

Page 1

MAKING MODERN LIVING POSSIBLE
Guía de diseño
Motor FCM 300 de Brook Crompton
®
para VLT
www.danfoss.com/drives
Page 2

Page 3
Índice
Índice
Serie FCM de VLT® DriveMotor
1 Introducción
1.1.1 Versión de software 4
1.1.5 Normas de seguridad 5
1.1.6 Advertencia contra arranques accidentales 5
1.3.1 Integración del convertidor de frecuencia y el motor 6
1.4.1 Formulario de pedido 8
1.4.2 Gama de productos 9
1.4.3 Pedido 10
1.4.4 Herramientas de software para PC 10
1.4.5 Información para pedidos de bastidores y bridas 11
1.4.6 Información de pedido acerca de la posición de la caja del inversor y la posición
del orificio de purga 12
2 Instalación
2.1.1 FCM 305-375 para 3 fases, 380-480 V 13
2.1.2 Datos técnicos generales 14
2.1.3 Pares de apriete 17
2.1.4 Sección máxima de cable 17
4
13
2.1.5 Tamaños de tornillo 18
2.1.6 Protección 18
2.2 Descripción del motor
2.2.1 Manejo del motor FC 20
2.2.2 Cojinetes 20
2.2.3 Salidas de eje motor 21
2.2.4 Dimensiones 21
2.2.5 Instalación del motor FC 24
2.2.6 Alineación 24
2.2.7 Par de apriete de los pernos 25
2.2.8 Mantenimiento 25
2.2.9 Protección térmica de FCM 300 26
2.3.1 Kit de conector de servicio (175N2546) 26
2.3.2 Kit de conexión (175N2545) 27
2.3.3 Kit de montaje remoto (175N0160) 27
2.3.5 Opción de potenciómetro (177N0011) 28
2.3.6 Panel de funcionamiento local (LOP) (175N0128) IP65 28
19
3 Programación
3.1.1 Panel de control (175NO131) 30
3.1.2 Instalación de LCP 30
3.1.3 Funciones del LCP 30
30
MG03BA05 - VLT® es una marca registrada de Danfoss 1
Page 4
Índice
Serie FCM de VLT® DriveMotor
3.1.4 Pantalla 31
3.1.5 LED 31
3.1.6 Teclas de control 31
3.1.7 Funciones de las teclas de control 32
3.1.8 Estado de lectura de la pantalla 32
3.1.9 Modo de pantalla 33
3.1.10 Modo de pantalla: selección del estado de lectura 33
3.1.11 Modo de menú rápido frente a modo de menú 34
3.1.12 Configuración rápida con el menú rápido 34
3.1.13 Selección de parámetros 35
3.1.14 Modo de menú 35
3.1.15 Grupos de parámetros 35
3.1.16 Cambio de datos 35
3.1.17 Cambio de un valor de texto 36
3.1.18 Cambio variable de valores de datos numéricos 36
3.1.19 Estructura del menú 37
3.1.20 Grupo de parámetros 0-** Funcionamiento y display 38
3.2.1 Grupo de parámetros 1-** Carga y motor 42
3.6.1 Bus de serie 64
3.6.2 Comunicación de telegramas 64
3.6.3 Estructura de telegramas 64
3.6.4 Bytes de datos 65
3.6.5 Código de control según el perfil estándar de bus de campo 68
3.7.1 Grupo de parámetros 5-** Comunicación serie 74
3.8 Parámetros 600-678 (Guía de diseño de FCM 300)
3.8.1 Grupo de parámetros 6-** Funciones técnicas 80
4 Información sobre FCM 300
4.1.1 Aislamiento galvánico (PELV) 83
4.1.2 Corriente de fuga a tierra 83
4.1.3 Condiciones de funcionamiento extremas 84
4.1.4 Ruido acústico 84
4.1.5 Equilibrio 84
80
83
4.1.6 Protección térmica y reducción de potencia 85
4.1.7 Reducción de potencia en función de la temperatura ambiente 85
4.1.8 Reducción de potencia en función de la presión atmosférica 85
4.1.9 Reducción de potencia en función del funcionamiento a velocidad lenta 85
4.1.10 Reducción de potencia por alta frecuencia de conmutación 86
4.1.11 Vibración y golpe 86
4.1.12 Humedad atmosférica 86
4.1.13 Norma UL 86
2 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 5
Índice
Serie FCM de VLT® DriveMotor
4.1.14 Rendimiento 86
4.1.15 Interferencia de alimentación de red / Armónicos 87
4.1.16 Factor de potencia 88
4.1.17 ¿Qué es la marca CE? 88
4.1.18 Directiva de máquinas (98/37/CEE) 88
4.1.19 Directiva de baja tensión (73/23/CEE) 88
4.1.20 Directiva CEM (89/336/CEE) 88
4.1.21 Situaciones cubiertas 88
4.1.22 Motores de la serie FCM 300 de Danfoss y marca CE 89
4.1.23 Conformidad con la Directiva sobre compatibilidad electromagnética
89/336/CEE 89
4.1.24 Normas CEM 89
4.1.25 Entornos agresivos 90
4.2.1 Lista de advertencias y alarmas 91
4.2.2 ¿Si el motor no arranca? 91
4.2.3 Advertencias 92
4.2.4 Código de advertencia, código de estado ampliado y código de alarma 94
4.3 Lista de parámetros
Índice
95
102
MG03BA05 - VLT® es una marca registrada de Danfoss 3
Page 6
Introducción
Serie FCM de VLT® DriveMotor
1
1 Introducción
1.1 Seguridad
1.1.1 Versión de software
Serie FCM 300
Guía de diseño
Versión del software: 3.1x
Esta Guía de diseño puede emplearse para todos los convertidores de frecuencia de la serie FCM 300 que incorporen la
versión de software 3.1x.
El número de versión de software puede verse en el parámetro
624, N.º de versión de software.
Tabla 1.1
Instrucciones de eliminación
1.1.2
Los equipos que contienen componentes
eléctricos no pueden desecharse junto
con los desperdicios domésticos.
Deben recogerse de forma independiente
con los residuos electrónicos y eléctricos
de acuerdo con la legislación local
actualmente vigente.
PRECAUCIÓN
Indica una situación potencialmente peligrosa que, si no
se evita, puede producir lesiones leves o moderadas.
También puede utilizarse para alertar contra prácticas
inseguras.
1.1.4 Advertencias generales
AVISO!
Todas las operaciones deben realizarlas personas
adecuadamente formadas.
Emplee todos los medios de elevación provistos, por
ejemplo, los dos puntos de elevación, si están montados,
o el punto único de elevación, si está montado*.
Elevación vertical: evite la rotación incontrolada.
Máquina elevadora: no eleve otros equipos que solo
tengan puntos de elevación motorizados.
Antes de la instalación, compruebe si hay daños en la
cubierta del ventilador, daños en el eje, daños en el
soporte / montaje y fijadores sueltos. Compruebe la
información de la placa de características.
Asegúrese de que la superficie de montaje es lisa y de
que el montaje está equilibrado y bien alineado.
Los obturadores y/o selladores y los dispositivos de
seguridad deben estar correctamente ajustados.
Corrija la tensión de la correa.
Cumpla las reglas sobre reducción de potencia, consulte
4.1 Condiciones especiales.
Tabla 1.2
Símbolos
1.1.3
Los siguientes símbolos se emplean en esta Guía de
diseño, por lo que requieren una atención especial.
ADVERTENCIA
Indica situaciones potencialmente peligrosas que, si no
se evitan, pueden producir lesiones graves e incluso la
muerte.
AVISO!
Indica información destacada que debe tenerse en
cuenta para evitar errores o utilizar el equipo con un
rendimiento inferior al óptimo.
* Nota: la máxima elevación manual es de 20 kg por
debajo del soporte, pero por encima del nivel del suelo.
Pesos brutos máximos:
Tamaño del bastidor 80: 15 kg
-
Tamaño del bastidor 90 y 100: 30 kg
-
Tamaño del bastidor 112: 45 kg
-
Tamaño del bastidor 132: 80 kg
-
4 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 7
Introducción
Serie FCM de VLT® DriveMotor
ADVERTENCIA
La tensión del motor FC es peligrosa cuando el motor
está conectado a la red eléctrica. La instalación
incorrecta del motor FC puede ocasionar daños
materiales, lesiones graves e incluso la muerte.
Por ello, deben seguirse las instrucciones de este
manual, así como los reglamentos de seguridad locales y
nacionales.
Puede resultar peligroso tocar los elementos eléctricos,
incluso después de desconectar la tensión. Espere al
menos 4 minutos.
- La instalación debe tener fusibles y estar correctamente
aislada.
- Las cubiertas y entradas de cables deben estar
instaladas.
ADVERTENCIA
En altitudes superiores a 2 km, póngase en contacto con
Danfoss Drives en relación con PELV.
debe ser fija y permanente y que hay que
reforzar la conexión a tierra protectora.
1.1.6 Advertencia contra arranques
accidentales
El motor puede pararse mediante comandos
•
digitales, comandos de bus o referencias,
mientras el convertidor de frecuencia esté
conectado a la alimentación eléctrica.
Si la seguridad de las personas requiere que no
se produzca bajo ningún concepto un arranque
accidental,
suficientes.
El motor podría arrancar mientras se modifican
•
los parámetros.
Un motor parado puede arrancar si se produce
•
un fallo en los componentes electrónicos del
motor FC, o si desaparece una sobrecarga
provisional o un fallo de la red eléctrica.
estas funciones de parada no son
1
1
AVISO!
Será responsabilidad del usuario o del electricista
certificado asegurar la conexión a tierra y protección
correctas según las reglas y los estándares nacionales y
locales aplicables.
1.1.5 Normas de seguridad
El motor del convertidor VLT (motor FC) debe
•
desconectarse de la alimentación de red si deben
realizarse tareas de reparación.
Compruebe que se ha desconectado la alimentación y que ha transcurrido el tiempo necesario
(4 minutos).
Debe establecerse una correcta conexión
•
protectora a tierra del equipo, el usuario debe
estar protegido de la tensión de alimentación y el
motor debe estar protegido contra sobrecargas
conforme a la normativa nacional y local
aplicable.
La utilización de RCD (relés ELCB) se describe en
4.1.2 Corriente de fuga a tierra .
La corriente de fuga a tierra es superior a 3,5 mA.
•
Esto significa que la instalación del motor FC
1.2 Introducción
Publicaciones técnicas específicas sobre la serie FCM 300:
Guía de diseño:
Configuración
rápida:
Tabla 1.3
Si desea obtener más información sobre la serie FCM 300,
póngase en contacto con el distribuidor local de Danfoss.
Proporciona toda la información de diseño
necesaria y una completa descripción del
concepto del producto, la gama del
producto, datos técnicos, control, programación, etc.
Ayuda a los usuarios a instalar y poner en
marcha rápidamente su motor de la serie
FCM 300.
La Configuración rápida siempre se
suministra con la unidad.
MG03BA05 - VLT® es una marca registrada de Danfoss 5
Page 8
175NA161.10
Promotion
All
users
X = version number
YY = language
Misc.
Quick Setup
MG.03.FX.YY
Design
Guide
MG03BXYY
PROFIBUS-
Manual
MG.03.EX.YY
Brochure
MB.03.CX.YY
Articles
MZ.03.AX.YY
MCT 10 Setup
Software Manual
MG10RXYY
Data sheet
MD.03.AX.YY
1
Introducción
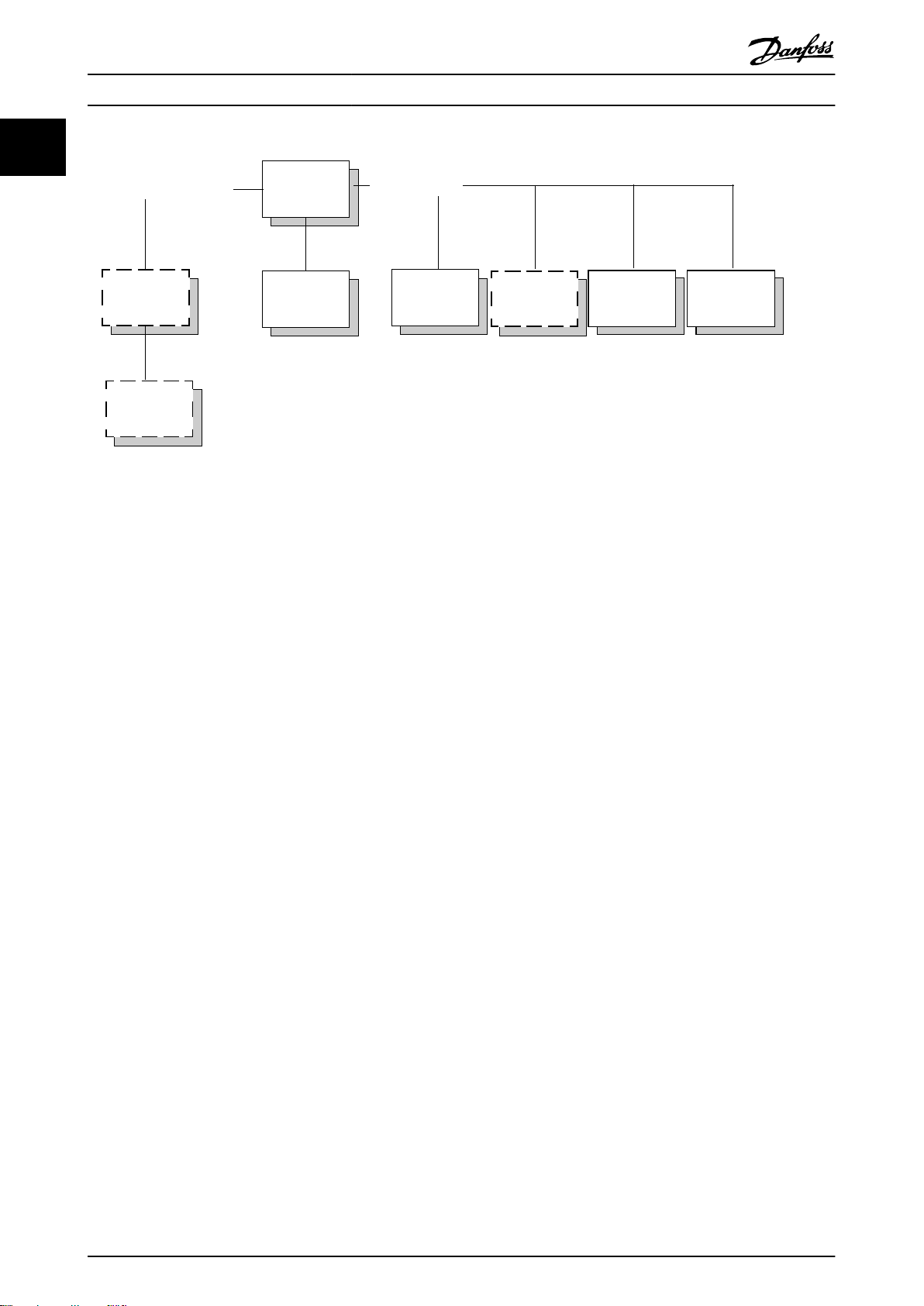
Ilustración 1.1 Documentación disponible sobre la serie FCM 300
Serie FCM de VLT® DriveMotor
1.3 Concepto del producto
1.3.1 Integración del convertidor de
frecuencia y el motor
El convertidor de frecuencia VLT de Danfoss integrado en
el motor asíncrono proporciona un control de velocidad
ilimitado en una sola unidad.
El motor de la serie FCM 300 del convertidor de frecuencia
VLT es una alternativa muy compacta frente a la solución
estándar, en la que el convertidor VLT y el motor son
unidades independientes. En lugar de la caja de terminales
del motor, se fija el convertidor de frecuencia, que no es
más alto que la caja de terminales estándar ni más ancho
ni largo que el motor (consulte 2.2.4 Dimensiones).
La instalación es extremadamente sencilla. No hay
problemas con el espacio para el panel. Tampoco se
precisa información especial sobre cableado para cumplir
la directiva sobre compatibilidad electromagnética, ya que
no hacen falta cables de motor. Las únicas conexiones son
las de red eléctrica y control.
La adaptación de fábrica entre el convertidor de frecuencia
y el motor proporciona un control preciso y energéticamente eficaz, además de eliminar la necesidad de
preajustar en la instalación.
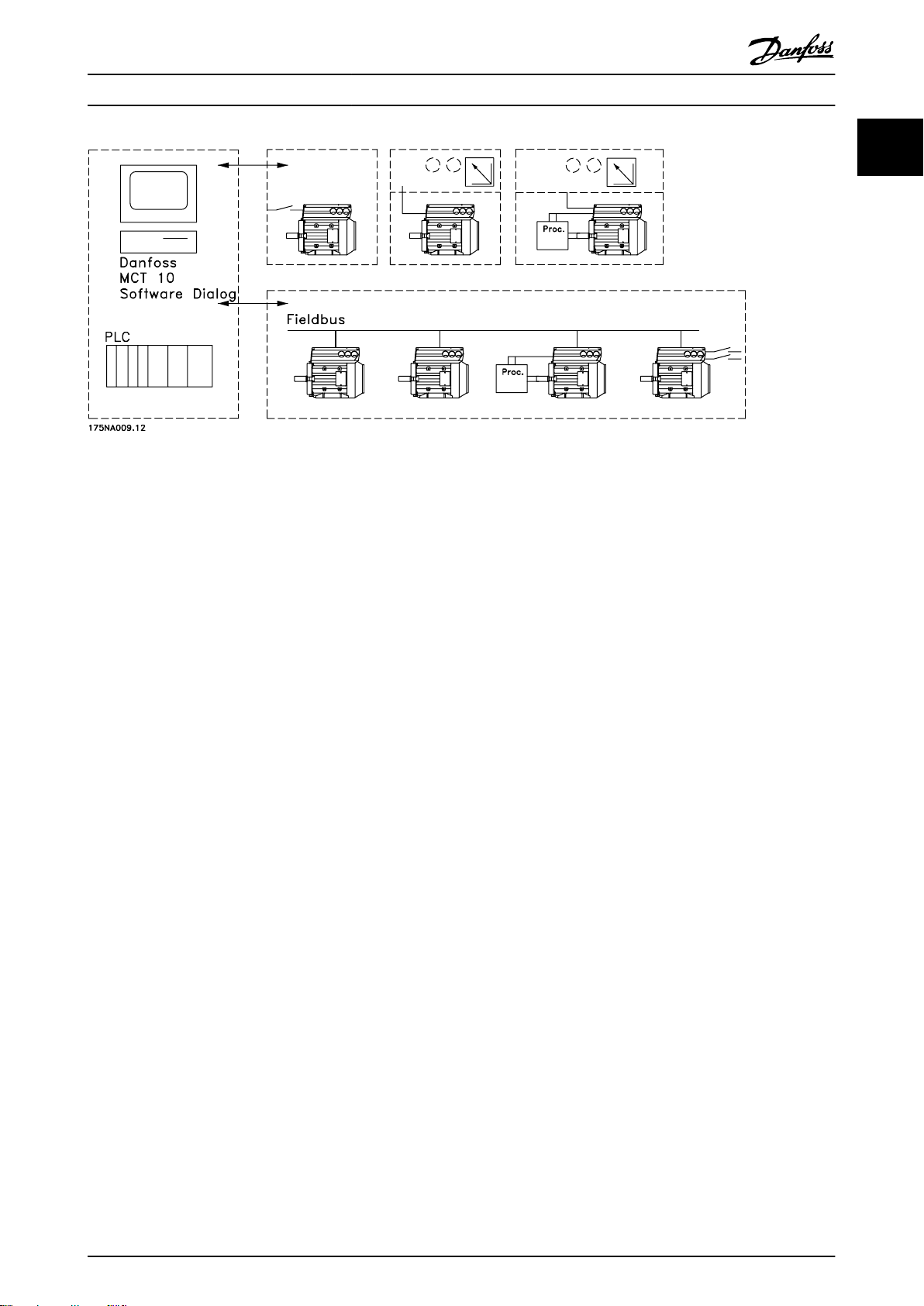
El motor FC puede utilizarse en sistemas autónomos con
señales de control convencionales, como señales de
arranque / parada, referencias de velocidad y un control de
proceso en lazo cerrado, o en sistemas con múltiples
convertidores de frecuencia con señales de control distribuidas por un bus de campo.
Es posible combinar el bus de campo y las señales de
control convencionales con el control de PID en lazo
cerrado.
6 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 9
Introducción
Ilustración 1.2 Estructuras de control
Serie FCM de VLT® DriveMotor
1
1
MG03BA05 - VLT® es una marca registrada de Danfoss 7
Page 10
1
Introducción
Serie FCM de VLT® DriveMotor
1.4 Selección del motor FC, FCM 300
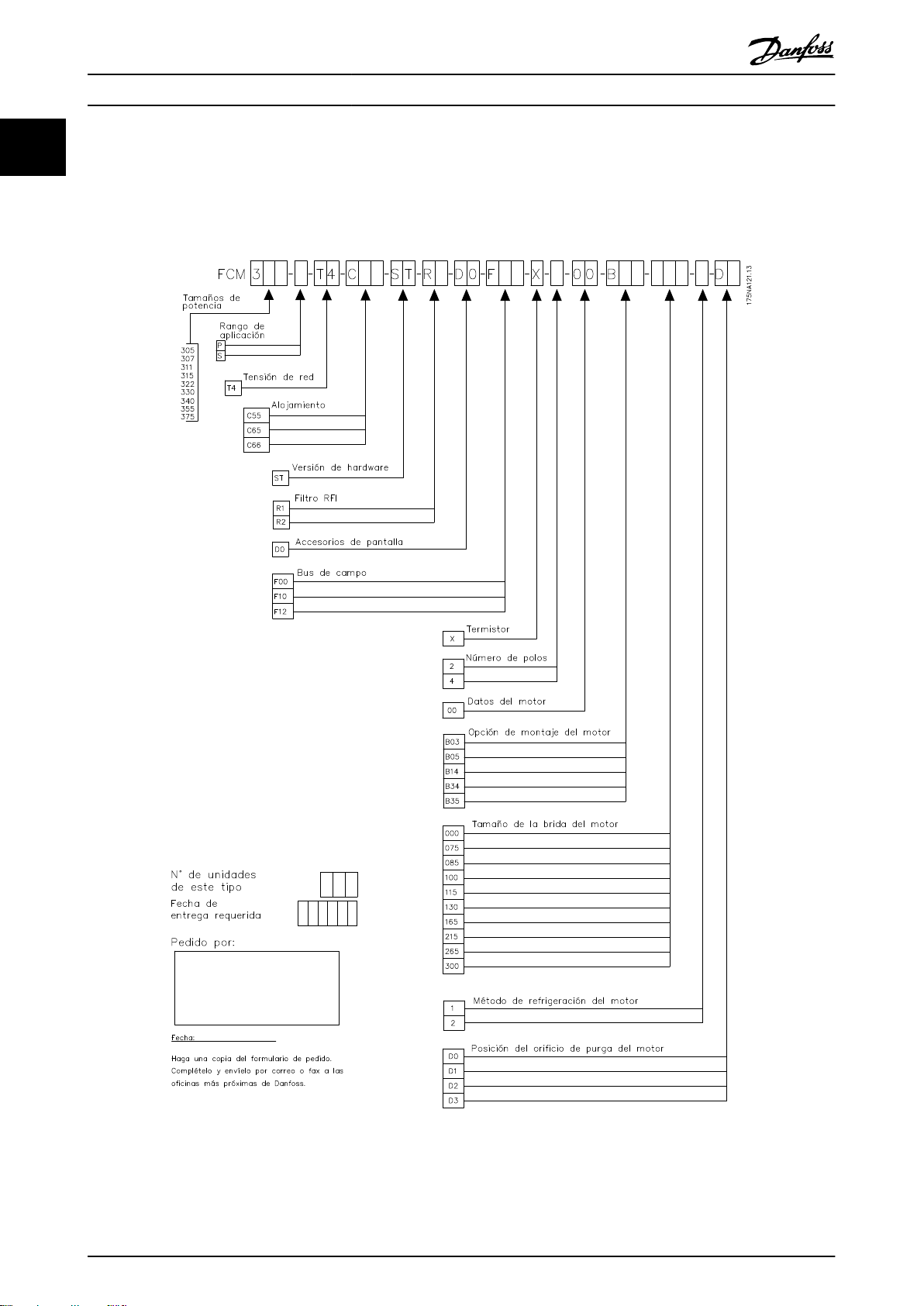
1.4.1 Formulario de pedido
Ilustración 1.3
8 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 11
Introducción
Serie FCM de VLT® DriveMotor
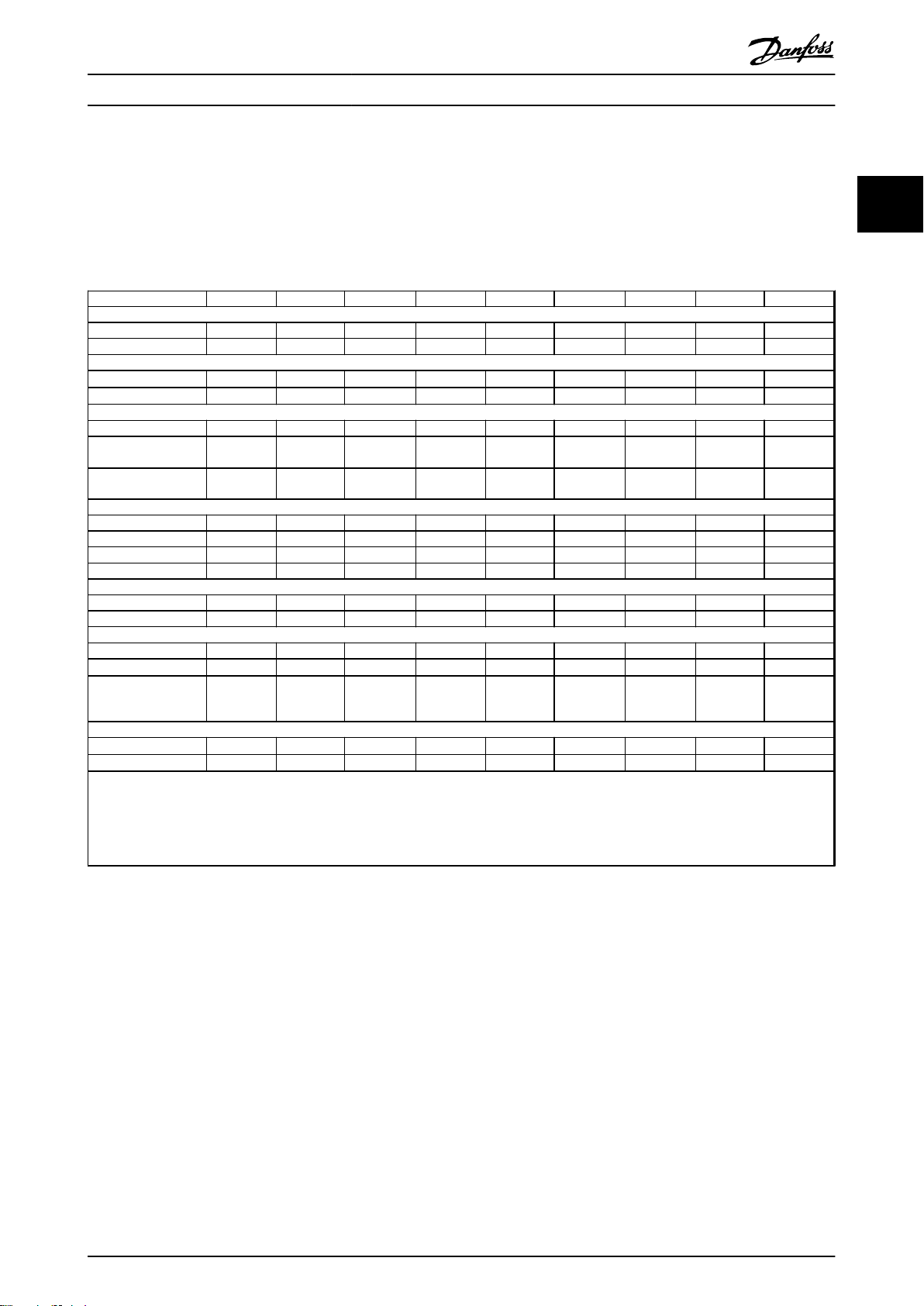
1.4.2 Gama de productos
VLT DriveMotor, serie FCM 300, motores de 2/4 polos
Tipo Salida del motor Alimentación de red
FCM 305 0,55 kW
FCM 307 0,75 kW
FCM 311 1,1 kW
FCM 315 1,5 kW
FCM 322 2,2 kW
FCM 330 3,0 kW
FCM 340 4,0 kW
FCM 355 5,5 kW
FCM 375 7,5 kW
Tabla 1.4 Potencia
Cada tipo de la gama de productos está disponible en
diferentes versiones:
Versiones del inversor
Potencia:
(Véase Tabla 1.4)
Aplicación
P: proceso
•
S: sensorless (bomba especial OEM)
•
Tensión de red:
T4: fuente de alimentación trifásica 380-480 V
•
Protección
C55: IP55
•
C66: IP66
•
Variante de hardware:
ST: estándar
•
Filtro RFI
R1: Conformidad con clase 1A
•
R2: Conformidad con clase 1B
•
Conector de pantalla
D0: sin conector para pantalla
•
Bus de campo
F00: sin bus de campo
•
F10: Profibus DPV1 3 MB
•
F12: Profibus DPV1 12 MB
•
Termistor del motor
Trifásica de 380-480 V
Número de polos
2: motor de 2 polos
•
4: motor de 4 polos
•
Datos del motor
B2: IE2 motor de alto rendimiento
•
BC: IE2 motor de alto rendimiento / hierro
•
fundido
Opción de montaje del motor
B03: montaje de pie
•
B05: brida B5
•
B14: cara B14
•
B34: pata y cara B14
•
B35: pata y brida B5
•
Código de la brida del motor
(Teniendo en cuenta el tamaño de brida estándar y los
tamaños de bridas disponibles, consulte 1.4.5 Información
para pedidos de bastidores y bridas).
000: solo montaje de pie
•
085: 85 mm
•
100: 100 mm
•
115: 115 mm
•
130: 130 mm
•
165: 165 mm
•
215: 215 mm
•
265: 265 mm
•
300: 300 mm
•
Método de refrigeración del motor
1: ventilador montado en el eje
•
Posición del inversor
D: estándar encima
•
Posición del orificio de purga del motor
(consulte 1.4.6 Información de pedido acerca de la posición
de la caja del inversor y la posición del orificio de purga)
0: sin orificio de purga
•
1: ambos extremos de la caja inversora opuesta
•
(transmisión / sin transmisión)
2: 90° a la derecha de la caja del inversor
•
3: 90° a la izquierda de la caja del inversor
•
1
1
X: sin termistor del motor
•
MG03BA05 - VLT® es una marca registrada de Danfoss 9
Page 12
175NA162.10
Introducción
Serie FCM de VLT® DriveMotor
1
1.4.3 Pedido
Coja una copia del formulario de pedido, consulte
1.4.1 Formulario de pedido. Rellene y envíe por correo o fax
el pedido a la oficina más próxima de la organización de
ventas de Danfoss. En el pedido, el motor de la serie FCM
300 lleva un código de tipo.
Se debe cumplimentar siempre el formulario de pedido
para la unidad básica. Cuando se escriba el código de tipo,
indique siempre los caracteres de la cadena básica (1-34).
Junto con la confirmación de pedido, el cliente recibe un
número de código de 8 cifras que utilizará al volver a
realizar un pedido.
Software para PC de Danfoss para la comunicación en
serie, MCT 10
Todas las unidades de la serie FCM 300 cuentan con un
puerto RS 485 de serie, que les permite comunicarse, por
ejemplo, con un PC. Para ello, se dispone de un programa
llamado MCT 10 (consulte1.4.4 Herramientas de software
para PC ).
Números de pedido, MCT 10
Utilice el código 130B1000 para pedir el CD con el
software de configuración MCT 10.
Accesorios para el motor FC
Hay disponible para el motor FC un panel de control local
(LOP) para un valor de consigna local y arranque / parada.
El LOP dispone de protección IP 65. De la misma manera,
se encuentra disponible un panel de control local (LCP 2)
que crea una interfaz completa para el funcionamiento,
programación y control del motor FC.
1.4.4
Herramientas de software para PC
Software para PC MCT 10
Todos los convertidores de frecuencia están equipados con
un puerto de comunicación en serie. Danfoss proporciona
una herramienta para PC que permite la comunicación
entre el PC y el convertidor de frecuencia: MCT 10
Software de configuración VLT Motion Control Tool.
MCT 10 Software de configuración
MCT 10 se ha diseñado como una herramienta interactiva
y fácil de usar que permite configurar los parámetros de
nuestros convertidores de frecuencia.
El software de configuración MCT 10 resulta útil para:
Planificar una red de comunicaciones sin
•
conexión. El MCT 10 incluye una completa base
de datos de convertidores de frecuencia.
Poner en marcha convertidores de frecuencia en
•
línea.
Guardar la configuración de todos los conver-
•
tidores de frecuencia.
Sustituir un convertidor de frecuencia en una red.
•
Ampliar una red existente.
•
Se añadirán los convertidores de frecuencia que
•
se desarrollen en el futuro.
Módulos del software de configuración MCT 10
El paquete de software incluye los siguientes módulos:
Números de pedido, accesorios
LOP (panel de control local) con cable incluido
Panel de control local (LCP 2) 175N0131
Kit de montaje remoto (LCP 2) 175N0160
Kit de conexión (LCP 2) 175N2545
Cable para el kit de conexión (LCP 2) 175N0162
Cable (montaje directo) (LCP 2) 175N0165
Kit conector de servicio (LCP 2) 175N2546
Opción de potenciómetro 177N0011
Tabla 1.5
10 MG03BA05 - VLT® es una marca registrada de Danfoss
175N0128
Ilustración 1.4
Page 13
Introducción
Serie FCM de VLT® DriveMotor
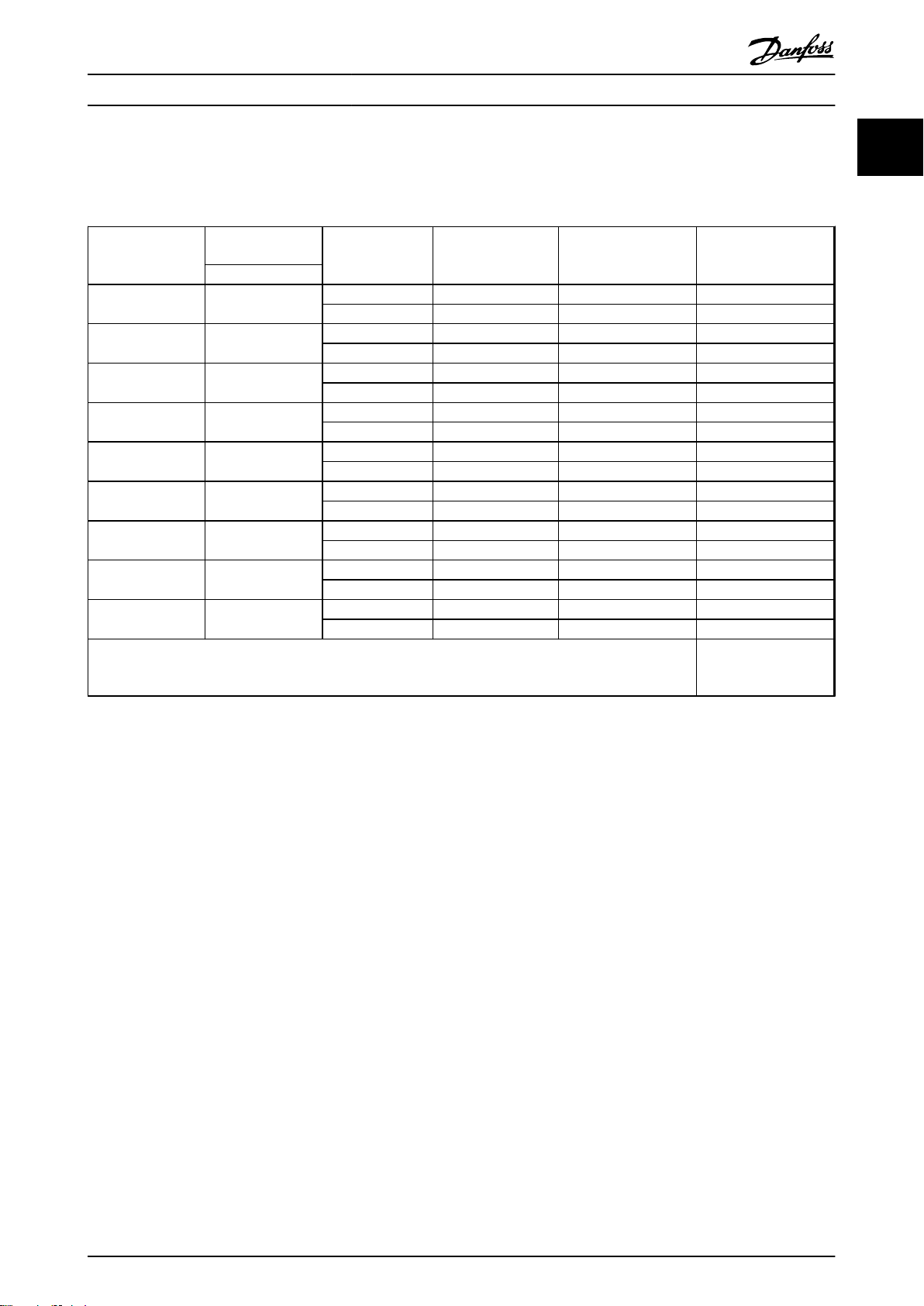
1.4.5 Información para pedidos de bastidores y bridas
Tamaños de bastidores y los tamaños de brida correspondientes para las diferentes versiones de montaje
1
1
Tamaño de
Tipo
FCM 305 80
FCM 307 80
FCM 311 90
FCM 315 90
FCM 322 100
FCM 330 100
FCM 340 112
FCM 355 132
FCM 375 132
S: Disponible como eje estándar
A: Disponible como alternativa con eje especial alargado para proporcionar al bastidor un eje estándar
B: Disponible como alternativa con eje estándar para el bastidor, no requiere modificación
bastidor del motor
4 polos
Versión de
montaje
B5/B35 165 115/130
B14/B34 100 75/85/115/130
B5/B35 165 115/130
B14/B34 100 75/85/115/130
B5/B35 165 110/115/130 215
B14/B34 115 85/100/130/165
B5/B35 165 110/115/130 215
B14/B34 115 85/100/130/165
B5/B35 215 165
B14/B34 130 165 85/100/115
B5/B35 215 165
B14/B34 130 165 85/100/115
B5/B35 215 165
B14/B34 130 165 85/100/115
B5/B35 265 215
B14/B34 165 215
B5/B35 265 215
B14/B34 165 215
Tamaño de brida,
estándar (S) [mm]
Tamaño de brida,
alternativo (A) [mm]
Tamaño de brida,
alternativo (B) [mm]
Tabla 1.6
MG03BA05 - VLT® es una marca registrada de Danfoss 11
Page 14
Introducción
Serie FCM de VLT® DriveMotor
1
1.4.6 Información de pedido acerca de la posición de la caja del inversor y la posición del
orificio de purga
Posición de la caja del inversor, siempre montada en la parte superior.
Todos los orificios de purga se montan con tornillos y arandelas, el IP 66 si no se abre.
Ilustración 1.5
1: Orificios de purga opuestos al lado del inversor, tanto el extremo de transmisión como el otro.
2/3: orificios de purga a 90° del inversor, tanto el extremo de transmisión como el otro.
12 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 15
Instalación
Serie FCM de VLT® DriveMotor
2 Instalación
2.1 Datos técnicos
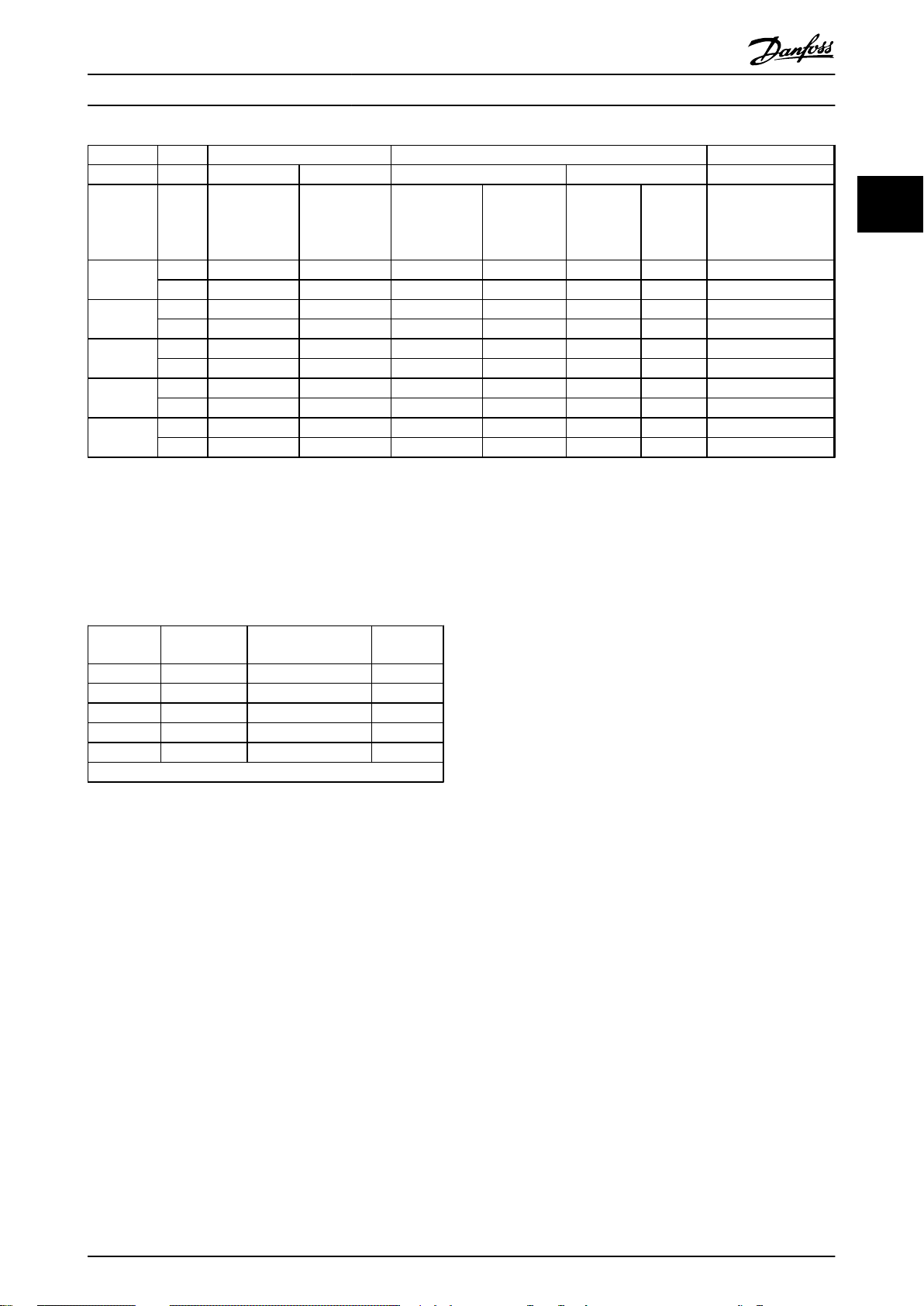
2.1.1 FCM 305-375 para 3 fases, 380-480 V
2 2
FCM
Salida del motor
[CV] 0,75 1,0 1,5 2,0 3,0 4,0 5,0 7,5 10,0
[kW] 0,55 0,75 1,1 1,5 2,2 3,0 4,0 5,5 7,5
Par motor
2 polos [Nm]
4 polos [Nm]
Bastidor
tamaño [mm] 80 80 90 90 100 100 112 132 132
Peso de DriveMotor
3)
[kg]
Peso de convertidor
de frecuencia [kg]
Corriente de entrada [A]
380 V 2 p 1,5 1,8 2,3 3,4 4,5 5,0 8,0 12,0 15,0
380 V 4 p 1,4 1,7 2,5 3,3 4,7 6,4 8,0 11,0 15,5
480 V 2 p 1,2 1,4 1,8 2,7 3,6 4,0 6,3 9,5 11,9
480 V 4 p 1,1 1,3 2,0 2,6 3,7 5,1 6,3 8,7 12,3
Rendimiento a velocidad nom.
2 polos 73,4 75,3 77,5 79,0 81,3 82,7 83,8 85,1 86,2
4 polos 75,9 77,5 79,3 80,5 82,4 83,6 84,6 85,8 86,7
Terminales de potencia
[AWG] 10 10 10 10 10 10 10 6 6
[mm2]
Tamaños del prensacables
Fusible previo máx.
UL4) [A]
CEI4) [A]
1)
A 400 V 3000 r/min
2)
A 400 V 1500 r/min
3)
motor de 2 polos - B3
4)
Deben utilizarse fusibles previos de tipo gG. Para cumplir la normativa UL / cUL, utilice fusibles previos Bussmann KTS-R 500 V o Ferraz
Shawmut, tipo ATMR, clase C (máx. 30 A). Estos fusibles deben proteger un circuito capaz de suministrar un máximo de 100 000 A RMS
(simétrico), 500 V como máximo.
1)
2)
305 307 311 315 322 330 340 355 375
1,8 2,4 3,5 4,8 7,0 9,5 12,6 17,5 24,0
3,5 4,8 7,0 9,6 14,0 19,1 25,4 35,0 48,0
11 13 17 20 26 28 37 56 61
2,2 2,2 2,8 2,8 4,1 4,2 6,4 10,4 10,4
4 4 4 4 4 4 4 10 10
3 x M20 x
3 x M20 x
1,5
10 10 10 10 10 15 15 25 25
25 25 25 25 25 25 25 25 25
1,5
3 x M20 x
1,5
3 x M20 x
1,5
3 x M20 x
1,5
3 x M20 x
1,5
3 x M20 x
1,5
1 x M25 x
1,5 / 2 x
M20 x 1,5
1 x M25 x
1,5 / 2 x
M20 x 1,5
Tabla 2.1
MG03BA05 - VLT® es una marca registrada de Danfoss 13
Page 16
Instalación
Serie FCM de VLT® DriveMotor
2.1.2 Datos técnicos generales
Alimentación de red, TT, TN e IT* (L1, L2 y L3)
22
Tensión de alimentación, unidades de 380-480 V 3 × 380 / 400 / 415 / 440 / 460 / 480 V ±10%
Frecuencia de alimentación 50 / 60 Hz
Máximo desequilibrio en la tensión de alimentación ±2% de la tensión de alimentación nominal
Factor de potencia / cos Máx. 0,9 / 1,0 a carga nominal
N.º de conmutaciones en entradas de alimentación L1, L2 y L3 aprox. 1 vez/2 min
*) No válido para unidades de clase RFI 1B
Características de par
Par de arranque / par de sobrecarga 160% durante 1 min
Par continuo véase más arriba
Tarjeta de control, entradas digitales / de impulsos
Número de entradas digitales programables 4
N.os de terminal X101–2, –3, –4, –5
Nivel de tensión 0-24 V CC (lógica positiva PNP)
Nivel de tensión, 0 lógico <5 V CC
Nivel de tensión, 1 lógico >10 V CC
Tensión máxima de entrada 28 V CC
Resistencia de entrada, R
Tiempo de exploración 20 ms
i
aprox. 2 kΩ
Tarjeta de control, entrada de impulsos
N.º de entradas de impulsos programables 1
N.os de terminal X101-3
Frecuencia máx. en terminal 3, colector abierto / contrafase de 24 V 8 kHz / 70 kHz
Resolución 10 bits
Precisión (0,1-1 kHz), terminal 3 Error máx.: un 0,5% de la escala completa
Precisión (1-12 kHz), terminal 3 Error máx.: un 0,1% de la escala completa
Tarjeta de control, entradas analógicas
N.º de entradas analógicas de tensión programables 1
N.os de terminal X101-2
Nivel de tensión 0-10 V CC (escalable)
Resistencia de entrada, R
N.º de entradas de corriente analógicas programables 1
N.º de terminal X101-1
Intervalo de corriente 0-20 mA (escalable)
Resistencia de entrada, R
Resolución 9 bits
Precisión en la entrada Error máx. del 1% de la escala completa
Tiempo de exploración 20 ms
Tarjeta de control, salidas digitales / de impulsos y analógicas
N.º de salidas digitales y analógicas programables 1
N.os de terminal X101-9
