

Page 1

MAKING MODERN LIVING POSSIBLE
Handbok
VLT® Lift Drive LD 302
www.danfoss.se/vlt
Page 2

Page 3

Page 4

Page 5

Innehåll Handbok
Innehåll
1 Inledning
1.1 Syftet med handboken
1.2 Ytterligare dokumentation
1.3 Dokument- och programversion
1.4 Avsett användningsområde
1.5 Certikat
1.6 Instruktion för kassering
2 Säkerhet
2.1 Behörig personal
2.2 Säkerhetsåtgärder
3 Mekanisk installation
3.1 Utrustningschecklista före installation
3.2 Uppackning
3.3 Installationsmiljö
3.3.1 Checklista för installationsplatsen 7
3.4 Montering
4
4
4
4
4
5
5
6
6
6
7
7
7
7
8
3.4.1 Kylning 8
3.4.2 Lyft 8
3.4.3 Montering 8
4 Elektrisk installation
4.1 Säkerhetsinstruktioner
4.1.1 Krav 10
4.1.2 Kabelposter 11
4.2 EMC-korrekt installation
4.2.1 Allmänt om EMC-emissioner 13
4.2.2 EMC-immunitet 14
4.3 Övertoner
4.4 Jordning
4.4.1 Jordningskrav 17
4.4.1.1 Läckström 17
4.4.1.2 Jordning med hjälp av skärmade kablar 18
4.5 PELV – Protective Extra Low Voltage
4.6 Kopplingsschema
10
10
13
16
17
18
20
4.6.1 Drivs med motorkontaktorer 20
4.6.2 Drivs utan motorkontaktorer 21
4.7 Motoranslutning
4.8 Anslutning till växelströmsnät
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 1
22
22
Page 6

Innehåll
VLT® Lift Drive LD 302
4.9 Styrkablar
4.9.1.1 Ta bort skyddet 22
4.9.1.2 Styrplintstyper 23
4.9.1.3 Reläanslutning 24
4.9.1.4 Kabeldragning till styrplintarna 25
4.9.1.5 Lift Controller MCO 361 – styrplintar 25
4.9.1.6 Med skärmade styrkablar 26
4.9.1.7 Plint 37 = Safe Torque O 27
4.9.1.8 Hisstyrning utan motorkontaktorer 28
4.10 Checklista för installation
5 Idrifttagning
5.1 Säkerhetsinstruktioner
5.1.1 Säkerhetsinspektion 30
5.2 Inkoppling av nätspänning till frekvensomriktaren
5.2.1 Koppla på strömmen 30
5.3 Lokal manöverpanel
5.3.1 LCP – layout 31
22
29
30
30
30
31
5.3.2 Anpassa visning i LCP 31
5.3.3 Menyknappar för displayen 32
5.3.4 Navigeringsknappar 32
5.3.5 Manöverknappar 33
5.3.6 Säkerhetskopiera och kopiera parameterinställningar 33
5.3.7 Rekommenderad initiering 34
5.3.8 Manuell initiering 34
6 Programmering
6.1 Grundläggande driftprogrammering
6.2 Automatisk motoranpassning
6.3 Programmera hisstillämpningen
6.3.1 Start- och stoppsekvenser 37
7 Funktioner
7.1 Bromsfunktioner
7.1.1 Inledning 39
7.1.1.1 Mekanisk hållbroms 39
35
35
35
35
39
39
7.1.1.2 Dynamisk broms 39
7.1.2 Bromsmotståndkrav 39
7.1.2.1 Styrning av mekanisk broms 40
7.1.3 Kabeldragning för bromsmotstånd 41
7.2 DCP-kommunikation
2 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
41
Page 7

Innehåll Handbok
8 Diagnostik och felsökning
8.1 Statusmeddelanden
8.2 Varningar och larm
8.3 Grundläggande felsökning
9 Tillämpningsexempel
9.1 Huvudkontaktorer
9.2 Drift med absolut pulsgivare (SSI/EnDat)
9.3 Kontrollera pulsgivarens rotation
9.4 Nöddrift – UPS
10 Speciella förhållanden
10.1 Speciella förhållanden
10.1.1 Extrema driftförhållanden 53
10.1.2 Termiskt motorskydd 53
10.1.3 Nedstämpling 54
11 Översikt över parametrar
42
42
42
50
51
51
51
51
52
53
53
55
11.1 xx-** Aktiva parametrar
11.2 Parametrar 0-** Drift och display
11.3 Parametrar 1-** Belastning och motor
11.4 Parametrar 4-** Gränser/Varningar
11.5 Parametrar 14-** Specialfunktioner
11.6 Parametrar 19-** Application Parameters (Tillämpningsparametrar).
11.7 Parameter 32-** Pulsgivare
12 Specikationer
12.1 Elektriska data
12.2 Omgivande miljöförhållanden
12.3 Märkeekter, vikt och mått
12.4 Åtdragningsmoment för anslutningar
12.5 Specikation för Lift Controller MCO 361
12.6 Motortyp och associerat motornummer
12.6.1 Motortyp och associerat motornummer lagras i motordatabas 81
12.6.2 Motortyp och associerat motornummer lagras inte i motordatabasen 83
55
56
57
59
59
60
71
72
72
75
75
78
79
81
Index
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 3
85
Page 8

Inledning
VLT® Lift Drive LD 302
11
1 Inledning
1.1 Syftet med handboken
Handbokens målgrupp
systemdesigners
•
installatörer
•
servicetekniker
•
Innehåller detaljerad information om installation och start
av frekvensomriktaren Kapitel 3 Mekanisk installation
innehåller information för mekanisk och elektrisk installation, inklusive
ingång
•
motor
•
kabeldragning för styr- och seriell kommunikation
•
styrplintfunktioner
•
kapitel 5 Idrifttagning innehåller detaljerade processer för
driftsättning
•
grundläggande driftprogrammering
•
funktionstestning
•
Resterande kapitel innehåller information om
användargränssnitt
•
programmering
•
tillämpningar
•
felsökning vid driftsättning
•
specikationer
•
Ytterligare dokumentation
1.2
Dokument- och programversion
1.3
Denna handbok granskas och uppdateras regelbundet.
Förslag på förbättringar tas tacksamt emot. Tabell 1.1 visar
dokumentversionen och motsvarande programversion.
Utgåva Anmärkningar Program-
version
MG34X1 Det här är den första utgåvan av den
här handboken
Tabell 1.1 Dokument- och programversioner
6.72
1.4 Avsett användningsområde
1.4.1 Avsett användningsområde
Frekvensomformaren är en elektronisk motorregulator som
reglerar
motorvarvtalet som svar på systemåterkoppling
•
eller ärrkommandon från externa regulatorer. Ett
elektriskt drivsystem består av frekvensomformaren, motorn och utrustningen som drivs av
motorn.
övervakning av system- och motorstatus.
•
Frekvensomformaren kan också användas för motorskydd.
Beroende på
användas i fristående tillämpningar eller utgöra en del av
en större apparat eller anläggning.
Frekvensomformaren får användas i bostads-, industri- och
företagsmiljöer i enlighet med lokala lagar och normer.
kongurationen kan frekvensomformaren
OBS!
Du kan få tag på ytterligare dokumentation och
handböcker via Danfoss.
Se www.danfoss.com/BusinessAreas/DrivesSolutions/
Documentations/Technical+Documentation.htm för listor.
I en bostadsmiljö kan produkten orsaka radiostörningar
och lämpliga åtgärder för att minska störningarna kan
behöva vidtas.
Förutsebar felaktig användning
Använd inte frekvensomformaren inom användningsområden som inte motsvarar angivna driftförhållanden och
miljöer. Kontrollera att alla villkor i kapitel 12 Specikationer
är uppfyllda.
4 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 9

Inledning Handbok
1.5 Certikat
1.6 Instruktion för kassering
Utrustning som innehåller elektriska
komponenter får inte hanteras på samma
sätt som hushållsavfall.
Sortera det separat i enlighet med
gällande lokal lagstiftning.
Tabell 1.2 Instruktion för avfallshantering
1 1
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 5
Page 10

Säkerhet
2 Säkerhet
VLT® Lift Drive LD 302
22
Följande symboler används i det här dokumentet:
VARNING
Indikerar en potentiellt farlig situation som kan leda till
dödsfall eller allvarliga personskador.
FÖRSIKTIGT
Indikerar en potentiellt farlig situation som kan leda till
mindre eller måttliga personskador. Symbolen kan också
användas för att uppmärksamma tillvägagångssätt som
inte är säkra.
OBS!
Indikerar viktig information, inklusive situationer som
kan leda till skador på utrustning eller egendom.
2.1 Behörig personal
Korrekt och säker transport, lagring, installation, styrning
och underhåll krävs för problemfri och säker drift av
frekvensomformaren. Endast behörig personal får installera
och använda denna utrustning.
Behörig personal
med behörighet att installera, driftsätta och underhålla
utrustning, system och kretsar i enlighet med gällande
lagar och bestämmelser. Dessutom måste personalen vara
införstådd med de instruktioner och säkerhetsåtgärder som
beskrivs I detta dokument.
denieras som utbildade medarbetare
Säkerhetsåtgärder
2.2
VARNING
HÖG SPÄNNING
Frekvensomformare innehåller hög spänning när de är
anslutna till växelströmsnätet. Endast behörig personal
får utföra installation, driftsättning och underhåll. Om
installation, driftsättning och underhåll inte utförs av
utbildad personal kan det leda till dödsfall eller allvarliga
personskador.
VARNING
OAVSIKTLIG START
När frekvensomformaren är ansluten till växelströmsnätet
kan motorn starta när som helst. Frekvensomformaren,
motorn och all annan elektrisk utrustning måste vara
redo för drift. Om dessa delar inte är driftklara när
frekvensomformaren ansluts till nätspänningens
växelström kan det leda till dödsfall, allvarliga
personskador eller materiella skador på utrustning och
egendom.
VARNING
URLADDNINGSTID
Frekvensomformare har likströmskondensatorer som kan
behålla sin spänning även när nätspänningen kopplats
från. Undvik elektriska faror genom att koppla från
växelströmsnätet, eventuella permanentmagnetmotorer
och likströmsförsörjningar, inklusive reservbatterier, UPS
och likströmsanslutningar till andra frekvensomformare.
Vänta tills kondensatorerna är helt urladdade innan
underhåll eller reparationsarbete utförs. Läs mer om
väntetiderna för urladdning i tabellen Urladdningstid. Om
du påbörjar service- eller reparationsarbete på enheten
direkt när du brutit strömmen utan att vänta föreskriven
tid, kan det leda till dödsfall eller allvarliga personskador.
Spänning [V] Minsta väntetid (minuter)
4 15
380-400 0,25-7,5 kW
[0,34-10 hk]
Högspänning kan nnas kvar även om varningslysdioderna är
släckta!
Tabell 2.1 Urladdningstid
6 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
11-75 kW
[15-100 hk]
Page 11

Mekanisk installation Handbok
3 Mekanisk installation
3.1 Utrustningschecklista före installation
Jämför modellnumret på enhetens märkskylt med
•
numret i beställningen för att kontrollera att rätt
utrustning har levererats
Kontrollera att samma märkspänning gäller för:
•
Nätet (strömmen)
Frekvensomriktare
Motor
Säkerställ att frekvensomriktarens utgångsklassi-
•
cering är lika med eller större än motorns
maximala belastning vid maximal motorprestanda
Motorns storlek och frekvensomriktarens
eekt måste stämma överens för att
överbelastningsskyddet ska fungera
ordentligt.
Om frekvensomriktarens klassicering är
lägre än motorns går det inte att uppnå
maximal motoreekt
3.2 Uppackning
3.2.1 Levererade artiklar
Vilka artiklar som levereras varierar beroende på
produktens konguration.
Kontrollera att de levererade artiklarna och
•
informationen på märkskylten överensstämmer
med orderbekräftelsen.
Kontrollera om förpackningen och frekvensom-
•
riktaren ser ut att ha skador orsakade av olämplig
hantering under transporten. Lämna eventuellt
skadeståndskrav till transportören. Spara de
skadade delarna för framtida klargörande.
Installationsmiljö
3.3
3.3.1 Checklista för installationsplatsen
Frekvensomriktaren kyls med hjälp av den
•
omgivande luften. Gränsvärdena för omgivningstemperaturen måste följas för att
frekvensomriktare ska fungera optimalt.
Innan frekvensomriktaren monteras måste det
•
säkerställas att installationsplatsen har tillräcklig
bärighet
Håll frekvensomriktarens inre fritt från damm och
•
smuts. Se till att komponenterna hålls så rena
som möjligt. På byggarbetsplatser måste frekvensomriktaren skyddas. IP54- eller IP66-kapslingar
(NEMA 12 respektive 4) kan behövas (tillval).
Se till att handboken och alla ritningar och
•
diagram alltid
att få tag på detaljerade installations- och driftsanvisningar. Det är viktigt att utrustningens
operatörer har tillgång till handboken.
Placera utrustningen så nära motorn som möjligt.
•
Se till att motorkablarna hålls så korta som
möjligt. Kontrollera motorns egenskaper för att ta
reda på de faktiska toleransvärdena. Överskrid
inte
•
•
Överväg nedstämpling för temperaturer mellan
•
40 °C [104 °F] och 50 °C [122 °F], och höjder på
1 000 m [3 300 ft] över havet. I utrustningens
Design Guide
nns tillgängliga, så att det är lätt
300 m [1 000 ft] för oskärmade
motorkablar
150 m [500 ft] för skärmade kablar.
nns detaljerad information.
3 3
OBS!
Ta inte bort märkskylten från frekvensomriktaren
(garantiförlust).
3.2.2 Lagring
Kontrollera att kraven för lagring är uppfyllda. Mer
information nns i kapitel 12.2 Omgivande miljöförhål-
landen.
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 7
Page 12

a
b
130BA419.10
130BA219.11
1
130BA228.11
1
Mekanisk installation
VLT® Lift Drive LD 302
3.4 Montering
3.4.1 Kylning
Se till att kylningsavståndet är tillräckligt stort både
ovanför och under enheten. I Bild 3.1
33
specicerade.
nns avståndskraven
3.4.3 Montering
1. Kontrollera att monteringsplatsen kan bära
enhetens vikt. Frekvensomriktaren möjliggör
installation sida vid sida.
2. Montera enheten på en stadig, jämn yta eller på
den bakre plåten (se Bild 3.2 och Bild 3.3).
3. Använd enhetens monteringshål vid väggmontering, om sådana nns.
Objekt Beskrivning
1 Bakre plåt
Bild 3.1 Övre och nedre kylningsavstånd
Kapslingstyp A1-A5 B1-B4 C1, C3 C2, C4
a/b [mm] 100 200 200 225
Tabell 3.1 Minsta tillåtna kylningsavstånd
3.4.2 Lyft
För att hitta en säker lyftmetod ska du kontrollera
•
vad enheten väger
Kontrollera att lyftutrustningen lämpar sig för
•
uppgiften.
Planera vid behov för att ytta enheten med
•
hjälp av en lyft, en kran eller en gaeltruck med
lämplig klassicering.
Använd alltid lyftöglorna på enheten om sådana
•
nns.
Bild 3.2 Korrekt montering med bakre plåt
Den bakre plåten måste installeras korrekt för att enheten
ska få tillräckligt luftöde för kylning.
Objekt Beskrivning
1 Bakre plåt
8 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Bild 3.3 Korrekt montering med skenor
Page 13

Mekanisk installation Handbok
OBS!
En bakre plåt måste användas när enheten är monterad
på skenor.
OBS!
Felaktig montering kan orsaka överhettning och
reducerade prestanda.
3 3
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 9
Page 14

L1
L1L2L2L3L3
2
91 92 93
1
130BB460.11
Elektrisk installation
4 Elektrisk installation
4.1 Säkerhetsinstruktioner
4.1.1 Krav
VLT® Lift Drive LD 302
44
VARNING
FARLIG UTRUSTNING!
Roterande axlar och elektrisk utrustning kan innebära en
risk. Allt elektriskt arbete måste följa gällande nationella
och lokala elsäkerhetsföreskrifter. Endast behörig
personal ska installera, driftsätta och underhålla utrustningen. Om dessa rekommendationer inte följs kan det
leda till dödsfall eller allvarliga personskador.
OBS!
ObjektBeskrivning
LEDNINGSISOLERING!
Led ingående ström, motorkablar och styrkablar i 3
separata metallrör eller separata skärmade kablar för
bättre EMC-egenskaper. Om ström-, motor- och
styrkablarna inte isoleras kan det leda till sämre
prestanda hos frekvensomriktaren och den utrustning
som är ansluten.
Din säkerhet är beroende av att följande krav uppfylls.
Den elektroniska styrutrustningen är ansluten till
•
farlig nätspänning. Du måste vara oerhört
försiktig när du kopplar på strömmen till enheten
så att du inte utsätter dig för fara.
Se till att separera motorkablarna om du har era
•
frekvensomriktare. Inducerad spänning från
utgående motorkablar som är dragna tillsammans
kan ladda upp utrustningens kondensatorer, även
om utrustningen är avstängd och låst.
Överbelastning och skydd av utrustning
Frekvensomriktaren ger ett överbelastningsskydd
•
för motorn (motorskydd motsvarande klass 20).
Mer information nns i kapitel 10 Speciella förhål-
landen.
Alla frekvensomriktare måste vara försedda med
•
kortslutningsskydd och överspänningsskydd. För
detta krävs det ingångssäkringar – se Bild 4.1. Om
de inte fabriksmonteras, ska säkringarna tillhandahållas av installatören.
1 Säkringar
2 Jord
Bild 4.1 Frekvensomriktarsäkringar
Ledningstyper och klassiceringar
Alla kablar måste uppfylla nationella och lokala
•
krav på ledarareor och omgivningstemperaturer.
Danfoss rekommenderar att alla strömanslut-
•
ningar görs med kopparkabel som är klassicerad
för minst 75 °C [167 °F].
Se kapitel 12.3 Märkeekter, vikt och mått för
•
rekommenderad ledningsstorlek.
10 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 15

[3]
[4]
[5]
[6]
[2]
[1]
130BB664.10
[4]
[5]
[3]
[6]
[2]
[1]
130BB666.10
[1]
[4]
[5]
[3]
[2]
130BB659.10
[5]
[4]
[3]
[6]
[2]
[1]
130BB667.10
Elektrisk installation Handbok
4.1.2 Kabelposter
OBS!
Andra lösningar är möjliga. Oanvända kabelingångar kan
tätas med gummiskyddshylsor (för IP21).
Mått
1)
Närmaste
metriska
Objekt
Rekommenderat
användningsområde
UL [in] [mm]
1 Nät 3/4 28,4 M25
2 Motor 3/4 28,4 M25
3 Broms/
3/4 28,4 M25
lastdelning
4 Styrkabel 3/4 28,4 M25
5
6
1)
2)
Styrkabel
Styrkabel
Tolerans ±0,2 mm
hål
2)
2)
3/4 28,4 M25
3/4 28,4 M25
Bild 4.2 A5 (IP55)
Objekt Rekommenderat
Mått
användningsområde
1 Nät M25
2 Motor M25
3 Broms/lastdelning
28,4 mm
1)
4 Styrkabel M25
5 Styrkabel M25
6 Styrkabel M25
1)
Utstansat hål
Mått
1)
Närmaste
metriska
Objekt
Rekommenderat
användningsområde
UL [in] [mm]
1 Nät 1 34,7 M32
2 Motor 1 34,7 M32
3 Broms/lastdelning 1 34,7 M32
4 Styrkabel 1 34,7 M32
5 Styrkabel 1/2 22,5 M20
1)
Tolerans ± 0,2 mm
Bild 4.4 B1 (IP21)
Rekommenderat
Objekt
användningsområde
1)
Mått
UL [in] [mm]
Närmaste
metriska
1 Nät 1 34,7 M32
2 Motor 1 34,7 M32
3 Broms/lastdelning 1 34,7 M32
4 Styrkabel 3/4 28,4 M25
5 Styrkabel 1/2 22,5 M20
6
Styrkabel
1)
Tolerans ±0,2 mm
2)
hål
2)
1/2 22,5 M20
Bild 4.5 B1 (IP55)
4 4
Bild 4.3 A5 (IP55) gängade kabelförskruvningshål
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 11
Page 16

[6]
[5]
[3]
[2]
[4]
[1]
130BB669.10
[4]
[3]
[5]
[2]
[1]
130BB668.10
[4]
[3]
[2]
[5]
[1]
130BB670.10
Elektrisk installation
VLT® Lift Drive LD 302
Objekt Rekommenderat
Mått
användningsområde
44
1 Nät M32
2 Motor M32
3 Broms/lastdelning M32
4 Styrkabel M25
5 Styrkabel M25
Objekt Rekommenderat
användningsområde
1 Nät M40
2 Motor M40
3 Broms/lastdelning M32
4 Styrkabel M25
5 Styrkabel M20
Mått
6 Styrkabel 22,5 mm 1)
1)
Hål
Bild 4.8 B2 (IP55) gängade kabelförskruvningshål
Bild 4.6 B1 (IP55) gängade kabelförskruvningshål
Mått
1)
Närmaste
metriska
Objekt
Rekommenderat
användningsområde
UL [in] [mm]
1 Nät 1 1/4 44,2 M40
2 Motor 1 1/4 44,2 M40
3 Broms/lastdelning 1 34,7 M32
4 Styrkabel 3/4 28,4 M25
5
1)
Tolerans ±0,2 mm
2)
hål
Styrkabel
2)
1/2 22,5 M20
Bild 4.7 B2 (IP55)
12 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 17

1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Elektrisk installation Handbok
4.2 EMC-korrekt installation
4.2.1 Allmänt om EMC-emissioner
Frekvensomriktaren, motorkabeln och motorn genererar luftburna störningar mellan 30 MHz till 1 GHz.
Kapacitiva strömmar i motorkablarna tillsammans med ett högt dU/dt från motorspänningen genererar läckströmmar.
Använd en skärmad motorkabel för att minska störningarna. Motorkabelns skärm ska anslutas både till frekvensomriktarens
kapsling och motorns kapsling. Det görs bäst genom att använd de inbyggda skärmklämmorna för att undvika tvinnade
skärmändar.
För att reducera den totala störningsnivån från hela systemet (enhet och installation) ska motor- och bromskablarna vara så
korta som möjligt. Undvik att lägga kablar med känsliga signalnivåer längs med motor- eller bromskablar. Speciellt
radiostörning över 50 MHz (luftburen) som genereras av styrelektroniken.
4 4
1 Jordledning
2 Skärm
3 Växelströmsnätförsörjning
4 Frekvensomriktare
5 Skärmad motorkabel
6 Motor
Tabell 4.1
Bild 4.9 Situationer som skapar läckström
Säkerställ att skärmströmmen kan föras tillbaka till frekvensomriktaren. Se också till att det blir god elektrisk kontakt från
monteringsplåten via monteringsskruvarna till frekvensomriktarens chassi.
OBS!
Om oskärmade kablar används uppfylls immunitetskraven, men inte vissa emissionskrav.
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 13
Page 18

Elektrisk installation
VLT® Lift Drive LD 302
4.2.2 EMC-immunitet
Alla Danfoss-frekvensomriktare uppfyller såväl krav för industriella miljöer som för hem- och kontorsmiljö.
Immunitetstest har utförts enligt följande grundstandarder:
SS-EN 61000-4-2 (IEC 61000-4-2): Elektrostatiska urladdningar (ESD): Simulering av elektrostatiska urladdningar
•
från människor.
SS-EN 61000-4-3 (IEC 61000-4-3): Inkommande elektromagnetisk strålning, amplitudmodulerad simulering av
44
•
påverkan från radar- och radioutrustning och mobila kommunikationsapparater.
SS-EN 61000-4-4 (IEC 61000-4-4): Transienter: Simulering av störningar som orsakas av till- och frånslag i
•
kontaktorer, reläer eller liknande enheter.
SS-EN 61000-4-5 (IEC 61000-4-5): Stötpulser: Simulering av transienter som orsakas av till exempel blixtnedslag i
•
närliggande installationer.
SS-EN 61000-4-6 (IEC 61000-4-6): RF Common mode: Simulering av
•
sammanfogats med anslutningskablar.
Spänningsområde: 380-400 V
Grundstandard Stöt
IEC 61000-4-4
Acceptansvillkor B B B A A
Ledning
Motor
Broms 4 kV CM
Lastdelning 4 kV CM
Styrledningar
Standardbuss 2 kV CM
Reläledningar 2 kV CM
Applikation och fältbus-
stillval
LCP-kabel
Extern 24 V DC
Kapsling
4 kV CM
4 kV CM
2 kV CM
2 kV CM
2 kV CM
2 V CM
— —
Störningsvåg
IEC 61000-4-5
2 kV/2 Ω DM
4 kV/12 Ω CM
4 kV/2 Ω
4 kV/2 Ω
4 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
0,5 kV/2 Ω DM
1 kV/12 Ω CM
1)
1)
1)
1)
1)
1)
1)
1)
ESD
IEC
61000-4-2
— — 10 V
— — 10 V
— — 10 V
— — 10 V
— — 10 V
— — 10 V
— — 10 V
— — 10 V
— — 10 V
— — 10 V
8 kV AD
6 kV CD
eekten från radiolänksutrustning som
Utstrålat elektromagnetiskt
fält
IEC 61000-4-3
10 V/m —
RF common
mode-spänning
IEC 61000-4-6
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
Tabell 4.2 EMC-immunitet
1) Injektion på kabelskärmen
AD: Air discharge
CD: Contact discharge
CM: Common mode
Dierential mode
DM:
14 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 19

Elektrisk installation Handbok
EMC-testresultat
Följande testresultat har erhållits med ett system som använts med
en frekvensomriktare
•
skärmad kabel
•
en styrbox med potentiometer
•
en motor
•
en skärmad motorkabel
•
RFI-ltertyp Ledningsburen emission Luftburen emission
Standarder och
krav
H1: RFI-klass A1/B, kategori 1/2
LD 302 0-75 kW
H2: RFI-klass A2, kategori 3
LD 302 0-7,5 kW
H3: RFI-klass A1/B, kategori 1/2
LD 302 11-55 kW
SS-EN 55011 Klass B
Bostäder,
handel och lätt
industri
SS-EN/IEC 61800-3 Kategori C1
First
environment
(publika nät),
hem och kontor
IP20 50 m [164 ft] 150 m [492 ft] 150 m [492 ft] Nej Ja
[0-100 hk]
380-480 V
0-7,5 kW
[0-10 hk]
380-480 V
[0-10 hk]
380-480 V
11-75 kW
[15-100 hk]
380-480 V
0-7,5 kW
[0-10 hk]
380-480 V
[15-75 hk]
380-480 V
IP55 50 m [164 ft] 150 m [492 ft] 150 m [492 ft] Nej Ja
IP20 Nej Nej 5 m [16 ft] Nej Nej
IP20 Nej Nej 25 m [82 ft] Nej Nej
IP55 Nej Nej 5 m [16 ft] Nej Nej
IP55 50 m [164 ft] 150 m [492 ft] 150 m [492 ft] Nej Ja
Klass A
Grupp 1
Industrimiljö
Kategori C2
First
environment
(publika nät),
hem och kontor
Klass A
Grupp 2
Industrimiljö
Kategori C3
Second
environment
(industrinät)
Klass B
Bostäder,
handel och lätt
industri
Kategori C1
First
environment
(publika nät),
hem och kontor
Klass A
Grupp 1
Industrimiljö
Kategori C2
First
environment
(publika nät),
hem och kontor
4 4
Tabell 4.3 EMC-testresultat (emission, immunitet)
H1, H2 eller H3 anges på typkodsposition 16-17 för EMC-lter
H1 - Integrerat EMC-lter. Uppfyller SS-EN 55011 klass A1/B och SS-EN/IEC 61800-3, kategori 1/2
H2 - Inget ytterligare EMC-lter. Uppfyller SS-EN 55011 klass A2 och SS-EN/IEC 61800-3, kategori 3
H3 - Integrerat EMC-lter. Uppfyller SS-EN 55011 klass A1/B och SS-EN/IEC 61800-3, kategori 1/2.
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 15
Page 20

175HA034.10
Elektrisk installation
VLT® Lift Drive LD 302
4.3 Övertoner
4.3.1 Allmänt om övertonsströmmar
4.3.2 Emissionskrav gällande övertoner
Utrustning som är ansluten till det allmänna eldistributionsnätet
En frekvensomformare drar en icke sinusformad ström från
nätet, vilket ökar ingångsströmmen I
RMS
En icke
sinusformad ström omvandlas genom Fourier-analys och
delas upp i sinusformade strömmar med olika frekvens, det
vill säga olika övertonsströmmar In med 50 Hz som
44
grundfrekvens:
I
Hz 50 250 350
Tabell 4.4 Övertonsströmmar
1
I
5
I
7
Tillval Denition
1 IEC/SS-EN 61000-3-2 Klass A för 3-fasbalanserad
utrustning (för professionell utrustning upp till 1 kW
total eekt).
2 IEC/SS-EN 61000-3-12 Utrustning 16 A–75 A och
professionell utrustning från 1 kW upp till 16 Afasström.
Tabell 4.5 Ansluten utrustning
4.3.3 Övertoner, testresultat (emission)
Övertonerna påverkar inte den direkta eektförbrukningen
men ökar värmeförlusterna i installationen (transformatorer,
kablar). I anläggningar med hög likriktarbelastning är det
viktigt att hålla övertonsströmmarna på en låg nivå för att
undvika överbelastning i transformatorn och hög
temperatur i kablarna.
Eektstorlekar upp till PK75 i T2 och T4 uppfyller IEC/SS-EN
61000-3-2 klass A. Eektstorlekar från P1K1 och upp till
P18K i T2 och upp till P90K i T4 uppfyller IEC/SS-EN
61000-3-12, tabell 4. Eektstorlekar P110–P450 i T4
uppfyller också IEC/SS-EN 61000-3-12 även om det inte
krävs eftersom strömmen ligger över 75 A.
Bild 4.10 Övertonsströmmar
OBS!
Vissa övertonsströmmar kan eventuellt störa kommunikationsutrustning som är ansluten till samma
transformator eller orsaka resonans med batterier för
eektfaktorkorrigering.
För att säkerställa låga övertonsströmmar är frekvensomformaren som standard utrustad med spolar i
mellankretsen. Därmed minskar ingångsströmmen I
normalt med 40 %.
Spänningsdistortionen av nätspänningen är en funktion av
övertonsströmmen multiplicerad med nätimpedansen för
den aktuella frekvensen. Den totala spänningsdistortionen
THD beräknas ur de enskilda övertonsspänningarna med
formeln:
2
2
THD % = U
+ U
5
+ ... + U
7
2
N
(UN% av U)
RMS
Faktiskt
(normal)
Gräns för
R
≥120
sce
Faktiskt
(normal)
Gräns för
R
≥120
sce
Tabell 4.6 Övertoner, testresultat (emission)
Individuell övertonsström In/I1 (%)
I
5
40 20 10 8
40 25 15 10
Övertonsström, distortionsfaktor (%)
I
7
THD PWHD
46 45
48 46
I
11
I
13
Om kortslutningsströmmen Ssc är större eller lika med:
S
= 3 × R
SC
× U
× I
SCE
= 3 × 120 × 400 × I
nät
equ
equ
vid kopplingen mellan användarens system och det
allmänna systemet (R
sce
).
Det åligger installatören eller användaren av utrustningen
att säkerställa att utrustningen bara är ansluten till en källa
med en kortslutningsström Ssc som är större än eller lika
med det som anges ovan. Kontakta det lokala elbolaget
vid behov.
Andra eektstorlekar kan anslutas till det allmänna elnätet
efter överenskommelse med nätägaren.
16 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 21

