


MAKING MODERN LIVING POSSIBLE
Design Guide
FCM 300
ATB Motors
Contents
VLT® FCM Series
Introduction
Software version 4
Safety regulations 5
Warning against unintended start 5
Introduction 6
Integration of frequency converter and motor 7
Ordering form 8
Product range 9
Ordering 10
PC Software tools 10
Ordering info for Frames and Flanges 11
Ordering info for inverter box position and drain hole position 11
Installation
FCM 305-375 for 3 phases, 380-480 V 12
General technical data 12
Tightening Torques 16
Maximum Cable Cross Section 16
Screw Sizes 16
Protection: 16
Description of the motor 17
Handling the FC motor 18
Bearings 18
Output shafts 19
Dimensions 19
Installation of the FC motor 22
Alignment 22
Bolt torques 23
Maintenance 23
Forced ventilation (FV) units 23
Voltage range for forced ventilation (FV) unit 24
FCM 300 Thermal Protection 24
Service plug kit (175N2546) 25
Plug kit (175N2545) 25
Remote mounting kit (175N0160) 25
Potentiometer option (177N0011) 26
Local Operation Pad (LOP) (175N0128) IP65 26
4
12
Programming
Control panel (175NO131) 28
LCP installation 28
LCP functions 28
Display 28
LEDs 29
Control keys 29
Control key functions 29
Display read-out state 30
MG.03.H6.02 - VLT® is a registered Danfoss trademark 1
28
VLT® FCM Series
Display mode 30
Display mode - selection of read-out state 30
Quick menu mode versus Menu mode 31
Quick Setup via Quick menu 31
Parameter selection 31
Menu mode 32
Parameter groups 32
Changing data 32
Changing a text value 32
Infinitely variable change of numeric data value 32
Menu structure 33
Parameter Group 0-** Operation/Display 34
Parameter Group 1-** Load/Motor 40
Serial bus 68
Telegram communication 68
Telegram build-up 68
Databytes 69
Control word according to Fieldbus Profile Standard 71
Parameter Group 5-** Serial Communication 77
Parameter Group 6-** Technical Functions 84
All about FCM 300
Galvanic isolation (PELV) 88
Earth leakage current 88
Extreme running conditions 88
Acoustic noise 89
Balance 89
Thermal Protection and Derating 89
Derating for ambient temperature 89
Derating for air pressure 90
Derating for running at low speed 90
Derating for high switching frequency 90
Vibration and shock 91
Air humidity 91
UL standard 91
Efficiency 91
Mains supply interference/harmonics 91
Power factor 92
What is CE labelling? 92
The machinery directive(98/37/EEC) 92
The low-voltage directive (73/23/EEC) 92
The EMC directive(89/336/EEC) 92
What is covered? 92
Danfoss FCM 300 Series motor and CE labelling 92
Compliance with EMC directive 89/336/EEC 93
EMC standards 93
Aggressive environments 94
List of warnings and alarms 95
What if the motor does not start? 95
88
2 MG.03.H6.02 - VLT® is a registered Danfoss trademark
VLT® FCM Series
Warnings 96
Warning word, extended Status word and Alarm word 97
List of parameters 99
Index
104
MG.03.H6.02 - VLT® is a registered Danfoss trademark 3
VLT® FCM Series
FCM 300 Series
Design Guide
Software version: 3.1x
This Design Guide can be used for all FCM 300 Series frequency converters with software version 3.1x.
The software version number can be seen from parameter 624 Software version no.
Disposal Instruction
Equipment containing electrical components may not be disposed of together with domestic waste.
It must be separately collected with electrical and electronic waste according to local and currently
valid legislation.
When reading through this Design Guide, you will
come across various symbols that require special attention.
The symbols used are the following:
This symbol indicates a general warning.
NB!
This symbol indicates something to be noted by the reader.
This symbol indicates a high-voltage
warning.
4 MG.03.H6.02 - VLT® is a registered Danfoss trademark
VLT® FCM Series
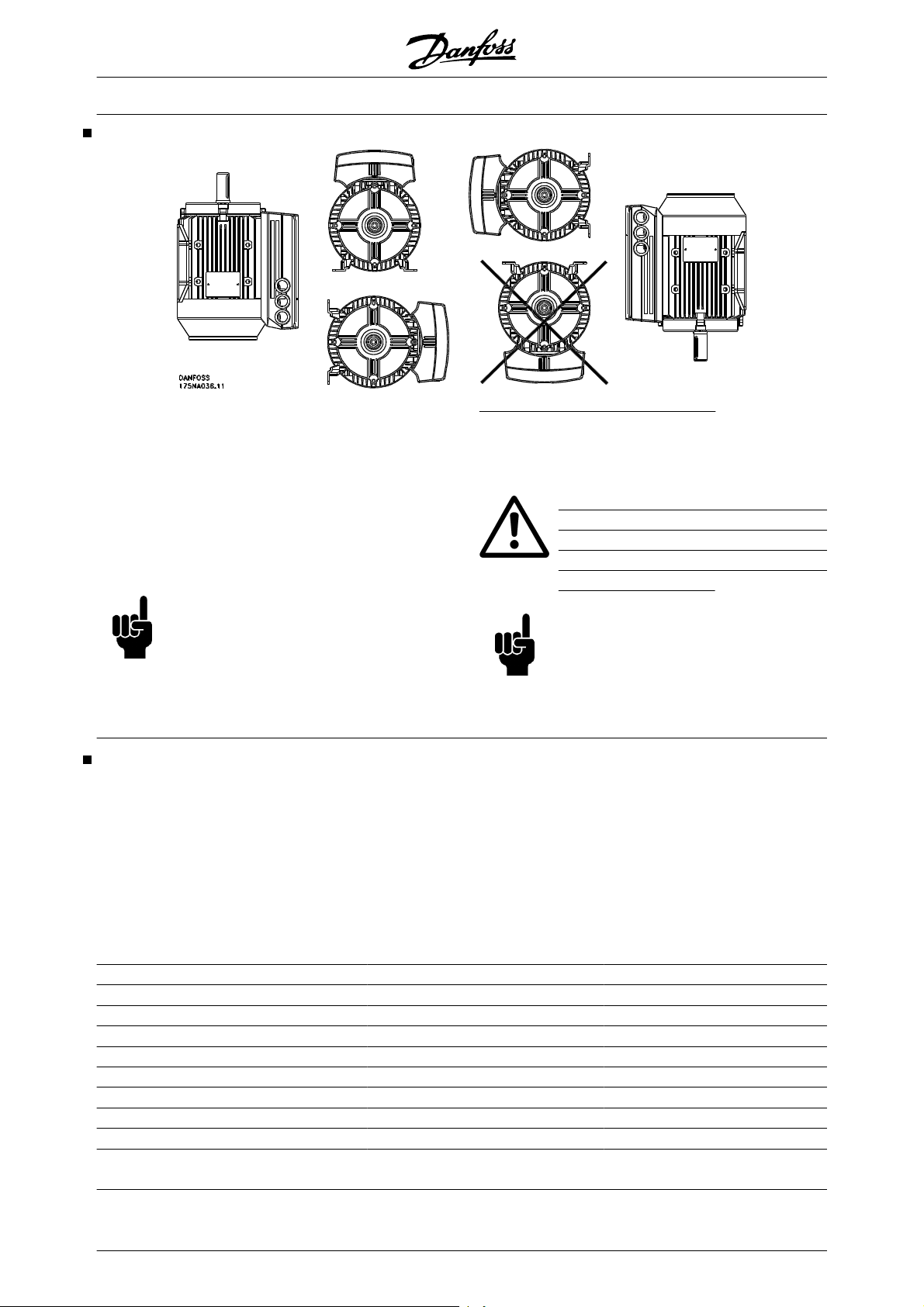
All operations must be carried out by appropriately trained personel.
Use all lifting facilities provided e.g. both
lifting points if fitted or single lifting point if
fitted*.
Vertical lifting - Prevent uncontrolled rotation.
Lift machine - Do not lift other equipment
with motor lifting points only.
Before installation check for fan cover
damage, shaft damage, foot/mounting
damage, and loose fasteners. Check
nameplate details.
Ensure level mounting surface, balanced
mounting, not misaligned.
Gaskets, and/or sealants, and guards
must be correctly fitted.
Correct belt tension.
Please observe derating rules, see "Special condi-
tions".
*Note: maximum hand lift is 20 kg below shoulder, but
above ground level. Max. gross weights:
Frame size 80: 15 kg
-
Frame size 90 & 100: 30 kg
-
Frame size 112: 45 kg
-
Frame size 132: 80 kg
-
The voltage on the FC motor is dangerous
when the motor is connected to mains. Incorrect installation of the FC motor may
lead to material damage or serious injury,
or it may be fatal.
Consequently, the instructions in this
manual as well as national and local rules
and safety regulations must be complied
with.
Touching the electrical parts may be fatal,
even after the mains supply has been disconnected. Wait at least 4 minutes.
- Installation must be fused and isolated
correctly.
- Covers and cable entries must be fitted.
NB!
It is the user's or certified electrician's responsibility to ensure correct earthing and
protection in accordance with applicable
national and local requirements and
standards.
Safety regulations
1. The VLT DriveMotor (FC motor) must be disconnected from mains if repair work is to be
carried out.
Check that the mains supply has been disconnected and that the necessary time has
passed (4 minutes).
2. Correct protective earthing of the equipment
must be established, the user must be protected against supply voltage, and the motor
must be protected against overload in accordance with applicable national and local
regulations.
Use of RCD's (ELCB relays) is described in
chapter 10.
3. The earth leakage currents are higher than
3.5 mA. This means that the FC motor requires a fixed, permanent installation as well
as reinforced protective earthing.
Warning against unintended start
1. The motor can be brought to a stop by means
of digital commands, bus commands, or references, while the frequency converter is
connected to mains.
If personal safety considerations make it necessary to ensure that no unintended start
occurs,
cient .
2. While parameters are being changed, the
motor may start.
3. A motor that has been stopped may start if
faults occur in the electronics of the FC motor, or if a temporary overload or a fault in the
mains supply ceases.
these stop functions are not suffi-
By altitudes above 2 km, please contact
Danfoss Drives regarding PELV.
MG.03.H6.02 - VLT® is a registered Danfoss trademark 5
VLT® FCM Series
Introduction
Design Guide:
Gives all required information for design purposes, and gives a good insight
Specific technical publications on the FCM 300 series:
into the product concept, product range, technical data, control, programming, etc.
Quick Setup:
Helps the users to quickly get their FCM 300 Series motor unit installed and
running.
The Quick Setup is always delivered with the unit.
If you have any questions concerning FCM 300 Series,
please call us. We have drive specialists all over the
world ready to advise you on applications, program-
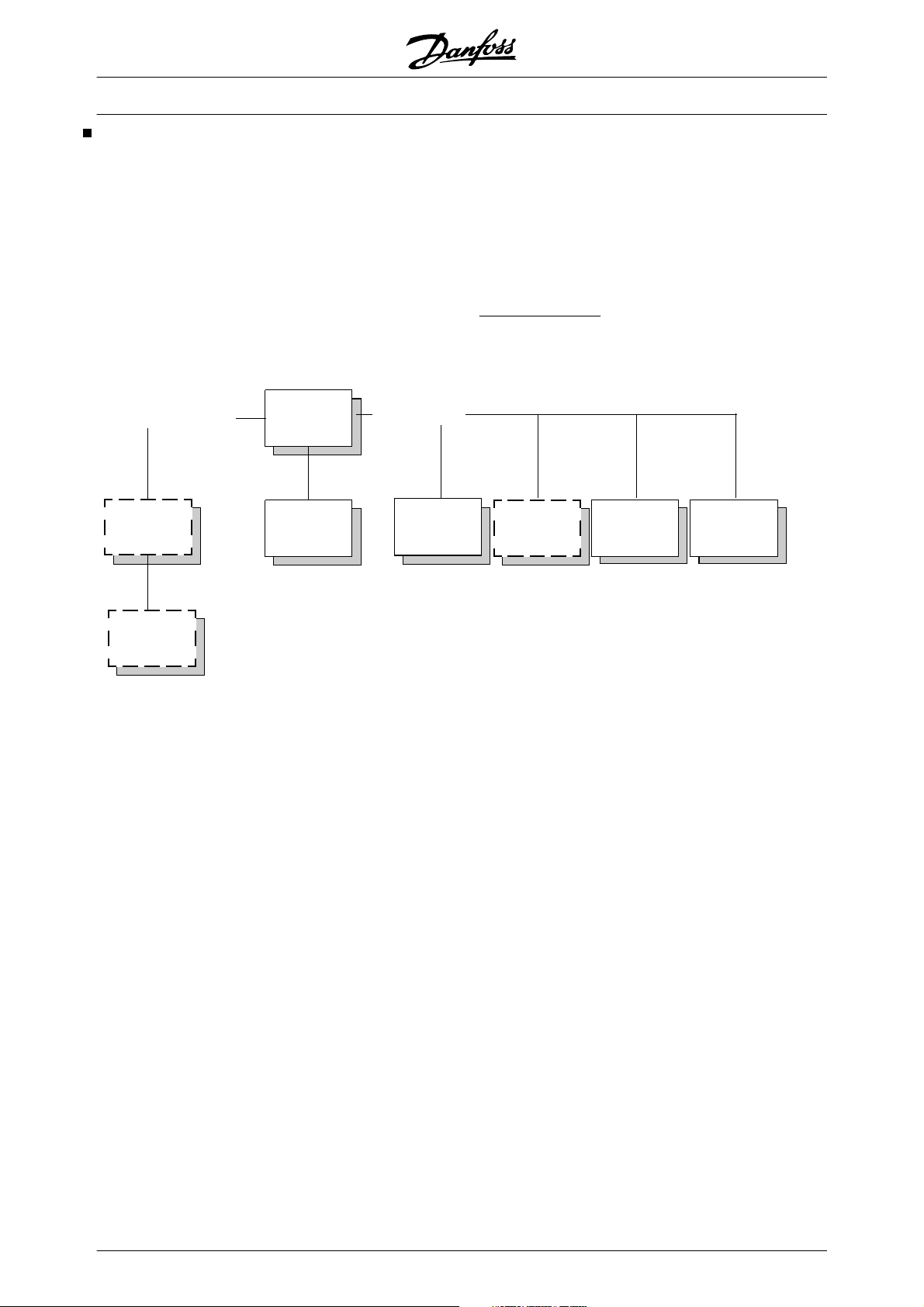
Available literature
The chart below gives an overview of the literature
available for the FCM 300 Series.
ming, training and service.
Promotion
Brochure
MB.03.CX.YY
All
users
Quick Setup
MG.03.FX.YY
Misc.
Design
Guide
MG.03.HX.YY
MCT 10 Setup
Software Manual
MG.10.RX.YY
PROFIBUS-
Manual
MG.03.EX.YY
1
16.1
175NA1
Data sheet
MD.03.AX.YY
Articles
MZ.03.AX.YY
X = version number
YY = language
6 MG.03.H6.02 - VLT® is a registered Danfoss trademark
VLT® FCM Series
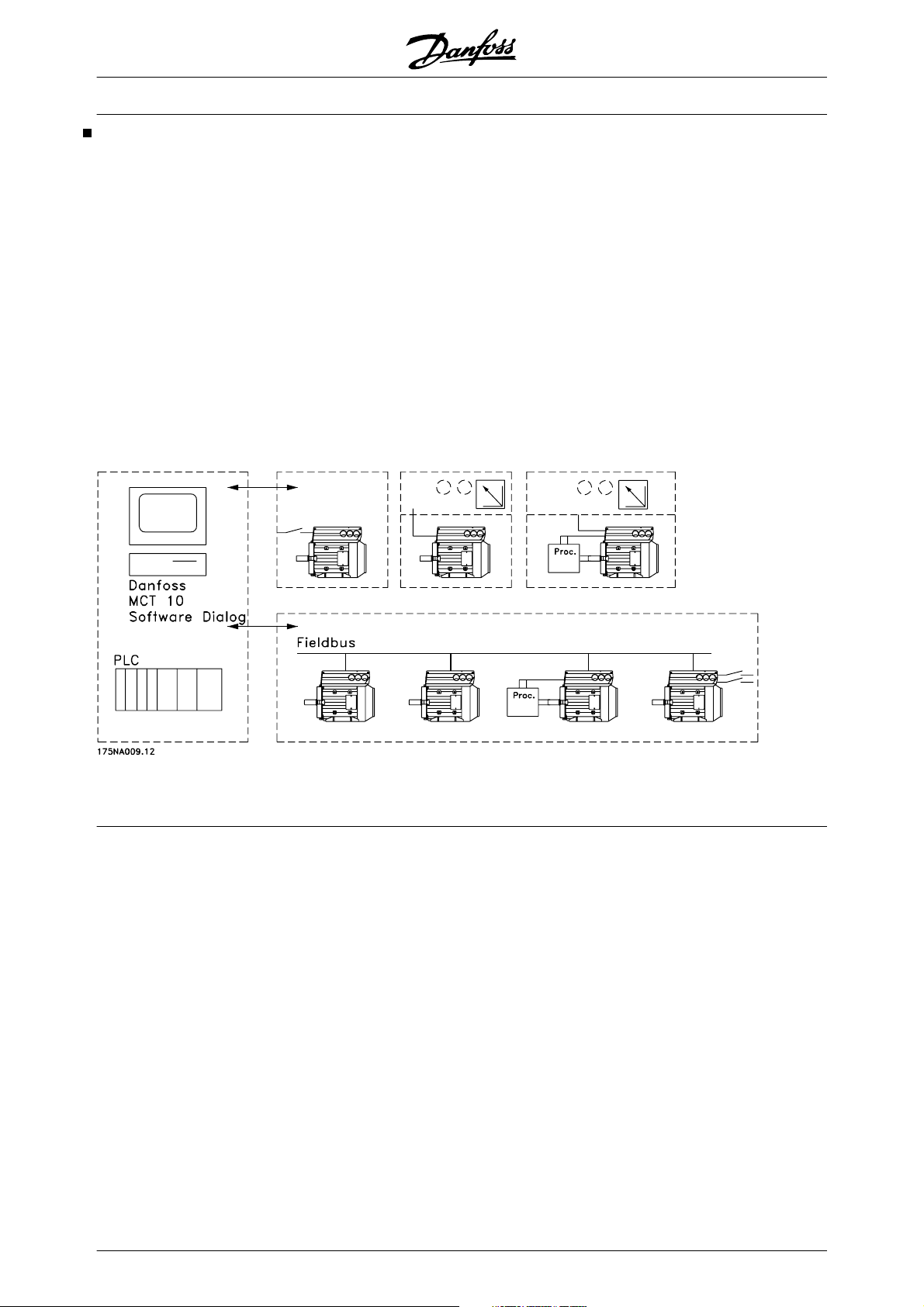
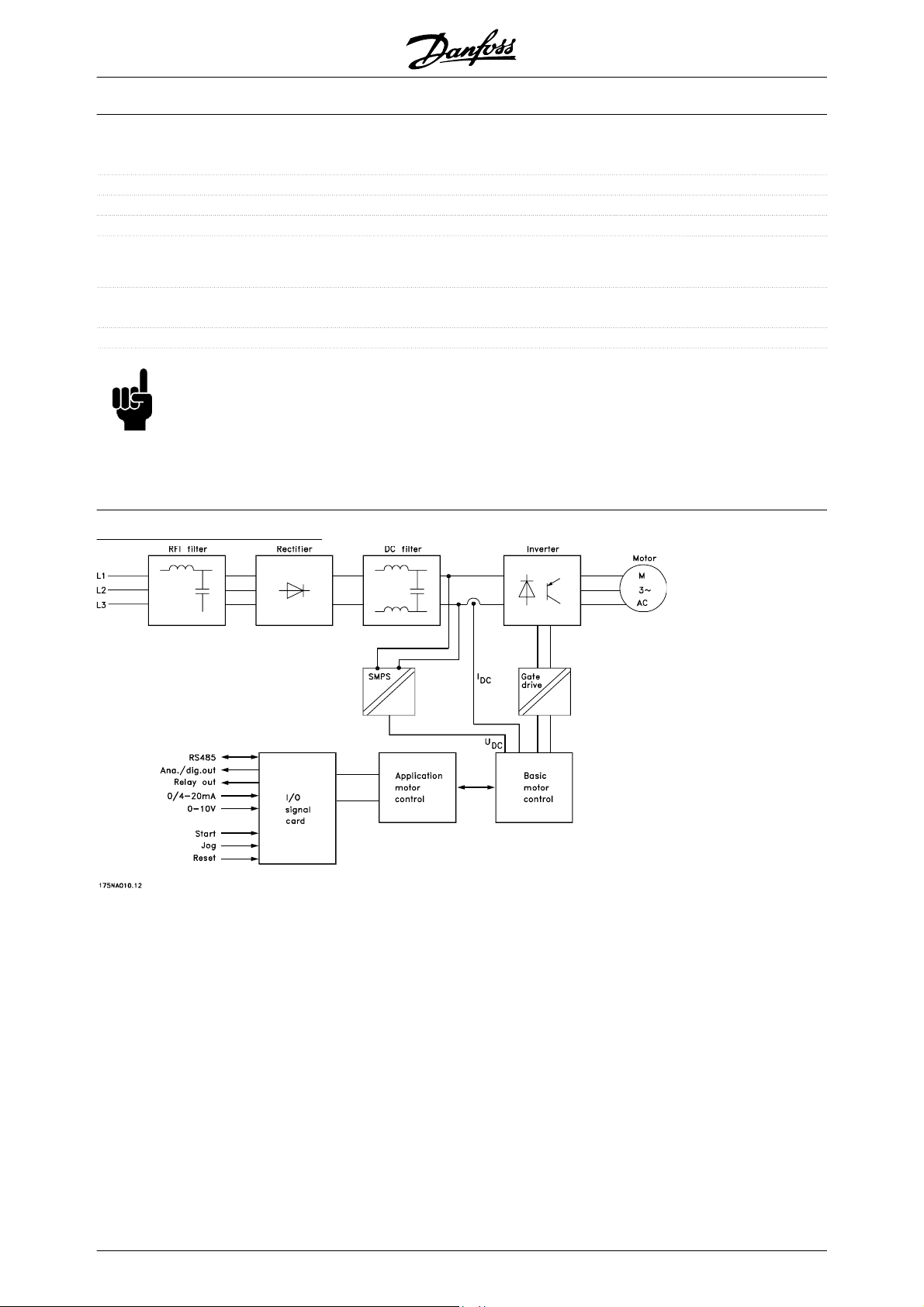
Integration of frequency converter and motor
The Danfoss VLT frequency converter integrated onto
the asynchronous motor gives infinite speed control in
one unit.
The VLT DriveMotor FCM 300 Series is a very compact alternative to the ordinary solution with VLT frequency converter and motor as separate units. The
frequency converter is attached instead of the motor
terminal box, and it is no higher than the standard terminal box, nor wider or longer than the motor (see
chapter 6).
Installation is made extremely easy. Panel space is not
a problem. There is no need for special details on wiring to meet the EMC directive, since motor cables are
not necessary. The only connections are mains and
control connections.
Factory-set adaption between frequency converter
and motor gives precise and energy efficient control in
addition to eliminating pre-setting on site.
The FC motor can be used in stand alone SYSTEMs
with traditional control signals, such as start/stop signals, speed references and closed loop process control or in multiple drive SYSTEMs with control signals
distributed by a field bus.
Combination of fieldbus and traditional control signals
and closed loop PID control is possible.
Control structures
MG.03.H6.02 - VLT® is a registered Danfoss trademark 7
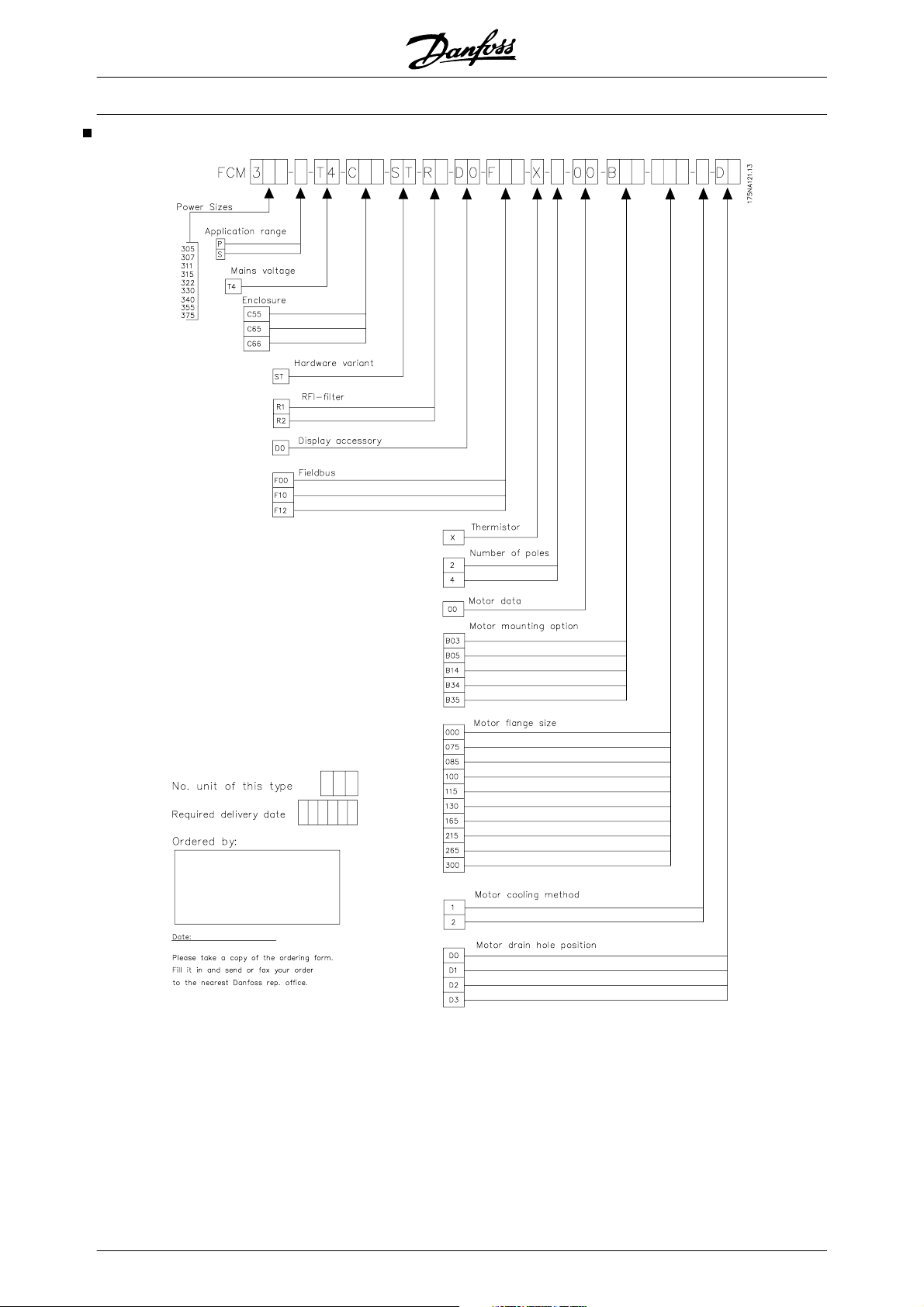
Ordering form
VLT® FCM Series
8 MG.03.H6.02 - VLT® is a registered Danfoss trademark
VLT® FCM Series
Product range
VLT DriveMotor FCM 300 Series, 2/4 poled motors
Type
FCM 305 0.55 kW
FCM 307 0.75 kW
FCM 311 1.1 kW
FCM 315 1.5 kW
FCM 322 2.2 kW
FCM 330 3.0 kW
FCM 340 4.0 kW
FCM 355 5.5 kW
FCM 375 7.5 kW
Each type in the product range is available in different
versions:
Inverter versions
Power size:
(See power size table)
Application
• P: Process
• S: Sensorless (special pump OEM)
Mains voltage:
• T4: 380-480 V three phase supply
Enclosure
• C55: IP55
• C65: IP65
• C66: IP66
Hardware variant:
• ST: Standard
RFI filter
• R1: Compliance with class 1A
• R2: Compliance with class 1B
Display connector
Motor output Mains supply
3 phase 380-480 V
Motor data
• 00: ATB motor
Motor mounting option
• B03: Foot mounting
• B05: B5 flange
• B14: B14 face
• B34: Foot and B14 face
• B35: Foot and B5 flange
Motor flange code
(Regarding standard flange size and available flange
sizes, see table, IEC-FFxxx, Dimension M).
• 000: Foot mounting only
• 085: 85 mm
• 100: 100 mm
• 115: 115 mm
• 130: 130 mm
• 165: 165 mm
• 215: 215 mm
• 265: 265 mm
• 300: 300 mm
Motor cooling method
• 1: Shaft mounted fan
• 2: Forced ventilation
Motor drain hole position
(see drawing)
• D0: No drain hole
• D1: Opposite inverter box both ends (drive/
non drive)
• D2: 90 (deg) inverter box right
• D3: 90 (deg) inverter box left
• D0: No display plug able connector
Fieldbus
• F00: No fieldbus
• F10: Profibus DPV1 3 MB
• F12: Profibus DPV1 12 MB
Motor thermistor
• X: No motor thermistor
Number of poles
• 2: 2 pole motor
• 4: 4 pole motor
MG.03.H6.02 - VLT® is a registered Danfoss trademark 9
VLT® FCM Series
Ordering
Take a copy of the ordering form, see section Ordering
form. Fill in and post or fax your order to the nearest
branch office of the Danfoss sales organisation. On the
basis of your order, the FCM 300 Series motor is given
a type code.
The ordering form for the basic unit must always be
completed. When the type code is written, always state
the characters of the basic string (1-34). Together with
the order confirmation the customer receives an 8-figure code number to be used when reordering.
Danfoss PC software for serial communication, MCT
10
All FCM 300 Series units have an RS 485 port as
standard, which enables them to communicate e.g.
with a PC. A programme entitled MCT 10 is available
for this purpose (see section PC Software tools).
Ordering numbers, MCT 10
Please order your CD containing MCT 10 Set-up Software using code number 130B1000.
Accessories for the FC motor
A Local Operation Pad (LOP) for local set point and
start/stop is available for the FC motor. The LOP is IP
65 enclosed. A Local Control Panel (LCP 2) which
makes up a complete interface for operation, programming and monitoring of the FC motor is also available.
• Commissioning frequency converters on line
• Saving settings for all frequency converters
• Replacing a drive in a network
• Expanding an existing network
• Future developed drives will be supported
The MCT 10 Set-up Software Modules
The following modules are included in the software
package:
MCT 10 Set-up Software
Setting parameters
Copy to and from frequency converters
Documentation and print out of parameter settings incl. diagrams
Ordering number:
Please order your CD containing MCT 10 Set-up Software using code number 130B1000.
SyncPos
Creating SyncPos programme
Ordering numbers, accessories
Local Operation Pad incl. cable(LOP) 175N0128
Local Control Panel (LCP 2) 175N0131
Remote mounting kit (LCP 2) 175N0160
Plug kit (LCP 2) 175N2545
Cable for plug kit (LCP 2) 175N0162
Cable (direct mounting) (LCP 2) 175N0165
Service plug kit (LCP 2) 175N2546
Potentiometer option 177N0011
PC Software tools
PC Software - MCT 10
All drives are equipped with a serial communication
port. We provide a PC tool for communication between
PC and frequency converter, VLT Motion Control Tool
MCT 10 Set-up Software.
MCT 10 Set-up Software
MCT 10 has been designed as an easy to use interactive tool for setting parameters in our frequency
converters.
The MCT 10 Set-up Software will be useful for:
• Planning a communication network off-line.
MCT 10 contains a complete frequency converter database
10 MG.03.H6.02 - VLT® is a registered Danfoss trademark
VLT® FCM Series
Ordering info for Frames and Flanges
Frame sizes and the corresponding flange sizes for different mounting versions
Type
Motor frame size Mounting version Flange code, standard
(S) [mm]
FCM 305 80
FCM 307 80
FCM 311 90
FCM 315 90
FCM 322 100
FCM 330 100
FCM 340 112
FCM 355 132
FCM 375 132
B5/B35 165 100/115/130/215
B14/B34 100 85/115/130
B5/B35 165 100/115/130/215
B14/B34 100 85/115/130
B5/B35 165 130/215
B14/B34 115 100/130
B5/B35 165 130/215
B14/B34 115 100/130
B5/B35 215 165/265
B14/B34 130 115/165
B5/B35 215 165/265
B14/B34 130 115/165
B5/B35 215 165/265
B14/B34 130 165
B5/B35 265 215/300
B14/B34 165 130
B5/B35 265 215/300
B14/B34 165 130
Flange size according to IEC ref. FFxxx (Dimension M), see section Dimensions
S: Available as standard shaft
*
No changes regarding shaft dimensions
Flange code, alterna-
*
tives
[mm]
Ordering info for inverter box position and drain
hole position
Inverter box position, always top mounted.
All drain holes are mounted with screw and washer, IP 66 if not opened.
D1: Drain holes opposite inverter side, both drive end and non drive end.
D2/D3: Drain holes 90° to inverter, both drive end and non drive end.
MG.03.H6.02 - VLT® is a registered Danfoss trademark 11
VLT® FCM Series
FCM 305-375 for 3 phases, 380-480 V
FCM 305 307 311 315 322 330 340 355 375
Motor output
[HP] 0.75 1.0 1.5 2.0 3.0 4.0 5.0 7.5 10.0
[kW]
Motor torque
2 pole [Nm]
4 pole [Nm]
Frame
size [mm]
Weight [kg] 11 13 17 20 26 28 37 56 61
Input current
[A]
380 V
2 p 1.5 1.8 2.3 3.4 4.5 5.0 8.0 12.0 15.0
4 p
480 V
2 p 1.2 1.4 1.8 2.7 3.6 4.0 6.3 9.5 11.9
4 p
Efficiency at
nom. speed
(4 pole) %
Efficiency at
nom. speed
(2 pole) %
Power terminals
[AWG] 10101010101010 6 6
[mm2]
Gland sizes 3xM20x1.5 3xM20x1.5 3xM20x1.5 3xM20x1.5 3xM20x1.5 3xM20x1.5 3xM20x1.5 1xM25x1.5
Max. prefuse
3)
UL
IEC
At 400 V 3000 r/min
1)
At 400 V 1500 r/min
2)
Type gG prefuses must be used. If you want to maintain UL/cUL you must use prefuses of the type Bussmann KTS-R 500 V or
3)
Ferraz Shawmut, ATMR Class C (max. 30A). The fuses must be placed for protection in a circuit that is capable of supplying a maximum
of 100,000 amps RMS (symmetrical), 500 V maximum.
3)
1)
2)
[A]
[A]
General technical data
Mains supply, TT, TN and IT* (L1, L2, L3):
- Supply voltage 380-480 V units 3 x 380/400/415/440/460/480 V ±10%
- Supply frequency 50/60 Hz
- Max. imbalance of supply voltage ±2% of rated supply voltage
- Power factor / cos max. 0.9/1.0 at rated load
- No. of switching operations on supply input L1, L2, L3 approx. 1 time/2 min
0.55 0.75 1.1 1.5 2.2 3.0 4.0 5.5 7.5
1.8 2.4 3.5 4.8 7.0 9.5 12.6 17.5 24.0
3.5 4.8 7.0 9.6 14.0 19.1 25.4 35.0 48.0
80 80 90 90 100 100 112 132 132
1.4 1.7 2.5 3.3 4.7 6.4 8.0 11.0 15.5
1.1 1.3 2.0 2.6 3.7 5.1 6.3 8.7 12.3
66 71 74 80 80 81 80 84 84
61 64 76 75 76 85 82 83 91
4 4 4 4 4 4 4 10 10
2xM20x1.5
10 10 10 10 10 15 15 25 25
25 25 25 25 25 25 25 25 25
1xM25x1.5/
/
2xM20x1.5
*) Not valid for RFI class 1B units
Torque characteristics:
- Starting torque/overload torque 160 % for 1 min
- Continuous torque see above
Control card, digital/pulse inputs:
- Number of programmable digital inputs 4
- Terminal nos. X101-2, -3, -4, -5
- Voltage level 0-24 V DC (PNP positive logics)
- Voltage level, logic 0 < 5 V DC
- Voltage level, logic 1 > 10 V DC
- Maximum voltage on input 28 V DC
- Input resistance, R
i
approx. 2 kΩ
- Scanning time 20 msec
12 MG.03.H6.02 - VLT® is a registered Danfoss trademark
VLT® FCM Series
Control card, pulse input:
- No. of programmable pulse inputs 1
- Terminal nos. X101-3
- Max. frequency on terminal 3, open collector/push pull 24 V 8 kHz/70 kHz
- Resolution 10 bit
- Accuracy (0.1-1 kHz), terminal 3 Max. error: 0.5% of full scale
- Accuracy (1-12 kHz), terminal 3 Max. error: 0.1% of full scale
Control card, analogue inputs:
- No. of programmable analogue voltage inputs 1
- Terminal nos. X101-2
- Voltage level 0 - 10 V DC (scalable)
- Input resistance, R
i
- No. of programmable analogue current inputs 1
- Terminal no. X101-1
- Current range 0 - 20 mA (scalable)
- Input resistance, R
i
- Resolution 9 bit
- Accuracy on input Max. error 1% of full scale
- Scanning time 20 msec.
approx. 10 kΩ
approx. 300 Ω
Control card, digital/pulse and analogue outputs:
- No. of programmable digital and analogue outputs 1
- Terminal nos. X101-9
- Voltage level at digital output/load 0 - 24 V DC/25 mA
- Current at analoque output 0 - 20 mA
R
- Maximum load to frame (terminal 8) at analogue output
LOAD
500 Ω
- Accuracy of analogue output Max. error: 1.5% of full scale
- Resolution on analogue output. 8 bit
Relay output:
- No. of programmable relay outputs 1
- Terminal number (resistive and inductive load) 1-3 (break), 1-2 (make)
- Max. terminal load (AC1) on 1-3, 1-2 250 V AC, 2A, 500 VA
- Max. terminal load (DC1) (IEC 947) on 1-3, 1-2 25 V DC, 3A / 50 V DC, 1.5 A , 75 W
- Min. terminal load (AC/DC) on 1-3, 1-2 control card 24 V DC, 10 mA/ 24 V AC, 100 mA
Rated values for up to 300,000 operations (at inductive loads the number of operations is reduced by 50%)
Control card, RS 485 serial communication:
- Terminal nos. X100-1, -2
Control characteristics (frequency converter):
0 - 132 Hz
- Frequency range
Please see special conditions for frequency range for IP 66 motors at the end of this section.
- Resolution on output frequency 0.1 %
- System response time Max. 40 msec.
- Speed accuracy (open loop, CT mode, 4 P motor driven in speed range 150-1500 rPm) +/- 15 rpm
Externals:
IP 55 (IP65, IP66)
- Enclosure
Please see special conditions for frequency range for IP 66 motors at the end of this section.
- Vibration test 1 g
- Max. relative humidity 95 % for storage/transport/operation
- Ambient temperature Max. 40°C (24-hour average max. 35°C)
MG.03.H6.02 - VLT® is a registered Danfoss trademark 13
VLT® FCM Series
see Derating for high ambient temperature
- Min. ambient temperature in full operation
- Min. ambient temperature at reduced performance -10°C
- Temperature during storage/transport -25 - +65/70°C
- Max. altitude above sea level 1000 m
see Derating for air pressure
- EMC standards applied, Emission
EN 61000-6-2, EN 61000-4-2, EN 61000-4-3, EN 61000-4-4, EN 61000-4-5,
- EMC standards applied, Immunity
- Safety standards applied, EN 60146, EN 50178, EN 60204, UL508
NB!
Please note that the normal IP 66 solution
is only intended for speed up to maximum
3000 rpm. If higher speed is needed,
please give notification when ordering.
Key diagram for FCM 300 Series
EN 61000-6-3/EN 6100-6-4, EN 61800-3, EN 55011, EN 55014
EN 61000-4-6, ENV 50204
0°C
14 MG.03.H6.02 - VLT® is a registered Danfoss trademark

