

Page 1
MAKING MODERN LIVING POSSIBLE
Projektierungshandbuch
VLT® HVAC Drive FC 102
1,1-90 kW
www.danfoss.com/drives
Page 2

Page 3
Inhaltsverzeichnis Projektierungshandbuch
Inhaltsverzeichnis
1 Lesen des Projektierungshandbuchs
2 Einführung zum VLT® HVAC Drive
2.1 Sicherheit
2.2 CE-Kennzeichnung
2.3 Luftfeuchtigkeit
2.4 Aggressive Umgebungsbedingungen
2.5 Vibrationen und Erschütterungen
2.6 Sicher abgeschaltetes Moment
2.7 Vorteile
2.8 Regelungsstrukturen
2.9 Allgemeine EMV-Aspekte
2.10 Galvanische Trennung (PELV)
2.11 Gefahren durch elektrischen Schlag
2.12 Bremsfunktion
2.13 Extreme Betriebsbedingungen
3 Auswahl
6
11
11
12
13
14
14
15
22
36
46
51
52
53
54
58
3.1 Optionen und Zubehör
3.1.1 Einbau von Optionsmodulen in Steckplatz B 58
3.1.2 Universal-E/A-Modul MCB 101 59
3.1.3 Digitaleingänge – Klemme X30/1–4 60
3.1.4 Analoge Spannungseingänge – Klemme X30/10–12 60
3.1.5 Digitalausgänge – Klemme X30/5–7 60
3.1.6 Analogausgänge – Klemme X30/5+8 60
3.1.7 Relais-Option MCB 105 61
3.1.8 24-V-Notstromoption MCB 107 (Option D) 63
3.1.9 Analoge I/O-Option MCB 109 64
3.1.10 PTC-Thermistorkarte MCB 112 65
3.1.11 Sensoreingangsoption MCB 114 67
3.1.11.1 Bestellnummern und gelieferte Teile 68
3.1.11.2 Elektrische und mechanische Daten 68
3.1.11.3 Elektrische Verdrahtung 69
3.1.12 LCP-Einbausatz 69
3.1.13 IP21/IP41-Gehäuseabdeckung 70
58
3.1.14 Gehäuseabdeckung IP21 70
3.1.15 Ausgangsfilter 72
4 Bestellen
4.1 Bestellformular
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 1
73
73
Page 4
Inhaltsverzeichnis Projektierungshandbuch
4.2 Bestellnummern
5 Mechanische Installation
5.1 Mechanische Installation
5.1.1 Sicherheitstechnische Anforderungen für die Aufstellung 86
5.1.2 Abmessungen 87
5.1.3 Beutel mit Zubehör 89
5.1.4 Aufstellung 90
5.1.5 Montage vor Ort 91
6 Elektrische Installation
6.1 Anschlüsse – Gehäusetypen A, B und C
6.1.1 Anzugsdrehmoment 92
6.1.2 Öffnen von Aussparungen für zusätzliche Kabel 93
6.1.3 Netzanschluss und Erdung 93
6.1.4 Motoranschluss 96
6.1.5 Relaisanschluss 102
6.2 Sicherungen und Trennschalter
76
86
86
92
92
103
6.2.1 Sicherungen 103
6.2.2 Empfehlungen 104
6.2.3 CE-Konformität 104
6.2.4 Sicherungstabellen 105
6.3 Trennschalter und Schütze
6.4 Zusätzliche Motorinformationen
6.4.1 Motorleitungen 113
6.4.2 Thermischer Motorschutz 114
6.4.3 Parallelschaltung von Motoren 114
6.4.4 Drehrichtung des Motors. 116
6.4.5 Motorisolation 116
6.4.6 Motorlagerströme 117
6.5 Steuerkabel und -klemmen
6.5.1 Zugang zu den Steuerklemmen 117
6.5.2 Steuerkabelführung 118
6.5.3 Steuerklemmen 118
6.5.4 Schalter S201, S202 und S801 119
113
113
117
6.5.5 Elektrische Installation, Steuerklemmen 119
6.5.6 Einfaches Verdrahtungsbeispiel 120
6.5.7 Elektrische Installation, Steuerkabel 121
6.5.8 Relaisausgang 122
6.6 Zusätzliche Anschlüsse
6.6.1 DC-Zwischenkreisanschluss 123
2 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
123
Page 5
Inhaltsverzeichnis Projektierungshandbuch
6.6.2 Zwischenkreiskopplung 123
6.6.3 Installation eines Anschlusskabels für die Bremse 123
6.6.4 Anschließen eines PC an den Frequenzumrichter 123
6.6.5 PC-Software 124
6.6.6 MCT 31 124
6.7 Sicherheit
6.7.1 Hochspannungsprüfung 124
6.7.2 Erdung 124
6.7.3 Schutzerdung 125
6.7.4 ADN-konforme Installation 125
6.8 EMV-gerechte Installation
6.8.1 Elektrische Installation – EMV-Schutzmaßnahmen 125
6.8.2 EMV-gerechte Verkabelung 128
6.8.3 Erdung abgeschirmter Steuerkabel 129
6.8.4 EMV-Schalter 130
6.9 Fehlerstromschutzschalter
6.10 Endgültige Konfiguration und Prüfung
7 Anwendungsbeispiele
7.1 Anwendungsbeispiele
7.1.1 Start/Stopp 132
7.1.2 Puls-Start/Stopp 132
7.1.3 Potenziometer Sollwert 133
124
125
130
130
132
132
7.1.4 Automatische Motoranpassung (AMA) 133
7.1.5 Smart Logic Control 133
7.1.6 Programmieren des Smart Logic Controllers 134
7.1.7 SLC-Anwendungsbeispiel 135
7.1.8 Kaskadenregler 136
7.1.9 Pumpenzuschaltung mit Führungspumpen-Wechsel 137
7.1.10 Systemstatus und Betrieb 138
7.1.11 Schaltbild für Pumpe mit konstanter/variabler Drehzahl 138
7.1.12 Schaltbild für den Führungspumpen-Wechsel 138
7.1.13 Schaltbild für Kaskadenregler 139
7.1.14 Start/Stopp-Bedingungen 140
8 – Installation und Konfiguration
8.1 – Installation und Konfiguration
8.2 Übersicht zum FC-Protokoll
8.3 Netzwerkkonfiguration
8.4 Aufbau der Telegrammblöcke für FC-Protokoll
8.4.1 Inhalt eines Zeichens (Byte) 144
141
141
143
143
144
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 3
Page 6
Inhaltsverzeichnis Projektierungshandbuch
8.4.2 Telegrammaufbau 144
8.4.3 Telegrammlänge (LGE) 144
8.4.4 Frequenzumrichteradresse (ADR) 144
8.4.5 Datensteuerbyte (BCC) 144
8.4.6 Das Datenfeld 145
8.4.7 Das PKE-Feld 146
8.4.8 Parameternummer (PNU) 146
8.4.9 Index (IND) 146
8.4.10 Parameterwert (PWE) 147
8.4.11 Vom Frequenzumrichter unterstützte Datentypen 147
8.4.12 Umwandlung 147
8.4.13 Prozesswörter (PCD) 148
8.5 Beispiele
8.5.1 Schreiben eines Parameterwerts 148
8.5.2 Lesen eines Parameterwertes 148
8.6 Übersicht zu Modbus RTU
8.6.1 Voraussetzungen 149
8.6.2 Was der Anwender bereits wissen sollte 149
8.6.3 Übersicht zu Modbus RTU 149
8.6.4 mit Modbus RTU 149
8.7 Netzwerkkonfiguration
8.8 Modbus RTU Aufbau der Telegrammblöcke
8.8.1 mit Modbus RTU 150
8.8.2 Modbus RTU-Telegrammaufbau 150
8.8.3 Start-/Stoppfeld 150
8.8.4 Adressfeld 151
8.8.5 Funktionsfeld 151
8.8.6 Datenfeld 151
8.8.7 CRC-Prüffeld 151
148
149
150
150
8.8.8 Adressieren von Einzelregistern 151
8.8.9 Regelung des s 152
8.8.10 Von Modbus RTU unterstützte Funktionscodes 153
8.8.11 Modbus-Ausnahmecodes 153
8.9 Zugriff auf Parameter
8.9.1 Parameterverarbeitung 154
8.9.2 Datenspeicherung 154
8.9.3 IND 154
8.9.4 Textblöcke 154
8.9.5 Umrechnungsfaktor 154
8.9.6 Parameterwerte 154
4 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
154
Page 7
Inhaltsverzeichnis Projektierungshandbuch
8.10 Beispiele
8.10.1 Spulenzustand lesen (01 HEX) 154
8.10.2 Einzelne Spule erzwingen/schreiben (05 HEX) 155
8.10.3 Mehrere Spulen erzwingen/schreiben (0F HEX) 156
8.10.4 Halteregister lesen (03 HEX) 156
8.10.5 Voreingestelltes, einzelnes Register (06 HEX) 157
8.10.6 Voreingestellte multiple Register (10 HEX) 157
8.11 Danfoss FC-Steuerprofil
8.11.1 Steuerwort gemäß FC-Profil (8-10 Steuerprofil = FC-Profil) 158
8.11.2 Zustandswort gemäß FC-Profil (ZSW) (8-10 Steuerprofil = FC-Profil) 159
8.11.3 Bus (Drehzahl) Sollwert 160
9 Allgemeine technische Daten und Fehlersuche und -behebung
9.1 Netzversorgungstabellen
9.2 Allgemeine technische Daten
9.3 Wirkungsgrad
9.4 Störgeräusche
9.5 Spitzenspannung am Motor
154
158
161
161
170
175
175
176
9.6 Besondere Betriebsbedingungen
9.6.1 Zweck der Leistungsreduzierung 180
9.6.2 Leistungsreduzierung wegen erhöhter Umgebungstemperatur 180
9.6.3 Leistungsreduzierung wegen erhöhter Umgebungstemperatur, Gehäusetyp A 180
9.6.4 Leistungsreduzierung wegen erhöhter Umgebungstemperatur, Gehäusetyp B 181
9.6.5 Leistungsreduzierung wegen erhöhter Umgebungstemperatur, Gehäusetyp C 182
9.6.6 Automatische Anpassungen zur Sicherstellung der Leistung 184
9.6.7 Leistungsreduzierung wegen niedrigem Luftdruck 184
9.6.8 Leistungsreduzierung beim Betrieb mit niedriger Drehzahl 185
9.7 Fehlersuche und -behebung
9.7.1 Alarmwörter 190
9.7.2 Warnwörter 191
9.7.3 Erweiterte Zustandswörter 192
Index
180
186
200
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 5
Page 8
Lesen des Projektierungshan... Projektierungshandbuch
1
1 Lesen des Projektierungshandbuchs
VLT® HVAC Drive
FC 102 Baureihe
Dieses Handbuch beschreibt alle
VLT® HVAC Drive-Frequenzum-
richter mit Software-Version 3.9x.
