

Page 1

MAKING MODERN LIVING POSSIBLE
Manuel de configuration
Moteur FCM 300 VLT® Brook
Crompton
www.danfoss.com/drives
Page 2

Page 3
Table des matières
Table des matières
Motovariateur VLT® série FCM
1 Introduction
1.1.1 Version logiciel 4
1.1.5 Réglementations de sécurité 5
1.1.6 Avertissement concernant les démarrages imprévus 5
1.3.1 Intégration du variateur de fréquence et du moteur 6
1.4.1 du formulaire de commande 8
1.4.2 Gamme de produits 9
1.4.3 Commande 10
1.4.4 Outils de logiciel PC 10
1.4.5 Informations pour la commande de châssis et de brides 11
1.4.6 Informations de commande pour l'emplacement du boîtier onduleur et de l'orifice de drainage 12
2 Installation
2.1.1 FCM 305-375, triphasé, 380-480 V 13
2.1.2 Données techniques générales 14
2.1.3 Couples de serrage 17
2.1.4 Section maximale du câble 17
4
13
2.1.5 Taille des vis 17
2.1.6 Protection 18
2.2 Description du moteur
2.2.1 Manutention du moteur FC 20
2.2.2 Paliers 20
2.2.3 Arbres de sortie 21
2.2.4 Dimensions 21
2.2.5 Installation du moteur FC 24
2.2.6 Alignement 24
2.2.7 Couples des boulons 25
2.2.8 Maintenance 25
2.2.9 Protection thermique FCM 300 26
2.3.1 Kit service connexion rapide (175N2546) 26
2.3.2 Kit de fiches (175N2545) 27
2.3.3 Montage externe (175N0160) 27
2.3.5 Option potentiomètre (177N0011) 28
2.3.6 Panneau de commande local (LOP) (175N0128) IP65 28
19
3 Programmation
3.1.1 Panneau de commande (175NO131) 30
3.1.2 Installation du LCP 30
3.1.3 Fonctions du LCP 30
30
MG03BA04 - VLT® est une marque déposée Danfoss 1
Page 4