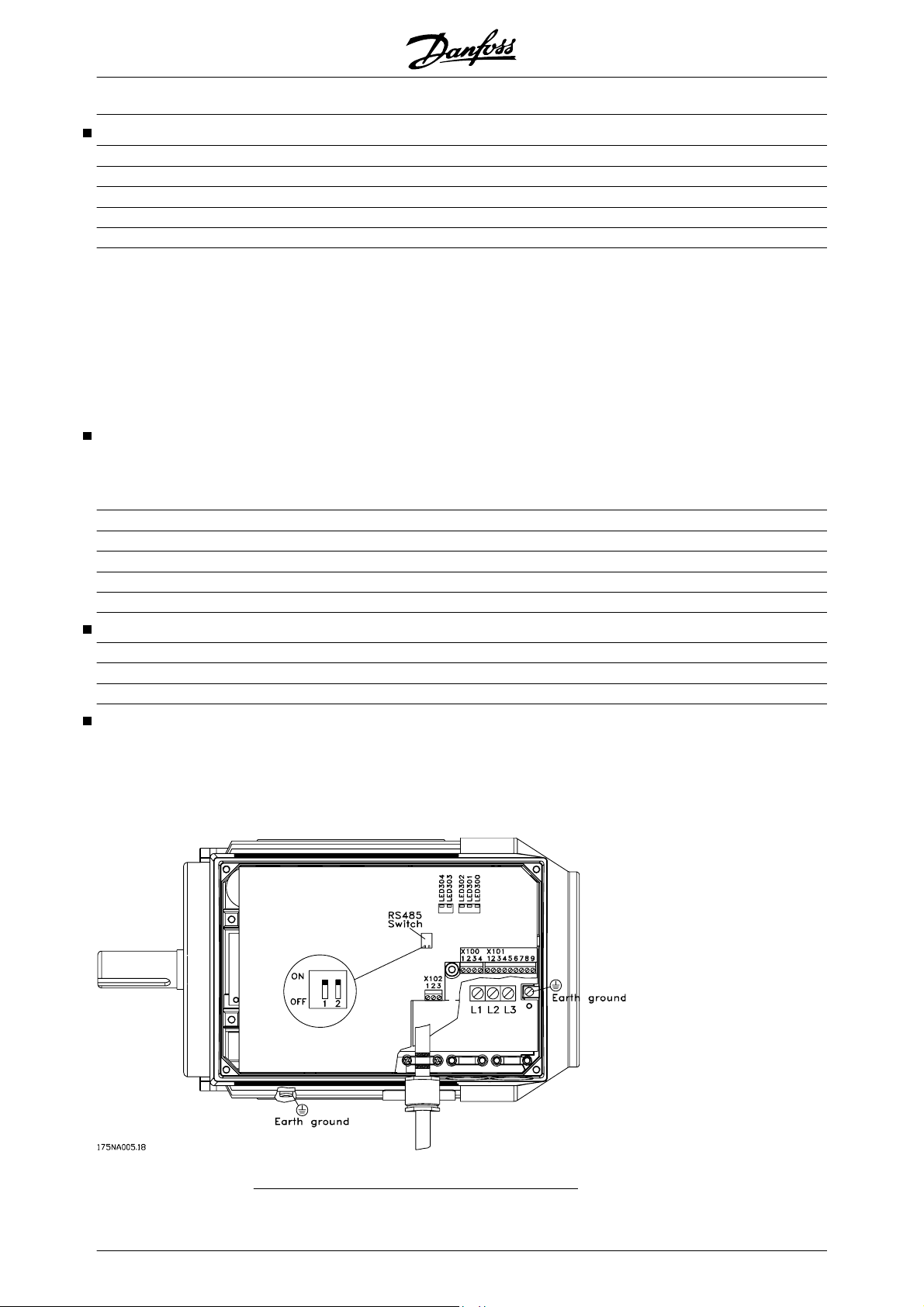
X101: Terminal block for analogue/digital control signals
Terminal No.
1 Analogue input (0-20 mA) Feedback signal
2 Analogue (0-10 V)/digital input 2 Speed reference
3 Digital input (or pulse) 3 Reset
4 Digital input (or precise stop) 4 Start
5 Digital input (other) 5 Jog (fixed speed)
6 24 V DC supply for digital inputs (max. 150 mA)
7 10 V DC supply for potentiometer (max. 15 mA)
8 0 V for terminals 1-7 and 9
9 Analogue (0-20 mA)/digital output Fault indication
Connection diagram - factory setting
Function Example
VLT® FCM Series
-
Reset to be closed short time for resetting fault trips
- Start to be closed for changing to run mode
- Jog will run at fixed speed while closed (10 Hz)
- Speed reference (0-10 V) determines speed while in
run mode
X102: Terminal block for relay output
Terminal No. Function
1-2 Make (normally open)
1-3 Brake (normally closed)
See parameter 323 (relay output) for programming of
relay output.
X100: Terminal block for data communication
Terminal No.
1 P RS 485 for connection to
2 N RS 485
3 5 V DC Supply for RS
4 0 V DC
Function
bus or PC
485 bus
LED 300-304
LED 300 (red): Fault trip
LED 301 (yellow): Warning
LED 302 (green): Power on
LED 303-304: Communication
For PROFIBUS versions please refer to the manual
MG.90.AX.YY.
MG.03.H6.02 - VLT® is a registered Danfoss trademark 15
VLT® FCM Series
Tightening Torques
Cover (lid) screws:
Plastic cable entrance plugs: 19.5 lb-in (2.2 Nm)
L1, L2, L3 (AC Line) screws (FCM 305-340): 5 - 7 lb-in (0.5 - 0.6 Nm)
L1, L2, L3 (AC Line) screws (FCM 355-375): 15 lb-in (1.2 - 1.5 Nm)
Earth Ground: 30.1 lb-in (3.4 Nm)
Terminal screws require a max 2.5 mm flat-blade
screwdriver.
AC Line screws require a 8mm flat-blade screwdriver.
Lid screws , earth ground and cable clamp screws all
require T-20 Torx or flat-blade screwdriver (max. tightening speed 300 RPM).
Maximum Cable Cross Section
Note:
Use °60 C copper wire or better
Max size AC Line cable (FCM 305-340): 10 4.0
Max size AC Line cable (FCM 355-375): 6 10
Max size control cable: 16 1.5
Max size serial communication cable: 16 1.5
Earth Ground: 6 10
25.6 - 31lb-in (3 - 3.5 Nm)
AWG
mm
2
Screw Sizes
Cover (lid) screws:
M5
Earth Ground and Cable Clamp screws (FCM 305-340): M4
Earth Ground and Cable Clamp screws (FCM 355-375): M5
Protection:
• Thermal overload protection of motor and
electronics.
• Monitoring of the intermediate circuit voltage
mediate circuit voltage gets too high or too
low.
• If a mains phase is missing, the inverter will
cut out when a load is placed on the motor.
ensures that the inverter cuts out if the inter-
Terminal arrangement (for installation see quick setup, MG.03.AX.62)
16 MG.03.H6.02 - VLT® is a registered Danfoss trademark
VLT® FCM Series
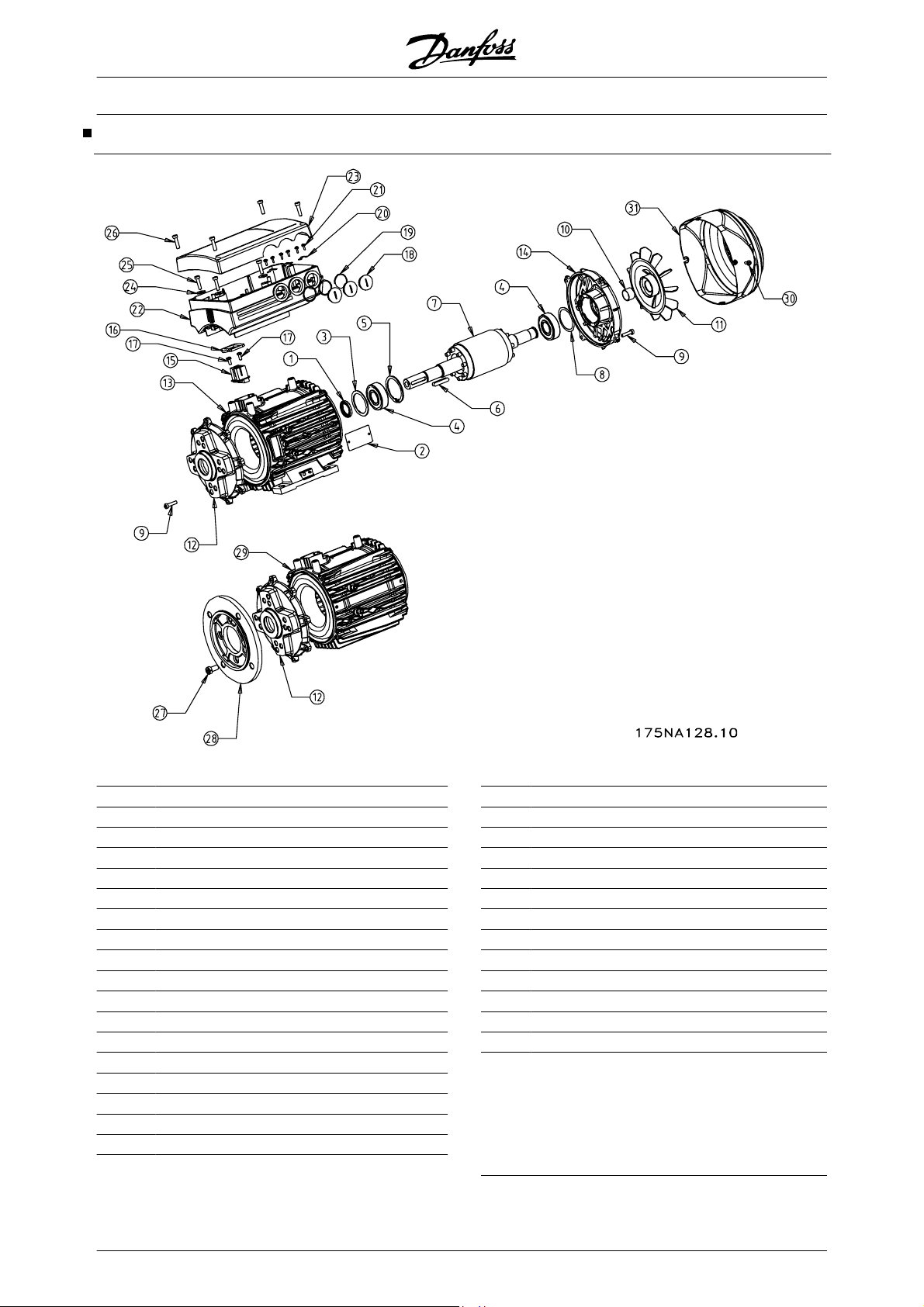
Description of the motor
The FC motor consists of the following parts:
Item Description Item Description
1 Gasket
2 Name plate
3 Shim ring
4 Ball bearing
5 Circlip for drive-end bearing
6 Key
7 Rotor
8 Shim ring for bearing
9 Tension screws
10 Tolerance ring for air blower
11 Air blower
12 Endshield drive end
13 Stator
14 Endshield non drive end
15 Connector block
16
17
18
Gasket
Screws for connector block
Metric blind plugs
19
20
21
22
23
24
25
26
27
28
29
30
31
Gaskets for cable glands
Cable Clamps
Screws for cable clamps
Frequency inverter
Lid for frequency inverter
Gasket
Torx-screws for inverter monting
Screws for lid
Mounting screws for flange ring
Flange ring
Stator
Mounting screws for air blower hood
Air blower hood
MG.03.H6.02 - VLT® is a registered Danfoss trademark 17
VLT® FCM Series
Handling the FC motor
Handling and lifting of VLT DriveMotors (FC motors)
must only be undertaken by qualified personnel. Full
product documentation and operating instructions
must be available together with tools and equipment
necessary for safe working practice. Eyebolts and/or
lifting trunnions supplied with the FC motor are designed to support only the weight of the FC motor, not
the weight of the FC motor and any auxcillary equipment attached to it. Be absolutely sure that cranes,
jacks, slings and lifting beams are capable of carrying
the weight of equipment to be lifted. Where an eyebolt
is provided with the motor, this should be screwed
Bearings
The standard solution is fixed bearing in the drive side
of the motor (shaft output side).
To avoid static indention, the storage area should be
vibration free. Where exposure to some vibration is
unavoidable, the shaft should be locked. Bearings may
be fitted with a shaft locking device which should be
kept in place during storage. Shafts should be rotated
down until its shoulder is firmly against the face of the
stator frame to be lifted.
FCM type approx. weight (kg.)
FCM 305
11
FCM 307 13
FCM 307 17
FCM 315 20
FCM 322 26
FCM 330 28
FCM 340 37
FCM 355 56
FCM 375 61
by hand, one quarter of a revolution, at weekly intervals. Bearings are despatched from the works fully
charged with lithium based grease.
Lubrication
Frame size Lubrication type Temperatur range
80-132 Esso unirex N3 -10 to + 1400°C
Bearing life
3
Maximum hours bearing life (Lna) expected at 80° C bearing temp. x 10
FCM
3000 min
-1
hours.
1500 min
-1
Horiz. Vert. Horiz. Vert.
305-315
22 22 30 30
322-340 26 26 30 30
355-375 26 26 30 30
Lna bearing life is the adjusted, L10 life rating, taking account of: -Reliability -Material improvement -Lubrication
conditions.
Standard Bearing references and oil seals
FCM Mounting Poles (2/4) Bearings Oil seals - Bore x O/D x width in mm
Drive end Non-drive end
305-307
All All 6204 2Z-C3 6204 2RS-C3 20 x 30 x 7
311-315 All All 6205 2Z-C3 6205 2RS-C3 25 x 35 x 7
322-330 All All 6206 2Z-C3 6206 2RS-C3 30 x 42 x 7
340 All All 6206 2Z-C3 6206 2RS-C3 30 x 42 x 7
355-375 All All 6208 2Z-C3 6208 2RS-C3 40 x 52 x 7
18 MG.03.H6.02 - VLT® is a registered Danfoss trademark
VLT® FCM Series
Output shafts
Balance
All motors are dynamically balanced, to ISO 8821with
key convention to IEC 60034-14.
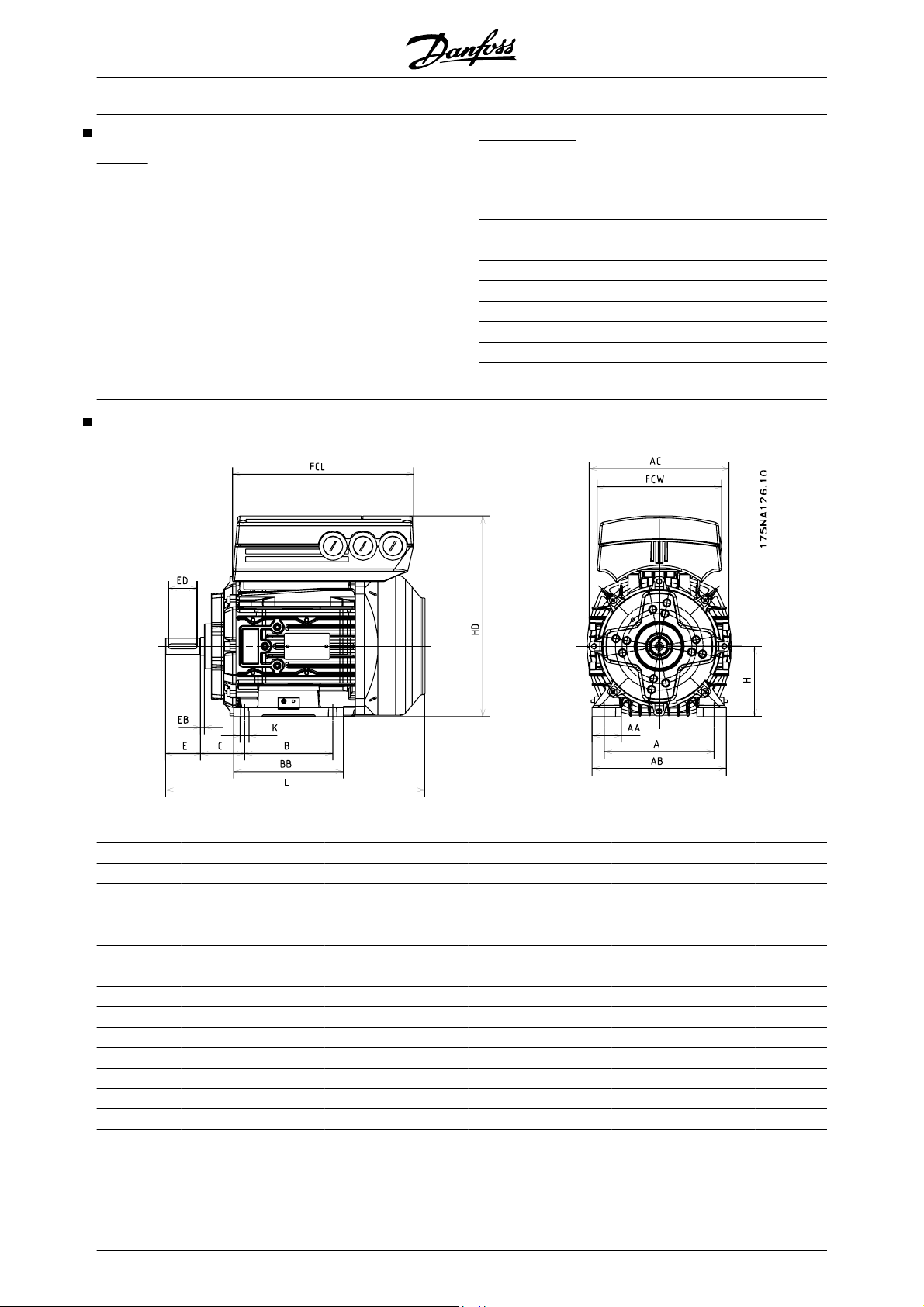
Dimensions
Foot mounting - B3
Inertia J [kgm2]
FCM 2 pole 4 pole
305
307 0.00082 0.0027
311 0.00090 0.0022
315 0.0011 0.0030
322 0.0024 0.0042
330 0.0028 0.0050
340 0.0053 0.0091
355 0.0072 0.0143
375 0.0097 0.0190
0.00082 0.0019
General
FCM
Frame size 80 80 90 90 100 100 112 132 132
A [mm] 125 125 140 140 160 160 190 216 216
B [mm] 100 100 125 125 140 140 140 178 178
C [mm] 50 50 56 56 63 63 70 89 89
H [mm] 80 80 90 90 100 100 112 132 132
K [mm] 9 9 9 9 12 12 12 12 12
EB [mm] 4 4 5 5 5 5 5 5 5
AA [mm] 33.5 33.5 35 35 38 38 44 55 55
AB [mm] 153 153 170 170 195 195 225 256 256
BB [mm] 125 125 155 155 176 176 176 218 218
L [mm] 293 293 319 319 363 363 380 485 485
AC [mm] 159 159 176 176 196 196 220 246 246
HD [mm] 228.5 228.5 241 241 267 267 296 344 344
FCL [mm] 206 206 230 230 256 256 286 340 340
FCW [mm] 142 142 158 158 176 176 197 235 235
305 307 311 315 322 330 340 355 375
MG.03.H6.02 - VLT® is a registered Danfoss trademark 19
VLT® FCM Series
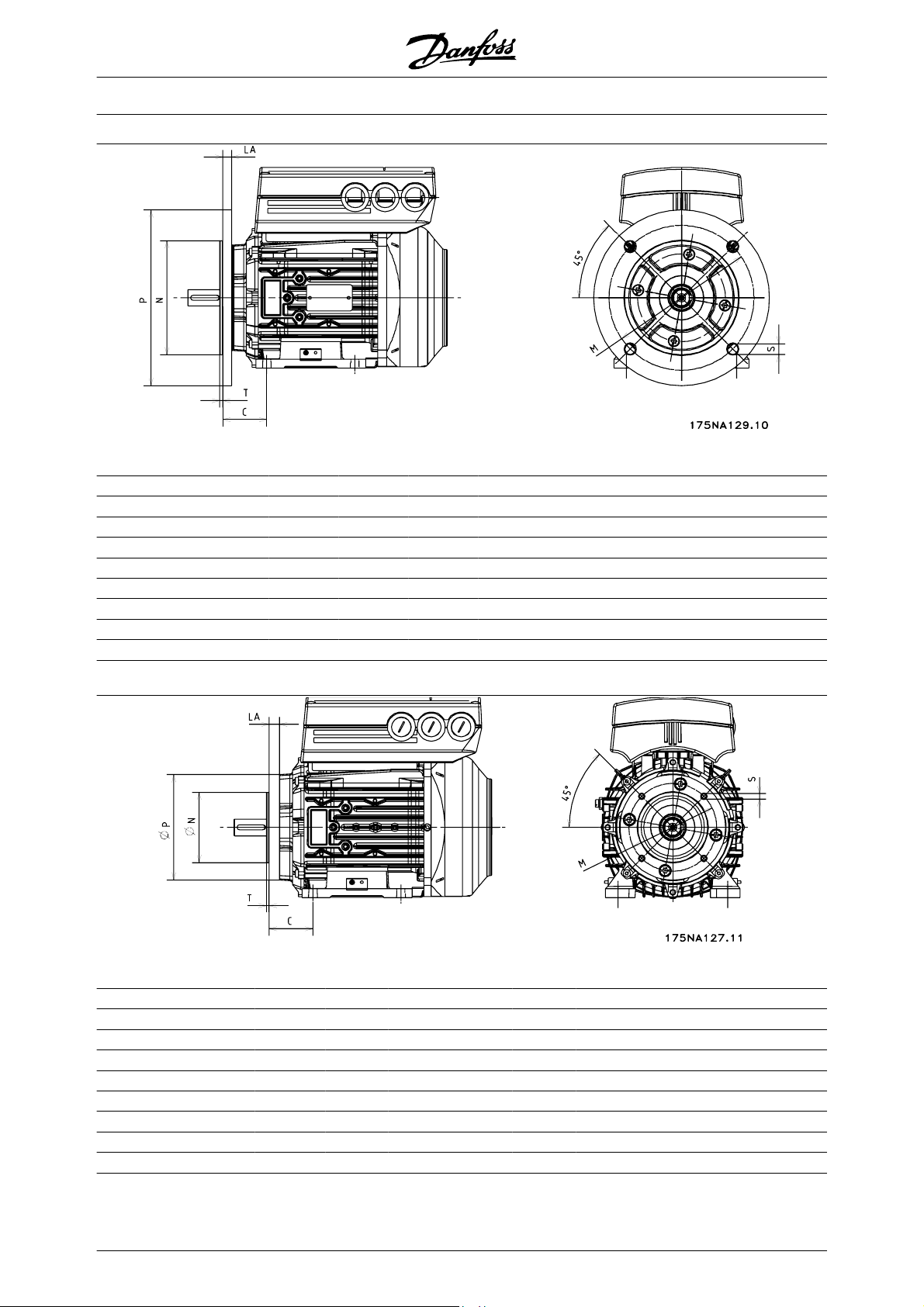
Flange mounting - B5, B35 (B3+B5)
B5
FCM
Frame size 80 80 90 90 100 100 112 132 132
IEC Ref. FF165 FF165 FF165 FF165 FF215 FF215 FF215 FF265 FF265
DIN Ref. A200 A200 A200 A200 A250 A250 A250 A300 A300
M [mm] 165 165 165 165 215 215 215 265 265
N [mm] 130 130 130 130 180 180 180 250 230
P [mm] 200 200 200 200 250 250 250 300 300
S [mm] 12 12 11.5 11.5 14 14 14 14 14
T [mm] 3.5 3.5 3.5 3.5 4 4 4 4 4
LA [mm] 10 10 10 10 11 11 11 12 12
305 307 311 315 322 330 340 355 375
Face mounting - B14, B34 (B3+B14)
B14
FCM
Frame size 80 80 90 90 100 100 112 132 132
IEC Ref. FT100 FT100 FT115 FT115 FT130 FT130 FT130 FT165 FT165
DIN Ref. C120 C120 C140 C140 C160 C160 C160 C200 C200
M [mm] 100 100 115 115 130 130 130 165 165
N [mm] 80 80 95 95 110 110 110 130 130
P [mm] 120 120 140 140 160 160 160 200 200
S [mm] M6 M6 M8 M8 M8 M8 M8 M10 M10
T [mm] 3 3 3 3 3.5 3.5 3.5 3.5 3.5
LA [mm] 12 12 10 10 10 10 10 12 12
305 307 311 315 322 330 340 355 375
20 MG.03.H6.02 - VLT® is a registered Danfoss trademark
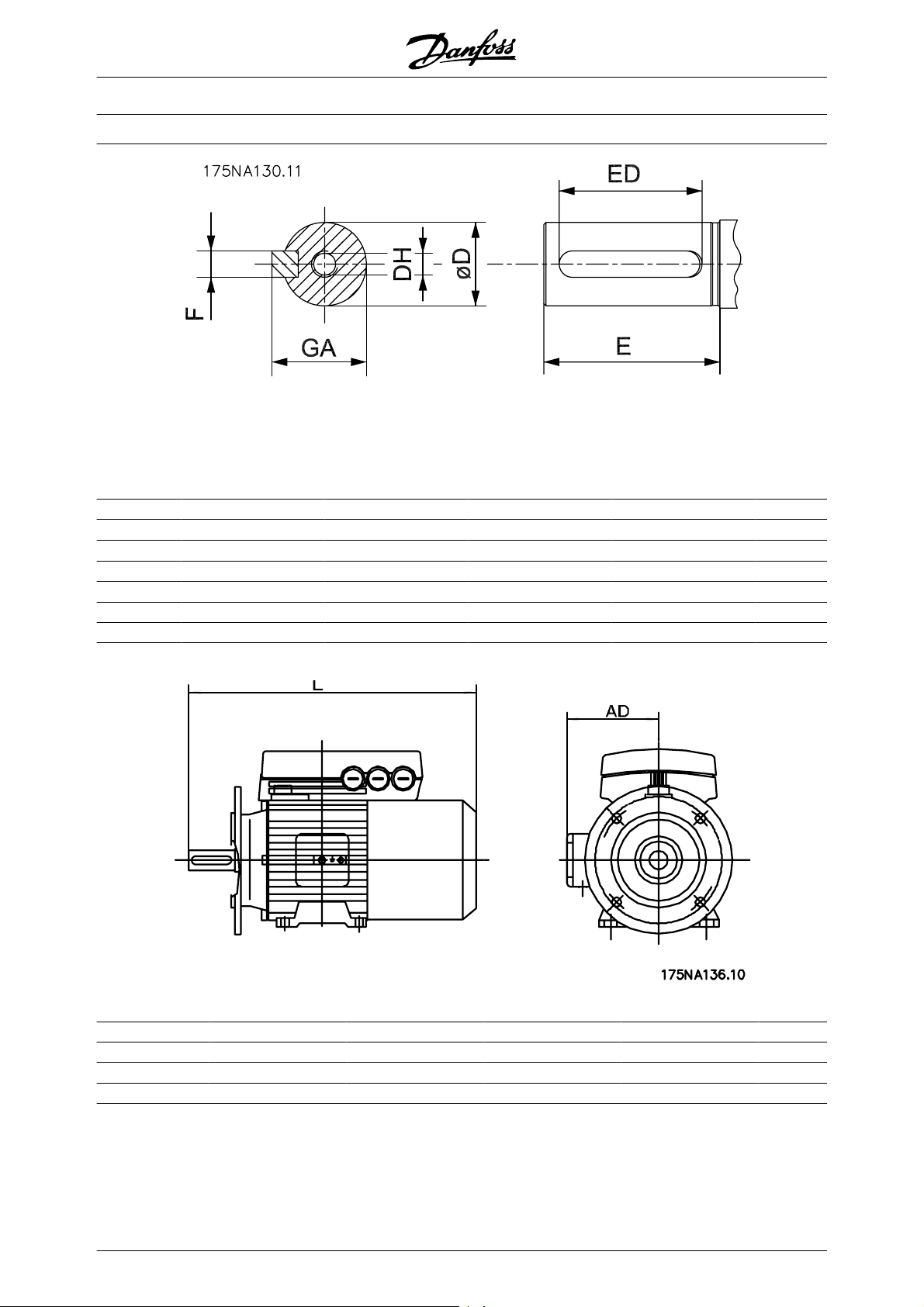
Shaft Drive End
VLT® FCM Series
Shaft tapped
DH x deep to
DIN 332 Form DR
Closed profile keyway
FCM 305 307 311 315 322 330 340 355 375
Frame size 80 80 90 90 100 100 112 132 132
∅D [mm]
E [mm] 40 40 50 50 60 60 60 80 80
ED [mm] 32 32 40 40 50 50 50 70 70
DH [mm] M6x16 M6x16 M8x19 M8x19 M10x22 M10x22 M10x22 M12x28 M12x28
F [mm] 6 6 8 8 8 8 8 10 10
GA [mm] 21.5 21.5 27 27 31 31 31 41 41
19 19 24 24 28 28 28 38 38
Forced ventilation
FCM
Frame size 80 80 90 90 100 100 112 132 132
AD [mm] 132 132 160 160 170 170 182 195 195
L [mm] 386 386 427,5 427,5 440 440 482 616 616
MG.03.H6.02 - VLT® is a registered Danfoss trademark 21
305 307 311 315 322 330 340 355 375
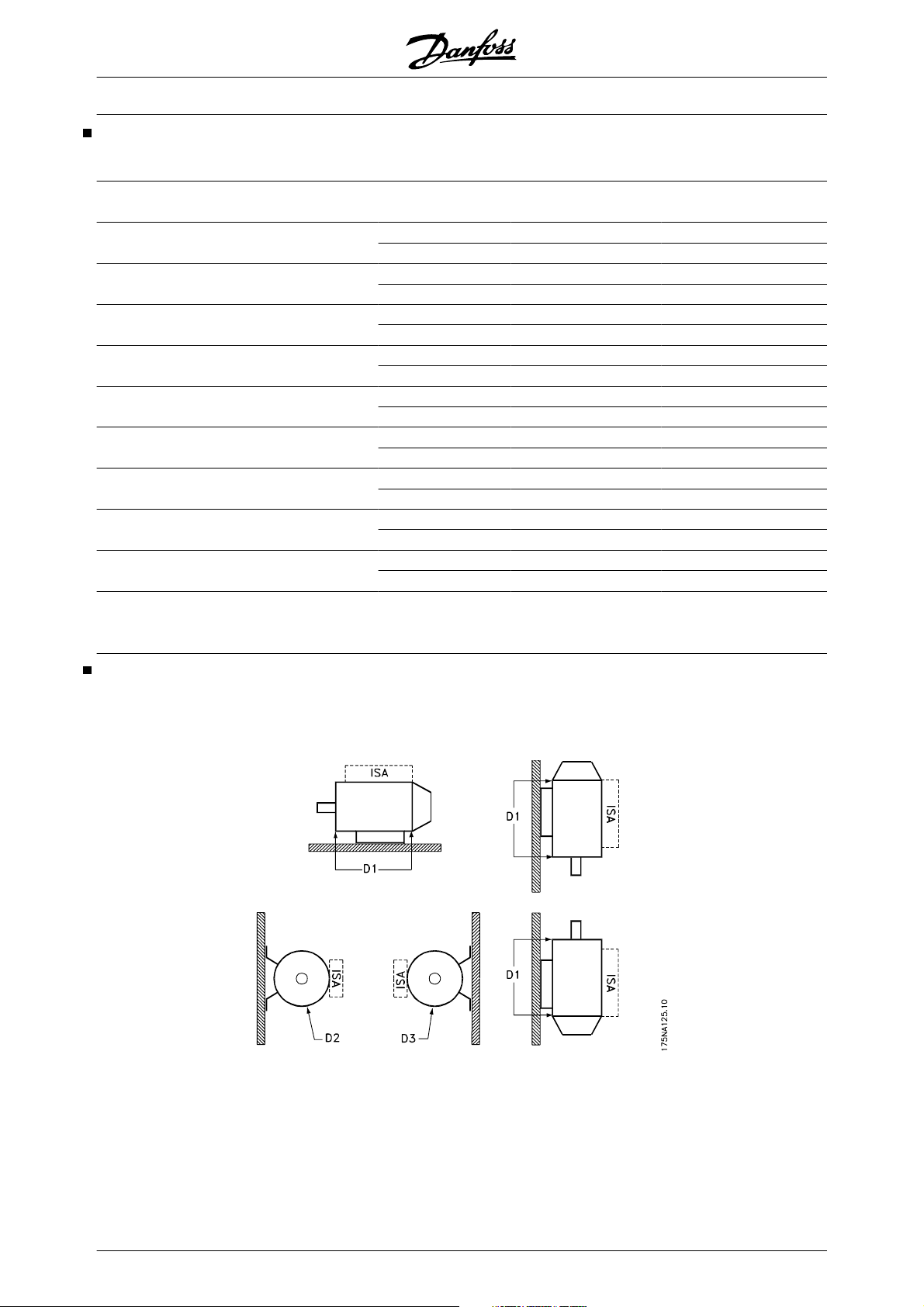
Installation of the FC motor
VLT® FCM Series
FC motors must be installed with adequate access for
routine maintenance. A minimum of 0.75m of working
space around the motor is recommended. Adequate
space around the motor, particularly at the fan inlet (50
mm), is also necessary to facilitate airflow.
Where several FC motors are installed in close proximity, care must be taken to ensure that there is no
recirculation of exhausted warm air. Foundations must
be solid, rigid and level.
NB!
Electrical installation
Do not remove the top foil inside the inverter part, as this is a part of the protective arrangements.
Alignment
When the application calls for direct coupling, the
shafts must be correctly aligned in all three planes.
Bad alignment can be a major source of noise and vibration.
Fitting pinions, pulleys and couplings.
These should be bored to our standard limits and fitted
on the shaft with a screwing motion. Attention must be
paid to correct guarding of all moving parts.
Tapping of fitments onto the FC motor
shaft, with a hammer or mallet, causes
bearing damage. This results in an increase in bearing noise and a significant
reduction in bearing life.
NB!
Max. length of mounting bolts penetrating
the B14 flange, see section Dimensions in
this chapter.
Allowance must be made for shaft endfloat and thermal expansion in both axial and vertical planes. It is
preferable to use flexible drive couplings.
Maximum permissible axial and radial loads in N
Frame size Poles Axial load in [N]
Horizontal shaft
80
80 4 760 770
90 2 600 650
90 4 810 820
100 2 830 890
100 4 1120 1160
112 2 820 890
112 4 1100 1110
132 2 1300 1440
132 4 1710 1780
All figures are based on L10 bearing life of 20,000 hours, standrad bearings.
Reinforced bearings available.
22 MG.03.H6.02 - VLT® is a registered Danfoss trademark
2 570 610
Radial load in [N] at 0.5 X shaft
length
VLT® FCM Series
Bolt torques
Endshields and lid should be secured with the bolt
sizes and torque's detailed in the table below.
Endshield fixing bolt torques
FCM
Type
Nm.
305-307
311-315 90 M5 5
322-330 100 M6 (taptite) 8-10
340 112 M6 (taptite) 8-10
355-375 132 M8 (taptite) 29
LID screws torque: 2.2 - 2.4 Nm
Maintenance
Routine cleaning of the FC motor
Remove the fan cover and ensure that all air inlet holes
are completely free. Clean any dirt and obstructions
from behind the fan and along the ribs of the frame,
and between the motor and inverter part.
Periodic maintenance of motor part.
a. Remove the inverter part, the fan cover and
Frame size Bolt diameter Torque
80 M5 5
the fan which is keyed to the shaft extension.
Loosen and remove bearing cover screws
and endshield bolts/studs.The endshields
should then be eased off their spigots.
driven part, as misalignment will lead to ultimate bearing trouble and shaft breakage.
g. When replacing screws and bolts, care
should be taken to use only those with the
requisite quality and tensile strength recommended by the manufacturer. These must
also be of identical thread form and screw/
bolt length (see the table above).
Forced ventilation (FV) units
In some applications the fan built on to the motor shaft
do not give sufficient cooling for operation at low
speed. That problem is solved by mounting a FV unit.
Typical applications are for example conveyors, spindles and other constant torque (CT) applications
where the customer wants a wide control range without reduction in torque down to low speed.
The VLT Drive Motor yields full continuous torque
down to low speed with FV built on. The forced vent
enclosure is IP 66. Approved according to UL.
b. The rotor can now be carefully withdrawn
from the stator, taking care not to damage the
stator bore and both stator and rotor windings.
c. Having dismantled the motor, maintenance
can be carried out to remove all dirt. For this
purpose, the use of an air line supplying dry
compressed air under comparatively low
pressure is best, as a high velocity air-stream
can force dirt into the spaces between the
windings and insulation, etc. Grease-removing solvents can cause damage to impregnating varnish or insulation
d. The FC-motor should be re-assembled in the
reverse order from dismantling, remembering to ease endshields onto bearings and
spigots. DO NOT USE FORCE.
e. Before starting, check that the rotor revolves
freely. Ensure that the electrical connections
are correct.
f. Refit any pulley, coupling, sprocket etc.
which has been removed, being particularly
careful to ensure correct alignment with the
MG.03.H6.02 - VLT® is a registered Danfoss trademark 23
VLT® FCM Series
Voltage range for forced ventilation (FV) unit
The FVU can be supplied with a wide range of voltages
depending on the way the terminals are connected.
Standard is three phase 380-500 V (50 Hz), 380-575
FCM 300 Thermal Protection
The thermal protection of FC and motor is covered in
the following way:
1. Overload situations are handled by the cal-
2
culated electrical load (I
X t).
2. Missing ventillation and high ambient temperature is handled by the temperature
measurement. The derating for low speed
(due to missing ventillation) is not incoporated in the electrical load calculaton but taken
care of by the temperature measurement.
Forced ventillation is thus automaticly covered.
Electrical load
The current is measured in the DC link and the estimated load is calculated. The level of the electrical
load is set at an output torque of 105%. Above that
level a counter is increased, below the level it is decreased. The counter starts at zero. When the counter
reaches 100, the unit trips. At 98 the warning indication
goes on (LED and status word).
V (60 Hz) with the possibility to connect three phase
220-290 V (50 Hz), 220-332 V (60 Hz) or single phase
230-277 V (50/60 Hz). The capacitor for single phase
is mounted inside the terminal box.
Trip level => Immediate trip and alarm indication (LED
and status word).
The value can be read in parameter 537 (LCP: Heat
sink temp.).
The temperature levels seem to be high, but due to a
local heating of the sensor the practical levels of the
inside air temperature are approx. 10 deg C lower.
Load Time from 0 to 100 Time from 100 to 0
0% - 60 sec
20% - 100 sec
40% - 150 sec
60% - 200 sec
80% - 250 sec
105% 900 sec (if over 105%) 300 sec (if under 105%)
120% 550 sec 140% 210 sec 160% 60 sec >165% 20 sec -
At full AC brake (parameter 400) a load > 165% is simulated => 20 sec to trip.
The value can be read in parameter 527. (LCP:FC
thermal)..
Temperature measurement
The temperature measurement is sensing the temperature within the electronics box.'
At warning level => Warning indication goes on (LED
and status word) and the unit might trip if the temperature doesn't sink back below warning level within 15
minutes. If the function TEMP.DEP.SW is activated in
parameter 412, the switching frequency is decreased
gradually down to 2 kHz attempting to decrease the
temperature.
24 MG.03.H6.02 - VLT® is a registered Danfoss trademark
Service plug kit (175N2546)
Purpose:
To run LCP2 and PROFIBUS at the same time. The
service plug can be used with FCM 300 of serial number 03Gxxx and software version as from 2.03. Used
together with cable for plug kit 175N0162.
Plug kit (175N2545)
Purpose
To make a plugable connection between LCP 2 and
FCM 300.
Used together with cable for plug kit 175N0162.
VLT® FCM Series
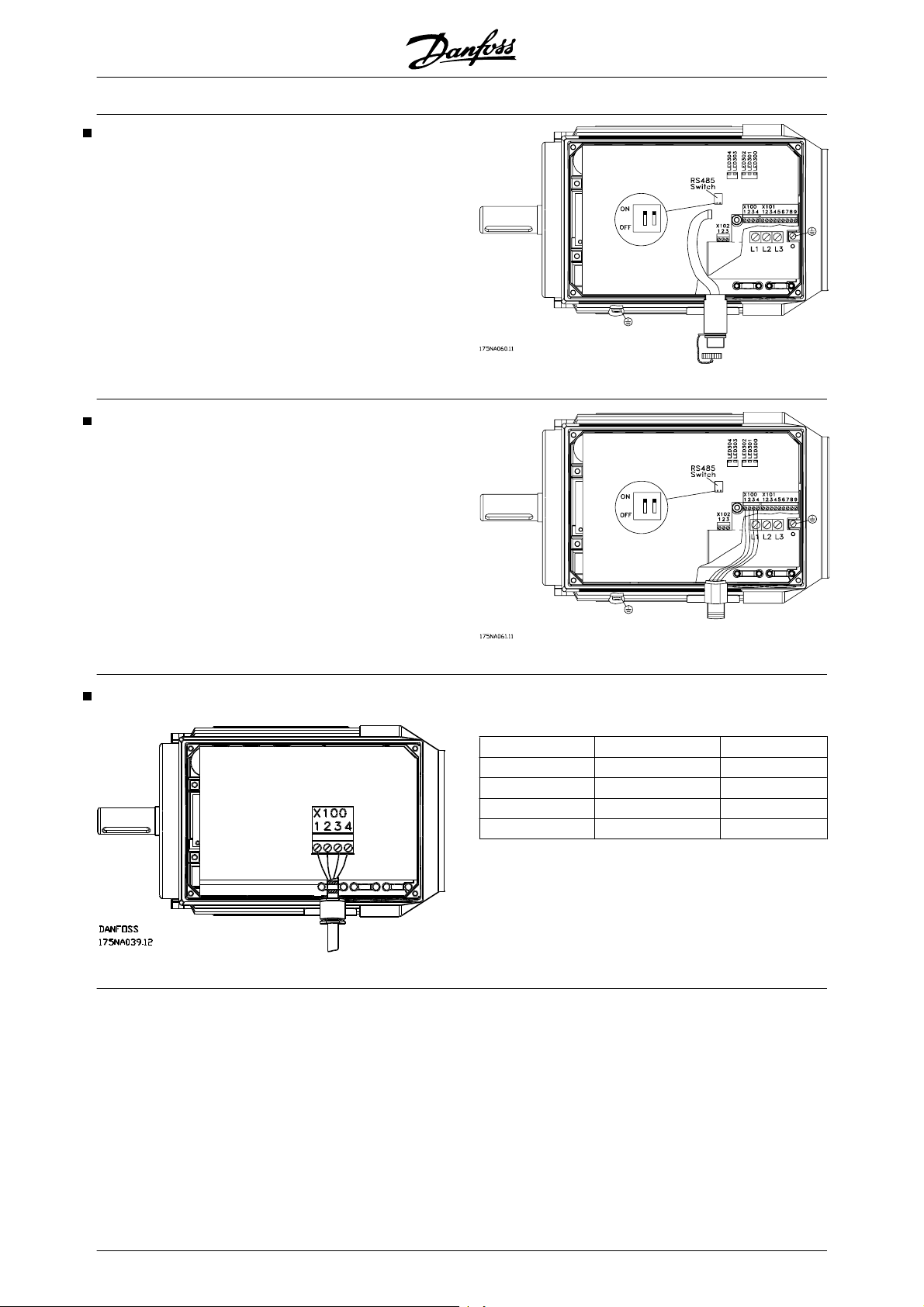
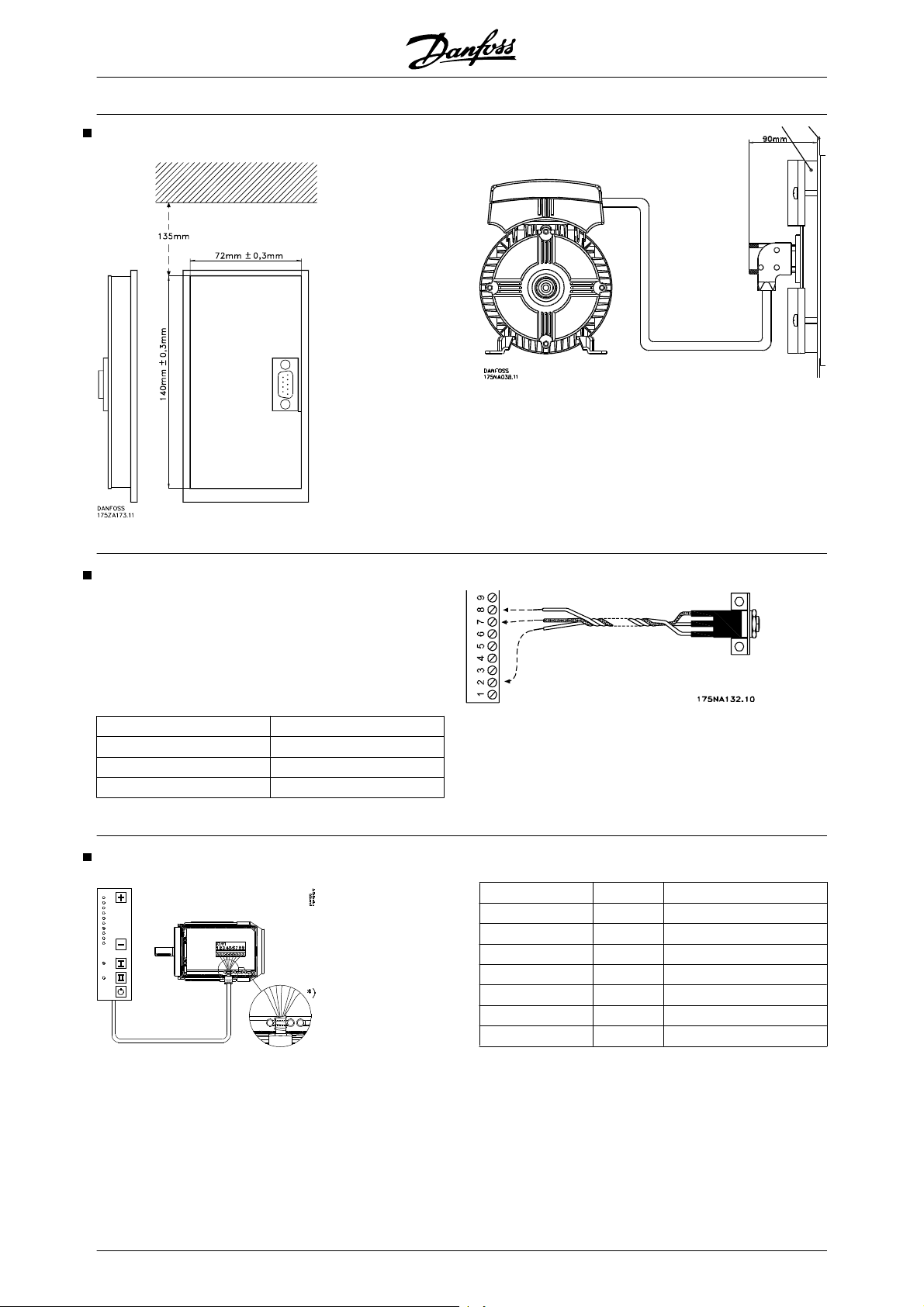
Remote mounting kit (175N0160)
Connections
Colour of wire/ Terminal X100/ D-sub pin
yellow 1 8
green 2 9
red 3 2
blue 4 3
MG.03.H6.02 - VLT® is a registered Danfoss trademark 25
Remote mounting kit cont.
VLT® FCM Series
Potentiometer option (177N0011)
Option to control the reference by means of a potentiometer. The option is mounted instead of a cable bracket. The potentiometer is operated by removing the blind
plug to set the desired reference, and then mount the
blind plug again.
Colour of wire Terminal on X101
White 2 (analog input)
Red 8 (0 V)
Black 7 (+10 V)
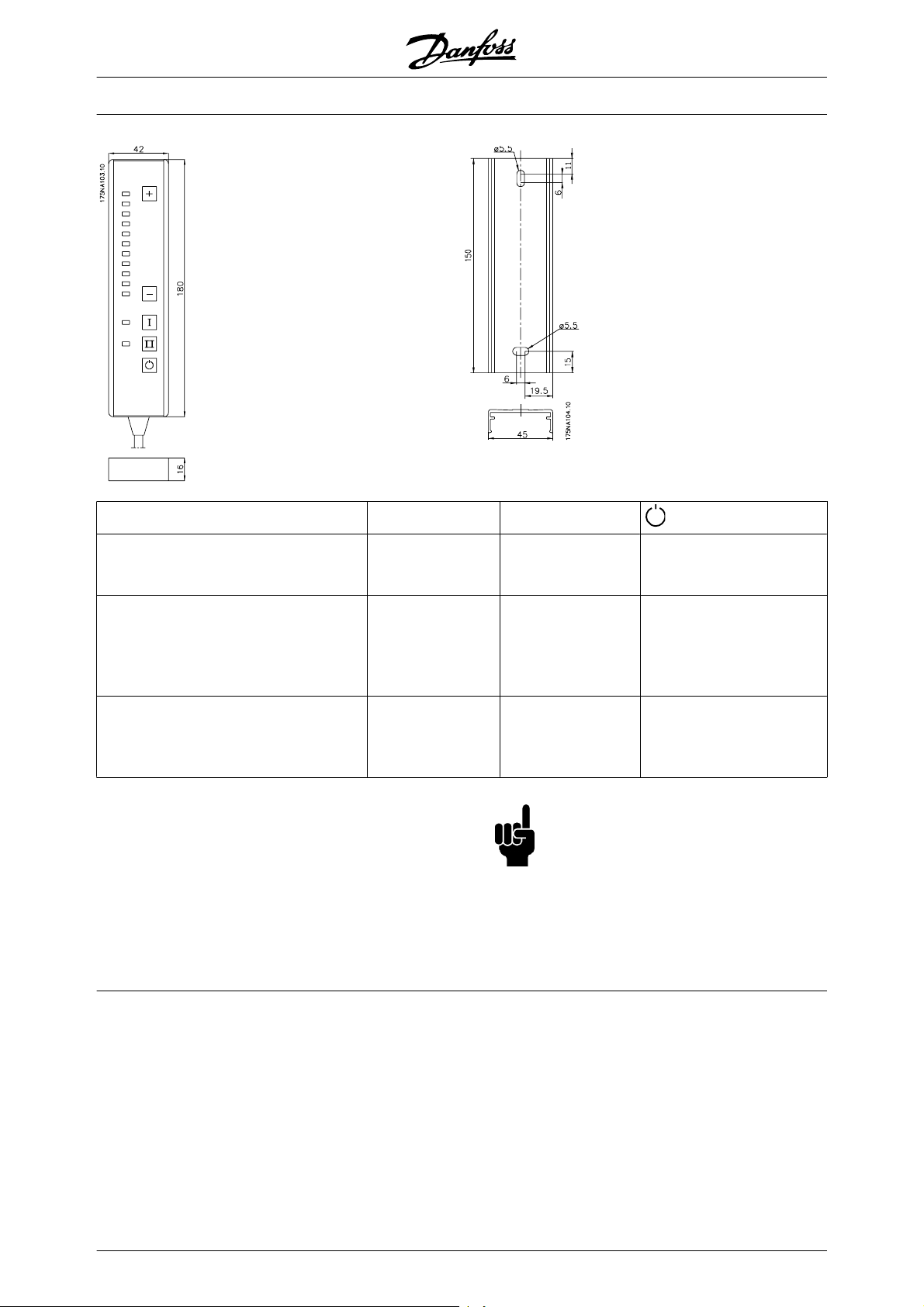
Local Operation Pad (LOP) (175N0128) IP65
Wiring
Colour of wire
White 2 Reference
Brown 3 Reset
Purple * or Grey 4 See table under button
Green 5 See table under button
Red 6 +24V
Yellow 7 +10V
Blue 8 Ground
Terminal Function
* Can be orange in some cables
26 MG.03.H6.02 - VLT® is a registered Danfoss trademark
VLT® FCM Series
Local Operation Panel (LOP) 175N0128 IP 65 Fixture for LOP 175N2717 (included in 175N0128)
Functions/settings Key I (Start) Key II (Start)
Default - Dual speed operation (connect
purple wire):
No changes to factory setting.
Function 2 - Dual mode operation (connect purple wire)
Select desired modes of operation in Setups 1 and 2 (use para. 4-6) Parameter
335 = 18 (select Setup)
Function 3 - Dual direction operation
(connect grey wire)
Parameter 335 = 10 (start reversing) Parameter 200 = 1 (both directions)
*If no reset is required, do not connect the brown
wire**or set parameter 213
Use the +/- keys to set reference
At power up the unit will always be in stop mode. Set
reference will be stored during power down. If permanent start mode is desired, connect terminal 6 to terminal 4 and do not connect purple/grey wire to terminal
4. This means the stop function on LOP is disabled.
Run on set reference (+/-)
Run with Setup 1 Run with Setup 2 Stop (and reset* - if trip)
Run forward Run reverse Stop (and reset* - if trip)
Run on 10 Hz** jog
speed
NB!
After fitting, cut off or isolate excess wire.
Key (Stop)
Stop (and reset* - if trip)
MG.03.H6.02 - VLT® is a registered Danfoss trademark 27
VLT® FCM Series
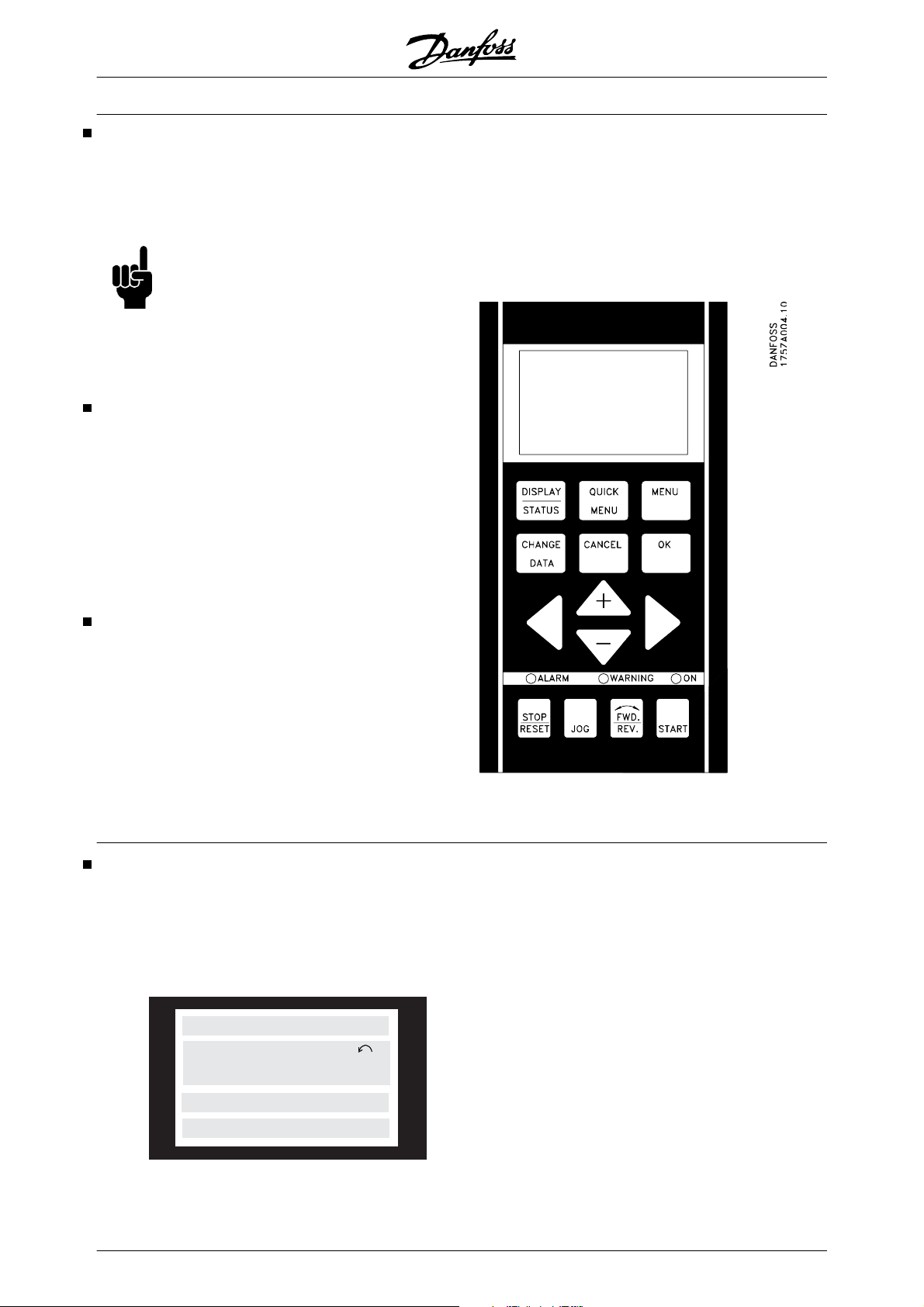
Control panel (175NO131)
The FC motor optionally features a Local Control Panel- LCP 2 which makes up a complete interface for
operation and monitoring of the FC motor.
IP 65 on front.
NB!
The LCP from the VLT 5000 Series (code
number 175Z0401) cannot be used for the
FC motor. However, the general LCP 2
(code number 175N0131) can be used for
both the FCM 300, VLT 2800 and the VLT
5000 Series.
LCP installation
The LCP 2 is connected to the terminal X100, 1-4 (see
separate instruction MI.03.AX.YY).
1. Service Plug Kit (175N2546) (see section
Service plug kit) and cabel 175N0162
2.
Plug kit (175N2545) (see section Plug kit) and
cabel 175N0162
3. Remote mounting kit (175N0160) (see section Remote mounting kit)
4 measurements and 3 operating conditions continuously. During programming, all the information required for quick, effective parameter Setup of the FC
motor will be displayed. As a supplement to the display, there are three LEDs for voltage, warning and
alarm. All program parameters of the FC motor can be
changed immediately from the control panel, unless
this function has been blocked via parameter 018.
LCP functions
The functions of the control panel can be divided into
three groups:
•display
• keys for changing program parameters
• keys for local operation
All data are indicated by means of a 4-line alphanumeric display, which in normal operation is able show
Display
The LCD-displayhas rear lighting and a total of 4 alpha-numeric lines together with a box that shows the
direction of rotation (arrow) and the chosen Setup as
well as the Setup in which programming is taking place
if that is the case.
1st line
2nd line
3rd line
4th line
12345678901234567890
SETUP
12345678
1
12345678901234567890
12345678901234567890
1st line shows up to 3 measurements continuously in
normal operating status or a text which explains the
2nd line.
2nd line shows a measurement with related unit continuously, regardless of status (except in the case of
alarm/warning).
175ZA443.10
3rd line is normally blank and is used in the menu
mode to show the selected parameter number or parameter group number and name.
4th line is used in operating status for showing a status
text or in data change mode for showing the value of
the selected parameter.
28 MG.03.H6.02 - VLT® is a registered Danfoss trademark
VLT® FCM Series
An arrow indicates the direction of rotation
of the motor. Furthermore, the Setup which
has been selected as the Active Setup in
parameter 004 is shown. When programming another Setup than the Active Setup,
the number of the Setup which is being programmed will appear to the right. This second Setup number will flash.
LEDs
At the bottom of the control panel is a red alarm
LEDand a yellow warning LED, as well as a green
voltage LED.
If certain threshold values are exceeded, the alarm
and/or warning lamp lights up together with a status
and alarm text on the control panel.
The voltage LED is activated when the FC motor receives voltage; at the same time the rear lighting of the
display will be on.
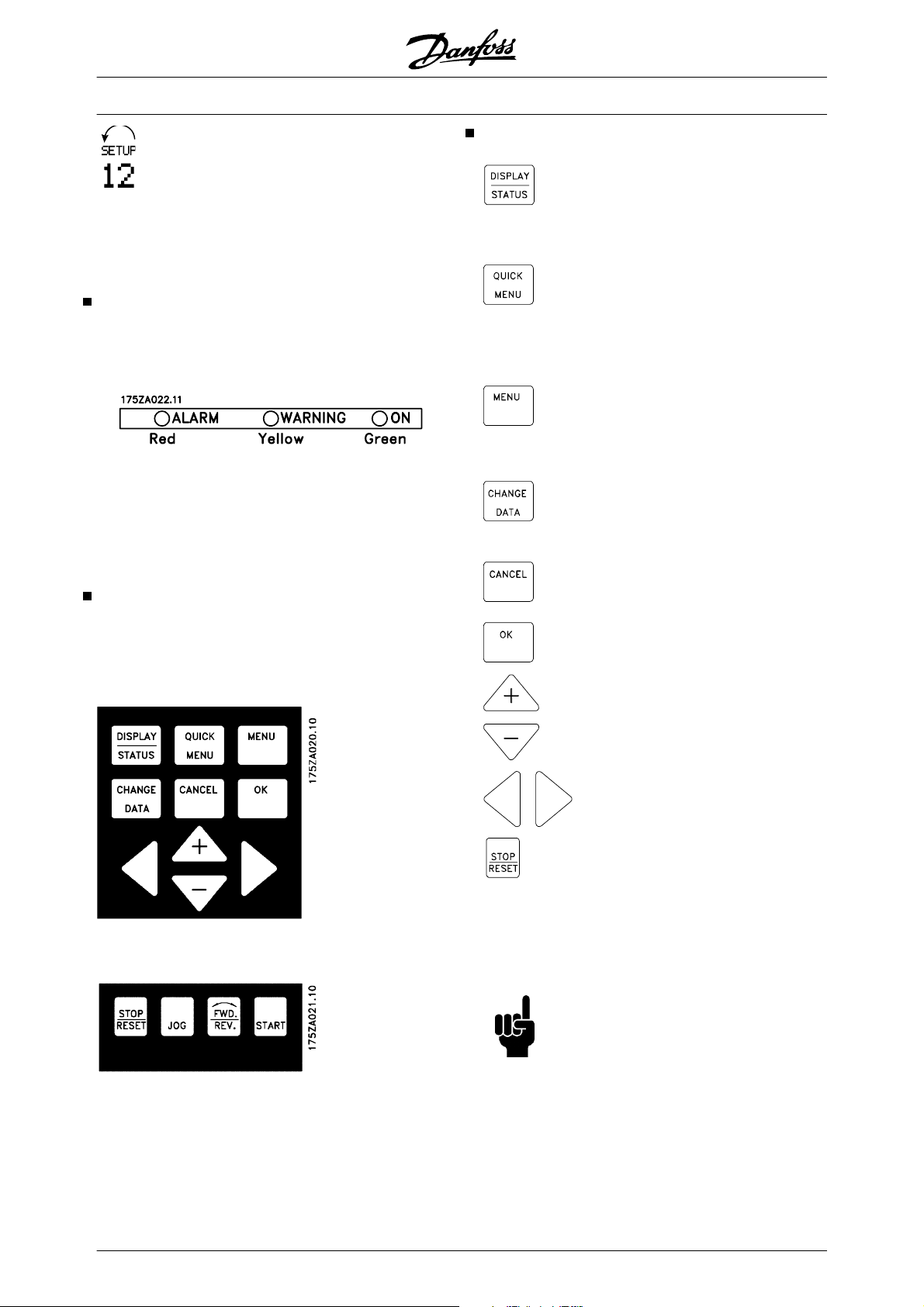
Control keys
The control keys are divided into functions. This
means that the keys between display and indicator
LEDs are used for parameter Setup, including choice
of display indication during normal operation.
Control key functions
[DISPLAY / STATUS] is used for
selecting the mode of display or for
changing back to Display mode
from either the Quick menu mode
or the Menu mode.
[QUICK MENU] is used for programming the parameters that belong under the Quick menu mode.
It is possible to switch directly between Quick menu mode and
Menu mode.
[MENU] is used for programming
all parameters. It is possible to
switch directly between Menu
mode and Quick menu mode.
[CHANGE DATA] is used for
changing the parameter selected
either in the Menu mode or the
Quick menu mode.
[CANCEL] is used if a change of
the selected parameter is not to be
carried out.
[OK] is used for confirming a
change of the parameter selected.
[+/-] is used for selecting parameter and for changing the chosen
parameter or for changing the read
out in line 2.
Keys for local control are found under the indicator
LEDs.
[<>] is used for selecting group
and to move the cursor when
changing numerical parameters.
[STOP / RESET] is used for stopping or for resetting the FC motor
after a drop-out (trip). Can be selected via parameter 014 to be active or inactive. If stop is activated,
line 2 will flash, and [START] must
be activated.
NB!
Pressing [STOP/RESET] will prevent motor from running also with disconnected
LCP 2. Restarting is only possible via the
LCP 2 [START] key.
MG.03.H6.02 - VLT® is a registered Danfoss trademark 29
195NA113
10
VLT® FCM Series
[JOG] overrides the output frequency to a preset frequency while
the key is kept down. Can be selected via parameter 015 to be active or inactive.
[FWD / REV] changes the direction of rotation of the motor, which
is indicated by means of the arrow
on the display although only in Local. Can be selected via parameter
016 to be active or inactive (parameter 013 must be set to [1] or
[3] and parameter 200 set to [1].
[START] is used for starting the FC
motor after stop via the [Stop] key.
Is always active, but cannot override a stop command given via the
terminal strip.
NB!
If the keys for local control have been selected as active, they will remain active
both when the frequency has been set for
Local Control and for Remote Control via
parameter 002, although with the exception of [FWD/REV], which is only active in
Local operation.
NB!
If no external stop function has been selected and the [STOP] key has been selected as inactive via parameter 014, the
FC motor can be started and can only be
stopped by disconnecting the voltage to
the motor.
Display mode - selection of read-out state
There are three options in connection with the choice
of read-out state in the Display mode - I, II and III. The
choice of read-out state determines the number of operating variables read out.
Read-out state: I: II: III:
Line 1 Description for
operating variable in line 2
Data value for 3
operating variables in line 1
Description for 3
operating variables in line 1
The table below gives the units linked to the variables
in the first and second line of the display (see parameter 009).
Operating variable: Unit:
Reference [%]
Reference [unit]*
Feedback [unit]*
Frequency [Hz]
Frequency x scaling [-]
Motor current [A]
Torque [%]
Power [kW]
Power [HP]
Motor voltage [V]
DC-link voltage [V]
FC thermal [%]
Hours run [Hours]
Input status, dig. Input [Binary code]
External reference [%]
Status word [Hex]
Heat sink temp. [ºC]
Alarm word [Hex]
Control word [Hex]
Warning word 1 [Hex]
Warning word 2 [Hex]
Analog input 1 [mA]
Analog input 2 [V]
*) Select in parameter 416. The unit is shown in readout state 1 line 1
otherwise 'U' is shown.
Operating variables 1,1 and 1,2 and 1,3 in the first line,
and operating variable 2 in the second line are selected via parameter 009, 010, 011 and 012.
• Read-out state I:
Display read-out state
The display read-out state can be varied - see the list
This read-out state is standard after starting up or after
initialisation.
on page 32 - depending on whether the FC motor is in
normal operation or is being programmed.
Display mode
In normal operation, up to 4 different operating varia-
FREQUENCY
50.0 Hz
bles can be indicated continuously: 1,1 and 1,2 and 1,3
and 2, and in line 4 the present operating status or
MOTOR IS RUNNING
alarms and warnings that have arisen.
Line 2 gives the data value of an operating variable
VAR 1.1 VAR 1.2 VAR 1.3
.
VAR 2
SETUP
1
STATUS
30 MG.03.H6.02 - VLT® is a registered Danfoss trademark
with related unit, and line 1 provides a text which explains line 2, cf. table. In the example, Frequency has
been selected as variable via parameter 009. During
normal operation another variable can immediately be
read out by using the [+/-] keys.
• Read-out state II:

VLT® FCM Series
Switching between read-out states I and II is effected
by pressing the [DISPLAY / STATUS] key.
24.3% 30.2% 13.8A
50.0 Hz
MOTOR IS RUNNING
In this state, data values for four operating values are
shown at the same time, giving the related unit, cf. table. In the example, Reference, Torque, Current and
Frequency are selected as variables in the first and
second line.
• Read-out state III:
This read-out state can be held as long as the [DISPLAY/STATUS] key is pressed. When the key is released, the system switches back to Read-out state II,
unless the key is pressed for less than approx. 1 sec.
REF% TORQUE CURR A
In addition to having a name, each parameter is linked
up with a number which is the same regardless of the
programming mode. In the Menu mode, the parameters are divided into groups, with the first digit of the
parameter number (from the left) indicating the group
number of the parameter in question.
Regardless of the mode of programming, a change of
a parameter will take effect and be visible both in the
Menu mode and in the Quick menumode.
Quick Setup via Quick menu
The Quick Setup starts with pressing the [QUICK
MENU] key, which brings out the following read-out on
the display:
QUICK MENU X OF Y
50.0 Hz
SETUP
1
001 LANGUAGE
ENGLISH
SETUP
50.0 Hz
1
MOTOR IS RUNNING
This is where parameter names and units for operating
variables in the first line are given - operating variable
2 remains unchanged.
Quick menu mode versus Menu mode
The FC motor series can be used for practically all assignments, which is why the number of parameters is
quite large. Also, this series offers a choice between
two programming modes - a Menu mode and a Quick
menu mode.
• The Quick menu takes the user through a
number of parameters that may be enough to
get the motor to run nearly optimally, if the
factory setting for the other parameters takes
the desired control functions into account, as
well as the configuration of signal inputs/outputs (control terminals).
At the bottom of the display, the parameter number
and name are given together with the status/value of
the first parameter under Quick Setup. The first time
the [Quick Menu] key is pressed after the unit has been
switched on, the read-outs will always start at pos. 1 see table below.
Parameter selection
The selection of parameter is effected by means of the
[+/-] keys. The following parameters are accessible:
Pos.: No.: Parameter: Unit:
1 001 Language
2 200 Direction of rotation
3 101 Torque characteristic
4 204 Min. reference [Hz]
5 205 Max. reference [Hz]
6 207 Ramp up time [sec.]
7 208 Ramp down time [sec.]
8 002 Local/remote control
9 003 Local reference
10 500 Bus address
• The Menu mode makes it possible to select
and change all parameters at the user's option. However, some parameters will be
"missing", depending on the choice of configuration (parameter 100), e.g. open loop
hides all the PID parameters.
MG.03.H6.02 - VLT® is a registered Danfoss trademark 31