Nivel de tensión en salida digital / carga 0-24 V CC / 25 mA
Corriente de la salida analógica 0-20 mA
Carga máxima a bastidor (terminal 8) en la salida analógica
Precisión de la salida analógica Error máx.: 1,5% de escala completa
Resolución en la salida analógica. 8 bits
i
i
aprox. 10 kΩ
aprox. 300 Ω
R
500 Ω
CARGA
Salida de relé
N.º de salidas de relé programables 1
Número de terminal (carga resistiva e inductiva) 1-3 (desconexión), 1-2 (conexión)
Carga del terminal máx. (AC1) en 1-3, 1-2 250 V CA, 2 A, 500 VA
14 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 17
Instalación
Carga del terminal máx. (DC1) (IEC 947) en 1-3, 1-2 25 V CC, 3 A / 50 V CC, 1,5 A, 75 W
Carga del terminal mín. (CA / CC) en 1-3, 1-2, tarjeta de control 24 V CC, 10 mA / 24 V CA, 100 mA
Valores nominales para un máximo de 300 000 operaciones (con cargas inductivas, el número de operaciones se reduce en un
50%)
Tarjeta de control, comunicación en serie RS 485
N.os de terminal X100–1, –2
Características de control (convertidor de frecuencia)
Consulte 4.1 Condiciones especiales para conocer los intervalos de frecuencia de los motores IP 66 al
Intervalo de frecuencia
Resolución en la frecuencia de salida 0,1%
Tiempo de respuesta del sistema Máx. 40 ms
Precisión de velocidad (lazo abierto, modo CT, motor de 4 P en el intervalo de velocidades de 150 a 1500 r/min) ±15 r/min
Externos
Consulte 4.1 Condiciones especiales para conocer los intervalos de frecuencia de los motores IP 66 al final de este
Protección
Prueba de vibración 1 g
Humedad relativa máx. 95% para almacenamiento / transporte / funcionamiento
Temperatura ambiente Máx. de 40 °C (promedio de 24 horas máx. de 35 °C)
Consulte 4.1.7 Reducción de potencia en función de la temperatura ambiente
Temperatura ambiente mín. en funcionamiento completo 0 °C
Temperatura ambiente mín. con rendimiento reducido –10 °C
Temperatura durante el almacenamiento / transporte –25-+65 / 70 °C
Altitud máx. sobre el nivel del mar 1000 m
Consulte 4.1.8 Reducción de potencia en función de la presión atmosférica
Normas CEM aplicadas, Emisión EN 61000-6-3 / EN 6100-6-4, EN 61800-3, EN 55011, EN 55014
Normas CEM aplicadas,
Inmunidad
Normas de seguridad aplicadas, EN 60146, EN 50178, EN 60204, UL508
Serie FCM de VLT® DriveMotor
0-132 Hz
final de este apartado.
IP 55 (IP65 y IP66)
apartado.
EN 61000-6-2, EN 61000-4-2, EN 61000-4-3, EN 61000-4-4, EN 61000-4-5, EN 61000-4-6,
ENV 50204
2 2
MG03BA05 - VLT® es una marca registrada de Danfoss 15
Page 18
Instalación
Serie FCM de VLT® DriveMotor
AVISO!
La solución normal IP 66 únicamente es adecuada para velocidades máximas de hasta 3000 r/min. Si se necesita una
velocidad mayor, comuníquelo al hacer el pedido.
22
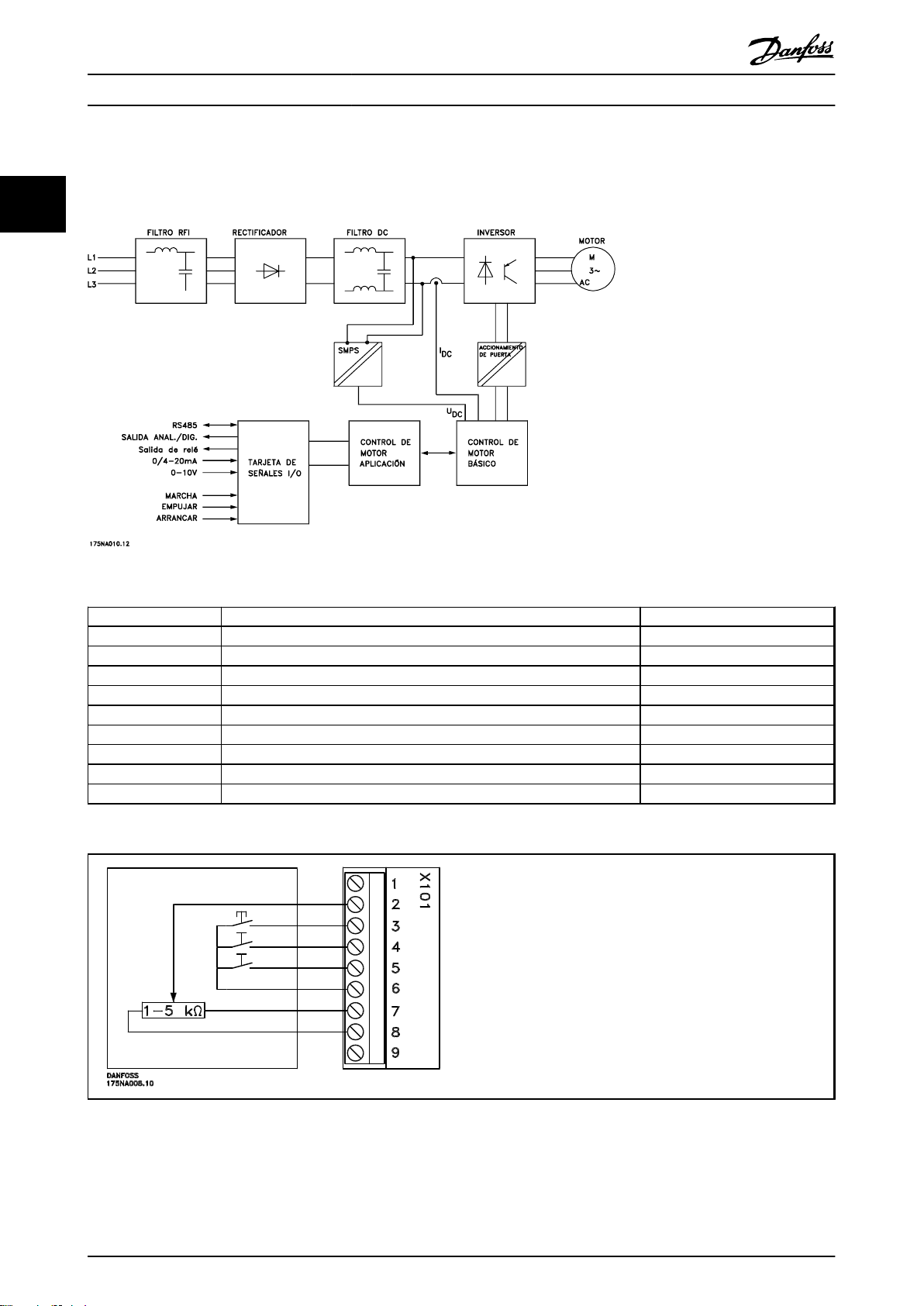
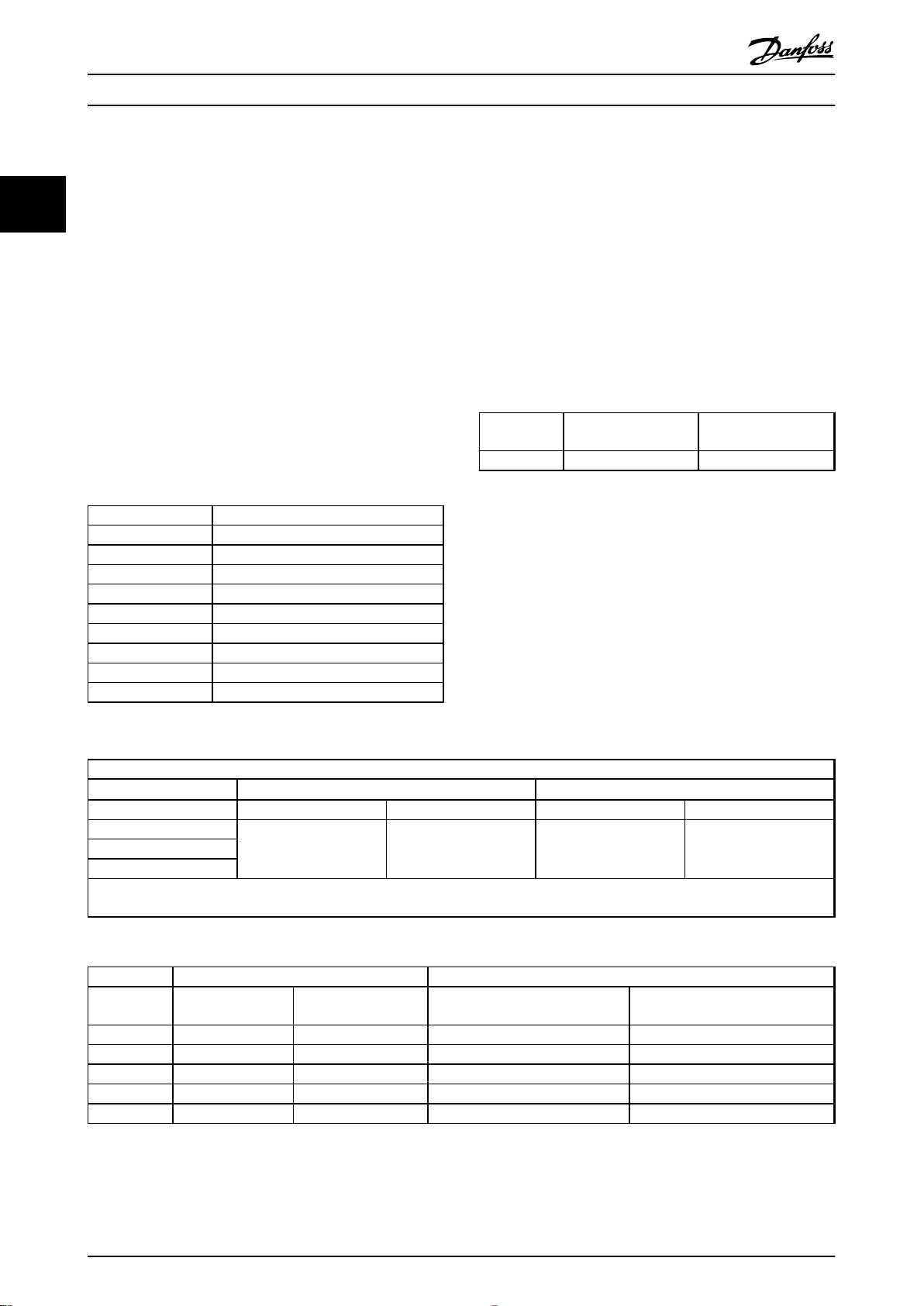
Ilustración 2.1 Esquema básico para la serie FCM 300
N.º de terminal Función Ejemplo
1 Entrada analógica (0-20 mA) Señal de realimentación
2 Entrada analógica (0-10 V) / digital 2 Referencia de velocidad
3 Entrada digital (o de impulsos) 3 Reinicio
4 Entrada digital (o parada precisa) 4 Arranque
5 Entrada digital (otra) 5 Velocidad fija
6 Suministro externo de 24 V CC para entradas digitales (máx. 150 mA)
7 Suministro de 10 V CC para potenciómetro (máx. 15 mA)
8 0 V para terminales 1-7 y 9
9 Salida analógica (0-20 mA) / digital Indicación de fallo
Tabla 2.2 X101: bloque de terminales para señales de control analógicas / digitales
Reset para cerrar durante un corto periodo y reiniciar las
-
desconexiones por fallo
Arranque para cerrar y cambiar a modo de ejecución
-
Velocidad fija se ejecutará a una velocidad fija mientras esté
-
cerrado (10 Hz)
Referencia de velocidad (0-10 V) determina la velocidad en modo
-
de ejecución
Tabla 2.3 Diagrama de conexiones: ajustes de fábrica
16 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 19
Instalación
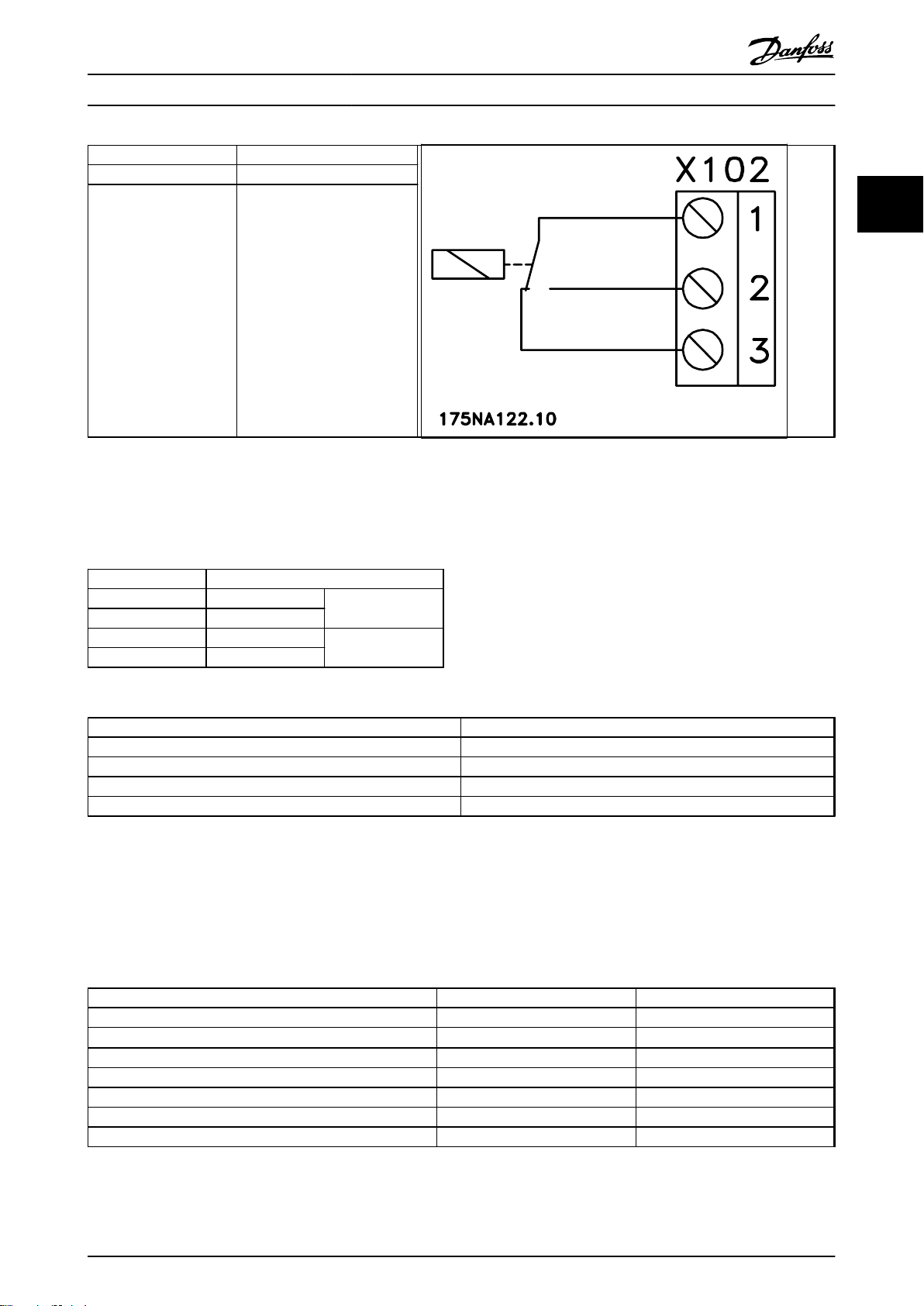
N.º de terminal Función
1-2 Conexión (normalmente abierta)
1-3 Desconexión (normalmente
cerrada)
Tabla 2.4 X102: bloque de terminales para la salida de relé
Serie FCM de VLT® DriveMotor
2 2
AVISO!
Consulte el parámetro 323 (salida de relé)
para programar la salida de relé.
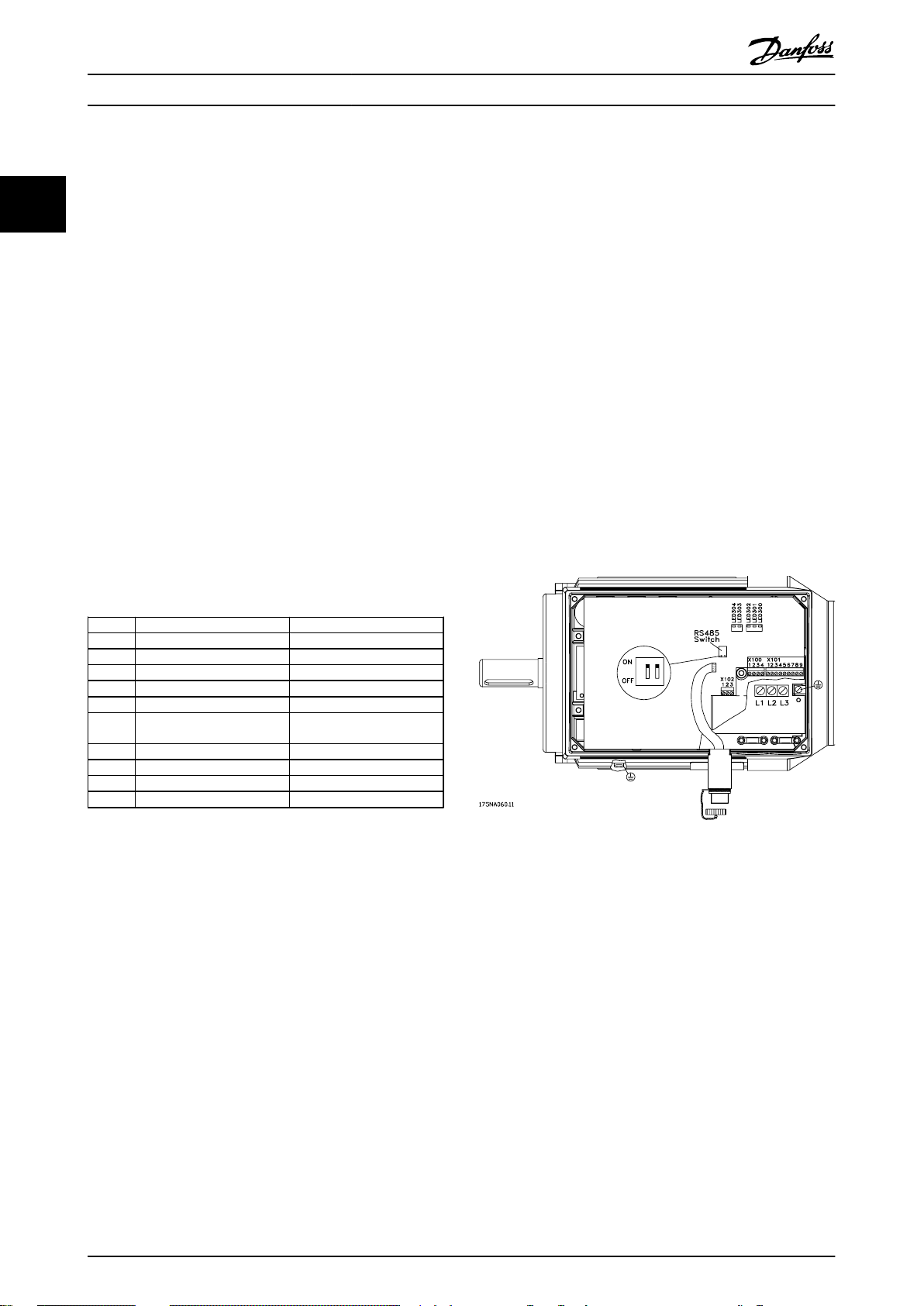
LED 300-304
LED 300 (rojo): desconexión por fallo
LED 301 (amarillo): advertencia
LED 302 (verde): encendido
N.º de terminal Función
1 P RS 485 Para la conexión a
2 N RS 485
3 5 V CC Alimentación para
4 0 V CC
bus o PC
bus RS 485
LED 303-304: comunicación
Para las versiones con PROFIBUS, consulte el manual
MG90AXYY.
2.1.3 Pares de apriete
Tabla 2.5 X100: bloque de terminales para la comunicación de datos
Tornillos de cubierta (tapa) 25,6-31 lb-in (3-3,5 Nm)
Conectores de entrada de cable de plástico 19,5 lb-in (2,2 Nm)
Tornillos L1, L2 y L3 (línea CA) (FCM 305-340) 5-7 lb-in (0,5-0,6 Nm)
Tornillos L1, L2 y L3 (línea CA) (FCM 355-375) 15 lb-in (1,2-1,5 Nm)
Toma de tierra 30,1 lb-in (3,4 Nm)
Tabla 2.6
Se necesita un destornillador plano de 2,5 mm para los tornillos de terminal.
Los tornillos de línea de CA requieren un destornillador plano de 8 mm.
Para los tornillos de la tapa, de la toma de tierra y del sujetacables, se necesita un destornillador T-20 Torx o plano
(velocidad máx. de apriete: 300 r/min).
Sección máxima de cable
2.1.4
Nota
Utilice hilo de cobre a 60 °C o mejor
Tamaño máx. del cable de línea de CA (FCM 305-340) 10 4,0
Tamaño máx. del cable de línea de CA (FCM 355-375) 6 10
Tamaño máx. del cable de control 16 1,5
Tamaño máx. del cable de comunicación en serie 16 1,5
Toma de tierra 6 10
Tabla 2.7
MG03BA05 - VLT® es una marca registrada de Danfoss 17
AWG
mm
2
Page 20
Instalación
Serie FCM de VLT® DriveMotor
2.1.5 Tamaños de tornillo
Tornillos de cubierta (tapa) M5
22
Tornillos de toma de tierra y de sujetacables (FCM 305-340): M4
Tornillos de toma de tierra y de sujetacables (FCM 355-375) M5
Tabla 2.8
2.1.6 Protección
Protección de sobrecarga térmica del motor y los componentes electrónicos.
•
El control de la tensión del circuito intermedio asegura que el inversor se desconectará si dicha tensión es
•
demasiado alta o baja.
Si falta una fase de red, el inversor se desconecta cuando se aplica una carga al motor.
•
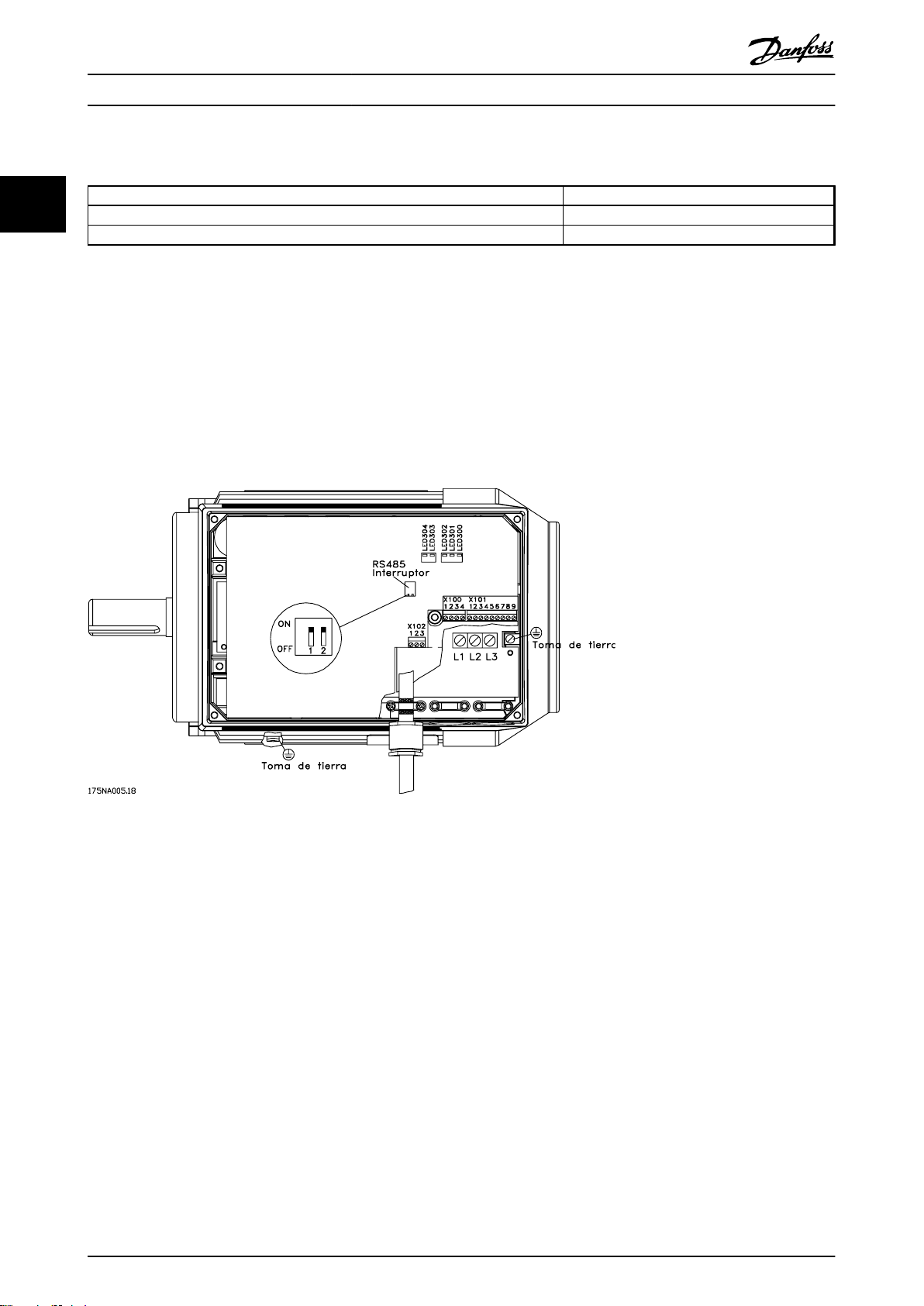
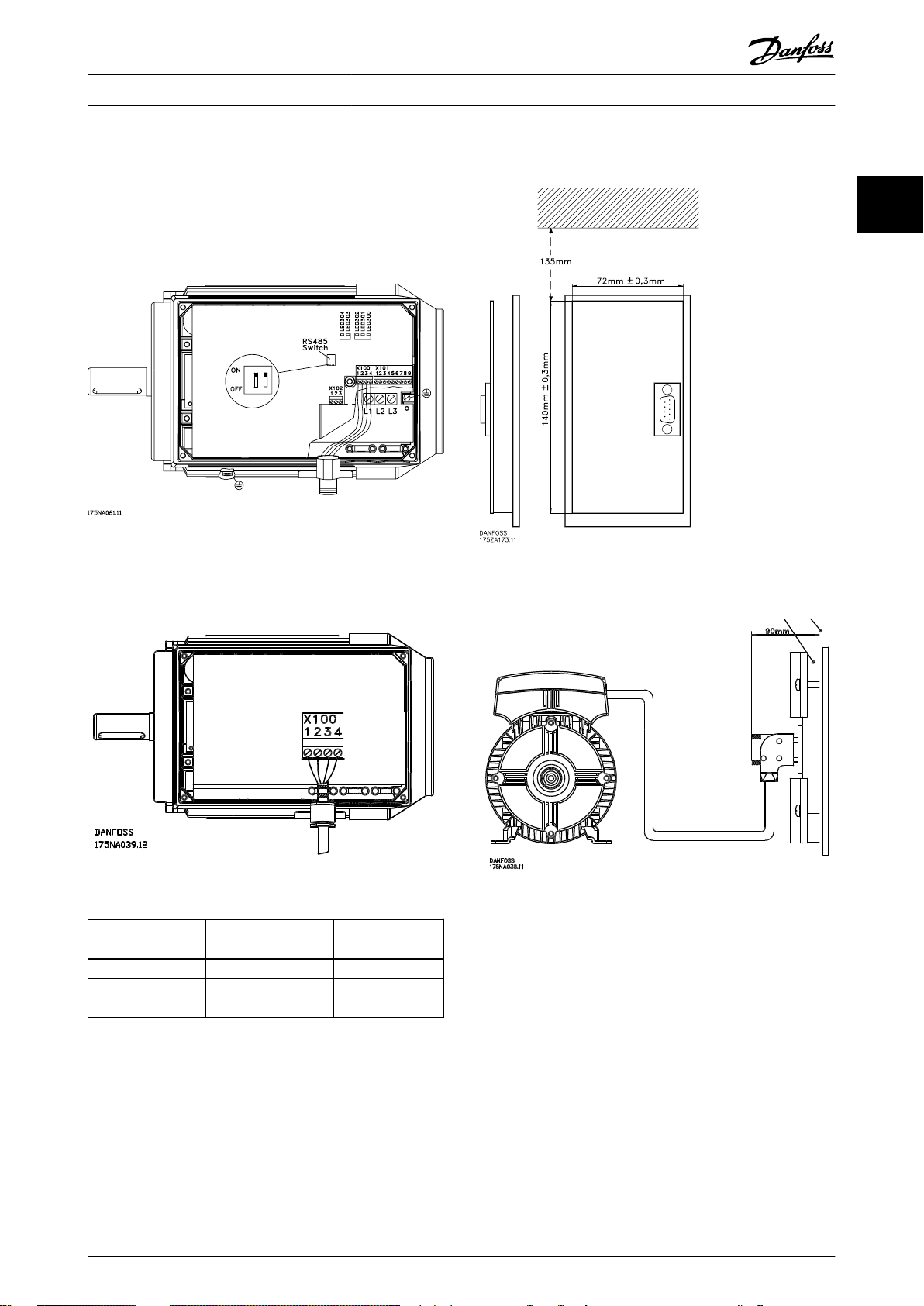
Ilustración 2.2 Disposición del terminal (para ver el montaje, consulte la Configuración rápida, MG03AXYY)
18 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 21
175NA163.10
Instalación
2.2 Descripción del motor
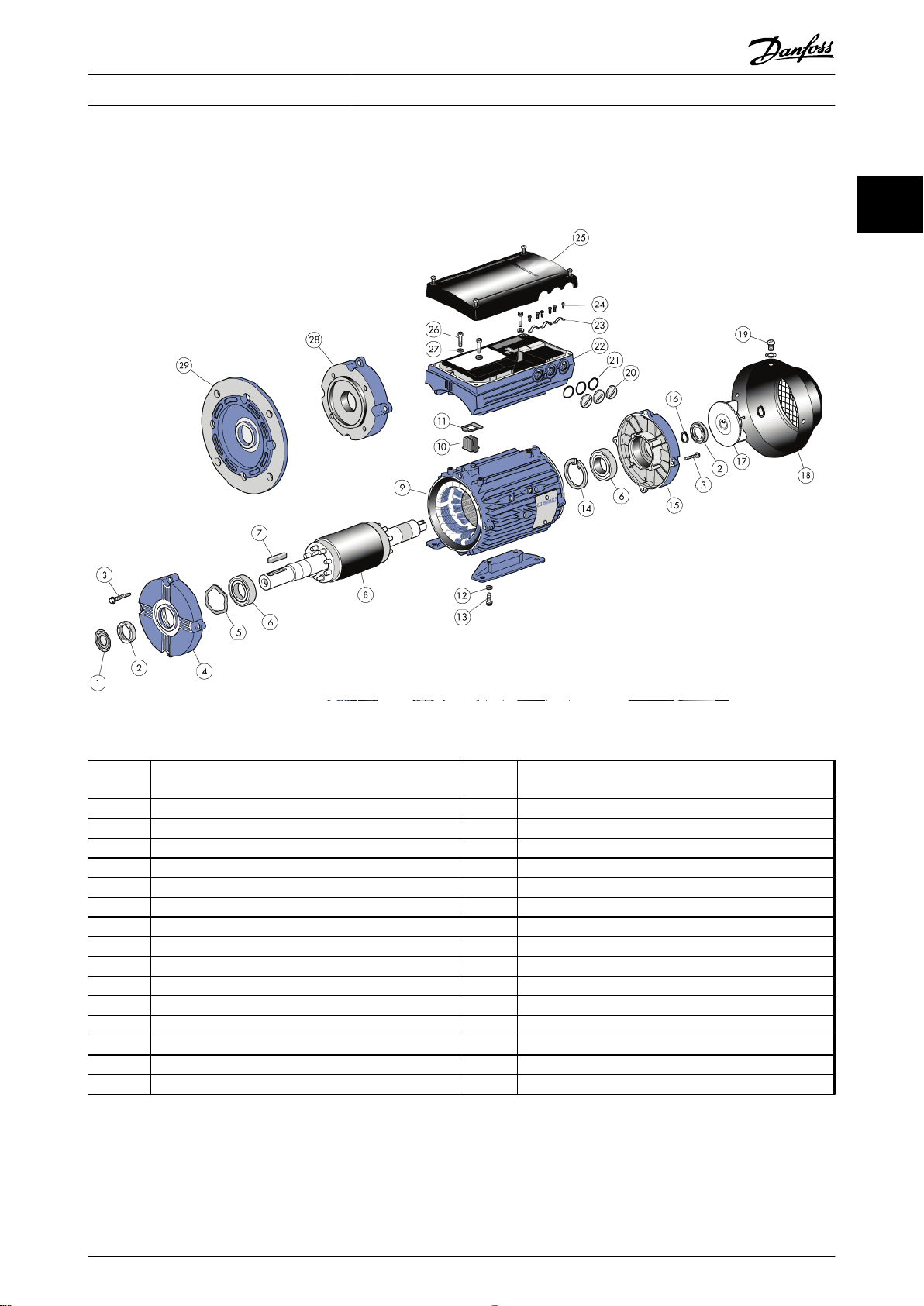
El motor FC consiste en las siguientes partes:
Serie FCM de VLT® DriveMotor
2 2
Ilustración 2.3
Elemento Descripción ElementoDescripción
1 Sujeción (si se ha instalado) 16 Anillo del rodamiento
2 Convertidor de frecuencia y junta de aceite 17 Ventilador
3 Tornillo de montaje del protector del extremo 18 Tapa del ventilador
4 Convertidor de frecuencia y protector del extremo 19 Tornillo y arandela de la tapa del ventilador
5 Arandela de apriete 20 Tapón roscado
6 Rodamiento 21 Junta tórica
7 Chaveta 22 Caja ISM
8 Conjunto de rotor 23 Fijacables
9 Conjunto de estátor con o sin patas 24 Tornillos de fijacables
10 Bloque conector 25 Tapa de la caja ISM
11 Junta 26 Tornillo Torx
12 Patas extraíbles 27 Arandela
13 Perno y arandela de montaje de patas 28 Tapa frontal
14 Anillo de sujeción del rodamiento 29 Protector del extremo de la brida
15 Protector del extremo opuesto al accionamiento
Tabla 2.9
MG03BA05 - VLT® es una marca registrada de Danfoss 19
Page 22
Instalación
Serie FCM de VLT® DriveMotor
2.2.1 Manejo del motor FC
El manejo y la elevación de los motores de los conver-
22
tidores de frecuencia VLT (motores FC) únicamente deberá
realizarlos personal cualificado. También deberá estar
disponible para garantizar un trabajo seguro toda la
documentación y las instrucciones de funcionamiento del
producto, junto con las herramientas y los equipos
necesarios. Los cáncamos y / o soportes de elevación
suministrados con el motor FC están diseñados
únicamente para el peso del motor FC, sin incluir los
equipos auxiliares que pueda tener instalados. Asegúrese
de que las grúas, gatos, cadenas y barras de elevación
Cojinetes
2.2.2
La solución estándar consiste en un cojinete fijo en el
extremo propulsor del motor (lado de salida de eje).
Para evitar su indentación estática, es necesario que la
zona de almacenamiento no tenga vibración. Cuando la
exposición a algún tipo de vibración sea inevitable, el eje
debe bloquearse. Los cojinetes se pueden instalar con un
dispositivo bloqueador del eje que debe quedar montado
durante el almacenamiento. Los ejes deben girarse
manualmente un cuarto de revolución, una vez por
semana. Los cojinetes se suministran de fábrica totalmente
lubricados con grasa a base de litio.
tengan capacidad suficiente para levantar el peso del
equipo. Si se proporciona un cáncamo con el motor, es
necesario atornillarlo hasta que su soporte quede
firmemente sujeto contra la parte frontal del bastidor del
Tamaño de
bastidor
80-132 Esso unirex N3 De –30 °C a 140 °C
Tipo de lubricación Intervalo de
temperaturas
estátor que va a levantarse.
Tabla 2.11 Lubricación
Tipo FCM Peso aprox. [kg]
FCM 305 11
FCM 307 13
FCM 307 17
FCM 315 20
FCM 322 26
FCM 330 28
FCM 340 37
FCM 355 56
FCM 375 61
Tabla 2.10 Peso
La vida útil máxima en horas (Lna) prevista del cojinete a una temperatura de 80 °C es de x 10³ horas.
FCM
305-315
355-375
La duración del cojinete se calcula a partir de un valor L10, teniendo en cuenta: la fiabilidad, las mejoras en los materiales y las
condiciones de lubricación.
Tabla 2.12 Vida útil de los cojinetes
FCM Cojinetes Juntas de aceite - Diám. int. x Diám. ext. x ancho en mm
Extremo del eje
305-307 6204ZZ 6003ZZ 20 x 30 x 7 17 x 28 x 6
311-315 6205ZZ 6003ZZ 25 x 35 x 7 17 x 28 x 6
322-330 6206ZZ 6005ZZ 30 x 42 x 7 25 x 37 x 7
340 6206ZZ 6005ZZ 30 x 42 x 7 25 x 37 x 7
355-375 6208ZZ 6005ZZ 40 x 52 x 7 25 x 37 x 7
Tabla 2.13 Referencia de cojinetes y juntas de aceite estándar
Horiz. Vert. Horiz. Vert.
30 30 30 30322-340
Extremo opuesto al
3000 min
eje
-1
Extremo del eje
1500 min
-1
Extremo opuesto al eje
20 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 23
Instalación
Serie FCM de VLT® DriveMotor
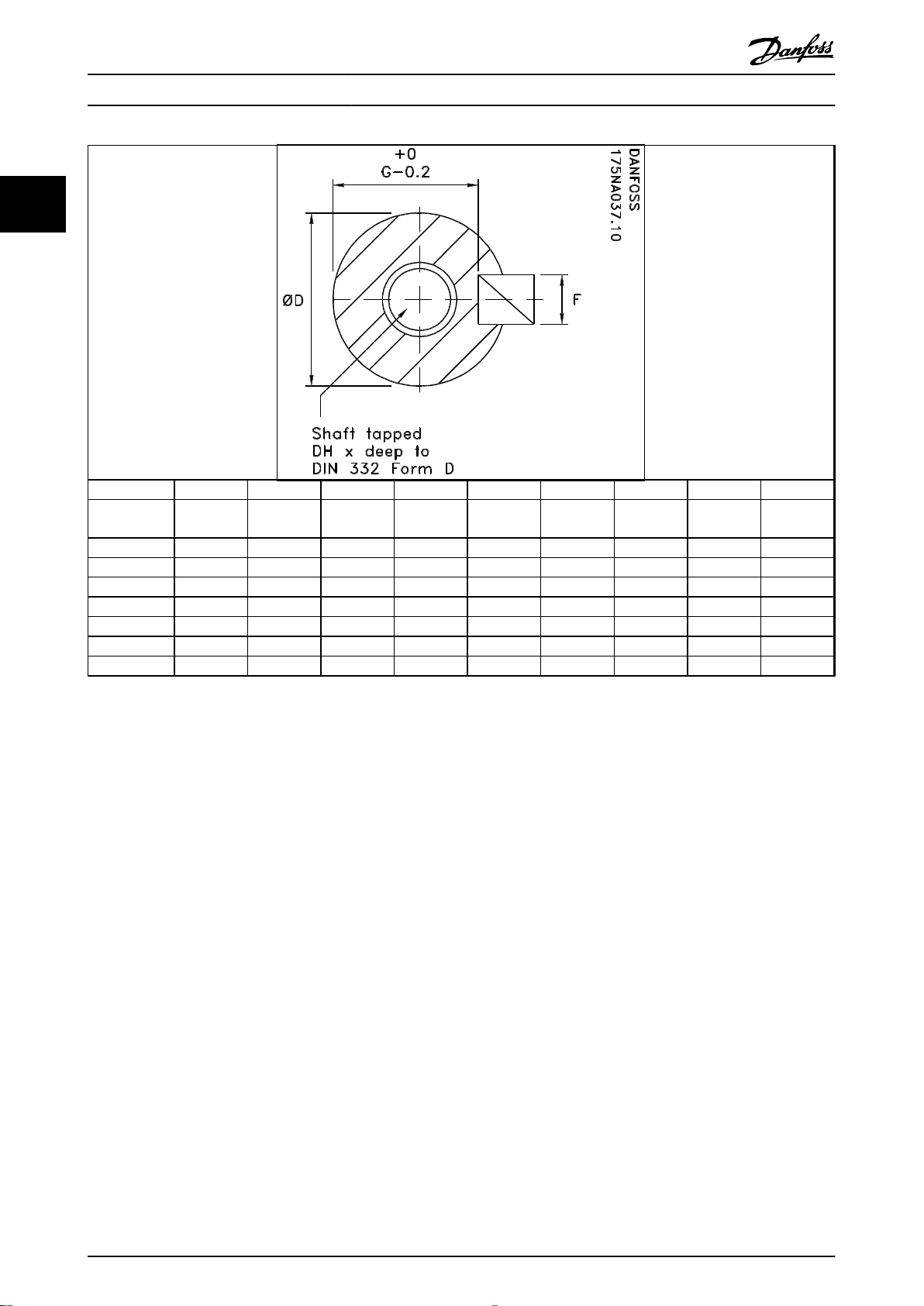
2.2.3 Salidas de eje motor
Las salidas de eje motor se fabrican de acero con
resistencia de 35 / 40 t (460 / 540 Mn/m2). Los extremos
del eje del convertidor de frecuencia tienen, de serie, un
orificio taladrado según DIN 332, parte D, y un paso de
llave de perfil cerrado.
Equilibrado
Todos los motores se equilibran dinámicamente para
cumplir con ISO 8821 y de acuerdo con CEI 60034-14.
FCM 2 polos 4 polos
305 0,00082 0,0019
307 0,00082 0,0027
311 0,00090 0,0022
315 0,0011 0,0030
322 0,0024 0,0042
330 0,0028 0,0050
340 0,0053 0,0091
355 0,0072 0,0143
375 0,0097 0,0190
Tabla 2.14 Inercia
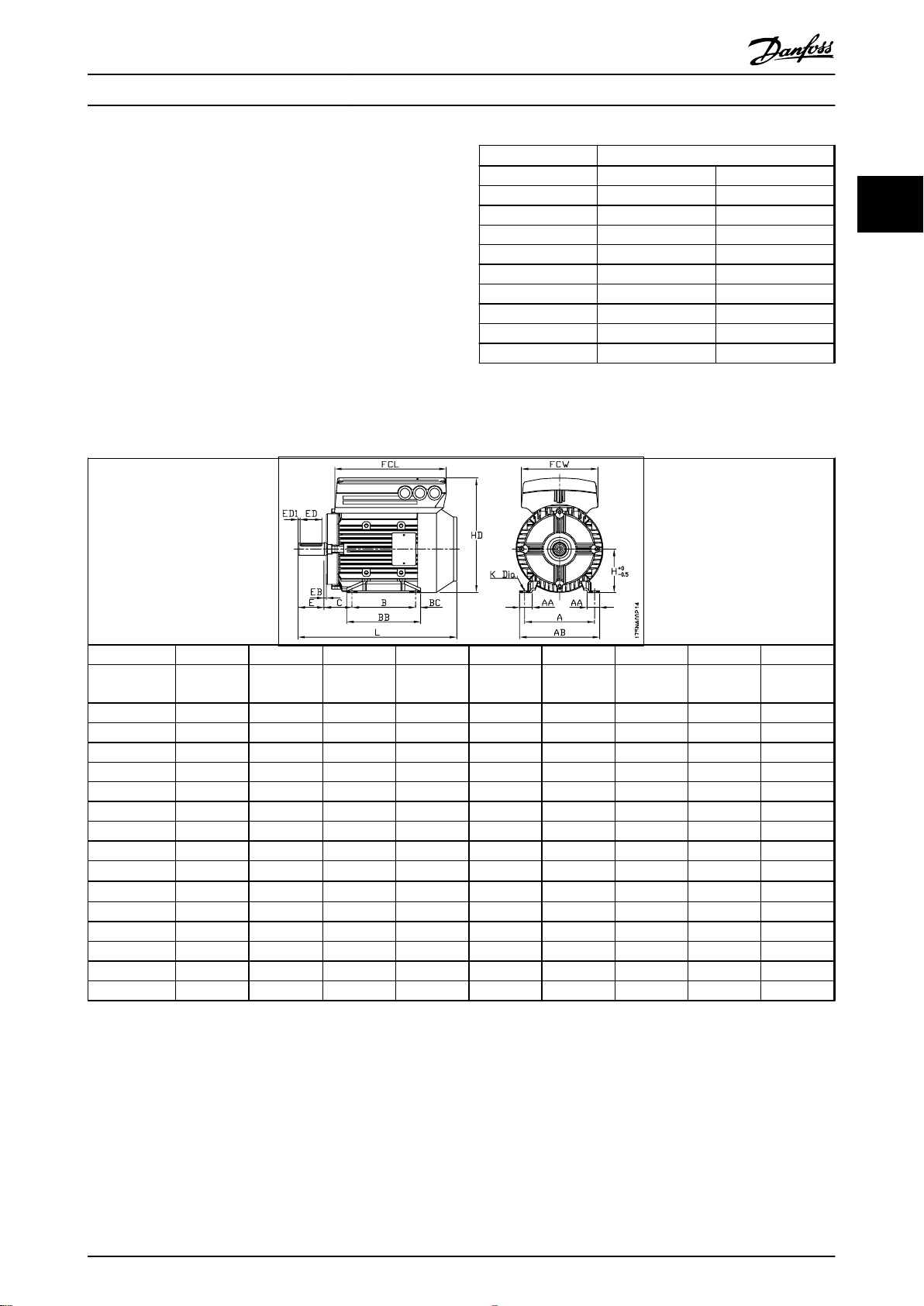
Dimensiones
2.2.4
J [kgm2]
2 2
FCM general 305 307 311 315 322 330 340 355 375
Tamaño de
bastidor
A [mm] 125 125 140 140 160 160 190 216 216
B [mm] 125 125 140 140 140 140 178
C [mm] 50 50 56 56 63 63 70 89 89
H [mm] 80 80 90 90 100 100 112 132 132
K [mm] 10 10 10 10 12 12 12 12 12
AA [mm] 27 27 28 28 28 28 35 38 38
AB [mm] 157 157 164 164 184 184 218 242 242
BB [mm] 127 127 150 150 170 170 170 208 208
BC [mm] 13,5 13,5
L [mm] 278 278 322 322 368 368 382 484,5
AC [mm] 160 160 178 178 199 199 215 255 255
HD [mm] 219,5 219,5 238 238 264 264 292 334 334
EB [mm] 1,5 1,5 2,5 2,5 6 6 6 6 6
FCL [mm] 206 206 230 230 256 256 286 357,5 357,5
FCW [mm] 141 141 158 158 176 176 196 242,5 242,5
Tabla 2.15 Montaje de pie: B3
1)
Motor de 2 polos = 37,5 2) Motor de 2 polos = 53
80 80 90 90 100 100 112 132 132
12,5
1)
12,5
1)
15 15 15 53 15
484,5
2)
MG03BA05 - VLT® es una marca registrada de Danfoss 21
Page 24
Instalación
Serie FCM de VLT® DriveMotor
22
FCM 305 307 311 315 322 330 340 355 375
Tamaño de
bastidor
D [mm] 19 19 24 24 28 28 28 38 38
E [mm] 40 40 50 50 60 60 60 80 80
ED [mm] 32 32 40 40 50 50 50 70 70
ED1 [mm] 4 4 5 5 5 5 5 5 5
DH M6 x 16 M6 x 16 M8 x 19 M8 x 19 M10 x 22 M10 x 22 M10 x 22 M12 x 28 M12 x 28
F [mm] 6 6 8 8 8 8 8 10 10
G [mm] 15,5 15,5 20 20 24 24 24 33 33
80 80 90 90 100 100 112 132 132
Tabla 2.16 Extremo de accionamiento del eje
22 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 25
Instalación
Serie FCM de VLT® DriveMotor
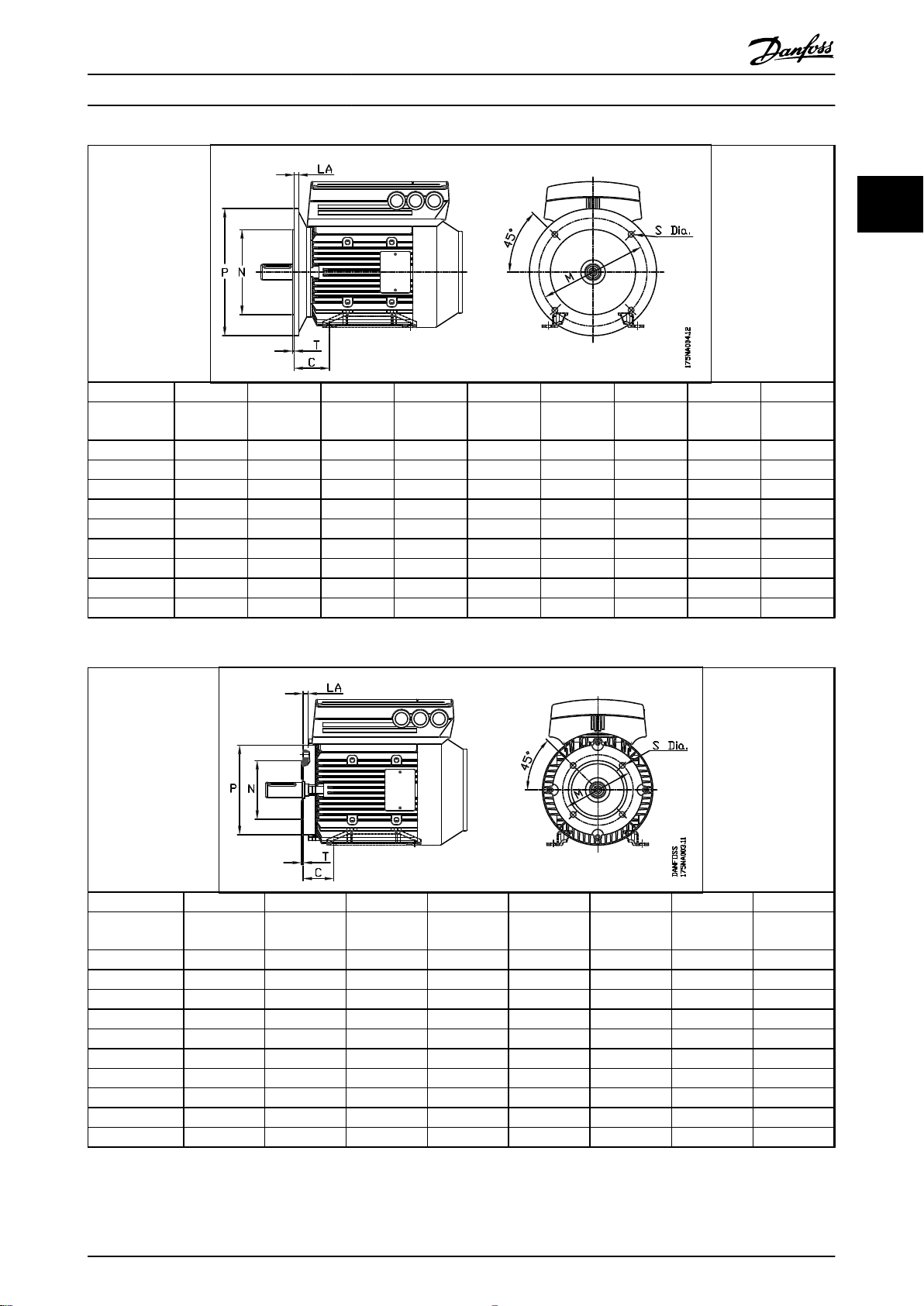
2 2
B5 FCM
Tamaño de
bastidor
Ref. CEI FF85 FF100 FF115 FF130 FF165 FF165 FF215 FF215 FF265
Ref. DIN A105 A120 A140 A160 A200 A200 A250 A250 A300
C [mm] 50 56 63 70 89
M [mm] 85 100 115 130 165 165 215 215 265
N [mm] 70 80 95 110 130 130 180 180 230
P [mm] 105 120 140 160 200 200 250 250 300
S [mm] 10 10 12 12 14,5 14,5 14,5
T [mm] 3 3,5 3,5 3,5 4 4 4
LA [mm] 7 7 12 10 12 12 12
Tabla 2.17 Montaje de brida: B5, B35 (B3 + B5)
48 56 63 71 80 90 100 112 132
305/307 311/315 322/330 340 355/375
B14 FCM
Tamaño de
bastidor
Ref. CEI FT65 FT75 FT85 FT100 FT115 FT130 FT130 FT165
Ref. DIN C80 C90 C105 C120 C140 C160 C160 C2OO
C [mm] 50 56 63 70 89
M [mm] 65 75 85 100 115 130 130 165
N [mm] 50 60 70 80 95 110 110 130
P [mm] 80 90 105 120 140 160 164 200
S [mm] M5 M6 M6 M8 M8 M8 M10
T [mm] 2,5 2,5 3 3 3,5 3,5 3,5
LA [mm] 9 9 9 9 8,5 13 13
Máx. brida B14 8,5 11 11 11,5 15 15,5 17
Tabla 2.18 Montaje frontal: B14, B34 (B3 + B14)
56 63 71 80 90 100 112 132
MG03BA05 - VLT® es una marca registrada de Danfoss 23
305/307 311/315 322/330 340 355/375
Page 26
Instalación
Serie FCM de VLT® DriveMotor
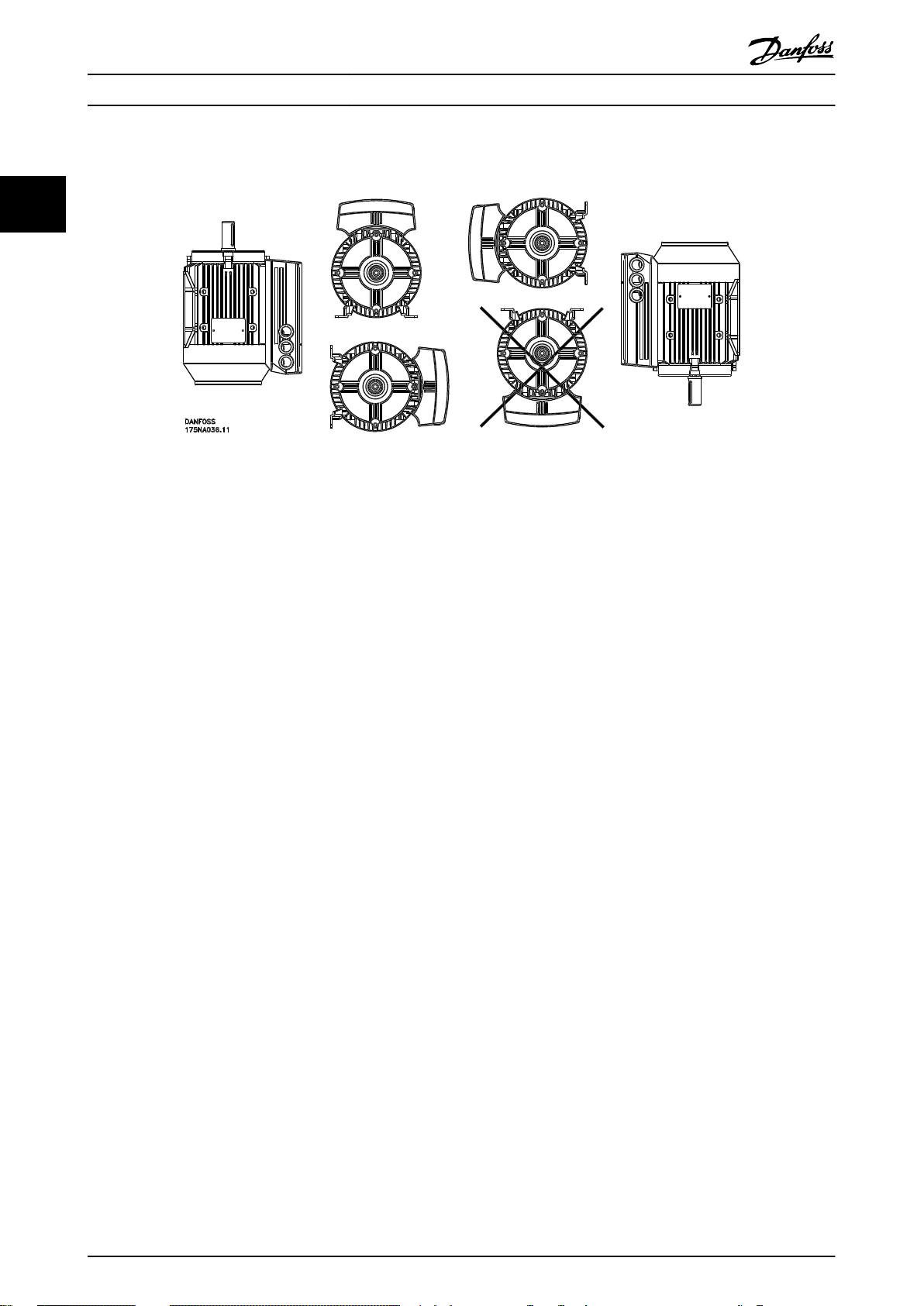
2.2.5 Instalación del motor FC
22
Ilustración 2.4
Los motores FC se deben instalar con el acceso adecuado para realizar su mantenimiento habitual. Se recomienda un
mínimo de 0,75 m de espacio de trabajo alrededor del motor. También se necesita espacio alrededor de la entrada del
ventilador (50 mm), con el fin de facilitar la circulación de aire.
Cuando se instalen varios motores FC muy próximos, debe tenerse cuidado de que no haya una recirculación del aire
caliente de salida. La base de instalación deberá ser sólida, rígida y nivelada.
AVISO!
Instalación eléctrica
No retire la película superior situada dentro del inversor, ya que es una medida de protección.
Instalación de piñones, poleas y acoplamientos.
Los taladros de estos componentes deberán realizarse según nuestros límites estándar y se deberán montar en el eje con
un movimiento de roscado. Debe prestarse atención a la adecuada protección de todas las partes móviles.
AVISO!
La instalación de componentes en el eje del motor FC con un martillo o mazo causará daños a los rodamientos. Esto se
notará por más ruido proveniente de los rodamientos y la reducción de su duración.
AVISO!
Brida B14 máx., consulte 2.2.4 Dimensiones.
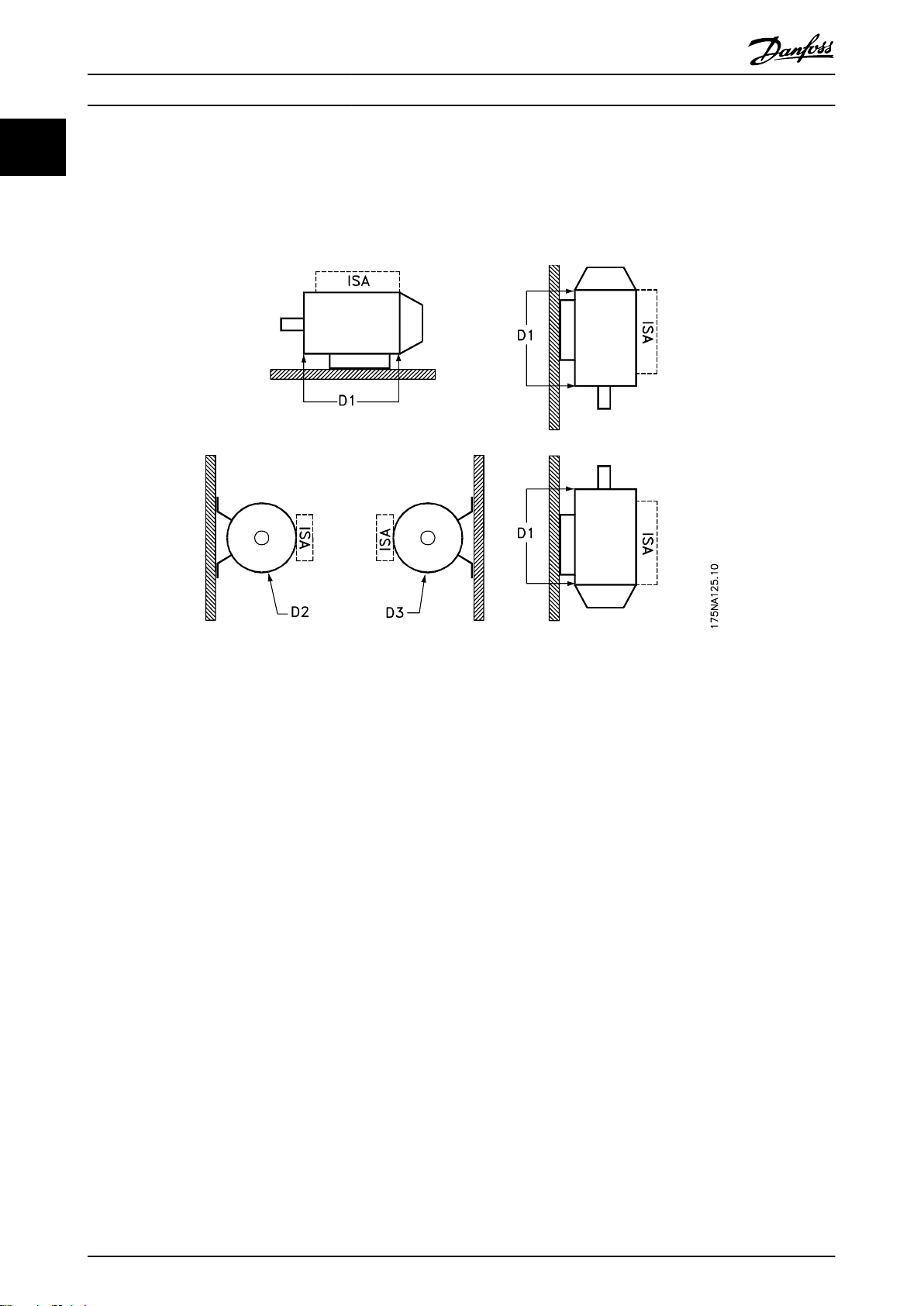
2.2.6 Alineación
Cuando la aplicación requiera un acoplamiento directo, los ejes se deberán alinear correctamente en los tres planos. Su
alineación incorrecta puede causar ruido y vibración significativos.
Deben tomarse precauciones para la suspensión del extremo del eje y la expansión térmica en el plano axial y vertical. Por
ello, es preferible utilizar acoplamientos flexibles para ejes.
24 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 27
Instalación
Eje horizontal Eje vertical
Tipo Polos Carga hacia el
motor
W-DA80
W-DA90
W-DA100
W-DA112
W-DA132
Tabla 2.19 Cargas axiales y radiales externas máximas permitidas en N
2 339 539 321 565 362 521 774
4 303 503 283 530 330 583 729
2 444 684 421 716 476 661 915
4 398 638 366 682 442 606 854
2 781 1101 743 1159 839 1063 1295
4 710 1030 655 1107 787 975 1215
2 768 1088 715 1170 850 1035 1295
4 690 1010 612 1131 811 932 1202
2 1355 1707 1266 1838 1486 1618 2114
4 1253 1605 1130 1779 1427 1482 2068
Carga desde el
Serie FCM de VLT® DriveMotor
Eje arriba Eje abajo
Carga hacia el
motor
motor
Carga desde
el motor
Carga hacia
arriba
Carga
hacia
abajo
Carga radial máxima
permitida en el
extremo del eje
(montaje horizontal)
2 2
Par de apriete de los pernos
2.2.7
Los extremos de la protección y la tapa deben asegurarse
con los pernos y según el par de apriete y el tamaño
detallados en Tabla 2.20.
Tipo FCM Tamaño de
bastidor
305-307 80 M5 5
311-315 90 M5 5
322-330 100 M6 (taptite) 8-10
340 112 M6 (taptite) 8-10
355-375 132 M8 (taptite) 29
Par de tornillos de la TAPA: 2,2-2,4 Nm
Tabla 2.20 Par de apriete de los pernos de montaje de los extremos
de la protección
Mantenimiento
2.2.8
Diámetro de perno
(Nm)
Par
Limpieza habitual del motor FC
Retire la cubierta del ventilador y asegúrese de que todos
los orificios de entrada de aire estén abiertos. Limpie la
suciedad y las obstrucciones detrás del ventilador y a lo
largo de los nervios del bastidor, así como entre el motor y
el inversor.
Mantenimiento periódico de la pieza del motor
1. Retire la pieza del inversor, la cubierta del
ventilador y el ventilador, fijado a la extensión del
eje. Afloje y retire los tornillos de las cubiertas del
rodamiento y los pernos / pasadores de la tapa.
Las tapas deberán retirarse de las llaves.
2. Ahora el rotor se podrá desmontar fácilmente del
estátor, con cuidado de no dañar el orificio del
estátor o los bobinados del rotor.
3. Una vez desmontado el motor, puede realizarse
su mantenimiento y limpiarse. A estos efectos,
utilice una línea de aire comprimido seco con una
presión relativamente baja para obtener el mejor
resultado, ya que un caudal de aire muy potente
introducirá suciedad en los espacios entre los
bobinados y el aislante, y otras partes. Los
disolventes para limpiar grasa pueden dañar el
barniz impregnado o el aislante.
4. El motor FC se deberá volver a montar en orden
inverso a su desmontaje, acordándose de instalar
las tapas frontales sobre sus rodamientos y llaves.
NO LO FUERCE.
5. Antes de empezar, compruebe que el rotor gira
libremente. Compruebe que las conexiones
eléctricas son correctas.
6. Vuelva a instalar las poleas, acoplamientos,
ruedas dentadas, etc., que haya desmontado, con
especial cuidado de alinearlos correctamente con
la parte accionada, ya que, si están desalineados,
habrá problemas en los rodamientos y puede
romperse el eje.
7. Al volver a colocar los tornillos y pernos, deben
utilizarse solo aquellos con los requisitos de
calidad y resistencia a la tensión que recomienda
el fabricante. Deberán tener el mismo tipo de
rosca y la misma longitud (consulte Tabla 2.24).
MG03BA05 - VLT® es una marca registrada de Danfoss 25
Page 28
Instalación
Serie FCM de VLT® DriveMotor
2.2.9 Protección térmica de FCM 300
La protección térmica de FC y del motor se lleva a cabo
22
del siguiente modo:
Las situaciones de sobrecarga se controlan
•
mediante la carga eléctrica calculada (I 2X t).
La falta de ventilación y las temperaturas
•
ambiente altas se controlan mediante la medición
de la temperatura. La reducción de potencia por
velocidad baja (debido a la falta de ventilación)
no se incorpora en el cálculo de carga eléctrica,
sino en la medición de la temperatura. De esta
forma, se abarca automáticamente la ventilación
forzada.
Carga eléctrica
La intensidad se mide en el enlace de CC y se calcula la
carga estimada. El nivel de carga eléctrica se establece a
un par de salida del 105%. Por encima de ese nivel,
aumenta un contador; por debajo de él, disminuye. El
contador empieza a cero. Cuando alcanza el valor 100, la
unidad se desconecta. A 98, se activa la indicación de
advertencia (LED y código de estado).
Nivel de desconexión ⇒ Desconexión inmediata e
indicación de alarma (LED y código de estado).
El valor puede leerse en el parámetro 537. (LCP: temp.
disipador).
Los niveles de temperatura parecen altos, pero, debido a
un calentamiento local del sensor, los niveles prácticos de
la temperatura del aire interior son unos 10 °C más bajos.
2.3 Control local
2.3.1 Kit de conector de servicio
(175N2546)
Propósito
Accionar el LCP2 y el PROFIBUS al mismo tiempo. Este
conector de servicio se puede utilizar con los números
03Gxxx de la serie FCM 300 y a partir de la versión de
software 2.03. Se utiliza con el cable para el kit de
conexión 175N0162.
Carga
0% - 60 s
20% - 100 s
40% - 150 s
60% - 200 s
80% - 250 s
105% 900 s (si es superior al
120% 550 s 140% 210 s 160% 60 s >165% 20 s -
Con freno de CA completo (parámetro 400), se simula una
carga > 165% => 20 s para la desconexión.
El valor puede leerse en el parámetro 527. (LCP: térmico
FC).
La medición de la temperatura detecta la temperatura
dentro de la caja de componentes electrónicos.
A nivel de advertencia ⇒ se activa la indicación de
advertencia (LED y código de estado), y la unidad podría
desconectarse si la temperatura no baja a un valor inferior
al nivel de advertencia en un periodo de 15 minutos. Si se
activa la función TEMP.DEP.SW en el parámetro 412, la
frecuencia de conmutación se reduce gradualmente hasta
2 kHz en un intento de bajar la temperatura.
Tiempo de 0 a 100 Tiempo de 100 a 0
105%)
Tabla 2.21
300 s (si es inferior al
105%)
Ilustración 2.5
26 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 29
Instalación
Serie FCM de VLT® DriveMotor
2.3.2 Kit de conexión (175N2545)
Propósito
Obtener una conexión enchufable entre el LCP 2 y el FCM
300.
Se utiliza con el cable para el kit de conexión 175N0162.
Ilustración 2.6
Kit de montaje remoto (175N0160)
2.3.3
2.3.4
Kit de montaje remoto (cont.)
Ilustración 2.8
2 2
Ilustración 2.7 Conexiones
Color del cable / Terminal X100 / Pin sub-D
amarillo 1 8
verde 2 9
rojo 3 2
azul 4 3
Tabla 2.22
MG03BA05 - VLT® es una marca registrada de Danfoss 27
Ilustración 2.9
Page 30
Instalación
Serie FCM de VLT® DriveMotor
2.3.5 Opción de potenciómetro (177N0011)
22
Opción para controlar la referencia por medio de un
potenciómetro. Se monta esta opción en lugar de un
soporte de cable. El potenciómetro se utiliza quitando el
conector ciego para poner la referencia deseada y
volviendo a montar el conector ciego.
Ilustración 2.10
Color del cable Terminal en X101
Blanco 2 (entrada analógica)
Rojo 8 (0 V)
Negro 7 (+10 V)
Rojo 6 +24 V
Amarillo 7 +10 V
Azul 8 Tierra
Tabla 2.24 Conexiones
* Puede ser naranja en algunos cables
Tabla 2.23
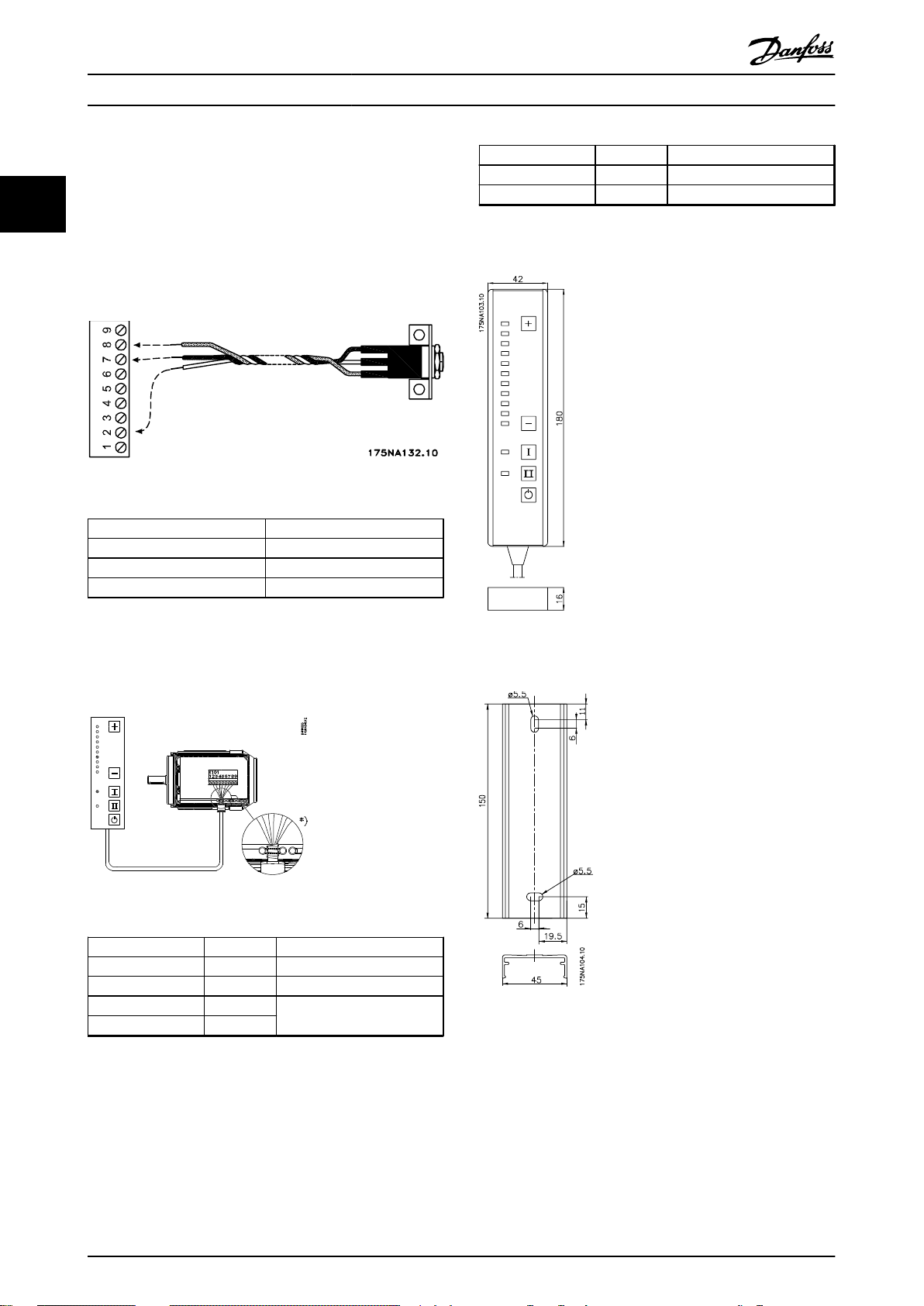
Panel de funcionamiento local (LOP)
2.3.6
(175N0128) IP65
Ilustración 2.11
Color del cable Terminal Función
Blanco 2 Referencia
Marrón 3 Reinicio
Morado* o gris 4
Verde 5
Consulte Ilustración 2.11
Ilustración 2.12 Panel de funcionamiento local (LOP) 175N0128
IP 65
Ilustración 2.13 Dispositivo para LOP 175N2717 (incluido en
175N0128)
28 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 31

