


MAKING MODERN LIVING POSSIBLE
Guia de Design
VLT® Brook Crompton Motor FCM 300
www.danfoss.com/drives
Índice
Índice
VLT® DriveMotor FCM Series
1 Introdução
1.1.1 Versão do Software 4
1.1.5 Normas de Segurança 5
1.1.6 Advertência contra Partida Acidental 5
1.3.1 Integração do Conversor de Frequência e Motor 7
1.4.1 Formulário de Pedido 8
1.4.2 Gama de Produtos 9
1.4.3 Pedido 10
1.4.4 Ferramentas de Software de PC 10
1.4.5 Informações para pedido de compra de Chassi e Flanges 11
1.4.6 Informações para pedido de Posição da Caixa do Inversor e de Posição da Caixa
de Drenagem 12
2 Instalação
2.1.1 FCM 305-375 para trifásico, 380-480 V 13
2.1.2 Dados Técnicos Gerais 14
2.1.3 Torques de Aperto 17
2.1.4 Seção transversal máxima do cabo 17
4
13
2.1.5 Tamanhos de parafusos 17
2.1.6 Proteção 18
2.2 Descrição do Motor
2.2.1 Manuseio do Motor FC 20
2.2.2 Rolamentos 20
2.2.3 Eixos de saída 21
2.2.4 Dimensões 21
2.2.5 Instalação do Motor FC 24
2.2.6 Alinhamento 24
2.2.7 Torques dos Parafusos 25
2.2.8 Manutenção 25
2.2.9 Proteção térmica do FCM 300 26
2.3.1 Kit de Plugue de Serviço (175N2546) 26
2.3.2 Kit de Plugue (175N2545) 27
2.3.3 Kit de Montagem Remota (175N0160) 27
2.3.5 Opcional de Potenciômetro (177N0011) 28
2.3.6 Teclado de Operação Local (LOP) (175N0128) IP65 28
19
3 Programação
3.1.1 Painel de Controle (175NO131) 30
3.1.2 Instalação do LCP 30
3.1.3 Funções do LCP 30
30
MG03BA28 - VLT® é marca registrada da Danfoss 1
Índice
VLT® DriveMotor FCM Series
3.1.4 Display 31
3.1.5 LEDs 31
3.1.6 Teclas de Controle 31
3.1.7 Funções das Teclas de Controle 32
3.1.8 Estado de Leitura do Display 32
3.1.9 Modo Display 33
3.1.10 Modo Display - Seleção do Estado de Leitura 33
3.1.11 Modo Menu Rápido vs. Modo Menu 34
3.1.12 Programação Rápida via Menu Rápido 34
3.1.13 Seleção do Parâmetro 35
3.1.14 Modo Menu 35
3.1.15 Grupos do Parâmetro 35
3.1.16 Alteração de Dados 35
3.1.17 Alterando um Valor de Texto 36
3.1.18 Alteração de Valores de Dados Numéricos Infinitamente Variáveis 36
3.1.19 Estrutura do Menu 37
3.1.20 Grupo de Parâmetros 0-** Operação/Display 38
3.2.1 Grupo de Parâmetros 1-** Carga/Motor 42
3.6.1 Barramento serial 62
3.6.2 Comunicação de telegramas 63
3.6.3 Composição do telegrama 63
3.6.4 Bytes de dados 64
3.6.5 Control Word Segundo o Padrão de Perfil do Fieldbus 66
3.7.1 Grupo de Parâmetros 5-** Comunicação Serial 72
3.8.1 Grupo de Parâmetros 6-** Funções Técnicas 77
4 Tudo sobre o FCM 300
4.1.1 Isolação galvânica (PELV) 81
4.1.2 Corrente de Fuga para o Terra 81
4.1.3 Condições de operação Extremas 82
4.1.4 Ruído Acústico 82
4.1.5 Balanceamento 82
4.1.6 Proteção térmica e "Derating" 83
81
4.1.7 Derating devido à Temperatura Ambiente 83
4.1.8 Derating devido à Pressão do Ar 83
4.1.9 Derating devido a operação em Baixa Velocidade 83
4.1.10 Derating devido a Frequência de Chaveamento Alta 84
4.1.11 Vibração e Choque 84
4.1.12 Umidade do Ar 84
4.1.13 Padrão UL 84
4.1.14 Eficiência 84
2 MG03BA28 - VLT® é marca registrada da Danfoss
Índice
VLT® DriveMotor FCM Series
4.1.15 Harmônicas /Interferência da Alimentação de Rede Elétrica 85
4.1.16 Fator de Potência 86
4.1.17 O que é Certificação CE? 86
4.1.18 A Diretiva de Maquinaria (98/37/EEC) 86
4.1.19 A Diretiva de Baixa Tensão (73/23/EEC) 86
4.1.20 A Diretiva EMC (89/336/EEC) 86
4.1.21 O que é Coberto? 86
4.1.22 Danfoss Motor Série FCM 300 e Certificação CE 87
4.1.23 Conformidade com a Diretiva EMC 89/336/EEC 87
4.1.24 Normas de EMC 87
4.1.25 Ambientes Agressivos 88
4.2.1 Lista de Advertências e Alarmes 89
4.2.2 E se o motor não der partida? 89
4.2.3 modern dvertências 90
4.2.4 Warning Word, Status Word Estendida e Alarm Word 92
4.3 Lista de Parâmetros
Índice
93
99
MG03BA28 - VLT® é marca registrada da Danfoss 3
Introdução
VLT® DriveMotor FCM Series
1
1 Introdução
1.1 Segurança
1.1.1 Versão do Software
Série FCM 300
Guia de Design
Versão do software: 3.1x
Este Guia de Design pode ser utilizado para todos os
conversores de frequência Série FCM 300, com a versão de
software 3.1x.
O número da versão de software pode ser encontrado no
parâmetro 624 Versão de software n⁰.
Tabela 1.1
Instruções para Descarte
1.1.2
O equipamento que contiver
componentes elétricos não pode ser
descartado junto com o lixo doméstico.
Deve ser coletado separadamente com o
lixo elétrico e lixo eletrônico em conformidade com a legislação local atualmente
em vigor.
CUIDADO
Indica uma situação potencialmente perigosa que, se
não for evitada, poderá resultar em ferimentos leves ou
moderados. Também podem ser usadas para alertar
contra práticas inseguras.
1.1.4 Advertências gerais
AVISO!
Todas as operações devem ser realizadas por pessoal
devidamente treinado.
Use todos os elementos de içamento fornecidos, p.ex.,
ambos os pontos de içamento, se estiverem instalados,
ou um único ponto de içamento, se estiver instalado*.
Içamento vertical - Evite rotação desgovernada.
Empilhadeira - Não levante outro equipamento apenas
com pontos de içamento do motor.
Antes da instalação verifique se há danos na tampa do
ventilador, danos no eixo, na montagem da base/
estrutura e se há parafusos soltos. Verifique os detalhes
da plaqueta de identificação.
Certifique-se de que a superfície de montagem está
nivelada, a montagem equilibrada, e que não está
desalinhada.
As juntas de vedação e/ou guarnições seladoras e as
proteções devem ser ajustados corretamente.
Corrija a tensão da correia.
Observe as regras de derating, veja 4.1 Condições Especiais.
Tabela 1.2
Símbolos
1.1.3
Os símbolos a seguir são usados neste Guia de Design e
requerem atenção especial.
ADVERTÊNCIA
Indica uma situação potencialmente perigosa que, se
não for prevenida, pode resultar em morte ou ferimentos
graves.
AVISO!
Indica informações realçadas que devem ser
consideradas com atenção para evitar erros ou operação
do equipamento com desempenho inferior ao ideal.
*Nota: o içamento manual máximo é de 20 kg, abaixo do
ombro, desde que acima do nível do solo. Pesos brutos
máximos:
Chassi de tamanho 80: 15 kg
-
Chassi de tamanho 90 & 100: 30 kg
-
Chassi de tamanho 112: 45 kg
-
Chassi de tamanho 132: 80 kg
-
4 MG03BA28 - VLT® é marca registrada da Danfoss
Introdução
VLT® DriveMotor FCM Series
ADVERTÊNCIA
A tensão do motor do FC é perigosa, quando o motor
está conectado à rede elétrica. A instalação incorreta do
motor FC pode causar danos ao equipamento,
ferimentos graves ou morte.
Portanto, as instruções deste manual, bem como as
normas nacionais e locais e as normas de segurança,
devem ser obedecidas.
Tocar as partes eletrificadas pode causar a morte,
mesmo depois de desligar a alimentação de rede
elétrica. Aguarde pelo menos 4 minutos.
- A instalação deve ter um isolamento e fusíveis corretos.
- As tampas e as entradas dos cabos devem estar
encaixadas.
ADVERTÊNCIA
Para altitudes acima de 2 km, entre em contacto com a
Danfoss Drives com relação à PELV.
1.1.6
Advertência contra Partida Acidental
O motor pode ser parado por meio dos
•
comandos digitais, os comandos via serial, as
referências ou uma parada local, enquanto o
conversor de frequência estiver ligado à rede
elétrica.
Se, por motivos de segurança pessoal, for
necessário garantir que não ocorra nenhuma
partida acidental, estas funções de parada não
são suficientes.
Enquanto os parâmetros estiverem sendo
•
alterados, o motor pode dar partida.
Um motor que houver parado pode voltar a
•
funcionar se houver uma falha nos circuitos
eletrônicos do motor FC ou se a sobrecarga
temporária ou a queda de fornecimento de
energia da alimentação de rede elétrica cessar.
1
1
AVISO!
É de responsabilidade do usuário ou do eletricista
especializado garantir o aterramento e a proteção
corretos de acordo com as normas e os padrões
nacionais e locais aplicáveis.
1.1.5 Normas de Segurança
O VLT DriveMotor (motor FC) deve ser
•
desconectado da rede elétrica se forem
necessários reparos.
Verifique se a rede elétrica foi desligada e se
passou o tempo necessário antes de remover as
ligações do motor e da rede (4 minutos).
O aterramento de proteção correto do
•
equipamento deve estar estabelecido, o operador
deve estar protegido contra a tensão de
alimentação e o motor deve estar protegido
contra sobrecarga, conforme as normas nacionais
e locais aplicáveis.
O uso dos RCDs (relés ELCB) está descrito no
4.1.2 Corrente de Fuga para o Terra .
As correntes de fuga para o terra são superiores a
•
3,5 mA. Isto significa que o motor FC necessita
uma instalação fixa permanente, assim como um
aterramento de proteção reforçado.
MG03BA28 - VLT® é marca registrada da Danfoss 5
175NA161.10
Promotion
All
users
X = version number
YY = language
Misc.
Quick Setup
MG.03.FX.YY
Design
Guide
MG03BXYY
PROFIBUS-
Manual
MG.03.EX.YY
Brochure
MB.03.CX.YY
Articles
MZ.03.AX.YY
MCT 10 Setup
Software Manual
MG10RXYY
Data sheet
MD.03.AX.YY
Introdução
VLT® DriveMotor FCM Series
1
1.2 Introdução
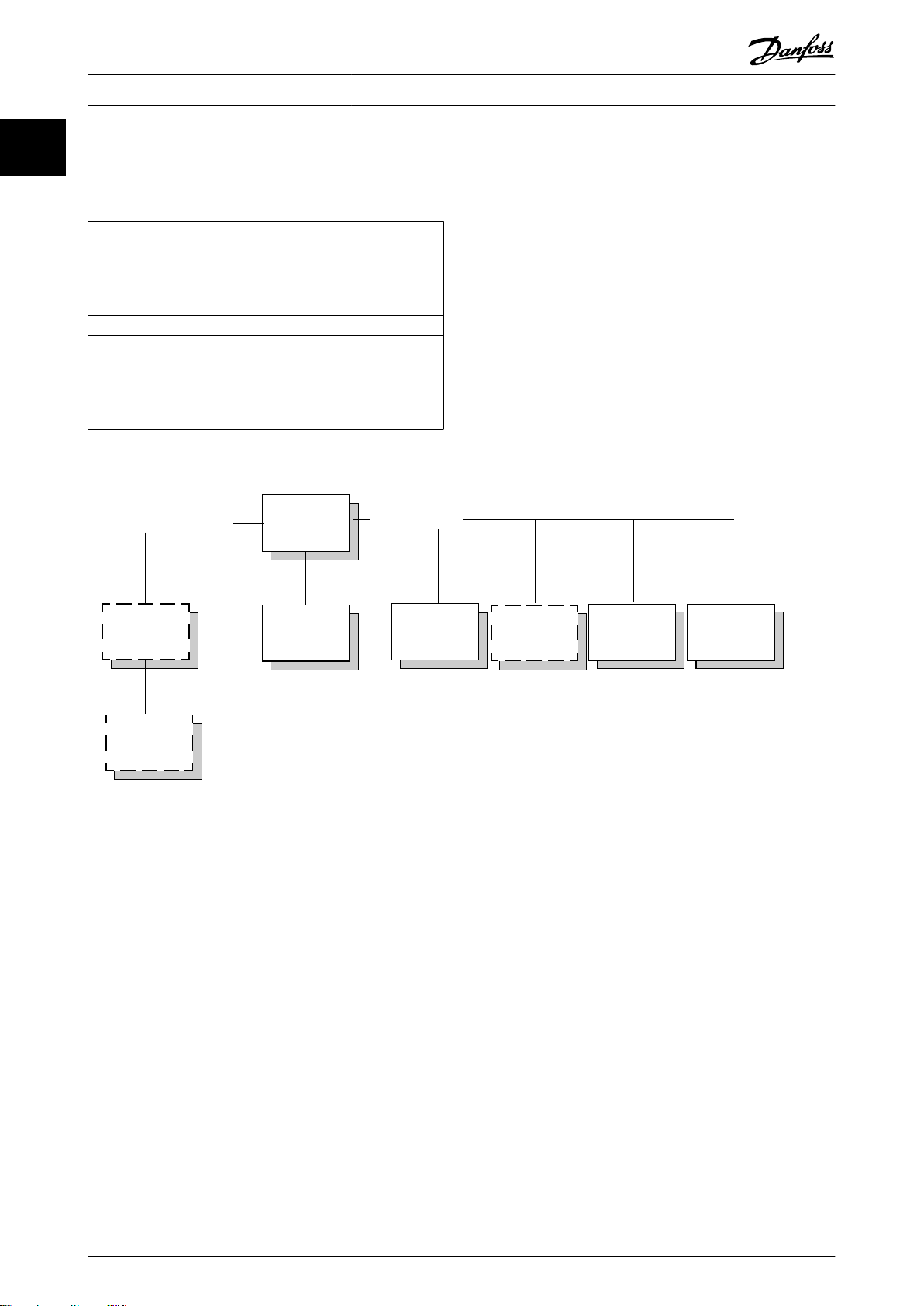
Publicações técnicas específicas sobre o FCM da Série 300:
Guia de Design:
Programação
Rápida:
Tabela 1.3
Fornece todas as informações para
finalidade de projeto, bem como uma boa
visão sobre a tecnologia, gama de
produtos, dados técnicos, controle,
programação, etc.
Ajuda os usuários a instalar e operar
rapidamente uma unidade do motor FCM
da Série 300.
O Guia de Setup Rápido é sempre
entregue com a unidade.
Para obter mais informações sobre a Série FCM 300, entre
em contato com o fornecedor Danfoss local.
Ilustração 1.1 Literatura disponível para a Série FCM 300
6 MG03BA28 - VLT® é marca registrada da Danfoss
Introdução
1.3 Conceito do Produto
VLT® DriveMotor FCM Series
1
1
1.3.1 Integração do Conversor de
Frequência e Motor
O conversor de frequência Danfoss VLT integrado ao motor
assíncrono dá controle de velocidade infinito em uma
unidade.
O VLT DriveMotor Série FCM 300 é uma alternativa
bastante compacta para a solução simples com conversor
de frequência VLT e motor como unidades separadas. O
conversor de frequência é conectado em vez da caixa do
terminal do motor e não é mais alto do que a caixa de
terminais padrão, nem mais largo ou mais comprido do
que o motor (veja 2.2.4 Dimensões ).
A instalação é extremamente fácil. O espaço do painel não
constitui um problema. Não são necessários detalhes
especiais sobre a fiação para seguir a diretiva EMC uma
vez que os cabos do motor não são necessários. As únicas
conexões são a rede elétrica e as conexões de controle.
A configuração de fábrica do conversor de frequência do
motor dá um controle eficiente e preciso da energia, além
de eliminar a pré-configuração no local.
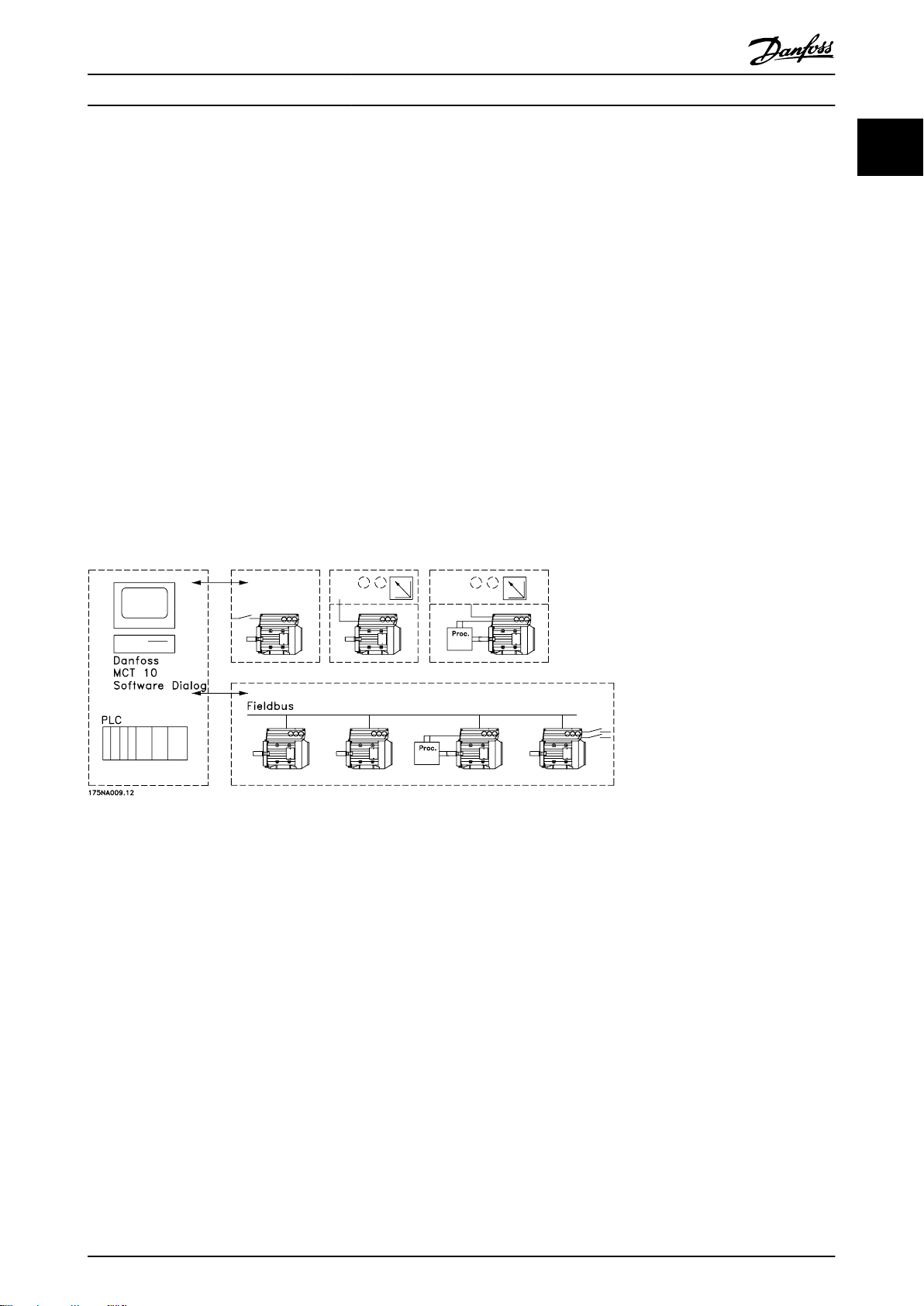
O motor FC pode ser usado em sistemas independentes
com sinais de controle tradicionais, como sinais de partida/
parada, referências de velocidade e controle do processo
de malha fechada ou em múltiplos sistemas de
acionamento com sinais de controle distribuídos por um
fieldbus.
A combinação de fieldbus com sinais de controle
tradicionais e controle do PID de malha fechada é possível.
Ilustração 1.2 Estruturas de Controle
MG03BA28 - VLT® é marca registrada da Danfoss 7
1
Introdução
1.4 Seleção do motor FC, FCM 300
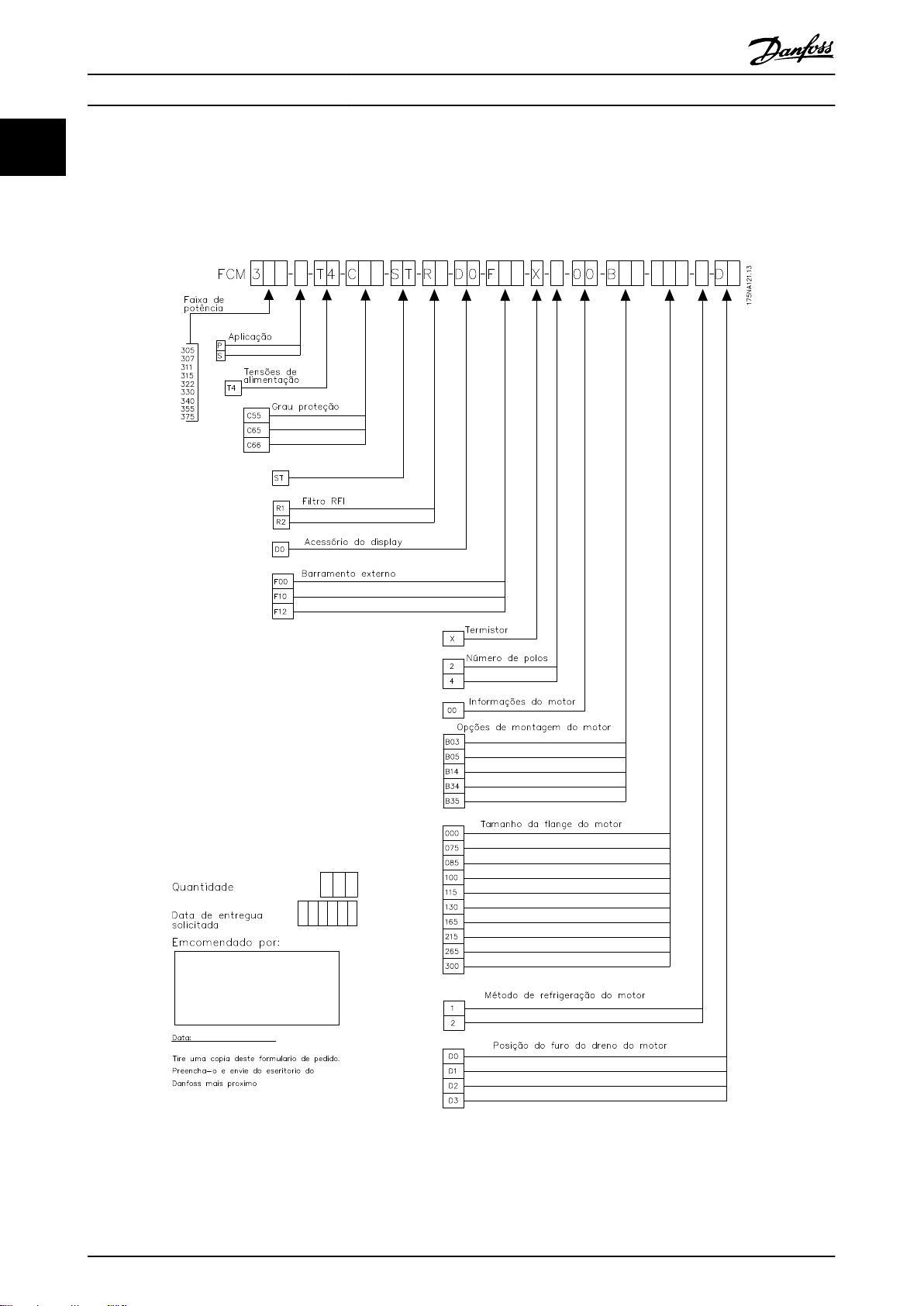
1.4.1 Formulário de Pedido
VLT® DriveMotor FCM Series
Ilustração 1.3
8 MG03BA28 - VLT® é marca registrada da Danfoss
Introdução
VLT® DriveMotor FCM Series
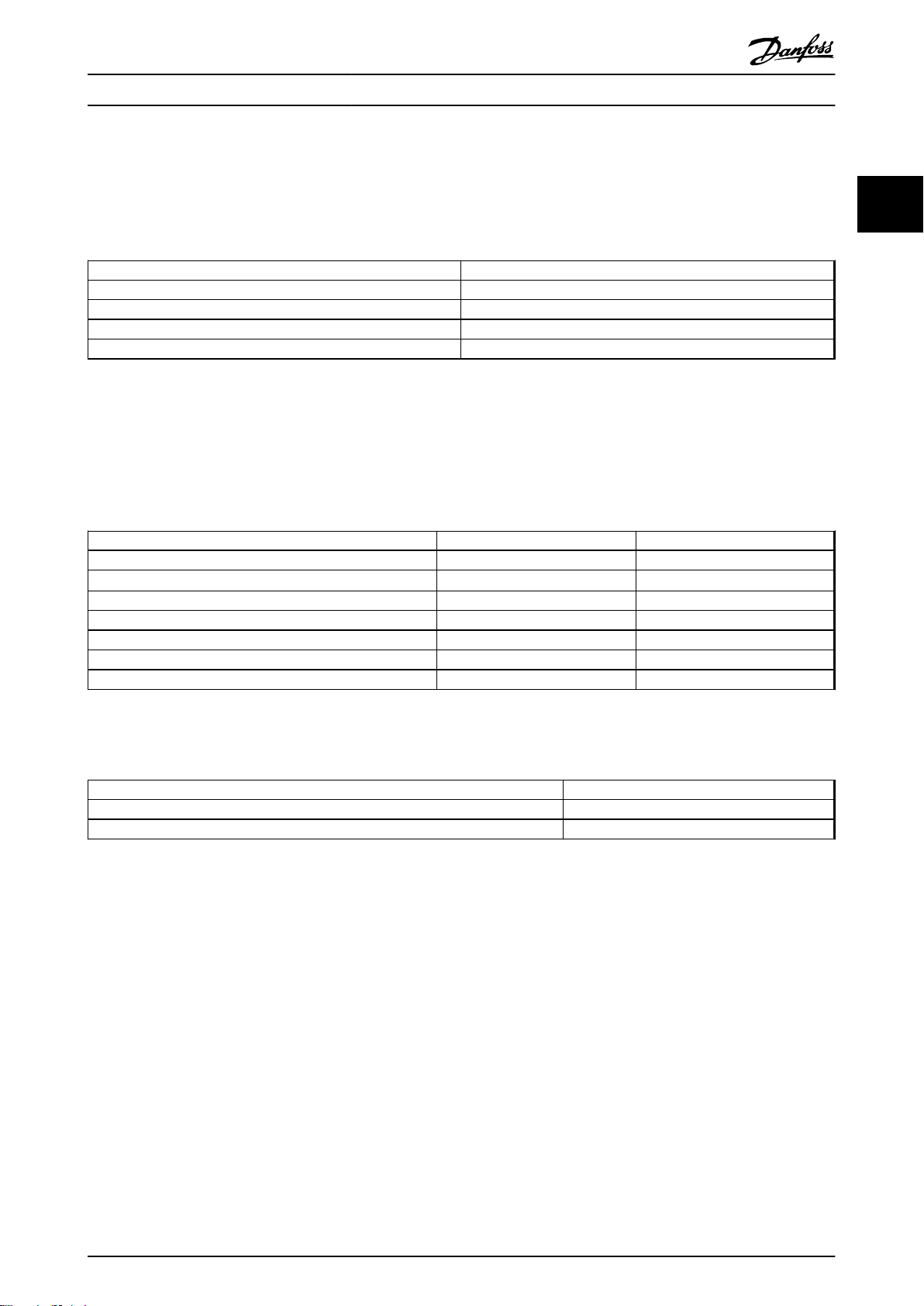
1.4.2 Gama de Produtos
Série FCM 300 do VLT DriveMotor, motores de 2/4 polos
Tipo Saída do motor Alimentação de rede
elétrica
FCM 305 0,55 kW
FCM 307 0,75 kW
FCM 311 1,1 kW
FCM 315 1,5 kW
FCM 322 2,2 kW
FCM 330 3,0 kW
FCM 340 4,0 kW
FCM 355 5,5 kW
FCM 375 7,5 kW
Tabela 1.4 Capacidade de Potência
Cada tipo no catálogo de produtos está disponível em
versões diferentes:
Versões do inversor
Tamanho da potência:
(Veja Tabela 1.4)
Aplicação
P: Processo
•
S: Sem sensor (bomba OEM especial)
•
Tensão de rede:
T4: Alimentação de 380-480 V trifásica
•
Gabinete metálico
C55: IP55
•
C66: IP66
•
Variantes de hardware:
ST: Padrão
•
Filtro de RFI
R1: Em conformidade com classe 1A
•
R2: Em conformidade com classe 1B
•
Conector do display
D0: Sem conector de display encaixável
•
Fieldbus
F00: Sem fieldbus
•
F10: Profibus DPV1 3 MB
•
F12: Profibus DPV1 12 MB
•
Termistor do motor
380-480 V trifásica
X: Sem termistor do motor
•
Número de polos
2: Motor de 2 polos
•
4: Motor de 4 polos
•
Dados do motor
B2: motor de alta eficiência IE2
•
BC: motor de alta eficiência IE2 / ferro fundido
•
Opcionais de montagem do motor
B03: Montagem sobre a base
•
B05: Flange B5
•
B14: Face B14
•
B34: Base e face B14
•
B35: Base e flange B5
•
Código de flange do motor
(Para saber o tamanho do flange padrão e os tamanhos de
flange disponíveis, veja 1.4.5 Informações para pedido de
compra de Chassi e Flanges).
000: Somente montagem sobre a base
•
085: 85 mm
•
100: 100 mm
•
115: 115 mm
•
130: 130 mm
•
165: 165 mm
•
215: 215 mm
•
265: 265 mm
•
300: 300 mm
•
Método de resfriamento do motor
1: Ventilador montado no eixo
•
Posição do inversor
D: Padrão na parte superior
•
Posição do furo de drenagem do motor
(veja 1.4.6 Informações para pedido de Posição da Caixa do
Inversor e de Posição da Caixa de Drenagem)
0: Sem furo de drenagem
•
1: Ambas as extremidades opostas à caixa do
•
inversor (drive/não drive)
2: 90º direita da caixa do inversor
•
3: 90º esquerda da caixa do inversor
•
1
1
MG03BA28 - VLT® é marca registrada da Danfoss 9
175NA162.10
Introdução
VLT® DriveMotor FCM Series
1
1.4.3 Pedido
Obtenha uma cópia do formulário de pedido, veja
1.4.1 Formulário de Pedido. Preencha e envie pelo correio
ou por fax ao escritório da organização de vendas da
Danfoss mais próximo. Com base no seu pedido, será
atribuído um código de tipo ao motor da Série FCM 300.
O formulário da colocação de pedido para o motor básico
necessita estar sempre completo. Quando o código do tipo
for escrito, informe sempre os caracteres do string básico
(1-34). Junto com a confirmação do pedido, o cliente
recebe um número de código com 8 dígitos, a ser utilizado
caso queira fazer um novo pedido.
Software de PC da Danfoss para comunicação serial, MCT
10
Todas as unidades da Série FCM 300 têm uma porta RS
485 padrão, que lhes permite comunicar, p.ex., com um
PC. Um programa intitulado MCT 10 está disponível para
essa finalidade (veja 1.4.4 Ferramentas de Software de PC ).
Números para pedido de compra, MCT 10
Use o número de código 130B1000 para fazer pedido do
CD que contém o Software de Setup do MCT 10.
Acessórios para o motor do FC
Está disponível um Dispositivo de Operação Local (LOP Local Operation Pad) para estabelecer o setpoint local e
partida/parada para o motor do FC. O LOP vem acondicionado em um IP 65. Também está disponível um Painel
de Controle Local (LCP 2) que provê uma interface
completa para a operação, programação e monitoramento
do motor do FC.
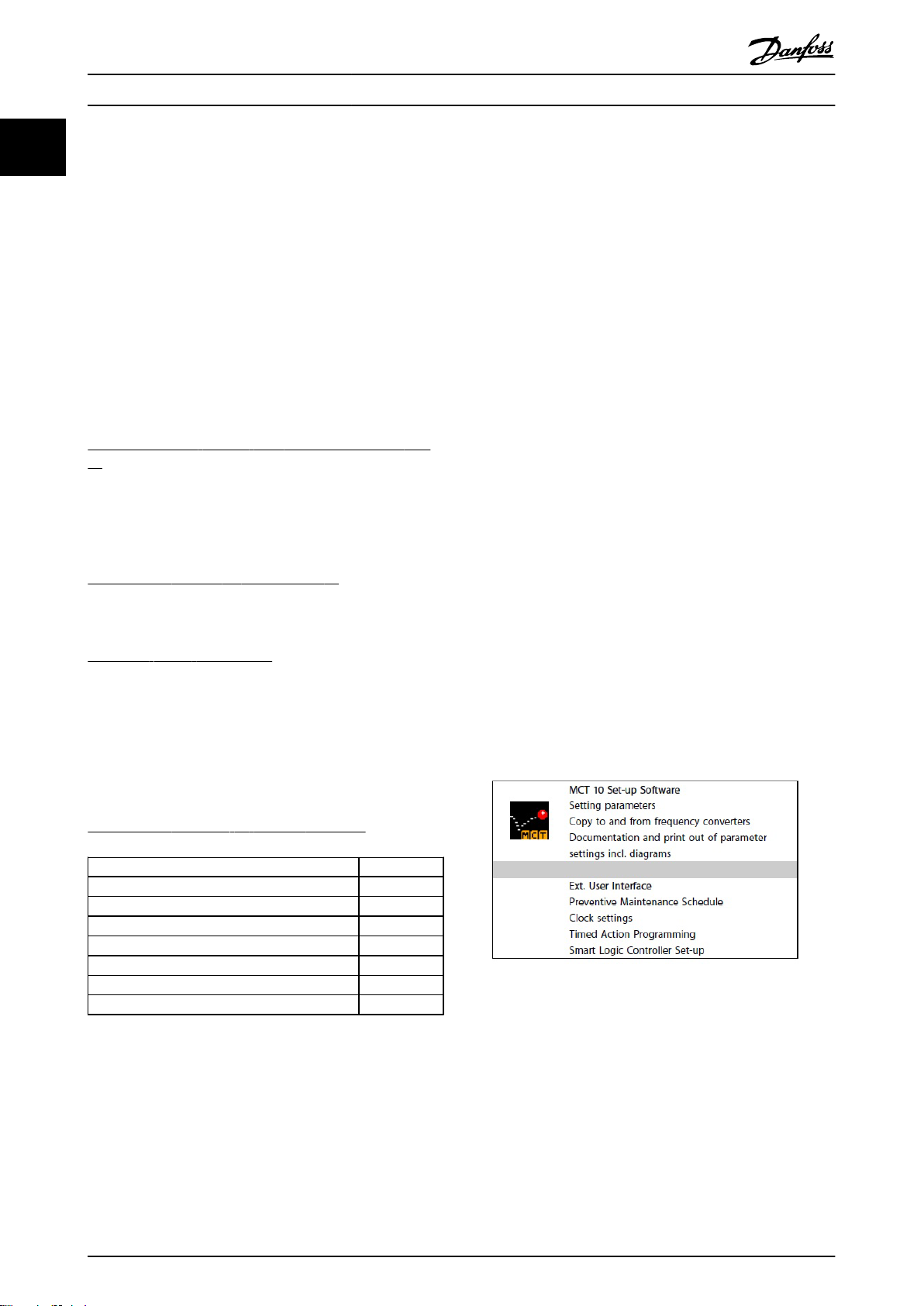
1.4.4
Ferramentas de Software de PC
Software de PC - MCT 10
Todos os conversores de frequência são equipados com
uma porta de comunicação serial. A Danfoss disponibiliza
uma ferramenta de PC para a comunicação entre o PC e o
conversor de frequência, o Software de Setup do MCT 10
VLT Motion Control Tool.
Software de Setup do MCT 10
O MCT 10 foi desenvolvido como uma ferramenta fácil de
usar, para configurar os parâmetros dos conversores de
frequência.
O Software de Setup do MCT 10 será útil para:
Planejar uma rede de comunicação off-line. O
•
MCT 10 contém um banco de dados completo do
conversor de frequência
Colocar em operação on-line os conversores de
•
frequência
Gravar configurações para todos os conversores
•
de frequência
Substituir um drive em uma rede
•
Expandir uma rede existente
•
Drives desenvolvidos futuramente serão
•
suportados
Os Módulos do Software de Setup do MCT 10
Os seguintes módulos estão incluídos no pacote de
software:
Números para o pedido de compra, acessórios
Teclado de Operação Local incl. cabo (LOP)
Painel de Controle Local (LCP 2) 175N0131
Kit de montagem remota (LCP 2) 175N0160
Kit de plugues (LCP 2) 175N2545
Cabo do kit de plugues (LCP 2) 175N0162
Cabo (montagem direta) (LCP 2) 175N0165
Kit de plugues de manutenção (LCP 2) 175N2546
Opcional de potenciômetro 177N0011
Tabela 1.5
10 MG03BA28 - VLT® é marca registrada da Danfoss
175N0128
Ilustração 1.4
Introdução
VLT® DriveMotor FCM Series
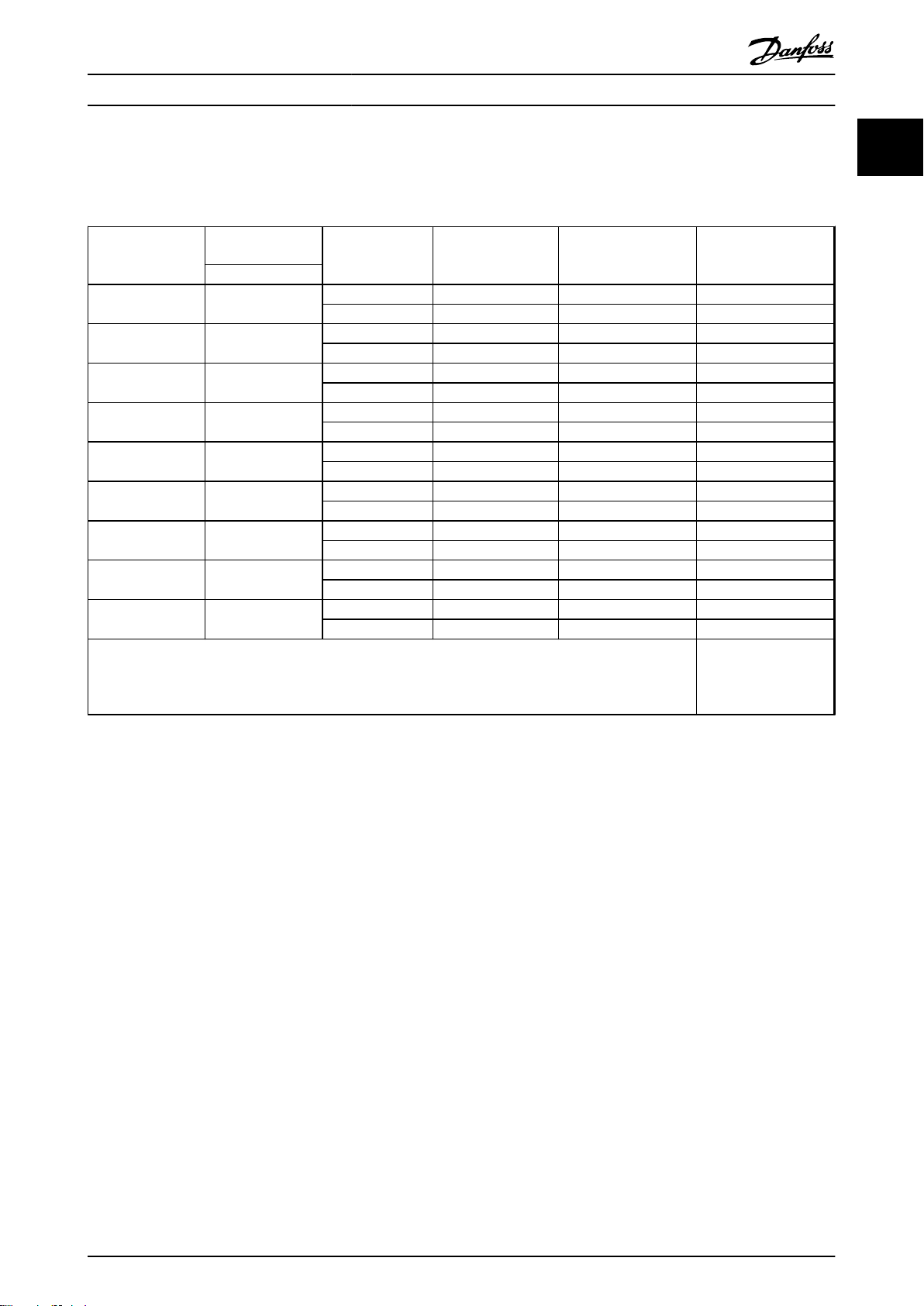
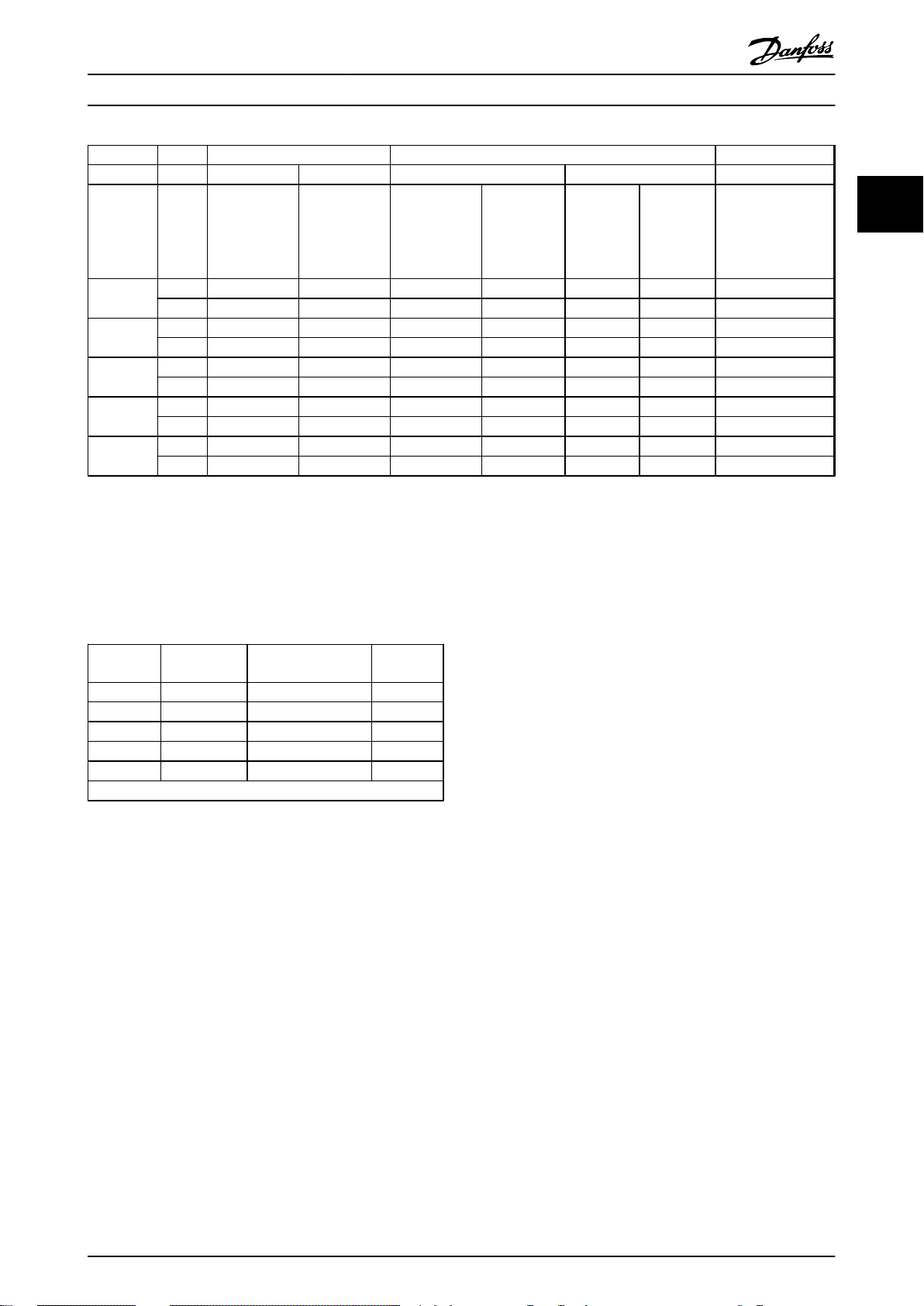
1.4.5 Informações para pedido de compra de Chassi e Flanges
Tamanhos de chassi e do flange correspondente, para versões diferentes de montagem
1
1
Tamanho da
Tipo
FCM 305 80
FCM 307 80
FCM 311 90
FCM 315 90
FCM 322 100
FCM 330 100
FCM 340 112
FCM 355 132
FCM 375 132
S: Disponível como eixo padrão
A: Disponível como alternativa com um eixo especialmente alongado para fornecer o eixo padrão para a
carcaça
B: Disponível como alternativa com um eixo padrão para a carcaça, sem a necessidade de modificação
carcaça do motor
4 polos
Versão de
montagem
B5/B35 165 115/130
B14/B34 100 75/85/115/130
B5/B35 165 115/130
B14/B34 100 75/85/115/130
B5/B35 165 110/115/130 215
B14/B34 115 85/100/130/165
B5/B35 165 110/115/130 215
B14/B34 115 85/100/130/165
B5/B35 215 165
B14/B34 130 165 85/100/115
B5/B35 215 165
B14/B34 130 165 85/100/115
B5/B35 215 165
B14/B34 130 165 85/100/115
B5/B35 265 215
B14/B34 165 215
B5/B35 265 215
B14/B34 165 215
Tamanho da flange,
standard (S) [mm]
Tamanho da flange,
alternativas (A) [mm]
Tamanho do flange,
alternativas (B) [mm]
Tabela 1.6
MG03BA28 - VLT® é marca registrada da Danfoss 11