VLT® FCM Series
Menu mode
The Menu mode is started by pressing the [MENU]
key, which produces the following read-out on the display:
FREQUENCY
50.0 Hz
0 KEYB.&DISPLAY
Line 3 on the display shows the parameter group number and name.
Parameter groups
In the Menu mode the parameters are divided into
groups. Selection of parameter group is effected by
means of the [<>] keys.
The following parameter groups are accessible:
Group no.
0 Operation & Display
1 Load & Motor
2 References & Limits
3 Inputs & Outputs
4 Special functions
5 Serial communication
6 Technical functions
*For information on parameter group 800 and 900 for
PROFIBUS, please see the FCM Profibus manual
MG.03.EX.YY.
When the desired parameter group has been selected,
each parameter can be chosen by means of the [+/-]
keys:
Parameter group:
line 4 will flash on the display. The procedure for
changing data depends on whether the selected parameter represents a numerical data value or a text
value.
Changing a text value
If the selected parameter is a text value, the text value
is changed by means of the [+/-] keys.
FREQUENCY
50.0 Hz
001 LANGUAGE
ENGLISH
The bottom display line shows the text value that will
be entered (saved) when acknowledgement is given
[OK].
Infinitely variable change of numeric data value
If the chosen parameter represents a numeric data
value, a digit is first selected by means of the [<>] keys.
FREQUENCY
50.0 Hz
130 START FREQUENCY
09.0 HZ
Then the chosen digit is changed infinitely variably by
means of the [+/-] keys:
SETUP
1
FREQUENCY
FREQUENCY
50.0 Hz
50.0 Hz
001 LANGUAGE
ENGLISH
The 3rd line of the display shows the parameter number and name, while the status/value of the selected
parameter is shown in line 4.
Changing data
Regardless of whether a parameter has been selected
under the Quick menu or the Menu mode, the procedure for changing data is the same. Pressing the
[CHANGE DATA] key gives access to changing the
selected parameter, following which the underlining in
32 MG.03.H6.02 - VLT® is a registered Danfoss trademark
130 START FREQUENCY
10.0 HZ
The chosen digit is indicated by the digit flashing. The
bottom display line shows the data value that will be
entered (saved) when signing off with [OK].
SETUP
1

Menu structure
DISPLAY MODE
VAR 1.1 VAR 1.2 VAR 1.3
▲
VAR 2
STATUS
VLT® FCM Series
▲
▲
MENU MODE
FREQUENCY
50.0 HZ
0 KEYB.&DISPLAY
Choice of
parameter
DATA MODE
FREQUENCY
50.0 HZ
001 LANGUAGE
ENGLISH
▲
Choice of
group
▲
QUICK MENU MODE
QUICK MENU 1 OF 13
▲
▲
▲
50.0 HZ
001 LANGUAGE
ENGLISH
▲
DATA CHANGE MODE
FREQUENCY
50.0 HZ
001 LANGUAGE
ENGLISH
175ZA446.11
MG.03.H6.02 - VLT® is a registered Danfoss trademark 33
Choice of
data value
DATA CHANGE MODE
QUICK MENU 1 OF 13
50.0 HZ
001 LANGUAGE
ENGLISH

VLT® FCM Series
Parameter Group 0-** Operation/Display
001 Language
(LANGUAGE)
Value:
English (ENGLISH) [0]
German (DEUTSCH) [1]
French (FRANCAIS) [2]
Danish (DANSK) [3]
Spanish (ESPAÑOL) [4]
Italian (ITALIANO) [5]
State when delivered may vary from factory setting.
Function:
The choice in this parameter defines the language to
be used on the display.
Description of choice:
There is a choice of English [0], German[1], French [2],
Danish [3], Spanish [4] and Italian [5].
002 Local/remote control
(OPERATION SITE)
Value:
Remote control (REMOTE) [0]
Local control (LOCAL) [1]
Function:
There is a choice of two methods of controlling the FC
motor: Remote control [0] and Local control [1].
Description of choice:
If Remote control [0] is selected, the FC motor can be
controlled via:
1. The control terminals or the serial communication port .
2. The [START] key. However, this cannot overrule Stop commands (also start-disable) entered via the digital inputs or the serial
communication port.
3. The [STOP], [JOG] and [RESET] keys, provided that these are active (see parameters
014, 015 and 017).
If Local control [1] is selected, the FC motor can be
controlled via:
1. The [START] key. However, this cannot override Stop commands on the digital terminals
(if [2] or [4] has been selected in parameter
013).
2. The [STOP], [JOG] and [RESET] keys, provided that these are active (see parameters
014, 015 and 017).
3. The [FWD/REV] key, provided that this has
been activated in parameter 016 and that in
parameter 013 a choice of [1] or [3] has been
made.
4. Via parameter 003 the local referencecan be
controlled by means of the "Arrow up" and
"Arrow down" keys.
003 Local reference
(LOCAL REFERENCE)
Value:
Par 013 set for [1] or [2]:
0 - f
MAX
000.000
Par 013 set for [3] or [4] and par. 203
= [0] set for:
Ref
MIN
- Ref
MAX
000.000
Par 013 set for [3] or [4] and par. 203
= [1] set for:
MAX
- + Ref
MAX
000.000
-Ref
Function:
This parameter allows manual setting of the desired
reference value (speed or reference for the selected
configuration, depending on the choice made in parameter 013).
The unit follows the configuration selected in parameter 100, provided that Process regulation, closed loop
[3] has been selected.
Description of choice:
Local [1] must be selected in parameter 002 for this
parameter to be used.
The set value is saved in the case of a voltage dropout,
see parameter 019.
In this parameter Data Change Mode is not exited automatically (after time out).
Local reference cannot be set via the serial communication port.
Warning: Since the value set is remembered after the power has been cut, the
motor may start without warning when the
power is reinstated; if parameter 019 is
changed to Auto restart, use saved ref.
[0].
= factory setting, () = display text, [] = value for use in communication via serial communication port
34 MG.03.H6.02 - VLT® is a registered Danfoss trademark

VLT® FCM Series
004 Active Setup
(ACTIVE SETUP)
Value:
Factory Setup (FACTORY SETUP) [0]
Setup 1 (SETUP 1) [1]
Setup 2 (SETUP 2) [2]
Multi Setup (MULTI SETUP) [5]
Function:
The choice in this parameter defines the Setup number
you want to control the functions of the FC motor.
All parameters can be programmed in two individual
parameter Setups, Setup 1 and Setup 2. In addition,
there is a pre-programmed Setup, called Factory Setup, that cannot be modified.
Description of choice:
Factory Setup [0] contains the factory data. Can be
used as a data source if the other Setups are to be
returned to a known state.
Parameters 005 and 006 allow copying from one Setup to the other.
Setups 1 [1] and 2 [2] are two individual Setups that
can be selected as required.
Multi-Setup [5] is used if remote-mounting switching
between Setups is desired. Terminals 2, 3, 4, and 5 as
well as the serial communication port can be used for
switching between Setups.
Setups 1 [1] and 2 [2] are individual Setups which can
be used as required. They can be programmed freely,
regardless of the Setup selected as the Active Setup
and thus controlling the functions of the FC motor.
NB!
If a general change of data or a copying to
the Active Setup is effected, this immediately affects the functioning of the unit.
006 Copying of Setups
(SETUP COPY)
Value:
No copying (NO COPY) [0]
Copy to Setup 1 from # (COPY TO SETUP 1) [1]
Copy to Setup 2 from # (COPY TO SETUP 2) [2]
Copy to Setup all from # (COPY TO ALL) [5]
# = the Setup selected in parameter 005
Function:
A copy is made from the Setup selected in parameter
005 to one of the other Setups or to all the other Setups
simultaneously.
NB!
Copying is only possible in Stop Mode
(motor stopped on a Stop command).
Copying will take max. 3 seconds and has
ended when parameter 006 has returned
to value 0.
005 Programming Setup
(EDIT SETUP)
Value:
Factory Setup (FACTORY SETUP) [0]
Setup 1 (SETUP 1) [1]
Setup 2 (SETUP 2) [2]
Active Setup (ACTIVE SETUP) [5]
Function:
The choice is of the Setup in which programming
(change of data) is to occur during operation. It is possible to programme the two Setups independently of
the Setup selected as the Active Setup (selected in
parameter 004).
Description of choice:
The Factory Setup [0] contains the factory data and can
be used as a data source if the other Setups are to be
returned to a known state.
= factory setting, () = display text, [] = value for use in communication via serial communication port
MG.03.H6.02 - VLT® is a registered Danfoss trademark 35
007 LCP copy
(LCP COPY)
Value:
No copying (NO COPY) [0]
Upload all parameters (UPLOAD ALL PAR-
AM) [1]
Download all parameters (DOWNLOAD ALL) [2]
Download power-independent par.
(DOWNLOAD SIZE INDEP.) [3]
Function:
Parameter 007 is used if it is desired to use the integrated copying function of the control panel. You can
therefore easily copy parameter value(s) from one FC
motor to another.

VLT® FCM Series
Description of choice:
Select Upload all parameters [1] if all parameter values
are to be transmitted to the control panel. Select
Download all parameters [2] if all transmitted parameter
values are to be copied to the FC motor on which the
control panel has been mounted. Select Download
power-independent par. [3] if only the power-independent parameters are to be downloaded. This is used if
downloading to a FC motor that has a different rated
power than the one from where the parameter Setup
originates.
NB!
Uploading/Downloading can only be carried out in the Stop mode and only between units with the same
major database version (see par. 626 value
major.minor)
008 Display scaling of motor frequency
(FREQUENCY SCALE)
Value:
0.01 - 100.00 [1 - 10000]
1.00 [100]
Function:
This parameter chooses the factor to be multiplied by
the motor frequency, f
, for presentation in the display,
M
when parameters 009-012 have been set for Frequency x Scaling [5].
Description of choice:
Set the desired scaling factor.
Power [HP] (POWER [hp] [US]) [9]
Motor voltage [V] (MOTOR VOLTAGE [V]) [11]
DC link voltage [V] (DC LINK VOLTAGE [V]) [12]
Thermal load, FC [%] (FC THERMAL [%]) [14]
Hours run [Hours] (RUNNING HOURS) [15]
Digital input [Binary code] (DIGITAL INPUT
[BIN]) [16]
External reference [%] (EXTERNAL REF
[%]) [21]
Status word [Hex] (STATUS WORD [HEX]) [22]
Heat sink temp. [°C] (HEATSINK TEMP [°C]) [25]
Alarm word [Hex] (ALARM WORD [HEX]) [26]
Control word [Hex] (CONTROL WORD
[HEX]) [27]
Warning word 1 [Hex]
(WARNING WORD 1 [HEX]) [28]
Warning word 2 [Hex]
(EXTENDED STATUS WORD [HEX]) [29]
Analog input 1 [mA] (ANALOG INPUT 1
[mA]) [30]
Analog input 2 [V] (ANALOG INPUT 2 [V]) [31]
Function:
This parameter allows a choice of the data value to be
displayed in line 2 of the display.
Parameters 010-012 enable the use of three additional
data values to be displayed in line 1.
For display read-outs, press the [DISPLAY/STATUS]
button, see also page 31.
NB!
In parameter 009, "none" [0] cannot be
selected.
009 Display line 2
(DISPLAY LINE 2)
Value:
None [0]
Reference [%] (REFERENCE [%]) [1]
Reference [unit] (REFERENCE [UNIT]) [2]
Feedback [unit] (FEEDBACK [UNIT]) [3]
Frequency [Hz] (FREQUENCY [Hz]) [4]
Frequency x Scaling [-] (FREQUENCY X
SCALE) [5]
Motor current [A] (MOTOR CURRENT [A]) [6]
Torque [%] (TORQUE [%]) [7]
Power [kW] (POWER [kW]) [8]
= factory setting, () = display text, [] = value for use in communication via serial communication port
36 MG.03.H6.02 - VLT® is a registered Danfoss trademark
Description of choice:
Reference [%] corresponds to the total reference (sum
of digital/analogue/preset/bus/freeze ref./ catch-up
and slow-down).
Reference [unit] gives the sum of the references using
the unit stated on the basis of configuration in parameter 100 (Hz, Hz and rpm).
Feedback [unit] gives the status value of terminal 1 and
2 using the unit/scale selected in parameter 414, 415
and 416.
Frequency [Hz] gives the motor frequency, i.e. the output frequency to the motor.
Frequency x Scaling [-] corresponds to the present motor frequency f
multiplied by a factor (scaling) set in
M
parameter 008.

VLT® FCM Series
Motor current [A] states the phase current of the motor
measured as effective value.
Torque [%] gives the current motor load in relation to
the rated motor torque.
Power [kW] states the actual power consumed by the
motor in kW.
Power [HP] states the actual power consumed by the
motor in HP.
Motor voltage [V] states the voltage supplied to the
motor.
DC link voltage [V] states the intermediate circuit voltage in the FC motor.
Thermal load, FC [%] states the calculated/ estimated
thermal load on the FC motor. 100% is the cut-out limit.
Hours run [Hours] states the number of hours that the
motor has run since the latest reset in parameter 619.
Digital input [Binary code] states the signal states from
the 4 digital terminals (2, 3, 4 and 5). Input 5 corresponds to the bit at the far left. '0' = no signal, '1' =
connected signal.
External reference [%] gives the sum of the external
reference as a percentage (the sum of analogue/
pulse/bus).
Status word [Hex] gives the status word sent via the
serial communication port in Hex code from the FC
motor.
Heat sink temp. [°C] states the present heat sink temperature of the FC motor. The cut-out limit is 90 ± 5°C;
cutting back in occurs at 60 ± 5°C.
Alarm word [Hex] indicates one or several alarms in a
Hex code. See page 74.
Control word [Hex] indicates the control word for the
FC motor. See Serial communication.
Warning word 1 [Hex] indicates one or more warnings
in a Hex code. See page 74 for further information.
Extended status word [Hex] indicates one or more status states in a Hex code. See page 74 for further
information.
Analog input 1 [mA] states the signal value on terminal
1.
Analog input 2[V] states the signal value on terminal 2.
Function:
This parameter enables a choice of the first of three
data values to be shown on the display, line 1, position
1.
Description of choice:
There is a choice of 24 different data values, see parameter 009.
011 Display line 1.2
(DISPLAY LINE 1.2)
Value:
Motor current [A] [1]
See parameter 009
Function:
This parameter enables a choice of the second of the
three data values to be shown on the display, line 1,
position 2.
For Display read-outs, press the [DISPLAY/STATUS]
button, see also page 31.
Description of choice:
There is a choice of 24 different data values, see parameter 009.
012 Display line 1.3
(DISPLAY LINE 1.3)
Value:
Power [kW] [8]
See parameter 009
Function:
This parameter enables a choice of the third of the
three data values to be shown on the display, line 1,
position 3.
Display read-outs are made by pressing the [DISPLAY/STATUS] button, see also page 31.
010 Display line 1.1
(DISPLAY LINE 1.1)
Value:
Reference [%] [1]
See parameter 009.
= factory setting, () = display text, [] = value for use in communication via serial communication port
MG.03.H6.02 - VLT® is a registered Danfoss trademark 37
Description of choice:
There is a choice of 24 different data values, see parameter 009.

VLT® FCM Series
013
Local Control/Configuration as parameter 100
(LOCAL CTRL/CONFIG.)
Value:
Local not active (DISABLE) [0]
LCP control and open loop.
(LCP CTRL/OPEN LOOP) [1]
LCP digital control and open loop.
(LCP+DIG CTRL/OP.LOOP) [2]
LCP control/as parameter 100.
(LCP CTRL/AS P100) [3]
LCP digital control/as parameter 100.
(LCP+DIG CTRL/AS P100) [4]
Function:
This is where the desired function is to be selected if
Local control has been chosen in parameter 002. See
also the description of parameter 100.
Description of choice:
If Local not active [0] is selected, a possible setting of
Local reference via parameter 003 is blocked. It is only
possible to change to Local not active [0] from one of
the other setting options in parameter 013, when the
FC motor has been set to Remote control [0] in parameter 002.
LCP control and open loop [1] is used when the speed
is to be adjustable (in Hz) via parameter 003, when the
FC motor has been set to Local control [1] in parameter
002.
If parameter 100 has not been set to Speed regulation
open loop [0], switch to Speed regulation open loop [0].
LCP digital control and open loop [2] functions as LCP
control and open loop [1], the only difference being that
when parameter 002 has been set to Local operation
[1], the motor is controlled via the digital inputs.
does not correspond to the reversing signal (negative
reference), the motor frequency f
will be set at 0 Hz.
M
Shift from LCP digital control and open loop to Remote
control:
The selected configuration (parameter 100) will be active. Shifts are effected without any abrupt movement.
Shift from Remote control to LCP control/as parameter
100 or LCP digital control/as parameter 100.
The present reference will be maintained. If the reference signal is negative, the local reference will be set
at 0.
Shift from LCP control/as parameter 100 or LCP re-
mote control as parameter 100 to Remote control.
The reference will be replaced by the active reference
signal from the remote control..
014 Local stop
(LOCAL STOP)
Value:
Not possible (DISABLE) [0]
Possible (ENABLE) [1]
Function:
This parameter disables/enables the local stop function in question from the control panel. This key is used
when parameter 002 has been set for Remote control
[0] or Local [1].
Description of choice:
If Disable [0] is selected in this parameter, the [STOP]
key will be inactive.
NB!
If Enable is selected, the [STOP] key overrules all Start commands.
LCP control/as parameter 100 [3] is selected if the reference is to be set via parameter 003.
LCP digital control/as parameter 100 [4] functions as
LCP control/as parameter 100 [3], although, when pa-
rameter 002 has been set to Local operation [1], the
motor may be controlled via the digital inputs.
NB!
Shift from Remote control to LCP digital
control and open loop:
015 Local jog
(LOCAL JOGGING)
Value:
Not possible (DISABLE) [0]
Possible (ENABLE) [1]
Function:
In this parameter, the jog function can be enabled/ disabled on the control panel.
The present motor frequency and direction of rotation
must be maintained. If the present direction of rotation
= factory setting, () = display text, [] = value for use in communication via serial communication port
38 MG.03.H6.02 - VLT® is a registered Danfoss trademark

VLT® FCM Series
Description of choice:
If Disable [0] is selected in this parameter, the [JOG]
key will be inactive.
016 Local reversing
(LOCAL REVERSING)
Value:
Not possible (DISABLE) [0]
Possible (ENABLE) [1]
Function:
In this parameter, the reversing function can be enabled/disabled on the control panel. This key can only
be used if parameter 002 has been set to Local oper-
ation [1] and parameter 013 to LCP control with open
loop [1] or LCP control as parameter 100 [3].
Description of choice:
If Disable [0] is selected in this parameter, the [FWD/
REV] key will be inactive.
See parameter 200.
Locked (LOCKED) [1]
Function:
In this parameter, the software can "lock" the control,
which means that data changes cannot be made via
LCP 2 (however, this is still possible via the serial communication port).
Description of choice:
If Locked [1] is selected, data changes cannot be
made.
019
Value:
Auto restart, use saved ref. (AUTO RESTART) [0]
Forced stop, use saved ref. (LOCAL=STOP) [1]
Forced stop, set ref. to 0 (LOCAL=STOP,
REF=0) [2]
Operating state at power up, local control
(POWER UP ACTION)
017 Local reset of trip
(LOCAL RESET)
Value:
Not possible (DISABLE) [0]
Possible (ENABLE) [1]
Function:
In this parameter, the reset function can be selected/
removed from the keyboard. This key can be used
when parameter 002 has been set for Remote control
[0] or Local control [1].
Description of choice:
If Disable [0] is selected in this parameter, the [RESET]
key will be inactive.
NB!
Only select Disable [0] if an external reset
signal has been connected via the digital
inputs.
018 Lock for data change
(DATA CHANGE LOCK)
Value:
Not locked (NOT LOCKED) [0]
Function:
Setting of the desired operating mode when the mains
voltage is reconnected.
This function can only be active in connection with
Local control [1] in parameter 002.
Description of choice:
Auto restart, use saved ref. [0] is selected if the unit is
to start up with the same local reference (set in parameter 003) and the same start/stop conditions (given
via the [START/STOP] keys) that the FC motor had
before it was switched off.
Forced stop, use saved ref. [1] is used if the unit is to
remain stopped when the mains voltage is connected,
until the [START] key is pressed. After the start command, the local reference used is set in parameter 003.
Forced stop, set ref. to 0 [2] is selected if the unit is to
remain stopped when the mains voltage is connected.
Local reference (parameter 003) is reset.
NB!
In remote controlled operation (parameter
002), the start/stop condition at power up
will depend on the external control signals. If Latched start is selected in parameter 332-335, the motor will remain stopped at power up.
= factory setting, () = display text, [] = value for use in communication via serial communication port
MG.03.H6.02 - VLT® is a registered Danfoss trademark 39
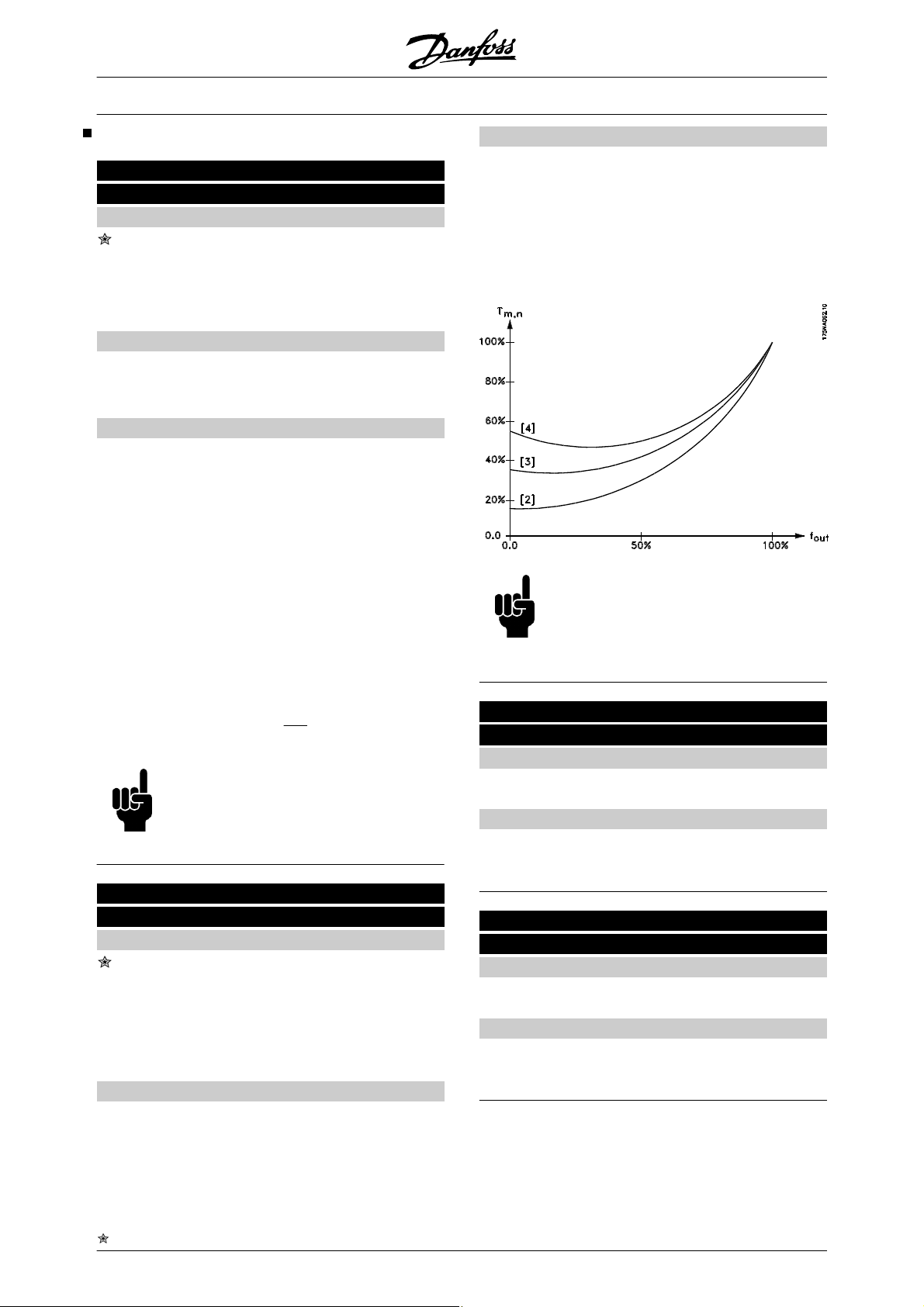
VLT® FCM Series
Parameter Group 1-** Load/Motor
100 Configuration
(CONFIG. MODE)
Value:
Speed, open loop mode (SPEED OPEN
LOOP) [0]
Process, closed loop mode
(PROCESS CLOSED LOOP) [1]
Function:
This parameter is used for selecting the configuration
to which the FC motor is to be adapted.
Description of choice:
If Speed, open loop mode [0] is selected, a normal
speed control (without feedback signal) is obtained,
but with automatic slip compensation, ensuring a nearly constant speed at varying loads. Compensations
are active, but may be disabled as required in parameter 133 - 136.
If Process, closed loop mode [3] is selected, the internal process regulator will be activated, thereby enabling accurate regulation of a process with respect to
a given process signal. The process signal can be set
using the actual process unit or as a percentage. A
feedback signal must be supplied from the process,
and the process setpoint must be adjusted. In process
closed loop both directions is
200.
NB!
This is only possible in Stop Mode (motor
stopped on a Stop command).
not allowed in parameter
Description of choice:
If Constant torque [1] is selected, a load-dependent U/
f characteristic is obtained in which the output voltage
is increased in the case of an increasing load (current)
so as to maintain constant magnetisation of the motor.
Select Variable torque low [2], Variable torque medi-
um [3] or Variable torque high [4] if the load is square
(centrifugal pumps, fans).
NB!
Slip compensation (parameter 136) and
start (parameter 134) are not active if a
variable torque is used.
102 Motor power
(MOTOR POWER)
Value:
XX.XX kW - depends on the FC motor [XXXX]
Function:
Read only parameter.
101 Torque characteristics
(TORQUE CHARACT)
Value:
Constant torque (CONSTANT TORQUE) [1]
Variable torque: low (VAR.TORQUE: LOW) [2]
Var. torque: medium (VAR.TORQUE: MEDI-
UM) [3]
Variable torque: high (VAR.TORQUE: HIGH) [4]
Function:
In this parameter, the principle for adjusting the U/f
characteristics of the FC motor to the torque characteristics of the load is selected.
= factory setting, () = display text, [] = value for use in communication via serial communication port
40 MG.03.H6.02 - VLT® is a registered Danfoss trademark
103 Motor voltage
(MOTOR VOLTAGE)
Value:
XX V- depends on the FC motor [XX]
Function:
Read only parameter.