130BB955.12
a
b
Leakage current
Motor cable length
130BB956.12
THDv=0%
THDv=5%
Leakage current
Elektrisk installation Handbok
Uppfyller olika systemnivåriktlinjer:
De övertonsströmsdata som nns i Tabell 4.6 ges enligt
IEC/SS-EN 61000-3-12 med referens till produktstandarden
för elektriska drivsystem. Data kan användas för beräkning
av övertonströmmarnas påverkan på strömförsörjningssystemet och för dokumentation av efterlevnaden av
relevanta regionala riktlinjer: IEEE 519-1992; G5/4.
4.4 Jordning
4.4.1 Jordningskrav
VARNING
JORDNINGSFARA!
Jorda frekvensomriktaren korrekt i enlighet med såväl
nationella och lokala elföreskrifter som de instruktioner
som nns i denna handbok. Jordströmmen är högre än
3,5 mA. Om jordningen inte genomförs korrekt kan det
orsaka dödsfall eller livshotande skador.
Följ alla lokala och nationella elsäkerhetsföre-
•
skrifter så att den elektriska utrustningen jordas
korrekt.
Det är nödvändigt med korrekt skyddsjordning
•
för utrustning med jordströmmar som är högre
än 3,5 mA (se kapitel 4.4.1.1 Läckström )
Det behövs en särskild jordningsledning för de
•
ingående strömkablarna, motorkablarna och
styrkablarna
Använd de bifogade klämmorna för att jordans-
•
lutningarna ska bli korrekta.
”Kedjejorda” inte frekvensomformarna.
•
Håll jordanslutningarna så korta som möjligt.
•
Användning av "high strand-wire"
•
rekommenderas för att minska elektriskt buller
Följ motortillverkarens krav på kablarna.
•
4.4.1.1 Läckström
4 4
Bild 4.11 Kabellängdens och eektstorlekens inverkan på
läckström. Pa > Pb.
Bild 4.12 Ledningsstörningar påverkar läckströmmen
Följ gällande nationella och lokala regler om skyddsjordning av utrustning med en läckström på > 3,5 mA.
Frekvensomriktare genererar en läckström i jordanslutningen. En felström i frekvensomriktaren vid
utgångsplintarna kan ladda lterkondensatorerna och
orsaka transient jordningsström.
Läckströmmen till jord är avhängig olika systemkongura-
tioner, bland annat RFI-ltrering, skärmade motorkablar
och frekvensomriktarens eekt.
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 17
Enligt SS-EN/IEC 61800-51, måste du förstärka jordningskabeln om läckströmmen överstiger 3,5 mA.
Jordledning (plint 95) på minst 10 mm 2 (8 AWG).
•
Två separata jordledningar som båda uppfyller
•
dimensioneringskraven
Se SS-EN/IEC 61800-5-1 och SS-EN 50178 för mer
information.
Page 22

130BB958.12
f
sw
Cable
150 Hz
3rd harmonics
50 Hz
Mains
RCD with low f
cut-
RCD with high f
cut-
Leakage current
Frequency
130BB957.11
Leakage current [mA]
100 Hz
2 kHz
100 kHz
130BA266.10
+DC
BR-
B
MAINS
L1 L2 L3
91 92 93
RELAY 1 RELAY 2
99
- LC -
UVW
MOTOR
Elektrisk installation
VLT® Lift Drive LD 302
Användning av jordfelsbrytare (RCD)
Om jordfelsbrytare (RCD) används måste följande krav
4.4.1.2 Jordning med hjälp av skärmade
kablar
uppfyllas:
Använd endast jordfelsbrytare av typ B som kan
Jordklämmor bifogas för motorkablarna (se Bild 4.15).
känna av både växelström och likström
Använd jordfelsbrytare med fördröjning för att
förhindra fel på grund av transienta jordströmmar
44
Dimensionera jordfelsbrytarna enligt systemkongurationen och omgivningsmässiga hänsyn.
Bild 4.15 Jordning med hjälp av skärmade kablar
Bild 4.13 Huvudsakliga bidragande faktorer till läckström
Bild 4.14 Påverkan av jordfelsbrytarens gränsfrekvens på
läckström
4.5 PELV – Protective Extra Low Voltage
VARNING
RISK FÖR ELEKTRISKA STÖTAR!
Skydd mot elektriska stötar säkerställs när elförsörjningen är av PELV-typ och när installationen har utförts
enligt lokala och nationella bestämmelser för PELVelförsörjning. Att inte skydda mot elektriska stötar kan
orsaka personskador eller dödsfall.
Alla styrplintar och reläplintar 01-03/04-06 uppfyller PELV,
förutom jordad Delta över 400 V.
Den elektriskas isolering uppfyller kraven för hög isolering
enligt SS-EN 61800-5-1.
För att PELV-isoleringen ska bibehållas måste alla
komponenter som ansluts till styrplintarna vara PELVisolerande, det vill säga en termistor måste vara förstärkt/
dubbelisolerad.
18 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 23

130BC968.11
1325 4
6
9
8
M
7
Elektrisk installation Handbok
ObjektBeskrivning
1 Strömförsörjning (SMPS) inkl. signalisolering av UDC, som
indikerar spänningen i mellanliggande likströmslänkkrets.
2 Växelriktare som styr IGBT-enheterna (triggtransformatorer/
optokopplare).
3 Strömomvandlare
4 Optokopplare, bromsmodul
5 Kretsar för mätning av interna strömmar, RFI och
temperatur
6 Anpassade reläer
7 Mekanisk broms
8 Funktionell galvanisk isolation för 24 V, säkerhetstillval
9 Den funktionella galvaniska isolationen avser standard-
bussgränssnittet RS-485
4 4
Bild 4.16 Galvanisk isolation
VARNING
Installation på hög höjd:
380-400 V, kapslingsstorlek A, B och C: För höjder över 2
000 m över havet kontaktar du Danfoss angående PELV.
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 19
Page 24

130BD154.10
Parameter
19 - 50
Drive
enable
K10.1
K10
K10.1
K10
K2
K1
K12
K1 K2
K12
Safety
Chain
K2
K1
N
Speed
select
Motor
Thermistor
L1
L2
L3
PE
Direction
up down
91 92 93 95
81 82 PE 96 97 98 99
50 53 55
20
20 29
37 12 1332
33
27
1
2 3 4 5 6 7 8
MCO 361
18
Brake
Resistor
Motor
Brake Relay
(max. 29 mA)
1 2 3 4 5 6 7 8 9 10 1112
1 2 3 4 5 6 7 8 21
X58
K1
K2
U V W PE
M
3~
X57 - Input
X55 - Encoder
Encoder
Interface
X59 - Output
Frequency Converter
Brake
Contractor
Brake
Motor
Elektrisk installation
VLT® Lift Drive LD 302
4.6 Kopplingsschema
4.6.1 Drivs med motorkontaktorer
Bild 4.17 gäller när 19-86 Enable SC (Aktivera SC) är inställd på [1] Enkel styrning.
44
Bild 4.17 kopplingsschema med kontaktor
20 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 25

130BD155.10
Parameter
19 - 50
Drive
enable
K10.1
K10
K10.1
K10
K2
K1
K12
K1 K2
K12
Safety
Chain
K2
K1
N
Speed
select
Motor
Thermistor
L1
L2
L3
PE
Direction
up down
91 92 93 95
81 82 PE 96 97 98 99
505355
20
20 29
37 12 1332 33 27
1
2 3 4 5 6 7 8
MCO 361
18
Brake
Resistor
Motor
Brake Relay
(max. 29 mA)
1 2 3 4 5 6 7 8 9 10 1112
1 2 3 4 5 6 7 8 21
X58
U V W PE
M
3~
X57 - Input
X55 - Encoder
Encoder
Interface
X59 - Output
Frequency Converter
Brake
Contractor
Brake
Motor
K2
K1
Elektrisk installation Handbok
4.6.2 Drivs utan motorkontaktorer
Bild 4.18 gäller när 19-86 Enable SC (Aktivera SC) är inställd på [1] Enkel styrning.
4 4
Bild 4.18 Kopplingsschema utan kontaktor
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 21
Page 26

130BT248.10
Elektrisk installation
4.7 Motoranslutning
VARNING
INDUCERAD SPÄNNING!
Se till att dra motorkablarna separat om du har era
frekvensomriktare. Inducerad spänning från utgående
motorkablar som är dragna tillsammans kan ladda upp
utrustningens kondensatorer, även om utrustningen är
44
avstängd och låst. Om motorkablarna inte dras separat
kan det leda till dödsfall eller allvarliga personskador.
Information om maximala kabeldimensioner nns
•
i kapitel 12.3 Märkeekter, vikt och mått
Följ gällande lokala och nationella elsäkerhetsfö-
•
reskrifter om kabeldimensioner.
Installera inte kondensatorer för eektfaktorkorri-
•
gering mellan frekvensomriktaren och motorn.
Koppla inte in någon start- eller polvänd-
•
ningsenhet mellan frekvensomriktaren och
motorn.
1. Anslut trefasmotorkablarna till plint 96 (U), 97 (V)
och 98 (W).
2. Jorda kabeln i enlighet med bifogade jordningsanvisningar
3. Dra åt plintarna i enlighet med informationen i
kapitel 12.4 Åtdragningsmoment för anslutningar.
4. Se till att motortillverkarens ledningskrav uppfylls.
Bild 4.15 visar nätingången, motorn och jordningen för
frekvensomriktare av standardtyp. Den verkliga
tionen kan variera beroende på enhetstyp och
tillvalsutrustning.
VLT® Lift Drive LD 302
kongura-
Alla frekvensomriktare kan användas med såväl
•
en isolerad ingångskälla som med jordade
referenseektledningar. Om frekvensomriktaren
matas med nätspänning från ett isolerat nät (ITnät eller ytande delta) eller från ett TT/TN-S-nät
med en jordad gren (jordat delta) måste du ställa
in parameter 14-50 RFI-lter på OFF (AV). När den
här avstängd är RFI-lterkondensatorerna mellan
chassi och mellankretsarna isolerade. Den här
isoleringen förhindrar skador på mellankretsen
och reducerar jordströmmar i enlighet med IEC
61800-3.
4.9 Styrkablar
Separera styrkablarna från kraftkomponenterna i
•
frekvensomriktaren.
Om frekvensomriktaren är ansluten till en
•
termistor måste termistorn vara dubbelisolerad
eller ha förstärkt isolering för att uppfylla kraven
för PELV-isolering. En 24 V DC-nätspänning
rekommenderas.
4.9.1.1 Ta bort skyddet
Ta bort skyddsplåten med hjälp av en
•
skruvmejsel. Se Bild 4.19.
Du kan också ta bort frontplåten genom att lossa
•
skruvarna. Se Bild 4.20.
Anslutning till växelströmsnät
4.8
Anpassa kablarna efter inströmmen till frekven-
•
somriktaren. Uppgifter om maximal
ledningsstorlek nns i kapitel 12.3 Märkeekter,
vikt och mått.
Följ gällande lokala och nationella elsäkerhetsfö-
•
reskrifter om kabeldimensioner.
Anslut 3-fas växelströmskablar till plint L1, L2 och
•
L3 (se Bild 4.15).
Beroende på utrustningens konguration ansluts
•
inströmmen till nätets ingångsplintar eller till
ingångsströmbrytaren.
Jorda kabeln i enlighet med de anvisningar som
•
22 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
nns i kapitel 4.4.1 Jordningskrav
Bild 4.19 Åtkomst till styrkablar för A2-, A3-, B3-, B4-,
C3- och C4-kapslingar
Page 27

130BT334.10
130BA248.11
1
4
3
2
130BB921.12
130BB931.11
12 13 18 19 27 29 32 33 20 37
39696861 42 50 53 54 55
1
32
Elektrisk installation Handbok
Kapslingstyper A5, B1 och B2
Alla MCO 361-plintar sitter bredvid styrkortet. Ta bort
frontskyddet för att få åtkomst, se Bild 4.20.
Se Tabell 4.7 innan du drar åt skydden.
Kapslingstyp IP20 IP55
A4/A5 - 2/1.5
B1 - 2.2/1.6
B2 - 2.2/1.6
C1 - 2.2/1.6
C2 - 2.2/1.6
- Finns inte
Tabell 4.7 Åtdragningsmoment för skydd [Nm]/[lb-ft]
4 4
Bild 4.20 Åtkomst till styrkablar för A4, A5-, B1-, B2-,
C1- och C2-kapslingar
Kapslingstyp A2 och A3
Pulsgivare och I/O-plintar är placerade bakom C-alternativets plintskydd, se Bild 4.21.
Hissregulatorns bussanslutning och felsökningsplintar
(RS-485) sitter överst på C-alternativets skydd. Om de här
anslutningarna används ska plastdelarna ovanför anslutningarna skäras ut och kabelavlastaren ska monteras.
4.9.1.2 Styrplintstyper
Bild 4.22 visar frekvensomriktarens borttagningsbara
kabelförskruvningar.
Bild 4.22 Placering av styrplint
Bild 4.21 Placering av pulsgivare och I/O-plintar
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 23
Bild 4.23 Plintnummer
Page 28

130BA029.12
Relay2
Relay1
35 36
311
130BA215.10
RELAY 1
RELAY 2
9
9
6
03 02 01
90 05 04
130BA391.12
RELAY 1 RELAY 2
06 05 04 03 02 01
DC+
Elektrisk installation
Anslutning 1, plintar 12-37
•
Anslutning 2, plintar 61, 68, 69
•
Anslutning 3, plintar 39-55
•
Anslutning 4 är en USB-port som kan användas
•
VLT® Lift Drive LD 302
för MCT 10 kongurationsprogramvara
Det nns även 2 Form C-reläutgångar.
•
Utgångarnas placering beror på frekvensomrik-
44
tarens konguration och storlek.
4.9.1.3 Reläanslutning
För att ställa in reläutgång, se parametergrupp 5-4* Reläer.
Nr 01-02 slutande (normalt öppen)
01-03 brytande (normalt stängd)
04-05 slutande (normalt öppen)
04-06 brytande (normalt stängd)
Tabell 4.8 Reläanslutningar
Placering av reläer
Bild 4.24 Plintar för reläanslutning
(Kapslingstyper A1, A2 och A3).
Bild 4.25 Plintar för reläanslutning
(kapslingstyp A5-, B1 och B2).
Bild 4.26 Plintar för reläanslutningar
(kapslingstyp C1 och C2).
24 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 29

2
1
10 mm
130BA310.10
12 13
18
19
27
29
32
33
X62
X55
X56
X57
X58
X59
2
X60
130BB794.10
1
Elektrisk installation Handbok
4.9.1.4 Kabeldragning till styrplintarna
Det går att koppla bort styrplintsanslutningarna från
frekvensomriktaren för att underlätta installationen (se
Bild 4.22).
1. Öppna kontakten genom att sätta en liten
skruvmejsel i skåran ovanför eller under
kontakten (se Bild 4.27).
2. Sätt i den skalade styrkabeln i kontakten.
3. Ta bort skruvmejseln så att styrkabeln fäster i
kontakten.
4. Se till att kontakten inte är lös. Löst sittande
styrkablar kan orsaka utrustningsfel och medföra
att enheten inte fungerar optimalt.
4 4
Bild 4.27 Ansluta styrkablar
Dimensionerna för styrplintarnas kablar hittar du i
ObjektBeskrivning ObjektBeskrivning
kapitel 12.3 Märkeekter, vikt och mått.
Se kapitel 4.7 Motoranslutning för typiska styrkabelanslutningar.
4.9.1.5 Lift Controller MCO 361 – styrplintar
1 Anslutningsblock 1 X58 24 V DC-försörjning
2 Anslutningsblock 2 X59 Digitala utgångar
X55 Pulsgivare 2 X62 Används inte
X56 Används inte X60 DCP-kontaktor
X57 Digitala ingångar
MCO-styrplintarna är kontaktanslutningar med skruvplintar.
X55 = Pulsgivare
Bild 4.28 Placering av anslutningsplintar på MCO 361
X56 = Används inte
X57 = Digitala ingångar
X58 = 24 V DC-försörjning
X59 = Digitala utgångar
Anslutningsblock 1 används med bookstyle-kapslingstyper,
och anslutningsblock 2 med kompakta kapslingstyper.
X62 = Används inte
X60 = DCP-kabelförskruvning
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 25
Page 30

1
2
PE
FC
PE
PLC
130BB922.12
PE PE
<10 mm
Elektrisk installation
VLT® Lift Drive LD 302
Plint
Block Nej
TTL
1 +24 V-försörjning - - 2 +8 V-försörjning - - 3 +5 V-försörjning 5 V 5 V 5 V
4 GND 0 V 0 V 0 V
44
X55
X56 1-12 Används inte Ingen funktion
X57
X58
5 A A A A
6 ej A ej A ej A ej A
7 B B B B
8 ej B ej B ej B ej B
9 Z/klocka H N Klocka
10 ej Z/ej klocka ej H ej N ej Klocka
11 DATA - - DATA
12 ej DATA - - ej DATA
1 Digital ingång Drv. aktiverad
2 Digital ingång
3 Digital ingång
4 Digital ingång
5 Digital ingång
6 Digital ingång
7 Digital ingång
8 Digital ingång
9 Digital ingång används inte
10 Digital ingång används inte
1 +24 V-försörjning används inte
2 GND används inte
Plintbeskrivning Hissregleringsfunktion
SinCos
(1 Vpp)
Denierad av 19-50 Run-in
mode (Inkörningsläge)
Denierad av 19-50 Run-in
mode (Inkörningsläge)
Denierad av 19-50 Run-in
mode (Inkörningsläge)
Denierad av 19-50 Run-in
mode (Inkörningsläge)
Denierad av 19-50 Run-in
mode (Inkörningsläge)
Denierad av 19-50 Run-in
mode (Inkörningsläge)
Denierad av 19-50 Run-in
mode (Inkörningsläge)
SSI/Endat
Plint
Block Nej
X59
X60
*CS är hög när överföringen är aktiv
X62 1-5 Används inte N/A
Tabell 4.9 Anslutningsplintar
Plintbeskrivning Hissregleringsfunktion
Denierad av 19-84
1 Digital utgång
2 Digital utgång
3 Digital utgång
4 Digital utgång Utgångskontaktor K12
5 Digital utgång CTR - Klar/fel
6 Digital utgång
7 Digital utgång
8 Digital utgång Ansluten till plint 18
CS* Styrningsväljare Can DCP3 DCP4
1 RxD/TxD - P
2 RxD/TxD - N
3 0 V
4 5 V
Function output 1
(Funktionsutgång 1)
Varvtalsnivå 1, < 0,8 m/s
eller beroende på 19-71
Set-up counter (Inställning
av räknare)
Varvtalsnivå 2, < 0,3 m/s
eller beroende på 19-71
Set-up counter (Inställning
av räknare)
Övertemperatur. Beror på
19-70 Temp. monitor
(Temperaturöverv.)
I position eller stillastående
för inställning av 19-50
Run-in mode
(Inkörningsläge) till 6 eller 7.
4.9.1.6 Med skärmade styrkablar
Korrekt skärmning
Använd skärmade klämmor i bägge ändar av kabeln för att
säkerställa bästa möjliga kabelkontakt.
Om jordpotentialen är olika mellan frekvensomriktaren och
PLC kan det medföra elektriska störningar. Lös problemet
genom att sätta en utjämningskabel invid styrkabeln.
Minsta ledararea: 16 mm2 [6 AWG].
Objekt Beskrivning
1
2 Utjämningskabel
26 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Min. 16 mm2 [6 AWG]
Bild 4.29 Korrekt skärmning
Page 31

100nF
FC
PE
PE
PLC
<10 mm
130BB609.12
PE
FC
PE
FC
130BB923.12
PE PE
69
68
61
69
68
61
1
2
<10 mm
37
12
130BT314.10
Elektrisk installation Handbok
Långa styrkablar
Med långa styrkablar kan jordslingor uppstå. Jordslingor
kan elimineras genom att ena änden av skärmen ansluts
till jord via en 100 nF-kondensator (kort längd).
Bild 4.30 Långa styrkablar
Undvik EMC-störningar på seriell kommunikation
Använd partvinnade kablar för att minska störningen
mellan ledarna, se Bild 4.31. Anslut den här plinten till jord
via en intern RC-länk. Den rekommenderade metoden visas
i Bild 4.31.
Bild 4.31 Tvinnade parkablar
4.9.1.7 Plint 37 = Safe Torque O
Förberedelse
Ta bort bygeln mellan plint 37 och 12 (24 V DC). Det räcker
inte att klippa eller bryta bygeln.
4 4
Bild 4.32 Bygel mellan plint 37 och 12, 24 V DC
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 27
Page 32

130BD343.10
Mains supply
Rectier
Control
Card
Inverter
M
V LT
COM
(T20)
24V (T12)
37
K1 K2
K1
K2
K1 K2
Mechanical brake control
Switching element
monitor
Control system
K1
K2
Switching element
Safety circuit with
switching elements
Digital
controls
Elektrisk installation
VLT® Lift Drive LD 302
44
Bild 4.33 Kabeldragning vid hisstillämpningar
Systemkomponentkrav
Alla komponenter som används med Safe Torque O
måste uppfylla kraven i SS-EN81-1.
Krav för brytaranordningar
Övervakningen av brytaranordningen i enlighet med
denitionen i SS-EN81-1 § 12.7.1: "Matningen till plint 27
måste kunna avbrytas med 2 oberoende kontakter (se
blockschema). Om en kontaktor inte öppnas, måste en ny
start förhindras med nästa riktningsändring".
Design av brytaranordingar:
I enlighet med SS-EN81 § 13..2.1.2 b) kategori DC -13, §
13.2.1.3 (i tvingande kontakter) och § 13.2.2.
§ 14.1.1 felövervägning för elektriska säkerhetsanordningar
Elektriska krav för brytaranordningar:
Luft- och läckagevägar
•
Nominell stötkapacitet 4 kV
•
IEC 60 664-1 överspänningskategori III
•
Grad av förorening 3
•
Nominell isolationsspänning 250 V AC
•
Ledningsdragningen mellan plint 12 och det första kontaktelementet är identisk med kabeln som går mellan
kontaktelementet och plint 27. Den här kabeln måste
skyddas och skärmningen måste anslutas till plint 20
(GND). De 2 brytarelementen måste installeras intill
varandra. Kabeln måste uppfylla de elektriska kraven i SSEN 81-1 § 13,5. Kablarna måste vara exibla och skyddade,
nominell spänning Uo/U 300/500 V.
OBS!
De två oberoende brytarelementets funktion kan även
aktiveras med ett nödstoppsrelä i enlighet med SSEN954-1 kategori 4 och EN81 bilaga H. Utför en
funktionstest enligt hisstyrsystemets dokumentation.
4.9.1.8 Hisstyrning utan motorkontaktorer
Funktionen Safe Torque O kan användas för att ersätta de
två oberoende kontaktorerna mellan frekvensomriktaren
och motorn.
28 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 33

Elektrisk installation Handbok
4.10 Checklista för installation
Innan installationen slutförs ska den inspekteras enligt beskrivningen i Tabell 4.10. Bocka av uppgifterna efterhand som de
slutförs.
Inspektera Beskrivning
Tillvalsutrustning
Kabeldragning
Styrkablar
Kylningsavstånd
Omgivande
miljöförhållanden
Säkringar och
maximalbrytare
Jordning
Kablar för in- och
utström
Apparatskåpets inre•Kontrollera att enhetens inre är fritt från smuts, metallrasp, fukt och korrosion
Brytare
Vibrationer
Se efter om det nns extrautrustning, brytare, strömbrytare eller ingångssäkringar/maximalbrytare på
•
frekvensomformarens ingångssida eller utgångssida till motorn. Kontrollera att de är redo för drift med
fullt varvtal
Kontrollera att alla givare som används för återkoppling till frekvensomformaren fungerar och att de är
•
korrekt installerade.
Ta bort eventuella lock för korrigering av eektfaktorn från motorn (motorerna)
•
Justera eventuella lock för korrigering av eektfaktor på nätsidan och kontrollera att de är dämpade
•
Kontrollera att motorkablarna och styrkablarna är separerade eller skärmade, eller leds i tre separata
•
skyddsrör av metall för isolering av högfrekventa störningar
Kontrollera att inga kablar är skadade och att inga anslutningar är lösa
•
Kontrollera att styrkablarna är isolerade från ström- och motorkablarna (för ljudimmunitet)
•
Kontrollera signalernas spänningskällor, om nödvändigt
•
Vi rekommenderar att skärmade kablar eller tvinnade parkablar används. Kontrollera att skärmningen
•
avslutas korrekt
Kontrollera att kylningsavståndet är tillräckligt stort både ovanför och under enheten, se
•
Kontrollera att kraven för omgivande förhållanden är uppfyllda
•
Kontrollera att rätt säkringar och maximalbrytare används
•
Kontrollera att alla säkringar sitter ordentligt och är i funktionsdugligt skick, liksom att alla maximalbrytare
•
är öppna
Kontrollera att jordanslutningarna korrekta, åtdragna och inte har oxiderat.
•
Att dra jordningsledningar till skyddsrör eller montera bakpanelen på en metallyta utgör inte lämplig
•
jordning
Kontrollera att inga anslutningar är lösa
•
Kontrollera att motor- och nätspänningskablarna dras i separata skyddsrör eller i separata skärmade kablar
•
Kontrollera att enheten är monterad på en omålad yta av metall
•
Kontrollera att alla brytare och strömbrytare är inställda på rätt läge
•
Kontrollera att enheten är fast monterad eller att vibrationsdämpande stöd används
•
Kontrollera att det inte förekommer onormalt mycket vibrationer
•
☑
4 4
Tabell 4.10 Checklista för installationen
FÖRSIKTIGT
RISK FÖR FARA I HÄNDELSE AV INTERNT FEL
Risk för personskador om frekvensomformaren inte är korrekt försluten.
Innan du kopplar på strömmen ska du säkerställa att alla skyddskåpor sitter på plats och är säkrade.
•
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 29
Page 34

Idrifttagning
5 Idrifttagning
VLT® Lift Drive LD 302
5.1 Säkerhetsinstruktioner
5.1.1 Säkerhetsinspektion
5.2 Inkoppling av nätspänning till
frekvensomriktaren
5.2.1 Koppla på strömmen
FÖRSIKTIGT
HÖG SPÄNNING!
Om ingångs- och utgångsanslutningarna inte är korrekt
55
anslutna nns det risk farlig spänning på dessa plintar.
Kraftkablar för era motorer som inte går korrekt i
samma skyddsrör kan medföra en risk för läckström som
laddar kondensatorer i frekvensomriktaren. Det nns
även en risk för det när frekvensomriktaren är
frånkopplad från nätspänningen. Gör inga antaganden
om eektkomponenterna före driftsättningen. Följ
procedurerna inför start. Personskador eller materiella
skador kan bli följden om procedurerna inför start inte
följs.
1. Kraftförsörjningen till enheten måste vara
frånkopplad och låst. Lita inte på att frekvensomriktarens strömbrytare isolerar inströmmen.
2. Kontrollera att ingångsplintarna L1 (91), L2 (92)
och L3 (93), fas-till-fas och fas-till-jord är
spänningslösa,
3. Kontrollera att utgångsplintarna 96 (U), 97 (V) och
98 (W), fas-till-fas och fas-till-jord är
spänningslösa.
4. Kontrollera motorns anslutning genom att mäta
resistansen på U-V (96–97), V-W (97–98) och W-U
(98–96).
5. Kontrollera att såväl frekvensomriktaren som
motorn är korrekt jordad.
6. Kontrollera att frekvensomriktaren inte har lösa
anslutningar på plintar.
7. Kontrollera att nätspänningen stämmer överens
med frekvensomriktarens och motorns spänning.
OBS!
Innan strömmen kopplas på till enheten måste hela
installationen, se kapitel 4.10.1 Checklista för installa-
tionen
VARNING
HÖG SPÄNNING!
Frekvensomriktaren innehåller hög spänning när den är
ansluten till den spänningssatta DC-bussen. Endast
behörig personal ska installera, driftsätta och underhålla
frekvensomriktarna. Om installation, driftsättning och
underhåll inte utförs av behörig personal kan det leda
till dödsfall eller allvarliga personskador.
VARNING
OAVSIKTLIG START!
När frekvensomriktaren är ansluten till den
spänningssatta DC-bussen kan motorn starta när som
helst. Frekvensomriktaren, motorn och all annan elektrisk
utrustning måste vara redo för drift. Om dessa delar inte
är driftklara när frekvensomriktaren ansluts till den
spänningssatta DC-bussen kan det leda till dödsfall,
allvarliga personskador eller skador på utrustning och
egendom.
1. Kontrollera att inspänningen är balanserad inom
3 %. Korrigera annars obalansen i ingångspänningen innan du fortsätter. Upprepa proceduren
efter spänningskorrigeringen.
2. Kontrollera att eventuella kablar till tillvalsutrustningen stämmer överens med
installationstillämpningen.
3. Kontrollera att alla operatörsenheter är inställda
på OFF (AV). Apparatskåpens dörrar måste vara
stängda eller försedda med monterade skydd.
4. Slå på strömmen till enheten. Starta INTE frekvensomriktaren i det här läget. Om
frekvensomriktaren är försedd med en strömbrytare vrider du den till läget ON (PÅ) för att
koppla på strömmen till enheten.
OBS!
Om det står AUTO REMOTE COAST i statusraden på LCP:n
betyder det att enheten är klar för drift, men att det
saknas en ingångssignal på plint 27.
30 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 35