Introdução
VLT® DriveMotor FCM Series
1
1.4.6 Informações para pedido de Posição da Caixa do Inversor e de Posição da Caixa de
Drenagem
Posição da caixa do inversor, sempre montada no topo.
Todos os furos do dreno são montados com parafuso e arruela, IP66 se não estiverem abertos.
Ilustração 1.5
1: Furos do dreno opostos ao do inversor, tanto na extremidade do drive quanto na extremidade oposta.
2/3: Furos do dreno a 90° em relação ao inversor, tanto na extremidade do drive quanto na extremidade oposta à do drive.
12 MG03BA28 - VLT® é marca registrada da Danfoss
Instalação
VLT® DriveMotor FCM Series
2 Instalação
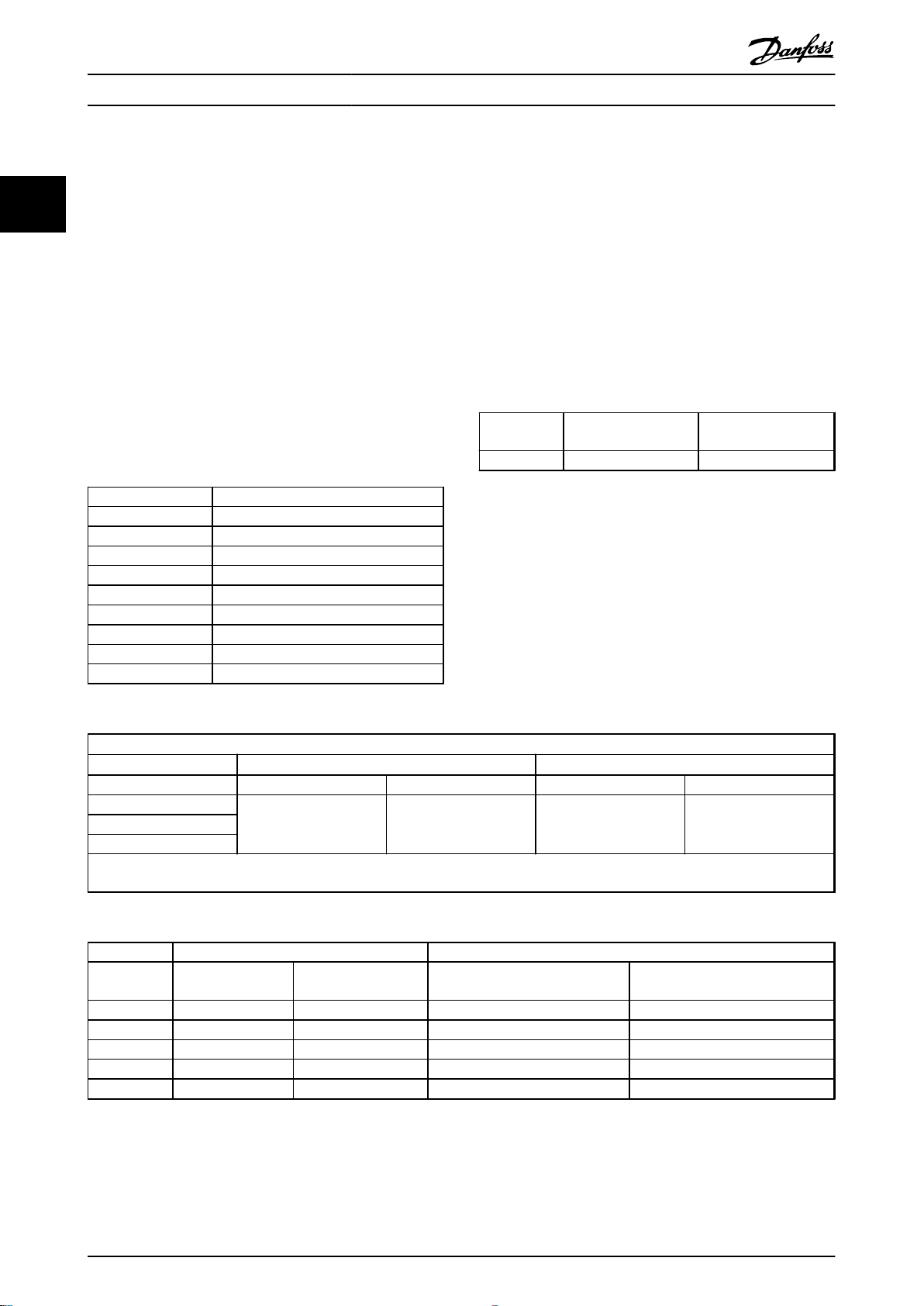
2.1 Dados Técnicos
2.1.1 FCM 305-375 para trifásico, 380-480 V
FCM 305 307 311 315 322 330 340 355 375
Saída do motor
[HP] 0,75 1,0 1,5 2,0 3,0 4,0 5,0 7,5 10,0
[kW] 0,55 0,75 1,1 1,5 2,2 3,0 4,0 5,5 7,5
Torque do motor
2 polos [Nm]1) 1,8 2,4 3,5 4,8 7,0 9,5 12,6 17,5 24,0
4 polos [Nm]2) 3,5 4,8 7,0 9,6 14,0 19,1 25,4 35,0 48,0
Chassi
tamanho [mm] 80 80 90 90 100 100 112 132 132
Peso do Drive e
Motor [kg]
Peso do Drive [kg] 2,2 2,2 2,8 2,8 4,1 4,2 6,4 10,4 10,4
Corrente de entrada [A]
380 V 2 p 1,5 1,8 2,3 3,4 4,5 5,0 8,0 12,0 15,0
380 V 4 p 1,4 1,7 2,5 3,3 4,7 6,4 8,0 11,0 15,5
480 V 2 p 1,2 1,4 1,8 2,7 3,6 4,0 6,3 9,5 11,9
480 V 4 p 1,1 1,3 2,0 2,6 3,7 5,1 6,3 8,7 12,3
Eficiência na velocidade nom.
2 polos 73,4 75,3 77,5 79,0 81,3 82,7 83,8 85,1 86,2
4 polos 75,9 77,5 79,3 80,5 82,4 83,6 84,6 85,8 86,7
Terminais de potência
[AWG] 10 10 10 10 10 10 10 6 6
[mm2] 4 4 4 4 4 4 4 10 10
Tamanhos dos
passa-cabos
Pré-fusível máx.
UL4) [A]
IEC4) [A]
1)
A 400 V 3000 r/min
2)
A 400 V 1500 r/min
3)
motor de 2 polos - B3
4)
Devem ser usados pré-fusíveis tipo gG. Para manter a conformidade com UL/cUL, devem ser usados pré-fusíveis do tipo Bussmann KTS-
-R 500 V ou Ferraz Shawmut, ATMR Classe C (máx. 30 A). Para proteção, os fusíveis devem ser instalados em um circuito capaz de
fornecer o máximo de 100.000 amps RMS (simétricos), 500 V máximo.
3)
11 13 17 20 26 28 37 56 61
3xM20x1,5 3xM20x1,5 3xM20x1,5 3xM20x1,5 3xM20x1,5 3xM20x1,5 3xM20x1,5 1xM25x1,5/
2xM20x1,5
10 10 10 10 10 15 15 25 25
25 25 25 25 25 25 25 25 25
1xM25x1,5/
2xM20x1,5
2 2
Tabela 2.1
MG03BA28 - VLT® é marca registrada da Danfoss 13
Instalação
VLT® DriveMotor FCM Series
2.1.2 Dados Técnicos Gerais
Alimentação de rede elétrica, TT, TN e IT* (L1, L2, L3)
22
Unidades com tensão de alimentação de 380-480 V 3x380/400/415/440/460/480 V ±10%
Frequência de alimentação 50/60 Hz
Desbalanceamento máx. da tensão de alimentação ± 2% da tensão de alimentação nominal
Fator de potência / cos max. 0,9/1,0 em carga nominal
N°. de chaveamentos nas entradas de alimentação L1, L2, L3 aprox. 1 vez a cada 2 min
*) Não se aplica às unidades de RFI classe 1B
Características de torque
Torque inicial/torque de sobrecarga 160% durante 1 min
Torque contínuo veja acima
Cartão de controle, entradas digitais/de pulso
N °. de entradas digitais programáveis 4
Nº. do terminal X101-2, -3, -4, -5
Nível de tensão 0-24 V CC (lógica positiva PNP)
Nível de tensão, 0 lógico <5 V CC
Nível de tensão, 1 lógico >10 V CC
Tensão máxima na entrada 28 VCC
Resistência de entrada, R
Tempo de varredura 20 ms
i
aprox. 2 kΩ
Placa de controle, entrada de pulso
№ de entradas de pulso programáveis 1
Nº. do terminal X101-3
Frequência máx. no terminal 3, coletor aberto/push pull 24 V 8 kHz/70 kHz
Resolução 10 bits
Precisão (0,1-1 kHz), terminal 3 Erro máx: 0,5% do fundo de escala
Precisão (1-12 kHz), terminal 3 Erro máx: 0,1% do fundo de escala
Placa de controle, entradas analógicas
N°. de entradas de tensão analógica programáveis 1
Nº. do terminal X101-2
Nível de tensão 0-10 V CC (escalonável)
Resistência de entrada, R
N°. de entradas de corrente analógica programáveis 1
N°. do Terminal X101-1
Faixa de corrente 0 - 20 mA (graduável)
Resistência de entrada, R
Resolução 9 bits
Precisão na entrada Erro máx. 1% do fundo de escala
Tempo de varredura 20 ms
Placa de controle, saídas digitais/de pulso e analógicas
N°. de saídas digitais e analógicas programáveis 1
Nº. do terminal X101-9
Nível de tensão na saída digital/carga 0 - 24 V CC/25 mA
Corrente na saída analógica 0 - 20 mA
Carga máxima para o chassi (terminal 8) na saída analógica
Precisão da saída analógica Erro máx: 1,5% do fundo de escala
Resolução na saída analógica. 8 bits
i
i
aprox. 10 kΩ
aprox. 300 Ω
R
500 Ω
LOAD
Saída do relé
N°. de saídas de relé programáveis 1
Número do terminal (carga resistiva e indutiva) 1-3 (freio ativado), 1-2 (freio desativado)
Carga máx. de terminal (CA1) nos terminais 1-3, 1-2 250 V CA, 2 A, 500 VA
14 MG03BA28 - VLT® é marca registrada da Danfoss
Instalação
Carga máx. de terminal (DC1 (IEC 947)) nos terminais 1-3, 1-2 25 V CC, 3A/50 V CC, 1,5 A, 75 W
Carga mín. de terminal (CA/CC) nos terminais 1-3, 1-2 cartão de controle 24 V CC, 10 mA/24 V CA, 100 mA
Valores nominais de até 300.000 operações (com cargas indutivas o número de operações é reduzido em 50%)
Placa de controle, comunicação serial RS 485
Nº. do terminal X100-1, -2
Características de controle (conversor de frequência)
Faixa de frequência
Resolução na frequência de saída 0,1%
Tempo de resposta do sistema Velocidade 40 ms.
Precisão da velocidade (malha aberta, modo TC, motor 4P acionado na faixa de velocidades 150-1500 rpm) ±15 rpm
Externos
Gabinete metálico
Teste de vibração 1 g
Umidade relativa máx. 95% para armazenagem/transporte/operação
Temperatura ambiente 40 °C máx. (média de 24 horas 35 °C máx.)
Veja 4.1.7 Derating devido à Temperatura Ambiente
Temperatura ambiente mín. em operação plena 0°C
Temperatura ambiente mín. com desempenho reduzido -10 °C
Temperatura durante a armazenagem/transporte -25-+65/70 °C
Altitude máx. acima do nível do mar 1000 m
Veja 4.1.8 Derating devido à Pressão do Ar
Normas EMC aplicadas, Emissão EN 61000-6-3/EN 6100-6-4, EN 61800-3, EN 55011, EN 55014
Normas EMC aplicadas,
Imunidade
Normas de segurança aplicadas, EN 60146, EN 50178, EN 60204, UL508
Veja 4.1 Condições Especiais no final desta seção para saber a faixa de frequência dos motores IP 66.
Veja 4.1 Condições Especiais no final desta seção para saber a faixa de frequência dos motores IP 66.
VLT® DriveMotor FCM Series
0-132 Hz
IP 55 (IP65, IP66)
EN 61000-6-2, EN 61000-4-2, EN 61000-4-3, EN 61000-4-4, EN 61000-4-5, EN 61000-4-6,
ENV 50204
2 2
AVISO!
A solução para o IP66 normal destina-se somente para aceleração de até 3000 rpm no máximo. Se houver necessidade
de velocidade mais alta, notifique ao fazer o pedido.
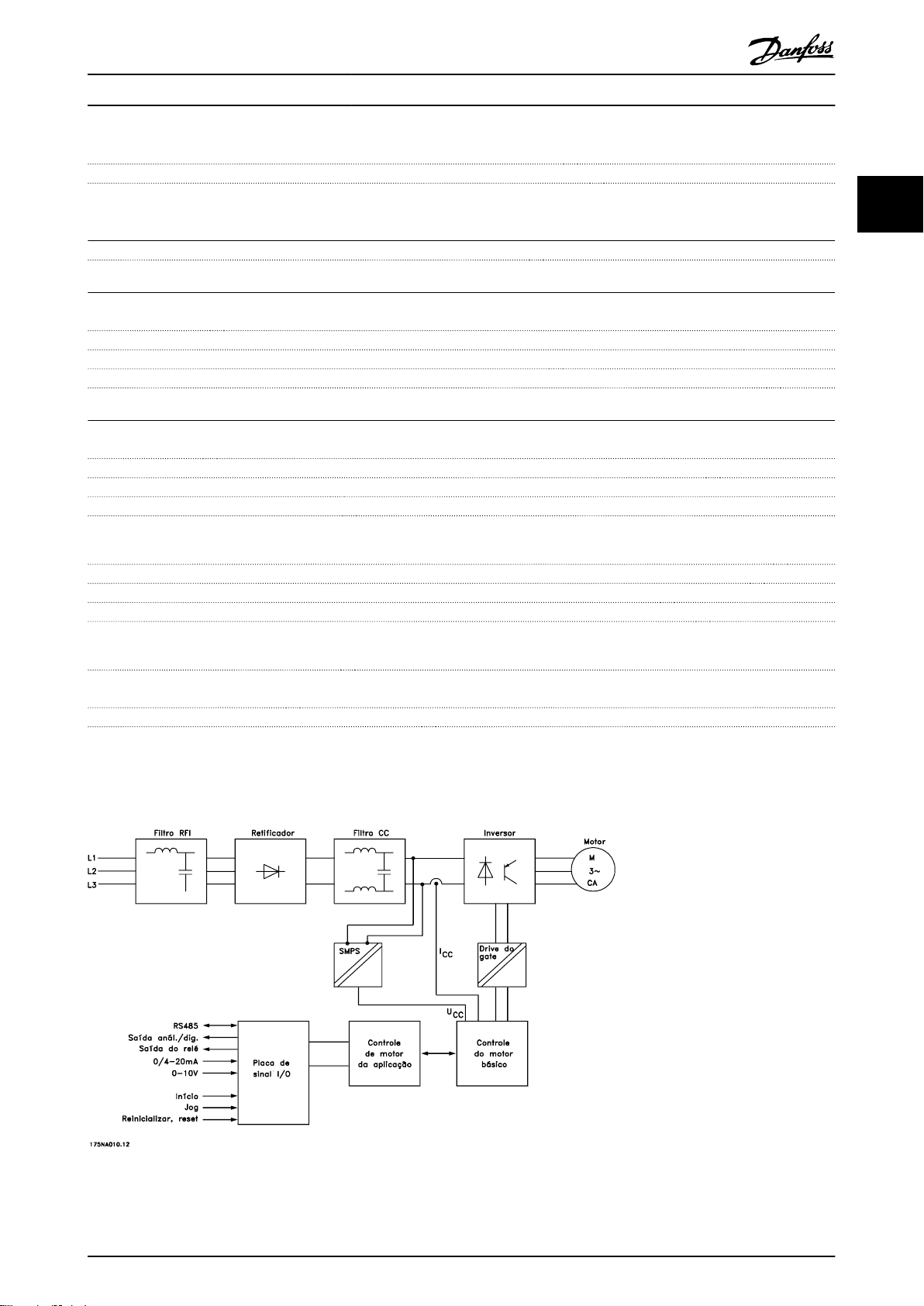
Ilustração 2.1 Diagrama Chave para a Série FCM 300
MG03BA28 - VLT® é marca registrada da Danfoss 15
Instalação
Número do Terminal Função Exemplo
1 Entrada analógica (0-20 mA) Sinal de feedback
2 Entrada analógica(0-10 V)/digital 2 Referência de velocidade
22
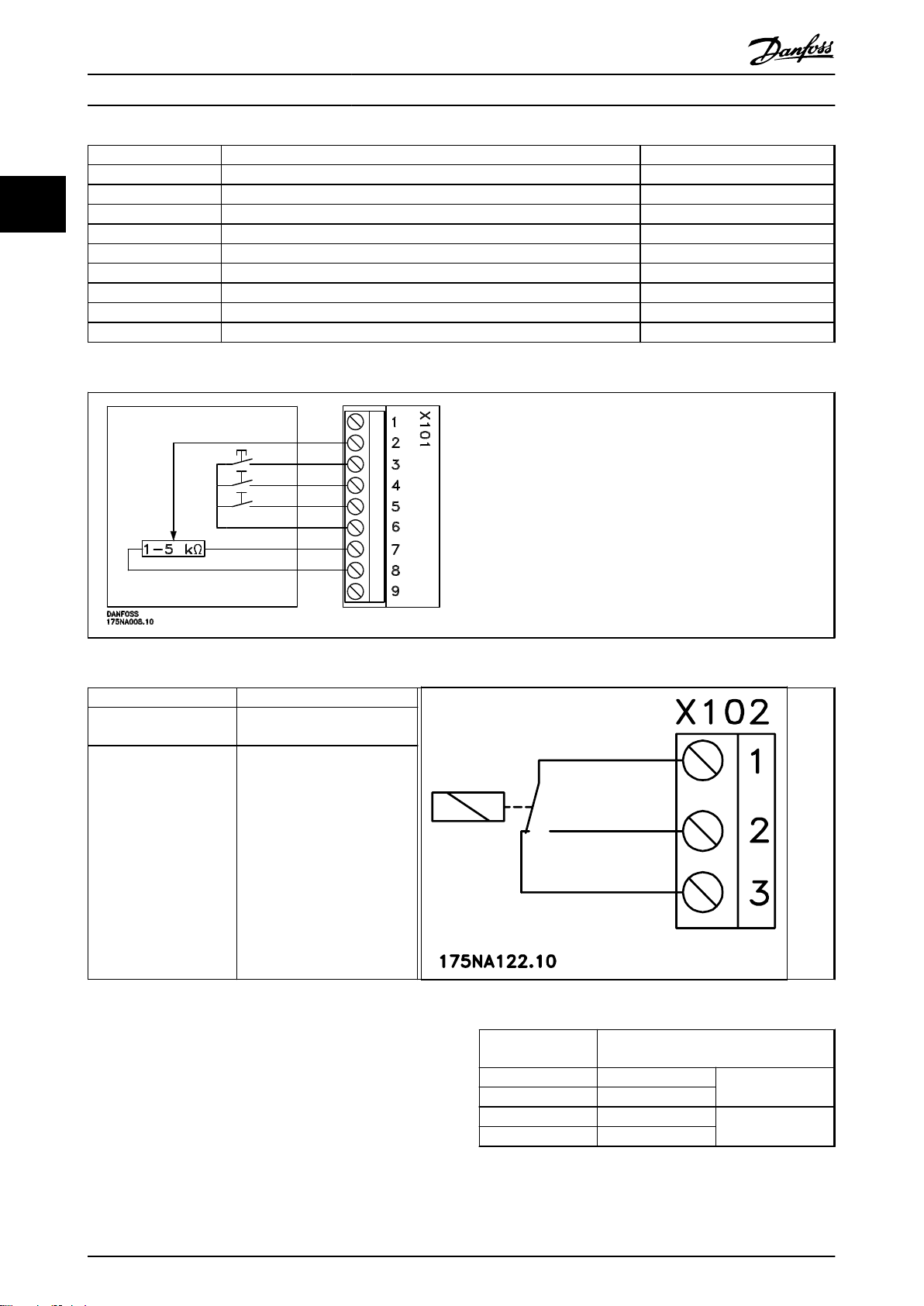
Tabela 2.2 X101: Bloco de Terminais para Sinais de Controle Analógicos/Digitais
3 Entrada digital (ou pulso) 3 Reset
4 Entrada digital (ou parada com precisão) 4 Partida
5 Entrada digital (outra) 5 Jog (velocidade fixa)
6 Alimentação de 24 V CC para entradas digitais (150 mA máx)
7 Alimentação de 10 V CC para o potenciômetro (15 mA máx)
8 0 V para os terminais 1-7 e 9
9 Saída analógica (0-20 mA)/digital Indicação de falha
VLT® DriveMotor FCM Series
Reset a ser fechado brevemente para reinicializar desarmes por
-
falha
Start deve estar fechado a fim de mudar para o modo run
-
Jog executará em velocidade fixa enquanto estiver fechado (10
-
Hz)
Speed reference (0-10 V) determina a velocidade durante o modo
-
run
Tabela 2.3 Diagrama de Conexão - Configuração de Fábrica
Número do Terminal Função
1-2 Freio desativado (normalmente
aberto)
1-3 Freio ativado (normalmente
fechado)
Tabela 2.4 X102: Bloco de Terminais para Saída do Relé
AVISO!
Veja o parâmetro 323 (saída do relé) para
saber a programação da saída do relé.
Número do
Terminal
Função
1 P RS 485 Para conexão ao
2 N RS 485
3 5 V CC Alimentação para o
4 0 V CC
barramento ou PC
barramento RS 485
Tabela 2.5 X100: Bloco de Terminais para Comunicação de Dados
16 MG03BA28 - VLT® é marca registrada da Danfoss
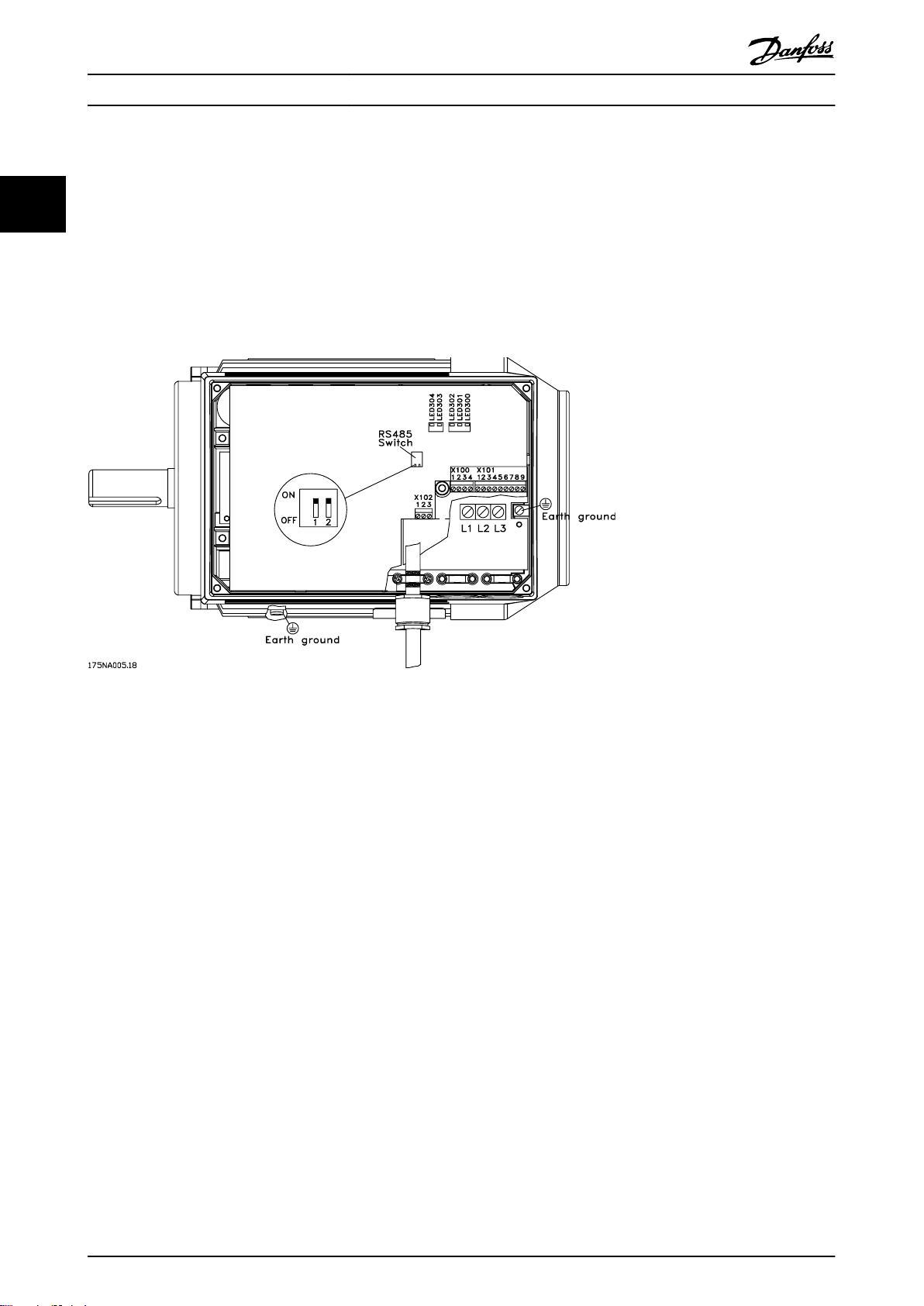
Instalação
VLT® DriveMotor FCM Series
LED 300-304
Para versões do PROFIBUS, veja o manual MG90AXYY.
LED 300 (vermelho): Desarme por falha
LED 301 (amarelo): Advertência
2.1.3 Torques de Aperto
LED 302 (verde): Sistema ligado
LED 303-304: Comunicação
Parafusos da tampa 25,6-31 lb-pol (3-3,5 Nm)
Plugues de entrada de cabo de plástico 19,5 lb-pol (2,2 Nm)
Parafusos L1, L2, L3 (linha CA) (FCM 305-340) 5-7 lb-pol (0,5-0,6 Nm)
Parafusos L1, L2, L3 (linha CA) (FCM 355-375) 15 lb-pol (1,2-1,5 Nm)
Ponto de Aterramento 30,1 lb-pol (3,4 Nm)
Tabela 2.6
Os parafusos de terminal requerem uma chave de fenda de lâmina de no máximo 2,5 mm.
Os parafusos Linha CA requerem uma chave de fenda de lâmina chata de 8 mm.
Os parafusos da tampa, o fio terra e os parafusos da braçadeira de cabo requerem uma chave de fenda T-20 Torx ou de
lâmina chata (com velocidade máx. de aperto de 300 RPM).
Seção transversal máxima do cabo
2.1.4
Observação
Use fio de cobre para 60 ºC ou melhor
Tamanho máx. de cabo Linha CA (FCM 305-340) 10 4,0
Tamanho máx. de cabo Linha CA (FCM 355-375) 6 10
Tamanho máx. do cabo de controle 16 1,5
Tamanho máximo do cabo de comunicação serial 16 1,5
Ponto de Aterramento 6 10
AWG
mm
2
2 2
Tabela 2.7
2.1.5 Tamanhos de parafusos
Parafusos da tampa M5
Fio terra e parafusos da braçadeira de cabo (FCM 305-340): M4
Fio terra e parafusos da braçadeira de cabo (FCM 355-375) M5
Tabela 2.8
MG03BA28 - VLT® é marca registrada da Danfoss 17
Instalação
VLT® DriveMotor FCM Series
2.1.6 Proteção
22
Proteção contra sobrecarga térmica do motor e dos componentes eletrônicos.
•
O monitoramento da tensão do circuito intermediário garante que o inversor desligue se esta tensão ficar muito
•
alta ou muito baixa.
Se uma das fases da rede de alimentação estiver ausente, o inversor desligará quando uma carga for aplicada ao
•
motor.
Ilustração 2.2 Arranjo dos Terminais (para a instalação, veja Quick Setup, MG03AXYY)
18 MG03BA28 - VLT® é marca registrada da Danfoss
175NA163.10
Instalação
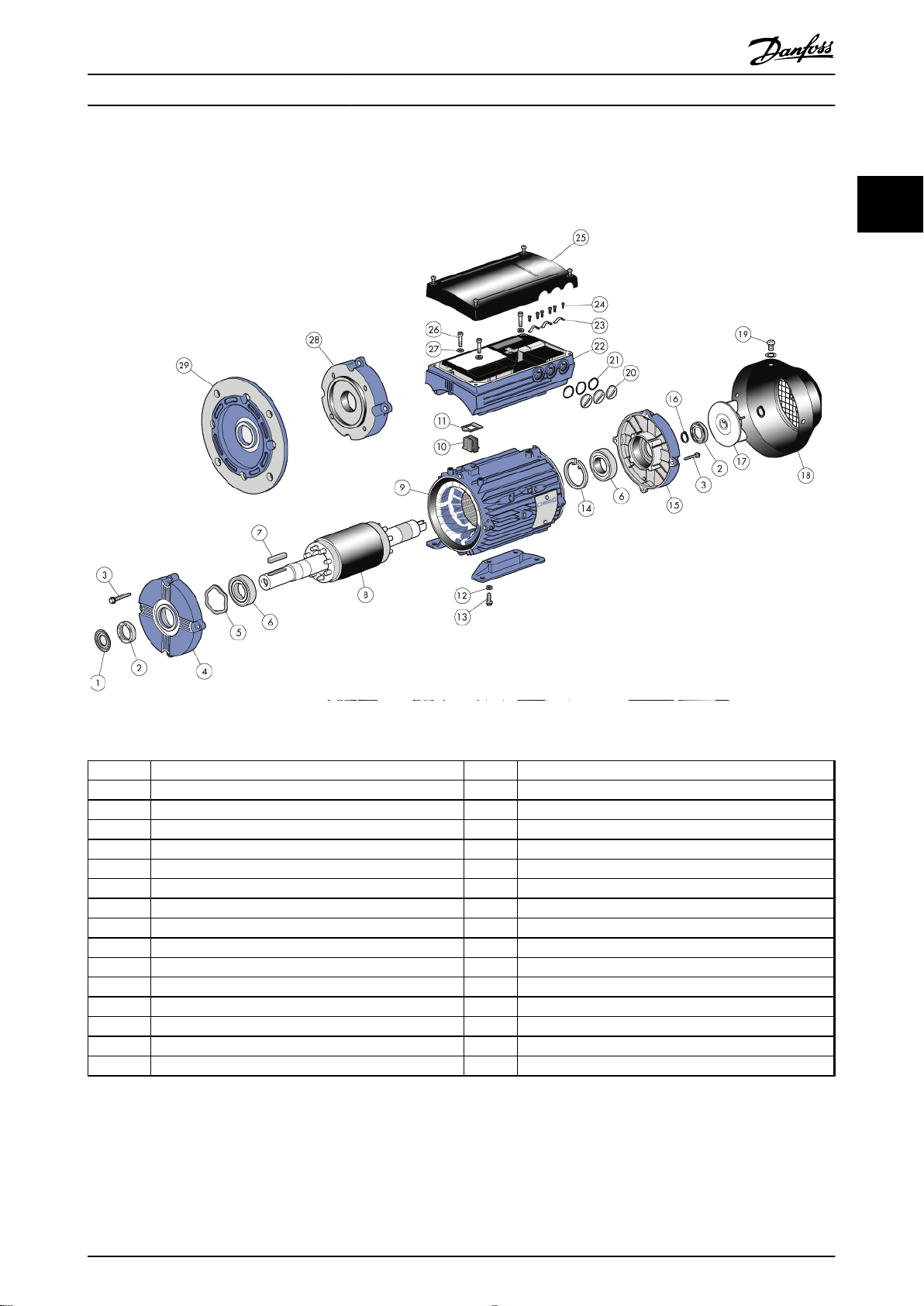
2.2 Descrição do Motor
O motor FC consiste nas seguintes peças:
VLT® DriveMotor FCM Series
2 2
Ilustração 2.3
Item Descrição Item Descrição
1 Palheta (quando ajustado) 16 Pino de retenção do rolamento
2 Drive e vedação de óleo 17 do Ventilador
3 Parafuso de blindagem lateral 18 Tampa do ventilador
4 Drive e blindagem da extremidade 19 Arruela e parafuso da tampa do ventilador
5 Arruela de pré-carga 20 Batoque aparafusado
6 Rolamento 21 O-ring
7 Chave do eixo 22 Caixa ISM
8 Conjunto do rotor 23 Estrape do cabo
9 Conjunto do estator, com ou sem pés 24 Parafusos do estrape do cabo
10 Bloco do conector 25 Tampa da caixa ISM
11 Gaxeta 26 Parafuso
12 Pé destacável 27 Arruela
13 Arruela e parafuso de fixação do pé 28 Blindagem lateral da face
14 Trava do pino de retenção do rolamento 29 Blindagem lateral da flange
15 Blindagem lateral não acionada
Tabela 2.9
MG03BA28 - VLT® é marca registrada da Danfoss 19
Instalação
VLT® DriveMotor FCM Series
2.2.1 Manuseio do Motor FC
O manuseio e movimentação dos VLT® DriveMotors
22
(motores FC) deve ser realizado somente por pessoal
qualificado. A documentação completa do produto e as
instruções de utilização devem acompanhar as ferramentas
e o equipamento necessário para uma prática de trabalho
segura. Os olhais e/ou munhões de levantamento
fornecidos com o motor FC foram projetados para suportar
apenas o peso do motor FC e não o peso do motor FC e
outros equipamentos auxiliares acoplados a ele. Tenha
absoluta certeza de que os guindastes, macacos, eslingas e
alavancas de suspensão sejam capazes de suportar o peso
Rolamentos
2.2.2
A solução padrão é fixar o rolamento no lado do drive do
motor (lado da saída do eixo)
Para evitar entalhes estáticos, a área de armazenagem
deve estar livre de vibrações. Nos casos em que a
exposição às vibrações for inevitável, o eixo deve ser
travado. Os rolamentos podem ser fixados com um
dispositivo de trava do eixo, que pode ser mantido na
posição durante o armazenamento. Os eixos devem ser
manualmente girados um quarto de revolução, a cada
semana. Os rolamentos são enviados da fábrica totalmente
cheios de graxa a base de lítio.
do equipamento a ser levantado. Onde houver um olhal
fornecido com o motor, deverá ser parafusado até a sua
saliência ficar bem firme na superfície da estrutura do
estator a ser levantado.
Tipo de FCM Peso aproximado [kg]
FCM 305 11
FCM 307 13
FCM 307 17
FCM 315 20
FCM 322 26
FCM 330 28
FCM 340 37
FCM 355 56
FCM 375 61
Tamanho do
chassi
80-132 Esso unirex N3 -30 °C a + 140 °C
Tabela 2.11 Lubrificação
Tipo de lubrificação Faixa de temperatura
Tabela 2.10 Peso
Número máximo de horas de vida do rolamento (Lna) esperado a 80 °C de temperatura do rolamento x 103 horas.
FCM
305-315
355-375
A duração do rolamento Lna é o valor nominal ajustado L10, levando em conta: -Confiabilidade - Melhoria do material - Condições de
lubrificação.
Tabela 2.12 Vida Útil do Rolamento
FCM Rolamentos Vedação do óleo - Eixo x O/D x largura em mm
Extremidade do
acionador
305-307 6204ZZ 6003ZZ 20x30x7 17x28x6
311-315 6205ZZ 6003ZZ 25x35x7 17x28x6
322-330 6206ZZ 6005ZZ 30x42x7 25x37x7
340 6206ZZ 6005ZZ 30x42x7 25x37x7
355-375 6208ZZ 6005ZZ 40x52x7 25x37x7
Tabela 2.13 Vedações de Óleo e Referências do Rolamento Padrão
Horiz. Vert. Horiz. Vert.
30 30 30 30322-340
Extremidade não do
3000 min
acionador
-1
Extremidade do acionador
1500 min-1
Extremidade não do acionador
20 MG03BA28 - VLT® é marca registrada da Danfoss
Instalação
VLT® DriveMotor FCM Series
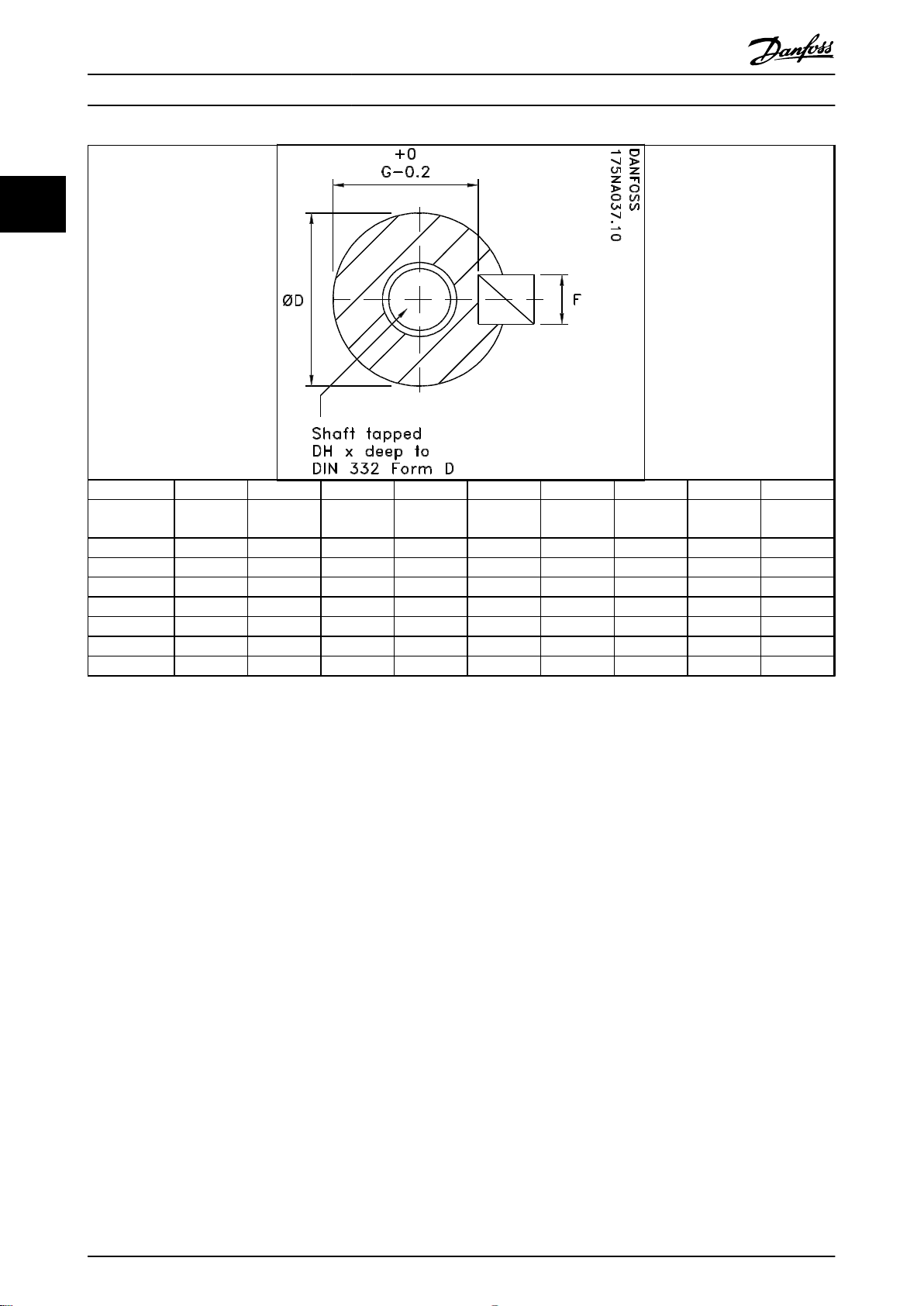
2.2.3 Eixos de saída
Os eixos de saída são produzidos com aço existente à
tração de 35/40 toneladas (460/540 MN/m2). Os eixos do
da extremidade de acionamento são fornecidos com um
orifício roscado conforme DIN 332 Formulário D e um
rasgo de chaveta de perfil fechado como padrão.
Balanceamento
Todos os motores são balanceados dinamicamente,
conforme a ISO 8821 e a convenção principal do IEC
60034-14.
FCM 2 polos 4 polos
305 0,00082 0,0019
307 0,00082 0,0027
311 0,00090 0,0022
315 0,0011 0,0030
322 0,0024 0,0042
330 0,0028 0,0050
340 0,0053 0,0091
355 0,0072 0,0143
375 0,0097 0,0190
Tabela 2.14 Inércia
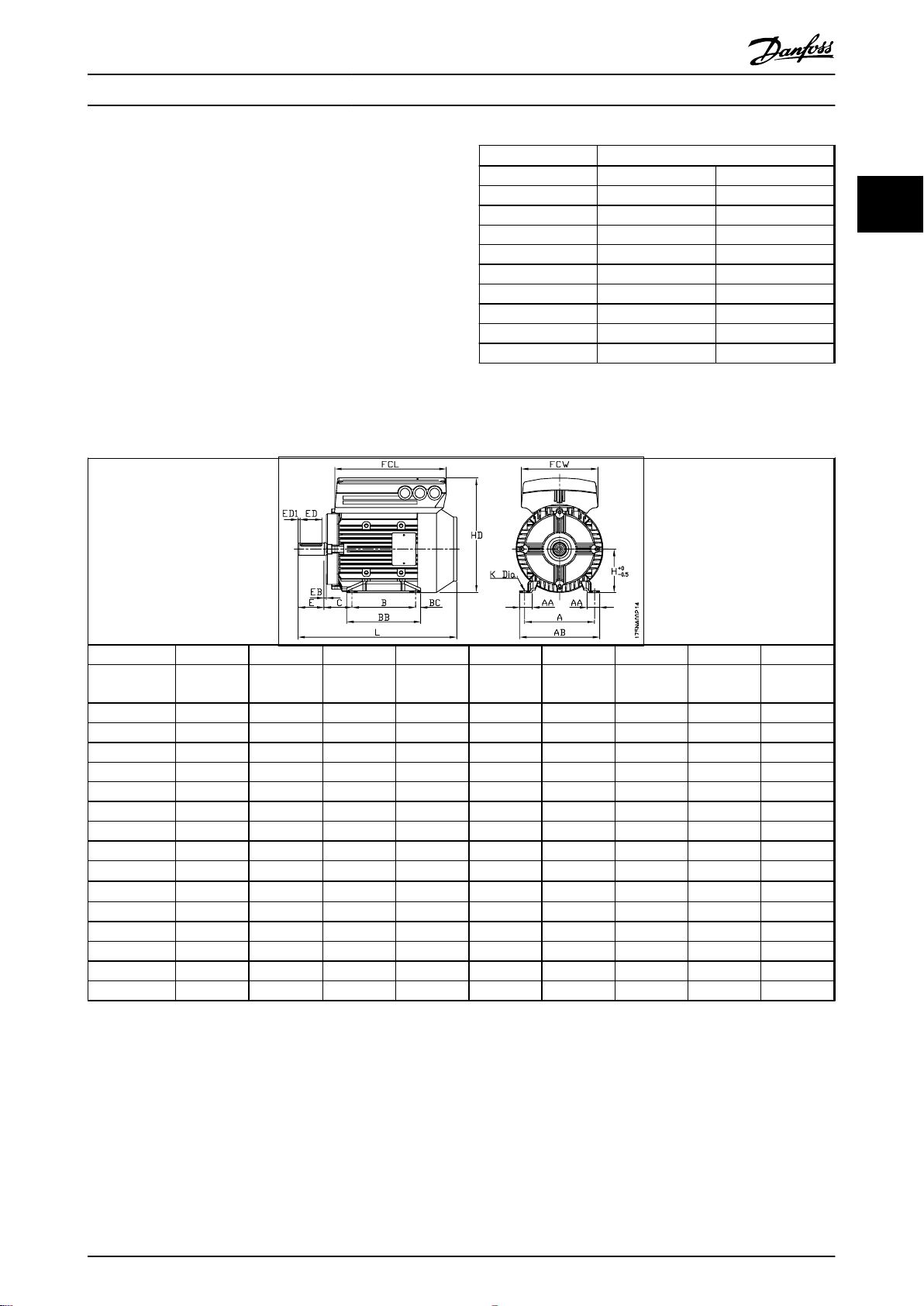
Dimensões
2.2.4
J [kgm2]
2 2
FCM Geral 305 307 311 315 322 330 340 355 375
Tamanho do
chassi
A [mm] 125 125 140 140 160 160 190 216 216
B [mm] 125 125 140 140 140 140 178
C [mm] 50 50 56 56 63 63 70 89 89
H [mm] 80 80 90 90 100 100 112 132 132
K [mm] 10 10 10 10 12 12 12 12 12
AA [mm] 27 27 28 28 28 28 35 38 38
AB [mm] 157 157 164 164 184 184 218 242 242
BB [mm] 127 127 150 150 170 170 170 208 208
BC [mm] 13,5 13,5
L [mm] 278 278 322 322 368 368 382 484,5
AC [mm] 160 160 178 178 199 199 215 255 255
HD [mm] 219,5 219,5 238 238 264 264 292 334 334
EB [mm] 1,5 1,5 2,5 2,5 6 6 6 6 6
FCL [mm] 206 206 230 230 256 256 286 357,5 357,5
FCW [mm] 141 141 158 158 176 176 196 242,5 242,5
Tabela 2.15 Montagem sobre Pés - B3
1)
motor de 2 polos = 37,5 2) motor de 2 polos = 53
80 80 90 90 100 100 112 132 132
12,5
1)
12,5
1)
15 15 15 53 15
484,5
2)
MG03BA28 - VLT® é marca registrada da Danfoss 21
Instalação
VLT® DriveMotor FCM Series
22
FCM 305 307 311 315 322 330 340 355 375
Tamanho do
chassi
D [mm] 19 19 24 24 28 28 28 38 38
E [mm] 40 40 50 50 60 60 60 80 80
ED [mm] 32 32 40 40 50 50 50 70 70
ED1 [mm] 4 4 5 5 5 5 5 5 5
DH M6x16 M6x16 M8x19 M8x19 M10x22 M10x22 M10x22 M12x28 M12x28
F [mm] 6 6 8 8 8 8 8 10 10
G [mm] 15,5 15,5 20 20 24 24 24 33 33
80 80 90 90 100 100 112 132 132
Tabela 2.16 Extremidade do Eixo do Drive
22 MG03BA28 - VLT® é marca registrada da Danfoss
Instalação
VLT® DriveMotor FCM Series
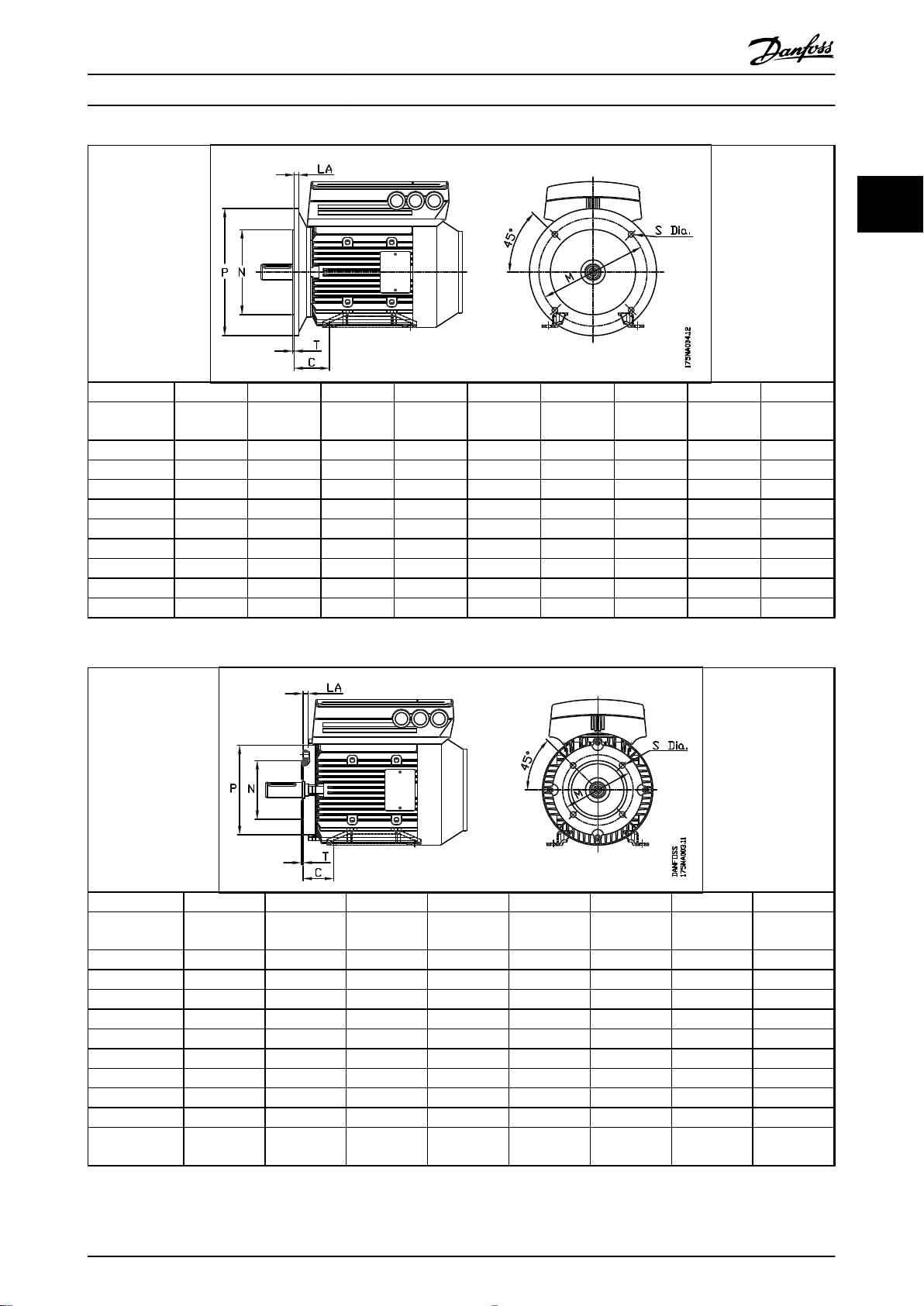
2 2
B5 FCM
Tamanho do
chassi
Ref. IEC FF85 FF100 FF115 FF130 FF165 FF165 FF215 FF215 FF265
Ref. DIN A105 A120 A140 A160 A200 A200 A250 A250 A300
C [mm] 50 56 63 70 89
M [mm] 85 100 115 130 165 165 215 215 265
N [mm] 70 80 95 110 130 130 180 180 230
P [mm] 105 120 140 160 200 200 250 250 300
S [mm] 10 10 12 12 14,5 14,5 14,5
T [mm] 3 3,5 3,5 3,5 4 4 4
LA [MM] 7 7 12 10 12 12 12
Tabela 2.17 Montagem do Flange - B5, B35 (B3+B5)
48 56 63 71 80 90 100 112 132
305/307 311/315 322/330 340 355/375
B14 FCM
Tamanho do
chassi
Ref. IEC FT65 FT75 FT85 FT100 FT115 FT130 FT130 FT165
Ref. DIN C80 C90 C105 C120 C140 C160 C160 C2OO
C [mm] 50 56 63 70 89
M [mm] 65 75 85 100 115 130 130 165
N [mm] 50 60 70 80 95 110 110 130
P [mm] 80 90 105 120 140 160 164 200
S [mm] M5 M6 M6 M8 M8 M8 M10
T [mm] 2,5 2,5 3 3 3,5 3,5 3,5
LA [MM] 9 9 9 9 8,5 13 13
Máx.o flange
B14
Tabela 2.18 Montagem Facial - B14, B34 (B3+B14)
56 63 71 80 90 100 112 132
8,5 11 11 11,5 15 15,5 17
MG03BA28 - VLT® é marca registrada da Danfoss 23
305/307 311/315 322/330 340 355/375
Instalação
VLT® DriveMotor FCM Series
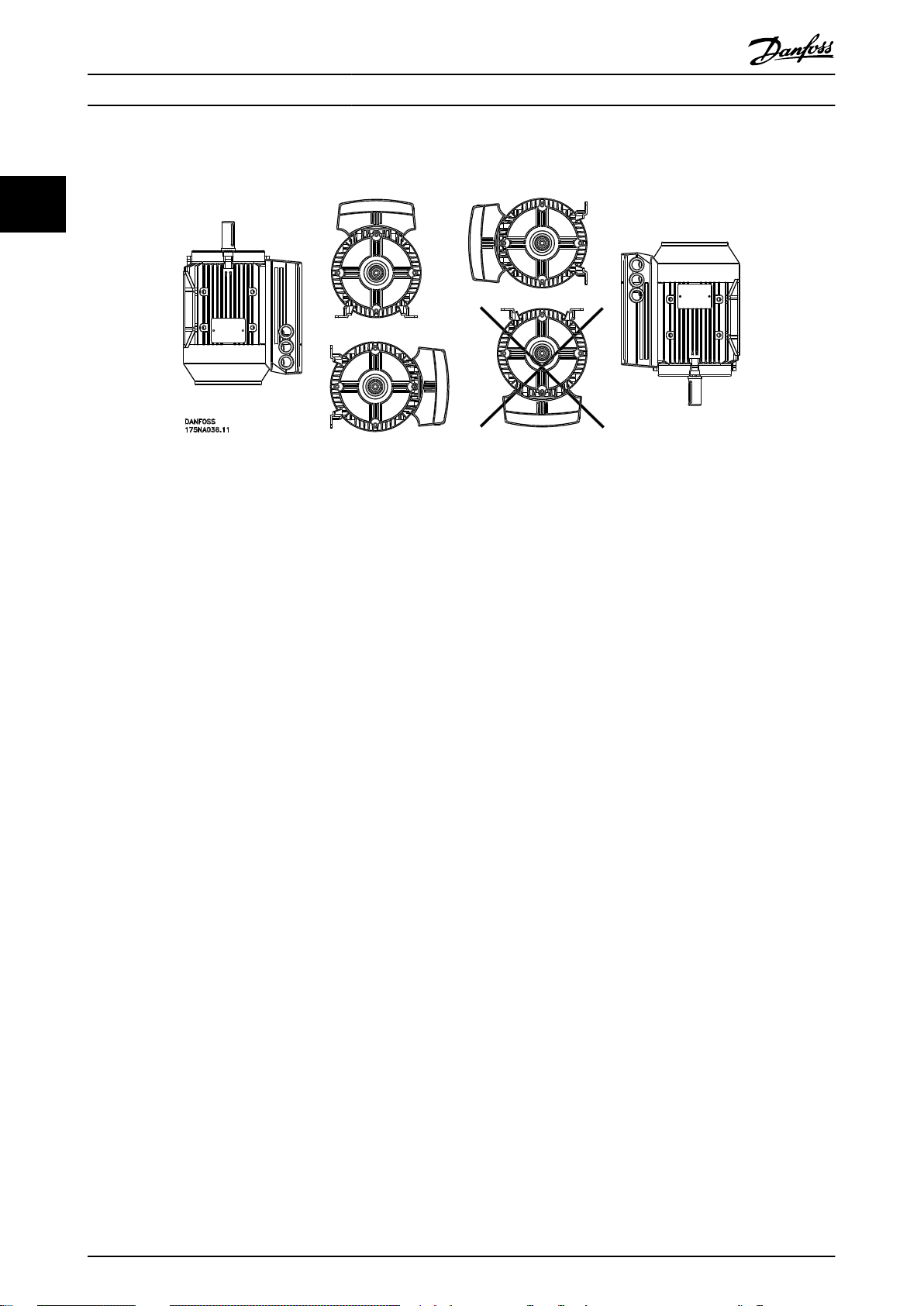
2.2.5 Instalação do Motor FC
22
Ilustração 2.4
Os motores FC devem ser instalados com o espaço
adequado para a manutenção de rotina. É recomendável
deixar um espaço de trabalho mínimo de 0,75 m em torno
do motor. O espaço apropriado em torno do motor,
especialmente na entrada do ventilador (50 mm) é
também necessário para facilitar o fluxo de ar.
Em um local onde vários motores FC estão instalados
próximos uns dos outros, deve-se tomar cuidado para
assegurar que não haja re-circulação do ar quente oriundo
da exaustão. Os alicerces devem ser sólidos, rígidos e
nivelados.
AVISO!
Instalação Elétrica
Não remova a lâmina superior localizada dentro do
inversor, pois ela faz parte do dispositivo de proteção.
Ajustando pinhões, roldanas e acoplamentos.
Estes devem Ter diâmetro compatível com os nossos
limites padrão e ajustados no eixo com um movimento de
rosca. Deve-se prestar atenção à correta proteção de todas
as partes móveis.
AVISO!
Bater nas conexões no eixo do motor FC com um
martelo ou marreta causa danos ao rolamento. Isto leva
a um aumento no ruído gerado pelo rolamento e em
uma redução significativa em sua vida útil.
AVISO!
Máx. o flange B14, veja 2.2.4 Dimensões .
2.2.6 Alinhamento
Quando a aplicação necessitar de um acoplamento direto,
os eixos devem estar corretamente alinhados em todos os
três planos. Um mau alinhamento pode ser a fonte
principal de ruído e vibração.
Deve-se deixar espaço para a extremidade livre do eixo
bem como para a expansão térmica nos planos axial e
vertical. É preferível usar acoplamentos de drive flexíveis.
24 MG03BA28 - VLT® é marca registrada da Danfoss
Instalação
Eixo horizontal Eixo vertical
Tipo Polos Carga em
direção ao
motor
W-DA80
W-DA90
W-DA100
W-DA112
W-DA132
Tabela 2.19 Cargas Axiais e Radiais Externas Máximas Permissíveis em Newtons
2 339 539 321 565 362 521 774
4 303 503 283 530 330 583 729
2 444 684 421 716 476 661 915
4 398 638 366 682 442 606 854
2 781 1101 743 1159 839 1063 1295
4 710 1030 655 1107 787 975 1215
2 768 1088 715 1170 850 1035 1295
4 690 1010 612 1131 811 932 1202
2 1355 1707 1266 1838 1486 1618 2114
4 1253 1605 1130 1779 1427 1482 2068
VLT® DriveMotor FCM Series
Carga distante
do motor
Carga em
direção ao
Eixo para cima Eixo para baixo
distante do
motor
Carga
motor
Carregar Descarregar Carga radial
máxima permissível
na extremidade do
eixo (montagem
horizontal)
2 2
Torques dos Parafusos
2.2.7
As blindagens de extremidade e a tampa devem ser
fixadas com os tamanhos de parafuso e os torques
detalhados em Tabela 2.20.
Tipo de
FCM
305-307 80 M5 5
311-315 90 M5 5
322-330 100 M6 (taptite) 8-10
340 112 M6 (taptite) 8-10
355-375 132 M8 (taptite) 29
Torque dos parafusos da TAMPA: 2,2-2,4 Nm
Tabela 2.20 Torques para os parafusos de fixação da blindagem lateral
2.2.8
Tamanho do
chassi
Manutenção
Diâmetro dos
parafusos Nm.
Torque
Limpeza de rotina do motor FC
Remova a tampa do ventilador e assegure que todos os
orifícios para a entrada de ar estejam completamente
desobstruídos. Limpe qualquer sujeira e obstrução da parte
de trás do ventilador e ao longo dos frisos da carcaça,
como também entre o motor e a unidade do inversor.
Manutenção periódica da unidade do motor
1. Remova a unidade do inversor, a tampa do
ventilador e o ventilador que está conectado à
extensão do eixo. Afrouxe e remova os parafusos
da tampa do rolamento e os parafusos/ prisio-
neiros da blindagem da extremidade. Em seguida,
remova o ressalto da blindagem da extremidade.
2. O rotor pode agora ser cuidadosamente retirado
do estator, com cuidado para não danificar o
orifício do estator, nem o enrolamento do rotor
nem do estator.
3. Tendo desmontado o motor, a manutenção pode
ser realizada para remover toda a poeira. Para
este fim, o uso de uma linha de ar fornecendo ar
comprimido seco sob uma pressão comparativamente menor é melhor, visto que um fluxo de
ar de alta velocidade pode forçar poeira para
dentro dos espaços entre os enrolamentos e ao
isolamento, etc. Solventes para remoção de graxa
podem causar danos ao verniz ou ao isolamento
4. O motor FC deve ser remontado na ordem
inversa da desmontagem, lembrando de recolocar
com cuidado as blindagens laterais nos
rolamentos e batoques. NÃO FORCE.
5. Antes de iniciar, verifique se o rotor gira
livremente. Verifique se as conexões elétricas
estão corretas.
6. Reajuste as roldanas, acoplamentos, correntes
articuladas, etc., que tenham sido removidas, com
especial cuidado para assegurar um correto
alinhamento com a parte acionada, pois um
desalinhamento levará a um eventual problema
com o rolamento e quebra do eixo.
7. Ao substituir parafusos e pinos, tome cuidado
para usar somente os que tenham a qualidade e
a resistência à tensão recomendada pelo
fabricante. Também devem ter forma de rosca
idêntica e mesmo comprimento (veja Tabela 2.24).
MG03BA28 - VLT® é marca registrada da Danfoss 25
Instalação
VLT® DriveMotor FCM Series
2.2.9 Proteção térmica do FCM 300
A proteção termal do FC e do motor é abordada da
22
seguinte forma:
As situações de sobrecarga são tratadas pela
•
carga elétrica calculada (I2X t).
Falta de ventilação e alta temperatura ambiente
•
são tratadas pela medição da temperatura. O
derating para baixa velocidade (devido à falta de
ventilação) não é incorporado no cálculo da carga
elétrica, mas vigiado pela medição da
temperatura. Por isso, a ventilação forçada é
coberta automaticamente.
Carga elétrica
A corrente é medida no barramento CC e a carga estimada
é calculada. O nível da carga elétrica é definido no torque
de saída de 105%. Acima desse nível, o contador aumenta;
abaixo do nível, ele diminui. A marcação do contador
começa em zero. Quando ele chega a 100, ocorre um
desarme na unidade. Em 98 aparece uma indicação de
advertência (LED e palavra de status).
O valor pode ser lido no parâmetro 537. (LCP:).
temperatura do dissipador).
Os níveis de temperatura parecem altos, mas, devido a um
aquecimento local do sensor, os níveis práticos da
temperatura do ar interior ficam cerca de 10 ºC mais
baixos.
2.3 Controle Local
2.3.1 Kit de Plugue de Serviço (175N2546)
Objetivo
Fazer o LCP 2 e o PROFIBUS funcionarem ao mesmo
tempo. O plug de serviço pode ser usado com o FCM 300
com número de série 03Gxxx e versão do software a partir
de 2.03. Usado em conjunto com o cabo do kit de plugs
175N0162.
Carga
0% - 60 s
20% - 100 s
40% - 150 s
60% - 200 s
80% - 250 s
105% 900 s (se acima de 105%) 300 s (se abaixo de 105%)
120% 550 s 140% 210 s 160% 60 s >165% 20 s -
No freio CA total (parâmetro 400), uma carga > 165% é
simulada => 20 seg para desarme.
O valor pode ser lido no parâmetro 527. (LCP: FC térmico).
A medição de temperatura detecta a temperatura dentro
da caixa de sistemas eletrônicos.
No nível de advertência => Aparece uma indicação de
advertência (LED e status word) e a unidade poderá
desarmar se a temperatura não voltar para abaixo do nível
de advertência em 15 minutos. Se a função TEMP.DEP.SW
estiver ativada no parâmetro 412, a frequência de
chaveamento será diminuída gradualmente para 2 kHz
tentando abaixar a temperatura.
Tempo de 0 a 100 Tempo de 100 a 0
Tabela 2.21
Ilustração 2.5
Nível de desarme => Indicação de alarme e desarme
imediato (LED e status word).
26 MG03BA28 - VLT® é marca registrada da Danfoss
Instalação
VLT® DriveMotor FCM Series
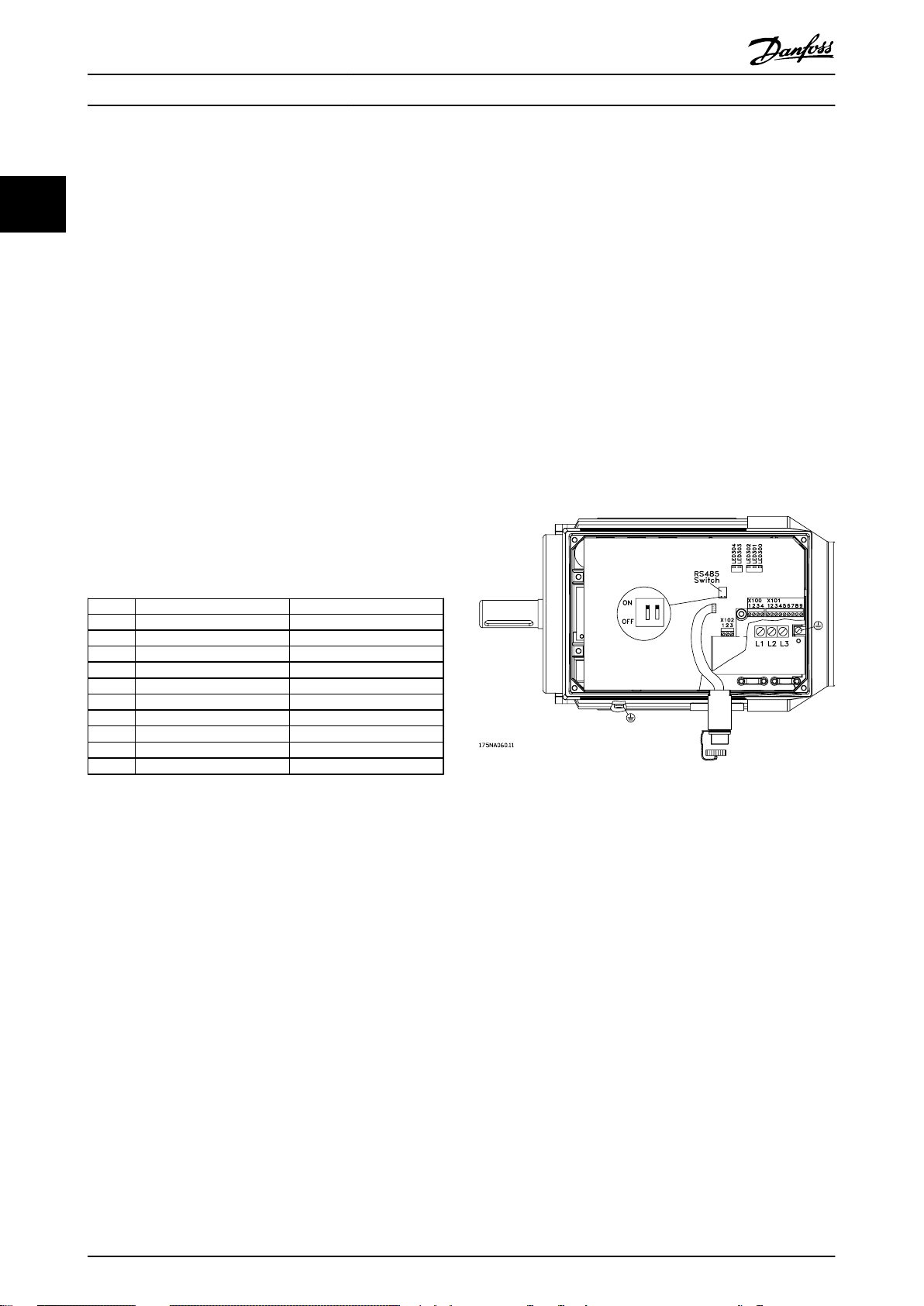
2.3.2 Kit de Plugue (175N2545)
Objetivo
Fazer uma conexão plugável entre LCP 2 e FCM 300.
Usado em conjunto com o cabo do kit de plugs 175N0162.
Ilustração 2.6
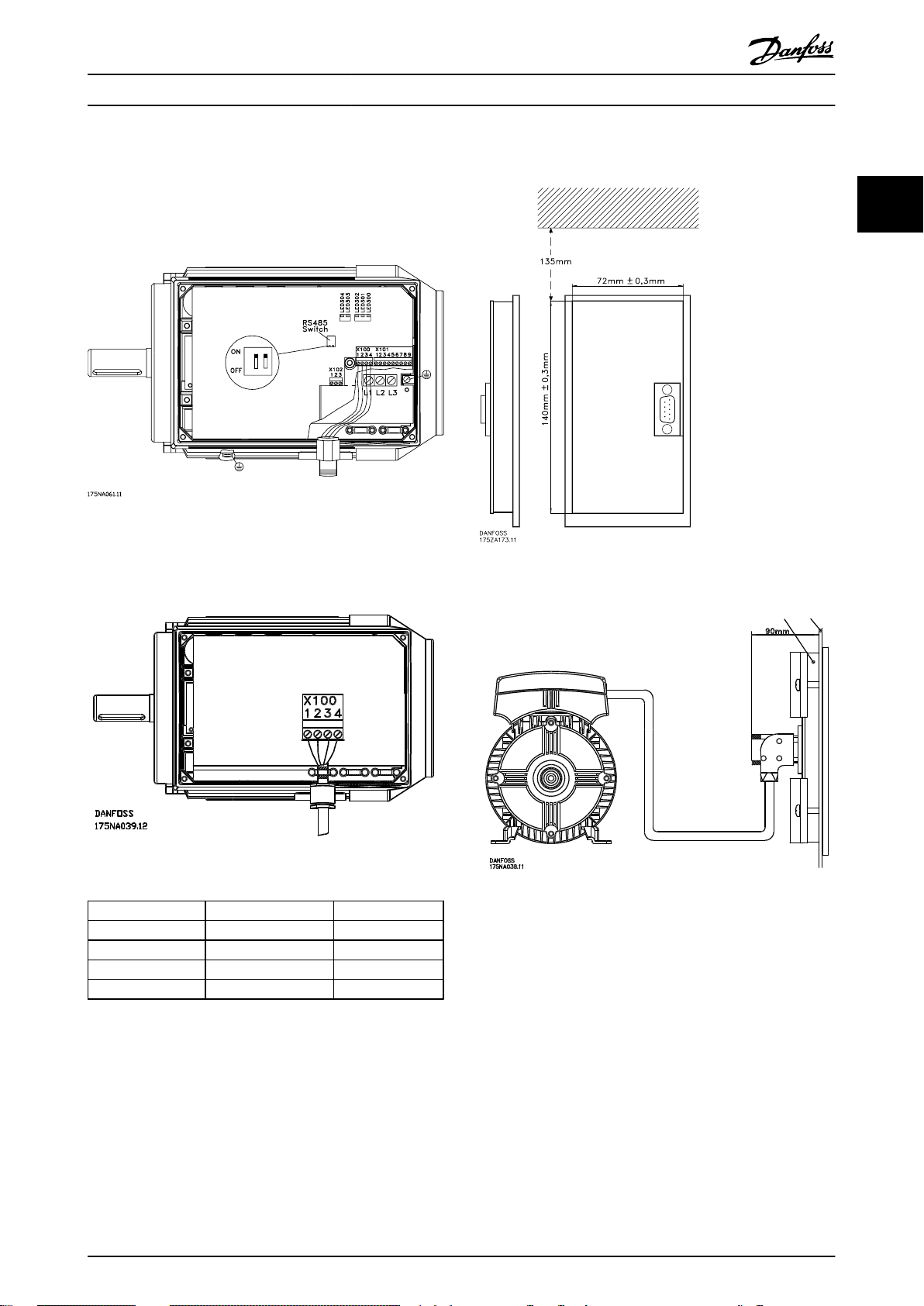
Kit de Montagem Remota (175N0160)
2.3.3
2.3.4
Kit de Montagem Remota (cont.)
Ilustração 2.8
2 2
Ilustração 2.7 Conexões
Cor do fio/ Terminal X100/ Pino D-sub
amarela 1 8
verde 2 9
vermelho 3 2
azul 4 3
Tabela 2.22
MG03BA28 - VLT® é marca registrada da Danfoss 27
Ilustração 2.9
Instalação
2.3.5 Opcional de Potenciômetro
(177N0011)
VLT® DriveMotor FCM Series
22
Opcional para controlar a referência por meio de um
potenciômetro. Monta-se o opcional ao invés de uma
braçadeira de cabo. O potenciômetro é acionado
removendo-se o plugue aparente para programar a
referência desejada e, em seguida, recoloca-se o plugue.
Ilustração 2.10
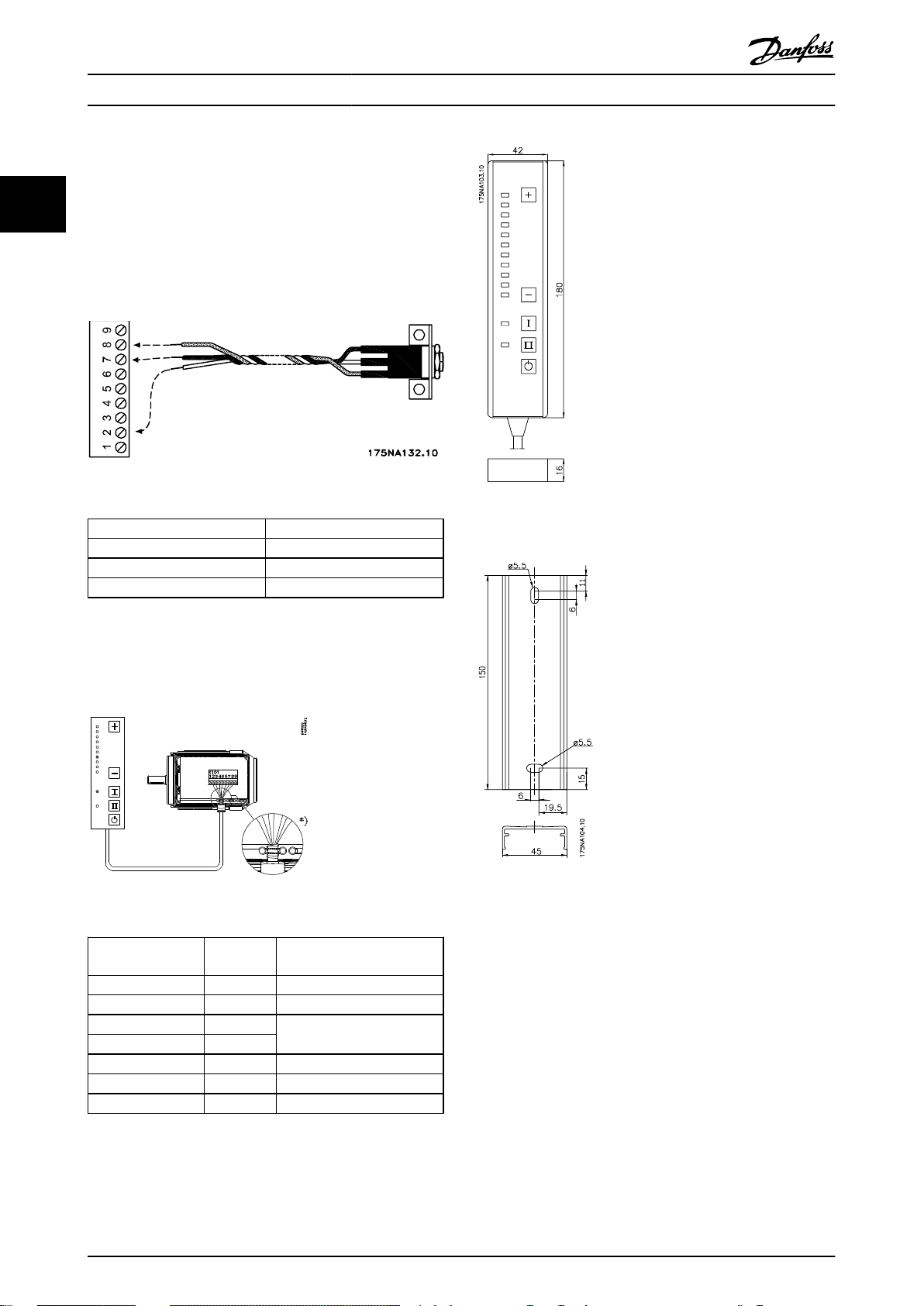
Ilustração 2.12 Painel para Operação Local (LOP) 175N0128 IP
65
Cor do fio Terminal X101
Branco 2 (entrada analógica)
Vermelho 8 (0 V)
Preto 7 (+10 V)
Tabela 2.23
Teclado de Operação Local (LOP)
2.3.6
(175N0128) IP65
Ilustração 2.11
Cor do fio Terminal
número
Branco 2 Referência
Marrom 3 Reset
Roxo* ou Cinza 4
Verde 5
Vermelho 6 +24 V
Amarelo 7 +10 V
Azul 8 Terra
Função
Veja Ilustração 2.11
Ilustração 2.13 Peça para fixação do LOP 175N2717 (incluído
no 175N0128)
Tabela 2.24 Fiação
* Pode ser laranja em alguns cabos
28 MG03BA28 - VLT® é marca registrada da Danfoss
Instalação
Função/configurações Tecla I (Start) Tecla II (Start)
Default - operação em velocidade dupla
(conectar o fio roxo):
Sem alterações na programação de fábrica.
Função 2 - Operação em modo duplo (conectar
o fio roxo):
Selecione os modos de operação desejados, nos
Setups 1 e 2 (utilize o par. 4-6) Parâmetro 335 =
18 (selecionar Setup)
Função 3 - Operação em direção dupla (conectar
o fio cinza):
Parâmetro 335 = 10 (partida em reversão)
Parâmetro 200 = 1 (nos dois sentidos)
Tabela 2.25
*Se não for necessário reset, não conecte o fio marrom
**ou programe o parâmetro 213
VLT® DriveMotor FCM Series
Funcionar em
referência definida (+/-)
Funcionar com Setup 1 Funcionar com Setup 2 Stop (e reset* - se houver
Funcionar para adiante Funcionar reverso Parar (e reset* - se houver
Funcionar em 10 Hz**
velocidade de jog
Use as teclas [+[/[-] para ajustar a referência
Tecla (Start)
Stop (e reset* - se houver
desarme)
desarme)
desarme)
2 2
No momento da energização, a unidade estará sempre no modo de parada. A referência programada será gravada durante
a desenergização. Se você desejar o modo de partida permanente, conecte o terminal 6 ao terminal 4 e não conecte o fio
roxo/cinza ao terminal 4. Isto significa que a função de parada no LOP está desabilitada.
AVISO!
Feitas as instalações, corte ou isole o fio em excesso.
MG03BA28 - VLT® é marca registrada da Danfoss 29

