


MAKING MODERN LIVING POSSIBLE
Guia de Programação
VLT® DriveMotor FCP 106/FCM 106
vlt-drives.danfoss.com

Índice Guia de Programação
Índice
1 Introdução
1.1 Objetivo do Manual
1.2 Recursos adicionais
1.3 Versão do Software e do Documento
1.4 Símbolos, Abreviações e Denições
1.5 Visão Geral Elétrica
2 Programação
2.1 Programação com o Software de Setup MCT 10
2.2 Painel de Controle Local Gráco (GLCP)
2.3 Menus do GLCP
2.3.1 Menu de Status 9
2.3.2 Quick Menu 9
2.3.3 Main Menu (Menu Principal) 9
2.3.4 Conguração para Aplicações de Malha Aberta 10
2.3.5 Assistente de Setup para Aplicações de Malha Fechada 12
2.3.6 Setup do quick menu do motor 13
2.4 Programação de Parâmetros
5
5
5
5
5
7
8
8
8
9
14
2.5 Fazer Backup e Copiar Programações dos Parâmetros
2.6 Restaurando Congurações Padrão
3 Instalação e Setup da RS485
3.1 RS485
3.1.1 Visão geral 16
3.1.2 Cuidados com EMC 17
3.1.3 Conexão de Rede 17
3.1.4 Programação do parâmetro de Comunicação do
Modbus 18
3.2 Protocolo Danfoss FC
3.3 Conguração de Rede
3.4 Estrutura do Enquadramento de Mensagem do Protocolo Danfoss FC
3.4.2 Estrutura do Telegrama 19
3.4.4 Endereço (ADR) do conversor de frequência. 19
3.4.5 Byte de Controle dos Dados (BCC) 20
3.4.6 O Campo de Dados 20
3.4.7 O Campo PKE 21
14
14
16
16
18
19
19
3.4.8 Número do Parâmetro (PNU) 21
3.4.9 Índice (IND) 21
3.4.10 Valor do Parâmetro (PWE) 21
3.4.11 Tipos de Dados suportados pelo Conversor de Frequência 22
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 1
Índice
VLT® DriveMotor FCP 106/FCM 106
3.4.12 Conversão 22
3.5 Exemplos
3.6 Visão Geral do Modbus RTU
3.6.1 Pré-requisito de Conhecimento 23
3.6.2 O que o Usuário já Deverá Saber 23
3.6.3 Visão geral 23
3.6.4 Conversor de Frequência com Modbus RTU 24
3.7 Conguração de Rede
3.8 Estrutura do Enquadramento de Mensagem do Modbus RTU
3.8.1 Introdução 24
3.8.2 Estrutura do telegrama do Modbus RTU 24
3.8.3 Campo Partida/Parada 25
3.8.4 Campo de Endereço 25
3.8.5 Campo da Função 25
3.8.6 Campo dos Dados 25
3.8.7 Campo de Vericação de CRC 25
3.8.8 Endereçamento do Registrador da Bobina 26
3.8.9 Acesso via Gravação/Leitura do PCD 26
22
23
24
24
3.8.10 Mapeando os Registradores de Retenção para Parâmetros do Drive 26
3.8.11 Como controlar o Conversor de Frequência 27
3.8.12 Códigos de Função Suportados pelo Modbus RTU 27
3.8.13 Códigos de Exceção do Modbus 28
3.9 Como Acessar os Parâmetros
3.9.1 Tratamento de Parâmetros 28
3.9.2 Armazenagem de Dados 28
3.10 Exemplos
3.10.1 Ler Registradores de Retenção (03 hex) 29
3.10.2 Predenir Registrador Único (06 hex) 29
3.10.3 Predenir Registradores Múltiplos (10 hex) 30
3.10.4 Ler/Gravar registradores múltiplos(17 hex) 30
3.11 Perl de Controle do FC da
3.11.1 Control word de acordo com o Perl do FC (Protocolo 8–10 = Perl do FC) 31
3.11.2 Status Word De acordo com o Perl do FC (STW) (parâmetro 8-30 Protocolo =
Perl do FC) 33
4 Parâmetros
28
29
31
35
4.1 Main Menu (Menu Principal) - Operação e Display - Grupo 0
4.2 Main Menu (Menu Principal) - Carga e Motor - Grupo 1
4.3 Main Menu (Menu Principal) - Freios - Grupo 2
4.4 Main Menu (Menu Principal) - Referências/Rampas - Grupo 3
4.5 Main Menu (Menu Principal) - Limites/Advertências - Grupo 4
2 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228
35
41
52
54
57
Índice Guia de Programação
4.6 Main Menu (Menu Principal) - Entrada/Saída Digital - Grupo 5
4.7 Main Menu (Menu Principal) - Entrada/Saída Analógica - Grupo 6
4.8 Main Menu (Menu Principal) - Comunicação e Opcionais - Grupo 8
4.9 Menu principal - PROFIdrive - Grupo 9
4.10 Main Menu (Menu Principal) - Smart Logic - Grupo 13
4.11 Menu Principal - Funções Especiais - Grupo 14
4.12 Main Menu (Menu Principal) - Informações sobre o Drive - Grupo 15
4.13 Main Menu (Menu Principal) - Leitura de Dados Grupo 16
4.14 Menu principal - Leitura de Dados 2 - Grupo 18
4.15 Main Menu (Menu Principal) - Malha Fechada do FC - Grupo 20
4.16 Main Menu (Menu Principal) - Funções de Aplicação - Grupo 22
4.17 Main Menu (Menu Principal) - Funções de Aplicação 2 - - Grupo 24
4.18 Menu Principal - Recursos Especiais - Grupo 30
5 Diagnósticos e resolução de problemas
5.1 Visão Geral de Alarmes e Advertências
5.2 Alarm Words
5.3 Warning Words
60
70
75
81
87
95
99
102
106
107
109
119
121
122
122
126
127
5.4 Status Word Estendidas
5.5 Resolução de Problemas
6 Listas de Parâmetros
6.1 Opções de Parâmetro
6.1.1 Congurações Padrão 133
6.1.2 0-** Operação/Display 134
6.1.3 1-** Carga e Motor 134
6.1.4 2-** Freios 136
6.1.5 3-** Referência / Rampas 137
6.1.6 4-** Limites/Advertências 138
6.1.7 5-** Entrada/Saída Digital 138
6.1.8 6-** Entrada/Saída Analógica 139
6.1.9 8-** Com. e Opcionais 140
6.1.10 9-** PROFIdrive 141
6.1.11 13-** Smart Logic 142
6.1.12 14-** Funções Especiais 142
6.1.13 15-** Informações do Drive 143
128
129
133
133
6.1.14 16-** Exibições dos Dados 144
6.1.15 18-** Informações e Leituras 145
6.1.16 20-** Malha Fechada do Drive 145
6.1.17 22-** Aplic. Funções 146
6.1.18 24-** Aplic. Funções 2 147
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 3
Índice
VLT® DriveMotor FCP 106/FCM 106
6.1.19 30-** Recursos Especiais 147
Índice
148
4 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228
Introdução Guia de Programação
1 Introdução
1.1 Objetivo do Manual
O guia de programação fornece as informações necessárias
para colocação em funcionamento e programação do
conversor de frequência, incluindo as descrições completas
dos parâmetros.
1.2 Recursos adicionais
Literatura disponível:
Instruções de Utilização do VLT® DriveMotor FCP
•
106/FCM 106, para obter as informações
necessárias para instalar e colocação em funcionamento do conversor de frequência.
®
O Guia de Design do VLT
•
106 fornece as informações necessárias para
integração do conversor de frequência em uma
diversidade de aplicações.
Guia de Programação do VLT® DriveMotor FCP
•
106/FCM 106, para saber como programar a
unidade, incluindo descrições do parâmetro
completas.
Instruções do VLT
•
controle local (LCP).
Instrução do VLT
•
de operação local (LOP).
Instruções de Utilização do Modbus RTU e
•
Instruções de Utilização do BACnet VLT® DriveMotor
FCP 106/FCM 106 para obter as informações
necessárias para controlar, monitorar e programar
o conversor de frequência.
O Guia de Instalação do VLT® PROFIBUS DP MCA
•
101 fornece informações sobre a instalação e
resolução de problemas do PROFIBUS.
®
®
LOP para operação do teclado
DriveMotor FCP 106/FCM
LCP para operação do painel de
®
O software Danfoss VLT
www.danfoss.com/BusinessAreas/DrivesSolutions, área de
download de software de PC.
Energy Box está disponível em
1.3 Versão do Software e do Documento
Este manual é revisado e atualizado regularmente. Todas as
sugestões sobre para melhorias são bem-vindas. Tabela 1.1
mostra a versão do documento com a respectiva versão de
software.
No conversor de frequência, leia a.versão de software em
parâmetro 15-43 Versão de Software.
Edição Observações Versão do software
MG03N2xx
Tabela 1.1 Versão do Software e do Documento
Atualização de software.
PROFIBUS available.
5.00
1.4 Símbolos, Abreviações e Denições
Os símbolos a seguir são usados neste manual.
ADVERTÊNCIA
Indica uma situação potencialmente perigosa que poderá
resultar em morte ou ferimentos graves.
CUIDADO
Indica uma situação potencialmente perigosa que poderá
resultar em ferimentos leves ou moderados. Também
podem ser usadas para alertar contra práticas inseguras.
AVISO!
Indica informações importantes, inclusive situações que
poderá resultar em danos no equipamento ou na
propriedade.
1 1
O Guia de Programação do VLT® PROFIBUS DP MCA
•
101 fornece informações sobre conguração do
sistema, controle do conversor de frequência,
acesso ao conversor de frequência, programação
e resolução de problemas. Também contém
exemplos de aplicações típicas.
VLT® Motion Control Tool MCT 10 permite a
•
conguração do conversor de frequência em um
ambiente de PC baseado em Windows™.
O software Danfoss VLT® Energy Box, para cálculo
•
de energia em aplicações de HVAC.
Literatura técnica e aprovações estão disponíveis online em
vlt-drives.danfoss.com/Support/Service/.
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 5
AVM de 60° Modulação Vetorial Assíncrona de 60°
A Ampère/AMP
CA Corrente alternada
AD Descarga aérea
AEO Otimização Automática de Energia
AI Entrada analógica
AMA Adaptação automática do motor
AWG American wire gauge
°C
CD Descarga constante
CDM Módulo do drive completo: O conversor de
CM Modo comum
TC Torque constante
Graus centígrados
frequência, seção de alimentação e auxiliares
Introdução
VLT® DriveMotor FCP 106/FCM 106
11
CC Corrente contínua
DI Entrada digital
DM Módulo diferencial
TIPO D Depende do drive
EMC Compatibilidade eletromagnética
FEM Força
Eletro Motriz
ETR Relé térmico eletrônico
f
JOG
f
M
f
MAX
f
MIN
f
M,N
FC Conversor de frequência
g Grama
Hiperface®Hiperface® é marca registrada da Stegmann.
HO Sobrecarga Alta
hp Cavalos de força
HTL Encoder HTL (10-30 V) pulsos - Transistor lógico
Hz Hertz
I
INV
I
LIM
I
M,N
I
VLT,MAX
I
VLT,N
kHz kiloHertz
LCP Painel de controle local
lsb O bit menos signicativo
m Metro
mA Miliampère
MCM Mille circular mil
MCT Motion Control Tool
mH Indutância em milli Henry
mm Milímetro
ms Milissegundo
msb O bit mais signicativo
η
VLT
nF Capacitância em nano Farad
NLCP Painel de controle local numérico
Nm Newton metro
NO Sobrecarga normal
n
s
Parâmetros
Online/
Oine
Força eletromotriz
Frequência do motor quando a função de jog
estiver ativada.
Frequência do motor
Frequência de saída máxima, o conversor de
frequência a aplica à sua saída.
Frequência do motor mínima do conversor de
frequência
Frequência do motor nominal
de alta tensão
Corrente nominal de saída do inversor
Limite de Corrente
Corrente nominal do motor
Corrente de saída máxima
Corrente de saída nominal fornecida pelo
conversor de frequência.
Eciência do conversor de frequência denida
como a relação entre a potência de saída e a
potência de entrada.
Velocidade do motor síncrono
As alterações nos parâmetros online são ativadas
imediatamente após o valor dos dados ser
alterado.
P
br,cont.
PCB Placa de circuito Impresso
PCD Dados do processo
PDS Sistema de drive de potência um CDM e um
PELV Tensão extra baixa protetiva
P
m
P
M,N
Motor PM Motor de ímã permanente
PID de
processo
R
br,nom
RCD Dispositivo de corrente residual
Regen Terminais regenerativos
R
min
RMS Raiz quadrada média
RPM Rotações por minuto
R
rec
s Segundo
SFAVM Modulação vetorial assíncrona orientada a uxo
STW Status Word
SMPS Fonte de alimentação com modo de comutação
THD Distorção harmônica total
T
LIM
TTL Pulsos do encoder TTL (5 V) - lógica de transistor
U
M,N
V Volts
VT Torque variável
VVC+
Tabela 1.2 Abreviações
Potência nominal do resistor de frenagem
(potência média durante frenagem contínua).
motor
Potência de saída nominal do conversor de
frequência como sobrecarga alta (HO).
Potência do motor nominal
Regulador do PID (Diferencial Proporcional
Integrado) que mantém os valores de velocidade,
pressão, temperatura, etc.
Valor nominal do resistor que garante potência de
frenagem no eixo do motor de 150/160% durante
1 minuto
Valor do resistor de frenagem mínimo permissível
por conversor de frequência
Resistência recomendada do resistor do freio de
Danfoss resistores do freio
do estator
Limite de torque
Tensão do motor nominal
Controle vetorial de tensão mais
Convenções
Listas numeradas indicam os procedimentos.
Listas de itens indicam outras informações e a descrição
das ilustrações.
O texto em itálico indica:
Referência cruzada.
•
Link.
•
Rodapé.
•
Nome do parâmetro, nome do grupo do
•
parâmetro, opcional de parâmetro.
Todas as dimensões estão em mm (pol).
* indica uma conguração padrão de um parâmetro.
6 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228
195NA507.11
L1
L2
L3
PE
3-phase
power
input
+10 V DC
0–10 V DC 0/4–20 mA
0/4–20 mA
0–10 V DC -
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN/OUT)
42 0/4–20 mA A OUT/DIG OUT
45 0/4–20 mA A OUT/DIG OUT
12 (+24 V OUT)
18 (DIGI IN)
19 (DIGI IN)
20 (COM D IN)
27 (DIGI IN)
29 (DIGI IN)
PROFIBUS
MCM
24 V (NPN)
0 V (PNP)
24 V (NPN)
0 V (PNP)
24 V (NPN)
0 V (PNP)
24 V (NPN)
0 V (PNP)
Bus ter.
RS485
Interface
(N RS485) 69
(P RS485) 68
(Com RS485) 61
RS485
(PNP)-Source
(NPN)-Sink
Bus ter.
1 2
ON
ON=Terminated
OFF=Unterminated
03
02
01
relay 1
240 V AC 3A
06
05
04
relay 2
240 V AC 3A
UDC+
UDC-
PE
Motor
U
V
W
T1
T2
Thermistor
located in
motor
Group 5-*
Located in
motor block
Introdução Guia de Programação
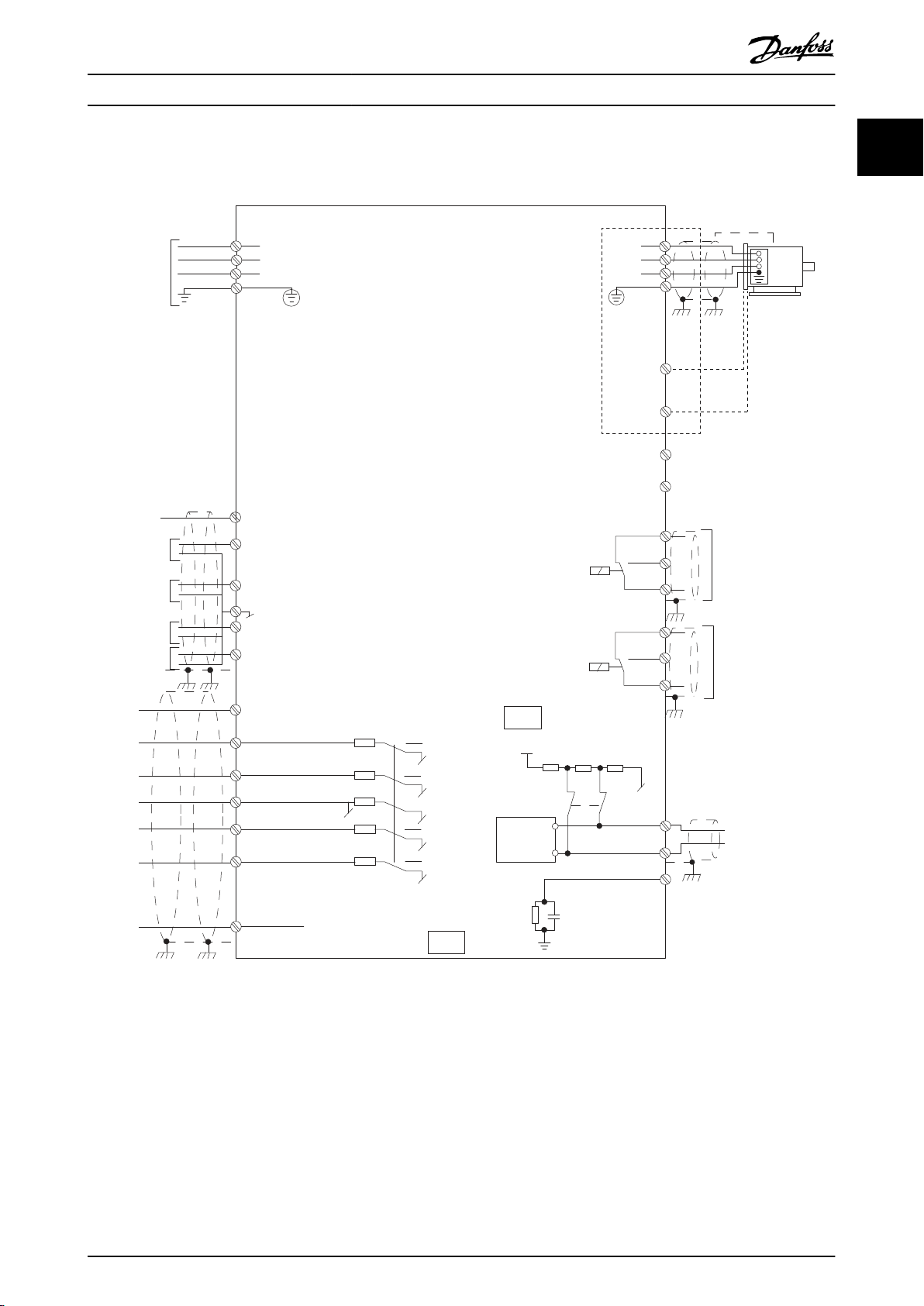
1.5 Visão Geral Elétrica
1 1
Ilustração 1.1 Visão Geral Elétrica
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 7
130BD512.10
Auto
on
Reset
Hand
on
O
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
0.00 kW
O Remote Stop
0.0Hz
On
Alarm
Warn.
A
0.00 A
0.0 %
B
C
D
2605 kWh
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18 19 20 21
Programação
2 Programação
VLT® DriveMotor FCP 106/FCM 106
22
2.1 Programação com o Software de Setup
MCT 10
O conversor de frequência pode ser programado em um
LCP ou em um PC via porta de comunicação RS485
instalando o Software de Setup MCT 10. Consulte
capétulo 1.2 Recursos adicionais para obter mais detalhes
sobre o software.
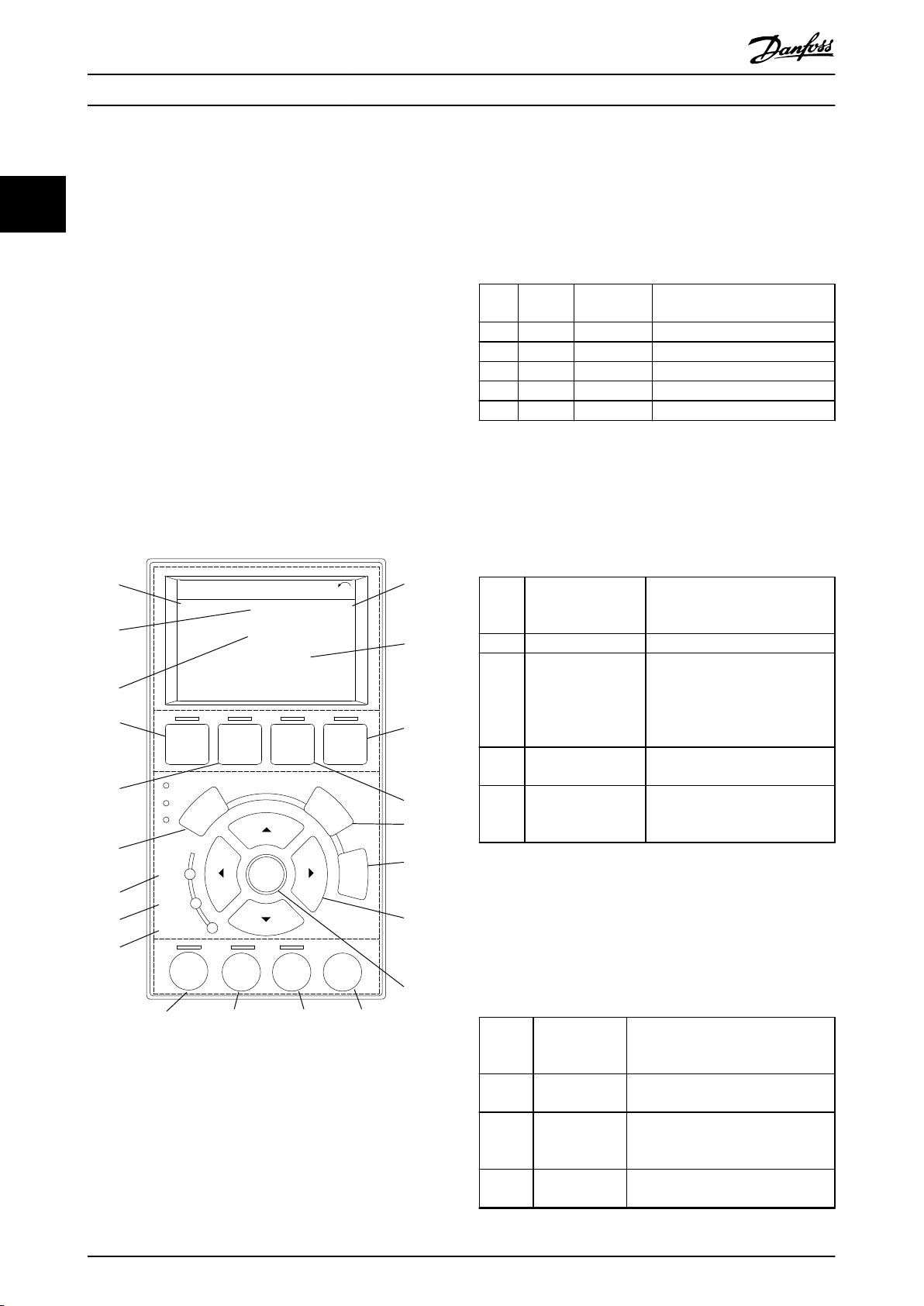
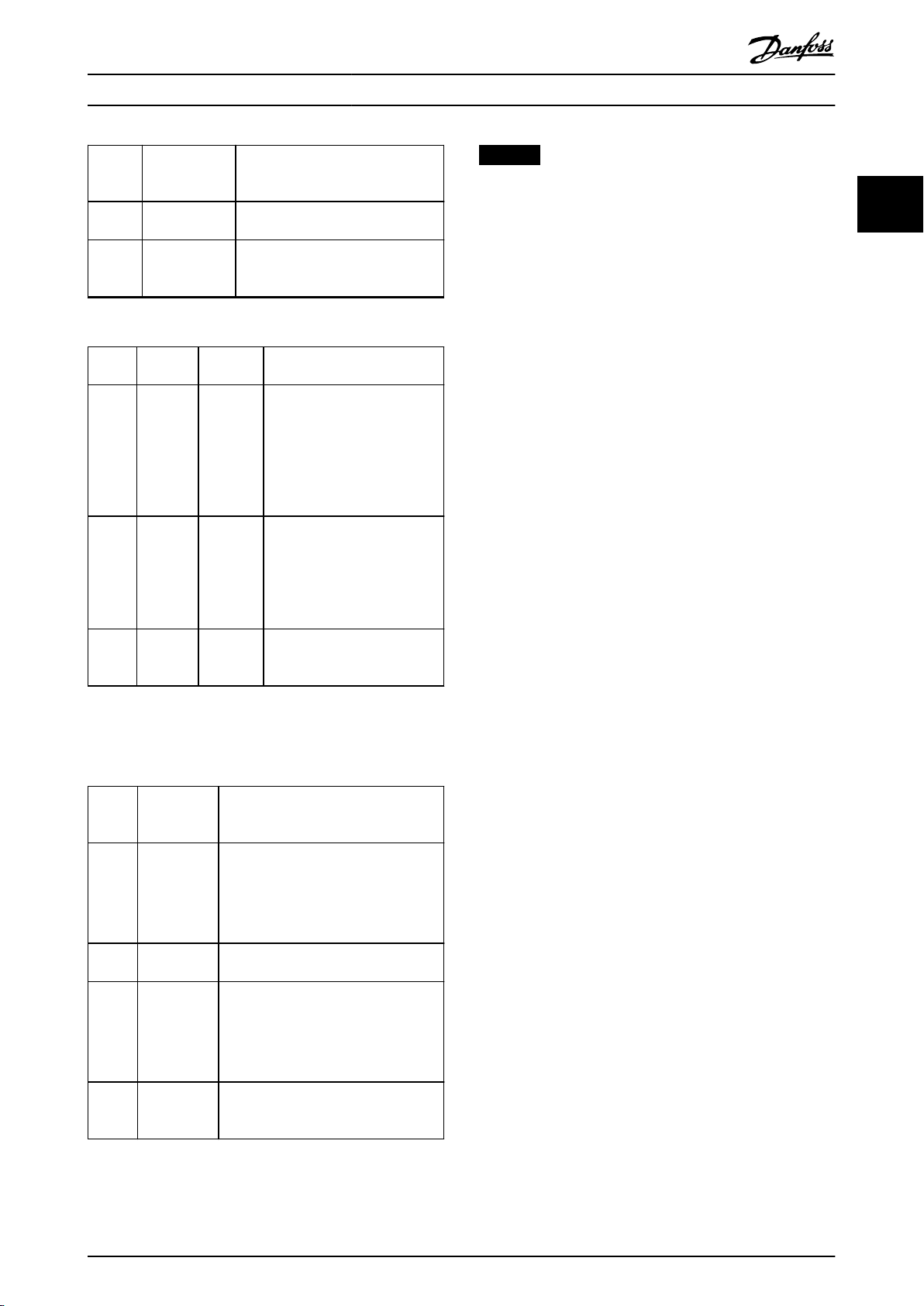
2.2 Painel de Controle Local Gráco (GLCP)
O LCP está dividido em quatro seções funcionais.
A. Display alfanumérico.
B. Seleção de menu.
C. Teclas de navegação e luzes indicadoras(LEDs).
D. Teclas de operação e luzes indicadoras (LEDs).
As informações mostradas no LCP podem ser customizadas
para aplicação do usuário. Selecione as opções no Quick
Menu Q3-13 Congurações do Display.
Call-
Display. Número do
out
1 1.1 0-20 Referência %
2 1.2 0-21 Corrente do Motor
3 1.3 0-22 Potência [kW]
4 2 0-23 Frequência
5 3 0-24 Contador de kWh
Tabela 2.1 Legenda para Ilustração 2.1
parâmetro
Conguração padrão
B. Tecla do menu do display
As teclas de menu são usadas para acesso ao menu para
conguração de parâmetros, articulação entre modos
display de status durante a operação normal e visualização
de dados do registro de falhas.
Texto
Tecla Função
explica
tivo
6 Status Mostra informações operacionais.
7 Quick Menu Permite acesso aos parâmetros de
programação para obter
instruções de setup iniciais e
muitas instruções detalhadas da
aplicação.
8 Main Menu (Menu
Principal)
9 Registro de Alarmes Mostra uma lista das advertências
Permite acesso a todos os
parâmetros de programação.
atuais, os últimos 10 alarmes e o
log de manutenção.
Tabela 2.2 Legenda para Ilustração 2.1
C. Teclas de navegação e luzes indicadoras (LEDs)
As teclas de navegação são usadas para programar funções
e mover o cursor no display. As teclas de navegação
também fornecem controle da velocidade na operação
local. Há também três luzes indicadoras de status do
conversor de frequência nessa área.
A. Área do display
Ilustração 2.1 Painel de Controle Local (LCP)
A área do display é ativada quando o conversor de
frequência recebe energia da tensão de rede, de terminais
de comunicação serial CC ou de alimentação de 24 V CC
externa.
8 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228
Texto
explicati
vo
10 Anterior Retorna à etapa ou lista anterior na
11 Cancelar Cancela a última alteração ou
12 Informações Pressione para obter uma denição
Tecla Função
estrutura de menu.
comando enquanto o modo display
não for alterado.
da função exibida.
Programação Guia de Programação
Texto
explicati
vo
13 Teclas de
14 OK Pressione para acessar grupos do
Tabela 2.3 Legenda para Ilustração 2.1
Callout
15 ON Verde A luz ON (Ligado) é ativada
16 ADVERTÊ
17 ALARME Vermelho Uma condição de falha faz a luz
Tabela 2.4 Legenda para Ilustração 2.1
D. Teclas de operação e luzes indicadoras (LEDs)
As teclas de operação estão na parte inferior do LCP.
Tecla Função
Pressione para mover entre os itens
navegação
Indicador Luz Função
NCIA
do menu.
parâmetro ou para ativar uma
seleção.
quando o conversor de
frequência recebe energia da
tensão de rede, de terminais de
comunicação serial CC ou de
uma alimentação de 24 V
externa.
Amarelo Quando condições de
advertência forem obtidas, a luz
amarela AVISO acende e um
texto é exibido na área do
display identicando o
problema.
vermelha de alarme piscar e um
texto de alarme é exibido.
AVISO!
Para ajustar o contraste do display, pressione [Status] e
[▲]/[▼].
2.3 Menus do GLCP
2.3.1 Menu de Status
No menu Status, as opções de seleção são:
Frequência do motor [Hz],
•
parâmetro 16-13 Freqüência.
Corrente do Motor [A], parâmetro 16-14 Corrente
•
do motor.
Referência de Velocidade do Motor em
•
Porcentagem [%]), parâmetro 16-02 Referência %.
Feedback, parâmetro 16-52 Feedback [Unidade].
•
Potência do Motor (kW) (se
•
parâmetro 0-03
programado para [1] América do Norte, a potência
do motor é mostrada na unidade hp ao invés de
kW), parâmetro 16-10 Potência [kW] para kW,
parâmetro 16-11 Potência [hp] para hp.
Leitura Personalizada
•
parâmetro 16-09 Leit.Personalz..
2.3.2 Quick Menu
Utilize o Quick Menu para programar as funções mais
comuns. O Quick Menu consiste em:
Denições Regionais estiver
2 2
Texto
explicat
ivo
18 Hand On
19 Desligado Para o motor, mas não remove a energia
20 Auto On
21 Reinicializar Reinicializa o conversor de frequência
Tecla Função
Inicia o conversor de frequência no
(Manual
Ligado)
(Automático
Ligado)
Tabela 2.5 Legenda para Ilustração 2.1
controle local.
Um sinal de parada externo por
•
entrada de controle ou comunicação
serial substitui o manual ligado local.
para o conversor de frequência.
Coloca o sistema em modo operacional
remoto.
Responde a um comando de partida
•
externo por terminais de controle ou
comunicação serial.
manualmente após uma falha ser
eliminada.
Assistente para aplicações de malha aberta.
•
Consulte capétulo 2.3.4
Aplicações de Malha Aberta para obter mais
detalhes.
Assistente para aplicações de malha fechada.
•
Consulte capétulo 2.3.5 Assistente de Setup para
Aplicações de Malha Fechada para obter mais
detalhes.
Setup do motor. Consulte capétulo 2.3.6 Setup do
•
quick menu do motor para obter mais detalhes.
Mudanças feitas.
•
Conguração para
2.3.3 Main Menu (Menu Principal)
O Menu Principal é utilizado para acessar e programar
todos os parâmetros. Os parâmetros do Menu Principal
podem ser acessados imediatamente, a menos que uma
senha tenha sido criada via parâmetro 0-60 Senha do Menu
Principal.
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 9
FC
+24V
DIG IN
DIG IN
DIG IN
DIG IN
COM DIG IN
A OUT / D OUT
A OUT / D OUT
18
19
27
29
42
55
50
53
54
20
12
01
02
03
04
05
06
R2
R1
0-10V
Referência
Partida
+10V
A IN
A IN
COM
130BB674.10
45
+
-
Programação
VLT® DriveMotor FCP 106/FCM 106
Para a maioria das aplicações não é necessário acessar os
parâmetros do Menu Principal. Em vez disso, o Quick Menu
fornece o acesso mais simples e mais rápido aos
22
parâmetros que são necessários tipicamente.
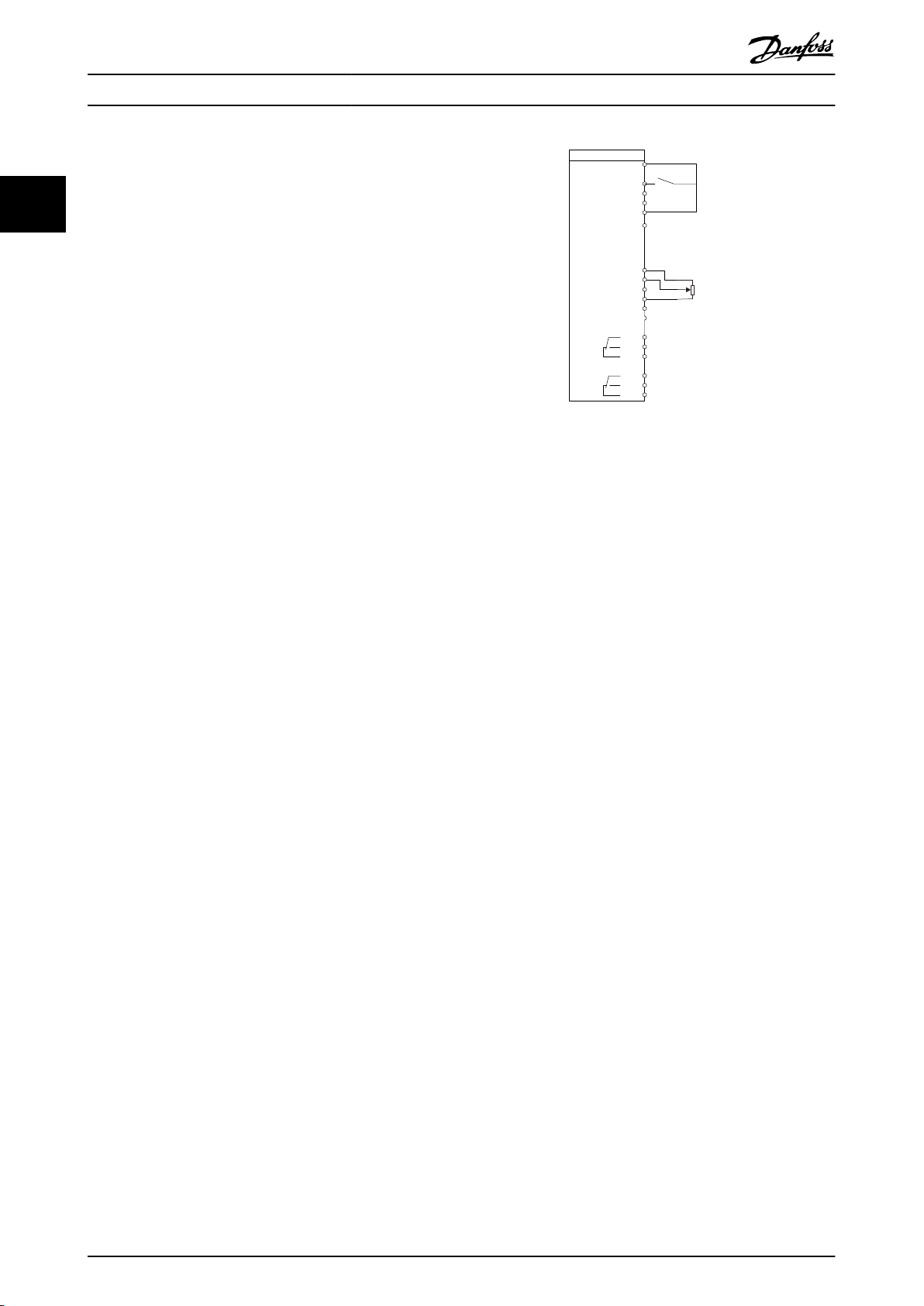
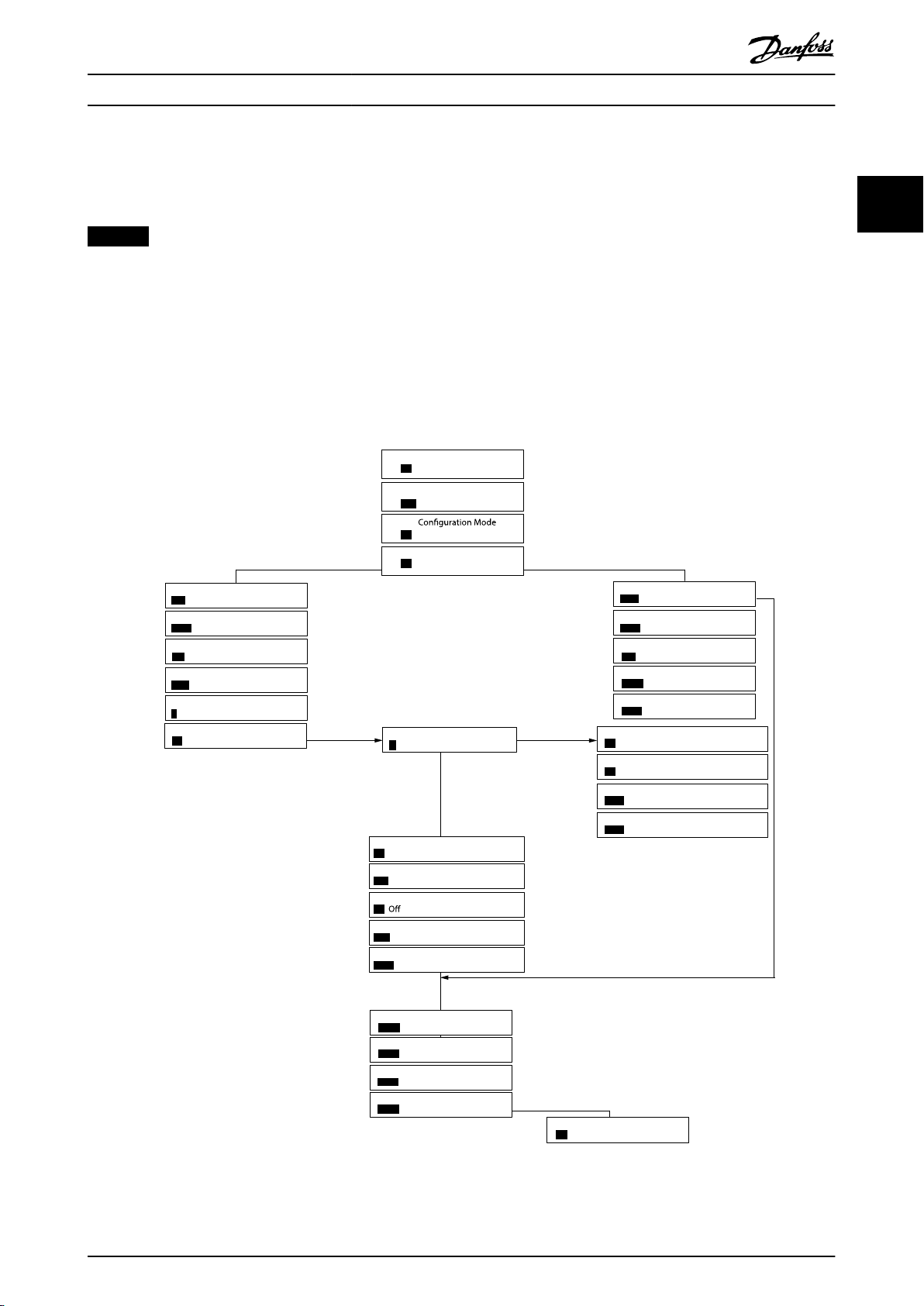
2.3.4 Conguração para Aplicações de
Malha Aberta
Esta seção conduz o instalador através do setup do
conversor de frequência de maneira clara e estruturada
para congurar uma aplicação de malha aberta. Uma
aplicação de malha aberta não utiliza um sinal de feedback
do processo.
Ilustração 2.2 Fiação Principal da Aplicação de Malha Aberta
10 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228
195NA416.11
International
4-12
Motor Speed low Limit
Hz
4-14
Motor Speed high Limit
Hz
3-41
Ramp 1 ramp-up time
s
3-42
Ramp 1 ramp-down Time
s
1-73 Active
Flying start?
Disable
1-20
Motor Power
1-22
Motor Voltage
1-23
Motor frequency
1-24
Motor current
1-25
Motor nominal speed
0-03
Regional Settings
380-440V/50Hz
Grid Type
Asynchronous motor
Asynchronous
1-10
Motor Type
1-24
Motor current
1-25
Motor nominal speed
1-26
Motor Cont. Rated Torque
1-30
Stator resistance
1-39
Motor poles
1-40
Back EMF at 1000 rpm
1-37
d-axis inductance
6 - 10 T53 low Voltage
V
6 - 11 T53 high Voltage
V
6 - 12 T53 Low Current
A
6 - 13 T53 High Current
A
Current
Voltage
AMA Failed
0.0 Hz
0.0 kW
Wizard completed
Press OK to accept
1-29
Automatic Motor Adaption
O
Auto Motor Adapt OK
Press OK
5 - 40 Function of Relay 2
No function
5 - 40 Function of Relay 1
[0] No function
3-03
Max Reference
Hz
3-02
Min Reference
Hz
AMA running
-----
AMA failed
Perform AMA
(Do not perform AMA)
AMA OK
6 - 19 T53 Mode
Current
3.8
A
3000
RPM
5.4
Nm
0.65
Ohms
8
57
V
5
mH
1.50
kW
0050
V
0050
Hz
04.66
A
1420
RPM
[0]
Motor type = Asynchronous
Motor type = PM motor
0000
0050
0003
0003
04.66
13.30
0050
0220
0000
0050
[12]
[0]
[0]
[0]
[0]
[1]
[0]
0-06
PM motor
1-38 q-axis Inductance (Lq)
5
mH
1-44 Current at Min Inductance for d-axis
100
%
Current at Min Inductance for q-axis
100
%
1-70 PM Start Mode
Rotor Detection
[0]
1-46 Position Detection Gain
%
O
100
30-22 Locked Rotor Detection
[0]
s
30-23 Locked Rotor Detection Time[s]
0.10
4-19 Max Output Frequency
65
Hz
Motor Type = IPM
IPM Type = Sat.
IPM Type = non-Sat.
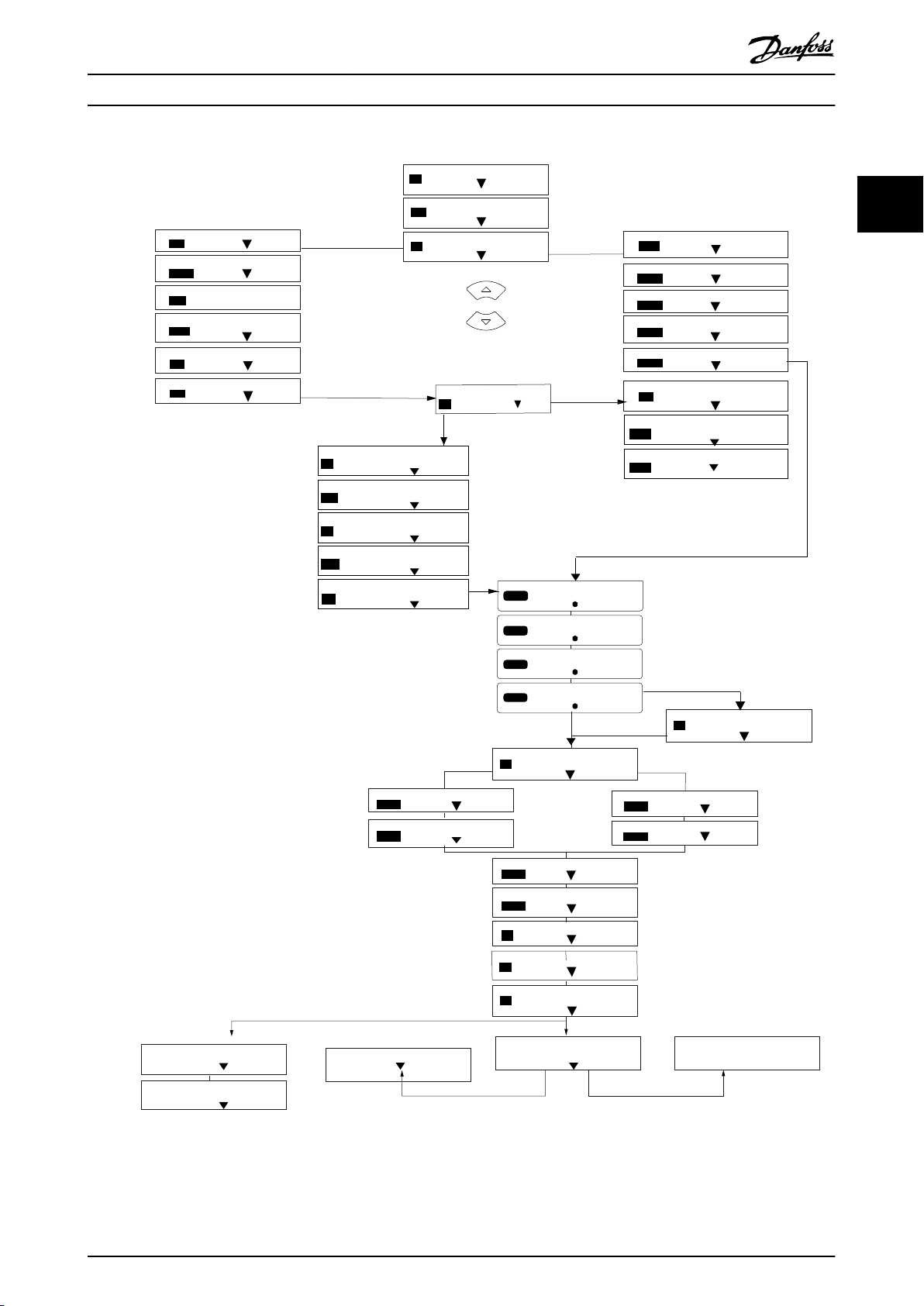
Programação Guia de Programação
2 2
Ilustração 2.3 Conguração para Aplicações de Malha Aberta
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 11
6-29 Terminal 54 Mode
[1]
Voltage
6-25 T54 high Feedback
0050
Hz
20-94 PI integral time
0020.00
s
Current
Voltage
This dialog is set to
[1] Analog input 54
20-00 Feedback 1 source
[1]
Analog input 54
3-10 Preset reference [0]
0.00
3-03 Max Reference
50.00
3-02 Min Reference
0.00
Asynchronous Motor
1-73 Flying Start
[0]
No
1-22 Motor Voltage
400
V
1-24 Motor Current
04.66
A
1-25 Motor nominal speed
1420
RPM
3-41 Ramp 1 ramp-up time
0003
s
3-42 Ramp1 ramp-down time
0003
s
0-06 Grid Type
4-12 Motor speed low limit
0016
Hz
4-13 Motor speed high limit
0050
Hz
195NA417.11
1-20 Motor Power
1.10
kW
1-23 Motor Frequency
50
Hz
6-22 T54 Low Current
A
6-24 T54 low Feedback
0016
Hz
6-23 T54 high Current
13.30
A
6-25 T54 high Feedback
0050
0.01
s
20-81 PI Normal/Inverse Control
[0]
Normal
20-83 PI Normal/Inverse Control
0050
Hz
20-93 PI Proportional Gain
00.50
1-29 Automatic Motor Adaption
[0]
O
6-20 T54 low Voltage
0050
V
6-24 T54 low Feedback
0016
Hz
6-21 T54 high Voltage
0220
V
6-26
T54 Filter time const.
1-00 Conguration Mode
[3]
Closed Loop
0-03 Regional Settings
[0]
Power kW/50 Hz
3-16 Reference Source 2
[0]
No Operation
1-10 Motor Type
[0]
Asynchronous
[12]]
1-30 Stator Resistance
0.65
Ohms
1-25 Motor Nominal Speed
3000
RPM
1-24 Motor Current
3.8
A
1-26 Motor Cont. Rated Torque
5.4
Nm
1-38 q-axis inductance(Lq)
5
mH
4-19 Max Ouput Frequency
0065
Hz
1-40 Back EMF at 1000 RPM
57
V
PM Motor
1-39 Motor Poles
8
%
04.66
Hz
MotorType = Asynchronous
MotorType = PM Motor
Motor Type = IPM
IPM Type = Sat.
IPM Type = non-Sat.
1-44 d-axis Inductance Sat. (LdSat)
(1-70) PM Start Mode
Rotor Detection
[0]
1-46 Position Detection Gain
%
O
100
30-22 Locked Rotor Detection
[0]
s
30-23 Locked Rotor Detection Time[s]
0.10
5
mH
(1-45) q-axis Inductance Sat. (LqSat)
5
mH
(1-48) Current at Min Inductance for d-axis
100
%
1-49 Current at Min Inductance for q-axis
100
%
380-440V/50Hz
This dialog is set to
[0] No Operation
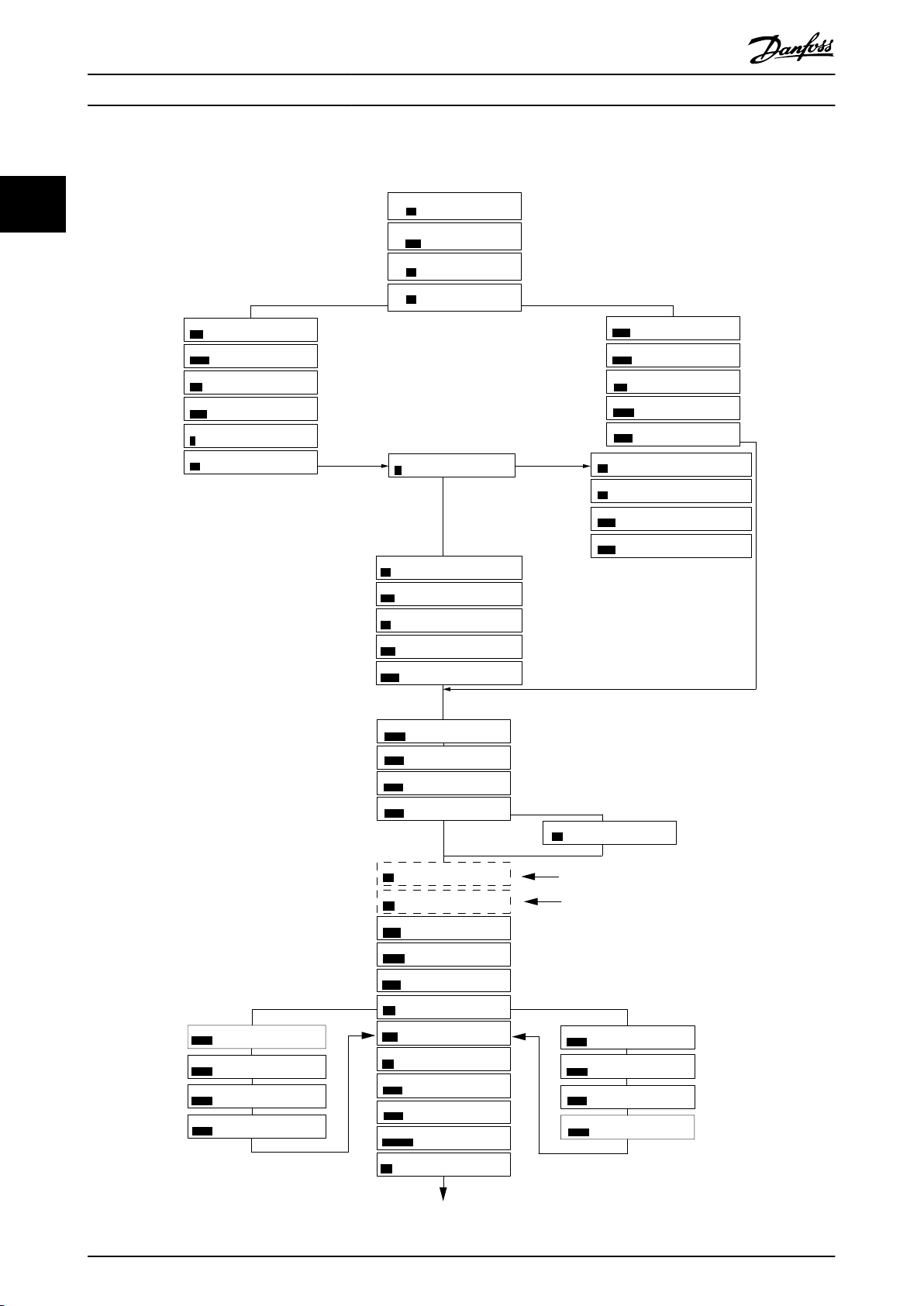
Programação
2.3.5 Assistente de Setup para Aplicações de Malha Fechada
22
VLT® DriveMotor FCP 106/FCM 106
Ilustração 2.4 Assistente de Setup de Malha Fechada
12 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228
Asynchronous Motor
1-73 Flying Start
[0]
No
1-22 Motor Voltage
400
V
1-24 Motor Current
04.66
A
1-25 Motor nominal speed
1420
RPM
3-41 Ramp 1 ramp-up time
0003
s
3-42 Ramp1 ramp-down time
0003
s
0-06 Grid Type
4-12 Motor speed low limit
0016
Hz
4-13 Motor speed high limit
0050
Hz
195NA462.11
1-20 Motor Power
1.10
kW
1-23 Motor Frequency
50
Hz
1-00
[3]
Closed Loop
0-03 Regional Settings
[0]
International
1-10 Motor Type
[0]
Asynchronous
[12]]
1-30 Stator Resistance
0.65
Ohms
1-25 Motor Nominal Speed
3000
RPM
1-24 Motor Current
3.8
A
1-26 Motor Cont. Rated Torque
5.4
Nm
1-38 q-axis inductance(Lq)
5
mH
4-19 Max Ouput Frequency
0065
Hz
1-40 Back EMF at 1000 RPM
57
V
PM Motor
1-39 Motor Poles
8
MotorType = Asynchronous
MotorType = PM Motor
Motor Type = IPM
IPM Type = Sat.
IPM Type = non-Sat.
1-44 d-axis Inductance Sat. (LdSat)
(1-70) PM Start Mode
Rotor Detection
[0]
1-46 Position Detection Gain
%
100
30-22 Locked Rotor Dete ction
[0]
s
30-23 Locked Rotor Dete ction Time[s]
0.10
5
mH
(1-45) q-axis Inductanc e Sat. (LqSat)
5
mH
(1-48) Current at Min I nductance for d-axis
100
%
1-49 Current at Min Ind uctance for q-axis
100
%
380-440V/50Hz
Programação Guia de Programação
2.3.6 Setup do quick menu do motor
O Setup do Motor no Quick Menu conduz o instalador através da programação dos parâmetros do motor necessários.
AVISO!
PROTEÇÃO DE SOBRECARGA DO MOTOR
É recomendável proteção térmica do motor. Especialmente quando funcionando em baixa velocidade, o resfriamento do
ventilador do motor integrado geralmente não é suciente.
•
•
Utilize PTC. Consulte capítulo Conexão do Motor nas Instruções de Utilização VLT® DriveMotor FCP 106/FCM
106, ou
Ative a proteção térmica do motor programando parâmetro 1-90 Proteção Térmica do Motor para [4] Desarme
do ETR 1.
2 2
Ilustração 2.5 Setup do quick menu do motor
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 13
Programação
VLT® DriveMotor FCP 106/FCM 106
2.4 Programação de Parâmetros
Procedimento:
22
1. Pressione [Menu] até a seta do display apontar o
menu desejado: Quick Menu ou Menu Principal.
2. Para navegar pelos grupos do parâmetro,
pressione [▲] [▼].
3. Para selecionar um grupo do parâmetro,
pressione [OK].
4. Para navegar pelos parâmetros no grupo
especíco, pressione [▲] [▼].
5. Para selecionar o parâmetro, pressione [OK].
6.
Para alterar o valor do parâmetro, pressione [▲]
[▼] [▶].
7. Para salvar a nova conguração, pressione [OK].
Para abortar, pressione [Back].
8. Para retornar ao menu anterior, pressione [Back].
2.5 Fazer Backup e Copiar Programações
dos Parâmetros
AVISO!
Pare o motor antes de fazer backup ou de copiar programações do parâmetro.
Armazenagem de dados no LCP
Uma vez concluído o setup de um conversor de
frequência, armazene os dados no LCP. Como alternativa,
utilize um PC com o Software de Setup MCT 10 para
executar o mesmo backup.
1. Ir para parâmetro 0-50 Cópia do LCP.
2. Pressione [OK].
3. Selecione [1] Todos para LCP.
4. Pressione [OK].
Transferência de dados do LCP para o conversor de
frequência
Conecte o LCP a outro conversor de frequência e copie as
programações do parâmetro para esse conversor de
frequência também.
1. Ir para parâmetro 0-50 Cópia do LCP.
2. Pressione [OK].
3. Selecione [2] Todos do LCP.
4. Pressione [OK].
Restaurando Congurações Padrão
2.6
Selecione o modo de inicialização de acordo com a
necessidades de reter as programações do parâmetro.
Inicialização recomendada (via parâmetro 14-22 Modo
Operação).
Utilize este método para inicializar o conversor de
frequência sem reinicializar as
comunicação.
1. Selecione parâmetro 14-22 Modo Operação.
2. Pressione [OK].
3. Selecione [2] Inicialização e Pressione [OK].
4. Corte a alimentação de rede elétrica e aguarde
até que o display apague.
5. Conecte a alimentação de rede elétrica
novamente.
O conversor de frequência está agora reinicializado, exceto
os seguintes parâmetros:
Parâmetro 0-03 Denições Regionais.
•
Parâmetro 8-30 Protocolo.
•
Parâmetro 8-31 Endereço.
•
Parâmetro 8-32 Baud Rate da Porta do FC.
•
Parâmetro 8-33 Bits de Paridade / Parada.
•
Parâmetro 8-35 Atraso Mínimo de Resposta.
•
Parâmetro 8-36 Atraso de Resposta Mínimo.
•
Parâmetro 8-70 Instânc Dispos BACnet.
•
Parâmetro 8-72 Masters Máx MS/TP.
•
Parâmetro 8-73 Chassi Info Máx.MS/TP.
•
Parâmetro 8-74 Serviço "I-Am".
•
Parâmetro 8-75 Senha de Inicialização.
•
Parâmetro 15-00 Horas de funcionamento.
•
Parâmetro 15-03 Energizações.
•
Parâmetro 15-04 Superaquecimentos.
•
Parâmetro 15-05 Sobretensões.
•
Parâmetro 15-30 Log Alarme: Cód Falha.
•
Grupo do Parâmetro 15-4* Parâmetros de identi-
•
cação do drive.
Parâmetro 1-06 Sentido Horário.
•
congurações de
14 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