Instalación
Funciones / ajustes Tecla I (Arranque) Tecla II (Arranque)
Predeterminado: funcionamiento en dos
velocidades (conectar el cable morado):
No son necesarios cambios en el ajuste de fábrica.
Función 2: funcionamiento en dos modos
(conecte el cable morado):
Seleccione los modos de funcionamiento
deseados en la configuración 1 y 2 (use el par.
4-6) Parámetro 335 = 18 (seleccione la configuración)
Función 3: funcionamiento en ambos sentidos
(conecte el cable gris):
Parámetro 335 = 10 (arranque con cambio de
sentido) Parámetro 200 = 1 (ambos sentidos)
Tabla 2.25
* Si no se necesita un reinicio, no conecte el cable marrón
** También se puede ajustar el parámetro 213
Serie FCM de VLT® DriveMotor
Func. en ref. ajustada
(+/–)
Func. con la Configuración 1
Func. en sentido
horario
Func. en vel. fija de 10
Hz**
Func. con la Configuración 2
Func. en sentido inverso Parada (y reinicio*, si hay
Tecla (Parada)
Parada (y reinicio*, si hay
desconexión)
Parada (y reinicio*, si hay
desconexión)
desconexión)
2 2
Utilice las teclas [+] / [–] para ajustar la referencia
En la puesta en marcha, la unidad siempre estará en el modo de parada. La referencia ajustada se almacena durante la
desconexión. Si se desea un modo de arranque permanente, es necesario conectar el terminal 6 al 4 y no conectar el cable
morado / gris al terminal 4. Así se desactivará la función de parada del panel LOP.
AVISO!
Después de montar los cables, corte o aísle la parte sobrante de los mismos.
MG03BA05 - VLT® es una marca registrada de Danfoss 29
Page 32

Programación
3 Programación
Serie FCM de VLT® DriveMotor
33
3.1 Parámetros
3.1.1 Panel de control (175NO131)
El motor FC dispone de manera opcional de un panel de
control local (LCP 2) que proporciona una interfaz
completa para el funcionamiento y control del motor FC.
IP 65 en la parte delantera.
3.1.2 Instalación de LCP
El LCP 2 se conecta al terminal X100, 1-4 (consulte las
instrucciones correspondientes, MI03AXYY).
1. Kit de conector de servicio (175N2546) (consulte
2.3.1 Kit de conector de servicio (175N2546)) y
cable 175N0162
2.
Kit de conexión (175N2545) (consulte 2.3.2 Kit de
conexión (175N2545)) y cable 175N0162
3.
Kit de montaje remoto (175N0160) (consulte 2.3.4
Kit de montaje remoto (cont.))
Funciones del LCP
3.1.3
Las funciones del panel de control pueden dividirse en tres
grupos:
Pantalla
•
Teclas para cambiar los parámetros de progra-
•
mación
Teclas para el funcionamiento local
•
Todos los datos se indican en una pantalla alfanumérica de
4 líneas, que puede mostrar continuamente, en el funcionamiento normal, hasta 4 mediciones y 3 condiciones
operativas. Durante la programación, se presenta toda la
información necesaria para lograr una configuración de
parámetros del motor FC rápida y efectiva. Como
suplemento de la pantalla, hay tres LED para la tensión,
advertencias y alarmas. Todos los parámetros de programación del motor FC se pueden modificar inmediatamente
desde el panel de control, a menos que se haya bloqueado
esta función con el parámetro 018.
Ilustración 3.1
30 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 33

Programación
Serie FCM de VLT® DriveMotor
3.1.4 Pantalla
La pantalla LCD está retroiluminada y cuenta con un total
de 4 líneas alfanuméricas, junto con un cuadro que
muestra el sentido de giro (flecha) y la configuración
elegida, así como la configuración en la que tiene lugar la
programación, si fuese el caso.
Ilustración 3.2
La 1.ª línea muestra hasta 3 mediciones de manera
continua en el estado de funcionamiento normal o un
texto que explica la 2.ª línea.
La 2.ª línea muestra una medición con la unidad correspondiente de manera continua, independientemente del
estado (excepto en caso de advertencia o alarma).
3.1.5
LED
En la parte inferior del panel de control, hay un LED rojo
de alarma y un LED amarillo de advertencia, además de un
LED verde de tensión.
Ilustración 3.4
Si se sobrepasan determinados valores de umbral, las luces
de alarma y/o advertencia se activan, junto con un texto
de estado y de alarma que se muestra en el panel de
control.
El LED de tensión se activa cuando el motor FC recibe
tensión eléctrica; al mismo tiempo se enciende la
iluminación posterior de la pantalla.
Teclas de control
3.1.6
Las teclas de control se dividen en funciones. Las teclas
situadas entre la pantalla y los LED indicadores se utilizan
para configurar los parámetros, incluida la opción de
lectura en pantalla durante el funcionamiento normal.
3 3
La 3.ª línea suele estar en blanco y se utiliza en el modo
de menú para mostrar el número de parámetro
seleccionado o el número o nombre de un grupo de
parámetros.
La 4.ª línea se utiliza en el estado de funcionamiento para
mostrar un texto de estado o para mostrar el valor del
parámetro seleccionado en el modo de cambio de datos.
Ilustración 3.3
Una flecha indica el sentido de giro del motor. Además, se
muestra la configuración elegida como configuración
activa en el parámetro 004. Cuando se programe otra
configuración diferente a la activa, el número de configuración que se está programando aparecerá a la derecha.
Este segundo número de configuración parpadeará.
Ilustración 3.5
Las teclas para el control local están debajo de los LED
indicadores.
Ilustración 3.6
MG03BA05 - VLT® es una marca registrada de Danfoss 31
Page 34

Programación
Serie FCM de VLT® DriveMotor
3.1.7 Funciones de las teclas de control
[DISPLAY / STATUS] se utiliza para
seleccionar el modo de pantalla o para
volver al modo de pantalla, tanto desde
el menú rápido como desde el modo de
33
Tabla 3.1
menú.
[QUICK MENU] se utiliza para programar
los parámetros pertenecientes al modo
de menú rápido. Es posible conmutar
directamente entre el modo de menú
rápido y el modo de menú.
[MENU] se utiliza para programar todos
los parámetros. Es posible conmutar
directamente entre el modo de menú y el
modo de menú rápido.
[CHANGE DATA] se utiliza para cambiar el
parámetro seleccionado en el modo de
menú o en el modo de menú rápido.
[CANCEL] se utiliza para cancelar un
cambio en el parámetro seleccionado.
Tabla 3.3
AVISO!
Si se han activado las teclas para el control local,
permanecerán activas tanto cuando se haya configurado
[JOG] sustituye la frecuencia de salida por
una frecuencia fija, mientras se mantiene
pulsada la tecla. Puede activarse o
desactivarse con el parámetro 015.
[FWD / REV] cambia el sentido de
rotación del motor, que se indica por
medio de una flecha en la pantalla,
aunque solo en modo local. Puede
seleccionarse con el parámetro 016 para
que se active o se desactive (el parámetro
013 deberá ajustarse en [1] o [3] y el
parámetro 200, en [1]).
[START] se utiliza para arrancar el motor
FC después de pararlo con la tecla
[STOP]. Siempre está activada, pero no
puede cancelar un comando de parada
emitido mediante una regleta de
conexiones.
la frecuencia en Control local y Control remoto en el
[OK] se utiliza para confirmar un cambio
en el parámetro seleccionado.
parámetro 002, aunque con la excepción de [FWD / REV],
que únicamente se activa en funcionamiento local.
[+] / [–] se utiliza para seleccionar un
parámetro y para cambiar el parámetro
elegido o para cambiar la lectura en la
línea 2.
[<][>] se utiliza para seleccionar un grupo
y para mover el cursor cuando se
modifican los parámetros numéricos.
[STOP / RESET] se utiliza para parar o
reiniciar el motor FC después de un corte
de red (desconexión). Puede activarse o
desactivarse mediante el parámetro 014.
Si se activa la parada, la línea 2 parpadea
y ha de activarse [START].
Tabla 3.2
AVISO!
Si presiona la tecla [STOP/RESET], impedirá que funcione
el motor, también con el panel LCP 2 desconectado. Su
arranque solo se podrá realizar con la tecla [START] del
LCP 2.
AVISO!
Si no se ha seleccionado una función de parada externa
y la tecla [STOP] se ha ajustado como inactiva en el
parámetro 014, el motor FC solo se podrá arrancar y
parar desconectando la tensión del mismo.
3.1.8 Estado de lectura de la pantalla
Es posible cambiar el estado de lectura de la pantalla,
consulte 3.1.15 Grupos de parámetros, en función de si el
motor FC está en funcionamiento normal o se está
programando.
32 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 35

195NA113.10
VAR 2
SETUP
1
STATUS
VAR 1.1 VAR 1.2 VAR 1.3
FRECUENCIA
MOTOR EN MARCHA
50.0 Hz
Programación
Serie FCM de VLT® DriveMotor
3.1.9 Modo de pantalla
En funcionamiento normal, pueden visualizarse
continuamente hasta 4 variables de funcionamiento: 1,1,
1,2, 1,3 y 2, y en la línea 4, el estado de funcionamiento
actual o las alarmas y advertencias que surjan.
Ilustración 3.7
3.1.10
Modo de pantalla: selección del
estado de lectura
Hay tres opciones en relación con la selección del estado
de lectura del modo de pantalla: I, II y III. La elección del
estado de lectura determina el número de variables de
funcionamiento que se leen.
Variable de funcionamiento: Unidad
Referencia [%]
Referencia [unidad]*
Realimentación [unidad]*
Frecuencia [Hz]
Frecuencia x escalado [-]
Corriente del motor [A]
Par [%]
Potencia [kW]
Potencia [CV]
Tensión del motor [V]
Tensión de enlace de CC [V]
Térmico FC [%]
Horas de funcionamiento [Horas]
Estado de la entrada, entrada
dig.
Referencia externa [%]
Código de estado [Hex]
Temp. del disipador [ºC]
Código de alarma [Hex]
Código de control [Hex]
Código de advertencia 1 [Hex]
Código de advertencia 2 [Hex]
Entrada analógica 1 [mA]
Entrada analógica 2 [V]
*) Se selecciona en el parámetro 416. La unidad aparece en el
estado de lectura 1, línea 1, o se muestra «U».
[Código binario]
3 3
Estado de
lectura:
Línea 1 Descripción de
Tabla 3.4
Tabla 3.5 proporciona las unidades vinculadas a las
variables de la primera y la segunda línea (consulte el
parámetro 009).
I: II: III:
Valor de datos
la variable de
funcionamiento de la
línea 2
para 3
variables de
funciona-
miento en la
línea 1
Descripción de
3 variables de
funcionamiento en la
línea 1
Tabla 3.5
Las variables de funcionamiento 1,1, 1,2 y 1,3 de la primera
línea, así como la variable de funcionamiento 2 de la
segunda línea, se seleccionan mediante los parámetros
009, 010, 011 y 012.
Estado de lectura I:este estado de lectura es estándar tras
el arranque o la inicialización.
La línea 2 muestra el valor de datos de una variable de
funcionamiento con la unidad relacionada, y la línea 1
muestra un texto que explica la línea 2 (véase la tabla). En
el ejemplo, se ha seleccionado la frecuencia como variable
mediante el parámetro 009. Durante el funcionamiento
normal, se podrá leer de inmediato otra variable con las
teclas [+] / [–] .
Estado de lectura II:
MG03BA05 - VLT® es una marca registrada de Danfoss 33
Page 36

