

Page 1

ENGINEERING TOMORROW
Projektierungshandbuch
VLT® DriveMotor FCP 106/FCM 106
www.danfoss.de/vlt
Page 2
Page 3
Inhaltsverzeichnis Projektierungshandbuch
Inhaltsverzeichnis
1 Einführung
1.1 Zweck des Projektierungshandbuchs
1.2 Zusätzliche Materialien
1.3 Symbole, Abkürzungen und Konventionen
1.4 Zulassungen
1.4.1 Was unter die Richtlinien fällt 6
1.4.2 CE-Zeichen 7
1.4.2.1 Niederspannungsrichtlinie 7
1.4.2.2 EMV-Richtlinie 7
1.4.2.3 Maschinenrichtlinie 7
1.4.2.4 Ökodesign-Richtlinie (ErP) 8
1.4.3 C-tick-Konformität (australische EMV-Standards) 8
1.4.4 UL-Konformität 8
1.4.5 Exportkontrollvorschriften 8
1.5 Softwareversion
1.6 Vorgaben zur Entsorgung
1.7 Sicherheit
5
5
5
5
6
8
8
8
1.7.1 Allgemeine Leitlinien zur Sicherheit 8
2 Produktübersicht
2.1 Einführung
2.1.1 Dichtung 11
2.1.2 Hauptdiagramm 12
2.1.3 Elektrische Anschlussübersicht 13
2.1.4 Steuerklemmen und -relais 3 14
2.1.5 (Feldbus-) Netzwerke für serielle Kommunikation 15
2.2 VLT® Memory Module MCM 101
2.2.1 Konfiguration mit dem VLT® Memory Module MCM 101 15
2.2.2 Kopieren von Daten über PC und Memory Module Programmer (MMP) 16
2.2.3 Kopieren einer Konfiguration zu mehreren Frequenzumrichtern 17
2.3 Regelungsstrukturen
2.3.1 Regelungsstruktur ohne Rückführung 18
2.3.2 Regelungsstruktur (Regelung mit Rückführung) (PI) 18
2.4 Hand-Steuerung (Hand On) und Fern-Betrieb (Auto On)
2.5 Ist- und Sollwertverarbeitung
11
11
15
18
19
20
2.6 Allgemeine EMV-Aspekte
2.7 Ableitstrom
2.7.1 Erdableitstrom 27
2.8 Galvanische Trennung (PELV)
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 1
21
27
28
Page 4
Inhaltsverzeichnis
VLT® DriveMotor FCP 106/FCM 106
3 Systemintegration
3.1 Einführung
3.2 Netzeingang
3.2.1 Netzversorgungsstörung/-rückwirkung 31
3.2.1.1 Allgemeine Aspekte zur Oberwellenemission 31
3.2.1.2 Oberschwingungsemissionsanforderungen 32
3.2.1.3 Prüfergebnisse für Oberschwingungsströme (Emission) 32
3.3 Motoren
3.3.1 Explosionszeichnungen 34
3.3.2 Heben 36
3.3.3 Lager 36
3.3.4 Lagerlebensdauer und Schmierung 37
3.3.5 Auswuchten 39
3.3.6 Antriebswellen 39
3.3.7 FCM 106 Trägheitsmoment 39
3.3.8 FCM 106 Motorbaugröße 39
3.3.9 Thermischer Motorschutz 39
30
30
31
34
3.3.9.1 Elektronisches Thermorelais 39
3.3.9.2 Thermistor (nur FCP 106) 40
3.4 Auswahl Frequenzumrichter/Optionen
3.4.1 Fern-Einbausatz 40
3.4.2 LOP-Einheit 41
3.5 Besondere Betriebsbedingungen
3.5.1 Zweck der Leistungsreduzierung 42
3.5.2 Leistungsreduzierung wegen erhöhter Umgebungstemperatur und Taktfrequenz 42
3.5.3 Automatische Anpassungen zur Sicherstellung der Leistung 42
3.5.4 Leistungsreduzierung wegen niedrigem Luftdruck 42
3.5.5 Extreme Betriebszustände 43
3.6 Umgebungsbedingungen
3.6.1 Luftfeuchtigkeit 44
3.6.2 Temperatur 44
3.6.3 Kühlung 44
3.6.4 Aggressive Umgebungsbedingungen 44
3.6.5 Umgebungstemperatur 45
40
42
44
3.6.6 Störgeräusche 45
3.6.7 Vibrationen und Erschütterungen 45
3.7 Energieeffizienz
3.7.1 IES- und IE-Klassen 46
2 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
46
Page 5
Inhaltsverzeichnis Projektierungshandbuch
3.7.2 Verlustleistungsdaten und Wirkungsgraddaten 46
3.7.3 Verluste und Wirkungsgrad eines Motors 47
3.7.4 Verluste und Wirkungsgrad eines Antriebssystems 48
4 Anwendungsbeispiele
4.1 HLK-Anwendungsbeispiele
4.1.1 Stern-/Dreieckstarter oder Softstarter nicht erforderlich 49
4.1.2 Start/Stopp 49
4.1.3 Puls-Start/Stopp 49
4.1.4 Potenziometer-Sollwert 50
4.1.5 Automatische Motoranpassung (AMA) 50
4.1.6 Lüfteranwendung mit Resonanzvibrationen 51
4.2 Beispiele für Energieeinsparungen
4.2.1 Gründe für den Einsatz eines Frequenzumrichters zur Regelung von Lüftern und
Pumpen 51
4.2.2 Der klare Vorteil: Energieeinsparung 52
4.2.3 Beispiele für Energieeinsparungen 52
4.2.4 Vergleich der Energieeinsparungen 53
4.2.5 Beispiel mit variablem Durchfluss über 1 Jahr 53
4.3 Regelung – Beispiele
4.3.1 Verbesserte Regelung 54
4.3.2 Smart Logic Control 54
49
49
51
54
4.3.3 Programmierung des Smart Logic Controllers 54
4.3.4 SLC-Anwendungsbeispiel 55
4.4 EC+ Konzept für Asynchron- und PM-Motoren
5 Typencode und Auswahlhilfe
5.1 Antriebskonfigurator
5.2 Typencode
5.3 Bestellnummern
6 Technische Daten
6.1 Abstände, Abmessungen und Gewichte
6.1.1 Abstände 62
6.1.2 Motorbaugröße gemäß Bauform FCP 106 63
6.1.3 FCP 106 Abmessungen 63
6.1.4 FCM 106 Abmessungen 64
6.1.5 Gewicht 67
6.2 Elektrische Daten
6.2.1 Netzversorgung 3 x 380-480 VAC – Normale und hohe Überlast 68
56
58
58
59
61
62
62
68
6.3 Netzversorgung
6.4 Schutzfunktionen und Eigenschaften
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 3
69
70
Page 6
Inhaltsverzeichnis
VLT® DriveMotor FCP 106/FCM 106
6.5 Umgebungsbedingungen
6.6 Kabelspezifikationen
6.7 Steuereingang/-ausgang und Steuerdaten
6.8 Technische Daten des FCM 106-Motors
6.8.1 Motorüberlastdaten, VLT DriveMotor FCM 106 73
6.9 Spezifikationen für Sicherung und Trennschalter
6.10 Leistungsreduzierung aufgrund Umgebungstemperatur und Taktfrequenz
6.11 dU/dt
6.12 Wirkungsgrad
Index
70
71
71
73
74
75
76
76
78
4 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 7
Einführung Projektierungshandbuch
1 Einführung
1.1 Zweck des Projektierungshandbuchs
Dieses Projektierungshandbuch für Danfoss VLT
DriveMotor FCP 106 und FCM 106 ist vorgesehen für:
Projektingenieure und Anlagenbauer
•
Planer
•
Anwendungs- und Produktspezialisten
•
Das Projektierungshandbuch enthält technische Informationen zu den Möglichkeiten und Funktionen des
Frequenzumrichters zur Integration in Systeme zur
Motorsteuerung und -überwachung.
Das Projektierungshandbuch hat den Zweck, Informationen
zum Anlagendesign und notwendige Daten für die
Integration des Frequenzumrichters in Anwendungen zu
liefern. Das Projektierungshandbuch ermöglicht die
Auswahl der passenden Frequenzumrichter und Optionen
für Anwendungen und Installationen.
Die Verfügbarkeit aller detaillierten Produktinformationen
in der Projektierungsphase ist für die Entwicklung einer
ausgereiften Anlage mit optimaler Funktionalität und
Effizienz sehr hilfreich.
®
Überwachung und Programmierung des Frequenzumrichters.
Die VLT® PROFIBUS DP MCA 101-Installationsan-
•
leitung enthält Informationen zur Installation des
PROFIBUS sowie zur Fehlersuche und beseitigung.
®
Das VLT
•
handbuch enthält Informationen zur Konfiguration
des Systems, zur Steuerung des Frequenzumrichters, zum Zugriff auf den Frequenzumrichter,
zur Programmierung und zur Fehlersuche und behebung. Zudem enthält es einige typische
Anwendungsbeispiele.
Das VLT® Motion Control Tool MCT 10 ermöglicht
•
Ihnen das Konfigurieren des Frequenzumrichters
auf einem Windows™-PC.
Danfoss VLT
•
rechung in HLK-Anwendungen.
Technische Literatur und Zulassungen sind online
verfügbar unter vlt-drives.danfoss.com/Support/Service/.
Sie können die Danfoss VLT® Energy Box-Software unter
www.danfoss.com/BusinessAreas/DrivesSolutionsim
Download-Bereich für PC-Software herunterladen.
PROFIBUS DP MCA 101-Programmier-
®
Energy Box-Software zur Energiebe-
1 1
VLT® ist eine eingetragene Marke.
Zusätzliche Materialien
1.2
Verfügbare Literatur:
®
Das VLT
•
thandbuch, für Informationen, die für Installation
und Inbetriebnahme des Frequenzumrichters
erforderlich sind.
Das VLT
•
rungshandbuch enthält die notwendigen
Informationen für die Integration des Frequenzumrichters in einer Vielzahl von Anwendungen.
Das VLT® DriveMotor FCP 106/FCM 106 Program-
•
mierhandbuch beschreibt die Programmierung
des Frequenzumrichters, einschließlich kompletter
Parameterbeschreibungen.
VLT® LCP-Anleitung zum Betrieb der Bedieneinheit
•
(LCP).
VLT® LOP-Anleitung zum Betrieb der LOP-Einheit.
•
Das Modbus RTU Produkthandbuch und das VLT
•
DriveMotor FCP 106/FCM 106 BACnet Produkthandbuch enthalten Informationen zur Regelung,
DriveMotor FCP 106/FCM 106 Produk-
®
DriveMotor FCP 106/FCM 106 Projektie-
Symbole, Abkürzungen und
1.3
Konventionen
Dieses Handbuch verwendet folgende Symbole:
HINWEIS
Kennzeichnet wichtige Hinweise, die Sie beachten
müssen, um Fehler oder den Betrieb mit reduzierter
Leistung zu vermeiden.
* Kennzeichnet die Werkseinstellung.
Schutzart Die Schutzart ist eine genormte Spezifikation für
elektrische Betriebsmittel, die den Schutz gegen
das Eindringen von Fremdobjekten und Wasser
beschreibt (Beispiel: IP20).
DIx DI1: Digitaleingang 1.
DI2: Digitaleingang 2.
EMV Elektromagnetische Verträglichkeit.
Fehler Diskrepanz zwischen einem berechneten,
beobachteten oder gemessenen Wert oder
Zustand und dem vorgegebenen oder
®
Werkseinstellung
theoretisch richtigen Wert oder Zustand.
Werkseinstellungen im Auslieferungszustand des
Produkts.
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 5
Page 8
Einführung
VLT® DriveMotor FCP 106/FCM 106
11
Fehler Ein Fehler kann einen Störungszustand
verursachen.
Fehlerrückstellung
MM Speichermodul.
MMP Speichermodul-Programmierung.
Parameter Gerätedaten und -werte, die ausgelesen und (bis
PELV Protective Extra Low Voltage, Schutzklein-
Übergeordnete
Steuerung
(SPS)
RS485 Feldbus-Schnittstelle gemäß EIA-422/485-
Warnung Wird der Begriff außerhalb des Zusammenhangs
Tabelle 1.1 Abkürzungen
Konventionen
•
•
•
•
Zulassungen
1.4
Frequenzumrichter werden in Übereinstimmung mit den in
diesem Abschnitt beschriebenen Richtlinien konstruiert.
Weitere Informationen zu den Zulassungen und Zertifizierungen finden Sie im Downloadbereich unter http://
www.danfoss.com/BusinessAreas/DrivesSolutions/Documentations/.
Eine Funktion, mit der nach Beheben eines
erkannten Fehlers durch Entfernen der Ursache
des Fehlers der Frequenzumrichter in einen
Betriebszustand zurückversetzt wird. Der Fehler
ist dann nicht mehr aktiv.
zu einem gewissen Umfang) festgelegt werden
können.
spannung. Weitere Informationen finden Sie
unter IEC 60364-4-41 oder IEC 60204-1.
Speicherprogrammierbare Steuerung.
Busbeschreibung, die serielle Datenübertragung
zu mehreren Geräten ermöglicht.
von Sicherheitsanweisungen verwendet,
informiert eine Warnung über ein potenzielles
Problem, das von einer Überwachungsfunktion
erkannt wurde. Eine Warnung ist kein Fehler und
führt nicht zu einem Übergang des Betriebs-
zustands.
Nummerierte Listen zeigen Vorgehensweisen.
Aufzählungslisten zeigen weitere Informationen
und Beschreibung der Abbildungen.
Kursivschrift bedeutet:
- Querverweise.
- Link.
- Fußnoten.
- Parametername
- Parametergruppenname.
- Parameteroption.
Alle Abmessungen in mm (Zoll).
Zertifizierung FCP 106 FCM 106
EG-Konformitätserklärung
UL-gelistet –
UL erkannt
C-Tick
Die EG-Konformitätserklärung basiert auf den folgenden
Richtlinien:
Niederspannungsrichtlinie (2006/95/EG) basiert
•
auf EN 61800-5-1 (2007).
EMV-Richtlinie 2004/108/EG basiert auf EN
•
61800-3 (2004).
UL-gelistet
Produktauswertung wurde abgeschlossen und das Produkt
kann auf dem System installiert werden. Das System muss
außerdem von dem entsprechenden Anbieter UL gelistet
werden.
UL erkannt
Vor Inbetriebnahme der Kombination aus Frequenzumrichter und Motor ist eine zusätzliche Auswertung
erforderlich. Das System, auf dem Sie das Produkt installieren, muss auch von dem entsprechenden Anbieter UL
gelistet sein.
✓ ✓
✓
✓ ✓
✓
–
1.4.1 Was unter die Richtlinien fällt
Der in der EU geltende Leitfaden zur Anwendung der
Richtlinie 2004/108/EG des Rates nennt drei typische
Situationen.
Der Frequenzumrichter wird direkt im freien
•
Handel an den Endkunden verkauft. Für derartige
Anwendungen bedarf der Frequenzumrichter der
CE-Kennzeichnung gemäß der EMV-Richtlinie.
Der Frequenzumrichter wird als Teil eines Systems
•
verkauft. Das System wird als Kompletteinheit
angeboten, z. B. eine Klimaanlage. Das gesamte
System muss gemäß der EMV-Richtlinie CEgekennzeichnet sein. Dies kann der Hersteller
durch Überprüfung der EMV-Eigenschaften des
Systems gewährleisten. Die Systemkomponenten
müssen nicht mit einer CE-Kennzeichnung
versehen werden.
6 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 9
Einführung Projektierungshandbuch
Der Frequenzumrichter wird für die Installation in
•
einer Anlage verkauft. Es kann sich dabei z. B. um
eine Produktionsanlage oder um eine von
Fachleuchten konstruierte und installierte
Heizungs- oder Lüftungsanlage handeln. Der
Frequenzumrichter muss über eine CEKennzeichnung gemäß der EMV-Richtlinie
verfügen. Die fertige Anlage muss nicht über eine
CE-Kennzeichnung verfügen. Sie muss jedoch den
grundlegenden Anforderungen der EMV-Richtlinie
entsprechen. Dies kann der Anlagenbauer durch
den Einsatz von Bauteilen, Geräten und Systemen
sicherstellen, die eine CE-Kennzeichnung gemäß
der EMV-Richtlinie besitzen.
1.4.2 CE-Zeichen
Abbildung 1.1 CE
Das CE-Zeichen (Communauté Européenne) zeigt an, dass
der Hersteller des Produkts alle relevanten EU-Richtlinien
einhält. Die geltenden EU-Richtlinien zu Ausführung und
Konstruktion des Frequenzumrichters sind in Tabelle 1.2
aufgeführt.
HINWEIS
Über die Qualität eines Produkts sagt die CEKennzeichnung nichts aus. Auch gibt sie keinen
Aufschluss zu technischen Spezifikationen.
1.4.2.1 Niederspannungsrichtlinie
Die Niederspannungsrichtlinie gilt für alle elektrischen
Geräte im Spannungsbereich von 50–1000 V AC und 75–
1600 V DC.
Der Zweck der Richtlinie ist die Gewährleistung der
Personensicherheit und die Vermeidung von Beschädigungen der Anlage und Geräte, wenn die elektrischen
Betriebsmittel bei ordnungsgemäßer Installation und
Wartung bestimmungsgemäß verwendet werden.
1.4.2.2 EMV-Richtlinie
Der Zweck der EMV-Richtlinie (elektromagnetische Verträglichkeit) ist die Reduzierung elektromagnetischer
Störungen und die Steigerung der Störfestigkeit der
elektrischen Geräte und Installationen. Die grundlegende
Schutzanforderung der EMV-Richtlinie 2004/108/EG gibt
vor, dass Betriebsmittel, die elektromagnetische Störungen
verursachen oder deren Betrieb durch diese Störungen
beeinträchtigt werden kann, bei einer ordnungsmäßigen
Installation und Wartung sowie einer bestimmungsgemäßen Verwendung so ausgelegt sein müssen, dass ihre
erreichten elektromagnetischen Störungen begrenzt sind
und die Betriebsmittel eine bestimmte Störfestigkeit
aufweisen.
Elektrische Geräte, die alleine oder als Teil einer Anlage
verwendet werden, müssen eine CE-Kennzeichnungen
tragen. Anlagen müssen nicht über eine CE-Kennzeichnung
verfügen, jedoch den grundlegenden Schutzanforderungen
der EMV-Richtlinie entsprechen.
1.4.2.3 Maschinenrichtlinie
1 1
HINWEIS
Frequenzumrichter mit integrierter Sicherheitsfunktion
müssen mit der Maschinenrichtlinie konform sein.
EU-Richtlinie Version
Niederspannungsrichtlinie 2014/35/EU
EMV-Richtlinie 2014/30/EU
Maschinenrichtlinie
Ökodesign-Richtlinie (ErP) 2009/125/EC
ATEX-Richtlinie 2014/34/EU
RoHS-Richtlinie 2002/95/EC
Tabelle 1.2 Frequenzumrichter betreffende EU-Richtlinien
1) Konformität mit der Maschinenrichtlinie ist nur bei Frequenzumrichtern mit integrierter Sicherheitsfunktion erforderlich.
Konformitätserklärungen sind auf Anfrage erhältlich.
1)
2014/32/EU
Der Zweck der Maschinenrichtlinie ist die Gewährleistung
der Personensicherheit und die Vermeidung von Beschädigungen der Anlage und Geräte, wenn die mechanischen
Betriebsmittel bestimmungsgemäß verwendet werden. Die
Maschinenrichtlinie bezieht sich auf Maschinen, die aus
einem Aggregat mehrerer zusammenwirkender
Komponenten oder Betriebsmittel bestehen, von denen
mindestens eine(s) mechanisch beweglich ist.
Frequenzumrichter mit integrierter Sicherheitsfunktion
müssen mit der Maschinenrichtlinie konform sein. Frequenzumrichter ohne Sicherheitsfunktion fallen nicht unter die
Maschinenrichtlinie. Wird ein Frequenzumrichter jedoch in
ein Maschinensystem integriert, so stellt Danfoss Informationen zu Sicherheitsaspekten des Frequenzumrichters zur
Verfügung.
Wenn Frequenzumrichter in Maschinen mit mindestens
einem beweglichen Teil eingesetzt werden, muss der
Maschinenhersteller eine Erklärung zur Verfügung stellen,
die die Übereinstimmung mit allen relevanten gesetzlichen
Bestimmungen und Sicherheitsrichtlinien bestätigt.
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 7
Page 10
Einführung
VLT® DriveMotor FCP 106/FCM 106
11
1.4.2.4 Ökodesign-Richtlinie (ErP)
Die Ökodesignrichtlinie ist die europäische Richtlinie zur
umweltgerechten Gestaltung energieverbrauchsrelevanter
Produkte. Die Richtlinie legt die Anforderungen an die
umweltgerechte Gestaltung energieverbrauchsrelevanter
Produkte einschließlich Frequenzumrichtern fest. Die
Richtlinie hat eine verbesserte Energieeffizienz und
allgemeine Umweltverträglichkeit von Elektrogeräten bei
gleichzeitiger Erhöhung der Sicherheit der Energieversorgung zum Ziel. Die Einflüsse der
energieverbrauchsrelevanten Produkte auf die Umwelt
umfassen den Energieverbrauch über die gesamte Produktlebensdauer.
Der Frequenzumrichter erfüllt die Anforderungen der UL
508C bezüglich der thermischen Sicherung. Weitere
Informationen finden Sie unter Kapitel 3.3.9 Thermischer
Motorschutz.
1.4.5 Exportkontrollvorschriften
Frequenzumrichter können regionalen und/oder nationalen
Exportkontrollvorschriften unterliegen.
Frequenzumrichter, die Exportkontrollvorschriften
unterliegen, sind mit einer ECCN-Nummer gekennzeichnet.
Die ECCN-Nummer finden Sie in den Dokumenten, die Sie
mit dem Frequenzumrichter erhalten.
1.4.3 C-tick-Konformität (australische EMVStandards)
Im Falle einer Wiederausfuhr ist der Exporteur dafür verantwortlich, die Einhaltung aller geltenden
Exportkontrollvorschriften sicherzustellen.
1.5 Softwareversion
Abbildung 1.2 C-Tick
Die C-Tick-Kennzeichnung zeigt eine Übereinstimmung mit
den relevanten technischen Standards zur elektromagnetischen Verträglichkeit (EMV) an. Die C-Tick-Konformität ist
für die Markteinführung elektrischer und elektronischer
Geräte auf dem Markt in Australien und Neuseeland
erforderlich.
Die C-Tick-Richtlinie befasst sich mit leitungsgeführter und
abgestrahlter Störaussendung. Wenden Sie für Frequenzumrichter die in EN/IEC 61800-3 angegebenen
Störaussendungsbeschränkungen an.
Die auf dem Frequenzumrichter installierte Softwareversion
können Sie in
Parameter 15-43 Softwareversion ablesen.
Vorgaben zur Entsorgung
1.6
Sie dürfen Geräte mit elektrischen Bauteilen
nicht zusammen mit dem Hausmüll entsorgen.
Diese müssen separat mit Elektro- und
Elektronik-Altgeräten gemäß den lokalen Bestimmungen und den aktuell gültigen Gesetzen
gesammelt werden.
1.7 Sicherheit
Eine Konformitätserklärung ist auf Anfrage erhältlich.
1.4.4 UL-Konformität
Abbildung 1.3 UL-gelistet
Abbildung 1.4 UL-Zulassung
8 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
1.7.1 Allgemeine Leitlinien zur Sicherheit
Frequenzumrichter können bei unsachgemäßer
Handhabung tödliche Verletzungen verursachen, da sie
Hochspannungskomponenten enthalten. Nur qualifiziertes
Fachpersonal darf dieses Gerät installieren oder bedienen.
Reparaturarbeiten dürfen erst begonnen werden, wenn der
Frequenzumrichter vom Netz getrennt und der festgelegte
Zeitraum für die Entladung gespeicherter elektrischer
Energie verstrichen ist.
Für einen sicheren Betrieb des Frequenzumrichters ist die
strikte Befolgung von Sicherheitsmaßnahmen und hinweisen unbedingt erforderlich.
Der einwandfreie und sichere Betrieb des Frequenzumrichters setzt fachgerechten und zuverlässigen Transport
voraus. Lagerung, Installation, Bedienung und Instandhaltung müssen diese Anforderungen ebenfalls erfüllen.
Nur qualifiziertes Fachpersonal darf dieses Gerät installieren
oder bedienen.
Page 11
Einführung Projektierungshandbuch
Qualifiziertes Fachpersonal sind per Definition geschulte
Mitarbeiter, die gemäß den einschlägigen Gesetzen und
Vorschriften zur Installation, Inbetriebnahme und Instandhaltung von Betriebsmitteln, Systemen und Schaltungen
berechtigt sind. Ferner muss das qualifizierte Personal mit
allen Anweisungen und Sicherheitsmaßnahmen gemäß
diesem Produkthandbuch vertraut sein.
WARNUNG
HOCHSPANNUNG
Bei Anschluss an Versorgungsnetzeingang, DCVersorgung oder Zwischenkreiskopplung führen
Frequenzumrichter Hochspannung. Erfolgen Installation,
Inbetriebnahme und Wartung nicht durch qualifiziertes
Personal, kann dies zum Tod oder zu schweren Verletzungen führen.
Installation, Inbetriebnahme und Wartung
•
dürfen ausschließlich von qualifiziertem
Personal durchgeführt werden.
WARNUNG
UNERWARTETER ANLAUF
Bei Anschluss des Frequenzumrichters an Versorgungsnetz, DC-Versorgung oder Zwischenkreiskopplung
kann der angeschlossene Motor jederzeit unerwartet
anlaufen. Ein unerwarteter Anlauf im Rahmen von
Programmierungs-, Service- oder Reparaturarbeiten kann
zu schweren bzw. tödlichen Verletzungen oder zu
Sachschäden führen. Der Motor kann über einen
externen Schalter, einen Feldbus-Befehl, ein Sollwerteingangssignal, über ein LCP oder nach einem quittierten
Fehlerzustand anlaufen.
So verhindern Sie ein unerwartetes Starten des Motors:
Trennen Sie den Frequenzumrichter vom Netz.
•
Drücken Sie [Off/Reset] am LCP, bevor Sie
•
Parameter programmieren.
Verkabeln und montieren Sie Frequenzum-
•
richter, Motor und alle angetriebenen Geräte
vollständig, bevor Sie den Frequenzumrichter an
Netzversorgung, DC-Versorgung oder Zwischenkreiskopplung anschließen.
WARNUNG
ENTLADEZEIT
Der Frequenzumrichter enthält Zwischenkreiskondensatoren, die auch bei abgeschaltetem Frequenzumrichter
geladen sein können. Auch wenn die Warn-LED nicht
leuchten, kann Hochspannung anliegen. Das Nichteinhalten der angegebenen Wartezeit nach dem Trennen
der Stromversorgung vor Wartungs- oder Reparaturarbeiten kann zum Tod oder zu schweren Verletzungen
führen.
Stoppen Sie den Motor.
•
Trennen Sie das Versorgungsnetz und alle
•
externen DC-Zwischenkreisversorgungen,
einschließlich externer Batterie-, USV- und DCZwischenkreisverbindungen mit anderen
Frequenzumrichtern.
Trennen oder verriegeln Sie den PM-Motor.
•
Warten Sie, damit die Kondensatoren
•
vollständig entladen können. Die minimale
Wartezeit finden Sie in Tabelle 1.3.
Verwenden Sie vor der Durchführung von
•
Wartungs- oder Reparaturarbeiten ein
geeignetes Spannungsmessgerät, um sicherzustellen, dass die Kondensatoren vollständig
entladen sind.
Spannung
[V]
3x400 0,55–7,5 4
Tabelle 1.3 Entladezeit
1) Die Nennleistungen beziehen sich auf die normale Überlast (HO).
Leistungsbereich
[kW]
1)
Mindestwartezeit
(Minuten)
WARNUNG
GEFAHR DURCH ABLEITSTRÖME
Die Ableitströme überschreiten 3,5 mA. Eine nicht
vorschriftsmäßige Erdung des Frequenzumrichters kann
zum Tod oder zu schweren Verletzungen führen!
Lassen Sie die ordnungsgemäße Erdung der
•
Geräte durch einen zertifizierten Elektroinstallateur überprüfen.
1 1
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 9
Page 12
Einführung
VLT® DriveMotor FCP 106/FCM 106
11
WARNUNG
GEFAHR DURCH ANLAGENKOMPONENTEN!
Ein Kontakt mit drehenden Wellen und elektrischen
Betriebsmitteln kann zu schweren Personenschäden oder
sogar tödlichen Verletzungen führen.
Stellen Sie sicher, dass Installations-,
•
Inbetriebnahme- und Wartungsarbeiten