Programação Guia de Programação
Inicialização com dois dedos
Utilize este método para inicializar o conversor de
frequência, incluindo reinicializar as congurações de
comunicação.
1. Desligue o conversor de frequência.
2. Pressione [OK] e [Menu] simultaneamente.
3. Energize o conversor de frequência enquanto
estiver pressionando as teclas mencionadas acima
durante 10 s.
O conversor de frequência está agora reinicializado, exceto
os seguintes parâmetros:
Parâmetro 0-03 Denições Regionais.
•
Parâmetro 15-00 Horas de funcionamento.
•
Parâmetro 15-03 Energizações.
•
Parâmetro 15-04 Superaquecimentos.
•
Parâmetro 15-05 Sobretensões.
•
Grupo do Parâmetro 15-4* Parâmetros de identi-
•
cação do drive
Alarme 80, Drive inicializado é exibido como conrmação
de que os parâmetros foram inicializados. Pressione [Reset].
2 2
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 15
drop cable
Instalação e Setup da RS485
VLT® DriveMotor FCP 106/FCM 106
3 Instalação e Setup da RS485
3.1 RS485
33
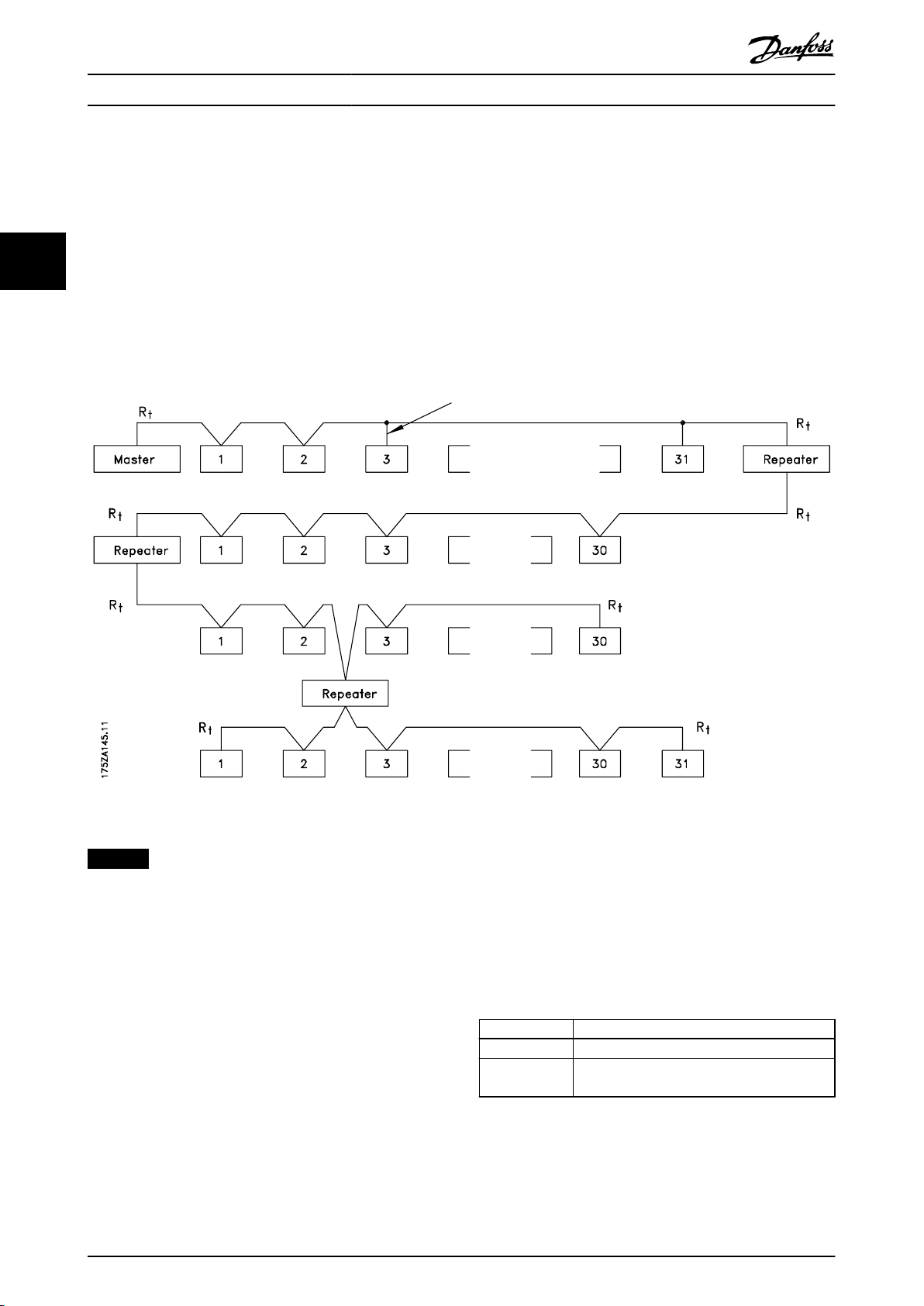
3.1.1 Visão geral
RS485 é uma interface de barramento de par de os, compatível com topologia de rede de perdas múltiplas. Nós podem
ser conectados como bus ou através de uma queda de cabos de uma linha tronco comum. Um total de 32 nós podem ser
conectados a um segmento de rede.
Repetidores dividem segmentos de rede, consulte Ilustração 3.1.
Ilustração 3.1 Interface do Barramento da RS485
AVISO!
Cada repetidor funciona como um nó dentro do
segmento em que está instalado. Cada nó conectado em
uma rede especíca deve ter um endereço do nó
exclusivo em todos os segmentos.
Cada segmento deve estar com terminação em ambas as
extremidades; para isso use o interruptor de terminação
(S800) dos conversores de frequência ou um banco de
resistores de terminação polarizado. Use sempre par
trançado blindado (STP) para cabeamento de barramento e
siga boas práticas de instalação comuns.
A conexão do terra de baixa impedância da malha de
blindagem em cada nó é muito importante, inclusive em
altas frequências. Por isso, conecte uma superfície grande
da blindagem ao aterramento, por exemplo, com uma
braçadeira de cabo ou uma bucha de cabo condutiva. É
possível que seja necessário aplicar cabos equalizadores de
potencial para manter o mesmo potencial de aterramento
ao longo da rede de comunicação - particularmente em
instalações com cabos longos.
Para prevenir descasamento de impedância, use sempre o
mesmo tipo de cabo ao longo da rede inteira. Ao conectar
um motor a um conversor de frequência, use sempre um
cabo de motor que seja blindado.
Comprimento Par trançado blindado (STP)
Impedância [Ω]
Comprimento
de cabo [m]
Tabela 3.1 Especicações de Cabo
120
Máximo 1200 (incluindo drop lines)
Máximo 500 de estação a estação
16 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228
195NA493.11
1
2
90°
61 68 69
N
P
COMM. GND
130BB795.10
Instalação e Setup da RS485 Guia de Programação
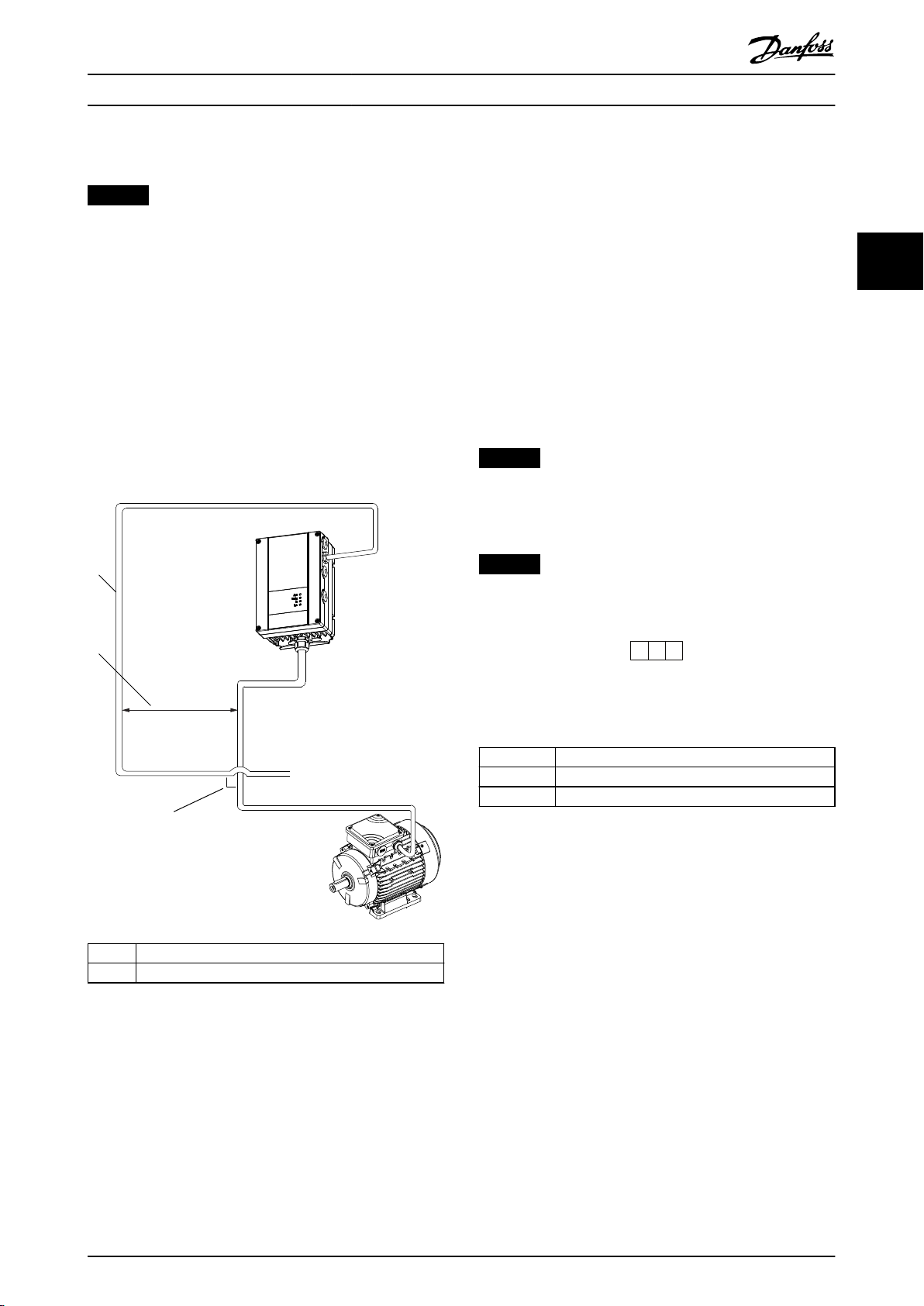
3.1.2 Cuidados com EMC
AVISO!
Observe os regulamentos locais e nacionais relevantes
relativos à conexão do ponto de aterramento de
proteção. Falha em aterrar os cabos corretamente pode
resultar em degradação da comunicação e danos ao
equipamento. Para evitar acoplamento do ruído de alta
frequência de um cabo para outro, o cabo de
comunicação RS485 deve ser mantido distante dos cabos
de motor e do resistor do freio. Normalmente uma
distância de 200 mm (8 polegadas) é suciente.
Mantenha a maior distância possível entre os cabos,
principalmente onde forem instalados em paralelo por
grandes distâncias. Se o cruzamento for inevitável, o
cabo da RS485 deve cruzar com os cabos de motor e do
resistor do freio em um ângulo de 90°.
3.1.3 Conexão de Rede
Conecte o conversor de frequência à rede R4S85 da
seguinte maneira (veja também Ilustração 3.3):
1. Conecte os os de sinal aos terminais 68 (P+) e
69 (N-), na placa de controle principal do
conversor de frequência.
2. Conecte a blindagem do cabo às braçadeiras de
cabo.
3. O terminal 61 normalmente não é usado: No
entanto, quando houver um grande diferença de
potencial entre conversores de frequência,
conecte a blindagem do cabo RS485 ao terminal
61. O terminal 61 tem um ltro RC para eliminar
o ruído de corrente no cabo.
AVISO!
REQUISITOS DO ISOLAMENTO, MH1
Para cartão de controle e os da placa de relé, o
isolamento mínimo necessário é 300 V e 75 °C (167 °F).
AVISO!
Recomendam-se cabos de par trançado blindados para
reduzir o ruído entre os condutores.
3 3
COMM. GND Aterramento da comunicação
P (P+) Positivo
N (N-) Negativo
Ilustração 3.3 Conexão de Rede
4. Programe a chave tipo DIP do cartão de controle
com ON para nalizar o barramento RS485 e
1 Cabo Fieldbus
2 Mínimo 200 mm (8 pol) de distância
Ilustração 3.2 Distância Mínima entre a Comunicação e os
Cabos de Energia
ativar o RS485 Para obter informações sobre o
posicionamento da chave tipo DIP, consulte
Ilustração 3.4. A conguração de fábrica da chave
tipo DIP é OFF.
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 17

