

Page 1

MAKING MODERN LIVING POSSIBLE
Руководство по программированию
VLT® DriveMotor FCP 106/FCM 106
www.DanfossDrives.com
Page 2

Page 3
Оглавление Руководство по программированию
Оглавление
1 Введение
1.1 Цель данного руководства
1.2 Дополнительные ресурсы
1.3 Версия документа и программного обеспечения
1.4 Символы, сокращения и определения
1.5 Обзор электрических клемм
2 Программирование
2.1 Удаленное программирование c помощью средства конфигурирования MCT 10
2.2 Графическая панель местного управления (GLCP)
2.3 Меню GLCP
2.3.1 Меню состояния 10
2.3.2 Быстрое меню 11
2.3.3 Главное меню 11
2.3.4 Настройка параметров применений с разомкнутым контуром 11
2.3.5 Мастер настройки параметров применений с замкнутым контуром 13
2.3.6 Настройка двигателя с помощью быстрого меню 14
2.4 Программирование параметров
5
5
5
5
5
8
9
9
9
10
15
2.5 Создание резервной копии и копирование настроек параметров
2.6 Восстановление настроек по умолчанию
3 Монтаж и настройка RS485
3.1 RS485
3.1.1 Краткое описание 17
3.1.2 Обеспечение ЭМС 18
3.1.3 Подключение сети 18
3.1.4 Настройки параметров для связи Modbus 19
3.2 Протокол FC
3.3 Конфигурация сети
3.4 Структура кадра сообщения по протоколу FC
3.4.2 Структура телеграммы 20
3.4.4 Адрес преобразователя частоты (ADR) 21
3.4.5 Управляющий байт (BCC) 21
3.4.6 Поле данных 21
3.4.7 Поле PKE 22
3.4.8 Номер параметра (PNU) 22
15
15
17
17
19
20
20
3.4.9 Индекс (IND) 22
3.4.10 Значение параметра (PWE) 22
3.4.11 Типы данных, поддерживаемые преобразователем частоты 23
3.4.12 Преобразование 23
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 1
Page 4
Оглавление
VLT® DriveMotor FCP 106/FCM 106
3.5 Примеры
3.6 Краткое описание Modbus RTU
3.6.1 Необходимые сведения 24
3.6.2 Что уже должен знать пользователь 24
3.6.3 Краткое описание 24
3.6.4 Преобразователь частоты с Modbus RTU 25
3.7 Конфигурация сети
3.8 Структура кадра сообщения Modbus RTU
3.8.1 Введение 25
3.8.2 Структура сообщения Modbus RTU 26
3.8.3 Поля начала/останова 26
3.8.4 Адресное поле 26
3.8.5 Поле функции 26
3.8.6 Поле данных 27
3.8.7 Поле контроля CRC 27
3.8.8 Адресация катушек и регистров 27
3.8.9 Доступ посредством чтения/записи PCD 27
23
24
25
25
3.8.10 Назначение регистров временного хранения параметрам привода 28
3.8.11 Управление преобразователем частоты 29
3.8.12 Коды функций, поддерживаемые Modbus RTU 29
3.8.13 Исключительные коды Modbus 29
3.9 Доступ к параметрам
3.9.1 Операции с параметрами 30
3.9.2 Хранение данных 30
3.10 Примеры
3.10.1 Чтение регистров временного хранения (03 16-ричн.) 31
3.10.2 Установка одного регистра (06 16-ричн.) 31
3.10.3 Установка нескольких регистров (10 16-ричн.) 32
3.10.4 Запись/чтение нескольких регистров (17 16-ричн.) 32
3.11 Профиль управления FC
3.11.1 Командное слово, соответствующее профилю FC (пар. 8-10 Протокол =
Профиль FC) 33
3.11.2 Слово состояния, соответствующее профилю FC (STW)
(параметр 8-30 Протокол = профиль FC) 35
30
31
33
4 Параметры
4.1 Главное меню — Управление и отображение — Группа 0
4.2 Главное меню — Нагрузка/двигатель — Группа 1
4.3 Главное меню — Торможение — Группа 2
4.4 Главное меню – Задание/Разгон и торможение – Группа 3
4.5 Главное меню — Пределы/Предупреждения — Группа 4
2 Danfoss A/S © 11/2015 Все права защищены. MG03N250
37
37
44
57
59
63
Page 5
Оглавление Руководство по программированию
4.6 Главное меню — Цифровой вход/выход — Группа 5
4.7 Главное меню — Аналог.ввод/вывод — Группа 6
4.8 Главное меню — Связь и дополнительные устройства — Группа 8
4.9 Главное меню — PROFIdrive — Группа 9
4.10 Главное меню — Интеллектуальная логика — Группа 13
4.11 Главное меню — Специальные функции — Группа 14
4.12 Главное меню — Сведения о приводе — Группа 15
4.13 Главное меню — Вывод данных — Группа 16
4.14 Главное меню — Показания 2 — Группа 18
4.15 Главное меню — Замкнутый контур FC — Группа 20
4.16 Главное меню — Прикладные функции — Группа 22
4.17 Главное меню — Прикладные функции 2 — Группа 24
4.18 Главное меню — Специальные возможности — Группа 30
5 Диагностика и устранение неисправностей
5.1 Обзор аварийных сигналов и предупреждений
5.2 Слова аварийной сигнализации
5.3 Слова предупреждения
67
78
84
91
97
105
110
113
119
120
122
134
137
138
138
142
143
5.4 Расширенные слова состояния
5.5 Устранение неисправностей
6 Перечни параметров
6.1 Значения параметра
6.1.1 Установки по умолчанию 150
6.1.2 0-** Operation/Display 151
6.1.3 1-** Load and Motor 151
6.1.4 2-** Brakes 153
6.1.5 3-** Reference/Ramps 153
6.1.6 4-** Limits/Warnings 154
6.1.7 5-** Digital In/Out 154
6.1.8 6-** Analog In/Out 155
6.1.9 8-** Comm. and Options 156
6.1.10 9-** PROFIdrive 157
6.1.11 13-** Smart Logic 158
6.1.12 14-** Special Functions 158
6.1.13 15-** Drive Information 159
144
145
150
150
6.1.14 16-** Data Readouts 160
6.1.15 18-** Info & Readouts 161
6.1.16 20-** Drive Closed Loop 161
6.1.17 22-** Appl. Functions 162
6.1.18 24-** Appl. Functions 2 163
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 3
Page 6
Оглавление
VLT® DriveMotor FCP 106/FCM 106
6.1.19 30-** Special Features 163
Алфавитный указатель
164
4 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 7
Введение Руководство по программированию
1 Введение
1.1 Цель данного руководства
Руководство по программированию содержит
информацию, необходимую для ввода преобразователя
частоты в эксплуатацию и его программирования, в том
числе полные описания параметров.
1.2 Дополнительные ресурсы
Список литературы:
Инструкции по эксплуатации VLT® DriveMotor
•
FCP 106/FCM 106 содержат информацию,
необходимую для установки преобразователя
частоты и ввода его в эксплуатацию.
Руководство по проектированию VLT
•
DriveMotor FCP 106/FCM 106 содержит
информацию об интеграции преобразователя
частоты в различные системы.
Руководство по программированию VLT
•
DriveMotor FCP 106/FCM 106 содержит сведения
по программированию и включает полные
описания параметров.
Инструкция по работе с VLT
•
панель местного управления (LCP).
Инструкция по работе с VLT
•
пульт местного управления (LOP).
Инструкции по эксплуатации Modbus RTU и
•
Инструкции по эксплуатации BACnet VLT
DriveMotor FCP 106/FCM 106 содержат
информацию, необходимую для управления
преобразователем частоты, его контроля и
программирования.
Руководство по монтажу VLT® PROFIBUS DP
•
MCA 101 содержит информацию о монтаже
PROFIBUS и устранению неисправностей.
Руководство по программированию VLT
•
PROFIBUS DP MCA 101 содержит информацию о
конфигурировании системы, управлении
преобразователем частоты, доступе к его
параметрам, его программировании и
устранению неисправностей. В руководстве
также приведены примеры применения.
Служебная программа VLT® Motion Control Tool
•
MCT 10 позволяет пользователю настраивать
преобразователь частоты с ПК под
управлением ОС Windows™.
®
®
LOP описывает
®
®
LCP описывает
®
®
Техническая и аттестационная документация
представлена в Интернете по адресу vlt-
drives.danfoss.com/Support/Service/.
Энергосберегающее ПО Danfoss VLT® Energy Box можно
загрузить с веб-сайта www.danfoss.com/BusinessAreas/
DrivesSolutionsв разделе загрузок ПО для ПК.
1.3 Версия документа и программного
обеспечения
Данное руководство регулярно пересматривается и
обновляется. Все предложения по его улучшению будут
приняты и рассмотрены. В Таблица 1.1 указаны версия
документа и соответствующая версия ПО.
Версию ПО преобразователя частоты можно посмотреть
в параметре параметр 15-43 Версия ПО.
Редакция Комментарии Версия ПО
Доступно обновление программного
MG03N2xx
Таблица 1.1 Версия документа и программного обеспечения
Символы, сокращения и определения
1.4
В этом руководстве используются следующие символы.
обеспечения
PROFIBUS.
5,00
ВНИМАНИЕ!
Указывает на потенциально опасную ситуацию, при
которой существует риск летального исхода или
серьезных травм.
ПРЕДУПРЕЖДЕНИЕ
Указывает на потенциально опасную ситуацию, при
которой существует риск получения незначительных
травм или травм средней тяжести. Также может
использоваться для обозначения потенциально
небезопасных действий.
УВЕДОМЛЕНИЕ
Указывает на важную информацию, в том числе о
такой ситуации, которая может привести к
повреждению оборудования или другой
собственности.
1 1
Программное обеспечение Danfoss VLT® Energy
•
Box используется для расчета характеристик
энергии в системах HVAC.
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 5
Page 8
Введение
VLT® DriveMotor FCP 106/FCM 106
11
60° AVM Aсинхронная векторная модуляция 60°
A Ампер
AC Переменный ток
AD Электростатический разряд через воздух
AOЭ Автоматическая оптимизация
энергопотребления
AI Аналоговый вход
AIC Ампер тока отключения
ААД Автоматическая адаптация двигателя
AWG Американский сортамент проводов
°C
CB Автоматический выключатель
CD Постоянный разряд
CDM Комплектный модуль привода: преобразователь
CE Соответствие стандартам безопасности
CM Синфазный режим
CT Постоянный крутящий момент
DC Постоянный ток
DI Цифровой вход
DM Дифференциальный режим
D-TYPE В зависимости от типа привода
ЭМС Электромагнитная совместимость
ЭДС Электродвижущая сила
ЭТР Электронное тепловое реле
°F
f
JOG
f
M
f
MAX
f
MIN
Градусы Цельсия
частоты, секция питания и вспомогательные
устройства
Евросоюза
Градусы Фаренгейта
Частота двигателя в случае активизации
функции фиксации частоты
Частота двигателя
Максимальная выходная частота, выдаваемая
на выходе преобразователя частоты
Минимальная частота двигателя на выходе
LCP Local control panel = панель местного
управления
Младший
Младший значащий бит
бит
м метр
мА Миллиампер
MCM, mcm Млн круглых мил
MCT Служебная программа управления движением
мГ Индуктивность в миллигенри
мм Миллиметр
мс Миллисекунда
Старший бит Старший значащий бит
η
VLT
КПД преобразователя частоты определяется
отношением выходной мощности и входной
мощности
нФ Емкость в нанофарадах
NLCP Цифровая панель местного управления
Н·м Ньютон-метр
NO Нормальная перегрузка (NO)
n
s
Оперативны
е/
Синхронная скорость двигателя.
Оперативные параметры вступают в действие
сразу же после изменения их значений
автономные
параметры
P
торм., длит.
Номинальная мощность тормозного резистора
(средняя за время длительного торможения)
PCB Печатная плата
PCD Технологические данные
PDS Система силового привода: CDM и двигатель
PELV Защитное сверхнизкое напряжение
P
m
Номинальная выходная мощность
преобразователя частоты при высокой
перегрузке
P
M,N
Номинальная мощность двигателя
Двигатель сПМС двигателем с постоянными магнитами
преобразователя частоты
f
M,N
FC Преобразователь частоты (привод)
FSP Насос с фиксированной скоростью
HIPERFACE®HIPERFACE® является зарегистрированным
HO Повышенная перегрузка (HO)
л. с. Мощность в лошадиных силах
HTL Импульсы энкодера HTL (10–30 В) —
Гц Герц
I
INV
I
LIM
I
M,N
I
VLT,MAX
I
VLT,N
кГц Килогерц
Номинальная частота двигателя
товарным знаком компании Stegmann
высоковольтная транзистор-транзисторная
логика (High-voltage Transistor Logic, HTL)
Номинальный выходной ток инвертора
Предел по току
Номинальный ток двигателя
Максимальный выходной ток
Номинальный выходной ток, обеспечиваемый
преобразователем частоты
ПИДрегулятор
процесса
Пропорционально-интегрально-
дифференциальный регулятор, поддерживает
необходимую скорость, давление, температуру
и т. д.
R
торм., ном.
Номинальное сопротивление резистора, при
котором обеспечивается мощность торможения
на валу двигателя, равная 150/160 %, в течение
1 минуты.
RCD Датчик остаточного тока
Рекуперация Клеммы рекуперации
R
мин.
Минимальное допустимое преобразователем
частоты значение сопротивления тормозного
резистора
эфф. Эффективное (среднеквадратическое) значение
об/мин Число оборотов в минуту
R
рек.
Рекомендуемое сопротивление тормозных
резисторов Danfoss
с Секунда
SCCR Номинальный ток короткого замыкания
6 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 9
Введение Руководство по программированию
SFAVM Асинхронная векторная модуляция с
ориентацией по магнитному потоку статора
STW Слово состояния
SMPS Импульсный источник электропитания
THD Общее гармоническое искажение
T
LIM
ТТЛ Импульсы энкодера TTL (5 В) — транзисторная
U
M,N
Предел момента
логика
Номинальное напряжение двигателя
Соответстви
е UL
В Вольты
VSP Насос с переменной скоростью
VT Переменный крутящий момент
+
VVC
Таблица 1.2 Сокращения и символы
Underwriters Laboratories (Организация в США,
занимающаяся сертификацией в области
безопасности оборудования)
Расширенное векторное управление
напряжением
1 1
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 7
Page 10
195NA507.11
L1
L2
L3
PE
3-phase
power
input
+10 V DC
0–10 V DC 0/4–20 mA
0/4–20 mA
0–10 V DC -
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN/OUT)
42 0/4–20 mA A OUT/DIG OUT
45 0/4–20 mA A OUT/DIG OUT
12 (+24 V OUT)
18 (DIGI IN)
19 (DIGI IN)
20 (COM D IN)
27 (DIGI IN)
29 (DIGI IN)
PROFIBUS
MCM
24 V (NPN)
0 V (PNP)
24 V (NPN)
0 V (PNP)
24 V (NPN)
0 V (PNP)
24 V (NPN)
0 V (PNP)
Bus ter.
RS485
Interface
(N RS485) 69
(P RS485) 68
(Com RS485) 61
RS485
(PNP)-Source
(NPN)-Sink
Bus ter.
1 2
ON
ON=Terminated
OFF=Unterminated
03
02
01
relay 1
240 V AC 3A
06
05
04
relay 2
240 V AC 3A
UDC+
UDC-
PE
Motor
U
V
W
T1
T2
Thermistor
located in
motor
Group 5-*
Located in
motor block
Введение
VLT® DriveMotor FCP 106/FCM 106
11
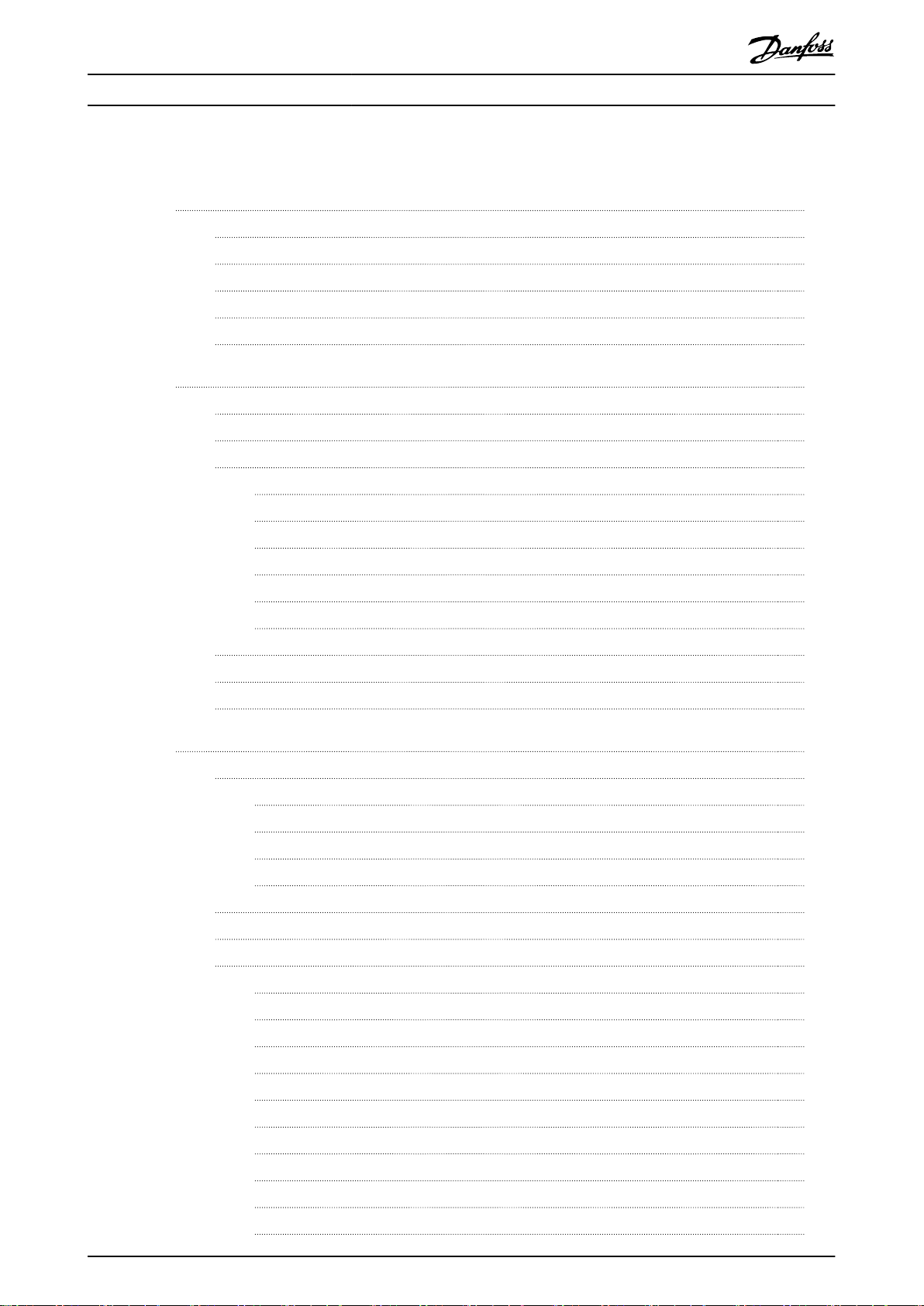
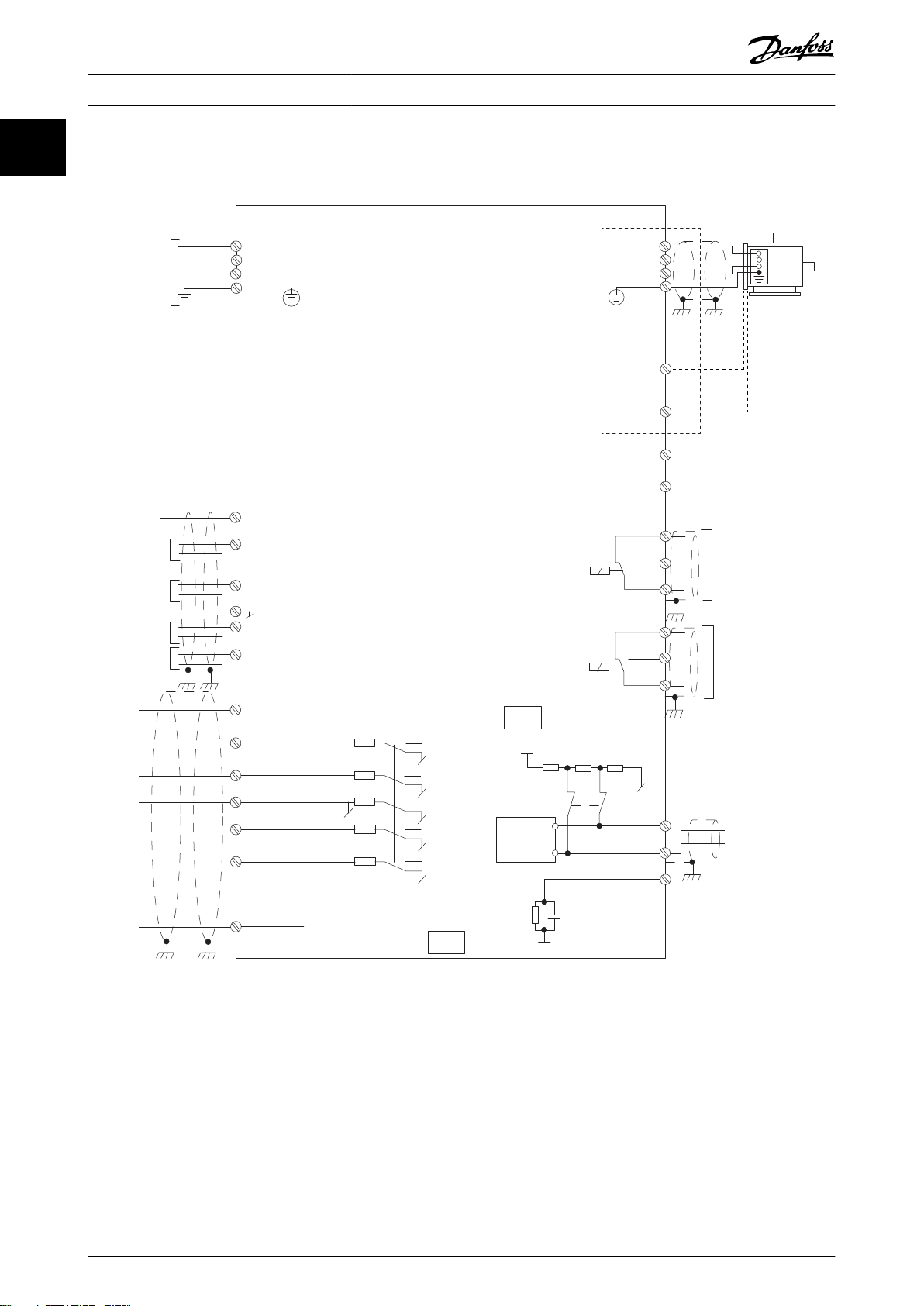
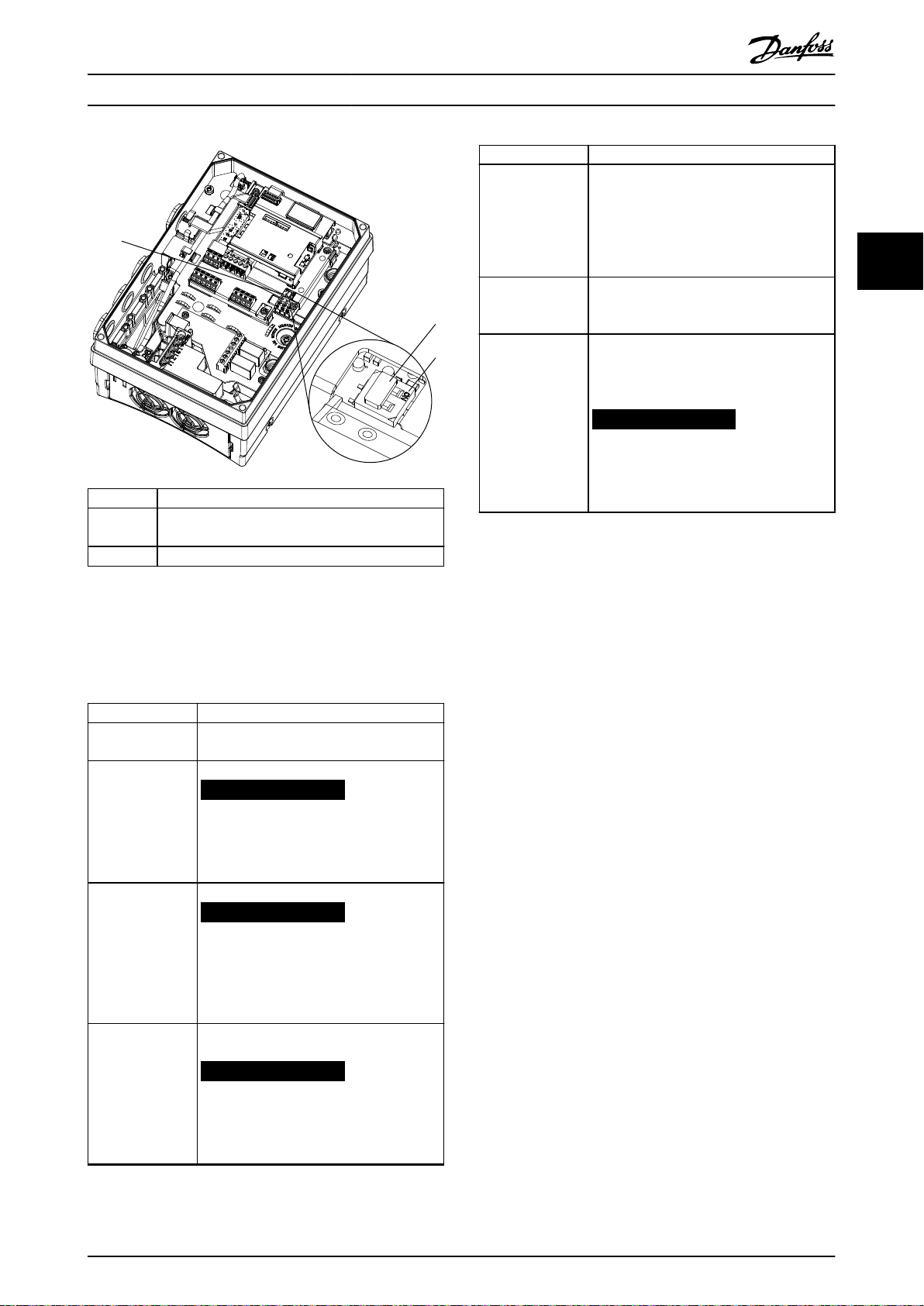
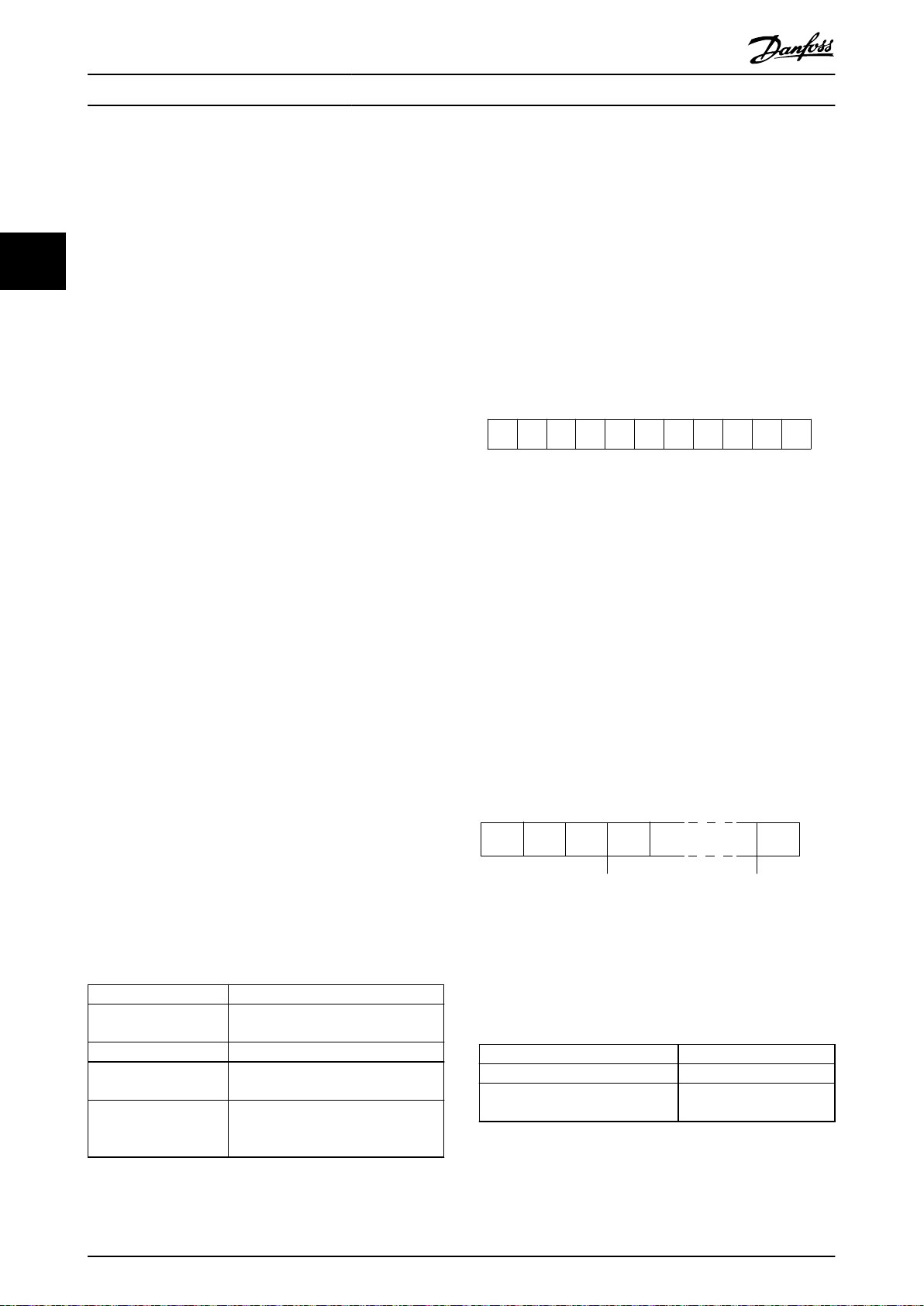
1.5 Обзор электрических клемм
Рисунок 1.1 Обзор электрических клемм
8 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 11
130BD512.10
Auto
on
Reset
Hand
on
O
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
0.00 kW
O Remote Stop
0.0Hz
On
Alarm
Warn.
A
0.00 A
0.0 %
B
C
D
2605 kWh
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18 19 20 21
Программирование Руководство по программированию
2 Программирование
2.1 Удаленное программирование c
помощью средства
конфигурирования MCT 10
Преобразователь частоты может быть
запрограммирован с LCP или ПК через
коммуникационный порт RS485 с помощью средства
конфигурирования Средство конфигурирования MCT 10.
Более подробные сведения об этом программном
обеспечении см. в глава 1.2 Дополнительные ресурсы.
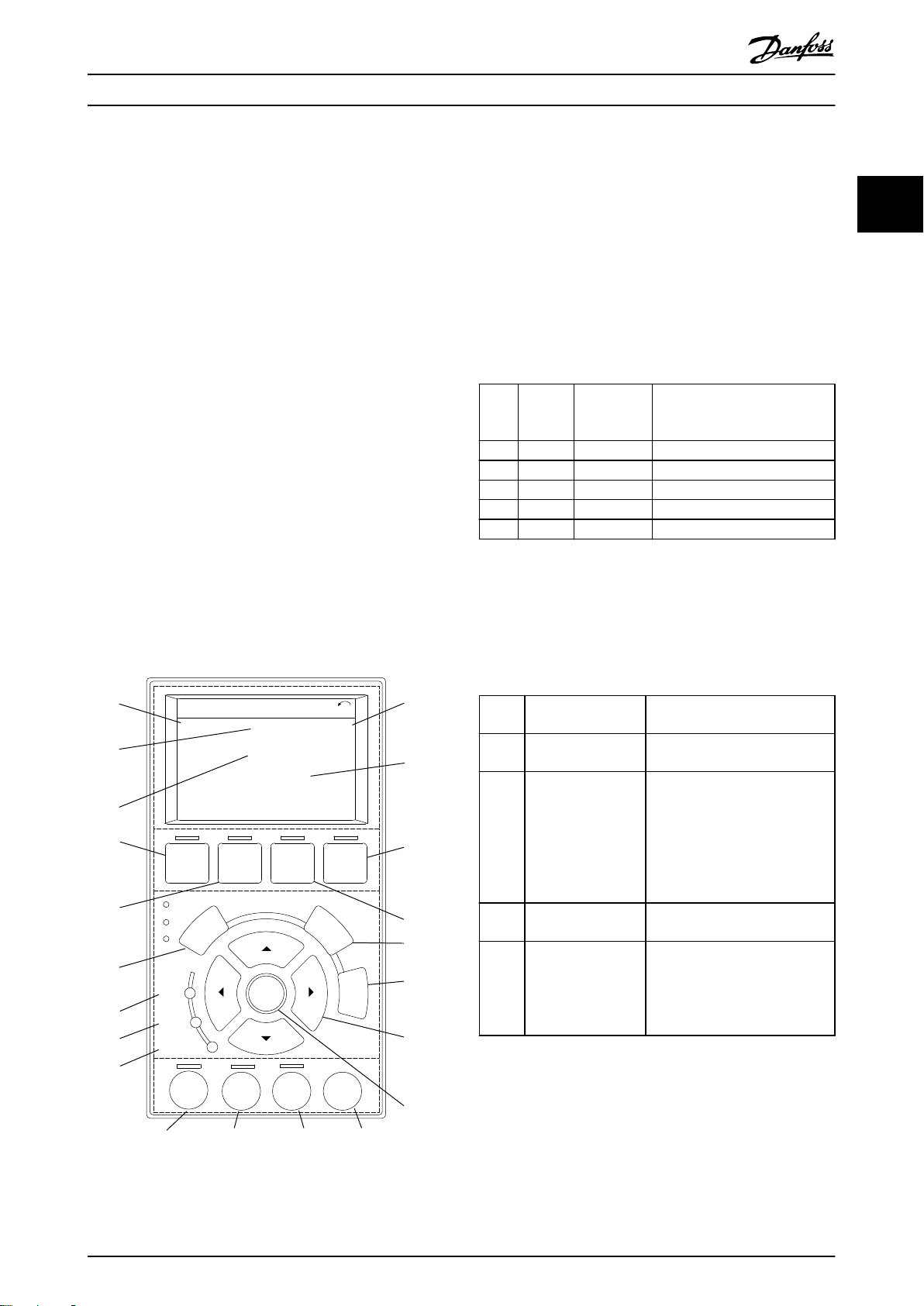
2.2 Графическая панель местного
управления (GLCP)
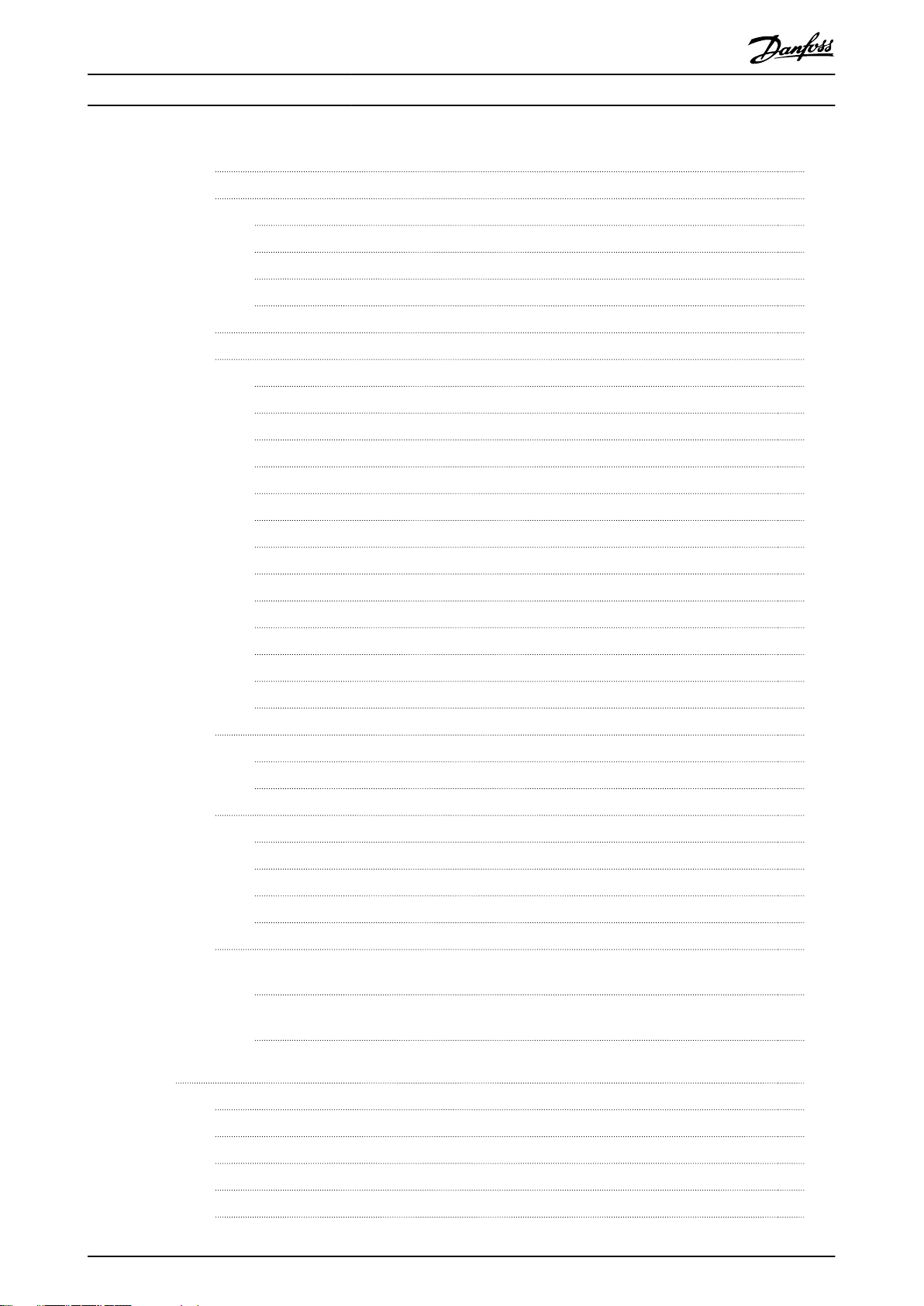
LCP разделена на 4 функциональные зоны.
А. Буквенно-цифровое отображение
информации.
B. Выбор меню.
C. Кнопки навигации и световые индикаторы
(светодиоды).
D. Кнопки управления и световые индикаторы
(светодиоды).
A. Область экрана
Дисплей включается при подключении преобразователя
частоты к сети питания, клемме шины постоянного тока
или внешнему источнику питания 24 В.
Отображаемая на LCP информация может быть
настроена в соответствии с требованиями конкретного
применения. Выберите дополнительное оборудование в
быстром меню Q3-13 Настройки дисплея..
Вы-
Дисплей Номер
носк
а
1 1.1 0-20 Задание %
2 1.2 0-21 Ток двигателя
3 1.3 0-22 Мощность [кВт]
4 2 0-23 Частота
5 3 0-24 Счетчик кВтч
Таблица 2.1 Пояснения к Рисунок 2.1
параметра
Настройка по умолчанию
B. Кнопки меню дисплея.
Кнопки меню обеспечивают доступ к установке
параметров, позволяют переключать режимы дисплея
состояния во время работы и просматривать данные
журнала отказов.
2 2
ВыноскаКнопка Функция
6 Status (Состояние) Выводит на дисплей рабочую
информацию.
7 Quick menu
(Быстрое меню)
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 9
Рисунок 2.1 Панель местного управления (LCP)
8 Main Menu (Главное
меню)
9 Alarm Log (Журнал
аварий)
Таблица 2.2 Пояснения к Рисунок 2.1
Позволяет получить доступ к
инструкциям по
программированию параметров
для выполнения первичной
настройки, а также подробным
инструкциям для различных
применений.
Открывает доступ ко всем
параметрам программирования.
Отображает список текущих
предупреждений, 10 последних
аварийных сигналов и журнал
учета технического
обслуживания.
Page 12
Программирование
VLT® DriveMotor FCP 106/FCM 106
C. Навигационные кнопки и световые индикаторы
(светодиоды)
Кнопки навигации используются для программирования
22
функций и перемещения курсора на дисплее. При
помощи навигационных кнопок можно также
D. Кнопки управления и световые индикаторы
(светодиоды)
Кнопки управления находятся в нижней части LCP.
ВыноскаКнопка Функция
контролировать скорость в режиме местного
управления. В этой зоне также расположены три
световых индикатора состояния преобразователя
частоты.
ВыноскаКнопка Функция
10 Back (Назад) Позволяет возвратиться к
предыдущему шагу или списку в
структуре меню.
11 Cancel
(Отмена)
12 Info
(Информация)
13 Кнопки
навигации
14 OK Нажмите для доступа к группам
Таблица 2.3 Пояснения к Рисунок 2.1
Выноска
15 ON Зеленый Светодиод включения ON
16 WARN Желтый При возникновении условия
17 ALARM Красный В случае неисправности
ИндикаторЦвет Функция
Таблица 2.4 Пояснения к Рисунок 2.1
Аннулирует последнее внесенное
изменение или команду, пока
режим дисплея не изменен.
Нажмите для просмотра описания
отображаемой функции.
Позволяют перемещаться по
пунктам меню.
параметров или для
подтверждения выбранных
значений.
(ВКЛ.) горит, когда на
преобразователь частоты
поступает напряжение
питания от сети, с шины
постоянного тока или от
внешнего источника питания
24 В.
предупреждения загорается
желтый светодиод
предупреждения WARN
(ПРЕДУПР.), и на дисплее
появляется текст,
описывающий проблему.
начинает мигать красный
светодиод и отображается
текстовое описание
аварийного сигнала.
18 Hand On
(Ручной
режим)
19 O (Выкл.) Останавливает двигатель без
20 Auto On
(Автоматичес
кий режим)
21 Reset (Сброс) Выполняет сброс преобразователя
Таблица 2.5 Пояснения к Рисунок 2.1
УВЕДОМЛЕНИЕ
Для регулировки контрастности изображения
нажмите [Status] и [▲]/[▼].
2.3 Меню GLCP
2.3.1 Меню состояния
В меню состояния для выбора доступны следующие
варианты:
Частота двигателя [Гц],
•
параметр 16-13 Частота
Ток двигателя [A], параметр 16-14 Ток
•
двигателя.
Задание скорости двигателя в процентах [%],
•
параметр 16-02 Задание %.
Обратная связь, параметр 16-52 Обратная
•
связь [ед. изм.].
Для параметр 16-10 Мощность [кВт]
•
мощность двигателя указаны в кВт, для
Запускает преобразователь частоты в
режиме местного управления.
Внешний сигнал останова,
•
подаваемый входом управления
или посредством
последовательной связи, блокирует
включенный режим местного
управления.
отключения питания преобразователя
частоты.
Переводит систему в режим
дистанционного управления.
Отвечает на внешнюю команду
•
запуска, переданную с клемм
управления или посредством
последовательной связи.
частоты вручную после устранения
сбоя.
параметр 16-11 Мощность [л. с.] — в л. с. Если
в параметр 0-03 Региональные установки
выбрано значение [1] Северная Америка,
мощность двигателя указывается в л. с., а не в
кВт.
10 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 13
ПЧ
+24 В
ЦИФ ВХ
ЦИФ ВХ
ЦИФ ВХ
ЦИФ ВХ
КОМ ЦИФ ВХ
АН ВЫХ / ЦИФ ВЫХ
АН ВЫХ / ЦИФ ВЫХ
18
19
27
29
42
55
50
53
54
20
12
01
02
03
04
05
06
R2
R1
0-10 В
Задание
Пуск
+10 В
АН ВХ
АН ВХ
КОМ
130BB674.10
45
+
-
Программирование Руководство по программированию
Показания по выбору пользователя
•
параметр 16-09 Показ.по выб.польз..
2.3.2 Быстрое меню
Быстрое меню используется для программирования
наиболее распространенных функций. Быстрое меню
содержит следующие пункты:
Мастер настройки параметров применений с
•
разомкнутым контуром. Подробнее см.
глава 2.3.4 Настройка параметров применений
с разомкнутым контуром.
Мастер настройки параметров применений с
•
замкнутым контуром. Для получения
дополнительной информации см.
глава 2.3.5 Мастер настройки параметров
применений с замкнутым контуром.
Настройка двигателя. Для получения
•
дополнительной информации см.
глава 2.3.6 Настройка двигателя с помощью
быстрого меню.
Внесенные изменения
•
2.3.3 Главное меню
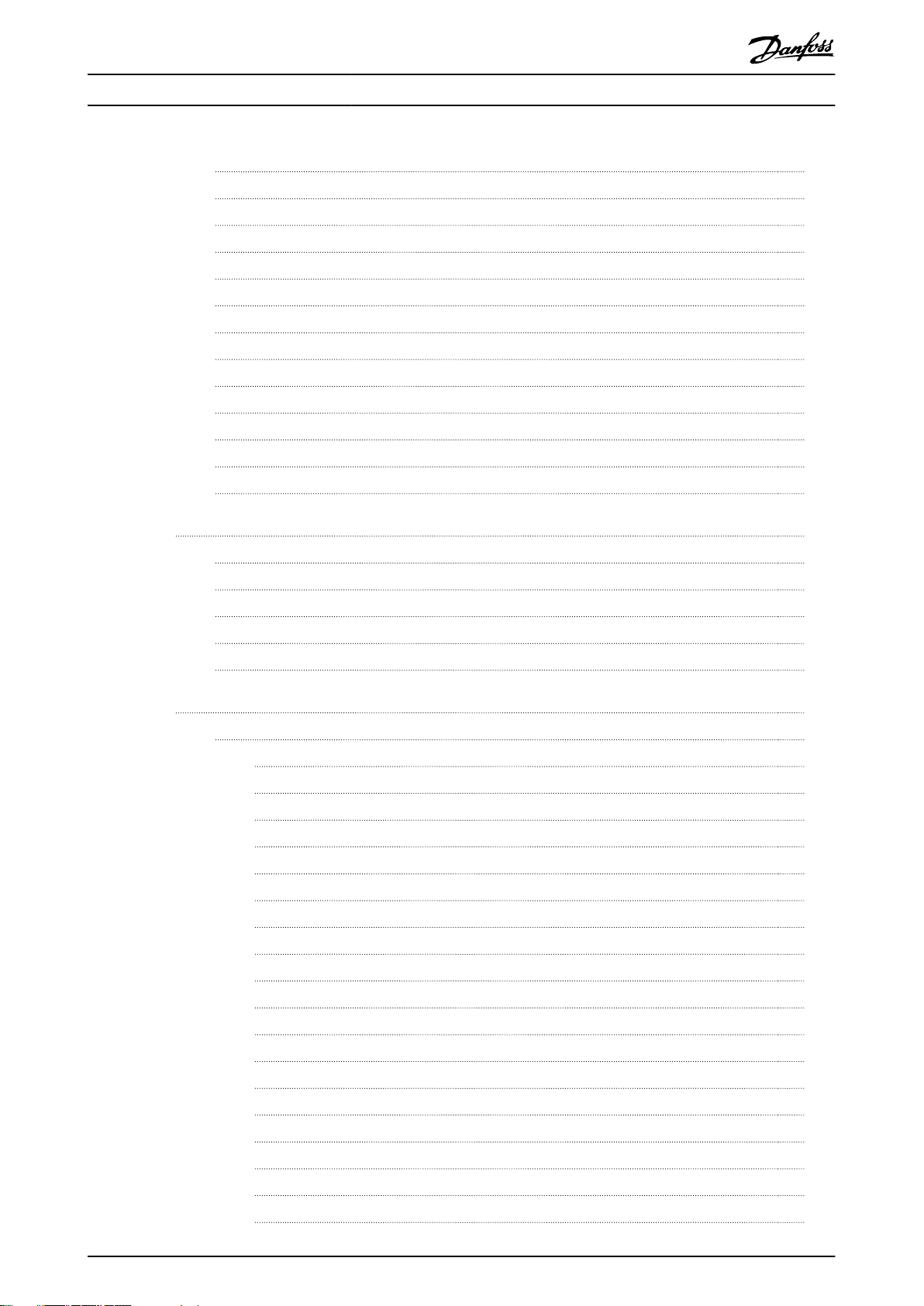
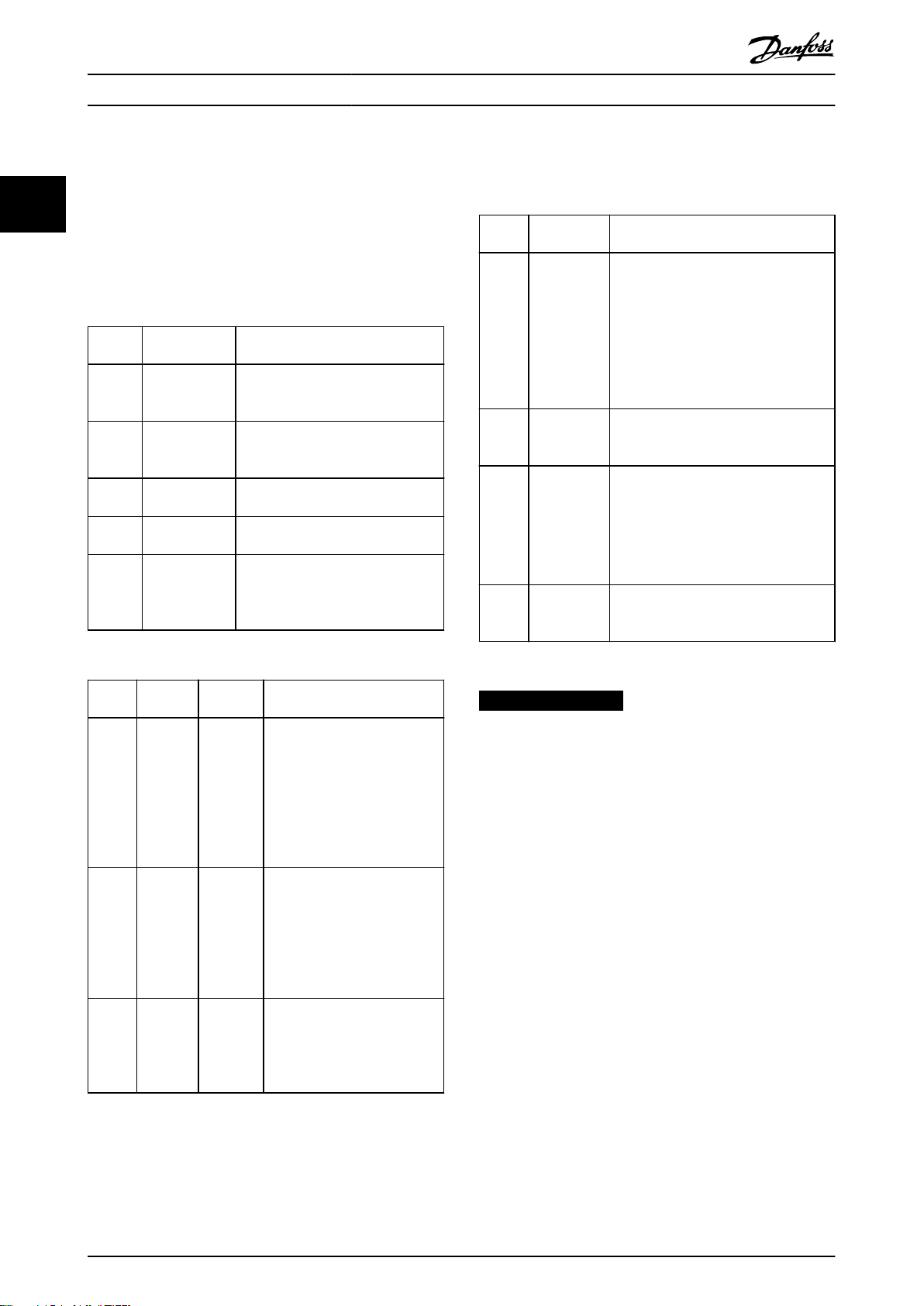
2.3.4 Настройка параметров применений
с разомкнутым контуром
Этот раздел мастера настройки параметров понятно и
пошагово инструктирует специалиста в ходе настройки
преобразователя частоты в отношении параметров
разомкнутого контура. Применение с разомкнутым
контуром не использует сигнал обратной связи от
процесса.
Рисунок 2.2 Принципиальная схема проводки для
применения с разомкнутым контуром
2 2
Главное меню используется для доступа ко всем
параметрам и программирования всех параметров.
Параметры в главном меню свободно открываются,
только если не установлен пароль с помощью
параметр 0-60 Пароль главного меню.
Для большинства применений постоянный доступ к
параметрам главного меню не требуется. Наиболее
простой и удобный способ доступа к стандартным
параметрам — использовать быстрое меню.
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 11
Page 14
195NA416.11
International
4-12
Motor Speed low Limit
Hz
4-14
Motor Speed high Limit
Hz
3-41
Ramp 1 ramp-up time
s
3-42
Ramp 1 ramp-down Time
s
1-73 Active
Flying start?
Disable
1-20
Motor Power
1-22
Motor Voltage
1-23
Motor frequency
1-24
Motor current
1-25
Motor nominal speed
0-03
Regional Settings
380-440V/50Hz
Grid Type
Asynchronous motor
Asynchronous
1-10
Motor Type
1-24
Motor current
1-25
Motor nominal speed
1-26
Motor Cont. Rated Torque
1-30
Stator resistance
1-39
Motor poles
1-40
Back EMF at 1000 rpm
1-37
d-axis inductance
6 - 10 T53 low Voltage
V
6 - 11 T53 high Voltage
V
6 - 12 T53 Low Current
A
6 - 13 T53 High Current
A
Current
Voltage
AMA Failed
0.0 Hz
0.0 kW
Wizard completed
Press OK to accept
1-29
Automatic Motor Adaption
O
Auto Motor Adapt OK
Press OK
5 - 40 Function of Relay 2
No function
5 - 40 Function of Relay 1
[0] No function
3-03
Max Reference
Hz
3-02
Min Reference
Hz
AMA running
-----
AMA failed
Perform AMA
(Do not perform AMA)
AMA OK
6 - 19 T53 Mode
Current
3.8
A
3000
RPM
5.4
Nm
0.65
Ohms
8
57
V
5
mH
1.50
kW
0050
V
0050
Hz
04.66
A
1420
RPM
[0]
Motor type = Asynchronous
Motor type = PM motor
0000
0050
0003
0003
04.66
13.30
0050
0220
0000
0050
[12]
[0]
[0]
[0]
[0]
[1]
[0]
0-06
PM motor
1-38 q-axis Inductance (Lq)
5
mH
1-44 Current at Min Inductance for d-axis
100
%
Current at Min Inductance for q-axis
100
%
1-70 PM Start Mode
Rotor Detection
[0]
1-46 Position Detection Gain
%
O
100
30-22 Locked Rotor Detection
[0]
s
30-23 Locked Rotor Detection Time[s]
0.10
4-19 Max Output Frequency
65
Hz
Motor Type = IPM
IPM Type = Sat.
IPM Type = non-Sat.
Программирование
VLT® DriveMotor FCP 106/FCM 106
22
Рисунок 2.3 Настройка параметров применений с разомкнутым контуром
12 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 15
6-29 Terminal 54 Mode
[1]
Voltage
6-25 T54 high Feedback
0050
Hz
20-94 PI integral time
0020.00
s
Current
Voltage
This dialog is set to
[1] Analog input 54
20-00 Feedback 1 source
[1]
Analog input 54
3-10 Preset reference [0]
0.00
3-03 Max Reference
50.00
3-02 Min Reference
0.00
Asynchronous Motor
1-73 Flying Start
[0]
No
1-22 Motor Voltage
400
V
1-24 Motor Current
04.66
A
1-25 Motor nominal speed
1420
RPM
3-41 Ramp 1 ramp-up time
0003
s
3-42 Ramp1 ramp-down time
0003
s
0-06 Grid Type
4-12 Motor speed low limit
0016
Hz
4-13 Motor speed high limit
0050
Hz
195NA417.11
1-20 Motor Power
1.10
kW
1-23 Motor Frequency
50
Hz
6-22 T54 Low Current
A
6-24 T54 low Feedback
0016
Hz
6-23 T54 high Current
13.30
A
6-25 T54 high Feedback
0050
0.01
s
20-81 PI Normal/Inverse Control
[0]
Normal
20-83 PI Normal/Inverse Control
0050
Hz
20-93 PI Proportional Gain
00.50
1-29 Automatic Motor Adaption
[0]
O
6-20 T54 low Voltage
0050
V
6-24 T54 low Feedback
0016
Hz
6-21 T54 high Voltage
0220
V
6-26
T54 Filter time const.
1-00 Conguration Mode
[3]
Closed Loop
0-03 Regional Settings
[0]
Power kW/50 Hz
3-16 Reference Source 2
[0]
No Operation
1-10 Motor Type
[0]
Asynchronous
[12]]
1-30 Stator Resistance
0.65
Ohms
1-25 Motor Nominal Speed
3000
RPM
1-24 Motor Current
3.8
A
1-26 Motor Cont. Rated Torque
5.4
Nm
1-38 q-axis inductance(Lq)
5
mH
4-19 Max Ouput Frequency
0065
Hz
1-40 Back EMF at 1000 RPM
57
V
PM Motor
1-39 Motor Poles
8
%
04.66
Hz
MotorType = Asynchronous
MotorType = PM Motor
Motor Type = IPM
IPM Type = Sat.
IPM Type = non-Sat.
1-44 d-axis Inductance Sat. (LdSat)
(1-70) PM Start Mode
Rotor Detection
[0]
1-46 Position Detection Gain
%
O
100
30-22 Locked Rotor Detection
[0]
s
30-23 Locked Rotor Detection Time[s]
0.10
5
mH
(1-45) q-axis Inductance Sat. (LqSat)
5
mH
(1-48) Current at Min Inductance for d-axis
100
%
1-49 Current at Min Inductance for q-axis
100
%
380-440V/50Hz
This dialog is set to
[0] No Operation
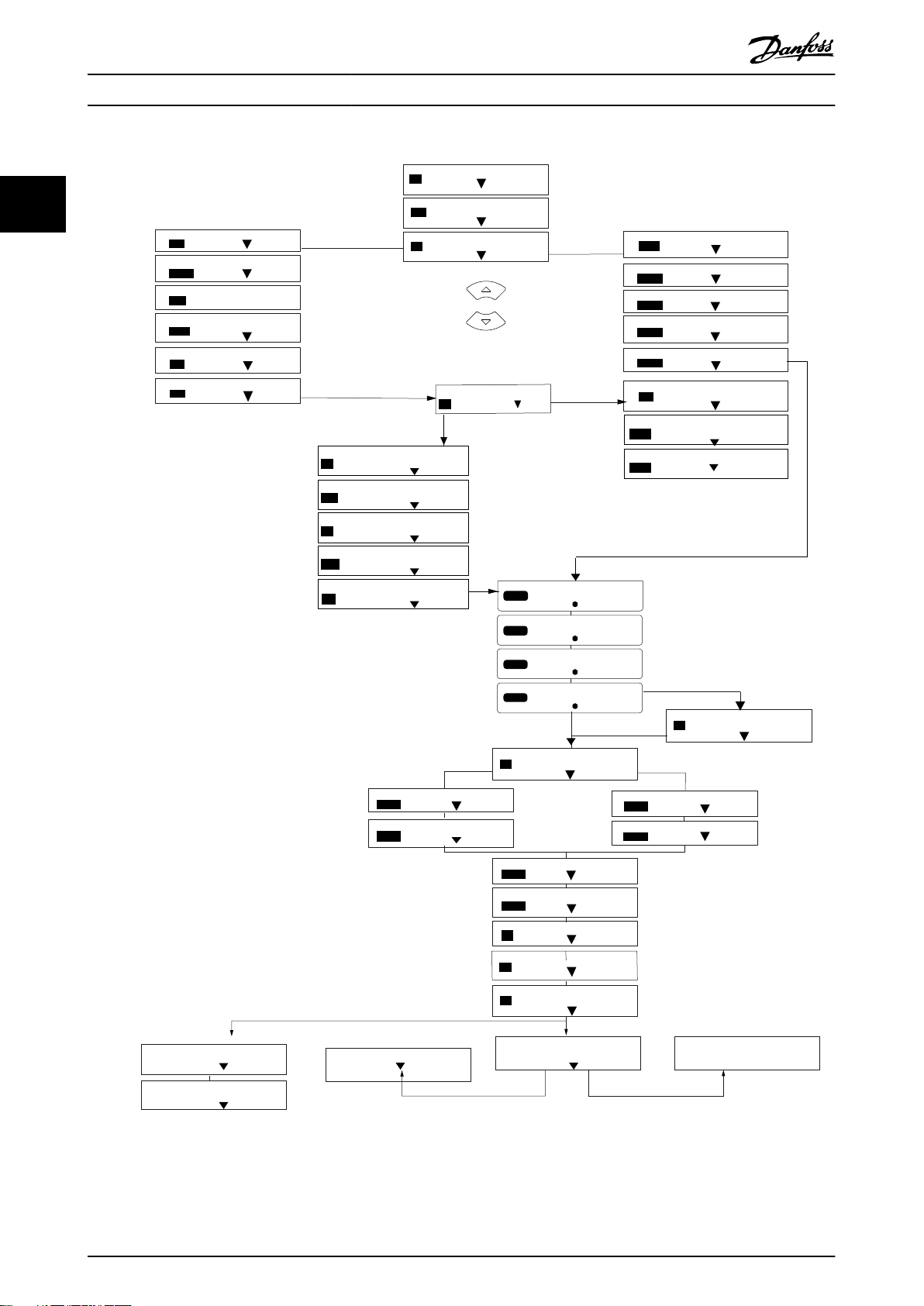
Программирование Руководство по программированию
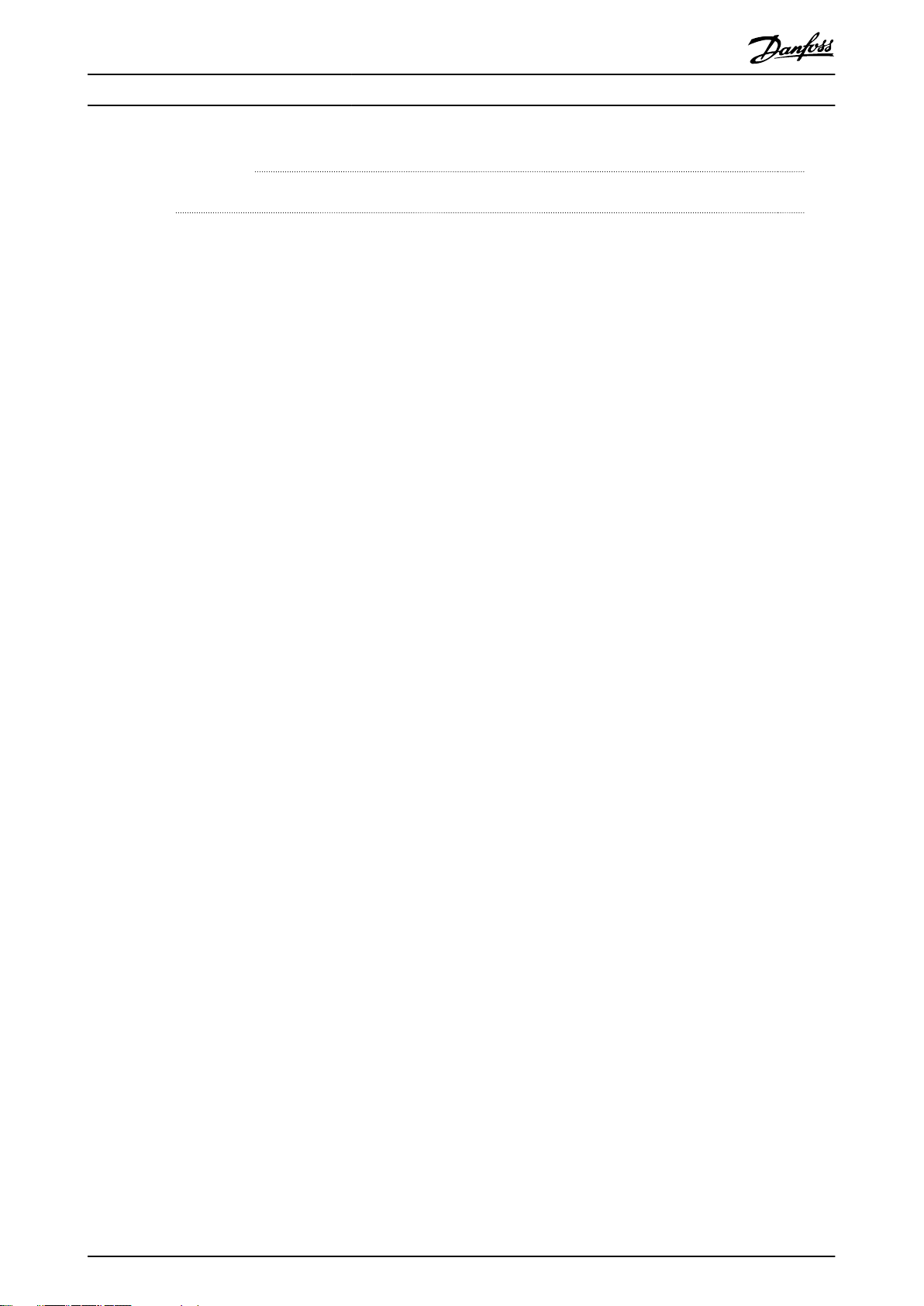
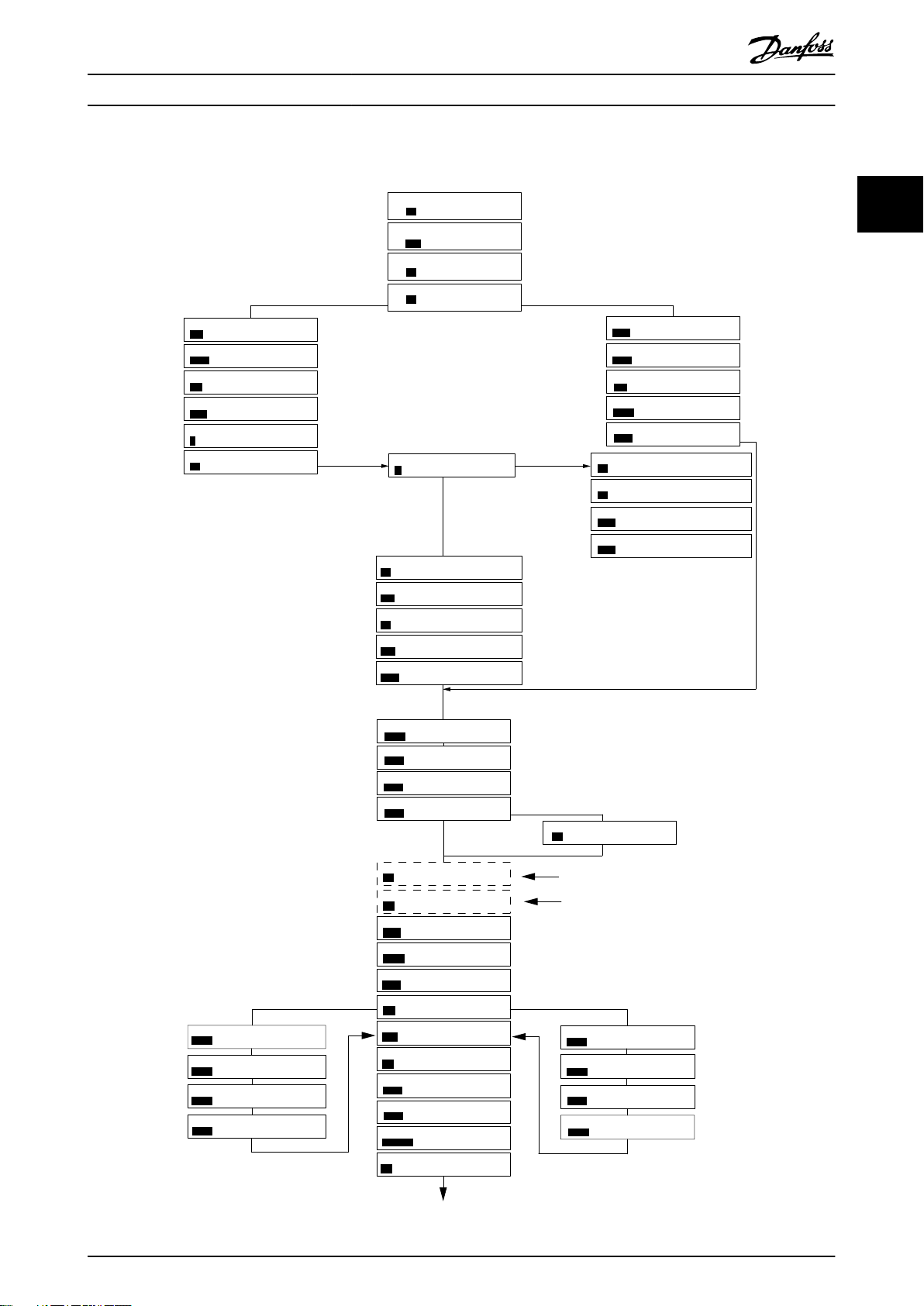
2.3.5 Мастер настройки параметров применений с замкнутым контуром
2 2
Рисунок 2.4 Мастер настройки параметров замкнутого контура
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 13
Page 16
Asynchronous Motor
1-73 Flying Start
[0]
No
1-22 Motor Voltage
400
V
1-24 Motor Current
04.66
A
1-25 Motor nominal speed
1420
RPM
3-41 Ramp 1 ramp-up time
0003
s
3-42 Ramp1 ramp-down time
0003
s
0-06 Grid Type
4-12 Motor speed low limit
0016
Hz
4-13 Motor speed high limit
0050
Hz
195NA462.11
1-20 Motor Power
1.10
kW
1-23 Motor Frequency
50
Hz
1-00
[3]
Closed Loop
0-03 Regional Settings
[0]
International
1-10 Motor Type
[0]
Asynchronous
[12]]
1-30 Stator Resistance
0.65
Ohms
1-25 Motor Nominal Speed
3000
RPM
1-24 Motor Current
3.8
A
1-26 Motor Cont. Rated Torque
5.4
Nm
1-38 q-axis inductance(Lq)
5
mH
4-19 Max Ouput Frequency
0065
Hz
1-40 Back EMF at 1000 RPM
57
V
PM Motor
1-39 Motor Poles
8
MotorType = Asynchronous
MotorType = PM Motor
Motor Type = IPM
IPM Type = Sat.
IPM Type = non-Sat.
1-44 d-axis Inductance Sat. (LdSat)
(1-70) PM Start Mode
Rotor Detection
[0]
1-46 Position Detection Gai n
%
100
30-22 Locked Rotor Detecti on
[0]
s
30-23 Locked Rotor Detecti on Time[s]
0.10
5
mH
(1-45) q-axis Inductance Sat. (LqSat)
5
mH
(1-48) Current at Min Indu ctance for d-axis
100
%
1-49 Current at Min Induct ance for q-axis
100
%
380-440V/50Hz
Программирование
VLT® DriveMotor FCP 106/FCM 106
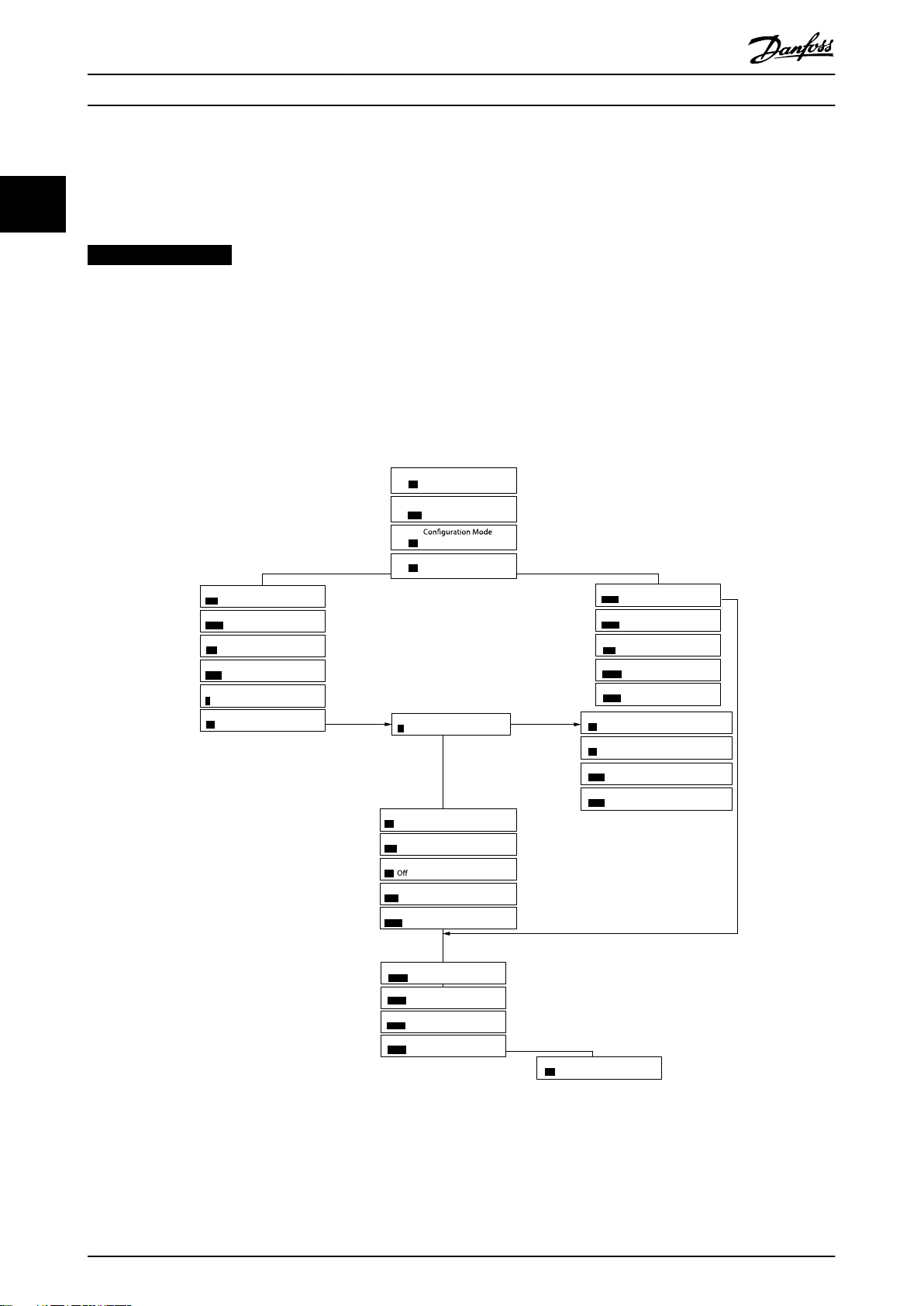
2.3.6 Настройка двигателя с помощью быстрого меню
22
двигателя.
УВЕДОМЛЕНИЕ
ЗАЩИТА ДВИГАТЕЛЯ ОТ ПЕРЕГРУЗКИ
Рекомендуется использовать тепловую защиту двигателя. Охлаждение от встроенного вентилятора двигателя
часто является недостаточным, особенно при работе на низкой скорости.
Используйте PTC. См. главу Подключение двигателя в Инструкциях по эксплуатации VLT® DriveMotor FCP
•
106/FCM 106 или
включите тепловую защиту двигателя, установив для параметр 1-90 Тепловая защита двигателя
•
значение [4] ЭТР: отключение 1.
Быстрое меню настройки параметров двигателя проводит специалиста через настройку требуемых параметров
Рисунок 2.5 Настройка двигателя с помощью быстрого меню
14 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 17