Die tatsächliche Software-Versions-
nummer:
finden Sie unter 15-43 Software-
version.
Tabelle 1.1 Software-Version
Dieses Handbuch enthält Informationen, die Eigentum von
Danfoss sind. Durch die Annahme und Verwendung dieses
Handbuchs erklärt sich der Benutzer damit einverstanden,
die darin enthaltenen Informationen ausschließlich für
Geräte von Danfoss oder solche anderer Hersteller zu
verwenden, die ausdrücklich für die Kommunikation mit
Danfoss-Geräten über die serielle Kommunikationsverbindung bestimmt sind. Dieses Handbuch ist durch
Urheberschutzgesetze Dänemarks und der meisten
anderen Länder geschützt.
Danfoss übernimmt keine Gewährleistung dafür, dass die
nach den im vorliegenden Handbuch enthaltenen
Richtlinien erstellten Softwareprogramme in jedem
physischen Umfeld bzw. jeder Hard- oder Softwareumgebung einwandfrei laufen.
Obwohl die im Umfang dieses Handbuchs enthaltene
Dokumentation von Danfoss überprüft und überarbeitet
wurde, leistet Danfoss in Bezug auf die Dokumentation
einschließlich Beschaffenheit, Leistung oder Eignung für
einen bestimmten Zweck keine vertragliche oder
gesetzliche Gewähr.
Danfoss übernimmt keinerlei Haftung für unmittelbare,
mittelbare oder beiläufig entstandene Schäden,
Folgeschäden oder sonstige Schäden aufgrund der
Nutzung oder Unfähigkeit zur Nutzung der in diesem
Handbuch enthaltenen Informationen. Dies gilt auch dann,
wenn auf die Möglichkeit solcher Schäden hingewiesen
wurde. Danfoss haftet insbesondere nicht für Kosten,
einschließlich aber nicht beschränkt auf entgangenen
Gewinn oder Umsatz, Verlust oder Beschädigung von
Ausrüstung, Verlust von Computerprogrammen,
Datenverlust, Kosten für deren Ersatz oder Ansprüche
Dritter jeglicher Art.
Danfoss behält sich das Recht vor, jederzeit Überarbeitungen oder inhaltliche Änderungen an dieser Druckschrift
ohne Vorankündigung oder eine verbindliche Mitteilungspflicht vorzunehmen.
Das Projektierungshandbuch enthält alle
•
technischen Informationen zum Frequenzumrichter sowie Informationen zur
kundenspezifischen Anpassung und Anwendung.
Das Programmierungshandbuch enthält Informa-
•
tionen über die Programmierung und
vollständige Parameterbeschreibungen.
Anwendungshinweis, Richtlinie zur Temperaturredu-
•
zierung
Das Produkthandbuch für MCT 10 Konfigurations-
•
software ermöglicht Ihnen das Konfigurieren des
Frequenzumrichters auf einem Windows™-PC.
Danfoss VLT® Energy Box-Software unter
•
www.danfoss.com/BusinessAreas/DrivesSolutions
und wählen Sie dann PC-Software Download
VLT® HVAC Drive BACnet, Produkthandbuch
•
VLT® HVAC Drive Metasys, Produkthandbuch
•
®
VLT
•
Technische Literatur von Danfoss erhalten Sie in gedruckter
Form von Ihrer örtlichen Danfoss-Vertriebsniederlassung.
www.danfoss.com/BusinessAreas/DrivesSolutions/Documentations/Technical+Documentation.htm
HVAC Drive FLN, Produkthandbuch
6 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 9
Lesen des Projektierungshan...
Tabelle 1.2
Projektierungshandbuch
Der Frequenzumrichter erfüllt die Anforderungen des
thermischen Gedächtnisses nach UL508C. Weitere Informationen finden Sie unter Kapitel 6.4.2 Thermischer
Motorschutz.
Folgende Symbole werden in diesem Dokument
verwendet.
WARNUNG
Kennzeichnet eine potenziell gefährliche Situation, die
den Tod oder schwere Verletzungen zur Folge haben
kann.
VORSICHT
Kennzeichnet eine potenziell gefährliche Situation, die
leichte Verletzungen zur Folge haben könnte, Die
Kennzeichnung kann ebenfalls als Warnung vor
unsicheren Verfahren dienen.
Millisekunden ms
Minute min
Motion Control Tool MCT
Nanofarad nF
Newtonmeter Nm
Motornennstrom I
Motornennfrequenz f
Motornennleistung P
Motornennspannung U
Permanentmagnet-Motor PM Motor
Schutzkleinspannung – Protective extra low
voltage
Leiterplatte PCB
Wechselrichter-Nennausgangsstrom I
Umdrehungen pro Minute U/min [UPM]
Generatorische Klemmen Regen
Sekunde s
Synchrone Motordrehzahl n
Drehmomentgrenze T
Volt V
Der maximale Ausgangsstrom des Frequenzumrichters.
Der vom Frequenzumrichter gelieferte
Ausgangsnennstrom.
Tabelle 1.3 Abkürzungen
Definitionen
1.1.1
M,N
M,N
M,N
M,N
PELV
INV
s
LIM
I
VLT,MAX
I
VLT,N
1
1
HINWEIS
Weist auf wichtige Informationen hin, darunter Situation,
die zu Geräte- oder Sachschäden führen kann.
Wechselstrom AC
American Wire Gauge = Amerikanisches
Drahtmaß
Ampere A
Automatische Motoranpassung AMA
Stromgrenze I
Grad Celsius
Gleichstrom DC
Abhängig vom Frequenzumrichter D-TYPE
Elektromagnetische Verträglichkeit EMV
Elektronisches Thermorelais ETR
Frequenzumrichter FU
Gramm g
Hertz Hz
Pferdestärke PS
Kilohertz kHz
Local Control Panel LCP
Meter m
Millihenry (Induktivität) mH
Milliampere mA
AWG
LIM
°C
Frequenzumrichter:
I
VLT,MAX
Der maximale Ausgangsstrom des Frequenzumrichters.
I
VLT,N
Der vom Frequenzumrichter gelieferte Ausgangsnennstrom.
U
VLT, MAX
Die maximale Ausgangsspannung des Frequenzumrichters.
Eingang:
Steuerbefehl
Startet und stoppt den
angeschlossenen Motor
über das LCP oder die
Digitaleingänge.
Die Funktionen sind in
zwei Gruppen unterteilt.
Funktionen in Gruppe 1
haben eine höhere
Priorität als Funktionen in
Gruppe 2.
Tabelle 1.4 Funktionsgruppen
Gruppe 1 Reset, Motorfreilauf,
Reset und Motorfreilauf,
Schnellstopp, DCBremsung, Stopp und
„Off“-Taste am LCP.
Gruppe 2 Start, Puls-Start,
Reversierung, Start +
Reversierung,
Festdrehzahl JOG und
Ausgangsfrequenz
speichern
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 7
Page 10

Lesen des Projektierungshan...
Projektierungshandbuch
1
Motor:
f
JOG
Die Motorfrequenz (Festfrequenz „Jog“), wählbar über
Digitaleingang oder Bus, wenn die Funktion Festdrehzahl
JOG aktiviert ist.
f
M
Die Motorfrequenz.
f
MAX
Die maximale Motorfrequenz.
f
MIN
Die minimale Motorfrequenz.
f
M,N
Die Motornennfrequenz (Typenschilddaten).
I
M
Der Motorstrom.
I
M,N
Der Motornennstrom (Typenschilddaten).
n
M,N
Die Motornenndrehzahl (Typenschilddaten).
P
M,N
Die Motornennleistung (Typenschilddaten).
T
M,N
Das Nenndrehmoment (Motor).
U
M
Die momentane Spannung des Motors.
U
M,N
Die Motornennspannung (Typenschilddaten).
Losbrechmoment
Abbildung 1.1 Losbrechmoment
η
VLT
Der Wirkungsgrad des Frequenzumrichters ist definiert als
das Verhältnis zwischen Leistungsabgabe und Leistungsaufnahme.
Einschaltsperrbefehl
Ein Stoppbefehl, der zur Gruppe 1 der Steuerbefehle
gehört – siehe Tabelle 1.4.
Stoppbefehl
Siehe Steuerbefehle.
Sollwerte:
Analogsollwert
Ein Sollwertsignal an den Analogeingängen 53 oder 54
(Spannung oder Strom).
Bussollwert
Ein an die serielle Kommunikationsschnittstelle (FC-Schnittstelle) übertragenes Signal.
Festsollwert
Ein definierter Festsollwert, einstellbar zwischen -100 %
und +100 % des Sollwertbereichs. Sie können bis zu 8
Festsollwerte über die Digitaleingänge auswählen.
Pulssollwert
Ein an die Digitaleingänge übertragenes Pulsfrequenzsignal
(Klemme 29 oder 33).
Ref
MAX
Bestimmt das Verhältnis zwischen dem Sollwerteingang bei
100 % des Gesamtskalenwerts (in der Regel 10 V, 20 mA)
und dem resultierenden Sollwert. Der in 3-03 Maximaler
Sollwert eingestellte maximale Sollwert.
Ref
MIN
Bestimmt das Verhältnis zwischen dem Sollwerteingang bei
0 % (normalerweise 0 V, 0 mA, 4 mA) und dem
resultierenden Sollwert. Der in 3-02 Minimaler Sollwert
eingestellte minimale Sollwert.
Verschiedenes:
Advanced Vector Control
Analogeingänge
Die Analogeingänge können verschiedene Funktionen des
Frequenzumrichters steuern.
Es gibt 2 Arten von Analogeingängen:
Stromeingang, 0-20 mA und 4-20 mA
Spannungseingang, 0-10 V DC
Analogausgänge
Die Analogausgänge können ein Signal von 0-20 mA, 4-20
mA oder ein Digitalsignal ausgeben.
Automatische Motoranpassung (AMA)
Der AMA-Algorithmus bestimmt die elektrischen Parameter
für den angeschlossenen Motor bei Stillstand.