Table des matières
Motovariateur VLT® série FCM
3.1.4 Ecran 31
3.1.5 LED 31
3.1.6 Touches de commande 31
3.1.7 Fonction des touches de commande 32
3.1.8 Etat des indications de l'écran 33
3.1.9 Mode d'affichage 33
3.1.10 Mode d'affichage - Choix de l'état des indications 33
3.1.11 Mode menu rapide comparé au mode menu 34
3.1.12 Configuration rapide à l'aide du menu rapide 34
3.1.13 Sélection de paramètre 35
3.1.14 Mode menu 35
3.1.15 Groupes de paramètres 35
3.1.16 Modification de données 35
3.1.17 Changement de texte 36
3.1.18 Modification à l'infini d'une valeur numérique 36
3.1.19 Structure de menu 37
3.1.20 Groupe de paramètres 0-** Fonction./Affichage 38
3.2.1 Groupe de paramètres 1-** Charge/moteur 42
3.6.1 Bus série 63
3.6.2 Trafic télégramme 63
3.6.3 Composition d'un télégramme 63
3.6.4 Octets de données 64
3.6.5 Mot de contrôle selon la norme de profil bus 66
3.7.1 Groupe de paramètres 5-** Communication série 72
3.8 Paramètres 600-678 - Manuel de configuration du FCM 300
3.8.1 Groupe de paramètres 6-** Fonctions techniques 77
4 Informations complètes sur le FCM 300
4.1.1 Isolation galvanique (PELV) 81
4.1.2 Courant de fuite à la terre 81
4.1.3 Conditions de fonctionnement extrêmes 82
4.1.4 Bruit acoustique 82
4.1.5 Equilibrage 82
77
81
4.1.6 Protection thermique et déclassement 83
4.1.7 Déclassement pour température ambiante 83
4.1.8 Déclassement pour pression atmosphérique 83
4.1.9 Déclassement pour fonctionnement à faible vitesse 83
4.1.10 Déclassement pour fréquence de commutation élevée 84
4.1.11 Vibrations et chocs 84
4.1.12 Humidité relative de l'air 84
4.1.13 Exigences UL 84
2 MG03BA04 - VLT® est une marque déposée Danfoss
Page 5
Table des matières
Motovariateur VLT® série FCM
4.1.14 Rendement 84
4.1.15 Interférences alimentation secteur/harmoniques 85
4.1.16 Facteur de puissance 86
4.1.17 Que signifie le marquage CE ? 86
4.1.18 Directive machine (98/37/CEE) 86
4.1.19 Directive basse tension (73/23/CEE) 86
4.1.20 Directive CEM (89/336/CEE) 86
4.1.21 Champ d'application 86
4.1.22 Moteur Danfoss FCM série 300 et marquage CE 87
4.1.23 Conformité avec la directive CEM 89/336/CEE 87
4.1.24 Normes CEM 87
4.1.25 Environnements agressifs 88
4.2.1 Liste des avertissements et alarmes 89
4.2.2 Que faire si le moteur ne démarre pas ? 89
4.2.3 Avertis. 90
4.2.4 Mot d'avertissement, mot d'état élargi et mot d'alarme 92
4.3 Liste des paramètres
Indice
93
100
MG03BA04 - VLT® est une marque déposée Danfoss 3
Page 6
Introduction
Motovariateur VLT® série FCM
1
1 Introduction
1.1 Sécurité
1.1.1 Version logiciel
Série FCM 300
Manuel de configuration
Version du logiciel : 3.1x
Ce Manuel de configuration concerne l'ensemble des variateurs
de fréquence série FCM 300 avec logiciel version 3.1x.
Voir le numéro de la version du logiciel au paramètre 624
Numéro version logiciel.
Tableau 1.1
Instruction de mise au rebut
1.1.2
Cet équipement contient des composants
électriques et ne peut pas être jeté avec
les ordures ménagères.
Il doit être collecté séparément avec les
déchets électriques et électroniques
conformément à la législation locale en
vigueur.
Tableau 1.2
ATTENTION
Indique une situation potentiellement dangereuse qui, si
elle n'est pas évitée, peut entraîner des blessures superficielles à modérées. Ce signe peut aussi être utilisé pour
mettre en garde contre des pratiques non sûres.
1.1.4 Avertissements d'ordre général
AVIS!
Toutes les interventions doivent être réalisées par du
personnel qualifié.
Utiliser les possibilités de levage disponibles, p. ex. les
deux points de levage ou un seul point de levage, selon
l'équipement monté *.
Levage vertical - Éviter toute rotation incontrôlée.
Machine de levage - Ne pas relever d'autres équipements
en n'utilisant que les points de levage du moteur.
Avant l'installation, vérifier l'état général : endommagement du capot du ventilateur ou de l'arbre,
endommagement du socle/des pièces de montage,
fixations desserrées. Vérifier les détails sur la plaque
signalétique.
Prévoir une surface plane de montage et un montage
équilibré, non décalé.
Les garnitures et/ou scellements ainsi que les protections
doivent être correctement installés.
Tension de courroie correcte.
Veiller à respecter les règles de déclassement, voir
4.1 Exigences particulières.
Symboles
1.1.3
Lors de la lecture de ce Manuel de configuration, on
rencontre les symboles suivants, auxquels il faut porter une
attention toute particulière.
AVERTISSEMENT
Indique une situation potentiellement dangereuse qui, si
elle n'est pas évitée, peut entraîner des blessures graves
ou le décès.
*Note : le levage manuel maximum est de 20 kg audessous de l'épaule mais au-dessus du niveau du sol. Poids
bruts max. :
Châssis de taille 80 : 15 kg
-
Châssis de taille 90 et 100 : 30 kg
-
Châssis de taille 112 : 45 kg
-
Châssis de taille 132 : 80 kg
-
AVIS!
Met en évidence une information qui doit être attentivement prise en considération pour éviter toute erreur
ou toute utilisation non optimale de l'équipement.
4 MG03BA04 - VLT® est une marque déposée Danfoss
Page 7
Introduction
Motovariateur VLT® série FCM
AVERTISSEMENT
Lorsqu'il est relié au secteur, le moteur FC est traversé
par des tensions élevées. Tout branchement incorrect du
moteur FC risque d'endommager l'appareil et de causer
des blessures graves ou mortelles.
Il faut donc se conformer aux instructions de ce manuel
et aux réglementations de sécurité locales et nationales.
Tout contact avec les parties électriques, même après la
mise hors tension de l'appareil, peut provoquer des
blessures graves ou mortelles. Attendre 4 minutes
minimum.
- L’installation doit comporter des fusibles adéquats et
être correctement isolée.
- Les protections et entrées de câble doivent être
installées.
AVERTISSEMENT
À des altitudes de plus de 2000 m, merci de contacter
Danfoss Drives en ce qui concerne la norme PELV.
une installation permanente fixe ainsi qu’une
protection de mise à la terre renforcée.
1.1.6 Avertissement concernant les
démarrages imprévus
Le moteur peut être stoppé à l'aide des entrées
•
digitales, des commandes de bus, des références
analogiques ou de l'arrêt local lorsque le variateur
de fréquence est relié au secteur.
Ces modes d'arrêt ne sont pas suffisants lorsque
la sécurité des personnes exige l'élimination de
tout risque de démarrage imprévu.
Le moteur peut se mettre en marche lors de la
•
programmation des paramètres.
Un moteur à l'arrêt peut se mettre en marche en
•
cas de panne des composants électroniques du
moteur FC ou après une surcharge temporaire ou
une panne de secteur.
1
1
AVIS!
L'utilisateur ou l'électricien agréé a la responsabilité
d'assurer une mise à la terre et une protection correctes
en conformité avec les normes nationales et locales en
vigueur.
1.1.5 Réglementations de sécurité
L'alimentation secteur doit impérativement être
•
coupée avant toute intervention sur l'ensemble
motovariateur VLT (moteur FC).
S'assurer que l'alimentation secteur est bien
coupée et que le temps nécessaire (4 minutes)
s'est écoulé.
La protection de mise à la terre du matériel doit
•
être correcte afin de protéger l'utilisateur contre
la tension d'alimentation et le moteur contre les
surcharges, conformément aux réglementations
locales et nationales.
L’utilisation des relais différentiels (RCD) est
décrite au 4.1.2 Courant de fuite à la terre .
Les courants de fuite à la terre sont supérieurs à
•
3,5 mA. Cela signifie que le moteur FC nécessite
1.2 Introduction
Publications techniques spécifiques concernant le FCM
Série 300 :
Manuel de configuration :
Configuration
rapide :
Tableau 1.3
Pour plus d'informations sur les FCM 300, contacter le
fournisseur Danfoss local.
Il contient toutes les informations utiles
pour l’étude et permet de se familiariser
avec la technologie, la gamme de
produits, les caractéristiques techniques, la
commande, la programmation, etc.
Il s’agit d’un manuel d’installation qui
permet aux utilisateurs d’installer et de
démarrer rapidement leur FCM Série 300.
Le Manuel configuration rapide est
toujours livré avec l’appareil.
MG03BA04 - VLT® est une marque déposée Danfoss 5
Page 8
175NA161.10
Promotion
All
users
X = version number
YY = language
Misc.
Quick Setup
MG.03.FX.YY
Design
Guide
MG03BXYY
PROFIBUS-
Manual
MG.03.EX.YY
Brochure
MB.03.CX.YY
Articles
MZ.03.AX.YY
MCT 10 Setup
Software Manual
MG10RXYY
Data sheet
MD.03.AX.YY
1
Introduction
Illustration 1.1 Littérature disponible pour la série FCM 300
Motovariateur VLT® série FCM
1.3 Conception du produit
1.3.1 Intégration du variateur de fréquence
et du moteur
Le variateur de fréquence VLT Danfoss intégré au moteur
asynchrone permet une commande extrêmement précise
de la vitesse en une seule unité.
L'ensemble motovariateur VLT FCM Série 300 est une
alternative très compacte à la solution standard composée
du variateur de fréquence VLT et du moteur en tant
qu'unités séparées. Le variateur de fréquence, installé à la
place du bornier du moteur, ne dépasse ni en hauteur le
bornier standard ni en largeur ou en longueur le moteur
(voir 2.2.4 Dimensions ).
L’installation est extrêmement facile. Trouver de la place
dans une armoire n'est plus un problème. Aucun renseignement particulier n’est nécessaire pour le câblage afin
de respecter la directive CEM du fait que les câbles moteur
sont superflus. Les seules connexions sont les connexions
secteur et de commande.
L’adaptation, réglée en usine, entre le variateur de
fréquence et le moteur permet une commande précise et
efficace tout en éliminant tout besoin de préréglage sur le
site.
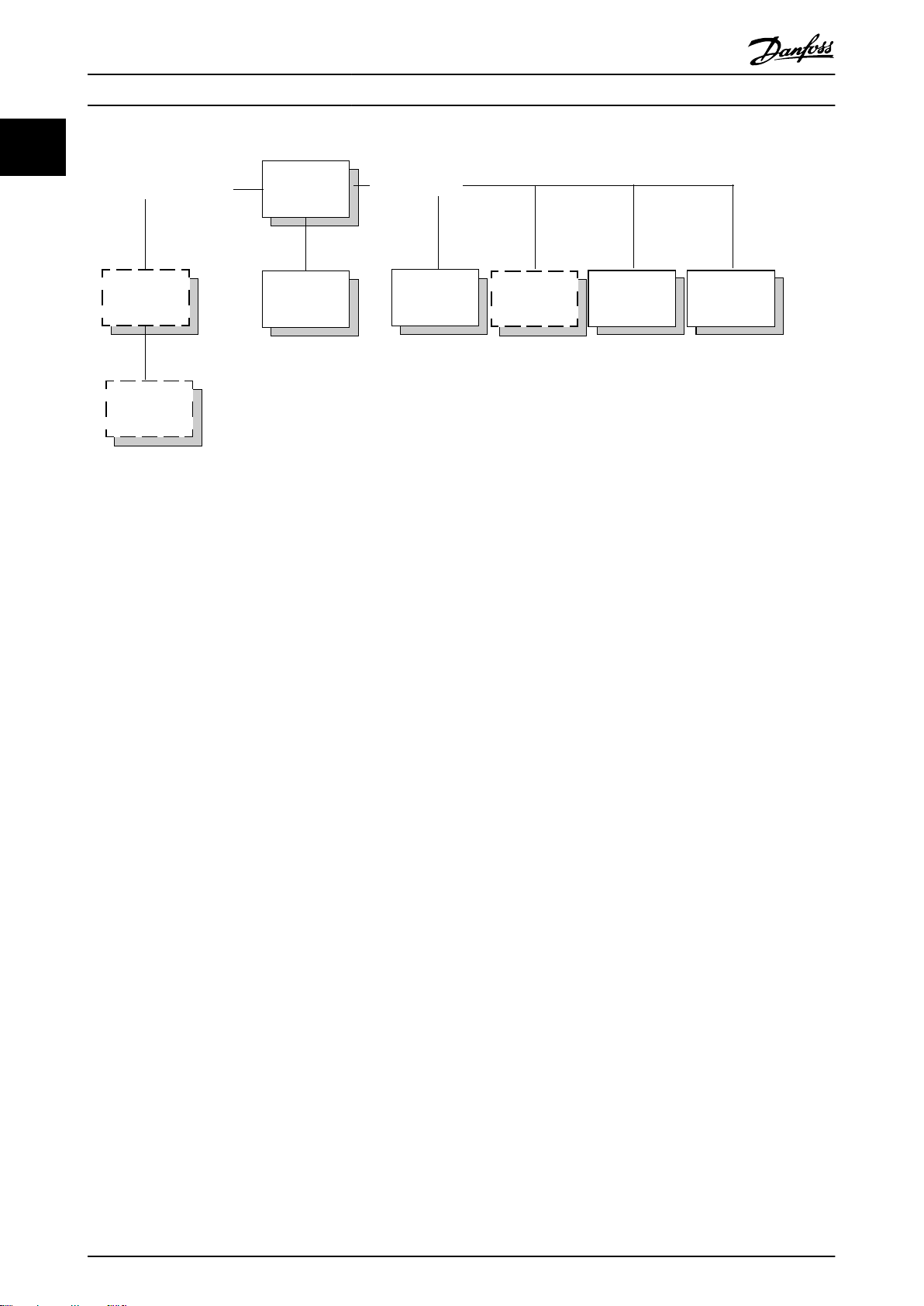
Le moteur FC peut être utilisé dans des systèmes
individuels avec des signaux de commande traditionnels,
comme des signaux de marche/arrêt, des références de
vitesse et le contrôle de process en boucle fermée ou dans
des systèmes à variateurs multiples avec des signaux de
commande distribués par bus.
La combinaison du bus de terrain avec les signaux de
commande traditionnels et le contrôle PID en boucle
fermée est également possible.
6 MG03BA04 - VLT® est une marque déposée Danfoss
Page 9
Introduction
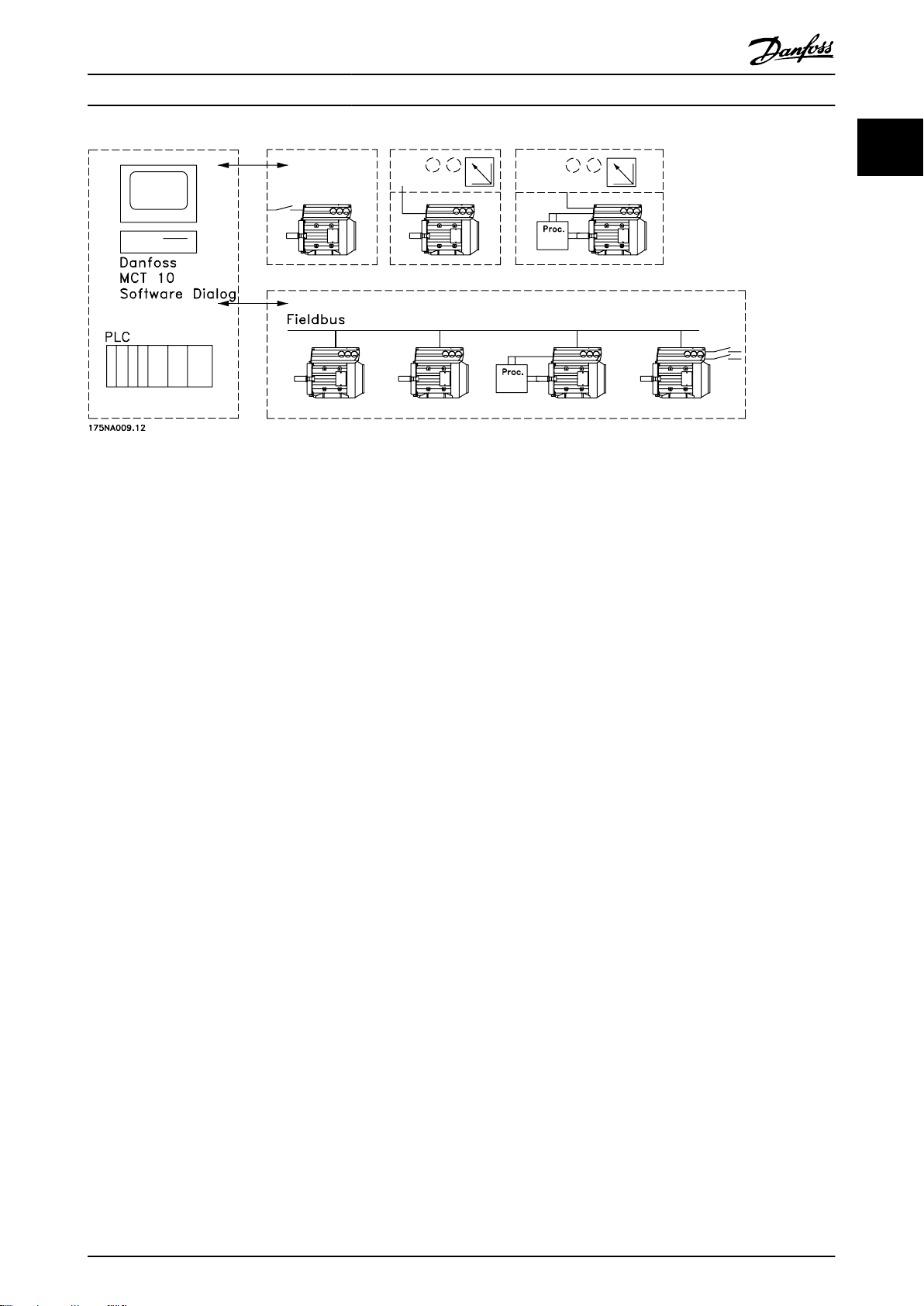
Illustration 1.2 Structures de contrôle
Motovariateur VLT® série FCM
1
1
MG03BA04 - VLT® est une marque déposée Danfoss 7
Page 10
1
Introduction
Motovariateur VLT® série FCM
1.4 Sélection du moteur FC, FCM 300
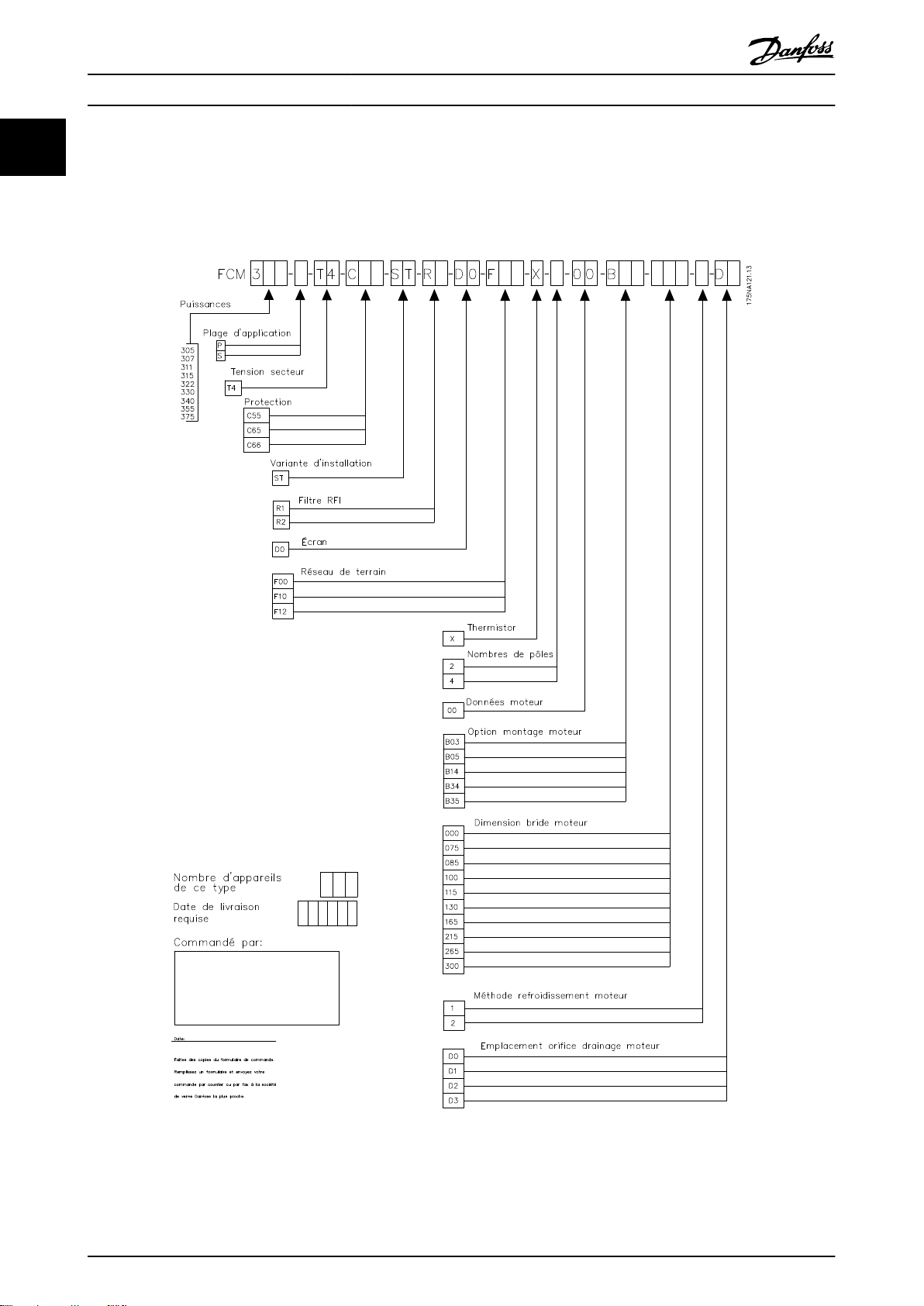
1.4.1 du formulaire de commande
Illustration 1.3
8 MG03BA04 - VLT® est une marque déposée Danfoss
Page 11
Introduction
Motovariateur VLT® série FCM
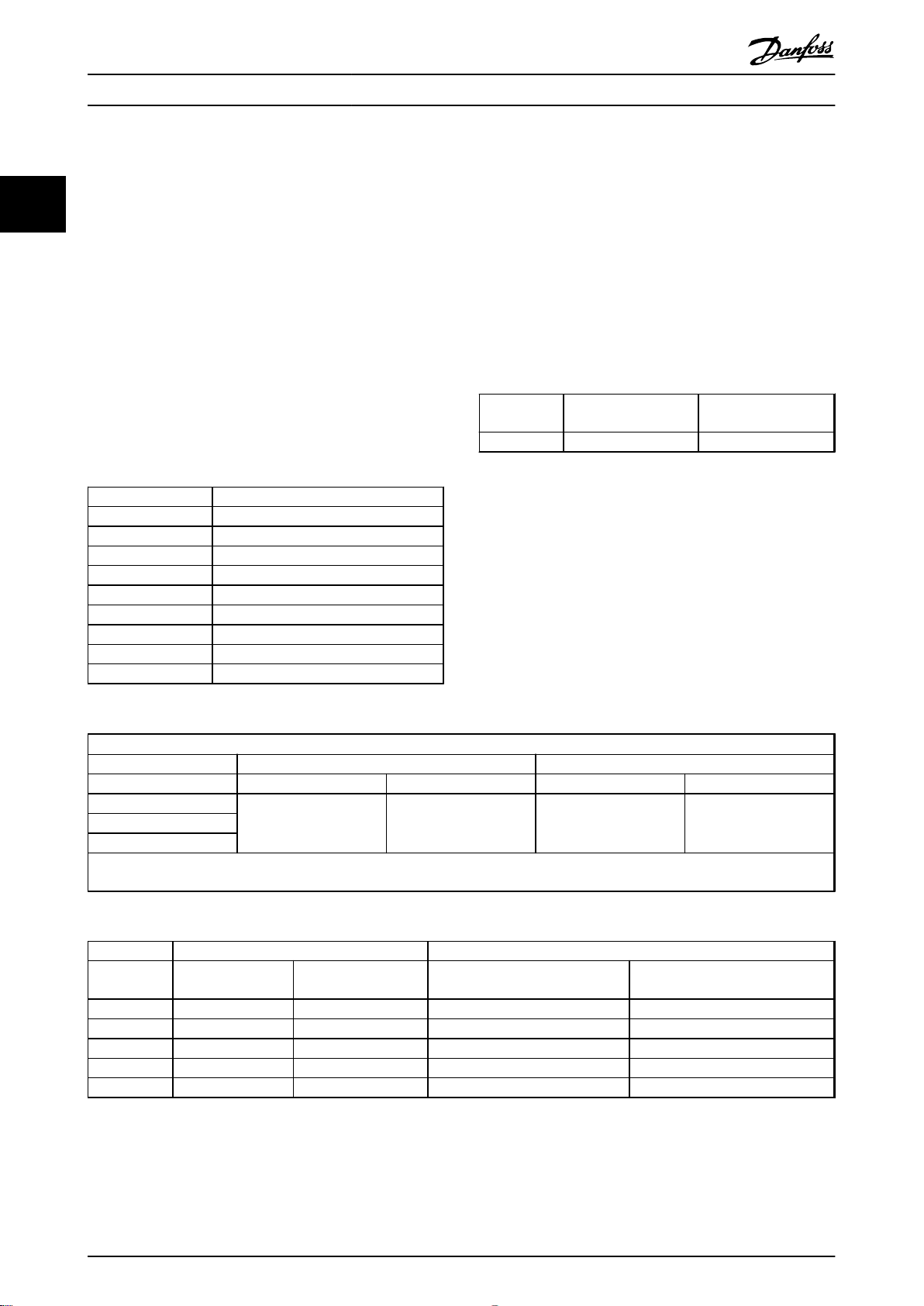
1.4.2 Gamme de produits
Ensemble motovariateur VLT FCM 300, moteurs
bipolaires ou quadripolaires
Type Puissance moteur Alimentation secteur
FCM 305 0,55 kW
FCM 307 0,75 kW
FCM 311 1,1 kW
FCM 315 1,5 kW
FCM 322 2,2 kW
FCM 330 3,0 kW
FCM 340 4,0 kW
FCM 355 5,5 kW
FCM 375 7,5 kW
Tableau 1.4 Puissance
Chaque appareil de la gamme de produits est disponible
en différentes versions.
Versions onduleurs
Puissance :
(Voir Tableau 1.4)
Application
P: Process
•
S : sans capteur (version OEM dédiée)
•
Tension secteur :
T4 : 380-480 V tension alimentation triphasée
•
Protection
C55: IP55
•
C66: IP66
•
Variante de matériel :
ST: résistances de freinage
•
Filtre RFI
R1: conformité avec classe 1A
•
R2: conformité avec classe 1B
•
Connecteur d'affichage
D0: pas de connecteur d'affichage enfichable
•
Bus de terrain
F00: pas de bus de terrain
•
F10: Profibus DPV1 3 MB
•
F12: Profibus DPV1 12 MB
•
Thermistance moteur
Triphasé 380-480 V
X: pas de thermistance moteur
•
Nombre de pôles
2: moteur bipolaire
•
4: moteur quadripolaire
•
Données du moteur
B2 : IE2 moteur haute efficacité
•
BC : IE2 moteur/fonte haute efficacité
•
Option de montage du moteur
B03 : montage sur pied
•
B05 : bride B5
•
B14 : face B14
•
B34 : à pattes et de face B14
•
B35 : à pattes et à bride B5
•
Code bride du moteur
(En ce qui concerne la taille de bride standard et les tailles
disponibles, se reporter au paragraphe 1.4.5 Informations
pour la commande de châssis et de brides).
000 : montage à pattes uniquement
•
085 : 85 mm
•
100 : 100 mm
•
115 : 115 mm
•
130 : 130 mm
•
165 : 165 mm
•
215 : 215 mm
•
265 : 265 mm
•
300 : 300 mm
•
Méthode de refroidissement du moteur
1 : ventilateur monté sur arbre
•
Position de l'onduleur
D : en haut en standard
•
Orifice de drainage du moteur
(voir 1.4.6 Informations de commande pour l'emplacement du
boîtier onduleur et de l'orifice de drainage)
0 : pas d'orifice de drainage
•
1 : opposé du boîtier onduleur aux deux
•
extrémités (côté entraînement et côté opposé à
l'entraînement)
2 : 90° à droite du boîtier onduleur
•
3 : 90° à gauche du boîtier onduleur
•
1
1
MG03BA04 - VLT® est une marque déposée Danfoss 9
Page 12
175NA162.10
Introduction
Motovariateur VLT® série FCM
1
1.4.3 Commande
Prendre une copie du formulaire de commande, voir
1.4.1 du formulaire de commande. La remplir et l'envoyer
par courrier ou par télécopie à Danfoss. Un code de type
est attribué au moteur série FCM 300 sur la base de votre
commande.
Le formulaire de commande d'unités de base doit toujours
être rempli. Lors de l'écriture du code de type, les
caractères de la séquence de base (1 à 34) doivent
toujours être indiqués. Le client recevra, avec la confirmation de commande, un numéro de code à 8 chiffres à
utiliser en cas de commande ultérieure.
Logiciel PC Danfoss pour communication série, MCT 10
Tous les FCM Série 300 sont équipés en standard d'une
interface RS 485 qui leur permet de communiquer p. ex.
avec un PC. Un MCT 10 programmable est disponible en
ce sens (voir 1.4.4 Outils de logiciel PC ).
Numéro de commande, MCT 10
Pour commander le CD du logiciel de programmation MCT
10, utiliser le numéro de code 130B1000.
Accessoires pour le moteur FC
Un boîtier local de commande (LOP) pour réglage local et
marche/arrêt est disponible pour le moteur FC. Le LOP
dispose d'une protection IP65. Un panneau de commande
local (LCP 2), constituant une interface complète de
fonctionnement, de programmation et de surveillance du
moteur FC, est également disponible.
1.4.4
Outils de logiciel PC
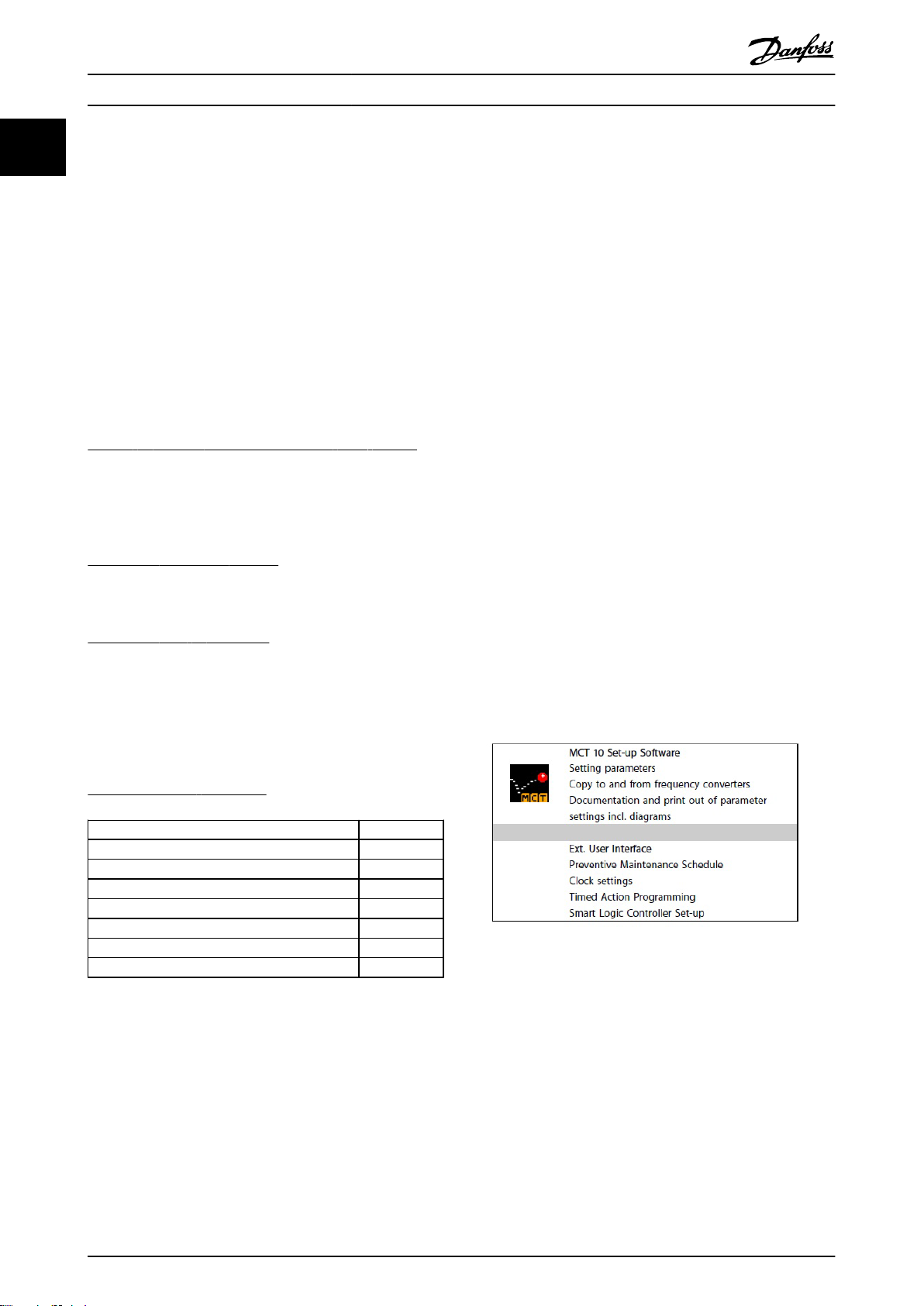
Logiciel PC - MCT 10
Tous les variateurs de fréquence sont équipés d'un port de
communication série. Danfoss propose un outil PC pour la
communication entre le PC et le variateur de fréquence : le
logiciel de programmation de l'outil de contrôle du
mouvement VLT MCT 10.
Logiciel de programmation MCT 10
Le MCT 10 est un outil interactif simple qui permet de
configurer les paramètres de nos variateurs de fréquence.
Le logiciel de programmation du MCT 10 permet de :
Planifier un réseau de communication hors ligne.
•
Le MCT 10 contient une base de données
complète de variateurs de fréquence.
Mettre en service des variateurs de fréquence en
•
ligne.
Enregistrer les réglages pour tous les variateurs
•
de fréquence.
Remplacer un variateur sur un réseau.
•
Élargir un réseau existant.
•
Les variateurs développés à l'avenir seront pris en
•
charge.
Modules du logiciel de programmation MCT 10
Les modules suivants sont inclus dans le logiciel :
Numéros de code, accessoires
Boîtier de commande local (LOP) avec câble
Panneau de commande local (LCP 2) 175N0131
Kit de montage externe (LCP 2) 175N0160
Kit de fiches (LCP 2) 175N2545
Câble pour kit de fiches (LCP 2) 175N0162
Câble (montage direct) (LCP 2) 175N0165
Kit service connexion rapide (LCP 2) 175N2546
Option potentiomètre 177N0011
Tableau 1.5
175N0128
Illustration 1.4
10 MG03BA04 - VLT® est une marque déposée Danfoss
Page 13
Introduction
Motovariateur VLT® série FCM
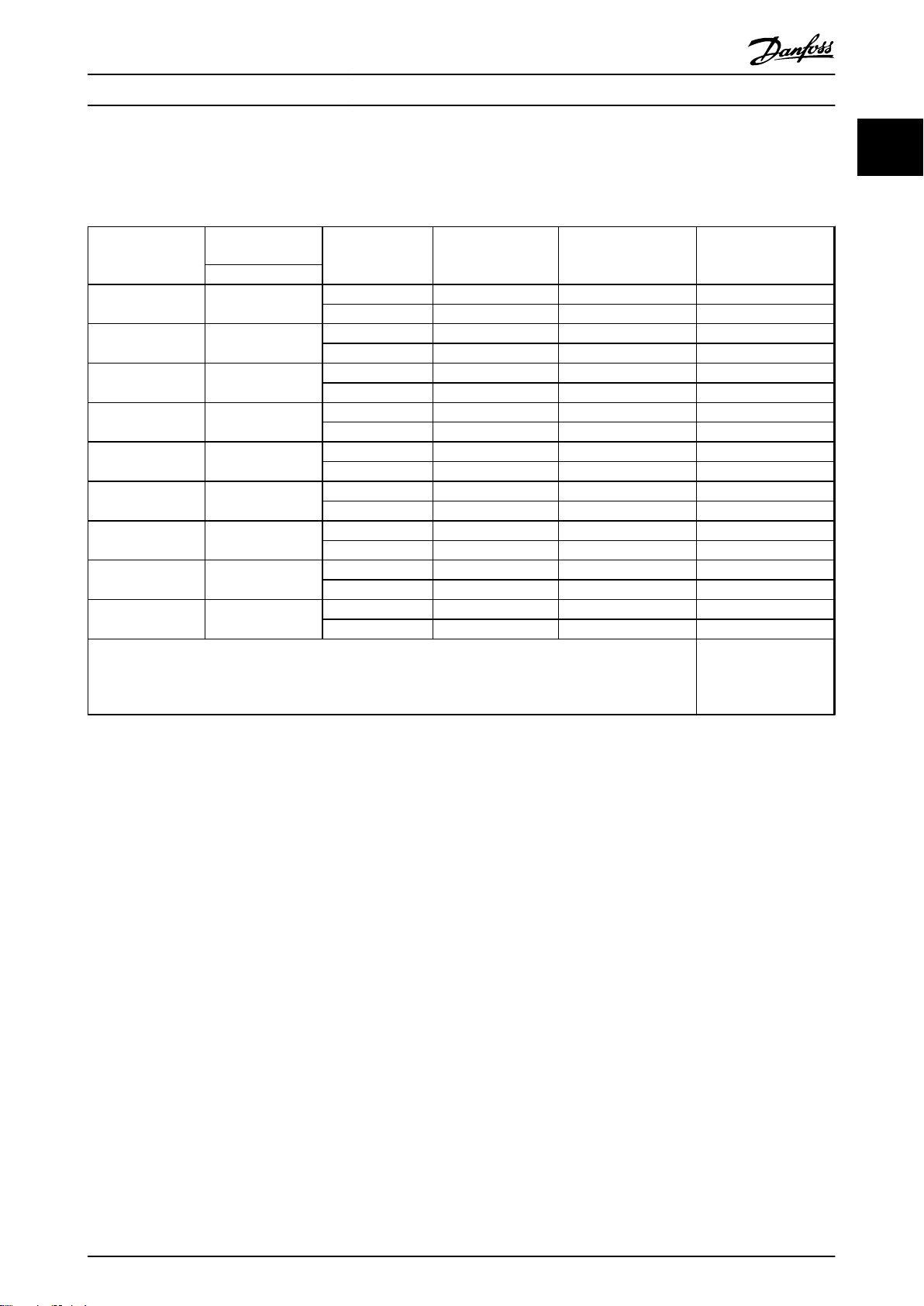
1.4.5 Informations pour la commande de châssis et de brides
Dimensions des châssis et des brides correspondantes pour différentes versions de montage
1
1
Dimension du
Type
FCM 305 80
FCM 307 80
FCM 311 90
FCM 315 90
FCM 322 100
FCM 330 100
FCM 340 112
FCM 355 132
FCM 375 132
S : disponible en tant qu'arbre standard
A : Disponible en tant qu'alternative avec un arbre particulièrement rallongé afin d'assurer un arbre standard au
châssis
B : Disponible en tant qu'alternative avec un arbre standard pour le châssis ne nécessitant aucune modification
châssis du moteur
Quadripolaire
Version de
montage
B5/B35 165 115/130
B14/B34 100 75/85/115/130
B5/B35 165 115/130
B14/B34 100 75/85/115/130
B5/B35 165 110/115/130 215
B14/B34 115 85/100/130/165
B5/B35 165 110/115/130 215
B14/B34 115 85/100/130/165
B5/B35 215 165
B14/B34 130 165 85/100/115
B5/B35 215 165
B14/B34 130 165 85/100/115
B5/B35 215 165
B14/B34 130 165 85/100/115
B5/B35 265 215
B14/B34 165 215
B5/B35 265 215
B14/B34 165 215
Dimension de bride,
standard (S) [mm]
Dimension de bride,
autres possibilités (A)
[mm]
Dimension de bride,
autres possibilités (B)
[mm]
Tableau 1.6
MG03BA04 - VLT® est une marque déposée Danfoss 11
Page 14
Introduction
Motovariateur VLT® série FCM
1
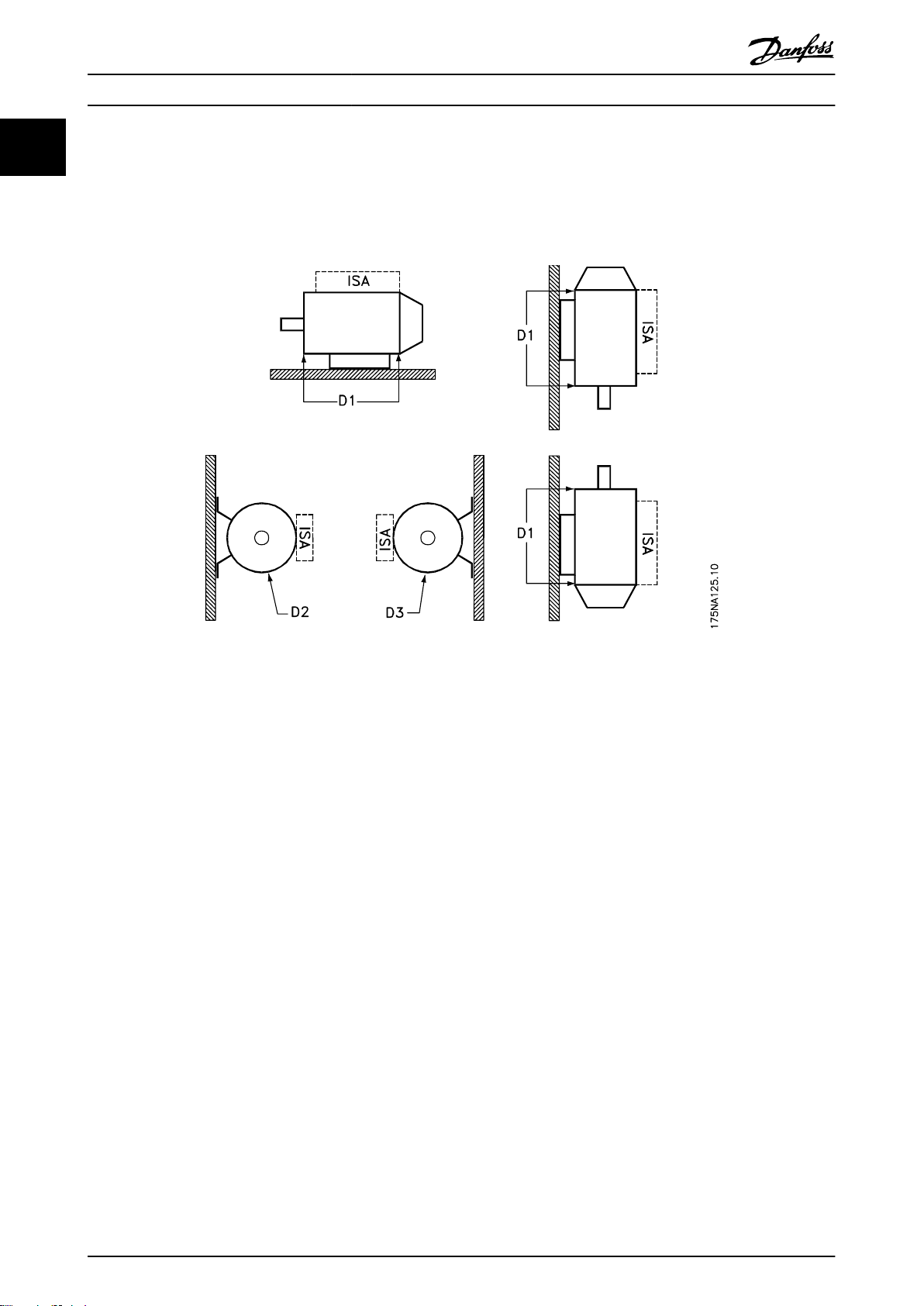
1.4.6 Informations de commande pour l'emplacement du boîtier onduleur et de l'orifice de
drainage
Emplacement du boîtier onduleur, toujours monté en haut.
Tous les orifices de drainage sont montés avec une vis et une rondelle, avec protection IP 66 s'ils ne sont pas ouverts.
Illustration 1.5
1 : Orifices de drainage à l'opposé de l'onduleur, côté
entraînement et côté opposé à l'entraînement.
2/3: Orifices de drainage à 90° de l'onduleur, côté entraînement et côté opposé à l'entraînement.
12 MG03BA04 - VLT® est une marque déposée Danfoss
Page 15
Installation
Motovariateur VLT® série FCM
2 Installation
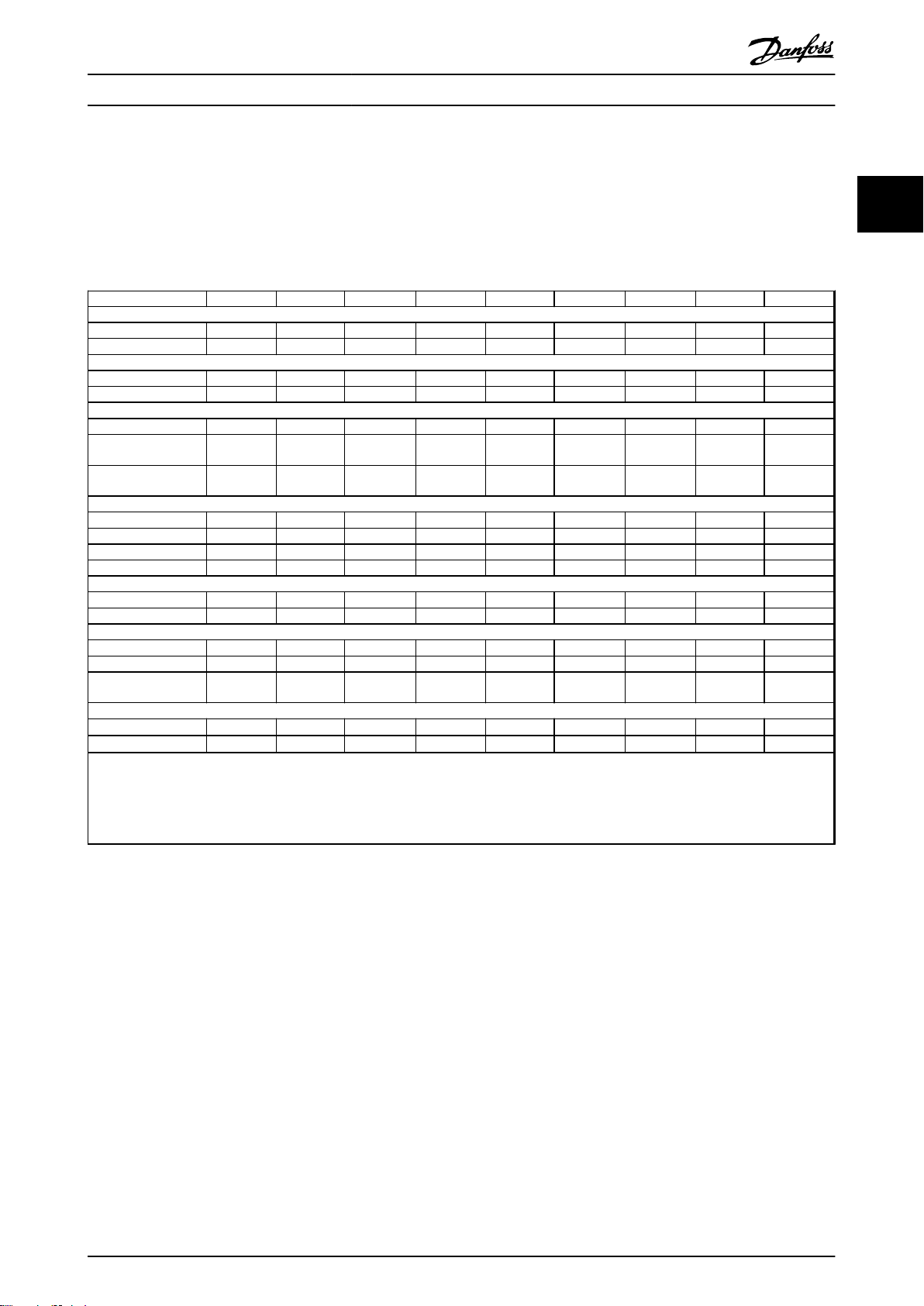
2.1 Caractéristiques techniques
2.1.1 FCM 305-375, triphasé, 380-480 V
2 2
FCM
Puissance moteur
[HP] 0,75 1,0 1,5 2,0 3,0 4,0 5,0 7,5 10,0
[kW] 0,55 0,75 1,1 1,5 2,2 3,0 4,0 5,5 7,5
Couple moteur
2 pôles [Nm]1) 1,8 2,4 3,5 4,8 7,0 9,5 12,6 17,5 24,0
4 pôles [Nm]2) 3,5 4,8 7,0 9,6 14,0 19,1 25,4 35,0 48,0
Châssis
taille [mm] 80 80 90 90 100 100 112 132 132
Poids du motovariateur [kg]3)
Poids du variateur
[kg]
Courant d'entrée [A]
380 V 2 p 1,5 1,8 2,3 3,4 4,5 5,0 8,0 12,0 15,0
380 V 4 p 1,4 1,7 2,5 3,3 4,7 6,4 8,0 11,0 15,5
480 V 2 p 1,2 1,4 1,8 2,7 3,6 4,0 6,3 9,5 11,9
480 V 4 p 1,1 1,3 2,0 2,6 3,7 5,1 6,3 8,7 12,3
Rendement à vitesse nom.
Bipolaire 73,4 75,3 77,5 79,0 81,3 82,7 83,8 85,1 86,2
Quadripolaire 75,9 77,5 79,3 80,5 82,4 83,6 84,6 85,8 86,7
Bornes de puissance
[AWG] 10 10 10 10 10 10 10 6 6
[mm2] 4 4 4 4 4 4 4 10 10
Dimensions des
presse-étoupe
Fusible d'entrée max.
UL4) [A]
CEI4) [A]
1)
A 400 V, 3000 tr/min
2) A 400 V, 1500 tr/min
3) Moteur bipolaire - B3
4) Des fusibles d'entrée de type gG doivent être utilisés. Pour respecter les normes UL/cUL, il convient d'utiliser des fusibles d'entrée du
type Bussmann KTS-R 500 V ou Ferraz Shawmut de type ATMR Classe C (max. 30 A). Les fusibles doivent assurer la protection d'un circuit
capable de délivrer un maximum de 100 000 ampères RMS (symétriques), 500 V maximum.
305 307 311 315 322 330 340 355 375
11 13 17 20 26 28 37 56 61
2,2 2,2 2,8 2,8 4,1 4,2 6,4 10,4 10,4
3xM20x1,5 3xM20x1,5 3xM20x1,5 3xM20x1,5 3xM20x1,5 3xM20x1,5 3xM20x1,5 1xM25x1,5/
2xM20x1,5
10 10 10 10 10 15 15 25 25
25 25 25 25 25 25 25 25 25
1xM25x1,5/
2xM20x1,5
Tableau 2.1
MG03BA04 - VLT® est une marque déposée Danfoss 13
Page 16
Installation
Motovariateur VLT® série FCM
2.1.2 Données techniques générales
Alimentation secteur, TT, TN et IT* (L1, L2, L3)
22
Tension d'alimentation des appareils 380-480 V 3 x 380/400/415/440/460/480 V ±10%
Fréquence d'alimentation 50/60 Hz
Asymétrie max. de la tension d'alimentation ±2% de la tension nominale d’alimentation
Facteur de puissance/cos. max. 0,9/1,0 à charge nominale
Nombre de commutations sur les entrées d'alimentation L1, L2, L3 env. 1 fois/2 min
*) Non valable pour les unités avec RFI classe 1B
Caractéristiques de couple
Couple de démarrage/surcouple 160% pendant 1 min
Couple continu voir ci-dessus
Carte de commande, entrées digitales/impulsions
Nombre d'entrées digitales programmables 4
N° bornes X101-2, -3, -4, -5
Niveau de tension 0-24 V CC (logique positive PNP)
Niveau de tension, 0 logique < 5 V CC
Niveau de tension, 1 logique >10 V CC
Tension maximale sur l'entrée 28 V CC
Résistance d'entrée, Ri env. 2 kΩ
Cycle de scrutation 20 ms
Carte de commande, entrée impulsions
Nombre d'entrées impulsions programmables 1
N° bornes X101-3
Fréquence max. à la borne 3, collecteur ouvert/push pull 24 V 8 kHz/70 kHz
Résolution 10 bits
Précision (0,1-1 kHz), borne 3 Erreur max. : 0,5% de l'échelle totale
Précision (1-12 kHz), borne 3 Erreur max. : 0,1% de l'échelle totale
Carte de commande, entrées analogiques
Nombre d'entrées de tension analogiques programmables 1
N° bornes X101-2
Niveau de tension 0-10 V CC (mise à échelle possible)
Résistance d'entrée, Ri env. 10 kΩ
Nombre d'entrées de courant analogiques programmables 1
N° de borne X101-1
Plage de courant 0-20 mA (mise à échelle possible)
Résistance d'entrée, Ri env. 300 Ω
Résolution 9 bits
Précision à l'entrée Erreur maximum : 1% à échelle complète
Cycle de scrutation 20 ms
Carte de commande, sorties digitales/impulsions et analogiques
Nombre de sorties digitales et analogiques programmables 1
N° bornes X101-9
Niveau de tension à la sortie digitale/charge 0-24 V CC/25 mA
Courant à la sortie analogique 0 - 20 mA
R
Charge maximum vers châssis (borne 8) à la sortie analogique
Précision de la sortie analogique Erreur max. : 1,5% de l'échelle totale
Résolution de la sortie analogique 8 bits
CHARGE
500 Ω
Sortie relais
Nombre de sorties relais programmables 1
Numéro de bornes (charge résistive et inductive) 1-3 (interruption), 1-2 (établissement)
Charge max. (CA1) sur les bornes 1-3, 1-2 250 V CA, 2 A, 500 VA
14 MG03BA04 - VLT® est une marque déposée Danfoss
Page 17
Installation
Charge max. (CC1) (CEI 947) sur les bornes 1-3, 1-2 25 V CC, 3 A/50 V CC, 1,5 A, 75 W
Charge min. (CA/CC) sur les bornes 1-3, 1-2, carte de commande 24 V CC, 10 mA/24 V CA, 100 mA
Valeurs nominales jusqu'à 300 000 opérations (avec des charges inductives, le nombre d'opérations est réduit de 50%)
Carte de commande, communication série RS 485
N° bornes X100-1, -2
Caractéristiques de commande (variateur de fréquence)
Plage de fréquences
Fréquence de sortie, résolution 0.1%
Temps de réponse du système Max. 40 ms.
Précision de la vitesse (boucle ouverte, mode CT, moteur quadripolaire entraîné entre 150 et 1500 tr/min) ±15 tr/min
Eléments externes
Protection
Essai de vibration 1 g
Humidité relative max. 95% pour le stockage/transport/exploitation
Température ambiante Max. 40 °C (moyenne sur 24 heures max. 35 °C)
Voir 4.1.7 Déclassement pour température ambiante
Température ambiante min. à pleine exploitation 0°C
Température ambiante min. en exploitation réduite -10 °C
Température durant le stockage/transport -25-+65/70 °C
Altitude max 1000 m
Voir 4.1.8 Déclassement pour pression atmosphérique
Normes CEM appliquées, Émission EN 61000-6-3/EN 6100-6-4, EN 61800-3, EN 55011, EN 55014
Normes CEM appliquées,
Immunité
Normes de sécurité appliquées EN 60146, EN 50178, EN 60204, UL508
Voir 4.1 Exigences particulières en fin de section pour les plages de fréquences des moteurs IP66.
Voir 4.1 Exigences particulières en fin de section pour les plages de fréquences des moteurs IP66.
Motovariateur VLT® série FCM
0-132 Hz
IP55 (IP65, IP66)
EN 61000-6-2, EN 61000-4-2, EN 61000-4-3, EN 61000-4-4, EN 61000-4-5, EN 61000-4-6,
ENV 50204
2 2
AVIS!
La solution IP66 normale n'est destinée qu'à des vitesses maximum de 3 000 tr/min. Si une vitesse supérieure s'avère
nécessaire, il faut le préciser à la commande.
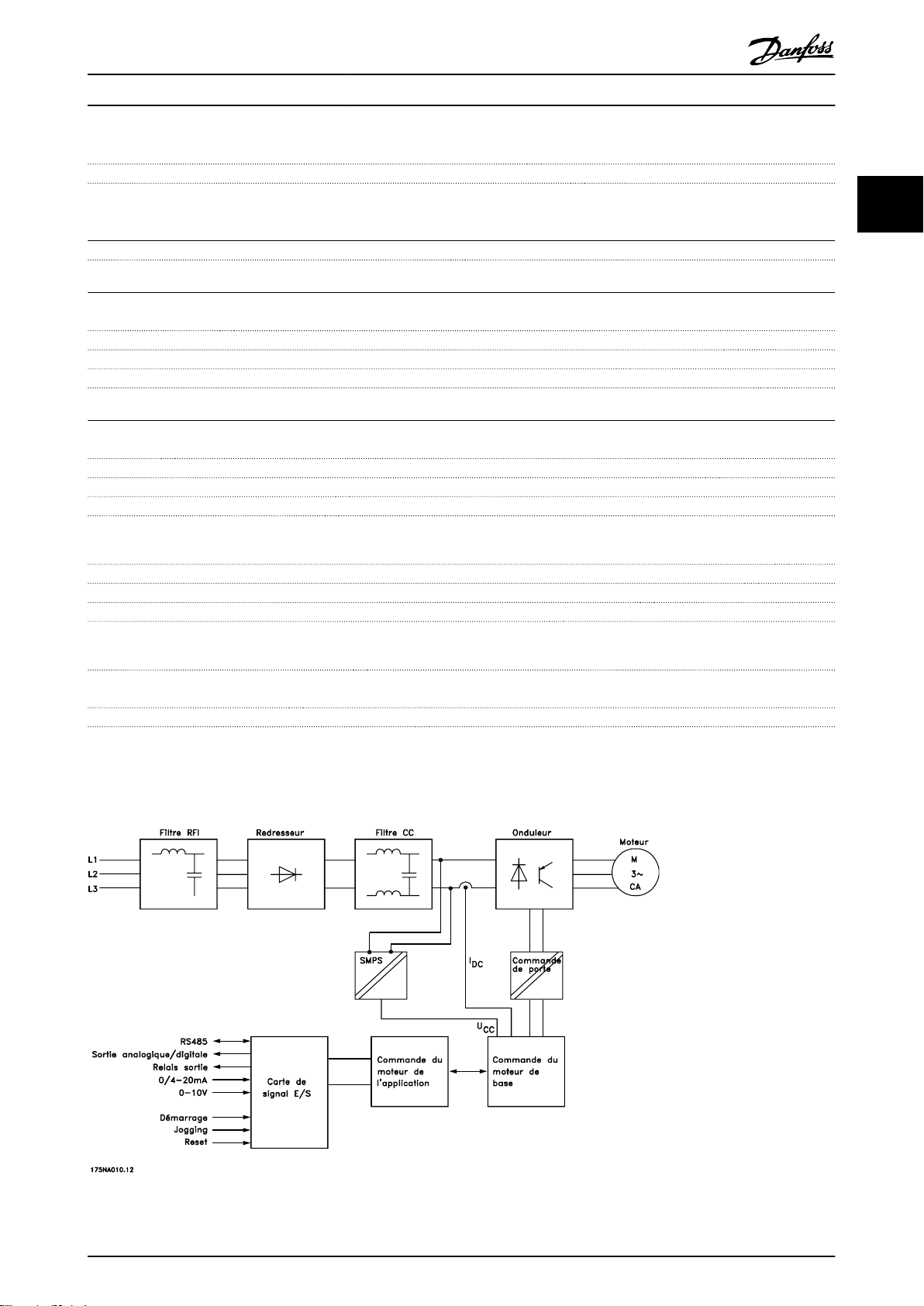
Illustration 2.1 Schéma clé pour la série FCM 300
MG03BA04 - VLT® est une marque déposée Danfoss 15
Page 18
Installation
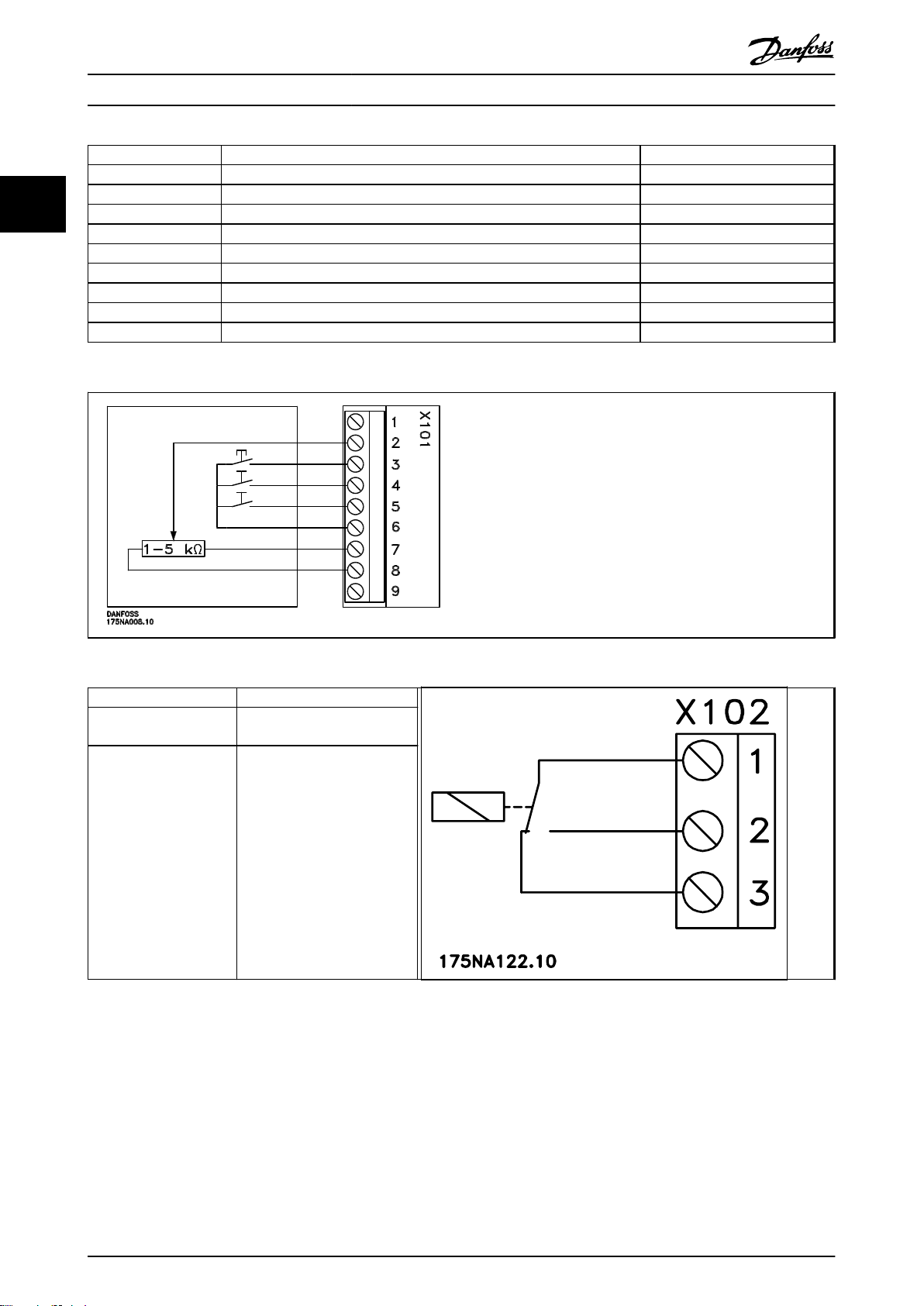
N° de borne Fonction Exemple
1 Entrée analogique (0-20 mA) Signal de retour
2 Entrée analogique (0-10 V)/digitale 2 Référence de vitesse
22
Tableau 2.2 X101 : bornier de raccordement pour signaux de commande analogiques/digitaux
3 Entrée digitale (ou impulsions) 3 Reset
4 Entrée digitale (ou arrêt précis) 4 Démarrage
5 Entrée digitale (autre) 5 Jogging (vitesse fixe)
6 Alimentation 24 V CC pour entrées digitales (max. 150 mA)
7 Alimentation 10 V CC pour potentiomètre (max. 15 mA)
8 0 V, bornes 1 à 7 et 9
9 Sortie analogique (0-20 mA)/digitale Indication de panne
Motovariateur VLT® série FCM
Reset doit être brièvement fermé pour la réinitialisation d'un
-
arrêt suite à une panne
Démarrage doit être fermé pour passer en mode fonctionnement
-
Lorsque Jogging est fermé, l'unité fonctionne à vitesse fixe (10
-
Hz)
Référence de vitesse (0-10 V) détermine la vitesse en mode
-
fonctionnement
Tableau 2.3 Diagramme de connexion - réglage d'usine
N° de borne Fonction
1-2 Établissement (normalement
ouverte)
1-3 Coupure (normalement fermée)
Tableau 2.4 X102: bornier de raccordement pour sortie relais
16 MG03BA04 - VLT® est une marque déposée Danfoss
Page 19
Installation
Motovariateur VLT® série FCM
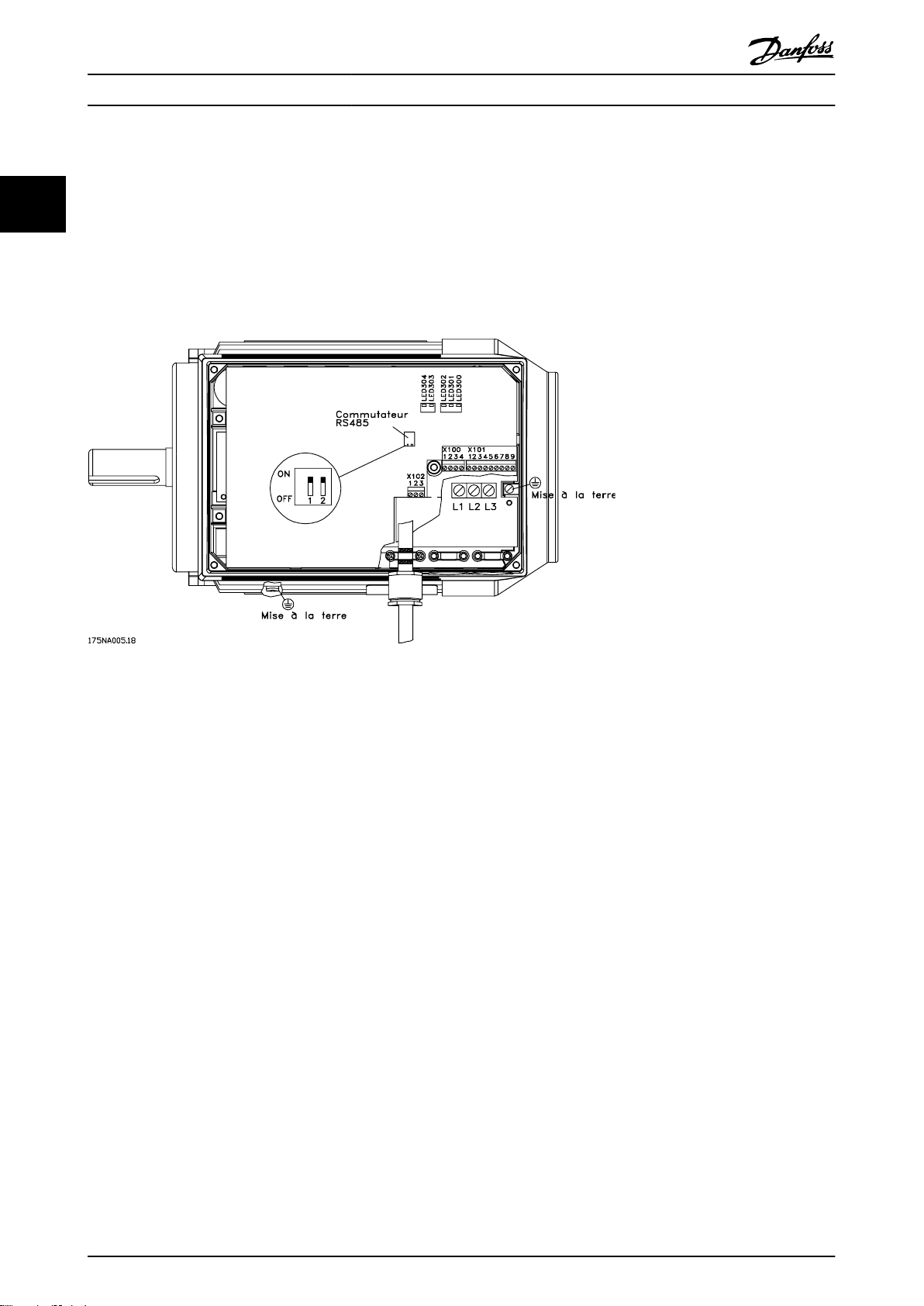
AVIS!
Voir le paramètre 323 (sortie relais) pour la
programmation de la sortie relais.
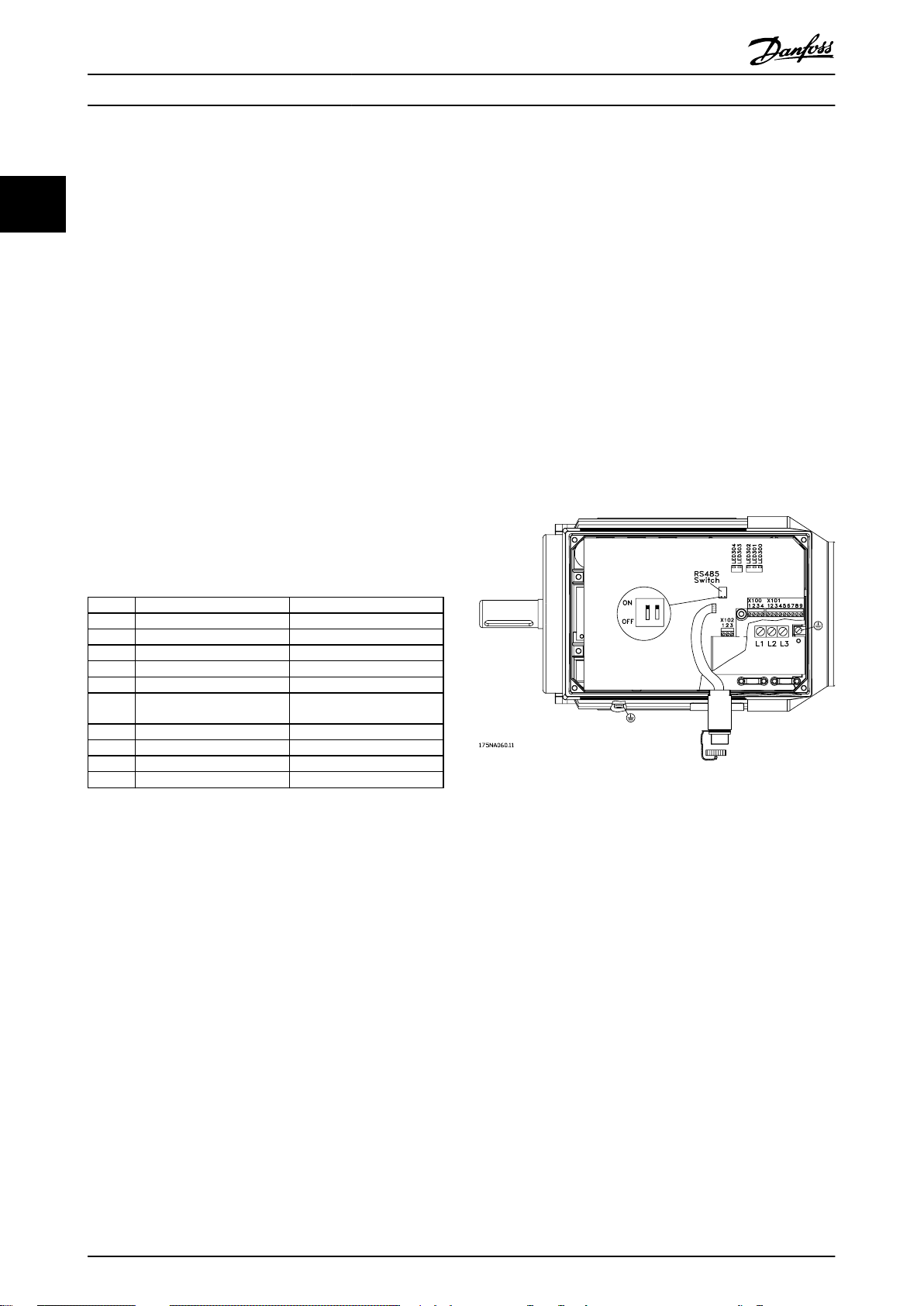
LED 300-304
LED 300 (rouge) : Disjonction
LED 301 (jaune) : Avertissement
LED 302 (verte) : Activé
N° de borne Fonction
1 P RS 485 Pour la connexion
2 N RS 485
3 5 V CC Alimentation pour
4 0 V CC
au bus ou au PC
bus RS 485
LED 303-304 : Communication
Pour les versions PROFIBUS, consulter le manuel
MG90AXYY.
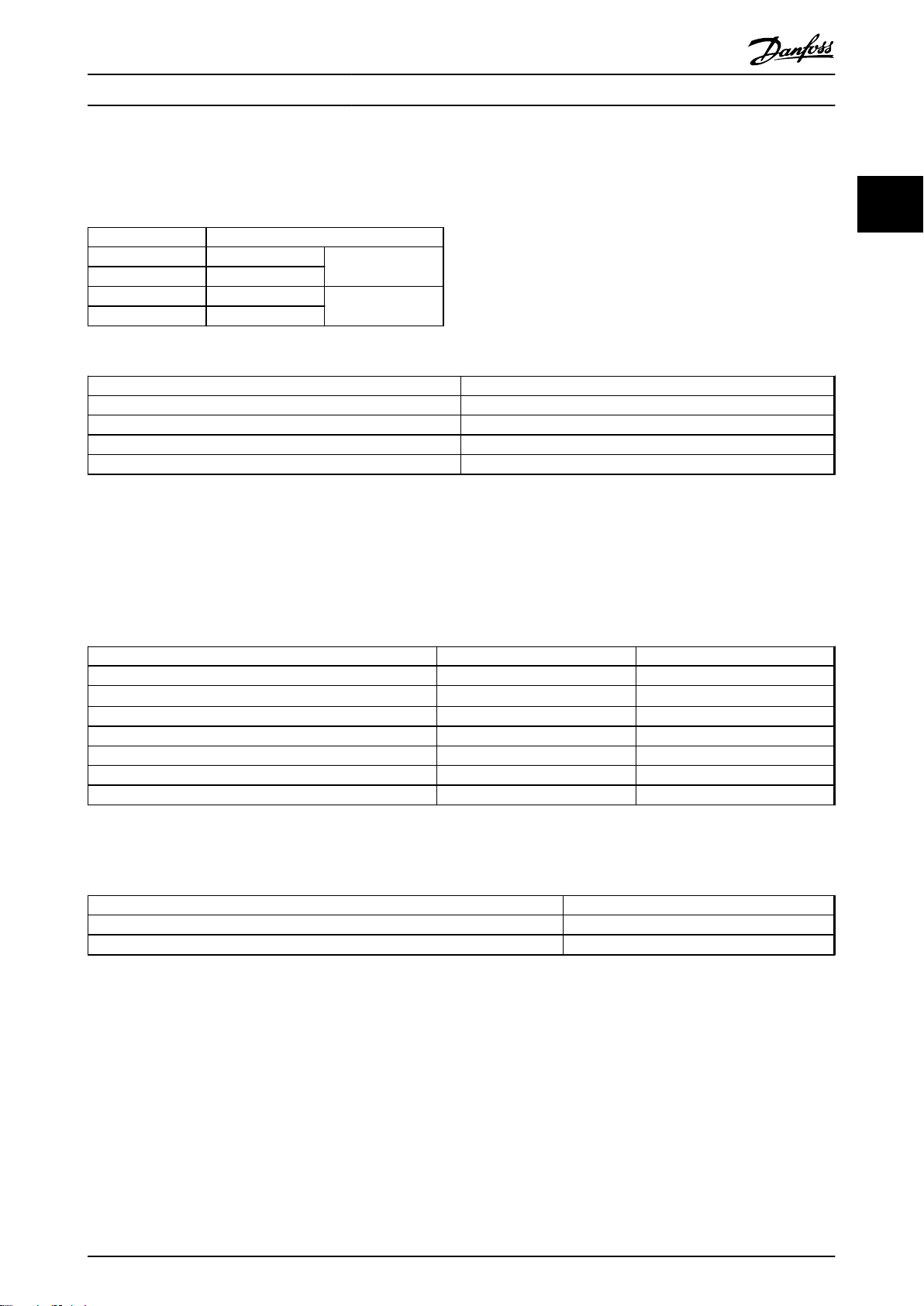
2.1.3 Couples de serrage
Tableau 2.5 X100 : bornier de raccordement pour communication de données
Vis du couvercle 3-3,5 Nm
Obturateurs d'entrée de câble en plastique 2,2 Nm
Vis L1, L2, L3 (ligne CA) (FCM 305-340) 0,5-0,6 Nm
Vis L1, L2, L3 (ligne CA) (FCM 355-375) 1,2-1,5 Nm
Mise à la terre 3,4 Nm
Tableau 2.6
Les vis du bornier nécessitent un tournevis plat d'au moins 2,5 mm.
Les vis des lignes CA nécessitent un tournevis plat de 8 mm.
Les vis du couvercle, les vis des brides de mise à la terre et d'étriers de serrage nécessitent un tournevis plat ou Torx T-20
(vitesse de serrage max. 300 tr/min).
2 2
Section maximale du câble
2.1.4
Remarque
Utiliser un fil de cuivre 60 °C minimum
Section maxi des câbles de ligne CA (FCM 305-340) 10 4,0
Section maxi des câbles de ligne CA (FCM 355-375) 6 10
Section maxi des câbles de commande 16 1,5
Section maxi des câbles de communication série 16 1,5
Mise à la terre 6 10
Tableau 2.7
AWG
2.1.5 Taille des vis
Vis du couvercle M5
Vis de brides de mise à la terre et d'étriers de serrage (FCM 305-340) : M4
Vis de brides de mise à la terre et d'étriers de serrage (FCM 355-375) M5
Tableau 2.8
mm
2
MG03BA04 - VLT® est une marque déposée Danfoss 17
Page 20
Installation
Motovariateur VLT® série FCM
2.1.6 Protection
22
Protection thermique du moteur et de l'électronique contre les surcharges.
•
Surveillance de la tension du circuit intermédiaire : assure l'arrêt de l'onduleur en cas de tension du circuit intermé-
•
diaire trop faible ou trop élevée.
En cas d'absence d'une phase secteur, l'onduleur s'arrête lorsque le moteur est en charge.
•
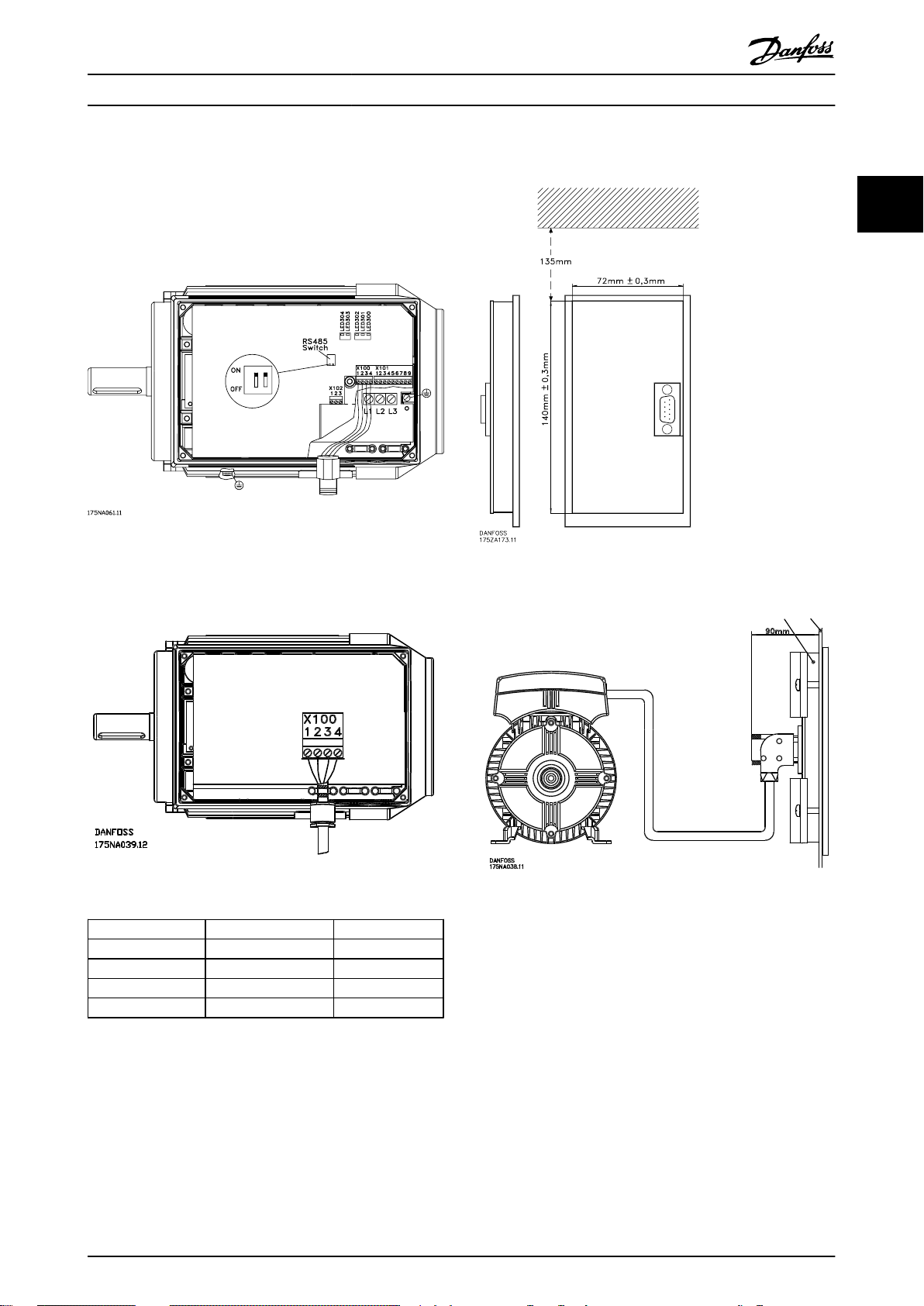
Illustration 2.2 Disposition des bornes (pour l'installation, voir la Configuration rapide, MG03AXYY)
18 MG03BA04 - VLT® est une marque déposée Danfoss
Page 21
175NA163.10
Installation
Motovariateur VLT® série FCM
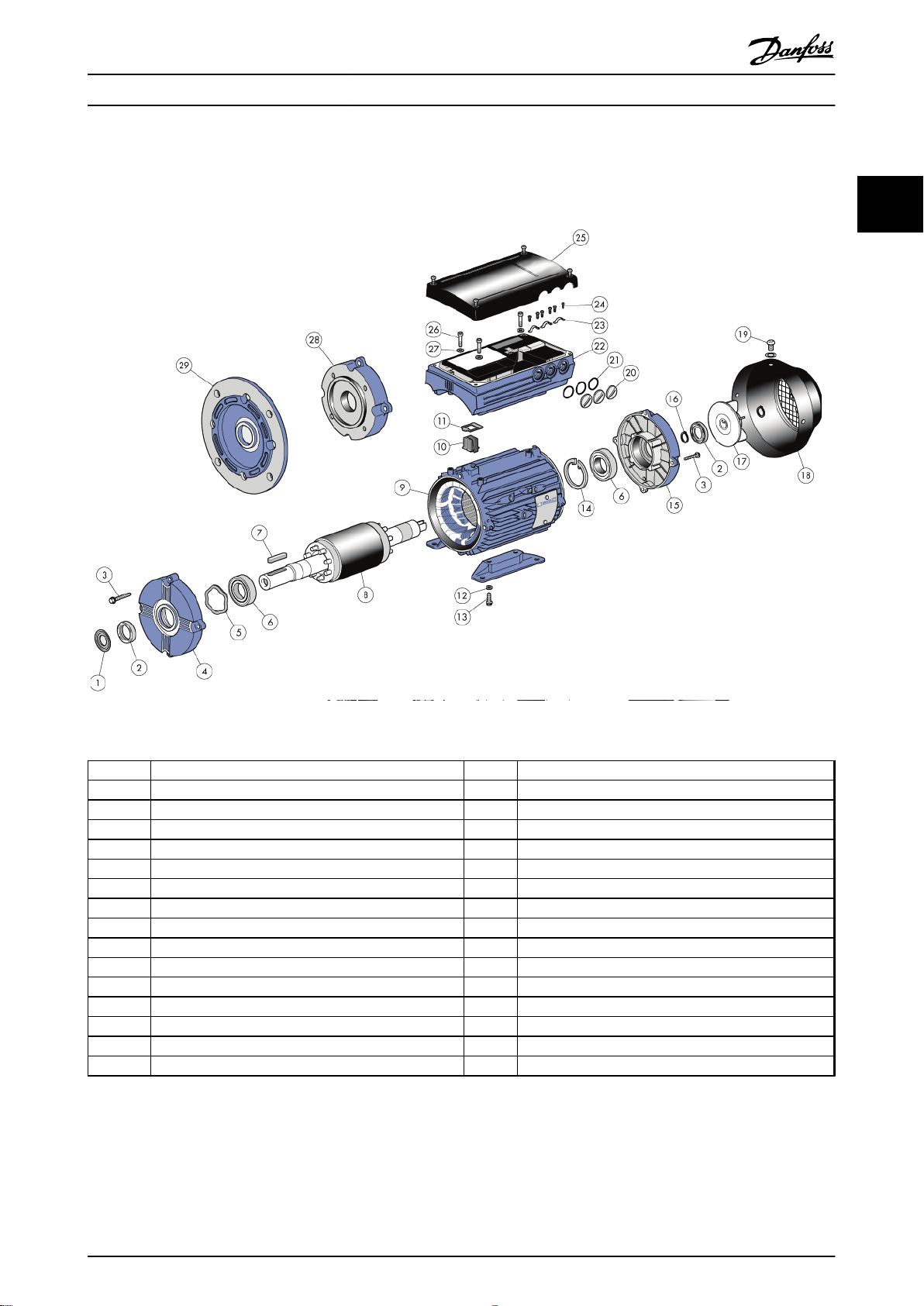
2.2 Description du moteur
Le moteur FC se compose des pièces suivantes :
2 2
Illustration 2.3
Elément Description Elément Description
1 Flinger (si installé) 16 Circlip du palier
2 Variateur et joint étanche à l'huile 17 Ventilateur
3 Boulon de fixation de la flasque du moteur 18 Protection du ventilateur
4 Variateur et flasque du moteur 19 Vis et rondelle de la protection du ventilateur
5 Rondelle de précontrainte 20 Bonde vissée
6 Palier 21 Joint torique
7 Clé d'arbre 22 Boîtier ISM
8 Assemblage rotor 23 Etrier de câble
9 Assemblage stator avec ou sans pieds 24 Vis de l'étrier de câble
10 Bloc de connexion 25 Couvercle du boîtier ISM
11 Joint d'étanchéité 26 Vis torx
12 Pieds détachables 27 Rondelle
13 Boulon et rondelle de fixation du pied 28 Flasque avant
14 Circlip d'arrêt du palier 29 Flasque bride
15 Flasque du moteur côté opposé à l'entraînement
Tableau 2.9
MG03BA04 - VLT® est une marque déposée Danfoss 19
Page 22
Installation
Motovariateur VLT® série FCM
2.2.1 Manutention du moteur FC
La manutention et le levage des motovariateurs VLT
22
(moteurs FC) doivent uniquement être effectués par du
personnel qualifié. Pour travailler en toute sécurité, la
documentation complète, le manuel d'utilisation, les outils
et équipements nécessaires doivent être disponibles. Les
boulons à œillet et/ou les tourillons de levage, fournis avec
le moteur FC, sont conçus pour supporter uniquement le
poids du moteur FC et non le poids du moteur FC avec un
quelconque équipement auxiliaire raccordé. Il faut
absolument s'assurer que les grues, crics, élingues et
Paliers
2.2.2
La solution standard est un palier fixe côté entraînement
du moteur (côté de sortie de l'arbre).
La zone de stockage doit être exempte de vibrations afin
d'éviter l'indentation statique. Lorsque l'exposition à
certaines vibrations est inévitable, il convient de verrouiller
l'arbre. Les paliers peuvent être munis d'un dispositif de
verrouillage qui doit rester en place lors du stockage. Il
convient de faire faire un quart de tour manuellement aux
arbres chaque semaine. Les paliers sont expédiés de l'usine
totalement chargés de graisse à base de lithium.
poutres de levage sont capables de porter le poids de
l'équipement à lever. Lorsqu'un boulon à œillet est fourni
avec le moteur, ce boulon doit être vissé jusqu'à ce que
son épaulement touche fermement la face du châssis de
Dimensions
du châssis
80-132 Esso unirex N3 -30 °C à + 140 °C
Lubrification type Plage de température
stator à lever.
Tableau 2.11 Lubrification
FCM type Poids approx. [kg]
FCM 305 11
FCM 307 13
FCM 307 17
FCM 315 20
FCM 322 26
FCM 330 28
FCM 340 37
FCM 355 56
FCM 375 61
Tableau 2.10 Poids
Nombre maximal d'heures de durée de vie du palier (Lna) attendu à une température du palier de 80 °C x 103 heures.
FCM 3 000 min-1 1 500 min-1
305-315
355-375
La durée de vie du palier Lna correspond à la durée de vie L10 ajustée en tenant compte de : la fiabilité, l'amélioration des matériaux et
les conditions de lubrification.
Tableau 2.12 Durée de vie du palier
FCM Paliers Joints étanches à l'huile - Alésage x diam. ext. x largeur en mm
Côté entraînement
305-307 6204ZZ 6003ZZ 20x30x7 17x28x6
311-315 6205ZZ 6003ZZ 25x35x7 17x28x6
322-330 6206ZZ 6005ZZ 30x42x7 25x37x7
340 6206ZZ 6005ZZ 30x42x7 25x37x7
355-375 6208ZZ 6005ZZ 40x52x7 25x37x7
Tableau 2.13 Référence du palier standard et joints étanches à l'huile
Horiz. Vert. Horiz. Vert.
30 30 30 30322-340
Côté opposé à l'entraî-
nement
Côté entraînement
Côté opposé à l'entraînement
20 MG03BA04 - VLT® est une marque déposée Danfoss
Page 23
Installation
Motovariateur VLT® série FCM
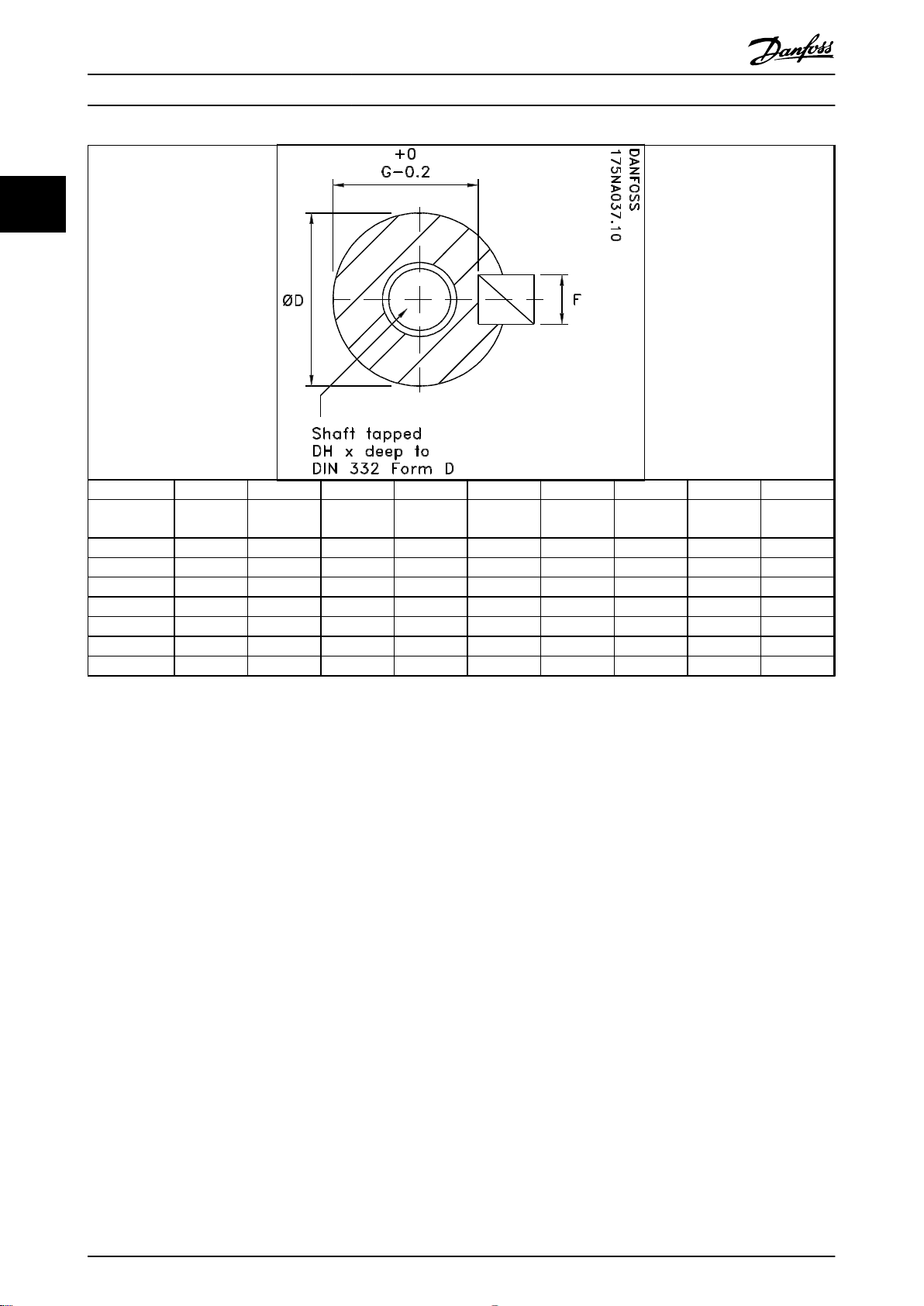
2.2.3 Arbres de sortie
Les arbres de sortie sont fabriqués à partir d'acier à
résistance élevée 35/40 tonnes (460/540 MN/m2). Les
arbres côté entraînement sont fournis en standard avec
trou taraudé DIN332, forme D et rainure de clavette à
profil fermé.
Equilibrage
Tous les moteurs sont dynamiquement équilibrés selon ISO
8821 et sont conformes à CEI 60034-14.
FCM Bipolaire Quadripolaire
305 0,00082 0,0019
307 0,00082 0,0027
311 0,00090 0,0022
315 0,0011 0,0030
322 0,0024 0,0042
330 0,0028 0,0050
340 0,0053 0,0091
355 0,0072 0,0143
375 0,0097 0,0190
Tableau 2.14 Inertie
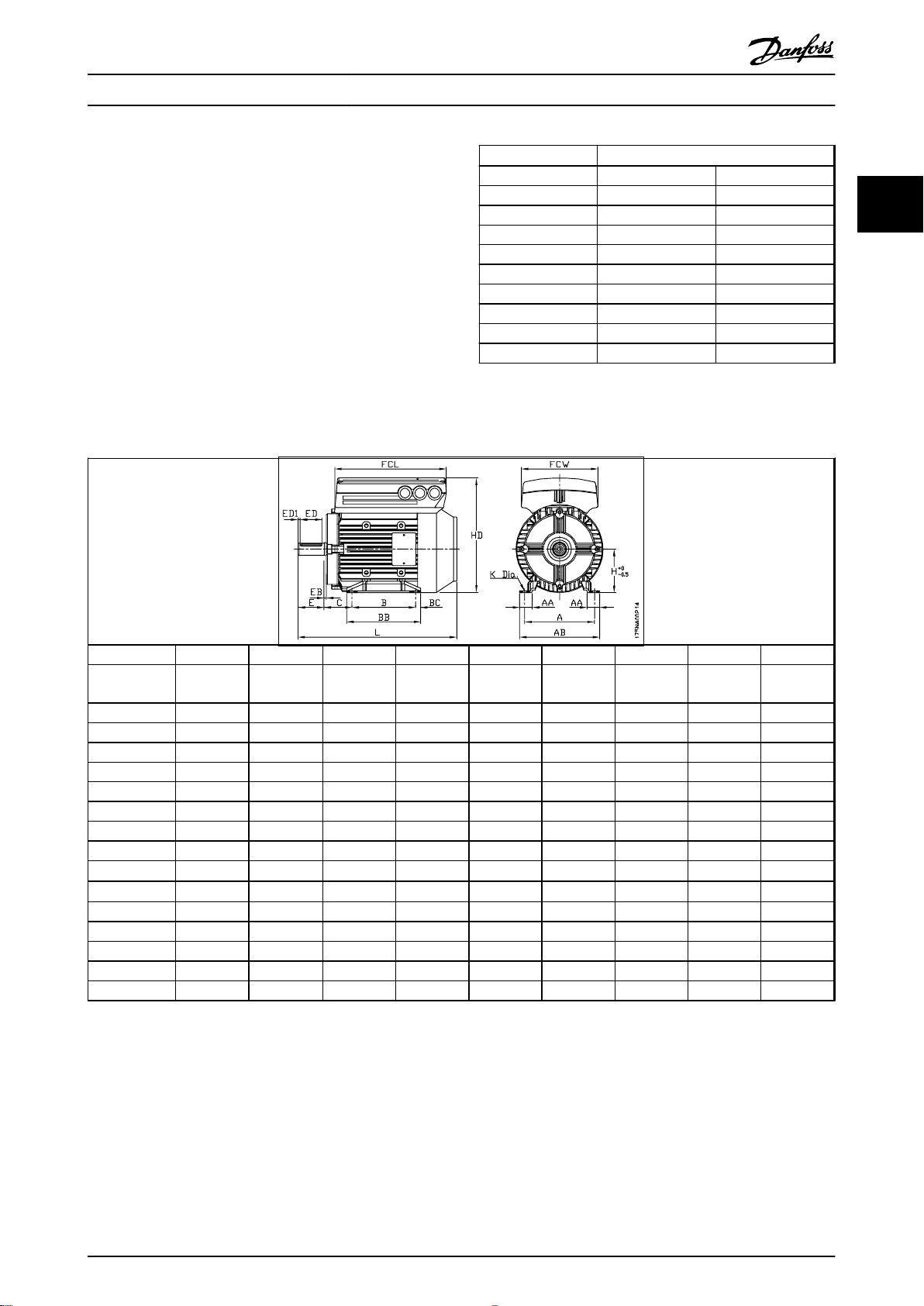
Dimensions
2.2.4
J [kgm2]
2 2
FCM général 305 307 311 315 322 330 340 355 375
Dimensions du
châssis
A [mm] 125 125 140 140 160 160 190 216 216
B [mm] 125 125 140 140 140 140 178
C [mm] 50 50 56 56 63 63 70 89 89
H [mm] 80 80 90 90 100 100 112 132 132
K [mm] 10 10 10 10 12 12 12 12 12
AA [mm] 27 27 28 28 28 28 35 38 38
AB [mm] 157 157 164 164 184 184 218 242 242
BB [mm] 127 127 150 150 170 170 170 208 208
BC [mm] 13,5 13,5
L [mm] 278 278 322 322 368 368 382 484,5
AC [mm] 160 160 178 178 199 199 215 255 255
HD [mm] 219,5 219,5 238 238 264 264 292 334 334
EB [mm] 1,5 1,5 2,5 2,5 6 6 6 6 6
FCL [mm] 206 206 230 230 256 256 286 357,5 357,5
FCW [mm] 141 141 158 158 176 176 196 242,5 242,5
Tableau 2.15 Montage sur pied - B3
1)
moteur bipolaire = 37,5. 2)moteur bipolaire = 53
80 80 90 90 100 100 112 132 132
12,5
1)
12,5
1)
15 15 15 53 15
484,5
2)
MG03BA04 - VLT® est une marque déposée Danfoss 21
Page 24
Installation
Motovariateur VLT® série FCM
22
FCM 305 307 311 315 322 330 340 355 375
Dimensions du
châssis
D [mm] 19 19 24 24 28 28 28 38 38
E [mm] 40 40 50 50 60 60 60 80 80
ED [mm] 32 32 40 40 50 50 50 70 70
ED1 [mm] 4 4 5 5 5 5 5 5 5
DH M6x16 M6x16 M8x19 M8x19 M10x22 M10x22 M10x22 M12x28 M12x28
F [mm] 6 6 8 8 8 8 8 10 10
G [mm] 15,5 15,5 20 20 24 24 24 33 33
80 80 90 90 100 100 112 132 132
Tableau 2.16 Côté entraînement de l'arbre
22 MG03BA04 - VLT® est une marque déposée Danfoss
Page 25
Installation
Motovariateur VLT® série FCM
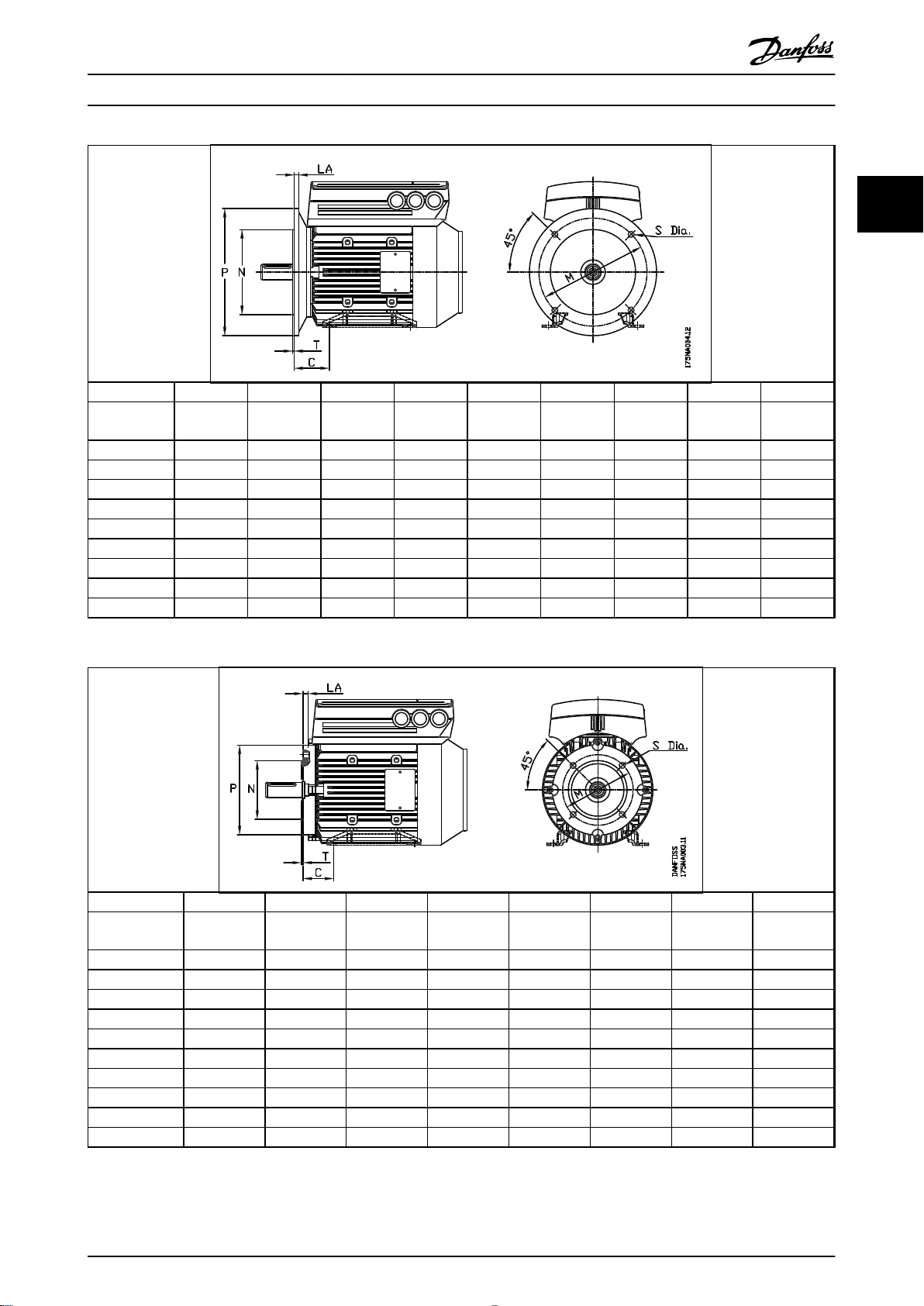
2 2
B5 FCM
Dimensions du
châssis
Réf. CEI FF85 FF100 FF115 FF130 FF165 FF165 FF215 FF215 FF265
Réf. DIN A105 A120 A140 A160 A200 A200 A250 A250 A300
C [mm] 50 56 63 70 89
M [mm] 85 100 115 130 165 165 215 215 265
N [mm] 70 80 95 110 130 130 180 180 230
P [mm] 105 120 140 160 200 200 250 250 300
S [mm] 10 10 12 12 14,5 14,5 14,5
T [mm] 3 3,5 3,5 3,5 4 4 4
LA [MM] 7 7 12 10 12 12 12
Tableau 2.17 Montage par bride - B5, B35, (B3+B5)
48 56 63 71 80 90 100 112 132
305/307 311/315 322/330 340 355/375
B14 FCM
Dimensions du
châssis
Réf. CEI FT65 FT75 FT85 FT100 FT115 FT130 FT130 FT165
Réf. DIN C80 C90 C105 C120 C140 C160 C160 C2OO
C [mm] 50 56 63 70 89
M [mm] 65 75 85 100 115 130 130 165
N [mm] 50 60 70 80 95 110 110 130
P [mm] 80 90 105 120 140 160 164 200
S [mm] M5 M6 M6 M8 M8 M8 M10
T [mm] 2,5 2,5 3 3 3,5 3,5 3,5
LA [MM] 9 9 9 9 8,5 13 13
Bride B14 max. 8,5 11 11 11,5 15 15,5 17
Tableau 2.18 Montage de face - B14, B34 (B3+B14)
56 63 71 80 90 100 112 132
MG03BA04 - VLT® est une marque déposée Danfoss 23
305/307 311/315 322/330 340 355/375
Page 26
Installation
Motovariateur VLT® série FCM
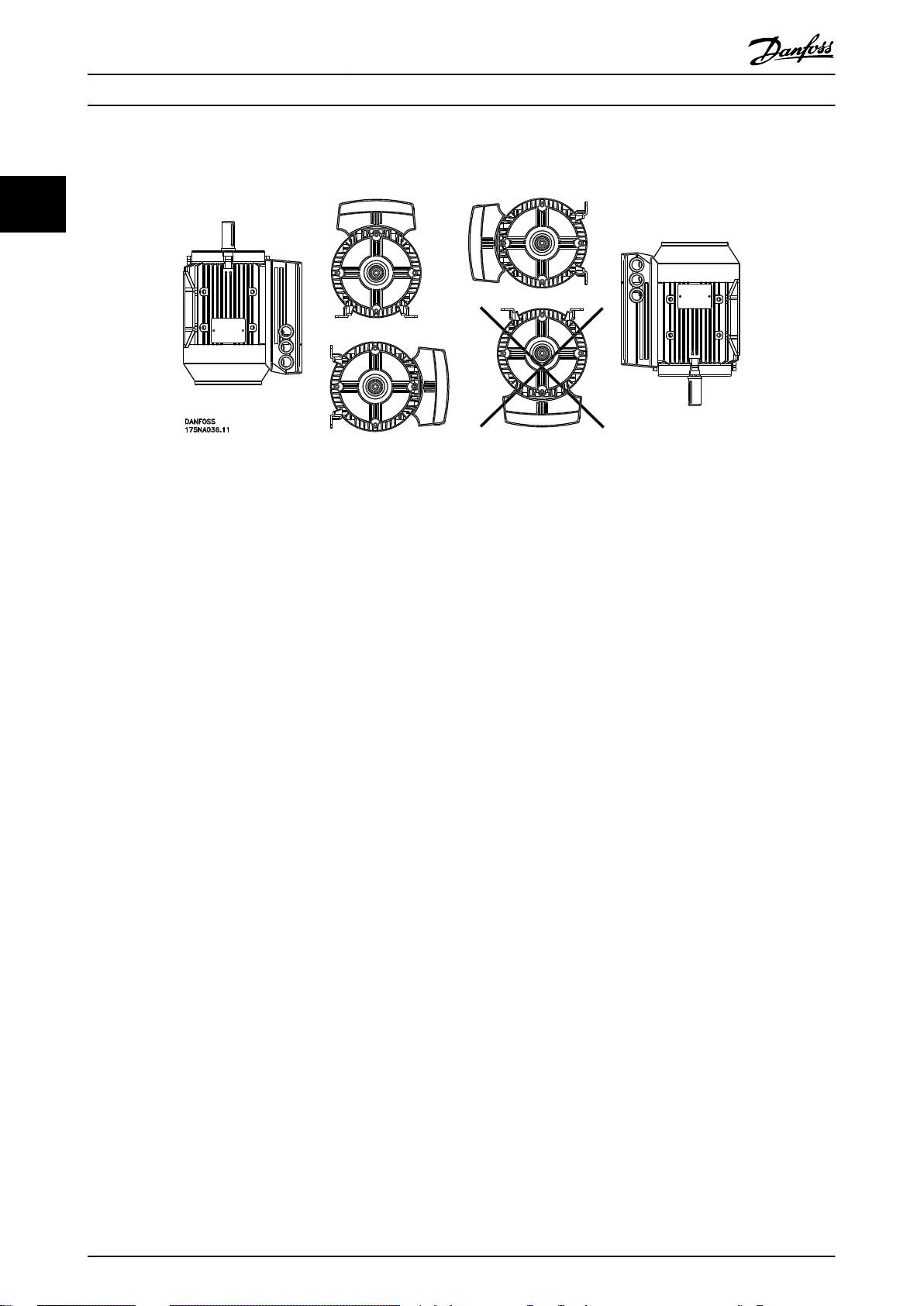
2.2.5 Installation du moteur FC
22
Illustration 2.4
L'installation des moteurs FC doit assurer leur accessibilité
en vue de la maintenance de routine. Il est recommandé
de prévoir un espace de travail d'au minimum 0,75 m
autour du moteur. Un espace adéquat autour du moteur,
notamment à l'entrée du ventilateur (50 mm) est
également nécessaire afin d'assurer la circulation de l'air.
Lorsque plusieurs moteurs FC sont installés à proximité, il
faut s'assurer qu'aucun air chaud expulsé n'est recyclé. Les
fondations doivent être solides, rigides et à niveau.
AVIS!
Installation électrique
Ne pas enlever le film supérieur à l’intérieur de la partie
onduleur. Ce film fait partie du dispositif de protection.
Installation de pignons, de poulies et d'accouplements
Ils doivent être alésés en fonction de nos limites standard
et installés sur l'arbre en vissant. Une attention particulière
doit être accordée à la protection correcte de toutes les
pièces mobiles.
AVIS!
Frapper sur les raccords de l'arbre moteur FC avec un
marteau ou un maillet endommage les roulements. Le
bruit de roulement augmente et la durée de vie des
roulements est nettement réduite.
AVIS!
Bride B14 maxi., voir 2.2.4 Dimensions .
2.2.6 Alignement
Lorsque l'application nécessite un accouplement direct, les
arbres doivent être correctement alignés sur les trois plans.
Un mauvais alignement peut constituer une source
importante de bruits et de vibrations.
Il faut tenir compte du jeu axial de l'arbre et de l'expansion
thermique dans les plans axiaux et verticaux. Il est
préférable d'utiliser des accouplements flexibles pour
l'entraînement.
24 MG03BA04 - VLT® est une marque déposée Danfoss
Page 27
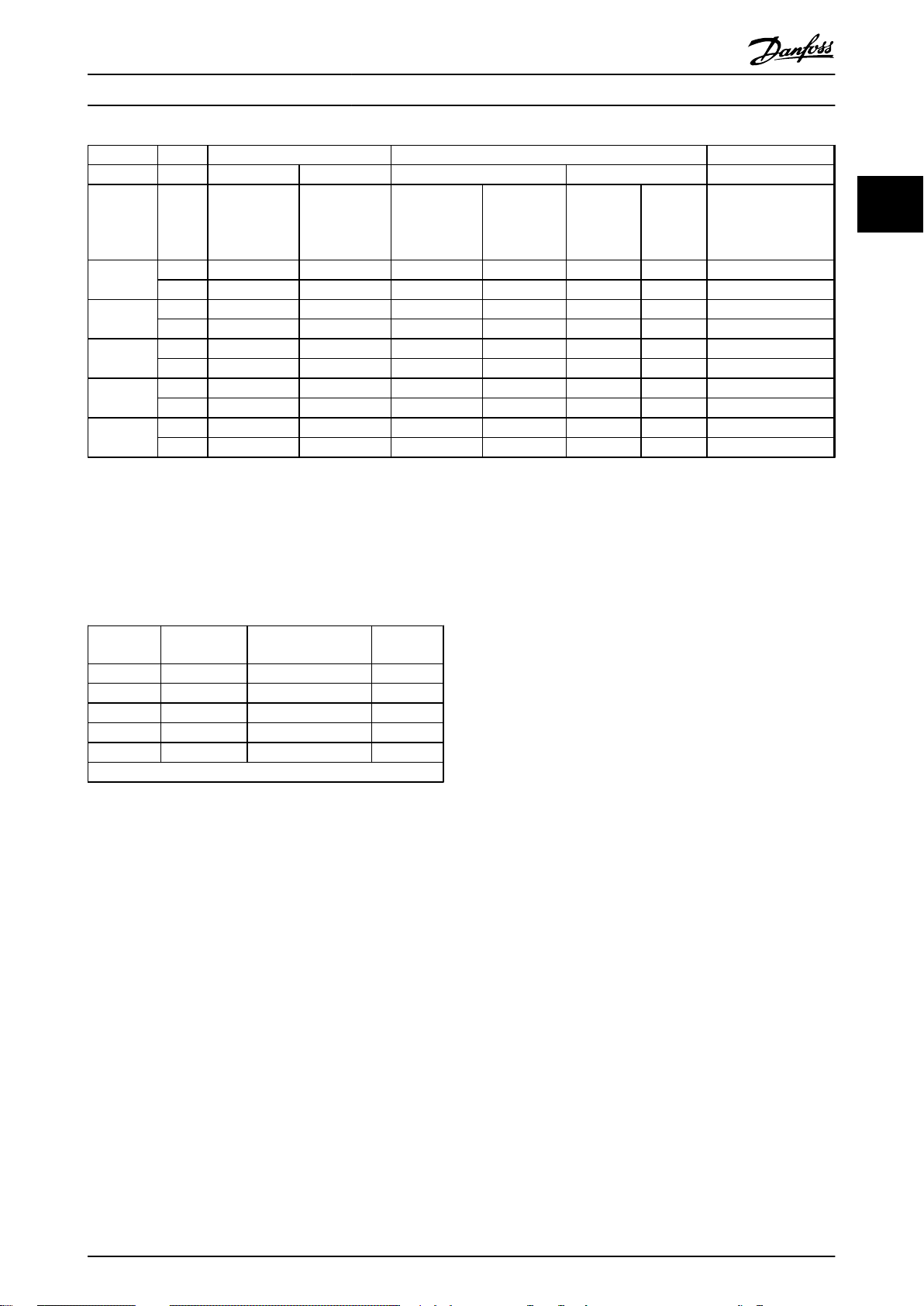
Installation
Arbre horizontal Arbre vertical
Type Pôles Charge vers
moteur
W-DA80
W-DA90
W-DA100
W-DA112
W-DA132
Tableau 2.19 Charges radiales et axiales externes maximales autorisées en Newton
2 339 539 321 565 362 521 774
4 303 503 283 530 330 583 729
2 444 684 421 716 476 661 915
4 398 638 366 682 442 606 854
2 781 1101 743 1159 839 1063 1295
4 710 1030 655 1107 787 975 1215
2 768 1088 715 1170 850 1035 1295
4 690 1010 612 1131 811 932 1202
2 1355 1707 1266 1838 1486 1618 2114
4 1253 1605 1130 1779 1427 1482 2068
Motovariateur VLT® série FCM
Charge
distante du
moteur
Charge vers
moteur
Arbre haut Arbre bas
Charge
distante du
moteur
Charge en
haut
Charge en
bas
Charge radiale max.
autorisée à
l'extrémité de l'arbre
(montage horizontal)
2 2
Couples des boulons
2.2.7
Les flasques et le couvercle doivent être fixés à l'aide de
boulons dont les dimensions et couples sont indiqués en
détail dans le Tableau 2.20.
FCM type Dimensions
du châssis
305-307 80 M5 5
311-315 90 M5 5
322-330 100 M6 (taptite) 8-10
340 112 M6 (taptite) 8-10
355-375 132 M8 (taptite) 29
Couple de serrage des vis du couvercle : 2,2-2,4 Nm
Tableau 2.20 Couples de serrage des boulons de fixation des flasques
Maintenance
2.2.8
Diamètre du boulon
(Nm)
Couple
Programme de nettoyage du moteur FC
Retirer la protection du ventilateur et s'assurer que toutes
les entrées d'air sont totalement libres. Nettoyer et retirer
toutes impuretés et obstructions derrière le ventilateur et
le long des nervures du châssis ainsi qu'entre la partie
moteur et onduleur.
Maintenance périodique de la partie moteur
1. Retirer la partie onduleur, la protection du
ventilateur et le ventilateur calé sur l'extension
d'arbre. Desserrer et retirer les vis de la protection
du palier et les boulons/goujons de flasque.
Enlever ensuite doucement les flasques des
centrages.
2. Il est maintenant possible de retirer soigneusement le rotor du stator en prenant soin de ne
pas endommager l'alésage du rotor ainsi que les
enroulements du stator et du rotor.
3. Après avoir démonté le moteur, la maintenance
peut être effectuée afin de retirer toutes les
impuretés. Pour ce faire, le mieux est d'utiliser de
l'air sec comprimé à une pression relativement
basse étant donné qu'un courant d'air grande
vitesse peut forcer des impuretés à entrer dans
les espaces entre les enroulements et l'isolation,
etc. Les solvants de dégraissage peuvent
endommager le vernis d'imprégnation ou
l'isolation.
4. Le moteur FC doit être assemblé dans l'ordre
inverse du démontage en n'oubliant pas de
placer en douceur les flasques sur les paliers et
les centrages. NE PAS FORCER.
5. Avant de démarrer, vérifier que le rotor tourne
librement. S'assurer que les connexions
électriques sont correctes.
6. Réinstaller l'ensemble des poulies, accouplements,
dents, etc., qui ont été retirés, en faisant particulièrement attention à l'alignement correct avec la
partie entraînée du fait que le mauvais
alignement conduira en fin de compte à des
problèmes de palier et à la rupture de l'arbre.
7. En remettant les vis et boulons, il faut veiller à
n'utiliser que ceux qui ont la qualité et la
résistance recommandées par le fabricant. Leur
pas et la longueur des vis/boulons doivent
également être identiques (voir Tableau 2.24).
MG03BA04 - VLT® est une marque déposée Danfoss 25
Page 28
Installation
Motovariateur VLT® série FCM
2.2.9 Protection thermique FCM 300
La protection thermique du FC et du moteur est assurée
22
de la manière suivante :
Les situations de surcharge sont gérées par le
•
calcul de la charge électrique (I 2X t).
L’absence de ventilation et la température
•
ambiante élevée sont gérées par la mesure de la
température. Le déclassement pour faible vitesse
(dû à l’absence de ventilation) n’est pas intégré
dans le calcul de la charge électrique, mais géré
par la mesure de la température. La ventilation
forcée est ainsi automatiquement assurée.
Charge électrique
Le courant est mesuré en tension continue et la charge
estimée est calculée. Le niveau de charge électrique est
défini sur un couple de sortie de 105%. Au-dessus de ce
niveau, le compteur monte, au-dessous de ce niveau, celuici descend. Le compteur démarre à zéro. Lorsqu’il atteint
100, l’unité s’arrête. A 98 le signal d’avertissement continue
à être généré (voyant et mot d’état.
La valeur peut être lue dans le paramètre 537 (panneau de
commande : temp. du variateur).
Les niveaux de température paraissent élevés, mais en
raison du réchauffement local du détecteur, les niveaux
pratiques de température de l’air intérieur sont inférieurs
d’environ 10 °C.
2.3 Commande locale
2.3.1 Kit service connexion rapide
(175N2546)
Objectif
Faire fonctionner LCP 2 et PROFIBUS en même temps. La
fiche auxiliaire peut être utilisée avec le FCM 300, numéro
de série 03Gxxx, et le logiciel à partir de la version 2.03. A
utiliser avec le câble pour kit de fiches 175N0162.
Charge
0% - 60 s
20% - 100 s
40% - 150 s
60% - 200 s
80% - 250 s
105% 900 s (si au-dessus de
120% 550 s 140% 210 s 160% 60 s >165% 20 s -
Lors d’un freinage CA complet (paramètre 400), une charge
> 165% est simulée => 20 s pour s’arrêter.
La valeur peut être lue au paramètre 527. (LCP : FC
thermique).
La mesure de la température détecte la température
présente à l’intérieur du boîtier électronique.
Seuil d’avertissement => Le signal d’avertissement
continue à être généré (LED et mot d’état) et l’unité peut
s’arrêter si la température ne redescend pas sous le seuil
d’avertissement dans l’intervalle de 15 minutes. Si la
fonction TEMP.DEP.SW est activée au paramètre 412, la
fréquence de commutation diminue progressivement à 2
kHz pour abaisser la température.
Temps de 0 à 100 Temps de 100 à 0
105%)
Tableau 2.21
300 s (si en dessous de
105%)
Illustration 2.5
Seuil de déclenchement ⇒ Arrêt immédiat et signal
d’alarme (LED et mot d’état).
26 MG03BA04 - VLT® est une marque déposée Danfoss
Page 29
Installation
Motovariateur VLT® série FCM
2.3.2 Kit de fiches (175N2545)
Objectif
Permet de faire une connexion entre le LCP 2 et le FCM
300.
A utiliser avec le câble pour kit de fiches 175N0162.
Illustration 2.6
Montage externe (175N0160)
2.3.3
2.3.4
Montage externe (suite)
Illustration 2.8
2 2
Illustration 2.7 Connexions
Couleur du fil/ Borne X100/ Fiche D-sub
jaune 1 8
vert 2 9
rouge 3 2
bleu 4 3
Tableau 2.22
MG03BA04 - VLT® est une marque déposée Danfoss 27
Illustration 2.9
Page 30
Installation
Motovariateur VLT® série FCM
2.3.5 Option potentiomètre (177N0011)
Option destinée à contrôler la référence au moyen d'un
22
potentiomètre. L'option est montée à la place d'un support
de câble. Pour que le potentiomètre fonctionne, il suffit de
retirer le cache, de définir la référence souhaitée puis de
remettre le cache en place.
Illustration 2.10
Couleur du fil Borne sur X101
Blanc 2 (entrée analogique)
Rouge 8 (0 V)
Noir 7 (+10 V)
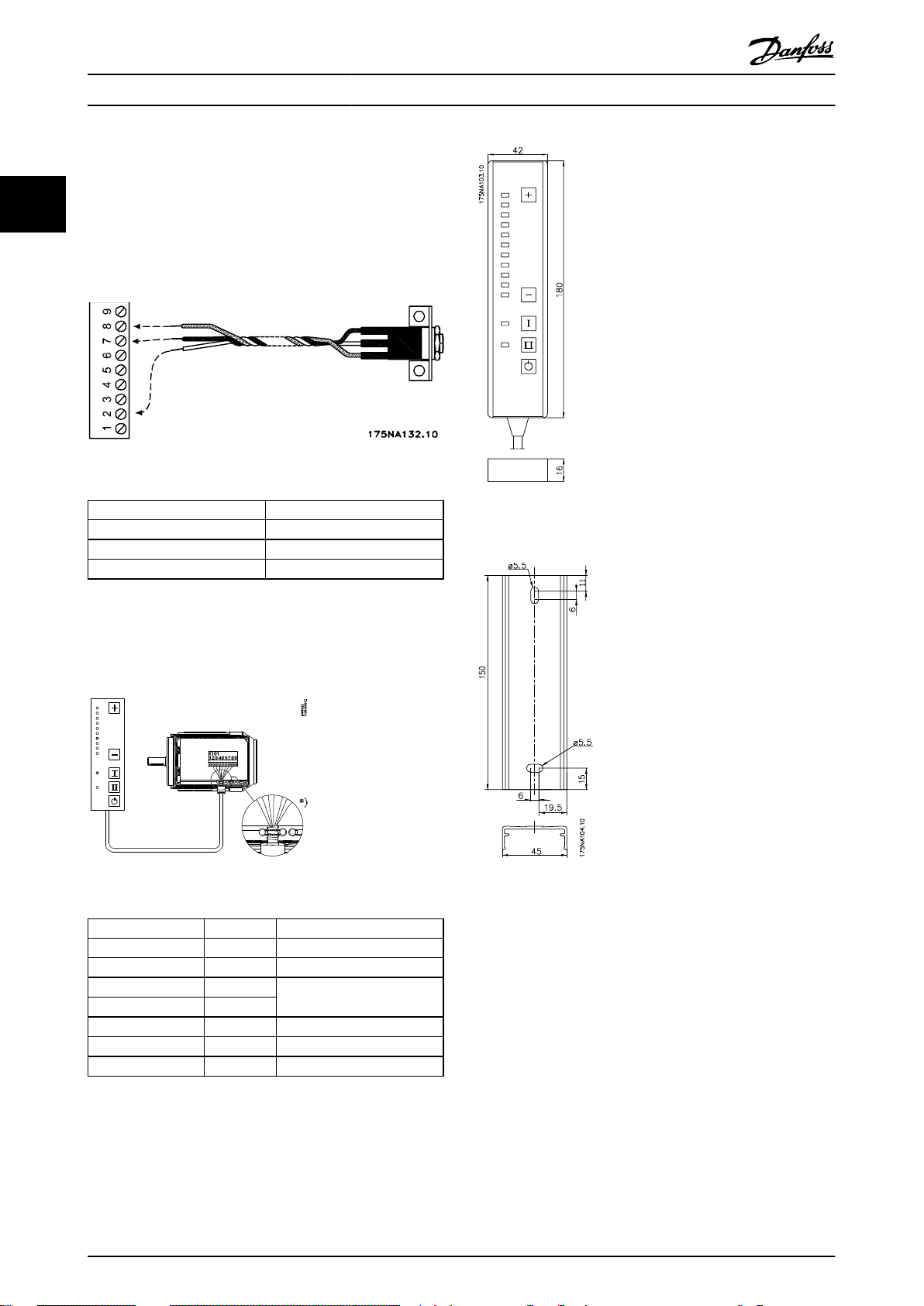
Illustration 2.12 Panneau de commande local (LOP) 175N0128
IP65
Tableau 2.23
Panneau de commande local (LOP)
2.3.6
(175N0128) IP65
Illustration 2.11
Couleur du fil Borne Fonction
Blanc 2 Référence
Marron 3 Reset
Violet* ou gris 4
Vert 5
Rouge 6 +24 V
Jaune 7 +10 V
Bleu 8 Terre
Voir Illustration 2.11
Illustration 2.13 Fixation pour LOP 175N2717 (inclus dans
175N0128)
Tableau 2.24 Câblage
* Orange pour certains câbles
28 MG03BA04 - VLT® est une marque déposée Danfoss
Page 31