Программирование Руководство по программированию
2.4 Программирование параметров
Процедура:
1. Нажимайте кнопку [Menu] (Меню) до
перемещения индикатора на дисплее на строку
нужного меню: Быстрое меню или Главное
меню.
2. Для перехода между группами параметров
используйте кнопки со стрелками [▲] [▼].
3. Чтобы выбрать группу параметров, нажмите
[OK].
4. Для перехода между параметрами в группе
используйте кнопки [▲] [▼].
5. Чтобы выбрать параметр, нажмите [OK].
6. Чтобы изменить значение параметра,
используйте кнопки [▲] [▼] [▶].
7. Чтобы сохранить новое значение, нажмите
кнопку [OK]. Для отмены изменения, нажмите
[Back] (Назад).
8. Для возврата к предыдущему меню нажмите
[Back] (Назад).
Создание резервной копии и
2.5
копирование настроек параметров
УВЕДОМЛЕНИЕ
Перед созданием резервной копии или копированием
параметров остановите двигатель.
Сохранение данных в LCP
После завершения настройки преобразователя частоты
сохраните данные в LCP. Для создания резервной копии
можно также использовать ПК с Средство
конфигурирования MCT 10.
1. Перейдите к параметр 0-50 Копирование с LCP.
2. Нажмите [OK].
3. Выберите [1] Все в LCP.
4. Нажмите [OK].
Передача данных из LCP в преобразователь частоты
Подключите LCP к другому преобразователю частоты и
скопируйте в него значения параметров.
1. Перейдите к параметр 0-50 Копирование с LCP.
2. Нажмите [OK].
3. Выберите [2] Все из LCP.
4. Нажмите [OK].
Восстановление настроек по
2.6
умолчанию
Выберите режим инициализации, если требуется, для
остальных значений параметров.
Рекомендуемый порядок инициализации (с помощью
параметр 14-22 Режим работы).
Используйте этот способ, чтобы инициализировать
преобразователь частоты без сброса настроек связи.
1. Выберите параметр 14-22 Режим работы.
2. Нажмите [OK].
3. Выберите [2] Инициализация и нажмите [OK].
4. Отключите сетевое питание и подождите, пока
выключится дисплей.
5. Вновь подключите питание.
Настройки преобразователя частоты сброшены, за
исключением следующих параметров:
Параметр 0-03 Региональные установки.
•
Параметр 8-30 Протокол.
•
Параметр 8-31 Адрес.
•
Параметр 8-32 Скорость передачи данных.
•
Параметр 8-33 Биты контроля четности/
•
стоповые биты.
Параметр 8-35 Минимальная задержка реакции.
•
Параметр 8-36 Максимальная задержка
•
реакции.
Параметр 8-70 Вариант уст. BACnet.
•
Параметр 8-72 Макс. вед. устр-в MS/TP.
•
Параметр 8-73 Макс инф. фрейм MS/TP.
•
Параметр 8-74 Обслуж. "I-Am".
•
Параметр 8-75 Пароль инициализации.
•
Параметр 15-00 Время работы в часах.
•
Параметр 15-03 Power Up's (Кол-во включений
•
питания).
Параметр 15-04 Кол-во перегревов.
•
Параметр 15-05 Кол-во перенапряжений.
•
Параметр 15-30 Жур.авар: код ошибки.
•
Группа параметров 15-4* Идентиф. привода
•
Параметр 1-06 По часовой стрелке.
•
2 2
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 15
Page 18

