

Page 1

MAKING MODERN LIVING POSSIBLE
Design Guide
VLT® Brook Crompton Motor FCM 300
www.danfoss.com/drives
Page 2

Page 3
Indholdsfortegnelse
Indholdsfortegnelse
VLT® DriveMotor FCM Series
1 Introduktion
1.1.1 Softwareversion 4
1.1.5 Sikkerhedsforskrifter 5
1.1.6 Advarsel mod utilsigtet start 5
1.3.1 Integrering af frekvensomformer og motor 6
1.4.1 Bestillingsformular 7
1.4.2 Produktprogram 8
1.4.3 Bestilling 9
1.4.4 Pc-softwareværktøjer 9
1.4.5 Bestillingsoplysninger for kapslinger og flanger 10
1.4.6 Bestillingsoplysninger til placering af vekselretterboks og afløbshul 11
2 Installation
2.1.1 FCM 305-375 til 3 faser, 380-480 V 12
2.1.2 Generelle tekniske data 13
2.1.3 Tilspændingsmomenter 16
2.1.4 Maksimum kabelareal 16
2.1.5 Skruestørrelser 16
4
12
2.1.6 Beskyttelse 17
2.2 Beskrivelse af motoren
2.2.1 Håndtering af FC-motoren 19
2.2.2 Lejer 19
2.2.3 Udgangsaksler 20
2.2.4 Mål 20
2.2.5 Montering af FC-motoren 23
2.2.6 Justering 24
2.2.7 Boltmomenter 24
2.2.8 Vedligeh. 24
2.2.9 FCM 300 Termisk motorbeskyttelse 25
2.3.1 Stiksæt til service (175N2546) 25
2.3.2 Stiksæt (175N2545) 26
2.3.3 Frembygningssæt (175N0160) 26
2.3.5 Potentiometeroption (177N0011) 27
2.3.6 Lokalbetjeningspanel (LOP) (175N0128) IP65 27
3 Programmering
18
29
3.1.1 Betjeningspanel (175NO131) 29
3.1.2 Installation af LCP 29
3.1.3 LCP-funktioner 29
3.1.4 Display 30
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 1
Page 4
Indholdsfortegnelse
VLT® DriveMotor FCM Series
3.1.5 LED'er 30
3.1.6 Betjeningstaster 30
3.1.7 Betjeningstasternes funktioner 31
3.1.8 Displayets visningstilstand 31
3.1.9 Display mode 31
3.1.10 Display mode - valg af udlæsningstilstand 32
3.1.11 Tilstanden Kvikmenu kontra Menu mode 33
3.1.12 Hurtig opsætning via kvikmenu 33
3.1.13 Parametervalg 33
3.1.14 Menu mode 33
3.1.15 Parametergrupper 34
3.1.16 Ændring af data 34
3.1.17 Ændring af en tekstværdi 34
3.1.18 Uendeligt variabel ændring af numerisk dataværdi 35
3.1.19 Menustruktur 36
3.1.20 Parametergruppe 0-** Drift og display 37
3.2.1 Parametergruppe 1-** Belastning og motor 41
3.6.1 Seriel bus 61
3.6.2 Telegramkommunikation 61
3.6.3 Telegramopbygning 62
3.6.4 Databyte 62
3.6.5 Styreord i overensstemmelse med Fieldbus-profilstandard 65
3.7.1 Parametergruppe 5-** Seriel kommunikation 71
3.8.1 Parametergruppe 6-** Tekniske funktioner 76
4 Alt om FCM 300
4.1.1 Galvanisk adskillelse (PELV) 79
4.1.2 Lækstrøm til jord 79
4.1.3 Ekstreme driftsforhold 80
4.1.4 Akustisk støj 80
4.1.5 Afbalancering 80
4.1.6 Termisk motorbeskyttelse og derating 81
4.1.7 Derating for omgivelsestemperatur 81
79
4.1.8 Derating for lufttryk 81
4.1.9 Derating for kørsel ved lav hastighed 81
4.1.10 Derating for høj switchfrekvens 81
4.1.11 Vibrationer og rystelser 82
4.1.12 Luftfugtighed 82
4.1.13 UL-standard 82
4.1.14 Virkningsgrad 82
4.1.15 Netforsyningsforstyrrelse/harmoniske strømme 83
2 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 5
Indholdsfortegnelse
VLT® DriveMotor FCM Series
4.1.16 Effektfaktor 84
4.1.17 Hvad er CE-mærkning? 84
4.1.18 Maskindirektivet (98/37/EØF) 84
4.1.19 Lavspændingsdirektivet (73/23/EØF) 84
4.1.20 EMC-direktiv (89/336/EØF) 84
4.1.21 Hvad er omfattet af EMC-direktivet? 84
4.1.22 Danfoss FCM 300-serie motor og CE-mærkning 85
4.1.23 Overholdelse af EMC-direktivet 89/336/EØF 85
4.1.24 EMC-standarder 85
4.1.25 Aggressive miljøer 86
4.2.1 Oversigt over advarsler og alarmer 87
4.2.2 Hvad sker der, hvis motoren ikke starter? 87
4.2.3 Advarsler 88
4.2.4 Advarselsord, udvidet statusord og alarmord 90
4.3 Liste over parametre
Indeks
91
97
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 3
Page 6
Introduktion
VLT® DriveMotor FCM Series
1
1 Introduktion
1.1 Sikkerhed
1.1.1 Softwareversion
FCM 300-serie
Design Guide
Softwareversion: 3.1x
Denne Design Guide kan bruges til alle frekvensomformere i
FCM 300-serien med softwareversion 3.1x.
Softwareversionsnummeret kan ses i parameter 624 Softwareversionsnummer.
Tabel 1.1
1.1.4 Generelle advarsler
BEMÆRK!
Al betjening af frekvensomformeren skal udføres af
uddannet personale.
Benyt alle medfølgende løfteanordninger, f.eks. begge
løftepunkter, hvis de er monteret, eller eventuelt et
enkelt løftepunkt*.
Vertikal løft - undgå ukontrolleret omdrejning.
Løft maskinen - løft ikke andet udstyr udelukkende med
motorens løftepunkter.
Før installationen skal der kontrolleres for skader på
ventilatorplade, aksel, bund/montering og løse beslag.
Kontrollér oplysninger på typeskiltet.
Kontrollér, at monteringsfladen er plan, afbalanceret og
ikke er ude af niveau.
Pakninger og/eller tætningsmiddel og afskærmninger
skal monteres korrekt.
Korrekt spænding af kilerem.
Bortskaffelsesinstruktion
1.1.2
Udstyr, der indeholder elektriske
komponenter, må ikke smides ud sammen
med almindeligt affald.
Det skal samles separat som elektrisk og
elektronisk affald i overensstemmelse med
lokale regler og gældende lovgivning.
Tabel 1.2
Symboler
1.1.3
Følgende symboler anvendes i denne Design Guide og
kræver særlig opmærksomhed.
ADVARSEL
Angiver en potentielt farlig situation, som, hvis den ikke
undgås, kan medføre dødsfald eller alvorlig personskade.
BEMÆRK!
Angiver fremhævede oplysninger, der skal tages hensyn
til for at undgå fejl eller for at undgå at bruge udstyret
på en måde, så det ikke fungerer optimalt.
Overhold reglerne for derating, se 4.1 Særlige betingelser.
*Bemærk: Maksimalt manuelt løft er 20 kg. under
skulderen, men over jordniveau. Maks. bruttovægt:
Kapslingsstørrelse 80: 15 kg
-
Kapslingsstørrelse 90 og 100: 30 kg
-
Kapslingsstørrelse 112: 45 kg
-
Kapslingsstørrelse 132: 80 kg
-
ADVARSEL
Spændingen på FC-motoren er farlig, når motoren er
tilsluttet netforsyningen. Forkert montering af FCmotoren kan forårsage materielle skader, alvorlig
personskade eller dødsfald.
Overhold derfor instruktionerne i denne manual samt
lokale og nationale bestemmelser og sikkerhedsforskrifter.
Det kan være forbundet med livsfare at berøre de
elektriske dele, også efter at udstyret er koblet fra
netforsyningen. Vent mindst 4 minutter.
- Installationen skal sikres og isoleres korrekt.
- Afdækninger og kabelindgange skal monteres.
FORSIGTIG
Angiver en potentielt farlig situation, som, hvis den ikke
undgås, kan medføre mindre eller moderat personskade.
Kan også bruges til at advare mod usikre
fremgangsmåder.
4 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
ADVARSEL
Kontakt Danfoss Drives vedrørende PELV i
forbindelse med højder over 2 km.
Page 7
175NA161.10
Promotion
All
users
X = version number
YY = language
Misc.
Quick Setup
MG.03.FX.YY
Design
Guide
MG03BXYY
PROFIBUS-
Manual
MG.03.EX.YY
Brochure
MB.03.CX.YY
Articles
MZ.03.AX.YY
MCT 10 Setup
Software Manual
MG10RXYY
Data sheet
MD.03.AX.YY
Introduktion
VLT® DriveMotor FCM Series
BEMÆRK!
Det er brugerens eller en autoriseret elektrikers ansvar at
sørge for korrekt jording og beskyttelse i overensstemmelse med gældende nationale og lokale
sikkerhedsforskrifter og standarder.
1.1.5 Sikkerhedsforskrifter
VLT-frekvensomformermotoren (FC-motoren) skal
•
afbrydes fra netforsyningen, hvis der skal udføres
reparationsarbejde.
Kontrollér, at netforsyningen er afbrudt, og at den
fornødne tid er gået (4 minutter).
Apparatet skal have korrekt beskyttelsesjording,
•
brugeren skal sikres imod forsyningsspænding, og
motoren skal beskyttes imod overbelastning i
overensstemmelse med gældende nationale og
lokale bestemmelser.
Brug af RCD'er (fejlstrømsrelæer) er beskrevet i
4.1.2 Lækstrøm til jord .
Lækstrøm til jord er højere end 3,5 mA. Dette
•
betyder, at FC-motoren kræver en fast,
permanent installation og en forstærket beskyttelsesjording.
Hvis hensynet til personsikkerheden kræver, at
der ikke forekommer utilsigtet start, er disse
stopfunktioner ikke tilstrækkelige.
Mens parametrene ændres, kan det ske, at
•
motoren starter.
En standset motor kan starte, hvis der opstår fejl i
•
FC-motorens elektronik, eller hvis en midlertidig
overbelastning eller en fejl i netforsyningen
ophører.
1.2 Introduktion
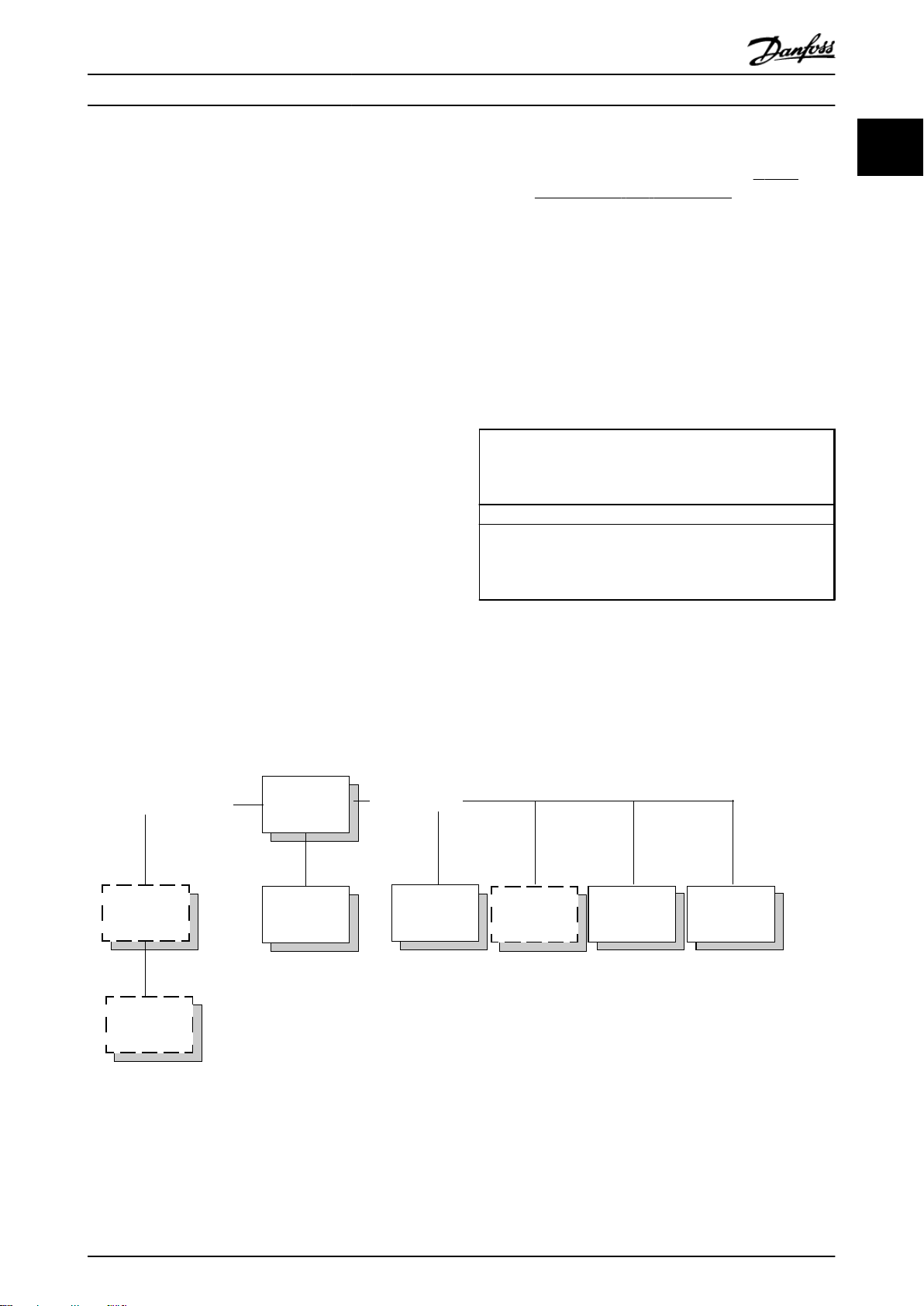
Specifikke tekniske publikationer om FCM 300-serien:
Design Guide:
Hurtig opsætning:
Tabel 1.3
Giver alle nødvendige oplysninger, når der
skal projekteres, og giver et godt indblik i
produktkoncept, produktprogram, tekniske
data, styring, programmering osv.
Hjælper brugerne til hurtigt at få FCM
300-motoren monteret og idriftsat.
Hurtig opsætning leveres altid med
apparatet.
1
1
Advarsel mod utilsigtet start
1.1.6
Motoren kan bringes til stop med digitale
•
kommandoer, buskommandoer eller referencer,
mens frekvensomformeren er tilsluttet netforsyningen.
Illustration 1.1 Tilgængelig litteratur til FCM 300-serien
Kontakt den lokale Danfoss-leverandør for oplysninger om
FCM 300-serien.
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 5
Page 8
1
Introduktion
1.3 Produktkoncept
VLT® DriveMotor FCM Series
1.3.1 Integrering af frekvensomformer og
motor
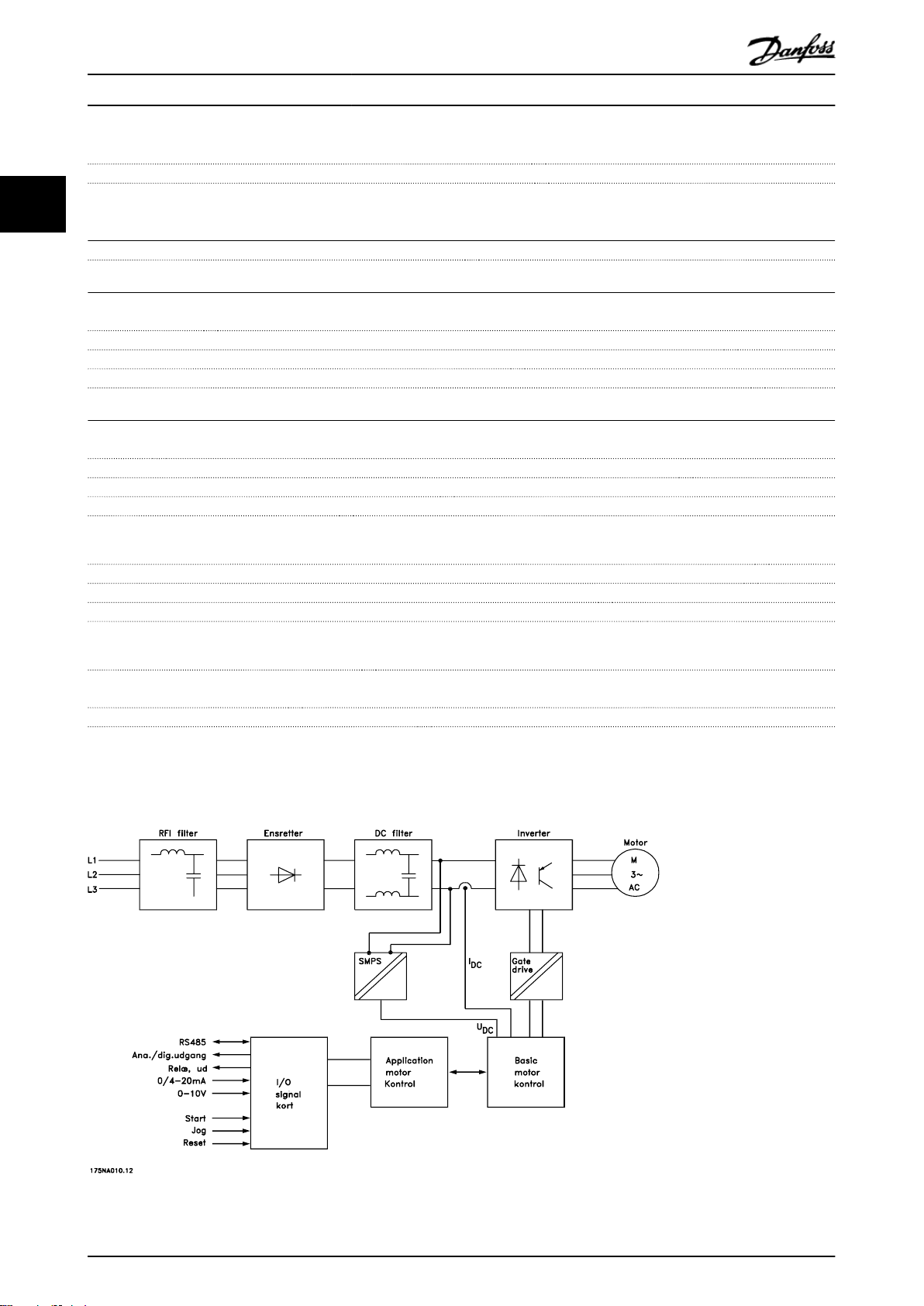
Danfoss VLT-frekvensomformeren giver, når den bygges
sammen med den asynkrone motor, mulighed for trinløs
variabel hastighedsstyring i ét apparat.
VLT DriveMotor FCM 300-serien er et meget kompakt
alternativ til den almindelige løsning med VLT frekvensomformer og motor som separate enheder.
Frekvensomformeren er fastgjort i stedet for motorklemkassen, og den er ikke højere end standardklemkassen - og
heller ikke bredere eller længere end motoren (se 2.2.4
Mål).
Den er meget nem at montere. Det er ikke et problem
med tavleplads. Der er ikke brug for særlige oplysninger
om ledningsføring for at overholde EMC-direktivet, da
motorkabler ikke er nødvendige. De eneste tilslutninger er
netforsyning og styretilslutninger.
Fabriksindstillet tilpasning mellem frekvensomformeren og
motoren giver præcis og energieffektiv styring og overflødiggør derudover forindstilling på stedet.
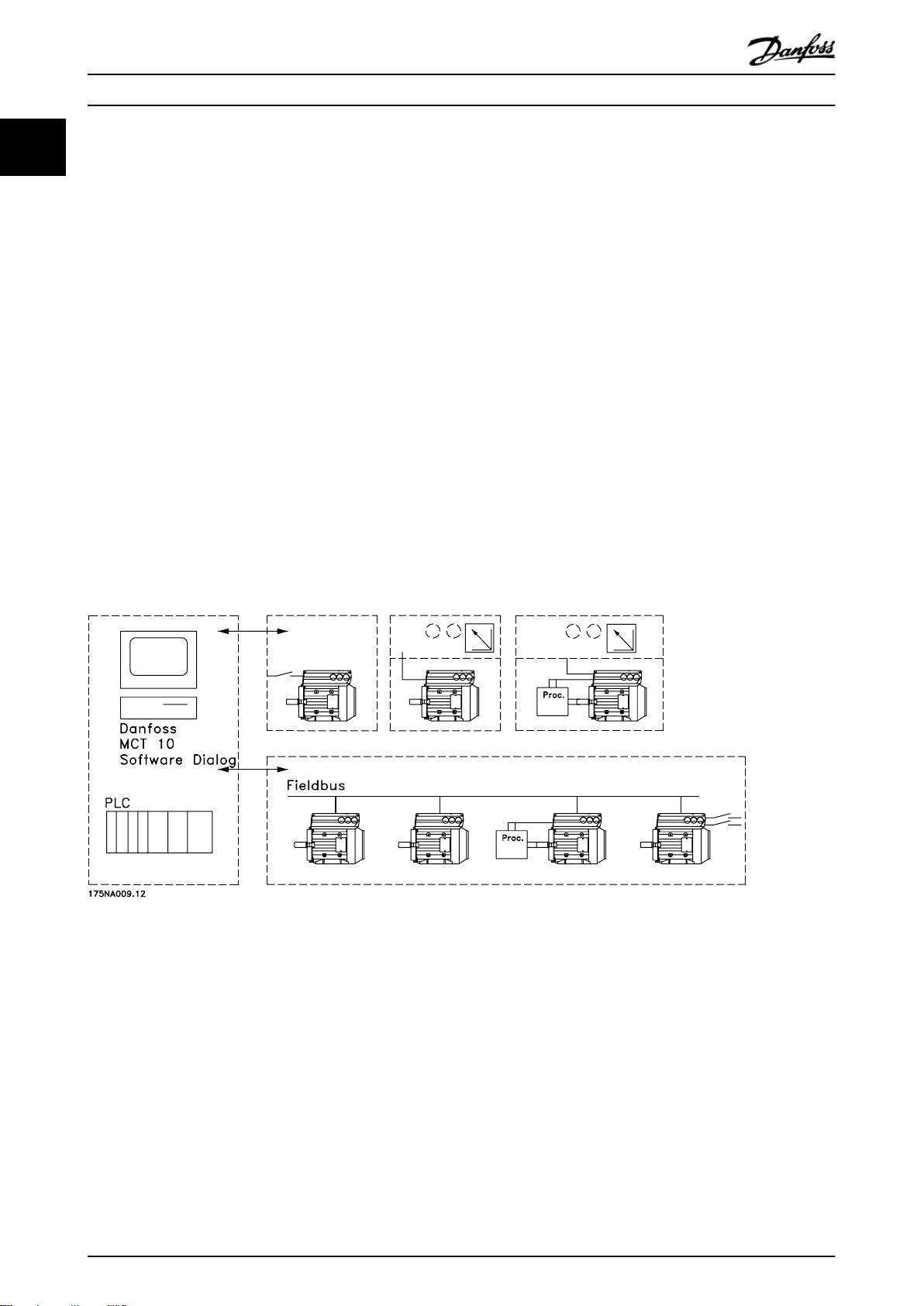
FC-motoren kan benyttes i stand alone-systemer med
traditionelle styresignaler, som f.eks. start-/stopsignaler,
hastighedsreferencer og processtyring for lukket sløjfe,
eller i systemer med flere frekvensomformere med
styresignaler, der distribueres af en Fieldbus.
Kombination af Fieldbus og traditionelle styresignaler og
PID-styring, lukket sløjfe er mulig.
Illustration 1.2 Styringsstrukturer
6 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 9
Introduktion
1.4 Valg af FC-motor, FCM 300
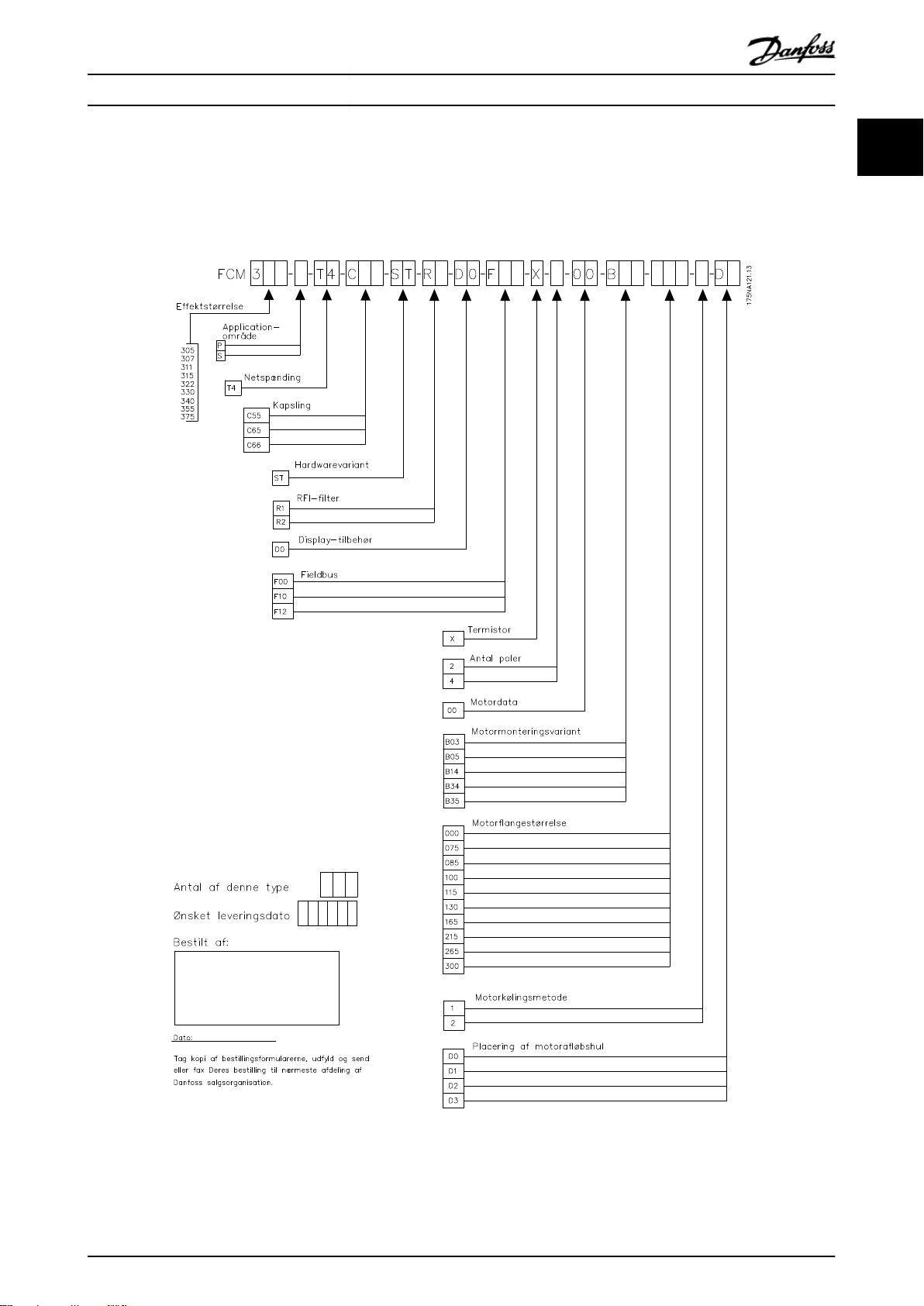
1.4.1 Bestillingsformular
VLT® DriveMotor FCM Series
1
1
Illustration 1.3
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 7
Page 10
Introduktion
VLT® DriveMotor FCM Series
1
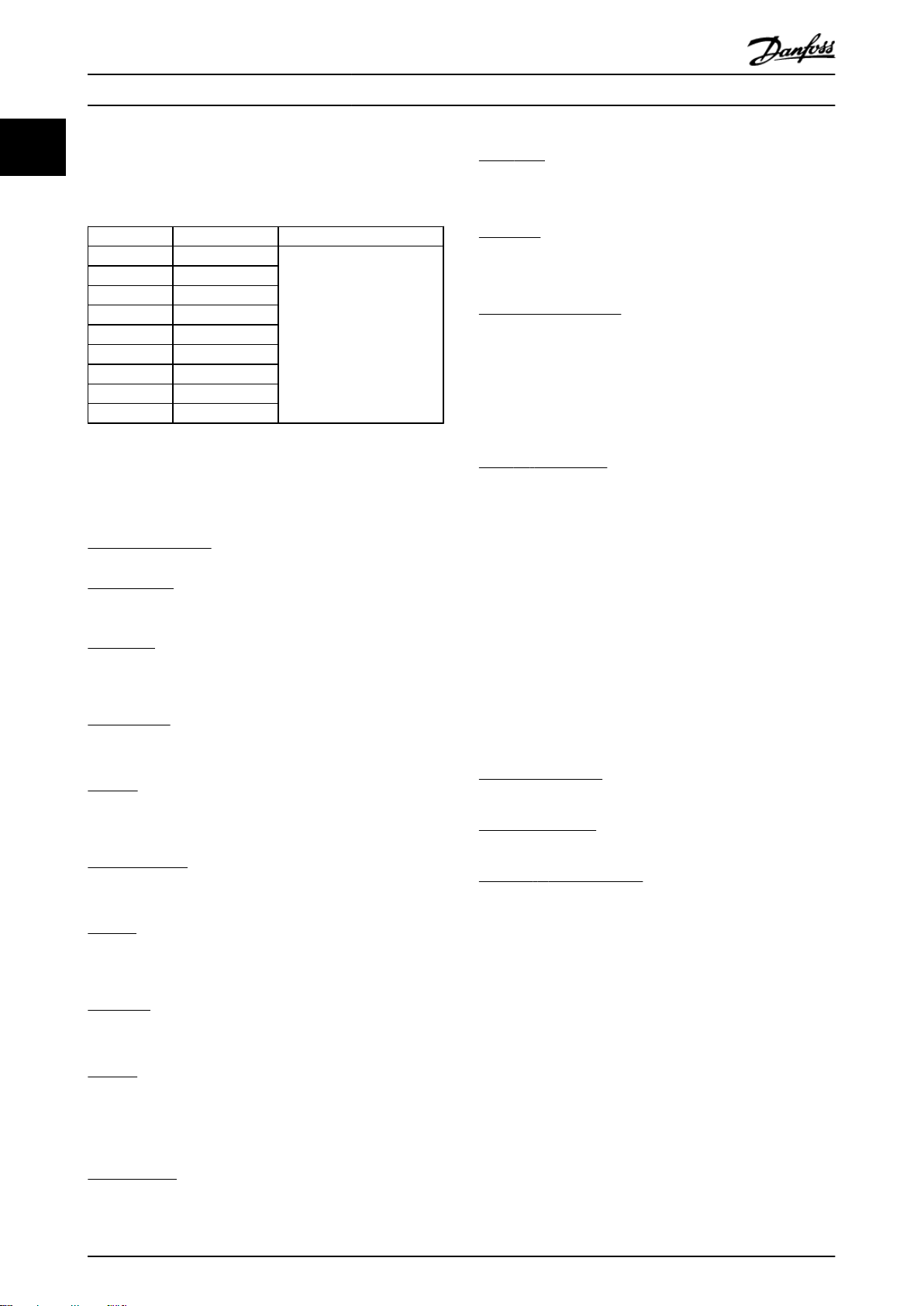
1.4.2 Produktprogram
VLT DriveMotor FCM 300-serie, 2-/4-polet motorer
Type Motorudgang Netforsyning
FCM 305 0,55 kW
FCM 307 0,75 kW
FCM 311 1,1 kW
FCM 315 1,5 kW
FCM 322 2,2 kW
FCM 330 3,0 kW
FCM 340 4,0 kW
FCM 355 5,5 kW
FCM 375 7,5 kW
Tabel 1.4 Effektstørrelse
Hver enkelt type i produktprogrammet fås i forskellige
versioner:
Vekselretterversioner
Effektstørrelse:
(Se Tabel 1.4)
Applikation
P: Proces
•
S: Sensorless (særlig pumpe-OEM)
•
Netspænding:
T4: 380-480 V trefaset forsyning
•
Kapsling
C55: IP55
•
C66: IP66
•
Hardwarevariant:
ST: Standard
•
RFI-filter
R1: Overholder klasse 1A
•
R2: Overholder klasse 1B
•
Displaystik
D0: Intet tilslutningsbart stik
•
Fieldbus
F00: Ingen Fieldbus
•
F10: Profibus DPV1 3 MB
•
F12: Profibus DPV1 12 MB
•
Motortermistor
3-faset 380-480 V
Antal poler
2: 2-polet motor
•
4: 4-polet motor
•
Motordata
B2: IE2, motor med høj virkningsgrad
•
BC: IE2 motor med høj virkningsgrad/støbejern
•
Motormonteringsoption
B03: Fodmontering
•
B05: B5 flange
•
B14: B14 front
•
B34: Fod og B14 front
•
B35: Fod og B5 flange
•
Kode for motorflange
(Se 1.4.5 Bestillingsoplysninger for kapslinger og flanger
angående standardflangestørrelser og tilgængelige flangestørrelser).
000: Kun fodmontering
•
085: 85 mm
•
100: 100 mm
•
115: 115 mm
•
130: 130 mm
•
165: 165 mm
•
215: 215 mm
•
265: 265 mm
•
300: 300 mm
•
Motorkølingsmetode
1: Akselmonteret ventilator
•
Vekselretterposition
D: Standard øverst
•
Placering af motorafløbshul
(se 1.4.6 Bestillingsoplysninger til placering af vekselretterboks
og afløbshul)
0: Intet afløbshul
•
1: Over for vekselretterboksen, begge ender
•
(frekvensomformer/ikke frekvensomformer)
2: 90° vekselretterboks, højre
•
3: 90° vekselretterboks, venstre
•
X: Ingen motortermistor
•
8 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 11
175NA162.10
Introduktion
1.4.3 Bestilling
VLT® DriveMotor FCM Series
1.4.4
Pc-softwareværktøjer
1
1
Tag en kopi af bestillingsformularen, se 1.4.1 Bestillingsformular. Udfyld ordren, og send eller fax den til Danfoss-
salgsorganisationens nærmeste afdelingskontor. FCM 300serie-motoren tildeles en typekode på grundlag af
bestillingen.
Bestillingsformularen til basisenheden skal altid udfyldes.
Når typekoden skrives, skal basisstrengens tegn (1-34) altid
tages med. Sammen med ordrebekræftelsen modtager
kunden en 8-cifret kode, som skal oplyses ved
genbestilling.
Danfoss pc-software til seriel kommunikation, MCT 10
Alle apparater i FCM 300-serien har som standard en RS
485-port, hvilket sætter dem i stand til at kommunikere
med f.eks. en pc. Der fås et program med navnet MCT 10
til dette formål (se 1.4.4 Pc-softwareværktøjer ).
Bestillingsnumre, MCT 10
Bestil cd'en med MCT 10-opsætningssoftwaren med
varenummer 130B1000.
Tilbehør til FC-motoren.
Der kan fås et lokalbetjeningspanel (LOP) til FC-motoren til
lokalt sætpunkt og start/stop. LOP er IP 65-kapslet. Der fås
også et LCP-betjeningspanel (LCP 2), der udgør en komplet
grænseflade til drift, programmering og overvågning af FCmotoren.
Pc-software - MCT 10
Alle frekvensomformere er udstyret med en seriel
kommunikationsport. Danfoss leverer et pc-værktøj til
kommunikation mellem pc og frekvensomformer, VLT
Motion Control Tool MCT 10-opsætningssoftware.
MCT 10-opsætningssoftware
MCT 10 er udviklet som et brugervenligt og interaktivt
værktøj til indstilling af parametrene i vores frekvensomformere.
MCT 10-opsætningssoftwaren er egnet til:
Planlægning af et kommunikationsnetværk
•
offline. MCT 10 indeholder en fuldstændig
frekvensomformerdatabase
Idriftsættelse af frekvensomformere online
•
Lagring af indstillinger for alle frekvensomformere
•
Udskiftning af en frekvensomformer i et netværk
•
Udvidelse af et eksisterende netværk
•
Nyudviklede frekvensomformere understøttes
•
MCT 10-opsætningssoftwaremoduler
Følgende moduler findes i softwarepakken:
Bestillingsnumre, tilbehør
Lokalbetjeningspanel inkl. kabel (LOP)
LCP-betjeningspanel (LCP 2) 175N0131
Frembygningssæt (LCP 2) 175N0160
Stiksæt (LCP 2) 175N2545
Kabel til stiksæt (LCP 2) 175N0162
Kabel (direkte montering) (LCP 2) 175N0165
Stiksæt til service (LCP 2) 175N2546
Potentiometeroption 177N0011
Tabel 1.5
175N0128
Illustration 1.4
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 9
Page 12
Introduktion
VLT® DriveMotor FCM Series
1
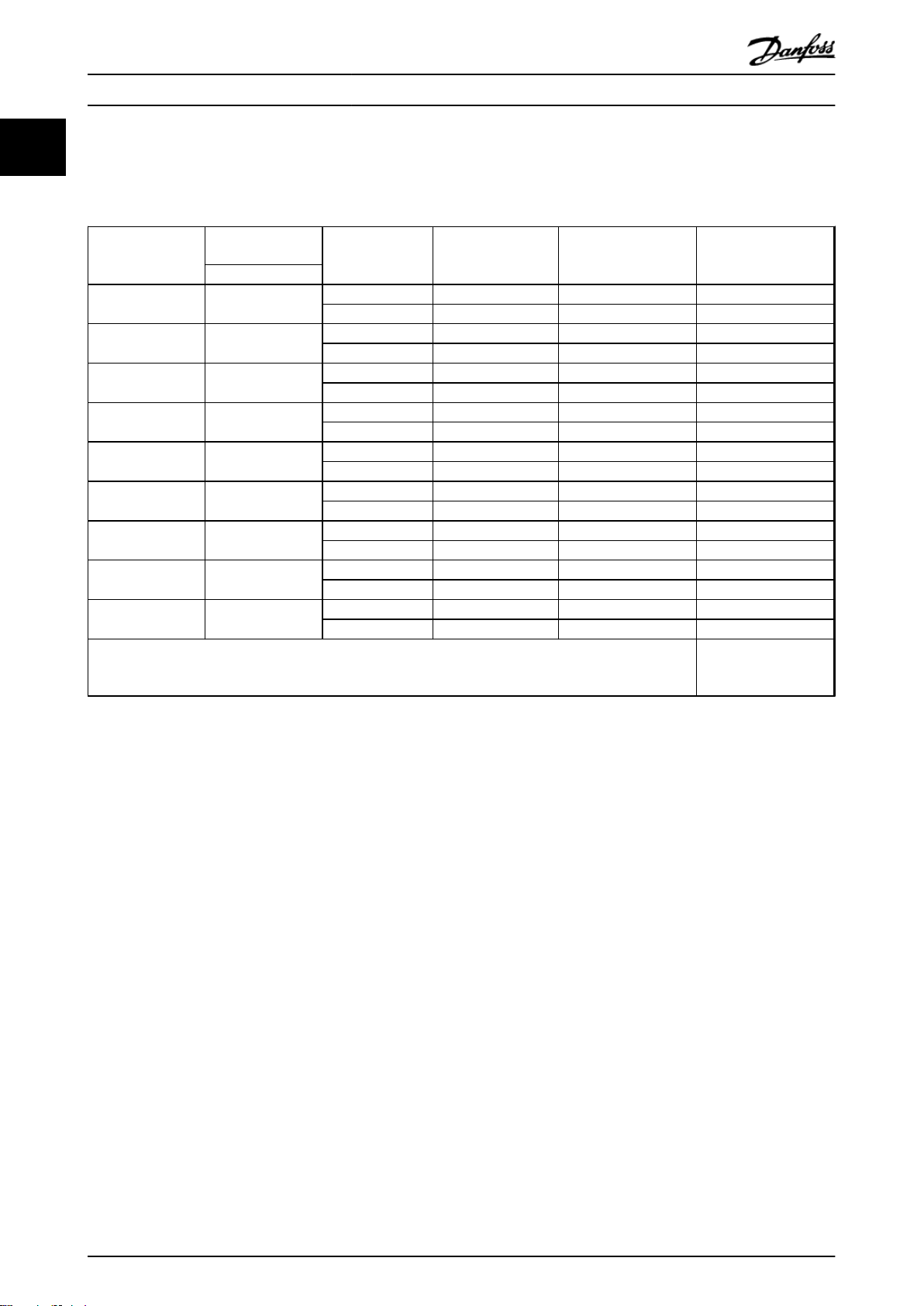
1.4.5 Bestillingsoplysninger for kapslinger og flanger
Kapslingsstørrelser og de tilsvarende flangestørrelser for forskellige monteringsversioner
Motorens
Type
FCM 305 80
FCM 307 80
FCM 311 90
FCM 315 90
FCM 322 100
FCM 330 100
FCM 340 112
FCM 355 132
FCM 375 132
S: Fås som standardaksel
A: Fås som et alternativ med særligt forlænget aksel til standardakslen til kapsling
B: Tilgængelig som et alternativ med standardaksel til kapsling, kræver ingen modificering
kapslingsstørrelse
4 poler
Monteringsversion
B5/B35 165 115/130
B14/B34 100 75/85/115/130
B5/B35 165 115/130
B14/B34 100 75/85/115/130
B5/B35 165 110/115/130 215
B14/B34 115 85/100/130/165
B5/B35 165 110/115/130 215
B14/B34 115 85/100/130/165
B5/B35 215 165
B14/B34 130 165 85/100/115
B5/B35 215 165
B14/B34 130 165 85/100/115
B5/B35 215 165
B14/B34 130 165 85/100/115
B5/B35 265 215
B14/B34 165 215
B5/B35 265 215
B14/B34 165 215
Flangestørrelse,
standard (S) [mm]
Flangestørrelse,
alternativer (A) [mm]
Flangestørrelse,
alternativer (B) [mm]
Tabel 1.6
10 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 13
Introduktion
VLT® DriveMotor FCM Series
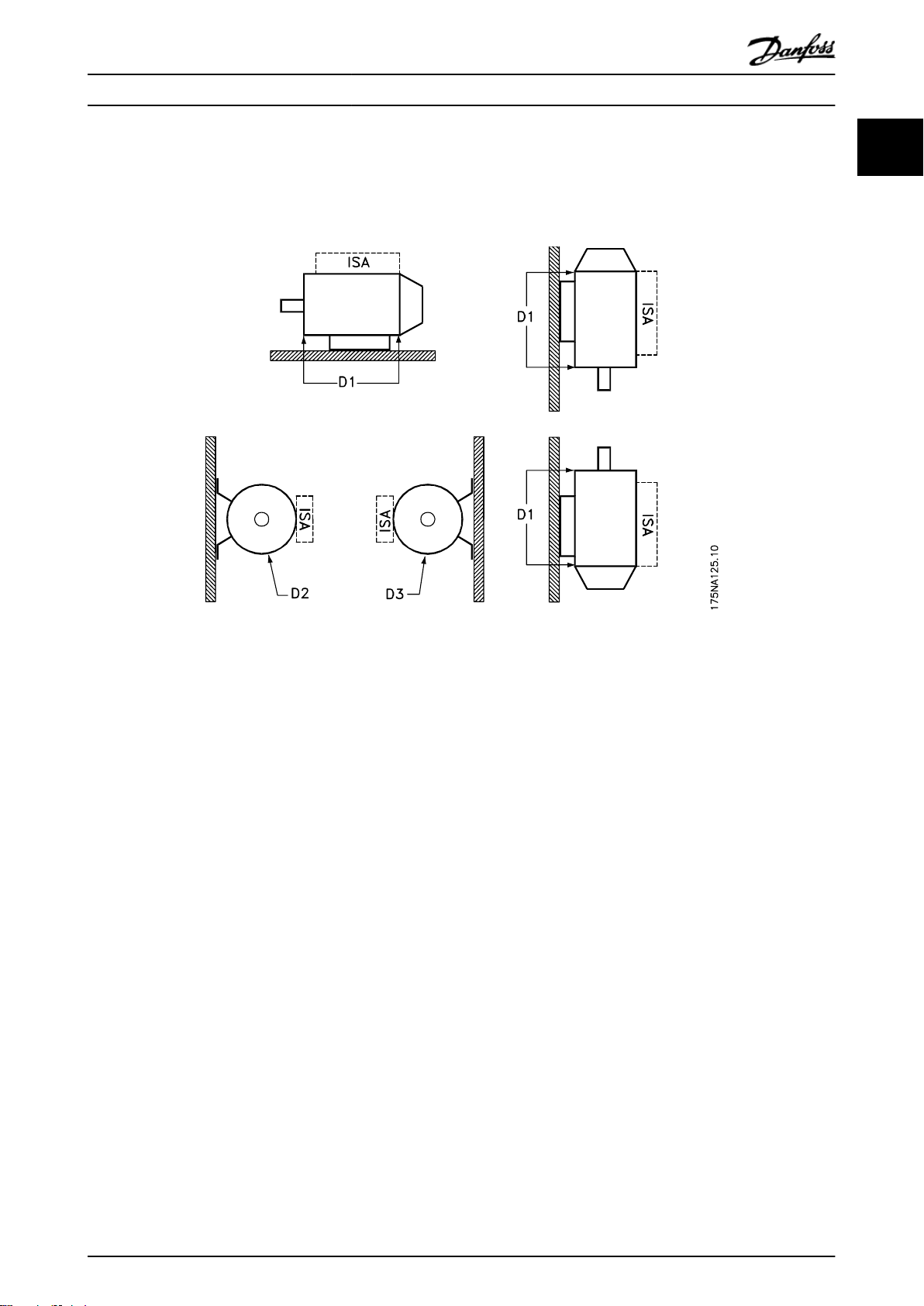
1.4.6 Bestillingsoplysninger til placering af vekselretterboks og afløbshul
Placering af vekselretterboks, altid topmonteret.
Alle afløbshuller er monteret med skrue og spændeskive, IP 66, hvis uopnået.
1
1
Illustration 1.5
1: Afløbshuller i modsatte side af vekselretteren, både i frekvensomformerenden og i den modsatte ende.
2/3: Afløbshuller 90° i forhold til vekselretteren, både i frekvensomformerenden og i den modsatte ende.
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 11
Page 14
Installation
VLT® DriveMotor FCM Series
2 Installation
22
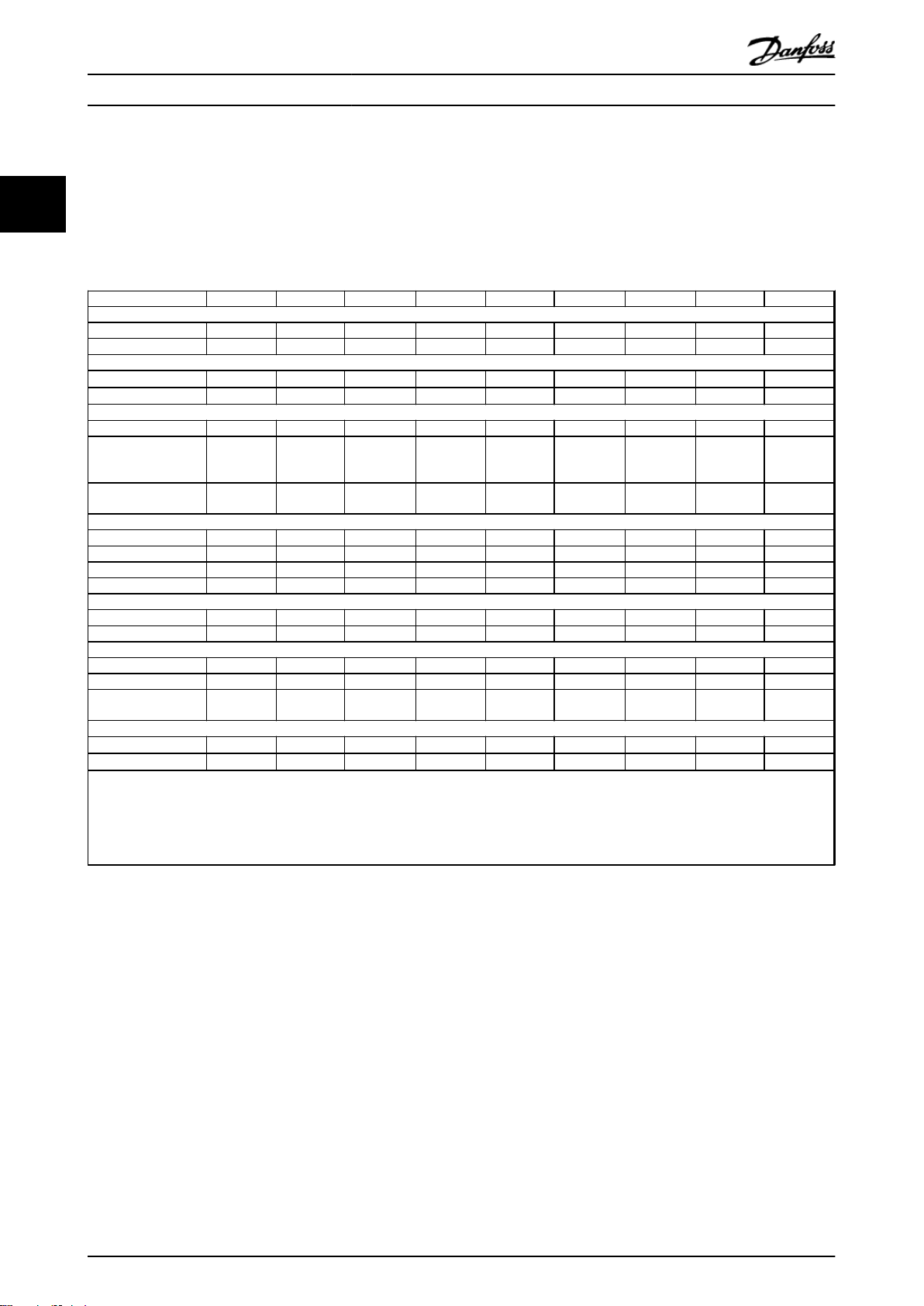
2.1 Tekniske data
2.1.1 FCM 305-375 til 3 faser, 380-480 V
FCM 305 307 311 315 322 330 340 355 375
Motorudgang
[HK] 0,75 1,0 1,5 2,0 3,0 4,0 5,0 7,5 10,0
[kW] 0,55 0,75 1,1 1,5 2,2 3,0 4,0 5,5 7,5
Motormoment
2-polet [Nm]
4-polet [Nm]
Kapslingsstørrelse [mm] 80 80 90 90 100 100 112 132 132
Vægt for frekvensomformermotor
3)
[kg]
Vægt for frekvensomformer [kg]
Indgangsstrøm [A]
380 V 2 p 1,5 1,8 2,3 3,4 4,5 5,0 8,0 12,0 15,0
380 V 4 p 1,4 1,7 2,5 3,3 4,7 6,4 8,0 11,0 15,5
480 V 2 p 1,2 1,4 1,8 2,7 3,6 4,0 6,3 9,5 11,9
480 V 4 p 1,1 1,3 2,0 2,6 3,7 5,1 6,3 8,7 12,3
Effektivitet ved nom. hastighed
2 poler 73,4 75,3 77,5 79,0 81,3 82,7 83,8 85,1 86,2
4 poler 75,9 77,5 79,3 80,5 82,4 83,6 84,6 85,8 86,7
Strømklemmer
[AWG] 10 10 10 10 10 10 10 6 6
[mm2] 4 4 4 4 4 4 4 10 10
Kabelbøsningsstørrelser
Maks. for-sikring
UL4) [A]
IEC4) [A]
1)
Ved 400 V 3.000 O/MIN
2)
Ved 400 V 1.500 O/MIN
3)
2-polet motor - B3
4)
For-sikringer af typen gG skal anvendes. Hvis UL/cUL skal opretholdes, skal der benyttes for-sikringer af typen Bussmann KTS-R 500 V
eller Ferraz Shawmut, ATMR klasse C (maks. 30A). Sikringerne skal anbringes til beskyttelse i et kredsløb, som er i stand til at levere højst
100.000 amps RMS (symmetrisk), 500 V maksimum.
1)
2)
1,8 2,4 3,5 4,8 7,0 9,5 12,6 17,5 24,0
3,5 4,8 7,0 9,6 14,0 19,1 25,4 35,0 48,0
11 13 17 20 26 28 37 56 61
2,2 2,2 2,8 2,8 4,1 4,2 6,4 10,4 10,4
3xM20x1,5 3xM20x1,5 3xM20x1,5 3xM20x1,5 3xM20x1,5 3xM20x1,5 3xM20x1,5 1xM25x1,5/
2xM20x1,5
10 10 10 10 10 15 15 25 25
25 25 25 25 25 25 25 25 25
1xM25x1,5/
2xM20x1,5
Tabel 2.1
12 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 15
Installation
VLT® DriveMotor FCM Series
2.1.2 Generelle tekniske data
Netforsyning, TT, TN og IT* (L1, L2, L3)
Forsyningsspænding 380-480 V-apparater 3x380/400/415/440/460/480 V ±10%
Forsyningsfrekvens 50/60 Hz
Maks. ubalance på forsyningsspænding ±2% af nominel forsyningsspænding
Effektfaktor/cos maks. 0,9/1,0 ved nominel belastning
Antal switchforekomster på forsyningsindgang L1, L2, L3 ca. 1 time/2 min
*) Ikke gyldig for RFI-klasse 1B-enheder
Momentkarakteristikker
Startmoment/overmoment 160% i 1 min
Kontinuerligt moment se ovenfor
Styrekort, digitale indgange/pulsindgange
Antal programmerbare digitale indgange 4
Klemmenr. X101-2, -3, -4, -5
Spændingsniveau 0-24 V DC (PNP positiv logik)
Spændingsniveau, logisk 0 <5 V DC
Spændingsniveau, logisk 1 >10 V DC
Maksimumspænding på indgang 28 V DC
Indgangsmodstand, R
Scanningstid 20 ms
i
ca. 2 kΩ
2 2
Styrekort, pulsindgang
Antal programmerbare pulsindgange 1
Klemmenr. X101-3
Maks.-frekvens på klemme 3, åben kollektor/push-pull 24 V 8 kHz/70 kHz
Opløsning 10 bit
Nøjagtighed (0,1-1 kHz), klemme 3 Maks. fejl: 0,5% af fuld skala
Nøjagtighed (1-12 kHz), klemme 3 Maks. fejl: 0,1% af fuld skala
Styrekort, analoge indgange
Antal programmerbare analoge spændingsindgange 1
Klemmenr. X101-2
Spændingsniveau 0-10 V DC (skalerbar)
Indgangsmodstand, R
Antal programmerbare analoge strømindgange 1
Klemmenr. X101-1
Strømområde 0-20 mA (skalerbar)
Indgangsmodstand, R
Opløsning 9 bit
Nøjagtighed på indgang Maks. fejl 1% af fuld skala
Scanningstid 20 ms.
Styrekort, digitale indgange/pulsindgange og analoge udgange
Antal programmerbare digitale og analoge udgange 1
Klemmenr. X101-9
Spændingsniveau på digital udgang/belastning 0-24 V DC/25 mA
Strøm ved analog udgang 0-20 mA
Maksimumbelastning til kapsling (klemme 8) ved analog udgang
Nøjagtighed for analog udgang Maks. fejl: 1,5% af fuld skala
Opløsning på analog udgang. 8 bit
i
i
R
BELASTNING
ca. 10 kΩ
ca. 300 Ω
500 Ω
Relæudgang
Antal programmerbare relæudgange 1
Klemmenummer (resistiv og induktiv belastning) 1-3 (bryde), 1-2 (slutte)
Maks. klemmebelastning (AC1) på 1-3, 1-2 250 V AC, 2A, 500 VA
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 13
Page 16
Installation
Maks. klemmebelastning (DC1) (IEC 947) på 1-3, 1-2 25 V DC, 3A/50 V DC, 1,5 A, 75 W
Min. klemmebelastning (AC/DC) på 1-3, 1-2 styrekort 24 V DC, 10 mA/24 V AC, 100 mA
22
Nominelle værdier for op til 300.000 kørsler (ved induktiv belastning er antallet af kørsler reduceret med 50%)
Styrekort, RS-485 seriel kommunikation
Klemmenr. X100-1, -2
Styrekarakteristik (frekvensomformer)
Frekvensområde
Opløsning på udgangsfrekvens 0,1%
Systemresponstid Maks. 40 ms.
Hastighedsnøjagtighed (åben sløjfe, CT-tilstand, 4 P-motor køres i hastighedsområdet 150-1.500 O/MIN) ±15 O/MIN
Eksterne
Kapsling
Vibrationstest 1 g
Maks. relativ luftfugtighed 95% for lager/transport/drift
Omgivelsestemperatur Maks. 40 °C (døgngennemsnit maks. 35 °C)
Se 4.1.7 Derating for omgivelsestemperatur
Min. omgivelsestemperatur ved fuld drift 0 °C
Min. omgivelsestemperatur ved reduceret ydeevne -10 °C
Temperatur ved lager/transport -25-+65/70 °C
Maks. højde over havet 1.000 m
Se 4.1.8 Derating for lufttryk
Anvendte EMC-standarder, emission EN 61000-6-3/EN 6100-6-4, EN 61800-3, EN 55011, EN 55014