24,3% 30,2% 13,8A
MOTOR EN MARCHA
50.0 Hz
MOTOR EN MARCHA
50.0 Hz
REF% PAR% INTEN A
50.0 Hz
ESPAÑOL
001 LENGUAJE
MENU RAPIDO X OF Y
Programación
Serie FCM de VLT® DriveMotor
La conmutación entre los estados de lectura I y II se
efectúa pulsando la tecla [DISPLAY / STATUS].
33
Además de tener un nombre, cada parámetro se vincula
con un número, que es el mismo, independientemente del
modo de programación. En el modo de menú, los
parámetros se dividen en grupos, según los cuales el
primer dígito del número de parámetro (de la izquierda)
En este estado, los valores de datos de los cuatro valores
de funcionamiento se muestran al mismo tiempo,
indicando la unidad relacionada (véase la tabla). En el
ejemplo, Referencia, Par, Corriente y Frecuencia están
seleccionadas como variables en la primera y segunda
líneas.
Estado de lectura III:
Este estado de lectura puede activarse, siempre que se
mantenga pulsada la tecla [DISPLAY / STATUS]. Al soltar
esta tecla, el sistema conmuta al estado de lectura II, a
menos que se pulse durante menos de aprox. 1 s.
indica el número de grupo al que pertenece este.
Independientemente del modo de programación, el
cambio en un parámetro tendrá efecto y se mostrará tanto
en el modo de menú como en el modo de menú rápido.
3.1.12
La configuración rápida se inicia pulsando la tecla [Quick
Menu], que proporciona la siguiente lectura en pantalla:
las entradas / salidas de señal (terminales de
control).
El modo de menú permite seleccionar y cambiar
•
todos los parámetros a elección del usuario. Sin
embargo, algunos parámetros «faltarán», en
función de la opción de configuración (parámetro
100), p. ej, el lazo abierto oculta todos los
parámetros PID.
Configuración rápida con el menú
rápido
Aquí se visualizan los nombres y unidades de los
parámetros para las variables de funcionamiento de la
primera línea, la variable 2 no cambia.
3.1.11
Modo de menú rápido frente a
modo de menú
La serie de motores FC puede utilizarse prácticamente para
cualquier asignación de tareas, motivo por el cual el
número de parámetros es bastante amplio. Además, esta
serie ofrece una opción de dos modos de programación:
un modo de menú y un modo de menú rápido.
El menú rápido guía al usuario por un conjunto
•
de parámetros, que serán suficientes para hacer
que el motor funcione casi óptimamente,
mientras que los ajustes de fábrica de los demás
parámetros tienen en cuenta las funciones de
control deseadas, además de la configuración de
34 MG03BA05 - VLT® es una marca registrada de Danfoss
En la parte inferior de la pantalla, se dan el número y
nombre del parámetro, junto con el estado y valor del
primer parámetro de la configuración rápida. La primera
vez que se pulsa la tecla [Quick Menu] después de
encender la unidad, las lecturas empiezan en la pos. 1,
consulte Tabla 3.6.
Page 37

FRECUENCIA
50.0 Hz
0 PANEL Y DISPLAY
FREKVENS
001 LENGUAJE
ENGLISH
50.0 Hz
Programación
Serie FCM de VLT® DriveMotor
3.1.13 Selección de parámetros
La selección de parámetros se realiza con las teclas
[+] / [–]. Puede accederse a los siguientes parámetros:
Pos.: N.º: Parámetro: Unidad:
1 001 Idioma
2 200 Sentido de giro
3 101 Características de par
4 204 Referencia mín. [Hz]
5 205 Referencia máx. [Hz]
6 207 Tiempo de rampa de
aceleración
7 208 Tiempo de rampa de
desaceleración
8 002 Control local / remoto
9 003 Referencia local
10 500 Dirección del bus
Tabla 3.6 Selección de parámetros
3.1.14
El modo de menú se inicia pulsando la tecla [MENU], lo
que produce la siguiente lectura en pantalla:
Modo de menú
[s]
[s]
3.1.15
En el modo de menú, los parámetros se dividen en grupos.
La selección de cada grupo se realiza con las teclas [<][>] .
Se puede acceder a los siguientes grupos de parámetros:
N.º de grupo Grupo de parámetros
0 Funcionamiento y pantalla
1 Carga y motor
2 Referencias y límites
3 Entradas y salidas
4 Funciones especiales
5 Comunicación en serie
6 Funciones técnicas
* Si desea obtener más información sobre los grupos de
parámetros 800 y 900 para PROFIBUS, consulte el manual de
FCM Profibus, MG03EXYY.
Una vez seleccionado el grupo de parámetros deseado,
puede elegirse cada parámetro con las teclas [+] / [–]:
Grupos de parámetros
Tabla 3.7
3 3
Ilustración 3.8
La línea 3 de la pantalla muestra el número y nombre del
grupo de parámetros.
Ilustración 3.9
La línea 3 de la pantalla muestra el número y nombre del
parámetro, mientras que el estado / valor del mismo se
indica en la línea 4.
3.1.16
Independientemente de si se ha seleccionado un
parámetro en el modo de menú rápido o en el modo de
menú, el procedimiento para cambiar los datos es el
mismo. Al pulsar la tecla [Change Data], tiene acceso a
cambiar el parámetro seleccionado, después de lo cual
parpadeará el subrayado en la línea 4 de la pantalla. El
procedimiento para modificar los datos depende de si el
parámetro seleccionado representa un valor de dato
numérico o un valor de texto.
Cambio de datos
MG03BA05 - VLT® es una marca registrada de Danfoss 35
Page 38

50.0 Hz
FRE CUENCIA
001 LENGUAJE
ENGLISH
09,0 HZ
FRECUENCIA
50.0 Hz
130 FREC. ARRANQUE
50.0 Hz
130 FREC. ARRANQUE
10,0 HZ
FRECUENCIA
Programación
Serie FCM de VLT® DriveMotor
3.1.17 Cambio de un valor de texto
Si el parámetro seleccionado es un valor de texto, este
valor deberá cambiarse con las teclas [+] / [–].
El dígito seleccionado se puede modificar de manera
ilimitada con las teclas [+] / [–]:
33
Ilustración 3.12
Ilustración 3.10
El dígito seleccionado se indica mediante un dígito
parpadeante. La línea inferior de la pantalla muestra el
La línea inferior de la pantalla muestra el valor de texto
que se introducirá (guardará) al confirmar dicho valor [OK].
3.1.18
Cambio variable de valores de datos
numéricos
valor de dato que se introducirá (guardará) cuando lo
confirme con [OK].
Si el parámetro elegido representa un valor de dato
numérico, primero se selecciona un dígito con las teclas [<]
[>].
Ilustración 3.11
36 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 39

175ZA446.11
VAR 2
ESTADO
MODO DE DISPLAY
50.0 HZ
MODO DE DATOS
001 LENGUAJE
ENGLISH
▲
▲
▲
▲
▲
▲
▲
▲
▲
VAR 1.1 VAR 1.2 VAR 1.3
FRECUENCIA
50.0 HZ
FRECUENCIA
001 LENGUAJE
ENGLISH
50.0 HZ
ENGLISH
001 LENGUAJE
50.0 HZ
0 PANEL Y DISPLAY
MODO DE CAMBIO DE DATOS MODO DE CAMBIO DE DATOS
Selección de
valor de datos
MODO DE MENU RAPIDO
MODO DE MENU
Selección de
parámetro
Selección
de grupo
FREKVENS
001 LENGUAJE
ENGLISH
50.0 HZ
QUICK MENU 1 of 13
QUICK MENU 1 of 13
Programación
3.1.19 Estructura del menú
Serie FCM de VLT® DriveMotor
3 3
Ilustración 3.13
MG03BA05 - VLT® es una marca registrada de Danfoss 37
Page 40

Programación
Serie FCM de VLT® DriveMotor
3.1.20 Grupo de parámetros 0-**
Funcionamiento y display
001 Idioma
Valor:
33
Inglés (ENGLISH) [0]
Alemán (DEUTSCH) [1]
Francés (FRANÇAIS) [2]
Danés (DANSK) [3]
Español (ESPAÑOL) [4]
Italiano (ITALIANO) [5]
El estado en la entrega puede ser distinto del ajuste de
fábrica.
Función:
Las opciones de este parámetro definen el idioma que se
utiliza en la pantalla.
Descripción de opciones:
Pueden elegirse los idiomas [0] Inglés, [1] Alemán, [2]
Francés, [3] Danés, [4] Español e [5] Italiano.
002
Valor:
Control remoto (REMOTO) [0]
Control local (LOCAL) [1]
Función:
Existen dos métodos para controlar el motor FC: [0] Control
remoto y [1] Control local.
Descripción de opciones:
Si se selecciona [0] Control remoto, el motor FC puede
controlarse mediante:
1. Los terminales de control o el puerto de comuni-
2. La tecla [Start]. Sin embargo, no puede cancelar
3. Las teclas [Stop], [Jog] y [Reset], siempre que
Si se selecciona [1] Control local, el motor FC puede
controlarse mediante:
1. La tecla [Start]. No obstante, esto no puede
2. Las teclas [Stop], [Jog] y [Reset], siempre que
3. La tecla [FWD / REV], siempre que se haya
Control local / remoto
cación en serie.
los comandos de parada (también desactivación
de arranque) introducidos mediante las entradas
digitales o el puerto de comunicación en serie.
estén activadas (consulte los parámetros 014, 015
y 017).
anular los comandos de parada en los terminales
digitales (si se ha seleccionado [2] o [4] en el
parámetro 013).
estén activadas (consulte los parámetros 014, 015
y 017).
activado en el parámetro 016 y que se haya
elegido entre [1] o [3] en el parámetro 013.
4. Las teclas «Flecha arriba» y «Flecha abajo» para
controlar la referencia local mediante el
parámetro 003.
003 Referencia local
Valor:
Par. 013 ajustado para [1] o [2]:
0-f
MÁX.
Par. 013 ajustado para [3] o [4] y par. 203 =
[0] ajustado para:
Ref
-Ref
MÍN.
MÁX.
Par. 013 ajustado para [3] o [4] y par. 203
= [1] ajustado para:
–Ref
Función:
Este parámetro permite ajustar manualmente el valor de
referencia deseado (velocidad o referencia de la configuración seleccionada según la opción elegida en el
parámetro 013).
La unidad sigue la configuración seleccionada en el
parámetro 100, siempre que se haya seleccionado [3]
Regulación del proceso, lazo cerrado.
Descripción de opciones:
[1] Debe seleccionarse Local en el parámetro 002 para
utilizar este parámetro.
El valor ajustado se guarda, en caso de corte de
electricidad, véase el parámetro 019.
En este parámetro, no se sale automáticamente del modo
de cambio de datos (tras un tiempo límite).
La referencia local no puede ajustarse mediante el puerto
de comunicación en serie.
004
Valor:
Función:
Las opciones de este parámetro definen el número de
configuración que quiere utilizar para controlar las
funciones del motor FC.
Todos los parámetros pueden programarse en dos configuraciones de parámetros individuales, Configuración 1 y
Configuración 2. Además, hay una configuración preprogramada, denominada Ajuste de fábrica, que no se puede
modificar.
Descripción de opciones:
[0] Ajuste de fábrica contiene los datos de fábrica. Puede
emplearse como fuente de datos, si las demás configuraciones van a establecerse en una condición conocida.
En los parámetros 005 y 006, es posible copiar de una
configuración a otra.
-+Ref
MÁX.
Ajuste de fábrica (AJUSTE DE FÁBRICA) [0]
Configuración 1 (CONFIGURACIÓN 1) [1]
Configuración 2 (CONFIGURACIÓN 2) [2]
Configuración múltiple (CONFIGURACIÓN
MÚLTIPLE) [5]
MÁX.
Configuración activa
000,000
000,000
000,000
38 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 41

Programación
Serie FCM de VLT® DriveMotor
[1] Las configuraciones 1 y [2] 2 son dos configuraciones
individuales que pueden seleccionarse, según se necesite.
[5] La configuración múltiple se utiliza si se desea la
conmutación del montaje remoto entre varias configuraciones. Pueden emplearse los terminales 2, 3, 4 y 5,
además del puerto de comunicación en serie, para
conmutar entre las configuraciones.
005 Configuración de programación
Valor:
Ajuste de fábrica (AJUSTE DE FÁBRICA) [0]
Configuración 1 (CONFIGURACIÓN 1) [1]
Configuración 2 (CONFIGURACIÓN 2) [2]
Configuración activa (CONFIGURACIÓN ACTIVA) [5]
Función:
Debe elegirse la configuración en que va a tener lugar la
programación (cambio de datos) durante el funcionamiento. Puede programar ambas configuraciones,
independientemente de la que haya seleccionado como
activa (en el parámetro 004).
Descripción de opciones:
El [0] Ajuste de fábrica contiene los datos de fábrica y
puede utilizarse como fuente de datos, si las demás
configuraciones van a establecerse en una condición
conocida.
[1] Las configuraciones 1 y [2] 2 son configuraciones individuales que se pueden utilizar, según se necesite. Es posible
programarlas libremente, independientemente de la
configuración que haya seleccionado como configuración
activa, que controla las funciones del motor FC.
006
Valor:
Sin copiar (SIN COPIA) [0]
Copiar a Configuración 1 desde # (COPIAR A
CONFIGURACIÓN 1) [1]
Copiar a Configuración 2 desde # (COPIAR A
CONFIGURACIÓN 2) [2]
Copiar a Configuración todos desde # (COPIAR A
TODOS) [5]
# = Configuración seleccionada en el parámetro 005
Función:
Se efectúa una copia de la configuración seleccionada en
el parámetro 005 a una de las demás configuraciones o a
todas ellas de manera simultánea.
007
Valor:
Sin copiar (SIN COPIA) [0]
Cargar todos los parámetros (CARGAR TODOS LOS
PAR.) [1]
Descargar todos los parámetros (DESCARGAR
TODOS) [2]
Copia de configuraciones
Copia con el LCP
Descargar par. no relativos a potencia
(DESC. NO REL. TAMAÑO) [3]
Función:
El parámetro 007 se emplea si va a utilizarse la función de
copia integrada del panel de control. De esta forma, puede
copiar fácilmente los valores de parámetros de un motor
FC a otro.
Descripción de opciones:
Seleccione [1] Cargar todos los parámetros, si todos los
valores de parámetros se van a transmitir al panel de
control. Seleccione [2] Descargar todos los parámetros, si
todos los valores de parámetros transmitidos van a
copiarse en el motor FC, en el que está montado el panel
de control. Seleccione [3] Descargar par. no relativos a
potencia, si únicamente se van a descargar los parámetros
no relativos a potencia. Esto se utiliza cuando se descargan
los parámetros a un motor FC con una potencia nominal
distinta del motor utilizado como origen de la configuración de parámetros.
008
Valor:
0.0-100.00 [1-10000]
1,00 [100]
Función:
Este parámetro selecciona el factor por el que se multiplica
la frecuencia del motor, fM, para la presentación en
pantalla, cuando los parámetros 009-012 se han ajustado
como Frecuencia x Escalado [5].
Descripción de opciones:
Ajuste el factor de escalado requerido.
009
Valor:
Ninguno [0]
Referencia [%] (REFERENCIA [%]) [1]
Referencia [unidad] (REFERENCIA [UNIDAD]) [2]
Realimentación [unidad] (REALIMENTACIÓN
[UNIDAD]) [3]
Frecuencia [Hz] (FRECUENCIA (Hz]) [4]
Frecuencia x Escalado [–] (FRECUENCIA x ESCALA) [5]
Corriente del motor [A] (CORRIENTE DEL MOTOR
[A]) [6]
Par [%] (PAR [%]) [7]
Potencia [kW] (POTENCIA [kW]) [8]
Potencia [CV] (POTENCIA [cv] [US]) [9]
Tensión del motor [V] (TENSIÓN DEL MOTOR [V]) [11]
Tensión del enlace de CC [V] (TENSIÓN DEL
ENLACE DE CC [V]) [12]
Carga térmica, FC [%] (TÉRMICO FC [%]) [14]
Horas de funcionamiento [Horas] (HORAS DE
FUNCIONAMIENTO) [15]
Escalado de pantalla de la frecuencia del
motor
Línea de pantalla 2
3 3
MG03BA05 - VLT® es una marca registrada de Danfoss 39
Page 42

Programación
Serie FCM de VLT® DriveMotor
Entrada digital [Código binario] (ENTRADA
DIGITAL [BIN]) [16]
Referencia externa [%] (REF. EXTERNA [%]) [21]
Código de estado [hex] (CÓDIGO DE ESTADO
[HEX]) [22]
33
Temp. disipador [°C] (TEMP. DISIPADOR [°C]) [25]
Código de alarma [hex] (CÓDIGO DE ALARMA
[HEX]) [26]
Código de control [hex] (CODIGO DE CONTROL
[HEX]) [27]
Código de advertencia 1 [hex]
(CÓDIGO DE ADVERTENCIA 1 [HEX]) [28]
Código de advertencia 2 [hex]
(CÓDIGO DE ESTADO AMPLIADO [HEX]) [29]
Entrada analógica 1 [mA] (ENTRADA ANALÓGICA
1 [mA]) [30]
Entrada analógica 2 [V] (ENTRADA ANALÓGICA 2
[V]) [31]
Función:
Este parámetro permite presentar una opción de valores
de datos en la línea 2 de la pantalla.
Los parámetros 010-012 permiten utilizar tres valores de
datos más, que se presentan en la línea 1.
Las lecturas de la pantalla se efectúan pulsando el botón
[DISPLAY / STATUS]; consulte 3.1.7 Funciones de las teclas
de control.
Descripción de opciones:
Referencia [%] corresponde a la referencia total (suma de
ref. digital / analógica / interna / de bus / de
mantener / de enganche arriba y abajo).
Referencia [unidad] da la suma de las referencias, utilizando
la unidad definida, partiendo de la configuración del
parámetro 100 (Hz, Hz y r/min).
Realimentación [unidad] da el valor de estado de los
terminales 1 y 2, utilizando la unidad / escala
seleccionadas en los parámetros 414, 415 y 416.
Frecuencia [Hz] da la frecuencia del motor, es decir, la
frecuencia de salida que recibe el motor.
Frecuencia x Escalado [–] corresponde a la frecuencia actual
del motor fM, multiplicada por un factor (escalado)
ajustado en el parámetro 008.
Corriente del motor [A] indica la corriente de fase del motor
medida como valor efectivo.
Par [%] indica la carga actual del motor en relación con el
par motor nominal.
Potencia [kW] indica la potencia real que consume el
motor en kW.
Potencia [CV] indica la potencia real que consume el motor
en CV.
Tensión del motor [V] indica la tensión de salida al motor.
Tensión del enlace de CC [V] indica la tensión del circuito
intermedio del motor FC.
Carga térmica, FC [%] indica la carga térmica
calculada / estimada del motor FC. 100% es el límite de
desconexión.
Horas de funcionamiento
que ha funcionado el motor desde el último reinicio en el
parámetro 619.
Entrada digital [Código binario] indica los estados de señal
de los 4 terminales digitales (2, 3, 4 y 5). La entrada 5
corresponde al bit del extremo izquierdo. «0» = sin señal,
«1» = señal conectada.
Referencia externa [%] da la suma de la referencia externa
como porcentaje (suma de analógica / impulso / bus).
Código de estado [hex] da el código de estado enviado por
el puerto de comunicación en serie en código hex desde el
motor FC.
Temp. disipador [°C] indica la temperatura actual del
disipador del motor FC. El límite de desconexión es 90
±5 °C y el de reconexión, 60 ±5 °C.
Código de alarma [hex] indica una o varias alarmas en
código hexadecimal. Consulte 4.2.4 Código de advertencia,
código de estado ampliado y código de alarma.
Código de control [hex] indica el código de control para el
motor FC. Consulte 3.6 Comunicación en serie (Guía de
diseño de FCM 300).
Código de advertencia 1 [hex] indica una o más
advertencias en código hexadecimal. Consulte 4.2.4 Código
de advertencia, código de estado ampliado y código de
alarma para obtener más información.
Código de estado ampliado [hex] indica una o más
condiciones de estado en código hexadecimal. Consulte
4.2.4 Código de advertencia, código de estado ampliado y
código de alarma para obtener más información.
Entrada analógica 1 [mA] indica el valor de la señal en el
terminal 1.
Entrada analógica 2 [V] indica el valor de la señal en el
terminal 2.
010
Valor:
Referencia [%] [1]
Consulte el parámetro 009.
Función:
Este parámetro permite la opción de presentar en la línea
1, posición 1, de la pantalla el primero de tres valores de
datos.
Descripción de opciones:
Se dispone de 24 valores de datos distintos, consulte el
parámetro 009.
011
Valor:
Corriente del motor [A] [1]
Consulte el parámetro 009
Función:
Este parámetro permite la opción de presentar en la línea
1, posición 2, de la pantalla el segundo de tres valores de
datos.
Línea de pantalla 1,1
Línea de pantalla 1,2
[Horas] indica el número de horas
40 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 43

Programación
Serie FCM de VLT® DriveMotor
Las lecturas de la pantalla se efectúan pulsando el botón
[DISPLAY / STATUS]; consulte 3.1.7 Funciones de las teclas
de control.
Descripción de opciones:
Se dispone de 24 valores de datos distintos, consulte el
parámetro 009.
012 Línea de pantalla 1,3
Valor:
Potencia [kW] [8]
Consulte el parámetro 009
Función:
Este parámetro da la opción de presentar en la línea 1,
posición 3, el tercero de los tres valores de datos.
Las lecturas de la pantalla se realizan pulsando el botón
[DISPLAY / STATUS], consulte 3.1.7 Funciones de las teclas
de control.
Descripción de opciones:
Se dispone de 24 valores de datos distintos, consulte el
parámetro 009.
013
Valor:
Local no activo (DESACTIVAR) [0]
Control de LCP y lazo abierto.
(CTRL LCP / LAZO ABIERTO) [1]
Control digital de LCP y lazo abierto.
(CTRL DIG. + LCP / LAZO AB.) [2]
Control de LCP / como parámetro 100.
(CTRL LCP / COMO P100) [3]
Control digital de LCP / como parámetro 100.
(CTRL DIG. + LCP / COMO P100) [4]
Función:
Aquí es donde se selecciona la función deseada, si se ha
elegido el control local en el parámetro 002. Consulte
también la descripción del parámetro 100.
Descripción de opciones:
Si se selecciona Local no activo [0], se bloquea un posible
ajuste de Referencia local mediante el parámetro 003.
Únicamente se puede cambiar a Local no activo [0] desde
alguna de las otras opciones de ajuste del parámetro 013,
cuando el motor FC se haya ajustado en Control remoto [0],
en el parámetro 002.
Control de LCP y lazo abierto [1] se utiliza cuando se quiere
ajustar la velocidad (en Hz) mediante el parámetro 003,
cuando el motor FC se ha ajustado en Control local [1], en
el parámetro 002.
Si el parámetro 100 no se ha ajustado en Regulación de
velocidad lazo abierto [0], habrá una conmutación a
Regulación de velocidad lazo abierto [0].
Control digital de LCP y lazo abierto [2] funciona igual que
Control de LCP y lazo abierto [1], con la única diferencia de
que, cuando el parámetro 002 se ha ajustado en Funciona-
Control local / Configuración como
parámetro 100
miento local
digitales.
Control de LCP / como parámetro 100 [3] debe
seleccionarse, si la referencia se va a ajustar en el
parámetro 003.
Control digital de LCP / como parámetro 100 [4] funciona
igual que Control de LCP / como parámetro 100 [3], aunque,
cuando el parámetro 002 se ha ajustado en Funciona-
miento local [1], el motor puede controlarse mediante las
entradas digitales.
La frecuencia del motor y el sentido de giro actuales se
deben conservar. Si el sentido de giro actual no
corresponde a la señal de inversión (referencia negativa), la
frecuencia del motor fM se ajustará en 0 Hz.
Cambio de control digital de LCP y lazo abierto a control
remoto:
La configuración seleccionada (parámetro 100) estará
activada. La función asegura un cambio suave.
Cambio de Control remoto a Control de LCP / como
parámetro 100 o Control digital de LCP / como parámetro
100.
Se mantendrá la referencia actual. Si la señal de referencia
es negativa, la referencia local se ajustará en 0.
Cambio de Control de LCP / como parámetro 100 o Control
remoto de LCP / como parámetro 100 a Control remoto.
La referencia se sustituirá por la señal de referencia activa
del control remoto.
014
Valor:
No es posible (DESACTIVAR) [0]
Posible (ACTIVAR) [1]
Función:
Este parámetro desactiva o activa la función en cuestión
desde el panel de control. La tecla se utiliza si se ha
definido el parámetro 002 como [0] Control remoto o [1]
Local.
Descripción de opciones:
Si se selecciona [0] Desactivar en este parámetro, la tecla
[STOP] estará desactivada.
015
Valor:
No es posible (DESACTIVAR) [0]
Posible (ACTIVAR) [1]
Función:
En este parámetro, la función en cuestión puede activarse
o desactivarse en el panel de control.
Descripción de opciones:
Si se selecciona [0] Desactivar en este parámetro, la tecla
[JOG] estará desactivada.
[1], el motor se controla mediante las entradas
Parada local
Velocidad fija local
3 3
MG03BA05 - VLT® es una marca registrada de Danfoss 41
Page 44

Programación
Serie FCM de VLT® DriveMotor
016 Cambio de sentido local
Valor:
No es posible (DESACTIVAR) [0]
Posible (ACTIVAR) [1]
33
Función:
En este parámetro, la función en cuestión puede activarse
o desactivarse en el panel de control. Esta función
únicamente se puede utilizar si el parámetro 002 se ha
ajustado en [1] Funcionamiento local y el parámetro 013,
en [1] Control de LCP con lazo abierto o [3] Control de LCP
como parámetro 100.
Descripción de opciones:
Si se selecciona [0] Desactivar en este parámetro, la tecla
[FWD / REV] estará desactivada.
Consulte el parámetro 200.
017
Valor:
No es posible (DESACTIVAR) [0]
Posible (ACTIVAR) [1]
Función:
En este parámetro, la función en cuestión puede
seleccionarse o retirarse del teclado. La tecla se utiliza si se
ha definido el parámetro 002 como [0] Control remoto o [1]
Control local.
Descripción de opciones:
Si se selecciona [0] Desactivar en este parámetro, la tecla
[RESET] estará desactivada.
018
Valor:
Desbloqueado (DESBLOQUEADO) [0]
Bloqueado (BLOQUEADO) [1]
Función:
En este parámetro, el software puede «bloquear» el
control, es decir, no es posible realizar cambios de datos
mediante LCP 2 (sin embargo, esto sigue siendo posible
mediante el puerto de comunicación en serie).
Descripción de opciones:
Si se ha seleccionado [1] Bloqueado, no es posible realizar
cambios de datos.
019
Valor:
Rearranque autom., usar ref. guardada
(REARRANQUE AUTOM.) [0]
Parada forzada, usar ref. guardada (LOCAL =
PARADA) [1]
Parada forzada, ajustar ref. en 0 (LOCAL =
PARADA, REF. = 0) [2]
Función:
Ajuste del modo de funcionamiento deseado cuando se ha
reconectado la tensión de red.
Reinicio de fallo local
Bloqueo de parámetros
Estado de funcionamiento en arranque,
control local
Está función únicamente puede estar activada en correspondencia con [1] Control local en el parámetro 002.
Descripción de opciones:
[0] Rearranque autom., usar ref. guardada se selecciona si la
unidad debe arrancar con la misma referencia local
(ajustada en el parámetro 003) y con las condiciones de
arranque y parada dadas con las teclas [Start / Stop] del
motor FC justo antes de desconectar la alimentación
eléctrica.
[1] Parada forzada, usar ref. guardada se utiliza si la unidad
debe permanecer parada cuando se conecta la tensión de
red, hasta que se pulse la tecla [START]. Después del
comando de arranque, la referencia local utilizada se ajusta
en el parámetro 003.
[2] Parada forzada, ajustar ref. en 0 se selecciona si la
unidad debe permanecer parada cuando se conecta la
tensión de red. La referencia local (parámetro 003) se
reinicia.
Grupo de parámetros 1-** Carga y
3.2.1
motor
100 Configuración
Valor:
Velocidad, modo de lazo abierto (LAZO ABIERTO
VELOCIDAD) [0]
Proceso, modo de lazo cerrado
(LAZO CERRADO PROCESO) [1]
Función:
Este parámetro se utiliza para seleccionar la configuración
a la que se va a adaptar el motor FC.
Descripción de opciones:
Si se selecciona [0] Velocidad, modo de lazo abierto, se
obtiene un control normal de la velocidad (sin señal de
realimentación), con compensación automática del deslizamiento, que asegura una velocidad constante con cargas
variables. Las compensaciones están activadas, aunque
puede desactivarlas de la forma requerida en los
parámetros 133-136.
Si se selecciona [3] Proceso, modo de lazo cerrado, se
activará el controlador interno de proceso, permitiendo así
la regulación precisa de un proceso respecto a una señal
determinada. Esta señal de proceso se puede ajustar
mediante la unidad de proceso real o en forma de
porcentaje. Es necesario que el proceso suministre una
señal de realimentación, y debe ajustarse el valor de
consigna. Si se utiliza un proceso en modo de lazo cerrado,
no se podrán ajustar ambos sentidos en el parámetro 200.
42 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 45
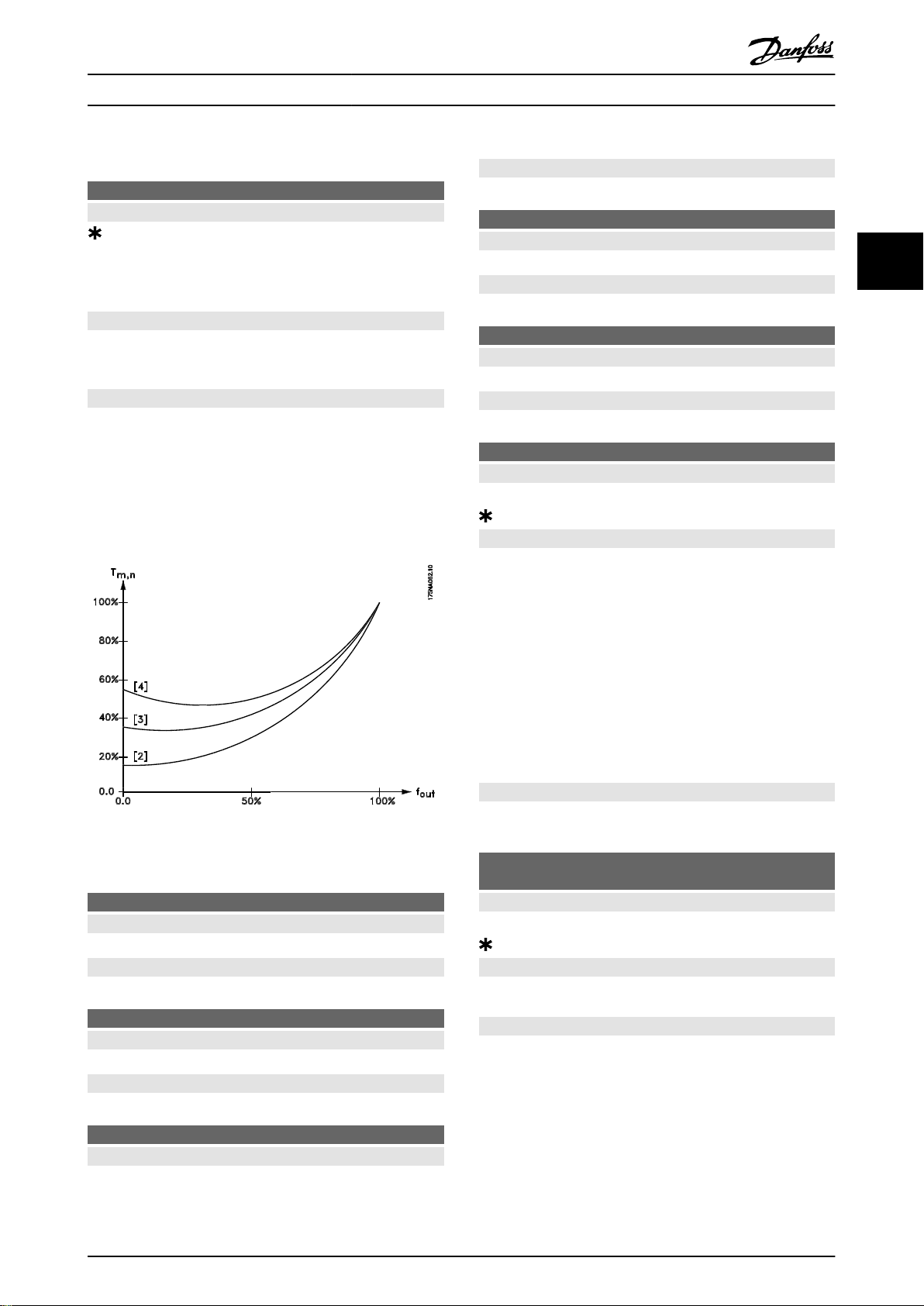
Programación
101 Características de par
Valor:
Par constante (PAR CONSTANTE) [1]
Par variable: bajo (PAR VAR.: BAJO) [2]
Par var.: medio (PAR VAR.: MEDIO) [3]
Par variable: alto (PAR VAR.: ALTO) [4]
Función:
En este parámetro, se selecciona el principio para ajustar la
característica U/f del motor FC de acuerdo con las características de par de la carga.
Descripción de opciones:
Si se selecciona [1] Par constante, se obtiene una característica U/f en función de la carga, en la que aumenta la
tensión de salida, en caso de un incremento de la carga
(corriente), de forma que se conserve una magnetización
constante del motor.
Seleccione [2] Par variable: bajo, [3] Par variable: medio o [4]
Par variable: alto, si la carga es cuadrática (bombas
centrífugas, ventiladores).
Serie FCM de VLT® DriveMotor
Función:
Parámetro de solo lectura.
105 Corriente del motor
Valor:
XX,X X A, depende del motor FC. [XXXX]
Función:
Parámetro de solo lectura.
106 Velocidad nominal del motor
Valor:
XX r/min, depende del motor FC [XX]
Función:
Parámetro de solo lectura.
117
Valor:
OFF - 100% [OFF -100]
OFF%. [DESACTIVADO]
Función:
Se puede optimizar la amortiguación de resonancia. En
este parámetro, se ajusta el grado de influencia.
El valor puede establecerse entre el 0% (DESACTIVADO) y
el 100%.
El 100 % corresponde a la ganancia proporcional permitida
en función de la unidad. El valor predeterminado es
DESACTIVADO.
Amortiguación de resonancia
3 3
Ilustración 3.14
102
Valor:
XX,XX kW, depende del motor FC [XXXX]
Función:
Parámetro de solo lectura.
103
Valor:
XX V, depende del motor FC [XX]
Función:
Parámetro de solo lectura.
104
Valor:
XX,X Hz, depende del motor FC [XXX]
Potencia del motor
Tensión del motor
Frecuencia del motor
Descripción de la función:
El par del sistema se estima basándose en el enlace de CC
y se realimenta a un controlador de ganancia proporcional.
El controlador se desactiva a un nivel dependiente de la
unidad de corriente de motor activa.
Descripción de opciones:
Ajuste el grado de ganancia proporcional para la realimentación de par entre el 0 % (DESACTIVADO) y el 100%.
118
Valor:
0-200% [0-200]
Dependiente del motor
Función:
La resonancia de alta frecuencia puede eliminarse
configurando los parámetros 117 y 118.
Descripción de opciones:
Ajuste el porcentaje de carga a partir del cual la función
de amortiguación de la resonancia no debe estar activada.
Desconexión de la amortiguación de la
resonancia
MG03BA05 - VLT® es una marca registrada de Danfoss 43
Page 46

Programación
Serie FCM de VLT® DriveMotor
126 Tiempo de frenado de CC
Valor:
0,0-60,0 s [0-600]
10,0 s [100]
33
Frenado de CC, consulte P132
Función:
Este parámetro sirve para ajustar el tiempo de frenado de
CC durante el cual debe activarse la tensión de frenado de
CC (parámetro 132).
0,0 s = DESACTIVADO
Descripción de opciones:
Ajuste el tiempo deseado.
127
Valor:
0,0-f
0,0 Hz = DESACTIVADO [0]
Frenado de CC, consulte P132
Función:
Este parámetro sirve para establecer la frecuencia de
conexión de frenado de CC, en que se activará la tensión
de frenado de CC (parámetro 132), en relación con un
comando de parada.
Descripción de opciones:
Ajuste la frecuencia deseada.
128
Valor:
Sin protección (SIN PROTECCIÓN) [0]
Función:
Parámetro de sólo lectura
Consulte la sección Protección térmica FCM 300.
132
Valor:
0-100% [0-100]
0% [0]
Función:
Frenado de CC:
si se proporciona tensión de CC al estátor en un motor
asíncrono, se producirá un par de frenado.
El par de frenado depende de la tensión de frenado de CC
seleccionada.
Para aplicar un par de frenado por medio del frenado de
CC, el campo giratorio (CA) del motor se sustituye por un
campo fijo (CC).
El frenado de CC se activará cuando se encuentre por
debajo de la frecuencia de conexión y la parada se active
al mismo tiempo. P126, P127 y P132 se utilizan para el
control del frenado de CC.
El frenado de CC también puede activarse directamente
mediante una entrada digital.
Frecuencia de conexión de frenado de CC
(parámetro 202)
MÁX.
Protección térmica del motor
Tensión de frenado de CC
[0 -]
Función:
El par de frenado depende de la tensión de frenado de CC
seleccionada. La tensión de frenado de CC se indica como
porcentaje de la tensión de frenado máxima.
Descripción de opciones:
Ajuste la tensión deseada como porcentaje específico de la
tensión de frenado máxima.
133 Tensión de arranque
Valor:
0,00-100,00 V [0-10000]
Depende del motor
Función:
Es posible ajustar la tensión del motor por debajo del
punto de debilitamiento del campo, independientemente
de la corriente del motor. Utilice este parámetro para
compensar pares de arranque demasiado bajos.
La tensión de arranque es la tensión a 0 Hz.
Descripción de opciones:
Ajuste la tensión de arranque que desee.
134
Valor:
0.0-300.0% [0-3000]
100,0% [1000]
Función:
En este parámetro, se ajusta la característica de carga. Al
incrementar esta compensación, el motor recibe una
tensión adicional y una frecuencia suplementaria a medida
que aumenta la carga. Esto se utiliza, por ejemplo, en
motores y aplicaciones en que hay una gran diferencia
entre la corriente de carga máxima y la corriente de carga
en vacío del motor.
Descripción de opciones:
Si los ajustes de fábrica no son adecuados, es necesario
compensar la carga para que el motor arranque con la
carga correspondiente.
Compensación de carga
PRECAUCIÓN
Se debería fijar al 0%, en caso de cambios rápidos de
carga. Una compensación excesiva de la carga puede
producir inestabilidad.
135 Relación U/f
Valor:
0,00-20,00 V/Hz [0-2000]
Dependiente del motor
Función:
La tensión de salida al motor puede ajustarse en una base
lineal desde 0 a la frecuencia nominal.
44 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 47

Programación
Serie FCM de VLT® DriveMotor
Descripción de opciones:
Ajuste la frecuencia deseada.
Ilustración 3.15
136
Valor:
–500,0-+500,0% [-5000 - +5000]
100,0% [1000]
Función:
La compensación de deslizamiento nominal (ajuste de
fábrica) se calcula según los parámetros del motor. En el
parámetro 136, la compensación de deslizamiento puede
ajustarse con detalle. Al optimizarse, la velocidad del motor
depende menos de la carga. Esta función no se activa al
mismo tiempo que el par variable (parámetro 101).
Descripción de opciones:
Introduzca un valor en % de la compensación de deslizamiento nominal.
137
Valor:
0-100% [0-100]
0 (DESACTIVADO)% [0]
Función:
Este parámetro se utiliza para mantener la función del
motor (par mantenido) o para precalentarlo. La tensión de
CC mantenida está activada con el motor parado, cuando
se ajusta en un valor distinto de 0. La parada por inercia
desactiva esta función.
Descripción de opciones:
Introduzca el valor en %.
Compensación de deslizamiento
Tensión de CC mantenida
139
Valor:
0,5-132 Hz (parámetro 200) [5-]
3,0 Hz [30]
Función:
Aquí se selecciona la frecuencia con la que se activará el
freno externo por medio de la salida establecida en el
parámetro 323 o 340, cuando el motor desacelera para
detenerse.
Descripción de opciones:
Ajuste la frecuencia deseada.
Consulte Ilustración 3.16.
Ilustración 3.16 Perfil de velocidad para la función de freno
147 Ajuste del tipo de motor
Valor:
Depende de la unidad.
Función:
Aquí es donde se selecciona el motor específico en el que
se va a instalar la pieza de recambio.
Descripción de opciones:
Seleccione la opción de motor de acuerdo con la marca, el
número de polos y la potencia.
Ejemplo: ATB STD-4-075 significa motor ATB de 4 polos,
0,75 kW
.
3.3.1
Frecuencia de conexión del freno en la
parada activada
Grupo de parámetros 2-** Referencias
y límites
3 3
138
Valor:
0,5-132 Hz (parámetro 200) [5-]
3,0 Hz [30]
Función:
Aquí se selecciona la frecuencia con la que se debe soltar
el freno externo por medio de la salida establecida en el
parámetro 323 o 340 durante el funcionamiento.
Frecuencia de desconexión del freno
MG03BA05 - VLT® es una marca registrada de Danfoss 45
200 Dirección de giro
Valor:
Solo en sentido horario,
(Solo en sentido horario) [0]
Ambos sentidos,
0-132 Hz
(132 Hz AMBOS SENTIDOS) [1]
Solo en sentido antihorario, 0-132 Hz
(132 Hz EN SENT. ANTIHOR.) [2]
Función:
Este parámetro garantiza la protección contra una
inversión no deseada.
Page 48

Programación
Serie FCM de VLT® DriveMotor
Si se utiliza Proceso, modo de lazo cerrado (parámetro 100),
el parámetro 200 no se deberá cambiar a [1] Ambos
sentidos.
Descripción de opciones:
Seleccione
seleccionado Proceso, modo de lazo cerrado.
Descripción de opciones:
Seleccione el intervalo deseado.
[0] Mín.-Máx. si en el parámetro 100 se ha
Seleccione el sentido deseado que se visualiza desde el
33
extremo de la transmisión del motor.
Tenga en cuenta que, si selecciona [0] Solo en sentido
horario, 0-132 Hz [2] Solo en sentido antihorario, 0-132 Hz, la
frecuencia de salida se limitará al intervalo f
MÍN.-fMÁX.
.
204 Referencia mínima
Valor:
–100 000,000-Ref
(par. 205)
MÁX.
[-100000000 -]
0,000 [0]
Si selecciona [1] Ambos sentidos, 0-132 Hz, la frecuencia de
salida se limitará al intervalo ±f
(la frecuencia mínima
MÁX.
no es significativa).
Por lo tanto,
es aconsejable que no se asignen al parámetro 200 valores
diferentes en ambas configuraciones. Si fuera necesario
hacerlo, el usuario debe asegurarse de que los cambios de
configuración solo se realizan con el motor parado.
Depende del parámetro 100.
Función:
La
referencia mínima proporciona el ajuste mínimo que
puede suponerse sumando todas las referencias.
La referencia mínima solo está activa si se ha ajustado [0]
Mín.-Máx. en el parámetro 203; sin embargo, siempre está
activa en Proceso, modo de lazo cerrado (parámetro 100).
Descripción de opciones:
Solo está activada cuando el parámetro 203 se ha ajustado
201
Valor:
0,0 Hz-f
0,0 Hz [0]
Función:
En este parámetro, puede seleccionarse un límite mínimo
de frecuencia del motor que corresponda a la frecuencia
mínima a la que puede funcionar el motor.
La frecuencia mínima nunca puede ser superior a la
frecuencia máxima, f
Si se ha seleccionado Ambos sentidos en el parámetro 200,
la frecuencia mínima no es significativa.
Descripción de opciones:
Es posible elegir un valor desde 0,0 Hz hasta la máxima
frecuencia seleccionada en el parámetro 202 (f
Frecuencia de salida mín.
(parámetro 202)
MÁX.
.
MÁX.
MÁX.
en [0] Mín.-Máx.
Ajuste el valor deseado.
[0 -]
205
Referencia máxima
Valor:
Ref.
(parámetro 204)-100 000 000
MÍN.
[-100000000]
50 000 Hz [50000]
Función:
La referencia máxima proporciona el valor más alto que
puede suponerse sumando todas las referencias. Si en el
parámetro 100 se ha seleccionado un lazo abierto, el ajuste
máximo es 132 Hz.
Si se ha seleccionado un lazo cerrado, la referencia máxima
no se puede ajustar en un valor superior al de la realimen-
).
tación máxima (parámetro 415).
Descripción de opciones:
202
Frecuencia de salida máx.
Ajuste el valor deseado.
Valor:
f
(parámetro 201)-f
MÍN.
f
INTERVALO
INTERVALO
(132 Hz, par. 200)
Función:
En este parámetro, puede seleccionarse una frecuencia
máxima del motor, que corresponda a la frecuencia más
alta a la que puede funcionar el motor.
Consulte además el parámetro 205.
Descripción de opciones:
Puede seleccionarse un valor entre f
y 132 Hz.
MÍN.
207
Valor:
0,15-3600,00 s [5 -360000]
3,00 s [300]
Función:
El tiempo de aceleración es el transcurrido desde 0 Hz
hasta la frecuencia nominal del motor f
104). Esto presupone que no se alcanza el límite de
corriente (definible en el parámetro 221).
Tiempo de aceleración 1
(parámetro
M, N
203
Intervalo de referencia / realimentación
Valor:
Mín.-máx. (MÍN.-MÁX.) [0]
- Máx. - + Máx. (–MÁX.-+MÁX.) [1]
Función:
Este parámetro decide si la señal de referencia va a ser
positiva, o va a ser positiva y negativa.
46 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 49