Auto
on
Reset
Hand
on
O
Status
Quick
Menu
Main
Menu
Alarm
Log
Cancel
Info
Status
1(1)
1234rpm
Back
OK
43,5Hz
Run OK
43,5Hz
On
Alarm
Warn.
130BC362.10
a
b
c
d
1.0 A
1.1
2
3
1.3
1.2
130BP041.10
799 v/m
1 (1)
36,4 kW7,83 A
0,000
53,2 %
Status
Idrifttagning Handbok
5.3 Lokal manöverpanel
Den lokala manöverpanelen (LCP) består av displayen och
knappsatsen på enhetens framsida.
Den startar, stoppar och styr varvtalet vid lokal
•
styrning.
Visning av driftdata, status, varningar och larm
•
Programmera frekvensomriktarens funktioner
•
När automatisk återställning är inaktiverat och ett
•
fel har inträat används den för att återställa
frekvensomriktaren manuellt.
OBS!
Ändra displayens kontrast genom att trycka på [Status]
och knapparna [▲]/[▼].
5.3.1 LCP – layout
LCP:n är indelad i fyra funktionsgrupper (se Bild 5.1).
a. Displayområde.
b. Menyknappar som används för att visa statusal-
ternativ, programmering eller
felmeddelandehistorik.
c. Navigeringsknappar för programmeringsfunk-
tioner, för att ytta displaymarkören och
varvtalsreglering vid lokal drift. Till den här
gruppen hör även statuslamporna.
d. Knappar för driftlägen och återställning.
5.3.2 Anpassa visning i LCP
Displayen är aktiverad när frekvensomriktaren matas från
nätspänning
•
en likströmsbussanslutning
•
extern 24 V-försörjning
•
Informationen som visas på LCP kan anpassas efter
användarens tillämpning.
Varje displayvisning är kopplad till en parameter.
•
Alternativen väljs på huvudmenyn 0-2*
•
Frekvensomriktarens status på displayens nedre
•
rad genereras automatiskt och går inte att välja. I
kapitel 9 Tillämpningsexempel hittar du
tioner och mer information.
deni-
5 5
Display Parameternummer Fabriksinställning
1,1 0-20 Varvtal [v/m]
1,2 0-21 Motorström
1,3 0-22 Eekt [kW]
2 0-23 Frekvens
3 0-24 Referens [%]
Bild 5.1 LCP
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 31
Tabell 5.1 Parameternummer och standardinställning för
display Rader
Bild 5.2 Exempel på visning av alla displayrader
Page 36

1.1
1.2
2
1.3
130BP062.10
207 v/m
Autoärr körs
1 (1)
24,4 kW5,25 A
6,9 Hz
Status
130BP045.10
Status
Quick
Menu
Main
Menu
Alarm
Log
130BT117.10
OK
Back
Info
Warn
Alarm
On
Cancel
Idrifttagning
Bild 5.3 Exempel på visning av mindre antal
displayrader
55
5.3.3 Menyknappar för displayen
VLT® Lift Drive LD 302
Knapp Funktion
Huvudmeny Ger åtkomst till alla programmeringsparametrar.
Tryck på knappen två gånger för att komma
•
åt index på toppnivå
Tryck på knappen en gång för att gå tillbaka
•
till den senaste platsen
Håll ned knappen för att ange ett parame-
•
ternummer och gå direkt till den
parametern.
Larmlogg Visar en lista över aktuella varningar, de 5
senaste larmen och underhållsloggen.
Välj larmnummer med navigeringsknapparna
•
och tryck på [OK] om du vill ha mer
information om frekvensomriktaren innan
den övergick till larmläge.
Menyknapparna används för åtkomst till parameterinställningar, för att växla mellan visningslägen vid normal drift
och för att visa felloggsdata.
Tabell 5.2 Menyfunktioner
5.3.4 Navigeringsknappar
Navigeringsknapparna används för att ställa in olika
funktioner och för att ytta displaymarkören. Via navige-
Bild 5.4 Menyknappar
ringsknapparna går det också att sköta varvtalsregleringen
vid lokal (manuell) styrning.Intill nns nns också tre
statusindikeringslampor.
Knapp Funktion
Status Tryck på den här knappen om du vill visa drifts-
informationen.
I läget Auto håller du in knappen för att
•
växla mellan statusavläsningsskärmarna.
Tryck på knappen era gånger för att
•
bläddra genom statusvisningarna
•
Håll in [Status] och [▲] eller [▼] för att
justera ljusstyrkan på displayen.
Symbolen i displayens övre, högra hörn visar
•
motorns rotationsriktning och vilken
inställning som är aktiv. Detta går inte att
programmera.
Snabbmeny Ger åtkomst till programmeringsparametrarna
för de första inställningsinstruktionerna och
många detaljerade tillämpningsinstruktioner.
Tryck på den här knappen för att komma åt
•
Q2 Snabbinställning för sekventiella
anvisningar för att programmera den
grundläggande frekvensomriktarinställningen
Följ parametersekvensen som visas för
•
funktionsinställningen
Bild 5.5 Navigeringsknappar
Knapp Funktion
Tillbaka Återgår till det föregående steget eller den
föregående listan i menystrukturen.
Avbryt Upphäver den senaste ändringen eller det senaste
kommandot, såvida displayläget inte har ändrats.
Info Ger en denition av den funktion som visas när du
trycker på knappen.
Navigeringsknappar
OK Används för att komma åt parametergrupper eller
Tabell 5.3 Navigeringsknappfunktioner
De fyra navigeringsknapparna används för att gå
mellan olika objekt i menyn.
för att aktivera ett val.
32 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 37

130BP046.10
Hand
on
O
Auto
on
Reset
Idrifttagning Handbok
Indikatorlampa
Grön På Indikatorlampan tänds när frekven-
Gul Varn. När varningsvillkoren uppfylls
Röd Larm Om det uppstår ett fel blinkar den
Tabell 5.4 Indikatorlampornas funktion
Indikator Funktion
somriktaren är ansluten till
nätspänningen, en DC-bussanslutning eller en extern 24 Vförsörjningskälla.
tänds den gula varningslampan
och en text som identierar
problemet visas på displayen.
röda lampan och en larmtext visas.
5.3.5 Manöverknappar
Manöverknapparna nns längst ned på LCP:n.
Bild 5.6 Manöverknappar
Knapp Funktion
Hand on Startar frekvensomriktaren med lokal styrning.
Styr frekvensomriktarens varvtal via navige-
•
ringsknapparna
En extern stoppsignal via styringången eller
•
via seriell kommunikation åsidosätter den
lokala styrningen.
O Stannar motorn men kopplar inte bort strömmen
från frekvensomriktaren.
Auto On Försätter systemet i ärrdriftläge.
Svarar på ett externt startkommando via
•
styrplintarna eller via seriell kommunikation.
Varvtalsreferensen hämtas från en extern källa.
•
Återställning Återställer frekvensomriktaren manuellt efter att
ett fel har kvitterats.
Tabell 5.5 Manöverknapparnas funktioner
5.3.6 Säkerhetskopiera och kopiera
parameterinställningar
Programmeringsdata lagras internt i frekvensomriktaren.
Data kan laddas upp till LCP-minnet som en
•
säkerhetskopia
Efter att de lagrats i LCP:n går det att hämta
•
tillbaka dem till frekvensomriktaren
Data kan också överföras till andra frekvensom-
•
riktare genom att LCP:n ansluts till dessa och de
lagrade inställningarna hämtas. (Detta är ett
snabbt sätt att programmera era enheter med
samma inställningar).
Initiering av frekvensomriktaren för att återställa
•
fabriksinställningarna påverkar inte de data som
lagrats i LCP-minnet
VARNING
OAVSIKTLIG START!
När frekvensomriktaren är ansluten till växelströmsnätet
kan motorn starta när som helst. Frekvensomriktaren,
motorn och all annan elektrisk utrustning måste vara
redo för drift. Om dessa delar inte är driftklara när
frekvensomriktaren ansluts till nätspänningen kan det
leda till dödsfall, allvarliga personskador eller skador på
utrustning och egendom.
FÖRSIKTIGT
Initiering återställer enheten till fabriksinställningarna.
All information om programmering, motordata, lokalisering och övervakningsposter kommer att gå förlorade.
Om du överför data till LCP:n före initieringen skapar du
en säkerhetskopia.
Du återställer frekvensomformarens parameterinställningar
till fabriksinställningarna genom att initiera frekvensomformaren. Initiering kan göras via parameter 14-22 Driftläge
eller manuellt.
Initiering med parameter 14-22 Driftläge ändrar
•
inte frekvensomformardata av typen drifttimmar,
val för seriell kommunikation, egna menyinställningar, fellogg, larmlogg och andra
övervakningsfunktioner.
Vanligtvis rekommenderar vi att du använder
•
parameter 14-22 Driftläge.
Manuell initiering raderar alla data om motorn,
•
programmering, lokalisering och övervakning och
återställer fabriksinställningarna.
5 5
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 33
Page 38

130BD644.10
Auto
on
Reset
Hand
on
O
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
0.00A
Operating Mode
On
Alarm
Warn.
000000000000bin
X57.1
X57.2
X57.3
X57.4
X57.5
X57.6
X57.7
X57.8
X57.9
X57.10
00 00000000000 bin
130BD352.10
Idrifttagning
VLT® Lift Drive LD 302
5.3.7 Rekommenderad initiering
1. Tryck på [Main Menu] två gånger för att komma
åt parametrarna.
2. Gå till parameter 14-22 Driftläge.
3. Tryck på [OK].
4. Bläddra till Initiering.
5. Tryck på [OK].
6. Bryt nätspänningen till enheten och vänta tills
displayen slocknat.
55
7. Slå på strömmen till enheten.
De fabriksinställda parameterinställningarna återställs
under startsekvensen. Detta kan ta något längre tid än
normalt.
8. Larm 80 visas.
9. Tryck på [Reset] för att återgå till driftläge.
5.3.8 Manuell initiering
1. Koppla från nätspänningen till enheten och vänta
tills displayen slocknat.
2. Håll [Status], [Main Menu] och [OK] intryckta
samtidigt och koppla in nätspänningen.
Parameterinställningarna återställs till fabriksvärden under
startsekvensen.
Efter frekvensomriktaren tagits i drift visar LCP:n Driftläge.
LCP:n visar ingångsstatus plint X.57 (0 bin=0 V DC, 1
bin=24 V DC) och faktisk motorström i Ampere.
Bild 5.7 LCP-display
Bild 5.8 LCP-display, status plint X.57
34 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 39

Programmering Handbok
6 Programmering
6.1 Grundläggande driftprogrammering
Frekvensomriktaren kräver grundläggande programmering
innan de kan tas i drift och fungera optimalt.
1. Aktivera motordrift genom att ange
märkskyltsdata.
Kongurera parametrarna i parametergrupp19-**
2.
Application Parameters ( Tillämpningsparametrar)
för hisstillämpningen.
6.2 Automatisk motoranpassning
Automatisk motoranpassning (AMA) är en testprocedur
som mäter motorns elektriska egenskaper för att optimera
kompatibiliteten mellan frekvensomriktaren och motorn.
Frekvensomriktaren skapar en matematisk modell
•
av motorn för att reglera den utgående
motorströmmen. Proceduren testar även den
elektriska strömmens balans i ingångsfasen. Den
jämför motoregenskaperna med de data som har
angetts i parametrarna Parameter 1-20 Motoreekt
[kW] till Parameter 1-25 Nominellt motorvarvtal.
Den startar inte motorn och skadar inte motorn.
•
Det är möjligt att vissa motorer inte kan utföra
•
den fullständiga versionen av testet. Välj Aktivera
reducerad AMA i sådana fall.
Om ett utgångslter är anslutet till motorn väljer
•
du Aktivera red. AMA
Om varningar och larm visas se
•
kapitel 10 Speciella förhållanden
Kör den här processen med kall motor för bästa
•
resultat.
Så här kör du AMA:
1. Tryck på [Main Menu] för att komma åt
parametrarna.
2. Bläddra till parametergrupp 19-** Application
Parameters ( Tillämpningsparametrar).
3. Tryck på [OK].
4. Bläddra till 19-63 Motor Adaptation (AMA)
(Motoranpassning).
5. Tryck på [OK].
6. Välj [1] Aktivera fullst. AMA.
7. Tryck på [OK].
8. Följ instruktionerna på skärmen.
9. AMA utförs automatiskt och när det är klart visas
ett meddelande.
10. Tryck på [OK] och [Cancel] för att spara resultat.
6.3 Programmera hisstillämpningen
Tryck på [Main Menu] eller [Quick Menu] för att ställa in
hisstillämpningsparametrarna.
OBS!
Tryck på [OK] och [Cancel] samtidigt för att spara
ändrade parameterinställningar.
Följande procedurer beskriver vilka parametrar som ska
ställas in och i vilken ordning.
Inställning av motordata för asynkronmotorer
1. 19-01 Motor number (Motornummer).
2. parameter 1-10 Motorkonstruktion.
3. parameter 1-20 Motoreekt [kW].
4. parameter 1-22 Motorspänning.
5. parameter 1-23 Motorfrekvens.
6. parameter 1-24 Motorström.
7. parameter 1-25 Nominellt motorvarvtal.
8. 19-02 Motor cos phi (Motorns cos phi).
Inställning av motordata för asynkronmotorer
1. 19-01 Motor number (Motornummer).
2. parameter 1-10 Motorkonstruktion.
3. parameter 1-24 Motorström.
4. parameter 1-25 Nominellt motorvarvtal.
5. parameter 1-26 Märkmoment motor.
6. parameter 1-30 Statorresistans (Rs).
7. parameter 1-37 Induktans för d-axel (Ld).
8. parameter 1-39 Motorpoler.
9. parameter 1-40 Mot-EMK vid 1000 RPM.
Ställa in inkrementell pulsgivardata
1. parameter 32-00 Inkrementell signaltyp.
2. parameter 32-01 Inkrementell upplösning.
Motoranpassning för asynkronmotorer
1. 19-63 Motor adaptation (asynchron motor)
(Motoranpassning (asynkronmotor)).
Ställa in hisskonstruktionsdata
1. 19-10 Traction sheave [mm] (Drivskiva [mm]).
2. 19-11 Ration 100 (Förhållande 100).
3. 19-12 Suspension (Upphängning).
6
6
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 35
Page 40

Programmering
VLT® Lift Drive LD 302
6
Inställning av styrningstyp
1. 19-86 Enable simple control (Aktivera enkel
styrning).
2. 19-50 Run-in mode (Inkörningsläge).
Spara data och beräkna interna inställningar
1. 19-64 Store parameter (Lagra parameter).
Kontroll innan start
De två LED-indikatorerna på plint X55 visar status på
kanalerna A och B för inkrementella pulsgivaren.
Kontrollera att LED-indikatorerna lyser. Om LED-indikatorerna inte lyser beror det förmodligen på kortslutning
eller en trasig kabel.
Startar frekvensomriktaren i inspektionsläge.
1. Ange varvtalssignalen (vi) och riktningssignalen
(32/33).
2. Ange aktiveringssignalen (X57.1 och 27).
Motorn är nu magnetiserad, bromsen är frigjord och
frekvensomriktaren startar. Om motorn inte startar, se
kapitel 8.3.1 Grundläggande felsökning.
Motorns körs kontrollerat i bägge riktningarna och frekvensomriktaren kan styra hissmotorn.
Starta varvtalsregleringen - asynkronmotor
1. Ställ in 19-13 Brake lift delay (Bromshissfördröjning)
till ett värde mellan 300 och 800 ms.
2. Ställ in 19-14 Brake lift delay (Bromshissförd-
röjning) till ett värde mellan 30 och 500 ms.
3. Ställ in 19-40 KP-gain at start (KP-förstärkning vid
start) till 100.
4. Ställ in 19-42 I-time at start (I-tid vid start) till 200
ms.
5. Ställ in 19-44 Filtertime at start (Filtertid vid start)
till 10 ms.
6. Ställ in 19-46 Pos gain start (Pos förstärkning start)
till 0,1.
Starta varvtalsreglering - permanentmagnetmotor
1. Ställ in 19-13 Brake lift delay (Bromshissfördröjning)
till 0 ms.
2. Ställ in 19-14 Brake lift delay (Bromshissförd-
röjning) till ett värde mellan 300 och 500 ms.
3. Ställ in 19-40 KP-gain at start (KP-förstärkning vid
start) till ett värde mellan 500 och 100.
4. Ställ in 19-42 I-time at start (I-tid vid start) till ett
värde mellan 12 and -50 ms.
5. Ställ in 19-44 Filtertime at start (Filtertid vid start)
till 1 ms.
6. Ställ in 19-46 Pos gain start (Pos förstärkning start)
till ett värde mellan 0,2 och 0,5.
Drift varvtalsreglering – asynkronmotor
1. Ställ in 19-41 KP-gain at operation (KP-förstärkning
vid drift) till 100.
2. Ställ in 19-43 I-time operation (I-tid drift) till 200
ms.
3. Ställ in 19-45 Filtertime operation (Filtertid drift) till
10 ms.
Drift varvtalsreglering – permanentmagnetmotor
1. Ställ in 19-41 KP-gain at operation (KP-förstärkning
vid drift) till ett värde mellan 10 och 70.
2. Ställ in 19-43 I-time operation (I-tid drift) till 200
ms.
3. Ställ in 19-45 Filtertime operation (Filtertid drift) till
10 ms.
Motorfunktion
1. 19-15 Brake close delay (Broms stängd,
fördröjning).
2. 19-58 Delay after stop (Fördröj efter stopp).
3. 19-59 Torque down time (Nedrampningstid).
Inställning av varvtal
1. 19-20 Max. speed [m/s] (Max. varvtal [m/s]).
2. 19-21 V4 [m/s], Nominal speed (Nominellt
motorvarvtal)
3. 19-22 V0 [m/s], Levelling speed (Utjämningsvarvtal).
4. 19-23 Vi [m/s], Inspection speed (Inspektionsvarvtal).
5. 19-24 V3 [m/s], Intermediate speed 1 (Mellanvarvtal 1).
6. 19-25 V2 [m/s], Intermediate speed 2 (Mellanvarvtal 2).
7. 19-26 Vn [m/s], Relevelling speed (Återutjämningsvarvtal).
8. 19-28 V1 [m/s], Intermediate speed 3 (Mellanvarvtal 3).
Justera motorprolen
1. 19-19 Run in distance [mm] (Körning i distans
[mm]).
2. 19-21 V4 [mm/s]
3. 19-22 V0 [mm/s].
4.
19-30 Acceleration [mm/s2].
5.
19-31 Deceleration [mm/s2].
6.
19-32 Start at jerk [mm(s3] (Startryck [mm(s3]).
36 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 41

130BD353.10
Release
I1+27+37
Start
Brake
release
Speed
I2...I8
Direction
selected
Motor
on
Motor current
on
Release time
expired
Release
I1+27+37
Speed
I2...I8
Set speed
Direction
UP and Down
Direction
Down
Direction
change?
Decelerate
to 0 mm/s
Motor
off
Error
message
Brake
close
Motor off
No direction
Decelerate
to 0 mm/s
Execute travel
command
Y
N
N
NN
N
N
N
N
N
Y
Y
Y
Y
YYY
Y
Programmering Handbok
7.
19-33 Accel. jerk [mm/s3] (Accelerationsryck [mm/s3]).
8.
19-34 Decel. jerk [mm/s3] (Decelerationsryck [mm/s3]).
9.
19-35 Run in jerk [mm/s3] (Körningsryck [mm/s3]).
10.
19-55 L-start acc [mm/s2] (L-start acc [mm/s2]).
11. 19-56 L-start speed [mm/s] (L-start varvtal [mm/s]).
12. 19-57 L-start time [ms] (L-starttid [ms]).
6.3.1 Start- och stoppsekvenser
OBS!
Start- och stoppsekvenser i hissdriftläge.
6
6
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 37
Bild 6.1 Hisstyrning startsekvens
Page 42

130BD354.10
Falling edge
run-in signal
Target position
=pos + run - in pos
Positioning
mode
Release
I1+27+37
Position
reached
Brake
close
Closing time
expired?
Motor not
energized
Signal position
reached
Release
I1+27+37
Position reached
delete
End
Lift drive
Motor
de-energized
Brake
close
Y
N
Y
Y
Y
N N
N
6
Programmering
VLT® Lift Drive LD 302
Bild 6.2 Hisstyrning stoppsekvens
38 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 43

T
tb tat0
tc
ta
Hz
[s]
50
8
3
0
0.5 2.5 1.3
1
2
3
4
51
2.5 2 0.5 30
Im
143%
123%
112%
83%
0
130BD342.10
Funktioner Handbok
7 Funktioner
7.1 Bromsfunktioner
7.1.1 Inledning
Bromsfunktionen används för att bromsa lasten på
motoraxeln, antingen som dynamisk eller statisk
bromsning.
7.1.1.1 Mekanisk hållbroms
En mekanisk hållbroms som monteras direkt på motoraxeln
ger vanligtvis statisk bromsning. I en del tillämpningar
fungerar det statiska hållmomentet som statisk hållning av
motoraxeln (synkrona permanentmotorer). En PLC eller en
digital utgång på frekvensomriktaren (relä eller solid state)
styr hållbromsen.
7 7
OBS!
Om hållbromsen ingår i en säkerhetskedja:
En frekvensomriktare kan inte åstadkomma säker
styrning av en mekanisk broms. En redundant krets för
bromsstyrningen måste inkluderas i den övergripande
installationen.
7.1.1.2 Dynamisk broms
Etablera en dynamisk broms genom att använda ett
bromsmotstånd. En broms-IGBT håller överspänningen
under en viss tröskelnivå genom att styra bromsenergin
från motorn till det anslutna bromsmotståndet.
7.1.2 Bromsmotståndkrav
Ett bromsmotstånd säkerställer att energin absorberas i
bromsmotståndet och inte i frekvensomriktaren. Mer
information nns i Bromsmotstånd Design Guide.
Mängden kinetisk energi som överförs till resistorn i varje
bromsperiod kan beräknas baserat på cykeltiden och
bromstiden (intermittent driftcykel).
Beräkna den intermittent driftcykeln för motståndet på
följande sätt:
Driftcykel = tb/T
T = cykeltid i s
tb är bromstiden i s (av cykeltiden)
1 Lastcykel
2 Motorström
3 Motordrift
4 Generatordrift
Bild 7.1 Intermittent driftcykel
380-400 V
PK37-P75K
Cykeltid (s) 120
Bromsdriftcykel vid 100 % moment Kontinuerlig
Bromsdriftcykel vid överbelastningsmoment
(150/160 %)
Tabell 7.1 Bromsning vid högt överbelastningsmoment
40%
Om en driftcykel på 10 % används, kan bromsmotstånden
absorbera bromseekt under 10 % av cykeltiden.
Resterande 90 % av cykeltiden används för att kyla bort
bromsvärmen. Danfoss erbjuder bromsmotstånd med
driftcykel på 5 %, 10 % och 40 %.
OBS!
Kontrollera att motståndet är konstruerat för att klara
den krävda bromstiden.
Den maximala tillåtna belastningen på bromsmotståndet
anges som en toppeekt vid en given intermittent
driftcykel och kan beräknas som:
2
U
dc
Ω =
R
br
P
topp
där
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 39
Page 44
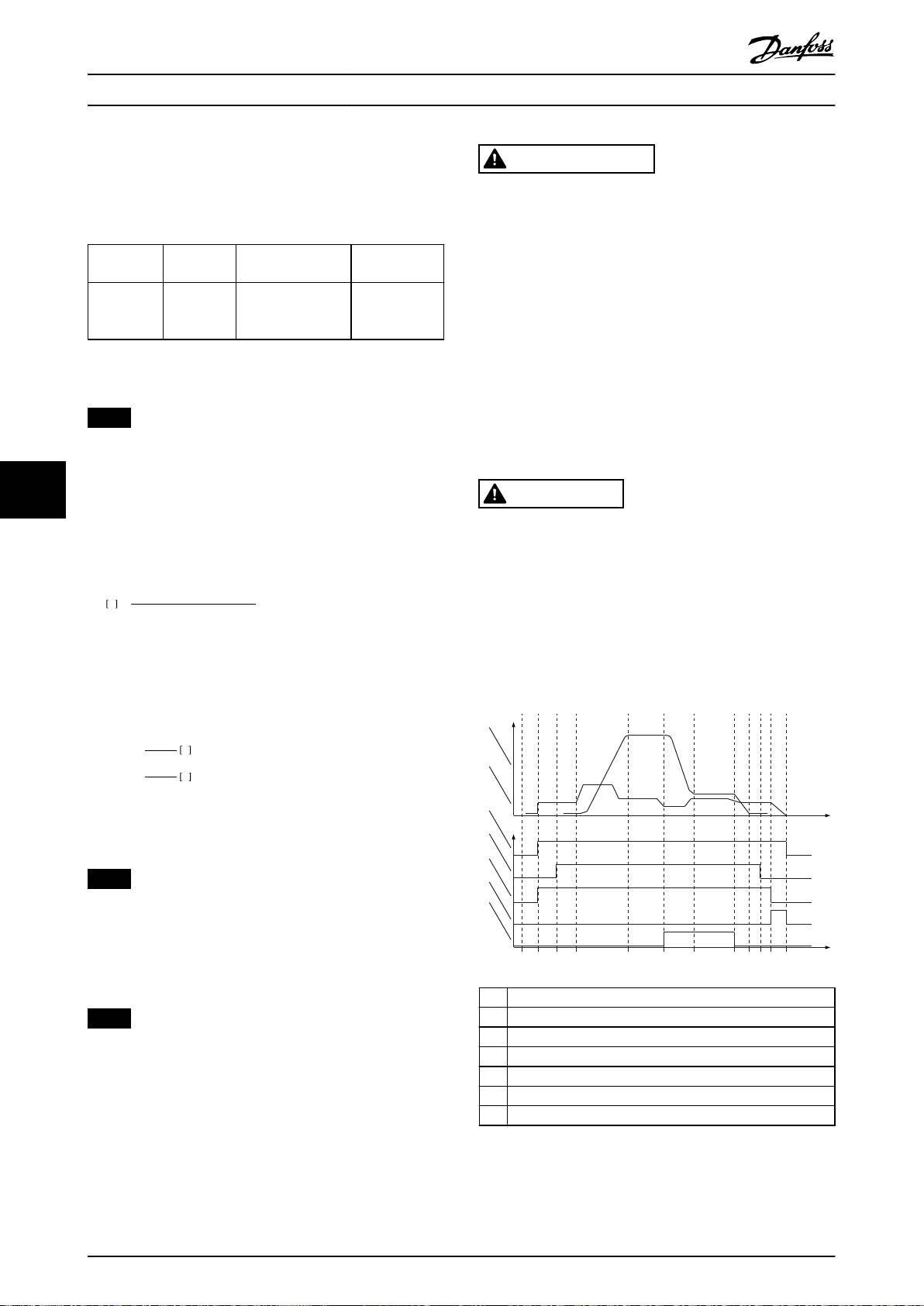
t0 t1 t2 t3 t4 t5 t6 t7t8t9 t10 t11 Time
par. 19-13
par. 19-14
par. 19-19
par. 19-58
par. 19-15
1
2
3
4
5
6
7
130BD351.11
par. 19-59
Funktioner
P
= P
peak
motor
x Mbr [%] x η
motor
x η
VLT
VLT® Lift Drive LD 302
[W]
Bromsmotståndet beror, som visas, på mellankretsspänningen (Udc).
Storlek Broms
aktiv
LD 302
3x380-400V*650 V 840 V/828 V 850 V/855 V
Varning innan
urkoppling
Urkoppling
(tripp)
FÖRSIKTIGT
BRANDFARA!
Rör inte bromsmotståndet då det kan bli mycket varmt
under/efter bromsning. Bromsmotståndet ska placeras i
en säker miljö för att undvika brand. Undlåtande att
följda dessa riktlinjer kan leda till personskador och
skador på egendom/utrustning.
7.1.2.1 Styrning av mekanisk broms
Tabell 7.2 Mellankretsspänning
* Beroende på eektstorlek
VLT Lift Drive LD 302 har en styrning av mekanisk broms
som har utformats speciellt för hissanordningar. Utgång 29
används för att styra bromsen.
OBS!
Säkerställ att bromsmotståndet är dimensionerat för
850 V.
77
Danfoss rekommenderar bromsmotståndet R
rec
som
garanterar att frekvensomriktaren kan bromsa med det
högsta bromsmomentet (M
) på 160 %. Formeln kan
br(%)
skrivas så här:
2
U
x100
R
Ω =
rec
P
η
har normalt värdet 0,90
motor
η
har normalt värdet 0,98
VLT
motor
xM
dc
br( % )
xη
motor
xη
VLT
LD 302 implementerar automatiskt styrning av den
mekaniska bromsen och inställningen av regulatorns
parametrar.
VARNING
Risk för fel på den mekaniska bromsen. Ändra inte
inställningarna för den mekaniska bromsfunktionens
parametrar.
Bryt strömförsörjningen vid två separata elektriska enheter
som är oberoende av varandra. Enheterna kan vara samma
som enheten för switchplint 37 (Safe Torque O). Om
switchningselementen inte bryter en av de två kontakterna
vid hisstopp, ska förnyad start förhindras senast vid nästa
För frekvensomriktare om 480 V kan R
vid ett
rec
byte av riktning.
bromsmoment om 160 % uttryckas som:
480
480
V :R
V :R
375300
=
rec
428914
=
rec
1)
Ω
P
motor
2)
Ω
P
motor
1) För frekvensomriktare med axeleekt ≤ 7,5 kW [10 hk]
2) För frekvensomriktare med axeleekt på 11–75 kW [15–
100 hk]
OBS!
Tillämpa inte högre kretsmotstånd för bromsmotståndet
är vad som rekommenderas av Danfoss. Om ett
bromsmotstånd med högre ohm-värde väljs är det inte
säkert att 160 % bromsmoment kan uppnås, eftersom
frekvensomriktaren kan koppla ur av säkerhetsskäl.
OBS!
Om kortslutning inträar i bromstransistorn ska du
förhindra eektavgivning i bromstransistorn genom att
koppla från frekvensomriktaren från nätet med en
huvudströmbrytare eller kontaktor. (Frekvensomriktaren
kan styra kontaktorn).
40 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
1 Motorvarvtal
2 Motorström
3 Frekvensomriktare aktiverar X57.1
4 Broms öppen/stängd
5 Styrning aktiv X59.4
6 I position X59.7
7 Låg hastighet V0
Bild 7.2 Bromsfrikopplingssekvens för styrning av mekanisk
broms
Page 45