Anvendte EMC-standarder,
immunitet
Anvendte sikkerhedsstandarder EN 60146, EN 50178, EN 60204, UL508
VLT® DriveMotor FCM Series
0-132 Hz
Se 4.1 Særlige betingelser for frekvensområde for IP 66-motorer i slutningen af dette afsnit.
IP 55 (IP65, IP66)
Se 4.1 Særlige betingelser for frekvensområde for IP 66-motorer i slutningen af dette afsnit.
EN 61000-6-2, EN 61000-4-2, EN 61000-4-3, EN 61000-4-4, EN 61000-4-5, EN 61000-4-6,
ENV 50204
BEMÆRK!
Den normale IP 66-løsning er kun beregnet til en hastighed på op til maksimum 3.000 O/MIN. Underret ved bestilling,
hvis det er nødvendigt med en højere hastighed.
Illustration 2.1 Blokdiagram for FCM 300-serien
14 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 17
Installation
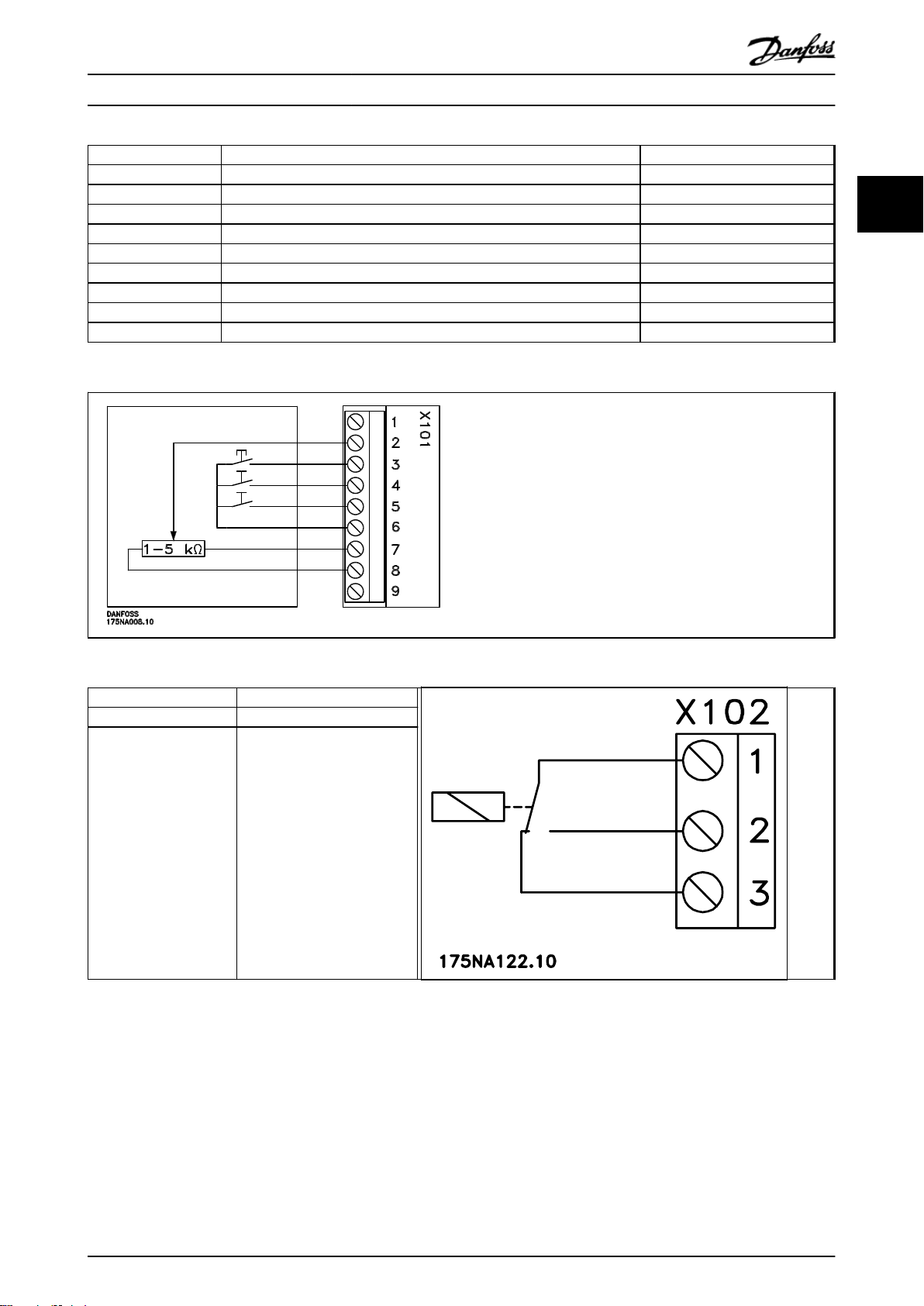
Klemmenr. Funktion Eksempel
1 Analog indgang (0-20 mA) Feedbacksignal
2 Analog (0-10 V)/digital indgang 2 Hastighedsreference
3 Digital indgang (eller puls) 3 Nulstil
4 Digital indgang (eller præcist stop) 4 Start
5 Digital indgang (anden) 5 Jog (fast hastighed)
6 24 V DC-forsyning til digitale indgange (maks. 150 mA)
7 10 V DC-forsyning til potentiometer (maks. 15 mA)
8 0 V til klemmer 1-7 og 9
9 Analog (0-20 mA)/digital udgang Fejlvisning
Tabel 2.2 X101: Klemblok til analoge/digitale styresignaler
VLT® DriveMotor FCM Series
Nulstil skal være lukket i kort tid, når fejltrip skal nulstilles
-
Start skal være lukket, når der skal skiftes til driftstilstand
-
Jog kører ved en fast hastighed under lukning (10 Hz)
-
Hastighedsreference (0-10 V) bestemmer hastigheden i drifts-
-
tilstand
2 2
Tabel 2.3 Forbindelsesdiagram - fabriksindstilling
Klemmenr. Funktion
1-2 Slutte (normalt åben)
1-3 Bryde (normalt lukket)
Tabel 2.4 X102: Klemblok til relæudgang
BEMÆRK!
Se parameter 323 (relæudgang) for programmering af relæudgang.
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 15
Page 18
Installation
VLT® DriveMotor FCM Series
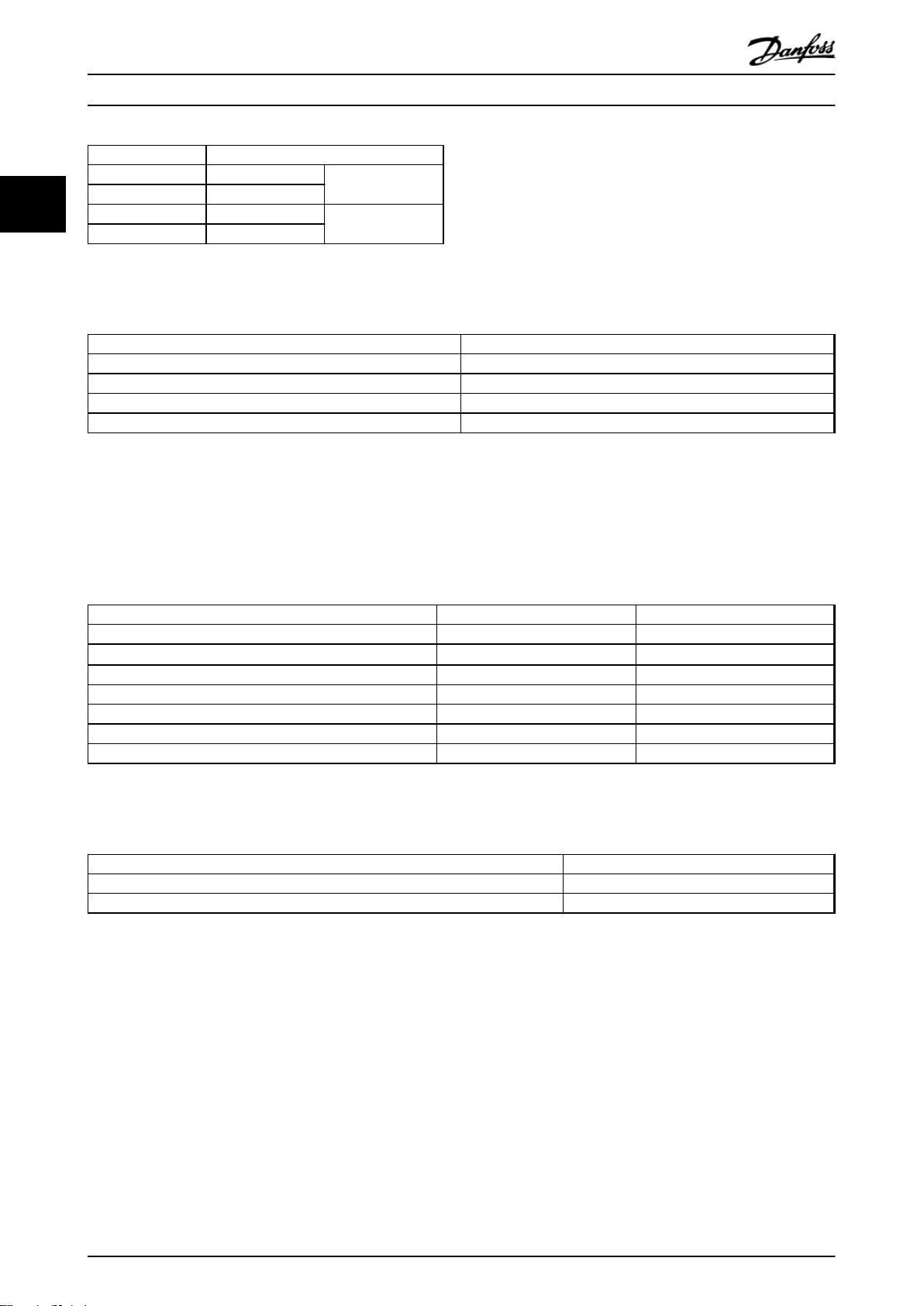
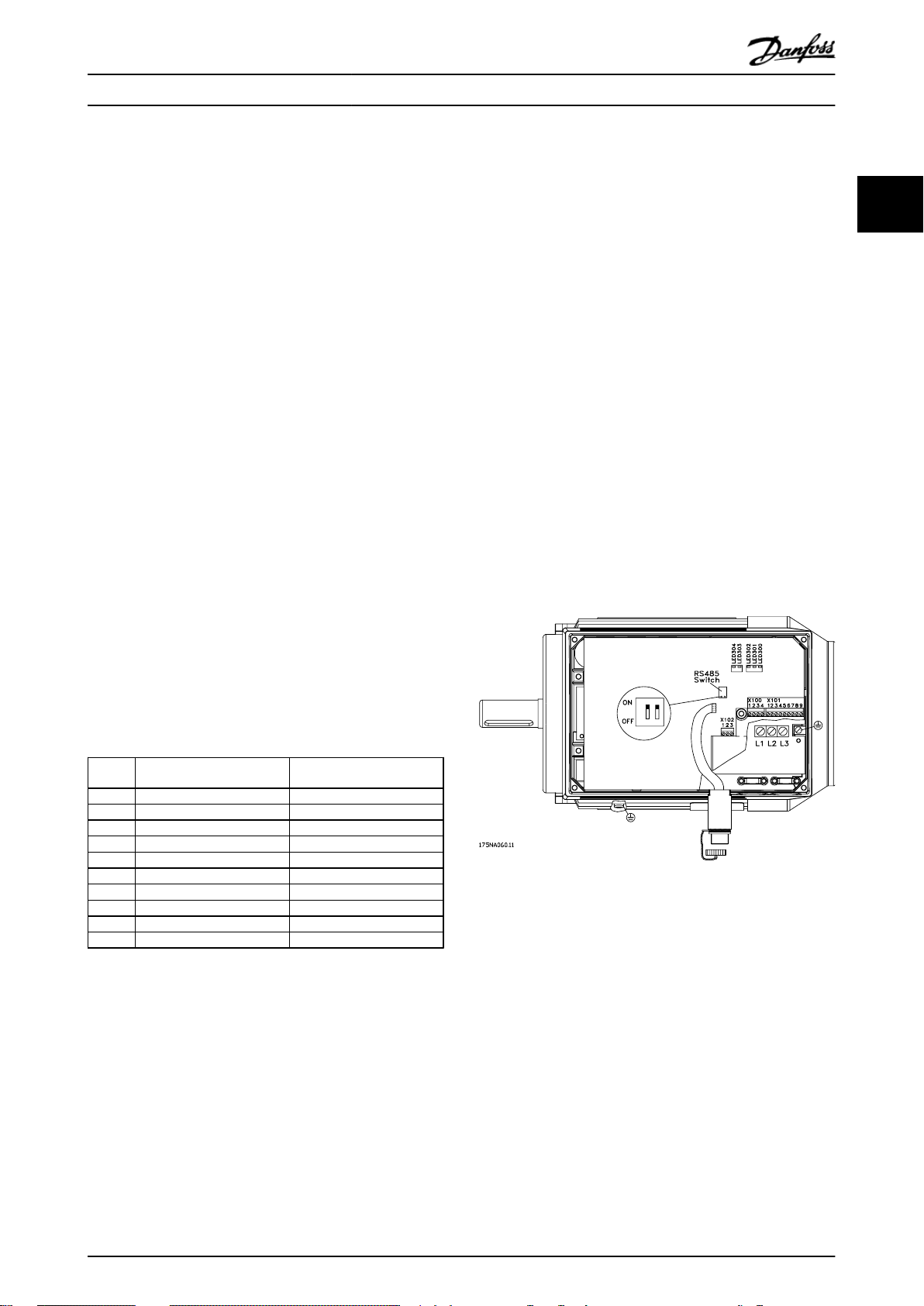
Klemmenr. Funktion
1 P RS 485 For tilslutning til bus
2 N RS 485
22
3 5 V DC Forsyning til RS 4854 0 V DC
eller pc
bus
LED 300 (rød): Fejltrip
LED 301 (gul): Advarsel
LED 302 (grøn): Tændt
LED 303-304: Kommunikation
Se manualen MG90AXYY for PROFIBUS-versioner.
Tabel 2.5 X100: Klemblok til datakommunikation
LED 300-304
Skruer til afdækning (låg) 25,6-31pund-tom (3-3,5 Nm)
Plastikstik til kabelindgange 19,5 pund-tom (2,2 Nm)
L1, L2, L3 (AC-ledning)-skruer (FCM 305-340) 5-7 pund-tom (0,5-0,6 Nm)
L1, L2, L3 (AC-ledning)-skruer (FCM 355-375) 15 pund-tom (1,2-1,5 Nm)
Jord 30,1 pund-tom (3,4 Nm)
Tabel 2.6
2.1.3 Tilspændingsmomenter
Til klemskruer kræves der en flad skruetrækker på maks. 2,5 mm.
Til skruer til AC-ledning kræves der en flad skruetrækker på 8 mm.
Til skruer til låg, jordforbindelse og kabelbøjle kræves der en skruetrækker af typen T-20 Torx eller en flad skruetrækker
(maks. tilspændingshastighed 300 O/MIN).
Maksimum kabelareal
2.1.4
Bemærk
Brug minimum °60 C kobberledning
Maks. størrelse på AC-ledning (FCM 305-340) 10 4,0
Maks. størrelse på AC-ledning (FCM 355-375) 6 10
Maks. størrelse på styrekabel 16 1,5
Maks. størrelse på seriel kommunikationskabel 16 1,5
Jord 6 10
Tabel 2.7
AWG
2.1.5 Skruestørrelser
Skruer til afdækning (låg) M5
Skruer til jordforbindelse og kabelbøjler (FCM 305-340): M4
Skruer til jordforbindelse og kabelbøjler (FCM 355-375) M5
Tabel 2.8
mm
2
16 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 19
Installation
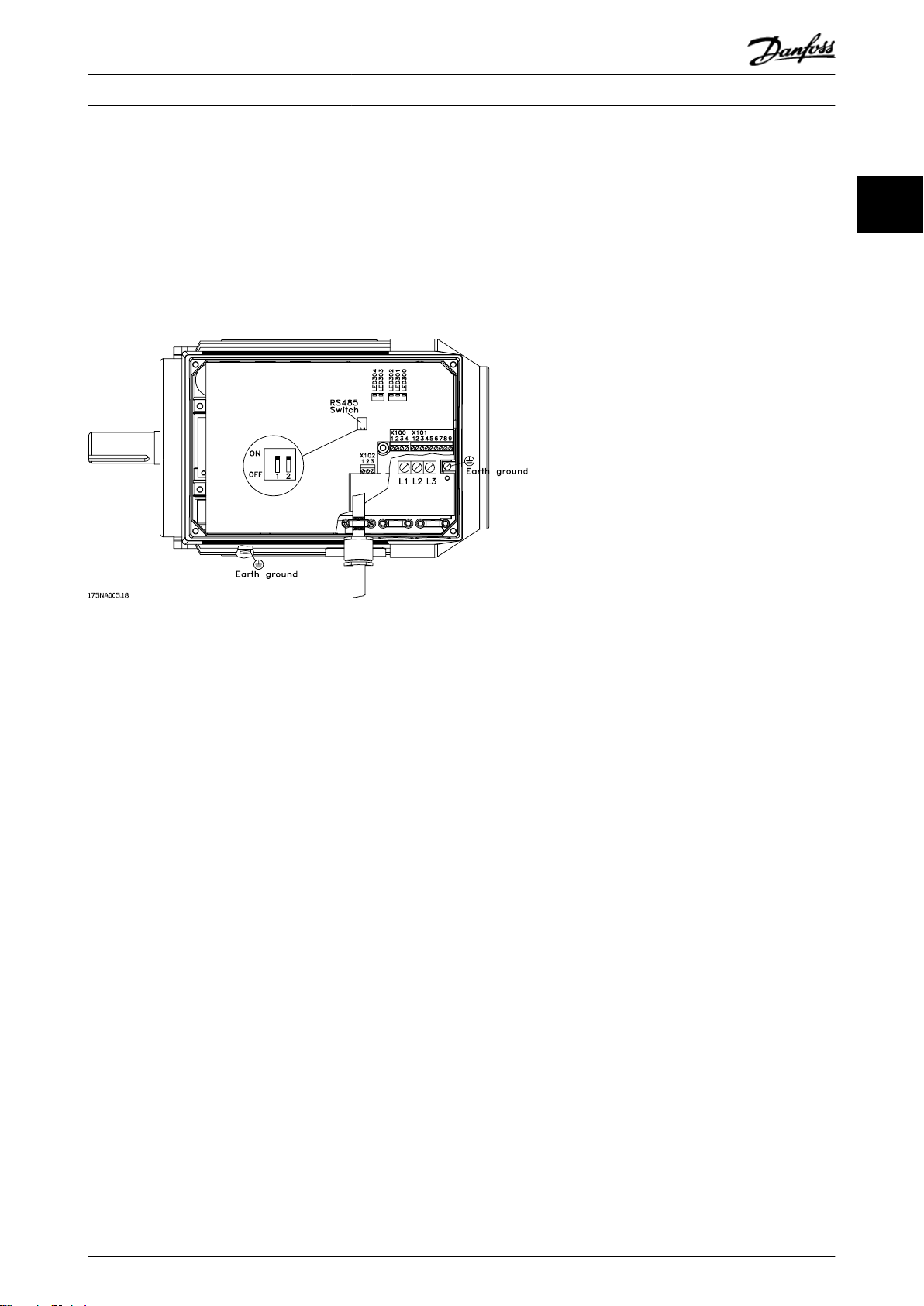
2.1.6 Beskyttelse
Termisk overbelastningsbeskyttelse af motor og elektronik.
•
Overvågning af mellemkredsspændingen sikrer, at vekselretteren kobler ud, hvis mellemkredsspændingen er for
•
høj eller for lav.
Ved manglende netfase kobler vekselretteren ud, når motoren belastes.
•
VLT® DriveMotor FCM Series
2 2
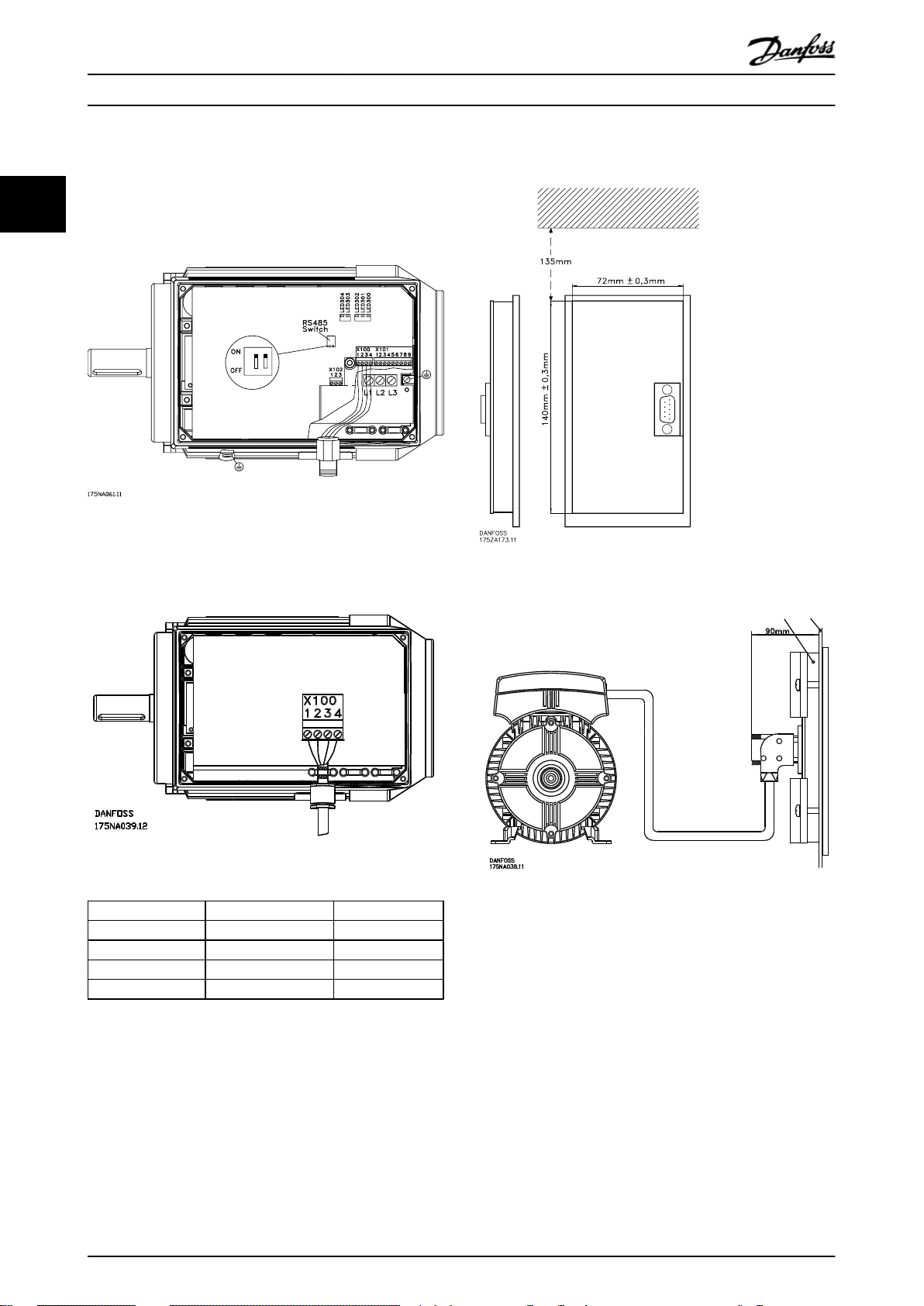
Illustration 2.2 Klemmeplaceringer (se Hurtig opsætning MG03AXYY vedr. installation)
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 17
Page 20
175NA163.10
Installation
VLT® DriveMotor FCM Series
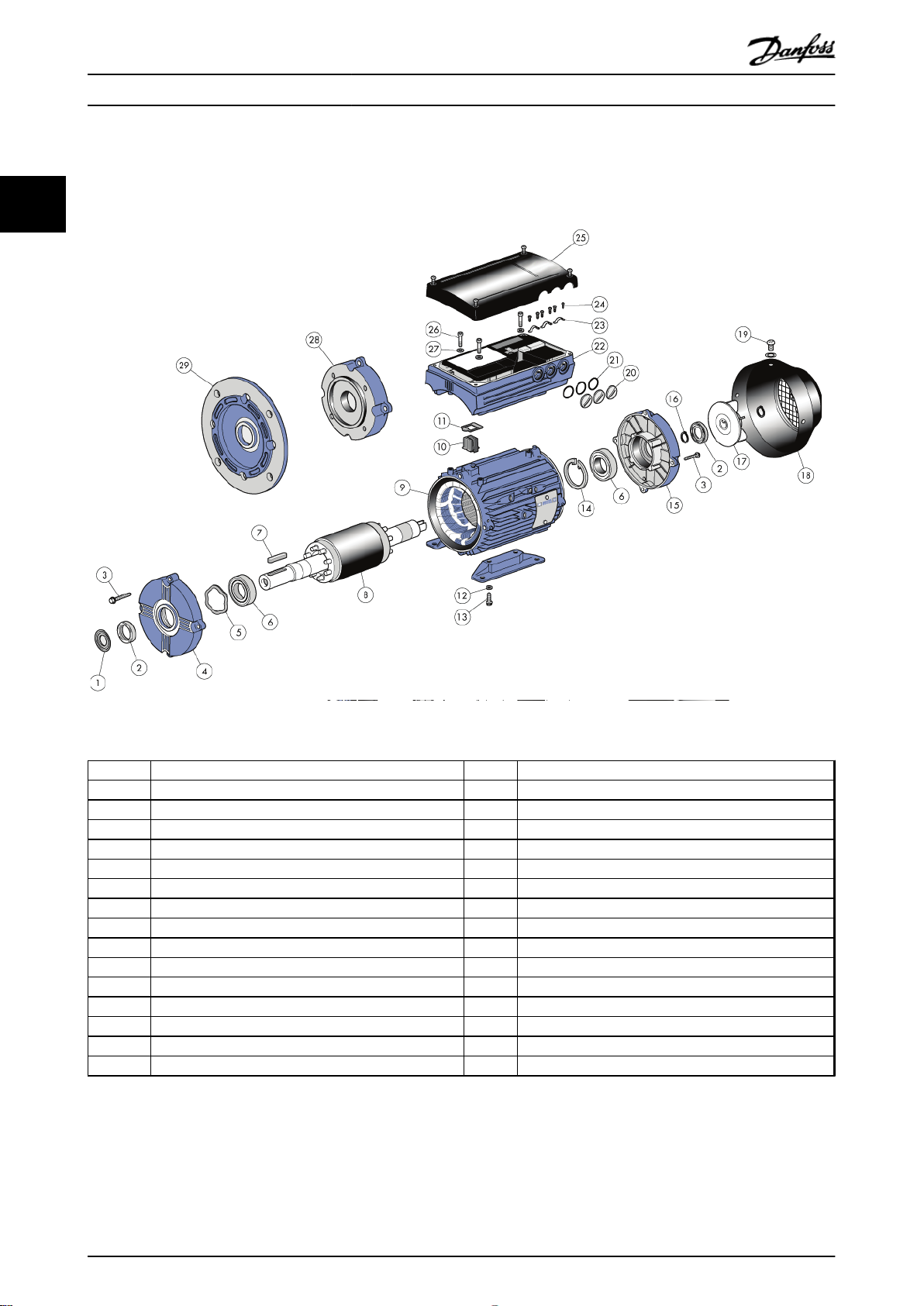
2.2 Beskrivelse af motoren
FC-motoren består af følgende dele:
22
Illustration 2.3
Del Beskrivelse Del Beskrivelse
1 Slyngring (hvis monteret) 16 Låsering til lejet
2 Olietætning 17 Ventilator
3 Fastspændingsbolt til lejeskjold 18 Ventilatorplade
4 Lejeskjold til frekvensomformer 19 Skrue og spændeskive til ventilatorplade
5 Spændeskive 20 Prop med gevind
6 Leje 21 O-ring
7 Akselkile 22 ISM-boks
8 Rotor 23 Kabelsko
9 Statorsamling med eller uden fødder 24 Skruer til kabelsko
10 Stikblok 25 Afdækning til ISM-boks
11 Pakning 26 Torx-skrue
12 Aftagelige fødder 27 Spændskive
13 Fastspændingsbolt og spændeskive til fod 28 Frontlejeskjold
14 Låsering til fastholdelse af leje 29 Lejeskjold til flange
15 Lejeskjold til enden uden frekvensomformer
Tabel 2.9
18 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 21
Installation
VLT® DriveMotor FCM Series
2.2.1 Håndtering af FC-motoren
Håndtering og løft af VLT-frekvensomformermotorer (FCmotorer) må kun foretages af kvalificeret personale.
Komplet produktdokumentation og betjeningsvejledning
skal være tilgængelig sammen med det værktøj og udstyr,
der er nødvendigt for sikker arbejdspraksis. Øjebolte og/
eller løftetappe til FC-motoren er konstrueret til kun at
bære FC-motorens vægt og ikke vægten af FC-motoren og
ekstra tilbehør, der måtte være monteret. Det skal sikres, at
kraner, donkrafte, slynger og løftebjælker er i stand til at
bære vægten af det udstyr, der skal løftes. Hvis motoren er
forsynet med en øjebolt, skal denne skrues i for enden af
den statorenhed, der skal løftes, indtil bolthovedet er
spændt.
FCM-type Ca. vægt [kg]
FCM 305 11
FCM 307 13
FCM 307 17
FCM 315 20
FCM 322 26
FCM 330 28
FCM 340 37
FCM 355 56
FCM 375 61
Lejer
2.2.2
Standardløsningen er et fast leje i motorens frekvensomformerende (akseludgangsenden).
For at undgå statisk indrykning skal lagerområdet være frit
for vibrationspåvirkninger. Hvor en vis vibrationspåvirkning
er uundgåelig, skal akslen låses. Lejerne kan være udstyret
med en akselblokeringsfunktion, som skal være aktiveret
under lagring. Akslerne skal drejes en kvart omdrejning
med håndkraft en gang om ugen. Lejerne afsendes fra
fabrikken fyldt med litiumbaseret fedt.
Kapslings-
størrelse
80-132 Esso unirex N3 -30 °C til + 140 °C
Tabel 2.11 Smøring
Smøringstype Temperaturområde
2 2
Tabel 2.10 Vægt
Maks. forventede driftstimer for lejer (Lna) ved 80 °C lejetemperatur x 103 timer.
FCM
305-315
355-375
Lna-lejeholdbarheden er den justerede L10-holdbarhedsklassificering under hensyntagen til: -Pålidelighed -Materialeforbedring -Smøringsforhold.
Tabel 2.12 Lejers levetid
FCM Lejer Olietætninger - Boring x O/D bredde i mm
Frekvensomfor-
merende
305-307 6204ZZ 6003ZZ 20x30x7 17x28x6
311-315 6205ZZ 6003ZZ 25x35x7 17x28x6
322-330 6206ZZ 6005ZZ 30x42x7 25x37x7
340 6206ZZ 6005ZZ 30x42x7 25x37x7
355-375 6208ZZ 6005ZZ 40x52x7 25x37x7
Tabel 2.13 Standardlejereferencer og olietætninger
Vandret Lodret Vandret Lodret
30 30 30 30322-340
3.000 min
Modsat ende end
frekvensomfor-
merende
-1
Frekvensomformerende
1.500 min
Modsat ende end frekvensomfor-
-1
merende
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 19
Page 22
Installation
VLT® DriveMotor FCM Series
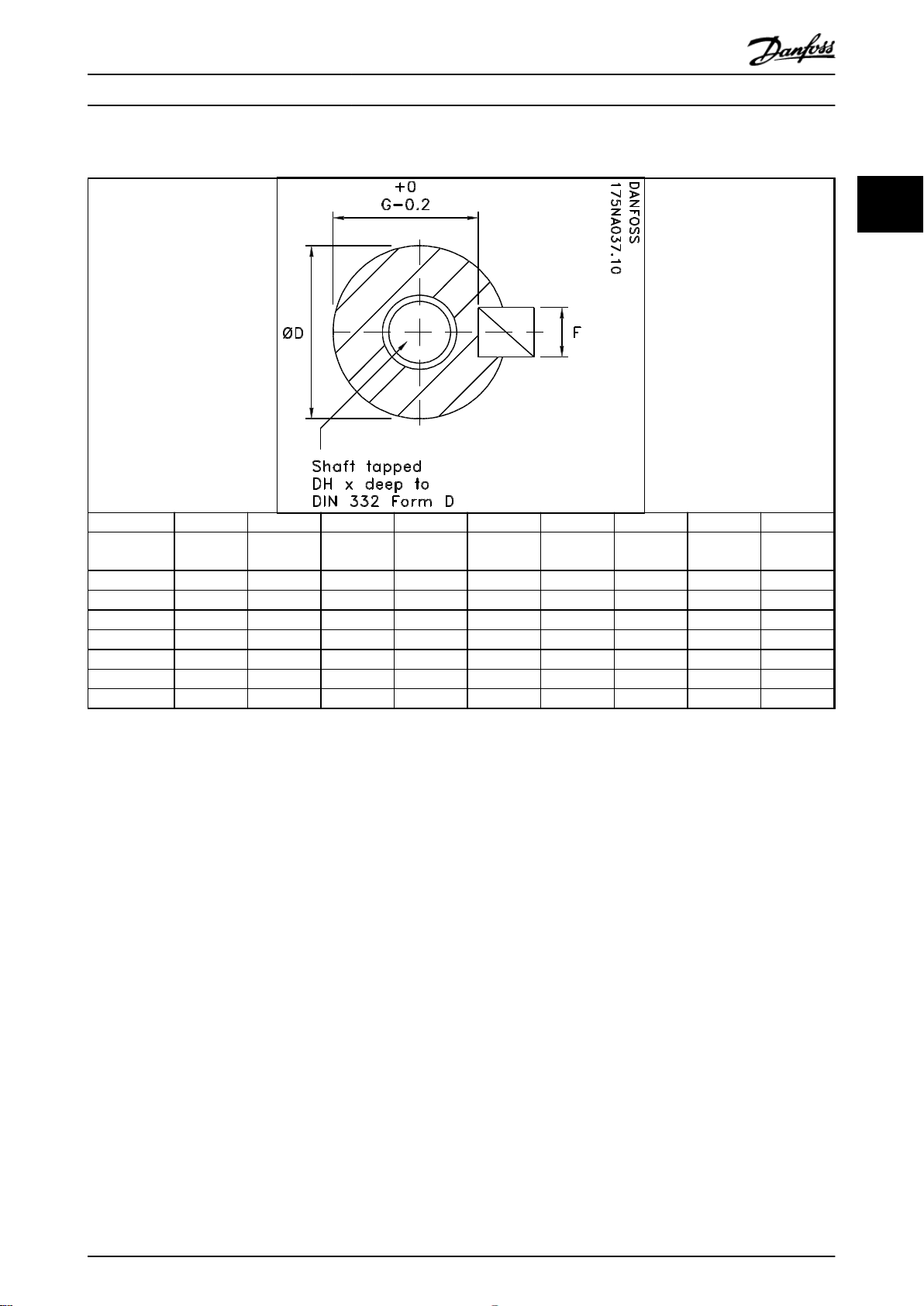
2.2.3 Udgangsaksler
Mål
Udgangsakslerne er fremstillet i 35/40 ton (460/540
22
MN/m2) højstyrkestål. Akslerne i frekvensomformerenden er
som standard forsynet med et gevindhul i overensstemmelse med DIN 332 Form D og en notgang med
lukket profil.
Afbalancering
Alle motorer er dynamisk afbalanceret iht. ISO 8821 med
nøglekonvention iht. IEC 60034-14.
2.2.4
FCM 2 poler 4 poler
305 0,00082 0,0019
307 0,00082 0,0027
311 0,00090 0,0022
315 0,0011 0,0030
322 0,0024 0,0042
330 0,0028 0,0050
340 0,0053 0,0091
355 0,0072 0,0143
375 0,0097 0,0190
Tabel 2.14 Inerti
J [kgm2]
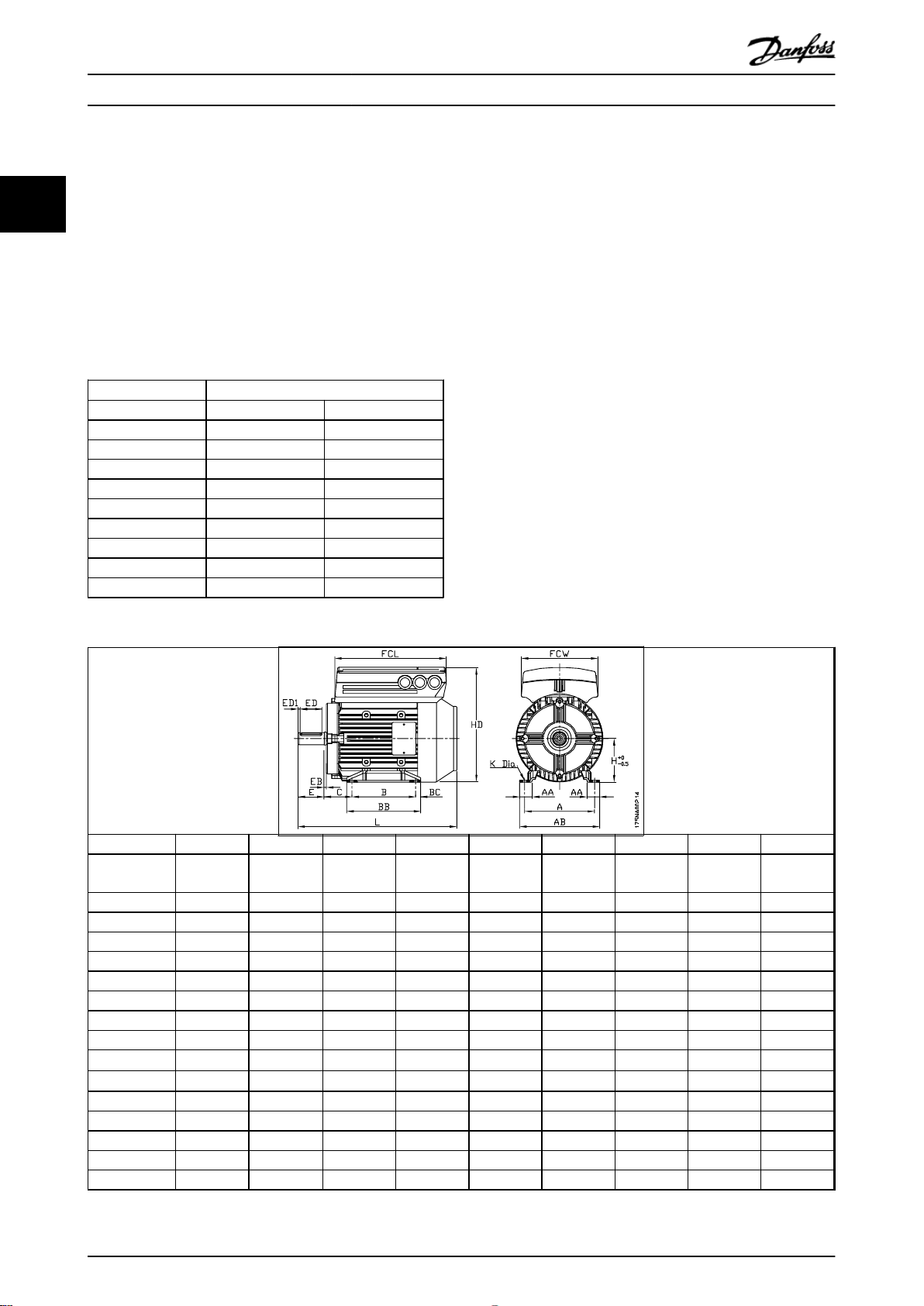
Generel FCM 305 307 311 315 322 330 340 355 375
Kapslingsstørrelse
A [mm] 125 125 140 140 160 160 190 216 216
B [mm] 125 125 140 140 140 140 178
C [mm] 50 50 56 56 63 63 70 89 89
H [mm] 80 80 90 90 100 100 112 132 132
K [mm] 10 10 10 10 12 12 12 12 12
AA [mm] 27 27 28 28 28 28 35 38 38
AB [mm] 157 157 164 164 184 184 218 242 242
BB [mm] 127 127 150 150 170 170 170 208 208
BC [mm] 13,5 13,5
L [mm] 278 278 322 322 368 368 382 484,5
AC [mm] 160 160 178 178 199 199 215 255 255
HD [mm] 219,5 219,5 238 238 264 264 292 334 334
EB [mm] 1,5 1,5 2,5 2,5 6 6 6 6 6
FCL [mm] 206 206 230 230 256 256 286 357,5 357,5
FCW [mm] 141 141 158 158 176 176 196 242,5 242,5
Tabel 2.15 Fodmontering - B3
20 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
80 80 90 90 100 100 112 132 132
12,5
1)
12,5
1)
15 15 15 53 15
484,5
2)
Page 23
Installation
1)
2-polet motor = 37,5. 2)2-polet motor = 53
FCM 305 307 311 315 322 330 340 355 375
Kapslingsstørrelse
D [mm] 19 19 24 24 28 28 28 38 38
E [mm] 40 40 50 50 60 60 60 80 80
ED [mm] 32 32 40 40 50 50 50 70 70
ED1 [mm] 4 4 5 5 5 5 5 5 5
DH M6x16 M6x16 M8x19 M8x19 M10x22 M10x22 M10x22 M12x28 M12x28
F [mm] 6 6 8 8 8 8 8 10 10
G [mm] 15,5 15,5 20 20 24 24 24 33 33
80 80 90 90 100 100 112 132 132
VLT® DriveMotor FCM Series
2 2
Tabel 2.16 Aksel i frekvensomformerende
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 21
Page 24
Installation
VLT® DriveMotor FCM Series
22
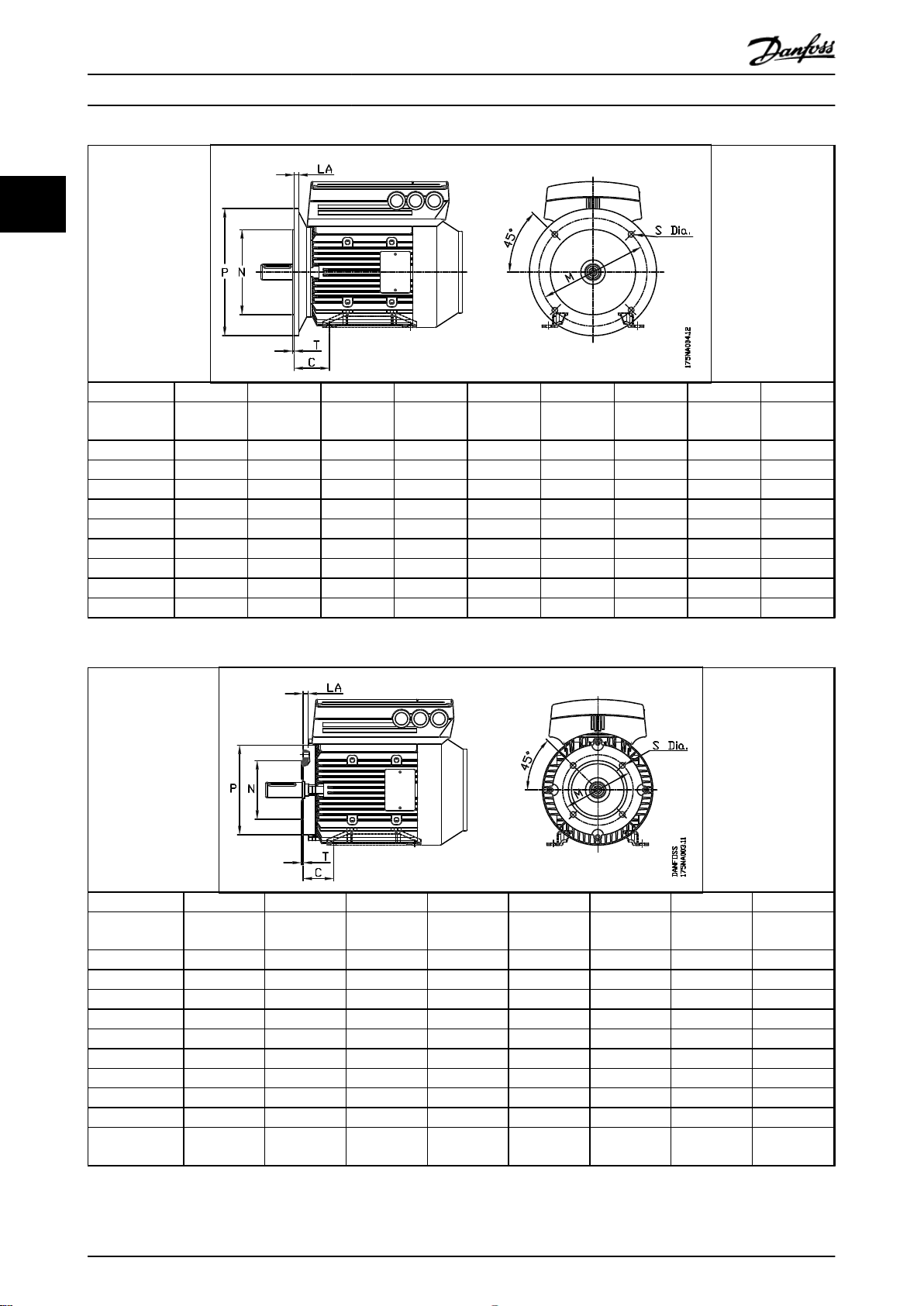
B5 FCM
Kapslingsstørrelse
IEC-ref. FF85 FF100 FF115 FF130 FF165 FF165 FF215 FF215 FF265
DIN-ref. A105 A120 A140 A160 A200 A200 A250 A250 A300
C [mm] 50 56 63 70 89
M [mm] 85 100 115 130 165 165 215 215 265
N [mm] 70 80 95 110 130 130 180 180 230
P [mm] 105 120 140 160 200 200 250 250 300
S [mm] 10 10 12 12 14,5 14,5 14,5
T [mm] 3 3,5 3,5 3,5 4 4 4
LA [MM] 7 7 12 10 12 12 12
Tabel 2.17 Flangemontering - B5, B35, (B3+B5)
48 56 63 71 80 90 100 112 132
305/307 311/315 322/330 340 355/375
B14 FCM
Kapslingsstørrelse
IEC-ref. FT65 FT75 FT85 FT100 FT115 FT130 FT130 FT165
DIN-ref. C80 C90 C105 C120 C140 C160 C160 C2OO
C [mm] 50 56 63 70 89
M [mm] 65 75 85 100 115 130 130 165
N [mm] 50 60 70 80 95 110 110 130
P [mm] 80 90 105 120 140 160 164 200
S [mm] M5 M6 M6 M8 M8 M8 M10
T [mm] 2,5 2,5 3 3 3,5 3,5 3,5
LA [MM] 9 9 9 9 8,5 13 13
Maks. B14flangen
Tabel 2.18 Frontmontering - B14, B34 (B3+B14)
22 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
56 63 71 80 90 100 112 132
8,5 11 11 11,5 15 15,5 17
305/307 311/315 322/330 340 355/375
Page 25
Installation
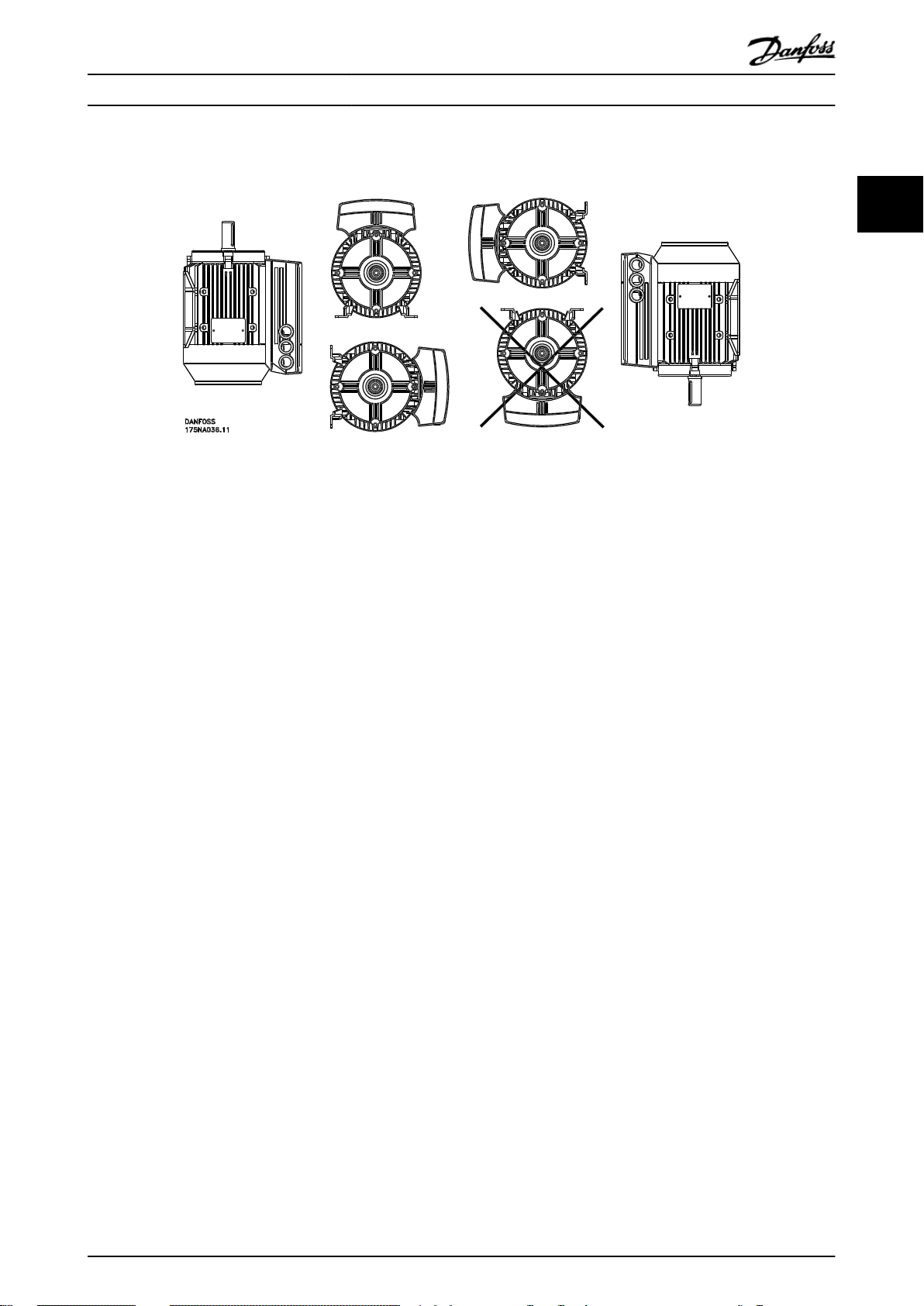
2.2.5 Montering af FC-motoren
Illustration 2.4
VLT® DriveMotor FCM Series
2 2
FC-motorer skal monteres med tilstrækkelig adgangsplads
til at udføre rutinemæssig vedligeholdelse. Der anbefales
minimum 0,75 m plads omkring motoren til at udføre
arbejdet. Tilstrækkelig plads omkring motoren er også
påkrævet af hensyn til luftstrømningen, især omkring
ventilatorindsugningen (50 mm).
Hvor der monteres flere FC-motorer tæt på hinanden, skal
det omhyggeligt sikres, at der ikke forekommer recirkulation af varm luft. Fundamentet skal være fast, massivt og
plant.
BEMÆRK!
Elektrisk installation
Den øverste film på indersiden af vekselretterdelen må
ikke fjernes, da den er en del af beskyttelsesudstyret.
Montering af spidshjul, remskiver og koblinger.
Disse bør have en indvendig diameter i overensstemmelse
med vores standardgrænser og skal monteres på akslen
med en skruende bevægelse. Der skal udvises stor omhu
med at afskærme alle bevægelige dele.
BEMÆRK!
Hvis dele monteres på FC-motorens aksel med en
hammer eller mukkert, forårsager det skader på lejet.
Denne beskadigelse medfører øget støj fra lejerne og en
væsentlig reduktion af lejets levetid.
BEMÆRK!
Maks. B14-flangen, se 2.2.4 Mål.
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 23
Page 26
Installation
VLT® DriveMotor FCM Series
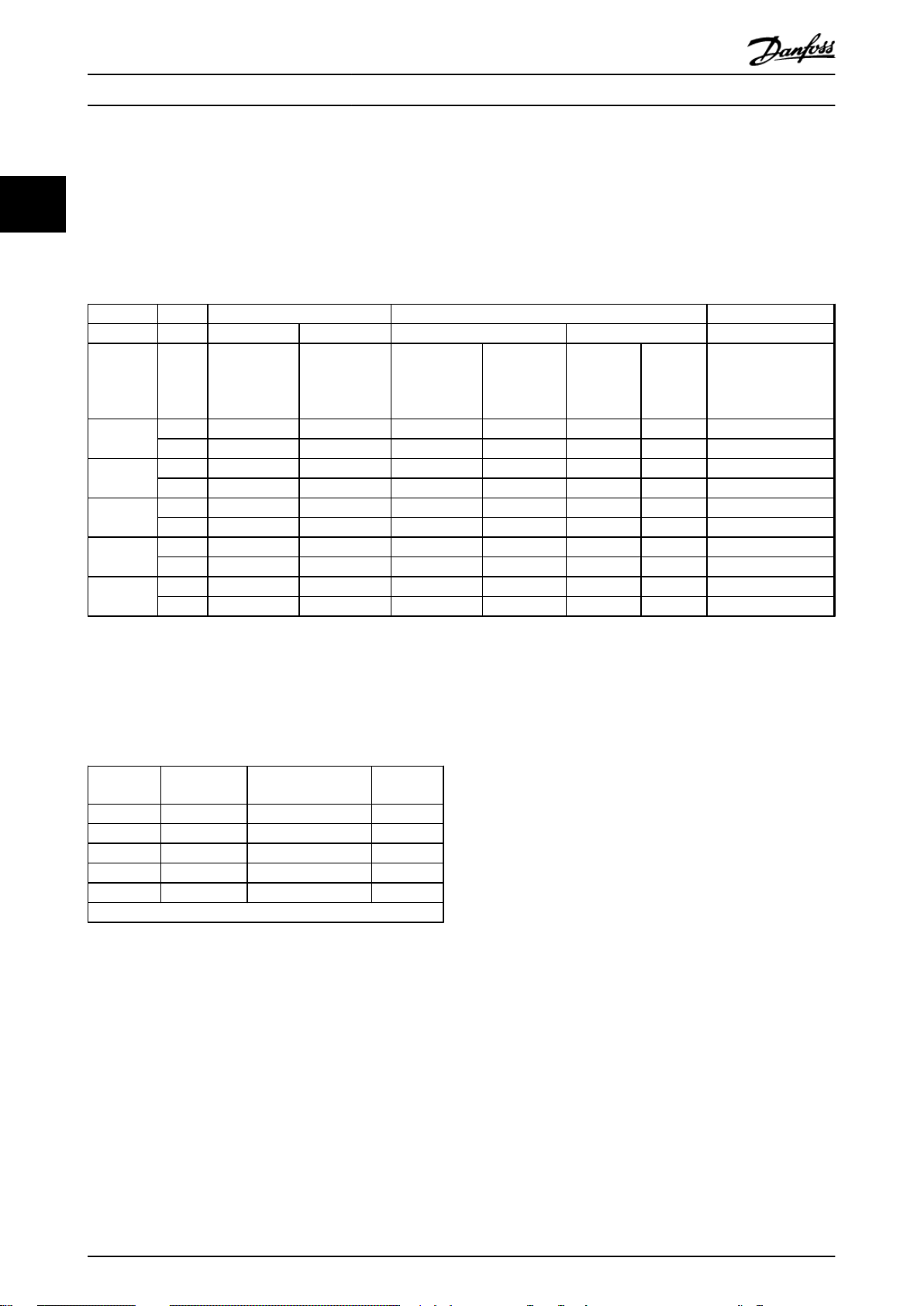
2.2.6 Justering
Hvis den aktuelle anvendelse kræver direkte kobling, skal akslerne justeres korrekt i forhold til hinanden i alle tre planer.
22
Forkert justering kan forårsage omfattende støj og vibrationer.
Der skal tages højde for akselendens bevægelse og termisk udvidelse i både det aksiale og vertikale plan. Det anbefales at
bruge fleksible frekvensomformerkoblinger.
Vandret aksel Lodret aksel
Aksel op Aksel ned
Type Poler Belastning
mod motor
W-DA80
W-DA90
W-DA100
W-DA112
W-DA132
2 339 539 321 565 362 521 774
4 303 503 283 530 330 583 729
2 444 684 421 716 476 661 915
4 398 638 366 682 442 606 854
2 781 1101 743 1159 839 1063 1295
4 710 1030 655 1107 787 975 1215
2 768 1088 715 1170 850 1035 1295
4 690 1010 612 1131 811 932 1202
2 1355 1707 1266 1838 1486 1618 2114
4 1253 1605 1130 1779 1427 1482 2068
Belastning væk
fra motor
Belastning
mod motor
Belastning
væk fra
motor
BelastningopBelastning
ned
Maksimum tilladelig
radial belastning i
enden af akslen
(vandret montering).
Tabel 2.19 Maksimalt tilladelige eksterne aksiale og radiale belastninger i Newton
Boltmomenter
2.2.7
1. Fjern vekselretterdelen, ventilatordækslet og
Lejeskjold og afdækning skal fastgøres med de boltstørrelser og momenter, der ses i Tabel 2.20.
FCM-type Kapslings-
størrelse
305-307 80 M5 5
311-315 90 M5 5
322-330 100 M6 (taptite) 8-10
340 112 M6 (taptite) 8-10
355-375 132 M8 (taptite) 29
Moment for afdækningsskruer: 2,2-2,4 Nm
Tabel 2.20 Boltmomenter til fastgøring af lejeskjold
Vedligeh.
2.2.8
Boltdiameter Nm. Moment
2. Rotoren kan nu trækkes forsigtigt ud af statoren.
3. Efter demontering af motoren kan vedlige-
4. FC-motoren samles igen i omvendt rækkefølge af
Rutinemæssig rengøring af FC-motoren
Fjern ventilatordækslet, og sørg for, at alle luftindtag er
helt rene. Fjern eventuel snavs og eventuelle blokeringer
bag ventilatoren og langs rammens køleribber samt
mellem motoren og vekselretterdelen.
Periodisk vedligeholdelse af motordelen
5. Kontrollér før start, at rotoren roterer frit. Sørg for,
6. Påsæt evt. fjernet remskive, kobling, tandhjul osv.
ventilatoren, som er kilet fast til akselforlængelsen. Løsn og fjern skruerne til lejedækslet og
lejeskjoldenes bolte/gevindtappe. Herefter tages
lejeskjoldene forsigtigt af tapperne.
Vær meget forsigtig med at undgå at beskadige
indersiden af statoren samt stator- og rotorviklingerne.
holdelse udføres for at fjerne alt snavs. Dette
gøres bedst med tør trykluft ved relativt lavt tryk,
eftersom et højt lufttryk kan tvinge snavs ind i
mellemrummene mellem viklingerne og
isoleringen m.v. Opløsningsmidler med
affedtende virkning kan forårsage beskadigelse af
imprægneringslak og isolering.
demonteringen. Husk at sætte lejeskjoldene
forsigtigt på lejer og styretapper. DE MÅ IKKE
TVINGES PÅ.
at de elektriske tilslutninger er korrekte.
Vær meget påpasselig med at sikre, at justeringen
i forhold til den drevne del er korrekt, idet forkert
24 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 27
Installation
VLT® DriveMotor FCM Series
justering før eller senere vil medføre lejeproblemer og brud på akslen.
7. Når skruer og bolte sættes i igen, skal det sikres,
at de overholder de nødvendige krav mht.
kvalitet og brudstyrke som anbefalet af
producenten. Endvidere skal de have identisk
gevindform og længde (se Tabel 2.24).
2.2.9 FCM 300 Termisk motorbeskyttelse
Den termiske beskyttelse af FC og motoren sikres på
følgende måde:
Overbelastninger håndteres ved hjælp af
•
beregning af den elektriske belastning (I 2X t).
Manglende ventilation og høje omgivelsestempe-
•
raturer håndteres ved hjælp af
temperaturmålinger. Derating for lav hastighed
(grundet manglende ventilation) er ikke
indbygget i beregningen af den elektriske
belastning, men udføres via temperaturmålingerne. Forceret ventilation er dermed
automatisk sikret.
Elektrisk belastning
Strømmen måles i DC-linket, og den estimerede belastning
beregnes. Det elektriske belastningsniveau indstilles til et
udgangsmoment på 105%. Over dette niveau øges en
tæller, under dette niveau reduceres den. Tælleren starter
ved nul. Når tælleren når 100, tripper apparatet. Ved 98
tændes advarselsindikatoren (LED og statusord).
15 minutter. Hvis funktionen TEMP.DEP.SW er aktiveret i
parameter 412, sænkes switchfrekvensen gradvist til 2 kHz
i et forsøg på at sænke temperaturen.
2 2
Tripniveau ⇒ øjeblikkeligt trip og advarselsindikation (LED
og statusord).
Værdien kan aflæses i parameter 537 (LCP: Kølepladetemp.).
Temperaturniveauerne kan virke høje, men grundet lokal
opvarmning af føleren er de faktiske indvendige lufttemperaturniveauer ca. 10 °C lavere.
2.3 Lokal betjening
2.3.1 Stiksæt til service (175N2546)
Formål
At køre LCP2 og PROFIBUS samtidigt. Servicestikket kan
anvendes sammen med FCM 300 med serienummer
03Gxxx og softwareversion fra 2.03. Anvendes sammen
med kabel til stiksæt 175N0162.
Belastn
ing
0% - 60 s
20% - 100 s
40% - 150 s
60% - 200 s
80% - 250 s
105% 900 s (hvis over 105%) 300 s (hvis under 105%)
120% 550 s 140% 210 s 160% 60 s >165% 20 s -
Ved fuld AC-bremse (parameter 400) simuleres en
belastning > 165% => 20 sek. til trip.
Værdien kan aflæses i parameter 527 (termisk LCP:FC).
Temperaturmålingen registrerer temperaturen i elektronikboksen.
Ved advarselsniveauet ⇒ tændes advarselsindikatoren (LED
og statusord), og apparatet tripper muligvis, hvis
temperaturen ikke falder under advarselsniveauet inden for
Tid fra 0 til 100 Tid fra 100 til 0
Tabel 2.21
Illustration 2.5
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 25
Page 28
Installation
VLT® DriveMotor FCM Series
2.3.2 Stiksæt (175N2545)
Formål
22
At etablere en stikforbindelse mellem LCP 2 og FCM 300.
Anvendes sammen med kabel til stiksæt 175N0162.
Illustration 2.6
Frembygningssæt (175N0160)
2.3.3
2.3.4
Frembygningssæt forts.
Illustration 2.8
Illustration 2.7 Tilslutninger
Illustration 2.9
Ledningsfarve/ Klemme X100/ D-sub-ben
Gul 1 8
Grøn 2 9
Rød 3 2
Blå 4 3
Tabel 2.22
26 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 29
Installation
VLT® DriveMotor FCM Series
2.3.5 Potentiometeroption (177N0011)
Option til at styre referencen ved hjælp af et potentiometer. Optionen er monteret i stedet for en kabelkonsol.
Potentiometeret betjenes ved at fjerne blindproppen for at
indstille den ønskede reference og derefter montere
blindproppen igen.
Illustration 2.10
Ledningsfarve Klemme på X101
Hvid 2 (analog indgang)
Rød 8 (0 V)
Sort 7 (+10 V)
2 2
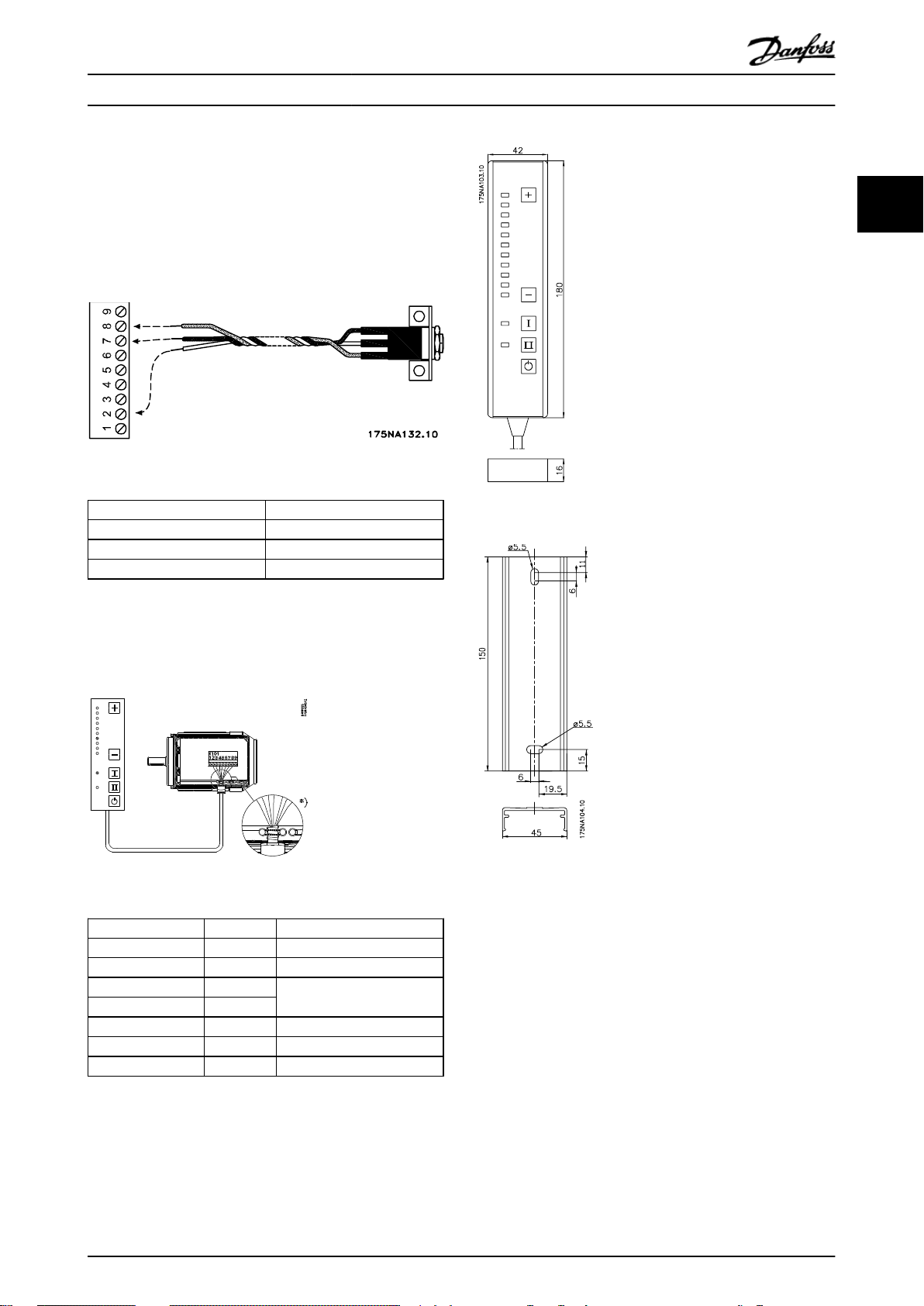
Illustration 2.12 Lokalbetjeningspanel (LOP) 175N0128 IP 65
Tabel 2.23
Lokalbetjeningspanel (LOP)
2.3.6
(175N0128) IP65
Illustration 2.11
Ledningsfarve Klemme Funktion
Hvid 2 Reference
Brun 3 Nulstil
Lilla* eller grå 4
Grøn 5
Rød 6 +24 V
Gul 7 +10 V
Blå 8 Jord
Se Illustration 2.11
Illustration 2.13 Beslag til LOP 175N2717 (medfølger i
175N0128)
Tabel 2.24 Kabelføring
* Kan være orange i nogle kabler
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 27
Page 30
Installation
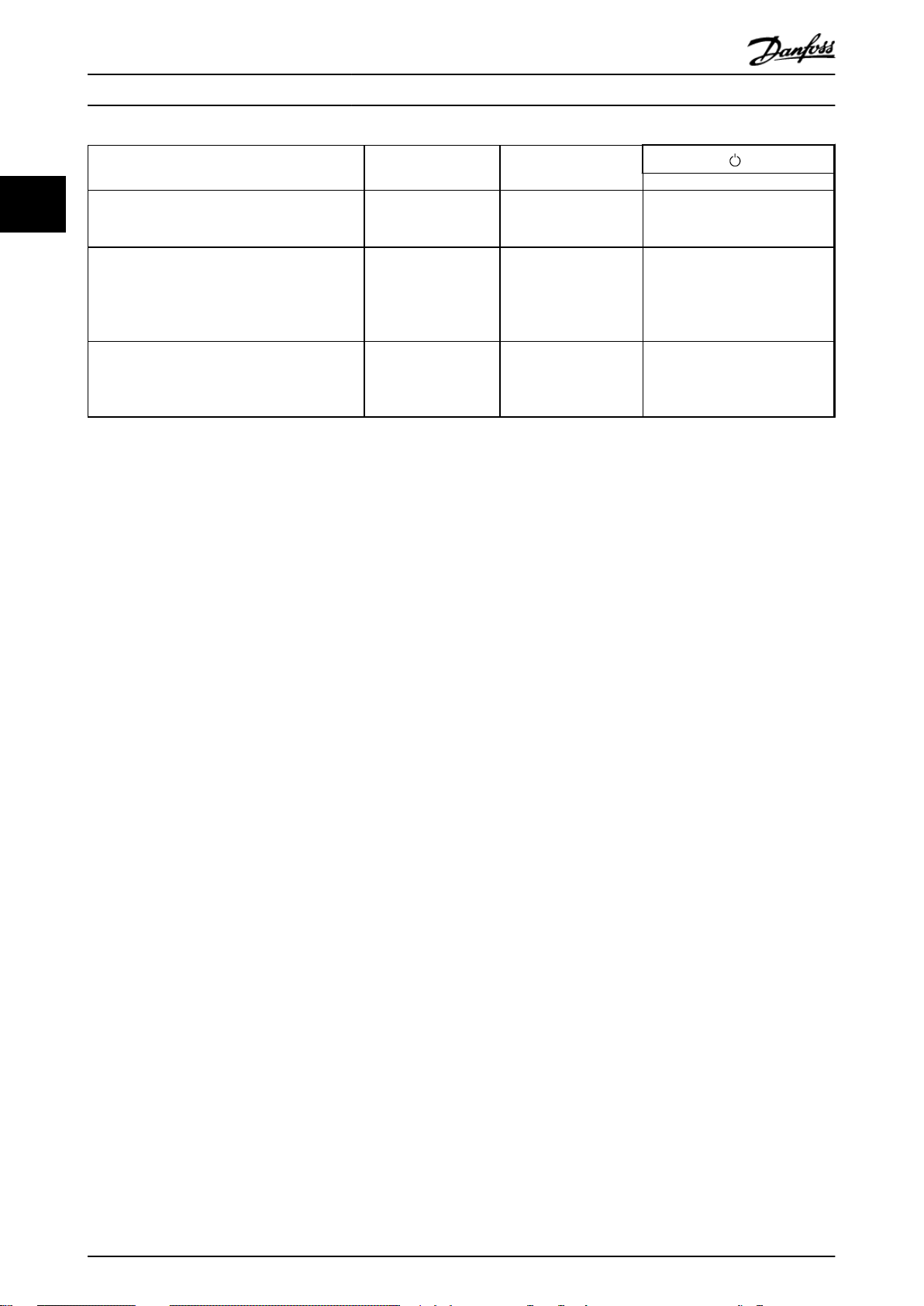
Funktioner/indstillinger Tast I (Start) Tast II (Start)
22
Standard - Drift med to hastigheder (tilslut lilla
ledning):
Ingen ændring af fabriksindstillingen.
Funktion 2 - Drift med to tilstande (tilslut lilla
ledning):
Vælg de ønskede driftstilstande i opsætning 1 og
2 (brug parameter 4-6) Parameter 335 =18 (vælg
opsætning)
Funktion 3 - Drift med to omdrejningsretninger
(tilslut grå ledning):
Parameter 335 = 10 (start reversering) Parameter
200 = 1 (begge retninger)
Tabel 2.25
*Hvis nulstilling ikke er påkrævet, skal den brune ledning ikke tilsluttes
**eller indstil parameter 213
VLT® DriveMotor FCM Series
Tast (Stop)
Kør ved indstillet
reference (+/-)
Kør med Opsætning 1 Kør med Opsætning 2 Stop (og nulstil*- hvis trip)
Kør fremad Kør baglæns Stop (og nulstil*- hvis trip)
Kør ved 10 Hz** joghastighed
Stop (og nulstil*- hvis trip)
Brug tasterne [+]/[-] til at indstille reference
Ved opstart af apparatet er denne altid i stoptilstand. Den indstillede reference lagres under nedlukning. Hvis indstillingen til
permanent start ønskes anvendt, skal klemme 6 tilsluttes klemme 4, og den lilla/grå ledning skal ikke tilsluttes klemme 4.
Det medfører, at stopfunktionen på LOP er deaktiveret.
BEMÆRK!
Efter montering skal overskydende ledning skæres af eller isoleres.
28 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 31
Programmering
3 Programmering
VLT® DriveMotor FCM Series
3.1 Parametre
3.1.1 Betjeningspanel (175NO131)
FC-motoren har som tilbehør et LCP-betjeningspanel - LCP
2, som udgør en komplet grænseflade for betjening og
overvågning af FC-motoren.
IP 65 fortil.
3.1.2 Installation af LCP
LCP 2 forbindes med klemme X100, 1-4 (se separat
instruktion MI03AXYY).
1.
Stiksæt til service (175N2546) (se 2.3.1 Stiksæt til
service (175N2546)) og kabel 175N0162
2.
Stiksæt (175N2545) (se 2.3.2 Stiksæt (175N2545))
og kabel 175N0162
3.
Frembygningssæt (175N0160) (se 2.3.4 Frembyg-
ningssæt forts.)
LCP-funktioner
3.1.3
3 3
Betjeningspanelets funktioner kan opdeles i tre grupper:
display
•
taster til ændring af programparametre
•
taster til lokalbetjening
•
Al visning af data sker via et 4-linjers alfanumerisk display,
som under normal drift kontinuerligt vil kunne vise 4 driftsvariabler og 3 driftstilstande. Under programmering vises
alle de oplysninger, som er nødvendige for en hurtig og
effektiv parameteropsætning af FC-motoren. Som
supplement til displayet er der tre LED'er for spænding,
advarsel og alarm. Alle FC-motorens programparametre
kan ændres umiddelbart via betjeningspanelet, med
mindre denne funktion er blokeret via parameter 018.
Illustration 3.1
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 29
Page 32