Programação
3 Programação
VLT® DriveMotor FCM Series
33
3.1 Parâmetros
3.1.1 Painel de Controle (175NO131)
O motor FC tem, opcionalmente, um Painel de Controle
Local - LCP 2 que faz uma interface completa para
operação e monitoramento do motor FC.
IP 65 frontal.
3.1.2 Instalação do LCP
O LCP 2 está conectado ao terminal X100, 1-4 (veja a
instrução separada MI03AXYY).
1.
Kit do Plugue de Serviço (175N2546) (veja 2.3.1
Kit de Plugue de Serviço (175N2546)) e cabo
175N0162
2.
Kit de plugue (175N2545) (veja 2.3.2 Kit de Plugue
(175N2545)) e cabo 175N0162
3.
Kit de montagem remota (175N0160) (veja 2.3.4
Kit de Montagem Remota (cont.))
Funções do LCP
3.1.3
As funções do painel de controle podem ser divididas em
três grupos:
Display
•
Teclas para alterar os parâmetros do programa
•
Teclas para operação local
•
Todos os dados são indicados no display alfanumérico de
4 linhas, que na operação normal tem capacidade de
apresentar sempre 4 variáveis de operação e 3 condições
de operação. Durante a programação, todas as
informações necessárias para a programação de
parâmetros rápida e eficiente, o motor FC será exibido.
Como suplemento ao display, existem três LEDs para
tensão, advertência e alarme. Todos os parâmetros do
programa do motor FC podem ser mudados imediatamente no painel de controle, exceto se a função tiver
sido bloqueada por meio do parâmetro 018.
Ilustração 3.1
30 MG03BA28 - VLT® é marca registrada da Danfoss

Programação
3.1.4 Display
VLT® DriveMotor FCM Series
O display LCD tem luz de fundo e um total de 4 linhas
alfanuméricas junto com uma caixa que mostra o sentido
de rotação (seta) e o Setup selecionado, bem como o
Setup no qual a programação é realizada, se for o caso.
Ilustração 3.2
A 1ª linha mostra continuamente até 3 medidas no estado
de operação normal ou um texto que explica a 2ª linha.
A 2ª linha mostra uma medida com a unidade relacionada
continuamente, independentemente do status (exceto no
caso de alarme/advertência).
Ilustração 3.4
Se determinados limiares de valores forem excedidos, a
lâmpada de alarme e/ou advertência é ativada, ao mesmo
tempo em que um texto de estado e de alarme é
mostrado no painel de controle.
O LED indicador de tensão acende quando o motor FC é
alimentado; ao mesmo tempo a luz de fundo do display
acende-se.
Teclas de Controle
3.1.6
As teclas de controle estão divididas por funções. Isso
significa que as teclas entre o display e os LEDs
indicadores são utilizadas para o setup dos parâmetros,
inclusive para a escolha das indicações de display, durante
a operação normal.
3 3
A 3ª linha normalmente está em branco e é usada no
modo menu para mostrar o número do parâmetro
selecionado ou o número e nome do grupo do parâmetro.
A 4ª linha é usada no status operacional para mostrar um
texto de status ou no modo de mudança de dados para
mostrar o valor do parâmetro selecionado.
Ilustração 3.3
Uma seta indica o sentido de rotação do motor. Além
disso, o Setup selecionado como o Setup Ativo no
parâmetro 004 é mostrado. Ao programar um Setup
diferente do Setup Ativo, o número do Setup que está
sendo programado aparece à direita. Este número desse
segundo Setup piscará.
3.1.5
LEDs
Na parte inferior do painel de controle há um LED
vermelho de alarme e um LED amarelo de advertência,
bem como um LED verde.
Ilustração 3.5
As teclas para o controle local encontram-se sob os LEDs
indicadores.
Ilustração 3.6
MG03BA28 - VLT® é marca registrada da Danfoss 31

Programação
VLT® DriveMotor FCM Series
3.1.7 Funções das Teclas de Controle
[DISPLAY /STATUS] é utilizada para
selecionar o modo display ou para voltar
para o Modo display do modo Menu
Rápido ou do modo Menu
33
Tabela 3.1
[QUICK MENU] é utilizado para a
programação dos parâmetros que
pertencem ao modo menu rápido. É
possível comutar diretamente entre o
modo menu rápido e o modo menu.
[MENU] é utilizado para a programação
de todos os parâmetros. É possível
comutar diretamente entre o modo menu
e o modo menu rápido.
[CHANGE DATA] é utilizada para a troca
de parâmetros selecionados seja no modo
menu quanto no modo menu rápido.
[CANCEL] é utilizada se a troca de um
parâmetro selecionado não deve ser
efetuada.
[ OK] é utilizada para confirmar uma
alteração do parâmetro selecionado.
Tabela 3.3
AVISO!
Se as teclas de controle local foram selecionadas como
ativas, permanecerão ativas quando a frequência estiver
programada para Controle Local ou para Controle Remoto
[JOG] substitui a frequência de saída por
uma frequência pré ajustada, enquanto a
tecla estiver apertada. Pode ser
selecionado por meio do parâmetro 015
para estar ativado ou desativado.
[FWD / REV] muda o sentido de rotação
do motor, que é indicado pela seta no
display, embora somente em Local. Pode
ser selecionada por meio do parâmetro
016 para estar ativa ou inativa (o
parâmetro 013 deve estar programado
para [1] ou [3] e o parâmetro 200 para
[1]).
[START] é utilizada para a partida do
motor FC depois de uma parada, por
meio da tecla [Stop]. Está sempre ativo,
mas não pode substituir um comando de
parada dado por meio de uma entrada
digital.
via parâmetro 002, embora com a exceção de [FWD/
[+/-] é utilizada para selecionar o
parâmetro e alterar o parâmetro
escolhido ou para alterar a leitura da
linha 2.
[<][>] é utilizada para selecionar o grupo
e mover o cursor ao alterar os parâmetros
numéricos.
[STOP / RESET] é utilizada para parar ou
reiniciar o motor FC depois de um
desarme. Pode ser selecionado por meio
do parâmetro 014 para estar ativado ou
desativado. Se parada for ativada, a linha
2 piscará e [START] deve ser ativado.
REV], que está ativa somente em Operação local.
AVISO!
Se nenhuma função de parada externa for selecionada e
a tecla [STOP] tiver sido selecionada como inativa
através do parâmetro 014, o motor FC pode ser iniciado
e só pode ser parado desconectando a tensão do motor.
3.1.8 Estado de Leitura do Display
O estado de leitura do display pode ser variado - veja
3.1.15 Grupos do Parâmetro - dependendo de o motor FC
estar em operação normal ou estar sendo programado.
Tabela 3.2
AVISO!
Pressionar [STOP/RESET] impedirá que o motor funcione
também com a LCP 2 desconectada. A reinicialização só
é possível através de uma tecla [START] de LCP 2.
32 MG03BA28 - VLT® é marca registrada da Danfoss

195NA113.10
VAR 2
SETUP
1
STATUS
VAR 1.1 VAR 1.2 VAR 1.3
50.0 Hz
FREQUENCY
MOTOR IS RUNNING
Programação
VLT® DriveMotor FCM Series
3.1.9 Modo Display
Na operação normal, até 4 variáveis operacionais diferentes
podem ser continuamente indicadas: 1,1, 1,2, 1,3 e 2. A
linha 4 indica o estado de operação atual, alarmes e
advertências que aconteceram.
Ilustração 3.7
3.1.10
Modo Display - Seleção do Estado
de Leitura
Existem três opções relacionadas à escolha do estado da
leitura no modo display - I, II e III. A escolha do estado da
leitura determina o número de variáveis de operação lidas.
Variável de operação: Unidade
Referência [%]
Referência [unidade]*
Feedback [unidade]*
Frequência [Hz]
Frequência x escalonamento [-]
Corrente do Motor [A]
Torque [%]
Potência [kW]
Potência [HP]
Tensão do Motor [V]
Tensão do barramto CC [V]
Carga térmica do FC [%]
Horas de funcionamento [Horas]
Status da entrada, dig. Entrada [Código binário]
Referência Externa [%]
Status Word [Hex]
Temp. do dissipdor de calor [ºC]
Alarm Word [Hex]
Control Word [Hex]
Palavra de advertência 1 [Hex]
Warning word 2 [Hex]
Entrada analógica 1 [mA]
Entrada analógica 2 [V]
*) Selecionar no parâmetro 416. A unidade é mostrada no
estado de leitura 1 linha 1; caso contrário é mostrado 'U'.
3 3
Estado de
leitura:
Linha 1 Descrição da
Tabela 3.4
Tabela 3.5 indica as unidades vinculadas às variáveis na
primeira e segunda linha do display (veja o parâmetro
009).
I: II: III:
Valores de
variável de
operação na
linha 2
dados das 3
variáveis de
operação na
linha 1
Descrição das
3 variáveis de
operação na
linha 1
Tabela 3.5
As variáveis de operação 1.1 e 1.2 e 1.3 na primeira linha e
a variável de operação 2 na segunda linha são
selecionadas por meio dos parâmetros 009, 010, 011 e 012.
Estado de leitura I:Este estado de leitura é padrão após a
partida ou a inicialização.
A linha 2 apresenta o valor dos dados de uma variável de
operação com a unidade relacionada e a linha 1 fornece
um texto que explica a linha 2, conforme a tabela. No
exemplo, Frequência foi selecionada como variável através
do parâmetro 009. Durante a operação normal, outra
variável pode ser lida imediatamente usando as teclas [+]/
[-].
Estado de leitura II:
MG03BA28 - VLT® é marca registrada da Danfoss 33

MOTOR IS RUNNING
50.0 Hz
24.3% 30.2% 13.8A
50.0 Hz
SETUP
1
MOTOR IS RUNNING
REF% TORQUE CURR A
50.0 Hz
SETUP
1
QUICK MENU X OF Y
001 LANGUAGE
ENGLISH
Programação
VLT® DriveMotor FCM Series
A comutação entre os estados de leitura I e II é realizada
pressionando o botão [DISPLAY / STATUS].
33
Além de ter um nome, cada parâmetro é ligado a um
número que é o mesmo, independentemente do modo de
programação. No modo menu, os parâmetros são divididos
em grupos, com o primeiro dígito do número do
parâmetro (da esquerda para a direita) indicando o
Neste estado, os valores de dados de quatro valores de
operação são mostrados ao mesmo tempo, fornecendo a
unidade relacionada, conforme a tabela. No exemplo,
referência, torque, corrente e frequência são selecionados
como variáveis na primeira e na segunda linha.
Estado de leitura III:
Este estado de leitura pode ser ativado tão logo seja
pressionada a tecla [DISPLAY/STATUS. Quando a tecla é
liberada o sistema volta ao Estado de leitura II, a menos
que a tecla seja pressionada durante menos de aprox. 1
segundo.
número do grupo do parâmetro em questão.
Independente do modo de programação, uma alteração de
um parâmetro ficará efetiva e será visível tanto no modo
Menu quanto no modo Menu Rápido.
3.1.12
O Setup Rápido começa pressionando a tecla [Quick Menu]
(Menu Rápido), o que exibe a seguinte leitura no display:
controle desejadas, bem como a configuração do
sinal de entrada/saída (terminais de controle).
O modo menu possibilita selecionar e mudar
•
todos os parâmetros à vontade do operador.
Entretanto, alguns parâmetros serão "perdidos",
dependendo da escolha de configuração
(parâmetro 100), exemplo malha aberta
escondendo todos os parametros do PID.
Programação Rápida via Menu
Rápido
Aqui são apresentados os nomes do parâmetro e as
unidades para as variáveis operacionais na primeira e na
segunda linha - a variável operacional 2 permanece
invariável.
3.1.11
O motor da Série FC pode ser usado para praticamente
todas as tarefas, razão pela qual o número de parâmetros
é tão grande. Além disso esta série oferece a escolha entre
dois modos de programação - um modo Menu e um
modo menu rápido.
Modo Menu Rápido vs. Modo Menu
O menu rápido conduz o operador por um
•
número de parâmetros que podem ser suficientes
para fazer partir o motor de modo perfeito, se a
programação de fábrica para os outros
parâmetros levar em consideração as funções de
Na parte inferior do display, o número do parâmetro e o
seu nome são apresentados juntos com o estado/valor
deste parâmetro da programação rápida. Na primeira vez
que a tecla [Quick Menu] (Menu Rápido) for pressionada
após a unidade ser ligada, as leituras sempre começarão
na posição nº 1 - veja Tabela 3.6.
34 MG03BA28 - VLT® é marca registrada da Danfoss
50.0 Hz
FREQUENCY
0 KEYB.&DISPLAY
FREQUENCY
001 LANGUAGE
ENGLISH
50.0 Hz
Programação
VLT® DriveMotor FCM Series
3.1.13 Seleção do Parâmetro
A seleção do parâmetro é efetuada por meio das teclas
[+]/[-]. Os seguintes parâmetros são acessíveis:
Pos.: Nº: parâmetro: Unidade:
1 001 Idioma
2 200 Sentido de rotação
3 101 Características de torque
4 204 Referência mín. [Hz]
5 205 Referência máx [Hz]
6 207 Tempo rampa acel. [s]
7 208 Tempo rampa desac. [s]
8 002 Controle local/remoto
9 003 Referência local
10 500 Endereço do barramento
Tabela 3.6 Seleção de Parâmetro
3.1.14
O modo Menu é iniciado pressionando a tecla [Menu], o
que produz a seguinte leitura no display:
Modo Menu
№ do grupo Grupo do parâmetro
0 Operação & Display
1 Carga e Motor
2 Referências & Limites
3 Entradas e Saídas
4 Funções especiais
5 Comunicação serial
6 Funções técnicas
*Para obter informações sobre o grupo do parâmetro 800 e 900
do PROFIBUS, veja o manual MG03EXYY do FCM Profibus.
Tabela 3.7
Quando o grupo do parâmetro desejado for selecionado,
cada parâmetro poderá ser selecionado por meio das
teclas [+]/[-]:
3 3
Ilustração 3.8
A linha 3 do display mostra o número e o nome do grupo
do parâmetro.
3.1.15
No modo Menu, os parâmetros estão divididos em grupos.
A seleção do grupo do parâmetro é efetuada por meio das
teclas [<][>].
Os seguintes grupos do parâmetro estão acessíveis:
Grupos do Parâmetro
Ilustração 3.9
A terceira linha do display mostra o número e o nome do
parâmetro, enquanto o estado/valor do parâmetro
selecionado é mostrado na linha 4.
3.1.16
Independentemente do modo pela qual foi selecionado o
parâmetro: menu rápido ou modo menu, o procedimento
para mudar os dados é o mesmo. Pressionar a tecla
[Change Data] (Alterar Dados) dá acesso ao parâmetro
selecionado, após o que o sublinhado na linha 4 piscará no
display. O procedimento para a alteração de dados
depende de o parâmetro selecionado representar um valor
numérico ou um valor de texto.
Alteração de Dados
MG03BA28 - VLT® é marca registrada da Danfoss 35

50.0 Hz
FREQUENCY
001 LANGUAGE
ENGLISH
50.0 Hz
SETUP
1
FREQUENCY
130 START FREQUENCY
09.0 HZ
50.0 Hz
SETUP
1
FREQUENCY
130 START FREQUENCY
10.0 HZ
Programação
VLT® DriveMotor FCM Series
3.1.17 Alterando um Valor de Texto
Se um parâmetro selecionado for um valor de texto, o
valor de texto é a\lterado por meio as teclas [+]/[-].
3.1.18
Se o parâmetro escolhido representar um valor numérico
de dados, um dígito é selecionado primeiro com as teclas
[<][>].
Alteração de Valores de Dados
Numéricos Infinitamente Variáveis
33
Ilustração 3.10
Ilustração 3.11
A última linha do display apresenta o texto que será
digitalizado (memorizado) quando for confirmado por
meio do botão [OK].
Em seguida, o dígito selecionado é alterado infinitamente
com as teclas[+]/[-]:
Ilustração 3.12
O dígito selecionado é indicado pelo dígito piscando. A
linha inferior do display apresenta o valor do dado que
será digitalizado (memorizado) quando for confirmado com
o botão [OK].
36 MG03BA28 - VLT® é marca registrada da Danfoss

175ZA446.10
MODO DISPLA Y
MODO MENU RÁPIDO
MODO TROCA DE DADOS
▲
▲
▲
▲
▲
▲
▲
▲
▲
Seleção de
parâmetr o
Seleção do
valor de
dados
Seleção
do grupo
MODO DADOS
VAR 1.1 VAR 1.2 VAR 1.3
VAR 2
STATUS
FREQUENCY
50.0 HZ
0 KEYB. & DISPLAY
QUICK MENU X OF Y
50.0 HZ
50.0 HZ
50.0 HZ
FREQUENCY
FREQUENCY
QUICK MENU X OF Y
001 LANGUAGE
001 LANGUAGE
001 LANGUAGE
ENGLISH
ENGLISH
MODO MENU
001 LANGUAGE
ENGLISH
ENGLISH
50.0 HZ
Programação
3.1.19 Estrutura do Menu
VLT® DriveMotor FCM Series
3 3
Ilustração 3.13
MG03BA28 - VLT® é marca registrada da Danfoss 37