ausschließlich von geschultem und qualifiziertem Personal durchgeführt werden.
Alle Elektroarbeiten müssen den VDE-
•
Vorschriften und anderen lokal geltenden
Elektroinstallationsvorschriften entsprechen.
Befolgen Sie die Verfahren in dieser Anleitung.
•
WARNUNG
UNERWARTETE MOTORDREHUNG
WINDMÜHLEN-EFFEKT
Ein unerwartetes Drehen von Permanentmagnetmotoren
erzeugt Spannung und lädt das Gerät ggf. auf, was zu
schweren Verletzungen oder Sachschäden führen kann.
Stellen Sie sicher, dass die Permanentmagnet-
•
motoren blockiert sind, sodass sie sich unter
keinen Umständen drehen können.
VORSICHT
GEFAHR BEI EINEM INTERNEN FEHLER
Ein interner Fehler im Frequenzumrichter kann zu
schweren Verletzungen führen, wenn der Frequenzumrichter nicht ordnungsgemäß geschlossen wird.
Stellen Sie vor dem Anlegen von Netzspannung
•
sicher, dass alle Sicherheitsabdeckungen
angebracht und ordnungsgemäß befestigt sind.
10 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 13
195NA447.10
195NA419.10
Produktübersicht Projektierungshandbuch
2 Produktübersicht
2.1 Einführung
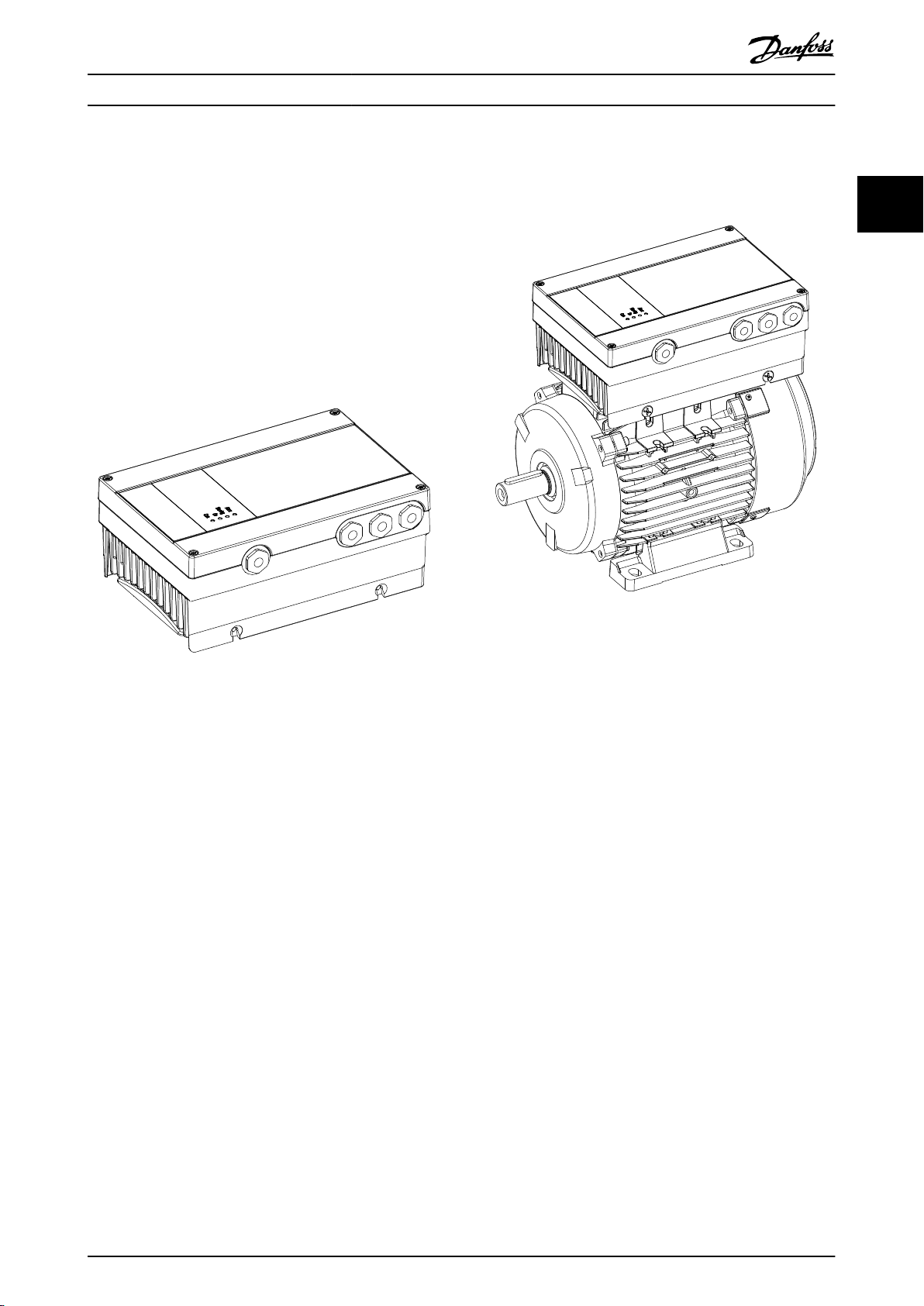
Die Produktübersicht gilt für FCP 106 und FCM 106.
VLT® DriveMotor FCP 106
Die Lieferung umfasst nur den Frequenzumrichter. Zur
Installation sind zusätzlich eine Wand- oder Motoradapterplatte sowie Crimp-Leistungsklemmen erforderlich.
Bestellen Sie den Wandmontagesatz oder die Adapterplatte
sowie die Crimp-Leistungsklemmen separat.
2 2
Abbildung 2.1 FCP 106
VLT® DriveMotor FCM 106
Der Frequenzumrichter ist bei Lieferung bereits auf dem
Motor montiert. Die Kombination von FCP 106 und dem
Motor heißt VLT® DriveMotor FCM 106.
Abbildung 2.2 FCM 106
2.1.1 Dichtung
Die Montage des FCP 106 auf einem Motor erfordert den
Einbau einer angepassten Dichtung. Die Dichtung passt
zwischen Motoradapterplatte und Motor.
Im Lieferumfang des FCP 106-Frequenzumrichters ist keine
Dichtung enthalten.
Deshalb müssen Sie die Dichtung vor der Installation
auslegen und prüfen, damit sie die Schutzart erfüllt (z. B.
IP55, IP66 oder Typ 4X).
Anforderungen an die Dichtung:
Erhalten Sie die Masseverbindung zwischen
•
Frequenzumrichter und Motor aufrecht. Der
Frequenzumrichter ist zur Motoradapterplatte
geerdet. Verwenden Sie zwischen Motor und
Frequenzumrichter eine Leitungsverbindung.
Verwenden Sie ein UL-genehmigtes Material für
•
die Dichtung, wenn für das fertig montierte
Produkt eine UL-Zulassung oder -Registrierung
erforderlich ist.
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 11
Page 14
195NA508.10
RS485
PROFIBUS
0/4 - 20mA
0–10V
I/O
Memory
Module
M
3~
AC
L1
L2
L3
IDC UDC
MCP
ACP
UDC
1
2 3 4 5
6
7
8
9
10
11
12
13
14
15
16
17
SMPS
GATE
DRIVE
Produktübersicht
VLT® DriveMotor FCP 106/FCM 106
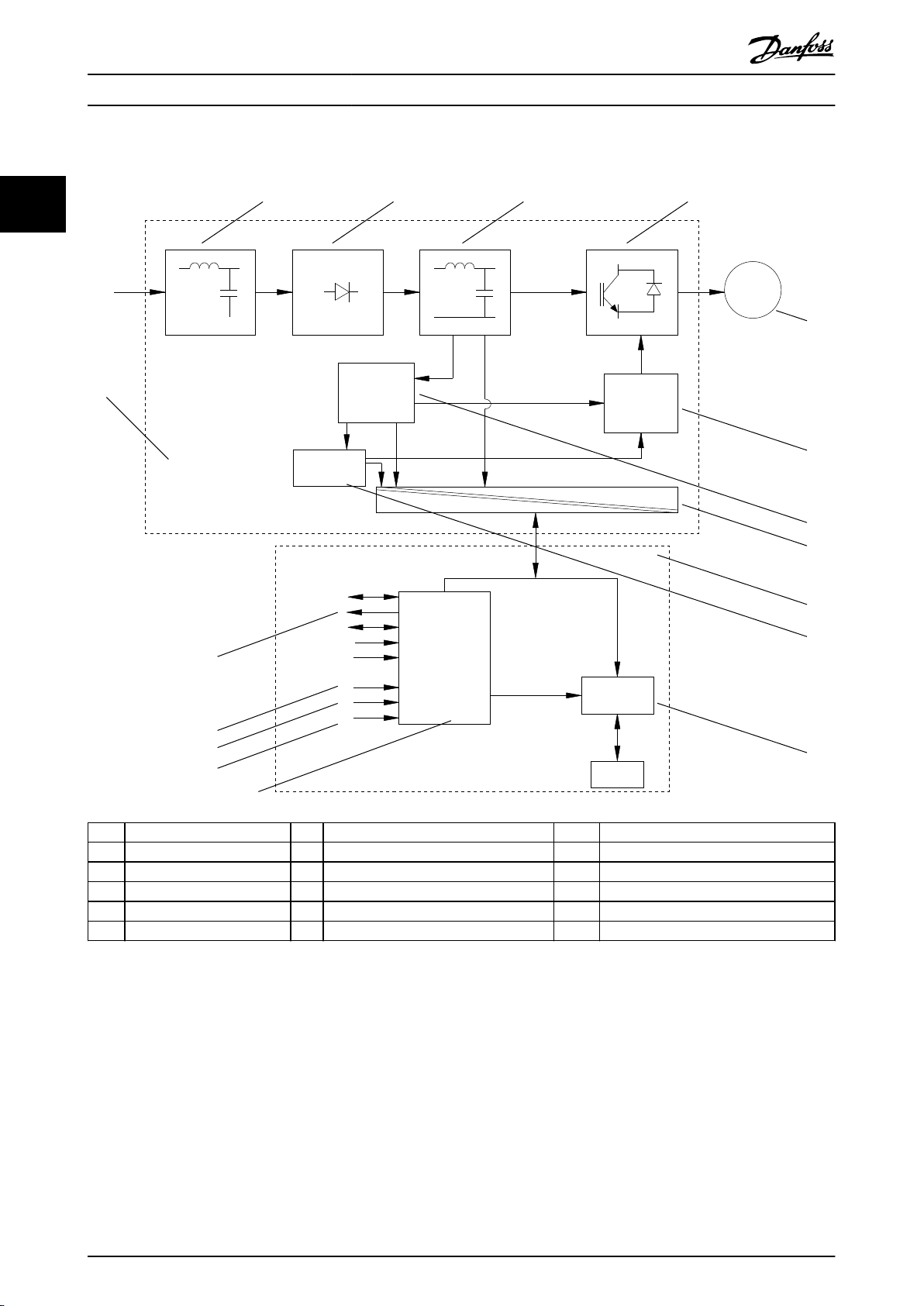
2.1.2 Hauptdiagramm
22
1 Leistungskarte 7 IGBT-Ansteuerkarte 13 Steuerklemmen
2 EMV-Filter 8 SMPS 14 Reset
3 Gleichrichter 9 Galvanische Trennung 15 Festdrehzahl JOG
4 Zwischenkreis/DC-Filter 10 Steuerkarte 16 Start
5 Wechselrichter 11 MCP (Motor Control Processor) 17 Analog-/Digitalausgang
6 Motor 12 ACP (Application Control Processor)
Abbildung 2.3 Hauptdiagramm
12 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 15
195NA507.11
L1
L2
L3
PE
3-phase
power
input
+10 V DC
0–10 V DC 0/4–20 mA
0/4–20 mA
0–10 V DC -
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN/OUT)
42 0/4–20 mA A OUT/DIG OUT
45 0/4–20 mA A OUT/DIG OUT
12 (+24 V OUT)
18 (DIGI IN)
19 (DIGI IN)
20 (COM D IN)
27 (DIGI IN)
29 (DIGI IN)
PROFIBUS
MCM
24 V (NPN)
0 V (PNP)
24 V (NPN)
0 V (PNP)
24 V (NPN)
0 V (PNP)
24 V (NPN)
0 V (PNP)
Bus ter.
RS485
Interface
(N RS485) 69
(P RS485) 68
(Com RS485) 61
RS485
(PNP)-Source
(NPN)-Sink
Bus ter.
1 2
ON
ON=Terminated
OFF=Unterminated
03
02
01
relay 1
240 V AC 3A
06
05
04
relay 2
240 V AC 3A
UDC+
UDC-
PE
Motor
U
V
W
T1
T2
Thermistor
located in
motor
Group 5-*
Located in
motor block
Produktübersicht Projektierungshandbuch
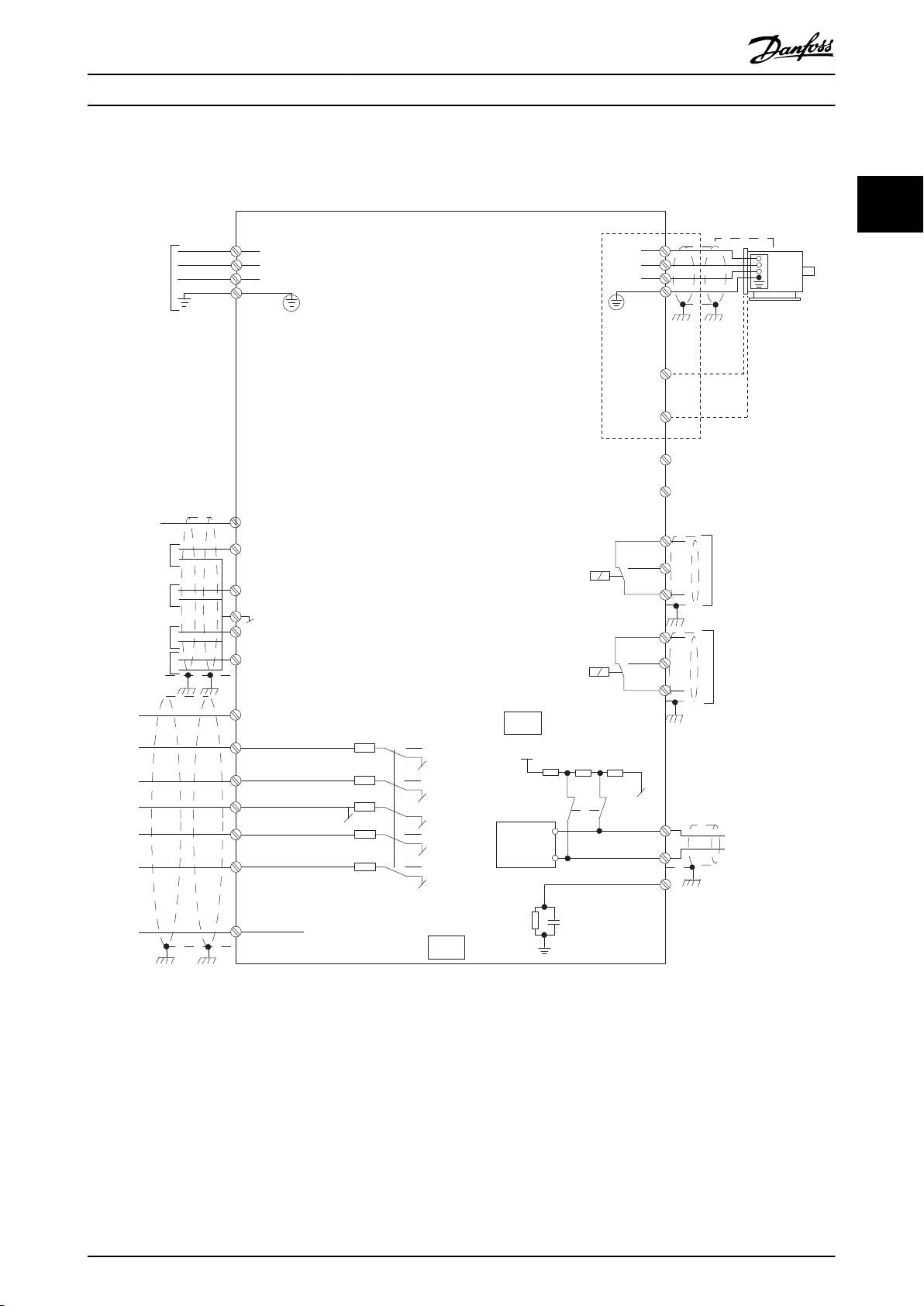
2.1.3 Elektrische Anschlussübersicht
2 2
Abbildung 2.4 Elektrische Anschlussübersicht
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 13
Page 16
195NA458.12
5
7
1
2
4
3
6
195NA409.12
1
2
3
4
8
5
6
7
130BB625.11
12 20 55
202729 42 45 55
50 53 54
GND
GND
DIGI IN/OUT
DIGI IN/OUT
61 68 69
N
P
COMM. GND
+24 V
DIGI IN
DIGI IN
10 V/20 mA IN
10 V/20 mA IN
0/4-20m A A OUT/DIG OUT
0/4-20 mA A OUT/DIG OUT
10 V OUT
BUS TER.
OFF ON
Produktübersicht
VLT® DriveMotor FCP 106/FCM 106
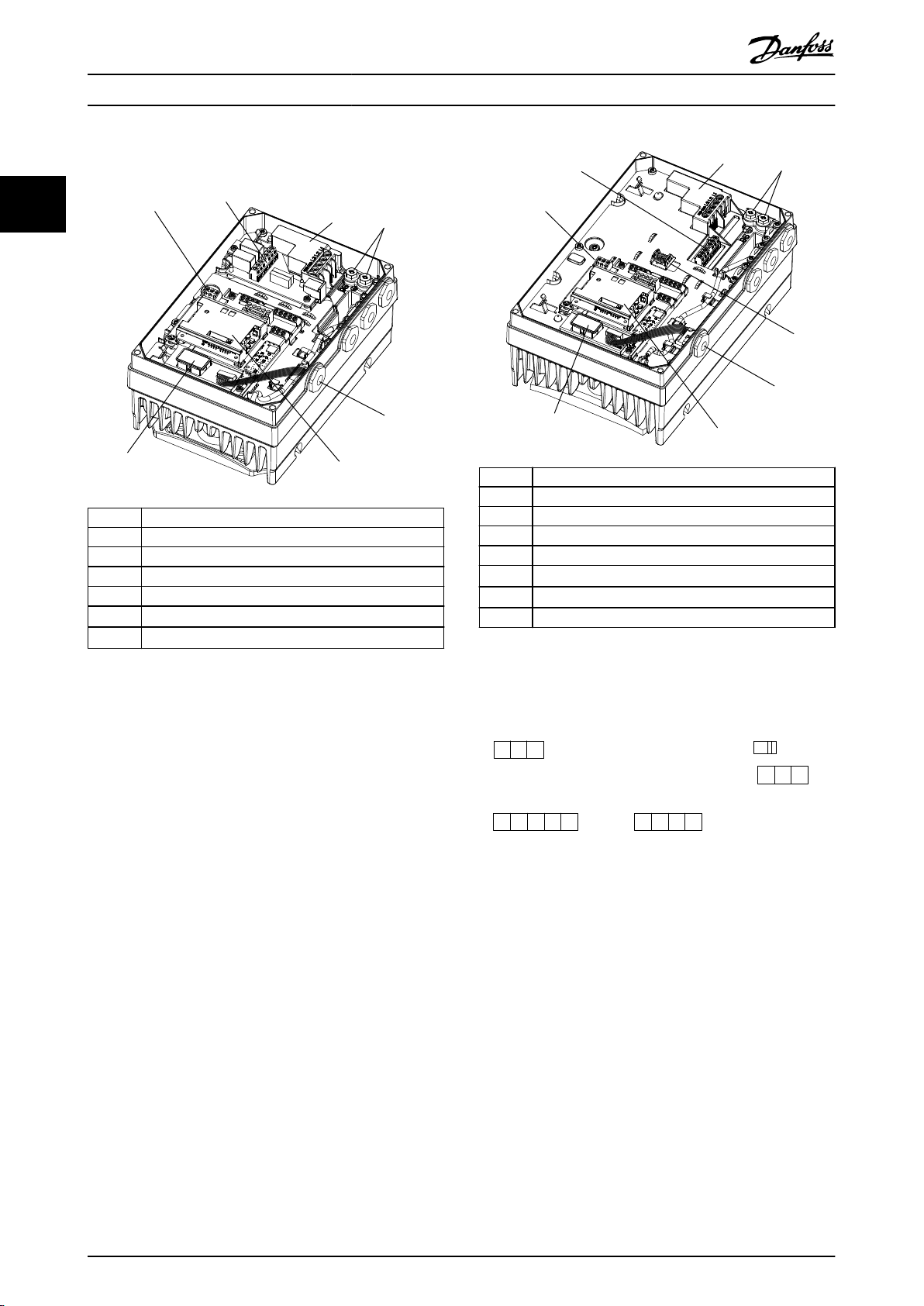
2.1.4 Steuerklemmen und -relais 3
22
1 Steuerklemmen
2 Relaisklemmen
1 Steuerklemmen
2 Relaisklemmen
3 UDC+, UDC-, Leitung (L3, L2, L1)
4 PE
5 LCP-Anschluss
6
7
VLT® PROFIBUS DP MCA 101
VLT® Memory Module MCM 101
Abbildung 2.5 Position der Klemmen und Relais, MH1
3 UDC+, UDC-, Leitung (L3, L2, L1)
4 PE
5 LCP-Anschluss
6
7
VLT® PROFIBUS DP MCA 101
VLT® Memory Module MCM 101
8 Federschelle für PROFIBUS-Kabel
Abbildung 2.6 Position der Klemmen und Relais, MH2-MH3
Steuerklemmen
Abbildung 2.7 Steuerklemmen
14 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 17
195NA501.10
1
Produktübersicht Projektierungshandbuch
Klemme
Nr.
12 +24 V-
18 Digital-
19 Digital-
20 Masse – –
27 Digital-
29 Digital-
50 +10 V-
53 Analog-
54 Analog-
55 Masse – –
42 10 Bit *0–20 mA/4–20 mA/DO Analog
45 10 Bit *0–20 mA/4–20 mA/DO Analog
1, 2, 3 Relais 1 1, 2 NO 1, 3 NC [9] Alarm
4, 5, 6 Relais 2 4, 5 NO 4, 6 NC [5] Motor ein
Tabelle 2.1 Steuerklemmenfunktionen
* Kennzeichnet die Werkseinstellung.
Funktion Konfiguration Werksein-
stellung
– –
Ausgang
*PNP/NPN Start
eingang
*PNP/NPN Ohne
eingang
eingang/ausgang
eingang/ausgang/
Pulseingang
Ausgang
eingang
eingang
*PNP/NPN Motorfreilauf
*PNP/NPN Festdrehzahl
– –
*0–10 V/0–20 mA/
4–20 mA
*0–10 V/0–20 mA/
4–20 mA
Funktion
(inv.)
JOG
Ref1
Ref2
HINWEIS
PNP/NPN ist Masse für die Klemmen 18, 19, 27 und 29.
2.1.5 (Feldbus-) Netzwerke für serielle
Kommunikation
Die folgenden Protokolle sind in den Frequenzumrichter
integriert:
BACnet MSTP
•
Modbus RTU
•
FC-Protokoll
•
2.2
VLT® Memory Module MCM 101
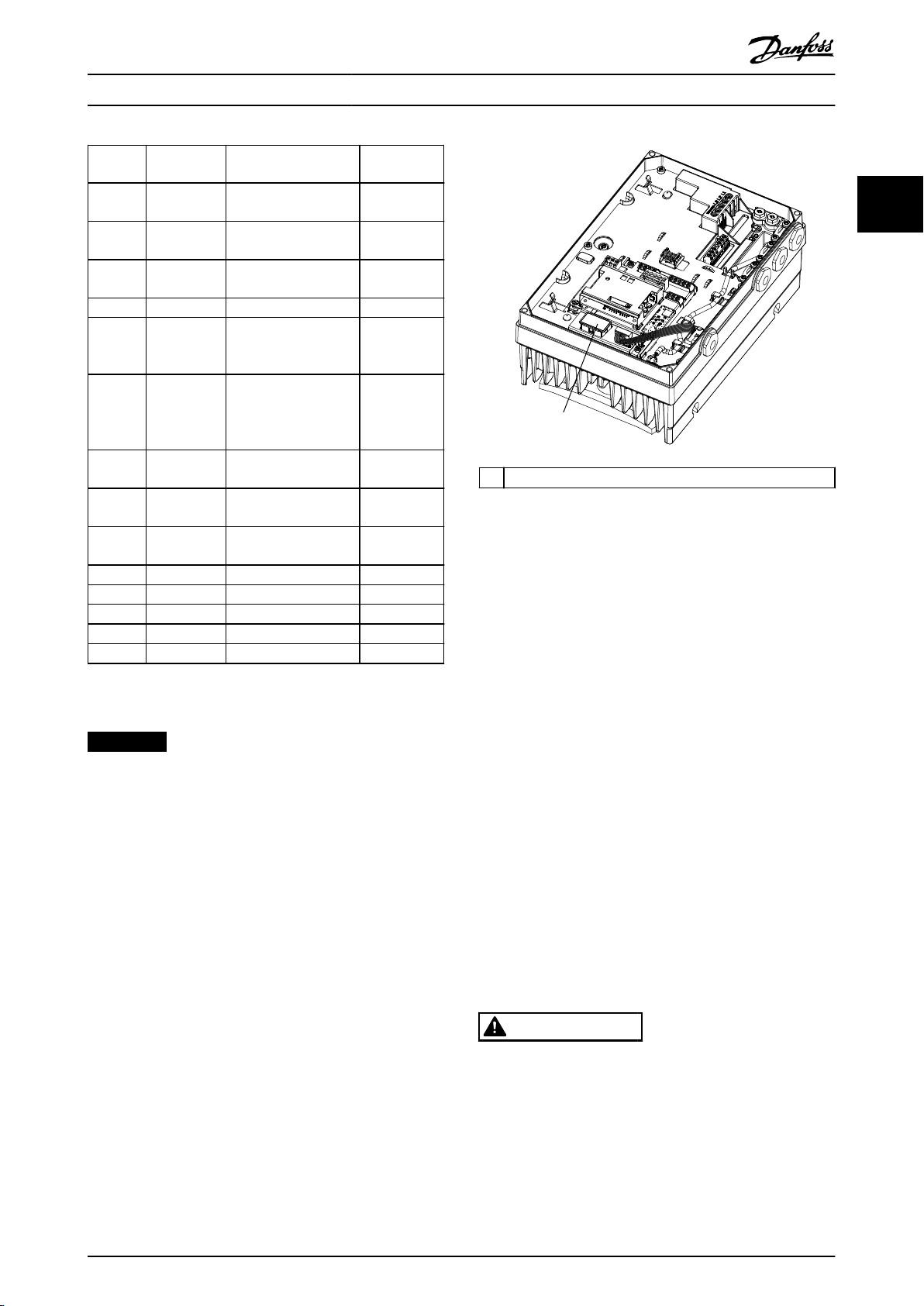
1
VLT® Memory Module MCM 101
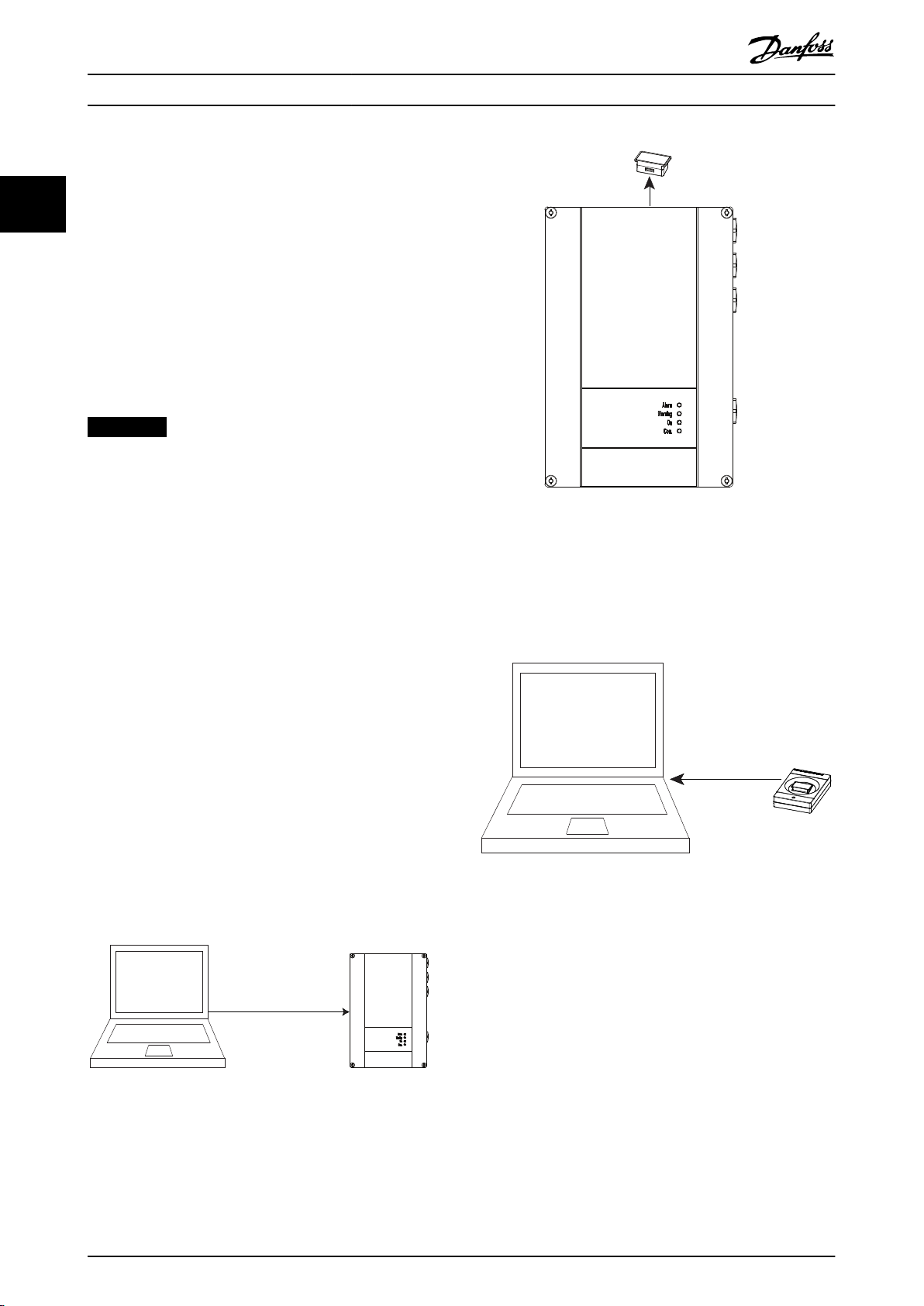
Abbildung 2.8 Position des Speichermoduls
Wenn das Speichermodul ausfällt, kann der Frequenzumrichter dennoch weiterarbeiten. Die Warn-LED am Deckel
blinkt, und das LCP (falls installiert) zeigt eine Warnung an.
Warnung 206, Speichermodul zeigt an, dass Sie einen
Frequenzumrichter ohne Speichermodul betreiben oder
das Speichermodul defekt ist. Die genaue Ursache für die
Warnung finden Sie in Parameter 18-51 Ursache der
Warnung Speichermodul.
Sie können ein neues Speichermodul als Ersatzteil
bestellen.
Bestellnummer: 134B0791.
2.2.1
Konfiguration mit dem VLT® Memory
Module MCM 101
Beim Austausch oder Hinzufügen eines Frequenzumrichters
zu einem System ist eine einfache Übertragung der
vorhandenen Daten zum Frequenzumrichter möglich. Die
Frequenzumrichter müssen jedoch dieselbe Leistungsgröße
haben und über kompatible Hardware verfügen.
2 2
Das VLT® Memory Module MCM 101 ist ein kleines
Speichermedium, das beispielsweise folgende Daten
enthält:
Firmware.
•
SIVP-Datei.
•
Pumpentabelle.
•
Motor-Datenbank.
•
Parameterlisten.
•
Das Modul ist werkseitig am Frequenzumrichter installiert.
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 15
WARNUNG
TRENNEN SIE DIE NETZVERSORGUNG VOR DER
WARTUNG!
Vor der Durchführung von Reparaturarbeiten müssen Sie
den Frequenzumrichter vom Versorgungsnetz trennen.
Warten Sie nach dem Trennen der Netzversorgung 4
Minuten, damit sich die Kondensatoren entladen können.
Eine Nichtbeachtung dieser Schritte kann tödliche oder
schwerste Verletzungen zur Folge haben.
Page 18
Parameter list
Firmware
Motor database
.
.
.
Not encoded data
195NA502.10
Encoded data
MCM
195NA503.10
Copy
195NA504.10
Parameter list
Firmware
Motor database
.
.
.
Produktübersicht
VLT® DriveMotor FCP 106/FCM 106
1. Entfernen Sie den Deckel von einem Frequenzumrichter mit Speichermodul.
22
2. Klemmen Sie das Speichermodul ab.
3. Setzen Sie den Deckel ein und befestigen Sie
diesen.
4. Entfernen Sie den Deckel vom neuen Frequenzumrichter.
5. Bauen Sie das Speichermodul in den neuen/
anderen Frequenzumrichter ein.
6. Setzen Sie den Deckel am neuen Frequenzumrichter ein und befestigen Sie diesen.
7. Schalten Sie den Frequenzumrichter ein.
HINWEIS
Die erste Netz-Einschaltung dauert ca. 3 Minuten. In
dieser Zeit werden alle Daten an den Frequenzumrichter
übertragen.
2.2.2 Kopieren von Daten über PC und
Memory Module Programmer (MMP)
Abbildung 2.10 Datenübertragung vom Frequenzumrichter
zum Speichermodul
Durch Verwendung eines PCs und dem MMP können Sie
mehrere Speichermodule mit denselben Daten erstellen.
Sie können diese Speichermodule in VLT® DriveMotor FCP
106 oder VLT® DriveMotor FCM 106 einstecken.
Beispiele der kopierbaren Daten:
Firmware.
•
Parametereinstellung.
•
Pumpenkurven.
•
Während des Betriebs wird der Downloadstatus auf dem
Bildschirm angezeigt.
1. Schließen Sie einen FCP 106 oder FCM 106 an
einen PC an.
2. Übertragen Sie die Konfigurationsdaten vom PC
zum Frequenzumrichter. Diese Daten sind NICHT
codiert.
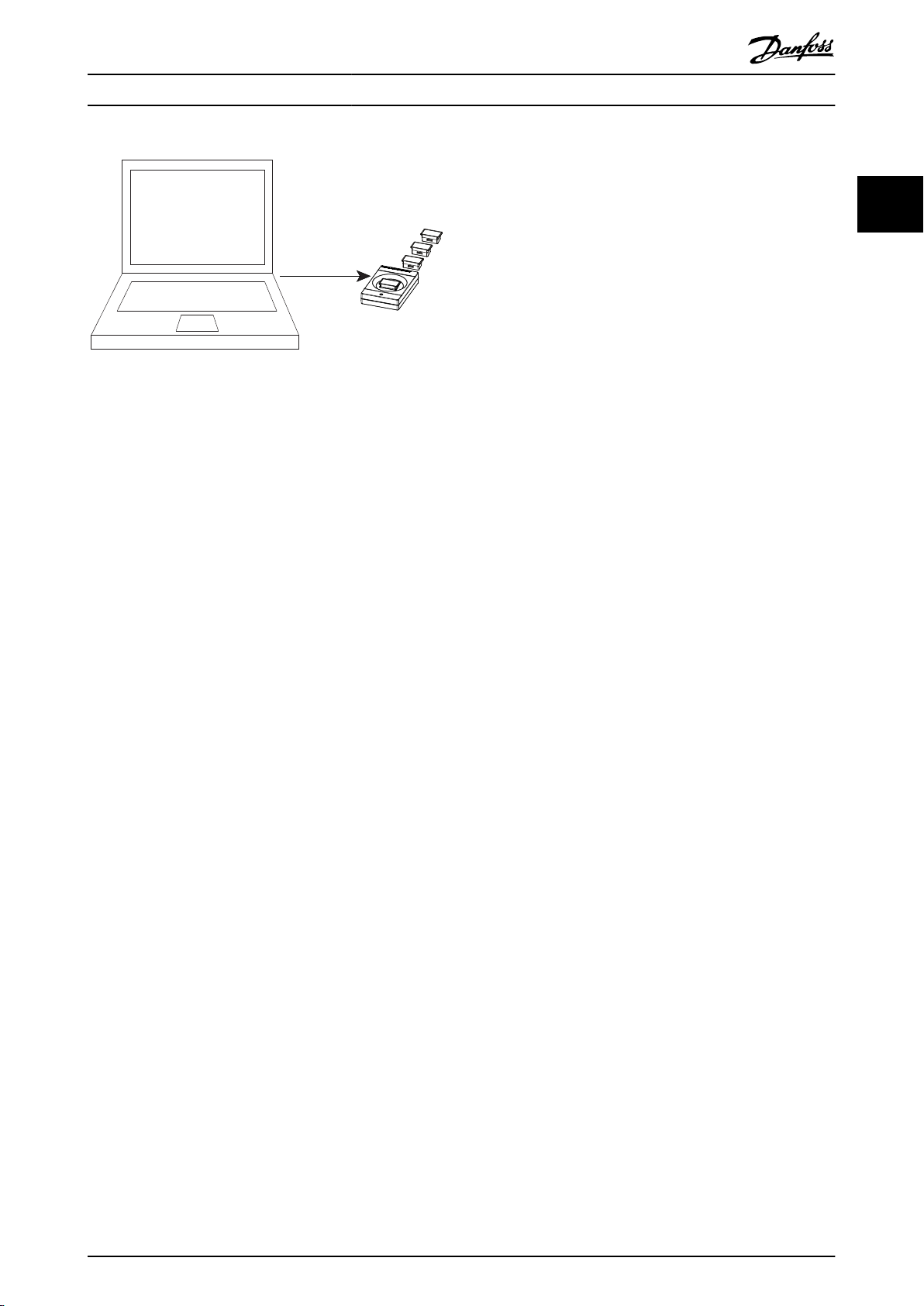
4. Stecken Sie das Speichermodul in den MMP ein.
5. Schließen Sie den MMP an einen PC an, um die
Daten vom Speichermodul zu übertragen.
Abbildung 2.11 Datenübertragung vom MMP zum PC
6. Stecken Sie ein leeres Speichermodul in den MMP
ein.
7. Wählen Sie aus, welche Daten vom PC zum
Speichermodul übertragen werden sollen.
Abbildung 2.9 Datenübertragung vom PC zum Frequenzumrichter
3. Die Daten werden automatisch in codierter Form
vom Frequenzumrichter zum Speichermodul
übertragen.
16 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 19
195NA505.10
Copy motor
database
Parameter list
Firmware
Motor database
.
.
.
Produktübersicht Projektierungshandbuch
Abbildung 2.12 Datenübertragung vom PC zum
Speichermodul
8. Wiederholen Sie die Schritte 6 und 7 für die
einzelnen Speichermodule, die in dieser
bestimmten Konfiguration benötigt werden.
9. Stecken Sie die Speichermodule in die Frequenzumrichter ein.
2 2
2.2.3 Kopieren einer Konfiguration zu
mehreren Frequenzumrichtern
Sie können die Konfiguration von 1 VLT® DriveMotor FCP
106 oder VLT® DriveMotor FCM 106 an mehrere andere
übertragen. Hierfür benötigen Sie lediglich einen Frequenzumrichter, der bereits über die gewünschte Konfiguration
verfügt.
1. Entfernen Sie den Deckel vom Frequenzumrichter,
dessen Konfiguration kopiert werden soll.
2. Klemmen Sie das Speichermodul ab.
3. Entfernen Sie den Deckel vom Frequenzumrichter,
zu dem die Konfiguration kopiert werden soll.
4. Stecken Sie das Speichermodul ein.
5. Wenn das Kopieren abgeschlossen ist, stecken Sie
ein leeres Speichermodul in den Frequenzumrichter ein.
6. Setzen Sie den Deckel ein und befestigen Sie
diesen.
7. Schalten Sie den Frequenzumrichter aus und
wieder ein.
8. Wiederholen Sie die Schritte 3–7 für jeden
Frequenzumrichter, der die Konfiguration erhalten
soll.
9. Stecken Sie das Speichermodul in den OriginalFrequenzumrichter ein.
10. Setzen Sie den Deckel ein und befestigen Sie
diesen.
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 17
Page 20
Reference
handling
Remote
reference
Auto mode
Hand mode
Local
reference
scaled to
Hz
LCP Hand on,
o and auto
on keys
Remote
Local
Reference
P 4-14
Motor speed
high limit [Hz]
P 4-12
Motor speed
low limit [Hz]
P 3-4* Ramp 1
P 3-5* Ramp 2
Ramp
100%
0%
100%
-100%
P 4-10
Motor speed
direction
P 4-19
Max output
frequency
To motor
control
195NA449.10
Produktübersicht
VLT® DriveMotor FCP 106/FCM 106
2.3 Regelungsstrukturen
Wählen Sie in Parameter 1-00 Regelverfahren, ob die Regelung ohne oder mit Rückführung erfolgt.
22
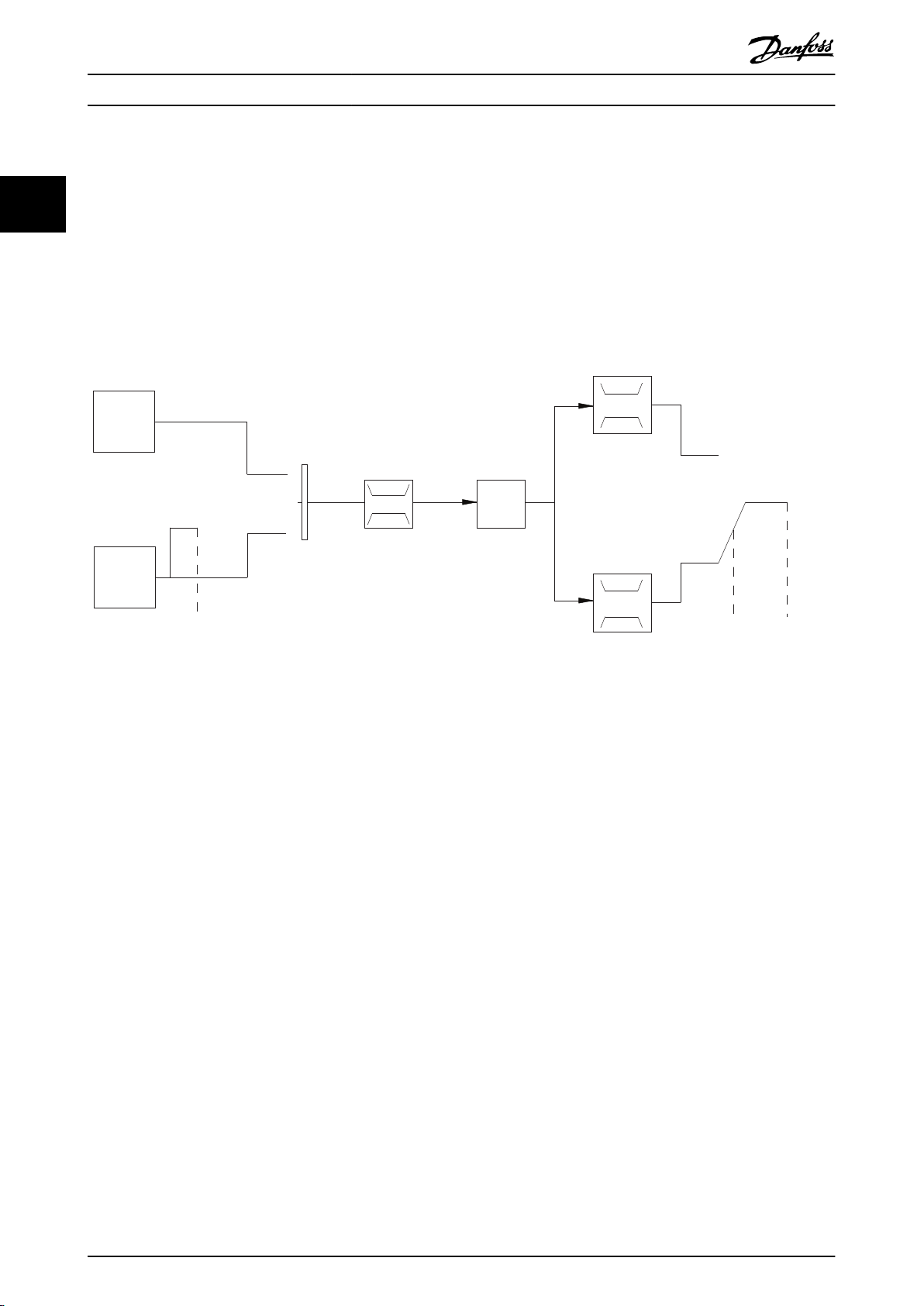
2.3.1 Regelungsstruktur ohne Rückführung
In der in Abbildung 2.13 dargestellten Konfiguration ist Parameter 1-00 Regelverfahren auf [0] Regelung ohne Rückführung
eingestellt. Der Frequenzumrichter empfängt aus dem Sollwertsystem den resultierenden Sollwert oder den Ortsollwert. Er
verarbeitet diesen Wert in der Rampen- und Drehzahlbegrenzung. Anschließend wird er an die Motorsteuerung gesendet.
Der Ausgang der Motorsteuerung wird dann durch die maximale Frequenzgrenze beschränkt.
Abbildung 2.13 Struktur ohne Rückführung
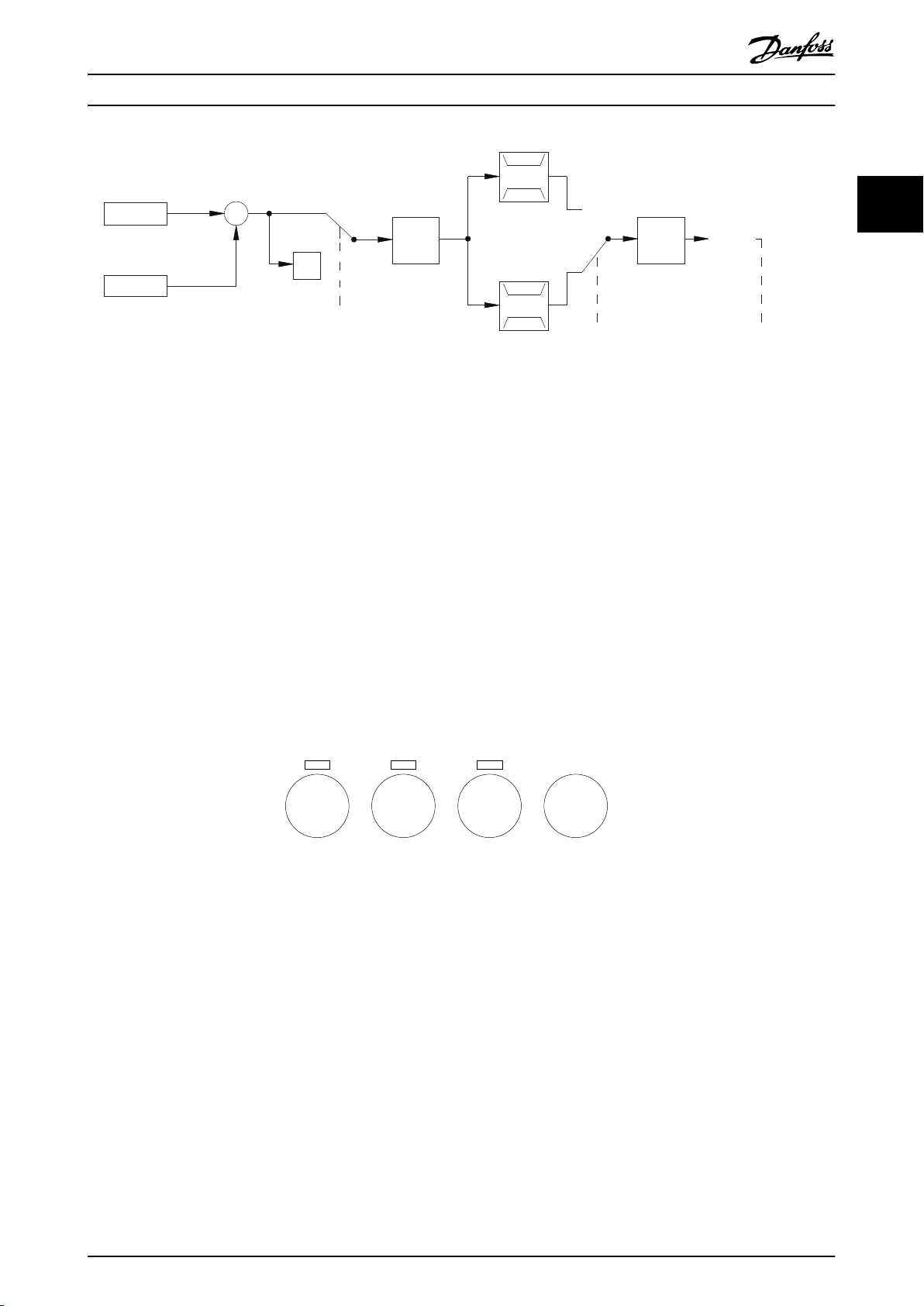
2.3.2 Regelungsstruktur (Regelung mit Rückführung) (PI)
Der interne Regler macht den Frequenzumrichter zu einem Teil des geregelten Systems. Der Frequenzumrichter empfängt
ein Istwertsignal von einem Sensor im System. Daraufhin vergleicht er diesen Istwert mit einem Sollwert und erkennt ggf.
eine Abweichung zwischen diesen beiden Signalen. Zum Ausgleich dieser Abweichung passt er dann die Drehzahl des
Motors an.
Beispiel: Eine Pumpanwendung, die die Drehzahl der Pumpe so regelt, dass der statische Druck in einer Leitung konstant
bleibt. Der gewünschte statische Druckwert wird als Sollwert an den Frequenzumrichter übermittelt. Ein statischer
Drucksensor misst den tatsächlichen statischen Druck in der Leitung und übermittelt diesen als Istwertsignal an den
Frequenzumrichter. Wenn das Istwertsignal größer ist als der Sollwert, reduziert der Frequenzumrichter die Drehzahl zur
Druckminderung. In dem ähnlich gelagerten Fall, dass der Leitungsdruck niedriger ist als der Sollwert, beschleunigt der
Frequenzumrichter automatisch zur Erhöhung des Pumpendrucks.
18 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 21
Reference
Feedback
S
+
-
*[-1]
PI
100%
0%
100%
-100%
Scale to
speed
To motor
control
P 4-10
Motor speed
direction
P 4-19
Max output
frequency (Hz)
20-81 PI
Normal/Inverse
control
195NA450.11
130BP046.10
Hand
on
O
Auto
on
Reset
Produktübersicht Projektierungshandbuch
Abbildung 2.14 Regler mit Rückführung
Auch wenn der Regler mit Rückführung oft bereits mit den Standardwerten eine zufrieden stellende Leistung erreicht, lässt
sich die Regelung des Systems durch Optimierung einiger Parameter des Reglers mit Rückführung häufig noch verbessern.
2.4 Hand-Steuerung (Hand On) und Fern-Betrieb (Auto On)
Der Frequenzumrichter kann manuell über das Bedienteil vor Ort (LCP) oder aus der Ferne über Analog-/Digitaleingänge
oder Feldbus betrieben werden.
2 2
Starten und stoppen Sie den Frequenzumrichter über das LCP mit den Tasten [Hand On] und [Off/Reset]. Eine Einstellung ist
erforderlich:
Parameter 0-40 [Hand On]-LCP Taste.
•
Parameter 0-44 [Off/Reset]-LCP Taste.
•
Parameter 0-42 [Auto On]-LCP Taste.
•
Quittieren Sie Alarme mithilfe der [Off/Reset]-Taste oder über einen Digitaleingang, wenn die Klemme auf Reset
programmiert wird.
Abbildung 2.15 LCP-Steuertasten
Der Ortsollwert versetzt das Regelverfahren in eine Regelung ohne Rückführung, die unabhängig von den Einstellungen in
Parameter 1-00 Regelverfahren ist.
Der Ortsollwert wird bei einem Ausschalten wiederhergestellt.
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 19
Page 22
195NA451.10
Speed open
loop
P 1-00
Conguration
mode
Input command:
freeze reference
Process
control
Scale to
Hz
Scale to
process
unit
Remote
reference/
setpoint
±200%
Feedback
handling
P 16-02 Remote
Reference in %
maxRefPCT
minRefPct
minref -maxref
Freeze
reference &
increase/
decrease
reference
±100%
Input commands:
Speed up/speed down
±200%
Relative
reference
=
X+X*Y/100
±200%
P 16-50 External reference in %
±200%
Parameter choice:
Reference resource 1,2,3
±100%
P 3-10 Preset
reference
Input command:
preset ref bit0, bit1, bit2
+
+
Relative scaling reference
Internal resource
Preset relative
reference
±100%
Preset reference 0 ±100%
Preset reference 1 ±100%
Preset reference 2 ±100%
Preset reference 3 ±100%
Preset reference 4 ±100%
Preset reference 5 ±100%
Preset reference 6 ±100%
Preset reference 7 ±100%
No function
Analog reference
±200%
Local bus reference
±200%
No function
Analog reference
±200%
Pulse reference
±200%
No function
Analog reference
±200%
Local bus reference
±200%
Y
X
P 3-14
P 3-15 Reference 1
resource
P 16-01
Reference
[Unit]
P 3-16 Reference 2
resource
Local bus reference
±200%
P 3-17 Reference 3
resource
Pulse reference
±200%
P 20 - 12
Reference
/Feedback
unit
or rpm
P 4 - 14 Motor
Speed high
limit (Hz)
P 4 - 12 Motor
Speed low
limit (Hz)
Pulse reference
±200%
Produktübersicht
VLT® DriveMotor FCP 106/FCM 106
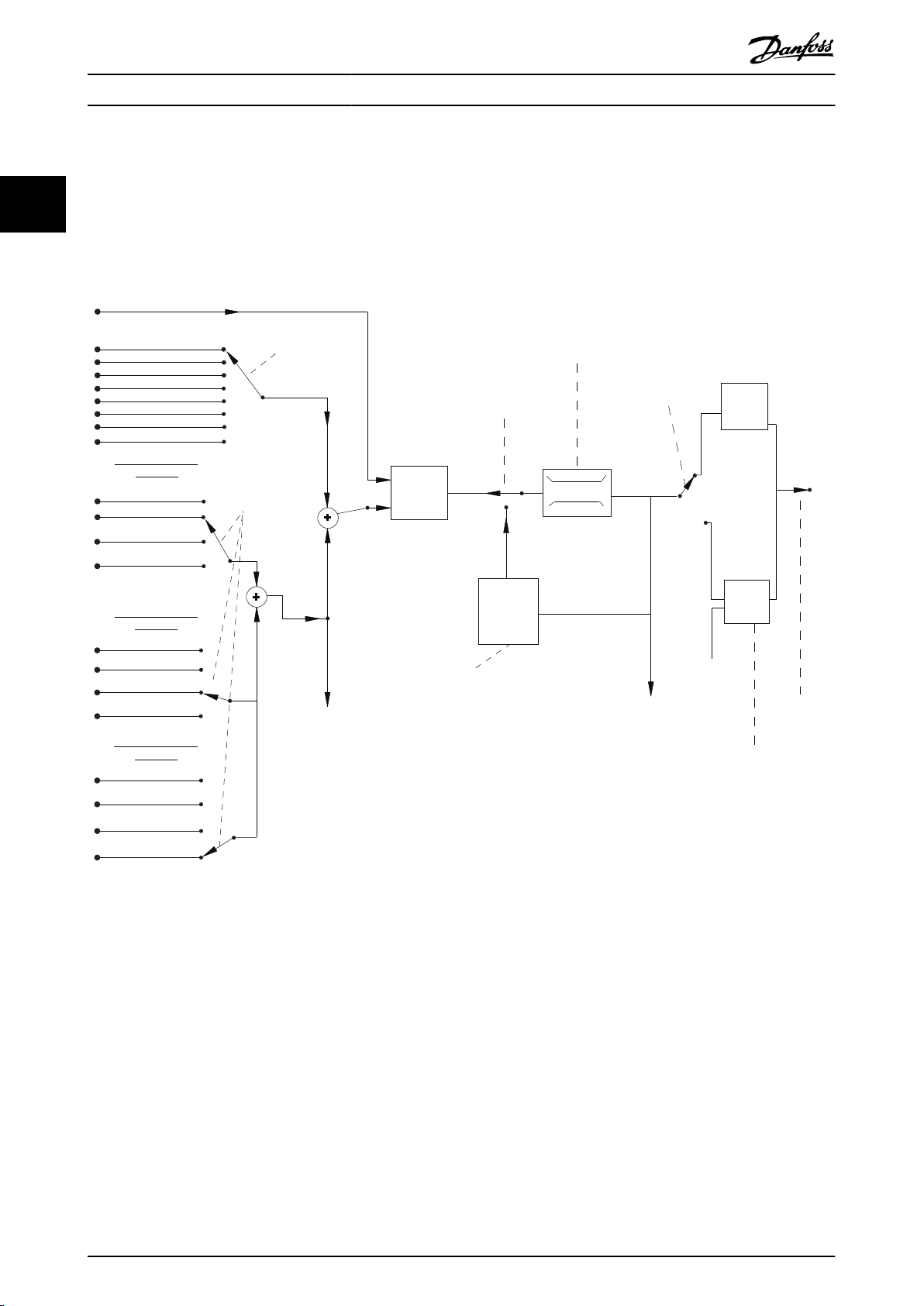
2.5 Ist- und Sollwertverarbeitung
2.5.1 Sollwertverarbeitung
22
Einzelheiten zum Betrieb ohne Rückführung und mit Rückführung.
Abbildung 2.16 Blockschaltbild mit Fernsollwert
20 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 23
130BB895.10
+
-
PI
P
P
P
Ref.
signal
Desired
ow
FB conversion
Ref.
FB
Flow
FB
signal
Flow
P 20-01
Produktübersicht Projektierungshandbuch
Der Fernsollwert besteht aus:
Festsollwerten.
•
Externen Sollwerten (Analogeingängen und
•
Sollwerten des seriellen Kommunikationsbusses).
Dem relativen Festsollwert.
•
Dem durch Rückführung geregelten Sollwert.
•
Im Frequenzumrichter können bis zu 8 Festsollwerte
programmiert werden. Sie können den aktiven Festsollwert
mithilfe von Digitaleingängen oder dem seriellen
Kommunikationsbus auswählen. Der Sollwert kann auch
von extern kommen, für gewöhnlich von einem Analogeingang. Diese externe Quelle wird über die drei
Sollwertquellenparameter ausgewählt:
Parameter 3-15 Variabler Sollwert 1.
•
Parameter 3-16 Variabler Sollwert 2.
•
Parameter 3-17 Variabler Sollwert 3.
•
Alle variablen Sollwerte sowie der Bus-Sollwert ergeben
durch Addition den gesamten externen Sollwert. Wählen
Sie den externen Sollwert, den Festsollwert oder die
Summe aus beiden als aktiven Sollwert aus. Schließlich
kann dieser Sollwert mithilfe von Parameter 3-14 Relativer
Festsollwert skaliert werden.
Der skalierte Sollwert wird wie folgt berechnet:
Sollwert = X + X ×
X ist der externe Sollwert, der Festsollwert oder die Summe
dieser Sollwerte, und Y ist Parameter 3-14 Relativer
Festsollwert in [%].
Wenn Y, Parameter 3-14 Relativer Festsollwert, auf 0 %
eingestellt ist, wird der Sollwert nicht von der Skalierung
beeinflusst.
Y
100
2.5.2 Istwertverarbeitung
Die Istwertverarbeitung lässt sich so konfigurieren, dass sie
mit Anwendungen arbeitet, die eine erweiterte Steuerung
erfordern. Konfigurieren Sie die Istwertquelle über
Parameter 20-00 Istwertanschluss 1.
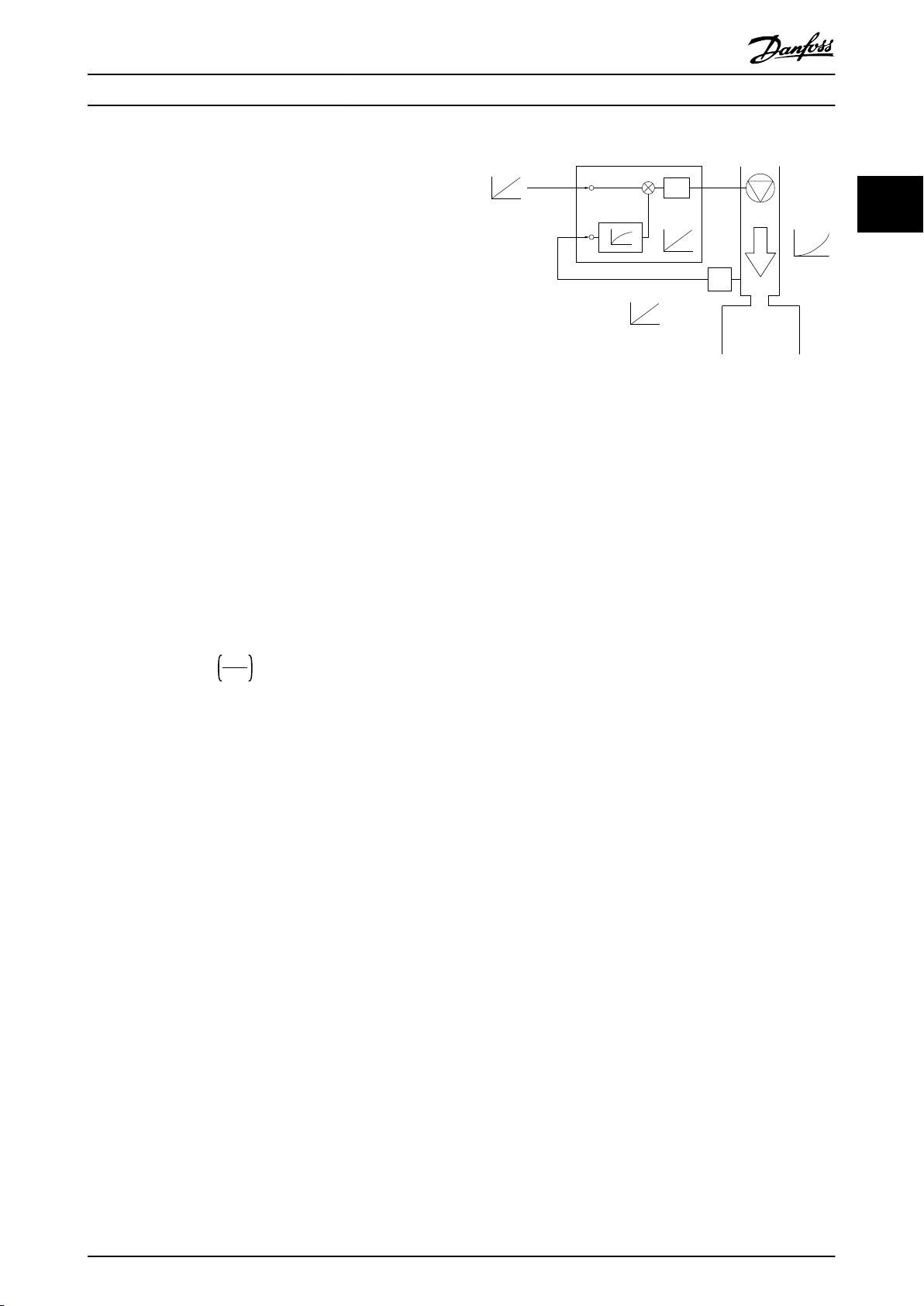
2.5.3 Istwertumwandlung
In einigen Anwendungen kann die Umwandlung des
Istwertsignals hilfreich sein. Zum Beispiel kann ein
Drucksignal für eine Durchflussrückführung verwendet
werden. Da die Quadratwurzel des Druck proportional zum
Durchfluss ist, ergibt die Quadratwurzel des Drucksignals
einen zum Durchfluss proportionalen Wert. Siehe
Abbildung 2.17.
Abbildung 2.17 Istwertumwandlung
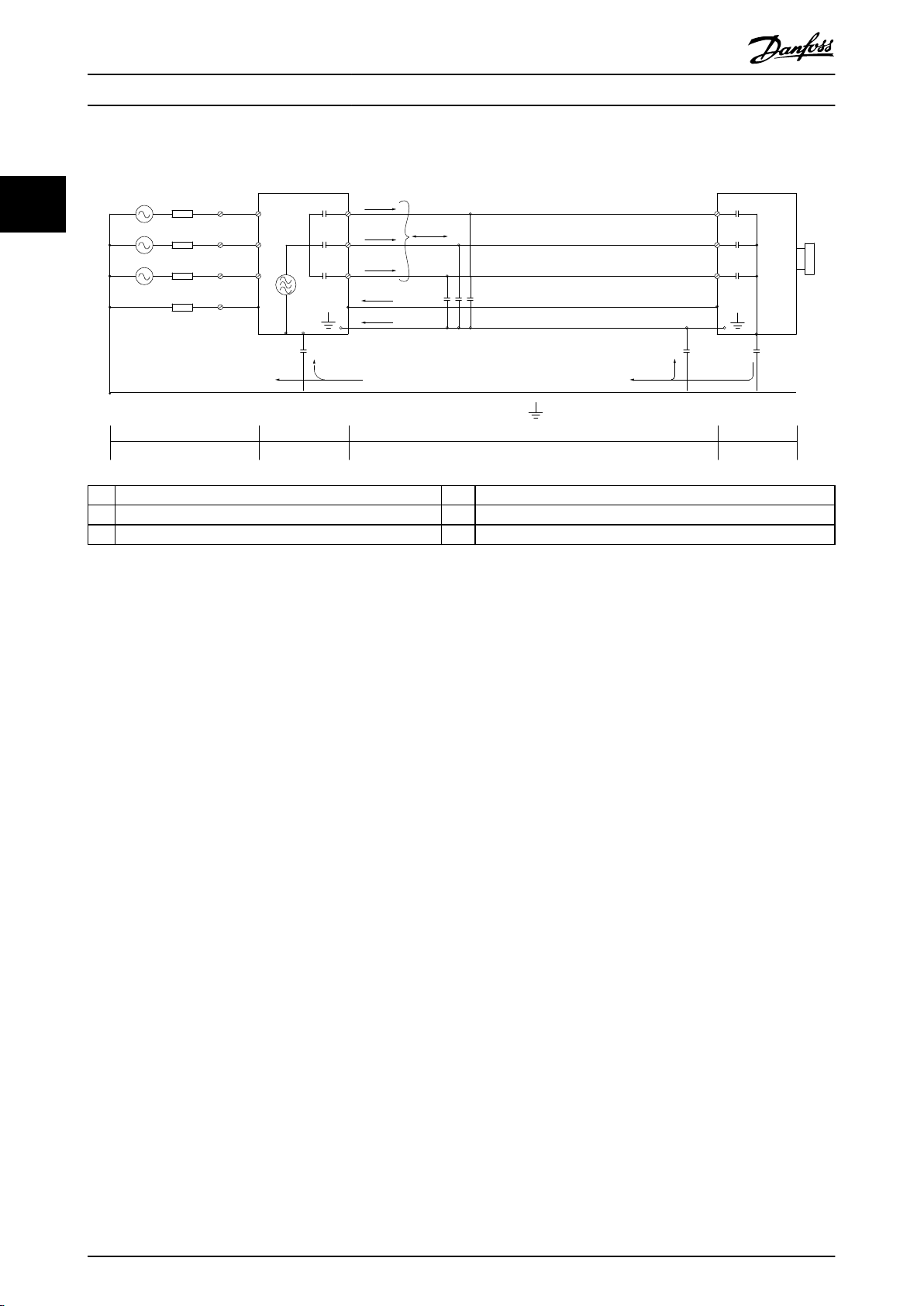
2.6 Allgemeine EMV-Aspekte
Schalttransienten sind leitungsgebunden im Frequenzbereich von 150 kHz bis 30 MHz. Der Wechselrichter, das
Motorkabel und der Motor erzeugen feldgebundene
Störungen des Frequenzumrichtersystems im Frequenzbereich von 30 MHz bis 1 GHz. Durch kapazitive Ströme
des Motorkabels werden in Verbindung mit hohem dU/dt
der Motorspannung Ableitströme erzeugt. Die Verwendung
eines abgeschirmten Motorkabels erhöht den Ableitstrom
(siehe Abbildung 2.18), da abgeschirmte Kabel eine höhere
Kapazität zu Erde haben als nicht abgeschirmte Kabel. Wird
der Ableitstrom nicht gefiltert, verursacht dies in der
Netzzuleitung größere Störungen im Funkfrequenzbereich
unterhalb von etwa 5 MHz. Der Ableitstrom (I1) kann über
die Abschirmung (I3) direkt zurück zum Gerät fließen. Es
verbleibt dann nur ein kleines elektromagnetisches Feld
(I4), das vom abgeschirmten Motorkabel über die Erde
zurückfließen muss. Die Abschirmung verringert zwar die
abgestrahlte Störung, erhöht jedoch die Niederfrequenzstörungen am Netz. Schließen Sie den Motorkabelschirm an
die Gehäuse von Frequenzumrichter und Motor an. Dies
geschieht am besten durch die Verwendung von
integrierten Schirmbügeln, um verdrillte Abschirmungsenden (Pigtails) zu vermeiden. Die verdrillten
Abschirmungsenden erhöhen die Abschirmungsimpedanz
bei höheren Frequenzen, wodurch der Abschirmungseffekt
reduziert und der Ableitstrom (I4) erhöht wird.
Verbinden Sie die Abschirmung an beiden Enden mit dem
Gehäuse, wenn abgeschirmte Kabel für Folgendes
verwendet werden:
Relais
•
Steuerkabel
•
Signalschnittstelle
•
Bremse.
•
2 2
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 21
Page 24
1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Produktübersicht
VLT® DriveMotor FCP 106/FCM 106
In einigen Situationen ist zum Vermeiden von Stromschleifen jedoch eine Unterbrechung der Abschirmung notwendig.
22
1 Massekabel 4 Frequenzumrichter
2 Abschirmung 5 Abgeschirmtes Motorkabel
3 Netzversorgung 6 Motor
Abbildung 2.18 Ersatzschaltbild: Kopplung der Kondensatoren, wodurch Ableitströme erzeugt werden
Wenn eine Abschirmung auf einer Montageplatte für den
Frequenzumrichter angebracht wird, muss diese Montageplatte aus Metall gefertigt sein. Montageplatten aus Metall
stellen sicher, dass die Ableitströme zum Gerät zurückgeführt werden. Außerdem muss durch die
Montageschrauben stets ein guter elektrischer Kontakt von
der Montageplatte zur Gehäusemasse des Frequenzumrichters gewährleistet sein.
Halten Sie Motorkabel so kurz wie möglich, um das
Störungsniveau des gesamten Systems (Frequenzwandler
und Installation) so weit wie möglich zu reduzieren. Steuerund Buskabel dürfen nicht gemeinsam mit Motorkabeln
verlegt werden. Insbesondere die Regelelektronik erzeugt
Funkstörungen von mehr als 50 MHz (schwebend). Weitere
Informationen zu EMV finden Sie unter Kapitel 2.6.1 EMV-
gerechte elektrische Installation.
Beim Einsatz ungeschirmter Leitungen werden einige
Emissionsanforderungen nicht erfüllt. Die immunitätsbezogenen Anforderungen werden jedoch erfüllt.
22 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 25
195NA420.10
L1
L2
L3
PE
7
1
2
3
4
56
Produktübersicht Projektierungshandbuch
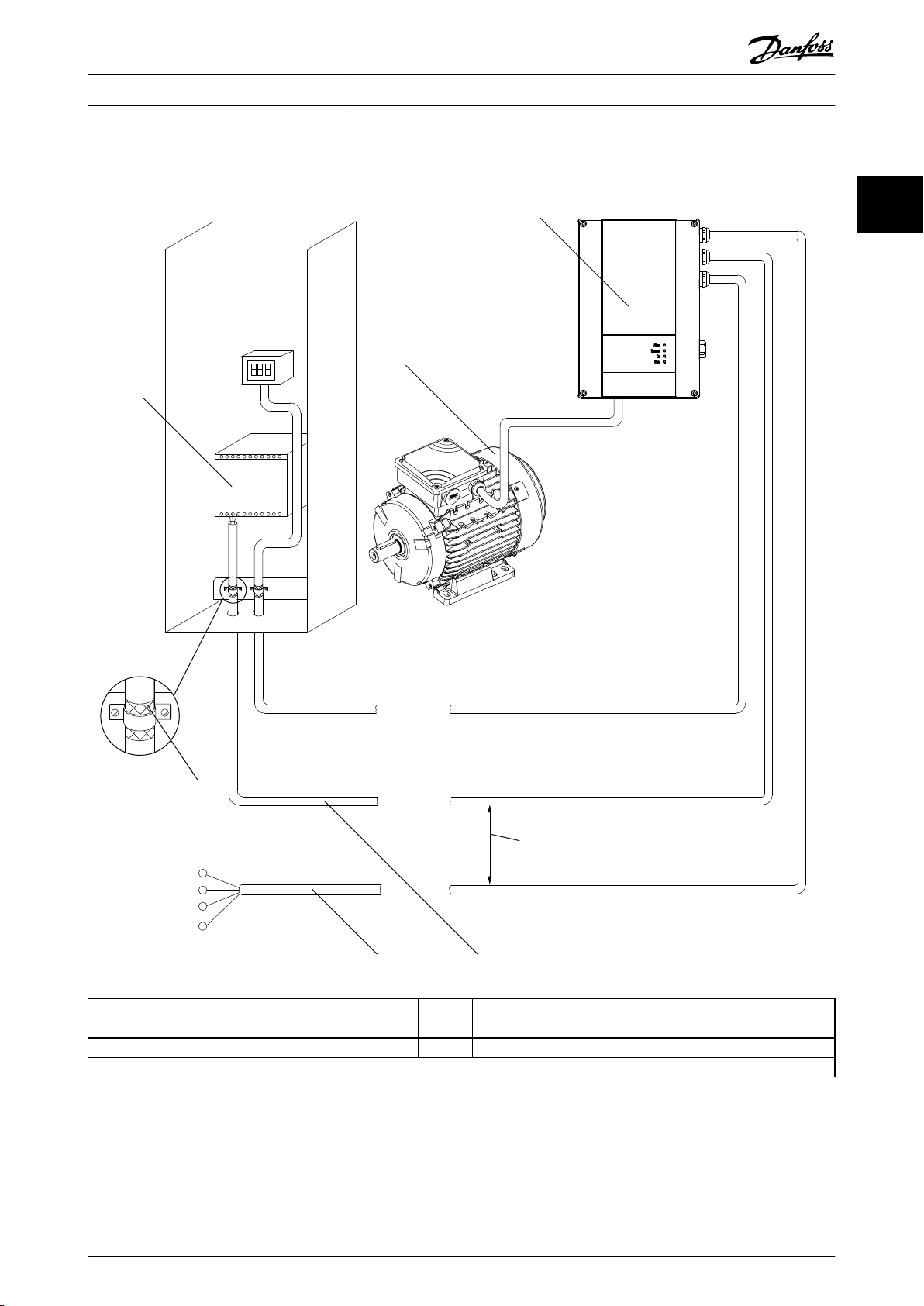
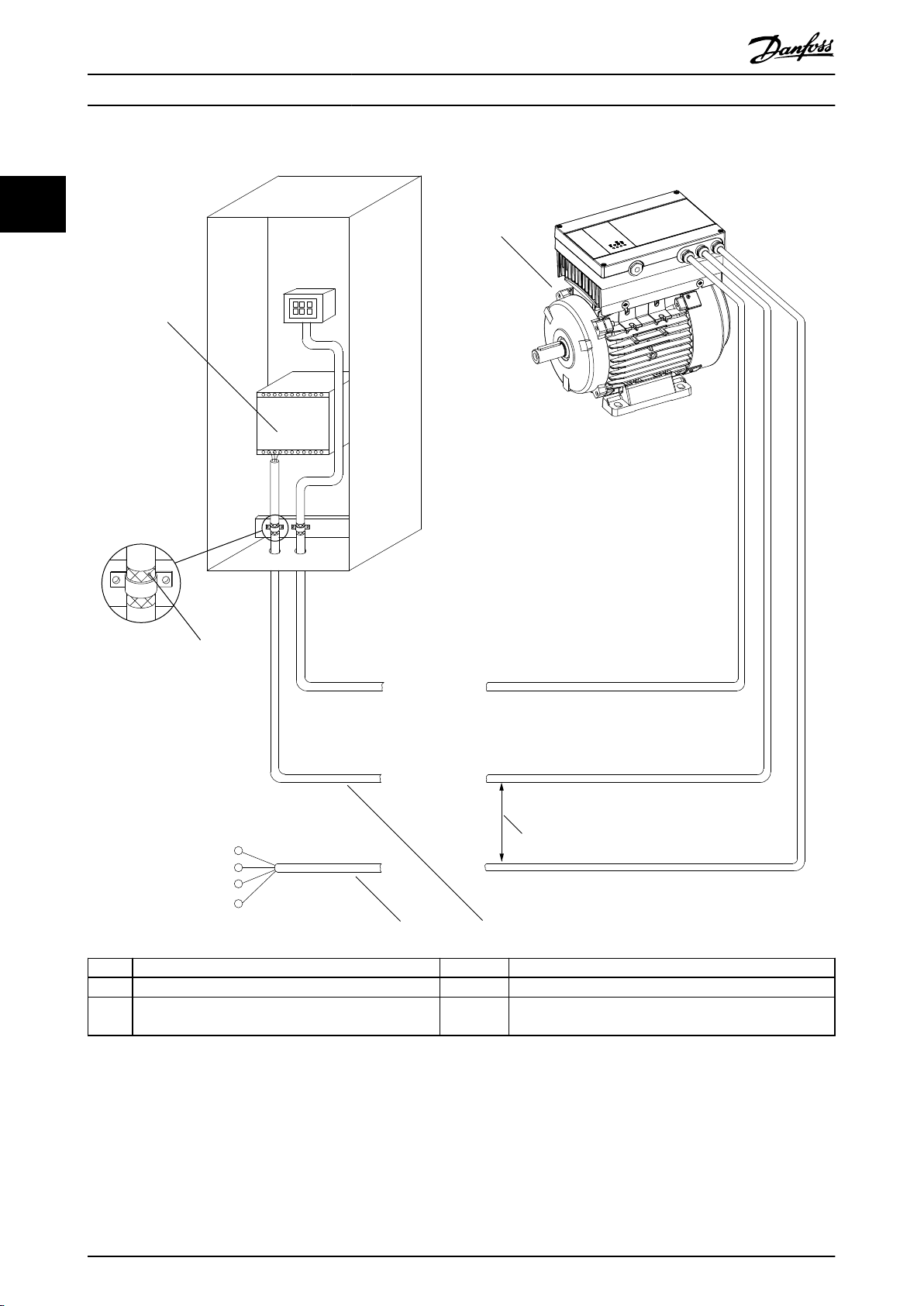
2.6.1 EMV-gerechte elektrische Installation
2 2
1 Übergeordnete Steuerung (SPS) 5 Steuerkabel
2 Motor 6 Netz, 3 Phasen und verstärkter PE-Leiter
3 Frequenzumrichter 7 Kabelisolierung (abisoliert)
4 Mindestens 200 mm (7,87 in) Abstand zwischen Steuerkabel, Netzkabel und Motorkabel.
Abbildung 2.19 EMV-gerechte elektrische Installation, FCP 106
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 23
Page 26
195NA407.10
L1
L2
L3
PE
1
6
2
5 4
3
Produktübersicht
VLT® DriveMotor FCP 106/FCM 106
22
1 Übergeordnete Steuerung (SPS) 4 Steuerkabel
2 DriveMotor 5 Netz, 3 Phasen und verstärkter PE-Leiter
3 Mindestens 200 mm (7,87 in) Abstand zwischen
Steuerkabel und Netzkabel.
6 Kabelisolierung (abisoliert)
Abbildung 2.20 EMV-gerechte elektrische Installation, FCM 106
24 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 27