12345678
SETUP
1
12345678901234567890
12345678901234567890
12345678901234567890
175ZA443.10
1. linie
2. linie
3. linie
4. linie
Programmering
VLT® DriveMotor FCM Series
3.1.4 Display
Displayet er et baggrundsbelyst LCD-display med i alt 4
alfanumeriske linjer og et felt, som viser omdrejningsretning (pil), samt den aktuelle opsætning og den
opsætning, som der evt. programmeres i.
3.1.5
LED'er
Nederst på betjeningspanelet findes en rød alarm-LED og
en gul advarsels-LED samt en grøn spændings-LED.
33
Illustration 3.4
Ved overskridelse af visse grænseværdier aktiveres alarmog/eller advarselslampen samtidig med en status- og
alarmtekst i betjeningspanelet.
Spændings-LED'en er aktiveret, når FC-motoren modtager
spænding; samtidig vil displayets baggrundsbelysning
Illustration 3.2
1. linje viser op til 3 målinger kontinuerligt i normal drifts-
status eller en tekst, som forklarer 2. linje.
2. linje viser kontinuerligt en driftsvariabel med tilhørende
enhed uanset status (på nær i tilfælde af alarm/advarsel).
være tændt.
Betjeningstaster
3.1.6
Betjeningstasterne er opdelt i funktioner. Dette betyder, at
tasterne mellem display og indikator-LED'er benyttes til
parameteropsætning, herunder valg af displayets visning
under normal drift.
3. linje er normalt tom og benyttes i menu mode til
visning af det valgte parameternummer eller parametergruppenummer og -navn.
4. linje benyttes i driftsstatus til visning af en statustekst
eller i dataændringstilstand til visning af den valgte
parameters værdi.
Illustration 3.3
Motorens omdrejningsretning angives ved hjælp af en pil.
Endvidere vises den opsætning, der er valgt som aktivt
setup i parameter 004. Hvis der programmeres en anden
opsætning end aktivt setup, vises nummeret på den
opsætning, der programmeres, til højre. Dette andet
opsætningsnummer vil blinke.
Illustration 3.5
Tasterne til lokal betjening er placeret under LED'erne.
Illustration 3.6
30 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 33

195NA113.10
VAR 2
SETUP
1
STATUS
VAR 1.1 VAR 1.2 VAR 1.3
Programmering
VLT® DriveMotor FCM Series
3.1.7 Betjeningstasternes funktioner
[DISPLAY/STATUS] benyttes til at vælge
visningstilstand eller til at skifte tilbage til
Display mode fra enten tilstanden
kvikmenu eller menu mode.
[QUICK MENU] benyttes ved programmering af de parametre, som hører under
kvikmenutilstand. Det er muligt at skifte
direkte mellem tilstandene kvikmenu og
menu mode.
[MENU] benyttes til programmering af
samtlige parametre. Det er muligt at
skifte direkte mellem menu mode og
kvikmenutilstand.
Tabel 3.1
[CHANGE DATA] benyttes ved ændring af
den parameter, som er valgt enten i
menu mode eller kvikmenutilstand.
[CANCEL] benyttes, hvis en ændring af
den valgte parameter ikke skal udføres.
[OK] benyttes ved bekræftelse af en
ændring af den valgte parameter.
[+]/[-] anvendes til at vælge parameter og
ændre den valgte parameter eller til at
ændre udlæsningen i linje 2.
[<][>] benyttes til at vælge gruppe og til
at flytte markøren ved ændring af
numeriske parametre.
[STOP/RESET] benyttes til stop eller
nulstilling af FC-motoren efter et udfald
(trip). Kan vælges aktivt eller inaktivt via
parameter 014. Hvis stop aktiveres, vil
linje 2 blinke, og [START] skal aktiveres.
Tabel 3.2
BEMÆRK!
Et tryk på [STOP/RESET] forhindrer motoren i at køre,
selvom LCP 2 er koblet fra. Genstart er kun mulig via
tasten [START] på LCP 2.
[JOG] tilsidesætter udgangsfrekvensen til
en forudindstillet frekvens, mens tasten
holdes nede. Kan vælges aktiv eller
inaktiv via parameter 015.
[FWD/REV] skifter motorens omdrejningsretning, hvilket angives af pilen i
displayet, dog kun i Lokal. Kan vælges
aktiv eller inaktiv via parameter 016
(parameter 013 skal være indstillet til [1]
eller [3], og parameter 200 til [1]).
[START] benyttes til start af FC-motoren
efter stop via [Stop]-tasten. Er altid aktiv,
kan dog ikke tilsidesætte en
stopkommando afgivet via klemrækken.
Tabel 3.3
BEMÆRK!
Hvis tasterne for lokalstyring er valgt som aktive, vil
disse være aktive både når frekvensomformeren er
indstillet til Lokal betjening og Fjernbetjening via
parameter 002, dog undtaget [FWD/REV], der kun er
aktiv i Lokal betjening.
BEMÆRK!
Hvis der ikke er valgt en ekstern stopfunktion, og tasten
[STOP] er valgt som inaktiv via parameter 014, kan FCmotoren startes og kan kun stoppes ved at afbryde
spændingen til motoren.
3.1.8 Displayets visningstilstand
Displayet har flere forskellige visningstilstande, se
3.1.15 Parametergrupper, alt efter om FC-motoren er i
normal drift eller er under programmering.
Display mode
3.1.9
Ved normal drift kan der efter eget valg kontinuerligt
angives op til 4 forskellige driftsvariabler: 1,1 og 1,2 og 1,3
og 2, og i linje 4 den øjeblikkelige driftsstatus eller
opståede alarmer og advarsler.
3 3
Illustration 3.7
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 31
Page 34