Программирование
Инициализация в два касания
Используйте этот способ, чтобы инициализировать
преобразователь частоты со сбросом настроек связи.
22
1. Выключите питание преобразователя частоты.
2. Нажмите кнопки [OK] и [Menu] (Меню)
одновременно.
3. Включите питание преобразователя частоты,
одновременно удерживая указанные кнопки в
течение 10 с.
Настройки преобразователя частоты сброшены, за
исключением следующих параметров:
Параметр 0-03 Региональные установки.
•
Параметр 15-00 Время работы в часах.
•
Параметр 15-03 Power Up's (Кол-во включений
•
питания).
Параметр 15-04 Кол-во перегревов.
•
Параметр 15-05 Кол-во перенапряжений.
•
Группа параметров 15-4* Идентиф. привода
•
Как подтверждение инициализации параметров
отображается Аварийный сигнал 80, Привод иниц.
Нажмите кнопку [Reset] (Сброс).
VLT® DriveMotor FCP 106/FCM 106
16 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 19
drop cable
Монтаж и настройка RS485 Руководство по программированию
3 Монтаж и настройка RS485
3.1 RS485
3.1.1 Краткое описание
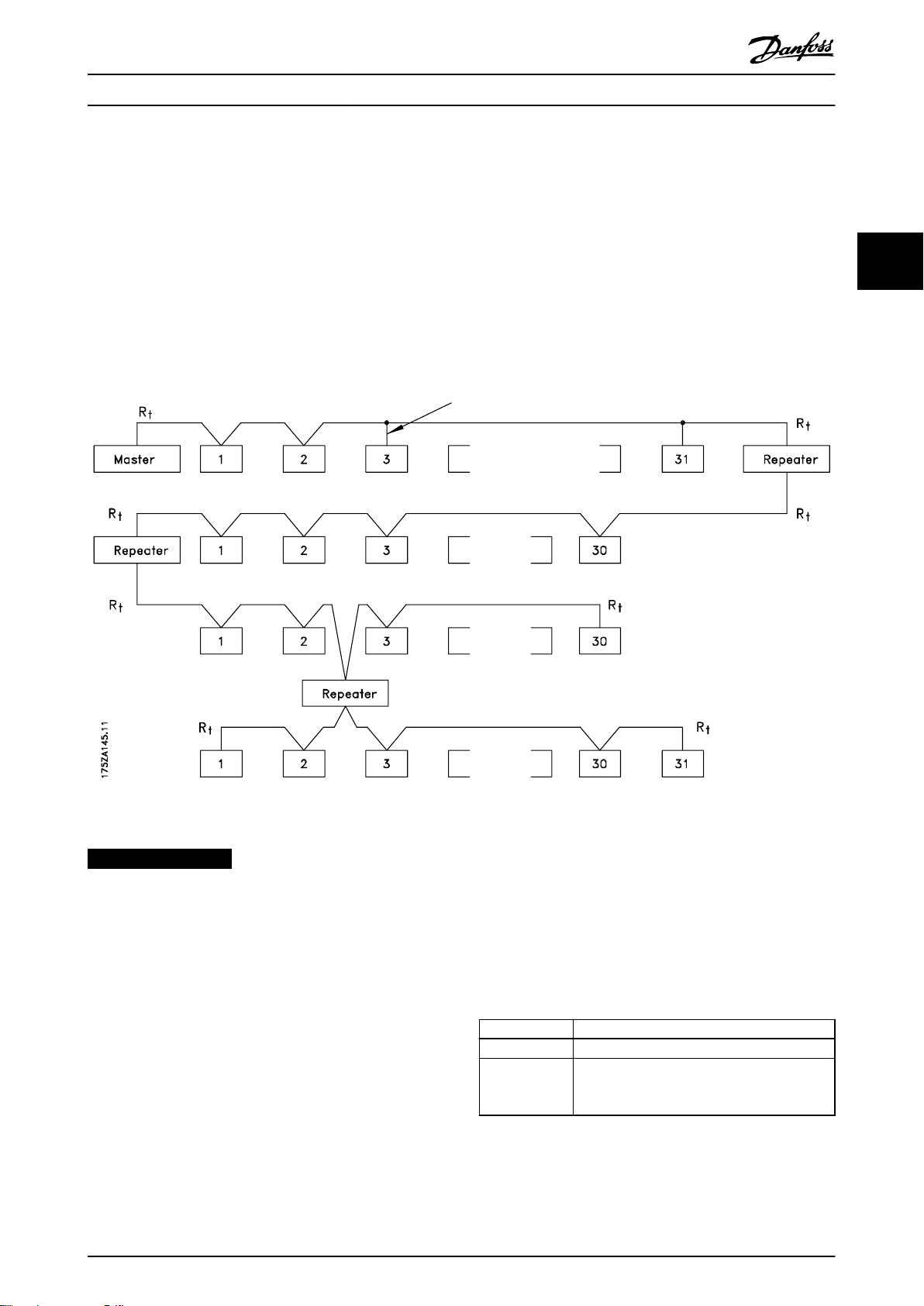
RS485 представляет собой двухпроводный интерфейс шины, совместимый с топологией многоабонентской сети. Узлы
сети можно подключать через шину, а также через ответвительные кабели от магистральной шины. Всего к одному
сегменту сети может быть подключено до 32 узлов.
Сегменты сети разделены ретрансляторами, см. Рисунок 3.1.
3 3
Рисунок 3.1 Интерфейс шины RS485
УВЕДОМЛЕНИЕ
Каждый ретранслятор действует как узел внутри
сегмента, в котором он установлен. Каждый узел в
составе данной сети должен иметь уникальный адрес,
не повторяющийся в остальных сегментах.
Подключите каждый сегмент на обоих концах,
используя либо конечные переключатели (S800)
преобразователей частоты, либо оконечную
резисторную схему со смещением. Для устройства шины
всегда используйте экранированную витую пару (STP) и
следуйте общепринятым способам монтажа.
Большое значение имеет обеспечение низкого
импеданса заземления экрана в каждом узле, в том
числе по высоким частотам. Подключите экран с
большой поверхностью к «земле» с помощью,
например, кабельного зажима или проводящего
кабельного уплотнения. Для создания одинакового
потенциала по всей сети, особенно в установках с
кабелями большой длины, может потребоваться
применение кабелей выравнивания потенциалов.
Для предотвращения несогласования импедансов всегда
используйте во всей сети кабели одного типа.
Подключайте двигатель к преобразователю частоты
экранированным кабелем.
Кабель Экранированная витая пара (STP)
Импеданс [Ом]
Длина кабеля
[м]
Таблица 3.1 Технические характеристики кабелей
120
Не более 1200 м (включая ответвительные
линии)
Не более 500 м между станциями
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 17
Page 20
195NA493.11
1
2
90°
61 68 69
N
P
COMM. GND
130BB795.10
Монтаж и настройка RS485
VLT® DriveMotor FCP 106/FCM 106
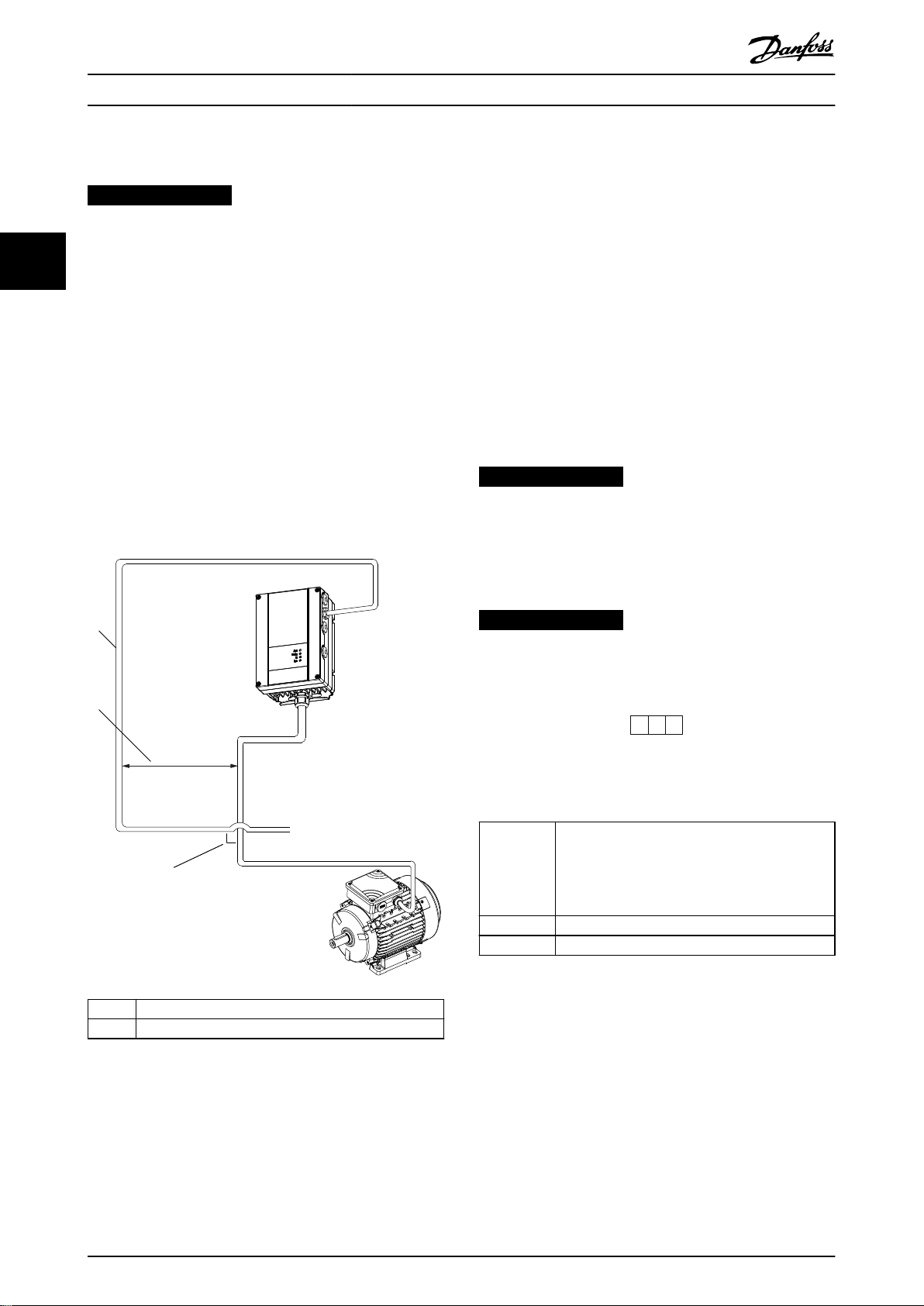
3.1.2 Обеспечение ЭМС
УВЕДОМЛЕНИЕ
Необходимо соблюдать надлежащие государственные
и местные нормы и правила, касающиеся
33
подключения защитного заземления. Неправильно
выполненное заземление кабелей может привести к
ухудшению качества связи или повреждению
оборудования. Чтобы предотвратить взаимные ВЧпомехи между кабелями, кабель связи RS485 должен
прокладываться на удалении от кабелей двигателя и
тормозного резистора. Обычно достаточно
обеспечить расстояние в 200 мм (8 дюймов).
Рекомендуется предусматривать максимально
возможное расстояние между кабелями, особенно
там, где кабели проложены параллельно на большой
протяженности. Если не удается избежать
пересечения, кабель RS485 должен пересекаться с
кабелями двигателя и тормозного резистора под
углом 90°.
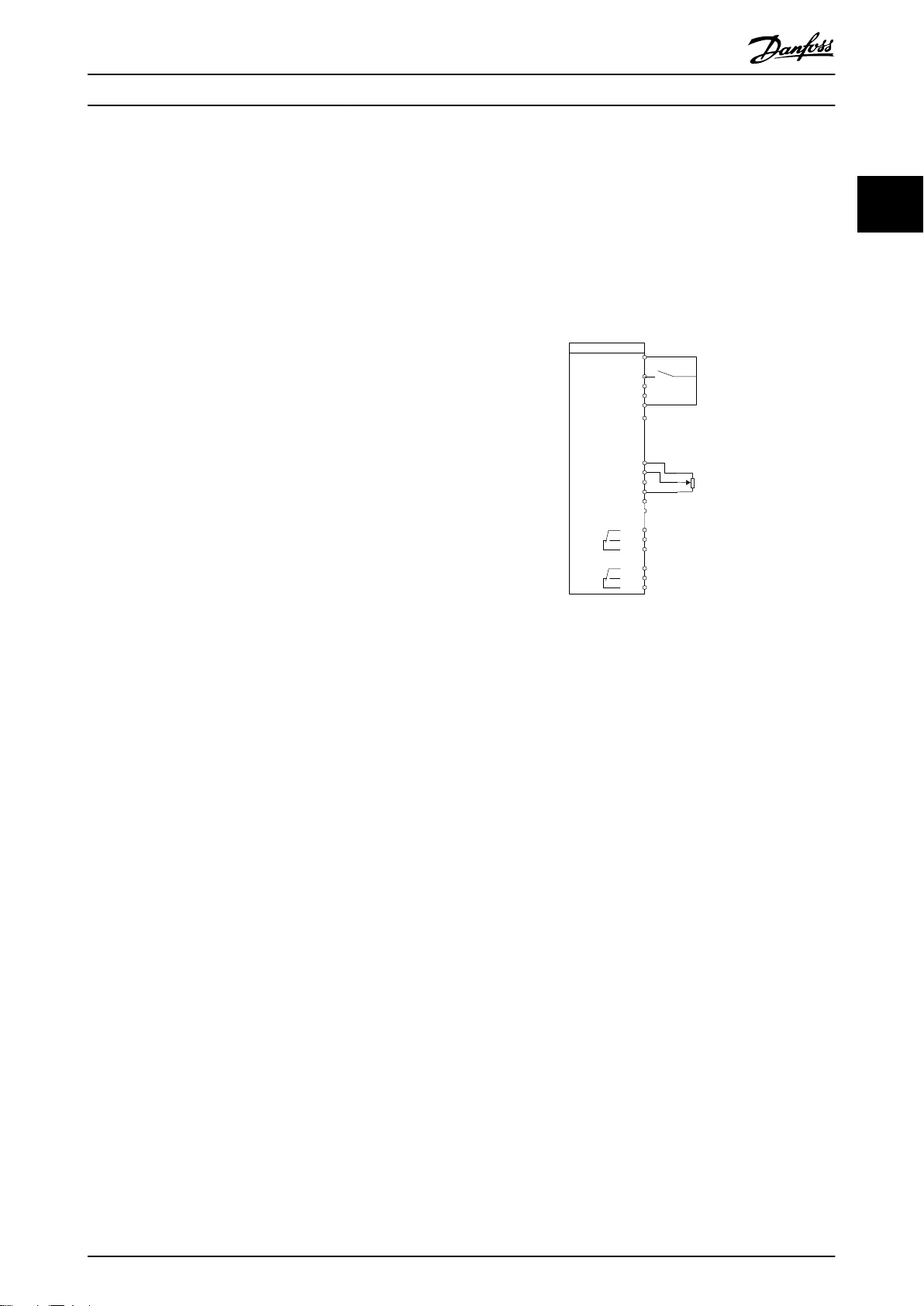
3.1.3 Подключение сети
Подключите преобразователь частоты к сети R4S85
следующим образом (см. также Рисунок 3.3):
1. Подключите сигнальные провода к клеммам 68
(P+) и 69 (N-) на главной плате управления
преобразователя частоты.
2. Подключите экран кабеля к кабельным
зажимам.
3. Клемма 61 обычно не используется. Однако
при большой разности потенциалов между
двумя преобразователями частоты следует
подключить экран кабеля RS485 к клемме 61.
Клемма 61 имеет резистивно-емкостной
фильтр, позволяющий устранить токовый шум в
кабеле.
УВЕДОМЛЕНИЕ
ТРЕБОВАНИЯ К ИЗОЛЯЦИИ, MH1
Для проводов платы управления и платы реле
необходимо использовать изоляцию, рассчитанную,
как минимум, на напряжение 300 В и температуру
75 °C (167 °F).
УВЕДОМЛЕНИЕ
Для снижения помех между проводниками
рекомендуется использовать экранированную витую
пару.
COMM. GND
(Клеммы
заземления
системы
связи)
1 Кабель периферийной шины
2 Расстояние минимум 200 мм (8 дюймов)
Рисунок 3.2 Минимальное расстояние между кабелями
связи и силовыми кабелями
P (P+) плюсовая клемма
N (N-) минусовая клемма
Рисунок 3.3 Подключение сети
4. Подключите шину RS485 и установите DIP-
Заземление системы связи
переключатель на плате управления в
положение ON (ВКЛ), чтобы активировать
RS485. Положение DIP-переключателя см. на
Рисунок 3.4. Заводская установка DIPпереключателя — OFF (ВЫКЛ.).
18 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 21
1
2
3
195NA488.11
Монтаж и настройка RS485 Руководство по программированию
Параметр Функция
Параметр 8-35 М
инимальная
задержка реакции
Параметр 8-36 М
аксимальная
задержка реакции
Параметр 8-37 М
акс. задержка
между символами
1 DIP-переключатель
2 DIP-переключатель в заводском положении OFF
(ВЫКЛ.)
3 DIP-переключатель в положении ON (ВКЛ)
Таблица 3.2 Настройка параметров связи по протоколу Modbus
3.2 Протокол FC
Рисунок 3.4 DIP-переключатель в заводском положении
3.2.1 Краткое описание протокола FC
Задайте минимальную задержку между
получением запроса и передачей ответа.
Эта функция используется для
преодоления задержек при
реверсировании передачи данных
модемом.
Задайте максимальную задержку между
передачей запроса и получением ответа.
Установите максимальную задержку между
двумя получаемыми байтами, чтобы
инициировать таймаут в случае
прерывания передачи.
УВЕДОМЛЕНИЕ
Выбор по умолчанию зависит от
протокола, выбранного в пар.
параметр 8-30 Протокол.
3 3
3.1.4 Настройки параметров для связи
Modbus
Параметр Функция
Параметр 8-30 Пр
отокол
Параметр 8-31 Ад
рес
Параметр 8-32 Ск
орость передачи
данных
Параметр 8-33 Би
ты контроля
четности/
стоповые биты
Выберите прикладной протокол для
работы с интерфейсом RS485.
Установите адрес узла.
УВЕДОМЛЕНИЕ
Диапазон адресов зависит от
протокола, выбранного в пар.
параметр 8-30 Протокол.
Установите скорость передачи данных.
УВЕДОМЛЕНИЕ
Скорость передачи данных по
умолчанию зависит от протокола,
выбранного в пар.
параметр 8-30 Протокол.
Установите биты контроля четности и
число стоповых битов.
УВЕДОМЛЕНИЕ
Выбор по умолчанию зависит от
протокола, выбранного в пар.
параметр 8-30 Протокол.
Протокол FC, также называемый шиной FC или
стандартной шиной, является стандартным протоколом
Danfoss для периферийной шины. Он определяет
способ доступа к данным по принципу главный/
подчиненный для связи по шине последовательной
связи.
К шине можно подключить 1 главное и до 126
подчиненных устройств. Главное устройство выбирает
подчиненные устройства по символу адреса в
телеграмме. Подчиненное устройство не может
передавать сообщение по собственной инициативе: для
этого требуется запрос; также невозможен обмен
сообщениями между подчиненными устройствами.
Связь осуществляется в полудуплексном режиме.
Функция главного устройства не может быть передана
другому узлу (система с одним главным устройством).
Физическим уровнем является RS485, то есть
используется порт RS485, встроенный в
преобразователь частоты. Протокол FC поддерживает
разные форматы телеграмм:
Укороченный формат из 8 байтов для данных
•
процесса.
Удлиненный формат из 16 байтов, который
•
также включает канал параметров.
Формат, используемый для текстов.
•
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 19
Page 22
0 1 32 4 5 6 7
195NA036.10
Bit di
start
Parità Bit di
stop
STX LGE ADR D ATA BCC
195NA099.10
Монтаж и настройка RS485
VLT® DriveMotor FCP 106/FCM 106
3.2.2 FC с Modbus RTU
Структура кадра сообщения по
3.4
протоколу FC
Протокол FC обеспечивает доступ к командному слову и
заданию по шине преобразователя частоты.
33
Командное слово позволяет главному устройству
Modbus управлять несколькими важными функциями
преобразователя частоты:
Пуск
•
Останов преобразователя частоты различными
•
способами:
- Останов выбегом
- Быстрый останов
- Останов торможением постоянным
током
- Нормальный останов (изменением
скорости)
Возврат в исходное состояние (сброс) после
•
аварийного отключения
Работа с различными предустановленными
•
скоростями
Работа в обратном направлении
•
Изменение активного набора параметров
•
Управление двумя реле, встроенными в
•
преобразователь частоты.
Для регулирования скорости обычно используется
задание по шине. Также возможен доступ к параметрам,
чтение их значений и, где предусмотрено, запись
значений в параметры. Доступ к параметрам позволяет
реализовать различные возможности управления,
включая управление уставкой преобразователя частоты
во время использования его внутреннего ПИрегулятора.
3.4.1 Состав символа (байта)
Каждый передаваемый символ начинается со стартового
бита. Затем передаются 8 бит данных, что соответствует
байту. Каждый символ защищается с помощью бита
четности. Этот бит устанавливается равным 1 после
подтверждения четности. Четность достигается, когда
суммарное число двоичных единиц в 8 битах данных и
бите четности являются четными. Символ завершается
стоповым битом, так что общее число битов равно 11.
Рисунок 3.5 Состав символа
3.4.2 Структура телеграммы
Каждая телеграмма имеет свою структуру:
1. Первый символ (STX) = 02 16-ричн.
2. Байт, указывающий длину телеграммы (LGE).
3. Байт, указывающий адрес преобразователя
частоты (ADR).
Затем следует несколько байтов данных (переменное
число, зависящее от типа телеграммы).
Телеграмма завершается управляющим байтом (BCC).
Конфигурация сети
3.3
Чтобы ввести в действие протокол FC для
преобразователя частоты, установите следующие
параметры.
Параметр Настройка
Параметр 8-30 ПротоколFC
Параметр 8-31 Адрес 1–126
Параметр 8-32 Скорос
ть передачи данных
Параметр 8-33 Биты
контроля четности/
стоповые биты
Таблица 3.3 Параметры включения протокола
20 Danfoss A/S © 11/2015 Все права защищены. MG03N250
2400–115200
Контроль по четности, 1 стоповый
бит (по умолчанию)
Рисунок 3.6 Структура телеграммы
3.4.3 Длина телеграммы (LGE)
Длина телеграммы — это число байтов данных в сумме
с байтом адреса ADR и управляющим байтом BCC.
4 байта данных LGE = 4 + 1 + 1 = 6 байт
12 байтов данных LGE = 12 + 1 + 1 = 14 байт
Длина телеграмм, содержащих
тексты
Таблица 3.4 Длина телеграммы
1) Здесь 10 соответствует фиксированным символам, а «n» —
переменная величина (зависящая от длины текста).
101)+n байт
Page 23
ADRLGESTX PCD1 PCD2 BCC
130BA269.10
PKE INDADRLGESTX PCD1 PCD2 BCC
130BA271.10
PWE
high
PWE
low
PKE IND
130BA270.10
ADRLGESTX PCD1 PCD2 BCCCh1 Ch2 Chn
Монтаж и настройка RS485 Руководство по программированию
3.4.4 Адрес преобразователя частоты
(ADR)
Формат адреса 1–126
Бит 7 = 1 (активен формат адреса 1–126)
•
Биты 0–6 = адрес преобразователя частоты 1–
•
126.
Биты 0–6 = 0 циркулярная рассылка
•
В своей ответной телеграмме главному устройству
подчиненное устройство посылает адресный байт без
изменения.
3.4.5 Управляющий байт (BCC)
Контрольная сумма вычисляется как функция
«исключающее ИЛИ». До получения первого байта
телеграммы расчетная контрольная сумма (BCS) равна 0.
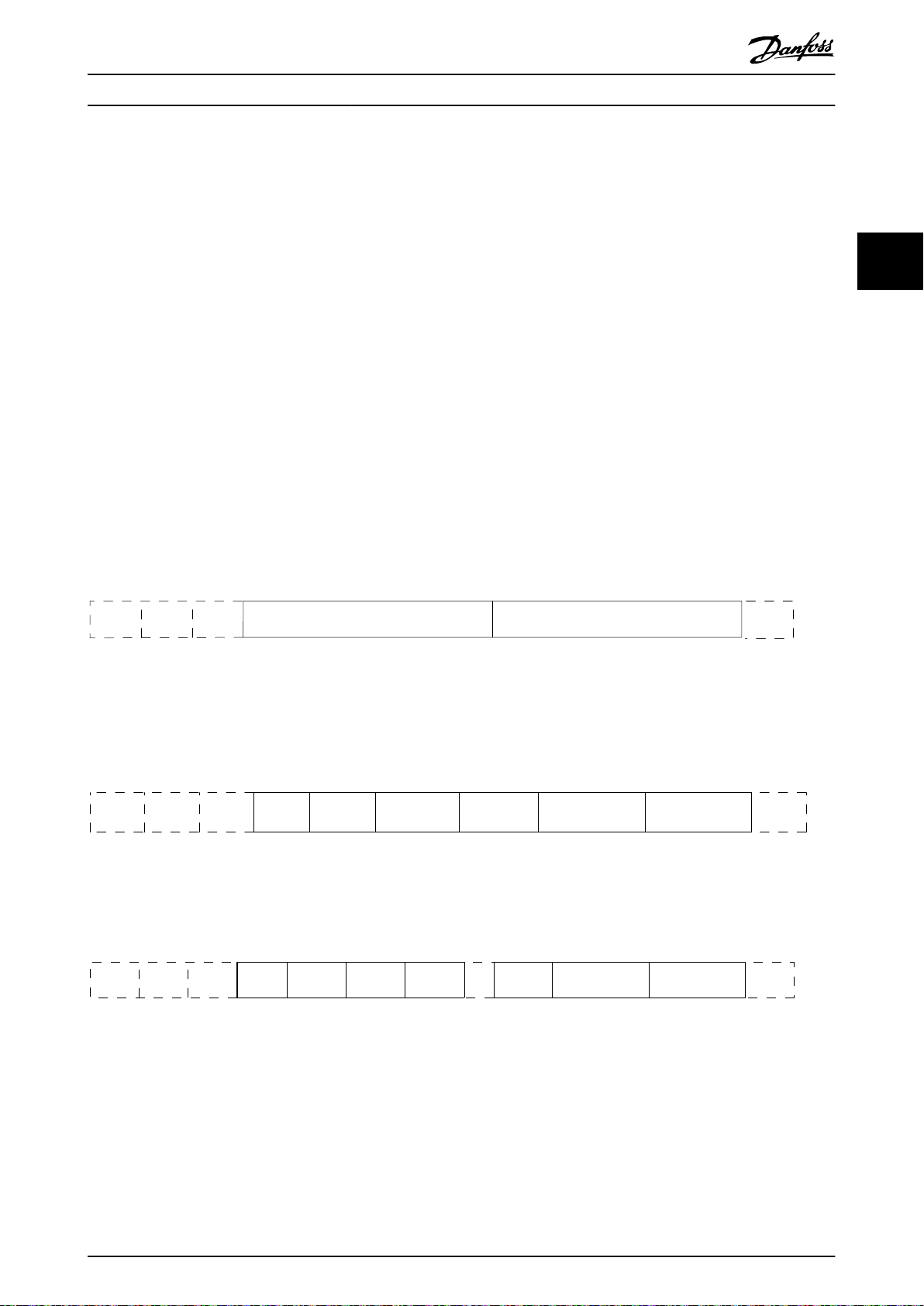
3.4.6 Поле данных
Состав блоков данных зависит от типа телеграммы. Существуют телеграммы трех типов, при этом тип телеграммы
относится как к управляющим телеграммам (главное устройство⇒подчиненное устройство), так и к ответной
телеграмме (подчиненное устройство⇒главное устройство).
3 типа телеграмм:
Блок данных процесса (PCD)
PCD образуется блоком данных, состоящим из 4 байтов (2 слов), и содержит:
Командное слово и значение задания (от главного к подчиненному).
•
Слово состояния и текущую выходную частоту (от подчиненного устройства к главному).
•
3 3
Рисунок 3.7 Блок обработки
Блок параметров
Блок параметров используется для пересылки параметров между главным и подчиненным устройствами. Блок данных
состоит из 12 байтов (6 слов) и содержит также блок данных процесса.
Рисунок 3.8 Блок параметров
Текстовый блок
Текстовый блок используется для чтения текстов с помощью блока данных.
Рисунок 3.9 Текстовый блок
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 21
Page 24
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BB918.10
PKE IND
PWE
high
PWE
low
AK PNU
Parameter
commands
and replies
Parameter
number
Монтаж и настройка RS485
VLT® DriveMotor FCP 106/FCM 106
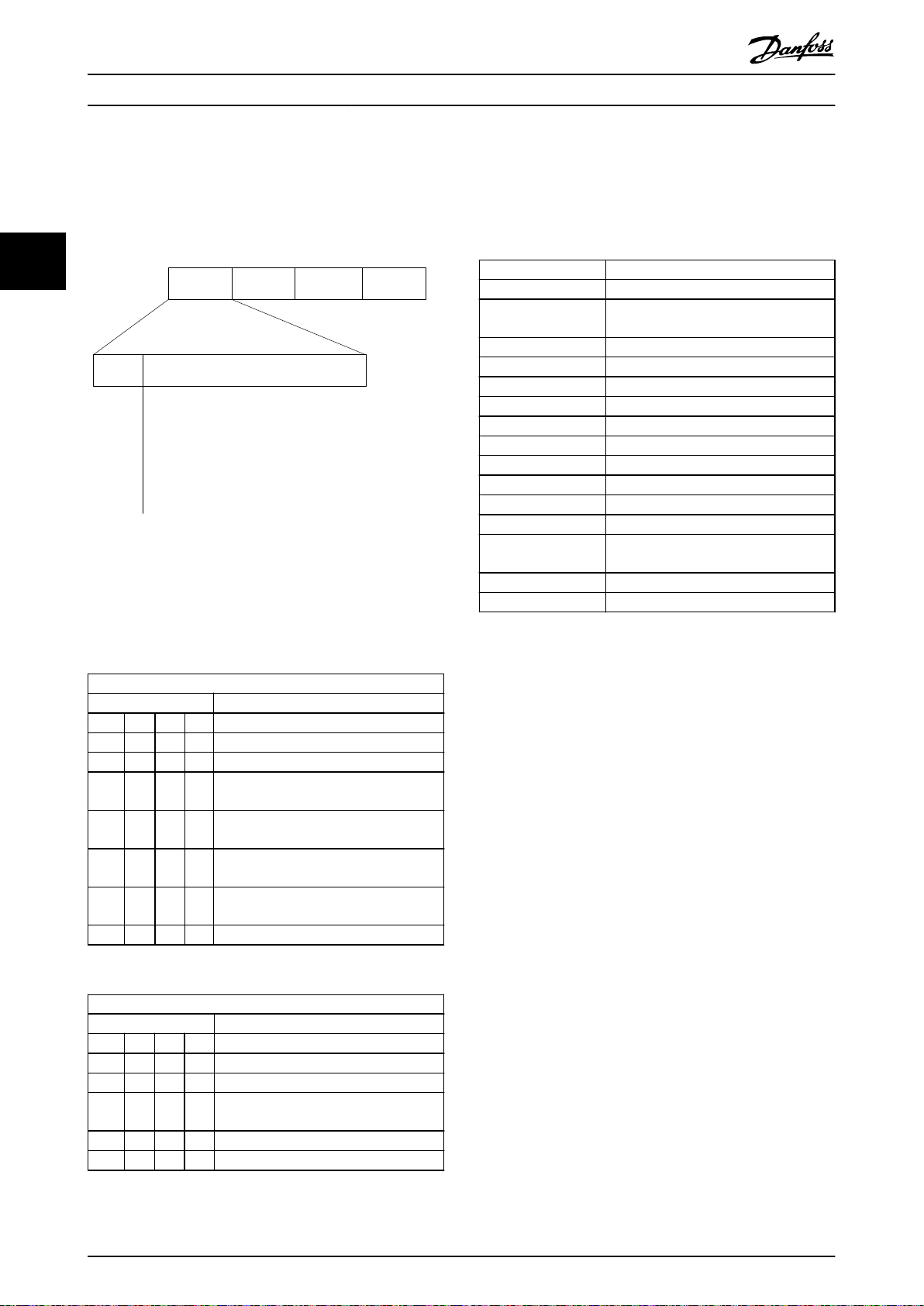
3.4.7 Поле PKE
Если команда не может быть выполнена, подчиненное
устройство посылает ответ:
Поле PKE содержит два субполя: поле команды
параметров + ответа (AK) и поле номера параметра
(PNU):
33
Рисунок 3.10 Поле PKE
В битах 12–15 пересылаются команды параметров от
главного устройства к подчиненному и возвращаются
обработанные ответы от подчиненного устройства к
главному.
«0111 Команда не может быть выполнена»
— и направляет в значении параметра следующее
сообщение о неисправности:
Код неисправности + Технические требования
0 Недопустимый номер параметра
2 Превышены верхний и нижний
пределы
3 Поврежден субиндекс
4 Нет массива
5 Ошибочный тип данных
6 Не используется
7 Не используется
17 Не во время работы
18 Другая ошибка
23 База данных параметров занята
100
>100
130 Отсутствует доступ по шине к данному
параметру
132 Нет доступа с LCP
255 Нет ошибки
Таблица 3.7 Отчет подчиненного устройства
Команды параметра: главное⇒подчиненное
Номер бита Команда параметра
15 14 13 12
0 0 0 0 Нет команды
0 0 0 1 Считывание значения параметра
0 0 1 0 Запись значения параметра в ОЗУ
0 0 1 1 Запись значения параметра в ОЗУ
1 1 0 1 Запись значения параметра в ОЗУ и
1 1 1 0 Запись значения параметра в ОЗУ и
1 1 1 1 Чтение текста
Таблица 3.5 Команды параметров
Ответ: подчиненное⇒главное
Номер бита Ответ
15 14 13 12
0 0 0 0 Нет ответа
0 0 0 1 Значение параметра передано (слово)
0 0 1 0 Значение параметра передано
0 1 1 1 Команда не может быть выполнена
1 1 1 1 Текст передан
Таблица 3.6 Ответ
(слово)
(двойное слово)
ЭСППЗУ (двойное слово)
ЭСППЗУ (слово)
(двойное слово)
3.4.8 Номер параметра (PNU)
В битах 0–11 пересылаются номера параметров.
Функция соответствующего параметра определена в
описании параметров в глава 2 Программирование.
3.4.9 Индекс (IND)
Индекс используется с номером параметра для доступа
к чтению/записи параметров, которые имеют индекс,
например, параметр 15-30 Жур.авар: код ошибки.
Индекс состоит из 2 байтов: младшего и старшего.
В качестве индекса используется только младший байт.
3.4.10 Значение параметра (PWE)
Блок значения параметра состоит из 2 слов (4 байтов), и
его значение зависит от поданной команды (AK). Если
блок PWE не содержит значения параметра, главное
устройство подсказывает его. Чтобы изменить значение
параметра (записать), запишите новое значение в блок
PWE и пошлите его от главного устройства в
подчиненное.
Если подчиненное устройство реагирует на запрос
значения параметра (команда чтения), текущее значение
параметра посылается в блоке PWE и возвращается
22 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 25
E19E H
PKE IND PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA092.10
Монтаж и настройка RS485 Руководство по программированию
главному устройству. Если параметр содержит
несколько вариантов выбора данных, например
параметр 0-01 Язык, значение данных выбирается путем
ввода величины в блок PWE. Последовательная связь
позволяет только считывать параметры, содержащие
данные типа 9 (текстовая строка).
Параметр 15-40 Тип ПЧ–параметр 15-53 Серийный №
силовой платы содержат данные типа 9.
Например, размер блока и диапазон напряжения сети
можно посмотреть в параметр 15-40 Тип ПЧ. При
пересылке текстовой строки (чтение) длина телеграммы
переменная, поскольку тексты имеют разную длину.
Длина телеграммы указывается во втором байте
телеграммы (LGE). При использовании передачи текста
символ индекса определяет, является ли команда
командой чтения или записи.
Чтобы прочесть текст с помощью блока PWE, для
команды параметра (AK) следует задать 16-ричное
значение F. Старший бит символа индекса должен быть
равен 4.
3.4.11 Типы данных, поддерживаемые
преобразователем частоты
Без знака означает, что в телеграмме отсутствует знак
операции.
Типы данных Описание
3 Целое 16
4 Целое 32
5 Целое без знака 8
6 Целое без знака 16
7 Целое без знака 32
9 Текстовая строка
Таблица 3.8 Типы данных
3.4.12 Преобразование
Индекс преобразования Коэффициент
преобразования
74 3600
2 100
1 10
0 1
-1 0,1
-2 0,01
-3 0,001
-4 0,0001
-5 0,00001
Таблица 3.9 Преобразование
3.4.13 Слова состояния процесса (PCD)
Блок слов состояния процесса разделен на два блока
по 16 бит, которые всегда поступают в определенной
последовательности.
PCD 1 PCD 2
Слово состояния управляющей телеграммы
(главное устройство⇒подчиненное
устройство)
Слово состояния управляющей телеграммы
(подчиненное устройство⇒главное
устройство)
Таблица 3.10 Слова состояния процесса (PCD)
Примеры
3.5
Значение
задания
Текущая
выходная частота
3.5.1 Запись значения параметра
Измените значение параметр 4-14 Верхний предел
скорости двигателя [Гц], чтобы оно составило 100 Гц.
Запишите данные в ЭСППЗУ.
PKE = E19E 16-ричн. — запись одного слова в
параметр 4-14 Верхний предел скорости двигателя [Гц]:
3 3
Различные атрибуты каждого параметра указаны в
глава 4 Параметры. Значения параметров передаются
только как целые числа. Для передачи дробной части
числа используются коэффициенты преобразования.
Коэффициент преобразования Параметр 4-12 Нижний
предел скорости двигателя [Гц] равен 0,1. Если нужно
предварительно установить минимальную частоту
равной 10 Гц, то должно быть передано число 100.
Коэффициент преобразования 0,1 означает, что
переданная величина умножается на 0,1. Таким образом,
величина 100 будет восприниматься как 10,0.
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 23
IND = 0000 16-ричн.
•
PWEHIGH = 0000 16-ричн.
•
PWELOW = 03E8 16-ричн.
•
Значение данных — 1000, что соответствует 100 Гц, см.
глава 3.4.12 Преобразование.
Телеграмма имеет вид как на Рисунок 3.11.
Рисунок 3.11 Телеграмма
Page 26
119E H
PKE
IND
PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA093.10
1155 H
PKE IND PWE
high
PWE
low
0000 H 0000 H 0000 H
130BA094.10
130BA267.10
1155 H
PKE
IND
0000 H 0000 H 03E8 H
PWE
high
PWE
low
Монтаж и настройка RS485
УВЕДОМЛЕНИЕ
Параметр 4-14 Верхний предел скорости двигателя
[Гц] представляет собой одно слово, и командой
VLT® DriveMotor FCP 106/FCM 106
Краткое описание Modbus RTU
3.6
3.6.1 Необходимые сведения
параметра для записи в ЭСППЗУ является E. Параметр
Параметр 4-14 Верхний предел скорости двигателя
[Гц] равен 19F (в шестнадцатеричном виде).
33
Ответ от подчиненного устройства главному показан на
Рисунок 3.12.
Danfoss предполагает, что установленный контроллер
поддерживает интерфейсы, описанные в этом
документе, и что все требования и ограничения,
предусмотренные в контроллере и преобразователе
частоты, строго соблюдаются.
MODBUS RTU (Remote Terminal Unit, дистанционный
терминал) предназначен для осуществления связи с
любым контроллером, который поддерживает
интерфейсы, указанные в настоящем документе.
Рисунок 3.12 Ответ главного устройства
Предполагается, что пользователь полностью
осведомлен о возможностях и ограничениях
контроллера.
3.5.2 Считывание значения параметра
3.6.2 Что уже должен знать пользователь
Чтение значения в параметр 3-41 Время разгона 1.
MODBUS RTU (Remote Terminal Unit, дистанционный
PKE = 1155 16-ричн. — чтение значения параметра в
параметр 3-41 Время разгона 1:
терминал) предназначен для осуществления связи с
любым контроллером, который поддерживает
интерфейсы, указанные в настоящем документе.
IND = 0000 16-ричн.
•
PWE
PWE
HIGH
LOW
•
•
= 0000 16-ричн.
= 0000 16-ричн.
Предполагается, что пользователь полностью
осведомлен о возможностях и ограничениях
контроллера.
3.6.3 Краткое описание
Рисунок 3.13 Телеграмма
Если значение параметр 3-41 Время разгона 1 равно 10
секундам, ответ от подчиненного устройства главному
показан на Рисунок 3.14.
Рисунок 3.14 Ответ
3E8 (16-ричн.) соответствует десятичному числу 1000.
Индекс преобразования для параметр 3-41 Время
разгона 1 равен -2, то есть 0,01.
Параметр 3-41 Время разгона 1 относится к типу Без
знака 32.
Вне зависимости от типа физических
коммуникационных сетей, в этом разделе
рассматривается процесс, который использует
контроллер для запроса доступа к другому устройству.
В этом процессе описывается, как Modbus RTU
реагирует на запросы другого устройства, как будут
обнаруживаться ошибки и как о них будет сообщаться.
Кроме того, устанавливается общий формат для
компоновки и содержимого полей сообщения.
Во время обмена данными через сеть Modbus RTU
протокол:
Определяет, как каждый контроллер узнает
•
адрес своего устройства.
Распознает сообщение, направленное ему.
•
Определяет, какие действия предпринять.
•
Извлекает данные или прочие сведения,
•
содержащиеся в сообщении.
Если требуется ответ, контроллер формирует ответное
сообщение и отсылает его.
Контроллеры осуществляют связь по принципу
«главный — подчиненный», при котором только главное
устройство может инициировать операции связи
(называемые запросами). Подчиненные устройства
отвечают, посылая запрошенные данные главному
24 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 27
Монтаж и настройка RS485 Руководство по программированию
устройству или выполняя действие, затребованное
запросом.
Главное устройство может обращаться к отдельным
подчиненным устройствам или посылать циркулярное
сообщение всем подчиненным устройствам.
Подчиненные устройства посылают ответное сообщение
на запросы, которые им адресовались индивидуально.
На циркулярные запросы главного устройства ответы не
посылаются. Протокол Modbus RTU определяет формат
запроса главного устройства путем предоставления
следующей информации:
Адрес устройства (или циркулярной рассылки).
•
Код функции, определяющий требуемое
•
действие.
Любые данные, которые необходимо
•
отправить.
Поле контроля ошибок.
•
Ответное сообщение подчиненного устройства также
формируется с использованием протокола Modbus. Оно
содержит поля, подтверждающие выполненные
действия, любые возвращаемые данные и поле
обнаружения ошибок. Если при приеме сообщения
происходит ошибка или если подчиненное устройство
не может выполнить затребованное действие,
подчиненное устройство формирует сообщение об
ошибке и посылает его в ответе. Как вариант, возникает
таймаут.
3.6.4 Преобразователь частоты с Modbus
RTU
Работа с различными предустановленными
•
скоростями
Работа в обратном направлении
•
Изменение активного набора параметров
•
Управление встроенным реле преобразователя
•
частоты.
Для регулирования скорости обычно используется
задание по шине. Также возможен доступ к параметрам,
чтение их значений и, где предусмотрено, запись
значений в параметры. Доступ к параметрам позволяет
реализовать различные возможности управления,
включая управление уставкой преобразователя частоты
во время использования его внутреннего ПИрегулятора.
3.7 Конфигурация сети
Чтобы разрешить протокол Modbus RTU на
преобразователе частоты, установите следующие
параметры:
Параметр Настройка
Параметр 8-30 Протокол Modbus RTU
Параметр 8-31 Адрес 1–247
Параметр 8-32 Скорость
передачи данных
Параметр 8-33 Биты
контроля четности/
стоповые биты
Таблица 3.11 Конфигурация сети
2400–115200
Контроль по четности, 1 стоповый
бит (по умолчанию)
3 3
Преобразователь частоты осуществляет передачу в
формате Modbus RTU через встроенный интерфейс
RS485. Протокол Modbus RTU обеспечивает доступ к
командному слову и заданию по шине преобразователя
частоты.
Командное слово позволяет главному устройству
Modbus управлять несколькими важными функциями
преобразователя частоты:
Пуск
•
Остановы различного типа:
•
- Останов выбегом
- Быстрый останов
- Останов посредством тормоза
постоянного тока.
- Нормальный останов (изменением
скорости)
Возврат в исходное состояние (сброс) после
•
аварийного отключения
Структура кадра сообщения Modbus
3.8
RTU
3.8.1 Введение
Контроллеры настраиваются на передачу по сети
Modbus с использованием режима RTU (дистанционного
терминала), в котором каждый байт в сообщении
содержит два 4-битных шестнадцатеричных символа.
Формат для каждого байта показан в Таблица 3.12.
Старт
овый
бит
Таблица 3.12 Формат для каждого байта
Байт данных Остан
ов/
контр
оль
четно
сти
Остан
ов
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 25
Page 28
Монтаж и настройка RS485
VLT® DriveMotor FCP 106/FCM 106
Система
кодирования
Битов на байт
33
Поле контроля
ошибок
Таблица 3.13 Сведения о байте
3.8.2 Структура сообщения Modbus RTU
Передающее устройство помещает сообщение Modbus
RTU в кадр с известными начальной и конечной
точками. Это позволяет принимающему устройству
начать с начала сообщения, cчитать адресную часть,
определить, какому устройству адресуется сообщение
(или всем устройствам, если является циркулярным), и
распознать, когда сообщение закончено. Частичные
сообщения выявляются и определяются как ошибочные.
Передаваемые символы в каждом поле должны быть
шестнадцатеричного формата от 00 до FF.
Преобразователь частоты непрерывно контролирует
сетевую шину, в том числе и во время интервалов
молчания. Когда получено первое поле (поле адреса),
каждый преобразователь частоты или устройство
декодирует его, чтобы определить, кому адресовано
сообщение. Сообщения Modbus RTU с адресом 0
являются циркулярными. В случае циркулярных
сообщений ответ не разрешается. Типичный кадр
сообщения показан в Таблица 3.14.
Пуск Адрес Функция Данные Контрол
T1-T2-T3-T48 бит 8 бит N x 8 бит 16 бит T1-T2-T3-
Таблица 3.14 Типичная структура сообщения Modbus RTU
3.8.3 Поля начала/останова
Сообщения начинаются с периода молчания
продолжительностью не менее 3,5 интервалов передачи
символа. Период молчания реализуется в виде
интервалов передачи символа при выбранной скорости
передачи данных в сети (показывается как Начало T1–
T2–T3–T4). Первым передаваемым полем является адрес
устройства. После последнего переданного символа
8-битовая двоичная, шестнадцатеричная
0–9, A–F. Два шестнадцатеричных символа
в каждом 8-битовом поле сообщения.
1 стартовый бит.
•
8 битов данных, сначала посылается
•
младший значащий бит.
1 бит для контроля по четности/
•
нечетности; без бита четности, если
контроль не используется.
1 стоповый бит, если контроль по
•
четности используется; 2 стоповых
бита, если не используется.
Циклический контроль избыточности
(CRC).
Конец
ь CRC
T4
предусматривается аналогичный период молчания
длительностью 3,5 интервалов передачи символа,
указывающий конец сообщения. После этого периода
может начаться новое сообщение.
Весь кадр сообщения должен передаваться в виде
непрерывного потока. Если перед окончанием кадра
появляется период молчания длительностью более 1,5
интервалов передачи символа, принимающее
устройство игнорирует неполное сообщение и считает,
что следующий байт — это адресное поле следующего
сообщения. Аналогичным образом, если новое
сообщение начинается раньше, чем переданы 3,5
символьных интервала после предыдущего сообщения,
принимающее устройство будет считать его
продолжением предыдущего сообщения. Это поведение
становится причиной таймаута (отсутствия ответа от
подчиненного устройства), поскольку значение в
конечном поле CRC не действительно для
объединенных сообщений.
3.8.4 Адресное поле
Адресное поле кадра сообщения содержит 8 бит.
Достоверные адреса подчиненных устройств находятся
в диапазоне десятичных чисел 0–247. Конкретным
подчиненным устройствам присваиваются адреса в
диапазоне 1–247. («0» оставлен для циркулярного
режима, который распознают все подчиненные
устройства.) Главное устройство обращается к
подчиненному путем ввода его адреса в адресное поле
сообщения. Когда подчиненное устройство посылает
свой ответ, оно помещает в это адресное поле свой
адрес, чтобы позволить главному устройству
определить, какое подчиненное устройство отвечает.
3.8.5 Поле функции
Поле функции в кадре сообщения содержит 8 бит.
Допустимые коды находятся в диапазоне 1–FF. Поля
функций используются для передачи сообщений между
главным и подчиненным устройствами. Когда
сообщение посылается от главного устройства к
подчиненному, поле кода функции сообщает
подчиненному устройству, какое действие требуется
выполнить. Когда подчиненное устройство отвечает
главному, оно использует поле кода функции, чтобы
указать, что ответ является либо нормальным (ошибки
нет), либо произошла какая-либо ошибка
(исключительный ответ).
При нормальном ответе подчиненное устройство
просто повторяет первоначальный код функции. Для
исключительного ответа подчиненное устройство
возвращает код, который эквивалентен
первоначальному коду со старшим значащим битом,
установленным на логическую «1». Кроме того,
26 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 29
Монтаж и настройка RS485 Руководство по программированию
подчиненное устройство помещает уникальный код в
поле данных ответного сообщения. Этот код извещает
главное устройство о том, какая произошла ошибка, или
сообщает причину исключения. См. также
глава 3.8.12 Коды функций, поддерживаемые Modbus RTU
и глава 3.8.13 Исключительные коды Modbus.
3.8.6 Поле данных
Поле данных формируется с помощью групп из двух
шестнадцатеричных цифр в диапазоне от 00 до FF. Эти
цифры составляют один символ RTU. Поле данных
сообщений, посылаемых главным устройством
подчиненному, содержит дополнительную информацию,
которую подчиненное устройство должно использовать
для совершения действия, определяемого кодом
функции. Эта информация может содержать такие
элементы, как адреса катушки или регистра, количество
обрабатываемых элементов и счет текущих байтов
данных в этом поле.
3.8.7 Поле контроля CRC
Сообщения содержат поле обнаружения ошибок,
действующее по методу циклического контроля
избыточности (CRC). Поле CRC проверяет содержимое
всего сообщения. Поле CRC используется независимо от
методов проверки четности отдельных символов
сообщения. Значение CRC вычисляется передающим
устройством и присоединяется им к сообщению в
качестве последнего поля сообщения. Принимающее
устройство пересчитывает CRC во время приема
сообщения и сравнивает вычисленное значение с
значением, полученным в поле CRC. Если эти два
значения не равны, результатом будет таймаут шины.
Поле обнаружения ошибок содержит двоичное число из
16 бит, составленное из двух 8-битовых байтов. При
составлении в поле сначала добавляется младший байт,
а затем старший байт. Старший байт CRC — последний
байт, посылаемый в сообщении.
телеграмме можно записать несколько регистров. Такая
структура обладает также гибкостью, поскольку в
контроллер можно записать только два регистра, а
считать из него можно 10 регистров.
Список записи PCD представляет собой данные,
отправляемые из контроллера в преобразователь
частоты, такие как:
Командное слово.
•
Задание.
•
Данные, относящиеся к применению, такие как
•
минимальное задание и значения времени
изменения скорости.
УВЕДОМЛЕНИЕ
Командное слово и задание всегда включены в список
данных, отправляемых с контроллера на
преобразователь частоты.
Список записи PCD настраивается в
параметр 8-42 Конфиг-е записи PCD.
Список чтения PCD — это данные, отправляемые с
преобразователя частоты в контроллеры, например:
Слово состояния.
•
Текущее значение параметра.
•
Данные, относящиеся к применению, такие как
•
наработка в часах, ток двигателя и аварийный
код.
УВЕДОМЛЕНИЕ
Слово состояния и текущее значение параметра
всегда включены в список данных, отправляемых с
преобразователя частоты в контроллер.
3 3
3.8.8 Адресация катушек и регистров
Об адресации катушек и регистров см. Инструкции по
эксплуатации Modbus RTU.
3.8.9 Доступ посредством чтения/записи
PCD
Преимущество использования конфигурации с записью/
чтением PCD заключается в том, что контроллер
получает возможность записывать или считывать
больше данных в одной телеграмме. Посредством
регистра временного хранения в коде функции может
быть считано или записано до 63 регистров; в одной
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 27
Page 30
CTW
Holding
Register
2810
Write
Master Frequency Converter
Read
Frequency
Converter Master
Controlled by
Parameter
Holding
Register
Controlled by
Parameter
8-42 [0]
REF
2811
8-42 [1]
2812
8-42 [2]
PCD 2
write
2813
8-42 [3]
PCD 3
write
2814
8-42 [4]
PCD 4
write
2815
8-42 [5]
PCD 5
write
...
...
...
write
2873
8-42 [63]
PCD 63
write
STW
2910
8-43 [0]
MAV
2911
8-43 [1]
2912
8-43 [2]
PCD 2
read
2913
8-43 [3]
PCD 3
read
2914
8-43 [4]
PCD 4
read
2915
8-43 [5]
PCD 5
read
...
...
...
read
2919
8-43 [63]
PCD 63
read
130BC048.10
CTW
REF
Analog
output 42
Torque
limit
Register 2810
2811
2812
2813
Write
Frequency Converter Drive
CTW = Parameter 16-85,
Analog output = Parameter 6-52,
REF = Parameter 16-86,
Torque limit Motor mode = 4-16
130BC049.10
Motor
current
Digital
inputs
Actual
Torque [Nm]
Register 2910
2911
2912
2913
2914
Read
Frequency Converter Master
STW
MAV
130BC050.10
STW = Parameter 16-03,
Motor Current = Parameter 16-14,
Actual Torque [Nm]
MAV = Parameter 16-05,
Digital Inputs = Parameter 16-60
130BC198.10
130BC199.10
Монтаж и настройка RS485
VLT® DriveMotor FCP 106/FCM 106
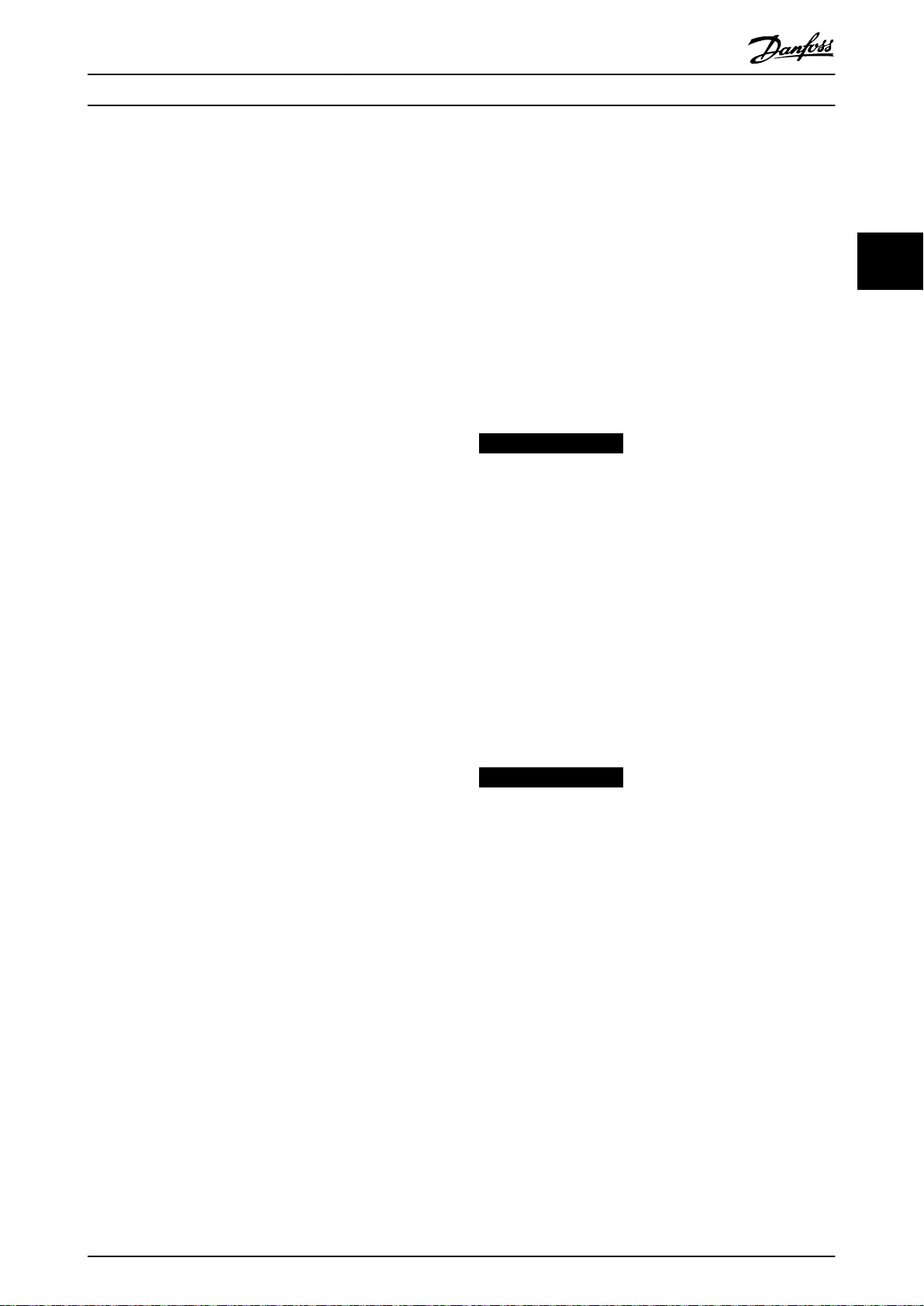
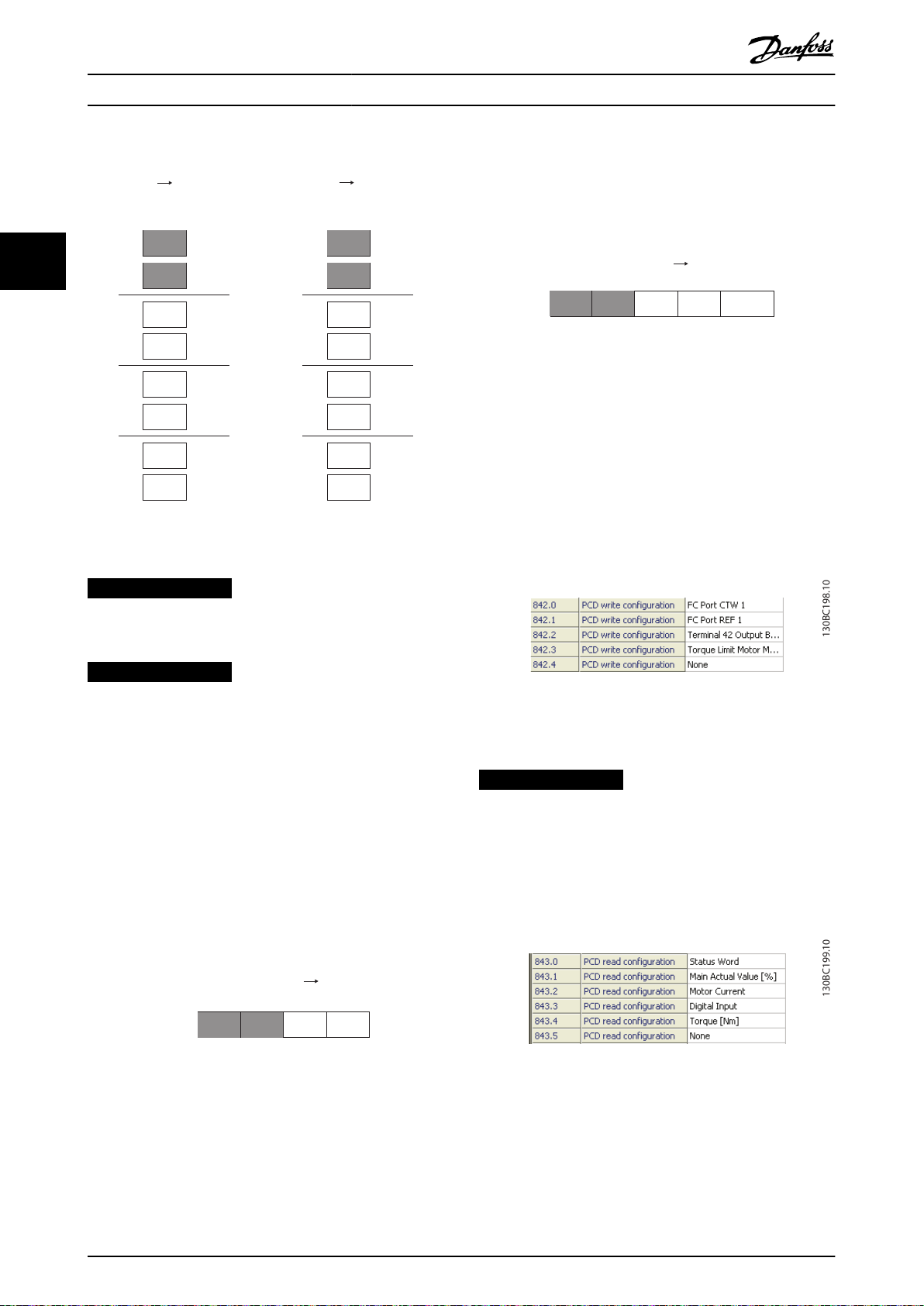
Пример:
Преобразователь частоты отправляет слово состояния,
текущее значение параметра, текущий ток двигателя,
цифровые входы и крутящий момент [Н·м].
33
Рисунок 3.17 Данные, отправляемые преобразователем
частоты
Пример, продолжение
Сопоставьте данные о входах и выходах Modbus RTU
параметру преобразователя частоты. Для сопоставления
Рисунок 3.15 Списки чтения/записи PCD
используйте параметр 8-42 Конфиг-е записи PCD и
параметр 8-43 Конфиг-е чтения PCD.
УВЕДОМЛЕНИЕ
Ячейки, отмеченные серым, не подлежат изменению и
являются значениями по умолчанию.
УВЕДОМЛЕНИЕ
Назначайте 32-битные параметры в 32-битные
регистры, PCD2 и PCD3 или PCD4 и PCD5 и так далее,
где номер параметра прописывается дважды в
параметр 8-42 Конфиг-е записи PCD или
параметр 8-43 Конфиг-е чтения PCD.
3.8.10 Назначение регистров временного
Пример:
ПЛК отправляет командное слово, задание, настройку
аналогового выхода 42 и настройку предельного
крутящего момента.
хранения параметрам привода
Рисунок 3.18 Сопоставление данных о входах/выходах в
Параметр 8-42 Конфиг-е записи PCD
УВЕДОМЛЕНИЕ
В серых строках представлены фиксированные
значения, красные значения выбираются
пользователем.
Установите в преобразователе частоты следующие
параметры:
Рисунок 3.16 Данные, отправляемые ПЛК
28 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Рисунок 3.19 Сопоставление данных о входах/выходах в
Параметр 8-43 Конфиг-е чтения PCD
Page 31