Produktübersicht Projektierungshandbuch
Bitte beachten Sie auf diese allgemeinen Punkte, damit
eine EMV-gerechte elektrische Installation gewährleistet ist.
Verwenden Sie nur abgeschirmte Motor- und
•
Steuerkabel.
Verbinden Sie die Abschirmung beidseitig mit der
•
Erde.
Vermeiden Sie die Installation mit verdrillten
•
Abschirmungsenden (Pig-Tails), die den Abschir-
mungseffekt bei hohen Frequenzen zunichte
machen. Verwenden Sie stattdessen die mitgelieferten Kabelschellen.
Stellen Sie sicher, dass zwischen Frequenzum-
•
richter und Massepotenzial der SPS das gleiche
Potenzial vorhanden ist.
Verwenden Sie Sternscheiben und galvanisch
•
leitfähige Montageplatten.
2.6.2 Emissionsanforderungen
Gemäß der EMV-Produktnorm für drehzahlveränderbare Frequenzumrichter, EN/IEC 61800-3:2004, hängen die EMV-Anforderungen von der beabsichtigten Verwendung des Frequenzumrichters ab. Der EMV-Produktstandard definiert 4 Kategorien,
die in Tabelle 2.2 beschrieben sind, zusammen mit den Anforderungen für Störaussendungen von Netzversorgungsspannung.
Anforderungen an leitungsgeführte
Kategorie Definition gemäß EN/IEC 61800-3:2004
C1 In der ersten Umgebung (Wohn-, Geschäfts- und Gewerbebereich sowie
Kleinbetriebe) installierte Frequenzumrichter mit einer Versorgungsspannung
unter 1000 V.
C2 In der ersten Umgebung (Wohn-, Geschäfts- und Gewerbebereich sowie
Kleinbetriebe) installierte Frequenzumrichter mit einer Versorgungsspannung
unter 1000 V, die weder steckerfertig noch beweglich sind und von Fachkräften
installiert und in Betrieb genommen werden müssen.
C3 In der zweiten Umgebung (Industriebereich) installierte Frequenzumrichter mit
einer Versorgungsspannung unter 1000 V.
C4 In der zweiten Umgebung (Industriebereich) installierte Frequenzumrichter mit
einer Versorgungsspannung gleich oder über 1000 V oder einem Nennstrom
gleich oder über 400 A oder vorgesehen für den Einsatz in komplexen
Systemen.
Störaussendungen gemäß
Grenzwerten in EN 55011
Klasse B
Klasse A Gruppe 1
Klasse A Gruppe 2
Keine Begrenzung.
Erstellen Sie einen EMV-Plan.
2 2
Tabelle 2.2 Anforderungen zur Störaussendung - EN/IEC 61800-3:2004
Wenn die Fachgrundnorm Störungsaussendung zugrunde gelegt wird, muss der Frequenzumrichter folgende Grenzwerte
einhalten:
Anforderungen an leitungsgeführte
Umgebung Fachgrundnorm
Erste Umgebung
(Wohnung und Büro)
Zweite Umgebung
(Industriebereich)
Tabelle 2.3 Anforderungen zur Störaussendung - EN/IEC 61000-6-3 und EN/IEC 61000-6-4
Ein System besteht aus:
FCP 106, Motor und abgeschirmtem Motorkabel;
•
oder
FCM 106
•
Bei beiden Systemen ist die leitungsgeführte Störaussendung mit EN 55011 Klasse B konform, und die
feldgebundene Störaussendung ist mit EN 55011 Klasse A,
Gruppe 1 konform. Konformität kann erreicht werden,
wenn die folgenden Bedingungen zutreffen:
Fachgrundnorm EN/IEC 61000-6-3 für Wohnbereich,
Geschäfts- und Gewerbebereiche sowie Kleinbetriebe.
Fachgrundnorm EN/IEC 61000-6-4 für Industriebereiche. Klasse A Gruppe 1
Eingebaute EMV-Filter.
•
Frequenzumrichter ist auf die Nenn-Taktfrequenz
•
eingestellt.
Das abgeschirmte Motorkabel hat eine
•
Maximallänge von 2 m.
Störaussendungen gemäß
Grenzwerten in EN 55011
Klasse B
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 25
Page 28

Produktübersicht
2.6.3 Störfestigkeitsanforderungen
VLT® DriveMotor FCP 106/FCM 106
22
sind die Anforderungen höher als in Wohn- oder Bürobereichen. Alle Danfoss Frequenzumrichter erfüllen die Störfestigkeitsanforderungen für Industriebereiche. Folglich erfüllen die Frequenzumrichter auch die niedrigeren Anforderungen für Wohnund Bürobereiche mit einem großen Sicherheitsspielraum.
Zur Dokumentation der Störfestigkeit gegenüber elektrischen Störungen/Schalttransienten wurde der nachfolgende Störfestigkeitstest entsprechend den folgenden grundlegenden Normen durchgeführt:
Die Störfestigkeitsanforderungen für Frequenzumrichter sind abhängig von der Installationsumgebung. In Industriebereichen
EN 61000-4-2 (IEC 61000-4-2): Elektrostatische Entladung (ESD): Simulation elektrostatischer Entladung von
•
Personen.
EN 61000-4-3 (IEC 61000-4-3): Elektromagnetisches Einstrahlfeld, amplitudenmodulierte Simulation der Auswir-
•
kungen von Radar- und Funkgeräten sowie von mobilen Kommunikationsgeräten.
EN 61000-4-4 (IEC 61000-4-4): Schalttransienten: Simulation von Störungen, herbeigeführt durch Schalten mit
•
einem Schütz, Relais oder ähnlichen Geräten.
EN 61000-4-5 (IEC 61000-4-5): Überspannungstransienten: Simulation von Transienten, z. B. durch Blitzschlag in
•
nahe gelegenen Anlagen.
EN 61000-4-6 (IEC 61000-4-6): HF-Gleichtakt: Simulation der Auswirkung von Funksendegeräten, die an Verbin-
•
dungskabel angeschlossen sind.
Fachgrundnorm Elektrische
Störgrößen/Burst IEC
61000-4-4
Abnahmekriterium B B B A A
Leitung (keine
Abschirmung)
LCP-Kabel 2 kV
Steuerkabel 2 kV
Externe 24 V DC 2 kV
Relaisleitungen 2 kV
Gehäuse – – 8 kV AD
4 kV 2 kV/2 Ω DM
Stoßwellen IEC
61000-4-5
4 kV/12 Ω CM
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
42 kV/42 Ω
1)
1)
1)
Entladungen
statischer Elektrizität
IEC 61000-4-2
– – 10 V
– – 10 V
– – 10 V
– – 10 V
– – 10 V
6 kV CD
Hochfrequente
elektromagnetische
Felder IEC 61000-4-3
10 V/m –
HF-Gleichtaktspannung IEC
61000-4-6
eff
eff
eff
eff
eff
Tabelle 2.4 Störfestigkeitsanforderungen
1) Injektion auf Kabelschirm.
Abkürzungen:
AD - Air Discharge (Luftentladung).
CD - Contact Discharge (Kontaktentladung).
CM - Common Mode (Gleichtakt).
DM - Difference Mode (Differenzbetrieb).
26 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 29
130BB955.12
a
b
Leakage current
Motor cable length
130BB956.12
THDv=0%
THDv=5%
Leakage current
Produktübersicht Projektierungshandbuch
2.7 Ableitstrom
2.7.1 Erdableitstrom
Befolgen Sie im Hinblick auf die Schutzerdung von Geräten
mit einem Ableitstrom gegen Erde von mehr als 3,5 mA
alle nationalen und lokalen Vorschriften.
Die Frequenzumrichtertechnik nutzt hohe Taktfrequenzen
bei gleichzeitig hoher Leistung. Dies erzeugt einen
Ableitstrom in der Erdverbindung.
Der Erdableitstrom setzt sich aus verschiedenen Faktoren
zusammen und hängt von verschiedenen Systemkonfigurationen ab, u. a. folgenden:
Filterung von Funkfrequenzstörungen.
•
Motorkabellänge.
•
Motorkabelabschirmung.
•
Leistung des Frequenzumrichters.
•
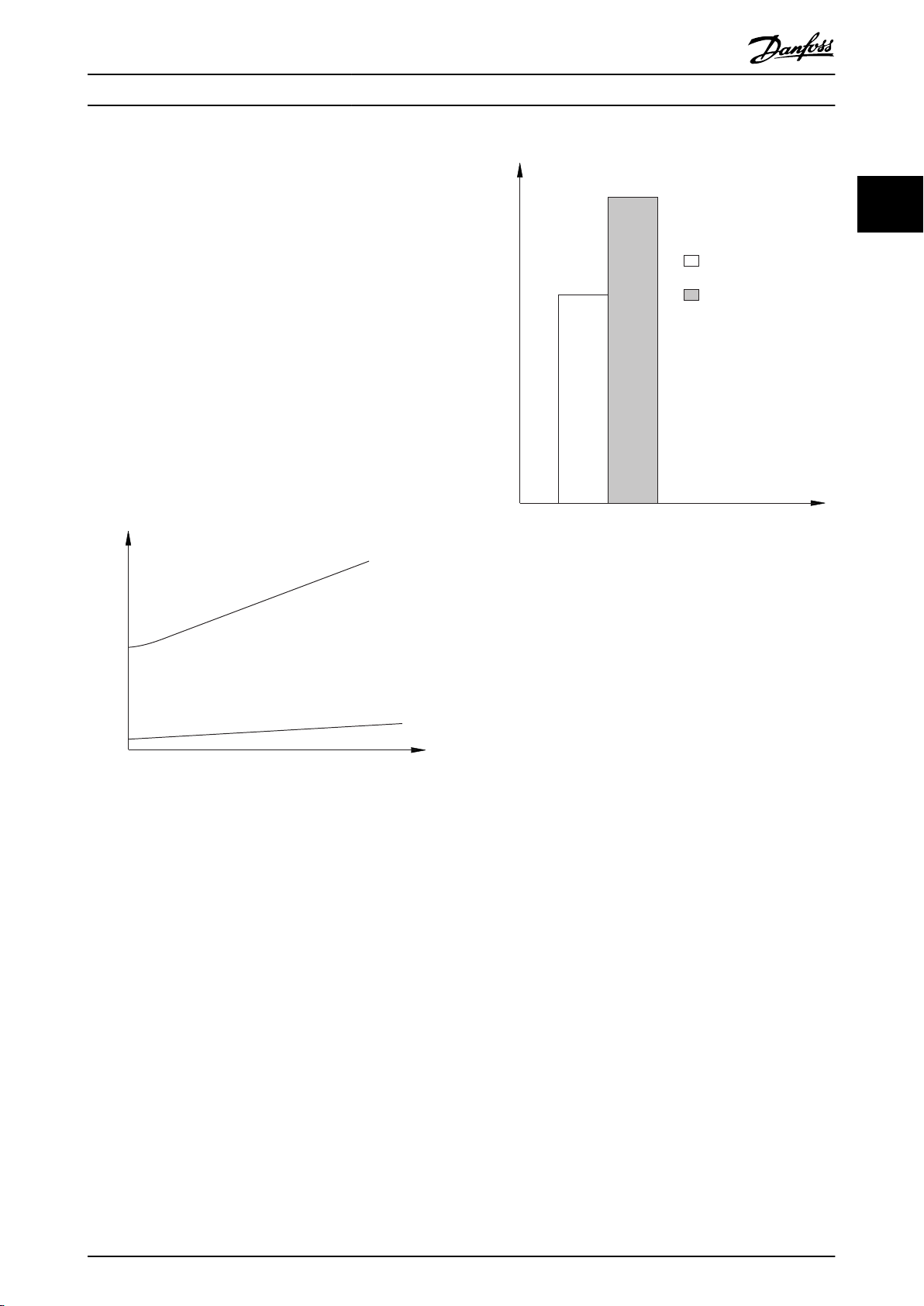
Abbildung 2.22 Die Netzverzerrung beeinflusst den
Ableitstrom
2 2
Abbildung 2.21 Einfluss von Motorkabellänge und
Leistungsgröße auf den Ableitstrom. Leistungsgröße a >
Leistungsgröße b
Der Ableitstrom hängt ebenfalls von der Netzverzerrung
ab.
Wenn der Erdableitstrom 3,5 mA übersteigt, müssen zur
Einhaltung von EN/IEC 61800-5-1 (Produktnorm für
Elektrische Leistungsantriebssysteme mit einstellbarer
Drehzahl) besondere Anforderungen erfüllt werden.
Verstärken Sie die Erdung durch Berücksichtigung der
folgenden Anforderungen zur Schutzerdung:
Erdungskabel (Klemme 95) mit einem Querschnitt
•
von mindestens 10 mm2.
Zwei getrennt verlegte Erdungskabel, die die
•
vorgeschriebenen Maße einhalten.
Weitere Informationen finden Sie in EN/IEC 61800-5-1 und
EN 50178.
Fehlerstromschutzschalter
Wenn Fehlerstromschutzschalter (RCD), auch als
Erdschlusstrennschalter bezeichnet, zum Einsatz kommen,
sind die folgenden Anforderungen einzuhalten:
Verwenden Sie netzseitig allstromsensitive Fehler-
•
stromschutzschalter (Typ B).
Verwenden Sie Fehlerstromschutzschalter mit
•
Einschaltverzögerung, um Fehler durch transiente
Erdströme zu vermeiden.
Bemessen Sie RCD in Bezug auf Systemkonfigu-
•
ration und Umgebungsbedingungen.
Der Ableitstrom enthält mehrere Frequenzen, die ihren
Ursprung in der Netzfrequenz und in der Taktfrequenz
haben. Der Typ der verwendeten Fehlerstromschutzeinrichtung beeinflusst, ob die Taktfrequenz erkannt wird.
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 27
Page 30
130BB958.12
f
sw
Cable
150 Hz
3rd harmonics
50 Hz
Mains
RCD with low f
cut-
RCD with high f
cut-
Leakage current
Frequency
130BB957.11
Leakage current [mA]
100 Hz
2 kHz
100 kHz
195NA438.11
+24 V
18
Functional
isolation
RS485
Relay
output
High
voltage
Control
PELV isolation
Mains
Motor
DC bus
Thermistor
input
2
1
3
Produktübersicht
VLT® DriveMotor FCP 106/FCM 106
2.8 Galvanische Trennung (PELV)
PELV bietet Schutz durch Kleinspannung. Ein Schutz gegen
22
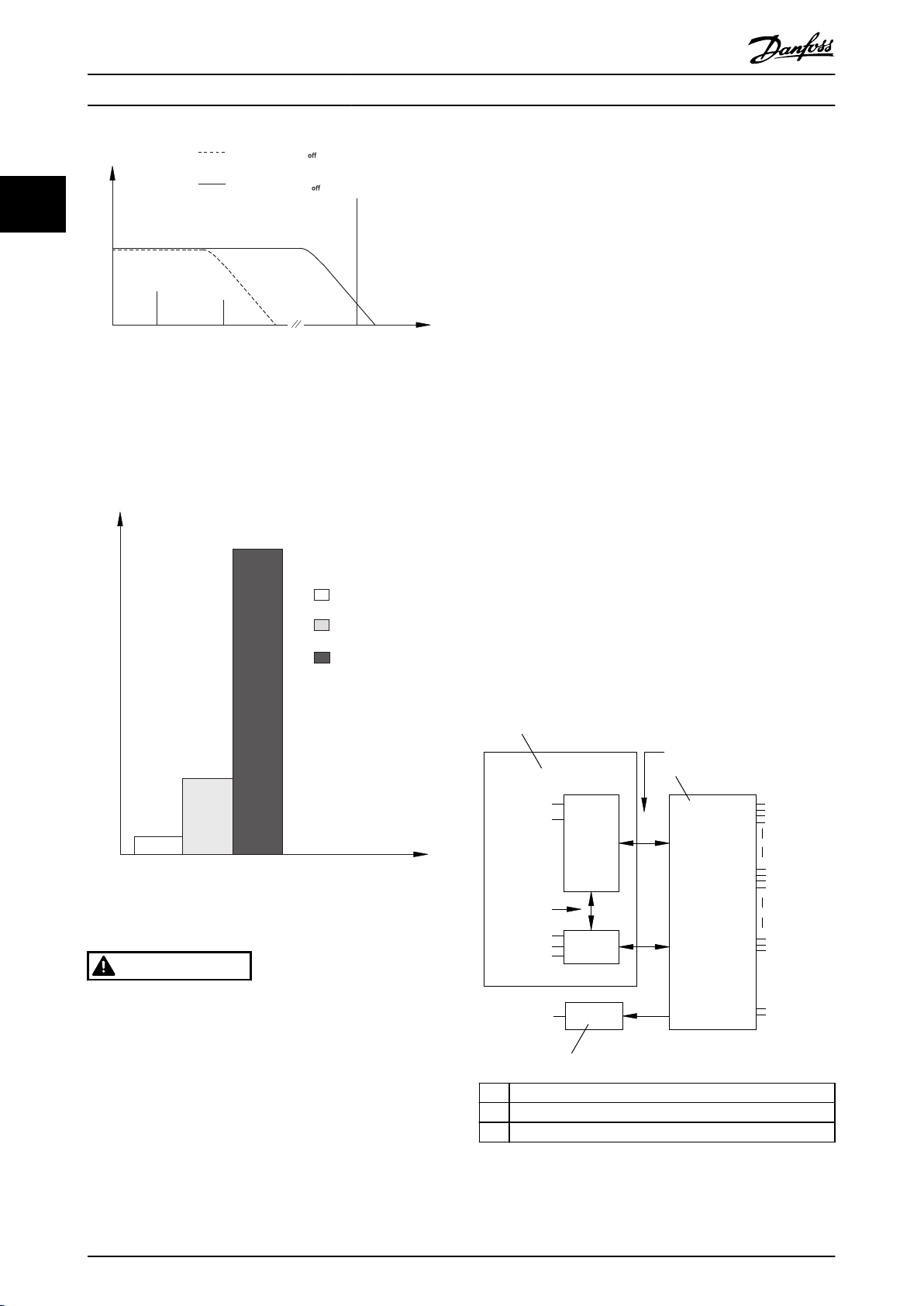
Abbildung 2.23 Hauptbeitragsfaktoren zum Ableitstrom
Die Menge des von der Fehlerstromschutzeinrichtung
erkannten Ableitstroms hängt von der Trennfrequenz des
Fehlerstromschutzschalters ab.
elektrischen Schlag gilt als gewährleistet, wenn die
Stromversorgung vom Typ PELV (Schutzkleinspannung –
Protective Extra Low Voltage) ist und die Installation
gemäß den örtlichen bzw. nationalen Vorschriften für PELVVersorgungen ausgeführt wurde.
Alle Steuerklemmen und die Relaisklemmen 01-03/04-06
entsprechen PELV (gilt nicht bei geerdetem Dreieck-Netz
größer 300 V).
Sie erreichen die galvanische (sichere) Trennung, indem Sie
die Anforderungen für höhere Isolierung erfüllen und die
entsprechenden Kriech-Luftabstände beachten. Diese
Anforderungen sind in der Norm EN/IEC 61800-5-1
beschrieben.
Die Bauteile, die die elektrische Trennung bilden, erfüllen
ebenfalls die Anforderungen für höhere Isolierung und der
entsprechenden Tests gemäß Beschreibung in EN/IEC
61800-5-1.
Die galvanische PELV-Isolierung wird in Abbildung 2.25
dargestellt.
Abbildung 2.24 Einfluss der Trennfrequenz des Fehlerstromschutzschalters auf den Ableitstrom
WARNUNG
STROMSCHLAGGEFAHR
Der Frequenzumrichter kann einen Gleichstrom im
Schutzleiter verursachen und daher zum Tod oder zu
schweren Verletzungen führen.
•
Eine Nichtbeachtung dieser Empfehlung kann dazu
führen, dass der Fehlerstromschutzschalter nicht den
gewünschten Schutz bietet.
Wenn Sie zum Schutz vor elektrischem Schlag
einen Fehlerstromschutzschalter (Residual
Current Device, RCD) verwenden, muss dieser
an der Versorgungsseite vom Typ B sein.
Um den PELV-Schutzgrad beizubehalten, müssen alle
steuerklemmenseitig angeschlossenen Geräte den PELVAnforderungen entsprechen.
1 Hochspannungskreis
2 I/O-Steuerkarte
3 Ausgangsrelais
Abbildung 2.25 Galvanische Trennung
28 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 31