50.0 Hz
SETUP
1
FREKVENS
MOTOR KØRER
50.0 Hz
SETUP
1
24,3% 30,2% 13,8A
MOTOR KØRER
50.0 Hz
SETUP
1
MOTOR KØRER
REF% MOMENT% STRØMA
Programmering
VLT® DriveMotor FCM Series
3.1.10 Display mode - valg af
udlæsningstilstand
Der er tre muligheder i forbindelse med valg af
udlæsningstilstand i Display mode, I, II og III. Valg af
udlæsningstilstand bestemmer antallet af de udlæste drifts-
33
variabler.
Udlæsningstilstand:
Linje 1 Beskrivelse for
Tabel 3.4
Tabel 3.5 angiver apparaterne, der er kædet sammen med
variablerne i første og anden linje i displayet (se parameter
009).
Driftsvariabel: Enhed
Reference [%]
Reference [enhed]*
Feedback [enhed]*
Frekvens [Hz]
Frekvens x skalering [-]
Motorstrøm [A]
Moment [%]
Effekt [kW]
Effekt [HK]
Motorspænding [V]
DC-linkspænding [V]
FC-termisk [%]
Kørte timer [Timer]
Indgangsstatus, dig. indgang [Binær kode]
Ekstern reference [%]
Statusord [Hex]
Kølepladetemp. [ºC]
Alarmord [Hex]
Styreord [Hex]
Advarselsord 1 [Hex]
Advarselsord 2 [Hex]
Analog indgang 1 [mA]
Analog indgang 2 [V]
*) Vælg i parameter 416. Enheden vises i visningstilstand, 1 linje
1, ellers vises 'U'.
I: II: III:
driftsvariabel i
linje 2
Dataværdi for
3 driftsvariabler i linje 1
Beskrivelse for
3 driftsvariabler i linje 1
Udlæsningstilstand I:
efter opstart eller initialisering.
Linje 2 angiver dataværdien for en driftsvariabel med
tilhørende enhed, og linje 1 viser en tekst, som forklarer
linje 2, jvf. tabellen. I eksemplet er Frekvens valgt som
variabel via parameter 009. Under normal drift kan en
anden variabel umiddelbart udlæses ved betjening af [+]/
[-]-tasterne.
Udlæsningstilstand II:
Der skiftes mellem Udlæsningstilstand I og II ved at trykke
på [DISPLAY/STATUS]-tasten.
I denne tilstand vises samtidig dataværdier for fire driftsvariabler med tilhørende enhed jvf. skema. I eksemplet er
valgt hhv. Reference, Moment, Strøm og Frekvens som
variabler i første og anden linje.
Udlæsningstilstand III:
Denne udlæsningstilstand kaldes frem, så længe tasten
[DISPLAY/STATUS] holdes inde. Når tasten slippes, skifter
systemet tilbage til Udlæsningstilstand II, med mindre
tasten er holdt inde i mindre end ca. 1 sek.
Denne udlæsningstilstand er standard
Tabel 3.5
Driftsvariabel 1.1, 1.2 og 1.3 i første linje og driftsvariabel 2
i anden linje vælges via parameter 009, 010, 011 og 012.
32 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Her udlæses parameternavne og enheder for driftsvariabler
i første linje - driftsvariabel 2 forbliver uændret.
Page 35

50.0 Hz
QUICK MENU X OF Y
001 SPROG
ENGLISH
SETUP
1
50.0 Hz
FREKVENS
0.. DRIFT&DISPLAY
SETUP
1
Programmering
VLT® DriveMotor FCM Series
3.1.11 Tilstanden Kvikmenu kontra Menu
mode
FC-motorserien kan anvendes til praktisk taget alle
opgaver, hvilket er grunden til, at antallet af parametre er
ganske stort. Desuden tilbyder denne serie et valg mellem
to programming modes - Menu og Kvikmenu.
Kvikmenuen fører brugeren gennem et antal
•
parametre, som kan være tilstrækkelige til at få
motoren til at køre tilnærmelsesvist optimalt, hvis
fabriksindstillingen for øvrige parametre i øvrigt
tilgodeser ønskede styrefunktioner og konfigurering af signalind-/udgange (styreklemmer).
Menu mode giver mulighed for valg og ændring
•
af samtlige parametre efter eget valg. Dog vil
nogle parametre "mangle", afhængig af valget af
konfiguration (parameter 100), f.eks. skjuler åben
sløjfe alle PID-parametrene.
Ud over at have et navn er hver parameter kædet sammen
med et tal, som er det samme uanset programming mode.
I menu mode er parametrene opdelt i grupper, idet det
første ciffer i parameternummeret (fra venstre) angiver
gruppenummeret for den pågældende parameter.
3.1.13
Parametervalget foretages ved hjælp af [+]/[-]-tasterne. Der
er adgang til følgende parametre:
Pos.: Nr.: Parameter: Enhed:
1 001 Sprog
2 200 Omdrejningsretning
3 101 Momentkarakteristik
4 204 Min. reference [Hz]
5 205 Maks. reference [Hz]
6 207 Rampe op-tid [s]
7 208 Rampe ned-tid [s]
8 002 Lokal-/fjernbetjening
9 003 Lokal reference
10 500 Busadresse
3.1.14
Menu mode startes ved at trykke på [Menu]-tasten, hvilket
giver følgende udlæsning på displayet:
Parametervalg
Tabel 3.6 Parametervalg
Menu mode
3 3
Uanset programmeringstilstanden finder der et parameterskift sted, og dette vil være synligt i både Menu mode
og Kvikmenu mode.
3.1.12
Hurtig opsætning startes med et tryk på [Quick Menu]tasten, hvorefter følgende visning kommer frem i displayet:
Nederst i displayet vises parameternummer og -navn samt
status/værdi for første parameter under Hurtig opsætning.
Første gang, der trykkes på [Quick-menu]-tasten, efter at
apparatet er tændt, starter udlæsningen altid i pos. 1 - se
Tabel 3.6.
Hurtig opsætning via kvikmenu
Illustration 3.8
Linje 3 på displayet viser parameterens gruppenummer og
-navn.
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 33
Page 36

50.0 Hz
SETUP
1
FREKVENS
001 SPROG
ENGLISH
50.0 Hz
SETUP
1
FREKVENS
001 SPROG
ENGLISH
Programmering
VLT® DriveMotor FCM Series
3.1.15 Parametergrupper
I menu mode er parametrene gruppeopdelt. Valg af
parametergruppe foretages ved hjælp af [<][>]-tasterne.
Følgende parametergrupper er tilgængelige:
33
Gruppenr. Parametergruppe
0 Betjening og display
1 Last og motor
2 Referencer og grænser
3 Ind- og udgange
4 Specielle funktioner
5 Seriel kommunikation
6 Tekniske funktioner
*Nærmere oplysninger om parametergruppe 800 og 900 til
PROFIBUS findes i FCM Profibus manual MG03EXYY.
Tabel 3.7
Når den ønskede parametergruppe er valgt, kan hver
enkelt parameter vælges ved hjælp af tasterne [+]/[-]:
3.1.16
Uanset om en parameter er kaldt frem under Kvikmenu
eller Menu mode, vil proceduren for ændring af data være
den samme. Ved et tryk på [Change data]-tasten opnås
adgang til ændring af den valgte parameter, hvorefter
understregningen i linje 4 blinker på displayet. Proceduren
for ændring af data afhænger af, om den valgte parameter
repræsenterer en numerisk dataværdi eller en tekstværdi.
3.1.17 Ændring af en tekstværdi
Hvis den valgte parameter er en tekstværdi, kan
tekstværdien ændres ved hjælp af [+]/[-]-tasterne.
Ændring af data
Illustration 3.9
Linje 3 på displayet viser parameternummer og -navn, og
status/værdi for den valgte parameter vises i linje 4.
Illustration 3.10
Den nederste displaylinje vil vise den tekstværdi, som vil
blive indlæst (gemt), når der kvitteres med [OK].
34 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 37

50.0 Hz
SETUP
1
FREKVENS
130 START FREKVENS
09,0 HZ
50.0 Hz
SETUP
1
FREKVENS
130 START FREKVENS
10,0 HZ
Programmering
3.1.18 Uendeligt variabel ændring af
numerisk dataværdi
Hvis den valgte parameter repræsenterer en numerisk
dataværdi, vælges først et ciffer med [<][>]-tasterne.
Illustration 3.11
VLT® DriveMotor FCM Series
3 3
Dernæst ændres det valgte ciffer trinløst med [+]/[-]tasterne:
Illustration 3.12
Det valgte ciffer indikeres ved, at det blinker. Nederste
displaylinje vil vise den dataværdi, som vil blive indlæst
(gemt), når der kvitteres med [OK].
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 35
Page 38

175ZA446.11
VAR 2
SETUP
1
STATUS
VAR 1.1 VAR 1.2 VAR 1.3
50.0 HZ
FREKVENS
0 DRIFT&DISPLAY
50.0 HZ
SETUP
1
QUICK MENU 1 OF 13
001 SPROG
ENGLISH
DISPLAY MODE
MENU MODE
QUICK MENU MODE
SETUP
1
FREKVENS
001 SPROG
ENGLISH
50.0 HZ
SETUP
1
FREKVENS
001 SPROG
ENGLISH
DATA CHANGE MODE
DATA MODE
50.0 HZ
SETUP
1
001 SPROG
ENGLISH
SETUP
1
▲
▲
▲
▲
▲
▲
▲▲
▲
Valg af
parameter
Valg af
gruppe
Valg af
dataværdi
50.0 HZ
QUICK MENU 1 OF 13
Programmering
VLT® DriveMotor FCM Series
3.1.19 Menustruktur
33
Illustration 3.13
36 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 39

Programmering
VLT® DriveMotor FCM Series
3.1.20 Parametergruppe 0-** Drift og
display
001 Sprog
Værdi:
Engelsk (ENGLISH) [0]
Tysk (DEUTSCH) [1]
Fransk (FRANCAIS) [2]
Dansk (DANSK) [3]
Spansk (ESPAÑOL) [4]
Italiensk (ITALIANO) [5]
Udleveringsstand kan afvige fra fabriksindstilling.
Funktion:
Valget i denne parameter definerer det sprog, der skal
bruges på displayet.
Beskrivelse af valg:
Der kan vælges mellem [0] Engelsk, [1] Tysk, [2] Fransk, [3]
Dansk, [4] Spansk og [5] Italiensk.
002
Værdi:
Fjernbetjening (FJERNBET.) [0]
Lokal betjening (LOKAL) [1]
Funktion:
Der kan vælges mellem to metoder til styring af FCmotoren: [0] Fjernbetjent og [1] Lokal betjening.
Beskrivelse af valg:
Hvis der er valgt [0] Fjernbetjent, kan FC-motoren styres via:
1. Styreklemmerne eller den serielle kommunikati-
2. [Start]-tasten. Denne kan dog ikke tilsidesætte
3. Tasterne [Stop], [Jog] og [Reset], forudsat at disse
Hvis der er valgt [1] Lokal betjening, kan FC-motoren styres
via:
1. [Start]-tasten. Denne kan dog ikke tilsidesætte
2. Tasterne [Stop], [Jog] og [Reset], forudsat at disse
3. [FWD/REV]-tasten, forudsat at denne er aktiveret i
4. Via parameter 003 kan den lokale reference styres
Lokal-/fjernbetjening
onsport.
stopkommandoer (også start-deaktiver), der er
indtastet via de digitale indgange eller den
serielle kommunikationsport.
er aktive (se parameter 014, 015 og 017).
stopkommandoer på de digitale klemmer (hvis
der er valgt [2] eller [4] i parameter 013).
er aktive (se parameter 014, 015 og 017).
parameter 016, samt at parameter 013 er
indstillet til [1] eller [3].
ved hjælp af tasterne "Pil op" og "Pil ned".
MAKS
MIN
MAKS
- Ref
- + Ref
Lokal reference
MAKS
MAKS
Aktivt setup
indeholder de fabriksindstillede data.
000,000
000,000
000,000
003
Værdi:
Par 013 indstillet til [1] eller [2]:
0 - f
Par 013 indstillet til [3] eller [4] og par. 203
= [0] indstillet til:
Ref
Par 013 indstillet til [3] eller [4] og par. 203
= [1] indstillet til:
-Ref
Funktion:
I denne parameter kan den ønskede referenceværdi
indstilles manuelt (hastighed eller reference ved den valgte
konfiguration, afhængigt af valget i parameter 013).
Apparatet følger den valgte konfiguration i parameter 100,
hvis der er valgt [3] Procesregulering, lukket sløjfe.
Beskrivelse af valg:
[1] Lokal skal vælges i parameter 002, for at denne
parameter kan benyttes.
Den indstillede værdi gemmes ved spændingsudfald, se
parameter 019.
I denne parameter forlades tilstanden Dataændring ikke
automatisk (efter time out).
Lokal reference kan ikke indstilles via den serielle
kommunikationsport.
004
Værdi:
Fabriksopsætning (FABRIKSOPSÆTNING) [0]
Opsætning 1 (OPSÆTNING 1) [1]
Opsætning 2 (OPSÆTNING 2) [2]
Multi-opsætning (MULTI-OPSÆTNING) [5]
Funktion:
Valget i denne parameter definerer det opsætningsnummer, der skal styre FC-motorens funktioner.
Alle parametre kan programmeres i to individuelle parameteropsætninger, Opsætning 1 og Opsætning 2. Derudover
findes en forprogrammeret opsætning, kaldet Fabriksopsætning, som ikke kan ændres.
Beskrivelse af valg:
[0] Fabriksopsætning
Kan anvendes som datakilde, hvis de øvrige opsætninger
skal bringes tilbage til en kendt tilstand.
Parameter 005 og 006 giver mulighed for kopiering fra en
opsætning til en anden.
[1] Opsætning 1 og [2] 2 er to individuelle opsætninger,
som kan vælges efter behov.
[5] Multi-opsætning anvendes, hvis der ønskes fjernbetjent
skift mellem flere opsætninger. Klemme 2, 3, 4 og 5 samt
den serielle kommunikationsport kan bruges til at skifte
mellem opsætninger.
3 3
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 37
Page 40

Programmering
VLT® DriveMotor FCM Series
005 Programmeringsopsætning
Værdi:
Fabriksopsætning (FABRIKSOPSÆTNING) [0]
Opsætning 1 (OPSÆTNING 1) [1]
33
Opsætning 2 (OPSÆTNING 2) [2]
Aktivt setup (AKTIVT SETUP) [5]
Funktion:
Der sker et valg af den opsætning, hvor programmering
(ændring af data) skal ske under drift. Det er muligt at
programmere de to opsætninger uafhængigt af, hvilken
opsætning, der er valgt som aktivt setup (valgt i parameter
004).
Beskrivelse af valg:
[0] Fabriksopsætning indeholder de fabriksindstillede data
og kan anvendes som datakilde, hvis de øvrige
opsætninger skal bringes tilbage til en kendt tilstand.
[1] Opsætning 1 og [2] Opsætning 2 er individuelle
opsætninger, som kan anvendes efter ønske. Disse kan
programmeres frit, uafhængigt af hvilken opsætning, der er
valgt som aktivt setup og dermed bestemmer FC-motorens
funktioner.
006
Værdi:
Ingen kopiering (INGEN KOPI) [0]
Kopiér til Opsætning 1 fra # (KOPIÉR TIL
OPSÆTNING 1) [1]
Kopiér til Opsætning 2 fra # (KOPIÉR TIL
OPSÆTNING 2) [2]
Kopiér til Opsætning alle fra # (KOPIÉR TIL ALLE) [5]
# = den opsætning, der er valgt i parameter 005
Funktion:
Der kopieres fra den opsætning, der er valgt i parameter
005, til en af de andre opsætninger eller til alle de andre
opsætninger samtidigt.
007
Værdi:
Ingen kopiering (INGEN KOPI) [0]
Upload alle parametre (UPLOAD ALLE PARAM) [1]
Download alle parametre (DOWNLOAD ALLE) [2]
Download effektuafhængige par.
(DOWNLOAD STR.UAFHÆNG.) [3]
Funktion:
Parameter 007 benyttes, hvis betjeningspanelets
indbyggede kopifunktion skal benyttes. Det er derfor let at
kopiere parameterværdi(er) fra en FC-motor til en anden.
Beskrivelse af valg:
Vælg [1] Upload alle parametre, hvis alle parameterværdier
skal overføres til betjeningspanelet. Vælg [2] Download alle
parametre, hvis alle overførte parameterværdier skal
kopieres til den FC-motor, hvorpå betjeningspanelet er
monteret. Vælg [3] Download effektuafhængige par., hvis
Kopiering af opsætninger
LCP-kopi
kun effektuafhængige parametre skal downloades. Dette
benyttes, hvis der downloades til en FC-motor med en
anden nominel effektstørrelse end den, hvorfra parameteropsætningen stammer.
008 Visning af motorfrekvensskalering
Værdi:
0.0-100.00 [1-10000]
1.00 [100]
Funktion:
I denne parameter vælges den faktor, som bliver ganget
(multipliceret) med motorfrekvensen, fM, og vist i displayet,
når parameter 009-012 er indstillet til Frekvens x Skalering
[5].
Beskrivelse af valg:
Indstil den ønskede skaleringsfaktor.
009
Værdi:
Ingen [0]
Reference [%] (REFERENCE [%]) [1]
Reference [enhed] (REFERENCE [ENHED]) [2]
Feedback [enhed] (FEEDBACK [ENHED]) [3]
Frekvens [Hz] (FREKVENS [Hz]) [4]
Frekvens x Skalering [-] (FREKVENS X SKALERING) [5]
Motorstrøm [A] (MOTORSTRØM [A]) [6]
Moment [%] (MOMENT [%]) [7]
Effekt [kW] (EFFEKT [kW]) [8]
Effekt [HK] (EFFEKT [hk] [US]) [9]
Motorspænding [V] (MOTORSPÆNDING [V]) [11]
DC-link-spænding [V] (DC-LINK-SPÆNDING [V]) [12]
Termisk belastning, FC [%] (FC TERMISK [%]) [14]
Kørte timer [Timer] (KØRTE TIMER) [15]
Digital indgang [binær kode] (DIGITAL INDGANG
[BIN]) [16]
Ekstern reference [%} (EKSTERN REF [%]) [21]
Statusord [hex] (STATUSORD [HEX]) [22]
Kølepladetemp. [°C] (KØLEPLADETEMP [°C]) [25]
Alarmord [hex] (ALARMORD [HEX]) [26]
Styreord [hex] (STYREORD [HEX]) [27]
Advarselsord 1 [hex]
(ADVARSELSORD 1 [HEX]) [28]
Advarselsord 2 [hex]
(UDVIDET STATUSORD [HEX]) [29]
Analog indgang 1 [mA] (ANALOG INDGANG 1
[mA]) [30]
Analog indgang 2 [V] (ANALOG INDGANG 2 [V]) [31]
Funktion:
I denne parameter kan den dataværdi vælges, der skal
vises i displayet i linje 2.
I parameter 010-012 kan yderligere tre dataværdier vælges,
der skal vises i linje 1.
Displaylinje 2
38 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 41

Programmering
VLT® DriveMotor FCM Series
Displayudlæsningen sker ved at trykke på knappen
[DISPLAY/STATUS], se 3.1.7 Betjeningstasternes funktioner.
Beskrivelse af valg:
Reference [%] er lig med den totale reference (sum af
digitale/analoge/preset/bus/fastfrys ref./catch up og slow
down).
Reference [enhed] angiver summen af referencerne ved
brug af den enhed, der står angivet på grundlag af
konfigurationen i parameter 100 (Hz, Hz og O/MIN).
Feedback [enhed] angiver statusværdien for klemme 1 og 2
med den enhed/skalering, som er valgt i parameter 414,
415 og 416.
Frekvens [Hz] angiver motorfrekvensen, dvs. udgangsfrekvensen til motoren.
Frekvens x Skalering [-] er lig med den aktuelle
motorfrekvens fM ganget med en faktor (skalering), der er
indstillet i parameter 008.
Motorstrøm [A] angiver motorens fasestrøm målt som en
effektiv værdi.
Moment [%] angiver motorens aktuelle belastning i forhold
til motorens nominelle moment.
Effekt [kW] angiver den faktiske effekt, som motoren
forbruger i kW.
Effekt [HK] angiver den faktiske effekt, som motoren
forbruger i HK.
Motorspænding [V] angiver den spænding, som tilføres
motoren.
DC-link-spænding [V] angiver mellemkredsspændingen i FCmotoren.
Termisk belastning, FC [%] angiver den beregnede/
estimerede termiske belastning af FC-motoren. 100% er
udkoblingsgrænsen.
Kørte timer [Timer] angiver det antal timer, som motoren
har kørt siden sidste nulstilling i parameter 619.
Digital indgang [Binær kode] angiver signalstatus fra de 4
digitale klemmer (2, 3, 4 og 5). Indgang 5 svarer til bitten
længst til venstre. '0' = intet signal, '1' = tilsluttet signal.
Ekstern reference [%] angiver summen af ekstern reference
som en procentdel (summen af analog/puls/bus).
Statusord [hex] angiver det statusord, der er sendt via den
serielle kommunikationsport i hex-kode fra FC-motoren.
Kølepladetemp. [°C] angiver den aktuelle kølepladetemperatur på FC-motoren. Udkoblingsgrænsen er 90 ± 5 °C.
Indkobling sker ved 60 ± 5 °C.
Alarmord [hex] angiver en eller flere alarmer i en hex-kode.
Se 4.2.4 Advarselsord, udvidet statusord og alarmord.
Styreord [hex] angiver styreordet til FC-motoren. Se
3.6 Seriel kommunikation - FCM 300 Design Guide.
Advarselsord 1 [hex] angiver en eller flere advarsler i en
hex-kode. Se 4.2.4 Advarselsord, udvidet statusord og
alarmord for flere oplysninger.
Udvidet statusord [hex] angiver en eller flere statustilstande
i en hex-kode. Se 4.2.4 Advarselsord, udvidet statusord og
alarmord for flere oplysninger.
Analog indgang 1 [mA] angiver signalværdien på klemme 1.
Analog indgang 2 [V]
010 Displaylinje 1.1
Værdi:
Reference [%] [1]
Se parameter 009.
Funktion:
I denne parameter kan den første af tre dataværdier
vælges, som ønskes vist i displayet, linje 1, position 1.
Beskrivelse af valg:
Der kan vælges mellem 24 forskellige dataværdier, se
parameter 009.
011
Værdi:
Motorstrøm [A] [1]
Se parameter 009
Funktion:
I denne parameter kan den anden af tre dataværdier
vælges, som ønskes vist i displayet, linje 1, position 2.
Displayudlæsningen sker ved at trykke på [DISPLAY/
STATUS]-tasten, se 3.1.7 Betjeningstasternes funktioner.
Beskrivelse af valg:
Der kan vælges mellem 24 forskellige dataværdier, se
parameter 009.
012
Værdi:
Effekt [kW] [8]
Se parameter 009
Funktion:
I denne parameter kan den tredje af de tre dataværdier
vælges, som ønskes vist i displayet, linje 1, position 3.
Displayudlæsningen sker ved at trykke på [DISPLAY/
STATUS]-tasten, se 3.1.7 Betjeningstasternes funktioner.
Beskrivelse af valg:
Der kan vælges mellem 24 forskellige dataværdier, se
parameter 009.
013
Værdi:
Lokal ikke aktiv (DEAKTIVER) [0]
LCP-styring og åben sløjfe.
(LCP-STYR/ÅBEN SLØJFE) [1]
LCP digital styring og åben sløjfe.
(LCP+DIG STYR/Å.SLØJF) [2]
LCP-styring/som parameter 100.
(LCP-STYR/SOM P100) [3]
LCP digital styring/som parameter 100.
(LCP+DIG STYR/SOM P100) [4]
Displaylinje 1.2
Displaylinje 1.3
Lokal betjening/konfiguration som
parameter 100
angiver signalværdien på klemme 2.
3 3
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 39
Page 42
Programmering
Funktion:
Her vælges den ønskede funktion, når der er valgt Lokal
betjening i parameter 002. Se også beskrivelsen af
parameter 100.
Beskrivelse af valg:
33
Vælges Lokal ikke aktiv [0], blokeres for en eventuel
indstilling af Lokal reference via parameter 003. Der kan kun
skiftes til Lokal ikke aktiv [0] fra en af de andre indstillingsmuligheder i parameter 013, når FC-motoren er indstillet til
Fjernbetjening [0] i parameter 002.
LCP-styring og åben sløjfe [1] benyttes, når hastigheden skal
kunne indstilles (i Hz) via parameter 003, når FC-motoren
er indstillet til Lokal betjening [1] i parameter 002.
Hvis parameter 100 ikke er indstillet til Hastighedsregu-
lering, åben sløjfe [0], skiftes til Hastighedsregulering, åben
sløjfe [0].
LCP digital styring og åben sløjfe [2] fungerer som LCPstyring og åben sløjfe [1], dog kan motoren styres via de
digitale indgange, når parameter 002 er indstillet til Lokal
betjening [1].
LCP-styring/som parameter 100 [3] vælges, hvis referencen
skal indstilles via parameter 003.
LCP digital styring/som parameter 100 [4] fungerer som LCPstyring/som parameter 100 [3], dog kan motoren styres via
de digitale indgange, når parameter 002 er indstillet til
Lokal betjening [1].
Den aktuelle motorfrekvens og omdrejningsretning skal
opretholdes. Hvis den aktuelle omdrejningsretning ikke
svarer til reverseringssignalet (negativ reference), sættes
motorfrekvensen fM til 0 Hz.
Skift fra LCP digital styring og åben sløjfe til Fjernbetjening:
Den valgte konfiguration (parameter 100) vil være aktiv.
Skift sker uden pludselige ryk.
Skift fra Fjernbetjening til LCP-styring/som parameter 100
eller LCP digital styring/som parameter 100.
Den aktuelle reference bibeholdes. Hvis referencesignalet
er negativt, vil den lokale reference sættes til 0.
Skift fra LCP-styring/som parameter 100 eller LCP-fjernbe-
tjening som parameter 100 til Fjernbetjening.
Referencen vil blive erstattet med det aktive referencesignal for fjernbetjening.
014
Værdi:
Ikke mulig (DEAKTIVER) [0]
Mulig (AKTIVÉR) [1]
Funktion:
I denne parameter kan den lokale stopfunktion
deaktiveres/aktiveres på betjeningspanelet. Tasten kan
benyttes, når parameter 002 er indstillet til [0] Fjernbe-
tjening eller [1] Lokal.
Beskrivelse af valg:
Hvis der vælges [0] Deaktiver i denne parameter, vil [STOP]tasten være inaktiv.
Lokalt stop
VLT® DriveMotor FCM Series
015
Værdi:
Ikke mulig (DEAKTIVER) [0]
Mulig (AKTIVÉR) [1]
Funktion:
I denne parameter kan jog-funktionen aktiveres/deaktiveres
på betjeningspanelet.
Beskrivelse af valg:
Hvis [0] Deaktiver er valgt i denne parameter, vil [JOG]tasten være inaktiv.
016
Værdi:
Ikke mulig (DEAKTIVER) [0]
Mulig (AKTIVÉR) [1]
Funktion:
I denne parameter kan reverseringsfunktionen aktiveres/
deaktiveres på betjeningspanelet. Denne tast kan kun
benyttes, hvis parameter 002 er indstillet til [1] Lokalbe-
tjening og parameter 013 til [1] LCP-styring med åben sløjfe
eller [3] LCP-styring som parameter 100.
Beskrivelse af valg:
Hvis der vælges [0] Deaktiver i denne parameter, vil [FWD/
REV]-tasten være inaktiv.
Se parameter 200.
017
Værdi:
Ikke mulig (DEAKTIVER) [0]
Mulig (AKTIVÉR) [1]
Funktion:
I denne parameter kan nulstillingsfunktionen vælges/
fjernes fra tastaturet. Denne tast kan anvendes, når
parameter 002 er indstillet til [0] Fjernbetjening eller [1]
Lokal betjening.
Beskrivelse af valg:
Hvis [0] Deaktiver er valgt i denne parameter, vil tasten
[RESET] være inaktiv.
018
Værdi:
Ikke låst (IKKE LÅST) [0]
Låst (LÅST) [1]
Funktion:
I denne parameter kan betjeningen "låses", så det ikke er
muligt at foretage dataændringer via LCP 2 (det er dog
fortsat muligt via den serielle kommunikationsport).
Lokal jog
Lokal reversering
Lokal nulstilling af trip
Lås for dataændringer
40 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 43

Programmering
Beskrivelse af valg:
Hvis [1] Låst vælges, vil der ikke kunne foretages dataændringer.
019 Driftstilstand ved opstart, lokal betjening
Værdi:
Auto-genstart, brug gemt ref. (AUTO-GENSTART) [0]
Tvangsstop, brug gemt ref. (LOKAL=STOP) [1]
Tvangsstop, indstil ref. til 0 (LOKAL=STOP, REF=0) [2]
Funktion:
Indstilling af den ønskede driftstilstand, når netspændingen
tilsluttes igen.
Denne funktion kan kun være aktiv i forbindelse med [1]
Lokal betjening i parameter 002.
Beskrivelse af valg:
[0] Auto-genstart, brug gemt ref. vælges, hvis apparatet skal
starte op med den samme lokale reference (indstilles i
parameter 003) og den start-/stoptilstand (der var givet via
[Start/Stop]-tasterne) som lige før frakobling af FCmotoren.
[1] Tvangsstopp, brug gemt ref. vælges, hvis apparatet skal
forblive stoppet ved indkobling af netspænding, indtil
[START]-tasten aktiveres. Efter startkommando køres med
den lokale reference indstillet i parameter 003.
[2] Tvangsstop, indstil ref. til 0 vælges, hvis apparatet skal
forblive stoppet, når netspændingen tilsluttes igen. Lokal
reference (parameter 003) nulstilles.
VLT® DriveMotor FCM Series
101
Værdi:
Konstant moment (KONSTANT MOMENT) [1]
Variabelt moment: lavt (VAR.MOMENT: LAVT) [2]
Var. moment: mellem (VAR.MOMENT: MELLEM) [3]
Variabelt moment: høj (VAR.MOMENT: HØJT) [4]
Funktion:
I denne parameter kan princippet for tilpasning af FCmotorens u/f-karakteristik til belastningens
momentkarakteristik vælges.
Beskrivelse af valg:
Hvis [1] Konstant moment vælges, opnås en belastningsafhængig u/f-karakteristik, hvor udgangsspændingen øges
ved stigende belastning (strøm) for at opretholde en
konstant magnetisering af motoren.
Vælg [2] Variabelt moment, lav, [3] Variabelt moment,
medium eller [4] Variabelt moment, højt såfremt belastningen er kvadratisk (centrifugalpumper, ventilatorer).
Momentkarakteristikker
3 3
Parametergruppe 1-** Belastning og
3.2.1
motor
100 Konfiguration
Værdi:
Hastighed, åben sløjfe-tilstand (HASTIGHED, ÅBEN
SLØJFE) [0]
Proces, lukket sløjfe-tilstand
(PROCES, LUKKET SLØJFE) [1]
Funktion:
Denne parameter benyttes til at vælge den konfiguration,
FC-motoren skal tilpasses til.
Beskrivelse af valg:
[0] Hastighed, åben sløjfe vælges, opnås en normal
Hvis
hastighedsstyring (uden feedbacksignal), men med
automatisk slipkompensering, der sikrer en næsten
konstant hastighed ved varierende belastninger. Kompensationerne er aktive, men kan evt. deaktiveres som ønsket i
parameter 133-136.
Hvis [3] Proces, lukket sløjfe vælges, aktiveres den interne
procesregulator, som muliggør en præcis regulering af en
proces i forhold til et givet processignal. Processignalet kan
indstilles med den aktuelle procesenhed eller som en
procentdel. Der skal tilføres et feedbacksignal fra
processen, og processætpunktet skal indstilles. Ved proces,
lukket sløjfe er begge retninger ikke tilladt i parameter 200.
Illustration 3.14
102
Værdi:
XX.XX kW - afhænger af FC-motoren [XXXX]
Funktion:
Skrivebeskyttet parameter.
103
Værdi:
XX V- afhænger af FC-motoren [XX]
Funktion:
Skrivebeskyttet parameter.
Motoreffekt
Motorspænding
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 41
Page 44

Programmering
VLT® DriveMotor FCM Series
104 Motorfrekvens
Værdi:
XX.X Hz - afhænger af FC-motoren [XXX]
Funktion:
Skrivebeskyttet parameter.
33
105 Motorstrøm
Værdi:
XX.X X A- afhænger af FC-motoren. [XXXX]
Funktion:
Skrivebeskyttet parameter.
106
Værdi:
XX O/MIN - afhænger af FC-motoren [XX]
Funktion:
Skrivebeskyttet parameter.
117
Værdi:
OFF - 100% [OFF -100]
OFF%. [OFF]
Funktion:
Det er muligt at optimere resonansdæmpningen. Indvirkningsgraden justeres i denne parameter
Værdien kan indstilles til mellem 0% (OFF) og 100%.
100% svarer til den apparatafhængige maks. tilladte
proportionalforstærkning. Standardværdi er OFF.
Beskrivelse af funktioner:
Systemets moment estimeres baseret på DC-linket og ledes
tilbage til en proportionalforstærkningsstyring.
Styreenheden deaktiveres ved et niveau for aktiv
motorstrøm, som er afhængigt af apparatet.
Beskrivelse af valg:
Indstil graden af proportionalforstærkning for momentfeedback mellem 0% (OFF) og 100%.
118
Værdi:
0-200% [0-200]
Motorafhængig
Funktion:
Højfrekvent resonans kan fjernes ved at indstille parameter
117 og 118.
Beskrivelse af valg:
Justér procentdelen af belastningen, hvorfra resonansdæmpningsfunktionen ikke længere skal være aktiv.
126
Værdi:
0,0-60,0 sek. [0-600]
10,0 sek. [100]
DC-bremsning, se P132
Nominel motorhastighed
Resonansdæmpning
Udkobling af resonansdæmpning
DC-bremsetid
Funktion:
Denne parameter anvendes til at indstille den DCbremsetid, hvor DC-bremsestrømmen (parameter 132) skal
være aktiv.
0,0 sek. = OFF
Beskrivelse af valg:
Indstil den ønskede tid.
127 DC-bremseindkoblingsfrekvens
Værdi:
0,0-f
0,0 Hz = OFF [0]
DC-bremsning, se P132
Funktion:
Denne parameter anvendes til at indstille DC-bremsens
indkoblingsfrekvens, hvorved DC-bremsespændingen
(parameter 132) skal være aktiv i forbindelse med en
stopkommando.
Beskrivelse af valg:
Indstil den ønskede frekvens.
128
Værdi:
Ingen beskyttelse (INGEN BESKYTTELSE) [0]
Funktion:
Kun læsbar parameter
Se afsnittet FCM 300 Termisk beskyttelse.
132
Værdi:
0-100% [0-100]
0% [0]
Funktion:
DC-bremsning:
Hvis statoren i en asynkron motor forsynes med DCspænding, opstår der et bremsemoment.
Bremsemomentet afhænger af den valgte DC-bremsespænding.
Hvis der skal opnås et bremsemoment ved hjælp af DCbremsning, udskiftes rotationsfeltet (AC) i motoren med et
stationært felt (DC).
DC-bremsningen aktiveres, når den er under indkoblingsfrekvensen, og stop samtidig aktiveres. P126, P127 og P132
bruges til at styre DC-bremsningen med.
DC-bremsningen kan også aktiveres direkte ved hjælp af
en digital indgang.
Funktion:
Bremsemomentet afhænger af den valgte DC-bremsespænding. DC-bremsespændingen angives som en
procentdel af den maksimale bremsespænding.
Beskrivelse af valg:
Indstil den ønskede spænding som en nærmere angivet
procentdel af den maksimale bremsespænding.
(parameter 202)
MAKS
Termisk motorbeskyttelse
DC-bremsespænding
[0 -]
42 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 45

Programmering
133 Startspænding
Værdi:
0,00-100,00 V [0-10000]
Afhænger af motor
Funktion:
Motorspændingen kan indstilles til under feltsvækningspunktet uafhængigt af motorstrømmen Anvend denne
parameter til at kompensere for et for lavt startmoment.
Startspændingen er spændingen ved 0 Hz.
Beskrivelse af valg:
Indstil den ønskede startspænding.
VLT® DriveMotor FCM Series
3 3
Illustration 3.15
134
Værdi:
0.0-300.0% [0-3000]
100,0% [1000]
Funktion:
I denne parameter indstilles belastningskarakteristikken.
Ved at forøge belastningskompenseringen vil motoren få
en ekstra spændings- og frekvensandel ved en øget
belastning. Dette benyttes f.eks. på motorer/applikationer,
hvor der er stor forskel på motorens fulde belastningsstrøm og tomgangsstrøm.
Beskrivelse af valg:
Hvis fabriksindstillingen ikke er tilstrækkelig, indstilles
belastningskompenseringen således, at motoren kan starte
ved den aktuelle belastning.
Belastningskompensering
FORSIGTIG
Bør indstilles til 0% i tilfælde af hurtige belastningsudsving. For høj belastningskompensering kan medføre
ustabilitet.
135 U/f-forhold
Værdi:
0,00-20,00 V/Hz [0-2000]
Motorafhængig
Funktion:
Udgangsspændingen til motoren kan justeres på et lineært
grundlag fra 0 til nominel frekvens.
136
Værdi:
-500,0-+500,0% [-5000 - +5000]
100,0% [1000]
Funktion:
Den nominelle slipkompensering (fabriksindstillingen)
beregnes på grundlag af motorparametrene. I parameter
136 kan slipkompenseringen justeres i detaljer. Optimering
gør motorhastigheden mindre belastningsafhængig. Denne
funktion er ikke aktiv, når der vælges variabelt moment
(parameter 101)
Beskrivelse af valg:
Indtast en procentværdi af den nominelle slipkompensering.
137
Værdi:
0-100% [0-100]
0 (OFF)% [0]
Funktion:
Denne parameter anvendes til at holde motormagnetiseringen oppe (holdemoment) eller til forvarmning af
motoren. DC-holdespændingen er aktiv ved stoppet motor,
når den er indstillet til en værdi, som er forskellig fra 0.
Friløbsstop deaktiverer denne funktion.
Beskrivelse af valg:
Indtast en procentværdi.
138
Værdi:
0,5-132 Hz (parameter 200) [5-]
3,0 Hz [30]
Funktion:
Her vælges den frekvens, hvorved den eksterne bremse
skal frigøres via udgangsindstillingen i parameter 323 eller
340 under driften.
Beskrivelse af valg:
Indstil den ønskede frekvens.
Slipkompensering
DC-holdespænding
Bremseudkoblingsfrekvens
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 43
Page 46

Programmering
VLT® DriveMotor FCM Series
139
Bremseindkoblingsfrekvens ved aktiveret
stop
Værdi:
0,5-132 Hz (parameter 200) [5-]
3,0 Hz [30]
33
Funktion:
Her vælges den frekvens, hvorved den eksterne bremse
skal aktiveres via udgangsindstillingen i parameter 323
eller 340, når motoren er under nedrampning til stop.
Beskrivelse af valg:
Indstil den ønskede frekvens.
Se Illustration 3.16.
Beskrivelse af valg:
Vælg den ønskede retning set fra motorens frekvensomformerende.
Bemærk, at hvis der er valgt [0] Kun med uret, 0-132 Hz [2]
Kun mod uret, 0-132 Hz, begrænses udgangsfrekvensen til
området f
MIN
- f
MAKS
.
Hvis der vælges [1] Begge retninger, 0-132 Hz, vil udgangsfrekvensen begrænses til området ± f
MAKS
(minimumfrekvensen har ingen betydning).
Derfor!
Det anbefales, at parameter 200 ikke indstilles til forskellige
værdier i de to opsætninger. Hvis det skulle blive
nødvendigt, skal brugeren sikre sig, at ændringer i
opsætningerne kun foretages, når motoren er stoppet.
201
Min. udgangsfrekvens
Værdi:
0,0 HZ - f
(parameter 202)
MAKS
[0 -]
0,0 Hz [0]
Illustration 3.16 Hastighedsprofil for bremsefunktion
Funktion:
I denne parameter kan der vælges en minimummotorfrekvensgrænse, svarende til den mindste frekvens, motoren
147 Opsætning af motortype
Værdi:
Afhænger af apparatet
Funktion:
Her vælges den specifikke motor, hvor reservedelsenheden
skal installeres.
Beskrivelse af valg:
Vælg motoren i overensstemmelse med motormærke, antal
poler og effektstørrelse.
Eksempel: ATB STD-4-075 betyder ATB 4-polet 0,75 kWmotor.
Parametergruppe 2-** Referencer og
3.3.1
grænser
skal køre med.
Minimumfrekvensen kan aldrig blive højere end
maksimumfrekvensen, f
MAKS
.
Hvis der er valgt Begge retninger i parameter 200, har
minimumfrekvensen ingen betydning.
Beskrivelse af valg:
Der kan vælges en værdi fra 0,0 Hz til den maks. frekvens,
der er valgt i parameter 202 (f
202
Maks. udgangsfrekvens
MAKS
).
Værdi:
f
(parameter 201) - f
MIN
f
OMRÅDE
(132 Hz, par. 200)
OMRÅDE
Funktion:
I denne parameter kan der vælges en maksimummotorfrekvens, svarende til den højeste frekvens, motoren skal
200 Omdrejningsretning
Værdi:
Kun med uret,
(Kun med uret) [0]
Begge retninger,
0-132 Hz
(132 Hz BEGGE RETNINGER) [1]
Kun mod uret, 0-132 Hz
(132 Hz MOD URET) [2]
Funktion:
Denne parameter garanterer beskyttelse mod uønsket
reversering.
Ved brug af Proces, lukket sløjfe (parameter 100) må
parameter 200
ikke ændres til [1] Begge retninger.
køre med.
Se også parametergruppe 205.
Beskrivelse af valg:
Der kan vælges en værdi fra f
203
Reference/feedbackområde
til 132 Hz.
MIN
Værdi:
Min - Maks (MIN - MAKS) [0]
- Maks. - + Maks (-MAKS-+MAKS) [1]
Funktion:
I denne parameter vælges, om referencesignalet skal være
positivt, eller om det kan være både positivt og negativt.
Vælg [0] Min - Maks, hvis Proces, lukket sløjfe er valgt i
parameter 100.
44 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 47

Programmering
VLT® DriveMotor FCM Series
Beskrivelse af valg:
Vælg det ønskede område.
204 Minimumreference
Værdi:
-100.000,000-Ref
MAKS
(par. 205)
[-100000000 -]
0,000 [0]
Afhænger af parameter 100.
Funktion:
Minimumreferencen angiver den minimumindstilling, som
kan antages af summen af alle referencer.
Minimumreferencen er kun aktiv, hvis der er valgt [0] MinMaks i parameter 203; imidlertid er den altid aktiv under
Proces, lukket sløjfe (parameter 100).
Beskrivelse af valg:
Er kun aktiv, når parameter 203 er indstillet til [0] Min Maks.
Indstil den ønskede værdi.
205
Maksimumreference
Værdi:
Ref
(parameter 204)-100,000,000
MIN
[-100000000]
50,000 Hz [50000]
Funktion:
Maksimumreference er den højeste værdi, som summen af
alle referencer kan antage. Hvis åben sløjfe er valgt for
parameter 100, er den maksimale indstilling 132 Hz.
Hvis der er valgt lukket sløjfe, kan maksimumreferencen
ikke indstilles over maks. feedback (parameter 415).
Beskrivelse af valg:
Indstil den ønskede værdi.
207
Rampe op-tid 1
Værdi:
0,15-3600,00 s [5 -360000]
3,00 s [300]
Funktion:
Rampe op-tiden er accelerationstiden fra 0 Hz til den
nominelle motorfrekvens f
(parameter 104). Dette
M,N
forudsætter, at strømgrænsen ikke er nået (skal indstilles i
parameter 221).
Illustration 3.17
Beskrivelse af valg:
Programmér den ønskede rampe op-tid.
208
Rampe ned-tid 1
Værdi:
0,15-3600,00 s [5 - 360000]
3,00 s [300]
Funktion:
Rampe ned-tiden er decelerationstiden fra den nominelle
motorfrekvens f
(parameter 104) til 0 Hz, forudsat at der
M,N
ikke er nogen overspænding i vekselretteren p.g.a.
regenerativ motordrift, og forudsat at strømgrænsen ikke
er nået (skal indstilles i parameter 221).
Beskrivelse af valg:
Programmér den ønskede rampe ned-tid.
209
Rampe op-tid 2
Værdi:
0,15-3600,00 s [5 -360000]
3,00 s [300]
Funktion:
Rampe op-tiden er accelerationstiden fra 0 Hz til den
nominelle motorfrekvens f
(parameter 104). Dette
M,N
forudsætter, at strømgrænsen ikke er nået (skal indstilles i
parameter 221).
Beskrivelse af valg:
Programmér den ønskede rampe op-tid.
Skift fra rampe 1 til rampe 2 sker ved at aktivere rampe 2
via en digital indgang.
3 3
210
Rampe ned-tid 2
Værdi:
0,15-3600,00 s [5-360000]
3,00 s [300]
Funktion:
Rampe ned-tiden er decelerationstiden fra den nominelle
motorfrekvens f
(parameter 104) til 0 Hz, forudsat at der
M,N
ikke er nogen overspænding i vekselretteren p.g.a.
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 45
Page 48