1
2
3
195NA488.11
Instalação e Setup da RS485
33
VLT® DriveMotor FCP 106/FCM 106
Parâmetro Função
Parâmetro 8-35 Atr
aso Mínimo de
Resposta
Parâmetro 8-36 Atr
aso de Resposta
Mínimo
Parâmetro 8-37 Atr
aso Inter-Caractere
Máximo
Especique o tempo de atraso mínimo,
entre o recebimento de uma solicitação e a
transmissão de uma resposta. Essa função
contorna os atrasos de retorno do modem.
Especique um tempo de atraso máximo
entre a transmissão de uma solicitação e o
recebimento de uma resposta.
Se a transmissão for interrompida,
especique um tempo de atraso máximo
entre 2 bytes recebidos para garantir o
timeout.
AVISO!
A seleção padrão depende do
protocolo selecionado no
parâmetro 8-30 Protocolo.
1 Chave tipo DIP
2 Chave tipo DIP programado com a conguração de
fábrica, posição de OFF
3 Chave tipo DIP na posição ON
Tabela 3.2 Programação do Parâmetro de Comunicação do Modbus
3.2 Protocolo Danfoss FC
3.2.1 Visão Geral do Protocolo Danfoss FC
Ilustração 3.4 Chave tipo DIP programado com a Conguração
de Fábrica
3.1.4 Programação do parâmetro de
Comunicação do
Modbus
Parâmetro Função
Parâmetro 8-30 Pro
tocolo
Parâmetro 8-31 End
ereço
Parâmetro 8-32 Bau
d Rate da Porta do
FC
Parâmetro 8-33 Bits
de Paridade /
Parada
Selecione o protocolo da aplicação a ser
executado para a interface RS485.
Programe o endereço do nó.
AVISO!
A faixa de endereços depende do
protocolo selecionado no
parâmetro 8-30 Protocolo.
Programe a baud rate.
AVISO!
A baud rate padrão depende do
protocolo selecionado no
parâmetro 8-30 Protocolo.
Programe os bits de paridade e do número
de paradas.
AVISO!
A seleção padrão depende do
protocolo selecionado no
parâmetro 8-30 Protocolo.
O Protocolo Danfoss FC, também conhecido como Bus do
FC ou Bus padrão, é o Danfoss eldbus padrão. Ele dene
uma técnica de acesso, de acordo com o princípio mestre/
escravo para comunicações através de um eldbus.
Um mestre e o máximo de 126 escravos podem ser
conectados ao barramento. O mestre seleciona os escravos
individuais por meio de um caractere de endereço no
telegrama. Um escravo por si só nunca pode transmitir
sem que primeiramente seja solicitado a fazê-lo e não é
permitido que um escravo transra a mensagem para
outro escravo. A comunicação ocorre no modo Half duplex.
A função do mestre não pode ser transferida para outro nó
(sistema de mestre único).
A camada física e o RS485, usando, portanto, a porta
RS485 embutida no conversor de frequência. O Protocolo
Danfoss FC suporta diferentes formatos de telegrama:
Um formato curto de 8 bytes para dados de
•
processo.
Um formato longo de 16 bytes que também
•
inclui um canal de parâmetro.
Um formato usado para textos.
•
3.2.2 FC com Modbus RTU
O Protocolo Danfoss FC permite acesso à control word e à
referência do barramento do conversor de frequência.
A control word permite ao Modbus mestre controlar
diversas funções importantes do conversor de frequência.
18 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228
0 1 32 4 5 6 7
195NA036.10
Start
bit
Pridade Stop
Par bit
STX LGE ADR DATA BCC
195NA099.10
Instalação e Setup da RS485 Guia de Programação
Partida
•
É possível parar o conversor de frequência por
•
diversos meios:
- Parada por inércia.
- Parada rápida.
- Parada por Freio CC.
- Parada (de rampa) normal.
Reset após um desarme por falha.
•
Operação em diversas velocidades predenidas.
•
Funcionamento em reversão.
•
Alteração da conguração ativa.
•
Controle de dois relés integrados no conversor de
•
frequência.
A referência de bus é comumente usada para controle da
velocidade. Também é possível acessar os parâmetros, ler
seus valores e, onde for possível, inserir valores neles.
Acessar os parâmetros oferece uma variedade de opções
de controle, inclusive controlar o setpoint do conversor de
frequência quando o seu controlador PI interno for usado.
Ilustração 3.5 Conteúdo de um Caractere
3 3
3.4.2 Estrutura do Telegrama
Cada telegrama tem a seguinte estrutura:
1. Caractere de partida (STX)=02 hex.
2. Um byte representando o comprimento do
telegrama (LGE).
3. Um byte representando o endereço do conversor
de frequência (ADR).
Seguem vários bytes de dados (variável, dependendo do
tipo de telegrama).
Um byte de controle dos dados (BCC) completa o
telegrama.
Conguração de Rede
3.3
Para ativar o Protocolo Danfoss FC para o conversor de
frequência, programe os parâmetros a seguir.
Parâmetro Conguração
Parâmetro 8-30 Protocolo FC
Parâmetro 8-31 Endereço 1–126
Parâmetro 8-32 Baud
Rate da Porta do FC
Parâmetro 8-33 Bits de
Paridade / Parada
Tabela 3.3 Parâmetros para Ativar o Protocolo
Estrutura do Enquadramento de
3.4
2400–115200
Paridade par, 1 bit de parada (padrão)
Mensagem do Protocolo Danfoss FC
3.4.1 Conteúdo de um Caractere (byte)
Cada caractere transferido começa com um bit de início.
Em seguida, são transmitidos 8 bits de dados, que correspondem a um byte. Cada caractere é protegido por um bit
de paridade. Esse bit é denido para 1 ao atingir a
paridade. Paridade é quando houver um número igual de
1s nos 8 bits de dados e no bit de paridade no total. Um
bit de parada completa um caractere, assim é composto
por 11 bits no total.
Ilustração 3.6 Estrutura do Telegrama
3.4.3 Comprimento do Telegrama (LGE)
O comprimento do telegrama é o número de bytes de
dados, mais o byte de endereço ADR e o byte de controle
dos dados BCC.
4 bytes de dados LGE=4+1+1=6 bytes
12 bytes de dados LGE=12+1+1=14 bytes
Telegramas contendo textos
Tabela 3.4 Comprimento dos telegramas
1) O 10 representa os caracteres xos, enquanto o n é variável
(dependendo do comprimento do texto).
101)+n bytes
3.4.4 Endereço (ADR) do conversor de
frequência.
Formato de endereço 1-126
Bit 7 = 1 (formato de endereço 1-126 ativo)
Bit 0-6 = endereço do conversor de frequência
1-126
Bit 0-6=0 Broadcast
O escravo retorna o byte de endereço inalterado no
telegrama de resposta ao mestre.
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 19
ADRLGESTX PCD1 PCD2 BCC
130BA269.10
PKE IND
130BA270.10
ADRLGESTX PCD1 PCD2 BCCCh1 Ch2 Chn
Instalação e Setup da RS485
VLT® DriveMotor FCP 106/FCM 106
3.4.5 Byte de Controle dos Dados (BCC)
O checksum é calculado como uma função lógica XOR (OU exclusivo). Antes de o primeiro byte do telegrama ser recebido,
o CheckSum calculado é 0.
33
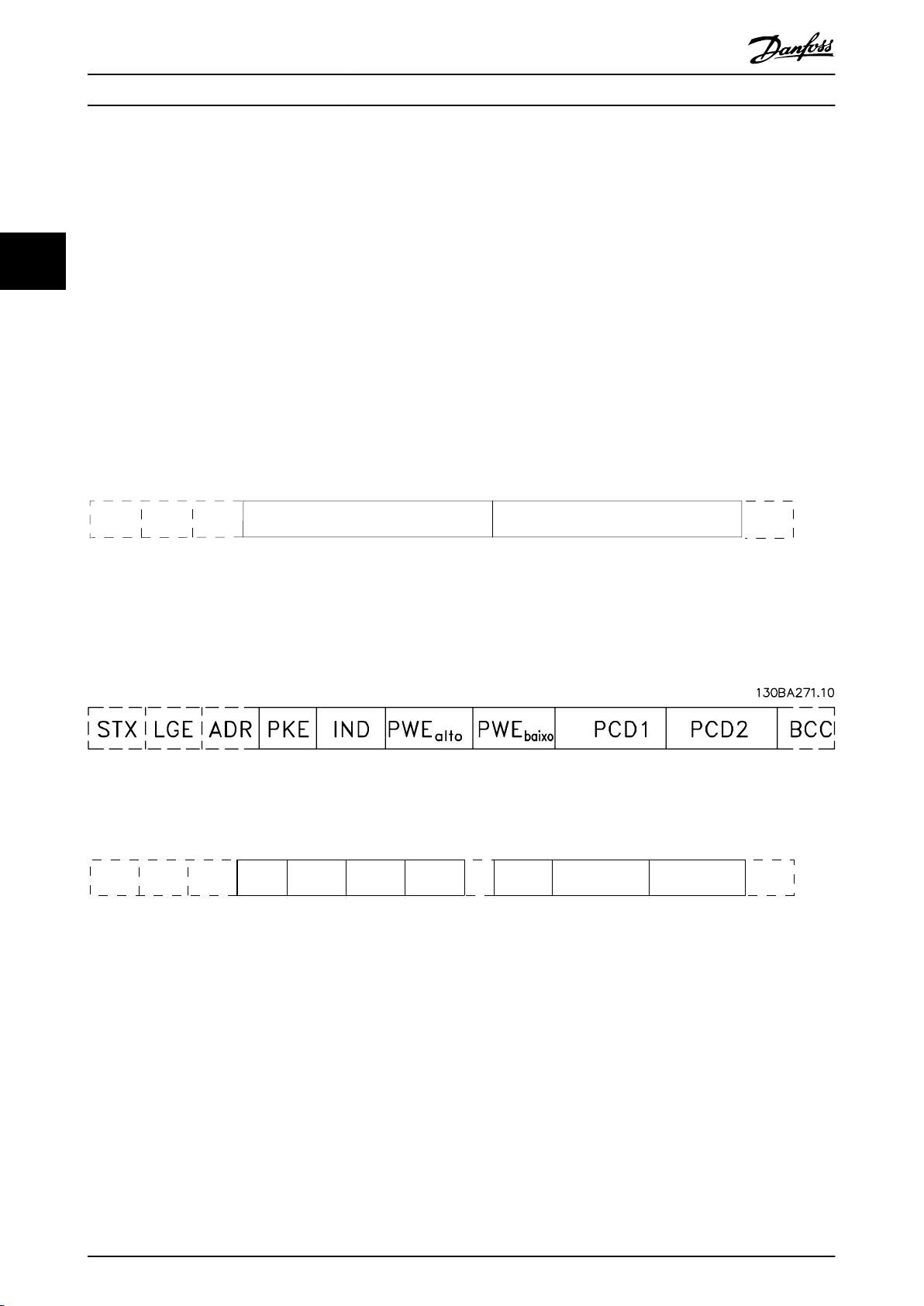
3.4.6 O Campo de Dados
A estrutura dos blocos de dados depende do tipo de telegrama. Há três tipos de telegramas e o tipo aplica-se tanto aos
telegramas de controle (mestre⇒escravo) quanto aos telegramas de resposta (escravo⇒mestre).
Os 3 tipos de telegrama são:
Bloco de processo (PCD)
O PCD é composto por um bloco de dados de 4 bytes (2 palavras) e contém:
Control word e valor de referência (do mestre para o escravo).
•
Status word e a frequência de saída atual (do escravo para o mestre).
•
Ilustração 3.7 Bloco de Processo
Bloco de parâmetro
Bloco de parâmetros, usado para transmitir parâmetros entre mestre e escravo. O bloco de dados é composto de 12 bytes (6
words) e também contém o bloco de processo.
Ilustração 3.8 Bloco de parâmetro
Bloco de texto
O bloco de texto é usado para ler textos, via bloco de dados.
Ilustração 3.9 Bloco de texto
20 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BB918.10
PKE IND
PWE
high
PWE
low
AK PNU
Parameter
commands
and replies
Parameter
number
Instalação e Setup da RS485 Guia de Programação
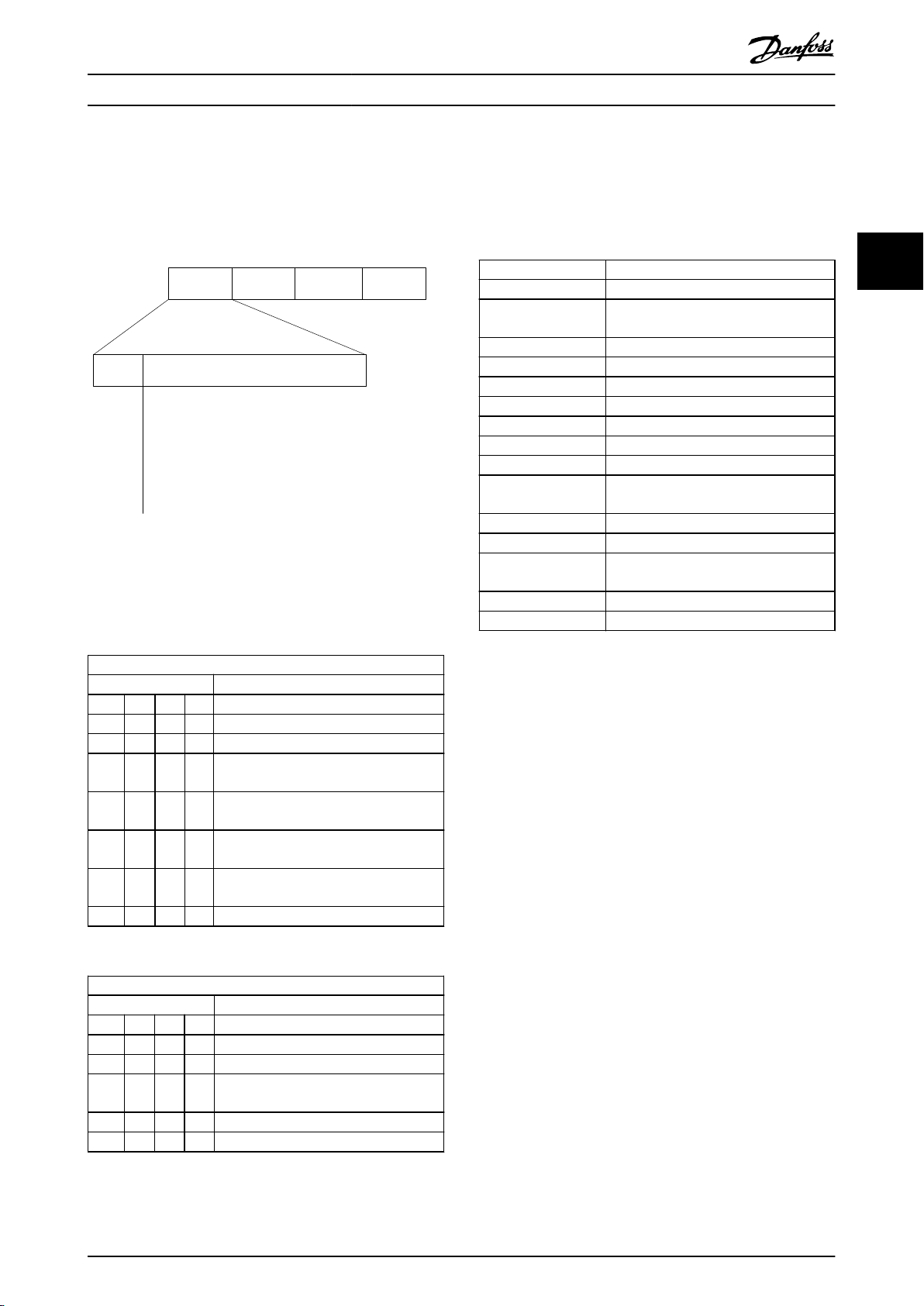
3.4.7 O Campo PKE
O campo PKE contém dois subcampos: Comando e
resposta (AK) do parâmetro e o Número de parâmetro
(PNU):
Ilustração 3.10 Campo PKE
Os bits 12–15 transferem comandos de parâmetro do
mestre para o escravo e retornam respostas do escravo
processadas para o mestre.
Se o comando não puder ser executado, o escravo envia
esta resposta:
0111 O comando não pode ser executado
- e emite o seguinte relatório de falha no valor do
parâmetro:
Código de falha + Especicação
0 Número ilegal do parâmetro
2 Limites superior e inferior foram
excedidos
3 Sub-índice corrompido
4 Nenhuma matriz
5 Tipo de dados incorreto
6 Não usado
7 Não usado
17 Não durante o funcionamento
18 Outros erros
23 O banco de dados dos parâmetros está
ocupado
100
>100
130 Sem acesso de barramento para esse
parâmetro
132 Sem acesso ao LCP
255 Sem erro
3 3
Comandos de parâmetro mestre ⇒escravo
Número de bits Comando de parâmetro
15 14 13 12
0 0 0 0 Sem comando
0 0 0 1 Ler valor do parâmetro
0 0 1 0 Gravar valor do parâmetro na RAM
0 0 1 1 Gravar valor do parâmetro na RAM (word
1 1 0 1 Gravar valor do parâmetro na RAM e na
1 1 1 0 Gravar valor do parâmetro na RAM e na
1 1 1 1 Leitura de texto
Tabela 3.5 Comandos de Parâmetro
Resposta escravo ⇒ mestre
Número de bits Resposta
15 14 13 12
0 0 0 0 Nenhuma resposta
0 0 0 1 Valor de parâmetro transferido (word)
0 0 1 0 Valor do parâmetro transferido (word
0 1 1 1 O comando não pode ser executado
1 1 1 1 Texto transferido
Tabela 3.6 Resposta
(word)
dupla)
EEPROM (word dupla)
EEPROM (word)
dupla)
Tabela 3.7 Relatório do Escravo
3.4.8 Número do Parâmetro (PNU)
Os bits 0–11 transferem números de parâmetro. A função
do parâmetro relevante é denida na descrição do
parâmetro em capétulo 2 Programação.
3.4.9 Índice (IND)
O índice é usado com o número do parâmetro para
parâmetros de acesso de leitura/gravação com um índice,
por exemplo, parâmetro 15-30 Log Alarme: Cód Falha. O
índice é formado por 2 bytes; um byte baixo e um byte
alto.
Somente o byte baixo é usado como índice.
3.4.10 Valor do Parâmetro (PWE)
O bloco de valor de parâmetro consiste em 2 words (4
bytes) e o seu valor depende do comando denido (AK).
Se o mestre solicita um valor de parâmetro quando o
bloco PWE não contiver nenhum valor. Para alterar um
valor de parâmetro (gravar), grave o novo valor no bloco
PWE e envie-o do mestre para o escravo.
Se um escravo responder a uma solicitação de parâmetro
(comando de leitura), o valor do parâmetro atual no bloco
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 21
E19E H
PKE IND PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA092.10
Instalação e Setup da RS485
VLT® DriveMotor FCP 106/FCM 106
PWE é transferido e devolvido ao mestre. Se um parâmetro
contiver várias opções de dados, por exemplo
parâmetro 0-01 Idioma, selecione o valor de dados
digitando o valor no bloco PWE. Através da comunicação
serial somente é possível ler parâmetros com tipo de
dados 9 (sequência de texto).
33
Parâmetro 15-40 Tipo do FC a parâmetro 15-53 Nº. Série
Cartão de Potência contêm o tipo de dados 9.
Por exemplo, pode-se ler a potência da unidade e a faixa
de tensão de rede elétrica no par. parâmetro 15-40 Tipo do
FC. Quando uma sequência de texto é transferida (lida), o
Índice de conversão Fator de conversão
74 3600
2 100
1 10
0 1
-1 0,1
-2 0,01
-3 0,001
-4 0,0001
-5 0,00001
Tabela 3.9 Conversão
comprimento do telegrama é variável, porque os textos
têm comprimentos diferentes. O comprimento do
telegrama é denido no segundo byte do telegrama (LGE).
Ao usar a transferência de texto, o caractere do índice
indica se o comando é de leitura ou gravação.
3.4.13 Words do Processo (PCD)
O bloco de words de processo está dividido em dois
blocos de 16 bits, que sempre ocorrem na sequência
denida.
Para ler um texto via bloco PWE, programe o comando do
parâmetro (AK) para F hex. O byte alto do caractere do
índice deve ser 4.
3.4.11 Tipos de Dados suportados pelo
Conversor de Frequência
PCD 1 PCD 2
Telegrama de controle (mestre⇒control word
do escravo)
Status word do telegrama de controle
(escravo ⇒mestre)
Valor de
referência
Frequência de
saída atual
Sem designação signica que não há sinal de operação no
telegrama.
Tipos de dados Descrição
3 № inteiro 16
4 № inteiro 32
5 8 sem designação
6 16 sem designação
7 32 sem designação
9 String de texto
Tabela 3.8 Tipos de Dados
3.4.12 Conversão
Os diversos atributos de cada parâmetro são exibidos
capétulo 4 Parâmetros. Os valores de parâmetro são
transferidos somente como números inteiros. Os fatores de
conversão são usados para transferir decimais.
Parâmetro 4-12 Lim. Inferior da Veloc. do Motor [Hz] tem um
fator de conversão de 0,1. Para predenir a frequência
mínima em 10 Hz, deve-se transferir o valor 100. Um fator
de conversão 0,1 signica que o valor transferido é
multiplicado por 0,1. O valor 100, portanto, será recebido
como 10,0.
Tabela 3.10 Words do Processo (PCD)
Exemplos
3.5
3.5.1 Gravando um Valor de Parâmetro
Mude o par. parâmetro 4-14 Lim. Superior da Veloc do Motor
[Hz] para 100 Hz.
Grave os dados na EEPROM.
PKE = E19E hex - Gravar word única em
parâmetro 4-14 Lim. Superior da Veloc do Motor [Hz]:
IND=0000 hex.
•
PWEHIGH=0000 hex.
•
PWELOW=03E8 hex.
•
Valor de dados 1.000, correspondendo a 100 Hz, consulte
capétulo 3.4.12 Conversão.
O telegrama terá a aparência de Ilustração 3.11.
Ilustração 3.11 Telegrama
22 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228
119E H
PKE
IND
PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA093.10
1155 H
PKE IND PWE
high
PWE
low
0000 H 0000 H 0000 H
130BA094.10
130BA267.10
1155 H
PKE
IND
0000 H 0000 H 03E8 H
PWE
high
PWE
low
Instalação e Setup da RS485 Guia de Programação
AVISO!
Parâmetro 4-14 Lim. Superior da Veloc do Motor [Hz] é
uma palavra única e o comando do parâmetro para
gravar na EEPROM é E. Parâmetro 4-14 Lim. Superior da
Veloc do Motor [Hz] é 19E em hexadecimal.
A resposta do escravo para o mestre é mostrada em
Ilustração 3.12.
Ilustração 3.12 Resposta do Mestre
3.5.2 Lendo um Valor de Parâmetro
Ler o valor em parâmetro 3-41 Tempo de Aceleração da
Rampa 1.
PKE = 1155 Hex - Ler o valor do parâmetro em
parâmetro 3-41 Tempo de Aceleração da Rampa 1:
IND=0000 hex.
•
PWE
•
PWE
•
Ilustração 3.13 Telegrama
Se o valor em parâmetro 3-41 Tempo de Aceleração da
Rampa 1 for 10 s, a resposta do escravo para o mestre é
mostrada em Ilustração 3.14.
Ilustração 3.14 Resposta
Hex 3E8 corresponde ao decimal 1000. O índice de
conversão de parâmetro 3-41 Tempo de Aceleração da
Rampa 1 é -2, ou seja, 0,01.
Parâmetro 3-41 Tempo de Aceleração da Rampa 1 é do tipo
32 sem designação.
=0000 hex.
HIGH
=0000 hex.
LOW
Visão Geral do Modbus RTU
3.6
3.6.1 Pré-requisito de Conhecimento
Danfoss supõe que o controlador instalado suporta as
interfaces neste documento e observa rigidamente todos
os requisitos e limitações estipulados no controlador e no
conversor de frequência.
O Modbus RTU (Unidade de Terminal Remoto) foi
projetado para comunicar com qualquer controlador que
suportar as interfaces denidas neste documento. É
suposto que o usuário tem conhecimento pleno das
capacidades bem como das limitações do controlador.
3.6.2 O que o Usuário já Deverá Saber
O Modbus RTU (Unidade de Terminal Remoto) foi
projetado para comunicar com qualquer controlador que
suportar as interfaces denidas neste documento. É
suposto que o usuário tem conhecimento pleno das
capacidades bem como das limitações do controlador.
3.6.3 Visão geral
Independentemente do tipo de rede física de
comunicação, esta seção descreve o processo usado por
um controlador para solicitar acesso a outro dispositivo.
Esse processo inclui como o Modbus RTU responde às
solicitações de outro dispositivo e como erros são
detectados e relatados. O documento também estabelece
um formato comum para o leiaute e para o conteúdo dos
campos de mensagem.
Durante a comunicação por uma rede Modbus RTU, o
protocolo:
Determina como cada controlador aprende seu
•
endereço de dispositivo.
Reconhece uma mensagem endereçada a ele.
•
Determina quais ações tomar.
•
Extrai quaisquer dados ou outras informações
•
contidas na mensagem.
Se uma resposta for solicitada, o controlador constrói a
mensagem de resposta e a envia.
Os controladores comunicam-se usando uma técnica
mestre/escravo em que somente o mestre pode iniciar
transações (denominadas consultas). Os escravos
respondem fornecendo os dados solicitados ao mestre ou
agindo como solicitada na consulta.
O mestre pode endereçar escravos individuais ou pode
iniciar uma mensagem de broadcast a todos os escravos.
Os escravos devolvem uma resposta às consultas
endereçadas a eles individualmente. Nenhuma resposta é
devolvida às solicitações de broadcast do mestre. O
3 3
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 23
Instalação e Setup da RS485
VLT® DriveMotor FCP 106/FCM 106
protocolo do Modbus RTU estabelece o formato para a
consulta do mestre fornecendo as seguintes informações:
O endereço do dispositivo (ou broadcast).
•
Um código da função denindo a ação solicitada.
•
Quaisquer dados a serem enviados.
33
•
Um campo de vericação de erro.
•
A mensagem de resposta do escravo também é elaborada
usando o protocolo do Modbus. Ela contém campos que
conrmam a ação tomada, quaisquer tipos de dados a
serem devolvidos e um campo de vericação de erro. Se
ocorrer um erro na recepção da mensagem ou se o
escravo for incapaz de executar a ação solicitada, o escravo
constrói uma mensagem de erro e a envia. Como
alternativa, ocorre um timeout.
3.6.4 Conversor de Frequência com
Modbus RTU
O conversor de frequência comunica-se no formado do
Modbus RTU através da interface RS485 integrada. O
Modbus RTU fornece o acesso à control word e à
referência de bus do conversor de frequência.
A control word permite ao Modbus mestre controlar
diversas funções importantes do conversor de frequência:
Partida
•
Várias paradas:
•
- Parada por inércia.
- Parada rápida.
- Parada por freio CC.
- Parada (de rampa) normal.
Reset após um desarme por falha.
•
Operação em diversas velocidades
•
Funcionamento em reversão.
•
Alterar a conguração ativa.
•
Controlar o relé integrado do conversor de
•
frequência.
A referência de bus é comumente usada para controle da
velocidade. Também é possível acessar os parâmetros, ler
seus valores e quando possível, inserir valores. Acessar os
parâmetros oferece uma variedade de opções de controle,
inclusive controlar o setpoint do conversor de frequência
quando o seu controlador PI interno for usado.
Conguração de Rede
3.7
Para ativar o Modbus RTU no conversor de frequência,
programe os seguintes parâmetros:
predenidas.
Parâmetro Conguração
Parâmetro 8-30 Protocolo Modbus RTU
Parâmetro 8-31 Endereço 1–247
Parâmetro 8-32 Baud Rate
da Porta do FC
Parâmetro 8-33 Bits de
Paridade / Parada
Tabela 3.11 Conguração de Rede
2400–115200
Paridade par, 1 bit de parada
(padrão)
3.8 Estrutura do Enquadramento de
Mensagem do Modbus RTU
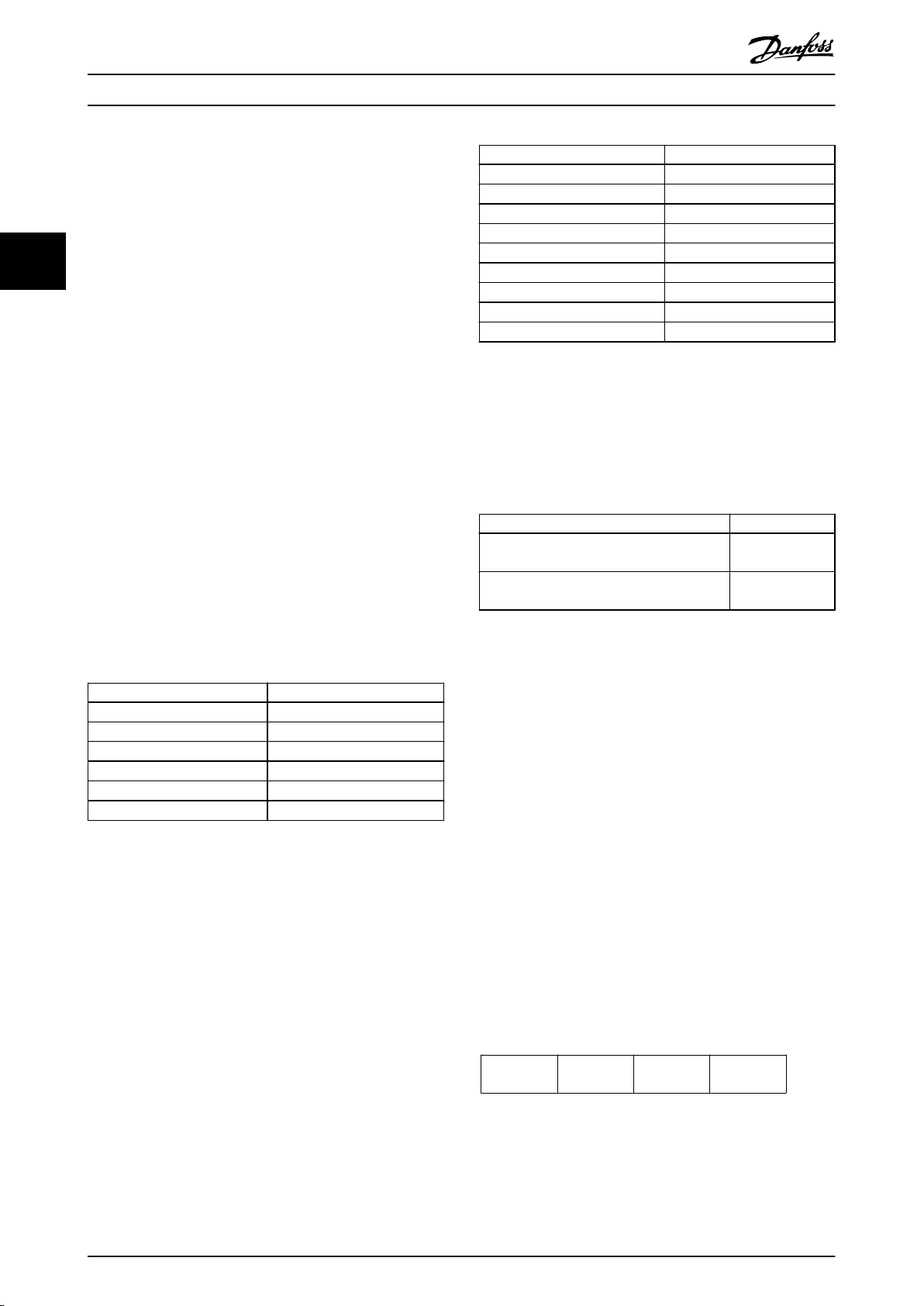
3.8.1 Introdução
Os controladores são congurados para se comunicar na
rede do Modbus usando o modo RTU (remote terminal
unit), com cada byte em uma mensagem contendo dois
caracteres hexadecimais de 4 bits. O formato de cada byte
é mostrado em Tabela 3.12.
Start
bit
Tabela 3.12 O formato de cada byte
Sistema de
codicação
Bits por byte
Campo de
vericação de erro
Tabela 3.13 Detalhes de Byte
Byte de dados Parada
Binário de 8 bits, hexadecimal 0–9, A–F. Dois
caracteres hexadecimais contidos em cada
campo de 8 bits da mensagem.
1 bit de partida.
•
8 bits de dados, o bit menos signi-
•
cativo é enviado primeiro.
1 bit para paridade par/ímpar; nenhum
•
bit para sem paridade.
1 bit de parada se for usada a paridade;
•
2 bits se for sem paridade.
Vericação de redundância cíclica (CRC).
/
parida
de
Parad
a
3.8.2 Estrutura do telegrama do Modbus
RTU
O dispositivo de transmissão coloca uma mensagem do
Modbus RTU em um chassi, com um ponto de início e
outro de término conhecidos. Isto permite aos dispositivos
de recepção começar no inicio da mensagem, ler a porção
do endereço, determinar qual dispositivo está sendo
endereçado (ou todos os dispositivos, se a mensagem for
do tipo broadcast) e a reconhecer quando a mensagem for
completada. As mensagens parciais são detectadas e os
24 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228
Instalação e Setup da RS485 Guia de Programação
erros programados, em consequência. Os caracteres para
transmissão devem estar no formato hexadecimal de 00 a
FF, em cada campo. O conversor de frequência monitora
continuamente o barramento da rede, inclusive durante os
intervalos silenciosos. Quando o primeiro campo (o campo
de endereço) é recebido, cada conversor de frequência ou
dispositivo decodica esse campo, para determinar qual
dispositivo está sendo endereçado. As mensagens do
Modbus RTU, endereçadas como 0, são mensagens de
broadcast. Não é permitida nenhuma resposta para
mensagens de broadcast. Um chassi de mensagem típico é
mostrado em Tabela 3.14.
Partida Endereço Função Dados Vericaçã
o de CRC
T1-T2-T3-
-T4
Tabela 3.14 Estrutura do telegrama típica do Modbus RTU
8 bits 8 bits N x 8 bits 16 bits T1-T2-T3-
Final da
Acel.
-T4
3.8.3 Campo Partida/Parada
As mensagens iniciam com um período de silêncio com
intervalos de no mínimo 3,5 caracteres. O período de
silêncio é implementado como um múltiplo de intervalos
de caracteres na baud rate da rede selecionada (mostrado
como Início T1-T2-T3-T4). O primeiro campo a ser
transmitido é o endereço do dispositivo. Após a
transmissão do último caractere, um período semelhante
de intervalos de no mínimo 3,5 caracteres marca o m da
mensagem. Após este período, pode-se começar uma
mensagem nova.
O quadro completo da mensagem deve ser transmitido
como um uxo contínuo. Se ocorrer um período de
silêncio com intervalos maiores que 1,5 caracteres antes de
completar o quadro, o dispositivo receptor livra-se da
mensagem incompleta e assume que o byte seguinte é um
campo de endereço de uma nova mensagem. De forma
semelhante, se uma nova mensagem começar antes de
intervalos de 3,5 caracteres após uma mensagem anterior,
o dispositivo receptor o considera uma continuação da
mensagem anterior. Esse comportamento causa um
timeout (nenhuma resposta do escravo), uma vez que o
valor no m do campo de CRC não é válido para as
mensagens combinadas.
3.8.4 Campo de Endereço
O campo de endereço de um quadro de mensagem
contém 8 bits. Os endereços de dispositivos escravo
válidos estão na faixa de 0–247 decimal. Aos dispositivos
escravos individuais são designados endereços na faixa de
1-247. (0 é reservado para modo broadcast, que todos os
escravos reconhecem.) Um mestre endereça um escravo
colocando o endereço do escravo no campo de endereço
da mensagem. Quando o escravo envia a sua resposta, ele
insere o seu próprio endereço neste campo de endereço
para que o mestre identique qual escravo está
respondendo.
3.8.5 Campo da Função
O campo da função de um quadro de mensagem contém
8 bits. Os códigos válidos estão na faixa de 1-FF. Os
campos de função são usados para enviar mensagens
entre o mestre e o escravo. Quando uma mensagem é
enviada de um mestre para um dispositivo escravo, o
campo do código da função informa o escravo a espécie
de ação a ser executada. Quando o escravo responde ao
mestre, ele usa o campo do código da função para
sinalizar uma resposta (sem erros) ou informar que ocorreu
algum tipo de erro (conhecida como resposta de exceção)
Para uma resposta normal, o escravo simplesmente retorna
o código de função original. Para uma resposta de exceção,
o escravo retorna um código que é equivalente ao código
da função original com o bit mais signicativo programado
para 1 lógico. Além disso, o escravo insere um código
único no campo dos dados da mensagem de resposta.
Este código informa ao mestre que espécie de erro ocorreu
ou o motivo da exceção. Consulte também
capétulo 3.8.12 Códigos de Função Suportados pelo Modbus
RTU e capétulo 3.8.13 Códigos de Exceção do Modbus.
3.8.6 Campo dos Dados
O campo dos dados é construído usando conjuntos de
dois dígitos hexadecimais, na faixa de 00 a FF hexadecimal.
Estes dígitos são constituídos de um caractere RTU. O
campo dos dados de mensagens, enviadas de um mestre
para um dispositivo escravo, contém informações complementares que o escravo deve usar para tomar a ação de
acordo com o código da função. As informações pode
incluir itens como uma bobina ou endereços de
registradores, a quantidade de itens a ser manuseada e a
contagem dos bytes de dados reais no campo.
3.8.7 Campo de Vericação de CRC
As mensagens incluem um campo de vericação de erro
que opera com base em um método de vericação de
redundância cíclica (CRC). O campo de CRC verica o
conteúdo da mensagem inteira. Ele é aplicado independentemente de qualquer método de vericação de
paridade usado pelos caracteres individuais da mensagem.
O valor de CRC é calculado pelo dispositivo de
transmissão, o qual insere a CRC como o último campo na
mensagem. O dispositivo receptor recalcula um CRC,
durante a recepção da mensagem e compara o valor
calculado com o valor real recebido no campo da CRC. Se
os dois valores forem diferentes, ocorrerá timeout do bus.
O campo de vericação de erro contém um valor binário
3 3
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 25
CTW
Holding
Register
2810
Write
Master Frequency Converter
Read
Frequency
Converter Master
Controlled by
Parameter
Holding
Register
Controlled by
Parameter
8-42 [0]
REF
2811
8-42 [1]
2812
8-42 [2]
PCD 2
write
2813
8-42 [3]
PCD 3
write
2814
8-42 [4]
PCD 4
write
2815
8-42 [5]
PCD 5
write
...
...
...
write
2873
8-42 [63]
PCD 63
write
STW
2910
8-43 [0]
MAV
2911
8-43 [1]
2912
8-43 [2]
PCD 2
read
2913
8-43 [3]
PCD 3
read
2914
8-43 [4]
PCD 4
read
2915
8-43 [5]
PCD 5
read
...
...
...
read
2919
8-43 [63]
PCD 63
read
130BC048.10
CTW
REF
Analog
output 42
Torque
limit
Register 2810
2811
2812
2813
Write
Frequency Converter Drive
CTW = Parameter 16-85,
Analog output = Parameter 6-52,
REF = Parameter 16-86,
Torque limit Motor mode = 4-16
130BC049.10
Instalação e Setup da RS485
VLT® DriveMotor FCP 106/FCM 106
de 16 bits implementado como dois bytes de 8 bits. Após
a implementação, o byte de ordem baixa do campo é
inserido primeiro, seguido pelo byte de ordem alta. O byte
de ordem alta da CRC é o último byte enviado na
mensagem.
33
3.8.8 Endereçamento do Registrador da
Bobina
Para obter informações sobre o endereçamento do
registrador da bobina, consulte as Instruções de Utilização
do Modbus RTU.
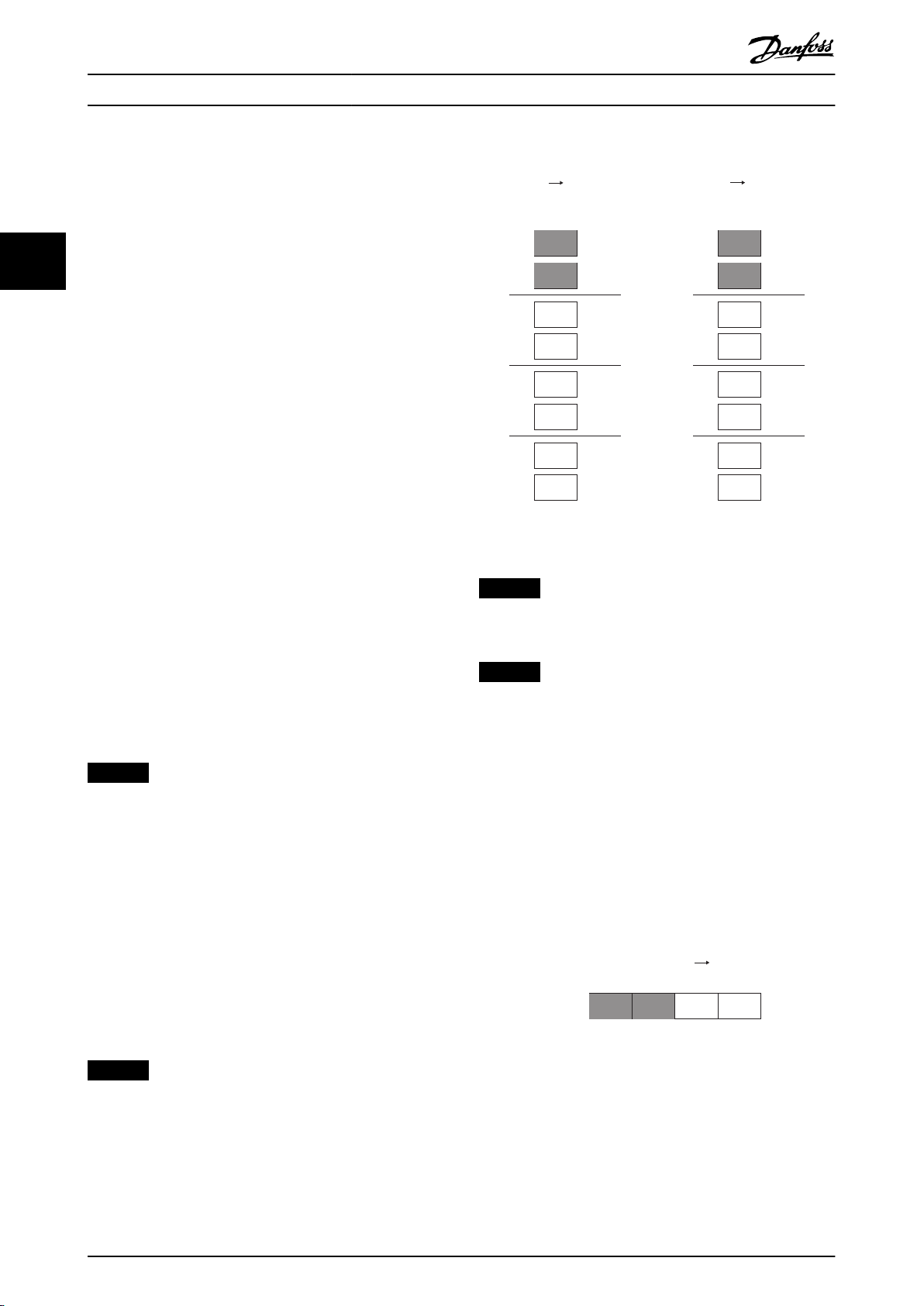
3.8.9 Acesso via Gravação/Leitura do PCD
A vantagem de utilizar a conguração de gravação/leitura
do PCD é que o controlador pode gravar ou ler mais dados
em um telegrama. Até 63 registradores podem ser lidos ou
gravados através da função registrador de retenção da
leitura de código ou gravar múltiplos registros em 1
telegrama. A estrutura também é exível de modo que
apenas 2 registradores do controlador podem ser gravados
e 10 registradores podem ser lidos.
A lista de gravação do PCD são dados enviados do
controlador para o conversor de frequência, tais como:
Control word.
•
Referência.
•
Dados dependente da aplicação, como a
•
referência mínima e tempos de rampa.
AVISO!
A control word e a referência são sempre enviadas na
lista do controlador para o conversor de frequência.
A lista de gravação do PCD é programada no
parâmetro 8-42 Conguração de gravação do PCD.
A lista de leitura do PCD são dados enviados do
controlador para o conversor de frequência, tais como:
AVISO!
O status word e o valor real principal são sempre
enviados na lista do conversor de frequência para o
controlador.
26 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228
Status word.
•
Valor real principal.
•
Dados dependentes da aplicação, como, horas de
•
funcionamento, corrente do motor e alarm word.
Ilustração 3.15 Listas de Gravação/Leitura do PCD
AVISO!
As caixas marcadas em cinza não são alteráveis, são os
valores padrão.
AVISO!
Mapeie os parâmetros de 32-bit dentro dos limites de
32-bit, PCD2 & PCD3 ou PCD4 & PCD5 etc., quando o
número de parâmetro for mapeado duas vezes para
parâmetro 8-42 Conguração de gravação do PCD ou
parâmetro 8-43 Conguração de Leitura do PCD.
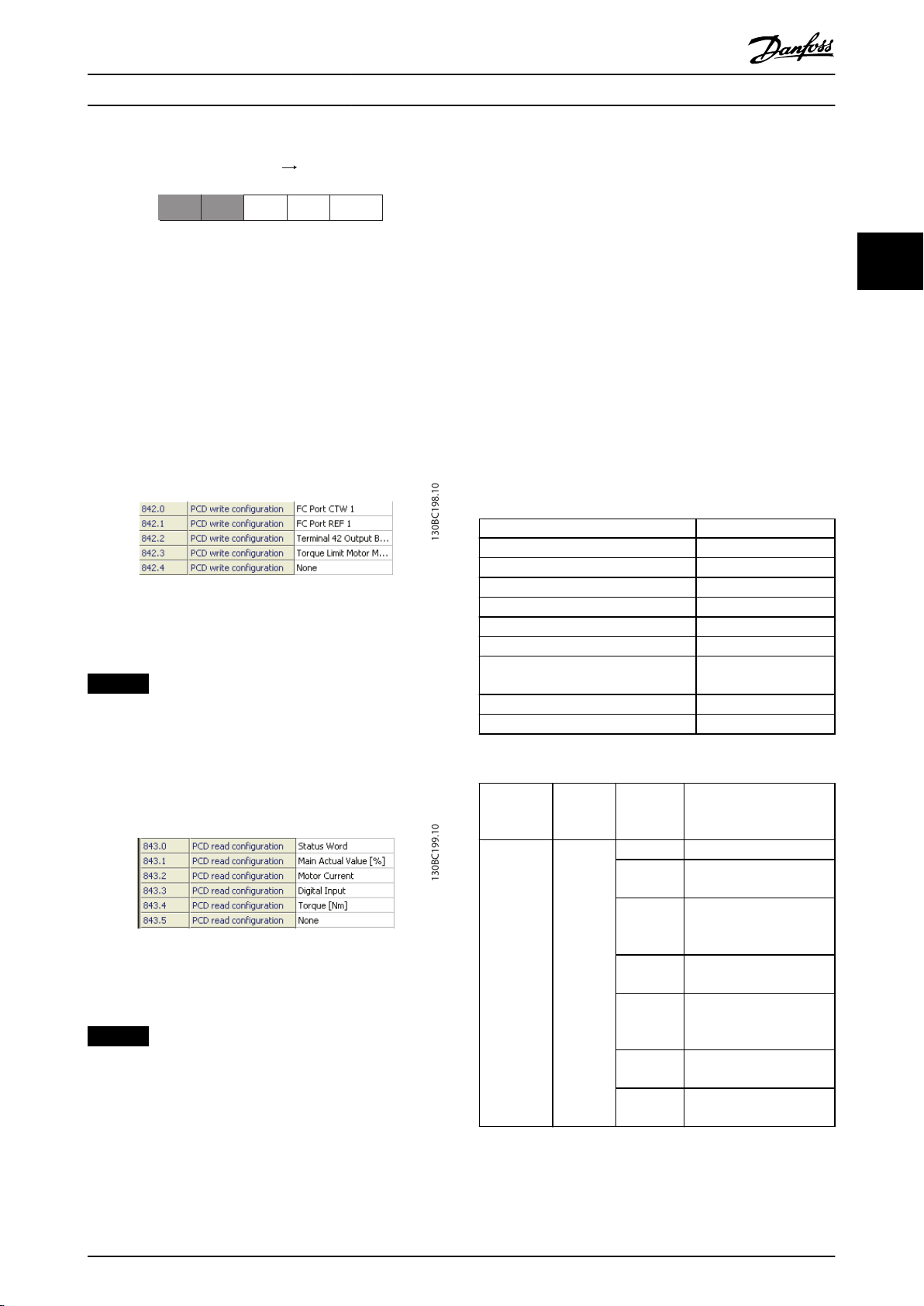
3.8.10 Mapeando os Registradores de
Retenção para Parâmetros do Drive
Exemplo:
O PLC envia a control word e a referência, programa a
saída analógica 42 e o limite de torque.
Ilustração 3.16 Dados enviados pelo PLC
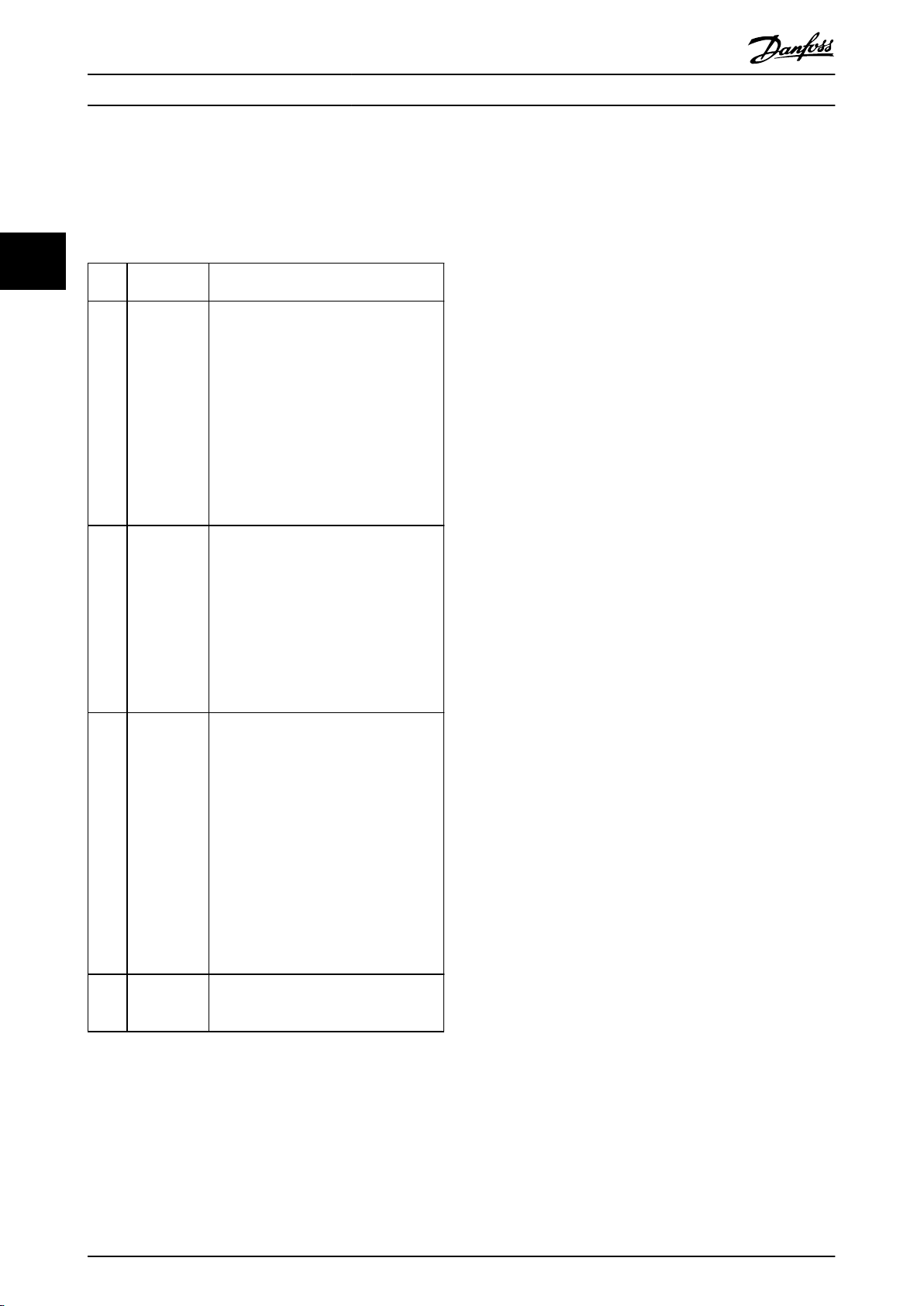
Exemplo:
O conversor de frequência envia a status word, o valor real
principal, a corrente do motor real, as entradas digitais e o
torque [Nm].
Motor
current
Digital
inputs
Actual
Torque [Nm]
Register 2910
2911
2912
2913
2914
Read
Frequency Converter Master
STW
MAV
130BC050.10
STW = Parameter 16-03,
Motor Current = Parameter 16-14,
Actual Torque [Nm]
MAV = Parameter 16-05,
Digital Inputs = Parameter 16-60
130BC198.10
130BC199.10
Instalação e Setup da RS485 Guia de Programação
Para leitura de amperagens mais altas, utilize uma leitura
de 32-bit.
Mapear um parâmetro 32-bit como 16 bit, sempre acessa
os 16 bits inferiores.
Ilustração 3.17 Dados de Envio do conversor de frequência
Exemplo, continuação
Mapeie os dados de entrada e dados de saída do Modbus
RTU para o parâmetro do conversor de frequência. Utilize
parâmetro 8-42
Conguração de gravação do PCD e
parâmetro 8-43 Conguração de Leitura do PCD para o
mapeamento.
Ilustração 3.18 Mapeamento de Dados de Entrada/Dados de
Saída em Parâmetro 8-42 Conguração de gravação do PCD
AVISO!
As linhas cinzas são xas, as vermelhas são selecionáveis
pelo usuário.
3.8.11 Como controlar o Conversor de
Frequência
Esta seção descreve os códigos que podem ser usados nos
campos função e dados de uma mensagem do Modbus
RTU.
3.8.12 Códigos de Função Suportados pelo
Modbus RTU
O Modbus RTU suporta o uso dos códigos de função a
seguir no campo de função de uma mensagem.
Função Código da Função
Ler bobinas 1 hex
Ler registradores de retenção 3 hex
Gravar bobina única 5 hex
Gravar registrador único 6 hex
Gravar bobinas múltiplas F hex
Gravar registradores múltiplos 10 hex
Ler contador de eventos de
comunicação
Relatar ID do escravo 11 hex
Ler gravar registradores múltiplos 17 hex
B hex
3 3
Programe os parâmetros a seguir no conversor de
frequência:
Ilustração 3.19 Mapeamento de Dados de Entrada/Dados de
Saída em Parâmetro 8-43 Conguração de Leitura do PCD
AVISO!
A corrente do motor em parâmetro 16-14 Corrente do
motor é 32 bits. Este mapeamento está mapeando
somente os 16 bit inferiores, então, a leitura de corrente
do motor máxima é 327 A.
Tabela 3.15 Códigos de Função
Função Código
da
Função
Diagnósticos8 1 Reiniciar a comunicação.
Tabela 3.16 Códigos de Função
Código de
subfunção
2 Retornar registrador de
10 Limpar contadores e
11 Retornar contador de
12 Retornar contador de
13 Retornar contador de
14 Retornar contador de
Subfunção
diagnósticos.
registrador de
diagnósticos.
mensagem do bus.
erros de comunicação do
bus.
erros do escravo.
mensagem do escravo.
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 27
Instalação e Setup da RS485
VLT® DriveMotor FCP 106/FCM 106
3.8.13 Códigos de Exceção do Modbus
Para obter uma explicação completa da estrutura de uma
Como Acessar os Parâmetros
3.9
3.9.1 Tratamento de Parâmetros
resposta do código de exceção, consulte
capétulo 3.8.5 Campo da Função.
O PNU (número de parâmetro) é traduzido do endereço de
registrador contido na mensagem de leitura ou gravação
33
CódigoNome Signicado
do Modbus. O número de parâmetro é convertido para o
Modbus como (10 x número do parâmetro) decimal.
1 Função
inválida
2 Endereço de
dados
inválido
3 Valor de
dados
inválido
4 Falha do
dispositivo
escravo
O código de função recebido na consulta
não é uma ação permitida para o servidor
(ou escravo). Isso pode ser porque o
código de função é aplicável somente em
dispositivos mais recentes e ainda não foi
implementado na unidade selecionada.
Isso também pode indicar que o servidor
(ou escravo) está no estado incorreto para
processar um pedido desse tipo, por
exemplo, em virtude de não estar
congurado e por estar sendo requisitado
a retornar valores de registro.
O endereço dos dados recebido na
consulta não é um endereço permitido
para o servidor (ou escravo). Mais especi-
camente, a combinação do número de
referência e o comprimento de transferência não é válido. Para um controlador
com 100 registradores, um pedido com
oset 96 e comprimento 4 teria êxito, um
pedido com oset 96 e comprimento 5
gera exceção 02.
Um valor contido no campo de dados da
consulta não é um valor permitido para o
servidor (ou escravo). Isso indica uma
falha na estrutura do restante de um
pedido complexo, como o do
comprimento implícito estar incorreto.
NÃO signica especicamente que um
item de dados submetido para
armazenagem em um registrador
apresenta um valor fora da expectativa do
programa de aplicação, uma vez que o
protocolo do Modbus não está ciente do
signicado de qualquer valor particular de
qualquer registrador particular.
Ocorreu um erro irrecuperável enquanto o
servidor (ou escravo) tentava executar a
ação requisitada.
Exemplo: Leitura parâmetro 3-12 Valor de Catch Up/Slow
Down (16 bits): O registrador de retenção 3120 mantém o
valor dos parâmetros. Um valor de 1352 (decimal)
signica
que o parâmetro está programado para 12,52%
Leitura parâmetro 3-14 Referência Relativa
Pré-denida (32
bits): Os registradores de retenção 3410 e 3411 mantêm os
valores dos parâmetros. Um valor de 11300 (decimal)
signica que o parâmetro está programado para 1113.00.
Para obter informações sobre os parâmetros, tamanho e
índice de conversão, consulte capétulo 4 Parâmetros.
3.9.2 Armazenagem de Dados
A bobina 65 decimal determina se os dados gravados no
conversor de frequência são armazenados na EEPROM e
RAM (bobina 65=1) ou somente na RAM (bobina 65= 0).
3.9.3 IND (Índice)
Alguns parâmetros do conversor de frequência são
parâmetros de matriz, por exemplo
parâmetro 3-10 Referência Predenida. Como o Modbus não
suporta matrizes nos registradores de retenção, o
conversor de frequência reservou o registrador de retenção
9 como apontador da matriz. Antes de ler ou gravar um
parâmetro de matriz, programe o registrador de retenção
9. A conguração do registrador de retenção para o valor
de 2 faz com que todos os parâmetros de matriz de
leitura/gravação seguintes sejam para o índice 2.
3.9.4 Blocos de Texto
Os parâmetros armazenados como sequências de texto são
acessados do mesmo modo que os demais parâmetros. O
tamanho máximo do bloco de texto é 20 caracteres. Se
uma solicitação de leitura de um parâmetro for maior que
o número de caracteres que este comporta, a resposta será
Tabela 3.17 Códigos de Exceção do Modbus
truncada. Se uma solicitação de leitura de um parâmetro
for menor que o número de caracteres que este comporta,
a resposta será preenchida com brancos.
3.9.5 Fator de conversão
Um valor de parâmetro pode ser transferido somente
como um número inteiro. Para transferir os decimais, use
um fator de conversão.
28 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

Instalação e Setup da RS485 Guia de Programação
3.9.6 Valores de Parâmetros
Tipos de dados padrão
Os tipos de dados padrão são int 16, int 32, uint 8, uint 16
e uint 32. Eles são armazenados como registradores 4x
(40001–4FFFF). Os parâmetros são lidos usando a função
03 hex ler registradores de retenção. Os parâmetros são
gravados usando a função 6 hex predenir registrador único
para 1 registrador (16 bits) e a função 10 hex predenir
múltiplos registradores para 2 registradores (32 bits). Os
tamanhos legíveis variam desde 1 registrador (16 bits) a 10
registradores (20 caracteres).
Tipos de dados não padrão
Os tipos de dados não padrão são sequências de textos e
são armazenados como registradores 4x (40001 – 4FFFF).
Os parâmetros são lidos usando a função 03 hex ler
registradores de retenção e gravados usando a função 10
hex predenir múltiplos registradores. Os tamanhos legíveis
variam de 1 registrador (2 caracteres) a 10 registradores (20
caracteres).
3.10 Exemplos
Os exemplos seguintes mostram diversos comandos do
Modbus RTU.
3.10.1 Ler Registradores de Retenção (03
hex)
Descrição
Esta função lê o conteúdo dos registradores de retenção
no escravo.
Consulta
A mensagem de consulta especica o registrador inicial e a
quantidade de registradores a ser lida. Os endereços dos
registradores começam em 0, ou seja, os registradores 1-4
são endereçados como 0-3.
Exemplo: Ler parâmetro 3-03 Referência Máxima, registrador
03030.
Nome do campo Exemplo (hex)
Endereço do escravo 01
Função 03 (Ler registradores de retenção)
Endereço inicial ALTO 0B (Endereço do Registrador 3029)
Endereço inicial BAIXO D5 (Endereço do registrador 3029)
Número de pontos HI 00
Número de pontos LO 02 - (parâmetro 3-03 Referência Máxima
tem 32 bits de comprimento, ou seja, 2
registradores)
Vericação de Erro
(CRC)
–
Resposta
Os dados do registrador na mensagem de resposta são
empacotados em dois bytes por registrador, com o
conteúdo binário justicado à direita em cada byte. Para
cada registrador, o primeiro byte contém os bits de ordem
mais alta e o segundo contém os bits de ordem mais
baixa.
Exemplo: hex 000088B8=35.000=35 Hz.
Nome do campo Exemplo (hex)
Endereço do escravo 01
Função 03
Contagem de bytes 04
Dados HI (registrador 3030) 00
Dados LO (registrador 3030) 16
Dados HI (registrador 3031) E3
Dados LO (registrador 3031) 60
Vericação de Erro (CRC) –
Tabela 3.19 Resposta
3.10.2 Predenir Registrador Único (06 hex)
Descrição
Esta função predene um valor em um registrador de
retenção único.
Consulta
A mensagem de consulta especica que a referência do
registrador seja predenida. Os endereços dos
registradores começam em 0, ou seja, o registrador 1 é
endereçado como 0.
Exemplo: Gravar em parâmetro 1-00 Modo Conguração,
registrador 1000.
Nome do campo Exemplo (hex)
Endereço do escravo 01
Função 06
Endereço do registrador ALTO 03 (Endereço do Registrador 999)
Endereço do registrador
BAIXO
Dados predenidos ALTO 00
Dados predenidos BAIXO 01
Vericação de Erro (CRC) –
Tabela 3.20 Consulta
E7 (Endereço do Registrador 999)
3 3
Tabela 3.18 Consulta
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 29

Instalação e Setup da RS485
VLT® DriveMotor FCP 106/FCM 106
Resposta
A resposta normal é um eco da consulta, retornada após o
conteúdo do registrador ter sido transmitido.
Resposta
A resposta normal retorna o endereço do escravo, o código
da função, endereço inicial e a quantidade de registradores
predenidos.
Nome do campo Exemplo (hex)
Endereço do escravo 01
33
Função 06
Endereço do registrador ALTO 03
Endereço do registrador
BAIXO
Dados predenidos ALTO 00
Dados predenidos BAIXO 01
Vericação de Erro (CRC) –
Tabela 3.21 Resposta
E7
3.10.3 Predenir Registradores Múltiplos
(10 hex)
Descrição
Esta função predene valores em uma sequência de
registradores de retenção.
Consulta
A mensagem de solicitação especica as referências do
registrador que serão predenidas. Os endereços dos
registradores começam em 0, ou seja, o registrador 1 é
endereçado como 0. Exemplo de uma solicitação para
predenir dois registradores (programar
parâmetro 1-24 Corrente do Motor para 738 (7,38 A)):
Nome do campo Exemplo (hex)
Endereço do escravo 01
Função 10
Endereço inicial ALTO 04
Endereço inicial BAIXO 19
Número de registradores HI 00
Número de registradores LO 02
Vericação de Erro (CRC) –
Tabela 3.23 Resposta
3.10.4 Ler/Gravar registradores múltiplos(17
hex)
Descrição
Este código de função combina 1 operação de leitura e 1
operação de gravação em uma única transação do
Modbus. A operação de gravação é executada antes da
leitura.
Consulta
A mensagem de consulta especica o endereço inicial e o
número de registradores de retenção a serem lidos, bem
com o endereço inicial, o número de registradores de
retenção e os dados a serem gravados. Registradores de
Retenção são endereçados inicialmente em 0
Nome do campo Exemplo (hex)
Endereço do escravo 01
Função 10
Endereço inicial ALTO 04
Endereço inicial BAIXO 07
Número de registradores HI 00
Número de registradores LO 02
Contagem de bytes 04
Gravar dados HI
(Registrador 4: 1049)
Gravar dados LO
(Registrador 4: 1049)
Gravar dados HI
(Registrador 4: 1050)
Gravar dados LO
(Registrador 4: 1050)
Vericação de Erro (CRC) –
Tabela 3.22 Consulta
00
00
02
E2
Exemplo de uma solicitação para predenir
parâmetro 1-24 Corrente do Motor para 738 (7,38 A) e ler
parâmetro 3-03 Referência Máxima que tem o valor em
50000 (50000 Hz):
Nome do campo Exemplo (hex)
Endereço do escravo 01
Função 17
Ler Endereço Inicial HI 0B (Endereço do Registrador
3029)
Ler Endereço Inicial LO D5 (Endereço do registrador
3029)
Quantidade para Leitura HI 00
Quantidade para Leitura LO 02
(parâmetro 3-03 Referência
Máxima tem 32 bits de
comprimento, ou seja, 2
registradores)
Gravar Endereço Inicial HI 04 (Endereço do registrador
1239)
Gravar Endereço Inicial LO D7 (Endereço do registrador
1239)
Quantidade para Gravação HI 00
Quantidade para Gravação LO 02
Gravar Contagem de Bytes 04
30 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

Speed ref.CTW
Master-follower
130BA274.11
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bit
no.:
Instalação e Setup da RS485 Guia de Programação
Nome do campo Exemplo (hex)
Valor de Registradores de GravaçãoHI00
Valor de Registradores de GravaçãoLO00
Valor de Registradores de GravaçãoHI02
Valor de Registradores de GravaçãoLO0E
Vericação de Erro (CRC) –
Tabela 3.24 Consulta
Resposta
A resposta normal contém os dados do grupo de
registradores que foram lidos. O campo de contagem de
bytes especica a quantidade a ser seguida no campo de
dados de leitura.
Nome do campo Exemplo (hex)
Endereço do escravo 01
Função 17
Contagem de Bytes 04
Valor de Registradores de LeituraHI00
Valor de Registradores de LeituraLO00
Valor de Registradores de LeituraHIC3
Valor de Registradores de LeituraLO50
CRC –
Tabela 3.25 Resposta
Perl de Controle do FC da
3.11
3.11.1 Control word de acordo com o Perl
do FC (Protocolo 8–10 = Perl do
FC)
Bit Valor do bit = 0 Valor do bit = 1
00 Valor de referência Seleção externa lsb
01 Valor de referência Seleção externa msb
02 Freio CC Rampa
03 Parada por inércia Sem parada por inércia
04 Parada rápida Rampa
05 Manter a frequência
de saída
06 Parada de rampa Partida
07 Sem função Reinicializar
08 Sem função Jog
09 Rampa 1 Rampa 2
10 Dados inválidos Dados válidos
11 Relé 01 aberto Relé 01 ativo
12 Relé 02 aberto Relé 02 ativo
13 Conguração de
parâmetros
15 Sem função Reversão
Tabela 3.26 Control word de acordo com o perl do FC
Utilizar a rampa de velocidade
Seleção do lsb
Explicação dos bits de controle
Bits 00/01
Os bits 00 e 01 são usados para fazer a seleção entre os
quatro valores de referência, que são pré-programados em
parâmetro 3-10 Referência
Predenida de acordo com
Tabela 3.27.
Valor de
referência
programado
1 Parâmetro 3-10 Referência
2 Parâmetro 3-10 Referência
3 Parâmetro 3-10 Referência
4 Parâmetro 3-10 Referência
Tabela 3.27 Bits de Controle
Parâmetro Bit01Bit
00
0 0
Predenida [0]
0 1
Predenida [1]
1 0
Predenida [2]
1 1
Predenida [3]
3 3
Ilustração 3.20 Control word de acordo com o perl do FC
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 31
AVISO!
Faça uma seleção em parâmetro 8-56 Seleção da
Referência Pré-denida para denir como o bit 00/01
sincroniza com a função correspondente nas entradas
digitais.
Bit 02, Freio CC:
Bit 02=0: Conduz à frenagem CC e parada. A corrente e a
duração de frenagem foram denidas nos par.
parâmetro 2-01 Corrente de Freio CC e
parâmetro 2-02 Tempo de Frenagem CC.
Bit 02=1: Conduz à rampa.