Produktübersicht Projektierungshandbuch
HINWEIS
GROSSE HÖHENLAGE
Bei Höhenlagen über 2000 m über NN ziehen Sie bitte
die Danfoss-Hotline bezüglich PELV zurate.
2 2
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 29
Page 32

Systemintegration
3 Systemintegration
VLT® DriveMotor FCP 106/FCM 106
3.1 Einführung
33
Dieses Kapitel beschäftigt sich mit den Aspekten, die bei
der Integration des Frequenzumrichters in eine Systemauslegung zu berücksichtigen sind. Das Kapitel ist in 4
Abschnitte unterteilt:
3.1.1 FCM 106 - Integrierter
- Leistungsreduzierung.
- Weitere Aspekte (Kapitel 3.6 Umgebungs-
bedingungen).
Frequenzumrichter und Motor
Netzseitiger Eingang in den Umrichter,
•
einschließlich:
- Leistung.
- Oberschwingungen.
- Überwachung
- Verdrahtung.
- Sicherungen.
- Weitere Aspekte
(Kapitel 3.2 Netzeingang).
Ausgang vom Umrichter zum Motor,
•
einschließlich:
- Motortypen.
- Last.
- Überwachung.
- Verdrahtung.
- Weitere Aspekte (Kapitel 3.3 Motoren).
Integration von Frequenzumrichterein- und -
•
ausgang für ein optimales Systemdesign
einschließlich:
- Anpassung von Frequenzumrichter/
Motor.
- Systemmerkmale.
- Weitere Aspekte (Kapitel 3.4 Auswahl
Frequenzumrichter/Optionen).
Betriebsumgebungsbedingungen für den
•
Frequenzumrichter, einschließlich:
- Umgebung.
- Gehäuse.
- Temperatur.
Der auf den Asynchron- oder Permanentmagnet-Motor
integrierte Danfoss VLT® Frequenzumrichter ermöglicht die
Drehzahlregelung in einem einzigen Gerät.
Der FCM 106 ist eine kompakte Alternative zu einer
zentralen Lösung, bei der Frequenzumrichter und Motor als
separate Geräte installiert sind.
Kein Schaltschrank erforderlich.
•
Der Frequenzumrichter ist direkt am Motor
•
installiert, anstatt über den Motor-Klemmkasten
angeschlossen zu werden.
Die elektrische Installation besteht nur aus Netz-
•
und Steuerkabeln. Zur Erfüllung der EMVRichtlinie sind keine speziellen Details zur
Verkabelung erforderlich, da keine Motorkabel
benötigt werden.
Die werkseitige Anpassung zwischen FCM 106 und Motor
ermöglicht eine genaue und energieeffiziente Regelung
und macht darüber hinaus die Voreinstellung vor Ort
überflüssig.
Der FCM 106 kann in Stand-Alone-Systemen mit konventionellen Regelsignalen, z. B. Start/Stopp-Signalen,
Drehzahlsollwerten und Prozessregelung mit Rückführung
eingesetzt werden. Er lässt sich auch in Systemen mit
mehreren Frequenzumrichtern verwenden, in denen die
Regelsignalen per Feldbus übertragen werden.
Eine Kombination aus Feldbus- und konventionellen
Regelsignalen mit PI-Regelung mit Rückführung ist
möglich.
30 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 33

195NA440.10
Danfoss
MCT 10
PLC
1 2 3
4
175HA034.10
Systemintegration Projektierungshandbuch
1 Start/Stopp 3 Prozessregelung mit Rückführung
2 2-Drehzahl-Sollwert 4 Kombination aus Feldbus- und konventionellen Regelsignalen
3 3
Abbildung 3.1 Beispiel für Regelungsstrukturen
Netzeingang
3.2
3.2.1 Netzversorgungsstörung/rückwirkung
3.2.1.1 Allgemeine Aspekte zur
Oberwellenemission
Ein Frequenzumrichter nimmt vom Netz einen nicht
sinusförmigen Strom auf, der den Eingangsstrom I
erhöht. Nicht sinusförmige Ströme können mithilfe einer
Fourier-Analyse in Sinusströme verschiedener Frequenz, d.
h. in verschiedene Oberwellenströme In mit einer
Grundfrequenz von 50 Hz, zerlegt werden:
Oberschwingungsströme I
Hz 50 250 350
Tabelle 3.1 Oberschwingungsströme
1
Die Oberschwingungsströme führen zu größeren
Wärmeverlusten in der Installation (Transformator, Kabel),
aber sie beeinflussen die Leistungsaufnahme nicht direkt.
Erhöhte Wärmeverluste können zu einer Überlastung des
Transformators und zu hohen Temperaturen in den Kabeln
führen. Halten Sie die Oberschwingungen daher durch
folgende Maßnahmen auf einem niedrigen Niveau:
Verwendung von Frequenzumrichtern mit
•
integrierten Oberschwingungsfiltern.
Verwendung externer Oberschwingungsfilter
•
(aktiv oder passiv).
I
5
Abbildung 3.2 Filter
HINWEIS
eff
I
7
Oberwellenströme können Kommunikationsgeräte
stören, die an denselben Transformator angeschlossen
sind, oder Resonanzen mit Blindstromkompensationsanlagen verursachen.
Um die Netzrückwirkung gering zu halten, sind Frequenzumrichter bereits serienmäßig mit Drosseln im
Zwischenkreis ausgestattet. Diese Drosseln reduzieren den
Eingangsstrom I
um 40 %.
eff
Die Spannungsverzerrung in der Netzversorgung hängt
von der Größe der Oberschwingungsströme multipliziert
mit der internen Netzimpedanz der betreffenden Frequenz
ab. Die gesamte Spannungsverzerrung THDv wird aus den
einzelnen Spannungsoberschwingungen nach folgender
Formel berechnet:
2
2
THD % =
U
+ U
5
+ ... + U
7
2
N
(UN % von U)
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 31
Page 34

Systemintegration
VLT® DriveMotor FCP 106/FCM 106
3.2.1.2 Oberschwingungsemission-
sanforderungen
An das öffentliche Versorgungsnetz angeschlossene Geräte
müssen die folgenden Standards erfüllen:
33
Standard Gerätetyp
IEC/EN
61000-3-2, Klasse
A
IEC/EN
61000-3-12,
Tabelle 4
Tabelle 3.2 Konformität mit Oberschwingungsemissionsstandards
1) Nennleistungen beziehen sich auf NO, siehe Kapitel 6.2 Elektrische
Daten.
Professionelle Dreiphasengeräte, nur bis zu 1
kW Gesamtleistung.
Gerät 16-75 A,
und professionell
genutzte Geräte ab 1 kW
bis 16 A Phasenstrom.
Leistungsgröße
FCP 106 und FCM
106
0,55-0,75 kW
1,1-7,5 kW
IEC 61000-3-2, Grenzwerte für Oberschwingungsströme
(Geräte-Eingangsstrom ≤ 16 A je Leiter)
Die Norm IEC 61000-3-2 befasst sich mit Geräten für das
öffentliche Niederspannungs-Stromversorgungsnetz mit
einem Eingangsstrom ≤ 16 A je Leiter. Vier Klassen der
Störaussendung sind definiert: Klasse A bis D. Die Danfoss
Frequenzumrichter befinden sich in der Klasse A. Jedoch
gibt es keine Grenzwerte für Profigeräte mit einer Gesamtnennleistung über 1 kW.
IEC 61000-3-12, Grenzwerte für Oberschwingungsströme
von Geräten für das öffentliche NiederspannungsStromversorgungsnetz mit einem Eingangsstrom >16 A
und ≤75 A
Die Norm IEC 61000-3-12 befasst sich mit Geräten für das
öffentliche Niederspannungs-Stromversorgungsnetz mit
einem Eingangsstrom von 16-75 A. Die Grenzwerte für die
Störaussendung gelten derzeit nur für Systeme mit
230/400 V / 50 Hz; Grenzwerte für andere Systeme werden
künftig ergänzt. Die Grenzwerte für Frequenzumrichter sind
in Tabelle 4 der Norm aufgeführt. Es sind Anforderungen
1)
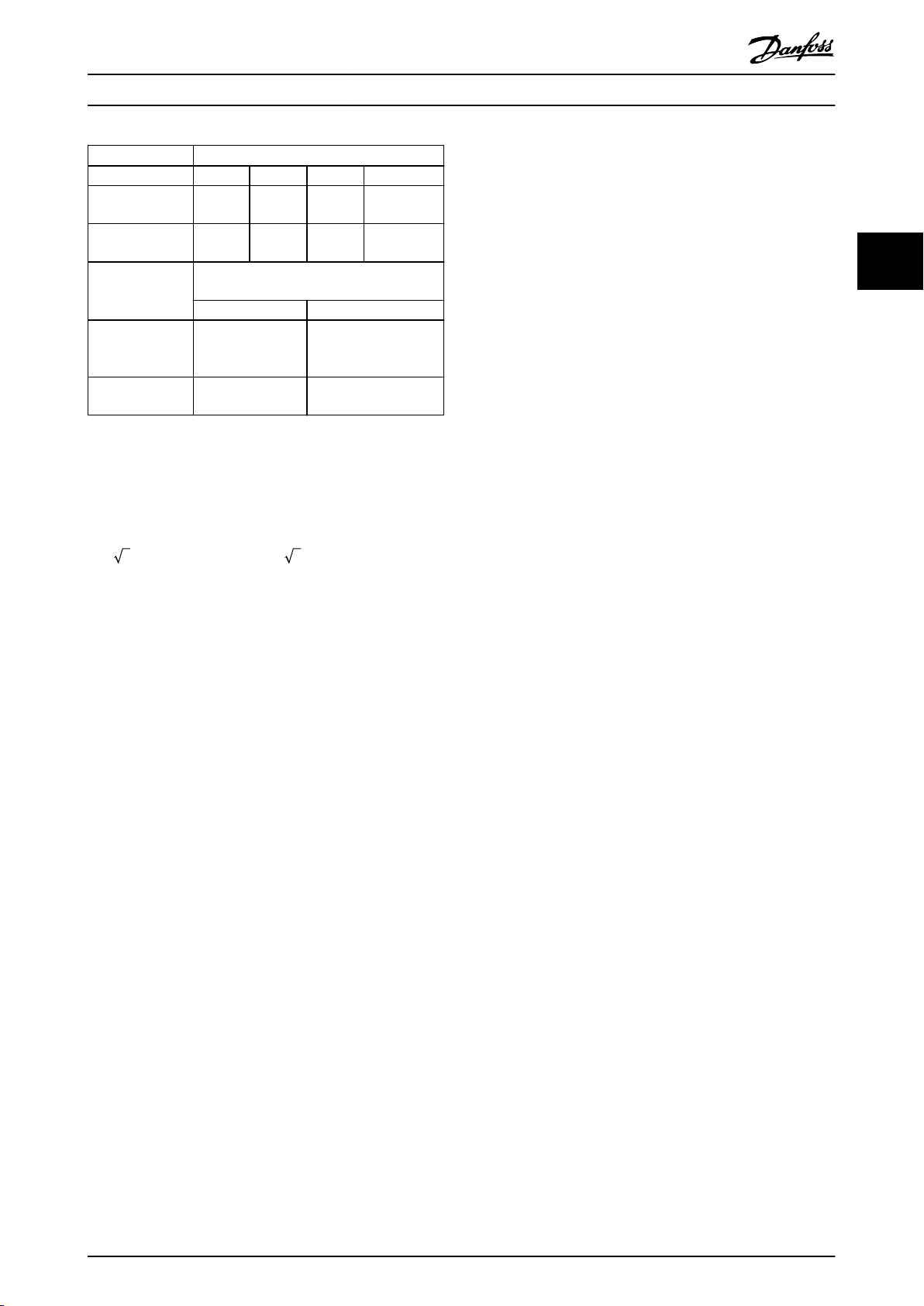
3.2.1.3 Prüfergebnisse für
Oberschwingungsströme (Emission)
1)
MH1
I
0,55-1,5 kW,
380-480 V
Grenzwert für
R
sce
0,55-1,5 kW,
380-480 V
(typisch)
Grenzwert für
R
sce
Tabelle 3.3 MH1
1) Nennleistungen beziehen sich auf NO, siehe Kapitel 6.2 Elektrische
Daten.
1)
MH2
I
2,2-4 kW,
380-480 V
Grenzwert für
R
sce
2,2-4 kW,
380-480 V
(typisch)
Grenzwert für
R
sce
Tabelle 3.4 MH2
1) Nennleistungen beziehen sich auf NO, siehe Kapitel 6.2 Elektrische
Daten.
Einzelner Oberschwingungsstrom In/I
5
32,33 17,15 6,8 3,79
98 86 59 48
Oberschwingungsstrom Verzerrungsfaktor
Einzelner Oberschwingungsstrom In/I
5
35,29 35,29 7,11 5,14
107 99 61 61
Oberschwingungsstrom Verzerrungsfaktor
I
7
THC PWHC
38 30,1
95 63
I
7
THC PWHC
42,1 36,3
105 86
I
11 13
(%)
I
11 13
(%)
(%)
ref
(%)
ref
für einzelne Oberschwingungen (5., 7., 11. und 13.) sowie
für THDi und PWHD vorhanden.
32 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 35
Systemintegration Projektierungshandbuch
1)
MH3
I
5,5-7,5 kW,
380-480 V
Grenzwert für
R
sce
5,5-7,5 kW,
380-480 V
(typisch)
Grenzwert für
R
sce
Tabelle 3.5 MH3
1) Nennleistungen beziehen sich auf NO, siehe Kapitel 6.2 Elektrische
Daten.
Einzelner Oberschwingungsstrom In/I
5
30,08 15,00 07,70 5,23
91 75 66 62
Oberschwingungsstrom Verzerrungsfaktor
I
7
THC PWHC
35,9 39,2
90 97
I
11 13
(%)
(%)
ref
Stellen Sie sicher, dass die Kurzschlussleistung der Netzversorgung Ssc mindestens:
S
= 3 × R
SC
SCE
× U
Netz
× I
= 3 × 120 × 400 × I
equ
equ
an der Schnittstelle zwischen der Benutzerversorgung und
der öffentlichen Versorgung (R
) beträgt.
sce
Der Monteur oder der Benutzer des Geräts muss sicherstellen, dass das Gerät nur an eine Versorgung mit einer
Kurzschlussleistung Ssc ≥dem oben angegebenen Wertangeschlossen wird. Ggf. beim Betreiber des Verteilernetzes
nachfragen.
Andere Leistungsgrößen dürfen Sie nur nach Absprache
mit dem Betreiber des Verteilernetzes an das öffentliche
Stromversorgungsnetz anschließen.
Übereinstimmung mit verschiedenen SystemebenenRichtlinien:
Die in Tabelle Tabelle 3.3 bis Tabelle 3.5 aufgeführten
Angaben zum Oberwellenstrom entsprechen der Norm
IEC/EN 61000-3-12 mit Bezug zur Produktnorm der
Antriebssysteme. Diese Daten können:
als Grundlage zur Berechnung der Einflüsse der
•
Oberschwingungsströme auf das Stromversorgungssystem und
zur Dokumentation der Übereinstimmung mit
•
den relevanten regionalen Richtlinien verwendet
werden: IEEE 519 -1992; G5/4.
3 3
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 33
Page 36

195NA518.10
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
9
1
2
3
24
4
5
6
Systemintegration
VLT® DriveMotor FCP 106/FCM 106
3.3 Motoren
3.3.1 Explosionszeichnungen
33
1 Frequenzumrichter-Abdeckung 13 Fuß-Befestigungsschraube
2 Bauform des Frequenzumrichters 14 Baugröße des Stators
3 Motorstecker 15 Befestigungsschraube Gehäuseschild Antriebsseite
4 Motoranschlussdichtung 16 Wellenstift
5 Motoradapterplatte 17 Rotor
6 Dichtung zwischen Motor und Motor-Adapterplatte 18 Vorlast-Beilagscheibe
7 Staubdichtung Antriebsende 19 Gehäuseschild Nicht-Antriebsende
8 Gehäuseschild Antriebsende 20 Befestigungsschraube Gehäuseschild Nicht-Antriebsseite
9 Lager 21 Lüfter
10 Sprengring 22 Lüfterabdeckung
11 Fußbefestigung 23 Schraube der Lüfterabdeckung
12 Abnehmbare Füße 24 LCP
Abbildung 3.3 FCM 106 mit Asynchronmotor, Explosionszeichnung B3
34 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 37

195NA517.10
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
9
16
22
17
18
19
20
21
Systemintegration Projektierungshandbuch
3 3
1 Frequenzumrichter-Abdeckung 12 Befestigungsschraube Gehäuseschild Antriebsseite
2 Bauform des Frequenzumrichters 13 Wellenstift
3 Motorstecker 14 Rotor
4 Motoranschlussdichtung 15 Sprengring
5 Motoradapterplatte 16 Vorlast-Beilagscheibe
6 Dichtung zwischen Motor und Motor-Adapterplatte 17 Gehäuseschild Nicht-Antriebsende
7 Staubdichtung Antriebsende 18 Befestigungsschraube Gehäuseschild Nicht-Antriebsseite
8 Flansch-Gehäuseschild 19 Lüfter
9 Lager 20 Lüfterabdeckung
10 Sprengring 21 Schraube der Lüfterabdeckung
11 Stator-Rahmen 22 LCP
Abbildung 3.4 FCM 106 mit PM-Motor, Explosionszeichnung B5
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 35
Page 38

Systemintegration
VLT® DriveMotor FCP 106/FCM 106
3.3.2 Heben
HINWEIS
HEBEN - GEFAHR VON SACHSCHÄDEN
Ein nicht ordnungsgemäßes Heben kann Sachschäden
33
verursachen.
Verwenden Sie beide Hebeösen, sofern
•
vorhanden.
Vermeiden Sie bei vertikalem Anheben
•
unkontrollierte Drehungen.
Heben Sie mit Hubvorrichtungen keine Geräte
•
an, die nur über Hebepunkte am Motor
verfügen.
Die Bedienung und das Heben des Geräts darf nur durch
qualifiziertes Personal erfolgen. Stellen Sie Folgendes
sicher:
Verfügbarkeit der gesamten Produktdokumen-
•
tation sowie der für ein sicheres Arbeiten
erforderlichen Werkzeuge und Geräte.
Krane, Hebevorrichtungen, Hebegurte und
•
Traversen müssen für die zu hebenden Geräte
ausgelegt sein. Angaben zum Gewicht des Geräts
finden Sie unter Kapitel 6.1.5 Gewicht.
Wenn Sie eine Hebeöse verwenden, müssen Sie
•
vor dem Heben sicherstellen, dass der Schaft der
Hebeöse fest auf der Oberfläche des Rahmens
angezogen ist.
Die mit dem Gerät mitgelieferten Hebeösen oder
Lagerzapfen sind nur für das Gewicht des Geräts ausgelegt,
nicht jedoch für zusätzlich daran befestigte Geräte.
3.3.3 Lager
Die Standardlösung ist ein festes Lager an der
Antriebsseite des Motors (Wellenleistungsseite).
Zur Vermeidung von statisch bedingten Verformungen
muss der Lagerbereich vibrationsfrei sein. Wenn einige
Vibrationen unvermeidbar sind, verriegeln Sie die Welle.
Lager müssen mit einer Vorrichtung zur Verriegelung der
Welle ausgestattet sein, die bei der Lagerung an der Welle
verbleiben muss. Drehen Sie die Wellen im regelmäßigen
Abstand von einer Woche manuell um eine Vierteldrehung.
Die Lager werden ab Werk vollständig mit Lithiumbasierten Schmierfett befüllt.
36 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 39

Systemintegration Projektierungshandbuch
3.3.4 Lagerlebensdauer und Schmierung
Die Lebensdauer von Kugellagern entspricht Tabelle 3.6 und Tabelle 3.7, wenn die folgenden Bedingungen erfüllt sind:
Temperatur von 80 °C (176 °F).
•
Radialkräfte am Lastpunkt bei halber Motorwellendehnung überschreiten nicht die in Tabelle 3.6 und Tabelle 3.7
•
angegebenen Werte.
3 3
Zulässige Radialkräfte Zulässige Axialkräfte
IE2 50 Hz 3-phasige Motoren
20000 h 40000 h 20000 h 40000 h 20000 h 40000 h 20000 h 40000 h
Motorgröße Anzahl der Pole F rad [N] F rad [N] F ax [N] F ax [N] F ax [N] F ax [N] F ax [N] F ax [N]
71
80
90
100
112
132 S
132 M
160 M
160 L
2 460 370 230 175 260 205 210 170
4 580 465 330 250 350 275 300 240
2 590 475 320 255 340 280 290 220
4 830 665 440 350 470 380 410 310
2 670 535 340 260 380 315 310 235
4 940 750 480 365 470 385 440 330
2 920 735 480 360 540 460 430 325
4 1290 1030 680 530 740 620 620 465
2 930 745 480 380 560 475 400 300
4 1300 1040 680 540 750 630 600 450
2 1350 1080 800 625 1000 845 610 460
4 1900 1520 1130 880 1320 1095 930 700
2 1400 1120 780 610 990 835 580 435
4 1970 1575 1090 850 1300 1080 890 670
2 1550 1240 840 685 1180 975 500 395
4 2170 1735 1180 950 1520 1245 830 640
2 1580 1265 820 675 1180 980 460 365
4 2220 1775 1150 925 1510 1245 790 610
(IMB3)
Beide Richtungen Kraft nach oben Kraft nach unten
Zulässige Axialkräfte
(IMV1)
Zulässige Axialkräfte
(IMV1)
Tabelle 3.6 Zulässige Kräfte, IE2 50 Hz 3-phasige Motoren
Zulässige Radialkräfte: Lastpunkt bei halber Motorwellendehnung, 0 Axialkraft zugrunde gelegt.
Zulässige Axialkräfte: 0 Radialkraft zugrunde gelegt.
Zulässige Lasten mit simultanen Radial- und Axialkräften sind auf Anfrage erhältlich.
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 37
Page 40

Systemintegration
VLT® DriveMotor FCP 106/FCM 106
Zulässige Radial-
HPS-Motoren
Motorgröße
33
71
90
112
132 M
132 XL
132 XXL
Drehzahl
[U/min]
1500 580 465 330 250 350 275 300 240
1800 520 420 295 225 315 250 270 215
3000 460 370 230 175 260 205 210 170
3600 415 335 205 155 235 185 190 150
1500 940 750 480 365 470 385 440 330
1800 845 675 430 330 420 345 395 300
3000 670 535 340 260 380 315 310 235
3600 600 480 305 235 340 285 280 210
1500 1300 1040 680 540 750 630 600 450
1800 1170 935 610 485 675 565 540 405
3000 930 745 480 380 560 475 400 300
3600 835 670 430 340 505 430 360 270
1500 – – – – – – – –
1800 1710 1370 1015 790 1190 985 835 630
3000 1350 1080 800 625 1000 845 610 460
3600 1215 970 720 565 900 760 550 415
1500 1970 1575 1090 850 1300 1080 890 670
1800 – – – – – – – –
3000 1400 1120 780 610 990 835 580 435
3600 1260 1010 700 550 890 750 520 390
1500 1970 1575 1090 850 1300 1080 890 670
1800 1770 1415 980 765 1170 970 800 600
3000 1400 1120 780 610 990 835 580 435
3600 1260 1010 700 550 890 750 520 390
kräfte
20000 h 40000 h 20000 h 40000 h 20000 h 40000 h 20000 h 40000 h
F rad [N] F rad [N] F ax [N] F ax [N] F ax [N] F ax [N] F ax [N] F ax [N]
Zulässige Axialkräfte
(IMB3)
Beide Richtungen Kraft nach oben Kraft nach unten
Zulässige Axialkräfte
(IMV1)
Zulässige Axialkräfte
(IMV1)
Tabelle 3.7 Zulässige Kräfte, HPS-Motoren
Zulässige Radialkräfte: Lastpunkt bei halber Motorwellendehnung, 0 Axialkraft zugrunde gelegt.
Zulässige Axialkräfte: 0 Radialkraft zugrunde gelegt.
Zulässige Lasten mit simultanen Radial- und Axialkräften sind auf Anfrage erhältlich.
Motortyp Motorbaugröße Schmiermitteltyp Temperaturbereich
Asynchron 80–180
PM 71–160
Tabelle 3.8 Schmierung
Motorbaugr
öße
71 1500/3000 – – 6205 2ZC3 6303 2ZC3
80 1500/3000 6204 2ZC3 6204 2ZC3 – –
90 1500/3000 6205 2ZC3 6205 2ZC3 6206 2ZC3 6205 2ZC3
100 1500/3000 6206 2ZC3 6206 2ZC3 – –
112 1500/3000 6306 2ZC3 6306 2ZC3 6208 2ZC3 6306 2ZC3
132 1500/3000 6208 2ZC3 6208 2ZC3 6309 2ZC3 6208 2ZC3
160 1500/3000
180 1500/3000
Tabelle 3.9 Standard-Lagerbezeichnungen und Öldichtungen für Motoren
1) Daten bei künftiger Veröffentlichung verfügbar.
Drehzahl
[U/min]
Lagertyp, Asynchronmotoren Lagertyp, PM-Motoren
Antriebsende Nicht-Antriebsende Antriebsende Nicht-Antriebsende
1) 1)
1) 1)
Lithium-Basis
-40 bis +140 °C (-40 bis +280 °F)
– –
– –
38 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 41

195NA497.10
1.21.0 1.4
30
10
20
100
60
40
50
1.81.6 2.0
2000
500
200
400
300
1000
600
t [s]
f
OUT
= 2 x f
M,N
f
OUT
= 0.1 x f
M,N
f
OUT
= 1 x f
M,N
(par. 1-23)
I
MN
(par. 1-24)
I
M
Systemintegration Projektierungshandbuch
3.3.5 Auswuchten
Leistungsgröße
[kW] 1500
Der FCM 106 ist nach Klasse R gemäß ISO 8821
ausgewuchtet (reduziertes Auswuchten). Bei kritischen
Anwendungen, insbesondere solchen mit hohen
5,5 112 112 112 90
7,5 132 112 112 112
Drehzahlen (>4000 U/min) ist ggf. eine besondere
Auswuchtung (Klasse S) erforderlich.
3.3.6 Antriebswellen
Tabelle 3.11 FCM 106 - Motorbaugröße für PM- und
Asynchronmotoren
1) Nennleistungen beziehen sich auf NO, siehe Kapitel 6.2 Elektrische
Daten.
Antriebswellen werden aus hochfestem Stahl (35/40
Tonnen; 460/540 MN/m2) gefertigt. Antriebswellen
3.3.9 Thermischer Motorschutz
verfügen standardmäßig über eine Gewindebohrung
gemäß DIN 332 Form D und eine Keilnut mit
geschlossenem Profil.
Der Motorüberlastschutz kann über eine Reihe von
Verfahren realisiert werden:
1)
Asynchronmotor PM-Motor
3000
U/min
U/min
1500
U/min
3000
U/min
3 3
3.3.7 FCM 106 Trägheitsmoment
Trägheitsmoment J
FCM 106
[kW] 3000
0,55 – – – 0,00047
0,75 0,0007 0,0025 0,00047 0,0007
1,1 0,00089 0,00373 0,00047 0,00091
1,5 0,00156 0,00373 0,0007 0,0011
2,2 0,0018 0,00558 0,00091 0,00082
3,0 0,00405 0,00703 0,00082 0,00104
4,0 0,00648 0,0133 0,00107 0,00131
5,5 0,014 0,03 0,00131 0,0136
7,5 0,016 0,036 0,0136 0,0206
Tabelle 3.10 Trägheitsmoment [kgm2]
1) Nennleistungen beziehen sich auf NO, siehe Kapitel 6.2 Elektrische
Daten.
Asynchronmotor PM-Motor
1)
1500
U/min
U/min
3000
U/min
1500
U/min
3.3.9.1 Elektronisches Thermorelais
ETR ist nur für Asynchronmotoren zweckmäßig. Der ETRSchutz umfasst die Simulation eines Bimetallrelais, die auf
den Frequenzumrichter-eigenen internen Messwerten zu
Iststrom und -Drehzahl basiert. Die Kennlinie wird in
Abbildung 3.5 gezeigt.
Elektronisches Thermorelais (ETR).
•
Thermistorsensor ist zwischen den Motorwick-
•
lungen positioniert.
Mechanischer Thermoschalter.
•
3.3.8 FCM 106 Motorbaugröße
1)
Leistungsgröße
[kW] 1500
0,55 – – 71 –
0,75 80 71 71 71
1,1 90 80 71 71
1,5 90 80 71 71
2,2 100 90 90 71
3 100 90 90 90
4 112 100 90 90
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 39
Asynchronmotor PM-Motor
3000
U/min
U/min
1500
U/min
3000
U/min
Abbildung 3.5 ETR-Schutzeigenschaft
Die X-Achse zeigt das Verhältnis zwischen Motorstrom
(I
) und Motornennstrom (I
motor
motor, nom
). Die Y-Achse zeigt
die Zeit in Sekunden, bevor ETR eingreift und den
Frequenzumrichter abschaltet. Die Kurven zeigen das
Verhalten der Nenndrehzahl bei Nenndrehzahl x 2 und
Nenndrehzahl x 0,1.
Es ist klar, dass ETR bei niedriger Drehzahl durch die
geringere Kühlung des Motors bei niedrigerer Wärmeentwicklung abschaltet. So wird der Motor auch in niedrigen
Drehzahlbereichen vor Überhitzung geschützt.
Page 42
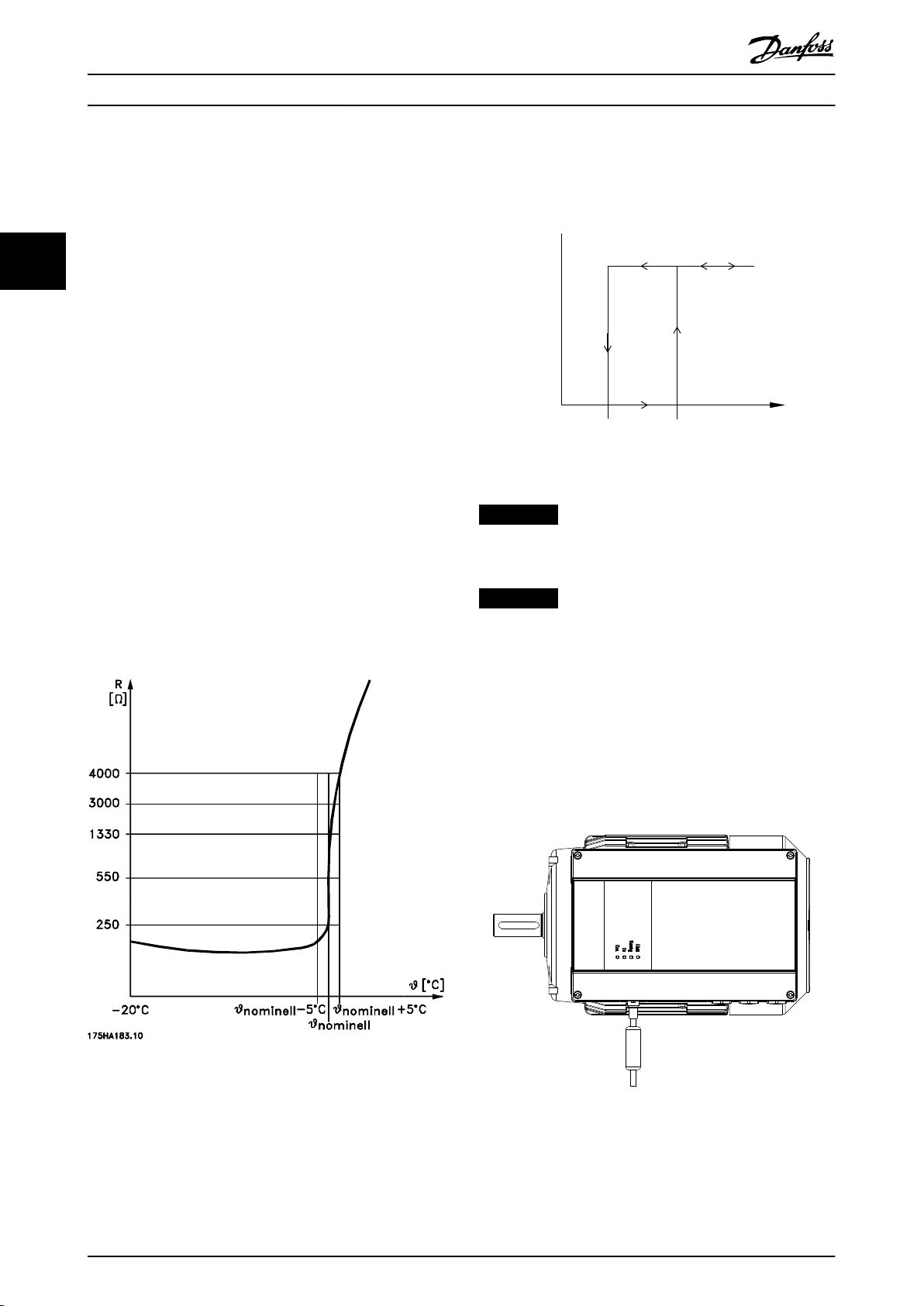
195NA439.10
R
OFF
ON
<800 Ω
>2.9 kΩ
195NA431.10
Systemintegration
VLT® DriveMotor FCP 106/FCM 106
Fazit
ETR ist nur für Asynchronmotoren zweckmäßig. Das ETR
schützt den Motor vor Überhitzung. Ein weiterer
Motorüberlastschutz ist nicht notwendig. So regelt das ETR
bei Erhitzung des Motors, wie lange der Motor mit hoher
Temperatur laufen kann, bevor er gestoppt wird, um
33
Überhitzung zu vermeiden.
Wenn der Motor überlastet ist, ohne dass die Temperatur
erreicht wird, bei der das ETR den Motor abschaltet,
schützt die Stromgrenze den Motor und die Anwendung
vor Überlast. In diesem Fall wird das ETR nicht aktiviert,
weshalb eine andere thermische Schutzmethode
erforderlich ist.
Aktivieren Sie das ETR in Parameter 1-90 Thermischer
Motorschutz. Das ETR wird in Parameter 4-18 Current Limit
Mode geregelt.
Wenn der Thermistorwert aufgrund der Motortemperatur
über 2,9 kΩ steigt, schaltet der Frequenzumrichter ab.
Wenn der Thermistorwert unter 0,8 kΩ sinkt, wird der
Frequenzumrichter wird neu gestartet.
Abbildung 3.7 Frequenzumrichterbetrieb mit Thermistor
3.3.9.2 Thermistor (nur FCP 106)
Der Thermistorsensor wird zwischen den Motorwicklungen
positioniert. Der Thermistor wird über den Motorstecker
bei Klemmenpositionen T1 und T2 angeschlossen. Informationen zu den Klemmenpositionen und zur Verkabelung
finden Sie im Abschnitt Motoranschluss im Produk-
thandbuch VLT® DriveMotor FCP 106 und FCM 106.
Stellen Sie Parameter 1-90 Motor Thermal Protection auf [1]
Thermistorwarnung oder [2] Thermistorabschaltung.
HINWEIS
Wählen Sie den Thermistor gemäß der Spezifikation in
Abbildung 3.6 und Abbildung 3.7.
HINWEIS
Wenn der Thermistor nicht galvanisch isoliert ist, kann
das Vertauschen von Thermistorkabeln und Motorkabeln
untereinander den Frequenzumrichter dauerhaft
beschädigen.
Abbildung 3.6 Typisches Thermistorverhalten
Anstelle eines Thermistors kann ein mechanischer Thermoschalter (Klixon-Schalter) verwendet werden.
Auswahl Frequenzumrichter/Optionen
3.4
3.4.1 Fern-Einbausatz
Abbildung 3.8 Fern-Einbausatz-Anschlüsse
40 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 43