Programmering
VLT® DriveMotor FCM Series
regenerativ motordrift, og forudsat at strømgrænsen ikke
er nået (skal indstilles i parameter 221).
Beskrivelse af valg:
Programmér den ønskede rampe ned-tid.
Skift fra rampe 1 til rampe 2 ved at aktivere rampe 2 via
33
en digital indgang.
Beskrivelse af valg:
Programmér den ønskede rampe ned-tid.
213 Jog-frekvens
Værdi:
0,0 Hz-parameter 202 [0 -]
10,0 Hz [100]
211 Jog-rampetid
Værdi:
0,15-3600,00 s [5-360000]
3,00 s [300]
Funktion:
Funktion:
Jog-frekvensen f
er den faste udgangsfrekvens, som FC-
JOG
motoren kører med, når jog-funktionen aktiveres.
Beskrivelse af valg:
Indstil den ønskede frekvens.
Jog-rampetiden er accelerations-/decelerationstiden fra 0
Hz til den nominelle motorfrekvens f
(parameter 104),
M,N
forudsat at der ikke er nogen overspænding i vekselretteren p.g.a. regenerativ motordrift, og forudsat at
strømgrænsen ikke er nået (indstilles i parameter 221).
214
Værdi:
Sum (SUM) [0]
Ekstern/preset (EKSTERN/PRESET) [2]
Referencefunktion
Funktion:
Det er muligt at definere, hvordan preset-referencerne skal
føjes til de øvrige referencer. Til dette formål anvendes
Sum. Det er også muligt at vælge, om der ønskes skift
mellem eksterne referencer og preset-referencer med
funktionen Ekstern/preset.
Beskrivelse af valg:
Hvis [0] Sum vælges, tilføjes en af de justerede preset-
referencer (parameter 215-216) som en procentdel af den
højest mulige reference.
Hvis [2] Ekstern/preset vælges, kan der via en af klemmerne
2, 3, 4 eller 5 (parameter 332, 333, 334 eller 335) skiftes
mellem eksterne referencer eller preset-referencer. Preset-
referencer vil være en procentværdi af referenceområdet.
Illustration 3.18
Ekstern reference er summen af de analoge referencer,
puls- og busreferencer.
Jog-rampetiden starter, hvis der gives et jog-signal via de
digitale indgange eller via den serielle kommunikationsport.
Beskrivelse af valg:
Vælg den ønskede rampetid.
215
Preset-reference 1
216 Preset-reference 2
Værdi:
-100,00%-+100,00% [-10000-+10000]
% af referenceområdet/den eksterne reference
212
Værdi:
0,15-3600,00 s [5-360000]
3,00 s [300]
Funktion:
Rampe ned-tiden er decelerationstiden fra den nominelle
motorfrekvens til 0 Hz, forudsat at der ikke opstår
overspænding i vekselretteren p.g.a. regenerativ motordrift,
og forudsat at strømgrænsen ikke er nået (indstilles i
parameter 221).
Hurtigt stop aktiveres ved hjælp af et signal på en af de
digitale indgangsklemmer (2-5), eller via den serielle
kommunikationsport.
46 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Hurtigt stop, rampe ned-tid
0,00% [0]
Funktion:
Der kan programmeres to forskellige preset-referencer i
parameter 215-216.
Preset-referencen angives som en procentdel af værdien
Ref
eller som en procentdel af de øvrige eksterne
MAKS
referencer, afhængigt af valget i parameter 214. Hvis der er
programmeret en Ref
MIN
procentdel beregnes af forskellen mellem Ref
Ref
, og derefter føjes værdien til Ref
MIN
Beskrivelse af valg:
Indstil den eller de ønskede faste referencer, som der skal
kunne vælges mellem.
≠ 0, vil preset-referencen som en
og
MAKS
.
MIN
Page 49

Programmering
VLT® DriveMotor FCM Series
For at kunne benytte de faste referencer er det nødvendigt
at have valgt preset reference til på klemme 2, 3, 4 eller 5
(parametre 332-335).
Der kan vælges mellem de faste referencer ved at aktivere
klemmerne 2, 3, 4 eller 5 - se Tabel 3.8.
Klemme 2/3/4/5
Preset-reference
Preset-reference 1 0
Preset-reference 2 1
Tabel 3.8
3 3
219
Catch up-/slow down-værdi
Værdi:
0.00-100.00% [0-10000]
0,00% [0]
Funktion:
Det er i denne parameter muligt at indtaste en
procentværdi (relativ), som enten vil blive lagt til eller
trukket fra den faktiske reference.
Beskrivelse af valg:
Hvis der er valgt Catch up via en af klemmerne 2, 3, 4 eller
5 (parameter 332-335), vil procentværdien (relativ) valgt i
parameter 219 blive lagt til den totale reference.
Hvis der er valgt slow-down via en af klemmerne 2, 3, 4
eller 5 (parameter 332-335), vil procentværdien (relativ)
valgt i parameter 219 blive trukket fra den totale reference.
221
Strømgrænse for motortilstand
Værdi:
Min. grænse (XX.X) - maks. grænse
(XXX.X)
i% af I
NOMINEL
[XXX - XXXX]
Maks. grænse (XXX.X) [XXXX]
I
= nominel motorstrøm
NOMINEL
Min. grænse = magnetiseringsstrøm i% af I
Maks. grænse = apparatafhængig grænse i % af I
NOMINEL
NOMINEL
Funktion:
Denne funktion er relevant for alle applikationskonfigurationer; hastighed- og procesregulering. Her indstilles
strømgrænsen for motordrift.
Illustration 3.19
Illustration 3.20
Beskrivelse af valg:
Indstil den ønskede procentdel af strømmen.
229
Frekvens-bypass, båndbredde
Værdi:
0 (OFF)-100% [0-100]
0 (OFF)% [0]
Funktion:
Nogle systemer kræver, at visse udgangsfrekvenser undgås
på grund af resonansproblemer i systemet.
I parameter 230-231 kan disse udgangsfrekvenser
programmeres til bypass (Frekvens-bypass). I denne
parameter (229) kan der defineres en båndbredde omkring
hver frekvens-bypass.
Beskrivelse af valg:
Bypass-båndet er bypass-frekvensen +/-halvdelen af den
indstillede båndbredde.
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 47
Page 50

Programmering
Der vælges en procentdel af indstillingen i parameter
230-231.
VLT® DriveMotor FCM Series
3.4.1
Parametergruppe 3-** Indgange og
udgange
230 Frekvens-bypass 1
231 Frekvens-bypass 2
33
Værdi:
0,0-132 Hz (parameter 200) [0 -]
0,0 Hz [0]
Funktion:
Nogle systemer kræver, at visse udgangsfrekvenser undgås
på grund af resonansproblemer i systemet.
Beskrivelse af valg:
Indtast de frekvenser, som skal undgås.
Se også parameter 229.
241
242 Reference-preset 2
243 Reference-preset 3
244 Reference-preset 4
245 Reference-preset 5
246 Reference-preset 6
247 Reference-preset 7
Værdi:
-100,00%-+100,00% [-10000-+10000]
% af referenceområdet/den eksterne reference
0,00% [0]
Funktion:
Der kan programmeres syv forskellige reference-presets i
parameter 241-247 reference-preset. Reference-preset
angives som en procentdel af værdien Ref
procentdel af de øvrige eksterne referencer, afhængigt af
valget i parameter 214. Hvis der er programmeret Ref
0, beregnes reference-preset som en procentdel på
grundlag af forskellen mellem Ref
værdien lægges til Ref
Valget mellem reference-preset kan foretages via de
digitale indgange eller via seriel kommunikation.
Beskrivelse af valg:
Indstil den eller de ønskede faste referencer, som der skal
kunne vælges mellem.
Se P332, P333, P334 og P335, Beskrivelse af valg, hvor der
gives en beskrivelse af opsætningen af den digitale
indgang.
Reference-preset 1
.
MIN
MAKS
MAKS
og Ref
eller som en
MIN
, hvorefter
MIN
≠
317 Timeout
Værdi:
1-99 s [1-99]
10 s [10]
Funktion:
Hvis værdien af det referencesignal, der er forbundet med
indgangen, klemme 1, falder til under 50% af indstillingen i
parameter 336 i en periode, som er længere end den tid,
der er indstillet i parameter 317, aktiveres den funktion,
som er valgt i parameter 318.
Beskrivelse af valg:
Indstil den ønskede tid.
48 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 51

Programmering
VLT® DriveMotor FCM Series
318 Funktion efter timeout
Værdi:
Off (OFF) [0]
Stop og trip (STOP OG TRIP) [5]
Funktion:
Denne parameter giver mulighed for at vælge den
signal, der er forbundet med indgangen, klemme 1, falder
til under 50% af indstillingen i parameter 336 i en periode,
som er længere end den tid, der er indstillet i parameter
317.
Hvis der optræder en timeoutfunktion (parameter 318)
samtidig med en bustimeoutfunktion (parameter 514), vil
timeoutfunktionen (parameter 318) blive aktiveret.
funktion, som skal aktiveres, hvis værdien af det reference-
Indstillinger:
Ingen funktion
Klarsignal (APPARAT KLAR) [1]
Frigivet, ingen adv. (FRIGIVET/INGEN ADVARSEL) [2]
Kører (KØRER) [3]
Kører, ingen advarsel (KØRER, INGEN ADVARSEL) [4]
Kører på reference, ingen advarsel (KØRER PÅ REFERENCE) [5]
Fejl (FEJL) [6]
Fejl eller advarsel (FEJL ELLER ADVARSEL) [7]
Strømgrænse (STRØMGRÆNSE) [8]
Termisk advarsel (TERMISK ADVARSEL) [9]
Reversering (REVERSERE) [10]
Styreord bit 11 (STYREORD BIT 11) [11]
Styreord bit 12 (STYREORD BIT 12) [12]
Mekanisk bremse (MEKANISK BREMSE) [20]
Sleep mode (SLEEP MODE) [21]
(INGEN FUNKTION) [0]
3 3
Tabel 3.9 323 Klemme X102, relæfunktion (RELÆFUNK.)
Relæudgangen kan anvendes til at give preset-status eller
en advarsel.
Relæ
1 - 3 bryde, 1 - 2 slutte
Maks. 250 V AC, 5 Amp.
Tabel 3.10
Beskrivelse af valg:
Apparat klar-signal
, FC-motoren er klar til brug.
Aktivér/ingen advarsel, FC-motoren er klar til brug; der er
ikke afgivet en start- eller stopkommando (start/deaktiver).
Ingen advarsel.
Kørsel, Der er afgivet en startkommando.
Kørsel, ingen advarsel, Der er afgivet en startkommando.
Ingen advarsel.
Kører på reference, ingen advarsel, hastighed iht. reference.
Fejl, udgangen aktiveres af en alarm.
Fejl eller advarsel, udgangen aktiveres af en alarm eller
advarsel.
Strømgrænse, strømgrænsen i parameter 221 er
overskredet.
Termisk advarsel, over temperaturgrænsen i frekvensomformeren.
Reversering. Logisk ’1’ = relæ aktiveret, 24 V DC på
udgangen, når motorens omdrejningsretning er med uret.
Logisk ’0’ = relæ ikke aktiveret, intet signal på udgangen,
når motorens omdrejningsretning er mod uret.
Styreord bit 11, hvis bit 11 = "1" i styreordet (både Fieldbusprofil og FC-profil) er relæet aktiveret.
Styreord bit 12, hvis bit 12 = "1" i styreordet (både Fieldbusprofil og FC-profil) er relæet aktiveret.
Mekanisk bremse gør det muligt at styre en ekstern
mekanisk bremse (ekstraudstyr) (se også parameter 138 og
139).
Sleep mode, aktiv, når apparatet er i sleep mode. Se
3.5.2 Sleep Mode.
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 49
Page 52

Programmering
VLT® DriveMotor FCM Series
327 Pulsreference/Feedback, maks. frekvens
Værdi:
100-70.000 Hz [100-70000]
5.000 HZ [5000]
Funktion:
33
I denne parameter indstilles den signalværdi, som svarer til
den maksimale reference/feedbackværdi, der er indstillet i
parameter 205/415.
Beskrivelse af valg:
Indstil den ønskede pulsfrekvens.
331 Klemme 1, analog indgangsstrøm
Værdi:
Ingen funktion (INGEN FUNKTION) [0]
Reference (REFERENCE) [1]
Skalering af indgangssignalet foretages i parameter 336 og
337.
Beskrivelse af valg:
[0] Ingen funktion. Vælges, hvis FC-motoren ikke skal
reagere på de signaler, der er forbundet med klemmen.
[1] Reference. Vælges for at muliggøre en referenceændring
ved hjælp af et analogt referencesignal.
Hvis andre indgange er tilsluttet, lægges disse sammen,
idet der tages højde for deres fortegn.
[2] Feedback. Vælges, hvis der anvendes lukket sløjferegulering med et analogt signal.
332
Klemme 2, analog/digital indgang
333 Klemme 3, digital indgang
334 Klemme 4, digital indgang
335 Klemme 5, digital indgang
Feedback (FEEDBACK) [2]
Funktion:
Det er i denne parameter muligt at vælge mellem de
forskellige funktionsmuligheder for indgangen klemme 1.
Parameter 332 333 334 335
Digital indgang på klemmenr. 2 3 4 5
Indstillinger
Ingen funktion (INGEN FUNKTION) [0] [0] [0] [0]
Nulstil (NULSTIL) [1]
Friløbsstop, inverteret (INVERTERET FRILØB) [2] [2] [2] [2]
Nulstilling og friløbsstop, inverteret (NULSTIL OG INV. FRILØB) [3] [3] [3] [3]
Hurtigt stop, inverteret (HURTIGT STOP, INVERTERET) [4] [4] [4] [4]
DC-bremse, inverteret (DC-BREMSE, INVERTERET) [5] [5] [5] [5]
Stop inverteret (INVERTERET STOP) [6] [6] [6] [6]
Start (START) [7] [7]
Pulsstart (PULSSTART) [8] [8] [8] [8]
Reversering (REVERSERING) [9] [9] [9] [9]
Start reverseret (START REVERSERING) [10] [10] [10] [10]
Start med uret til (AKTIVÉR FREMAD) [11] [11] [11] [11]
Start mod uret til (AKTIVÉR REVERSERET) [12] [12] [12] [12]
Jog (JOG) [13] [13] [13]
Fastfrys reference (FASTFRYS REFERENCE) [14] [14] [14] [14]
Fastfrys udgang (FASTFRYS UDGANG) [15] [15] [15] [15]
Hastighed op (HASTIGHED OP) [16] [16] [16] [16]
Hastighed ned (HASTIGHED NED) [17] [17] [17] [17]
Valg af opsætning (OPSÆTNINGSVALG) [18] [18] [18] [18]
Catch up (CATCH UP) [19] [19] [19] [19]
Slow-down (SLOW-DOWN) [20] [20] [20] [20]
Preset-reference (PRESET-REF.) [21] [21] [21] [21]
Preset-reference til (PRESET-REF. TIL) [22] [22] [22] [22]
Præcist stop, inverteret (PRÆCIST STOP) [23]
Pulsreference (PULSREFERENCE) [24]
Pulsfeedback (PULSFEEDBACK) [25]
Analog reference (REFERENCE)
Analog feedback (FEEDBACK) [31]
Nulstil og start (NULSTIL OG START) [32] [32] [32] [32]
[30]
[1]
[1] [1]
[7]
[7]
[13]
50 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 53

Programmering
VLT® DriveMotor FCM Series
Parameter 332 333 334 335
Digital indgang på klemmenr. 2 3 4 5
Indstillinger
Fastfrys reference og start (FASTFRYS REF OG START) [33] [33] [33] [33]
Rampe 2 (RAMPE 2) [34] [34] [34] [34]
Start-ref bit 1 (STARTREF BIT 1) [35] [35] [35] [35]
Startref bit 2 (STARTREF BIT 2) [36] [36] [36] [36]
Startref bit 3 (STARTREF BIT 3) [37] [37] [37] [37]
Tabel 3.11
3 3
Funktion:
Under parameter 332-335 er det muligt at vælge mellem
de forskellige mulige funktioner, som vedrører indgangen
på klemme 2-5. Funktionsmulighederne vises i Tabel 3.13.
Beskrivelse af valg:
Ingen funktion vælges, hvis FC-motoren ikke skal reagere
på signaler, der tilføres klemmen.
Nulstil nulstiller FC-motoren efter en alarm; dog kan ikke
alle alarmer nulstilles uden afbrydelse af netforsyningen.
Friløbsstop, inverteret anvendes til at få FC-motoren til at
løbe frit til stop. Logisk '0' medfører friløbsstop.
Nulstilling og friløbsstop, inverteret anvendes til at aktivere
friløbsstop samtidig med nulstilling.
Logisk '0' medfører friløbsstop og nulstilling.
Hurtigt stop, inverteret anvendes til at standse motoren i
overensstemmelse med til hurtigt stop af rampen (indstillet
i parameter 212).
Logisk '0' medfører et hurtigt stop.
DC-bremsning, inverteret anvendes til at standse motoren
ved at påtrykke denne en DC-spænding i en given tid, se
parameter 126-132.
Bemærk, at denne funktion kun er aktiv, hvis indstillingerne i parameter 126-132 er forskellig fra 0. Logisk '0'
medfører DC-bremsning.
Inverteret stop aktiveres ved at afbryde spændingen til
klemmen. Det betyder, at hvis klemmen er spændingsløs,
kan motoren ikke køre. Stop vil ske i henhold til den valgte
rampe (parameter 207/208)
Start vælges, hvis der ønskes en start-/stopkommando.
Logisk '1' = start, logisk '0' = stop (standby).
Pulsstart - hvis der påføres en puls i min. 20 ms, vil
motoren starte, forudsat der ikke er givet en
stopkommando. Motoren stoppes ved en kort aktivering af
inverteret stop.
Reversering anvendes til at ændre motorakslens omdrejningsretning. Logisk "0" vil ikke medføre reversering. Logisk
"1" vil medføre reversering. Reverseringssignalet ændrer
kun omdrejningsretning; det aktiverer ikke startfunktionen.
Bør ikke anvendes sammen med Proces, lukket sløjfe.
Start reversering anvendes til start/stop og til reversering
med samme signal. Der tillades intet startsignal på samme
tid. Fungerer som pulsstart reversering, forudsat at der er
valgt pulsstart for en anden klemme.
Bør ikke anvendes sammen med Proces, lukket sløjfe.
Start med uret, til anvendes, hvis motorakslen kun skal
kunne rotere med uret ved start.
Bør ikke anvendes sammen med Proces, lukket sløjfe.
Start mod uret, til anvendes, hvis motorakslen skal kunne
rotere mod uret ved start.
Bør ikke anvendes sammen med Proces, lukket sløjfe.
Jog anvendes til at tilsidesætte udgangsfrekvensen og i
stedet køre den jog-frekvens, der er indstillet i parameter
213. Rampetiden kan indstilles i parameter 211. Jog er ikke
aktiv, hvis der er givet en stopkommando (start-deaktiver).
Jog tilsidesætter standby.
Fastfrys reference - fastfryser den aktuelle reference. Den
fastfrosne reference er nu udgangspunkt/betingelse for, at
Hastighed op og Hastighed ned kan benyttes.
Hvis Hastighed op/ned anvendes, følger hastighedsændringen altid den normale rampe (parameter 207/208) i
området 0 - Ref
MAKS
.
Fastfrys udgang - fastfryser den aktuelle motorfrekvens (Hz).
Den fastfrosne motorfrekvens er nu udgangspunkt/
betingelse for, at Hastighed op og Hastighed ned kan
benyttes.
Fastfrys udgang tilsidesætter start/standby, slipkompensering og en lukket sløjfe processtyring.
Hvis hastighed op/ned anvendes, følger hastighedsændringen altid den normale rampe (parameter 207/208) i
området 0 - f
M,N
.
Hastighed op og Hastighed ned vælges, hvis der ønskes en
digital styring af hastigheden op/ned (motorpotentiometer). Funktionen er kun aktiv, hvis der er valgt Fastfrys
reference eller Fastfrys udgang.
Så længe der er logisk '1' på klemmen, som er valgt til
hastighed op, vil referencen eller udgangsfrekvensen øges.
Så længe der er logisk '1' på klemmen, som er valgt til
hastighed ned, vil referencen eller udgangsfrekvensen
reduceres.
Pulser (logisk ‘1’ minimum høj i 20 ms og en minimum
pausetid på 20 ms) vil medføre en hastighedsændring på
0,1% (reference) eller 0,1 Hz (udgangsfrekvens).
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 51
Page 54

Programmering
VLT® DriveMotor FCM Series
Ingen hastighedsændring
Hastighed ned 0 1 1
33
Hastighed op 1 0 1
Hastighed ned 1 1 1
Tabel 3.12 Eksempel:
Klemme Fastfrys ref./
2-5 2-5 Fastfrys udgang
0 0 1
Valg af opsætning giver mulighed for at vælge en af de to
opsætninger; dette forudsætter imidlertid, at parameter
004 er indstillet til Multiopsætning.
Catch up/Slow down vælges hvis referenceværdien skal
øges eller reduceres med en programmerbar procentværdi,
der er indstillet i parameter 219.
Uændret hastighed 0 0
Reduceret med %-værdi 1 0
Forøget med %-værdi 0 1
Reduceret med %-værdi 1 1
Slow-down Catch up
Logisk '0' medfører rampe 1, og logisk '1' medfører rampe
2.
Startref. bit 1, 2 og 3 gør det muligt at vælge, hvilken REFNULSTILLING (1-7), der skal bruges. REF-NULSTILLING (1-7)
indstilles i parameter 241 til 247.
Par. nr. Fast hastighed STARTREF BIT
321
- - - Standby 000
241 REF-NULSTILLING 1 001
242 REF-NULSTILLING 2 010
243 REF-NULSTILLING 3 011
244 REF-NULSTILLING 4 100
245 REF-NULSTILLING 5 101
246 REF-NULSTILLING 6 110
247 REF-NULSTILLING 7 111
Tabel 3.14
Hvis mindst en af de tre digitale indgange er aktiveret, får
FCM et startsignal. De syv mulige indgangskombinationer
bestemmer derefter, hvilken forhåndsindstillet hastighed,
der skal bruges.
Tabel 3.13
Hvis der kun bruges en eller to digitale indgange, kan der
vælges henholdsvis en eller tre hastigheder efter
Preset-reference giver mulighed for at vælge en af de to
preset-referencer i henhold til tabellen i parameter 215 og
216. For at dette kan være aktivt, skal der vælges Preset-
reference, til.
Preset-reference anvendes til at skifte mellem ekstern
reference og preset-reference. Det forudsættes, at [2]
Ekstern/preset er valgt i parameter 214. Logisk '0' = ekstern
reference er aktiv; logisk '1' = en af de to preset-referencer
er aktive.
Præcist stop korrigerer rampe ned-tiden for at opnå en høj
gentagelsesnøjagtighed af stoppunktet.
Pulsreference vælges, hvis der anvendes en pulssekvens
(frekvens) på 0 Hz, hvilket svarer til Ref
, parameter 204.
MIN
Frekvensen er indstillet i parameter 327, hvilket svarer til
Ref
.
MAKS
Pulsfeedback vælges, hvis en pulssekvens (frekvens) vælges
som et feedbacksignal. Se også parameter 327.
Analog reference vælges for at muliggøre en ændring i
referencen ved hjælp af et analogt referencesignal.
Hvis andre indgange er tilsluttet, lægges disse sammen,
idet der tages højde for deres fortegn.
Analogt feedback vælges, hvis der anvendes lukket sløjferegulering med et analogt signal.
Reset og start bruges til at aktivere start samtidig med
nulstilling.
Fastfrys reference og start, der initieres både en START- og
ovenstående princip.
Hvis der bruges to opsætninger, kan der vælges op til 14
indstillede hastigheder ved hjælp af fire digitale indgange.
Indstillingerne for P241 og P242 afspejles i P215 og P216.
Eksempel
Digitale indgange 2, 3 og 4: P332 [valg 35 markeret], P333
[valg 36 markeret] og P334 [valg 37 markeret].
Indgangskombinationer til digital indgang 2, 3 og 4: "010".
Dette betyder, at REF-PRESET 2 er den indstillede
hastighed.
Skalering af indgangssignalet foretages i parameter 338 og
339.
336
Klemme 1, min. skalering
Værdi:
0,0-20,0 mA [0-200]
0,0 mA [0]
Funktion:
I denne parameter indstilles den værdi af referencesignalet,
der skal svare til den min. referenceværdi, der er indstillet i
parameter 204.
Hvis timeoutfunktionen i parameter 317 skal anvendes, skal
indstillingen være > 2 mA.
Beskrivelse af valg:
Indstil den ønskede strømværdi.
en FASTFRYS REFERENCE-kommando. Ved brug af
HASTIGHED OP/HASTIGHED NED skal både FASTFRYS
REFERENCE og START være aktiveret. Hvis denne funktion
implementeres, frigives en digital indgang.
Rampe 2 vælges, hvis der ønskes et skift mellem rampe 1
(parameter 207-208) og rampe 2 (parameter 209-210).
52 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 55

Programmering
VLT® DriveMotor FCM Series
337 Klemme 1, maks. skalering
Værdi:
0,0-20,0 mA [0-200]
20,0 mA [200]
Funktion:
I denne parameter indstilles den værdi af referencesignalet,
der skal svare til den maksimumreferenceværdi, der er
indstillet i parameter 205.
Beskrivelse af valg:
Indstil den ønskede strømværdi.
338 Klemme 2, maks. skalering
Værdi:
0,0-10,0 V [0-100]
0,0 V [0]
Funktion:
Denne parameter bruges til at indstille den signalværdi,
der skal svare til minimumreferencen eller minimum
feedback, parameter 204 Minimumreference, Ref
Minimum feedback, FB
Indstillinger:
Ingen funktion
Klarsignal (APPARAT KLAR) [1]
Frigivet, ingen adv. (FRIGIVET/INGEN ADVARSEL) [2]
Kører (KØRER) [3]
Kører, ingen advarsel (KØRER, INGEN ADVARSEL) [4]
Kører på reference, ingen advarsel (KØRER PÅ REFERENCE) [5]
Fejl (FEJL) [6]
Fejl eller advarsel (FEJL ELLER ADVARSEL) [7]
Strømgrænse (STRØMGRÆNSE) [8]
Termisk advarsel (TERMISK ADVARSEL) [9]
Reversering (REVERSERE) [10]
Styreord bit 11 (STYREORD BIT 11) [11]
Aktuel frekvens 0-20 mA (0-FMAKS = 0-20 mA) [12]
Aktuel frekvens 4-20 mA (0-FMAKS = 4-20 mA) [13]
Reference
Reference
Feedback
Feedback
Aktuel strøm 0-20 mA (0-IMAKS = 0-20 mA) [18]
Aktuel strøm 4-20 mA (0-IMAKS = 4-20 mA) [19]
Mekanisk bremse (MEKANISK BREMSE) [20]
Sleep mode (SLEEP MODE) [21]
Moment 0-20 mA (0-TMAKS = 0-20 mA) [22]
Moment 4-20 mA (0-TMAKS = 4-20 mA) [23]
- reference
MIN
- reference
MIN
- feedback
MIN
- feedback
MIN
.
MIN
: 0-20 mA (REF MIN-MAKS =0-20 mA) [14]
MAKS
: 4-20 mA (REF MIN-MAKS =4-20 mA) [15]
MAKS
: 0-20 mA (FB MIN-MAKS =0-20 mA) [16]
MAKS
: 4-20 mA (FB MIN-MAKS =4-20 mA) [17]
MAKS
MIN
/414
Beskrivelse af valg:
Indstil den krævede spændingsværdi. Der skal af hensyn til
nøjagtigheden kompenseres for spændingstab i lange
signalledninger. Hvis timeoutfunktionen skal bruges
(parameter 317 Timeout og 318 Timeoutfunktion), skal den
indstillede værdi være over 1 Volt.
339 Klemme 2, maks. skalering
Værdi:
0,0-10,0 V [0-100]
10,0 V [100]
Funktion:
Denne parameter bruges til at indstille signalværdien, der
skal svare til den maksimumreferenceværdi eller maks.
feedback, parameter 205 Maksimumreference, Ref
Maksimumfeedback, FB
MAKS
.
Beskrivelse af valg:
Indstil den krævede spændingsværdi. Der skal af hensyn til
nøjagtigheden kompenseres for spændingstab i lange
signalledninger.
(INGEN FUNKTION) [0]
MAKS
3 3
/415
Tabel 3.15 340 Klemme 9, Udgangsfunktioner (UDGANGSFUNKT.)
Funktion:
Denne udgang kan fungere både som digital og analog
udgang. Hvis den bruges som en digital udgang
(dataværdi [0]-[23]), sendes der et 24 V DC-signal; hvis den
bruges som en analog udgang, sendes der enten et 0-20
mA eller et 4-20 mA udgangssignal.
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 53
Beskrivelse af valg:
Apparat klar-signal, FC-motoren er klar til brug.
Aktivér/ingen advarsel, FC-motoren er klar til brug; der er
ikke afgivet en start- eller stopkommando (start/deaktiver).
Ingen advarsel.
Kører, der er afgivet en startkommando.
Page 56

Programmering
VLT® DriveMotor FCM Series
Kører, ingen advarsel, der er afgivet en startkommando.
Ingen advarsel.
Kører på reference, ingen advarsel, hastighed iht. reference.
Fejl, udgangen aktiveres af en alarm.
Fejl eller advarsel, udgangen aktiveres af en alarm eller
33
advarsel.
Strømgrænse, strømgrænsen i parameter 221 er
overskredet.
Termisk advarsel, over temperaturgrænsen i frekvensomformeren.
Reversering. Logisk ’1’ = relæ aktiveret, 24 V DC på
udgangen, når motorens omdrejningsretning er med uret.
Logisk ’0’ = relæ ikke aktiveret, intet signal på udgangen,
når motorens omdrejningsretning er mod uret.
Styreord bit 11, hvis bit 11 = '1' i styreordet (både Fieldbusprofil og FC-profil), aktiveres den digitale udgang.
0-f
(parameter 202) ⇒ 0-20 mA og
MAKS
0-f
(parameter 202) ⇒ 4-20 mA
MAKS
Reference
Reference
Feedback
Feedback
0-I
VLT, MAKS
0-I
VLT, MAKS
- Reference
MIN
- Reference
MIN
- Feedback
LAV
- Feedback
LAV
⇒ 0-20 mA og
⇒
4-20 mA
: 0-20 mA og
MAKS
: 4-20 mA
MAKS
: 0-20 mA og
HØJ
: 4-20 mA
HØJ
Mekanisk bremse, giver mulighed for styring af en ekstra
Illustration 3.21
Beskrivelse af valg:
Vælg [4] AC-bremse, hvis der opstår kortvarige genererede
belastninger.
Sleep Mode
3.5.2
mekanisk bremse (se også parameter 138 og 139).
Sleep mode, aktiv, når apparatet er i sleep mode. Se
3.5.2 Sleep Mode
0-T
⇒ 0-20 mA og
MAKS
⇒
0-T
3.5.1
4-20 mA og
MAKS
Parametergruppe 4-** Specielle
funktioner
Sleep mode gør det muligt at standse motoren, når den
kører ved lav hastighed, svarende til ingen belastning. Hvis
forbruget i systemet øges igen, starter frekvensomformeren
motoren og leverer den påkrævede strøm.
BEMÆRK!
Denne funktion er energibesparende, da den sikrer, at
motoren kun er i drift, når der er behov for det.
400 Bremsefunktioner
Værdi:
OFF (OFF) [0]
AC-bremse (AC-BREMSE) [4]
Sleep mode er ikke aktiv, hvis der er valgt Lokal reference
eller Jog.
Funktionen er aktiv både med Åben sløjfe og Lukket sløjfe.
Funktion:
[4] AC-bremse kan vælges for at forbedre bremsning. Med
den nye AC-bremsefunktion er det muligt at styre
tidsrummet med øgede motortab, mens motoren stadig
beskyttes termisk. Funktionen yder et bremsemoment på
mellem 80 og 20% i hastighedsområdet op til basishastigheden (50 Hz). Over basishastigheden forsvinder den
ekstra bremsning gradvist.
I parameter 403 Sleep mode timer aktiveres sleep mode. I
parameter 403 Sleep mode timer indstilles en timer, der
bestemmer, hvor længe udgangsfrekvensen kan være
under den frekvens, der er indstillet i parameter 404 Sleep-
frekvens. Når timeren løber ud, ramper
frekvensomformeren motoren ned til stop via parameter
208 Rampe ned-tid. Hvis udgangsfrekvensen overstiger den
frekvens, der er indstillet i parameter 404 Sleep-frekvens,
nulstilles timeren.
54 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 57

Programmering
VLT® DriveMotor FCM Series
Mens frekvensomformeren har stoppet motoren i sleep
mode, beregnes en teoretisk udgangsfrekvens på grundlag
af referencesignalet. Når den teoretiske udgangsfrekvens
stiger over frekvensen i parameter 407 Wake up-frekvens,
genstarter frekvensomformeren motoren, og udgangsfrekvensen ramper op til referencen.
I systemer med konstant trykregulering er det en fordel at
tilføre systemet ekstra tryk, før frekvensomformeren
stopper motoren. Dette forlænger det tidsrum, hvori
frekvensomformeren holder motoren stoppet, og
forebygger hyppig opstart og standsning af motoren, f.eks.
i forbindelse med systemlækager.
Hvis der kræves 25% ekstra tryk, før frekvensomformeren
stopper motoren, indstilles parameter 406 Boost-sætpunkt
til 125%.
Parameter 406 Boost-sætpunkt er kun aktiv i Lukket sløjfe.
BEMÆRK!
I meget dynamiske pumpeprocesser anbefales det at slå
funktionen Flying start fra (parameter 445).
Illustration 3.22
403 Sleep mode timer
Værdi:
0-300 s (301 s = OFF)
Funktion:
Denne parameter gør det muligt for frekvensomformeren
at stoppe motoren, hvis belastningen på motoren er
minimal. Timeren i parameter 403 Sleep mode timer starter,
når udgangsfrekvensen falder under den frekvens, der er
indstillet i parameter 404 Sleep-frekvens.
Når den indstillede tid i timeren udløber, slukker frekvensomformeren for motoren.
Frekvensomformeren genstarter motoren, når den
teoretiske udgangsfrekvens overstiger frekvensen i
parameter 407 Wake up-frekvens.
Beskrivelse af valg:
Vælg Off, hvis denne funktion ikke ønskes. Indstil grænseværdien, der skal aktivere sleep mode, når
OFF
udgangsfrekvensen er faldet under parameter 404
frekvens.
404 Sleep-frekvens
Værdi:
000,0- par. 407 Wake up-frequency
Funktion:
Når udgangsfrekvensen falder under den indstillede værdi,
starter timeren den tæller, der er indstillet i parameter 403
Sleep mode. Den aktuelle udgangsfrekvens følger den
teoretiske udgangsfrekvens, indtil f
Beskrivelse af valg:
Indstil den ønskede frekvens.
405
Værdi:
Manuel nulstilling (manuel NULSTILLING) [0]
Autonulstilling x 1 (AUTOMATISK X 1) [1]
Autonulstilling x 2 (AUTOMATISK X 2) [2]
Autonulstilling x 3 (AUTOMATISK X 3) [3]
Autonulstilling x 4 (AUTOMATISK X 4) [4]
Autonulstilling x 5 (AUTOMATISK X 5) [5]
Autonulstilling x 6 (AUTOMATISK X 6) [6]
Autonulstilling x 7 (AUTOMATISK X 7) [7]
Autonulstilling x 8 (AUTOMATISK X 8) [8]
Autonulstilling x 9 (AUTOMATISK X 9) [9]
Autonulstilling x 10 (AUTOMATISK X 10) [10]
Reset ved opstart (NULSTIL VED OPSTART) [11]
Funktion:
Med denne parameter er det muligt at vælge den ønskede
nulstillingsfunktion efter trip.
Efter nulstilling er genstart af FC-motoren mulig efter 1,5
sek.
Beskrivelse af valg:
Hvis der vælges [0] Manuel nulstilling, skal nulstilling
foretages via de digitale indgange.
Vælg dataværdi [1]-[10], hvis FC-motoren skal udføre en
automatisk nulstilling (maks. 1-10 gange inden for 10
minutter) efter et trip.
406
Værdi:
1 - 200%
Funktion:
Denne funktion kan kun anvendes, hvis Lukket sløjfe er
valgt i parameter 100.
I systemer med konstant trykregulering er det en fordel at
øge trykket i systemet, før frekvensomformeren standser
motoren. Dette forlænger det tidsrum, hvori frekvensomformeren standser motoren, og hjælper til at undgå hyppig
start og standsning af motoren, f.eks. i tilfælde af
utætheder i vandforsyningssystemet.
Nulstillingsfunktion
Boost-sætpunkt
opnås.
MIN
100% af sætpunktet
Sleep-
0,0 Hz
3 3
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 55
Page 58

Programmering
Brug Boost-timeout, par. 472, til at indstille boost-timeout.
Hvis boost-sætpunktet ikke kan nås inden for det angivne
tidsrum, fortsætter frekvensomformeren i normal drift (og
går ikke i sleep mode).
Beskrivelse af valg:
33
Indstil det krævede boost-sætpunkt som en procentdel af
den resulterende reference under normal drift. 100% svarer
til referencen uden boost (tilskud).
407 Wake up-frekvens
Værdi:
Par 404 Sleep-frekvens - par. 202 f
Funktion:
Når den teoretiske udgangsfrekvens overstiger den
indstillede værdi, genstarter frekvensomformeren motoren.
Beskrivelse af valg:
Indstil den ønskede frekvens.
MAKS
VLT® DriveMotor FCM Series
50 Hz
Illustration 3.23
411
Værdi:
1,5-14,0 kHz [1500-14000]
Apparatafhængig
Funktion:
Indstillingen bestemmer vekselretterens switchfrekvens.
Ved ændring af switchfrekvensen kan eventuelle akustiske
støjgener fra motoren minimeres.
Beskrivelse af valg:
Når motoren kører, justeres switchfrekvensen i parameter
411, indtil den frekvens er opnået, hvor motoren er så
støjsvag som muligt.
Se endvidere parameter 446 - switchmønster. Se
4.1.6 Termisk motorbeskyttelse og derating
412
Værdi:
Ikke mulig (DEAKTIVER) [0]
Variabel switchfrek. (VAR BÆREFREK.) [1]
Temperaturafh. switchfrek. (TEMP.-AFH. FREK.) [2]
Funktion:
Denne funktion gør det muligt at ændre switchfrekvensen
afhængigt af belastningen. Den maksimale switchfrekvens
bestemmes imidlertid af den værdi, der er indstillet i
parameter 411.
Beskrivelse af valg:
Vælg [0] Ikke muligt, hvis der ønskes en fast switchfrekvens.
Switchfrekvensen indstilles i parameter 411.
Hvis der er valgt [1] Variabel switchfrekvens, vil switchfrekvensen falde ved stigende udgangsfrekvens. Dette
anvendes i applikationer med kvadratisk momentkarakteristik (centrifugalpumper og ventilatorer), hvor
belastningen falder afhængigt af udgangsfrekvensen.
Hvis [2] Temperaturafhængig switchfrekvens vælges, vil
switchfrekvensen falde ved stigende vekselrettertemperatur, se Illustration 3.23.
Switchfrekvens
Variabel switchfrekvens
413
Værdi:
Off (OFF) [0]
On (ON) [1]
Funktion:
Denne parameter tillader overmoduleringsfunktion for
udgangsspændingen.
Beskrivelse af valg:
[0] Off betyder, at der ikke er overmodulering af udgangsspændingen, og derved undgås momentrippel på
motorakslen. Dette kan være nyttigt på f.eks. slibemaskiner.
[1] On betyder, at der kan opnås en udgangsspænding,
som er større end netspændingen (op til 5%).
414
Værdi:
-100.000.000 - FB
0,000 [0]
Funktion:
Parameter 414 og 415 anvendes til at skalere feedbackområdet efter de fysiske værdier, som anvendes af
brugeren. Indstillingen vil også blive grænserne for
referencen (parameter 204 og 205).
Anvendes sammen med Proces, lukket sløjfe (parameter
100).
Beskrivelse af valg:
Er kun aktiv, når parameter 203 er indstillet til [0] MinMaks.
415
Værdi:
(par. 414) FB
1.500.000 [1500000]
Overmoduleringsfunktion
Minimum feedback
(par. 415)
HØJ
Maks. feedback
- 100.000.000
LAV
[-100000000 -]
[- 100000000]
56 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 59

Programmering
VLT® DriveMotor FCM Series
Funktion:
Se beskrivelse af parameter 414.
416 Reference-/feedbackenhed
Værdi:
INGEN ENHED [0]
% [1]
PPM [2]
O/MIN [3]
bar [4]
CYKLUS/min [5]
PULS/s [6]
ENHED/s [7]
ENHED/min [8]
ENHED/t [9]
°C [10]
Pa [11]
l/s [12]
m3/s [13]
l/min [14]
m3/min [15]
l/t [16]
m3/t [17]
kg/s [18]
kg/min [19]
kg/tim [20]
t/min [21]
t/t [22]
m [23]
Nm [24]
m/s [25]
m/min [26]
°F [27]
i wg [28]
gal/s [29]
fod3/s [30]
gal/min [31]
fod3/min [32]
gal/tim [33]
ft3/t [34]
pund/s [35]
pund/min [36]
pund/tim [37]
pund/fod [38]
fod/s [39]
fod/min [40]
Funktion:
Vælg mellem forskellige enheder, som ønskes vist i
displayet.
Enheden benyttes også direkte ved
sløjfe som enhed for Minimum-/maksimumreference
(parameter 204/205) og Min./Maks. feedback (parameter
414/415).
Muligheden for valg af enhed i parameter 416 vil afhænge
af de valg, der er foretaget i følgende parametre:
Par. 002 Lokal-/fjernbetjening.
Par. 013 Lokal betjening/konfig. som par. 100.
Par. 100 Konfiguration.
Vælg parameter 002 som Fjernbetjening
Hvis parameter 100 er valgt til Hastighedsregulering, åben
sløjfe, kan den valgte enhed i parameter 416 anvendes ved
displayvisning (par. 009-12 Feedback [enhed]) af procesparametre.
Bemærk: Referencen kan kun vises i Hz (Hastighedsregu-
lering, åben sløjfe).
Hvis parameter 100 er valgt til Procesregulering, lukket
sløjfe, vil den valgte enhed i parameter 416 anvendes ved
displayvisning af både reference (par. 009-12: Reference
[enhed]) og feedback (par. 009-12: Feedback [enhed]).
Vælg parameter 002 som Lokal betjening
Hvis parameter 013 er valgt til LCP-styring og åben sløjfe
eller LCP digital styring og åben sløjfe, vil referencen vises i
Hz uanset valg i parameter 416. Hvis parameter 013 er
valgt til LCP-styring/som par. 100 eller LCP digital
styring/som par. 100, vil enheden være som beskrevet
ovenfor under parameter 002, Fjernbetjening.
Beskrivelse af valg:
Vælg den ønskede enhed for reference-/feedbacksignalet.
FCM 300 Regulator
3.5.3
Procesregulering
PID-regulatoren opretholder en konstant procestilstand
(tryk, temperatur, gennemstrømning osv.) og justerer
motorhastigheden på baggrund af referencen, sætpunktet
og feedbacksignalet.
En transmitter forsyner PID-regulatoren med et feedbacksignal fra processen som et udtryk for processens faktiske
tilstand. Feedbacksignalet varierer, efterhånden som
procesbelastningen varierer.
Dette betyder, at der opstår en afvigelse mellem
referencen/sætpunktet og den faktiske procestilstand.
Denne afvigelse kompenseres af PID-regulatoren, når
udgangsfrekvensen reguleres op eller ned i forhold til
afvigelsen mellem referencen/sætpunktet og feedbacksignalet.
Den indbyggede PID-regulator i frekvensomformeren er er
optimeret til anvendelse i procesapplikationer. Dette
betyder, at en række specielle funktioner er tilgængelige i
frekvensomformeren.
Tidligere var det nødvendigt at få et system til at håndtere
disse specielle funktioner ved at installere ekstra I/Omoduler og ved programmering af systemet. Med
Procesregulering, lukket
3 3
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 57
Page 60