Programación
Ilustración 3.17
Serie FCM de VLT® DriveMotor
Descripción de opciones:
Programe el tiempo de aceleración deseado.
208
Tiempo de desaceleración 1
Valor:
0,15-3600,00 s [5 - 360000]
3,00 s [300]
Función:
El tiempo de desaceleración es el transcurrido desde la
frecuencia nominal del motor f
(parámetro 104) hasta
M, N
0 Hz, siempre que no haya una sobretensión en el inversor
por causa del funcionamiento regenerativo del motor y
que no se haya alcanzado el límite de corriente (que se
ajusta en el parámetro 221).
Descripción de opciones:
Programe el tiempo de desaceleración deseado.
0 Hz, siempre que no haya una sobretensión en el inversor
por causa del funcionamiento regenerativo del motor y
que no se haya alcanzado el límite de corriente (que se
ajusta en el parámetro 221).
Descripción de opciones:
Programe el tiempo de desaceleración deseado.
Cambie de la rampa 1 a la rampa 2 activando la rampa 2
mediante una entrada digital.
211 Tiempo de rampa de velocidad fija
Valor:
0,15-3600,00 s [5-360000]
3,00 s [300]
Función:
El tiempo de rampa de velocidad fija es el tiempo de
aceleración / desaceleración desde 0 Hz hasta la frecuencia
nominal del motor f
(parámetro 104), siempre que no
M, N
haya sobretensión en el inversor debido al funcionamiento
regenerativo del motor y que no se haya alcanzado el
límite de corriente (definible en el parámetro 221).
3 3
209
Tiempo de aceleración 2
Valor:
0,15-3600,00 s [5 -360000]
3,00 s [300]
Función:
El tiempo de aceleración es el transcurrido desde 0 Hz
hasta la frecuencia nominal del motor f
(parámetro
M, N
104). Esto presupone que no se alcanza el límite de
corriente (definible en el parámetro 221).
Descripción de opciones:
Programe el tiempo de aceleración deseado.
Cambie de la rampa 1 a la rampa 2 activando la rampa 2
mediante una entrada digital.
210
Tiempo de desaceleración 2
Valor:
0,15-3600,00 s [5-360000]
3,00 s [300]
Función:
El tiempo de desaceleración es el transcurrido desde la
frecuencia nominal del motor f
(parámetro 104) hasta
M, N
Ilustración 3.18
El tiempo de rampa de velocidad fija empieza si se
transmite una señal de velocidad fija mediante las entradas
digitales o el puerto de comunicación en serie.
Descripción de opciones:
Ajuste el tiempo de rampa deseado.
212
Tiempo de desaceleración de parada rápida
Valor:
0,15-3600,00 s [5-360000]
3,00 s [300]
Función:
El tiempo de desaceleración es el tiempo que se tarda en
desacelerar desde la frecuencia nominal del motor hasta 0
Hz, siempre que no surja una sobretensión en el inversor
por causa del funcionamiento regenerativo del motor y no
se alcance el límite de corriente (que se ajusta en el
parámetro 221).
MG03BA05 - VLT® es una marca registrada de Danfoss 47
Page 50

Programación
Serie FCM de VLT® DriveMotor
La parada rápida se activa mediante una señal en uno de
los terminales de entrada digital (2-5) o mediante el puerto
de comunicación en serie.
Descripción de opciones:
Programe el tiempo de desaceleración deseado.
33
213 Frecuencia de velocidad fija
Valor:
0,0 Hz (parámetro 202) [0 -]
10,0 Hz [100]
Función:
La frecuencia de velocidad fija f
VELOCIDAD FIJA
es la frecuencia
de salida fija en que funciona el motor FC, cuando se
activa la función de velocidad fija.
base de la diferencia entre Ref
valor se añade a Ref
MÍN.
.
MÁX.
y Ref
, tras lo cual el
MÍN.
Descripción de opciones:
Ajuste las referencias fijas que deban utilizarse como
opciones.
Para emplear las referencias fijas, es necesario haber
seleccionado Activar ref. interna en los terminales 2, 3, 4 o
5 (parámetros 332-335).
Las opciones entre referencias fijas pueden seleccionarse
activando los terminales 2, 3, 4 o 5, consulte Tabla 3.8.
Terminales 2 / 3 / 4 / 5
Referencia interna
Referencia interna 1 0
Referencia interna 2 1
Descripción de opciones:
Ajuste la frecuencia deseada.
214
Función de referencia
Valor:
Suma (SUMA) [0]
Externa / Interna (EXTERNA / INTERNA) [2]
Función:
Es posible definir cómo se suman las referencias internas a
las demás referencias. Para este propósito, se utiliza Suma.
También es posible seleccionar si se requiere una
conmutación entre referencias externas o internas
mediante la función Externa / Interna.
Descripción de opciones:
Si selecciona [0] Suma, una de las referencias internas
ajustadas (parámetros 215-216) se suma como valor
porcentual de la referencia máxima posible.
Si selecciona [2] Externa / Interna, es posible cambiar entre
las referencias externas y las referencias internas por medio
de los terminales 2, 3, 4 o 5 (parámetros 332, 333, 334 o
335). Las referencias internas serán un valor porcentual del
intervalo de referencias.
Las referencias externas son la suma de las referencias
analógicas, referencias de impulsos y de buses.
Tabla 3.8
219
Valor de enganche arriba / abajoValor de
enganche arriba / abajo
Valor:
0.00-100.00% [0-10000]
0,00% [0]
Función:
Este parámetro permite la introducción de un valor
porcentual (relativo) que se sumará a o se restará de la
referencia.
Descripción de opciones:
Si se ha seleccionado Enganche arriba en uno de los
terminales 2, 3, 4 o 5 (parámetros 332-335), el valor
porcentual (relativo) seleccionado en el parámetro 219 se
sumará a la referencia total.
Si se ha seleccionado Enganche abajo en uno de los
terminales 2, 3, 4 o 5 (parámetros 332-335), el valor
porcentual (relativo) seleccionado en el parámetro 219 se
restará de la referencia total.
221
Límite de corriente para el modo de motor
Valor:
215
216 Referencia interna 2
Valor:
–100,00%-+100,00% [-10000-+10000]
% del intervalo de referencias / de referencia externa
0,00% [0]
Función:
Es posible programar dos referencias internas distintas en
los parámetros 215 y 216.
La referencia interna se indica como un porcentaje del
valor Ref
externas, en función de la selección realizada en el
parámetro 214. Si se ha programado un valor de Ref
Referencia interna 1
o como porcentaje de otras referencias
MÁX.
MÍN.
≠ 0,
Límite mín. (XX,X)-límite máx. (XXX,X)
en % de I
NOMINAL
[XXX - XXXX]
Límite máx. (XXX,X) [XXXX]
I
= corriente nominal del motor
NOMINAL
Límite mín. = corriente de magnetización en % de I
NOMINAL
Límite máx. = límite dependiente de la unidad en % de
I
NOMINAL
Función:
Esta función es importante para todas las configuraciones
de la aplicación; la regulación de velocidad y proceso. Aquí
se ajusta el límite de corriente para el funcionamiento del
motor.
la referencia interna como porcentaje se calcula sobre la
48 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 51

Programación
Ilustración 3.19
Serie FCM de VLT® DriveMotor
Se selecciona un porcentaje del ajuste en los parámetros
230 y 231.
230 Bypass de frecuencia 1
231 Bypass de frecuencia 2
Valor:
0,0-132 Hz (parámetro 200) [0 -]
0,0 Hz [0]
Función:
Algunos sistemas requieren que se eviten algunas
frecuencias de salida, debido a la resonancia en los
mismos.
Descripción de opciones:
Introduzca las frecuencias que se deben evitar.
Consulte, además, el parámetro 229.
3 3
Ilustración 3.20
Descripción de opciones:
Ajuste el % de corriente deseado.
229
Bypass de frecuencia, ancho de banda
Valor:
0 (DESACTIVADO)-100% [0-100]
0 (DESACTIVADO)% [0]
Función:
Algunos sistemas requieren que se eviten algunas
frecuencias de salida, debido a la resonancia en los
mismos.
En los parámetros 230 y 231, es posible programar dichas
frecuencias de salida para la desviación (bypass de
frecuencia). En este parámetro (229), se puede definir un
ancho de banda a ambos lados de los bypass de
frecuencia.
Descripción de opciones:
La banda de bypass es la frecuencia de bypass +/– la
mitad del ancho de banda ajustado.
241
Referencia interna 1
242 Referencia interna 2
243 Referencia interna 3
244 Referencia interna 4
245 Referencia interna 5
246 Referencia interna 6
247 Referencia interna 7
Valor:
–100,00%-+100,00% [-10000-+10000]
% del intervalo de referencias / de referencia externa
0,00% [0]
Función:
En los parámetros 241-247 referencia interna, se pueden
programar siete referencias internas diferentes. La
referencia interna se indica como porcentaje del valor
Ref
o como porcentaje de otras referencias externas, en
MÁX.
función de la selección realizada en el parámetro 214. Si se
ha programado un valor de Ref
≠ 0, la referencia interna
MÍN.
como porcentaje se calcula sobre la base de la diferencia
entre Ref
Ref
MÍN.
MÁX.
y Ref
, tras lo cual el valor se añade a
MÍN.
.
La selección entre las referencias internas puede realizarse
mediante entradas digitales o la comunicación en serie.
Descripción de opciones:
Ajuste las referencias fijas que deban utilizarse como
opciones.
Consulte la Descripción de opciones de los P332, P333,
P334 y P335, donde se incluye la descripción de la configuración de la entrada digital.
MG03BA05 - VLT® es una marca registrada de Danfoss 49
Page 52

Programación
Serie FCM de VLT® DriveMotor
3.4.1 Grupo de parámetros 3-** Entrada y
salida
318
Valor:
Desactivado (DESACTIVADO) [0]
317 Tiempo límite
Valor:
33
1-99 s [1-99]
10 s [10]
Función:
Si el valor de la señal de referencia conectada a la entrada,
terminal 1, desciende por debajo del 50% del ajuste del
parámetro 336 durante un periodo superior al tiempo
ajustado en el parámetro 317, se activará la función
seleccionada en el parámetro 318.
Parada y desconexión (PARADA Y DESCONEXIÓN) [5]
Función:
Este parámetro permite activar una opción de la función si
el valor de la señal de referencia conectada a la entrada,
terminal 1, desciende por debajo del 50% del ajuste del
parámetro 336 durante un periodo superior al tiempo
ajustado en el parámetro 317.
Si se efectúa la función de tiempo límite (parámetro 318)
al mismo tiempo que la función de tiempo límite de bus
(parámetro 514), se activará dicha función (parámetro 318).
Descripción de opciones:
Ajuste el tiempo deseado.
Ajustes:
Sin funcionamiento
Señal de listo (UNIDAD LISTA) [1]
Activar, sin advertencia (ACTIVAR / SIN ADVERTENCIA) [2]
En funcionamiento (EN FUNCIONAMIENTO) [3]
En funcionamiento, sin advertencia (EN FUNCIONAMIENTO / SIN
En funcionamiento en referencia, sin advertencia (EN FUNCIONAMIENTO EN REFERENCIA) [5]
Fallo (FALLO) [6]
Fallo o advertencia (FALLO O ADVERTENCIA) [7]
Límite de corriente (LÍMITE DE CORRIENTE) [8]
Advertencia térmica (ADVERTENCIA TÉRMICA) [9]
Cambio de sentido (CAMBIO DE SENTIDO) [10]
Bit 11, código de control (BIT 11, CÓDIGO DE CONTROL) [11]
Código de control, bit 12 (CÓDIGO DE CONTROL, BIT 12) [12]
Freno mecánico (FRENO MECÁNICO) [20]
Modo de reposo (MODO DE REPOSO) [21]
Funcionamiento tras tiempo límite
(SIN FUNCIONAMIENTO) [0]
[4]
ADVERTENCIA)
Tabla 3.9 323 Terminal X102, función de relé (FUNC. RELÉ)
La salida de relé se puede utilizar para dar el estado actual
o una advertencia.
Relé
1-3 desconexión, 1-2 conexión
Máx. 250 V CA, 5 A
Tabla 3.10
Descripción de opciones:
Señal de unidad lista
: el motor FC está listo para ser
utilizado.
Activar / sin advertencia: el motor FC está listo para ser
utilizado; no se ha dado una orden de arranque o de
parada (arrancar / desactivar). Sin advertencia.
En funcionamiento: se ha dado un comando de arranque.
Funcionamiento, sin advertencia: se ha dado un comando
de arranque. Sin advertencia.
En funcionamiento en referencia, sin advertencia: velocidad
según la referencia.
Fallo: la salida se activa mediante una alarma.
Fallo o advertencia: la salida se activa mediante alarma o
advertencia.
Límite de corriente: se ha sobrepasado el límite de corriente
del parámetro 221.
Advertencia térmica: por encima del límite de temperatura
en el convertidor de frecuencia.
Cambio de sentido. «1» lógico = relé activado, 24 V CC en
salida, cuando el motor gira en sentido horario. «0» lógico
= relé no activado: no hay señal en la salida, cuando el
motor gira en sentido antihorario.
Código de control, bit 11: si el bit 11 = «1» en el código de
control (tanto en el perfil de bus de campo como en el
perfil FC), el relé se activará.
Código de control, bit 12: si el bit 12 = «1» en el código de
control (tanto en el perfil de bus de campo como en el
perfil FC), el relé se activará.
50 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 53

Programación
Serie FCM de VLT® DriveMotor
Freno mecánico: permite el control de un freno mecánico
externo opcional (véanse también los parámetros 138 y
139).
Modo de reposo: se activa cuando la unidad está en modo
de reposo. Consulte 3.5.2 Modo de reposo.
327
Referencia / realimentación por impulsos,
frecuencia máx.
Valor:
100-70 000 Hz [100-70000]
5000 Hz [5000]
Función:
En este parámetro, se ajusta el valor de señal que
corresponde al valor de referencia / realimentación
máximo ajustado en el parámetro 205 / 415.
Descripción de opciones:
Referencia (REFERENCIA) [1]
Realimentación (REALIMENTACIÓN) [2]
Función:
Este parámetro permite elegir entre las distintas funciones
disponibles para la entrada, terminal 1.
El escalado de la señal de entrada se realiza en los
parámetros 336 y 337.
Descripción de opciones:
[0] Sin funcionamiento. Se selecciona para que el motor FC
no reaccione a las señales conectadas al terminal.
[1] Referencia. Se selecciona para activar el cambio de
referencia por medio de una señal de referencia analógica.
Si se conectan otras entradas, se añaden teniendo en
cuenta su signo.
[2] Realimentación. Se selecciona si se usa la regulación en
lazo cerrado con una señal analógica.
Ajuste la frecuencia de impulso deseada.
Terminal 2, entrada analógica / digital
331
Terminal 1, corriente de entrada analógica
Valor:
Sin funcionamiento (SIN FUNCIONAMIENTO) [0]
332
333 Terminal 3, entrada digital
334 Terminal 4, entrada digital
335 Terminal 5, entrada digital
Parámetro 332 333 334 335
Entrada digital en terminal n.º 2 3 4 5
Ajustes
Sin funcionamiento (SIN FUNCIONAMIENTO) [0] [0] [0] [0]
Reinicio (REINICIO) [1]
Parada por inercia, inversa (INERCIA DEL MOTOR INVERSA) [2] [2] [2] [2]
Reinicio y parada por inercia, inversa (REINICIO E INERCIA INV.) [3] [3] [3] [3]
Parada rápida, inversa (PARADA RÁPIDA INVERSA) [4] [4] [4] [4]
Frenado de CC, inverso (FRENO DE CC INVERSO) [5] [5] [5] [5]
Parada inversa (PARADA INVERSA) [6] [6] [6] [6]
Arranque (ARRANQUE) [7] [7]
Arranque por impulsos (ARRANQUE POR IMPULSOS) [8] [8] [8] [8]
Cambio de sentido (CAMBIO DE SENTIDO) [9] [9] [9] [9]
Arranque y cambio de sentido (ARRANQUE Y CAMBIO DE SENTIDO) [10] [10] [10] [10]
Arranque en sentido horario, activado (ACTIVAR ADELANTE) [11] [11] [11] [11]
Arranque en sentido antihorario, activado (ACTIVAR CAMBIO DE SENTIDO) [12] [12] [12] [12]
Velocidad fija (VELOCIDAD FIJA) [13] [13] [13]
Mantener referencia (MANTENER REFERENCIA) [14] [14] [14] [14]
Mantener salida (MANTENER SALIDA) [15] [15] [15] [15]
Aceleración (ACELERACIÓN) [16] [16] [16] [16]
Desaceleración (DESACELERACIÓN) [17] [17] [17] [17]
Selección de configuración (SELECCIÓN DE CONFIGURACIÓN) [18] [18] [18] [18]
Enganche arriba (ENGANCHE ARRIBA) [19] [19] [19] [19]
Enganche abajo (ENGANCHE ABAJO) [20] [20] [20] [20]
Referencia interna (REF. INTERNA) [21] [21] [21] [21]
Referencia interna, activado (REF. INTERNA, ACTIVADO) [22] [22] [22] [22]
Parada precisa, inversa (PARADA PRECISA) [23]
Referencia por impulsos (REFERENCIA POR IMPULSOS) [24]
Realimentación por impulsos (REALIMENTACIÓN POR IMPULSOS) [25]
Referencia analógica (REFERENCIA)
Realimentación analógica (REALIMENTACIÓN) [31]
[30]
[1]
[1] [1]
[7]
[7]
3 3
[13]
MG03BA05 - VLT® es una marca registrada de Danfoss 51
Page 54

Programación
Serie FCM de VLT® DriveMotor
Parámetro 332 333 334 335
Entrada digital en terminal n.º 2 3 4 5
Ajustes
Reinicio y arranque (REINICIO Y ARRANQUE) [32] [32] [32] [32]
Mantener referencia y arranque (MANTENER REF. Y ARRANQUE) [33] [33] [33] [33]
33
Rampa 2 (RAMPA 2) [34] [34] [34] [34]
Arranque-ref. bit 1 (ARRANQUE-REF. BIT 1) [35] [35] [35] [35]
Arranque-ref. bit 2 (ARRANQUE-REF. BIT 2) [36] [36] [36] [36]
Arranque-ref. bit 3 (ARRANQUE-REF. BIT 3) [37] [37] [37] [37]
Tabla 3.11
Función:
En el parámetro 332-335, es posible elegir entre las
distintas funciones relativas a las entradas en los
terminales 2-5. Las opciones de la función se muestran en
Tabla 3.13.
Descripción de opciones:
Sin funcionamiento se selecciona para que el motor FC no
reaccione ante las señales transmitidas al terminal.
Reinicio pone a cero el motor FC después de una alarma;
no obstante, no todas las alarmas pueden reiniciarse sin
desconectar el suministro eléctrico.
Parada por inercia, inversa se usa para que el motor FC gire
libremente hasta parar. El «0» lógico lleva a la parada por
inercia.
Reinicio y parada por inercia, inversa se usa para activar la
parada por inercia a la vez que el reinicio.
El «0» lógico origina un reinicio y una parada por inercia.
Parada rápida, inversa se usa para parar el motor según la
rampa de parada rápida (definida en el parámetro 212).
El «0» lógico lleva a una parada rápida.
Frenado de CC, inversa se utiliza para parar el motor
suministrándole una tensión de CC durante un tiempo
determinado; consulte los parámetros 126-132.
Observe que esta función únicamente se activa si los
ajustes de los parámetros 126-132 son diferentes de 0. El
«0» lógico produce el frenado de CC.
Parada inversa se activa interrumpiendo el suministro de
tensión al terminal. Esto significa que, si el terminal no
tiene tensión, el motor no puede funcionar. La parada se
efectuará de acuerdo con la rampa seleccionada
(parámetros 207 / 208).
Seleccione Arranque si se requiere un comando de
arranque / parada. «1» lógico = arranque, «0» lógico =
parada (en espera).
Arranque por impulsos: si se aplica un impulso durante un
mínimo de 20 ms, el motor arrancará, siempre que no
haya ningún comando de parada. El motor se para si se
activa brevemente Parada inversa.
Cambio de sentido se utiliza para cambiar el sentido de giro
del eje del motor. El «0» lógico no llevará al cambio de
sentido. El «1» lógico llevará al cambio de sentido. La señal
de cambio de sentido solo cambia la dirección de giro; no
activa la función de arranque.
No debe utilizarse con Proceso, modo de lazo cerrado.
Arranque y cambio de sentido se utiliza para el arranque / la
parada y el cambio de sentido con la misma señal. No se
permite ninguna señal de arranque al mismo tiempo.
Actúa como inversión de arranque por impulsos, siempre
que este se haya elegido para otro terminal.
No debe utilizarse con Proceso, modo de lazo cerrado.
Arranque en sentido horario se utiliza si se requiere que el
eje del motor gire solo en sentido horario al arrancar.
No debe utilizarse con Proceso, modo de lazo cerrado.
Arranque en sentido antihorario, activado se utiliza para que
el eje del motor gire en sentido antihorario al arrancar.
No debe utilizarse con Proceso, modo de lazo cerrado.
Velocidad fija se utiliza para cancelar la frecuencia de salida
y emplear la frecuencia de velocidad fija determinada en el
parámetro 213. El tiempo de rampa puede ajustarse en el
parámetro 211. La velocidad fija no está activa si se ha
dado un comando de parada (arranque desactivado).
La velocidad fija tiene prioridad sobre «en espera».
Mantener referencia: mantiene la referencia actual. La
referencia mantenida es ahora el punto de partida o la
condición que se utilizará para Aceleración y Desaceleración.
Si se usa aceleración / desaceleración, el cambio de
velocidad siempre sigue la rampa normal (parámetros
207 / 208) en el intervalo 0-Ref
MÁX.
.
Mantener salida: mantiene la frecuencia del motor actual
(Hz). La frecuencia mantenida del motor es ahora el punto
de partida o la condición que se utilizará para Aceleración y
Desaceleración.
Mantener salida anula el ajuste de arranque / espera, la
compensación de deslizamiento y el control de proceso en
lazo cerrado.
Si se utiliza aceleración / desaceleración, el cambio de
velocidad sigue siempre la rampa normal (parámetros
207 / 208) en el intervalo 0-f
M, N
.
Aceleración y Desaceleración se seleccionan si se desea un
control digital del aumento y la disminución de la
velocidad (potenciómetro del motor). Esta función solo
está activada si se ha seleccionado Mantener referencia o
Mantener salida.
52 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 55

Programación
Serie FCM de VLT® DriveMotor
Siempre que haya un «1» lógico en el terminal
seleccionado para la aceleración, se incrementará la
referencia o la frecuencia de salida.
Siempre que haya un «1» lógico en el terminal
seleccionado para la desaceleración, se reducirá la
referencia o la frecuencia de salida.
Los impulsos («1» lógico mínimo alto para 20 ms y una
pausa mínima de 20 ms) llevarán a un cambio de la
velocidad del 0,1% (referencia) o 0,1 Hz (frecuencia de
salida).
Sin cambio de
velocidad
Desaceleración 0 1 1
Aceleración 1 0 1
Desaceleración 1 1 1
Tabla 3.12 Ejemplo:
Terminal Mantener ref. /
2-5 2-5 Mantener salida
0 0 1
Selección de configuración permite elegir una de las dos
configuraciones; sin embargo, para ello ha de haberse
ajustado el parámetro 004 en Configuración múltiple.
Enganche arriba / abajo se selecciona si el valor de
referencia se va a incrementar o reducir en un valor
porcentual programable ajustado en el parámetro 219.
Sin cambio de velocidad 0 0
Reducción porcentual 1 0
Aumento porcentual 0 1
Reducción porcentual 1 1
Tabla 3.13
Enganche
abajo
Enganche
arriba
Referencia interna permite elegir una de las dos referencias
internas, según la tabla de los parámetros 215 y 216. Para
activarla, ha de seleccionarse Referencia interna, activado.
Referencia interna se usa para cambiar entre referencia
externa y referencia interna. Se presupone que está
seleccionada [2] Externa / interna en el parámetro 214. «0»
lógico = referencias externas activas; «1» lógico = una de
las dos referencias internas está activa.
Parada precisa corrige el tiempo de desaceleración para
obtener una alta precisión de repetición del punto de
parada.
Referencia por impulsos se selecciona si se utiliza una
secuencia de impulsos (frecuencia) de 0 Hz, correspondiente a Ref
el parámetro 327, correspondiente a Ref
, parámetro 204. La frecuencia se ajusta en
MÍN.
.
MÁX.
Realimentación por impulsos se selecciona si se usa una
secuencia de impulsos (frecuencia) como señal de
realimentación. Consulte también el parámetro 327.
Referencia analógica se selecciona para permitir el cambio
de referencia mediante una señal de referencia analógica.
Si se conectan otras entradas, se añaden teniendo en
cuenta su signo.
Realimentación analógica
se selecciona si se usa la
regulación en lazo cerrado con una señal analógica.
Reinicio y arranque se utiliza para activar el arranque al
mismo tiempo que el reinicio.
Mantener referencia y arranque: se iniciarán los comandos
ARRANQUE Y MANTENER REFERENCIA. Si se utiliza
ACELERACIÓN / DESACELERACIÓN, tanto MANTENER
REFERENCIA como ARRANQUE tienen que estar activados.
Con la implementación de esta función, se puede ahorrar
una entrada digital.
Rampa 2 se selecciona si se requiere el cambio entre la
rampa 1 (parámetros 207-208) y la rampa 2 (parámetros
209-210). El «0» lógico lleva a la rampa 1 y el «1» lógico
lleva a la rampa 2.
Arranque-ref bit 1,2 y 3 permite seleccionar la REF. INTERNA
(1-7) que se va a utilizar. Las REF. INTERNAS (1-7) se
definen en los parámetros de 241 a 247.
Par. n.º Velocidad fija ARRANQUE REF. BIT
321
- - - En espera 000
241 REF. INTERNA 1 001
242 REF. INTERNA 2 010
243 REF. INTERNA 3 011
244 REF. INTERNA 4 100
245 REF. INTERNA 5 101
246 REF. INTERNA 6 110
247 REF. INTERNA 7 111
Tabla 3.14
Si al menos una de las 3 entradas digitales está activada, el
FCM tiene la señal de arranque. Las 7 posibles combinaciones de entrada decidirán entonces qué velocidad
preajustada debe utilizarse.
Si solo se utilizan 1 o 2 entradas digitales, se pueden elegir
respectivamente 1 o 3 velocidades, según el criterio
anterior.
Si se utilizan 2 ajustes, se pueden elegir hasta 14
velocidades preajustadas por medio de 4 entradas
digitales. Los valores P241 y P242 se reflejarán en P215 y
P216.
Ej.
Entradas digitales 2, 3 y 4: P332 [seleccionada la opción
35], P333 [seleccionada la opción 36] y P334 [seleccionada
la opción 37]
Combinación de entrada en las entradas digitales 2, 3 y 4:
«010».
Esto significa que REF. INTERNA 2 será la velocidad
preajustada.
El escalado de la señal de entrada se realiza en los
parámetros 338 y 339.
3 3
MG03BA05 - VLT® es una marca registrada de Danfoss 53
Page 56

Programación
Serie FCM de VLT® DriveMotor
336 Terminal 1, escalado mín.
Valor:
0,0-20,0 mA [0-200]
0,0 mA [0]
Función:
33
Este parámetro determina el valor de la señal de referencia
que debe corresponderse con el valor de referencia
mínimo establecido en el parámetro 204.
Si va a utilizarse la función de Tiempo límite del parámetro
317, el ajuste debe ser >2 mA.
Descripción de opciones:
Ajuste el valor de corriente requerido.
0,0 V [0]
Función:
Este parámetro se utiliza para ajustar el valor de señal que
debe corresponder a la referencia mínima o la retroalimentación mínima, parámetro 204 Referencia mínima,
Ref
/ 414 Realimentación mínima, FB
MÍN.
MÍN.
.
Descripción de opciones:
Ajuste el valor de tensión requerido. Por motivos de
precisión, debe realizarse una compensación para la
pérdida de tensión en cables de señal largos. Si va a
utilizarse la función de tiempo límite (parámetros 317
Tiempo límite y 318 Función tras tiempo límite), el valor
ajustado debe ser <1 V.
337
Valor:
0,0-20,0 mA [0-200]
20,0 mA [200]
Función:
Este parámetro determina el valor de la señal de referencia
que debe corresponderse con el valor de referencia
máximo establecido en el parámetro 205.
Descripción de opciones:
Ajuste el valor de corriente requerido.
Terminal 1, escalado máx.
339
Terminal 2, escalado máx.
Valor:
0,0-10,0 V [0-100]
10,0 V [100]
Función:
Este parámetro se utiliza para ajustar el valor de señal que
debe corresponder al valor de referencia máxima o
realimentación máxima del parámetro 205 Referencia
máxima, Ref.
/ 415 Realimentación máxima, FB
MÁX.
MÁX.
.
Descripción de opciones:
338
Terminal 2, escalado mín.
Valor:
0,0-10,0 V [0-100]
Ajuste el valor de tensión requerido. Por motivos de
precisión, debe realizarse una compensación para las
pérdidas de tensión en cables de señal largos.
54 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 57

Programación
Ajustes:
Sin funcionamiento
Señal de listo (UNIDAD LISTA) [1]
Activar, sin advertencia (ACTIVAR / SIN ADVERTENCIA) [2]
En funcionamiento (EN FUNCIONAMIENTO) [3]
En funcionamiento, sin advertencia (EN FUNCIONAMIENTO / SIN
En funcionamiento en referencia, sin advertencia (EN FUNCIONAMIENTO EN REFERENCIA) [5]
Fallo (FALLO) [6]
Fallo o advertencia (FALLO O ADVERTENCIA) [7]
Límite de corriente (LÍMITE DE CORRIENTE) [8]
Advertencia térmica (ADVERTENCIA TÉRMICA) [9]
Cambio de sentido (CAMBIO DE SENTIDO) [10]
Bit 11, código de control (BIT 11, CÓDIGO DE CONTROL) [11]
Frecuencia real 0-20 mA (0-F
Frecuencia real 4-20 mA (0-F
Referencia
Referencia
Realimentación
Realimentación
Corriente real 0-20 mA (0-I
Corriente real 4-20 mA (0-I
Freno mecánico (FRENO MECÁNICO) [20]
Modo de reposo (MODO DE REPOSO) [21]
Par 0-20 mA (0-T
Par 4-20 mA (0-T
-referencia
MÍN.
-referencia
MÍN.
MÍN.
MÍN.
: 0-20 mA (REF. MÍN.-MÁX. = 0-20 mA) [14]
MÁX.
: 4-20 mA (REF. MÍN.-MÁX. = 4-20 mA) [15]
MÁX.
-realimentación
-realimentación
: 0-20 mA (FB MÍN.-MÁX. = 0-20 mA) [16]
MÁX.
: 4-20 mA (FB MÍN.-MÁX. = 4-20 mA) [17]
MÁX.
Serie FCM de VLT® DriveMotor
(SIN FUNCIONAMIENTO) [0]
[4]
ADVERTENCIA)
= 0-20 mA) [12]
MÁX.
= 4-20 mA) [13]
MÁX.
= 0-20 mA) [18]
MÁX.
= 4-20 mA) [19]
MÁX.
= 0-20 mA) [22]
MÁX.
= 4-20 mA) [23]
MÁX.
3 3
Tabla 3.15 340 Terminal 9, funciones de salida (FUNC. DE SALIDA)
Función:
Esta salida puede actuar tanto como salida digital como
analógica. Si se utiliza como salida digital (valor de dato
[0]-[23]), se transmite una señal de 24 V CC; si se utiliza
como salida analógica, se transmite una señal de 0-20 mA
o una salida de señal de 4-20 mA.
Descripción de opciones:
Señal de unidad lista: el motor FC está listo para ser
utilizado.
Activar / sin advertencia: el motor FC está listo para ser
utilizado; no se ha dado una orden de arranque o de
parada (arrancar / desactivar). Sin advertencia.
En funcionamiento: se ha dado una orden de arranque.
En funcionamiento, sin advertencia: se ha dado un comando
de arranque. Sin advertencia.
En funcionamiento en referencia, sin advertencia: velocidad
según la referencia.
Fallo: la salida se activa mediante una alarma.
Fallo o advertencia: la salida se activa mediante alarma o
advertencia.
Límite de corriente: se ha sobrepasado el límite de corriente
del parámetro 221.
Advertencia térmica: por encima del límite de temperatura
en el convertidor de frecuencia.
Cambio de sentido. «1» lógico = relé activado, 24 V CC en
salida, cuando el motor gira en sentido horario. «0» lógico
= relé no activado: no hay señal en la salida, cuando el
motor gira en sentido antihorario.
Bit 11, código de control: si el bit 11 = «1» en el código de
control (tanto en el perfil de bus de campo como en el
perfil FC), la salida digital se activará.
⇒
0-f
(parámetro 202)
MÁX.
0-f
(parámetro 202) ⇒ 4-20 mA
MÁX.
Referencia
Referencia
Realimentación
Realimentación
0-I
VLT, MÁX.
0-I
VLT, MÁX.
-Referencia
MÍN.
-Referencia
MÍN.
BAJA
BAJA
⇒ 0-20 mA y
⇒
4-20 mA
0-20 mA y
: 0-20 mA y
MÁX.
: 4-20 mA
MÁX.
-Realimentación
-Realimentación
: 0-20 mA y
ALTA
: 4-20 mA
ALTA
Freno mecánico: permite el control de un freno mecánico
externo opcional (véanse también los parámetros 138 y
139).
Modo de reposo: se activa cuando la unidad está en modo
de reposo. Consulte 3.5.2 Modo de reposo
0-T
⇒ 0-20 mA y
MÁX.
0-T
⇒ 4-20 mA y
MÁX.
MG03BA05 - VLT® es una marca registrada de Danfoss 55
Page 58

Programación
Serie FCM de VLT® DriveMotor
3.5.1 Grupo de parámetros 4-** Funciones
especiales
400 Funciones de freno
Valor:
33
DESACTIVADO (DESACTIVADO) [0]
Freno de CA (FRENO DE CA) [4]
Función:
[4] Freno de CA se puede seleccionar para mejorar el
frenado. Con la nueva función de freno de CA, se puede
controlar el tiempo de pérdidas de motor en incremento
sin dejar de proteger térmicamente el motor. Esta función
generará un par de frenado entre el 80 y el 20% en la
gama de velocidades hasta la velocidad base (50 Hz). Por
encima de la velocidad base, el frenado adicional desaparecerá gradualmente.
El modo de reposo no está activado si se ha seleccionado
Referencia local o Velocidad fija.
La función se activa en Lazo abierto y Lazo cerrado.
En el parámetro 403 Temporizador de modo de reposo, el
modo de reposo está activado. En el parámetro 403
Temporizador de modo de reposo, se ajusta un
temporizador que determina durante cuánto tiempo la
frecuencia de salida puede ser inferior a la frecuencia
ajustada en el parámetro 404 Frecuencia de reposo. Cuando
finaliza el temporizador, el convertidor de frecuencia
desacelera el motor para detenerlo mediante el parámetro
208 Tiempo de rampa de desaceleración. Si la frecuencia de
salida aumenta por encima de la frecuencia ajustada en el
parámetro 404 Frecuencia de reposo, el temporizador se
reinicia.
Mientras el convertidor de frecuencia detiene el motor en
el modo de reposo, se calcula una frecuencia de salida
teórica basada en la señal de referencia. Cuando la
frecuencia de salida teórica aumenta por encima de la
frecuencia del parámetro 407 Frecuencia de reactivación, el
convertidor de frecuencia reinicia el motor y la frecuencia
de salida se eleva hasta el valor de referencia.
Ilustración 3.21
Descripción de opciones:
Seleccione [4] Freno de CA si se producen cargas a corto
plazo.
Modo de reposo
3.5.2
El modo de reposo permite detener el motor cuando
funciona a baja velocidad, como ocurre en una situación
sin carga. Si el sistema consume suministro de reserva, el
convertidor de frecuencia arranca el motor y suministra la
potencia necesaria.
En los sistemas con regulación de presión constante,
resulta beneficioso aplicar una presión adicional al sistema
antes de que el convertidor de frecuencia detenga el
motor. Con ello, se amplía el tiempo durante el cual el
convertidor de frecuencia detiene el motor y se ayuda a
evitar el arranque y la parada frecuentes de motor, por
ejemplo, en caso de fugas del sistema.
Si se necesita un 25% más de presión antes de que el
convertidor de frecuencia detenga el motor, el parámetro
406 Consigna de refuerzo se ajusta en el 125%.
El parámetro 406 Consigna de refuerzo únicamente se
activa en Lazo cerrado.
AVISO!
En procesos de bombeo altamente dinámicos, se
aconseja desactivar la función de Motor en giro
(parámetro 445).
AVISO!
Se puede ahorrar energía con esta función, puesto que
el motor solo funciona cuando el sistema lo necesita.
56 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 59

Programación
Ilustración 3.22
403 Temporizador de modo de reposo
Valor:
0-300 s (301 s = DESACTIVADO)
Función:
Este parámetro permite que el convertidor de frecuencia
detenga el motor cuando su carga sea mínima. El
temporizador del parámetro 403 Temporizador de modo de
reposo se inicia cuando la frecuencia de salida disminuye
por debajo de la frecuencia ajustada en el parámetro 404
Frecuencia de reposo.
Cuando ha transcurrido el tiempo ajustado en el
temporizador, el convertidor de frecuencia apaga el motor.
El convertidor de frecuencia rearranca el motor cuando la
frecuencia de salida teórica supera la frecuencia del
parámetro 407 Frecuencia de reactivación.
Descripción de opciones:
Seleccione Desactivado si no se requiere esta función.
Ajuste el valor de umbral que va a activar el modo de
reposo después de que la frecuencia de salida haya
disminuido por debajo del parámetro 404 Frecuencia de
reposo.
404
Valor:
000,0- par. 407 Frecuencia de reactivación
Función:
Cuando la frecuencia de salida disminuye por debajo del
valor ajustado, el temporizador inicia el recuento de
tiempo definido en el parámetro 403 Modo de reposo. La
frecuencia de salida actual será igual a la frecuencia de
salida teórica hasta que se alcance f
Descripción de opciones:
Ajuste la frecuencia necesaria.
Frecuencia de reposo
MÍN.
Serie FCM de VLT® DriveMotor
DESACTIVADO
0,0 Hz
.
Reinicio automático x 7 (AUTOMÁTICO X 7) [7]
Reinicio automático x 8 (AUTOMÁTICO X 8) [8]
Reinicio automático x 9 (AUTOMÁTICO X 9) [9]
Reinicio automático x 10 (AUTOMÁTICO X 10) [10]
Reinicio al encender (REINICIO AL ENCENDER) [11]
Función:
Este parámetro permite seleccionar la función de reinicio
deseada después de una desconexión.
Después del reinicio, el motor FC puede volver a
arrancarse después de 1,5 s.
Descripción de opciones:
Si se selecciona [0] Reinicio manual, este debe efectuarse
mediante las entradas digitales.
Para que el motor FC realice un reinicio automático (máx.
1-10 veces en 10 minutos) después de desconectarse,
seleccione un valor de dato [1]-[10].
406
Valor:
1 - 200%
Función:
Esta función solo se puede utilizar si se ha seleccionado
Lazo cerrado en el parámetro 100.
En los sistemas con regulación de presión constante,
resulta beneficioso aumentar la presión en el sistema antes
de que el convertidor de frecuencia detenga el motor. Con
ello, se amplía el tiempo durante el cual el convertidor de
frecuencia detiene el motor y se ayuda a evitar el arranque
y la parada frecuentes del motor, por ejemplo, en caso de
fugas del sistema de suministro de agua.
Utilice Tiempo límite de refuerzo, par. 472, para ajustar el
tiempo límite de refuerzo. Si la consigna de refuerzo no
puede alcanzarse dentro del tiempo especificado, el
convertidor de frecuencia seguirá en funcionamiento
normal (sin entrar en reposo).
Descripción de opciones:
Ajuste la Consigna de refuerzo necesaria como porcentaje
de la referencia resultante en condiciones de funcionamiento normal. El 100% corresponde a la referencia sin
refuerzo (suplemento).
Consigna de refuerzo
100% del valor de consigna
3 3
405
Valor:
Reinicio manual (REINICIO manual) [0]
Reinicio automático x 1 (AUTOMÁTICO X 1) [1]
Reinicio automático x 2 (AUTOMÁTICO X 2) [2]
Reinicio automático x 3 (AUTOMÁTICO X 3) [3]
Reinicio automático x 4 (AUTOMÁTICO X 4) [4]
Reinicio automático x 5 (AUTOMÁTICO X 5) [5]
Reinicio automático x 6 (AUTOMÁTICO X 6) [6]
Función de reinicio
MG03BA05 - VLT® es una marca registrada de Danfoss 57
Page 60

Programación
407 Frecuencia de reactivación
Valor:
Par. 404 Frecuencia de reposo – par. 202 f
Función:
33
Cuando la frecuencia de salida teórica supera el valor
ajustado, el convertidor de frecuencia rearranca el motor.
Descripción de opciones:
Ajuste la frecuencia necesaria.
411 Frecuencia de conmutación
Valor:
1,5-14,0 kHz [1500-14000]
Depende de la unidad
Función:
El ajuste determina la frecuencia de conmutación del
inversor. Cambiar la frecuencia de conmutación puede
ayudar a minimizar el ruido acústico del motor.
Descripción de opciones:
Cuando el motor está en funcionamiento, la frecuencia de
conmutación se ajusta en el parámetro 411 hasta que se
obtenga la frecuencia en que el motor emite el menor
ruido posible.
Consulte, además, el parámetro 446: patrón de
conmutación. Consulte 4.1.6 Protección térmica y reducción
de potencia
412
Valor:
No es posible (DESACTIVAR) [0]
Frec. de conmutación variable (FREC. PORTADORA
VAR.) [1]
Temperatura seg. frec. conm. (TEMP. DEP. FREC.) [2]
Función:
Esta función permite cambiar la frecuencia de conmutación
según la carga. Sin embargo, la frecuencia de conmutación
máxima se determinará por el valor ajustado en el
parámetro 411.
Descripción de opciones:
Seleccione [0] No si se desea una frecuencia de
conmutación permanente. Ajuste la frecuencia de
conmutación en el parámetro 411.
Si se selecciona [1] Frecuencia de conmutación variable, la
frecuencia de conmutación se reducirá cuando aumente la
frecuencia de salida. Se usa para aplicaciones con características de par cuadrático (bombas y ventiladores
centrífugos), donde la carga disminuye según la frecuencia
de salida.
Si se selecciona [2] Temperatura según frecuencia de
conmutación, la frecuencia de conmutación disminuirá
cuando aumente la temperatura del inversor, consulte
Ilustración 3.23.
Frecuencia de conmutación variable
Serie FCM de VLT® DriveMotor
MÁX.
50 Hz
Ilustración 3.23
413
Valor:
Desactivado (DESACTIVADO) [0]
Activado (ACTIVADO) [1]
Función:
Este parámetro permite conectar la función de sobremodulación de la tensión de salida.
Descripción de opciones:
[0] Desactivado significa que no hay sobremodulación de la
tensión de salida, lo que implica que se evita el rizado del
par en el eje del motor. Esto puede ser una función útil,
por ejemplo, en máquinas rectificadoras.
[1] Activado significa que puede obtenerse una tensión de
salida superior a la tensión de red (hasta el 5%).
414
Valor:
–100 000 000-FB
0,000 [0]
Función:
Los parámetros 414 y 415 se usan para escalar el intervalo
de realimentación a los valores físicos utilizados por el
usuario. El ajuste también marcará los límites de la
referencia (parámetros 204 y 205).
Se utiliza junto con Proceso, modo de lazo cerrado
(parámetro 100).
Descripción de opciones:
Solo está activada cuando el parámetro 203 se ha ajustado
en [0] Mín.-Máx.
Función de sobremodulación
Realimentación mínima
(par. 415)
ALTA
[-100000000 -]
58 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 61