Монтаж и настройка RS485 Руководство по программированию
УВЕДОМЛЕНИЕ
Значение тока двигателя в параметр 16-14 Ток
двигателя состоит из 32 бит. При сопоставлении
используются только 16 нижних бит, поэтому
максимальное показание для тока двигателя — 327 А.
Для более высоких значений тока необходимо
использовать 32-разрядные адреса.
При назначении 32-разрядного параметра 16разрядному адресу всегда используются 16 нижних
битов.
3.8.11 Управление преобразователем
частоты
В настоящем разделе описываются коды, которые
можно использовать в полях функций и данных
сообщения Modbus RTU.
3.8.12 Коды функций, поддерживаемые
Modbus RTU
Функция Код
функции
Диагностика8 1 Перезапуск связи.
Таблица 3.16 Коды функций
Код
подфункц
ии
2 Возврат регистра
10 Очистка счетчиков и
11 Возврат счета
12 Возврат счета ошибок
13 Возврат счета ошибок
14 Возврат счета сообщений
Подфункция
диагностики.
регистра диагностики.
сообщений,
передаваемых по шине.
связи по шине.
подчиненного
устройства.
подчиненного
устройства.
3.8.13 Исключительные коды Modbus
3 3
Протокол Modbus RTU поддерживает использование
следующих кодов функций в поле функции сообщения.
Функция Код функции
Считать с катушки 1 (16-ричн.)
Считать с регистров временного
хранения
Записать на одну катушку 5 (16-ричн.)
Записать в один регистр 6 (16-ричн.)
Записать на несколько катушек F (16-ричн.)
Записать в несколько регистров 10 (16-ричн.)
Вызвать счетчик событий связи B (16-ричн.)
Сообщить идентиф. номер подчинен.
устройства
Запись и чтение нескольких
регистров
Таблица 3.15 Коды функций
3 (16-ричн.)
11 (16-ричн.)
17 (16-ричн.)
Полное описание структуры ответа с исключительным
кодом приведено в глава 3.8.5 Поле функции.
Код НаименованиеЗначение
1 Недопустима
я функция
2 Недопустимы
й адрес
данных
Код функции, полученный в запросе,
является недопустимым действием для
сервера (или подчиненного устройства).
Это может быть связано с тем, что код
функции применяется только к более
новым устройствам и не был внедрен в
выбранном устройстве. Он также может
указывать на то, что сервер (или
подчиненное устройство) находится в
ошибочном состоянии для обработки
запроса данного типа, например, он не
настроен и получает запрос на
возвращение значений регистра.
Адрес данных, полученный в запросе,
является недопустимым адресом для
сервера (или подчиненного устройства).
В частности, сочетание номера задания
и длины передачи является
недопустимым. Для контроллера со 100
регистрами запрос со смещением 96 и
длиной 4 будет успешно обработан,
запрос со смещением 96 и длиной 5
создает исключение 02.
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 29
Page 32

Монтаж и настройка RS485
VLT® DriveMotor FCP 106/FCM 106
Код НаименованиеЗначение
3 Недопустимо
е значение
данных
33
4 Ошибка
подчиненног
о устройства
Таблица 3.17 Исключительные коды Modbus
Значение в поле данных запроса
является недопустимым значением для
сервера (или подчиненного устройства).
Это указывает на ошибку в структуре
остатка сложного запроса, как будто
примененная длина является
неправильной. Это НЕ значит конкретно,
что элемент данных, отправленный для
сохранения в регистре, имеет значение,
не подходящее для прикладной
программы, поскольку протокол Modbus
не знает о значении определенного
значения определенного регистра.
Возникла неисправимая ошибка во
время попытки сервера (или
подчиненного устройства) выполнить
запрашиваемое действие.
3.9 Доступ к параметрам
3.9.1 Операции с параметрами
Номер параметра (PNU) переносится из адреса
регистра, содержащегося в читаемом или записываемом
сообщении Modbus. Номер параметра передается в
Modbus как десятичное число (10 x номер параметра).
Пример: Считываемое значение параметр 3-12 Значение
разгона/замедления (16 бит): регистр временного
хранения 3120 содержит значение параметра. Значение
1352 (десятичное) означает, что параметр установлен на
12,52 %.
3.9.3 Индекс (IND)
Некоторые параметры в преобразователе частоты,
например параметр 3-10 Предустановленное задание,
являются массивами. Поскольку Modbus не
поддерживает массивы в регистрах временного
хранения, в преобразователе частоты регистр
временного хранения 9 зарезервирован в качестве
указателя на массив. Перед чтением или записью
параметра массива настройте регистр временного
хранения 9. При установке регистра временного
хранения в значение 2 все последующие операции
чтения/записи параметров массива будут
осуществляться по индексу 2.
3.9.4 Текстовые блоки
Параметры, сохраняемые в виде текстовых строк,
вызываются таким же образом, как и прочие параметры.
Максимальный размер текстового блока — 20
символов. Если запрос на считывание параметра
предназначен для большего числа символов, чем
хранит параметр, ответ укорачивается. Если запрос на
считывание параметра предназначен для меньшего
числа символов, чем хранит параметр, свободное
пространство ответа заполняется.
3.9.5 Коэффициент преобразования
Значение параметра может передаваться только как
целое число. Для пересылки десятичных чисел слдует
использовать коэффициент преобразования.
3.9.6 Значения параметров
Считываемое значение
параметр 3-14 Предустановл.относительное задание
(32 бит): регистры временного хранения 3410 и 3411
содержат значения параметров. Значение 11300
(десятичное) означает, что для параметр установлено
значения 1113,00.
Сведения о параметрах, размере и индексе
преобразования, см. в глава 4 Параметры.
3.9.2 Хранение данных
Десятичное значение параметра «Катушка 65»
определяет, куда будут записываться данные в
преобразователе частоты: в ЭСППЗУ и в ОЗУ (катушка 65
= 1) или только в ОЗУ (катушка 65 = 0).
30 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Стандартные типы данных
Стандартными типами данных являются int 16, int 32,
uint 8, uint 16 и uint 32. Они хранятся как регистры 4x
(40001–4FFFF). Чтение параметров производится с
помощью функции 03 16-ричн., чтение регистров
временного хранения. Запись параметров
осуществляется с помощью функции 6 16-ричн.,
установка одного регистра для одного регистра (16
бит), и функции 10 16-ричн., установка нескольких
регистров, для двух регистров (32 бита). Диапазон
считываемых размеров: от 1 регистра (16 битов) до 10
регистров (20 символов).
Нестандартные типы данных
Нестандартные типы данных — текстовые строки; они
хранятся как регистры 4x (40001–4FFFF). Параметры
считываются с помощью функции 03 16-ричн., чтение
регистров временного хранения, и записываются с
помощью функции 10 16-ричн., установка нескольких
регистров. Диапазон считываемых размеров: от 1
регистра (2 символа) до 10 регистров (20 символов).
Page 33

Монтаж и настройка RS485 Руководство по программированию
3.10 Примеры
Приведенные ниже примеры иллюстрируют различные
команды Modbus RTU.
3.10.1 Чтение регистров временного
хранения (03 16-ричн.)
Описание
Эта функция считывает содержимое регистров
временного хранения в подчиненном устройстве.
Запрос
Запросное сообщение определяет начальный регистр и
количество считываемых регистров. Адреса регистров
начинаются с 0, т. е. адресами регистров 1–4 будут 0–3.
Пример: чтение параметр 3-03 Максимальное задание,
регистр 03030.
Наименование поля Пример (16-ричн.)
Адрес подчиненного
устройства
Функция 03 (чтение регистров временного
Начальный адрес,
старш. байт
Начальный адрес,
младш. байт
Число точек, старш.
байт
Число точек, младш.
байт
Контроль ошибок
(CRC)
Таблица 3.18 Запрос
Ответ
Данные регистра в ответном сообщении формируются
как 2 байта на каждый регистр с двоичным
содержимым, выровненным по правому краю внутри
каждого байта. У каждого регистра первый байт
содержит старшие биты (HI), а второй байт — младшие
(LO).
Пример: 16-ричн. 000088B8 = 35,000 = 35 Гц.
01
хранения)
0B (адрес регистра 3029)
D5 (адрес регистра 3029)
00
02 — (пар.
параметр 3-03 Максимальное задание
имеет длину 32 бита, то есть 2
регистра)
–
Наименование поля Пример (16-ричн.)
Адрес подчиненного устройства 01
Функция 03
Число байтов 04
Данные, старш. байт (регистр 3030) 00
Данные, младш. байт (регистр 3030) 16
Данные, старш. байт (регистр 3031) E3
Данные, младш. байт (регистр 3031) 60
Контроль ошибок (CRC) –
Таблица 3.19 Ответ
3.10.2 Установка одного регистра (06 16ричн.)
Описание
Эта функция устанавливает значение в одном регистре
временного хранения.
Запрос
Запросное сообщение определяет устанавливаемое
задание регистра. Адреса регистров начинаются с 0, т. е.
адресом регистра 1 будет 0.
Пример: запись в параметр 1-00 Режим
конфигурирования, регистр 1000.
Наименование поля Пример (16-ричн.)
Адрес подчиненного
устройства
Функция 06
Адрес регистра, старш. байт 03 (Адрес регистра 999)
Адрес регистра, младш. байт E7 (Адрес регистра 999)
Устанавливаемые данные,
старш. байт
Устанавливаемые данные,
младш. байт
Контроль ошибок (CRC) –
Таблица 3.20 Запрос
Ответ
Нормальным ответом является отражение запроса,
возвращенное после того, как было передано
содержимое регистра.
01
00
01
3 3
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 31
Page 34

Монтаж и настройка RS485
VLT® DriveMotor FCP 106/FCM 106
Наименование поля Пример (16-ричн.)
Адрес подчиненного
устройства
Функция 06
Адрес регистра, старш. байт 03
33
Адрес регистра, младш. байт E7
Устанавливаемые данные,
старш. байт
Устанавливаемые данные,
младш. байт
Контроль ошибок (CRC) –
01
00
01
Наименование поля Пример (16-ричн.)
Адрес подчиненного устройства 01
Функция 10
Начальный адрес, старш. байт 04
Начальный адрес, младш. байт 19
Число регистров, старш. байт 00
Число регистров, младш. байт 02
Контроль ошибок (CRC) –
Таблица 3.23 Ответ
3.10.4 Запись/чтение нескольких
Таблица 3.21 Ответ
3.10.3 Установка нескольких регистров
(10 16-ричн.)
Описание
Эта функция устанавливает значение в
последовательности регистров временного хранения.
Запрос
Запросное сообщение определяет устанавливаемые
задания регистров. Адреса регистров начинаются с 0, т.
е. адресом регистра 1 будет 0. Пример запроса
установки двух регистров (устанавливаемый параметр
параметр 1-24 Ток двигателя = 738 (7,38 A)):
Наименование поля Пример (16-ричн.)
Адрес подчиненного устройства 01
Функция 10
Начальный адрес, старш. байт 04
Начальный адрес, младш. байт 07
Число регистров, старш. байт 00
Число регистров, младш. байт 02
Число байтов 04
Записать данные, старш. байт
(регистр 4: 1049)
Записать данные, младш. байт
(регистр 4: 1049)
Записать данные, старш. байт
(регистр 4: 1050)
Записать данные, младш. байт
(регистр 4: 1050)
Контроль ошибок (CRC) –
Таблица 3.22 Запрос
Ответ
В нормальном ответе возвращается адрес подчиненного
устройства, код функции, начальный адрес и количество
установленных регистров.
00
00
02
E2
Описание
Этот код функции сочетает в одной транзакции Modbus
одну операцию чтения и одну операцию записи.
Операция записи имеет место до операции чтения.
Запрос
Сообщение с запросом указывает начальный адрес и
количество регистров временного хранения для
считывания, а также начальный адрес, количество
регистров временного хранения и данные для записи.
Нумерация адресов регистров временного хранения
начинается с 0.
Пример запроса (устанавливаемый параметр
параметр 1-24 Ток двигателя = 738 (7,38 A),
считываемый параметр параметр 3-03 Максимальное
задание имеет значение 50000 (50000 Гц)):
Наименование поля Пример (16-ричн.)
Адрес подчиненного устройства 01
Функция 17
Начальный адрес чтения, старш.
байт
Начальный адрес чтения, младш.
байт
Количество считываемых
регистров, старш. байт
Количество считываемых
регистров, младш. байт
Начальный адрес записи, старш.
байт
Начальный адрес записи, младш.
байт
Количество записываемых
регистров, старш. байт
Количество записываемых
регистров, младш. байт
Счет записи байтов 04
регистров (17 16-ричн.)
0B (адрес регистра 3029)
D5 (адрес регистра 3029)
00
02
(
параметр 3-03 Максималь
ное задание имеет длину
32 бита, то есть 2
регистра)
04 (адрес регистра 1239)
D7 (адрес регистра 1239)
00
02
32 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 35

Speed ref.CTW
Master-follower
130BA274.11
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bit
no.:
Монтаж и настройка RS485 Руководство по программированию
Наименование поля Пример (16-ричн.)
Значение регистров записи,
старш. байт
Значение регистров записи,
младш. байт
Значение регистров записи,
старш. байт
Значение регистров записи,
младш. байт
Контроль ошибок (CRC) –
Таблица 3.24 Запрос
00
00
02
0E
Ответ
Нормальный ответ содержит данные из группы
считанных регистров. Поле счета байтов определяет
число байтов для последующего считывания в поле
данных.
Наименование поля Пример (16-ричн.)
Адрес подчиненного устройства 01
Функция 17
Счет байтов 04
Значение регистров чтения,
старш. байт
Значение регистров чтения,
младш. байт
Значение регистров чтения,
старш. байт
Значение регистров чтения,
младш. байт
CRC –
Таблица 3.25 Ответ
Профиль управления FC
3.11
00
00
C3
50
3.11.1 Командное слово,
соответствующее профилю FC (пар.
8-10 Протокол = Профиль FC)
Рисунок 3.20 Командное слово, соответствующее профилю
FC
Бит Значение бита = 0 Значение бита = 1
00 Значение задания Младший бит внешнего выбора
01 Значение задания Старший бит внешнего выбора
02 Торможение
постоянным током
03 Выбег Нет выбега
04 Быстрый останов Изменение скорости
05 Фиксация выходной
частоты
06 Останов с
изменением
скорости
07 Не используется Сброс
08 Не используется Фикс. част.
09 Изменение
скорости 1
10 Данные не
действительны
11 Реле 01 разомкнуто Реле 01 включено
12 Реле 02 разомкнуто Реле 02 включено
13 Настройка
параметров
15 Не используется Реверс
Таблица 3.26 Командное слово, соответствующее профилю FC
Изменение скорости
Использовать изменение
скорости
Пуск
Изменение скорости 2
Данные действительны
Младший разряд выбора
Расшифровка управляющих битов
Биты 00/01
Биты 00 и 01 используются для выбора одного из
четырех значений задания, предварительно
запрограммированных в параметре
параметр 3-10 Предустановленное задание в
соответствии с Таблица 3.27.
Запрограмми
рованное
значение
задания
1 Параметр 3-10 Предустановленн
2 Параметр 3-10 Предустановленн
3 Параметр 3-10 Предустановленн
4 Параметр 3-10 Предустановленн
Таблица 3.27 Биты управления
Параметр Бит01Бит
00
0 0
ое задание [0]
0 1
ое задание [1]
1 0
ое задание [2]
1 1
ое задание [3]
3 3
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 33
Page 36

Монтаж и настройка RS485
VLT® DriveMotor FCP 106/FCM 106
УВЕДОМЛЕНИЕ
Сделайте выбор в параметр 8-56 Выбор
предустановленного задания, чтобы определить, как
бит 00/01 логически объединяется с соответствующей
функцией на цифровых входах.
33
Бит 02, торможение постоянным током
Бит 02 = 0: приводит к торможению постоянным током
и к останову. Установите ток торможения и
длительность в параметрах параметр 2-01 Ток
торможения пост. током и параметр 2-02 Время
торможения пост. током.
Бит 02 = 1: вызывает изменение скорости.
Бит 03, останов с выбегом
Бит 03 = 0: преобразователь частоты немедленно
отпускает двигатель (выходные транзисторы
запираются), который выбегом останавливается до
состояния покоя.
Бит 03 = 1: если выполняются другие условия запуска,
преобразователь частоты запускает двигатель.
Значение параметра параметр 8-50 Выбор выбега
определяет, как бит 03 логически объединяется с
соответствующей функцией на цифровом входе.
Бит 04, быстрый останов
Бит 04 = 0: вызывает снижение скорости вращения
двигателя до останова (устанавливается в параметре
параметр 3-81 Время замедл.для быстр.останова).
Бит 05, фиксация выходной частоты
Бит 05 = 0: фиксируется текущая выходная частота (в
Гц). Изменить зафиксированную выходную частоту
можно только с помощью цифровых входов (параметры
с параметр 5-10 Клемма 18, цифровой вход по
параметр 5-13 Клемма 29, цифровой вход),
запрограммированных как [21] Увеличение скорости или
[22] Уменьшение скорости.
УВЕДОМЛЕНИЕ
Если активна фиксация выходной частоты, остановить
преобразователь частоты можно только следующими
способами:
Бит 03 Останов выбегом.
•
Бит 02 Tорможение пост. током.
•
Цифровой вход (параметры с
•
параметр 5-10 Клемма 18, цифровой вход по
параметр 5-13 Клемма 29, цифровой вход),
запрограммированный на [5] Торможение
постоянным током, [2] Останов выбегом или
[3] Сброс и останов выбегом.
Бит 06, останов/пуск с изменением скорости
Бит 06 = 0: вызывает останов и заставляет двигатель
снижать скорость до останова с помощью выбранного
параметра замедления.
Бит 06 = 1: позволяет преобразователю частоты
запустить двигатель, если выполнены прочие условия
пуска.
Выберите значение параметра параметр 8-53 Выбор
пуска с целью определить, как бит 06 «Останов/пуск с
изменением скорости» логически объединяется с
соответствующей функцией на цифровом входе.
Бит 07, сброс
Бит 07 = 0: нет сброса.
Бит 07 = 1: сброс отключения. Сброс активируется по
переднему фронту сигнала, то есть при переходе
сигнала от логического 0 к логической 1.
Бит 08, фиксация частоты
Бит 08 = 1: Параметр 3-11 Фиксированная скорость [Гц]
определяет выходную частоту.
Бит 09, выбор изменения скорости 1/2
Бит 09 = 0: изменение скорости 1 включено (параметры
параметр 3-41 Время разгона 1–параметр 3-42 Время
замедления 1).
Бит 09 = 1: изменение скорости 2 (параметры
параметр 3-51 Время разгона 2–параметр 3-52 Время
замедления 2) включено.
Бит 10, данные недействительны/данные
действительны
Указывает преобразователю частоты, использовать или
игнорировать командное слово.
Бит 10 = 0: командное слово игнорируется.
Бит 10 = 1: командное слово используется. Эта функция
имеет большое значение, поскольку независимо от типа
используемой телеграммы в ней всегда содержится
командное слово. Отключите командное слово, если не
требуется его использование при обновлении или
чтении параметров.
Бит 11, реле 01
Бит 11 = 0: реле не активируется.
Бит 11 = 1: реле 01 активируется при условии, что в
параметре параметр 5-40 Реле функций выбрано
значение [36] Кмнд. слово, бит 11.
Бит 12, реле 02
Бит 12 = 0: реле 02 не активируется.
Бит 12 = 1: реле 02 активируется при условии, что в
параметре параметр 5-40 Реле функций выбрано
значение [37] Кмнд. слово, бит 12.
Бит 13, выбор набора
Бит 13 используется для выбора любого из 2 наборов
параметров в соответствии с Таблица 3.28.
Набор параметров Бит 13
1 0
2 1
Таблица 3.28 Меню наборов параметров
34 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 37

Output frequencySTW
Bit
Slave-master
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BA273.12
Монтаж и настройка RS485 Руководство по программированию
Эта функция возможна только в том случае, если в
параметре параметр 0-10 Активный набор выбрано
значение [9] Несколько наборов.
Используйте значение параметра параметр 8-55 Выбор
набора, чтобы указать, как бит 13 логически
объединяется с соответствующей функцией на
цифровых входах.
Бит 15, реверс
Бит 15 = 0: нет реверса.
Бит 15 = 1: реверс. При заводской настройке значение
параметра параметр 8-54 Выбор реверса устанавливает
управление реверсом с помощью цифрового входа. Бит
15 вызывает реверс только в том случае, если выбран
один из следующих вариантов: последовательная связь,
[2] Логическое ИЛИ или [3] Логическое И.
3.11.2 Слово состояния, соответствующее
профилю FC (STW)
(параметр 8-30 Протокол =
профиль FC)
Рисунок 3.21 Слово состояния
Бит Бит = 0 Бит = 1
00 Управление не готово Готовн. к управлению
01 Привод не готов Привод готов
02 Выбег Разрешено
03 Нет ошибки Отключение
04 Нет ошибки Ошибка (нет отключения)
05 Зарезервировано –
06 Нет ошибки Отключение с
блокировкой
07 Нет предупреждения Предупреждение
08 Скорость
вращения≠задание
09 Местное управление Упр. по шине
10 Частота вне диапазона Частота в заданных
11 Не используется В работе
12 Привод в норме Останов, автоматический
13 Напряжение в норме Превышение напряжения
14 Крутящий момент в норме Превышение крутящего
Скорость вращения =
задание
пределах
пуск
момента
Бит Бит = 0 Бит = 1
15 Таймер в норме Превышение таймера
Таблица 3.29 Слово состояния, соответствующее профилю
FC
Объяснение битов состояния
Бит 00, управление не готово/готово
Бит 00 = 0: преобразователь частоты отключается.
Бит 00 = 1: система управления преобразователя
частоты готова, но не гарантируется получение питания
силовым блоком (при питании системы управления от
внешнего источника 24 В).
Бит 01, привод готов
Бит 01 = 0: преобразователь частоты не готов к работе.
Бит 01 = 1: преобразователь частоты готов к работе, но
через цифровые входы или по последовательной связи
подается команда останова выбегом.
Бит 02, останов выбегом
Бит 02 = 0: преобразователь частоты «отпускает»
двигатель.
Бит 02 = 1: преобразователь частоты запускает
двигатель командой пуска.
Бит 03, нет ошибки/отключение
Бит 03 = 0: преобразователь частоты не находится в
состоянии отказа. Бит 03 = 1: преобразователь частоты
отключается. Для восстановления работы нажмите
[Reset] (Сброс).
Бит 04, нет ошибки/ошибка (без отключения)
Бит 04 = 0: преобразователь частоты не находится в
состоянии отказа.
Бит 04 = 1: преобразователь частоты отображает
ошибку, но не отключается.
Бит 05, не используется
В слове состояния бит 05 не используется.
Бит 06, нет ошибки / отключение с блокировкой
Бит 06 = 0: преобразователь частоты не находится в
состоянии отказа.
Бит 06 = 1: преобразователь частоты отключен и
блокирован.
Бит 07, нет предупреждения/предупреждение
Бит 07 = 0: предупреждений нет.
Бит 07 = 1: появилось предупреждение.
Бит 08, задание скорости/скорость = задание
Бит 08 = 0: двигатель работает, но текущая скорость
отличается от предустановленного задания скорости.
Такая ситуация возможна, например, когда происходит
разгон/замедление при пуске/останове.
Бит 08 = 1: скорость двигателя соответствует
предустановленному заданию скорости.
3 3
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 35
Page 38

Actual output
frequency
STW
Follower-slave
Speed referenceCTW
Master-slave
16bit
130BA276.11
100%0%
(0hex) (4000hex)
Forward
Par.3-02
Min reference
Par.3-03
Max reference
195NA490.10
-100% 100%0%
(C000hex) (0hex) (4000hex)
Reverse Forward
0
Par.3-03
Max reference
Par.3-03
Max reference
195NA489.10
-100% 100%0%
(C000hex) (0hex) (4000hex)
Reverse Forward
0
Par.4-14
Motor Speed High Limit
Par.4-14
Motor Speed High Limit
195NA491.10
Монтаж и настройка RS485
VLT® DriveMotor FCP 106/FCM 106
Бит 09, местное управление/управление по шине
Бит 09 = 0: нажата кнопка [O/Reset] (Стоп/Сброс) на
блоке управления или в параметре
параметр 3-13 Место задания выбрано значение [2]
Местное. Управлять преобразователем частоты через
канал последовательной связи нельзя.
33
Бит 09 = 1: преобразователь частоты может управляться
по периферийной шине или по последовательной
связи.
Рисунок 3.22 Текущая выходная частота (MAV)
Бит 10, предел частоты вне диапазона
Бит 10 = 0: выходная частота достигла значения,
установленного в параметре параметр 4-12 Нижний
Задание и MAV масштабируются следующим образом:
предел скорости двигателя [Гц] или
параметр 4-14 Верхний предел скорости двигателя [Гц].
Бит 10 = 1: выходная частота находится в заданных
пределах.
Бит 11, не работает/работает
Бит 11 = 0: двигатель не работает.
Бит 11 = 1: преобразователь частоты получает сигнал
пуска без останова выбегом.
Рисунок 3.23 Задание
Бит 12, привод в норме/остановлен, автозапуск
Бит 12 = 0: отсутствует временное превышение
температуры преобразователя частоты.
Бит 12 = 1: преобразователь частоты остановлен из-за
перегрева, но блок не отключается и возобновляет
работу, как только перегрев нормализуется.
Бит 13, напряжение в норме/выход за предел
Бит 13 = 0: нет предупреждений о напряжении.
Бит 13 = 1: Напряжение постоянного тока в цепи
постоянного тока преобразователя частоты слишком
мало или велико.
Бит 14, крутящий момент в норме/выход за предел
Рисунок 3.24 MAV, если для Параметр 1-00 Режим
конфигурированияустановлено значение [0] Разомкнутый
контур.
Бит 14 = 0: ток двигателя меньше, чем ток предел,
установленный в параметре параметр 4-18 Current Limit.
Бит 14 = 1: превышен предел по току в пар.
параметр 4-18 Current Limit.
Бит 15, таймер в норме/выход за предел
Бит 15 = 0: таймеры для тепловой защиты двигателя и
тепловой защиты преобразователя частоты не перешли
предел 100 %.
Бит 15 = 1: один из таймеров превысил предел 100 %.
3.11.3 Значение задания скорости
передачи по шине
Рисунок 3.25 MAV, если для Параметр 1-00 Режим
конфигурирования установлено значение [3] Разомкнутый
контур.
Значение задания скорости передается в
преобразователь частоты как относительное значение в
процентах. Значение пересылается в виде 16-битного
слова; в целых числах (0–32767) значение 16384 (4000 в
16-ричном формате) соответствует 100 %.
Отрицательные числа форматируются с помощью
двоичного дополнения. Текущая выходная частота (MAV)
масштабируется таким же образом, как и задание по
шине.
36 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 39

Параметры Руководство по программированию
4 Параметры
4.1 Главное меню — Управление и отображение — Группа 0
Параметры, относящиеся к основным функциям
преобразователя частоты, функциям кнопок LCP и
конфигурации дисплея LCP.
4.1.1 0-0* Basic Settings (Основные
настройки)
0-01 Язык
Опция: Функция:
Определяет язык,
используемый на дисплее.
[0] * Aнглийский
[1] Deutsch (немецкий)
[2] Français (французский)
[3] Dansk (датский)
[4] Испанский
[5] Italiano (итальянский)
[28] Португальский (Бразилия)
[255] No Text (Нет текста)
0-03 Региональные установки
Опция: Функция:
УВЕДОМЛЕНИЕ
Этот параметр невозможно
регулировать во время работы
двигателя.
Чтобы сделать возможным установку
различных настроек по умолчанию для
различных регионов мира, в
преобразователе частоты имеется
параметр параметр 0-03 Региональные
установки. Выбранная настройка
влияет на настройку номинальной
частоты двигателя по умолчанию.
[0]*Международные Устанавливает значение по умолчанию
параметр 1-23 Частота двигателя,
равное 50 Гц.
[1] Северная
Америка
Устанавливает значение по умолчанию
параметр 1-23 Частота двигателя,
равное 60 Гц.
0-04 Рабочее состояние при включении питания
Опция: Функция:
питания в режиме ручного
(местного) управления.
[0]*Восстановление Возобновление работы
преобразователя частоты с
восстановлением местного задания
и условий пуска/останова (команд,
поданных кнопками [Hand On]
(Ручной режим)/[O] (Выкл.) на LCP,
или команды местного пуска,
поданной через цифровой вход),
которые были активны перед
выключением питания
преобразователя частоты.
[1] Прин.остан,стар.зад Использование сохраненного
значения задания [1] для останова
преобразователя частоты и
одновременное сохранение в
памяти значения местного задания
скорости, имевшее место перед
аварийным отключением питания
преобразователя частоты. После
подачи напряжения сети и
получения команды пуска (поданной
при помощи кнопки [Hand On]
(Ручной режим) или команды
местного пуска, поданной через
цифровой вход) преобразователь
частоты запускается и работает с
использованием задания скорости,
сохраненного в памяти.
0-06 GridType
Опция: Функция:
Выберите тип сети питающего
напряжения/частоты.
УВЕДОМЛЕНИЕ
Не все варианты выбора
доступны для всех
типоразмеров.
4 4
0-04 Рабочее состояние при включении питания
Опция: Функция:
Выберите рабочий режим, который
будет иметь место при повторном
подключении преобразователя
частоты к сети после пропадания
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 37
Сеть IT представляет собой сеть
питания, в которой отсутствует
заземление.
Отрегулируйте расположение
переключателя фильтра ВЧ-помех
в соответствии с типом сети (см.
Page 40

Параметры
VLT® DriveMotor FCP 106/FCM 106
0-06 GridType
4.1.2 0-1* Раб. с набор. парам.
Опция: Функция:
Инструкции по эксплуатации
VLT® DriveMotor FCP 106/FCM 106 ).
Сеть типа «треугольник» — это
сеть питания, в которой
вторичная обмотка
трансформатора подсоединена
44
[10] 380-440V/50Hz/IT-grid
(380-440 В/50 Гц/сеть
IT)
[11] 380-440V/50Hz/Delta
(380-440 В/50 Гц/
треугольник)
[12] 380-440V/50Hz
(380-440 В/50 Гц)
[20] 440-480V/50Hz/IT-grid
(440-480 В/50 Гц/сеть
IT)
[21] 440-480V/50Hz/Delta
(440-480 В/50 Гц/
треугольник)
[22] 440-480V/50Hz
(440-480 В/50 Гц)
[110] 380-440V/60Hz/IT-grid
(380-440 В/60 Гц/сеть
IT)
[111] 380-440V/60Hz/Delta
(380-440 В/60 Гц/
треугольник)
[112] 380-440V/60Hz
(380-440 В/60 Гц)
[120] 440-480V/60Hz/IT-grid
(440-480 В/60 Гц/сеть
IT)
[121] 440-480V/60Hz/Delta
(440-480 В/60 Гц/
треугольник)
[122] 440-480V/60Hz
(440-480 В/60 Гц)
по схеме «треугольник», и одна
фаза заземлена.
Все множество параметров, управляющих
преобразователем частоты, называется набором
параметров. Преобразователь частоты содержит 2
набора параметров: набор 1 и набор 2. Кроме того,
фиксированный набор заводских настроек можно
скопировать в один или оба набора.
Некоторые преимущества наличия нескольких наборов
в преобразователе частоты:
Работа двигателя с одним набором параметров
•
(активный набор) при одновременном
обновлении параметров в другом наборе
(редактируемый набор).
Подключение двух двигателей к
•
преобразователю частоты (работать будет
только один двигатель за раз). Данные для двух
двигателей можно помещать в двух наборах.
Быстрая замена настроек преобразователя
•
частоты и/или двигателя во время работы
двигателя. Например, можно задать время
изменения скорости или предустановленные
задания по шине или через цифровые входы.
В качестве активного набора можно задать как
несколько наборов; активный набор выбирается
подачей входного сигнала на клемму цифрового входа
и/или через командное слово шины.
Для копирования набора параметров 1 в набор
параметров 2 или копирования набора параметров 2 в
набор параметров 1 используйте
параметр 0-51 Копировать набор. Чтобы избежать
конфликта настроек одного и того же параметра в двух
различных наборах параметров, следует связать эти
наборы при помощи параметр 0-12 Этот набор связан
с. Если необходимо переключиться между наборами
параметров, в которых параметры имеют метку не
допускается изменение во время работы, следует
сначала остановить преобразователь частоты.
Параметры, изменение которых не допускается в
процессе работы, имеют метку false (ложь) в
0-07 Автом. торможение пост. током
Опция: Функция:
Функция защиты от перенапряжения при
останове выбегом.
УВЕДОМЛЕНИЕ
Может вызвать PWM при останове
выбегом.
[0] Выкл. Эта функция неактивна.
[1] * Вкл. Эта функция активна.
глава 6 Перечни параметров.
0-10 Активный набор
Опция: Функция:
Выберите набор параметров, в
соответствии с которым будет работать
преобразователь частоты.
[1] * Набор 1 Набор 1 является активным.
[2] Набор 2 Набор 2 является активным.
[9] Несколько
наборов
Используется для дистанционного выбора
набора с помощью цифровых входов и
38 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 41

Параметры Руководство по программированию
0-10 Активный набор
Опция: Функция:
порта последовательной связи. Этот
набор использует настройки из
параметр 0-12 Этот набор связан с.
0-11 Программирование набора
Опция: Функция:
Номер редактируемого набора,
отображаемый на LCP, мигает.
[1] Набор 1 Редактирование набора 1.
[2] Набор 2 Редактирование набора 2.
[9] * Активный набор Редактирование параметров в наборе,
выбранном через цифровые входы/
выходы.
0-12 Этот набор связан с
Опция: Функция:
Если наборы не связаны, их смена во
время работы двигателя невозможна.
[0] Нет связи При выборе для работы другого набора
параметров изменение набора не
происходит до останова двигателя
выбегом.
[20] * Linked
(Связан)
Параметры, не подлежащие изменению во
время работы, копируются из одного
набора в другой. Cмена набора
параметров во время работы двигателя
возможна.
0-20 Строка дисплея 1.1, малая
Опция: Функция:
Выберите переменную для
отображения на дисплее в строке
1, левая позиция.
[0] Значение для вывода на дисплей
не выбрано.
[37] Текст 1 на дисплее Разрешает записать
индивидуальную текстовую строку
для отображения на LCP или
считывания посредством
последовательной связи.
[38] Текст 2 на дисплее Разрешает записать
индивидуальную текстовую строку
для отображения на LCP или
считывания посредством
последовательной связи.
[39] Текст 3 на дисплее Разрешает записать
индивидуальную текстовую строку
для отображения на LCP или
считывания посредством
последовательной связи.
0-20 Строка дисплея 1.1, малая
Опция: Функция:
[953] Слово
предупреждения
Probus
[1501] Наработка в часах Показывает число часов работы
[1502] Счетчик кВтч Показывает потребление энергии
[1600] Командное слово Показывает в шестнадцатеричном
[1601] Задание [ед.
измер.]
[1602]*Задание % Полное задание (сумма заданий
[1603] Слово состояния Текущее слово состояния
[1605] Основное фактич.
значение [%]
[1609] Показ.по
выб.польз.
[1610] Мощность [кВт] Фактическая мощность,
[1611] Мощность [л. с.] Фактическая мощность,
[1612] Напряжение
двигателя
Отображает предупреждения
системы связи по шине PROFIBUS.
двигателя.
из сети в кВтч.
коде командное слово,
передаваемое из преобразователя
частоты через порт
последовательной связи.
Полное задание (сумма заданий
через цифровые входы/заданий
через аналоговые входы/
предварительно установленного
задания/задания по шине/
фиксации задания/увеличения и
уменьшения задания) в
выбранных единицах измерения.
через цифровые входы/заданий
через аналоговые входы/
предварительно установленного
задания/задания по шине/
фиксации задания/увеличения и
уменьшения задания) в
процентах.
Показывает слово из двух байтов,
передаваемое со словом
состояния на главное устройство
шины с сообщением текущего
значения параметра.
Отображает показания по выбору
пользователя, определенные в
параметр 0-30 Ед.изм. показания,
выб.польз.,
параметр 0-31 Мин.знач.
показания, зад.пользователем и
параметр 0-32 Макс.знач.
показания, зад.пользователем.
потребляемая двигателем (в кВт).
потребляемая двигателем (в л. с.).
Напряжение, подаваемое на
двигатель.
4 4
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 39
Page 42

Параметры
VLT® DriveMotor FCP 106/FCM 106
0-20 Строка дисплея 1.1, малая
Опция: Функция:
[1613] Частота Частота двигателя, то есть
выходная частота
преобразователя частоты (в Гц).
[1614] Ток двигателя Ток фазы двигателя (эффективное
значение).
44
[1615] Частота [%] Частота двигателя, то есть
выходная частота
преобразователя частоты (в
процентах).
[1616] Крутящий момент
[Н·м]
[1618] Тепловая нагрузка
двигателя
[1622] Крутящий момент
[%]
[1626] Фильтр. мощн.
[кВт]
[1627] Фильтр. мощн.
[л.с.]
[1630] Напряжение цепи
пост. тока
[1634] Темп. радиатора Текущая температура радиатора
[1635] Тепловая нагрузка
инвертора
[1636] Номинальный ток
инвертора
[1637] Макс. ток
инвертора
[1638] Состояние SL
контроллера
[1639] Температура платы
управления
[1650] Внешнее задание Сумма внешних заданий в
[1652] Обратная связь
[ед. изм.]
Текущая нагрузка двигателя в
процентах от номинального
крутящего момента двигателя.
Тепловая нагрузка двигателя,
вычисляемая электронным
тепловым реле (ЭТР). См. также
группу параметров 1-9*
Темпер.двигателя.
Показывает текущее значение
крутящего момента в процентах.
Напряжение цепи постоянного
тока преобразователя частоты.
преобразователя частоты. Порог
отключения составляет 95 ±5 °C;
повторное включение происходит
при температуре 70 ±5 °C.
Нагрузка инверторов в процентах.
Номинальный ток
преобразователя частоты.
Максимальный ток
преобразователя частоты.
Состояние события,
отрабатываемого контроллером.
Температура платы управления.
процентах, то есть сумма задания
через аналоговый вход,
импульсного задания и задания
по шине.
Значение задания, поступающего
с запрограммированных
цифровых входов.
0-20 Строка дисплея 1.1, малая
Опция: Функция:
[1660] Цифровой вход Выводит на дисплей состояние
цифровых входов. Низкий
уровень сигнала = 0; высокий
уровень сигнала = 1.
Относительно порядка см.
параметр 16-60 Цифровой вход.
Бит 0 — крайний справа.
[1661] Клемма 53,
настройка
переключателя
[1662] Аналоговый вход
AI53
[1663] Клемма 54,
настройка
переключателя
[1664] Аналоговый вход
AI54
[1665] Аналоговый выход
AO42 [мА]
[1666] Цифровой выход Двоичное значение всех
[1667] Импульсный вход
29# [Гц]
[1671] Релейный выход
[двоичный]
[1672] Счетчик A Показывает текущее значение
[1673] Счетчик B Показывает текущее значение
[1679] Аналоговый выход
AO45 [мА]
[1680] Fieldbus,
командное слово
1
[1682] Fieldbus, ЗАДАНИЕ1Главное значение задания,
[1684] Слово сост. вар.
связи
Установка входной клеммы 53. Ток
= 0; напряжение = 1.
Текущее значение сигнала на
входе 53, который используется
как задание или в качестве
уставки для защиты.
Установка входной клеммы 54. Ток
= 0; напряжение = 1.
Текущее значение сигнала на
входе 54 (значение задания или
уставки защиты).
Текущее значение сигнала на
выходе 42 в мА. С помощью
параметр 6-50 Клемма 42, выход
выбирается переменная для
представления выхода 42.
цифровых выходов.
Текущее значение частоты на
клемме 29, используемой в
качестве импульсного входа.
Показывает настройку всех реле.
счетчика A.
счетчика B.
Командное слово (CTW),
поступающее от главного
устройства шины.
посылаемое с командным словом
по сети последовательной связи,
например, от системы управления
зданием (BMS), ПЛК или иного
главного контроллера.
Расширенное слово состояния
варианта связи по периферийной
шине.
40 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 43