Programmering
VLT® DriveMotor FCM Series
frekvensomformeren fjernes behovet for at installere ekstra
moduler. De parametre, som er specifikke for procesregulatoren, er parameter 437 til parameter 444.
33
3.5.4 PID-funktioner
Reference-/feedbackenhed
Når Procesregulering, lukket sløjfe er valgt i parameter 100
Konfiguration, defineres enheden i parameter 416
Reference/feedbackenhed:
Feedback
Der skal være indstillet et feedbackområde for regulatoren.
Dette feedbackområde begrænser samtidig det mulige
referenceområde, således at hvis summen af alle referencer
ligger uden for feedbackområdet, vil referencen blive
begrænset til feedbackområdet.
Feedbacksignalet skal forbindes til en klemme på frekvensomformeren. Hvis der er valgt feedback på to klemmer
samtidig, kombineres de to signaler.
Brug nedenstående oversigt til at afgøre, hvilken klemme
der skal benyttes, og hvilke parametre der skal
programmeres.
Feedbacktype Klemme Parametre
Puls 3 333, 327
Spænding 2 332, 338, 339
Strøm 1 331, 336, 337
Tabel 3.16
Der kan foretages korrektion for spændingstab i lange
signalkabler, når der anvendes en transmitter med en
spændingsudgang. Dette gøres i parametrene 338/339
Min./Maks. skalering.
Parametrene 414/415 Minimum/Maks.feedback skal også
været indstillet til en værdi i procesenheden, der svarer til
den minimale og maksimale skaleringsværdi for signaler,
der er sluttet til klemmen.
langt væk fra den optimale reference. Referenceområdet
kan ikke overskride feedbackområdet.
Hvis preset-referencer ønskes, angives de i parametrene
215 til 216 Preset-reference. Se beskrivelsen Reference-
funktion og Håndtering af referencer i parameter 214.
Hvis der benyttes et strømsignal som feedbacksignal, vil
der kun kunne benyttes spænding som en analog
reference. Brug nedenstående oversigt til at afgøre, hvilken
klemme der skal benyttes, og hvilke parametre der skal
programmeres.
Referencetype Klemme Parametre
Puls 3 333, 327
Spænding 2 332, 338, 339
Strøm 1 331, 336, 337
Preset
referencer
Busreference 68+69
Tabel 3.17
215-216
(241-247)
BEMÆRK!
Busreference kun kan indstilles via seriel kommunikation.
BEMÆRK!
Det er bedst at forudindstille klemmer, der ikke
skal bruges, til [0] Ingen funktion.
Grænse for differentiatorforstærkning
Hvis der i en applikation sker meget hurtige variationer i
enten referencesignalet eller feedbacksignalet, vil
afvigelsen mellem referencen/sætpunktet og processens
faktiske tilstand hurtigt ændre sig. Differentiatoren kan
dermed blive for dominerende. Dette skyldes, at den
reagerer på afvigelsen mellem referencen og processens
faktiske tilstand, og jo hurtigere afvigelsen ændrer sig, des
kraftigere bliver differentiatorens frekvensandel. Differentiatorens frekvensandel kan derfor begrænses, således at der
både kan indstilles en fornuftig differentieringstid for
langsomme ændringer og en passende frekvensandel for
hurtige ændringer. Dette gøres i parameter 443, Process
PID-differentiatorforstærkningsgrænse.
Reference
I parameter 205 Maksimumreference, Ref
at forudindstille en maksimumreference, som skalerer
summen af alle referencer, dvs. den resulterende reference.
Minimumreferencen i parameter 204 er et udtryk for den
mindste værdi, den resulterende reference kan antage.
Alle referencer vil blive kombineret, og summen vil være
den reference, der reguleres op imod. Det er muligt at
begrænse referenceområdet til et område, som er mindre
end feedbackområdet. Dette kan være en fordel, hvis det
skal undgås, at en utilsigtet ændring af en ekstern
reference får summen af referencerne til at fjerne sig for
58 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
er det muligt
MAKS
Lavpasfilter
Såfremt der optræder en del støj på feedbacksignalet, kan
denne dæmpes med et indbygget lavpasfilter. Der
indstilles en passende tidskonstant for lavpasfilteret.
Hvis lavpasfilteret forudindstilles til 0,1 s, vil cut-offfrekvensen være 10 RAD/sek., hvilket svarer til (10/2 x π) =
1,6 Hz. Dette medfører, at samtlige strømme/spændinger,
der varierer med mere end 1,6 svingninger pr. sekund, vil
blive dæmpet. Der vil med andre ord kun foregå
regulering på grundlag af et feedbacksignal, der varierer
med en frekvens på mindre end 1,6 Hz. Den passende
tidskonstant vælges i parameter 444 Process PID-lavpasfil-
tertid.
Page 61

Programmering
VLT® DriveMotor FCM Series
Inverteret regulering
Normal regulering vil sige, at motorhastigheden øges, når
referencen/sætpunktet er større end feedbacksignalet. Hvis
det er nødvendigt at køre inverteret regulering, hvorunder
hastigheden reduceres, når referencen/sætpunktet er større
end feedbacksignalet, skal parameter 437 PID normal/
inverteret styring programmeres som Inverteret.
Anti-windup
Procesregulatoren er indstillet med aktiv anti-windupfunktion fra fabrikken. Denne funktion gør, at når enten en
frekvensgrænse, en strømgrænse eller en spændingsgrænse nås, initialiseres integratoren til en frekvens, der
svarer til den aktuelle udgangsfrekvens. Derved undgås, at
der integreres på en afvigelse mellem referencen og
processens faktiske tilstand, som ikke kan dereguleres med
en hastighedsændring. Denne funktion kan fravælges i
parameter 438 Proces-PID-anti windup.
Startbetingelser
I nogle applikationer vil den optimale indstilling af procesregulatoren medføre, at der går relativt lang tid, inden den
ønskede procestilstand nås. I disse applikationer kan det
være en fordel at fastsætte en udgangsfrekvens, som
frekvensomformeren skal køre motoren op til, inden
procesregulatoren aktiveres. Dette gøres ved at
programmere en startfrekvens i parameter 439 Process PID-
startfrekvens.
Håndtering af feedback
3.5.5
Håndteringen af feedback ses i dette flowdiagram.
Flowdiagrammet viser, hvilke parametre der kan påvirke
feedbackhåndteringen, og hvordan. Som feedbacksignal
kan der vælges mellem spændings-, strøm- og pulsfeedbacksignaler.
Anvendes sammen med
(parameter 100).
Beskrivelse af valg:
Vælg [0] Normal, hvis FC-motoren skal mindske udgangsfrekvensen i tilfælde af, at feedbacksignalet stiger. Vælg [1]
Inverteret, hvis FC-motoren skal øge udgangsfrekvensen i
tilfælde af, at feedbacksignalet stiger.
438 Proces-PID-anti windup
Værdi:
Deaktiver (DEAKTIVER) [0]
Aktivér (AKTIVÉR) [1]
Funktion:
Det er muligt at vælge, om procesregulatoren skal
fortsætte med at regulere på en fejl, selv om det ikke er
muligt at forøge/reducere udgangsfrekvensen. Anvendes
sammen med Proces, lukket sløjfe-tilstand (parameter 100).
Beskrivelse af valg:
Fabriksindstillingen er [1] Aktivér, hvilket betyder, at
integrationsleddet justeres i forhold til den aktuelle
udgangsfrekvens, hvis enten strømgrænsen eller maks./
min.-frekvens er nået. Procesregulatoren vil først tilkobles
igen, når fejlen enten er nul eller har ændret fortegn.
Vælg [0] Deaktiver, hvis integratoren fortsat skal integrere
på en fejl, selv om det ikke er muligt at fjerne fejlen ved
en sådan regulering.
439
Værdi:
f
MIN-fMAKS
parameter 201
Funktion:
Ved et startsignal vil FC-motoren reagere som Hastighed,
åben sløjfe efter rampen. Først når den programmerede
startfrekvens nås, skifter den til Proces, lukket sløjfe. Det er
derved muligt at indstille en frekvens svarende til den
hastighed, processen normalt vil køre med, hvorved den
ønskede procestilstand hurtigere vil kunne nås.
Benyttes sammen med Proces, lukket sløjfe (parameter 100).
Beskrivelse af valg:
Indstil den ønskede startfrekvens.
Process PID-startfrekvens
(parameter 201 og 202)
Proces, lukket sløjfe-tilstand
[X.X]
3 3
Illustration 3.24
437 Process PID-normal/inverteret styring
Værdi:
Normal (NORMAL) [0]
Inverteret (INVERTERET) [1]
Funktion:
Det er muligt at vælge, om procesregulatoren skal øge/
mindske udgangsfrekvensen, hvis der er forskel mellem
referencesignalet og feedbacksignalet.
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 59
440
Værdi:
0,00 (OFF)-10,00 [0-1000]
0,01 [1]
Funktion:
Proportionalforstærkningen angiver, hvor mange gange
fejlen mellem sætpunktet og feedbacksignalet skal
anvendes.
Benyttes sammen med Proces, lukket sløjfe (parameter 100).
Process PID-proportionalforstærkning
Page 62

Programmering
VLT® DriveMotor FCM Series
Beskrivelse af valg:
Der opnås en hurtig regulering ved en høj forstærkning,
men hvis forstærkningen er for høj, kan processen blive
ustabil.
33
441 Process PID-integrationstid
Værdi:
0,01-9.999 s (OFF) [1-999900]
9.999 s [999900]
Funktion:
Integratoren giver en stigende forstærkning ved en
konstant fejl mellem sætpunktet og feedbacksignalet. Jo
større fejlen er, des hurtigere vil forstærkningen stige.
Integrationstiden er den tid, integratoren skal bruge for at
nå samme forstærkning som proportionalforstærkningen.
Benyttes sammen med Proces, lukket sløjfe (parameter 100).
Beskrivelse af valg:
Der opnås en hurtig regulering ved en kort integrationstid.
Denne kan dog blive for kort, hvorved processen kan blive
ustabil.
Hvis integrationstiden er lang, vil der kunne forekomme
store afvigelser fra det ønskede sætpunkt, da procesregulatoren vil være lang tid om at regulere i forhold til en
given fejl.
442
Værdi:
0,00 (Off)-10,00 s [0-1000]
0,00 s [0]
Funktion:
Differentiatoren reagerer ikke på en konstant fejl. Den
giver kun en forstærkning, når fejlen ændrer sig. Jo
hurtigere fejlen ændrer sig, des kraftigere vil forstærkningen fra differentiatoren være.
Forstærkningen er proportional med den hastighed,
hvormed fejlen ændrer sig.
Benyttes sammen med Proces, lukket sløjfe (parameter 100).
Beskrivelse af valg:
Hurtig regulering opnås med en lang differentieringstid.
Tiden kan dog blive for lang, hvorved processen kan blive
ustabil.
443
Værdi:
5.0-50.0 [50-500]
5,0 [50]
Funktion:
Det er muligt at indstille en grænse for differentiatorforstærkningen.
Differentiatorforstærkningen vil stige ved hurtige
ændringer, hvorfor det kan være gavnligt at begrænse
denne forstærkning. Derved opnås en reel differentiatorforstærkning ved langsomme ændringer og en konstant
differentiatorforstærkning ved hurtige ændringer på fejlen.
Benyttes sammen med Proces, lukket sløjfe (parameter 100).
Process PID-differentieringstid
Process PID-diff.-forstærkningsgrænse
Beskrivelse af valg:
Vælg en ønsket grænse for differentiatorforstærkningen.
444 Process PID-lavpasfiltertid
Værdi:
0,02-10,00 s [2-1000]
0,02 s [2]
Funktion:
Oscilleringer på feedbacksignalet dæmpes af lavpasfilteret
for at mindske deres indvirkning på procesreguleringen.
Dette kan blandt andet være en fordel, hvis der er meget
støj på signalet.
Benyttes sammen med Proces, lukket sløjfe (parameter 100).
Beskrivelse af valg:
Vælg den ønskede tidskonstant (τ). Hvis der er
programmeret en tidskonstant (τ) på 100 ms, er grænsefrekvensen for lavpasfilteret 1/0,1= 10 RAD/sek., hvilket svarer
til (10/2 x π) = 1,6 Hz.
Procesregulatoren regulerer derved kun et feedbacksignal,
der varierer med en frekvens på mindre end 1,6 Hz. Hvis
feedbacksignalet varierer med en højere frekvens end 1,6
Hz, reagerer procesregulatoren ikke.
445
Værdi:
Deaktiver (DEAKTIVER) [0]
OK - samme retning (OK-SAMME RETNING) [1]
OK - begge retninger (OK-BEGGE RETNINGER) [2]
DC-bremse før start
(DC-BREMSE FØR START) [3]
Funktion:
Denne funktion gør det muligt at "fange" en motor, som
roterer frit som følge af et netudfald.
Beskrivelse af valg:
Vælg [0] Deaktiveret, hvis denne funktion ikke er
nødvendig.
[1] OK - samme retning: Valgt, hvis motoren kun kan rotere
i samme retning ved indkobling.
[2] OK - begge retninger: Valgt, hvis motoren kan rotere i
begge retninger ved indkobling.
[3] DC-bremse - før start: Vælges, hvis motoren skal standses
ved brug af DC-bremsen, før motoren rampes op til den
ønskede hastighed. DC-bremsetiden skal indstilles i
parameter 126.
Begrænsninger:
1. For lavt inerti vil medføre acceleration af belast-
2. Hvis belastningen f.eks. drives af "vindmølle-
Flying start
ningen, hvilket kan være farligt eller forhindre en
korrekt flying start. Brug DC-bremse i stedet.
effekten", kan apparatet trippe på grund af
overspænding.
60 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 63

Programmering
3.
Under 250 O/MIN fungerer flying start ikke.
446 Switchmønster
Værdi:
60° AVM (60° AVM) [0]
SFAVM (SFAVM) [1]
Funktion:
Beskrivelse af valg:
Normalt er det ikke nødvendigt for kunden at indstille
denne parameter
VLT® DriveMotor FCM Series
3 3
Illustration 3.25 Feedbackkonvertering
455
Værdi:
Deaktiver [0]
Aktivér [1]
Funktion:
Denne parameter anvendes, hvis advarsel 35 Uden for
frekvensområde skal slukkes i displayet i processtyring,
lukket sløjfe. Denne parameter påvirker ikke det udvidede
statusord.
Beskrivelse af valg:
Vælg [1] Aktiveret for at aktivere udlæsning i displayet, hvis
advarsel 35 Uden for frekvensområde opstår. Vælg [0]
Deaktiveret for at deaktivere udlæsning i displayet, hvis
advarsel 35 Uden for frekvensområde opstår.
461
Værdi:
Lineær (LINEÆR) [0]
Kvadratrod (KVADRATROD) [1]
Funktion:
I denne parameter kan der vælges en funktion, der
konverterer et tilsluttet feedbacksignal fra processen til en
feedbackværdi, der er lig med kvadratroden af det
tilsluttede signal.
Dette bruges for eksempel, når reguleringen af en
gennemstrømning (volumen) er nødvendig på grundlag af
tryk som feedbacksignal (gennemstrømning = konstant x
√tryk). Denne konvertering gør det muligt at indstille
referencen således, at der er en lineær sammenhæng
mellem referencen og den nødvendige gennemstrømning.
Se Illustration 3.25.
Beskrivelse af valg:
Hvis der vælges [0] Lineær, vil feedbacksignalet og feedbackværdien være proportionale.
Hvis der vælges [1] Kvadratrod, oversætter frekvensomformeren feedbacksignalet til kvadratrodsværdien.
Overvågning af frekvensområde
Feedbackkonvertering
3.6.1 Seriel bus
Illustration 3.26 Seriel bus
3.6.2 Telegramkommunikation
Styre- og svartelegrammer
Telegramkommunikationen i et master/slave-system styres
af masteren. Der kan maksimalt tilsluttes 31 slaver (FCmotorer) til en master, med mindre der anvendes en
repeater, se Illustration 3.28 og Illustration 3.30.
Masteren sender kontinuerligt styretelegrammer adresseret
til slaverne og afventer svartelegrammer fra disse. Slavens
svartid er maksimalt 50 ms.
Kun en slave, som har modtaget et fejlfrit telegram
adresseret til den pågældende slave, reagerer ved at sende
telegrammet uændret retur.
Broadcast
En master kan sende det samme telegram samtidig til alle
slaver, der er tilsluttet bussen. Ved en sådan broadcast-
kommunikation har styretelegrammets broadcast-bit i
adressebyten værdien 1 (se VLT-adresse). Adressebit 0-4
bruges ikke.
Indholdet af en byte
Hvert overført tegn begynder med en startbit. Derefter
overføres 8 databit. Hvert tegn sikres via en paritetsbit,
som sættes til "1", når der er en lige paritet (dvs. at der er
et lige antal binære 1-taller i de 8 databit og paritetsbit
tilsammen). Tegnet afsluttes med en stopbit og består
således af i alt 11 bit.
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 61
Page 64

STX LGE ADR D ATA BCC
195NA099.10
Programmering
VLT® DriveMotor FCM Series
2. Danfoss-format:
Illustration 3.27
33
3.6.3 Telegramopbygning
Hvert telegram begynder med en startbyte, (STX) = 02 hex,
efterfulgt af en byte, der angiver telegramlængden (LGE)
samt en byte, der angiver adressen (ADR). Derefter
kommer et antal databyte (variable, afhænger af
telegramtype). Telegrammet slutter med en datakon-
Illustration 3.30 Adresseformat
Bit 7 = 1
Bit 0-6 = VLT-adresse 1-127 (0 = Broadcast)
Datakontrolbyte (BCC)
Datakontrolbyten forklares bedst med et eksempel: Inden
første tegn i telegrammet modtages, er BCC = 0.
trolbyte (BCC).
Illustration 3.28 Telegram
Illustration 3.31
Efter at første tegn er modtaget:
Telegramlængde (LGE)
Telegramlængden er antallet af databyte plus adressebyten
ADR og datakontrolbyten BCC.
BCCNY = BCC
EXOR "første byte"
GAMMEL
(EXOR = exclusive-or gate)
BCC
= 0 0 0 0 0 0 0 0
GAMMEL
EXOR
Telegrammer med 4 databyte har en længde på:
LGE = 4 + 1 + 1 = 6 byte
Telegrammer med 12 databyte har en længde på:
LGE = 12 + 1 + 1 = 14 byte
"første byte" = 0 0 0 0 0 0 1 0 (02H)
BCCNY = 0 0 0 0 0 0 1 0
Hver ekstra efterfølgende byte gates af
BCC
EXOR og giver en ny BCCNY, f.eks.:
GAMMEL
VLT-adresse (ADR)
Der anvendes to forskellige adresseformater:
1. Siemens USS-protokoladresseformat:
Illustration 3.29 Adresseformat
Bit 7 = 0
Bit 6 anvendes ikke
Bit 5 = 1: Broadcast. Adressebittene (0-4) anvendes ikke
Bit 5 = 0: Ingen broadcast
Bit 0-4 = VLT-adresse 1-31
BCC
= 0 0 0 0 0 0 1 0
GAMMEL
EXOR
"anden byte" = 1 1 0 1 0 1 1 0 (D6H)
BCCNY = 1 1 0 1 0 1 0 0
Resultatet efter sidste modtagne tegn er BCC.
Databyte
3.6.4
Blokken af databyte er inddelt i to mindre blokke:
1. Parameterbyte, der bruges til overførsel af
parametre mellem master og slave.
2. Procesbyte, som omfatter
styreord og referenceværdi (fra master
-
til slave)
statusord og aktuel udgangsfrekvens (fra
-
slave til master)
Denne struktur gælder både for styretelegrammet (master
⇒ slave) og svartelegrammet (slave ⇒master).
62 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 65
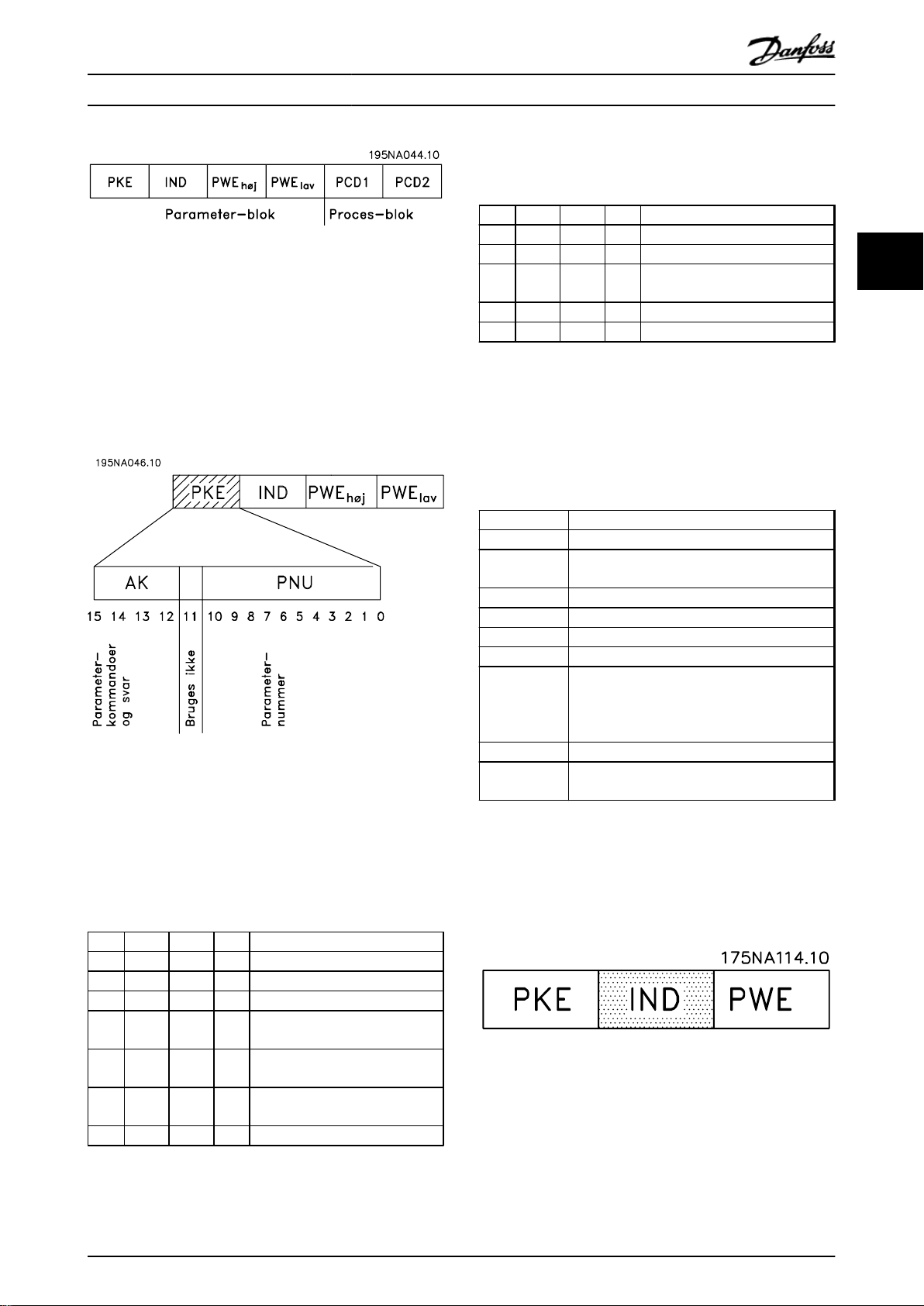
Programmering
Illustration 3.32
VLT® DriveMotor FCM Series
Der findes to telegramtyper:
med 12 byte, opbygget som vist ovenfor med
-
parameter- og procesblok
med fire byte, som er procesblokken fra
-
telegrammet på 12 byte
1. Parameterbyte
Illustration 3.33
Kommandoer og svar (AK)
Bit 12-15 benyttes til overførsel af kommandoer fra master
til slave og slavens behandlede svar tilbage til masteren.
Kommandoer master ⇒slave:
Bitnr.
14 13 12 Kommando
15
0 0 0 0 Ingen kommando
0 0 0 1 Læs parameterværdi
0 0 1 0 Skriv parameterværdi i RAM (ord)
0 0 1 1 Skriv parameterværdi i RAM
(dobbeltord)
1 1 0 1 Skriv parameterværdi i RAM og
EEPROM (dobbeltord)
1 1 1 0 Skriv parameterværdi i RAM og
EEprom (ord)
1 1 1 1 Læs tekst
Svar slave ⇒ master:
Bitnr.
15 14 13 12 Svar
0 0 0 0 Intet svar
0 0 0 1 Parameterværdi overført (ord)
0 0 1 0 Parameterværdi overført
(dobbeltord)
0 1 1 1 Kommando kan ikke udføres
1 1 1 1 Tekst overført
Tabel 3.19
Hvis kommandoen ikke kan udføres, sender slaven dette
svar (0111) og afgiver følgende fejlmeddelelse i parameterværdien:
Fejlkode
(svar 0111) Fejlmeddelelse
0 Det anvendte parameternummer eksisterer ikke
1 Der er ikke skriveadgang til den kaldte
parameter
2 Dataværdien overskrider parameterens grænser
3 Det anvendte underindeks eksisterer ikke
4 Parameteren er ikke af array-typen
5 Datatypen svarer ikke til den kaldte parameter
17 Dataændring i den kaldte parameter er ikke
mulig i FC-motorens aktuelle tilstand. Visse
parametre kan f.eks. kun ændres, når motoren
er stoppet.
130 Der er ikke busadgang til den kaldte parameter
131 Dataændringer er ikke mulige, da fabriksopsæt-
ningen er valgt
Tabel 3.20
Parameternummer (PNU)
Bit nr. 0-10 anvendes til overførsel af parameternumre. En
given parameters funktion kan ses af parameterbeskrivelsen.
Illustration 3.34
3 3
Tabel 3.18
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 63
Page 66

Programmering
VLT® DriveMotor FCM Series
Indeks
Indeks anvendes sammen med parameternummeret til
læse-/skrive-adgang til parametre af typen array (par. 615,
616 og 617).
Eksempel:
Parameter 201: minimumfrekvens, konverteringsfaktor 0,1.
Hvis parameter 201 skal indstilles til 10 Hz, skal værdien
100 overføres, idet en konverteringsfaktor på 0,1 betyder,
at den overførte værdi ganges med 0,1. Værdien 100 vil
Parameterværdi (PWE)
således blive opfattet som 10.
33
Adressering efter apparatets ID
Apparatets ID står trykt på etiketten på plastikafdækningen
under elektronikboksens låg. De tre grupper af apparatID’er hver med tre cifre skal omdannes til hex. Den
ønskede adresse tilføjes som sidste byte. Kapslingen
Illustration 3.35
Parameterværdien afhænger af den givne kommando. Hvis
masteren ønsker en parameter (læse), er den ikke
interesseret i PWE-blokkens værdi. Hvis en parameter
ændres af masteren (skrive), overføres den nye værdi i
PWE-blokken. Hvis slaven svarer på en parameteranmodning (læse-kommando), overføres den nuværende
parameterværdi til PWE-blokken.
Den overførte værdi svarer til de tal, der står angivet i
parameterbeskrivelserne. F.eks. parameter 101, hvor [1]
svarer til Konstant moment, [2] svarer til Variabelt moment:
lav, osv. Parametre med datatype 9 (tekststreng) er
imidlertid forventet, idet denne tekst overføres som en
ASCII-tekststreng. Når en tekststreng overføres (læses), er
telegramlængden variabel, da teksterne har forskellig
længde. Telegramlængden står angivet i telegrammets
anden byte, kaldet LGE, se 3.6.3 Telegramopbygning .
Parameter 621-634 (typeskiltdata) har datatype 9
(tekststreng).
sendes til busadresseparameteren/-parametrene 500 (og
918) via en broadcast.
PKE: Skriv til parameter nr. 500 eller 918
IND: Ikke brugt
2. Procesbyte
Blokken af procesbyte er delt i to blokke på hver 16 bit,
der altid kommer i den angivne rækkefølge.
Illustration 3.36
Styretelegram
(master⇒slave)
Svartelegram
(slave⇒master)
PCD1 PCD2
Styreord Referenceværdi
Statusord Given udgangs-
frekvens
Datatyper, der understøttes af VLT-frekvensomformeren
Datatype Beskrivelse
3 16-bit heltal
4 32-bit heltal
5 8-bit uden fortegn
6 16-bit uden fortegn
7 32-bit uden fortegn
9 Tekststreng
Tabel 3.21
Uden fortegn betyder, at der intet fortegn er med i
telegrammet.
Under afsnittet om fabriksindstillinger ses de forskellige
attributter for hver parameter. Da en parameterværdi kun
kan overføres som heltal, skal der anvendes en konverteringsfaktor for at overføre decimaltal.
Tabel 3.22
64 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 67

Programmering
VLT® DriveMotor FCM Series
3.6.5 Styreord i overensstemmelse med
Fieldbus-profilstandard
(parameter 512 = Fieldbus-profil) Styreordet anvendes til
overførsel af kommandoer fra en master (f.eks. en pc) til en
slave (FC-motor).
Bit Bit = 0 Bit =1
00 OFF 1 ON 1
01 OFF 2 ON 2
02 OFF 3 ON 3
03 Motorfriløb Aktivér
04 Hurtigt stop Rampe
05 Fastfrys udgangsfrekvens Aktivér rampe
06 Rampe stop Start
07 Ingen funktion Nulstil
08 Jog 1 OFF ON
09 Jog 2 OFF ON
10 Data ikke gyldig Gyldig
11 Ingen funktion Slow-down/Relæ 123/
Digital udgangs-
klemme 9
12 Ingen funktion Catch up/Relæ 123
13 Opsætning 1 Opsætning 2
14
15 Ingen funktion Reversering
Bit 02, OFF3/ON3
Hurtigt stop, som anvender rampetiderne i parameter 212.
Bit 02 = "0" medfører et hurtigt stop. Bit 02 = "1" betyder,
at frekvensomformeren kan starte, forudsat at de andre
startbetingelser er opfyldt.
Bit 03, Friløb/aktiveret
Friløb. Bit 03 = "0" fører til en standsning. Bit 03 = "1"
betyder, at frekvensomformeren kan starte, forudsat at de
andre startbetingelser er opfyldt.
BEMÆRK!
I parameter 502 vælges, hvordan bit 03 skal kombineres
(gates) med den tilsvarende funktion på de digitale
indgange.
Bit 04, Hurtigt stop/rampe
Hurtigt stop, som anvender rampetiderne i parameter 212.
Bit 04 = "0" medfører et hurtigt stop. Bit 04 = "1" betyder,
at frekvensomformeren kan starte, forudsat at de andre
startbetingelser er opfyldt.
BEMÆRK!
I parameter 503 vælges, hvordan bit 04 skal kombineres
(gates) med den tilsvarende funktion på de digitale
indgange.
Bit 05, Fastfrys udgangsfrekvens/aktivér rampe
Bit 05 = "0" betyder, at den aktuelle udgangsfrekvens
fastholdes, selv om referencen ændres. Bit 05= "1" betyder,
at frekvensomformeren igen kan regulere, og den aktuelle
reference følges.
3 3
Tabel 3.23
BEMÆRK!
Brug af bit 00, bit 01 og bit 02 til afbrydelse af strømforsyningen (ved hjælp af et relæ) kræver separat tænding.
Dette skyldes, at der ikke er nogen ekstern 24 Vtilslutning, der kan forsyne FCM 300-styringen, hvilket er
påkrævet for at kunne aktivere FCM 300 igen via et
indgangssignal.
Bit 00, OFF1/ON1
Almindeligt rampestop, som anvender rampetiden i
parameter 207/208. Bit 00 = "0" fører til en standsning. Bit
00 = "1" betyder, at frekvensomformeren kan starte,
forudsat at de andre startbetingelser er opfyldt.
Bit 01, OFF2/ON2
Friløbsstop. Bit 01 = "0" fører til et friløbsstop. Bit 01 = "1"
betyder, at frekvensomformeren kan starte, forudsat at de
andre startbetingelser er opfyldt.
Bit 06, Rampestop/-start
Et almindeligt rampestop, som anvender rampetiden i
parameter 207/208. Bit 06 = "0" fører til en standsning. Bit
06 = "1" betyder, at frekvensomformeren kan starte,
forudsat at de andre startbetingelser er opfyldt.
BEMÆRK!
I parameter 505 vælges, hvordan bit 06 skal kombineres
(gates) med den tilsvarende funktion på de digitale
indgange.
Bit
07, Ingen funktion/nulstilling
Nulstilling af trip. Bit 07 = "0" betyder ingen nulstilling. Bit
07 = "1" betyder nulstilling af et trip. Efter nulstilling tager
det ca. 1,5 sekund, før apparatet er klar. Statusordet
angiver, når enheden er klar.
Bit 08, Jog 1 OFF/ON
Aktivering af forprogrammeret hastighed i parameter 509
(Bus JOG 1). JOG 1 er kun mulig, når bit 04 = "0" og bit
00-03 = "1".
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 65
Page 68

Programmering
VLT® DriveMotor FCM Series
Bit 09, Jog 2 OFF/ON
Aktivering af forprogrammeret hastighed i parameter 510
(Bus JOG 2). JOG 2 er kun mulig, når bit 04 = "0" og bit 00
- 03 = "1". Hvis både JOG 1 og JOG 2 er aktiveret (bit 08
Bit 15, Ingen funktion/reversering
Reversering af motorens omdrejningsretning. Bit 15 = "0"
medfører ingen reversering, Bit 15 = "1" medfører
reversering.
og 09 = "1") har JOG 1 højeste prioritet, d.v.s. at
hastigheden, der er programmeret i parameter 509,
33
anvendes.
BEMÆRK!
Hvor intet andet er nævnt, kombineres (gates)
styreordets bit med den tilsvarende funktion på de
Bit 10, Data ikke gyldig/gyldig
digitale indgange som en logisk "eller"-funktion.
Anvendes til at informere FC-motoren, om styreordet skal
anvendes eller ignoreres. Bit 10 = "0" betyder, at styreordet
ignoreres. Bit 10 = "1" betyder, at styreordet anvendes.
Denne funktion er relevant, fordi styreordet altid er
indeholdt i telegrammet, uanset hvilken telegramtype, der
Statusord (i henhold til Fieldbus-profilstandard)
Statusordet anvendes til at informere masteren (f.eks. en
pc) om slavens (FC-motor) tilstand.
anvendes, dvs. at der er mulighed for at koble styreordet
fra, hvis det ikke ønskes anvendt i forbindelse med
opdatering eller læsning af parametre.
Bit 11, Ingen funktion/slow-down, relæ 123, digital
udgangsklemme 9
Anvendes til at nedsætte hastighedsreferencen med
værdien i parameter 219. Bit 11 = "0" betyder ingen
ændring af referencen. Bit 11 = "1" betyder, at referencen
reduceres. Bit 11 = "1" aktiverer også relæ 123 (givet
parameter 323 = "Styreord bit 11") og indstille digital
udgangsklemme 9, høj (forudsat at parameter 340 =
"Styreord bit 11").
Bit 12, Ingen funktion/catch up, relæ 123
Anvendes til at øge hastighedsreferencen med værdien i
parameter 219. Bit 12 = "0" betyder ingen ændring af
referencen; Bit 12 = "1" betyder, at referencen øges. Hvis
både slow-down og catch up er aktiveret (bit 11 og 12 =
"1"), har slow-down højeste prioritet, dvs. at hastighedsreferencen reduceres. Bit 12 = "1" aktiverer også relæ 123
(forudsat at parameter 323 = "Styreord bit 12").
Bit 13, Valg af opsætning
Bit 13 anvendes til at vælge mellem de to menuopsætninger i overensstemmelse med følgende tabel:
Bit Bit = 0 Bit =1
00 Styring ikke klar Klar
01 FC ikke klar Klar
02 Friløb Aktivér
03 Ingen fejl Trip
04 ON 2 OFF 2
05 ON 3 OFF 3
06 Start aktivér Start deaktiver
07 Ingen advarsel Advarsel
08
09 Lokal betjening Seriel kommunikation
10 Uden for frekvensområde Frekvensgrænse OK
11 Kører ikke Kører
12
13 Spænding OK Over grænse
14 Strøm OK Over grænse
15 Termisk advarsel
Hastighed ≠ ref.
Tabel 3.25
Hastighed = ref.
Opsætning Bit 13
1 0
2 1
Tabel 3.24
Bit 00, Styring ikke klar/klar
Bit 00 = "0" betyder, at styreordets bit 00, 01 eller 02 er "0"
(OFF1, OFF2 eller OFF3), eller at frekvensomformeren er
trippet.
Bit 00 = "1" betyder, at frekvensomformerens styring er
klar.
Funktionen er kun mulig, når der er valgt Multiopsætning i
parameter 004.
Bit 01, FC ikke klar/klar
Samme betydning som Bit 00; dog er der også en
BEMÆRK!
forsyning til effektdelen, og frekvensomformeren er klar til
at køre, når den får de nødvendige startsignaler.
I parameter 507 vælges, hvordan bit 13 skal kombineres
(gates) med den tilsvarende funktion på de digitale
indgange.
66 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Bit 02, Friløb/aktiveret
Page 69

Programmering
VLT® DriveMotor FCM Series
Bit 02 = "0" betyder, at styreordets Bit 00, 01, 02 eller 03 er
"0" (OFF1, OFF2, OFF3 eller Friløb), eller FCM 300-apparatet
er trippet.
Bit 02 = "1" betyder, at styreordets bit 00, 01, 02 eller 03 er
"1", og at FC-motoren ikke er trippet.
Bit 03, Ingen fejl/trip
Bit 03 = "0" betyder at FCM 300-serien ikke er i en
fejltilstand.
Bit 03 = "1" betyder, at FCM 300-serien er trippet, og at
den har brug for et nulstillingssignal, før den kan køre.
Bit 04, ON2/OFF2
Bit 04 = "0" betyder, at styreordets bit 01 = "1".
Bit 04 = "1" betyder, at styreordets bit 01 = "0".
Bit 05, ON3/OFF3
Bit 05 = "0" betyder, at styreordets bit 02 = "1".
Bit 05 = "1" betyder, at styreordets bit 02 = "0".
Bit 06, Start aktivér/start deaktiver
Bit 06 er altid "0", hvis der er valgt FC-frekvensomformer i
parameter 512. Hvis der er valgt [Profidrive] i parameter
512, vil bit 06 være "1" efter nulstilling af et trip, efter
aktivering af OFF2 eller OFF3 og efter tilslutning af
netspænding. Start ikke mulig nulstilles, idet styreordets bit
00 sættes til "0", og bit 01, 02 og 10 sættes til "1".
Bit 10 = "0", hvis udgangsfrekvensen har nået værdien i
parameter 201 Udgangsfrekvens, lav grænse eller parameter
202 Udgangsfrekvens, høj grænse.
Bit 10 = "1" betyder, at udgangsfrekvensen ligger inden for
de definerede grænser.
3 3
Bit 07, Ingen advarsel/advarsel
Bit 07 = "0" betyder, at der ikke foreligger en usædvanlig
situation.
Bit 07 = "1" betyder, at der er opstået en unormal tilstand
for FC-motoren. Alle advarsler beskrevet i 4.2 Liste over
advarsler og alarmer - FCM 300 Design Guide vil indstille bit
07 til "1".
Bit 08, Hastighed ≠ ref/hastighed. = ref.
Bit 08 = "0" betyder, at motorens aktuelle hastighed er
forskellig fra den indstillede hastighedsreference. Det kan
f.eks. være tilfældet, mens hastigheden rampes op/ned ved
start/stop.
Bit 08 = "1" betyder, at motorens aktuelle hastighed er lig
med den indstillede hastighedsreference.
Bit 09, Lokal betjening/seriel kommunikationsstyring
Bit 09 = "0" betyder, at [STOP/RESET] aktiveres på
styreenheden, eller at der er valgt Lokal betjening i
parameter 002 Lokal/fjernbetjening. Det er ikke muligt at
styre frekvensomformeren via seriel kommunikation.
Bit 09 = "1" betyder, at det er muligt at styre frekvensomformeren via seriel kommunikation.
Bit 10, Uden for frekvensområde
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 67
Page 70

Programmering
VLT® DriveMotor FCM Series
Bit 11, Kører ikke/kører:
Bit 11 = "0" betyder, at motoren ikke kører.
Bit 11= "1" betyder, at FC-motoren har et startsignal, eller
at udgangsfrekvensen er større end 0 Hz.
Bit 13, Spænding ok/over grænse
33
Bit 13 = "0" betyder, at FC-motorens spændingsgrænser
ikke er overskredet.
Bit 13= "1" betyder, at DC-spændingen i FC-motorens
mellemkreds er for lav eller for høj.
Bit 14, Moment ok/over grænse
Bit 14 = "0" betyder, at motorstrømmen er mindre end
momentgrænsen valgt i parameter 221.
Bit 14 = "1" betyder, at momentgrænsen i parameter 221
er overskredet.
Bit 15, Termisk advarsel
Bit 15 = "0" betyder, at timerne for henholdsvis termisk
motorbeskyttelse og termisk VLT-beskyttelse ikke har
overskredet 100%.
Bit 15 = "1" betyder, at en af timerne har overskredet 100
%.
Styreord under FC-profil (parameter 512 = FC-frekvensomformer)
Styreordet bruges til at sende kommandoer fra en master
(f.eks. en pc) til en slave (FC-motor).
Bit 00
Bit 00 anvendes til at vælge mellem de to forprogrammerede referencer (parameter 215-216) i overensstemmelse
med følgende tabel:
Preset-ref. Parameter Bit 00
1 215 0
2 216 1
Tabel 3.27
BEMÆRK!
I parameter 508 vælges, hvordan bit 1/12 skal
kombineres (gates) med den tilsvarende funktion på de
digitale indgange.
Bit 02, DC-bremse
Bit 02 = "0" medfører DC-bremsning og stop. Bremsestrøm
og varighed indstilles i parameter 132 og 133.
Bit 02 = "1" medfører rampning.
Bit 03, Friløb/aktiveret
Friløb. Bit 03 = "0" fører til en standsning.
Bit 03 = "1" betyder, at frekvensomformeren kan starte,
forudsat at de andre startbetingelser er opfyldt.
BEMÆRK!
I parameter 502 vælges, hvordan bit 03 skal kombineres
(gates) med den tilsvarende funktion på de digitale
indgange.
Bit
00 Preset-reference valg
01 Ingen funktion
02 DC-bremse Rampe
03 Friløb Aktivér
04 Hurtigt stop Rampe
05 Hold Aktivér rampe
06 Rampe stop Start
07 Ingen funktion Nulstil
08 Ingen funktion Jog
09 Ingen funktion
10 Data ikke gyldig Gyldig
11 Ingen funktion Relæ 123/digital
12 Ingen funktion Relæ 123
13 Opsætning 1 Opsætning 2
15 Ingen funktion Reversering
Bit = 0 Bit =1
indgangsklemme 9
Tabel 3.26
Bit 04, Hurtigt stop/rampe
Hurtigt stop, som anvender rampetiderne i parameter 212.
Bit 04 = "0" medfører et hurtigt stop.
Bit 04 = "1" betyder, at frekvensomformeren kan starte,
forudsat at de andre startbetingelser er opfyldt.
BEMÆRK!
I parameter 503 vælges, hvordan bit 04 skal kombineres
(gates) med den tilsvarende funktion på de digitale
indgange.
Bit 05, Hold/rampe aktivér
Bit 05 = "0" betyder, at den aktuelle udgangsfrekvens
fastholdes, selv om referencen ændres.
Bit 05= "1" betyder, at frekvensomformeren igen kan
regulere, og den aktuelle reference følges.
Bit 06, Rampestop/-start
Et almindeligt rampestop, som anvender rampetiden i
parameter 207/208. Bit 06 = "0" fører til en standsning.
Bit 06 = "1" betyder, at frekvensomformeren kan starte,
forudsat de andre startbetingelser er opfyldt.
68 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 71

Programmering
VLT® DriveMotor FCM Series
BEMÆRK!
I parameter 505 vælges, hvordan bit 06 skal kombineres
(gates) med den tilsvarende funktion på de digitale
indgange.
Bit 07, Ingen funktion/nulstilling
Nulstilling af trip. Bit 07 = "0" betyder ingen nulstilling.
Bit 07 = "1" betyder nulstilling af et trip. Efter nulstilling
tager det ca. 1,5 sekund, før apparatet er klar. Statusordet
angiver, når enheden er klar.
Bit 08, Aktivering af jog-hastighed i parameter 213
Bit 08 = "0" Jog hastighed ikke aktiveret.
Bit 08 = "1" betyder, at motoren kører med jog-hastighed.
Bit 10, Data ikke gyldig/gyldig
Anvendes til at informere FC-motoren, om styreordet skal
anvendes eller ignoreres.
Bit 10 = "0" betyder, at styreordet ignoreres.
Bit 10 = "1" betyder, at styreordet anvendes. Denne
funktion er relevant, fordi styreordet altid er indeholdt i
telegrammet, uanset hvilken telegramtype, der anvendes,
dvs. at der er mulighed for at koble styreordet fra, hvis det
ikke ønskes anvendt i forbindelse med opdatering eller
læsning af parametre.
Bit 11, Ingen funktion/relæ 123, digital udgangsklemme 9
Bit 11 = "1" aktiverer relæ 123 (forudsat at parameter 323
= "Styreord bit 11") og indstiller digital udgangsklemme 9,
høj (forudsat at parameter 340 = "Styreord bit 11").
Bit 12, Ingen funktion/relæ 123
Bit 12 = "1" aktiverer relæ 123 (forudsat at parameter 323
= "Styreord bit 12").
Bit 13, Valg af opsætning
Bit 13 anvendes til at vælge mellem de to menuopsætninger i overensstemmelse med følgende tabel:
Opsætning Bit 13
1 0
2 1
Tabel 3.28
Funktionen er kun mulig, når der er valgt Multiopsætning i
parameter 004.
Bit 15 = "0" fører ikke til reversering. Bit 15 = "1" fører til
reversering.
BEMÆRK!
Hvor intet andet er nævnt, kombineres (gates)
styreordets bit med den tilsvarende funktion på de
digitale indgange som en logisk "eller"-funktion.
Statusord under FC-profil
Statusordet anvendes til at informere masteren (f.eks. en pc) om
slavens (FC-motor) tilstand.
Bit Bit = 0 Bit =1
00 Styring ikke klar Klar
01 FC ikke klar Klar
02 Friløb Aktivér
03 Ingen fejl Trip
04 Reserveret
05 Reserveret
06 Reserveret
07 Ingen advarsel Advarsel
08
09 Lokal betjening Busstyring
10 Uden for hastigheds-
11 Kører ikke Kører
12
13 Spænding OK Over grænse
14 Strøm OK Over grænse
15 Timer OK Termisk advarsel
Hastighed ≠ ref.
området
Tabel 3.29
Bit 01, FC ikke klar/klar
Bit 01 = "0" betyder, at frekvensomformeren er trippet.
Bit 01 = "1" betyder, at frekvensomformeren er klar.
Bit 02, Friløb/aktiveret
Bit 02 = "0" betyder at styreordets bit 03 er "0" (Friløb),
eller at FC-motoren er trippet.
Bit 02 = "1" betyder, at styreordets bit 03 er "1", og at FCmotoren ikke er trippet.
Hastighed = ref.
Frekvens OK
3 3
BEMÆRK!
I parameter 507 vælges, hvordan bit 13 skal kombineres
(gates) med den tilsvarende funktion på de digitale
indgange.
Bit
15, Ingen funktion/reversering
Reversering af motorens omdrejningsretning.
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 69
Bit 03, Ingen fejl/trip
Bit 03 = "0" betyder at FCM 300-serien ikke er i en
fejltilstand.
Bit 03 = "1" betyder, at FCM 300-serien er trippet, og at
den har brug for et nulstillingssignal, før den kan køre.
Page 72