Bremswiderstand
Der Bremswiderstand kann die bei generatorischer
Bremsung erzeugte Bremsleistung aufnehmen. Während
generatorischer Bremsung erhöht sich die Zwischenkreisspannung. Ein Bremschopper stellt sicher, dass die
generatorische Energie an den Bremswiderstand
übertragen wird.
Konstantmoment (CT)-Kennlinie
Konstante Drehmomentkennlinie; wird für Schrauben- und
Scrollverdichter in der Kältetechnik eingesetzt.
8 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 11

Lesen des Projektierungshan...
Digitaleingänge
Die Digitaleingänge können verschiedene Funktionen des
Frequenzumrichters steuern.
Digitalausgänge
Der Frequenzumrichter verfügt über zwei programmierbare
Ausgänge, die ein 24 V-DC-Signal (max. 40 mA) liefern
können.
DSP
Digitaler Signalprozessor.
Relaisausgänge
Der Frequenzumrichter verfügt über 2 programmierbare
Relaisausgänge.
ETR
Das elektronische Thermorelais ist eine Berechnung der
thermischen Belastung auf Grundlage der aktuellen
Belastung und Zeit. Damit lässt sich die Motortemperatur
schätzen.
LCP 102
Grafisches LCP Bedienteil (LCP 102)
Initialisierung
Die Initialisierung (14-22 Betriebsart) stellt die Parameter
des Frequenzumrichters auf Werkseinstellungen zurück.
Arbeitszyklus für Aussetzbetrieb
Der Aussetzbetrieb bezieht sich auf eine Abfolge von
Arbeitszyklen. Jeder Zyklus besteht aus einem Belastungsund einem Entlastungszeitraum. Der Betrieb kann
periodisch oder aperiodisch sein.
LCP
Das LCP ist ein Bedienteil mit kompletter Benutzeroberfläche zum Steuern und Programmieren des
Frequenzumrichters. Das LCP ist abnehmbar und kann mit
Hilfe des Montagebausatzes bis zu 3 m entfernt vom
Frequenzumrichter angebracht werden (z. B. in einer
Schaltschranktür).
Das LCP ist in 2 Ausführungen erhältlich:
Numerisches LCP 101 (NLCP)
-
Grafisches LCP 102 (GLCP)
-
lsb
Steht für „Least Significant Bit“, bei binärer Codierung das
Bit mit der niedrigsten Wertigkeit.
MCM
Steht für Mille Circular Mil; eine amerikanische Maßeinheit
für den Kabelquerschnitt. 1 MCM ≡ 0,5067 mm2.
msb
Steht für „Most Significant Bit“; bei binärer Codierung das
Bit mit der höchsten Wertigkeit.
LCP 101
Numerisches LCP Bedienteil (LCP 101)
Projektierungshandbuch
Online-/Offline-Parameter
Änderungen der Online-Parameter werden sofort nach
Änderung des Datenwertes aktiviert. Drücken Sie [OK], um
die Änderungen der Offline-Parameter zu aktivieren.
PID-Regler
Der PID-Regler sorgt durch Anpassung der Ausgangsfrequenz an wechselnde Lasten für eine konstante
Prozessleistung (Drehzahl, Druck, Temperatur usw.).
RCD
Steht für „Residual Current Device"; englische Bezeichnung
für Fehlerstromschutzschalter (FI-Schalter).
Parametersatz
Sie können die Parametereinstellungen in 4 Parametersätzen speichern. Sie können zwischen den 4
Parametersätzen wechseln oder einen Satz bearbeiten,
während ein anderer Satz gerade aktiv ist.
SFAVM
Steht für Stator Flux oriented Asynchronous Vector
Modulation und bezeichnet einen Schaltmodus des
Wechselrichters (14-00 Schaltmuster).
Schlupfausgleich
Der Frequenzumrichter gleicht den belastungsabhängigen
Motorschlupf aus, indem er unter Berücksichtigung des
Motorersatzschaltbildes und der gemessenen Motorbelastung die Ausgangsfrequenz anpasst (nahezu konstante
Drehzahl).
Smart Logic Control (SLC)
SLC ist eine Folge benutzerdefinierter Aktionen, die der
Frequenzumrichter ausführt, wenn die SLC die zugehörigen
benutzerdefinierten Ereignisse als TRUE (WAHR) auswertet.
Thermistor
Ein temperaturabhängiger Widerstand, mit dem die
Temperatur des Frequenzumrichters oder des Motors
überwacht wird.
Abschaltung
Ein Zustand, der in Fehlersituationen eintritt, z. B. bei einer
Übertemperatur des Frequenzumrichters oder wenn der
Frequenzumrichter den Motor, Prozess oder Mechanismus
schützt. Der Neustart wird verzögert, bis die Fehlerursache
behoben wurde und der Alarmzustand über die [Reset]Taste am LCP quittiert wird. In einigen Fällen erfolgt die
Aufhebung automatisch (durch vorherige Programmierung). Sie dürfen Abschaltung nicht zu Zwecken der
Personensicherheit verwenden.
1
1
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 9
Page 12
Lesen des Projektierungshan...
Projektierungshandbuch
1
Abschaltblockierung
Ein Zustand, der in Fehlersituationen eintritt, in denen der
Frequenzumrichter aus Sicherheitsgründen abschaltet und
ein manueller Eingriff erforderlich ist, z. B. bei einem
Kurzschluss am Ausgang des Frequenzumrichters. Sie
können eine Abschaltblockierung nur durch Unterbrechen
der Netzversorgung, Beheben der Fehlerursache und
erneuten Anschluss des Frequenzumrichters aufheben. Der
Neustart wird verzögert, bis der Fehlerzustand über die
[Reset]-Taste am LCP quittiert wird. In einigen Fällen
erfolgt die Aufhebung automatisch (durch vorherige
Programmierung). Die Abschaltblockierung darf nicht zu
Zwecken der Personensicherheit verwendet werden.
VT-Kennlinie
Variable Drehmomentkennlinie; typisch bei Anwendungen
mit quadratischem Lastmomentverlauf über den Drehzahlbereich, z. B. Kreiselpumpen und Lüfter.
plus
VVC
Im Vergleich zur herkömmlichen U/f-Steuerung bietet die
Spannungsvektorsteuerung (VVC
plus
) eine verbesserte
Dynamik und Stabilität der Motordrehzahl in Bezug auf
Änderungen des Last-Drehmoments.
60 ° AVM
Steht für 60° Asynchronous Vector Modulation
(Asynchrone Vektormodulation) und bezeichnet einen
Schaltmodus des Wechselrichters (14-00 Schaltmuster).
Leistungsfaktor
1.1.2
Der Leistungsfaktor ist das Verhältnis zwischen I1 und I
3 × U ×
I
1 ×
COS
Leistungs- faktor
=
3 × U ×
ϕ
I
EFF
RMS
Der Leistungsfaktor einer 3-Phasen-Regelung ist definiert
als:
I
×
cos
ϕ1
1
=
I
1
=
da
cos
I
EFF
ϕ1 =1
I
EFF
Der Leistungsfaktor gibt an, wie stark ein Frequenzumrichter die Netzversorgung belastet.
Je niedriger der Leistungsfaktor, desto höher der I
RMS
bei
gleicher kW-Leistung.
2
2
2
I
EFF
=
I
+
I
+
1
5
I
7
+ . . +
2
I
n
Darüber hinaus weist ein hoher Leistungsfaktor darauf hin,
dass der Oberwellenstrom sehr niedrig ist.
Die im Frequenzumrichter eingebauten DC-Spulen
erzeugen einen hohen Leistungsfaktor. Dadurch wird die
Netzbelastung reduziert.
.
10 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 13
Einführung zum VLT® HVAC Dr... Projektierungshandbuch
2
Einführung zum VLT® HVAC Drive
2.1 Sicherheit
2.1.1 Sicherheitshinweis
WARNUNG
Der Frequenzumrichter steht bei Netzanschluss unter
lebensgefährlicher Spannung. Unsachgemäße Installation
des Motors, des Frequenzumrichters oder des Feldbus
kann Schäden am Gerät sowie schwere Personenschäden
oder sogar tödliche Verletzungen verursachen. Daher
müssen Sie die Anleitungen in diesem Handbuch sowie
nationale und lokale Sicherheitsvorschriften befolgen.
Sicherheitsvorschriften
1. Trennen Sie den Frequenzumrichter bei Reparaturarbeiten vom Netz. Stellen Sie sicher, dass die
Netzversorgung unterbrochen wurde und die
erforderliche Zeit verstrichen ist, bevor Sie die
Motor- und Netzstecker ziehen.
2. Die Taste [Stop/Reset] am LCP des Frequenzumrichters trennt das System nicht von der
Stromversorgung und kann daher nicht als
Sicherheitsschalter verwendet werden.
3. Achten Sie auf korrekte Schutzerdung. Außerdem
muss der Benutzer gemäß den geltenden
nationalen und lokalen Bestimmungen vor der
Versorgungsspannung geschützt werden.
Entsprechend müssen Sie den Motor vor Überlast
schützen.
4. Die Erdableitströme überschreiten 3,5 mA.
5. Der Schutz vor Motorüberlastung wird durch
1-90 Thermischer Motorschutz eingestellt. Wird
diese Funktion gewünscht, setzen Sie
1-90 Thermischer Motorschutz auf den Datenwert
[ETR-Abschaltung] (Werkseinstellung) oder auf
den Datenwert [ETR-Warnung]. Achtung: Der
Frequenzumrichter initialisiert die Funktion beim
1,16-Fachen des Motornennstroms und der
Motornennfrequenz. Für den nordamerikanischen
Markt: Die ETR-Funktionen bieten einen
Motorüberlastungsschutz der Klasse 20 gemäß
NEC.
Installation in großen Höhenlagen
380-500 V, Gehäusetypen A, B und C: Bei Höhenlagen
von mehr als 2 km über NN ziehen Sie bitte Danfoss
bezüglich PELV (Schutzkleinspannung) zurate.
525-690 V: Bei Höhenlagen von mehr als 2 km über NN
ziehen Sie bitte Danfoss bezüglich PELV (Schutzkleinspannung) zurate.
Warnung vor unerwartetem Anlauf
2 2
6. Sie dürfen die Stecker für die Motor- und Netzversorgung nicht entfernen, während der
Frequenzumrichter an die Netzspannung
angeschlossen ist. Stellen Sie sicher, dass die
Netzversorgung unterbrochen wurde und die
erforderliche Zeit verstrichen ist, bevor Sie die
Motor- und Netzstecker ziehen.