195NA506.11
R1.5 +_ 0.5
62.5 +_ 0.2
86 +_ 0.2
1
2
3
4
195NA422.12
1
2
42 mm
195NA441.10
53
18
19
27
12
50
55
Systemintegration Projektierungshandbuch
3.4.2 LOP-Einheit
3 3
1 Wandausschnitt. Wanddicke 1-3 mm
2 Schaltschrank
3 Dichtung
4 LCP
Abbildung 3.9 Stecker für Fern-Einbausatz
Abbildung 3.11 LOP-Anschlüsse
Taste 2-Drehzahl-
Betrieb
Dual-ModusBetrieb
Taste +/- Festlegen des Sollwerts
Taste I Betrieb mit Sollwert Betrieb mit
Datensatz 1
Taste II Betrieb mit
Festdrehzahl JOG
Betrieb mit
Datensatz 2
Taste O Stopp + Reset
Tabelle 3.12 Funktion
Anschluss2-Drehzahl-
Betrieb
Dual-Modus-
Betrieb
18 Violett Grau
19 –
27 Braun
29 Grün
12 Rot
50 Gelb
55 Blau
Tabelle 3.13 Elektrische Anschlüsse
2-RichtungsBetrieb
Vorwärtslauf
Rückwärtslauf
2-Richtungs-
Betrieb
1 Bedieneinheit
2 Schaltschranktür
Abbildung 3.10 LCP-Ferneinbau
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 41
Page 44

Systemintegration
VLT® DriveMotor FCP 106/FCM 106
Parameter 2-Drehzahl-
Betrieb
Parameter 5-10
Klemme 18
Digitaleingang
Klemme 18
33
Parameter 5-12
Klemme 27
Digitaleingang
Klemme 27
Parameter 5-13
Klemme 29
Digitaleingang
Klemme 29
Zusätzliche
Parameter
Tabelle 3.14 Parametereinstellungen
* Kennzeichnet die Werkseinstellung.
Alarme werden bei jedem Start quittiert. Lassen Sie zur
Vermeidung dieses Resets:
•
•
Beim Einschalten befindet sich das Gerät im Stoppmodus.
Der eingestellte Sollwert wird beim Ausschalten
gespeichert.
Deaktivieren Sie zur Einstellung der permanenten
Startfunktion wie folgt die Stoppfunktion am LOP:
•
•
Besondere Betriebsbedingungen
3.5
Festdrehzahl
JOG*
Parameter 311 Festdrehza
hl Jog [Hz]
den braunen Draht unangeschlossen oder
stellen Sie Parameter 5-12 Terminal 27 Digital Input
auf [0] Ohne Funktion.
Schließen Sie Klemme 12 an Klemme 18 an.
Schließen Sie den violetten/grauen Draht nicht an
Klemme 18 an.
3.5.1 Zweck der Leistungsreduzierung
Berücksichtigen Sie Leistungsreduzierung bei Verwendung
des Frequenzumrichters unter folgenden Bedingungen:
Bei niedrigem Luftdruck (große Höhenlagen).
•
Bei niedrigen Drehzahlen.
•
Mit langen Motorkabeln,
•
Kabel mit großem Querschnitt.
•
Hohe Umgebungstemperatur.
•
Dieser Abschnitt beschreibt die erforderlichen Maßnahmen.
Dual-ModusBetrieb
Start*
Reset
Anwahl
Datensatz
Parameter 0-10
Aktiver Satz =
[9] Externe
Anwahl
2-RichtungsBetrieb
Start +
Reversierung
Parameter 4-10 M
otor Drehrichtung
= [2] Beide
Richtungen
3.5.2 Leistungsreduzierung wegen erhöhter
Umgebungstemperatur und
Taktfrequenz
Siehe Kapitel 6.10 Leistungsreduzierung aufgrund
Umgebungstemperatur und Taktfrequenz in diesem
Handbuch.
3.5.3 Automatische Anpassungen zur
Sicherstellung der Leistung
Der Frequenzumrichter überprüft ständig, ob kritische
Werte bei Innentemperatur, Laststrom, Hochspannung im
Zwischenkreis und niedrige Motordrehzahlen vorliegen. Als
Reaktion auf einen kritischen Wert kann der Frequenzumrichter die Taktfrequenz anpassen und/oder den
Schaltmodus ändern, um die Leistung des Frequenzumrichters zu sichern. Die Fähigkeit zur automatischen
Reduzierung des Ausgangsstroms erweitert die
akzeptablen Betriebsbedingungen noch weiter.
3.5.4 Leistungsreduzierung wegen
niedrigem Luftdruck
Bei niedrigerem Luftdruck nimmt die Kühlfähigkeit der Luft
ab.
Unterhalb einer Höhe von 1000 m über NN ist
•
keine Leistungsreduzierung erforderlich.
Oberhalb einer Höhe von 1000 m muss die
•
Umgebungstemperatur oder der max.
Ausgangsstrom entsprechend reduziert werden.
- Reduzieren Sie den Ausgangsstrom um
1 % pro 100 m Höhe über 1000 m bzw.
-
die max. Umgebungstemperatur um 1 °
C pro 200 m.
Bei Höhen über 2.000 m ziehen Sie bitte Danfoss
•
zu PELV (Schutzkleinspannung - Protective extra
low voltage) zurate.
Eine Alternative ist die Reduzierung der Umgebungstemperatur bei großen Höhen und damit die Sicherstellung
von 100 % Ausgangsstrom bei großen Höhen. Beispiel: Bei
einer Höhe von 2000 m und einer Temperatur von 45 °C
(T
verfügbar. Bei einer Temperatur von 41,7 °C sind 100 %
des Ausgangsnennstroms verfügbar.
- 3.3 K) sind 91 % des Ausgangsnennstroms
AMB, MAX
42 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 45
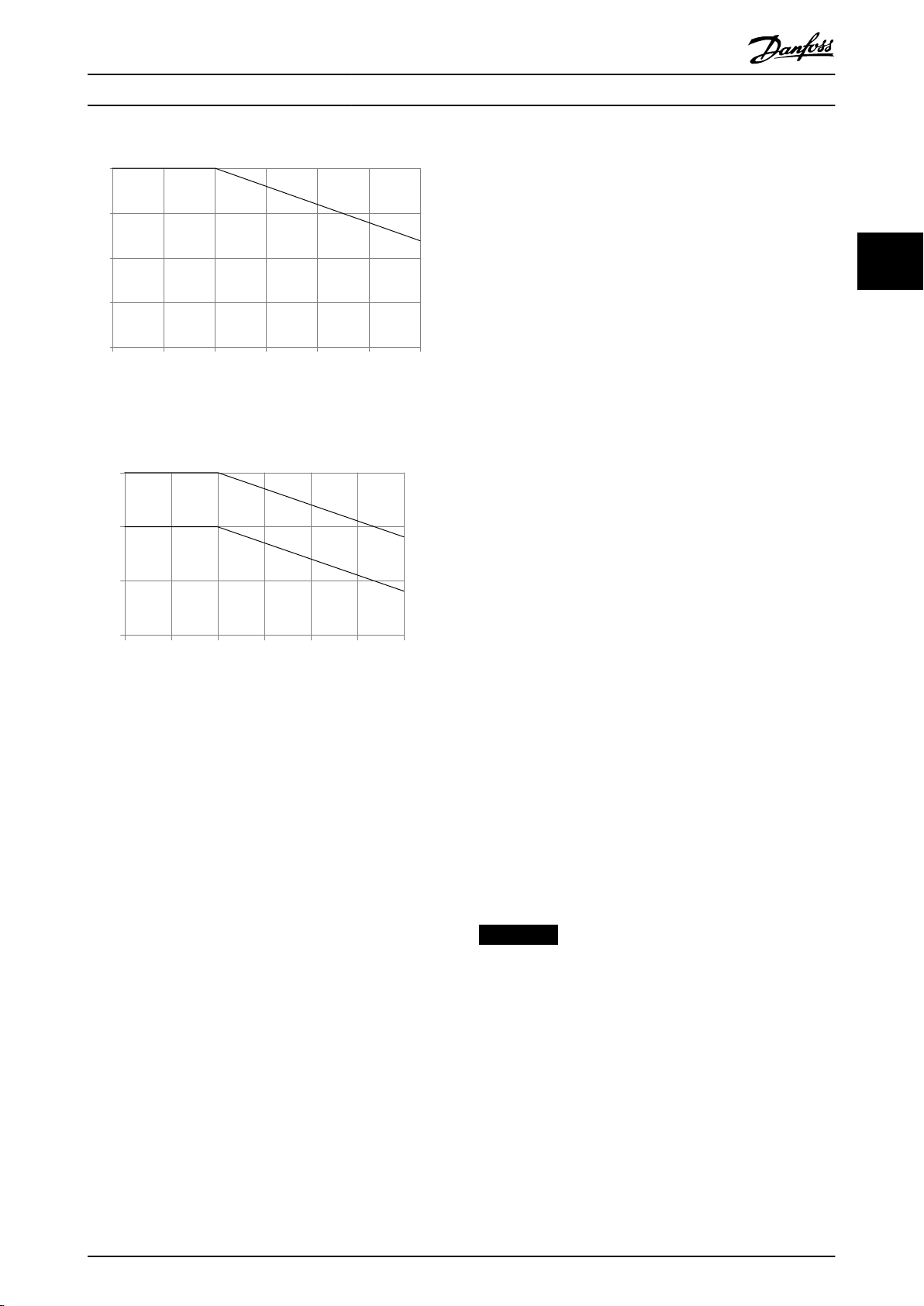
80
0 500
100
95
90
85
1000 1500 2000 2500 3000
Altitude (metres above sea level)*
130BB008.10
I
OUT
(%)
0 500 1000 1500 2000 2500 3000
Altitude (meters above sea level)*
30
35
40
45
(°C)
Amb. Temp.
130BB009.10
HO
NO
Systemintegration Projektierungshandbuch
Abbildung 3.12 Beispiel
Abbildung 3.13 Höhenabhängige Ausgangsstromreduzierung
bei T
AMB, MAX
Die Bedieneinheit versucht ggf. die Rampe zu kompen-
3.5.5 Extreme Betriebszustände
sieren (Parameter 2-17 Überspannungssteuerung).
Wenn ein bestimmtes Spannungsniveau erreicht ist, wird
der Frequenzumrichter abgeschaltet, um die Transistoren
Kurzschluss (Motorphase – Phase)
Der Frequenzumrichter ist durch seine Strommessung in
jeder der 3 Motorphasen oder im DC-Zwischenkreis gegen
und die Zwischenkreiskondensatoren zu schützen.
Wählen Sie die Methode zur Regelung des ZwischenkreisSpannungsniveaus über:
Kurzschlüsse geschützt. Ein Kurzschluss zwischen zwei
Ausgangsphasen bewirkt einen Überstrom im Wechselrichter. Jedoch wird der Wechselrichter abgeschaltet,
sobald sein Kurzschlussstrom den zulässigen Wert (Alarm
16 Abschaltblockierung) überschreitet.
Schalten am Ausgang
Das Schalten am Ausgang, zwischen Motor und Frequenzumrichter, ist zulässig. Es können Fehlermeldungen
HINWEIS
Sie können OVC nicht aktivieren, wenn Sie einen PMMotor betreiben (d. h. wenn Parameter 1-10 Motorart auf
[1] PM, Vollpol SPM eingestellt ist).
auftreten. Aktivieren Sie zum Abfangen eines drehenden
Motors [2] Immer aktiviert in Parameter 1-73 Motorfang-
schaltung.
Vom Motor erzeugte Überspannung
Die Spannung im Zwischenkreis erhöht sich beim generatorischen Betrieb des Motors. Dieser Spannungsanstieg tritt
in folgenden Fällen auf:
Netzausfall
Während eines Netzausfalls arbeitet der Frequenzumrichter
weiter, bis die Zwischenkreisspannung unter das minimale
Niveau abfällt, typischerweise 15 % unter der niedrigsten
Versorgungsnennspannung des Frequenzumrichters. Die
Höhe der Netzspannung vor dem Ausfall und die aktuelle
Motorbelastung bestimmen, wie lange der Frequenzumrichter im Freilauf ausläuft.
Die Last treibt den Motor an (bei konstanter
•
Ausgangsfrequenz des Frequenzumrichters), d. h.,
die Last erzeugt Energie.
Während der Verzögerung (Rampe Ab) ist die
•
Reibung bei hohem Trägheitsmoment niedrig und
die Rampenzeit zu kurz, um die Energie als
Verlustleistung im Frequenzumrichter, Motor oder
in der Anlage abzugeben.
Eine falsche Einstellung beim Schlupfausgleich
•
kann eine höhere DC-Zwischenkreisspannung
hervorrufen.
Gegen-EMK durch PM-Motorbetrieb. Bei Freilauf
•
mit hoher Drehzahl kann die Gegen-EMK des PMMotors möglicherweise die maximale
Spannungstoleranz des Frequenzumrichters
überschreiten und Schäden verursachen. Zur
Vermeidung dieser Beschädigungsgefahr wird der
Wert von Parameter 4-19 Max. Ausgangsfrequenz
automatisch begrenzt. Die Grenze basiert auf
einer internen Berechnung anhand der Werte
von:
- Parameter 1-40 Gegen-EMK bei 1000 UPM.
- Parameter 1-25 Motornenndrehzahl.
- Parameter 1-39 Motorpolzahl.
Wenn die Gefahr eines Überdrehens des Motors
besteht (z. B. durch den Windmühlen-Effekt, bei
dem der Motor durch die Last gedreht wird),
verwenden Sie einen Bremswiderstand.
Parameter 2-10 Bremsfunktion.
•
Parameter 2-17 Überspannungssteuerung.
•
3 3
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 43
Page 46
Systemintegration
VLT® DriveMotor FCP 106/FCM 106
Statische Überlast im Modus VVC
Wird der Frequenzumrichter überlastet, reduziert der
Frequenzumrichter automatisch die Ausgangsfrequenz, um
so die Belastung zu reduzieren.
Bei extremer Überlastung kann jedoch ein Strom auftreten,
der den Frequenzumrichter nach etwa 5-10 s zum
33
Abschalten zwingt.
+
3.6.3 Kühlung
Auch Geräte der Schutzarten IP54, IP55 oder IP66
•
müssen den festgelegten Umgebungstemperaturbereichen entsprechen.
Eine zusätzliche Klimatisierung des Schaltschranks
•
oder des Installationsorts ist ggf. notwendig.
3.6 Umgebungsbedingungen
3.6.1 Luftfeuchtigkeit
Obwohl der Frequenzumrichter bei hoher Feuchtigkeit (bis
95 % relativer Feuchte) ordnungsgemäß betrieben werden
kann, müssen Sie Kondensation möglichst vermeiden.
Insbesondere besteht die Gefahr von Kondensation, wenn
der Frequenzumrichter kälter als feuchte Umgebungsluft
ist. Luftfeuchtigkeit kann auch an den elektronischen
Komponenten kondensieren und Kurzschlüsse verursachen.
Kondensation tritt an stromlosen Geräten auf. Installieren
Sie eine Schaltschrankheizung, wenn aufgrund der
Umgebungsbedingungen Kondensation möglich ist.
Vermeiden Sie eine Installation in Bereichen, in denen Frost
auftritt.
Alternativ kann die Gefahr von Kondensation durch den
Standby-Betrieb des Frequenzumrichters (Gerät am Netz
angeschlossen) reduziert werden. Stellen Sie jedoch sicher,
dass der Leistungsverlust ausreichend ist, damit die
Frequenzumrichterschaltung frei von Feuchtigkeit bleibt.
Der Frequenzumrichter erfüllt die folgenden Standards:
IEC/EN 60068-2-3, EN 50178 9.4.2.2 bei 50 °C.
•
IEC 600721 Klasse 3K4
•
Frequenzumrichter geben Energie in Form von Wärme ab.
Für eine effektive Kühlung der Geräte müssen die
folgenden Empfehlungen berücksichtigt werden.
Die Höchsttemperatur der Luft, die in den Schalt-
•
schrank eintritt, darf niemals 40 °C [104 °F]
überschreiten.
Die tägliche/nächtliche Durchschnittstemperatur
•
darf 35 °C [95 °F] nicht überschreiten.
Befestigen Sie das Gerät so, dass die
•
ungehinderte Luftzirkulation zur Kühlung gewährleistet ist. Siehe Kapitel 6.1.1 Abstände für korrekte
Montageabstände.
Halten Sie die Mindestanforderungen für den
•
vorderen und hinteren Abstand zur Luftzirkulation
für die Kühlung ein. Siehe das VLT® DriveMotor
FCP 106und FCM 106 Produkthandbuch für die
ordnungsgemäßen Installationsanforderungen.
3.6.4 Aggressive Umgebungsbedingungen
Ein Frequenzumrichter besteht aus vielen mechanischen
und elektronischen Komponenten. Alle reagieren mehr
oder weniger empfindlich auf Umwelteinflüsse.
3.6.2 Temperatur
Für alle Frequenzumrichter sind Ober- und Untergrenzen
für die Umgebungstemperatur festgelegt. Durch die
Vermeidung extremer Umgebungstemperaturen wird die
Lebensdauer der Betriebsmittel verlängert und die
allgemeine Anlagenzuverlässigkeit optimiert. Befolgen Sie
die Empfehlungen für die maximale Leistung und die
Langlebigkeit der Geräte.
Frequenzumrichter können zwar bei
•
Temperaturen bis -10 °C eingesetzt werden,
jedoch ist ein einwandfreier Betrieb bei Nennlast
nur bei Temperaturen von 0 °C und höher
gewährleistet.
Überschreiten Sie nicht die Temperatur-
•
Höchstwerte.
Die Lebensdauer der elektronischen
•
Komponenten reduziert sich je 10 °C im Betrieb
über der Auslegungstemperatur um 50 %.
44 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
HINWEIS
Der Frequenzumrichter darf nicht in Umgebungen
installiert werden, deren Atmosphäre Flüssigkeiten,
Partikel oder Gase enthält, die die elektronischen
Bauteile beeinflussen oder beschädigen können. Werden
in solchen Fällen nicht die erforderlichen Schutzmaßnahmen getroffen, so verkürzt sich die Lebensdauer des
Frequenzumrichters und es erhöht sich das Risiko von
Ausfällen.
Flüssigkeiten können sich schwebend in der Luft befinden
und im Frequenzumrichter kondensieren. Dadurch können
Bauteile und Metallteile korrodieren. Dampf, Öl und
Salzwasser können ebenfalls zur Korrosion von Bauteilen
und Metallteilen führen. Für solche Umgebungen
verwenden Sie Geräte gemäß Schutzart IP54.
Schwebende Partikel, wie z. B. Staub, können zu
mechanisch, elektrisch oder thermisch bedingten Ausfällen
des Frequenzumrichters führen. Eine Staubschicht um den
Ventilator des Frequenzumrichters ist ein typisches
Page 47
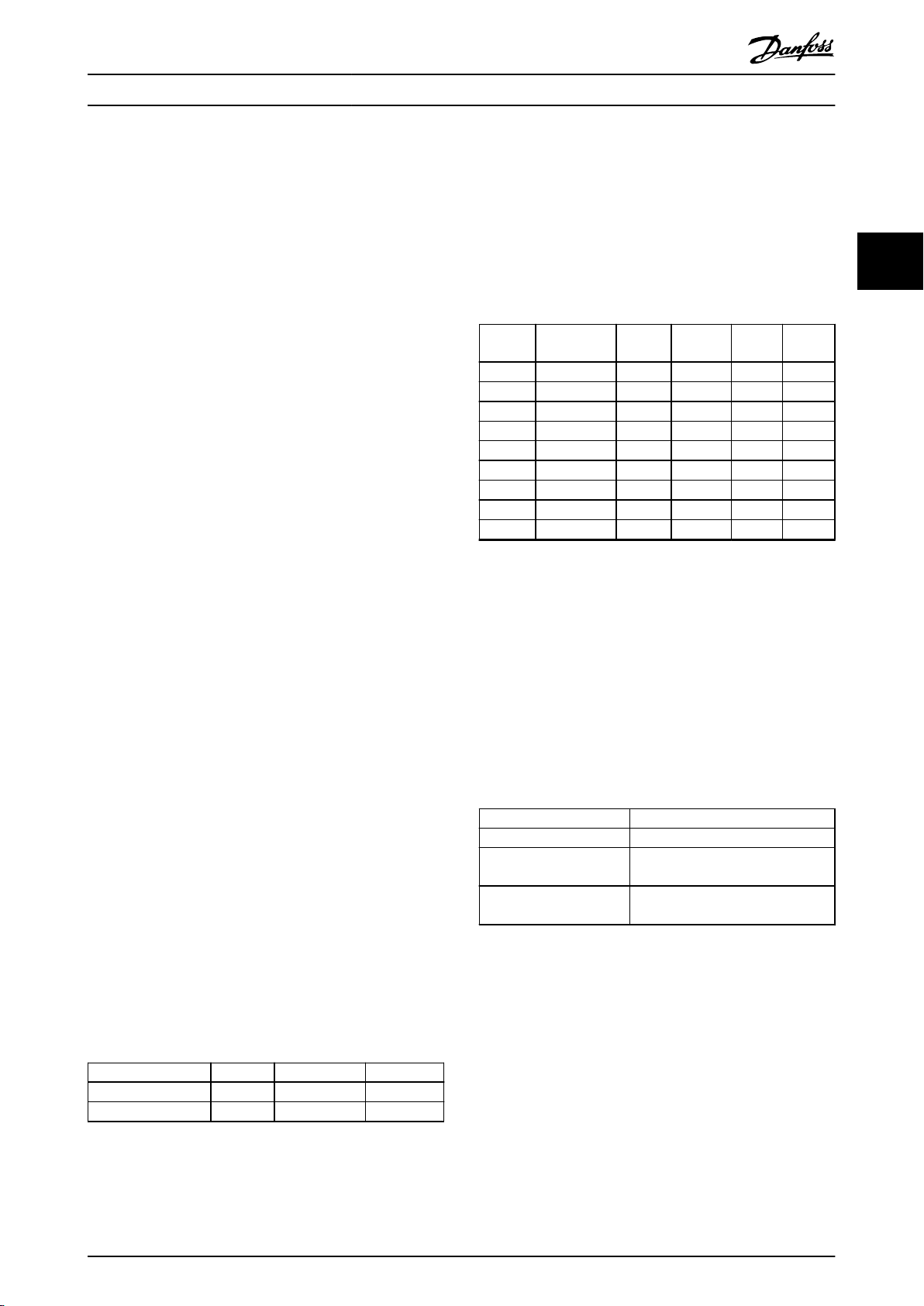
Systemintegration Projektierungshandbuch
Anzeichen für einen hohen Grad an Schwebepartikeln. In
sehr staubiger Umgebung verwenden Sie Geräte gemäß
Schutzart IP54 oder einen Schaltschrank für Geräte der
Schutzart IP20/Typ1.
In Umgebungen mit hohen Temperaturen und viel
Feuchtigkeit lösen korrosionsfördernde Gase, z. B. Schwefel,
Stickstoff und Chlorgemische, chemische Prozesse aus, die
sich auf die Bauteile des Frequenzumrichters auswirken.
Derartige chemischen Reaktionen können die elektronischen Bauteile sehr schnell in Mitleidenschaft ziehen und
zerstören. In solchen Umgebungen empfiehlt es sich, die
Geräte in einen extern belüfteten Schaltschrank
einzubauen, sodass die aggressiven Gase vom Frequenzumrichter ferngehalten werden.
Vor der Installation des Frequenzumrichters muss die
Umgebungsluft auf Flüssigkeiten, Stäube und Gase geprüft
werden. Diese Prüfungen können vorgenommen werden,
indem man in der jeweiligen Umgebung bereits
vorhandene Installationen näher in Augenschein nimmt.
Typische Anzeichen für schädliche, schwebend in der Luft
übertragene Flüssigkeiten sind an Metallteilen haftendes
Wasser oder Öl oder Korrosionsbildung an Metallteilen.
FCM 106
Störgeräusche haben die folgenden Ursachen:
Motorlüfter.
•
Externer Lüfter.
•
Motorstator und -rotor.
•
DC-Zwischenkreisdrosseln.
•
EMV-Filterdrossel.
•
Motordr
ehzahl Taktfrequenz Lüfter MH1 MH2 MH3
[U/min] [kHz] [on/off ] [dB] [dB] [dB]
0 5 ein 55 55,5 52
150 5 aus 57,5 50 57
150 5 ein 61 57 59
1500 5 aus 65,5 64 71,5
1500 5 ein 66 65,5 71,5
1500 10 aus 65 61,5 66,5
1500 16 aus 64 60 65,5
1500 16 ein 64,5 62 65,5
Tabelle 3.16 FCM 106 Störgeräuschniveaus,
gemessen im Abstand von 1 m zum Gerät
3.6.7 Vibrationen und Erschütterungen
3 3
Übermäßige Mengen Staub finden sich häufig an Schaltschränken und vorhandenen elektrischen Installationen. Ein
Anzeichen für aggressive Schwebegase sind Schwarzverfärbungen von Kupferstäben und Kabelenden bei
vorhandenen Installationen.
3.6.5 Umgebungstemperatur
Siehe Kapitel 6.5 Umgebungsbedingungen und
Kapitel 6.10 Leistungsreduzierung aufgrund Umgebungstemperatur und Taktfrequenz für die empfohlene
Umgebungstemperatur bei Lagerung und Betrieb.
3.6.6 Störgeräusche
FCP 106
Störgeräusche haben die folgenden Ursachen:
Externer Lüfter.
•
DC-Zwischenkreisdrosseln.
•
EMV-Filterdrossel.
•
Taktfrequenz MH1 MH2 MH3
[kHz] [dB] [dB] [dB]
5 55 55,5 52
Der Frequenzumrichter entspricht den Anforderungen für
Geräte zur Wand- oder Bodenmontage in Produktionsräumen, sowie bei Montage an Maschinengestellen oder in
Schaltschränken.
Der Frequenzumrichter wurde gemäß den in Tabelle 3.17
definierten Verfahren getestet.
IEC 61800-5-1 Ed.2 Vibrationstest, Kl. 5.2.6.4
IEC/EN 60068-2-6 Schwingung (sinusförmig) - 1970
IEC/EN 60068-2-64 Schwingung, Breitbandrauschen
(digital geregelt)
IEC 60068-2-34,
60068-2-35, 60068-2-36
Tabelle 3.17 Konformität mit Vibrations- und
Erschütterungstestverfahren
Kurve D (1-3) Langzeitprüfung 2,52 g
eff
Tabelle 3.15 FCP 106 Störgeräuschniveaus, Lüfter in Betrieb,
gemessen im Abstand von 1 m zum Gerät
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 45
Page 48

Extended product
Motor system
Drive system (PDS)
Complete drive module (CDM)
Infeed
section
Auxiliaries Auxiliaries Motor
Motor starter
contactors, soft starters, ...
Motor control system = CDM or starter
Driven equipment
Trans-
mission
Load
machine
Basic
drive
module
(BDM)
Mains
and
mains
cable
130BE604.11
Systemintegration
VLT® DriveMotor FCP 106/FCM 106
3.7 Energieeffizienz
Die Norm EN 50598 Ökodesign für Antriebssysteme, Motorstarter, Leistungselektronik und deren angetriebene Einrichtungen liefert
Richtlinien für die Bewertung der Energieeffizienz von Frequenzumrichtern.
Die Norm stellt eine neutrale Methode zur Bestimmung von Effizienzklassen und Leistungsverlusten unter Volllast und
33
Teillast bereit. Die Norm lässt die Kombination aus einem beliebigen Motor mit einem beliebigen Frequenzumrichter zu.
Abbildung 3.14 Antriebssystem (PDS) und komplettes Antriebsmodul (CDM)
Hilfseinrichtungen: Advanced Harmonic Filter AHF 005 AHF
010, Netzdrossel MCC 103, Sinusfilter MCC 101, dU/dt-Filter
MCC 102.
3.7.1 IES- und IE-Klassen
Komplette Antriebsmodule (CDM)
Gemäß der Norm EN 50598-2 umfasst das komplette
Antriebsmodul (CDM) den Frequenzumrichter, seinen
Speiseabschnitt und seine Hilfseinrichtungen.
Energieeffizienzklassen für CDM:
IE0 = unter dem Stand der Technik
•
IE1 = Stand der Technik.
•
IE2 = über dem Stand der Technik.
•
Danfoss Frequenzumrichter erfüllen die Werte der Effizienzklasse IE2. Die Energieeffizienzklasse bezieht sich auf den
Nennpunkt des CDM.
Antriebssysteme (PDS)
Ein Antriebssystem (PDS) besteht aus einem kompletten
Antriebsmodul (CDM) und einem Motor.
Energieeffizienzklassen für PDS:
Abhängig vom Motorwirkungsgrad erfüllen von einem
Danfoss VLT® Frequenzumrichter angetriebene Motoren
normalerweise die Energieeffizienzklasse IES2.
Die Energieeffizienzklasse bezieht sich auf den Nennpunkt
des PDS und kann auf der Basis von CDM und Motorverlusten berechnet werden.
3.7.2 Verlustleistungsdaten und
Leistungsverlust und Wirkungsgrad eines Frequenzumrichters sind abhängig von der Konfiguration und den
Zusatzeinrichtungen. Um konfigurationsspezifische Daten
zu Verlustleistung und Wirkungsgrad zu erhalten,
verwenden Sie das DanfossDanfoss ecoSmart Tool.
Die Verlustleistungdaten werden als Prozentsatz der
Nennscheinleistung angegeben und gemäß EN 50598-2
bestimmt. Bei der Bestimmung der Verlustleistungsdaten
verwendet der Frequenzumrichter die Werkseinstellungen
IES0 = unter dem Stand der Technik.
•
IES1 = Stand der Technik.
•
IES2 = über dem Stand der Technik.
•
Wirkungsgraddaten
46 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 49

T
f
100%
50%
50% 90%
25%
0%
0%
130BE605.10
130BD930.11
1.80
1.60
1.40
1.20
1.00
0.80
0.60
0.40
0.20
0.00
0 10 20 30 40 50 60 70 80 90 100
n [%]
P
L,CDM
(freq,load)
[%]
1
2
3
130BD931.11
n [%]
0 20 40 60 80 100
100.00
98.00
96.00
94.00
92.00
90.00
η
CDM (freq,load)
[%]
1
2
3
Systemintegration Projektierungshandbuch
mit Ausnahme der Motordaten, die für den Betrieb des
Motors erforderlich sind.
1 100 % Last
2 50 % Last
3 25 % Last
Abbildung 3.16 Verlustleistungsdaten des Frequenzumrichters.
CDM relative Verluste (P
(n) [% der Nenndrehzahl].
T Drehmoment [%]
f Frequenz [%]
) [%] bezogen auf Drehzahl
L, CDM
3 3
Abbildung 3.15 Betriebspunkte des Frequenzumrichters
gemäß EN 50598-2
Unter www.danfoss.com/vltenergyefficiency finden Sie
Informationen zu den Verlustleistungs- und Wirkungsgraddaten des Frequenzumrichters an den
Betriebspunkten, die in Abbildung 3.15 angegeben sind.
Mit der Danfoss ecoSmart-Anwendung können die Effizienzklassen IE und IES berechnet werden. Die Anwendung
ist verfügbar unter ecosmart.danfoss.com.
Beispiel für verfügbare Daten
Die folgenden Beispiele zeigt Verlustleistungs- und
Wirkungsgraddaten für einen Frequenzumrichter mit den
folgenden Eigenschaften:
Nennleistung 55 kW, Nennspannung bei 400 V.
•
Nennscheinleistung, Sr, 67,8 KVa.
•
Nennleistung, P
•
Nennwirkungsgrad, ηr, 98,3 %.
•
, 59,2 kW.
CDM
Abbildung 3.16 und Abbildung 3.17 zeigen Verlustleistungsund Wirkungsgradkurven. Die Drehzahl ist proportional zur
Frequenz.
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 47
1 100 % Last
2 50 % Last
3 25 % Last
Abbildung 3.17 Effizienzdaten des Frequenzumrichters.
CDM Wirkungsgrad (η
(n) [% der Nenndrehzahl].
CDM(freq, load)
) [%] bezogen auf Drehzahl
Interpolation der Verlustleistung
Die Verlustleistung wird an einem zufälligen Betriebspunkt
unter Verwendung einer zweidimensionalen Interpolation
bestimmt.
3.7.3 Verluste und Wirkungsgrad eines
Motors
Der Wirkungsgrad eines Motor, der mit 50-100 % der
Motornenndrehzahl und mit 75-100 % des Nenndrehmoments läuft, ist praktisch konstant. Dies gilt sowohl
dann, wenn der Motor vom Frequenzumrichter geregelt
wird als auch dann, wenn der Motor direkt im Netz
betrieben wird.
Der Wirkungsgrad ist abhängig vom Motortyp und vom
Niveau der Magnetisierung.
Page 50

130BE107.10
25
20
15
10
5
0
0 2 4 6 8 10
[kHz]
[%]
1
2
3
Systemintegration
Weitere Informationen zu Motortypen finden Sie in der
Motortechnologie-Broschüre unter www.vlt-
drives.danfoss.com.
Taktfrequenz
33
Die Taktfrequenz beeinflusst die Magnetisierungsverluste
im Motor und die Schaltverluste im Frequenzumrichter, wie
in Abbildung 3.18 dargestellt.
VLT® DriveMotor FCP 106/FCM 106
1 Motor und Frequenzumrichter
2 Nur Motor
3 Nur Frequenzumrichter
Abbildung 3.18 Verluste [%] bezogen auf Taktfrequenz [kHz]
HINWEIS
Ein Frequenzumrichter erzeugt zusätzliche Oberwellenverluste im Motor. Diese Verluste nehmen bei steigender
Taktfrequenz ab.
3.7.4 Verluste und Wirkungsgrad eines
Antriebssystems
Um die Verlustleistung für ein Antriebssystem an
verschiedenen Arbeitspunkten zu bestimmen, summieren
Sie die Verlustleistung jeder Systemkomponente am
jeweiligen Arbeitspunkt.
Frequenzumrichter
•
Motor
•
Zusatzeinrichtungen
•
48 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 51

Full load
% Full-load current
& speed
500
100
0
0 12,5 25 37,5 50Hz
200
300
400
600
700
800
4
3
2
1
175HA227.10
195NA446.10
1813
12
292719 32 33 20
+24V
P 5-10 [8]
P 5-12 [0]
1
2
3
Anwendungsbeispiele Projektierungshandbuch
4 Anwendungsbeispiele
4.1 HLK-Anwendungsbeispiele
4.1.1 Stern-/Dreieckstarter oder Softstarter
nicht erforderlich
Wenn größere Motoren gestartet werden, müssen in vielen
Ländern Geräte verwendet werden, die den Startstrom
begrenzen. In konventionelleren Systemen sind Stern-/
Dreieckstarter oder Softstarter weit verbreitet. Solche
Motorstarter sind bei Verwendung eines Frequenzumrichters nicht erforderlich.
Wie in Abbildung 4.1 gezeigt, benötigt ein Frequenzumrichter nicht mehr als den Nennstrom.
4 4
1 Start/Stopp
2 Drehzahl
3 Start/Stopp [18]
Abbildung 4.2 Start/Stopp und Drehzahl
4.1.3 Puls-Start/Stopp
Klemme 18 = Start/Stopp Parameter 5-10 Klemme 18
Digitaleingang [9] Puls-Start.
Klemme 27 = Stopp Parameter 5-12 Klemme 27 Digital-
eingang [6] Stopp invers.
1
VLT® DriveMotor
2 Stern-/Dreieckstarter
3 Sanftstarter
4 Start direkt am Netz
Abbildung 4.1 Startstrom
4.1.2 Start/Stopp
Klemme 18 = Start/Stopp Parameter 5-10 Klemme 18
Digitaleingang [8] Start.
Klemme 27 = Ohne Funktion Parameter 5-12 Klemme 27
Digitaleingang [0] Ohne Funktion (Werkseinstellung [2]
Motorfreilauf invers).
Parameter 5-10 Klemme 18 Digitaleingang = [8]
Start (Werkseinstellung).
Parameter 5-12 Klemme 27 Digitaleingang = [2]
Motorfreilauf invers (Werkseinstellung).
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 49
Parameter 5-10 Klemme 18 Digitaleingang = [9]
Puls-Start.
Parameter 5-12 Klemme 27 Digitaleingang = [6]
Stopp invers.
Page 52