Programmering
Bit 07, Ingen advarsel/advarsel
Bit 07 = "0" betyder, at der ikke foreligger en usædvanlig
situation.
Bit 07 = "1" betyder, at der er opstået en unormal tilstand
for FC-motoren. Alle advarsler beskrevet i 4.2 Liste over
advarsler og alarmer - FCM 300 Design Guide indstiller bit 07
33
til "1".
Bit 08, Hastighed ≠ ref/hastighed. = ref.
Bit 08 = "0" betyder, at motorens aktuelle hastighed er
forskellig fra den indstillede hastighedsreference. Det kan
f.eks. være tilfældet, når hastigheden ramper op/ned under
start/stop.
Bit 08 = "1" betyder, at motorens aktuelle hastighed er lig
med den indstillede hastighedsreference.
Bit 09, Lokal betjening/busstyring
Bit 09 = "0" betyder, at [STOP/RESET] aktiveres på
styreenheden, eller at der er valgt Lokal betjening i
parameter 002 Lokal/fjernbetjening. Det er ikke muligt at
styre frekvensomformeren via seriel kommunikation.
Bit 09 = "1" betyder, at det er muligt at styre frekvensomformeren via seriel kommunikation.
VLT® DriveMotor FCM Series
Bit 10, Uden for område/frekvens
Bit 10 = "0", hvis udgangsfrekvensen har nået værdien i
parameter 201 Udgangsfrekvens, lav grænse eller parameter
202 Udgangsfrekvens, høj grænse.
Bit 10 = "1" betyder, at udgangsfrekvensen ligger inden for
de definerede grænser.
Bit 11, Kører ikke/kører:
Bit 11 = "0" betyder, at motoren ikke kører.
Bit 11= "1" betyder, at FC-motoren har et startsignal, eller
at udgangsfrekvensen er større end 0 Hz.
Bit 13, Spænding ok/over grænse
Bit 13 = "0" betyder, at FC-motorens spændingsgrænser
ikke er overskredet.
Bit 13= "1" betyder, at DC-spændingen i FC-motorens
mellemkreds er for lav eller for høj.
Bit 14, Moment ok/over grænse
Bit 14 = "0" betyder, at motorstrømmen er lavere end den
momentgrænse, der er valgt i parameter 221.
Bit 14 = "1" betyder, at momentgrænsen i parameter 221
er overskredet.
Bit 15, Termisk advarsel
Bit 15 = "0" betyder, at timerne for henholdsvis termisk
motorbeskyttelse og termisk VLT-beskyttelse ikke har
overskredet 100%.
Bit 15 = "1" betyder, at en af timerne har overskredet 100
%.
70 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 73

Programmering
VLT® DriveMotor FCM Series
Busreferenceværdi
Illustration 3.37
Frekvensreferenceværdien overføres til frekvensomformeren som et 16-bit ord. Værdien overføres som et helt
tal tal (0-32.767). 16.384 (4.000 hex) svarer til 100%.
(Negative tal dannes ved hjælp af 2-komplement).
Busreferencen har følgende format:
Parameter 203 = "0"
"ref
-ref
MAKS
"
- ref
MIN
MAKS
MIN
0-16.384 (4.000 hex) ~ 0-100% ~ ref
Parameter 203 = "1"
-ref
- +ref
MAKS
MAKS
-16.384 (. . . hex) - +16.384 (4.000 hex) ~
-100- +100% ~ -ref
MAKS
- +ref
MAKS
Beskrivelse af valg:
Den enkelte frekvensomformer skal tildeles en unik
adresse. Hvis antallet af tilsluttede apparater (frekvensomformere + master) er større end 31, skal der anvendes en
forstærker. Parameter 500 Adresse kan ikke vælges via
seriel kommunikation, men skal forudindstilles via
styreenheden.
501 Baud-hastighed
Værdi:
300 Baud (300 BAUD) [0]
600 Baud (600 BAUD) [1]
1200 Baud (1200 BAUD) [2]
2400 Baud (2400 BAUD) [3]
4800 Baud (4800 BAUD) [4]
9600 Baud (9600 BAUD) [5]
Funktion:
I denne parameter programmeres den hastighed, hvormed
data overføres via den serielle forbindelse. Baud-hastighed
defineres som antallet af bit, der overføres pr. sekund.
Beskrivelse af valg:
FC-motorens transmissionshastighed skal indstilles til en
værdi svarende til transmissionshastigheden for PLC/PC.
3 3
Aktuel udgangsfrekvens
Illustration 3.38
Værdien af frekvensomformerens aktuelle udgangsfrekvens
overføres som et 16-bit ord. Værdien overføres som et helt
tal tal (0-32.767). 16.384 (4.000 hex) svarer til 100%.
(Negative tal dannes ved hjælp af 2-komplement).
Parametergruppe 5-** Seriel
3.7.1
kommunikation
500 Adresse
Værdi:
Parameter 561 Protokol = FC-protokol [0]
0 - 126 1
Parameter 561 Protokol = MODBUS RTU [3]
0 - 247 1
Funktion:
Det er i denne parameter muligt at specificere en adresse
til hver frekvensomformer i et serielt kommunikationsnetværk.
502
Friløb
503 Hurtigt stop
504 DC-bremse
505 Start
506 Reversering
507 Valg af opsætning
508 Valg af hastighed
Værdi:
Digital indgang (DIGITAL INDGANG) [0]
Bus (SERIEL PORT) [1]
Logisk og (LOGISK OG) [2]
Logisk eller (LOGISK ELLER) [3]
Funktion:
I parameter 502-508 kan der vælges mellem at styre FCmotoren via klemmerne (digital indgang) og/eller via
bussen.
Vælges Logisk og eller Bus kan den pågældende
kommando kun aktiveres, hvis den afgives via den serielle
kommunikationsport. Ved Logisk og skal den tillige være
aktiveret via en af de digitale indgange.
Beskrivelse af valg:
[0] Digital indgang vælges, hvis det ønskes, at den
pågældende styrekommando kun kan aktiveres via en
digital indgang.
[1] Bus vælges, hvis det ønskes, at den pågældende
styrekommando kun kan aktiveres via et bit i styreordet
(seriel kommunikation).
[2] Logisk og vælges, hvis det ønskes, at den pågældende
styrekommando kun aktiveres, når der gives signal (aktivt
signal = 1) både via styreord og en digital indgang.
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 71
Page 74
Programmering
VLT® DriveMotor FCM Series
Digital indgang
505-508 Bus Styrekommando
0 0 0
0 1 0
1 0 0
33
1 1 1
Tabel 3.30
Funktion:
Her kan indstilles en fast hastighed (jog), som aktiveres via
den serielle kommunikationsport.
Denne funktion er den samme som i parameter 213.
Beskrivelse af valg:
Jog-frekvensen f
(parameter 201) og f
kan vælges i intervallet mellem f
JOG
(parameter 202).
MAKS
MIN
512 Telegramprofil
[3] Logisk eller vælges, hvis det ønskes, at den pågældende
styrekommando aktiveres, når der gives et signal (aktivt
signal = 1) enten via styreord eller en digital indgang.
Digital indgang
505-508 Bus Styrekommando
0 0 0
0 1 1
1 0 1
1 1 1
Værdi:
Fieldbus-profil (FIELDBUS-PROFIL) [0]
FC-profil (FC-PROFIL) [1]
Funktion:
Det er muligt at vælge mellem to forskellige styreordsprofiler.
Beskrivelse af valg:
Vælg den ønskede styreordsprofil.
Se Seriel kommunikation for flere oplysninger om styreordsprofilerne.
Tabel 3.31
Parameter 502 = Logisk og
Digital indgang Bus Styrekommando
0 0 1 Friløb
0 1 0 Motor kører
1 0 0 Motor kører
1 1 0 Motor kører
Tabel 3.32
513
Værdi:
1-99 s [1-99]
1 s [1]
Funktion:
I denne parameter indstilles den tid, der maksimalt
forventes at gå mellem modtagelsen af to på hinanden
følgende telegrammer. Overskrides denne tid, formodes
Bustidsinterval
den serielle kommunikation at være ophørt, og den
Parameter 502 = Logisk eller
Digital indgang Bus Styrekommando
0 0 1 Friløb
0 1 1 Friløb
1 0 1 Friløb
1 1 0 Motor kører
ønskede reaktion indstilles i parameter 514.
Beskrivelse af valg:
Indstil den ønskede tid.
514
Bustidsintervalfunktion
Værdi:
Off (OFF) [0]
Tabel 3.33
Fastfrys udgang (FASTFRYS UDGANG) [1]
Stop (STOP) [2]
509
Bus jog 1
Værdi:
0,0-parameter 202 [0 -]
10,0 HZ [100]
Funktion:
Her kan indstilles en fast hastighed (jog), som aktiveres via
den serielle kommunikationsport.
Denne funktion er den samme som i parameter 213.
Beskrivelse af valg:
Jog-frekvensen f
(parameter 201) og f
kan vælges i intervallet mellem f
JOG
(parameter 202).
MAKS
MIN
Jogging (JOGGING) [3]
Maks. hast. (MAKS HASTIGHED) [4]
Stop og trip (STOP OG TRIP) [5]
Funktion:
I denne parameter vælges den ønskede reaktion for FCmotoren, når den indstillede tid for bustimeout (parameter
513) er overskredet. Hvis valg [1] til [5] aktiveres, vil relæ
01 og relæ 04 blive deaktiveret.
Beskrivelse af valg:
FC-motorens udgangsfrekvens kan: fryses til den aktuelle
værdi, fryses til referencen, gå til stop, gå til jog-frekvens
510
Bus jog 2
Værdi:
0,0-parameter 202 [0 -]
10,0 HZ [100]
72 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 75

Programmering
VLT® DriveMotor FCM Series
(parameter 213), gå til maks. udgangsfrekvens (parameter
202) eller stoppe og aktivere et trip.
515 Dataudlæsning: Reference %
Værdi:
XXX.X% [XXXX]
Funktion:
Denne parameter kan udlæses via den serielle kommunikationsport.
Beskrivelse af valg:
Den viste værdi er lig med den totale reference (sum af
digital/analog/preset/bus/fastfrys ref./catch up og slowdown).
Værdien opdateres med 320 ms mellemrum.
516
Værdi:
X.XXX Hz eller O/MIN. [XXXX]
Funktion:
Denne parameter kan udlæses via den serielle kommunikationsport.
Beskrivelse af valg:
Angiver statusværdien for apparatet på grundlag af den
valgte referencesum.
Værdien opdateres med 320 ms mellemrum.
517
Værdi:
X.XXX [XXXX]
Funktion:
Denne parameter kan udlæses via den serielle kommunikationsport.
Beskrivelse af valg:
Angiver statusværdien på klemme 1/2 med den enhed/
skalering, som er valgt i parameter 414 og 415.
Værdien opdateres med 320 ms mellemrum.
518
Værdi:
XXX.X Hz [XXXX]
Funktion:
Denne parameter kan udlæses via den serielle kommunikationsport.
Beskrivelse af valg:
Den viste værdi er lig med den aktuelle motorfrekvens.
Værdien opdateres med 320 ms mellemrum.
519
Værdi:
XXX.X Hz [XXXX]
Funktion:
Denne parameter kan udlæses via den serielle kommunikationsport.
Dataudlæsning: Referenceenhed
Dataudlæsning: Feedback
Dataudlæsning: Frekvens
Dataudlæsning: Frekvens x skala
Beskrivelse af valg:
Værdien svarer til den forudindstillede udgangsværdi f
anget med den forudindstillede faktor i parameter 008,
Displayskalering af udgangsfrekvens.
520 Dataudlæsning: Strøm
Værdi:
XXX.XX A [XXXXX]
Funktion:
Denne parameter kan udlæses via den serielle kommunikationsport.
Beskrivelse af valg:
Den viste værdi er en beregnet værdi for den givne
motorstrøm.
Værdien opdateres med 320 ms mellemrum.
521
Værdi:
XXX.X% [XXXX]
Funktion:
Denne parameter kan udlæses via den serielle kommunikationsport.
Beskrivelse af valg:
Den viste værdi er momentværdien med fortegn, der
leveres til motorakslen. Værdien angives som en
procentdel af det nominelle moment.
Der er ikke fuldstændig overensstemmelse mellem 160%
motorstrøm og moment i forhold til det nominelle
moment. Grundet tolerancer og temperaturforskelle leverer
nogle motorer imidlertid endnu større moment. Som følge
deraf afhænger min.-værdien og maks.-værdien af den
maksimale/minimale motorstrøm.
Værdien opdateres med 320 ms mellemrum.
522
Værdi:
XX.XX kW [XXXX]
Funktion:
Denne parameter kan udlæses via den serielle kommunikationsport.
Beskrivelse af valg:
Den viste værdi beregnes på grundlag af den faktiske
motorspænding og motorstrøm.
Værdien opdateres med 320 ms mellemrum.
523
Værdi:
XX.XX HK (US) [XXXX]
Funktion:
Denne parameter kan udlæses via den serielle kommunikationsport.
Beskrivelse af valg:
Den viste værdi beregnes på grundlag af den faktiske
motorspænding og motorstrøm. Værdien angives som HK.
Dataudlæsning: Moment
Dataudlæsning: Effekt, kW
Dataudlæsning: Effekt, HK
M
3 3
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 73
Page 76

Programmering
VLT® DriveMotor FCM Series
Værdien opdateres med 320 ms mellemrum.
Beskrivelse af valg:
Den viste værdi angiver summen af eksterne referencer
524 Dataudlæsning: Motorspænding
Værdi:
som en procentdel (sum af analog/bus/puls).
Værdien opdateres med 80 ms mellemrum.
XXX.X V [XXXX]
33
Funktion:
Denne parameter kan udlæses via den serielle kommunikationsport.
Beskrivelse af valg:
Den viste værdi er en udregnet værdi, som bruges til at
styre motoren med.
Værdien opdateres med 320 ms mellemrum.
534 Dataudlæsning: Statusord, binær
Værdi:
Enhed
Funktion:
Denne parameter kan udlæses via den serielle kommunikationsport.
Beskrivelse af valg:
Angiver det statusord, som overføres via den serielle
525
Dataudlæsning: DC-link-spænding
kommunikationsport.
Værdi:
XXXX V [XXXX]
Funktion:
Denne parameter kan udlæses via den serielle kommunikationsport.
Beskrivelse af valg:
Den viste værdi er en målt værdi.
Der sker en filtrering af værdien, som betyder, at der kan
gå ca. 1,3 sekund, fra en indgangsværdi skifter værdi, og til
dataudlæsningen skifter værdi.
537
Værdi:
Enhed: ºC
Funktion:
Denne parameter kan udlæses via den serielle kommunikationsport.
Beskrivelse af valg:
Angiver den givne frekvensomformertemperatur. Værdien
opdateres med 10 sekunders mellemrum.
Dataudlæsning: VEK.-temperatur
Værdien opdateres med 320 ms mellemrum.
527
Dataudlæsning: FC termisk
Værdi:
0-100% [0-100]
Funktion:
Denne parameter kan udlæses via den serielle kommunikationsport.
Beskrivelse af valg:
538
Værdi:
Enhed
Funktion:
Denne parameter kan udlæses via den serielle kommunikationsport. Se 4.2.1 Oversigt over advarsler og alarmer.
Beskrivelse af valg:
Angiver, om der er en alarm på FC-motoren.
Dataudlæsning: Alarmord
Der udlæses kun heltal.
Værdien opdateres med 160 ms mellemrum.
528
Dataudlæsning: Digital indgang
Værdi:
Enhed
Funktion:
Denne parameter kan udlæses via den serielle kommunikationsport.
Beskrivelse af valg:
Den viste værdi angiver signalstatus fra de fire digitale
klemmer (2, 3, 4 og 5).
Værdien opdateres med 20 ms mellemrum.
533
Dataudlæsning: Ekstern reference %
Værdi:
-200,0 til +200,0 %
Funktion:
Denne parameter kan udlæses via den serielle kommunika-
Hex Fejlmeddelelser
00000002 Triplås
00000040 HPFB-timeout
00000080 Standardbustimeout
00000100 Kortslutning
00000200 24 V-forsyningsfejl
00000400 Jordslut.-fejl
00000800 Overstrøm
00004000 Motortermistor
00008000 Overbelastning af vekselretter
00010000 Underspænding
00020000 Overspænding
00040000 Fasetab
00080000 Live zero-fejl
00100000 Overtemperatur
02000000 HPFB-fejl
08000000 Indkoblingsfejl
10000000 Intern fejl
tionsport.
Tabel 3.34
74 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 77

Programmering
VLT® DriveMotor FCM Series
539 Dataudlæsning: Styreord
Værdi:
Enhed
Funktion:
Denne parameter kan udlæses via den serielle kommunikationsport.
Beskrivelse af valg:
Angiver det styreord, som er sendt via den serielle
kommunikationsport i hex-kode fra FC-motoren. Denne
parameter opdateres med 20 sekunders mellemrum.
540
Dataudlæsning: Advarselsord
Værdi:
Enhed
Funktion:
Denne parameter kan udlæses via den serielle kommunikationsport. Se 4.2.1 Oversigt over advarsler og alarmer.
Beskrivelse af valg:
Angiver i hex-format, om der er en advarsel på FCmotoren.
Hex Statusmeddelelser
01 Rampning
04 Start med/mod uret
08 Slow-down
10 Catch up
8000 Frekvensgrænse
Tabel 3.36
542 Dataudlæsning: Klemme 1, analog indgang
Værdi:
Enhed: mA
Funktion:
Denne parameter kan udlæses via den serielle kommunikationsport.
Beskrivelse af valg:
Den viste værdi angiver signalværdien på klemme 1.
Skaleringen (parameter 336 og 337) påvirker ikke
udlæsningen. Min. og maks. afgøres af AD-omformerens
offset og forstærkningsjustering.
Værdien opdateres med 20 ms mellemrum.
3 3
Hex Advarselsmeddelelser
00000008 HPFB-timeout
00000010 Standardbustimeout
00000040 Strømgrænse
00000200 Overbelastning af vekselretter
00001000 Advarsel, lav spænding
00002000 Advarsel, høj spænding
00004000 Fasetab
00010000 Advarsel, live zero-fejl
00400000 Advarsel, udgangsfrekvensgrænse
00800000 HPFB-fejl
40000000 Advarsel, 24 V-forsyning
80000000 Vekselrettertemp. høj
Tabel 3.35
541
Dataudlæsning: Udvidet statusord
Værdi:
Enhed
Funktion:
Denne parameter kan udlæses via den serielle kommunikationsport.
Beskrivelse af valg:
Angiver i hex-format, om der er en advarsel på FCmotoren.
543
Dataudlæsning: Klemme 2, analog indgang
Værdi:
Enhed: X.X V
Funktion:
Denne parameter kan udlæses via den serielle kommunikationsport.
Beskrivelse af valg:
Den viste værdi angiver signalværdien på klemme 2.
Skaleringen (parameter 338 og 339) påvirker ikke
udlæsningen. Min. og maks. afgøres af AD-omformerens
offset og forstærkningsjustering.
Værdien opdateres med 20 ms mellemrum.
561
Protokol
Værdi:
FC-protokol (FC-PROTOKOL) [0]
Modbus RTU [2]
Funktion:
Der er et valg mellem tre forskellige protokoller.
Beskrivelse af valg:
Vælg den påkrævede styreordsprotokol.
Se MG10SX for oplysninger om brug af Modbus RTU.
570
Ramme for Modbus-paritet og meddelelse
Værdi:
(LIGE/1 STOPBIT) [0]
(ULIGE/1 STOPBIT) [1]
(INGEN PARITET/1 STOPBIT) [2]
(INGEN PARITET/2 STOPBIT) [3]
Funktion:
Denne parameter opsætter frekvensomformerens Modbus
RTU-grænseflade til at kommunikere korrekt med master-
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 75
Page 78

Programmering
styreenheden. Pariteten (LIGE, ULIGE eller INGEN PARITET)
skal indstilles til at matche indstillingen for masterstyreenheden.
Beskrivelse af valg:
Vælg den paritet, der matcher indstillingen for Modbus-
33
masterstyreenheden. Lige eller ulige paritet anvendes ind
imellem for at tillade, at overført ord kontrolleres for fejl.
Da Modbus RTU anvender den mere effektive CRC-metode
(Cyklisk redundanskontrol) til at kontrollere for fejl,
anvendes paritetskontrol sjældent i Modbus RTU-netværk.
BEMÆRK!
Enhver ændring deaktiverer brugen af displayenhed
(LCP2) og yderligere programmering også af FC-protokol.
571 Modbus-kommunikationstimeout
Værdi:
10 ms-2.000 ms
Funktion:
Denne parameter bestemmer det maksimale tidsrum, som
frekvensomformerens Modbus RTU venter mellem tegn,
der er sendt fra masterstyreenheden. Når tiden udløber,
antager frekvensomformerens Modbus RTU-grænseflade, at
den har modtaget hele meddelelsen.
Beskrivelse af valg:
Generelt er en værdi på 100 ms nok for Modbus RTUnetværk, selv om nogle Modbus RTU-netværk fungerer på
en timeoutværdi på så lidt som 35 ms.
Hvis værdien er indstillet for kort, kan frekvensomformerens Modbus RTU-grænseflade gå glip af en del af
meddelelsen. Da CRC-kontrollen ikke vil være gyldig,
ignorerer frekvensomformeren meddelelsen. Den
resulterende gentransmission af meddelelser sløver
kommunikationen på netværket.
Hvis værdien er indstillet for lang, venter frekvensomformeren længere end nødvendigt med at afgøre, at
meddelelsen er fuldført. Dette forsinker frekvensomformerens svar på meddelelsen og medfører muligvis en
timeout på masterstyreenheden. Den resulterende
gentransmission af meddelelser sløver kommunikationen
på netværket.
VLT® DriveMotor FCM Series
3.8.1
600 Driftsdata: Driftstimer
Værdi:
Enhed: timer
0,0-130.000,0
Funktion:
Denne parameter kan udlæses via displayet eller den
serielle kommunikationsport. Værdien kan ikke nulstilles.
Beskrivelse af valg:
Angiver antal timer, FC-motoren har været tændt i.
Værdien opdateres i FC-motoren hver time og gemmes,
når apparatet slukkes.
601
100 ms
Værdi:
Enhed: timer
0,0-130.000,0
Funktion:
Denne parameter kan udlæses via displayet eller den
serielle kommunikationsport. Værdien kan nulstilles via
parameter 619.
Beskrivelse af valg:
Angiver antallet af timer, FC-motoren har været i drift
siden nulstilling i parameter 619.
Værdien opdateres i FC-motoren hver time og gemmes,
når apparatet slukkes.
603
Værdi:
Enhed: antal
0-9999
Funktion:
Denne parameter kan udlæses via displayet eller den
serielle kommunikationsport.
Beskrivelse af valg:
Angiver antallet af opstarter for forsyningsspændingen til
FC-motoren.
604
Værdi:
Enhed: antal
0-9999
Funktion:
Denne parameter kan udlæses via displayet eller den
serielle kommunikationsport.
Beskrivelse af valg:
Angiver antallet af temperaturfejl, der er opstået på FCmotoren.
Parametergruppe 6-** Tekniske
funktioner
Driftsdata: Kørte timer
Driftsdata: Antal opstarter
Driftsdata: Antal overtemperaturer
605
Værdi:
Enhed: antal
76 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Driftsdata: Antal overspændinger
Page 79

Programmering
VLT® DriveMotor FCM Series
0-9999
Funktion:
Denne parameter kan udlæses via displayet eller den
serielle kommunikationsport.
Beskrivelse af valg:
Angiver antal overspændinger på FC-motoren.
BEMÆRK!
Parametrene 615-617 Fejllog kan ikke udlæses via
den indbyggede betjeningsenhed.
615 Fejllog: Fejlkode
Værdi:
[Indeks 1-10] Fejlkode: 0-99
Funktion:
I denne parameter er det muligt at se årsagen til et trip
(udkobling af frekvensomformeren). Der defineres 10
logværdier [1-10].
Det laveste lognummer [1] indeholder den nyeste/sidst
gemte dataværdi. Det højeste lognummer [10] indeholder
den ældste dataværdi, der er gemt. Hvis der opstår et trip,
er det muligt at se årsagen, tidspunktet og en mulig værdi
for udgangsstrømmen eller udgangsspændingen.
Beskrivelse af valg:
Givet som en fejlkode, hvor nummeret henviser til en
tabel. Se 4.2.1 Oversigt over advarsler og alarmer.
616
Værdi:
Enhed: Timer
[Visningsområde XX - XXX]
Funktion:
Parameter af typen array. I denne parameter er det muligt
at se de samlede antal driftstimer, før trippet fandt sted.
Der gemmes 10 (1-10) logværdier.
Det laveste lognummer (1) indeholder nyeste/sidst gemte
dataværdi, mens det højeste lognummer (10) indeholder
den ældste dataværdi.
Beskrivelse af valg:
Udlæses som en option.
Visningsområde: XX - XXX.
Fejlloggen nulstilles efter initialisering i (para. 620).
617
Værdi:
[Indeks XX - XXX]
Funktion:
Parameter af typen array. I denne parameter er det muligt
at se ved hvilken strøm eller spænding, et trip har fundet
sted.
Beskrivelse af valg:
Udlæses som en værdi.
Visningsområde: 0,0 - 999,9.
Fejllog: Tid
Fejllog: Værdi
Fejlloggen nulstilles efter initialisering (para 620).
619 Nulstilling af tæller for kørte timer
Værdi:
Ingen nulstilling (NULSTIL IKKE) [0]
Nulstil (NULSTIL TÆLLER) [1]
Funktion:
Nulstilling af tæller for kørte timer (parameter 601).
Beskrivelse af valg:
Hvis der er valgt [1] Nulstilling, nulstilles FC-motorens
tælleren for kørte timer.
620
Værdi:
Normal funktion (NORMAL DRIFT) [0]
Styrekorttest (STYREKORTTEST) [2]
Initialisering (INITIALISERING) [3]
Funktion:
Denne parameter kan, ud over den normale funktion,
anvendes til to forskellige test.
Desuden kan alle parametre initialiseres (undtagen
parameter 603-605).
Beskrivelse af valg:
[0] Normal funktion anvendes ved normal drift med
motoren i den valgte applikation.
[2] Styrekorttest vælges, hvis der ønskes styring af analoge
og digitale indgange, analoge, digitale udgange samt
styrespændingen på +10 V.
Der kræves tilslutning af et teststik med interne forbindelser til denne test. Opsætning: Analog/digital udgang til
digitale indgange 3, 4 og 5 og 10 V forsyning til analog/
digital indgang 2.
[3] Initialisering vælges, hvis der ønskes fabriksindstilling af
apparatet, uden at parameter 500, 501 + 600-605 nulstilles.
Initialiseringerne er aktive efter opstart.
621
Værdi:
Afhænger af apparatet
Funktion:
Apparatets nøgledata kan udlæses via displayet eller seriel
kommunikation.
Beskrivelse af valg:
Type angiver hvilken apparatstørrelse og grundfunktion,
der er tale om.
624
Værdi:
Afhænger af apparatet
Funktion:
Apparatets nøgledata kan udlæses via displayet eller seriel
kommunikation.
Driftstilstand
Typeskilt: FC-type
Typeskilt: Softwareversionsnr.
3 3
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 77
Page 80

Programmering
VLT® DriveMotor FCM Series
Beskrivelse af valg:
Softwareversion angiver versionsnummeret.
625 Typeskilt: LCP identifikations-nr.
Værdi:
33
Afhænger af apparat
Funktion:
Apparatets nøgledata kan udlæses via displayet eller den
serielle kommunikationsport. For eksempel: ID 1.42 2 kB
626 Typeskilt: Databaseidentifikationsnr.
Værdi:
Afhænger af apparatet
Funktion:
Apparatets nøgledata kan udlæses via displayet eller den
serielle kommunikationsport.
628
Værdi:
Funktion:
Apparatets nøgledata kan udlæses via displayet eller den
serielle kommunikationsport.
630
Værdi:
Typeskilt: Applikationsoptionstype
Typeskilt: Bestillingsnr. for kommunikationsoptionstype
Funktion:
Apparatets nøgledata kan udlæses via displayet eller den
serielle kommunikationsport.
635 Softwaredelnr.
Værdi:
Funktion:
Apparatets nøgledata kan udlæses via displayet eller den
serielle kommunikationsport.
678 Konfigurering af styrekort
Værdi:
Standardversion (STANDARDVERSION) [1]
Profibus 3 Mbaud-version
(PROFIBUS 3 MB-VER.) [2]
Profibus 12 Mbaud-version
(PROFIBUS 12 MB-VER.) [3]
Funktion:
Denne parameter aktiverer en konfiguration af et Profibus
styrekort. Standardværdien afhænger af den producerede
enhed og er samtidig den maksimalt opnåelige værdi.
Dette betyder, at et styrekort kun kan nedjusteres til en
lavere ydeevne.
Funktion:
Apparatets nøgledata kan udlæses via displayet eller den
serielle kommunikationsport.
632
Værdi:
Funktion:
Apparatets nøgledata kan udlæses via displayet eller den
serielle kommunikationsport.
633
Værdi:
Funktion:
Apparatets nøgledata kan udlæses via displayet eller den
serielle kommunikationsport.
634
Værdi:
BMC-softwareidentifikation
Motordatabaseidentifikation
Apparatidentifikation for kommunikation
78 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 81

Alt om FCM 300
4 Alt om FCM 300
4.1 Særlige betingelser
VLT® DriveMotor FCM Series
Størrelsen af den lækstrøm, der går til jord, afhænger af
følgende i prioriteret rækkefølge:
4.1.1 Galvanisk adskillelse (PELV)
PELV giver beskyttelse ved hjælp af en ekstra lav
spænding. Beskyttelse mod elektrisk stød anses for at være
sikret, når alle tilsluttede enheder er af PELV-typen, og
installationen laves som beskrevet i lokale/nationale
bestemmelser for PELV-forsyninger
I FCM 300-serien er alle styreklemmerne forsynet fra eller i
forbindelse med ekstra lav spænding (PELV).
Galvanisk (sikret) adskillelse opnås ved at opfylde kravene
til højere isolering og ved at sikre de relevante afstande for
krybning/frirum. Disse krav beskrives i standarden EN
50178.
De komponenter, der udgør den elektriske isolering i
henhold til beskrivelsen nedenfor, stemmer også overens
med kravene til højere isolering og de relevante test, der
er beskrevet i EN 50178.
Den galvaniske adskillelse kan vises tre steder (se
Illustration 4.1), nemlig:
Strømforsyning (SMPS) inkl. signalisolering af UDC,
•
der angiver den mellemliggende strømspænding.
Gate drive, som kører IGBT'er (optokoblere).
•
Strømtransducere (optokoblere).
•
Lækstrøm til jord
4.1.2
Lækstrøm til jord forårsages hovedsagelig af kapacitansen
mellem motorfaser og motorchassis. RFI-filteret bidrager til
forøget lækstrøm, da filterkredsen er forbundet til jord via
kondensatorerne.
1. Switchfrekvens
2. Motor jordet på stedet eller ej
Lækstrømmen har betydning for sikkerheden ved
håndtering/betjening af frekvensomformeren, hvis denne
(ved en fejl) ikke er jordforbundet.
BEMÆRK!
FCM 305-375 har alle lækstrømme > 3,5 mA, ca. 4 til 20
mA. Varierer med switchfrekvenserne inden for det givne
interval.
Dette betyder, at der skal tilsluttes forstærket jord, hvis
EN50178 skal overholdes.
Brug aldrig ELCB-relæer (fejlstrømsrelæer) – også kendt
som RCD (fejlstrømsafbrydere) – der ikke er egnede til DCfejlstrømme (type A).
Hvis der anvendes en RCD, skal den være:
egnet til at beskytte udstyr med et DC-indhold i
-
fejlstrømmen (3-faset ensretter)
egnet til indkobling med en kort ladestrøm til
-
jord
egnet til høj lækstrøm.
-
Dette betyder, at det er muligt at betjene FCM 300 med
en RCD af type B:
Fejlstrømsafbrydere (RCD) af type B har en tolerance på
tripniveau. Det anbefales derfor at bruge en RCD, hvis
FCM’ens maksimale lækstrøm (se ovenfor, 20 mA) er
mindre end 1/3 af tripniveauet for RCD. Dette medfører, at
tripniveauet for RCD skal være 60 mA eller højere, hvilket
vil sige, at en RCD af type B med et tripniveau på 100 mA
kan bruges til beskyttelse.
4 4
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 79
Page 82

Alt om FCM 300
VLT® DriveMotor FCM Series
44
Illustration 4.1 Galvanisk adskillelse
Ekstreme driftsforhold
4.1.3
Motorgenereret overspænding
Spændingen i mellemkredsen øges, når motoren fungerer
som en generator. Dette sker i to tilfælde:
Belastningen driver motoren (ved konstant
•
udgangsfrekvens fra frekvensomformeren), dvs. at
belastningen genererer energi.
Under en deceleration ("rampe ned") er belast-
•
ningen lav, hvis inertimomentet er højt, og rampe
ned-tiden er for kort til, at energien kan spredes
som et tab i VLT-frekvensomformeren, motoren
og installationen.
Styreenheden forsøger at korrigere rampen, hvis det er
muligt.
Vekselretteren slukkes for at beskytte transistorerne og
kondensatorerne på mellemkredsene, når der nås et vist
spændingsniveau.
Netudfald
I tilfælde af netudfald fortsætter FCM 300--serien, indtil
mellemkredsspændingen når ned under mindste
stopniveau, hvilket typisk er 15% under FCM 300-seriens
laveste nominelle forsyningsspænding.
Akustisk støj
4.1.4
Nedenfor angives de typiske værdier, der måles i en
afstand af 1 m fra apparatet ved fuld belastning:
2 poler 4 poler
FCM 305 54 dB(A)
FCM 311 58 dB(A)
FCM 315 59 dB(A)
FCM 322 58 dB(A)
FCM 330 61 dB(A)
FCM 340 62 dB(A) 63 dB(A)
FCM 355 64 dB(A) 60 dB(A)
FCM 375 61 dB(A)
Tabel 4.1
Afbalancering
4.1.5
FCM 300 er afbalanceret som klasse R ifølge ISO8821
(reduceret afbalancering). Ved kritisk anvendelse, specielt
ved høje hastigheder (>4000 OMDR./MIN.), kan speciel
afbalancering (klasse S) være nødvendig.
Tiden inden vekselretteren stopper afhænger af netspændingen før udfaldet samt af motorbelastningen.
Konstant overbelastning
Når FCM 300-serie overbelastes (strømgrænsen i parameter
221 er nået), reducerer styringen udgangsfrekvensen i et
forsøg på at reducere belastningen.
Hvis der er tale om meget stor overbelastning, kan der
forekomme en strøm, der får FC-motoren til at afbryde
efter ca. 1,5 s.
80 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 83

Alt om FCM 300
VLT® DriveMotor FCM Series
4.1.6 Termisk motorbeskyttelse og derating
Motoren i FCM 300-serien er termisk beskyttet i tilfælde af,
at grænserne overskrides. Ved høje temperaturer
nedbringes switchfrekvensen gradvist til 2 kHz, og motoren
vil med tiden trippe.
BEMÆRK!
En kombination af en høj switchfrekvens og manglende
ventilatorkøling kan beskadige apparatet.
Illustration 4.3
4 4
4.1.7 Derating for omgivelsestemperatur
Omgivelsestemperaturen (T
tilladelige temperatur. Gennemsnittet (T
24 timer skal være mindst 5 °C lavere.
Hvis FCM 300-serien kører ved temperaturer over 40 °C, er
det nødvendigt at derate den konstante udgangsstrøm.
Illustration 4.2
OMG,MAKS
) er den maksimalt
) målt over
OMG,GNS
4.1.9 Derating for kørsel ved lav hastighed
Når en centrifugalpumpe eller en ventilator styres af en FCmotor, er det ikke nødvendigt at reducere
udgangsstrømmen ved lave hastigheder, da centrifugalpumpernes/ventilatorernes belastningskarakteristik
automatisk sikrer den nødvendige reduktion.
FC-motorer, som anvendes til applikationer med konstant
belastningsmoment ved lav hastighed, skal derates (se
Illustration 4.4), eller der skal anvendes en uafhængig
ventilator (motorkølingsmulighed 2).
Nominelt moment (100%) kan ydes op til 15 min. og ved
en driftscyklus på op til 25% ved lav hastighed.
Derating for lufttryk
4.1.8
Kontakt Danfoss Drives vedrørende PELV i forbindelse med
højder over 2 km.
Under 1.000 m er derating ikke nødvendig.
Over 1.000 m skal den omgivende temperatur(T
den maksimale udgangsstrøm (I
til følgende diagram:
1. Derating af udgangsstrøm kontra højde ved T
= maks. 40 °C
2. Derating af maks. T
udgangsstrøm.
OMG
) derates i henhold
VLT,MAKS
kontra højde ved 100%
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 81
OMG
) eller
OMG
Illustration 4.4 Derating for kørsel ved lav hastighed
4.1.10 Derating for høj switchfrekvens
Motoren i FCM 300-serien kan anvende to forskellige PWMsystemer, SFAVM og 60° AVM. Fabriksindstillingen er
SFAVM. PWM-systemet kan ændres i parameter 446. Ved
en motorhastighed på under 25 Hz skifter motoren i FCM
300-serien automatisk over til SFAVM.
Fabriksindstillingen for switchfrekvensen er 4.000 Hz.
Denne kan ændres mellem 2 og 14 kHz i parameter 411.
En højere switchfrekvens medfører mere støjsvag drift af
apparatet, men større tab i FC-motorens elektronik og
nødvendiggør passende derating.
Page 84

Alt om FCM 300
VLT® DriveMotor FCM Series
Se Illustration 4.5
4.1.13
UL-standard
FCM 300-serien er UL-godkendt.
Se 2.1.2 Generelle tekniske data for korrekt brug af forsikringer.
4.1.14 Virkningsgrad
44
Frekvensomformerens virkningsgrad (η
Frekvensomformerens belastning påvirker kun i ringe grad
dens virkningsgrad. Generelt er virkningsgraden den
samme ved nominel motorfrekvens fM,N, uanset om
motoren yder 100% nominelt akselmoment eller kun 75%,
f.eks. ved delvis belastning.
Illustration 4.5 Momentkarakteristik
Dette betyder også, at virkningsgraden for frekvensomformeren ikke ændres, selv hvis der vælges andre u/f-
4.1.11
Vibrationer og rystelser
FCM 300-serien er afprøvet i henhold til en procedure, der
er baseret på følgende standarder:
karakteristikker.
U/f-karakteristikkerne påvirker imidlertid motorens
virkningsgrad.
VLT
)
IEC 60068-2-6:
IEC 60068-2-34: Tilfældig vibration, bredbånd
IEC 60068-2-35: Tilfældig vibration, bredbånd
IEC 60068-2-36: Tilfældig vibration, bredbånd
Tabel 4.2
Vibration (sinusformet) - 1970
- generelle krav
- høj reproducerbarhed
- middel reproducerbarhed
FCM 300-serien overholder krav, der svarer til
betingelserne i ovennævnte standarder.
4.1.12
Luftfugtighed
FCM 300-serien er designet til at overholde standarderne
IEC 60068-2-3, EN 50178 punkt 9.4.2.2/DIN 40040, klasse E,
ved 40 °C.
Cyklisk dampvarme iht. IEC 60068-2-30, 40 °C.
Virkningsgraden forringes en lille smule, når switchfrekvensen indstilles til en værdi på over 5 kHz.
Virkningsgraden vil også mindskes lidt ved en
netspænding på 480 V.
Motorens ydeevne (η
MOTOR
)
Motoren på FCM 300 er konstrueret i overensstemmelse
med IE2 og testet tilsvarende efter IEC 60034-1.
Virkningsgraden for en motor, der er sluttet til en frekvensomformer, afhænger af magnetiseringsniveauet. Med
optimerede data er virkningsgraden lige så god som ved
netforsyningsdrift. Inden for et område på 75-100% af det
nominelle moment er motorens virkningsgrad så godt som
konstant, både når den styres af frekvensomformeren, og
når den ville køre direkte på netforsyningen. Påvirkningen
fra switchfrekvensen på virkningsgraden er marginal.
Virkningsgrad for systemet (η
SYSTEM
)
Systemets virkningsgrad (FCM) beregnes ved at gange
virkningsgraden for frekvensomformeren (η
virkningsgraden for motoren (η
η
MOTOR
MOTOR
): η
SYSTEM
VLT
) med
= η
VLT
x
82 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 85

1,02
1,01
1,00
0,99
0,98
0,97
0,96
0,95
0,94
0,93
0,92
0,91
0,90
0,89
0,88
0,87
0,86
0,85
0,84
0,83
0,82
0,81
0,80
30Hz
40Hz
50Hz
60Hz
70Hz
100% Load 75% Load 50% Load 25% Load
Output Frequency
175NA159.10
Relative Efficiency
175HA034.10
Alt om FCM 300
VLT® DriveMotor FCM Series
4 4
Illustration 4.6 Typiske virkningsgradskurver
Udregningen af virkningsgraden for FCM 300 udregner
effektiviteten for FCM 300 ved forskellige belastninger
baseret på Illustration 4.6. Faktoren i denne graf skal
ganges med den specifikke virkningsgradsfaktor, der er
opført i specifikationstabellerne.
De harmoniske strømme påvirker ikke effektforbruget
direkte, men øger varmetabene i installationen
(transformer, kabler). I anlæg med en forholdsvis høj
procentdel af ensretterbelastning er det derfor vigtigt at
fastholde de harmoniske strømme på et lavt niveau for at
undgå overbelastning af transformeren og høj temperatur i
Eksempel: Eksemplet baseres på en FCM 375 ved 25%
kablerne.
belastning ved 30 Hz hastighed. Grafen viser 0,845 nominel virkningsgrad for en FCM 375 er 0,876.
Nogle af de harmoniske strømme kan forstyrre kommunikationsudstyr, der er sluttet til samme transformer, eller
Den faktiske virkningsgrad for FCM 300 er derfor:
0,845x0,876=0,74 ved delvis hastighed (30 Hz) og
skabe resonans i forbindelse med effektfaktorkorrektionsbatterier.
belastning (25%).
4.1.15
Netforsyningsforstyrrelse/harmoniske
strømme
En FC-motor optager en ikke sinusformet strøm fra nettet,
hvilket øger indgangsstrømmen I
strøm kan omformes ved hjælp af en Fourier-analyse og
opsplittes i sinusformede strømme med forskellige
frekvenser, dvs. forskellige harmoniske strømme IN med 50
Hz som grundfrekvens:
Harmonisk
e strømme
Hz 50 Hz 250 Hz 350 Hz 550 Hz
In/I1 [%] 100% 44% 29% 8%
Tabel 4.3
I
1
. En ikke sinusformet
RMS
I
5
I
I
11
7
Illustration 4.7
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 83
Page 86