Installation
Fonctions/réglages Touche I (Dém) Touche II (Dém)
Défaut - Fonctionnement à deux vitesses
(connecter le fil violet) :
Aucun changement par rapport au réglage
d'usine.
Fonction 2 - Exploitation à deux modes
(connecter le fil violet) :
Sélectionner les modes de fonctionnement
souhaités dans les process 1 et 2 (utiliser par. 4-6)
Paramètre 335 = 18 (select Setup)
Fonction 3 - Exploitation en deux sens
(connecter le fil gris) :
Paramètre 335 = 10 (démarrage avec inversion)
Paramètre 200 = 1 (deux sens)
Tableau 2.25
*ne pas connecter le fil marron si le reset n'est pas nécessaire
**ou régler le paramètre 213
Motovariateur VLT® série FCM
Fonctionne selon la
référence réglée (+/-)
Fonctionne avec le
process 1
Fonctionne dans le
sens horaire
Fonctionne à la vitesse
de jogging 10 Hz**
Fonctionne avec le
process 2
Fonction sens antihor Arrêt (et reset* - si déclen-
Touche (Arrêt)
Arrêt (et reset* - si déclenchement)
Arrêt (et reset* - si déclenchement)
chement)
2 2
Utiliser les touches [+]/[-]pour régler la référence.
À la mise sous tension, l'unité est toujours en mode arrêt. La référence réglée sera stockée lors de la mise hors tension. Pour
obtenir le mode démarrage permanent, connecter la borne 6 à la borne 4 et ne pas connecter le fil violet/gris à la borne 4.
Cela signifie l'inactivation de la fonction d'arrêt du LOP.
AVIS!
Après l'installation, couper ou isoler le fil excédentaire.
MG03BA04 - VLT® est une marque déposée Danfoss 29
Page 32

Programmation
3 Programmation
Motovariateur VLT® série FCM
33
3.1 Paramètres
3.1.1 Panneau de commande (175NO131)
Le moteur FC peut être équipé en option d'un panneau de
commande local - LCP 2 qui constitue une interface
complète d'exploitation et de surveillance du moteur FC.
IP65 à l'avant
3.1.2 Installation du LCP
Le LCP 2 est connecté à la borne X100, 1-4 (voir
instructions séparées MI03AXYY).
1. Kit service connexion rapide (175N2546) (voir
2.3.1 Kit service connexion rapide (175N2546)) et
câble 175N0162
2.
Kit de fiches (175N2545) (voir 2.3.2 Kit de fiches
(175N2545)) et câble 175N0162
3.
Montage externe (175N0160) (voir 2.3.4 Montage
externe (suite))
Fonctions du LCP
3.1.3
Les fonctions du panneau de commande sont réparties en
trois groupes :
Affichage
•
Touches de programmation des paramètres
•
Touches pour un fonctionnement en mode local
•
L’afficheur comporte quatre lignes. En cours de fonctionnement il peut indiquer quatre variables d'exploitation et
trois états de fonctionnement. Pendant la programmation,
toutes les informations nécessaires à la configuration
rapide et efficace des paramètres du moteur FC sont
affichées. Trois voyants indiquant respectivement la
tension, l'avertissement et l'alarme complètent l'écran
d'affichage. Tous les paramètres du moteur FC peuvent
être modifiés avec le panneau de commande sauf si le
paramètre 018 est réglé sur "Verrouillé".
Illustration 3.1
30 MG03BA04 - VLT® est une marque déposée Danfoss
Page 33

Programmation
Motovariateur VLT® série FCM
3.1.4 Ecran
L'écran LCD est rétroéclairé et comporte au total quatre
lignes alphanumériques et une indication du sens de
rotation (flèche), le process en cours ainsi que le process
éventuellement en cours de programmation.
Illustration 3.2
La 1ère ligne affiche en continu jusqu'à 3 mesures dans
l'état d'exploitation normal ou un texte expliquant la
deuxième ligne.
La 2e ligne affiche en continu une mesure de l'unité
concernée, quel que soit l'état (sauf en cas d'avertissement
ou d'alarme).
3.1.5
LED
En bas du panneau de commande se trouvent un voyant
rouge (alarme), un voyant jaune (avertissement) et un
voyant vert (tension).
Illustration 3.4
En cas de dépassement de certaines valeurs limites, le
voyant d'alarme et/ou d'avertissement s'allume et un texte
d'état ou d'alarme s'affiche
Le voyant d'indication de tension est activé lorsque le
moteur FC est sous tension; en même temps, le
rétroéclairage de l'écran d'affichage s'allume.
Touches de commande
3.1.6
Les touches de commande sont réparties selon leurs
fonctions. Cela signifie que les touches situées entre
l'affichage et les voyants sont utilisées pour la configuration des paramètres, notamment le choix des indications
de l'affichage en fonctionnement normal.
3 3
La 3e ligne, normalement vide, est utilisée en mode menu
pour afficher le numéro du paramètre sélectionné ou le
nom et le numéro du groupe de paramètres sélectionné.
La 4ème ligne est utilisée en état d'exploitation pour
afficher un texte d'état ou en mode changement de
données pour afficher la valeur du paramètre choisi.
Illustration 3.3
Une flèche indique le sens de rotation du moteur. De plus,
le process sélectionné en tant que process actif au
paramètre 004 est indiqué. Lors de la programmation d'un
process autre que le process actif, le numéro du process
programmé apparaît à droite. Ce deuxième numéro de
process clignote.
Illustration 3.5
Les touches de commande locale se trouvent sous les
voyants.
Illustration 3.6
MG03BA04 - VLT® est une marque déposée Danfoss 31
Page 34