Funktioner Handbok
Tid Beskrivning
t0 I position
t1 Motorstyrning på
t2 Fördröj och öppna broms
t3 Varvtalsreferens
t4 Max.varvtal
t5 Decelerationskommando
t6 Låg hastighet V0
t7 Stoppkommando
t8 Positionering
t9 Broms stängd
t10 Motor av
t11 I position
Parameter Beskrivning
19-13 Brake Lift delay (Bromshissfördröjning)
19-14 Brake delay (Bromsfördröjning)
19-19 Run in Distance (Körning i distans)
19-58 Delay after Stop (Fördröj efter stopp)
19-15
Tabell 7.3 Bromsfrikopplingssekvens för styrning av mekanisk broms
Brake close delay (Broms stängd,
fördröjning)
7.1.3 Kabeldragning för bromsmotstånd
OBS!
EMC (tvinnade kablar/skärmning)
För att reducera elektrisk störning från ledningarna
mellan bromsmotståndet och frekvensomriktaren måste
ledningarna vara tvinnade.
DCP4
För hissregulatorer med absolut pulsgivarsystem:
Som DCP3, plus:
•
Tidsoptimerad direktutjämning beroende på
•
återstående avstånd
Millimeterexakt justering beroende på avstånd
•
Övervakar decelerationen vid axeländarna
•
Fysiska
Punkt-till-punkt-länk
•
Frekvensomriktaren och hissregulatorn är länkade,
•
baserat på RS485-gränssnittet (halvduplexläge).
- Baudhastighet: 38,400 Baud
- Paritet: ingen
- Databitar: 8
- Stoppbitar: 1
Master/follower
Hissregulatorn är master.
•
Frekvensomriktaren är follower.
•
Meddelanden överförs i en cykel på 15 ms.
•
LD 302 har stöd för DCP 3- och DCP 4-protokoll. Plint 60
används som kommunikationsgränssnitt till mastern.
DCP-tillverkarkoder för VLT Lift Drive LD 302
Frekvensomriktarens tillverkare: Danfoss GmbH
•
DO-identiering: DA
•
7 7
Använd metallskärm för förbättrad EMC-prestanda.
DCP-kommunikation
7.2
Styrningen av frekvensomriktaren och positionsprotokollet
(DCP) används för serielänken mellan en hissregulator och
frekvensomriktare, baserat på ett RS485-gränssnitt.
DCP-protokollet skiljer mellan tre lägen:
DCPComChan
Läget tillhandahåller endast DCP-kommunikationskanalen
utan att aktivera rörelsekommandona.
DCP3
För hissregulatorer utan absolut pulsgivarsystem:
Styrning via den seriella DCP-länken istället för
•
plintkortet.
Statusmeddelanden om till exempel fel och
•
överhettning skickas via DCP-länken istället för av
reläet.
Övervakar hastighet (såsom utjämningsvarvtal,
•
decelerationsvarvtal och motorrusning)
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 41
Page 46

130BD645.10
Status
1(1)
0.00A
Operating Mode
000000000000bin
Diagnostik och felsökning
VLT® Lift Drive LD 302
8 Diagnostik och felsökning
8.1 Statusmeddelanden
Frekvensomriktaren genererar automatiskt statusmeddelanden som visas mitt på displayen.
Hisstillämpning – meddelande Beskrivning
Act. inspection mode! (Akt.
inspektionsläge!)
AMA active (AMA aktivt) AMA (Automatisk motoran-
Auto on!! (Auto på!) Frekvensomriktaren är inte i
Counter expired!!! (Räknare löpt
ut!)
Counter low (Räknare låg) Räknaren för riktningsändring
Operating Mode (Driftläge) Frekvensomriktaren är klar
88
Set parameter (Ange parameter) Intern parameterberäkning och
MCO track error (MCOspårningsfel)
MCO encoder error (MCOpulsgivarfel)
No motor data!! (Inga
motordata!)
Overspeed (Motorrusning) Avstängning till följd av
Overtemp heatsink
(Överhettning, kylplatta)
Overtemp motor (Överhettning,
motor)
Please wait (Vänta) Vänta tills frekvensomriktaren
Positioning n compl. (Positionering ej klar)
VLT alarm (VLT-larm) Ett fel föreligger i frekvensom-
Tabell 8.1 Meddelanden för hisstillämpning och beskrivningar
Styrläge är aktiverat.
passning) är aktiv
automatiskt läge
Räknaren för riktningsändring
har löpt ut
är låg. Ring efter service.
-justering
Övervaka spårningsfel.
Pulsgivarfel, kortslutning,
kabelbrott
Motordata saknas
motorrusning
Överhettning på kylplatta
Överhettning i motor
är klar
Positionering ej klar
riktaren
Bild 8.1 Statusvisning
8.2 Varningar och larm
Frekvensomriktaren övervakar tillståndet för
ingångsström
•
utgång
•
motorfaktorer
•
andra indikatorer för systemprestanda.
•
En varning eller ett larm indikerar antingen att det har
uppstått ett internt problem i frekvensomriktaren, eller
external felvillkor såsom
inspänning
•
motorbelastning eller temperatur
•
externa signaler
•
anda områden som övervakas av frekvensom-
•
riktaren.
Varningar
En varning utfärdas när ett larmvillkor föreligger eller när
ett onormalt driftvillkor får frekvensomriktaren att utfärda
ett larm. En varning rensas automatiskt när tillståndet
upphör.
Larm
Tripp
Frekvensomriktaren avbryter driften för att förhindra
skador på frekvensomriktaren eller systemet. Motorn
utrullar till stopp. Frekvensomriktaren fortsätter att
övervaka frekvensomriktarens status. Åtgärda felet och
återställ frekvensomriktaren.
42 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 47

130BP086.12
Status
0.0Hz 0.000kW 0.00A
0.0Hz
0
Earth Fault [A14]
Auto Remote Trip
1(1)
Diagnostik och felsökning Handbok
Återställa frekvensomriktaren efter tripp/tripplås
En tripp kan återställas på fyra olika sätt:
Med [Reset] på LCP.
•
Med ett återställningskommando via en digital
•
ingång.
Med ett återställningskommando via seriell
•
kommunikation.
Med automatisk återställning.
•
Tripplås
Ingångsströmmen kopplas på/av. Motorn utrullar till stopp.
Frekvensomriktaren fortsätter att övervaka frekvensomriktarens status.
1. Koppla bort frekvensomriktarens ingående eekt.
2. Åtgärda orsaken till felet.
3. Återställ frekvensomriktaren.
En varning och varningsnumret visas på LCP.
Ett larm blinkar på displayen tillsammans med larmnumret.
Bild 8.2 Visningsexempel på larm
Indikatorlamporna beskrivs i kapitel 5.3.4 Navigeringsknappar.
Följande varnings- eller larminformation denierar
respektive varnings- eller larmtillstånd, ger förslag på trolig
orsak och på en lösning eller på en felsökningsprocedur.
VARNING 1, 10 V låg
Styrkortets spänning från plint 50 ligger under 10 V.
Minska belastningen på plint 50 något, eftersom 10 Vförsörjningen är överbelastad. Max. 15 mA eller minst
590 Ω.
Detta tillstånd kan orsakas av en kortslutning i en ansluten
potentiometer eller av fel på kablarna till potentiometern.
Felsökning
Ta bort kabeln från plint 50. Om varningen
försvinner sitter felet i ledningarna. Byt ut
styrkortet om varningen inte försvinner.
VARNING/LARM 2, Spänn.för. 0
Varningen eller larmet visas bara om det har programmerats i parameter 6-01 Spänn.för. 0, tidsg.funktion. Signalen
på en av de analoga ingångarna ligger under 50 % av det
minimivärde som programmerats för ingången. Detta
tillstånd kan orsakas av trasig kabeldragning eller en
felaktig enhet som sänder signalen.
Felsökning
Kontrollera anslutningarna på alla analoga
ingångsplintar: Styrkortsplintarna 53 och 54 för
signaler, plint 55 gemensam. MCB 101-plintar 11
och 12 för signaler, plint 10 gemensam. MCB 109
plintar 1, 3, 5 för signaler, plintar 2, 4, 6
gemensamma.
Kontrollera att frekvensomformarens programmering och switch-inställningar matchar den
analoga signaltypen.
Utför ett signaltest på ingångsplintarna.
VARNING/LARM 3, Ingen motoransl.
Ingen motor har anslutits till frekvensomformarens utgång.
VARNING/LARM 4, Nätfasbortfall
En fas saknas på försörjningssidan, eller också är nätspänningsobalansen för hög. Det här meddelandet visas också
vid fel i ingångslikriktaren för frekvensomformaren.
Alternativen programmeras i parameter 14-12 Funktion vid
nätfel.
Felsökning
Kontrollera nätspänningen och försörjningsströmmen till frekvensomformaren.
VARNING 5, Hög DC-spän.
Mellankretsspänningen (likström) överskrider varningsgränsen för högspänning. Gränsen är avhängig av
frekvensomformarens spänningsmärkdata. Enheten är
fortfarande aktiv.
VARNING 6, Låg DC-spänning
Mellankretsspänningen (likström) understiger varningsgränsen för låg spänning. Gränsen är avhängig av
frekvensomformarens spänningsmärkdata. Enheten är
fortfarande aktiv.
VARNING/LARM 7, DC-översp.
Om mellankretsspänningen överskrider gränsvärdet
kommer frekvensomformaren att trippa efter en tid.
Felsökning
Anslut ett bromsmotstånd
Förläng ramptiden.
Ändra ramptypen.
Aktivera funktionerna i
parameter 2-10 Bromsfunktion.
Öka parameter 14-26 Trippfördröjning vid växelrik-
tarfel.
8 8
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 43
Page 48

Diagnostik och felsökning
VLT® Lift Drive LD 302
Om ett larm/varning inträar vid strömdipp ska
du använda kinetisk back-up
(parameter 14-10 Nätfel)
VARNING/LARM 8, DC-undersp.
Om DC-busspänningen sjunker under gränsvärdet för
underspänning kontrollerar frekvensomformaren om 24 V
DC-reservförsörjningen är ansluten. Om ingen 24 V DCreservförsörjning är ansluten trippar frekvensomformaren
efter en viss fastställd tidsfördröjning. Tidsfördröjningen
varierar med enhetens storlek.
Felsökning
Kontrollera att frekvensomformaren får rätt
nätspänning.
Testa ingångsspänningen.
Testa mjukladdningskretsarna.
VARNING/LARM 9, Växelri. överb.
Frekvensomformaren kommer snart att slå ifrån på grund
av överbelastning (för hög ström under för lång tid).
Räknaren för elektroniskt, termiskt växelriktarskydd varnar
88
vid 98 % och trippar vid 100 % samtidigt som ett larm
utlöses. Det går inte att återställa frekvensomformaren
förrän räknaren ligger under 90 %.
Orsaken till felet är att frekvensomformaren har körts med
mer än 100 % överbelastning under för lång tid.
Felsökning
Jämför den utström som visas på LCP med
frekvensomformarens nominella ström.
Jämför utströmmen som visas på LCP med
uppmätt motorström.
Visa den termiska frekvensomformarbelastningen
på LCP och övervaka värdet. Vid drift över
frekvensomformarens märkström ökar räknaren.
Vid drift under frekvensomformarens märkström
ska räknaren minska.
VARNING/LARM 10, Motor-ETR, öv.
Enligt det elektronisk-termiska skyddet (ETR) är motorn
överhettad. Välj om frekvensomriktaren ska ge varning eller
larm när det beräknade värdet når 100 % i
parameter 1-90 Termiskt motorskydd. Felet uppstår när
motorn drivs med mer än 100 % överbelastning under
alltför lång tid.
Felsökning
Kontrollera om motorn är överhettad.
Kontrollera om motorn är mekaniskt överbelastad.
Kontrollera att den inställda motorströmmen i
parameter 1-24 Motorström är korrekt.
Kontrollera att alla motordata är korrekt inställda i
parametrarna 1–20 till 1–25.
Om en extern äkt används kontrollerar du att
den är vald i parameter 1-91 Extern motoräkt.
VARNING/LARM 11, Motort., över
Termistorn kan vara urkopplad. Välj om frekvensomformaren ska utfärda en varning eller ett larm i
parameter 1-90 Termiskt motorskydd.
Felsökning
VARNING/LARM 12, Momentgräns
Momentet är högre än värdet i
parameter 4-16 Momentgräns, motordrift eller högre än
värdet i parameter 4-17 Momentgräns, generatordrift.
Parameter 14-25 Trippfördr. vid mom.gräns kan användas till
att ändra detta från endast en varning till en varning som
följs av ett larm.
Felsökning
Om du kör AMA i 19-63 Automatic Motor
Adaptation (Automatisk motoranpassning) kan du
justera frekvensomriktaren efter motorn och
därmed minska den termiska belastningen.
Kontrollera om motorn är överhettad.
Kontrollera om motorn är mekaniskt överbelastad.
Kontrollera att termistorn har anslutits korrekt
mellan antingen plint 53 eller 54 (analog
spänningsingång) och plint 50 (+10 V-försörjning).
Kontrollera även att plintbrytaren för 53 och 54 är
inställd på spänning. Kontrollera att 1-93 Termistorresurs väljer plint 53 eller 54.
Kontrollera, vid användning av digital ingång 18
eller 19, att termistorn har anslutits korrekt mellan
antingen plint 18 eller 19 (digital ingång, endast
PNP) och plint 50.
Kontrollera att anslutningen mellan plint 54 och
55 är korrekt om du använder en KTY-givare
Kontrollera att programmeringen i 1-93 termistor-
resurs matchar givarens kabeldragning om du
använder en termisk brytare eller termistor.
Kontrollera att programmeringen av
parameter 1-95 KTY-sensortyp, parameter 1-96 KTYtermistorresurs och parameter 1-97 KTYgränsvärdesnivåöverensstämmer med givarens
kabeldragning, om du använder en KTY-givare.
Om motormomentgränsen överskrids under
upprampning ska upprampningstiden förlängas.
Om generatormomentgränsen överskrids under
nedrampning ska nedrampningstiden ökas.
Om momentgränsen uppnås vid drift ska
momentgränsen sannolikt höjas. Kontrollera att
systemet fungerar säkert även vid högre moment.
Kontrollera att tillämpningen inte drar för mycket
ström från motorn.
44 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 49

Diagnostik och felsökning Handbok
VARNING/LARM 13, Överström
Växelriktarens toppströmgräns (som uppgår till ungefär
200 % av den nominella strömmen) har överskridits.
Varningen visas under cirka 1,5 sekunder, varefter frekvensomformaren trippar och larmar. Felet kan orsakas av
chockbelastning eller snabb acceleration när tröghetsbelastningen är hög. Om accelerationen vid upprampning är
snabb, kan felet även uppstå efter en kinetisk back-up. Om
utökad styrning av mekanisk broms är valt kan tripp
återställas externt.
Felsökning
Koppla bort strömmen och kontrollera om det
går att vrida på motoraxeln.
Kontrollera att motorstorleken passar till frekvensomformaren.
Kontrollera att alla motordata är korrekt inställda i
parametrarna 1-20 till 1-25.
LARM 14, Jordfel
Det nns ström från utfaserna till jord, antingen i kabeln
mellan frekvensomformaren och motorn eller i själva
motorn.
Felsökning
Koppla bort strömmen från frekvensomformaren
och åtgärda jordfelet.
Sök efter jordfel i motorn genom att mäta
motståndet till jord på motorkablarna och motorn
med en megohmmeter.
Utför strömgivartest.
LARM 15, Ofullst. mask.v.
Ett tillval som monterats fungerar inte tillsammans med
det aktuella styrkortets maskinvara eller programvara.
Notera värdena för följande parametrar och kontakta
Danfoss:
parameter 15-40 FC-typ
parameter 15-41 Eektdel
parameter 15-42 Spänning
parameter 15-43 Programversion
parameter 15-45 Faktisk typkodsträng
parameter 15-49 Program-ID, styrkort
parameter 15-50 Program-ID, nätkort
parameter 15-60 Tillval monterat
parameter 15-61 Programversion för tillval (för varje
tillvalsöppning)
LARM 16, Kortslutning
Det har skett en kortslutning i motor eller i motorkablage.
Koppla bort strömmen från frekvensomformaren och
åtgärda kortslutningen.
VARNING/LARM 22, Lyftmek. broms
Rapportvärdet visar vilken typ det gäller.
0 = Vridmomentsreferensen uppnåddes inte innan
tidsgränsen uppnåddes.
1 = Ingen förväntad bromsåterkoppling uppmättes innan
tidsgränsen uppnåddes.
VARNING 23, Interna äktar
Fläktvarningsfunktionen är en extra skyddsfunktion som
kontrollerar om äkten är i gång/monterad.
Felsökning
Kontrollera äktmotståndet.
Kontrollera mjukladdningssäkringar.
VARNING 24, Externa äktar
Fläktvarningsfunktionen är en extra skyddsfunktion som
kontrollerar om äkten är i gång/monterad.
Felsökning
Kontrollera äktmotståndet.
Kontrollera mjukladdningssäkringar.
VARNING 25, Bromsmotstånd
Bromsmotståndet övervakas under drift. Om kortslutning
uppstår inaktiveras bromsfunktionen och varningen visas.
Frekvensomriktaren fungerar fortfarande, men utan
bromsfunktionen. Koppla bort strömmen från frekvensomriktaren och byt ut bromsmotståndet.
VARNING/LARM 26, Bromsöverbel.
Den eekt som överförs till bromsmotståndet beräknas
som ett medelvärde över de senaste 120 sekundernas drift.
Beräkningen baseras på mellankretsspänningen och
bromsmotståndsvärdet. Varningen aktiveras när den
förbrukade bromsningen är högre än 90 % av bromsmotståndseekten.
VARNING
Det nns risk för stor eektutveckling i bromsmotståndet
om bromstransistorn är kortsluten.
VARNING/LARM 27, Broms IGBT
Bromstransistorn övervakas under drift och om den
kortsluts inaktiveras bromsfunktionen och en varning
utfärdas. Frekvensomriktaren kan fortfarande köras, men
eftersom bromstransistorn har kortslutits överförs en
avsevärd eekt till bromsmotståndet, även om detta inte är
aktivt.
Koppla bort strömmen till frekvensomriktaren och ta bort
bromsmotståndet.
Larmet/varningen kan också inträa om bromsmotståndet
överhettas.
VARNING/LARM 28, Bromskontroll
Bromsmotståndet är inte anslutet eller också fungerar det
inte.
8 8
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 45
Page 50

Diagnostik och felsökning
VLT® Lift Drive LD 302
LARM 29, Kylplattetemp.
Den maximala temperaturen för kylplattan har överskridits.
Temperaturfelet återställs när temperaturen har sjunkit
under den temperatur som är denierad för kylplattan.
Trippen och återställningspunkterna baseras på frekvensomriktarens eektstorlek.
Du kan behöva kontakta serviceavdelningen på Danfoss
eller leverantören. Notera felkoden för ytterligare felsökningsanvisningar.
Felsökning
Kontrollera om nedanstående tillstånd är aktuella.
För hög omgivningstemperatur.
För långa motorkablar.
Otillräckligt utrymme för luftöde över och under
frekvensomriktaren.
Blockerat luftöde runt frekvensomriktaren.
Skadad kylplatteäkt.
Smutsig kylplatta.
Felsökning
Kontrollera äktmotståndet.
Kontrollera mjukladdningssäkringar.
88
IGBT-termisk givare.
LARM 30, U-fasbortfall
Motorfas U mellan frekvensomformaren och motorn
saknas.
Koppla bort strömmen från frekvensomformaren och
kontrollera motorfas U.
1024–1279 Det gick inte att skicka ett CAN-telegram som
LARM 31, V-fasbortfall
Motorfas V mellan frekvensomformaren och motorn
saknas.
Koppla bort strömmen från frekvensomformaren och
kontrollera motorfas V.
LARM 32, W-fasbortfall
Motorfas W mellan frekvensomformaren och motorn
saknas.
Koppla bort strömmen från frekvensomformaren och
kontrollera motorfas W.
LARM 33, Uppstartfel
För många nättillslag har inträat inom en kort tidsperiod.
Låt enheten svalna till driftstemperatur.
VARNING/LARM 36, Nätfel
Den här varningen/det här larmet aktiveras bara om
nätspänningen till frekvensomformaren försvinner och
parameter 14-10 Nätfel inte är inställt på [0] Ingen funktion.
Kontrollera frekvensomformarens säkringar och enhetens
strömförsörjning.
LARM 38, Internt fel
När det uppstår ett internt fel visas en felkod som förklaras
i Tabell 8.2.
Felsökning
Koppla på/av strömmen
Kontrollera att alla kablar nns på plats och att
de sitter ordentligt.
No. Text
0 Den seriella porten kan inte initieras. Kontakta din
Danfoss-återförsäljare eller Danfoss-serviceavdelning.
256–258 EEPROM-uppgifterna är skadade eller för gamla
512 Styrkortets EEPROM-data är skadade eller för
gamla.
513 Kommunikationstimeout uppnåddes när EEPROM-
data skulle läsas
514 Kommunikationstimeout uppnåddes när EEPROM-
data skulle läsas
515 Den programorienterade styrningen känner inte
igen EEPROM-data.
516 Det går inte att skriva till EEPROM eftersom ett
skrivkommando pågår.
517 Skrivkommandot har nått timeout
518 Fel i EEPROM
519 Streckkodsdata saknas eller är ogiltiga i EEPROM
783 Parametervärdet ligger utanför min. gräns/max.
gräns
måste skickas.
1281 Digital signalprocessor, timeout för blinkning
1282 Dålig versionsmatchning i eekt mikropro-
gramvaran
1283 Dålig versionsmatchning i eekt EEPROM-data
1284 Det går inte att utläsa programversion på den
digitala signalprocessorn
1299 Tillvalsprogramvaran i öppning A är för gammal
1300 Tillvalsprogramvaran i öppning B är för gammal
1301 Tillvalsprogramvara i öppning C0 är för gammal
1302 Tillvalsprogramvaran i öppning C1 är för gammal
1315 Tillvalsprogramvaran i öppning A stöds inte (är inte
tillåten)
1316 Tillvalsprogramvaran i öppning B stöds inte (är inte
tillåten)
1317 Tillvalsprogramvara i öppning C0 stöds ej (inte
tillåten)
1318 Tillvalsprogramvaran i öppning C1 stöds inte (är
inte tillåten)
1379 Tillval A svarade inte när plattformsversion skulle
beräknas
1380 Tillval B svarade inte när plattformsversion skulle
beräknas
1381 Tillval C0 svarade inte när plattformsversion skulle
beräknas.
1382 Tillval C1 svarade inte när plattformsversion skulle
beräknas.
Kontrollera att tillvalet är korrekt installerat.
46 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 51

Diagnostik och felsökning Handbok
No. Text
1536 Ett undantagsfel registrerades i den programorien-
terade styrningen. Felsökningsinformation skrevs
till LCP-enheten.
1792 DSP Watch Dog är aktiverad. Felsökning av eekt-
delsdata, motororienterade styrdata överfördes inte
korrekt.
2049 Eektdata omstartades
2064–2072 H081x: tillvalet i öppning x har startat om
2080–2088 H082x: tillvalet i öppning x har utfärdat en
startfördröjning
2096–2104 H983x: tillvalet i öppning x har utfärdat en giltig
startfördröjning
2304 Det gick inte att läsa några data från eekt-
EEPROM
2305 Programversion från eektenhet saknas
2314 Eektenhetsdata från eektenhet saknas
2315 Programversion från eektenhet saknas
2316 Saknar Io_statepage från eektenhet
2324 Eektkortskongurationen är felaktig vid start
2325 Ett eektkort slutade kommunicera när
nätströmmen kopplades på
2326 Eektkortskongurationen är felaktig efter fördröj-
ningen då eektkorten registrerades.
2327 För många eektkort är för närvarande
registrerade.
2330 Eektstorleksinformationen mellan eektkorten
stämmer inte överens.
2561 Ingen kommunikation från DSP till ATACD
2562 Ingen kommunikation från ATACD till DSP (kör)
2816 Styrkortsmodul, stackspill
2817 Schemaläggare, långsamma uppgifter
2818 Snabba uppgifter
2819 Parametertråd
2820 LCP-enhet, stackspill
2821 Seriell port, spill
2822 USB-port, spill
2836 cfListMempool är för liten
3072–5122 Parametervärdet ligger utanför de tillåtna
gränserna
5123 Tillval i öppning A: Maskinvaran är inkompatibel
med styrkortets maskinvara
5124 Tillval i öppning B: Maskinvaran är inkompatibel
med styrkortets maskinvara.
5125 Tillval i öppning C0: Maskinvaran är inkompatibel
med styrkortets maskinvara.
5126 Tillval i öppning C1: Maskinvaran är inkompatibel
med styrkortets maskinvara.
5376–6231 Slut på minne
Tabell 8.2 Internt fel, kodnummer
LARM 39, Kylplattegiv.
Ingen återkoppling från kylplattans temperaturgivare.
Signalen från IGBT-term. givaren är inte tillgänglig på
eektkortet. Problemet kan bero på eektkortet, på
växelriktarkortet eller på kabeln mellan eektkortet och
växelriktarkortet.
VARNING 40, Överlast T27
Kontrollera belastningen på plint 27 eller åtgärda kortslutningen. Kontrollera parameter 5-00 Digitalt I/O-läge och
5-01 plint 27, funktion.
VARNING 41, Överlast T29
Kontrollera den anslutna belastningen på plint 29 eller ta
bort den kortslutna anslutningen. Kontrollera
parameter 5-00 Digitalt I/O-läge och parameter 5-02 Plint 29,
funktion.
VARNING 47, 24 V-spän. Låg
24 V DC-försörjningen mäts på styrkortet. Den externa 24
V DC-reservströmförsörjningen kan vara överbelastad.
Kontakta den lokala Danfoss-leverantören i annat fall.
VARNING 48, 1,8 V-spän.låg
Den 1,8 V DC-försörjning som används på styrkortet ligger
utanför de tillåtna gränserna. Försörjningsspänningen mäts
på styrkortet. Kontrollera om styrkortet är trasigt. Om det
nns ett tillvalskort kontrollerar du om ett överspänningtillstånd föreligger.
VARNING 49, Varvtalsgräns
När varvtalet inte ligger inom det specicerade området i
parameter 4-11 Motorvarvtal, nedre gräns [rpm] och
parameter 4-13 Motorvarvtal, övre gräns [rpm] visar frekven-
somformaren en varning. När varvtalet ligger under den
angivna gränsen i parameter 1-86 Tripp lågt varvtal [RPM]
kommer frekvensomformaren att trippa (utom vid start och
stopp).
LARM 50, AMA, kalibr.
Kontakta din Danfoss-återförsäljare eller serviceavdelningen
på Danfoss.
LARM 51, AMA Unom,Inom
Inställningarna för motorspänning, motorström och
motoreekt är felaktiga. Kontrollera inställningarna i
parameter 1-20 till 1-25.
LARM 52, AMA, låg Inom
Motorströmmen är för låg. Kontrollera inställningarna.
LARM 53, AMA, st. motor
Den anslutna motorn är för stor för att AMA ska kunna
genomföras.
LARM 54, AMA, lit. motor
Den anslutna motorn är för liten för att AMA ska kunna
genomföras.
LARM 55, AMA, par.omr.
Parametervärdena för motorn ligger utanför det tillåtna
gränsvärdena. AMA kan inte köras.
LARM 56, AMA, avbryt
AMA har avbrutits av användaren.
8 8
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 47
Page 52

Diagnostik och felsökning
VLT® Lift Drive LD 302
LARM 57, AMA – internt fel
Försök att starta AMA några gånger tills AMA kopplas på.
OBS!
Upprepade körningar kan hetta upp motorn till en nivå
där motstånden Rs och Rr ökar. I de esta fall är detta
inget problem.
LARM 58, AMA – internt fel
Kontakta Danfoss-återförsäljaren.
VARNING 59, Strömgräns
Strömmen är högre än värdet i parameter 4-18 Strömbegränsning. Kontrollera att motordata i parametrarna 1–20
till 1–25 är korrekt inställda. Strömgränsen kan möjligen
ökas. Försäkra dig om att systemet kan köras säkert även
om gränsen höjs.
LARM 64, Spänningsgräns
Kombinationen av belastning och varvtal kräver en motorspänning som är högre än den faktiska likspänningen.
VARNING/LARM 65, Styrkortstemp.
88
Frånslagstemperaturen för styrkortet är 80 °C.
Felsökning
Kontrollera att den omgivande driftstemperaturen
•
ligger inom gränsvärdena.
Kontrollera om luftltren är igensatta.
•
Kontrollera att äkten fungerar.
•
Kontrollera styrkortet.
•
VARNING 66, Låg temp.
Frekvensomriktaren är för kall för att köras. Varningen
bygger på uppgifter från temperaturgivaren i IGBTmodulen.
Felsökning
Temperaturen i kylplattan uppmättes till 0 °C. Detta kan
tyda på att temperaturgivaren är defekt, vilket gör att
äkthastigheten ökas maximalt. Denna varning ges om
givarkabeln mellan IGBT och växelriktarkortet kopplas ifrån.
Kontrollera även den termiska givaren i IGBT.
LARM 67, Tillvalsändring
Ett eller era tillval har antingen lagts till eller tagits bort
efter det senaste nätfrånslaget. Kontrollera att kongura-
tionsändringen är avsiktlig och återställ enheten.
LARM 68, Säkerhetsstopp
Säkert vridmoment av har aktiverats. Om du vill återgå till
normal drift ansluter du 24 V DC till plint 37 och skickar
sedan en återställningssignal (via buss, digital I/O eller
genom att trycka på [Reset]).
LARM 69, Nätkortstemp.
Temperaturgivaren på eektkortet är antingen för varm
eller för kall.
Felsökning
Kontrollera att ltren för luckäktarna inte är
blockerade.
LARM 70, Ogiltig FC-konf.
Styrkortet och eektkortet är inte kompatibla. Om du vill
kontrollera kompatibiliteten ska du kontakta din Danfossåterförsäljare och ange enhetens typkod, som står på
märkskylten, samt kortens artikelnummer.
VARNING 76, Pow. Unit Set.
Antalet begärda eektenheter stämmer inte överens med
det upptäckta antalet aktiva eektenheter.
Felsökning:
Den här varningen visas om du byter ut en Fkapslingsmodul och de eektspecika uppgifterna i
modulens eektkort stämmer inte överens med
uppgifterna i frekvensomformaren. Bekräfta att reservdelen
och dess eektkort har rätt artikelnummer.
VARNING 77, Red. eektläge
Frekvensomformaren körs i reducerat eektläge (mindre än
det tillåtna antalet växelriktaravsnitt). Varningen skapas på
eektcykeln när frekvensomformaren är inställd på att
köras med färre växelriktare och fortsätter att vara på.
LARM 79, Ogiltig PS-konf
Skalningskortets artikelnummer är felaktigt eller inte
installerat. Det gick inte att installera MK102-anslutningen
på eektkortet.
LARM 80, Enhet initierad
Parameterinställningar är återställda till fabriksinställningarna efter en manuell återställning. Ta bort larmet
genom att återställa enheten.
LARM 81, CSIV korrupt
CSIV-len innehåller syntaxfel.
LARM 82, CSIV, par.fel
CSIV kunde inte initiera en parameter.
LARM 85, Allv. fel PB:
Probus-/Prosafe-fel.
VARNING/LARM 104, Mixing fan fault
Fläkten fungerar inte. Fläktövervakningen kontrollerar att
äkten går vid start eller när blandäkten är påslagen.
Felsökning
Koppla på/av strömmen till frekvensomriktaren
för att avgöra om varningen/larmet returneras.
48 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 53