Alt om FCM 300
VLT® DriveMotor FCM Series
For at sikre lave harmoniske strømme er FCM 300-serien
som standard forsynet med spoler i mellemkredsen. THD
(strøm) ≤ 54%.
Spændingsforvrængningen på netforsyningen er afhængig
af størrelsen på de harmoniske strømme ganget med den
indre netimpedans for den pågældende frekvens. Den
samlede spændingsforvrængning THD beregnes på
grundlag af de enkelte spændingsharmoniske strømme
efter følgende formel:
44
U
THD =
4.1.16 Effektfaktor
Effektfaktoren er forholdet mellem I1 og I
Effektfaktoren til 3-faset styring
Effektfaktoren angiver i hvilket omfang, FC-motoren
belaster netforsyningen.
En lavere effektfaktor betyder højere I
kW-ydelse.
Derudover indikerer en høj effektfaktor, at de forskellige
harmoniske strømme er lave.
4.1.17
Formålet med CE-mærkningen er at undgå tekniske
barrierer for handel inden for EFTA og EU. EU har indført
CE-mærket, som er en enkel metode til at vise, hvorvidt et
produkt overholder de relevante EU-direktiver. CE-mærket
angiver ikke oplysninger om produktets specifikationer
eller kvalitet. Frekvensomformere er omfattet af tre EUdirektiver:
4.1.18
Alle maskiner med kritiske bevægelige dele er omfattet af
maskindirektivet, som trådte i kraft den 1. januar 1995. Da
en frekvensomformer overvejende er elektrisk, og da
motoren altid placeres i forbindelse med andre maskiner,
falder den ikke ind under maskindirektivet. Hvis en FCmotor leveres til brug med en maskine, kan vi imidlertid
tilbyde oplysninger om sikkerhedsaspekter angående FCmotoren. Dette gøres i form af en fabrikanterklæring.
U
2
2
1
+...+U
(%)
2
n
.
RMS
for den samme
RMS
Hvad er CE-mærkning?
Maskindirektivet (98/37/EØF)
4.1.19
Frekvensomformere skal CE-mærkes i overensstemmelse
med lavspændingsdirektivet. Direktivet finder anvendelse
for alt elektrisk udstyr og apparater, der anvendes i
spændingsområderne 50-1.000 V AC og 75-1.500 V DC.
Lavspændingsdirektivet (73/23/EØF)
4.1.20 EMC-direktiv (89/336/EØF)
EMC står for elektromagnetisk kompatibilitet (electromagnetic compatibility). Tilstedeværelsen af elektromagnetisk
kompatibilitet betyder, at den gensidige forstyrrelse
mellem forskellige komponenter/apparater er så lille, at det
ikke påvirker apparaternes funktion. EMC-direktivet trådte i
kraft den 1. januar 1996. I direktivet skelnes der mellem
komponenter, apparater, systemer og installationer.
4.1.21
EU's "Retningslinjer om anvendelsen af Rådets direktiv
89/336/EØF" beskriver tre typiske situationer, hvor der
anvendes en FC-motor. I hver af disse brugssituationer er
der anvisninger på, om den er omfattet af EMC-direktivet
og skal CE-mærkes.
Hvad er omfattet af EMC-direktivet?
1. FC-motoren sælges direkte til slutkunden. Den
sælges f.eks. til et byggemarked. Slutbrugeren er
lægmand. Han monterer selv FC-motoren med
henblik på brug med en hobbymaskine, en
køkkenmaskine osv. For disse applikationer skal
FC-motoren CE-mærkes i henhold til EMCdirektivet.
2. FC-motoren sælges til montering i en installation.
Installationen er konstrueret af fagfolk fra
branchen. Det kan f.eks. være et produktionsanlæg eller et varme-/ventilationsanlæg, der
er bygget og monteret af fagfolk. Hverken FCmotoren eller det færdige anlæg skal CE-mærkes
iht. til EMC-direktivet. Apparatet skal imidlertid
overholde de grundlæggende EMC-krav i
direktivet. Dette kan installatøren sikre ved at
anvende komponenter, apparater og systemer,
der er CE-mærkede iht. EMC-direktivet.
3. FC-motoren sælges som en del af et komplet
system. Systemet markedsføres som et komplet
system. Der kan f.eks. være tale om et luftkonditioneringssystem. Det komplette system skal CEmærkes i henhold til EMC-direktivet. Den
fabrikant, der leverer systemet, kan sikre CEmærkning iht. til EMC-direktivet, enten ved at
bruge CE-mærkede komponenter eller ved at
teste systemets EMC. Hvis brugeren vælger
udelukkende at bruge CE-mærkede komponenter,
er det ikke nødvendigt at teste hele systemet.
84 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 87

Alt om FCM 300
VLT® DriveMotor FCM Series
4.1.22 Danfoss FCM 300-serie motor og CEmærkning
CE-mærkning er positivt, når det bliver brugt til sit
egentlige formål, som er at forenkle samhandlen inden for
EU og EFTA.
CE-mærkning kan dog dække mange forskellige specifikationer. Det betyder, at det er nødvendigt at undersøge
præcist, hvad CE-mærkningen dækker.
Den kan reelt dække vidt forskellige specifikationer. Derfor
kan et CE-mærke medføre en falsk tryghed for installatøren, når en FC-motor bliver brugt som komponent i et
system eller et apparat.
Danfoss CE-mærker VLT®-frekvensomformermotorer i
henhold til lavspændingsdirektivet. Det vil sige, at hvis FCmotoren installeres korrekt, garanterer Danfoss, at den
overholder lavspændingsdirektivet. Danfoss udsteder en
overensstemmelseserklæring, som bekræfter CEmærkningen i overensstemmelse med
lavspændingsdirektivet.
4.1.24
EMC-standarder
BEMÆRK!
- Alle EMC-specifikationer er angivet med fabriksindstillingerne.
- Maksimum 4 kHz switchfrekvens.
- Der skal bruges skærmede data-/styreledninger
af hensyn til beskyttelse mod spændingsbølger.
- FC-motoren skal være forbundet til jord for at
overholde standarderne.
- Maksimum/minimum linjeimpedans Z
+ j0,15 ohm; Z
omkoblingshak)
Generiske standarder
De generiske standarder fremgår af EMC-direktivet (89/336/
EØF).
FC-motoren overholder:
EN 61000-6-3
Områder med beboelse, erhverv og let industri.
1)
, EN 61000-6-1.
= 0 + j0 ohm. (EN 61800-3
min
maks
= 0,24
4 4
CE-mærket gælder også for EMC-direktivet, under
forudsætning af at instruktionerne fra betjeningsvejledningen til EMC-korrekt installation og filtrering følges. På
dette grundlag er en overensstemmelseserklæring i
henhold til EMC-direktivet udstedt.
Quick Guiden indeholder en detaljeret installationsvejledning, som sikrer, at installationen er EMC-korrekt.
Desuden specificerer Danfoss, hvilke standarder vores
forskellige produkter overholder.
Danfoss tilbyder de filtre, der fremgår af specifikationerne,
ligesom vi gerne giver andre former for assistance, så det
bedste EMC-resultat opnås.
4.1.23
Overholdelse af EMC-direktivet
89/336/EØF
I langt de fleste tilfælde anvendes VLT-frekvensomformermotoren af fagfolk som en kompleks komponent, der
udgør en del af et større apparat, system eller en større
installation. Det skal bemærkes, at ansvaret for de endelige
EMC-egenskaber i apparatet, systemet eller installationen
ligger hos montøren. Danfoss har som en hjælp til
montøren udarbejdet EMC-monteringsretningslinjer til
Power Drive-systemet. Standarderne og testniveauerne for
frekvensomformersystemer overholdes, forudsat at de
EMC-korrekte vejledninger for monteringen følges.
EN 61000-6-2, EN 61000-6-4.
Industrimiljø.
1)
Emissionsniveauerne, der fremgår af EN 61000-6-3,
overholdes kun af FC-motorer med et filter af klasse B-1
(ekstraudstyr).
Yderligere overholder FC-motoren: DIN VDE 0160/1990
2)
"Beskyttelse mod overspænding 7.3.1. klasse 1"
Produktstandarder
Produktstandarderne fremgår af EN 61800-3 (IEC 61800-3).
FC-motoren overholder:
EN 61800-3, ubegrænset distribution3).
EN 61800-3, begrænset distribution.
3)
Emissionsniveauerne, der fremgår af EN 61800-3,
ubegrænset distribution, overholdes kun af FC-motorer
med klasse B-1-filter.
Grundlæggende standarder, emissioner
EN 55011: Grænser og metoder for måling af
•
radioforstyrrelseskarakteristikker for industrielt,
2)
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 85
Page 88

Alt om FCM 300
VLT® DriveMotor FCM Series
videnskabeligt og medicinsk (ISM)-radiofrekvensudstyr.
EN 55022: Grænser og metoder til måling af
•
radioforstyrrelseskarakteristikker for informationsteknologiudstyr.
EN 61000-3-2: Grænser for harmoniske strømemis-
•
sioner (udstyrets indgangsstrøm ≥ 16 A)
EN 61000-3-4: Grænser for harmoniske strømemis-
•
44
Grundlæggende standarder, immunitet
sioner (udstyrets indgangsstrøm ≤ 16 A)
EN 61000-2-4 (IEC 61000-2-4):
•
Kompatibilitetsniveauer
Simulering af spændings- og frekvensudsving
samt harmoni- og omkoblingshak på strømledningen.
EN 61000-4-2 (IEC 61000-4-2): Elektrostatisk
•
afladning (ESD)
Simulering af elektrostatisk afladning.
EN 61000-4-4 (IEC 61000-4-4): Hurtige burst-
•
transienter, 5/ 50 nS
Simulering af transienter forårsaget af udskiftning
af kontaktorer, relæer eller lignende apparater.
EN 61000-4-5 (IEC 61000-4-5):
•
Udsving 1,2/50 μS.
Simulering af transienter forårsaget af f.eks.
lynnedslag i nærheden af installationen.
EN 61000-4-3: (IEC 61000-4-3):
•
Radiofrekvensgenereret elektromagnetisk felt.
Amplitudemoduleret.
Simulering af forstyrrelser forårsaget af udstyr til
radiotransmission.
EN 61000-4-6: (IEC 61000-4-6):
•
RF common mode.
Simulering af påvirkningen fra udstyr til
radiotransmission, som er forbundet til tilslutningsledningerne.
ENV 50204:
•
Radiofrekvensgenereret elektromagnetisk felt.
Impulsmoduleret.
Simulering af forstyrrelse forårsaget af GSMmobiltelefoner.
standardbussen, styreledningerne og signalinterfacet
monteres åbent i den ene ende.
4.1.25 Aggressive miljøer
En VLT-frekvensomformer indeholder, som alt andet
elektronisk udstyr, en lang række mekaniske og
elektroniske komponenter, som i forskellig udstrækning er
sårbare over for miljøpåvirkninger.
ADVARSEL
VLT-frekvensomformeren må derfor ikke monteres i
miljøer, hvor der er væsker, partikler eller gasser i luften,
som kan påvirke og ødelægge de elektriske
komponenter. Hvis der ikke træffes de nødvendige
foranstaltninger til beskyttelse af VLT-frekvensomformeren, er der risiko for driftsstop, og det vil reducere
levetiden for VLT-frekvensomformeren.
Væsker kan transporteres gennem luften og kondensere i
VLT-frekvensomformeren. Væsker kan desuden fremme
galvanisk korrosion af komponenter og metaldele.
Damp, olie og saltvand kan medføre korrosion på
komponenter og metaldele.
I disse miljøer anbefaler vi udstyr med kapslingsgrad ≥
IP54.
I miljøer med høje temperaturer og fugtighed vil ætsende
gasser, f.eks. svovl-, kvælstof- og klorforbindelser, resultere
i kemiske processer på komponenter i VLT-frekvensomformeren. Sådanne kemiske reaktioner vil meget hurtigt
påvirke og skade de elektroniske komponenter.
BEMÆRK!
Hvis VLT-frekvensomformeren monteres i aggressive
miljøer, øges risikoen for driftsafbrydelser, og frekvensomformerens levetid reduceres markant.
Før VLT-frekvensomformeren installeres, skal det
undersøges, om der er væsker, partikler eller gasser i
luften. Det kan gøres ved at se på bestående installationer,
som er i samme miljø. Hvis der findes vand eller olie på
metaldelene, eller hvis der er korrosion på metaldelene, er
det typiske tegn på skadelige luftbårne væsker.
Generelle forhold vedr. EMC-emission
Hvis der skal opnås skærmning imod højfrekvente signaler,
skal de skærmede ledninger til Profibus, standardbussen,
styreledningerne og signalgrænsefladen generelt tilsluttes
til kapslingen i begge ender.
Generelle forhold vedr. EMC-immunitet
Hvis der er problemer med lavfrekvente forstyrrelser
(jordsløjfer), kan de skærmede ledninger til Profibus,
86 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Der findes ofte for høje niveauer af støvpartikler i installationens kabinetter og i de eksisterende elektriske
installationer.
Et tegn på aggressive luftbårne gasser er, at kobberskinnerne og kabelafslutningerne på de eksisterende
installationer bliver sorte.
Page 89

Alt om FCM 300
VLT® DriveMotor FCM Series
4.2.1 Oversigt over advarsler og alarmer
Tabellen viser de forskellige advarsler og alarmer, samt om fejlen fastlåser FC-motoren. Efter en triplås skal netforsyningen
afbrydes og fejlen rettes. Netforsyningen tilsluttes igen, og FC-motoren skal nulstilles, før den er klar. Når der er markeret
med et kryds i både advarsel og alarm, kan det betyde, at der kommer en advarsel før en alarm. Det kan også betyde, at
det er muligt selv at programmere, om der skal udløses en advarsel eller en alarm på en given fejl. Efter et trip vil alarm og
advarsel blinke, men hvis fejlen slettes, vil kun alarm blinke. Efter en nulstilling er FC-motoren igen klar til drift.
Nr. Beskrivelse Advarsel Trip, alarm Triplåst
2 Live zero-fejl (LIVE ZERO-FEJL) X X
4 Fasetab (NETFASETAB) X X X
5 Spændingsadvarsel høj (DC-LINK-SPÆNDING HØJ) X
6 Spændingsadvarsel lav (DC-LINK-SPÆNDING LAV) X
7 Overspænding (DC-LINK-OVERSP.) X X
8 Underspænding (DC-LINK-UNDERSP.) X
9 Overbelastning af vekselretter (VEKSELRETTERTID) X X
11 Motortermistor (MOTORTERMISTOR) X
12 Momentgrænse (MOMENTGRÆNSE) X
13 Overstrøm (OVERSTRØM) X X
14 Jordingsfejl (JORDINGSFEJL) X X
15 Forsyningsfejl (SWITCH MODE-FEJL) X X
16 Kortslutning (KORTSLUTNING) X X
17 Standardbustimeout (ST.BUSTIMEOUT) X X
18 HPFB-bustimeout (HPFB-TIMEOUT) X X
33 Uden for frekvensområde (UDENF. FR.OMR/ROT GR.) X
34 HPFB-FEJL (HPFB-ALARM) X X
35 Indkoblingsfejl (INDKOBLINGSFEJL) X X
36 Overtemperatur (OVERTEMPERATUR) X X
37 Intern fejl (INTERN FEJL) X X
Tabel 4.4 Advarsler og alarmer
4 4
Hvad sker der, hvis motoren ikke
4.2.2
starter?
LCP'et kan indstilles til lokalt stop. I så fald starter motoren ikke, når LCP'et afbrydes. Et LCP skal være tilsluttet, før motoren
kan startes – der er ingen andre muligheder, og MCT 10-opsætningssoftware afslører hverken, hvad der er galt, eller hvad
der kan gøres. Følg derfor nedenstående fremgangsmåde i tilfælde af problemer:
ADVARSEL
Advarsel:
Der skal udvises stor forsigtighed, når enheden apparatet uden påsat dæksel.
Grøn Gul Rød Handling
LED 302 LED 301 LED 300
OFF OFF OFF Tilfør strøm
ON OFF OFF Påfør start- og referencesignaler
ON OFF ON Påfør og fjern nulstillingssignalet
ON ON ON Afbryd strømforsyningen, indtil alle LED'er er slukket.
Se den hurtige opsætning MG03FXYY for oplysninger.
Tabel 4.5
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 87
Page 90

175NA117.10
ADVAR. 6
SETUP
1
DC LINK SPÆNDING LAV
Alt om FCM 300
VLT® DriveMotor FCM Series
1. Kontrollér, at ingen parametre er blevet ændret i
forhold til leveringstidspunktet (fabriksindstilling).
Brug LCP-betjeningspanelet eller seriel port til at
nulstille til fabriksindstillingerne. Kontrollér, at
parameter 002 er indstillet til fjernbetjening (hvis
ikke, blinker den gule LED 301 langsomt).
2. Kontrollér, at der er givet en STOP-kommando via
det ekstra tastatur til betjeningspanelet (lokalt
44
*) som i softwareversion 2.12
Problemer med den serielle kommunikation. Hvis
busadressen er sat til en høj værdi, kan kommunikationen
forekomme at være umulig, hvis den høje adresse ikke
scannes af masteren. Adressen ændres ikke til fabriksindstillingen med funktionen nulstilling til fabriksindstilling.
4.2.3
Displayet blinker mellem normal tilstand og advarsel.
Advarsler fremkommer i første og anden linje i displayet.
Se eksempel Illustration 4.8:
stop, den gule LED 301 blinker langsomt*).
Betjeningspanelets STOP kan kun genstartes med
knappen START på betjeningspanelet.
3. Kontrollér, at indikatorlamperne er synlige
gennem et hul i den indvendige isoleringsbelægning (se Illustration 2.2), følg nedenstående
tabel.
Advarsler
Alarmmeddelelser
Alarmen fremkommer i anden og tredje linje i displayet, se
eksempel Illustration 4.9:
Illustration 4.9 LCP ALARM:12
ADVARSEL/ALARM 2
Live zero-fejl (LIVE ZERO-fejl):
Strømsignalet på klemme 1 er under 50% af den værdi,
der er angivet i parameter 336 Klemme 1, min. skalering.
ADVARSEL/ALARM 4
Fasetab (NETFASETAB):
Manglende fase på forsyningssiden. Kontrollér forsyningsspændingen til FC-motoren.
ADVARSEL 5
Spændingsadvarsel høj (DC-LINK-SPÆNDING HØJ):
Mellemkredsspændingen (DC) er højere end styresystemets
overspændingsgrænse, se Tabel 4.6. FC-motoren er stadig
aktiv.
Illustration 4.8 LCP-ADV. 6
ADVARSEL 6
Spændingsadvarsel lav (DC-LINK-SPÆNDING LAV):
Mellemkredsspændingen (DC) er under styresystemets
underspændingsgrænse, se Tabel 4.6. FC-motoren er stadig
aktiv.
ALARM 7
Overspænding (DC-LINK-OVERSP.):
Hvis mellemkredsspændingen (DC) overstiger vekselretterens overspændingsgrænse (se Tabel 4.6), tripper FCmotoren. Desuden vil spændingen blive vist i displayet.
ALARM 8
Underspænding (DC-LINK-UNDERSP.):
Hvis mellemkredsspændingen (DC) falder til under vekselretterens nedre spændingsgrænse (se Tabel 4.6), tripper FCmotoren efter 3-28 sek, afhængigt af apparatet. Desuden
vil spændingen blive vist i displayet. Kontrollér, om
forsyningsspændingen passer til FC-motoren, se
2.1.2 Generelle tekniske data.
88 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 91

Alt om FCM 300
VLT® DriveMotor FCM Series
ADVARSEL/ALARM 9
Vekselretter overbelastet (VEKSELRETTERTID):
Ifølge den elektroniske termiske beskyttelse af vekselretteren er FC-motoren er tæt på udkobling p.g.a.
overbelastning (for høj strøm i for lang tid). Tælleren for
elektronisk termisk beskyttelse af vekselretteren giver en
advarsel ved 95% og tripper ved 100% med en alarm. FCmotoren kan ikke nulstilles, før tælleren er kommet under
90%.
FC-motorserie 3x380-480 V
[VDC]
Underspænding 410
Advarsel, lav spænding 440
Advarsel, høj spænding 760
Overspænding 760*
* 760 V i 5 sek eller 800 V øjeblikkeligt.
De angivne spændinger er FC-motorens
mellemkredsspænding.
Tabel 4.6 Trip-/alarm-/advarselsgrænser
ALARM 11
Motortermistor (MOTORTERMISTOR):
Hvis en termistor er monteret, og parameter 128 er sat til
[1] Aktiver, tripper FC-motoren, såfremt motoren bliver for
varm.
ADVARSEL 12
Strømgrænse (STRØMGRÆNSE):
Strømmen er større end værdien i parameter 221 (i
motordrift).
ALARM: 16
Kortslutning (STRØM, KORTSLUT):
Der er kortslutning på motorklemmerne eller i selve
motoren.
Kontakt Danfoss-leverandøren.
ALARM: 17
Standard bustimeout (STD BUSTIMEOUT)
Der er ingen kommunikation til FC-motoren. Advarslen vil
kun være aktiv, når parameter 514 er stillet til en anden
værdi end OFF.
Hvis parameter 514 er stillet til stop og trip, vil den først
afgive en advarsel og derefter rampe ned, indtil den
tripper og afgiver en alarm.
Parameter 513 Bustidsinterval kan evt. forøges.
ADVARSEL/ALARM 18
HPFB-bustimeout (HPFB-BUSTIMEOUT)
Der er ingen kommunikation med FC-motoren. Advarslen
vil kun være aktiv, når parameter 804 er stillet til en anden
værdi end OFF. Hvis parameter 804 er stillet til Stop og trip,
vil den først afgive en advarsel og derefter rampe ned,
indtil den tripper og afgiver alarm.
Parameter 803 Bustimeout kan muligvis stige.
ADVARSEL 33
Uden for frekvensområde:
Denne advarsel aktiveres, hvis udgangsfrekvensen har nået
parameter 201, Udgangsfrekvens, lav grænse eller parameter
202, Udgangsfrekvens, høj grænse.
4 4
ALARM 13
Overstrøm (OVERSTRØM):
Vekselretterens spidsstrømgrænse (ca. 230% af den
nominelle strøm) er overskredet. FC-motoren vil derefter
trippe med en alarm.
Sluk for FC-motoren, og kontrollér, om motorakslen kan
drejes.
BEMÆRK!
Denne alarm vises muligvis, hvis der
forekommer belastningsstød.
ALARM: 14
Jordingsfejl (JORDINGSFEJL):
Der er afladning fra udgangsfaserne til jord, enten mellem
vekselretteren og motoren eller i selve motoren.
ALARM: 15
Forsyningsfejl (SWITCH MODE-FEJL):
Fejl i switch mode-strømforsyningen (intern 24 Vforsyning).
Kontakt Danfoss-leverandøren.
ADVARSEL/ALARM 34
HPFB-fejl (HPFB-ALARM):
Profibuskommunikationen fungerer ikke korrekt.
ALARM 35
Indkoblingsfejl (INDKOBLINGSFEJL):
Denne advarsel fremkommer, når apparatet har været
tilsluttet for mange gange inden for 1 minut.
ADVARSEL/ALARM 36
Overtemperatur (OVERTEMPERATUR):
ALARM: 37
Intern fejl (INTERN FEJL):
Der er opstået en fejl i systemet. Kontakt Danfossleverandøren.
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 89
Page 92

Alt om FCM 300
VLT® DriveMotor FCM Series
4.2.4 Advarselsord, udvidet statusord og
alarmord
Advarselsord, udvidet statusord og alarmord vises på
displayet i hex-format. Hvis der er flere advarsler eller
alarmer, vil der blive vist en sum af de samlede advarsler
eller alarmer.
Advarselsord, udvidet statusord og alarmord kan også vises
med den serielle bus i parameter 540, 541 og 538.
44
Bit (hex) Advarselsord (P. 540)
00000008 HPFB-timeout
00000010 Standardbustimeout
00000040 Strømgrænse
00000200 Overbelastning af vekselretter
00001000 Advarsel, lav spænding
00002000 Advarsel, høj spænding
00004000 Fasetab
00010000 Advarsel, live zero-fejl
00400000 Advarsel, udgangsfrekvensgrænse
00800000 HPFB-fejl
40000000 Advarsel, 24 V-forsyning
80000000 Vekselrettertemp. høj
Bit (hex) Alarmord (P. 538)
00000002 Triplås
00000040 HPFB-timeout
00000080 Standardbustimeout
00000100 Kortslutning
00000200 24 V-forsyningsfejl
00000400 Jordslut.-fejl
00000800 Overstrøm
00004000 Motortermistor
00008000 Overbelastning af vekselretter
00010000 Underspænding
00020000 Overspænding
00040000 Fasetab
00080000 Live zero-fejl
00100000 Overtemperatur
02000000 HPFB-fejl
08000000 Indkoblingsfejl
10000000 Intern fejl
Tabel 4.9
Tabel 4.7
Bit (hex) Udvidet statusord (P. 541)
01 Rampning
04 Start med/mod uret
08 Slow-down
10 Catch up
8000 Frekvensgrænse
Tabel 4.8
90 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 93

Alt om FCM 300
4.3 Liste over parametre
VLT® DriveMotor FCM Series
Parametern
r. Funktion
001 Sprog 6 Engelsk 5 0
002 Lokal-/fjernbetjening 2 Fjernbetjening 5 0
003 Lokal reference 000,000 4 -3
004 Aktivt setup 4 Opsætning 1 5 0
005 Programmeringsopsætning 4 Aktivt setup 5 0
006 Kopiering af opsætninger 4 Ingen kopiering 5 0
007 LCP-kopi 4 Ingen kopiering 5 0
008 Visning af motorfrekvensskalering 100 6 -2
009 Displaylinje 2 24 Frekvens [Hz] 5 0
010 Displaylinje 1.1 24 Reference [%] 5 0
011 Displaylinje 1.2 24 Motorstrøm [A] 5 0
012 Displaylinje 1.3 24 Effekt [kW] 5 0
013 Lokal betjening/konfiguration 5 LCP, digital styring/par. 100 5 0
014 Lokalt stop 2 Mulig 5 0
015 Lokal jog 2 Ikke mulig 5 0
016 Lokal reversering 2 Ikke mulig 5 0
017 Lokal nulstilling af trip 2 Mulig 5 0
018 Lås for dataændringer 2 Ikke låst 5 0
019 Driftstilstand ved opstart, lokal styring 3 Tvangsstop, brug gemt ref. 5 0
Tabel 4.10 Funktioner til programmering, styring og overvågning via bussen (PROFIBUS) eller via pc.
Parametern
r. Funktion
100 Konfiguration 2 Hastighed, åben sløjfe-
101 Momentkarakteristikker 4 Konstant moment 5 0
102 Motoreffekt XX.XX kW - afh. af apparat 6 1
103 Motorspænding XX.XX V - afh. af apparat 6 0
104 Motorfrekvens XX.XX Hz - afh. af apparat 6 -1
105 Motorstrøm XX.XX A. - afh. af apparat 7 -2
106 Nominel motorhastighed XX O/MIN - afh. af apparat 6 0
117 Resonansdæmpning off -100% off % 6 0
118 Resonansdæmpning, udkobling 0-200% Motorafhængig 5 0
126 DC-bremsetid 0,0 (off)-60,0 sek. 10,0 sek. 6 -1
127 DC-bremseindkoblingsfrekvens 0,0 Hz-f
128 Termisk motorbeskyttelse 1 Ingen beskyttelse 5 0
132 DC-bremsespænding 0-100% 0% 5 0
133 Startspænding 0,00-100,00 V Motorafhængig 6 -2
134 Startkompensation 0.0-300.0% 100,0% 6 -1
135 U/f-forhold 0,0-20,00 V/Hz Motorafhængig 6 -2
136 Slipkompensering -500,0-+500,0% 100,0% 3 -1
137 DC-holdespænding 0-100% 0% 5 0
138 Bremseudkoblingsfrekvens 0,5-132 Hz 3,0 Hz 6 -1
139 Bremseindkoblingsfrekvens 0,5-132 Hz 3,0 Hz 6 -1
147 Opsætning af motortype afh. af apparat afh. af apparat 5 0
Område/antal indstillinger/
værdi Fabriksindstilling
Område/antal indstillinger/
værdi Fabriksindstilling
tilstand
MAKS
0,0 Hz 6 -1
Data
type
Data
type
5 0
Konv.
indeks
4 4
Konv.
indeks
Tabel 4.11 Funktioner til programmering, styring og overvågning via bussen (PROFIBUS) eller via pc.
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 91
Page 94

Alt om FCM 300
VLT® DriveMotor FCM Series
Konverteringsindeks:
Dette tal henviser til et konverteringstal, der bruges ved
skrivning eller læsning via seriel kommunikation med
frekvensomformeren.
Se 3.6.4 Databyte i 3.6.1 Seriel bus
Datatype:
Datatype viser type og længde på telegrammet.
Datatype Beskrivelse
3 16-bit heltal
4 32-bit heltal
5 8-bit uden fortegn
6 16-bit uden fortegn
7 32-bit uden fortegn
9 Tekststreng
44
Tabel 4.12
92 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 95

Alt om FCM 300
Parametern
r. Funktion Område/antal indstillinger/værdi Fabriksindstilling
VLT® DriveMotor FCM Series
Data
type
200 Omdrejningsretning 3 Kun med uret 0-132 Hz 5 0
201 Min. udgangsfrekvens
(f
)
MIN
202 Max. udgangsfrekvens
(f
)
MAKS
203 Reference-/feedback-
0,0 Hz-f
f
MIN-fOMRÅDE
MAKS
0,0 Hz 6 -1
f
(132 Hz) 6 -1
OMRÅDE
Min. - maks./-maks.- +maks. Min. - Maks. 5 0
område
204 Minimumreference -100.000,000-Ref
205 Maksimumreference Ref
-100.000,000 50,000 4 -3
MIN
MAKS
0,000 4 -3
207 Rampetid op-tid 1 0,05-3600,00 s 3,00 s 7 -2
208 Rampe ned-tid 1 0,05-3600,00 s 3,00 s 7 -2
209 Rampe op-tid 2 0,15-3600,00 s 3,00 7 -2
210 Rampe ned-tid 2 0,15-3600,00 s 3,00 s 7 -2
211 Jog-rampetid 0,05-3600,00 s 3,00 s 7 -2
212 Kvikstop, rampe ned-tid 0,05-3600,00 s 3,00 s 7 -2
213 Jog-frekvens 0 Hz - f
MAKS
10,0 Hz 6 -1
214 Referencefunktion 2 Sum 5 0
215 Preset-reference 1 -100,00%-+100,00% 0,00% 3 -2
216 Preset-reference 2 -100,00%-+100,00% 0,00% 3 -2
219 Catch up-/slow down-
0.00-100.00% 0,00% 6 -2
værdi
221 Strømgrænse for
Min.- maks.-grænse i% af I
nominel
Maks. grænse 6 -1
motortilstand
229 Frekvens-bypass,
0 (off)-100% 0% 6 0
båndbredde
230 Frekvens-bypass 1 0,0-132 Hz 0,0 Hz 6 -1
231 Frekvens-bypass 2 0,0-132 Hz 0,0 Hz 6 -1
241 Reference-preset 1 -100,00%-+100,00% 0,00% 3 -2
242 Reference-preset 2 -100,00%-+100,00% 0,00% 3 -2
243 Reference-preset 3 -100,00%-+100,00% 0,00% 3 -2
244 Reference-preset 4 -100,00%-+100,00% 0,00% 3 -2
245 Reference-preset 5 -100,00%-+100,00% 0,00% 3 -2
246 Reference-preset 6 -100,00%-+100,00% 0,00% 3 -2
247 Reference-preset 7 -100,00%-+100,00% 0,00% 3 -2
Konv
.
indek
s
4 4
Tabel 4.13 Funktioner til programmering, styring og overvågning via bussen (PROFIBUS) eller via pc.
Parametern
r. Funktion Område/antal indstillinger/værdi Fabriksindstilling
Data
type
317 Timeout 1-99 s 10 s 5 0
318 Funktion efter timeout Off/Stop og trip Off 5 0
323 X102 relæfunktion 14 Ingen funktion 5 0
327 Pulsreference/feedback, maks. frekv. 100-70.000 Hz 5000 Hz 7 0
331 Klemme 1, analog indgangsstrøm 3 Ingen funktion 6 0
332 Klemme 2, digital indgang 31 Reference 6 0
333 Klemme 3, digital indgang 31 Nulstil 6 0
334 Klemme 4, digital indgang 30 Start 6 0
335 Klemme 5, digital indgang 29 Jog 6 0
336 Klemme 1, min. skalering 0,0-20,0 mA 0,0 mA 6 -4
337 Klemme 1, maks. skalering 0,0-20,0 mA 20,0 mA 6 -4
338 Klemme 2, min. skalering 0,0-10,0 V 0,0 V 6 -1
339 Klemme 2, maks. skalering 0,0-10,0 V 10,0 V 6 -1
340 Udgangsfunktioner 24 Ingen funktion 6 0
Tabel 4.14 Funktioner til programmering, styring og overvågning via bussen (PROFIBUS) eller via pc.
Konv.
indeks
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 93
Page 96

Alt om FCM 300
VLT® DriveMotor FCM Series
Parametern
r. Funktion
400 Bremsefunktion Off/AC-bremsning Off 5 0
403 Sleep mode timer 0-300 s Off 6 0
404 Sleep-frekvens f
405 Nulstillingsfunktion 11 Manuel nulstilling 5 0
406 Boost-sætpunkt 1-200% 100% 6 0
407 Wake up-frekvens Par 404-f
411 Switchfrekvens 1,5-14,0 kHz Apparatafhængig 6 0
412 Variabel switchfrekvens 3 Temp.-afh. sw.frekv. 5 0
44
413 Overmoduleringsfunktion Off/On On 5 0
414 Minimum feedback -100000-FB
415 Maks. feedback FB
416 Reference-/feedbackenhed 42 % 5 0
437 Process PID normal/inverteret styr. Normal/inverteret Normal 5 0
438 Proces-PID-anti windup Deaktiver/Aktivér Aktivér 5 0
439 Process PID-startfrekvens f
440 Process PID-proportionalforstærkning 0,00 (off)-10,00 0,01 6 -2
441 Process PID-integrationstid 0,01-9.999 s (off) 9.999 s 7 -2
442 Process PID-differentieringstid 0,00 (off)-10,00 s 0,00 s 6 -2
443 Process PID diff. forst.grænse 5-50 5 6 -1
444 Process PID-lavpasfiltertid 0,1-10,00 s 0,1 s 6 -2
445 Flying start 4 Deaktiver 5 0
446 Switchmønster 2 SFAVM 5 0
455 Overvågning af frekvensområde Deaktiver/Aktivér Aktivér 5 0
461 Feedbackkonvertering Lineær eller kvadratrod Lineær 5 0
Tabel 4.15 Funktioner til programmering, styring og overvågning via bus (PROFIBUS) eller via pc.
Område/antal indstillinger/
værdi Fabriksindstilling
- par 407 0 Hz 6 -1
MIN
MAKS
HIGH
-100.000 1500 4 -3
LAV
MIN-fMAKS
50 Hz 6 -1
0 4 -3
f
MIN
Data
type
6 -1
Konv.
indeks
Konverteringsindeks:
Dette tal henviser til et konverteringstal, der bruges ved
skrivning eller læsning via seriel kommunikation med
frekvensomformeren.
Se 3.6.4 Databyte i 3.6.1 Seriel bus
Datatype:
Datatype viser type og længde på telegrammet.
Datatype Beskrivelse
3 16-bit heltal
4 32-bit heltal
5 8-bit uden fortegn
6 16-bit uden fortegn
7 32-bit uden fortegn
9 Tekststreng
Tabel 4.16
94 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 97

Alt om FCM 300
VLT® DriveMotor FCM Series
Parametern
r. Funktion
500 Busadresse 1-126 1 5 0
501 Baud-hastighed 300-9600 Baud/6 9600 Baud 5 0
502 Friløb 4 Logisk eller 5 0
503 Hurtigt stop 4 Logisk eller 5 0
504 DC-bremse 4 Logisk eller 5 0
505 Start 4 Logisk eller 5 0
506 Reversering 4 Logisk eller 5 0
507 Valg af opsætning 4 Logisk eller 5 0
508 Valg af hastighed 4 Logisk eller 5 0
509 Bus jog 1 0,0-f
510 Bus jog 2 0,0-f
512 Telegramprofil Profidrive/FC-frekvensom-
513 Bustidsinterval 1 s 5 0
514 Bustidsintervalfunktion 6 Off 5 0
515 Dataudlæsning: Reference XXX.X 3 -1
516 Dataudlæsning: Refer.-enhed Hz/O/MIN 4 -3
517 Dataudlæsning: Feedback 4 -3
518 Dataudlæsning: Frekvens Hz 3 -1
519 Dataudlæsning: Frekvens x skala Hz 7 -2
520 Dataudlæsning: Strøm A x 100 7 -2
521 Dataudlæsning: Moment % 3 -1
522 Dataudlæsning: Effekt kW 7 1
523 Dataudlæsning: Effekt hk 7 -2
524 Dataudlæsning: Motorspænding V 6 -1
525 Dataudlæsning: DC link-spænding V 6 0
527 Dataudlæsning: FC termisk 0-100% 5 0
528 Dataudlæsning: Digital indgang 5 0
533 Dataudlæsning: Ekstern reference -200,0-+200,0% 6 -1
534 Dataudlæsning: Statusord, binær 6 0
537 Dataudlæsning: FC-temperatur °C 5 0
538 Dataudlæsning: Alarmord, binært 7 0
539 Dataudlæsning: Styreord, binært 6 0
540 Dataudlæsning: Advarselsord, 1 7 0
541 Dataudlæsning: Advarselsord, 2 7 0
542 Dataudlæsning: Klemme 1, analog indgang mA X 10 5 -4
543 Dataudlæsning: Klemme 2, analog indgang V X 10 5 -1
561 Protokol FC-protokol/Modbus RTU FC-protokol 5 0
570 Ramme for Modbus-paritet og meddelelse 4 Lige/1stopbit 5 0
571 Modbus-kommunikationstimeout 10-2.000 ms 100 ms 6 0
Område/antal indstillinger/værdi Fabriksindstilling
MAKS
MAKS
former
10,0 Hz 6 -1
10,0 Hz 6 -1
FC-frekvensomformer 5 0
Data
type
Konv.
indeks
4 4
Tabel 4.17 Funktioner til programmering, styring og overvågning via bussen (PROFIBUS) eller via pc.
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 95
Page 98

Alt om FCM 300
VLT® DriveMotor FCM Series
Parameter
nr. Funktion Område/antal indstillinger/værdi Fabriksindstilling
600 Driftsdata: Driftstimer 0-130.000,0 timer 5 0
601 Driftsdata: Kørte timer 0-130.000,0 timer 7 73
603 Driftsdata: Antal opstarter 0-9999 7 73
604 Driftsdata: Antal overtemp. 0-9999 6 0
605 Driftsdata: Antal overspændinger 0-9999 6 0
615 Fejllog, udlæsning: Fejlkode Indeks XX-XXX 6 0
616 Fejllog, udlæsning: Tid Indeks XX-XXX 5 0
617 Fejllog, udlæsning: værdi Indeks XX-XXX 7 -1
44
619 Nulstilling af tæller for kørte timer Ingen nulstilling/nulstilling Ingen nulstilling 3 0
620 Driftstilstand 3 Normal funktion 5 0
621 Typeskilt: FC-motortype Afhænger af apparatet 5 0
624 Typeskilt: Softwareversionsnr.: Afhænger af apparatet 9 0
625 LCP-version Afhænger af apparatet 9 0
626 Typeskilt: Databaseidentifikationsnr. Afhænger af apparatet 9 0
628 Typeskilt: Applikationsoptionstype 9 -2
630 Typeskilt: Kommunikationsoptionstype 9 0
632 BMC-softwareidentifikation 9 0
633 Motordatabaseidentifikation 9 0
634 Apparatidentifikation for kommunikation 9 0
635 Softwaredelnr. 9 0
678 Konfigurering af styrekort Afhænger af apparatet 5 0
Tabel 4.18 Funktioner til programmering, styring og overvågning via bussen (PROFIBUS) eller via pc.
Konverteringsindeks:
Dette tal henviser til et konverteringstal, der bruges ved
Datatype:
Datatype viser type og længde på telegrammet.
Data
type
Konv.
indeks
skrivning eller læsning via seriel kommunikation med
frekvensomformeren.
Se 3.6.4 Databyte i 3.6.1 Seriel bus
Datatype Beskrivelse
3 16-bit heltal
4 32-bit heltal
5 8-bit uden fortegn
6 16-bit uden fortegn
7 32-bit uden fortegn
9 Tekststreng
Tabel 4.19
96 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
Page 99

Indeks
VLT® DriveMotor FCM Series
Indeks
A
Adresse.................................................................................................... 71
Advarsel Mod Utilsigtet Start........................................................... 5
Advarselsord......................................................................................... 90
Advarsler................................................................................................. 87
Æ
Ændring Af Data.................................................................................. 34
A
Aggressive Miljøer.............................................................................. 86
Aktivt Setup........................................................................................... 37
Akustisk Støj.......................................................................................... 80
Alarmer.................................................................................................... 87
Alarmord................................................................................................. 90
Apparatidentifikation For Kommunikation............................. 78
B
Baud-hastighed................................................................................... 71
Belastningskompensering.............................................................. 43
Bestilling.................................................................................................... 9
Betjeningspanel................................................................................... 29
Betjeningstaster.................................................................................. 30
BMC-softwareidentifikation........................................................... 78
Boltmomenter...................................................................................... 24
Bortskaffelsesinstruktion................................................................... 4
Broadcast................................................................................................ 61
Bus
Jog 1...................................................................................................... 72
Jog 2...................................................................................................... 72
Bustidsinterval..................................................................................... 72
Bustidsintervalfunktion................................................................... 72
C
Catch Up-/slow Down-værdi.......................................................... 47
CE-mærkning........................................................................................ 84
D
Databyte................................................................................................. 62
Datakontrolbyte (BCC)...................................................................... 62
Dataudlæsning:
Advarselsord...................................................................................... 75
Alarmord............................................................................................. 74
DC Link-spænding........................................................................... 74
Digital Indgang................................................................................. 74
Effekt, HK............................................................................................. 73
Effekt, KW............................................................................................ 73
Ekstern Reference %....................................................................... 74
FC Termisk.......................................................................................... 74
Feedback............................................................................................. 73
Frekvens.............................................................................................. 73
Klemme 1, Analog Indgang.......................................................... 75
Klemme 2, Analog Indgang.......................................................... 75
Moment............................................................................................... 73
Motorspænding................................................................................ 74
Reference %....................................................................................... 73
Referenceenhed............................................................................... 73
Statusord, Binær............................................................................... 74
Strøm.................................................................................................... 73
Styreord............................................................................................... 75
Udv. Statusord................................................................................... 75
VEK.-temperatur............................................................................... 74
DC-bremse............................................................................................. 71
DC-bremseindkoblingsfrekvens................................................... 42
DC-bremsespænding........................................................................ 42
DC-bremsetid........................................................................................ 42
Derating
For Høj Switchfrekvens.................................................................. 81
For Kørsel Ved Lav Hastighed...................................................... 81
For Lufttryk......................................................................................... 81
For Omgivelsestemperatur.......................................................... 81
Differentiator........................................................................................ 58
Display
Display................................................................................................. 30
Mode..................................................................................................... 31
Displayets Visningstilstand............................................................ 31
Displaylinje
1.1.......................................................................................................... 39
1.2.......................................................................................................... 39
1.3.......................................................................................................... 39
2.............................................................................................................. 38
Driftsdata:
Antal Opstarter................................................................................. 76
Antal Overspændinger................................................................... 76
Antal Overtemperaturer................................................................ 76
Kørte Timer......................................................................................... 76
Driftstilstand
Driftstilstand...................................................................................... 77
Ved Opstart, Lokal Betjening....................................................... 41
Driftstimer: Driftstimer..................................................................... 76
E
Effektfaktor............................................................................................ 84
Eksterne................................................................................................... 14
Ekstreme Driftsforhold..................................................................... 80
EMC-direktiv.......................................................................................... 84
EMC-standarder................................................................................... 85
MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss 97
Page 100

Indeks
VLT® DriveMotor FCM Series
F
FCM
300 Termisk Motorbeskyttelse.................................................... 25
305-375 Til 3 Faser, 380-480 V..................................................... 12
Feedback................................................................................................. 59
Feedbackområde................................................................................ 58
Fejllog....................................................................................................... 77
Fejllog:
Tid.......................................................................................................... 77
Værdi.................................................................................................... 77
Flying Start............................................................................................. 60
Frekvens-bypass 1.............................................................................. 48
Frekvens-bypass, Båndbredde...................................................... 47
Frembygningssæt............................................................................... 26
Friløb......................................................................................................... 71
Funktion Efter Timeout.................................................................... 49
G
Galvanisk Adskillelse (PELV)........................................................... 79
H
Håndtering Af FC-motoren............................................................. 19
Hurtigt
Stop....................................................................................................... 71
Stop, Rampe Ned-tid...................................................................... 46
I
Initialisering........................................................................................... 77
Integrering Af Frekvensomformer Og Motor............................ 6
J
Jog-frekvens.......................................................................................... 46
Jog-rampetid......................................................................................... 46
Justering................................................................................................. 24
K
Klemme
1, Analog Indgangsstrøm.............................................................. 50
1, Maks. Skalering............................................................................. 53
1, Min. Skalering............................................................................... 52
2, Analog/digital Indgang............................................................. 50
2, Maks. Skalering............................................................................. 53
3, Digital Indgang............................................................................ 50
4, Digital Indgang............................................................................ 50
5, Digital Indgang............................................................................ 50
Klemmeplaceringer............................................................................ 17
Konfiguration........................................................................................ 41
Konstant Overbelastning................................................................. 80
Kopiering Af Opsætninger.............................................................. 38
Kvikmenu................................................................................................ 33
L
Lækstrøm Til Jord................................................................................ 79
Lås For Dataændringer..................................................................... 40
Lavpasfilter............................................................................................ 58
Lavspændingsdirektivet (73/23/EØF)........................................ 84
LCP-display............................................................................................ 30
LCP-kopi.................................................................................................. 38
LED 300-304........................................................................................... 16
LED'er....................................................................................................... 30
Lejer.......................................................................................................... 19
Lokal
Betjening/konfiguration................................................................ 39
Jog......................................................................................................... 40
Nulstilling Af Trip.............................................................................. 40
Reference............................................................................................ 37
Reversering........................................................................................ 40
Lokal-/fjernbetjening........................................................................ 37
Lokalbetjeningspanel....................................................................... 27
Lokalt Stop............................................................................................. 40
Luftfugtighed........................................................................................ 82
M
Maks.
Feedback............................................................................................. 56
Udgangsfrekvens............................................................................. 44
Maksimumreference.......................................................................... 45
Mål............................................................................................................. 20
Maskindirektivet.................................................................................. 84
Menu Mode............................................................................................ 33
Menustruktur........................................................................................ 36
Min. Udgangsfrekvens...................................................................... 44
Minimum Feedback........................................................................... 56
Minimumreference............................................................................. 45
Momentkarakteristikker.................................................................. 13
Montering Af FC-motoren............................................................... 23
Motordatabaseidentifikation........................................................ 78
Motoreffekt............................................................................................ 41
Motorfrekvens...................................................................................... 42
Motorgenereret Overspænding................................................... 80
Motorspænding................................................................................... 41
Motorstrøm............................................................................................ 42
N
Netforsyning......................................................................................... 13
Netforsyningsforstyrrelse/harmoniske Strømme................. 83
Netudfald................................................................................................ 80
Nominel Motorhastighed................................................................ 42
98 MG03BA01 - VLT® er et registreret varemærke tilhørende Danfoss
 Loading...
Loading...