VLT® FCM Series
104 Motor frequency
(MOTOR FREQUENCY)
Value:
XX.X Hz - depends on the FC motor [XXX]
Function:
Read only parameter.
105 Motor current
(MOTOR CURRENT)
Value:
XX.X X A- depends on the FC motor. [XXXX]
Function:
Read only parameter.
106 Rated motor speed
(MOTOR NOM. SPEED)
Value:
XX rpm - depends on the FC motor [XX]
The system torque is estimated based on the DC-link
and fed back to a proportional gain controller.
At a unit dependent level of active motor current the
controller is disabled.
Description of choice:
Set the grade of proportional gain for the torque feedback between 0% (OFF) and 100%.
118 Resonance damping cut out
(RESONANCE CUT OUT)
Value:
0-200% [0-200]
Motor dependent
Function:
High-frequency resonance can be eliminated by setting parameter 117 and 118.
Description of choice:
Adjust the percentage of load from where the resonance damping function should no longer be active.
Function:
Read only parameter.
117 Resonance damping
(RESONANCE DAMP.)
Value:
OFF - 100% [OFF -100]
OFF %. [OFF]
Function:
It is possible to optimise the resonance damping. The
grade of the influence is adjusted in this parameter.
The value may be set between 0% (OFF) and 100%.
100% corresponds to the unit dependent max. allowed
proportional gain. Default value is OFF.
NB!
Vibrations cannot be removed in all cases
at no load function or high switching frequency. Vibrations are motor dependent.
Description of functionality:
126 DC braking time
(DC BRAKING TIME)
Value:
0.0 - 60.0 sec. [0-600]
10.0 sec. [100]
DC braking see P132
Function:
This parameter is for setting the DC braking time for
which the DC braking voltage (parameter 132) is to be
active.
0.0 sec. = OFF
Description of choice:
Set the desired time.
127 DC brake cut-in frequency
(DC BRAKE CUT-IN)
Value:
0.0 - f
(parameter 202)
MAX
[0 -]
0.0 Hz = OFF [0]
DC braking see P132
= factory setting, () = display text, [] = value for use in communication via serial communication port
MG.03.H6.02 - VLT® is a registered Danfoss trademark 41

VLT® FCM Series
Function:
This parameter is for setting the DC brake cut-in frequency at which the DC braking voltage (parameter
132) is to be active, in connection with a Stop command.
Description of choice:
Set the desired frequency.
128 Motor thermal protection
(MOTOR THERM. PROTEC.)
Value:
No protection (NO PROTECTION) [0]
Function:
Read only parameter
Please refer to section FCM 300 Thermal protection.
132 DC braking voltage
(DC BRAKE VOLTAGE)
Value:
0 - 100 % [0-100]
0 % [0]
Function:
DC braking:
If the stator in an asynchronous is supplied with DC
voltage, a braking torque will arise.
The braking torque depends on the selected DC braking voltage.
For applying a braking torque by means of DC braking
the rotating field (AC) in the motor is exchanged with
a stationary field (DC)˙
The DC braking will be active when below cut in frequency and stop is activated at the same time. P126,
P127 and P132 are used for the control of the DC
braking.
The DC braking can also be activated directly by a
digital input.
Function:
The braking torque depends on the selected DC braking voltage. The DC braking voltage is stated as a
percentage of maximum braking voltage.
NB!
The DC braking voltage cannot be used
as a holding brake.
133 Start voltage
(START VOLTAGE)
Value:
0.00 - 100.00 V [0-10000]
Depends on motor
Function:
You can set the motor voltage below the field weakening point independently of the motor current. Use
this parameter to compensate too low starting torque.
The start voltage is the voltage at 0 Hz.
NB!
If the start voltage is set too high, it can
lead to magnetic saturation and motor
overheating; the FC motor may trip.
Therefore take care when using the start
voltage.
Description of choice:
Set the desired start voltage.
134 Load compensation
(LOAD COMPENSATION)
Value:
0.0 - 300.0 % [0-3000]
100.0 % [1000]
Function:
In this parameter, the load characteristic is set. By increasing the load compensation, the motor is given an
extra voltage and frequency supplement at increasing
loads. This is used e.g. in motors/applications in which
there is a big difference between the full-load current
and idle-load current of the motor.
NB!
If the value is too high the FC motor can
trip due to overcurrent.
Description of choice:
Set the desired voltage as a specified percentage of
maximum braking voltage.
= factory setting, () = display text, [] = value for use in communication via serial communication port
42 MG.03.H6.02 - VLT® is a registered Danfoss trademark
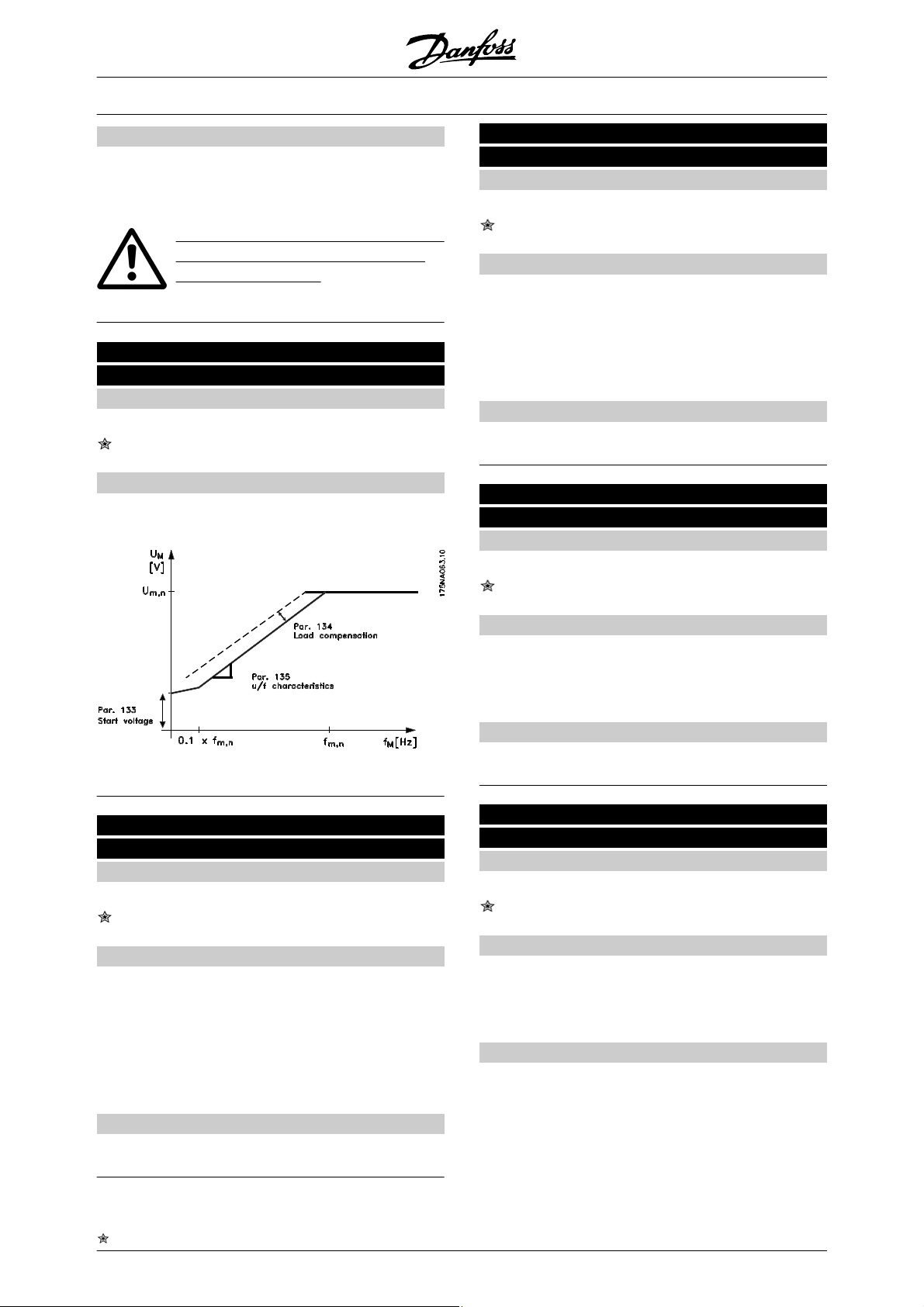
VLT® FCM Series
Description of choice:
If the factory setting is not adequate, load compensation must be set to enable the motor to start at the given
load.
Should be set to 0% in case of quick load
changes. Too high load compensation
may lead to instability.
135 U/f ratio
(U/F RATIO)
Value:
0.00 - 20.00 V/Hz [0-2000]
Motor dependent
Function:
The output voltage to the motor can be adjusted on a
linear basis from 0 to rated frequency.
137 DC holding voltage
(DC HOLD VOLTAGE)
Value:
0 - 100 % [0-100]
0 (OFF) % [0]
Function:
This parameter is used to uphold the motor function
(holding torque) or to pre-heat the motor. DC holding
voltage is active at stopped motor when it is set at a
value which is different from 0. Coasting stop will deactivate the function.
Description of choice:
Enter a percentage value.
138 Brake cut out frequency
(BRAKE RELEASE)
Value:
0.5 - 132 Hz (parameter 200) [5-]
3.0 Hz [30]
136 Slip compensation
(SLIP COMP.)
Value:
-500.0 - +500.0 % [-5000 - +5000]
100.0 % [1000]
Function:
The rated slip compensation (factory setting) is calculated on the basis of the motor parameters. In parameter 136 the slip compensation can be adjusted in
detail. Optimizing makes the motor speed less load
dependent. This function is not active at the same time
as variable torque (parameter 101).
Function:
Here the frequency at which the external brake is to be
released is selected via output set in parameter 323 or
340 during running.
Description of choice:
Set desired frequency.
139 Brake cut in frequency at activated stop
(BRAKE CUT IN)
Value:
0.5 - 132 Hz (parameter 200) [5-]
3.0 Hz [30]
Function:
Here the frequency at which the external brake is to be
activated is selected via output set in parameter 323
or 340 when the motor is ramping down to stop.
Description of choice:
Set the desired frequency.
See below speed profile for brake function.
Description of choice:
Enter a % value of rated slip compensation.
= factory setting, () = display text, [] = value for use in communication via serial communication port
MG.03.H6.02 - VLT® is a registered Danfoss trademark 43

147 Setup of motor type
(SETUP OF MOTOR TYPE)
Value:
Depends on unit
Function:
This is where to select the specific motor at which the
spare part unit is to be installed.
NB!
This parameter will only be changeable in
spare part units.
Please check software version number in
parameter 624.
If software version = 2.61:
After changing parameter 147, please set
parameter 620 to initialize [3] and power
off and on again.
If software version > 2.61:
After changing parameter 147, please
switch power off and on again.
Please note that the actions above will
put the drive into factory settings (except for parameters 500, and 600-605).
VLT® FCM Series
Description of choice:
Select the choice of motor according to motor brand,
numbers of poles and power size.
Example: ATB STD-4-075 means ATB 4 pole 0.75 kW
motor.
44 MG.03.H6.02 - VLT® is a registered Danfoss trademark

VLT® FCM Series
Parameter Group 2-** References/Limits
200 Rotation direction
(ROTATION)
Value:
Only clockwise,
(Only clockwise) [0]
Both directions,
0-132 Hz
(132 Hz BOTH DIRECTIONS) [1]
Only counterclockwise, 0-132 Hz
(132Hz COUNTERCLOCKW.) [2]
Function:
This parameter guarantees protection against unwanted reversing.
Using Process, closed loop mode (parameter 100) parameter 200 must
not be changed to Both directions
[1].
Description of choice:
Select the desired direction seen from the motor drive
end.
Note that if Only clockwise, 0-132 Hz [0] /Only coun-
terclockwise, 0-132 Hz [2] is selected, the output fre-
- f
quency will be limited to the range f
MIN
MAX
.
201 Min. output frequency
(MIN OUTPUT FREQ)
Value:
0.0 HZ - f
(parameter 202)
MAX
[0 -]
0.0 HZ [0]
Function:
In this parameter, a minimum motor frequency limit
can be selected that corresponds to the minimum frequency at which the motor is to run.
The minimum frequency can never be higher than the
maximum frequency, f
MAX
.
If Both directions has been selected in parameter 200,
the minimum frequency is of no significance.
Description of choice:
A value from 0.0 Hz to the max. frequency selected in
parameter 202 (f
) can be chosen.
MAX
202 Max. output frequency
(MAX OUTPUT FREQ)
Value:
(parameter 201) - f
f
MIN
f
RANGE
(132 Hz, par. 200)
RANGE
If Both directions, 0-132 Hz [1] is selected, the output
frequency will be limited to the range ± f
(the min-
MAX
imum frequency is of no significance).
NB!
This is only possible in Stop Mode (motor
stopped on a Stop command). Ramp will
be followed, if no set up change.
NB!
If parameter 200, selection of direction, is
set for different values in the 2 setups, and
the setup is changed during operation, the
direction changes without ramping. In
such cases trip may occur and that may
reduce the service life of the power module, as well as it may be harmful to the
application.
Therefore!
It is recommended
not to set parameter 200 for different values in the 2 setups. If that should be necessary the user must make sure that setup changes are
only made with stopped motor.
Function:
In this parameter, a maximum motor frequency can be
selected that corresponds to the highest frequency at
which the motor is to run.
See also parameter 205.
Description of choice:
A value from f
to 132 Hz can be selected.
MIN
203 Reference/feedback range
(REF/FEEDB. RANGE)
Value:
Min - Max (MIN - MAX) [0]
- Max - + Max (-MAX-+MAX) [1]
Function:
This parameter decides whether the reference signal
is to be positive or can be both positive and negative.
= factory setting, () = display text, [] = value for use in communication via serial communication port
MG.03.H6.02 - VLT® is a registered Danfoss trademark 45

NB!
Analogue input (reference/feedback) can
only be positive.
Choose Min - Max [0] if Process, closed loop mode has
been selected in parameter 100.
VLT® FCM Series
207 Ramp-up time 1
(RAMP UP TIME 1)
Value:
0.15 - 3600.00 sec. [5 -360000]
3.00 sec. [300]
Description of choice:
Choose the desired range.
204 Minimum reference
(MIN. REFERENCE)
Value:
-100,000.000 - Ref
(par. 205)
MAX
[-100000000 -]
0.000 [0]
Depends on parameter 100.
Function:
The Minimum reference gives the minimum setting that
can be assumed by the sum of all references.
Minimum reference is only active if Min - Max [0] has
been set in parameter 203; however, it is always active
in Process, closed loop mode (parameter 100).
Description of choice:
Is only active when parameter 203 has been set to Min
- Max [0].
Function:
The ramp-up time is the acceleration time from 0 Hz to
the rated motor frequency f
(parameter 104). This
M,N
presupposes that the current limit is not reached (to be
set in parameter 221).
Description of choice:
Program the desired ramp-up time.
Set the desired value.
205 Maximum reference
(MAX. REFERENCE)
Value:
(parameter
Ref
MIN
204)-100,000,000 [-100000000]
50.000 HZ [50000]
Function:
The Maximum reference gives the highest value that
can be assumed by the sum of all references. If parameter 100 has been selected to open loop the max.
setting is 132 Hz.
If closed loop has been selected the maximum reference cannot be set higher than the maximum feedback
(parameter 415).
Description of choice:
Set the desired value.
208 Ramp-down time 1
(RAMP DOWN TIME 1)
Value:
0.15 - 3600.00 sec. [5 - 360000]
3.00 sec. [300]
Function:
The ramp-down time is the deceleration time from the
rated motor frequency f
(parameter 104) to 0 Hz
M,N
provided there is no over-voltage in the inverter because of regenerative operation of the motor, and the
current limit is not reached (to be set in parameter
221).
Description of choice:
Program the desired ramp-down time.
= factory setting, () = display text, [] = value for use in communication via serial communication port
46 MG.03.H6.02 - VLT® is a registered Danfoss trademark

VLT® FCM Series
209 Ramp-up time 2
(RAMP UP TIME 2)
Value:
0.15 - 3600.00 sec. [5 -360000]
3.00 sec. [300]
Function:
The ramp-up time is the acceleration time from 0 Hz to
the rated motor frequency f
(parameter 104). This
M,N
presupposes that the current limit is not reached (to be
set in parameter 221).
Description of choice:
Program the desired ramp-up time.
Shift from ramp 1 to ramp 2 by activating ramp 2 via a
digital input.
210 Ramp-down time 2
(RAMP DOWN TIME 2)
Value:
0.15 - 3600.00 sec. [5 - 360000]
3.00 sec. [300]
Function:
The ramp-down time is the deceleration time from the
rated motor frequency f
(parameter 104) to 0 Hz
M,N
provided there is no over-voltage in the inverter because of regenerative operation of the motor, and the
current limit is not reached (to be set in parameter
221).
Description of choice:
Program the desired ramp-down time.
Shift from ramp 1 to ramp 2 by activating ramp 2 via a
digital input
tor, and the current limit is not reached (to be set in
parameter 221).
The jog ramp time starts if a jog signal is given via the
digital inputs or the serial communication port.
Description of choice:
Set the desired ramp time.
212 Quick stop ramp-down time
(Q STOP RAMP TIME)
Value:
0.15 - 3600.00 sec. [5 - 360000]
3.00 sec. [300]
Function:
The ramp-down time is the deceleration time from the
rated motor frequency to 0 Hz, provided there is no
over-voltage in the inverter because of regenerative
operation of the motor, and the current limit is not
reached (to be set in parameter 221).
Quick-stop is activated by means of a signal on one of
the digital input terminals (2-5), or via the serial communication port.
211 Jog ramp time
(JOG RAMP TIME)
Description of choice:
Program the desired ramp-down time.
Value:
0.15 - 3600.00 sec. [5 - 360000]
3.00 sec. [300]
Function:
The jog ramp time is the acceleration/deceleration
time from 0 Hz to the rated motor frequency f
M,N
(parameter 104), provided there is no over-voltage in the
inverter because of regenerative operation of the mo-
= factory setting, () = display text, [] = value for use in communication via serial communication port
MG.03.H6.02 - VLT® is a registered Danfoss trademark 47

VLT® FCM Series
213 Jog frequency
(JOG FREQUENCY)
Value:
0.0 HZ - parameter 202 [0 -]
10.0 HZ [100]
Function:
The jog frequency f
is the fixed output frequency at
JOG
which the FC motor is running when the jog function is
activated.
Description of choice:
Set the desired frequency.
214 Reference function
(REF FUNCTION)
Value:
Sum (SUM) [0]
External/preset (EXTERNAL/PRESET) [2]
Function:
It is possible to define how the preset references are
to be added to the other references. For this purpose,
Sum is used. It is also possible - by using the External/
preset function - to select whether a shift between ex-
ternal references and preset references is desired.
215 Preset reference 1
(PRESET REF. 1)
216 Preset reference 2
(PRESET REF. 2)
Value:
-100.00 % - +100.00 % [-10000 - +10000]
% of the reference range/external reference
0.00% [0]
Function:
Two different preset references can be programmed
in parameters 215-216.
The preset reference is stated as a percentage of the
value Ref
or as a percentage of the other external
MAX
references, depending on the choice made in parameter 214. If a Ref
≠ 0 has been programmed, the
MIN
preset reference as a percentage will be calculated on
the basis of the difference between Ref
, following the value is added to Ref
Ref
MIN
MAX
and
MIN
.
Description of choice:
Set the fixed reference(s) that is/are to be the options.
To use the fixed references, it is necessary to have
selected Preset ref. enable on terminal 2, 3, 4, or 5
(parameters 332 - 335).
Choices between fixed references can be made by
activating terminal 2, 3, 4, or 5 - see the table below.
Description of choice:
If Sum [0] is selected, one of the adjusted preset references (parameters 215-216) is added as a percentage of the maximum possible reference.
If External/preset [2] is selected, it is possible to shift
between external references or preset references via
terminal 2, 3, 4, or 5 (parameter 332, 333, 334, or 335).
Preset references will be a percentage value of the
reference range.
External reference is the sum of the analogue references, pulses and bus references.
NB!
If Sum is selected, one of the preset references will always be active. If the preset
references are to be without influence,
they should be set to 0 % (as in the factory
setting).
Terminals 2/3/4/5
Preset reference
Preset reference 1 0
Preset reference 2 1
NB!
The parameter 215-216 setting automatically will be the setting of parameter
241-242 as well. Parameter 241-247 can
be used for up to 7 preset references.
= factory setting, () = display text, [] = value for use in communication via serial communication port
48 MG.03.H6.02 - VLT® is a registered Danfoss trademark

219 Catch up/slow down value
(CATCH UP/SLW DWN)
Value:
0.00 - 100.00 % [0 - 10000]
0.00 % [0]
Function:
This parameter enables the entry of a percentage value (relative) which will either be added to or deducted
from the actual reference.
Description of choice:
If Catch up has been selected via one of the terminals
2, 3, 4, or 5 (parameters 332 - 335), the percentage
(relative) value selected in parameter 219 will be added to the total reference.
If Slow down has been selected via one of the terminals 2, 3, 4, or 5 (parameters 332 - 335), the percentage (relative) value selected in parameter 219 will be
deducted from the total reference.
VLT® FCM Series
221 Current limit for motor mode
(CURRENT LIMIT)
Value:
Min. limit (XX.X) - max. limit
(XXX.X)
in % of I
RATED
[XXX - XXXX]
Max. limit (XXX.X) [XXXX]
= rated motor current
I
RATED
Min. limit = magnetising current in % of I
Max. limit = unit dependent limit in % of I
RATED
RATED
Function:
This function is relevant for all application configurations; speed and process regulation. This is where to
set the current limit for motor operation.
Description of choice:
Set the desired % of current.
NB!
The setting is limited to 160%, but for motors with 2 poles (0.55 + 1.1 kW), the
setting is limited to 120% which corresponds to 160% torque, setting 73% corresponds to 100% torque.
229 Frequency bypass, bandwidth
(FREQ BYPASS B.W.)
Value:
0 (OFF) - 100% [0-100]
0 (OFF) % [0]
Function:
Some SYSTEMs call for some output frequencies to
be avoided because of resonance problems in the
SYSTEM.
In parameters 230-231 these output frequencies can
be programmed for bypassing (Frequency bypass). In
= factory setting, () = display text, [] = value for use in communication via serial communication port
MG.03.H6.02 - VLT® is a registered Danfoss trademark 49

VLT® FCM Series
this parameter (229), a bandwidth can be defined on
either side of these frequency bypasses.
Description of choice:
The bypass band is the bypass frequency +/- half the
set bandwidth.
A percentage of the setting in parameters 230-231 is
selected.
230 Frequency bypass 1
(FREQ. BYPASS 1)
231 Frequency bypass 2
(FREQ. BYPASS 2)
Value:
0.0 - 132 Hz (parameter 200) [0 -]
0.0 Hz [0]
Function:
Some SYSTEMs call for some output frequencies to
be avoided because of resonance problems in the
SYSTEM.
Function:
Seven different reference presets can be programmed
in parameters 241 - 247 reference preset. The reference preset is stated as a percentage of the value
Ref
or as a percentage of the other external refer-
MAX
ences, depending on the choice made in parameter
214. If a Ref
≠ 0 has been programmed, the refer-
MIN
ence preset as a percentage will be calculated on the
basis of the difference between Ref
lowing the value is added to Ref
MIN
MAX
.
and Ref
MIN
fol-
The choice between reference presets can be made
via the digital inputs or via serial communication.
Description of choice:
Set the fixed reference(s) that is/are to be the option.
See P332, P333, P334 and P335 Description of
choice, where the description of the digital input set up
is given.
Description of choice:
Enter the frequencies to be avoided.
See also parameter 229.
241 Reference preset 1
(REF PRESET 1)
242 Reference preset 2
(REF PRESET 2)
243 Reference preset 3
(REF PRESET 3)
244 Reference preset 4
(REF PRESET 4)
245 Reference preset 5
(REF PRESET 5)
246 Reference preset 6
(REF PRESET 6)
247 Reference preset 7
(REF PRESET 7)
Value:
-100.00 % - +100.00 % [-10000 - +10000]
% of the reference range/external reference
0.00% [0]
= factory setting, () = display text, [] = value for use in communication via serial communication port
50 MG.03.H6.02 - VLT® is a registered Danfoss trademark

VLT® FCM Series
Parameter Group 3-** Input/Output
317 Time out
(LIVE ZERO TIME OUT)
Value:
1 - 99 sec. [1 - 99]
10 sec. [10]
Function:
If the value of the reference signal connected to the
input, terminal 1, falls below 50% of the setting in parameter 336 for a period longer than the time set in
parameter 317, the function selected in parameter 318
will be activated.
Description of choice:
Set the desired time.
323 Terminal X102, relay function (RELAY FUNC.)
Settings:
No function
Ready signal (UNIT READY) [1]
Enable, no warning (ENABLE/NO WARNING) [2]
Running (RUNNING) [3]
Running, no warning (RUNNING NO WARNING) [4]
Running on reference, no warning (RUNNING ON REFERENCE) [5]
Fault (FAULT) [6]
Fault or warning (FAULT OR WARNING) [7]
Current limit (CURRENT LIMIT) [8]
Thermal warning (THERMAL WARNING) [9]
Reversing (REVERSE) [10]
Control word bit 11 (CONTROL WORD BIT 11) [11]
Control word bit 12 (CONTROL WORD BIT 12) [12]
Mechanical brake (MECHANICAL BRAKE) [20]
318 Function after time out
(LIVE ZERO FUNCT.)
Value:
Off (OFF) [0]
Stop and trip (STOP AND TRIP) [5]
Function:
This parameter allows a choice of the function to be
activated if the value of the reference signal connected
to the input, terminal 1, falls below 50% of the setting
in parameter 336 for a period longer than the time set
in parameter 317.
If a time-out function (parameter 318) occurs at the
same time as a bus time-out function (parameter 514),
the time-out function (parameter 318) will be activated.
(NO OPERATION) [0]
Sleep mode (SLEEP MODE) [21]
The relay output can be used to give the present status
or a warning.
Relay
1 - 3 break, 1 - 2 make
Max. 250 V AC, 5Amp.
Description of choice:
Unit Ready signal, the FC motor is ready for use.
Enable/no warning, the FC motor is ready for use; no
start or stop command has been given (start/ disable).
No warning.
Running, A start command has been given.
= factory setting, () = display text, [] = value for use in communication via serial communication port
MG.03.H6.02 - VLT® is a registered Danfoss trademark 51
Running no warning, A start command has been given.
No warning.
Running on reference, no warning, speed according to
reference.
Fault, output is activated by alarm.
Fault or warning, the output is activated by alarm or
warning.
Current limit, the current limit in parameter 221 has
been exceeded.
Thermal warning, above the temperature limit in the
frequency converter.
Reverse. Logic '1' = relay activated, 24 V DC on the
output when the direction of rotation of the motor is

VLT® FCM Series
clockwise. Logic '0' = relay not activated, no signal on
the output, when the direction of rotation of the motor
is counter-clockwise.
Control word bit 11, if bit 11 = “1” in the control word
(both Fieldbus Profile and FC Profile) the relay will be
activated.
Control word bit 12, if bit 12 = “1” in the control word
(both Fieldbus Profile and FC Profile) the relay will be
activated.
Mechanical brake, enables control of an optional external mechanical brake (see also parameter 138 and
139).
Sleep mode, active when the unit is in sleep mode. See
sectionSleep mode.
327
Value:
100 - 70000 Hz [100 - 70000]
5000 HZ [5000]
Function:
In this parameter, the signal value is set that corresponds to the maximum reference/feedback value set
in parameter 205/415.
Pulse reference/feedback, max. frequency
(PULSE REF/FB MAX)
331 Terminal 1, analogue input current
(AI [mA] 1 FUNCT)
Value:
No operation (NO OPERATION) [0]
Reference (REFERENCE) [1]
Feedback (FEEDBACK) [2]
Function:
This parameter allows a choice between the different
functions available for the input, terminal 1.
Scaling of the input signal is effected in parameters
336 and 337.
Description of choice:
No operation. Is selected if the FC motor is not to react
to signals connected to the terminal.
Reference. Is selected to enable change of reference
by means of an analogue reference signal.
If other inputs are connected, these are added up, taking account of their signs.
Feedback. Is selected if closed loop regulation with an
analogue signal is used.
NB!
If Reference or Feedback has been selected on more than one terminal, these signals will be added.
Description of choice:
Set the desired pulse frequency.
NB!
Frequency limit:
Open collector 24 V: 8 kHz
Push pull 24 V: 70 kHz
332 Terminal 2, analogue/digital input
(DIGITAL INPUT 2)
333 Terminal 3, digital input
(DIGITAL INPUT 3)
334 Terminal 4, digital input
(DIGITAL INPUT 4)
335 Terminal 5, digital input
(DIGITAL INPUT 5)
= factory setting, () = display text, [] = value for use in communication via serial communication port
52 MG.03.H6.02 - VLT® is a registered Danfoss trademark

VLT® FCM Series
Parameter 332 333 334 335
Digital input on terminal no. 2 3 4 5
Settings:
No function
Reset (RESET) [1]
Coasting stop, inverse (MOTOR COAST INVERSE) [2] [2] [2] [2]
Reset and coasting stop, inverse (RESET & COAST INV.) [3] [3] [3] [3]
Quick-stop, inverse (QUICK STOP INVERSE) [4] [4] [4] [4]
DC-braking, inverse (DC-BRAKE INVERSE) [5] [5] [5] [5]
Stop inverse (STOP INVERSE) [6] [6] [6] [6]
Start (START) [7] [7]
Latched start (LATCHED START) [8] [8] [8] [8]
Reversing (REVERSING) [9] [9] [9] [9]
Start reversing (START REVERSING) [10] [10] [10] [10]
Start clockwise, on (ENABLE FORWARD) [11] [11] [11] [11]
Start counter-clockwise, on (ENABLE REVERSE) [12] [12] [12] [12]
Jog (JOGGING) [13] [13] [13]
Freeze reference (FREEZE REFERENCE) [14] [14] [14] [14]
Freeze output (FREEZE OUTPUT) [15] [15] [15] [15]
Speed up (SPEED UP) [16] [16] [16] [16]
Speed down (SPEED DOWN) [17] [17] [17] [17]
Selection of Setup (SETUP SELECT) [18] [18] [18] [18]
Catch-up (CATCH UP) [19] [19] [19] [19]
Slow-down (SLOW DOWN) [20] [20] [20] [20]
Preset reference (PRESET REF.) [21] [21] [21] [21]
Preset reference, on (PRESET REF. ON) [22] [22] [22] [22]
Precise stop, inverse (PRECISE STOP) [23]
Pulse reference (PULSE REFERENCE) [24]
Pulse feedback (PULSE FEEDBACK) [25]
Analogue reference (REFERENCE)
Analogue feedback (FEEDBACK) [31]
Reset and start (RESET AND START) [32] [32] [32] [32]
Freeze reference and start (FREEZE REF AND START) [33] [33] [33] [33]
Ramp 2 (RAMP 2) [34] [34] [34] [34]
Start-ref bit 1 (START-REF BIT 1) [35] [35] [35] [35]
Start-ref bit 2 (START-REF BIT 2) [36] [36] [36] [36]
Start-ref bit 3 (START-REF BIT 3) [37] [37] [37] [37]
(NO OPERATION) [0] [0] [0] [0]
[1] [1]
[7]
[7]
[30]
[1]
[13]
Function:
In parameters 332-335 it is possible to choose between the different possible functions related to the
inputs on terminals 2-5. The function options are
shown in the table below.
Description of choice:
No function is selected if the FC motor is not to react
to signals transmitted to the terminal.
Reset zeroes the FC motor after an alarm; however,
not all alarms can be reset without disconnecting from
mains.
= factory setting, () = display text, [] = value for use in communication via serial communication port
MG.03.H6.02 - VLT® is a registered Danfoss trademark 53
Coasting stop, inverse is used for making the FC motor
run freely to stop. Logic '0' leads to coasting stop.
Reset and coasting stop, inverse, is used for activating
coasting stop at the same time as reset.
Logic ‘0’ leads to coasting stop and reset.
Quick stop, inverse is used for stopping the motor in
accordance with the quick-stop ramp (set in parameter
212).
Logic '0' leads to a quick-stop.
DC breaking, inverse is used for stopping the motor by
energizing it with a DC voltage for a given time, see
parameters 126-132.

VLT® FCM Series
Please note that this function is only active if the settings of parameters 126-132 is different from 0. Logic
'0' leads to DC braking.
Stop inverse is activated by interrupting the voltage to
the terminal. This means that if the terminal has no
voltage, the motor cannot run. The stop will be effected
in accordance with the selected ramp (parameters
207/208).
None of the above-mentioned stop commands are to be used as disconnection
switch in connection with repairs. Cut
mains instead.
Start, is selected if a start/stop command is desired.
Logic '1' = start, logic '0' = stop (stand-by).
Latched start - if a pulse is applied for min. 20 ms, the
motor will start, provided no stop command. The motor
stops if Stop inverse is activated briefly.
Reversing is used for changing the direction of rotation
of the motor shaft. Logic "0" will not lead to reversing.
Logic "1" will lead to reversing. The reversing signal
only changes the direction of rotation; it does not activate the start function.
Should not be used with Process, closed loop mode.
Start reversing, is used for start/stop and for reversing
with the same signal. No start signal is allowed at the
same time. Acts as latch start reversing, provided latch
start has been chosen for another terminal.
Should not be used with Process, closed loop mode.
Start clockwise is used if the motor shaft is only to be
able to rotate clockwise when starting.
Should not be used with Process, closed loop mode.
Start counter-clockwise, on is used if the motor shaft is
to be able to rotate counter-clockwise when started.
Should not be used with Process, closed loop mode.
Jog is used for overriding the output frequency to the
jog frequency set in parameter 213. The ramp time can
be set in parameter 211. Jog is not active if a stop
command has been given (start-disable).
Freeze output - freezes the actual motor frequency
(Hz). The frozen motor frequency is now the point of
enable/condition for Speed up and Speed down to be
used.
Freeze output overrides start/stand-by, slip compensation and closed loop process control.
If speed up/down is used, the speed change always
follows the normal ramp (parameters 207/208) in the
range 0 - f
M,N
.
Speed up and Speed down are selected if digital control of the up/down speed is desired (motor potentiometer). This function is only active if Freeze reference or
Freeze output has been selected.
As long as there is a logic ‘1‘ on the terminal selected
for speed up, the reference or the output frequency will
increase.
As long as there is a logic ‘1‘ on the terminal selected
for speed down, the reference or the output frequency
will be reduced.
Pulses (logic ‘1‘ minimum high for 20 ms and a minimum pause of 20 ms) will lead to a change of speed
of 0.1% (reference) or 0.1 Hz (output frequency).
Example:
Terminal Freeze ref./
2-5 2-5 Freeze output
No speed change 0 0 1
Speed down 0 1 1
Speed up 1 0 1
Speed down 1 1 1
Selection of Setup, enables a choice of one of the two
Setups; however, this presupposes that parameter
004 has been set to Multi Setup.
Catch-up/Slow-down is selected if the reference value
is to be increased or reduced by a programmable percentage value set in parameter 219.
Slow-down Catch-up
Unchanged speed 0 0
Reduced by %-value 1 0
Increased by %-value 0 1
Reduced by %-value 1 1
Jog overrides stand-by.
Freeze reference - freezes the actual reference. The
frozen reference is now the point of enable/ condition
for Speed up and Speed down to be used.
If speed up/down is used, the speed change always
follows the normal ramp (parameters 207/208) in the
range 0 - Ref
MAX
.
Preset reference enables a choice of one of the two
preset references, in accordance with the table in parameter 215 and 216. To be active, Preset reference,
on has to be selected.
Preset reference is used for shifting between external
reference and preset reference. It is assumed that Ex-
ternal/preset [2] has been selected in parameter 214.
Logic '0' = external references active; logic '1' = one of
the two preset references is active.
= factory setting, () = display text, [] = value for use in communication via serial communication port
54 MG.03.H6.02 - VLT® is a registered Danfoss trademark

VLT® FCM Series
Precise stop corrects the ramp-down time to obtain a
high repetitive accuracy of the stopping point.
Pulse reference is selected if a pulse sequence (frequency) of 0 Hz is used, corresponding to Ref
MIN
,
parameter 204. The frequency is set in parameter 327,
corresponding to Ref
MAX
.
Pulse feedback is selected if a pulse sequence (frequency) is selected as a feedback signal. See also
parameter 327.
Analogue reference is selected to enable change of
reference by means of an analogue reference signal.
If other inputs are connected, these are added up, taking account of their signs.
Analogue feedback is selected if closed loop regulation
with an analogue signal is used.
Reset and start is used for activating start at the same
time as reset.
Freeze reference and start, both a START and a
FREEZE REFERENCE command will be initiated.
When using SPEED UP/SPEED DOWN both
FREEZE REFERENCE and START must be activated. By implementing this feature a digital input can be
spared.
Ramp 2, is selected if a shift between ramp 1 (parameters 207-208) and ramp 2 (parameters 209-210) is
required. Logic "0" leads to ramp 1 and logic "1" leads
to ramp 2.
Start-ref bit 1,2 and 3, makes it possible to select which
REF RESET (1-7) is to be used. The REF PRESET
(1-7) are set in parameters 241 to 247.
Par. No
Fixed speed START REF BIT
321
- - -
Stand by 000
241 REF RESET 1 001
242 REF RESET 2 010
243 REF RESET 3 011
244 REF RESET 4 100
245 REF RESET 5 101
246 REF RESET 6 110
247 REF RESET 7 111
Digital inputs 2,3 and 4: P332 [choice 35 selected],
P333 [choice 36 selected] and P334 [choice 37 selected]
Input combination on the digital inputs 2,3 and 4: "010".
This means REF PRESET 2 will be the preset speed.
Scaling of the input signal is effected in parameters
338 and 339.
NB!
If Reference or Feedback has been selected on more than one terminal, these signals will be added with signs.
336 Terminal 1, min. scaling
(AI 1 SCALE LOW)
Value:
0.0 - 20.0 mA [0 - 200]
0.0 mA [0]
Function:
This parameter determines the value of the reference
signal that is to correspond to the minimum reference
value set in parameter 204.
If the Time-out function of parameter 317 is to be used,
the setting must be > 2 mA.
Description of choice:
Set the desired current value.
337 Terminal 1, max. scaling
(AI 1 SCALE HIGH)
Value:
0.0 - 20.0 mA [0 - 200]
20.0 mA [200]
Function:
This parameter sets the value of the reference signal
that is to correspond to the maximum reference value
set in parameter 205.
If at least one of the 3 digital inputs is activated the
FCM has start signal. The 7 possible input combina-
Description of choice:
Set the desired current value.
tions will than decide which preset speed is to be used.
If only 1 or 2 digital inputs are used respectively 1 or 3
speeds can be chosen after above shown principle.
If 2 set-ups are used up to 14 preset speeds can be
chosen by means of 4 digital inputs. The P241 and
P242 settings will be mirrored into P215 and P216.
Ex.
= factory setting, () = display text, [] = value for use in communication via serial communication port
MG.03.H6.02 - VLT® is a registered Danfoss trademark 55

VLT® FCM Series
338 Terminal 2, min. scaling
(AI 2 SCALE LOW)
Value:
0.0 - 10.0 V [0 - 100]
0.0 V [0]
Function:
This parameter is used for setting the signal value that
is to correspond to the minimum reference or the minimum feedback, parameter 204 Minimum reference,
/ 414 Minimum feedback, FB
Ref
MIN
MIN
.
Description of choice:
Set the required voltage value. For reasons of accuracy, compensation should be made for voltage loss
in long signal cables. If the Time out function is to be
used (parameter 317 Time out and 318 Function after
time out), the value set must be higher than 1 Volt.
340 Terminal 9, output functions (OUTPUT FUNC.)
Settings:
No function
Ready signal (UNIT READY) [1]
Enable, no warning (ENABLE/NO WARNING) [2]
Running (RUNNING) [3]
Running, no warning (RUNNING NO WARNING) [4]
Running on reference, no warning (RUNNING ON REFERENCE) [5]
Fault (FAULT) [6]
Fault or warning (FAULT OR WARNING) [7]
Current limit (CURRENT LIMIT) [8]
Thermal warning (THERMAL WARNING) [9]
Reversing (REVERSE) [10]
Control word bit 11 (CONTROL WORD BIT 11) [11]
Actual frequency 0-20 mA (0-FMAX = 0-20 mA) [12]
Actual frequency 4-20 mA (0-FMAX = 4-20 mA) [13]
Reference
Reference
Feedback
Feedback
- reference
MIN
- reference
MIN
- feedback
MIN
- feedback
MIN
: 0-20 mA (REF MIN-MAX =0-20 mA) [14]
MAX
: 4-20 mA (REF MIN-MAX =4-20 mA) [15]
MAX
: 0-20 mA (FB MIN-MAX =0-20 mA) [16]
MAX
: 4-20 mA (FB MIN-MAX =4-20 mA) [17]
MAX
Actual current 0-20 mA (0-IMAX = 0-20 mA) [18]
Actual current 4-20 mA (0-IMAX = 4-20 mA) [19]
Mechanical brake (MECHANICAL BRAKE) [20]
Sleep mode (SLEEP MODE) [21]
Torque 0-20 mA (0-TMAX = 0-20 mA) [22]
Torque 4-20 mA (0-TMAX = 4-20 mA) [23]
339 Terminal 2, max. scaling
(AI 2 SCALE HIGH)
Value:
0.0 - 10.0 V0.0 - 10.0 V [0 - 100]
10.0 V [100]
Function:
This parameter is used for setting the signal value that
is to correspond to the maximum reference value or
maximum feedback, parameter 205 Maximum refer-
ence, Ref
/ 415 Maximum feedback, FB
MAX
MAX
Description of choice:
Set the required voltage value. For reasons of accuracy, compensation should be made for voltage losses
in long signal cables.
(NO OPERATION) [0]
.
Function:
output.
This output can act both as a digital and an analogue
output either a 0-20 mA signal, or a 4-20 mA signal
output. If used as a digital output (data value [0]-[23]),
a 24 V DC signal is transmitted; if used as an analogue
= factory setting, () = display text, [] = value for use in communication via serial communication port
56 MG.03.H6.02 - VLT® is a registered Danfoss trademark
Description of choice:
Unit Ready signal, the FC motor is ready for use.