Diagnostik och felsökning Handbok
Alla meddelanden om hissregulatorn visas på LCP:n med en kort text.
Mer information nns i Tabell 8.3.
Felnummer LCP-display Feltext
102 Too many CAN objects Det nns inga er CAN-objekt tillgängliga (CANINI).
103 Ogiltigt axelnr. Axeln nns inte i systemet.
105 Fel ej återställt Felet har inte rensats.
106 HOME ej utfört Det gick inte att gå till positionen HOME.
107 HOME-hast. noll Hemhastighet 0
108 Positionsfel Positionsfel.
109 Index ej funnet Indexpuls (pulsgivare) ej funnen.
110 Okänt kmd. Okänt kommando.
111 Mjukvara ändl. Mjukvarans ändläge aktiverat.
112 Okänd param. Ogiltigt parameternummer.
113 FC ej aktiverad VLT-felstatus
114 F. många loop För många kapslade slingor.
115 Par. ej sparad INLONG-kommando har en ogiltig sträng.
116 Param.minne Parametrar i minnet är korrupta.
117 Program minne Programmen i minnet är korrupta.
118 Återst. av CPU Återställd av CPU.
119 Anv. avbröt Användaren avbröt.
121 No more SDO channels Antalet SDO-kanaler överskrider.
125 HW ändl.gräns Gränsbrytare aktiverad.
149 F. många heltal För många avbrottsfunktioner.
150 Ingen ext. 24V Extern försörjning saknas.
151 F. många gosup För många kapslade GOSUB-kommandon.
152 F. många return För många RETURN-kommandon.
154 D. utg., överb. Digital utgång överbelastad.
155 LÄNK-fel LINKGPAR misslyckades.
156 Illegal double arg. En ytande punktfunktion åberopades med ett ogiltigt argument.
160 Internal Intr. error Ett avbrott inträade, men avbrottsadressen är inte längre giltig.
162 Minnesfel Fel vid veriering.
170 Matris stl (DIM) För många DIM-matriser är denierade.
171 Array för litet Array för litet.
175 Out of array mem. Slut på lagringsutrymme för ny DIM-denierad array.
176 Wrong Array size Arraystorleken stämmer inte överens med storleken på bentlig array.
179 Waitndx-tidsg. Timeout vid väntan på index.
184 F. många ontime För många ONTIME- eller ONPERIODS-avbrott.
187 Slut på minne Det nns inte tillräckligt med minne för variabler.
188 CAN guarding error Ett skyddsfel inträade.
189 CAN send-receive error Fel när CAN skickar eller tar emot.
190 Minne låst Minnet är låst.
191 Og. CAM-array Ogiltig kurvarray i SETCURVE.
192 Pulsgivarfel Pulsgivarfel.
193 Stack overow Stackspill: Lokala variabler eller kapslade funktioner anropas för ofta.
194 Out of dyn. mem Slut på dynamiskt minne.
195 Too many test indices För många textindex i dataloggningskommando.
196 Code too old Koden är för gammal för den aktuella programversionen.
198 Limit sw. violation Fel riktning efter gränsbrytare trippade och felåterställning.
199 Internt MCO-fel Internt MCO-fel.
8 8
Tabell 8.3 Översikt över felmeddelanden
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 49
Page 54
Diagnostik och felsökning
VLT® Lift Drive LD 302
8.3 Grundläggande felsökning
OBS!
Tryck på [OK] och [Cancel] samtidigt för att spara ändrade parameterinställningar.
Symptom Möjlig orsak Test Lösning
Motor är stoppad med
MCO-spårningsfel, eller så
accelererar den oväntat.
Motor körs kontrollerat,
men i fel riktning.
Motorn avger oljud eller
vibrationer.
Motorn behöver för hög
strömstyrka.
Pulsgivarens rotationsriktning
skiljer sig från motorns riktning.
Rotationsriktningen beror på den
mekaniska konstruktionen.
Minska värdet i 19-41 KP-gain at
Fel motordata kan ha angetts. Kontrollera att motordata är
Ändra 19-05 Encoder direction
Ändra 19-04 Car direction
korrekta.
(Pulsgivarens rotationsriktning).
Om problemet kvarstår kontrollerar
du parameter 34-50 Faktisk position
för att se om pulsgivarens pulser
räknas korrekt. Om inte kontrollerar
du pulsgivarens kablage eller byter
ut pulsgivaren.
(Korgriktning).
operation (KP-förstärkning vid drift).
Utför AMA om en asynkronmotor
används.
88
Tabell 8.4 Felsökning
50 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 55

Start
Main contactors
switch on
Release + travel
command enabled
contractors
enabled
Main
N
130BD364.10
Position reached
Main contactors
switch o
Release + travel
command disabled
130BD365.10
= ”1”
End
Position reached
= ”0”
130BA119.10
B
A
A
B
A
B
B
A
Tillämpningsexempel Handbok
9 Tillämpningsexempel
9.1 Huvudkontaktorer
Förläng huvudkontaktorernas livslängd genom att endast
stänga av dem om hissmotorn är strömlös. För lastfri
aktivering/inaktivering av huvudkontaktorerna ska hisstyrningen fortlöpa så som visas i Bild 9.1 och Bild 9.2.
Bild 9.1 Aktivering av huvudkontaktorer
9.2 Drift med absolut pulsgivare (SSI/EnDat)
För att köra PM-motorer med frekvensomriktare måste du
känna till rotorns exakta position. Vanligtvis kan rotorns
position avgöras med hjälp av en envarvig absolut
pulsgivare monterad på rotoraxeln. LD 302 behöver inte en
absolut pulsgivare för att driva PM-motorer. Den detekterar
rotorns position genom att skapa en testsignal innan första
motorstart. Det går dock att använda en envarvig absolut
pulsgivare för att detektera rotorns position. Växla till en
absolut pulsgivare efter att den normala idrifttagningen är
slutförd.
1. 19-08 Abs. encoder type (Absolut pulsgivare, typ)
2. 19-09 Abs. encoder os. (Absolut pulsgivare,
förskjutning)
3. 19-98 Abs. enc. position. (Absolut pulsgivare,
position)
9.3 Kontrollera pulsgivarens rotation
Kontrollera pulsgivarens rotation om pulsgivaråterkoppling
används.
Pulsgivaren är ansluten till plintblock X55 på MCO 361.
9 9
Bild 9.2 Inaktivering av huvudkontaktorer
Pulsingången till frekvensomriktaren fastställer pulsgivarens
rotationsriktning. Medurs rotationsriktning på axeländen
innebär att kanal A är 90 elektriska grader före kanal B.
Moturs rotationsriktning innebär att kanal B är 90
elektriska grader före kanal A.
Bild 9.3 Encoder Direction (Pulsgivarens rotationsriktning)
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 51
Page 56

1
2 3 12
130BA163.11
754 6 8 9 10 11
24 V
8 V 5 V GND A A B B Z Z D D
24 V 8 V 5 V GND A A B B Z Z D D
1 2 3 4 5 6 7 8 9 10 11 12
1
1
130BA232.11
24 V
8 V 5 V
GND A A
B B
Z Z D
D
1 2 3 4 5 6 7 8 9 10 11 12
130BA233.11
Tillämpningsexempel
VLT® Lift Drive LD 302
OBS!
Om återkopplingen är negativ är pulsgivarens anslutning
felaktig!
9.3.1 Anslutningsexempel för pulsgivare
Bild 9.6 Absolut pulsgivare på 24 V (SSI). Försörjs av en extern
strömkälla.
99
Bild 9.4 5 V inkrementell pulsgivare (RS-422). Försörjs av MCO
361.
1 Extern 5 V-försörjning
OBS!
Common mode-störningar. När extern strömförsörjning
används ska du säkerställa att potentialen mellan GND
på den external försörjningen och pulsgivaranslutningarna (4) är samma för att undvika common modestörningar.
9.4 Nöddrift – UPS
För nöddrift i händelse av strömavbrott är det möjligt att
använda en UPS på 230 V. Drift med en UPS kräver ett
UPS-styrkort anslutet till frekvensomriktaren. För varje
hisstur avgör och lagrar frekvensomriktaren belastningens
riktning.
Om ett strömavbrott inträar under en hisstur, och efter
att UPS-spänning appliceras, startar hissregulatorn med
reducerat varvtal (evakueringsvarvtal) i korrekt riktning till
nästa våning.
Kontakta Danfoss för mer information.
Bild 9.5 5 V inkrementell pulsgivare (RS-422). Försörjs av en
extern strömkälla.
52 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 57

555039 42 53 54
+10 V
130BD356.10
PTC/Thermistor
Speciella förhållanden Handbok
10 Speciella förhållanden
10.1 Speciella förhållanden
10.1.1 Extrema driftförhållanden
Kortslutning (motorfas – fas)
Frekvensomriktaren är skyddad mot kortslutningar. Vid
kortslutning mellan två utfaser uppstår överström i
växelriktaren. Om kortslutningen överstiger det tillåtna
värdet stängs frekvensomriktaren av (larm 16 Tripplås).
Information om skydd mot kortslutning vid lastdelning och
bromsutgångar
Koppling på utgången
In- och urkoppling på utgången mellan motorn och
frekvensomriktaren kan orsaka ett fel, men skadar inte
frekvensomriktaren.
Motorgenererad överspänning
Spänningen i mellankretsen ökar när motorn fungerar som
generator. Spänningsökning sker i följande fall:
•
•
•
•
nns i relevant Design Guide.
Belastningen driver motorn (vid konstant
utfrekvens från frekvensomriktaren), vilket alltså
innebär att belastningen alstrar energi.
Vid nedrampning med högt tröghetsmoment, låg
friktion och för kort nedramptid för att energin
ska avsättas som en förlust i frekvensomriktaren,
motorn och installationen.
Felaktigt inställd eftersläpningskompensation kan
ge upphov till en högre DC-busspänning.
Mot-EMK från PM-motordrift. PM-motorns motEMK kan komma att överskrida
frekvensomriktarens maximala spänningstolerans
och orsaka skador om den utrullar på höga
varvtal.
10.1.2 Termiskt motorskydd
Frekvensomriktaren stöder termiskt motorskydd (skydd mot
överhettning av motorn) genom att använda en motortermistor i motorlindningarna (PTC-sensor) eller en mekanisk
termisk brytare (Klixon-typ). Termistoringången, plint 50
och 53, används för att ansluta PTC eller Klixon.
Bild 10.1 Motortermistor
10 10
I driftläge fungerar hissen så länge som termistoringången
understiger 3 kΩ. Om termistoringången överstiger 3 kΩ
genereras en temperatur om överhettning. När varningen
genereras kan hissen inte startas, eller så stannas den efter
att en tur har slutförts. Driften kan endast återupptas om
motortemperaturen understiger den kritiska motortemperaturen.
VARNING
Frekvensomriktaren måste vara utrustad med en
bromschopper och ett anslutet bromsmotstånd.
Nätavbrott
Vid nätavbrott fortsätter frekvensomriktaren att köra tills
mellankretsspänningen är lägre än den lägsta tillåtna
spänningen. Den minimala stoppnivån ligger normalt 15 %
under frekvensomriktarens lägsta nominella nätspänning.
Nätspänningen före avbrottet och motorbelastningen
bestämmer hur lång tid som går innan växelriktaren
utrullar.
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 53
Page 58

Speciella förhållanden
Bild 10.2 Termistoringång
VLT® Lift Drive LD 302
10.1.3 Nedstämpling
I vissa tillämpningar är det nödvändigt med manuell och/
eller automatisk nedstämpling.
1010
Manuell nedstämpling
Manuell nedstämpling måste övervägas för/vid:
installationer på höjder över 1 000 m över havet
•
kontinuerlig drift vid låga varvtal i tillämpningar
•
med konstant moment
omgivningstemperaturer över 45 °C [113 °F].
•
Automatisk nedstämpling
Frekvensomriktaren kontrollerar löpande om det föreligger
kritiska nivåer:
Kritiskt hög temperatur på styrkort eller kylplatta
•
Hög motorbelastning
•
Hög DC-busspänning
•
Lågt motorvarvtal
•
Som svar på en kritisk nivå justerar frekvensomriktaren
switchfrekvensen. Vid kritiskt höga, interna temperaturer
och lågt motorvarvtal kan frekvensomriktaren också tvinga
PWM-mönstret till SFAVM.
54 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 59
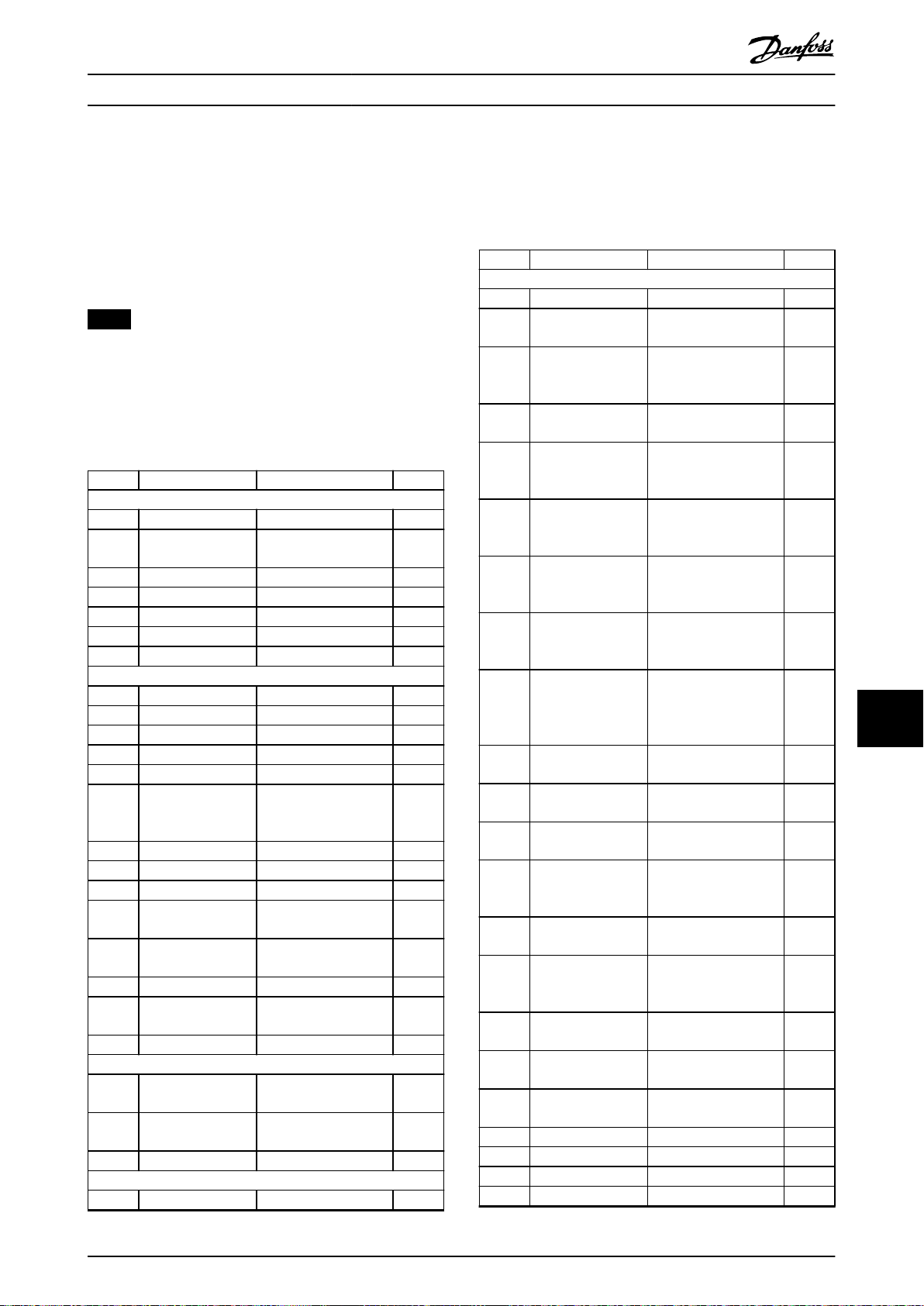
Översikt över parametrar Handbok
11 Översikt över parametrar
11.1 xx-** Aktiva parametrar
Tabell 11.1 innehåller aktiva parametrar för VLT Lift Drive LD
302.
OBS!
Den graska LCP:n (LCP 102) visar alla tillgängliga
parametrar i snabbmenyn och i huvudmenyn. Ändringar
av inaktiverade parametrar har ingen inverkan.
Tryck på [OK] och [Cancel] samtidigt för att spara ändrade
parameterinställningar.
ID Namn Standardvärde Enhet
0-** Drift/display
0-01 Språk [0] Engelska
Regionala inställ-
0-03
ningar [0] Internationell
0-20 Displayrad 1.1, liten [3440] Digitala ingångar bin
0-21 Displayrad 1.2, liten [1614] Motorström A
0-22 Displayrad 1.3, liten [1614] Motorström A
0-23 Displayrad 2, stor [1660] Digitala ingångar bin
0-24 Displayrad 3, stor [3450] Faktisk position
1-** Last/motor
1-10 Motorkonstruktion [0] Asynkront
1-20 Motoreekt Storleksrelaterad kW
1-22 Motorspänning Storleksrelaterad V
1-23 Motorfrekvens 50 Hz
1-24 Motorström Storleksrelaterad A
varv
Nominellt
1-25
motorvarvtal 1500
1-26 Märkmoment motor Storleksrelaterad
1-30 Statorresistans (Rs) Storleksrelaterad Ohm
1-31 Rotorresistans (Rr) Storleksrelaterad Ohm
Stator Läck Reaktans
1-33
(X1) Storleksrelaterad Ohm
Rotorläckage1-34
reaktans (X2) Storleksrelaterad Ohm
1-35 Huvudreaktans (Xh) Storleksrelaterad Ohm
Järnförlustmotstånd
1-36
(Rfe) Storleksrelaterad Ohm
1-39 Motorpoler 4
4-** Gränser/Varningar
Momentgräns,
4-16
motordrift 200 %
Momentgräns,
4-17
generatordrift 200 %
4-18 Strömbegränsning 160 %
14-** Specialfunktioner
14-01 Switchfrekvens Storleksrelaterad kHz
per
minut
ID Namn Standardvärde Enhet
19-** Lift Application Parameter (Hisstillämpningsparametrar)
19-01 Motor Number 0
19-02 Motor cos Phi
(Motorns cos phi) Storleksrelaterad
19-03 Encoder Auto
tuning (Autojustering, pulsgivare)
19-04 Car direction
(Korgriktning)
19-05 Encoder direction
(Pulsgivarens
rotationsriktning)
19-06 Encoder monitor
(Pulsgivarövervakning)
19-07 Encoder resolution
(Pulsgivarupplösning)
19-08 Absolute encoder
type (Absolut
pulsgivare)
19-09 Absolute encoder
oset (Absolut
pulsgivare,
förskjutning)
19-10 Traction sheave
(Drivskiva)
19-11 Ratio 100
(Förhållande 100)
19-12 Suspension
(Upphängning)
19-13 Brake Lift delay
(Bromshissfördröjning)
19-14 Brake delay
(Bromsfördröjning)
19-15 Brake close delay
(Broms stängd,
fördröjning)
19-16 Max. Torque (Max.
moment)
19-19 Run in Distance
(Körning i distans)
19-20 Max. Speed (Max.
varvtal)
19-21 V4 1,000 m/s
19-22 V0 0,100 m/s
19-23 Vi 0,300 m/s
19-24 V3 0,800 m/s
0
0
0
0
2
0
0
650 mm
36,85
1
300 ms
300 ms
600 ms
0,00 %
60,0 mm
1,000 m/s
11 11
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 55
Page 60

Översikt över parametrar
VLT® Lift Drive LD 302
ID Namn Standardvärde Enhet
19-25 V2 0,300 m/s
19-26 Vn 0,010 m/s
19-27 Floor level distance
(Våningsavstånd)
19-28 V1 0,200 m/s
19-30 Acceleration mm/s² 0,700 mm/s²
19-31 Deceleration mm/s² 1,000 mm/s²
19-32 Start jerk (Startryck) 0,600 mm/s³
19-33 Acceleration jerk
(Accelerationsryck)
19-34 Deceleration jerk
(Decelerationsryck)
19-35 Run in jerk
(Körnningsryck)
19-38 Comfort (Komfort) 0
19-40 KP – gain at start
(KP-förstärkning vid
start)
19-41 KP – gain at
operation (KP-
förstärkning vid
start)
19-42 I time at start (I-tid
vid start)
19-43 I time operation (I-
tid vid drift)
19-44 Filtertime start
(Filtertid vid start)
1111
19-45 Filtertime operation
(Filtertid drift)
19-46 Position gain start
(Pos förstärkning
start)
19-50 Run – in Mode
(Inkörningsläge)
19-55 L- start acceleration
(L-start acceleration)
19-56 L- start speed (L-
start varvtal)
19-57 L- start time (L-
starttid)
19-58 Delay after Stop
(Fördröj efter stopp)
19-59 Torque down time
(Nedrampningstid).
19-60 Test - körläge 0
19-62 Utan återkoppling 0
19-63 Motoranpassning 0
19-64 Visa parameter 0
19-65 Bromsövervakning inte aktiv
19-66 Digital seriell 0
19-67 Funktionsrelä 1 1
19-68 Tidsfördröjning
utrullning
5,0 mm
0,600 mm/s³
1,000 mm/s³
0,400 mm/s³
100
100
200,0 ms
200,0 ms
1,0 ms
10,0 ms
0,0000
0
0,020 m/s²
0,050 m/s
200 ms
100 ms
200 ms
5 ms
ID Namn Standardvärde Enhet
19-69 Synk position 0
19-70 Temp övervakning 0
19-71 Konf. räknare 0
19-72 DCP4 korr. faktor 1,000
19-73 DCP4 eftersläp-
ningskomp.
19-80 Logg nr 1
19-81 Felkod 0
19-82 Feltid 0 h
19-83 Återställning fellogg 0
19-84 Funktion, utgång 1 0
19-86 Aktivera SC 0
19-90 Programversion Versionsnr
19-92 Status
19-93 Riktningändrings-
räknare 1
19-94 Riktningändrings-
räknare 2
19-98 Absolut pulsgivare,
position
19-99 Distans vid deccela-
ration
32-** Hissregulatorns grundinställningar
Inkrementell
32-00
signaltyp [1] RS422 (5 V TTL)
Inkrementell
32-01
upplösning 1024
Tabell 11.1 Hisstillämpning – parametrar
Parametrar 0-** Drift och display
11.2
0 %
-1
0
0
0
0-01 Språk
Option: Funktion:
[0] * Engelska Anger displayspråket. När språket ställs in
till [0] Engelska eller [1] Tyska , visas status,
meddelanden och parameterbeskrivningar
på valt språk.
När språket har ställts in till ett av de
övriga alternativen, visas meddelande och
parametrar i 19-** Application Parameter
(Tillämpningsparametrar) på engelska.
[1] * Tyska
[2] * Franska
[3] * Danska
[4] * Spanska
[5] * Italienska
[6] * Svenska
[7] * Nederländska
[20] * Finska
56 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 61

Översikt över parametrar Handbok
0-03 Regionala inställningar
Option: Funktion:
[0] * Interna-
tionellt
[1] USA Aktiverar parameter 1-20 Motoreekt [kW] för
Aktiverar parameter 1-20 Motoreekt [kW] för
inställning av motoreekten i kW, samt ställer in
standardvärdet för parameter 1-23 Motorfrekvens
på 50 Hz.
inställning av motoreekten i hk, samt ställer in
standardvärdet för parameter 1-23 Motorfrekvens
på 60 Hz.
OBS!
Det går inte att ändra parametern medan motorn är
igång.
0-20 Displayrad 1.1, liten
Option: Funktion:
Välj en variabel som ska visas till
vänster i rad 1.
[3440] * Digitala ingångar
0-21 Displayrad 1.2, liten
Option: Funktion:
Välj en variabel för visning på rad 1,
mellanposition.
[1614] * Motorström
0-22 Displayrad 1.3, liten
Option: Funktion:
Välj en variabel för visning på rad 1, höger
position.
[1614] * Motorström
0-23 Displayrad 2, stor
Option: Funktion:
Välj en variabel för visning på rad 2.
[1660] * Digitala ingångar
0-24 Displayrad 3, stor
Option: Funktion:
Välj en variabel för visning på rad 3.
[3450] * Faktisk position
11.3 Parametrar 1-** Belastning och motor
1-10 Motorkonstruktion
Option: Funktion:
Välj typ av motordesign.
[0] Asynkront För asynkronmotorer.
[1] PM, ej
utpräglad SPM
1-20 Motoreekt [kW]
Range: Funktion:
Storleksrelaterad*
[Tillämpningsberoende]
1-21 Motoreekt [hk]
Range: Funktion:
Storleksrelaterad*
[Tillämpningsberoende]
1-22 Motorspänning
Range: Funktion:
Size
related*
1-23 Motorfrekvens
Range: Funktion:
Size
related*
[20 1000
Hz]
För utpräglad eller ej utpräglad PM-motorer.
PM-motorer kan delas in i två grupper, med
yttre magneter (ej utpräglad) eller inre
magneter (utpräglad).
Ange den nominella motoreekten
i kW enligt motorns
märkskyltsdata. Det fabriksinställda
värdet motsvarar den nominella
uteekten för enheten. Denna
parameter är synlig i LCP om
parameter 0-03 Regionala inställningar är [0] Internationell.
Mata in den nominella motoreffekten i hk enligt motorns
märkskyltsdata. Det fabriksinställda
värdet motsvarar den nominella
uteekten för enheten. Denna
parameter är synlig i LCP om
parameter 0-03 Regionala inställningar är [1] US.
[ 10 - 1000V]Ange den nominella motorspän-
ningen enligt motorns märkskyltsdata.
Det fabriksinställda värdet motsvarar
den nominella uteekten för enheten.
Min/Max motorfrekvens: 20-1000 Hz.
Välj motorfrekvensvärdet från motorns
märkskyltsdata. Om du väljer ett annat värde
än 50 Hz eller 60 Hz, måste de belastningsoberoende inställningarna i
parameter 1-50 Motormagnetisering vid
nollvarvtal till parameter 1-53 Frekvens byte
styrmodell justeras. Vid drift på 87 Hz med
230/400 V-motorer ska märkskyltsdata anges
för 230 V/50 Hz. Anpassa
parameter 4-13 Motorvarvtal, övre gräns [rpm]
och parameter 3-03 Maximireferens till 87 Hztillämpningen.
11 11
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 57
Page 62

Översikt över parametrar
VLT® Lift Drive LD 302
1-24 Motorström
Range: Funktion:
Size
related*
[ 0.10 -
10000.00 A]
Ange det nominella motorströmsvärdet från motorns märkskyltsdata.
Data används för att beräkna
vridmoment, motorskydd med
mera.
1-25 Nominellt motorvarvtal
Range: Funktion:
Size related* [10 - 60000
RPM]
Ange det nominella motorvarvtalet
från motorns märkskyltsdata. Data
används för att beräkna
motorkompensationer.
1-26 Märkmoment motor
Range: Funktion:
Size
related*
[0.1 10000
Nm]
Mata in värdet på motorns märkskylt.
Standardvärdet motsvarar den nominella
uteekten. Denna parameter är tillgänglig
när parameter 1-10 Motorkonstruktion har
angetts till PM, ej utpräg. SPM [1], dvs.
parametern gäller endast för PM och inte
utpräglade SPM-motorer.
1-30 Statorresistans (Rs)
Range: Funktion:
Size related* [ 0.0140 - 140.0000 Ohm]
1111
OBS!
Parametrar 1-31 till 1-35 har ingen eekt när 1-10
Motorkonstruktion är inställd på [1] PM, ej utpräglad SPM.
1-31 Rotorresistans (Rr)
Range: Funktion:
Size related* [ 0.0100 - 100.0000 Ohm]
1-33 Stator Läck Reaktans (X1)
Range: Funktion:
Size related* [ 0.0400 - 400.0000
Ohm]
Ställ in motorns statorläckagereaktans.
1-35 Huvudreaktans (Xh)
Range: Funktion:
Size related* [ 1.0000 - 10000.0000
Ohm]
Ställ in motorns
huvudreaktans.
OBS!
1. Kör AMA på en kall motor. Frekvensomriktaren
mäter värdet från motorn.
2. Ange värdena X1, X2 och Xh manuellt. Skaa
värdet från motorleverantören.
3. Använda fabriksinställningarna X1, X2 och Xh.
Frekvensomriktaren upprättar själv värdet
baserat på motorns märkskyltsdata.
1-36 Järnförlustmotstånd (Rfe)
Range: Funktion:
Size related* [ 0 - 10000.000 Ohm]
1-37 Induktans för d-axel (Ld)
Range: Funktion:
Size
related*
[0.0 -
1000.0
mH]
Ange fas-till-mittpunktsinduktans för PMmotorn. Hämta värdet från
permanentmagnetmotorns datablad.
Om endast data för fas-till-fas nns
tillgängligt, dividerar du värdet med två för
att få fram värdet fas-till-mittpunkt
(stjärnpunkt). Det är även möjligt att mäta
värdet med en induktansmätare, som tar
med kabelns induktans i beräkningen.
Dividera det uppmätta värdet med två och
ange resultatet.
Den här parametern är endast aktiv när
parameter 1-10 Motorkonstruktion har
angetts till PM, ej utpräg. SPM [1]
(permanentmagnetmotor).
Använd den här parametern när du väljer
en decimal. Använd
parameter 30-80 Induktans för d-axel (Ld)
när du väljer tre decimaler.
1-39 Motorpoler
1-34 Rotorläckagereaktans (X2)
Range: Funktion:
Size related* [ 0.0400 - 400.0000
Ohm]
Ställ in motorns rotorläckagereaktans.
Range: Funktion:
Size related* [2 - 128 ] Ange antalet motorpoler.
Poler ~nn@ 50 Hz ~nn@ 60 Hz
2 2700-2880 3250-3460
4 1350-1450 1625-1730
6 700-960 840-1153
Tabell 11.2 Antal motorpoler
58 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 63