Programmation
Motovariateur VLT® série FCM
3.1.7 Fonction des touches de commande
La touche [DISPLAY/STATUS] est utilisée
pour choisir le mode d'affichage ou pour
passer en mode d'affichage soit à partir
du mode menu rapide, soit du mode
33
Tableau 3.1
menu.
La touche [QUICK MENU] est utilisée pour
la programmation des paramètres faisant
partie du mode menu rapide. Il est
possible de changer directement entre le
mode menu rapide et le mode menu.
La touche [MENU] est utilisée pour la
programmation de l'ensemble des
paramètres. Il est possible de changer
directement entre le mode menu et le
mode menu rapide.
Tableau 3.3
La touche [JOG] active la fréquence de
sortie à une valeur préréglée tant que la
touche est maintenue. Peut être activée
ou désactivée dans le paramètre 015.
La touche [FWD/REV] modifie le sens de
rotation du moteur. Une flèche sur l'écran
indique le sens sélectionné, mais
uniquement en mode local. Peut être
activée ou désactivée dans le paramètre
016 (le paramètre 013 doit être réglé sur
[1] ou [3] et le paramètre 200 sur [1]).
La touche [START] active le démarrage du
moteur FC après un arrêt par la touche
[STOP]. Elle est toujours active mais n'est
pas prioritaire sur les ordres de stop
donnés par les bornes.
AVIS!
La touche [CHANGE DATA] est utilisée
pour modifier la valeur du paramètre
sélectionné soit en mode menu soit en
mode menu rapide.
La touche [CANCEL] est utilisée si la
modification du paramètre sélectionné ne
doit pas être effectuée.
La touche [OK] sert à valider la modification du paramètre sélectionné.
Les touches [+/-] sont utilisées pour
choisir un paramètre et le modifier ou
pour modifier le texte affiché à la
deuxième ligne.
Les touches [<][>] sont utilisées pour
choisir un groupe et déplacer le curseur
en cas de modification de paramètres
numériques.
La touche [STOP/RESET] est utilisée pour
arrêter ou remettre à zéro le moteur FC
après une perte d'informations (arrêt).
Peut être activée ou désactivée dans le
paramètre 014. Si l'arrêt est activé, la
ligne 2 clignote et [START] doit être
activé pour redémarrer.
Si les touches de commande locale sont actives, elles le
restent lorsque la fréquence est réglée pour la
commande locale et la commande à distance dans le
paramètre 002, exception faite de [FWD/REV] qui n'est
active qu'en commande locale.
AVIS!
Si aucune fonction d'arrêt externe n'a été sélectionnée et
que la touche [STOP] a été inactivée via le paramètre
014, le moteur FC peut être démarré et arrêté seulement
en coupant l'alimentation du moteur.
Tableau 3.2
AVIS!
L'activation de [STOP/RESET] empêchera le moteur de
fonctionner lorsque le LCP 2 est déconnecté. Le
redémarrage n'est possible que via la touche [START] du
LCP 2.
32 MG03BA04 - VLT® est une marque déposée Danfoss
Page 35

195NA113.10
VAR 2
SETUP
1
STATUS
VAR 1.1 VAR 1.2 VAR 1.3
50.0 Hz
FREQUENCE
MOTEUR TOURNE
SETUP
1
Programmation
Motovariateur VLT® série FCM
3.1.8 Etat des indications de l'écran
L'état des indications de l'écran peut varier - voir
3.1.15 Groupes de paramètres selon que le moteur FC est en
fonctionnement normal ou en cours de programmation.
3.1.9 Mode d'affichage
En fonctionnement normal, il est possible d'indiquer en
continu jusqu'à 4 variables d'exploitation différentes : 1,1
et 1,2 et 1,3 et 2. Sur la 4ème ligne s'affichent soit les états
de fonctionnement, soit les alarmes ou les avertissements.
Illustration 3.7
3.1.10
Mode d'affichage - Choix de l'état
des indications
Variable d'exploitation : Unité
Référence [%]
Référence [unité]*
Signal de retour [unité]*
Fréquence [Hz]
Fréquence x mise à l'échelle [-]
Courant moteur [A]
Couple [%]
Puissance [kW]
Puissance [HP]
Tension moteur [V]
Tension DC Bus [V]
Etat thermique du FC [%]
Nombre d'heures de fonctionnement
État des entrées, dig. Entrée [code binaire]
Référence externe [%]
Mot d'état [Hex]
Tempér. radiateur [ºC]
Mot d'alarme [Hex]
Mot de contrôle [Hex]
Mot d’avertissement 1 [Hex]
Mot d'avertissement 2 [Hex]
Entrée ANA 1 [mA]
Entrée ANA 2 [V]
*) Sélection au paramètre 416. L'unité est indiquée à la ligne 1
de l'état d'indication I, sinon "U" est indiqué.
Tableau 3.5
[heures]
3 3
Il existe trois possibilités d'état d'indication en mode
affichage : I, II et III. Le choix de lecture détermine le
nombre de variables d'exploitation lues.
État de
lecture :
Ligne 1 Description
Tableau 3.4
Le Tableau 3.5 indique les unités liées aux variables de la
1ère et de la 2ème ligne de l'écran (voir paramètre 009).
I : II : III :
Valeur des
d’une variable
d'exploitation
à la ligne 2
données de 3
variables
d’exploitation
à la ligne 1
Description de
3 variables
d’exploitation
à la ligne 1
Les variables d'exploitation 1.1, 1.2 et 1.3 de la première
ligne et la variable d'exploitation 2 de la deuxième ligne
sont sélectionnées via les paramètres 009, 010, 011 et 012.
État d'indication I :état d'indication standard après
démarrage ou initialisation.
La ligne 2 indique la valeur d'une variable d'exploitation
avec l'unité correspondante et la ligne 1 indique un texte
qui explique la ligne 2, cf. tableau. Dans cet exemple, la
fréquence a été sélectionnée comme variable par l'intermédiaire du paramètre 009. En fonctionnement normal, une
autre variable peut être lue immédiatement par l'intermédiaire des touches [+/-].
État d'indication II :
MG03BA04 - VLT® est une marque déposée Danfoss 33
Page 36

50.0 Hz
24,3% 30,2% 13,8A
MOTEUR TOURNE
SETUP
1
REF% COUPLE% COURAN A
50,0 Hz
MOTEUR TOURNE
50,0 Hz
QUICK MENU X OF Y
001 SELEC.LANGAGE
Programmation
Motovariateur VLT® série FCM
Le changement entre les états d'indication I et II se fait en
appuyant sur la touche [DISPLAY/STATUS].
33
Chaque paramètre a un nom et un numéro qui restent les
mêmes dans les deux modes de programmation. En mode
menu, les paramètres sont répartis en groupes. Le premier
chiffre du numéro de paramètre (en partant de la gauche)
indique le numéro de groupe du paramètre concerné.
Dans cet état, les valeurs des données de quatre variables
d'exploitation s'affichent en même temps, indiquant l'unité
associée (voir tableau). Dans l'exemple, Référence, Couple,
Courant et Fréquence sont sélectionnés comme variables
des première et deuxième lignes.
État de lecture III :
Cet état de lecture est affiché tant que la touche [DISPLAY/
STATUS] est maintenue enfoncée. Une fois la touche
relâchée, un changement vers l'état d'indication II a lieu,
sauf si la touche est maintenue pendant moins d'une
seconde env.
Quel que soit le mode de programmation, la modification
d'un paramètre entre en vigueur et est visible aussi bien
en mode menu qu'en mode menu rapide.
3.1.12
La configuration rapide est activée en appuyant sur la
touche [Quick Menu] qui fait apparaître sur l'écran l'indication suivante :
des entrées/sorties des signaux (bornes de
commande).
Le mode menu permet de choisir et de modifier
•
l'ensemble des paramètres. Certains paramètres
sont cependant "condamnés" en fonction du
choix de configuration (paramètre 100), par ex.
boucle ouverte cache tous les paramètres PID.
Configuration rapide à l'aide du
menu rapide
A ce niveau, affichage des noms des paramètres et unités
des variables d'exploitation à la 1ère ligne - l'affichage de
la variable d'exploitation 2 reste inchangé.
3.1.11
Mode menu rapide comparé au
mode menu
Le moteur FC peut être utilisé pratiquement pour tous les
travaux, ce qui explique le nombre important de
paramètres. L'utilisateur a donc la possibilité de choisir
entre deux modes de programmation : un mode menu et
un mode menu rapide.
Dans le menu rapide, l'utilisateur ne doit
•
programmer que les quelques paramètres
suffisants pour optimiser le fonctionnement du
moteur si les réglages “usine” des autres
paramètres prennent en compte les fonctions de
commande souhaitées, ainsi que la configuration
En bas de l'écran s'affichent le numéro et le nom du
premier paramètre du menu rapide, ainsi que son état ou
sa valeur. La première fois que la touche [Quick Menu] est
activée après la mise sous tension de l'appareil, les
indications commencent toujours par la position 1 voirTableau 3.6.
34 MG03BA04 - VLT® est une marque déposée Danfoss
Page 37

SETUP
1
FREQUENCE
50.0 Hz
0 EXPLOI.ET AFFICHE
SETUP
1
FREQUENCE
50.0 Hz
001 SELEC.LANGAGE
FRANÇAIS
Programmation
Motovariateur VLT® série FCM
3.1.13 Sélection de paramètre
La sélection des paramètres s'effectue à l'aide des touches
[+/-]. Les paramètres suivants sont accessibles :
Pos.: N° : Paramètre : Unité :
1 001 Langue
2 200 Sens de rotation
3 101 Caractéristique de couple
4 204 Référence min. [Hz]
5 205 Référence max. [Hz]
6 207 Temps d'accélération de
la rampe
7 208 Temps de décélération de
la rampe
8 002 Commande locale/
distance
9 003 Référence locale
10 500 Adresse bus
Tableau 3.6 Sélection des paramètres
3.1.14
Mode menu
[s]
[s]
3.1.15
En mode menu, les paramètres sont répartis en groupes.
Le choix d'un groupe de paramètres s’effectue à l'aide des
touches [<][>].
Les groupes de paramètres suivants sont accessibles :
N° de groupe Groupe de paramètres
0 Exploitation et affichage
1 Charge et moteur
2 Références et limites
3 Entrées et sorties
4 Fonct.particulières
5 Communication série
6 Fonctions techniques
*Pour toute information sur le groupe de paramètres 800 et 900
pour PROFIBUS, voir le manuel Profibus FCM MG03EXYY.
Après la sélection d'un groupe de paramètres, chaque
paramètre peut être choisi à l'aide des touches [+/-] :
Groupes de paramètres
Tableau 3.7
3 3
Le mode menu est activé en appuyant sur la touche
[Menu] qui fait apparaître sur l'écran l'indication suivante :
Illustration 3.8
La ligne 3 de l'écran indique le numéro du groupe et le
nom du paramètre.
Illustration 3.9
A la 3ème ligne de l'écran s'affichent le numéro et le nom
du paramètre et à la 4ème ligne son état ou sa valeur.
3.1.16
Qu'un paramètre soit sélectionné en mode menu rapide ou
en mode menu, la procédure de modification de sa valeur
reste la même. Une pression sur la touche [Change Data]
donne accès au changement du paramètre choisi. Ensuite,
le soulignement de la ligne 4 de l'écran clignote. La
procédure de modification de la valeur du paramètre
sélectionné dépend du fait que celui-ci représente une
valeur numérique ou un texte.
Modification de données
MG03BA04 - VLT® est une marque déposée Danfoss 35
Page 38

SETUP
1
FREQUENCE
50.0 Hz
001 SELEC.LANGAGE
FRANÇAIS
09,0 HZ
50.0 Hz
FREQUENCE
130 FREQ. DEMARRAGE
130 FREQ. DEMARRAGE
50.0 Hz
FREQUENCE
10,0 HZ
Programmation
3.1.17 Changement de texte
Dans le cas où la valeur du paramètre sélectionné est un
texte, sa modification se fait à l'aide des touches [+]/[-].
Motovariateur VLT® série FCM
33
Illustration 3.12
Le chiffre sélectionné clignote. La ligne inférieure de l'écran
indiquera la valeur du paramètre qui sera mémorisé en
Illustration 3.10
La ligne inférieure de l'écran indiquera le texte qui sera
mémorisé en confirmant par [OK].
confirmant par [OK].
3.1.18
Si la valeur du paramètre sélectionné est numérique,
sélectionnez d'abord un chiffre à l'aide des touches [<][>].
Modifier ensuite à volonté le chiffre sélectionné à l'aide des
touches [+]/[-] :
Modification à l'infini d'une valeur
numérique
Illustration 3.11
36 MG03BA04 - VLT® est une marque déposée Danfoss
Page 39

175ZA446.11
SETUP
1
MODE AFFICHAGE
MODE MENU
MODE MENU RAPIDE
SETUP
1
SETUP
1
MODE DONNEES
SETUP
1
SETUP
1
▲
▲
▲
▲
▲
▲
▲
▲
▲
Choix du
paramètre
Choix du
groupe
VAR 1.1 VAR 1.2 VAR 1.3
VAR 2
MOT D’ETAT
MODE MODIFICATION DE DONNEES
MODE MODIFICATION DE DONNEES
Choix de la
valeur
50.0 HZ
001 SELEC.LANGAGE
FRANÇAIS
FREQUENCE
50.0 HZ
0 EXPLOI.ET AFFICHE
FREQUENCE
50.0 HZ
001 SELEC.LANGAGE
FRANÇAIS
50.0 HZ
001 SELEC.LANGAGE
FRANÇAIS
FREQUENCE
50.0 HZ
001 SELEC.LANGAGE
FRANÇAIS
QUICK MENU 1 OF 13
QUICK MENU 1 OF 13
Programmation
3.1.19 Structure de menu
Motovariateur VLT® série FCM
3 3
Illustration 3.13
MG03BA04 - VLT® est une marque déposée Danfoss 37
Page 40

Programmation
Motovariateur VLT® série FCM
3.1.20 Groupe de paramètres 0-**
Fonction./Affichage
001 Langue
Valeur:
33
Français (FRANÇAIS) [0]
Allemand (DEUTSCH) [1]
Français (FRANCAIS) [2]
Danois (DANSK) [3]
Espagnol (ESPAÑOL) [4]
Italien (ITALIANO) [5]
La commande peut ne pas être livrée avec le réglage usine.
Fonction:
Ce paramètre permet de choisir la langue retenue pour les
affichages à l'écran.
Description du choix:
Il est possible de choisir entre [0] l'anglais, [1] l'allemand, [2]
le français, [3] le danois, [4] l'espagnol et [5] l'italien.
002
Valeur:
Contrôle à distance (REMOTE) [0]
Commande locale (MODE LOCAL) [1]
Fonction:
Deux modes sont proposés pour commander le moteur
FC : [0] la commande à distance et [1] la commande locale.
Description du choix:
Le choix de l'option [0] Commande à distance permet de
piloter le moteur FC via :
1. les bornes de commande ou le port de communi-
2. la touche [START]. Toutefois, cela n'annule en
3. les touches [Stop], [Jog] et [Reset] sous réserve
Le choix de l'option [1] Commande locale permet de piloter
le moteur FC via :
1. la touche [START]. Toutefois, cela n'annule en
2. les touches [Stop], [Jog] et [Reset] sous réserve
3. la touche [FWD/REV], sous réserve d'activation au
Commande locale/à distance
cation série,
aucun cas les commandes Arrêt (ni démarrage/
désactivé) saisies au moyen d'entrées digitales ou
du port de communication série,
que ces fonctions soient activées (voir paramètres
014, 015 et 017).
aucun cas les commandes Arrêt sur les bornes
digitales (dans le cas où [2] ou [4] a été
sélectionné au paramètre 013),
que ces fonctions soient activées (voir paramètres
014, 015 et 017),
paramètre 016 et de sélection de [1] ou [3] au
paramètre 013.
4. Il est possible de commander la référence locale
via le paramètre 003 au moyen des touches
"curseur haut" et "curseur bas".
003 Référence locale
Valeur:
Par. 013 réglé sur [1] ou [2] :
0-f MAX 000.000
Par. 013 réglé sur [3] ou [4] et par. 203
réglé sur [0] :
Réf
-Réf
MIN
MAX
Par. 013 réglé sur [3] ou [4] et par. 203
réglé sur [1] :
-Ref
- + Ref
MAX
Fonction:
Ce paramètre permet de régler manuellement à partir du
panneau de commande la valeur de référence souhaitée
(vitesse ou référence pour la configuration choisie selon le
choix effectué au paramètre 013).
L'unité se règle automatiquement sur la configuration
sélectionnée au paramètre 100 s'il s'agit de [3] Mode
process en boucle fermée.
Description du choix:
[1] Local doit être sélectionné au paramètre 002 pour que
ce paramètre soit utilisé.
La valeur entrée reste mémorisée après une coupure de
courant, voir paramètre 019.
Dans ce paramètre, on ne quitte pas automatiquement le
mode "changement de données" (après un dépassement
de temps).
Il est impossible de régler la référence locale au niveau du
port de communication série.
004
Valeur:
Process usine (Réglage d'usine) [0]
Proc.1 (REGLAGE 1) [1]
Proc.2 (REGLAGE 2) [2]
Multiprocess (MULTI PROCESS) [5]
Fonction:
Ce paramètre permet de sélectionner le process désiré
(fonctions demandées au moteur FC).
Tous les paramètres peuvent être programmés dans deux
process différents, Process 1 et Process 2. Il existe
également un process d’usine qui ne peut être modifié.
Description du choix:
[0] Process usine contient les caractéristiques de réglage
d’usine. Cette option peut servir de référence pour
ramener éventuellement les autres process à un état
donné.
Les paramètres 005 et 006 permettent de copier un
process dans l’autre.
[1] Process 1 et [2] 2 sont deux process séparés pouvant
être sélectionnés à tout moment.
MAX
Process actif
000.000
000.000
38 MG03BA04 - VLT® est une marque déposée Danfoss
Page 41

Programmation
Motovariateur VLT® série FCM
[5] Multiprocess permet de sélectionner la commutation à
distance entre plusieurs process. Les bornes 2, 3, 4 et 5
ainsi que le port de communication série peuvent être
utilisées pour passer d'un process à un autre.
005 Programmation process
Valeur:
Process usine (Réglage d'usine) [0]
Proc.1 (REGLAGE 1) [1]
Proc.2 (REGLAGE 2) [2]
Process actif (ACTIVE SETUP) [5]
Fonction:
Il est possible de sélectionner un process à programmer
(modification des données) pendant l'exploitation. La
programmation des 2 process peut s'effectuer indépendamment du process sélectionné comme étant actif
(paramètre 004).
Description du choix:
L'option [0] Réglage usine renferme les données d'usine.
Elle peut servir de référence pour ramener éventuellement
les autres process à un état connu.
[1] Process 1 et [2] 2 sont distincts et peuvent être utilisés
selon les besoins. Ils sont librement programmables,
indépendamment de la configuration du process actif, et
permettent ainsi de commander les fonctions du moteur
FC.
commande. Cette fonction permet facilement de copier
la/les valeur(s) des paramètres d'un moteur FC à un autre.
Description du choix:
Sélectionner [1] Envoi de tous les paramètres pour transférer
l'ensemble des paramètres au panneau de commande.
Sélectionner [2] Réception de tous les paramètres pour
copier toutes les valeurs de paramètres transmises dans le
moteur FC doté du panneau de commande. Sélectionner
[3] Réception des par. indépendants de la puissance si seuls
ces paramètres doivent être téléchargés. C'est le cas en
présence d'un moteur FC dont la puissance nominale
diffère de celle du moteur délivrant la configuration des
paramètres d'origine.
008
Valeur:
0.0-100.00 [1-10000]
1.00 [100]
Fonction:
Ce paramètre permet de sélectionner le coefficient
(multiplicateur) applicable à la fréquence du moteur (fM). Il
est indiqué sur l'afficheur, lorsque les paramètres 009 à 012
sont réglés sur Fréquence x mise à l'échelle [5].
Description du choix:
Réglez sur le coefficient désiré.
Mise à l'échelle de l'affichage de la fréquence
moteur
3 3
006
Valeur:
Pas de copie (Aucune copie) [0]
Copier dans Process 1 à partir de # (COPIE DANS
PROCESS1) [1]
Copier dans Process 2 à partir de # (COPIE DANS
PROCESS2) [2]
Copie dans tous les process à partir de # (COPIE
DANS TOUS) [5]
# = process sélectionné au paramètre 005
Fonction:
Une copie est effectuée du process sélectionné au
paramètre 005 vers un autre process ou vers tous les
autres process simultanément.
007
Valeur:
Pas de copie (Aucune copie) [0]
Envoi de tous les paramètres (LECTURE
PARAMETRES) [1]
Réception de tous les paramètres (ECRITURE
PARAMETRES) [2]
Réception des par. indépendants de la puissance
(ECRIT PUISSANCE SANS.) [3]
Fonction:
Le paramètre 007 est mis en œuvre si l'on souhaite utiliser
la fonction "Copie" proposée par le panneau de
Copie de process
Copie LCP
009
Valeur:
Aucun [0]
Réf. [%] (EXTERNE (%)) [1]
Réf. [unité] (REFERENCE UNITE) [2]
Signal de retour [Unité] (RETOUR [UNITE]) [3]
Fréquence [Hz] (FREQUENCE [Hz]) [4]
Fréquence x mise à l'échelle [-] (FREQUENCE x
COEFF) [5]
Courant moteur [A] (COURANT MOTEUR [A]) [6]
Couple [%] (COUPLE [%]) [7]
Puissance [kW] (PUISSANCE [kW]) [8]
Puissance [CV] (PUISSANCE [CV]) [9]
TENSION MOTEUR [V] (TENSION MOTEUR (V)) [11]
TENSION CONTINUE [V] (Tension circuit intermé-
diaire CC [V]) [12]
Etat thermique du FC [%] (THERMIQUE FC[%]) [14]
Nombre d'heures de fonctionnement [heures]
(HEURES FONCTION) [15]
Entrées digitales [code binaire] (ENTREES DIGIT
(BIN)) [16]
Consigne externe [%] (REFERENCE EXTERNE [%]) [21]
Mot d'état [Hex] (MOT D´ETAT [HEX]) [22]
Temp. du variateur [°C] (TEMP. RADIATEUR (°C)) [25]
Mot d'alarme [Hex] (MOT D'ALARME [HEX]) [26]
MOT CONTROLE [HEX] (MOT CONTROLE [HEX]) [27]
Affichage ligne 2
MG03BA04 - VLT® est une marque déposée Danfoss 39
Page 42

Programmation
Motovariateur VLT® série FCM
Mot d'avertissement 1 [Hex]
(MOT AVERT. 1 [HEX]) [28]
Mot d'avertissement 2 [Hex]
(MOT D’ETAT ETENDU [HEX]) [29]
Entrée analogique 1 [mA] (ENTREE ANALOG
33
1[mA]) [30]
Entrée analogique 2 [V] (ENTREE ANALOG 2 [V]) [31]
Fonction:
Ce paramètre permet de sélectionner la valeur affichée sur
la ligne 2 de l'écran.
Les paramètres 010 à 012 permettent de choisir trois
autres valeurs qui sont affichées sur la ligne 1 de l'écran.
Pour afficher les indications, appuyer sur la touche
[DISPLAY/STATUS], voir 3.1.7 Fonction des touches de
commande.
Description du choix:
Référence [%] correspond à la référence totale (somme des
références digitales/analogiques/présélectionnées/bus/gel,
ainsi que des valeurs de rattrapage et de ralentissement).
Référence [unité] correspond à la somme des références
avec l'unité donnée par la sélection de configuration dans
le paramètre 100 (Hz, Hz et tr/mn).
Retour [unité] indique l'état des bornes 1 et 2 avec l'unité
et l'échelle sélectionnées aux paramètres 414, 415 et 416.
Fréquence [Hz] indique la fréquence du moteur, c'est-à-dire
la fréquence de sortie vers le moteur.
Fréquence x mise à l’échelle [-] correspond à la fréquence
moteur fM instantanée multipliée par le coefficient (mise à
l'échelle) réglé au paramètre 008.
Courant Moteur [A] définit le courant de phase du moteur
mesuré comme valeur efficace.
Couple [%] fournit la charge instantanée du moteur par
rapport au couple nominal du moteur.
Puissance [kW] définit la puissance instantanée consommée
par le moteur en kW.
Puissance [CV] définit la puissance instantanée consommée
par le moteur en CV.
Tension Moteur [V] indique la tension fournie au moteur.
Tension circuit intermédiaire [V] indique la tension du circuit
intermédiaire du moteur FC.
État thermique, FC [%] indique la charge thermique calculée
ou estimée du moteur FC. 100 % est la valeur d'arrêt.
Heures de fonctionnement [Heures] indique le nombre
d'heures de fonctionnement depuis la dernière réinitialisation du moteur au paramètre 619.
Entrée digitale [code binaire] indique l'état du signal délivré
par les 4 bornes digitales (2, 3, 4 et 5). L'entrée 5
correspond au bit le plus à gauche. 0 = aucun signal, 1 =
signal connecté.
Référence externe [%] indique la somme des références
externes en % (somme des réf. analogiques/impulsion/bus).
Mot d'état [Hex] indique sous forme de code hexadécimal
le mot d'état envoyé par le moteur FC via le port de
communication série.
Tempér. radiateur [°C] indique la température instantanée
du radiateur du moteur FC. La valeur limite de mise en
défaut est de 90 ±5 °C ; la valeur de reprise se situe à 60
±5 °C.
Mot d'alarme [Hex] indique une ou plusieurs alarmes en
code hexadécimal. Voir le 4.2.4 Mot d'avertissement, mot
d'état élargi et mot d'alarme.
Mot de contrôle [Hex] indique le mot de contrôle destiné
au moteur FC. Voir le 3.6 Communication série - Manuel de
configuration du FCM 300.
Mot d'avertissement 1 [Hex] indique un ou plusieurs avertissements en code hexadécimal. Voir 4.2.4 Mot
d'avertissement, mot d'état élargi et mot d'alarme pour plus
d'informations.
Mot d'état élargi [Hex] indique un ou plusieurs états en
code hexadécimal. Voir 4.2.4 Mot d'avertissement, mot d'état
élargi et mot d'alarme pour plus d'informations.
Entrée analogique 1 [mA] indique la valeur du signal sur la
borne 1.
Entrée analogique 2 [V] indique la valeur du signal sur la
borne 2.
010
Valeur:
Réf. [%] [1]
Voir paramètre 009.
Fonction:
Ce paramètre permet de choisir la première des trois
valeurs affichées sur la ligne 1 de l'écran, position 1.
Description du choix:
Il est possible de choisir entre 24 valeurs de données, voir
le paramètre 009
011
Valeur:
Courant moteur [A] [1]
Voir paramètre 009
Fonction:
Ce paramètre permet de choisir la seconde des trois
valeurs affichées sur la ligne 1 de l'écran, position 2.
Pour afficher les indications, appuyer sur la touche
[DISPLAY/STATUS]. Voir 3.1.7 Fonction des touches de
commande.
Description du choix:
Il est possible de choisir entre 24 valeurs de données, voir
le paramètre 009
012
Valeur:
Puissance [kW] [8]
Voir paramètre 009
Fonction:
Ce paramètre permet de choisir la troisième des trois
valeurs affichées sur la ligne 1 de l'écran, position 3.
Les indications s'affichent en appuyant sur la touche
[DISPLAY/STATUS]. Voir 3.1.7 Fonction des touches de
commande.
Affichage ligne 1.1
Affichage ligne 1.2
Ligne d'affichage 1.3
40 MG03BA04 - VLT® est une marque déposée Danfoss
Page 43

Programmation
Motovariateur VLT® série FCM
Description du choix:
Il est possible de choisir entre 24 valeurs de données, voir
le paramètre 009
013
Valeur:
Mode local désactivé (INACTIF) [0]
Mode local en boucle ouverte
(LOC CTRL/BOUCLE OUV.) [1]
Mode local en boucle ouverte
(LOC+DIG CTRL/BOUCLE OUVERTE) [2]
Mode local/comme au paramètre 100
(LOC CTRL/COMME P100) [3]
Mode local/comme au paramètre 100
(LOC+DIG CTRL/P100) [4]
Fonction:
Sélectionner la fonction souhaitée dans le cas où le Mode
local a été sélectionné au paramètre 002. Voir aussi la
description du paramètre 100.
Description du choix:
Sélectionner Mode local désactivé [0] pour inhiber tout
réglage éventuel de la Référence locale au paramètre 003.
Le moteur FC doit être réglé sur Commande à distance [0]
au paramètre 002 pour pouvoir passer d'une des diverses
valeurs du paramètre 013 à l'option Mode local désactivé
[0].
Sélectionner Mode local en boucle ouverte [1] pour ajuster
la vitesse (en Hz) à l'aide du paramètre 003 quand le
moteur FC est réglé sur l'option Commande locale [1] au
paramètre 002.
Régler le paramètre 100 sur Mode vitesse en boucle ouverte
[0], s'il n'est pas sur cette valeur.
L'option Mode local digital en boucle ouverte [2] fonctionne
selon le même principe que Mode local en boucle ouverte
[1], sauf qu'il est possible de commander le moteur via les
entrées digitales, lorsque le paramètre 002 est réglé sur
Commande locale [1].
Mode local/comme au paramètre 100 [3] est sélectionné
dans le cas où la référence doit être réglée via le
paramètre 003.
L'option Mode local digital/comme au paramètre 100 [4]
fonctionne selon le même principe que Mode local/comme
au paramètre 100 [3], sauf qu'il est possible de commander
le moteur via les entrées digitales si le paramètre 0002 a
été réglé sur Commande locale [1].
La fréquence instantanée du moteur et le sens de rotation
seront conservés. La fréquence du moteur fM se règle sur
0 Hz si le sens de rotation instantané ne correspond pas
au signal d'inversion (référence négative).
Basculer du Mode local numérique en boucle ouverte à la
Commande à distance :
La configuration choisie au paramètre 100 Configuration
est activée. Eviter les mouvements brusques lors du
basculement.
Commande locale/configuration comme au
paramètre 100.
Commutation
paramètre 100 ou Mode local digital/comme au paramètre
100.
La référence instantanée sera conservée. La référence
locale se règle sur 0 si le signal de référence est négatif.
Commutation Mode local/comme au paramètre 100 ou
Mode local digital/comme au paramètre 100/Commande à
distance.
La référence est remplacée par le signal de référence actif
de la commande à distance.
014 Arrêt local
Valeur:
Impossible (INACTIF) [0]
Possible (ACTIF) [1]
Fonction:
Ce paramètre permet de sélectionner ou de désactiver la
fonction arrêt local du panneau de commande. Il est
possible d'utiliser cette touche lorsque le paramètre 002
est réglé sur [0] Commande à distance ou [1] Commande
locale.
Description du choix:
La touche [STOP] est désactivée si l'option [0] Impossible
est retenue pour ce paramètre.
015
Valeur:
Impossible (INACTIF) [0]
Possible (ACTIF) [1]
Fonction:
Ce paramètre permet de sélectionner ou de désactiver la
fonction jogging du panneau de commande.
Description du choix:
La touche [JOG] est désactivée si l'option [0] Impossible est
retenue pour ce paramètre.
016
Valeur:
Impossible (INACTIF) [0]
Possible (ACTIF) [1]
Fonction:
Ce paramètre permet de sélectionner ou de désactiver la
fonction inversion du panneau de commande. Cette
touche ne peut être utilisée que si le paramètre 002 est
réglé sur [1] Commande locale et le paramètre 013 sur [1]
Mode local en boucle ouverte ou [3] Mode local/comme au
paramètre 100.
Description du choix:
La touche [FWD/REV] est désactivée si l'option [0]
Impossible est retenue pour ce paramètre.
Voir paramètre 200.
017
Valeur:
Impossible (INACTIF) [0]
Commande à distance/Mode local/comme au
Jogging en mode local
Inversion local
Reset local du déclenchement
3 3
MG03BA04 - VLT® est une marque déposée Danfoss 41
Page 44

Programmation
Possible (ACTIF) [1]
Fonction:
Ce paramètre permet de sélectionner ou de désactiver la
fonction RESET sur le clavier. Il est possible d'utiliser cette
touche lorsque le paramètre 002 est réglé sur [0]
33
Commande à distance ou [1] Commande locale.
Description du choix:
La touche [RESET] est désactivée si l'option [0] Inactif est
sélectionnée pour ce paramètre.
018 Verrouillage pour la modification de données
Valeur:
Non verrouillé (NON VERROUILLE) [0]
Verrouillée (VERROUILLE) [1]
Fonction:
Ce paramètre permet de "verrouiller" la commande et
d'éviter une modification quelconque des données via le
panneau de commande local 2 (modifications cependant
toujours possibles via le port de communication série).
Description du choix:
La sélection de [1] Verrouillé empêche toute modification
des données.
019
Valeur:
Sélectionner Redémarrage automatique, utiliser réf.
mémorisée (REDEMARRAGE AUTO) [0]
Arrêt forcé, utiliser réf. mémorisée (LOCAL = STOP) [1]
Stop forcé, régler la réf. sur 0 (LOCAL=STOP REF =
0) [2]
Fonction:
Réglage du mode d'exploitation souhaité à la mise sous
tension.
Cette fonction ne peut être activée que si l'option [1]
Commande locale a été choisie au paramètre 002.
Description du choix:
[0] Sélectionner Redémarrage automatique, utiliser réf.
mémorisée si l'appareil doit démarrer en adoptant la même
référence locale (réglage au paramètre 003) et les mêmes
conditions de démarrage/arrêt (initiées à l'aide des touches
[Sart/Stop]) que le moteur FC présentait avant son arrêt.
Sélectionner [1] Stop forcé, utiliser réf. mémorisée si
l'appareil doit rester arrêté lors de la connexion de la
tension secteur et adopter cet état jusqu'à l'activation de la
touche [START]. La référence locale réglée au paramètre
003 est mise en œuvre après initialisation de l'ordre de
démarrage.
Sélectionner [2] Stop forcé, régler la réf. sur 0 si l'appareil
doit rester arrêté lors de la connexion de la tension
secteur. La référence locale (paramètre 003) est remise à
zéro.
Mode d'exploitation à la mise sous tension,
commande locale
Motovariateur VLT® série FCM
3.2.1
100 Configuration
Valeur:
Commande de vitesse en boucle ouverte
(BOUCLE.OUVERT.VITESS) [0]
Mode process en boucle fermée
(BOUCLE. FERMEE. PROC) [1]
Fonction:
Ce paramètre permet de sélectionner la configuration à
laquelle le moteur FC doit s'adapter.
Description du choix:
Sélectionner [0] Mode vitesse en boucle ouverte pour obtenir
une commande normale de la vitesse (sans signal de
retour) et une compensation automatique du glissement
garantissant une vitesse quasi constante indépendamment
des variations de charge. Les compensations sont actives
mais peuvent être désactivées dans les paramètres 133 à
136.
Sélectionner [3] Mode process en boucle fermée pour activer
le régulateur process interne qui permet une régulation
précise du process en fonction d'un signal de process
donné. Ce signal peut être réglé dans l'unité de process
actuelle ou en pourcentage. Le process doit fournir un
signal de retour et le régulateur de process doit être réglé.
En mode process en boucle fermée, la valeur deux sens
n'est pas autorisée au paramètre 200.
101
Valeur:
Couple constant (COUPLE CONSTANT) [1]
Couple variable : bas (COUPLE VAR: BAS) [2]
Couple var: moyen (COUPLE VAR: MOYEN) [3]
Couple variable : haut (COUPLE VAR: HAUT) [4]
Fonction:
Ce paramètre permet de sélectionner le principe mis en
œuvre pour adapter la courbe tension/fréquence du
moteur FC aux caractéristiques de charge.
Description du choix:
Sélectionner [1] Couple constant pour asservir la courbe
caractéristique tension/fréquence à la charge. La tension
de sortie augmente proportionnellement à la charge
(intensité) pour maintenir une magnétisation constante du
moteur.
Sélectionner [2] Couple variable bas, [3] Couple variable
moyen ou [4] Couple variable haut en présence d’une
charge quadratique (pompes centrifuges et ventilateurs).
Groupe de paramètres 1-** Charge/
moteur
Caractéristiques de couple
42 MG03BA04 - VLT® est une marque déposée Danfoss
Page 45

Programmation
Motovariateur VLT® série FCM
La valeur peut être réglée entre 0% (ARRET) et 100%.
100 % correspond au gain proportionnel max. autorisé en
fonction de l'unité. La valeur par défaut est ARRET.
Description de la fonctionnalité :
Le couple du système est estimé sur la base du circuit
intermédiaire et est renvoyé à un contrôleur du gain
proportionnel.
Le contrôleur est désactivé à un niveau donné du courant
du moteur actif (selon l'unité).
Description du choix:
Régler le degré du gain proportionnel pour le retour du
couple entre 0% (inactif) et 100%.
3 3
Illustration 3.14
102
Valeur:
XX,XX kW - selon le moteur FC [XXXX]
Fonction:
Paramètre de lecture uniquement.
103
Valeur:
XX V- selon le moteur FC [XX]
Fonction:
Paramètre de lecture uniquement.
104
Valeur:
XX,X Hz - selon le moteur FC [XXX]
Fonction:
Paramètre de lecture uniquement.
105
Valeur:
XX,X X A- selon le moteur FC [XXXX]
Fonction:
Paramètre de lecture uniquement.
106
Valeur:
XX tr/min. - selon le moteur FC [XX]
Fonction:
Paramètre de lecture uniquement.
117
Valeur:
OFF - 100% [OFF -100]
Inactif%. [Inactif]
Fonction:
Il est possible d'optimiser l'atténuation des résonances. Le
niveau de l'influence est ajusté avec ce paramètre.
Puissance du moteur
Tension moteur
Fréquence du moteur
Courant du moteur
Vitesse nominale du moteur
Amort. résonance
118
Valeur:
0-200% [0-200]
Dépend du moteur
Fonction:
La résonance haute fréquence peut être éliminée en
réglant les paramètres 117 et 118.
Description du choix:
Ajuster le pourcentage de charge à partir duquel la
fonction d'atténuation de la résonance ne doit plus être
active.
126
Valeur:
0,0 à 60,0 s [0-600]
10,0 s [100]
Freinage CC voir P132
Fonction:
Ce paramètre permet de régler la durée du freinage par
injection de courant continu pendant laquelle la tension
de freinage CC doit être active (paramètre 132).
0,0 sec. = OFF
Description du choix:
Régler le temps souhaité.
127
Valeur:
0,0-f
0.0 Hz = OFF [0]
Freinage CC voir P132
Fonction:
Ce paramètre permet de régler la fréquence d'application
du freinage par injection de courant continu (paramètre
132) dans le cadre d'un ordre d'arrêt.
Déclenchement d'atténuation des résonances
Temps frein CC
Fréquence d'application du freinage par
injection de courant continu
(paramètre 202)
MAX
[0 -]
MG03BA04 - VLT® est une marque déposée Danfoss 43
Page 46

Programmation
Motovariateur VLT® série FCM
Description du choix:
Réglez la fréquence souhaitée.
128 Protection thermique du moteur
Valeur:
33
Absence protection (INACTIF) [0]
Fonction:
Paramètre de lecture uniquement
Se reporter au chapitre Protection thermique FCM 300.
132 Tension freinage CC
Valeur:
0-100% [0-100]
0% [0]
Fonction:
Freinage CC :
Si le stator d’un moteur asynchrone est alimenté par une
tension continue, un couple de freinage peut apparaître.
Le couple de freinage dépend de la valeur de la tension
continue de freinage.
Pour appliquer un couple de freinage au moyen du
freinage en courant continu, le champ tournant (CA) du
moteur est remplacé par un champ fixe (CC).
Le freinage en courant continu est activé lors d’une chute
de fréquence au-dessous de la norme avec activation
simultanée de la commande d’arrêt. P126, P127 et P132
sont utilisés pour contrôler le freinage CC.
Ce dernier peut également être activé directement par une
entrée digitale.
Fonction
Le couple de freinage dépend de la valeur de la tension
continue de freinage. Cette tension de freinage est
indiquée en pourcentage de la tension maximale de
freinage.
Description du choix:
Régler sur la tension souhaitée sous forme d'un
pourcentage spécifié de la tension maximale de freinage.
133
Valeur:
0.00-100.00 V [0-10000]
Dépend du moteur
Fonction:
La tension moteur peut être réglée indépendamment du
courant du moteur, pour compenser un couple de
démarrage trop faible. Utiliser ce paramètre pour
compenser un couple de démarrage trop faible.
La tension de démarrage est la tension à 0 Hz.
Description du choix:
Régler sur la tension de démarrage souhaitée.
134
Valeur:
0.0-300.0% [0-3000]
100.0% [1000]
Tension de démarrage
Compensation de la charge
Fonction:
Dans ce paramètre, les caractéristiques de charge sont
définies. L'augmentation de la compensation de la charge
apporte une tension et une fréquence additionnelles au
moteur en cas de charge accrue. Cette fonction s'utilise, p.
ex., sur des moteurs/applications présentant une différence
importante entre le courant du moteur à pleine charge et
à vide.
Description du choix:
Si le réglage d'usine n'est pas suffisant, régler la compensation de la charge de manière à permettre au moteur de
démarrer avec la charge instantanée.
ATTENTION
Doit être réglée sur 0% en cas de modifications de
charge rapides. Une compensation trop élevée de la
charge peut entraîner une instabilité.
135 Rapport U/f
Valeur:
0,00-20,00 V/Hz [0-2000]
Dépend du moteur
Fonction:
La tension de sortie vers le moteur peut être réglée de
façon linéaire entre 0 et la fréquence nominale.
Illustration 3.15
136
Valeur:
-500.0-+500.0% [-5000 - +5000]
100.0% [1000]
Fonction:
La compensation du glissement (réglage d’usine) se calcule
sur la base des paramètres du moteur. Le paramètre 136
permet de régler avec précision la compensation du
glissement. L'optimisation permet de rendre la vitesse du
moteur moins dépendante de la charge. Cette fonction
n'est pas active en même temps que couple variable
(paramètre 101).
Compensation du glissement
44 MG03BA04 - VLT® est une marque déposée Danfoss
Page 47

Programmation
Motovariateur VLT® série FCM
Description du choix:
Entrez une valeur en pourcentage de la compensation
nominale du glissement.
137 Tension de maintien CC
Valeur:
0-100% [0-100]
0 (Inactif)% [0]
Fonction:
Ce paramètre permet de maintenir la fonction du moteur
(couple de maintien) ou de préchauffer le moteur. La
tension continue de maintien est active, moteur à l'arrêt,
lorsqu'elle est réglée sur une valeur différente de 0. L'arrêt
en roue libre désactive cette fonction.
Description du choix:
Entrez une valeur en pourcentage.
138
Valeur:
0.5-132 Hz (paramètre 200) [5-]
3.0 Hz [30]
Fonction:
Permet au cours du fonctionnement de sélectionner la
fréquence à laquelle le frein externe doit être désactivé via
la sortie définie au paramètre 323 ou 340.
Description du choix:
Définir la fréquence souhaitée.
139
Valeur:
0.5-132 Hz (paramètre 200) [5-]
3.0 Hz [30]
Fonction:
Permet de sélectionner la fréquence à laquelle le frein
externe doit être activé via la sortie définie au paramètre
323 ou 340 lorsque le moteur décélère puis s'arrête.
Description du choix:
Réglez la fréquence souhaitée.
Voir le Illustration 3.16.
Fréquence de déclenchement du frein CC
Fréquence d'application du freinage par
injection lorsque l'arrêt est activé
Fonction:
C'est ici qu'il faut sélectionner le moteur spécifique, sur
lequel une unité de rechange doit être installée.
Description du choix:
Sélectionnez le choix de moteur selon la marque du
moteur, le nombre de pôles et la puissance.
Exemple : ATB STD-4-075 signifie moteur ATB quadripolaire
de 0,75 kW.
3.3.1 Groupe de paramètres 2-**
Références/limites
200 Sens de rotation
Valeur:
Sens horaire uniquement,
(Sens horaire uniquement) [0]
Les deux sens,
0-132 Hz
(132 Hz DEUX SENS) [1]
Uniquement sens antihoraire, 0 à 132 Hz
(132 Hz ANTI-HORAIRE) [2]
Fonction:
Ce paramètre permet de se protéger contre une inversion
intempestive.
En utilisant Process en boucle fermée (paramètre 100), le
paramètre 200 ne doit
Description du choix:
Sélectionner le sens souhaité vu du côté entraînement du
moteur.
Noter que la fréquence de sortie est limitée à la plage
fMIN-fMAX si l'option [0] Uniquement sens horaire, 0 à 132
Hz, [2] Uniquement sens antihoraire, 0 à 132 Hz est
sélectionnée.
La fréquence de sortie est limitée à la plage ± fMAX (la
fréquence minimale n’a pas d’importance) si l’option [1]
Deux sens, 0 à 132 Hz est sélectionnée.
Par conséquent !
Il est recommandé de ne pas définir le paramètre 200 pour
différentes valeurs dans les 2 process. Le cas échéant,
l’utilisateur doit s’assurer que les changements de process
sont effectués uniquement à l’arrêt du moteur.
pas être modifié sur [1] Deux sens.
3 3
Illustration 3.16 Profil de vitesse pour la fonction de freinage
147 Configuration du type de moteur
Valeur:
Selon l'unité
MG03BA04 - VLT® est une marque déposée Danfoss 45
201
Valeur:
0,0 Hz à fMAX (paramètre 202) [0 -]
0,0 Hz [0]
Fonction:
Ce paramètre permet de sélectionner la fréquence
minimale correspondant à la vitesse minimale de fonctionnement du moteur.
La fréquence minimum ne peut jamais être supérieure à la
fréquence maximum f
Si l'option Deux sens a été sélectionnée au paramètre 200,
la fréquence minimum n'a pas d'importance.
Fréquence de sortie min.
.
MAX
Page 48