195NA432.10
1813
12
292719 32 33 20
+24V
P 5-10 [9]
P 5-12 [6]
1
3
5
2
4
Anwendungsbeispiele
VLT® DriveMotor FCP 106/FCM 106
44
Abbildung 4.4 Potenziometer-Sollwert
4.1.5 Automatische Motoranpassung (AMA)
1 Start
2 Stopp (invers)
3 Drehzahl
4 Start (18)
5 Stopp (27)
Motorparameter bei einem Motor im Stillstand misst. Die
AMA selbst liefert kein Drehmoment.
Die AMA lässt sich vorteilhaft bei der Inbetriebnahme von
Anlagen und bei der Optimierung der Anpassung des
Frequenzumrichters an den verwendeten Motor einsetzen.
Diese Funktion wird oft verwendet, wenn die Werksein-
Die AMA ist ein Testalgorithmus, der die elektrischen
Abbildung 4.3 Puls-Start/Stopp
stellung für den angeschlossenen Motor nicht gilt.
In Parameter 1-29 Autom. Motoranpassung wählen Sie
zwischen [1] Komplette AMA und [2] Reduzierte AMA. Die
4.1.4 Potenziometer-Sollwert
komplette AMA bestimmt alle elektrischen Motorparameter. Die reduzierte AMA bestimmt nur den
Spannungssollwert über ein Potenziometer
Parameter 3-15 Variabler Sollwert 1 [1] = Analogeingang 53.
Parameter 6-10 Klemme 53 Skal. Min.Spannung =
0 V.
Parameter 6-11 Klemme 53 Skal. Max.Spannung =
10 V.
Parameter 6-14 Klemme 53 Skal. Min.-Soll/Istwert =
0 U/min.
Parameter 6-15 Klemme 53 Skal. Max.-Soll/Istwert =
1500 U/min.
Statorwiderstand Rs.
Eine komplette AMA kann von ein paar Minuten bei
kleinen Motoren bis ca. 15 Minuten bei großen Motoren
dauern.
Einschränkungen und Voraussetzungen:
Damit die AMA die Motorparameter optimal
•
bestimmen kann, müssen die korrekten
Typenschilddaten in Parameter 1-20 Motornenn-
leistung [kW] bis
Parameter 1-28 Motordrehrichtungsprüfung
eingegeben werden. Geben Sie für Asynchronmotoren die korrekten Motor-Typenschilddaten in
Parameter 1-24 Motor Current und Parameter 1-37
d-axis Inductance (Ld) ein.
Zur besten Anpassung des Frequenzumrichters
•
wird die AMA an einem kalten Motor
durchgeführt. Wiederholter AMA-Betrieb kann zu
einer Erwärmung des Motors führen, was
wiederum eine Erhöhung des Statorwiderstands
Rs bewirkt. Normalerweise ist dies jedoch nicht
kritisch.
50 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 53
Anwendungsbeispiele Projektierungshandbuch
Die AMA ist nur durchführbar, wenn der
•
Motornennstrom mindestens 35 % des Ausgangsnennstroms des Frequenzumrichters beträgt. Die
AMA ist bis zu einer Motorstufe (Leistungsstufe)
größer möglich.
Bei installiertem Sinusfilter ist es möglich, einen
•
reduzierten AMA-Test durchzuführen. Von einer
kompletten AMA mit Sinusfilter ist abzuraten. Soll
eine Komplettanpassung vorgenommen werden,
so kann das Sinusfilter überbrückt werden,
während eine komplette AMA durchgeführt wird.
Nach Abschluss der AMA wird das Sinusfilter
wieder dazugeschaltet.
Bei parallel geschalteten Motoren ist
•
ausschließlich eine reduzierte AMA durchzuführen.
Während einer AMA erzeugt der Frequenzum-
•
richter kein Motordrehmoment. Während einer
AMA darf jedoch auch die Anwendung kein
Anlaufen der Motorwelle hervorrufen. Dies kann
beispielsweise bei Auftreten eines WindmühlenEffekts in Lüftungssystemen vorkommen. Die
laufende Motorwelle stört die AMA-Funktion.
Beim Betrieb eines PM-Motors (wenn
•
Parameter 1-10 Motorart auf [1] PM Vollpol SPM
eingestellt ist), kann nur [1] Komplette AMA
aktivieren gewählt werden.
4.1.6 Lüfteranwendung mit
Resonanzvibrationen
In den folgenden Anwendungen können resonante
Vibrationen auftreten, wodurch der Lüfter beschädigt
werden kann:
Motor mit direkt an der Motorwelle installiertem
•
Lüfter.
Laufpunkt im Feldschwächungsbereich.
•
Laufpunkt nahe oder über Nennpunkt.
•
Übermodulation ist eine Methode zur Erhöhung der vom
Frequenzumrichter für f
gelieferten Motorspannung.
Vorteile der Übermodulation:
•
- Niedrigere Ströme und eine höhere
- Der Frequenzumrichter kann bei
- Wenn die Netzspannung gelegentlich
zwischen 45 Hz und 65 Hz
mot
Effizienz können im Feldschwächungsbereich erreicht werden.
nominaler Netzfrequenz nominale
Netzspannung liefern.
unter die korrekte Motorspannung
abfällt, zum Beispiel bei 43 Hz, kann die
Übermodulation dies bis zum erforderlichen Motorspannungsniveau
kompensieren.
Nachteil der Übermodulation: Die nicht
•
sinusförmigen Spannungen führen zu höheren
Spannungsoberschwingungen. Diese Steigerung
führt zu Drehmoment-Rippel, wodurch der Lüfter
beschädigt werden kann.
Lösungen zur Vermeidung von Beschädigungen des
Lüfters:
Die beste Lösung ist, die Übermodulation zu
•
deaktivieren, wodurch Vibrationen auf ein
Minimum reduziert werden. Diese Lösung kann
jedoch auch eine Leistungsreduzierung des
geregelten Motors von 5–10 % zur Folge haben,
da die fehlende Spannung nicht mehr von der
Übermodulation kompensiert wird.
Eine alternative Lösung für Anwendungen, in
•
denen die Übermodulation nicht deaktiviert
werden kann, ist die Umstellung auf ein kleines
Frequenzband der Ausgangsfrequenzen. Wenn
der Motor zur Begrenzung der Lüfteranwendung
ausgelegt ist, führen die Spannungsverluste im
Frequenzumrichter zu einem unzureichenden
Drehmoment. In solchen Fällen kann das Vibrationsproblem deutlich reduziert werden, indem ein
kleines Frequenzband im Bereich der
mechanischen Resonanzfrequenz übersprungen
wird, zum Beispiel an der sechsten
Oberschwingung. Dieses Überspringen kann
durch die Einstellung der entsprechenden
Parameter (Parametergruppe 4-6*
Drehz.ausblendung) oder durch Verwendung der
Konfiguration Semi-Auto-Bypass umgesetzt
werdenParameter 4-64 Semi-Auto Bypass Set-up.
Jedoch gibt es bei dieser Vorgehensweise keine
allgemeine Regel zum optimalen Überspringen
der Frequenzbänder, da dies von der Breite der
Resonanzspitze abhängt. In den meisten Fällen ist
die Resonanz hörbar.
Beispiele für Energieeinsparungen
4.2
4.2.1 Gründe für den Einsatz eines
Frequenzumrichters zur Regelung von
Lüftern und Pumpen
Der Frequenzumrichter nutzt die Tatsache , dass Zentrifugallüfter und Kreiselpumpen den Proportionalitätsgesetzen
für Strömungsgeräte folgen. Nähere Informationen finden
Sie im Abschnitt Kapitel 4.2.3 Beispiele für Energieeinspa-
rungen.
4 4
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 51
Page 54

120
100
80
60
40
20
0
20 40 60 80 100 120 140 160 180
120
100
80
60
40
20
0 20 40 60 80 100 120 140 160 180
Volume %
Volume %
INPUT POWER % PRESSURE %
SYSTEM CURVE
FAN CURVE
A
B
C
130BA781.11
ENERGY
CONSUMED
Anwendungsbeispiele
VLT® DriveMotor FCP 106/FCM 106
4.2.2 Der klare Vorteil: Energieeinsparung
Der klare Vorteil beim Einsatz eines Frequenzumrichters zur
Drehzahlregelung von Lüftern oder Pumpen sind die
erreichbaren Einsparungen im Hinblick auf den Energieverbrauch.
Im Vergleich zu alternativen Regelsystemen bietet ein
Frequenzumrichter die höchste Energieeffizienz zur
Regelung von Lüftungs- und Pumpenanlagen.
44
Abbildung 4.5 Die Grafik zeigt Lüfterkurven (A, B und C) für
reduzierte Lüftervolumen.
Wenn die Lüfterkapazität mit einem Frequenzumrichter auf
60 % reduziert wird, können in Standardanwendungen
Energieeinsparungen von mehr als 50 % erzielt werden.
Abbildung 4.6 Energieeinsparungen mit reduzierter Lüfterkapazität
4.2.3 Beispiele für Energieeinsparungen
Wie in Abbildung 4.7 dargestellt, wird der Durchfluss durch
Änderung der Drehzahl geregelt. Durch Reduzierung der
Drehzahl um nur 20 % gegenüber der Nenndrehzahl wird
auch der Durchfluss um 20 % reduziert, da der Durchfluss
direkt proportional zur Drehzahl ist. Der Stromverbrauch
wird dagegen um 50 % reduziert.
Soll eine Anlage an nur wenigen Tagen im Jahr einen
Durchfluss erzeugen, der 100 % entspricht, im übrigen Teil
des Jahres jedoch im Durchschnitt unter 80 % des
Nenndurchflusswertes, so erreicht man eine Energieeinsparung von mehr als 50 %.
Abbildung 4.7 beschreibt die Abhängigkeit von Durchfluss,
Druck und Leistungsaufnahme von der Drehzahl.
52 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 55

195NA444.10
100
80
60
40
20
0
0 60
0 60 0 60
%
%
1
2
3
Anwendungsbeispiele Projektierungshandbuch
Abbildung 4.7 Proportionalitätsgesetze
4 4
Q
n
1
Durchfluss:
Druck:
Leistung:
Q = Durchfluss P = Leistung
Q1= Nenndurchfluss P1= Nennleistung
Q2= Reduzierter Durchfluss P2= Reduzierte Leistung
H = Druck n = Drehzahlregelung
H1= Nenndruck n1= Nenndrehzahl
H2= Reduzierter Druck n2= Reduzierte Drehzahl
Q
H
1
=
H
2
P
1
P
2
2
=
=
n
n
1
n
2
2
1
2
3
n
1
n
2
1 Entladedämpferlösung – geringere Energieeinsparungen
2 IGV-Lösung – hohe Installationskosten
3 VLT-Lösung – maximale Energieeinsparungen
Abbildung 4.8 Komparativer Energieverbrauch für energiesparende Systeme, Eingangsleistung (%) vs Volumen (%)
Durch Entladungsdämpfer wird die Leistungsaufnahme
leicht gesenkt. Durch Leitschaufeln ist eine Reduzierung
um 40 % möglich; deren Installation ist allerdings
kostspielig. Mit der leicht zu installierenden Frequenzumrichter-Lösung von Danfoss wird der Energieverbrauch um
über 50 % reduziert.
Tabelle 4.1 Legende für Gleichung
4.2.5 Beispiel mit variablem Durchfluss
4.2.4 Vergleich der Energieeinsparungen
Mit der Frequenzumrichter-Lösung von Danfoss können
größere Einsparungen erzielt werden als mit herkömmlichen Energiesparlösungen. So kann der
Frequenzumrichter die Lüfterdrehzahl entsprechend der
thermischen Belastung des Systems steuern. Weiterhin
weist der Frequenzumrichter eine integrierte Einrichtung
auf, mit der der Frequenzumrichter die Funktion eines
Gebäudeleitsystems (BMS) übernehmen kann.
Abbildung 4.8 zeigt die typischen Energieeinsparungen, die
mit drei wohlbekannten Lösungen möglich sind, wenn das
Lüftervolumen auf beispielsweise 60 % reduziert wird.
Durch den Einsatz einer VLT-Lösung in typischen
Anwendungen können Energieeinsparungen von mehr als
50 % erzielt werden.
über 1 Jahr
Das Beispiel wurde auf Basis einer Pumpenkennlinie
berechnet, die von einem Pumpendatenblatt stammt.
Das erzielte Ergebnis zeigt Energieeinsparungen von über
50 % bei der gegebenen Durchflussverteilung über ein
Jahr. Die Amortisationszeit hängt vom Preis pro kWh sowie
vom Preis des Frequenzumrichters ab. In diesem Beispiel
beträgt die Amortisationszeit weniger als 1 Jahr im
Vergleich zu Ventilen und konstanter Drehzahl. Nutzen Sie
zur Berechnung der Energieeinsparungen bestimmter
Anwendungen die VLT® Energy Box-Software.
Energieeinsparungen
P
Welle=PWellenausgang
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 53
Page 56

500
[h]
t
1000
1500
2000
200100 300
[m
3
/h]
400
Q
175HA210.11
Anwendungsbeispiele
VLT® DriveMotor FCP 106/FCM 106
Verteilung Ventilregelung Frequenzumrichter-
m3/h
% StundenLeistungVerbrauch LeistungVerbrauch
Regelung
A1–B
350 5 438 42,5 18,615 42,5 18,615
300 15 1314 38,5 50,589 29,0 38,106
250 20 1752 35,0 61,320 18,5 32,412
44
Abbildung 4.9 Durchflussverteilung über 1 Jahr
200 20 1752 31,5 55,188 11,5 20,148
150 20 1752 28,0 49,056 6,5 11,388
100 20 1752 23,0 40,296 3,5 6,132
100 8760 – 275,064 – 26,801
Σ
Tabelle 4.2 Pumpenleistung
[kWh] A1–C
1
[kWh]
1
4.3 Regelung – Beispiele
4.3.1 Verbesserte Regelung
Durch die Verwendung eines Frequenzumrichters zur
Regelung des Durchflusses oder des Drucks eines Systems
können Sie die Regelung verbessern.
Mithilfe eines Frequenzumrichters können Sie die Drehzahl
eines Lüfters oder einer Pumpe stufenlos ändern, sodass
sich auch eine stufenlose Regelung des Durchflusses und
des Drucks ergibt.
Darüber hinaus passt ein Frequenzumrichter die Lüfteroder Pumpendrehzahl schnell an die geänderten
Durchfluss- oder Druckbedingungen in der Anlage an.
Über den integrierten PI-Regler ist eine einfache Prozessregelung (Durchfluss, Pegel oder Druck) möglich.
4.3.2 Smart Logic Control
Eine nützliche Funktion des Frequenzumrichters ist die
Smart Logic Control (SLC).
In Anwendungen, in denen eine SPS eine einfache
Sequenz generiert, kann der SLC von der Hauptsteuerung
elementare Aufgaben übernehmen.
SLC reagiert auf Ereignisse, die an den Frequenzumrichter
Abbildung 4.10 Pumpenleistung
gesendet oder darin generiert wurden. Der Frequenzumrichter führt anschließend die programmierte Aktion aus.
4.3.3 Programmierung des Smart Logic
Controllers
Der SLC enthält eine Folge benutzerdefinierter Aktionen
(siehe Parameter 13-52 SL-Controller Aktion), die ausgeführt
werden, wenn das zugehörige Ereignis (siehe
Parameter 13-51 SL-Controller Ereignis) durch den SLC als
WAHR bewertet wird.
Ereignisse und Aktionen sind jeweils nummeriert und
paarweise verknüpft (Zustände). Wenn also Ereignis [1]
erfüllt ist (d. h. WAHR ist), wird die Aktion [1] ausgeführt.
Danach werden die Bedingungen von Ereignis [2]
ausgewertet, und wenn WAHR, wird Aktion [2] ausgeführt
54 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 57

Anwendungsbeispiele Projektierungshandbuch
usw. Ereignisse und Aktionen werden in sogenannten
Arrayparametern eingestellt.
Es wird jeweils nur ein Ereignis ausgewertet. Ist das
Ereignis FALSCH, wird während des aktuellen Abtastintervalls keine Aktion im SLC ausgeführt. Es werden auch
keine sonstigen Ereignisse ausgewertet. Dies bedeutet,
dass der SLC, wenn er startet, Ereignis [1] (und nur Ereignis
[1]) in jedem Abtastintervall auswertet. Nur wenn Ereignis
[1] als WAHR bewertet wird, führt der SLC Aktion [1] aus
und beginnt, Ereignis[2] auszuwerten.
Es ist möglich, zwischen 0 und 20 Ereignisse und Aktionen
zu programmieren. Wenn das letzte Ereignis/die letzte
Aktion ausgeführt worden ist, beginnt die Sequenz neu bei
Ereignis [1]/Aktion [1]. Abbildung 4.11 zeigt ein Beispiel mit
drei Ereignissen/Aktionen:
Abbildung 4.11 Beispiel mit 3 Ereignissen/Aktionen
4.3.4 SLC-Anwendungsbeispiel
4 4
Zustand 1 Start und Rampe auf.
Zustand 2 2 Sek. Sollwertdrehzahl fahren
Zustand 3 Rampe ab und Nulldrehzahl bis Stopp.
Abbildung 4.12 Beispiel einer Sequenz
1. Rampenzeiten in Parameter 3-41 Rampenzeit Auf 1
und Parameter 3-42 Rampenzeit Ab 1 auf die
gewünschten Zeiten einstellen.
t
=
Beschl.
t
Rampe
2. Stellen Sie Klemme 27 auf [0] Ohne Funktion
(Parameter 5-12 Klemme 27 Digitaleingang) ein.
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 55
× n
Par. . 1 − 25
Norm
Sollw. U /min
3. Stellen Sie den Festsollwert 0 auf gewünschte
Sollwertdrehzahl (Parameter 3-10 Festsollwert [0])
in Prozent von max. Sollwertdrehzahl
(Parameter 3-03 Maximaler Sollwert) ein. Beispiel:
60 %.
4. Stellen Sie den Festsollwert 1 auf die zweite
Festdrehzahl ein (Parameter 3-10 Festsollwert [1])
ein. Beispiel: 0 % (Null).
Page 58
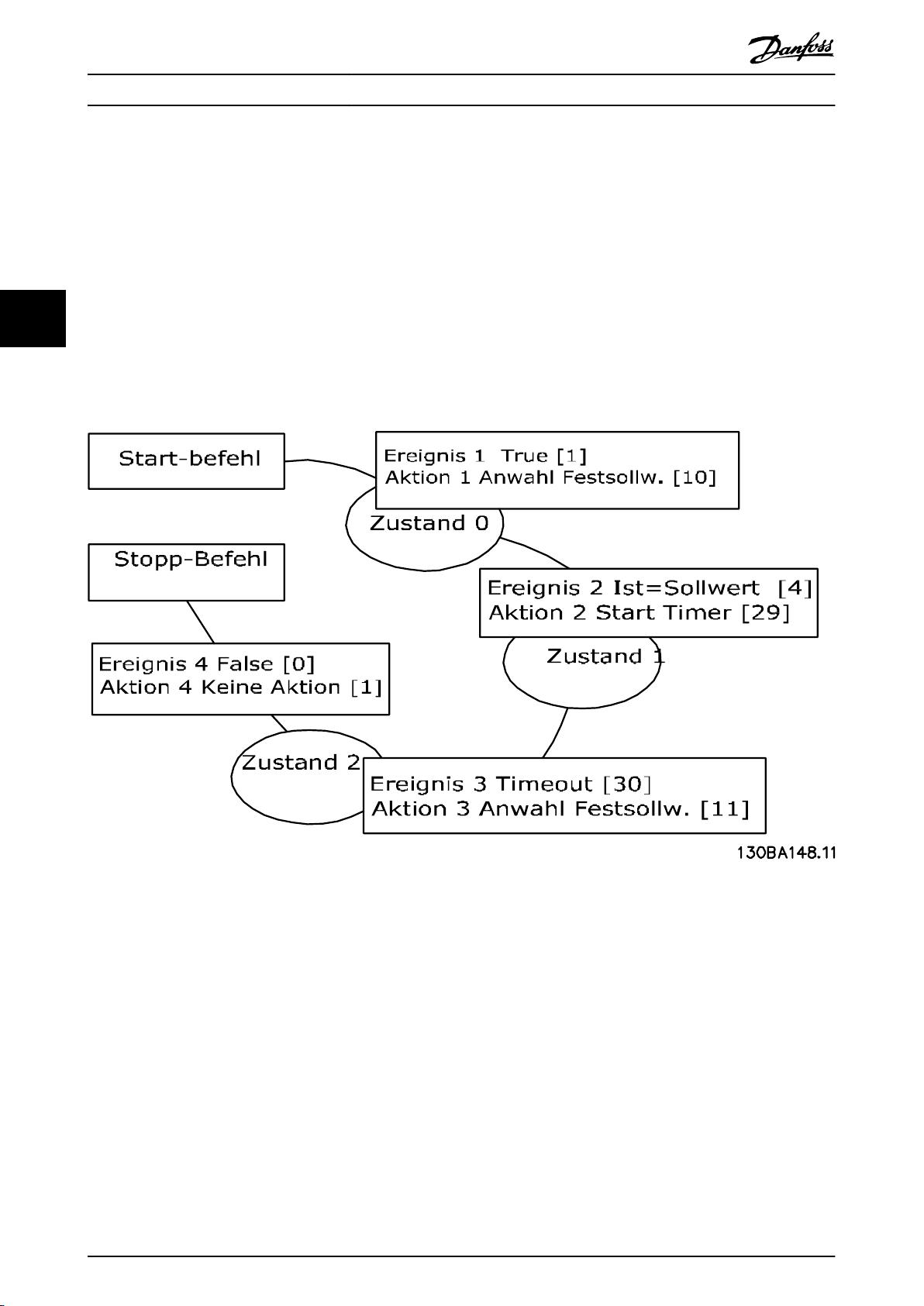
Anwendungsbeispiele
VLT® DriveMotor FCP 106/FCM 106
5. Stellen Sie den Timer 0 für eine konstante
Drehzahl in Parameter 13-20 SL-Timer [0] ein.
Beispiel: 2 s.
6. Stellen Sie Ereignis 1 in Parameter 13-51 SL-
Controller Ereignis auf [1] Wahr ein.
7. Stellen Sie Ereignis 2 in Parameter 13-51 SL-
Controller Ereignis auf [4] Ist=Sollwert ein.
8. Stellen Sie Ereignis 3 in Parameter 13-51 SL-
44
Controller Ereignis auf [30] Timeout 0 ein.
9. Stellen Sie Ereignis 4 in Parameter 13-51 SL-
Controller Ereignis auf [0] Falsch ein.
10. Stellen Sie Aktion 1 in Parameter 13-52 SL-
Controller Aktion auf [10] Anwahl Festsollw. 0 ein.
11. Stellen Sie Aktion 2 in Parameter 13-52 SL-
Controller Aktion auf [29] Start Timer 0 ein.
12. Stellen Sie Aktion 3 in Parameter 13-52 SL-
Controller Aktion auf [11] Anwahl Festsollw. 1 ein.
13. Stellen Sie Aktion 4 in Parameter 13-52 SL-
Controller Aktion auf [1] Keine Aktion ein.
14. Stellen Sie Smart Logic Control in
Parameter 13-00 Smart Logic Controller auf [1] EIN
ein.
Start-/Stopp-Befehl liegt an Klemme 18 an. Bei
anliegendem Stoppsignal werden die Rampe im Frequenzumrichter verringert und der Motorfreilauf aktiviert.
Abbildung 4.13 Einstellen von Ereignis und Aktion
EC+ Konzept für Asynchron- und PM-
4.4
Motoren
Systementwickler berücksichtigen das gesamte System, um
effektive Energieeinsparungen gewährleisten zu können.
Ihnen ist nämlich bewusst, dass der entscheidende Faktor
nicht die Effizienz einzelner Komponenten, sondern
vielmehr die Effizienz des gesamten Systems ist. Eine
hocheffiziente Motorkonstruktion hat keine Vorteile, wenn
andere Systemkomponenten die Gesamteffizienz des
Systems verringern. Das EC+-Konzept ermöglicht
unabhängig von der Quelle eine automatische Leistungsoptimierung der Komponenten. Daher kann der
Systementwickler bei Frequenzumrichter, Motor und Lüfter/
Pumpe aus Standardkomponenten eine optimale
56 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Kombination zusammenstellen und nach wie vor optimale
Systemeffizienz erreichen.
Beispiel
Ein praktisches Beispiel aus dem Bereich HLK ist die Plug
Fans-Ausführung EC mit externen Rotormotoren. Damit die
kompakte Bauweise möglich ist, ragt der Motor bis in den
Einlassbereich des Laufrads hinein. Durch dieses
Hineinragen wird die Effizienz des Lüfters beeinträchtigt
und letztendlich die Effizienz der gesamten Lüftungsanlage
reduziert. In diesem Fall hat die hohe Motoreffizienz keine
hohe Systemeffizienz zur Folge.
Page 59

Anwendungsbeispiele Projektierungshandbuch
Vorteile
Durch die Flexibilität von EC+ kann eine solche
Reduzierung der Systemeffizienz vermieden werden. EC+
bietet dem Systementwickler und dem Endbenutzer die
folgenden Vorteile:
Erhöhte Systemeffizienz dank einer Kombination
•
aus einzelnen Komponenten mit optimaler
Effizienz
Freie Wahl der Motortechnologie: Asynchron-
•
oder PM-Motor.
Hersteller-unabhängige Komponentenbe-
•
schaffung.
Einfache und kostengünstige Nachrüstung bei
•
vorhandenen Systemen.
FCP 106 und FCM 106 mit EC+ ermöglichen dem Systementwickler die Optimierung der Systemeffizienz ohne
Einbuße bei Flexibilität und Zuverlässigkeit.
Der FCP 106 kann an einen Asynchron- oder
•
Permanentmagnet-Motor angeschlossen werden
Der FCM 106 wird mit einem Asynchron- oder
•
Permanentmagnet-Motor ausgeliefert. Durch den
Einsatz von Standard-Motoren und -Frequenzumrichtern kann die Langlebigkeit der Komponenten
gewährleistet werden.
Die Programmierung von FCP 106 und FCM 106 erfolgt auf
identische Weise wie die Programmierung aller anderen
Danfoss-Frequenzumrichter.
4 4
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 57
Page 60
Typencode und Auswahlhilfe
VLT® DriveMotor FCP 106/FCM 106
5 Typencode und Auswahlhilfe
5.1 Antriebskonfigurator
Sie können einen Frequenzumrichter unter Verwendung
des Typencodesystems individuell gemäß den
Anwendungsanforderungen auslegen.
Frequenzumrichtermotoren können standardmäßig oder
mit integrierten Optionen mittels eines Typencodes bestellt
55
werden, d. h.
FCM106P4K0T4C55H1FSXXANXE4N4K0150B03000
Siehe Abschnitt Kapitel 5.2 Typencode für eine detaillierte
Spezifikation der einzelnen Zeichen im Code. Im obigen
Beispiel ist ein Motor der Effizienzklasse IE4 und mit dem
Lastprofil „normale Überlast“ im Frequenzumrichter zu
finden. Die Bestellnummern für die Standardausführungen
des Frequenzumrichtermotors sind in Kapitel 5.3 Bestell-
nummern zu finden.
Verwenden Sie zur Konfiguration des korrekten Frequenzumrichters oder Frequenzumrichtermotors für eine
Anwendung sowie zur Erzeugung des Typencodes den
Internet-basierten Antriebskonfigurator. Der Antriebskonfigurator erzeugt automatisch eine 8-stellige Bestellnummer,
mit der Sie den Frequenzumrichter über eine Vertriebsniederlassung vor Ort bestellen können. Außerdem können
Sie eine Projektliste mit mehreren Produkten aufstellen und
an Ihre Danfoss-Vertriebsvertretung senden.
Den Antriebskonfigurator können Sie hier aufrufen:
www.danfoss.com/drives.
58 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 61
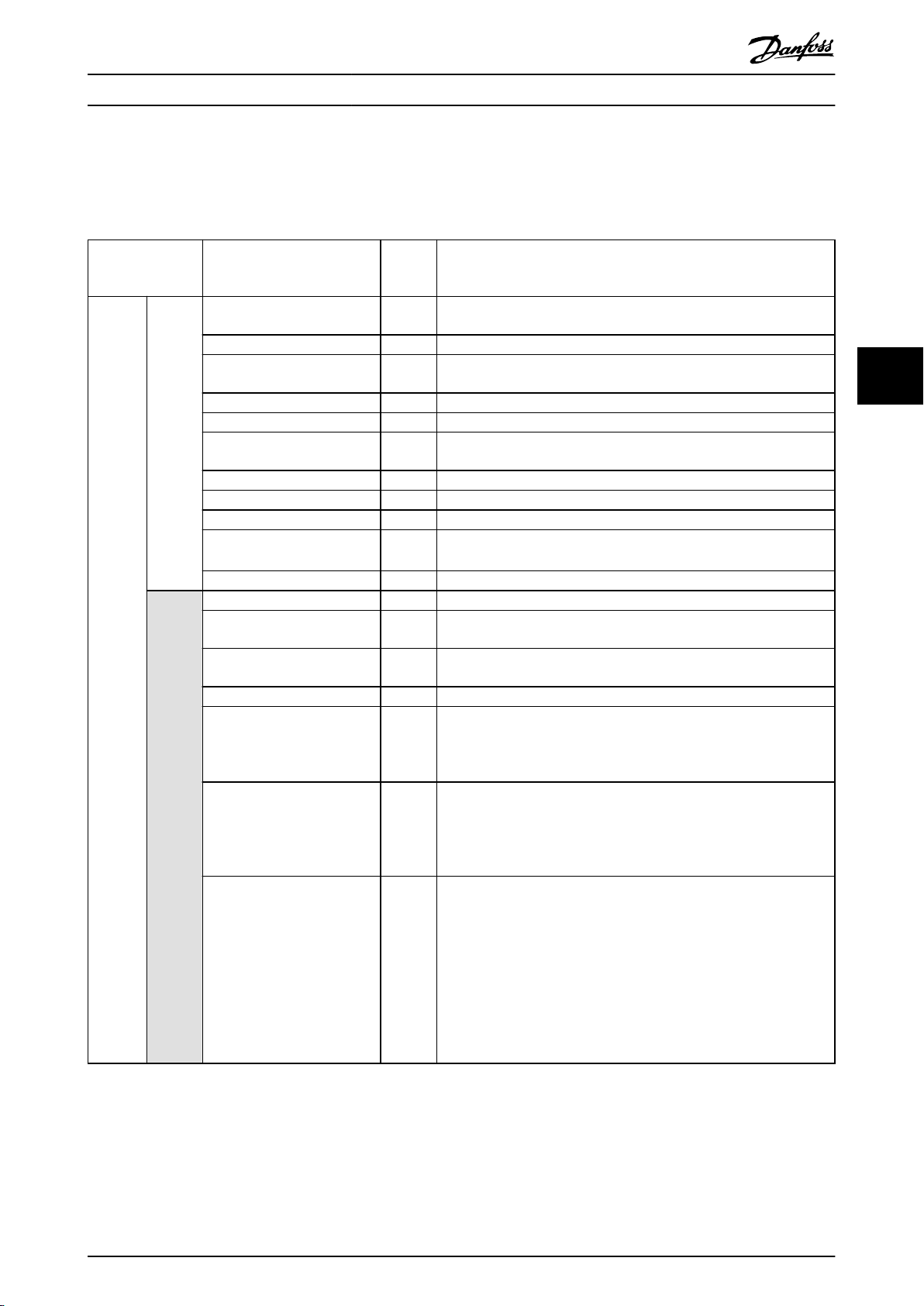
Typencode und Auswahlhilfe Projektierungshandbuch
5.2 Typencode
Beispiel der Schnittstellenkonfiguration des Antriebskonfigurators: Die Zahlen in den Feldern geben die Anzahl der im
Typencode enthaltenen Buchstaben/Ziffern an. Sie sind von links nach rechts zu lesen.
Produkt Bezeichnung Position Auswahloptionen
FCM 106 FCP 106 Produktgruppe 1–3 FCP
FCM
Baureihen 4–6 106
Lastprofil, Frequenzumrichter 7 N: Normale Überlast
H: Hohe Überlast
Nennleistung 8–10 0,55-7,5 kW (K55-7K5)
Netzspannung 11–12 T4: 380–480 V AC
Gehäuse 13–15 C66: IP66/UL TYP 4X (nur FCP 106)
C55: IP55/Typ 12 (nur FCM 106)
EMV-Filter 16–17 H1: EMV-Filter Klasse C1
Lüfteroption 18 F: mit Lüfter
Spezielle Ausführung 19–21 SXX: Aktuelle Version - Standard-Software
Optionen 22–23
Nicht zugewiesen 24 X: Reserviert
Motortypen 25 E: Standard-Motoren
Effizienzklasse 26 2: Motoreffizienz IE2
Lastprofil, Motor 27 N: Normale Überlast
Wellenleistung 28–30 0,55-7,5 kW (K55-7K5)
Motornenndrehzahl 31–33 150: 1500 U/min
Motormontageoption 34–36 B03: Fußmontage
Motorflansch 37–39 000: Nur Fußmontage
AN: VLT® Memory Module MCM 101, ohne Feldbus
AM: VLT® Memory Module MCM 101, VLT® PROFIBUS DP MCA 101
4: Motoreffizienz IE4
H: Hohe Überlast
180: 1800 U/min
300: 3000 U/min
360: 3600 U/min
B05: B5 Flansch
B14: B14 Oberfläche
B34: Fuß und B14-Oberfläche
B35: Fuß- und B5-Flansch
085: Motorflanschgröße 85 mm
100: Motorflanschgröße 100 mm
115: Motorflanschgröße 115 mm
130: Motorflanschgröße 130 mm
165: Motorflanschgröße 165 mm
215: Motorflanschgröße 215 mm
265: Motorflanschgröße 265 mm
300: Motorflanschgröße 300 mm
350: Motorflanschgröße 350 mm
5 5
Tabelle 5.1 Typencodespezifikation
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 59
Page 62
195NA445.10
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
F C M 1 0 6 T 4 P 5 5 H S X X X B
33 34 35 36 37 38 39
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
F C P 1 0 6 T 4 P 6 6 H S X X X
E1
1
Typencode und Auswahlhilfe
Abbildung 5.1 Typencode – Beispiel
VLT® DriveMotor FCP 106/FCM 106
5.2.1 Motorbaugrößen und -flansche
Die Flanschgrößen entsprechend der Motorbaugröße und der FCM 106-Nennleistung sind in Tabelle 5.2 aufgeführt.
55
FCM 106
Nennleistung [kW]
0,55 80
0,75 80
1,1 90
1,5 90
2,2 100
3,0 100
4,0 112
5,5 132
7,5 132
Tabelle 5.2 Flanschgrößen entsprechend der FCM 106-Nennleistung
S: Erhältlich als Standardwelle.
B: Alternativ erhältlich mit Standardwelle für die Baugröße, keine Änderung erforderlich.
Motor
rahmengröße
4-polig [mm] [mm]
Bauformen
B5/B35 165 –
B14/B34 100 75/85/115/130
B5/B35 165 –
B14/B34 100 75/85/115/130
B5/B35 165 215
B14/B34 115 85/100/130/165
B5/B35 165 215
B14/B34 115 85/100/130/165
B5/B35 215 –
B14/B34 130 85/100/115
B5/B35 215 –
B14/B34 130 85/100/115
B5/B35 215 –
B14/B34 130 85/100/115
B5/B35 265 –
B14/B34 165 –
B5/B35 265 –
B14/B34 165 –
Flanschgröße, Standard (S)
Flanschgröße, Alternativen
(B)
60 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 63
Typencode und Auswahlhilfe Projektierungshandbuch
5.3 Bestellnummern
5.3.1 Optionen und Zubehör
Gehäusegröße
Netzspannung T4 (380-480 V AC)
Beschreibung
Bedieneinheit (LCP), IP55 130B1107
Einbausatz inkl. 3-m-FCP 106Kabel, IP55,
für LCP
Local Operating Pad (LOP), IP65 175N0128
Motoradapterplatten-Satz:
Motoradapterplatte, Motorstecker, PEStecker, Motoranschlussdichtung, 4
Schrauben
Wandadapterplatte 134B0341 134B0391 134B0441
VLT® PROFIBUS DP MCA 101
VLT® Memory Module MCM 101
Potentiometeroption 177N0011
Tabelle 5.3 Optionen und Zubehör, Bestellnummern
1) Nennleistungen beziehen sich auf NO, siehe Kapitel 6.2 Elektrische Daten.
5.3.2 Ersatzteile
MH1
[kW]
0,55-1,5/
0,75-2
134B0340 134B0390 134B0440
5.3.3 Für den Einbau erforderliche Teile
MH2
[kW]
2,2-4/
3-5,5
134B0564
130B1200
134B0791
1)
MH3
[kW]
5,5-7,5/
7-5-10
5 5
Bestellnummern und Bestellinformationen siehe:
VLT Shop unter vltshop.danfoss.com.
•
Antriebskonfigurator unter www.danfoss.com/
•
drives.
Pos. Beschreibung Bestellnummer
Lüfterbaugruppe,
MH1
Lüfterbaugruppe,
MH2
Lüfterbaugruppe,
MH3
Beutel mit
Zubehör, MH1
Beutel mit
Zubehör, MH2
Beutel mit
Zubehör, MH3
Tabelle 5.4 Bestellnummern, Ersatzteile
Lüfterbaugruppe,
Bauform MH1
Lüfterbaugruppe,
Bauform MH2
Lüfterbaugruppe,
Bauform MH3
Beutel mit Zubehör,
Bauform MH1
Beutel mit Zubehör,
Bauform MH2
Beutel mit Zubehör,
Bauform MH3
134B0345
134B0395
134B0445
134B0346
134B0346
134B0446
Zusätzliche für den Motoranschluss erforderliche
Komponenten:
Crimpklemmen:
3 Stück für die Motorklemmen, UVW
•
2 Stück für den Thermistor (optional).
•
Die Bestellnummern für AMP-StandardFederkontakte finden Sie unter:
134B0495 (0,2–0,5 mm2) [AWG 24–20].
•
134B0496 (0,5–1 mm2) [AWG 20–17].
•
134B0497 (1–2,5 mm2) [AWG 17–13.5].
•
134B0498 (2,5–4 mm2) [AWG 13–11].
•
134B0499 (4–6 mm2) [AWG 12–10].
•
Informationen zur vollständigen Installation einschließlich
Motoranschluss finden Sie im VLT® DriveMotor FCP 106-
und FCM 106-Produkthandbuch.
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 61
Page 64