0
Custom Readout (Value)
P 16-09
Custom Readout
Unit P 0-30
Max value
P 0-32
Min value
Liniar
units only
P 0-31
Motor Speed
130BB779.10
Motor Speed
High limit
P 4-14 (Hz)
Linear Unit (e.g. Speed and ow)
Quadratic Unit (Pressure)
Cubic Unit (Power)
Параметры Руководство по программированию
0-20 Строка дисплея 1.1, малая
Опция: Функция:
[1685] Порт ПЧ, ком.
слово 1
[1686] Порт ПЧ, ЗАДАНИЕ1Слово состояния (STW),
[1690] Слово аварийной
сигнализации
[1691] Слово аварийной
сигнализации 2
[1692] Слово
предупреждения
[1693] Слово
предупреждения 2
[1694] Расшир. слово
состояния
[1695] Расшир. слово
состояния 2
[1697] Слово аварийной
сигнализации 3
[1850] Выв. данных без
датч. [ед.]
Командное слово (CTW),
поступающее от главного
устройства шины.
посылаемое на главное
устройство шины.
Один или несколько аварийных
сигналов в шестнадцатеричном
коде (используются для
последовательной связи)
Один или несколько аварийных
сигналов в шестнадцатеричном
коде (используются для
последовательной связи)
Одно или несколько
предупреждений в
шестнадцатеричном коде
(используются для
последовательной связи)
Одно или несколько
предупреждений в
шестнадцатеричном коде
(используются для
последовательной связи)
Одно или несколько состояний в
шестнадцатеричном коде
(используются для
последовательной связи).
Одно или несколько состояний в
шестнадцатеричном коде
(используются для
последовательной связи).
0-22 Строка дисплея 1.3, малая
Выберите переменную для отображения на дисплее, в строке
1, правая позиция.
Опция: Функция:
[1610] * Мощность [кВт] Варианты те же, что указаны в
параметр 0-20 Строка дисплея 1.1,
малая.
0-23 Строка дисплея 2, большая
Выберите переменную для отображения на дисплее в строке
2.
Опция: Функция:
[1613] * Частота Варианты те же, что указаны в
параметр 0-20 Строка дисплея 1.1, малая.
0-24 Строка дисплея 3, большая
Выберите переменную для отображения на дисплее в строке
3.
4.1.3 0-3* LCP Custom Readout and Display
Text (Вывод показаний по выбору
пользователя и текст на дисплее
LCP)
Элементы, выводимые на дисплей, можно настроить под
различные цели.
Показания по выбору пользователя
Отображаемая вычисленная величина основана на
настройках в параметрах
параметр 0-30 Ед.изм.показания, выб.польз.,
параметр 0-31 Мин.знач.показания, зад.пользователем
(только линейная), параметр 0-32 Макс.знач.показания,
зад.пользователем, параметр 4-14 Верхний предел
скорости двигателя [Гц] и фактической скорости.
4 4
0-21 Строка дисплея 1.2, малая
Выберите переменную для отображения на дисплее, в строке
1, средняя позиция.
Опция: Функция:
[1614] * Ток двигателя Варианты те же, что указаны в
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 41
параметр 0-20 Строка дисплея 1.1,
малая.
Рисунок 4.1 Показ.по выб.польз.
Page 44

Параметры
VLT® DriveMotor FCP 106/FCM 106
Скорость зависит от типа единицы измерения,
выбранного в параметр 0-30 Ед.изм.показания,
выб.польз.:
Тип ед. измерения Зависимость от скорости
Безразмерная
Скорость
Расход, объем
44
Расход, масса
Скорость позиционирования
Длина
Температура
Давление Квадратичная
Мощность Кубическая
Таблица 4.1 Зависимость от скорости
Линейная
0-30 Ед.изм.показания, выб.польз.
Опция: Функция:
Программирование значения,
отображаемого на дисплее LCP.
Эта величина имеет линейную,
квадратичную или кубическую
зависимость от скорости. Это
отношение зависит от
выбранной единицы измерения
(см. Таблица 4.1). Фактическое
расчетное значение может быть
прочитано в
параметр 16-09 Показ.по
выб.польз..
[0] Отсутствует
[1] * %
[5] млн.-1
[10] л/мин
[11] об/мин
[12] Импульсов/с
[20] л/с
[21] л/мин
[22] л/ч
[23] м³/с
[24] м³/мин
[25] м³/час
[30] кг/с
[31] кг/мин
[32] кг/ч
[33] т/мин
[34] т/ч
[40] м/с
[41] м/мин
[45] м
[60] °C (градусы Цельсия)
[70] мбар
[71] бар
[72] Па
0-30 Ед.изм.показания, выб.польз.
Опция: Функция:
[73] кПа
[74] м вод. ст.
[80] кВт
[120] галл./мин
[121] галл./с
[122] галл./мин
[123] галл./ч
[124] куб. фут/мин
[127] фут³/ч
[140] фут/с
[141] фут/мин
[160] °F (градусы
Фаренгейта)
[170] фунт/кв. дюйм
[171] фунт/кв. дюйм
[172] дюйм вод. ст.
[173] фут вод. ст.
[180] л. с.
0-31 Мин.знач.показания, зад.пользователем
Диапазон: Функция:
0 единиц
изм.,
выбр.
пользо
вателем*
[ 0-999999,99
единиц изм.,
выбр. пользо
вателем]
В данном параметре задается мин.
значение показания, выбираемого
пользователем, для вывода на экран
(выполняется на нулевой скорости).
При выборе линейных единиц
измерения в
параметр 0-30 Ед.изм.показания,
выб.польз. можно выбрать только
значение, отличное от 0. Для
квадратических и кубических
единиц минимальным значением
является 0.
0-32 Макс.знач.показания, зад.пользователем
Диапазон: Функция:
100 единиц
изм., выбр.
пользователем*
[ 0,0-999999,99
единиц изм.,
выбр.
пользователем]
Этот параметр задает
максимальное значение,
отображаемое, когда
скорость двигателя
достигла величины,
заданной в
параметр 4-14 Верхний
предел скорости
двигателя [Гц].
0-37 Текст 1 на дисплее
Диапазон: Функция:
[0 - 0 ] Используйте этот параметр для записи
индивидуальной текстовой строки для
считывания по последовательной связи.
Можно также включить идентификатор
устройства.
42 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 45

Параметры Руководство по программированию
0-37 Текст 1 на дисплее
Диапазон: Функция:
Используется, когда работает BACnet.
0-38 Текст 2 на дисплее
Диапазон: Функция:
[0 - 0 ] Используйте этот параметр для записи
индивидуальной текстовой строки для
считывания по последовательной связи.
Используется, когда работает BACnet.
0-39 Текст 3 на дисплее
Диапазон: Функция:
[0 - 0 ] Используйте этот параметр для записи
индивидуальной текстовой строки для
считывания по последовательной связи.
Используется, когда работает BACnet.
4.1.4 0-4* LCP
Активация, деактивация и защита паролем отдельных
кнопок на LCP.
0-40 Кнопка [Hand On] на LCP
Опция: Функция:
[0] Запрещено Выберите [0] Запрещено, чтобы исключить
случайный запуск преобразователя частоты
в местном режиме.
[1] * Разрешено Разрешает действие кнопки [Hand On]
(Ручной режим).
4.1.5 0-5* Copy/Save (Копир./сохранить)
Копирование настроек параметров из одного набора в
другой, а также в память LCP и из нее.
0-50 Копирование с LCP
Опция: Функция:
[0] * Не копировать
[1] Все в LCP Копирование всех параметров всех
наборов из памяти
преобразователя частоты в память
LCP. Для целей техобслуживания
скопируйте все параметры в LCP
после ввода преобразователя
частоты в эксплуатацию.
[2] Все из LCP Копирование всех параметров всех
наборов из памяти LCP в память
преобразователя частоты.
[3] Нез.от типор.из LCP Копирование только тех
параметров, которые не зависят от
типоразмера двигателя. Это
значение может использоваться
для программирования нескольких
преобразователей частоты с
одинаковыми функциями без
изменения заданных ранее
параметров двигателей.
[10] Delete LCP copy
data (Удалить
скопированные
данные на LCP)
4 4
0-42 Кнопка [Auto On] на LCP
Опция: Функция:
[0] Запрещено Выберите [0] Запрещено, чтобы исключить
случайный запуск преобразователя частоты
с LCP.
[1] * Разрешено Разрешает действие кнопки [Auto on]
(Автоматический режим).
0-44 Кнопка [O/Reset] на LCP
Опция: Функция:
[0] Запрещено Кнопка O/Reset (Выкл./Сброс)
отключена.
[1] * Разрешено Включены обе функции — и
выключения, и сброса.
[7] Разрешен
только сброс
Включена функция сброса и отключена
функция выключения, чтобы исключить
непреднамеренный останов
преобразователя частоты.
0-51 Копировать набор
Опция: Функция:
[0]*Не копировать Не используется.
[1] Копировать в
набор 1
[2] Копировать в
набор 2
[9] Копир. во все
наборы
Копирование из набора 1 в набор 2.
Копирование из набора 2 в набор 1.
Копирование заводской настройки в
программируемый набор (выбранный в
параметр 0-11 Программирование
набора).
4.1.6 0-6* Пароль
0-60 Пароль главного меню
Диапазон: Функция:
0* [0 - 999 ] Задайте пароль для доступа в Главное меню с
помощью кнопки [Main Menu] (Главное
меню). Установка значения 0 запрещает
функцию пароля.
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 43
Page 46

Параметры
VLT® DriveMotor FCP 106/FCM 106
4.2 Главное меню — Нагрузка/двигатель — Группа 1
Параметры, имеющие отношение к компенсациям
нагрузки и типу применяемой нагрузки, указанным на
паспортной табличке электродвигателя.
4.2.1 1-0* General Settings (Общие
настройки)
1-01 Принцип управления двигателем
Опция: Функция:
(Характеристика U/f — U) и параметр 1-56 U/f
Characteristic - F (Характеристика U/f — F).
[1] * VVC+
УВЕДОМЛЕНИЕ
Если в параметр 1-10 Конструкция
44
1-00 Режим конфигурирования
Опция: Функция:
УВЕДОМЛЕНИЕ
двигателя выбраны значения,
относящиеся к двигателям с постоянными
магнитами, доступно только значение VVC
+
.
Этот параметр нельзя изменить во
время работы двигателя.
[0]*Разомкнутый
контур
[3] Замкнутый
контур
Скорость вращения двигателя
определяется заданием скорости или
установкой требуемой скорости в местном
режиме.
Разомкнутый контур также используется,
если преобразователь частоты является
частью системы управления с замкнутым
контуром регулирования на базе
внешнего ПИ-регулятора, выдающего в
качестве выходного сигнала сигнал
задания скорости.
УВЕДОМЛЕНИЕ
Если выбрана работа в замкнутом
контуре, подача команд Реверс или
Запуск и реверс не приведет к
изменению направления вращения
двигателя.
Скорость двигателя определяется
заданием, поступающим с встроенного
ПИ-регулятора. ПИ-регулятор изменяет
скорость двигателя как составляющую
процесса регулирования с замкнутым
контуром (например, при постоянном
давлении или расходе). ПИ-регулятор
настраивается в группе параметров 20-**
Замкнутый контур управления приводом.
1-01 Принцип управления двигателем
Опция: Функция:
[0] U/f
УВЕДОМЛЕНИЕ
При управлении U/f управление
скольжением и компенсация нагрузки
отсутствуют.
1-03 Хар-ка момента нагрузки
Опция: Функция:
[0] Постоянный
[1]*Переменный
[3] Авт. Оптим.
1-06 Clockwise Direction
Опция: Функция:
Режим нормальной работы, включающий
компенсацию скольжения и нагрузки.
Используется только для регулирования
крутящий
момент
крутящий
момент
Энергопот
скорости двигателей сс постоянными
магнитами.
Применяется для регулирования
скорости центробежных насосов и
вентиляторов. Также следует
использовать при регулировании одним
преобразователем частоты нескольких
двигателей (например, вентиляторов
конденсаторной воды или вентиляторов
градирни). Подается напряжение,
оптимизированное для квадратичной
характеристики нагрузочного момента
двигателя.
Применяется для оптимального
энергосберегающего регулирования
скорости центробежных насосов и
вентиляторов, обеспечивает подачу
напряжения, оптимизированного для
квадратичной характеристики
нагрузочного момента двигателя. Кроме
того, функция автоматической
оптимизации энергопотребления (АОЭ)
точно адаптирует напряжение к
изменяющейся токовой нагрузке,
уменьшая тем самым расход энергии и
акустический шум двигателя.
УВЕДОМЛЕНИЕ
Этот параметр не может быть изменен во
Используется при параллельном подключении
двигателей и/или для двигателей в специальных
применениях. Задайте настройки U/f в
параметр 1-55 U/f Characteristic - U
время вращения двигателя.
Этот параметр определяет направление По
часовой стрелке, соответствующее стрелке
44 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 47

Параметры Руководство по программированию
1-06 Clockwise Direction
Опция: Функция:
направления на LCP. Используется для удобного
изменения направления вращения вала, чтобы
не менять местами провода двигателя.
[0]*Normal Вал двигателя вращается по часовой стрелке
при подключении преобразователя частоты к
двигателю следующим образом: U⇒U, V⇒V и
W⇒W.
[1] Inverse Вал двигателя вращается против часовой
стрелки при подключении преобразователя
частоты к двигателю следующим образом: U⇒U,
V⇒V и W⇒W.
1-08 Motor Control Bandwidth (Полоса управления
двигателем)
Опция: Функция:
[0] High (Высокая) Высокодинамичная реакция.
[1] Medium (Средняя) Оптимизировано для плавной работы
в установившемся режиме.
[2] Low (Низкая) Оптимизировано для плавной работы
в установившемся режиме с низкой
динамической реакцией.
[3] Adaptive 1 (Адапт.
управление 1)
[4] Adaptive 2 (Адапт.
управление 2)
Оптимизирован для плавной работы
в установившемся режиме с
подавлением излишней активности.
Альтернатива адаптивному режиму 1,
оптимизированная для двигателей
низкой индуктивности с постоянными
магнитами.
4.2.2 1-10 – 1-12 Выбор двигателя
УВЕДОМЛЕНИЕ
Эту группу параметров нельзя изменять во время
работы двигателя.
Перечисленные ниже параметры являются активными
(«x») в зависимости от значения параметра
параметр 1-10 Конструкция двигателя.
Параметр 1-10 Кон
струкция
двигателя
Параметр 1-00 Реж
им
конфигурирования
Параметр 1-03 Хар-
ка момента
нагрузки
Параметр 1-06 По
часовой стрелке
[0] Асинхронный [1] Одноф.с пост.
магн.
x x
x
x x
Параметр 1-14 Усил
. подавл.
Параметр 1-15 Пос
т. вр. фил./низк.
скор.
Параметр 1-16 Пос
т. вр. фил./выс.
скор.
Параметр 1-17 Пос
т. вр. фил. напряж.
Параметр 1-20 Мо
щность двигателя
[кВт]
Параметр 1-22 Нап
ряжение двигателя
Параметр 1-23 Час
тота двигателя
Параметр 1-24 Ток
двигателя
Параметр 1-25 Ном
инальная скорость
двигателя
Параметр 1-26 Дли
тельный ном.
момент двигателя
Параметр 1-29 Авт
о адаптация
двигателя (ААД)
Параметр 1-30 Соп
ротивление
статора (Rs)
Параметр 1-33 Реак
т.сопротивл.рассея
ния статора(X1)
Параметр 1-35 Осн
овное реактивное
сопротивление (Xh)
Параметр 1-37 Инд
уктивность по оси
d (Ld)
Параметр 1-39 Чис
ло полюсов
двигателя
Параметр 1-40 Про
тиво-ЭДС при 1000
об/мин
Параметр 1-52 Мин
. скорость норм.
намагнич. [Гц]
Параметр 1-60 Ком
пенсация нагрузки
на низк.скорости
Параметр 1-61 Ком
пенсация нагрузки
на выс.скорости
x
x
x
x
4 4
x
x
x x
x x
x x
x
x x
x x
x
x
x
x x
x
x
x
x
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 45
Page 48

Параметры
VLT® DriveMotor FCP 106/FCM 106
Параметр 1-62 Ком
пенсация
скольжения
Параметр 1-63 Пос
т.времени
компенсации
скольжения
Параметр 1-64 Под
авление резонанса
44
Параметр 1-65 Пос
тоянная времени
подавл. резонанса
Параметр 1-66 Мин
. ток при низкой
скорости
Параметр 1-71 Заде
ржка запуска
Параметр 1-72 Фун
кция запуска
Параметр 1-73 Запу
ск с хода
Параметр 1-80 Фун
кция при останове
Параметр 1-82 Мин
.ск. д.функц.при
ост. [Гц]
Параметр 1-90 Тепл
овая защита
двигателя
Параметр 2-00 Ток
удержания (пост.
ток)
Параметр 2-01 Ток
торможения пост.
током
Параметр 2-02 Вре
мя торможения
пост. током
Параметр 2-04 Ско
рость
включ.торм.пост.т
оком [Гц]
Параметр 2-06 Ток
торм. пост. т.
Параметр 2-07 Вр.
торм. пост. т.
Параметр 2-10 Фун
кция торможения
Параметр 2-16 Мак
с.ток торм.пер.ток
Параметр 2-17 Кон
троль
перенапряжения
Параметр 4-10 Нап
равление вращения
двигателя
x
x
x
x
x
x x
x x
x x
x x
x x
x x
x
x
x
x
x
x
x x
x
x x
x x
Параметр 4-12 Ниж
ний предел
скорости
двигателя [Гц]
Параметр 4-14 Верх
ний предел
скорости
двигателя [Гц]
Параметр 4-18 Пре
дел по току
Параметр 4-19 Мак
с. выходная
частота
Параметр 4-58 Фун
кция при обрыве
фазы двигателя
Параметр 14-40 Ур
овень изменяющ.
крутящ. момента
Параметр 14-41 Ми
н. намагничивание
АОЭ
Параметр 30-22
Locked Rotor
Detection (Определ.
блокир. ротора)
Параметр 30-23 Вр
емя определ.
блокир. ротора [с]
Таблица 4.2 Параметры, активируемые установкой
Параметр 1-10 Конструкция двигателя
x x
x x
x x
x x
x x
x
x
x
x
1-10 Конструкция двигателя
Опция: Функция:
[0]*Асинхронный Для асинхронных двигателей.
[1] Неявноп. с пост.
магн
[2] PM, salient IPM, non
Sat (Явнополюсн. с
пост. магнитами без
управл.
насыщением
индукции)
[3] PM, salient IPM, Sat
(Явнополюсн. с
пост. магнитами с
управл.
Для двигателей с постоянными
магнитами (PM) с наружными
(неявнополюсными) магнитами. Для
оптимизации работы двигателя
обратитесь к параметрам с
параметр 1-14 Damping Gain по
параметр 1-17 Voltage lter time
const..
Для двигателей с постоянными
магнитами с внутренними
(явнополюсными) магнитами без
управления насыщением индукции.
Для двигателей с постоянными
магнитами (PM) с внутренними
(явнополюсными) магнитами с
управлением насыщением
индукции.
46 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 49

Параметры Руководство по программированию
1-10 Конструкция двигателя
Опция: Функция:
насыщением
индукции)
1-11 Выбор двигателя
Опция: Функция:
[0] * Default Motor Selection (Выбор по
умолчанию для параметров
двигателя)
[1] Выбор двигателя 1
[2] Выбор двигателя 2
[3] Выбор двигателя 3
[4] Выбор двигателя 4
[5] Выбор двигателя 5
[6] Выбор двигателя 6
[7] Выбор двигателя 7
[8] Выбор двигателя 8
[9] Выбор двигателя 9
[10] Выбор двигателя 10
[11] Выбор двигателя 11
[12] Выбор двигателя 12
[13] Выбор двигателя 13
[14] Выбор двигателя 14
[15] Выбор двигателя 15
[16] Выбор двигателя 16
[17] Выбор двигателя 17
[18] Выбор двигателя 18
[19] Выбор двигателя 19
[20] Выбор двигателя 20
[21] Выбор двигателя 21
[22] Выбор двигателя 22
[23] Выбор двигателя 23
[24] Выбор двигателя 24
[25] Выбор двигателя 25
[26] Выбор двигателя 26
[27] Выбор двигателя 27
[28] Выбор двигателя 28
[29] Выбор двигателя 29
[30] Выбор двигателя 30
[31] Выбор двигателя 31
Автоматически
задает значения,
установленные
изготовителем для
выбранного
двигателя.
Значение этого
параметра может
повлиять на
следующие
параметры. При
изменении
выбранного типа
двигателя
изменяются и
другие параметры.
1-11 Выбор двигателя
Опция: Функция:
[32] Выбор двигателя 32
[33] Выбор двигателя 33
[34] Выбор двигателя 34
[35] Выбор двигателя 35
[36] Выбор двигателя 36
[37] Выбор двигателя 37
[38] Выбор двигателя 38
[39] Выбор двигателя 39
[40] Выбор двигателя 40
[41] Выбор двигателя 41
[42] Выбор двигателя 42
[43] Выбор двигателя 43
[44] Выбор двигателя 44
[45] Выбор двигателя 45
[46] Выбор двигателя 46
[47] Выбор двигателя 47
[48] Выбор двигателя 48
[49] Выбор двигателя 49
[50] Выбор двигателя 50
[51] Выбор двигателя 51
[52] Выбор двигателя 52
[53] Выбор двигателя 53
[54] Выбор двигателя 54
[55] Выбор двигателя 55
[56] Выбор двигателя 56
[57] Выбор двигателя 57
[58] Выбор двигателя 58
[59] Выбор двигателя 59
[60] Выбор двигателя 60
[61] Выбор двигателя 61
[62] Выбор двигателя 62
[63] Выбор двигателя 63
[64] Выбор двигателя 64
1-12 Motor ID (Идентификатор двигателя)
Диапазон: Функция:
Двигатель по
умолчанию*
4.2.3
1-14 – 1-17 VVC+ PM
[0 - 0 ] Отображает название двигателя в
соответствии с двигателем,
выбранным в
параметр 1-11 Выбор двигателя.
Параметры управления по умолчанию для ядра
управления двигателями с постоянными магнитами (VVC
+
) оптимизированы для применений HVAC и нагрузки
инерции в диапазоне 50> Jl/Jm >5. Jl — это инерция
нагрузки системы, а Jm — инерция машины.
Для систем с низкой инерцией (Jl/Jm<5) рекомендуется,
чтобы параметр 1-17 Пост. вр. фил. напряж.
увеличивался с коэффициентом 5–10. Для повышения
производительности и стабильности в некоторых
4 4
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 47
Page 50

Параметры
VLT® DriveMotor FCP 106/FCM 106
случаях необходимо уменьшить значение параметра
параметр 14-08 Коэффициент усиления подавления.
Для систем с высокой инерцией (Jl/Jm >50)
рекомендуется увеличить значения параметров
параметр 1-15 Пост. вр. фил./низк. скор.,
параметр 1-16 Пост. вр. фил./выс. скор. и
параметр 14-08 Коэффициент усиления подавления для
повышения производительности и устойчивости.
Для высокой нагрузки при малой скорости (<30 % от
44
номинальной) рекомендуется увеличить значение
параметра параметр 1-17 Пост. вр. фил. напряж. в
связи с нелинейностью в инверторе при малой
скорости.
1-14 Усил. подавл.
Диапазон: Функция:
120 %* [0 -
250 %]
Этот параметр стабилизирует двигатель с
постоянными магнитами и обеспечивает его
плавную и устойчивую работу. Значение
усиления подавления контролирует
динамические характеристики двигателя с
постоянными магнитами. Низкое значение
усиления подавления приведет к
повышению динамических характеристик, а
высокое значение — к понижению
динамических характеристик. Динамические
характеристики связаны с данными
двигателя и типом нагрузки. Если усиление
подавления слишком высокое или низкое,
управление станет неустойчивым.
1-16 Пост. вр. фил./выс. скор.
Диапазон: Функция:
мало, управление становится
неустойчивым. Эта постоянная
времени используется при
скорости, превышающей 10 %
от номинальной.
1-17 Пост. вр. фил. напряж.
Диапазон: Функция:
В соответствии с
типоразмером*
[0,001-1с]Постоянная времени фильтра
напряжения машины
используется для уменьшения
воздействия пульсации
высокой частоты и резонанса
в системе на расчет
напряжения машины. Без
этого фильтра пульсации тока
могут исказить вычисленное
напряжение и повлиять на
устойчивость системы.
4.2.4 1-2* Данные двигателя
Параметры этой группы содержат введенные данные с
паспортной таблички подключенного двигателя.
УВЕДОМЛЕНИЕ
Изменение значений этих параметров влияет на
1-15 Пост. вр. фил./низк. скор.
настройку других параметров.
Диапазон: Функция:
В соответствии с
типоразмером*
1-16 Пост. вр. фил./выс. скор.
Диапазон: Функция:
В соответствии с
типоразмером*
[0,01-20с]Постоянная времени
подавления фильтра высоких
частот определяет время
отклика на шаги нагрузки. При
малой постоянной времени
подавления обеспечивается
быстрое управление. Однако
если это значение слишком
мало, управление становится
неустойчивым. Эта постоянная
времени используется при
скорости, не превышающей
10 % от номинальной.
[0,01-20с]Постоянная времени
подавления фильтра высоких
частот определяет время
отклика на шаги нагрузки. При
малой постоянной времени
подавления обеспечивается
быстрое управление. Однако
если это значение слишком
1-20 Мощность двигателя
Введите номинальную мощность двигателя в киловаттах или
л.с. в соответствии с данными паспортной таблички двигателя.
Значение по умолчанию соответствует номинальной выходной
мощности блока.
Этот параметр невозможно регулировать во время работы
двигателя.
Опция: Функция:
[3] 0,18 кВт - 0,25 л. с.
[4] 0,25 кВт - 0,33 л. с.
[5] 0,37 кВт - 0,5 л. с.
[6] 0,55 кВт - 0,75 л. с.
[7] 0,75 кВт - 1 л. с.
[8] 1,1 кВт - 1 л. с.
[9] 1,5 кВт - 2 л. с.
[10] 2,2 кВт - 3 л. с.
[11] 3 кВт - 4 л. с.
[12] 3,7 кВт - 5 л. с.
[13] 4 кВт - 5,4 л. с.
[14] 5,5 кВт - 7,5 л. с.
[15] 7,5 кВт - 10 л. с.
[16] 11 кВт - 15 л. с.
[17] 15 кВт - 20 л. с.
48 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 51

Параметры Руководство по программированию
1-20 Мощность двигателя
Введите номинальную мощность двигателя в киловаттах или
л.с. в соответствии с данными паспортной таблички двигателя.
Значение по умолчанию соответствует номинальной выходной
мощности блока.
Этот параметр невозможно регулировать во время работы
двигателя.
Опция: Функция:
[18] 18,5 кВт - 25 л. с.
[19] 22 кВт - 30 л. с.
[20] 30 кВт - 40 л. с.
1-22 Напряжение двигателя
Диапазон: Функция:
В соответствии с
типоразмером*
[50-1000В]Введите номинальное
напряжение двигателя в
соответствии с его
паспортными данными.
Значение по умолчанию
соответствует номинальной
выходной мощности блока.
1-23 Частота двигателя
Диапазон: Функция:
В соответствии
с
типоразмером*
[20-400
Гц]
УВЕДОМЛЕНИЕ
Этот параметр невозможно
регулировать во время работы
двигателя.
Выберите значение частоты
двигателя по его паспортным
данным. Для работы на частоте 87
Гц с двигателями напряжением
230/400 В, установите паспортные
данные для 230 В/50 Гц. Задайте в
параметр 4-14 Верхний предел
скорости двигателя [Гц] и
параметр 3-03 Максимальное
задание работу с частотой 87 Гц.
1-24 Ток двигателя
Диапазон: Функция:
В соответствии
с
типоразмером*
[ 0,01-10000,00
A]
УВЕДОМЛЕНИЕ
Этот параметр
невозможно
регулировать во время
работы двигателя.
Введите номинальный ток
двигателя в соответствии его
паспортными данными. Эти
данные используются для
расчета крутящего момента
двигателя, тепловой защиты
двигателя и т. д.
1-25 Номинальная скорость двигателя
Диапазон: Функция:
В соответствии с
типоразмером*
[50-60000
об/мин]
Введите номинальную
скорость двигателя в
соответствии его
паспортными данными.
Данные используются для
расчета автоматической
компенсации двигателя.
1-26 Длительный ном. момент двигателя
Диапазон: Функция:
Size
related*
[0.1 10000
Nm]
УВЕДОМЛЕНИЕ
Изменение значения этого
параметра влияет на установку
других параметров.
Этот параметр действует только в том
случае, если для
параметр 1-10 Конструкция двигателя
установлены значения, включающие
режим двигателя с постоянными
магнитами.
1-29 Авто адаптация двигателя (ААД)
Опция: Функция:
УВЕДОМЛЕНИЕ
Этот параметр невозможно
регулировать во время работы
двигателя.
Функция ААД оптимизирует динамические
характеристики двигателя путем
автоматической оптимизации
расширенных параметров двигателя (с
параметр 1-30 Сопротивление статора
(Rs) по параметр 1-35 Основное
реактивное сопротивление (Xh)) при
неподвижном двигателе.
[0]*Выкл. Не используется
[1] Включ.
полной ААД
Если в параметр 1-10 Motor Construction
выбрано значение [0] Асинхронный,
выполняется ААД для параметров
параметр 1-30 Stator Resistance (Rs),
параметр 1-33 Stator Leakage Reactance
(X1) и параметр 1-35 Main Reactance (Xh).
Если в параметр 1-10 Motor Construction
выбраны значения, относящиеся к
двигателям с постоянными магнитами,
выполняется ААД для параметров
параметр 1-30 Stator Resistance (Rs) и
параметр 1-35 Main Reactance (Xh).
4 4
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 49
Page 52

Параметры
VLT® DriveMotor FCP 106/FCM 106
1-29 Авто адаптация двигателя (ААД)
Опция: Функция:
УВЕДОМЛЕНИЕ
Для цифрового входа клеммы 27
(параметр 5-12 Клемма 27,
цифровой вход) по умолчанию
установлено значение [2] Выбег,
инверсный. Это означает, что ААД не
44
[2] Включ.упрощ.
AАД
может быть выполнена при
отсутствии напряжения 24 В на
клемме 27.
Выполняется только упрощенная ААД
сопротивления статора Rs в системе.
Выберите этот вариант, если между
преобразователем частоты и двигателем
включен LC-фильтр.
УВЕДОМЛЕНИЕ
Если в параметр 1-10 Конструкция двигателя
установлены значения, включающие режим двигателя
с постоянными магнитами, единственным доступным
для выбора значением будет [1] Включ. полной ААД.
После выбора [1] Включ. полной ААД или [2]
Включ.упрощ. AАД активизируйте функцию ААД
нажатием кнопки [Hand on] (Ручной режим). После
выполнения обычной последовательности операций на
дисплее появляется сообщение: Нажмите [OK] для
завершения ААД. После нажатия кнопки [OK]
преобразователь частоты готов к работе.
УВЕДОМЛЕНИЕ
Для наилучшей адаптации преобразователя
•
частоты выполняйте ААД на холодном
двигателе.
ААД не может проводиться на работающем
•
двигателе.
ААД не может быть выполнена на двигателе с
•
большей номинальной мощностью, чем у
преобразователя частоты, например, при
подключении двигателя мощностью 5,5 кВт
(7,5 л. с.) к преобразователю частоты
мощностью 4 кВт (5 л. с.).
УВЕДОМЛЕНИЕ
При выполнении ААД на двигатель не должен
воздействовать внешний крутящий момент.
УВЕДОМЛЕНИЕ
При изменении одного из значений в группе
параметров 1-2* Данные двигателя расширенные
параметры двигателя (с
параметр 1-30 Сопротивление статора (Rs) по
параметр 1-39 Число полюсов двигателя)
возвращаются к установкам по умолчанию.
УВЕДОМЛЕНИЕ
Полная ААД выполняется без фильтра, а упрощенная
ААД должна выполняться с фильтром.
1-30 Сопротивление статора (Rs)
Диапазон: Функция:
В соответствии с
типоразмером*
1-33 Реакт. сопрот. рассеяния статора (X1)
Диапазон: Функция:
В соответствии с
типоразмером*
1-35 Основное реактивное сопротивление (Xh)
Диапазон: Функция:
В соответствии
с
типоразмером*
[ 0,0-99,99
Ом]
[ 0,0-999,9
Ом]
УВЕДОМЛЕНИЕ
Этот параметр невозможно
регулировать во время
работы двигателя.
Установите значение
сопротивления статора. Введите
значение из паспортных данных
двигателя или выполните ААД
на холодном двигателе.
[ 0,0-999,9 Ом] Задайте реактивное
сопротивление
рассеяния статора
двигателя.
Установите основное реактивное
сопротивление двигателя одним
из следующих способов.
Выполните ААД на
•
холодном двигателе.
Преобразователь
частоты измеряет это
значение на двигателе.
Введите значение X
•
вручную. Это значение
нужно получить у
поставщика двигателя.
Воспользуйтесь
•
значением Xh по
умолчанию.
Преобразователь
частоты определяет
значение на основе
h
50 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 53

Line to common (starpoint)
Line to line values
Rs and Ld
Rs and Ld
130BC008.11
Permanent magnet motors
130BC009.10
Line to Line Back
Emf in RMS Value
at 1000 rpm
Speed (mech)
Параметры Руководство по программированию
1-35 Основное реактивное сопротивление (Xh)
Диапазон: Функция:
данных паспортной
таблички двигателя.
1-37 Индуктивность по оси d (Ld)
Диапазон: Функция:
В соответствии
с
типоразмером*
[ 0-1000
мГн]
УВЕДОМЛЕНИЕ
Этот параметр действует,
только если в
параметр 1-10 Конструкция
двигателя установлено
значение [1] Одноф. с пост.
магн.
Введите значение индуктивности
по оси d. Возьмите это значение из
листа технических характеристик
двигателя с постоянными
магнитами.
В технических характеристиках активное сопротивления
статора и индуктивность по оси d для асинхронных
двигателей обычно указываются как значения между
линией и общим проводом (нейтральной точкой
звезды). Для двигателей с постоянными магнитами они
обычно приводятся в технических характеристиках как
значение «линия — линия». В двигателях с постоянными
магнитами обычно используется соединение типа
«звезда».
Параметр 1-40 Против
о-ЭДС при 1000 об/мин
Эффективное значение
(значение между
линиями).
Таблица 4.3 Параметры, относящиеся к двигателям с
постоянными магнитами
Этот параметр определяет противоЭДС через клемму статора двигателя
с постоянными магнитами при
механической скорости 1000 об/
мин. Оно определяется между
линиями и выражается как
эффективное значение.
УВЕДОМЛЕНИЕ
Изготовители двигателей предоставляют значения
активного сопротивления статора
(параметр 1-30 Сопротивление статора (Rs)) и
индукции по оси d (параметр 1-37 Индуктивность по
оси d (Ld)) в технических характеристиках как данные
между линией и общим проводом (нейтральной
точкой звезды) или между линиями. Не существует
общего стандарта. Разные настройки сопротивления
обмотки статора и индукции представлены на
Рисунок 4.2. Преобразователи частоты Danfoss всегда
требуют значения между линией и общим проводом.
Противо-ЭДС двигателя с постоянными магнитами
определяется как «Индуцированная ЭДС на любой из
двух фаз обмотки статора свободно вращающегося
двигателя». Преобразователи частоты Danfoss всегда
требуют использования эффективного значения
между линиями, измеренного при 1000 об/мин
механической скорости вращения. Это показано на
Рисунок 4.3.
4 4
Параметр 1-30 Сопрот
ивление статора (Rs)
(между линией и общим
проводом).
Параметр 1-37 Индукти
вность по оси d (Ld)
(между линией и общим
проводом).
Этот параметр определяет
сопротивление обмотки статора (Rs)
аналогично сопротивлению статора
асинхронного двигателя.
Сопротивление статора
определяется для измерения
значения «линия — общий провод».
Если сопротивление статора
измеряется между двумя линиями,
чтобы получить значение «линия —
линия», необходимо поделить
полученное значение на 2.
Этот параметр определяет
индуктивность по продольной оси
для двигателей с постоянными
магнитами. Индуктивность по оси d
определяется для измерения между
фазой и общим проводом. Если
сопротивление статора измеряется
между двумя линиями, чтобы
получить значение «линия —
линия», необходимо поделить
полученное значение на 2.
Рисунок 4.2 Характеристики обмотки статора
Рисунок 4.3 Определения параметров противо-ЭДС для
двигателей с постоянными магнитами
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 51
Page 54

Параметры
VLT® DriveMotor FCP 106/FCM 106
1-38 Индуктивн.по оси q (Lq)
Диапазон: Функция:
В соответствии с
типоразмером*
44
[ 0,000-1000
мГн]
Введите значение
индуктивности по оси q.
Возьмите это значение из
листа технических
характеристик двигателя с
постоянными магнитами.
Во время работы
двигателя это значение
изменять нельзя.
1-39 Число полюсов двигателя
1-45 q-axis Inductance Sat. (LqSat)
Диапазон: Функция:
индуктивности, введите значение, равное
200 % номинального значения
индуктивности.
1-46 Коэф. усил. обнаруж. положения
Диапазон: Функция:
100 %* [20 - 200 %] Настраивает амплитуду тестового
импульса в процессе обнаружения
положения при пуске. Отрегулируйте
этот параметр для улучшения
измерения положения.
Диапазон: Функция:
В соответствии с
типоразмером*
[2 -
УВЕДОМЛЕНИЕ
100 ]
Этот параметр не может быть
изменен во время вращения
двигателя.
Введите число полюсов двигателя.
Число полюсов двигателя всегда
четное, поскольку оно представляет
собой общее число полюсов, а не
число их пар.
1-40 Противо-ЭДС при 1000 об/мин
Диапазон: Функция:
В соответствии с
типоразмером*
[10-9000В]Линейное
среднеквадратическое
значение напряжения
противо-ЭДС при 1000 об/
мин.
1-44 d-axis Inductance Sat. (LdSat)
1-48 Current at Min Inductance for d-axis (Ток при мин.
индуктивности для оси d)
Диапазон: Функция:
100 %* [ 20 -
200 %]
Этот параметр определяет кривую
насыщения для значений индуктивности по
оси d. При значениях данного параметра от
20 % до 100 % значения индуктивности
линейно аппроксимируются в соответствии с
параметрами параметр 1-37 Индуктивность
по оси d (Ld), параметр 1-38 Индуктивн.по
оси q (Lq), параметр 1-44 Насыщение
индуктивности по оси d (LdSat) и
параметр 1-45 Насыщение индуктивности
по оси q (LqSat). Ниже и выше эти значения
задаются соответствующими параметрами.
Эти параметры имеют отношение к
компенсациям нагрузки, указанным на
паспортной табличке электродвигателя, типу
применяемой нагрузки, а также к функции
электронного торможения для быстрого
останова/удержания двигателя.
Диапазон: Функция:
Size
related*
[0 1000
mH]
Этот параметр соответствует
индуктивности насыщения Ld. В идеале
значение этого параметра совпадает со
значением в
параметр 1-37 Индуктивность по оси d
(Ld). Если поставщик двигателя
предоставил характеристики
индуктивности, введите значение, равное
200 % номинального значения
индуктивности.
1-45 q-axis Inductance Sat. (LqSat)
Диапазон: Функция:
Size
related*
[0 1000
mH]
Этот параметр соответствует
индуктивности насыщения Lq. В идеале
значение этого параметра совпадает со
значением в параметр 1-38 Индуктивн.
по оси q (Lq). Если поставщик двигателя
предоставил характеристики
1-49 Current at Min Inductance for q-axis (Ток при мин.
индуктивности для оси q)
Диапазон: Функция:
100 %* [ 20 -
200 %]
Этот параметр определяет кривую
насыщения для значений индуктивности по
оси q. При значениях данного параметра от
20 % до 100 % значения индуктивности
линейно аппроксимируются в соответствии с
параметрами параметр 1-37 Индуктивность
по оси d (Ld), параметр 1-38 Индуктивн.по
оси q (Lq), параметр 1-44 Насыщение
индуктивности по оси d (LdSat) и
параметр 1-45 Насыщение индуктивности
по оси q (LqSat). Ниже и выше эти значения
задаются соответствующими параметрами.
Эти параметры имеют отношение к
компенсациям нагрузки, указанным на
паспортной табличке электродвигателя, типу
применяемой нагрузки, а также к функции
52 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 55

Magn. current
130BB780.10
Hz
Par.1-50
90%
Par.1-52
Motor Voltage
Par 1-55 [x]
Output Frequency
Par 1-56 [x]
1-55[5]
1-55[4]
1-55[3]
1-55[2]
1-55[1]
1-55[0]
1-56
[0]
1-56
[1]
1-56
[2]
1-56
[3]
1-56
[4]
1-56
[5]
130BA166.10
Параметры Руководство по программированию
1-49 Current at Min Inductance for q-axis (Ток при мин.
индуктивности для оси q)
Диапазон: Функция:
электронного торможения для быстрого
останова/удержания двигателя.
1-50 Намагнич. двигателя при 0 скорости
Диапазон: Функция:
100 %* [0 -
300 %]
Этот параметр используется вместе с
параметр 1-52 Мин. скорость норм.
намагнич. [Гц] для получения различной
тепловой нагрузки двигателя при его
вращении на низкой скорости.
Введите значение в процентах от
номинального тока намагничивания. Если
заданное значение слишком мало, возможно
снижение крутящего момента на валу
двигателя.
1-56 U/f Characteristic - F (Характеристика U/f — F)
Диапазон: Функция:
В соответствии
с
типоразмером*
[0-400,0
Гц]
Введите частотные точки, чтобы
построить характеристику U/f,
соответствующую двигателю.
Напряжение в каждой точке
определяется в параметр 1-55 U/f
Characteristic - U (Характеристика
U/f — U).
Задайте характеристику U/f,
основанную на 6 определяющих
напряжениях и частотах, см.
Рисунок 4.5.
Упростите характеристику U/f,
объединив две или более точек
напряжения и частоты. Установите
для точек равные значения.
4 4
Рисунок 4.4 Намагничивание двигателя
1-52 Мин. скорость норм. намагнич. [Гц]
Диапазон: Функция:
1 Гц* [0,1-10,0 Гц] Данный параметр задает требуемую
частоту для нормального тока
намагничивания.
Используйте этот параметр вместе с
параметр 1-50 Намагнич. двигателя при 0
скорости. См. Рисунок 4.4.
1-55 U/f Characteristic - U (Характеристика U/f — U)
Диапазон: Функция:
В соответствии с
типоразмером*
[0-1000В]Введите значение
напряжения в каждой точке
по частоте, чтобы построить
характеристику U/f,
соответствующую двигателю.
Частотные точки
определяются в
параметр 1-56 U/f Charac-
teristic - F (Характеристика
U/f — F).
Рисунок 4.5 Характеристика U/f
1-60 Компенсация нагрузки на низк.скорости
Диапазон: Функция:
100 %* [0 -
300 %]
Введите в процентах значение компенсации
нагрузки на низкой скорости. Этот
параметр используется для оптимизации
нагрузки двигателя на низких оборотах.
Этот параметр активен, только если
параметр 1-10 Конструкция двигателя =
[0] Асинхронный.
1-61 Компенсация нагрузки на выс.скорости
Диапазон: Функция:
100 %* [0 -
300 %]
Введите в процентах значение компенсации
напряжения для нагрузки при высокой
скорости. Этот параметр используется для
оптимизации нагрузки двигателя на
высокой нагрузке. Этот параметр активен,
только если параметр 1-10 Конструкция
двигателя = [0] Асинхронный.
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 53
Page 56

Параметры
VLT® DriveMotor FCP 106/FCM 106
1-62 Компенсация скольжения
Диапазон: Функция:
В соответствии с
типоразмером*
44
[-400 400 %]
Введите величину в % для
компенсации скольжения, чтобы
скорректировать допуски на
значение n
скольжения вычисляется
автоматически на основе
номинальной скорости
двигателя, n
. Компенсация
M,N
.
M,N
1-63 Пост. времени компенсации скольжения
Диапазон: Функция:
0,1 с* [0,05-5 с] Введите скорость реакции при компенсации
скольжения. Большое значение
соответствует медленной реакции, низкое
значение — быстрой. Если возникают
проблемы с резонансом на низких частотах,
необходимо задавать большее значение
времени.
1-64 Подавление резонанса
Диапазон: Функция:
100 %* [0 -
500 %]
Введите величину подавления резонанса.
Установите параметр 1–64 Resonance
Dampening и параметр 1–65 Resonance
Dampening Time Constant для уменьшения
резонансных явлений на высоких
частотах. Для уменьшения резонансных
колебаний увеличьте значение
параметр 1–64 Resonance Dampening.
1-65 Постоянная времени подавл. резонанса
Диапазон: Функция:
0,005 с* [0,001-0,050 с] Установите параметр 1–64 Resonance
Dampening и параметр 1–65
Resonance Dampening Time Constant
для уменьшения резонансных
явлений на высоких частотах.
Установите постоянную времени,
обеспечивающую наилучшее
подавление резонанса.
1-70 Реж. пуска PM
Этот параметр действителен в версиях программного
обеспечения 2.80 и выше. Этот параметр используется для
выбора режима пуска двигателя с постоянными магнитами, то
есть для инициализации модуля управления VVC+ для
двигателя с постоянными магнитами (PM), ранее работавшего
в свободном режиме. Этот параметр действует для двигателей
с постоянными магнитами в режиме VVC+, только если
двигатель остановлен (или работает на низкой скорости).
Опция: Функция:
[0] * Обнаружение
ротора
[1] Парковка Функция парковки применяет
Функция обнаружения ротора
оценивает электрический угол
ротора и использует его в качестве
исходной точки. Это стандартный
вариант выбора для
автоматизированных применений
преобразователя частоты. Если
функция запуска с хода
обнаруживает, что двигатель
вращается на низкой скорости или
остановлен, преобразователь
частоты может обнаружить
положение ротора (угол). Затем
преобразователь частоты запускает
двигатель с этого угла.
постоянный ток к обмоткам статора
и вращает ротор до положения
электрического нуля. Эта функция
обычно используется для систем
HVAC. Если функция запуска с хода
обнаруживает, что двигатель
вращается на низкой скорости или
остановлен, преобразователь
частоты посылает сигнал
постоянного тока, чтобы
запарковать двигатель на нужном
угле. Затем преобразователь
частоты запускает двигатель с этого
угла.
1-71 Задержка запуска
Диапазон: Функция:
1-66 Мин. ток при низкой скорости
Диапазон: Функция:
50 %* [0 - 120 %] Применяется только в отношении
двигателей с постоянными магнитами.
Увеличение минимального тока улучшает
крутящий момент двигателя при низкой
скорости, но приводит к снижению КПД.
0 с* [0-10 с] Данный параметр используется для задания
задержки при запуске. Преобразователь
частоты начинает работу с учетом функции
запуска, заданной в параметр 1-72 Функция
запуска. Установите время задержки пуска до
начала ускорения.
54 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 57