Programmation
Motovariateur VLT® série FCM
Description du choix:
Il est possible d'opter pour une valeur comprise entre 0,0
Hz et la fréquence max. (fMAX) sélectionnée au paramètre
202.
33
202 Fréquence de sortie max.
Valeur:
fMIN (paramètre 201)-fPLAGE (132 Hz, par. 200)
fPLAGE
Fonction:
Ce paramètre permet de sélectionner la fréquence
maximale correspondant à la vitesse maximale du
fonctionnement du moteur.
Se reporter également au paramètre 205.
Description du choix:
Il est possible d’opter pour une valeur comprise entre fMIN
et 132 Hz.
203
Valeur:
Min-Max (MIN-MAX) [0]
- Max. - + Max (-MAX-+MAX) [1]
Fonction:
Ce paramètre permet de sélectionner dans quelle mesure
le signal de référence doit être positif ou bien peut être
positif ou négatif.
Référence/plage de retour
boucle ouverte a été choisie dans le paramètre 100, le
réglage max. est de 132 Hz.
Si la valeur boucle fermée a été choisie, la référence
maximale ne peut être réglée sur une valeur supérieure au
retour maximum (paramètre 415).
Description du choix:
Régler sur la valeur souhaitée.
207 Temps de rampe d'accél. 1
Valeur:
0.15-3600.00 s [5 -360000]
3.00 s [300]
Fonction:
Ce temps de rampe correspond à la durée de l’accélération
nécessaire pour passer de 0 Hz à la fréquence nominale du
moteur fM,N (paramètre 104). Cette fonction suppose que
la limite de courant n’est pas atteinte (à définir au
paramètre 221).
Il convient de sélectionner [0] Min-Max si Mode process en
boucle fermée a été choisi au paramètre 100.
Description du choix:
Sélectionner la plage voulue.
204
Valeur:
-100 000,000-RéfMAX (Par. 205) [-100000000 -]
0.000 [0]
Dépend du paramètre 100.
Fonction:
La Référence minimum est le réglage minimal que peut
adopter la somme de toutes les références.
Le par. Référence minimum n'est actif que si le par. 203 est
réglé sur [0] Min-Max, il est cependant toujours actif en
Mode process en boucle fermée (paramètre 100).
Description du choix:
Fonction active uniquement lorsque le paramètre 203 est
réglé sur [0] Min-Max.
Régler sur la valeur souhaitée.
205
Valeur:
Réf
50.000 Hz [50000]
Fonction:
La Référence maximale est la valeur maximale que peut
adopter la somme de toutes les références. Si la valeur
Référence minimum
Référence maximale
(paramètre 204)-100 000 000
MIN
[-100000000]
Illustration 3.17
Description du choix:
Programmez le temps de montée de rampe de votre choix.
208
Valeur:
0.15-3600.00 s [5 - 360000]
3.00 s [300]
Fonction:
Ce temps de rampe correspond à la durée de décélération
nécessaire pour passer de la fréquence nominale du
moteur fM,N (paramètre 104) à 0 Hz, sous réserve que le
mode régénérateur du moteur n’occasionne pas de
surtension dans l'onduleur et que la limite de courant ne
soit pas atteinte (à définir au paramètre 221).
Description du choix:
Programmez le temps de descente de rampe souhaité.
209
Valeur:
0.15-3600.00 s [5 -360000]
Temps de rampe décél. 1
Temps de rampe d'accél. 2
46 MG03BA04 - VLT® est une marque déposée Danfoss
Page 49

Programmation
3.00 s [300]
Fonction:
Ce temps de rampe correspond à la durée de l’accélération
nécessaire pour passer de 0 Hz à la fréquence nominale du
moteur fM,N (paramètre 104). Cette fonction suppose que
la limite de courant n’est pas atteinte (à définir au
paramètre 221).
Description du choix:
Programmez le temps de montée de rampe de votre choix.
Le changement de la rampe 1 à la rampe 2 se fait en
activant la rampe 2 via une entrée digitale.
Motovariateur VLT® série FCM
3 3
210
Valeur:
0.15-3600.00 s [5-360000]
3.00 s [300]
Fonction:
Ce temps de rampe correspond à la durée de décélération
nécessaire pour passer de la fréquence nominale du
moteur fM,N (paramètre 104) à 0 Hz, sous réserve que le
mode régénérateur du moteur n’occasionne pas de
surtension dans l'onduleur et que la limite de courant ne
soit pas atteinte (à définir au paramètre 221).
Description du choix:
Programmez le temps de descente de rampe souhaité.
Le changement de la rampe 1 à la rampe 2 se fait en
activant la rampe 2 via une entrée digitale.
211
Valeur:
0.15-3600.00 s [5-360000]
3.00 s [300]
Fonction:
Le temps de la rampe de jogging est le temps d’accélération et de décélération de 0 Hz à la fréquence nominale
du moteur fM,N (paramètre 104) sous réserve que le mode
régénérateur du moteur n’occasionne pas de surtension
dans l’onduleur et que la limite de courant ne soit pas
atteinte (à régler au paramètre 221).
Temps de rampe décél. 2
Temps de la rampe de jogging
Illustration 3.18
Le temps de la rampe de jogging est activé par un signal
de commande jogging sur les entrées digitales ou via le
port de communication série.
Description du choix:
Régler le temps de rampe souhaité.
212
Valeur:
0.15-3600.00 s [5-360000]
3.00 s [300]
Fonction:
Le temps de descente de la rampe correspond à la durée
de la décélération nécessaire pour passer de la fréquence
nominale du moteur à 0 Hz, sous réserve que le fonctionnement générateur du moteur n'occasionne pas de
surtension dans l'onduleur, ou quand le courant en
fonctionnement générateur atteint la limite de courant
réglée au paramètre 221.
L’arrêt rapide est activé à l’aide d’un signal sur l’une des
bornes d’entrée digitale (2 à 5) ou via le port de communication série.
Description du choix:
Programmer le temps de rampe de décélération souhaité.
Rampe de décélération arrêt rapide
213
Valeur:
0.0 Hz - paramètre 202 [0 -]
10.0 Hz [100]
Fonction:
La fréquence de jogging fJOG correspond à la fréquence
de sortie fixe du moteur FC quand la fonction Jogging est
activée.
Description du choix:
Réglez la fréquence souhaitée.
214
Valeur:
Somme (SOMME) [0]
MG03BA04 - VLT® est une marque déposée Danfoss 47
Fréquence de jogging
Fonction référence
Page 50

Programmation
Motovariateur VLT® série FCM
Externe/prédéfinie (EXTERNE/PREDEFINIE) [2]
Fonction:
Il est possible de définir le mode d'ajout des références
prédéfinies aux autres références. Utiliser à cet effet la
fonction Somme. L'option Externe/prédéfinie permet de
33
passer d'une référence externe à une référence prédéfinie.
Description du choix:
Sélectionner [0] Somme pour ajouter l'une des références
prédéfinies (paramètres 215-216) sous forme de
pourcentage à la référence maximum éventuelle.
Sélectionner [2] Externe/prédéfinie pour passer d'une
référence externe à une référence prédéfinie via la borne 2,
3, 4 ou 5 (paramètres 332, 333, 334 ou 335). Les références
prédéfinies seront un pourcentage de la plage de
références.
Les références externes correspondent à la somme des
références analogiques, impulsionnelles et éventuellement
les références de bus.
Fonction:
Ce paramètre permet d'entrer un pourcentage (relatif) qui
est ajouté ou retranché du signal de la référence
prédéfinie.
Description du choix:
Si Rattrapage a été sélectionné par l'intermédiaire d'une
des bornes 2, 3, 4 ou 5 (paramètres 332 à 335), le
pourcentage (relatif) choisi au paramètre 219 est ajouté à
la référence totale.
Si Ralentissement a été sélectionné par l'intermédiaire
d'une des bornes 2, 3, 4 ou 5 (paramètres 332 à 335), le
pourcentage (relatif) choisi au paramètre 219 est retranché
de la référence totale.
221
Limite de courant en mode moteur
Valeur:
Limite min. (XX,X) - limite max. (XXX,X)
en ¨% de I
NOM
[XXX - XXXX]
Limite max. (XXX,X) [XXXX]
215
216 Référence prédéfinie 2
Valeur:
-100.00%-+100.00% [-10000-+10000]
% de la plage de références/référence externe
0.00% [0]
Fonction:
Référence prédéfinie 1
INOM = courant nominal du moteur
Limite min. = courant de magnétisation en % du INOM
Limite max. = limite dépendant de l’appareil en % du INOM
Fonction:
Cette fonction est importante pour toutes les configurations d'application ; la régulation de process et de
vitesse. Ce paramètre permet de régler la limite du courant
de fonctionnement du moteur.
Les paramètres 215-216 permettent de programmer deux
références prédéfinies.
La référence prédéfinie est exprimée en pourcentage de la
valeur Ref
ou en pourcentage des autres références
MAX
externes, selon le choix fait au paramètre 214. Lorsqu'une
Ref
≠0 a été programmée, la référence prédéfinie sous
MIN
forme de pourcentage sera calculée sur la base de la
différence entre Ref MAX et RefMIN, puis la valeur est
ajoutée à Ref MIN.
Description du choix:
Régler la ou les références fixes parmi lesquelles on
souhaite pouvoir choisir.
Il est nécessaire de choisir Sélection référence digitale ou
externe sur les bornes 2, 3, 4 ou 5 pour pouvoir utiliser les
références fixes (paramètres 332 à 335).
Illustration 3.19
Le choix entre les références fixes se fait en activant les
bornes 2, 3, 4 ou 5 - voir Tableau 3.8.
Bornes 2/3/4/5
Réf.prédéfinie
Référence prédéfinie 1 0
Référence prédéfinie 2 1
Tableau 3.8
219
Valeur rattrapage/ralentissement
Valeur:
0.00-100.00% [0-10000]
0.00% [0]
48 MG03BA04 - VLT® est une marque déposée Danfoss
Page 51

Programmation
Illustration 3.20
Description du choix:
Entrez le pourcentage de couple souhaité.
229
Valeur:
0 (Inactif)-100% [0-100]
0 (Inactif)% [0]
Fonction:
Certains systèmes imposent de ne pas utiliser certaines
fréquences de sortie afin d'éviter des problèmes de
résonance mécaniques.
Les paramètres 230 à 231 permettent de programmer les
fréquences de sortie à éviter (bipasse de fréquence). Le
paramètre 229 permet de définir une largeur de bande de
chaque côté des bipasses de fréquence.
Description du choix:
La largeur de la bande de bipasse correspond à la
fréquence de bipasse ± la moitié de la largeur de bande
sélectionnée.
Sélectionner un pourcentage du réglage effectué aux
paramètres 230 à 231.
230
231 Bipasse de fréquence 2
Valeur:
0.0-132 Hz (paramètre 200) [0 -]
0.0 Hz [0]
Fonction:
Certains systèmes imposent de ne pas utiliser certaines
fréquences de sortie afin d'éviter des problèmes de
résonance mécaniques.
Description du choix:
Entrez les fréquences à éviter.
Bipasse de fréquence, largeur de bande
Bipasse de fréquence 1
Motovariateur VLT® série FCM
Se reporter également au paramètre 229.
241 Référence prédéfinie 1
242 Référence prédéfinie 2
243 Référence prédéfinie 3
244 Référence prédéfinie 4
245 Référence prédéfinie 5
246 Référence prédéfinie 6
247 Référence prédéfinie 7
Valeur:
-100.00%-+100.00% [-10000-+10000]
% de la plage de références/référence externe
0.00% [0]
Fonction:
Les paramètres 241 à 247
de programmer sept références. La référence prédéfinie est
exprimée en pourcentage de la valeur Réf
pourcentage des autres références externes, selon le choix
fait au paramètre 214. Lorsqu'une RéfMIN ≠ 0 a été
programmée, la référence prédéfinie sous forme de
pourcentage est calculée sur la base de la différence entre
RéfMAX et RéfMIN, puis la valeur est ajoutée à RéfMIN.
Le choix entre les références prédéfinies peut être effectué
via les entrées digitales ou via la communication série.
Description du choix:
Règle la ou les références fixes parmi lesquelles vous
pouvez faire votre choix.
Voir P332, P333, P334 et P335. Description du choix pour
lequel la description du process d’une entrée digitale est
donnée.
Groupe de paramètres 3-** Entrées/
3.4.1
Référence prédéfinie permettent
ou en
MAX
Sorties
317 Temporisation
Valeur:
1-99 s [1-99]
10 s [10]
Fonction:
La fonction sélectionnée au paramètre 318 est activée si la
valeur du signal de référence appliquée à l’entrée, borne 1,
reste inférieure à 50% de la valeur réglée au paramètre
336 durant un laps de temps supérieur à celui défini au
paramètre 317.
Description du choix:
Régler le temps souhaité.
318
Valeur:
Inactif (Inactif) [0]
Arrêt et alarme (ARRET.AVEC.ALARME) [5]
Fonction:
Ce paramètre permet de sélectionner la fonction à activer
si la valeur du signal de référence appliquée à l’entrée,
borne 1, reste inférieure à 50% de la valeur réglée au
Fonction après temporisation
3 3
MG03BA04 - VLT® est une marque déposée Danfoss 49
Page 52

Programmation
Motovariateur VLT® série FCM
paramètre 336 durant un laps de temps supérieur à celui
défini au paramètre 317.
Si une fonction à l'issue de la temporisation (paramètre
318) se présente en même temps qu'une fonction à l'expi-
ration de l'intervalle de temps du bus, (paramètre 514), la
première fonction est activée (paramètre 318).
Réglages :
33
Pas de fonction
Signal prêt (VAR PRET) [1]
Activé, pas d'avertissement (ACTIVE, PAS D'AVERT) [2]
En marche (EN MARCHE) [3]
En marche, pas d'avertissement (EN MARCHE, PAS D'AVERTISSEMENT) [4]
Fonctionnement sur référence, pas d'avertissement (FONC. SUR REFERENCE) [5]
Alarme (ALARME) [6]
Alarme ou avertissement (ALARME OU AVERTISS) [7]
Limite de courant (LIMITE DE COURANT) [8]
Avertis. thermiq. (AVERTIS.THERMIQ.) [9]
Inversion (INVERSION) [10]
Mot contrôle bit 11 (MOT CONTRÔLE BIT 11) [11]
Mot contrôle bit 12 (CONTROL WORD BIT 12) [12]
Frein mécanique (FREIN MECANIQUE) [20]
Mode veille (MODE VEIL) [21]
Tableau 3.9 323 Borne X102, fonction relais (FONCT. RELAIS)
(INACTIVE) [0]
La sortie relais permet d'indiquer un état actuel ou un
avertissement.
logique 0 = relais non activé, absence de signal sur la
sortie, quand le moteur tourne dans le sens antihoraire.
Relais
1-3 coupure, 1-2 établissement
250 V CA max., 5 A
Bit 11 du mot de contrôle, si bit 11 = "1" dans le mot de
contrôle (profils à la fois bus et FC), le relais est activé.
Bit 12 du mot de contrôle, si bit 12 = "1" dans le mot de
contrôle (profils à la fois bus et FC), le relais est activé.
Frein mécanique active la commande d'un frein mécanique
Tableau 3.10
externe en option (voir aussi paramètres 138 et 139).
Mode veille est actif lorsque le variateur est en mode veille.
Voir le 3.5.2 Mode veille.
Description du choix:
Le signal
opérationnel.
Activé, pas d'avertissement indique que le moteur FC est
prêt à être utilisé ; aucun ordre de démarrage ou d'arrêt
n'a été donné (démarrage/désactivé). Absence d'avertissement.
En fonctionnement indique qu’un ordre de démarrage a été
donné.
En fonctionnement, pas d'avertissement indique la présence
d'un ordre de démarrage. Absence d'avertissement.
Fonctionnement sur référence, pas d'avertissement indique
que la vitesse est conforme à la référence.
Commande prête indique que le moteur FC est
327
impulsions, référence/signal de retour,
fréquence max.
Valeur:
100-70000 Hz [100-70000]
5000 HZ [5000]
Fonction:
Ce paramètre permet de régler la valeur maximale correspondant à la référence/au retour réglé(e) au paramètre
205/415.
Description du choix:
Régler sur la fréquence d'impulsion souhaitée.
Panne indique que la sortie est activée en cas d'alarme.
Panne ou avertissement indique que la sortie est activée en
cas d'alarme ou d'avertissement.
L'option Limite de courant indique que la limite de courant
réglée au paramètre 221 a été dépassée.
Avertissement thermique indique que la limite de
température dans le variateur de fréquence est dépassée.
Inversion. Niveau logique 1 = relais activé, 24 V CC sur la
sortie, quand le moteur tourne dans le sens horaire. Niveau
331
Borne 1, entrée analogique, courant
Valeur:
Inactif (INACTIF) [0]
Référence (RÉFÉRENCE) [1]
Signal de retour (SIGNAL DE RETOUR) [2]
Fonction:
Ce paramètre permet de choisir entre les différentes
fonctions disponibles pour l'entrée, borne 1.
50 MG03BA04 - VLT® est une marque déposée Danfoss
Page 53

Programmation
Motovariateur VLT® série FCM
La mise à l'échelle du signal d'entrée s'effectue aux
paramètres 336 et 337.
Description du choix:
[2] Signal de retour. Cette option est sélectionnée en cas
d’utilisation du mode régulation en boucle fermée avec un
signal analogique.
[0] Inactif. Cette option est sélectionnée si le moteur FC ne
doit pas réagir aux signaux appliqués à la borne.
[1] Référence. Sélectionner cette option pour permettre le
changement de référence au moyen d’un signal de
référence.
332 Borne 2, entrée analogique/digitale
333 Borne 3, entrée digitale
334 Borne 4, entrée digitale
335 Borne 5, entrée digitale
Si d'autres entrées sont appliquées, elles sont ajoutées en
tenant compte de leurs signes.
Paramètre 332 333 334 335
Entrée digitale à la borne n° 2 3 4 5
Réglages
Pas de fonction (INACTIVE) [0] [0] [0] [0]
Reset (RESET) [1]
Arrêt roue libre (contact NF) (LACHAGE.MOTEUR) [2] [2] [2] [2]
Reset et lâchage moteur contact NF (RAZ + LACHAGE MOTEUR) [3] [3] [3] [3]
Arrêt rapide (contact NF) (ARRET RAPIDE.N.FERMÉ) [4] [4] [4] [4]
Freinage par injection de CC logique négative (FREIN CC LOG. NEG.) [5] [5] [5] [5]
Arrêt (ARRET N(FERME)) [6] [6] [6] [6]
Démarrage (DEMARRAGE) [7] [7]
Démarrage par impulsion (DÉMARRAGE PAR IMPULSION) [8] [8] [8] [8]
Inversion (INVERSION) [9] [9] [9] [9]
Démarrage avec inv. (DEMARRAGE AVEC INV.) [10] [10] [10] [10]
Démarrage sens horaire actif (MARCHE/HORAIRE) [11] [11] [11] [11]
Démarrage sens antihoraire actif (MARCHE/ANTIHORAIRE) [12] [12] [12] [12]
Jogging (JOGGING) [13] [13] [13]
Gel référence (GEL REFERENCE) [14] [14] [14] [14]
Gel sortie (GEL SORTIE) [15] [15] [15] [15]
Accélération (ACCÉLÉRATION) [16] [16] [16] [16]
Décélération (DÉCÉLÉRATION) [17] [17] [17] [17]
Sélection de process (SELECT.PROCESS.) [18] [18] [18] [18]
Rattrapage (RATTRAPAGE) [19] [19] [19] [19]
Ralentissement (RALENTISSEMENT) [20] [20] [20] [20]
Réf.prédéfinie (REF. PREDEF.) [21] [21] [21] [21]
Référence prédéfinie active (SELECTION REF 1/0) [22] [22] [22] [22]
Arrêt précis, inverse (ARRET PRECIS) [23]
Réf. impulsions (REF. IMPULSIONS) [24]
Retour impulsionnel (RETOUR IMPULSIONNEL) [25]
Référence analogique (REFERENCE)
Retour analogique (RETOUR) [31]
Reset et démarrage (RESET ET DEMARRAGE) [32] [32] [32] [32]
Gel référence et démarrage (GEL REFERENCE ET DEMARRAGE) [33] [33] [33] [33]
Rampe 2 (RAMPE 2) [34] [34] [34] [34]
Réf. démarrage bit 1 (REF DEMARRAGE BIT 1) [35] [35] [35] [35]
Réf. démarrage bit 2 (REF DEMARRAGE BIT 2) [36] [36] [36] [36]
Réf. démarrage bit 3 (REF DEMARRAGE BIT 3) [37] [37] [37] [37]
[30]
[1]
[1] [1]
[7]
[7]
3 3
[13]
Tableau 3.11
MG03BA04 - VLT® est une marque déposée Danfoss 51
Page 54

Programmation
Motovariateur VLT® série FCM
Fonction:
Aux paramètres 332 à 335, il est possible de sélectionner
les différentes fonctions affectées aux entrées aux bornes
2-5. Les options sont indiquées dans le Tableau 3.13.
Description du choix:
33
Sélectionner Pas de fonction si le moteur FC ne doit pas
réagir aux signaux appliqués à la borne.
Sélectionner Reset pour remettre le moteur FC à zéro à
l'issue d'une alarme. Cependant, certaines alarmes ne
peuvent pas être réinitialisées sans déconnexion du
secteur.
Sélectionner Lâchage moteur (contact NF) pour que le
moteur FC tourne en roue libre jusqu'à l'arrêt. Le niveau
logique "0" se traduit par un arrêt en roue libre.
Sélectionner Reset et lâchage moteur (contact NF) pour
activer simultanément le lâchage du moteur et la remise à
zéro.
Le niveau logique "0" se traduit par un fonctionnement en
roue libre jusqu'à l'arrêt.
Sélectionner Stop rapide (contact NF) pour stopper le
moteur en fonction du temps de rampe réglé au
paramètre 212.
Le niveau logique "0" se traduit par un arrêt rapide.
Sélectionner Freinage par injection de CC logique négative
pour arrêter le moteur par application d'une tension
continue durant un laps de temps donné, voir paramètres
126 à 132.
Noter que cette fonction n'est activée que si les réglages
des paramètres 126 à 132 sont différents de 0. Le niveau
logique "0" se traduit par un freinage par injection de
courant continu.
Arrêt NF est activé en coupant la tension sur la borne. Ce
qui signifie que dans le cas où la borne n'a aucune
tension, le moteur ne peut pas fonctionner. L'arrêt
s'effectue conformément à la rampe sélectionnée
(paramètres 207/208).
démarrage par impulsion a été sélectionné pour une autre
borne.
Ne pas utiliser en Mode process en boucle fermée.
Sélectionner Démarrage sens horaire afin qu'au démarrage,
l'arbre moteur ne tourne que dans le sens horaire.
Ne pas utiliser en Mode process en boucle fermée.
Sélectionner Démarrage sens antihoraire afin qu'au
démarrage, l'arbre moteur ne tourne que dans le sens
antihoraire.
Ne pas utiliser en Mode process en boucle fermée.
Sélectionner Jogging pour passer de la fréquence de sortie
à la fréquence de jogging définie au paramètre 213. Le
temps de rampe peut être défini au paramètre 211.
Jogging est inactif dans le cas où un ordre d'arrêt a été
émis (démarrage-inactif).
La fonction Jogging est prioritaire sur la veille.
Sélectionner Gel référence pour geler la référence effective.
Cette référence sert alors de base et de condition préalable
à la mise en œuvre des valeurs de compensation
applicables à l'accélération et à la décélération.
En cas d'utilisation d'accélération/décélération, la variation
de vitesse suit toujours la rampe normale (paramètres
207/208) dans la plage 0 à RéfMAX.
Sélectionner Gel sortie pour geler la fréquence effective du
moteur (en Hz). Cette fréquence sert alors de base et de
condition préalable à la mise en œuvre de l'accélération et
de la décélération.
La fonction Gel sortie est prioritaire sur démarrage/veille,
compensation du glissement et contrôle de process en
boucle fermée.
En cas d'utilisation d'accélération/décélération, la variation
de vitesse suit toujours la rampe normale (paramètres
207/208) dans la plage 0 à f
M,N
.
Sélectionner Accélération ou Décélération pour un contrôle
digital de la variation de la vitesse (potentiomètre moteur).
Cette fonction n'est active qu'à condition d'avoir
sélectionné Gel référence ou Gel sortie.
Tant que le niveau logique 1 est appliqué à la borne
commandant l'accélération, la référence ou la fréquence de
Sélectionner Démarrage pour obtenir un ordre de marche/
arrêt. Niveau logique 1 = démarrage, niveau logique 0 =
arrêt (veille).
Impulsion de démarrage. Si une impulsion d'au moins 20
ms est appliquée le moteur va démarrer sous réserve
qu'aucun ordre de stop n'ait été donné. Le moteur s'arrête
dans le cas où Arrêt NF est brièvement activé.
Inversion est utilisé pour modifier le sens de rotation de
sortie augmente.
Tant que le niveau logique 1 est appliqué à la borne
commandant la décélération, la référence ou la fréquence
de sortie diminue.
Une impulsion (niveau logique 1 au niveau haut durant au
moins 20 ms et temps de repos de 20 ms min.) entraîne
une variation de vitesse de 0,1% (référence) ou de 0,1 Hz
(fréquence de sortie).
l'arbre du moteur. Le niveau logique "0" ne se traduit pas
par une inversion. Le niveau logique "1" se traduit par une
inversion. Le signal d'inversion change seulement le sens
de rotation. Il n'active pas la fonction de démarrage.
Ne pas utiliser en Mode process en boucle fermée.
Sélectionner Démarrage avec inversion pour activer marche/
arrêt et inversion avec le même signal. Aucun signal de
démarrage n'est autorisé en même temps. Fonctionne
Aucune variation de
vitesse
Décélération 0 1 1
Accélération 1 0 1
Décélération 1 1 1
Borne Gel réf./
2-5 2-5 Gel sortie
0 0 1
comme démarrage par impulsion avec inversion si le
Tableau 3.12 Exemple :
52 MG03BA04 - VLT® est une marque déposée Danfoss
Page 55

Programmation
Motovariateur VLT® série FCM
Choisir Sélection du process pour adopter l'un des deux
process. Il convient toutefois d'avoir réglé le paramètre 004
sur Multi process.
Sélectionner Rattrapage/Ralentissement pour augmenter ou
diminuer la valeur de référence conformément au
pourcentage programmé au paramètre 219.
Vitesse stable 0 0
Réduire de (en %) 1 0
Augmenter de (en %) 0 1
Réduire de (en %) 1 1
Tableau 3.13
Ralentissement
Rattrapage
Référence prédéfinie permet de choisir l'une des deux
références prédéfinies conformément au tableau des
paramètres 215 et 216. Pour que cette fonction soit active,
Référence prédéfinie active doit être sélectionnée.
Choisir Référence prédéfinie active pour changer entre
référence externe et référence prédéfinie. Il va de soi que
[2] Externe/prédéfinie a été sélectionné au paramètre 214.
Niveau logique 0 = consignes externes actives ; Niveau
logique 1 = l'une des deux références prédéfinies est
activée.
Arrêt précis corrige le temps de descente de la rampe afin
d'obtenir une grande précision répétitive du point d'arrêt.
Référence d'impulsions est sélectionné si une séquence
d'impulsions (fréquence) de 0 Hz est sélectionnée, correspondant à Réf
au paramètre 327, correspondant à Réf
, paramètre 204. La fréquence est définie
MIN
.
MAX
Retour impulsionnel est sélectionné si une série
d'impulsions (fréquence) est choisie comme signal de
retour. Se reporter également au paramètre 327.
Sélectionner Référence analogique pour changer de
référence à l'aide d'un signal de référence analogique.
Si d'autres entrées sont appliquées, elles sont ajoutées en
tenant compte de leurs signes.
Sélectionner Retour analogique en cas d'utilisation de la
régulation en boucle fermée avec un signal analogique.
Sélectionner Reset et démarrage pour activer le démarrage
en même temps qu'une réinitialisation.
Gel référence et démarrage, les ordres MARCHE et GEL
REFERENCE sont donnés. Lors de l'utilisation de PLUS VITE/
MOINS VITE, GEL REFERENCE et MARCHE doivent être
activés. La mise en œuvre de cette fonction permet
d'éviter une entrée digitale.
Sélectionner Rampe 2 pour passer de la rampe 1
(paramètres 207 et 208) et rampe 2 (paramètres 209 et
210). Le niveau logique "0" correspond à la rampe 1, le
niveau logique "1" à la rampe 2.
Réf.-démarrage bit 1, 2 et 3 permet de sélectionner la REF
PRESET (1-7) à utiliser. Les REF. PRESET (1 à 7) sont définies
dans les paramètres 241 à 247.
N° Non Vitesse fixe START REF BIT
321
- - - Veille 000
241 REF PRESET 1 001
242 REF PRESET 2 010
243 REF PRESET 3 011
244 REF PRESET 4 100
245 REF PRESET 5 101
246 REF PRESET 6 110
247 REF PRESET 7 111
Tableau 3.14
Si au moins une des 3 entrées digitales est activée, le FCM
émet un signal de démarrage. Les 7 combinaisons d'entrée
possibles détermineront la vitesse prédéfinie à utiliser.
Si seulement 1 ou 2 entrées digitales sont utilisées respectivement, 1 ou 3 vitesses peuvent être choisies après le
principe indiqué ci-dessus.
Si 2 configurations sont utilisées, jusqu'à 14 vitesses
peuvent être choisies au moyen de 4 entrées digitales. Les
réglages P241 et P242 seront les mêmes que ceux de P215
et P216.
Ex.
Entrées digitales 2, 3 et 4 : P332 [choix 35 sélectionné],
P333 [choix 36 sélectionné] et P334 [choix 37 sélectionné]
Combinaison d'entrées digitales 2, 3 et 4 : "010".
Cela signifie que REF PRESET 2 sera la vitesse prédéfinie.
La mise à l'échelle du signal d'entrée s'effectue aux
paramètres 338 et 339.
336
Borne 1, mise à l'échelle de la valeur min.
Valeur:
0.0-20.0 mA [0-200]
0.0 mA [0]
Fonction:
Ce paramètre permet de régler la valeur correspondant à
la référence maximale réglée au paramètre 204.
Si la fonction Temporisation du paramètre 317 doit être
utilisée, le réglage doit être > 2 mA.
Description du choix:
Réglez sur le courant souhaité.
337
Borne 1, mise à l'échelle de la valeur max.
Valeur:
0.0-20.0 mA [0-200]
20.0 mA [200]
Fonction:
Ce paramètre permet de régler la valeur correspondant à
la référence maximale réglée au paramètre 205.
3 3
MG03BA04 - VLT® est une marque déposée Danfoss 53
Page 56

Programmation
Motovariateur VLT® série FCM
Description du choix:
Réglez sur le courant souhaité.
338 Borne 2, mise à l'échelle de la valeur min.
Valeur:
33
0.0-10.0 V [0-100]
0.0 V [0]
Fonction:
Ce paramètre permet de régler la valeur du signal correspondant à la référence minimum ou au retour minimum
au paramètre 204 Référence minimale, Réf
retour minimum, SR
MIN
.
/414 Signal de
MIN
Description du choix:
Réglez sur la tension souhaitée. Pour la précision, il
convient de compenser les pertes de tension dans les
câbles de signaux de grande longueur. Si l'opérateur
souhaite utiliser la fonction Temporisation (paramètres 317
Réglages :
Pas de fonction
Signal prêt (VAR PRET) [1]
Activé, pas d'avertissement (ACTIVE, PAS D'AVERT) [2]
En marche (EN MARCHE) [3]
En marche, pas d'avertissement (EN MARCHE, PAS D'AVERTISSEMENT) [4]
Fonctionnement sur référence, pas d'avertissement (FONC. SUR REFERENCE) [5]
Alarme (ALARME) [6]
Alarme ou avertissement (ALARME OU AVERTISS) [7]
Limite de courant (LIMITE DE COURANT) [8]
Avertis. thermiq. (AVERTIS.THERMIQ.) [9]
Inversion (INVERSION) [10]
Mot contrôle bit 11 (MOT CONTRÔLE BIT 11) [11]
Fréquence réelle 0-20 mA (0-FMAX = 0-20 mA) [12]
Fréquence réelle 4-20 mA (0-FMAX = 4-20 mA) [13]
Référence
Référence
Signal de retour
Signal de retour
Courant réel 0-20 mA (0-IMAX = 0-20 mA) [18]
Courant réel 4-20 mA (0-IMAX = 4-20 mA) [19]
Frein mécanique (FREIN MECANIQUE) [20]
Mode veille (MODE VEIL) [21]
Couple 0-20 mA (0-TMAX = 0-20 mA) [22]
Couple 4-20 mA (0-TMAX = 4-20 mA) [23]
-référence
MIN
-référence
MIN
: 0-20 mA (REF MIN-MAX=0-20 mA) [14]
MAX
: 4-20 mA (REF MIN-MAX =4-20 mA) [15]
MAX
-signal de retour
MIN
-signal de retour
MIN
: 0-20 mA (RET MIN-MAX = 0-20mA) [16]
MAX
: 4-20 mA (RET MIN-MAX = 4-20mA) [17]
MAX
Temporisation et 318 Fonction à l'issue de la temporisation),
la valeur réglée doit être supérieure à 1 V.
339 Borne 2, mise à l'échelle de la valeur max.
Valeur:
0.0-10.0 V [0-100]
10.0 V [100]
Fonction:
Ce paramètre permet de régler la valeur du signal correspondant à la valeur maximale définie au paramètre 205
Référence maximale, RéfMAX ou à la valeur de retour
maximum définie au paramètre 415 Retour maximum,
SRMAX.
Description du choix:
Réglez sur la tension souhaitée. Pour la précision, il
convient de compenser des pertes de tension dans les
câbles de signaux de grande longueur.
(INACTIVE) [0]
Tableau 3.15 Borne 9 340, Fonctions de sortie (FONC. SORTIE)
Fonction:
Cette sortie peut être aussi bien digitale qu'analogique. En
mode digital (options [0] à [23]), elle délivre un signal de
24 V CC. En mode analogique, elle délivre un signal 0 à 20
mA ou 4 à 20 mA.
Description du choix:
Le signal Commande prête indique que le moteur FC est
opérationnel.
Activé, pas d'avertissement indique que le moteur FC est
prêt à être utilisé ; aucun ordre de démarrage ou d'arrêt
n'a été donné (démarrage/désactivé). Absence d'avertissement.
En fonctionnement indique qu’un ordre de démarrage a été
donné.
En fonctionnement, pas d'avertissement indique la présence
d'un ordre de démarrage. Absence d'avertissement.
Fonctionnement sur référence, pas d'avertissement indique
que la vitesse est conforme à la référence.
54 MG03BA04 - VLT® est une marque déposée Danfoss
Page 57

Programmation
Motovariateur VLT® série FCM
Panne indique que la sortie est activée en cas d'alarme.
Panne ou avertissement indique que la sortie est activée en
cas d'alarme ou d'avertissement.
L'option Limite de courant indique que la limite de courant
réglée au paramètre 221 a été dépassée.
Avertissement thermique indique que la limite de
température dans le variateur de fréquence est dépassée.
Inversion. Niveau logique 1 = relais activé, 24 V CC sur la
sortie, quand le moteur tourne dans le sens horaire. Niveau
logique 0 = relais non activé, absence de signal sur la
sortie, quand le moteur tourne dans le sens antihoraire.
Bit 11 du mot de contrôle, si bit 11 = "1" dans le mot de
contrôle (profils à la fois bus et FC), la sortie digitale est
activée.
0-f
(paramètre 202) ⇒ 0-20 mA et
MAX
0-f
(paramètre 202) ⇒ 4-20 mA
MAX
Référence
Référence
Signal de retour
Signal de retour
0-I
VLT, MAX
0-I
VLT, MAX
-référence
MIN
- Référence
MIN
-signal de retour
BAS
BAS
⇒
0-20 mA et
⇒ 4-20 mA
: 0-20 mA et
MAX
: 4-20 mA
MAX
- Signal de retour
: 0-20 mA et
HAUT
: 4-20 mA
HAUT
Frein mécanique active la commande d'un frein mécanique
externe en option (voir aussi paramètres 138 et 139).
Mode veille est actif lorsque le variateur est en mode veille.
Voir 3.5.2 Mode veille
0-T
⇒ 0-20 mA et
MAX
0-T
⇒ 4-20 mA et
MAX
Groupe de par. 4-** Fonctions
3.5.1
spéciales
Illustration 3.21
Description du choix:
Sélectionner [4] Frein CA si des charges générées à court
terme apparaissent.
Mode veille
3.5.2
Le mode veille permet d'arrêter le moteur lorsqu'il tourne
à faible vitesse, comme dans une situation sans charge. Si
la puissance du système augmente à nouveau, le variateur
de fréquence démarre le moteur et fournit la puissance
nécessaire.
3 3
400 Fonctions de freinage
Valeur:
Inactif (Inactif) [0]
Frein CA (FREIN CA) [4]
Fonction:
[4] Frein CA peut être sélectionnée pour optimiser le
freinage. Avec la nouvelle fonction de freinage CA, il est
possible de contrôler le temps des pertes moteur
croissantes, tout en assurant la protection thermique du
moteur. Cette fonction délivre un couple de freinage entre
80 et 20% dans la plage de vitesse jusqu’à la vitesse de
base (50 Hz). Au-dessus de la vitesse de la base, le freinage
supplémentaire disparaît progressivement.
AVIS!
Cette fonction permet d'économiser de l'énergie, le
moteur n'étant en fonctionnement que lorsque le
système en a besoin.
Le mode veille n’est pas actif si l'option Référence locale ou
Jogging a été sélectionnée.
La fonction est active aussi bien en Boucle fermée qu'en
Boucle ouverte.
Au paramètre 403 Temporisation mode veille, le mode veille
est activé. Au paramètre 403 Temporisation mode veille, une
temporisation est définie pour déterminer pendant
combien de temps la fréquence de sortie peut être
inférieure à la fréquence définie au paramètre 404
Fréquence de veille. À la fin de la temporisation, le variateur
de fréquence décélère le moteur jusqu'à l'arrêt via le
paramètre 208 Temps de rampe de décélération. Si la
fréquence de sortie s'élève au-dessus de la fréquence
définie au paramètre 404 Fréquence de veille, la temporisation est remise à zéro.
MG03BA04 - VLT® est une marque déposée Danfoss 55
Page 58

Programmation
Motovariateur VLT® série FCM
Pendant l'arrêt du moteur en mode veille par le variateur
de fréquence, une fréquence de sortie théorique est
calculée sur la base du signal de référence. Lorsque la
fréquence de sortie théorique s'élève au-dessus de la
fréquence du paramètre 407 Fréquence de réveil, le
variateur redémarre le moteur et la fréquence de sortie
33
accélère jusqu'à la référence.
Dans les systèmes dont la régulation de pression est
constante, il est avantageux de fournir une pression accrue
au système avant que le variateur de fréquence n'arrête le
moteur. Cela augmente le temps d'arrêt du moteur par le
variateur et aide à éviter démarrages et arrêts fréquents du
moteur, p.ex. en cas de fuite du système.
S'il faut 25% de pression supplémentaire avant que le
variateur de fréquence n'arrête le moteur, le paramètre 406
Point de consigne surpression est fixé à 125%.
Le paramètre 406 Point de consigne surpression n'est actif
qu'en boucle fermée.
AVIS!
Dans des processus de pompage fortement dynamiques,
il est recommandé de désactiver la fonction Démarrage à
la volée (paramètre 445).
Illustration 3.22
403 Temporisation mode veille
Valeur:
0-300 s (301 s = Inactif)
Fonction:
Ce paramètre permet au variateur de fréquence VLT
d'arrêter le moteur en cas de charge minimale sur ce
dernier. La temporisation du paramètre 403 Temporisation
mode veille commence lorsque la fréquence de sortie
baisse en dessous de la fréquence définie au paramètre
404 Fréquence de veille.
Lorsque la période réglée dans l'horloge a expirée, le
variateur de vitesse VLT coupe le moteur.
Il le redémarre lorsque la fréquence de sortie théorique
dépasse la fréquence du paramètre 407 Fréquence de
réveil.
Description du choix:
Sélectionner Inactif si la fonction n'est pas souhaitée.
Régler la valeur de seuil qui doit activer le mode veille une
Inactif
fois que la fréquence de sortie passe au-dessous du
paramètre 404 Fréquence de veille.
404 Fréquence de veille
Valeur:
000,0 - par. 40 Fréquence de réveil
Fonction:
Lorsque la fréquence de sortie est inférieure à la valeur
prédéfinie, la temporisation lance le décompte défini au
paramètre 403 Mode veille. La fréquence de sortie
instantanée suit la fréquence de sortie théorique jusqu'à ce
que la valeur fMIN soit atteinte.
Description du choix:
Régler sur la fréquence souhaitée.
405
Valeur:
Reset manuel (RESET manuel) [0]
Reset auto. x 1 (RESET AUTOMATIQUE X 1) [1]
Reset auto. x 2 (RESET AUTOMATIQUE X 2) [2]
Reset auto. x 3 (RESET AUTOMATIQUE X 3) [3]
Reset auto. x 4 (RESET AUTOMATIQUE X 4) [4]
Reset auto. x 5 (RESET AUTOMATIQUE X 5) [5]
Reset auto. x 6 (RESET AUTOMATIQUE X 6) [6]
Reset auto. x 7 (RESET AUTOMATIQUE X 7) [7]
Reset auto. x 8 (RESET AUTOMATIQUE X 8) [8]
Reset auto. x 9 (RESET AUTOMATIQUE X 9) [9]
Reset auto. x 10 (10 RESET AUTOMATIQUE) [10]
RESET à mise ss tens° (RESET MISE SS TENS.) [11]
Fonction:
Ce paramètre permet de sélectionner le mode de Reset
souhaité à l'issue d'un arrêt.
Il est possible de redémarrer le moteur FC 1,5 s après avoir
procédé à la remise à zéro.
Description du choix:
Sélectionner [0] Reset manuel pour effectuer la remise à
zéro au moyen des entrées digitales.
Sélectionner une option comprise entre [1] et [10] si le
moteur FC doit procéder (max. 1 à 10 fois en 10 minutes)
à une reset automatique à l'issue d'un arrêt.
406
Valeur:
1 - 200%
Fonction:
Cette fonction ne peut être utilisée que si l'option Boucle
fermée a été sélectionnée au paramètre 100.
Dans les systèmes dont la régulation de pression est
constante, il est avantageux d'augmenter la pression du
système avant que le variateur de fréquence n'arrête le
moteur. Ceci augmente le temps d'arrêt du moteur par le
variateur de fréquence et aide à éviter des démarrages et
Mode de reset
Point de consigne surpression
100% de la consigne
0,0 Hz
56 MG03BA04 - VLT® est une marque déposée Danfoss
Page 59