Programação
VLT® DriveMotor FCM Series
3.1.20 Grupo de Parâmetros 0-** Operação/
Display
001 Idioma
Valor:
33
Inglês (ENGLISH) [0]
Alemão (DEUTSCH) [1]
Francês (FRANCAIS) [2]
Dinamarquês (DANSK) [3]
Espanhol (ESPAÑOL) [4]
Italiano (ITALIANO) [5]
O estado na entrega pode ser diferente da programação da
fábrica.
Funcão:
A escolha deste parâmetro define a língua a ser utilizada
no display.
Descricão da selecão:
Existe a opção de [0] Inglês, [1] Alemão, [2] Francês, [3]
Dinamarquês, [4] Espanhol e [5] Italiano.
002
Valor:
Controle remoto (REMOTO) [0]
Controle local (LOCAL) [1]
Funcão:
Há uma escolha entre dois métodos de controlar o motor
FC: [0] Controle remoto e [1] Controle local.
Descricão da selecão:
Se [0] Controle remoto for selecionado, o motor FC pode
ser controlado via:
1. os terminais de controle ou a porta de
2. A tecla [Start]. Entretanto, essa tecla não pode
3. As teclas [Stop], [Jog] e [Reset], desde que
Se [1] Controle local for selecionado, o motor FC pode ser
controlado via:
1. A tecla [Start]. Entretanto, isto não pode ignorar
2. As teclas [Stop], [Jog] e [Reset], desde que
3. A tecla [FWD/REV], desde que tenha sido ativada
Controle remoto/local
comunicação serial.
ignorar comandos de parada (e de desativação de
partida) vindos das entradas digitais ou porta de
comunicação serial.
estejam ativas (veja os parâmetros 014, 015 e
017).
comandos de Parada nos terminais digitais (se [2]
ou [4] tiverem sido selecionados no parâmetro
013).
estejam ativas (veja os parâmetros 014, 015 e
017).
no parâmetro 016 e que tenha sido feita uma
escolha de [1] ou [3] no parâmetro 013.
4. através do parâmetro 003, a referência local pode
ser controlada por meio das teclas de seta para
cima e para baixo.
003 Referência local
Valor:
Par 013 programado em [1] ou [2]:
0 - f
MAX
Par. 013 programado para [3] ou [4] e par.
203 = [0] programado para:
Ref
- Ref
MIN
Par. 013 programado para [3] ou [4] e par.
203 = [1] programado para:
-Ref
Funcão:
Este parâmetro permite a programação manual dos valores
de referência desejados (a velocidade ou a referência para
uma configuração selecionada, dependendo da escolha
efetuada no parâmetro 013).
A unidade segue a configuração selecionada no parâmetro
100, desde que [3] Regulagem do processo, malha fechada
tenha sido selecionado.
Descricão da selecão:
[1] Local deve estar selecionado no parâmetro 002 para
este parâmetro ser usado.
O valor programado é memorizado no caso de queda de
tensão, veja o parâmetro 019.
Neste parâmetro, o Modo de Alteração de Dados não é
abandonado automaticamente (após o timeout).
A referência local não pode ser programada através da
comunicação serial.
004
Valor:
Setup de fábrica (SETUP DE FÁBRICA) [0]
Setup 1 (SETUP 1) [1]
Setup 2 (SETUP 2) [2]
Setup Múltiplo (SETUP MÚLTIPLO) [5]
Funcão:
A seleção deste parâmetro define o número do Setup
desejado para controlar o motor FC.
Todos os parâmetros podem ser programados em dois
individuais Setups, Setup 1 e Setup 2. Além disso, há um
Setup pré-programado, chamado Setup de fábrica, que
não pode ser modificado.
Descricão da selecão:
[0] Programação de Fábrica contém os dados de fábrica.
Pode ser utilizado como fonte de dados quando os outros
setups devem retornar para um estado conhecido.
Os parâmetros 005 e 006 permitem copiar de um Setup
para outro.
[1] Setups 1 e [2] 2 são dois Setups individuais que podem
ser selecionados conforme necessário.
[5] Setup múltiplo é utilizado se for desejada comutação de
montagem remota entre Setups. Os terminais 2, 3, 4 e 5
MAX
- + Ref
MAX
MAX
Setup Ativo
000,000
000,000
000,000
38 MG03BA28 - VLT® é marca registrada da Danfoss

Programação
VLT® DriveMotor FCM Series
bem como a porta serial podem ser utilizados para a
comutação entre Setups.
005 Setup de Programação
Valor:
Setup de fábrica (SETUP DE FÁBRICA) [0]
Setup 1 (SETUP 1) [1]
Setup 2 (SETUP 2) [2]
Setup Ativo (SETUP ATIVO) [5]
Funcão:
A escolha é do Setup em que deve ocorrer programação
(alteração de dados) durante a operação. É possível
programar os dois Setups independentemente do Setup
selecionado como o Setup Ativo (selecionado no
parâmetro 004).
Descricão da selecão:
O [0] Setup de fábrica contém os dados de fábrica e pode
ser usado como uma fonte de dados se outros Setups
devem retornar para um estado conhecido.
[1] Setups 1 e [2] 2 são Setups individuais que podem ser
usados conforme necessário. Podem ser programados
livremente, independente do Setup selecionado como o
Setup Ativo, controlando assim as funções do motor FC.
006
Valor:
Sem cópia (SEM CÓPIA) [0]
Copiar para Setup 1 de # (COPIAR PARA SETUP 1) [1]
Copiar para Setup 2 de # (COPIAR PARA SETUP 2) [2]
Copiar para Setup todos de # (COPIAR PARA
TODOS) [5]
# = o Setup selecionado no parâmetro 005
Funcão:
É feita uma cópia do Setup selecionado no parâmetro 005
para um dos outros Setups ou para todos os outros Setups
simultaneamente.
007
Valor:
Sem cópia (SEM CÓPIA) [0]
Fazer upload de todos os parâmetros (FAZER
UPLOAD DE TODOS OS PARÂMETROS) [1]
Fazer download de todos os parâmetros (FAZER
DOWNLOAD DE TODOS) [2]
Fazer download dos par. independentes de
potência.
(FAZER DOWNLOAD INDEP. DO TAMANHO) [3]
Funcão:
O parâmetro 007 é utilizado caso seja necessário utilizar a
função de cópia no painel de controle “LCP”. Portanto,
você pode copiar facilmente copiar o(s) valor(es) do(s)
parâmetro(s) de um motor FC para outro.
Cópia de Setups
Cópia via LCP
Descricão da selecão:
Selecione [1] Fazer upload de todos os parâmetros se todos
os valores de parâmetro devem ser transmitidos para o
painel de controle. Selecione [2] Fazer download de todos
os parâmetros se todos os valores de parâmetros
transmitidos devem ser copiados para o motor FC no qual
o painel de controle foi montado. Selecione [3] Fazer
download de parâmetros independente de potência. Se
somente os parâmetros independentes de potência devem
ser transferidos por download. Este procedimento é usado
se a transferência por download para um motor FC que
tenha potência nominal diferente daquela em que se
origina o Setup do parâmetro.
008
Valor:
0.0-100.00 [1-10000]
1,00 [100]
Funcão:
Este parâmetro seleciona o fator a ser multiplicado pela
frequência do motor, fM, para apresentação no display,
quando os parâmetros 009-012 forem programados para
Frequência x Escala [5].
Descricão da selecão:
Programa o fator desejado para a escala.
009
Valor:
Nenhum [0]
Referência [%] (EXTERNA[%]) [1]
Referência [unidade] (REFERÊNCIA [UNID]) [2]
Feedback [unidade] (FEEDBACK [UNIDADE]) [3]
Frequência [Hz] (FREQUÊNCIA [Hz]) [4]
Frequência vezes a escala [-] (FREQUÊNCIA X
ESCALA) [5]
Corrente do motor [A] (CORRENTE MOTOR [A]) [6]
Torque [%] (TORQUE [%]) [7]
Potência [kW] (POTÊNCIA [kW]) [8]
Potência [HP] (POTÊNCIA [hp] [US]) [9]
Tensão do motor [V] (TENSÃO MOTOR [V]) [11]
Tensão do barramento CC [V] (TENSÃO DO
BARRAMENTO CC) [12]
Carga térmica, FC [%] (FC TÉRMICO [%]) [14]
Horário de operação [Horas] (HORAS DE FUNCIO-
NAMENTO) [15]
Entrada digital [Código binário] (ENTRADA
DIGITAL [BIN]) [16]
Referência externa [%] (REF.EXTERNA [%]) [21]
Status word [Hex] (STATUS WORD [HEX]) [22]
Temperatura do dissipador [°C] (TEMP.DISSIPAD
[°C]) [25]
Alarm word [Hex] (ALARM WORD [HEX]) [26]
Control word [Hex] (CONTROL WORD [HEX]) [27]
Display da escala de frequências do motor
Linha 2 do display
3 3
MG03BA28 - VLT® é marca registrada da Danfoss 39

Programação
VLT® DriveMotor FCM Series
Warning word 1 [Hex]
(WARNING WORD 1 [HEX]) [28]
Warning word 2 [Hex]
(STATUS WORD ESTENDIDA [HEX]) [29]
Entrada analógica 1 [mA] (ENTRADA ANALÓGICA
33
1 [mA]) [30]
Entrada analógica 2 [V] (ENTRADA ANALÓGICA 2
[V]) [31]
Funcão:
Este parâmetro permite a seleção do valor dos dados a
serem exibidos na linha 2 do display.
Os parâmetros de 010 a 012 permitem a utilização de três
valores de dados adicionais para serem exibidos na linha 1.
Para leituras do display pressione o botão [DISPLAY/
STATUS], veja 3.1.7 Funções das Teclas de Controle.
Descricão da selecão:
Referência [%] corresponde à referência total (soma de
digital/analógica/predefinida/bus/ref. congelada/catch-up e
slow-down).
Referência [unidade] fornece a soma das referências,
utilizando a unidade indicada com base na configuração
do parâmetro 100 (Hz, Hz e rpm).
Feedback [unidade] indica o valor do status do terminal 1 e
2 utilizando a unidade/escala selecionada no parâmetro
414, 415 e 416.
Frequência [Hz] dá a frequência do motor, ou seja, a
frequência de saída para o motor.
Frequência x Escala [-] corresponde à frequência do motor
atual fM multiplicada por um fator (escala) programado no
parâmetro 008.
A Corrente do motor [A] indica a corrente de fase do motor
medida como valor efetivo.
Torque [%] indica a carga atual do motor em relação ao
torque nominal do motor.
Potência [kW] indica a potência real consumida pelo motor
em kW.
Potência [HP] indica a potência real consumida pelo motor
em HP.
Tensão do motor [V] indica a tensão fornecida ao motor.
Tensão do barramento CC [V] indica a tensão do circuito
intermediário no motor FC.
Carga térmica, FC [%] indica a carga térmica calculada/
estimada no motor FC. O limite de desativação é 100%.
Horas de funcionamento [Horas] indica o número de horas
que o motor funcionou desde o último reset no parâmetro
619.
Entrada digital [Código binário] indica os estados do sinal
dos 4 terminais digitais (2, 3, 4 e 5). A Entrada 5
corresponde ao bit no extremo esquerdo. '0' = sem sinal,
'1' = sinal conectado.
Referência externa [%] indica a soma da referência externa
como porcentagem (a soma de analógica/ pulso/ bus).
Status word [Hex] fornece a status word enviada através da
porta de comunicação serial em código Hex, do motor FC.
Temperatura do dissipador de calor [ºC] indica a
temperatura atual no dissipador de calor do motor FC. O
limite de desativação é 90 ± 5 °C; a reativação ocorre a 60
± 5 °C.
Alarm word [Hex] indica um ou mais alarmes em código
hex. Veja 4.2.4 Warning Word, Status Word Estendida e
Alarm Word.
Control word [Hex] indica a control word do motor FC..
Veja 3.6 Comunicação serial - Guia de Design do FCM 300.
Warning word 1 [Hex] indica uma ou mais advertências em
um código Hex. Veja 4.2.4 Warning Word, Status Word
Estendida e Alarm Word para saber mais informações.
Status word estendida [Hex] indica um ou mais estados de
status em um código Hex. Veja 4.2.4 Warning Word, Status
Word Estendida e Alarm Word para obter mais informações.
Entrada analógica 1 [mA] indica o valor do sinal no
terminal 1.
Entrada analógica 2 [V] indica o valor do sinal no terminal
2.
010
Valor:
Referência [%] [1]
Veja o parâmetro 009.
Funcão:
Este parâmetro permite a escolha do primeiro de três
valores de dados a ser mostrado na linha 1, posição 1 do
display.
Descricão da selecão:
Há uma opção de 24 valores de dados diferentes, veja o
parâmetro 009.
011
Valor:
Corrente do motor [A] [1]
Veja o parâmetro 009
Funcão:
Este parâmetro possibilita e escolha do segundo dos três
valores de dados a ser apresentado no display, linha 1,
posição 2.
Para leituras do Display, pressione o botão [DISPLAY/
STATUS], veja 3.1.7 Funções das Teclas de Controle.
Descricão da selecão:
Há uma opção de 24 valores de dados diferentes, veja o
parâmetro 009.
012
Valor:
Potência [kW] [8]
Veja o parâmetro 009
Funcão:
Este parâmetro possibilita e escolha do terceiro dos três
valores de dados a ser apresentado no display, linha 1,
posição 3.
As leituras do display são feitas pressionando o botão
[DISPLAY/STATUS], veja 3.1.7 Funções das Teclas de Controle.
Linha 1.1 do display
Linha 1.2 do display
Linha 1.3 do display
40 MG03BA28 - VLT® é marca registrada da Danfoss
Programação
VLT® DriveMotor FCM Series
Descricão da selecão:
Há uma opção de 24 valores de dados diferentes, veja o
parâmetro 009.
013
Valor:
Local não ativo (DESABILITADO) [0]
Controle do Painel de controle local e malha
aberta.
(CTRL LCP/MALHA ABERTA) [1]
Controle digital do Painel de controle local e
malha aberta.
(LCP+CTRL DIG/MALHA AB) [2]
Controle do Painel de controle local/como
parâmetro 100.
(CTRL LCP/COMO P100) [3]
Controle digital do Painel de controle local/como
parâmetro 100.
(LCP+CTRL DIG/COMO P100) [4]
Funcão:
Aqui deve-se selecionar a função desejada se foi escolhido
controle Local no parâmetro 002. Veja também a descrição
do parâmetro 100.
Descricão da selecão:
Se Local não ativo [0] for selecionado, uma programação
possível de Referência local via parâmetro 003 é bloqueada.
Somente é possível mudar para Local não ativo [0] em uma
das outras opções de programação do parâmetro 013,
quando o motor FC tiver sido ajustado para Controle
remoto [0] no parâmetro 002.
Controle LCP e malha aberta [1] é usado quando a
velocidade deve ser ajustável (em Hz) via parâmetro 003,
quando o motor FC tiver sido ajustado para Controle local
[1] no parâmetro 002.
Se o parâmetro 100 não tiver sido programado para Malha
aberta de regulagem de velocidade [0], alterne para Malha
aberta de regulagem de velocidade [0].
Controle digital do LCP e malha aberta [2] funciona como
Controle do LCP e malha aberta [1], a única diferença é que
quando o parâmetro 002 estiver programado para
Operação local [1], o motor é controlado pelas entradas
digitais.
Controle do LCP/como parâmetro 100 [3] é selecionado se a
referência for ajustada via parâmetro 003.
Controle digital do LCP/ como parâmetro 100 [4] funciona
como Controle do LCP/ como parâmetro 100 [3], embora
quando o parâmetro 002 estiver programado para
Operação local [1], o motor pode ser controlado via
entradas digitais.
A frequência e sentido de rotação atuais do motor devem
ser mantidos. Se o sentido de rotação atual não corresponder ao sinal de reversão (referência negativa), a
frequência do motor fM será ajustada para 0 Hz.
Mudar de controle digital do LCP e malha aberta para
Controle remoto:
Controle local/Configuraçãocomo parâmetro
100
A configuração selecionada (parâmetro 100) estará ativa.
As comutações são efetuadas sem nenhum movimento
abrupto.
Mudar de Controle remoto para Controle do LCP/ como
parâmetro 100 ou Controle digital do LCP/ como parâmetro
100.
A referência atual será mantida. Se o sinal de referência for
negativo, a referência local será ajustada como 0.
Alternar de Controle do LCP/ como parâmetro 100 ou
Controle remoto do LCP como parâmetro 100 para Controle
remoto.
A referência será substituída pelo sinal de referência ativo
do controle remoto.
014
Valor:
Não é possível (DESABILITADO) [0]
Possível (ATIVADO) [1]
Funcão:
Este parâmetro ativa/desativa a função de parada via
painel de controle. Esta tecla é utilizada quando o
parâmetro 002 estiver programado para [0] Controle remoto
ou [1] Local.
Descricão da selecão:
Se [0] Desabilitado for selecionado neste parâmetro, a tecla
[STOP] ficará inativa.
015
Valor:
Não é possível (DESABILITADO) [0]
Possível (ATIVADO) [1]
Funcão:
Neste parâmetro a função de jog pode ser ativada/
desativada no painel de controle.
Descricão da selecão:
Se [0] Desabilitado for selecionado neste parâmetro, a tecla
[JOG] será desabilitada.
016
Valor:
Não é possível (DESABILITADO) [0]
Possível (ATIVADO) [1]
Funcão:
Neste parâmetro, a função reversão pode ser selecionada/
removida pelo painel de controle. Esta tecla só pode ser
usada se o parâmetro 002 estiver programado para [1]
Operação local e o parâmetro 013 para [1] Controle do LCP
com malha aberta ou [3] Controle do LCP como parâmetro
100.
Descricão da selecão:
Se [0] Desabilitado for selecionado neste parâmetro, a tecla
[FWD/ REV] será desabilitada.
Parada local
Jog local
Reversão local
3 3
MG03BA28 - VLT® é marca registrada da Danfoss 41

Programação
VLT® DriveMotor FCM Series
Veja o parâmetro 200.
017 Reset local do desarme
Valor:
Não é possível (DESABILITADO) [0]
33
Possível (ATIVADO) [1]
Funcão:
Neste parâmetro, a função de reset pode ser selecionada/
removida do teclado. Esta tecla pode ser utilizada quando
o parâmetro 002 estiver programado para [0] Controle
remoto ou [1] Controle local.
Descricão da selecão:
Se [0] Desabilitado for selecionado neste parâmetro, a tecla
[RESET] ficará inativa.
018
Valor:
Não bloqueado (NÃO BLOQUEADO) [0]
Bloqueado (BLOQUEADO) [1]
Funcão:
Neste parâmetro, o software pode "bloquear" o controle, o
que significa que mudanças de dados não podem ser
efetuadas via LCP 2 (no entanto, isso é ainda possível por
meio da porta de comunicação serial).
Descricão da selecão:
Se [1] Bloqueado for selecionado, mudanças de dados não
podem ser feitas.
019
Valor:
Nova partida automática, utilize ref. gravada
(NOVA PARTIDA AUTOMÁTICA) [0]
Parada forçada, use ref. gravada (LOCAL=STOP) [1]
Parada forçada, programe a ref. para 0
(LOCAL=PARADA, REF=0) [2]
Funcão:
Programação do modo de operação desejado quando a
tensão de alimentação for ligada.
Esta função somente pode estar ativa em conjunto com [1]
Controle local no parâmetro 002.
Descricão da selecão:
[0] Partida automática, usar ref. salva é selecionado se a
unidade der partida com a mesma referência local
(programada no parâmetro 003) e as mesmas condições de
partida/parada (fornecidas pelas teclas [Start/Stop]) que o
motor FC tinha antes do desligamento.
[1] Parada forçada, usar ref. salva é utilizado se a unidade
permanecer parada quando a tensão de rede for
conectada, até a tecla [START] (Partida) ser apertada.
Depois do comando de partida, a referência local usada é
programada no parâmetro 003.
[2] Parada forçada, ref. programada para 0 é selecionado
caso a unidade deva permanecer parada quando a tensão
Bloqueado para alteração de dados
Estado operacional na energização, controle
local
de rede for conectada. A referência local (parâmetro 003) é
resetado em zero.
3.2.1 Grupo de Parâmetros 1-** Carga/
Motor
100 Configuração
Valor:
Velocidade, modo malha aberta (MALHA ABERTA
DE VELOCIDADE) [0]
Regulagem de processo, malha fechada
(MALHA FECHADA DE PROCESSO) [1]
Funcão:
Este parâmetro é utilizado para a configuração na qual
deve adaptar-se o conversor motor FC.
Descricão da selecão:
Se [0] Velocidade, malha aberta for selecionado, um
controle normal de velocidade (sem sinal de feedback) será
obtido, com compensação de escorregamento automática,
garantindo uma velocidade quase constante com cargas
variáveis. As compensações estão ativas, mas podem ser
desativadas, se necessário, no parâmetro 133 - 136.
Se [3] Processo, modo malha fechada for selecionado, o
regulador de processo interno será ativado, permitindo
assim regulagem precisa de um processo com relação a
um sinal de processo determinado. O sinal de processo
pode ser programado utilizando a própria unidade do
processo ou na forma de um percentual. Um sinal de
feedback deve ser fornecido pelo processo e o setpoint do
processo deve ser ajustado. Em malha fechada do
processo, ambas as direções
200.
101
Valor:
Torque constante (TORQUE CONSTANTE) [1]
Torque variável: baixo (VAR.TORQUE: BAIXO) [2]
Toque variável: médio (VAR.TORQUE: MÉDIO) [3]
Torque variável: alto (VAR.TORQUE: ALTO) [4]
Funcão:
Neste parâmetro, é selecionado o ajuste das características
U/f do motor FC às características de torque da carga.
Descricão da selecão:
Se [1] Torque constante for selecionado, é obtida uma
característica U/f dependente da carga, na qual a tensão
de saída é aumentada no caso de aumento de carga
(corrente), de modo a manter constante a magnetização
do motor.
Selecione [2] Torque variável baixo, [3] Torque variável
médio ou [4] Torque variável alto se a carga for quadrática
(bombas centrífugas, ventiladores).
Características de torque
não é permitido no parâmetro
42 MG03BA28 - VLT® é marca registrada da Danfoss

Programação
VLT® DriveMotor FCM Series
O valor pode ser definido entre 0% (OFF) e 100%.
100% corresponde ao ganho proporcional máx.
dependente da unidade permitido. O valor padrão é OFF.
Descrição de funcionalidade:
O torque do sistema é estimado, com base no barramento
CC, e retornado para um controlador de ganho proporcional.
Em um nível que depende da unidade da corrente do
motor ativo, o controlador é desativado.
Descricão da selecão:
Programe a graduação do ganho proporcional para o
feedback do torque entre 0% (OFF (Desligado)) e 100%.
3 3
Ilustração 3.14
102
Valor:
XX,XX kW - depende do motor FC [XXXX]
Funcão:
Parâmetro só de leitura.
103
Valor:
XX V- depende do motor FC [XX]
Funcão:
Parâmetro só de leitura.
104
Valor:
XX,X Hz - depende do motor FC [XXX]
Funcão:
Parâmetro só de leitura.
105
Valor:
XX,X X A- depende do motor FC. [XXXX]
Funcão:
Parâmetro só de leitura.
106
Valor:
XX rpm - depende do motor FC [XX]
Funcão:
Parâmetro só de leitura.
117
Valor:
OFF - 100% [OFF - 100]
OFF%. [OFF (Desligada)]
Funcão:
O amortecimento de ressonância pode ser otimizado. O
grau da influência é ajustado neste parâmetro.
Potência do motor
Tensão do motor
Frequência do motor
Corrente do motor
Velocidade nominal do motor
Amortecimento da ressonância
118
Valor:
0-200% [0-200]
Dependente do motor
Funcão:
Ressonância de alta frequência pode ser eliminada
deficindo os parâmetros 117 e 118.
Descricão da selecão:
Ajuste o percentual de carga a partir de onde o amortecimento da ressonância não deverá mais estar ativo.
126
Valor:
0,0 - 60,0 seg. [0-600]
10,0 s [100]
Frenagem CC, veja P132
Funcão:
Este parâmetro é para ajustar o tempo de frenagem CC
para a qual a tensão de frenagem CC (parâmetro 132)
deve estar ativa.
0,0 seg. = OFF
Descricão da selecão:
Defina o tempo desejado.
127
Valor:
0,0-f
0,0 Hz = OFF [0]
Frenagem CC, veja P132
Funcão:
Este parâmetro é para a programação da frequência de
ativação CC na qual a corrente de frenagem CC (parâmetro
132) deve ser ativada, em relação a um comando de
parada.
Descricão da selecão:
Ajuste a frequência desejada.
Desativação do amortecimento da
ressonância
Tempo de frenagem CC
Frequência de ativação do freio CC
(parâmetro 202)
MAX
[0 -]
MG03BA28 - VLT® é marca registrada da Danfoss 43
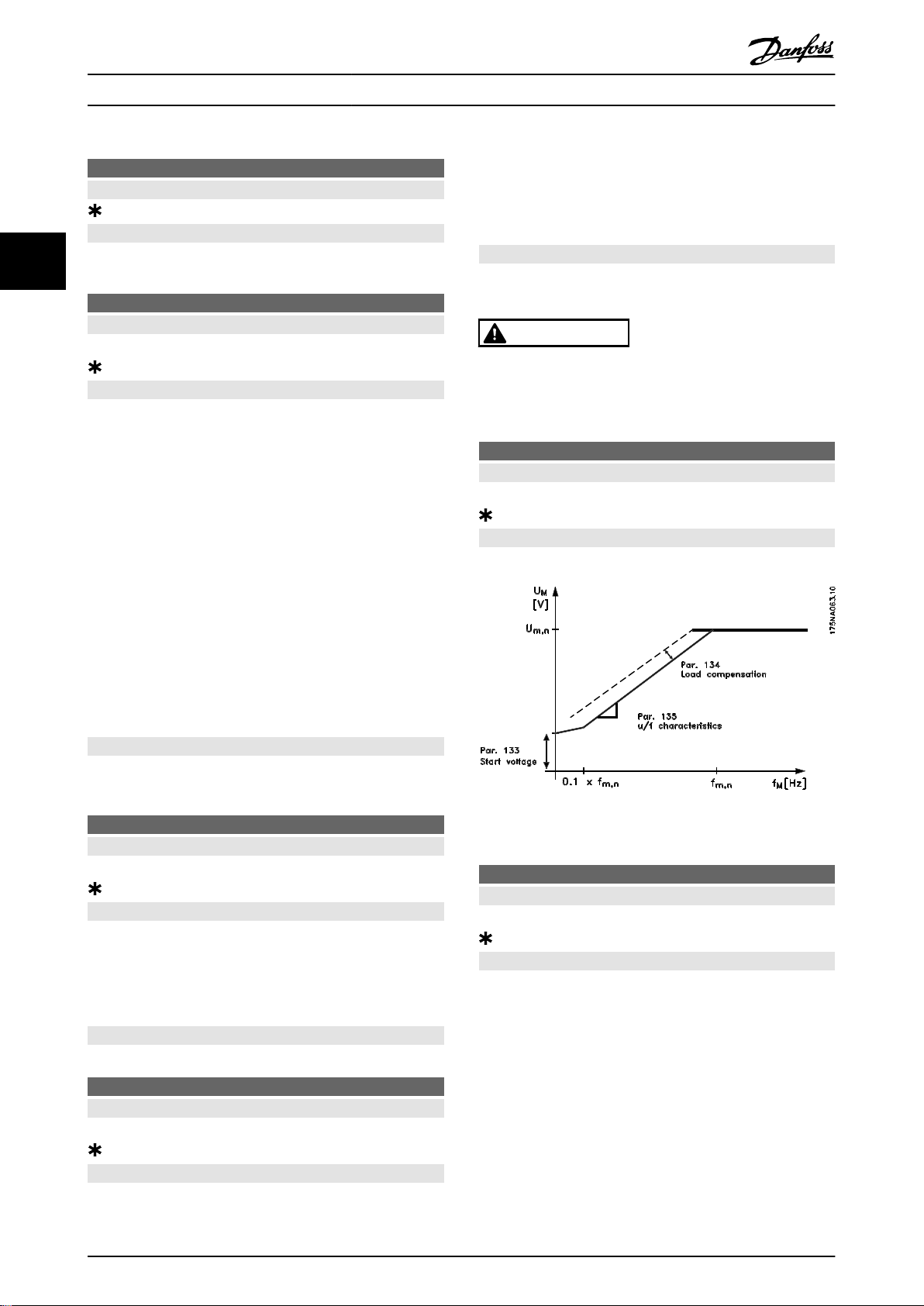
Programação
VLT® DriveMotor FCM Series
128 Proteção térmica do motor
Valor:
Sem proteção (NO PROTECTION) [0]
Funcão:
Parâmetro só de leitura
33
Consulte a seção Proteção térmica do FCM 300.
132 Tensão de frenagem CC
Valor:
0-100% [0-100]
0% [0]
Funcão:
Frenagem CC:
Se o estator em um motor assíncrono for alimentado com
tensão CC, aparecerá um torque de frenagem.
O torque de frenagem depende da tensão de frenagem CC
selecionada.
Para aplicar um torque de frenagem através de frenagem
CC, o campo giratório (CA) no motor é substituído por um
campo estacionário (CC).
A frenagem CC será ativada quando ficar abaixo da
frequência de religação e a parada for ativada ao mesmo
tempo. P126, P127 e P132 são usados para controlar a
frenagem CC.
Ela também pode ser ativada diretamente por uma
entrada digital.
Função:
O torque de frenagem depende da tensão de frenagem CC
selecionada. A tensão de frenagem CC é indicada como
um percentual da tensão máxima de frenagem.
Descricão da selecão:
Ajuste a tensão desejada como um valor percentual da
tensão máxima de frenagem.
133
Valor:
0,00-100,00 V [0-10000]
Depende do motor
Funcão:
Você pode ajustar a tensão do motor abaixo do ponto de
enfraquecimento do campo independentemente da
corrente do motor. Use este parâmetro para compensar
um torque de partida demasiado baixo.
A tensão de partida é a tensão de 0 Hz.
Descricão da selecão:
Ajuste a tensão de partida desejada.
134
Valor:
0.0-300.0% [0-3000]
100,0% [1000]
Funcão:
Neste parâmetro, programa-se a característica da carga.
Pelo aumento da compensação de carga, o motor recebe
Tensão de partida
Compensação de carga
um suplemento adicional de tensão e frequência em
valores crescentes de carga. Usado em motores/aplicações
em que há uma grande diferença entre a corrente de
carga total e a corrente de carga neutra do motor.
Descricão da selecão:
Se a programação de fábrica não for adequada, a
compensação de carga deve ser programada para permitir
que o motor parta com uma carga determinada.
CUIDADO
Deve ser programada em 0% no caso de mudanças
rápidas de carga. Uma compensação de carga demasiadamente alta pode levar a uma instabilidade.
135 Relação U/f
Valor:
0,00-20,00 V/Hz [0-2000]
Dependente do motor
Funcão:
A tensão da saída para o motor pode ser ajustada em uma
base linear de 0 para uma frequência nominal.
Ilustração 3.15
136
Valor:
-500,0-+500,0% [-5000 - +5000]
100,0% [1000]
Funcão:
A compensação de escorregamento nominal (programação
de fábrica) é calculada em base dos parâmetros do motor.
No parâmetro 136, a compensação de desvio pode ser
ajustada em detalhes. Sua otimização torna a velocidade
do motor menos dependente da carga. Esta função não
está ativa ao mesmo tempo que o torque variável
(parâmetro 101).
Compensação de escorregamento
44 MG03BA28 - VLT® é marca registrada da Danfoss
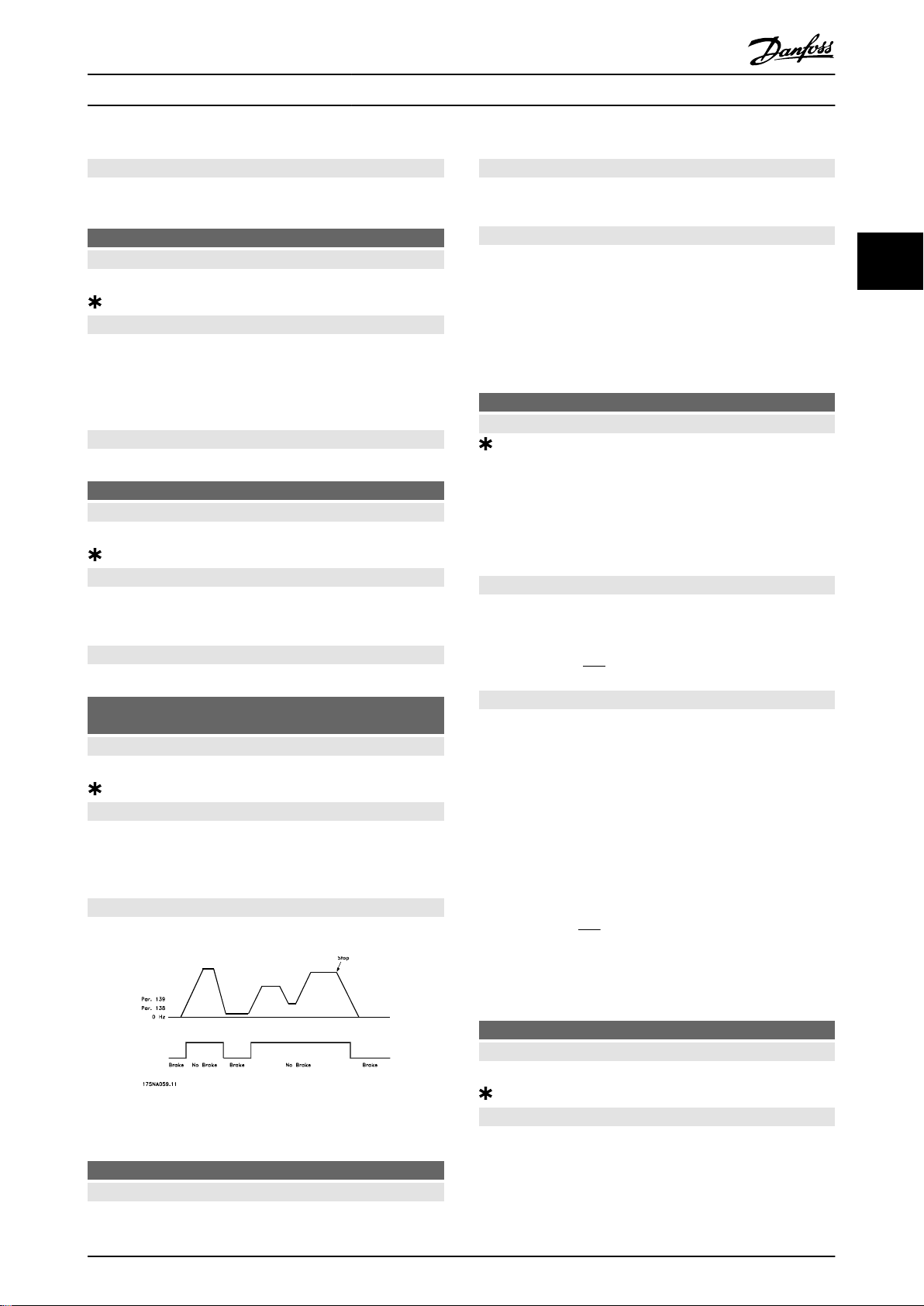
Programação
VLT® DriveMotor FCM Series
Descricão da selecão:
Introduza um valor em % da compensação nominal de
escorregamento.
137 Tensão de hold CC
Valor:
0-100% [0-100]
0 (OFF)% [0]
Funcão:
Este parâmetro é utilizado para manter parado o motor
(torque de frenagem) ou para aquecer previamente o
motor. A tensão de hold CC está ativa com o motor
parado, quando ela estiver programada com um valor
diferente de zero. A parada por inércia desativará a função.
Descricão da selecão:
Introduza um valor percentual.
138
Valor:
0,5-132 Hz (parâmetro 200) [5-]
3,0 Hz [30]
Funcão:
Aqui é selecionada a frequência na qual o freio externo
deve ser liberado, através da saída programada no
parâmetro 323 ou 340, durante a operação.
Descricão da selecão:
Ajuste a frequência desejada.
139
Valor:
0,5-132 Hz (parâmetro 200) [5-]
3,0 Hz [30]
Funcão:
A frequência na qual o freio externo deve ser ativado é
selecionada, por meio da programação da saída no
parâmetro 323 ou 340, quando o motor está desacelerando para parar.
Descricão da selecão:
Ajuste a frequência desejada.
Veja Ilustração 3.16.
Frequência de desativação do freio
Frequência de ativação do freio na parada
ativada
Funcão:
Nesta etapa é selecionado o motor específico no qual a
unidade de reserva deverá ser instalada.
Descricão da selecão:
Escolha o tipo de motor de acordo com a marca, número
de polos e potência.
Exemplo: ATB STD-4-075 significa motor ATB de 4 polos e
0,75 kW.
3.3.1 Grupo de Parâmetros 2-**
Referências/Limites
200 Sentido de rotação
Valor:
Somente sentido horário,
(Somente sentido horário) [0]
Nos dois sentidos,
0-132 Hz
(132 Hz NOS DOIS SENTIDOS) [1]
Somente no sentido anti-horário, 0-132 Hz
(132 Hz SENTIDO ANTI-HORÁRIO.) [2]
Funcão:
Este parâmetro garante proteção contra inversões
indesejadas.
Ao usar o modo Processo, malha fechada (parâmetro 100),
o parâmetro 200
sentidos.
Descricão da selecão:
Selecione a direção desejada vista da extremidade do
acionador do motor.
Observe que se for selecionado [0] Somente no sentido
horário, 0-132 Hz [2] Somente no sentido anti-horário, 0-132
Hz, a frequência de saída será limitada ao intervalo f
f
.
MAX
Se [1] Nos dois sentidos, 0-132 Hz for selecionado, a
frequência de saída estará limitada à faixa ± f
frequência mínima não é significativa).
Por isso!
É recomendável não programar o parâmetro 200 com
valores diferentes nas duas configurações. Se isso for
necessário, o usuário deve se certificar de que as
alterações na configuração sejam efetuadas com o motor
parado.
não deve ser alterado para [1] Nos dois
MIN
(a
MAX
-
3 3
Ilustração 3.16 Perfil de Velocidade para Função de Frenagem
147 Setup do tipo de motor
Valor:
Depende da unidade
MG03BA28 - VLT® é marca registrada da Danfoss 45
201
Valor:
0,0 HZ - fMÁX (parâmetro 202) [0 -]
0,0 HZ [0]
Funcão:
Neste parâmetro, pode ser selecionado um limite mínimo
de frequência do motor que corresponde à frequência
mínima na qual o motor funciona.
A frequência mínima nunca pode ser maior que a
frequência máxima, f
Frequência mín. de saída
.
MAX

Programação
VLT® DriveMotor FCM Series
Se foi selecionado Nos dois sentidos no parâmetro 200, a
frequência mínima não é significativa.
Descricão da selecão:
Pode ser escolhido um valor de 0,0 Hz até a frequência
máxima selecionada no parâmetro 202 (f
33
202 Frequência máx. de saída
MAX
).
parâmetro 100 tiver sido selecionado como malha aberta, a
configuração máxima é 132 Hz.
Se malha fechada tiver sido selecionado, a referência
máxima não pode ser definida com um valor mais alto que
o feedback máximo (parâmetro 415).
Descricão da selecão:
Programe no valor desejado.
Valor:
f
(parâmetro 201) - f
MIN
(132 Hz, par. 200)
RANGE
fGAMA
Funcão:
Neste parâmetro, pode ser selecionada uma frequência
máxima de motor que corresponde à frequência máxima
na qual o motor funciona.
Veja também o parâmetro 205.
Descricão da selecão:
Pode ser selecionado um valor de f
203
Faixa de feedback/referência
até 132 Hz.
MIN
207 Tempo de aceleração 1
Valor:
0,15-3600,00 s [5 -360000]
3,00 s [300]
Funcão:
O tempo de aceleração é o tempo de aceleração de 0 Hz
até a frequência nominal do motor f
(parâmetro 104).
M,N
Isso pressupõe que o limite da corrente não é alcançado (a
ser programado no parâmetro 221).
Valor:
Mín - Máx (MIN - MAX) [0]
- Max - + Max (-MAX-+MAX) [1]
Funcão:
Este parâmetro decide se o sinal de referência deve ser
positivo ou se pode ser tanto positivo quando negativo.
Escolha [0] Mín - Máx se Processo, modo malha aberta tiver
sido selecionado no parâmetro 100.
Descricão da selecão:
Selecione a faixa desejada.
204
Referência mínima
Valor:
-100.000,000-Ref
(Par. 205)
MAX
[-100000000 -]
0,000 [0]
Depende do parâmetro 100.
Funcão:
A Referência mínima indica o ajuste mínimo que pode ser
assumido pela soma de todas as referências.
A referência mínima só estará ativa se [0] Mín. - Máx. tiver
sido programada no parâmetro 203; no entanto, está
sempre ativa em Processo, modo malha fechada (parâmetro
100).
Descricão da selecão:
Está ativa somente quando o parâmetro 203 tiver sido
programado para [0] Mín. - Máx.
Programe no valor desejado.
205
Referência máxima
Valor:
Ref
(parâmetro 204)-100.000.000
MIN
[-100000000]
50,000 Hz [50000]
Funcão:
A Referência máxima indica o valor mais alto que pode ser
assumido pela soma de todas as referências. Se o
Ilustração 3.17
Descricão da selecão:
Programe o tempo de aceleração desejado.
208
Tempo de desaceleração 1
Valor:
0,15-3600,00 s [5 - 360000]
3,00 s [300]
Funcão:
O tempo de desaceleração é o tempo de desaceleração da
frequência nominal do motor f
(parâmetro 104) até 0 Hz
M,N
desde que não haja sobrecarga de tensão no inversor
causada pela operação regenerativa do motor e o limite de
corrente não seja alcançado (a ser programado no
parâmetro 221).
Descricão da selecão:
Programe o tempo de parada rápida desejado.
209
Tempo de aceleração 2
Valor:
0,15-3600,00 s [5 -360000]
3,00 s [300]
46 MG03BA28 - VLT® é marca registrada da Danfoss

Programação
VLT® DriveMotor FCM Series
Funcão:
O tempo de aceleração é o tempo de aceleração de 0 Hz
até a frequência nominal do motor f
(parâmetro 104).
M,N
Isso pressupõe que o limite da corrente não é alcançado (a
ser programado no parâmetro 221).
Descricão da selecão:
Programe o tempo de aceleração desejado.
Mudança da rampa 1 para rampa 2 ativando a rampa 2
através de uma entrada digital.
210 Tempo de desaceleração 2
Valor:
0,15-3600,00 s [5-360000]
3,00 s [300]
Funcão:
O tempo de desaceleração é o tempo de desaceleração da
frequência nominal do motor f
(parâmetro 104) até 0 Hz
M,N
desde que não haja sobrecarga de tensão no inversor
causada pela operação regenerativa do motor e o limite de
corrente não seja alcançado (a ser programado no
parâmetro 221).
Descricão da selecão:
Programe o tempo de parada rápida desejado.
A comutação entre a rampa 1 e a rampa 2 é efetuada pela
ativação da rampa 2 através de uma entrada digital
211
Tempo de rampa do jog
Valor:
0,15-3600,00 s [5-360000]
3,00 s [300]
Funcão:
O tempo de rampa do jog é o tempo de aceleração/
desaceleração de 0 Hz até a frequência nominal do motor
f
(parâmetro 104), se não houver sobrecarga de tensão
M,N
no inversor causada pela operação regenerativa do motor
e se o limite de corrente não for alcançado (a ser
programado no parâmetro 221).
Ilustração 3.18
O tempo de rampa para o jog inicia se um sinal de jog for
dado através do painel de controle, das entradas digitais
ou via comunicação serial.
Descricão da selecão:
Programe o tempo de rampa desejado.
212 Tempo de desaceleração com parada rápida
Valor:
0,15-3600,00 s [5-360000]
3,00 s [300]
Funcão:
O tempo de parada rápida é o tempo de desaceleração da
frequência nominal do motor até 0 Hz, se nenhuma sobre
carga de tensão ocorrer no inversor por causa da operação
de geração do motor e se o limite de corrente não for
alcançado (a ser definido no parâmetro 221).
A parada rápida é ativada através de um sinal em um dos
terminais de entrada digitais (2-5) ou através da porta de
comunicação serial.
Descricão da selecão:
Programe o tempo de parada rápida desejado.
213
Frequência de jog
Valor:
0,0 Hz-parâmetro 202 [0 -]
10,0 Hz [100]
Funcão:
A frequência de jog f
é a frequência de saída fixa na
JOG
qual o motor FC esatá funcionando quando a função de
jog estiver ativada.
Descricão da selecão:
Ajuste a frequência desejada.
214
Função de referência
Valor:
Soma (SOMA) [0]
Externo/predefinido (EXTERNO/PREDEFINIDO) [2]
Funcão:
É possível definir como as referências predefinidas devem
ser adicionadas às outras referências. Para este objetivo, é
utilizada Soma. Também é possível - utilizando a função
Externa/predefinida - selecionar se é desejável uma
alternação entre as referências externas e as referências
predefinidas.
Descricão da selecão:
Se for selecionado [0] Soma, uma das referências
predefinidas ajustadas (parâmetros 215-216) é somada
como uma porcentagem da máxima referência possível.
Se for selecionado [2] Externa/predefinida é possível
alternar entre referências externas ou referências
predefinidas via terminal 2, 3, 4 ou 5 (parâmetro 332, 333,
334 ou 335). As referências predefinidas são um valor
percentual da gama de referência.
A referência externa é a soma das referências analógicas,
pulsos e referências do barramento.
3 3
MG03BA28 - VLT® é marca registrada da Danfoss 47

Programação
VLT® DriveMotor FCM Series
Limite máx (XXX.X) [XXXX]
215 Referência predefinida 1
216 Referência predefinida 2
Valor:
-100,00%-+100,00% [-10000-+10000]
33
% da gama de referência/referência externa
0,00% [0]
Funcão:
Duas diferentes referências predefinidas podem ser
I
= corrente nominal do motor
RATED
Limite mín. = corrente de magnetização em % de I
Limite máx. = limite dependente da unidade em % de I
RATED
RATED
Funcão:
Essa função é relevante para todas as configurações de
aplicação; regulagem de velocidade e processo. Este é o
ponto onde deve ser configurado o limite de corrente de
operação do motor.
programadas nos parâmetros 215-216.
A referência predefinida é apresentada como uma
porcentagem do valor Ref
ou como porcentagem das
MAX
outras referências externas, dependendo da seleção feita
no parâmetro 214. Se for programada uma Ref
diferente
MIN
de 0, a referência predefinida como porcentagem é
calculada com base na diferença entre Ref
seguida o valor é adicionado à Ref
MIN
.
MAX
e Ref
MIN
, em
Descricão da selecão:
Programe a(s) referência(s) fixa(s) que deve(m) ser as
opções.
Para usar as referências fixas, é necessário ter selecionado
Habilita referência predefinida para os bornes 2, 3, 4 ou 5
(parâmetros 332 - 335).
Ilustração 3.19
A escolha entre as referências fixas pode ser feita ativando
o terminal 2, 3, 4 ou 5 - veja Tabela 3.8.
Bornes 2/3/4/5
Referência predefinida
Referência predefinida 1 0
Referência predefinida 2 1
Tabela 3.8
219
Valor de catch up/desaceleração
Valor:
0.00-100.00% [0-10000]
0,00% [0]
Funcão:
Este parâmetro possibilita a introdução de um valor
percentual (relativo) que será somado ou subtraído do
sinal de referência predefinido.
Descricão da selecão:
Se Catch-up foi selecionado através de um dos terminais 2,
3, 4 ou 5 (parâmetros 332 - 335), o valor porcentual
(relativo) selecionado no parâmetro 219 será adicionado à
referência total.
Se Slow-down foi selecionado através de um dos terminais
2, 3, 4 ou 5 (parâmetros 332 - 335), o valor percentual
(relativo) selecionado no parâmetro 219 será deduzido da
referência total.
221
Limite de corrente do modo motor
Valor:
Limite mín. (XX.X) - limite máx. (XXX.X)
em % de I
RATED
[XXX - XXXX]
Ilustração 3.20
Descricão da selecão:
Ajuste % da corrente desejada.
229
Bypass de frequência, largura da banda
Valor:
0 (OFF)-100% [0-100]
0 (OFF)% [0]
Funcão:
Alguns sistemas precisam evitar algumas frequências de
saída por causa de problemas de ressonância no sistema.
Nos parâmetros 230-231 estas frequências de saída podem
ser programadas. Neste parâmetro (229), a largura de
48 MG03BA28 - VLT® é marca registrada da Danfoss