Instalação e Setup da RS485
VLT® DriveMotor FCP 106/FCM 106
Bit 03, Parada por inércia
Bit 03=0: O conversor de frequência libera o motor imediatamente (os transistores de saída são desligados) e faz
parada por inércia.
Bit 03=1: Se as demais condições de partida estiverem
satisfeitas, o conversor de frequência dá partida.
33
Escolha em parâmetro 8-50 Seleção de Parada por Inércia
para denir como o bit 03 sincroniza com a função correspondente em uma entrada digital.
Bit 04, Parada rápida
Bit 04=0: Faz a velocidade do motor desacelerar até parar
(programado em parâmetro 3-81 Tempo de Rampa da
Parada Rápida).
Bit 05, Reter a frequência de saída
Bit 05=0: A frequência de saída atual (em Hz) congela.
Altere a frequência de saída congelada somente por meio
das entradas digitais (parâmetro 5-10 Terminal 18 Entrada
Digital a parâmetro 5-13 Terminal 29, Entrada Digital)
programadas para [21] Aceleração e [22] Desaceleração.
AVISO!
Se congelar frequência de saída estiver ativo, o conversor
de frequência somente pode ser parado por 1 das
opções a seguir:
Bit 03 Parada por inércia.
•
Bit 02 frenagem CC.
•
Entrada digital (parâmetro 5-10 Terminal 18
•
Entrada Digital a parâmetro 5-13 Terminal 29,
Entrada Digital) programada para [5] Frenagem
CC, [2] Parada por inércia ou [3] Reset e parada
por inércia.
Bit 09, Seleção de rampa 1/2
Bit 09=0: Rampa 1 está ativa (parâmetro 3-41 Tempo de
Aceleração da Rampa 1 para parâmetro 3-42 Tempo de
Desaceleração da Rampa 1).
Bit 09=1: Rampa 2 (parâmetro 3-51 Tempo de Aceleração da
Rampa 2 para parâmetro 3-52 Tempo de Desaceleração da
Rampa 2) está ativa.
Bit 10, Dados inválidos/Dados válidos
Informa o conversor de frequência se a control word deve
ser utilizada ou ignorada.
Bit 10=0: A control word é ignorada.
Bit 10=1: A control word é usada. Esta função é importante
porque o telegrama sempre contém a control word,
qualquer que seja o telegrama. Se a control word se não
for necessária ao atualizar ou ler parâmetros, desligue-a.
Bit 11, Relé 01
Bit 11=0: O relé não está ativo.
Bit 11=1: Relé 01 ativado se [36] Bit 11 da control word
tenha sido escolhido no parâmetro 5-40 Função do Relé.
Bit 12, Relé 02
Bit 12=0: Relé 02 não está ativado.
Bit 12=1: Relé 02 ativado se [37] Bit 12 da control word
tenha sido escolhido no parâmetro 5-40 Função do Relé.
Bit 13, Seleção de setup
Utilize o bit 13 para selecionar entre os dois setups de
menu de acordo com Tabela 3.28.
Setup Bit 13
1 0
2 1
Tabela 3.28 Setups de Menu
Bit 06, Parada/partida de rampa
Bit 06=0: Provoca uma parada e faz a velocidade do motor
desacelerar até parar por meio do parâmetro de desaceleração selecionado.
Bit 06=1: Permite ao conversor de frequência dar partida
no motor se as demais condições de partida forem
satisfeitas.
Faça uma seleção em parâmetro 8-53 Seleção da Partida
para denir como o bit 06 parada/partida de rampa
sincroniza com a função correspondente em uma entrada
digital.
Bit 07, Reset
Bit 07=0: Sem reset.
Bit 07=1: Reinicializa um desarme. A reinicialização é
ativada na borda de ataque do sinal, ou seja, na transição
de 0 lógico para 1 lógico.
Bit 08, Jog
Bit 08=1: Parâmetro 3-11 Velocidade de Jog [Hz] determina a
frequência de saída.
A função só é possível quando [9] Setups Múltiplos estiver
selecionado em parâmetro 0-10 Setup Ativo.
Use parâmetro 8-55 Seleção do Set-up para denir como o
bit 13 sincroniza com a função correspondente nas
entradas digitais.
Bit 15 Reversão
Bit 15=0: Sem reversão.
Bit 15=1: Reversão. Na conguração padrão, a reversão é
programada como digital em parâmetro 8-54 Seleção da
Reversão. O bit 15 causa reversão somente quando
Comunicação serial, [2] Lógica OU ou [3] Lógica E e estiver
selecionado.
32 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

Output freq.STW
Bit
no.:
Follower-master
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BA273.11
Instalação e Setup da RS485 Guia de Programação
3.11.2 Status Word De acordo com o Perl
Ilustração 3.21 Status Word
Bit Bit=0 Bit=1
00 Controle não pronto Controle pronto
01 Drive não pronto Drive pronto
02 Parada por inércia Ativado
03 Sem erro Desarme
04 Sem erro Erro (sem desarme)
05 Reservado –
06 Sem erro Bloqueio por desarme
07 Sem advertência Advertência
08
09 Operação local Controle do bus
10 Fora do limite de
11 Sem operação Em operação
12 Drive OK Parado, partida automática
13 Tensão OK Tensão excedida
14 Torque OK Torque excedido
15 Temporizador OK Temporizador expirado
Tabela 3.29 Status Word De acordo com o Perl do FC
Explicação dos bits de status
Bit 00, Controle não pronto/pronto
Bit 00=0: O conversor de frequência desarma.
Bit 00=1: Os controles do conversor de frequência estão
prontos, mas o componente de energia não recebe
necessariamente qualquer alimentação (se houver
alimentação de 24 V externa para os controles).
Bit 01, Drive pronto
Bit 01=0: O conversor de frequência não está pronto.
Bit 01=1: O conversor de frequência está pronto para
operação, mas existe um comando de parada por inércia
ativo, nas entradas digitais ou na comunicação serial.
Bit 02, Parada por inércia
Bit 02=0: O conversor de frequência libera o motor.
Bit 02=1: O conversor de frequência dá partida no motor
com um comando de partida.
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 33
do FC (STW)
(parâmetro 8-30 Protocolo = Perl do
FC)
Velocidade≠referência
frequência
Velocidade=referência
Limite de frequência OK
Bit 03, Sem erro/desarme
Bit 03=0: O conversor de frequência não está no modo de
defeito. Bit 03=1: O conversor de frequência desarma. Para
restabelecer a operação, pressione [Reset] (Reinicializar).
Bit 04, Sem erro/com erro (sem desarme)
Bit 04=0: O conversor de frequência não está no modo de
defeito.
Bit 04=1: O conversor de frequência exibe um erro mas
não desarma.
Bit 05, Sem uso
Bit 05 não é usado na status word.
Bit 06, Sem erro/bloqueio por desarme
Bit 06=0: O conversor de frequência não está no modo de
defeito.
Bit 06=1: O conversor de frequência está desarmado e
bloqueado.
Bit 07, Sem advertência/com advertência
Bit 07=0: Não há advertências.
Bit 07=1: Signica que ocorreu uma advertência.
Bit 08, Referência de velocidade/velocidade=referência
Bit 08=0: O motor está funcionando, mas a velocidade
atual é diferente da referência de velocidade predenida.
Pode ser o caso, por exemplo, quando a velocidade subir/
descer durante a partida/parada.
Bit 08=1: A velocidade do motor corresponde à referência
de velocidade predenida.
Bit 09, Operação local/controle do bus
Bit 09=0: [O/Reset] (Desligar/Reinicializar) é ativado na
unidade de controle ou [2] Local no parâmetro 3-13 Tipo de
Referência está selecionado. Não é possível controlar o
conversor de frequência via comunicação serial.
Bit 09=1: É possível controlar o conversor de frequência
por meio do eldbus/comunicação serial.
Bit 10, Fora do limite de frequência
Bit 10=0: A frequência de saída alcançou o valor
programado noparâmetro 4-12 Lim. Inferior da Veloc. do
Motor [Hz] ou parâmetro 4-14 Lim. Superior da Veloc do
Motor [Hz].
Bit 10=1: A frequência de saída está dentro dos limites
denidos.
Bit 11, Fora de funcionamento/em operação
Bit 11=0: O motor não está funcionando.
Bit 11=1: O conversor de frequência tem um sinal de
parada sem parada por inércia.
Bit 12, Drive OK/parado, partida automática
Bit 12=0: Não há superaquecimento temporário no
conversor de frequência.
Bit 12=1: O conversor de frequência para devido ao
superaquecimento, mas a unidade não desarma e retomará
a operação, assim que o superaquecimento normalizar.
Bit 13, Tensão OK/limite excedido
Bit 13=0: Não há advertências de tensão.
Bit 13=1: A tensão CC no barramento CC do conversor de
frequência está muito baixa ou muito alta.
3 3

Actual output
frequency
STW
Follower-slave
Speed referenceCTW
Master-slave
16bit
130BA276.11
100%0%
(0hex) (4000hex)
Forward
Par.3-02
Min reference
Par.3-03
Max reference
195NA490.10
-100% 100%0%
(C000hex) (0hex) (4000hex)
Reverse Forward
0
Par.3-03
Max reference
Par.3-03
Max reference
195NA489.10
-100% 100%0%
(C000hex) (0hex) (4000hex)
Reverse Forward
0
Par.4-14
Motor Speed High Limit
Par.4-14
Motor Speed High Limit
195NA491.10
Instalação e Setup da RS485
VLT® DriveMotor FCP 106/FCM 106
Bit 14, Torque OK/limite excedido
Bit 14=0: A corrente do motor está abaixo do limite de
corrente selecionado em parâmetro 4-18 Current Limit.
Bit 14=1: O limite de corrente em parâmetro 4-18 Current
Limit foi excedido.
33
Bit 15, Temporizador OK/limite excedido
Bit 15=0: Os temporizadores para proteção térmica do
motor e a proteção térmica não ultrapassaram 100%.
Bit 15=1: Um dos temporizadores ultrapassou 100%.
Ilustração 3.25 MAV quando Parâmetro 1-00 Modo
Conguração estiver programado para [3] Malha Fechada
3.11.3 Valor de Referência de Velocidade
Via Bus Serial
O valor de referência de velocidade é transmitido ao
conversor de frequência como valor relativo, em %. O valor
é transmitido no formato de uma word de 16 bits; em
números inteiros (0-32767) o valor 16384 (4000 hex)
corresponde a 100%. Os valores negativos são formatados
por complementos de 2. A frequência de Saída real (MAV)
é escalonada do mesmo modo que a referência de bus.
Ilustração 3.22 Frequência de saída real (MAV)
A referência e a MAV são escalonadas como a seguir:
Ilustração 3.23 Referência
Ilustração 3.24 MAV quando Parâmetro 1-00 Modo
Conguração estiver programado para [0] Malha Aberta
34 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

Parâmetros Guia de Programação
4 Parâmetros
4.1 Main Menu (Menu Principal) - Operação
e Display - Grupo 0
Parâmetros relacionados às funções fundamentais do
conversor de frequência, função das teclas do LCP e
conguração do display do LCP.
4.1.1 0-0* Congurações Básicas
0-01 Idioma
Option: Funcão:
Dene o idioma a ser utilizado no display.
[0] * English
[1] Deutsch
[2] Francais
[3] Dansk
[4] Spanish
[5] Italiano
[28] Bras.port
[255] No Text
0-03 Denições Regionais
Option: Funcão:
AVISO!
Este parâmetro não pode ser ajustado
enquanto o motor estiver em funcionamento.
Para atender as necessidades das diferentes
congurações padrão em várias partes do
mundo, o parâmetro 0-03 Denições Regionais é
implementado no conversor de frequência. A
conguração selecionada inui na conguração
padrão da frequência nominal do motor.
[0]*Interna-
cional
[1] América
do Norte
0-04 Estado Operacional na Energização
Option: Funcão:
[0]*Retomar Retoma a operação do conversor de
Programa o valor padrão de
parâmetro 1-23 Freqüência do Motor para 50 Hz.
Programa o valor padrão de
parâmetro 1-23 Freqüência do Motor para 60 Hz.
Selecione o modo de operação após a
reconexão do conversor de frequência à
tensão de rede depois de desligar ao operar
em modo Manual (local).
frequência, mantendo a mesma referência
local e a mesma condição de partida/parada
(aplicada por [Hand On]/[O] no LCP ou
0-04 Estado Operacional na Energização
Option: Funcão:
partida local através de uma entrada digital
como antes de o conversor ser desligado.
[1] Parad
forçd,ref=ant.
Usa a referência salva [1] para parar o
conversor de frequência, mas ao mesmo
tempo retém a referência de velocidade
local na memória antes de desligar. Após a
tensão de rede ser reconectada e após
receber um comando de partida
(pressionando a tecla [Hand On] ou usando
o comando de partida local por meio de
uma entrada digital), o conversor de
frequência dá nova partida e opera na
referência de velocidade retida.
0-06 Tipo de Grade
Option: Funcão:
Selecione o tipo de grade da
frequência / tensão de alimentação.
AVISO!
Nem todas as opções são
suportadas em todos os
tamanhos de potência.
A grade de TI é uma rede elétrica
de alimentação em que não há
conexões para o terra.
Ajuste a posição do interruptor de
RFI para atender o tipo de grade
(consulte as Instruções de Utilização
®
do VLT
DriveMotor FCP 106/FCM
106).
Delta é uma rede elétrica de
alimentação em que a parte
secundária do transformador é
conectada em delta e uma fase é
conectada ao terra.
[10] 380-440 V/50 Hz/
grade de TI
[11] 380-440 V/50 Hz/
Delta
[12] 380-440 V/50 Hz
[20] 440-480 V/50 Hz/
grade de TI
[21] 440-480 V/50 Hz/
Delta
[22] 440-480 V/50 Hz
[110] 380-440 V/60 Hz/
grade de TI
4 4
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 35

Parâmetros
VLT® DriveMotor FCP 106/FCM 106
0-06 Tipo de Grade
Option: Funcão:
[111] 380-440 V/60 Hz/
Delta
[112] 380-440 V/60 Hz
[120] 440-480 V/60 Hz/
grade de TI
[121] 440-480 V/60 Hz/
44
Delta
[122] 440-480 V/60 Hz
0-07 TI de Frenagem CC Automática
Option: Funcão:
Função de proteção com relação a
sobretensão na parada por inércia.
AVISO!
Pode causar PWM quando em parada
por inércia.
[0] O (Desligado) Esta função não está ativa.
[1] * On (Ligado) Esta função está ativa.
4.1.2 0-1* Denir e fazer Setup das
Operações
Um conjunto completo de todos os parâmetros que
controlam o conversor de frequência é denominado de
setup. O conversor de frequência contém dois setups:
Setup1 e Setup2 Além disso, um conjunto xo de congu-
rações de fábrica pode ser copiado para um ou ambos os
setups.
Para copiar setup 1 para setup 2 ou copiar setup 2 para
setup 1, use parâmetro 0-51 Cópia do Set-up. Para evitar
congurações conitantes do mesmo parâmetro em dois
setups diferentes, vincule os setups utilizando
parâmetro 0-12 Este Set-up é dependente de. Pare o
conversor de frequência antes de alternar entre setups em
que os parâmetros marcados como não alterável durante a
operação tiverem valores diferentes.
Os parâmetros que são não alteráveis durante a operação
são marcados como false em capétulo 6 Listas de
Parâmetros.
0-10 Setup Ativo
Option: Funcão:
Selecione o setup no qual o conversor de
frequência opera.
[1] * Setup 1 Setup 1 está ativo.
[2] Setup 2 Setup 2 está ativo.
[9] Setup
Múltiplo
Usado para seleções de setup remota via
entradas digitais e a porta de comunicação
serial. Este setup utiliza as congurações de
parâmetro 0-12 Este Set-up é dependente de.
0-11 Set-up da Programação
Option: Funcão:
O número do setup que está sendo editado
é mostrado no LCP, piscando.
[1] Setup 1 Editar setup 1.
[2] Setup 2 Editar setup 2.
[9] * Ativar Set-up Editar parâmetros no setup através dos E/S
digitais.
Algumas das vantagens de haver mais de um setup no
conversor de frequência são:
Operar o motor em um setup (conguração ativa)
•
enquanto atualiza parâmetros em outro setup
(editar setup).
Conectar os dois motores (um de cada vez) ao
•
conversor de frequência. Os dados do motor para
dois motores podem ser colocados nos dois
setups.
Alterar rapidamente as congurações do
•
conversor de frequência e/ou do motor enquanto
o motor estiver funcionando. Por exemplo, tempo
de rampa ou referências predenidas via
barramento ou entradas digitais.
A conguração ativa pode ser programada como setup
múltiplo, em que a conguração ativa é selecionada por
meio de entrada em um terminal de entrada digital e/ou
por meio da control word do bus.
0-12 Este Set-up é dependente de
Option: Funcão:
Se os setups não estiverem vinculados,
uma alternação entre eles não será
possível enquanto o motor estiver em
funcionamento.
[0] Não
conectado
[20] * Setups
Vinculados
Ao selecionar um setup diferente para
operação, a alteração do setup não ocorre
até o motor fazer parada por inércia.
Copia parâmetros não alteráveis durante a
operação de um setup para outro. É
possível comutar setups enquanto o
motor estiver funcionando.
0-20 Linha do Display 1.1 Pequeno
Option: Funcão:
Selecionar uma variável da linha 1 do
display, lado esquerdo.
[0] Não foi selecionado nenhum valor de
display.
36 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

Parâmetros Guia de Programação
0-20 Linha do Display 1.1 Pequeno
Option: Funcão:
[37] Texto de Display1Permite gravar uma sequência de
texto individual para exibir no LCP ou
para ser lido através de uma
comunicação serial.
[38] Texto de Display2Permite gravar uma sequência de
texto individual para exibir no LCP ou
para ser lido através de uma
comunicação serial.
[39] Texto de Display3Permite gravar uma sequência de
texto individual para exibir no LCP ou
para ser lido através de uma
comunicação serial.
[953] Warning Word
do Probus
[1501] Horas em
Funcionamento
[1502] Medidor de kWh Exibe o consumo de energia de rede
[1600] Control Word Ver a Control Word enviada do
[1601] Referência
[Unidade]
[1602]*Referência % Referência total (soma de digital/
[1603] Est. Status word atual.
[1605] Valor Real
Principal [%]
[1609] Leit.Personalz. Visualizar as leituras denidas pelo
[1610] Potência [kW] Energia real consumida pelo motor,
[1611] Potência [hp] Potência real consumida pelo motor
[1612] Tensão do motor Tensão entregue ao motor.
Mostra advertências de comunicação
do PROFIBUS.
Exibe o número de horas de funcionamento do motor.
elétrica, em kWh.
conversor de frequência via porta de
comunicação serial em código hex.
Referência total (soma de digital/
analógica/predenida/barramento/
congelar ref./catch-up e redução de
velocidade), na unidade de medida
escolhida.
analógica/predenida/barramento/
congelar ref./catch-up e redução de
velocidade), em porcentagem.
Visualizar a palavra de dois bytes
enviada com a status word para o
Mestre da rede relatando o valor real
principal.
usuário conforme denidas em
parâmetro 0-30 Unidade de Leitura
Personalizada, parâmetro 0-31 Valor
Mín Leitura Personalizada, e
parâmetro 0-32 Valor Máx Leitura
Personalizada.
em kW.
em HP.
0-20 Linha do Display 1.1 Pequeno
Option: Funcão:
[1613] Freqüência Frequência do motor, ou seja, a
frequência de saída do conversor de
frequência em Hz.
[1614] Corrente do
motor
[1615] Freqüência [%] Frequência do motor, ou seja, a
[1616] Torque [Nm] Carga do motor atual, como uma
[1618] Térmico
Calculado do
Motor
[1622] Torque [%] Exibe o torque real produzido, em
[1626] Potência Filtrada
[kW]
[1627] Potência Filtrada
[hp]
[1630] Tensão de
Conexão CC
[1634] Temp. do
Dissipador de
Calor
[1635] Térmico do
Inversor
[1636] Corrente Nom.do
Inversor
[1637] Corrente Máx.do
Inversor
[1638] Estado do SLC Estado do evento executado pelo
[1639] Temp.do Control
Card
[1650] Referência
Externa
[1652] Feedback
[Unidade]
[1660] Entrada digital Mostra o status das entradas digitais.
[1661] Denição do
Terminal 53
Corrente de fase do motor, medida
como valor ecaz.
frequência de saída do conversor de
frequência em porcentagem.
porcentagem do torque nominal do
motor.
Carga térmica no motor, calculada
pela função ETR. Ver também o grupo
do parâmetro 1-9* Temperatura do
Motor.
porcentagem.
Tensão do barramento CC no
conversor de frequência.
Temperatura atual do dissipador de
calor do conversor de frequência. O
limite de desativação é 95 ± 5 °C; a
reativação ocorre a 70 ± 5 °C.
Porcentagem da carga dos inversores.
Corrente nominal do conversor de
frequência.
Corrente máxima do conversor de
frequência.
controle.
Temperatura do cartão de controle.
Soma das referências externas como
uma porcentagem, ou seja, a soma de
analógico/pulso/bus.
Valor de referência das entradas
digitais programadas.
Sinal baixo = 0; Sinal alto = 1.
Com relação ao pedido de compra,
ver parâmetro 16-60 Entrada digital. O
bit 0 está na extrema direita.
Conguração do terminal de entrada
53. Corrente = 0; Tensão = 1.
4 4
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 37

Parâmetros
VLT® DriveMotor FCP 106/FCM 106
0-20 Linha do Display 1.1 Pequeno
Option: Funcão:
[1662] Entrada
Analógica 53
[1663] Denição do
Terminal 54
[1664] Entrada
44
[1665] Saída Analógica
[1666] Saída Digital
[1667] Entr. Freq. #29
[1671] Saída do Relé
[1672] Contador A Exibir o valor atual do Contador A.
[1673] Contador B Exibir o valor atual do Contador B.
[1679] Saída Analógica
[1680] CTW 1 do
[1682] REF 1 do
[1684] StatusWord do
[1685] CTW 1 da Porta
[1686] REF 1 da Porta
[1690] Alarm Word Um ou mais alarmes em código hex
[1691] Alarm Word 2 Um ou mais alarmes em código hex
[1692] Warning Word Uma ou mais advertências em código
[1693] Warning Word 2 Uma ou mais advertências em código
[1694] Status Word
Analógica 54
42 [mA]
[bin]
[Hz]
[bin]
AO45
Fieldbus
Fieldbus
Opcional d
Comunicação
Serial
Serial
Estendida
Valor real na entrada 53, como
referência ou valor de proteção.
Conguração do terminal de entrada
54. Corrente = 0; Tensão = 1.
Valor real na entrada 54, como
referência ou valor de proteção.
Valor real na saída 42, em mA. Utilize
o parâmetro 6-50 Terminal 42 Saída
para selecionar a variável a ser
representada na saída 42.
Valor binário de todas as saídas
digitais.
Valor real da frequência aplicada no
terminal 29, como uma entrada de
pulso.
Exibir a conguração de todos os
relés.
Control word (CTW) recebida do
Mestre da rede.
Valor de referência principal enviado
com a control word via rede de
comunicação serial, por exemplo, do
BMS, PLC ou outro controlador
mestre.
Status word estendida do opcional de
comunicação do eldbus.
Control word (CTW) recebida do
Mestre da rede.
Status word (STW) enviada ao Mestre
da rede.
(usado para comunicação serial).
(usado para comunicação serial).
hex (usado para comunicação serial).
hex (usado para comunicação serial).
Um ou mais condições de status em
código hex (usado para comunicação
serial).
0-20 Linha do Display 1.1 Pequeno
Option: Funcão:
[1695] Est. Status Word2Um ou mais condições de status em
código hex (usado para comunicação
serial).
[1697] Alarm Word 3
[1850] Leitura Sem o
Sensor [unidade]
0-21 Linha de Display 1,2 Pequeno
Selecionar uma variável na linha 1 do display, posição central.
Option: Funcão:
[1614] * Corrente do
Motor
As opções são as mesmas que as
listadas no parâmetro 0-20 Linha do
Display 1.1 Pequeno.
0-22 Linha de Display 1,3 Pequeno
Selecionar uma variável na linha 1 do display, lado direito.
Option: Funcão:
[1610] * Potência [kW] As opções são as mesmas que as listadas
no parâmetro 0-20 Linha do Display 1.1
Pequeno.
0-23 Linha de Display 2 Grande
Selecionar uma variável na linha 2 do display.
Option: Funcão:
[1613] * Frequência As opções são as mesmas que as listadas
no parâmetro 0-20 Linha do Display 1.1
Pequeno.
0-24 Linha de Display 3 Grande
Selecione uma variável para exibir na na linha 3.
4.1.3 0-3* Leitura personalizada do LCP e
Texto do display
É possível particularizar os elementos do display para
diversas nalidades.
Leitura personalizada
O valor calculado a ser mostrado baseia-se nas congurações em parâmetro 0-30 Unidade de Leitura Personalizada,
parâmetro 0-31 Valor Mín Leitura Personalizada (somente
linear), parâmetro 0-32 Valor Máx Leitura Personalizada,
parâmetro 4-14 Lim. Superior da Veloc do Motor [Hz] e na
velocidade real.
38 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

0
Custom Readout (Value)
P 16-09
Custom Readout
Unit P 0-30
Max value
P 0-32
Min value
Liniar
units only
P 0-31
Motor Speed
130BB779.10
Motor Speed
High limit
P 4-14 (Hz)
Linear Unit (e.g. Speed and ow)
Quadratic Unit (Pressure)
Cubic Unit (Power)
Parâmetros Guia de Programação
Ilustração 4.1 Leitura Personalizada
A relação dependerá do tipo de unidade de medida
selecionada no parâmetro 0-30 Unidade de Leitura Persona-
lizada:
Tipo de unidade Relação de velocidade
Adimensional
Velocidade
Vazão, volume
Vazão, massa
Velocidade
Comprimento
Temperatura
Pressão Quadrática
Potência Cúbica
Linear
0-30 Unidade de Leitura Personalizada
Option: Funcão:
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] Grau Celsius
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m Wg
[80] kW
[120] GPM
[121] galão/s
[122] galão/min
[123] galão/h
[124] CFM
[127] pé cúbico/h
[140] pés/s
[141] pés/min
[160] Grau Fahr
[170] psi
[171] lb/pol2
[172] pol wg
[173] pé WG
[180] hp
4 4
Tabela 4.1 Relação de Velocidade
0-30 Unidade de Leitura Personalizada
Option: Funcão:
[0] Nenhum
[1] * %
[5] PPM
[10] l/Min
[11] RPM
[12] PULSOS/s
[20] l/s
[21] l/min
[22] l/h
[23] m3/s
[24] m3/min
[25] m3/h
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 39
Programe um valor a ser exibido no display
do LCP. O valor tem uma relação linear, ao
quadrado ou cúbica com a velocidade. Essa
relação depende da unidade selecionada
(veja Tabela 4.1). O valor calculado real pode
ser lido em parâmetro 16-09 Leit.Personalz..
0-31 Valor Mín Leitura Personalizada
Range: Funcão:
0 CustomReadoutUnit*
[ 0 -
999999.99
CustomReadoutUnit]
Este parâmetro programa o valor
mínimo da leitura denida pelo
usuário (ocorre à velocidade
zero). É possível selecionar
apenas um valor diferente de 0
ao selecionar uma unidade linear
em parâmetro 0-30 Unidade de
Leitura Personalizada. Para
unidades quadráticas e cúbicas o
valor mínimo é 0.
0-32 Valor Máx Leitura Personalizada
Range: Funcão:
100 CustomReadoutUnit*
[ 0.0 -
999999.99
CustomReadoutUnit]
Este parâmetro programa o
valor máximo a ser mostrado
quando a velocidade do motor
atingir o valor programado de
parâmetro 4-14 Lim. Superior da
Veloc do Motor [Hz].

Parâmetros
VLT® DriveMotor FCP 106/FCM 106
0-37 Texto de Display 1
4.1.5 0-5* Copiar/Salvar
Range: Funcão:
[0 - 0 ] Use este parâmetro para gravar uma string de texto
individual para ser lida via comunicação serial. A ID
do dispositivo pode ser incluída.
Usado somente ao executar BACnet.
0-38 Texto de Display 2
44
Range: Funcão:
[0 - 0 ] Use este parâmetro para gravar uma string de texto
individual para ser lida via comunicação serial.
Usado somente ao executar BACnet.
0-39 Texto de Display 3
Range: Funcão:
[0 - 0 ] Use este parâmetro para gravar uma string de texto
individual para ser lida via comunicação serial.
Usado somente ao executar BACnet.
4.1.4 0-4* LCP
Ative, desabilite e proteja com senha as teclas individuais
do LCP.
0-40 Tecla [Hand on] (Manual ligado) do LCP
Option: Funcão:
[0] Desabilitar Todos Para evitar partida acidental do conversor
de frequência no modo local, selecione
[0] Desabilitado.
[1] * Habilitar Todos [Hand On] está ativado.
0-42 Tecla [Auto on] (Automát. ligado) do LCP
Option: Funcão:
[0] Desabilitar Todos Para evitar partida acidental do conversor
de frequência a partir do LCP, selecione
[0] Desabilitado.
[1] * Habilitar Todos [Auto On] está ativado.
0-44 Tecla [O/Reset] no LCP
Option: Funcão:
[0] Desabilitar Todos Desabilitar a tecla o/reset.
[1] * Habilitar Todos Ativar a função reset e a função o.
[7] Enable Reset Only Ative a função Reset e desative a função
O para evitar parada acidental do
conversor de frequência.
Copiar programação do parâmetro entre setups e do/para
o LCP.
0-50 Cópia do LCP
Option: Funcão:
[0] * Sem cópia
[1] Todos para o
LCP
[2] Todos a partir d
LCP
[3] Indep.d
tamanh.de LCP
[10] Delete LCP copy
data
Copia todos os parâmetros em todos os
setups, a partir da memória do conversor
de frequência, para a memória do LCP.
Para ns de serviço, copie todos os
parâmetros para o LCP após a colocação
em funcionamento.
Copia todos os parâmetros em todos os
setups, da memória do LCP para a
memória do conversor de frequência.
Copia somente os parâmetros que são
independentes do tamanho do motor.
Esta última seleção pode ser utilizada
para programar diversos conversores de
frequência com a mesma função, sem
tocar nos dados de motor que já estão
denidos.
0-51 Cópia do Set-up
Option: Funcão:
[0] * Sem cópia Sem função.
[1] Copiar p/set-
-up1
[2] Copiar p/set-
-up2
[9] Copiar para
todos
Copiar do setup 1 para setup 2.
Copiar do setup 2 para setup 1.
Copiar a conguração de fábrica para
setup de programação (selecionado em
parâmetro 0-11 Set-up da Programação).
4.1.6 0-6* Senha
0-60 Senha do Menu Principal
Range: Funcão:
0* [0 - 999 ] Denir a senha de acesso ao Menu Principal por
meio da tecla [Main Menu]. Programar o valor
para 0 desabilita a função de senha.
40 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

Parâmetros Guia de Programação
4.2 Main Menu (Menu Principal) - Carga e Motor - Grupo 1
Parâmetros relativos às compensações de carga da
plaqueta de identicação do motor e do tipo de carga da
aplicação.
4.2.1 1-0* Programações Gerais
1-00 Modo Conguração
Option: Funcão:
AVISO!
Este parâmetro não pode ser ajustado
quando o motor estiver em funcionamento.
[0]*Malha
Aberta
[3] Malha
Fechada
A velocidade do motor é determinada aplicando
uma referência de velocidade ou congurando a
velocidade desejada quando em modo local.
Malha aberta também é usada se o conversor de
frequência for parte de um sistema de controle
de malha fechada baseado em controlador PI
externo que fornece um sinal de referência de
velocidade como saída.
AVISO!
Quando programado para Malha Fechada,
os comandos Reversão e Partida Reversa
não revertem o sentido de rotação do
motor.
1-01 Principio de Controle do Motor
Option: Funcão:
Modo de funcionamento normal, incluindo compensações de carga e deslizamento.
1-03 Características de Torque
Option: Funcão:
[0] Torque
compressor
[1]*Torque
variável
[3] Otim. Autom
Energia VT
Somente para controle da velocidade de
motores PM.
Para controle da velocidade de bombas
centrífugas e ventiladores. Para ser usado
também no controle de mais de um motor
do mesmo conversor de frequência (por
exemplo, vários ventiladores de
condensador ou ventiladores de torres de
resfriamento). Fornece uma tensão que é
otimizada para uma característica de carga
de torque do motor elevada ao quadrado.
Para controle da velocidade ideal de
ventiladores e bombas centrífugas com
eciência energética, fornece uma tensão
otimizada para uma característica de carga
do motor com torque ao quadrado. Além
disso, o recurso AEO adapta a tensão
exatamente à situação da carga de corrente,
reduzindo assim o consumo de energia e o
ruído do motor.
4 4
A referência do controlador PI integrado
determina a velocidade do motor. O controlador
PID integrado varia a velocidade do motor como
de um processo de controle de malha fechada
(por exemplo, pressão ou uxo constante).
Congure o controlador PI no grupo do
parâmetro 20-** Malha Fechada do Drive.
1-01 Principio de Controle do Motor
Option: Funcão:
[0] U/f
AVISO!
Quando U/f estiver em funcionamento,
deslizamento de controle e compensações de
carga não estão incluídos.
Usado para motores conectados em paralelo e/ou
em aplicações de motor especiais. Programe as
congurações U/f em parâmetro 1-55 Características
U/f - U e parâmetro 1-56 Características U/f - F.
[1] * VVC+
AVISO!
Quando parâmetro 1-10 Construção do Motor
estiver programado para opções ativadas por
PM, somente a opção VVC+ está disponível.
1-06 Clockwise Direction
Option: Funcão:
AVISO!
Este parâmetro não pode ser ajustado
enquanto o motor estiver em funcionamento.
Esse parâmetro dene o termo sentido horário
correspondente à seta de direção do LCP. Usado
para mudar com facilidade o sentido de rotação
do eixo sem trocar os os do motor.
[0] * Normal O eixo do motor gira no sentido horário quando o
conversor de frequência estiver conectado U⇒U;
V⇒V; e W⇒W para o motor.
[1] Inverse O eixo do motor gira no sentido anti-horário
quando o conversor de frequência estiver
conectado U⇒U; V⇒V; e W⇒W para o motor.
1-08 Motor Control Bandwidth
Option: Funcão:
[0] High Alta resposta dinâmica.
[1] Medium Otimizada p/operação em estado estável suave.
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 41

Parâmetros
VLT® DriveMotor FCP 106/FCM 106
1-08 Motor Control Bandwidth
Option: Funcão:
[2] Low Otimizada p/operação em estado estável suave
c/a menor resposta dinâmica.
[3] Adaptive 1 Otimizado para operação suave em estado
estável com amortecimento ativo extra.
[4] Adaptive 2 Alternativa para Adaptativo 1, com foco em
motores PM baixa indutância
44
4.2.2 1-10 para 1-12 Seleção do motor
AVISO!
Este grupo do parâmetro não pode ser ajustado
enquanto o motor estiver em funcionamento.
Os parâmetros a seguir estão ativos (x) dependendo da
conguração de parâmetro 1-10 Construção do Motor.
Parâmetro 1-10 Construção do Motor [0]
Assíncrono
Parâmetro 1-00 Modo Conguração x x
Parâmetro 1-03 Características de Torque x
Parâmetro 1-06 Sentido Horário x x
Parâmetro 1-14 Fator de Ganho de
Amortecimento
Parâmetro 1-15 Const. de Tempo do Filtro
de Baixa Veloc
Parâmetro 1-16 Const. de Tempo do Filtro
de Alta Veloc.
Parâmetro 1-17 Const. de tempo do ltro
de tensão
Parâmetro 1-20 Potência do Motor [kW] x
Parâmetro 1-22 Tensão do Motor x
Parâmetro 1-23 Freqüência do Motor x x
Parâmetro 1-24 Corrente do Motor x x
Parâmetro 1-25 Velocidade nominal do
motor
Parâmetro 1-26 Torque nominal do Motor x
Parâmetro 1-29 Adaptação Automática do
Motor (AMA)
Parâmetro 1-30 Resistência do Estator (Rs) x x
Parâmetro 1-33 Reatância Parasita do
Estator (X1)
Parâmetro 1-35 Reatância Principal (Xh) x
Parâmetro 1-37 Indutância do eixo-d (Ld) x
Parâmetro 1-39 Pólos do Motor x x
Parâmetro 1-40 Força Contra Eletromotriz
em 1000RPM
Parâmetro 1-52 Veloc Mín de Magnetiz.
Norm. [Hz]
x
x
x
x
x x
x x
x
x
x
[1]
Motor
PM não
saliente
Parâmetro 1-60 Compensação de Carga
em Baix Velocid
Parâmetro 1-61 Compensação de Carga
em Alta Velocid
Parâmetro 1-62 Compensação de Escorre-
gamento
Parâmetro 1-63 Const d Tempo d Compens
Escorregam
Parâmetro 1-64 Amortecimento da
Ressonância
Parâmetro 1-65 Const Tempo Amortec
Ressonânc
Parâmetro 1-66 Corrente Mín. em Baixa
Velocidade
Parâmetro 1-71 Atraso da Partida x x
Parâmetro 1-72 Função de Partida x x
Parâmetro 1-73 Flying Start x x
Parâmetro 1-80 Função na Parada x x
Parâmetro 1-82 Veloc. Mín p/ Funcionar na
Parada [Hz]
Parâmetro 1-90 Proteção Térmica do
Motor
Parâmetro 2-00 Corrente de Hold CC x
Parâmetro 2-01 Corrente de Freio CC x
Parâmetro 2-02 Tempo de Frenagem CC x
Parâmetro 2-04 Veloc.Acion.d FreioCC [Hz] x
Parâmetro 2-06 Corrente de Estacio-
namento
Parâmetro 2-07 Tempo de Estacionamento x
Parâmetro 2-10 Função de Frenagem x x
Parâmetro 2-16 Corr Máx Frenagem CA x
Parâmetro 2-17 Controle de Sobretensão x x
Parâmetro 4-10 Sentido de Rotação do
Motor
Parâmetro 4-12 Lim. Inferior da Veloc. do
Motor [Hz]
Parâmetro 4-14 Lim. Superior da Veloc do
Motor [Hz]
Parâmetro 4-18 Limite de Corrente x x
Parâmetro 4-19 Freqüência Máx. de Saída x x
Parâmetro 4-58 Função de Fase do Motor
Ausente
Parâmetro 14-40 Nível do VT x
Parâmetro 14-41 Magnetização Mínima do
AEO
Parâmetro 30-22 Proteção de Rotor
Bloqueado
Parâmetro 30-23 Tempo de Detecção do
Rotor Bloq.[s]
Tabela 4.2 Parâmetros Ativados pela Programação do
Parâmetro 1-10 Construção do Motor
x
x
x
x
x
x
x
x x
x x
x
x x
x x
x x
x x
x
x
x
42 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

Parâmetros Guia de Programação
1-10 Construção do Motor
Option: Funcão:
[0] * Asynchron Para motores assíncronos.
[1] PM, non
salient SPM,
non Sat
[2] PM, salient
IPM, non Sat
[3] PM, salient
IPM, Sat
Para motores de ímã permanente (PM)
com ímãs montados na superfície (não
salientes). Consulte
parâmetro 1-14 Damping Gain a
parâmetro 1-17 Voltage lter time const.
para obter detalhes sobre a otimização da
operação do motor.
Para motores de ímã permanente (PM)
com ímãs internos (salientes), sem controle
de saturação da indutância.
Para motores de ímã permanente (PM)
com ímãs internos (saliente), com controle
de saturação da indutância.
1-11 Seleção do motor
Option: Funcão:
[0] * Default Motor Selection Automaticamente estabelece as
congurações de fábrica para o
motor selecionado.
Congurar o valor do parâmetro
poderá alterar estes parâmetros.
Outros parâmetros também
mudam quando alterar a seleção
do tipo do motor.
[1] Motor Selection 1
[2] Motor Selection 2
[3] Motor Selection 3
[4] Motor Selection 4
[5] Motor Selection 5
[6] Motor Selection 6
[7] Motor Selection 7
[8] Motor Selection 8
[9] Motor Selection 9
[10] Motor Selection 10
[11] Motor Selection 11
[12] Motor Selection 12
[13] Motor Selection 13
[14] Motor Selection 14
[15] Motor Selection 15
[16] Motor Selection 16
[17] Motor Selection 17
[18] Motor Selection 18
[19] Motor Selection 19
[20] Motor Selection 20
[21] Motor Selection 21
[22] Motor Selection 22
[23] Motor Selection 23
[24] Motor Selection 24
[25] Motor Selection 25
[26] Motor Selection 26
1-11 Seleção do motor
Option: Funcão:
[27] Motor Selection 27
[28] Motor Selection 28
[29] Motor Selection 29
[30] Motor Selection 30
[31] Motor Selection 31
[32] Motor Selection 32
[33] Motor Selection 33
[34] Motor Selection 34
[35] Motor Selection 35
[36] Motor Selection 36
[37] Motor Selection 37
[38] Motor Selection 38
[39] Motor Selection 39
[40] Motor Selection 40
[41] Motor Selection 41
[42] Motor Selection 42
[43] Motor Selection 43
[44] Motor Selection 44
[45] Motor Selection 45
[46] Motor Selection 46
[47] Motor Selection 47
[48] Motor Selection 48
[49] Motor Selection 49
[50] Motor Selection 50
[51] Motor Selection 51
[52] Motor Selection 52
[53] Motor Selection 53
[54] Motor Selection 54
[55] Motor Selection 55
[56] Motor Selection 56
[57] Motor Selection 57
[58] Motor Selection 58
[59] Motor Selection 59
[60] Motor Selection 60
[61] Motor Selection 61
[62] Motor Selection 62
[63] Motor Selection 63
[64] Motor Selection 64
1-12 ID do motor
Range: Funcão:
Default
Motor*
[0 - 0 ] Mostra o nome do motor de acordo com
o motor selecionado em
parâmetro 1-11 Seleção do motor.
4 4
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 43