Programmation
Motovariateur VLT® série FCM
des arrêts fréquents du moteur, p. ex. en cas de fuite dans
l'alimentation en eau du système.
Utiliser Temporisation de surpression, par. 472, pour définir
la temporisation de surpression. Si le point de consigne
surpression n'est pas atteint dans le temps spécifié, le
variateur de fréquence se maintient en exploitation
normale (n'entre pas en mode veille).
Description du choix:
Définir le point de consigne surpression nécessaire sous
forme de pourcentage de la référence résultante en
fonctionnement normal. 100% correspondent à la
référence sans surpression (supplément).
407
Valeur:
Par 404 Fréquence de veille - par. 202 fMAX
Fonction:
Lorsque la fréquence de sortie théorique dépasse la valeur
définie, le variateur de vitesse VLT redémarre le moteur.
Description du choix:
Régler sur la fréquence souhaitée.
411
Valeur:
1.5-14.0 kHz [1500-14000]
Selon l'unité
Fonction:
Le réglage détermine la fréquence de commutation de
l’onduleur. Si la fréquence de commutation est modifiée,
cela peut aider à minimiser le bruit acoustique éventuel
venant du moteur.
Description du choix:
Régler au paramètre 411 la fréquence de commutation
quand le moteur tourne et définir ainsi la fréquence
correspondant au niveau sonore minimal du moteur.
Voir également le paramètre 446 - type de modulation.
Voir 4.1.6 Protection thermique et déclassement
412
Valeur:
Impossible (INACTIF) [0]
Fréquence de commutation variable (FR COMMUT
VAR) [1]
Fréquence de commutation dépendant de la
température (FR COMMUT/TEMP) [2]
Fonction:
Cette fonction permet de modifier la fréquence de
commutation en fonction de la charge. La fréquence
maximale de commutation est toutefois définie par la
valeur affectée au paramètre 411.
Description du choix:
Sélectionner [0] Impossible si l’on souhaite une fréquence
de commutation fixe. Régler la fréquence de commutation
au paramètre 411.
Fréquence de réveil
50 Hz
Fréquence de commutation
Fréquence de commutation variable
Si l'option
sélectionnée, la fréquence de commutation diminue quand
la fréquence de sortie augmente. Cela est utilisé dans les
applications aux caractéristiques de charge quadratique
(pompes centrifuges et ventilateurs) dans lesquelles la
charge diminue en fonction de la fréquence de sortie.
Si l’option [2] Fréquence de commutation dépendant de la
température est sélectionnée, la fréquence de commutation
diminue quand la température de l’onduleur augmente,
voir Illustration 3.23.
Illustration 3.23
413
Valeur:
Fonction:
Ce paramètre permet de régler la fonction de surmodulation applicable à la tension de sortie.
Description du choix:
[0] Inactif signifie que la tension de sortie n'est pas
surmodulée et que toute ondulation du couple est évitée
sur l'arbre moteur. Cette technique peut s'avérer judicieuse
en présence de rectifieuses p. ex.
[1] Actif signifie qu'il est possible d'obtenir une tension de
sortie supérieure à la tension secteur (jusqu'à 5%).
414
Valeur:
Fonction:
Les paramètres 414 et 415 permettent de mettre à l’échelle
la plage de retour en fonction des valeurs physiques
utilisées par l’opérateur. Le réglage sera également les
limites de la référence (paramètres 204 et 205).
A utiliser avec Mode process en boucle fermée (paramètre
100).
[1] Fréquence de commutation variable est
Fonction de surmodulation
Inactif (INACTIF) [0]
Actif (ACTIF) [1]
Retour minimum
-100 000 000 - SR
0.000 [0]
HAUT
(Par. 415)
[-100000000 -]
3 3
MG03BA04 - VLT® est une marque déposée Danfoss 57
Page 60

Programmation
Motovariateur VLT® série FCM
Description du choix:
Fonction seulement active lorsque le paramètre 203 a été
réglé sur [0] Min-Max.
415 Retour maximum
33
Valeur:
(par. 414) SRBAS - 100 000 000 [- 100000000]
1.500.000 [1500000]
Fonction:
Voir description au paramètre 414.
416 Unité de référence/retour
Valeur:
PAS D'UNITE [0]
% [1]
PPM [2]
tr/min [3]
bar [4]
CYCLE/min [5]
IMPULSION/s [6]
UNITÉS/s [7]
UNITÉS/min [8]
UNITÉS/h [9]
°C [10]
Pa [11]
l/s [12]
m3/s [13]
l/min [14]
m3/min [15]
l/h [16]
m3/h [17]
kg/s [18]
kg/min [19]
kg/h [20]
t/min [21]
t/h [22]
m [23]
Nm [24]
m/s [25]
m/min [26]
°F [27]
in wg [28]
gal/s [29]
ft3/s [30]
gal/min [31]
ft3/min [32]
gal/h [33]
ft3/h [34]
lb/s [35]
lb/min [36]
lb/h [37]
lb ft [38]
ft/s [39]
ft/min [40]
Fonction:
Choisir entre les différentes unités que l'on souhaite
afficher.
L'unité est également utilisée directement en Mode process
en boucle fermée en tant qu'unité pour Référence minimale/
maximale (paramètres 204/205) et Retour minimum/
maximum (paramètres 414/415).
La possibilité de choix d'unité au paramètre 416 dépend
du choix dans les paramètres suivants :
Par. 002 Commande locale / à distance.
Par. 013 Mode local digital/comme au paramètre 100.
Par.100 Configuration.
L'option Commande à distance est sélectionnée au
paramètre 002.
Si l'option Mode vitesse en boucle ouverte est sélectionnée
au paramètre 100, l'unité choisie au paramètre 416 peut
être utilisée pour l'affichage (par. 009 à 12 Retour [unité])
des paramètres de process.
Remarque : La référence ne peut être affichée qu'en Hz
(Mode vitesse en boucle ouverte).
Si l'option Mode process en boucle fermée est sélectionnée
au paramètre 100, l'unité choisie au paramètre 416 est
utilisée pour l'affichage de la référence (par. 009 à 12 :
Référence [unité]) et du signal de retour (par. 009 à 12 :
Retour [unité]).
L'option Commande locale est sélectionnée au paramètre
002.
Si le paramètre 013 est réglé sur Mode local en boucle
ouverte ou Mode local digital en boucle ouverte, la référence
est affichée en Hz quel que soit le choix au paramètre 416.
Si le paramètre 013 est réglé sur Mode local/comme au
paramètre 100 ou Mode local digital/comme au paramètre
100, l'unité sera la même que celle décrite ci-dessus pour
l'option Commande à distance au paramètre 002.
Description du choix:
Sélectionner l'unité souhaitée pour le signal de référence/
retour.
58 MG03BA04 - VLT® est une marque déposée Danfoss
Page 61

Programmation
Motovariateur VLT® série FCM
3.5.3 Régulateur FCM 300
Régulation de process
Le régulateur PID maintient un état de process constant
(pression, température, débit, etc.) et règle la vitesse du
moteur sur la base de la référence/de la consigne et du
signal de retour.
Un transmetteur fournit au régulateur PID un signal de
retour du process qui exprime l'état réel du process. Le
signal de retour varie avec la variation de la charge du
process.
Il en résulte un écart entre la référence/la consigne et l'état
réel du process. Le régulateur PID ajuste cet écart en
augmentant ou en diminuant la fréquence de sortie par
rapport à l'écart entre la référence/la consigne et le signal
de retour.
Le régulateur PID intégré au variateur de fréquence est
optimisé pour l'utilisation dans des applications de process.
Cela signifie que le variateur de vitesse propose un certain
nombre de fonctions particulières.
Autrefois, il fallait avoir un système de traitement de ces
fonctions particulières en installant des modules supplémentaires d'E/S et en programmant le système. Le
variateur de vitesse permet d'éviter l'installation de
modules supplémentaires. Les paramètres spécifiques au
régulateur de process sont les paramètres 437 à 444.
Fonctions du PID
3.5.4
Unité de référence/retour
Si l'option Régulation de processus en boucle fermée est
sélectionnée au paramètre 100 Configuration, l'unité est
définie au paramètre 416 Unité de référence/retour.
Signal de retour
Il convient de prédéfinir une plage de retour pour le
régulateur. Elle limite en même temps la plage de
référence possible de manière à limiter la référence à la
plage de retour dans le cas où la somme de toutes les
références se trouverait en dehors de la plage.
Le signal de retour doit être relié à une borne du variateur
de fréquence. En cas de retour sur deux bornes simultanément, les deux signaux sont additionnés.
Utiliser le tableau ci-dessous afin de déterminer la borne à
utiliser et les paramètres à programmer.
Il est possible de corriger des pertes de tension dans les
câbles de signaux longs en utilisant un transmetteur avec
sortie de tension. Les paramètres 338/339 Mise à l'échelle
de la valeur min./max. le permettent.
Les paramètres 414/415 Retour minimal/maximal doivent
être prédéfinis sur une valeur dans une unité de process
qui correspond à la mise à l'échelle de la valeur minimale
et de la valeur maximale des signaux raccordés à la borne.
Référence
Au paramètre 205 Référence maximale, RéfMAX, il est
possible de prédéfinir une référence maximale qui met à
l'échelle la somme de toutes les références, c'est-à-dire la
référence résultante.
La référence minimale du paramètre 204 exprime la valeur
minimale pouvant être adoptée par la référence résultante.
Toutes les références sont additionnées et la somme
correspond à la référence par rapport à laquelle la
régulation est effectuée. Il est possible de limiter la plage
de référence à une plage plus restreinte que la plage de
retour. Cela présente un avantage pour éviter qu'une
modification intempestive d'une référence externe ait pour
résultat un éloignement trop important de la somme des
références par rapport à la référence optimale. La plage de
référence ne peut pas dépasser la plage de retour.
Si l'opérateur souhaite des références prédéfinies, il doit les
régler aux paramètres 215 à 216 Référence prédéfinie. Voir
la description de Fonction référence et de Gestion des
références au paramètre 214.
Lorsqu'un signal de courant est utilisé comme signal de
retour, seule la tension peut être utilisée en tant que
référence analogique. Utiliser le tableau ci-dessous afin de
déterminer la borne à utiliser et les paramètres à
programmer.
Type de référence Borne Paramètres
Impulsion 3 333, 327
Tension 2 332, 338, 339
Courant 1 331, 336, 337
Références
prédéfinies
Référence bus 68+69
Tableau 3.17
215-216
(241-247)
AVIS!
La référence bus peut uniquement être
prédéfinie via la communication série.
3 3
Type de retour Borne Paramètres
Impulsion 3 333, 327
Tension 2 332, 338, 339
Courant 1 331, 336, 337
Tableau 3.16
MG03BA04 - VLT® est une marque déposée Danfoss 59
AVIS!
Il est conseillé de prédéfinir les bornes
non utilisées sur [0] Inactive.
Page 62

Programmation
Motovariateur VLT® série FCM
Limite de gain différentiel
Dans une application où le signal de référence ou le signal
de retour varie très rapidement, l'écart entre la référence/la
consigne et l'état réel du process change rapidement. Le
différenciateur peut alors devenir trop dominant. Cela est
dû au fait qu'il réagit sur l'écart entre la référence et l'état
33
réel du processus et plus rapidement l'écart change, plus
élevée devient la contribution du différenciateur à la
fréquence. Il est donc possible de limiter la contribution du
différenciateur à la fréquence de manière à pouvoir à la
fois régler un temps de dérivée raisonnable en cas de
changements lents et une contribution convenable à la
fréquence en cas de changements rapides. Pour cela,
utiliser le paramètre 443, Mode process, limite gain
différentiel du PID.
Filtre passe-bas
En cas de bruit sur le signal de retour, une atténuation
peut être obtenue à l'aide d'un filtre passe-bas. Une
constante de temps de filtre passebas adapté est
prédéfinie.
Si le filtre passebas est préréglé sur 0,1 s, la fréquence de
coupure sera de 10 RAD/sec, ce qui correspond à (10 / 2 x
p) = 1.6 Hz. Ceci signifiera que tous les courants/toutes les
tensions qui varient de plus de 1,6 oscillations par seconde
seront atténués. Autrement dit, la régulation n'opérera
qu'en fonction d'un signal de retour qui varie d'une
fréquence inférieure à 1,6 Hz. La constante de temps
adéquate est sélectionnée au paramètre 444, Mode process,
temps de filtre retour du PID.
Régulation inverse
Une régulation normale signifie que la vitesse du moteur
est augmentée lorsque la référence/la consigne est
supérieure au signal de retour. S'il est nécessaire de
procéder à une régulation inversée qui diminue la vitesse
lorsque la référence/la consigne est supérieure au signal de
retour, il faut régler le paramètre 437 Commande normale/
inversée du PID sur Inversé.
Anti-saturation
Le régulateur de process est réglé en usine sur fonction
anti-saturation active. Cette fonction implique l'initialisation
de l'intégrateur à une fréquence correspondant à la
fréquence de sortie actuelle lorsqu'une limite de fréquence
ou de courant ou de tension est atteinte. Cela permet
d'éviter l'intégration d'un écart entre la référence et l'état
réel du processus qui ne peut être régulé en modifiant la
vitesse. Cette fonction peut être désactivée au paramètre
438 Mode process, PID anti-saturation.
Conditions de démarrage
Dans certaines applications, le réglage optimal du
régulateur de process implique une durée proportionnellement trop longue avant d'atteindre l'état de process
souhaité. Dans ces applications, il peut s'avérer utile de
fixer la fréquence de sortie à laquelle le variateur de
fréquence doit faire monter le moteur avant d'activer le
régulateur de processus. Pour ce faire, programmer une
fréquence de démarrage au paramètre 439 Mode process,
fréquence de démarrage du PID.
3.5.5 Utilisation du retour
L'utilisation du signal de retour est illustrée dans ce
schéma.
Ce schéma montre les paramètres pouvant influencer
l'utilisation du retour et leur manière de le faire. En tant
que signal de retour, il est possible de choisir entre des
signaux de tension, de courant et d'impulsion.
Illustration 3.24
437 Process PID, contrôle normal/inverse
Valeur:
Normal (NORMAL) [0]
Inverse (INVERSE) [1]
Fonction:
Il est possible de choisir dans quelle mesure le régulateur
de process doit augmenter/diminuer la fréquence de sortie
en cas de différence entre le signal de référence et le
signal de retour.
A utiliser avec Mode process en boucle fermée (paramètre
100).
Description du choix:
Sélectionner
fréquence de sortie en cas de hausse du signal de retour.
Sélectionner [1] Inverse si le moteur FC doit augmenter la
fréquence de sortie en cas de hausse du signal de retour.
438
Valeur:
Inactif (INACTIF) [0]
Actif (ACTIF) [1]
Fonction:
Il est possible de choisir dans quelle mesure le régulateur
de process doit continuer à réguler une erreur même s'il
n'est pas possible d'augmenter ou de réduire la fréquence
de sortie. A utiliser avec Mode process en boucle fermée
(paramètre 100).
[0] Normal si le moteur FC doit diminuer la
PID process/anti-saturation
60 MG03BA04 - VLT® est une marque déposée Danfoss
Page 63

Programmation
Motovariateur VLT® série FCM
Description du choix:
Le réglage d'usine est [1] Actif, ce qui implique un
ajustement de la partie intégration par rapport à la
fréquence de sortie réelle si la limite de courant ou la
fréquence max./min. a été atteinte. Le régulateur de
process ne redevient actif que lorsque l'erreur est égale à
zéro ou a changé de signe.
Sélectionner [0] Inactif si l'intégrateur doit continuer à
intégrer l'erreur même s'il n'est pas possible de la faire
disparaître en régulant.
439 PID process, fréquence de démarrage
Valeur:
f
paramètre 201
Fonction:
Au signal de démarrage, le moteur FC réagit en
vitesse boucle ouverte en suivant la rampe. Il ne passe en
Mode process boucle fermée que lorsque la fréquence de
démarrage programmée est atteinte. Il est de plus possible
de régler une fréquence correspondant à la vitesse à
laquelle le process fonctionne normalement, d'où
l'obtention plus rapide de l'état de process souhaité.
A utiliser avec Mode process en boucle fermée (paramètre
100).
Description du choix:
Régler sur la fréquence de démarrage souhaitée.
440
Valeur:
0.00 (INACTIF)-10.00 [0-1000]
0.01 [1]
Fonction:
Le gain proportionnel indique le facteur d'amplification de
l'erreur écart entre le signal de retour et la consigne.
A utiliser avec Mode process en boucle fermée (paramètre
100).
Description du choix:
Un gain élevé se traduit par une régulation rapide mais un
gain trop important peut affecter la régularité du process.
(paramètres 201 et 202)
MIN-fMAX
PID process, gain proportionnel
[X.X]
Mode
Description du choix:
Un temps d'action intégrale de courte durée se traduit par
une régulation rapide. Une durée trop courte peut
cependant rendre la régulation instable.
Si le temps d'action intégrale est long, des écarts
importants par rapport à la consigne souhaitée peuvent
apparaître du fait que le régulateur de process mettra
longtemps à réguler par rapport à une erreur donnée.
442 PID process, gain différentiel
Valeur:
0.00 (Inactif)-10.00 s [0-1000]
0.00 s [0]
Fonction:
Le différenciateur ne réagit pas à une erreur constante. Il
n'apporte un gain que si l'erreur change. Plus l'erreur
change rapidement, plus le gain du différenciateur est
important.
Le gain est proportionnel à la vitesse à laquelle l'erreur
change.
A utiliser avec Mode process en boucle fermée (paramètre
100).
Description du choix:
Un temps de dérivée de longue durée se traduit par un
pilotage rapide. Une durée trop longue peut toutefois
affecter la régularité du process.
443
Valeur:
5.0-50.0 [50-500]
5.0 [50]
Fonction:
Il est possible de fixer une limite au gain différentiel.
Celui-ci augmente en cas de changements rapides d'où
l'utilité de le limiter. Cela permet d'obtenir un gain
différentiel réel aux changements lents et un gain
différentiel constant aux changements rapides de l'erreur.
A utiliser avec Mode process en boucle fermée (paramètre
100).
Description du choix:
Sélectionnez la limite souhaitée pour le gain différentiel.
PID process, limite gain diff.
3 3
441
Valeur:
0.01-9999 s (Inactif) [1-999900]
9999 s [999900]
Fonction:
L'intégrateur donne un gain croissant en présence d'une
erreur constante entre consigne et signal de retour. Plus
l'erreur est importante plus le gain augmentera
rapidement. Le temps intégral est le temps nécessaire à
l'intégrateur pour atteindre le même gain que le gain
proportionnel.
A utiliser avec Mode process en boucle fermée (paramètre
100).
PID process, temps d'intégral
MG03BA04 - VLT® est une marque déposée Danfoss 61
444
Valeur:
0.02-10.00 s [2-1000]
0.02 s [2]
Fonction:
Des ondulations sur le signal de retour sont atténuées par
le filtre passebas afin de réduire leur influence sur la
régulation de process. Cela peut être un avantage p. ex. s'il
y a beaucoup de bruit sur le signal.
A utiliser avec Mode process en boucle fermée (paramètre
100).
Mode process, temps de filtre passebas du
PID
Page 64

Programmation
Motovariateur VLT® série FCM
Description du choix:
Sélectionner la constante de temps (τ) souhaitée. En
programmant une constante de temps (τ) de 100 ms par
ex., la fréquence d'interruption du filtre passebas sera
égale à 1/0,1 = 10 RAD/s, correspondant à (10/2 x π) =
33
1,6 Hz.
Le régulateur process régule alors uniquement un signal
de retour qui varie à une fréquence inférieure à 1,6 Hz. Si
la variation du signal de retour dépasse une fréquence de
1,6 Hz, le régulateur de process ne réagit pas.
445 Démarrage à la volée
Valeur:
Inactif (INACTIF) [0]
OK - même sens (OK-MEME SENS) [1]
OK - 2 sens (OK-2 SENS) [2]
Courant continu de freinage avant démarrage
(FREIN CC AVANT DEMAR) [3]
Fonction:
Cette fonction permet de "rattraper" un moteur, à la volée,
par ex. à cause d'une panne de secteur.
Description du choix:
Sélectionner [0] Inactif si la fonction n'est pas souhaitée.
[1] OK - même sens : option sélectionnée si le moteur ne
peut tourner que dans le même sens au moment du
rattrapage à la volée.
[2] OK - 2 sens : option sélectionnée si le moteur peut
tourner dans les deux sens au moment du rattrapage à la
volée.
[3] Courant continu de freinage avant démarrage : option
sélectionnée si le moteur doit être arrêté par injection de
courant continu avant qu'il n'accélère jusqu’à la vitesse
désirée. Le temps de freinage par injection de courant
continu doit être réglé au paramètre 126.
Limites :
1. Une inertie trop faible entraîne l’accélération de
la charge, ce qui peut être dangereux ou
empêcher un démarrage à la volée. Utiliser à la
place le frein par injection de courant continu.
2. Si la charge est entraînée, par ex. par un "effet
générateur", l’appareil risque de s'arrêter en
raison de surtension.
3.
En-dessous de 250 tr/min, le démarrage à la volée
ne fonctionne pas.
455
Valeur:
Inactif [0]
Activé [1]
Fonction:
Ce paramètre est utilisé si l'avertissement 35 Hors de la
plage de fréquences ne doit pas être actif à l'affichage en
mode process en boucle fermée. Ce paramètre n'a pas
d'influence sur le mot d'état élargi.
Description du choix:
Sélectionner
d'apparition de l'avertissement 35 Hors de la plage de
fréquences. Sélectionner [0] Inactive afin de désactiver
l'affichage en cas d'apparition de l'avertissement 35 Hors de
la plage de fréquences.
461
Valeur:
Linéaire (LINEAIRE) [0]
Racine carrée (x PAR RACINE CARREE) [1]
Fonction:
Une fonction est sélectionnée dans ce paramètre pour
convertir un signal de retour connecté du process à une
valeur de retour égale à la racine carrée du signal
connecté.
Cela est utilisé par exemple lorsqu'une régulation d'un flux
(volume) est nécessaire sur la base de la pression comme
signal de retour (flux = constante x √pression). Cette
conversion permet de définir la référence de manière à
obtenir un lien linéaire entre la référence et le flux
nécessaire. Voir le Illustration 3.25.
Description du choix:
Si l'option [0] Linéaire est sélectionnée, le signal et la valeur
de retour seront proportionnels.
Si l'option [1] Racine carrée est sélectionnée, le variateur de
fréquence traduit le signal de retour en valeur de racine
carrée.
Surveillance de la plage de fréquence
[1] Active afin de permettre l'affichage en cas
Conversion du signal de retour
446
Valeur:
60° AVM (60° AVM) [0]
SFAVM (SFAVM) [1]
Fonction:
Description du choix:
Normalement, le client n’a pas besoin de régler ce
paramètre.
62 MG03BA04 - VLT® est une marque déposée Danfoss
Type de modulation
Illustration 3.25 Conversion du signal de retour
Page 65

STX LGE ADR D ATA BCC
195NA099.10
Programmation
Motovariateur VLT® série FCM
3.6.1 Bus série
Illustration 3.26 Bus série
3.6.2 Trafic télégramme
Télégrammes de commande et de réponse
Le trafic télégramme dans un système maître/esclave est
commandée par le maître. Au maximum 31 esclaves
(moteurs FC) peuvent être raccordés à un maître excepté si
un répéteur est utilisé - voir Illustration 3.28 et
Illustration 3.30.
Le maître envoie en continu des télégrammes de
commande adressés aux esclaves et attendent des
télégrammes de réponse de leur part. Le délai de réponse
de l'esclave est de 50 msec au maximum.
Seul l’esclave ayant reçu un télégramme sans erreur qui lui
était adressé envoie un télégramme de réponse.
3.6.3 Composition d'un télégramme
Chaque télégramme commence par un octet de départ
(STX) = 02 Hex suivi d'un octet qui indique la longueur du
télégramme (LGE) et d'un octet indiquant l'adresse VLT
(ADR). Ensuite arrive un certain nombre d'octets de
données (variable, dépend du type de télégramme). Le
télégramme se termine par un octet de contrôle des
données (BCC).
Illustration 3.28 Télégramme
Longueur du télégramme (LGE)
La longueur du télégramme comprend le nombre d'octets
de données auquel s'ajoute l'octet d'adresse ADR et l'octet
de contrôle des données BCC.
La longueur des télégrammes à 4 octets de données est
égale à :
LGE = 4 + 1 + 1 = 6 octets
La longueur des télégrammes à 12 octets de données est
égale à :
LGE = 12 + 1 + 1 = 14 octets
3 3
Diffusion
Un maître peut envoyer un seul télégramme simultanément à tous les esclaves raccordés au bus. Lors de cette
communication diffusée , le bit de diffusion du télégramme
de commande du bit d'adresse adopte la valeur 1 (voir
adresse VLT). Les bits d'adresse 0-4 ne sont pas utilisés.
Contenu d’un octet
Chaque caractère transmis commence par un bit de
départ. Ensuite, 8 bits de données sont transmis. Chaque
caractère est contrôlé par un bit de parité égal à "1"
lorsque la parité est à nombre pair (c'est-à-dire que le total
de "1" binaires dans les 8 bits de données et du bit de
parité est un chiffre pair). Le caractère se termine par un
bit d'arrêt et se compose donc au total de 11 bits.
Illustration 3.27
Adresse VLT (ADR)
On opère avec deux formats d'adresse différents :
1. Format adresse Siemens protocole USS
Illustration 3.29 Format d'adresse
Bit 7 = 0
Bit 6 non utilisé
Bit 5 = 1 : diffusion, les bits d'adresse (0-4) ne sont pas
utilisés
Bit 5 = 0 : pas de diffusion
Bits 0-4 = Adresse VLT 1-31
MG03BA04 - VLT® est une marque déposée Danfoss 63
Page 66

Programmation
Motovariateur VLT® série FCM
2. Danfoss format :
mot de contrôle et valeur de référence
-
(du maître à l'esclave),
mot d'état et fréquence de sortie
-
actuelle (de l'esclave au maître).
Cette structure s'applique au télégramme de contrôle
33
Illustration 3.30 Format d'adresse
(maître ⇒ esclave) et au télégramme de réponse (esclave ⇒
maître).
Bit 7 = 1
Bits 0-6 = Adresse VLT 1-127 (0 = Diffusion)
Octet de contrôle des données (BCC)
L'octet de contrôle des données est expliqué par un
exemple : Avant de recevoir le premier caractère du
Illustration 3.32
télégramme, BCC = 0
Il existe deux types de télégrammes :
à 12 octets selon la construction indiquée ci-
-
dessus avec un bloc paramètres et un bloc
process
Illustration 3.31
à 4 octets qui est le bloc process du télégramme
-
12 octets.
Après réception du premier caractère :
BCC
NOUVEAU
= BCC
EXOR "premier octet"
ANCIEN
1. Octets de paramètres
(EXOR = porte OU exclusif)
BCC
= 0 0 0 0 0 0 0 0
ANCIEN
EXOR
"premier octet" = 0 0 0 0 0 0 1 0 (02H)
BCC
= 0 0 0 0 0 0 1 0
NOUVEAU
Chaque octet supplémentaire suivant est relié à
BCCANCIEN EXOR et donne un nouveau BCCNOUVEAU, par
ex. :
BCCANCIEN = 0 0 0 0 0 0 1 0
EXOR
"deuxième octet" = 1 1 0 1 0 1 1 0 (D6H)
BCC
= 1 1 0 1 0 1 0 0
NOUVEAU
Résultat une fois que le dernier caractère reçu correspond
à BCC.
Octets de données
3.6.4
Le bloc d'octets de données est divisé en deux petits
blocs :
1. Octets de paramètres utilisés pour transférer des
paramètres entre maître et esclave
2. Octets de process, couvrant
Illustration 3.33
Ordres et réponses (AK)
Les bits n° 12 à 15 sont utilisés pour le transfert d'ordres
du maître à l'esclave ainsi qu'à la réponse traitée par
l'esclave et renvoyée au maître.
64 MG03BA04 - VLT® est une marque déposée Danfoss
Page 67

Programmation
Motovariateur VLT® série FCM
Ordres du maître ⇒ esclave :
Bit n°
15 14 13 12 Ordre
0 0 0 0 Pas d'ordre
0 0 0 1 Lire valeur du paramètre
0 0 1 0 Écrire valeur du paramètre en
RAM (mot)
0 0 1 1 Écrire valeur du paramètre en
RAM (mot double)
1 1 0 1 Écrire valeur du paramètre en
RAM et EEPROM (mot double)
1 1 1 0 Écrire valeur du paramètre en
RAM et EEPROM (mot)
1 1 1 1 Lire texte
Tableau 3.18
Réponse esclave ⇒ maître :
Bit n°
15 14 13 12 Réponse
0 0 0 0 Pas de réponse
0 0 0 1 Valeur du paramètre transmise
(mot)
0 0 1 0 Valeur du paramètre transmise
(mot double)
0 1 1 1 Ordre impossible à exécuter
1 1 1 1 Texte transmis
Tableau 3.19
S'il est impossible d'exécuter l'ordre, l'esclave envoie cette
réponse (0111) et indique le message d'erreur suivant dans
la valeur du paramètre :
Code de défaut
(réponse 0111)
0 Le numéro de paramètre utilisé n'existe pas
1 Aucun accès en écriture au paramètre appelé
2 La valeur des données dépasse les limites du
3 Le sous-indice utilisé n'existe pas
4 Le paramètre n'est pas du type tableau
5 Le type de données ne correspond pas au
17 La modification des données dans le paramètre
130 Aucun accès du bus au paramètre appelé
131 La modification des données est impossible car
Message d'erreur
paramètre
paramètre appelé
appelé n'est pas possible dans l'état actuel du
moteur FC. Certains paramètres ne peuvent être
modifiés qu'avec le moteur à l'arrêt.
les réglages d'usine ont été sélectionnés
Numéro de paramètre (PNU)
Les bits n° 0 à 10 sont utilisés pour le transfert des
numéros de paramètre. La fonction d'un paramètre donnée
est expliquée dans la description du paramètre.
3 3
Illustration 3.34
Index
L'indice est utilisé avec le numéro de paramètre pour
l'accès lecture/écriture aux paramètres de type tableau
(array) (par. 615, 616 et 617).
Valeur du paramètre (PWE)
Illustration 3.35
La valeur du paramètre dépend de l'ordre donné. Si le
maître exige un paramètre (lire), il ne tient pas compte du
bloc PWE. Si le maître modifie un paramètre (écrire), la
nouvelle valeur est transmise au bloc PWE. Si l'esclave
répond à une demande de paramètre (ordre de lecture), la
valeur actuelle du paramètre est transmise au bloc PWE.
La valeur transmise correspond aux chiffres indiqués dans
la description du paramètre. P. ex. : paramètre 101 où [1]
correspond à Couple constant, [2] à Couple variable : bas,
etc. Les paramètres de type de données 9 (séquence de
texte) du fait que le texte est transmis sous forme d'une
séquence de texte ASCII. Lorsqu'une séquence de texte est
transmise (lue), la longueur du télégramme est variable du
fait que les textes présentent des longueurs variables. La
longueur du télégramme est indiquée dans le 2e octet du
télégramme appelé LGE, voir 3.6.3 Composition d'un
télégramme . Les paramètres 621-634 (données de la
plaque signalétique) ont des données de type 9 (chaîne de
texte).
Tableau 3.20
MG03BA04 - VLT® est une marque déposée Danfoss 65
Page 68

Programmation
Motovariateur VLT® série FCM
Types de données pris en charge par le variateur de
PCD1 PCD2
fréquence VLT
Télégramme de
Type de
données
3 Nombre entier 16 bits
33
4 Nombre entier 32 bits
5 Non signé 8 bits
6 Non signé 16 bits
7 Non signé 32 bits
9 Séquence de texte
Tableau 3.21
Description
Sans signe signifie que le télégramme ne comporte pas de
signe.
contrôle
(maître⇒esclave)
Télégramme de
réponse
(esclave⇒maître)
Tableau 3.22
3.6.5 Mot de contrôle selon la norme de
profil bus
(paramètre 512 = profil bus) Le mot de contrôle est utilisé
pour envoyer des ordres d'un maître (p. ex. un PC) à un
Mot de contrôle Valeur de référence
Mot d'état Fréquence de sortie
donnée
esclave (moteur FC).
Les caractéristiques de chaque paramètre sont indiquées
dans le chapitre réglages d'usine. Une valeur de paramètre
ne pouvant être transmise que sous la forme d'un nombre
entier, il faut utiliser un facteur de conversion pour
transmettre des chiffres à décimales.
Exemple :
Paramètre 201 : fréquence minimale, facteur de conversion
0,1. Si le paramètre 201 doit être réglé sur 10 Hz, il faut
transmettre la valeur 100, car un facteur de conversion de
0,1 signifie que la valeur transmise est multipliée par 0,1.
La valeur 100 sera donc interprétée comme 10.
Adressage par l'ID de l'appareil
L'ID de l'appareil est imprimée sur l'étiquette de la
protection plastique sous le couvercle du boîtier
électronique. Les trois groupes d'ID de l'appareil
comportant chacun trois chiffres doivent être convertis en
valeurs hexadécimales. L'adresse désirée est ajoutée
comme le dernier octet. Le cadre est envoyé au(x)
paramètre(s) d'adresse bus 500 (et 918) via un télégramme
diffusé.
PKE : écrire au paramètre n° 500 ou 918
IND : inutilisé
2. Octets de process
Le bloc d'octets de process est divisé en deux blocs
chacun de 16 bits qui apparaissent toujours dans l'ordre
indiqué.
Bit Bit = 0 Bit =1
00 OFF 1 ON 1
01 OFF 2 ON 2
02 OFF 3 ON 3
03 Moteur en roue libre Activé
04 Arrêt rapide Rampe
05 Gel de la fréquence de sortie Rampe activée
06 Arrêt rampe Démarrage
07 Pas de fonction Reset
08 Jog 1 OFF ACTIF
09 Jog 2 OFF ACTIF
10 Données non valides Valides
11 Pas de fonction Ralentissement/relais
123/borne de sortie
digitale 9
12 Pas de fonction Rattrapage/relais 123
13 Proc.1 Proc.2
14
15 Pas de fonction Inversion
Tableau 3.23
AVIS!
L'utilisation des bits 00, 01 et 02 pour la mise hors
tension (au moyen d'un relais) nécessite l'utilisation
d'une alimentation séparée. En effet, il n'existe pas de
connexion 24 V externe pour alimenter la commande
Illustration 3.36
FCM 300 requise pour réactiver le FCM 300 via un signal
d'entrée.
Bit
00, OFF1/ON1
66 MG03BA04 - VLT® est une marque déposée Danfoss
Page 69

Programmation
Motovariateur VLT® série FCM
Arrêt de rampe normal qui utilise le temps de rampe des
paramètres 207/208. Bit 00 = "0" entraîne l'arrêt. Bit 00 =
"1" implique que le variateur de fréquence peut démarrer
si les autres conditions de démarrage sont remplies.
Bit 01, OFF2/ON2
Arrêt roue libre. Bit 01 = "0" entraîne un arrêt en roue libre.
Bit 01 = "1" implique que le variateur de fréquence peut
démarrer si les autres conditions de démarrage sont
remplies.
Bit 02, OFF3/ON3
Arrêt rapide qui utilise le temps de rampe du paramètre
212. Bit 02 = "0" entraîne un arrêt rapide. Bit 02 = "1"
implique que le variateur de fréquence peut démarrer si
les autres conditions de démarrage sont remplies.
Bit 03, Roue libre/actif
Arrêt roue libre. Bit 03 = "0" entraîne l'arrêt. Bit 03 = "1"
implique que le variateur de fréquence peut démarrer si
les autres conditions de démarrage sont remplies.
AVIS!
le paramètre 502 permet de sélectionner comment
établir la liaison entre le bit 03 et la fonction correspondante des entrées digitales.
Bit 04, Arrêt rapide/rampe
Arrêt rapide qui utilise le temps de rampe du paramètre
212. Bit 04 = "0" entraîne un arrêt rapide. Bit 04 = "1"
implique que le variateur de fréquence peut démarrer si
les autres conditions de démarrage sont remplies.
AVIS!
le paramètre 503 permet de sélectionner comment
établir la liaison entre le bit 04 et la fonction correspondante des entrées digitales.
Bit 05, Gel fréquence de sortie/rampe active
Bit 05 = "0" implique le maintien de la fréquence de sortie
actuelle même si la référence est modifiée. Bit 05 = "1"
implique que le variateur de fréquence peut à nouveau
réguler pour permettre de suivre la référence actuelle.
Bit 06, Arrêt/marche rampe
Arrêt de rampe normal qui utilise le temps de rampe des
paramètres 207/208. Bit 06 = "0" entraîne l'arrêt. Bit 06 =
"1" implique que le variateur de fréquence peut démarrer
si les autres conditions de démarrage sont remplies.
AVIS!
le paramètre 505 permet de sélectionner comment
établir la liaison entre le bit 06 et la fonction correspondante des entrées digitales.
Bit 07, Pas de fonction/réinitialisation
Réinitialisation après déclenchement. Bit 07 = "0" signifie
qu'il n'y a pas de reset. Bit 07 = "1" entraîne un reset après
disjonction. L'unité est prête env. 1,5 s après le reset. Le
mot d'état indique prêt.
Bit 08, Jog 1 OFF/ON
Activation de la vitesse préprogrammée dans le paramètre
509 (Jogging bus 1). JOG 1 n'est possible que lorsque le
bit 04 = "0" et les bits 00-03 = "1".
Bit 09, Jogging 2 OFF/ON
Activation de la vitesse préprogrammée dans le paramètre
510 (Jogging bus 2). JOG 2 n'est possible que lorsque le
bit 04 = "0" et les bits 00-03 = "1". Si JOG 1 et JOG 2 sont
activés (bits 08 et 09 = "1" ), JOG 1 a la plus grande
priorité, c'est-à-dire que la vitesse programmée au
paramètre 509 est utilisée.
Bit 10, Données non valides/valides :
S'utilise pour indiquer au moteur FC dans quelle mesure le
mot de contrôle doit être utilisé ou ignoré. Bit 10 = "0"
implique que le mot de commande est ignoré. Bit 10 = "1"
signifie que le mot de contrôle est utilisé. Cette fonction
est "pertinente" du fait que le mot de contrôle est toujours
contenu dans le message quel que soit le type de message
utilisé, c'est-à-dire qu'il est possible de déconnecter le mot
de contrôle si l'on ne souhaite pas l'utiliser en relation avec
une mise à jour ou la lecture de paramètres.
Bit 11, Pas de fonction/ralentissement, relais 123, borne de
sortie digitale 9
S'utilise pour réduire la référence de vitesse de la valeur
indiquée dans le paramètre 219. Bit 11 = "0" n'implique
aucun changement de référence. Bit 11 = "1" implique une
réduction de la référence. Bit 11 = "1" active également le
relais 123 (à condition que paramètre 323 = "control word
bit 11") et règle la borne de sortie digitale 9 sur haut (à
condition que paramètre 340 = "control word bit 11").
Bit 12, Pas de fonction/rattrapage, relais 123
Sert à augmenter la référence de vitesse de la valeur
indiquée au paramètre 219. Bit 12 = "0" n'implique aucun
changement de référence. Bit 12 = "1" implique l'augmentation de la référence. Si le ralentissement et le rattrapage
sont activés (Bits 11 et 12 = "1"), le ralentissement a la plus
grande priorité, c'est-à-dire que la référence de vitesse est
réduite. Bit 12 = "1" active également le relais 123 (à
condition que paramètre 323 = "control word bit 12").
Bit 13, Sélection de process
Bit 13 est utilisé pour choisir entre les deux process du
menu selon le tableau suivant :
3 3
MG03BA04 - VLT® est une marque déposée Danfoss 67
Page 70

Programmation
Motovariateur VLT® série FCM
Process Bit 13
1 0
2 1
Bit 00, Commande non prête/prête
Bit 00 = "0" signifie que le bit 00, 01 ou 02 du mot de
contrôle est égal à "0" (ARRET 1, ARRET 2 OU ARRET 3, ou
bien que le variateur de fréquence a disjoncté.
Tableau 3.24
Bit 00 = "1" signifie que le variateur de fréquence est prêt
à fonctionner.
33
Cette fonction n'est possible qu'en choisissant Multi process
au paramètre 004.
Bit 01, FC non prêt/prêt
Même signification que le bit 00, cependant l'étage de
AVIS!
Le paramètre 507 permet de sélectionner comment
établir la liaison entre le bit 13 et la fonction corres-
puissance est alimenté et le variateur de fréquence est prêt
à fonctionner à réception des signaux de démarrage
nécessaires.
pondante des entrées digitales.
Bit 02, Roue libre/actif
Bit 15, Pas de fonction/inversion
Inversion du sens de rotation du moteur. Bit 15 = "0"
n'entraîne pas d'inversion, bit 15 = "1" entraîne une
inversion.
Bit 02 = "0" signifie que le bit 00, 01, 02 ou 03 du mot de
contrôle est égal à "0" (ARRET 1, ARRET 2, ARRET 3 ou Roue
libre). Ou bien que le FCM Série 300 a disjoncté.
Bit 02 = "1" signifie que les bits 00, 01, 02 ou 03 du mot
de contrôle sont égaux à 1 et que le moteur FC n'a pas
AVIS!
Sauf indication contraire, la liaison entre les bits du mot
de contrôle et la fonction correspondante des entrées
digitales est établie comme une fonction "ou" logique.
Mots d'état selon Fieldbus Profile
Le mot d'état est utilisé pour informer le maître (par ex. un
PC) sur l'état de l'esclave (Moteur FC).
disjoncté.
Bit 03, Pas de défaut/déclenchement
Bit 03 = "0" signifie que le moteur FC n'est pas en état de
défaut.
Bit 03 = "1" signifie que le FCM 300 a disjoncté et qu'il a
besoin d'un signal de reset pour pouvoir fonctionner.
Bit 04, ON2/OFF2
Bit 04 = "0" signifie que le bit 01 du mot de contrôle = "1".
Bit 04 = "1" signifie que le bit 01 du mot de contrôle = "0".
Bit
00 Commande pas prête Prêt
01 FC pas prêt Prêt
02 Roue libre Activé
03 Pas de panne Alarme
04 ON 2 OFF 2
05 ON 3 OFF 3
06 Démarrage activé Démarrage désactivé
07 Absence d'avertissement Avertissement
08
09 Commande locale Communication série
10 Hors de la plage de
11 Non lancé En marche
12
13 Tension OK Au-dessus de la limite
14 Courant OK Au-dessus de la limite
15 Avertis. thermiq.
Bit = 0 Bit =1
Vitesse ≠ réf.
fréquence
Tableau 3.25
Vitesse = réf.
Limite de fréquence OK
Bit 05, ON3/OFF3
Bit 05 = "0" signifie que le Bit 02 du mot de contrôle = "1".
Bit 05 = "1" signifie que le bit 02 du mot de contrôle = "0".
Bit 06, Démarrage actif/démarrage inactif
Bit 06 est toujours égal à "0" si FC Drive a été sélectionné
au par. 512. Si [Profidrive] a été sélectionné au par. 512, le
bit 06 est égal à "1" après le reset d'un déclenchement,
après l'activation de OFF2 ou OFF3 et après le raccordement de la tension secteur. Démarrage désactivé est
réinitialisé, le bit 00 du mot de commande étant fixé à 0 et
les bits 01, 02 et 10 à 1.
Bit 07, Sans avertissement/avertissement
Bit 07 = "0" signifie l'absence d'une situation
exceptionnelle.
Bit 07 = "1" signifie l'apparition d'un état anormal pour le
moteur FC. Tous les avertissements décrits au paragraphe
4.2 Liste des avertissements et des alarmes - Manuel de
configuration du FCM 300 règlent le bit 07 sur "1".
68 MG03BA04 - VLT® est une marque déposée Danfoss
Page 71

Programmation
Motovariateur VLT® série FCM
Bit 08, Vitesse ≠ réf./vitesse = réf.
Bit 08 = "0" signifie que la vitesse actuelle du moteur est
différente de la référence de vitesse réglée. Ceci peut par
exemple être le cas au moment des accélérations et
décélérations de rampe au démarrage et à l'arrêt.
Bit 08 = "1" signifie que la vitesse actuelle du moteur est
égale à la référence de vitesse réglée.
Bit 09, Commande locale/commande par communication
série
Bit 09 = "0" signifie que la touche [STOP/RESET] est activée
sur l'unité de commande ou que l'option Commande locale
a été sélectionnée au paramètre 002 Commande locale/à
distance. Il n'est pas possible de commander le variateur de
fréquence via la communication série.
Bit 09 = "1" signifie qu'il est possible de commander le
variateur de fréquence via la communication série.
Bit 10, Hors plages de fréquences
Bit 10 = "0", si la fréquence de sortie a atteint la valeur du
paramètre 201 Fréquence de sortie, limite basse ou du
paramètre 202 Fréquence de sortie, limite haute.
Bit 10 = "1" signifie que la fréquence de sortie est
comprise dans les limites mentionnées.
Bit
00 Sélection référence prédéfinie
01 Pas de fonction
02 Freinage par injection de
03 Roue libre Activé
04 Arrêt rapide Rampe
05 Maintien Rampe activée
06 Arrêt rampe Démarrage
07 Pas de fonction Reset
08 Pas de fonction Jogging
09 Pas de fonction
10 Données non valides Valides
11 Pas de fonction Relais 123/borne
12 Pas de fonction Relais 123
13 Proc.1 Proc.2
15 Pas de fonction Inversion
Bit = 0 Bit =1
Rampe
courant continu
d'entrée digitale 9
3 3
Bit 11, Non lancé/lancé
Bit 11 = "0" signifie que le moteur n'est pas en marche.
Bit 11 = "1" signifie que le moteur FC a un signal de
départ ou que la fréquence de sortie est supérieure à 0 Hz.
Bit 13, Tension correcte/Hors limite
Bit 13 = "0" signifie que les limites de tension du moteur
FC ne sont pas dépassées.
Bit 13 = "1" signifie que la tension CC du circuit intermédiaire du moteur FC est trop faible ou trop élevée.
Bit 14, Courant OK/hors limite
Bit 14 = "0" signifie que le courant du moteur est inférieur
à la limite de courant choisie dans le paramètre 221.
Bit 14 = "1" signifie que la limite de courant du paramètre
221 a été dépassée.
Bit 15, Avertissement thermique
Bit 15 = "0" signifie que les minuteries de protection
thermique du moteur et de protection thermique du VLT
n'ont pas dépassé 100%.
Bit 15 = "1" signifie que l'une des temporisations a dépassé
100%.
Tableau 3.26
Bit 00
Bit 00 est utilisé pour choisir l'une des deux références
prédéfinies (paramètres 215-216) selon le tableau ci-après :
Référence
prédéfinie
1 215 0
2 216 1
Tableau 3.27
Paramètre Bit 00
AVIS!
Le paramètre 508 permet de sélectionner comment
établir la liaison entre les bits 1/12 et la fonction correspondante des entrées digitales.
Bit 02, Freinage par injection de CC
Bit 02 = "0" entraîne le freinage par injection de courant
continu et l'arrêt. La tension de freinage et la durée se
règlent dans les paramètres 132 et 133.
Bit 02 = "1" signifie rampe.
Mot de contrôle selon le standard FC Profile (paramètre
512 = FC Drive)
Le mot de contrôle est utilisé pour envoyer des ordres
d'un maître (par ex. un PC) à un esclave (Moteur FC).
MG03BA04 - VLT® est une marque déposée Danfoss 69
Bit 03, Roue libre/actif
Arrêt roue libre. Bit 03 = "0" entraîne l'arrêt.
Bit 03 = "1" implique que le variateur de fréquence peut
démarrer si les autres conditions de démarrage sont
remplies.
Page 72