7. Beachten Sie, dass der Frequenzumrichter außer
L1, L2 und L3 noch weitere Spannungseingänge
hat, wenn eine DC-Zwischenkreiskopplung und
eine externe 24 V DC-Versorgung installiert sind.
Stellen Sie bei Reparaturarbeiten sicher, dass die
Netzversorgung unterbrochen und die
erforderliche Zeit verstrichen ist, bevor Sie die
Motor- und Netzstecker abziehen.
VORSICHT
WARNUNG
1. Der Motor kann mit einem digitalen Befehl,
einem Bus-Befehl, einem Sollwert oder „OrtStopp“ angehalten werden, obwohl der
Frequenzumrichter weiter unter Netzspannung
steht. Ist ein unerwarteter Anlauf des Motors
gemäß den Bestimmungen zur Personensicherheit jedoch unzulässig, so sind die oben
genannten Stoppfunktionen nicht ausreichend.
2. Während der Änderung von Parametern kann
der Motor starten. Daher muss stets die [Reset]Taste aktiviert sein. (Je nachdem, welche Daten
geändert werden können.)
3. Ein gestoppter Motor kann anlaufen, wenn ein
Fehler in der Elektronik des Frequenzumrichters,
eine temporäre Überlast, ein Ausfall der
Netzversorgung oder eine Unterbrechung der
Motorverbindung auftritt.
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 11
Page 14
Einführung zum VLT® HVAC Dr...
WARNUNG
Das Berühren spannungsführender Teile – auch nach der
22
Trennung vom Netz – ist lebensgefährlich.
Achten Sie außerdem darauf, dass andere Spannungseingänge, wie z. B. externe 24 V DC,
Zwischenkreiskopplung (Zusammenschalten eines DCZwischenkreises) sowie der Motoranschluss beim
kinetischen Speicher ausgeschaltet sind. Weitere Sicherheitsrichtlinien sind im Produkthandbuch zu finden.
2.1.2 Vorsicht
WARNUNG
Die Zwischenkreiskondensatoren des s können auch
nach der Trennung von der Spannungsversorgung
geladen bleiben. Zur Vermeidung von Stromschlag
trennen Sie den vor allen Wartungsarbeiten vom Netz.
Warten Sie mindestens wie folgt, bevor Sie Wartungsarbeiten am Frequenzumrichter durchführen:
Spannung [V] Min. Wartezeit (in Minuten)
4 15
200-240 1,1-3,7 kW 5,5-45 kW
380-480 1,1-7,5 kW 11-90 kW
525-600 1,1-7,5 kW 11-90 kW
525-690 11-90 kW
Beachten Sie, dass im Zwischenkreis auch dann Hochspannung
vorhanden sein kann, wenn die LED erloschen sind.
Tabelle 2.1 Entladungszeit
Entsorgungsanweisungen
2.1.3
Elektrische Geräte und Komponenten
dürfen nicht zusammen mit normalem
Hausabfall entsorgt werden.
Sie müssen separat mit Elektro- und
Elektronik-Altgeräten gemäß den lokalen
Bestimmungen und den aktuell gültigen
Gesetzen gesammelt werden.
Tabelle 2.2
Projektierungshandbuch
2.2
2.2.1 CE-Konformität und -Kennzeichnung
Was ist unter der CE-Konformität und -Kennzeichnung zu
verstehen?
Sinn und Zweck des CE-Zeichens ist ein Abbau von
technischen Handelsbarrieren innerhalb der EFTA und der
EU. Die EU hat das CE-Zeichen als einfache Kennzeichnung
für die Übereinstimmung eines Produkts mit den
entsprechenden EU-Richtlinien eingeführt. Über die
technischen Daten oder die Qualität eines Produkts sagt
die CE-Kennzeichnung nichts aus. Frequenzumrichter fallen
unter 3 EU-Richtlinien:
Die Maschinenrichtlinie (2006/42/EG)
Frequenzumrichter mit integrierter Sicherheitsfunktion
fallen nun unter die Maschinenrichtlinie. Danfoss nimmt
die CE-Kennzeichnung gemäß der Richtlinie vor und liefert
auf Wunsch eine Konformitätserklärung. Frequenzumrichter
ohne Sicherheitsfunktion fallen nicht unter die Maschinenrichtlinie. Wird ein Frequenzumrichter jedoch für den
Einsatz in einer Maschine geliefert, so stellt Danfoss
Informationen zu Sicherheitsaspekten des Frequenzumrichters zur Verfügung.
Die Niederspannungsrichtlinie (2006/95/EG)
Frequenzumrichter müssen seit dem 1. Januar 1997 in
Übereinstimmung mit der Niederspannungsrichtlinie die
CE-Kennzeichnung tragen. Die Richtlinie gilt für alle
elektrischen Betriebsmittel, Bauteile und Geräte im
Spannungsbereich 50-1000 V AC und 75-1500 V DC.
Danfoss nimmt die CE-Kennzeichnung gemäß der Richtlinie
vor und liefert auf Wunsch eine Konformitätserklärung.
Die EMV-Richtlinie (2004/108/EG)
EMV ist die Abkürzung für elektromagnetische Verträglichkeit. Elektromagnetische Verträglichkeit bedeutet, dass
die gegenseitigen elektronischen Störungen zwischen
verschiedenen Bauteilen bzw. Geräten so gering sind, dass
sie die Funktion der Geräte nicht beeinflussen.
Die EMV-Richtlinie trat am 1. Januar 1996 in Kraft. Danfoss
nimmt die CE-Kennzeichnung gemäß der Richtlinie vor und
liefert auf Wunsch eine Konformitätserklärung. Wie eine
EMV-gerechte Installation auszuführen ist, wird in diesem
Projektierungshandbuch erklärt. Danfoss gibt außerdem die
Normen an, denen unsere diversen Produkte entsprechen.
Danfoss bietet die in den technischen Daten angegebenen
Filter und weitere Unterstützung zum Erzielen einer
optimalen EMV-Sicherheit an.
CE-Kennzeichnung
Meistens werden Frequenzumrichter von Fachleuten als
komplexes Bauteil eingesetzt, das Teil eines größeren
Geräts oder Systems oder einer größeren Anlage ist. Es ist
zu beachten, dass die Verantwortung für die endgültigen
EMV-Eigenschaften des Geräts, der Anlage oder der Installation beim Installateur liegt.
12 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 15

Einführung zum VLT® HVAC Dr... Projektierungshandbuch
2.2.2 Was unter die Richtlinien fällt
Der in der EU geltende „Leitfaden zur Anwendung der
Richtlinie 2004/108/EG des Rates“ nennt für den Einsatz von
Frequenzumrichtern 3 typische Situationen.
1. Der Frequenzumrichter wird direkt im freien
Handel an den Endkunden verkauft. Für derartige
Anwendungen bedarf der Frequenzumrichter der
CE-Kennzeichnung gemäß der EMV-Richtlinie.
2. Der Frequenzumrichter wird als Teil eines Systems
verkauft. Er wird als Komplettsystem vermarktet,
z. B. eine Klimaanlage. Das gesamte System muss
gemäß der EMV-Richtlinie CE-gekennzeichnet
sein. Dies kann der Hersteller durch Überprüfung
der EMV-Eigenschaften des Systems gewährleisten. Die Bauteile des Systems müssen gemäß
EMV-Richtlinie CE-gekennzeichnet sein.
3. Der Frequenzumrichter wird für die Installation in
einer Anlage verkauft. Es kann sich dabei z. B. um
eine Produktionsanlage oder um eine von
Fachleuchten konstruierte und installierte
Heizungs- oder Lüftungsanlage handeln. Der
Frequenzumrichter muss gemäß der EMVRichtlinie CE-gekennzeichnet sein. Die fertige
Anlage bedarf keiner CE-Kennzeichnung. Die
Anlage muss jedoch den wesentlichen Anforderungen der EMV-Richtlinie entsprechen. Dies kann
der Anlagenbauer durch den Einsatz von Geräten
und Systemen, die eine CE-Kennzeichnung gemäß
der EMV-Richtlinie besitzen, als gegeben
annehmen.
Danfoss Frequenzumrichter und CE-
2.2.3
Kennzeichnung
Danfoss versieht die Frequenzumrichter mit einem CEZeichen gemäß der Niederspannungsrichtlinie. Dadurch
garantiert Danfoss, dass der Frequenzumrichter bei
korrekter Installation der Niederspannungsrichtlinie
entspricht. Zur Bestätigung, dass unsere CE-Kennzeichnung
der Niederspannungsrichtlinie entspricht, stellt Danfoss
eine Konformitätserklärung aus.
Das CE-Zeichen gilt auch für die EMV-Richtlinie, unter der
Voraussetzung, dass die Hinweise in diesem Handbuch zur
EMV-gerechten Installation und Filterung beachtet werden.
Auf dieser Grundlage wird eine Konformitätserklärung
gemäß EMV-Richtlinie ausgestellt.
Dieses Projektierungshandbuch bietet detaillierte
Anweisungen für eine EMV-gerechte Installation. Außerdem
gibt Danfoss die Normen an, denen die verschiedenen
Produkte entsprechen.
Danfoss bietet gerne weitere Unterstützung, damit
optimale EMV-Ergebnisse erzielt werden können.
Übereinstimmung mit EMV-Richtlinie
2.2.4
2004/108/EG
Wie vorstehend erläutert wird der Frequenzumrichter
meistens von Fachleuten als komplexes Bauteil eingesetzt,
das Teil eines größeren Geräts, Systems bzw. einer Anlage
ist. Beachten Sie, dass der Installierende die Verantwortung
für die endgültigen EMV-Eigenschaften des Geräts, Systems
oder der Installation trägt. Als Hilfe für den Installateur hat
Danfoss EMV-Installationsrichtlinien für das Power-DriveSystem erstellt. Die für Power-Drive-Systeme angegebenen
Standards und Prüfniveaus werden unter der Voraussetzung eingehalten, dass die Hinweise zur EMV-gerechten
Installation befolgt wurden (siehe ).
2 2
2.3
Sinn und Zweck des CE-Zeichens ist die Erleichterung des
Handelsverkehrs innerhalb der EU und EFTA.
Allerdings kann das CE-Zeichen viele verschiedene
technische Daten abdecken. Sie müssen also prüfen, was
durch ein bestimmtes CE-Zeichen tatsächlich gedeckt ist.