Параметры Руководство по программированию
1-72 Функция запуска
Опция: Функция:
[0] Уд.пост.током/
вр.зад
[2] * Выбег/время
задерж.
В течение времени задержки запуска
на двигатель запитывается с
использованием параметр 2-00 Ток
удержания (пост. ток)/ток
предпускового нагрева.
В период действия времени задержки
пуска (преобразователь частоты
выключен) преобразователь частоты
останавливается выбегом.
1-73 Запуск с хода
Опция: Функция:
Эта функция позволяет «подхватить»
двигатель, который свободно вращается
вследствие пропадания напряжения.
Поиск запуска с хода выполняется только в
направлении часовой стрелки. В случае
неудачи включается торможение
постоянным током. Если выбран двигатель с
постоянными магнитами, то в случае
скорости менее 2,5–5 %, в течение времени,
установленного в параметр 2-07 Вр. торм.
пост. т., будеи выполняться функция
парковки.
[0]*Запрещено Если эта функция не требуется, выберите [0]
Запрещено.
[2] Разрешено
всегда
Если требуется, чтобы преобразователь
частоты «подхватывал» вращающийся
двигатель и управлял им, выберите [2]
Разрешено всегда.
Для этого параметра всегда устанавливается
значение [2] Разрешено всегда, если
параметр 1-10 Конструкция двигателя = [1]
Одноф.с пост. магн.
Важные связанные параметры:
Параметр 2-01 Ток торможения
•
пост. током
Параметр 2-06 Ток торм. пост. т.
•
Параметр 2-07 Вр. торм. пост. т.
•
Функция подхвата вращающегося двигателя,
используемая для двигателей с постоянными магнитами,
основана на оценке начальной скорости. После
активного сигнала запуска всегда первым делом
оценивается скорость.
Если оценка скорости ниже значения номинальной
скорости на 2,5–5 %, включается функция парковки (см.
параметр 2-06 Ток торм. пост. т. и параметр 2-07 Вр.
торм. пост. т.). В противном случае преобразователь
частоты подхватывает двигатель на этой скорости и
возобновляет нормальную работу.
В настоящее время принцип подхвата вращающегося
двигателя, используемый для двигателей с постоянными
магнитами, имеет следующие ограничения:
Диапазон скорости составляет до 100 %
•
номинальной скорости или скорости
ослабления поля (в зависимости от того, какая
скорость ниже).
Для применений с большой инерцией (т. е.,
•
когда инерция нагрузки более чем в 30 раз
превышает инерцию двигателя).
1-80 Функция при останове
Опция: Функция:
Выберите действие после команды
останова или после снижения скорости
до значения, установленного в пар.
параметр 1-82 Мин.ск. д.функц.при ост.
[Гц].
[0] * Останов
выбегом
[1] Фиксация
пост. током/
подогрев
двигателя
Оставляет двигатель в режиме
свободного вращения.
Включает подачу на двигатель
удерживающего постоянного тока (см.
параметр 2-00 Ток удержания (пост.
ток)/ток предпускового нагрева).
1-82 Мин.ск. д.функц.при ост. [Гц]
Диапазон: Функция:
0 Гц* [0-20 Гц] Установите выходную частоту, при которой
активируется параметр 1-80 Функция при
останове.
1-88 AC Brake Gain (Коэффициент усиления
торможения переменным током)
Диапазон: Функция:
1,4*
[1,0-2,0 ]
Установите допустимую мощность торможения
переменным током (установите время
замедления, если инерция постоянная). Если
напряжение в цепи постоянного тока не
превышает значения предупреждения по
напряжению в цепи постоянного тока, эта
функция может регулировать генераторный
крутящий момент.
Чем выше коэффициент усиления торможения
постоянным током, тем выше допустимая
мощность торможения. Если коэффициент
усиления торможения равен 1,0, возможность
торможения переменным током отсутствует.
4 4
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 55
Page 58

Параметры
VLT® DriveMotor FCP 106/FCM 106
1-88 AC Brake Gain (Коэффициент усиления
торможения переменным током)
Диапазон: Функция:
УВЕДОМЛЕНИЕ
Непрерывный генераторный крутящий
момент может привести к перегреву
двигателя в связи с высокими током
двигателя. Обеспечьте защиту
44
электродвигателя от перегрева
параметр 2-16 Макс.ток торм.пер.ток.
1-90 Тепловая защита двигателя
Опция: Функция:
запустить, когда ток двигателя не
превышает 110 % от номинального и
срабатывает предел по току.
1-93 Источник термистора
Опция: Функция:
УВЕДОМЛЕНИЕ
Этот параметр не может быть
изменен во время вращения
1-90 Тепловая защита двигателя
двигателя.
Опция: Функция:
При использовании электронного
теплового реле (ЭТР) температура
двигателя вычисляется на основе
частоты, скорости и времени. В случае
отсутствия термистора компания
Danfoss рекомендует использовать
функцию ЭТР. Действие этой функции
такое же, как для асинхронных
двигателей и двигателей с постоянными
магнитами.
УВЕДОМЛЕНИЕ
Вычисление ЭТР выполняется по
данным двигателя из группы 1-2*
Данные двигателя
[0] Нет защиты Запрещает контроль температуры.
[1] Предупр.по
термист.
[2] Откл. по
термистору
[3] ЭТР:
предупрежд. 1
[4] ЭТР:
отключение 1
[22] ETR Trip -
Extended
Detection
(Отключение по
ЭТР —
расширенное
обнаружение)
Термистор выдает предупреждение при
превышении верхнего предела
диапазона температур двигателя.
При превышении верхнего предела в
диапазоне температуры двигателя
термистор выдает аварийный сигнал и
отключает преобразователь частоты.
При превышении вычисленного
верхнего предела в диапазоне
температуры двигателя выдается
предупреждение.
При превышении 90 % вычисленного
верхнего предела температуры
двигателя выдается аварийный сигнал,
и преобразователь частоты
отключается.
Когда ток двигателя превышает 110 %
от номинального, запускается расчет
температурного режима двигателя
исходя из фактической нагрузки и
времени, а также исходя из частоты
двигателя. Как вариант, расчет
температуры двигателя можно
[0]*Отсутствует Источник сигнала термистор не
[1] Аналог. вход
AI53
[6] Цифровой
вход 29
УВЕДОМЛЕНИЕ
Для цифрового входа следует
установить в параметр 5-03 Режим
цифрового входа 29 значение [0] PNP
— активен при 24 В.
Выберите вход, к которому должен быть
подключен термистор (датчик РТС). При
использовании аналогового входа один и
тот же вход может использоваться в
качестве задания в параметрах с
параметр 3-15 Источник задания 1 по
параметр 3-17 Источник задания 3,
параметр 20-00 Источник ОС 1,
параметр 20-03 Источник ОС 2,
параметр 24-06 Источник задания
предустановленного режима и
параметр 24-07 Источ. сигнала ОС пожар.
режима.
указывается.
Используйте аналоговый вход 53 в
качестве источника сигнала термистора.
Используйте аналоговый вход 29 в
качестве источника сигнала термистора.
56 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 59

Параметры Руководство по программированию
4.3 Главное меню — Торможение — Группа 2
2-00 Ток удержания (пост. ток)/ток предпускового
нагрева
Диапазон: Функция:
50 %* [0 -
160 %]
УВЕДОМЛЕНИЕ
Максимальное значение зависит от
номинального тока двигателя.
Избегайте слишком длительной
подачи 100-процентного тока.
Двигатель может быть поврежден
вследствие перегрева.
Ток удержания устанавливается в процентах
от номинального тока двигателя I
параметр 1-24 Ток двигателя.
Параметр 2-00 Ток удержания (пост.
ток)/ток предпускового нагрева удерживает
функцию двигателя (удерживающий
крутящий момент) или производит
предварительный нагрев двигателя. Этот
параметр активен, если в
параметр 1-72 Функция запуска [0] или
параметр 1-80 Функция при останове [1]
выбрано удержание постоянным током.
M,N
в
2-01 Ток торможения пост. током
Диапазон: Функция:
50 %* [0 -
150 %]
УВЕДОМЛЕНИЕ
ПЕРЕГРЕВ ДВИГАТЕЛЯ
Максимальное значение зависит от
номинального тока двигателя.
Во избежание повреждения двигателя
вследствие перегрева не позволяйте
двигателю работать с током 100 % в
течение длительного времени.
Ток устанавливается в процентах от
номинального тока двигателя,
параметр 1-24 Ток двигателя. Когда скорость
снижается до предельного значения,
установленного в параметр 2-04 Скорость
включ.торм.пост.током [Гц], или когда
активна функция инверсного торможения
постоянным током (в группе параметре 5-1*
Цифровые входы выбрано значение [5]
Торм.пост.током,инв, или соответствующая
команда подана через порт последовательной
связи), ток торможения постоянным током
подается по команде останова. См.
продолжительность в параметр 2-02 Время
торможения пост. током.
2-02 Время торможения пост. током
Диапазон: Функция:
10 с* [0-60 с] Установите продолжительность протекания
тока торможения постоянным током,
заданного в параметр 2-01 Ток торможения
пост. током, после активирования.
2-04 Скорость включ.торм.пост.током [Гц]
Диапазон: Функция:
0 Гц* [ 0-400 Гц] Этот параметр используется для задания
скорости включения торможения
постоянным током, при достижении
которой активируется параметр 2-01 Ток
торможения пост. током при команде
останова.
2-06 Ток торм. пост. т.
Диапазон: Функция:
100 %* [0 -
150 %]
Ток устанавливается в процентах от
номинального тока двигателя,
параметр 1-24 Ток двигателя. Активен с
параметр 1-73 Запуск с хода. Ток ожидания
действует в течение времени,
установленного в параметр 2-07 Вр. торм.
пост. т..
УВЕДОМЛЕНИЕ
Параметр 2-06 Ток торм. пост. т.
активен, только если в
параметр 1-10 Конструкция
двигателя выбран двигатель с
постоянным магнитом.
2-07 Вр. торм. пост. т.
Диапазон: Функция:
3 s* [0.1 - 60s]Установите продолжительность протекания
тока ожидания, заданную в параметре
параметр 2-06 Ток торм. пост. т.. Действует
в сочетании с параметр 1-73 Запуск с хода.
УВЕДОМЛЕНИЕ
Параметр Параметр 2-07 Вр. торм.
пост. т. активен только в том случае,
если в параметр 1-10 Конструкция
двигателя выбрано значение [1]
Одноф. с пост. магн.
4 4
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 57
Page 60

Параметры
VLT® DriveMotor FCP 106/FCM 106
4.3.1 2-1* Функция энергии торможения
2-22 Скорость включения тормоза [Гц]
Диапазон: Функция:
Группа параметров для выбора параметров
динамического торможения.
2-10 Функция торможения
Опция: Функция:
[0] * Выкл. Тормозной резистор неактивен.
44
[2] Торм. перем. током Тормоз переменного тока включен.
0 Гц* [0-400 Гц] Установите такое значение частоты
двигателя, при котором происходит
включение механического тормоза при
наличии условия останова.
2-16 Макс.ток торм.пер.ток
Диапазон: Функция:
100 %* [0 - 160 %] Чтобы исключить перегрев обмоток
двигателя, введите значение
максимально допустимого тока при
торможении переменным током.
2-17 Контроль перенапряжения
Опция: Функция:
Включите режим контроля
перенапряжения, чтобы уменьшить
опасность отключения преобразователя
частоты при перенапряжении в цепи
постоянного тока, обусловленного
поступлением энергии рекуперации из
нагрузки.
[0] Запрещено Контроль перенапряжения не требуется.
[1] Разр.(не при
остан.)
[2] * Разрешено Активизируется контроль
Активируется OVC, кроме случаев, когда
преобразователь частоты находится в
состоянии останова.
перенапряжения.
УВЕДОМЛЕНИЕ
Время изменения скорости
автоматически корректируется для
предотвращения отключения
преобразователя частоты.
4.3.2 2-2* Механический тормоз
Параметры для настройки скорости и тока для
механического тока.
2-20 Ток отпускания тормоза
Диапазон: Функция:
0 A* [0-100 A] Установите ток двигателя, при котором
отпускается механический тормоз, когда
имеется сигнал запуска. Верхний предел
задается в параметр 16–37 Inv. Max. Current.
58 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 61

P3-03
P3-02
0 50 100%
P3-10
130BB036.10
Параметры Руководство по программированию
4.4 Главное меню – Задание/Разгон и торможение – Группа 3
4.4.1 3-0* Reference Limits (Пределы
задания)
Параметры для настройки единицы измерения задания,
а также его пределов и диапазонов.
Подробную информацию о настройках в замкнутом
контуре также см. в группе параметров 20-0* Feedback
(Обратная связь).
3-02 Мин. задание
Диапазон: Функция:
0* [-4999–4999] Минимальное задание — это наименьшее
значение, которое можно получить при
суммировании всех заданий
3-03 Максимальное задание
Диапазон: Функция:
В соответствии
с
типоразмером*
[ -4999,0-4999
ед. изм.
сигнала ОС]
Максимальное задание —
это наибольшее значение,
которое можно получить
при суммировании всех
заданий Единица
измерения максимального
задания соответствует
конфигурации, выбранной в
параметр 1-00 Режим
конфигурирования.
4.4.2 3-1* References (Задания)
Рисунок 4.6 Задания
3-10 Предустановленное задание
Диапазон: Функция:
0 %* [-100 -
100 %]
Введите в этот параметр до восьми
различных предустановленных заданий (0–7),
используя метод программирования
массива. Чтобы установить задания,
выберите для соответствующих цифровых
входов в группе параметров 5-1* Цифровые
входы значение Предуст. задание, бит 0/1/2
[16], [17] или [18].
3-11 Фиксированная скорость [Гц]
Диапазон: Функция:
5 Гц* [ 0-400,0
Гц]
Фиксированная скорость — это
неизменная выходная скорость двигателя,
которую преобразователь частоты
обеспечивает, когда активизирована
функция фиксации частоты.
См. также параметр 3-80 Темп изм.
скор.при перех. на фикс. скор..
3-12 Значение разгона/замедления
Диапазон: Функция:
0 %* [0 -
100 %]
Введите относительную величину (в
процентах), которая должна добавляться к
фактическому заданию или вычитаться из него
для увеличения или уменьшения задания. Если
через один из цифровых входов (с
параметр 5-10 Клемма 18, цифровой вход по
параметр 5-15 Клемма 33, цифровой вход)
выбрано увеличение задания, то относительная
величина (в процентах) добавляется к полному
заданию. Если через один из цифровых входов
(с параметр 5-10 К лемма 18, цифровой вход по
параметр 5-15 Клемма 33, цифровой вход)
выбрано уменьшение задания, то
относительная величина (в процентах)
вычитается из полного задания. Расширение
функциональных возможностей дает функция
цифрового потенциометра. См. группу
параметров 3-9* Цифр.потенциометр.
3-14 Предустановл. относительное задание
Диапазон: Функция:
0 %* [-100 -
100 %]
Задайте в процентах фиксированное значение,
которое должно добавляться к переменной
величине, определенной в
параметр 3-18 Источник отн.
масштабирования задания.
Сумма фиксированной и переменной величин
(обозначена Y на Рисунок 4.7) умножается на
фактическое задание (обозначено Х
4 4
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 59
Page 62

Relative
Z=X+X*Y/100
Resulting
actual
reference
Y
X
130BA059.12
Z
t
acc
t
dec
130BB801.10
P 3-*2
Ramp (X)
Down
Time (Dec)
P 4-14
High-limit
RPM
Reference
P 1-23
Motor
frequency
P 4-12
Low limit
Time
P 3-*1
Ramp (X)Up
Time (Acc)
Параметры
VLT® DriveMotor FCP 106/FCM 106
44
3-14 Предустановл. относительное задание
Диапазон: Функция:
Рисунок 4.7). Это произведение добавляется к
действующему заданию X + X ×
Рисунок 4.7 Предустановл. относительное
задание
3-15 Источник задания 1
Опция: Функция:
Выберите вход, который должен
использоваться для подключения
первого сигнала задания.
Параметр 3-15 Источник задания 1,
параметр 3-16 Источник задания 2 и
параметр 3-17 Источник задания 3
определяют до трех различных
сигналов задания. Сумма этих
сигналов задания определяет
фактическое задание.
[0] Не используется
[1] * Аналоговый вход
53
[2] Аналоговый вход
54
[7] Импульсный вход
29
[11] Местн. зад. по
шине
3-16 Источник задания 2
Опция: Функция:
Выберите вход, который должен
использоваться для второго сигнала
задания. Параметр 3-15 Источник
задания 1, параметр 3-16 Источник
задания 2 и параметр 3-17 Источник
задания 3 определяют до трех
различных сигналов задания. Сумма
этих сигналов задания определяет
фактическое задание. См. также
параметр 1-93 Источник
термистора.
[0] Не используется
[1] Аналоговый вход
53
[2] * Аналоговый вход
54
[7] Импульсный вход
29
Y
100
3-16 Источник задания 2
Опция: Функция:
[11] Местн. зад. по
шине
3-17 Источник задания 3
Опция: Функция:
Выберите вход задания, который
должен использоваться для
подключения третьего сигнала
задания. Параметр 3-15 Источник
задания 1, параметр 3-16 Источник
задания 2 и
параметр 3-17 Источник задания 3
определяют до трех различных
сигналов задания. Сумма этих
сигналов задания определяет
фактическое задание.
[0] Не используется
[1] Аналоговый вход
53
[2] Аналоговый вход
54
[7] Импульсный вход
29
[11] * Местн. зад. по
шине
4.4.3 3-4* Изменение скорости 1
Используется для настройки параметров времени
изменения скорости для каждого из двух режимов
изменения скорости (группы параметров 3-4* Изменение
скорости 1 и 3-5* Изменение скорости 2). Для всех
типоразмеров по мощности время изменения скорости
устанавливается на минимальное значение 10 мс.
Рисунок 4.8 Параметры изменения скорости
60 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 63

Параметры Руководство по программированию
3-41 Время разгона 1
Диапазон: Функция:
В соответствии
с
типоразмером*
[0,05-3600
с]
Введите время ускорения от 0 Гц
до параметр 1-23 Частота
двигателя, если выбран
асинхронный двигатель. Введите
время ускорения от 0 об/мин до
параметр 1-25 Номинальная
скорость двигателя, если выбран
двигатель с постоянными
магнитами. Выберите время
разгона так, чтобы выходной ток
в процессе разгона не превышал
предельного тока, заданного в
параметр 4-18 Предел по току.
См. время замедления в
параметр 3-42 Время замедления
1.
3-42 Время замедления 1
Диапазон: Функция:
В соответствии
с
типоразмером*
[0,05-3600
с]
Если выбран асинхронный
двигатель, введите время
замедления от
параметр 1-23 Частота
двигателя до 0 Гц. Если выбран
двигатель с постоянными
магнитами, введите время
замедления от
параметр 1-25 Номинальная
скорость двигателя до 0 об/мин.
Выберите время изменения
скорости для предотвращения
отключения из-за
перенапряжения в цепи
постоянного тока.
4.4.4 3-5* Изменение скор. 2
В этой группе параметров настраиваются параметры
изменения скорости 2.
3-51 Время разгона 2
Диапазон: Функция:
В соответствии
с
типоразмером*
[0,05-3600
с]
Если выбран асинхронный
двигатель, введите время
ускорения от 0 Гц до
параметр 1-23 Частота
двигателя. Если выбран
двигатель с постоянными
магнитами, введите время
ускорения от 0 об/мин до
параметр 1-25 Номинальная
скорость двигателя. Выберите
время разгона так, чтобы
выходной ток в процессе разгона
3-51 Время разгона 2
Диапазон: Функция:
не превышал предельного тока,
заданного в
параметр 4-18 Предел по току.
3-52 Время замедления 2
Диапазон: Функция:
В соответствии
с
типоразмером*
[0,05-3600
с]
Введите время замедления от
параметр 1-25 Номинальная
скорость двигателя до 0 об/
мин. Выберите время
замедления так, чтобы в
процессе замедления выходной
ток не превышал предельного
тока, заданного в
параметр 4-18 Предел по току.
4.4.5 3-8* Др.изменен.скор.
3-80 Темп изм. скор.при перех. на фикс. скор.
Диапазон: Функция:
В соответствии
с
типоразмером*
3-81 Время замедл.для быстр.останова
Диапазон: Функция:
В соответствии
с
типоразмером*
[0,05-3600
с]
[0,05-3600
с]
Введите время достижения
фиксированной скорости, т.е.
время ускорения/замедления
двигателя в диапазоне от 0 Гц
до параметр 1-23 Частота
двигателя. Убедитесь также, что
результирующий ток,
необходимый для получения
заданного времени достижения
фиксированной скорости, не
превышает предельного тока,
заданного в
параметр 4-18 Предел по току.
Отсчет времени достижения
фиксированной скорости
начинается при подаче сигнала
режима фиксированной
скорости с панели управления,
через выбранный цифровой
вход или порт
последовательного канала
связи.
Введите время достижения
быстрого останова в диапазоне
от параметр 1-23 Частота
двигателя до 0 Гц. Во время
изменения скорости в
инверторе не должно возникать
повышенное напряжение, а
возникающий ток не должен
4 4
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 61
Page 64

130BA961.10
Speed
Motor Speed
Normal
Check valve
Motor Speed
High
Low
Time
Ramp
End Speed
Параметры
VLT® DriveMotor FCP 106/FCM 106
3-81 Время замедл.для быстр.останова
Диапазон: Функция:
превышать предел в
параметр 4-18 Предел по току.
Быстрый останов активируется
сигналом, подаваемым через
выбранный цифровой вход или
порт последовательного канала
44
связи.
3-87 Конечная скорость контр. клапана [Гц]
Диапазон: Функция:
В соответствии с
типоразмером*
[ 0-400
Гц]
Установите скорость [Гц]
ниже нижнего предела
скорости двигателя, на
которой изменение скорости
обратного клапана больше
не будет использоваться. См.
Рисунок 4.9.
3-85 Время изм. скорости контр. клапана
Диапазон: Функция:
0 с* [0-60 с] Для предохранения шаровых контрольных
клапанов в режиме остановки в качестве
значения замедления можно применить
изменение скорости срабатывания
контрольного клапана. Установите время
замедления от параметр 4-11 Нижн.предел
скор.двигателя[об/мин] или
параметр 4-12 Нижний предел скорости
двигателя [Гц] в соответствии с конечной
скоростью контрольного клапана, заданной в
параметр 3–86 Check Valve Ramp End Speed
[RPM] или параметр 3–87 Check Valve Ramp End
Speed [HZ]. Когда значение, установленное в
параметр 3–85 Check Valve Ramp Time,
отличается от 0 с, приводится в действие
время изменения скорости обратного клапана,
применяемое для снижения скорости от
нижнего предела скорости двигателя до
конечной скорости обратного клапана в
параметр 3–86 Check Valve Ramp End Speed
[RPM] или параметр 3–87 Check Valve Ramp End
Speed [HZ]. См. Рисунок 4.9.
Рисунок 4.9 Изменение скорости контрольного клапана
62 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 65

Параметры Руководство по программированию
4.5 Главное меню — Пределы/Предупреждения — Группа 4
4.5.1 4-1* Motor Limits (Пределы
двигателя)
Определите пределы по току и скорости для двигателя,
а также реакцию преобразователя частоты при выходе
за эти пределы.
4-10 Направление вращения двигателя
Опция: Функция:
[0] По час.
стрелке
[2] * Оба
направления
4-12 Нижний предел скорости двигателя [Гц]
Диапазон: Функция:
0 Гц* [ 0-400,0
Гц]
4-14 Верхний предел скорости двигателя [Гц]
Диапазон: Функция:
В соответствии с
типоразмером*
УВЕДОМЛЕНИЕ
Настройки в
параметр 4-10 Направление
вращения двигателя влияют на
параметр 1-73 Запуск с хода.
Допускается направление только по
часовой стрелке.
Допускается работа в направлениях по
часовой стрелке и против часовой
стрелки.
Введите нижний предел скорости
вращения двигателя. Нижний предел
скорости вращения двигателя может
устанавливаться в соответствии с
минимальной выходной частотой вала
двигателя. Нижний предел скорости не
должен превышать значение,
установленное в параметр 4-14 Верхний
предел скорости двигателя [Гц].
[ 0,1-400,0
Гц]
Введите верхний предел
скорости вращения двигателя.
Он может совпадать с
рекомендуемой максимальной
скоростью двигателя. Верхний
предел скорости двигателя
должен быть больше значения,
установленного в
параметр 4-12 Нижний предел
скорости двигателя [Гц].
Верхний предел скорости
двигателя не может быть
больше, чем
параметр 4-19 Макс. выходная
частота.
4-18 Предел по току
Диапазон: Функция:
В соответствии
с
типоразмером*
[0 -
Введите предел тока для
300
двигательного и генераторного
%]
режимов (в процентах от
номинального тока двигателя). Если
значение больше, чем максимальная
номинальная выходная мощность
преобразователя частоты, ток будет
ограничиваться максимальным
выходным током преобразователей
частоты. При изменении значений
параметров параметр 1-00 Режим
конфигурирования–
параметр 1-25 Номинальная скорость
двигателя параметр 4-18 Предел по
току не сбрасывается автоматически
к значению по умолчанию.
4-19 Макс. выходная частота
Диапазон: Функция:
В соответствии с
типоразмером*
[ 0-400
Гц]
Введите значение максимальной
выходной частоты. которое
определяет абсолютный предел
выходной частоты
преобразователя частоты для
повышения безопасности в
системах, в которых случайное
превышение скорости
недопустимо. Этот абсолютный
предел относится ко всем
конфигурациям и не зависит от
значения параметр 1-00 Режим
конфигурирования.
4.5.2 4-4* Adjustable Warnings 2
(Настраиваемые предупреждения 2)
4-40 Warning Freq. Low (Предупреждение: низкая
частота)
Диапазон: Функция:
В соответствии с
типоразмером*
[ 0-400
Гц]
Используйте этот параметр для
задания нижнего предела
диапазона частоты.
Когда скорость двигателя падает
ниже этого предела, на дисплее
появляется сообщение SPEED LOW
(НИЗКАЯ СКОРОСТЬ).
Предупреждение, бит 10,
устанавливается в
параметр 16-94 Расшир. Слово
состояния. Выходное реле или
цифровой выход можно настроить
4 4
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 63
Page 66

Параметры
VLT® DriveMotor FCP 106/FCM 106
4-40 Warning Freq. Low (Предупреждение: низкая
частота)
Диапазон: Функция:
для индикации этого
предупреждения.
Предупреждающий световой
сигнал на LCP не загорится при
достижении предела в этом
44
наборе параметров.
4-41 Warning Freq. High (Предупреждение: высокая
частота)
Диапазон: Функция:
В соответствии с
типоразмером*
[ 0-400
Гц]
Используйте этот параметр для
задания верхнего предела
диапазона частот.
Когда скорость двигателя
превышает данный предел, на
дисплее появляется сообщение
SPEED HIGH (ВЫСОКАЯ СКОРОСТЬ).
Предупреждение, бит 9,
устанавливается в
параметр 16-94 Расшир. Слово
состояния. Выходное реле или
цифровой выход можно настроить
для индикации этого
предупреждения.
Предупреждающий световой
сигнал на LCP не загорится при
достижении предела в этом
наборе параметров.
4.5.3 4-5* Adj. Warnings (Настр. предупр.)
Определите настраиваемые пределы для
предупреждений по току. Предупреждения выводятся
на дисплей, программируемый выход или
4-51 Предупреждение: высокий ток
Диапазон: Функция:
В соответствии с
типоразмером*
[ 0,0-194,0A]Введите значение I
ток двигателя превышает
данный предел,
устанавливается бит в слове
состояния. Данное значение
может программироваться на
формирование сигнала на
цифровом выходе или
релейном выходе.
4-54 Предупреждение: низкое задание
Диапазон: Функция:
-4999* [-4999 4999 ]
Введите нижний предел задания. Если
фактическое задание падает ниже этого
предела, на дисплее появляется
сообщение Ref
могут программироваться на
формирование сигнала состояния на
клемме 27 или 29 и на релейном выходе
01 или 02.
. Сигнальные выходы
НИЗК.
4-55 Предупреждение: высокое задание
Диапазон: Функция:
4999* [-4999
- 4999 ]
Используйте этот параметр для задания
верхнего предела диапазона задания.
Если текущее задание превышает указанный
предельный уровень, на дисплее появляется
сообщение Reference High (Высокое задание).
Предупреждение, бит 19, устанавливается в
параметр 16-94 Расшир. Слово состояния.
Выходное реле или цифровой выход можно
настроить для индикации этого
предупреждения. Предупреждающий
световой сигнал на LCP не загорится при
достижении предела в этом наборе
параметров.
ВЫС.
. Когда
последовательную шину.
4-50 Предупреждение: низкий ток
Диапазон: Функция:
0 A* [ 0-194,0 A] Введите значение I
падает ниже этого предела,
устанавливается бит в слове состояния.
Данное значение может
программироваться на формирование
сигнала на цифровом выходе или
релейном выходе.
. Когда ток двигателя
НИЗК.
4-56 Предупреждение: низкий сигнал ОС
Диапазон: Функция:
-4999 ед.
управл.
процессом*
[-4999 ...
4999 ед.
управл.
процессом]
Используйте этот параметр для
задания нижнего предела
диапазона сигнала ОС.
Если сигнал обратной связи ниже
этого предельного уровня, на
дисплее появляется сообщение
Feedback Low (Низкий сигн. ОС).
Предупреждение, бит 6,
устанавливается в
параметр 16-94 Расшир. Слово
состояния. Выходное реле или
цифровой выход можно
настроить для индикации этого
предупреждения.
Предупреждающий световой
64 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 67

Параметры Руководство по программированию
4-56 Предупреждение: низкий сигнал ОС
Диапазон: Функция:
сигнал на LCP не загорится при
достижении предела в этом
наборе параметров.
4-57 Предупреждение: высокий сигн. ОС
Диапазон: Функция:
4999 ед.
управл.
процессом*
[-4999 ...
4999 ед.
управл.
процессом]
Используйте этот параметр для
задания верхнего предела
диапазона сигнала.
Если сигнал обратной связи
превышает указанный
предельный уровень, на дисплее
появляется сообщение Feedback
High (Высокий сигн. ОС).
Предупреждение, бит 5,
устанавливается в
параметр 16-94 Расшир. Слово
состояния. Выходное реле или
цифровой выход можно
настроить для индикации этого
предупреждения.
Предупреждающий световой
сигнал на LCP не загорится при
достижении предела в этом
наборе параметров.
4-58 Функция при обрыве фазы двигателя
Опция: Функция:
[0] Выкл. Аварийный сигнал в случае обрыва фазы
двигателя не отображается.
[1] * Вкл. Отображается аварийный сигнал в случае обрыва
фазы двигателя.
4.5.4 4-6* Исключ. скорости
Определите интервалы скоростей, которые следует
исключить при разгоне и замедлении двигателя. Можно
исключать три диапазона частоты.
4-63 Исключение скорости до [Гц]
Диапазон: Функция:
0 Гц* [ 0-500 Гц] В некоторых системах необходимо
исключить определенные выходные
скорости из-за проблем, связанных с
резонансом. Введите верхнюю границу
интервала скоростей, подлежащего
исключению.
4 4
4.5.5 Настройка полуавтоматического
исключения скорости
Используйте полуавтоматическую установку
исключаемых скоростей для облегчения
программирования частот, которые следует исключить
во избежание возникновения на этих частотах
резонанса в системе.
Процедура:
1. Остановите двигатель.
УВЕДОМЛЕНИЕ
Отрегулируйте время изменения скорости в
параметр 3-41 Время разгона 1 и
параметр 3-42 Время замедления 1.
2. Выберите [1] Разрешено в
параметр 4-64 Настройка
полуавтоматического исключения скорости.
3. Нажмите кнопку [Hand On] (Ручной режим),
чтобы начать поиск полос частот, вызывающих
резонанс. Двигатель начинает разгон в
соответствии с уставкой скорости разгона.
УВЕДОМЛЕНИЕ
Цифровой вход клеммы 27 (параметр 5-12 Клемма 27,
цифровой вход) по умолчанию имеет значение [2]
Выбег, инверсный. При отсутствии напряжения 24 В на
клемме 27 невозможно запустить двигатель с
помощью кнопки [Hand On] (Ручной режим). В этом
случае следует подключить клемму 12 к клемме 27.
4-61 Исключение скорости с [Гц]
Диапазон: Функция:
0 Гц* [ 0-500 Гц] В некоторых системах необходимо
исключить определенные выходные
скорости из-за проблем, связанных с
резонансом. Введите нижний предел
интервала скоростей, подлежащих
исключению.
4. При проходе через резонансную полосу частот
нажмите кнопку [OK] на LCP, когда система
будет выходить из этой полосы. Фактическая
частота будет сохранена первым элементом в
параметр 4-63 Исключение скорости до [Гц]
(массив). Повторите эту процедуру для каждой
резонансной полосы частот, определенной при
разгоне двигателя (могут быть заданы
максимум 3 полосы частот).
5. По достижении максимальной скорости
двигатель начинает автоматически замедляться.
Повторите эту процедуру, когда система будет
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 65
Page 68

Параметры
выходить из резонансной полосы частот во
время замедления двигателя. Фактические
частоты, зарегистрированные при нажатиях
кнопки [OK], сохраняются в
параметр 4-61 Исключение скорости с [Гц].
6. Когда двигатель полностью остановится,
нажмите кнопку [OK].
параметр 4-64 Настройка
44
Если границы какой-либо резонансной полосы частот
не занесены в память надлежащим образом (например,
значения частот, сохраненные в
параметр 4-63 Исключение скорости до [Гц], ≥
значениям, содержащимся в параметр 4-61 Исключение
скорости с [Гц], или если количество записей для
параметр 4-61 Исключение скорости с [Гц] и
параметр 4-63 Исключение скорости до [Гц] не
совпадает, все занесенные в память частоты будут
отменены, и на дисплей будет выведено следующее
сообщение: Выявленные области частот
перекрываются или не определены. Для отмены
нажмите кнопку [Cancel] (Отмена).
полуавтоматического исключения скорости
автоматически перейдет в состояние выкл.
Преобразователь частоты будет оставаться в
ручном режиме до тех пор, пока не будет
нажата кнопка [O] (Выкл.) или [Auto On]
(Автоматический режим).
VLT® DriveMotor FCP 106/FCM 106
4-64 Настройка полуавтоматического исключения
скорости
Опция: Функция:
[0] * Выкл.
[1] Разрешено Если выбран этот вариант, диапазоны
скорости автоматически проверяются, чтобы
определить полосы резонанса.
66 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 69

Параметры Руководство по программированию
4.6 Главное меню — Цифровой вход/выход — Группа 5
4.6.1 5-0* Реж. цифр. вв/выв
Параметры для настройки входов и выходов с
использованием NPN и PNP.
УВЕДОМЛЕНИЕ
Эти параметры невозможно регулировать во время
работы двигателя.
5-00 Режим цифрового входа
Опция: Функция:
Задайте режим NPN или PNP для цифровых входов
18,19 и 27. Режим цифрового входа
[0] * PNP Действие на положительных импульсах
направления (0). В системах PNP напряжение
снижено до напряжения «земли» (GND).
[1] NPN Действие на отрицательных импульсах напряжения
(1). В системах NPN напряжение увеличено до +24
В внутри преобразователя частоты.
5-01 Клемма 27, режим
Опция: Функция:
УВЕДОМЛЕНИЕ
Этот параметр не может быть изменен во
время вращения двигателя.
[0] * Вход Определяет клемму 27 в качестве цифрового
входа.
[1] Выход Определяет клемму 27 в качестве цифрового
выхода.
5-02 Клемма 29, режим
Опция: Функция:
УВЕДОМЛЕНИЕ
Этот параметр невозможно регулировать
во время работы двигателя.
[0] * Вход Определение клеммы 29 в качестве цифрового
входа.
[1] Выход Определение клеммы 29 в качестве цифрового
выхода.
4.6.2 5-1* Цифровые входы
Параметры для конфигурирования входных функций
входных клемм.
Цифровые входы используются для выбора различных
функций преобразователя частоты. Для любого
цифрового входа может быть задано выполнение одной
из следующих функций:
Функция
цифрового входа
[0] Не используется Нет реакции на сигналы, поступившие
[1] Сброс Выполняет сброс преобразователя
[2] Выбег,
инверсный
[3] Выбег
+сброс,инверс
[4] Быстр.останов,
инверс
[5]
Торм.пост.током,инв
Описание
на клемму.
частоты после отключения/аварийного
сигнала. Аварийные сигналы
отключения с блокировкой могут быть
сброшены.
Оставляет двигатель в режиме
свободного вращения. Логический
0⇒останов выбегом.
Сброс и останов выбегом, инверсный
вход (НЗ). Оставляет двигатель в режиме
свободного вращения и выполняет
сброс преобразователя частоты.
Логический 0⇒останов выбегом и сброс.
Инверсный вход (нормально замкнутый).
Вызывает останов в соответствии с
временем замедления для быстрого
останова, установленным в
параметр 3-81 Время замедл.для
быстр.останова. После выполнения
торможения вал оказывается в режиме
свободного вращения.
Инверсный вход для торможения
постоянным током (НЗ). Останавливает
двигатель, подавая на него постоянный
ток в течение определенного периода
времени, см. параметр 2-01 Ток
торможения пост. током. Эта функция
активна только в том случае, если
значение параметра
параметр 2-02 Время торможения пост.
током отличается от 0. Это значение
недоступно, когда в
параметр 1-10 Конструкция
двигателяустановлено значение [1]
Одноф. с пост. магн.
4 4
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 67
Page 70

Параметры
VLT® DriveMotor FCP 106/FCM 106
Функция
цифрового входа
[6] Останов,
инверсный
44
[7] Внешняя
блокировка
[8] Пуск Выберите пуск в команде пуска/
[9] Импульсный
запуск
[10] Реверс Изменение направления вращения вала
[11] Запуск и реверс Используется для подачи команд пуска/
[14] Фикс. част. Используется для активизации
[16] Предуст. зад.,
бит 0
Описание
Функция инверсного останова
формирует функцию останова, когда
выбранная клемма переходит из
состояния логической 1 в состояние
логического 0 (без защелки). Останов
выполняется в соответствии с
выбранным временем изменения
скорости.
Та же функция, что и «останов выбегом,
инверсный», но, кроме того, когда на
клемме, запрограммированной для
выполнения инверсного останова с
выбегом, появляется логический 0,
функция внешней блокировки
генерирует на дисплее сообщение
external fault (внешняя неисправность).
Аварийный сигнал подается также через
цифровые и релейные выходы, если они
запрограммированы на функцию
внешней блокировки. Если причина
возникновения внешней блокировки
устранена, аварийный сигнал можно
сбросить, используя цифровой вход,
периферийную шину или кнопку [Reset]
(Сброс).
останова. Логическая 1 = пуск,
логический 0 = стоп. (По умолчанию
цифровой вход 18.)
Если импульс поступает не менее 2 мс,
двигатель запускается. Если подается
инверсный сигнал останова, двигатель
останавливается.
двигателя. Сигнал реверса воздействует
только на направление вращения; он не
приводит к запуску двигателя. Выберите
[2] Оба направления в
параметр 4-10 Направление вращения
двигателя: 0 = нормальное, 1 = реверс.
останова и реверса одновременно.
Одновременная подача сигналов [8]
Пуск не допускается. 0 = останов, 1 =
запуск и реверс.
фиксированной скорости. См.
параметр 3-11 Фиксированная скорость
[Гц]. (По умолчанию цифровой вход 29).
Разрешает выбор одного из восьми
предустановленных заданий в
соответствии с Таблица 4.5.
Функция
цифрового входа
[17] Предуст. зад.,
бит 1
[18] Предуст. зад.,
бит 2
[19] Зафиксиров.
задание
[20] Зафиксировать
выход
[21] Увеличение
скорости
[22] Снижение
скорости
[23] Выбор набора,
бит 0
[32] Импульсный
вход
Описание
Разрешает выбор одного из восьми
предустановленных заданий в
соответствии с Таблица 4.5.
Разрешает выбор одного из восьми
предустановленных заданий в
соответствии с Таблица 4.5.
Фиксация текущего задания.
Фиксированное задание теперь
выступает в качестве отправной точки
для функций увеличения скорости и
снижения скорости. При использовании
увеличения/снижения скорости
скорость всегда следует характеристике
изменения скорости 2
(параметр 3-51 Время разгона 2 и
параметр 3-52 Время замедления 2) в
диапазоне от параметр 3-02 Мин.
задание до
параметр 3-03 Максимальное задание.
Фиксирует текущее задание.
Фиксированное задание теперь
выступает в качестве отправной точки
для функций увеличения скорости и
снижения скорости. При использовании
увеличения/снижения скорости
скорость всегда следует характеристике
изменения 2.
Используется для цифрового
управления увеличением/снижением
скорости (потенциометр двигателя). Эта
функция активируется путем выбора
либо фиксированного задания, либо
фиксированного выхода. Если функция
увеличения скорости активна менее 400
мс, результирующее задание
увеличивается на 0,1%. Если функция
увеличения скорости активна более 400
мс, результирующее задание
увеличивается в соответствии с
изменением скорости 1 в параметре
параметр 3-41 Время разгона 1.
Аналогично [21] Увеличение скорости,
но задание убывает.
Используется для выбора одного из
двух наборов. Установите для
параметр 0-10 Активный набор
значение «Несколько наборов».
Выберите импульсный вход, если в
качестве задания или сигнала обратной
связи используется последовательность
импульсов. Масштабирование
выполняется с помощью группы
параметров 5-5* Импульсный вход.
Возможно только для клеммы 29.
68 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 71

Параметры Руководство по программированию
Функция
цифрового входа
[34] Измен.скорости,
бит 0
[37] Пожарный
режим
[52] Разрешение
работы
Описание
Выберите используемую характеристику
изменения скорости. При выборе
логического 0 используется изменение
скорости 1; при выборе логической 1 —
изменение скорости 2.
Поступивший сигнал переводит
преобразователь частоты в пожарный
режим, при этом все остальные
команды отменяются. См. 24-0* Пожар.
режим.
Чтобы команда пуска была выполнена,
на входной клемме, для которой
запрограммировано разрешение
работы, должна присутствовать
логическая 1. Разрешение работы имеет
функцию логического «И» по отношению
к клемме, запрограммированной на
функции [8] Пуск, [14] Фикс. част. или
[20] Зафиксировать выход. Для запуска
двигателя должны быть выполнены оба
условия. Если функция разрешения
работы запрограммирована на
нескольких клеммах, то для ее
выполнения достаточно сигнала
логической 1 только на одной из этих
клемм. Сигнал разрешения работы не
влияет на сигнал на цифровом выходе
для запроса пуска ([8] Пуск, [14]
Фикс.част. или [20] Зафиксировать
выход), запрограммированный в группе
параметров 5-3* Цифровые выходы или в
группе параметров 5-4* Реле.
УВЕДОМЛЕНИЕ
Если не применяется сигнал
разрешения работы, но
активированы команды пуска,
фиксации частоты или фиксации
выхода, строка состояния на
экране покажет Run Requested
(Запрос пуска), Jog Requested
(Запрос фиксации частоты) или
Freeze Requested (Запрос фиксации
выходной частоты).
Функция
цифрового входа
[53] Ручной пуск Поданный сигнал переводит
[54] Автоматический
пуск
[60] Счетчик A
(вверх)
[61] Счетчик A
(вниз)
[62] Сброс счетчикаAВход для сброса счетчика A.
[63] Счетчик B
(вверх)
[64] Счетчик B
(вниз)
[65] Сброс счетчикаBВход для сброса счетчика B
Описание
преобразователь частоты в режим
ручного управления, как при нажатии
кнопки [Hand On] (Ручной режим);
выполнение команды нормального
останова блокируется. При отключении
этого сигнала двигатель
останавливается. Чтобы сделать любые
другие команды пуска действительными,
следует назначить для другого
цифрового входа функцию
Автоматический пуск и подавать сигнал
на этот вход. Кнопки [Hand On] (Ручной
режим) и [Auto On] (Автоматический
режим) не действуют. Кнопка [O]
(Выкл.) отменяет действие сигналов
Ручной пуск и Автоматический пуск.
Чтобы снова сделать активными
сигналы Ручной пуск и Автоматический
пуск, нажмите кнопку [Hand On] (Ручной
режим) или [Auto On] (Автоматический
режим). Если нет ни сигнала Ручной
пуск, ни сигнала Автоматический пуск,
двигатель останавливается независимо
от любой поданной команды
нормального пуска. Если подан и сигнал
Ручной пуск, и сигнал Автоматический
пуск, будет действовать сигнал
Автоматический пуск.
Поданный сигнал переведет
преобразователь частоты в
автоматический режим, как при
нажатии кнопки [Auto On]
(Автоматический режим). См. также [53]
Ручной пуск.
Вход для прямого счета в счетчике SLC.
Вход для обратного счета в счетчике
SLC.
Вход для прямого счета в счетчике SLC.
Вход для обратного счета в счетчике
SLC.
4 4
Таблица 4.4 Функции цифрового входа
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 69
Page 72