Parâmetros
VLT® DriveMotor FCP 106/FCM 106
4.2.3
1-14 a 1-17 VVC+ PM
1-16 Const. de Tempo do Filtro de Alta Veloc.
Range: Funcão:
Os parâmetros de controle padrão do núcleo de controle
do motor PM VVC+ são otimizados para aplicativos HVAC e
carga de inércia no intervalo de 50>JI/Jm>5. Jl é a inércia
de carga da aplicação e Jm é a inércia da máquina.
Para Aplicações de inércia baixa (Jl/Jm<5), é recomendável
de amortecimento curto. No entanto, se
esse valor for muito curto, o controle
ca instável. Essa constante de tempo é
usada acima de 10% da velocidade
nominal.
que parâmetro 1-17 Const. de tempo do ltro de tensão seja
44
parâmetro 14-08 Fator de Ganho de Amortecimento também
deve ser reduzido para melhorar o desempenho e a estabilidade.
Para aplicações de alta inércia (Jl/Jm>50) é recomendável
que parâmetro 1-15 Const. de Tempo do Filtro de Baixa Veloc,
parâmetro 1-16 Const. de Tempo do Filtro de Alta Veloc. e
parâmetro 14-08 Fator de Ganho de Amortecimento sejam
aumentados para melhorar o desempenho e a estabilidade.
Para alta carga em baixa velocidade (<30% da velocidade
nominal) é recomendável que parâmetro 1-17 Const. de
tempo do ltro de tensão seja aumentado devido à falta de
aumentado com um fator de 5–10. As vezes,
1-17 Const. de tempo do ltro de tensão
Range: Funcão:
Size
related*
[0.001 - 1s]A constante de tempo do ltro de
tensão de alimentação da máquina é
utilizada para reduzir a inuência dos
ripples de alta frequência e das
ressonâncias do sistema no cálculo da
tensão de alimentação da máquina.
Sem esse ltro, os ripples nas correntes
podem distorcer a tensão calculada e
afetar a estabilidade do sistema.
linearidade no inversor em baixa velocidade.
1-14 Fator de Ganho de Amortecimento
Range: Funcão:
120 %* [0 -
250 %]
O parâmetro estabiliza o motor PM para
garantir operação suave e estável. O valor de
ganho de amortecimento controla o
desempenho dinâmico do motor PM. Ganho de
amortecimento baixo resulta em desempenho
dinâmico alto e valor alto resulta em
desempenho dinâmico baixo. O desempenho
dinâmico está relacionado aos dados do motor
e ao tipo de carga. Se o ganho de amortecimento for muito alto ou baixo, o controle
cará instável.
1-15 Const. de Tempo do Filtro de Baixa Veloc
Range: Funcão:
Size
related*
[0.01 20 s]
A constante de tempo de amortecimento do ltro de passagem alta
determina o tempo de resposta às
etapas de carga. Obtenha controle
rápido com uma constante de tempo
de amortecimento curto. No entanto, se
esse valor for muito curto, o controle
ca instável. Essa constante de tempo é
usado abaixo de 10% da velocidade
nominal.
1-16 Const. de Tempo do Filtro de Alta Veloc.
Range: Funcão:
Size
related*
[0.01 20 s]
A constante de tempo de amortecimento do ltro de passagem alta
determina o tempo de resposta às
etapas de carga. Obtenha controle
rápido com uma constante de tempo
4.2.4 1-2* Dados do Motor
O grupo do parâmetro compõe os dados de entrada na
plaqueta de identicação do motor conectado.
AVISO!
As alterações no valor destes parâmetros afetam a
conguração de outros parâmetros.
1-20 Potência do Motor
Insira a potência do motor nominal em kW/hp de acordo com os
dados na dados da plaqueta de identicação do motor. O valor
padrão corresponde à saída nominal efetiva da unidade.
Este parâmetro não pode ser ajustado enquanto o motor estiver
em funcionamento.
Option: Funcão:
[3] 0,18 kW - 0,25 Hp
[4] 0,25 kW - 0,33 Hp
[5] 0,37 kW - 0,50 Hp
[6] 0,55 kW - 0,75 Hp
[7] 0,75 kW - 1,00 Hp
[8] 1,10 kW - 1,50 Hp
[9] 1,50 kW - 2,00 Hp
[10] 2,20 kW - 3,00 Hp
[11] 3,00 kW - 4,00 Hp
[12] 3,70 kW - 5,00 Hp
[13] 4,00 kW - 5,40 Hp
[14] 5,50 kW - 7,50 Hp
[15] 7,50 kW - 10,0 Hp
[16] 11,00 kW - 15,00 Hp
[17] 15,00 kW - 20 Hp
[18] 18,5 kW - 25 Hp
[19] 22 kW - 30 Hp
44 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

Parâmetros Guia de Programação
1-20 Potência do Motor
Insira a potência do motor nominal em kW/hp de acordo com os
dados na dados da plaqueta de identicação do motor. O valor
padrão corresponde à saída nominal efetiva da unidade.
Este parâmetro não pode ser ajustado enquanto o motor estiver
em funcionamento.
Option: Funcão:
[20] 30 kW - 40 Hp
1-22 Tensão do Motor
Range: Funcão:
Size
related*
[50 - 1000V]Insira a tensão do motor nominal de
acordo com os dados da plaqueta de
identicação do motor. O valor padrão
corresponde à saída nominal efetiva da
unidade.
1-23 Freqüência do Motor
Range: Funcão:
Size
related*
[20 -
AVISO!
400
Este parâmetro não pode ser ajustado
Hz]
enquanto o motor estiver em funcionamento.
Selecione o valor da frequência do motor nos
dados da plaqueta de identicação do motor.
Para operação em 87 Hz com motores de
230/400 V, dena os dados da plaqueta de
identicação para 230 V/50 Hz. Adapte o
parâmetro 4-14 Lim. Superior da Veloc do Motor
[Hz] e o parâmetro 3-03 Referência Máxima para
a aplicação de 87 Hz.
1-24 Corrente do Motor
Range: Funcão:
Size
related*
[ 0.01 -
10000.00 A]
AVISO!
Este parâmetro não pode ser
ajustado enquanto o motor
estiver em funcionamento.
Insira o valor da corrente nominal do
motor nos dados da plaqueta de
identicação do motor. Esses dados
são usados para calcular o torque do
motor, a proteção térmica do motor
etc.
1-26 Torque nominal do Motor
Range: Funcão:
Size
related*
[0.1 10000
Nm]
AVISO!
Alterar este parâmetro afeta as
congurações de outros
parâmetros
Este parâmetro está disponível somente
quando parâmetro 1-10 Construção do
Motor estiver programado para opcionais
que ativam o modo motor permanente.
1-29 Adaptação Automática do Motor (AMA)
Option: Funcão:
AVISO!
Este parâmetro não pode ser ajustado
enquanto o motor estiver em funcionamento.
A função AMA otimiza o desempenho
dinâmico do motor ao otimizar automaticamente os parâmetros avançados do motor
parâmetro 1-30 Resistência do Estator (Rs) a
parâmetro 1-35 Reatância Principal (Xh)
enquanto o motor estiver parado.
[0]*O
(Desligado)
[1] Ativar AMA
completa
Sem função
Se parâmetro 1-10 Motor Construction estiver
programado para [0] Assíncrono, executa a
AMA de parâmetro 1-30 Stator Resistance (Rs),
parâmetro 1-33 Stator Leakage Reactance (X1)
e parâmetro 1-35 Main Reactance (Xh). Se
parâmetro 1-10 Motor Construction estiver
programado para opcionais que ativam o
motor PM, executa a AMA de
parâmetro 1-30 Stator Resistance (Rs) e
parâmetro 1-35 Main Reactance (Xh).
AVISO!
O terminal 27 Entrada Digital
(parâmetro 5-12 Terminal 27, Entrada
Digital) tem[2] parada por inércia
inversa como a conguração padrão.
Isso signica que AMA não pode ser
executada se não houver 24 V no
terminal 27.
4 4
1-25 Velocidade nominal do motor
Range: Funcão:
Size
related*
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 45
[50 - 60000
RPM]
Digite o valor da velocidade nominal
do motor dos dados da plaqueta de
identicação do motor. Os dados são
usados para calcular as compensações do motor automáticas.
[2] Ativar AMA
reduzida
Executa a AMA reduzida da resistência do
estator Rs, somente no sistema. Selecione esta
opção se for usado um ltro LC, entre o
conversor de frequência e o motor.

Parâmetros
VLT® DriveMotor FCP 106/FCM 106
AVISO!
Quando parâmetro 1-10 Construção do Motor estiver
programado para opcionais que ativam o modo motor
permanente, o único opcional disponível é [1] Ativar AMA
Completa.
Ative a função AMA pressionando [Hand On] após
selecionar [1] Ativar AMA Completa ou [2] Ativar AMA
44
Reduzida. Após uma sequência normal, o visor indica:
Pressione [OK] para encerrar a AMA. Após pressionar [OK], o
conversor de frequência está pronto para operação.
AVISO!
Para obter a melhor adaptação possível do
•
conversor de frequência, recomenda-se executar
a AMA quando o motor estiver frio.
A AMA não pode ser executada com o motor
•
em funcionamento.
A AMA não pode ser executada em um motor
•
com valor nominal da potência maior que o
conversor de frequência, por exemplo, quando
um motor de 5,5 kW (7,5 hp) estiver conectado
a um conversor de frequência de 4 kW (5 hp).
AVISO!
Evite gerar um torque externo durante a AMA.
1-33 Reatância Parasita do Estator (X1)
Range: Funcão:
Size related* [ 0.0 - 999.9 Ohm] Programe a reatância de fuga
do estator do motor
1-35 Reatância Principal (Xh)
Range: Funcão:
Size
related*
1-37 Indutância do eixo-d (Ld)
Range: Funcão:
Size
related*
[ 0.0 -
999.9
Ohm]
[ 0 1000
mH]
Programe a reatância principal do motor
usando um dos métodos seguintes:
Execute uma AMA quando o motor
•
estiver frio. O conversor de
frequência mede o valor do motor.
Insira o valor Xh manualmente. O
•
valor pode ser obtido com o
fornecedor do motor.
Utilize a conguração padrão Xh. O
•
conversor de frequência estabelece
a conguração com base nos dados
da plaqueta de identicação do
motor.
AVISO!
Este parâmetro está ativo somente
quando parâmetro 1-10 Construção
do Motor estiver programado para
[1] PM, SPM não saliente.
AVISO!
Se uma das programações no grupo do parâmetro 1-2*
Dados do Motor for alterada, os parâmetros do motor
avançados, parâmetro 1-30 Resistência do Estator (Rs) a
parâmetro 1-39 Pólos do Motor, retornam para a
conguração padrão.
AVISO!
Execute AMA completa somente sem ltro e a AMA
reduzida com ltro.
Para motor assíncrono, os valores de resistência do estator
e de indutância do eixo-d são, normalmente, descritos nas
especicações técnicas como entre a linha e o comum
(startpoint). Para motores PM, são descritos tipicamente em
especicações técnicas como entre linha-linha. Motores PM
geralmente são construídos para conexão em estrela.
Insira o valor da indutância do eixo-d.
Obtenha o valor na folha de dados do
motor PM.
1-30 Resistência do Estator (Rs)
Range: Funcão:
Size
related*
46 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228
[ 0.0 -
99.99 Ohm]
AVISO!
Este parâmetro não pode ser
ajustado enquanto o motor
estiver em funcionamento.
Programar o valor da resistência do
estator. Insira o valor a partir de uma
folha de dados do motor ou execute
uma AMA em um motor frio.

Line to common (starpoint)
Line to line values
Rs and Ld
Rs and Ld
130BC008.11
Permanent magnet motors
130BC009.10
Line to Line Back
Emf in RMS Value
at 1000 rpm
Speed (mech)
Parâmetros Guia de Programação
Parâmetro 1-30 Resistênci
a do Estator (Rs)
(linha para comum).
Parâmetro 1-37 Indutânci
a do eixo-d (Ld)
(linha para comum).
Parâmetro 1-40 Força
Contra Eletromotriz em
1000RPM
RMS (valor linha para
linha).
Tabela 4.3 Parâmetros relacionados a motores PM
Este parâmetro fornece a resistência
do enrolamento do estator (Rs)
semelhante à resistência do estator de
motor assíncrono. A resistência do
estator é denida para medição de
linha para comum. Isso signica
dados linha-linha, em que a
resistência do estator é medida entre
quaisquer 2 linhas, dividido por 2.
Este parâmetro fornece a indutância
direta do eixo do motor PM. A
indutância do eixo-d é denida para
medição fase para comum. Isso
signica dados linha-linha, em que a
resistência do estator é medida entre
quaisquer 2 linhas, dividido por 2.
Este parâmetro fornece Força Contra
Eletro Motriz no terminal do estator
do motor PM especicamente à
velocidade mecânica de 1000 rpm. É
denido entre linha para linha e
expresso em Valor RMS.
AVISO!
Os fabricantes de motores fornecem valores para a
resistência do estator (parâmetro 1-30 Resistência do
Estator (Rs)) e a indutância do eixo-d
(parâmetro 1-37 Indutância do eixo-d (Ld)) nas especi-
cações técnicas como entre linha e comum (startpoint)
ou linha entre linha. Não há padrão geral. Os diferentes
setups da resistência do enrolamento do estator e da
indução são mostrados em Ilustração 4.2. Os conversor
de frequência Danfoss sempre exigem o valor linha para
comum. A Força Contra Eletro Motriz de um motor PM é
denida como FEM Força Eletro Motriz induzida
desenvolvida entre quaisquer duas fases do enrolamento
do estator do motor em rotação livre. Os conversores de
frequência Danfoss sempre exigem o valor linha para
linha RMS medido a 1.000 rpm, velocidade de rotação
mecânica. Isso é mostrado em Ilustração 4.3).
Ilustração 4.3 Denições de Parâmetros da Máquina da Força
Contra Eletro Motriz de motores PM
1-38 Indutância do eixo-q (Lq)
Range: Funcão:
Size
related*
[ 0.000 1000 mH]
Programe o valor da indutância do
eixo q. Obter o valor na folha de
dados do motor de ímã permanente.
O valor não pode ser alterado
enquanto o motor estiver em funcionamento.
1-39 Pólos do Motor
Range: Funcão:
Size
related*
[2 100 ]
AVISO!
Este parâmetro não pode ser
ajustado enquanto o motor estiver
em funcionamento.
Insira o número de polos do motor.
O valor de polos do motor é sempre par,
pois refere-se ao número total de polos
do motor e não aos pares de polos.
1-40 Força Contra Eletromotriz em 1000RPM
Range: Funcão:
Size related* [10 - 9000 V] Tensão de Força Contra Eletro
Motriz do RMS linha a linha a 1000
RPM.
1-44 d-axis Inductance Sat. (LdSat)
Range: Funcão:
Size
related*
[0 1000
mH]
Este parâmetro corresponde à saturação de
indutância de Ld. idealmente, este
parâmetro tem o mesmo valor que
parâmetro 1-37 Indutância do eixo-d (Ld). Se
o fornecedor do motor fornecer uma curva
de indução, insira o valor de indução a
200% do valor nominal.
4 4
Ilustração 4.2 Setups do enrolamento do estator
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 47

Magn. current
130BB780.10
Hz
Par.1-50
90%
Par.1-52
Parâmetros
VLT® DriveMotor FCP 106/FCM 106
1-45 q-axis Inductance Sat. (LqSat)
Range: Funcão:
Size
related*
44
[0 1000
mH]
Este parâmetro corresponde à saturação de
indutância de Lq. idealmente, este
parâmetro tem o mesmo valor que
parâmetro 1-38 Indutância do eixo-q (Lq). Se
o fornecedor do motor fornecer uma curva
de indução, insira o valor de indução a
200% do valor nominal.
1-50 Magnetização do Motor a 0 Hz
Range: Funcão:
100%* [0 -
Utilize esse parâmetro juntamente com
300 %
parâmetro 1-52 Veloc Mín de Magnetiz. Norm. [Hz]
]
para obter uma carga térmica diferente no motor
funcionando em baixa velocidade.
Insira um valor que seja uma porcentagem da
corrente de magnetização nominal. Se a
conguração for muito baixa, o torque no eixo do
motor pode ser diminuído.
1-46 Ganho de Detecção de Posição
Range: Funcão:
100 %* [20 - 200 %] Ajusta a amplitude do pulso de teste
durante a detecção de posição na
partida. Ajustar este parâmetro para
melhorar a medição da posição.
Ilustração 4.4 Magnetização do Motor
1-48 Current at Min Inductance for d-axis
Range: Funcão:
100%* [ 20 -
Este parâmetro especica a curva de saturação
200 %
dos valores de indutância d. De 20%–100% deste
]
parâmetro, as indutâncias são linearmente
aproximadas devido a parâmetro 1-37 Indutância
do eixo-d (Ld), parâmetro 1-38 Indutância do eixo-q
(Lq), parâmetro 1-44 d-axis Inductance Sat. (LdSat)
e parâmetro 1-45 q-axis Inductance Sat. (LqSat).
Abaixo e acima são especicados pelos
parâmetros correspondentes. Os parâmetros são
relacionados às compensações de carga da
plaqueta de identicação do motor, ao tipo de
carga da aplicação e à função de frenagem
eletrônica para parada rápida/hold do motor.
1-49 Corrente na Indutância Mín.
1-52 Veloc Mín de Magnetiz. Norm. [Hz]
Range: Funcão:
1 Hz* [0.1 -
10.0 Hz]
Programe a frequência necessária para a
corrente de magnetização normal.
Utilizar este parâmetro junto com
parâmetro 1-50 Magnetização do Motor a 0 Hz.
Consulte Ilustração 4.4.
1-55 Características U/f - U
Range: Funcão:
Size
related*
[0 1000 V]
Insira a tensão em cada ponto de
frequência para formar uma característica
U/f que corresponda ao motor. Os pontos
de frequência são denidos em
parâmetro 1-56 Características U/f - F.
Range: Funcão:
100%* [ 20
200
%]
Este parâmetro especica a curva de saturação dos
valores de indutância q. De 20%–100% deste
parâmetro, as indutâncias são linearmente
aproximadas devido a parâmetro 1-37 Indutância
do eixo-d (Ld), parâmetro 1-38 Indutância do eixo-q
(Lq), parâmetro 1-44 d-axis Inductance Sat. (LdSat) e
parâmetro 1-45 q-axis Inductance Sat. (LqSat).
Abaixo e acima são especicados pelos parâmetros
correspondentes. Os parâmetros são relacionados
às compensações de carga da plaqueta de identicação do motor, ao tipo de carga da aplicação e
à função de frenagem eletrônica para parada
rápida/hold do motor.
1-56 Características U/f - F
Range: Funcão:
Size
related*
[0 -
400.0
Hz]
Insira os pontos de frequência para formar
uma característica U/f que corresponda ao
motor. A tensão em cada ponto é denida
em parâmetro 1-55 Características U/f - U.
Crie uma característica U/f com base em
seis tensões e frequências deníveis,
consulte Ilustração 4.5.
Simplique as características U/f
interpolando 2 ou mais pontos (tensões e
frequências). Programe os pontos em
valores iguais.
48 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

Parâmetros Guia de Programação
1-56 Características U/f - F
Range: Funcão:
Ilustração 4.5 Característica U/f
1-60 Compensação de Carga em Baix Velocid
Range: Funcão:
100 %* [0 -
300 %]
Insira o valor de compensação de tensão da
carga em baixa velocidade. Esse parâmetro é
utilizado para otimizar o desempenho de
carga em baixa velocidade. Esse parâmetro
está ativo somente se
parâmetro 1-10 Construção do Motor = [0]
Assíncrono.
1-61 Compensação de Carga em Alta Velocid
Range: Funcão:
100 %* [0 -
300 %]
Insira o valor de compensação de tensão da
carga em alta velocidade em porcentagem.
Esse parâmetro é utilizado para otimizar o
desempenho da carga em alta velocidade. Esse
parâmetro está ativo somente se
parâmetro 1-10 Construção do Motor = [0]
Assíncrono.
1-62 Compensação de Escorregamento
Range: Funcão:
Size
related*
[-400 400 %]
Insira o valor % da compensação de
escorregamento para compensar as
tolerâncias no valor de n
compensação de escorregamento é
calculada automaticamente com base
na velocidade nominal do motor n
M,N
1-63 Const d Tempo d Compens Escorregam
Range: Funcão:
0.1 s* [0.05 - 5 s] Inserir a velocidade de reação da
compensação de escorregamento. Um valor
alto redunda em uma reação lenta e um
valor baixo em uma reação rápida. Se
surgirem problemas de ressonância de baixa
frequência, use uma conguração de tempo
mais longo.
. A
M,N
1-64 Amortecimento da Ressonância
Range: Funcão:
100 %* [0 -
500 %]
Insira o valor de amortecimento de
ressonância. Programe o parâmetro 1–64
Resonance Dampening e o parâmetro 1–65
Resonance Dampening Time Constant para
ajudar a eliminar problemas de ressonância
em alta frequência. Para reduzir oscilação de
ressonância, o valor do parâmetro 1–64
Resonance Dampening deve ser aumentado.
4 4
1-65 Const Tempo Amortec Ressonânc
Range: Funcão:
0.005 s* [0.001 -
0.050 s]
Programe o parâmetro 1–64 Resonance
Dampening e o parâmetro 1–65 Resonance
Dampening Time Constant para ajudar a
eliminar problemas de ressonância em
alta frequência. Insira a constante de
tempo que proporciona o melhor amortecimento.
1-66 Corrente Mín. em Baixa Velocidade
Range: Funcão:
50 %* [0 - 120 %] Aplica somente para motores PM.
Aumentando a corrente mínima melhora o
torque do motor em velocidade baixa,
porém, reduz também a eciência.
1-70 Modo de Partida PM
Este parâmetro é válido para versão de software 2.80 e superior.
Use este parâmetro para selecionar o modo de partida do motor
PM, que é inicializar o núcleo de controle VVC+ para motores PM
anteriormente em funcionamento livre. Este parâmetro está ativo
para motores PM em modo VVC+ somente se o motor estiver
parado (ou funcionando em baixa velocidade).
Option: Funcão:
[0] * Detecção de
Rotor
.
[1] Estacionamento A função de estacionamento aplica
A função de detecção de rotor estima o
ângulo elétrico do rotor e usa o ângulo
como ponto de partida. Este opcional é
a seleção padrão para aplicações de
automação do conversor de frequência.
Se a função ying start detectar que o
motor está parado ou funcionando em
baixa velocidade, o conversor de
frequência pode detectar a posição do
rotor (o ângulo). Em seguida, o
conversor de frequência dá partida no
motor desse ângulo.
corrente CC através do enrolamento do
estator e gira o rotor para a posição
elétrica zero. Esta função é normalmente
selecionada para aplicações de HVAC. Se
a função ying start detectar que o
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 49

Parâmetros
VLT® DriveMotor FCP 106/FCM 106
1-70 Modo de Partida PM
Este parâmetro é válido para versão de software 2.80 e superior.
Use este parâmetro para selecionar o modo de partida do motor
PM, que é inicializar o núcleo de controle VVC+ para motores PM
anteriormente em funcionamento livre. Este parâmetro está ativo
para motores PM em modo VVC+ somente se o motor estiver
parado (ou funcionando em baixa velocidade).
Option: Funcão:
44
motor está parado ou funcionando em
baixa velocidade, o conversor de
frequência envia uma corrente CC para
estacionar o motor em um ângulo. Em
seguida, o conversor de frequência dá
partida no motor desse ângulo.
1-71 Atraso da Partida
Range: Funcão:
0 s* [0 - 10s]Este parâmetro ativa um atraso no tempo da
partida. O conversor de frequência inicia com a
função partida selecionada em
parâmetro 1-72 Função de Partida. Programe o
tempo de atraso da partida até que a aceleração
começar.
1-73 Flying Start
Option: Funcão:
parâmetro 1-10 Construção do Motor = [1] PM
não saliente.
Parâmetros relacionados importantes:
Parâmetro 2-01 Corrente de Freio CC
•
Parâmetro 2-06 Corrente de Estacio-
•
namento
Parâmetro 2-07 Tempo de Estacio-
•
namento
A função ying start usada para motores PM é baseada em
uma estimativa de velocidade inicial. A velocidade sempre
será estimada como a primeira coisa após um sinal de
partida ativo ser dado.
Se a estimativa de velocidade for menor que 2,5%-5% da
velocidade nominal, a função de estacionamento é
engatada (ver parâmetro 2-06 Corrente de Estacionamento e
parâmetro 2-07 Tempo de Estacionamento). Caso contrário, o
conversor de frequência capturará o motor naquela
velocidade e retomará a operação normal.
1-72 Função de Partida
Option: Funcão:
[0] Retnç CC/
temp atras
[2] * ParadInérc/
tempAtra
O motor é energizado com
parâmetro 2-00 Corrente de Hold CC/
Preaquecimento no tempo de atraso
durante a partida.
O conversor de frequência faz parada por
inércia no tempo de atraso durante a
partida (conversor de frequência desligado).
1-73 Flying Start
Option: Funcão:
Esta função permite assumir o controle de um
motor que esteja girando livremente, devido a
uma queda da rede elétrica.
Flying start procura somente no sentido horário.
Em caso de falha, um freio CC é ativado. Se
Motor PM estiver selecionado, o Estacionamento será realizado se a velocidade for
menor que 2,5%–5%, no tempo denido em
parâmetro 2-07 Tempo de Estacionamento.
[0]*Desativado Selecione [0] Desabilitado se essa função não
for necessária.
[2] Sempre
Ativo
Selecione [2] Sempre ativado para habilitar o
conversor de frequência para "capturar" e
controlar um motor em rotação livre.
O parâmetro está sempre programado para [2]
Sempre ativado quando
Limitações de corrente do princípio ying start usado em
motores PM:
A faixa de velocidade é até 100% da velocidade
•
nominal da velocidade de enfraquecimento do
campo (o qual for menor).
Em aplicações de alta inércia (por exemplo, onde
•
a inércia da carga for mais de 30 vezes superior à
inércia do motor).
1-80 Função na Parada
Option: Funcão:
Selecione esta função após um comando de
parada ou após a velocidade ser desacelerada até a programada em
parâmetro 1-82 Veloc. Mín p/ Funcionar na
Parada [Hz].
[0] * Parada por
inércia
[1] Hold de CC/
Preaquecimento do
Motor
Deixa o motor em modo livre.
Energiza o motor com uma corrente de hold
CC (consulte parâmetro 2-00 Corrente de Hold
CC/Preaquecimento).
1-82 Veloc. Mín p/ Funcionar na Parada [Hz]
Range: Funcão:
0 Hz* [0 - 20 Hz] Programar a frequência de saída que ativa o
parâmetro 1-80 Função na Parada.
50 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

Parâmetros Guia de Programação
1-88 AC Brake Gain
Range: Funcão:
1.4* [1.0 -
2.0 ]
Programe a capacidade da potência de frenagem
CA (programe o tempo de desaceleração quando a
inércia for constante). Se a tensão do barramento
CC não for mais alta que o valor de advertência da
tensão do barramento CC, o torque do gerador
pode ser ajustado com esta função.
Quanto maior for o ganho do freio CA, maior será
a capacidade do freio. Se o ganho do freio for
igual a 1,0, não haverá capacidade de freio CA
AVISO!
Torque de gerador contínuo pode resultar e,
superaquecimento do motor, devido a alta
corrente do motor. Proteger o motor contra
superaquecimento em
parâmetro 2-16 Frenagem CA, Corr Máx.
1-90 Proteção Térmica do Motor
Option: Funcão:
Usando ETR (relé térmico eletrônico), a
temperatura do motor é calculada com
base na frequência, na corrente e no
tempo. Se não houver um termistor,
Danfoss recomenda a utilização da função
ETR. A funcionalidade é a mesma para
motores assíncronos e motores PM.
1-90 Proteção Térmica do Motor
Option: Funcão:
nominal do motor. Como alternativa, inicia
o cálculo térmico do motor quando a
corrente do motor for menor que 110% da
corrente nominal do motor e o limite de
corrente for acionado.
4 4
AVISO!
O cálculo do ETR é baseado nos
dados do motor do grupo do
parâmetro 1-2* Dados do Motor.
[0] Sem proteção desabilita o monitoramento da
temperatura.
[1] Advrtnc d
Termistor
[2] Desrm por
Termistor
[3] Advertência do
ETR 1
[4] Desarme por
ETR 1
[22] ETR Trip -
Extended
Detection
Um termistor emite uma advertência se o
limite superior da faixa de temperatura do
motor for excedida.
Se o limite superior da faixa de
temperatura do motor for excedida, um
termistor emite um alarme e desarma o
conversor de frequência.
Se o limite superior calculado da faixa de
temperatura do motor for excedido, uma
advertência é emitida.
Se 90% o limite superior calculado da faixa
de temperatura do motor for excedido, um
alarme é emitido e o conversor de
frequência desarma.
Inicia o cálculo térmico do motor com base
na carga real e no tempo e também na
frequência do motor quando a corrente do
motor estiver acima de 110% da corrente
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 51

Parâmetros
VLT® DriveMotor FCP 106/FCM 106
4.3 Main Menu (Menu Principal) - Freios - Grupo 2
2-00 Corrente de Hold CC/Preaquecimento
Range: Funcão:
50 %* [0 -
160 %]
AVISO!
O valor máximo depende da corrente
nominal do motor.
Evite corrente 100% durante muito tempo.
44
pode danicar o motor devido a superaquecimento.
Congure a corrente de holding como uma
porcentagem da corrente nominal do motor I
em parâmetro 1-24 Corrente do Motor.
Parâmetro 2-00 Corrente de Hold CC/Preaquecimento mantém a função do motor (torque de
holding) ou pré-aquece o motor. Este parâmetro
cará ativo se retenção CC estiver selecionada em
parâmetro 1-72 Função de Partida [0] ou
parâmetro 1-80 Função na Parada [1].
M,N
2-01 Corrente de Freio CC
Range: Funcão:
50%* [0 -
AVISO!
150 %
O valor máximo depende da corrente
]
nominal do motor. Evite corrente 100%
durante muito tempo. O motor pode ser
danicado.
2-06 Corrente de Estacionamento
Range: Funcão:
100%* [0 -
Programe a corrente de acordo com a
150 %]
porcentagem da corrente nominal do motor,
parâmetro 1-24 Corrente do Motor. Ativo com
parâmetro 1-73 Flying Start. A corrente de
frenagem está ativa durante o intervalo de tempo
programado em parâmetro 2-07 Tempo de Estacio-
namento.
AVISO!
O Parâmetro 2-06 Corrente de Estacionamento é ativo somente se construção do
Motor PM estiver selecionado em
parâmetro 1-10 Construção do Motor
2-07 Tempo de Estacionamento
Range: Funcão:
3 s* [0.1 -
60 s]
Congure a duração do tempo de corrente de
estacionamento denida em
parâmetro 2-06 Corrente de Estacionamento. Ativo
em conexão com parâmetro 1-73 Flying Star t.
AVISO!
Parâmetro 2-07 Tempo de Estacionamento
está ativo somente quando [1] PM, SPM
não saliente estiver selecionado em
parâmetro 1-10 Construção do Motor.
Congure a corrente como % da corrente nominal
do motor, parâmetro 1-24 Corrente do Motor.
Corrente de freio CC é aplicada no comando de
parada quando a velocidade estiver abaixo do
limite programado em parâmetro 2-04 Veloc.Acion.d
FreioCC [Hz]. quando a função inversão da
frenagem CC estiver ativa (parâmetros 5-1*
Entradas digitais são programados para [5] Inversão
da frenagem CC, ou através da porta serial). Ver
parâmetro 2-02 Tempo de Frenagem CC para saber a
duração.
4.3.1 2-1* Funções do Freio
Grupo do parâmetro para selecionar os parâmetros de
frenagem dinâmica.
2-10 Função de Frenagem
Option: Funcão:
[0] * O (Desligado) O resistor do freio não está ativo.
[2] Freio CA O freio CA está ativo.
2-02 Tempo de Frenagem CC
Range: Funcão:
10 s* [0 - 60 s] Programe a duração da corrente de freio CC
programada em parâmetro 2-01 Corrente de
Freio CC, assim que ativada.
2-16 Frenagem CA, Corr Máx
Range: Funcão:
100 %* [0 - 160 %] Para evitar superaquecimento dos enrola-
mentos do motor, insira a corrente máxima
permitida ao usar o Freio CA.
2-04 Veloc.Acion.d FreioCC [Hz]
Range: Funcão:
0 Hz* [ 0 - 400
Hz]
Este parâmetro é para congurar a velocidade
de ativação do freio CC na qual
parâmetro 2-01 Corrente de Freio CC deve estar
ativa, com um comando de parada.
52 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

Parâmetros Guia de Programação
2-17 Controle de Sobretensão
Option: Funcão:
Ative o OVC durante a desaceleração para
reduzir o risco de o conversor de
frequência desarmar devido a sobretensão
no barramento CC causada pela energia
generativa da carga.
[0] Desativado Não é necessário nenhum OVC.
[1] Ativado (não
em stop)
[2] * Ativado Ativa o OVC
Ativa OVC quando o conversor de
frequência não estiver no estado de
parada.
AVISO!
O tempo de rampa é ajustado
automaticamente para evitar o
desarme do conversor de frequência.
4 4
4.3.2 2-2* Freio Mecânico
Parâmetros para programar a velocidade e a corrente do
freio mecânico.
2-20 Corrente de Liberação do Freio
Range: Funcão:
0 A* [0 - 100 A] Programe a corrente do motor para liberação
do freio mecânico, quando uma condição de
partida estiver presente. O limite superior é
especicado no parâmetro 16–37 Inv. Max.
Current.
2-22 Velocidade de Ativação do Freio [Hz]
Range: Funcão:
0 Hz* [0 - 400 Hz] Programar a frequência do motor de
ativação do freio mecânico, quando uma
condição de parada estiver presente.
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 53

P3-03
P3-02
0 50 100%
P3-10
130BB036.10
Parâmetros
VLT® DriveMotor FCP 106/FCM 106
4.4 Main Menu (Menu Principal) - Referências/Rampas - Grupo 3
4.4.1 3-0* Limites de Referência
3-10 Referência Predenida
Range: Funcão:
Parâmetros para congurar a unidade da referência, limites
e faixas.
Consulte também o grupo do parâmetro 20-0* Feedback
para obter informações sobre congurações em malha
44
fechada.
3-02 Referência Mínima
Range: Funcão:
0* [-4999–4999] A referência mínima é o menor valor obtido
pela soma de todas as referências.
3-03 Referência Máxima
Range: Funcão:
Size
related*
[ -4999.0 - 4999
ReferenceFeedbackUnit]
A referência máxima é o maior
valor obtido pela soma de todas
as referências A unidade da
referência máxima corresponde à
escolha da conguração em
parâmetro 1-00 Modo
Conguração.
4.4.2 3-1* Referências
0 %* [-100 -
100 %]
Insira até oito referências predenidas
diferentes (0-7) neste parâmetro usando a
programação de matriz. Selecione referência
predenida bit 0/1/2 [16], [17] ou [18] para as
respectivas entradas digitais no grupo do
parâmetro 5-1* Entradas Digitais, para
selecionar referências dedicadas.
3-11 Velocidade de Jog [Hz]
Range: Funcão:
5 Hz* [ 0 -
400.0 Hz]
A velocidade de jog é uma velocidade de
saída xa na qual o conversor de frequência
trabalha quando a função de jog estiver ativa.
Consulte também a parâmetro 3-80 Tempo de
Rampa do Jog.
3-12 Valor de Catch Up/Slow Down
Range: Funcão:
0 %* [0 -
100 %]
Insira um valor porcentual (relativo) a ser
adicionado ou subtraído da referência real para
catch-up ou redução de velocidade. Se catch-up
for selecionado através de uma das entradas
digitais (parâmetro 5-10 Terminal 18 Entrada Digital
ao parâmetro 5-15 Terminal 33 Entrada Digital), o
valor porcentual (relativo) será adicionado à
referência total. Se redução de velocidade for
selecionado através de uma das entradas digitais
(parâmetro 5-10 Terminal 18 Entrada Digital ao
parâmetro 5-15 Terminal 33 Entrada Digital), o valor
porcentual (relativo) será subtraído da referência
total. A funcionalidade estendida pode ser obtida
com a função DigiPot. Consulte o grupo do
parâmetro 3-9* Potenciômetro Digital.
Ilustração 4.6 Referências
54 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228
3-14 Referência Relativa Pré-denida
Range: Funcão:
0 %* [-100
100 %]
Denir o valor xo em % a ser adicionado ao valor
variável, denido no parâmetro 3-18 Fonte d
Referência Relativa Escalonada.
A soma dos valores xos e variáveis (denominada
Y em iIlustração 4.7) é multiplicada pela referência
real (denominada X em Ilustração 4.7). Este
produto é adicionado à referência real X + X ×
Ilustração 4.7 Referência Relativa Predenida
100
Y

t
acc
t
dec
130BB801.10
P 3-*2
Ramp (X)
Down
Time (Dec)
P 4-14
High-limit
RPM
Reference
P 1-23
Motor
frequency
P 4-12
Low limit
Time
P 3-*1
Ramp (X)Up
Time (Acc)
Parâmetros Guia de Programação
3-15 Fonte da Referência 1
Option: Funcão:
Selecione a entrada a ser usada para o
primeiro sinal de referência.
Parâmetro 3-15 Fonte da Referência 1,
parâmetro 3-16 Fonte da Referência 2 e
parâmetro 3-17 Fonte da Referência 3
denem até três sinais de referência
diferentes. A soma destes sinais de
referência dene a referência real.
[0] Sem função
[1] * Entrada
analógica 53
[2] Entrada
analógica 54
[7] Entr Pulso 29
[11] Refernc do Bus
Local
3-17 Fonte da Referência 3
Option: Funcão:
[11] * Refernc do Bus
Local
4.4.3 3-4* Rampa 1
Congure os parâmetros de tempo de rampa para cada
uma das duas rampas (grupo do parâmetro 3-4* Rampa 1 e
grupo do parâmetro 3-5* Rampa 2). O tempo de rampa é
predenido para o valor mínimo de 10 ms para todas as
potências.
3-16 Fonte da Referência 2
Option: Funcão:
Selecione a entrada a ser usada para o
segundo sinal de referência.
Parâmetro 3-15 Fonte da Referência 1,
parâmetro 3-16 Fonte da Referência 2 e
parâmetro 3-17 Fonte da Referência 3
denem até três sinais de referência
diferentes. A soma destes sinais de
referência dene a referência real.
Consulte também a parâmetro 1-93 Fonte
do Termistor.
[0] Sem função
[1] Entrada
analógica 53
[2] * Entrada
analógica 54
[7] Entr Pulso 29
[11] Refernc do Bus
Local
3-17 Fonte da Referência 3
Option: Funcão:
Selecione a entrada de referência a ser
usada para o terceiro sinal de referência.
Parâmetro 3-15 Fonte da Referência 1,
parâmetro 3-16 Fonte da Referência 2 e
parâmetro 3-17 Fonte da Referência 3
denem até três sinais de referência
[0] Sem função
[1] Entrada
analógica 53
[2] Entrada
analógica 54
[7] Entr Pulso 29
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 55
diferentes. A soma destes sinais de
referência dene a referência real.
Ilustração 4.8 Rampas
3-41 Tempo de Aceleração da Rampa 1
Range: Funcão:
Size
related*
[0.05
- 3600
s]
Insira o tempo de aceleração de 0 Hz a
parâmetro 1-23 Freqüência do Motor se motor
assíncrono estiver selecionado. Insira o
tempo de aceleração de 0 RPM até
parâmetro 1-25 Velocidade nominal do motor
se Motor PM estiver selecionado. Escolha um
tempo de aceleração de tal modo que a
corrente de saída não exceda o limite de
corrente do parâmetro 4-18 Limite de Corrente
durante a rampa. Ver o tempo de desaceleração noparâmetro 3-42 Tempo de
Desaceleração da Rampa 1.
3-42 Tempo de Desaceleração da Rampa 1
Range: Funcão:
Size
related*
[0.05 3600 s]
Se o motor assíncrono estiver selecionado,
insira o tempo de desaceleração de
parâmetro 1-23 Freqüência do Motor a 0 Hz.
Se o motor PM estiver selecionado, insira o
tempo de desaceleração de
parâmetro 1-25 Velocidade nominal do motor
a 0 RPM. Selecione um tempo de desaceleração para evitar desarme por
sobretensão no barramento CC.
4 4

130BA961.10
Velocidade
Velocidade
do Motor
Normal
Velocidade
do Motor
Alto
Baixo
Tempo
Aceleração
Parâmetros
VLT® DriveMotor FCP 106/FCM 106
4.4.4 3-5* Rampa 2
3-81 Tempo de Rampa da Parada Rápida
Range: Funcão:
Este grupo do parâmetro congura os parâmetros da
rampa 2.
3-51 Tempo de Aceleração da Rampa 2
Range: Funcão:
Size
related*
44
[0.05 3600 s]
Se o motor assíncrono estiver selecionado,
insira o tempo de aceleração de 0 Hz a
parâmetro 1-23 Freqüência do Motor. Se o
motor PM estiver selecionado, insira o
tempo de aceleração de 0 RPM a
parâmetro 1-25 Velocidade nominal do motor.
Escolha um tempo de aceleração de modo
que a corrente de saída não exceda o limite
de corrente de parâmetro 4-18 Limite de
Corrente durante a aceleração.
3-52 Tempo de Desaceleração da Rampa 2
Range: Funcão:
Size
related*
[0.05 3600 s]
Insira o tempo de desaceleração de
parâmetro 1-25 Velocidade nominal do
motor a 0 RPM. Escolha um tempo de
desaceleração de modo que a corrente de
saída não exceda o limite de corrente em
parâmetro 4-18 Limite de Corrente durante
a desaceleração.
4.4.5 3-8* Outras Rampas
3-80 Tempo de Rampa do Jog
Size
related*
[0.05 3600 s]
Insira o tempo de rampa da parada rápida
de parâmetro 1-23 Freqüência do Motor a 0
Hz. Durante a rampa não pode ocorrer
sobretensão no inversor e a corrente gerada
não pode exceder o limite em
parâmetro 4-18 Limite de Corrente. A parada
rápida é ativada via um sinal em uma
entrada digital selecionada ou via porta de
comunicação serial.
3-85 Check Valve Ramp Time
Range: Funcão:
0 s* [0 -
60 s]
Para proteger as válvulas de retenção esféricas em
uma situação de parada, a rampa da válvula de
retenção pode ser utilizada como uma taxa de
rampa de desaceleração. Programe a taxa de
rampa do parâmetro 4-11 Lim. Inferior da Veloc. do
Motor [RPM] ou do parâmetro 4-12 Lim. Inferior da
Veloc. do Motor [Hz] para a velocidade nal da
rampa da válvula de retenção programada em
parâmetro 3–86 Check Valve Ramp End Speed [RPM]
ou parâmetro 3–87 Check Valve Ramp End Speed
[HZ]. Quando parâmetro 3–85 Check Valve Ramp
Time for diferente de 0 s, o tempo de rampa da
válvula de retenção é efetuado e utilizado para
desacelerar a velocidade do limite inferior da
velocidade do motor até a velocidade nal da
válvula de retenção em parâmetro 3–86 Check Valve
Ramp End Speed [RPM] ou parâmetro 3–87 Check
Valve Ramp End Speed [HZ]. Consulte Ilustração 4.9.
Range: Funcão:
Size
related*
[0.05
- 3600
s]
Insira o tempo de rampa do jog, que é o
tempo de desaceleração/aceleração entre 0
Hz e parâmetro 1-23 Freqüência do Motor.
Garanta que a corrente de saída resultante,
necessária durante um determinado tempo
de rampa do jog, não exceda o limite de
corrente em parâmetro 4-18 Limite de Corrente.
O tempo de rampa do jog começa após a
ativação de um sinal de jog por meio do
painel de controle, uma entrada digital
selecionada ou da porta de comunicação
serial.
Ilustração 4.9 Rampa da Válvula de Retenção
3-87 Check Valve Ramp End Speed [HZ]
Range: Funcão:
Size related* [ 0 - 400
Hz]
56 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228
Programe a velocidade em [Hz] abaixo
do limite inferior da velocidade do
motor em que a rampa da válvula de
retenção não está mais ativa. Consulte
Ilustração 4.9.