Die gedeckten Spezifikationen können sehr unterschiedlich
sein, und ein CE-Zeichen kann einem Installateur auch
durchaus ein falsches Sicherheitsgefühl vermitteln, wenn
ein Frequenzumrichter als Bauteil eines Systems oder
Geräts eingesetzt wird.
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 13
Luftfeuchtigkeit
Der Frequenzumrichter ist so konstruiert, dass er der Norm
IEC/EN 60068-2-3, EN 50178 Pkt. 9.4.2.2 bei 50 °C
entspricht.
Page 16
Einführung zum VLT® HVAC Dr...
Projektierungshandbuch
2.4 Aggressive Umgebungsbedingungen
Ein Frequenzumrichter enthält zahlreiche mechanische und
22
elektronische Bauteile. Alle reagieren mehr oder weniger
empfindlich auf Umwelteinflüsse.
VORSICHT
Installieren Sie den Frequenzumrichter nicht in
Umgebungen, deren Atmosphäre Flüssigkeiten, Partikel
oder Gase enthält, die die elektronischen Bauteile
beeinflussen oder beschädigen können. Werden in
solchen Fällen nicht die erforderlichen Schutzmaßnahmen getroffen, so verkürzt sich die Lebensdauer des
Frequenzumrichters und es erhöht sich das Risiko von
Ausfällen.
Schutzart gemäß IEC 60529
Sie dürfen die Funktion „Sicher abgeschaltetes Moment“
nur in einem Schaltschrank mit Schutzart IP54 oder höher
(oder vergleichbar) installieren und betreiben. Dies soll
Querschlüsse und Kurzschlüsse zwischen Klemmen,
Anschlüssen, Strombahnen und sicherheitsbezogenen
Schaltungen durch Fremdobjekte vermeiden.
Flüssigkeiten können sich schwebend in der Luft befinden
und im Frequenzumrichter kondensieren. Dadurch können
Bauteile und Metallteile korrodieren. Dampf, Öl und
Salzwasser können ebenfalls zur Korrosion von Bauteilen
und Metallteilen führen. Für solche Umgebungen
empfehlen sich Geräte gemäß Schutzart IP54/55. Als
zusätzlicher Schutz können Sie als Option ebenfalls eine
Beschichtung der Platinen bestellen.
Schwebende Partikel, wie z. B. Staub, können zu
mechanisch, elektrisch oder thermisch bedingten Ausfällen
des Frequenzumrichters führen. Eine Staubschicht um den
Ventilator des Frequenzumrichters ist ein typisches
Anzeichen für einen hohen Grad an Partikeln in der Luft. In
sehr staubiger Umgebung sind Geräte gemäß Schutzart
IP54/55 oder ein zusätzliches Schutzgehäuse für IP00/IP20Geräte zu empfehlen.
In Umgebungen mit hohen Temperaturen und viel
Feuchtigkeit lösen korrosionsfördernde Gase, z. B. Schwefel,
Stickstoff und Chlorgemische, chemische Prozesse aus, die
sich auf die Bauteile des Frequenzumrichters auswirken.
Derartige chemischen Reaktionen können die elektronischen Bauteile sehr schnell in Mitleidenschaft ziehen und
zerstören. In solchen Umgebungen empfiehlt es sich, die
Geräte in einen extern belüfteten Schaltschrank
einzubauen, sodass die aggressiven Gase vom Frequenzumrichter ferngehalten werden.
Als zusätzlichen Schutz in solchen Bereichen können Sie als
Option eine bessere Beschichtung der Platinen bestellen.
HINWEIS
Die Aufstellung eines Frequenzumrichters in aggressiven
Umgebungsbedingungen verkürzt die Lebensdauer des
Geräts erheblich und erhöht das Risiko von Ausfällen.
Vor der Installation des Frequenzumrichters muss die
Umgebungsluft auf Flüssigkeiten, Stäube und Gase geprüft
werden. Dies kann z. B. geschehen, indem man in der
jeweiligen Umgebung bereits vorhandene Installationen
näher in Augenschein nimmt. Typische Anzeichen für über
die Luft übertragene Flüssigkeiten sind an Metallteilen
haftendes Wasser oder Öl oder Korrosionsbildung an
Metallteilen.
Übermäßige Mengen Staub finden sich häufig an Schaltschränken und vorhandenen elektrischen Installationen. Ein
Anzeichen für aggressive Schwebegase sind Schwarzverfärbungen von Kupferstäben und Kabelenden bei
vorhandenen Installationen.
Bauformen D und E haben eine Kühlkanaloption aus
Edelstahl, um zusätzlichen Schutz unter aggressiven
Umgebungsbedingungen zu bieten. Jedoch müssen Sie
weiterhin für eine ausreichende Belüftung der
Innenbauteile des Frequenzumrichters sorgen. Fragen Sie
Danfoss nach weiteren Informationen.
2.5
Vibrationen und Erschütterungen
Der Frequenzumrichter wurde Prüfverfahren gemäß den
folgenden Normen unterzogen:
IEC/EN 60068-2-6: Schwingung (sinusförmig) -
•
1970
IEC/EN 60068-2-64: Schwingung, Breitband-
•
rauschen (digital geregelt)
Der Frequenzumrichter entspricht den Anforderungen für
Geräte zur Wandmontage, sowie bei Montage an Maschinengestellen oder in Schaltschränken.
14 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 17
Einführung zum VLT® HVAC Dr... Projektierungshandbuch
2.6 Sicher abgeschaltetes Moment
Der FC 102 ist für Installationen mit der Sicherheitsfunktion
Sicher abgeschaltetes Moment (wie definiert durch EN IEC
61800-5-21) oder Stoppkategorie 0 (wie definiert in EN
60204-12) geeignet.).
Vor der Integration und Nutzung der Funktion „Sicher
abgeschaltetes Moment“ des Frequenzumrichters in einer
Anlage muss eine gründliche Risikoanalyse der Anlage
erfolgen, um zu ermitteln, ob die Funktion „Sicher
abgeschaltetes Moment“ und die Sicherheitsstufen des
Frequenzumrichters angemessen und ausreichend sind. Die
Funktion ist für folgende Anforderungen ausgelegt und als
dafür geeignet zugelassen:
Kategorie 3 in EN ISO 13849-1
•
Performance Level „d“ in ISO EN 13849-1:2008
•
SIL 2-Eignung in IEC 61508 und EN 61800-5-2
•
SILCL 2 in EN 62061
•
1) Nähere Angaben zur Funktion „Sicher abgeschaltetes
Moment (STO)“ finden Sie in EN IEC 61800-5-2.
2) Nähere Angaben zur Stoppkategorie 0 und 1 finden Sie
in EN IEC 60204-1.
Aktivierung und Deaktivierung der Funktion „Sicher
abgeschaltetes Moment“
Die Funktion „Sicher abgeschaltetes Moment“ (STO) wird
durch das Wegschalten der Spannung an Klemme 37 des
sicheren Umrichters aktiviert. Durch Anschließen des
sicheren Umrichters an externe Sicherheitsvorrichtungen,
die wiederum eine sichere Verzögerung bieten, kann in der
Installation auch Stoppkategorie 1 für sicher abgeschaltetes
Moment erzielt werden. Die Funktion „Sicher
abgeschaltetes Moment“ des FC 102 kann für asynchrone
und synchrone Motoren sowie Permanentmagnet-Motoren
benutzt werden. Siehe Beispiele in Kapitel 2.6.1 Klemme 37
Funktion „Sicher abgeschaltetes Moment“.
WARNUNG
Nach Installation der Funktion „Sicher abgeschaltetes
Moment (STO)“ muss eine Inbetriebnahmeprüfung
gemäß Abschnitt Inbetriebnahme des sicher
abgeschalteten Moments (STO) durchgeführt werden. Eine
bestandene Inbetriebnahmeprüfung ist nach der ersten
Installation und nach jeder Änderung der Sicherheitsinstallation Pflicht.
Technische Daten der Funktion „Sicher abgeschaltetes
Moment“
Für die verschiedenen Sicherheitsstufen gelten folgende
Werte:
Reaktionszeit für Klemme 37
Maximale Reaktionszeit: 20 ms
-
Reaktionszeit = Verzögerung zwischen Abschaltung des
STO-Eingangs und Abschalten der Ausgangsbrücke.
Daten für EN ISO 13849-1
Performance Level „d“
•
Mittlere Zeit bis zu einem gefährlichen Ausfall
•
(MTTFd): 14000 Jahre
DC (Diagnosedeckungsgrad): 90 %
•
Kategorie 3
•
Lebensdauer 20 Jahre
•
Daten für EN IEC 62061, EN IEC 61508, EN IEC 61800-5-2
SIL 2-Eignung, SILCL 2:
•
PFH (Wahrscheinlichkeit eines gefährlichen
•
Ausfalls pro Stunde) = 1E-10/h
SFF (Safe Failure Fraction) > 99 %
•
HFT (Hardwarefehlertoleranz) = 0 (1001-
•
Architektur)
Lebensdauer 20 Jahre
•
Daten für EN IEC 61508 (Low Demand)
PFDavg bei einjähriger Abnahmeprüfung: 1E-10
•
PFDavg bei dreijähriger Abnahmeprüfung: 1E-10
•
PFDavg bei fünfjähriger Abnahmeprüfung: 1E-10
•
Eine Wartung der STO-Funktionalität ist nicht notwendig.
Ergreifen Sie Sicherheitsmaßnahmen, z. B. dass nur
Fachpersonal geschlossene Schaltschränke öffnen und in
ihnen installieren darf.
SISTEMA-Daten
Daten zur funktionalen Sicherheit stehen von Danfoss über
eine Datenbibliothek zur Verwendung mit der Berechnungssoftware SISTEMA vom IFA (Institut für Arbeitsschutz
der Deutschen Gesetzlichen Unfallversicherung) und Daten
zur manuellen Berechnung zur Verfügung. Die Bibliothek
wird ständig vervollständigt und erweitert.
Abkürzung
Kat. EN ISO
FIT Failure In Time (Ausfallrate:): 1E-9
HFT IEC 61508 Hardwarefehlertoleranz: HFT = n
MTTFd EN ISO
Verweis Beschreibung
Sicherheitskategorie, Stufe „B, 1-4“
13849-1
Stunden
bedeutet, dass n+1 Fehler zu einem
Verlust der Sicherheitsfunktion führen
können
Mean Time To Failure - dangerous
13849-1
(Mittlere Zeit bis zu einem gefährlichen
Ausfall). Einheit: Jahre
2 2
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 15
Page 18
Einführung zum VLT® HVAC Dr...