Параметры
VLT® DriveMotor FCP 106/FCM 106
Выбранное
предустановл
енное
задание:
Предустановл
енное задание
0
Предустановл
енное задание
44
1
Предустановл
енное задание
2
Предустановл
енное задание
3
Предустановл
енное задание
4
Предустановл
енное задание
5
Предустановл
енное задание
6
Предустановл
енное задание
7
Таблица 4.5 Выбранное предустановленное задание
5-10 Клемма 18, цифровой вход
Параметр для конфигурирования функции входа на входной
клемме 18. Значения, выбираемые для настройки, см. в
Таблица 4.4.
Опция: Функция:
[0] Не используется
[1] Сброс
[2] Выбег, инверсный
[3] Выбег+сброс,инверс
[4] Быстр.останов, инверс
[5] Торм.пост.током,инв
[6] Останов, инверсный
[7] Внешняя блокировка
[8] * Пуск
[9] Импульсный запуск
[10] Реверс
[11] Запуск и реверс
[14] Фикс. част.
[16] Предуст. зад., бит 0
[17] Предуст. зад., бит 1
[18] Предуст. зад., бит 2
[19] Зафиксиров. задание
[20] Зафиксировать выход
[21] Увеличение скорости
[22] Снижение скорости
Предустановл
енное
задание бит 2
0 0 0
0 0 1
0 1 0
0 1 1
1 0 0
1 0 1
1 1 0
1 1 1
Предустановл
енное
задание 1
Предустановл
енное бит 0
5-10 Клемма 18, цифровой вход
Параметр для конфигурирования функции входа на входной
клемме 18. Значения, выбираемые для настройки, см. в
Таблица 4.4.
Опция: Функция:
[23] Выбор набора, бит 0
[34] Измен.скорости, бит 0
[37] Пожар. режим
[52] Разрешение работы
[53] Ручной пуск
[54] Автоматический пуск
[60] Счетчик A (вверх)
[61] Счетчик A (вниз)
[62] Сброс счетчика A
[63] Счетчик B (вверх)
[64] Счетчик B (вниз)
[65] Сброс счетчика B
[101] Режим ожид.
5-11 Клемма 19, цифровой вход
Параметр для конфигурирования функции входа на входной
клемме 19.
Опция: Функция:
[0] * Не используется
[1] Сброс
[2] Выбег, инверсный
[3] Выбег+сброс,инверс
[4] Быстр.останов, инверс
[5] Торм.пост.током,инв
[6] Останов, инверсный
[7] Внешняя блокировка
[8] Пуск
[9] Импульсный запуск
[10] Реверс
[11] Запуск и реверс
[14] Фикс. част.
[16] Предуст. зад., бит 0
[17] Предуст. зад., бит 1
[18] Предуст. зад., бит 2
[19] Зафиксиров. задание
[20] Зафиксировать выход
[21] Увеличение скорости
[22] Снижение скорости
[23] Выбор набора, бит 0
[34] Измен.скорости, бит 0
[37] Пожар. режим
[52] Разрешение работы
[53] Ручной пуск
[54] Автоматический пуск
[60] Счетчик A (вверх)
[61] Счетчик A (вниз)
[62] Сброс счетчика A
[63] Счетчик B (вверх)
[64] Счетчик B (вниз)
70 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 73

Параметры Руководство по программированию
5-11 Клемма 19, цифровой вход
Параметр для конфигурирования функции входа на входной
клемме 19.
Опция: Функция:
[65] Сброс счетчика B
[101] Режим ожид.
5-12 Клемма 27, цифровой вход
Параметр для конфигурирования функции входа на входной
клемме 27. Если в параметр 0-03 Региональные установки
выбрано значение [0] Международные, в качестве значения по
умолчанию используется [2] Выбег, инверсный. Если в
параметр 0-03 Региональные установки выбрано значение [1]
Северная Америка, в качестве значения по умолчанию
используется [7] Внешняя блокировка.
Опция: Функция:
[0] Не используется
[1] Сброс
[2] Выбег, инверсный
[3] Выбег+сброс,инверс
[4] Быстр.останов, инверс
[5] Торм.пост.током,инв
[6] Останов, инверсный
[7] Внешняя блокировка
[8] Пуск
[9] Импульсный запуск
[10] Реверс
[11] Запуск и реверс
[14] Фикс. част.
[16] Предуст. зад., бит 0
[17] Предуст. зад., бит 1
[18] Предуст. зад., бит 2
[19] Зафиксиров. задание
[20] Зафиксировать выход
[21] Увеличение скорости
[22] Снижение скорости
[23] Выбор набора, бит 0
[34] Измен.скорости, бит 0
[37] Пожар. режим
[52] Разрешение работы
[53] Ручной пуск
[54] Автоматический пуск
[60] Счетчик A (вверх)
[61] Счетчик A (вниз)
[62] Сброс счетчика A
[63] Счетчик B (вверх)
[64] Счетчик B (вниз)
[65] Сброс счетчика B
[101] Режим ожид.
5-13 Клемма 29, цифровой вход
Параметр для конфигурирования функции входа на входной
клемме 29.
Опция: Функция:
[0] Не используется
[1] Сброс
[2] Выбег, инверсный
[3] Выбег+сброс,инверс
[4] Быстр.останов, инверс
[5] Торм.пост.током,инв
[6] Останов, инверсный
[7] Внешняя блокировка
[8] Пуск
[9] Импульсный запуск
[10] Реверс
[11] Запуск и реверс
[14] * Фикс. част.
[16] Предуст. зад., бит 0
[17] Предуст. зад., бит 1
[18] Предуст. зад., бит 2
[19] Зафиксиров. задание
[20] Зафиксировать выход
[21] Увеличение скорости
[22] Снижение скорости
[23] Выбор набора, бит 0
[32] Импульсный вход
[34] Измен.скорости, бит 0
[37] Пожар. режим
[52] Разрешение работы
[53] Ручной пуск
[54] Автоматический пуск
[60] Счетчик A (вверх)
[61] Счетчик A (вниз)
[62] Сброс счетчика A
[63] Счетчик B (вверх)
[64] Счетчик B (вниз)
[65] Сброс счетчика B
[101] Режим ожид.
4.6.3 5-3* Цифровые выходы
Параметры для конфигурирования функций выхода для
выходных клемм.
5-30 Клемма 27, цифровой выход
Этот параметр имеет значения, описанные в глава 4.6.3 5-3*
Цифровые выходы.
Опция: Функция:
[0] * Не используется
4 4
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 71
Page 74

Параметры
VLT® DriveMotor FCP 106/FCM 106
5-31 Клемма 29, цифровой выход
Этот параметр имеет значения, описанные в глава 4.6.3 5-3*
Цифровые выходы.
Опция: Функция:
[0] * Не используется
5-34 On Delay, Digital Output (Задержка включения,
цифровой выход)
44
Диапазон: Функция:
0,01 с* [0-600 c] Введите время задержки перед
включением цифрового выхода. Состояние
цифрового выхода (клемма 42/45) не
должно прерываться в течение времени
задержки.
5-40 Реле функций
Массив (Реле 1 [0], Реле 2 [1])
Выберите варианты, определяющие функции реле.
Выбор каждого механического реле реализуется в параметре
типа массива.
Значения по умолчанию для параметр 5–40 Function Relay:
Если в параметр 0-03 Regional Settingsвыбрано значение [0]
Международные, значение по умолчанию для реле 1 —
Аварийный сигнал, а значение по умолчанию для реле 2 —
Drive running (Привод работает).
Если в параметр 0-03 Regional Settings выбрано значение [1]
Северная Америка, значение по умолчанию для реле 1 — Нет
авар. сигналов, а значение по умолчанию для реле 2 — Drive
running (Привод работает).
Опция: Функция:
5-35 O Delay, Digital Output (Задержка выключения,
цифровой выход)
Диапазон: Функция:
0,01 с* [0-600 c] Введите время задержки перед
выключением цифрового выхода.
Состояние цифрового выхода (клемма
42/45) не должно прерываться в течение
времени задержки.
4.6.4 5-4* Реле
Параметры для конфигурирования временных и
выходных функций реле.
5-40 Реле функций
Массив (Реле 1 [0], Реле 2 [1])
Выберите варианты, определяющие функции реле.
Выбор каждого механического реле реализуется в параметре
типа массива.
Значения по умолчанию для параметр 5–40 Function Relay:
Если в параметр 0-03 Regional Settingsвыбрано значение [0]
Международные, значение по умолчанию для реле 1 —
Аварийный сигнал, а значение по умолчанию для реле 2 —
Drive running (Привод работает).
Если в параметр 0-03 Regional Settings выбрано значение [1]
Северная Америка, значение по умолчанию для реле 1 — Нет
авар. сигналов, а значение по умолчанию для реле 2 — Drive
running (Привод работает).
Опция: Функция:
[0] Не используется Значение по умолчанию для
обоих реле.
[1] Control Ready
(Готовн. к
управлению)
[2] Привод готов Преобразователь частоты готов к
Плата управления получает
напряжение питания.
работе и подает сигнал питания
на плату управления.
[3] Привод готов/дистан. Преобразователь частоты готов к
работе и находится в режиме
автоматического управления.
[4] Дежурный
режим/нет
предупреждения
[5] Drive running
(Привод работает)
[6] Раб.,нет предупрежд. Двигатель вращается,
[7] Раб.в диап./нет пред. Двигатель работает в
[8] Раб.на зад./нет пред. Двигатель вращается на
[9] Аварийный сигнал Аварийный сигнал активизирует
[10] Авар.сигн./предупр. Аварийный сигнал или
[12] Вне диапазона тока Ток двигателя вышел за пределы
[13] Ток ниже минимальн. Ток двигателя меньше значения,
Преобразователь частоты готов к
работе. Не подана команда
запуска или останова.
Предупреждения отсутствуют.
Двигатель работает.
предупреждения отсутствуют.
запрограммированных
диапазонах тока, см.
параметр 4-50 Предупреждение:
низкий ток и
параметр 4-51 Предупреждение:
высокий ток. Предупреждения
отсутствуют.
скорости, соответствующей
заданию, предупреждения
отсутствуют.
выход.
предупреждение активизирует
выход.
диапазона, установленного в
параметр 4-50 Предупреждение:
низкий ток и
параметр 4-51 Предупреждение:
высокий ток.
установленного в
параметр 4-50 Предупреждение:
низкий ток.
72 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 75

Параметры Руководство по программированию
5-40 Реле функций
Массив (Реле 1 [0], Реле 2 [1])
Выберите варианты, определяющие функции реле.
Выбор каждого механического реле реализуется в параметре
типа массива.
Значения по умолчанию для параметр 5–40 Function Relay:
Если в параметр 0-03 Regional Settingsвыбрано значение [0]
Международные, значение по умолчанию для реле 1 —
Аварийный сигнал, а значение по умолчанию для реле 2 —
Drive running (Привод работает).
Если в параметр 0-03 Regional Settings выбрано значение [1]
Северная Америка, значение по умолчанию для реле 1 — Нет
авар. сигналов, а значение по умолчанию для реле 2 — Drive
running (Привод работает).
Опция: Функция:
[14] Ток выше макс. Ток двигателя больше значения,
установленного в
параметр 4-51 Предупреждение:
высокий ток.
[16] Скорость ниже
миним
[17] Скорость выше макс.
[19] ОС ниже миним
[20] ОС выше макс
[21] Предупр. о перегрев Предупреждение о перегреве
возникает, когда превышается
температурный предел двигателя,
преобразователя частоты или
термистора.
[22] Готов, нет пред.по Т Преобразователь частоты готов к
работе, предупреждение о
перегреве отсутствует.
[23] Дист.гот,нет перегр. Преобразователь частоты готов к
работе в автоматическом режиме,
предупреждение о перегреве
отсутствует.
[24] Готово,напряж.норм. Преобразователь частоты готов к
работе, и напряжение сети
находится в заданных пределах.
[25] Реверс Двигатель вращается (или готов к
вращению) по часовой стрелке
при логическом 0 и против
часовой стрелки при логической
1. При применении сигнала
реверса выходная мощность
изменяется.
[26] Шина в норме Осуществляется передача данных
через порт последовательной
связи (таймаута нет).
[32] Управл.мех.тормозом
[35] Внешняя блокировка См. цифровой вход.
[36] Ком. слово, бит 11 Бит 11 командного слова
управляет реле.
5-40 Реле функций
Массив (Реле 1 [0], Реле 2 [1])
Выберите варианты, определяющие функции реле.
Выбор каждого механического реле реализуется в параметре
типа массива.
Значения по умолчанию для параметр 5–40 Function Relay:
Если в параметр 0-03 Regional Settingsвыбрано значение [0]
Международные, значение по умолчанию для реле 1 —
Аварийный сигнал, а значение по умолчанию для реле 2 —
Drive running (Привод работает).
Если в параметр 0-03 Regional Settings выбрано значение [1]
Северная Америка, значение по умолчанию для реле 1 — Нет
авар. сигналов, а значение по умолчанию для реле 2 — Drive
running (Привод работает).
Опция: Функция:
[37] Ком. слово, бит 12 Бит 12 командного слова
управляет реле.
[41] Низкий: ниже
задания
[42] Высокий: выше зад-я
[45] Упр. по шине
[60] Компаратор 0 См. группу параметров 13-1*
Компараторы. Если состояние
компаратора 0 оценивается как
TRUE (Истина), на выход
поступает высокий уровень
сигнала. В противном случае —
низкий уровень.
[61] Компаратор 1 См. группу параметров 13-1*
Компараторы. Если состояние
компаратора 1 оценивается как
TRUE (Истина), на выход
поступает высокий уровень
сигнала. В противном случае —
низкий уровень.
[62] Компаратор 2 См. группу параметров 13-1*
Компараторы. Если состояние
компаратора 2 оценивается как
TRUE (Истина), на выход
поступает высокий уровень
сигнала В противном случае —
низкий уровень.
[63] Компаратор 3 См. группу параметров 13-1*
Компараторы. Если состояние
компаратора 3 оценивается как
TRUE (Истина), на выход
поступает высокий уровень
сигнала. В противном случае —
низкий уровень.
[64] Компаратор 4 См. группу параметров 13-1*
Компараторы. Если состояние
компаратора 4 оценивается как
TRUE (Истина), на выход
поступает высокий уровень
4 4
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 73
Page 76

Параметры
VLT® DriveMotor FCP 106/FCM 106
5-40 Реле функций
Массив (Реле 1 [0], Реле 2 [1])
Выберите варианты, определяющие функции реле.
Выбор каждого механического реле реализуется в параметре
типа массива.
Значения по умолчанию для параметр 5–40 Function Relay:
Если в параметр 0-03 Regional Settingsвыбрано значение [0]
Международные, значение по умолчанию для реле 1 —
44
Аварийный сигнал, а значение по умолчанию для реле 2 —
Drive running (Привод работает).
Если в параметр 0-03 Regional Settings выбрано значение [1]
Северная Америка, значение по умолчанию для реле 1 — Нет
авар. сигналов, а значение по умолчанию для реле 2 — Drive
running (Привод работает).
Опция: Функция:
сигнала. В противном случае —
низкий уровень.
[65] Компаратор 5 См. группу параметров 13-1*
Компараторы. Если состояние
компаратора 5 оценивается как
TRUE (Истина), на выход
поступает высокий уровень
сигнала. В противном случае —
низкий уровень.
[70] Логич.соотношение 0 См. группу параметров 13-4*
Правила логики. Если логическое
соотношение 0 оценивается как
TRUE (Истина), на выход
поступает высокий уровень
сигнала. В противном случае —
низкий уровень.
[71] Логич.соотношение 1 См. группу параметров 13-4*
Правила логики. Если логическое
соотношение 1 оценивается как
TRUE (Истина), на выход
поступает высокий уровень
сигнала. В противном случае —
низкий уровень.
[72] Логич.соотношение 2 См. группу параметров 13-4*
Правила логики. Если логическое
соотношение 2 оценивается как
TRUE (Истина), на выход
поступает высокий уровень
сигнала. В противном случае —
низкий уровень.
[73] Логич.соотношение 3 См. группу параметров 13-4*
Правила логики. Если логическое
соотношение 3 оценивается как
TRUE (Истина), на выход
поступает высокий уровень
сигнала. В противном случае —
низкий уровень.
[74] Лог.соотношение 4 См. группу параметров 13-4*
Правила логики. Если логическое
5-40 Реле функций
Массив (Реле 1 [0], Реле 2 [1])
Выберите варианты, определяющие функции реле.
Выбор каждого механического реле реализуется в параметре
типа массива.
Значения по умолчанию для параметр 5–40 Function Relay:
Если в параметр 0-03 Regional Settingsвыбрано значение [0]
Международные, значение по умолчанию для реле 1 —
Аварийный сигнал, а значение по умолчанию для реле 2 —
Drive running (Привод работает).
Если в параметр 0-03 Regional Settings выбрано значение [1]
Северная Америка, значение по умолчанию для реле 1 — Нет
авар. сигналов, а значение по умолчанию для реле 2 — Drive
running (Привод работает).
Опция: Функция:
соотношение 4 оценивается как
TRUE (Истина), на выход
поступает высокий уровень
сигнала. В противном случае —
низкий уровень.
[75] Лог.соотношение 5 См. группу параметров 13-4*
Правила логики. Если логическое
соотношение 5 оценивается как
TRUE (Истина), на выход
поступает высокий уровень
сигнала. В противном случае —
низкий уровень.
[80] Цифр. выход SL A См. параметр 13-52 Действие
контроллера SL. Вход становится
высокоуровневым при каждом
выполнении действия
интеллектуальной логики [38]
Ус.в.ур.на цфв.вых.А. Вход
становится низкоуровневым при
каждом выполнении действия
интеллектуальной логики [32]
Ус.н.ур.на цфв. вых. A.
[81] Цифр. выход SL B См. параметр 13-52 Действие
контроллера SL. Вход становится
высокоуровневым при каждом
выполнении действия
интеллектуальной логики [39]
Ус.в.ур.на цфв.вых.В. Вход
становится низкоуровневым при
каждом выполнении действия
интеллектуальной логики [33]
Ус.н.ур.на цфв.вых.В.
[82] Цифр. выход SL C См. параметр 13-52 Действие
контроллера SL. Вход становится
высокоуровневым при каждом
выполнении действия
интеллектуальной логики [40]
Ус.в.ур.на цфв.вых.С. Вход
становится низкоуровневым при
каждом выполнении действия
74 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 77

Параметры Руководство по программированию
5-40 Реле функций
Массив (Реле 1 [0], Реле 2 [1])
Выберите варианты, определяющие функции реле.
Выбор каждого механического реле реализуется в параметре
типа массива.
Значения по умолчанию для параметр 5–40 Function Relay:
Если в параметр 0-03 Regional Settingsвыбрано значение [0]
Международные, значение по умолчанию для реле 1 —
Аварийный сигнал, а значение по умолчанию для реле 2 —
Drive running (Привод работает).
Если в параметр 0-03 Regional Settings выбрано значение [1]
Северная Америка, значение по умолчанию для реле 1 — Нет
авар. сигналов, а значение по умолчанию для реле 2 — Drive
running (Привод работает).
Опция: Функция:
интеллектуальной логики [34]
Ус.н.ур.на цфв.вых.С.
[83] Цифр. выход SL D См. параметр 13-52 Действие
контроллера SL. Вход становится
высокоуровневым при каждом
выполнении действия
интеллектуальной логики [41]
Ус.в.ур.на цфв.вых.D. Вход
становится низкоуровневым при
каждом выполнении действия
интеллектуальной логики [35]
Ус.н.ур.на цфв.вых.D.
[160] Нет авар. сигналов При отсутствии аварийного
сигнала выход имеет высокий
уровень.
[161] Вращ.в обр.направл. На выходе высокий уровень,
когда преобразователь частоты
работает против часовой стрелки
(логическое произведение битов
состояния «работа» И «реверс»).
[165] Включ.местн.задание Выход становится
высокоуровневым, когда
параметр 3-13 Место задания =
[2] Местное или
параметр 3-13 Место задания =
[0] Связанное Ручн/Авто, а LCP
находится в режиме ручного
управления.
[166] Дист.задание активно Выход становится
высокоуровневым, когда
параметр 3-13 Место задания [1]
или Связанное Ручн/Авто [0], а
LCP находится в режиме
автоматического управления.
[167] Команда пуска акт. Выход имеет высокий уровень,
если активирована команда
пуска (например, через
цифровой вход, шину связи или
нажатием кнопки [Hand on]
5-40 Реле функций
Массив (Реле 1 [0], Реле 2 [1])
Выберите варианты, определяющие функции реле.
Выбор каждого механического реле реализуется в параметре
типа массива.
Значения по умолчанию для параметр 5–40 Function Relay:
Если в параметр 0-03 Regional Settingsвыбрано значение [0]
Международные, значение по умолчанию для реле 1 —
Аварийный сигнал, а значение по умолчанию для реле 2 —
Drive running (Привод работает).
Если в параметр 0-03 Regional Settings выбрано значение [1]
Северная Америка, значение по умолчанию для реле 1 — Нет
авар. сигналов, а значение по умолчанию для реле 2 — Drive
running (Привод работает).
Опция: Функция:
(Ручной режим) или [Auto on]
(Автоматический режим)), а
команда останова не активна.
[168] Привод в руч.реж. Выход имеет высокий уровень,
когда преобразователь частоты
находится в ручном режиме (на
что указывает горящий светодиод
над кнопкой [Hand on] (Ручной
режим)).
[169] Привод в авт.реж. На выходе высокий уровень,
когда преобразователь частоты
находится в автоматическом
режиме (на что указывает
горящий светодиод над кнопкой
[Auto on] (Автоматический
режим)).
[191] Сухой ход насоса
[192] Конец
характеристики
[193] Режим ожидания Преобразователь частоты/
система находятся в режиме
ожидания. Cм. группу параметров
22-4* Режим ожидания.
[194] Функция
обнаружения обрыва
ремня
[196] Пожар. режим Преобразователь частоты
[198] Байпас привода Используется в качестве сигнала
Обнаружен обрыв ремня. Эта
функция включается в
параметр 22-60 Функция
обнаружения обрыва ремня.
находится в пожарном режиме.
См. группу параметров 24-0*
Пожар. режим.
для внешнего
электромеханического
переключения привода
непосредственно на сеть питания
в обход привода.
См. 24-1* Байпас привода.
4 4
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 75
Page 78

Selected
Event
Relay
output
Selected
Event
Relay
output
On Delay
P 5-41
On Delay
P 5-41
O Delay
P 5-42
130BA171.10
Selected
Event
Relay
output
On Delay
P 5-41
O Delay
P 5-42
130BA172.10
Ref.
(RPM)
High
ref.
value
P 5-53
Low
ref.
value
P 5-52
Low freq.
P 5-50
High freq.
P 5-51
Input
(Hz)
195NA453.10
Параметры
VLT® DriveMotor FCP 106/FCM 106
5-40 Реле функций
Массив (Реле 1 [0], Реле 2 [1])
Выберите варианты, определяющие функции реле.
Выбор каждого механического реле реализуется в параметре
типа массива.
Значения по умолчанию для параметр 5–40 Function Relay:
Если в параметр 0-03 Regional Settingsвыбрано значение [0]
Международные, значение по умолчанию для реле 1 —
44
Аварийный сигнал, а значение по умолчанию для реле 2 —
Drive running (Привод работает).
5-42 Задержка выключения, реле
Массив [2]: реле 1 [0], реле 2 [1]
Диапазон: Функция:
0.01 s* [0.01 - 600 s] Введите величину задержки
выключения реле. Выберите одно из
имеющихся механических реле в
функции массива. См.
параметр 5-40 Реле функций.
Если в параметр 0-03 Regional Settings выбрано значение [1]
Северная Америка, значение по умолчанию для реле 1 — Нет
авар. сигналов, а значение по умолчанию для реле 2 — Drive
running (Привод работает).
Опция: Функция:
[235] Изменение скорости
контрольного
клапана
5-41 Задержка включения, реле
Рисунок 4.11 Задержка выключения, реле
Массив [9], (реле 1 [0], реле 2 [1], реле 3 [2], реле 4 [3], реле 5
[4], реле 6 [5], реле 7 [6], реле 8 [7], реле 9 [8])
Диапазон: Функция:
0.01 s* [0.01 - 600 s] Введите величину задержки включения
реле. Реле включается только если
условие в параметр 5-40 Реле функций
Если состояние выбранного события изменяется до
истечения времени задержки включения или
выключения, то это не влияет на состояние выхода
реле.
остается непрерывным в течение
указанного времени. Выберите одно из
4.6.5 5-5* Импульсный вход
имеющихся механических реле в
функции массива. См.
параметр 5-40 Реле функций.
Параметры импульсного входа используются с целью
определения соответствующего окна для зоны
импульсного задания путем конфигурирования
масштабирования и фильтров для импульсных входов. В
качестве входа задания частоты может действовать
входная клемма 29. Установите для клеммы 29
параметр 5-13 Клемма 29, цифровой вход значение [32]
Импульсный вход.
Рисунок 4.10 Задержка включения, реле
Рисунок 4.12 Импульсный вход
76 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 79

Параметры Руководство по программированию
5-50 Клемма 29, мин. частота
Диапазон: Функция:
20 Гц* [20-31999
Гц]
Введите нижний предел частоты,
соответствующий минимальной
скорости вращения вала двигателя (т. е.
минимальному значению задания), в
параметр 5-52 Клемма 29, мин. задание/
обр. связь. См. Рисунок 4.12.
5-51 Клемма 29, макс. частота
Диапазон: Функция:
32000
Гц*
[21-32000
Гц]
Введите верхний предел частоты,
соответствующий максимальному
значению скорости вращения вала
двигателя (т. е. максимальному
значению задания), в
параметр 5-53 Клемма 29, макс.
задание/обр. связь.
5-52 Клемма 29, мин. задание/ обр. связь
Диапазон: Функция:
0* [-4999 -
4999 ]
Введите нижний предел задания скорости
вращения вала двигателя [об/мин]. Эта
величина также является минимальным
значением сигнала обратной связи, см.
также параметр 5-13 К лемма 29, цифровой
вход = [32] Импульсный вход.
5-90 Управление цифр. и релейн. шинами
Диапазон: Функция:
Логический 0 показывает, что на выходе
имеет место низкий уровень или он
неактивен.
Биты 0–3 Зарезервировано
Бит 4 Реле 1, выходная клемма
Бит 5 Реле 2, выходная клемма
Биты 6–23 Зарезервировано
Бит 24 Клемма 42, цифровой выход
Бит 25 Клемма 45, цифровой выход
Биты 26–31 Зарезервировано
Таблица 4.6 Функции битов
4 4
5-53 Клемма 29, макс. задание/ обр. связь
Диапазон: Функция:
В соответствии с
типоразмером*
[-4999 4999 ]
Введите максимальное значение
задания [об/мин] для скорости
вращения вала двигателя и
максимальное значение сигнала
обратной связи (см. также
параметр 5-13 Клемма 29,
цифровой вход = [32]
Импульсный вход).
4.6.6 5-9* Управление по шине
Эта группа параметров предназначена для выбора
цифровых и релейных выходов через настройку
периферийной шины.
5-90 Управление цифр. и релейн. шинами
Диапазон: Функция:
0* [0-0xFFFFFFFF ] Этот параметр сохраняет состояние
цифровых выходов и реле, управляемых
по шине.
Логическая 1 показывает, что на выходе
имеет место высокий уровень или он
активен.
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 77
Page 80

Ref./Feedback
[RPM]
Analog input
High Ref./
Feedb. Value'
Low Ref./
Feedb. Value'
'Low Voltage'or
'Low Current'
'High Voltage'or
'High Current'
130BA038.13
1 V 5 V 10 V
300
600
900
1200
1500
[V]
150
Par 6-xx
Par 6-xx
Par 6-xx
Par 6-xx
Параметры
VLT® DriveMotor FCP 106/FCM 106
4.7 Главное меню — Аналог.ввод/вывод — Группа 6
Группа параметров для настройки конфигурации
аналоговых входов/выходов и цифрового выхода.
Преобразователь частоты имеет два аналоговых
входа:
Клемма 53.
•
Клемма 54.
44
•
Аналоговые входы можно свободно конфигурировать в
качестве входов по напряжению (0–10 В) или по току
(0/4–20 мА).
4.7.1 6-0* Analog I/O Mode (Реж. аналог.
вв/выв)
6-00 Время тайм-аута нуля
Диапазон: Функция:
10 с* [1-99 с] Введите время тайм-аута.
Рисунок 4.13 Функция при тайм-ауте нуля
6-01 Функция при тайм-ауте нуля
Опция: Функция:
Выберите функцию таймаута.
Функция, заданная в
параметр 6-01 Функция при таймауте нуля, активируется, если
величина входного сигнала на
клеммах 53 или 54 составляет менее
50 % значения, заданного в
параметрах параметр 6-10 Клемма
53, низкое напряжение,
параметр 6-12 Клемма 53, малый
ток, параметр 6-20 К лемма 54,
низкое напряжение или
параметр 6-22 Клемма 54, малый
ток, в течение времени,
определенного в
параметр 6-00 Время тайм-аута
нуля.
[0] * Выкл.
[1] Зафиксировать
выход
[2] Останов
[3] Фикс. скорость
[4] Макс. скорость
[5] Останов и
отключение
78 Danfoss A/S © 11/2015 Все права защищены. MG03N250
4.7.2 6-1* Analog Input 53 (Аналоговый
вход 53)
Параметры для конфигурирования масштаба и
пределов аналогового входа 53 (клемма 53).
6-10 Клемма 53, низкое напряжение
Диапазон: Функция:
0,07 В* [0-10 В] Введите напряжение (В), которое
соответствует параметр 6-14 Клемма 53,
низкое зад./ обр. связь. Чтобы активировать
параметр 6-01 Функция при тайм-ауте
нуля, установите значение >1 В.
6-11 Клемма 53, высокое напряжение
Диапазон: Функция:
10 В* [0-10 В] Введите значение напряжения (В), которое
соответствует высокому значению задания
(установленному в параметр 6-15 Клемма 53,
высокое зад./обр. связь).
6-12 Клемма 53, малый ток
Диапазон: Функция:
4 мА* [0-20
мА]
Введите нижнее значение тока. Этот сигнал
задания соответствует низкому значению
задания/сигнала обратной связи,
установленному в параметр 6-14 К лемма 53,
низкое зад./ обр. связь. Чтобы активировать
параметр 6-01 Функция при тайм-ауте нуля,
установите значение > 2 мА.
Page 81

Параметры Руководство по программированию
6-13 Клемма 53, большой ток
Диапазон: Функция:
20 мА* [0-20 мА] Введите высокое значение тока,
соответствующее максимальному
значению задания/сигнала обратной связи,
заданному в параметр 6-15 К лемма 53,
высокое зад./ обр. связь.
6-14 Клемма 53, низкое зад./ обр. связь
Диапазон: Функция:
0* [-4999 -
4999 ]
Введите значение задания или обратной
связи, которое соответствует значению
тока или напряжения, заданному в
параметрах спараметр 6-10 Клемма 53,
низкое напряжение по
параметр 6-12 Клемма 53, малый ток.
6-15 Клемма 53, высокое зад./ обр. связь
Диапазон: Функция:
В соответствии с
типоразмером*
[-4999 4999 ]
Введите значение задания или
обратной связи, которое
соответствует значению тока
или напряжения, заданному в
параметрах
спараметр 6-11 Клемма 53,
высокое напряжение по
параметр 6-13 Клемма 53,
большой ток.
6-16 Клемма 53,постоянн.времени фильтра
Диапазон: Функция:
0,01 с* [0,01-10 с] Введите постоянную времени. Это
постоянная времени цифрового фильтра
низких частот первого порядка для
подавления электрических помех на
клемме 53. Высокое значение постоянной
времени улучшает подавление колебаний,
но в то же время увеличивает временную
задержку прохождения сигнала через
фильтр.
4.7.3 6-2* Analog Input 54 (Аналоговый
вход 54)
Параметры для конфигурирования масштаба и
пределов аналогового входа 54 (клемма 54).
6-20 Клемма 54, низкое напряжение
Диапазон: Функция:
0,07 В* [0-10 В] Введите напряжение (В), которое
соответствует нижнему значению задания
(установленному в параметр 6-24 Клемма
54, низкое зад./ обр. связь). Чтобы
активировать параметр 6-01 Функция при
тайм-ауте нуля, установите значение >1 В.
6-21 Клемма 54, высокое напряжение
Диапазон: Функция:
10 В* [0-10 В] Введите значение напряжения (В), которое
соответствует высокому значению задания
(установленному в параметр 6-25 Клемма 54,
высокое зад./ обр. связь).
6-22 Клемма 54, малый ток
Диапазон: Функция:
4 мА* [0-20
мА]
6-23 Клемма 54, большой ток
Диапазон: Функция:
20 мА* [0-20 мА] Введите высокое значение тока,
Введите нижнее значение тока. Этот сигнал
задания соответствует низкому значению
задания/сигнала обратной связи,
установленному в параметр 6-24 К лемма 54,
низкое зад./ обр. связь. Чтобы активировать
функцию таймаута действующего нуля в
параметр 6-01 Функция при тайм-ауте нуля,
установите для этого параметра значение > 2
мА.
соответствующего максимальному
значению задания/сигнала обратной связи,
заданному в параметр 6-25 К лемма 54,
высокое зад./ обр. связь.
4 4
6-19 Клемма 53, режим
Опция: Функция:
Выберите тип входа на клемме 53:
ток или напряжение.
[0] Режим тока
[1] * Режим напряжения
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 79
6-24 Клемма 54, низкое зад./ обр. связь
Диапазон: Функция:
0* [-4999 -
4999 ]
Введите значение задания или обратной
связи, которое соответствует значению
тока или напряжения, заданному в
параметр 6-21 Клемма 54, высокое
напряжение/параметр 6-22 Клемма 54,
малый ток.
Page 82

Параметры
VLT® DriveMotor FCP 106/FCM 106
6-25 Клемма 54, высокое зад./ обр. связь
Диапазон: Функция:
В соответствии с
типоразмером*
44
[-4999 4999 ]
Введите значение задания или
обратной связи, которое
соответствует значению тока
или напряжения, заданному в
параметр 6-21 Клемма 54,
высокое напряжение/
параметр 6-23 Клемма 54,
большой ток.
6-71 Клемма 45, аналоговый выход
Опция: Функция:
[0] * Не используется
[100] Выходная частота 0–100 Гц
[101] Задание Min
[102] Обратная связь MinFB–Max
[103] Ток двигателя 0-I
[106] Мощность 0–P
[139] Упр. по шине 0–100%
Ref.
макс.
ном.
–Max
Ref.
FB
6-26 Клемма 54, пост. времени фильтра
Диапазон: Функция:
0,01 с* [0,01-10 с] Введите постоянную времени цифрового
фильтра низких частот первого порядка
для подавления электрических помех на
клемме 54. Высокое значение постоянной
времени улучшает подавление колебаний,
но в то же время увеличивает временную
задержку прохождения сигнала через
фильтр.
6-29 Клемма 54, режим
Опция: Функция:
Выберите, используется клемма 54
для входа по току или по
напряжению.
[0] Режим тока
[1] * Режим напряжения
4.7.4 6-7* Analog/Digital Output 45
(Аналогов./цифр. выход 45)
Параметры для конфигурирования масштаба и
пределов клеммы 45 аналогового/цифрового выхода.
Аналоговые выходы являются токовыми выходами: 0/4–
20 мА. Разрешение аналогового выхода составляет 12
бит. Клеммы аналогового выхода можно также
настроить в качестве цифрового выхода.
6-70 Клемма 45, режим
Опция: Функция:
Настройте клемму 45 для работы в
качестве аналогового выхода или как
цифрового выхода.
[0] * 0-20 мА
[1] 4-20 мA
[2] Цифровой выход
6-71 Клемма 45, аналоговый выход
Опция: Функция:
Выберите функцию для клеммы 45,
действующей в качестве аналогового
токового выхода. См. также
параметр 6-70 Клемма 45, режим.
6-72 Клемма 45, цифровой выход
Опция: Функция:
Выберите для клеммы
45 функцию цифрового
токового выхода. См.
также
параметр 6-70 Клемма
45, режим. Описание
выбираемых значений
см. в
параметр 5-40 Реле
функций.
[0] * Не используется
[1] Control Ready (Готовн. к
управлению)
[2] Привод готов
[3] Привод готов/дистан.
[4] Дежурный режим/нет
предупреждения
[5] Drive running (Привод
работает)
[6] Раб.,нет предупрежд.
[7] Раб.в диап./нет пред.
[8] Раб.на зад./нет пред.
[9] Аварийный сигнал
[10] Авар.сигн./предупр.
[12] Вне диапазона тока
[13] Ток ниже минимальн.
[14] Ток выше макс.
[16] Скорость ниже миним
[17] Скорость выше макс.
[19] ОС ниже миним
[20] ОС выше макс
[21] Предупр. о перегрев
[22] Готов, нет пред.по Т
[23] Дист.гот,нет перегр.
[24] Готово,напряж.норм.
[25] Реверс
[26] Шина в норме
[32] Управл.мех.тормозом
[35] Внешняя блокировка
[36] Ком. слово, бит 11
[37] Ком. слово, бит 12
80 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 83

(mA)
0%
20
0/4
100%
Current
Analogue
output
Min Scale
par. 6-73
Variable
for
output
example:
Power
Analogue
Output
Max Scale
par. 6-74
Параметры Руководство по программированию
6-72 Клемма 45, цифровой выход
Опция: Функция:
[41] Низкий: ниже задания
[42] Высокий: выше зад-я
[45] Упр. по шине
[60] Компаратор 0
[61] Компаратор 1
[62] Компаратор 2
[63] Компаратор 3
[64] Компаратор 4
[65] Компаратор 5
[70] Логич.соотношение 0
[71] Логич.соотношение 1
[72] Логич.соотношение 2
[73] Логич.соотношение 3
[74] Лог.соотношение 4
[75] Лог.соотношение 5
[80] Цифр. выход SL A
[81] Цифр. выход SL B
[82] Цифр. выход SL C
[83] Цифр. выход SL D
[160] Нет авар. сигналов
[161] Вращ.в обр.направл.
[165] Включ.местн.задание
[166] Дист.задание активно
[167] Команда пуска акт.
[168] Привод в руч.реж.
[169] Привод в авт.реж.
[191] Сухой ход насоса
[192] Конец характеристики
[193] Режим ожидания
[194] Функция обнаружения обрыва
ремня
[196] Пожар. режим
[198] Байпас привода
6-73 Клемма 45, мин. шкала выхода
Диапазон: Функция:
0 %* [0 -
200 %]
Масштаб минимального значения
выходного аналогового сигнала на клемме
45 (0 мA или 4 мA). Задайте значение в
виде процента полного диапазона
переменной, выбранной в
параметр 6-71 Клемма 45, аналоговый
выход.
6-74 Клемма 45, макс. шкала выхода
Диапазон: Функция:
100 %* [0 -
200 %]
Масштаб максимального значения
выходного аналогового сигнала (20 мА) на
клемме 45. Задайте значение в виде
процента полного диапазона переменной,
выбранной в параметр 6-71 Клемма 45,
аналоговый выход.
6-74 Клемма 45, макс. шкала выхода
Диапазон: Функция:
Рисунок 4.14 Максимальная шкала
выхода
6-76 Клемма 45, выход при управлении по шине
Диапазон: Функция:
0* [0 - 16384 ] Сохраняет уровень аналогового выхода при
управлении по шине.
4.7.5 6-9* Аналогов./цифр. выход 42
Параметры для конфигурирования пределов
аналогового/цифрового выхода клеммы 42. Аналоговые
выходы являются токовыми выходами: 0/4–20 мА.
Разрешение аналоговых выходов составляет 12 бит.
Клеммы аналогового выхода можно также настроить в
качестве цифрового выхода.
6-90 Клемма 42, режим
Опция: Функция:
Настройте клемму 42 для работы в
качестве аналогового выхода или в
качестве цифрового выхода.
[0] * 0-20 мА
[1] 4-20 мA
[2] Цифровой выход
6-91 Клемма 42, аналоговый выход
Опция: Функция:
Выберите функцию для клеммы 42,
действующей в качестве аналогового
токового выхода. См. также
параметр 6–90 Terminal 42 Mode.
[0] * Не используется
[100] Выходная частота 0–100 Гц
[101] Задание Min
[102] Обратная связь MinFB–Max
[103] Ток двигателя 0-I
[106] Мощность 0–P
Ref.
макс.
ном.
–Max
Ref.
FB
4 4
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 81
Page 84

Параметры
VLT® DriveMotor FCP 106/FCM 106
6-91 Клемма 42, аналоговый выход
Опция: Функция:
[139] Упр. по шине 0–100%
6-92 Клемма 42, цифровой выход
Опция: Функция:
Выберите функцию
для клеммы 42,
44
[0] * Не используется
[1] Control Ready (Готовн. к
управлению)
[2] Привод готов
[3] Привод готов/дистан.
[4] Дежурный режим/нет
предупреждения
[5] Drive running (Привод работает)
[6] Раб.,нет предупрежд.
[7] Раб.в диап./нет пред.
[8] Раб.на зад./нет пред.
[9] Аварийный сигнал
[10] Авар.сигн./предупр.
[12] Вне диапазона тока
[13] Ток ниже минимальн.
[14] Ток выше макс.
[16] Скорость ниже миним
[17] Скорость выше макс.
[19] ОС ниже миним
[20] ОС выше макс
[21] Предупр. о перегрев
[22] Готов, нет пред.по Т
[23] Дист.гот,нет перегр.
[24] Готово,напряж.норм.
[25] Реверс
[26] Шина в норме
[32] Управл.мех.тормозом
[35] Внешняя блокировка
[36] Ком. слово, бит 11
[37] Ком. слово, бит 12
[41] Низкий: ниже задания
[42] Высокий: выше зад-я
[45] Упр. по шине
[60] Компаратор 0
[61] Компаратор 1
[62] Компаратор 2
действующей в
качестве аналогового
токового выхода. См.
также параметр 6–
90 Terminal 42 Mode.
Описание
выбираемых
значений см. в
параметр 5-40 Реле
функций.
6-92 Клемма 42, цифровой выход
Опция: Функция:
[63] Компаратор 3
[64] Компаратор 4
[65] Компаратор 5
[70] Логич.соотношение 0
[71] Логич.соотношение 1
[72] Логич.соотношение 2
[73] Логич.соотношение 3
[74] Лог.соотношение 4
[75] Лог.соотношение 5
[80] Цифр. выход SL A
[81] Цифр. выход SL B
[82] Цифр. выход SL C
[83] Цифр. выход SL D
[160] Нет авар. сигналов
[161] Вращ.в обр.направл.
[165] Включ.местн.задание
[166] Дист.задание активно
[167] Команда пуска акт.
[168] Привод в руч.реж.
[169] Привод в авт.реж.
[191] Сухой ход насоса
[192] Конец характеристики
[193] Режим ожидания
[194] Функция обнаружения обрыва
ремня
[196] Пожар. режим
[198] Байпас привода
6-93 Terminal 42 Output Min Scale (Клемма 42, мин.
шкала выхода)
Диапазон: Функция:
0 %* [0 - 200 %] Масштаб минимального значения
выходного аналогового сигнала на клемме
42 (0 мA или 4 мA). Задайте значение в
виде процента полного диапазона
переменной, выбранной в параметр 6–
91 Terminal 42 Analog Output.
6-94 Terminal 42 Output Max Scale (Клемма 42, макс.
шкала выхода)
Диапазон: Функция:
100 %* [0 -
200 %]
Установите масштаб максимального
выходного значения (20 мА)
масштабирования на клемме 42. Задайте
значение в виде процента полного
диапазона переменной, выбранной в
параметр 6–91 Terminal 42 Analog Output.
82 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 85

(mA)
0%
20
0/4
100%
Current
Analog
output
Min Scale
par. 6-93
Variable
for
output
example:
Power
Analog
Output
Max Scale
par. 6-94
130BB772.10
Параметры Руководство по программированию
6-94 Terminal 42 Output Max Scale (Клемма 42, макс.
шкала выхода)
Диапазон: Функция:
Рисунок 4.15 Максимальная шкала
выхода
6-96 Клемма 42, выход при управлении по шине
Диапазон: Функция:
0* [0 - 16384 ] Сохраняет уровень аналогового выхода на
клемме 42 при управлении по шине.
4 4
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 83
Page 86