A
B
1 2
195NA494.10
Technische Daten
VLT® DriveMotor FCP 106/FCM 106
6 Technische Daten
6.1 Abstände, Abmessungen und Gewichte
6.1.1 Abstände
Beachten Sie alle in Tabelle 6.1 aufgeführten Mindestabstände, damit ein ausreichender Luftstrom zum Frequenzumrichter
gewährleistet ist.
Wenn der Luftstrom in der Nähe des Frequenzumrichters behindert wird, stellen Sie sicher, dass der Einlass von kühler Luft
und der Auslass von heißer Luft aus dem Gerät gewährleistet ist.
6
[kW]
1)
Maximale Höhe der Schraube über der Adapterplatte
(B) [mm (in)]
Abstand an den Enden
[mm (in)]
Gehäuse
Baugröße Schutzart
FCP 106 FCM 106
MH1
MH2
MH3
Tabelle 6.1 Mindestabstand zur Kühlung
1) Die Nennleistungen beziehen sich auf HO, siehe Kapitel 6.2 Elektrische Daten.
2) Die angegebenen IP- und Typ-Nennwerte gelten nur, wenn der FCP 106 an einer Wandmontageplatte oder an einem Motor mit der Adapterplatte montiert ist. Stellen Sie sicher, dass die Dichtung zwischen Adapterplatte und Motor über eine Schutzart verfügt, die der eingesetzten
Kombination aus Motor und Frequenzumrichter entspricht. Für die Stand-alone-Anwendung ist die Schutzart IP00, offener Typ.
Baugröße Maximale Tiefe der Bohrung in der Adapterplatte (A)
Tabelle 6.2 Enthält Einzelheiten zu den Schrauben für die Motoradapterplatte
IP66/Typ 4X
IP66/Typ 4X
IP66/Typ 4X
MH1 3 (0,12) 0,5 (0,02)
MH2 4 (0,16) 0,5 (0,02)
MH3 3,5 (0,14) 0,5 (0,02)
2)
2)
2)
[mm (in)]
IP55 0,55–1,5 30 (1,2) 100 (4,0)
IP55 2,2–4,0 40 (1,6) 100 (4,0)
IP55 5,5–7,5 50 (2,0) 100 (4,0)
Leistung
3x380–480 V Motor-Flanschende Kühllüfterende
1 Adapterplatte
2 Schraube
A Maximale Tiefe der Bohrung in der Adapterplatte
B Maximale Höhe der Schraube über der Adapterplatte
Abbildung 6.1 Schrauben zur Befestigung der Motoradapterplatte
62 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 65
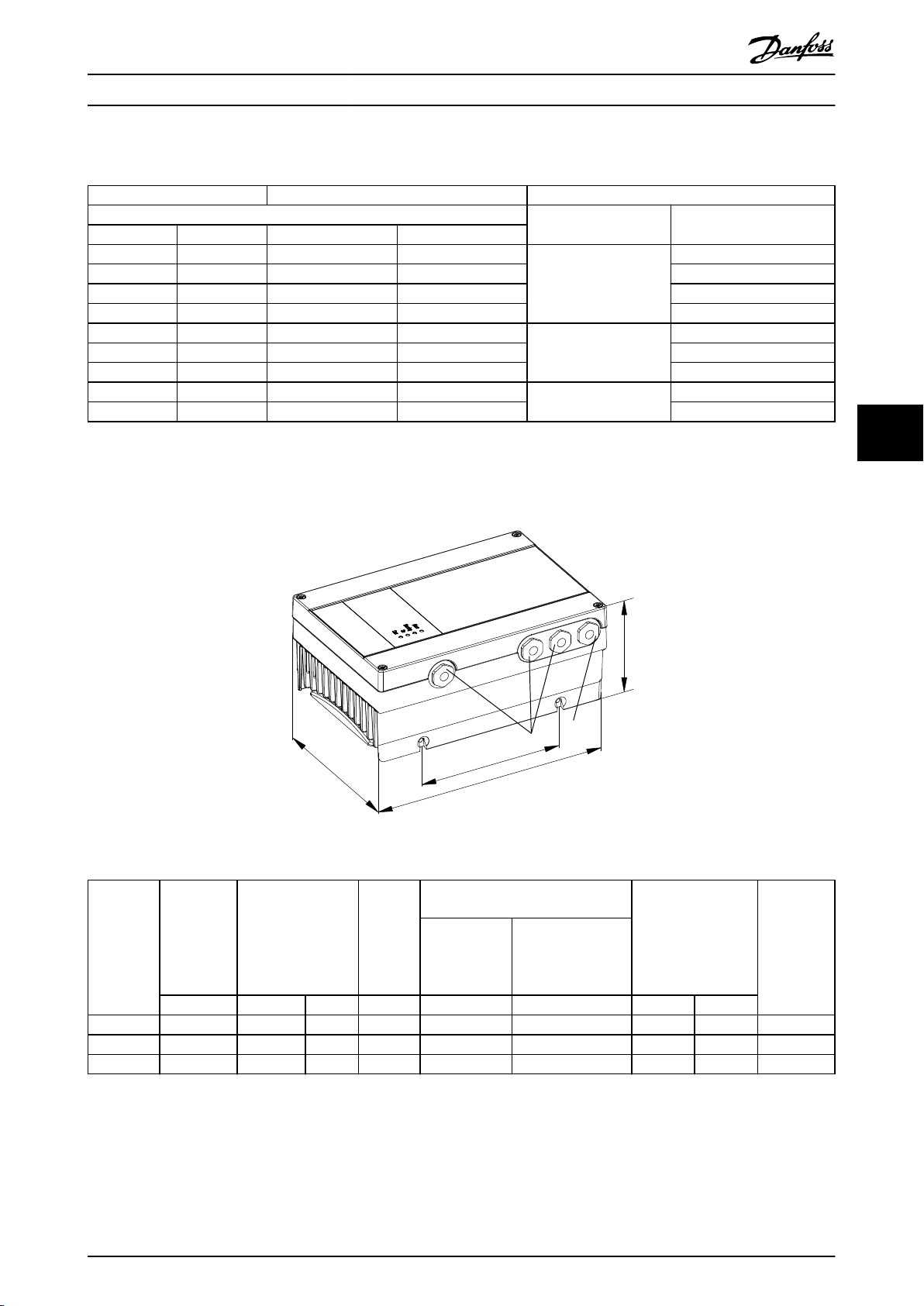
195NA418.10
CC
B
A
a
X
Y
Technische Daten Projektierungshandbuch
6.1.2 Motorbaugröße gemäß Bauform FCP 106
PM-Motor Asynchronmotor FCP 106
U/min [UPM]
1500 3000 3000 1500
71 – – –
71 71 71 80 0,75 (1,0)
71 71 80 90 1,1 (1,5)
71 71 80 90 1,5 (2,0)
90 71 90 100
90 90 90 100 3 (4,0)
90 90 100 112 4 (5,0)
112 90 112 112
112 112 112 132 7,5 (10)
Tabelle 6.3 Motorbaugröße gemäß Bauform FCP 106
Gehäuse
MH1
MH2
MH3
6.1.3 FCP 106 Abmessungen
Leistung
[kW (HP)]
0,55 (0,75)
2,2 (3,0)
5,5 (7,5)
6
6
Abbildung 6.2 FCP 106-Abmessungen
Leistung
Gehäusetyp
3x380–480 V A a B C C X Y
MH1 0,55–1,5 231,4 (9,1) 130 (5,1) 162,1 (6,4) 106,8 (4,2) 121,4 (4,8) M20 M20 M6
MH2 2,2–4,0 276,8 (10,9) 166 (6,5) 187,1 (7,4) 113,2 (4,5) 127,8 (5,0) M20 M20 M6
MH3 5,5–7,5 321,7 (12,7) 211 (8,3) 221,1 (8,7) 123,4 (4,9) 138,1 (5,4) M20 M25 M6
Tabelle 6.4 FCP 106-Abmessungen
1) Die Nennleistungen beziehen sich auf HO, siehe Kapitel 6.2 Elektrische Daten.
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 63
1)
[kW]
Länge
[mm (in)]
Breite
[mm (in)]
Normaler
Deckel
Höhe
[mm (in)]
Hoher Deckel für
VLT® PROFIBUS DP
MCA 101-
Option
Kabelverschraubung
Durchmesser
Befestigungs
bohrung
Page 66

195NA454.11
AB
A
AA
H
E
C
L
BB
B
BC
BA
K
AC
HD
ED1
ED
EB
6
Technische Daten
6.1.4 FCM 106 Abmessungen
VLT® DriveMotor FCP 106/FCM 106
Motorbaugröße 71 80 90S 90L 100S 100L 112M 132S 132M
A [mm (in)] 112 (4,4) 125 (4,9) 140 (5,5) 140 (5,5) 160 (6,3) 160 (6,3) 190 (7,5) 216 (8,5) 216 (8,5)
B [mm (in)] 90 (3,5) 100 (4,0) 100 (4,0) 125 (4,9) 140 (5,5) 140 (5,5) 140 (5,5) 140 (5,5) 178 (7,0)
C [mm (in)] 45 (1,8) 50 (2,0) 56 (2,2) 56 (2,2) 63 (2,5) 63 (2,5) 70 (2,6) 89 (3,5) 89 (3,5)
H [mm (in)] 71 (2,8) 80 (3,1) 90 (3,5) 90 (3,5) 100 (4,0) 100 (4,0) 112 (4,4) 132 (5,2) 132 (5,2)
K [mm (in)] 8 (0,3) 10 (0,4) 10 (0,4) 10 (0,4) 11 (0,43) 11 (0,43) 12,5 (0,5) 12 (0,47) 12 (0,47)
AA [mm (in)] 31 (1,2) 34,5 (1,4) 37 (1,5) 37 (1,5) 44 (1,7) 44 (1,7) 48 (1,9) 59 (2,3) 59 (2,3)
AB [mm (in)] 135 (5,3) 153 (6,0) 170 (6,7) 170 (6,7) 192 (7,6) 192 (7,6) 220 (8,7) 256 (10,1) 256 (10,1)
BB [mm (in)] 108 (4,3) 125 (4,9) 150 (5,9) 150 (5,9) 166 (6,5) 166 (6,5) 176 (6,9) 180 (7,1) 218 (8,6)
BC [mm (in)] 83 (3,3) 89 (3,5) 116 (4,6) 91 (3,6) 110 (4,3) 144 (5,7) 126 (5,0) 134 (5,3) 136 (5,4)
L [mm (in)] 246 (9,7) 272 (10,7) 317 (12,5) 317 (12,5) 366 (14,4) 400 (15,7) 388 (15,3) 445 (17,5) 485 (19,1)
AC [mm (in)] 139 (5,5) 160 (6,3) 180 (7,1) 180 (7,1) 196 (7,7) 194 (7,6) 225 (8,9) 248 (9,8) 248 (9,8)
E [mm (in)] 30 (1,2) 40 (1,6) 50 (2,0) 50 (2,0) 60 (2,4) 60 (2,4) 60 (2,4) 80 (3,1) 80 (3,1)
ED [mm (in)] 20 (0,8) 30 (1,2) 30 (1,2) 40 (1,6) 40 (1,6) 50 (2,0) 50 (2,0) 70 (2,6) 70 (2,6)
EB [mm (in)] 4 (0,16) 4 (0,16) 4 (0,16) 4 (0,16) 4 (0,16) 4 (0,16) 4 (0,16) 4 (0,16) 4 (0,16)
HD [mm (in)] ohne VLT® PROFIBUS DP MCA 101
MH1 247 (9,7) 267 (10,5) 286 (11,3) 286 (11,3) – – – – –
MH2 248 (9,8) 268 (10,6) 287 (11,4) 287 (11,4) 304 (12) 304 (12) 332 (13,1) – –
MH3 – – 299 (11,8) 299 (11,8) 316 (12,4) 316 (12,4) 344 (13,5) 379 (14,9) 379 (14,9)
HD [mm (in)] mit VLT® PROFIBUS DP MCA 101
MH1/ 262 (10,3) 282 (11,1) 301 (11,9) 301 (11,9) – – – – –
MH2 263 (10,4) 283 (11,1) 302 (11,9) 302 (11,9) 319 (12,6) 319 (12,6) 347 (13,7) – –
MH3 – – 314 (12,4) 314 (12,4) 331 (13,0) 331 (13,0) 359 (14,1) 394 (15,5) 394 (15,5)
Tabelle 6.5 FCM 106-Abmessungen: Fußmontage - B3 Asynchron- oder PM-Motor
64 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 67

195NA455.11
P
N
T
LA
C
H
°
15
°
30
°
45
M
S
D
E
HA
HD
AC1
Technische Daten Projektierungshandbuch
6
6
Motorbaugröße 71 80 90S 90L 100L 112M 132S
M [mm (in)] 130 (5,1) 165 (6,5) 165 (6,5) 165 (6,5) 215 (8,5) 215 (8,5) 265 (10,4)
N [mm (in)] 110 (4,3) 130 (5,1) 130 (5,1) 130 (5,1) 180 (7,8) 180 (7,8) 230 (9,1)
P [mm (in)] 160 (6,3) 200 (7,9) 200 (7,9) 200 (7,9) 250 (9,8) 250 (9,8) 300 (11,8)
S [mm (in)] M8 M10 M10 M10 M12 M12 M12
T [mm (in)] 3,5 (0,14) 3,5 (0,14) 3,5 (0,14) 3,5 (0,14) 4 (0,16) 4 (0,16) 4 (0,16)
LA [mm (in)] 10 (0,4) 10 (0,4) 12 (0,5) 12 (0,5) 14 (0,6) 14 (0,6) 14 (0,6)
HA [mm (in)] HA = AC1 + Höhe des Frequenzumrichters.
Weitere Informationen zu Abmessungen des Frequenzumrichters finden Sie unter Tabelle 6.4.
HD [mm (in)] ohne VLT® PROFIBUS DP MCA 101
MH1 247 (9,7) 267 (10,5) 286 (11,3) 286 (11,3) – – –
MH2 248 (9,8) 268 (10,6) 287 (11,4) 287 (11,4) 304 (12) 332 (13,1) –
MH3 – – 299 (11,8) 299 (11,8) 316 (12,4) 244 (9,6) 379 (14,9)
HD [mm (in)] mit VLT® PROFIBUS DP MCA 101
MH1 262 (10,3) 282 (11,1) 301 (11,9) 301 (11,9) – – –
MH2 263 (10,4) 283 (11,2) 302 (11,9) 302 (11,9) 319 (12,6) 347 (13,7) –
MH3 – – 314 (12,4) 314 (12,4) 331 (13,1) 359 (14,1) 394 (15,5)
Tabelle 6.6 FCM 106-Abmessungen: Flanschmontage - B5, B35 für Asynchron- oder PM-Motor
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 65
Page 68

195NA456.11
°
45
S
M
LA
BA
P
N
T
C
D
E
HA
HD
AC1
6
Technische Daten
VLT® DriveMotor FCP 106/FCM 106
Kleiner Flansch B14
Motorbaugröße 71 80 90S 100L 112M 132S
M [mm (in)] 85 (3,3) 100 (4,0) 115 (4,5) 130 (5,1) 130 (5,1) 165 (6,5)
N [mm (in)] 70 (2,8) 80 (3,1) 95 (3,7) 110 (4,3) 110 (4,3) 130 (5,1)
P [mm (in)] 105 (4,1) 120 (4,7) 140 (5,5) 160 (6,3) 160 (6,3) 200 (7,9)
S [mm (in)] M6 M6 M8 M8 M8 M10
T [mm (in)] 2,5 (0,1) 3 (0,12) 3 (0,12) 3,5 (0,14) 3,5 (0,14) 3,5 (0,14)
LA [mm (in)] 11 (0,4) 9 (0,35) 9 (0,35) 10 (0,4) 10 (0,4) 30 (0,4)
Großer Flansch B14
Motorbaugröße 71 80 90S 100L 112M 132S
M [mm (in)] 115 (4,5) 130 (5,1) 130 (5,1) 165 (6,5) 165 (6,5) 215 (8,5)
N [mm (in)] 95 (3,7) 110 (4,3) 110 (4,3) 130 (5,1) 130 (5,1) 180 (7,1)
P [mm (in)] 140 (5,5) 160 (6,3) 160 (6,3) 200 (7,9) 200 (7,9) 250 (9,8)
S [mm (in)] M8 M8 M8 M10 M10 M12
T [mm (in)] 2,5 (0,1) 3,5 (0,14) 3,5 (0,14) 3,5 (0,14) 3,5 (0,14) 4 (0,16)
LA [mm (in)] 8 (0,31) 8,5 (0,33) 9 (0,35) 12 (0,5) 12 (0,5) 12 (0,5)
HA [mm (in)] HA = AC1 + Höhe des Frequenzumrichters.
Weitere Informationen zu Abmessungen des Frequenzumrichters finden Sie unter Tabelle 6.4.
HD [mm (in)] ohne VLT® PROFIBUS DP MCA 101
MH1 247 (9,7) 267 (10,5) 286 (11,3) – – –
MH2 248 (9,8) 268 (10,6) 287 (11,4) 304 (12) 332 (13,1) –
MH3 – – 299 (11,8) 316 (12,4) 244 (9,6) 379 (14,9)
HD [mm (in)] mit VLT® PROFIBUS DP MCA 101
MH1 262 (10,3) 282 (11,1) 301 (11,9) – – –
MH2 263 (10,4) 283 (11,2) 302 (11,9) 319 (12,6) 347 (13,7) –
MH3 – – 314 (12,4) 331 (13) 359 (14,1) 394 (15,5)
Tabelle 6.7 FCM 106-Abmessungen: Oberflächenmontage - B14, B34 für Asynchron- oder PM-Motor
66 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 69

195NA457.10
M6 DIN 332-DH
G
F
D
Technische Daten Projektierungshandbuch
FCM 106 mit Asynchron- oder PM-Motor
Motorbaugröße 71 80 90S 100L 112M 132S
D [mm (in)] 14 (0,6) 19 (0,7) 24 (1,0) 28 (1,1) 28 (1,1) 38 (1,5)
F [mm (in)] 5 (0,2) 6 (0,25) 8 (0,3) 8 (0,3) 8 (0,3) 10 (0,4)
G [mm (in)] 11 (0,4) 15,5 (0,6) 20 (0,8) 24 (1,0) 24 (1,0) 33 (1,3)
DH M5 M6 M8 M10 M10 M12
Tabelle 6.8 FCM 106-Abmessungen: Welle Antriebsende - Asynchron- oder PM-Motor
6.1.5 Gewicht
Addieren Sie zur Berechnung des Gesamtgewichts der Einheit das
Gewicht von Frequenzumrichter und Adapterplatte, siehe Tabelle 6.9.
•
Gewicht des Motors, siehe Tabelle 6.10.
•
Gewicht
Gehäusetyp
MH1 3,9 (8,6) 0,7 (1,5) 4,6 (10,1)
MH2 5,8 (12,8) 1,12 (2,5) 6,92 (15,3)
MH3 8,1 (17,9) 1,48 (3,3) 9,58 (21,2)
Tabelle 6.9 Gewicht des FCP 106
Wellenleistung
[kW]
0,55 71 4,8 (10,6) – – –
0,75 71 5,4 (11,9) 71 4,8 (10,6) 80S 11 (24,3) 71 9,5 (20,9)
1,1 71 7,0 (15,4) 71 4,8 (10,6) 90S 16,4 (36,2) 80 11 (24,3)
1,5 71 10 (22) 71 6,0 (13,2) 90L 16,4 (36,2) 80 14 (30,9)
2,2 90 12 (26,5) 71 6,6 (14,6) 100L 22,4(49,4) 90L 16 (35,3)
3 90 14 (30,9) 90S 12 (26,5) 100L 26,5 (58,4) 100L 23 (50,7)
4 90 17 (37,5) 90S 14 (30,9) 112M 30,4 (67) 100L 28 (61,7)
5,5 112 30 (66) 90S 16 (35,3) 132S 55 (121,3) 112M 53 (116,8)
7,5 112 33 (72,8) 112M 26 (57,3) 132M 65 (143,3) 112M 53 (116,8)
FCP 106
[kg (lb)]
1500 U/min 3000 U/min 1500 U/min 3000 U/min
Motor-
bau-
größe
Motoradapterplatte [kg (lb)] Kombination von FCP 106
und Motoradapterplatte [kg (lb)]
PM-Motor Asynchronmotor
Gewicht
[kg (lb)]
Motor-
bau-
größe
Gewicht
[kg (lb)]
Motor-
bau-
größe
Gewicht
[kg (lb)]
Motor-
bau-
größe
Gewicht
[kg (lb)]
6
6
Tabelle 6.10 Ungefähres Motorgewicht
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 67
Page 70

Technische Daten
VLT® DriveMotor FCP 106/FCM 106
6.2 Elektrische Daten
6.2.1 Netzversorgung 3 x 380-480 VAC – Normale und hohe Überlast
6
Gehäuse
1)
Überlast
Typische Wellenleistung [kW]
Maximaler
Kabelquerschnitt
der Klemmen
(Netz, Motor)
[mm2/AWG]
Ausgangsstrom
40 °C Umgebungstemperatur
Dauerbetrieb
(3x380–440 V) [A]
Überlast
(3x380–440 V) [A]
Dauerbetrieb
(3x440–480 V) [A]
Überlast
(3x440–480 V) [A]
Max. Eingangsstrom
Dauerbetrieb
(3x380–440 V) [A]
Überlast
(3x380–440 V) [A]
Dauerbetrieb
(3x440–480 V) [A]
Überlast
(3x440–480 V) [A]
Maximale Netzsicherungen
Geschätzte Verlustleistung [W],
Bestfall/typisch
Wirkungsgrad [%],
Bestfall/typisch
PK55 PK75 P1K1 P1K5 P2K2 P3K0 P4K0 P5K5
NO HO NO HO NO HO NO HO NO HO NO HO NO HO
0,55 0,75 1,1 1,5 2,2 3,0 4,0
2)
3)
4)5)
4/12 4/12 4/12 4/12 4/12 4/12 4/12
1,7 2,2 3,0 3,7 5,3 7,2 9,0
1,9 2,7 2,4 3,5 3,3 4,8 4,1 5,9 5,8 8,5 7,9 11,5 9,9 14,4
1,6 2,1 2,8 3,4 4,8 6,3 8,2
1,8 2,6 2,3 3,4 3,1 4,5 3,7 5,4 5,3 7,7 6,9 10,1 9,0 13,2
1,3 2,1 2,4 3,5 4,7 6,3 8,3
1,4 2,3 2,6 2,6 3,7 3,9 4,6 5,2 7,0 6,9 9,6 9,1 12,0
1,2 1,8 2,2 2,9 3,9 5,3 6,8
1,3 1,9 2,5 2,4 3,5 3,2 4,2 4,3 6,3 5,8 8,4 7,5 11,0
MH1 MH2 MH3
Siehe Kapitel 6.9 Spezifikationen für Sicherung und Trennschalter.
38 44 57 73 91 129 143
0,96 0,97 0,97 0,97 0,97 0,97 0,97
Tabelle 6.11 Netzversorgung 3 x 380-480 VAC – Normale und hohe Überlast: Bauform MH1, MH2 und MH3
1) NO: Normale Überlast, 110 % für 1 Minute. HO: Hohe Überlast, 160 % für 1 Minute.
Für einen für hohe Überlast bestimmten Frequenzumrichter sind entsprechende Motornenndaten erforderlich. Zum Beispiel zeigt Tabelle 6.11, dass
bei einem 1,5-kW-Motor für hohe Überlast ein P2K2-Frequenzumrichter erforderlich ist.
2) Der maximale Kabelquerschnitt ist der größte Kabelquerschnitt, den Sie an die Klemmen anschließen können. Beachten Sie immer nationale
und örtliche Vorschriften.
3) Gilt für die Dimensionierung der Kühlung des Frequenzumrichters. Wenn die Schaltfrequenz im Vergleich zur Werkseinstellung erhöht wird, kann
die Verlustleistung bedeutend steigen. Die Leistungsaufnahme der LCP und typischer Steuerkarten sind eingeschlossen. Verlustleistungsdaten
gemäß EN 50-598-2 finden Sie unter www.danfoss.com/vltenergyefficiency.
4) Bei Nennstrom gemessener Wirkungsgrad. Die Energieeffizienzklasse finden Sie unter Kapitel 6.5 Umgebungsbedingungen. Für Teillastverluste
siehe www.danfoss.com/vltenergyefficiency.
5) Gemessen mit 4 m abgeschirmten Motorkabeln bei Nennlast und Nennfrequenz.
68 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 71

Technische Daten Projektierungshandbuch
Gehäuse
1)
Überlast
Typische Wellenleistung [kW] 5,5 7,5
Maximaler Kabelquerschnitt der Klemmen
(Netz, Motor)
[mm2/AWG]
Ausgangsstrom
40 °C Umgebungstemperatur
Dauerbetrieb
(3x380–440 V) [A]
Überlast
(3x380–440 V) [A]
Dauerbetrieb
(3x440–480 V) [A]
Überlast
(3x440–480 V) [A]
Max. Eingangsstrom
Dauerbetrieb
(3x380–440 V) [A]
Überlast
(3x380–440 V) [A]
Dauerbetrieb
(3x440–480 V) [A]
Überlast
(3x440–480 V) [A]
Maximale Netzsicherungen Siehe Kapitel 6.9 Spezifikationen für Sicherung und Trennschalter.
Geschätzte Verlustleistung [W], Bestfall/typisch
Wirkungsgrad [%], Bestfall/typisch
2)
3)
4)5)
P5K5 P7K5
NO HO NO
7,5 10
4/12 4/12
12 15,5
13,2 19,2 17,1
11 14
12,1 13,2 15,4
11 15
12 17 17
9,4 13
10 15 14
143 236
0,97 0,97
MH3
6
6
Tabelle 6.12 Netzversorgung 3 x 380-480 VAC – Normale und hohe Überlast: Bauform MH3
1) NO: Normale Überlast, 110 % für 1 Minute. HO: Hohe Überlast, 160 % für 1 Minute.
Für einen für hohe Überlast bestimmten Frequenzumrichter sind entsprechende Motornenndaten erforderlich. Zum Beispiel zeigt Tabelle 6.11, dass
bei einem 1,5-kW-Motor für hohe Überlast ein P2K2-Frequenzumrichter erforderlich ist.
2) Der maximale Kabelquerschnitt ist der größte Kabelquerschnitt, den Sie an die Klemmen anschließen können. Beachten Sie immer nationale
und örtliche Vorschriften.
3) Gilt für die Dimensionierung der Kühlung des Frequenzumrichters. Wenn die Schaltfrequenz im Vergleich zur Werkseinstellung erhöht wird, kann
die Verlustleistung bedeutend steigen. Die Leistungsaufnahme der LCP und typischer Steuerkarten sind eingeschlossen. Verlustleistungsdaten
gemäß EN 50-598-2 finden Sie unter www.danfoss.com/vltenergyefficiency.
4) Bei Nennstrom gemessener Wirkungsgrad. Die Energieeffizienzklasse finden Sie unter Kapitel 6.5 Umgebungsbedingungen. Für Teillastverluste
siehe www.danfoss.com/vltenergyefficiency.
5) Gemessen mit 4 m abgeschirmten Motorkabeln bei Nennlast und Nennfrequenz.
Netzversorgung
6.3
Netzversorgung (L1, L2, L3)
Versorgungsspannung 380–480 V ±10%
Niedrige Netzspannung/Netzausfall:
Bei einer niedrigen Netzspannung oder einem Netzausfall arbeitet der Frequenzumrichter weiter, bis die Zwischenkreis-
•
spannung unter den minimalen Stopppegel abfällt, typischerweise 15 % unter der niedrigsten
Versorgungsnennspannung des Frequenzumrichters. Bei einer Netzspannung von weniger als 10 % unterhalb der
niedrigsten Versorgungsnennspannung des Frequenzumrichters erfolgt kein Netz-Ein und es wird kein volles
Drehmoment erreicht.
Netzfrequenz 50 Hz
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 69
Page 72

6
Technische Daten
Maximale kurzzeitige Asymmetrie zwischen Netzphasen 3,0 % der Versorgungsnennspannung
Wirkleistungsfaktor (λ) ≥0,9 bei Nennlast
Verschiebungsleistungsfaktor (cosφ) Nahe 1 (> 0,98)
Schalten am Netzeingang L1, L2, L3 (Einschaltvorgang) max. 2 x/Min.
Umgebung gemäß EN 60664-1 und IEC 61800-5-1 Überspannungskategorie III/Verschmutzungsgrad 2
Das Gerät eignet sich für Netze, die einen Kurzschlussstrom von maximal
100.000 Aeff (symmetrisch) bei maximal je 480 V liefern, mit als Abzweigschutz eingesetzten Trennschaltern.
•
Siehe Tabelle 6.14 und Tabelle 6.15 bei mit als Abzweigschutz eingesetzten Trennschaltern.
•
VLT® DriveMotor FCP 106/FCM 106
6.4 Schutzfunktionen und Eigenschaften
Schutzfunktionen und Eigenschaften
Elektronischer thermischer Motorüberlastschutz
•
Die Temperaturüberwachung des Kühlkörpers stellt sicher, dass der Frequenzumrichter bei Erreichen einer
•
Temperatur von 90 °C (194 °F) ±5 °C (41 °F) abschaltet. Sie können eine Überlastabschaltung durch hohe
Temperatur erst zurücksetzen, nachdem die Kühlkörpertemperatur wieder unter 70 °C (158 °F) ±5 °C (41 °F)
gesunken ist. Beachten Sie, dass diese Temperaturen je nach Leistungsgröße, Gerätebaugröße, Schutzart usw.
abweichen können. Die automatische Leistungsreduzierung des Frequenzumrichters sorgt dafür, dass die Kühlkörpertemperatur keine 90 °C (194 °F) erreicht.
Die Motorklemmen U, V und W des Frequenzumrichters sind bei Netz-Einschaltung und beim Start des Motors
•
gegen Erdschluss geschützt.
Bei fehlender Motorphase schaltet der Frequenzumrichter ab und gibt eine Warnung aus.
•
Bei fehlender Netzphase schaltet der Frequenzumrichter ab oder gibt eine Warnung aus (je nach Last).
•
Die Überwachung der Zwischenkreisspannung stellt sicher, dass das Frequenzumrichter abschaltet, wenn die
•
Zwischenkreisspannung zu niedrig oder zu hoch ist.
Der Frequenzumrichter ist an den Motorklemmen U, V und W gegen Erdschluss geschützt.
•
Alle Steuerklemmen und die Relaisklemmen 01-03/04-06 entsprechen PELV. Dies gilt jedoch nicht für den
•
geerdeten Dreieck-Zweig über 300 V.
6.5 Umgebungsbedingungen
Umgebung
Schutzart der Baugröße IP66/Typ 4X
Schutzart der Baugröße FCP 106 zwischen Deckel und Kühlkörper IP66/Type 4X
Schutzart der Baugröße FCP 106 zwischen Kühlkörper und Adapterplatte IP66/Type 4X
FCP 106-Wandmontagesatz IP66
Stationäre Vibration IEC61800-5-1 Ed.2 Cl. 5.2,6.4
Nicht-stationäre Vibration (IEC 60721-3-3 Klasse 3M6) 25,0 g
Relative Luftfeuchtigkeit (IEC 60721-3-3; Klass 3K4 (nicht kondensierend)) 5–95 % während des Betriebs
Aggressive Umgebungsbedingungen (IEC 60721-3-3) Klasse 3C3
Prüfverfahren nach IEC 60068-2-43 H2S (10 Tage)
Umgebungstemperatur 40 °C (104 °F) (24-Stunden-Mittelwert)
Min. Umgebungstemperatur bei Volllast -10 °C (14 °F)
Min. Umgebungstemperatur bei reduzierter Leistung -20 °C (-4 °F)
Minimale Umgebungstemperatur bei reduzierter Leistung 50 °C (122 °F)
Temperatur bei Lagerung -25 bis +65 °C (-13 bis +149 °F)
Temperatur bei Transport -25 bis +70 °C (-13 bis +158 °F)
Max. Höhe über dem Meeresspiegel ohne Leistungsreduzierung 1000 m (3280 ft)
Max. Höhe über dem Meeresspiegel mit Leistungsreduzierung 3000 m (9842 ft)
Sicherheitsnormen EN/IEC 60204-1, EN/IEC 61800-5-1, UL 508C
EMV-Normen, Störaussendung EN 61000-3-2, EN 61000-3-12, EN 55011, EN 61000-6-4
1)
70 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 73

Technische Daten Projektierungshandbuch
EMV-Normen, Störfestigkeit EN 61800-3, EN 61000-6-1/2
Energieeffizienzklasse, VLT® DriveMotor FCP 106
Energieeffizienzklasse, VLT® DriveMotor FCM 106 IES
1) Die angegebenen IP- und Typ-Nennwerte gelten nur, wenn der FCP 106 an einer Wandmontageplatte oder an einem Motor
mit der Adapterplatte montiert ist. Stellen Sie sicher, dass die Dichtung zwischen Adapterplatte und Motor über eine Schutzart
verfügt, die der eingesetzten Kombination aus Motor und Frequenzumrichter entspricht. Für die Stand-alone-Anwendung ist die
Schutzart IP00, offener Typ.
2) Bestimmt gemäß EN50598-2 bei:
Nennlast
•
90 % der Nennfrequenz
•
Schaltfrequenz-Werkseinstellung.
•
Schaltmodus-Werkseinstellung
•
2)
IE2
6.6 Kabelspezifikationen
Kabellängen und Querschnitte
Maximale Motorkabellänge für Wandmontagesatz, abgeschirmt/geschirmt 2 m
Maximaler Querschnitt für Motor, Netz für MH1-MH3 4 mm2/11 AWG
Maximaler Querschnitt DC-Klemmen an Bauformen MH1-MH3 4 mm2/11 AWG
Max. Querschnitt für Steuerklemmen, starrer Draht 2,5 mm2/13 AWG
Max. Querschnitt für Steuerklemmen, flexibles Kabel 2,5 mm2/13 AWG
Mindestquerschnitt für Steuerklemmen 0,05 mm2/30 AWG
Maximaler Querschnitt für Thermistoreingang (am Motoranschluss) 4 mm2/11 AWG
6
6
6.7 Steuereingang/-ausgang und Steuerdaten
Digitaleingänge
Programmierbare Digitaleingänge 4
Klemme Nr. 18, 19, 27, 29
Logik PNP oder NPN
Spannungsniveau 0–24 V DC
Spannungsniveau, logisch 0 PNP <5 V DC
Spannungsniveau, logisch 1 PNP >10 V DC
Spannungspegel, logisch 0 NPN >19 V DC
Spannungspegel, logisch 1 NPN <14 V DC
Maximale Spannung am Eingang 28 V DC
Eingangswiderstand, R
Digitaleingang 29 als Pulseingang Maximale Frequenz 32 kHz Gegentakt und 5 kHz (O.C.)
Analogeingänge
Anzahl Analogeingänge 2
Klemme Nr. 53, 54
Klemme 53 Modus Parameter 6-19 Terminal 53 mode: 1=Spannung, 0=Strom
Klemme 54 Modus Parameter 6-29 Klemme 54 Funktion: 1=Spannung, 0=Strom
Spannungsniveau 0–10 V
Eingangswiderstand, R
Höchstspannung 20 V
Strombereich 0/4 bis 20 mA (skalierbar)
Eingangswiderstand, R
Maximaler Strom 29 mA
i
i
i
Ca. 4 kΩ
Ca. 10 kΩ
<500 Ω
Analogausgang
Anzahl programmierbarer Analogausgänge 2
Klemme Nr. 42, 45
Strombereich am Analogausgang 0/4–20 mA
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 71
1)
Page 74
6
Technische Daten
Maximale Last zum Bezugspotential am Analogausgang 500 Ω
Maximale Spannung am Analogausgang 17 V
Genauigkeit am Analogausgang Maximale Abweichung: 0,4 % der Gesamtskala
Auflösung am Analogausgang 10 Bit
1) Sie können die Klemmen 42 und 45 auch als Digitalausgänge programmieren.
Digitalausgang
Anzahl Digitalausgänge 4
Klemmen 27 und 29
Klemme Nr. 27, 29
Spannungsniveau am Digitalausgang 0–24 V
Maximaler Ausgangsstrom (Körper und Quelle) 40 mA
Klemmen 42 und 45
Klemme Nr. 42, 45
Spannungsniveau am Digitalausgang 17 V
Maximaler Ausgangsstrom am Digitalausgang 20 mA
Maximale Last am Digitalausgang 1 kΩ
1) Sie können die Klemmen 27 und 29 auch als Eingang programmieren.
2) Sie können die Klemmen 42 und 45 auch als Analogausgang programmieren.
Die Digitalausgänge sind von der Versorgungsspannung (PELV) und anderen Hochspannungsklemmen galvanisch getrennt.
VLT® DriveMotor FCP 106/FCM 106
1)
2)
Steuerkarte, RS485 serielle Schnittstelle
Klemme Nr. 68 (P, TX+, RX+), 69 (N, TX-, RX-)
Klemme Nr. 61 Masse für Klemmen 68 und 69
Steuerkarte, 24 V DC-Ausgang
Klemme Nr. 12
Maximale Last 80 mA
Relaisausgang
Programmierbarer Relaisausgang 2
Relais 01 und 02 01-03 (NC), 01-02 (NO), 04-06 (NC), 04-05 (NO)
Maximaler Belastungsstrom der Klemme (AC-1)
Maximaler Belastungsstrom der Klemme (AC-15)1) auf 01-02/04-05 (NO/Schließer) (induktive Last bei cosφ
0,4) 250 V AC, 0,2 A
Maximaler Belastungsstrom der Klemme (DC-1)1) auf 01-02/04-05 (NO/Schließer) (ohmsche Last) 30 V DC, 2 A
Maximaler Belastungsstrom der Klemme (DC-13)1) auf 01-02/04-05 (NO/Schließer) (induktive Last) 24 V DC, 0,1 A
Maximaler Belastungsstrom der Klemme (AC-1)1) auf 01-03/04-06 (NC/Öffner) (ohmsche Last) 250 V AC, 3 A
Maximaler Belastungsstrom der Klemme (AC-15)1) auf 01-03/04-06 (NC/Öffner) (induktive Last bei COSφ
0,4) 250 V AC, 0,2 A
Maximaler Belastungsstrom der Klemme
(DC-1)1) auf 01-03/04-06 (NC/Öffner)
(ohmsche Last)
Umgebung nach EN 60664-1 Überspannungskategorie III/Verschmutzungsgrad 2
1) IEC 60947 Abschnitte 4 und 5.
1)
auf 01-02/04-05 (NO/Schließer) (ohmsche Last) 250 V AC, 3 A
30 V DC, 2 A
Minimaler Belastungsstrom der Klemme an 01-03 (NC/Öffner), 01-02 (NO/
Schließer) 24 V DC 10 mA, 24 V AC 20 mA
Steuerkarte, 10 V DC-Ausgang
Klemme Nr. 50
Ausgangsspannung 10,5 V ±0,5 V
Maximale Last 25 mA
72 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 75