Enable/no warning, the FC motor is ready for use; no
start or stop command has been given (start/ disable).
No warning.
Running, a start command has been given.
Running no warning, a start command has been given.
No warning.
Running on reference, no warning, speed according to
reference.
Fault, output is activated by alarm.
Fault or warning, the output is activated by alarm or
warning.
Current limit, the current limit in parameter 221 has
been exceeded.
Thermal warning, above the temperature limit in the
frequency converter.
Reverse. Logic '1' = relay activated, 24 V DC on the
output when the direction of rotation of the motor is
clockwise. Logic '0' = relay not activated, no signal on
the output, when the direction of rotation of the motor
is counter-clockwise.
VLT® FCM Series
Control word bit 11, if bit 11 = “1” in the control word
(both Fieldbus Profile and FC Profile) the digital output
will be activated.
0-f
(parameter 202) ⇒ 0-20 mA and
MAX
(parameter 202) ⇒ 4-20 mA
0-f
MAX
Reference
Reference
Feedback
Feedback
0-I
VLT, MAX
0-I
VLT, MAX
- Reference
MIN
- Reference
MIN
- Feedback
LOW
- Feedback
LOW
⇒ 0-20 mA and
⇒ 4-20 mA
: 0-20 mA and
MAX
: 4-20 mA
MAX
: 0-20 mA and
HIGH
: 4-20 mA
HIGH
Mechanical brake, enables control of an optional exter-
nal mechanical brake (see also parameter 138 and
139).
NB!
Analog signal
4 mA: Closed brake
20 mA: Open brake
0 mA: Fault
Not suited for switching a relay
Sleep mode, active when the unit is in sleep mode. See
sectionSleep mode.
⇒ 0-20 mA and
0-T
MAX
0-T
⇒ 4-20 mA and
MAX
MG.03.H6.02 - VLT® is a registered Danfoss trademark 57

Parameter Group 4-** Special Functions
400 Brake functions
(BRAKE FUNCTIONS)
Value:
OFF (OFF) [0]
AC brake (AC BRAKE) [4]
Function:
AC brake [4] can be selected to improve braking. With
the new AC brake function it is possible to control the
time of increased motor losses, still protecting the motor thermally. This function will yield a braking torque
between 80 and 20 % in the speed range up to base
speed (50 Hz). Above base speed the extra braking
will gradually disappear.
VLT® FCM Series
NB!
Energy can be saved with this function,
since the motor is only in operation when
the system needs it.
Sleep mode is not active if Local reference or Jog has
been selected
The function is active in both Open loop and Closed
loop.
In parameter 403 Sleep mode timer, the Sleep mode is
activated. In parameter 403 Sleep mode timer, a timer
is set that determines how long the output frequency
can be lower than the frequency set in parameter
404 Sleep frequency. When the timer runs out, the
frequency converter will ramp down the motor to stop
via parameter 208 Ramp-down time. If the output frequency rises above the frequency set in parameter
404 Sleep frequency, the timer is reset.
While the frequency converter has stopped the motor
in sleep mode, a theoretical output frequency is calculated on the basis of the reference signal. When the
theoretical output frequency rises above the frequency
in parameter 407 Wake up frequency, the frequency
converter will restart the motor and the output frequency will ramp up to the reference.
Description of choice:
Select AC brake [4] if short-term generated loads occur.
Sleep mode
Sleep mode makes it possible to stop the motor when
it is running at low speed, similar to a no load situation.
If consumption in the system goes back up, the frequency converter will start the motor and supply the
power required.
In systems with constant pressure regulation, it is advantageous to provide extra pressure to the system
before the frequency converter stops the motor. This
extends the time during which the frequency converter
has stopped the motor and helps to avoid frequent
starting and stopping of the motor, e.g. in the case of
system leaks.
If 25% more pressure is required before the frequency
converter stops the motor, parameter 406 Boost set-
point is set to 125%.
Parameter 406 Boost setpoint is only active in Closed
loop.
NB!
In highly dynamic pumping processes, it
is recommended to switch off the Flying
Start function (parameter 445).
= factory setting, () = display text, [] = value for use in communication via serial communication port
58 MG.03.H6.02 - VLT® is a registered Danfoss trademark

VLT® FCM Series
403 Sleep mode timer
(SLEEP MODE TIMER)
Value:
0 - 300 sec. (301 sec. = OFF)
OFF
Function:
This parameter enables the frequency converter to
stop the motor if the load on the motor is minimal. The
timer in parameter 403 Sleep mode timer starts when
the output frequency drops below the frequency set in
parameter 404 Sleep frequency.
When the time set in the timer has expired, the frequency converter will turn off the motor.
The frequency converter will restart the motor, when
the theoretical output frequency exceeds the frequency in parameter 407 Wake up frequency.
Description of choice:
Select OFF if this function is not wanted. Set the
threshold value that is to activate Sleep mode after the
output frequency has fallen below parameter 404
Sleep frequency.
404 Sleep frequency
(SLEEP FREQUENCY)
Value:
000,0 - par. 407 Wake up frequency
0,0 Hz
Function:
When the output frequency falls below the preset value, the timer will start the time count set in parameter
403 Sleep mode. The present output frequency will follow the theoretical output frequency until f
MIN
is
reached.
Description of choice:
Set the required frequency.
405 Reset function
(RESET MODE)
Value:
Manual reset (manual RESET) [0]
Automatic reset x 1 (AUTOMATIC X 1) [1]
Automatic reset x 2 (AUTOMATIC X 2) [2]
Automatic reset x 3 (AUTOMATIC X 3) [3]
Automatic reset x 4 (AUTOMATIC X 4) [4]
Automatic reset x 5 (AUTOMATIC X 5) [5]
Automatic reset x 6 (AUTOMATIC X 6) [6]
Automatic reset x 7 (AUTOMATIC X 7) [7]
Automatic reset x 8 (AUTOMATIC X 8) [8]
Automatic reset x 9 (AUTOMATIC X 9) [9]
Automatic reset x 10 (AUTOMATIC X 10) [10]
Reset at power-up (RESET AT POWER UP) [11]
Function:
This parameter makes it possible to select the reset
function desired after tripping.
After reset, the FC motor can be restarted after 1.5 sec.
Description of choice:
If Manual reset [0] is selected, reset must be effected
via the digital inputs.
If the FC motor is to carry out an automatic reset (max.
1-10 times within 10 minutes) after tripping, select data
value [1]-[10].
= factory setting, () = display text, [] = value for use in communication via serial communication port
MG.03.H6.02 - VLT® is a registered Danfoss trademark 59

VLT® FCM Series
Warning: The motor may start without
warning up to 10 x 5 sec. after trip.
406 Boost setpoint
(BOOST SETPOINT)
Value:
1 - 200 %
100 % of setpoint
Function:
This function can only be used if Closed loop has been
selected in parameter 100.
In SYSTEMs with constant pressure regulation, it is
advantageous to increase the pressure in the SYSTEM before the frequency converter stops the motor.
This extends the time during which the frequency converter stops the motor and helps to avoid frequent
starting and stopping of the motor, e.g. in the case of
leaks in the water supply SYSTEM.
Use Boost Time-Out, par. 472, to set the boost timeout. If the boost set-point cannot be reached within the
specified time, the frequency converter will continue in
normal operation (Not entering sleep mode).
Description of choice:
Set the required Boost setpoint as a percentage of the
resulting reference under normal operation. 100% corresponds to the reference without boost (supplement).
407 Wake up frequency
(WAKEUP FREQUENCY)
Value:
Par 404 Sleep frequency - par. 202 f
MAX
50 Hz
Function:
When the theoretical output frequency exceeds the
preset value, the frequency converter restarts the motor.
Description of choice:
Set the required frequency.
411 Switching frequency
(SWITCH FREQ.)
Value:
1.5 -14.0 kHz [1500 - 14000]
Unit dependent
Function:
The setting determines the switching frequency of the
inverter. If the switching frequency is changed, this
may help to minimise possible acoustic noise from the
motor.
Description of choice:
When the motor is running, the switching frequency is
adjusted in parameter 411 until the frequency has
been obtained at which the motor is as low-noise as
possible.
See also parameter 446 - switching pattern. See derating in chapter 10.
NB!
Switching frequencies higher than 4 kHz
may cause thermal trip depending on ambient temperature.
412 Variable switching frequency
(VAR CARRIER FREQ)
Value:
Not possible (DISABLE) [0]
Variable switching freq. (VAR. CARRIER
FREQ.) [1]
Temperature dep. sw. freq. (TEMP. DEP.
FREQ.) [2]
Function:
This function makes it possible to change the switching
frequency depending on the load. However, the maximum switching frequency is determined by the value
set in parameter 411.
Description of choice:
Select Not possible [0] if a permanent switching frequency is desired. Set the switching frequency in parameter 411.
If Variable switching frequency [1] is selected the
switching frequency will decline at an increasing output frequency. This is used in applications with square
torque characteristics (centrifugal pumps and fans) in
which the load declines depending on the output frequency.
If Temperature dependent switching frequency [2] is
selected, the switching frequency will decline at an increasing inverter temperature, see the drawing below.
= factory setting, () = display text, [] = value for use in communication via serial communication port
60 MG.03.H6.02 - VLT® is a registered Danfoss trademark

VLT® FCM Series
Description of choice:
Is only active when parameter 203 has been set to
Min-Max [0].
415 Maximum feedback
(MAX. FEEDBACK)
Value:
(par. 414) FB
1.500.000 [1500000]
Function:
See description of parameter 414.
- 100,000,000
LOW
[- 100000000]
413 Overmodulation function
(OVERMODULATION)
Value:
Off (OFF) [0]
On (ON) [1]
Function:
This parameter allows connection of the overmodulation function for the output voltage.
Description of choice:
Off means that there is no overmodulation of the output
voltage, which means that torque ripple on the motor
shaft is avoided. This can be a good feature, e.g. on
grinding machines.
On means that an output voltage can be obtained
which is greater than the mains voltage (up to 5%).
414 Minimum feedback
(MIN. FEEDBACK)
Value:
-100,000,000 - FB
(par. 415)
HIGH
[-100000000 -]
0.000 [0]
Function:
Parameters 414 and 415 are used to scale the feedback range to physical values used by the user. The
setting will also be the bounds of the reference (parameters 204 and 205).
Used together with Process, closed loop mode (parameter 100).
416 Reference/feedback unit
(REF/FEEDB. UNIT)
Value:
NO UNIT [0]
% [1]
PPM [2]
RPM [3]
bar [4]
CYCLE/min [5]
PULSE/s [6]
UNITS/s [7]
UNITS/min [8]
UNITS/h [9]
°C [10]
Pa [11]
l/s [12]
3
m
/s [13]
l/min [14]
3
m
/min [15]
l/h [16]
3
m
/h [17]
kg/s [18]
kg/min [19]
kg/h [20]
t/min [21]
t/h [22]
m [23]
Nm [24]
m/s [25]
m/min [26]
°F [27]
= factory setting, () = display text, [] = value for use in communication via serial communication port
MG.03.H6.02 - VLT® is a registered Danfoss trademark 61

VLT® FCM Series
in wg [28]
gal/s [29]
3
ft
/s [30]
gal/min [31]
3
/min [32]
ft
gal/h [33]
3
/h [34]
ft
lb/s [35]
lb/min [36]
lb/h [37]
lb ft [38]
ft/s [39]
ft/min [40]
Function:
Choose among different units to be shown on the display.
This unit is also used directly in Process regulation,
closed loop as a unit for Minimum/Maximum reference (parameters 204/205) and Minimum/ Maximum
feedback (parameters 414/415).
The possibility of choosing a unit in parameter 416 will
depend on the choices made in the following parameters:
Par. 002 Local/remote control.
Par. 013 Local control/config. as par. 100.
Par. 100 Configuration.
Select parameter 002 as Remote control
If parameter 100 is selected as Speed regulation, open
loop, the unit selected in parameter 416 can be used
in displays (par. 009-12 Feedback [unit]) of process
parameters.
Note: The reference can only be shown in Hz (Speed
regulation, open loop).
If parameter 100 is selected as Process regulation,
closed loop, the unit selected in parameter 416 will be
used when displaying both reference (par. 009- 12:
Reference [unit]) and feedback (par. 009-12: Feedback
[unit]).
NB!
The above applies to display of Reference
[unit] and Feedback [unit]. If Reference [%]
or Feedback [%] is selected, the value dis-
played will be in the form of a percentage
of the selected range.
Description of choice:
Select the desired unit for the reference/feedback signal.
FCM 300 Regulator
Process regulation
The PID regulator maintains a constant process mode
(pressure, temperature, flow, etc.) and adjusts the motor speed on the basis of the reference/setpoint and
feedback signal.
A transmitter provides the PID regulator with a feedback signal from the process as an expression of the
process's actual mode. The feedback signal varies as
the process load varies.
This means that there is a variance between the reference/setpoint and the actual process mode. This
variance is compensated by the PID regulator by
means of the output frequency being regulated up or
down in relation to the variance between the reference/
setpoint and the feedback signal.
The integrated PID regulator in the frequency converter has been optimised for use in process applications.
This means that there are a number of special functions available in the frequency converter.
Previously it was necessary to obtain a SYSTEM to
handle these special functions by installing extra I/O
modules and programming the SYSTEM. With the frequency converter the need to install extra modules can
be avoided. The parameters that are specific to the
Process Regulator are parameter 437 to parameter
444.
Select parameter 002 as Local control
If parameter 013 is chosen as LCP control and open
loop or LCP digital control and open loop , the reference will be given in Hz, regardless of the choice made
in parameter 416. If parameter 013 is chosen as LCP
control/as par. 100 or LCP digital control/as par. 100,
the unit will be as described above under parameter
002, Remote-control.
= factory setting, () = display text, [] = value for use in communication via serial communication port
62 MG.03.H6.02 - VLT® is a registered Danfoss trademark

VLT® FCM Series
PID functions
Unit of reference/feedback
When Process regulation, closed loop is selected in
parameter 100 Configuration the unit is defined in parameter 416 Reference/feedback unit:
Feedback
A feedback range must be preset for the regulator. At
the same time this feedback range limits the potential
reference range so that if the sum of all references lies
outside the feedback range, the reference will be limited to lie within the feedback range.
The feedback signal must be connected to a terminal
on the frequency converter. If feedback is selected on
two terminals simultaneously, the two signals will be
added together.
Use the overview below to determine which terminal is
to be used and which parameters are to be programmed.
Feedback type
Terminal Parameters
Pulse 3 333, 327
Voltage 2 332, 338, 339
Current 1 331, 336, 337
A correction can be made for loss of voltage in long
signal cables when a transmitter with a voltage output
is used. This is done in parameters 338/339 Min./Max
scaling.
Parameters 414/415 Minimum/Maximum feedback
must also be preset to a value in the process unit corresponding to the minimum and maximum scaling values for signals that are connected to the terminal.
Reference
In parameter 205 Maximum reference, Ref
it is pos-
MAX
sible to preset a maximum reference that scales the
sum of all references, i.e. the resulting reference.
The minimum reference in parameter 204 is an expression of the minimum value that the resulting reference can assume.
All references will be added together and the sum will
be the reference against which regulation will take
place. It is possible to limit the reference range to a
range that is smaller than the feedback range. This can
be an advantage if you want to avoid an unintentional
change to an external reference making the sum of the
references move too far away from the optimal reference. The reference range cannot exceed the feedback range.
If preset references are desired, they are preset in parameters 215 to 216 Preset reference. See description
Reference Function and Handling of References in parameter 214.
If a current signal is used as the feedback signal, it will
only be possible to use voltage as an analogue reference. Use the overview below to determine which
terminal is to be used and which parameters are to be
programmed.
Reference type
Terminal Parameters
Pulse 3 333, 327
Voltage 2 332, 338, 339
Current 1 331, 336, 337
Preset
references
215-216
(241-247)
Bus reference 68+69
Note that the bus reference can only be preset via serial communication.
NB!
It is best to preset terminals that are not
being used to No function [0].
Differentiator gain limit
If very rapid variations occur in an application in either
the reference signal or the feedback signal, the deviation between the reference/setpoint and the process's actual mode will change quickly. The differentiator can then become too dominant. This is because it
is reacting to the deviation between the reference and
the process's actual mode, and the quicker the variance changes the more powerful the differentiator's
frequency contribution becomes. The differentiator's
frequency contribution can therefore be limited in such
a way that both a reasonable differentiation time for
slow changes and an appropriate frequency contribution for quick changes can be preset. This is done
using parameter 443 Process PID Differentiator gain
limit.
Lowpass filter
If there is a lot of noise in the feedback signal, these
can be dampened using an integrated lowpass filter.
A suitable lowpass filter time constant is preset.
If the lowpass filter is preset to 0.1 s, the cut-off frequency will be 10 RAD/sec, corresponding to (10 / 2 x
π) = 1.6 Hz. This will mean that all currents/voltages
that vary by more than 1.6 oscillations per second will
be dampened. In other words, there will only be regulation on the basis of a feedback signal that varies by
a frequency of less than 1.6 Hz. The appropriate time
constant is selected in parameter 444 Process PID
lowpass filter time.
= factory setting, () = display text, [] = value for use in communication via serial communication port
MG.03.H6.02 - VLT® is a registered Danfoss trademark 63

VLT® FCM Series
Inverse regulation
Normal regulation means that the motor speed is increased when the reference/setpoint is greater than
the feedback signal. If it is necessary to run inverse
regulation, in which the speed is reduced when the
reference/setpoint is greater than the feedback signal,
parameter 437 PID normal/inverse control must be programmed at Inverted .
Anti Windup
In the factory the process regulator is preset with an
active anti windup function. This function means that
when either a frequency limit, a current limit or a voltage limit is reached, the integrator is initialised at a
frequency corresponding to the present output frequency. This is a means of avoiding the integration of
a variance between the reference and the process's
actual mode that cannot be deregulated by means of
a change of speed. This function can be deselected in
parameter 438 Process PID anti windup.
Starting conditions
In some applications the optimal setting of the process
regulator will mean that a relatively long period of time
will pass before the required process condition is achieved. In these applications it can be a good idea to
define an output frequency to which the frequency
converter must run the motor before the process regulator is activated. This is done by programming a start
frequency in parameter 439 Process PID start frequen-
cy.
Handling of feedback
Feedback handling is depicted in this flowchart.
The flowchart shows which parameters can affect the
handling of feedback and how. A choice can be made
between voltage, current and pulse feedback signals.
437 Process PID Normal/inverse control
(PROC NO/INV CTRL)
Value:
Normal (NORMAL) [0]
Inverse (INVERSE) [1]
Function:
It is possible to choose whether the process regulator
is to increase/reduce the output frequency if there is a
difference between the reference signal and the feedback signal.
Used together with Process, closed loop mode (parameter 100).
Description of choice:
If the FC motor is to reduce the output frequency in
case the feedback signal increases, select Normal [0].
If the FC motor is to increase the output frequency in
case the feedback signal increases, select Inverse [1].
= factory setting, () = display text, [] = value for use in communication via serial communication port
64 MG.03.H6.02 - VLT® is a registered Danfoss trademark

VLT® FCM Series
438 Process PID anti windup
(PROC ANTI WINDUP)
Value:
Disable (DISABLE) [0]
Enable (ENABLE) [1]
Function:
It is possible to select whether the process regulator is
to continue regulating on an error even if it is not possible to increase/reduce the output frequency. Used
together with Process, closed loop mode (parameter
100).
Description of choice:
The factory setting is Enable [1], which means that the
integration link is adjusted in relation to the actual output frequency if either the current limit or the max./ min.
frequency has been reached. The process regulator
will not engage again until either the error is zero or its
sign has changed.
Select Disable [0] if the integrator is to continue integrating on an error, even if it is not possible to remove
the fault by such regulation.
NB!
If Disable [0] is selected, it will mean that
when the error changes its sign, the integrator will first have to integrate down from
the level obtained as a result of the former
error, before any change to the output frequency occurs.
Used together with Process, closed loop mode (parameter 100).
Description of choice:
Set the required start frequency.
NB!
If the FC motor is running at the current
limit before the desired start frequency is
obtained, the process regulator will not be
activated. For the regulator to be activated
anyway, the start frequency must be lowered to the required output frequency.
This can be done during operation.
440 Process PID proportional gain
(PROC. PROP. GAIN)
Value:
0.00 (OFF) - 10.00 [0 - 1000]
0.01 [1]
Function:
The proportional gain indicates the number of times
the error between the set point and the feedback signal
is to be applied.
Used together with Process, closed loop mode (parameter 100).
Description of choice:
Quick regulation is obtained by a high gain, but if the
gain is too high, the process may become unstable.
439 Process PID start frequency
(PROC START VALUE)
Value:
f
MIN-fMAX
(parameter 201 and 202)
parameter 201
[X.X]
441 Process PID integral time
(PROC. INTEGR. T.)
Value:
0.01 - 9999 sec. (OFF) [1 - 999900]
9999 sec. [999900]
Function:
When the start signal comes, the FC motor will react
in the form of Speed, open loop mode following the
ramp. Only when the programmed start frequency has
been obtained, will it change over to Process, closed
loop mode. In addition, it is possible to set a frequency
that corresponds to the speed at which the process
normally runs, which will enable the required process
conditions to be reached sooner.
Function:
The integrator provides an increasing gain at a constant error between the set point and the feedback
signal. The greater the error, the quicker the gain will
increase. The integral time is the time needed by the
integrator to reach the same gain as the proportional
gain.
Used together with Process, closed loop mode (parameter 100).
= factory setting, () = display text, [] = value for use in communication via serial communication port
MG.03.H6.02 - VLT® is a registered Danfoss trademark 65

VLT® FCM Series
Description of choice:
Quick regulation is obtained at a short integral time.
However, this time may become too short, which can
make the process unstable.
If the integral time is long, major deviations from the
required set point may occur, since the process regulator will take a long time to regulate in relation to a
given error.
442 Process PID differentiation time
(PROC. DIFF. TIME)
Value:
0.00 (OFF) - 10.00 sec. [0 - 1000]
0.00 sec. [0]
Function:
The differentiator does not react to a constant error. It
only provides a gain when the error changes. The
quicker the error changes, the stronger the gain from
the differentiator.
The gain is proportional to the speed at which the error
changes.
Description of choice:
Select a limit to differentiator gain as required.
444 Process PID lowpass filter time
(PROC. FILTER TIME)
Value:
0.02 - 10.00 sec [2 - 1000]
0.02 sec [2]
Function:
Oscillations on the feedback signal are dampened by
the lowpass filter in order to reduce their impact on the
process regulation. This can be an advantage e.g. if
there is a lot of noise on the signal.
Used together with Process, closed loop mode (parameter 100).
Description of choice:
Select the desired time constant (τ). If a time constant
(τ) of 100 ms is programmed, the break frequency for
the lowpass filter will be 1/0.1 = 10 RAD/sec., corresponding to (10/2 x π) = 1.6 Hz.
Used together with Process, closed loop mode (parameter 100).
Description of choice:
Fast regulation is obtained with a long differentiation
time. However, this time may become too long, which
can make the process unstable.
443 Process PID diff. gain limit
(PROC. DIFF. GAIN)
Value:
5.0 - 50.0 [50 - 500]
5.0 [50]
Function:
It is possible to set a limit for the differentiator gain.
The differentiator gain will increase if there are fast
changes, which is why it can be beneficial to limit this
gain, thereby obtaining a pure differentiator gain at
slow changes and a constant differentiator gain where
quick changes to the error occur.
Used together with Process, closed loop mode (parameter 100).
The process regulator will thus
back signal that varies by a frequency lower than 1.6
Hz. If the feedback signal varies by a higher frequency
than 1.6 Hz, the Process regulator will not react.
445 Flying start
(FLYING START)
Value:
Disable (DISABLE) [0]
OK - same direction (OK-SAME DIRECTION) [1]
OK - both directions (OK-BOTH DIREC-
TIONS) [2]
DC-brake before start
(DC-BRAKE BEF. START) [3]
Function:
This function makes it possible to ‘catch‘ a motor,
which is spinning freely because of a mains dropout.
Description of choice:
Select Disable if this function is not required.
OK - same direction: Chosen if the motor can only ro-
tate in same direction on cut-in.
OK - both directions: Chosen if the motor can rotate in
both directions on cut-in.
only regulate a feed-
= factory setting, () = display text, [] = value for use in communication via serial communication port
66 MG.03.H6.02 - VLT® is a registered Danfoss trademark

VLT® FCM Series
DC-brake - before start: Selected if the motor is to be
stopped using DC brake before the motor is ramped
up to the desired speed. The DC brake time must be
set in parameter 126.
Limitations:
1. Too low inertia will cause acceleration of the
load, which may be dangerous or prevent
succesful Flying start. Use DC brake instead.
2. If load is driven eg. by "windmilling", the unit
might trip due to overvoltage.
3.
Below 250 rpm the Flying start will not function.
446 Switching pattern
(SWITCH PATTERN)
Value:
60° AVM (60° AVM) [0]
SFAVM (SFAVM) [1]
Function:
Description of choice:
Normally it is not necessary for the customer to set this
parameter.
461 Feedback conversion
(FEEDBACK CONV.)
Value:
Linear (LINEAR) [0]
Square root (SQUARE ROOT) [1]
Function:
In this parameter, a function is selected which converts
a connected feedback signal from the process to a
feedback value that equals the square root of the connected signal.
This is used, e.g. where regulation of a flow (volume)
is required on the basis of pressure as feedback signal
(flow = constant x √pressure). This conversion makes
it possible to set the reference in such a way that there
is a linear connection between the reference and the
flow required. See drawing.
Description of choice:
If Linear [0] is selected, the feedback signal and the
feedback value will be proportional.
If Square root [1] is selected, the frequency converter
translates the feedback signal to be the square root
value.
455 Frequency range monitor
(MON. FREQ. RANGE)
Value:
Disable [0]
Enable [1]
Function:
his parameter is used if warning 35 Out of frequency
range must be turned off in the display in process con-
trol closed loop. This parameter does not affect the
extended status word.
Description of choice:
Select Enable [1] to enable the readout in the display
if warning 35
Disable [0] to disable the readout in the display if warning 35 ut of frequency range occurs.
Out of frequency range
occurs. Select
= factory setting, () = display text, [] = value for use in communication via serial communication port
MG.03.H6.02 - VLT® is a registered Danfoss trademark 67

Serial bus
Telegram communication
Control and reply telegrams
The telegram communication in a master/slave SYSTEM is controlled by the master. A maximum of 31
slaves (FC motors) can be connected to one master,
unless a repeater is used - see also the description of
the address format.
The master continuously sends control telegrams addressed to the slaves and awaits reply telegrams from
these. The response time of the slaves is maximum 50
ms.
Only a slave that has received a faultless telegram addressed to that slave will respond by sending back the
telegram unchanged.
VLT® FCM Series
Telegram length (LGE)
The telegram length is the number of databytes plus
address byte ADR plus data control byte BCC.
Telegrams with 4 databytes have a length of:
LGE = 4 + 1 + 1 = 6 bytes
Telegrams with 12 databytes have a length of:
LGE = 12 + 1 + 1 = 14 bytes
VLT address (ADR)
Two different address formats are used:
1. Siemens USS protocol address format:
Broadcast
A master can send the same telegram at the same time
to all slaves connected to the bus. In such broadcast
communication, the control telegram broadcast bit of
the address bit has a value of 1 (see VLT address).
Address bits 0-4 are not used.
Contents of a byte
Each transmitted sign begins with a start bit. Subsequently, 8 databits are transmitted. Each sign is given
via a parity bit set at "1" when there is an even parity
(i.e. an even number of binary 1's in the 8 databits and
parity bits together). The sign ends with a stop bit and
thus consists of a total of 11 bits.
Telegram build-up
Each telegram begins with a startbyte (STX) = 02 Hex,
followed by a byte that gives the telegram length (LGE)
and a byte that gives the address (ADR). Then follows
a number of databytes (variable, depending on telegram type). The telegram ends with a data control byte
(BCC).
Bit 7 = 0
Bit 6 is not used
Bit 5 = 1: Broadcast, address bits (0-4) are not used
Bit 5 = 0: No Broadcast
Bits 0-4 = VLT address 1-31
2. Danfoss format:
Bit 7 = 1
Bits 0-6 = VLT address 1-127 (0 = Broadcast)
Data control byte (BCC)
The data control byte can best be explained by means
of an example: Before the first sign of the telegram is
received, BCC = 0.
After the first sign has been received:
BCC
NEW
= BCC
EXOR "first byte"
OLD
68 MG.03.H6.02 - VLT® is a registered Danfoss trademark

(EXOR = exclusive-or gate)
BCC
= 0 0 0 0 0 0 0 0
OLD
EXOR
"first byte" = 0 0 0 0 0 0 1 0 (02H)
BCC
= 0 0 0 0 0 0 1 0
NEW
Each additional, subsequent byte is gated by
BCC
EXOR and gives a new BCC
OLD
NEW
, e.g.:
VLT® FCM Series
BCC
= 0 0 0 0 0 0 1 0
OLD
EXOR
"second byte" = 1 1 0 1 0 1 1 0 (D6H)
BCC
= 1 1 0 1 0 1 0 0
NEW
The result after the last received sign is BCC.
Databytes
The block of databytes is divided into two smaller
blocks:
1. Parameter bytes used for transferred parameters between master and slave
2. Process bytes, covering
Control word and reference value
-
(from master to slave)
Status word and present output fre-
-
quency (from slave to master)
This structure applies to both the control telegram
(master ⇒ slave) and the reply telegram (slave ⇒master).
There are two types of telegrams:
Commands and replies (AK)
Bits no. 12-15 are used for transmitting commands
from master to slave and the slave's processed reply
back to the master.
Commands master ⇒slave:
Bit no.
15
14 13 12 Command
0 0 0 0 No command
0 0 0 1 Read parameter value
0 0 1 0 Write parameter value in
RAM (word)
0 0 1 1 Write parameter value in
RAM (double word)
1 1 0 1 Write parameter value in
RAM and EEPROM (double
word)
1 1 1 0 Write parameter value in
RAM and EEPROM (word)
1 1 1 1 Read text
with 12 bytes built up as shown above, with
-
parameter and process block
with four bytes, which is the process block
-
from the 12 byte telegram
1. Parameter bytes
Reply slave • master:
Bit no.
15
14 13 12 Reply
0 0 0 0 No reply
0 0 0 1 Parameter value transferred
(word)
0 0 1 0 Parameter value transferred
(double word)
0 1 1 1 Command cannot be execu-
ted
1 1 1 1 Text transferred
If the command cannot be executed, the slave will
send this reply (0111) and give the following error
message in the parameter value:
Error code
MG.03.H6.02 - VLT® is a registered Danfoss trademark 69

VLT® FCM Series
(reply 0111) Error message
0 The parameter number used does not
exist
1 There is no write access to the param-
eter called
2 The data value exceeds the parameter
limits
3 The used sub-index does not exist
4 The parameter is not of the array type
5 The data type does not match the pa-
rameter called
17 Data change in the parameter called is
not possible in the present mode of the
FC motor. E.g. some parameters can
only be changed when the motor has
stopped
130 There is no bus access to the parame-
ter called
131 Data change is not possible because
factory Setup has been selected
Parameter number (PNU)
Bits no. 0-10 are used for transmitting parameter numbers. The function of a given parameter can be seen
from the parameter description in chapter 8.
The transferred value corresponds to the figures given
in the parameter descriptions in chapter 8. E.g. parameter 101, where [1] corresponds to Constant tor-
que, [2] corresponds to Variable torque: low, etc.
However, parameters with data type 9 (text string) are
excepted, as this text is transferred as an ASCII text
string. When a text string is transferred (read), the
telegram length is variable, since the texts have different lengths. The telegram length is stated in the 2nd
byte of the telegram, called LGE, see page 73. Parameters 621-634 (nameplate data) have data type 9
(text string).
Data types supported by the VLT frequency converter
Data type
3 Integer 16
4 Integer 32
5 Unsigned 8
6 Unsigned 16
7 Unsigned 32
9 Text string
Unsigned means there is no sign included in the telegram.
The different attributes for each parameter can be
seen in the section on factory settings. Since a parameter value can only be transferred as an integer, a
conversion factor must be used to transfer decimals.
Description
Index
Index is used together with the parameter number for
read/write access to parameters of the array type (par.
615, 616 and 617).
Parameter value (PWE)
The parameter value depends on the command given.
If the master wants a parameter (read), it does not care
about the PWE block value. If a parameter is changed
by the master (write), the new value is transferred in
the PWE block. If the slave replies to a parameter request (read command), the present parameter value
is transferred to the PWE block.
2. Process-bytes
The process byte block is divided into two blocks each
of 16 bits, which always come in the sequence stated.
Example:
Parameter 201: minimum frequency, conversion factor
0,1. If parameter 201 is to be set to 10 Hz, a value of
100 must be transferred, since a conversion factor of
0,1 means that the transferred value will be multiplied
by 0.1. A value of 100 will thus be understood as 10.
Addressing by unit ID
The unit ID is printed on the label on the plastic cover
under the lid of the electronics box. The three groups
of unit ID each with three digits must be converted to
Hex. The desired address is added as the last byte.
The frame is sent to the bus address parameter(s) 500
(and 918) via a broadcast.
PKE: Write to parameter No. 500 or 918
IND: Not Used
70 MG.03.H6.02 - VLT® is a registered Danfoss trademark