Projektierungshandbuch
Abkürzung
PFH IEC 61508 Probability of Dangerous Failures per
22
PFD IEC 61508 Mittlere Ausfallwahrscheinlichkeit bei
PL EN ISO
SFF IEC 61508 Safe Failure Fraction [%] ; Anteil der
SIL IEC 61508 Safety Integrity Level
STO EN
SS1 EN
Tabelle 2.3 Auf die funktionale Sicherheit bezogene
Abkürzungen
2.6.1
Der FC 102 ist mit der Funktion „Sicher abgeschaltetes
Moment“ über Steuerklemme 37 verfügbar. „Sicher
abgeschaltetes Moment“ schaltet die Steuerspannung der
Leistungshalbleiter in der Ausgangsstufe des Frequenzumrichters ab. Dies verhindert die Erzeugung der Spannung,
die der Motor zum Drehen benötigt. Ist „sicher
abgeschaltetes Moment“ (Klemme 37) aktiviert, gibt der
Frequenzumrichter einen Alarm aus, schaltet ab und lässt
den Motor im Freilauf zum Stillstand kommen. Zum
Wiederanlauf müssen Sie den Frequenzumrichter manuell
neu starten. Die Funktion „Sicher abgeschaltetes Moment“
dient zum Stoppen des Frequenzumrichters im Notfall.
Verwenden Sie im normalen Betrieb, bei dem Sie kein
sicher abgeschaltetes Moment benötigen, stattdessen die
normale Stoppfunktion des Frequenzumrichters. Wenn der
automatische Wiederanlauf zum Einsatz kommt, muss die
Anlage die Anforderungen nach ISO 12100-2 Absatz 5.3.2.5
erfüllen.
Verweis Beschreibung
Hour (Wahrscheinlichkeit eines gefährlichen Ausfalls pro Stunde). Dieser Wert
ist zu berücksichtigen, wenn die Sicherheitsvorrichtung mit hohem
Anforderungsgrad (mehr als einmal pro
Jahr) oder mit kontinuierlicher Anforderungsrate betrieben wird, wobei die
Anforderung an das sicherheitsbezogene System mehr als einmal pro Jahr
erfolgt.
Anforderung, für Betrieb mit niedriger
Anforderungsrate verwendeter Wert.
Kenngröße für die Zuverlässigkeit von
13849-1
61800-5-2
61800-5-2
sicherheitsbezogenen Funktionen von
Steuerungssystemen unter vorhersehbaren Bedingungen. Stufen a-e.
sicheren Fehler und erkannten gefährlichen Fehler einer Sicherheitsfunktion
oder eines Untersystems im Verhältnis
zu allen möglichen Fehlern.
Sicher abgeschaltetes Moment
Sicherer Stopp 1
Klemme 37 Funktion „Sicher
abgeschaltetes Moment“
Haftungsbedingungen
Der Anwender ist dafür verantwortlich, sicherzustellen, dass
Personal, das die Funktion „Sicher abgeschaltetes Moment“
installiert und bedient:
die Sicherheitsvorschriften im Hinblick auf
•
Arbeitsschutz und Unfallverhütung kennt.
die allgemeinen und Sicherheitsrichtlinien in der
•
vorliegenden Beschreibung sowie der erweiterten
Beschreibung im Projektierungshandbuch
versteht.
gute Kenntnisse über die allgemeinen und Sicher-
•
heitsnormen der jeweiligen Anwendung besitzt.
Normen
Zur Verwendung der Funktion „Sicher abgeschaltetes
Moment“ an Klemme 37 muss der Anwender alle Sicherheitsbestimmungen in einschlägigen Gesetzen, Vorschriften
und Richtlinien erfüllen. Die optionale Funktion „Sicher
abgeschaltetes Moment“ erfüllt die folgenden Normen:
IEC 60204-1: 2005 Kategorie 0 – unkontrollierter
Stopp
IEC 61508: 1998 SIL2
IEC 61800-5-2: 2007 – Funktionale Sicherheit
(Funktion „Sicher abgeschaltetes Moment (STO)“)
IEC 62061: 2005 SIL CL2
ISO 13849-1: 2006 Kategorie 3 PL d
ISO 14118: 2000 (EN 1037) – Vermeidung von
unerwartetem Anlauf
Die Informationen und Anweisungen des Produk-
thandbuchs reichen zur sicheren und einwandfreien
Verwendung der Funktion „Sicher abgeschaltetes Moment“
nicht aus. Betreiber müssen die zugehörigen Informationen
und Anweisungen des jeweiligen Projektierungshandbuchs
befolgen.
Schutzmaßnahmen
Nur qualifiziertes Personal darf sicherheitstech-
•
nische Systeme installieren und in Betrieb
nehmen.
Installieren Sie den Frequenzumrichter in einem
•
Schaltschrank mit Schutzart IP54 oder einer
vergleichbaren Umgebung. Bei speziellen
Anwendungen kann eine höhere Schutzart
erforderlich sein.
Schützen Sie das Kabel zwischen Klemme 37 und
•
der externen Sicherheitsvorrichtung gemäß ISO
13849-2 Tabelle D.4 gegen Kurzschluss.
Falls externe Kräfte auf die Motorachse wirken (z.
•
B. hängende Lasten), sind zur Vermeidung von
Gefahren zusätzliche Maßnahmen (z. B. eine
sichere Haltebremse) erforderlich.
16 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 19
12/13
37
130BA874.10
12
37
3
2
FC
4
1
130BB967.10
Einführung zum VLT® HVAC Dr...
Projektierungshandbuch
Funktion „Sicher abgeschaltetes Moment“ installieren
und einrichten
WARNUNG
FUNKTION „SICHER ABGESCHALTETES
MOMENT“
Die Funktion „Sicher abgeschaltetes Moment“ trennt
NICHT die Netzspannung zum Frequenzumrichter oder
zu Zusatzstromkreisen. Führen Sie Arbeiten an
elektrischen Teilen des Frequenzumrichters oder des
Motors nur nach Abschaltung der Netzspannung durch.
Halten Sie zudem zunächst die unter Sicherheit in
diesem Handbuch angegebene Wartezeit ein. Eine
Nichtbeachtung dieser Vorgaben kann zu schweren
Verletzungen oder zum Tod führen.
Danfoss empfiehlt, den Frequenzumrichter nicht
•
über die Funktion „Sicher abgeschaltetes
Moment“ zu stoppen. Stoppen Sie einen
laufenden Frequenzumrichter mit Hilfe dieser
Funktion, schaltet der Motor ab und stoppt über
Freilauf. Wenn dies nicht zulässig ist, z. B. weil
hierdurch eine Gefährdung besteht, müssen Sie
den Frequenzumrichter und alle angeschlossenen
Maschinen vor Verwendung dieser Funktion über
den entsprechenden Stoppmodus anhalten. Je
nach Anwendung kann eine mechanische Bremse
erforderlich sein.
Bei einem Ausfall mehrerer IGBT-Leistungshalb-
•
leiter bei Frequenzumrichtern für Synchron- und
Permanentmagnet-Motoren: Trotz der Aktivierung
der Funktion „Sicher abgeschaltetes Moment“
kann das Frequenzumrichtersystem ein Ausrichtmoment erzeugen, das die Motorwelle um
maximal 180/p-Grad dreht. p steht hierbei für die
Polpaarzahl.
Diese Funktion eignet sich allein für mechanische
•
Arbeiten am Frequenzumrichtersystem oder an
den betroffenen Bereichen einer Maschine.
Dadurch entsteht keine elektrische Sicherheit. Sie
dürfen diese Funktion nicht als Steuerung zum
Starten und/oder Stoppen des Frequenzumrichters verwenden.
Die folgenden Anforderungen müssen für eine sichere
Installation des Frequenzumrichters erfüllt sein:
1. Entfernen Sie die Drahtbrücke zwischen den
Steuerklemmen 37 und 12 oder 13. Ein
Durchschneiden oder Brechen der Drahtbrücke
reicht zur Vermeidung von Kurzschlüssen nicht
aus. (Siehe Drahtbrücke in Abbildung 2.1.)
2. Schließen Sie ein externes Sicherheitsüberwachungsrelais über eine stromlos geöffnete
Sicherheitsfunktion an Klemme 37 (Sicher
abgeschaltetes Moment) und entweder Klemme
12 oder 13 (24 V DC) an. (Beachten Sie hierbei
genau die Anleitung der Sicherheitsvorrichtung.)
Das Sicherheitsrelais muss Kategorie 3/PL „d“ (ISO
13849-1) oder SIL 2 (EN 62061) erfüllen.