Översikt över parametrar Handbok
Tabell 11.2 visar antalet poler för normala varvtalsområden
för olika motortyper. Deniera motorer konstruerade för
andra frekvenser separat. Motorpolsvärdet är alltid ett
jämnt tal och refererar till det totala antalet poler. Frekvensomriktaren skapar den inledande inställningen i
parameter 1-39 Motorpoler baserat på
parameter 1-23 Motorfrekvens och parameter 1-25 Nominellt
motorvarvtal.
1-40 Mot-EMK vid 1000 RPM
Range: Funktion:
Size
related*
[0 9000 V]
Ange nominell mot-Emk för motorn då den
körs med 1 000 varv/minut.
Mot-Emk är den spänning som genereras av
en PM-motor när ingen frekvensomriktare är
ansluten och axeln roteras externt. Mot-Emk
är normalt specicerad för nominellt
motorvarvtal eller till ett varvtal på 1 000
varv/minut som uppmätts mellan två faser.
Om värdet inte är angivet för motorvarvtalet
1 000 varv/minut räknar du ut ett korrekt
värde enligt följande: Om mot-Emk till
exempel är 320 V vid 1 800 varv/minut, kan
det beräknas vid 1 000 varv/minut enligt
följande:
Exempel
Mot-Emk 320 V vid 1 000 varv/minut. MotEMK = (spänning/varv/minut*1 000 = (320/1
800)*1 000 = 178.
Den här parametern är endast aktiv när
parameter 1-10 Motorkonstruktion har angetts
till PM-motor [1] (permanentmagnetmotor).
11.4 Parametrar 4-** Gränser/Varningar
4-16 Momentgräns, motordrift
Range: Funktion:
200%* [Tillämpningsbe-
roende]
4-17 Momentgräns, generatordrift
Range: Funktion:
200%* [Tillämpningsbe-
roende]
Funktionen begränsar momentet
på axeln för att skydda den
mekaniska installationen.
Funktionen begränsar momentet
på axeln för att skydda den
mekaniska installationen.
11.5 Parametrar 14-** Specialfunktioner
14-01 Switchfrekvens
Välj växelriktarens switchfrekvens. Att ändra switchfrekvensen kan
bidra till att minimera eventuella störande ljud från motorn.
Standard beroende på eektkod.
Option: Funktion:
[0] 1,0 kHz
[1] 1,5 kHz Standardswitchfrekvens för
355-1200 kW, 690 V
[2] 2,0 kHz Standardswitchfrekvens för
250-800 kW, 400 V och 37-315
kW, 690 V
[3] 2,5 kHz
[4] 3,0 kHz Standardswitchfrekvens för
18,5-37 kW, 200 V och 37-200 kW,
400 V
[5] 3,5 kHz
[6] 4,0 kHz Standardswitchfrekvens för 5,5–15
kW, 200 V samt 11–30 kW, 400 V
[7] 5,0 kHz Standardswitchfrekvens för 0,25–
3,7 kW, 200 V samt 0,37–7,5 kW,
400 V
[8] 6,0 kHz
[9] 7,0 kHz
[10] 8,0 kHz
[11] 10,0 kHz
[12] 12,0 kHz
[13] 14,0 kHz
[14] 16,0 kHz
OBS!
Utfrekvensen för n får aldrig överstiga 1/10 av switchfrekvensen. Justera switchfrekvensen i
parameter 4-11 Motorvarvtal, nedre gräns [rpm] när
motorn är igång, tills motorn blir så tyst som möjligt. Se
även parameter 14-00 Switchmönster och avsnittet
Speciella förhållanden i VLT® AutomationDrive Design
Guide, MG33BXYY.
OBS!
Switchfrekvenser över 5,0 kHz leder till automatisk
nedstämpling av ns maximala uteekt.
11 11
4-18 Strömbegränsning
Range: Funktion:
200%* [Tillämpnings-
beroende]
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 59
Funktionen är en verklig momentgränsfunktion som kan köra i det
översynkrona området. Men på grund
av fältförsvagning kan motormomentet vid strömgränsen falla, när
spänningsökning stannar ovanför det
synkroniserade motorvarvtalet.
Page 64

Översikt över parametrar
VLT® Lift Drive LD 302
11.6 Parametrar 19-** Application
Parameters (Tillämpningsparametrar).
19-01 Motor Number
Option: Funktion:
Välj ASM- eller PM-motortyp som lagrats i LD 302
motortypdatabas. Genom att välja en viss
motortyp, ställs all motordata som behövs in
automatiskt i LD 302. Se Tabell 12.21 och
Tabell 12.22 för olika motortyper och tillhörande
motornummer.
1. Ange motortypnummer.
2. Spara den valda motortypen.
3. Tryck på [OK] och [Cancel] samtidigt för
att spara inställningarna.
Om du väljer [0], ska följande parameter anges för
ASM- eller PM-motorer.
ASM-motorer
parameter 1-10 Motorkonstruktion
•
parameter 1-20 Motoreekt [kW]
•
parameter 1-22 Motorspänning
•
parameter 1-23 Motorfrekvens
•
parameter 1-24 Motorström
•
parameter 1-25 Nominellt motorvarvtal
•
19-02 Motor Cos Phi (Motorns cos phi)
•
19-63 Motor Adaption (Automatisk
•
1111
[0] * Inga standard ASM- eller PM-motorer i LD 302-
motordatabasen.
[XXX] [1 –
19-02 Motor cos Phi (Motorns cos phi)
Range: Funktion:
Storleksrelaterad*
De angivna värdet möjliggör en viss typ av ASM-
120]
eller PM-motor i LD 302-motordatabasen.
[65-95] Ange motorns cos phi-värde multiplicerat
motoranpassning)
PM-motorer
parameter 1-10 Motorkonstruktion
•
parameter 1-23 Motorfrekvens
•
parameter 1-24 Motorström
•
parameter 1-26 Märkmoment motor
•
parameter 1-30 Statorresistans (Rs)
•
parameter 1-37 Induktans för d-axel (Ld)
•
parameter 1-39 Motorpoler
•
parameter 1-40 Mot-EMK vid 1000 RPM
•
med 100. Det angivna cos phi-värdet ger
automatiskt en ny beräkning av
avancerade motordata,
parameter 1-30 Statorresistans (Rs) till
parameter 1-35 Huvudreaktans (Xh).
19-03 Encoder Autotuning (Pulsgivare, autotuning)
Option: Funktion:
Detektera pulsgivarens rotations-
riktning.
[0] * Ingen funktion Inte aktiv
[1] Encoder Autotuning
(Pulsgivare,
autotuning)
Bestäm pulsgivarens rotations-
riktning. Pulsgivarens
rotationsriktning lagras automatiskt i
19-06 Encoder Monitor (Pulsgivaröver-
vakning).
19-04 Car direction (Korgriktning)
Option: Funktion:
Ändra hisskorgens riktning.
[0] * Ingen funktion Hisskorgens riktning är inte
ändrad.
[1] Car direction
(Korgriktning)
Hisskorgens riktning är ändrad.
19-05 Encoder Direction (Pulsgivarens rotationsriktning)
Option: Funktion:
Ändra pulsgivarens rotationsriktning
genom att skifta två faser i motorkabeln.
Innan du byter till driftläge, ange 19-62
Open Loop (Utan återkoppling återkoppling)
till [0] Closed loop (Med återkoppling).
[0] * Ingen funktion Pulsgivarens rotationsriktning är inte
ändrad.
[1] Encoder
direction
(Pulsgivarens
rotationsriktning)
Pulsgivarens rotationsriktning är ändrad.
OBS!
Om du vill starta korgen i uppåtriktning måste motoraxelrotationen vara medurs.
19-06 Encoder Monitor (Pulsgivarövervakning)
Option: Funktion:
Aktiverar pulsgivarövervakning för
pulsgivarspänning
•
kabelbrott
•
pulsgivarfel
•
[0] * Ingen funktion Pulsgivarövervakningen är inte
aktiv.
[1] Encoder monitor
(Pulsgivarövervakning)
Pulsgivarövervakningen är aktiv.
60 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 65

Översikt över parametrar Handbok
19-07 Encoder Resolution (Pulsgivarupplösning)
Range: Funktion:
2* [2-8] Ange faktorn n för att beräkna pulsgivarupplösning.
Pulsgivarupplösning = upplösning x 2
För TTL-pulsgivare, ange fast n=2.
För SinCos-pulsgivare, ange 22 eller 23.
n
19-08 Absolute encoder type (Absolut pulsgivare)
Välj absolut pulsgivare för 13-bit enkel pulsgivare.
Option: Funktion:
[0] * Ingen
[1] SSI
[2] EnDat
19-09 Absolute Encoder Oset (Absolut pulsgivare,
förskjutning)
Välj absolut pulsgivare för förskjutning.
Range: Funktion:
0* [8192-0002]
OBS!
Innan inställning av parametrar 19-10 till 19-12:
1. Ange motordata.
2. Ställ in parametrarna.
3. Tryck på [OK] + [Cancel] samtidigt för att spara
inställningarna.
Frekvensomriktaren använder värdena för att beräkna
maximalt varvtal.
19-10 Traction sheave (Drivskiva)
Range: Funktion:
650 mm* [100-2500 mm ] Ställ in drivskivan i mm.
19-11 Ratio 100 (Förhållande 100)
Range: Funktion:
36,85* [99.99-1.00 ] Ange utväxlingsförhållandet multiplicerat
med 100
19-12 Suspension (Upphängning)
Range: Funktion:
1* [2-8] Anger antal upphängningar.
19-13 Brake Lift Delay (Bromshissfördröjning)
Range: Funktion:
300
ms*
[6000-20
ms]
Ange fördröjningstiden i ms för
hissbromsen. Se till att motorn är 100 %
premagnitiserad för att ta över maximal
belastning efter bromsfrikoppling. För
asynkronmotorer (ASM) tilldelar frekvensomriktaren en fördröjningstid på 300 ms till
1 500 ms, beroende på motorstorlek. Se
även kapitel 7.1.2.1 Styrning av mekanisk
broms.
19-14 Brake Delay (Bromsfördröjning)
Range: Funktion:
300
ms*
[3000-50
ms]
Ange tidsfördröjningen i ms för bromsfrikoppling efter 24 V-utgångssignalen på
plint 29. Se även kapitel 7.1.2.1 Styrning
av mekanisk broms.
19-15 Brake Close Delay (Broms stängd, fördröjning)
Range: Funktion:
600
ms*
[6000-50
ms]
Ange tidsfördröjningen i ms för bromsen
efter växlingen av utgångssignalen från
24 V till 0 V på 29. Tidsfördröjningen
säkerställer att motorn är aktiverad
tillräckligt länge för att stänga bromsen.
Se även kapitel 7.1.2.1 Styrning av
mekanisk broms.
19-16 Max. Torque (Max. moment)
Range: Funktion:
0,00 %
ms*
[200
till
-200 %]
Ange tidsfördröjningen i ms för bromsen efter
växlingen av utgångssignalen från 24 V till 0 V
på 29. Tidsfördröjningen säkerställer att motorn
är aktiverad tillräckligt länge för att stänga
bromsen. Se även kapitel 7.1.2.1 Styrning av
mekanisk broms.
Om inställd till 0, nns det ingen funktion. Om
inställd på mer eller mindre än 0, är funktionen
aktiv.
19-19 Run in Distance (Körning i distans)
Range: Funktion:
60,0 mm* [50000-0 mm] Ange körning i distans i mm. Se även
kapitel 7.1.2.1 Styrning av mekanisk
broms.
Parameter Symbol
19-20 Max. sSpeed (Max. sVarvtal)
19-21 Nominal Speed (Nominellt varvtal) V4
19-22 Levelling Speed (Utjämningsvarvtal) V0
19-23 Inspection Speed (Inspektionsvarvtal). Vi
19-24 Intermediate Speed 1 (Mellanvarvtal 1) V3
19-25 Intermediate Speed 2 (Mellanvarvtal 2) V2
19-26 Relevelling speed (Återutjämningsvarvtal). Vn
19-28 Intermediate Speed (Mellanvarvtal) V1
Evakueringsvarvtal, fast (V0) Veva
Tabell 11.3 Hissvarvtalsparametrar
19-20 Max. Speed (Max. varvtal)
Range: Funktion:
1 000
m/s*
[20-0,01
m/s]
Ange max. varvtal i m/s för hissen.
Beroende på nominellt motorvarvtal
och inställningarna i parameter 19-10
till 19-12, är maximalt varvtal begränsat
till 125 % till det nominella
motorvarvtalet.
11 11
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 61
Page 66

Översikt över parametrar
VLT® Lift Drive LD 302
19-21 V4, Nominal Speed (Nominellt varvtal)
Range: Funktion:
1 000 m/s* [20-0,01 m/s] Ange nominellt varvtal V4 i m/s.
19-22 Avvägt varvtal, V0
Range: Funktion:
0,100 m/s* [20-0,01 m/s] Ange avvägt varvtal V0 i m/s.
19-23 Inspektionsvarvtal, Vi
Range: Funktion:
0,300 m/s* [0,630-0,01 m/s] Ange inspektionsvarvtal Vi i m/s.
19-24 Mellanvarvtal, V3
Range: Funktion:
0,800 m/s* [20-0,01 m/s] Ange mellanvarvtalet V3 i m/s.
19-25 Mellanvarvtal, 2
Range: Funktion:
0,300 m/s* [20-0,01 m/s] Ange mellanvarvtal V2 i m/s.
19-26 Återutjämnat varvtal, Vn
Range: Funktion:
0,010 m/s* [20-0,01 m/s] Ange återutjämnat varvtal Vn i m/s.
19-27 Floor level distance (Våningsavstånd)
Range: Funktion:
5,0 mm* [2000-10 mm] Ange våningsavståndet i mm.
19-32 Start jerk (Startryck)
Range: Funktion:
0,600
m/s
3
*
[9,990-0,1
m/s3]
Ställ in startrycket i mm/s3. Startrycket
är en viktig komfortfunktion. Förslag på
inställning av startryck:
mjuk: < 0,3 m/s
•
normal: 0,6 m/s
•
dynamisk: > 1,0 m/s
•
19-33 Acceleration jerk (Accelerationsryck)
Range: Funktion:
0,600 m/s
3
* [9,990-0,1 m/s
3
] Anger accelerationsrycket i m/s3.
19-34 Deceleration jerk (Decelerationsryck)
Range: Funktion:
1,000
m/s
3
*
[9,990-0,1
m/s3]
Ange decelerationsrycket i mm/s3
Körningsrycket aktiveras när
utjämningsvarvtalet har uppnåtts.
Förslag för inställning av decelerationsryck:
mjuk: < 06 m/s
•
normal: 1,0 m/s
•
dynamisk: > 1,4 m/s
•
3
3
3
3
3
3
19-35 Run in jerk (Körningsryck)
19-28 Intermediate Speed, V1 (Mellanvarvtal, V1)
Range: Funktion:
1111
0,200 m/s* [20-0,01 m/s] Ange mellanvarvtalet V1 i m/s.
OBS!
Om parametrarna 19-38 Comfort (Komfort) ändras, ändras
även parameterinställningarna i 19-30 Acceleration mm/s2,
19-31 Deceleration mm/s2, 19-32 Start Jerk (Startryck),
19-33, 19-34 Deceleration Jerk (Decelerationsryck) and
19-35 Run in Jerk (Körningsryck).
Range: Funktion:
0,400
m/s
3
*
[9,990-0,1
m/s3]
Ställ in startrycket i mm/s3. Körningsrycket är aktiverat när
utjämningsvarvtalet har uppnåtts.
Förslag för inställning av körningsryck:
•
•
•
mjuk: < 0,2 m/s
normal: 0,4 m/s
dynamisk: > 0,6 m/s
3
3
3
OBS!
OBS!
En ändring av parameterinställningarna för 19-31 Deceleration mm/s2, 19-34 Deceleration Jerk (Decelerationsryck)
och 19-35 Run in Jerk (Körningsryck), ändrar bromsav-
ståndet.
19-30 Acceleration mm/s
Range: Funktion:
0,700 m/s
2
* [2-0,1 m/s
19-31 Deceleration mm/s
Range: Funktion:
1,000 m/s
62 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
2
* [2-0,1 m/s
2
2
Ange max. acceleration för valt varvtal
]
2
i m/s
2
2
] Ange max. deceleration i mm/s
2
Om parametrarna 19-38 Comfort (Komfort) ändras, ändras
även parameterinställningarna i 19-30 Acceleration
mm/s2, 19-31 Deceleration mm/s2, 19-32 Start Jerk
(Startryck), 19-33 Acceleration Jerk (Accelerationsryck),
19-34 Deceleration Jerk (Decelerationsryck) och 19-35
Run in Jerk (Körningsryck).
19-38 Comfort (Komfort)
Option: Funktion:
Ställ in reskomforten.
[0] * Normal Normal komfort
[1] Mjuk Mjuk komfort
[2] Dynamiskt Dynamisk komfort
[3] Ingen funktion
Page 67

0
1
2
3
4
5
6
7
8
9
t0 t1 t2 t3 t4t5 t6 t7 t8 t9 t10
v
[m/s]
t [s]
130BD345.10
1
2
3
Par.
19-40
19-42
19-44
19-46
Par.
19-41
19-43
19-45
Par.
19-14
t0 t1 t2 t3 t/s
130BD344.10
Översikt över parametrar Handbok
1 Faktiskt varvtal
2 Mekanisk broms
3 Motor aktiv
Tabell 11.5 Teckenförklaring till Bild 11.2
19-40 KP Gain at Start (KP-förstärkning vid start)
Range: Funktion:
100* [5000-1] Ange proportionell förstärkning för PID vid start.
Öka KP-startvärdet om motorn roterar baklänges
efter start.
Bild 11.1 Rampningsparametrar för acceleration, deceleration
och ryck
Identi-
Tidsperiod Parameter Beskrivning
erare
0 t0-t2 19-55 till
Linjestart
19-57
1 t1-t2 19-32 Start jerk (Startryck)
2 t2-t3 19-30 Acceleration
3 t3-t4 19-33 Accel. ryck
4 t4-t5 19-21 V4
5 t5-t6 19-34 Decel. ryck
6 t6-t7 19-31 Deceleration
7 t7-t8 19-35 Run in jerk
(Körnningsryck)
8 t8-t9 Låg hastighet V0
9 t9-t10 19-19 Run in Distance (Körning i
distans)
Tabell 11.4 Teckenförklaring till Bild 11.1
Beskrivning av rampningsparametrar
Bild 11.2 Styrparametrar start/drift
19-41 KP Gain at Operation (KP-förstärkning vid drift)
Range: Funktion:
100* [5000-1] Ange proportionell förstärkning för PID vid drift.
Minska KP-driftvärdet om motorn bullrar vid
drift. Öka KP-driftvärdet om motorn vibrerar vid
drift.
19-42 TI Time at Start (TI Tid vid start)
Range: Funktion:
200* [500-2 ms] Ange PID-integraltiden i ms vid start. Öka
tidsvärdet om motorn roterar baklänges efter
start.
19-43 TI Time Operation (TI Tidsdrift)
Range: Funktion:
200* [500-2 ms] Ange PID-integraltiden i ms för drift.
19-44 Filtertime Start (Filtertid vid start)
Range: Funktion:
1,0
ms*
[500-1
ms]
OBS!
Hård ltrering kan orsaka dålig
dynamiska prestanda.
Ställ in en tidskonstant för varvtalsregleringens
lågpasslter. Lågpassltret förbättrar prestanda i
stabilt läge och dämpar oscillering hos
återkopplingssignalen. Detta är en fördel om
signalen är behäftad med många störningar, se
Bild 11.3. Om du väljer en tidskonstant (τ) på t.
ex. 100 ms blir gränsfrekvensen för lågpassltret 1/0,1 = 10 RAD/s. Värdet motsvarar (10/(2
x π) = 1,6 Hz. PID-regulatorn reglerar därför
bara signaler som varierar med en frekvens
lägre än 1,6 Hz. Om återkopplingssignalen
varierar med en frekvens som är högre än 1,6
Hz reagerar PID-regulatorn inte.
11 11
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 63
Page 68

0.6
0.6
f
g
= 10 Hz
175ZA293.11
Eterkoppling
Oltrerad eterkopplingssignal
t (S.)
t (S.)
Filtrerad eterkopplingssignal
Legpasslter
Eterkoppling
Översikt över parametrar
VLT® Lift Drive LD 302
19-45 Filtertime Operation (Filtertid drift)
Range: Funktion:
10,0 ms* [500-1 ms] Ange varvtalsstyrningens ltertid för
driftläge.
19-46 Position Gain Start (Pos förstärkning start)
Range: Funktion:
0,0000* [500-1 ms] Välj pos förstärkning start.
19-50 Run-in mode (Inkörningsläge)
Range: Funktion:
0 [255 till -255] Ange inkörningslägesfunktionen för
styrprolen och varvtal. Se även Tabell 11.6 till
Tabell 11.11 för funktion beroende på angivet
parametervärde för inkörningsläget.
1111
Bild 11.3 Filtrering återkoppling via lågpasslter
64 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 69

Översikt över parametrar Handbok
Val av ingång
Drv. aktiverad + Plint 0, 1, 7 4, 6 8 9
Vald ingångsplint Resulterande varvtal
X57.1⇒T27
X57.1⇒T27
X57.1⇒T27
X57.1⇒T27
X57.1⇒T27
X57.1⇒T27
X57.1⇒T27
X57.1⇒T27
X57.1⇒T27
Tabell 11.6 Styrprol
Digital ingångsplint Parameterinställning
LD 302 Hissreglering 19-50 Run-in mode (Inkörningsläge)
32 33 X57.7 X57.8 0, 1, 4 6, 7 8, 9
0 0 x x ingen föryttning ingen föryttning x
0 1 x x Ned Ned x
1 0 x x Upp Upp x
1 1 x x Upp Ned x
x x 0 0 x x ingen föryttning
x x 0 1 x x Ned
x x 1 0 x x Upp
x x 1 1 x x Upp
X57.2 V0 SL1 V0 SL1
X57.3 V4 SL2 V4 SL2
X57.4 V3 SL3 V3 SL3
X57.5 V2 Vi
X57.6 Vn
X57.7 Vi Upp
X57.8 Veva Ned
T32 Upp Upp Pulsgivare A
T33 Ned Ned Pulsgivare B
19-50 Run-in mode (Inkörningsläge)
Tillåtna inställningsvärden
Tabell 11.7 Reseriktning
X57.2 X57.8 X57.7 X576 X57.5 X57.4 X57.3
V0 1* X X X X X X
Veva 0 1 X X X X X
Vi 0 0 1 X X X X
Vn 0 0 0 1 X X X
V2 0 0 0 0 1 X X
V3 0 0 0 0 0 1 X
V4 0 0 0 0 0 0 1**
Tabell 11.8 Prioritet av resulterande varvtal i relation till inställning av digital ingång på plint X57 för 19-50 Run-in mode
(Inkörningsläge), värde inställt på 0
* högsta prioritet
** lägsta prioritet
1 - hög signal
0 - låg signal
x - alla lägen
Vid val av 19-50 Run-in Mode (Inkörningsläge) 0 eller 1, är gränsen på ingång X57.2 inkörningsvarvtal, det som avgör
positionen på våningsnivå (19-19 Run in Distance (Inkörningsavstånd), oberoende av det valda varvtalet.
11 11
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 65
Page 70

Översikt över parametrar
X57.8 X57.7 X57.6 X57.5 X57.4 X57.3 X57.2
Veva
Vi 0 1 X X X X X
Vn 0 0 1 X X X X
V2 0 0 0 1 X X X
V3 0 0 0 0 1 X X
V4 0 0 0 0 0 1 X
V0 0 0 0 0 0 0
Tabell 11.9 Prioritet av resulterande varvtal i relation till inställning av digital ingång på plint X57 för 19-50 Run-in mode
(Inkörningsläge), värde inställt på 1
* högsta prioritet
** lägsta prioritet
1 - hög signal
0 - låg signal
x - alla lägen
Varvtalsval 3 (X57.4) Varvtalsval 2 (X57.3 Varvtalsval 1 (X57.2)
V0, Run in Speed (Inkörningsvarvtal) (19-22)
Vi, Inspection Speed (Inspektionsvarvtal) (19-23)
V3, Intermediate Speed 1
(Mellanvarvtal 1) (19-24)
Vn, Relevelling speed (Återutjämningsvarvtal) (19-26)
V2, Intermediate Speed 2
(Mellanvarvtal 1) (19-25)
V4, Max. Speed (Max. varvtal)
(19-21)
*
1
VLT® Lift Drive LD 302
X X X X X X
0 0 1
0 1 0
1 0 0
1 0 1
1 1 0
0 1 1
**
1
1111
Tabell 11.10 Resulterande varvtal i relation till inställning av digital ingång på plint X57 för 19-50 Run-in mode (Inkörningsläge),
värde inställt på 4
Varvtalsval 3 (X57.4) Varvtalsval 2 (X57.3 Varvtalsval 1 (X57.2)
Vn, Relevelling speed (Återutjämningsvarvtal) (19-26)
V0, Run in Speed (Inkörningsvarvtal) (19-22)
Vi, Inspection Speed (Inspektionsvarvtal) (19-23)
V1, Intermediate Speed 3
(Mellanvarvtal 3) (19-28)
V2, Intermediate Speed 2
(Mellanvarvtal 1) (19-25)
V3, Intermediate Speed 1
(Mellanvarvtal 1) (19-24)
V4, Max. Speed (Max. varvtal)
(19-21)
Tabell 11.11 Resulterande varvtal i relation till inställning av digital ingång på plint X57 för 19-50 Run-in mode (Inkörningsläge),
värde inställt på 6
0 0 1
0 1 0
0 1 1
1 0 0
1 0 1
1 1 0
1 1 1
66 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 71

Par. 19-55
Par. 19-56
Par. 19-57
Par. 19-32
Par. 19-30
Par. 19-33
Par. 19-21
Time
10 11 12
13
Speed
130BD350.10
Översikt över parametrar Handbok
X57.5 X57.4 X57.3 X57.2
Vi 1* x x x
V3 0 1 x x
V4 0 0 1 x
V0 0 0 0 1**
Tabell 11.12 Resulterande varvtal i relation till inställning av digital ingång på plint X57 för 19-50 Run-in mode (Inkörningsläge),
värde inställt på 8
19-55 L- start Acc
Range: Funktion:
0,020 m/s
2
* [2-0,01 ms
2
Anger startaccelerationen för linjär
]
rampning i m/s2.
19-56 L- start Speed (L- startvartval)
Range: Funktion:
0,050 m/s* [0,5-0,01 ms] Anger startvarvtalet för linjär
rampning i m/s.
19-57 L- start time (L-starttid)
Range: Funktion:
200 ms* [2000-0 ms] Ange tiden för linjär starttid i ms. Om en
starttid på 0 ms anges, inaktiveras den
linjära rampningsfunktionen.
Bild 11.4 Linjär starttid
19-58 Delay after Stop (Fördröj efter stopp)
Range: Funktion:
100 ms* [1000-1ms] Ange fördröjningen för den mekaniska
bromsen i ms. Se kapitel 7.1.2.1 Styrning
av mekanisk broms.
19-60 Test - körläge
Option: Funktion:
Test av körläge.
[0] * Testet inte aktiverat.
[1] Aktivera test.
19-62 Utan återkoppling
Option: Funktion:
Styrning utan återkoppling.
[0] * Med
återkoppling
[1] Utan
återkoppling
Styr med pulsgivare, med återkoppling.
Nödstoppstyrning utan pulsgivare, utan
återkoppling med ingång X57.2 eller
X57.7 för styrning. Minska KP-driftvärdet,
19-41 KP Gain at Operation (KP-förstärkning
vid drift), om motorn bullrar vid drift.
19-63 Motor Adaption (Automatisk motoranpassning)
Option: Funktion:
AMA-funktionen optimerar den dynamiska
motorprestandan.
[0] * Ingen
funktion
[1] Fullständig
anpassning
[2] Reducerad
anpassning
[3] Beräkning Beräknar datavärdet för motormodellen och
[4]
Utför AMA för statormotståndet RS,
rotormotståndet Rr, statorläckagereaktansen
X1, rotorläckagereaktansen X2 och
huvudreaktansen Xh. (1-30 Statormotstånd
(Rs) till 1-35 Huvudreaktans (Xh)). Välj inte
detta tillval om ett LC-lter används mellan
frekvensomriktaren och motorn.
Utför en reducerad AMA av statormotståndet Rs endast i systemet.
skriver automatiskt det beräknade värdet till
1-30 Statormotstånd (Rs) till 1-35
Huvudreaktans (Xh).
11 11
19-59 Torque down time (Nedrampningstid)
Range: Funktion:
200 ms* [5000-50 ms] Ange nedrampningstiden i ms. Se
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 67
kapitel 7.1.2.1 Styrning av mekanisk
broms.
Page 72

Översikt över parametrar
VLT® Lift Drive LD 302
19-64 Visa parameter
Option: Funktion:
Lagra alla parameterinställningar.
[0] * Ingen funktion
[1] Visa parameter Aktivera lagring
19-66 Digital seriell
Option: Funktion:
Aktivera digital ingångsåtkomst eller DCP-
protokoll.
[0] * Digital ingång Aktivera digital ingång – åtkomst
[1] DCP 3 Aktivera DCP 3- protokoll
[2] DCP 4 Aktivera DCP 4-protokoll
19-67 Funktionsrelä 1
Option: Funktion:
Välj funktion för relä 1.
[0]
[1] * Öppna reläkontakt när spänningen är "Av"
[2] Öppna reläkontakt vid nödstopp och om rörelsen inte
har avslutats på rätt sätt.
19-68 Tidsfördröjd utrullning
Range: Funktion:
5 ms* [0–500
ms]
1111
19-69 Synk position
Ställ in en fördröjningstid för frekvensomriktarens alla ingångar. Fördröjningstiden är den
tid som passerar tills frekvensomriktaren tar
emot ingångstatusen, och säkrar ingångarna
mot studsande signaler.
Range: Funktion:
0* [0-214783634] Används för DCP4-kommunikation för att
avgöra lägesavvikelsen för regulatorns
pulsgivare och motorns pulsgivare. Ange det
fastställda värdet i 19-72 DCP4 Corr. Factor
(DCP4-korrektionsfaktor).
19-70 Temp. överv.
Option: Funktion:
Väljer temperaturövervakningen.
[0] * Endast övervakning av kylplatta.
[1] Aktivera övervakning av motortermistor (PTC-sensor) på
plint A 53 och övervakning av kylplattor.
[-1] Ingen funktion
19-71 (Räknarinställning)
Range: Funktion:
0* [2147483646
– 0]
Funktionen används för att fastställa antalet
cykelbyten för plastöverdragna linor. Antalet
cykelbyten ger en indikation om skicket på
de plastöverdragna linor som används för
hissen. Antalet cykelbyten anger om de
plastöverdragna linorna bör bytas eller ej.
Antalet cykelbyten nns i riktningsräknare 1
och 2, 19-93 Dir Change Cnt 1 (Riktningsändringsräknare 1) eller 19-94 Dir Change Cnt 2
(Riktningsändringsräknare 2). Det kodade
parametervärdet för 19-71 Set-up Counter
(Räknarinställning) denierar användningen
av riktningsräknare 1 och 2, eller riktningsräknare 1 för larmtröskel. Tillämpningen
kontrollerar parameterns ingångsvärde. När
rätt ingångsvärde har angetts för parametern
ställs 19-71 Set-up Counter (Räknarinställning)
in till 0. Vid orimlig indata ställs 9-71 Set-up
Counter (Räknarinställning) in till "–1". Data
accepteras efter när [OK] + [CANCEL] har
tryckts in.
19-72 DCP4-korrigeringsfaktor Factor (DCP4-korrigeringsfaktor)
Range: Funktion:
1,000* [1,200–0,800] Ange DCP4-korrigeringsfaktor. Se 19-69
Sync Position (Synkroniseringsposition)
19-73 DCP4-eftersläpningskom.
Range: Funktion:
0%* [1,50 %–0 %] Ange eftersläpningskompensation för DCP4
i %.
19-80 Logg nr
Option: Funktion:
Parametrar i denna grupp är matrisparametrar, där upp
till 10 felloggar kan visas. [1] är senast loggade data
och [10] de äldsta.
[1] * Fellogg nr 1
[2] Fellogg nr 2
[3] Fellogg nr 3
[4] Fellogg nr 4
[5] Fellogg nr 5
[6] Fellogg nr 6
[7] Fellogg nr 7
[8] Fellogg nr 8
[9] Fellogg nr 9
[10] Fellogg nr 10
19-81 Felkod
Range: Funktion:
0* [0000000000] Visar felkoden.
68 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 73