PCD1 PCD2
Control telegram
(master⇒slave)
Reply telegram
(slave⇒master)
Control word Reference value
Status word Given output fre-
quency
VLT® FCM Series
Control word according to Fieldbus Profile Standard
(parameter 512 = Fieldbus Profile) The control word is
used for transmitting commands from a master (e.g. a
PC) to a slave (FC motor).
Bit Bit = 0 Bit =1
00 OFF 1 ON 1
01 OFF 2 ON 2
02 OFF 3 ON 3
03 Motor coasting Enable
04 Quick-stop Ramp
05 Freeze output frequency Ramp enable
06 Ramp stop Start
07 No function Reset
08 Jog 1 OFF ON
09 Jog 2 OFF ON
10 Data not valid Valid
11 No function Slow down / Relay
123 / Digital output
terminal 9
12 No function Catch-up / Relay
123
13 Setup 1 Setup 2
14
15 No function Reversing
NB!
The use of Bit 00, Bit 01 and Bit 02 for
switching off the power supply (by use of
relay) will require a separate power on.
This because there is no 24V external
connection to supply the FCM 300 control,
which is required to activate the FCM 300
again via input signal.
Bit 00, OFF1/ON1:
An ordinary ramp stop which uses the ramp time in
parameters 207/208. Bit 00 = "0" leads to a stop. Bit
00 = “1” means that the frequency converter will be
able to start if the other conditions for starting have
been fulfilled.
Bit 01, OFF2/ON2:
Coasting stop. Bit 01 = "0" leads to a coasting stop. Bit
01 = "1" means that the frequency converter is able to
start, provided the other conditions for starting have
been fulfilled.
Bit 02, OFF3/ON3:
Quick-stop, which uses the ramp time in parameter
212. Bit 02 = "0" leads to a quick-stop. Bit 02 = "1"
means that the frequency converter is able to start,
provided the other conditions for starting have been
fulfilled.
Bit 03, Coasting/enable:
Coasting. Bit 03 = "0" leads to a stop. Bit 03 = "1"
means that the frequency converter is able to start,
provided the other conditions for starting are fulfilled.
Note: In parameter 502 the choice is made as to how
bit 03 is to be combined (gated) with the corresponding
function in the digital inputs.
Bit 04, Quick-stop/ramp:
Quick-stop which uses the ramp time in parameter
212. Bit 04 = "0" leads to a quick-stop. Bit 04 = "1"
means that the frequency converter is able to start,
provided the other conditions for starting are fulfilled.
Note: In parameter 503 the choice is made as to how
bit 04 is to be combined (gated) with the corresponding
function on the digital inputs.
Bit 05, Freeze output frequency/ramp enable:
Bit 05 = "0" means that the given output frequency is
maintained even if the reference is changed. Bit 05 =
"1" means that the frequency converter is again able
to regulate, and the given reference is followed.
Bit 06, Ramp stop/start:
An ordinary ramp stop that uses the ramp time in parameters 207/208. Bit 06 = "0" leads to a stop. Bit 06
= "1" means that the frequency converter is able to
start, provided the other conditions for starting have
been fulfilled. Note: In parameter 505 the choice is
made as to how bit 06 is to be combined (gated) with
the corresponding function on the digital inputs.
MG.03.H6.02 - VLT® is a registered Danfoss trademark 71

VLT® FCM Series
Bit 07, No function/reset
Reset of trip. Bit 07 = "0" means that there is no reset.
Bit 07 = "1" means that a trip is reset. After reset it will
take approx. 1.5 second until the unit is ready. The
status word will indicate the ready state.
Bit 08, Jog 1 OFF/ON:
Activation of pre-programmed speed in parameter 509
(Bus JOG 1). JOG 1 is only possible when Bit 04 = "0"
and bit 00-03 = "1".
Bit 09, Jog 2 OFF/ON:
Activation of pre-programmed speed in parameter 510
(Bus JOG 2). JOG 2 is only possible when Bit 04 = "0"
and Bits 00-03 = "1". If both JOG 1 and JOG 2 are
activated (Bits 08 and 09 = "1"), JOG 1 has the higher
priority, which means that the speed programmed in
parameter 509 will be used.
Bit 10, Data not valid/valid:
Used for telling the FC motor whether the control word
is to be used or ignored. Bit 10 = "0" means that the
control word is ignored. Bit 10 = "1" means that the
control word is used. This function is relevant because
the control word is always contained in the telegram,
regardless of the type of telegram used, i.e. it is possible to disconnect the control word if it is not to be
used in connection with updating or reading of parameters.
This function is only possible if Multi-Setups have been
selected in parameter 004.
NB!
Parameter 507 is used for choosing how
Bit 13 is to be combined (gated) with the
corresponding function on the digital inputs.
Bit 15, No function/reversing:
Reversing of the direction of rotation of the motor. Bit
15 = "0" leads to no reversing, Bit 15 = "1" leads to
reversing.
NB!
Unless otherwise mentioned, the control
word bit is combined (gated) with the corresponding function on the digital inputs
as a logic "or" function.
Status word (according to Fieldbus Profile standard)
The status word is used for informing the master (e.g.
a PC) of the condition of a slave (FC motor).
Bit 11, No function / slow down, relay 123, digital output
terminal 9:
Used for reducing the speed reference by the value in
parameter 219. Bit 11 = "0" means that there is no
change of the reference. Bit 11 = "1" means that the
reference is reduced. Bit 11 = “1” will also activate relay
123 (provided parameter 323 = “Control word bit 11”)
and set digital out terminal 9 high (provided parameter
340 = “Control word bit 11”).
Bit 12, No function / catchup, relay 123:
Used for increasing the speed reference by the value
of parameter 219. Bit 12 = "0" means that there is no
change of the reference; Bit 12 = "1" means that the
reference is increased. If both slow down and catchup
are activated (Bits 11 and 12 = "1"), slow down has the
higher priority, i.e. the speed reference is reduced. Bit
12 = “1” will also activate relay 123 (provided parameter 323 = “Control word bit 12”).
Bits 13, Choice of Setup:
Bit 13 is used for choosing between the two menu Setups in accordance with the following table:
Bit Bit = 0 Bit =1
00 Control not ready Ready
01 FC not ready Ready
02 Coasting Enable
03 No fault Trip
04 ON 2 OFF 2
05 ON 3 OFF 3
06 Start enable Start disable
07 No warning Warning
08
09 Local control Serial communication
10 Outside frequency
11 Not running Running
12
13 Voltage OK Above limit
14 Current OK Above limit
15 Thermal warning
Speed ≠ ref.
range
Speed = ref.
Frequency limit OK
Setup
1 0
21
72 MG.03.H6.02 - VLT® is a registered Danfoss trademark
Bit 13

VLT® FCM Series
Bit 00, Control not ready/ready:
Bit 00 = "0" means that bit 00, 01 or 02 of the control
word is "0" (OFF1, OFF2 or OFF3), or that the frequency converter has tripped. Bit 00 = "1" means that
the frequency converter control is ready.
Bit 01, FC not ready/ready:
Same meaning as bit 00; however, there is also a supply to the power section, and the frequency converter
is ready to run when it receives the necessary start
signals.
Bit 02, Coasting/enable:
Bit 02 = "0" means that the control word bit 00, 01, 02
or 03 is "0" (OFF1, OFF2, OFF3 or Coasting), or the
FCM 300 Series unit has tripped. Bit 02 = "1" means
that the control word bits 00, 01, 02 or 03 are "1" and
that the FC motor has not tripped.
Bit 03, No fault/trip:
Bit 03 = "0" means that FCM 300 Series is not in a fault
condition. Bit 03 = "1" means that FCM 300 Series has
tripped and needs a reset signal in order to run.
Bit 04, ON2/OFF2:
Bit 04 = "0" means that control word bit 01 = "1". Bit 04
= "1" means that control word bit 01 = "0".
Bit 05, ON3/OFF3:
Bit 05 = "0" means that control word bit 02 = "1". Bit 05
= "1" means that control word bit 02 = "0".
Bit 06, Start enable/start disable:
Bit 06 is always "0" if FC Drive has been selected in
parameter 512. If Profidrive has been selected in parameter 512, bit 06 will be "1" after reset of a trip, after
activation of OFF2 or OFF3 and after connection of
mains voltage. Start disable is reset, setting control
word bit 00 to "0" and bits 01, 02 and 10 to "1".
Bit 07, No warning/warning:
Bit 07 = "0" means that there is no unusual situation.
Bit 07 = "1" means that an abnormal condition has
arisen for the FC motor. All warnings described in section List of warnings and alarms will set bit 07 to "1".
Bit 08, Speed ≠ ref/speed. = ref.:
Bit 08 = "0" means that the actual motor speed is different from the speed reference set. This can be the
case i.a. while the speed is ramped up/down during
start/stop. Bit 08 = "1" means that the present motor
speed equals the speed reference set.
Bit 09, Local operation / serial communication control:
Bit 09 = "0" means that [STOP/RESET] is activated on
the control unit, or that Local control in parameter 002
Local/remote operation is selected. It is not possible to
control the frequency converter via serial communication. Bit 09 = “1” means that it is possible to control the
frequency converter via serial communication.
Bit 10, Outside frequency range:
Bit 10 = "0", if the output frequency has reached the
value in parameter 201Output frequency low limit or
parameter 202 Output frequency high limit. Bit 10 = “1”
means that the output frequency is within the defined
limits.
Bit 11, Not running/running:
Bit 11 = "0" means that the motor is not running. Bit 11
= "1" means that the FC motor has a start signal or that
the output frequency is greater than 0 Hz.
Bit 13, Voltage OK/above limit:
Bit 13 = "0" means that the voltage limits of the FC
motor have not been exceeded. Bit 13 = "1" means that
the DC voltage of the FC motor intermediate circuit is
too low or too high.
Bit 14, Current OK / above limit:
Bit 14 = "0" means that the motor current is lower than
the current limit selected in parameter 221. Bit 14 = "1"
means that the current limit in parameter 221 has been
exceeded.
Bit 15, Thermal warning:
Bit 15 = "0" means that the timers for motor thermal
protection and VLT thermal protection, respectively,
have not exceeded 100%. Bit 15 = "1" means that one
of the timers has exceeded 100%.
MG.03.H6.02 - VLT® is a registered Danfoss trademark 73

VLT® FCM Series
Control word under FC Profile (parameter 512 = FC
Drive)
The control word is used for sending commands from
a master (e.g. a PC) to a slave (FC motor).
Bit Bit = 0 Bit =1
00 Preset reference choice
01 No function
02 DC brake Ramp
03 Coasting Enable
04 Quick-stop Ramp
05 Hold Ramp enable
06 Ramp stop Start
07 No function Reset
08 No function Jog
09 No function
10 Data not valid Valid
11 No function Relay 123 / digital
input terminal 9
12 No function Relay 123
13 Setup 1 Setup 2
15 No function Reversing
Bit 00:
Bit 00 is used for choosing between the two pre-programmed references (parameters 215-216) in accordance with the following table:
Preset ref.
1 215 0
22161
Bit 02, DC brake:
Bit 02 = "0" leads to DC braking and stop. Braking current and duration are set in parameters 132 and 133.
Bit 02 = "1" leads to ramp.
Bit 03, Coasting/enable:
Coasting. Bit 03 = "0" leads to a stop. Bit 03 = "1"
means that the frequency converter is able to start,
provided the other conditions for starting have been
fulfilled. Note: In parameter 502 the choice is made as
to how bit 03 is to be combined (gated) with the corresponding function in the digital inputs.
Parameter Bit 00
NB!
Parameter 508 is where to choose the
way bits 1/12 are to be combined (gated)
with the corresponding function on the
digital inputs.
Bit 04, Quick-stop / ramp:
Quick-stop which uses the ramp time in parameter
212. Bit 04 = “0” leads to a quick-stop. Bit 04 = “1”
means that the frequency converter is able to start,
provided the other conditions for starting have been
fulfilled. Note: In parameter 503 the choice is made as
to how bit 04 is to be combined (gated) with the corresponding function on the digital inputs.
Bit 05, Hold / ramp enable:
Bit 05 = “0” means that the given output frequency is
maintained even if the reference is changed. Bit 05 =
“1” means that the frequency converter is again able
to regulate, and the given reference is followed.
Bit 06, Ramp stop / start:
An ordinary ramp stop that uses the ramp time in parameters 207/208. Bit 06 = “0” leads to a stop. Bit 06
= “1” means that the frequency converter is able to
start, provided the other conditions for starting have
been fulfilled. Note: In parameter 505 the choice is
made as to how bit 06 is to be combined (gated) with
the corresponding function on the digital inputs.
Bit 07, No function / reset:
Reset of trip. Bit 07 = “0” means that there is no reset.
Bit 07 = “1” means that a trip is reset. After reset it will
take approx. 1.5 second until the unit is ready. The
status word will indicate the ready state.
Bit 08, Activation of Jog speed in parameter 213:
Bit 08 = "0": Jog speed not activated. Bit 08 = "1"
means that the motor is running at Jog speed.
Bit 10, Data not valid / valid:
Used for telling the FC motor whether the control word
is to be used or ignored. Bit 10 = “0” means that the
control word is ignored. Bit 10 = “1” means that the
control word is used. This function is relevant because
the control word is always contained in the telegram,
regardless of the type of telegram used, i.e. it is possible to disconnect the control word if it is not to be
used in connection with updating or reading of parameters.
Bit 11, No function / relay 123, digital output terminal
9:
Bit 11 = “1” will activate relay 123 (provided parameter
323 = “Control word bit 11”) and set digital out terminal
9 high (provided parameter 340 = “Control word bit
11”).
Bit 12, No function / relay 123:
Bit 12 = “1” will activate relay 123 (provided parameter
323 = “Control word bit 12”).
74 MG.03.H6.02 - VLT® is a registered Danfoss trademark

VLT® FCM Series
Bit 13, Choice of setup:
Bit 13 is used for choosing between the two menu setups in accordance with the following table:
Setup
1 0
21
This function is only possible if Multi-Setups have been
selected in parameter 004.
NB!
Parameter 507 is used for choosing how
Bit 13 is to be combined (gated) with the
corresponding function on the digital inputs.
Bit 15, No function / reversing::
Reversing of the direction of rotation of the motor. Bit
15 = “0” leads to no reversing. Bit 15 = “1” leads to
reversing..
NB!
Unless otherwise mentioned, the control
word bit is combined (gated) with the corresponding function on the digital inputs
as a logic "or" function.
Status word under FC Profile
The status word is used for informing the master (e.g.
a PC) about the condition of the slave (FC motor).
Bit 13
Bit 01, FC not ready/ready:
Bit 01 = "0" means that the frequency converter has
tripped.
Bit 01 = "1" means that the frequency converter is
ready.
Bit 02, Coasting/enable:
Bit 02 = "0" means that the control word bit 03 is
"0" (Coasting) or that the FC motor has tripped.
Bit 02 = "1" means that control word bit 03 is "1" and
that the FC motor has not tripped.
Bit 03, No fault / trip:
Bit 03 = "0" means that FCM 300 Series is not in a fault
condition. Bit 03 = “1” means that FCM 300 Series has
tripped and needs a reset signal in order to run.
Bit 07, No warning / warning:
Bit 07 = "0" means that there is no unusual situation.
Bit 07 = “1” means that an abnormal condition has
arisen for the FC motor. All warnings described in the
part List of warnings and alarms will set bit 07 to “1”.
Bit 08, Speed ≠ ref/speed. = ref.:
Bit 08 = "0" means that the actual motor speed is different from the speed reference set. This can be the
case i.e. while the speed is ramped up/down during
start/stop. Bit 08 = “1” means that the present motor
speed equals the speed reference set.
Bit 09, Local operation / bus control:
Bit 09 = "0" means that [STOP/RESET] is activated on
the control unit, or that Local control in parameter 002
Local/remote operation is selected. It is not possible to
control the frequency converter via serial communication. Bit 09 = “1” means that it is possible to control the
frequency converter via serial communication.
Bit 10, Out of range/frequency:
Bit Bit = 0 Bit =1
00 Control not ready Ready
01 FC not ready Ready
02 Coasting Enable
03 No fault Trip
04 Reserved
05 Reserved
06 Reserved
07 No warning Warning
08
09 Local control Bus control
10 Out of range Frequency OK
11 Not running Running
12
13 Voltage OK Above limit
14 Current OK Above limit
15 Timer OK Thermal warning
MG.03.H6.02 - VLT® is a registered Danfoss trademark 75
Speed ≠ ref.
Speed = ref.
Bit 10 = "0", if the output frequency has reached the
value in parameter 201 Output frequency low limit or
parameter 202 Output frequency high limit. Bit 10 = “1”
means that the output frequency is within the defined
limits.
Bit 11, Not running / running:
Bit 11 = "0" means that the motor is not running. Bit 11
= “1” means that the FC motor has a start signal or that
the output frequency is greater than 0 Hz.
Bit 13, Voltage OK / above limit:
Bit 13 = "0" means that the voltage limits of the FC
motor have not been exceeded. Bit 13 = "1" means that
the DC voltage of the FC motor intermediate circuit is
too low or too high.

Bit 14, Current OK / above limit:
Bit 14 = "0" means that the motor current is lower than
the torque limit selected in parameter 221. Bit 14 = "1"
means that the torque limit in parameter 221 has been
exceeded.
Bit 15, Thermal warning:
Bit 15 = "0" means that the timers for motor thermal
protection and VLT thermal protection, respectively,
have not exceeded 100%. Bit 15 = "1" means that one
of the timers has exceeded 100%.
Bus reference value:
The frequency reference value is transmitted to the
frequency converter in the form of a 16-bit word. The
value is transmitted as a whole number (0-32767).
16384 (4000 Hex) corresponds to 100%. (Negative
figures are formed by means of 2's complement.)
VLT® FCM Series
The bus reference has the following format:
Parameter 203 = "0"
"ref
-ref
MAX
"
- ref
MIN
MAX
MIN
0-16384 (4000 Hex) ~ 0-100% ~ ref
Parameter 203 = "1"
-ref
- +ref
MAX
MAX
-16384 (. . . Hex) - +16384 (4000 Hex) ~
-100- +100% ~ -ref
MAX
- +ref
MAX
Actual output frequency
The value of the actual output frequency of the frequency converter is transmitted in the form of a 16- bit
word. The value is transmitted as a whole number
(0-32767). 16384 (4000 Hex) corresponds to 100%.
(Negative figures are formed by means of 2's complement).
76 MG.03.H6.02 - VLT® is a registered Danfoss trademark

VLT® FCM Series
Parameter Group 5-** Serial Communication
500 Address
(BUS ADDRESS)
Value:
Parameter 561 Protocol = FC protocol [0]
0 - 126
Parameter 561 Protocol = MODBUS RTU [3]
0 - 247
Function:
This parameter allows the allocation of an address to
each frequency converter in a serial communication
network.
Description of choice:
The individual frequency converter must be allocated
a unique address. If the number of units connected
(frequency converters + master) is higher than 31, a
repeater must be used. Parameter 500 Address can-
not be selected via the serial communication, but must
be preset via the control unit.
501 Baudrate
(BAUDRATE)
Value:
300 Baud (300 BAUD) [0]
600 Baud (600 BAUD) [1]
1200 Baud (1200 BAUD) [2]
2400 Baud (2400 BAUD) [3]
4800 Baud (4800 BAUD) [4]
9600 Baud (9600 BAUD) [5]
Function:
This parameter is for programming the speed at which
data is to be transmitted via the serial connection.
Baud rate is defined as the number of bits transferred
per second.
Description of choice:
The transmission speed of the FC motor is to be set at
a value that corresponds to the transmission speed of
the PLC/PC.
NB!
Can not be changed via LCP 2. LCP 2 is
only capable to communicate at 9600
baud.
502 Coasting
(COASTING SELECT)
503 Quick-stop
(Q STOP SELECT)
504 DC-brake
1
1
505 Start
506 Reversing
507 Selection of Setup
508 Selection of speed
Value:
Digital input (DIGITAL INPUT) [0]
Bus (SERIAL PORT) [1]
Logic and (LOGIC AND) [2]
Logic or (LOGIC OR) [3]
Function:
Parameters 502-508 allow a choice between controlling the FC motor via the terminals (digital input) and/
or via the bus.
If Logic and or Bus is selected, the command in question can only be activated if transmitted via the serial
communication port. In the case of Logic and, the command must additionally be activated via one of the
digital inputs.
Description of choice:
Digital input [0] is selected if the control command in
question is only to be activated via a digital input.
Bus [1] is selected if the control command in question
is only to be activated via a bit in the control word (serial communication).
Logic and [2] is selected if the control command in
question is only to be activated when a signal is transmitted (active signal = 1) via both a control word and a
digital input.
Digital input
(DC BRAKE SELECT)
(START SELECT)
(REVERSING SELECT)
(SETUP SELECT)
(PRES.REF. SELECT)
505-508
0 0 0
0 1 0
1 0 0
11 1
Bus Control command
Logic or [3] is selected if the control command in question is to be activated when a signal is given (active
signal = 1) either via a control word or via a digital input.
= factory setting, () = display text, [] = value for use in communication via serial communication port
MG.03.H6.02 - VLT® is a registered Danfoss trademark 77

VLT® FCM Series
Digital input
505-508
Bus Control command
0 0 0
0 1 1
1 0 1
11 1
NB!
Parameters 502-504 deal with stop functions - see examples regarding 502
(coasting) below. Active stop command
"0".
Parameter 502 = Logic and
Digital input
Bus Control command
0 0 1 Coasting
0 1 0 Motor running
1 0 0 Motor running
1 1 0 Motor running
Parameter 502 = Logic or
Digital input
Bus Control command
0 0 1 Coasting
0 1 1 Coasting
1 0 1 Coasting
1 1 0 Motor running
Function:
This is where to set a fixed speed (jog) that is activated
via the serial communication port.
This function is the same as in parameter 213.
Description of choice:
The jog frequency f
between f
(parameter 201) and f
MIN
can be selected in the range
JOG
(parameter
MAX
202).
512 Telegram profile
(TELEGRAM PROFILE)
Value:
Fieldbus Profile (FIELDBUS PROFILE) [0]
FC Profile (FC PROFILE) [1]
Function:
There is a choice of two different control word profiles.
Description of choice:
Select the desired control word profile.
See Serial communication for further information about
the control word profiles.
509 Bus jog 1
(BUS JOG 1 FREQ.)
Value:
0.0 - parameter 202 [0 -]
10.0 HZ [100]
Function:
This is where to set a fixed speed (jog) that is activated
via the serial communication port.
This function is the same as in parameter 213.
Description of choice:
The jog frequency f
between f
(parameter 201) and f
MIN
can be selected in the range
JOG
(parameter
MAX
202).
510 Bus jog 2
(BUS JOG 2 FREQ.)
Value:
0.0 - parameter 202 [0 -]
10.0 HZ [100]
NB!
This is only possible in Stop Mode (motor
stopped on a Stop command).
513 Bus time interval
(BUS TIMEOUT TIME)
Value:
1 - 99 sec. [1-99]
1 sec. [1]
Function:
This parameter sets the maximum time expected to
pass between the receipt of two consecutive telegrams. If this time is exceeded, the serial communication is assumed to have stopped and the desired
reaction is set in parameter 514.
Description of choice:
Set the desired time.
= factory setting, () = display text, [] = value for use in communication via serial communication port
78 MG.03.H6.02 - VLT® is a registered Danfoss trademark

VLT® FCM Series
514 Bus time interval function
(BUS TIMEOUT FUNC)
Value:
Off (OFF) [0]
Freeze output (FREEZE OUTPUT) [1]
Stop (STOP) [2]
Jogging (JOGGING) [3]
Max. speed (MAX SPEED) [4]
Stop and trip (STOP AND TRIP) [5]
Function:
This parameter selects the desired reaction of the FC
motor when the set time for bus timeout (parameter
513) has been exceeded. If choices [1] to [5] are activated, relay 01 and relay 04 will be de-activated.
Description of choice:
The output frequency of the FC motor can: be frozen
at the present value, be frozen at the reference, go to
stop, go to jogging frequency (parameter 213), go to
max. output frequency (parameter 202) or stop and
activate a trip.
515 Data read-out: Reference %
(REFERENCE)
Value:
XXX.X % [XXXX]
Function:
This parameter can be read out via the serial communication port.
Description of choice:
The value shown corresponds to the total reference
(sum of digital/analogue/preset/bus/freeze ref./catchup and slow-down).
This value is updated every 320 ms.
516 Data read-out: Reference unit
(REFERENCE [UNIT])
Value:
X.XXX Hz or rpm. [XXXX]
Description of choice:
Indicates the status value of the unit given on the basis
of the choice of the reference sum.
This value is updated every 320 ms.
517 Data read-out: Feedback
(FEEDBACK [UNIT])
Value:
X.XXX [XXXX]
Function:
This parameter can be read out via the serial communication port.
Description of choice:
Indicates the status value of terminals 1/2 at the unit/
scale selected in parameters 414 and 415.
This value is updated every 320 ms.
518 Data read-out: Frequency
(FREQUENCY)
Value:
XXX.X Hz [XXXX]
Function:
This parameter can be read out via the serial communication port.
Description of choice:
The value shown corresponds to the actual motor frequency.
This value is updated every 320 ms.
519 Data read-out: Frequency x scale
(FREQUENCY X SCALE)
Value:
XXX.X Hz [XXXX]
Function:
This parameter can be read out via the serial communication port.
Function:
This parameter can be read out via the serial communication port.
Description of choice:
The value corresponds to the present output frequen-
multiplied by the factor preset in parameter 008
cy f
M
Display scaling of output frequency.
= factory setting, () = display text, [] = value for use in communication via serial communication port
MG.03.H6.02 - VLT® is a registered Danfoss trademark 79

520 Data read-out: Current
(MOTOR CURRENT)
Value:
XXX.XX A [XXXXX]
VLT® FCM Series
Description of choice:
The value shown is calculated on the basis of the actual motor voltage and motor current.
This value is updated every 320 ms.
Function:
This parameter can be read out via the serial communication port.
Description of choice:
The value shown is a calculated value of the given
motor current.
This value is updated every 320 ms.
521 Data read-out: Torque
(TORQUE)
Value:
XXX.X % [XXXX]
Function:
This parameter can be read out via the serial communication port.
Description of choice:
The value shown is the torque, with sign, supplied to
the motor shaft. The value is given as a percentage of
the rated torque.
There is not exact linearity between 160% motor current and torque in relation to the rated torque. Due to
tollerences and temperature differences some motors
supply more torque than that. Consequently, the min.
value and the max. value will depend on the max./min.
motor current.
523 Data read-out: Power, HP
(POWER (hp))
Value:
XX.XX HP (US) [XXXX]
Function:
This parameter can be read out via the serial communication port.
Description of choice:
The value shown is calculated on the basis of the actual motor voltage and motor current. The value is
indicated in the form of HP.
This value is updated every 320 ms.
524 Data read-out: Motor voltage
(MOTOR VOLTAGE)
Value:
XXX.X V [XXXX]
Function:
This parameter can be read out via the serial communication port.
Description of choice:
The value shown is a calculated value used for controlling the motor.
This value is updated every 320 ms.
This value is updated every 320 ms.
525 Data read-out: DC link voltage
522 Data read-out: Power, kW
(POWER (kW))
Value:
XX.XX kW [XXXX]
Function:
This parameter can be read out via the serial communication port.
= factory setting, () = display text, [] = value for use in communication via serial communication port
80 MG.03.H6.02 - VLT® is a registered Danfoss trademark
Value:
XXXX V [XXXX]
Function:
This parameter can be read out via the serial communication port.
Description of choice:
The value shown is a measured value.
(DC LINK VOLTAGE)

VLT® FCM Series
The value is filtered, which means that approx. 1.3
seconds may pass from an input value changes until
the data read-out changes values.
This value is updated every 320 ms.
527 Data read-out: FC therm.
(FC THERMAL)
Value:
0 - 100% [0 - 100]
Function:
This parameter can be read out via the serial communication port.
Description of choice:
Only whole numbers are displayed.
This value is updated every 160 ms.
528 Data read-out: Digital input
(DIGITAL INPUT)
Value:
Unit
Function:
This parameter can be read out via the serial communication port.
Description of choice:
The value shown indicates the signal status from the
4 digital terminals (2, 3, 4, and 5).
534 Data read-out: Status word, binary
(STATUS WORD [HEX])
Value:
Unit
Function:
This parameter can be read out via the serial communication port.
Description of choice:
Indicates the status word transmitted via the serial
communication port.
537 Data read-out: INV. temperature
(INVERTER TEMP.)
Value:
Unit: ºC
Function:
This parameter can be read out via the serial communication port.
Description of choice:
States the given temperature of the frequency converter. This value is updated every 10 sec.
538 Data read-out: Alarm word
(ALARM WORD)
Value:
Unit
This value is updated every 20 ms.
533 Data read-out: External reference %
(EXT. REFERENCE)
Value:
-200.0 - +200.0 %
Function:
This parameter can be read out via the serial communication port.
Description of choice:
The value stated gives, as a percentage, the sum of
external references (sum of analogue/bus/pulse).
This value is updated every 80 ms.
= factory setting, () = display text, [] = value for use in communication via serial communication port
MG.03.H6.02 - VLT® is a registered Danfoss trademark 81
Function:
This parameter can be read out via the serial communication port. See chapter on "Warnings and alarms".
Description of choice:
States whether there is an alarm on the FC motor.

VLT® FCM Series
Hex Fault messages
00000002 Trip lock
00000040 HPFB timeout
00000080 Standard bus timeout
00000100 Short circuit
00000200 24 V supply fault
00000400 Earth fault
00000800 Overcurrent
00004000 Motor thermistor
00008000 Inverter overload
00010000 Undervoltage
00020000 Overvoltage
00040000 Phase loss
00080000 Live zero error
00100000 Overtemperature
02000000 HPFB error
08000000 Inrush fault
10000000 Internal error
NB!
This parameter is updated every 20 ms.
539 Data read-out: Control word
(CONTROL WORD)
Value:
Unit
Hex
00000008 HPFB timeout
00000010 Standard bus timeout
00000040 Current limit
00000200 Inverter overload
00001000 Voltage warning low
00002000 Voltage warning high
00004000 Phase loss
00010000 Live zero error warning
00400000 Output freq. limit warning
00800000 HPFB error
40000000 24 V supply warning
80000000 Inverter temp. high
541 Data read-out: Extended status word
540
Value:
Unit
Function:
This parameter can be read out via the serial communication port.
Description of choice:
States in Hex format whether there is a warning on the
FC motor.
Warning messages
(STATUS WORD)
Function:
This parameter can be read out via the serial communication port.
Description of choice:
Indicates the control word sent via the serial communication port in Hex code from the FC motor. This
parameter is updated every 20 ms.
540 Data read-out: Warning word
(WARN. WORD)
Value:
Unit
Function:
This parameter can be read out via the serial communication port. See chapter on "Warnings and alarms".
Description of choice:
States in Hex format whether there is a warning on the
FC motor.
Hex
01 Ramping
04 Start clockwise/counterclockwise
08 Slow down
10 Catch-up
8000 Frequency limit
542
Value:
Unit: mA
Function:
This parameter can be read out via the serial communication port.
Description of choice:
The value shown indicates the signal value on terminal
1.
Status messages
Data read-out: Terminal 1, analogue input
(ANALOG INPUT 1)
= factory setting, () = display text, [] = value for use in communication via serial communication port
82 MG.03.H6.02 - VLT® is a registered Danfoss trademark

VLT® FCM Series
The scaling (parameters 336 and 337) does not influence the read-out. Min. and max. are determined by
the offset and gain adjustment of the AD-converter.
This value is updated every 20 ms.
543
Value:
Unit: X.X V
Function:
This parameter can be read out via the serial communication port.
Description of choice:
The value shown indicates the signal value on terminal
2.
The scaling (parameters 338 and 339) does not influence the read-out. Min. and max. are determined by
the offset and gain adjustment of the AD-converter.
This value is updated every 20 ms.
561 Protocol
Value:
FC protocol (FC PROTOKOL) [0]
Modbus RTU [2]
Function:
There is a choice of three different protocols.
Description of choice:
Select the required control word protocol.
For further information about using the Modbus RTU,
see MG10SX.
570 Modbus parity and message framing
Value:
(EVEN/1 STOPBIT) [0]
(ODD/1 STOPBIT) [1]
(NO PARITY/1 STOPBIT) [2]
(NO PARITY/2 STOPBIT) [3]
Data read-out: Terminal 2, analogue input
(ANALOG INPUT 2)
(PROTOCOL)
(M.BUS PAR./FRAME)
Function:
This parameter sets up the drive’s Modbus RTU interface to communicate properly with the master controller. The parity (EVEN, ODD, or NO PARITY) must be
set to match the setting of the master controller.
Description of choice:
Select the parity that matches the setting for the Modbus master controller. Even or odd parity is sometimes
used to allow a transmitted word to be checked for errors. Because Modbus RTU uses the more efficient
CRC (Cyclic Redundancy Check) method of checking
for errors, parity checking is seldom used in Modbus
RTU networks.
NB!
Any change will disable use of display unit
(LCP2), and further programming also by
FC protocol.
571 Modbus communications timeout
(M.BUS COM.TIME.)
Value:
10 ms - 2000 ms
Function:
This parameter determines the maximum amount of
time that the drive’s Modbus RTU will wait between
characters that are sent by the master controller.
When this amount of time expires, the drive’s Modbus
RTU interface will assume that it has received the entire message.
Description of choice:
Generally, the value of 100 ms is sufficient for Modbus
RTU networks, although some Modbus RTU networks
may operate on a timeout value as short as 35 ms.
If this value is set too short, the drive’s Modbus RTU
interface may miss a part of the message. Since the
CRC check will not be valid, the drive will ignore the
message. The resulting retransmissions of messages
will slow communications on the network.
If this value is set too long, the drive will wait longer
than necessary to determine that the message is completed. This will delay the drive’s response to the message and possibly cause the master controller to time
out. The resulting retransmissions of messages will
slow communications on the network.
100 ms
= factory setting, () = display text, [] = value for use in communication via serial communication port
MG.03.H6.02 - VLT® is a registered Danfoss trademark 83

Parameter Group 6-** Technical Functions
VLT® FCM Series
600 Operating data: Operating hours
(OPERATING HOURS)
Value:
Unit: hours
0.0 - 130,000.0
Function:
This parameter can be read out via the display or the
serial communication port. The value cannot be reset.
Description of choice:
Indicates the number of hours in which the FC motor
has been switched on.
The value is updated in the FC motor every hour and
saved when the unit is turned off.
601 Operating data: Hours run
(RUNNING HOURS)
Value:
Unit: hours
0.0 - 130,000.0
604
Value:
Unit: number
0 - 9999
Function:
This parameter can be read out via the display or the
serial communication port.
Description of choice:
States the number of temperature faults there has
been on the FC motor.
605
Value:
Unit: number
0 - 9999
Operating data: Number of overtemperatures
(OVER TEMP’S)
Operating data: Number of overvoltages
(OVER VOLT’S)
Function:
This parameter can be read out via the display or the
serial communication port. The value can be reset via
parameter 619.
Description of choice:
Indicates the number of hours in which the FC motor
has been in operation since reset in parameter 619.
The value is updated in the FC motor every hour and
saved when the unit is turned off.
603 Operating data: Number of power-up’s
(POWER UP’S)
Value:
Unit: number
0 - 9999
Function:
This parameter can be read out via the display or the
serial communication port.
Function:
This parameter can be read out via the display or the
serial communication port.
Description of choice:
States the number of overvoltages there has been on
the FC motor.
NB!
Parameters 615-617 Fault log cannot be
read out via the integral control unit.
NOTE:
Parameters 615-617 Fault log cannot be read out via
the integral control unit.
Description of choice:
States the number of power-ups of the supply voltage
to the FC motor.
= factory setting, () = display text, [] = value for use in communication via serial communication port
84 MG.03.H6.02 - VLT® is a registered Danfoss trademark

VLT® FCM Series
615 Fault log: Error code
(F.LOG: ERROR COD)
Value:
[Index 1 - 10] Error code: 0 - 99
Function:
In this parameter it is possible to see the reason for a
trip (cut-out of the frequency converter) occurring. 10
[1-10] log values are defined.
The lowest log number [1] contains the latest/most recently saved data value. The highest log number [10]
contains the oldest data value saved. If a trip occurs,
it is possible to see the cause, time and a possible value of the output current or output voltage.
Description of choice:
Given as a fault code, in which the number refers to a
table. See the table in Warnings/alarm messages.
616 Fault log: Time
(F.LOG: TIME)
Value:
Unit: Hours
[Indication range XX - XXX]
Function:
Array type parameter. This parameter makes it possible to see the total number of operating hours before
the trip occurred. 10 (1-10) log values are stored.
The lowest log number (1) contains the latest/most recently saved data value, while the highest log number
(10) contains the oldest data value.
Description of choice:
Read out as one value.
Indication range: 0.0 - 999.9.
The fault log is reset after initialisation (para. 620).
619 Reset of hours-run counter
(RESET RUN. HOUR)
Value:
No reset (DO NOT RESET) [0]
Reset (RESET COUNTER) [1]
Function:
Reset to zero of hours-run counter (parameter 601).
Description of choice:
If Reset [1] has been selected the hours-run counter of
the FC motor is reset.
620 Operating mode
(OPERATION MODE)
Value:
Normal function (NORMAL OPERATION) [0]
Control card test (CONTROL CARD TEST) [2]
Initialisation (INITIALIZE) [3]
Function:
In addition to its normal function, this parameter can
be used for two different tests.
Also, all parameters (except parameters 603-605) can
be initialized.
Description of choice:
Read out as an option.
Indication range: XX - XXX.
The fault log is reset after initialization (para. 620).
617 Fault log: Value
(F.LOG: VALUE)
Value:
[Index XX - XXX]
Function:
Array type parameter. This parameter makes it possible to see at what current or voltage a given trip occurred.
= factory setting, () = display text, [] = value for use in communication via serial communication port
MG.03.H6.02 - VLT® is a registered Danfoss trademark 85
Description of choice:
Normal function [0] is selected for normal operation
with the motor in the selected application.
Control card test [2] is selected if control of the analogue and digital inputs, as well as the analogue, digital
outputs and the +10 V control voltage is desired.
A test connector with internal connections is required
for this test. Setup: Analogue/digital output to digital
inputs 3, 4 and 5 and 10 V supply to analogue/digital
input 2.
Initialization [3] is selected if the factory setting of the
unit is desired without resetting parameters 500, 501
+ 600 - 605. Initialisationis active after power up.