Programação
banda pode ser definida em qualquer dos lados dos
bypasses de frequência.
Descricão da selecão:
A banda de bypass é a frequência de bypass +/- metade
da largura de banda configurada.
É selecionada uma porcentagem da configuração dos
parâmetros 230-231.
230 Bypass de frequência 1
231 Frequência de bypass 2
Valor:
0,0-132 Hz (parâmetro 200) [0 -]
0,0 Hz [0]
Funcão:
Alguns sistemas precisam evitar algumas frequências de
saída por causa de problemas de ressonância no sistema.
Descricão da selecão:
Digite as frequências a serem canceladas.
Veja também o parâmetro 229.
VLT® DriveMotor FCM Series
3.4.1
Grupo do parâmetros 3-** Entrada/
Saída
317 Timeout
Valor:
1-99 s [1-99]
10 s [10]
Funcão:
Se o valor do sinal de referência conectado à entrada,
terminal 1, descer abaixo dos 50% do valor no parâmetro
336 durante um período mais longo do que o tempo
programado no parâmetro 317, a função selecionada no
parâmetro 318 será ativada.
Descricão da selecão:
Defina o tempo desejado.
3 3
241
242 Referência predefinida 2
243 Referência predefinida 3
244 Referência predefinida 4
245 Referência predefinida 5
246 Referência predefinida 6
247 Referência predefinida 7
Valor:
-100,00%-+100,00% [-10000-+10000]
% da gama de referência/referência externa
0,00% [0]
Funcão:
Sete referências predefinidas podem ser programadas nos
parâmetros 241 - 247 referência predefinida. A referência
predefinida é apresentada como uma porcentagem do
valor Ref
externas, dependendo da escolha feita no parâmetro 214.
Se uma Ref
predefinida como porcentagem será calculada com base
na diferença entre Ref
adicionado a Ref
A escolha entre as referências predefinidas pode ser feita
através de entradas digitais ou de comunicação serial.
Descricão da selecão:
Programe a(s) referência(s) fixa(s) que deve(m) ser a opção.
Veja P332, P333, P334 e P335 Descrição da opção, onde é
fornecida a descrição da configuração da entrada digital.
Referência predefinida 1
ou como porcentagem das outras referências
MAX
≠ 0 tiver sido programada, a referência
MIN
MIN
e Ref
MAX
.
em seguida o valor é
MIN
MG03BA28 - VLT® é marca registrada da Danfoss 49

Programação
VLT® DriveMotor FCM Series
318 Função após timeout
Valor:
Off (Desligado) (OFF (Desligada)) [0]
Parada e desarme (PARADA E DESARME) [5]
Funcão:
33
Este parâmetro permite uma escolha da função a ser
entrada, terminal 1, descer abaixo dos 50% do valor do
parâmetro 336 durante um período mais longo do que o
tempo programado no parâmetro 317.
Se uma função timeout (parâmetro 318) ocorrer ao mesmo
tempo como uma função timeout do bus (parâmetro 514),
a função timeout (parâmetro 318) será ativada.
ativada se o valor do sinal de referência conectado à
Definições:
Sem função
Sinal de pronto (UNIDADE PRONTA) [1]
Ativar, sem advertência (ATIVADO/SEM ADVERTÊNCIA) [2]
Em operação (RUNNING) [3]
Em operação, sem advertência (RUNNING NO WARNING) [4]
Funcionando na referência, sem advertência (FUNCIONANDO NA REFERÊNCIA) [5]
Falha (FALHA) [6]
Falha ou advertência (FALHA OU ADVERTÊNCIA) [7]
Lim. d Corrente (LIMITE DE CORRENTE) [8]
Advertência térmica (ADVERTÊNCIA TÉRMICA) [9]
Reversão (REVERSO) [10]
Control word bit 11 (CONTROL WORD BIT 11) [11]
Control word bit 12 (CONTROL WORD BIT 12) [12]
Freio mecânico (FREIO MECÂNICO) [20]
Sleep mode (SLEEP MODE) [21]
(SEM OPERAÇÃO) [0]
Tabela 3.9 323 Terminal X102, Função Relé (FUNÇ. RELÉ)
A saída do relé pode ser utilizada para enviar o status atual
ou uma advertência.
Relé
1 - 3 freio ativado, 1 - 2 freio desativado
Máx. 250 V CA, 5 Amp.
Tabela 3.10
Descricão da selecão:
Sinal de Unidade pronta
, o motor do FC está pronto para
uso.
Ativar/sem advertência, o motor do FC está pronto para
uso; nenhum comando de partida ou parada foi dado
(partida/desabilitado). Sem advertência.
Em operação, foi dado um comando de partida.
Funcionando, sem advertência, foi dado um comando de
partida. Sem advertência.
Funcionando na referência, sem advertência, velocidade de
acordo com a referência.
Falha, saída é ativada por alarme.
Falha ou advertência, a saída é ativada por alarme ou
advertência.
Limite de corrente, o limite de corrente no parâmetro 221
foi excedido.
Advertência térmica, conversor de frequência acima do
limite de temperatura.
Reversão. '1' lógico = relé ativado, 24 V CC na saída,
quando o sentido de rotação do motor for horário. '0'
lógico = relé desativado, nenhum sinal na saída quando o
sentido de rotação do motor for anti-horário.
Control word bit 11, se o bit 11 = “1” na control word (do
Perfil do Fieldbus e do Perfil do FC) o relé será ativado.
Control word bit 12, se o bit 12 = “1” na control word (do
Perfil do Fieldbus e do Perfil do FC) o relé será ativado.
Freio Mecânico, ativa o controle de um freio mecânico
externo opcional (consultar também os parâmetros 138 e
139).
Sleep mode, ativo quando a unidade estiver funcionando
em sleep mode. Veja 3.5.2 Sleep Mode.
327
Referência por pulso, frequência máx.
Valor:
100-70000 Hz [100-70000]
5000 HZ [5000]
Funcão:
Neste parâmetro, o valor do sinal é programado em correspondência ao valor máximo de referência programado nos
parâmetros 205/415.
Descricão da selecão:
Ajuste a frequência de pulsos desejada.
50 MG03BA28 - VLT® é marca registrada da Danfoss

Programação
VLT® DriveMotor FCM Series
331 Terminal 1, corrente de entrada analógica
Valor:
Sem operação (SEM OPERAÇÃO) [0]
Referência (REFERÊNCIA) [1]
Feedback (FEEDBACK) [2]
[1] Referência. É selecionada para permitir alteração de
referência por meio de um sinal de referência analógico.
Se outras entradas estiverem conectadas, elas são
somadas, levando-se em conta os seus sinais algébricos.
[2] Feedback. É selecionada se for usada regulagem de
malha fechada com um sinal analógico.
Funcão:
Este parâmetro permite escolher entre as diferentes
funções disponíveis para a entrada, terminal 1.
A escala do sinal de entrada é realizada nos parâmetros
336 e 337.
Descricão da selecão:
[0] Sem operação
. É selecionada se o motor FC não reagir
332 Terminal 2, entrada analógica/digital
333 Terminal 3, entrada digital
334 Terminal 4, entrada digital
335 Terminal 5, entrada digital
aos sinais conectados ao terminal.
Parâmetro 332 333 334 335
Entrada digital no terminal nº. 2 3 4 5
Configurações
Sem função (SEM OPERAÇÃO) [0] [0] [0] [0]
Reset (RESET) [1]
Parada por inércia, inversa PARADA DO MOTOR POR INÉRCIA
INVERSA
Reset e parada por inércia, inversa (RESET E INÉRCIA INVERSA) [3] [3] [3] [3]
Quick-stop, inversão (PARADA RÁPIDA POR INÉRCIA
INVERSA)
Frenagem CC, inversa (FRENAGEM CC INVERSA) [5] [5] [5] [5]
Parada por inércia inversa (PARADA POR INÉRCIA INVERSA) [6] [6] [6] [6]
Partida (PARTIDA) [7] [7]
Partida por pulso PARTIDA POR PULSO [8] [8] [8] [8]
Reversão (REVERSÃO) [9] [9] [9] [9]
Partida em Reversão (PARTIDA EM REVERSÃO) [10] [10] [10] [10]
Partida no sentido horário, ativa (ENABLE FORWARD) [11] [11] [11] [11]
Partida sentido anti-horário, ativa (ENABLE REVERSE) [12] [12] [12] [12]
Jog (JOGGING) [13] [13] [13]
Congelar referência (CONGELAR REFERÊNCIA) [14] [14] [14] [14]
Congelar Saída (CONGELAR SAÍDA) [15] [15] [15] [15]
Acelerar (ACELERAR) [16] [16] [16] [16]
Desacelerar (DESACELERAR) [17] [17] [17] [17]
Seleção de Setup (SETUP SELECIONADO) [18] [18] [18] [18]
Catch-up (CATCH UP) [19] [19] [19] [19]
Desacelerar (DESACELERAR) [20] [20] [20] [20]
Referência predefinida (REF. PREDEFINIDA) [21] [21] [21] [21]
Ref. predefinida, ligada (REF. PREDEFINIDA LIGADA) [22] [22] [22] [22]
Parada precisa, inversa (PARADA PRECISA) [23]
Referência de pulso (REFERÊNCIA DE PULSO) [24]
Referência de pulso (FEEDBACK DE PULSO) [25]
Referência analógica (REFERÊNCIA)
Feedback analógico (FEEDBACK) [31]
Reinicialização e partida (RESET E PARTIDA) [32] [32] [32] [32]
Congelar Referência e partida (CONGELAR REF. E PARTIDA) [33] [33] [33] [33]
Rampa 2 (RAMPa 2) [34] [34] [34] [34]
Partida-bit ref. 1 (PARTIDA-BIT REF. 1) [35] [35] [35] [35]
Partida-bit ref. 2 (PARTIDA-BIT REF. 2) [36] [36] [36] [36]
[2] [2] [2] [2]
[4] [4] [4] [4]
[30]
[1]
[1] [1]
[7]
[7]
3 3
[13]
MG03BA28 - VLT® é marca registrada da Danfoss 51

Programação
Parâmetro 332 333 334 335
Entrada digital no terminal nº. 2 3 4 5
Configurações
Partida-bit ref. 3 (PARTIDA-BIT REF. 3) [37] [37] [37] [37]
VLT® DriveMotor FCM Series
33
Tabela 3.11
Funcão:
Nos parâmetros 332-335, é possível escolher entre as
diferentes funções possíveis relacionadas com as entradas
nos terminais 2-5. As opções de funções são mostradas em
Tabela 3.13.
Descricão da selecão:
Sem função é selecionada caso o motor do FC não deva
reagir aos sinais transmitidos ao terminal.
Reset zera o motor do FC, após um alarme; entretanto,
nem todos os alarmes podem ser resetados sem que seja
necessário desconexão da rede elétrica.
Parada por inércia, inversa é usado para permitir que o
motor do FC gire livremente até parar. O ‘0’ lógico ativa
uma parada por inércia.
Reset e parada por inércia, inversa, é usado para ativar a
parada por inércia, ao mesmo tempo que reinicializa.
O ‘0’ lógico ativa uma parada por inércia e reset.
Parada rápida, inversa é usado para parar o motor, de
acordo com a rampa de parada rápida (programada no
parâmetro 212).
O '0' lógico leva a uma parada rápida.
Frenagem CC, inversa é utilizado para parar o motor
energizando-o com uma tensão CC, durante um tempo
determinado; veja os parâmetros 126-132.
Observe que esta função só fica ativa se a programação
dos parâmetros 126-132 for diferente de 0. O '0' lógico
aciona a frenagem CC.
Parada inversa é ativado interrompendo-se a tensão para o
terminal. Isto significa que, se o terminal não estiver
energizado, o motor não poderá funcionar. A parada será
efetuada de acordo com a rampa selecionada (parâmetros
207/208).
Partida, é selecionado se o comando partida/parada for
desejado. O "1" lógico = partida, o "0" lógico = parada
(stand-by).
Partida por pulso - caso um pulso seja aplicado durante no
mínimo 20 ms, o motor dará partida, desde que nenhum
comando de parada tenha sido emitido. O motor pára se a
Parada inversa for ativada brevemente.
Reversão é usado para alterar o sentido de rotação do eixo
do motor. O "0" lógico não acionará a reversão. O "1"
lógico acionará a reversão. O sinal de reversão só mudará
o sentido da rotação; ele não ativa a função de partida.
Não deve ser usado em Processo, modo malha fechada.
Partida em reversão, é utilizada para partida/parada e para
reversão com o mesmo sinal. Nenhum sinal de partida é
permitido ao mesmo tempo. Atua como reversão de
partida com pulso, desde que a partida com pulso tenha
sido selecionada para um outro terminal.
Não deve ser usado em Processo, modo malha fechada.
Partir no sentido horário é usado se o eixo do motor
necessitar girar apenas no sentido horário, na partida.
Não deve ser usado em Processo, modo malha fechada.
Partir no sentido anti-horário, ligar é usado se o eixo do
motor tiver que girar no sentido anti-horário, na partida.
Não deve ser usado em Processo, modo malha fechada.
Jog é usado para substituir a frequência de saída pela
frequência de jog, programada no parâmetro 213. O
tempo de rampa pode ser programado no parâmetro 211.
O jog não estará ativo se um comando de partida tiver
sido emitido (desativação de partida).
O jog anula um stand-by.
Congelar referência - congela a referência real. A referência
congelada passa a ser agora o ponto de ativação/condição
para que Acelerar e Desacelerar possam ser usadas.
Se for usada aceleração/desaceleração, a alteração de
velocidade sempre segue a rampa normal (parâmetros
207/208) no intervalo de 0 - Ref
Congelar saída - congela a frequência real do motor (em
Hz). A frequência congelada do motor agora é o ponto de
ativação/condição para a Aceleração e Desaceleração a
serem utilizadas.
Congelar saída prevalece sobre partida/stand-by,
compensação de escorregamento e controle de processo
de malha fechada.
Se for usada a aceleração/desaceleração, a mudança de
velocidade sempre acompanhará a rampa normal
(parâmetros 207/208) na faixa de 0 - f
Acelerar e Desacelerar são selecionadas se for desejado um
controle digital de aumento/diminuição da velocidade
(potenciômetro do motor). Esta função será ativada
somente se Congelar referência ou Congelar saída tiver sido
selecionada.
Desde que exista estado lógico ‘1‘ no terminal selecionado
para aceleração, a referência ou a frequência de saída
aumentará.
Desde que exista ‘1‘ lógico no terminal selecionado para
desaceleração, a referência ou a frequência de saída
diminuirá.
Os pulsos ('1' lógico alto por 20 ms no mínimo, e pausa
mínima de 20 ms) conduzirão a uma mudança de
velocidade de 0,1% (referência) ou 0,1 Hz (frequência de
saída).
MAX
.
.
M,N
52 MG03BA28 - VLT® é marca registrada da Danfoss

Programação
VLT® DriveMotor FCM Series
Sem alteração de
velocidade
Desacelerar 0 1 1
Acelerar 1 0 1
Desacelerar 1 1 1
Tabela 3.12 Exemplo:
Terminal número Congelar ref./
2-5 2-5 Congelar Saída
0 0 1
Seleção de Setup, permite uma seleção de um dos dois
Setups; contudo, isto pressupõe que o parâmetro 004 foi
programado no Setup Multiplo.
Catch-up/Redução de velocidade é selecionado se o valor de
referência precisar ser aumentado ou reduzido por um
valor porcentual programável definido no parâmetro 219.
Velocidade inalterada 0 0
Reduzida de % do valor 1 0
Aumentada de % do valor 0 1
Reduzida de % do valor 1 1
Tabela 3.13
Desacelerar Catch-up
Referência predefinida permite a seleção de uma de duas
referências predefinidas, de acordo com a tabela nos
parâmetros 215 e 216. Para ser ativada, Referência
predefinida, ligada deverá ser selecionado.
Referência predefinida é utilizada para migrar da referência
externa para a referência predefinida. Supõe-se que [2]
Externa/predefinida tenha sido selecionado no parâmetro
214. '0' lógico = referências externas ativas; ‘1’ lógico =
uma das duas referências predefinidas está ativa.
Parada Precisa corrige o tempo de desaceleração para
obter uma alta precisão repetitiva do ponto de parada.
Pulse reference (Referência de pulso) é selecionada se for
usada uma sequência de pulsos (frequência) de 0 Hz,
correspondente à Ref
programada no parâmetro 327, correspondendo a Ref
, parâmetro 204. A frequência
MIN
MAX.
Feedback de pulso é selecionado se uma sequência de
pulsos (frequência) for selecionada como sinal de feedback.
Veja também o parâmetro 327.
Referência analógica é selecionado para ativar uma
mudança ou uma referência por meio de um sinal de
referência analógica.
Se outras entradas estiverem conectadas, elas são
somadas, levando-se em conta os seus sinais algébricos.
Feedback analógico é selecionado se for utilizada a
regulagem de malha fechada com um sinal analógico.
Reset e partida é usado para ativar a partida ao mesmo
tempo que o reset.
Congelar referência e partida, um comando de START e
FREEZE REFERENCE serão iniciados. Ao se utilizar SPEED
UP/SPEED DOWN, tanto FREEZE REFERENCE quanto START
devem estar ativados. Implementando este recurso, é
possível economizar uma saída digital.
Rampa 2,
é selecionado se for necessária uma mudança
entre rampa 1 (parâmetros 207-208) e rampa 2
(parâmetros 209-210). O "0" lógico conduz à rampa 1 e o
"1" lógico à rampa 2.
Partida- bit ref 1,2 e 3, permite selecionar qual REF RESET
(1-7) será usada. As REF PRESET (1-7) são definidas nos
parâmetros 241 a 247.
Nº par. Velocidade constante INICIAR BIT REF.
321
- - - Stand-by 000
241 RESET REF. 1 001
242 RESET REF. 2 010
243 RESET REF. 3 011
244 RESET REF. 4 100
245 RESET REF. 5 101
246 RESET REF. 6 110
247 RESET REF. 7 111
Tabela 3.14
Se pelo menos uma das 3 entradas digitais estiver ativada,
o FCM tem sinal de partida. As 7 combinações de entrada
possíveis irão decidir qual velocidade predefinida será
usada.
Se apenas 1 ou 2 entradas digitais forem usadas, 1 ou 3
velocidades, respectivamente, poderão ser selecionadas
segundo o princípio mostrado acima.
Se 2 setups forem usados, no máximo 14 velocidades
predefinidas poderão ser selecionadas por meio de 4
entradas digitais. As configurações P241 e P242 serão
espelhadas em P215 e P216.
Ex.
Entradas digitais 2, 3 e 4: P332 [opção 35 selecionada],
P333 [opção 36 selecionada] e P334 [opção 37 selecionada]
Combinação de entrada nas entradas digitais 2,3 e 4: "010".
Isto significa que REF PRESET 2 será a velocidade
predefinida.
A escala do sinal de entrada é realizada por meio dos
parâmetros 338 e 339.
336
Terminal 1, escala mín.
Valor:
0,0-20,0 mA [0-200]
0,0 mA [0]
Funcão:
Este parâmetro determina o valor do sinal de referência
que corresponde ao valor de referência mínimo
programado no parâmetro 204.
Se a função Timeout do parâmetro 317 for usada, o valor
deve ser > 2 mA.
3 3
MG03BA28 - VLT® é marca registrada da Danfoss 53

Programação
VLT® DriveMotor FCM Series
Descricão da selecão:
Programar o valor da corrente desejada.
337 Terminal 1, escala máx.
Valor:
33
0,0-20,0 mA [0-200]
20,0 mA [200]
Funcão:
Este parâmetro programa o valor do sinal de referência
que corresponde ao valor de referência máximo
programado no parâmetro 205.
Descricão da selecão:
Programar o valor da corrente desejada.
feedback mínimo, parâmetro 204 Referência mínima,
Ref
/414 Feedback mínimo, FB
MIN
MIN
.
Descricão da selecão:
Configurar o valor da tensão desejada. Por razões de
precisão, as perdas de tensão do sinal em cabos longos
devem ser compensadas. Se a função Timeout tiver que
ser utilizada (parâmetro 317 Timeout e 318 Função após
timeout), o valor programado deve ser superior a 1 Volt.
339 Terminal 2, escala máx.
Valor:
0,0-10,0 V [0-100]
10,0 V [100]
Funcão:
338
Valor:
0,0-10,0 V [0-100]
0,0 V [0]
Funcão:
Este parâmetro é utilizado para programar o valor do sinal
que deve corresponder â referência mínima ou ao
Terminal 2, escala mín.
Esse parâmetro é usado para definir o valor do sinal que
corresponde ao valor de preferência máximo ou feedback
máximo, parâmetro 205 Referência máxima, Ref
Feedback máximo, FB
MAX
.
MAX
/415
Descricão da selecão:
Configurar o valor da tensão desejada. Por razões de
exatidão, as perdas de tensão de sinal em cabos longos
devem ser compensadas.
Definições:
Sem função
Sinal de pronto (UNIDADE PRONTA) [1]
Ativar, sem advertência (ATIVADO/SEM ADVERTÊNCIA) [2]
Em operação (RUNNING) [3]
Em operação, sem advertência (RUNNING NO WARNING) [4]
Funcionando na referência, sem advertência (FUNCIONANDO NA REFERÊNCIA) [5]
Falha (FALHA) [6]
Falha ou advertência (FALHA OU ADVERTÊNCIA) [7]
Lim. d Corrente (LIMITE DE CORRENTE) [8]
Advertência térmica (ADVERTÊNCIA TÉRMICA) [9]
Reversão (REVERSO) [10]
Control word bit 11 (CONTROL WORD BIT 11) [11]
Frequência real 0-20 mA (0-FMAX = 0-20 mA) [12]
Frequência real 4-20 mA (0-FMAX = 4-20 mA) [13]
Referência
Referência
Feedback
Feedback
Corrente real 0-20 mA (0-IMAX = 0-20 mA) [18]
Corrente real 4-20 mA (0-IMAX = 4-20 mA) [19]
Freio mecânico (FREIO MECÂNICO) [20]
Sleep mode (SLEEP MODE) [21]
Torque 0-20 mA (0-TMAX = 0-20 mA) [22]
Torque 4-20 mA (0-TMAX = 4-20 mA) [23]
- referência
MIN
- referência
MIN
- feedback
MIN
- feedback
MIN
: 0-20 mA (REF MIN-MAX = 0-20 mA) [14]
MAX
: 4-20 mA (REF MIN-MAX =4-20 mA) [15]
MAX
: 0-20 mA (FB MIN-MAX =0-20 mA) [16]
MAX
: 4-20 mA (FB MIN-MAX = 4-20 mA) [17]
MAX
(SEM OPERAÇÃO) [0]
Tabela 3.15 340 Terminal 9, Funções de Saída (FUNC. SAÍDA)
Funcão:
Esta saída pode funcionar como uma saída tanto digital
Como saída analógica será transmitido um sinal de saída
de 0-20 mA ou um de 4-20 mA.
quanto analógica. Se utilizada como saída digital (valor dos
dados [0]-[23]), será transmitido um sinal de 24 V CC;
54 MG03BA28 - VLT® é marca registrada da Danfoss
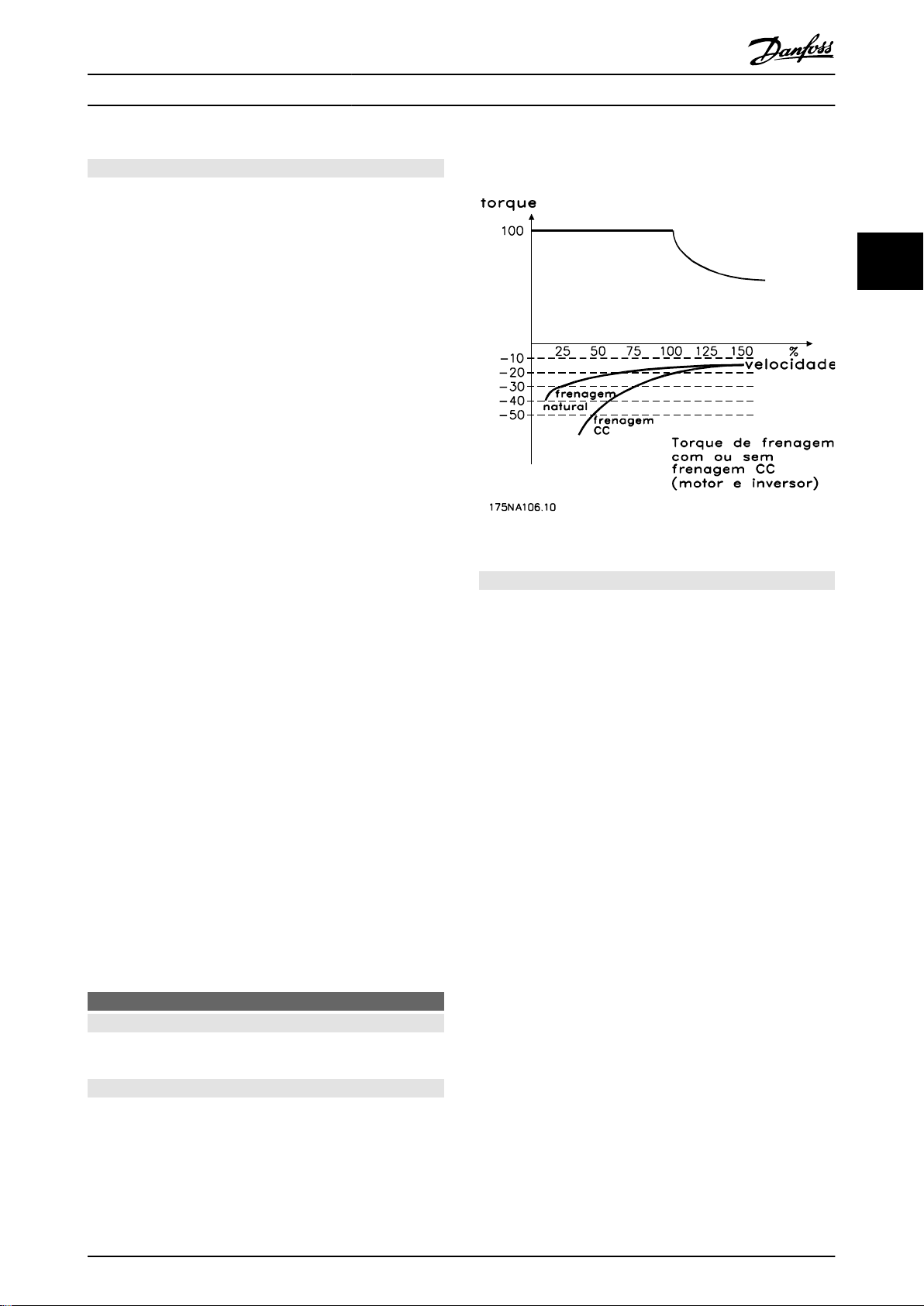
Programação
VLT® DriveMotor FCM Series
Descricão da selecão:
Sinal de Unidade pronta, o motor do FC está pronto para
uso.
Ativar/sem advertência, o motor do FC está pronto para
uso; nenhum comando de partida ou parada foi dado
(partida/desabilitado). Sem advertência.
Em operação, foi dado um comando de partida.
Funcionando, sem advertência, foi dado um comando de
partida. Sem advertência.
Funcionando na referência, sem advertência, velocidade de
acordo com a referência.
Falha, saída é ativada por alarme.
Falha ou advertência, a saída é ativada por alarme ou
advertência.
Limite de corrente, o limite de corrente no parâmetro 221
foi excedido.
Advertência térmica, conversor de frequência acima do
limite de temperatura.
Reversão. '1' lógico = relé ativado, 24 V CC na saída,
quando o sentido de rotação do motor for horário. '0'
lógico = relé desativado, nenhum sinal na saída quando o
sentido de rotação do motor for anti-horário.
Control word bit 11, se o bit 11 = “1” na control word (no
Perfil do Fieldbus e no Perfil do FC), a saída digital será
ativada.
0-f
(parâmetro 202) ⇒ 0-20 mA e
MAX
⇒
0-f
(parâmetro 202)
MAX
Referência
Referência
Feedback
Feedback
0-I
VLT, MAX
0-I
VLT, MAX
- Referência
MIN
- Referência
MIN
- Feedback
LOW
- Feedback
BAIXO
⇒
0-20 mA e
⇒
4-20 mA
4-20 mA
: 0-20 mA e
MAX
: 4-20 mA
MAX
: 0-20 mA e
HIGH
: 4-20 mA
ALTO
Freio Mecânico, ativa o controle de um freio mecânico
externo opcional (consultar também os parâmetros 138 e
139).
Sleep mode, ativo quando a unidade estiver funcionando
em sleep mode. Veja 3.5.2 Sleep Mode
0-T
⇒ 0-20 mA e
MAX
⇒
0-T
3.5.1
4-20 mA e
MAX
Grupo de Parâmetros 4-** Funções
Especiais
velocidade básica, a frenagem adicional desaparecerá
gradualmente.
Ilustração 3.21
Descricão da selecão:
Selecione [4] Freio CA se ocorrerem cargas geradas de curta
duração.
Sleep Mode
3.5.2
torna possível parar o motor quando estiver funcionando
em baixa velocidade, semelhante a uma situação sem
carga. Se o consumo do sistema voltar a aumentar, o
conversor de frequência VLT dará partida no motor e
fornecerá a potência requerida.
AVISO!
Esta função pode contribuir para a economia de energia,
já que o motor entrará em operação somente quando
for necessário para o sistema.
Sleep mode não ficará ativo se Referência local ou Jog tiver
sido selecionado
A função fica ativa tanto em Malha aberta quanto em
Malha fechada.
3 3
400 Funções de frenagem
Valor:
OFF (Desligada) (OFF (Desligada)) [0]
Freio CA (FREIO CA) [4]
Funcão:
[4] Freio CA pode ser selecionado para melhorar a
frenagem. Com a nova função de freio CA, é possível
controlar o tempo de perda do motor, inclusive
protegendo o motor termicamente. Esta função produzirá
um torque de frenagem entre 80% e 20% na faixa de
velocidade até a velocidade básica (50 Hz). Abaixo da
MG03BA28 - VLT® é marca registrada da Danfoss 55
No parâmetro 403 Temporizador do sleep mode, o Sleep
mode é ativado. No parâmetro 403 Temporizador do sleep
mode é programado um temporizador que determina
durante quanto tempo a frequência de saída pode ser
inferior à frequência programada no parâmetro 404
Frequência de Sleep. Quando o temporizador esgotar, o
conversor de frequência desacelerará o motor até parar
por meio do parâmetro 208 Tempo de desaceleração. Se a
frequência de saída subir acima da frequência programada
no parâmetro 404 Frequência de Sleep, o temporizador é
reinicializado
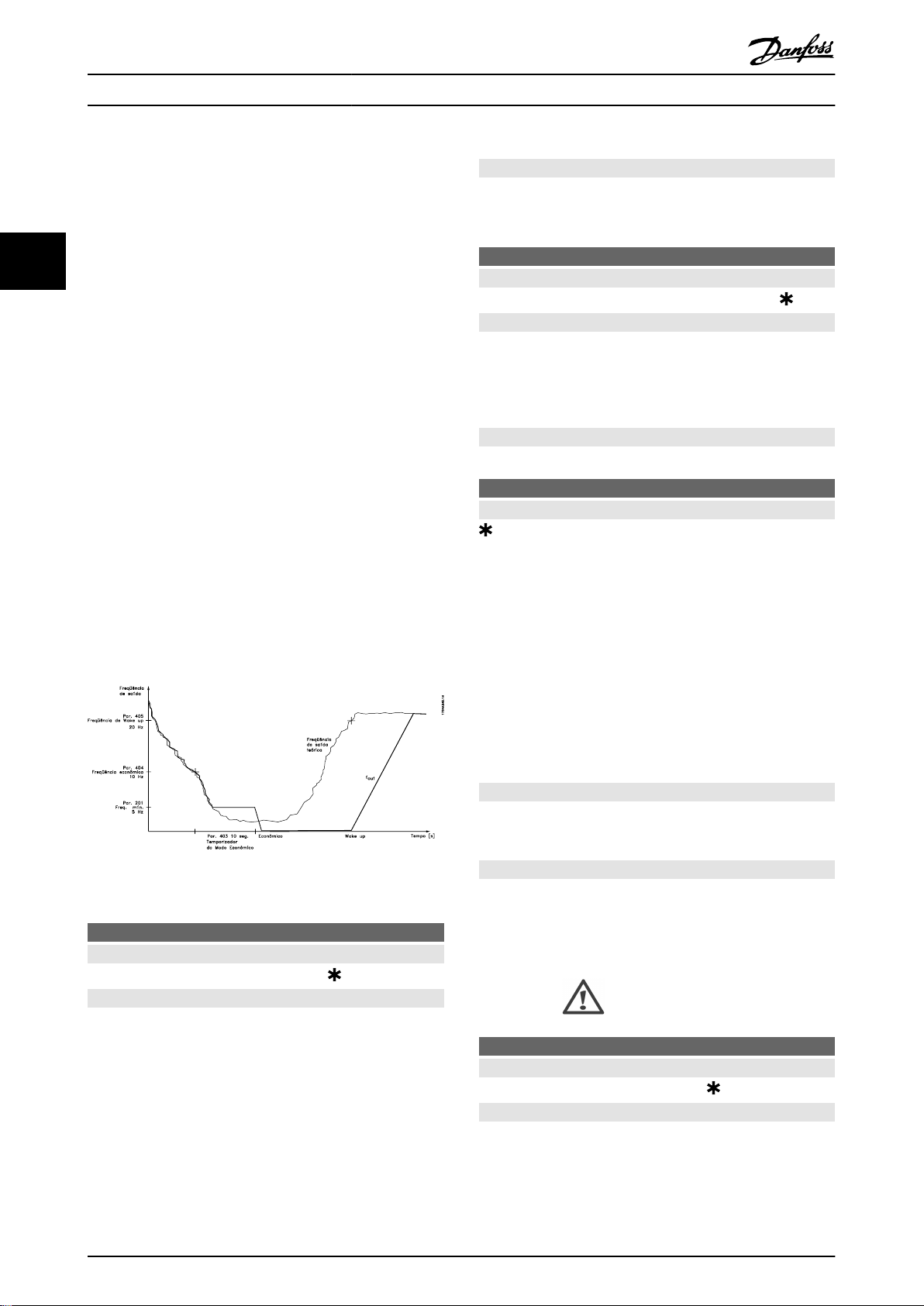
Programação
VLT® DriveMotor FCM Series
.
Quando o conversor de frequência VLT pára o motor e o
põe em modo "Sleep", a frequência de saída teórica é
calculada com base no sinal de referência. Quando a
frequência de saída teórica subir acima da frequência
33
indicada no parâmetro 407 Frequência de wake up, o
conversor de frequência reiniciará o motor e a frequência
de saída acelerará até a referência.
Em sistemas com regulagem constante da pressão, é
vantajoso fornecer pressão adicional ao sistema antes que
o conversor de frequência VLT faça o motor parar. Isto
provoca o aumento do tempo durante o qual o conversor
de frequência VLT faz o motor parar, ajudando a evitar
partidas e paradas frequentes do motor, p.ex. no caso de
uma fugas no sistema.
Se for necessário 25% mais pressão antes de o conversor
de frequência VLT parar o motor, o parâmetro 406 Ponto
de programação do boost é programado para 125%.
O parâmetro 406 Ponto de programação do boost fica ativo
somente em Malha fechada.
AVISO!
Em processos de bombeamento altamente dinâmicos é
recomendável desligar a função Flying Start (parâmetro
445).
Ilustração 3.22
403 Temporizador do sleep mode
Valor:
0 - 300 s (301 s = OFF)
Funcão:
Este parâmetro permite ao conversor de frequência parar o
motor se a carga for mínima. O temporizador no
parâmetro 403 Temporizador do sleep mode inicia quando a
frequência de saída cai abaixo da frequência programada
no parâmetro 404 Frequência de Sleep.
Quando o tempo definido no temporizador esgotar, o
conversor de frequência desligará o motor.
O conversor de frequência reiniciará o motor quando a
frequência teórica de saída exceder a frequência no
parâmetro 407 Frequência de wake up.
OFF (Desligada)
Descricão da selecão:
Selecione Off se não desejar esta função. Defina o valor
limite que ativará o Sleep mode após a frequência de saída
cair abaixo do valor no parâmetro 404 Frequência de Sleep.
404 Frequência de sleep
Valor:
000,0- par. 407 Frequência de wake up
Funcão:
Quando a frequência de saída atingir valor inferior ao
predefinido, o temporizador começará a contagem do
tempo programado no parâmetro 403 Sleep mode. A
frequência atual de saída seguirá a frequência de saída
teórica até ser atingido o fMÍN.
Descricão da selecão:
Programe a frequência desejada.
405
Valor:
Reset manual (RESET manual) [0]
Reset automático x1 (AUTOMÁTICO X 1) [1]
Reset automático x2 (AUTOMÁTICO X 2) [2]
Reset automático x3 (AUTOMÁTICO X 3) [3]
Reset automático x4 (AUTOMÁTICO X 4) [4]
Reset automático x5 (AUTOMÁTICO X 5) [5]
Reset automático x6 (AUTOMÁTICO X 6) [6]
Reset automático x7 (AUTOMÁTICO X 7) [7]
Reset automático x8 (AUTOMÁTICO X 8) [8]
Reset automático x9 (AUTOMÁTICO X 9) [9]
Reset autom. x10 (AUTOMÁTICO X 10) [10]
Reset na alimentação (RESET AT POWER UP) [11]
Funcão:
Este parâmetro permite selecionar a função de reset após
um desarme.
Após o reset, o motor FC pode dar nova partida após 1,5 s.
Descricão da selecão:
Se [0] Reset manual for selecionado, o reset deve ser
efetuado via entradas digitais.
Se o motor FC tiver que realizar um reset automático (máx.
1-10 vezes dentro de 10 minutos) após o desarme,
selecione os valores dos dados [1]-[10].
406
Valor:
1 - 200 %
Funcão:
Esta função pode ser utilizada somente se Malha fechada
estiver selecionada no parâmetro 100.
Em sistemas com regulagem de pressão constante, torna-
-se vantajoso aumentar a pressão no sistema antes de o
conversor de frequência parar o motor. Isso aumenta o em
tempo que o conversor de frequência para o motor e
Função de reset
Ponto de programação do boost
100 % do setpoint
0,0 Hz
56 MG03BA28 - VLT® é marca registrada da Danfoss

Programação
VLT® DriveMotor FCM Series
ajuda a evitar partidas e paradas frequentes do motor,
p.ex., no caso de vazamentos no sistema de abastecimento
de água.
Utilize Timeout do recalque, par. 472, para programar o
timeout do recalque. Se o ponto de progrmação do boost
não puder ser atingido dentro do tempo especificado, o
conversor de frequência continuará funcionando
normalmente (Não entra em sleep mode).
Descricão da selecão:
Programe o Ponto de programação do boost requerido
como porcentagem da referência resultante em operação
normal. 100% corresponde à referência sem recalque
(suplemento).
407
Valor:
Par 404 Frequência de sleep - par. 202 f
Funcão:
Quando a frequência teórica de saída exceder o valor
predefinido, o conversor de frequência reinicia o motor.
Descricão da selecão:
Programe a frequência desejada.
411
Valor:
1,5-14,0 kHz [1500-14000]
Dependente do motor
Funcão:
O valor determina a frequência da portadora do inversor.
Se a frequência de chaveamento for alterada, isso poderá
ajudar a minimizar possíveis ruídos acústicos do motor.
Descricão da selecão:
Quando o motor estiver funcionando, a frequência de
comutação é ajustada no parâmetros 411 até ser obtida a
frequência na qual o ruído será o mais baixo possível.
Veja também o parâmetro 446 - padrão de chaveamento.
Veja 4.1.6 Proteção térmica e "Derating"
412
Valor:
Não é possível (DESABILITADO) [0]
Freq. da portadora variável (FREQ. PORTADORA
VAR.) [1]
Temperatura dep. freq. da port. (TEMP. DEP. FREQ.) [2]
Funcão:
Esta função torna possível alterar a frequência de
chaveamento dependo da carga. Entretanto, a frequência
máxima de chaveamento é determinada pelo valor
programado no parâmetro 411.
Descricão da selecão:
Selecione [0] Não possível se for desejável uma frequência
de chaveamento permanente. Programe a frequência da
portadora no parâmetro 411.
Se [1] Frequência de chaveamento variável for selecionado,
a frequência de chaveamento diminuirá com o aumento
Frequência de ativação
MAX
Frequência de chaveamento
Frequência de chaveamento variável
50 Hz
da frequência de saída. Isto é utilizado nas aplicações com
características de torque quadrado (bombas centrífugas e
ventiladores) em que a carga diminui dependendo da
frequência de saída.
Se [2] Frequência de chaveamento dependente da
temperatura for selecionado, a frequência de chaveamento
diminuirá com uma temperatura crescente do inversor,
veja Ilustração 3.23.
Ilustração 3.23
413
Valor:
Off (Desligado) (OFF (Desligada)) [0]
On (LIGADO) [1]
Funcão:
Este parâmetro permite a programação do fator de
sobremodulação da tensão de saída.
Descricão da selecão:
[0] Desligado significa que não há sobremodulação da
tensão de saída, o que significa que o ripple de torque no
eixo do motor é evitado. Este pode ser um bom recurso,
por exemplo nas máquinas lixadeiras.
[1] Ligado significa que pode ser obtida uma tensão de
saída maior que a tensão de rede (até 5% mais).
414
Valor:
-100.000.000 - FB
0,000 [0]
Funcão:
Os parâmetros 414 e 415 são utilizados para escalar a
gama do feedback nos valores físicos utilizados pelo
operador. O valor também será os limites da referência
(parâmetros 204 e 205).
Usado junto com Processo, modo malha fechada (parâmetro
100).
Função sobremodulação
Feedback mínimo
(Par. 415)
ALTO
[-100000000 -]
3 3
MG03BA28 - VLT® é marca registrada da Danfoss 57
Programação
VLT® DriveMotor FCM Series
Descricão da selecão:
Ativo somente quando o parâmetro 203 tiver sido
programado para [0] Mín-Máx.
415 Feedback máximo
33
Valor:
(par. 414) FB
1.500.000 [1500000]
Funcão:
Veja a descrição do parâmetro 414.
416 Unidade da referência/feedback
Valor:
Nenhum [0]
% [1]
PPM [2]
RPM [3]
bar [4]
CICLOS/min [5]
PULSOS/s [6]
UNIDADES/s [7]
UNIDADES/min [8]
UNIDADES/h [9]
°C [10]
Pa [11]
l/s [12]
m3/s [13]
l/min [14]
m3/min [15]
l/h [16]
m3/h [17]
kg/s [18]
kg/min [19]
kg/h [20]
t/min [21]
t/h [22]
m [23]
Nm [24]
m/s [25]
m/min [26]
°F [27]
pol wg [28]
galão/s [29]
pés3/s [30]
galão/min [31]
pés3/min [32]
galão/h [33]
pé cúbico/h [34]
lb/s [35]
lb/min [36]
- 100.000.000
LOW
[- 100000000]
lb/h [37]
lb pé [38]
pés/s [39]
pés/min [40]
Funcão:
Escolha entre as diferentes unidades para serem mostradas
no display.
Esta unidade também é usada diretamente em Regulagem
de processo, malha fechada como uma unidade de
Referência Máxima/Mínima (parâmetros 204/205) e
Feedback Máximo/Mínimo (parâmetros 414/415).
A possibilidade de escolha de uma unidade no parâmetro
416 dependerá da escolha feita nos seguintes parâmetros:
Par. 002 Controle local/remoto.
Par. 013 Config/controle local como par. 100.
Par. 100 Configuração.
Selecione o parâmetro 002 como Controle remoto
Se o parâmetro 100 for selecionado como Regulagem de
velocidade, malha aberta, a unidade selecionada no
parâmetro 416 poderá ser usada nos displays (par. 009-12
Feedback [unit]) dos parâmetros de processo.
Observação: A referência somente pode ser mostrada em
Hz (Regulagem de velocidade, malha aberta).
Se o parâmetro 100 for selecionado como Regulagem do
processo, malha fechada, a unidade selecionada no
parâmetro 416 será usada quando forem exibidos tanto a
referência (par. 009-12: Referência [unidade]) quanto o
feedback (par. 009-12: Feedback [unidade]).
Selecione o parâmetro 002 como Controle local
Se o parâmetro 013 for escolhido como Controle do LCP e
malha aberta ou Controle digital do LCP e malha aberta, a
referência será dada em Hz, independentemente da
escolha feita no parâmetro 416. Se o parâmetro 013 for
escolhido como Controle do LCP/como par. 100 ou Controle
digital do LCP/como par. 100, a unidade ficará como
descrito anteriormente no parâmetro 002, Controle remoto.
Descricão da selecão:
Selecione a unidade desejada para o sinal de referência/
feedback.
Regulador do FCM 300
3.5.3
Regulagem de processo
O regulador do PID mantém um modo de processo
constante (pressão, temperatura, fluxo, etc.) e ajusta a
velocidade do motor com base na referência/ponto de
definição e no sinal de feedback.
Um transmissor proporciona ao regulador PID um sinal de
feedback do processo, como uma expressão do modo real
do processo. O sinal de feedback varia na medida em que
varia a carga do processo.
Isto significa que há uma variância entre a referência/
ponto de programação e o modo real do processo. A
variância é compensada pelo regulador do PID por
58 MG03BA28 - VLT® é marca registrada da Danfoss