Parâmetros Guia de Programação
4.5 Main Menu (Menu Principal) - Limites/Advertências - Grupo 4
4.5.1 4-1* Limites do Motor
Dena o limite de velocidade e de corrente do motor e a
reação do conversor de frequência quando os limites
forem excedidos.
4-10 Sentido de Rotação do Motor
Option: Funcão:
[0] Sentido
horário
[2] * Nos dois
sentidos
4-12 Lim. Inferior da Veloc. do Motor [Hz]
Range: Funcão:
0 Hz* [ 0 -
400.0 Hz]
4-14 Lim. Superior da Veloc do Motor [Hz]
Range: Funcão:
Size
related*
[ 0.1 -
400.0
Hz]
4-18 Limite de Corrente
Range: Funcão:
Size
related*
[0 300
%]
AVISO!
A programação do
parâmetro 4-10 Sentido de Rotação do
Motor afeta o parâmetro 1-73 Flying
Start.
Somente será permitida operação no
sentido horário.
É permitida operação tanto no sentido
horário quanto no anti-horário.
Insira o limite mínimo para a velocidade do
motor. O limite inferior da velocidade do
motor pode ser programado para corresponder à frequência de saída mínima do eixo
do motor. O limite inferior da velocidade não
deve exceder a conguração em
parâmetro 4-14 Lim. Superior da Veloc do Motor
[Hz].
Insira o limite máximo para a velocidade do
motor. Pode ser denida para corresponder
à velocidade máxima do motor
recomendada. O Limite limite superior da
velocidade do motor deve ultrapassar o
valor em parâmetro 4-12 Lim. Inferior da
Veloc. do Motor [Hz].
O limite superior da velocidade do motor
não pode ser programada mais alta que
parâmetro 4-19 Freqüência Máx. de Saída.
Inserir o limite de corrente para operação
como motor e como gerador (em porcentagem
da corrente nominal do motor). Se o valor for
superior à saída nominal máxima do conversor
de frequência, a corrente ainda está limitada à
corrente de saída máxima do conversor de
frequência. Se uma conguração nos
parâmetro 1-00 Modo Conguração ao
4-18 Limite de Corrente
Range: Funcão:
parâmetro 1-25 Velocidade nominal do motor for
alterada, o parâmetro 4-18 Limite de Corrente
não será automaticamente reinicializado com a
conguração padrão.
4-19 Freqüência Máx. de Saída
Range: Funcão:
Size
related*
[ 0 400
Hz]
Insira a frequência de saída máxima, que
dene o limite absoluto na frequência de
saída do conversor de frequência para
segurança melhorada em aplicações em que
se deve evitar excesso de velocidade
acidental. Este limite absoluto aplica-se as
todas as congurações e independe da
programação de parâmetro 1-00 Modo
Conguração.
4.5.2 4-4* Advertências Ajustáveis 2
4-40 Warning Freq. Low
Range: Funcão:
Size
related*
4-41 Warning Freq. High
Range: Funcão:
Size
related*
[ 0 -
Utilize este parâmetro para programar um
400
limite inferior para a faixa de frequência.
Hz]
Quando a velocidade do motor cair abaixo
desse limite, o display exibe VELOCIDADE
BAIXA. O bit de advertência 10 é programado
em parâmetro 16-94 Status Word Estendida. A
saída digital ou o relé de saída pode ser
congurado para indicar essa advertência. A
luz indicadora de advertência do LCP não
acende quando esse limite programado do
parâmetro é alcançado.
[ 0 -
Utilize este parâmetro para programar um
400
limite superior para a faixa de frequência.
Hz]
Quando a velocidade do motor exceder esse
limite, o display exibe VELOCIDADE ALTA. O bit
9 de advertência é programado em
parâmetro 16-94 Status Word Estendida. A saída
digital ou o relé de saída pode ser congurado
para indicar essa advertência. A luz indicadora
de advertência do LCP não acende quando
esse limite programado do parâmetro é
alcançado.
4 4
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 57

Parâmetros
VLT® DriveMotor FCP 106/FCM 106
4.5.3 4-5* Ajuste Advertências
4-56 Advert. de Feedb Baixo
Range: Funcão:
Denir os limites de advertência ajustáveis para corrente.
As advertências são mostradas no display, na saída
programada ou no eldbus.
4-50 Advertência de Corrente Baixa
Range: Funcão:
0 A* [ 0 - 194.0A]Insira o valor I
44
motor cair abaixo desse limite, é programado
um bit na status word. Esse valor também
pode ser programado para produzir um sinal
na saída digital ou na saída do relé.
. Quando a corrente do
LOW
4-51 Advertência de Corrente Alta
Range: Funcão:
Size
related*
[ 0.0 -
194.0 A]
Insira o valor I
do motor exceder esse limite, é
programado um bit na status word.
Esse valor também pode ser
programado para produzir um sinal na
saída digital ou na saída do relé.
. Quando a corrente
HIGH
4-54 Advert. de Refer Baixa
Range: Funcão:
-4999* [-4999 -
4999 ]
Insira o limite de referência inferior. Quando
a referência real cair abaixo desse limite, o
display exibe Ref
podem ser programadas para gerar um sinal
de status no terminal 27 ou 29 e na saída
do relé 01 ou 02.
. As saídas de sinal
LOW
4-55 Advert. Refer Alta
Range: Funcão:
4999* [-4999
- 4999 ]
Use este parâmetro para programar o limite
superior da faixa de referência.
Quando a referência real exceder este limite, o
display indica Referência Alta. O bit de
advertência 19 é programado em
parâmetro 16-94 Status Word Estendida. A saída
digital ou o relé de saída pode ser congurado
para indicar essa advertência. A luz indicadora
de advertência do LCP não acende quando esse
limite programado do parâmetro é alcançado.
-4999
ProcessCtrlUnit*
[-4999 - 4999
ProcessCtrlUnit]
Utilize este parâmetro para
programar um limite inferior
para a faixa de feedback.
Quando o feedback cair
abaixo desse limite, o display
exibe Feedback Baixo. O bit
de advertência 6 é
programado em
parâmetro 16-94 Status Word
Estendida. A saída digital ou o
relé de saída pode ser
congurado para indicar essa
advertência. A luz indicadora
de advertência do LCP não
acende quando esse limite
denido pelo parâmetro é
alcançado.
4-57 Advert. de Feedb Alto
Range: Funcão:
4999
ProcessCtrlUnit*
[-4999 - 4999
ProcessCtrlUnit]
Utilize este parâmetro para
programar um limite superior
para a faixa de feedback.
Quando o feedback exceder
este limite, o display indica
Feedback Alto. O bit de
advertência 5 é programado
em parâmetro 16-94 Status
Word Estendida. A saída
digital ou o relé de saída
pode ser congurado para
indicar essa advertência. A luz
indicadora de advertência do
LCP não acende quando esse
limite denido pelo
parâmetro é alcançado.
4-58 Função de Fase do Motor Ausente
Option: Funcão:
[0] Desativado Nenhum alarme é exibido se ocorrer uma fase
ausente de motor.
[1] * Ativado Um alarme é exibido se ocorrer uma fase
ausente de motor.
58 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

Parâmetros Guia de Programação
4.5.4 4-6* Bypass de Velocidade
Denir as áreas de bypass de velocidade das rampas. Três
faixas de frequências podem ser evitadas.
4-61 Bypass de Velocidade de [Hz]
Range: Funcão:
0 Hz* [ 0 - 500
Hz]
4-63 Bypass de Velocidade até [Hz]
Range: Funcão:
0 Hz* [ 0 - 500
Hz]
Alguns sistemas requerem que
determinadas velocidades de saída sejam
evitadas, devido a problemas de
ressonância no sistema. Insira os limites
inferiores das velocidades a serem evitados.
Alguns sistemas requerem que
determinadas velocidades de saída sejam
evitadas, devido a problemas de
ressonância no sistema. Insira os limites
superiores das velocidades a serem
evitadas.
4.5.5 Setup Semiautomático da Velocidade
de Bypass
Use o setup semiautomático da velocidade de bypass para
facilitar a programação das frequências a serem ignoradas
devido a ressonâncias do sistema.
Velocidade até [Hz] (matriz). Repita este
procedimento para cada banda de ressonância
identicada na aceleração (três no máximo
podem ser ajustadas).
5. Quando a velocidade máxima for atingida, o
motor começa a desacelerar automaticamente.
Repita esse procedimento quando a velocidade
estiver saindo das bandas de ressonância durante
a desaceleração. Ao pressionar [OK], as
frequências reais registradas serão armazenadas
no parâmetro 4-61 Bypass de Velocidade de [Hz].
6. Quando o motor desacelerar para parar, pressione
[OK]. O parâmetro 4-64 Setup de Bypass Semi-Auto
reinicializa automaticamente para desligado. O
conversor de frequência permanecerá no modo
hand on até [O] ou [Auto On] ser pressionado.
Se as frequências de uma determinada banda de
ressonância não forem registradas na ordem correta
(valores de frequência armazenados em
parâmetro 4-63 Bypass de Velocidade até [Hz] são ≥ os
valores em parâmetro 4-61 Bypass de Velocidade de [Hz]), ou
se não tiverem os mesmos números de registro para
parâmetro 4-61 Bypass de Velocidade de [Hz] e
parâmetro 4-63 Bypass de Velocidade até [Hz], todos os
registros serão cancelados e a seguinte mensagem será
exibida: As áreas de velocidades coletadas estão se
sobrepondo ou não estão determinadas. Pressione [Cancel]
para abortar.
4 4
Procedimento:
1. Pare o motor.
AVISO!
Ajuste os tempos de aceleração no
parâmetro 3-41 Tempo de Aceleração da Rampa 1 e
parâmetro 3-42 Tempo de Desaceleração da Rampa 1.
2. Selecione [1] Ativado no parâmetro 4-64 Setup de
Bypass Semi-Auto.
3. Pressione [Hand On] para iniciar a procura das
bandas de frequência que causam ressonâncias. O
motor acelera de acordo com a rampa
programada.
AVISO!
O terminal 27 Entrada digital parâmetro 5-12 Terminal 27,
Entrada Digital tem [2] Parada por inércia inversa como
conguração padrão. Se não houver 24 V no terminal 27,
[Hand On] não dá partida no motor. Nesse caso, conecte
o terminal 12 ao terminal 27.
4. Ao fazer a varredura em uma banda de
ressonância, pressione OK no LCP ao sair da
banda. A frequência real será armazenada como o
primeiro elemento no parâmetro 4-63 Bypass de
4-64 Setup de Bypass Semi-Auto
Option: Funcão:
[0] * [O] (Desligar)
[1] Ativado Se essa opção for selecionada, as faixas de
velocidade são varridas automaticamente
para identicar bandas de ressonâncias.
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 59

Parâmetros
VLT® DriveMotor FCP 106/FCM 106
4.6 Main Menu (Menu Principal) - Entrada/Saída Digital - Grupo 5
4.6.1 5-0* Modo E/S Digital
Parâmetros para congurar a entrada e saída utilizando
NPN e PNP.
Função de entrada
digital
[0] Sem operação Não responde aos sinais transmitidos para
[1] Reinicializar Reinicializa o conversor de frequência
AVISO!
44
Esses parâmetros não podem ser ajustados enquanto o
motor estiver em funcionamento.
5-00 Modo I/O Digital
Option: Funcão:
Programe o modo NPN ou PNP das entradas
digitais 18, 19 e 27. Modo entrada digital.
[0] * PNP - Ativo
em 24 V
[1] NPN - Ativo
em 0 V
Ação em pulsos direcionais positivos (0).
Sistemas PNP são ligados no terra (GND).
Ação nos pulsos direcionais negativos (1). Os
sistemas NPN são elevados para até + 24 V,
internamente no conversor de frequência.
5-01 Modo do Terminal 27
Option: Funcão:
[2] Parada por inércia
inversa
[3] parada por
inércia e reinicializar
inversão
[4] Parada por inércia
inversa rápida
[5] Inversão da
frenagem CC
AVISO!
Este parâmetro não pode ser ajustado
enquanto o motor estiver em funcionamento.
[0] * Entrada Dene o terminal 27 como uma entrada digital.
[1] Saída Dene o terminal 27 como uma saída digital.
5-02 Modo do Terminal 29
Option: Funcão:
[6] Parada por inércia
inversa
AVISO!
Este parâmetro não pode ser ajustado
enquanto o motor estiver em funcionamento.
[7] Travamento
[0] * Entrada Dene o terminal 29 como uma entrada digital.
[1] Saída Dene o terminal 29 como uma saída digital.
4.6.2 5-1* Entradas Digitais
Parâmetros para congurar as funções de entrada dos
terminais de entrada.
As entradas digitais são utilizadas para selecionar as
diversas funções do conversor de frequência. Todas as
entradas digitais podem ser programadas para as seguintes
funções:
Externo
[8] Partida Selecione partida para um comando de
Descrição
o terminal.
após um desarme/alarme. Os alarmes
bloqueados por desarme podem ser
reinicializados.
Deixa o motor em modo livre. '0' lógico ⇒
parada por inércia.
Reinicializa e faz parada por inércia da
entrada invertida (NC). Deixa o motor em
modo livre e reinicializa o conversor de
frequência. ‘0’ lógico ⇒ parada por inércia
e reset.
Entrada invertida (NC). Gera uma parada
de acordo com o tempo da rampa de
parada rápida programado em
parâmetro 3-81 Tempo de Rampa da
Parada Rápida. Após a desaceleração o
eixo está em modo livre.
Entrada invertida para frenagem CC (NC).
Para o motor energizando-o com corrente
CC durante um determinado intervalo de
tempo, ver parâmetro 2-01 Corrente de
Freio CC. A função está ativa somente se o
valor de parâmetro 2-02 Tempo de
Frenagem CC for diferente de 0. Essa
seleção não é possível quando
parâmetro 1-10 Construção do Motor
estiver programado para [1] PM, SPM não
saliente.
A função parada por inércia inversa gera a
função de parada quando o terminal
selecionado passa do nível lógico 1 para 0
(não por pulso). A parada é executada de
acordo com o tempo de rampa
selecionado.
Mesma função que parada por inércia
inversa, mas o bloqueio externo gera a
mensagem de alarme defeito externo no
display quando o terminal, que está
programado para parada por inércia
inversa, for ‘0’ lógico. A mensagem de
alarme também está ativa via saídas
digitais e saídas do relé, se programadas
para bloqueio externo. O alarme pode ser
reinicializado usando uma entrada digital,
um eldbus ou a tecla [Reset] se a causa
do bloqueio externo tiver sido removida.
partida/parada. Lógico 1=partida, lógica
0=parada. (Entrada digital 18 padrão)
60 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

Parâmetros Guia de Programação
Função de entrada
digital
[9] Partida por pulso O motor dá partida se um pulso for
[10] Reversão Muda o sentido de rotação do eixo do
[11] Partida reversa Utilize para partida/parada e para
[14] Jog Utilizado para ativar a velocidade de jog.
[16] Ref predenida
bit 0
[17] Ref predenida
bit 1
[18] Referência
predenida bit 2
[19] Congelar
referência
[20] Congelar
frequência de saída
Descrição
aplicado durante 2 minutos no mínimo. O
motor para quando parada por inércia
inversa for ativada.
motor. O sinal de reversão altera somente
o sentido de rotação, não ativa a função
de partida. Selecione [2] Ambos os sentidos
em parâmetro 4-10 Sentido de Rotação do
Motor. 0=normal, 1=reversão.
reversão, ao mesmo tempo. Sinais em [8]
partida não são permitidos ao mesmo
tempo. 0=parar, 1=partida reversa.
Consulte parâmetro 3-11 Velocidade de Jog
[Hz]. (Entrada digital 29 padrão)
Permite a seleção de uma das oito
referências predenidas de acordo com
Tabela 4.5.
Permite a seleção de uma das oito
referências predenidas de acordo com
Tabela 4.5.
Permite a seleção de uma das oito
referências predenidas de acordo com
Tabela 4.5.
Congelar referência real. A referência
congelada é agora o ponto de ativação/
condição para que aceleração e desaceleração sejam usadas. Se aceleração/
desaceleração for utilizada, uma alteração
de velocidade sempre segue a rampa 2
(parâmetro 3-51 Tempo de Aceleração da
Rampa 2 e parâmetro 3-52 Tempo de
Desaceleração da Rampa 2) no intervalo
parâmetro 3-02 Referência Mínima parâmetro 3-03 Referência Máxima.
Congela a referência real. A referência
congelada é agora o ponto de ativação/
condição para que aceleração e desaceleração sejam usadas. Se aceleração/
desaceleração for usado, a mudança de
velocidade sempre segue a rampa 2.
Função de entrada
digital
[21] Aceleração Para controle digital da velocidade
[22] Desaceleração O mesmo que [21] Aceleração, mas a
[23] Seleção do bit 0
de setup
[32] Entrada de Pulso Selecione entrada de pulso ao usar uma
[34] Bit 0 da rampa Selecione qual rampa utilizar. O 0 lógico
[37] Fire mode Um sinal aplicado coloca o conversor de
Descrição
ascendente/descendente (potenciômetro
do motor). Ative essa função selecionando
Congelar referência ou Congelar
frequência de saída. Quando a aceleração
estiver ativada durante menos de 400 ms,
a referência resultante é aumentada em
0,1%. Se a aceleração estiver ativada
durante mais de 400 ms, a referência
resultante acelera de acordo com a tampa
1 em parâmetro 3-41 Tempo de Aceleração
da Rampa 1.
referência diminui.
Seleciona um dos dois setups. Programe
parâmetro 0-10 Setup Ativo para setup
múltiplo.
sequência de pulsos como referência ou
feedback. A escala é feita no grupo do
parâmetro 5-5* Entrada de Pulso.
Disponível somente para o Terminal 29.
seleciona a rampa 1 e o 1 lógico seleciona
a rampa 2.
frequência em Fire Mode e desconsidera
todos os demais comandos. Ver 24-0* Fire
Mode.
4 4
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 61

Parâmetros
VLT® DriveMotor FCP 106/FCM 106
Função de entrada
digital
[52] Funcionamento
permissivo
44
[53] Partida Manual Um sinal aplicado coloca o conversor de
Descrição
O terminal de entrada, para o qual o
funcionamento permissivo foi
programado, deve ser um 1 lógico antes
que um comando de partida possa ser
aceito. O funcionamento permissivo tem
uma função E lógica relacionada ao
terminal, que está programado para [8]
Partida, [14] Jog ou [20] Congelar
frequência de saída. Para dar partida no
motor, as duas condições devem ser
atendidas. Se funcionamento permissivo
estiver programado em múltiplos
terminais, o funcionamento permissivo
precisa ser somente 1 lógico em um dos
terminais para a função ser executada. O
sinal de saída digital para solicitação de
funcionamento ([8] Partida, [14] Jog ou
[20] Congelar frequência de saída)
programado no grupo do parâmetro 5-3*
Saídas Digitais ou grupo do parâmetro
5-4* Relés, não é afetado pelo funcionamento permissivo.
AVISO!
Se nenhum sinal de funcionamento
permissivo for aplicado, mas um dos
comandos Funcionar, Jog ou
Congelar estiver ativado, a linha de
status no display exibe Funcio-
namento solicitado, Jog solicitado ou
Congelamento solicitado.
frequência em modo Manual como se
[Hand On] tivesse sido pressionado e um
comando de parada normal é ignorado.
Se o sinal for desconectado, o motor para.
Para validar outros comandos de partida,
outra entrada digital deve ser designada
para Partida Automática e um sinal
aplicado. As teclas [Hand On] (Manual
Ligado) e [Auto On] (Automático Ligado)
não causam efeito. O botão [O] (Desligar)
substituirá Hand Start (Partida Manual) e
Auto Start (Partida Automática). Pressione
[Hand On] ou [Auto On] para ativar
novamente Partida Manual e Partida
Automática. Se não houver sinal de
Partida Manual ou Partida Automática, o
motor para independentemente de
qualquer comando de partida normal
aplicado. Se um sinal for aplicado tanto a
Partida Manual quanto a Partida
Automática, a função é Partida Automática.
Função de entrada
digital
[54] Partida
automática
[60] Contador A (up) Entrada para incrementar a contagem no
[61] Contador A
(down)
[62] Reinicializar
contador A
[63] Contador B
(crescente)
[64] Contador B
(decrescente)
[65] Reinicializa o
contador B
Tabela 4.4 Funções da Entrada Digital
Ref.
predenida
selecionada:
Referência
predenida 0
Referência
predenida 1
Referência
predenida 2
Referência
predenida 3
Referência
predenida 4
Referência
predenida 5
Referência
predenida 6
Referência
predenida 7
Tabela 4.5 Referência predenida selecionada
Descrição
Um sinal aplicado coloca o conversor de
frequência em modo Automático como se
[Auto On] tivesse sido pressionado. Ver
também [53] Partida Manual.
contador do SLC.
Entrada para decremento da contagem no
contador do SLC.
Entrada para reinicializar o contador A.
Entrada para incrementar a contagem no
contador do SLC.
Entrada para decremento da contagem no
contador do SLC.
Entrada para reinicializar o contador B
Ref
predenida bit
2
0 0 0
0 0 1
0 1 0
0 1 1
1 0 0
1 0 1
1 1 0
1 1 1
Ref
predenida bit
1
Bit 0 de ref.
predenida
5-10 Terminal 18 Entrada Digital
O parâmetro para congurar a função de entrada no terminal de
entrada 18. Consulte Tabela 4.4 para saber as opções de
conguração.
Option: Funcão:
[0] Sem Operação
[1] Rep.alarmes
[2] Parada/inérc.inversa
[3] PardaP/inérc-rst.inv
[4] Inversão de Parada Rápida
[5] Frenagem CC,reversa
[6] Parada - Ativo em 0
62 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

Parâmetros Guia de Programação
5-10 Terminal 18 Entrada Digital
O parâmetro para congurar a função de entrada no terminal de
entrada 18. Consulte Tabela 4.4 para saber as opções de
conguração.
Option: Funcão:
[7] Bloqueio Externo
[8] * Partida
[9] Partida por pulso
[10] Reversão
[11] Partida em Reversão
[14] Jog
[16] Ref predenida bit 0
[17] Ref predenida bit 1
[18] Ref predenida bit 2
[19] Congelar referência
[20] Congelar frequência de saída
[21] Acelerar
[22] Desacelerar
[23] Selç do bit 0 d setup
[34] Bit0 da rampa
[37] Fire Mode
[52] Funcionamento permissivo
[53] Partida manual
[54] Partida automática
[60] Contador A (cresc)
[61] Contador A (decresc)
[62] Resetar Contador A
[63] Contador B (cresc)
[64] Contador B (decresc)
[65] Resetar Contador B
[101] Sleep
5-11 Terminal 19, Entrada Digital
O parâmetro para congurar a função de entrada no terminal de
entrada 19.
Option: Funcão:
[0] * Sem Operação
[1] Rep.alarmes
[2] Parada/inérc.inversa
[3] PardaP/inérc-rst.inv
[4] Inversão de Parada Rápida
[5] Frenagem CC,reversa
[6] Parada - Ativo em 0
[7] Bloqueio Externo
[8] Partida
[9] Partida por pulso
[10] Reversão
[11] Partida em Reversão
[14] Jog
[16] Ref predenida bit 0
[17] Ref predenida bit 1
[18] Ref predenida bit 2
[19] Congelar referência
[20] Congelar frequência de saída
5-11 Terminal 19, Entrada Digital
O parâmetro para congurar a função de entrada no terminal de
entrada 19.
Option: Funcão:
[21] Acelerar
[22] Desacelerar
[23] Selç do bit 0 d setup
[34] Bit0 da rampa
[37] Fire Mode
[52] Funcionamento permissivo
[53] Partida manual
[54] Partida automática
[60] Contador A (cresc)
[61] Contador A (decresc)
[62] Resetar Contador A
[63] Contador B (cresc)
[64] Contador B (decresc)
[65] Resetar Contador B
[101] Sleep
5-12 Terminal 27, Entrada Digital
O parâmetro para congurar a função de entrada no terminal de
entrada 27. Quando parâmetro 0-03 Denições Regionais estiver
programado para [0] Internacional, o valor padrão é [2] Parada
por inércia inversa. Quando parâmetro 0-03 Denições Regionais
estiver programado para [1] América do Norte, o valor padrão é
[7] Bloqueio Externo.
Option: Funcão:
[0] Sem Operação
[1] Rep.alarmes
[2] Parada/inérc.inversa
[3] PardaP/inérc-rst.inv
[4] Inversão de Parada Rápida
[5] Frenagem CC,reversa
[6] Parada - Ativo em 0
[7] Bloqueio Externo
[8] Partida
[9] Partida por pulso
[10] Reversão
[11] Partida em Reversão
[14] Jog
[16] Ref predenida bit 0
[17] Ref predenida bit 1
[18] Ref predenida bit 2
[19] Congelar referência
[20] Congelar frequência de saída
[21] Acelerar
[22] Desacelerar
[23] Selç do bit 0 d setup
[34] Bit0 da rampa
[37] Fire Mode
[52] Funcionamento permissivo
[53] Partida manual
[54] Partida automática
4 4
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 63

Parâmetros
VLT® DriveMotor FCP 106/FCM 106
5-12 Terminal 27, Entrada Digital
O parâmetro para congurar a função de entrada no terminal de
entrada 27. Quando parâmetro 0-03 Denições Regionais estiver
programado para [0] Internacional, o valor padrão é [2] Parada
por inércia inversa. Quando parâmetro 0-03 Denições Regionais
estiver programado para [1] América do Norte, o valor padrão é
[7] Bloqueio Externo.
Option: Funcão:
44
[60] Contador A (cresc)
[61] Contador A (decresc)
[62] Resetar Contador A
[63] Contador B (cresc)
[64] Contador B (decresc)
[65] Resetar Contador B
[101] Sleep
5-13 Terminal 29, Entrada Digital
O parâmetro para congurar a função de entrada no terminal de
entrada 29.
Option: Funcão:
[0] Sem Operação
[1] Rep.alarmes
[2] Parada/inérc.inversa
[3] PardaP/inérc-rst.inv
[4] Inversão de Parada Rápida
[5] Frenagem CC,reversa
[6] Parada - Ativo em 0
[7] Bloqueio Externo
[8] Partida
[9] Partida por pulso
[10] Reversão
[11] Partida em Reversão
[14] * Jog
[16] Ref predenida bit 0
[17] Ref predenida bit 1
[18] Ref predenida bit 2
[19] Congelar referência
[20] Congelar frequência de saída
[21] Acelerar
[22] Desacelerar
[23] Selç do bit 0 d setup
[32] Entrada de pulso
[34] Bit0 da rampa
[37] Fire Mode
[52] Funcionamento permissivo
[53] Partida manual
[54] Partida automática
[60] Contador A (cresc)
[61] Contador A (decresc)
[62] Resetar Contador A
[63] Contador B (cresc)
[64] Contador B (decresc)
[65] Resetar Contador B
[101] Sleep
4.6.3 5-3* Saídas Digitais
Parâmetros para congurar as funções de saída para os
terminais de saída.
5-30 Terminal 27 Saída Digital
Este parâmetro tem as opções descrito em capétulo 4.6.3 5-3*
Saídas Digitais.
Option: Funcão:
[0] * Sem operação
5-31 Terminal 29 Saída Digital
Este parâmetro tem as opções descrito em capétulo 4.6.3 5-3*
Saídas Digitais.
Option: Funcão:
[0] * Sem operação
5-34 On Delay, Digital Output
Range: Funcão:
0.01 s* [0 - 600 s] Insira o tempo de atraso antes de a saída
digital ser ligada. A condição da saída
digital (terminal 42/45) não deve ser
interrompida durante o tempo de atraso.
5-35 O Delay, Digital Output
Range: Funcão:
0.01 s* [0 - 600 s] Insira o tempo de atraso antes de a saída
digital ser desligada. A condição da saída
digital (terminal 42/45) não deve ser
interrompida durante o tempo de atraso.
4.6.4 5-4* Relés
Parâmetro para congurar o timing e as funções de saída
dos relés.
5-40 Função do Relé
Matriz (Relé 1 [0], Relé 2 [1])
Selecione as opções para denir a função dos relés.
A seleção de cada relé mecânico é efetivada por meio de um
parâmetro de matriz.
Valores padrão para parâmetro 5–40 Function Relay:
Quando parâmetro 0-03 Regional Settings estiver programado
para [0] Internacional, o valor padrão do Relé 1 é Alarme e o
valor padrão do Relé 2 é Drive em Funcionamento.
Quando parâmetro 0-03 Regional Settings estiver programado
para [1] América do Norte o valor padrão do Relé 1 é Sem Alarme
e o valor padrão do Relé 2 é Drive em Funcionamento.
Option: Funcão:
[0] Fora de funcio-
nament
[1] Placa d Cntrl
Pronta
Padrão para os dois relés.
A placa de controle recebe tensão de
alimentação
64 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

Parâmetros Guia de Programação
5-40 Função do Relé
Matriz (Relé 1 [0], Relé 2 [1])
Selecione as opções para denir a função dos relés.
A seleção de cada relé mecânico é efetivada por meio de um
parâmetro de matriz.
Valores padrão para parâmetro 5–40 Function Relay:
Quando parâmetro 0-03 Regional Settings estiver programado
para [0] Internacional, o valor padrão do Relé 1 é Alarme e o
valor padrão do Relé 2 é Drive em Funcionamento.
Quando parâmetro 0-03 Regional Settings estiver programado
para [1] América do Norte o valor padrão do Relé 1 é Sem Alarme
e o valor padrão do Relé 2 é Drive em Funcionamento.
Option: Funcão:
[2] Drive Pronto O conversor de frequência está pronto
para operação e aplica o sinal de
alimentação na placa de controle.
[3] Drive pto/ctrl
rem
[4] Stndby/
semAdvrtncia
[5] Em funcio-
namento
[6] Rodand sem
advrtênc
[7] Func faixa/sem
advrt
[8] Func ref/sem
advrt
[9] Alarme Um alarme ativa a saída.
[10] Alarme ou
advertênc
[12] Fora da faixa de
Corr
[13] Corrent abaix d
baix
[14] Corrent acima d
alta
O conversor de frequência está pronto
para operação no modo Automático
Ligado.
O conversor de frequência está pronto
para operação. Nenhum comando de
partida ou parada foi dado. Nenhuma
advertência presente.
O motor funciona.
O motor está funcionando e não há
advertência presente.
O motor está funcionando dentro das
faixas de corrente programadas, consulte
parâmetro 4-50 Advertência de Corrente
Baixa e parâmetro 4-51 Advertência de
Corrente Alta. Nenhuma advertência
presente.
O motor funciona na velocidade de
referência e sem advertências.
Um alarme ou uma advertência ativa a
saída.
A corrente do motor está fora da faixa
programada em
parâmetro 4-50 Advertência de Corrente
Baixa e parâmetro 4-51 Advertência de
Corrente Alta..
A corrente do motor está menor que a
programada no
parâmetro 4-50 Advertência de Corrente
Baixa.
A corrente do motor está maior que a
programada no
parâmetro 4-51 Advertência de Corrente
Alta.
5-40 Função do Relé
Matriz (Relé 1 [0], Relé 2 [1])
Selecione as opções para denir a função dos relés.
A seleção de cada relé mecânico é efetivada por meio de um
parâmetro de matriz.
Valores padrão para parâmetro 5–40 Function Relay:
Quando parâmetro 0-03 Regional Settings estiver programado
para [0] Internacional, o valor padrão do Relé 1 é Alarme e o
valor padrão do Relé 2 é Drive em Funcionamento.
Quando parâmetro 0-03 Regional Settings estiver programado
para [1] América do Norte o valor padrão do Relé 1 é Sem Alarme
e o valor padrão do Relé 2 é Drive em Funcionamento.
Option: Funcão:
[16] Veloc abaixo da
baix
[17] Veloc acima da
alta
[19] Abaixo do
feedb,baix
[20] Acima do
feedb,alto
[21] Advertência
térmica
[22] Pront,s/
advertTérm
[23] Remot,ok,s/
advTérm
[24] Pronto, TensãoOKO conversor de frequência está pronto
[25] Reversão O motor funciona/está pronto para
[26] Bus OK Comunicação ativa (sem timeout) por
[32] Ctrlfreio mecân
[35] Bloqueio
Externo
[36] Control word
bit 11
[37] Control word
bit 12
[41] Abaixo ref.,baixa
[42] Acima ref, alta
[45] Ctrl. bus
A advertência térmica é ativada quando
a temperatura exceder o limite no motor,
no conversor de frequência ou no
termistor.
O conversor de frequência está pronto
para operação e não há advertência de
superaquecimento presente.
O conversor de frequência está pronto
para operação em modo Automático e
não há advertência de superaquecimento
presente.
para operação e a tensão de rede está
dentro da faixa de tensão especicada.
funcionar no sentido horário quando
lógica = 0 e no sentido anti-horário
quando lógica = 1. A saída muda
quando o sinal de reversão for aplicado.
meio da porta de comunicação serial.
Ver a entrada digital.
O bit 11, na control word, controla o relé.
O bit 12 na control word controla o relé.
4 4
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 65

Parâmetros
VLT® DriveMotor FCP 106/FCM 106
5-40 Função do Relé
Matriz (Relé 1 [0], Relé 2 [1])
Selecione as opções para denir a função dos relés.
A seleção de cada relé mecânico é efetivada por meio de um
parâmetro de matriz.
Valores padrão para parâmetro 5–40 Function Relay:
Quando parâmetro 0-03 Regional Settings estiver programado
para [0] Internacional, o valor padrão do Relé 1 é Alarme e o
44
valor padrão do Relé 2 é Drive em Funcionamento.
Quando parâmetro 0-03 Regional Settings estiver programado
para [1] América do Norte o valor padrão do Relé 1 é Sem Alarme
e o valor padrão do Relé 2 é Drive em Funcionamento.
Option: Funcão:
[60] Comparador 0 Ver o grupo do parâmetro 13-1*
Comparadores. Se o comparador 0 for
avaliado como TRUE (Verdadeiro), a saída
é alta. Caso contrário, é baixa.
[61] Comparador 1 Ver o grupo do parâmetro 13-1*
Comparadores. Se o comparador 1 for
avaliado como TRUE (Verdadeiro), a saída
é alta. Caso contrário, é baixa.
[62] Comparador 2 Ver o grupo do parâmetro 13-1*
Comparadores. Se o comparador 2 for
avaliado como TRUE (Verdadeiro), a saída
é alta. Caso contrário, é baixa.
[63] Comparador 3 Ver o grupo do parâmetro 13-1*
Comparadores. Se o comparador 3 for
avaliado como TRUE (Verdadeiro), a saída
é alta. Caso contrário, é baixa.
[64] Comparador 4 Ver o grupo do parâmetro 13-1*
Comparadores. Se o comparador 4 for
avaliado como TRUE (Verdadeiro), a saída
é alta. Caso contrário, é baixa.
[65] Comparador 5 Ver o grupo do parâmetro 13-1*
Comparadores. Se o comparador 5 for
avaliado como TRUE (Verdadeiro), a saída
é alta. Caso contrário, é baixa.
[70] Regra lógica 0 Ver o grupo do parâmetro 13-4* Regras
lógicas. Se a regra lógica 0 for avaliada
como TRUE (Verdadeiro), a saída é alta.
Caso contrário, é baixa.
[71] Regra lógica 1 Ver o grupo do parâmetro 13-4* Regras
lógicas. Se a regra lógica 1 for avaliada
como TRUE (Verdadeiro), a saída é alta.
Caso contrário, é baixa.
[72] Regra lógica 2 Ver o grupo do parâmetro 13-4* Regras
lógicas. Se a regra lógica 2 for avaliada
como TRUE (Verdadeiro), a saída é alta.
Caso contrário, é baixa.
[73] Regra lógica 3 Ver o grupo do parâmetro 13-4* Regras
lógicas. Se a regra lógica 3 for avaliada
como TRUE (Verdadeiro), a saída é alta.
Caso contrário, é baixa.
5-40 Função do Relé
Matriz (Relé 1 [0], Relé 2 [1])
Selecione as opções para denir a função dos relés.
A seleção de cada relé mecânico é efetivada por meio de um
parâmetro de matriz.
Valores padrão para parâmetro 5–40 Function Relay:
Quando parâmetro 0-03 Regional Settings estiver programado
para [0] Internacional, o valor padrão do Relé 1 é Alarme e o
valor padrão do Relé 2 é Drive em Funcionamento.
Quando parâmetro 0-03 Regional Settings estiver programado
para [1] América do Norte o valor padrão do Relé 1 é Sem Alarme
e o valor padrão do Relé 2 é Drive em Funcionamento.
Option: Funcão:
[74] Regra lóg 4 Ver o grupo do parâmetro 13-4* Regras
lógicas. Se a regra lógica 4 for avaliada
como TRUE (Verdadeiro), a saída é alta.
Caso contrário, é baixa.
[75] Regra lóg 5 Ver o grupo do parâmetro 13-4* Regras
lógicas. Se a regra lógica 5 for avaliada
como TRUE (Verdadeiro), a saída é alta.
Caso contrário, é baixa.
[80] Saída digitl A
do SLC
[81] Saída digitl B
do SLC
[82] Saída digitl C
do SLC
[83] Saída digitl D
do SLC
[160] Sem alarme A saída será alta quando não houver
[161] Rodando em
Revrsão
Consulte parâmetro 13-52 Ação do SLC. A
entrada é alta toda vez que a Ação
Smart Logic [38] Programar saída digital A
altafor executada. A entrada é baixa toda
vez que a Ação Smart Logic [32]
Programar saída digital. Uma baixa é
executada.
Consulte parâmetro 13-52 Ação do SLC. A
entrada é alta toda vez que a Ação
Smart Logic [39] Programar saída digital B
alta for executada. A entrada é baixa
toda vez que a Ação Smart Logic [33]
Programar saída digital B baixa for
executada.
Consulte parâmetro 13-52 Ação do SLC. A
entrada é alta toda vez que a Ação
Smart Logic [40] Programar saída digital C
alta for executada. A entrada é baixa
toda vez que a Ação Smart Logic [34]
Programar saída digital C baixa for
executada.
Consulte parâmetro 13-52 Ação do SLC. A
entrada é alta toda vez que a Ação
Smart Logic [41] Programar saída digital
D alta for executada. A entrada é baixa
toda vez que a Ação do Smart Logic [35]
Programar saída digital D baixa for
executada.
nenhum alarme presente.
A saída é alta quando o conversor de
frequência estiver funcionando no
sentido anti-horário (o produto lógico
66 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

Parâmetros Guia de Programação
5-40 Função do Relé
Matriz (Relé 1 [0], Relé 2 [1])
Selecione as opções para denir a função dos relés.
A seleção de cada relé mecânico é efetivada por meio de um
parâmetro de matriz.
Valores padrão para parâmetro 5–40 Function Relay:
Quando parâmetro 0-03 Regional Settings estiver programado
para [0] Internacional, o valor padrão do Relé 1 é Alarme e o
valor padrão do Relé 2 é Drive em Funcionamento.
Quando parâmetro 0-03 Regional Settings estiver programado
para [1] América do Norte o valor padrão do Relé 1 é Sem Alarme
e o valor padrão do Relé 2 é Drive em Funcionamento.
Option: Funcão:
dos bits de status em funcionamento E
reversão).
[165] Ref. local ativa A saída é alta quando
parâmetro 3-13 Tipo de Referência = [2]
Local ou quando parâmetro 3-13 Tipo de
Referência = [0] Vinculado a manual
automático enquanto o LCP estiver no
modo [Hand On] (Manual Ligado).
[166] Ref. remota
ativa
[167] Comando partid
ativ
[168] ModManual A saída é alta quando o conversor de
[169] ModoAutom A saída é alta quando o conversor de
[191] Bomba Seca
[192] Final de Curva
[193] Sleep mode O conversor de frequência/sistema está
[194] Correia Partida Foi detectada uma condição de correia
[196] Fire Mode Ativo O conversor de frequência está operando
[198] Bypass do Drive A ser utilizado como sinal de ativação de
A saída será alta quando
parâmetro 3-13 Tipo de Referência = [1] ou
vinculado ao manual/automático [0]
enquanto o LCP estiver no modo [Auto
on] (Automático ligado).
A saída é alta quando houver um
comando Partida ativo (ou seja, por meio
da conexão do barramento de entrada
digital ou [Hand on] ou [Auto on] e sem
comando de parada ativo.
frequência estiver em modo Manual
ligado (como indicado pelo LED acima
de [Hand on].
frequência estiver em modo Automático
ligado (como indicado pelo LED acima
de [Auto on].
em sleep mode. Ver o grupo do
parâmetro 22-4* - Sleep Mode.
partida. Ativar esta função em
parâmetro 22-60 Função Correia Partida.
em Fire Mode. Ver o grupo do parâmetro
24-0* Fire mode.
um bypass eletromecânico externo, que
liga o motor diretamente online.
5-40 Função do Relé
Matriz (Relé 1 [0], Relé 2 [1])
Selecione as opções para denir a função dos relés.
A seleção de cada relé mecânico é efetivada por meio de um
parâmetro de matriz.
Valores padrão para parâmetro 5–40 Function Relay:
Quando parâmetro 0-03 Regional Settings estiver programado
para [0] Internacional, o valor padrão do Relé 1 é Alarme e o
valor padrão do Relé 2 é Drive em Funcionamento.
Quando parâmetro 0-03 Regional Settings estiver programado
para [1] América do Norte o valor padrão do Relé 1 é Sem Alarme
e o valor padrão do Relé 2 é Drive em Funcionamento.
Option: Funcão:
Ver o 24-1* Bypass do Drive.
[235] Check Valve
Ramping
5-41 Atraso de Ativação do Relé
Matriz [9] (Relé 1 [0], Relé 2 [1], Relé 3 [2], Relé 4 [3], Relé 5 [4],
Relé 6 [5], Relé 7 [6], Relé 8 [7], Relé 9 [8])
Range: Funcão:
0.01 s* [0.01 - 600 s] Insira o atraso no tempo de ativação do
relé. O relé é acionado somente se a
condição em parâmetro 5-40 Função do
Relé for ininterrupta durante o tempo
especicado. Selecione 1 dos relés
mecânicos disponíveis em uma função de
matriz. Consulte parâmetro 5-40 Função
do Relé.
Ilustração 4.10 Atraso de Ativação do Relé
4 4
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 67

Ref.
(RPM)
High
ref.
value
P 5-53
Low
ref.
value
P 5-52
Low freq.
P 5-50
High freq.
P 5-51
Input
(Hz)
195NA453.10
Parâmetros
VLT® DriveMotor FCP 106/FCM 106
5-42 Atraso de Desativação do Relé
Matriz[2]: Relé1[0], Relé2[1]
Range: Funcão:
0.01 s* [0.01 - 600s]Inserir o atraso do tempo de desativação
do relé. Selecione 1 dos relés mecânicos
disponíveis em uma função de matriz.
Consulte parâmetro 5-40 Função do Relé.
44
5-50 Term. 29 Baixa Freqüência
Range: Funcão:
20 Hz* [20 -
31999 Hz]
Insira o limite inferior da frequência correspondente à velocidade do eixo do motor
baixa (ou seja, o valor de referência baixo)
no parâmetro 5-52 Term. 29 Ref./feedb. Valor
Baixo. Veja Ilustração 4.12.
5-51 Term. 29 Alta Freqüência
Range: Funcão:
32000
Hz*
[21 32000 Hz]
Insira o limite de frequência superior
correspondente à alta velocidade do eixo
do motor (ou seja, o valor de referência
superior) em parâmetro 5-53 Term. 29
Ref./Feedb. Valor Alto.
5-52 Term. 29 Ref./feedb. Valor Baixo
Range: Funcão:
Ilustração 4.11 Atraso de desligamento, relé
Se a condição do evento selecionado mudar antes do
estado de ligado ou desligado do temporizador de atraso
expirar, a saída do relé não é afetada.
0* [-4999 -
4999 ]
5-53 Term. 29 Ref./Feedb. Valor Alto
Insira o limite inferior do valor de referência
para a velocidade do eixo do motor [rpm]. Este
é também o valor de feedback mínimo, consulte
também o parâmetro 5-13 Terminal 29, Entrada
Digital = [32] Entrada de Pulso.
Range: Funcão:
4.6.5 5-5* Entrada de Pulso
Os parâmetros da entrada de pulso são utilizados para
denir uma janela apropriada, para a área de referência de
impulso, estabelecendo a escala e a conguração do ltro
Size
related*
[-4999 4999 ]
Insira o valor de referência alto [RPM]
para a velocidade do eixo do motor e o
valor alto de feedback; consulte também
parâmetro 5-13 Terminal 29, Entrada
Digital = [32] Entrada de Pulso.
para as entradas de pulso. O terminal de entrada 29 age
como entradas de referência de frequência. Programe o
4.6.6 5-9* Controlado por Bus
terminal 29 (parâmetro 5-13 Terminal 29, Entrada Digital
para [32] Entrada de pulso.
Este grupo do parâmetro seleciona saídas digitais e do relé
através da programação do eldbus.
5-90 Controle Bus Digital & Relé
Range: Funcão:
0* [0 - 0xFFFFFFFF ] Este parâmetro mantém o estado das
saídas digitais e dos relés controlados
pelo barramento.
Um '1' lógico indica que a saída é alta ou
ativa.
Um '0' lógico indica que a saída é baixa
ou inativa.
Ilustração 4.12 Entrada de Pulso
68 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

Parâmetros Guia de Programação
Bit 0–3 Reservado
Bit 4 Terminal de saída do Relé 1
Bit 5 Terminal de saída do Relé 2
Bit 6–23 Reservado
Bit 24 Terminal 42 Saída Digital
Bit 25 Terminal 45 Saída Digital
Bit 26–31 Reservado
Tabela 4.6 Funções de bit
4 4
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 69

Ref./Feedback
[RPM]
Entrada analógica
Ref.Alta/
Feedb Valor'
Ref.Baix/
Feedb Valor'
'Baixa Tensão'ou
'Corrente baixa'
'Alta Tensão'ou
'Alta corrente'
130BA038.13
1 V 5 V 10 V
300
600
900
1200
1500
[V]
150
Par 6-xx
Par 6-xx
Par 6-xx
Par 6-xx
Parâmetros
VLT® DriveMotor FCP 106/FCM 106
4.7 Main Menu (Menu Principal) - Entrada/Saída Analógica - Grupo 6
Grupo do parâmetro para programar a conguração de E/S
analógica e a saída digital. O conversor de frequência
fornece 2 entradas analógicas:
Terminal 53.
•
Terminal 54.
•
As entradas analógicas podem ser alocadas livremente com
44
entrada de tensão (0-10 V) ou de corrente (0/4-20 mA)
4.7.1 6-0* Modo E/S Analógica
6-00 Timeout do Live Zero
Range: Funcão:
10 s* [1 - 99 s] Insira o tempo do timeout.
6-01 Função Timeout do Live Zero
Option: Funcão:
Selecione a função de timeout. A função
programada em parâmetro 6-01 Função
Timeout do Live Zero será ativada se o sinal
de entrada no terminal 53 ou 54 estiver
abaixo de 50% do valor denido em
parâmetro 6-10 Terminal 53 Tensão Baixa,
parâmetro 6-12 Terminal 53 Corrente Baixa,
parâmetro 6-20 Terminal 54 Tensão Baixa ou
parâmetro 6-22 Terminal 54 Corrente Baixa
durante um intervalo de tempo denido
em parâmetro 6-00 Timeout do Live Zero.
[0] * O (Desligado)
[1] Congelar saída
[2] Parada
[3] Jog
[4] Velocidade
máxima
[5] Parada e
desarme
Ilustração 4.13 Função Timeout do Live Zero
4.7.2 6-1* Entrada Analógica 53
Parâmetros para congurar a escala e os limites da entrada
analógica 53 (terminal 53).
6-10 Terminal 53 Tensão Baixa
Range: Funcão:
0.07 V* [0 - 10V]Insira a tensão (V) que corresponde a
parâmetro 6-14 Terminal 53 Ref./Feedb. Valor
Baixo. Para ativar parâmetro 6-01 Função
Timeout do Live Zero, programe o valor em >1
V.
6-11 Terminal 53 Tensão Alta
Range: Funcão:
10 V* [0 - 10 V] Inserir a tensão (V) que corresponde ao valor
de referência alta (programado em
parâmetro 6-15 Terminal 53 Ref./Feedb. Valor
Alto).
6-12 Terminal 53 Corrente Baixa
Range: Funcão:
70 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228
4 mA* [0 - 20
mA]
Digite o valor de corrente baixa. Este sinal de
referência corresponde ao valor de feedback/
referência baixo, programado em
parâmetro 6-14 Terminal 53 Ref./Feedb. Valor
Baixo. Para ativar parâmetro 6-01 Função
Timeout do Live Zero, programe o valor para >2
mA.