Technische Daten Projektierungshandbuch
6.8 Technische Daten des FCM 106-Motors
Motorausgang (U, V, W)
Ausgangsspannung 0–100 % der Versorgungsspannung
Ausgangsfrequenz, Asynchronmotor 0–200 Hz (VVC+), 0–400 Hz (u/f)
Ausgangsfrequenz, PM-Motor 0–390 Hz (VVC+ PM)
Schalten am Ausgang Unbegrenzt
Rampenzeiten 0,05–3600 s
Thermistoreingang (bei Motoranschluss)
Eingangsbedingungen Fehler: >2,9 kΩ, kein Fehler: <800 Ω
6.8.1 Motorüberlastdaten, VLT DriveMotor FCM 106
Typ Größe Drehzahl
[UPM]
HPS 71 1500 0,55 (0,74) 4,54 (40,2) 1,7 4,91 (43,5) 1,9 6,74 (59,7) 2,7
HPS 71 1500 0,75 (1,0) 6,07 (53,7) 2,2 6,38 (56,5) 2,4 8,99 (79,6) 3,5
HPS 71 1500 1,10 (1,47) 8,37 (74,1) 3 8,96 (79,3) 3,3 12,55 (111,1) 4,8
HPS 71 1500 1,50 (2,0) 10,18 (90,1) 3,7 11,08 (98,1) 4,1 15,35 (135,9) 5,9
HPS 71 1800 0,55 (0,74) 4,52 (40) 1,7 4,81 (42,6) 1,9 6,63 (58,7) 2,7
HPS 71 1800 0,75 (1,0) 5,06 (44,8) 2,2 5,32 (47,1) 2,4 7,48 (66,2) 3,5
HPS 71 1800 1,10 (1,47) 6,93 (61,3) 3 7,44 (65,8) 3,3 10,40 (92) 4,8
HPS 71 1800 1,50 (2,0) 8,97 (79,4) 3,7 9,70 (85,9) 4,1 13,43 (118,9) 5,9
HPS 71 3000 0,75 (1,0) 3,03 (26,8) 2,2 3,17 (28,1) 2,4 4,50 (39,8) 3,5
HPS 71 3000 1,10 (1,47) 4,18 (37) 3 4,48 (39,7) 3,3 6,27 (55,5) 4,8
HPS 71 3000 1,50 (2,0) 5,25 (46,5) 3,7 5,71 (50,5) 4,1 7,90 (69,9) 5,9
HPS 71 3000 2,20 (2,95) 7,56 (66,9) 5,3 8,13 (72) 5,8 11,44 (101,3) 8,5
HPS 71 3600 0,75 (1,0) 2,53 (22,4) 2,2 2,66 (23,5) 2,4 3,74 (3,1) 3,5
HPS 71 3600 1,10 (1,47) 3,47 (30,7) 3 3,72 (32,9) 3,3 5,20 (46) 4,8
HPS 71 3600 1,50 (2,0) 4,53 (40,1) 3,7 4,91 (43,5) 4,1 6,79 (60,1) 5,9
HPS 71 3600 2,20 (2,95) 6,26 (55,4) 5,3 6,74 (59,7) 5,8 9,48 (83,9) 8,5
HPS 90 1500 1,50 (2,0) 10,18 (90,1) 3,7 11,08 (98,1) 4,1 15,35 (135,6) 5,9
HPS 90 1500 2,20 (2,95) 14,49 (128,2) 5,3 15,63 (138,3) 5,8 21,99 (194,6) 8,5
HPS 90 1500 3,00 (4,02) 19,70 (174,4) 7,2 21,37 (189,1) 7,9 29,83 (264) 11,5
HPS 90 1500 4,00 (5,36) 29,81 (263,8) 9 32,19 (284,9) 9,9 44,81 (396,6) 14,4
HPS 90 1800 2,20 (2,95) 12,63 (111,8) 5,3 13,59 (120,3) 5,8 19,12 (166,2) 8,5
HPS 90 1800 3,00 (4,02) 16,40 (145,2) 7,2 17,79 (157,5) 7,9 24,84 (219,9) 11,5
HPS 90 1800 4,00 (5,36) 22,42 (198,4) 9 24,27 (214,8) 9,9 33,88 (299,9) 14,4
HPS 90 3000 2,20 (2,95) 7,25 (64,2) 5,3 7,81 (69,1) 5,8 10,99 (97,3) 8,5
HPS 90 3000 3,00 (4,02) 9,90 (87,6) 7,2 10,73 (95) 7,9 14,99 (132,7) 11,5
HPS 90 3000 4,00 (5,36) 13,29 (117,6) 9 14,32 (126,7) 9,9 20,03 (177,3) 14,4
HPS 90 3000 5,50 (7,37) 18,32 (162,1) 12 19,91 (176,2) 13,2 27,78 (245,9) 19,2
HPS 90 3600 3,00 (4,02) 8,25 (73) 7,2 8,95 (79,2) 7,9 12,50 (110,6) 11,5
HPS 90 3600 4,00 (5,36) 10,67 (94,4) 9 11,61 (102,8) 9,9 16,21 (143,5) 14,4
HPS 90 3600 5,50 (7,37) 15,40 (136,3) 12 16,61 (147) 13,2 23,23 (205,6) 19,2
HPS 112 1500 5,50 (7,37) 36,62 (324,1) 12 39,66 (351) 13,2 55,41 (490,4) 19,2
HPS 112 1500 7,50 (10,05) 49,59 (438,9) 15,5 53,98 (477,8) 17,1 71,01 (628,5) 23,3
HPS 112 1800 5,50 (7,37) 30,36 (268,7) 12 32,94 (291,5) 13,2 45,99 (407) 19,2
HPS 112 1800 7,50 (10,05) 42,14 (373) 15,5 45,80 (405,4) 17,1 60,25 (533,3) 23,3
HPS 112 3000 7,50 (10,05) 24,66 (218,5) 15,5 26,83 (237,5) 17,1 35,30 (312,4) 23,3
HPS 112 3600 7,50 (10,05) 21,33 (188,8) 15,5 23,23 (205,6) 17,1 30,52 (270,1) 23,3
AMHE 71Z 2865 0,75 (1,0) 2,89 (25,6) 2,2 3,55 (31,4) 2,4 5,10 (45,1) 3,5
Pn [kW
(HP)]
TN100 [Nm
(in-lb)]
Frequenzumrichterstrom
[A] 100 %
T110 [Nm
(in-lb)]
Frequenzumrichterstrom
[A] 110 %
T160 [Nm
(in-lb)]
Frequenzumrichterstrom
[A] 160 %
6
6
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 73
Page 76
Technische Daten
VLT® DriveMotor FCP 106/FCM 106
6
Typ Größe Drehzahl
[UPM]
AMHE 80Z 1430 0,75 (1,0) 6,11 (54,1) 2,2 7,67 (67,9) 2,4 11,20 (99,1) 3,5
AMHE 80Z 2880 1,10 (1,47) 4,32 (38,2) 3 5,78 (15,2) 3,3 8,77 (77,6) 4,8
AMHE 80Z 2880 1,50 (2,0) 5,44 (48,1) 3,7 6,96 (61,6) 4,1 10,61 (93,9) 5,9
AMHE 90S 1430 1,10 (1,47) 8,76 (77,5) 3 11,30 (100) 3,3 16,91 (149,7) 4,8
AMHE 90L 1430 1,50 (2,0) 10,88 (96,3) 3,7 13,29 (117,6) 4,1 20,52 (181,6) 5,9
AMHE 90L 2860 2,20 (2,95) 8,79 (77,8) 5,3 10,48 (92,8) 5,8 15,62 (138,2) 8,5
AMHE 90L 2880 3,00 (4,02) 11,69 (103,5) 7,2 14,33 (126,8) 7,9 19,61 (173,6) 11,5
AMHE 100L 1450 2,20 (2,95) 15,07 (133,4) 5,3 18,21 (161,2) 5,8 28,62 (253,3) 8,5
AMHE 100L 1440 3,00 (4,02) 19,63 (173,7) 7,2 22,61 (200,1) 7,9 32,93 (291,5) 11,5
AMHE 100L 2920 4,00 (5,36) 15,12 (133,8) 9 18,75 (166) 9,9 27,23 (241) 14,4
AMHE 112M 1450 4,00 (5,36) 27,85 (246,5) 9 33,22 (294) 9,9 51,53 (456,1) 14,4
AMHE 112M 1450 5,50 (7,37) 36,50 (323,1) 12 42,60 (377) 13,2 62,05 (549,2) 19,2
AMHE 112M 2920 5,50 (7,37) 20,88 (184,8) 12 26,45 (234,1) 13,2 34,27 (303,3) 19,2
AMHE 112M 2900 7,50 (10,05) 28,79 (254,8) 15,5 31,84 (281,8) 17,1 42,09 (372,5) 23,3
AMHE 132M 1450 7,50 (10,05) 49,18 (435,3) 15,5 56,62 (501,1) 17,1 78,74 (696,9) 23,3
Tabelle 6.13 Motorüberlastdaten
Pn [kW
(HP)]
TN100 [Nm
(in-lb)]
Frequenzumrichterstrom
[A] 100 %
T110 [Nm
(in-lb)]
Frequenzumrichterstrom
[A] 110 %
T160 [Nm
(in-lb)]
Frequenzumrichterstrom
[A] 160 %
6.9 Spezifikationen für Sicherung und Trennschalter
Überspannungsschutz
Sorgen Sie für einen Überlastschutz, um eine Überhitzung der Kabel in der Anlage auszuschließen. Führen Sie den
Überspannungsschutz stets gemäß den örtlichen und nationalen Vorschriften aus. Die Sicherungen müssen für den Schutz
eines Kreislaufs ausgelegt sein, der imstande ist, höchstens 100.000 A
Tabelle 6.14 und Tabelle 6.15 für die Bremskapazität des Danfoss CTI25M-Trennschalters bei max. 480 V.
UL-Konformität/Nicht-UL-Konformität
Verwenden Sie die in Tabelle 6.14, Tabelle 6.15 und Tabelle 6.16 aufgelisteten Trennschalter und Sicherungen, damit die
Übereinstimmung mit UL 508C oder IEC 61800-5-1 gewährleistet ist.
(symmetrisch), 480 V max. zu liefern. Siehe
eff
HINWEIS
SACHSCHÄDEN
Im Falle einer Fehlfunktion kann das Nichtbeachten der Empfehlung zu Schäden am Frequenzumrichter führen.
Gehäusegröße
MH1
MH2
MH3
Tabelle 6.14 Trennschalter, mit UL-Zertifizierung
Leistung1) [kW]
3x380–480 V
0,55 CTI25M - 47B3146 100000 CTI25M - 047B3149 50000
0,75 CTI25M - 47B3147 100000 CTI25M - 047B3149 50000
1,1 CTI25M - 47B3147 100000 CTI25M - 047B3150 6000
1,5 CTI25M - 47B3148 100000 CTI25M - 047B3150 6000
2,2 CTI25M - 47B3149 50000 CTI25M - 047B3151 6000
3,0 (4,0) CTI25M - 47B3149 50000 CTI25M - 047B3151 6000
4,0 (5,0) CTI25M - 47B3150 6000 CTI25M - 047B3151 6000
5,5 CTI25M - 47B3150 6000 CTI25M - 047B3151 6000
7,5 CTI25M - 47B3151 6000 CTI25M - 047B3151 6000
Empfohlen, mit UL-Zertifi-
zierung
Brems-
kapazität
Hauptschalter
Maximale UL
Brems-
kapazität
74 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 77
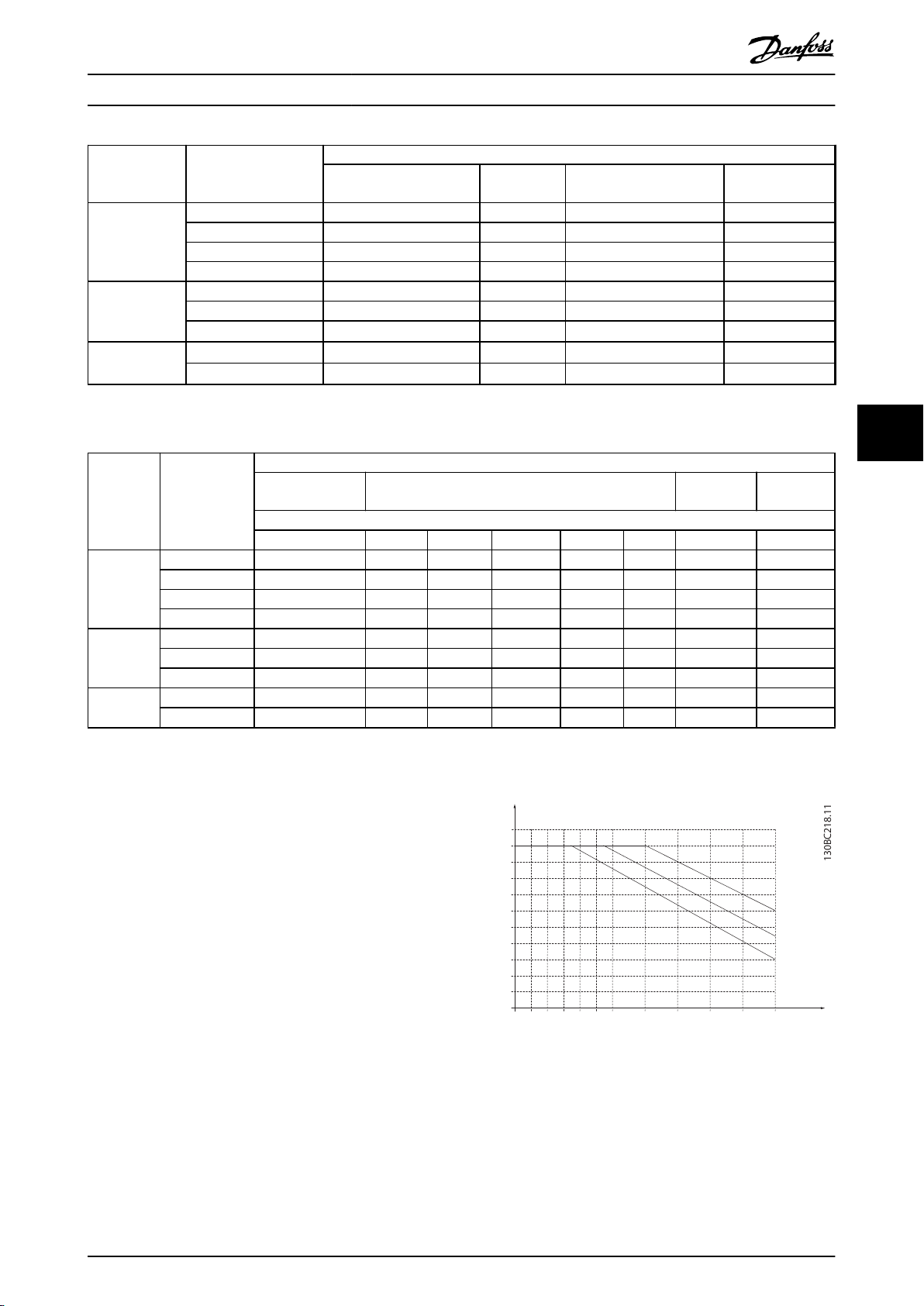
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
40
45
50
5
o
C
o
C
o
C
104 oF
113 oF
122
o
F
Technische Daten Projektierungshandbuch
Gehäusegröße
Leistung1) [kW]
3x380–480 V
0,55 CTI25M - 47B3146 100000 CTI25M - 47B3149 100000
MH1
0,75 CTI25M - 47B3147 100000 CTI25M - 47B3149 100000
1,1 CTI25M - 47B3147 100000 CTI25M - 47B3150 50000
1,5 CTI25M - 47B3148 100000 CTI25M - 47B3150 50000
2,2 CTI25M - 47B3149 100000 CTI25M - 047B3151 15000
MH2
3,0 (4,0) CTI25M - 47B3149 100000 CTI25M - 047B3151 15000
4,0 (5,0) CTI25M - 47B3150 50000
MH3
5,5 CTI25M - 47B3150 50000
7,5 CTI25M - 47B3151 15000
Tabelle 6.15 Trennschalter, ohne UL-Zertifizierung
1) Maximaler Abschaltwert auf 32 A eingestellt.
Gehäusegrö
ße
Leistung
1)
3x380–480 V
[kW]
Empfohlen, mit
UL-Zertifizierung
RK5, RK1, J, T, CC RK5 RK1 J T CC gG gG
0,55 6 6 6 6 6 6 10 10
MH1
0,75 6 6 6 6 6 6 10 10
1,1 6 10 10 10 10 10 10 10
1,5 6 10 10 10 10 10 10 10
2,2 6 20 20 20 20 20 16 20
MH2
3,0 (4,0) 15 25 25 25 25 25 16 25
4,0 (5,0) 15 30 30 30 30 30 16 32
MH3
5,5 20 30 30 30 30 30 25 32
7,5 25 30 30 30 30 30 25 32
nicht UL empfohlen
Hauptschalter
Brems-
kapazität
Sicherung
Maximale UL
Typ
Maximal ohne UL
CTI25M - 047B3102
CTI25M - 047B3102
CTI25M - 047B3102
1)
1)
1)
Empfohlen
ohne UL
Brems-
kapazität
15000
15000
15000
Maximal
ohne UL
6
6
Tabelle 6.16 Sicherungen
1) Die Nennleistungen beziehen sich auf HO, siehe Kapitel 6.2 Elektrische Daten.
6.10 Leistungsreduzierung aufgrund
Umgebungstemperatur und
Taktfrequenz
Der über 24 Stunden gemessene Durchschnittswert für die
Umgebungstemperatur muss mindestens 5 °C (41 °F) unter
der maximal zulässigen Umgebungstemperatur liegen.
Betreiben Sie den Frequenzumrichter bei hoher
Umgebungstemperatur, müssen Sie den konstanten
Ausgangsstrom reduzieren.
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 75
Abbildung 6.3 400 V MH1 0,55–1,5 kW (0,75–2,0 HP)
Page 78
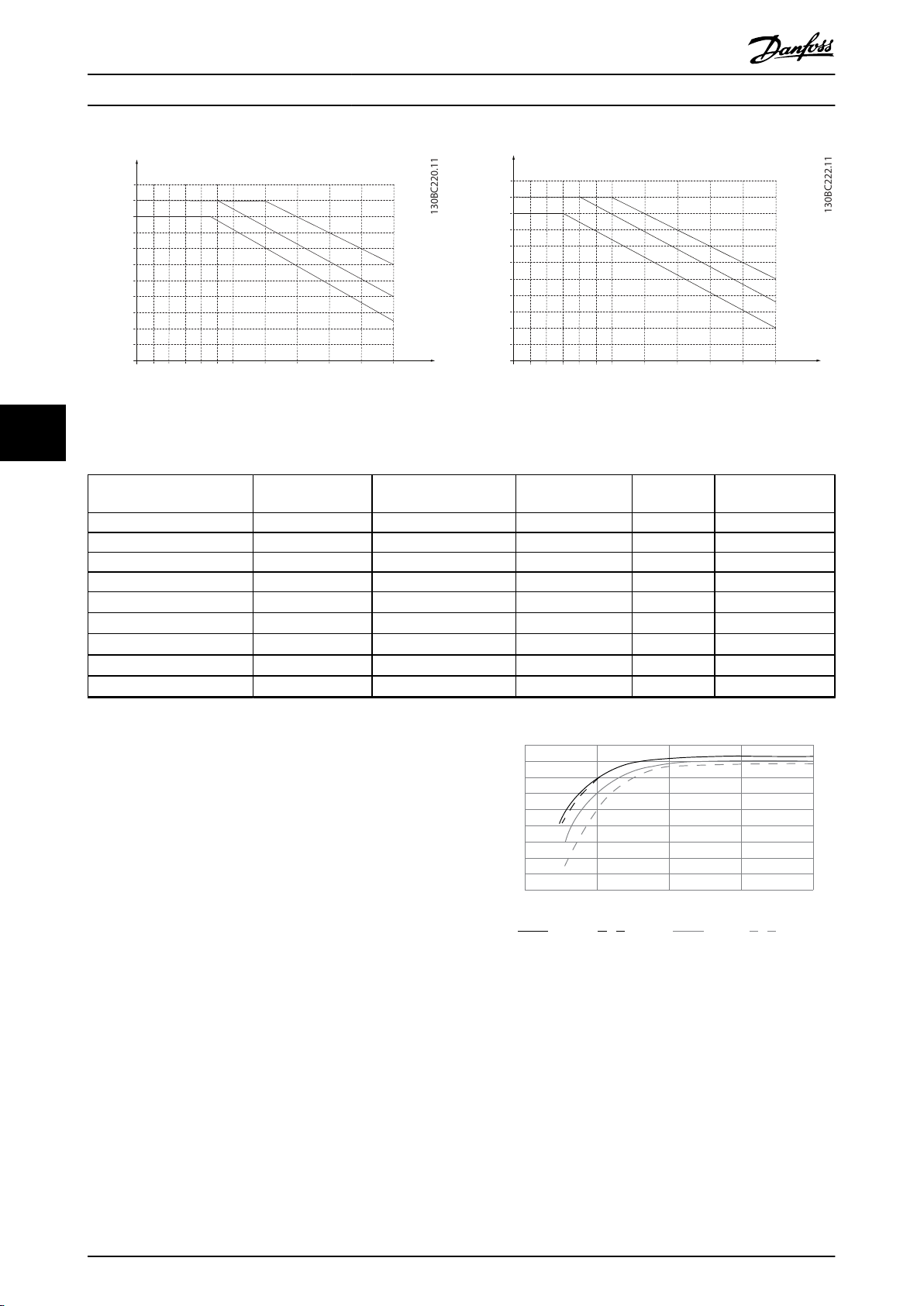
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
110%
I
out
[%]
16
5
130BC220.11
40
45
50
o
C
o
C
o
C
104 oF
113 oF
122
o
F
fsw[kHz]
20 10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
1
00%
1
10 %
I
out
[%]
16
5
40
45
50
o
C
o
C
o
C
104 oF
113 oF
122 oF
1.0
0.99
0.98
0.97
0.96
0.95
0.93
0.92
0% 50% 100% 200%
0.94
Relative Eciency
130BB252.11
1.01
150%
% Speed
100% load 75% load 50% load 25% load
Technische Daten
VLT® DriveMotor FCP 106/FCM 106
Abbildung 6.4 400 V MH2 2,2–4,0 kW (3,0–5,0 HP)
6
6.11 dU/dt
Wellenleistung
[kW (HP)]
0,55 (0,75) 0,5 (1,6) 400 0,1 0,57 4,5
0,75 (1,0) 0,5 (1,6) 400 0,1 0,57 4,5
1,1 (1,5) 0,5 (1,6) 400 0,1 0,57 4,5
1,5 (2,0) 0,5 (1,6) 400 0,1 0,57 4,5
2,2 (3,0) <0,5 (1,6) 400
3,0 (4,0) <0,5 (1,6) 400
4,0 (5,0) <0,5 (1,6) 400
5,5 (7,5) <0,5 (1,6) 400
7,5 (10) <0,5 (1,6) 400
Tabelle 6.17 dU/dt, MH1–MH3
1) Daten bei künftiger Veröffentlichung verfügbar.
6.12 Wirkungsgrad
Wirkungsgrad des Frequenzumrichters (η
Die Last am Frequenzumrichter hat kaum Auswirkung auf
seinen Wirkungsgrad. In der Regel ist der Wirkungsgrad bei
der Motornennfrequenz f
Motor 100 % des Wellennenndrehmoments oder, im Fall
von Teillasten, nur 75 % liefert.
Das heißt auch, dass sich der Wirkungsgrad des Frequenzumrichters selbst dann nicht ändert; wenn Sie eine andere
U/f-Kennlinie wählen.
Dennoch haben die U/f-Kennlinien Einfluss auf den
Wirkungsgrad des Motors. Der Wirkungsgrad nimmt leicht
ab, wenn die Taktfrequenz auf einen Wert von über 5 kHz
eingestellt ist. Der Wirkungsgrad nimmt auch leicht ab,
wenn die Netzspannung 480 V beträgt.
Berechnung des Frequenzumrichter-Wirkungsgrads
Berechnen Sie den Wirkungsgrad des Frequenzumrichters
bei unterschiedlichen Lasten auf Grundlage von
Abbildung 6.6. Multiplizieren Sie den Faktor in dieser
Abbildung mit dem spezifischen Wirkungsgradfaktor, der in
den Spezifikationstabellen zu finden ist.
76 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
M,N
Kabellänge
[m (ft)]
)
VLT
derselbe, selbst wenn der
Netzspannung
[V]
Abbildung 6.5 400 V MH3 5,5–7,5 kW (7,5–10 HP)
Anstiegzeit
[µs]
1) 1) 1)
1) 1) 1)
1) 1) 1)
1) 1) 1)
1) 1) 1)
V
[kV]
peak
dU/dt
[kV/µs]
Abbildung 6.6 Typische Wirkungsgradkurven
Beispiel: Legen Sie zugrunde, dass ein Frequenzumrichter
mit 22 kW (30 HP) bei 25 % Last und 50 % der Drehzahl
läuft. Das Diagramm zeigt 0,97 an, während der Nennwirkungsgrad eines 22-kW-Frequenzumrichters (30 HP) 0,98
beträgt. Der tatsächliche Wirkungsgrad ist gleich: 0,97 x
0,98 = 0,95.
Motorwirkungsgrad (η
MOTOR
)
Der Wirkungsgrad eines an den Frequenzumrichter
angeschlossenen Motors hängt von der Magnetisierungsstufe ab. In der Regel ist der Wirkungsgrad genauso
Page 79
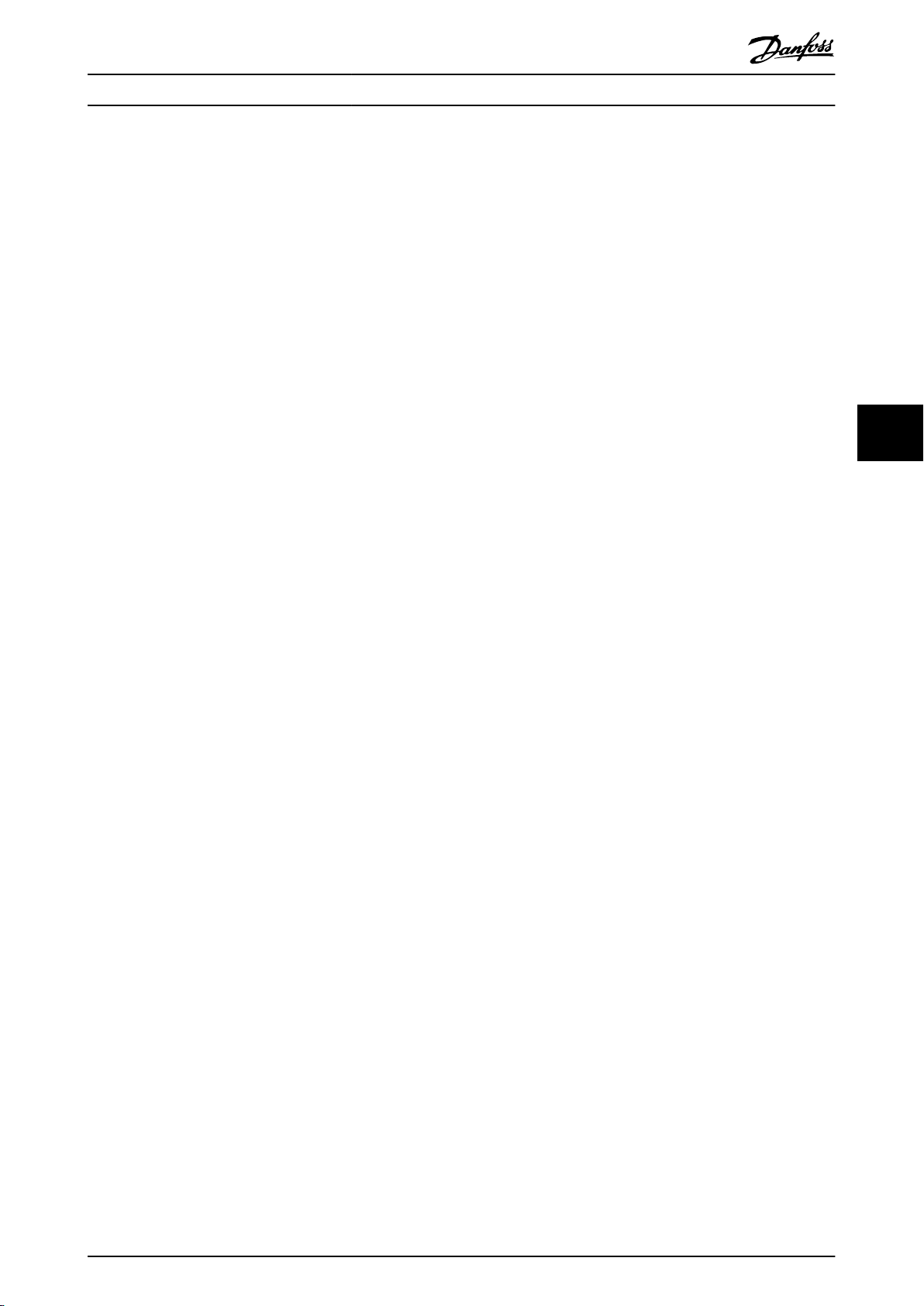
Technische Daten Projektierungshandbuch
gut wie bei Netzbetrieb. Der Wirkungsgrad des Motors
hängt vom Motortyp ab.
Im Nenndrehmomentbereich von 75–100 % ist der
Motorwirkungsgrad praktisch konstant, sowohl wenn dieser
vom Frequenzumrichter geregelt wird, als auch wenn er
direkt im Netz betrieben wird.
Bei kleinen Motoren haben die U/f-Kennlinien nur einen
minimalen Einfluss auf den Wirkungsgrad. Allerdings
ergeben sich beachtliche Vorteile bei Motoren mit
mindestens 11 kW (15 HP).
Im Allgemeinen hat die Taktfrequenz keinen Einfluss auf
den Wirkungsgrad von kleinen Motoren. Bei Motoren mit
einer Leistung von mindestens 11 kW (15 HP) wird der
Wirkungsgrad erhöht (1–2 %). Dies liegt daran, dass die
Form der Sinuskurve des Motorstroms bei hoher
Taktfrequenz fast perfekt ist.
Wirkungsgrad des Systems (η
Zur Berechnung des Systemwirkungsgrads wird der
Wirkungsgrad des Frequenzumrichters (η
Motorwirkungsgrad (η
η
= η
SYSTEM
VLT
x η
MOTOR
) multipliziert:
MOTOR
SYSTEM
)
) mit dem
VLT
6
6
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 77
Page 80

Index
VLT® DriveMotor FCP 106/FCM 106
Index
A
Abgeschirmtes Kabel................................................................... 21, 25
Abkürzungen............................................................................................ 6
Ableitstrom......................................................................................... 9, 21
Abmessungen................................................................... 64, 65, 66, 67
Abmessungen mit Asynchron- und PM-Motor......................... 64
Abmessungen, FCM 106.................................................................... 64
Abmessungen, FCP 106..................................................................... 63
Abstand...................................................................................... 23, 44, 62
Aggressive Umgebungsbedingungen.................................. 44, 70
Alarm quittieren.................................................................................... 19
AMA........................................................................................................... 50
Amortisationszeit................................................................................. 53
Antriebskonfigurator........................................................................... 58
Antriebswelle......................................................................................... 39
Anwendungen
Puls-Start/Stopp............................................................................... 49
Start/Stopp......................................................................................... 49
Asynchronmotor............................................................................ 50, 57
Ausgänge
Analogausgang......................................................................... 12, 72
Digitalausgang........................................................................... 12, 72
Relaisausgang................................................................................... 72
Automatische Anpassungen zur Sicherstellung der Leistung
...... 42
Automatische Motoranpassung..................................................... 50
B
Beispiel mit variablem Durchfluss über 1 Jahr........................... 53
Beispiele für Energieeinsparungen................................................ 52
Bessere Regelung................................................................................. 54
Betauung................................................................................................. 44
C
CDM........................................................................................................... 46
D
DeviceNet.................................................................................................. 5
Diskrepanz................................................................................................. 5
E
EC+ Konzept........................................................................................... 56
Effizienz
Effizienzklasse................................................................................... 46
Energieeffizienz................................................................................ 46
Energieeffizienzklasse.................................................................... 46
Effizienzklasse........................................................................................ 59
Eingänge
Analogeingang................................................................................. 71
Analogeingang 53........................................................................... 50
Digitaleingang................................................................ 5, 19, 21, 71
Elektrische Anschlussübersicht....................................................... 13
Elektronik-Altgeräte............................................................................... 8
Elektronisches Thermorelais............................................................. 39
EMV
Allgemeine Aspekte von EMV-Emissionen............................. 21
Emissionsanforderungen................................................ 22, 25, 32
EMV-Filter............................................................................................ 27
EMV-gerechte elektrische Installation...................................... 23
EMV-gerechte Installation............................................................ 23
Störfestigkeitsanforderungen.............................................. 22, 26
Energieeinsparungen............................................................ 52, 53, 56
Entladezeit................................................................................................. 9
Erdung...................................................................................................... 27
ETR............................................................................................................. 39
Exportkontrollvorschriften.................................................................. 8
Extreme Betriebszustände................................................................ 43
F
Filter
EMV-Filter............................................................................................ 27
Motorkabellänge.............................................................................. 27
G
Galvanische Trennung........................................................................ 28
Gebäudeleitsystem, BMS................................................................... 53
H
Hauptdiagramm.................................................................................... 12
Hauptschalter........................................................................... 27, 70, 74
Heben....................................................................................................... 36
Hochspannung................................................................................. 9, 15
I
Installation
EMV-gerechte elektrische Installation...................................... 23
EMV-gerechte Installation............................................................ 23
Integrierter Frequenzumrichter und Motor................................ 30
Istwertumwandlung............................................................................ 21
K
Kabel
Kabellängen und Querschnitte................................................... 71
Kabelquerschnitt....................................................................... 68, 69
Motorkabellänge.............................................................................. 27
78 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 81

Index Projektierungshandbuch
Klemmen
DC-Klemme........................................................................................ 71
Klemme 12.......................................................................................... 72
Klemme 18................................................................................... 15, 71
Klemme 19................................................................................... 15, 71
Klemme 27................................................................................... 15, 71
Klemme 29.......................................................................................... 71
Klemme 42.......................................................................................... 71
Klemme 45.......................................................................................... 71
Klemme 50.......................................................................................... 72
Klemme 53.......................................................................................... 71
Klemme 54.......................................................................................... 71
Klemme 68 (P, TX+, RX+)............................................................... 72
Klemme 69 (N, TX-, RX-)................................................................. 72
Motorklemmen................................................................................. 70
Relaisklemme.................................................................................... 70
Steuerklemme.............................................................. 12, 14, 70, 71
Steuerklemmenfunktionen.......................................................... 15
Konformität
CE............................................................................................................. 7
CE-Zeichen............................................................................................ 7
C-Tick....................................................................................................... 8
UL-gelistet............................................................................................. 8
UL-Zulassung....................................................................................... 8
Konvention................................................................................................ 6
Kühlung............................................................................................. 44, 62
Kurzschluss (Motorphase – Phase)................................................. 43
Motor
Asynchronmotor.................................................................... 0 , 39
Motorausgang (U, V, W)................................................................. 73
Motorkabel......................................................................................... 27
Motorklemmen................................................................................. 70
Motorparameter............................................................................... 50
Motorphasen..................................................................................... 43
Motorschutz....................................................................................... 70
PM-Motor.................................................................... 35, 0 , 39, 43
Thermischer Motorschutz............................................................. 39
Vom Motor erzeugte Überspannung....................................... 43
N
Netz
Netzausfall................................................................................... 43, 69
Netzversorgung (L1, L2, L3).......................................................... 69
Netzversorgung 3 x 380-480 VAC – Normale und hohe
Überlast...... 68
Normen
EN 50598............................................................................................. 46
EN 50598-2......................................................................................... 46
L
Lager..................................................................................... 34, 35, 36, 37
LCP...................................................................................................... 19, 61
LCP-Anschluss........................................................................................ 14
LCP-Steuertasten.................................................................................. 19
Leistungsreduzierung
Automatische Leistungsreduzierung....................................... 70
Leistungsreduzierung, erhöhte Umgebungstemperatur.......
75
Leistungsreduzierung, niedriger Luftdruck............................ 42
Leistungsreduzierung, Taktfrequenz................................. 42, 75
Leistungsreduzierung, Umgebungstemperatur................... 42
Ziel......................................................................................................... 42
Luftfeuchtigkeit.............................................................................. 44, 45
Luftzirkulation........................................................................................ 44
M
Magnetisierungsverlust..................................................................... 48
Modbus....................................................................................................... 5
Modbus RTU........................................................................................... 15
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 79
Page 82

Index
VLT® DriveMotor FCP 106/FCM 106
Normen und Richtlinien
Cl. 5.2,6.4............................................................................................. 70
Die EMV-Richtlinie 2004/108/EG................................................... 6
Die Niederspannungsrichtlinie (2006/95/EG).......................... 6
DIN 332 Form D................................................................................ 39
EIA-422/485.......................................................................................... 6
EN 50178 9.4.2.2 bei 50.................................................................. 44
EN 50598-2......................................................................................... 46
EN 55011...................................................................................... 25, 70
EN 55011 Klasse A, Gruppe 1....................................................... 25
EN 55011 Klasse B............................................................................ 25
EN 60664-1.................................................................................. 70, 72
EN 61000-3-12................................................................................... 70
EN 61000-3-2..................................................................................... 70
EN 61000-6-1/2................................................................................. 71
EN 61000-6-4..................................................................................... 70
EN 61800-3......................................................................................... 71
EN 61800-3 (2004).............................................................................. 6
EN 61800-5-1 (2007).......................................................................... 6
EN/IEC 60204-1................................................................................. 70
EN/IEC 61000-4-2............................................................................. 26
EN/IEC 61000-4-3............................................................................. 26
EN/IEC 61000-4-4............................................................................. 26
EN/IEC 61000-4-5............................................................................. 26
EN/IEC 61000-4-6............................................................................. 26
EN/IEC 61000-6-3............................................................................. 25
EN/IEC 61000-6-4............................................................................. 25
EN/IEC 61800-3:2004...................................................................... 25
EN/IEC 61800-5-1...................................................................... 28, 70
IEC 60068-2-34.................................................................................. 45
IEC 60068-2-35.................................................................................. 45
IEC 60068-2-36.................................................................................. 45
IEC 60068-2-43.................................................................................. 70
IEC 60204-1........................................................................................... 6
IEC 60364-4-41..................................................................................... 6
IEC 60721-3-3..................................................................................... 70
IEC 60721-3-3; Klasse 3K4.............................................................. 70
IEC 60947............................................................................................ 72
IEC 61800-5-1.............................................................................. 70, 74
IEC 61800-5-1 Ed.2........................................................................... 45
IEC/EN 60068-2-3............................................................................. 44
IEC/EN 60068-2-6............................................................................. 45
IEC/EN 60068-2-64........................................................................... 45
IEC/EN 61000-3-12.................................................................... 32, 33
IEC/EN 61000-3-2, Klasse A........................................................... 32
IEC600721 Klasse 3K4..................................................................... 44
IEC61800-5-1 Ed.2............................................................................ 70
IEEE 519 -1992; G5/4....................................................................... 33
ISO 8821.............................................................................................. 39
UL 508C................................................................................................ 70
Ö
Öffentliches Versorgungsnetz.................................................. 32, 33
O
Optionen und Zubehör, Bestellnummern................................... 61
P
PELV......................................................................................... 6, 28, 42, 70
PELV (Schutzkleinspannung - Protective Extra Low Voltage)
...... 6, 28, 70
PM-Motor................................................................................................ 51
Potential................................................................................................... 25
Potenziometer-Sollwert..................................................................... 50
PROFIBUS..................................................................................... 5, 59, 61
Programmierung des Smart Logic Controllers.......................... 54
Proportionalitätsgesetze................................................................... 52
Q
Qualifiziertes Personal........................................................................... 9
R
RCD............................................................................................................ 27
Regelung von Lüftern und Pumpen.............................................. 51
Regelungsstrukturen
Regelung mit Rückführung.......................................................... 20
Regelung mit Rückführung PI.............................................. 18, 30
Regelung ohne Rückführung........................................ 18, 19, 20
Regelungsstruktur, Beispiel.......................................................... 30
Relais
Ausgangsrelais.................................................................................. 28
Relais..................................................................................................... 14
Relaisausgang................................................................................... 72
Relaisklemme.................................................................................... 70
Reset..................................................................................................... 6, 42
Richtlinie
EMV-Richtlinie...................................................................................... 7
Richtlinien
EMV-........................................................................................................ 7
Maschinen-........................................................................................... 7
Maschinenrichtlinie........................................................................... 7
Niederspannungs-............................................................................. 7
Niederspannungsrichtlinie............................................................. 7
Ökodesign-........................................................................................... 8
S
Schalten
Schaltverlust...................................................................................... 48
Taktfrequenz............................................................................... 27, 48
Schalten am Ausgang......................................................................... 43
Schalten am Netzeingang................................................................. 69
Schaltschrankheizung........................................................................ 44
Schmierung............................................................................................ 38
Schutzart........................................................................ 5, 11, 28, 44, 74
Schutzfunktionen und Eigenschaften.......................................... 70
Schutzmaßnahmen................................................................................ 8
Sicherheit............................................................................................ 8, 10
Sicherungen........................................................................................... 75
Smart Logic Control...................................................................... 54, 56
Softwareversion....................................................................................... 8
Sollwertverarbeitung................................................................... 18, 20
Speichermodul........................................................................................ 6
80 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. MG03M203
Page 83

Index Projektierungshandbuch
Speichermodul-Programmierung..................................................... 6
Statische Überlast im Modus VVC+............................................... 44
Stern-/Dreieckstarter........................................................................... 49
Steuerkarte, 10 V DC-Ausgang........................................................ 72
Steuerkarte, 24 V DC-Ausgang........................................................ 72
Steuerkarte, RS485 serielle Schnittstelle...................................... 72
Steuerung/Regelung
Steuerkarte......................................................................................... 12
Steuerklemme................................................................................... 12
Störgeräusche........................................................................................ 45
Störgeräuschniveaus........................................................................... 45
Strom
Ableitstrom........................................................................................ 27
Stufenlose Regelung von Durchfluss oder Druck..................... 54
Symbole...................................................................................................... 5
Z
Zertifizierung............................................................................................ 6
Zubehör
Fern-Einbausatz................................................................................ 40
LCP-Ferneinbau................................................................................ 41
LOP-Einheit......................................................................................... 41
Stecker für Fern-Einbausatz......................................................... 41
Zulassungen.............................................................................................. 6
Zwischenkreis............................................................ 12, 43, 45, 69, 70
Zwischenkreiskopplung....................................................................... 9
T
Temperatur
Durchschnittstemperatur............................................................. 44
Höchsttemperatur........................................................................... 44
Umgebungstemperatur................................................................ 44
Thermistor............................................................................................... 40
Thermistoreingang (bei Motoranschluss)................................... 73
Trägheitsmoment.......................................................................... 39, 43
Transiente................................................................................................ 27
Typencode und Auswahlhilfe........................................................... 58
Ü
Überspannungsschutz....................................................................... 74
U
UL-Konformität...................................................................................... 74
Umgebung.............................................................................................. 70
Unerwartete Motordrehung............................................................. 10
Unerwarteter Anlauf.............................................................................. 9
V
Vergleich der Energieeinsparungen.............................................. 53
Verlustleistung....................................................................................... 46
Vibrationen und Erschütterungen................................................. 45
W
Was unter die Richtlinien fällt............................................................. 6
Windmühlen-Effekt.............................................................................. 10
Wirkungsgrad
Wirkungsgrad.................................................................................... 46
Wirkungsgrad........................................................................... 51, 56, 76
MG03M203 Danfoss A/S © 06/2016 Alle Rechte vorbehalten. 81
Page 84

Die in Katalogen, Prospekten und anderen schriftlichen Unterlagen, wie z.B. Zeichnungen und Vorschlägen enthaltenen Angaben und technischen Daten sind vom Käufer vor Übernahme und
Anwendung zu prüfen. Der Käufer kann aus diesen Unterlagen und zusätzlichen Diensten keinerlei Ansprüche gegenüber Danfoss oder Danfoss-Mitarbeitern ableiten, es sei denn, dass diese
vorsätzlich oder grob fahrlässig gehandelt haben. Danfoss behält sich das Recht vor, ohne vorherige Bekanntmachung im Rahmen der angemessenen und zumutbaren Änderungen an seinen
Produkten – auch an bereits in Auftrag genommenen – vorzunehmen. Alle in dieser Publikation enthaltenen Warenzeichen sind Eigentum der jeweiligen Firmen. Danfoss und das Danfoss-Logo sind
Warenzeichen der Danfoss A/S. Alle Rechte vorbehalten.
Danfoss A/S
Ulsnaes 1
DK-6300 Graasten
vlt-drives.danfoss.com
130R0389 MG03M203 06/2016
*MG03M203*
 Loading...
Loading...