Параметры
VLT® DriveMotor FCP 106/FCM 106
4.8 Главное меню — Связь и дополнительные устройства — Группа 8
4.8.1 8-0* General Settings (Общие
настройки)
8-01 Место управления
Опция: Функция:
Установка этого параметра имеет
44
[0] * Цифр.и
кмнд.слово
[1] Digital only
(Только
цифровое)
[2] Только коман.
слово
приоритет над настройками в
параметр 8-50 Выбор выбега–
параметр 8-56 Выбор
предустановленного задания.
Управление с помощью как цифрового
входа, так и командного слова.
Управление с помощью только
цифровых входов.
Управление с помощью только
командного слова.
8-02 Источник управления
Опция: Функция:
УВЕДОМЛЕНИЕ
Этот параметр не может быть
изменен во время вращения
двигателя.
Выберите источник командного слова.
[0] Отсутствует
[1] Порт FC
[3] Доп. устройство А PROFIBUS и PROFINET.
8-03 Время таймаута управления
8-04 Функция таймаута управления
Опция: Функция:
появляется только после установки
протокола Metasys N2.
[0] * Выкл.
[1] Зафиксировать
выход
[2] Останов
[3] Фикс. скорость
[4] Макс. скорость
[5] Останов и
отключение
[20] Отпускание
блокировки N2
8-07 Запуск диагностики
Опция: Функция:
Выберите [0] Запрещено, чтобы не
отправлять расширенные данные
диагностики (EDD). Выберите [1] Триггер
аварий, чтобы отправлять EDD при
аварийных сигналах или [2] Триггер авар/
предуп., чтобы отправлять EDD при
аварийных сигналах или
предупреждениях. Функции диагностики
поддерживаются не всеми
периферийными шинами.
[0] * Запрещено
[1] Триггер
аварий
[2] Триггер авар/
предуп.
Диапазон: Функция:
1 с* [0,1-6000с]Введите максимальное ожидаемое время
между приемом двух следующих друг за
другом телеграмм. Если установленное
время превышено, то это свидетельствует о
прерывании связи по последовательному
каналу. После этого выполняется функция,
выбранная в параметр 8-04 Функция
таймаута управления Функция таймаута
управления.
8-04 Функция таймаута управления
Опция: Функция:
Выберите функцию таймаута.
Функция таймаута активируется,
если командное слово не
обновляется в течение времени,
заданного в параметр 8-03 Время
таймаута управления. Вариант
[20] Отпускание блокировки N2
4.8.2 8-1* Настр. командн.сл.
8-10 Профиль командного слова
Опция: Функция:
Выберите интерпретацию командного
слова и слова состояния,
соответствующую установленной
периферийной шине. На дисплее LCP
отображаются только варианты выбора,
действительные для периферийной
шины, установленной в гнезде А.
[0] * Профиль FC
[1] Профиль
PROFIdrive
84 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 87

Параметры Руководство по программированию
8-14 Настраив. слово управл. СTW
Опция: Функция:
[0] Отсутствует Преобразователь частоты игнорирует
всю информацию, содержащуюся в
этом бите.
[1] * Проф. по умолч. Функция бита зависит от значения,
выбранного в параметр 8-10 Профиль
командного слова.
[2] CTW действит.,
низк. актив.
Если установлено значение 1,
преобразователь частоты игнорирует
остальные биты командного слова.
8-19 Product Code
Диапазон: Функция:
Size
related*
[0 2147483647 ]
Выберите 0 для вывода на
дисплей кода установленного
дополнительного устройства
периферийной шины. Выберите 1
для вывода на дисплей текущего
идентификатора изготовителя.
4.8.3 8-3* FC Port Settings (Настройки
порта ПЧ)
8-30 Протокол
Опция: Функция:
Выберите протокол для встроенного порта
RS485. Изменение настройки в
параметр 8-30 Протокол может изменить
скорость передачи.
[0] * FC Связь осуществляется в соответствии с
протоколом FC.
[2] Modbus
RTU
[4] FLN
[5] BACNet
8-31 Address
Диапазон: Функция:
1* [ 0.0 - 247 ] Введите адрес для порта RS485.
8-32 Скорость передачи данных
Опция: Функция:
Связь осуществляется в соответствии с
протоколом Modbus RTU.
Допустимый диапазон: 1–126 для шины FC
или 1–247 для Modbus.
Выберите скорость передачи для порта RS485
Значение по умолчанию относится к
протоколу FC. Изменение протокола в
параметр 8-30 Протокол может изменить
скорость передачи.
8-32 Скорость передачи данных
Опция: Функция:
Изменение протокола в
параметр 8-30 Протокол может изменить
скорость передачи.
[0] 2400 бод
[1] 4800 бод Настройка по умолчанию для FLN.
[2] 9600 бод Настройка по умолчанию для BACnet.
4 4
[3] 19200 бод Настройка по умолчанию для Modbus RTU.
[4] 38400 бод
[5] 57600 бод
[6] 76800 бод
[7] 115200 бод
8-33 Биты контроля четности/стоповые биты
Опция: Функция:
Биты контроля четности и
стоповые биты для протокола,
использующего порт FC. Для
некоторых протоколов будут
доступны не все опции.
Значение по умолчанию
относится к протоколу FC.
Изменение протокола в
параметр 8–30 Protocol может
изменить скорость передачи.
[0] Контроль по
нечетности, 1 стоповый
бит
[1] Контроль по
нечетности, 1 стоповый
бит
[2] Контроль четности
отсутствует, 1 стоповый
бит
[3] Контроль четности
отсутствует, 2 стоповых
бита
8-35 Минимальная задержка реакции
Диапазон: Функция:
0,01 с* [ 0,0010-0,5 с] Задайте минимальную задержку между
получением запроса и передачей
ответа. Это минимальное время
задержки используется для
преодоления задержки при
реверсировании передачи данных
модемом.
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 85
Page 88

Параметры
VLT® DriveMotor FCP 106/FCM 106
8-36 Максимальная задержка реакции
Диапазон: Функция:
В соответствии с
типоразмером*
44
[ 0,1-10,0 с] Задайте максимально
допустимую задержку
между получением запроса
и передачей ответа. Если
установленное время
превышено, ответ не
возвращается.
8-37 Макс. задержка между символами
Диапазон: Функция:
0,025 с* [0,025-0,025 с] Задайте максимально допустимый
временной интервал между приемом
двух байтов. Этот параметр
активирует тайм-аут при
прерывании передачи.
4.8.4 8-4* Уст. прот-ла MC
8-40 Выбор телеграммы
Опция: Функция:
Разрешает использование
свободно конфигурируемых
телеграмм или стандартных
телеграмм для порта FC.
[1] * Станд.телеграмма 1
[300] Станд.телеграмма
FCM300
8-42 Конфигурирование записи PCD
Различные параметры могут быть присвоены данным PCD 3–
10, относящимся к PPO. Число доступных PCD зависит от типа
PPO.
Значения данных в PCD 3–10 записываются в выбранные
параметры в качестве их значений.
Опция: Функция:
[0] Отсутствует
[1] [302] Мин. задание
[2] [303] Максимальное задание
[3] [341] Время разгона 1
[4] [342] Время замедления 1
[5] [351] Время разгона 2
[6] [352] Время замедления 2
[7] [380] Темп изм. скор.при перех.
на фикс. скор.
[8] [381] Время замедл.для
быстр.останова
[9] [412] Нижний предел скорости
двигателя [Гц]
[10] [414] Верхний предел скорости
двигателя [Гц]
[11] [590] Управление цифр. и
релейн. шинами
8-42 Конфигурирование записи PCD
Различные параметры могут быть присвоены данным PCD 3–
10, относящимся к PPO. Число доступных PCD зависит от типа
PPO.
Значения данных в PCD 3–10 записываются в выбранные
параметры в качестве их значений.
Опция: Функция:
[12] [676] Клемма 45, выход при
управлении по шине
[13] [696] Клемма 42, выход при
управлении по шине
[14] [894] Обр. связь по шине 1
[15] Порт FC, ком. слово
[16] Порт FC, ЗАДАНИЕ
8-43 Конфигурирование чтения PCD
Различные параметры могут быть присвоены данным PCD 3–
10, относящимся к PPO. Число доступных PCD зависит от типа
PPO.
PCD 3–10 содержат в реальном времени фактические
значения выбранных параметров.
Опция: Функция:
[0] Отсутствует
[1] [1500] Время работы в часах
[2] [1501] Наработка в часах
[3] [1502] Счетчик кВтч
[4] [1600] Командное слово
[5] [1601] Задание [ед. измер.]
[6] [1602] Задание %
[7] [1603] Слово состояния
[8] [1605] Основное фактич. значение
[%]
[9] [1609] Показ.по выб.польз.
[10] [1610] Мощность [кВт]
[11] [1611] Мощность [л. с.]
[12] [1612] Напряжение двигателя
[13] [1613] Частота
[14] [1614] Ток двигателя
[15] [1615] Частота [%]
[16] [1616] Крутящий момент [Н·м]
[17] [1618] Тепловая нагрузка двигателя
[18] [1630] Напряжение цепи пост. тока
[19] [1634] Темп. радиатора
[20] [1635] Тепловая нагрузка инвертора
[21] [1638] Состояние SL контроллера
[22] [1650] Внешнее задание
[23] [1652] Обратная связь [ед. изм.]
[24] [1660] Цифровой вход 18, 19, 27, 33
[25] [1661] Клемма 53, настройка
переключателя
[26] [1662] Аналоговый вход 53
[27] [1663] Клемма 54, настройка
переключателя
[28] [1664] Аналоговый вход 54
[29] [1665] Аналоговый выход 42 [мА]
86 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 89

Параметры Руководство по программированию
8-43 Конфигурирование чтения PCD
Различные параметры могут быть присвоены данным PCD 3–
10, относящимся к PPO. Число доступных PCD зависит от типа
PPO.
PCD 3–10 содержат в реальном времени фактические
значения выбранных параметров.
Опция: Функция:
[30] [1671] Релейный выход [двоичный]
[31] [1672] Счетчик A
[32] [1673] Счетчик B
[33] [1690] Слово аварийной
сигнализации
[34] [1692] Слово предупреждения
[35] [1694] Расшир. Слово состояния
[36] [1850] Выв. данных без датч. [ед.]
4.8.5 8-5* Digital/Bus (Цифровое/Шина)
Параметры для конфигурирования объединения
командного слова цифрового управления/шины.
8-50 Выбор выбега
Опция: Функция:
УВЕДОМЛЕНИЕ
Этот параметр активен только в том
случае, когда в
параметр 8-01 Место управления
выбрано значение [0] Цифр.и
кмнд.слово.
Выберите способ управления функцией
выбега через клеммы (цифровой вход)
и/или по шине.
[0] Цифровой
вход
[1] Шина Включение останова выбегом через порт
[2] ЛогическоеИАктивация останова выбегом через
[3]*Логическое
ИЛИ
Активация команды останова выбегом
через цифровой вход.
последовательной связи.
периферийную шину/порт
последовательной связи и через один из
цифровых входов.
Активация останова выбегом через порт
последовательной связи или через один
из цифровых входов.
8-51 Выбор быстрого останова
Опция: Функция:
УВЕДОМЛЕНИЕ
Этот параметр активен только в том
случае, когда в
параметр 8-01 Место управления
выбрано значение [0] Цифр.и
кмнд.слово.
Выберите управление функцией быстрого
останова через клеммы (цифровой вход)
и/или по шине.
[0] Цифровой
вход
[1] Шина Активизирует быстрый останов через
[2] Логическое И Активация быстрого останова через порт
[3] * Логическое
ИЛИ
Активизирует быстрый останов через
цифровой вход.
порт последовательной связи.
последовательной связи и через один из
цифровых входов.
Активация быстрого останова через порт
последовательной связи или через один
из цифровых входов.
8-52 Выбор торможения пост. током
Опция: Функция:
УВЕДОМЛЕНИЕ
Этот параметр активен только в том
случае, когда в
параметр 8-01 Место управления
выбрано значение [0] Цифр.и
кмнд.слово.
Выберите управление торможением
постоянным током через клеммы
(цифровой вход).
[0] Цифровой
вход
[1] Шина Активация торможения постоянным током
[2] Логическое И Активация тормоза постоянного тока через
[3] Логическое
ИЛИ
Активация торможения постоянным током
через цифровой вход.
через порт последовательной связи.
порт последовательной связи и через один
из цифровых входов.
Активация тормоза постоянного тока через
порт последовательной связи или через
один из цифровых входов.
4 4
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 87
Page 90

Параметры
VLT® DriveMotor FCP 106/FCM 106
8-53 Выбор пуска
Опция: Функция:
УВЕДОМЛЕНИЕ
Этот параметр активен только в том
случае, когда в
параметр 8-01 Место управления
выбрано значение [0] Цифр.и
кмнд.слово.
8-55 Выбор набора
Опция: Функция:
УВЕДОМЛЕНИЕ
Этот параметр активен только в том
случае, когда в
параметр 8-01 Место управления
выбрано значение [0] Цифр.и
кмнд.слово.
44
Выберите управление пуском
преобразователя частоты через клеммы
(цифровой вход).
[0] Цифровой
вход
[1] Шина Активирует команду пуска через порт
[2] ЛогическоеИАктивация команды пуска через порт
[3]*Логическое
ИЛИ
Активирует команду пуска через
цифровой вход.
последовательной связи или
дополнительное устройство
периферийной шины.
последовательной связи и через один из
цифровых входов.
Активация команды пуска через порт
последовательной связи или через один
из цифровых входов.
8-54 Выбор реверса
Опция: Функция:
УВЕДОМЛЕНИЕ
Этот параметр активен только в том
случае, когда в
параметр 8-01 Место управления
выбрано значение [0] Цифр.и
кмнд.слово.
Выберите способ управления функцией
Реверс преобразователя частоты через
клеммы (цифровой вход) и/или порт
последовательной связи.
[0]*Цифровой
вход
[1] Шина Активизирует команду реверса через порт
[2] ЛогическоеИАктивация команды реверса через порт
[3] Логическое
ИЛИ
Активизирует команду реверса через
цифровой вход.
последовательной связи.
последовательной связи и через один из
цифровых входов.
Активация команды реверса через порт
последовательной связи или через один
из цифровых входов.
[0] Цифровой
вход
[1] Шина Активизирует выбор набора через порт
[2] ЛогическоеИАктивация выбора набора через порт
[3]*Логическое
ИЛИ
8-56 Выбор предустановленного задания
Опция: Функция:
[0] Цифровой
вход
[1] Шина Активизирует команду выбора
[2] Логическое И Активация выбора предустановленного
[3] * Логическое
ИЛИ
Выберите управление выбором набора
параметров преобразователя частоты
через клеммы (цифровой вход) и/или
через порт последовательной связи.
Активирует выбор набора через цифровой
вход.
последовательной связи.
последовательной связи и через один из
цифровых входов.
Активация выбора набора через порт
последовательной связи или через один
из цифровых входов.
Выберите способ управления выбором
предустановленного задания
преобразователя частоты через клеммы
(цифровой вход) и/или через порт
последовательной связи.
Активирует выбор предустановленного
задания через цифровой вход.
предустановленного задания через порт
последовательной связи.
задания через порт последовательной
связи и через один из цифровых входов.
Активация выбора предустановленного
задания через порт последовательной
связи или через один из цифровых
входов.
88 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 91

Параметры Руководство по программированию
8-57 Выбор пар. OFF2 привода Prodrive
Выберите параметр OFF2 управления преобразователем
частоты через клеммы (цифровой вход) и/или через
периферийную шину. Этот параметр активен только в том
случае, когда в параметр 8-01 Место управления выбрано
значение [0] Цифр.и кмнд.слово, а параметр
параметр 8-10 Профиль командного слова имеет значение [1]
Профиль PROFIdrive.
Опция: Функция:
[0] Цифровой вход
[1] Шина
[2] Логическое И
[3] * Логическое ИЛИ
8-58 Выбор пар. OFF3 привода Prodrive
Выберите параметр OFF3 управления преобразователем
частоты через клеммы (цифровой вход) и/или через
периферийную шину. Этот параметр активен только в том
случае, когда в параметр 8-01 Место управления выбрано
значение [0] Цифр.и кмнд.слово, а параметр
параметр 8-10 Профиль командного слова имеет значение [1]
Профиль PROFIdrive.
Опция: Функция:
[0] Цифровой вход
[1] Шина
[2] Логическое И
[3] * Логическое ИЛИ
4.8.6 8-7* BACnet
8-70 Вариант уст. BACnet
Диапазон: Функция:
1* [0 - 4194303 ] Введите уникальный номер устройства
BACnet.
8-72 Макс. вед. устр-в MS/TP
Диапазон: Функция:
127* [0 - 127 ] Определите адрес ведущего устройства,
имеющего самый старший адрес в этой
сети. Уменьшение этого значения
оптимизирует опрос меток.
8-73 Макс инф. фрейм MS/TP
Диапазон: Функция:
1* [1 - 65534 ] Определите, сколько блоков данных/
информации разрешено посылать
устройству при наличии метки.
8-74 Обслуж. "I-Am"
Опция: Функция:
[0] * Посылка при вкл
пит.
Выберите, если устройство должно
посылать служебное сообщение I-Am
только при включении питания.
8-74 Обслуж. "I-Am"
Опция: Функция:
[1] Непрерывно Выберите, если устройство должно
посылать служебное сообщение I-Am
постоянно с интервалом примерно 1
раз в минуту.
8-75 Пароль инициализации
Диапазон: Функция:
админ.* [1 - 1 ] Введите пароль для выполнения повторной
инициализации привода.
админ.* [1 - 1 ] Введите пароль для выполнение повторной
инициализации привода из сети BACnet.
8-79 Protocol Firmware version (Версия
микропрограммы протокола)
Диапазон: Функция:
В соответствии с
типоразмером*
[0 65535 ]
Используется для
считывания
поддерживаемой версии
протокола. Индекс 5
означает BACnet.
4.8.7 8-8* Диагностика порта FC
Эти параметры используются для контроля связи по
шине через порт FC.
8-80 Счетчик сообщений при управ. по шине
Диапазон: Функция:
0* [0 - 4294967295 ] Этот параметр показывает количество
корректных телеграмм, определяемых
на шине.
8-81 Счетчик ошибок при управ. по шине
Диапазон: Функция:
0* [0 - 4294967295 ] Этот параметр показывает количество
телеграмм со сбоями (например, с
ошибками контрольной суммы),
определенных на шине.
8-82 Получ. сообщ. от подчин-го
Диапазон: Функция:
0* [0 - 4294967295 ] Этот параметр показывает количество
корректных телеграмм, адресованных
подчиненному устройству,
отправленных преобразователем
частоты.
4 4
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 89
Page 92

Параметры
VLT® DriveMotor FCP 106/FCM 106
8-83 Подсчет ошибок подчиненного устройства
Диапазон: Функция:
0* [0 - 4294967295 ] Этот параметр показывает количество
телеграмм с ошибками, которые не
могут быть выполнены
преобразователем частоты.
8-84 Отправ. сообщ. подчин.
44
Диапазон: Функция:
0* [0 - 4294967295 ] Этот параметр показывает количество
сообщений, отправленных
подчиненным устройством.
8-85 Ошибки тайм-аута подч.
Диапазон: Функция:
0* [0 - 4294967295 ] Этот параметр показывает количество
ошибок тайм-аута подчиненного
устройства.
8-88 Сброс диагностики порта ПЧ
Опция: Функция:
[0] * Не сбрасывать
[1] Сброс счетчика
4.8.8 8-9* Обр. связь по шине
8-90 Фикс. скор. 1, уст. по шине
Диапазон: Функция:
100
об/мин*
8-91 Фикс. скор. 2, уст. по шине
Диапазон: Функция:
200
об/мин*
8-94 Обр. связь по шине 1
Диапазон: Функция:
0* [-32768 -
32767 ]
[ 0-1500 об/
мин]
[ 0-1500 об/
мин]
В этот параметр записывается значение
сигнала ОС через порт последовательной
связи. Этот параметр должен быть выбран в
качестве источника сигнала обратной связи в
параметр 20-00 Источник ОС 1 или
параметр 20-03 Источник ОС 2. 16-ричная
величина 4000 h соответствует 100 %
обратной связи, диапазон составляет ±200 %)
Введите толчковую скорость.
Активируйте эту фиксированную
толчковую скорость через порт
последовательной связи или по
дополнительной периферийной
шине.
Введите толчковую скорость.
Активируйте эту фиксированную
толчковую скорость через порт
последовательной связи или по
дополнительной периферийной
шине.
90 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 93

Параметры Руководство по программированию
4.9 Главное меню — PROFIdrive — Группа 9
9-00 Setpoint
Диапазон: Функция:
0* [0 -
65535 ]
Этот параметр получает циклическое
задание от главного устройства класса 2.
Если приоритет управления назначен
главному устройству класса 2, то задание для
преобразователя частоты берется из данного
параметра, а циклическое задание при этом
игнорируется.
9-07 Actual Value
Диапазон: Функция:
0* [0 - 65535 ] Данный параметр определяет посылку MAV
для главного устройства класса 2. Параметр
действителен только в том случае, если в
качестве приоритета управления выбрано
главное устройство класса 2.
9-15 Конфигурирование записи PCD
Выберите параметры для назначения в PCD 3–10 телеграмм.
Число доступных PCD зависит от типа телеграммы. Значения
PCD 3–10 записаны в выбранные параметры в виде данных.
Стандартные телеграммы PROFIBUS см. в
параметр 9-22 Telegram Selection.
Опция: Функция:
[0]
[302] Мин. задание
[303] Максимальное задание
[312] Значение разгона/замедления
[341] Время разгона 1
[342] Время замедления 1
[351] Время разгона 2
[352] Время замедления 2
[380] Темп изм. скор.при перех. на
фикс. скор.
[381] Время замедл.для
быстр.останова
[412] Нижний предел скорости
двигателя [Гц]
[414] Верхний предел скорости
двигателя [Гц]
[553] Клемма 29, макс. задание/ обр.
связь
[590] Управление цифр. и релейн.
шинами
[615] Клемма 53, высокое зад./ обр.
связь
[625] Клемма 54, высокое зад./ обр.
связь
[696] Клемма 42, выход при
управлении по шине
[890] Фикс. скор. 1, уст. по шине
[891] Фикс. скор. 2, уст. по шине
9-15 Конфигурирование записи PCD
Выберите параметры для назначения в PCD 3–10 телеграмм.
Число доступных PCD зависит от типа телеграммы. Значения
PCD 3–10 записаны в выбранные параметры в виде данных.
Стандартные телеграммы PROFIBUS см. в
параметр 9-22 Telegram Selection.
Опция: Функция:
[894] Обр. связь по шине 1
[1680] Fieldbus, командное слово 1
[1682] Fieldbus, ЗАДАНИЕ 1
[2021] Уставка 1
9-16 Конфигурирование чтения PCD
Выберите параметры для назначения в PCD 3–10 телеграмм.
Число доступных PCD зависит от типа телеграммы. PCD 3–10
содержат фактические значения выбранных параметров.
Опция: Функция:
[0]
[894] Обр. связь по шине 1
[1500] Время работы в часах
[1501] Наработка в часах
[1502] Счетчик кВтч
[1600] Командное слово
[1601] Задание [ед. измер.]
[1602] Задание %
[1603] Слово состояния
[1605] Основное фактич. значение [%]
[1609] Показ.по выб.польз.
[1610] Мощность [кВт]
[1611] Мощность [л. с.]
[1612] Напряжение двигателя
[1613] Частота
[1614] Ток двигателя
[1615] Частота [%]
[1616] Крутящий момент [Н·м]
[1618] Тепловая нагрузка двигателя
[1622] Крутящий момент [%]
[1626] Фильтр. мощн. [кВт]
[1627] Фильтр. мощн. [л.с.]
[1630] Напряжение цепи пост. тока
[1634] Темп. радиатора
[1635] Тепловая нагрузка инвертора
[1638] Состояние SL контроллера
[1639] Температура платы управления
[1650] Внешнее задание
[1652] Обратная связь [ед. изм.]
[1660] Цифровой вход
[1661] Клемма 53, настройка
переключателя
[1662] Аналоговый вход AI53
[1663] Клемма 54, настройка
переключателя
4 4
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 91
Page 94

Параметры
VLT® DriveMotor FCP 106/FCM 106
9-16 Конфигурирование чтения PCD
Выберите параметры для назначения в PCD 3–10 телеграмм.
Число доступных PCD зависит от типа телеграммы. PCD 3–10
содержат фактические значения выбранных параметров.
Опция: Функция:
[1664] Аналоговый вход AI54
[1665] Аналоговый выход AO42 [мА]
[1666] Цифровой выход
44
[1667] Импульсный вход 29# [Гц]
[1671] Релейный выход [двоичный]
[1672] Счетчик A
[1673] Счетчик B
[1679] Аналоговый выход AO45 [мА]
[1684] Слово сост. вар. связи
[1685] Порт ПЧ, ком. слово 1
[1690] Слово аварийной сигнализации
[1691] Слово аварийной сигнализации 2
[1692] Слово предупреждения
[1693] Слово предупреждения 2
[1694] Расшир. слово состояния
[1695] Расшир. слово состояния 2
[1697] Слово аварийной сигнализации 3
[1850] Выв. данных без датч. [ед.]
9-18 Node Address
Диапазон: Функция:
126* [ 0 -
126 ]
Введите в этот параметр адрес станции; адрес
можно также ввести с помощью аппаратного
переключателя. Для установки адреса станции
с помощью параметр 9-18 Node Address
установите аппаратный переключатель в
состояние 126 или 127 (т. е. все
переключатели должны быть в состоянии on
(вкл.)). В противном случае этот параметр
отображает фактическое состояние
переключателя.
9-19 Drive Unit System Number (Системный номер
блока привода)
Диапазон: Функция:
1038* [0 - 65535 ] Системный идентификатор, свой у
каждого изготовителя.
9-22 Telegram Selection
Выберите для преобразователя частоты стандартную
конфигурацию телеграммы PROFIBUS в качестве альтернативы
свободно конфигурируемым телеграммам, определяемым
параметрами параметр 9-15 PCD Write Conguration и
параметр 9-16 PCD Read Conguration.
Опция: Функция:
[1] Standard telegram 1
[100] * None
[101] PPO 1
[102] PPO 2
[103] PPO 3
9-22 Telegram Selection
Выберите для преобразователя частоты стандартную
конфигурацию телеграммы PROFIBUS в качестве альтернативы
свободно конфигурируемым телеграммам, определяемым
параметрами параметр 9-15 PCD Write Conguration и
параметр 9-16 PCD Read Conguration.
Опция: Функция:
[104] PPO 4
[105] PPO 5
[106] PPO 6
[107] PPO 7
[108] PPO 8
[200] Custom telegram 1
9-23 Параметры сигналов
Опция: Функция:
[0] *
[302] Мин. задание
[303] Максимальное задание
[312] Значение разгона/замедления
[341] Время разгона 1
[342] Время замедления 1
[351] Время разгона 2
[352] Время замедления 2
[380] Темп изм. скор.при перех. на фикс. скор.
[381] Время замедл.для быстр.останова
[412] Нижний предел скорости двигателя [Гц]
[414] Верхний предел скорости двигателя [Гц]
[553] Клемма 29, макс. задание/ обр. связь
[590] Управление цифр. и релейн. шинами
[615] Клемма 53, высокое зад./ обр. связь
[625] Клемма 54, высокое зад./ обр. связь
[696] Клемма 42, выход при управлении по шине
[890] Фикс. скор. 1, уст. по шине
[891] Фикс. скор. 2, уст. по шине
[894] Обр. связь по шине 1
[1500] Время работы в часах
[1501] Наработка в часах
[1502] Счетчик кВтч
[1600] Командное слово
[1601] Задание [ед. измер.]
[1602] Задание %
[1603] Слово состояния
[1605] Основное фактич. значение [%]
[1609] Показ.по выб.польз.
[1610] Мощность [кВт]
[1611] Мощность [л. с.]
[1612] Напряжение двигателя
[1613] Частота
[1614] Ток двигателя
[1615] Частота [%]
[1616] Крутящий момент [Н·м]
[1618] Тепловая нагрузка двигателя
[1622] Крутящий момент [%]
92 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 95

Параметры Руководство по программированию
9-23 Параметры сигналов
Опция: Функция:
[1626] Фильтр. мощн. [кВт]
[1627] Фильтр. мощн. [л.с.]
[1630] Напряжение цепи пост. тока
[1634] Темп. радиатора
[1635] Тепловая нагрузка инвертора
[1638] Состояние SL контроллера
[1639] Температура платы управления
[1650] Внешнее задание
[1652] Обратная связь [ед. изм.]
[1660] Цифровой вход
[1661] Клемма 53, настройка переключателя
[1662] Аналоговый вход AI53
[1663] Клемма 54, настройка переключателя
[1664] Аналоговый вход AI54
[1665] Аналоговый выход AO42 [мА]
[1666] Цифровой выход
[1667] Импульсный вход 29# [Гц]
[1671] Релейный выход [двоичный]
[1672] Счетчик A
[1673] Счетчик B
[1679] Аналоговый выход AO45 [мА]
[1680] Fieldbus, командное слово 1
[1682] Fieldbus, ЗАДАНИЕ 1
[1684] Слово сост. вар. связи
[1685] Порт ПЧ, ком. слово 1
[1690] Слово аварийной сигнализации
[1691] Слово аварийной сигнализации 2
[1692] Слово предупреждения
[1693] Слово предупреждения 2
[1694] Расшир. слово состояния
[1695] Расшир. слово состояния 2
[1697] Слово аварийной сигнализации 3
[1850] Выв. данных без датч. [ед.]
[2021] Уставка 1
9-27 Редактирование параметра
Опция: Функция:
Параметры можно редактировать по шине
PROFIBUS, через стандартный интерфейс
RS485 или с LCP.
[0] Запрещено Запрещение редактирования через
PROFIBUS.
[1] * Разрешено Разрешение редактирования по шине
PROFIBUS.
9-28 Управление процессом
Опция: Функция:
Управление процессом
(формирование командного слова,
задания скорости и данных
процесса) возможно по шине
PROFIBUS или по стандартной
периферийной шине, но не
одновременно по обеим шинам.
Местное управление с местной
панели управления (LCP) возможно
всегда. Управление через систему
управления процессом возможно
либо через клеммы, либо по
периферийной шине, в
зависимости от значений в
параметрах с
параметр 8-50 Выбор выбега до
параметр 8-56 Выбор
предустановленного задания.
[0] Запрещен Запрещает управление процессом
с главного устройства PROFIBUS
класса 1 и разрешает управление
процессом по стандартной
периферийной шине или с
главного устройства PROFIBUS
класса 2.
[1]*Разреш.циклич.ведущ. Разрешает управление процессом
с главного устройства PROFIBUS
класса 1 и запрещает управление
процессом по стандартной
периферийной шине или с
главного устройства PROFIBUS
класса 2.
9-44 Счетчик сообщений о неисправностях
Диапазон: Функция:
0* [0 - 65535 ] Указывает число отказов, содержащееся в
данный момент в параметре
параметр 9-45 Код неисправности.
Максимальная емкость буфера — 8 событий
отказа. Буфер и счетчик устанавливаются на
нуль путем сброса или включения питания.
9-45 Код неисправности
Диапазон: Функция:
0* [0 - 0 ] Данный буфер содержит аварийное слово для
всех аварийных сигналов и предупреждений,
появившихся со времени последнего
перезапуска или включения питания.
Максимальная емкость буфера — 8 событий
отказа.
4 4
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 93
Page 96

Параметры
VLT® DriveMotor FCP 106/FCM 106
9-47 Номер неисправности
Диапазон: Функция:
0* [0 - 0 ] Данный буфер содержит аварийное слово для
всех аварийных сигналов и предупреждений,
появившихся со времени последнего
перезапуска или включения питания.
Максимальная емкость буфера — 8 событий
отказа.
44
9-52 Fault Situation Counter
Диапазон: Функция:
0* [0 - 1000 ] Отображает число событий неисправности,
возникших со времени последнего
перезапуска или включения питания.
9-53 Probus Warning Word
Диапазон: Функция:
0* [0 -
65535 ]
Этот параметр показывает предупреждения
системы связи по шине PROFIBUS.
Бит Описание
0 Соединение с главным
устройством DP отсутствует.
1 Не используется.
2 FDL (eldbus data link layer,
уровень передачи данных
периферийной шины) не в
порядке.
3 Получена команда стирания
данных
4 Фактическое значение не
обновлено.
5 Поиск скорости передачи данных.
6 Специализированная
интегральная схема PROFIBUS не
передает данные.
7 Инициализация PROFIBUS не
выполнена.
8 Преобразователь частоты
отключен.
9 Внутренняя ошибка CAN.
10 Неправильные данные
конфигурации, поступившие из
PLC.
11 Неправильный идентификатор,
переданный PLC.
12 Произошел внутренний сбой.
13 Не настроено.
14 Тайм-аут активен.
15 Активно предупреждение 34.
Таблица 4.7 Определение бита
9-63 Actual Baud Rate
Опция: Функция:
Этот параметр отображает
фактическую скорость передачи по
шине PROFIBUS. Скорость передачи
данных автоматически
устанавливается главным
управляющим устройством
PROFIBUS.
[0] 9,6 kbit/s
[1] 19,2 kbit/s
[2] 93,75 kbit/s
[3] 187,5 kbit/s
[4] 500 kbit/s
[6] 1500 kbit/s
[7] 3000 kbit/s
[8] 6000 kbit/s
[9] 12000 kbit/s
[10] 31,25 kbit/s
[11] 45,45 kbit/s
[255] * No baudrate found
9-64 Device Identication
Диапазон: Функция:
0* [0 -
0 ]
УВЕДОМЛЕНИЕ
Этот параметр не отображается на
местной панели управления.
Параметр идентификации устройства. Тип
данных — массив [n] из целых чисел без знака
(Unsigned16). Назначение первых субиндексов
определено и показано в Таблица 4.8.
Индекс Содержимое Значение
0 Изготовитель 128
1 Тип устройства 1
2 Версия xxyy
3 Год выпуска
микропрограммы
4 День и месяц
выпуска
микропрограммы
5 Число осей Изменяемое
6 Данные
поставщика:
версия печатной
платы
7 Данные
поставщика:
версия базы
данных
8 Данные
поставщика:
версия AOC
гггг
ддмм
xxyy
xxyy
xxyy
94 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 97

Параметры Руководство по программированию
9-64 Device Identication
Диапазон: Функция:
Индекс Содержимое Значение
9 Данные
поставщика:
версия MOC
Таблица 4.8 Назначение 1-го подиндекса
идентификации устройств
xxyy
9-65 Prole Number
Диапазон: Функция:
0* [0 - 0 ]
УВЕДОМЛЕНИЕ
Этот параметр не отображается на
местной панели управления.
Этот параметр содержит данные
идентификации профиля. Байт 1 содержит
номер профиля, а байт 2 — номер версии
профиля.
9-67 Control Word 1
Диапазон: Функция:
0* [0 - 65535 ] Этот параметр получает командное слово от
главного устройства класса 2 в таком же
формате, что и PCD 1.
9-68 Status Word 1
Диапазон: Функция:
0* [0 - 65535 ] Этот параметр обеспечивает доставку слова
состояния для главного устройства класса 2
в таком же формате, что и PCD 2.
9-70 Edit Set-up
Опция: Функция:
Выберите набор параметров, в котором
программирование (изменение данных)
выполняется во время работы. Независимо от
того, какой набор выбран активным, можно
программировать все четыре набора
параметров. Доступ к параметрам с каждого
из главных устройств определяется в
соответствии с набором параметров, который
выбран конкретным главным устройством
(циклический, ациклический MCL1, первый
ациклический MCL2, второй ациклический
MCL2, третий ациклический MCL2).
[1] Set-up 1
[2] Set-up 2
[9] * Active
Set-up
9-71 Probus Save Data Values
Опция: Функция:
Значения параметров, измененных через порт
RS485, не сохраняются автоматически в
энергонезависимой памяти. Используйте этот
параметр для активации функции, которая
сохраняет значения параметров в
энергонезависимой памяти ЭСППЗУ, чтобы при
выключении питания сохранились измененные
значения параметров.
[0] * O Отключает функцию сохранения в
энергонезависимой памяти.
[1] Store all
setups
[2] Store all
setups
Сохранение в энергонезависимой памяти всех
значений параметров набора, выбранного в
параметр 9-70 Edit Set-up. После того как все
значения сохранены, этот параметр
возвращается в состояние [0] Выкл.
Сохраняет все значения параметров всех
наборов в энергонезависимой памяти. После
того как все значения сохранены, этот
параметр возвращается в состояние [0] Выкл.
9-72 ProbusDriveReset
Опция: Функция:
УВЕДОМЛЕНИЕ
Сброс только дополнительной платы
VLT® PROFIBUS DP MCA 101.
[0] * No action
[1] Power-on
reset
[2] Power-on
reset prep
[3] Comm
option reset
9-75 DO Identication
Диапазон: Функция:
0* [0 - 65535 ] Содержит информацию об объекте привода
9-80 Dened Parameters (1)
Диапазон: Функция:
0* [0 - 9999 ] Этот параметр отображает перечень всех
Сброс преобразователя частоты после
подачи питания (как в случае выключения
и включения питания).
При сбросе преобразователь частоты
перестает определяться периферийной
шиной, что может привести к появлению
ошибки связи на главном устройстве.
(DO означает Drive Object, объект привода)
заданных параметров преобразователя
частоты, предусмотренных для шины
PROFIBUS.
4 4
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 95
Page 98

Параметры
VLT® DriveMotor FCP 106/FCM 106
9-81 Dened Parameters (2)
Диапазон: Функция:
0* [0 - 9999 ] Этот параметр отображает перечень всех
заданных параметров преобразователя
частоты, предусмотренных для шины
PROFIBUS.
9-82 Dened Parameters (3)
44
Диапазон: Функция:
0* [0 - 9999 ] Этот параметр отображает перечень всех
заданных параметров преобразователя
частоты, предусмотренных для шины
PROFIBUS.
9-83 Dened Parameters (4)
Диапазон: Функция:
0* [0 - 9999 ] Этот параметр отображает перечень всех
заданных параметров преобразователя
частоты, предусмотренных для шины
PROFIBUS.
9-84 Dened Parameters (5)
Диапазон: Функция:
0* [0 - 9999 ] Этот параметр отображает перечень всех
заданных параметров преобразователя
частоты, предусмотренных для шины
PROFIBUS.
9-92 Changed Parameters (3)
Диапазон: Функция:
0* [0 - 9999 ] Этот параметр отображает перечень всех
параметров преобразователя частоты,
которые отличаются от установок по
умолчанию.
9-93 Changed Parameters (4)
Диапазон: Функция:
0* [0 - 9999 ] Этот параметр отображает перечень всех
параметров преобразователя частоты,
которые отличаются от установок по
умолчанию.
9-94 Changed Parameters (5)
Диапазон: Функция:
0* [0 - 9999 ] Этот параметр отображает перечень всех
параметров преобразователя частоты,
которые отличаются от установок по
умолчанию.
9-99 Probus Revision Counter
Диапазон: Функция:
0* [0 - 65535 ] Вывод на диспл. счетч. измер.
9-85 Dened Parameters (6)
Диапазон: Функция:
0* [0 - 9999 ] Этот параметр отображает перечень всех
заданных параметров преобразователя
частоты, предусмотренных для шины
PROFIBUS.
9-90 Changed Parameters (1)
Диапазон: Функция:
0* [0 - 9999 ] Этот параметр отображает перечень всех
параметров преобразователя частоты,
которые отличаются от установок по
умолчанию.
9-91 Changed Parameters (2)
Диапазон: Функция:
0* [0 - 9999 ] Этот параметр отображает перечень всех
параметров преобразователя частоты,
которые отличаются от установок по
умолчанию.
96 Danfoss A/S © 11/2015 Все права защищены. MG03N250
Page 99

130BA062.14
State 1
13-51.0
13-52.0
State 2
13-51.1
13-52.1
Start
event P13-01
State 3
13-51.2
13-52.2
State 4
13-51.3
13-52.3
Stop
event P13-02
Stop
event P13-02
Stop
event P13-02
Параметры Руководство по программированию
4.10 Главное меню — Интеллектуальная логика — Группа 13
4.10.1 13-** Prog. Features (Функции
программирования)
событие останова (параметр 13-02 Событие останова)
принимает значение true (истина).
Параметр 13-03 Сброс SLC сбрасывает все параметры
Интеллектуальное логическое управление (SLC)
SLC и запускает программу сначала.
представляет собой заданную пользователем
последовательность действий (см.
4.10.2 13-0* Настройка SLC
параметр 13-52 Действие контроллера SL [x]), которая
выполняется SLC, когда соответствующее заданное
пользователем событие (см. параметр 13-51 Событие
контроллера SL [x]) оценивается SLC как true (истина).
События и действия пронумерованы и связаны в пары
(состояния). Это означает, что, когда наступает событие
[0] (приобретает значение true (истина)), выполняется
Настройки SLC используются для включения,
выключения и сброса последовательности
интеллектуального логического управления. Логические
функции и компараторы всегда работают в фоновом
режиме, что позволяет осуществлять отдельное
управление цифровыми входами и выходами.
действие [0]. После выполнения этого действия
анализируются состояния события [1] и, если оно
оценивается как TRUE (истина), выполняется действие
[1], и т. д. В каждый момент времени оценивается
только одно событие. Если событие оценено как FALSE
(Ложь), в течение текущего интервала сканирования (в
SLC) ничего не происходит и никакие другие события не
анализируются. Это значит, что когда запускается SLC, в
каждом интервале контроля выполняется оценка
события [0] (и только события [0]). Только когда оценка
события [0] примет значение true (истина), SLC
выполнит действие [0] и начнет оценивать событие [1].
Можно запрограммировать от 1 до 20 событий и
действий. Когда произошло последнее событие/
13-00 Режим контроллера SL
Опция: Функция:
Выберите [1] Вкл., чтобы разрешить
интеллектуальное логическое управление пуском
при наличии команды пуска, например, на
цифровом входе. Для отключения
интеллектуального логического управления,
выберите [0] Выкл.
[0] * Выкл. Запрет работы программируемого логического
контроллера.
[1] Вкл. Разрешение работы программируемого
логического контроллера.
действие, последовательность начинается снова с
события [0]/действия [0].
13-01 Событие запуска
Опция: Функция:
Для активации интеллектуального
логического управления выберите
булевый вход (true (истина) или
false (ложь)).
[0] FALSE Вводит фиксированное значение
FALSE (Ложь) в логическое
соотношение.
[1] TRUE Вводит фиксированное значение
TRUE (Истина) в логическое
соотношение.
Рисунок 4.16 Пример с тремя событиями/действиями
Пуск и останов SLC
Чтобы выполнить пуск или останов SLC, выберите [1]
Вкл. или [2] Выкл. в параметр 13-00 Режим контроллера
SL. SLC всегда запускается в состоянии 0 (в котором он
оценивает событие [0]). SLC запускается, когда оценка
события запуска (определенного в параметре
параметр 13-01 Событие запуска) принимает значение
true (истина) (при условии, что в параметре
параметр 13-00 Режим контроллера SL установлено
значение [1] Вкл.). Останов SLC происходит, когда
MG03N250 Danfoss A/S © 11/2015 Все права защищены. 97
[2] Работа Двигатель работает.
[3] В диапазоне Двигатель вращается в
запрограммированных диапазонах
тока
(параметр 4-50 Предупреждение:
низкий ток и
параметр 4-51 Предупреждение:
высокий ток)
[4] На задании Двигатель вращается со
скоростью, соответствующей
заданию.
4 4
Page 100

Параметры
VLT® DriveMotor FCP 106/FCM 106
13-01 Событие запуска
Опция: Функция:
[7] Вне диапазона тока Ток двигателя вышел за пределы
диапазона, установленного в
параметр 4-18 Предел по току.
[8] Ток ниже
минимальн.
44
[9] Ток выше макс. Ток двигателя больше значения,
[16] Предупр. о перегрев Предупреждение о перегреве
[17] Напр.сети вне диап. Предупреждение или аварийный
[18] Реверс Преобразователь частоты
[19] Предупреждение Присутствует предупреждение.
[20] Авар.сигнал(отключ.) Присутствует аварийный сигнал.
[21] Ав.сигн.(откл.с фик) Присутствует аварийный сигнал
[22] Компаратор 0 Использование в логическом
[23] Компаратор 1 Использование в логическом
[24] Компаратор 2 Использование в логическом
[25] Компаратор 3 Использование в логическом
[26] Логич.соотношение0Использование в логическом
[27] Логич.соотношение1Использование в логическом
[28] Логич.соотношение2Использование в логическом
Ток двигателя меньше значения,
установленного в
параметр 4-50 Предупреждение:
низкий ток.
установленного в
параметр 4-51 Предупреждение:
высокий ток.
возникает, когда превышается
температурный предел двигателя,
преобразователя частоты или
термистора.
сигнал обрыва фазы, если в
параметр 14-12 Функция при
асимметрии сети не установлено
значение [2] Запрещено.
вращается в обратном
направлении.
отключения с блокировкой.
соотношении результата
сравнения компаратора 0.
соотношении результата
сравнения компаратора 1.
соотношении результата
сравнения компаратора 2.
соотношении результата
сравнения компаратора 3.
соотношении результата
логического соотношения 0.
соотношении результата
логического соотношения 1.
соотношении результата
логического соотношения 2.
13-01 Событие запуска
Опция: Функция:
[29] Логич.соотношение3Использование в логическом
соотношении результата
логического соотношения 3.
[33] Цифровой вход DI18 Использование значения DI18 в
логическом соотношении (высокий
уровень сигнала = TRUE (Истина)).
[34] Цифровой вход DI19 Использование значения DI19 в
логическом соотношении (высокий
уровень сигнала = TRUE (Истина)).
[35] Цифровой вход DI27 Использование значения DI27 в
логическом соотношении (высокий
уровень сигнала = TRUE (Истина)).
[36] Цифровой вход DI29 Использование значения DI29 в
логическом соотношении (высокий
уровень сигнала = TRUE (Истина)).
[39]*Команда пуска Это событие имеет значение true
(истина), если преобразователь
частоты запущен (через цифровой
вход, периферийную шину или
другим путем).
[40] Привод остановлен Это событие имеет значение true
(истина), если преобразователь
частоты выключается или
производит останов выбегом
(через цифровой вход, по
периферийной шине или другим
путем).
[42] Откл. авт.сброса Это событие имеет значение TRUE
(Истина), если преобразователь
частоты отключен (но отключен
без блокировки) и поступила
команда автоматического сброса.
[50] Компаратор 4 Использование в логическом
соотношении результата
сравнения компаратора 4.
[51] Компаратор 5 Использование в логическом
соотношении результата
сравнения компаратора 5.
[60] Лог.соотношение 4 Использование в логическом
соотношении результата
логического соотношения 4.
[61] Лог.соотношение 5 Использование в логическом
соотношении результата
логического соотношения 5.
[83] Обрыв ремня Обнаружен обрыв ремня. Эта
функция включается в
параметр 22-60 Функция
обнаружения обрыва ремня.
98 Danfoss A/S © 11/2015 Все права защищены. MG03N250
 Loading...
Loading...