Programação
VLT® DriveMotor FCM Series
intermédio da frequência de saída que é regulada para
mais ou para menos em relação à variância entre a
referência/ponto de definição e o sinal de feedback.
O regulador do PID integrado, no conversor de frequência,
foi otimizado para ser usado em aplicações de processo.
Isto significa que há diversas funções especiais disponíveis
no conversor de frequência.
Anteriormente era necessário obter um sistema para
manipular essas funções especiais instalando módulos de
E/S adicionais e programando o sistema. Com o conversor
de frequência, a necessidade de instalar módulos
adicionais pode ser evitada. Os parâmetros específicos para
o Regulador de Processo são os parâmetros de 437 a 444.
Funções do PID
3.5.4
Unidade de referência/feedback
Quando Regulagem do processo, malha fechada estiver
selecionado no parâmetro 100 Configuração, a unidade é
definida no parâmetro 416 Unidade de referência/feedback:
Referência
No parâmetro 205 Referência máxima, Ref
predefinir uma referência máxima que coloca em escala a
soma de todas as referências, ou seja, a referência
resultante.
A referência mínima no parâmetro 204 é uma expressão
do valor mínimo que a referência resultante pode assumir.
Todas as referências serão adicionadas e essa soma será a
referência segundo a qual a regulagem ocorrerá. É possível
limitar a gama de referência para uma faixa de valores
inferior â da gama de feedback. Isto pode ser vantajoso se
você quiser evitar uma mudança não intencional em uma
referência externa, fazendo com que a soma das
referências se afaste demais do valor ótimo de referência.
A faixa de referência não pode ser maior que a faixa de
feedback.
Se referências predefinidas forem desejáveis, deverão ser
predefinidas nos parâmetros 215 a 216 Referência
predefinida. Veja a descrição de Função de Referência e
Tratamento de Referências no parâmetro 214.
Se um sinal de corrente for usado como sinal de feedback,
só será possível usar tensão como referência analógica.
Utilize a tabela abaixo para verificar qual terminal deve ser
usado e quais parâmetros precisam ser programados.
é possível
MAX
3 3
Feedback
Uma faixa de feedback deve ser predefinida para o
regulador. Ao mesmo tempo, este intervalo de feedback
limita o intervalo de referência do potencial de forma que,
se a somatória de todas as referências estiver fora do
intervalo de feedback, a referência ficará restrita ao
intervalo de feedback.
O sinal de feedback deve estar conectado a um terminal
no conversor de frequência. Se feedback estiver
selecionado em dois terminais simultaneamente, esses
sinais serão adicionados.
Utilize a tabela abaixo para verificar qual terminal deve ser
usado e quais parâmetros precisam ser programados.
Tipo de feedback Terminal número Parâmetros
Pulso 3 333, 327
Tensão 2 332, 338, 339
Corrente 1 331, 336, 337
Tabela 3.16
Pode ser feita uma correção em função de perdas de
tensão em cabos longos para transmissão de sinais,
quando um transmissor for usado com uma saída de
tensão. Isso é feito nos parâmetros 338/339 Escala Mín/
Máx.
Os parâmetros 414/415 Feedback mínimo/máximo também
devem ser predefinidos para um valor na unidade de
processo correspondente aos valores de escala mínima e
máxima para os sinais conectados ao terminal.
Tipo de referência Terminal número Parâmetros
Pulso 3 333, 327
Tensão 2 332, 338, 339
Corrente 1 331, 336, 337
Referências
predefinidas
Referência de
barramento
Tabela 3.17
215-216
(241-247)
68+69
AVISO!
A referência de barramento somente pode ser
predefinida por meio da comunicação serial.
AVISO!
É melhor predefinir os terminais que não
estiverem sendo usados para [0] Sem função.
Limite de ganho do diferenciador
Se ocorrerem variações muito rápidas, em uma aplicação,
ou no sinal de referência ou no sinal de feedback, o desvio
entre a referência/ponto de programação e o modo real
do processo mudará rapidamente. O diferenciador pode
então tornar-se predominante exageradamente. Isto ocorre
porque ele está reagindo ao desvio entre a referência e o
modo real do processo e, quanto mais rápidas forem as
mudanças na variância, mais poderosa será a contribuição
de frequência para o diferenciador. A contribuição da
frequência do diferenciador pode ser limitada de forma tal
que tanto um tempo de diferenciação razoável para as
MG03BA28 - VLT® é marca registrada da Danfoss 59
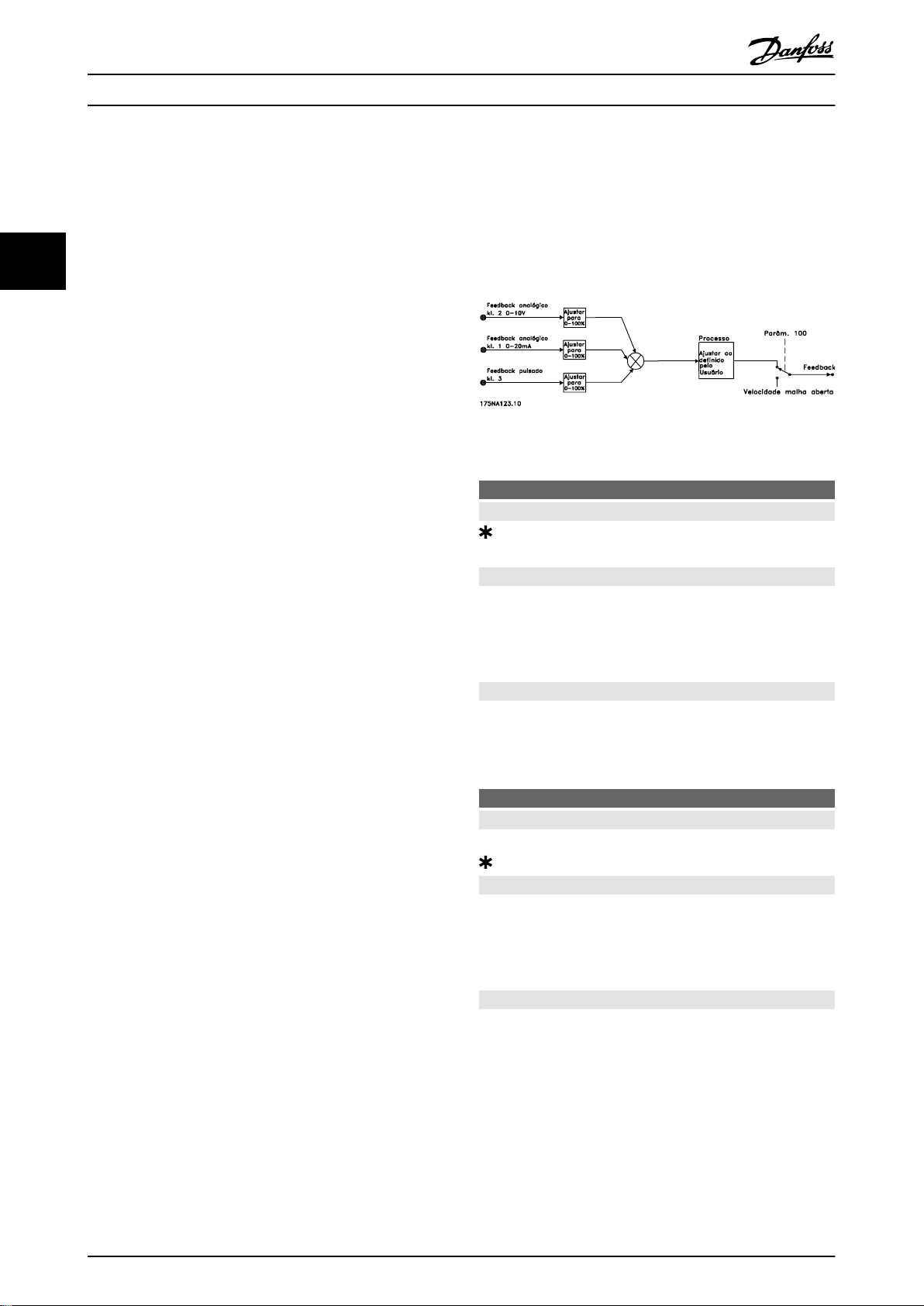
Programação
VLT® DriveMotor FCM Series
mudanças lentas quanto uma contribuição apropriada de
frequência para as mudanças rápidas possam ser
predefinidos. Isso é feito usando o parâmetro 443 Limite de
ganho do diferenciador do PID de Processo.
Filtro passa-baixa
33
Se houver muito ruído no sinal de feedback, o ruído pode
ser amortecido utilizando um filtro passa-baixa integrado.
Deve-se pré-definir uma constante de tempo adequada do
filtro passa-baixa.
Se o filtro passa baixa for predefinido para 0,1 s, a
frequência de desativação será 10 RAD/seg, que
corresponde a (10 / 2 x π) = 1,6 Hz. Isso tem por objetivo
que todas as correntes/tensões que variarem mais de 1,6
oscilações por segundo serão amortecidas. Ou seja, só
haverá regulagem com base em um sinal de feedback cuja
frequência varie menos de 1,6 Hz. A constante de tempo
apropriada é selecionada no parâmetro 444 Tempo do filtro
passa-baixa do PID de processo.
Regulagem inversa
Regulagem normal significa que a velocidade do motor
aumenta quando a referência/ponto de definição for maior
que o sinal de feedback. Se for necessário funcionar com
regulagem inversa, em que a velocidade é reduzida
quando a referência/setpoint for maior que o sinal de
feedback, o parâmetro 437 Controle normal/inverso do PID
deve ser programado comInvertido.
Anti Windup
Na fábrica, o regulador de processo é predefinido com
uma função anti-windup ativa. O significado desta função
é que quando um limite de frequência, um limite de
corrente ou um limite de tensão é atingido, o integrador é
inicializado com uma frequência que corresponde à
frequência de saída atual. Esse é um meio de evitar a
integração de uma variância entre a referência e o modo
real do processo que não pode ser desregulado por
intermédio de uma mudança de velocidade. A seleção
dessa função pode ser cancelada no parâmetro 438 Anti
Windup do PID de Processo.
Condições de partida
Em algumas aplicações, a configuração ideal do regulador
de processo significará que um intervalo de tempo relativamente longo deverá transcorrer, antes que a condição
requerida do processo seja alcançada. Nessas aplicações,
pode ser uma boa idéia definir uma frequência de saída
com a qual o conversor de frequência deva fazer o motor
funcionar, antes que o regulador de processo seja ativado.
Isso é feito programando uma frequência de partida no
parâmetro 439 Frequência de partida do PID de processo.
3.5.5
Tratamento do Feedback
O tratamento do feedback está descrito neste fluxograma.
O fluxograma mostra os parâmetros que podem afetar o
tratamento do feedback e como podem fazê-lo. Pode ser
feita uma escolha entre sinais de feedback de tensão,
corrente e pulso.
Ilustração 3.24
437 Controle normal/inverso do PID de processo
Valor:
Normal (NORMAL) [0]
Inverso (INVERSE) [1]
Funcão:
É possível escolher se o regulador do processo deve
aumentar/diminuir a frequência de saída se houver uma
diferença entre o sinal de referência e o sinal do feedback.
Usado junto com Processo, modo malha fechada (parâmetro
100).
Descricão da selecão:
Se o motor FC tiver que reduzir a frequência de saída caso
o sinal de feedback aumentar, selecione [0] Normal. Se o
motor FC tiver que aumentar a frequência de saída caso o
sinal de feedback aumentar, selecione [1] Inversão.
438
Valor:
Desabilitado (DESABILITADO) [0]
Ativado (ATIVADO) [1]
Funcão:
É possível selecionar se um regulador de processo deve
continuar regulando numa falha, mesmo que não seja
possível aumentar/reduzir a frequência de saída. Usado em
conjunto com Processo, modo malha fechada (parâmetro
100).
Descricão da selecão:
A configuração de fábrica é [1] Ativado, o que significa que
o vínculo de integração é ajustado com relação à
frequência de saída real se o limite de corrente ou a
frequência máx./mín. tiver sido alcançada. O regulador de
processo não será ativado novamente, até que o erro seja
zero ou seu sinal tenha mudado.
Selecione [0] Desabilitado se o integrador tiver que
continuar integrando em um erro, mesmo que não seja
possível remover a falha por meio dessa regulagem.
Anti Windup do PID do processo
60 MG03BA28 - VLT® é marca registrada da Danfoss
Programação
439 Frequência de partida do PID de processo
Valor:
f
parâmetro 201
Funcão:
Quando surgir o sinal de partida, o motor FC reagirá na
forma de Velocidade, modo malha aberta após a rampa.
Somente quando a frequência de partida programada for
alcançada ele mudará para Processo, modo malha fechada.
Além disso, é possível programar uma frequência que
corresponda à velocidade na qual o processo normalmente
funciona, o que fará com que as condições requeridas pelo
processo sejam alcançadas mais depressa.
Usado junto com Processo, modo malha fechada (parâmetro
100).
Descricão da selecão:
Programe a frequência de partida necessária.
440
Valor:
0,00 (OFF)-10,00 [0-1000]
0,01 [1]
Funcão:
O ganho proporcional indica o número de vezes em que o
erro, entre o ponto programado e o sinal de feedback,
deve ser aplicado.
Usado junto com Processo, modo malha fechada (parâmetro
100).
Descricão da selecão:
O ajuste rápido é obtido por um alto ganho, mas se o
ganho for demasiadamente alto, o processo pode tornar-se
instável.
441
Valor:
0,01-9999 s (OFF (Desligada)) [1-999900]
9999 s [999900]
Funcão:
O integrador fornece um ganho crescente, enquanto
houver um erro constante entre o ponto programado e o
sinal de feedback. Quanto maior o erro, mais rápido o
ganho aumenta. O tempo de integração é aquele
requerido pelo integrador para alcançar o mesmo ganho
que o ganho proporcional.
Usado junto com Processo, modo malha fechada (parâmetro
100).
Descricão da selecão:
A regulagem rápida é obtida em um tempo de integração
curto. Entretanto, esse tempo pode se tornar muito curto,
podendo levar o processo a tornar-se instável em caso de
exceder os limites.
Se o tempo de integração for longo, podem ocorrer
importantes desvios do nível de referência requerido, uma
(parâmetros 201 e 202)
MIN-fMAX
Ganho proporcional do PID de processo
Tempo de integração do PID de processo
VLT® DriveMotor FCM Series
[X.X]
vez que o regulador de processo levará mais tempo para
regular, em relação a um determinado erro.
442 Tempo do diferencial do PID de processo
Valor:
0,00 (Off)-10,00 s [0-1000]
0,00 s [0]
Funcão:
O diferenciador não responde a um erro constante. Ele só
fornece algum ganho se houver mudança no erro. Quanto
mais rápido o erro mudar, maior será o ganho do diferen-
ciador.
O ganho é proporcional à velocidade na qual o erro muda.
Usado junto com Processo, modo malha fechada (parâmetro
100).
Descricão da selecão:
Através de um tempo diferencial mais longo é possível ter
um controle rápido. No entanto, esse tempo pode se
tornar demasiadamente longo, tornando o processo
instável no caso de exceder os limites.
443
Valor:
5.0-50.0 [50-500]
5,0 [50]
Funcão:
É possível definir um limite para o ganho diferencial.
O ganho do diferenciador aumentará se houver mudanças
rápidas, razão pela qual pode ser vantagem limitar este
ganho, daí obtendo-se um ganho normal do diferenciador
nas mudanças lentas e um ganho constante do diferen-
ciador onde ocorrem as mudanças rápidas do erro.
Usado junto com Processo, modo malha fechada (parâmetro
100).
Descricão da selecão:
Selecione um limite apropriado para do ganho do diferen-
ciador.
444
Valor:
0,02-10,00 s [2-1000]
0,02 s [2]
Funcão:
As oscilações do sinal de feedback são amortecidas por um
filtro de baixa passagem para reduzir sua influência na
regulagem. Isto pode ser uma vantagem, por exemplo, se
houver muito ruído no sistema.
Usado junto com Processo, modo malha fechada (parâmetro
100).
Descricão da selecão:
Selecione a constante de tempo desejada (τ). Se for
programada uma constante de tempo (τ) de 100 ms, a
frequência de desativação do filtro passa-baixa será 1/0,1 =
10 RAD/s, correspondendo a (10/2 x π) = 1,6 Hz.
Limite de ganho dif. do PID de processo
Tempo do filtro passa-baixa do PID de
processo
3 3
MG03BA28 - VLT® é marca registrada da Danfoss 61

Programação
VLT® DriveMotor FCM Series
O regulador de processo portanto regulará somente um
sinal de feedback que varie em uma frequência inferior a
1,6 Hz. Se o sinal de feedback variar numa frequência
superior a 1,6 Hz, o regulador do processo PID não reagirá.
33
445 Flying start
Valor:
Desabilitado (DESABILITADO) [0]
OK - mesmo sentido (OK-MESMO SENTIDO) [1]
OK - nos dois sentidos (OK-NOS DOIS SENTIDOS) [2]
DC - freio antes da partida
(FREIO CC ANTES PART.) [3]
Funcão:
Esta função permite assumir o controle de um motor que
está girando livremente, por causa de uma queda de
tensão na rede.
Descricão da selecão:
Selecione [0] Desabilitado se esta função não for necessária.
[1} OK - mesmo sentido: Escolhido se o motor puder rodar
somente no mesmo sentido na ativação.
[2] OK - nos dois sentidos: Escolhido se o motor puder rodar
nos dois sentidos na ativação.
[3] Freio CC - antes da partida: Selecionada se o motor deve
parar usando o freio CC antes do motor acelerar para a
velocidade desejada. O tempo do freio CC deve ser
programado no parâmetro 126.
Limitações:
1. Uma inércia muito baixa causará aceleração da
carga, o que pode ser perigoso ou impedir Flying
start bem sucedido. Ao invés disso, use um freio
CC.
2. Se a carga for excitada através de um "sistema de
moinho de vento", por exemplo, a unidade pode
apresentar um desarme em função da
sobretensão.
3.
Abaixo de 250 rpm o Flying start não funcionará.
446
Valor:
60° AVM (60° AVM) [0]
SFAVM (SFAVM) [1]
Funcão:
Descricão da selecão:
Normalmente não é necessário que o cliente defina este
parâmetro.
455
Valor:
Desabilitado [0]
Ativado [1]
Funcão:
este parâmetro é usado se a advertência 35 Fora da faixa
de frequência tiver que ser desligada no display na malha
Padrão de chaveamento
Monitoramento da faixa de frequência
fechada de controle de processo. Este parâmetro não afeta
a status word estendida.
Descricão da selecão:
Selecione [1] Ativado [1] para ativar a leitura no display se
ocorrer a advertência 35 Fora da faixa de frequência.
Selecione [0] Desabilitado para desativar a leitura no
display se ocorrer a advertência 35 Fora da faixa de
frequência.
461 Conversão de feedback
Valor:
Linear (LINEAR) [0]
Raiz quadrada (RAIZ QUADRADA) [1]
Funcão:
Neste parâmetro, é selecionada uma função que converte
um sinal de feedback do processo para um valor de
feedback que é igual à raiz quadrada do sinal conectado.
Isso é utilizado, por exemplo, onde for necessária a
regulagem de um fluxo (volume), com base na pressão,
como sinal de feedback (fluxo = constante x √pressão).
Esta conversão possibilita programar a referência de tal
forma que haja uma conexão linear entre a referência e o
fluxo pretendido. Veja Ilustração 3.25.
Descricão da selecão:
Se [0] Linear [0] for selecionado, o sinal de feedback e o
valor de feedback serão proporcionais.
Se [1] Raiz quadrada [1] estiver selecionado, o conversor de
frequência traduz o sinal de feedback para ser o valor da
raiz quadrada.
Ilustração 3.25 Conversão de Feedback
3.6.1 Barramento serial
Ilustração 3.26 Barramento serial
62 MG03BA28 - VLT® é marca registrada da Danfoss

STX LGE ADR D ATA BCC
195NA099.10
Programação
VLT® DriveMotor FCM Series
3.6.2 Comunicação de telegramas
Telegramas de controle e de resposta
A comunicação de telegramas em um sistema mestre/
escravo é controlada pelo mestre. O máximo de 31
escravos (motores FC) podem ser conectados em um
mestre, a menos de seja usado um repetidor - veja
Ilustração 3.28 e Ilustração 3.30.
O mestre envia continuamente telegramas aos escravos e
aguarda os telegramas de resposta. O tempo máximo de
resposta dos escravos é 50 ms.
Somente um escravo que recebeu um telegrama sem erros
endereçado a esse escravo responderá enviando de volta o
telegrama inalterado.
Broadcast
Um mestre pode enviar o mesmo telegrama ao mesmo
tempo para todos os escravos conectados ao barramento.
Nessa comunicação de broadcast, o bit de broadcast do
telegrama de controle do bit de endereço tem valor 1
(veja o endereço do VLT). Bits de endereço (0-4) não são
usados.
Conteúdo de um byte
Cada sinal transmitido começa com um bit de início. Em
seguida são transmitidos 8 bit de dados. Cada sinal possui
um bit de paridade programado para "1" quando existir
paridade par (ou seja, um número par de valores 1
binários nos 8 bits de dados e os bits de paridade juntos).
O sinal termina com um bit de parada, consistindo assim
em um total de 11 bits.
Comprimento do telegrama (LGE)
O comprimento do telegrama é o número de bytes dos
dados, mais o byte endereçado ADR, mais o byte de
controle dos dados BCC.
Telegramas com 4 bytes de dados tem um comprimento
de:
LGE = 4 + 1 + 1 = 6 bytes
Telegramas com 12 bytes de dados têm comprimento de:
LGE = 12 + 1 + 1 = 14 bytes
Endereço do VLT (ADR)
São utilizados dois diferentes formatos de endereço:
1. Formato do endereço do protocolo USS Siemens:
Ilustração 3.29 Formato de Endereço
Bit 7 = 0
Bit 6 não é utilizado
Bit 5 = 1: Broadcast, os bits de endereço (0-4) não são
utilizados
Bit 5 = 0: Sem Broadcast
Bits 0-4 = endereço do VLT 1-31
2. Formato da Danfoss:
3 3
Ilustração 3.27
3.6.3 Composição do telegrama
Cada telegrama começa com um byte de início (STX) = 02
Hex, seguido de um byte que indica o comprimento do
telegrama (LGE) e de um byte que indica o endereço
(ADR). Segue então um certo número de bytes de dados
(variável dependendo do tipo de telegrama). O telegrama
termina com um byte de controle dos dados (BCC).
Ilustração 3.28 Telegrama
MG03BA28 - VLT® é marca registrada da Danfoss 63
Ilustração 3.30 Formato de Endereço
Bit 7 = 1
Bits 0-6 = endereço do VLT 1-127 (0 = Broadcast)
Byte de controle de dados (BCC)
Os bytes de controle de dados podem ser melhor
explicados através de um exemplo: Antes de o primeiro
sinal do telegrama ser recebido, BCC = 0.
Ilustração 3.31

Programação
VLT® DriveMotor FCM Series
Depois que foi recebido o primeiro sinal:
BCC
NOVO
= BCC
EXOR "primeiro byte"
ANTIGO
1. Bytes de parâmetro
(EXOR = exclusivo-ou gate)
BCC
= 0 0 0 0 0 0 0 0
ANTIGO
EXOR
"primeiro byte" = 0 0 0 0 0 0 1 0 (02H)
33
BCC
= 0 0 0 0 0 0 1 0
NOVO
Cada byte adicional, subsequente é captado por
BCC
BCC
EXOR e dá um novo BCC
ANTIGO
= 0 0 0 0 0 0 1 0
ANTIGO
NOVO
, p.ex.:
EXOR
"segundo byte" = 1 1 0 1 0 1 1 0 (D6H)
BCC
= 1 1 0 1 0 1 0 0
NOVO
O resultado depois do último sinal recebido é BCC.
Bytes de dados
3.6.4
O bloco dos bytes de dados é dividido em dois blocos
menores:
1. Bytes do parâmetro usados para parâmetros
transferidos entre o mestre e o escravo
Ilustração 3.33
Comandos e respostas (AK)
Os bits nº 12-15 são utilizados para transmitir os comandos
do mestre ao escravo e a resposta enviada do escravo ao
mestre.
2. Bytes de processo, cobrindo
Control word e o valor de referência (do
-
mestre para o escravo)
A status word e a frequência de saída
-
atual (do escravo para o mestre)
Esta estrutura aplica-se tanto ao telegrama de controle
(mestre ⇒ escravo) quanto ao telegrama resposta (escravo
⇒ mestre).
Ilustração 3.32
Comandos do mestre ⇒escravo:
Bit nº
14 13 12 Comando
15
0 0 0 0 Sem comando
0 0 0 1 Ler valor do parâmetro
0 0 1 0 Gravar valor do parâmetro na
RAM (word)
0 0 1 1 Gravar valor do parâmetro na
RAM (word dupla)
1 1 0 1 Gravar valor do parâmetro na
RAM e na EEPROM (word dupla)
1 1 1 0 Gravar valor do parâmetro na
RAM e na EEPROM (word)
1 1 1 1 Leitura de texto
Existem dois tipos de telegramas:
telegrama com 12 bytes, estruturado como
-
Tabela 3.18
mostrado acima, com parâmetro e bloco de
processo
telegrama com quatro bytes, que é o bloco de
-
processo do telegrama de 12 bytes
64 MG03BA28 - VLT® é marca registrada da Danfoss

Programação
VLT® DriveMotor FCM Series
Resposta escravo ⇒ mestre:
Bit nº
15 14 13 12 Resposta
0 0 0 0 Sem resposta
0 0 0 1 Valor de parâmetro transferido
(word)
0 0 1 0 Valor do parâmetro transferido
(word dupla)
0 1 1 1 O comando não pode ser
executado
1 1 1 1 Texto transferido
Tabela 3.19
Se o comando não pode ser executado, o escravo enviará
esta resposta (0111) e comunicará a seguinte mensagem
de erro no valor do parâmetro:
Código de erro
(resposta 0111) Mensagem de erro
0 O número do parâmetro utilizado não existe
1 Não há nenhum acesso de gravação ao
parâmetro solicitado
2 O valor dos dados ultrapassa os limites do
parâmetro
3 O sub-índice utilizado não existe
4 O parâmetro não é do tipo matriz
5 O tipo de dados não corresponde ao parâmetro
solicitado
17 A modificação dos dados no parâmetro
solicitado não é possível no modo atual do
motor do FC. Por exemplo, alguns parâmetros
só podem ser modificados quando o motor está
parado.
130 Não existe acesso no barramento para o
parâmetro solicitado
131 Mudança de dados não é possível porque o
Setup de fábrica foi selecionado
Índice
O índice é utilizado com o número do parâmetro para o
acesso de leitura/gravação aos parâmetros do tipo matriz
(par. 615, 616 e 617).
Valor do parâmetro (PWE)
3 3
Ilustração 3.35
O valor do parâmetro depende do comando indicado. Se o
mestre pedir um parâmetro (ler), não se necessita do valor
do bloco PWE. Se um parâmetro for modificado pelo
mestre (gravar), o novo valor é transferido no bloco PWE.
Se o escravo responder a um pedido do parâmetro
(comando ler), o valor do parâmetro atual é transferido
para o bloco PWE.
O valor transferido corresponde aos números fornecidos na
descrição do parâmetro. Por exemplo, o parâmetro 101,
em que [1] corresponde a Torque constante, [2]
corresponde a Torque variável: baixo etc. Contudo, os
parâmetros com o tipo de dados 9 (string de texto) estão
excluídos, uma vez que este texto é transferido como um
string de texto ASCII. Quando um string de texto é
transferido (leitura), o comprimento do telegrama é
variável, uma vez que os textos têm comprimentos
diferentes. O comprimento do telegrama é indicado no
segundo byte do telegrama, chamado LGE, veja 3.6.3
Composição do telegrama . Os parâmetros 621-634 (dados
da plaqueta de identificação) têm o tipo de dados 9 (string
de texto).
Os Tipos de Dados Suportados pelo Conversor de
Frequência VLT
Tabela 3.20
Número do parâmetro (PNU)
Os bits de 0-10 são utilizados para transmitir os números
de parâmetros. A função de um parâmetro determinado
pode ser vista na descrição do parâmetro.
Ilustração 3.34
MG03BA28 - VLT® é marca registrada da Danfoss 65
Tipo de dados Descrição
3 № inteiro 16
4 № inteiro 32
5 8 sem sinal algébrico
6 16 sem sinal algébrico
7 32 sem sinal algébrico
9 String de texto
Tabela 3.21
Sem sinal algébrico significa que não há sinal incluído no
telegrama.
Os diferentes atributos para cada parâmetro podem ser
obtidos na seção sobre programação de fábrica. Como um

Programação
VLT® DriveMotor FCM Series
valor de parâmetro pode ser somente transferido como
um número inteiro, deve ser usado um fator de conversão
para a transferência de decimais.
Exemplo:
Parâmetro 201: frequência mínima, fator de conversão 0,1.
33
Se o parâmetro 201 for programado para 10 Hz, um valor
de 100 deverá ser transferido, uma vez que um fator de
conversão de 0,1 significa que o valor transferido será
multiplicado por 0,1. Um valor de 100 será, portanto,
interpretado como 10.
Endereçamento por ID da unidade
O ID da unidade está impresso na etiqueta localizada na
cobertura de plástico, sob a tampa da caixa dos circuitos
eletrônicos. Os três grupos do ID da unidade, com três
dígitos cada, devem ser convertidos para Hex. O endereço
desejado é acrescentado como o último byte. A estrutura é
enviada para o(s) parâmetro(s) 500 (e 918) de endereço do
Bit
00 OFF 1 ON 1
01 OFF 2 ON 2
02 OFF 3 ON 3
03 Parada do motor por inércia Ativado
04 Parada rápida Rampa
05 Congelar frequência de saída Rampa ativada
06 Parada de rampa Partida
07 Sem função Reset
08 Jog 1 OFF ON
09 Jog 2 OFF ON
10 Dados inválidos Válidos
11 Sem função Redução de
bus por meio de broadcast.
PKE: Escreva no parâmetro Nº 500 ou 918
IND: Não Usado
2. Bytes de processo
O bloco de bytes de processo é dividido em duas partes,
12 Sem função Catch-up/Relé 123
13 Setup 1 Setup 2
14
15 Sem função Reversão
cada uma composta de 16 bits, que aparecem sempre na
sequência indicada.
Bit = 0 Bit =1
velocidade/Relé 123/
Terminal de Saída
digital 9
Tabela 3.23
Ilustração 3.36
Telegrama de
controle
(mestre⇒escravo)
Telegrama de
resposta
(escravo⇒mestre)
Tabela 3.22
3.6.5
Control Word Segundo o Padrão de
PCD1 PCD2
Control Word Valor de referência
Status Word Frequência de saída
fornecida
Perfil do Fieldbus
(parâmetro 512 = Perfil do Fieldbus) A control word é
utilizada para transmitir comandos a partir de um mestre
(por ex. um PC) para um escravo (motor do FC).
AVISO!
O uso dos Bit 00, Bit 01 e Bit 02 para desligar a fonte de
alimentação (usando um relé) exigirá uma energização
separada. Isso porque não há conexão externa de 24 V
para alimentar o controle do FCM 300, o que é
necessário para ativar o FCM 300 novamente via sinal de
entrada.
Bit 00, OFF1/ON1
Uma parada de rampa comum que usa o tempo da rampa
nos parâmetros 207/208. Bit 00 = "0" acarreta uma parada.
Bit 00 = "1" significa que o conversor de frequência será
capaz de dar partida, se as demais condições de partida
foram satisfeitas.
Bit 01, OFF2/ON2
Parada por inércia. Bit 01 = "0" acarreta uma parada por
inércia. Bit 01 = "1" significa que o conversor de frequência
será capaz de partir, se as demais condições para a partida
foram satisfeitas.
Bit 02, OFF3/ON3
Parada rápida, que usa o tempo da rampa no parâmetro
212. Bit 02 = "0" acarreta uma parada rápida. Bit 02 = "1"
significa que o conversor de frequência será capaz de
partir, se as demais condições para a partida foram
satisfeitas.
66 MG03BA28 - VLT® é marca registrada da Danfoss
Programação
VLT® DriveMotor FCM Series
Bit 03, Parada por inércia/ativado
Inércia. Bit 03 = "0" acarreta uma parada. Bit 03 = "1"
significa que o conversor de frequência é capaz de dar
partida, desde que as demais condições de partida tenham
sido satisfeitas.
AVISO!
No parâmetro 502, a escolha é feita sobre como o bit 03
deve ser combinado (encadeado) com a função correspondente em entradas digitais.
Bit 04, Parada rápida/rampa
É uma parada rápida que utiliza o tempo de rampa do
parâmetro 212. Bit 04 = "0" acarreta uma parada rápida. Bit
04 = "1" significa que o conversor de frequência será capaz
de partir, se as demais condições para a partida forem
satisfeitas.
AVISO!
O parâmetro 503 define como o Bit 04 deve ser
combinado com a função correspondente nas entradas
digitais.
Bit 05, Congelar frequência de saída / rampa ativada
Bit 05 = "0" significa que uma dada frequência de saída é
mantida, mesmo se a referência for alterada. Bit 05 = "1"
significa que o conversor de frequência é novamente
capaz de efetuar a regulagem e a referência dada ser
obedecida.
Bit 06, Parada/partida de rampa
Uma parada de rampa comum que utiliza o tempo da
rampa nos parâmetros 207/208. Bit 06 = "0" acarreta uma
parada. Bit 06 = "1" significa que o conversor de frequência
será capaz de partir, se as demais condições para a partida
forem satisfeitas.
AVISO!
No parâmetro 505, a escolha é feita baseada em como o
Bit 06 está combinado (encadeado) com a função correspondente nas entradas digitais.
Bit 07, Sem função / reset:
Reset de desarme. Bit 07 = "0" significa que não há reset.
Bit 07 = "1" significa que um desarme é resetado. Após o
reset, a unidade precisará de aproxim. 1,5 segundos para
ficar pronta. A status word indicará o estado quando a
unidade estiver pronta.
Bit 09, Jog 2 OFF/ON
Ativação da velocidade pré-programada no parâmetro 510
(Bus JOG 2). JOG 2 somente é possível se o Bit 04 = "0" e
os Bits 00-03 = "1". Se o JOG 1 e o JOG 2 forem ambos
ativados (Bit 08 e 09 = "1"), o JOG 1 tem prioridade
superior, vale dizer que será utilizada a velocidade
programada no parâmetro 509.
Bit 10, Dados não válidos/válidos
Utilizado para indicar se no motor do FC a control word é
para ser utilizada ou ignorada. Bit 10 = "0" significa que a
control word é ignorada. Bit 10 = "1" significa que a
control word é utilizada. Esta função é importante porque
a control word está sempre contida no telegrama,
independentemente do tipo de telegrama utilizado;
significando que é possível desconectar a control word, se
esta não estiver sendo utilizada em conjunto com a
atualização ou a leitura dos parâmetros.
Bit 11, Sem função/redução de velocidade, relé 123,
terminal de saída digital 9
Usado para reduzir a referência de velocidade pelo valor
do parâmetro 219. Bit 11 = "0" significa que não há
alteração da referência. Bit 11 = '1' significa que a
referência é reduzida. Bit 11 = “1” ativará também o relé
123 (desde que o parâmetro 323 = “Control word bit 11”)
e programará a saída digital no terminal 9 para o nível alto
(desde que o parâmetro 340 = “Control word bit 11”).
Bit 12, Sem função/catchup, relé 123
É utilizada para aumentar a referência da velocidade com o
valor contido no parâmetro 219. Bit 12 = "0" significa que
não há alteração da referência; Bit 12 = "1" significa que a
referência é aumentada. Se redução de velocidade e catch-
-up forem ambos ativados, simultaneamente (Bits 11 e 12
= "1"), redução de velocidade tem prioridade mais alta,
significando que a referência da velocidade é reduzida. Bit
12 = “1” ativará também o relé 123 (desde que o
parâmetro 323 = “Control word bit 12”).
Bits 13, Opção de Setup
O Bit 13 é utilizado para efetuar seleção entre os dois
Setups do menu, de acordo com a seguinte tabela:
Setup Bit 13
1 0
2 1
Tabela 3.24
3 3
Bit 08, Jog 1 OFF/ON
Ativação da velocidade pré-programada no parâmetro 509
(Bus JOG 1). JOG 1 somente é possível se o Bit 04 = "0" e
os bits 00-03 = "1".
MG03BA28 - VLT® é marca registrada da Danfoss 67
Esta função somente é possível se Setups múltiplos estiver
selecionado no parâmetro 004.

Programação
VLT® DriveMotor FCM Series
AVISO!
O parâmetro 507 é utilizado para escolher como o Bit 13
deve ser combinado (encadeado) com as funções correspondentes nas entradas digitais.
Bit 01, FC não pronto/pronto
Mesmo significado que o Bit 00; entretanto, há também
uma alimentação da seção de potência, estando o
conversor de frequência pronto para funcionar tão logo
receba o sinal de partida.
Bit 15, Sem função/reversão
33
Reversão do sentido de rotação do motor. Bit 15 = "0" não
determina reversão. Bit 15 = "1" determina reversão.
Bit 02, Parada por Inércia/ativado
Bit 02 = "0" significa que o Bits 00, 01, 02 ou 03 da control
word são "0". (OFF1, OFF2, OFF3 ou Parada por inércia) ou
AVISO!
A menos que mencionado em contrário, o bit da control
word é combinado (encadeado) com a função correspondente, nas entradas digitais, a uma função lógica
"or".
Status word (de acordo com o padrão do Perfil do
Fieldbus)
A "status word" é utilizada para informar o mestre (p. ex.:
um PC) sobre a condição de um escravo (motor FC).
que a unidade da Série FCM 300 desarmou.
Bit 02 = "1" significa que o bit 00, 01, 02 ou 03 da control
word é "1" e que o motor do FC não desarmou.
Bit 03, Sem defeito/desarme
Bit 03 = "0" significa que a Série FCM 300 não está em
condição de falha.
Bit 03 = "1" significa que a Série FCM 300 desarmou e
precisa de um sinal de reset para funcionar.
Bit 04, ON2/OFF2
Bit 04 = "0" significa que a control word bit 01 = "1".
Bit 04 = "1" significa que a control word bit 01 = "0".
Bit 05, ON3/OFF3
Bit 05 = "0" significa que a control word bit 02 = "1".
Bit 05 = "1" significa que a control word bit 02 = "0".
Bit Bit = 0 Bit =1
00 Controle não preparado Pronto
01 FC não preparado Pronto
02 Parada por inércia Ativado
03 Sem falha Desarme
04 ON 2 OFF 2
05 ON 3 OFF 3
06 Ativação da partida Desativação da partida
07 Sem advertência Advertência
08
09 Controle local Comunicação serial
10 Fora da faixa de
11 Não funcionando Em operação
12
13 Tensão OK Acima do limite
14 Corrente OK Acima do limite
15 Advertência térmica
Velocidade ≠ ref.
frequência
Tabela 3.25
Velocidade = ref.
Limite de frequência OK
Bit 00, Controle não pronto/pronto
Bit 00 = "0" significa que os Bits 00, 01 ou 02 da control
word são "0" (OFF1, OFF2 ou OFF3) ou que o conversor de
frequência desarmou.
Bit 06, Partida ativada/partida desabilitada
O bit 06 está sempre "0", se o Drive do FC tiver sido
selecionado no parâmetro 512. Se [Profidrive] tiver sido
selecionado no parâmetro 512, o bit 06 será "1" após o
reset de um desarme, após a ativação de OFF2 ou OFF3 e
após a conexão da tensão de rede. A Partida inativa é
reinicializada, ao configurar-se a control word bit 00 para
"0" e os bits 01, 02 e 10 para "1.
Bit 07, Sem advertência/com advertência
Bit 07 = "0" significa que não há nenhuma situação
anormal.
Bit 07 = "1" significa que no motor do FC surgiu uma
situação anormal. Todas as advertências descritas em
4.2 Lista de Advertências e Alarmes - Guia de Design do FCM
300 definirão o bit 07 para "1".
Bit 08, Velocidade≠ ref/velocidade = ref.
Bit 08 = "0" significa que a velocidade real do motor é
diferente da referência da velocidade programada. Este
pode ser o caso, por exemplo, enquanto a velocidade é
acelerada / desacelerada durante a partida / a parada.
Bit 08 = "1" significa que a velocidade atual do motor é
igual à referência de velocidade programada.
Bit 00 = "1" significa que o controle do conversor de
frequência está pronto.
68 MG03BA28 - VLT® é marca registrada da Danfoss
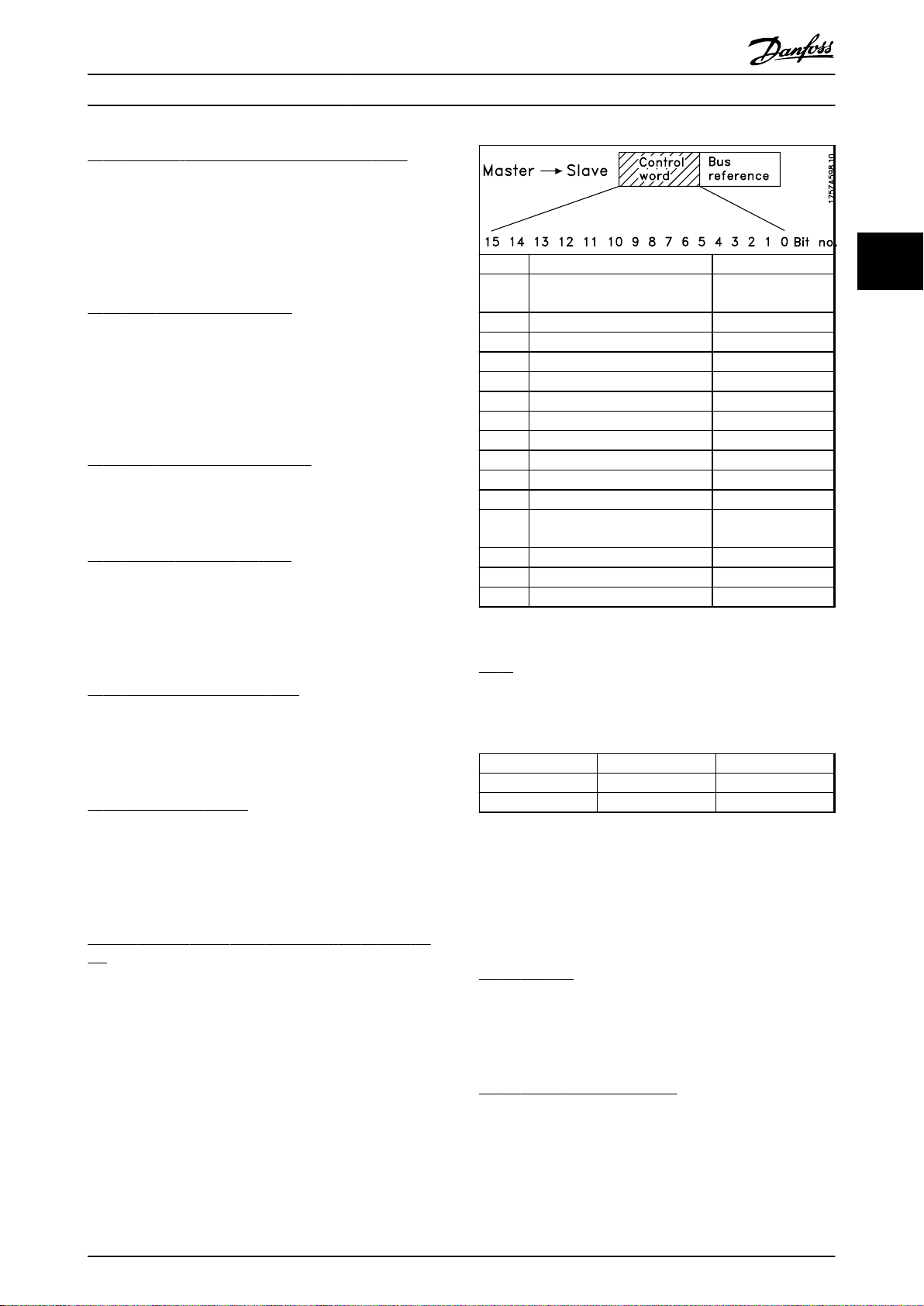
Programação
VLT® DriveMotor FCM Series
Bit 09, Controle da operação local/comunicação serial
Bit 09 = '0' significa que [STOP/RESET] está ativado na
unidade de controle ou que Controle local no parâmetro
002 Operação local/remota está selecionado. Não é possível
controlar o conversor de frequência via comunicação serial.
Bit 09 = "1" significa que é possível controlar o conversor
de frequência via comunicação serial.
Bit 10, Fora da faixa de frequência
Bit 10 = "0", se a frequência de saída tiver alcançado o
valor do parâmetro 201 Limite inferior da frequência de
saída ou do parâmetro 202 Limite superior da frequência de
saída.
Bit 10 = "1" significa que a frequência de saída está dentro
dos limites definidos.
Bit 11, Não funcionando/funcionando
Bit 11 = "0" significa que o motor não está em operação.
Bit 11 = "1" significa que o motor do FC recebeu um sinal
de partida ou que a frequência de saída é maior que 0 Hz.
Bit 13, Tensão OK/Acima do limite
Bit 13 = "0" significa que não foram superados os limites
de tensão do motor do FC.
Bit 13 = "1" significa que a tensão CC do circuito intermediário do motor do FC é demasiadamente alta ou
demasiadamente baixa.
Bit 14, Corrente OK/acima do limite
Bit 14 = "0" significa que a corrente do motor é inferior à
do limite de corrente, selecionado no parâmetro 221.
Bit 14 = "1" significa que o limite de corrente, selecionado
no parâmetro 221, foi excedido.
Bit 15, Advertência térmica
Bit 15 = "0" significa que temporizadores para a proteção
térmica do motor e a proteção térmica do VLT, respectivamente, não ultrapassaram 100%.
Bit 15 = "1" significa que um dos temporizadores excedeu
100%.
Control word no Perfil doFC (parâmetro 512 = Drive do
FC)
A control word é utilizada para enviar comandos de um
mestre (p.ex.: um PC) para um escravo (motor do FC).
Bit
00 Seleção da referência
01 Sem função
02 Freio CC Rampa
03 Parada por inércia Ativado
04 Parada rápida Rampa
05 Hold Rampa ativada
06 Parada de rampa Partida
07 Sem função Reset
08 Sem função Jog
09 Sem função
10 Dados inválidos Válidos
11 Sem função Relé 123 / entrada
12 Sem função Relé 123
13 Setup 1 Setup 2
15 Sem função Reversão
Bit = 0 Bit =1
predefinida
digital terminal 9
Tabela 3.26
Bit 00
O Bit 00 é utilizado para selecionar entre as duas
referências pré-programadas (parâmetros 215-216), de
acordo com a seguinte tabela:
Ref. predefinida. Parâmetro Bit 00
1 215 0
2 216 1
Tabela 3.27
AVISO!
O parâmetro 508 seleciona o modo como os Bits 1/12
devem ser combinados (encadeados) com as correspondentes funções, nas entradas digitais.
Bit 02, Freio CC:
Bit 02 = "0" determina uma frenagem CC e a parada. A
corrente e a duração de frenagem foram definidas nos
parâmetros 132 e 133.
Bit 02 = "1" conduz à rampa.
3 3
Bit 03, Parada por inércia/ativado
Inércia. Bit 03 = "0" acarreta uma parada.
Bit 03 = "1" significa que o conversor de frequência será
capaz de partir, se as demais condições para a partida
forem satisfeitas.
MG03BA28 - VLT® é marca registrada da Danfoss 69

Programação
VLT® DriveMotor FCM Series
AVISO!
No parâmetro 502, a escolha é feita sobre como o bit 03
deve ser combinado (encadeado) com a função correspondente em entradas digitais.
33
Bit 04, Parada rápida/rampa
É uma parada rápida que utiliza o tempo de rampa do
parâmetro 212. Bit 04 = "0" conduz a uma parada rápida.
Bit 04 = "1" significa que o conversor de frequência será
capaz de partir, se as demais condições para a partida
forem satisfeitas.
AVISO!
O parâmetro 503 define como o Bit 04 deve ser
combinado com a função correspondente nas entradas
digitais.
Bit 05, Espera / rampa ativada
Bit 05 = “0” significa que uma dada frequência de saída é
mantida, mesmo se a referência for alterada.
Bit 05 = "1" significa que o conversor de frequência é
novamente capaz de efetuar a regulagem e a referência
dada ser obedecida.
contida no telegrama, independentemente do tipo de
telegrama utilizado; significando que é possível
desconectar a control word, se esta não estiver sendo
utilizada em conjunto com a atualização ou a leitura dos
parâmetros.
Bit 11, Sem função/relé 123, terminal de saída digital 9
Bit 11 = “1” ativará o relé 123 (desde que o parâmetro 323
= “Control word bit 11”) e programará a saída digital no
terminal 9, com o nível alto (desde que o parâmetro 340 =
“Control word bit 11”).
Bit 12, Sem função/relé 123
Bit 12 = “1” ativará o relé 123 (desde que o parâmetro 323
= “Control word bit 12”).
Bit 13, Opção de setup
O bit 13 é utilizado para escolher entre os dois setups do
menu de acordo com a seguinte tabela:
Setup Bit 13
1 0
2 1
Bit 06, Parada/partida de rampa
Uma parada de rampa comum que utiliza o tempo da
rampa nos parâmetros 207/208. Bit 06 = "0" leva a uma
parada.
Bit 06 = "1" significa que o conversor de frequência é
capaz de iniciar se as demais condições de partida forem
atendidas.
AVISO!
No parâmetro 505, a escolha é feita baseada em como o
Bit 06 está combinado (encadeado) com a função correspondente nas entradas digitais.
Bit 07, Sem função / reset
Reset de desarme. Bit 07 = "0" significa que não há reset.
Bit 07 = "1" significa que um desarme é resetado. Após o
reset, a unidade precisará de aproxim. 1,5 segundos para
ficar pronta. A status word indicará o estado quando a
unidade estiver pronta.
Bit 08, Ativação da velocidade de Jog no parâmetro 213
Bit 08 = "0": Velocidade de jog não ativada.
Bit 08 = "1" significa que o motor está funcionando na
velocidade de Jog.
Tabela 3.28
Esta função somente é possível se Setups múltiplos estiver
selecionado no parâmetro 004.
AVISO!
O parâmetro 507 é utilizado para escolher como o Bit 13
deve ser combinado (encadeado) com as funções correspondentes nas entradas digitais.
Bit 15, Sem função/reversão
Reversão do sentido de rotação do motor.
Bit 15 = "0" não conduz à reversão. Bit 15 = "1" conduz à
reversão.
Bit 10, Dados não válidos/válidos
Utilizado para indicar se no motor do FC a control word é
para ser utilizada ou ignorada.
Bit 10 = "0" significa que a control word é ignorada.
Bit 10 = "1" significa que a control word é utilizada. Esta
função é importante porque a control word está sempre
70 MG03BA28 - VLT® é marca registrada da Danfoss