130BD346.11
LD 302
12
27
X57.1
32 Direction- Up
33 Direction- Down
PLC
K1
K2
X59.4
K12 K1 K2
K12
N
Drv. enable
Safety
chain
130BD347.11
1
2
3
4
5
t
130BD348.11
LD 302
12
27
X57.1
32 Direction- Up
33 Direction- Down
PLC
K1
K2
X59.4
K12
K1 K2
K12
N
Safety
chain
Drive enable
Översikt över parametrar Handbok
19-82 Feltid
Range: Funktion:
0 h* [0000000000 h] Visar feltiden i timmar (h).
19-83 Återställning fellogg
Option: Funktion:
Återställ felloggen för parametrarna 9-80 till
19-82.
[0] * Ingen funktion
[1] Återställning Återställ datalogg
19-84 Funktionsutgång 1
Option: Funktion:
Anger utgångsfunktionen för
utgång X59.1.
[0] * Rusningsvarvtal
[1] Riktningsevakuering
[2] Inverterad riktningseva-
kuering
19-86 Aktivera SC
Option: Funktion:
Aktivera enkel styrning
[0] * Standard Standardvarvtalsreglering
[1] Signal Börja med "upp"- och "ned"-signal
Bild 11.6 19-86 Enable Simple Control=[0] (Aktivera enkel
styrning=[0])
1 Riktning
2 Vald hastighet
11 11
3 Utgång X59.4
4 Drift
5 Drv. aktiverad
Tabell 11.13 Teckenförklaring till Bild 11.6
Bild 11.5 19-86 Enable Simple Control=[0] (Aktivera enkel
styrning=[0])
Bild 11.7 19-86 Enable simple control =[1] (Aktivera enkel
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 69
styrning).
Page 74

t
1
2
3
4
5
130BD349.11
Översikt över parametrar
VLT® Lift Drive LD 302
19-93 Riktningsändringsräknare 1
Range: Funktion:
-1 * [2147483646–
-1]
Indikerar räknarvärdet för cykeländringar.
19-71 Set-up counter (Inställning av räknare)
aktiverar räknarfunktionen. Aktivering av
19-93 Dir Change Cnt 1 (Riktningsändringsräknare 1) ändrar funktionen för utgång
X59.2 från standardinställningen
Varvtalsnivå 1 till räknarvarning. Enhetsfel
eller återställning till fabriksinställning
medför att räknaravläsningarna försvinner.
Använd en extra externa riktningsräknare
så att inte räknaravläsningarna försvinner.
Efter varje varv med ändrad riktning,
minskas värdet med en (nedräkning).
19-94 Riktningändringsräknare 2
Range: Funktion:
0* [2147483646–0]Indikerar räknarvärdet för cykeländringar.
19-71 Set-up counter (Inställning av räknare)
aktiverar räknarfunktionen. Enhetsfel eller
återställning till fabriksinställning medför att
räknaravläsningarna försvinner. Använd en
extra externa riktningsräknare så att inte
räknaravläsningarna försvinner. Efter varje
Bild 11.8 19-86 Enable simple control =[1] (Aktivera enkel
styrning).
1111
1 Riktning
2 Vald hastighet
3 Utgång X59.4
4 Drift
5 Drv. aktiverad
Tabell 11.14 Teckenförklaring till Bild 11.8
19-98 Absolut pulsgivarposition
Range: Funktion:
0* [2147483646– -1] Absolut pulsgivarposition.
19-99 Avstånd vid deceleration
Range: Funktion:
0* [1000000 till -1000000] Avstånd vid deceleration.
varv med ändrad riktning, minskas värdet
med en. När maximalt värde har uppnåtts,
börjar räknaren på noll igen. Riktningändringsräknaren 2 är alltid aktiv.
19-90 Programversion
Range: Funktion:
0000000000 * [Build X.XX] Visar programvaruversion som
build-nummer.
19-92 Status
Range: Funktion:
[2147483646– 0] Indikerar intern statusinformation.
70 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 75

Översikt över parametrar Handbok
11.7 Parameter 32-** Pulsgivare
32-00 Inkrementell signaltyp
Option: Funktion:
Ange typ av inkrementell pulsgivare som är
ansluten till pulsgivare 2 (X55 och X62, om
CAN-pulsgivare används).
[0] Ingen Om ingen inkrementell pulsgivare är ansluten,
välj [0].
[1] * TTL (5V,
RS422)
[2] SinCos Om en digital inkrementell pulsgivare med 1
[3] CAN
encoder
32-01 Inkrementell upplösning
Range: Funktion:
1024* [1 -
1073741823 ]
Om en digital inkrementell pulsgivare med ett
gränssnitt enligt RS422 är anslutet, välj [1].
V peak-peak-signal är anslutet, välj [2].
Om en MCO CAN-pulsgivare används, välj [3].
Beräkna varvtal i varv/minut och timeout
för att registrera noll puls med HOME och
INDEX
Välj upplösning för den inkrementella
pulsgivaren som är ansluten till pulsgivare
2 (X55). Pulsgivarupplösning nns på
märkskylten eller i databladet.
Digital inkrementell pulsgivare
•
(32-00 = [1]): Upplösningen
måste anges i puls per varv
Analog inkrementell pulsgivare
•
(32-00 = [2]): Upplösningen
måste anges i sinusformade
signalperioder per varv
CAN-pulsgivare (32-00 = [3]):
•
Inkrementell pulsgivare: Puls per
varv absolut pulsgivare: (puls per
varv)/4
11 11
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 71
Page 76

Specikationer
VLT® Lift Drive LD 302
12 Specikationer
12.1 Elektriska data
P4K0 P5K5 P7K5
Typisk axeleekt [kW]/[hk] 4/5 5.5/7.5 7,5/10
Kapsling IP20 A2 A3 A3
Kapsling IP55 A4/A5 A5 A5
Utström
Hög överbelastning 160 % i 1 minut
Axeleekt [kW]/[hk] 4/5 5.5/7.5 7,5/10
Kontinuerlig
(3x380–440 V) [A]
Intermittent
(3x380–440 V) [A]
Kontinuerlig
(3x441-500 V) [A]
Intermittent
(3x441-500 V) [A]
Kontinuerlig kVA
(400 V AC) [kVA]
Kontinuerlig kVA
(460 V AC) [kVA]
Max. inström
Kontinuerlig
(3x380–440 V) [A]
Intermittent
(3x380–440 V) [A]
Kontinuerlig
(3x441-500 V) [A]
Intermittent
1212
(3x441-500 V) [A]
Ytterligare specikationer
IP20 max. ledararea5) (nät, motor, broms och lastdelning) [mm2 (AWG)]2)
IP55 max. ledararea5) (nät, motor, broms och lastdelning) [mm2 (AWG)]
Max. ledararea5) med frånkoppling 6,4,4 (10,12,12)
Uppskattad eektförlust
vid max. belastning [W]
Vikt, kapsling IP20, [kg]/[lbs] 4.9/10.8 6.6/14.6 6.6/14.6
Vikt, kapsling IP55, [kg]/[lbs] 13.5/29.8 14.2/31.3 14.2/31.3
Verkningsgrad
0,37–7,5 kW endast tillgängligt som 160 % överbelastning.
4)
4)
10 13 16
16 20,8 25,6
8,2 11 14,5
13,1 17,6 23,2
6,9 9,0 11,0
6,5 8,8 11,6
9,0 11,7 14,4
14,4 18,7 23,0
7,4 9,9 13,0
11,8 15,8 20,8
4,4,4 (12,12,12)
(min. 0,2 (24))
4,4,4 (12,12,12)
124 187 255
0,97 0,97 0,97
Tabell 12.1 Nätspänning 3x380-400 V AC
72 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 77

Specikationer Handbok
P11K P15K P18K P22K
Hög/normal belastning1) HO NO HO NO HO NO HO NO
Typisk axeleekt [kW]/[hk] 11/15 15/20 15/20 18,5/25 18,5/25 22/30 22/30 30/40
Kapsling IP20 B3 B4 B4 B4
Kapsling IP55 B1 B1 B2 B2
Utström
Kontinuerlig (3 x 380–440 V) [A] 24 32 32 37,5 37,5 44 44 61
Intermittent (60 s överbelastning)
(3 x 551–690 V) [A]
Kontinuerlig
(3 x 441-500 V) [A]
Intermittent (60 s överbelastning)
(3 x 441-500 V) [A]
Kontinuerlig kVA
(400 V AC) [kVA]
Kontinuerlig kVA
(460 V AC) [kVA]
Max. inström
Kontinuerlig
(3 x 380–440 V) [A]
Intermittent (60 s överbelastning)
(3 x 551–690 V) [A]
Kontinuerlig
(3 x 441-500 V) [A]
Intermittent (60 s överbelastning)
(3 x 441-500 V) [A]
Ytterligare specikationer
IP55 max. ledararea 5) (nät, motor,
broms, lastdelning) [mm2 (AWG)]
IP55 max. ledararea 5) (motor) [mm
2)
(AWG)]
2)
2
IP20 max. ledararea5) (nät, broms, motor
och lastdelning)
Max. ledararea med frånkoppling [mm
2)
(AWG)]
Uppskattad eektförlust
vid max. belastning [W]
4)
Vikt, kapsling IP20 [kg]/[lbs] 12/26,5 12/26,5 23.5/51.8 23.5/51.8
Vikt,
kapsling IP55, [kg]/[lbs]
Verkningsgrad
4)
38,4 35,2 51,2 41,3 60 48,4 70,4 67,1
21 27 27 34 34 40 40 52
33,6 29,7 43,2 37,4 54,4 44 64 57,2
16,6 22,2 22,2 26 26 30,5 30,5 42,3
21,5 27,1 31,9 41,4
22 29 29 34 34 40 40 55
35,2 31,9 46,4 37,4 54,4 44 64 60,5
19 25 25 31 31 36 36 47
30,4 27,5 40 34,1 49,6 39,6 57,6 51,7
16, 10, 16 (6, 8, 6) 16, 10, 16 (6, 8, 6) 35,-,-(2,-,-) 35,-,-(2,-,-)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35, 25, 25 (2, 4, 4) 35, 25, 25 (2, 4, 4)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35,-,-(2,-,-) 35,-,-(2,-,-)
2
16, 10, 10 (6, 8, 8)
291 392 379 465 444 525 547 739
23/50,7 23/50,7 27/59,5 27/59,5
0,98 0,98 0,98 0,98
12 12
Tabell 12.2 Nätspänning 3x380-400 V AC
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 73
Page 78

Specikationer
VLT® Lift Drive LD 302
P30K P55K
Hög/normal belastning1) HO NO HO NO
Typisk axeleekt [kW]/[hk] 30/40 37/50 55/75 75/100
Kapsling IP20 B4 C4
Kapsling IP55 C1 C2
Utström
Kontinuerlig (3x380–440 V) [A] 61 73 106 147
Intermittent (60 s överbelastning)
(3 x 380–440 V) [A]
Kontinuerlig
(3x441-500 V) [A]
Intermittent (60 s överbelastning)
(3 x 441–500 V) [A]
91,5 80,3 159 162
52 65 105 130
78 71,5 158 143
Kontinuerlig kVa (400 V AC) [kVa] 42,3 50,6 73,4 102
Kontinuerlig kVA (460 V AC) [kVA] 51,8 104
Max. inström
Kontinuerlig (3 x 380–440 V) [A] 55 66 96 133
Intermittent (60 s överbelastning)
(3 x 380–440 V) [A]
Kontinuerlig
(3x441-500 V) [A]
Intermittent (60 s överbelastning)
(3 x 441–500 V) [A]
82,5 72,6 144 146
47 59 95 118
70,5 64,9 143 130
Ytterligare specikationer
IP20 max. ledararea5) (nät och motor)
IP20 max. ledararea5) (broms och lastdelning)
IP55 max. ledararea5) (nät, motor) [mm2 (AWG)]
IP55 max. ledararea 5) (motor, broms, lastdelning) [mm
2)
(AWG)]
Max. kabeldimension med frånkoppl. nätspänning [mm
2)
(AWG)]
2)
2
2
Uppskattad eektförlust
1212
vid max. belastning [W]
4)
Vikt,
kapsling IP55, [kg]/[lbs]
Verkningsgrad
4)
35 (2) 150 (300 mcm)
35 (2) 95 (4/0)
50 (1) 150 (300 MCM)
50 (1) 95 (3/0)
50, 35, 35
(1, 2, 2)
95, 70, 70
(3/0, 2/0, 2/0)
570 698 1022 1384
45/99,2 65/143,3
0,98 0,98
Tabell 12.3 Nätspänning 3x380-400 V AC
1) Hög överbelastning = 160 % moment under 60 s, Normal överbelastning = 110 % moment under 60 s
2) American Wire Gauge.
3) Mätt med 5 m skärmad motorkabel vid nominell belastning och nominell frekvens.
4) Den normala
eektförlusten gäller vid nominella belastningsförhållanden och förväntas inte avvika mer än ±15 % (toleransen beror
på hur spänning och kabelförhållanden varierar).
Värdena är baserade på en normal motorverkningsgrad (på gränsen mellan e2/e3). Motorer med lägre eekt bidrar också till eekt-
förlusten i frekvensomriktaren och omvänt.
Om switchfrekvensen ökar jämfört med fabriksinställningen kan eektförlusterna stiga markant.
LCP och typisk eektförbrukning för styrkort är inkluderade. Fler tillval och belastningar kan öka förlusterna med upp till 30 W.
(Vanligtvis endast 4 W extra vardera för ett fullt belastat styrkort, eller tillval för öppning A eller öppning B).
Även om mätningar görs med noggrann utrustning måste viss bristande precision i mätningen tillåtas (± 5 %).
5) De tre värdena för max. ledararea gäller för enkel kärna, mjuk kabel och mjuk kabel med hylsor.
74 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 79

Specikationer Handbok
12.2 Omgivande miljöförhållanden
Miljö
Kapsling IP20, IP55
Vibrationstest 1,0 g
Max. THVD 10%
Max. relativ luftfuktighet 5–93 % (IEC 721-3-3) Klass 3K3 (icke kondenserande) under drift
Aggressiv miljö (IEC 60068-2-43) H2S-test klass Kd
Omgivningstemperatur Max. 50 °C (dygnsgenomsnitt max. 45 °C)
Lägsta omgivningstemperatur vid fullskalig drift 0 °C
Lägsta omgivningstemperatur vid reducerade prestanda - 10 °C
Temperatur vid lagring/transport –25 till +65/70 °C
Maximal höjd över havet utan nedstämpling 1000 m
Nedstämpling för hög höjd – se avsnittet om speciella förhållanden i Design Guide.
EMC-standarder, emission SS-EN 61800-3
EMC-standard, immunitet SS-EN 61800-3
12.3 Märkeekter, vikt och mått
Kapsling A2 A3 A5 B1 B2 B3 B4
Märkeekt [kW]/
[hk]
IP-klass IP20 IP20 IP55 IP55 IP55 IP20 IP20 IP20 IP20
Spänning [V] 400 400 400 400 400 400 400 400 400
Kontinuerlig
utström (100 %)
[A]
Överbelastning 6
s/60 s [A]
Ström vid 16 kHz
[A]
Ström vid 14 kHz
[A]
Ström vid 12 kHz
[A]
Ström vid 10 kHz
[A]
Ström vid 8 kHz
[A]
Omgivningstemperatur [°C ]
belastningscykler:
designgräns år
Driftcykel [%] 50 50 50 50 50 50 50 50 50
4/5
10 13-16 13-16 21 35 26 35 44 51
16/16 20.8-25.6 20.8-25.6 33,6 56 46.8/41.6 59,9/56 70.4/70.4 91.3/81.6
10 13-16 13-16 - 35 - 32 35 44
10 13-16 13-16 - 35 - 32 35 44
10 13-16 13-16 21 35 21 35 44 51
10 13-16 13-16 21 35 26 35 44 51
10 13-16 13-16 21 35 26 35 44 51
45 45 45 45 45 45 45 45 45
2,1 mio. 2,1 mio 2,1 mio 2,1 mio 2,1 mio 2,1 mio 2,1 mio 2,1 mio 2,1 mio
5,5-7,5/7,5
-10
5,5-7,5/7,5-1
0
11/15 18/25 11/15 15/20 18/25 22/30
12 12
Tabell 12.4 Kapslingar och märkeekter, A2-A5, B1-B4
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 75
Page 80

C
a
b
130BA648.12
f
e
B
A
a
d
e
b
c
a
e
f
130BA715.12
Specikationer
VLT® Lift Drive LD 302
Kapsling C1 C2 C3 C4
Märkeekt [kW]/[hk] 30/40 55/75 30/40 37/50 45/60 55/75
IP-klass IP55 IP55 IP20 IP20 IP20 IP20
Spänning [V] 400 400 400 400 400 400
Kontinuerlig utström
(100 %) [A]
Överbelastning 6
s/60 s [A]
50 98 60 75 90 110
75 147 108/90 135/112.5 162/135 198/165
Ström vid 16 kHz [A] 50 - - - - Ström vid 14 kHz [A] 50 - - - - Ström vid 12 kHz [A] 50 98 60 75 83 98
Ström vid 10 kHz [A] 50 98 60 75 90 98
Ström vid 8 kHz [A] 50 98 60 75 90 110
Omgivningstemperatur [°C ]
belastningscykler:
designgräns år
45 45 45 45 45 45
2,1 mio 2,1 mio 2,1 mio 2,1 mio 2,1 mio 2,1 mio
Driftcykel [%] 50 50 50 50 50 50
Tabell 12.5 Kapslingar och märkeekter, C1-C4
I leveransen ingår tillbehörspåsar som innehåller
de fästen som behövs
•
skruvar
•
anslutningar
•
1212
Bild 12.1 Övre och nedre monteringshål.
Bild 12.2 Övre och nedre monteringshål (endast B4)
76 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 81

Specikationer Handbok
Kapslingstyp A1 A2 A3 A4 A5 B1 B2 B3 B4
Nominell eekt [kW]/[hk] 480 V 0.37-1.5/
0.5-2.0
IP
NEMA
Höjd [mm]/[in]
Bakre plåtens höjd A 200/7,87 268/10,55 268/10,55 390/15,35 420/16,54 480/18,9 650/25,6
Höjd med jordningsplåt för fältbusskablar
Avstånd mellan monteringshål a 190/7,48 257/10,12 257/10,12 401/15,79 402/15,83 454/17,87
Bredd [mm (in)]
Bakre plåtens bredd B 75/2,95 90/3,54 130/5,12 200/7,87 242/9,53 242/9,53 242/9,53 165/6,5 230/9,06
Bakre plåtens bredd med ett C-tillval B 130/5,12 170/6,69 242/9,53 242/9,53 242/9,53 205/8,07 230/9,06
Bakre plåtens bredd med två C-tillval B 150/5,91 190/7,48 242/9,53 242/9,53 242/9,53 225/8,86 230/9,06
Avstånd mellan monteringshål b 60/2,36 70/2,76 110/4,33 171/6,73 215/8,46 210/8,27 210/8,27 140/5,51 200/7,87
Djup [mm]/[in]
Djup utan tillval A/B C 207/8,15 205/8,07 205/8,07 175/6,89 200/7,87 260/10,24
Med tillval A/B C 222/8,74 220/8,66 220/8,66 175/6,89 200/7,87 260/10,24
Skruvhål [mm]/[in]
Max. vikt [kg]/[lbs] 2.7/6.0 4,9/11 6.6/14.6 9.7/21.4
Åtdragningsmoment frontstycke
Plastkåpa (låg IP) Klicka Klicka Klicka - - Klicka Klicka Klicka Klicka
Metallkåpa (IP55/66) [Nm]/[lb-ft] - - - 1.5/1.1 1.5/1.1 2.2/1.6 2.2/1.6 - -
Tabell 12.6 Mått och märkeekter, kapslingstyper A1-A5 och B1-B4
Chassi20Chassi20Chassi55Typ 1255Typ 1255Typ 1255Typ 1220Chassi20Chassi
A 316/12,44 374/14,72 374/14,72 - - - -
c 6.0/0.24 8.0/0.31 8.0/0.31 8.25/0.32 8.25/0.32 12/0,47 12/0,47 8/0,31
d ø8 ø11 ø11 ø12 ø12 ø19 ø19 12/0,47
e ø5 ø5,5 ø5,5 ø6,5 ø6,5 ø9 ø9 6.8/0,27 8.5/0,33
f 5/0,2 9/0,35 6.5/0,26 6/0,24 9/0,35 9/0,35 9/0,35 7.9/0,31 15/0,59
20
0.37-4.0/
0.5-5.0
5,5-7,5/
7,5-10
0.37-4.0/
0.5-5.0
0,37-7,5/
0,5-10
13.5/14.2
29.8/31.3
11-15/
15-20
23/50,7 27/59,5 12/26,5
18,5-22/
25-30
624/
24,57
260/
10,24
260/
10,24
11-15/
15-20
399/
15,71
420/
16,54
380/
14,96
249/9,8 242/9,53
262/10,
31
18,5-30/
25-40
520/
20,47
595/
23,43
495/
19,49
242/9,53
23.5/
51.8
12 12
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 77
Page 82

Specikationer
Kapslingstyp C1 C2 C3 C4
Nominell eekt [kW]/[hk] 480 V 30-45/40-60 55-75/75-100 37-45/50-60 55-75/75-100
IP
NEMA
Höjd [mm]/[in]
Bakre plåtens höjd A 680/26,77 770/30,31 550/21,65 660/25,98
Höjd med jordningsplåt för fältbusskablar A 630 800
Avstånd mellan monteringshål a 648/25,51 739/29,09 521/20,51 631/24,84
Bredd [mm (in)]
Bakre plåtens bredd B 308/12,13 370/14,57 308/12,13 370/14,57
Bakre plåtens bredd med ett C-tillval B 308/12,13 370/14,57 308/12,13 370/14,57
Bakre plåtens bredd med två C-tillval B 308/12,13 370/14,57 308/12,13 370/14,57
Avstånd mellan monteringshål b 272/10,71 334/13,15 270/10,63 330/12,99
Djup [mm]/[in]
Djup utan tillval A/B C 310/12,2 335/13,19 333/13,11 333/13,11
Med tillval A/B C 310/12,2 335/13,19 333/13,11 333/13,11
Skruvhål [mm]/[in]
Max. vikt [kg][lbs] 45/99 65/143
Åtdragningsmoment frontstycke
Plastkåpa (låg IP) [Nm]/[lb-ft] Klicka Klicka 2,0/1,48 2,0/1,48
Metallkåpa (IP55/66) [Nm]/[lb-ft] 2.2/1.6 2.2/1.6 2,0/1,48 2,0/1,48
VLT® Lift Drive LD 302
c 12.5/0,49 12.5/0,49
d ø19 ø19 8.5/0,33 8.5/0,33
e ø9 ø9 17/0,67 17/0,67
f 9,8/0,39 9,8/0,39 35/1,38 50/1,97
55
Typ 1/Typ 1255Typ 1/Typ 12
20
Chassi
20
Chassi
Tabell 12.7 Mått och märkeekter, kapslingstyper C1-C4
Åtdragningsmoment för anslutningar
12.4
Eekt [kW]/[hk] Moment [Nm]/[lb-ft]
Kaps-
1212
ling
A2 0.37-4.0/0.5-5.0 1.8/1.3 1.8/1.3 1.8/1.3 1.8/1.3 3/2,2 0,6/0,44
A3 5,5-7,5/7,5-10 1.8/1.3 1.8/1.3 1.8/1.3 1.8/1.3 3/2,2 0,6/0,44
A4 0.37-4.0/0.5-5.0 1.8/1.3 1.8/1.3 1.8/1.3 1.8/1.3 3/2,2 0,6/0,44
A5 0,37-7,5/0,5-10 1.8/1.3 1.8/1.3 1.8/1.3 1.8/1.3 3/2,2 0,6/0,44
B1 11-15/15-20 1.8/1.3 1.8/1.3 1.5/1.1 1.5/1.1 3/2,2 0,6/0,44
B2 18-22/25-30 4.5/3.3 4.5/3.3 3.7/2.7 3.7/2.7 3/2,2 0,6/0,44
B3 11-15/15-20 1.8/1.3 1.8/1.3 1.8/1.3 1.8/1.3 3/2,2 0,6/0,44
B4 18-30/25-40 4.5/3.3 4.5/3.3 4.5/3.3 4.5/3.3 3/2,2 0,6/0,44
C1 30-45/40-60 10/7,4 10/7,4 10/7,4 10/7,4 3/2,2 0,6/0,44
C2 55-75/75-100
C3 37-45/50-60 10/7,4 10/7,4 10/7,4 10/7,4 3/2,2 0,6/0,44
C4 55-75/75-100
Tabell 12.8 Åtdragning av plintar
380–480/500 V Nät Motor
1)
14/24
10,3/17,71
14/24
10,3/17,71
)
1)
)
14/24
10,3/17,71
14/24
10,3/17,71
1)
1)
)
)
Likströmsanslutning
14/10,3 14/10,3 3/2,2 0,6/0,44
14/10,3 14/10,3 3/2,2 0,6/0,44
Broms Jord Relä
1)
För andra kabeldimensioner x/y, där x ≤ 95 mm2 [3/0 AWG] och y ≥ 95 mm2 [3/0 AWG].
78 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 83

Specikationer Handbok
12.5 Specikation för Lift Controller MCO
361
12.5.1 Skydd och funktioner
Alla ingångar, utgångar och nätspänningar
•
skyddas mot kortslutningar.
Alla ingångar, utgångar och nätspänningar är
•
galvaniskt isolerade mot hög spänning som t.ex.
nätförsörjning och motorspänning (PELV).
Signaler från pulsgivaren övervakas under drift
•
och stillastående.
Kundspecika tillämpningsprogram kan vara
•
kopieringsskyddade.
Alla MCO 361-parametrar inklusive användarde-
•
nierade tillämpningsparametrar är tillgängliga via
LCP:n.
Alla digitala ingångar och utgångar är galvaniskt
•
isolerade från den invändiga elektroniken och kan
kopplas till en extern 24 V-försörjning.
12.5.2 Styringång/-utgång och styrdata
Typ Kontaktanslutning med
skruvplintar
Maximal ledararea, styv
ledning
Maximal ledararea, mjuk
ledning
Maximal ledararea, mantlad
ledning
Minsta ledararea
Tabell 12.9 Anslutningsplintar
Antal programmerbara digitala
ingångar
Anslutningsblock X57
Plintnummer 1, 2, 3, 4, 5, 6, 7, 8, 9, 10
Logik
Spänningsnivå 0–24 V DC
Spänningsnivå, logisk 0 PNP < 5 V DC
Spänningsnivå, logisk 1 PNP > 10 V DC
Spänningsnivå, logisk 0 NPN > 19 V DC
Spänningsnivå, logisk 1 NPN < 14 V DC
Maximal spänning på ingång 28 V DC
Tabell 12.10 Digitala ingångar
1)
Valdes i parameter 5-00 Digitalt I/O-läge. Alla digitala ingångar
och utgångar är galvaniskt isolerade från den invändiga elektroniken
och kan kopplas till en extern 24 V-försörjning.
1,5 mm2/AWG 16
1,5 mm2/AWG 16
1,5 mm2/AWG 16
0,08 mm2/AWG 28
10
PNP eller NPN ¹)
Antal programmerbara digitala utgångar
Anslutningsblock X59
Plintnummer
Enhetstyp Mottakt
Logik
Spänningsnivå 0–24 V DC
Max. utström (platta eller källa) med intern
strömförsörjning (total)
Max. utström (platta eller källa) med
extern strömförsörjning (per utgång)
Tabell 12.11 Digitala utgångar
1)
Plintarna X59-1 och X59-2 kan programmeras som ingångar,
parameter 33-60 Plint X59/1- och X59/2-läge.
2)
Valdes i parameter 5-00 Digitalt I/O-läge.
Antal digitala utgångar som kan användas som
digitala ingångar
Anslutningsblock X59
Plintnummer 1, 2
Logik
Spänningsnivå 0–24 V DC
Spänningsnivå, logisk 0 PNP < 10 V DC
Spänningsnivå, logisk 1 PNP > 17 V DC
Spänningsnivå, logisk 0 NPN > 13 V DC
Spänningsnivå, logisk 1 NPN < 6 V DC
Maximal spänning på ingång 28 V DC
Tabell 12.12 Kombinerade digitala ingångar/utgångar
1)
Plintarna X59-1 och X59-2 kan programmeras som ingångar,
parameter 33-60 Plint X59/1- och X59/2-läge.
2)
Valdes i parameter 5-00 Digitalt I/O-läge.
Anslutningsblock X58
Plintnummer 1, 2
Maximal belastning 65 mA
Tabell 12.13 24 V DC-utgång
1
8 (6)
11), 21), 3, 4, 5, 6, 7, 8
PNP eller NPN
40 mA
100 mA
1)
2
PNP eller NPN
Den interna 24 V-försörjningen kan kopplas från via
parameter 33–85. Efter det måste en extern 24 Vförsörjning anslutas till X58-1 och X58-2.
Allmänna specikationer
Antal pulsgivaringångar 2
Anslutningsblock X55 och X56
Plintnummer 5, 6, 7, 8, 9, 10, 11, 12
Ingångsimpedans
Maximal spänning på
ingångar
Kabeltyp Skärmad kabel med en tvinnad
Tabell 12.14 Pulsgivaringångar
120Ω
5 V DC
parkabel för varje pulsgivarkanal
2)
2)
12 12
1)
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 79
Page 84