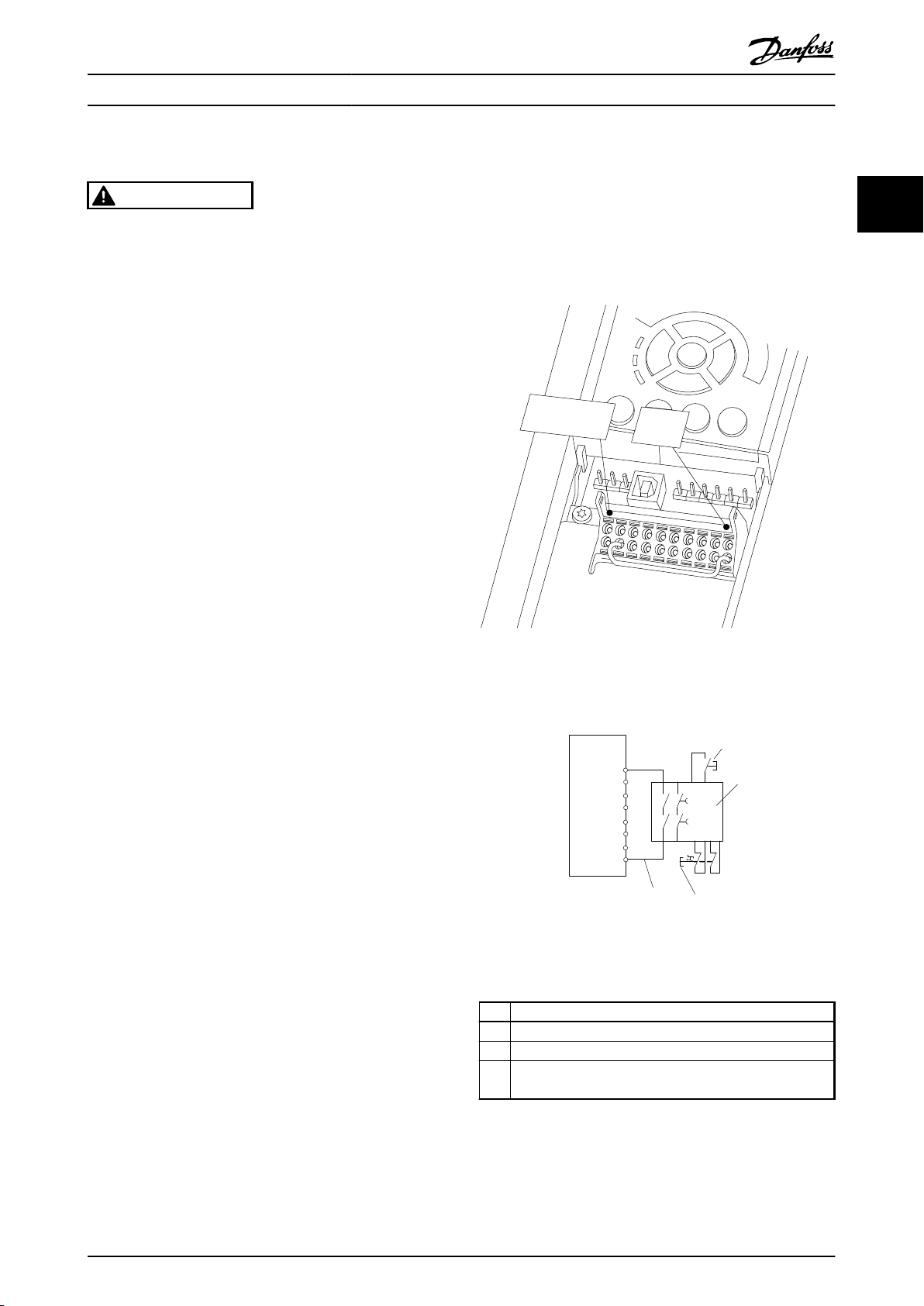
Abbildung 2.1 Drahtbrücke zwischen Klemme 12/13 (24 V)
und 37
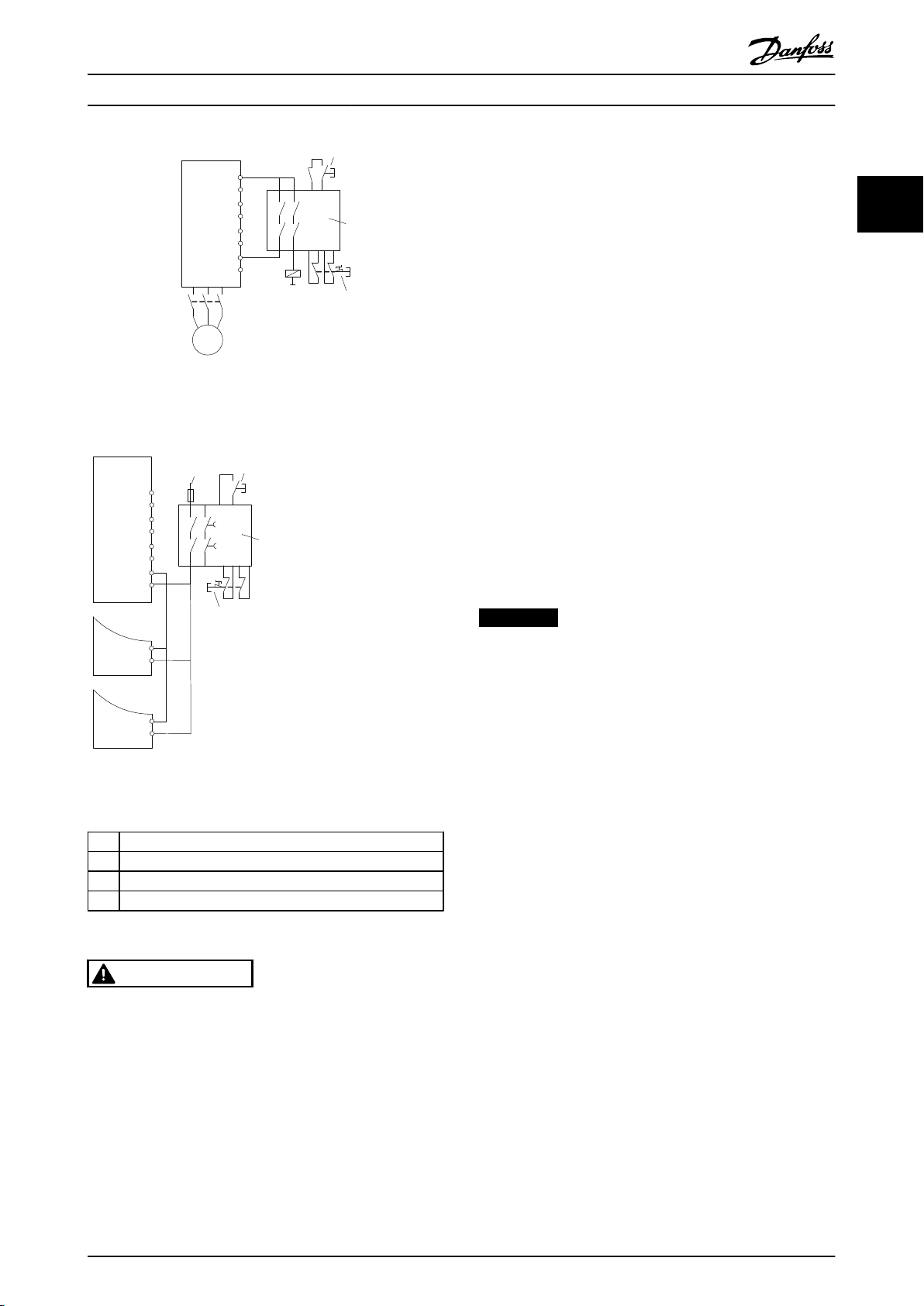
Abbildung 2.2 Installation zum Erreichen einer Stoppkategorie
0 (EN 60204-1) mit Sicherheitskat. 3/PL „d“ (ISO 13849-1) oder
SIL 2 (EN 62061).
1 Sicherheitsrelais (Kat. 3, PL d oder SIL2)
2 Not-Aus-Taster
3 Reset-Taste
4 Gegen Kurzschluss geschütztes Kabel (wenn nicht im IP54-
Gehäuse installiert)
Tabelle 2.4 Legende zu Abbildung 2.2
2 2
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 17
Page 20
12
37
FC
1
2
3
130BB968.10
FC
12
18
37
3
1
2
130BB969.10
Einführung zum VLT® HVAC Dr... Projektierungshandbuch
Inbetriebnahmeprüfung der Funktion „Sicher
abgeschaltetes Moment“
Führen Sie nach der Installation und vor erstmaligem
22
Betrieb eine Inbetriebnahmeprüfung der Anlage oder der
Anwendung, die vom sicher abgeschalteten Moment
Gebrauch macht, durch. Wiederholen Sie diese Prüfung
nach jeder Änderung der Anlage oder Anwendung.
Beispiel mit sicherer Abschaltung des Motormoments
Ein Sicherheitsrelais wertet die Signale des Not-Aus-Tasters
aus und löst die sichere Abschaltung des Motormoments
am Frequenzumrichter bei Betätigung des Not-Aus-Tasters
aus (siehe Abbildung 2.3). Diese Sicherheitsfunktion
entspricht einem Stopp der Kategorie 0 (unkontrollierter
Stopp) gemäß IEC 60204-1. Wird die Funktion während des
Betriebs ausgelöst, läuft der Motor unkontrolliert aus. Die
Netzspannung zum Motor wird sicher abgeschaltet, sodass
keine weitere Bewegung möglich ist. Eine Anlage muss im
Stillstand nicht überwacht werden. Wenn eine externe
Kraft auf die Anlage wirken kann, sorgen Sie für zusätzliche
Maßnahmen, um potenzielle Bewegung zu verhindern (z.
B. mechanische Bremsen).
HINWEIS
Bei allen Anwendung mit der Funktion „sicher
abgeschaltetes Moment“ ist es wichtig, dass ein
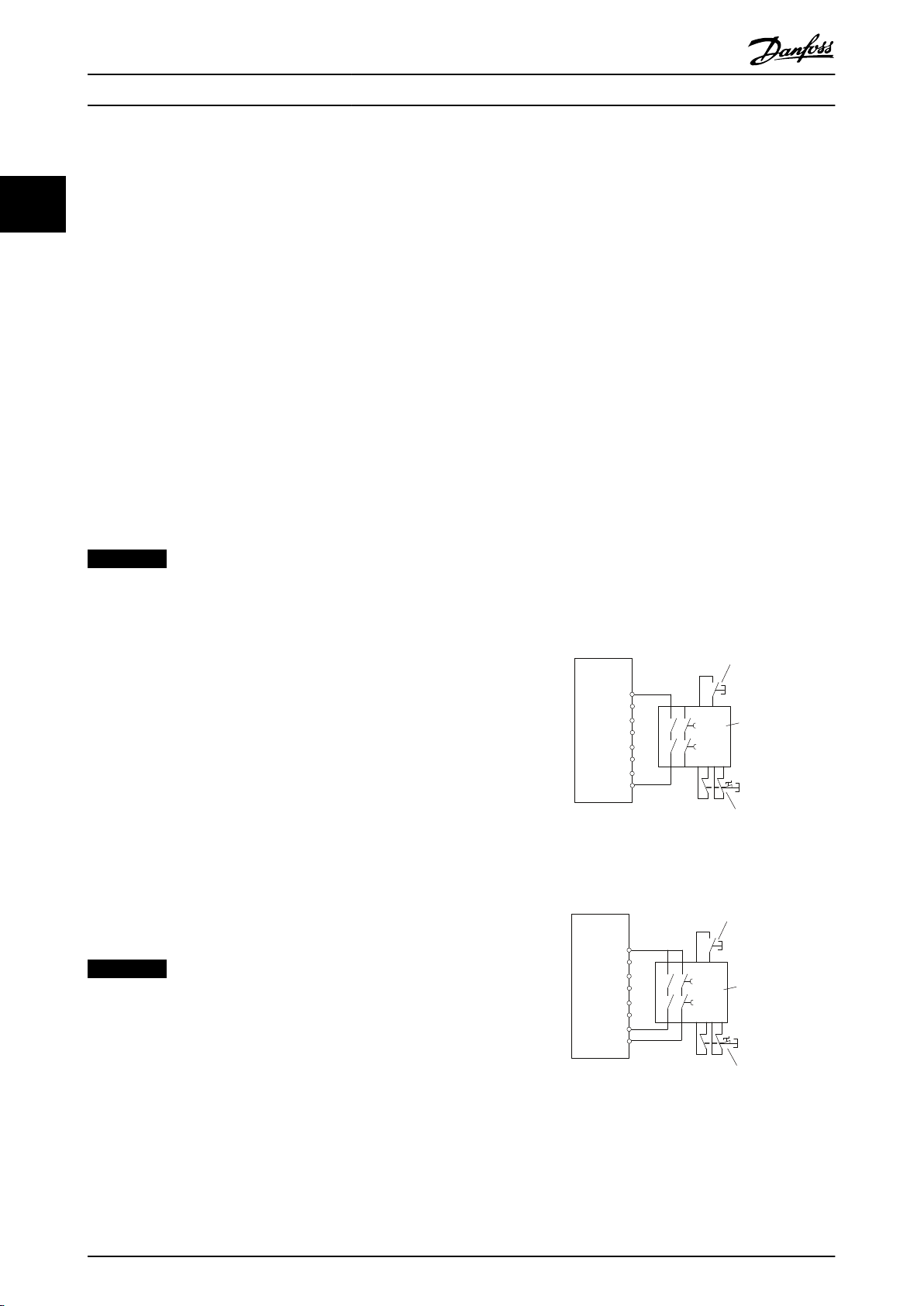
Beispiel mit Anwendung der Kategorie 4/PL e
Wenn die Auslegung des Sicherheitssteuersystems 2 Kanäle
für die Funktion „Sicher abgeschaltetes Moment“ erfordert,
um Kategorie 4/PL e zu erreichen, realisieren Sie einen
Kanal über die Klemme für „sicher abgeschaltetes Moment“
Klemme 37 (STO) und den anderen durch ein Schütz. Das
Schütz können Sie entweder in den Eingangs- oder
Ausgangsstromkreisen des Frequenzumrichters anschließen
und über das Sicherheitsrelais steuern (siehe
Abbildung 2.5). Sie müssen das Schütz durch einen hilfsgeführten Kontakt überwachen lassen und an den
Quittiereingang des Sicherheitsrelais anschließen.