Parâmetros Guia de Programação
6-13 Terminal 53 Corrente Alta
Range: Funcão:
20 mA* [0 - 20
mA]
Insira o valor de corrente alta que
corresponde ao referência/feedback alto,
programado em parâmetro 6-15 Terminal 53
Ref./Feedb. Valor Alto.
6-14 Terminal 53 Ref./Feedb. Valor Baixo
Range: Funcão:
0* [-4999 -
4999 ]
Insira o valor de referência ou de feedback
que corresponde à tensão ou corrente
programada em parâmetro 6-10 Terminal 53
Tensão Baixa a parâmetro 6-12 Terminal 53
Corrente Baixa.
6-15 Terminal 53 Ref./Feedb. Valor Alto
Range: Funcão:
Size
related*
[-4999 4999 ]
Insira o valor de referência ou de
feedback que corresponde à tensão ou
corrente programada em
parâmetro 6-11 Terminal 53 Tensão Alta
a parâmetro 6-13 Terminal 53 Corrente
Alta.
6-16 Terminal 53 Const. de Tempo do Filtro
Range: Funcão:
0.01 s* [0.01 - 10s]Insira a constante de tempo. Esta é uma
constante de tempo do ltro passa-baixa
digital de primeira ordem para eliminar o
ruído elétrico no terminal 53. Um valor de
constante de tempo alto melhora o
amortecimento, porém, aumenta também o
atraso de tempo através do ltro.
6-19 Terminal 53 mode
Option: Funcão:
Selecione se o terminal 53 é usado para entrada
de corrente ou de tensão.
[0] Corrente
[1] * Tensão
6-21 Terminal 54 Tensão Alta
Range: Funcão:
10 V* [0 - 10 V] Inserir a tensão (V) que corresponde ao valor
de referência alta (programado em
parâmetro 6-25 Terminal 54 Ref./Feedb. Valor
Alto).
6-22 Terminal 54 Corrente Baixa
Range: Funcão:
4 mA* [0 - 20
mA]
Digite o valor de corrente baixa. Este sinal de
referência deve corresponder ao valor de
feedback/referência baixo, programado em
parâmetro 6-24 Terminal 54 Ref./Feedb. Valor
Baixo. Para ativar a função timeout do live zero
em parâmetro 6-01 Função Timeout do Live Zero,
programe o valor para >2 mA.
6-23 Terminal 54 Corrente Alta
Range: Funcão:
20 mA* [0 - 20
mA]
Insira o valor de corrente alta que
corresponde ao valor de feedback de
referência alto programado em
parâmetro 6-25 Terminal 54 Ref./Feedb. Valor
Alto.
6-24 Terminal 54 Ref./Feedb. Valor Baixo
Range: Funcão:
0* [-4999 -
4999 ]
Insira o valor de referência ou de feedback
que corresponde à tensão ou corrente
programada em parâmetro 6-21 Terminal 54
Tensão Altaparâmetro 6-22 Terminal 54 Corrente
Baixa.
6-25 Terminal 54 Ref./Feedb. Valor Alto
Range: Funcão:
Size
related*
[-4999 4999 ]
Insira o valor de referência ou de
feedback que corresponde à tensão ou
corrente programada em
parâmetro 6-21 Terminal 54 Tensão
Altaparâmetro 6-23 Terminal 54 Corrente
Alta.
4 4
4.7.3 6-2* Entrada Analógica 54
Parâmetros para congurar a escala e os limites da entrada
analógica 54 (terminal 54).
6-20 Terminal 54 Tensão Baixa
Range: Funcão:
0.07 V* [0 - 10V]Inserir a tensão (V) que corresponde ao valor
de referência baixa (programado em
parâmetro 6-24 Terminal 54 Ref./Feedb. Valor
Baixo). Para ativar parâmetro 6-01 Função
Timeout do Live Zero, programe o valor em >1
V.
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 71
6-26 Terminal 54 Const. de Tempo do Filtro
Range: Funcão:
0.01 s* [0.01 - 10s]Insira a constante de tempo que é uma
constante de tempo do ltro de passa-
-baixa digital para suprimir ruído elétrico
no terminal 54. Um valor de constante de
tempo alto melhora o amortecimento,
porém, aumenta também o atraso de
tempo através do ltro.

Parâmetros
VLT® DriveMotor FCP 106/FCM 106
6-29 Modo do terminal 54
Option: Funcão:
Selecione se o terminal 54 é usado para entrada
de corrente ou tensão.
[0] Corrente
[1] * Tensão
4.7.4 6-7* Saída Analógica/Digital 45
44
Parâmetros para congurar a escala e os limites do
terminal de saída digital/analógica 45. As saídas analógicas
são saídas de corrente: 0/4–20 mA. A resolução na saída
analógica é de 12 bits. Os terminais de saída analógica
também podem ser programados como saída digital.
6-70 Modo do Terminal 45
Option: Funcão:
Programe o terminal 45 para atuar como
saída analógica ou digital.
[0] * 0-20 mA
[1] 4-20 mA
[2] Saída Digital
6-71 Terminal 45 Saída Analógica
Option: Funcão:
Selecione a função do terminal 45
como uma saída de corrente
analógica. Consulte também a
parâmetro 6-70 Modo do Terminal 45.
[0] * Fora de funcio-
nament
[100] Freq. saída 0-100 0–100 Hz
[101] Referência Mín-Máx Mín
[102] Feedback MínFB–Máx
[103] Corr. motor 0-Imax 0–I
[106] Potência 0–P
[139] Ctrl bus 0–100%
6-72 Terminal 45 Saída Digital
Option: Funcão:
[0] * Fora de funcionament
[1] Placa d Cntrl Pronta
[2] Drive Pronto
[3] Drive pto/ctrl rem
[4] Stndby/semAdvrtncia
–Máx
Ref.
Ref.
FB
máx
nom
Selecione a função do terminal 45
como saída de corrente digital.
Consulte também a
parâmetro 6-70 Modo do Terminal
45. Consulte parâmetro 5-40 Função
do Relé para obter a descrição das
opções.
6-72 Terminal 45 Saída Digital
Option: Funcão:
[5] Em funcionamento
[6] Rodand sem advrtênc
[7] Func faixa/sem advrt
[8] Func ref/sem advrt
[9] Alarme
[10] Alarme ou advertênc
[12] Fora da faixa de Corr
[13] Corrent abaix d baix
[14] Corrent acima d alta
[16] Veloc abaixo da baix
[17] Veloc acima da alta
[19] Abaixo do feedb,baix
[20] Acima do feedb,alto
[21] Advertência térmica
[22] Pront,s/advertTérm
[23] Remot,ok,s/advTérm
[24] Pronto, Tensão OK
[25] Reversão
[26] Bus OK
[32] Ctrlfreio mecân
[35] Bloqueio Externo
[36] Control word bit 11
[37] Control word bit 12
[41] Abaixo ref.,baixa
[42] Acima ref, alta
[45] Ctrl. bus
[60] Comparador 0
[61] Comparador 1
[62] Comparador 2
[63] Comparador 3
[64] Comparador 4
[65] Comparador 5
[70] Regra lógica 0
[71] Regra lógica 1
[72] Regra lógica 2
[73] Regra lógica 3
[74] Regra lóg 4
[75] Regra lóg 5
[80] Saída digitl A do SLC
[81] Saída digitl B do SLC
[82] Saída digitl C do SLC
[83] Saída digitl D do SLC
[160] Sem alarme
[161] Rodando em Revrsão
[165] Ref. local ativa
[166] Ref. remota ativa
[167] Comando partid ativ
[168] ModManual
[169] ModoAutom
[191] Bomba Seca
[192] Final de Curva
[193] Sleep mode
72 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

(mA)
0%
20
0/4
100%
Current
Analogue
output
Min Scale
par. 6-73
Variable
for
output
example:
Power
Analogue
Output
Max Scale
par. 6-74
Parâmetros Guia de Programação
6-72 Terminal 45 Saída Digital
Option: Funcão:
[194] Correia Partida
[196] Fire Mode Ativo
[198] Bypass do Drive
6-90 Terminal 42 Mode
Option: Funcão:
[2] Saída Digital
6-91 Terminal 42 Saída Analógica
Option: Funcão:
6-73 Terminal 45 Escala Mínima de Saída
Range: Funcão:
0 %* [0 -
200 %]
Escala da saída mínima (0 mA ou 4 mA) do
sinal analógico no terminal 45 Programe o
valor para ser a porcentagem da faixa
completa da variável selecionada no
parâmetro 6-71 Terminal 45 Saída Analógica.
6-74 Terminal 45 Escala Máxima de Saída
Range: Funcão:
100%* [0 -
200 %]
Escala da saída máxima (20 mA) do sinal
analógico no terminal 45 Programe o valor para
ser a porcentagem da faixa completa da variável
selecionada no parâmetro 6-71 Terminal 45 Saída
Analógica.
[0] * Fora de funcio-
nament
[100] Freq. saída 0-100 0–100 Hz
[101] Referência Mín-Máx Ref.
[102] Feedback FB
[103] Corr. motor 0-Imax 0–I
[106] Potência 0–P
[139] Ctrl bus 0–100%
Selecione a função do Terminal 42
como uma saída de corrente
analógica. Consulte também a
parâmetro 6–90 Terminal 42 Mode.
- Ref.
Mín.
Mín.
máx
nom
- FB
Máx.
Máx.
6-92 Terminal 42 Digital Output
Option: Funcão:
Selecione a função do Terminal 42
como uma saída de corrente
analógica. Consulte também a
parâmetro 6–90 Terminal 42 Mode.
Consulte parâmetro 5-40 Função do
Relé para obter a descrição das
opções.
[0] * Fora de funcionament
Ilustração 4.14 Escala máxima de saída
6-76 Terminal 45 Controle do barramento de saída
Range: Funcão:
0* [0 - 16384 ] Contém o nível da saída analógica se
controlada por barramento.
4.7.5 6-9* Saída Analógica/Digital 42
Parâmetros para congurar os limites do terminal de saída
digital/analógica 42. As saídas analógicas são saídas de
corrente: 0/4–20 mA. A resolução nas saídas analógicas é
de 12 bits. Os terminais de saída analógica também
podem ser programados como saída digital.
6-90 Terminal 42 Mode
Option: Funcão:
Programe o terminal 42 para atuar como
saída analógica ou digital.
[0] * 0-20 mA
[1] 4-20 mA
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 73
[1] Placa d Cntrl Pronta
[2] Drive Pronto
[3] Drive pto/ctrl rem
[4] Stndby/semAdvrtncia
[5] Em funcionamento
[6] Rodand sem advrtênc
[7] Func faixa/sem advrt
[8] Func ref/sem advrt
[9] Alarme
[10] Alarme ou advertênc
[12] Fora da faixa de Corr
[13] Corrent abaix d baix
[14] Corrent acima d alta
[16] Veloc abaixo da baix
[17] Veloc acima da alta
[19] Abaixo do feedb,baix
[20] Acima do feedb,alto
[21] Advertência térmica
[22] Pront,s/advertTérm
[23] Remot,ok,s/advTérm
[24] Pronto, Tensão OK
[25] Reversão
[26] Bus OK
4 4

(mA)
0%
20
0/4
100%
Current
Analog
output
Min Scale
par. 6-93
Variable
for
output
example:
Power
Analog
Output
Max Scale
par. 6-94
130BB772.10
Parâmetros
VLT® DriveMotor FCP 106/FCM 106
6-92 Terminal 42 Digital Output
Option: Funcão:
[32] Ctrlfreio mecân
[35] Bloqueio Externo
[36] Control word bit 11
[37] Control word bit 12
[41] Abaixo ref.,baixa
6-94 Terminal 42 Escala Máxima de Saída
Range: Funcão:
100%* [0 -
200 %]
Escala de saída máxima (20 mA) da escala no
terminal 42. Programe o valor para ser a
porcentagem da faixa completa da variável
selecionada no parâmetro 6–91 Terminal 42
Analog Output.
[42] Acima ref, alta
44
[45] Ctrl. bus
[60] Comparador 0
[61] Comparador 1
[62] Comparador 2
[63] Comparador 3
[64] Comparador 4
[65] Comparador 5
[70] Regra lógica 0
[71] Regra lógica 1
[72] Regra lógica 2
Ilustração 4.15 Escala máxima de saída
[73] Regra lógica 3
[74] Regra lóg 4
[75] Regra lóg 5
[80] Saída digitl A do SLC
[81] Saída digitl B do SLC
[82] Saída digitl C do SLC
[83] Saída digitl D do SLC
6-96 Terminal 42 Ctrl Saída Bus
Range: Funcão:
0* [0 - 16384 ] Mantém a saída analógica no terminal 42 se
controlada pelo bus.
[160] Sem alarme
[161] Rodando em Revrsão
[165] Ref. local ativa
[166] Ref. remota ativa
[167] Comando partid ativ
[168] ModManual
[169] ModoAutom
[191] Bomba Seca
[192] Final de Curva
[193] Sleep mode
[194] Correia Partida
[196] Fire Mode Ativo
[198] Bypass do Drive
6-93 Terminal 42 Escala Mínima de Saída
Range: Funcão:
0 %* [0 -
200 %]
74 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228
Escala da saída mínima (0 mA ou 4 mA) do
sinal analógico no terminal 42. Programe o
valor para ser a porcentagem da faixa
completa da variável selecionada no
parâmetro 6–91 Terminal 42 Analog Output.

Parâmetros Guia de Programação
4.8 Main Menu (Menu Principal) - Comunicação e Opcionais - Grupo 8
4.8.1 8-0* Programações Gerais
8-01 Tipo de Controle
Option: Funcão:
Este parâmetro prevalece sobre as
congurações em parâmetro 8-50 Seleção
de Parada por Inércia a
parâmetro 8-56 Seleção da Referência Pré-
-denida.
[0] * Digital e Control
Wrd
[1] Somente Digital Controle utilizando somente as entradas
[2] SomenteCon-
trolWord
Controle utilizando a entrada digital e a
control word.
digitais.
Controle utilizando somente a control
word.
8-02 Origem do Controle
Option: Funcão:
AVISO!
Não é possível ajustar este parâmetro
enquanto o motor estiver em funcionamento.
Selecione a origem da control word.
[0] Nenhum
[1] Porta RS485
[3] Opcional A PROFIBUS e PROFINET.
8-04 Função Timeout de Controle
Option: Funcão:
[3] Jog
[4] Velocidade
máxima
[5] Parada e
desarme
[20] Liberação da
substituição de
N2
8-07 Trigger de Diagnóstico
Option: Funcão:
Selecionar [0] Desabilitado para não enviar
dados de diagnóstico estendido (EDD).
Selecionar [1] Disparar em alarmes para
enviar EDD em alarmes ou [2] Disparar
alarme/advertência para enviar EDD em
alarmes ou advertências. Nem todos os
eldbuses suportam as funções de
diagnósticos.
[0] * Inativo
[1] Disparar em
alarmes
[2] Disp alarm/
advertnc
4.8.2 8-1* Congurações Word Deniç
4 4
8-03 Tempo de Timeout de Controle
Range: Funcão:
1 s* [0.1 -
6000 s]
Insira o tempo máximo esperado entre a
recepção de dois telegramas consecutivos. Se
este tempo for excedido, é indicativo de que a
comunicação serial foi interrompida. A função
selecionada no parâmetro 8-04 Função Timeout
de Controle Função Timeout de Controle será
executada.
8-04 Função Timeout de Controle
Option: Funcão:
Selecione a função de timeout. A função
de timeout é ativada quando a
atualização da control word falhar dentro
do intervalo de tempo especicado em
parâmetro 8-03 Tempo de Timeout de
Controle. A opção [20] N2 Liberação de
Substituição aparece somente depois de
congurar o protocolo N2 da Metasys.
[0] * O (Desligado)
[1] Congelar saída
[2] Parada
8-10 Perl de Controle
Option: Funcão:
Selecione a interpretação da control
word e status word que corresponda ao
eldbus instalado. Somente as seleções
válidas para o eldbus instalado no slot
A são visíveis no display do LPC.
[0] * Perl do FC
[1] Perl do
PROFIdrive
8-14 Control Word Congurável CTW
Option: Funcão:
[0] Nenhum O conversor de frequência ignora as
informações deste bit.
[1] * Perl padrão A funcionalidade do bit depende da
seleção parâmetro 8-10 Perl da Control
Word.
[2] CTW
Válida,ativa baix
Se programado para 1, o conversor de
frequência ignora os bits restantes da
control word.
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 75

Parâmetros
VLT® DriveMotor FCP 106/FCM 106
8-19 Product Code
Range: Funcão:
Size
related*
44
4.8.3 8-3* Congurações da Porta do FC
[0 2147483647 ]
Selecione 0 para leitura do código
real do produto do eldbus de
acordo com o opcional de eldbus
montado. Selecione 1 para leitura
do ID do fornecedor real.
8-30 Protocolo
Option: Funcão:
Selecione o protocolo para a porta RS485
integrada. Alterar as congurações em
parâmetro 8-30 Protocolo pode alterar a baud
rate.
[0] * FC Comunicação de acordo com o Protocolo
Danfoss FC.
[2] Modbus
RTU
[4] FLN
[5] BACNet
Comunicação de acordo com o protocolo do
Modbus RTU.
8-31 Address
Range: Funcão:
1* [ 0.0 - 247 ] Insira o endereço da porta RS485. Intervalo
válido: 1–126 do FC-bus, ou 1–247 para
Modbus.
8-32 Baud Rate da Porta do FC
Option: Funcão:
Selecione a baud rate para a porta RS485.
O padrão refere-se ao Protocolo Danfoss FC.
Alterar o protocolo em
parâmetro 8-30 Protocolo pode alterar a baud
rate.
Alterar protocolo em parâmetro 8-30 Protocolo
pode alterar a baud rate.
[0] 2400 Baud
[1] 4800 Baud Conguração padrão do FLN.
[2] 9600 Baud Conguração padrão do BACnet.
[3] 19200 Baud Conguração padrão do Modbus RTU.
[4] 38400 Baud
[5] 57600 Baud
[6] 76800 Baud
[7] 115200 Baud
8-33 Bits de Paridade / Parada
Option: Funcão:
Bits de paridade e parada do
protocolo usando a Porta do FC.
Para alguns protocolos, nem todas
as opções estão disponíveis.
O padrão refere-se ao Protocolo
Danfoss FC. Alterar protocolo em
parâmetro 8–30 Protocol pode alterar
a baud rate.
[0] Paridade Par, 1 Bit de
Parada
[1] Paridade Ímpar, 1 Bit
de Parada
[2] Paridade Par, 1 Bit de
Parada
[3] Sem Paridade, 2 Bits de
Parada
8-35 Atraso Mínimo de Resposta
Range: Funcão:
0.01 s* [ 0.0010 - 0.5s]Especique o tempo de atraso mínimo
entre o recebimento de uma solicitação e
a transmissão de uma resposta. O tempo
de atraso mínimo é usado para contornar
os atrasos de retorno do modem.
8-36 Atraso de Resposta Mínimo
Range: Funcão:
Size related* [ 0.1 - 10.0s]Especique o tempo de atraso
máximo permitido entre receber o
pedido e transmitir a resposta. Se
esse tempo for excedido, nenhuma
resposta será retornada.
8-37 Atraso Inter-Caractere Máximo
Range: Funcão:
0.025 s* [0.025 -
0.025 s]
Especique o intervalo de tempo
máximo permitido entre a recepção de
dois bytes. Este parâmetro ativa o
timeout se a transmissão for
interrompida.
4.8.4 8-4* Conjunto de Protocolos MC
8-40 Seleção do telegrama
Option: Funcão:
Permite o uso de telegramas
livremente conguráveis ou
telegramas padrão para a Porta do
FC.
[1] * Standard telegram 1
[300] Standard telegram
FCM300
76 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

Parâmetros Guia de Programação
8-42 Conguração de gravação do PCD
Parâmetros diferentes podem ser designados para os PCD 3–10
dos PPOs. A quantidade de PCDs depende do tipo de PPO.
Os valores do PCD 3–10 são gravados nos parâmetros
selecionados como valores de dados.
Option: Funcão:
[0] None
[1] [302] Minimum Reference
[2] [303] Maximum Reference
[3] [341] Ramp 1 Ramp up time
[4] [342] Ramp 1 Ramp down time
[5] [351] Ramp 2 Ramp up time
[6] [352] Ramp 2 Ramp down time
[7] [380] Jog Ramp Time
[8] [381] Quick Stop Time
[9] [412] Motor Speed Low Limit
[Hz]
[10] [414] Motor Speed High Limit
[Hz]
[11] [590] Digital & Relay Bus Control
[12] [676] Terminal45 Output Bus
Control
[13] [696] Terminal 42 Output Bus
Control
[14] [894] Bus Feedback 1
[15] FC Port CTW
[16] FC Port REF
8-43 Conguração de Leitura do PCD
Parâmetros diferentes podem ser designados para os PCD 3–10
dos PPOs. A quantidade de PCDs depende do tipo de PPO.
O PCD 3–10 mantém o valor dos dados de tempo real dos
parâmetros selecionados.
Option: Funcão:
[0] None
[1] [1500] Operation Hours
[2] [1501] Running Hours
[3] [1502] kWh Counter
[4] [1600] Control Word
[5] [1601] Reference [Unit]
[6] [1602] Reference %
[7] [1603] Status Word
[8] [1605] Main Actual Value [%]
[9] [1609] Custom Readout
[10] [1610] Power [kW]
[11] [1611] Power [hp]
[12] [1612] Motor Voltage
[13] [1613] Frequency
[14] [1614] Motor Current
[15] [1615] Frequency [%]
[16] [1616] Torque [Nm]
[17] [1618] Motor Thermal
[18] [1630] DC Link Voltage
[19] [1634] Heatsink Temp.
[20] [1635] Inverter Thermal
8-43 Conguração de Leitura do PCD
Parâmetros diferentes podem ser designados para os PCD 3–10
dos PPOs. A quantidade de PCDs depende do tipo de PPO.
O PCD 3–10 mantém o valor dos dados de tempo real dos
parâmetros selecionados.
Option: Funcão:
[21] [1638] SL Controller State
[22] [1650] External Reference
[23] [1652] Feedback [Unit]
[24] [1660] Digital Input 18,19,27,33
[25] [1661] Terminal 53 Switch Setting
[26] [1662] Analog Input 53(V)
[27] [1663] Terminal 54 Switch Setting
[28] [1664] Analog Input 54
[29] [1665] Analog Output 42 [mA]
[30] [1671] Relay Output [bin]
[31] [1672] Counter A
[32] [1673] Counter B
[33] [1690] Alarm Word
[34] [1692] Warning Word
[35] [1694] Ext. Status Word
[36] [1850] Sensorless Readout [Unit]
4.8.5 8-5* Digital/Bus
Parâmetros para congurar a fusão da control word digital/
bus.
8-50 Seleção de Parada por Inércia
Option: Funcão:
AVISO!
Este parâmetro está ativo somente
quando parâmetro 8-01 Tipo de Controle
estiver programado para [0] Digital e
control word.
Selecione o controle da função de parada por
inércia, por meio dos terminais (entrada digital)
e/ou pelo barramento.
[0] Entrada
digital
[1] Bus Ativa a parada por inércia por meio da porta de
[2] Lógica E Ativa a parada por inércia por meio do eldbus/
[3] * Lógica OU Ativa a parada por inércia por meio da porta de
Ativa a parada por inércia por meio de uma
entrada digital.
comunicação serial.
porta de comunicação serial e por meio de uma
das entradas digitais.
comunicação serial ou de uma das entradas
digitais.
4 4
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 77

Parâmetros
VLT® DriveMotor FCP 106/FCM 106
8-51 Seleção de Parada Rápida
Option: Funcão:
AVISO!
Este parâmetro está ativo somente
quando parâmetro 8-01 Tipo de Controle
estiver programado para [0] Digital e
control word.
44
[0] Entrada
digital
[1] Bus Ativa a parada rápida por meio da porta de
[2] Lógica E Ativa a parada rápida por meio da porta de
[3] * Lógica OU Ativa a parada rápida por meio da porta de
Selecionar o controle da função Parada Rápida,
por meio dos terminais (entrada digital) e/ou
pelo bus.
Ativa a parada rápida por meio de uma entrada
digital.
comunicação serial.
comunicação serial e de uma das entradas
digitais.
comunicação serial ou de uma das entradas
digitais.
8-53 Seleção da Partida
Option: Funcão:
AVISO!
Este parâmetro está ativo somente
quando parâmetro 8-01 Tipo de Controle
estiver programado para [0] Digital e
control word.
Selecione o controle da função partida do
conversor de frequência através dos terminais
(entrada digital).
[0] Entrada
digital
[1] Bus Ativa um comando de partida por meio da
[2] Lógica E Ativa um comando de partida através da porta
[3] * LógicaOUAtiva um comando de partida através da porta
Ativa um comando de partida por meio de uma
entrada digital.
porta de comunicação serial ou de opcionais de
eldbus.
de comunicação serial e de uma das entradas
digitais.
de comunicação serial ou uma das entradas
digitais.
8-52 Seleção de Frenagem CC
Option: Funcão:
AVISO!
Este parâmetro está ativo somente
quando parâmetro 8-01 Tipo de Controle
estiver programado para [0] Digital e
control word.
8-54 Seleção da Reversão
Option: Funcão:
AVISO!
Este parâmetro está ativo somente
quando parâmetro 8-01 Tipo de Controle
estiver programado para [0] Digital e
control word.
Selecione o controle do freio CC por meio dos
terminais (entrada digital).
[0] Entrada
digital
[1] Bus Ativa o Freio CC através da porta de
[2] Lógica E Ativa o Freio CC através da porta de
[3] Lógica OU Ativa o Freio CC através da porta de
Ativa o freio CC por meio de uma entrada
digital.
comunicação serial.
comunicação serial e de uma das entradas
digitais.
comunicação serial ou de uma das entradas
digitais.
[0] * Entrada
digital
[1] Bus Ativa um comando de reversão através da porta
[2] Lógica E Ativa um comando de reversão através da porta
[3] LógicaOUAtiva um comando de reversão através da porta
Selecione o controle da função Reversão do
conversor de frequência através dos terminais
(entrada digital) e/ou da porta de comunicação
serial.
Ativa um comando de reversão por meio de
uma entrada digital.
de comunicação serial.
de comunicação serial e de uma das entradas
digitais.
de comunicação serial ou de uma das entradas
digitais.
78 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

Parâmetros Guia de Programação
8-55 Seleção do Set-up
Option: Funcão:
AVISO!
Este parâmetro está ativo somente
quando parâmetro 8-01 Tipo de Controle
estiver programado para [0] Digital e
control word.
Selecione o controle de seleção de setup do
conversor de frequência através dos terminais
(entrada digital) e/ou da porta de comunicação
serial.
[0] Entrada
digital
[1] Bus Ativa a seleção de setup através da porta de
[2] Lógica E Ativa a seleção de setup através da porta de
[3] * LógicaOUAtiva a seleção de setup através da porta de
8-56 Seleção da Referência Pré-denida
Option: Funcão:
[0] Entrada
digital
[1] Bus Ativa a seleção de referência predenida
[2] Lógica E Ativa a seleção de referência predenida
[3] * Lógica OU Ativa a seleção de referência predenida
8-57 Seleção Prodrive OFF2
Selecione o controle da seleção OFF2 do conversor de frequência
por meio dos terminais (entrada digital) e/ou do eldbus. Este
parâmetro está ativo somente quando parâmetro 8-01 Tipo de
Controle estiver programado para [0] Digital e control word e
parâmetro 8-10 Perl da Control Word estiver programado para [1]
Perl do Prodrive.
Option: Funcão:
[0] Entrada digital
[1] Bus
[2] Lógica E
[3] * Lógica OU
Ativa a seleção de setup através de uma
entrada digital.
comunicação serial.
comunicação serial e de uma das entradas
digitais.
comunicação serial ou de uma das entradas
digitais.
Controle de seleção da seleção de referência
predenida do conversor de frequência através
dos terminais (entrada digital) e/ou da porta
de comunicação serial.
Ativa a seleção de referência predenida por
meio de uma entrada digital.
através da porta de comunicação serial.
através da porta de comunicação serial e de
uma das entradas digitais.
através da porta de comunicação serial ou de
uma das entradas digitais.
8-58 Seleção Prodrive OFF3
Selecione o controle da seleção OFF3 do conversor de frequência
por meio dos terminais (entrada digital) e/ou do eldbus. Este
parâmetro está ativo somente quando parâmetro 8-01 Tipo de
Controle estiver programado para [0] Digital e control word e
parâmetro 8-10 Perl da Control Word estiver programado para [1]
Perl do Prodrive.
Option: Funcão:
[0] Entrada digital
[1] Bus
[2] Lógica E
[3] * Lógica OU
4.8.6 8-7* BACnet
8-70 Instânc Dispos BACnet
Range: Funcão:
1* [0 - 4194303 ] Digite um número de ID para o dispositivo
BACnet.
8-72 Masters Máx MS/TP
Range: Funcão:
127* [0 - 127 ] Dena o endereço do mestre, que detém o
endereço mais alto nesta rede. Diminuir este
valor otimiza a sondagem do token.
8-73 Chassi Info Máx.MS/TP
Range: Funcão:
1* [1 - 65534 ] Denir quantos chassis de info/dados é
permitido ao dispositivo enviar, enquanto este
detém o token.
8-74 Serviço "I-Am"
Option: Funcão:
[0] * Enviar na
energizção
[1] Continuamente Selecione se o dispositivo deve enviar a
8-75 Senha de Inicialização
Range: Funcão:
admin* [1 - 1 ] Inserir a senha necessária p/ execução de
8-79 Protocol Firmware version
Range: Funcão:
Size related* [0 - 65535 ] Ler a versão do protocolo suportado
Selecione se o dispositivo deve enviar a
mensagem de serviço I-Am somente na
energização.
mensagem de serviço I-Am
continuamente ou com um intervalo
de aproximadamente um minuto.
Reinicialização do Drive no BACnet.
O índice 5 é para o BACnet.
4 4
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 79

Parâmetros
VLT® DriveMotor FCP 106/FCM 106
4.8.7 8-8* Diagnósticos da Porta do FC
8-91 Velocidade de Jog 2 via Bus
Range: Funcão:
Esses parâmetros são usados para monitorar a
comunicação de bus por meio da Porta do FC.
8-80 Contagem de Mensagens do Bus
Range: Funcão:
0* [0 - 4294967295 ] Este parâmetro exibe o número de
telegramas válidos detectados no bus.
44
8-81 Contagem de Erros do Bus
Range: Funcão:
0* [0 - 4294967295 ] Este parâmetro exibe o número de
telegramas com falhas (por exemplo,
falha de CRC) detectados no bus.
8-82 Mensagem Receb. do Escravo
200 RPM* [ 0 - 1500
RPM]
8-94 Feedb. do Bus 1
Range: Funcão:
0* [-32768 -
32767 ]
Grave o feedback para este parâmetro através
de uma porta de comunicação serial. Selecione
este parâmetro em parâmetro 20-00 Fonte de
Feedback 1 ou parâmetro 20-03 Fonte de
Feedback 2 como uma fonte do feedback. O
valor hexadecimal 4000 h corresponde a 100%
feedback/faixa é de ±200%)
Inserir a velocidade de jog. Ative essa
velocidade de jog xa por meio da
porta serial ou do opcional de
eldbus.
Range: Funcão:
0* [0 - 4294967295 ] Este parâmetro exibe o número de
telegramas válidos endereçados ao
escravo, enviados pelo conversor de
frequência.
8-83 Contagem de Erros do Escravo
Range: Funcão:
0* [0 - 4294967295 ] Este parâmetro exibe o número de
telegramas com erros, que não puderam
ser executados pelo conversor de
frequência.
8-84 Mensagens Enviadas ao Escravo
Range: Funcão:
0* [0 - 4294967295 ] Esse parâmetro mostra o número de
mensagens enviadas do escravo.
8-85 Erros de Timeout do Escravo
Range: Funcão:
0* [0 - 4294967295 ] Esse parâmetro mostra o número de
erros de timeout do escravo.
8-88 Reinicializar Diagn.Porta do FC
Option: Funcão:
[0] * Não reinicializar
[1] Reset contador
4.8.8 8-9* Feedback do Barramento
8-90 Velocidade de Jog 1 via Bus
Range: Funcão:
100 RPM* [ 0 - 1500
RPM]
Inserir a velocidade de jog. Ative essa
velocidade de jog xa por meio da
porta serial ou do opcional de
eldbus.
80 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

Parâmetros Guia de Programação
4.9 Menu principal - PROFIdrive - Grupo 9
9-00 Setpoint
Range: Funcão:
0* [0 -
65535 ]
Este parâmetro recebe a referência cíclica da
classe mestre 2. Se a prioridade de controle
estiver programada para Classe Mestre 2, a
referência do conversor de frequência é adotada
deste parâmetro, enquanto que a referência
cíclica será ignorada.
9-07 Actual Value
Range: Funcão:
0* [0 - 65535 ] Este parâmetro fornece o MAV para classe
mestre 2. O parâmetro é válido se a prioridade
estiver programada para classe mestre 2.
9-15 Conguração de Gravar do PCD
Selecione os parâmetros a serem atribuídos ao PCD 3 até 10 dos
telegramas. A quantidade de PCDs disponíveis depende do tipo
de telegrama. Os valores nos PCD 3 até 10 são gravados como
dados nos parâmetros selecionados. Para os telegramas de
PROFIBUS padrão, consulte o parâmetro 9-22 Telegram Selection.
Option: Funcão:
[0]
[302] Referência Mínima
[303] Referência Máxima
[312] Valor de Catch Up/Slow Down
[341] Tempo de Aceleração da
Rampa 1
[342] Tempo de Desaceleração da
Rampa 1
[351] Tempo de Aceleração da
Rampa 2
[352] Tempo de Desaceleração da
Rampa 2
[380] Tempo de Rampa do Jog
[381] Tempo de Rampa da Parada
Rápida
[412] Lim. Inferior da Veloc. do Motor
[Hz]
[414] Lim. Superior da Veloc do
Motor [Hz]
[553] Term. 29 Ref./Feedb. Valor Alto
[590] Controle Bus Digital & Relé
[615] Terminal 53 Ref./Feedb. Valor
Alto
[625] Terminal 54 Ref./Feedb. Valor
Alto
[696] Terminal 42 Ctrl Saída Bus
[890] Velocidade de Jog 1 via Bus
[891] Velocidade de Jog 2 via Bus
[894] Feedb. do Bus 1
[1680] CTW 1 do Fieldbus
[1682] REF 1 do Fieldbus
9-15 Conguração de Gravar do PCD
Selecione os parâmetros a serem atribuídos ao PCD 3 até 10 dos
telegramas. A quantidade de PCDs disponíveis depende do tipo
de telegrama. Os valores nos PCD 3 até 10 são gravados como
dados nos parâmetros selecionados. Para os telegramas de
PROFIBUS padrão, consulte o parâmetro 9-22 Telegram Selection.
Option: Funcão:
[2021] Setpoint 1
9-16 Conguração de Leitura do PCD
Selecione os parâmetros a serem atribuídos ao PCD 3 até 10 dos
telegramas. A quantidade de PCDs disponíveis depende do tipo
de telegrama. O PCD 3–10 contém os valores dos dados reais
dos parâmetros selecionados.
Option: Funcão:
[0]
[894] Feedb. do Bus 1
[1500] Horas de funcionamento
[1501] Horas em Funcionamento
[1502] Medidor de kWh
[1600] Control Word
[1601] Referência [Unidade]
[1602] Referência %
[1603] Est.
[1605] Valor Real Principal [%]
[1609] Leit.Personalz.
[1610] Potência [kW]
[1611] Potência [hp]
[1612] Tensão do motor
[1613] Freqüência
[1614] Corrente do motor
[1615] Freqüência [%]
[1616] Torque [Nm]
[1618] Térmico Calculado do Motor
[1622] Torque [%]
[1626] Potência Filtrada [kW]
[1627] Potência Filtrada [hp]
[1630] Tensão de Conexão CC
[1634] Temp. do Dissipador de Calor
[1635] Térmico do Inversor
[1638] Estado do SLC
[1639] Temp.do Control Card
[1650] Referência Externa
[1652] Feedback [Unidade]
[1660] Entrada digital
[1661] Denição do Terminal 53
[1662] Entrada Analógica 53
[1663] Denição do Terminal 54
[1664] Entrada Analógica 54
[1665] Saída Analógica 42 [mA]
[1666] Saída Digital [bin]
[1667] Entr. Freq. #29 [Hz]
4 4
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 81

Parâmetros
VLT® DriveMotor FCP 106/FCM 106
9-16 Conguração de Leitura do PCD
Selecione os parâmetros a serem atribuídos ao PCD 3 até 10 dos
telegramas. A quantidade de PCDs disponíveis depende do tipo
de telegrama. O PCD 3–10 contém os valores dos dados reais
dos parâmetros selecionados.
9-22 Telegram Selection
Option: Funcão:
[107] PPO 7
[108] PPO 8
[200] Custom telegram 1
Option: Funcão:
[1671] Saída do Relé [bin]
[1672] Contador A
44
[1673] Contador B
[1679] Saída Analógica AO45
[1684] StatusWord do Opcional d
Comunicação
[1685] CTW 1 da Porta Serial
[1690] Alarm Word
[1691] Alarm Word 2
[1692] Warning Word
[1693] Warning Word 2
[1694] Status Word Estendida
[1695] Est. Status Word 2
[1697] Alarm Word 3
[1850] Leitura Sem o Sensor [unidade]
9-18 Node Address
Range: Funcão:
126* [ 0 -
126 ]
Insira o endereço da estação neste parâmetro ou,
alternativamente, na chave de hardware. Para
ajustar o endereço da estação no
parâmetro 9-18 Node Address, programe a chave de
hardware com 126 ou 127 (ou seja, todas as
chaves programadas para on (ligada)). Caso
contrário, este parâmetro exibe a programação
real da chave.
9-19 Drive Unit System Number
Range: Funcão:
1038* [0 - 65535 ] ID do sistema especíco do fabricante.
9-22 Telegram Selection
Option: Funcão:
[1] Standard telegram1Selecione uma conguração de
telegrama de PROFIBUS padrão para
o conversor de frequência, como
uma alternativa para os telegramas
livremente conguráveis nos
parâmetro 9-15 PCD Write Conguration e parâmetro 9-16 PCD Read
Conguration.
[100] * None
[101] PPO 1
[102] PPO 2
[103] PPO 3
[104] PPO 4
[105] PPO 5
[106] PPO 6
9-23 Parâmetros para Sinais
Option: Funcão:
[0] *
[302] Referência Mínima
[303] Referência Máxima
[312] Valor de Catch Up/Slow Down
[341] Tempo de Aceleração da Rampa 1
[342] Tempo de Desaceleração da Rampa 1
[351] Tempo de Aceleração da Rampa 2
[352] Tempo de Desaceleração da Rampa 2
[380] Tempo de Rampa do Jog
[381] Tempo de Rampa da Parada Rápida
[412] Lim. Inferior da Veloc. do Motor [Hz]
[414] Lim. Superior da Veloc do Motor [Hz]
[553] Term. 29 Ref./Feedb. Valor Alto
[590] Controle Bus Digital & Relé
[615] Terminal 53 Ref./Feedb. Valor Alto
[625] Terminal 54 Ref./Feedb. Valor Alto
[696] Terminal 42 Ctrl Saída Bus
[890] Velocidade de Jog 1 via Bus
[891] Velocidade de Jog 2 via Bus
[894] Feedb. do Bus 1
[1500] Horas de funcionamento
[1501] Horas em Funcionamento
[1502] Medidor de kWh
[1600] Control Word
[1601] Referência [Unidade]
[1602] Referência %
[1603] Est.
[1605] Valor Real Principal [%]
[1609] Leit.Personalz.
[1610] Potência [kW]
[1611] Potência [hp]
[1612] Tensão do motor
[1613] Freqüência
[1614] Corrente do motor
[1615] Freqüência [%]
[1616] Torque [Nm]
[1618] Térmico Calculado do Motor
[1622] Torque [%]
[1626] Potência Filtrada [kW ]
[1627] Potência Filtrada [hp]
[1630] Tensão de Conexão CC
[1634] Temp. do Dissipador de Calor
[1635] Térmico do Inversor
[1638] Estado do SLC
[1639] Temp.do Control Card
[1650] Referência Externa
82 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

Parâmetros Guia de Programação
9-23 Parâmetros para Sinais
Option: Funcão:
[1652] Feedback [Unidade]
[1660] Entrada digital
[1661] Denição do Terminal 53
[1662] Entrada Analógica 53
[1663] Denição do Terminal 54
[1664] Entrada Analógica 54
[1665] Saída Analógica 42 [mA]
[1666] Saída Digital [bin]
[1667] Entr. Freq. #29 [Hz]
[1671] Saída do Relé [bin]
[1672] Contador A
[1673] Contador B
[1679] Saída Analógica AO45
[1680] CTW 1 do Fieldbus
[1682] REF 1 do Fieldbus
[1684] StatusWord do Opcional d Comunicação
[1685] CTW 1 da Porta Serial
[1690] Alarm Word
[1691] Alarm Word 2
[1692] Warning Word
[1693] Warning Word 2
[1694] Status Word Estendida
[1695] Est. Status Word 2
[1697] Alarm Word 3
[1850] Leitura Sem o Sensor [unidade]
[2021] Setpoint 1
9-27 Edição do Parâmetro
Option: Funcão:
Pode-se editar parâmetros por intermédio do
PROFIBUS, da interface RS485 padrão ou do
LCP.
[0] Desativado Desativa a edição pelo PROFIBUS.
[1] * Ativado Ativa a edição pelo PROFIBUS.
9-28 Controle de Processo
Option: Funcão:
O controle de processo (conguração da control
word, referência de velocidade e dados do
processo) é possível através do PROFIBUS ou do
eldbus padrão, porém, não de ambos simulta-
neamente. O controle local é sempre possível por
meio do LCP. O controle via controle de processo
é possível ou pelos terminais ou pelo eldbus,
dependendo das programações dos
parâmetro 8-50 Seleção de Parada por Inércia a
parâmetro 8-56 Seleção da Referência Pré-denida..
[0] Inativo Desativa o controle de processo por intermédio
do PROFIBUS classe mestre 1 e o ativa por meio
do eldbus padrão ou do PROFIBUS classe mestre
2.
9-28 Controle de Processo
Option: Funcão:
[1]*Ativar
mestreCíclico
Ativa o controle de processo por intermédio do
PROFIBUS mestre classe 1 e o desativa por meio
do eldbus padrão ou do PROFIBUS classe mestre
2.
9-44 Contador da Mens de Defeito
Range: Funcão:
0* [0 -
65535 ]
Indica o número de eventos de falha
atualmente armazenados no
parâmetro 9-45 Código do Defeito. A capacidade
máxima do buer é de oito eventos de erro. O
buer e o contador são zerados pela
energização ou pelo reset.
9-45 Código do Defeito
Range: Funcão:
0* [0 - 0 ] Este buer contém a alarm word de todos os
alarmes e advertências que ocorreram, desde o
último reset ou energização. A capacidade máxima
do buer é de oito eventos de erro.
9-47 N°. do Defeito
Range: Funcão:
0* [0 - 0 ] Este buer contém a alarm word de todos os
alarmes e advertências que ocorreram, desde o
último reset ou energização. A capacidade máxima
do buer é de oito eventos de erro.
9-52 Fault Situation Counter
Range: Funcão:
0* [0 - 1000 ] Indica o número de eventos de falha que tem
ocorrido desde o último reset ou energização.
9-53 Probus Warning Word
Range: Funcão:
0* [0 -
65535 ]
Este parâmetro exibe advertências de
comunicação do PROFIBUS.
Bit Descrição
0 Conexão com o mestre DP perdida.
1 Não usado.
2 FDL (camada de ligação dos dados
do eldbus) não está OK.
3 Recebido comando de limpar dados.
4 Valor real não está atualizado.
5 Procura de baud rate.
6 O PROFIBUS ASIC não está
transmitindo.
7 Inicialização do PROFIBUS não está
OK.
8 Conversor de frequência está
desarmado.
4 4
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 83

Parâmetros
VLT® DriveMotor FCP 106/FCM 106
9-53 Probus Warning Word
Range: Funcão:
Bit Descrição
9 Erro interno de CAN.
10 Os dados de conguração do PLC
estão errados.
11 ID errado enviado pelo PLC.
12 Ocorreu defeito interno.
44
13 Não congurado.
14 Timeout ativo.
15 Advertência 34 ativa.
Tabela 4.7 Denição de bit
9-63 Actual Baud Rate
9-64 Device Identication
Range: Funcão:
Índice Conteúdo Valor
6 Especíco do
fornecedor: Versão
do PB
7 Especíco do
fornecedor: Versão
do Banco de Dados
8 Especíco do
fornecedor: Versão
do AOC
9 Especíco do
fornecedor: Versão
do MOC
xxyy
xxyy
xxyy
xxyy
Option: Funcão:
Este parâmetro mostra a baud rate
real do PROFIBUS. O PROFIBUS
mestre estabelece a baud rate
automaticamente.
9-65 Prole Number
Range: Funcão:
0* [0 - 0 ]
AVISO!
Este parâmetro não é visível por meio do
[0] 9,6 kbit/s
[1] 19,2 kbit/s
[2] 93,75 kbit/s
[3] 187,5 kbit/s
[4] 500 kbit/s
[6] 1500 kbit/s
[7] 3000 kbit/s
[8] 6000 kbit/s
[9] 12000 kbit/s
[10] 31,25 kbit/s
[11] 45,45 kbit/s
[255] * No baudrate found
9-64 Device Identication
Range: Funcão:
0* [0 -
0 ]
AVISO!
Este parâmetro não é visível por meio do
LCP.
9-67 Control Word 1
Range: Funcão:
0* [0 - 65535 ] Este parâmetro aceita a control word de uma
9-68 Status Word 1
Range: Funcão:
0* [0 - 65535 ] Este parâmetro entrega a status word para o
9-70 Edit Set-up
LCP.
Este parâmetro contém a identicação do perl. O
byte 1 contém o número do
número da versão do perl.
classe mestre 2, no mesmo formato do PCD 1.
classe mestre 2, no mesmo formato que o PCD
2.
perl e o byte 2, o
Option: Funcão:
O parâmetro de identicação do dispositivo. O tipo
de dados é matriz [n] de unsigned16. A atribuição
dos primeiros sub-índices está
na Tabela 4.8.
Índice Conteúdo Valor
0 Fabricante 128
1 Tipo de dispositivo 1
2 Versão xxyy
3 Ano da data do
rmware
4 Mês da data do
rmware
5 Nº. de eixos Variável
denida e mostrada
yyyy
ddmm
[1] Set-up 1
[2] Set-up 2
[9] * Active Set-
-up
Selecione o Setup em que deve ocorrer a
programação (alteração de dados) durante a
operação. É possível programar os quatro
setups independentemente do setup
selecionado como conguração ativa. O acesso
ao parâmetro por cada mestre é orientado ao
setup selecionado pelo mestre individual
(cíclico, acíclico MCL1, primeiro acíclico MCL2,
segundo acíclico MCL2, terceiro acíclico MCL2).
84 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

Parâmetros Guia de Programação
9-71 Probus Save Data Values
Option: Funcão:
Os valores de parâmetro alterados por
intermédio do RS485 não são gravados automaticamente na memória não volátil. Use este
parâmetro para ativar uma função que armazene
os valores dos parâmetros na memória não
volátil EEPROM, de modo que os valores dos
parâmetros alterados sejam mantidos ao desligar
a unidade.
[0] * O Desativa a função de armazenagem não volátil.
[1] Store all
setups
[2] Store all
setups
Grava todos os valores de parâmetro, do setup
selecionado no parâmetro 9-70 Edit Set-up, na
memória não volátil. A seleção retorna para [0]
O quando todos os valores são armazenados.
Grava todos os valores de parâmetro, de todos
os setups, na memória não volátil. A seleção
retorna para [0] O quando todos os valores dos
parâmetros são armazenados.
9-72 ProbusDriveReset
Option: Funcão:
AVISO!
Reinicializa somente o opcional do
VLT® PROFIBUS DP MCA 101.
[0] * No action
[1] Power-on reset Reinicializa o conversor de frequência após
a energização, relativamente ao ciclo de
energização.
[2] Power-on reset
prep
[3] Comm option
reset
9-75 DO Identication
Range: Funcão:
0* [0 - 65535 ] Fornece informações sobre o DO (drive object).
Quando reinicializado, o conversor de
frequência desaparece do eldbus, o que
pode causar um erro de comunicação do
mestre.
9-81 Dened Parameters (2)
Range: Funcão:
0* [0 - 9999 ] Este parâmetro exibe uma lista de todos os
parâmetros denidos do conversor de
frequência disponíveis para o PROFIBUS.
9-82 Dened Parameters (3)
Range: Funcão:
0* [0 - 9999 ] Este parâmetro exibe uma lista de todos os
parâmetros denidos do conversor de
frequência disponíveis para o PROFIBUS.
9-83 Dened Parameters (4)
Range: Funcão:
0* [0 - 9999 ] Este parâmetro exibe uma lista de todos os
parâmetros denidos do conversor de
frequência disponíveis para o PROFIBUS.
9-84 Dened Parameters (5)
Range: Funcão:
0* [0 - 9999 ] Este parâmetro exibe uma lista de todos os
parâmetros denidos do conversor de
frequência disponíveis para o PROFIBUS.
9-85 Dened Parameters (6)
Range: Funcão:
0* [0 - 9999 ] Este parâmetro exibe uma lista de todos os
parâmetros denidos do conversor de
frequência disponíveis para o PROFIBUS.
9-90 Changed Parameters (1)
Range: Funcão:
0* [0 - 9999 ] Este parâmetro mostra uma lista de todos os
parâmetros do conversor de frequência com
desvio da conguração padrão.
9-91 Changed Parameters (2)
Range: Funcão:
0* [0 - 9999 ] Este parâmetro mostra uma lista de todos os
parâmetros do conversor de frequência com
desvio da conguração padrão.
4 4
9-80 Dened Parameters (1)
Range: Funcão:
0* [0 - 9999 ] Este parâmetro exibe uma lista de todos os
parâmetros denidos do conversor de
frequência disponíveis para o PROFIBUS.
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 85
9-92 Changed Parameters (3)
Range: Funcão:
0* [0 - 9999 ] Este parâmetro mostra uma lista de todos os
parâmetros do conversor de frequência com
desvio da conguração padrão.