Specikationer
VLT® Lift Drive LD 302
Typ av inkrementell pulsgivare RS422/TTL
Maximal frekvens 410 kHz
Fasförskjutning mellan mellan A och B.
Maximal kabellängd
90° ±30°
2
300 m
Tabell 12.15 Specikation för inkrementell pulsgivare
Typ av absolut pulsgivare SSI
Datakodning Gray
Datalängd 12–32 bitar
Klockfrekvens
Maximal kabellängd
78 kHz – 2 MHz
2
150 m
1)
Tabell 12.16 Specikation för absolut pulsgivare
1)
Följ alltid specikationer/begränsningar som rekommenderas av
pulsgivarens leverantör.
2)
En 150 m [492 ft] lång kabel kan användas upp till en
klockfrekvens på 500 kHz, över 500 kHz måste kabellängden
begränsas ytterligare.
Antal pulsgivarutgångar 1
Uttagsplint X56
Plintnummer 5, 6, 7, 8, 9, 10, 11, 12
Signaltyp RS422
Maximal frekvens 410 kHz
Maximalt antal follower-enheter 31 (er med repeater)
Maximal kabellängd 400 m
Programminnesstorlek 100 Kb
Maximalt antal tillämpningsprogram 90
Genomsnittlig exekveringstid för kommando 0,3 ms
Maximal reaktionstid vid avbruten ingång ms
Tabell 12.20 Tillämpningsprogram
12.5.3 Översikt för nätspänning
Tabell 12.17 Pulsgivarutgång
Max. antal spänningsförsörjningar 3
Uttagsplint X55 och X56
Plintnummer 1, 2, 3, 4
24 V, max. belastning
8 V, max. belastning
1212
5 V, max. belastning
250 mA
250 mA1),
400 mA
1)
2)
1)
Tabell 12.18 Spänningsförsörjning för pulsgivare
1)
Med en spänningsförsörjning. Med er spänningsförsörjningar ska
belastningen minskas enligt följande princip: 6 W: belastning 24 V
+ 8 V + 5 V och 2 W: 8 V + 5 V.
2)
8 V är endast tillgängligt vid uttagsplint X55.
Tidsenhet för Position PID-slinga 1 ms
Positioneringsnoggrannhet
Synkroniseringsnoggrannhet
± 1 steg
± 1 steg
¹)
¹)
Bild 12.3 Kopplingsschema – nätspänning
Tabell 12.19 Styregenskaper
1)
Det här är den statiska noggrannheten; dynamisk noggrannhet
beror på många "externa" faktorer som pulsgivarupplösning,
tröghetsmoment, mekanisk dödgång och elasticitet.
80 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 85

Specikationer Handbok
12.6 Motortyp och associerat motornummer
12.6.1 Motortyp och associerat motornummer lagras i motordatabas
Parameter Motor Eekt Ström Varv Moment Motstånd Induktans Poler Mot-EMK
19-01 Typ P [kW]/[hk] I [A] N [1/min]
[Nr 39–116] Ziehl Abegg par. 1-21 par. 1-24 par. 1-25 par. 1-26 Par. 1-30 Par. 1-37 Par. 1-39 Par. 1-40
39 160,20 3.3/4.4 9 240 130/96 3,36 16,7 20 908
40 160,20 5,2/7 13 384 130/96 1,58 7,6 20 626
41 160,30 2.8/3.7 10,5 192 195/144 2,98 16,7 20 1126
42 160,30 3.5/4.7 13 240 195/144 2,07 11,6 20 937
43 160,30 4.4/5.9 16 300 195/144 1,39 7,8 20 796
44 160,30 5.6/7.5 19,5 384 195/144 0,91 5,1 20 626
45 160.40A 5,2/7 14 192 260/192 2,21 13,3 20 1162
46 160.40A 6.5/8.7 16,5 240 260/192 1,56 9,3 20 973
47 160.40A 8,2/11 20 300 260/192 1,05 6,4 20 807
48 160.40A 10.5/14.1 25 384 260/192 0,67 4 20 640
49 200.15C-20 2.5/3.4 9 96 250/184 6,22 37,1 20 1766
50 200.15C-20 4.4/5.9 11,3 168 250/184 2,79 17,4 20 1267
51 200.15C-20 4.3/5.8 11,5 186 220/162 2,7 16,8 20 1060
52 200.15C-20 5/6,7 14,5 192 250/184 2,29 13,3 20 1063
53 200.15C-20 6.8/9.1 18,5 258 250/184 1,37 8,1 20 818
54 200.15C-20 7.9/10.6 20,5 300 250/184 1,13 6,6 20 744
55 200.20C-20 3.3/4.4 11 96 330/243 4,66 30,8 20 1874
56 200.20C-20 4.1/5.5 12,5 120 330/243 3,46 22,7 20 1629
57 200.20C-20 5.8/7.8 16 168 330/243 2,08 13,7 20 1256
58 200.20C-20 6.6/8.8 18 192 330/243 1,58 10,5 20 1099
59 200.20C-20 8.9/11.9 24 258 330/243 0,92 6,1 20 831
60 200.20C-20 10.4/13.9 27,5 300 330/243 0,71 4,7 20 732
61 200.30C-20 4.8/6.4 14 96 475/350 3,09 23,4 20 2054
62 200.30C-20 6/8 16,5 120 475/350 2,25 17 20 1730
63 200.30C-20 6,7/9 17 168 380/280 1,58 12,2 20 1318
64 200.30C-20 8.4/11.3 21,5 168 475/350 1,35 10,1 20 1328
65 200.30C-20 9.6/12.9 24,5 192 475/350 1,05 7,9 20 1180
66 200.30C-20 12.8/17.2 31 258 475/350 0,67 5,1 20 945
67 200.30C-20 14.1/18.9 35 300 450/332 0,461 3,5 20 784
68 200.40C-20 6/8 17,5 96 600/443 2,21 18,4 20 2108
69 200.40C-20 7.5/10.1 20 120 600/443 1,63 13,4 20 1788
70 200.40C-20 10.6/14.2 27 168 600/443 0,94 7,9 20 1359
71 200.40C-20 12.1/16.2 32 192 600/443 0,67 5,6 20 1153
72 200.40C-20 16.2/21.7 39 258 600/443 0,448 3,8 20 945
73 200.40C-20 18.8/25.2 44 300 600/443 0,352 3 20 830
74 225,30-20 3.2/4.3 11 60 500/369 2,86 28,9 20 2855
75 225,30-20 5/6,7 15,5 96 500/369 1,43 14,7 20 1964
76 225,30-20 6.3/8.4 17,5 120 500/369 1,2 11,9 20 1716
77 225,30-20 8,2/11 23 156 500/369 0,66 6,6 20 1320
78 225,30-20 10/13,4 25 192 500/369 0,54 5,5 20 1216
79 225,40-20 4,5/6 16 60 710/524 2,86 28,9 20 2855
80 225,40-20 7/9,4 22,5 96 710/524 1,43 14,7 20 1964
81 225,40-20 8/10,7 22,5 108 710/524 1,43 14,9 20 1954
82 225,40-20 9/12,1 25 120 710/524 1,2 9 20 1644
83 225,40-20 11.5/15.4 33,5 156 710/524 0,66 6,6 20 1320
84 225,40-20 12.5/16.8 33,5 168 710/524 0,66 6,6 20 1318
T [Nm]/
[lb-ft]
R1 [Ohm] Ld [mH] nummer
V/1000
varv/minut
12 12
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 81
Page 86

Specikationer
Parameter Motor Eekt Ström Varv Moment Motstånd Induktans Poler Mot-EMK
19-01 Typ P [kW]/[hk] I [A] N [1/min]
[Nr 39–116] Ziehl Abegg par. 1-21 par. 1-24 par. 1-25 par. 1-26 Par. 1-30 Par. 1-37 Par. 1-39 Par. 1-40
85 225,40-20 13/17,4 33 192 650/479 0,539 5,5 20 1216
86 225.60B-20 7/9,4 23 60 1120/826 1,92 22 20 2999
87 225.60B-20 11/14,7 35 96 1120/826 0,86 9,8 20 1982
88 225.60B-20 12.5/16.8 35 108 1120/826 0,86 9,8 20 1986
89 225.60B-20 14/18,8 42 120 1120/826 0,563 6,7 20 1629
90 225.60B-20 18/24,1 53,5 156 1120/826 0,37 4,3 20 1309
91 225.60B-20 20/26,8 53,5 168 1120/826 0,37 4,3 20 1308
92 225.60B-20 20/26,8 53,5 192 1000/738 0,29 3,3 20 1144
93 225.60B-20 25/33,5 65 240 1000/738 0,214 2,4 20 973
94 225.60B-20 31.5/42.2 70 336 900/664 0,147 1,7 20 819
95 250.60B-20 10/13,4 30 60 1600/1180 1,36 20,9 20 3258
96 250.60B-20 16/21,4 43 96 1600/1180 0,645 9,9 20 2235
97 250.60B-20 20/26,8 52,5 120 1600/1180 0,431 6,6 20 1831
98 250.60B-20 26/34,9 68 156 1600/1180 0,263 4 20 1419
99 250.60B-20 32/42,9 80 192 1600/1180 0,193 2,9 20 1216
100 250.60B-20 38/51 92 240 1500/1106 0,132 2 20 1009
101 250.60B-20 37/49,6 85 252 1400/1033 0,132 2 20 1009
102 250.60B-20 42/56,3 94 336 1200/885 0,086 1,3 20 819
103 250.80C-20 19/25,5 58 84 2100/1549 0,533 8,4 20 2286
104 250.80C-20 25/33,5 70 114 2100/1549 0,325 5,1 20 1776
105 250.80C-20 30/40,2 80 138 2100/1549 0,239 3,7 20 1529
106 250.80C-20 27/36,2 64 156 1650/1217 0,239 3,7 20 1519
107 250.80C-20 33/44,2 81 192 1650/1217 0,164 2,4 20 1270
108 250.80C-20 42/56,3 102 240 1650/1217 0,106 1,7 20 1009
109 250.80C-20 54/72,4 137 312 1650/1217 0,06 0,9 20 771
110 250.100C-20 22/29,4 62 78 2650/1955 0,503 8,3 20 2551
111 250.100C-20 30/40,2 82 108 2650/1955 0,285 4,7 20 1906
112 250.100C-20 37/49,6 98 132 2650/1955 0,196 3,2 20 1586
1212
113 250.100C-20 33/44,2 77 150 2100/1549 0,196 3,3 20 1592
114 250.100C-20 42/56,3 98 192 2100/1549 0,127 2,1 20 1270
115 250.100C-20 58/77,7 139 264 2100/1549 0,071 1,2 20 963
116 250.100C-20 69/92,5 167 312 2100/1549 0,05 0,8 20 793
VLT® Lift Drive LD 302
T [Nm]/
[lb-ft]
R1 [Ohm] Ld [mH] nummer
V/1000
varv/minut
Tabell 12.21 PM-motor, Ziehl Abegg lagras i motordatabas
82 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 87

Specikationer Handbok
12.6.2 Motortyp och associerat motornummer lagras inte i motordatabasen
OBS!
Danfoss kan inte ta ansvar för tillverkarens motordata.
Motor Eekt Ström Varv Moment Motstånd Induktans Poler Mot-EMK
PM-typ P [kW]/[hk] I [A] N [1/min] T [Nm]/[lb-ft] R1 [Ohm] Ld [mH] nummer
Ziehl Abegg par. 1-20 par. 1-24 par. 1-25 par. 1-26 Par. 1-30 Par. 1-37 Par. 1-39 Par. 1-40
SM160.20 2.6/3.5 6,6 240 105/77 3,751 17,2 20 894
SM160.20 4.2/5.6 10 384 105/77 1,588 7,5 20 590
SM160.30 2.8/3.7 7 192 140/103 3,401 21,4 20 1144
SM160.30 3.5/4.7 8,3 240 140/103 2,38 12,7 20 952
SM160.30 4.4/5.9 10 300 140/103 1,645 8,9 20 796
SM160.30 5.6/7.5 12,5 384 140/103 1,082 5,6 20 626
SM160.40 3,7/5 8,7 192 185/136 2,581 14,9 20 1180
SM160.40 4.6/6.2 10,5 240 185/136 1,719 10,1 20 973
SM160.40 5.8/7.8 13 300 185/136 1,147 6,6 20 796
SM160.40 7.4/9.9 16,5 384 185/136 0,733 4,2 20 626
200.15B-20 1.6/2.1 5,3 84 180/133 9,51 58,2 20 1977
200.15B-20 3.2/4.3 9,5 168 180/133 2,7 16,8 20 1061
200.15B-20 3.5/4.7 9,5 186 180/133 2,7 16,8 20 1060
200.15B-20 4.3/5.8 11,5 186 220/162 2,7 16,8 20 1060
200.15B-20 4.9/6.6 13 258 180/133 1,776 10,6 20 845
200.15B-20 5.7/7.6 14 300 180/133 1,329 6,9 20 732
200.20B-20 2.1/2.8 6,7 84 240/177 7,04 45,5 20 2060
200.20B-20 4.2/5.6 10,8 168 240/177 2,79 17,4 20 1267
200.20B-20 4.7/6.3 11,7 186 240/177 2,267 14,9 20 1181
200.20B-20 6,5/ 16 258 240/177 1,31 8,3 20 885
200.20B-20 7.5/10.1 17,5 300 240/177 0,992 6,6 20 784
200.30B-20 3.3/4.4 10,5 84 380/280 4,09 31,8 20 2121
200.30B-20 4.8/6.4 13 120 380/280 2,54 20 20 1687
200.30B-20 6,7/9 17 168 380/280 1,58 12,1 20 1318
200.30B-20 7.6/10.2 19 192 380/280 1,24 9,7 20 1180
200.30B-20 10.3/13.8 25 258 380/280 0,71 5,4 20 885
200.30B-20 10.7/14.3 25 258 340/251 0,551 4,2 20 952
700.09AL-30 3/4 7,6 60 500/369 4,616 73,7 30 3996
700.09AL-30 5/6,7 11,5 96 500/369 2,09 33,4 30 2691
700.12AL-30 4,5/6 11,5 60 750/553 1,833 33,8 30 3921
700.12AL-30 7.5/10.1 18 96 750/553 0,779 14 30 2518
700.12AL-30 12/16,1 29 156 750/553 0,288 5,2 30 1537
700.12AL-30 13/17,4 32,5 168 750/553 0,238 4,3 30 1403
700.14AL-30 5.5/7.4 13 60 850/627 1,833 33,8 30 3921
700.14AL-30 8.5/11.4 20,5 96 850/627 0,779 14 30 2518
700.14AL-30 14/18,8 33,5 156 850/627 0,288 5,2 30 1537
700.14AL-30 15/20,1 36,5 168 850/627 0,238 4,3 30 1403
700.14AL-30 17/22,8 40,5 192 850/627 0,189 3,5 30 1269
700.14AL-30 17.5/23.5 43 240 700/516 0,115 2,2 30 980
700.16AL-30 6.5/8.7 16,5 60 1000/738 1,333 25,9 30 3691
700.16AL-30 10/13,4 25 96 1000/738 0,555 11 30 2402
700.16AL-30 16/21,4 41,5 156 1000/738 0,201 4 30 1442
700.16AL-30 17.5/23.5 49 168 1000/738 0,159 3,1 30 1287
700.16AL-30 18/24,1 50 192 900/664 0,121 2,4 30 1115
V/1000 varv/
minut
12 12
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 83
Page 88

Specikationer
Motor Eekt Ström Varv Moment Motstånd Induktans Poler Mot-EMK
PM-typ P [kW]/[hk] I [A] N [1/min] T [Nm]/[lb-ft] R1 [Ohm] Ld [mH] nummer
Ziehl Abegg par. 1-20 par. 1-24 par. 1-25 par. 1-26 Par. 1-30 Par. 1-37 Par. 1-39 Par. 1-40
700.16AL-30 20/26,8 50 240 800/590 0,093 1,8 30 961
700.16AL3-30 7.2/9.7 19 60 1150/848 1,333 25,9 30 3691
700.16AL3-30 11.6/15.5 29 96 1150/848 0,555 11 30 2402
700.16AL3-30 18.8/25.2 48 156 1150/848 0,201 4 30 1442
700.16AL3-30 20/26,8 55 168 1150/848 0,159 3,1 30 1287
860.28AL-30 9.2/12.3 25,5 40 2200/1623 1,244 30,3 30 5091
860.28AL-30 17/22,8 43 75 2200/1623 0,418 10 30 2980
860.28AL-30 22/29,5 53,5 96 2200/1623 0,28 6,8 30 2402
860.28AL-30 30/40,2 68,5 132 2200/1623 0,168 4,1 30 1883
860.28AL-30 37/49,6 80,5 160 2200/1623 0,124 3 30 1614
860.28AL-30 36/48,3 80 180 1900/1401 0,085 2,1 30 1346
860.28AL-30 39/52,3 80 196 1900/1401 0,085 1,9 30 1345
Tabell 12.22 PM-motor, Ziehl Abegg lagras inte i motordatabasen
VLT® Lift Drive LD 302
V/1000 varv/
minut
1212
84 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 89

Index Handbok
Index
A
Allmänt om EMC-emissioner............................................................ 13
Allmänt om övertonsströmmar....................................................... 16
AMA.................................................................................................... 44, 47
Analog ingång....................................................................................... 43
Analog signal......................................................................................... 43
Anslutning................................................................... 23, 24, 25, 76, 79
Anslutningsexempel för pulsgivare............................................... 52
Anslutningsplintar................................................................................ 79
Användarfunktioner............................................................................ 31
Å
Åtdragning av plintar.......................................................................... 78
Åtdragningsmoment frontstycke............................................ 77, 78
Återkoppling................................................................................... 29, 47
Återställning.......................................... 31, 33, 34, 42, 44, 45, 46, 48
A
Auto........................................................................................................... 33
Auto on..................................................................................................... 33
Auto On.................................................................................................... 33
Automatisk återställning................................................................... 31
Automatisk motoranpassning......................................................... 35
Avbryt....................................................................................................... 32
Avsett användningsområde................................................................ 4
Avstånd................................................................................................ 8, 46
B
Bakre plåt................................................................................................... 8
Behörig personal..................................................................................... 6
Bromschopper................................................................................ 45, 53
Bromsfrikopplingssekvens................................................................ 40
Broms-IGBT............................................................................................. 39
Bromsmotstånd.................................................. 39, 40, 41, 43, 45, 53
Bromsstyrning................................................................................ 39, 45
Bussanslutning........................................................................ 23, 31, 33
C
Certikat..................................................................................................... 5
D
DCP3.......................................................................................................... 41
DCP4.......................................................................................................... 41
DCPComChan........................................................................................ 41
DCP-protokoll........................................................................................ 41
Det allmänna eldistributionsnätet................................................. 16
Detaljerad information nns i.......................................................... 30
Digital ingång........................................................................................ 44
Digitala ingångar.................................................................................. 79
Digitala utgångar.................................................................................. 79
Displayområde............................................................................... 31, 33
Driftsättning.............................................................................................. 4
Dynamisk broms................................................................................... 39
E
Eektfaktor...................................................................................... 22, 29
Eftersläpningskompensation.................................................... 53, 68
ELCB........................................................................................................... 18
Elektriska data........................................................................................ 72
Elektriskt brus......................................................................................... 41
Elektriskt buller...................................................................................... 17
Elinstallation............................................................................................. 4
EMC......................................................................... 13, 14, 15, 27, 41, 75
EMC-immunitet..................................................................................... 14
Emissionskrav gällande övertoner................................................. 16
Externa regulatorer................................................................................ 4
Extrema driftförhållanden................................................................. 53
F
Fasbortfall................................................................................................ 43
Fellogg...................................................................................................... 32
Felsökning................................................................................... 4, 42, 43
Felsökningsanslutning....................................................................... 23
Fjärrkommandon.................................................................................... 4
Flera frekvensomriktare............................................................... 10, 22
Flera motorer.......................................................................................... 30
Flytande delta........................................................................................ 22
Förbrukad broms.................................................................................. 45
Före installation....................................................................................... 7
Funktionstestning............................................................................ 4, 30
G
Grad av förorening 3............................................................................ 28
Grundläggande driftprogrammering........................................... 35
H
Hållbroms................................................................................................ 39
Hand.......................................................................................................... 33
Hand on.................................................................................................... 33
Hand On................................................................................................... 33
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 85
Page 90

Index
VLT® Lift Drive LD 302
Hisstyrning startsekvens.................................................................... 37
Hisstyrning stoppsekvens................................................................. 38
Huvudkontaktorer................................................................................ 51
Huvudmeny................................................................ 31, 32, 34, 35, 55
I
I/O-plint.................................................................................................... 23
IEC 61800-3............................................................................................. 22
Immunitetstester.................................................................................. 14
Inducerad spänning..................................................................... 10, 22
Info............................................................................................................. 32
Ingångsbrytare...................................................................................... 22
Ingångsplint........................................................................................... 43
Ingångsplintar......................................................................... 22, 30, 65
Ingångsström........................................................ 6, 10, 17, 22, 42, 43
Initiering.................................................................................................. 34
Inspänning....................................................................................... 30, 42
Installation................................................................ 4, 7, 10, 25, 29, 30
Inström....................................................................................... 22, 29, 30
Instruktion för avfallshantering......................................................... 5
Isolerad nätspänning.......................................................................... 22
J
Jordad delta............................................................................................ 22
Jordanslutningar............................................................................ 17, 29
Jordfelsbrytare....................................................................................... 18
Jordledning...................................................................................... 13, 17
Jordning..................................................................................... 22, 29, 30
Jordning med hjälp av skärmade kablar...................................... 18
Jordpotential.......................................................................................... 26
Jordslingor.............................................................................................. 27
K
Kabeldimensioner.................................................................. 10, 22, 74
Kabeldragning....................................................................................... 29
Kabeldragning för bromsmotstånd............................................... 41
Kabeldragning för inström................................................................ 22
Kabeldragning för seriell kommunikation..................................... 4
Kabelingångar....................................................................................... 11
Kabelklassicering................................................................................ 10
Kabellängder............................................................................ 17, 22, 80
Kabeltyp................................................................................................... 10
Kablar för inström................................................................................. 29
Kablar för utström................................................................................ 29
Kinetisk energi....................................................................................... 39
Kombinerade digitala ingångar/utgångar.................................. 79
Kommunikationsgränssnitt.............................................................. 41
Konguration......................................................................................... 32
Koppla från brytarna........................................................................... 30
Koppling på utgången....................................................................... 53
Kopplingsschema................................................................................. 20
Korrekt skärmning................................................................................ 26
Kortslutning............................................................................................ 45
Kortslutning (motorfas – fas)............................................................ 53
Kortslutningsskydd.............................................................................. 10
Kylning.................................................................................................... 7, 8
Kylningsavstånd............................................................................... 8, 29
Kylplatta....................................................................... 46, 47, 48, 54, 68
L
Läckström.................................................................................. 13, 17, 30
Läget Auto............................................................................................... 32
Lagring........................................................................................................ 7
Larm........................................................................................................... 42
Larmlogg................................................................................................. 32
Lastfri aktivering/inaktivering.......................................................... 51
LCP – layout............................................................................................ 31
Ledararea................................................................................... 26, 72, 74
Levererade artiklar.................................................................................. 7
Likströmsbuss........................................................................................ 43
Ljudisolering........................................................................................... 10
Lokal manöverpanel............................................................................ 31
Lokal styrning................................................................................. 31, 33
Lyft................................................................................................................ 8
M
Manöverknappar........................................................................... 31, 33
Manuell initiering................................................................................. 34
Märkeekter........................................................................................... 75
Märkskylt.................................................................................................... 7
Märkström................................................................................................. 7
Master/follower..................................................................................... 41
Mått........................................................................................................... 75
Maximal kabeldimension.................................................................. 22
Maximalbrytare..................................................................................... 29
Mekanisk installation............................................................................. 4
Mellankrets................................................................. 22, 40, 43, 45, 53
Menyåtkomst......................................................................................... 32
Menyknappar.................................................................................. 31, 32
Menystruktur.......................................................................................... 32
Miljö........................................................................................................... 75
Moment....................... 22, 39, 40, 44, 45, 54, 59, 61, 74, 78, 81, 83
86 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 91

Index Handbok
Montering........................................................................ 7, 8, 13, 29, 76
Monteringshål................................................................................ 77, 78
Motoranslutning................................................................................... 22
Motordata........................................................................................ 44, 48
Motoreekt...................................................................................... 17, 47
Motoregenskaper............................................................................ 7, 35
Motorfaser............................................................................................... 53
Motorgenererad överspänning....................................................... 53
Motorkablar......................... 7, 10, 13, 15, 17, 18, 22, 29, 46, 60, 74
Motorns rotation................................................................................... 32
Motorskydd........................................................................................ 4, 10
Motorstatus............................................................................................... 4
Motorström............................................................................... 31, 35, 47
N
Nätanslutningar.................................................................................... 10
Nätavbrott............................................................................................... 53
Nätspänning............................................................... 22, 30, 31, 32, 46
Navigeringsknappar.............................................................. 31, 32, 33
Nedstämpling.................................................................................... 7, 54
Nöddrift.................................................................................................... 52
Nominell isolationsspänning........................................................... 28
Nominell stötkapacitet....................................................................... 28
O
O............................................................................................................... 33
OK............................................................................................................... 32
Omgivande miljöförhållanden........................................................ 75
Omgivningstemperatur..................................... 7, 10, 46, 54, 75, 76
Ö
Överbelastningsskydd................................................................... 7, 10
Översikt för nätspänning................................................................... 80
Överströmsskydd.................................................................................. 10
Övertoner, testresultat (emission).................................................. 16
P
PELV........................................................................................................... 22
PELV – Protective Extra Low Voltage............................................. 18
Placering av reläer................................................................................ 24
Programmering..................................................... 4, 31, 32, 33, 43, 55
Programmeringsfunktioner.............................................................. 32
Pulsgivaråterkoppling......................................................................... 51
Pulsgivare.... 23, 25, 36, 41, 42, 49, 50, 51, 60, 61, 65, 67, 70, 71,
79
Pulsgivarens rotation.......................................................................... 51
Pulsgivaringångar................................................................................ 79
Pulsgivarutgång.................................................................................... 80
Punkt-till-punkt-länk........................................................................... 41
R
RCD............................................................................................................ 18
RC-länk..................................................................................................... 27
Redundant krets.................................................................................... 39
Referens................................................................................................... 31
Reläplintar............................................................................................... 18
Reläutgångar.......................................................................................... 24
RFI-lter...................................................................................... 15, 17, 22
Rörelsekommandon............................................................................ 41
Rotorposition......................................................................................... 51
S
Safe Torque O........................................................................ 27, 28, 40
Säkerhetsinspektion............................................................................ 30
Säkerhetsinstruktioner....................................................................... 30
Säkerhetskedja...................................................................................... 39
Säkringar.................................................................................... 10, 29, 46
Seriell kommunikation......................................................... 26, 33, 43
Skada........................................................................................................... 7
Skärmad kabel............................................................................ 7, 10, 29
Skärmade styrkablar............................................................................ 26
Skydd.................................................................................................... 7, 18
Skydd och funktioner.......................................................................... 79
Skyddsjord.............................................................................................. 17
Skyddsrör................................................................................................. 29
Snabbmeny...................................................................................... 32, 55
Spänningsförsörjning för pulsgivare............................................. 80
Spänningsobalans................................................................................ 43
Specikation för absolut pulsgivare.............................................. 80
Specikation för inkrementell pulsgivare.................................... 80
Specikationer.................................................................................. 4, 72
Start........................................................................................................... 34
Statisk broms.......................................................................................... 39
Status.............................................................. 30, 31, 32, 34, 56, 68, 70
Störningsisolering................................................................................ 29
Strömavbrott.......................................................................................... 52
Strömbrytare.......................................................................................... 30
Strömmärkdata................................................................................. 7, 44
Styregenskaper..................................................................................... 80
Styrkablar......................................................... 4, 10, 17, 22, 25, 27, 29
Styrkort..................................................................................................... 43
Styrledning............................................................................................. 25
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 87
Page 92

Index
Styrning av mekanisk broms............................................................ 40
Styrplintar........................................................................... 18, 23, 25, 33
Styrplintfunktioner................................................................................. 4
Systemåterkoppling............................................................................... 4
Systemövervakning............................................................................. 42
VLT® Lift Drive LD 302
T
Termiskt motorskydd................................................................... 44, 53
Termistor........................................................................................... 22, 44
Termistorstyrkablar.............................................................................. 22
Tillämpningsexempel......................................................................... 51
Tillämpningsinstruktioner................................................................. 32
Tillämpningsprogram......................................................................... 80
Tillbaka..................................................................................................... 32
Tillvalsutrustning.................................................................... 22, 29, 30
Transient jordström............................................................................. 18
Tripp.......................................................................................................... 42
Trippfunktion......................................................................................... 10
Tripplås..................................................................................................... 43
Tröghetsmoment.................................................................................. 53
U
Urladdningstid......................................................................................... 6
Utgångsplintar....................................................................................... 30
Utström.................................................................................................... 44
V
Varningar och larm............................................................................... 42
Växelström................................................................................ 13, 22, 33
Växelströmsingång.............................................................................. 22
Växelströmsnät........................................................................................ 6
Vikt............................................................................................................. 75
Visar driftinformation.......................................................................... 32
W
Warning.................................................................................................... 42
88 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. MG34X107
Page 93

Index Handbok
MG34X107 Danfoss A/S © Rev. 2013-12-04 Med ensamrätt. 89
Page 94

Danfoss tar inte på sig något ansvar för eventuella fel i kataloger, broschyrer eller annat tryckt material. Danfoss förbehåller sig rätten till konstruktionsändringar av sina produkter utan föregående
meddelande. Detsamma gäller produkter upptagna på innestående order under förutsättning att redan avtalade specikationer inte ändras. Alla varumärken i det här materialet tillhör respektive
företag. Danfoss och Danfoss logotyp är varumärken som tillhör Danfoss A/S. Med ensamrätt.
Danfoss A/S
Ulsnaes 1
DK-6300 Graasten
vlt-drives.danfoss.com
130R0514 MG34X107 Rev. 2013-12-04
*MG34X107*
 Loading...
Loading...