Programación
Serie FCM de VLT® DriveMotor
415 Realimentación máxima
Valor:
(par. 414) FB
1.500.000 [1500000]
Función:
Consulte la explicación del parámetro 414.
416 Unidad de referencia / realimentación
Valor:
NINGUNA UNIDAD [0]
% [1]
PPM [2]
R/MIN [3]
bar [4]
CICLO/min [5]
IMPULSO/s [6]
UNIDADES/s [7]
UNIDADES/min [8]
UNIDADES/h [9]
°C [10]
Pa [11]
l/s [12]
m3/s [13]
l/min [14]
m3/min [15]
l/h [16]
m3/h [17]
kg/s [18]
kg/min [19]
kg/h [20]
t/min [21]
t/h [22]
m [23]
Nm [24]
m/s [25]
m/min [26]
°F [27]
in wg [28]
gal/s [29]
ft3/s [30]
gal/min [31]
ft3/min [32]
gal/h [33]
ft3/h [34]
lb/s [35]
lb/min [36]
lb/h [37]
lb ft [38]
ft/s [39]
ft/min [40]
-100 000 000
BAJA
[- 100000000]
Función:
Seleccione entre las unidades que se mostrarán en la
pantalla.
Esta unidad también se utiliza con Regulación de proceso,
lazo cerrado, en que actúa directamente como unidad para
Referencia mínima / máxima (parámetros 204 / 205) y
Realimentación mínima / máxima (parámetros 414 / 415).
La posibilidad de elegir una unidad en el parámetro 416
depende de las opciones seleccionadas en los siguientes
parámetros:
Par. 002 Control local / remoto.
Par. 013 Control / conf. local según par. 100.
Par. 100 Configuración.
Seleccione Control remoto en el parámetro 002
Si se ha seleccionado Regulación de velocidad, lazo abierto
en el parámetro 100, la unidad seleccionada en el
parámetro 416 puede utilizarse en las pantallas (par.
009-12, Realimentación [unidad]) de los parámetros de
proceso.
Nota: la referencia únicamente puede mostrarse en Hz
(Regulación de velocidad, lazo abierto).
Si se selecciona Regulación de proceso, lazo cerrado en el
parámetro 100, se utiliza la unidad seleccionada en el
parámetro 416 para visualizar la referencia (par. 009-12,
Referencia [unidad]) y la realimentación (par. 009-12,
Realimentación [unidad]).
Seleccione Control local en el parámetro 002
Si se selecciona en el parámetro 013 Control de LCP y lazo
abierto o Control digital de LCP y lazo abierto, la referencia
se indicará en Hz, independientemente de la opción
elegida en el parámetro 416. Si se selecciona en el
parámetro 013 Control de LCP / como par. 100 o Control
digital de LCP / como par. 100, la unidad funcionará como
se describe en el parámetro 002, Control remoto.
Descripción de opciones:
Seleccione la unidad que desee para la señal de
referencia / retroalimentación.
Controlador FCM 300
3.5.3
Regulación de proceso
El controlador PID mantiene un modo de proceso
constante (presión, temperatura, flujo, etc.) y ajusta la
velocidad del motor a partir de la referencia / valor de
consigna y la señal de realimentación.
Un transmisor proporciona al controlador PID una señal de
realimentación como expresión del modo real del proceso.
La señal de realimentación varía a medida que cambia la
carga del proceso.
Esto significa que hay una diferencia entre la referencia /
valor de consigna y el modo real del proceso. Dicha
diferencia se compensa por el controlador PID mediante la
frecuencia de salida regulada de manera ascendente o
descendente en relación con la diferencia entre la
referencia / valor de consigna y la señal de realimentación.
3 3
MG03BA05 - VLT® es una marca registrada de Danfoss 59
Page 62

Programación
Serie FCM de VLT® DriveMotor
El controlador PID integrado en el convertidor de
frecuencia se ha optimizado para utilizarlo en aplicaciones
de procesos. Esto significa que el convertidor de frecuencia
tiene disponible una serie de funciones especiales.
Antes era necesario obtener un sistema que manejara
estas funciones especiales instalando módulos de E / S
33
adicionales y programando el sistema. Con el convertidor
de frecuencia, se evita la necesidad de instalar más
módulos. Los parámetros específicos del controlador de
proceso son del 437 al 444.
3.5.4 Funciones PID
Unidad de referencia / realimentación
Cuando se selecciona Regulación del proceso, lazo cerrado
en el parámetro 100 Configuración, la unidad se define en
el parámetro 416 Unidad de referencia / realimentación:
Realimentación
Debe ajustarse un intervalo de realimentación para el
controlador. Al mismo tiempo, este intervalo de realimentación limita el posible intervalo de referencia, para que, si
la suma de todas las referencias cae fuera del mismo, la
referencia quede limitada a dicho intervalo de realimentación.
La señal de realimentación se debe conectar a un terminal
del convertidor de frecuencia. Si se selecciona la realimentación en dos terminales a la vez, las dos señales se
sumarán.
Utilice la siguiente descripción para determinar los
terminales que se deben utilizar y qué parámetros se
deben programar.
Referencia
En el parámetro 205 Referencia máxima, Ref
preajustar una referencia máxima que escale la suma de
todas las referencias, es decir, la referencia resultante.
La referencia mínima del parámetro 204 es una expresión
del valor mínimo que puede tener la referencia resultante.
Todas las referencias se sumarán, y la suma será la
referencia en relación con la que se realizará la regulación.
Es posible limitar el intervalo de referencia a otro intervalo
más pequeño que el de realimentación. Esto es una
ventaja si se desea evitar un cambio no intencionado en
una referencia externa, al hacer que la suma de las
referencias se aleje del valor óptimo. El intervalo de
referencia no puede sobrepasar el intervalo de realimentación.
Si se desean referencias internas, pueden preajustarse en
los parámetros de 215 a 216 Referencia interna. Consulte la
descripción Función de referencia y Manejo de las referencias
en el parámetro 214.
Si se utiliza una señal de corriente como señal de
realimentación, solo se podrá utilizar la tensión como
referencia analógica. Utilice la siguiente descripción para
determinar los terminales que se deben utilizar y qué
parámetros se deben programar.
Tipo de referencia Terminal Parámetros
Impulso 3 333, 327
Tensión 2 332, 338, 339
Corriente 1 331, 336, 337
Referencias
internas
Referencia de bus 68+69
Tabla 3.17
215-216
, es posible
MÁX.
(241-247)
Tipo de realimentación
Impulso 3 333, 327
Tensión 2 332, 338, 339
Corriente 1 331, 336, 337
Tabla 3.16
Puede realizarse una corrección de la pérdida de tensión
en los cables de señal largos cuando se utilice un
transmisor con una salida de tensión. Se hace esto en los
parámetros 338 / 339 Escalado mín. / máx.
Los parámetros 414 / 415 Realimentación mínima / máxima
también deben preajustarse en unos valores en las
unidades de proceso que correspondan a los valores de
escalado mínimo y máximo que tengan las señales
conectadas al terminal.
Terminal Parámetros
AVISO!
La referencia de bus únicamente se puede
preajustar mediante la comunicación en serie.
AVISO!
Es recomendable preajustar los terminales
que no se utilicen en [0] Sin función.
Límite de ganancia del diferenciador
Si se producen variaciones muy rápidas en la señal de
referencia o de realimentación en una aplicación, la
diferencia entre la referencia / valor de consigna y el modo
real del proceso también cambiará rápidamente. El diferenciador puede llegar a ser demasiado importante. Esto se
debe a que está reaccionando a la diferencia entre la
referencia y el modo real del proceso, y cuanto más
rápidamente cambia esta diferencia, más importante es la
contribución de frecuencia del diferenciador. La frecuencia
con que contribuye el diferenciador, por lo tanto, puede
limitarse de manera que se preajuste un tiempo de
diferenciación adecuado para cambios lentos y una contri-
60 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 63
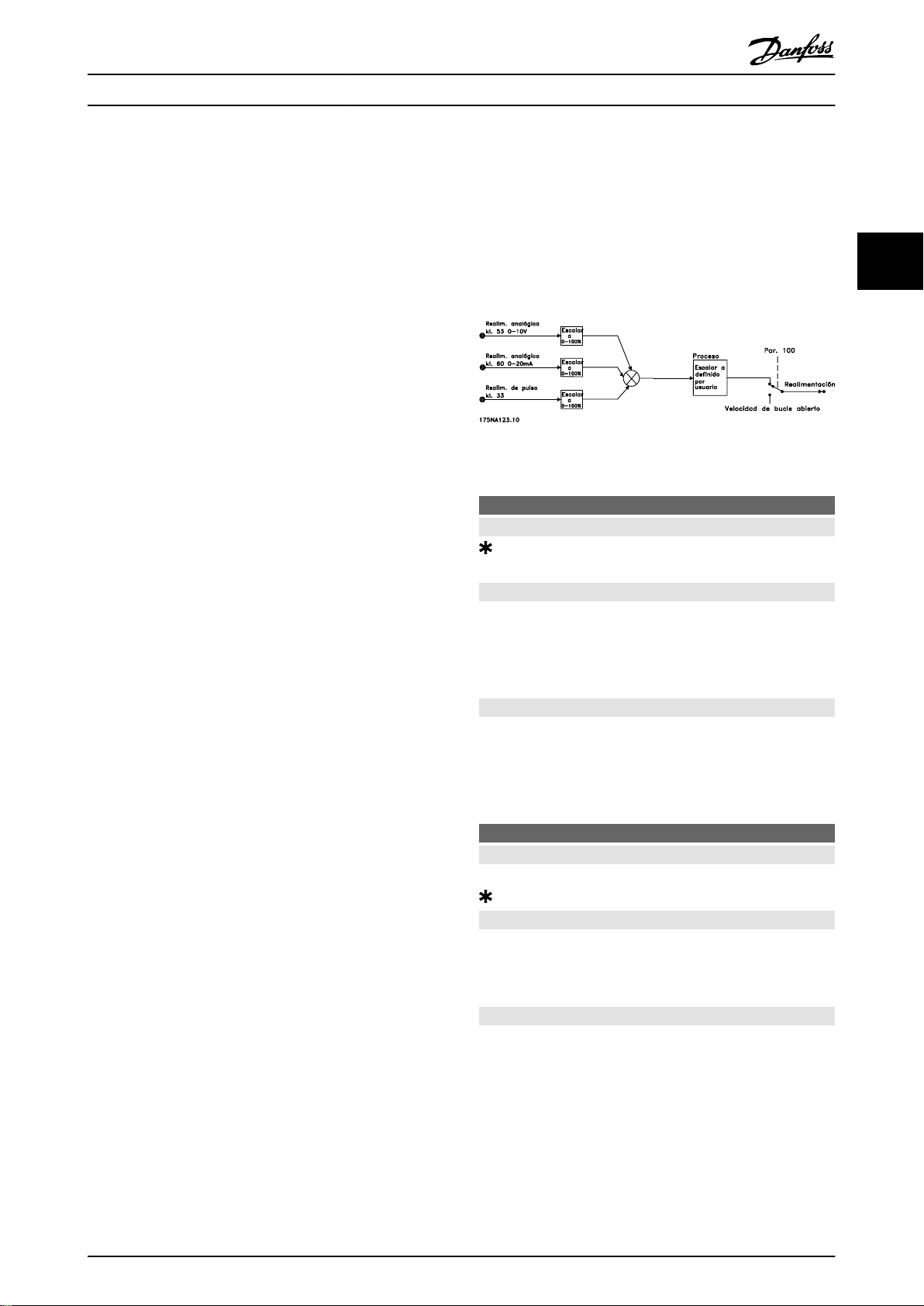
Programación
Serie FCM de VLT® DriveMotor
bución de frecuencia para cambios rápidos. Esto se efectúa
en el parámetro 443 Límite de ganancia del diferenciador de
PID de proceso.
Filtro de paso bajo
Si hay mucho ruido en la señal de realimentación, puede
suprimirse mediante un filtro de paso bajo integrado. Se
preajusta una constante de tiempo adecuada para el filtro
de paso bajo.
Si el filtro de paso bajo se preajusta en 0,1 s, la frecuencia
de desconexión será de 10 RAD/s, que corresponde a (10/2
x π) = 1,6 Hz. Esto significará que todas las corrientes /
tensiones que varían más de 1,6 oscilaciones por segundo
se perderán. En otras palabras, solo habrá una regulación
basada en una señal de realimentación que varíe en una
frecuencia menor de 1,6 Hz. La constante de tiempo
adecuada se selecciona en el parámetro 444 Tiempo de
filtro de paso bajo de PID de proceso.
Regulación inversa
En la regulación normal, la velocidad del motor aumenta
cuando la referencia / valor de consigna es mayor que la
señal de realimentación. Si es necesario realizar la
regulación inversa, en que la velocidad se reduce cuando
la referencia / valor de consigna es mayor que la señal de
realimentación, el parámetro 437 Control normal / inverso
de PID debe programarse en Inverso.
Saturación
El controlador de proceso se preajusta en fábrica con una
función de saturación activa. Esta función significa que,
cuando se alcance un límite de frecuencia, un límite de
corriente o un límite de tensión, el integrador se inicializará a la frecuencia que corresponda a la frecuencia de
salida actual. Esto evita la integración de una diferencia
entre la referencia y el modo real del proceso que no se
puede desregularizar mediante un cambio en la velocidad.
Esta función se puede dejar sin seleccionar en el
parámetro 438 Saturación de PID de proceso.
Condiciones de arranque
En algunas aplicaciones, el ajuste óptimo del controlador
de proceso requiere que transcurra un periodo prolongado
antes de que se alcance la condición deseada del proceso.
En estas aplicaciones, es recomendable definir una
frecuencia de salida a la que el convertidor deba hacer
funcionar el motor antes de que se active el controlador
de proceso. Esto se realiza programando una frecuencia de
arranque en el parámetro 439 Frecuencia de arranque de
PID de proceso.
3.5.5
Manejo de realimentación
El manejo de la realimentación se representa en este
diagrama de flujo.
Este diagrama muestra los parámetros y la manera en que
pueden afectar al manejo de la realimentación. Es posible
elegir entre señales de realimentación de tensión, corriente
o impulsos.
Ilustración 3.24
437 Control normal / inverso de PID de proceso
Valor:
Normal (NORMAL) [0]
Inverso (INVERSO) [1]
Función:
Es posible elegir si el controlador del proceso debe
aumentar / reducir la frecuencia de salida, cuando la señal
de referencia y la señal de realimentación difieren.
Se utiliza junto con Proceso, modo de lazo cerrado
(parámetro 100).
Descripción de opciones:
Cuando el motor FC debe reducir la frecuencia de salida, si
se incrementa la señal de realimentación, seleccione [0]
Normal. Cuando el motor FC debe aumentar la frecuencia
de salida, si se aumenta la señal de realimentación,
seleccione [1] Inverso.
438
Valor:
Desactivar (DESACTIVAR) [0]
Activar (ACTIVAR) [1]
Función:
Es posible seleccionar si el controlador de proceso va a
continuar regulando en un error, incluso si no es posible
incrementar o reducir la frecuencia de salida. Se utiliza
junto con Proceso, modo de lazo cerrado (parámetro 100).
Descripción de opciones:
El ajuste de fábrica es [1] Activar, lo cual significa que el
cálculo de integral se inicializa respecto a la frecuencia de
salida si se ha alcanzado el límite de corriente o la
frecuencia máx. / mín. El controlador de proceso no se
volverá a activar hasta que el error sea cero o haya
cambiado su signo.
Seleccione [0] Desactivar si la integral debe continuar
integrando en un error, aunque no sea posible suprimir
dicho fallo con esta regulación.
Saturación de PID de proceso
3 3
MG03BA05 - VLT® es una marca registrada de Danfoss 61
Page 64

Programación
Serie FCM de VLT® DriveMotor
439 Frecuencia de arranque del PID de proceso
Valor:
f
MÍN.-fMÁX.
parámetro 201
33
Función:
Cuando se recibe la señal de arranque, el motor FC
reaccionará utilizando Velocidad, modo de lazo abierto tras
la rampa. Únicamente cuando se haya obtenido la
frecuencia de arranque programada cambiará a Proceso,
modo de lazo cerrado. Además, es posible ajustar una
frecuencia que corresponda a la velocidad a la que se
ejecuta normalmente el proceso, lo que permitirá alcanzar
en menos tiempo las condiciones de proceso requeridas.
Se utiliza junto con Proceso, modo de lazo cerrado
(parámetro 100).
Descripción de opciones:
Ajuste la frecuencia de arranque requerida.
440
Valor:
0,00 (OFF)-10,00 [0-1000]
0,01 [1]
Función:
La ganancia proporcional indica el número de veces que
debe aplicarse el error entre el valor de consigna y la señal
de realimentación.
Se utiliza junto con Proceso, modo de lazo cerrado
(parámetro 100).
Descripción de opciones:
Se obtiene una regulación rápida con una ganancia alta,
aunque, si es excesiva, el proceso puede volverse inestable.
441
Valor:
0,01-9999 s (DESACTIVADO) [1-999900]
9999 s [999900]
Función:
La integral proporciona una ganancia que se incrementa
en un error constante entre el valor de consigna y la señal
de realimentación. Cuanto mayor es el error, más rápido se
incrementa la ganancia. El tiempo integral es el período
que necesita la integral para alcanzar una ganancia igual a
la ganancia proporcional.
Se utiliza junto con Proceso, modo de lazo cerrado
(parámetro 100).
Descripción de opciones:
Se obtiene una regulación rápida con un tiempo integral
corto. Sin embargo, este período puede ser demasiado
corto, con lo que el proceso puede resultar inestable.
Si el tiempo integral es largo, pueden producirse desviaciones importantes respecto al valor de consigna
(parámetros 201 y 202)
Ganancia proporcional del PID de proceso
Tiempo integral del PID de proceso
[X.X]
requerido, ya que el controlador de proceso tardará mucho
tiempo en regular respecto a un determinado error.
442 Tiempo diferencial del PID de proceso
Valor:
0,00 (Off)-10,00 s [0-1000]
0,00 s [0]
Función:
El diferenciador no reacciona a un error constante. Solo
proporciona una ganancia cuando cambia el error. Cuanto
más rápido cambia el error, mayor es la ganancia del
diferenciador.
La ganancia es proporcional a la velocidad en que cambia
el error.
Se utiliza junto con Proceso, modo de lazo cerrado
(parámetro 100).
Descripción de opciones:
Se obtiene una regulación rápida con un tiempo
diferencial largo. Sin embargo, este tiempo puede ser
demasiado largo, con lo que el proceso puede resultar
inestable.
443
Valor:
5.0-50.0 [50-500]
5,0 [50]
Función:
Es posible ajustar un límite para la ganancia diferencial.
La ganancia diferencial se incrementará si hay cambios
rápidos, por lo que puede resultar beneficioso limitarla,
obteniéndose una ganancia diferencial regular en cambios
lentos y una ganancia diferencial constante en cambios
rápidos del error.
Se utiliza junto con Proceso, modo de lazo cerrado
(parámetro 100).
Descripción de opciones:
Seleccione un límite de ganancia diferencial de la forma
requerida.
444
Valor:
0,02-10,00 s [2-1000]
0,02 s [2]
Función:
El rizado en la señal de realimentación se amortigua por el
filtro de paso bajo con el fin de reducir su impacto en la
regulación de proceso. Esto puede ser una ventaja, por
ejemplo, si hay mucho ruido en la señal.
Se utiliza junto con Proceso, modo de lazo cerrado
(parámetro 100).
Descripción de opciones:
Seleccione la constante de tiempo deseada (τ). Si se
programa una constante de tiempo (τ) de 100 ms, la
frecuencia de apertura para el filtro de paso bajo será de
1/0,1 = 10 RAD/s, que corresponde a (10/2 x π) = 1,6 Hz.
Límite de ganancia dif. del PID de proceso
Tiempo de filtro de paso bajo del PID de
proceso
62 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 65

Programación
Serie FCM de VLT® DriveMotor
El controlador de proceso únicamente regulará, por tanto,
una señal de realimentación que varíe con una frecuencia
inferior a 1,6 Hz. Si la señal de realimentación varía en una
frecuencia superior a 1,6 Hz, el controlador de proceso no
reacciona.
445 Motor en giro
Valor:
Desactivar (DESACTIVAR) [0]
OK: mismo sentido (OK-MISMO SENTIDO) [1]
OK: ambos sentidos (OK-AMBOS SENTIDOS) [2]
Freno de CC antes del arranque
(FRENO DE CC ANTES DEL ARRANQUE) [3]
Función:
Esta función permite «enganchar» un motor que está
girando libremente, debido a un corte de electricidad.
Descripción de opciones:
Seleccione [0] Desactivar si no se requiere esta función.
[1} OK: mismo sentido: se utiliza cuando el motor
únicamente puede girar en un mismo sentido durante la
conexión.
[2] OK: ambos sentidos: se utiliza cuando el motor puede
girar en ambos sentidos durante la conexión.
[3] Freno de CC antes del arranque: se selecciona para que
el motor se detenga con el freno de CC antes de acelerarlo
a la velocidad deseada. El tiempo de freno de CC debe
ajustarse en el parámetro 126.
Limitaciones:
1. Una inercia demasiado baja causará la aceleración
de la carga, lo que puede ser peligroso o impedir
el Motor en giro con éxito. Utilice el freno de CC,
en este caso.
2. Si la carga se dirige mediante «autorrotación»,
por ejemplo, la unidad puede desconectarse
debido a sobretensión.
3.
Por debajo de 250 r/min, no funciona Motor en
giro.
446
Valor:
60° AVM (60° AVM) [0]
SFAVM (SFAVM) [1]
Función:
Descripción de opciones:
No suele ser necesario que el cliente ajuste este
parámetro.
Patrón de conmutación
en el control de proceso, en lazo cerrado. Este parámetro
no tiene efecto en el código de estado ampliado.
Descripción de opciones:
Seleccione [1] Activar [1] si desea que se lea en pantalla la
advertencia 35 Fuera del intervalo de frecuencia, cuando se
produzca. Seleccione [0] Desactivar si desea que no
aparezca en pantalla la advertencia 35 Fuera de intervalo de
frecuencia, cuando se produzca.
461 Conversión de realimentación
Valor:
Lineal (LINEAL) [0]
Raíz cuadrada (RAÍZ CUADRADA) [1]
Función:
En este parámetro, se selecciona una función que
convierte una señal de realimentación conectada del
proceso en un valor de realimentación que equivale a la
raíz cuadrada de la señal conectada.
Esto se usa, por ejemplo, cuando la regulación de un flujo
(volumen) es necesaria basándose en la presión como
señal de realimentación (flujo = constante x √presión). Esta
conversión permite ajustar la referencia de forma que haya
una conexión lineal entre la referencia y el flujo necesario.
Consulte Ilustración 3.25.
Descripción de opciones:
Si se selecciona [0] Lineal [0], la señal de realimentación y
el valor de realimentación serán proporcionales.
Si se selecciona [1] Raíz cuadrada [1], el convertidor de
frecuencia convierte la señal de realimentación en un valor
cuadrático.
Ilustración 3.25 Conversión de realimentación
3 3
455
Valor:
Desactivar [0]
Activar [1]
Función:
Este parámetro se utiliza si se desea que la advertencia 35
Fuera del intervalo de frecuencia esté apagada en pantalla,
Control de intervalos de frecuencia
MG03BA05 - VLT® es una marca registrada de Danfoss 63
Page 66

STX LGE ADR D ATA BCC
195NA099.10
Programación
Serie FCM de VLT® DriveMotor
3.6.1 Bus de serie
33
Ilustración 3.26 Bus de serie
3.6.3 Estructura de telegramas
Cada telegrama comienza con un byte de inicio (STX) = 02
Hex, seguido de un byte que da la longitud del telegrama
(LGE) y un byte que da la dirección (ADR). A esto le sigue
un número de bytes de datos (que varía según el tipo de
telegrama). El telegrama termina con un byte de control
de datos (BCC).
3.6.2 Comunicación de telegramas
Telegramas de control y de respuesta
En un sistema maestro / esclavo, es el maestro el que
controla la comunicación de telegramas. Es posible
conectar 31 esclavos (motores FC), como máximo, a un
maestro, a menos que se utilice un repetidor, consulte
Ilustración 3.28 y Ilustración 3.30.
El maestro envía continuamente telegramas de control
dirigidos a los esclavos y espera a recibir telegramas de
respuesta de estos. El tiempo de respuesta de los esclavos
es 50 ms, como máximo.
Solo el esclavo que haya recibido un telegrama sin fallos
dirigido a dicho esclavo enviará un telegrama de
respuesta.
Ilustración 3.28 Telegrama
Longitud del telegrama (LGE)
La longitud del telegrama es el número de bytes de datos
sumado al byte de dirección ADR y al byte de control de
datos BCC.
Los telegramas con 4 bytes de datos tienen la siguiente
longitud:
LGE = 4 + 1 + 1 = 6 bytes
Los telegramas con 12 bytes de datos tienen la siguiente
longitud:
LGE = 12 + 1 + 1 = 14 bytes
Transmisión
Un maestro puede enviar el mismo telegrama a la vez a
todos los esclavos conectados al bus. En cada comunicación transmitida, el bit transmitido del telegrama de
control tiene un valor igual a 1 (consulte el apartado sobre
la dirección del VLT). Los bits de dirección 0-4 no se
utilizan.
Contenido de un byte
Cada señal transmitida comienza con un bit de inicio.
Posteriormente, se transmiten 8 bits de datos. Cada señal
recibe un bit de paridad ajustado en «1», cuando hay una
paridad par (es decir, un número par de 1 binarios en los 8
bits de datos y los bits de paridad sumados). La señal
termina con un bit de parada, por lo que consiste de 11
bits en total.
Ilustración 3.27
64 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 67

Programación
Serie FCM de VLT® DriveMotor
Dirección VLT (ADR)
Se emplean dos formatos de dirección distintos:
1. Formato de dirección del protocolo USS Siemens:
Ilustración 3.29 Formato de dirección
Bit 7 = 0
Bit 6 no se utiliza
Bit 5 = 1: transmisión, los bits de dirección (0-4) no se
utilizan
Bit 5 = 0: sin transmisión
Bits 0-4 = dirección del VLT, 1-31
2. Danfoss formato:
«segundo byte» = 1 1 0 1 0 1 1 0 (D6H)
BCC
= 1 1 0 1 0 1 0 0
NUEVO
El resultado después de la última señal recibida es BCC.
3.6.4 Bytes de datos
El bloque de bytes de datos se divide en dos bloques más
pequeños:
1. Bytes de parámetros utilizados para la transferencia de parámetros entre el maestro y el
esclavo
2. Bytes de proceso, incluido
Código de control y valor de referencia
-
(de maestro a esclavo)
Código de estado y frecuencia de salida
-
actual (de esclavo a maestro)
Esta estructura se aplica tanto al telegrama de control
(maestro ⇒ esclavo) como al telegrama de respuesta
(esclavo ⇒ maestro).
3 3
Ilustración 3.30 Formato de dirección
Bit 7 = 1
Bits 0-6 = dirección VLT 1-127 (0 = transmisión)
Byte de control de datos (BCC)
El byte de control de datos se explica más fácilmente con
un ejemplo: antes de recibirse la primera señal del
telegrama, BCC = 0.
Ilustración 3.31
Después de recibirse la primera señal:
BCC
NUEVO
= BCC
EXOR «primer byte»
ANTIGUO
(EXOR = puerta exclusiva)
BCC
= 0 0 0 0 0 0 0 0
ANTIGUO
EXOR
«primer byte» = 0 0 0 0 0 0 1 0 (02H)
BCC
= 0 0 0 0 0 0 1 0
NUEVO
Cada byte adicional consecutivo se direcciona por
BCC
EXOR y da como resultado un BCC
ANTIGUO
NUEVO
. Por
ejemplo:
Ilustración 3.32
Hay dos tipos de telegramas:
con 12 bytes, estructurados como se muestra
-
arriba, con un bloque de parámetro y de proceso.
con 4 bytes, que es el bloque de proceso del
-
telegrama de 12 bytes.
BCC
EXOR
= 0 0 0 0 0 0 1 0
ANTIGUO
MG03BA05 - VLT® es una marca registrada de Danfoss 65
Page 68

Programación
Serie FCM de VLT® DriveMotor
1. Bytes de parámetro
Si no puede ejecutarse el comando, el esclavo envía una
respuesta (0111) y da el siguiente mensaje de error en el
valor de parámetro:
código de error
33
Ilustración 3.33
Comandos y respuestas (AK)
Los bits n.º 12-15 se utilizan para transmitir comandos del
maestro al esclavo y la respuesta procesada del esclavo al
maestro.
(respuesta
0111)
0 El número de parámetro utilizado no existe.
1 No hay acceso para escribir el parámetro
2 El valor de dato excede los límites del
3 El subíndice utilizado no existe
4 El parámetro no es de tipo matriz
5 El tipo de dato no es equivalente al parámetro
17 No es posible cambiar los datos del parámetro
130 No hay acceso de bus al parámetro invocado
131 No es posible cambiar los datos, porque se ha
Mensaje de error
invocado
parámetro
invocado
invocado en el modo actual del motor FC. Por
ejemplo, algunos parámetros solo se pueden
cambiar cuando el motor está parado.
seleccionado el ajuste de fábrica
Comandos maestro ⇒ esclavo:
N.º de bit
14 13 12 Comando
15
0 0 0 0 Sin comando
0 0 0 1 Leer valor de parámetro
0 0 1 0 Escribir valor de parámetro en
RAM (código)
0 0 1 1 Escribir valor de parámetro en
RAM (doble código)
1 1 0 1 Escribir valor de parámetro en
RAM y EEPROM (doble código)
1 1 1 0 Escribir valor de parámetro en
RAM y EEPROM (código)
1 1 1 1 Leer texto
Tabla 3.18
Respuesta esclavo ⇒ maestro:
N.º de bit
15
14 13 12 Respuesta
0 0 0 0 Sin respuesta
0 0 0 1 Valor de parámetro transferido
(código)
0 0 1 0 Valor de parámetro transferido
(doble código)
0 1 1 1 Comando no ejecutable
1 1 1 1 Texto transferido
Tabla 3.20
Número de parámetro (PNU)
Los bits n.º 0-10 se utilizan para transmitir el número de
parámetros. La función de cada parámetro puede verse en
la descripción de parámetros.
Ilustración 3.34
Índice
El índice se utiliza con el número de parámetro para el
acceso de lectura / escritura a los parámetros del tipo
matriz (par. 615, 616 y 617).
Valor de parámetro (PWE)
Ilustración 3.35
Tabla 3.19
66 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 69

Programación
Serie FCM de VLT® DriveMotor
El valor de parámetros depende del comando dado. Si el
maestro solicita un parámetro (lectura), no importa el valor
del bloque PWE. Si el maestro cambia un parámetro
(escritura), el nuevo valor se transfiere en el bloque PWE. Si
el esclavo responde a una solicitud de parámetro
(comando de lectura), el valor del parámetro actual se
transfiere al bloque PWE.
El valor transferido corresponde a las cifras indicadas en la
descripción de parámetros. Por ejemplo, en el parámetro
101, [1] corresponde a Par constante, [2] corresponde a Par
variable: bajo, etc. Sin embargo, se exceptúan los
parámetros con el tipo de dato 9 (cadena de texto), ya que
este texto se transfiere como una cadena de texto ASCII.
Cuando se transfiere una cadena de texto (lectura), el
telegrama tendrá una longitud variable, debido a que el
texto puede tener distintas longitudes. La longitud del
telegrama se indica en el 2.º byte de este, denominado
LGE, consulte 3.6.3 Estructura de telegramas . Los
parámetros 621-634 (datos de la placa de características)
tienen el tipo de dato 9 (cadena de texto).
Tipos de datos admitidos por el convertidor de
frecuencia VLT
Tipo de dato Descripción
3 Entero 16
4 Entero 32
5 Sin signo 8
6 Sin signo 16
7 Sin signo 32
9 Cadena de texto
requerida se añade como el último byte. La serie se envía
a los parámetros de dirección de bus 500 (y 918) mediante
una transmisión.
PKE: escritura al parámetro n.º 500 o 918
IND: sin uso
2. Bytes de proceso
El bloque de bytes de proceso se divide en dos bloques,
cada uno de 16 bits, que siempre están en la secuencia
indicada.
Ilustración 3.36
Telegrama de
control
(maestro⇒esclavo)
Telegrama de
respuesta
(esclavo⇒maestro)
Tabla 3.22
PCD1 PCD2
Código de control Valor de referencia
Código de estado Frecuencia de salida
determinada
3 3
Tabla 3.21
«Sin signo» significa que el telegrama no lleva ningún
signo.
Los distintos atributos de cada parámetro pueden verse en
el apartado de ajustes de fábrica. Dado que los valores de
parámetros solo pueden transferirse como enteros, debe
usarse un factor de conversión para transferir decimales.
Ejemplo:
Parámetro 201: frecuencia mínima, factor de conversión de
0,1. Si el parámetro 201 se va a ajustar en 10 Hz, es
necesario transferir el valor de 100, ya que un factor de
conversión de 0,1 significa que el valor transferido se
multiplica por 0,1. En este sentido, se tomará el valor de
100 para 10.
Dirección por ID de unidad
La ID de unidad está impresa en la etiqueta de la tapa
plástica debajo de la cubierta de la caja de componentes
electrónicos. Los tres grupos con tres dígitos de la ID de
unidad deben convertirse al formato Hex. La dirección
MG03BA05 - VLT® es una marca registrada de Danfoss 67
Page 70

Programación
Serie FCM de VLT® DriveMotor
3.6.5 Código de control según el perfil
estándar de bus de campo
(parámetro 512 = perfil de bus de campo) El código de
control se usa para transmitir comandos de un maestro
(por ejemplo, un PC) a un esclavo (motor FC).
Bit 02, DESACTIVADO 3 / ACTIVADO 3
Parada rápida, que utiliza el tiempo de rampa del
parámetro 212. El bit 02 = «0» lleva a una parada rápida.
Bit 02 = «1» significa que el convertidor de frecuencia
puede arrancar si se cumplen las demás condiciones de
arranque.
33
Bit 03, Inercia / activar
Inercia. El bit 03 = «0» lleva a una parada. Bit 03 = «1»
significa que el convertidor de frecuencia puede arrancar si
se cumplen las demás condiciones de arranque.
Bit Bit = 0 Bit = 1
00 DESACTIVADO 1 ACTIVADO 1
01 DESACTIVADO 2 ACTIVADO 2
02 DESACTIVADO 3 ACTIVADO 3
03 Inercia del motor Activar
04 Parada rápida Rampa
05 Mantener frecuencia de salida Rampa activa
06 Parada de rampa Arranque
07 Sin funcionamiento Reinicio
08 Velocidad fija 1 DESACTIVADO ACTIVADO
09 Velocidad fija 2 DESACTIVADO ACTIVADO
10 Datos no válidos Válido
11 Sin funcionamiento Enganche abajo / Relé
123 / Terminal de
salida digital 9
12 Sin funcionamiento Enganche arriba / Relé
123
13 Configuración 1 Configuración 2
14
15 Sin funcionamiento Cambio de sentido
Tabla 3.23
AVISO!
Las opciones del parámetro 502 permiten definir cómo
combinar (direccionar) el bit 03 con la función correspondiente de las salidas digitales.
Bit 04, Parada rápida / rampa
Parada rápida que utiliza el tiempo de rampa del
parámetro 212. El bit 04 = «0» lleva a una parada rápida. El
bit 04 = «1» significa que el convertidor de frecuencia
puede arrancar, siempre que se cumplan las demás
condiciones para el arranque.
AVISO!
En el parámetro 503, se selecciona cómo se combinará
(direccionará) el bit 04 con la función correspondiente en
las entradas digitales.
Bit 05, Mantener frecuencia de salida / rampa activada
El bit 05 = «0» significa que se mantiene la frecuencia de
salida, aunque se cambie la referencia. El bit 05 = «1»
significa que el convertidor de frecuencia puede volver a
regularse siguiéndose la referencia dada.
AVISO!
El uso de bit 00, bit 01 y bit 02 para desconectar la
fuente de alimentación (mediante relé) necesitará un
encendido independiente. Esto se debe a que no existe
una conexión externa de 24 #V que alimente el control
de FCM 300, lo que resulta necesario para activar de
nuevo el FCM 300 mediante una señal de entrada.
Bit 06, Parada / arranque de rampa
Parada de rampa normal que utiliza el tiempo de rampa
de los parámetros 207 / 208. Bit 06 = «0» lleva a una
parada. Bit 06 = «1» significa que el convertidor de
frecuencia puede arrancar si se cumplen las demás
condiciones de arranque.
AVISO!
Bit 00, DESACTIVADO 1 / ACTIVADO 1
Parada de rampa normal que utiliza el tiempo de rampa
de los parámetros 207 / 208. El bit 00 = «0» lleva a una
parada. El bit 00 = «1» significa que el convertidor de
frecuencia podrá arrancar si se han cumplido las demás
condiciones necesarias para el arranque.
Bit 01, DESACTIVADO 2 / ACTIVADO 2
Parada por inercia. Bit 01 = «0» produce una parada por
inercia. Bit 01 = «1» significa que el convertidor de
frecuencia puede arrancar si se cumplen las demás
condiciones de arranque.
68 MG03BA05 - VLT® es una marca registrada de Danfoss
En el parámetro 505, se selecciona de qué forma se
combinará (direccionará) el bit 06 con la función correspondiente en las entradas digitales.
Bit
07, Sin función / reinicio
Reinicio de una desconexión. El bit 07 = «0» significa que
no se produce el reinicio. El bit 07 = «1» significa un
reinicio después de la desconexión. Después del reinicio, la
unidad tardará aproximadamente 1,5 s en estar lista. El
código de estado indicará que la unidad está lista para
funcionar.
Page 71

Programación
Serie FCM de VLT® DriveMotor
Bit 08, Velocidad fija 1 DESACTIVADO / ACTIVADO
Activación de una velocidad preprogramada en el
parámetro 509 (VELOCIDAD FIJA Bus 1). VELOCIDAD FIJA 1
solo es posible cuando el bit 04 = «0» y los bits 00-03 =
«1».
Bit 09, Velocidad fija 2 DESACTIVADO / ACTIVADO
Activación de una velocidad preprogramada en el
parámetro 510 (VELOCIDAD FIJA Bus 2). VELOCIDAD FIJA 2
solo es posible cuando el bit 04 = «0» y los bits 00-03 =
«1». Si tanto VELOCIDAD FIJA 1 como VELOCIDAD FIJA 2
están activadas (bits 08 y 09 = «1»), VELOCIDAD FIJA 1
tiene prioridad, por lo que se utilizará la velocidad
programada en el parámetro 509.
Bit 10, Dato no válido / válido
Sirve para indicar al motor FC si debe usar u omitir el
código de control. El bit 10 = «0» significa que se ignora el
código de control. El bit 10 = «1» significa que se utiliza el
código de control. Esta función es importante, debido a
que el código de control siempre está contenido en el
telegrama, independientemente del tipo de telegrama que
se emplee, es decir, se puede desconectar el código de
control si no se va a utilizar en relación con la actualización o la lectura de parámetros.
Ajuste Bit 13
1 0
2 1
Tabla 3.24
Esta función únicamente se puede utilizar si se ha
seleccionado Ajuste múltiple en el parámetro 004.
AVISO!
El parámetro 507 se utiliza para elegir de qué forma se
combinará (direccionará) el bit 13 con la función correspondiente en las entradas digitales.
Bit 15, Sin función / cambio de sentido
Cambio del sentido de giro del motor. El bit 15 = «0» lleva
a que no haya cambio de sentido y el bit 15 = «1»
produce un cambio de sentido.
AVISO!
A menos que se mencione lo contrario, el bit del código
de control se combina (direcciona) con la función correspondiente en las entradas digitales como una función
«O» lógica.
3 3
Bit 11, Sin función / enganche abajo, relé 123, terminal de
salida digital 9
Se utiliza para reducir la referencia de velocidad según el
valor del parámetro 219. El bit 11 = «0» significa que no se
realiza ningún cambio en la referencia. El bit 11 = «1»
significa que se reduce la referencia. Bit 11 = «1» activará
también el relé 123 (siempre que el parámetro 323 =
«Código de control, bit 11») y ajustará como alto el
terminal de salida digital 9 (siempre que el parámetro 340
= «Código de control, bit 11”).
Bit 12, Sin función / enganche arriba, relé 123
Se utiliza para aumentar la referencia de velocidad con el
valor del parámetro 219. El bit 12 = «0» significa que no se
realiza ningún cambio en la referencia. El bit 12 = «1»
significa que la referencia se incrementa. Si se activan
tanto el enganche abajo como el enganche arriba (bits 11
y 12 = «1»), el enganche abajo tiene prioridad, por lo que
se reduce la referencia de velocidad. Bit 12 = «1» activará
también el relé 123 (siempre que el parámetro 323 =
«Código de control, bit 12»).
Bit 13, Selección de ajuste
El bit 13 se utiliza para seleccionar entre los dos ajustes de
menú, de acuerdo con la siguiente tabla:
Código de estado (según el estándar de perfil de bus de
campo)
El código de estado se utiliza para comunicar al maestro
(por ejemplo, un PC) la condición de un esclavo (motor
FC).
MG03BA05 - VLT® es una marca registrada de Danfoss 69
Page 72

Programación
Serie FCM de VLT® DriveMotor
Bit 04, ACTIVADO 2 / DESACTIVADO 2
El bit 04 = «0» significa que el bit 01 del código de control
= «1».
El bit 04 = «1» significa que el bit 01 del código de control
= «0».
33
Bit Bit = 0 Bit = 1
00 Control no listo Listo
01 FC no listo Listo
02 Inercia Activar
03 Sin fallo Desconexión
04 ACTIVADO 2 DESACTIVADO 2
05 ACTIVADO 3 DESACTIVADO 3
06 Arranque activado Arranque desactivado
07 Sin advertencia advertencia
08
09 Control local Comunicación en serie
10 Fuera del intervalo de
11 No en funcionamiento En funcionamiento
12
13 Tensión OK Límite sobrepasado
14 Corriente OK Límite sobrepasado
15 Advertencia térmica
Velocidad ≠ ref.
frecuencia
Velocidad = ref.
Límite de frecuencia OK
Bit 05, ACTIVADO 3 / DESACTIVADO 3
El bit 05 = «0» significa que el bit 02 del código de control
= «1».
El bit 05 = «1» significa que el bit 02 del código de control
= «0».
Bit 06, Arranque activado / desactivado
El bit 06 siempre es «0» si se ha seleccionado convertidor
FC en el parámetro 512. Si se ha seleccionado [Profidrive]
en el parámetro 512, el bit 06 será «1» tras un reinicio de
la desconexión, tras la activación de DESACTIVADO 2 o
DESACTIVADO 3 y la conexión de la tensión de red. Se
reinicia Arranque desactivado ajustando el bit 00 del
código de control a «0» y los bits 01, 02 y 10 a «1».
Bit 07, Sin advertencia / advertencia
El bit 07 = «0» significa que no existe una situación
inusual.
El bit 07 = «1» significa que ha surgido una condición
Tabla 3.25
anómala en el motor FC. Todas las advertencias que se
explican en 4.2 Advertencias / alarmas (Guía de diseño de
Bit 00, Control no listo / listo
FCM 300) ajustan el bit 07 en «1».
El bit 00 = «0» significa que el bit 00, 01 o 02 del código
de control es «0» (DESACTIVADO 1, DESACTIVADO 2 o
DESACTIVADO 3) o que el convertidor de frecuencia se ha
desconectado.
El bit 00 = «1» significa que el control del convertidor de
frecuencia está listo.
Bit 08, Velocidad ≠ ref. / velocidad = ref.
El bit 08 = «0» significa que la velocidad real del motor es
distinta a la referencia de velocidad ajustada. Esto puede
producirse, por ejemplo, cuando se aumenta o reduce la
velocidad durante el arranque o la parada.
El bit 08 = «1» significa que la velocidad actual del motor
Bit 01, FC no listo / listo
es igual a la referencia de velocidad ajustada.
El mismo significado que el del bit 00; aunque también
hay alimentación eléctrica al componente de potencia, y el
convertidor está listo para funcionar cuando recibe las
señales de arranque necesarias.
Bit 09, Funcionamiento local / control de comunicación en
serie
El bit 09 = «0» significa que [STOP/RESET] se ha activado
en la unidad de control o que se ha seleccionado Control
Bit 02, Inercia / activar
El bit 02 = «0» significa que el bit 00, 01, 02 o 03 del
código de control es «0» (DESACTIVADO 1, DESACTIVADO
2, DESACTIVADO 3 o Inercia) o que la unidad de la serie
FCM 300 se ha desconectado.
El bit 02 = «1» significa que el bit 00, 01, 02 o 03 del
local en el parámetro 002 Funcionamiento local / remoto.
No es posible controlar el convertidor de frecuencia
mediante la comunicación en serie.
El bit 09 = «1» significa que es posible controlar el
convertidor de frecuencia mediante la comunicación en
serie.
código de control es «1» y que el motor FC no se ha
desconectado.
Bit 10, Fuera del intervalo de frecuencia
El bit 10 = «0», si la frecuencia de salida ha alcanzado el
Bit 03, Sin fallo / desconexión
El bit 03 = «0» significa que la serie FCM 300 no tiene una
condición de fallo.
El bit 03 = «1» significa que la serie FCM 300 se ha
valor del parámetro 201 Frecuencia mínima de salida o del
parámetro 202 Frecuencia máxima de salida.
El bit 10 = «1» significa que la frecuencia de salida está
dentro de los límites definidos.
desconectado y requiere una señal de reinicio para
funcionar.
70 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 73