Programmation
Motovariateur VLT® série FCM
AVIS!
le paramètre 502 permet de sélectionner comment
établir la liaison entre le bit 03 et la fonction correspondante des entrées digitales.
33
Bit 04, Arrêt rapide/rampe
Arrêt rapide qui utilise le temps de rampe du paramètre
212. Bit 04 = "0" entraîne un arrêt rapide.
Bit 04 = "1" implique que le variateur de fréquence peut
démarrer si les autres conditions de démarrage sont
remplies.
AVIS!
le paramètre 503 permet de sélectionner comment
établir la liaison entre le bit 04 et la fonction correspondante des entrées digitales.
Bit 05, Maintien/rampe active
Bit 05 = "0" implique le maintien de la fréquence de sortie
actuelle même si la référence est modifiée.
Bit 05 = "1" implique que le variateur de fréquence peut à
nouveau réguler pour permettre de suivre la référence
actuelle.
soit le type de message utilisé, c'est-à-dire qu'il est possible
de déconnecter le mot de contrôle si l'on ne souhaite pas
l'utiliser en relation avec une mise à jour ou la lecture de
paramètres.
Bit 11, Pas de fonction/relais 123, borne de sortie digitale 9
Bit 11 = “1” active le relais 123 (à condition que paramètre
323 = "control word bit 11") et règle la borne de sortie
digitale 9 sur haut (à condition que paramètre 340 =
"control word bit 11").
Bit 12, Pas de fonction/relais 123
Bit 12 = "1" active le relais 123 (à condition que paramètre
323 = "control word bit 12").
Bit 13, Sélection de process
Le bit 13 est utilisé pour choisir entre les deux process du
menu selon le tableau suivant :
Process Bit 13
1 0
2 1
Tableau 3.28
Bit 06, Arrêt/marche rampe
Arrêt de rampe normal qui utilise le temps de rampe des
paramètres 207/208. Bit 06 = "0" entraîne l'arrêt.
Bit 06 = "1" implique que le variateur de fréquence peut
démarrer si les autres conditions de démarrage sont
remplies.
AVIS!
le paramètre 505 permet de sélectionner comment
établir la liaison entre le bit 06 et la fonction correspondante des entrées digitales.
Bit 07, Pas de fonction/réinitialisation
Réinitialisation après déclenchement. Bit 07 = "0" signifie
qu'il n'y a pas de reset.
Bit 07 = "1" entraîne un reset après disjonction. L'unité est
prête env. 1,5 s après le reset. Le mot d'état indique prêt.
Bit 08, Activation de la vitesse de jogging au paramètre
213
Bit 08 = "0" : vitesse de jogging non activée.
Bit 08 = "1" a pour résultat que le moteur tourne à la
vitesse de jogging.
Cette fonction n'est possible qu'en choisissant Multi process
au paramètre 004.
AVIS!
Le paramètre 507 permet de sélectionner comment
établir la liaison entre le bit 13 et la fonction correspondante des entrées digitales.
Bit 15, Pas de fonction/inversion
Inversion du sens de rotation du moteur.
Bit 15 = "0" n'entraîne aucune inversion. Bit 15 = "1" mène
à une inversion.
Bit 10, Données non valides/valides :
S'utilise pour indiquer au moteur FC dans quelle mesure le
mot de contrôle doit être utilisé ou ignoré.
Bit 10 = "0" signifie que le mot de contrôle est ignoré.
Bit 10 = "1" signifie que le mot de contrôle est utilisé.
Cette fonction est "pertinente" du fait que le mot de
contrôle est toujours contenu dans le message quel que
70 MG03BA04 - VLT® est une marque déposée Danfoss
Page 73

Programmation
Motovariateur VLT® série FCM
AVIS!
Sauf indication contraire, la liaison entre les bits du mot
de contrôle et la fonction correspondante des entrées
digitales est établie comme une fonction "ou" logique.
Mot d'état sous profil FC
Le mot d'état est utilisé pour informer le maître (p. ex. un PC)
sur l'état de l'esclave (moteur FC).
Bit Bit = 0 Bit =1
00 Commande pas prête Prêt
01 FC pas prêt Prêt
02 Roue libre Activé
03 Pas de panne Alarme
04 Réservé
05 Réservé
06 Réservé
07 Absence d'avertissement Avertissement
08
09 Commande locale Ctrl bus
10 Hors plage de vitesse Fréquence OK
11 Non lancé En marche
12
13 Tension OK Au-dessus de la limite
14 Courant OK Au-dessus de la limite
15 Temporisation OK Avertis. thermiq.
Vitesse ≠ réf.
Tableau 3.29
Bit 01, FC non prêt/prêt
Bit 01 = "0" signifie que le variateur de fréquence a
disjoncté.
Bit 01 = "1" signifie que le variateur de fréquence est prêt
à fonctionner.
Bit 02, Roue libre/actif
Bit 02 = "0" signifie que le bit 03 du mot de contrôle est
égal à "0" (Roue libre). Ou bien le moteur FC a disjoncté.
Bit 02 = "1" signifie que le bit 03 du mot de contrôle est
égal à 1 et que le moteur FC n'a pas disjoncté.
Bit 03, Pas de défaut/déclenchement
Bit 03 = "0" signifie que le moteur FC n'est pas en état de
défaut.
Bit 03 = "1" signifie que le FCM 300 a disjoncté et qu'il a
besoin d'un signal de reset pour pouvoir fonctionner.
Bit 07, Sans avertissement/avertissement
Bit 07 = "0" signifie l'absence d'une situation
exceptionnelle.
Vitesse = réf.
Bit 07 = "1" signifie l'apparition d'un état anormal pour le
moteur FC. Tous les avertissements décrits au paragraphe
4.2 Liste des avertissements et des alarmes - Manuel de
configuration du FCM 300 règlent le bit 07 sur "1".
Bit 08, Vitesse ≠ réf./vitesse = réf.
Bit 08 = "0" signifie que la vitesse actuelle du moteur est
différente de la référence de vitesse réglée. Ceci peut par
exemple être le cas au moment des accélérations et
décélérations de rampe au démarrage et à l'arrêt.
Bit 08 = "1" signifie que la vitesse effective du moteur est
égale à la référence de vitesse définie.
Bit 09, Commande locale/contrôle par bus
Bit 09 = "0" signifie que la touche [STOP/RESET] est activée
sur l'unité de commande ou que l'option Commande locale
a été sélectionnée au paramètre 002 Commande locale/à
distance. Il n'est pas possible de commander le variateur de
fréquence via la communication série.
Bit 09 = "1" signifie qu'il est possible de commander le
variateur de fréquence via la communication série.
Bit 10, Hors gamme/fréquence
Bit 10 = "0", si la fréquence de sortie a atteint la valeur du
paramètre 201 Fréquence de sortie, limite basse ou du
paramètre 202 Fréquence de sortie, limite haute.
Bit 10 = "1" signifie que la fréquence de sortie est
comprise dans les limites mentionnées.
Bit 11, Non lancé/lancé
Bit 11 = "0" signifie que le moteur n'est pas en marche.
Bit 11 = "1" signifie que le moteur FC reçoit un signal de
démarrage ou que la fréquence de sortie est supérieure à
0 Hz.
Bit 13, Tension correcte/Hors limite
Bit 13 = "0" signifie que les limites de tension du moteur
FC ne sont pas dépassées.
Bit 13 = "1" signifie que la tension CC du circuit intermédiaire du moteur FC est trop faible ou trop élevée.
Bit 14, Courant OK/hors limite
Bit 14 = "0" signifie que le courant du moteur est inférieur
à la limite de couple choisie dans le paramètre 221.
Bit 14 = "1" signifie que la limite de couple du paramètre
221 a été dépassée.
Bit 15, Avertissement thermique
Bit 15 = "0" signifie que les minuteries de protection
thermique du moteur et de protection thermique du VLT
n'ont pas dépassé 100%.
Bit 15 = "1" signifie que l'une des temporisations a dépassé
100%.
3 3
MG03BA04 - VLT® est une marque déposée Danfoss 71
Page 74

Programmation
Motovariateur VLT® série FCM
Référence bus
Description du choix:
Une adresse spécifique doit être attribuée à chaque
variateur de fréquence. Il convient de mettre en œuvre un
répéteur si le nombre d'unités raccordées (variateurs de
fréquence + systèmes maîtres) dépasse 31. Le paramètre
33
Illustration 3.37
500 Adresse ne peut être sélectionné via la communication
série, mais doit être prédéfini au moyen de l'unité de
commande.
501 Vitesse de transmission
La valeur référence de fréquence est transmise au variateur
sous forme d'un mot de 16 bits. La valeur est transmise en
tant que nombre entier (0-32767). 16384 (4000 hexa)
correspond à 100 %. (Les chiffres négatifs sont formés par
le complément de 2).
Valeur:
300 bauds (300 BAUDS) [0]
600 bauds (600 BAUDS) [1]
1200 bauds (1200 BAUDS) [2]
2400 bauds (2400 BAUDS) [3]
La référence du bus a le format suivant :
Paramètre 203 = "0"
"réf
-réf
MAX
"
MIN
MIN
0-16384 (4000 hexa) ~ 0-100% ~ réf
-réf
MAX
4800 bauds (4800 BAUDS) [4]
9600 bauds (9600 BAUDS) [5]
Fonction:
Ce paramètre permet de sélectionner la vitesse de
transmission des données sur la liaison série. La vitesse
Paramètre 203 = "1"
-réf
- +réf
MAX
MAX
-16384 (. . . hexa) - +16384 (4000 hexa) ~
-100- +100% ~ -réf
MAX
- +réf
MAX
exprimée en bauds correspond au nombre de bits transmis
par seconde.
Description du choix:
Il convient de régler la vitesse de transmission du moteur
FC sur une valeur compatible avec la vitesse de
Fréquence de sortie réelle
transmission de l'automate ou du PC.
Illustration 3.38
La valeur de la fréquence de sortie actuelle du variateur de
fréquence est transmise sous forme d'un mot de 16 Bits. La
valeur est transmise en tant que nombre entier (0-32767).
16384 (4000 hexa) correspond à 100%. (Les chiffres
négatifs sont formés par le complément de 2).
Groupe de paramètres 5-**
3.7.1
Communication série
500 Adresse
Valeur:
Paramètre 561 Protocole = protocole FC [0]
0 - 126 1
Paramètre 561 Protocole = MODBUS RTU [3]
0 - 247 1
Fonction:
Ce paramètre permet d'attribuer une adresse à chaque
variateur de fréquence d'un réseau de communication
série.
502
Roue libre
503 Arrêt rapide
504 Frein CC
505 Démarrage
506 Inversion
507 Sélection de process
508 Sélection de la vitesse
Valeur:
Entrée digitale (ENTREE DIGITALE) [0]
Bus (PORT SERIE) [1]
Digitale et série (DIGITALE ET SERIE) [2]
Digital ou série (DIGITALE OU SERIE) [3]
Fonction:
Les paramètres 502 à 508 permettent de piloter le moteur
FC à l'aide des bornes (entrées digitales) et/ou du bus.
Si les options Digitale et série ou Bus sont retenues, l'ordre
correspondant ne peut être activé que s'il transite par le
port de communication série. En cas de sélection de
Digitale et série, l'ordre doit également être activé via l'une
des entrées digitales.
Description du choix:
[0] Entrée digitale doit être sélectionnée pour que l'ordre de
commande correspondant ne puisse être activé que par
une entrée digitale.
[1] Bus doit être sélectionnée pour que l'ordre de
commande correspondant ne puisse être activé que par un
bit du mot de contrôle (communication série).
72 MG03BA04 - VLT® est une marque déposée Danfoss
Page 75

Programmation
Motovariateur VLT® série FCM
[2] Digitale et sériedoit être sélectionnée pour que l'ordre
de commande correspondant ne puisse être activé qu'en
présence d'un signal (actif = 1) venant simultanément du
mot de contrôle et d'une entrée digitale.
Entrée digitale
505-508 Bus Ordre de commande
0 0 0
0 1 0
1 0 0
1 1 1
Tableau 3.30
[3] Digitale ou série doit être sélectionnée pour que l'ordre
de commande correspondant puisse être activé en
présence d'un signal (actif = 1) venant du mot de contrôle
ou d'une entrée digitale.
Entrée digitale
505-508 Bus Ordre de commande
0 0 0
0 1 1
1 0 1
1 1 1
Tableau 3.31
Paramètre 502 = Digitale et série
Entrée digitale Bus Ordre de commande
0 0 1 Roue libre
0 1 0 Moteur en marche
1 0 0 Moteur en marche
1 1 0 Moteur en marche
Tableau 3.32
Paramètre 502 = Digitale ou série
Entrée digitale Bus Ordre de commande
0 0 1 Roue libre
0 1 1 Roue libre
1 0 1 Roue libre
1 1 0 Moteur en marche
Description du choix:
La fréquence de jogging fJOG se règle dans la plage fMIN
(paramètre 201) - fMAX (paramètre 202).
510 Jogging bus 2
Valeur:
0.0 - paramètre 202 [0 -]
10.0 HZ [100]
Fonction:
Ce paramètre permet de sélectionner une vitesse fixe
(jogging) activée au travers du port de communication
série.
Cette fonction est identique à celle du paramètre 213.
Description du choix:
La fréquence de jogging fJOG se règle dans la plage fMIN
(paramètre 201) - fMAX (paramètre 202).
512
Profil du télégramme
Valeur:
Profil bus (PROFIL BUS) [0]
Profil FC (PROFIL FC) [1]
Fonction:
Il est possible de choisir entre deux profils du mot de
contrôle.
Description du choix:
Sélectionner le profil souhaité du mot de contrôle.
Voir le chapitre Communication série pour de plus amples
renseignements sur les profils du mot de contrôle.
513
Bus, intervalle de temps
Valeur:
1-99 s [1-99]
1 s [1]
Fonction:
Ce paramètre permet de régler le temps maximal
théorique séparant la réception de deux télégrammes
consécutifs. La communication série est supposée finie si
ce temps est dépassé. Le temps de réaction souhaité se
règle au paramètre 514.
Description du choix:
Régler le temps souhaité.
3 3
Tableau 3.33
509
Jogging bus 1
Valeur:
0.0 - paramètre 202 [0 -]
10.0 HZ [100]
Fonction:
Ce paramètre permet de sélectionner une vitesse fixe
(jogging) activée au travers du port de communication
série.
Cette fonction est identique à celle du paramètre 213.
MG03BA04 - VLT® est une marque déposée Danfoss 73
514
Fonction bus, intervalle de temps
Valeur:
Inactif (INACTIF) [0]
Gel sortie (GEL SORTIE) [1]
Arrêt (ARRET) [2]
Jogging (JOGGING) [3]
Vitesse max. (VITESSE MAX.) [4]
Arrêt et alarme (ARRET ET ALARME) [5]
Fonction:
Ce paramètre permet de sélectionner la fonction adoptée
par le moteur FC en cas de dépassement du temps réglé
Page 76

Programmation
Motovariateur VLT® série FCM
au paramètre 513. Si les options [1] à [5] sont activées, les
relais 01 et 04 sont désactivés.
Description du choix:
La fréquence de sortie appliquée au moteur FC peut :
gelée à la valeur instantanée ou sur la référence,
33
commuter à l'arrêt, adopter la fréquence de jogging
(paramètre 213), opter pour la fréquence max. de sortie
(paramètre 202) ou arrêter et initier un déclenchement.
515 Lecture des données : Référence %
Valeur:
XXX.X% [XXXX]
Fonction:
Ce paramètre peut être lu via le port de communication
série.
Description du choix:
La valeur affichée est égale à la référence totale (somme
des références digitales/analogiques/prédéfinies/bus/gel
référence, rattrapage et ralentissement).
Cette valeur est actualisée toutes les 320 ms.
516
Valeur:
X,XXX Hz ou tr/mn. [XXXX]
Fonction:
Ce paramètre peut être lu via le port de communication
série.
Description du choix:
Indique la valeur d’état de l’appareil sur la base du choix
de la somme de référence.
Cette valeur est actualisée toutes les 320 ms.
517
Valeur:
X.XXX [XXXX]
Fonction:
Ce paramètre peut être lu via le port de communication
série.
Description du choix:
Indique la valeur d'état des bornes 1/2 avec l'unité/le
coefficient choisi aux paramètres 414 et 415.
Cette valeur est actualisée toutes les 320 ms.
518
Valeur:
XXX.X Hz [XXXX]
Fonction:
Ce paramètre peut être lu via le port de communication
série.
Description du choix:
La valeur affichée est égale à la fréquence instantanée du
moteur.
Lecture des données : Unité de référence
Lecture des données : Signal de retour
Lecture des données : Fréquence
Cette valeur est actualisée toutes les 320 ms.
519 Lecture des données : fréquence x coefficient
Valeur:
XXX.X Hz [XXXX]
Fonction:
Ce paramètre peut être lu via la liaison série.
Description du choix:
La valeur est égale à la fréquence instantanée f
multipliée par le coefficient réglé au paramètre 008
Affichage du coefficient applicable à la fréquence de sortie.
520
Valeur:
XXX.XX A [XXXXX]
Fonction:
Ce paramètre peut être lu via le port de communication
série.
Description du choix:
La valeur affichée est une valeur calculée du courant
moteur donné.
Cette valeur est actualisée toutes les 320 ms.
521
Valeur:
XXX.X% [XXXX]
Fonction:
Ce paramètre peut être lu via le port de communication
série.
Description du choix:
La valeur affichée est égale au couple (avec son signe) de
l'arbre du moteur. Cette valeur est exprimée en
pourcentage du couple nominal.
La correspondance entre le couple exprimé en
pourcentage du couple nominal et une valeur de courant
moteur de 160% n'est pas parfaite. En raison des
différences de tolérance et de température, certains
moteurs peuvent développer un couple plus important.
Les valeurs max. et min. sont donc fonction du courant
max./min. du moteur et du modèle de moteur utilisé.
Cette valeur est actualisée toutes les 320 ms.
522
Valeur:
XX.XX kW [XXXX]
Fonction:
Ce paramètre peut être lu via le port de communication
série.
Description du choix:
La valeur affichée est calculée sur la base de la tension et
du courant moteur réels.
Cette valeur est actualisée toutes les 320 ms.
Lecture des données : Courant
Lecture des données : Couple
Lecture des données : Puissance, kW
M
74 MG03BA04 - VLT® est une marque déposée Danfoss
Page 77

Programmation
Motovariateur VLT® série FCM
523 Lecture des données : Puissance, CV
Valeur:
XX.XX CV (US) [XXXX]
Fonction:
Ce paramètre peut être lu via le port de communication
série.
Description du choix:
La valeur affichée est calculée sur la base de la tension et
du courant moteur réels. Cette valeur est exprimée en CV
(US).
Cette valeur est actualisée toutes les 320 ms.
524
Valeur:
XXX.X V [XXXX]
Fonction:
Ce paramètre peut être lu via le port de communication
série.
Description du choix:
La valeur affichée est calculée pour contrôler le moteur.
Cette valeur est actualisée toutes les 320 ms.
525
Valeur:
XXXX V [XXXX]
Fonction:
Ce paramètre peut être lu via le port de communication
série.
Description du choix:
La valeur affichée est une valeur mesurée.
La valeur est filtrée ce qui signifie qu'un intervalle
d'environ 1,3 secondes peut s'écouler entre une modification de valeur d'entrée et la modification de la valeur de
l'affichage des données.
Cette valeur est actualisée toutes les 320 ms.
Lecture des données : Tension du moteur
Lecture des données : Tension du circuit
intermédiaire
Description du choix:
La valeur affichée indique l'état du signal délivré par les
quatre bornes digitales (2, 3, 4 et 5).
Cette valeur est actualisée toutes les 20 ms.
533 Lecture des données : Référence externe %
Valeur:
-200.0 à +200.0%
Fonction:
Ce paramètre peut être lu via le port de communication
série.
Description du choix:
La valeur indiquée donne, sous forme de pourcentage, la
somme des références externes (total des références
analogiques/bus/impulsions).
Cette valeur est actualisée toutes les 80 ms.
534
Valeur:
Unité
Fonction:
Ce paramètre peut être lu via le port de communication
série.
Description du choix:
Indique le mot d’état transmis via le port de communication série.
537
Valeur:
Unité : ºC
Fonction:
Ce paramètre peut être lu via le port de communication
série.
Description du choix:
Indique la température instantanée du variateur de
fréquence. Cette valeur est actualisée toutes les 10 s.
Lecture des données : Mot d'état, binaire
Lecture des données : Température OND.
3 3
527
Valeur:
0-100% [0-100]
Fonction:
Ce paramètre peut être lu via le port de communication
série.
Description du choix:
Seuls des nombres entiers sont affichés.
Cette valeur est actualisée toutes les 160 ms.
528
Valeur:
Unité
Fonction:
Ce paramètre peut être lu via le port de communication
série.
Lecture des données : Thermique FC
Lecture des données : Entrée digitale
MG03BA04 - VLT® est une marque déposée Danfoss 75
538
Valeur:
Unité
Fonction:
Ce paramètre peut être lu via le port de communication
série. Voir le 4.2.1 Liste des avertissements et alarmes.
Description du choix:
Indique la présence éventuelle d’une alarme dans le
moteur FC.
Lecture des données : Mot d'alarme
Page 78

Programmation
Motovariateur VLT® série FCM
Hex Messages d'alarme
00000002 Alarme verr.
00000040 Dépassement temps bus HPFP
00000080 Dépassement temps bus standard
00000100 Court-circuit
33
00000200 Panne alimentation 24 V
00000400 Défaut de mise à la terre
00000800 Surcourant
00004000 Thermistance moteur
00008000 Surcharge onduleur
00010000 Sous-tension
00020000 Surtension
00040000 Défaut phase
00080000 Déf zéro signal
00100000 Surtempérature
02000000 Erreur HPFP
08000000 Erreur charge
10000000 Erreur interne
Tableau 3.34
Hex Messages d’avertissement
00000008 Dépassement temps bus HPFP
00000010 Dépassement temps bus standard
00000040 Limite de courant
00000200 Surcharge onduleur
00001000 Avertissement de tension basse
00002000 Avertissement tension haute
00004000 Défaut phase
00010000 Avertissement Déf.zéro signal
00400000 Avertissement hors de la plage de
fréquences
00800000 Erreur HPFP
40000000 Avertissement alimentation 24 V
80000000 Température haute onduleur
Tableau 3.35
541
Lecture des données : Mot d'état élargi
Valeur:
Unité
Fonction:
539
Lecture des données : Mot de contrôle
Valeur:
Unité
Fonction:
Ce paramètre peut être lu via le port de communication
série.
Description du choix:
Indique le mot de contrôle en code hexadécimal envoyé
par le moteur FC via le port de communication série.
Actualisation toutes les 20 ms.
540
Lecture des données : Mot d'avertissement
Valeur:
Ce paramètre peut être lu via le port de communication
série.
Description du choix:
Indique en format hexadécimal la présence éventuelle d’un
avertissement dans le moteur FC.
Hex Messages d'état
01 Marche rampe
04 Démarrage sens horaire/sens antihoraire
08 Ralentis.
10 Rattrapage
8000 Limite de fréquence
Tableau 3.36
Unité
Fonction:
Ce paramètre peut être lu via le port de communication
série. Voir le 4.2.1 Liste des avertissements et alarmes.
Description du choix:
Indique en format hexadécimal la présence éventuelle d’un
avertissement dans le moteur FC.
542
Valeur:
Unité : mA
Fonction:
Lecture des données : Borne 1, entrée
analogique
Ce paramètre peut être lu via le port de communication
série.
Description du choix:
La valeur affichée indique la valeur du signal à la borne 1.
La mise à l’échelle (paramètres 336 et 337) n’influence pas
la lecture. Les valeurs min. et max. sont définies par le
réglage du gain et l’offset du convertisseur A/N.
Cette valeur est actualisée toutes les 20 ms.
76 MG03BA04 - VLT® est une marque déposée Danfoss
Page 79

Programmation
Motovariateur VLT® série FCM
543
Valeur:
Unité : X,X V
Fonction:
Ce paramètre peut être lu via le port de communication
série.
Description du choix:
La valeur affichée indique la valeur du signal à la borne 2.
La mise à l’échelle (paramètres 338 et 339) n’influence pas
la lecture. Les valeurs min. et max. sont définies par le
réglage du gain et l’offset du convertisseur A/N.
Cette valeur est actualisée toutes les 20 ms.
561
Valeur:
Protocole FC (PROTOCOLE FC) [0]
Modbus RTU [2]
Fonction:
Ce paramètre propose trois protocoles différents.
Description du choix:
Sélectionner le protocole de mot de contrôle requis.
Pour plus d'informations concernant l'utilisation du
Modbus RTU, voir MG10SX.
570
Valeur:
(EVEN/1 STOPBIT) [0]
(ODD/1 STOPBIT) [1]
(NO PARITY/1 STOPBIT) [2]
(NO PARITY/2 STOPBIT) [3]
Fonction:
Ce paramètre configure l'interface Modbus RTU du
variateur de manière à ce qu'elle communique correctement avec le contrôleur maître. La parité (PAIR, IMPAIR
ou PAS DE PARITE) doit être réglée de manière à correspondre au réglage du contrôleur maître.
Description du choix:
Sélectionner la parité qui correspond au réglage du
contrôleur maître Modbus. La parité paire ou impaire est
parfois utilisée pour permettre de détecter les erreurs d'un
mot transmis. Étant donné que Modbus RTU fait appel à la
méthode de détection d'erreurs CRC (contrôle de
redondance cyclique), plus efficace, la vérification de la
parité est rarement utilisée dans les réseaux Modbus RTU.
Lecture des données : Borne 2, entrée
analogique
Protocole
Parité Modbus et constitution des messages
AVIS!
Tout changement désactive l'utilisation de l'unité
d'affichage (LCP 2) et la programmation par le protocole
FC.
571 Temporisation des communications Modbus
Valeur:
10-2000 ms
100 ms
Fonction:
Ce paramètre détermine la durée maximale d'attente du
Modbus RTU du variateur entre les caractères envoyés par
le contrôleur maître. À l'expiration de cette durée,
l'interface Modbus RTU suppose qu'elle a reçu l'intégralité
du message.
Description du choix:
Une valeur de 100 ms est généralement suffisante pour les
réseaux Modbus RTU bien que certains puissent
fonctionner sur une valeur de temporisation de 35 ms.
Si cette valeur est trop courte, l'interface Modbus RTU
risque de perdre une partie du message. Puisque la vérification CRC ne sera pas valable, le variateur ignorera le
message. Les retransmissions de messages qui en résultent
ralentiront les communications sur le réseau.
Si cette valeur est trop longue, le variateur de fréquence
attend plus longtemps que nécessaire afin de déterminer
si le message est complet. Cela retardera la réponse du
variateur au message et entraînera probablement une
temporisation du contrôleur maître. Les retransmissions de
messages qui en résultent ralentiront les communications
sur le réseau.
3.8
Paramètres 600-678 - Manuel de
configuration du FCM 300
3.8.1 Groupe de paramètres 6-** Fonctions
techniques
600
Valeur:
Unité : heures
0.0-130 000.0
Fonction:
Ce paramètre peut être lu via l'écran d'affichage ou via le
port de communication série. La valeur ne peut être remise
à zéro.
Description du choix:
Indique le nombre d'heures de mise sous tension du
moteur FC.
La valeur est mémorisée dans le moteur FC toutes les
heures et lorsque l'appareil est mis hors tension.
601
Valeur:
Unité : heures
0.0-130 000.0
Fonction:
Ce paramètre peut être lu via l'écran d'affichage ou via le
port de communication série. La valeur peut être remise à
zéro via le paramètre 619.
Variables d'exploitation : Heures de fonctionnement
Variables d'exploitation : Nombre d'heures
de fonctionnement
3 3
MG03BA04 - VLT® est une marque déposée Danfoss 77
Page 80

Programmation
Motovariateur VLT® série FCM
Description du choix:
Indique le nombre d'heures de fonctionnement du moteur
FC depuis la RAZ au paramètre 619.
La valeur est mémorisée dans le moteur FC toutes les
heures et lorsque l'appareil est mis hors tension.
33
603
Valeur:
Unité : nombre
0-9999
Fonction:
Ce paramètre peut être lu via l'écran d'affichage ou via le
port de communication série.
Description du choix:
Indique le nombre de mises sous tension d'alimentation du
moteur FC.
604
Valeur:
Unité : nombre
0-9999
Fonction:
Ce paramètre peut être lu via l'écran d'affichage ou via le
port de communication série.
Description du choix:
Indique le nombre d'arrêts dus à la surtempérature du
moteur FC.
605
Valeur:
Unité : nombre
0-9999
Fonction:
Ce paramètre peut être lu via l'écran d'affichage ou via le
port de communication série.
Description du choix:
Indique le nombre de surtensions du moteur FC.
Variables d'exploitation : Nombre de mises
sous tension
Variables d'exploitation : Nombre de surtempératures
Variables d'exploitation : Nombre de
surtensions
AVIS!
Les paramètres 615-617 Mémoire déf. ne peuvent pas
être lus via l'unité de commande complète.
615 Mémoire déf. : Code de défaut
Valeur:
[Indice 1 à 10] Code de défaut : 0-99
Fonction:
Ce paramètre permet de voir la cause d'un arrêt
(débrayage du variateur de fréquence). Dix valeurs [de 1 à
10] sont indiquées.
Le numéro de défaut le plus bas [1] contient la valeur de
donnée la plus récente/mémorisée en dernier. Le numéro
de défaut le plus haut [10] contient la valeur de donnée la
plus ancienne. En cas d'arrêt, il est possible de voir la
cause, la durée et une valeur éventuelle du courant de
sortie ou de la tension de sortie.
Description du choix:
Valeur affichée en tant que code de défaut où le numéro
réfère à un tableau. Voir le 4.2.1 Liste des avertissements et
alarmes.
616 Mémoire déf. : Temps
Valeur:
Unité : Heures
[Plage d'affichage : XX - XXX]
Fonction:
Paramètre de type tableau. Ce paramètre permet de voir le
nombre total d'heures d'exploitation avant l'arrêt. 10 (de 1
à 10) valeurs de défauts sont indiquées.
Le numéro de défaut le plus bas [1] contient la valeur de
donnée la plus récente/mémorisée en dernier et le numéro
de défaut le plus haut [10] contient la valeur de donnée la
plus ancienne.
Description du choix:
Affichage sous forme d'une option.
Plage d'affichage : XX à XXX.
La mémoire des défauts est remise à zéro après initialisation (paramètre 620).
617
Valeur:
[Indice XX à XXX]
Fonction:
Paramètre de type tableau. Ce paramètre permet de voir à
quelle valeur de courant ou de tension un arrêt s'est
produit.
Description du choix:
Affichage sous forme d'une valeur.
Plage d'affichage : 0.0 - 999.9.
La mémoire des défauts est réinitialisée après initialisation
(paramètre 620).
619
Valeur:
Pas de reset (PAS DE RESET) [0]
Reset (RESET COMPTEUR) [1]
Fonction:
Remise à zéro du compteur du nombre d'heures de
fonctionnement (paramètre 601).
Description du choix:
Si [1] Reset est sélectionnée, le compteur du nombre
d'heures de fonctionnement du moteur FC est remis à
zéro.
620
Valeur:
Fonction normale (FONCTIONNEMENT NORMAL) [0]
Test carte contrôle (TEST CARTE CONTROLE) [2]
Mémoire déf. : Valeur
Reset compteur heures de fonctionnement
Mode d'exploitation
78 MG03BA04 - VLT® est une marque déposée Danfoss
Page 81

Programmation
Motovariateur VLT® série FCM
Initialisation (INITIALISATION) [3]
Fonction:
En dehors du fonctionnement normal, ce paramètre peut
être utilisé pour 2 tests différents.
Il permet également d'initialiser tous les paramètres
(exception faite des paramètres 603 à 605).
Description du choix:
[0] Fonction normale est sélectionné pour le fonctionnement normal avec le moteur dans l'application choisie.
[2] Test carte contrôle est sélectionnée si l’on souhaite
contrôler les entrées analogiques et digitales ainsi que les
sorties analogiques et digitales et la tension de contrôle de
+10 V.
Un connecteur d'essai avec connexions internes est
nécessaire pour effectuer ce test. Configuration: raccorder
la sortie analogique/digitale aux entrées digitales 3, 4 et 5
et l’alimentation 10 V à l’entrée analogique/digitale 2.
[3] Initialisation est sélectionnée si l’on souhaite le réglage
d’usine pour l’appareil sans remise à zéro des paramètres
500, 501 + 600 à 605. L’initialisation est active après la
mise sous tension.
621
Valeur:
Selon l'unité
Fonction:
Les principales données de l’unité peuvent être lues sur
l’afficheur et via la communication série.
Description du choix:
Type indique la taille de l'unité et la fonction de base
concernée.
624
Valeur:
Selon l'unité
Fonction:
Les principales données de l’unité peuvent être lues sur
l’afficheur et via la communication série.
Description du choix:
Logiciel version indique le numéro de la version.
625
Valeur:
Selon l'appareil
Fonction:
Les principales caractéristiques de l'appareil peuvent être
lues sur l'écran ou via le port de communication série.
Exemple : ID 1.42 2 kB.
Plaque signalétique : Type FC
Plaque signalétique : Logiciel version n°
Plaque d'identification : numéro d'identification panneau de commande local
626
Valeur:
Selon l'unité
Fonction:
Les principales données de l'unité peuvent être lues via
l'afficheur ou le port de communication série.
628
Valeur:
Fonction:
Les principales données de l'unité peuvent être lues via
l'afficheur ou le port de communication série.
630
Valeur:
Fonction:
Les principales données de l'unité peuvent être lues via
l'afficheur ou le port de communication série.
632
Valeur:
Fonction:
Les principales données de l'unité peuvent être lues via
l'afficheur ou le port de communication série.
633
Valeur:
Fonction:
Les principales données de l'unité peuvent être lues via
l'afficheur ou le port de communication série.
634
Valeur:
Fonction:
Les principales données de l'unité peuvent être lues via
l'afficheur ou le port de communication série.
Plaque signalétique : N° d'identification de la
base de données
Plaque signalétique : Type, option
application
Plaque signalétique : N° de code type option
communication
Identification logiciel BMC
Identification de la base de données du
moteur
Identification de l'appareil de communication
3 3
MG03BA04 - VLT® est une marque déposée Danfoss 79
Page 82

Programmation
635 Réf. logiciel
Valeur:
Fonction:
Les principales données de l'unité peuvent être lues via
33
l'afficheur ou le port de communication série.
678 Configurer carte de commande
Valeur:
Version standard (VERSION STANDARD) [1]
Version Profibus 3 Mbaud
(PROFIBUS 3 MB VER.) [2]
Version Profibus 12 Mbaud
(PROFIBUS 12 MB VER.) [3]
Fonction:
Ce paramètre permet de configurer une carte de
commande Profibus. La valeur par défaut dépend de
l'unité produite, étant également la valeur maximale qui
puisse être obtenue. Ceci signifie qu'une carte de
commande peut être mise au niveau d'une version à
performance moindre.
Motovariateur VLT® série FCM
80 MG03BA04 - VLT® est une marque déposée Danfoss
Page 83

Informations complètes sur ...
Motovariateur VLT® série FCM
4 Informations complètes sur le FCM 300
L'intensité du courant de fuite à la terre est fonction des
4.1 Exigences particulières
paramètres suivants par ordre de priorité
4.1.1 Isolation galvanique (PELV)
La norme PELV offre une protection grâce à une tension
extrêmement basse. La protection contre l'électrocution est
normalement assurée lorsque tous les dispositifs connectés
sont de type PELV et que l'installation est réalisée selon les
dispositions des réglementations locales et nationales
concernant les alimentations PELV.
Dans le FCM Série 300, toutes les bornes de commande
sont alimentées à partir de ou reliées à une tension
extrêmement basse (PELV).
L'Isolation galvanique est obtenu en respectant les
exigences en matière d'isolation renforcée avec les lignes
de fuite et les distances correspondantes. Ces exigences
sont décrites dans la norme EN 50178.
Les composants qui forment l'Isolation électrique décrit cidessous, répondent également aux exigences en matière
d'isolation renforcée avec les tests correspondants décrits
dans EN 50178.
L'Isolation galvanique existe à trois endroits (voir
Illustration 4.1), à savoir :
Alimentation (SMPS), isolation du signal de U
•
incluse, indiquant la tension du circuit intermédiaire.
Le pilotage des IGTB par transformateurs
•
d'impulsions/coupleurs optoélectroniques.
Les transducteurs de courant (coupleurs optoélec-
•
troniques).
Courant de fuite à la terre
4.1.2
Le courant de fuite à la terre résulte principalement de la
capacité créée entre les phases du moteur et le châssis du
moteur. Le filtre RFI augmente encore le courant de fuite
car le circuit de filtrage est relié à la terre par l'intermédiaire de condensateurs.
CC
1. Fréquence de commutation
2. Mise à la terre ou non du moteur
Le courant de fuite est un élément important en ce qui
concerne la sécurité de manipulation ou d'exploitation du
variateur de fréquence quand ce dernier (par erreur) n'est
pas relié à la terre.
AVIS!
FCM 305 à 375 sont alimentés par des courants de fuite
> 3,5 mA, environ 4 à 20 mA. Cela varie avec les
fréquences de commutation dans l’intervalle de temps
donné.
Cela signifie qu’une mise à la terre renforcée est
indispensable pour une conformité avec la
norme EN50178.
Ne jamais utiliser de relais différentiels ELCB (Earth Leakage
Circuit Breaker) aussi appelés RCD (Residual Current
Device) non prévus pour les courants de défaut CC (type
A).
En cas d'utilisation d'un RCD, il doit :
être adapté à la protection d’équipements avec
-
du courant continu (dans le courant de fuite
(redresseur à pont triphasé),
être adapté à une pointe de courant avec
-
décharge de courte durée lors de la mise sous
tension,
convenir à un courant de fuite élevé.
-
Il est donc possible d’utiliser le FCM 300 sur un dispositif
RCD type B :
Les dispositifs de courant résiduel (RCD) type B ont une
tolérance de seuil de déclenchement. Il est par conséquent
recommandé d’utiliser un dispositif RCD lorsque le courant
de fuite max. pour le FCM (voir ci-dessus, 20 mA) est
inférieur à un tiers du seuil de déclenchement du RCD. Le
seuil de déclenchement doit donc avoir une valeur
supérieure ou égale à 60 mA. Par conséquent, un RCD de
type B avec un seuil de déclenchement de 100 mA peut
être utilisé pour la protection.
4 4
MG03BA04 - VLT® est une marque déposée Danfoss 81
Page 84

Informations complètes sur ...
Motovariateur VLT® série FCM
44
Illustration 4.1 Isolation galvanique
Conditions de fonctionnement
4.1.3
extrêmes
Surtension générée par le moteur
La tension du circuit intermédiaire augmente lorsque le
moteur agit comme un alternateur. Cela se produit dans
deux cas:
La charge entraîne le moteur (à fréquence de
•
sortie constante générée par le variateur de
fréquence), c'est-à-dire que l'énergie est fournie
par la charge.
En cours de décélération (rampe descendante), si
•
le moment d'inertie est élevé, la charge de frottement est faible et le temps de rampe
descendante est trop court pour permettre de
dégager l'énergie sous forme de perte dans le
variateur de fréquence VLT, le moteur et l'installation.
Le système de régulation tente de corriger la rampe dans
la mesure du possible.
L'onduleur s'arrête afin de protéger les transistors et les
condensateurs du circuit intermédiaire quand un certain
niveau de tension est atteint.
Panne de secteur
En cas de chute de tension/secteur, le FCM Série 300
continue de fonctionner jusqu'à ce que la tension présente
sur le circuit intermédiaire chute au-dessous du seuil
d'arrêt minimum, qui est généralement inférieur de 15% à
la tension nominale d'alimentation secteur du FCM Série
300.
Surcharge statique
Quand le FCM Série 300 est en surcharge (limite de couple
atteinte, par. 221), le régulateur réduit la fréquence de
sortie dans le but de réduire la charge.
En cas de surcharge extrême, un courant peut apparaître
et faire disjoncter le moteur FC après 1,5 s env.
4.1.4 Bruit acoustique
Le tableau suivant donne les valeurs de base mesurées à
une distance de 1 mètre de l'équipement à pleine charge :
Bipolaire Quadripolaire
FCM 305 54 dB(A)
FCM 311 58 dB(A)
FCM 315 59 dB(A)
FCM 322 58 dB(A)
FCM 330 61 dB(A)
FCM 340 62 dB(A) 63 dB(A)
FCM 355 64 dB(A) 60 dB(A)
FCM 375 61 dB(A)
Tableau 4.1
Equilibrage
4.1.5
Le FCM 300 est équilibré pour classe R, conformément à
ISO8821 (équilibrage réduit). Pour des applications
critiques, surtout à haute vitesse (>4000 tr/min), un
équilibrage spécial (classe S) pourrait être nécessaire.
Le temps qui s'écoule avant l'arrêt de l'onduleur dépend
de la tension secteur présente avant la panne et de la
charge du moteur.
82 MG03BA04 - VLT® est une marque déposée Danfoss
Page 85

Informations complètes sur ...
Motovariateur VLT® série FCM
4.1.6 Protection thermique et déclassement
Le moteur FCM Série 300 est doté d'une protection
thermique en cas de dépassement des limites. A
températures élevées, la fréquence de commutation sera
progressivement réduite jusqu'à 2 kHz et le moteur finit
par disjoncter.
AVIS!
L’association d’une haute fréquence de commutation et
de l’absence de ventilateur de refroidissement peut
endommager l’unité.
4.1.7 Déclassement pour température
ambiante
La température ambiante est la température maximale
admissible (T
MOY) sur 24 heures doit être inférieure d'au moins 5 °C.
Si le FCM Série 300 est en service à des températures
dépassant 40 °C, un déclassement du courant de sortie en
continu est nécessaire.
). La température moyenne (TAMB,
AMB,MAX
1. Déclassement du courant de sortie en fonction de
l'altitude à T
2. Déclassement de la température TAMB maximale
en fonction de l'altitude pour un courant de
sortie de 100%.
Illustration 4.3
= max. 40 °C
AMB
4.1.9 Déclassement pour fonctionnement à
faible vitesse
Quand une pompe centrifuge ou un ventilateur est régulé
par un moteur FC, il n'est pas nécessaire de réduire la
sortie à une faible vitesse en raison de la caractéristique de
charge spécifique aux pompes centrifuges et aux
ventilateurs, qui assure automatiquement la réduction
nécessaire.
4 4
Illustration 4.2
Déclassement pour pression
4.1.8
atmosphérique
À des altitudes de plus de 2 000 m, contacter Danfoss
Drives en ce qui concerne la norme PELV.
Au-dessous d'une altitude de 1000 m, aucun déclassement
n'est nécessaire.
Les moteurs FC qui fonctionnent en continu dans des
applications à couple constant et à faible vitesse doivent
être déclassés (voir Illustration 4.4) ou un ventilateur
indépendant doit être utilisé (méthode de refroidissement
du moteur 2).
Le couple nominal (100%) est possible pendant 15 min. et
pour un cycle d'utilisation jusqu'à 25% à faible vitesse.
Illustration 4.4 Déclassement pour fonctionnement à faible
vitesse
Au-dessus de 1000 m, la température ambiante (T
ou le courant de sortie maximal (I
en conformité avec la courbe suivante :
) doit être déclassé
VLT,MAX
MG03BA04 - VLT® est une marque déposée Danfoss 83
AMB,MAX
)
Page 86