Parâmetros
9-93 Changed Parameters (4)
Range: Funcão:
0* [0 - 9999 ] Este parâmetro mostra uma lista de todos os
parâmetros do conversor de frequência com
desvio da conguração padrão.
9-94 Changed Parameters (5)
Range: Funcão:
44
0* [0 - 9999 ] Este parâmetro mostra uma lista de todos os
parâmetros do conversor de frequência com
desvio da conguração padrão.
9-99 Probus Revision Counter
Range: Funcão:
0* [0 - 65535 ] Leitura da contagem de revisões.
VLT® DriveMotor FCP 106/FCM 106
86 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

130BA062.13
Estado 1
Evento 1/
Ação 1
Estado 2
Evento 2/
Ação 2
Iniciar
evento P13-01
Estado 3
Evento 3/
Ação 3
Estado 4
Evento 4/
Ação 4
Parar
event P13-02
Parar
event P13-02
Parar
event P13-02
Parâmetros Guia de Programação
4.10 Main Menu (Menu Principal) - Smart Logic - Grupo 13
4.10.1 13-** Recursos do Programa
O Smart Logic Control (SLC) é uma sequência de ações
denidas pelo usuário (consulte o parâmetro 13-52 Ação do
SLC [x]) executada pelo SLC quando o SLC avalia o evento
associado denido pelo usuário (consulte o
parâmetro 13-51 Evento do SLC [x]) como true. Eventos e
ações são numerados e conectados em pares. Isto signica
que quando o [0] evento estiver completo (atinge o valor
true (Verdadeiro)), a [0] ação é executada. Após executar
essa ação, as condições do [1] evento são avaliadas e se o
resultado for true, a [1] ação é executada e assim sucessivamente. Apenas um evento é avaliado a qualquer
momento. Se um evento for avaliado como FALSE (Falso),
não acontece nada (no SLC) durante o intervalo de
varredura atual e nenhum outro evento é avaliado. Isto
signica que, quando o SLC é iniciado, ele avalia [0] evento
4.10.2 13-0* Congurações do SLC
Utilize os ajustes do SLC para ativar, desabilitar e
reinicializar a sequência do Smart Logic Control. As funções
lógicas e os comparadores estão sempre em execução em
segundo plano, que abre para controle separado das
entradas e saídas digitais.
13-00 Modo do SLC
Option: Funcão:
Para habilitar o smart logic control para
iniciar quando um comando de partida
estiver presente, por exemplo, através de
uma entrada digital, selecione [1] Ligado.
Para desativar o smart logic control,
selecione [0] Desligado.
[0] * O (Desligado) Desabilita o smart logic controller.
(e unicamente [0] evento) a cada intervalo de varredura.
Somente quando [0] evento for avaliado true (Verdadeiro),
[1] On (Ligado) Ativa o smart logic controller.
o SLC executa a [0] ação e começa a avaliar o [1] evento. É
possível programar de 1–20 eventos e ações. Quando o
último evento/ação tiver sido executado, a sequência
recomeça a partir de [0] evento/[0] ação.
Ilustração 4.16 Exemplo com três Eventos/Ações
13-01 Iniciar Evento
Option: Funcão:
Para ativar o smart logic control,
selecione a entrada booleana (true ou
false).
[0] FALSE (Falso) Insere o valor xo false (Falso) na regra
lógica.
[1] True
(Verdadeiro)
[2] Em funcio-
namento
[3] Dentro da Faixa O motor funciona dentro da faixa atual
[4] Na referência O motor funciona na velocidade de
Insere o valor xo true (Verdadeiro) na
regra lógica.
O motor funciona.
programada e
(parâmetro 4-50 Advertência de Corrente
Baixa e parâmetro 4-51 Advertência de
Corrente Alta)
referência.
Iniciando e parando o SLC
Para iniciar ou parar o SLC, selecione [1] Ligado ou [2]
Desligado emparâmetro 13-00 Modo do SLC. O SLC sempre
[7] Fora da Faix de
Corr
começa no estado 0 (onde avalia o [0] evento). O SLC inicia
quando o evento de partida (denido em
parâmetro 13-01 Iniciar Evento) for avaliado como true (se
[8] Abaixo da I
baixa
[1] Ligado estiver selecionado em parâmetro 13-00 Modo do
SLC). O SLC para quando evento de parada
(parâmetro 13-02 Parar Evento) for true.
Parâmetro 13-03 Resetar o SLC reinicializa todos os
parâmetros do SLC e começa a programação desde o
princípio.
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 87
[9] Acima da I alta A corrente do motor está maior que a
[16] Advertência
térmica
A corrente do motor está fora da faixa
programada no parâmetro 4-18 Limite de
Corrente.
A corrente do motor está menor que a
programada no
parâmetro 4-50 Advertência de Corrente
Baixa.
programada no
parâmetro 4-51 Advertência de Corrente
Alta.
A advertência térmica é ativada quando a
temperatura excede o limite no motor,
conversor de frequência ou termistor.
4 4

Parâmetros
VLT® DriveMotor FCP 106/FCM 106
13-01 Iniciar Evento
Option: Funcão:
[17] Red.Elétr Fora d
Faix
[18] Reversão O conversor de frequência inverte.
44
[19] Advertência Há uma advertência presente.
[20] Alarme
(desarme)
[21] Alarm(bloq.p/
desarm)
[22] Comparador 0 Utilize o resultado do comparador 0 na
[23] Comparador 1 Utilize o resultado do comparador 1 na
[24] Comparador 2 Utilize o resultado do comparador 2 na
[25] Comparador 3 Utilize o resultado do comparador 3 na
[26] Regra lógica 0 Utilize o resultado da regra lógica 0 na
[27] Regra lógica 1 Utilize o resultado da regra lógica 1 na
[28] Regra lógica 2 Utilize o resultado da regra lógica 2 na
[29] Regra lógica 3 Utilize o resultado da regra lógica 3 na
[33] Entrada digital,
DI18
[34] Entrada digital,
DI19
[35] Entrada digital,
DI27
[36] Entrada digital,
DI29
[39]*Comando
partida
[40] Drive parado Este evento é true se o conversor de
[42] Desarme de
Auto Reset
Advertência ou alarme de perda de fases
de rede elétrica, se
parâmetro 14-12 Função no Desbalanceamento da Rede não for denido em [2]
Desativado.
Há um alarme presente.
Há um alarme de bloqueio por desarme
presente.
regra lógica.
regra lógica.
regra lógica.
regra lógica.
regra lógica.
regra lógica.
regra lógica.
regra lógica.
Utilize o valor de DI18 na regra lógica
(Alto = true (Verdadeiro)).
Utilize o valor de DI19 na regra lógica
(Alto = true (Verdadeiro)).
Utilize o valor de DI27 na regra lógica
(Alto = true (Verdadeiro)).
Utilize o valor de DI29 na regra lógica
(Alto = true (Verdadeiro)).
Este evento é true se o conversor de
frequência der a partida (por meio da
entrada digital, eldbus ou outro).
frequência for parado ou sofrer parada
por inércia (por meio da entrada digital,
do eldbus ou outro).
Este evento é true (Verdadeiro) se o
conversor de frequência for desarmado
(mas não bloqueio por desarme) e um
Reset Automático for executado.
13-01 Iniciar Evento
Option: Funcão:
[50] Comparador 4 Utilize o resultado do comparador 4 na
regra lógica.
[51] Comparador 5 Utilize o resultado do comparador 5 na
regra lógica.
[60] Regra lóg 4 Utilize o resultado da regra lógica 4 na
regra lógica.
[61] Regra lóg 5 Utilize o resultado da regra lógica 5 na
regra lógica.
[83] Correia Partida Foi detectada uma condição de correia
partida. Ativar esta função em
parâmetro 22-60 Função Correia Partida.
13-02 Parar Evento
Option: Funcão:
Selecione a condição (true
(Verdadeiro) ou false (Falso)) que
desabilita o smart logic controller.
[0] FALSE (Falso)
[1] True (Verdadeiro)
[2] Em funcionamento
[3] Dentro da Faixa
[4] Na referência
[7] Fora da Faix de Corr
[8] Abaixo da I baixa
[9] Acima da I alta
[16] Advertência térmica
[17] Red.Elétr Fora d Faix
[18] Reversão
[19] Advertência
[20] Alarme (desarme)
[21] Alarm(bloq.p/desarm)
[22] Comparador 0
[23] Comparador 1
[24] Comparador 2
[25] Comparador 3
[26] Regra lógica 0
[27] Regra lógica 1
[28] Regra lógica 2
[29] Regra lógica 3
[30] Timeout 0 do SLC
[31] Timeout 1 do SLC
[32] Timeout 2 do SLC
[33] Entrada digital, DI18
[34] Entrada digital, DI19
[35] Entrada digital, DI27
[36] Entrada digital, DI29
[39] Comando partida
[40] * Drive parado
[42] Desarme de Auto Reset
[50] Comparador 4
[51] Comparador 5
88 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
Parâmetros Guia de Programação
13-02 Parar Evento
Option: Funcão:
[60] Regra lóg 4
[61] Regra lóg 5
[70] Timeout 3 do SL
[71] Timeout 4 do SL
[72] Timeout 5 do SL
[73] Timeout 6 do SL
[74] Timeout 7 do SL
[81] Bomba Seca
[82] Final de Curva
[83] Correia Partida
13-03 Resetar o SLC
Option: Funcão:
[0] * Não resetar o
SLC
[1] Resetar o SLC Reinicializa todos os parâmetros do grupo
Retém as congurações programadas em
todos os parâmetros do grupo 13 (13-**
Smart Logic).
13 (13-** Smart Logic) para as congu-
rações padrão.
4.10.3 13-1* Comparadores
Os comparadores são utilizados para comparar variáveis
contínuas (como, frequência de saída, corrente de saída e
entrada analógica) com um valor predenido xo.
Ilustração 4.17 Comparadores
Além disso, há valores digitais que são comparados a
valores de tempo xos. Consulte a explicação em
parâmetro 13-10 Operando do Comparador. Os
comparadores são avaliados uma vez a cada intervalo de
varredura. Utilize o resultado (true ou false) (Verdadeiro ou
Falso) diretamente. Todos os parâmetros nesse grupo do
parâmetro são parâmetros de matriz com índice 0–5.
Selecione índice 0 para programar o comparador 0,
selecione índice 1 para programar o comparador 1 e assim
por diante.
13-10 Operando do Comparador
Matriz [6]
Option: Funcão:
Selecione a variável a ser
monitorada pelo comparador.
[0] * DISABLED (Desativd)
[1] Referência
[2] Feedback %
[3] Velocidade do motor
[4] Corrente do Motor
[6] Potência do motor
[7] Tensão do motor
[12] Entrada analógic AI53
[13] Entrada analógic AI54
[18] Entrada de pulso FI29
[20] Número do alarme
[30] Contador A
[31] Contador B
13-11 Operador do Comparador
Matriz [6]
Option: Funcão:
[0] Less Than
(<)
[1] * ~ (igual) Selecione [1] ≈ para o resultado da avaliação ser
[2] Greater
Than (>)
Selecione [0] < para que o resultado da
avaliação ser true quando a variável selecionada
em parâmetro 13-10 Operando do Comparador
for menor que o valor xado em
parâmetro 13-12 Valor do Comparador. O
resultado é false (Falso) se a variável selecionada
em parâmetro 13-10 Operando do Comparador
for maior que o valor xado em
parâmetro 13-12 Valor do Comparador.
true, quando a variável selecionada em
parâmetro 13-10 Operando do Comparador for
aproximadamente igual ao valor xo no
parâmetro 13-12 Valor do Comparador.
Selecione [2] > para a lógica inversa da opção
[0] <.
13-12 Valor do Comparador
Matriz [6]
Range: Funcão:
0* [-9999 -
9999 ]
Insira o nível de disparo para a variável
monitorada por este comparador. Este é um
parâmetro de matriz que contém os valores
dos comparadores 0–5.
4 4
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 89

. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
Parâmetros
VLT® DriveMotor FCP 106/FCM 106
44
4.10.4 13-2* Temporizadores
Prioridade de cálculo
Os resultados de parâmetro 13-40 Regra Lógica Booleana 1,
Utilize o resultado (true ou false) (verdadeiro ou falso) dos
temporizadores diretamente para denir um evento
(consulte o parâmetro 13-51 Evento do SLC) ou como
entrada booleana, em uma regra lógica (consulte o
parâmetro 13-40 Regra Lógica Booleana 1,
parâmetro 13-42 Regra Lógica Booleana 2 ou
parâmetro 13-44 Regra Lógica Booleana 3). Um
temporizador somente é false (Falso) quando iniciado por
uma ação (por exemplo, [29] Iniciar temporizador 1) até
decorrer o valor do temporizador inserido neste parâmetro.
Então, ele torna-se true (Verdadeiro) novamente.
Todos os parâmetros nesse grupo do parâmetro são
parâmetros de matriz com índice 0–2. Selecione o índice 0
para programar o temporizador 0, selecione o índice 1
para programar o temporizador 1 e assim por diante.
13-20 Temporizador do SLC
Matriz [8]
Range: Funcão:
0 s* [0 -
3600 s]
Insira o valor para denir a duração da saída false
(Falso) do temporizador programado. Um
temporizador somente é false (Falso) se for
iniciado por uma ação (consulte
parâmetro 13-52 Ação do SLC [29–31] e
parâmetro 13-52 Ação do SLC [70–74] Iniciar
temporizador X) e até que o valor do
temporizador tenha decorrido. Parâmetros de
matriz contêm temporizadores 0–7.
4.10.5 13-4* Regras Lógicas
Combine até três entradas booleanas (entradas true/false)
(verdadeiro/falso) de temporizadores, comparadores,
entradas digitais, bits de status e eventos usando os
operadores lógicos AND, OR e NOT. Selecionar entradas
booleanas para o cálculo em parâmetro 13-40 Regra Lógica
Booleana 1, parâmetro 13-42 Regra Lógica Booleana 2 e
parâmetro 13-44 Regra Lógica Booleana 3. Denir os
operadores usados para combinar, logicamente, as
entradas selecionadas em parâmetro 13-41 Operador de
Regra Lógica 1 e parâmetro 13-43 Operador de Regra Lógica
2.
Ilustração 4.18 Regras Lógicas
90 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228
parâmetro 13-41 Operador de Regra Lógica 1 e
parâmetro 13-42 Regra Lógica Booleana 2 são calculados
primeiro. O resultado (true/false) (verdadeiro/falso) desse
cálculo é combinado com as congurações de
parâmetro 13-43 Operador de Regra Lógica 2 e
parâmetro 13-44 Regra Lógica Booleana 3, produzindo o
resultado nal (true/false) da regra lógica.
13-40 Regra Lógica Booleana 1
Matriz [6]
Option: Funcão:
[0] * FALSE (Falso)
[1] True (Verdadeiro)
[2] Em funcionamento
[3] Dentro da Faixa
[4] Na referência
[7] Fora da Faix de Corr
[8] Abaixo da I baixa
[9] Acima da I alta
[16] Advertência térmica
[17] Red.Elétr Fora d Faix
[18] Reversão
[19] Advertência
[20] Alarme (desarme)
[21] Alarm(bloq.p/desarm)
[22] Comparador 0
[23] Comparador 1
[24] Comparador 2
[25] Comparador 3
[26] Regra lógica 0
[27] Regra lógica 1
[28] Regra lógica 2
[29] Regra lógica 3
[30] Timeout 0 do SLC
[31] Timeout 1 do SLC
[32] Timeout 2 do SLC
[33] Entrada digital, DI18
[34] Entrada digital, DI19
[35] Entrada digital, DI27
[36] Entrada digital, DI29
[39] Comando partida
[40] Drive parado
[42] Desarme de Auto Reset
[50] Comparador 4
[51] Comparador 5
[60] Regra lóg 4
[61] Regra lóg 5
[70] Timeout 3 do SL
[71] Timeout 4 do SL
[72] Timeout 5 do SL
[73] Timeout 6 do SL
[74] Timeout 7 do SL
[81] Bomba Seca

Parâmetros Guia de Programação
13-40 Regra Lógica Booleana 1
Matriz [6]
Option: Funcão:
[82] Final de Curva
[83] Correia Partida
13-41 Operador de Regra Lógica 1
Option: Funcão:
[0] * DISABLED (Desativd)
[1] AND
[2] OR
[3] AND NOT
[4] OR NOT
[5] NOT AND
[6] NOT OR
[7] NOT AND NOT
[8] NOT OR NOT
13-42 Regra Lógica Booleana 2
Matriz [6]
Option: Funcão:
Selecione a segunda entrada
booleana (true ou false) para a
regra lógica selecionada.
Consulte parâmetro 13-40 Regra
Lógica Booleana 1 para obter
descrições detalhadas das opções
e suas funções.
[0] * FALSE (Falso)
[1] True (Verdadeiro)
[2] Em funcionamento
[3] Dentro da Faixa
[4] Na referência
[7] Fora da Faix de Corr
[8] Abaixo da I baixa
[9] Acima da I alta
[16] Advertência térmica
[17] Red.Elétr Fora d Faix
[18] Reversão
[19] Advertência
[20] Alarme (desarme)
[21] Alarm(bloq.p/desarm)
[22] Comparador 0
[23] Comparador 1
[24] Comparador 2
[25] Comparador 3
[26] Regra lógica 0
[27] Regra lógica 1
[28] Regra lógica 2
[29] Regra lógica 3
[30] Timeout 0 do SLC
[31] Timeout 1 do SLC
[32] Timeout 2 do SLC
[33] Entrada digital, DI18
13-42 Regra Lógica Booleana 2
Matriz [6]
Option: Funcão:
[34] Entrada digital, DI19
[35] Entrada digital, DI27
[36] Entrada digital, DI29
[39] Comando partida
[40] Drive parado
[42] Desarme de Auto Reset
[50] Comparador 4
[51] Comparador 5
[60] Regra lóg 4
[61] Regra lóg 5
[70] Timeout 3 do SL
[71] Timeout 4 do SL
[72] Timeout 5 do SL
[73] Timeout 6 do SL
[74] Timeout 7 do SL
[81] Bomba Seca
[82] Final de Curva
[83] Correia Partida
13-43 Operador de Regra Lógica 2
Matriz [6]
Option: Funcão:
Selecione o segundo operador lógico que
será usado na entrada booleana calculada
em parâmetro 13-40 Regra Lógica Booleana
1, parâmetro 13-41 Operador de Regra
Lógica 1 e parâmetro 13-42 Regra Lógica
Booleana 2 e a entrada booleana vindo de
parâmetro 13-42 Regra Lógica Booleana 2.
[13-44] representa a entrada booleana de
parâmetro 13-44 Regra Lógica Booleana 3.
[13-40/13-42] representa a entrada
booleana calculada em
parâmetro 13-40 Regra Lógica Booleana 1,
parâmetro 13-41 Operador de Regra Lógica 1
e parâmetro 13-42 Regra Lógica Booleana 2.
[0] Desativado (conguração de fábrica):
Selecione esta opção para ignorar
parâmetro 13-44 Regra Lógica Booleana 3.
[0] * DISABLED
(Desativd)
[1] AND
[2] OR
[3] AND NOT
[4] OR NOT
[5] NOT AND
[6] NOT OR
[7] NOT AND NOT
[8] NOT OR NOT
4 4
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 91

Parâmetros
VLT® DriveMotor FCP 106/FCM 106
13-44 Regra Lógica Booleana 3
Matriz [6]
Option: Funcão:
Selecione a terceira entrada
booleana (true ou false) para a
regra lógica selecionada.
Consulte parâmetro 13-40 Regra
Lógica Booleana 1 para obter
44
[0] * FALSE (Falso)
[1] True (Verdadeiro)
[2] Em funcionamento
[3] Dentro da Faixa
[4] Na referência
[7] Fora da Faix de Corr
[8] Abaixo da I baixa
[9] Acima da I alta
[16] Advertência térmica
[17] Red.Elétr Fora d Faix
[18] Reversão
[19] Advertência
[20] Alarme (desarme)
[21] Alarm(bloq.p/desarm)
[22] Comparador 0
[23] Comparador 1
[24] Comparador 2
[25] Comparador 3
[26] Regra lógica 0
[27] Regra lógica 1
[28] Regra lógica 2
[29] Regra lógica 3
[30] Timeout 0 do SLC
[31] Timeout 1 do SLC
[32] Timeout 2 do SLC
[33] Entrada digital, DI18
[34] Entrada digital, DI19
[35] Entrada digital, DI27
[36] Entrada digital, DI29
[39] Comando partida
[40] Drive parado
[42] Desarme de Auto Reset
[50] Comparador 4
[51] Comparador 5
[60] Regra lóg 4
[61] Regra lóg 5
[70] Timeout 3 do SL
[71] Timeout 4 do SL
[72] Timeout 5 do SL
[73] Timeout 6 do SL
[74] Timeout 7 do SL
[81] Bomba Seca
[82] Final de Curva
[83] Correia Partida
descrições detalhadas das opções
e suas funções.
4.10.6 13-5* Estados
13-51 Evento do SLC
Matriz [20]
Option: Funcão:
Selecione a entrada booleana (true
(Verdadeiro) ou false (Falso)) para
denir o evento do smart logic
controller.
Consulte parâmetro 13-02 Parar
Evento para obter descrições
detalhadas das opções e suas
funções.
[0] * FALSE (Falso)
[1] True (Verdadeiro)
[2] Em funcionamento
[3] Dentro da Faixa
[4] Na referência
[7] Fora da Faix de Corr
[8] Abaixo da I baixa
[9] Acima da I alta
[16] Advertência térmica
[17] Red.Elétr Fora d Faix
[18] Reversão
[19] Advertência
[20] Alarme (desarme)
[21] Alarm(bloq.p/desarm)
[22] Comparador 0
[23] Comparador 1
[24] Comparador 2
[25] Comparador 3
[26] Regra lógica 0
[27] Regra lógica 1
[28] Regra lógica 2
[29] Regra lógica 3
[30] Timeout 0 do SLC
[31] Timeout 1 do SLC
[32] Timeout 2 do SLC
[33] Entrada digital, DI18
[34] Entrada digital, DI19
[35] Entrada digital, DI27
[36] Entrada digital, DI29
[39] Comando partida
[40] Drive parado
[42] Desarme de Auto Reset
[50] Comparador 4
[51] Comparador 5
[60] Regra lóg 4
[61] Regra lóg 5
[70] Timeout 3 do SL
[71] Timeout 4 do SL
[72] Timeout 5 do SL
[73] Timeout 6 do SL
[74] Timeout 7 do SL
92 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

Parâmetros Guia de Programação
13-51 Evento do SLC
Matriz [20]
Option: Funcão:
[81] Bomba Seca
[82] Final de Curva
[83] Correia Partida
13-52 Ação do SLC
Matriz [20]
Option: Funcão:
Selecione a ação correspondente ao
evento do SLC. As ações são executadas
quando o evento correspondente (denido
em parâmetro 13-51 Evento do SLC) for
avaliado como TRUE (Verdadeiro). As
seguintes ações estão disponíveis para
seleção:
[0] * DESATIVADO
[1] Nenhuma ação
[2] Selec.set-up 1 Altera a conguração ativa
(parâmetro 0-10 Setup Ativo) para setup 1.
[3] Selec.set-up 2 Altera a conguração ativa
(parâmetro 0-10 Setup Ativo) para setup 2.
[10] Selec ref.Predef.0Seleciona a referência predenida 0.
[11] Selec
ref.predef.1
[12] Selec.
ref.predef2
[13] Selec.
ref.predef3
[14] Selec.
ref.predef4
[15] Selec.
ref.predef5
[16] Selec.
ref.predef6
[17] Selec.
ref.predef7
[18] Selecionar
rampa 1
[19] Selecionar
rampa 2
[22] Funcionar Emite um comando de partida para o
[23] Fncionar em
Revrsão
[24] Parada Emite um comando de parada para o
Seleciona a referência predenida 1.
Seleciona a referência predenida 2.
Seleciona a referência predenida 3.
Seleciona a referência predenida 4.
Seleciona a referência predenida 5.
Seleciona a referência predenida 6.
Seleciona a referência predenida 7. Se a
referência predenida ativa for alterada, é
mesclada com outros comandos de
referência predenida, vindo das entradas
digitais ou de um eldbus.
Seleciona a rampa 1.
Seleciona a rampa 2.
conversor de frequência.
Emite um comando de partida reversa
para o conversor de frequência.
conversor de frequência.
13-52 Ação do SLC
Matriz [20]
Option: Funcão:
[25] Quick Stop Emite um comando de parada rápida para
conversor de frequência.
[26] Dc Stop Emite um comando Parada CC para o
conversor de frequência.
[27] Parada por
inércia
[28] Congelar saída Congela a frequência de saída do
[29] Iniciar
tmporizadr 0
[30] Iniciar
tmporizadr 1
[31] Iniciar
tmporizadr 2
[32] Den saíd
dig.A baix
[33] Den saíd dig.B
baix
[34] Den saíd
dig.C baix
[35] Den saíd
dig.D baix
[38] Den saíd
dig.A alta
[39] Den saíd dig.
B alta
[40] Den saíd
dig.C alta
[41] Den saíd
dig.D alta
[60] Resetar
Contador A
[61] Resetar
Contador B
[70] Iniciar
Tmporizadr3
[71] Iniciar
Tmporizadr4
O conversor de frequência faz parada por
inércia imediatamente. Todos os comandos
de parada, inclusive o comando de parada
por inércia, param o SLC.
conversor de frequência.
Inicia o temporizador 0, consulte o
parâmetro 13-20 Temporizador do SLC para
descrição detalhada.
Inicia o temporizador 1; consulte o
parâmetro 13-20 Temporizador do SLC para
descrição detalhada.
Inicia o temporizador 2; consulte o
parâmetro 13-20 Temporizador do SLC para
descrição detalhada.
Qualquer saída com saída digital 1
selecionada está baixa (desligada).
Qualquer saída com saída digital 2
selecionada está baixa (desligada).
Qualquer saída com saída digital 3
selecionada está baixa (desligada).
Qualquer saída com saída digital 4
selecionada está baixa (desligada).
Qualquer saída com saída digital 1
selecionada está alta (fechada).
Qualquer saída com saída digital 2
selecionada está alta (fechada).
Qualquer saída com saída digital 3
selecionada está alta (fechada).
Qualquer saída com saída digital 4
selecionada está alta (fechada).
Zera o contador A.
Zera o contador B:
Inicia o temporizador 3; consulte o
parâmetro 13-20 Temporizador do SLC para
descrição detalhada.
Inicia o temporizador 4; consulte o
parâmetro 13-20 Temporizador do SLC para
descrição detalhada.
4 4
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 93

Parâmetros
VLT® DriveMotor FCP 106/FCM 106
13-52 Ação do SLC
Matriz [20]
Option: Funcão:
[72] Iniciar
Tmporizadr5
[73] Iniciar
Tmporizadr6
44
[74] Iniciar
Tmporizadr7
Inicia o temporizador 5; consulte o
parâmetro 13-20 Temporizador do SLC para
descrição detalhada.
Inicia o temporizador 6; consulte o
parâmetro 13-20 Temporizador do SLC para
descrição detalhada.
Inicia o temporizador 7; consulte o
parâmetro 13-20 Temporizador do SLC para
descrição detalhada.
94 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

Parâmetros Guia de Programação
4.11 Menu Principal - Funções Especiais - Grupo 14
4.11.1 14-0* Chaveamento do Inversor
14-01 Freqüência de Chaveamento
Option: Funcão:
Selecionar a frequência de chaveamento do
inversor. Alterar a frequência de chaveamento
pode contribuir para reduzir o ruído acústico do
motor.
AVISO!
O valor da frequência de saída do
conversor de frequência nunca deve ser
superior a 1/10 da frequência de
chaveamento. Quando o motor estiver
funcionando, ajuste a frequência de
chaveamento em
parâmetro 14-01 Freqüência de
Chaveamento até o motor funcionar o mais
silenciosamente possível.
AVISO!
Altas frequências de chaveamento
aumentam a geração de calor no conversor
de frequência e pode reduzir sua vida útil.
AVISO!
Nem todas as opções estão disponíveis em
todos os tamanhos de potência.
[0] Ran3 3 kHz aleatório verdadeiro PWM (modulação de
ruído branco).
[1] Ran5 5 kHz aleatório verdadeiro PWM (modulação de
ruído branco).
[2] 2,0 kHz
[3] 3,0 kHz
[4] 4,0 kHz
[5] 5,0 kHz
[6] 6,0 kHz
[7] 8,0 kHz
[8] 10,0 kHz
[9] 12,0kHz
[10] 16,0kHz
14-03 Sobremodulação
Option: Funcão:
[0] * O
(Desligado)
[1] On (Ligado) A função sobremodulação gera uma tensão
Não seleciona sobremodulação da tensão de
saída para evitar ripple de torque no eixo do
motor.
adicional de até 8% da tensão de saída U
sem sobremodulação. Essa tensão adicional
resulta em um torque extra de 10-12% no
max
14-03 Sobremodulação
Option: Funcão:
meio da faixa sobressíncrona (de 0% com
velocidade nominal, crescendo até aproximadamente 12% com o dobro da velocidade
nominal).
14-07 Dead Time Compensation Level
Range: Funcão:
Size
related*
[0 100 ]
Nível de compensação por tempo ocioso
aplicado em %. Um nível alto (> 90%)
otimiza a resposta dinâmica do motor,um
nível de 50–90% é bom para a
minimização do ripple de torque e para as
dinâmicas do motor, um nível 0 desliga a
compensação por te ocioso.
14-08 Fator de Ganho de Amortecimento
Range: Funcão:
Size related* [0 - 100 %] Fator de amortecimento da
compensação de tensão do
barramento CC.
14-09 Dead Time Bias Current Level
Range: Funcão:
Size related* [0 -
100 %]
Para adicionar ao sinal de detecção de
corrente para compensação de tempo
ocioso para alguns motores, programe
um sinal de distorção (em
porcentagem).
4.11.2 14-1* Liga/Desliga Rede Elétrica
Parâmetros para congurar o monitoramento e tratamento
de falha de rede elétrica.
14-10 Função no Desbalanceamento de Rede
Option: Funcão:
Este parâmetro informa o conversor de
frequência a ação a ser tomada se a tensão
de rede cair abaixo do limite programado
em parâmetro 14–11 Mains Voltage at Mains
Fault.
[0] * Sem função
[3] Parada por
inércia
14-11 Tensã Red na FalhaRed.Elétr.
Range: Funcão:
Size related* [100 - 800V]Este parâmetro dene a tensão CA
em que a função selecionada em
parâmetro 14–10 Mains Failure deve
ser ativada.
4 4
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 95

Parâmetros
VLT® DriveMotor FCP 106/FCM 106
14-12 Função no Desbalanceamento da Rede
Option: Funcão:
AVISO!
Selecionar esta opção pode reduzir a
vida útil do conversor de frequência.
A operação em condições de desbalanceamento de rede crítico reduz a vida útil do
44
[0] * Desarme Desarma o conversor de frequência.
[1] Advertência Emite uma advertência.
[2] Desativado Nenhuma ação.
motor. Se o motor funciona continuamente
com carga próxima da nominal, as condições
são consideradas críticas,
Quando um desbalanceamento de rede crítico
for detectado, selecione uma das funções
disponíveis.
4.11.3 14-2* Reset do Desarme
14-20 Modo Reset
Option: Funcão:
AVISO!
O reset automático também
14-21 Tempo para Nova Partida Automática
Range: Funcão:
10 s* [0 - 600s]Para iniciar a função reset automático, insira o
intervalo de tempo desde o desarme. Este
parâmetro está ativo quando
parâmetro 14-20 Modo Reset estiver
programado para [1] - [13] Reset automático.
14-22 Modo Operação
Option: Funcão:
Para reinicializar todos os valores dos
parâmetros para o padrão, selecione [2] Inicia-
lização.
[0]*Operação
normal
[2] Inicia-
lização
Selecione [0] Operação normal para operação
normal do conversor de frequência com o
motor na aplicação selecionada.
Selecione [2] Inicialização para reinicializar todos
os valores de parâmetros para as congurações
padrão, exceto parâmetros de comunicação do
bus, grupos do parâmetro 15-0* Dados
Operacionais e 15-3*Registro de Alarme. O
conversor de frequência é reinicializado durante
a próxima energização.
O Parâmetro 14-22 Modo Operação também
reverte a conguração padrão [0] Operação
normal.
está ativo para reinicialização da
função Safe Torque O.
Selecione a função reset após um
desarme. Feito o reset, o conversor
de frequência pode partir
novamente.
[0] * Reset manual Selecione [0] Reset manual para
executar reset por meio da tecla
[Reset] ou das entradas digitais.
[1] Reset automático x1 Selecione [1]-[12] Reset automático x
1…x20 para executar entre 1 e 20
resets automáticos após desarme.
[2] Reset automático x2
[3] Reset automático x3
[4] Reset automático x4
[5] Reset automático x5
[6] Reset automático x6
[7] Reset automático x7
[8] Reset automático x8
[9] Reset automático x9
[10] Reset automátco x10
[11] Reset automátco x15
[12] Reset automátco x20
[13] Reset automát innit Selecione [13] Reinicialização
automática innita para reinicialização contínua após desarme.
14-27 Ação na Falha do Inversor
Selecione como o conversor de frequência age em caso de
sobretensão, sobrecorrente, curto-circuito ou falhas de
aterramento.
Option: Funcão:
[0] Desarme
[1] * Advertência
14-28 Programações de Produção
Option: Funcão:
[0] * Nenhuma ação
[1] Reset de Service
[3] Reset do Software
14-29 Código de Service
Range: Funcão:
0* [0 - 0x7FFFFFFF ] Uso exclusivo da manutenção
4.11.4 14-3* Controle de Limite de Corrente
O conversor de frequência possui um controlador de limite
de corrente integral que é ativado quando a corrente do
motor e, portanto o torque, for maior que os limites de
torque programados em parâmetro 4-16 Limite de Torque do
Modo Motor e parâmetro 4-17 Limite de Torque do Modo
Gerador.
96 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228

Parâmetros Guia de Programação
Quando o limite de corrente for atingido durante a
operação do motor ou durante uma operação regenerativa,
o conversor de frequência tenta diminuir o torque abaixo
dos limites de torque predenidos tão rápido quanto
possível sem perder o controle do motor.
Enquanto o controle de corrente estiver ativo, o conversor
de frequência poderá ser parado somente congurando
uma entrada digital para [2] Parada por inércia inversa ou
[3] Parada e reset por inércia inversa. Nenhum sinal nos
terminais 18 a 33 está ativo enquanto o conversor de
frequência estiver próximo do limite de corrente.
Ao usar uma entrada digital programada para [2] Parada
por inércia inversa ou [3] Parada e reset por inércia inversa o
motor não usa o tempo de desaceleração, pois o conversor
de frequência está parado por inércia.
14-30 Ganho Proporcional-Contr.Lim.Corrente
Range: Funcão:
100 %* [0 -
500 %]
Inserir o valor do ganho proporcional para o
controlador de limite de corrente. A seleção
de um valor alto faz com que o controlador
reaja mais rápido. Uma conguração excessivamente alta causa instabilidade no
controlador.
14-31 Tempo de Integração-ContrLim.Corrente
Range: Funcão:
Size
related*
[0.002 - 2s]Controla o tempo de integração do
controle de limite de corrente.
Congurando-o para um valor menor
faz com que ele reaja mais
rapidamente. Uma conguração
excessivamente baixa redunda em
instabilidade do controle.
14-32 Contr.Lim.Corrente, Tempo do Filtro
Range: Funcão:
Size related* [1 - 100 ms] Programa uma constante de tempo
do ltro passa-baixa do controlador
de limite de corrente.
14-40 Nível do VT
Range: Funcão:
90 %* [40 -
90 %]
AVISO!
Este parâmetro não pode ser ajustado
enquanto o motor estiver em funcionamento.
Insira o nível de magnetização do motor em
velocidade baixa. A seleção de um valor baixo
reduz a perda de energia no motor, porém,
reduz também a capacidade de carga.
14-41 Magnetização Mínima do AEO
Range: Funcão:
66 %* [40 -
75 %]
Insira a magnetização mínima permitida para
AEO. A seleção de um valor baixo reduz a
perda de energia no motor, porém, reduz
também a resistência a alterações repentinas
da carga.
14-44 d-axis current optimization for IPM
Range: Funcão:
100%* [0 -
Este parâmetro está disponível somente quando
200 %
parâmetro 1-10 Motor Construction estiver
]
programado para [2] PM, IPM saliente, não Sat.
Normalmente, o controle PM VVC+ otimiza
automaticamente a corrente de desmagnetização
do eixo d com base nas congurações do eixo d
e eixo q. Quando parâmetro 1-10 Motor
Construction estiver programado para [2] PM, IPM
saliente, não Sat, use esse parâmetro para
compensar o efeito de saturação em carga alta.
Normalmente, diminuir este valor melhora a
eciência. Entretanto, 0% signica nenhuma
otimização e a corrente no eixo d é zero (não
recomendado).
4.11.6 14-5* Ambiente
4 4
4.11.5 14-4* Otimização de Energia
Parâmetros para ajustar o nível de otimização da energia,
nos modos torque variável (TV) e otimização automática
da energia (AEO).
A Otimização Automática de Energia estará ativa somente
se o parâmetro 1-03 Características de Torque estiver
programado para [3] Otimização Automática de Energia.
MG03N228 Danfoss A/S © 11/2015 Todos os direitos reservados. 97
Estes parâmetros auxiliam o conversor de frequência a
funcionar sob condições ambientais especiais.
14-51 Compensação da Tensão do Barramento CC
Option: Funcão:
[0] O (Desligado) A sobremodulação da tensão de saída é
desligada para evitar ripple de torque no
eixo do motor.
[1] * On (Ligado) Ativa a sobremodulação da tensão de saída
para obter uma tensão de saída até 15%
maior que a tensão de rede.

Parâmetros
VLT® DriveMotor FCP 106/FCM 106
14-55 Filtro de Saída
Selecione se há um ltro de saída presente.
Option: Funcão:
[0] * SemFiltro
[1] FiltrOndaSenoidl
[3] Filtro de Onda Senoidal com Feedback
4.11.8 14-8* Opcionais
14-89 Option Detection
Seleciona o comportamento quando uma alteração no opcional
for detectada. Este parâmetro retorna para [0] Proteger
Conguração do Opcional após uma alteração de opcionais.
Option: Funcão:
4.11.7 14-6* Derate Automático
44
[0] * Protect Option
Cong.
Este grupo contém parâmetros para efetuar o derate
automático da corrente de saída do conversor de
frequência.
14-61 Função na Sobrecarga do Inversor
É usado se houver sobrecarga constante além dos limites
térmicos (110% durante 60 s).
[1] Enable Option
Change
Congela as congurações atuais
e impede alterações indesejadas
quando opcionais ausentes ou
com defeito forem detectados.
As congurações podem ser
alteradas quando a conguração
do sistema estiver sendo
alterada.
Option: Funcão:
[0] * Desarme O conversor de frequência desarma e emite um
alarme.
[1] Derate Reduz a velocidade da bomba para diminuir a
carga na seção de potência e permitir que resfrie.
14-63 Freqüência de Chaveamento Mín.
Programe a frequência de chaveamento mínima permitida pelo
ltro de saída.
Option: Funcão:
[2] * 2,0 kHz
[3] 3,0 kHz
[4] 4,0 kHz
[5] 5,0 kHz
[6] 6,0 kHz
[7] 8,0 kHz
[8] 10,0 kHz
[9] 12,0kHz
[10] 16,0kHz
4.11.9 14-9* Congurações de Defeitos
Conguração de personalização de falha
14-90 Nível de Defeito
Utilize este parâmetro para personalizar os níveis de falha.
Congurar o valor do parâmetro pode alterar parâmetro 1–73
Flying Start.
Option: Funcão:
[3] * Bloqueio por desarme
[4] Desarme com atraso de
reset
[5] Flystart
14-64 Nível de Corrente Zero para Compensação de
Tempo Ocioso
Para um cabo de motor longo, programe este parâmetro com [0]
Desativado para minimizar o ripple de torque do motor.
Option: Funcão:
[0] * Desabilitado
[1] Ativado
14-65 Speed Derate Dead Time Compensation
Range: Funcão:
Size
related*
98 Danfoss A/S © 11/2015 Todos os direitos reservados. MG03N228
[ 20 1000 Hz]
O nível de compensação de tempo ocioso
é reduzido linearmente em relação à
frequência de saída. Parâmetro 14-07 Dead
Time Compensation Level dene o nível
máximo. O nível de frequência de saída
mínima é denido em
parâmetro 14-65 Speed Derate Dead Time
Compensation.
 Loading...
Loading...