Programación
Serie FCM de VLT® DriveMotor
Bit 11, Funcionamiento sí / no
Bit 11 = «0» significa que el motor no está en funcionamiento.
El bit 11 = «1» significa que el motor FC tiene una señal de
arranque o que la frecuencia de salida es mayor que 0 Hz.
Bit 13, Tensión OK / sobre el límite
El bit 13 = «0» significa que no se han excedido los límites
de tensión del motor FC.
El bit 13 = «1» significa que la tensión CC del circuito
intermedio del motor FC es demasiado baja o demasiado
alta.
Bit 14, Corriente OK / sobre el límite
El bit 14 = «0» significa que la corriente del motor es
inferior al límite de corriente seleccionado en el parámetro
221.
El bit 14 = «1» significa que se ha sobrepasado el límite de
corriente del parámetro 221.
Bit 15, Advertencia térmica
El bit 15 = «0» significa que los temporizadores para la
protección térmica del motor y la protección térmica del
VLT, respectivamente, no han excedido el 100%.
Bit 15 = «1» significa que uno de los temporizadores ha
excedido el 100 %.
Código de control según el perfil FC (parámetro 512 =
convertidor FC)
El código de control se utiliza para enviar comandos de un
maestro (por ejemplo, un PC) a un esclavo (motor FC).
Bit
00 Selección de referencia interna
01 Sin funcionamiento
02 Freno de CC Rampa
03 Inercia Activar
04 Parada rápida Rampa
05 Mantener Rampa activa
06 Parada de rampa Arranque
07 Sin funcionamiento Reinicio
08 Sin funcionamiento Velocidad fija
09 Sin funcionamiento
10 Datos no válidos Válido
11 Sin funcionamiento Relé 123 / terminal
12 Sin funcionamiento Relé 123
13 Configuración 1 Configuración 2
15 Sin funcionamiento Cambio de sentido
Bit = 0 Bit = 1
de entrada digital 9
Tabla 3.26
Bit 00
El bit 00 se utiliza para seleccionar entre las dos referencias
preprogramadas (parámetros 215-216), de acuerdo con la
siguiente tabla:
Ref. interna Parámetro Bit 00
1 215 0
2 216 1
3 3
Tabla 3.27
AVISO!
En el parámetro 508, se selecciona la manera en que se
combinan (direccionan) los bits 1 / 12 con la función
correspondiente en las entradas digitales.
Bit 02, Freno de CC
El bit 02 = «0» lleva al frenado de CC y la parada. La
corriente y duración de frenado se ajustan en los
parámetros 132 y 133.
Bit 02 = «1» lleva al empleo de la rampa.
Bit 03, Inercia / activar
Inercia. El bit 03 = «0» lleva a una parada.
El bit 03 = «1» significa que el convertidor de frecuencia
puede arrancar, siempre que se cumplan las demás
condiciones para el arranque.
MG03BA05 - VLT® es una marca registrada de Danfoss 71
Page 74

Programación
Serie FCM de VLT® DriveMotor
AVISO!
Las opciones del parámetro 502 permiten definir cómo
combinar (direccionar) el bit 03 con la función correspondiente de las salidas digitales.
33
Bit 04, Parada rápida / rampa
Parada rápida que utiliza el tiempo de rampa del
parámetro 212. El bit 04 = «0» lleva a una parada rápida.
Bit 04 = «1» significa que el convertidor de frecuencia
puede arrancar si se han cumplido las demás condiciones
de arranque.
AVISO!
En el parámetro 503, se selecciona cómo se combinará
(direccionará) el bit 04 con la función correspondiente en
las entradas digitales.
Bit 05, Mantener / activar rampa
El bit 05 = «0» significa que se mantiene la frecuencia de
salida, aunque se cambie la referencia.
El bit 05 = «1» significa que el convertidor de frecuencia
puede volver a regularse siguiéndose la referencia dada.
Bit 06, Parada / arranque de rampa
Parada de rampa normal que utiliza el tiempo de rampa
de los parámetros 207 / 208. El bit 06 = «0» lleva a una
parada.
Bit 06 = «1» significa que el convertidor de frecuencia
puede arrancar si se cumplen las demás condiciones de
arranque.
Bit 10, Dato no válido / válido
Sirve para indicar al motor FC si debe usar u omitir el
código de control.
El bit 10 = «0» significa que se ignora el código de control.
El bit 10 = «1» significa que se utiliza el código de control.
Esta función es importante, debido a que el código de
control siempre está contenido en el telegrama, independientemente del tipo de telegrama que se emplee, es
decir, se puede desconectar el código de control si no se
va a utilizar en relación con la actualización o la lectura de
parámetros.
Bit 11, Sin función / relé 123, terminal de salida digital 9
Bit 11 = «1» activará el relé 123, siempre que el parámetro
323 = «Código de control, bit 11», y ajustará como alto el
terminal de salida digital 9, siempre que el parámetro 340
= «Código de control, bit 11».
Bit 12, Sin función / relé 123
Bit 12 = «1» activará el relé 123, siempre que el parámetro
323 = «Código de control, bit 12».
Bit 13, Selección de ajuste
El bit 13 se utiliza para seleccionar entre los dos ajustes de
menú, de acuerdo con la siguiente tabla:
Ajuste Bit 13
1 0
2 1
Tabla 3.28
AVISO!
En el parámetro 505, se selecciona de qué forma se
combinará (direccionará) el bit 06 con la función correspondiente en las entradas digitales.
Bit 07, Sin función / reinicio
Reinicio de una desconexión. El bit 07 = «0» significa que
no se produce el reinicio.
El bit 07 = «1» significa un reinicio después de una
desconexión. Después del reinicio, la unidad tardará
aproximadamente 1,5 s en estar lista. El código de estado
indicará que la unidad está lista para funcionar.
Bit 08, Activación de la velocidad fija en el parámetro 213
Bit 08 = «0»: la velocidad fija no está activada.
El bit 08 = «1» significa que el motor está funcionando a
una velocidad fija.
Esta función únicamente se puede utilizar si se ha
seleccionado Ajuste múltiple en el parámetro 004.
AVISO!
El parámetro 507 se utiliza para elegir de qué forma se
combinará (direccionará) el bit 13 con la función correspondiente en las entradas digitales.
Bit 15, Sin función / cambio de sentido
Cambio del sentido de giro del motor.
El bit 15 = «0» lleva a que no haya cambio de sentido. Bit
15 = «1» produce un cambio de sentido.
72 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 75

Programación
Serie FCM de VLT® DriveMotor
AVISO!
A menos que se mencione lo contrario, el bit del código
de control se combina (direcciona) con la función correspondiente en las entradas digitales como una función
«O» lógica.
Código de estado según el perfil FC
El código de estado se utiliza para comunicar al maestro (por
ejemplo, un PC) la condición de un esclavo (motor FC).
Bit Bit = 0 Bit = 1
00 Control no listo Listo
01 FC no listo Listo
02 Inercia Activar
03 Sin fallo Desconexión
04 Reservado
05 Reservado
06 Reservado
07 Sin advertencia advertencia
08
09 Control local Control de bus
10 Fuera de intervalo Frecuencia OK
11 No en funcionamiento En funcionamiento
12
13 Tensión OK Límite sobrepasado
14 Corriente OK Límite sobrepasado
15 Temporizador OK Advertencia térmica
Velocidad ≠ ref.
Tabla 3.29
Velocidad = ref.
Bit 01, FC no listo / listo
El bit 01 = «0» significa que el convertidor de frecuencia se
ha desconectado.
Bit 01 = «1» significa que el convertidor de frecuencia está
listo.
Bit 02, Inercia / activar
El bit 02 = «0» significa que el bit 03 del código de control
es «0» (Inercia) o que se ha desconectado el motor FC.
El bit 02 = «1» significa que el bit 03 del código de control
es «1» y que el motor FC no se ha desconectado.
Bit 03, Sin fallo / desconexión
El bit 03 = «0» significa que la serie FCM 300 no tiene una
condición de fallo.
El bit 03 = «1» significa que la serie FCM 300 se ha
desconectado y requiere una señal de reinicio para
funcionar.
Bit 07, Sin advertencia / advertencia
El bit 07 = «0» significa que no existe una situación
inusual.
El bit 07 = «1» significa que ha surgido una condición
anómala en el motor FC. Todas las advertencias que se
explican en 4.2 Advertencias / alarmas (Guía de diseño de
FCM 300) ajustan el bit 07 en «1».
Bit 08, Velocidad ≠ ref. / velocidad = ref.
El bit 08 = «0» significa que la velocidad real del motor es
distinta a la referencia de velocidad ajustada. Esto puede
producirse, por ejemplo, cuando se aumenta o reduce la
velocidad durante el arranque o la parada.
El bit 08 = «1» significa que la velocidad actual del motor
es igual a la referencia de velocidad ajustada.
3 3
Bit 09, Funcionamiento local / control de bus
El bit 09 = «0» significa que [STOP/RESET] se ha activado
en la unidad de control o que se ha seleccionado Control
local en el parámetro 002 Funcionamiento local / remoto.
No es posible controlar el convertidor de frecuencia
mediante la comunicación en serie.
El bit 09 = «1» significa que es posible controlar el
convertidor de frecuencia mediante la comunicación en
serie.
Bit 10, Fuera de intervalo / frecuencia
El bit 10 = «0», si la frecuencia de salida ha alcanzado el
valor del parámetro 201 Frecuencia mínima de salida o del
parámetro 202 Frecuencia máxima de salida.
El bit 10 = «1» significa que la frecuencia de salida está
dentro de los límites definidos.
MG03BA05 - VLT® es una marca registrada de Danfoss 73
Page 76

Programación
Serie FCM de VLT® DriveMotor
Bit 11, Funcionamiento sí / no
Frecuencia de salida real
Bit 11 = «0» significa que el motor no está en funcionamiento.
El bit 11 = «1» significa que el motor FC tiene una señal de
arranque o que la frecuencia de salida es mayor que 0 Hz.
33
Bit 13, Tensión OK / sobre el límite
El bit 13 = «0» significa que no se han excedido los límites
de tensión del motor FC.
Ilustración 3.38
El bit 13 = «1» significa que la tensión CC del circuito
intermedio del motor FC es demasiado baja o demasiado
alta.
Bit 14, Corriente OK / sobre el límite
El bit 14 = «0» significa que la corriente del motor es
inferior al límite de par seleccionado en el parámetro 221.
El bit 14 = «1» significa que se ha sobrepasado el límite de
par del parámetro 221.
Bit 15, Advertencia térmica
El bit 15 = «0» significa que los temporizadores para la
protección térmica del motor y la protección térmica del
VLT, respectivamente, no han excedido el 100%.
Bit 15 = «1» significa que uno de los temporizadores ha
excedido el 100 %.
El valor de la frecuencia de salida real del convertidor se
transmite en forma de código de 16 bits. Se transmite el
valor como un número entero (0-32767). 16384 (4000
hexadecimal) corresponde al 100%. (Las cifras negativas se
forman por medio del complementario de 2.)
Grupo de parámetros 5-**
3.7.1
Comunicación serie
500 Dirección
Valor:
Parámetro 561 Protocolo = Protocolo FC [0]
0-126 1
Parámetro 561 Protocolo = MODBUS RTU [3]
0-247 1
Valor de referencia del bus
Función:
Este parámetro permite asignar una dirección en una red
de comunicación en serie a cada convertidor de frecuencia.
Descripción de opciones:
Cada convertidor de frecuencia debe recibir una dirección
distinta. Si el número de unidades conectadas (convertidores de frecuencia + maestro) es mayor de 31, es
Ilustración 3.37
necesario utilizar un repetidor. El parámetro 500 Dirección
no se puede seleccionar mediante la comunicación en
serie, sino que debe ajustarse en la unidad de control.
El valor de referencia de la frecuencia se transmite al
convertidor en forma de código de 16 bits. Se transmite el
valor como un número entero (0-32767). 16384 (4000
hexadecimal) corresponde al 100 %. (Las cifras negativas se
forman por medio del complementario de 2.)
501
Velocidad en baudios
Valor:
300 baudios (300 BAUDIOS) [0]
600 baudios (600 BAUDIOS) [1]
1200 baudios (1200 BAUDIOS) [2]
La referencia de bus tiene el siguiente formato:
Parámetro 203 = «0»
«ref
-ref
MÁX.
»
-ref
MÍN.
MÁX.
MÍN.
0-16384 (4000 hex) ~ 0-100% ~ ref
2400 baudios (2400 BAUDIOS) [3]
4800 baudios (4800 BAUDIOS) [4]
9600 baudios (9600 BAUDIOS) [5]
Función:
Este parámetro se utiliza para programar la velocidad a la
Parámetro 203 = «1»
–ref
-+ref
MÁX.
MÁX.
–16384 (. . . hex)-+16384 (4000 hex) ~
–100-+100% ~ –ref
MÁX.
-+ref
MÁX.
que se transmiten los datos mediante la conexión en serie.
La velocidad en baudios se define como el número de bits
transferidos por segundo.
Descripción de opciones:
La velocidad de transmisión del motor FC se debe ajustar
en un valor que corresponda a la velocidad del transmisión
del PLC o PC.
74 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 77

Programación
Serie FCM de VLT® DriveMotor
502 Inercia
503 Parada rápida
504 Freno de CC
505 Arranque
506 Cambio de sentido
507 Selección de ajuste
508 Selección de velocidad
Valor:
Entrada digital (ENTRADA DIGITAL) [0]
Bus (PUERTO EN SERIE) [1]
«Y» lógico («Y» LÓGICO) [2]
«O» lógico («O» LÓGICO) [3]
Función:
Los parámetros de 502 a 508 permiten la opción de elegir
si se controla el motor FC mediante los terminales
(entradas digitales) y/o a través del bus.
Si se selecciona «Y» lógico o Bus, el comando en cuestión
únicamente puede activarse si se transmite por el puerto
de comunicación en serie. En el caso de «Y» lógico, el
comando debe activarse, además, mediante una de las
entradas digitales.
Descripción de opciones:
[0] Se selecciona Entrada digital si el comando de control en
cuestión únicamente se va a activar mediante una entrada
digital.
[1] Se selecciona Bus si el comando de control en cuestión
únicamente se va a activar mediante un bit en el código
de control (comunicación en serie).
[2] Se selecciona «Y» lógico si el comando de control en
cuestión únicamente se va a activar cuando se transmita
una señal (señal activada = 1) mediante un código de
control y una entrada digital.
Entrada digital
505-508 Bus Comando de control
0 0 0
0 1 0
1 0 0
1 1 1
Tabla 3.30
[3] Se selecciona «O» lógico si el comando de control en
cuestión se va a activar cuando se dé una señal (señal
activada = 1) mediante un código de control o mediante
una entrada digital.
Entrada digital
505-508 Bus Comando de control
0 0 0
0 1 1
1 0 1
1 1 1
Tabla 3.31
Parámetro 502 = «Y» lógico
Entrada digital Bus Comando de control
0 0 1 Inercia
0 1 0 Motor en funciona-
miento
1 0 0 Motor en funciona-
miento
1 1 0 Motor en funciona-
miento
Tabla 3.32
Parámetro 502 = «O» lógico
Entrada digital Bus Comando de control
0 0 1 Inercia
0 1 1 Inercia
1 0 1 Inercia
1 1 0 Motor en funciona-
miento
Tabla 3.33
509
Velocidad fija bus 1
Valor:
0,0-parámetro 202 [0 -]
10,0 Hz [100]
Función:
Aquí se ajusta una velocidad fija que se activa mediante el
puerto de comunicación en serie.
Esta función es la misma que la del parámetro 213.
Descripción de opciones:
La frecuencia de velocidad fija f
el intervalo entre f
(parámetro 201) y f
MÍN.
puede seleccionarse en
JOG
(parámetro
MÁX.
202).
510
Velocidad fija bus 2
Valor:
0,0-parámetro 202 [0 -]
10,0 Hz [100]
Función:
Aquí se ajusta una velocidad fija que se activa mediante el
puerto de comunicación en serie.
Esta función es la misma que la del parámetro 213.
Descripción de opciones:
La frecuencia de velocidad fija f
el intervalo entre f
(parámetro 201) y f
MÍN.
puede seleccionarse en
JOG
(parámetro
MÁX.
202).
512
Perfil de telegrama
Valor:
Perfil de bus de campo (PERFIL BUS DE CAMPO) [0]
Perfil FC (PERFIL FC) [1]
Función:
Se puede elegir entre dos perfiles diferentes de código de
control.
3 3
MG03BA05 - VLT® es una marca registrada de Danfoss 75
Page 78

Programación
Serie FCM de VLT® DriveMotor
Descripción de opciones:
Seleccione el perfil de código de control que desee.
Si desea obtener más información sobre los perfiles de
código de control, consulte Comunicación en serie.
33
513 Intervalo de tiempo de bus
Valor:
1-99 s [1-99]
1 s [1]
Función:
Este parámetro establece el tiempo máximo que debe
transcurrir entre la recepción de dos telegramas
consecutivos. Si se sobrepasa este tiempo, se presupone
que se ha parado la comunicación en serie y se ajusta la
reacción deseada en el parámetro 514.
Descripción de opciones:
Ajuste el tiempo deseado.
514
Valor:
Desactivado (DESACTIVADO) [0]
Mantener salida (MANTENER SALIDA) [1]
Parada (PARADA) [2]
Velocidad fija (VELOCIDAD FIJA) [3]
Velocidad máx. (VELOCIDAD MÁX.) [4]
Parada y desconexión (PARADA Y DESCONEXIÓN) [5]
Función:
Este parámetro selecciona la reacción deseada del motor
FC cuando se ha sobrepasado el tiempo ajustado para el
tiempo límite del bus (parámetro 513). Si se activan las
opciones de [1] a [5], los relés 01 y 04 se desactivarán.
Descripción de opciones:
La frecuencia de salida del motor FC puede: mantenerse
en su valor actual, mantenerse en la referencia, ir a parada,
ir a la frecuencia de velocidad fija (parámetro 213), ir a la
frecuencia de salida máx. (parámetro 202) o pararse y
activar una desconexión.
515
Valor:
XXX.X% [XXXX]
Función:
Este parámetro se puede leer mediante el puerto de
comunicación en serie.
Descripción de opciones:
El valor mostrado corresponde a la referencia total (suma
de ref. digital / analógica / interna / de bus / mantenida /
de enganche arriba-abajo).
Este valor se actualiza cada 320 ms.
516
Valor:
X,XXX Hz o r/min [XXXX]
Función de intervalo de tiempo de bus
Lectura de datos: Referencia %
Lectura de datos: Unidad de referencia
Función:
Este parámetro se puede leer mediante el puerto de
comunicación en serie.
Descripción de opciones:
Indica el valor de estado de la unidad dada según la suma
de referencia elegida.
Este valor se actualiza cada 320 ms.
517 Lectura de datos: Realimentación
Valor:
X.XXX [XXXX]
Función:
Este parámetro se puede leer mediante el puerto de
comunicación en serie.
Descripción de opciones:
Indica el valor de estado de los terminales 1 / 2 en la
unidad / escala seleccionada en los parámetros 414 y 415.
Este valor se actualiza cada 320 ms.
518
Valor:
XXX,X Hz [XXXX]
Función:
Este parámetro se puede leer mediante el puerto de
comunicación en serie.
Descripción de opciones:
El valor mostrado corresponde a la frecuencia real del
motor.
Este valor se actualiza cada 320 ms.
519
Valor:
XXX.X Hz [XXXX]
Función:
Este parámetro se puede leer mediante el puerto de
comunicación serie.
Descripción de opciones:
El valor corresponde a la frecuencia de salida fMactual
multiplicada por el factor preajustado en el parámetro 008
Presentar escalado de la frecuencia de salida.
520
Valor:
XXX,XX A [XXXXX]
Función:
Este parámetro se puede leer mediante el puerto de
comunicación en serie.
Descripción de opciones:
El valor que aparece es un valor calculado de la corriente
de motor dada.
Este valor se actualiza cada 320 ms.
Lectura de datos: Frecuencia
Lectura de datos: Frecuencia x escalado
Lectura de datos: Corriente
76 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 79

Programación
Serie FCM de VLT® DriveMotor
521 Lectura de datos: Par
Valor:
XXX.X% [XXXX]
Función:
Este parámetro se puede leer mediante el puerto de
comunicación en serie.
Descripción de opciones:
El valor mostrado es el par, con signo, que se suministra al
eje del motor. El valor se proporciona como porcentaje del
par nominal.
No hay una linealidad total entre un 160% de la corriente
del motor y el par en relación con el par nominal. Debido
a las diferencias de temperatura y tolerancias, algunos
motores suministran un par superior a esta proporción. En
consecuencia, los valores mín. y máx. dependerán de la
corriente máx. y mín. del motor.
Este valor se actualiza cada 320 ms.
522
Valor:
XX,XX kW [XXXX]
Función:
Este parámetro se puede leer mediante el puerto de
comunicación en serie.
Descripción de opciones:
El valor mostrado se calcula sobre la base de la tensión y
corriente reales del motor.
Este valor se actualiza cada 320 ms.
523
Valor:
XX,XX CV (EE. UU.) [XXXX]
Función:
Este parámetro se puede leer mediante el puerto de
comunicación en serie.
Descripción de opciones:
El valor mostrado se calcula sobre la base de la tensión y
corriente reales del motor. El valor se indica en forma de
CV.
Este valor se actualiza cada 320 ms.
524
Valor:
XXX,X V [XXXX]
Función:
Este parámetro se puede leer mediante el puerto de
comunicación en serie.
Descripción de opciones:
El valor mostrado es un cálculo que se usa para controlar
el motor.
Este valor se actualiza cada 320 ms.
Lectura de datos: Potencia, kW
Lectura de datos: Potencia, CV
Lectura de datos: Tensión del motor
525
Valor:
XXXX V [XXXX]
Función:
Este parámetro se puede leer mediante el puerto de
comunicación en serie.
Descripción de opciones:
El valor mostrado es una medición.
El valor se filtra, por lo que pueden transcurrir 1,3
segundos aproximadamente desde que cambia un valor de
entrada hasta que la pantalla refleja el cambio.
Este valor se actualiza cada 320 ms.
527
Valor:
0-100% [0-100]
Función:
Este parámetro se puede leer mediante el puerto de
comunicación en serie.
Descripción de opciones:
Solo se muestran número enteros.
El valor se actualiza cada 160 ms.
528
Valor:
Unidad
Función:
Este parámetro se puede leer mediante el puerto de
comunicación en serie.
Descripción de opciones:
El valor mostrado indica el estado de señal de los 4
terminales digitales (2, 3, 4 y 5).
Este valor se actualiza cada 20 ms.
533
Valor:
De –200,0 a +200,0%
Función:
Este parámetro se puede leer mediante el puerto de
comunicación en serie.
Descripción de opciones:
El valor indicado proporciona, como porcentaje, la suma
de las referencias externas (suma de referencia analógica /
de bus / de impulsos).
El valor se actualiza cada 80 ms.
534
Valor:
Unidad
Función:
Este parámetro se puede leer mediante el puerto de
comunicación en serie.
Descripción de opciones:
Indica el código de estado transmitido mediante el puerto
de comunicación en serie.
Lectura de datos: Tensión de enlace de CC
Lectura de datos: Térm. FC
Lectura de datos: Entrada digital
Lectura de datos: % referencia externa
Lectura de datos: Código de estado, binario
3 3
MG03BA05 - VLT® es una marca registrada de Danfoss 77
Page 80

Programación
Serie FCM de VLT® DriveMotor
537 Lectura de datos: Temperatura INV.
Valor:
Unidad: ºC
Función:
Este parámetro se puede leer mediante el puerto de
33
comunicación en serie.
Descripción de opciones:
Indica la temperatura del convertidor de frecuencia. Este
valor se actualiza cada 10 s.
540
Valor:
Unidad
Función:
Este parámetro se puede leer mediante el puerto de
comunicación en serie. Consulte 4.2.1 Lista de advertencias
y alarmas.
Descripción de opciones:
Indica en formato hexadecimal si hay una advertencia en
Lectura de datos: Código de advertencia
el motor FC.
538 Lectura de datos: Código de alarma
Valor:
Unidad
Función:
Este parámetro se puede leer mediante el puerto de
comunicación en serie. Consulte 4.2.1 Lista de advertencias
y alarmas.
Descripción de opciones:
Indica si hay una alarma en el motor FC.
Hex Mensajes de fallo
00000002 Bloqueo por alarma
00000040 Tiempo límite de HPFB
00000080 Tiempo límite de bus estándar
00000100 Cortocircuito
00000200 Fallo de alimentación de 24 V
00000400 Fallo de conexión a tierra
00000800 Sobrecorriente
00004000 Termistor del motor
00008000 Sobrecarga del inversor
00010000 Subtensión
00020000 Sobretensión
00040000 Pérdida de fase
00080000 Error de cero activo
00100000 Sobretemperatura
02000000 Error de HPFB
08000000 Fallo en la carga de arranque
10000000 Error interno
Tabla 3.34
539
Lectura de datos: Código de control
Valor:
Hex Mensajes de advertencia
00000008 Tiempo límite de HPFB
00000010 Tiempo límite de bus estándar
00000040 Límite de corriente
00000200 Sobrecarga del inversor
00001000 Advertencia de baja tensión
00002000 Advertencia de alta tensión
00004000 Pérdida de fase
00010000 Advertencia de error de cero activo
00400000 Advertencia de límite de frec. de salida
00800000 Error de HPFB
40000000 Advertencia de suministro de 24 V
80000000 Temp. alta del inversor
Tabla 3.35
541
Lectura de datos: Código de estado
ampliado
Valor:
Unidad
Función:
Este parámetro se puede leer mediante el puerto de
comunicación en serie.
Descripción de opciones:
Indica en formato hexadecimal si hay una advertencia en
el motor FC.
Hex Mensajes de estado
01 En rampa
04 Arrancar en sentido horario / antihorario
08 Enganche abajo
10 Enganche arriba
8000 Límite de frecuencia
Unidad
Función:
Tabla 3.36
Este parámetro se puede leer mediante el puerto de
comunicación en serie.
Descripción de opciones:
Indica el código de control hexadecimal enviado mediante
el puerto de comunicación en serie desde el motor FC. El
parámetro se actualiza cada 20 ms.
78 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 81

Programación
Serie FCM de VLT® DriveMotor
542
Valor:
Unidad: mA
Función:
Este parámetro se puede leer mediante el puerto de
comunicación en serie.
Descripción de opciones:
El valor mostrado indica el valor de señal en el terminal 1.
El escalado (parámetros 336 y 337) no influye en la lectura.
Los valores mín. y máx. se determinan mediante el ajuste
de compensación y ganancia del convertidor analógico
digital.
Este valor se actualiza cada 20 ms.
543
Valor:
Unidad: X,X V
Función:
Este parámetro se puede leer mediante el puerto de
comunicación en serie.
Descripción de opciones:
El valor mostrado indica el valor de señal en el terminal 2.
El escalado (parámetros 338 y 339) no influye en la lectura.
Los valores mín. y máx. se determinan mediante el ajuste
de compensación y ganancia del convertidor analógico
digital.
Este valor se actualiza cada 20 ms.
561
Valor:
Protocolo FC (PROTOCOLO FC) [0]
Modbus RTU [2]
Función:
Es posible elegir entre tres protocolos.
Descripción de opciones:
Seleccione el protocolo de código de control necesario.
Para obtener más información acerca del uso del Modbus
RTU, consulte MG10SX.
Lectura de datos: Terminal 1, entrada
analógica
Lectura de datos: Terminal 2, entrada
analógica
Protocolo
Descripción de opciones:
Seleccione la paridad que coincida con el ajuste del
controlador maestro de Modbus. La paridad par o impar se
utiliza en ocasiones para permitir la comprobación de
errores de un código transmitido. Puesto que el Modbus
RTU utiliza el más eficiente método CRC (comprobación
cíclica de redundancia) para la comprobación de errores, la
comprobación de paridad apenas se utiliza en las redes
Modbus RTU.
AVISO!
Los cambios desactivarán el uso de la unidad de pantalla
(LCP2) y su programación futura también según el
protocolo FC.
571 Tiempo límite de comunicaciones Modbus
Valor:
10-2000 ms
Función:
Este parámetro determina el tiempo máximo durante el
que esperará el Modbus RTU del dispositivo entre
caracteres enviados por el controlador maestro. Cuando
finalice este tiempo, la interfaz Modbus RTU del dispositivo
asumirá que ha recibido el mensaje completo.
Descripción de opciones:
Por lo general, el valor de 100 ms es suficiente para redes
Modbus RTU, aunque algunas redes Modbus RTU pueden
funcionar con un valor de tiempo límite de incluso 35 ms.
Si este valor es demasiado corto, la interfaz Modbus RTU
del convertidor de frecuencia puede perder parte del
mensaje. Puesto que la comprobación CRC no será válida,
el convertidor ignorará el mensaje. Las retransmisiones de
mensajes resultantes ralentizarán las comunicaciones en la
red.
Si este valor es demasiado largo, el convertidor de
frecuencia esperará más de lo necesario para determinar si
el mensaje se ha completado. Esto retrasará la respuesta
del dispositivo al mensaje y provocará posiblemente que
expire el tiempo establecido en el controlador maestro. Las
retransmisiones de mensajes resultantes ralentizarán las
comunicaciones en la red.
100 ms
3 3
570
Valor:
(PAR / 1 BIT PARADA) [0]
(IMPAR / 1 BIT PARADA) [1]
(SIN PARIDAD / 1 BIT PARADA) [2]
(SIN PARIDAD / 2 BITS PARADA) [3]
Función:
Este parámetro configura la interfaz Modbus RTU del
dispositivo para comunicarse adecuadamente con el
controlador principal. La paridad (PAR, IMPAR o SIN
PARIDAD) debe estar ajustada de forma que coincida con
la del controlador principal.
Paridad Modbus y ajuste de mensajes
MG03BA05 - VLT® es una marca registrada de Danfoss 79
Page 82

Programación
Serie FCM de VLT® DriveMotor
3.8 Parámetros 600-678 (Guía de diseño de
FCM 300)
3.8.1 Grupo de parámetros 6-** Funciones
técnicas
33
600
Valor:
Unidad: horas
0,0-130 000,0
Función:
Este parámetro se puede leer en pantalla o mediante el
puerto de comunicación en serie. Su valor no puede
reiniciarse.
Descripción de opciones:
Indica el número de horas que el motor FC ha estado en
funcionamiento.
El valor se actualiza en el motor FC cada hora y se guarda
cuando se desconecta la unidad.
601
Valor:
Unidad: horas
0,0-130 000,0
Función:
Este parámetro se puede leer en pantalla o mediante el
puerto de comunicación en serie. El valor se puede
reiniciar mediante el parámetro 619.
Descripción de opciones:
Indica el número de horas que el motor FC ha funcionado
desde el reinicio del parámetro 619.
El valor se actualiza en el motor FC cada hora y se guarda
cuando se desconecta la unidad.
603
Valor:
Unidad: número
0-9999
Función:
Este parámetro se puede leer en pantalla o mediante el
puerto de comunicación en serie.
Descripción de opciones:
Indica el número de puestas en marcha de la tensión de
suministro al motor FC.
604
Valor:
Unidad: número
0-9999
Datos de funcionamiento: Horas de funcionamiento
Datos de funcionamiento: Horas de funcionamiento
Datos de funcionamiento: Número de
puestas en marcha
Datos de funcionamiento: Número de
sobretemperaturas
Función:
Este parámetro se puede leer en pantalla o mediante el
puerto de comunicación en serie.
Descripción de opciones:
Indica el número de fallos de temperatura producidos en
el motor FC.
605
Valor:
Unidad: número
0-9999
Función:
Este parámetro se puede leer en pantalla o mediante el
puerto de comunicación en serie.
Descripción de opciones:
Indica el número de sobretensiones que ha habido en el
motor FC.
Datos de funcionamiento: Número de
sobretensiones
AVISO!
Los parámetros 615-617 Registro de fallos no se pueden
leer mediante la unidad de control integrada.
615 Registro de fallos: código de error
Valor:
[Índice 1-10] Código de error: 0-99
Función:
En este parámetro, se puede ver el motivo de una
desconexión (interrupción de alimentación al convertidor
de frecuencia) que se haya producido. Se definen los
valores de registro 10 [1-10].
El número de registro más bajo [1] contiene el valor de
dato guardado más reciente. El número de registro más
alto [10] contiene el valor de dato más antiguo guardado.
Si se produce una desconexión, es posible ver la causa, la
hora y un valor probable de la intensidad de salida o la
tensión de salida.
Descripción de opciones:
Se indica un código de error, en que el número hace
referencia a una tabla. Consulte 4.2.1 Lista de advertencias y
alarmas.
616
Valor:
Unidad: Horas
[Intervalo de indicación: XX-XXX]
Función:
Parámetro de grupo. Con este parámetro, se puede
obtener el número total de horas de funcionamiento antes
de que se produjera la desconexión. Se almacenan 10
(1-10) valores de registro.
El número de registro más pequeño (1) contiene el último
o más reciente valor de dato guardado, mientras que el
más alto (10) contiene el valor de dato más antiguo.
Registro de fallos: Tiempo
80 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 83

Programación
Serie FCM de VLT® DriveMotor
Descripción de opciones:
Se lee como una opción.
Intervalo de indicación: XX-XXX.
El registro de fallos se reinicia después de la reinicialización
en el parámetro 620.
617 Registro de fallos: Valor
Valor:
[Índice XX-XXX]
Función:
Parámetro de grupo. Con este parámetro, se puede ver la
corriente o tensión a la que se produjo una desconexión.
Descripción de opciones:
Se lee como un solo valor.
Intervalo de indicación: 0,0-999,9.
El registro de fallos se reinicia después de la reinicialización
(par. 620).
619
Valor:
Sin reinicio (NO REINICIAR) [0]
Reinicio (REINICIAR CONTADOR) [1]
Función:
Puesta a cero del contador de horas de funcionamiento
(parámetro 601).
Descripción de opciones:
Si se ha seleccionado [1] Reinicio, se reinicia el contador de
horas de funcionamiento del motor FC.
620
Valor:
Funcionamiento normal (FUNCIONAMIENTO
NORMAL) [0]
Prueba de tarjeta de control (PRUEBA DE TARJETA
DE CONTROL) [2]
Inicialización (INICIALIZAR) [3]
Función:
Este parámetro se puede utilizar para dos pruebas
distintas, además de para el funcionamiento normal.
Por otra parte, todos los parámetros (excepto los
parámetros del 603 al 605) se pueden inicializar.
Descripción de opciones:
[0] Funcionamiento normal se selecciona para el funcionamiento normal con el motor en la aplicación seleccionada.
[2] Prueba de tarjeta de control se selecciona si se desea
controlar las entradas analógicas y digitales, las salidas
digitales y analógicas y la tensión de control de +10 V.
Se requiere un conector de prueba con conexiones
internas para esta prueba. Ajuste: salida analógica / digital
a las entradas digitales 3, 4 y 5, y suministro de 10 V a la
entrada analógica / digital 2.
[3] Inicialización se selecciona si se desea restablecer los
ajustes de fábrica de la unidad sin reiniciar los parámetros
Reinicio del contador de horas de funcionamiento
Modo de funcionamiento
500, 501 y 600-605. La inicialización se activa después de la
puesta en marcha.
621 Placa de características: tipo FC
Valor:
Depende de la unidad.
Función:
Los datos clave de la unidad pueden leerse mediante la
pantalla o el puerto de comunicación en serie.
Descripción de opciones:
Tipo
indica el tamaño de la unidad y la función básica
relacionada.
624
Valor:
Depende de la unidad.
Función:
Los datos clave de la unidad pueden leerse mediante la
pantalla o el puerto de comunicación en serie.
Descripción de opciones:
Versión de software indica el número de versión.
625
Valor:
Depende de la unidad
Función:
Los datos clave de la unidad pueden leerse en el display o
mediante el puerto de comunicación serie. Por ejemplo: ID
1.42 2 kB.
626
Valor:
Depende de la unidad.
Función:
Los datos clave de la unidad pueden leerse mediante la
pantalla o el puerto de comunicación en serie.
628
Valor:
Función:
Los datos clave de la unidad pueden leerse mediante la
pantalla o el puerto de comunicación en serie.
630
Valor:
Placa de características: n.º de versión del
software
Placa de características: N de identificación
de LCP
Placa de características: n.º de identificación
de la base de datos
Placa de características: tipo de opción de
aplicación
Placa de características: n.º de pedido de
tipo de opción de comunicación
3 3
MG03BA05 - VLT® es una marca registrada de Danfoss 81
Page 84

Programación
Función:
Los datos clave de la unidad pueden leerse mediante la
pantalla o el puerto de comunicación en serie.
632 Identificación de software BMC
33
Valor:
Función:
Los datos clave de la unidad pueden leerse mediante la
pantalla o el puerto de comunicación en serie.
633 Identificación de base de datos del motor
Valor:
Función:
Los datos clave de la unidad pueden leerse mediante la
pantalla o el puerto de comunicación en serie.
Serie FCM de VLT® DriveMotor
634
Valor:
Función:
Los datos clave de la unidad pueden leerse mediante la
pantalla o el puerto de comunicación en serie.
635
Valor:
Función:
Los datos clave de la unidad pueden leerse mediante la
pantalla o el puerto de comunicación en serie.
678
Valor:
Versión estándar (VERSIÓN ESTÁNDAR) [1]
Profibus versión 3 Mbaudios
(PROFIBUS VER. 3 MB) [2]
Profibus versión 12 Mbaudios
(PROFIBUS VER. 12 MB) [3]
Función:
Este parámetro permite realizar la configuración de una
tarjeta de control Profibus. El valor predeterminado
depende de la unidad producida, siendo también el valor
máximo que se puede conseguir. Esto significa que las
tarjetas de control solo pueden bajar a una versión de
menor rendimiento.
Identificación de unidad para comunicación
N.º de componente de software
Tarjeta de control de configuración
82 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 85

Información sobre FCM 300
Serie FCM de VLT® DriveMotor
4 Información sobre FCM 300
4.1 Condiciones especiales
El tamaño de la corriente de fuga a tierra depende de los
siguientes factores, en este orden de prioridad:
4.1.1 Aislamiento galvánico (PELV)
PELV ofrece protección mediante una tensión muy baja. Se
considera garantizada la protección contra descargas
eléctricas cuando todos los dispositivos conectados son del
tipo PELV y se ha realizado la instalación como se describe
en los reglamentos locales y nacionales sobre equipos
PELV suministrados.
En la serie FCM 300, todos los terminales de control se
suministran para conectarlos a una tensión muy baja
(PELV).
El aislamiento galvánico (garantizado) se consigue
cumpliendo los requisitos relativos a un mayor aislamiento
y proporcionando las distancias necesarias en los circuitos.
Estos requisitos se describen en la norma EN 50178 .
Los componentes que forman el aislamiento eléctrico,
según se explica a continuación, también cumplen todos
los requisitos relativos al aislamiento y a la prueba correspondiente descrita en la norma EN 50178.
El aislamiento galvánico puede mostrarse en los tres
lugares indicados (consulte Ilustración 4.1).
Fuente de alimentación (SMPS), incl. aislamiento
•
de señal de UCC, indicando la tensión de corriente
intermedia.
Accionamiento de puerta que activa los IGBT
•
(optoacopladores).
Transductores de corriente (optoacopladores).
•
Corriente de fuga a tierra
4.1.2
La corriente de fuga a tierra está causada, principalmente,
por la capacitancia entre las fases del motor y el bastidor
del mismo. El filtro RFI contribuye a una corriente de fuga
adicional, ya que el circuito del filtro se conecta a tierra
mediante condensadores.
1. Frecuencia de conmutación
2. Conexión a tierra del motor o no en su
instalación
La corriente de fuga es importante para la seguridad
durante el manejo y funcionamiento del convertidor de
frecuencia, si no se ha establecido una conexión a tierra
del mismo (por error).
AVISO!
Los FCM 305-375 tienen todos corrientes de fuga >3,5
mA, aproximadamente de 4 a 20 mA. Varía con las
frecuencias de conmutación dentro del intervalo dado.
Esto significa que debe establecerse una conexión a tierra
reforzada si hay que cumplir con la norma EN 50178.
No deben utilizarse nunca relés ELCB (Disyuntor de fuga a
tierra), también denominados RCD (Dispositivo de corriente
residual), que no sean adecuados para corrientes de fallo
CC (tipo A).
Si se utilizan RCD, deben ser:
Adecuados para la protección de equipos con
-
corriente CC en la corriente de fallo (rectificador
trifásico).
Adecuados para el arranque con una reducida
-
corriente de carga a tierra.
Adecuados para una corriente de fuga alta.
-
Esto significa que se puede utilizar el FCM 300 en RCD de
tipo B:
Los dispositivos de corriente residual (RCD) de tipo B
tienen una tolerancia de nivel de desconexión. Por lo
tanto, es aconsejable utilizar un RCD cuya corriente de
fuga máxima para el FCM (véase arriba, 20 mA) sea inferior
a 1/3 del nivel de desconexión para el RCD. Esto significa
que el nivel de desconexión para el RCD tendrá que ser
60 mA o superior, es decir, se puede utilizar un RCD de
tipo B con un nivel de desconexión de 100 mA para la
protección.
4 4
MG03BA05 - VLT® es una marca registrada de Danfoss 83
Page 86

Información sobre FCM 300
Serie FCM de VLT® DriveMotor
44
Ilustración 4.1 Aislamiento galvánico
Condiciones de funcionamiento
4.1.3
extremas
Sobretensión generada por el motor
La tensión en el circuito intermedio aumenta cuando el
motor actúa como generador. Esto ocurre en dos casos:
Si la carga arrastra el motor (a una frecuencia de
•
salida constante del convertidor de frecuencia), es
decir, la carga genera energía.
Si el momento de inercia es alto durante la
•
desaceleración («rampa de desaceleración»), la
carga es baja y/o el tiempo de desaceleración es
demasiado corto para que la energía se disipe en
el convertidor VLT, el motor y la instalación.
La unidad de control intenta corregir la rampa, si es
posible.
El inversor se apaga para proteger a los transistores y
condensadores del circuito intermedio, cuando se alcanza
un determinado nivel de tensión.
Corte de red
Durante un corte de red, la serie FCM 300 sigue
funcionando hasta que la tensión del circuito intermedio
desciende por debajo del nivel de parada mínimo.
Generalmente, este nivel es un 15% menos que la tensión
de alimentación nominal más baja de la serie FCM 300.
El tiempo que transcurre antes de que se pare el inversor
depende de la tensión de red antes del corte de alimentación y de la carga del motor.
reducen la frecuencia de salida en un intento de reducir la
carga.
Si la sobrecarga es excesiva, puede darse una corriente
que desconecte el motor FC después de aproximadamente
1,5 s.
4.1.4 Ruido acústico
A continuación, se indican los valores característicos
medidos a una distancia de 1 m de la unidad a plena
carga:
2 polos 4 polos
FCM 305 54 dB(A)
FCM 311 58 dB(A)
FCM 315 59 dB(A)
FCM 322 58 dB(A)
FCM 330 61 dB(A)
FCM 340 62 dB(A) 63 dB(A)
FCM 355 64 dB(A) 60 dB(A)
FCM 375 61 dB(A)
Tabla 4.1
Equilibrio
4.1.5
La unidad FCM 300 posee un equilibrado de clase R, según
lo especificado en la norma ISO8821 (equilibrado
reducido). Para aplicaciones críticas, especialmente a alta
velocidad (>4.000 RPM), puede que sea necesario un
equilibrado especial (clase S).
Sobrecarga estática
Cuando la serie FCM 300 se sobrecarga (se alcanza el
límite de corriente en el parámetro 221), los controles
84 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 87

Información sobre FCM 300
Serie FCM de VLT® DriveMotor
4.1.6 Protección térmica y reducción de
potencia
Los motores de la serie FCM 300 están protegidos
térmicamente, si se sobrepasan sus límites. A altas
temperaturas, la frecuencia de conmutación se puede
reducir gradualmente hasta 2 kHz y, a la postre, el motor
se desconectará.
AVISO!
La combinación de una frecuencia de conmutación alta y
la falta de refrigeración por ventilador podría causar
daños en la unidad.
4.1.7 Reducción de potencia en función de
la temperatura ambiente
La temperatura ambiente (T
permitida. La media (T
24 horas debe ser al menos 5 °C inferior.
Si la serie FCM 300 se maneja a temperaturas superiores a
40 °C, es necesario reducir la corriente de salida constante.
AMB., MÁX.
AMB, AVG
) es la máxima
) medida a lo largo de
1. Reducción de la corriente de salida en relación
con la altitud a T
2. Reducción de la T
100% de la corriente de salida.
Ilustración 4.3
= máx. 40 °C.
AMB
máx. frente a la altitud al
AMB
4.1.9 Reducción de potencia en función del
funcionamiento a velocidad lenta
Cuando una bomba centrífuga o un ventilador se
controlan con un motor FC, no es necesario reducir la
salida a baja velocidad, porque la característica de carga de
las bombas centrífugas y ventiladores garantiza automáticamente la reducción necesaria.
4 4
Ilustración 4.2
Reducción de potencia en función de
4.1.8
la presión atmosférica
En altitudes superiores a 2 km, póngase en contacto con
Danfoss en relación con PELV.
A una altitud inferior a 1000 m, no es necesario reducir la
potencia.
Debe reducirse la potencia de los motores FC que ejecutan
aplicaciones de par de carga constante a baja velocidad
continuamente (consulte Ilustración 4.4) o utilizarse un
ventilador separado (opción de enfriamiento del motor 2).
El par nominal (100%) puede conseguirse durante 15
minutos, como máximo, en un ciclo útil de trabajo de
hasta el 25% a baja velocidad.
Ilustración 4.4 Reducción de potencia debido a funcionamiento a velocidad lenta
A una altitud superior a 1000 m, es necesario reducir la
temperatura ambiente (T
(I
) de acuerdo con el siguiente gráfico:
VLT, MÁX.
) o la corriente de salida máx.
AMB
MG03BA05 - VLT® es una marca registrada de Danfoss 85
Page 88