Programação
VLT® DriveMotor FCM Series
AVISO!
A menos que mencionado em contrário, o bit da control
word é combinado (encadeado) com a função correspondente, nas entradas digitais, a uma função lógica
"or".
Status word para Perfil do FC
A "status word" é utilizada para informar o mestre (Por ex.: um
PC) sobre as condições do escravo (motor FC).
Bit Bit = 0 Bit =1
00 Controle não preparado Pronto
01 FC não preparado Pronto
02 Parada por inércia Ativado
03 Sem falha Desarme
04 Reservado
05 Reservado
06 Reservado
07 Sem advertência Advertência
08
09 Controle local Controle do bus
10 Fora da faixa Frequência OK
11 Não funcionando Em operação
12
13 Tensão OK Acima do limite
14 Corrente OK Acima do limite
15 Temporizador OK Advertência térmica
Velocidade ≠ ref.
Tabela 3.29
Bit 01, FC não pronto/pronto
Bit 01 = "0" significa que o conversor de frequência
desarmou.
Bit 01 = "1" significa que o conversor de frequência está
preparado.
Bit 02, Parada por Inércia/ativado
Bit 02 = "0" significa que o Bit 03 da control word é "0"
(Parada por Inércia) ou que o motor do FC desarmou.
Bit 02 = "1" significa que o bit 03 da control word é "1" e
que o motor do FC não desarmou.
Bit 03, Sem defeito/desarme
Bit 03 = "0" significa que a Série FCM 300 não está em
condição de falha.
Bit 03 = "1" significa que a Série FCM 300 desarmou e
precisa de um sinal de reset para voltar a funcionar.
Bit 07, Sem advertência/com advertência
Velocidade = ref.
Bit 07 = "0" significa que não há nenhuma situação
anormal.
Bit 07 = "1" significa que no motor do FC surgiu uma
situação anormal. Todas as advertências descritas em
4.2 Lista de Advertências e Alarmes - Guia de Design do FCM
300 definirão o bit 07 para "1".
3 3
Bit 08, Velocidade≠ ref/velocidade = ref.
Bit 08 = "0" significa que a velocidade real do motor é
diferente da referência da velocidade programada. Este
pode ser o caso, por exemplo, quando a velocidade é
acelerada / desacelerada durante a partida / parada.
Bit 08 = "1" significa que a velocidade atual do motor é
igual a da referência da velocidade programada.
Bit 09, Operação local / controle do bus
Bit 09 = '0' significa que [STOP/RESET] está ativado na
unidade de controle ou que Controle local no parâmetro
002 Operação local/remota está selecionado. Não é possível
controlar o conversor de frequência via comunicação serial.
Bit 09 = "1" significa que é possível controlar o conversor
de frequência via comunicação serial.
Bit 10, Fora da faixa/frequência
Bit 10 = "0", se a frequência de saída tiver alcançado o
valor do parâmetro 201 Limite inferior da frequência de
saída ou do parâmetro 202 Limite superior da frequência de
saída.
Bit 10 = "1" significa que a frequência de saída está dentro
dos limites definidos.
Bit 11, Não funcionando/funcionando
Bit 11 = "0" significa que o motor não está em operação.
Bit 11 = "1" significa que o motor do FC recebeu um sinal
de partida ou que a frequência de saída é maior que 0 H z.
Bit 13, Tensão OK/Acima do limite
Bit 13 = "0" significa que não foram superados os limites
de tensão do motor do FC.
Bit 13 = "1" significa que a tensão CC do circuito intermediário do motor do FC é demasiadamente alta ou
demasiadamente baixa.
Bit 14, Corrente OK/acima do limite
Bit 14 = "0" significa que a corrente do motor é inferior à
do limite de torque selecionado no parâmetro 221.
Bit 14 = "1" significa que o limite de torque no parâmetro
221 foi excedido.
Bit 15, Advertência térmica
Bit 15 = "0" significa que temporizadores para a proteção
térmica do motor e a proteção térmica do VLT, respectivamente, não ultrapassaram 100%.
Bit 15 = "1" significa que um dos temporizadores excedeu
100%.
MG03BA28 - VLT® é marca registrada da Danfoss 71
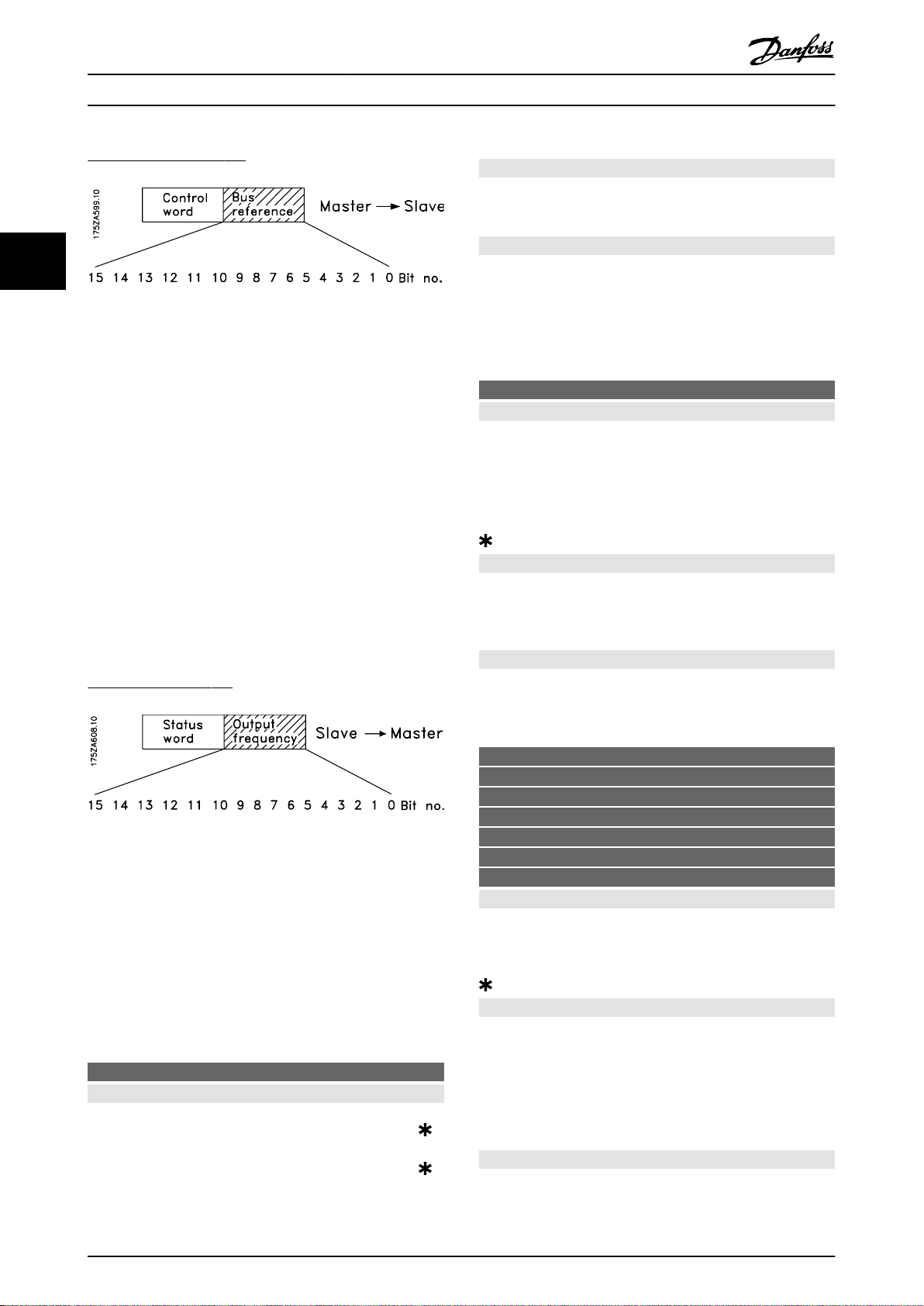
Programação
VLT® DriveMotor FCM Series
Valor de referência do bus
Funcão:
Este parâmetro permite a alocação de um endereço para
cada conversor de frequência de uma rede de
comunicação serial.
Descricão da selecão:
33
Ilustração 3.37
Cada conversor de frequência deve ser alocado a um
endereço exclusivo. Se o número de unidades conectadas
(conversor de frequência + mestre) for superior a 31, deve
ser utilizado um repetidor. Parâmetro 500 Endereço não
pode ser selecionado via comunicação serial, mas deve ser
O valor de referência de frequência é transmitido ao
predefinido por meio da unidade de controle.
conversor de frequência no formato de uma word de 16
bits. O valor é transmitido como um número inteiro
(0-32767). O valor 16384 (4000 Hex) corresponde a 100%.
(Os valores negativos são formados como complementos
de 2).
A referência de bus tem o seguinte formato:
Parâmetro 203 = "0"
"ref
-ref
MAX
"
- ref
MIN
MAX
MIN
0-16384 (4000 Hex) ~ 0-100% ~ ref
501
Valor:
300 Baud (300 BAUD) [0]
600 Baud (600 BAUD) [1]
1200 Baud (1200 BAUD) [2]
2400 Baud (2400 BAUD) [3]
4800 Baud (4800 BAUD) [4]
9600 Baud (9600 BAUD) [5]
Baudrate
Funcão:
Parâmetro 203 = "1"
-ref
até +ref
MIN
MAX
-16384 (... Hex) até +16384 (4000 Hex) ~
-100 até +100% ~ -ref
MAX
até +ref
MAX
Este parâmetro é para a programação da velocidade na
qual os dados devem ser transmitidos pela ligação serial. A
taxa Baud é definida como o número de bits transferidos
por segundo.
Descricão da selecão:
Frequência de saída real
A velocidade de transmissão do motor FC deve ser
regulada em um valor que corresponde à velocidade de
transmissão do PLC/Micro.
Ilustração 3.38
O valor da frequência de saída real do conversor de
frequência é transmitido no formato de uma word de 16
bits. O valor é transmitido como um número inteiro
(0-32767). O valor 16384 (4000 Hex) corresponde a 100%.
(Os valores negativos são formados como complementos
de 2).
3.7.1
Grupo de Parâmetros 5-**
Comunicação Serial
500 Endereço
Valor:
Parâmetro 561 Protocolo = Protocolo do FC [0]
0 - 126 1
Parâmetro 561 Protocolo = MODBUS RTU [3]
0 - 247 1
502
Parada por inércia
503 Parada rápida
504 Freio CC
505 Partida
506 Reversão
507 Seleção de Setup
508 Seleção da velocidade
Valor:
Entrada digital (DIGITAL INPUT) [0]
Bus (SERIAL PORT) [1]
E lógico (LOGIC AND) [2]
OU Lógico (LOGIC OR) [3]
Funcão:
Os parâmetros 502-508 permitem uma escolha para o
controle do motor FC pelos terminais (entrada digital) e/ou
pelo bus serial.
Se Lógica e ou Bus for selecionado, o comando em questão
pode ser ativado somente se transmitido via porta de
comunicação serial. No caso de Lógica e o comando deve,
além disso, ser ativado por uma das entradas digitais.
Descricão da selecão:
[0] A entrada digital é selecionada se o comando de
controle em questão deve ser ativado somente por uma
entrada digital.
72 MG03BA28 - VLT® é marca registrada da Danfoss

Programação
VLT® DriveMotor FCM Series
[1] Bus é selecionado se o comando de controle em
questão deve ser ativado somente por um bit na control
word (comunicação serial).
[2] A Lógica e é selecionada se o comando de controle em
questão deve ser ativado somente quando um sinal for
transmitido (sinal ativo = 1) via uma control word e uma
entrada digital.
Entrada digital
505-508 Bus Comando de controle
0 0 0
0 1 0
1 0 0
1 1 1
Tabela 3.30
[3] A Lógica ou é selecionada se o comando de controle
em questão deve ser ativado quando um sinal for dado
(sinal ativo = 1) via uma control word ou uma entrada
digital.
Entrada digital
505-508 Bus Comando de controle
0 0 0
0 1 1
1 0 1
1 1 1
Tabela 3.31
Parâmetro 502 = Lógica e
Entrada digital Bus Comando de controle
0 0 1 Parada por inércia
0 1 0 Motor em operação
1 0 0 Motor em operação
1 1 0 Motor em operação
Tabela 3.32
Parâmetro 502 = Lógica ou
Entrada digital Bus Comando de controle
0 0 1 Parada por inércia
0 1 1 Parada por inércia
1 0 1 Parada por inércia
1 1 0 Motor em operação
Tabela 3.33
509
Jog do bus 1
Valor:
0,0-parâmetro 202 [0 -]
10,0 HZ [100]
Funcão:
Aqui a programação de uma velocidade fixa (jog) é ativada
por meio da porta serial.
Esta função é a mesma do parâmetro 213.
Descricão da selecão:
A frequência de jog f
entre f
(parâmetro 201) e f
MIN
pode ser selecionada na faixa
JOG
(parâmetro 202).
MAX
510 Jog do bus 2
Valor:
0,0-parâmetro 202 [0 -]
10,0 HZ [100]
Funcão:
Aqui a programação de uma velocidade fixa (jog) é ativada
por meio da porta serial.
Esta função é a mesma do parâmetro 213.
Descricão da selecão:
A frequência de jog f
entre f
(parâmetro 201) e f
MIN
512
Perfil do telegrama
pode ser selecionada na faixa
JOG
(parâmetro 202).
MAX
Valor:
Perfil Fieldbus (FIELDBUS PROFILE) [0]
Perfil do FC (FC PROFILE) [1]
Funcão:
É possível escolher entre dois diferentes perfis da palavra
de controle.
Descricão da selecão:
Selecionar o perfil desejado para a palavra de controle.
Veja Comunicação serial para obter mais informações sobre
os perfis da control word.
513
Intervalo de tempo do bus serial
Valor:
1-99 s [1-99]
1 s [1]
Funcão:
Este parâmetro regula o máximo tempo de espera entre a
recepção de duas mensagens consecutivas. Se este tempo
for ultrapassado, supõem-se que a comunicação serial
parou e a reação desejada é programada no parâmetro
514.
Descricão da selecão:
Defina o tempo desejado.
514
Função intervalo de tempo do bus
Valor:
Off (Desligado) (OFF (Desligada)) [0]
Congelar Saída (FREEZE OUTPUT) [1]
Parada (STOP) [2]
Jogging (JOGGING) [3]
Veloc. máx. (MAX SPEED) [4]
Parada e desarme (PARADA E DESARME) [5]
Funcão:
Este parâmetro seleciona a reação desejada para o motor
FC, quando for ultrapassado o tempo de espera do Bus
(parâmetro 513). Se as escolhas de [1] a [5] estiverem
ativadas, os relés 01 e 04 serão desativados.
3 3
MG03BA28 - VLT® é marca registrada da Danfoss 73

Programação
VLT® DriveMotor FCM Series
Descricão da selecão:
A frequência de saída do motor FC pode: ser congelada
com os valores atuais, com a referência congelada, parar, ir
para frequência de jog (parâmetro 213), ir para a
frequência de saída máxima (parâmetro 202) ou parar e
33
ativar um desarme.
515 Leitura de Dados: Referência %
Valor:
XXX.X% [XXXX]
Funcão:
Este parâmetro pode ser lido através da porta de
comunicação serial.
Descricão da selecão:
O valor apresentado corresponde a referência total (soma
de digital/analógico/preset/bus/ref. congelada/catch-up e
slow-down).
Esse valor é atualizado a cada 320 ms.
516
Valor:
X,XXX Hz ou rpm. [XXXX]
Funcão:
Este parâmetro pode ser lido através da porta de
comunicação serial.
Descricão da selecão:
Indica o valor de estado da unidade dado na base da
escolha da soma de referência.
Esse valor é atualizado a cada 320 ms.
517
Valor:
X.XXX [XXXX]
Funcão:
Este parâmetro pode ser lido através da porta de
comunicação serial.
Descricão da selecão:
Indica o valor do estado dos terminais 1/2 na unidade/
escala selecionada nos parâmetros 414 e 415.
Esse valor é atualizado a cada 320 ms.
518
Valor:
XXX.X Hz [XXXX]
Funcão:
Este parâmetro pode ser lido através da porta de
comunicação serial.
Descricão da selecão:
O valor apresentado corresponde à atual frequência do
motor.
Esse valor é atualizado a cada 320 ms.
Leitura de Dados: Unidade da referência
Leitura de Dados: Feedback
Leitura de Dados: Frequência
519
Valor:
XXX.X Hz [XXXX]
Funcão:
Este parâmetro pode ser lido através da porta de
comunicação serial.
Descricão da selecão:
O valor corresponde à freqüência atual de saída
fMmultiplicada pelo valor predefinido no parâmetro 008
Fator de escala do display da freqüência de saída.
520 Leitura de Dados: Corrente
Valor:
XXX.XX A [XXXXX]
Funcão:
Este parâmetro pode ser lido através da porta de
comunicação serial.
Descricão da selecão:
O valor mostrado é um valor calculado da corrente
fornecida pelo motor.
Esse valor é atualizado a cada 320 ms.
521
Valor:
XXX.X% [XXXX]
Funcão:
Este parâmetro pode ser lido através da porta de
comunicação serial.
Descricão da selecão:
O valor mostrado é o torque, com sinal, fornecido ao eixo
do motor. O valor é fornecido como porcentagem do
torque nominal.
Não há uma correspondência integral entre 160% da
corrente do motor e o torque, em relação ao torque
nominal. Devido a diferenças de temperatura e tolerâncias,
alguns motores fornecem mais torque que isso. Portanto, o
valor mín. e o valor máx. dependerão da corrente máx./
mín. do motor.
Esse valor é atualizado a cada 320 ms.
522
Valor:
XX.XX kW [XXXX]
Funcão:
Este parâmetro pode ser lido através da porta de
comunicação serial.
Descricão da selecão:
O valor apresentado é calculado com base na atual tensão
do motor e da corrente do motor.
Esse valor é atualizado a cada 320 ms.
Leitura de dados: Freqüência x escala
Leitura de Dados: Torque
Leitura de Dados: Potência, kW
74 MG03BA28 - VLT® é marca registrada da Danfoss
Programação
VLT® DriveMotor FCM Series
523 Leitura de Dados: Potência, HP
Valor:
XX.XX HP (US) [XXXX]
Funcão:
Este parâmetro pode ser lido através da porta de
comunicação serial.
Descricão da selecão:
O valor apresentado é calculado com base na atual tensão
do motor e da corrente do motor. O valor é indicado sob a
forma de HP.
Esse valor é atualizado a cada 320 ms.
524
Valor:
XXX.X V [XXXX]
Funcão:
Este parâmetro pode ser lido através da porta de
comunicação serial.
Descricão da selecão:
O valor mostrado é um valor calculado, usado para
controlar o motor.
Esse valor é atualizado a cada 320 ms.
525
Valor:
XXXX V [XXXX]
Funcão:
Este parâmetro pode ser lido através da porta de
comunicação serial.
Descricão da selecão:
O valor mostrado é um valor medido.
O valor é filtrado, o que significa que aprox. 1,3 segundos
podem passar desde a alteração de um valor de entrada
até a alteração do valor da leitura de dados.
Esse valor é atualizado a cada 320 ms.
527
Valor:
0-100% [0-100]
Funcão:
Este parâmetro pode ser lido através da porta de
comunicação serial.
Descricão da selecão:
Somente números inteiros são exibidos.
Esse valor é atualizado a cada 160 ms.
Leitura de Dados: Tensão do motor
Leitura de Dados: Tensão do barramento CC
Leitura de Dados: Térm. do FC
Este valor é atualizado cada 20 milissegundos.
533 Leitura de Dados: Referência externa %
Valor:
-200,0 a +200,0%
Funcão:
Este parâmetro pode ser lido através da porta de
comunicação serial.
Descricão da selecão:
O valor informado fornece, como porcentagem, a soma de
referências externas (soma de analógico/bus/pulso).
Este valor é atualizado a cada 80 ms.
534
Valor:
Unidade
Funcão:
Este parâmetro pode ser lido através da porta de
comunicação serial.
Descricão da selecão:
Indica a "status word" transmitida através da porta de
comunicação serial.
537
Valor:
Unidade: ºC
Funcão:
Este parâmetro pode ser lido através da porta de
comunicação serial.
Descricão da selecão:
Indica a temperatura fornecida pelo conversor de
frequência. Este valor é atualizado cada 10 seg.
538
Valor:
Unidade
Funcão:
Este parâmetro pode ser lido através da porta de
comunicação serial. Veja 4.2.1 Lista de Advertências e
Alarmes.
Descricão da selecão:
Indica se há um alarme no motor FC.
Leitura de Dados: Status word, binário
Leitura de Dados: Temperatura do INV.
Leitura de Dados: Alarm word
3 3
528
Valor:
Unidade
Funcão:
Este parâmetro pode ser lido através da porta de
comunicação serial.
Descricão da selecão:
O valor apresentado indica o estado do sinal dos 4
terminais digitais (2, 3, 4 e 5).
Leitura de Dados: Entrada digital
MG03BA28 - VLT® é marca registrada da Danfoss 75
Programação
VLT® DriveMotor FCM Series
Hex Mensagens de falha
00000002 Bloq. p/Dsarme
00000040 "Timeout" no HPFB
00000080 Timeout de bus padrão
00000100 Curto circuito
33
00000200 Falha na alimentação de 24 V
00000400 Falha de aterramento
00000800 Sobrecarga de corrente
00004000 Termistor do motor
00008000 Sobrecarga do inversor
00010000 Subtensão
00020000 Sobretensão
00040000 Falha de fase
00080000 Erro live zero
00100000 Sobretemperatura
02000000 Erro no HPFB
08000000 Falha de Inrush
10000000 Erro interno
Tabela 3.34
Hex Mensagens de advertência
00000008 "Timeout" no HPFB
00000010 Timeout de bus padrão
00000040 Lim. d Corrente
00000200 Sobrecarga do inversor
00001000 Advertência de tensão baixa
00002000 Advertência de tensão alta
00004000 Falha de fase
00010000 Advert. de Erro live zero
00400000 Limite da freq. de saída
00800000 Erro no HPFB
40000000 Alimentação de 24 V
80000000 Temp. alta no inversor
Tabela 3.35
541
Leitura de Dados: Status word estendida
Valor:
Unidade
Funcão:
Este parâmetro pode ser lido através da porta de
539
Leitura de Dados: Control word
Valor:
Unidade
Funcão:
Este parâmetro pode ser lido através da porta de
comunicação serial.
Descricão da selecão:
Indica a palavra de controle enviada pela porta de
comunicação serial no Código hexadecimal do motor FC.
Atualizado a cada 20 milissegundos.
comunicação serial.
Descricão da selecão:
Indica no formato Hexadecimal se há uma advertência no
motor FC.
Hex Mensagens de status
01 Rampa
04 Partida sentido horário/anti-horário
08 Redução de velocidade
10 Catch-up
8000 Limite de frequência
540
Leitura de Dados: Warning word
Valor:
Unidade
Funcão:
Este parâmetro pode ser lido através da porta de
comunicação serial. Veja 4.2.1 Lista de Advertências e
Alarmes.
Descricão da selecão:
Indica no formato Hexadecimal se há uma advertência no
motor FC.
Tabela 3.36
542
Leitura de Dados: Terminal 1, entrada
analógica
Valor:
Unidade: mA
Funcão:
Este parâmetro pode ser lido através da porta de
comunicação serial.
Descricão da selecão:
O valor mostrado indica o valor do sinal no terminal 1.
A escala (parâmetros 336 e 337) não influencia a leitura.
Mín. e máx. são determinados pelo ajuste de deslocamento
e ganho do conversor AD.
Este valor é atualizado cada 20 milissegundos.
76 MG03BA28 - VLT® é marca registrada da Danfoss
Programação
VLT® DriveMotor FCM Series
543
Valor:
Unidade: X.X V
Funcão:
Este parâmetro pode ser lido através da porta de
comunicação serial.
Descricão da selecão:
O valor mostrado indica o valor do sinal no terminal 2.
A escala (parâmetros 338 e 339) não influencia a leitura.
Mín. e máx. são determinados pelo ajuste de deslocamento
e ganho do conversor AD.
Este valor é atualizado cada 20 milissegundos.
561
Valor:
Protocolo do FC (FC PROTOCOL) [0]
Modbus RTU [2]
Funcão:
Há três diferentes protocolos possíveis de serem
selecionados.
Descricão da selecão:
Selecione o protocolo de control word necessário.
Para informações adicionais sobre como utilizar o Modbus
RTU, veja MG10SX.
570
Valor:
(EVEN/1 STOPBIT) [0]
(ODD/1 STOPBIT) [1]
(NO PARITY/1 STOPBIT) [2]
(NO PARITY/2 STOPBIT) [3]
Funcão:
Este parâmetro configura a interface do Modbus RTU do
drive para que haja comunicação adequada com o
controlador mestre. A paridade (EVEN, ODD ou NO PARITY)
deve ser definida para corresponder à definição no
controlador mestre.
Descricão da selecão:
Selecione a paridade que corresponda à definição no
controlador mestre do Modbus. Paridade par ou ímpar
pode ser utilizada para verificar se houve erros em uma
word transmitida. Uma vez que o Modbus RTU utiliza o
método de CRC (Cyclic Redundancy Check - Verificação
Cíclica Redundante), mais eficiente para verificação de
erros, a verificação de paridade raramente é usada em
redes de Modbus RTU.
Leitura de Dados: Terminal 2, entrada
analógica
Protocolo
Paridade e molduragem de mensagem
Modbus
AVISO!
Qualquer alteração desativará o uso da unidade de
display (LCP2) e a programação adicional, também pelo
protocolo do FC.
571 Timeout das comunicações do Modbus
Valor:
10 ms-2000 ms
Funcão:
Este parâmetro determina a quantidade de tempo máxima
que o Modbus RTU do drive aguardará, entre caracteres
enviados pelo controlador mestre. Quando este tempo
expirar, a interface do Modbus RTU do drive assumirá que
recebeu a mensagem completa.
Descricão da selecão:
Geralmente, o valor de 100 ms é suficiente para redes
Modbus RTU, embora algumas destas redes possam operar
em valores de timeout tão curtos quanto 35 ms.
Se este valor for excessivamente curto, a interface do
Modbus RTU do drive pode perder uma parte da
mensagem. Uma vez que a verificação de CRC não será
válida, o drive ignorará a mensagem. As retransmissões de
mensagens resultantes diminuirão a velocidade das
comunicações na rede.
Se esse valor for programado muito longo, o conversor de
frequência aguardará mais tempo que o necessário para
determinar se a mensagem está completa. Isto atrasará a
resposta do drive para a mensagem e, possivelmente,
forçará o controlador mestre a interromper, por expiração
de tempo. As retransmissões de mensagens resultantes
diminuirão a velocidade das comunicações na rede
.
Grupo de Parâmetros 6-** Funções
3.8.1
Técnicas
600 Dados oper.: Horas de funcionamento
Valor:
Unidade: horas
0,0-130.000,0
Funcão:
Este parâmetro pode ser lido através da porta de
comunicação serial ou do display. O valor não pode ser
resetado.
Descricão da selecão:
Indica o número de horas em que o motor FC esteve em
operação.
O valor é armazenado no motor FC a cada hora e também
quando o aparelho é desligado.
100 ms
3 3
601
Valor:
Unidade: horas
0,0-130.000,0
MG03BA28 - VLT® é marca registrada da Danfoss 77
Dados oper.: Horas de funcionamento
Programação
VLT® DriveMotor FCM Series
Funcão:
Este parâmetro pode ser lido através da porta de
comunicação serial ou do display. O valor pode ser
resetado através do parâmetro 619.
Descricão da selecão:
33
Indica o numero de horas na qual o motor FC esteve em
operação desde reset no parâmetro 619.
O valor é armazenado no motor FC a cada hora e também
quando o aparelho é desligado.
603 Dados oper.: Número de energizações
Valor:
Unidade: código
0-9999
Funcão:
Este parâmetro pode ser lido através da porta de
comunicação serial ou do display.
Descricão da selecão:
Informa o número vezes que a fonte de alimentação
energizou o motor FC.
604
Valor:
Unidade: código
0-9999
Funcão:
Este parâmetro pode ser lido através da porta de
comunicação serial ou do display.
Descricão da selecão:
Informa o número vezes que a fonte de alimentação
energizou o motor FC.
605
Valor:
Unidade: código
0-9999
Funcão:
Este parâmetro pode ser lido através da porta de
comunicação serial ou do display.
Descricão da selecão:
Informa o número de sobretensões ocorridas no motor FC.
Dados oper.: Número de superaquecimentos
Dados oper.: Número de sobretensões
AVISO!
Parâmetros 615-617 Registro de falhas não pode ser
lido através da unidade de controle integrada.
615 Reg. de Falhas: Código de erro
Valor:
[Índice 1-10] Código de erro: 0-99
Funcão:
Nesse parâmetro é possível observar o motivo da
ocorrência de um desarme (desativação do conversor de
frequência). Os valores de registro 10 [1-10] são definidos.
O número de registro mais baixo [1] contém o último/mais
recente valor dos dados gravados. O número de registro
mais alto [10] contém o valor de dados mais antigo. Se
ocorrer um desarme, é possível ver a causa, a hora e um
possível valor da corrente ou da tensão de saída.
Descricão da selecão:
Indicada como um código de falha, no qual o número
refere-se a uma tabela. Veja 4.2.1 Lista de Advertências e
Alarmes.
616 Reg. de Falhas: Tempo
Valor:
Unidade: Horas
[Gama de indicações: XX - XXX]
Funcão:
Parâmetro do tipo de conjunto. Esse parâmetro possibilita
ver o número total de horas de funcionamento antes do
erro ocorrer. São apresentados 10 (1-10) valores
registrados.
O número de registro mais baixo (1) contém o último/mais
recente valor dos dados gravados, e o mais alto número
de registro (10) contém o valor mais antigo.
Descricão da selecão:
Leitura como uma opção.
Faixa de indicação: XX - XXX.
O registro das falhas é reinicializado após a inicialização
(par. 620).
617
Valor:
[Index XX - XXX]
Funcão:
Parâmetro do tipo de conjunto. Esse parâmetro possibilita
ver em que corrente ou tensão um determinado erro
ocorreu.
Descricão da selecão:
Leitura como um valor.
Faixa de indicação: 0,0 - 999,9.
O registro das falhas é resetado após a inicialização
(parâmetro 620).
619
Valor:
Sem reset (DO NOT RESET) [0]
Reset (RESET COUNTER) [1]
Funcão:
Colocar o contador das horas de funcionamento em zero
(parâmetro 601).
Descricão da selecão:
Se [1] Reset tiver sido selecionado, o contador das horas de
funcionamento do motor FC é reinicializado.
620
Valor:
operação normal (NORMAL OPERATION) [0]
Test.do cartão d cntrl (CONTROL CARD TEST) [2]
Reg. de Falhas: Valor
Reinicialização do contador de horas de
funcionamento
Modo de operação
78 MG03BA28 - VLT® é marca registrada da Danfoss

Programação
VLT® DriveMotor FCM Series
Inicialização (INITIALIZE) [3]
Funcão:
Além da operação normal, este parâmetro pode ser
utilizado para dois testes diferentes.
Todos os parâmetros (exceto os parâmetros 603-605)
também podem ser iniciados manualmente.
Descricão da selecão:
[0] Função normal é selecionado para operação normal
com o motor na aplicação selecionada.
[2] Teste do cartão de controle é selecionado se for
desejado controle das entradas analógicas e digitais, assim
como das saídas analógicas e digitais e da tensão de
controle de +10 V.
Para este teste é necessário um conector de teste com
ligações internas. Setup: Saída analógica/digital para as
entradas digitais 3, 4 e 5, além de uma alimentação de 10
V para a entrada 2 analógica/digital.
[3] Inicialização é selecionado se for desejado a
configuração de fábrica da unidade sem reinicializar os
parâmetros 500, 501 + 600 - 605. A inicialização fica ativa
após a energização.
621
Valor:
Depende da unidade
Funcão:
Os dados-chave da unidade podem ser lidos por meio do
display ou da porta de comunicação serial.
Descricão da selecão:
Tipo indica o tamanho da unidade e a função básica
respectiva.
624
Valor:
Depende da unidade
Funcão:
Os dados-chave da unidade podem ser lidos por meio do
display ou da porta de comunicação serial.
Descricão da selecão:
Versão de software informa o número da versão.
625
Valor:
Depende da unidade
Funcão:
Os dados-chave o da unidade podem ser lidos na via porta
de comunicação serial ou do display. Por exemplo: ID 1.42
2 kB.
Plaqueta de identificação: FC tipo
Plaqueta de identificação: Versão de
software nº
Placa de identificação: nº de identificação do
LCP
Funcão:
Os dados-chave o da unidade podem ser lidos através da
porta de comunicação serial ou pelo display.
628
Valor:
Funcão:
Os dados-chave o da unidade podem ser lidos através da
porta de comunicação serial ou pelo display.
630
Valor:
Funcão:
Os dados-chave o da unidade podem ser lidos através da
porta de comunicação serial ou pelo display.
632
Valor:
Funcão:
Os dados-chave o da unidade podem ser lidos através da
porta de comunicação serial ou pelo display.
633
Valor:
Funcão:
Os dados-chave o da unidade podem ser lidos através da
porta de comunicação serial ou pelo display.
634
Valor:
Funcão:
Os dados-chave o da unidade podem ser lidos através da
porta de comunicação serial ou pelo display.
635
Valor:
Funcão:
Os dados-chave o da unidade podem ser lidos através da
porta de comunicação serial ou pelo display.
Plaqueta de identificação: Tipo de opcional
da aplicação
Plaqueta de identificação: n.º de código da
opção de comunicação
Identificação do software BMC
Identificação do banco de dados do motor
Identificação da unidade de comunicação
№ de Peça do Software
3 3
626
Valor:
Depende da unidade
Plaqueta de identificação: Nº de identificação
do banco de dados
MG03BA28 - VLT® é marca registrada da Danfoss 79

Programação
678 Configurar o Cartão de Controle
Valor:
Versão standard (VERSÃO PADRÃO) [1]
Versão Mbaud 3 do Profibus
(PROFIBUS 3 MB VER.) [2]
33
Versão Mbaud 12 do Profibus
(PROFIBUS 12 MB VER.) [3]
Funcão:
Este parâmetro permite uma configuração de um Cartão
de Controle do Profibus. O valor padrão depende da
unidade produzida, sendo também o valor máximo que
pode ser obtido. Isto significa que um cartão de controle
somente pode ser rebaixado para uma versão de
desempenho inferior.
VLT® DriveMotor FCM Series
80 MG03BA28 - VLT® é marca registrada da Danfoss

Tudo sobre o FCM 300
4 Tudo sobre o FCM 300
4.1 Condições Especiais
VLT® DriveMotor FCM Series
O nível da fuga de corrente à terra depende dos seguintes
fatores, em ordem de prioridade:
4.1.1 Isolação galvânica (PELV)
A PELV oferece proteção por meio da tensão muito baixa.
Considera-se que a proteção contra choque elétrico está
garantida quando todos os dispositivos conectados forem
do tipo PELV e se a instalação for feita como descrito nas
normas locais/nacionais relativas à alimentação PELV.
No FCM da Série 300, todos os bornes de comando são
alimentados com/ou conectados com baixíssima tensão
(PELV).
A isolação galvânica (garantida) é obtida satisfazendo-se às
exigências relativas à alta isolação e mantendo-se espaços
necessários para circulação. Estes requisitos encontram-se
descritos na norma EN 50178.
Os componentes de isolação elétrica, como descrito a
seguir, também estão de acordo com os requisitos
relacionados com a isolação elevada e o teste relevante,
como descrito na EN 50178.
A isolação galvânica pode ser mostrada em três locais (veja
Ilustração 4.1), que são:
Fonte de alimentação (SMPS) inclusive da isolação
•
da UDC, indicando a tensão do circuito intermediário.
A gate drive controla os IGBTs (opto-acopladores).
•
Transdutores de corrente (opto-acopladores).
•
Corrente de Fuga para o Terra
4.1.2
A corrente de fuga à terra é basicamente causada pela
capacitância existente as fases do motor e sua carcaça. O
filtro RFI contribui para o aumento da corrente de fuga,
porque o circuito do filtro é aterrado através de
capacitores.
1. Frequência de chaveamento
2. Motor aterrado ou não no local
A fuga de corrente é importante para a segurança durante
o manuseio/operação do conversor de frequência, se (por
engano) o conversor de frequência não tiver sido ligado à
terra.
AVISO!
FTodos os P305-375 do FCM têm correntes de fuga > 3,5
mA (aproxim. 4 a 20 mA). Variam segundo as frequências
de chaveamento dentro de uma determinada faixa.
Isso significa que deve ser instalado aterramento reforçado
se for necessária conformidade com a EN50178.
Nunca use relés ELCB (Disjuntor para a corrente de fuga à
terra), também chamados RCD(Dispositivo de corrente
residual), que não sejam adequados às correntes de falha
CC (tipo A).
Se um RCD for usado, deverá ser:
Adequados à proteção de equipamento com um
-
componente CC na corrente de falha (retificador
trifásico)
Adequados para permitir uma breve descarga de
-
corrente à terra quando da energização
Adequados para uma corrente de fuga elevada.
-
Isto significa que é possível operar o FCM 300 no RCD tipo
B:
O RCD (Dispositivo de corrente residual) tipo B tem uma
tolerância no nível de desarme. Portanto, é recomendável
usar um RCD onde a corrente de fuga máx. para o FCM
(veja acima, 20 mA) seja menor que 1/3 do nível de
desarme do RCD. Isso significa que o nível de desarme do
RCD terá de ser igual ou superior a 60 mA, ou seja, um
RCD tipo B com nível de desarme de 100 mA pode ser
usado para proteção.
4 4
MG03BA28 - VLT® é marca registrada da Danfoss 81

Tudo sobre o FCM 300
VLT® DriveMotor FCM Series
44
Ilustração 4.1 Isolação galvânica
Condições de operação Extremas
4.1.3
Sobretensão gerada pelo motor
A tensão no circuito intermediário aumenta quando o
motor atua como um gerador. Isto ocorre em dois casos:
Quando a carga controla o motor (em frequência
•
de saída constante do conversor), ou seja, a carga
gera energia.
Durante a desaceleração (“ramp-down”) se o
•
momento de inércia é alto, a carga é baixa e o
tempo de rampa de desaceleração é muito breve
para permitir que a energia seja dissipada no
conversor de frequência VLT, no motor e na
instalação.
A unidade de controle tenta corrigir a variação, se possível.
Quando um determinado nível de tensão é atingido, o
inversor desliga para proteger os transistores e os
capacitores do circuito intermediário.
Queda de tensão na rede elétrica
Durante uma queda de alimentação, o FCM da Série 300
permanece ligado até a tensão do circuito intermédio
descer abaixo do nível de parada mínimo, que é habitualmente 15% inferior à tensão de alimentação nominal
mínima do FCM da Série 300.
Se a sobrecarga for excessiva, pode ocorrer uma corrente
que desativa o motor FC após aproximadamente 1,5 s.
4.1.4 Ruído Acústico
Em seguida, encontram-se os valores típicos medidos a
uma distância de 1 m da unidade, com carga máxima:
2 polos 4 polos
FCM 305 54 dB(A)
FCM 311 58 dB(A)
FCM 315 59 dB(A)
FCM 322 58 dB(A)
FCM 330 61 dB(A)
FCM 340 62 dB(A) 63 dB(A)
FCM 355 64 dB(A) 60 dB(A)
FCM 375 61 dB(A)
Tabela 4.1
Balanceamento
4.1.5
O FCM 300 é balanceado conforme a classe R, de acordo
com a norma ISO8821 (balanceamento reduzido). Para
aplicações críticas, especialmente em altas velocidades
(acima de 4000 RPM), a classe especial de balanceamento
(classe S) poderá ser necessária.
O intervalo de tempo, antes do inversor parar, depende da
tensão da rede, antes do queda e da carga do motor.
Sobrecarga estática
Quando o FCM da Série 300. estiver sobrecarregado (o
limite de corrente no parâmetro 221 tiver sido atingido), a
unidade de controle reduzirá a frequência de saída numa
tentativa de reduzir a carga.
82 MG03BA28 - VLT® é marca registrada da Danfoss
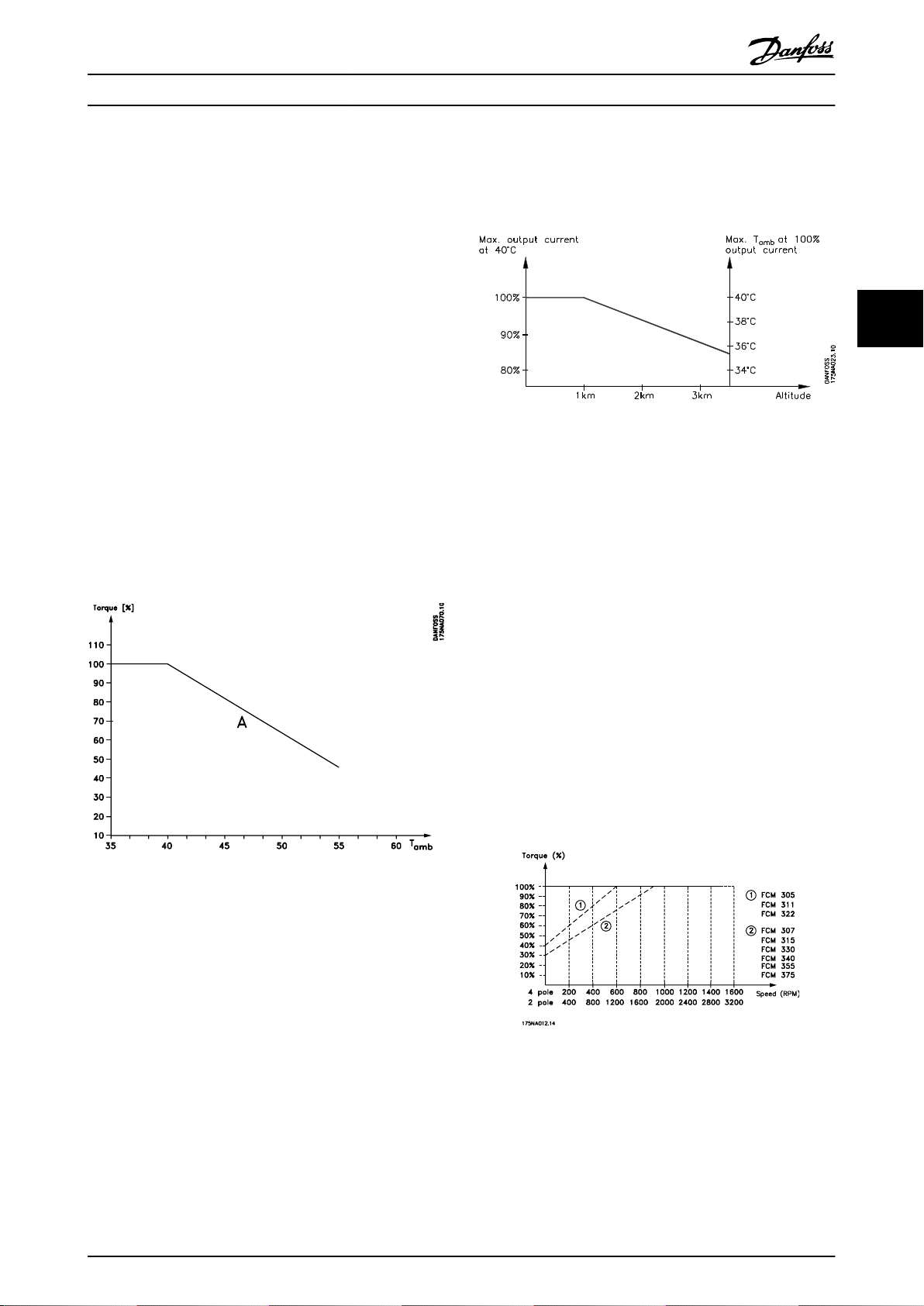
Tudo sobre o FCM 300
VLT® DriveMotor FCM Series
4.1.6 Proteção térmica e "Derating"
O motor FCM da Série 300 é termicamente protegido, caso
sejam excedidos os limites. Em altas temperaturas, a
frequência de chaveamento será gradualmente reduzida
até 2 kHz e o motor finalmente entrará em desarme.
AVISO!
A combinação de alta frequência de chaveamento com
falta de ventiladores de refrigeração pode danificar a
unidade.
4.1.7 Derating devido à Temperatura
Ambiente
A temperatura ambiente (T
temperatura permitida. A média (T
24 horas deve ser pelo menos 5 ºC mais baixa.
Se a Série FCM 300 for operada a temperaturas acima de
40 °C é necessário derating da corrente de saída contínua.
AMB,MAX
) é a máxima
) da medição de
AMB,AVG
1. Derating da corrente de saída em relação à
altitude em T
2. Derating da T
100% da corrente de saída.
Ilustração 4.3
= máx. 40 °C
AMB
máx. em relação à altitude a
AMB
4.1.9 Derating devido a operação em Baixa
Velocidade
Quando uma bomba centrífuga ou um ventilador for
controlado por um motor FC, não é necessário reduzir a
saída em baixa velocidade porque a característica de carga
dos ventiladores/bombas centrífugas garante automaticamente a redução necessária.
4 4
Ilustração 4.2
Derating devido à Pressão do Ar
4.1.8
Para altitudes acima de 2 km entre em contacto com a
Danfoss Drives com relação à PELV.
Abaixo de 1000 m de altitude não há necessidade de
derating.
Acima de 1000 m a temperatura ambiente (T
corrente de saída máxima (I
acordo com o seguinte diagrama:
) deve sofrer derating de
VLT,MAX
AMB
) ou a
Os motores FC que funcionam em aplicações de torque de
carga constante continuamente em baixa velocidade
devem sofrer derating (veja Ilustração 4.4) ou deve ser
usado um ventilador independente (método 2 de
resfriamento do motor).
O torque nominal (100%) pode ser conseguido em até 15
minutos e em um ciclo útil de até 25%, em baixa
velocidade.
Ilustração 4.4 Derating para operação em Baixa Velocidade
MG03BA28 - VLT® é marca registrada da Danfoss 83