VLT® FCM Series
621 Nameplate: FC type
(FC TYPE)
Value:
Depends on unit
Function:
The key data of the unit can be read out via the display
or the serial communication.
Description of choice:
Type indicates the unit size and basic function concerned.
624 Nameplate: Software version no.
(SOFTWARE VERSION)
Value:
Depends on unit
Function:
The key data of the unit can be read out via the display
or the serial communication.
628 Nameplate: Application option type
(APP. OPTION)
Value:
Function:
The key data of the unit can be read out via the display
or the serial communication port.
630
Value:
Function:
The key data of the unit can be read out via the display
or the serial communication port.
Nameplate: Communication option
type ordering no.
(COM. ORDER NO)
Description of choice:
Software version gives the version number.
625 Nameplate: LCP identification no.
(LCP VERSION)
Value:
Depends on unit
Function:
The key data of the unit can be read out via the display
or the serial communication port. For example: ID 1,42
2 kB.
626 Nameplate: Database identification no.
(DATABASE VER.)
Value:
Depends on unit
632 BMC software identification
(BMC SW VERSION)
Value:
Function:
The key data of the unit can be read out via the display
or the serial communication port.
633 Motor database identification
(MOTOR DATA VERS.)
Value:
Function:
The key data of the unit can be read out via the display
or the serial communication port.
Function:
The key data of the unit can be read out via the display
or the serial communication port.
= factory setting, () = display text, [] = value for use in communication via serial communication port
86 MG.03.H6.02 - VLT® is a registered Danfoss trademark

634 Unit identification for communication
(UNIT ID)
Value:
Function:
The key data of the unit can be read out via the display
or the serial communication port.
635 Software Part No.
(Software Part No.)
Value:
Function:
The key data of the unit can be read out via the display
or the serial communication port.
VLT® FCM Series
678 Configure Control Card
(CONFIG CONTROL CARD)
Value:
Standard version (STANDARD VERSION) [1]
Profibus 3 Mbaud Version
(PROFIBUS 3 MB VER.) [2]
Profibus 12 Mbaud Version
(PROFIBUS 12 MB VER.) [3]
Function:
This parameter enables a configuration of a Profibus
Control Card. The default value depends on the produced unit, also being the maximum obtainable value.
This means, that a control card only can be down graded to a lower performance version.
= factory setting, () = display text, [] = value for use in communication via serial communication port
MG.03.H6.02 - VLT® is a registered Danfoss trademark 87

VLT® FCM Series
Galvanic isolation (PELV)
PELV offers protection by way of extra low voltage.
Protection against electric shock is considered to be
ensured when all connected devices are of the PELV
type and the installation is made as described in local/
national regulations on PELV supplies.
In FCM 300 Series all control terminals are supplied
from or in connection with extra low voltage (PELV).
Galvanic (ensured) isolation is obtained by fulfilling requirements concerning higher isolation and by providing the relevant creapage/clearance distances. These
requirements are described in the EN 50178 standard.
The components that make up the electrical isolation,
as described below, also comply with the requirements
concerning higher isolation and the relevant test as
described in EN 50178.
The galvanic isolation can be shown in three locations
(see drawing below), namely:
1. Power supply (SMPS) incl. signal isolation of
, indicating the intermediate current volt-
U
DC
age.
2. Gate drive that runs the IGBTs (optocou-
plers).
2. Motor grounded on site or not
The leakage current is of importance to safety during
handling/operation of the frequency converter if (by
mistake) the frequency converter has not been earthed.
NB!
FCM 305-375 all have leakage currents >
3.5 mA, approx 4 to 20 mA. Varies with
switching frequencies within the given interval.
This means reinforced earthing mus be established, if
EN50178 is to be complied with.
Never use ELCB (Earth Leakage Circuit Breaker) relays also called RCD(Residual Current Device) that
are not suitable for DC fault currents (type A).
If a RCD is used it must be:
Suitable for protecting equipment with a DC
-
current content in the fault current (3-phase
rectifier)
Suitable for power-up with short charging
-
current to earth
Suitable for a high leakage current.
-
3. Current transducers (opto-couplers).
Earth leakage current
Earth leakage current is primarily caused by the capacitance between motor phases and the motor frame.
The RFI filter contributes additional leakage current,
as the filter circuit is connected to earth through capacitors.
The size of the leakage current to the ground depends
on the following factors, in order of priority:
1. Switching frequency
This means it is possible to operate the FCM 300 on
RCD type B:
Residual Current Devices (RCD) type B has a tolerance on trip level. It is therefore recommended to use
a RCD where the max leakage current for the FCM
(see above, 20 mA) is less than 1/3 of the trip level for
the RCD. This means the trip level for the RCD will
have to be 60 mA or higher, i.e. a RCD type B with a
trip level 100 mA can be used for protection.
Galvanic isolation
88 MG.03.H6.02 - VLT® is a registered Danfoss trademark

VLT® FCM Series
Extreme running conditions
Motor-generated overvoltage
The voltage in the intermediate circuit is increased
when the motor acts as a generator. This occurs in two
cases:
1. The load drives the motor (at constant output
frequency from the frequency converter), i.e.
the load generates energy.
2. During deceleration ("ramp-down") if the mo-
ment of inertia is high, the load is low and the
ramp-down time is too short for the energy to
be dissipated as a loss in the VLT frequency
converter, the motor and the installation.
The control unit attempts to correct the ramp if possible.
The inverter turns off to protect the transistors and the
intermediate circuit capacitors when a certain voltage
level is reached.
Mains drop-out
During a mains drop-out, FCM 300 Series continues
until the intermediate circuit voltage drops below the
minimum stop level, which is typically 15% below FCM
300 Series's lowest rated supply voltage.
The time before the inverter stops depends on the
mains voltage before the drop-out and on the motor
load.
Static overload
When FCM 300 Series is overloaded (the current limit
in parameter 221 has been reached), the controls will
reduce the output frequency in an attempt to reduce
the load.
If the overload is excessive, a current may occur that
makes the FC motor cut out after approx. 1.5 sec.
Acoustic noise
Below are the typical values measured at a distance
of 1 m from the unit at full load:
2 pole 4 pole
FCM 305 54 dB(A)
FCM 311 58 dB(A)
FCM 315 59 dB(A)
FCM 322 58 dB(A)
FCM 330 61 dB(A)
FCM 340 62 dB(A) 63 dB(A)
FCM 355 64 dB(A) 60 dB(A)
FCM 375 61 dB(A)
Balance
The FCM 300 is balanced to class R according to
ISO8821 (reduced balance). For critical applications
especially at high speed (>4000 RPM) special balance
(class S) might be required.
Thermal Protection and Derating
The FCM 300 Series motor is thermally protected in
case limits are exceeded. At high temperatures the
switching frequency will be gradually reduced down to
2 kHz and eventually the motor will trip.
NB!
Combination of high switching frequency
and missing fan cooling might damage the
unit.
Derating for ambient temperature
The ambient temperature (T
AMB,MAX
temperature allowed. The average (T
) is the maximum
) meas-
AMB,AVG
ured over 24 hours must be at least 5ºC lower.
If FCM 300 Series is operated at temperatures above
40 ºC, a derating of the continuous output current is
necessary.
MG.03.H6.02 - VLT® is a registered Danfoss trademark 89

VLT® FCM Series
Derating for air pressure
By altitudes above 2 km, please contact Danfoss
Drives regarding PELV.
Below 1000 m altitude no derating is necessary.
Above 1000 m the ambient temperature (T
output current (I
) must be derated in accord-
VLT,MAX
AMB
) or max.
ance with the following diagram:
1. Derating of output current versus altitude at
= max. 40°C
T
AMB
Derating for running at low speed
When a centrifugal pump or a fan is controlled by a FC
motor, it is not necessary to reduce the output at low
speed because the load characterstic of the centrifugal
pumps/fans, automatically ensures the necessary reduction.
FC motors running constant load torque applications
continuously at low speed must be derated (see diagram) or an independent fan must be used (motor
cooling method 2).
2. Derating of max. T
100% output current.
versus altitude at
AMB
Nominal torque (100%) can be yielded up to 15 min
and at a duty cycle up to 25% at low speed.
Derating for high switching frequency
The FCM 300 Series motor can use two different PWM
schemes, SFAVM and 60° AVM. Factory setting is
SFAVM. The PWM scheme can be changed in parameter 446. Below 25 Hz motor speed the FCM 300
Series motor automatically change to SFAVM.
Factory setting of the switching frequency is 4000 Hz.
It can be changed between 2 and 14 kHz in parameter
411.
A higher switching frequency leads to a quieter running
unit but higher losses in the electronics of the FC motor
and makes an appropriate derating necessary.
See below Torque carateteristic
90 MG.03.H6.02 - VLT® is a registered Danfoss trademark

Vibration and shock
FCM 300 Series has been tested according to a procedure based on the following standards:
IEC 60068-2-6: Vibration (sinusoidal) - 1970
IEC 60068-2-34: Random vibration broad-band
- general requirements
IEC 60068-2-35: Random vibration broad-band
- high reproducibility
IEC 60068-2-36: Random vibration broad-band
- medium reproducibility
FCM 300 Series complies with requirements that correspond to conditions in the standards mentioned
above.
VLT® FCM Series
Air humidity
FCM 300 Series has been designed to meet the IEC
60068-2-3 standard, EN 50178 item 9.4.2.2/DIN
40040, class E, at 40°C.
Cyclic damp heat according to IEC 60068-2-30, 40°C.
UL standard
FCM 300 Series is UL approved.
See Technical data for correct use of prefuses.
Efficiency
4 pole
Mains supply interference/harmonics
A FC motor takes up a non-sinusoidal current from
mains, which increases the input current I
RMS
. A nonsinusoidal current can be transformed by means of a
Fourier analysis and split up into sine wave currents
with different frequencies, i.e. different harmonic currents I
with 50 Hz as the basic frequency:
N
Harmonic
currents
Hz 50 Hz 250 Hz 350 Hz 550 Hz
In/I1 [%] 100% 44% 29% 8%
I
1
I
5
I
7
I
11
The harmonics do not affect the power consumption
directly, but increase the heat losses in the installation
(transformer, cables). Consequently, in plants with a
rather high percentage of rectifier load, it is important
to maintain harmonic currents at a low level to avoid
overload of the transformer and high temperature in
the cables.
Some of the harmonic currents might disturb communication equipment connected to the same transformer or cause resonance in connection with power-factor
correction batteries.
2 pole
To ensure low, harmonic currents, FCM 300 has intermediate circuit coils as standard.. THD (current) ≤
54%
The voltage distortion on the mains supply depends on
the size of the harmonic currents multiplied by the
mains impedance for the frequency in question. The
total voltage distortion THD is calculated on the basis
of the individual voltage harmonics using the following
formula:
MG.03.H6.02 - VLT® is a registered Danfoss trademark 91

VLT® FCM Series
U
THD =
U
+...+U
2
2
1
(%)
2
n
Power factor
The power factor is the relation between I
and I
1
RMS
The power factor for 3-phase control
The power factor indicates the extent to which the FC
motor imposes a load on the mains supply.
The lower the power factor, the higher the I
RMS
for the
same kW performance.
In addition, a high power factor indicates that the different harmonic currents are low.
What is CE labelling?
The purpose of CE labellingis to avoid technical obstacles to trade within EFTA and the EU. The EU has
introduced the CE label as a simple way of showing
whether a product complies with the relevant EU directives. The CE label says nothing about the specifications or quality of the product. Frequency converters
are regulated by three EU directives:
The machinery directive(98/37/EEC)
All machines with critical moving parts are covered by
the machinery directive, which came into force on 1
January 1995. Since a frequency converter is largely
electrical, and the motor always will be placed in connection with other machines, it does not fall under the
machinery directive. However, if a FC motor is supplied for use in a machine, we provide information on
safety aspects relating to the FC motor. We do this by
means of a manufacturer's declaration.
The low-voltage directive (73/23/EEC)
Frequency converters must be CE labelled in accordance with the low-voltage directive. The directive applies to all electrical equipment and appliances used
in the voltage range of 50-1000 V AC and 75-1500 V
DC.
The EMC directive(89/336/EEC)
EMC is short for electromagnetic compatibility. The
presence of electromagnetic compatibility means that
the mutual interference between different components/ appliances is so small that the functioning of the
appliances is not affected. The EMC directive came
into force on 1 January 1996. The directive distin-
guishes between components, appliances, SYSTEMs
and installations.
What is covered?
The EU "Guidelines on the Application of Council Di-
.
rective 89/336/EEC" outline three typical situations of
using a FC motor. For each of these situations, explanations are offered as to whether the situation in
question is covered by the EMC directive and must be
CE labelled.
1. The FC motor is sold directly to the endconsumer. The FC motor is for example sold to
a DIY market. The end-consumer is a layman. He installs the FC motor himself for use
with a hobby machine, a kitchen appliance,
etc. For such applications, the FC motor must
be CE labelled in accordance with the EMC
directive.
2. The FC motor is sold for installation in a plant.
The plant is built up by professionals of the
trade. It could be a production plant or a heating/ ventilation plant designed and installed
by professionals of the trade. Neither the FC
motor nor the finished plant has to be CE labelled under the EMC directive. However, the
unit must comply with the basic EMC requirements of the directive. The installer can ensure this by using components, appliances
and SYSTEMs that are CE labelled under the
EMC directive.
3. The FC motor is sold as part of a complete
SYSTEM. The SYSTEM is being marketed
as complete. It could be e.g. an air-conditioning SYSTEM. The complete SYSTEM must
be CE labelled in accordance with the EMC
directive. The manufacturer who supplies the
SYSTEM can ensure CE labelling under the
EMC directive either by using CE labelled
components or by testing the EMC of the
SYSTEM. If he chooses to use only CE labelled components, he does not have to test
the entire SYSTEM.
Danfoss FCM 300 Series motor and CE labelling
CE labelling is a positive feature when used for its
original purpose, i.e. to facilitate trade within the EU
and EFTA.
However, CE labelling may cover many different specifications. This means that it has to be checked what a
given CE label specifically covers.
The specifications covered can in fact be widely different. That is why a CE label can give the installer a
92 MG.03.H6.02 - VLT® is a registered Danfoss trademark

false feeling of security when using a FC motor as a
component in a SYSTEM or an appliance.
We CE label our VLT® DriveMotors in accordance with
the low-voltage directive. This means that as long as
the FC motor is installed correctly, we guarantee that
it complies with the low-voltage directive. We issue a
declaration of conformity that confirms our CE labelling
in accordance with the low-voltage directive.
The CE label also applies to the EMC directive, on
condition that the instructions given in the Operating
Instructions for EMC-correct installation and filtering
have been followed. On this basis, a declaration of
conformity in accordance with the EMC directive is issued.
The Quick Guide gives detailed instructions for installation to ensure that your installation is EMCcorrect.
Furthermore, we specify which norms that are complied with by our different products.
We offer the filters that can be seen from the specifications and gladly provide other types of assistance
that can help you obtain the best EMC result.
Compliance with EMC directive 89/336/EEC
In the great majority of cases, the VLT DriveMotor is
used by professionals of the trade as a complex component forming part of a larger appliance, SYSTEM or
installation. It must be noted that the responsibility for
the final EMC properties of the appliance, SYSTEM or
installation rests with the installer. As an aid to the installer, Danfoss has prepared EMC installation guidelines for the Power Drive System. The standards and
test levels stated for Power Drive Systems are complied with, provided the right EMC-correct instructions
for installation have been followed, see electrical installation.
VLT® FCM Series
Z
= 0 + j0 ohm. (EN 61800-3
min
commutation notches)
Generic standards
The generic standards are stated in the EMC directive
(89/336/EEC).
The FC motor complies with:
1)
EN 61000-6-3
Residential, commercial and light industrial environment.
EN 61000-6-2, EN 61000-6-4.
Industrial environment.
1)
Emission levels stated by EN 61000-6-3 are only ful-
filled by FC motors with class B-1 optional filter.
Furthermore the FC motor complies with: DIN VDE
0160/1990
2)
‘Protection against overvoltage 7.3.1. class1’
Product standards
The product standards are stated in EN 61800-3 (IEC
61800-3).
The FC motor complies with:
EN 61800-3, unrestricted distribution
EN 61800-3, restricted distribution.
3)
Emission levels stated by EN 61800-3 unrestricted
distribution are only fulfilled by FC motors with class
B-1 filter.
Basic standards, emissions
- EN 55011: Limits and methods of measuring
, EN 61000-6-1.
2)
3)
.
radio disturbance characteristics of industrial, scientific and medical (ISM) radio-frequency equipment.
EMC standards
- EN 55022: Limits and methods of measuring
radio disturbance characteristics of informa-
NB!
All EMC specifications are sta-
-
ted with factory settings.
Maximum 4 kHz switching fre-
-
quency.
Screened data/control cables
-
Basic standards, immunity
must be used for surge protection.
The FC motor must be connec-
-
ted to earth in order to comply.
Maximum/minimum line impe-
-
dance Z
MG.03.H6.02 - VLT® is a registered Danfoss trademark 93
= 0.24 + j0.15 ohm;
max
tion technology equipment.
-
EN 61000-3-2: Limits for harmonic current
emissions (equipment input current ≥ 16 A)
- EN 61000-3-4: Limits for harmonic current
emissions (equipment input current ≤ 16 A)
- EN 61000-2-4 (IEC 61000-2-4):
Compatibility levels
Simulation of voltage and frequency fluctuations, harmonics and commutation notches
on the power line.

VLT® FCM Series
- EN 61000-4-2 (IEC 61000-4-2): Electrostatic
discharge (ESD)
Simulation of electrostatic discharge.
- EN 61000-4-4 (IEC 61000-4-4): Fast transients, burst 5/ 50 nS
Simulation of transients caused by switching
of contactors, relays or similar devices.
- EN 61000-4-5 (IEC 61000-4-5):
Surges 1.2/ 50 μS.
Simulation of transients caused by e.g. lightning that strikes near an installation.
-
EN 61000-4-3: (IEC 61000-4-3):
Radio-frequency electromagnetic field. Amplitude modulated.
Simulation of interference caused by radio
transmission equipment.
- EN 61000-4-6: (IEC 61000-4-6):
RF common mode.
Simulation of the effect from radio-transmitting equipment connected to connection cables.
-
ENV 50204:
Radio-frequency electromagnetic field. Pulse
modulated.
Simulation of interference caused by GSM
mobile phones.
General aspects of EMC emissions
For high frequency shielding, screened cables used
for Profibus, standard bus, control cables and signal
interface must in general be connected to the enclosure at both ends.
Liquids can be carried through the air and condense
in the VLT frequency converter. In addition to this, liquids may cause corrosion of components and metal
parts.
Steam, oil and salt water may cause corrosion of components and metal parts.
In such environments, equipment with enclosure rating ≥ IP 54 is recommended.
In environments with high temperatures and humidity,
corrosive gases such as sulphur, nitrogen and chlorine
compounds will cause chemical processes on the VLT
frequency converter components. Such chemical reactions will rapidly affect and damage the electronic
components.
NB!
Mounting VLT frequency converters in aggressive environments will increase the
risk of stoppages and furthermore considerably reduce the life of the converter.
Before the installation of the VLT frequency converter,
the ambient air should be checked for liquids, particles
and gases. This may be done by observing existing
installations in this environment. Typical indicators of
harmful airborne liquids are water or oil on metal parts,
or corrosion of metal parts.
Excessive dust particle levels are often found on installation cabinets and existing electrical installations.
One indicator of aggressive airborne gases is blackening of copper rails and cable ends on existing installations.
General aspects of EMC immunity
If there are problems with low frequency interference
(ground loops), screened cable used for Profibus,
standard bus, control cables and signal interface can
be left open at one end.
Aggressive environments
In common with all electronic equipment, a VLT frequency converter contains a large number of mechanical and electronic components, all of which are
vulnerable to environmental effects to some extent.
The VLT frequency converter should not
therefore be installed in environments
with airborne liquids, particles or gases
capable of affecting and damaging the
electronic components. Failure to take the
necessary protective measures increases
the risk of stoppages, thus reducing the
life of the VLT frequency converter.
94 MG.03.H6.02 - VLT® is a registered Danfoss trademark

VLT® FCM Series
List of warnings and alarms
The table gives the different warningsand alarmsand
indicates whether the fault locks the FC motor. After
Trip locked, the mains supply must be cut and the fault
must be corrected. Reconnect the mains supply and
reset the FC motor before being ready. Wherever a
cross is placed under both Warning and
No.
11 Motor thermistor (MOTOR THERMISTOR) X
12 Torque limit (TORQUE LIMIT) X
13 Overcurrent (OVERCURRENT) X X
14 Earth fault (EARTH FAULT) X X
15 Supply fault (SWITCH MODE FAULT) X X
16 Short-circuit (CURR.SHORT CIRCUIT) X X
17 Standard bus timeout (STD BUS TIMEOUT) X X
18 HPFB bus timeout (HPFB TIMEOUT) X X
33 Out of frequency range (OUT FREQ RNG/ROT LIM) X
34 HPFB error (HPFB ALARM) X X
35 Inrush fault (INRUSH FAULT) X X
36 Overtemperature (OVERTEMPERATURE) X X
37 Internal error (INTERNAL ERROR) X X
Description Warning Trip Alarm Trip locked
2 Live zero fault (LIVE ZERO ERROR) X X
4 Phase loss (MAINS PHASE LOSS) X X X
5 Voltage warning high (DC LINK VOLTAGE HIGH) X
6 Voltage warning low (DC LINK VOLTAGE LOW) X
7 Overvoltage (DC LINK OVERVOLT) X X
8 Undervoltage (DC LINK UNDERVOLT) X
9 Inverter overload (INVERTER TIME) X X
Alarm, this can mean that a warning precedes the
alarm. It can also mean that it is possible to program
whether a given fault is to result in a warning or an
alarm. After a trip, alarm and warning will flash, but if
the fault is removed, only alarm will flash. After a reset,
the FC motor will be ready to start operation again.
What if the motor does not start?
The LCP may be set for local stop. If so, the motor does
not start when you disconnect the LCP. To make the
motor start a LCP has to be connected, - there is no
other way, and the MCT 10 Setup Software will not tell
you what is wrong or what to do. So in case of problems follow the procedure stated below:
Green
LED 302 LED 301 LED 300
OFF OFF OFF Apply power
ON OFF OFF Apply start and reference signals
ON OFF ON Apply and remove reset signal
ON ON ON Switch off power until all LED's have turned off
For further information see the quick setup MG.03.Fx.xx.
1. Make sure no parameters have been
2. Make sure no STOP command has been
Yellow Red Action
changed from initial delivery status (factory
setting). Use the Local Control Panel or serial
port to reset to factory setting. Make sure that
parameter 002 is set for remote (if not, the
yellow LED 301 will be flashing slowly.
made via the optional control panel keyboard
3. Check the Light Emitting Diodes visible
*) as from software version 2.12
Warning:
Extreme care must be taken when operating the unit with open lid.
(local stop, yellow LED 301 flashing slowly *),
Control panel STOP can only be restarted by
the Control Panel START button.
through a hole in the inside isolation cover
(see drawing page 16) follow table below.
MG.03.H6.02 - VLT® is a registered Danfoss trademark 95

VLT® FCM Series
Serial communication problems If the bus address is
set for a high value, communication may seem to be
impossible, if the high address is not scanned by the
master. The address is not changed back to factory
setting with reset to factory setting function.
Warnings
The display flashes between normal state and warning. A warning comes up on the first and second line
of the display. See examples below:
DC LINK VOLTAGE LOW
SETUP
WARN. 6
WARNING/ALARM 2
Live zero fault (LIVE ZERO ERROR):
The current signal on terminal 1 is less than 50% of the
value set in parameter 336 Terminal 1, min. scaling.
1
175NA117.10
Alarm messages
The alarm comes up in the 2. and 3. line of the display,
see example below:
TRIP (RESET)
SETUP
SETUP
ALARM:12
1
1
175NA118.10
TORQUE LIMIT
If the intermediate circuit voltage (DC) exceeds the inverter overvoltage limit (see table), the FC motor will
trip. Furthermore, the voltage will be stated in the display.
WARNING/ALARM 4
Phase loss (MAINS PHASE LOSS):
Phase missing on the supply side. Check the supply
voltage to the FC motor.
WARNING 5
Voltage warning high (DC LINK VOLTAGE HIGH):
The intermediate circuit voltage (DC) is higher than the
overvoltage limit of the control SYSTEM, see table on
this page. The FC motor is still active.
WARNING 6
Voltage warning low (DC LINK VOLTAGE LOW):
The intermediate circuit voltage (DC) is below the undervoltage limit of the control SYSTEM, see table below. The FC motor is still active.
ALARM 7
Overvoltage (DC LINK OVERVOLT):
ALARM 8
Undervoltage (DC LINK UNDERVOLT):
If the intermediate circuit voltage (DC) drops below the
inverter lower voltage limit (see table on this page), the
FC motor will trip after 3 - 28 sec., depending on unit.
Furthermore, the voltage will be stated in the display.
Check whether the supply voltage matches the FC
motor, see technical data.
WARNING/ALARM 9
Inverter overload (INVERTER TIME):
The electronic, thermal inverter protection reports that
the FC motor is about to cut out because of an overload (too high current for too long). The counter for
electronic, thermal inverter protection gives a warning
at 95% and trips at 100%, while giving an alarm. The
FC motor
90%.
cannot be reset until the counter is below
96 MG.03.H6.02 - VLT® is a registered Danfoss trademark

VLT® FCM Series
Trip/Alarm/warning limits:
FC motor Series 3 x 380 - 480
V
[VDC]
Undervoltage 410
Voltage warning low 440
Voltage warning high 760
Overvoltage 760*
* 760V in 5 sec. or 800V immediately.
The voltages stated are the intermediate circuit voltage of the FC motor.
ALARM 11
Motor thermistor (MOTOR THERMISTOR):
If a thermistor is mounted and parameter 128 is set to
Enable [1], the FC motor will trip if the motor gets too
hot.
WARNING 12
Current limit (CURRENT LIMIT):
The current is higher than the value in parameter 221
(in motor operation).
ALARM 13
Overcurrent (OVERCURRENT):
The inverter peak current limit (approx. 230% of the
rated current) has been exceeded. The FC motor will
trip, while giving an alarm.
Turn off the FC motor and check whether the motor
shaft can be turned.
ALARM: 17
Standard bus timeout (STD BUSTIMEOUT)
There is no communication to the FC motor. The warning will only be active when parameter 514 has been
set to another value than OFF.
If parameter 514 has been set to stop and trip, it will
first give a warning and then ramp down until it trips,
while giving an alarm.
Parameter 513 Bus time interval could possibly be increased.
WARNING/ALARM 18
HPFB bus timeout (HPFB BUS TIMEOUT)
There is no communication with the FC motor. The
warning will only be active when parameter 804 has
been set to another value than OFF. If parameter 804
has been set to Stop and trip, it will first give a warning
and then ramp down until it trips, while giving an alarm.
Parameter 803 Bus time out could possibly be increased.
WARNING 33
Out of frequency range:
This warning is active if the output frequency has
reached parameter 201 Output frequency low limit or
parameter 202 Output frequency high limit.
WARNING/ALARM 34
HPFB error (HPFB ALARM):
The profibus communication is not working correctly.
NB!
If shock loads occur this alarm may appear.
ALARM: 14
Earth fault (EARTH FAULT):
There is a discharge from the output phases to earth,
either between the inverter and the motor or in the motor itself.
ALARM: 15
Supply fault (SWITCH MODE FAULT):
Fault in the switch mode power supply (internal 24 V
supply).
Contact your Danfoss supplier.
ALARM: 16
Short-circuiting (CURR.SHORT CIRCUIT):
There is short-circuiting on the motor terminals or the
motor itself.
Contact your Danfoss supplier.
ALARM 35
Inrush fault (INRUSH FAULT):
This warning occurs when the unit has been switched
on too many times within 1 minute.
WARNING/ALARM 36
Overtemperature (OVERTEMPERATURE):
ALARM: 37
Internal error (INTERNAL ERROR):
An error has occurred in the SYSTEM. Contact your
Danfoss supplier.
Warning word, extended Status word and Alarm
word
Warning word, extened status word and alarm
wordare shown on the display in Hex format. If there
are more than one warning or alarm, a sum of all warnings or alarms will be shown.
Warning word, extened status word and alarm word
can also be displayed using the serial bus in parameter
540, 541 and 538.
MG.03.H6.02 - VLT® is a registered Danfoss trademark 97

Bit (Hex) Warning word (P. 540)
00000008 HPFB timeout
00000010 Standard bus timeout
00000040 Current limit
00000200 Inverter overload
00001000 Voltage warning low
00002000 Voltage warning high
00004000 Phase loss
00010000 Live zero error warning
00400000 Output freq. limit warning
00800000 HPFB error
40000000 24 V supply warning
80000000 Inverter temp. high
Bit (Hex) Extended status word (P.541)
01 Ramping
04 Start clockwise/counterclockwise
08 Slow down
10 Catch-up
8000 Frequency limit
VLT® FCM Series
Bit (Hex) Alarm word (P.538)
00000002 Trip lock
00000040 HPFB timeout
00000080 Standard bus timeout
00000100 Short circuit
00000200 24 V supply fault
00000400 Earth fault
00000800 Overcurrent
00004000 Motor thermistor
00008000 Inverter overload
00010000 Undervoltage
00020000 Overvoltage
00040000 Phase loss
00080000 Live zero error
00100000 Overtemperature
02000000 HPFB error
08000000 Inrush fault
10000000 Internal error
98 MG.03.H6.02 - VLT® is a registered Danfoss trademark

VLT® FCM Series
List of parameters
Functions to programme, to control, and to monitor via bus (PROFIBUS) or by PC.
Parameter No.
001 Language 6 English 5 0
002 Local/remote control 2 Remote control 5 0
003 Local reference 000.000 4 -3
004 Active Setup 4 Setup 1 5 0
005 Programming Setup 4 Active setup 5 0
006 Copying of Setups 4 No copying 5 0
007 LCP copy 4 No copying 5 0
008 Display scaling of motor frequency 100 6 -2
009 Display line 2 24 Frequency [Hz] 5 0
010 Display line 1.1 24 Reference [%] 5 0
011 Display line 1.2 24 Motor current [A] 5 0
012 Display line 1.3 24 Power [kW] 5 0
013 Local control/configuration 5 LCP digital control/par. 100 5 0
014 Local stop 2 Possible 5 0
015 Local jog 2 Not possible 5 0
016 Local reversing 2 Not possible 5 0
017 Local reset of trip 2 Possible 5 0
018 Lock for data change 2 Not locked 5 0
019 Operating state at power up, local c. 3 Forced stop, use saved ref. 5 0
Function
Range/number of settings/value
Factory setting
Data
type
Conv.
index
Functions to programme, to control, and to monitor via bus (PROFIBUS) or by PC.
Parameter No.
100 Configuration 2 Speed, open loop mode 5 0
101 Torque characteristics 4 Constant torque 5 0
102 Motor power XX.XX kW - dep. on unit 6 1
103 Motor voltage XX.XX V - dep. on unit 6 0
104 Motor frequency XX.X Hz - dep. on unit 6 -1
105 Motor current XX.XX A - dep. on unit 7 -2
106 Rated motor speed XX rpm - dep. on unit 6 0
117 Resonance damping off - 100% off % 6 0
118 Resonance damping cut out 0-200% Motor dependent 5 0
126 DC braking time 0.0 (off) - 60.0 sec. 10.0 sec. 6 -1
127 DC brake cut-in frequency 0.0 Hz - f
128 Motor thermal protection 1 No protection 5 0
132 DC braking voltage 0 - 100 % 0 % 5 0
133 Start voltage 0.00 - 100.00 V Motor dependent 6 -2
134 Start compensation 0.0 - 300.0 % 100.0 % 6 -1
135 U/f ratio 0.00 - 20.00 V/Hz Motor dependent 6 -2
136 Slip compensation -500.0 - +500.0 % 100.0 % 3 -1
137 DC holding voltage 0 - 100 % 0 % 5 0
138 Brake cut out frequency 0.5 - 132 Hz 3.0 Hz 6 -1
139 Brake cut in frequency 0.5 - 132 Hz 3.0 Hz 6 -1
147 Setup of motor type dept. on unit dept. on unit 5 0
Function
Conversion index:
This number refers to a conversion figure to be used
when writing or reading via serial communication with
a frequency converter.
See Databytes in Serial Bus.
Range/number of settings/value
MAX
Data type:
Data type shows the type and length of the telegram.
Data type Description
3 Integer 16
4 Integer 32
5 Unsigned 8
6 Unsigned 16
7 Unsigned 32
9 Text string
Factory setting
0.0 Hz 6 -1
Data
type
Conv.
index
MG.03.H6.02 - VLT® is a registered Danfoss trademark 99
 Loading...
Loading...