Información sobre FCM 300
Serie FCM de VLT® DriveMotor
4.1.10 Reducción de potencia por alta
4.1.12
Humedad atmosférica
frecuencia de conmutación
La serie FCM 300 ha sido diseñada para cumplir las normas
El motor de la serie FCM 300 puede utilizar dos esquemas
PWM distintos: SFAVM y 60° AVM. El ajuste de fábrica es
SFAVM. El esquema PWM puede modificarse en el
parámetro 446. Con una velocidad inferior a 25 Hz, el
motor de la serie FCM 300 cambia automáticamente a
SFAVM.
44
El ajuste de fábrica de la frecuencia de conmutación es
4000 Hz. Puede cambiarse entre 2 y 14 kHz en el
parámetro 411.
Una frecuencia de conmutación más alta produce un
funcionamiento más silencioso, aunque también pérdidas
mayores en los componentes electrónicos del motor FC,
por lo que puede ser necesaria la reducción de potencia
correspondiente.
Consulte Ilustración 4.5
CEI 60068-2 3, EN 50178 artículo 9.4.2.2 / DIN 40040, clase
E, a 40 °C.
Calor humidificado cíclico de acuerdo con la norma
CEI 60068-2-30, 40 °C.
4.1.13 Norma UL
La serie FCM 300 está aprobada por UL.
Consulte 2.1.2 Datos técnicos generales para conocer el uso
correcto de los fusibles previos.
4.1.14
Rendimiento de los convertidores de frecuencia (η
La carga del convertidor de frecuencia apenas influye en
su rendimiento. En general, el rendimiento es el mismo a
la frecuencia nominal del motor fM,N, tanto si el motor
suministra el 100% del par nominal en el eje o solo el 75%,
es decir, en caso de cargas parciales.
Rendimiento
VLT
)
Ilustración 4.5 Características de par
4.1.11
La serie FCM 300 se ha probado según un procedimiento
basado en los siguientes estándares:
CEI 60068-2-6:
CEI 60068-2-34: Vibración aleatoria de banda ancha,
CEI 60068-2-35: Vibración aleatoria de banda ancha,
CEI 60068-2-36: Vibración aleatoria de banda ancha,
Vibración y golpe
Vibración (sinusoidal) – 1970
requisitos generales
reproducibilidad alta
reproducibilidad media
Tabla 4.2
Esto significa que el rendimiento del convertidor de
frecuencia tampoco cambia, aunque se elijan otras caracte-
rísticas de U/f distintas.
Sin embargo, las características U/f influyen en el
rendimiento del motor.
El rendimiento disminuye un poco si la frecuencia de
conmutación se ajusta en un valor superior a 5 kHz. El
rendimiento también se reducirá ligeramente a una
tensión de red de 480 V.
Eficiencia del motor (η
El motor del FCM 300 se ha diseñado conforme a IE2 y se
ha probado de conformidad con CEI 60034-1.
El rendimiento de un motor conectado al convertidor de
frecuencia depende del nivel de magnetización. Con unos
datos optimizados, el rendimiento es el mismo que si
funcionase conectado a la red. En un intervalo del 75 al
100% del par nominal, el rendimiento del motor es prácti-
camente constante, tanto cuando lo controla el
convertidor de frecuencia como cuando funciona
directamente con tensión de red. La influencia de la
frecuencia de conmutación sobre el rendimiento es
mínima.
MOTOR
)
La serie FCM 300 cumple los requisitos relativos a las
condiciones de los estándares mencionados previamente.
86 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 89

1,02
1,01
1,00
0,99
0,98
0,97
0,96
0,95
0,94
0,93
0,92
0,91
0,90
0,89
0,88
0,87
0,86
0,85
0,84
0,83
0,82
0,81
0,80
30Hz
40Hz
50Hz
60Hz
70Hz
100% Load 75% Load 50% Load 25% Load
Output Frequency
175NA159.10
Relative Efficiency
175HA034.10
Información sobre FCM 300
Serie FCM de VLT® DriveMotor
Rendimiento del sistema (η
SISTEMA
)
Para calcular el rendimiento del sistema (FCM), el rendimiento del convertidor de frecuencia (η
rendimiento del motor (η
MOTOR
): η
SISTEMA
= η
VLT
x η
MOTOR
) se multiplica por el
VLT
4 4
Ilustración 4.6 Curvas de rendimiento típico
El cálculo de rendimiento del FCM 300 estima el
rendimiento del FCM #300 a diferentes cargas basándose
Hz 50 Hz 250 Hz 350 Hz 550 Hz
In/I1 [%] 100% 44% 29% 8%
en Ilustración 4.6. El factor en este gráfico debe
multiplicarse por el factor de rendimiento específico
Tabla 4.3
indicado en las tablas de especificaciones.
Los armónicos no afectan directamente al consumo
Ejemplo: Supongamos un FCM 375 al 25% de su carga a
una velocidad de 30 Hz. El gráfico muestra 0,845 (el
rendimiento nominal para un convertidor de frecuencia
FCM 375 es de 0,876).
El rendimiento real del FCM 300 será: 0,845 x 0,876 = 0,74
a velocidad (30 Hz) y carga (25%) parciales.
4.1.15
Un motor FC acepta una corriente no sinusoidal de la red
eléctrica, que aumenta la corriente de entrada l
corriente no sinusoidal se transforma mediante un análisis
Fourier y se divide en corrientes sinusoidales con
diferentes frecuencias, es decir, corrientes armónicas
diferentes l N con 50 Hz como frecuencia básica:
Corrientes
armónicas
Interferencia de alimentación de
red / Armónicos
RMS
I
1
I
5
I
7
. Una
I
11
eléctrico, aunque aumentan las pérdidas de calor en la
instalación (transformador, cables). Por ello, en instala-
ciones con un porcentaje alto de carga rectificada, es
importante mantener las corrientes armónicas en un nivel
bajo para evitar la sobrecarga del transformador y una
temperatura elevada de los cables.
Algunas corrientes armónicas pueden perturbar el equipo
de comunicación conectado al mismo transformador o
causar resonancias, si se utilizan baterías con corrección
del factor de potencia.
Ilustración 4.7
MG03BA05 - VLT® es una marca registrada de Danfoss 87
Page 90

Información sobre FCM 300
Serie FCM de VLT® DriveMotor
Para asegurar corrientes armónicas bajas, FCM 300 tiene
bobinas en el circuito intermedio de serie. THD (corriente)
≤54%
La distorsión de la tensión en la alimentación de la red
depende de la magnitud de las corrientes armónicas
multiplicada por la impedancia interna de la red para la
frecuencia dada. La distorsión de tensión total THD se
calcula según los distintos armónicos de tensión usando la
siguiente fórmula:
44
U
THD =
4.1.16 Factor de potencia
El factor de potencia es la relación entre I1 e I
El factor de potencia para el control trifásico
U
2
2
1
+...+U
(%)
2
n
.
RMS
los aspectos de seguridad relativos a dicho motor. Lo
hacemos mediante una declaración del fabricante.
4.1.19 Directiva de baja tensión (73/23/CEE)
Los convertidores de frecuencia deben contar con la marca
CE según la directiva sobre baja tensión. Esta directiva se
aplica a todos los equipos y aparatos eléctricos utilizados
en el intervalo de tensión de 50-1000 V CA y 75-1500 V
CC.
4.1.20 Directiva CEM (89/336/CEE)
CEM son las siglas de «compatibilidad electromagnética».
La presencia de compatibilidad electromagnética significa
que las interferencias mutuas entre los diferentes
componentes / aparatos es tan pequeña que no afecta al
funcionamiento de dichos aparatos. La directiva CEM entró
en vigor el 1 de enero de 1996. Distingue entre
componentes, aparatos, sistemas e instalaciones.
4.1.21
Situaciones cubiertas
El factor de potencia indica la carga que impone el motor
FC sobre la alimentación de red.
Cuanto menor es el factor de potencia, mayor es I
el mismo rendimiento en kW.
Además, un factor de potencia elevado indica que las
distintas corrientes armónicas son bajas.
4.1.17
El propósito de la marca CE es evitar los obstáculos
técnicos para la comercialización en la AELC y la UE. La UE
ha introducido la marca CE como un modo sencillo de
demostrar si un producto cumple con las directivas correspondientes de la UE. La marca CE no es indicativa de la
calidad o las especificaciones de un producto. Los convertidores de frecuencia se tratan en tres directivas de la UE,
que son las siguientes:
4.1.18
Toda la maquinaria con partes móviles críticas está
cubierta por la directiva de máquinas, vigente desde el 1
de enero de 1995. Un convertidor de frecuencia funciona
primordialmente con electricidad y el motor siempre se
conecta a otras máquinas, por lo que no le afecta esta
directiva. Sin embargo, si se suministra un motor FC para
usarlo en una máquina, proporcionamos información sobre
¿Qué es la marca CE?
Directiva de máquinas (98/37/CEE)
RMS
para
La directriz de la UE «Guidelines on the Application of
Council Directive 89/336/EEC» (directrices para la aplicación
de la Directiva del Consejo 89/336/CEE) describe tres
situaciones típicas de utilización de un motor FC. En cada
una de ellas, se explica si la situación en cuestión está
sujeta a la directiva sobre CEM y debe contar con la marca
CE.
1. El motor FC se vende directamente al usuario
final. Por ejemplo, el motor FC se vende en el
mercado nacional. El consumidor final es un
ciudadano sin una formación especial. Instala el
motor FC personalmente, por ejemplo, en una
máquina que usa como pasatiempo o en un
electrodoméstico. En este caso, el motor FC debe
contar con la marca CE según la directiva sobre
CEM.
2. El motor FC se vende para instalarlo en una
planta, construida por profesionales del sector
correspondiente. Por ejemplo, puede tratarse de
una instalación de producción o de calefacción /
ventilación, diseñada e instalada por
profesionales. En este caso, ni el motor FC ni la
instalación terminada necesitan contar con la
marca CE según la directiva sobre CEM. Sin
embargo, la unidad debe cumplir con los
requisitos básicos de compatibilidad electromagnética establecidos en la directiva. El instalador
puede garantizar este aspecto utilizando
componentes, aparatos y sistemas con la marca
CE, según la directiva sobre CEM.
88 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 91

Información sobre FCM 300
Serie FCM de VLT® DriveMotor
3. El motor FC se vende como parte de un sistema
completo que se comercializa como una sola
unidad. Podría tratarse, por ejemplo, de un
sistema de aire acondicionado. El sistema
completo debe contar con la marca CE según la
directiva sobre CEM. El fabricante del sistema
puede garantizar la marca CE según la directiva
sobre CEM, ya sea utilizando componentes con la
marca CE, o bien realizando pruebas de CEM del
sistema. Si decide utilizar únicamente
componentes con la marca CE, no está obligado
a probar todo el sistema.
4.1.22
Motores de la serie FCM 300 de
Danfoss y marca CE
La marca CE es una característica positiva cuando se
emplea para su propósito original, es decir, facilitar la
comercialización en la UE y la AELC.
Sin embargo, la marca CE puede abarcar muchas especificaciones diferentes. Esto implica que hay que comprobar
lo que cubre una determinada marca CE.
Las especificaciones abarcadas pueden, de hecho, ser muy
diferentes. Esta es la razón por la que la marca CE puede
dar a los instaladores una falsa impresión de seguridad,
cuando utilizan un motor FC como componente de un
sistema o un aparato.
Danfoss asigna la marca CE a los VLT® DriveMotors según
la directiva sobre baja tensión. Ello significa que, siempre
que el motor FC se instale correctamente, Danfoss
garantiza que cumple con la directiva. Danfoss emite una
declaración de conformidad para hacer constar que la
marca CE cumple la directiva sobre baja tensión.
La marca CE se aplica a la directiva sobre CEM, con la
condición de que se sigan las instrucciones del Manual de
funcionamiento para la instalación y el filtrado correctos en
cuanto a CEM. Sobre esta base, se emite una declaración
de conformidad con la directiva sobre CEM.
La Guía rápida proporciona instrucciones detalladas de
instalación para asegurar que su instalación es correcta en
cuanto a compatibilidad electromagnética. Además,
Danfoss especifica las normas que cumple el producto de
que se trate.
4.1.23
Conformidad con la Directiva sobre
compatibilidad electromagnética
89/336/CEE
En la mayoría de los casos, los profesionales del sector
utilizan el VLT DriveMotor como un complejo componente
que forma parte de un aparato, sistema o instalación más
amplios. Debe señalarse que la responsabilidad sobre las
propiedades finales en cuanto a CEM del aparato, sistema
o instalación corresponde al instalador. Como ayuda al
instalador, Danfoss ha preparado unas directrices de
instalación en cuanto a compatibilidad electromagnética
para el sistema de accionamiento. Las normas y niveles de
prueba establecidos para sistemas de accionamiento se
cumplirán, siempre que se hayan seguido las instrucciones
para la instalación correcta en cuanto a CEM.
4.1.24
Normas CEM
AVISO!
- Todas las especificaciones de CEM se indican
con los ajustes de fábrica.
- Máxima frecuencia de conmutación de 4 kHz.
- Deben utilizarse cables de datos / control
apantallados como medida de protección contra
sobretensiones.
- El motor FC debe estar conectado a tierra para
cumplir los estándares.
- Impedancia de línea máxima / mínima Z
0,24 + j0,15 Ω; Z
conmutación EN 61800-3)
Estándares generales
Los estándares generales se indican en la directiva sobre
compatibilidad electromagnética (89/336/CEE).
El motor FC cumple con:
EN 61000-6-31), EN 61000-6-1.
Entornos residenciales, comerciales y de industria ligera.
EN 61000-6-2, EN 61000-6-4.
Entorno industrial.
1)
Los niveles de emisión estipulados en la norma
EN 61000-6-3 únicamente los cumplen los motores FC con
filtro opcional de clase B-1.
= 0 + j0 Ω (ranuras de
MÍN.
MÁX.
=
4 4
Danfoss ofrece los filtros que se mencionan en las especificaciones y está a su disposición para proporcionar otros
tipos de asistencia que le ayuden a obtener el mejor
resultado posible en cuanto a compatibilidad electromagnética.
MG03BA05 - VLT® es una marca registrada de Danfoss 89
Además, el motor FC cumple con: DIN VDE 0160/1990
2)
«Protección contra sobretensión 7.3.1., clase 1»
2)
Page 92

Información sobre FCM 300
Serie FCM de VLT® DriveMotor
Estándares del producto
Los estándares del producto están estipulados en EN
61800-3 (CEI 61800-3).
El motor FC cumple con:
EN 61800-3, distribución no restringida
EN 61800-3, distribución restringida.
3)
44
Los niveles de emisión indicados en la distribución no
restringida de EN 61800-3 solo se cumplen en motores FC
con filtro de clase B-1.
Estándares básicos, emisiones
EN 55011: Límites y métodos de medición de
•
características de perturbaciones radioeléctricas
de equipos de radiofrecuencia industriales,
científicos y médicos (ISM).
EN 55022: Límites y métodos de medición de
•
características de perturbaciones radioeléctricas
de equipos de tecnología de la información.
EN 61000-3-2: Límites para las emisiones de
•
corriente armónica (corriente de entrada del
equipo ≥16 A)
EN 61000-3-4: Límites para las emisiones de
•
corriente armónica (corriente de entrada del
equipo ≤16 A)
3)
.
Aspectos generales de las emisiones con CEM
Para la protección contra altas frecuencias, el cable
apantallado utilizado para PROFIBUS, bus estándar, cables
de control e interfaz de señal debe estar, en general,
conectado a ambos extremos del alojamiento.
Aspectos generales sobre inmunidad CEM
Si surgen problemas con interferencias de baja frecuencia
(lazos de tierra), el cable apantallado utilizado para
PROFIBUS, bus estándar, cables de control e interfaz de
señal puede dejarse abierto por un extremo.
4.1.25
En común con todos los equipos electrónicos, un
convertidor de frecuencia VLT contiene un gran número de
componentes mecánicos y electrónicos, todos los cuales
son vulnerables a los efectos ambientales en algún grado.
RF modo común.
Simulación del efecto del equipo transmisor de
radio conectado a cables de conexión.
ENV 50204:
•
Campo electromagnético de radiofrecuencia.
Impulsos modulados.
Simulación de interferencias procedentes de
teléfonos móviles GSM.
Entornos agresivos
Estándares básicos, inmunidad
EN 61000-2-4 (CEI 61000-2-4):
•
Niveles de compatibilidad
Simulación de fluctuaciones de tensión y
frecuencia, ranuras de conmutación y armónicos
en la red de alimentación.
EN 61000-4-2 (CEI 61000-4-2): Descarga electro-
•
stática (ESD)
Simulación de descargas electrostáticas.
EN 61000-4-4 (CEI 61000-4-4): Transitorios rápidos,
•
descarga 5/ 50 nS
Simulación de transitorios procedentes de
conmutación de contactores, relés o dispositivos
similares.
EN 61000-4-5 (CEI 61000-4-5):
•
Sobretensiones 1,2/ 50 μS.
Simulación de transitorios procedentes de, por
ejemplo, rayos que caen en instalaciones
cercanas.
EN 61000-4-3: (CEI 61000-4-3):
•
Campo electromagnético de radiofrecuencia.
Amplitud modulada.
Simulación de interferencias procedentes de
equipos de transmisión por radio.
EN 61000-4-6: (CEI 61000-4-6):
•
ADVERTENCIA
Por lo tanto, el convertidor de frecuencia VLT no debe
instalarse en lugares en los que haya líquidos, partículas
o gases en suspensión capaces de afectar y dañar a los
componentes electrónicos. Si no se toman las medidas
de protección necesarias, aumenta el riesgo de que se
produzcan obturaciones, lo que reduciría la vida útil del
convertidor.
El aire puede transportar líquidos que se condensan en el
interior del convertidor de frecuencia VLT. Además, los
líquidos pueden provocar la corrosión de componentes y
de piezas metálicas.
El vapor, la grasa y el agua salada pueden ocasionar la
corrosión de componentes y de piezas metálicas.
En dichos ambientes, se recomienda instalar un equipo
con alojamiento de clase ≥IP54.
En ambientes de temperatura y humedad elevadas, la
presencia de
cloro, nitrógeno y azufre, originará procesos químicos en
los componentes del convertidor. Dichas reacciones
químicas afectarán a los componentes electrónicos y los
dañarán con rapidez.
gases corrosivos, como los compuestos de
90 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 93

Información sobre FCM 300
Serie FCM de VLT® DriveMotor
AVISO!
La instalación de los convertidores de frecuencia VLT en
conductos de cobre y los extremos de los cables de las
instalaciones existentes.
entornos agresivos aumentará el riesgo de parada del
sistema y, además, reducirá considerablemente la vida
del convertidor.
4.2.1 Lista de advertencias y alarmas
La tabla indica las distintas advertencias y alarmas, y
Antes de instalar el convertidor de frecuencia VLT, se debe
comprobar si el aire del lugar en que se va a montar
contiene líquidos, partículas o gases en suspensión. Para
ello, es necesario observar las instalaciones existentes en
este entorno. Signos habituales de líquidos dañinos en el
aire son la existencia de agua o aceite en las piezas
metálicas o su corrosión.
también si el fallo bloquea el motor FC. Tras una
desconexión bloqueada, hay que cortar el suministro
eléctrico y corregir el problema. Vuelva a conectar la
alimentación de red y restablezca el motor FC antes de
recomenzar. Cuando se pone una cruz en Advertencia y en
Alarma, una advertencia precede a la alarma. También
indica que existe la posibilidad de programar si un
determinado fallo debe producir una advertencia o una
Los niveles excesivos de partículas de polvo suelen
encontrarse en los armarios de instalación y en las instalaciones eléctricas existentes.
Un indicador de la presencia de gases corrosivos
alarma. Después de una desconexión, la alarma y la
advertencia parpadearán, pero en cuanto se suprima el
fallo solo parpadeará la alarma. Después del reinicio, el
motor FC estará preparado para su funcionamiento.
transmitidos por el aire es el ennegrecimiento de los
N.º Descripción advertencia Alarma por
desconexión
2 Fallo de cero activo (ERROR CERO ACTIVO) X X
4 Pérdida de fase (PÉRDIDA FASE DE RED) X X X
5 Advertencia de tensión alta (TENSIÓN DE ENLACE CC ALTA) X
6 Advertencia de tensión baja (TENSIÓN DE ENLACE CC BAJA) X
7 Sobretensión (SOBRET. DE ENLACE CC) X X
8 Subtensión (SUBT. DE ENLACE CC) X
9 Sobrecarga del inversor (TIEMPO DEL INVERSOR) X X
11 Termistor del motor (TERMISTOR DEL MOTOR) X
12 Límite de par (LÍMITE DE PAR) X
13 Sobrecorriente (SOBRECORRIENTE) X X
14 Fallo de conexión a tierra (FALLO DE CONEXIÓN A TIERRA) X X
15 Fallo de alimentación (FALLO MODO CONMUT.) X X
16 Cortocircuito (CORTOCIRCUITO DE CORR.) X X
17 Tiempo límite de bus estándar (TIEMPO LÍMITE BUS EST.) X X
18 Tiempo límite de bus HPFB (TIEMPO LÍMITE HPFB) X X
33 Fuera del intervalo de frecuencia (FUERA INTERV. FREC. / LÍM. GIRO) X
34 Error de HPFB (ALARMA HPFB) X X
35 Fallo en la carga de arranque (FALLO EN LA CARGA DE ARRANQUE) X X
36 Sobretemperatura (SOBRETEMPERATURA) X X
37 Error interno (ERROR INTERNO) X X
4 4
Bloqueo por
alarma
Tabla 4.4 Advertencias y alarmas
¿Si el motor no arranca?
4.2.2
Es posible que el LCP se haya configurado para parada local. Si es así, el motor no arranca cuando se desconecta el LCP.
Para que el motor arranque, hay que conectar un LCP; no hay otra forma de hacerlo, y el software de configuración MCT 10
no le indicará qué es lo que no funciona bien ni lo que debe hacer. Así pues, si tiene problemas, siga el procedimiento
siguiente:
MG03BA05 - VLT® es una marca registrada de Danfoss 91
Page 94

175NA117.10
TENSION C.C BAJA
ADVER 6
175NA1 18.10
ALARME:12
DESCONEXION (RESET)
LIMITE DE PAR
ADJUSTE
1
Información sobre FCM 300
Serie FCM de VLT® DriveMotor
ADVERTENCIA
Advertencia:
Debe tener especial precaución al utilizar la unidad con la tapa abierta.
Verde Amarillo Rojo Acción
LED 302 LED 301 LED 300
DESACTIVADO DESACTIVADO DESACTIVADO Aplicar potencia
ACTIVADO DESACTIVADO DESACTIVADO Aplicar una señal de arranque y de referencia
44
ACTIVADO DESACTIVADO ACTIVADO Aplicar y quitar la señal de reinicio
ACTIVADO ACTIVADO ACTIVADO Apagar la alimentación eléctrica hasta que todos los LED se apaguen
Para obtener más información, consulte la Configuración rápida, MG03FXYY.
Tabla 4.5
1. Asegúrese de que no se ha cambiado ningún
parámetro desde el estado inicial de entrega
(ajustes de fábrica). Utilice el panel de control
local o el puerto de serie para reiniciar los ajustes
de fábrica. Compruebe que el parámetro 002 está
configurado para su uso remoto (si no es así, el
LED amarillo 301 parpadeará lentamente).
2. Asegúrese de que no se ha emitido ningún
comando STOP mediante el teclado del panel de
control opcional (parada local, LED 301 amarillo
parpadea lentamente*). La orden STOP emitida
desde el panel de control solo se puede reiniciar
mediante el botón START de este panel.
3. Compruebe que los LED se pueden ver por un
orificio dentro de la cubierta aislante (consulte
Ilustración 2.2) y siga la tabla.
*) según el software versión 2.12
Ilustración 4.8 ADV. LCP 6
Mensajes de alarma
La alarma aparece en la segunda y tercera líneas de la
pantalla; consulte el ejemplo Ilustración 4.9:
Problemas de comunicación en serie Si la dirección de bus
se define en un valor alto, quizás la comunicación parezca
imposible, si el maestro no explora esta dirección. La
función de ajuste de fábrica no sirve para reiniciar el ajuste
de fábrica de la dirección.
Advertencias
4.2.3
La pantalla parpadea entre estado normal y advertencia.
Las advertencias se muestran en la primera y segunda
líneas de la pantalla. Consulte el ejemplo Ilustración 4.8:
92 MG03BA05 - VLT® es una marca registrada de Danfoss
Ilustración 4.9 ALARMA LCP: 12
Page 95

Información sobre FCM 300
Serie FCM de VLT® DriveMotor
ADVERTENCIA / ALARMA 2
Fallo de cero activo (ERROR DE CERO ACTIVO):
La señal de corriente del terminal 1 es menor del 50% del
valor ajustado en el parámetro 336 Terminal 1, escalado
mín.
ADVERTENCIA / ALARMA 4
Pérdida de fase (PÉRDIDA FASE DE RED):
Falta una fase en el lado de alimentación. Revise la tensión
de alimentación al motor FC.
ADVERTENCIA 5
Advertencia de tensión alta (TENSIÓN DE ENLACE CC
ALTA):
La tensión del circuito intermedio (CC) es superior al límite
de sobretensión del sistema de control; consulte Tabla 4.6.
El motor FC aún está activo.
ADVERTENCIA 6
Advertencia de tensión baja (TENSIÓN DE ENLACE CC
BAJA):
La tensión del circuito intermedio (CC) está por debajo del
límite de subtensión del sistema de control, consulte
Tabla 4.6. El motor FC aún está activo.
ALARMA 7
Sobretensión (SOBRET. DE ENLACE CC):
Si la tensión del circuito intermedio (CC) supera el límite
de sobretensión del inversor (consulte Tabla 4.6), el motor
FC se desconecta. Además, la pantalla indicará la tensión.
Serie de motores FC 3 x 380-480 V
[V CC]
Subtensión 410
Advertencia de baja tensión 440
Advertencia de alta tensión 760
Sobretensión 760*
* 760 V en 5 s u 800 V de manera inmediata.
Las tensiones indicadas son las del circuito
intermedio del motor FC.
Tabla 4.6 Límites de desconexión / alarma / advertencia
ALARMA 11
Termistor del motor (TERMISTOR MOTOR):
Si hay un termistor instalado y el parámetro 128 está
ajustado en [1] Activar, el motor FC se desconectará si
alcanza una temperatura excesiva.
ADVERTENCIA 12
Límite de corriente (LÍMITE CORRIENTE):
La corriente es superior al valor del parámetro 221 (con el
motor en funcionamiento).
ALARMA 13
Sobrecorriente (SOBRECORRIENTE):
Se ha superado el límite de corriente pico del inversor
(aprox. 230% de la corriente nominal). El motor FC se
desconectará y dará una alarma.
Desconecte el motor FC y compruebe si puede girarse el
eje del mismo.
4 4
ALARMA 8
Subtensión (SUBT. DE ENLACE CC):
Si la tensión del circuito intermedio (CC) disminuye por
debajo del límite de tensión mínima del inversor (consulte
Tabla 4.6), el motor FC se desconectará después de 3-28 s,
en función de la unidad. Además, la pantalla indicará la
tensión. Compruebe si la tensión de alimentación es la del
motor FC; consulte 2.1.2 Datos técnicos generales.
ADVERTENCIA / ALARMA 9
Sobrecarga del inversor (TIEMPO INVERSOR):
La protección térmica electrónica del inversor indica que el
motor FC está a punto de desconectarse, debido a una
sobrecarga (corriente demasiado alta durante demasiado
tiempo). El contador de la protección térmica y electrónica
del inversor emite una advertencia al 95% y se desconecta
al 100 % con una alarma. El motor FC
reiniciar hasta que el contador esté por debajo del 90 %.
no se puede
AVISO!
Esta alarma podría aparecer si se
producen cambios de carga.
ALARMA: 14
Fallo de conexión a tierra (FALLO DE CONEXIÓN A
TIERRA):
Hay una descarga de las fases de salida a tierra, entre el
inversor y el motor o en el motor.
ALARMA: 15
Fallo de alimentación (FALLO MODO CONMUT.):
Hay un fallo en la alimentación eléctrica del modo de
conmutación (suministro interno de 24 V).
Diríjase a su distribuidor de Danfoss.
ALARMA: 16
Cortocircuito (CORTOCIRCUITO CORR.):
Hay un cortocircuito en los terminales del motor o en el
motor.
Diríjase a su distribuidor de Danfoss.
MG03BA05 - VLT® es una marca registrada de Danfoss 93
Page 96

Información sobre FCM 300
Serie FCM de VLT® DriveMotor
ALARMA: 17
Tiempo límite de bus estándar (TIEMPO LÍMITE BUS EST.)
4.2.4
Código de advertencia, código de
estado ampliado y código de alarma
No hay comunicación al motor FC. La advertencia
únicamente se activará cuando el parámetro 514 se haya
ajustado en otro valor que no sea DESACTIVADO.
Si el parámetro 514 se ha ajustado en Parada y
desconexión, primero se dará la advertencia y después el
motor desacelerará hasta que se desconecte, mientras se
emite la alarma.
44
El código de advertencia, de estado ampliado y de alarma
se muestra en la pantalla en formato hexadecimal. Si hay
más de una advertencia o alarma, se muestra la suma de
todas ellas.
Los códigos de advertencia, de estado ampliado y de
alarma también se pueden mostrar con el bus de serie en
los parámetros 540, 541 y 538.
Podría incrementarse el valor del parámetro 513, Intervalo
de tiempo de bus.
ADVERTENCIA / ALARMA 18
Tiempo límite de bus HPFB (TIEMPO LÍMITE BUS HPFB)
No hay comunicación al motor FC. La advertencia solo se
activará cuando el parámetro 804 se haya ajustado a otro
valor que no sea DESACTIVADO. Si el parámetro 804 se ha
ajustado en Parada y desconexión, primero se dará la
advertencia y después el motor desacelerará hasta que se
desconecte, mientras se emite la alarma.
Podría incrementarse el parámetro 803, Tiempo límite de
bus.
ADVERTENCIA 33
Fuera del intervalo de frecuencia:
Bit (hex) Código de advertencia (par. 540)
00000008 Tiempo límite de HPFB
00000010 Tiempo límite de bus estándar
00000040 Límite de corriente
00000200 Sobrecarga del inversor
00001000 Advertencia de baja tensión
00002000 Advertencia de alta tensión
00004000 Pérdida de fase
00010000 Advertencia de error de cero activo
00400000 Advertencia de límite de frec. de salida
00800000 Error de HPFB
40000000 Advertencia de suministro de 24 V
80000000 Temp. alta del inversor
Tabla 4.7
Esta advertencia se activa si la frecuencia de salida ha
llegado al parámetro 201 Límite inferior de frecuencia de
salida o al parámetro 202 Límite superior de frecuencia de
salida.
ADVERTENCIA / ALARMA 34
Error de HPFB (ALARMA HPFB):
La comunicación Profibus no funciona correctamente.
Bit (hex) Código de estado ampliado (par. 541)
01 En rampa
04 Arrancar en sentido horario / antihorario
08 Enganche abajo
10 Enganche arriba
8000 Límite de frecuencia
Tabla 4.8
ALARMA 35
Fallo en la carga de arranque (FALLO EN LA CARGA DE
ARRANQUE):
Esta advertencia se produce cuando la unidad se ha
conectado demasiadas veces en 1 minuto.
ADVERTENCIA / ALARMA 36
Sobretemperatura (SOBRETEMPERATURA):
ALARMA: 37
Error interno (ERROR INTERNO):
Se ha producido un error en el SISTEMA. Diríjase a su
distribuidor de Danfoss.
94 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 97

Información sobre FCM 300
Bit (hex) Código de alarma (par. 538)
00000002 Bloqueo por alarma
00000040 Tiempo límite de HPFB
00000080 Tiempo límite de bus estándar
00000100 Cortocircuito
00000200 Fallo de alimentación de 24 V
00000400 Fallo de conexión a tierra
00000800 Sobrecorriente
00004000 Termistor del motor
00008000 Sobrecarga del inversor
00010000 Subtensión
00020000 Sobretensión
00040000 Pérdida de fase
00080000 Error de cero activo
00100000 Sobretemperatura
02000000 Error de HPFB
08000000 Fallo en la carga de arranque
10000000 Error interno
Tabla 4.9
Serie FCM de VLT® DriveMotor
4 4
4.3 Lista de parámetros
N.º de
parámetro Función
001 Idioma 6 Inglés 5 0
002 Control local / remoto 2 Control remoto 5 0
003 Referencia local 000,000 4 -3
004 Configuración activa 4 Configuración 1 5 0
005 Ajuste de programación 4 Ajuste activo 5 0
006 Copia de ajustes 4 Sin copiar 5 0
007 Copia con el LCP 4 Sin copiar 5 0
008 Escalado de pantalla de la frecuencia del
motor
009 Línea de pantalla 2 24 Frecuencia [Hz] 5 0
010 Línea de pantalla 1.1 24 Referencia [%] 5 0
011 Línea de pantalla 1.2 24 Corriente del motor [A] 5 0
012 Línea de pantalla 1.3 24 Potencia [kW] 5 0
013 Control / configuración local 5 Control digital LCP / par.
014 Parada local 2 Posible 5 0
015 Velocidad fija local 2 No es posible 5 0
016 Cambio de sentido local 2 No es posible 5 0
017 Reinicio de desconexión local 2 Posible 5 0
018 Bloqueo de parámetros 2 Desbloqueado 5 0
019 Estado de funcionamiento al arrancar, c.
local
Tabla 4.10 Funciones para programar, controlar y supervisar mediante bus (PROFIBUS) o PC.
Intervalo / número de ajustes /
valor Ajuste de fábrica
100 6 -2
100
3 Parada forzada, usar ref.
guardada
Tipo
de dato
5 0
5 0
Índice
de
conv.
MG03BA05 - VLT® es una marca registrada de Danfoss 95
Page 98

Información sobre FCM 300
Serie FCM de VLT® DriveMotor
N.º de
parámetro Función
100 Configuración 2 Velocidad, modo de lazo
101 Características de par 4 Par constante 5 0
102 Potencia del motor XX,XX kW, dep. de la unidad 6 1
103 Tensión del motor XX,XX V, dep. de la unidad 6 0
104 Frecuencia del motor XX,X Hz, dep. de la unidad 6 -1
105 Corriente del motor XX,XX A, dep. de la unidad 7 -2
106 Velocidad nominal del motor XX r/min, dep. de la unidad 6 0
44
117 Amortiguación de la resonancia desactivado –100% desactivado % 6 0
118 Desconexión de la amortiguación de la
resonancia
126 Tiempo de frenado de CC 0,0(desactivado)-60,0 s 10,0 s 6 -1
127 Frecuencia de conexión del freno de CC 0,0 Hz-f
128 Protección térmica del motor 1 Sin protección 5 0
132 Tensión de frenado de CC 0-100% 0% 5 0
133 Tensión de arranque 0,00-100,00 V Dependiente del motor 6 -2
134 Compensación de arranque 0.0-300.0% 100,0% 6 -1
135 Relación U/f 0,0-20,00 V / Hz Dependiente del motor 6 -2
136 Compensación de deslizamiento –500,0-+500,0% 100,0% 3 -1
137 Tensión de CC mantenida 0-100% 0% 5 0
138 Frecuencia de desconexión del freno 0,5-132 Hz 3,0 Hz 6 -1
139 Frecuencia de conexión del freno 0,5-132 Hz 3,0 Hz 6 -1
147 Ajuste del tipo de motor dep. de la unidad dep. de la unidad 5 0
Tabla 4.11 Funciones para programar, controlar y supervisar mediante bus (PROFIBUS) o PC.
Intervalo / número de ajustes /
valor Ajuste de fábrica
abierto
0-200% Dependiente del motor 5 0
MÁX.
0,0 Hz 6 -1
Tipo
de dato
5 0
Índice
de
conv.
Índice de conversión:
Este número se refiere a una cifra de conversión que se
utiliza al escribir o leer mediante la comunicación en serie
con un convertidor de frecuencia.
Véase 3.6.4 Bytes de datos en 3.6.1 Bus de serie
Tipo de dato:
«Tipo de dato» indica el tipo y la longitud del telegrama.
Tipo de dato Descripción
3 Entero 16
4 Entero 32
5 Sin signo 8
6 Sin signo 16
7 Sin signo 32
9 Cadena de texto
Tabla 4.12
96 MG03BA05 - VLT® es una marca registrada de Danfoss
Page 99

Información sobre FCM 300
Serie FCM de VLT® DriveMotor
Tipo
N.º de
parámetro Función Intervalo / número de ajustes / valor Ajuste de fábrica
200 Dirección de giro 3 Únicamente en sentido horario
de
dato
5 0
0-132 Hz
201 Frecuencia de salida
mín. (f
MÍN.
)
202 Frecuencia de salida
máx. (f
MÁX.
)
203 Intervalo de referencia /
0,0 Hz-f
MÁX.
f
MÍN.-fINTERVALO
0,0 Hz 6 -1
f
(132 Hz) 6 -1
INTERVALO
Mín.-máx. / –máx.-+máx. Mín.-máx. 5 0
realimentación
204 Referencia mínima –100 000,000-Ref
205 Referencia máxima Ref
207 Tiempo de rampa de
-100 000,000 50,000 4 -3
MÍN.
0,05-3600,00 s 3,00 s 7 -2
MÁX.
0,000 4 -3
aceleración 1
208 Tiempo de rampa de
0,05-3600,00 s 3,00 s 7 -2
desaceleración 1
209 Tiempo de rampa de
0,15-3600,00 s 3,00 7 -2
aceleración 2
210 Tiempo de rampa de
0,15-3600,00 s 3,00 s 7 -2
desaceleración 2
211 Tiempo de rampa de
0,05-3600,00 s 3,00 s 7 -2
velocidad fija
212 Tiempo de rampa de
0,05-3600,00 s 3,00 s 7 -2
desaceleración de
parada rápida
213 Frecuencia de velocidad
0 Hz-f
MÁX.
10,0 Hz 6 -1
fija
214 Función de referencia 2 Suma 5 0
215 Referencia interna 1 –100,00%-+100,00% 0,00% 3 -2
216 Referencia interna 2 –100,00%-+100,00% 0,00% 3 -2
219 Valor de enganche
0.00-100.00% 0,00% 6 -2
arriba / abajo
221 Límite de corriente en
Límite mín.-máx. en % de I
nominal
Límite máx. 6 -1
modo motor
229 Bypass de frecuencia,
0(desactivado)-100% 0% 6 0
ancho de banda
230 Bypass de frecuencia 1 0,0-132 Hz 0,0 Hz 6 -1
231 Bypass de frecuencia 2 0,0-132 Hz 0,0 Hz 6 -1
241 Referencia interna 1 –100,00%-+100,00% 0,00% 3 -2
242 Referencia interna 2 –100,00%-+100,00% 0,00% 3 -2
243 Referencia interna 3 –100,00%-+100,00% 0,00% 3 -2
244 Referencia interna 4 –100,00%-+100,00% 0,00% 3 -2
245 Referencia interna 5 –100,00%-+100,00% 0,00% 3 -2
246 Referencia interna 6 –100,00%-+100,00% 0,00% 3 -2
247 Referencia interna 7 –100,00%-+100,00% 0,00% 3 -2
Índic
e
de
conv.
4 4
Tabla 4.13 Funciones para programar, controlar y supervisar mediante bus (PROFIBUS) o PC.
MG03BA05 - VLT® es una marca registrada de Danfoss 97
Page 100
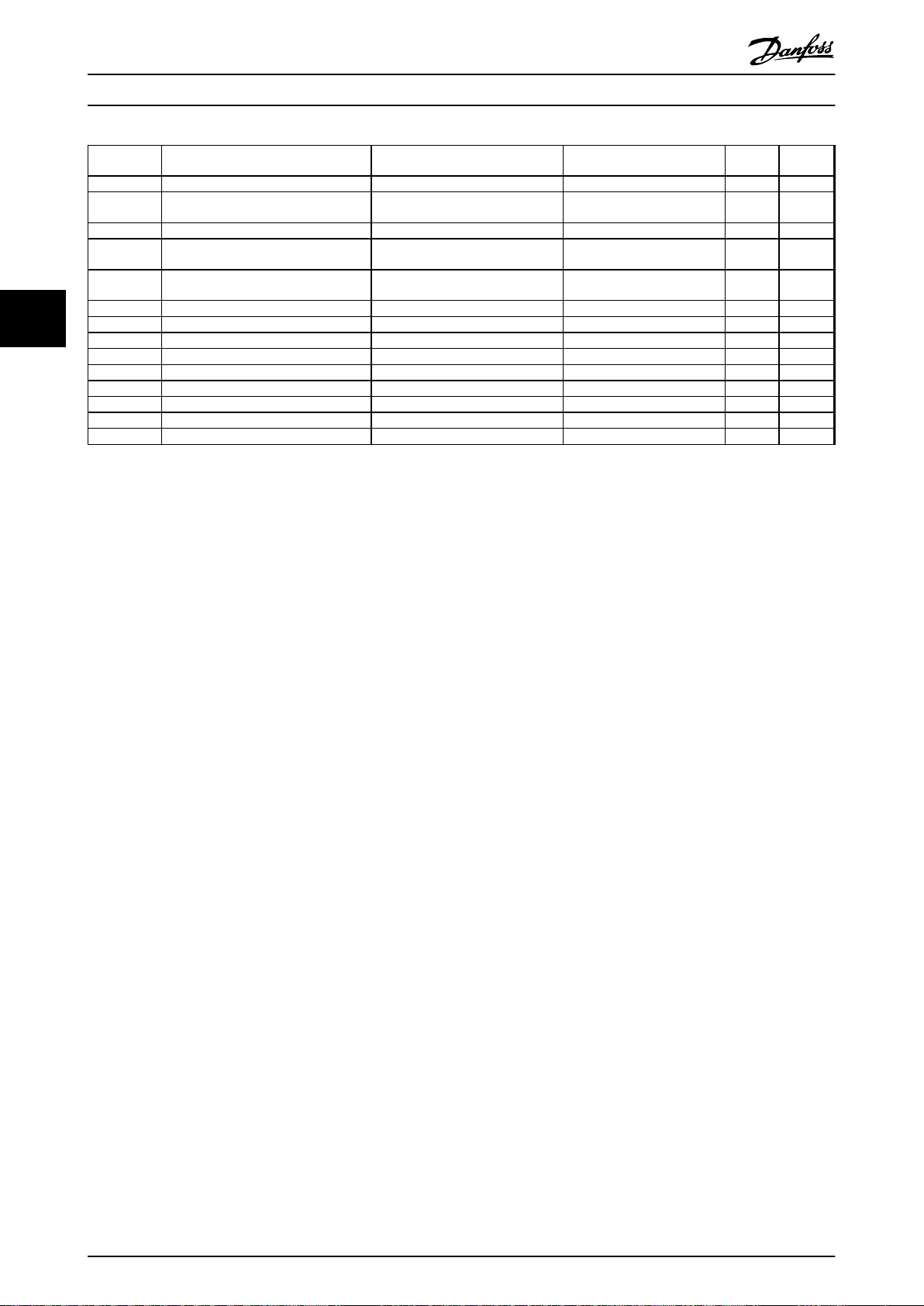
Información sobre FCM 300
Serie FCM de VLT® DriveMotor
N.º de
parámetro Función
317 Tiempo límite 1-99 s 10 s 5 0
318 Función transcurrido el tiempo límite Desactivado / Parada y
323 Función de relé X102 14 Sin funcionamiento 5 0
327 Referencia / realimentación por
331 Terminal 1, corriente de entrada
332 Terminal 2, entrada digital 31 Referencia 6 0
44
333 Terminal 3, entrada digital 31 Reinicio 6 0
334 Terminal 4, entrada digital 30 Arranque 6 0
335 Terminal 5, entrada digital 29 Velocidad fija 6 0
336 Terminal 1, escalado mín. 0,0-20,0 mA 0,0 mA 6 -4
337 Terminal 1, escalado máx. 0,0-20,0 mA 20,0 mA 6 -4
338 Terminal 2, escalado mín. 0,0-10,0 V 0,0 V 6 -1
339 Terminal 2, escalado máx. 0,0-10,0 V 10,0 V 6 -1
340 Funciones de salida 24 Sin funcionamiento 6 0
Tabla 4.14 Funciones para programar, controlar y supervisar mediante bus (PROFIBUS) o PC.
impulsos, frecuencia máx.
analógica
Intervalo / número de ajustes /
valor Ajuste de fábrica
Desactivado 5 0
desconexión
100-70 000 Hz 5000 Hz 7 0
3 Sin funcionamiento 6 0
Tipo
de dato
Índice
de conv.
98 MG03BA05 - VLT® es una marca registrada de Danfoss
 Loading...
Loading...