Informations complètes sur ...
Motovariateur VLT® série FCM
4.1.10 Déclassement pour fréquence de
4.1.12
Humidité relative de l'air
commutation élevée
La série FCM 300 a été conçue en conformité avec les
Le moteur FCM Série 300 peut fonctionner avec deux
modèles de modulation, SFAVM et 60° AVM. Réglage
d’usine SFAVM. Le modèle de modulation peut être
modifié au paramètre 446. Pour une fréquence moteur
inférieure à 25 Hz, le moteur FCM Série 300 change
automatiquement en mode SFAVM.
44
La fréquence de commutation est réglée en usine sur 4000
Hz. Elle peut être modifiée entre 2 et 14 kHz au paramètre
411.
Une fréquence de commutation plus élevée signifie un
fonctionnement plus silencieux mais entraîne une perte
plus grande dans l'électronique du moteur FC et nécessite
un déclassement approprié.
Voir Illustration 4.5
normes CEI 60068-2-3 et EN 50178 pt. 9.4.2.2/DIN 40040,
classe E, à 40 °C.
Atténuation cyclique de la chaleur selon la norme
CEI 60068-2-30, 40 °C.
4.1.13 Exigences UL
La série FCM 300 satisfait aux exigences UL.
Voir 2.1.2 Données techniques générales pour l'utilisation
correcte des fusibles d'entrée.
4.1.14
Rendement du variateur de fréquence (η
La charge du variateur de fréquence a peu d'influence sur
son rendement. En général, le rendement résultant de la
fréquence moteur fM,N est identique, que le moteur
développe un couple nominal sur l'arbre de 100% ou de
75%, notamment avec une charge partielle.
Rendement
VLT
)
Illustration 4.5 Caractéristique de couple
4.1.11
Les FCM Série 300 sont testés suivant une procédure basée
sur les normes suivantes :
CEI 60068-2-6 :
CEI 60068-2-34 : Vibrations aléatoires à bande large
CEI 60068-2-35 : Vibrations aléatoires à bande large
CEI 60068-2-36 : Vibrations aléatoires à bande large
Le FCM Série 300 répond aux spécifications correspondant
aux conditions des normes mentionnées ci-dessus.
Vibrations et chocs
Vibrations (sinusoïdales) - 1970
- spécifications générales
- haute reproductibilité
- reproductibilité moyenne
Tableau 4.2
Ceci signifie aussi que le rendement du variateur de
fréquence n'est pas modifié en choisissant différentes
caractéristiques tension/fréquence.
Ces dernières affectent cependant le rendement du
moteur.
Le rendement baisse un peu lorsque la fréquence de
commutation est réglée sur une valeur supérieure à 5 kHz.
Le rendement baisse également un peu en présence d'une
tension secteur de 480 V.
Rendement du moteur (η
Le moteur du FCM 300 est conçu selon IE2 et testé en
conséquence d'après la norme CEI 60034-1.
Le rendement d'un moteur raccordé à un variateur de
fréquence est lié au niveau de magnétisation. Avec des
données optimisées, le rendement est comparable à celui
qui résulte d'une exploitation alimentée par le secteur.
Dans la plage de 75 à 100 % du couple nominal, le
rendement du moteur est pratiquement constant dans les
deux cas d'exploitation : avec le variateur de fréquence et
avec l'alimentation directe par le secteur. L'influence de la
fréquence de commutation sur le rendement est
marginale.
MOTEUR
)
84 MG03BA04 - VLT® est une marque déposée Danfoss
Page 87

1,02
1,01
1,00
0,99
0,98
0,97
0,96
0,95
0,94
0,93
0,92
0,91
0,90
0,89
0,88
0,87
0,86
0,85
0,84
0,83
0,82
0,81
0,80
30Hz
40Hz
50Hz
60Hz
70Hz
100% Load 75% Load 50% Load 25% Load
Output Frequency
175NA159.10
Relative Efficiency
Informations complètes sur ...
Motovariateur VLT® série FCM
Rendement du système (η
SYSTÈME
)
Pour calculer le rendement du système (FCM), multiplier le rendement du variateur de fréquence (ηVLT) par le rendement
du moteur (ηMOTEUR) : ηSYSTÈME = ηVLT x ηMOTEUR
4 4
Illustration 4.6 Courbes de rendement typique
Le calcul du rendement du FCM 300 s'effectue à
différentes charges selon l'Illustration 4.6. Le facteur dans
ce graphique doit être multiplié par le facteur de
rendement spécifique répertorié dans les tableaux de
spécifications.
Exemple : prenons comme hypothèse un FCM 375 à une
Courants
harmoniqu
es
Hz 50 Hz 250 Hz 350 Hz 550 Hz
In/I1 [%] 100% 44% 29% 8%
Tableau 4.3
I
1
I
5
I
7
I
11
charge de 25% et à une vitesse de 30 Hz. Le graphique
indique 0,845 ; le rendement nominal d'un FCM 375 est de
0,876.
Les courants harmoniques ne contribuent pas directement
à la consommation de puissance mais ils augmentent les
pertes thermiques de l'installation (transformateurs, câbles).
Le rendement réel d'un FCM 300 est donc :
0,845 x 0,876 = 0,74 à vitesse (30 Hz) et charge partielles
(25%).
4.1.15
Un moteur FC consomme un courant non sinusoïdal à
partir du secteur, qui accroît le courant d'entrée IRMS. Un
courant non sinusoïdal peut être transformé à l'aide d'une
analyse de Fourier en une somme de courants sinusoïdaux
de fréquences différentes, c'est-à-dire en courants
harmoniques IN différents dont la fréquence de base est
égale à 50 Hz :
Interférences alimentation secteur/
harmoniques
De ce fait, il est important que dans les installations
caractérisées par un pourcentage relativement élevé de
charge redressée, les courants harmoniques soient
maintenus à un faible niveau afin d'éviter la surcharge du
transformateur et la surchauffe des câbles.
Certains harmoniques de courant sont susceptibles de
perturber les équipements de communication reliés au
même transformateur ou de provoquer des résonances
dans les connexions avec les batteries de correction du
facteur de puissance.
MG03BA04 - VLT® est une marque déposée Danfoss 85
Page 88

175HA034.10
Informations complètes sur ...
Motovariateur VLT® série FCM
4.1.18
Cette directive, entrée en vigueur depuis le 1er janvier
1995, réglemente l'ensemble des machines présentant des
Illustration 4.7
Afin d'assurer un niveau bas d'harmoniques de courant, le
44
FCM 300 est équipé en standard de bobines dans le circuit
intermédiaire. THD (courant) ≤ 54%
La distorsion de la tension d'alimentation secteur dépend
des courants harmoniques multipliés par l'impédance
secteur à la fréquence concernée. La distorsion de la
tension totale THD est calculée à partir de chacun des
courants harmoniques selon la formule suivante:
U
THD =
4.1.16
Le facteur de puissance est le rapport entre I1 et I
Facteur de puissance pour alimentation triphasée
U
+...+U
2
2
1
(%)
2
n
Facteur de puissance
RMS
.
pièces mobiles critiques. Le variateur de fréquence n’est
pas concerné par cette directive car son fonctionnement
est essentiellement électrique et le moteur est toujours
relié à d’autres machines. Cependant, si un moteur FC est
livré pour être monté dans une machine, nous précisons
les règles de sécurité applicables au moteur FC. Pour cela,
nous établissons une "déclaration du fabricant".
4.1.19 Directive basse tension (73/23/CEE)
Aux termes de cette directive, la marque CE doit être
apposée sur les variateurs de vitesse. Elle s'applique à tous
les matériels électriques et appareils analogues utilisés
dans les plages de tension allant de 50 à 1 000 V CA et de
75 à 1 500 V CC.
4.1.20
CEM est l'abréviation de compatibilité électromagnétique.
Il y a compatibilité électromagnétique quand les pertur-
bations mutuelles des divers composants et unités sont si
faibles que ce phénomène ne nuit pas à leur bon fonction-
nement. La directive CEM est en vigueur depuis le 1er
janvier 1996. Cette directive établit une distinction entre
composants, appareils, systèmes et installations.
Directive machine (98/37/CEE)
Directive CEM (89/336/CEE)
Le facteur de puissance indique dans quelle proportion un
moteur FC charge l'alimentation secteur.
Plus le facteur de puissance est bas, plus l'I
pour la même performance en kW.
En outre, un facteur de puissance élevé indique que les
différents harmoniques de courant sont faibles.
4.1.17
Le marquage CE a pour but de réduire les barrières
commerciales et techniques au sein de l'AELE et de l'UE.
L'UE a instauré la marque CE pour indiquer de manière
simple que le produit satisfait aux directives spécifiques de
l'UE. La marque CE n'est pas un label de qualité ni une
homologation des caractéristiques du produit. Les
variateurs de fréquence sont concernés par trois directives
de l'Union européenne :
Que signifie le marquage CE ?
RMS
est élevé
4.1.21
Dans ses "Principes d’application de la directive du Conseil
89/336/CEE", l’UE prévoit trois types d’utilisation d’un
moteur FC. Dans chaque cas, des explications précisent si
le variateur de fréquence est régi par la directive CEM et
s'il doit porter le marquage CE.
Champ d'application
1. Le moteur FC est directement vendu au client
final. A titre d'exemple, le moteur FC est vendu à
une grande surface de bricolage. L'utilisateur final
n'est pas un spécialiste. Il installe lui même le
moteur FC pour commander, par exemple, une
machine de bricolage ou un appareil électroménager. Aux termes de la directive CEM, ce
moteur FC doit porter le marquage CE.
2. Le moteur FC est vendu pour être installé dans
une usine. L'usine est construite par des professionnels de l'industrie. Il peut s'agir d'une
installation de production ou d'un groupe de
chauffage/ventilation conçu et mis en place par
des professionnels. Aux termes de la directive
CEM, ni le moteur FC ni l'installation globale ne
sont tenus de porter le marquage CE. L'installation doit toutefois satisfaire aux exigences
86 MG03BA04 - VLT® est une marque déposée Danfoss
Page 89

Informations complètes sur ...
Motovariateur VLT® série FCM
essentielles de CEM prévues dans la directive.
L'installateur peut s'en assurer en utilisant des
composants, des appareils et des systèmes
marqués CE conformément aux dispositions de la
directive CEM.
3. Le moteur FC est vendu comme faisant partie
intégrante du système. Ce système est commercialisé comme un ensemble. Il peut s'agir, par
exemple, d'un système de climatisation. Conformément à la directive CEM, l'ensemble du
système doit porter le marquage CE. Le fabricant
du système peut garantir le marquage CE prévu
dans les dispositions de la directive CEM en
utilisant des composants marqués CE ou en
contrôlant la CEM du système. Le fabricant n'est
pas tenu de contrôler l'ensemble du système s'il
opte pour la mise en œuvre exclusive de
composants marqués CE.
4.1.22
Moteur Danfoss FCM série 300 et
marquage CE
Le marquage CE se révèle une bonne chose s'il remplit sa
mission initiale : faciliter les échanges au sein de l'UE et de
l'AELE.
en matière de CEM. En outre, Danfoss précise les normes
respectées par nos différents produits.
Danfoss propose les filtres indiqués dans les caractéristiques techniques et peut vous aider à atteindre le meilleur
résultat possible en termes de CEM.
4.1.23 Conformité avec la directive CEM
89/336/CEE
Dans la plupart des cas, l'ensemble motovariateur VLT est
utilisé par les professionnels en tant que composant
complexe intégré à un plus vaste ensemble (appareil,
système ou installation). Nous attirons l'attention du
lecteur sur le fait que la mise en conformité définitive de
l'unité, du système ou de l'installation en matière de CEM
incombe à l'installateur. Afin d'aider l'installateur dans son
travail, Danfoss a rédigé, pour son système de variateur à
commande, un manuel d'installation permettant de
satisfaire à la réglementation CEM. Les normes et valeurs
d'essais des systèmes de variateur à commande sont
satisfaites à condition de respecter les instructions d'installation spécifiques à la CEM.
4.1.24
Normes CEM
4 4
Mais le marquage CE peut couvrir des réalités fort
différentes. En d'autres termes, il est nécessaire d'analyser
au cas par cas ce qui se cache derrière une marque CE
donnée.
Il peut s'agir en effet de caractéristiques très différentes. La
marque CE peut donc donner à tort à l'installateur un
sentiment de sécurité si le moteur FC est un simple
composant intervenant dans un système ou dans un
appareil.
Danfoss appose la marque CE sur les motovariateurs VLT
conformément aux dispositions de la directive basse
tension. Danfoss garantit donc que le moteur FC satisfait à
la directive basse tension si son montage a été correctement effectué. Danfoss délivre un certificat de
conformité qui atteste le marquage CE selon la directive
basse tension.
Cette marque CE est également reconnue par la directive
CEM sous réserve d'avoir suivi les instructions du manuel
d'utilisation relatives au filtrage et au respect des
recommandations en matière de CEM lors de l'installation.
La déclaration de conformité prévue dans la directive CEM
est délivrée sur cette base.
®
AVIS!
- Toutes les spécifications CEM correspondent
aux réglages d’usine.
- Fréquence de commutation max. 4 kHz.
- Utilisation obligatoire de câbles de commande
blindés pour la protection contre les transitoires.
- Le moteur FC doit être mis à la terre pour être
conforme.
- Impédance de ligne maximum/minimum Zmax
= 0,24 + j0,15 ohm ; Zmin = 0 + j0 ohm
(encoches de commutation EN 61800-3).
Normes génériques
Les normes génériques correspondent à la directive CEM
(89/336/CEE).
Le moteur FC est conforme à :
EN 61000-6-3
Habitat, commerce et industrie légère.
EN 61000-6-2, EN 61000-6-4.
Environnement industriel.
1)
, EN 61000-6-1.
Le Guide rapide fournit des instructions détaillées afin de
garantir une installation conforme aux recommandations
MG03BA04 - VLT® est une marque déposée Danfoss 87
1)
Les niveaux d'émission fixés par la norme EN 61000-6-3
sont uniquement respectés par des moteurs FC avec filtre
optionnel classe B-1.
Page 90

Informations complètes sur ...
Motovariateur VLT® série FCM
De plus, le moteur FC est conforme à : DIN VDE
0160/1990
2)
Protection contre la surtension 7.3.1 classe 1
Normes des produits
Les normes des produits correspondent à EN 61800-3
(CEI 61800-3).
44
Le moteur FC est conforme à :
EN 61800-3, distribution sans restriction3).
EN 61800-3, distribution avec restriction.
3)
Les niveaux d’émission fixés par EN 61800-3, distribution
sans restriction, sont uniquement respectés par des
moteurs FC avec filtre optionnel classe B-1.
Normes de base, émission
Normes de base, immunité
2)
EN 55011 : Valeurs limites et méthodes de mesure
•
d’interférences radioélectriques d’équipements
industriels, scientifiques et médicaux (ISM) haute
fréquence.
EN 55022 : Valeurs limites et méthodes de mesure
•
d’interférences radioélectriques d’équipements
informatiques.
EN 61000-3-2 : Valeurs limites pour émission
•
d’harmoniques (courant d’entrée équipement ≥
16 A)
EN 61000-3-4 : Valeurs limites pour émission
•
d’harmoniques (courant d’entrée équipement £
16 A)
EN 61000-2-4 : (CEI 61000-2-4) :
•
Niveaux de compatibilités.
Simulation de fluctuations de tension et de
fréquence, harmoniques et
"battements"(commutations) sur le secteur.
EN 61000-4-2 (CEI 61000-4-2) : décharges électro-
•
statiques (DES)
Simulation de décharges électrostatiques.
EN 61000-4-4 (CEI 61000-4-4) : Perturbations
•
rapides, rafale 5/ 50 ns
Simulation de perturbations provoquées par une
ouverture de contacteur, relais ou similaire.
EN 61000-4-5 (CEI 61000-4-5) :
•
Transitoires 1,2/50 µs.
Simulation de transitoires provoquées par
exemple par la foudre à proximité de l'installation.
EN 61000-4-3 : (CEI 61000-4-3) :
•
Généralités concernant l'émission CEM
En cas d’utilisation de câbles blindés pour Profibus, pour le
bus standard, les câbles de commande et d’interface, le
blindage doit être raccordé aux appareils aux deux
extrémités.
Généralités concernant l’immunité CEM
En cas de problème d’interférence basse fréquence
(boucles de terre), les câbles blindés pour Profibus, pour le
bus standard, les câbles de commande et d’interface
peuvent avoir une extrémité libre.
4.1.25
Tout comme d'autres équipements électroniques, un
variateur de fréquence VLT renferme un grand nombre de
composants mécaniques et électroniques qui sont tous,
dans une certaine mesure, sensibles aux effets de l'environnement.
Pour cette raison, le variateur de fréquence VLT ne doit
pas être installé dans des environnements où les
liquides, les particules ou les gaz en suspension dans l'air
risquent d'attaquer et d'endommager les composants
électroniques. Les risques de pannes augmentent si les
mesures de protection nécessaires ne sont pas prises, ce
qui réduit la vie du variateur de fréquence VLT.
Des liquides à l'état gazeux peuvent se condenser dans le
variateur de fréquence VLT. Ils peuvent alors également
provoquer la corrosion des composants et pièces
métalliques.
La vapeur, l'huile et l'eau de mer peuvent aussi provoquer
la corrosion des composants et pièces métalliques.
Dans de tels environnements, il est conseillé d'utiliser un
équipement doté d'un niveau de protection ≥ IP54.
Dans les environnements présentant des températures et
une humidité élevées, les
Champ électromagnétique radioélectrique à
modulation d’amplitude.
Simulation de l’influence d’équipement de
transmission radio.
EN 61000-4-6 : (CEI 61000-4-6) :
•
Mode commun RF.
simulation de l'effet d'équipement de
transmission connecté aux câbles de raccordement.
ENV 50204 :
•
Champ électromagnétique radioélectrique à
modulation d’impulsion.
Simulation de l’influence des téléphones GSM.
Environnements agressifs
AVERTISSEMENT
gaz corrosifs tels les composés
88 MG03BA04 - VLT® est une marque déposée Danfoss
Page 91

Informations complètes sur ...
Motovariateur VLT® série FCM
du soufre, de l’azote et du chlore, provoquent des
phénomènes chimiques sur les composants du variateur de
fréquence VLT. De telles réactions chimiques affecteront et
endommageront rapidement les composants électroniques.
Le noircissement des rails en cuivre et des extrémités de
câble des installations existantes est un indicateur de
présence de gaz agressifs en suspension dans l'air.
4.2.1 Liste des avertissements et alarmes
AVIS!
L'installation de variateurs de fréquence VLT dans des
environnements agressifs augmente non seulement le
risque d'arrêts mais réduit également la durée de vie du
variateur de fréquence.
Avant l'installation du variateur de fréquence VLT, contrôler
la teneur en liquides, particules et gaz de l'air ambiant.
Cela peut être fait en observant les installations existantes
dans l'environnement. L'existence de liquides nocifs en
suspension dans l'air est signalée par la présence d'eau ou
d'huile sur les pièces métalliques ou la corrosion de ces
dernières.
Des niveaux excessifs de poussière sont souvent présents
dans les armoires d'installation et installations électriques
existantes.
No. Description Avertissement Alarme de
2 Défaut signal zéro (TEMPS/SIGNAL ZERO) X X
4 Perte de phase (MANQUE PHAS SECTEUR) X X X
5 Avertissement tension haute (CC/INTERM/HAUT) X
6 Avertissement tension basse (CC/INTERM/BAS) X
7 Surtension (SURTENSION CC/INTERM) X X
8 Sous-tension (SOUSTENSION CC/INTER) X
9 Surcharge onduleur (TEMPS ONDULEUR) X X
11 Thermistance du moteur (THERMISTANCE MOTEUR) X
12 Limite de couple (LIMITE COUPLE) X
13 Surcourant (SURCOURANT) X X
14 Défaut de mise à la terre (DEFAUT TERRE) X X
15 Défaut d'alimentation (DEFAUT MODE COMM.) X X
16 Court-circuit (COURT-CIRCUIT COUR.) X X
17 Dépassement temps bus standard (STD/DEPASS.TPS/BUS) X X
18 Temporisation du temps du bus (HPFB/DEPASSEMENT TPS) X X
33 Hors gamme de fréquence (AVERT/GAMMFREQ) X
34 Erreur HPFP (ALARME HPFB) X X
35 Défaut instantané (DEFAUT INSTANT.) X X
36 Surtempérature (SURTEMP.) X X
37 Erreur interne (ERREUR INTERNE) X X
Le tableau répertorie les différents avertissements et
alarmes et indique si la panne verrouille le moteur FC.
Après un Arrêt verrouillé, il faut couper l'alimentation
secteur et corriger la cause de la panne. Remettre sous
tension secteur, puis effectuer une RAZ : le moteur FC est
prêt. Lorsque les deux colonnes avertissement et alarme
sont cochées, cela peut signifier l'apparition d'un avertissement avant une alarme. Cela peut également signifier
qu'il est possible de programmer un avertissement ou une
alarme dans le cas d'une erreur donnée. Après un arrêt,
l'alarme et l'avertissement clignotent mais, si l'erreur est
supprimée, seule l'alarme clignotera. Après une RAZ, le
moteur FC est à nouveau prêt à l'exploitation.
déclenchement
4 4
Alarme
verrouillée
Tableau 4.4 Avertissements et alarmes
Que faire si le moteur ne démarre
4.2.2
pas ?
Le panneau de commande peut être défini pour un arrêt
local. Si c'est le cas, le moteur ne démarre que si le
panneau de commande est raccordé. Son raccordement
est indispensable pour que le moteur démarre et le logiciel
MG03BA04 - VLT® est une marque déposée Danfoss 89
de programmation MCT 10 ne signale pas les dysfonctionnements ou les actions à effectuer. En cas de problèmes, il
faut donc exécuter la procédure suivante :
Page 92

175NA117.10
AVERT. 6
SETUP
1
CC INTERM BAS
175NA118.10
ALAR.:12
SETUP
1
RESET
LIMITE COUPLE
Informations complètes sur ...
Motovariateur VLT® série FCM
AVERTISSEMENT
Avertissement :
Une attention extrême est nécessaire lorsque l'appareil
fonctionne, le couvercle ouvert.
Vert Jaune Rouge Action
LED 302 LED 301 LED 300
Inactif Inactif Inactif Application de la tension.
44
ACTIF Inactif Inactif Application des signaux de démarrage et de référence
ACTIF Inactif ACTIF Application et élimination du signal de reset
ACTIF ACTIF ACTIF Mise hors tension jusqu'à ce que toutes les LED soient éteintes.
Pour plus de renseignements, consulter la Configuration rapide MG03FXYY.
Tableau 4.5
1. S'assurer qu'aucun paramètre n'a été modifié
depuis l'état de livraison initiale (réglage d'usine).
Utiliser le panneau de commande local ou le port
série pour revenir au réglage d'usine. Veiller à ce
que le paramètre 002 soit réglé sur commande à
distance (si ce n'est pas le cas, le voyant 301
jaune clignote légèrement).
2. S'assurer que la commande STOP n'a pas été
activée au moyen du clavier du panneau de
commande (arrêt local, voyant 301 jaune
clignotant légèrement *). La commande STOP du
panneau de commande ne peut être réactivée
que par la touche START du panneau de
commande.
3. Vérifier que les diodes électroluminescentes sont
visibles dans l'orifice situé à l'intérieur de la
protection d'isolation (voir Illustration 2.2). Se
reporter au tableau ci-dessous.
*) à partir de la version 2.12
Problèmes de communication série. Si l'adresse de bus est
définie pour une valeur élevée, la communication peut
paraître impossible, si la première adresse n'est pas
analysée par le maître. Le réglage d'usine n'est pas restitué
avec la fonction de remise à zéro des réglages d'usine.
Avertis.
4.2.3
L'écran clignote entre l'état normal et l'avertissement. Un
avertissement apparaît sur la première et la deuxième ligne
de l'écran. Voir exemple Illustration 4.8 :
Illustration 4.8 LCP AVERT. 6
Messages d'alarme
L'alarme apparaît sur les lignes 2 et 3 de l'écran, voir
exemple Illustration 4.9 :
Illustration 4.9 LCP ALARME : 12
90 MG03BA04 - VLT® est une marque déposée Danfoss
Page 93

Informations complètes sur ...
Motovariateur VLT® série FCM
AVERTISSEMENT/ALARME 2
Défaut zéro signal (DÉFAUT ZÉRO SIGNAL) :
Le signal de courant de la borne 1 est inférieur à 50% de
la valeur réglée au paramètre 336 Borne 1, mise à l'échelle
de la valeur min.
AVERTISSEMENT/ALARME 4
Perte de phase (PERTE PHASE SECTEUR) :
Absence de l'une des phases secteur. Vérifier la tension
d'alimentation du moteur FC.
AVERTISSEMENT 5
Avertissement tension haute (TENSION DU CIRCUIT
INTERMÉDIAIRE HAUTE) :
La tension du circuit intermédiaire (CC) est supérieure à la
limite de surtension du système de commande, voir
Tableau 4.6. Le moteur FC est toujours actif.
AVERTISSEMENT 6
Avertissement tension basse (TENSION DU CIRCUIT
INTERMÉDIAIRE BASSE) :
La tension (CC) du circuit intermédiaire est inférieure à la
limite de sous-tension du système de commande, voir
Tableau 4.6. Le moteur FC est toujours actif.
ALARME 7
Surtension (SURTENSION CIRCUIT INTERMÉDIAIRE) :
Si la tension du circuit intermédiaire (CC) est supérieure à
la limite de surtension de l'onduleur (voir Tableau 4.6), le
moteur FC s'arrête. Par ailleurs, la tension est indiquée sur
l'écran.
ALARME 8
Sous-tension (SOUS-TENSION CIRCUIT INTERMÉDIAIRE) :
Si la tension du circuit intermédiaire (CC) est inférieure à la
limite basse de tension de l'onduleur (voir Tableau 4.6), le
moteur FC s'arrête après un délai de 3 à 28 s selon
l'appareil. Par ailleurs, la tension est indiquée sur l'écran.
Vérifier si la tension d'alimentation correspond au moteur
FC, voir 2.1.2 Données techniques générales.
AVERTISSEMENT/ALARME 9
Surcharge onduleur (TEMPS ONDULEUR) :
La protection électronique de l'onduleur signale que le
moteur FC est proche de la mise en sécurité en raison
d'une surcharge (courant trop élevé pendant trop
longtemps). Le compteur de la protection thermique
électronique de l'onduleur émet un avertissement à 95% et
s’arrête à 100% avec une alarme. Le moteur FC
pas être remis à zéro tant que le compteur n'est pas
inférieur à 90%.
ne peut
Moteurs FC 3x380-480 V
[VCC]
Sous-tension 410
Avertissement de tension basse 440
Avertissement tension haute 760
Surtension 760*
* 760 V en 5 s ou 800 V immédiatement.
Les tensions indiquées correspondent à la
tension du circuit intermédiaire du moteur FC.
Tableau 4.6 Limites de déclenchement/d'alarme/d'avertissement
ALARME 11
Thermistance du moteur (THERMISTANCE MOTEUR) :
En présence d'une thermistance, le paramètre 128 étant
réglé sur [1] Possible, le moteur FC s'arrête si la
température est trop élevée.
AVERTISSEMENT 12
Limite de courant (LIMITE COURANT) :
Le courant a dépassé la valeur du paramètre 221 (en
fonctionnement moteur).
ALARME 13
Surcourant (SURCOURANT) :
la limite de courant de pointe de l'onduleur (env. 230% du
courant nominal) a été dépassée. Le moteur FC s'arrête
avec une alarme.
Mettre hors tension le moteur FC et vérifier que l'arbre du
moteur peut tourner.
AVIS!
Si des variations de charge se produisent,
cette alarme peut être générée.
ALARME 14
Défaut de mise à la terre (DEFAUT TERRE) :
Présence d'une fuite à la masse d'une phase de sortie, soit
entre l'onduleur et le moteur soit dans le moteur.
ALARME 15
Défaut d'alimentation (DEFAUT MODE COMM.) :
Défaut d'alimentation en mode commutation (alimentation
interne 24 V).
Contacter le fournisseur Danfoss.
ALARME 16
Court-circuit (COURT-CIRCUIT COUR.) :
Court-circuit des bornes du moteur ou dans le moteur.
Contacter le fournisseur Danfoss.
4 4
MG03BA04 - VLT® est une marque déposée Danfoss 91
Page 94

Informations complètes sur ...
Motovariateur VLT® série FCM
ALARME 17
Temporisation bus standard (TEMPO BUS STD) :
4.2.4
Mot d'avertissement, mot d'état élargi
et mot d'alarme
Absence de communication avec le moteur FC. Cet avertissement est actif uniquement lorsque le paramètre 514 a
été réglé à une valeur autre que INACTIF.
Si le paramètre 514 est réglé sur Stop et déclenchement, un
avertissement est d'abord émis, puis une décélération
s'amorce jusqu'à l'arrêt avec une alarme.
Le mot d'avertissement, le mot d'état élargi et le mot
d'alarme sont affichés à l'écran au format hexadécimal. En
présence de plusieurs avertissements ou alarmes, le total
de tous les avertissements ou alarmes est affiché.
Les mots d'avertissement, mots d'état élargi et mots
d'alarme peuvent également être affichés via le bus série
44
Le paramètre 513 Bus, intervalle de temps peut éventuel-
dans les paramètres 540, 541 et 538.
lement être augmenté.
Bit (Hex) Mot d'avertissement (P. 540)
AVERTISSEMENT/ALARME 18
Temporisation du bus HPFB (TEMPO BUS HPFB)
Absence de communication avec le moteur FC. Cet avertissement est actif uniquement lorsque le paramètre 804 a
été réglé sur une valeur autre que INACTIF. Si le
paramètre 804 est réglé sur Stop et déclenchement, un
avertissement est d'abord émis, puis une décélération
s'amorce jusqu'à l'arrêt avec une alarme.
La temporisation du bus, paramètre 803, peut éventuellement être rallongée.
AVERTISSEMENT 33
Hors plages de fréquences :
Cet avertissement est actif si la fréquence de sortie a
atteint le paramètre 201 Fréquence de sortie, limite basse ou
00000008 Dépassement temps bus HPFP
00000010 Dépassement temps bus standard
00000040 Limite de courant
00000200 Surcharge onduleur
00001000 Avertissement de tension basse
00002000 Avertissement tension haute
00004000 Défaut phase
00010000 Avertissement Déf.zéro signal
00400000 Avertissement hors de la plage de
fréquences
00800000 Erreur HPFP
40000000 Avertissement alimentation 24 V
80000000 Température haute onduleur
Tableau 4.7
le paramètre 202 Fréquence de sortie, limite haute.
Bit (Hex) Mot d’état élargi (P. 541)
AVERTISSEMENT/ALARME 34
Erreur HPFP (ALARME HPFP) :
La communication Profibus ne fonctionne pas correctement.
01 Marche rampe
04 Démarrage sens horaire/sens antihoraire
08 Ralentis.
10 Rattrapage
8000 Limite de fréquence
ALARME 35
Défaut instantané (DÉFAUT INSTANTANÉ) :
Tableau 4.8
Cet avertissement apparaît lorsque l'appareil a été mis sous
tension trop souvent dans l'intervalle d'une minute.
AVERTISSEMENT/ALARME 36
Surtempérature (SURTEMP.) :
ALARME 37
Erreur interne (ERREUR INTERNE) :
Une erreur s'est produite dans le système. Contacter le
fournisseur Danfoss.
92 MG03BA04 - VLT® est une marque déposée Danfoss
Page 95

Informations complètes sur ...
Bit (Hex) Mot d'alarme (P. 538
00000002 Alarme verr.
00000040 Dépassement temps bus HPFP
00000080 Dépassement temps bus standard
00000100 Court-circuit
00000200 Panne alimentation 24 V
00000400 Défaut de mise à la terre
00000800 Surcourant
00004000 Thermistance moteur
00008000 Surcharge onduleur
00010000 Sous-tension
00020000 Surtension
00040000 Défaut phase
00080000 Déf zéro signal
00100000 Surtempérature
02000000 Erreur HPFP
08000000 Erreur charge
10000000 Erreur interne
Tableau 4.9
Motovariateur VLT® série FCM
4 4
4.3 Liste des paramètres
Type
Paramètre
n° Fonction
001 Langue 6 Français 5 0
002 Commande locale/distance 2 Contrôle à distance 5 0
003 Référence locale 000.000 4 -3
004 Process actif 4 Proc.1 5 0
005 Programmation process 4 Process actuel 5 0
006 Copie de process 4 Pas de copie 5 0
007 Copie LCP 4 Pas de copie 5 0
008 Mise à l'échelle de l'affichage de la
fréquence moteur
009 Affichage ligne 2 24 Fréquence [Hz] 5 0
010 Affichage ligne 1.1 24 Réf. [%] 5 0
011 Affichage ligne 1.2 24 Courant moteur [A] 5 0
012 Affichage ligne 1.3 24 Puissance [kW] 5 0
013 Configuration du mode local 5 Mode local digital/comme
014 Arrêt local 2 Possible 5 0
015 Jogging, mode local 2 Impossible 5 0
016 Inversion local 2 Impossible 5 0
017 Reset local de défaut 2 Possible 5 0
018 Verrouillage pour la modification de
données
019 Mode d'exploitation à la mise sous tension,
commande locale
Plage/nombre de réglages/
valeur Réglage d'usine
100 6 -2
au par. 100
2 Non verrouillé 5 0
3 Arrêt forcé, utiliser réf.
mémorisée
de
donnéesIndice
5 0
5 0
conv.
Tableau 4.10 Fonctions à programmer, à commander et à contrôler via bus (PROFIBUS) ou par PC.
MG03BA04 - VLT® est une marque déposée Danfoss 93
Page 96

Informations complètes sur ...
Paramètre
n° Fonction
100 Configuration 2 Commande de vitesse en
101 Caractéristiques de couple 4 Couple constant 5 0
102 Puiss. moteur XX,XX kW - selon l'unité 6 1
103 Tension moteur XX,XX V - selon l'unité 6 0
104 Fréquence du moteur XX,X Hz - selon l'unité 6 -1
105 Courant moteur XX,XX A - selon l'unité 7 -2
44
106 Vitesse nominale du moteur XX tr/min - selon l'unité 6 0
117 Atténuation des résonances Inactif - 100% Inactif % 6 0
118 Déclenchement d'atténuation des
résonances
126 Temps frein CC 0,0 (inactif) - 60,0 s 10,0 s 6 -1
127 Fréquence d'application du freinage CC 0,0 Hz-f
128 Protection thermique moteur 1 Inactif 5 0
132 Tension frein CC 0-100% 0% 5 0
133 Tension de démarrage 0.00-100.00 V Dépend du moteur 6 -2
134 Compensation de la charge 0.0-300.0% 100.0% 6 -1
135 Rapport tension/fréquence 0.0-20.00 V/Hz Dépend du moteur 6 -2
136 Compensation glissement -500.0-+500.0% 100.0% 3 -1
137 Tension de maintien CC 0-100% 0% 5 0
138 Fréquence de déclenchement du frein CC 0.5-132 Hz 3.0 Hz 6 -1
139 Fréquence d'application du frein CC 0.5-132 Hz 3.0 Hz 6 -1
147 Configuration du type de moteur Dépend de l'unité Dépend de l'unité 5 0
Motovariateur VLT® série FCM
Plage/nombre de réglages/
valeur Réglage d'usine
0-200% Dépend du moteur 5 0
MAX
Type
de
donnéesIndice
conv.
5 0
boucle ouverte
0,0 Hz 6 -1
Tableau 4.11 Fonctions à programmer, à commander et à contrôler via bus (PROFIBUS) ou par PC.
Indice de conversion
Le chiffre fait référence à un facteur de conversion à
utiliser en cas d'écriture ou de lecture via la communi-
Type de données
Le type de données indique le type et la longueur du
télégramme.
cation série avec un variateur de fréquence.
Voir le par. 3.6.4 Octets de données à la section 3.6.1 Bus
série .
Type de données Description
3 Nombre entier 16 bits
4 Nombre entier 32 bits
5 Non signé 8 bits
6 Non signé 16 bits
7 Non signé 32 bits
9 Séquence de texte
Tableau 4.12
94 MG03BA04 - VLT® est une marque déposée Danfoss
Page 97

Informations complètes sur ...
Motovariateur VLT® série FCM
Type
de
Paramètre
n° Fonction Plage/nombre de réglages/valeur Réglage d'usine
donn
ées
200 Sens de rotation 3 Uniquement sens horaire, 0 à 132Hz5 0
Indic
e
conv.
201 Fréquence de sortie
min. (f
MIN
)
202 Fréquence de sortie
max. (f
MAX
)
203 Plage de référence/
0,0 Hz-f
f
MIN-fPLAGE
MAX
0.0 Hz 6 -1
f
(132 Hz) 6 -1
PLAGE
Min. à max./-max. à +max. Min. à Max. 5 0
retour
204 Référence minimale -100 000,000-RéfMAX 0.000 4 -3
205 Référence max. Réf
207 Temps de rampe
-100 000.000 50.000 4 -3
MIN
0.05-3600.00 s 3.00 s 7 -2
d'accélération 1
208 Temps de rampe de
0.05-3600.00 s 3.00 s 7 -2
décélération 1
209 Temps de rampe
0.15-3600.00 s 3.00 7 -2
d'accélération 2
210 Temps de rampe de
0.15-3600.00 s 3.00 s 7 -2
décélération 2
211 Tps rampe Jog. 0.05-3600.00 s 3.00 s 7 -2
212 Temps de rampe de
0.05-3600.00 s 3.00 s 7 -2
décélération, arrêt
rapide
213 Fréquence de jogging 0 Hz-fMAX 10.0 Hz 6 -1
214 Type de référence 2 Somme 5 0
215 Référence prédéfinie 1 -100.00%-+100.00% 0.00% 3 -2
216 Référence prédéfinie 2 -100.00%-+100.00% 0.00% 3 -2
219 Rattrap/ralentiss 0.00-100.00% 0.00% 6 -2
221 Limite de courant en
Limite min.-max. en % de INOM Limite Max 6 -1
mode moteur
229 Largeur de bande de
0 (inactif)-100% 0% 6 0
bipasse de fréquence
230 Bipasse de fréquence 1 0.0-132 Hz 0.0 Hz 6 -1
231 Bipasse de fréquence 2 0.0-132 Hz 0.0 Hz 6 -1
241 Référence prédéfinie 1 -100.00%-+100.00% 0.00% 3 -2
242 Référence prédéfinie 2 -100.00%-+100.00% 0.00% 3 -2
243 Référence prédéfinie 3 -100.00%-+100.00% 0.00% 3 -2
244 Référence prédéfinie 4 -100.00%-+100.00% 0.00% 3 -2
245 Référence prédéfinie 5 -100.00%-+100.00% 0.00% 3 -2
246 Référence prédéfinie 6 -100.00%-+100.00% 0.00% 3 -2
247 Référence prédéfinie 7 -100.00%-+100.00% 0.00% 3 -2
4 4
Tableau 4.13 Fonctions à programmer, à commander et à contrôler via bus (PROFIBUS) ou par PC.
MG03BA04 - VLT® est une marque déposée Danfoss 95
Page 98

Informations complètes sur ...
Motovariateur VLT® série FCM
Paramètre
n° Fonction Plage/nombre de réglages/valeur Réglage d'usine
317 Temporisation 1-99 s 10 s 5 0
318 Fonction à l'issue de la temporisation Off/Arrêt avec alarme Inactif 5 0
323 Fonction de relais X102 14 Inactif 5 0
327 Consigne analogique/retour, fréq.
331 Courant d'entrée analogique borne 1 3 Inactif 6 0
332 Entrée digitale borne 2 31 Référence 6 0
333 Borne 3, entrée digitale 31 Reset 6 0
44
334 Borne 4, entrée digitale 30 Démarrage 6 0
335 Borne 5, entrée digitale 29 Jogging 6 0
336 Borne 1, mise à l'échelle de la valeur
337 Borne 1, mise à l'échelle de la valeur
338 Borne 2, mise à l'échelle de la valeur
339 Borne 2, mise à l'échelle de la valeur
340 Fonctions de sortie 24 Inactif 6 0
Tableau 4.14 Fonctions à programmer, à commander et à contrôler via bus (PROFIBUS) ou par PC.
max.
min.
max.
min.
max.
100-70000 Hz 5000 Hz 7 0
0.0-20.0 mA 0.0 mA 6 -4
0.0-20.0 mA 20.0 mA 6 -4
0.0-10.0 V 0.0 V 6 -1
0.0-10.0 V 10.0 V 6 -1
Type
de
données
Indice
conv.
96 MG03BA04 - VLT® est une marque déposée Danfoss
Page 99

Informations complètes sur ...
Motovariateur VLT® série FCM
Paramètre n
° Fonction
400 Fonction Frein et Surtension Freinage inactif/CA Inactif 5 0
403 Temporisation mode veille 0-300 s Inactif 6 0
404 Fréquence de veille f
405 Mode de reset 11 Reset manuel 5 0
406 Point de consigne surpression 1-200% 100% 6 0
407 Fréquence de réveil Par 404-f
411 Fréquence de commutation 1.5-14.0 kHz Selon l'unité 6 0
412 Fréquence de commutation variable 3 Fréq. de comm. dépendant de
413 Fonction de surmodulation Inactif/actif Actif 5 0
414 Retour minimum -100000-FB
415 Retour maximum SR
416 Unité de référence/retour 42 % 5 0
437 Mode process, contrôle normal/
inversé du PID
438 PID process, anti-saturation Inactif/actif Actif 5 0
439 Mode process, fréquence de
démarrage du PID
440 PID process, gain proportionnel 0.00 (inactif)-10.00 0.01 6 -2
441 PID process, temps d'intégral 0.01-9999 s (inactif) 9999 s 7 -2
442 PID process, gain différentiel 0.00 (inactif)-10.00 s 0.00 s 6 -2
443 Mode process, limite gain différentiel
du PID
444 Mode process, temps de filtre passe-
bas du PID
445 Démarr. volée 4 Inactif 5 0
446 Type modulation 2 SFAVM 5 0
455 Surveillance de la plage de
fréquence
461 Conversion du signal de retour Linéaire ou racine carrée Linéaire 5 0
Plage/nombre de réglages/
valeur Réglage d'usine
- par. 407 0 Hz 6 -1
MIN
MAX
HIGH
-100 000 1500 4 -3
BAS
Normal/inversé Normal 5 0
f
MIN-fMAX
5-50 5 6 -1
0.1-10.00 s 0.1 s 6 -2
Inactif/actif Activé 5 0
50 Hz 6 -1
la temp.
0 4 -3
f
MIN
Type
de
données
5 0
6 -1
Indice
conv.
4 4
Tableau 4.15 Fonctions à programmer, à commander et à contrôler via bus (PROFIBUS) ou par PC.
Indice de conversion
Le chiffre fait référence à un facteur de conversion à
utiliser en cas d'écriture ou de lecture via la communi-
Type de données
Le type de données indique le type et la longueur du
télégramme.
cation série avec un variateur de fréquence.
Voir le par. 3.6.4 Octets de données à la section 3.6.1 Bus
série .
Type de données Description
3 Nombre entier 16 bits
4 Nombre entier 32 bits
5 Non signé 8 bits
6 Non signé 16 bits
7 Non signé 32 bits
9 Séquence de texte
Tableau 4.16
MG03BA04 - VLT® est une marque déposée Danfoss 97
Page 100

Informations complètes sur ...
Motovariateur VLT® série FCM
Paramètre
n° Fonction
500 Adresse bus 1-126 1 5 0
501 Vitesse de transmission 300-9600 bauds/6 9600 bauds 5 0
502 Roue libre 4 Digital ou série 5 0
503 Arrêt rapide 4 Digital ou série 5 0
504 Frein NF 4 Digital ou série 5 0
505 Démarrage 4 Digital ou série 5 0
506 Inversion 4 Digital ou série 5 0
44
507 Sélection du process 4 Digital ou série 5 0
508 Sélection de la vitesse 4 Digital ou série 5 0
509 Bus jog 1 0,0-f
510 Bus jog 2 0,0-f
512 Profil du télégramme Profidrive/FC Drive FC Profile 5 0
513 Bus, intervalle de temps 1 s 5 0
514 Fonction à l'expiration de l'intervalle de
temps du bus
515 Lecture des données : Référence XXX.X 3 -1
516 Lecture des données : Réf., unité Hz, tr/min 4 -3
517 Lecture des données : Signal de retour 4 -3
518 Lecture des données : Fréquence Hz 3 -1
519 Lecture des données : Fréquence x
coefficient
520 Lecture des données : Courant A x 100 7 -2
521 Lecture des données : Couple % 3 -1
522 Lecture des données : Puissance kW 7 1
523 Lecture des données : Puissance hp 7 -2
524 Lecture des données : Tension moteur V 6 -1
525 Lecture des données : Tension du circuit
intermédiaire
527 Lecture des données : Thermique FC 0-100% 5 0
528 Lecture des données : Entrée digitale 5 0
533 Lecture des données : Référence externe -200.0-+200.0% 6 -1
534 Lecture des données : Mot d'état, binaire 6 0
537 Lecture des données : Température du FC °C 5 0
538 Lecture des données : Mot d'alarme, binaire 7 0
539 Lecture des données : Mot de contrôle,
binaire
540 Lecture des données : Mot d'avertissement,1 7 0
Plage/nombre de
réglages/valeur Réglage d'usine
MAX
MAX
6 Inactif 5 0
Hz 7 -2
V 6 0
6 0
10.0 Hz 6 -1
10.0 Hz 6 -1
Type
de
données
Indice
conv.
541 Lecture des données : Mot d'avertissement,2 7 0
542 Lecture des données : Borne 1, entrée
analogique
543 Lecture des données : Borne 2, entrée
analogique
561 Protocole Protocole FC/Modbus RTU Protocole FC 5 0
570 Parité Modbus et constitution des messages 4 Even/1stopbit 5 0
571 Temporisation des communications Modbus 10-2000 ms 100 ms 6 0
Tableau 4.17 Fonctions à programmer, à commander et à contrôler via bus (PROFIBUS) ou par PC.
mA x 10 5 -4
V x 10 5 -1
98 MG03BA04 - VLT® est une marque déposée Danfoss
 Loading...
Loading...