Tudo sobre o FCM 300
VLT® DriveMotor FCM Series
4.1.10 Derating devido a Frequência de
4.1.12
Umidade do Ar
Chaveamento Alta
A Série FCM 300 foi projetada para atender à norma IEC
O motor FCM da série 300 pode utilizar dois diferentes
esquemas de PWM: SFAVM e 60° AVM. A programação de
fábrica vem com o SFAVM. O esquema PWM pode ser
alterado no parâmetro 446. Abaixo de 25 Hz de velocidade
do motor, o FCM da Série 300 muda automaticamente
para o SFAVM.
44
A frequência de chaveamento vem programada de fábrica
em 4000 Hz. Ela pode ser variada de 2 a 14 kHz no
parâmetro 411.
Uma frequência de chaveamento mais alta leva a uma
unidade que funciona com menos ruído, porém leva
também a maiores perdas nos circuitos do motor FC,
tornando necessária uma apropriada redução de potência.
Veja Ilustração 4.5
60068-2-3, EN 50178 item 9.4.2.2/DIN 40040, classe E, a 40
°C.
Aquecimento de amortecimento cíclico de acordo com IEC
60068-2-30, 40 °C.
4.1.13 Padrão UL
A Série do FCM 300 está aprovada pelo UL.
Veja 2.1.2 Dados Técnicos Gerais para saber o uso correto
dos pré-fusíveis.
4.1.14
Eficiência do Conversor de Frequência (η
A carga do conversor de frequência não influi muito na
sua eficiência. Em geral, a eficiência é a mesma na
frequência nominal do motor fM,N, inclusive se o motor
fornecer 100% do torque de eixo nominal ou apenas 75%,
ou seja, em caso de cargas parciais.
Eficiência
VLT
)
Ilustração 4.5 Características de torque
4.1.11
O FCM da Série 300 foi testado segundo um procedimento
baseado nas seguintes normas:
IEC 60068-2-6:
IEC 60068-2-34: Vibração aleatória de banda larga
IEC 60068-2-35: Vibração aleatória de banda larga
IEC 60068-2-36: Vibração aleatória de banda larga
O FCM da Série 300 está em conformidade com os
requisitos que correspondem às condições das normas
mencionadas acima.
Vibração e Choque
Vibração (senoidal) - 1970
- requisitos gerais
- alta capacidade de reprodução
- média capacidade de reprodução
Tabela 4.2
Isto também significa que a eficiência do conversor de
frequência não se altera, mesmo que outras características
U/f sejam escolhidas.
Entretanto, as características U/f influem na eficiência do
motor.
A eficiência diminui um pouco quando a frequência de
chaveamento for definida com um valor superior a 5 kHz.
A eficiência também será ligeiramente reduzida se a
tensão de rede for 480 V.
Eficiência do motor (η
O motor do FCM 300 é projetado de acordo com o IE2 e
testado de maneira correspondente para IEC 60034-1.
A eficiência de um motor conectado ao conversor de
frequência depende do nível de magnetização. Com dados
otimizados, a eficiência tão boa quanto com operação com
rede elétrica. Na faixa de 75-100% do torque nominal, a
eficiência do motor é praticamente constante quando
controlado pelo conversor de frequência e também
quando se estivesse conectado diretamente à rede elétrica.
A influência da frequência de chaveamento na eficiência é
marginal.
MOTOR)
84 MG03BA28 - VLT® é marca registrada da Danfoss

1,02
1,01
1,00
0,99
0,98
0,97
0,96
0,95
0,94
0,93
0,92
0,91
0,90
0,89
0,88
0,87
0,86
0,85
0,84
0,83
0,82
0,81
0,80
30Hz
40Hz
50Hz
60Hz
70Hz
100% Load 75% Load 50% Load 25% Load
Output Frequency
175NA159.10
Relative Efficiency
Tudo sobre o FCM 300
VLT® DriveMotor FCM Series
Eficiência do sistema (η
SYSTEM
)
Para calcular a eficiência do sistema (FCM), a eficiência do conversor de frequência (η
motor (η
MOTOR
): η
SYSTEM
= η
VLT
x η
MOTOR
) é multiplicada pela eficiência do
VLT
4 4
Ilustração 4.6 Curvas de Eficiência Típicas
O cálculo da eficiência do FCM 300 calcula a eficiência do
FCM #300 em cargas diferentes com base em
Ilustração 4.6. O fator neste gráfico deve ser multiplicado
pelo fator de eficiência específico indicado nas tabelas de
especificação.
Correntes
de
harmônica
s
Hz 50 Hz 250 Hz 350 Hz 550 Hz
In/I1 [%] 100% 44% 29% 8%
I
1
I
5
I
7
I
11
Exemplo: Considere um FCM 375 com 25% de carga e 30
Hz de velocidade. O gráfico está mostrando 0,845 - a
Tabela 4.3
eficiência nominal de um FCM 375 é 0,876.
As harmônicas de corrente não contribuem diretamente
Assim, a eficiência real do FCM 300 é: 0,845x0,876=0,74
com velocidade (30 H) e carga (25%) parciais.
4.1.15
Um motor FC absorve uma corrente não senoidal da rede
elétrica, o que aumenta a corrente de entrada I
corrente não-senoidal pode ser transformada, por meio da
análise de Fourier, e decomposta em correntes de ondas
senoidais com diferentes frequências, ou seja, correntes
harmônicas IN diferentes, com uma frequência fundamental
de 50 Hz:
Harmônicas /Interferência da
Alimentação de Rede Elétrica
RMS
. Uma
para o consumo de energia elétrica, mas aumentam a
perda por calor na instalação (transformador, cabos).
Consequentemente, em instalações com alta porcentagem
de carga de retificador, é importante manter as correntes
das harmônicas em um nível baixo, para não sobrecarregar
o transformador e não superaquecer os cabos.
Algumas das correntes de harmônicas podem interferir em
equipamento de comunicação que estiver conectado no
mesmo transformador ou causar ressonância vinculada
com banco de capacitores para correção do fator de
potência.
MG03BA28 - VLT® é marca registrada da Danfoss 85

175HA034.10
Tudo sobre o FCM 300
VLT® DriveMotor FCM Series
4.1.18
Todas as máquinas com peças com movimento crítico
estão cobertas pela diretiva das máquinas, publicada no
Ilustração 4.7
Para assegurar correntes harmônicas baixas, o FCM 300 usa
44
bobinas no circuito intermediário como padrão. THD
(corrente) ≤ 54%
A distorção na tensão de alimentação de rede elétrica
depende da amplitude das correntes harmônicas,
multiplicada pela impedância de rede elétrica, para a
frequência em questão. A distorção de tensão total THD é
calculada com base na tensão das harmônicas individuais,
utilizando a seguinte fórmula:
U
THD =
4.1.16
O fator de potência é a relação entre I1 entre I
O fator de potência para o controle trifásico
U
2
2
1
+...+U
(%)
2
n
Fator de Potência
RMS
.
dia 1º de Janeiro de 1995. Uma vez que o conversor de
frequência é em grande parte elétrico e que o motor será
sempre colocado em conexão com outras máquinas, ele
não é abrangido pela diretiva de maquinários. Contudo, se
um motor FC for fornecido para uso em uma máquina,
fornecemos informações sobre os aspectos de segurança
relacionados ao motor FC. Isto é feito por meio de uma
declaração do fabricante.
4.1.19
Os conversores de frequência devem ter certificação CE de
acordo com a diretiva de baixa tensão. Esta diretiva aplica-
-se a todo o equipamento e aparelhos elétricos que
utilizem tensão de 50 a 1000 V CA e 75 a 1500 V CC.
4.1.20
EMC é a sigla de compatibilidade eletromagnética. A
compatibilidade eletromagnética significa que a interfe-
rência mútua entre os diferentes componentes/aparelhos é
tão pequena que não chega a afetar a operação dos
mesmos. A diretiva EMC entrou em vigor no dia 1º de
Janeiro de 1996. A diretiva faz distinção entre
componentes, aparelhos, sistemas e instalações.
A Diretiva de Maquinaria (98/37/EEC)
A Diretiva de Baixa Tensão (73/23/
EEC)
A Diretiva EMC (89/336/EEC)
O fator de potência indica a extensão em que o motor FC
impõe uma carga na alimentação de rede elétrica.
Quanto menor o fator de potência, maior será a I
mesmo desempenho em kW.
Além disso, um fator de potência alto indica que as
diferentes correntes harmônicas são baixas.
4.1.17
O objetivo das certificações CE é evitar obstáculos técnicos
nas transações comerciais no âmbito dos países da EFTA e
da União Européia. A U.E. introduziu a Certificação CE
como uma forma simples de mostrar se um produto está
em conformidade com as diretivas relevantes da U.E. A
etiqueta CE não tem informações sobre a qualidade ou
especificações do produto. Os conversores de frequência
são regidos por três diretivas da UE:
O que é Certificação CE?
RMS
para o
4.1.21
As "Diretrizes sobre a Aplicação da Diretiva do Conselho
89/336/CEE" da União Européia indicam três situações
típicas de uso do motor FC. Para cada uma destas
situações são oferecidas explicações se a situação em
questão está coberta pela diretiva EMC e se deve ter
Certificação CE.
O que é Coberto?
1. O motor FC é vendido diretamente ao
consumidor final. O motor FC, por exemplo, é
vendido ao mercado de "Faça Você Mesmo". O
consumidor final não é um especialista. A
instalação do motor FC é feita por ele próprio
para uso numa máquina que é um dos seus
passatempos ou então em um eletrodoméstico
etc. Para estas aplicações o motor FC deverá ter a
marca CE em conformidade com a diretiva EMC.
2. O motor FC é vendido para instalação em uma
fábrica. A fábrica é construída por profissionais do
ramo. Pode ser uma instalação fabril ou de
aquecimento/ventilação, que foi projetada e
instalada por profissionais do ramo. Nem o motor
FC nem a instalação completa necessitam de
86 MG03BA28 - VLT® é marca registrada da Danfoss

Tudo sobre o FCM 300
VLT® DriveMotor FCM Series
marca CE, de acordo com a diretiva EMC. Todavia,
a unidade deve estar em conformidade com os
requisitos EMC fundamentais da diretiva. O
instalador pode assegurar isso usando
componentes, aparelhos e sistemas que tenham
Certificação CE de acordo com a diretiva EMC.
3. O motor FC é vendido como parte de um sistema
completo. O sistema é comercializado como
completo. Pode ser, por exemplo, um sistema de
ar condicionado. O sistema completo deverá ter
Certificação CE em conformidade com a diretiva
EMC. O fabricante que fornecer o sistema pode
garantir a Certificação CE conforme a diretiva
EMC usando componentes com Certificação CE
ou testando a EMC do sistema. Se for escolhido
usar somente componentes com Certificação CE,
não será necessário testar o sistema inteiro.
4.1.22
Danfoss Motor Série FCM 300 e
Certificação CE
A Certificação CE constitui uma característica positiva
quando usada para seu propósito original, ou seja, facilitar
transações comerciais no âmbito da UE e da EFTA.
No entanto, as marcas CE poderão cobrir muitas e diversas
especificações. Este é o motivo pelo qual a marca CE pode
difundir nos instaladores uma falsa sensação de segurança
quando o conversor de frequência é utilizado como
componente em um sistema.
As especificações cobertas podem, com efeito, ser bastante
diferentes. É por isso que uma Certificação CE pode dar ao
instalador uma falsa sensação de segurança ao usar um
motor FC como componente de um sistema ou aparelho.
Danfoss CE certifica os VLT® DriveMotors de acordo com a
diretiva de baixa tensão. Isso significa que desde que o
motor FC seja instalado corretamente, a Danfoss garante
que ele atende a diretiva de baixa tensão. A Danfoss emite
uma declaração de conformidade que confirma a
Certificação CE de acordo com a diretiva de baixa tensão.
A marca CE aplica-se igualmente à diretiva EMC, no
Manual de Operação para uma instalação conforme os
requisitos EMC e a filtragem de acordo com a EMC.
Baseada neste fato, é emitida uma declaração de conformidade com a diretiva EMC.
possam ajudá-lo a obter os melhores resultados em termos
de EMC.
4.1.23 Conformidade com a Diretiva EMC
89/336/EEC
Na grade maioria dos casos o VLT DriveMotor é usado
pelos profissionais do ramo como um componente
complexo que faz parte de um aparelho, sistema ou
instalação maior. Deve ser enfatizado que a responsabilidade pelas propriedades de EMC finais do aparelho,
sistema ou instalação é do instalador. Para ajudar o
instalador, a Danfoss preparou orientações para instalação
de EMC do Sistema de Drive de Potência. As normas e os
níveis de teste determinados para Sistemas de Drive de
Potência são atendidos, desde que sejam seguidas as
instruções de instalação em conformidade com a EMC.
4.1.24
Normas de EMC
AVISO!
- Todas as especificações de EMC são indicadas
com configuração de fábrica.
- Frequência máxima da portadora de 4 kHz.
- Cabos de controle/dados blindados devem ser
utilizados para proteção contra sobretensão.
- O motor FC deve ser conectado à terra de
modo a seguir a norma.
- Impedância da linha máxima/mínima Z
0,24 + j0,15 ohm; Z
61800-3 nós de comutação)
Padrões genéricos
Os padrões genéricos estão indicados com a diretiva EMC
(89/336/CEE).
O motor FC está de acordo com:
EN 61000-6-3
Ambiente residencial, comercial e de indústria ligeira.
EN 61000-6-2, EN 61000-6-4.
Ambiente industrial.
1)
Os níveis de emissão estabelecidos pela EN 61000-6-3 são
atendidos somente pelos motores FC com filtro opcional
classe B-1.
1)
, EN 61000-6-1.
= 0 + j0 ohm. (EN
min
max
=
4 4
O Guia Rápido fornece instruções detalhadas para a
instalação para garantir que a instalação esteja correta com
relação à EMC. Além disso, a Danfoss especifica quais
normas são atendidas pelos nossos diferentes produtos.
A Danfoss oferece os filtros indicados nas especificações e
está à sua disposição para outros tipos de assistência que
MG03BA28 - VLT® é marca registrada da Danfoss 87
Além disso, o motor FC está de acordo com: DIN VDE
0160/1990 2)
2)
‘Proteção contra sobretensão 7.3.1. classe1’
Tudo sobre o FCM 300
VLT® DriveMotor FCM Series
Normas para produtos
As normas para produtos estão estabelecidas na EN
61800-3 (IEC 61800-3).
O motor FC está de acordo com:
EN 61800-3, distribuição sem restrição
EN 61800-3, distribuição sem restrição.
3)
44
Os níveis de emissões indicados pela distribuição sem
restrição da EN 61800-3 são atendidos somente pelos
motores FC com filtro classe B-1.
Normas básicas, emissões
EN 55011: Limites e métodos de medição de rádio
•
interferência, característicos do equipamento de
rádiofrequência industrial, científico e médico
(ISM).
EN 55022: Limites e métodos de medição de rádio
•
interferência, característicos do equipamento de
informática.
EN 61000-3-2: Limites para as emissões de
•
correntes harmônicas (corrente de entrada do
equipamento≥ 16 A)
EN 61000-3-4: Limites para as emissões de
•
correntes harmônicas (corrente de entrada do
equipamento ≤ 16 A)
Padrões básicos, imunidade
EN 61000-2-4 (IEC 61000-2-4):
•
Níveis de compatibilidade
Simulação de flutuações de tensão e de
frequência, de nós harmônicos e de comutação
na linha de potência.
EN 61000-4-2 (IEC 61000-4-2): Descarga eletro-
•
stática (ESD)
Simulação de descarga eletrostática.
EN 61000-4-4 (IEC 61000-4-4): Transientes rápidos,
•
severos de 5/ 50 ns
Simulação de transitórios causados pela
portadora de contatores, relés e de dispositivos
similares.
EN 61000-4-5 (IEC 61000-4-5):
•
Picos de sobretensão de 1,2/ 50 μS.
Simulação de transitórios causados por um raio
que caia próximo à instalação.
EN 61000-4-3: (IEC 61000-4-3):
•
Campo eletromagnético de radiofrequência.
Amplitude modulada.
Simulação de interferência causada pelo
equipamento de transmissão de rádio.
EN 61000-4-6: (IEC 61000-4-6):
•
Modo RF comum.
3)
.
Aspectos gerais de emissões EMC
Para uma blindagem de alta frequência, os cabos
blindados utilizados por Profibus, pela via de comunicação
serial padrão, pelos cabos de controle e pela interface de
sinais devem em geral ser conectados ao invólucro em
ambas extremidades.
Aspectos gerais da imunidade EMC
Se houver problemas com interferência de baixa
frequência (malhas de aterramento), o cabo blindado
usado pelo Profibus, a via de comunicação padrão, os
cabos de controle e a interface de sinais podem ser
deixados abertos em uma das extremidades.
4.1.25
Assim como todos os equipamentos eletrônicos, um
conversor de frequência VLT contém uma grande
quantidade de componentes mecânicos e eletrônicos, os
quais são sempre vulneráveis aos efeitos do ambiente em
algum grau.
Por este motivo, o conversor de frequência VLT não deve
ser instalado em ambientes onde o ar esteja saturado de
líquidos, gases ou partículas que podem afetar e
danificar os componentes eletrônicos. A não observação
das medidas de proteção aumenta o risco de paradas,
reduzindo assim a vida útil do conversor de frequência
VLT.
Líquidos podem ser transportados pelo ar e condensar no
conversor de frequência VLT. Além disso, os líquidos
podem corroer os componentes e as peças metálicas.
Vapor, óleo e maresia podem causar corrosão nos
componentes e peças metálicas.
Nesses ambientes é recomendável equipamento com
classificação do gabinete ≥ IP54.
Em ambientes com altas temperaturas e umidade, a
presença de
compostos clorados provocará processos químicas nos
componentes do conversor de frequência VLT. Estas
reações afetarão e danificarão, rapidamente, os
componentes eletrônicos.
Simulação do efeito de equipamento de
radiotransmissão, ligado aos cabos de conexão.
ENV 50204:
•
Campo eletromagnético de radiofrequência.
Modulação por pulsos.
Simulação de interferência causada por telefones
celulares GSM.
Ambientes Agressivos
ADVERTÊNCIA
gases corrosivos como enxofre, nitrogênio e
88 MG03BA28 - VLT® é marca registrada da Danfoss

Tudo sobre o FCM 300
VLT® DriveMotor FCM Series
AVISO!
A montagem do conversor de frequência VLT em
ambientes agressivos aumentará o risco de paradas,
além de reduzir consideravelmente sua vida útil.
Antes de instalar o conversor de frequência VLT, deve-se
verificar a presença de líquidos, partículas e gases no ar.
Isto pode ser feito observando-se as instalações já
existentes nesse ambiente. A presença de água ou óleo
sobre peças metálicas ou a corrosão nas partes metálicas,
são indicadores típicos de líquidos nocivos em suspensão
no ar.
Com frequência, detectam-se níveis excessivos de
partículas de poeira em cabines de instalação e em
instalações elétricas existentes.
Um indicador de gases agressivos no ar é o enegrecimento
de barras de cobre e extremidades de fios de cobre em
instalações existentes.
Lista de Advertências e Alarmes
4.2.1
A tabela mostra os diferentes alarmes e advertências e
indica se a falha bloqueia o motor FC. Após um Bloqueio
por desarme, a alimentação de rede elétrica deve ser
desligada e a falha corrigida. Religue a alimentação e
reinicialize o motor FC antes de estar pronto. Onde houver
um asterisco, sob Advertência e Alarme, isto pode
significar que uma advertência precede o alarme. Pode
significar também que é possível programar se uma
determinada falha deve redundar em uma advertência ou
alarme. Depois de um desarme, o alarme e a advertência
piscarão, mas, se a falha for removida, somente o alarme
piscará. Depois de uma reinicialização, o motor FC estará
pronto para iniciar novamente a operação.
4 4
N°. Descrição Advertência Desarme Bloqueado por
desarme
2 Falha de live zero (LIVE ZERO ERROR) X X
4 Queda de fase (MAINS PHASE LOSS) X X X
5 Advertência de tensão alta (DC LINK VOLTAGE HIGH) X
6 Advertência de tensão baixa (DC LINK VOLTAGE LOW) X
7 Overvoltage (DC LINK OVERVOLT) X X
8 Undervoltage (DC LINK UNDERVOLT) X
9 Sobrecarga do inversor (INVERTER TIME) X X
11 Motor thermistor (MOTOR THERMISTOR) X
12 Limite de torque (TORQUE LIMIT) X
13 Overcurrent (OVERCURRENT) X X
14 Earth fault (EARTH FAULT) X X
15 Falha na alimentação (SWITCH MODE FAULT) X X
16 Curto circuito (CURTO CIRCUITO DE CORR.) X X
17 Timeout do barramento padrão (STD BUS TIMEOUT) X X
18 Timeout do barramento do HPFB (HPFB TIMEOUT) X X
33 Fora da faixa de frequência (OUT FREQ RNG/ROT LIM) X
34 Erro no HPFB (HPFB ALARM) X X
35 Inrush fault (INRUSH FAULT) X X
36 Overtemperature (OVERTEMPERATURE) X X
37 Erro interno (INTERNAL ERROR) X X
Tabela 4.4 Advertências e Alarmes
E se o motor não der partida?
4.2.2
O LCP pode ser programado para parada local. Nesse caso, o motor não dará partida quando você desconectar o LCP. Para
o motor dar partida é necessário haver um LCP conectado - não há outra maneira e o MCT 10 Setup Software não indicará
o que está errado ou o que fazer. Desse modo, em caso de problemas, siga o procedimento abaixo:
MG03BA28 - VLT® é marca registrada da Danfoss 89

175NA117.10
SETUP
1
WARN. 6
DC LINK VOLTAGE LOW
175NA118.10
SETUP
1
ALARM:12
TRIP (RESET)
TORQUE LIMIT
SETUP
1
Tudo sobre o FCM 300
VLT® DriveMotor FCM Series
ADVERTÊNCIA
Advertência:
Deve-se ter extrema cautela ao manusear a unidade com a tampa aberta.
Verde Amarelo Vermelho Ação
LED 302 LED 301 LED 300
OFF
(Desligada)
44
LIGADO OFF (Desligada) OFF
LIGADO OFF (Desligada) LIGADO Aplique e remova o sinal de reset
LIGADO LIGADO LIGADO Desligue a energia elétrica até que todos os LEDs se apaguem
Para obter mais informações veja o Setup Rápido MG03FXYY.
Tabela 4.5
1. Verifique se nenhum parâmetro foi alterado
2. Verifique se nenhum comando [STOP] foi ativado
3. Verifique os LEDs visíveis através de um orifício
*) como na versão de software 2.12
OFF (Desligada) OFF
(Desligada)
(Desligada)
desde o momento da entrega (configuração de
fábrica). Use o Painel de Controle Local ou a
porta serial para reconfigurar com a configuração
de fábrica. Verifique se o parâmetro 002 está
programado para remoto (caso não esteja, o LED
301 amarelo estará piscando devagar.
através do teclado opcional do painel de controle
(parada local, LED 301 amarelo piscando devagar
*). O [STOP] do Painel de Controle só pode ser
reinicializado através do botão [START].
na tampa de isolamento interna (veja
Ilustração 2.2), conforme a tabela a seguir.
Aplique a eletricidade
Aplique a partida e os sinais de referência
Ilustração 4.8 ADV. LCP 6
Mensagens de alarme
O alarme aparece nas linhas 2. e 3. do display, veja o
exemplo Ilustração 4.9:
Problemas de comunicação serial. Se o endereço do
barramento for programado como um valor alto, a
comunicação pode ficar impossível, caso o endereço alto
não seja varrido pelo mestre. O endereço não retornará à
programação de fábrica com a reinicialização desta função.
modern dvertências
4.2.3
O display indica alternadamente estado normal e
advertência. Uma advertência aparece na primeira e
segunda linhas do display. Veja o exemplo Ilustração 4.8:
Ilustração 4.9 ALARME DE LCP:12
90 MG03BA28 - VLT® é marca registrada da Danfoss
Tudo sobre o FCM 300
VLT® DriveMotor FCM Series
ADVERTÊNCIA/ALARME 2
Falha de live zerot (ERRO DE LIVE ZERO):
O sinal de corrente no terminal 1 é menor que 50% do
valor definido no parâmetro 336 Terminal 1, escala mín.
ADVERTÊNCIA/ALARME 4
Perda de fase (PERDA DE FASE DA REDE ELÉTRICA):
Ausência de fase no lado da alimentação. Verifique a
tensão de alimentação para o motor do FC.
ADVERTÊNCIA 5
Advertência de alta tensão (ALTA TENSÃO DO
BARRAMENTO CC):
A tensão do circuito intermediário (CC) é mais alta que o
limite de sobretensão do sistema de controle, veja
Tabela 4.6. O motor do FC ainda está ativo.
ADVERTÊNCIA 6
Advertência de tensão baixa (BAIXA TENSÃO DO
BARRAMENTO CC):
A tensão do circuito intermediário (CC) está abaixo do
limite de subtensão do sistema de controle, veja
Tabela 4.6. O motor do FC ainda está ativo.
ALARME 7
Sobretensão (SOBRETENSÃO DO BARRAMENTO CC):
Se a tensão do circuito intermediário (CC) exceder o limite
de sobretensão do inversor (veja Tabela 4.6), o motor FC
sofrerá desarme. Além disso, a tensão será exibida no
display.
Série do motor do FC 3x380-480 V
[VCC]
Subtensão 410
Advertência de tensão baixa 440
Advertência de tensão alta 760
Sobretensão 760*
* 760 V em 5 s ou 800 V imediatamente.
As tensões informadas são as do circuito
intermediário do motor do FC.
Tabela 4.6 Limites de Desarme/Alarme/Advertência
ALARME 11
Termistor do motor (TERMISTOR DO MOTOR):
Se houver um termistor montado e se o parâmetro 128
estiver programado para [1] Ativado o motor FC sofrerá
desarme se esquentar demais.
ADVERTÊNCIA 12
Limite de corrente (LIMITE DE CORRENTE):
A corrente está maior que o valor no parâmetro 221 (com
o motor em operação).
ALARME 13
Sobrecarga de corrente (SOBRECARGA DE CORRENTE):
O limite da corrente de pico do inversor (aprox. 230% da
corrente nominal) foi excedido. Ocorrerá o desarme do
motor FC, enquanto emite um alarme.
Desligue o motor FC e verifique se o eixo do motor pode
ser girado.
4 4
ALARME 8
Subtensão (SUBTENSÃO DO BARRAMENTO CC):
Se a tensão (CC) do circuito intermediário cair abaixo do
limite de subtensão do inversor (veja Tabela 4.6), o motor
FC sofrerá desarme após 3-28 s, dependendo da unidade.
Além disso, a tensão será exibida no display. Verifique se a
tensão de alimentação corresponde à do motor do FC, veja
2.1.2 Dados Técnicos Gerais.
ADVERTÊNCIA/ALARME 9
Sobrecarga do inversor (TEMPO DO INVERSOR):
A proteção térmica eletrônica do inversor informa se que o
motor FC está prestes a entrar em desarme, por causa de
uma sobrecarga (corrente muito alta durante muito
tempo). O contador para proteção térmica eletrônica do
inversor emite uma advertência a 95% e desarma a 100%,
enquanto emite um alarme. O motor do FC
reinicializado até o contador estar abaixo de 90%.
não pode ser
AVISO!
É possível que este alarme apareça
caso haja impacto de carga.
ALARME: 14
Falha do terra (FALHA DO TERRA):
Há uma descarga das fases de saída à terra, ou no cabo
entre o inversor e o motor ou no próprio motor.
ALARME: 15
Falha de alimentação (FALHA DO MODO DE
INTERRUPTOR):
Falha na fonte de alimentação no modo de chaveamento
(alimentação interna de 24 V).
Entre em contacto com o seu Danfoss fornecedor.
ALARME: 16
Curto circuito (CURTO CIRCUITO DE CORR.):
Há um curto-circuito nos terminais do motor ou no próprio
motor.
Entre em contacto com o seu Danfoss fornecedor.
MG03BA28 - VLT® é marca registrada da Danfoss 91

Tudo sobre o FCM 300
VLT® DriveMotor FCM Series
ALARME: 17
Timeout do bus padrão (TIMEOUT BUS PADR.)
Não há comunicação com o motor FC. A advertência ficará
Warning word, extended status word e alarm word
também podem ser exibidas usando o barramento serial
nos parâmetros 540, 541 e 538.
ativa somente quando o parâmetro 514 tiver sido
programado para valor diferente de OFF.
Se o parâmetro 514 tiver sido programado para parada e
desarme, primeiro emitirá uma advertência e desacelerará
até desarmar, enquanto emite um alarme.
44
O parâmetro 513 Intervalo de tempo do bus possivelmente
poderia ser aumentado.
ADVERTÊNCIA/ALARME 18
Timeout do bus HPFB (TIMEOUT DO BUS HPFB)
Não há comunicação com o motor FC. A advertência só
estará ativa quando o parâmetro 804 tiver sido
programado com um valor diferente de OFF. Se o
parâmetro 804 estiver programado para Parar e desarmar,
primeiro emitirá uma advertência e desacelerará até
Bit (Hex) Palavra de advertência (P. 540)
00000008 "Timeout" no HPFB
00000010 Timeout de bus padrão
00000040 Lim. d Corrente
00000200 Sobrecarga do inversor
00001000 Advertência de tensão baixa
00002000 Advertência de tensão alta
00004000 Falha de fase
00010000 Advert. de Erro live zero
00400000 Limite da freq. de saída
00800000 Erro no HPFB
40000000 Alimentação de 24 V
80000000 Temp. alta no inversor
Tabela 4.7
desarmar, enquanto emite um alarme.
O parâmetro 803 Timeout do bus pode ter sido aumentado.
ADVERTÊNCIA 33
Fora da faixa de frequência:
Esta advertência é ativada se a frequência de saída
alcançar o parâmetro 201 Limite inferior da frequência de
saída ou o parâmetro 202 Limite superior da frequência de
saída.
Bit (Hex) Palavra de status estendida (P. 541)
01 Rampa
04 Partida sentido horário/anti-horário
08 Redução de velocidade
10 Catch-up
8000 Limite de frequência
Tabela 4.8
ADVERTÊNCIA/ALARME 34
Erro de HPFBr (ALARME HPFB):
A comunicação do profibus não está funcionando
corretamente.
ALARME 35
Falha de inrush (FALHA DE INRUSH):
Esta advertência ocorre quando a unidade tiver sido ligada
um grande número de vezes no intervalo de 1 minuto.
ADVERTÊNCIA/ALARME 36
Superaquecimento (OVERTEMPERATURE):
ALARME: 37
Erro interno (ERRO INTERNO):
Ocorreu um erro no SISTEMA. Entre em contacto com o
seu Danfoss fornecedor.
4.2.4
Warning Word, Status Word Estendida
e Alarm Word
Warning word, warning word estendida e alarm word são
mostradas no display em formato hexadecimal. Se há mais
de uma advertência ou alarme, uma soma de todas as
advertências e alarmes é mostrada.
Bit (Hex) Alarm word (P. 538)
00000002 Bloq. p/Dsarme
00000040 "Timeout" no HPFB
00000080 Timeout de bus padrão
00000100 Curto circuito
00000200 Falha na alimentação de 24 V
00000400 Falha de aterramento
00000800 Sobrecarga de corrente
00004000 Termistor do motor
00008000 Sobrecarga do inversor
00010000 Subtensão
00020000 Sobretensão
00040000 Falha de fase
00080000 Erro live zero
00100000 Sobretemperatura
02000000 Erro no HPFB
08000000 Falha de Inrush
10000000 Erro interno
Tabela 4.9
92 MG03BA28 - VLT® é marca registrada da Danfoss
Tudo sobre o FCM 300
4.3 Lista de Parâmetros
VLT® DriveMotor FCM Series
Parâmetro
№ Função
001 Idioma 6 Inglês 5 0
002 Controle local/remoto 2 Controle remoto 5 0
003 Referência local 000,000 4 -3
004 Setup Ativo 4 Setup 1 5 0
005 Setup de Programação 4 Ativar setup 5 0
006 Cópia de Setups 4 Sem cópia 5 0
007 Cópia do LCP 4 Sem cópia 5 0
008 Display da escala de frequência do motor 100 6 -2
009 Linha do display 2 24 Frequência [Hz] 5 0
010 Linha do display 1.1 24 Referência [%] 5 0
011 Linha do display 1.2 24 Corrente do motor [A] 5 0
012 Linha do display 1.3 24 Potência [kW] 5 0
013 Controle local/configuração 5 Controle digital do LCP/par.
014 Parada local 2 Possível 5 0
015 Jog local 2 Não é possível 5 0
016 Reversão local 2 Não é possível 5 0
017 Reset local do desarme 2 Possível 5 0
018 Bloqueio para a mudança de dados 2 Não bloqueado 5 0
019 Estado operacional na energização, c. local. 3 Parada forçada, use ref.
Tabela 4.10 Funções para Programar, Controlar e Monitorar via Barramento (PROFIBUS) ou PC.
Parâmetro
№
100 Configuração 2 Velocidade, modo malha
101 Características de torque 4 Torque constante 5 0
102 Potência do motor XX,XX kW - depende da unidade 6 1
103 Tensão do Motor XX,XX V - depende da unidade 6 0
104 Frequência do motor XX,X Hz - dep. do motor 6 -1
105 Corrente do Motor XX,XX A - depende da unidade 7 -2
106 Velocidade nominal do motor XX rpm - depende do motor 6 0
117 Amortecimento da ressonância off -100% off % 6 0
118 Desativação do amortecimento da
126 Tempo de frenagem CC 0,0 (off)-60,0 s 10,0 s 6 -1
127 Frequência de acionamento da frenagemCC0,0 Hz-f
Função
ressonância
Intervalo/número de configurações/valor Configuração de fábrica
100
gravada
Intervalo/número de configurações/valor Configuração de fábrica
aberta
0-200% Dependente do motor 5 0
MAX
0,0 Hz 6 -1
Tipo de
dados
5 0
5 0
Tipo de
dados
5 0
Índice
de
conv.
4 4
Índice
de
conv.
128 Proteção térmica do motor 1 Sem proteção 5 0
132 Tensão CC de frenagem 0-100% 0% 5 0
133 Tensão de partida 0,00-100,00 V Dependente do motor 6 -2
134 Compensação da partida 0.0-300.0% 100,0% 6 -1
135 Relação U/f 0,0-20,00 V/Hz Dependente do motor 6 -2
136 Compensação de escorregamento -500,0-+500,0% 100,0% 3 -1
137 Tensão de hold CC 0-100% 0% 5 0
138 Frequência de desativação do freio 0,5-132 Hz 3,0 Hz 6 -1
139 Frequência de ativação do freio 0,5-132 Hz 3,0 Hz 6 -1
147 Setup do tipo de motor depende do motor depende do motor 5 0
Tabela 4.11 Funções para Programar, Controlar e Monitorar via Barramento (PROFIBUS) ou PC.
MG03BA28 - VLT® é marca registrada da Danfoss 93

Tudo sobre o FCM 300
VLT® DriveMotor FCM Series
Índice de conversão:
Este número refere-se a um valor de conversão, a ser
usado durante a gravação ou leitura via comunicação serial
com um conversor de frequência.
Veja 3.6.4 Bytes de dados em 3.6.1 Barramento serial
Tipo de dados:
Tipos de dados mostram o tipo e o comprimento do
Tipo de dados Descrição
3 № inteiro 16
4 № inteiro 32
5 8 sem sinal algébrico
6 16 sem sinal algébrico
7 32 sem sinal algébrico
9 String de texto
Tabela 4.12
telegrama.
44
Tipo
Índic
de
Parâmetro
№ Função Intervalo/número de configurações/valor Configuração de fábrica
200 Sentido da rotação 3 Somente no sentido horário
201 Frequência de saída
202 Frequência de saída
203 Faixa de referência/
204 Referência mínima -100.000,000-Ref
205 Referência máxima Ref
207 Tempo de aceleração 1 0,05-3600,00 s 3,00 s 7 -2
208 Tempo de desace-
209 Tempo de aceleração 2 0,15-3600,00 s 3,00 7 -2
210 Tempo de desace-
211 Tempo de rampa do
212 Tempo de desace-
213 Frequência de jog 0 Hz até fMAX 10,0 Hz 6 -1
214 Função de referência 2 Soma 5 0
215 Referência predefinida1-100,00%-+100,00% 0,00% 3 -2
mínima inferior (f
máxima (f
feedback
leração 1
leração 2
jog
leração com parada
rápida
MAX
)
0,0 Hz-f
MIN
)
MAX
f
MIN-fRANGE
máx./-máx.- +máx. Mín - Máx 5 0
-100.000,000 50,000 4 -3
MIN
0,05-3600,00 s 3,00 s 7 -2
0,15-3600,00 s 3,00 s 7 -2
0,05-3600,00 s 3,00 s 7 -2
0,05-3600,00 s 3,00 s 7 -2
MAX
0-132 Hz
0,0 Hz 6 -1
f
(132 Hz) 6 -1
RANGE
0,000 4 -3
dado
s
5 0
e
de
conv.
216 Referência predefinida2-100,00%-+100,00% 0,00% 3 -2
219 Valor de Catch up/
redução de velocidade
221 Limite de corrente para
o modo motor
229 Bypass de frequência,
largura da banda
230 Frequência de bypass 1 0,0-132 Hz 0,0 Hz 6 -1
231 Frequência de bypass 2 0,0-132 Hz 0,0 Hz 6 -1
241 Referência predefinida1-100,00%-+100,00% 0,00% 3 -2
242 Referência predefinida2-100,00%-+100,00% 0,00% 3 -2
243 Referência predefinida3-100,00%-+100,00% 0,00% 3 -2
244 Referência predefinida4-100,00%-+100,00% 0,00% 3 -2
245 Referência predefinida5-100,00%-+100,00% 0,00% 3 -2
246 Referência predefinida6-100,00%-+100,00% 0,00% 3 -2
247 Referência predefinida7-100,00%-+100,00% 0,00% 3 -2
Tabela 4.13 Funções para Programar, Controlar e Monitorar via Barramento (PROFIBUS) ou PC.
0.00-100.00% 0,00% 6 -2
Limite mín.- máx. em % de I
0 (off)-100% 0% 6 0
rated
Limite máx. 6 -1
94 MG03BA28 - VLT® é marca registrada da Danfoss
Tudo sobre o FCM 300
VLT® DriveMotor FCM Series
Parâmetro
№ Função
317 Timeout 1-99 s 10 s 5 0
318 Função após o timeout Desligado/Parada e desarme Off (Desligado) 5 0
323 Função do relé X102 14 Sem operação 5 0
327 Referência por pulso, frequência máx. 100-70000 Hz 5000 Hz 7 0
331 Terminal 1, entr. analógica de tensão 3 Sem operação 6 0
332 Terminal 2, entrada digital 31 Referência 6 0
333 Terminal 3, entrada digital 31 Reset 6 0
334 Terminal 4, entrada digital 30 Partida 6 0
335 Terminal 5, entrada digital 29 Jog 6 0
336 Terminal 1, escala mínima 0,0-20,0 mA 0,0 mA 6 -4
337 Terminal 1, escala máxima 0,0-20,0 mA 20,0 mA 6 -4
338 Terminal 2, escalonamento mín. 0,0-10,0 V 0,0 V 6 -1
339 Terminal 2, escalonamento máx. 0,0-10,0 V 10,0 V 6 -1
340 Funções de saída 24 Sem operação 6 0
Tabela 4.14 Funções para Programar, Controlar e Monitorar via Barramento (PROFIBUS) ou PC.
Intervalo/número de configurações/valor Configuração de fábrica
Tipo de
dados
Índice
de conv.
4 4
MG03BA28 - VLT® é marca registrada da Danfoss 95

Tudo sobre o FCM 300
VLT® DriveMotor FCM Series
Parâmetro
№ Função
400 Função de Frenagem Desligado/Frenagem CA Off (Desligado) 5 0
403 Temporizador do sleep mode 0-300 s Off (Desligado) 6 0
404 Frequência de sleep f
405 Função reset 11 Reset manual 5 0
406 Ponto de programação do boost 1-200% 100% 6 0
407 Frequência de ativação Par. 404-f
411 Frequência de chaveamento 1,5-14,0 kHz Dependente do motor 6 0
412 Frequência da portadora
44
413 Função de sobremodulação Off/On (Desligado/Ligado) On 5 0
414 Feedback mínimo -100000-FB
415 Feedback máximo FB
416 Unidade da referência/feedback 42 % 5 0
437 Controle normal/inverso do PID de
438 Anti windup do PID de processo Desabilitado/Ativado Ativado 5 0
439 Frequência de partida do PID de
440 Ganho proporcional do PID de
441 Tempo de integração do PID de
442 Tempo de diferenciação do PID de
443 Limite de ganho diferencial do PID
444 Tempo do filtro passabaixa do PID
445 Flying start 4 Desabilitado 5 0
446 Padrão de chaveamento 2 SFAVM 5 0
455 Monitoramento da faixa de
461 Conversão de feedback Linear ou raiz quadrada Linear 5 0
dependente da frequência de saída
processo
processo
processo
processo
processo
de processo
de processo
frequência
Intervalo/número de configurações/valor Configuração de fábrica
- par 407 0 Hz 6 -1
MIN
MAX
3 Freq. chav. dep. temp 5 0
HIGH
-100,000 1500 4 -3
LOW
Normal/Inverso Normal 5 0
f
MIN-fMAX
0,00 (off)-10,00 0,01 6 -2
0,01-9999 s (off) 9999 s 7 -2
0,00 (off)-10,00 s 0,00 s 6 -2
5-50 5 6 -1
0,1-10,00 s 0,1 s 6 -2
Desabilitado/Ativado Ativado 5 0
50 Hz 6 -1
0 4 -3
fMIN 6 -1
Tipo de
dados
Índice
de conv.
Tabela 4.15 Funções para Programar, Controlar e Monitorar via Barramento (PROFIBUS) ou PC.
Índice de conversão:
Este número refere-se a um valor de conversão, a ser
usado durante a gravação ou leitura via comunicação serial
Tipo de dados:
Tipos de dados mostram o tipo e o comprimento do
telegrama.
com um conversor de frequência.
Veja 3.6.4 Bytes de dados em 3.6.1 Barramento serial
Tipo de dados Descrição
3 № inteiro 16
4 № inteiro 32
5 8 sem sinal algébrico
6 16 sem sinal algébrico
7 32 sem sinal algébrico
9 String de texto
Tabela 4.16
96 MG03BA28 - VLT® é marca registrada da Danfoss
Tudo sobre o FCM 300
VLT® DriveMotor FCM Series
Parâmetro
№ Função
500 Endereço do barramento 1-126 1 5 0
501 Baudrate 300-9600 Baud/6 9600 Baud 5 0
502 Parada por inércia 4 OU Lógico 5 0
503 Parada rápida 4 OU Lógico 5 0
504 Freio CC 4 OU Lógico 5 0
505 Partida 4 OU Lógico 5 0
506 Reversão 4 OU Lógico 5 0
507 Seleção de setup 4 OU Lógico 5 0
508 Seleção da velocidade 4 OU Lógico 5 0
509 Bus jog 1 0,0-f
510 Bus jog 2 0,0-f
512 Perfil do telegrama Profidrive/Drive do FC Drive do FC 5 0
513 Intervalo de tempo do bus 1 s 5 0
514 Função intervalo de tempo do bus 6 Off (Desligado) 5 0
515 Leitura de Dados: Referência XXX.X 3 -1
516 Leitura de Dados: Unidade refer. Hz/rpm 4 -3
517 Leitura de Dados: Feedback 4 -3
518 Leitura de Dados: Frequência Hz 3 -1
519 Leitura de Dados: frequência x escala Hz 7 -2
520 Leitura de Dados: Corrente A x 100 7 -2
521 Leitura de Dados: Torque % 3 -1
522 Leitura de Dados: Potência kW 7 1
523 Leitura de Dados: Potência hp 7 -2
524 Leitura de Dados: Tensão do Motor V 6 -1
525 Leitura de Dados: Tensão do barramento CC V 6 0
527 Leitura de Dados: Térm. do FC 0-100% 5 0
528 Leitura de Dados: Entrada digital 5 0
533 Leitura de Dados: Referência Externa -200,0-+200,0% 6 -1
534 Leitura de Dados: Status Word, binário 6 0
537 Leitura de Dados: Temperatura do FC °C 5 0
538 Leitura de Dados: Alarm word, binário 7 0
539 Leitura de Dados: Control word, binário 6 0
540 Leitura de Dados: Warning word, 1 7 0
541 Leitura de Dados: Warning word, 2 7 0
542 Leitura de Dados: Terminal 1, entrada
analógica
543 Leitura de Dados: Terminal 2, entrada
analógica
561 Protocolo Protocolo do FC/Modbus
570 Paridade e molduragem de mensagem
Modbus
571 Timeout das Comunicações do Modbus 10-2000 ms 100 ms 6 0
Intervalo/número de
configurações/valor Configuração de fábrica
MAX
MAX
mA X 10 5 -4
V X 10 5 -1
RTU
4 Par/stopbit1 5 0
10,0 Hz 6 -1
10,0 Hz 6 -1
Protocolo do FC 5 0
Tipo de
dados
Índice
de conv.
4 4
Tabela 4.17 Funções para Programar, Controlar e Monitorar via Barramento (PROFIBUS) ou PC.
MG03BA28 - VLT® é marca registrada da Danfoss 97

Tudo sobre o FCM 300
VLT® DriveMotor FCM Series
Parâmetro
№ Função
600 Dados oper.: Horas de funcionamento 0-130.000,0 horas 5 0
601 Dados oper.: Horas de funcionamento 0-130.000,0 horas 7 73
603 Dados oper.: Quantidade de energi-
604 Dados oper.: № de superaquecimentos. 0-9999 6 0
605 Dados oper.: № de sobretensões 0-9999 6 0
615 Reg.das falhas, leitura: Código de erro Índice XX-XXX 6 0
616 Reg.das falhas, leitura: Tempo Índice XX-XXX 5 0
44
617 Reg.das falhas, leitura: Valor Índice XX-XXX 7 -1
619 Reposição do contador de horas em
620 Modo operacional 3 operação normal 5 0
621 Plaqueta de identificação: Tipo do motor
624 Plaqueta de identificação: № da versão
625 Versão do LCP Depende da unidade 9 0
626 Plaqueta de identificação: № de identi-
628 Plaqueta de identificação: Tipo de
630 Plaqueta de identificação: Tipo do
632 Identificação do software BMC 9 0
633 Identificação do banco de dados do
634 Identificação da unidade de
635 № de Peça do software 9 0
678 Configurar o Cartão de Controle Depende da unidade 5 0
zações
execução
do FC
do software
ficação do banco de dados
opcional da aplicação
opcional de comunicação
motor
comunicação
Intervalo/número de configurações/valor Configuração de fábrica
0-9999 7 73
Nenhum reset/Reset Sem reset 3 0
Depende da unidade 5 0
Depende da unidade 9 0
Depende da unidade 9 0
9 -2
9 0
9 0
9 0
Tipo de
dados
Índice
de
conv.
Tabela 4.18 Funções para Programar, Controlar e Monitorar via Barramento (PROFIBUS) ou PC.
Índice de conversão:
Este número refere-se a um valor de conversão, a ser
usado durante a gravação ou leitura via comunicação serial
Tipo de dados:
Tipos de dados mostram o tipo e o comprimento do
telegrama.
com um conversor de frequência.
Veja 3.6.4 Bytes de dados em 3.6.1 Barramento serial
Tipo de dados Descrição
3 № inteiro 16
4 № inteiro 32
5 8 sem sinal algébrico
6 16 sem sinal algébrico
7 32 sem sinal algébrico
9 String de texto
Tabela 4.19
98 MG03BA28 - VLT® é marca registrada da Danfoss
 Loading...
Loading...