Parallelschaltung des Eingangs „sicher abgeschaltetes
Moment“ mit einem Sicherheitsrelais
Sie können die Eingänge für „sicher abgeschaltetes
Moment“ Klemme 37 (STO) direkt verbinden, wenn
mehrere Frequenzumrichter an der gleichen Steuerleitung
über ein Sicherheitsrelais gesteuert werden müssen (siehe
Abbildung 2.6). Verbinden von Eingängen erhöht die
Wahrscheinlichkeit einer Störung in unsicherer Richtung,
da bei einem Defekt in einem Frequenzumrichter alle
Frequenzumrichter aktiviert werden können. Die
Wahrscheinlichkeit einer Störung für Klemme 37 ist so
gering, dass die resultierende Wahrscheinlichkeit weiterhin
die Anforderungen für SIL2 erfüllt.
Kurzschluss in der Verdrahtung zu Klemme 37
ausgeschlossen werden kann. Dies kann wie in EN ISO
13849-2 D4 beschrieben durch Verwendung von Schutzverdrahtung (abgeschirmt oder abgetrennt) erfolgen.
Beispiel mit SS1
SS1 entspricht einem kontrollierten Stopp, Stoppkategorie
1 gemäß IEC 60204-1 (siehe Abbildung 2.4). Bei Aktivierung
der Sicherheitsfunktion führt der Frequenzumrichter einen
normalen kontrollierten Stopp aus. Diesen können Sie über
Klemme 27 aktivieren. Nach Ablauf der sicheren Verzögerungszeit am externen Sicherheitsmodul wird die sichere
Abbildung 2.3 Beispiel für sicher abgeschaltetes Moment
Abschaltung des Motormoments ausgelöst und Klemme 37
wird deaktiviert. Die Rampe ab wird wie im Frequenzumrichter konfiguriert durchgeführt. Ist der Frequenzumrichter
nach der sicheren Verzögerungszeit nicht gestoppt, lässt
die Aktivierung des sicher abgeschalteten Moments den
Frequenzumrichter im Freilauf auslaufen.
HINWEIS
Bei Verwendung der SS1-Funktion wird die Bremsrampe
des Frequenzumrichters im Hinblick auf Sicherheit nicht
überwacht.
Abbildung 2.4 SS1-Beispiel
18 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 21
12
FC
37
K1
K1
K1
130BB970.10
2
3
1
12
37
FC
20
130BC001.10
FC
FC
20
20
37
37
3
1
2
4
Einführung zum VLT® HVAC Dr...
Abbildung 2.5 Beispiel für sicher abgeschaltetes Moment,
Kategorie 4
Projektierungshandbuch
1. Aktivieren Sie die Funktion „Sicher abgeschaltetes
Moment“ durch Wegschalten der 24 V DCSpannung an Klemme 37.
2. Nach Aktivieren der Funktion „Sicher
abgeschaltetes Moment“ (d. h. nach der
Antwortzeit) lässt der Frequenzumrichter den
Motor im Freilauf auslaufen (er erzeugt kein
Drehfeld im Motor mehr). Die Antwortzeit ist für
das komplette Leistungsangebot an Frequenzumrichtern kürzer als 10 ms.
Es ist gewährleistet, dass der Frequenzumrichter die
Erzeugung eines Drehfelds nicht durch einen internen
Fehler wieder aufnimmt (gemäß Kat. 3, PL d gemäß EN ISO
13849-1 und SIL 2 gemäß EN 62061). Nach Aktivierung der
Funktion „Sicher abgeschaltetes Moment“ zeigt der
Frequenzumrichter den Text „Sicher abgeschaltetes
Moment aktiviert“. Der zugehörige Hilfetext sagt „Die
Funktion „Sicher abgeschaltetes Moment“ wurde durch die
Steuerklemme 37 aktiviert (Signal 0V)“. Dies weist darauf
hin, dass die Funktion „Sicher abgeschaltetes Moment“
aktiviert wurde oder dass der Normalbetrieb nach einer
Aktivierung der Funktion „Sicher abgeschaltetes Moment“
noch nicht wieder aufgenommen wurde.
2 2
HINWEIS
Die Anforderungen von Kat. 3/PL „d“ (ISO 13849-1)
werden nur erfüllt, während die 24 V DC-Versorgung zu
Klemme 37 von einer Sicherheitsvorrichtung, die selbst
Kat. 3/PL „d“ (ISO 13849-1) erfüllt, unterbrochen oder
niedrig gehalten wird. Wenn externe Kräfte auf den
Motor wirken können, zum Beispiel bei einer vertikalen
Abbildung 2.6 Beispiel für Parallelschaltung mehrerer
Frequenzumrichter
1 Sicherheitsrelais
2 Not-Aus-Taster
3 Reset-Taste
4 24 V DC
Tabelle 2.5 Legende für Abbildung 2.3 bis Abbildung 2.6
WARNUNG
Aktivieren der Funktion „Sicher abgeschaltetes Moment“
(d. h. Wegschalten des 24 V DC-Signals an Klemme 37)
schafft keine elektrische Sicherheit. Die Funktion „Sicher
abgeschaltetes Moment“ selbst reicht nicht aus, um die
in EN 60204-1 definierte Notabschaltfunktion zu
realisieren. Die Notabschaltung fordert Maßnahmen zur
elektrischen Isolierung, z. B. durch Abschaltung der
Netzversorgung über ein zusätzliches Schütz.
Achse (hängende Lasten), und eine unerwünschte
Bewegung z. B. durch Schwerkraft eine Gefahr darstellen
könnte, darf der Motor nicht ohne zusätzliche Fallschutzmaßnahmen betrieben werden. Es müssen z. B.
mechanische Bremsen zusätzlich vorgesehen werden.
Zum Wiederanlauf nach Aktivierung der Funktion „sicher
abgeschaltetes Moment“ müssen Sie zunächst wieder die
24 V DC-Spannung an Klemme 37 anlegen (Text „Sicher
abgeschaltetes Moment aktiviert“ wird immer noch
angezeigt), zweitens müssen Sie ein Reset-Signal (über Bus,
Digital-E/A oder die [Reset]-Taste am Wechselrichter)
erzeugen.
Standardmäßig sind die Funktionen für „sicher
abgeschaltetes Moment“ auf den Schutz vor unerwartetem
Wiederanlauf eingestellt. Dies bedeutet, dass, um das
sicher abgeschaltete Moment zu beenden und normalen
Betrieb wieder aufzunehmen, zuerst wieder 24 V DC an
Klemme 37 angelegt werden müssen. Danach müssen Sie
ein Reset-Signal (über Bus, Digital-E/A oder die [Reset]Taste am Wechselrichter) senden.
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 19
Page 22
130BA967.11
121110987654321
372033322 92719181312
DI DI
SIL 2
Safe Stop
Digital Input
e.g. Par 5-15
PTC
Sensor
X44/
Par. 5-19
Terminal 37 Saf e Stop
Safety D evice
Safe Input
Safe Output
Safe AND Input
Manual Rest art
PTC Therm istor C ard
MCB112
Non- Haz ardous AreaHaz ardous
Area
Einführung zum VLT® HVAC Dr... Projektierungshandbuch
Die Funktion „Sicher abgeschaltetes Moment“ kann durch
Einstellung von 5-19 Klemme 37 Sicherer Stopp von der
Werkseinstellung [1] auf Wert [3] für automatischen
22
Wiederanlauf eingestellt werden. Ist eine MCB112-Option
an den Frequenzumrichter angeschlossen, wird der
automatische Wiederanlauf über Werte [7] und [8]
eingestellt.
Automatischer Wiederanlauf bedeutet, dass „sicher
abgeschaltetes Moment“ beendet und normaler Betrieb
wieder aufgenommen wird, sobald 24 V DC an Klemme 37
angelegt werden. Es wird kein Reset-Signal benötigt.
WARNUNG
Automatischer Wiederanlauf ist nur in einem von 2
Fällen zulässig:
1. Der Schutz vor unerwartetem Anlauf wird über
andere Teile der Installation des „sicher
abgeschalteten Moments“ implementiert.
2. Ein Aufenthalt in der Gefahrenzone kann
mechanisch ausgeschlossen werden, wenn die
Funktion „Sicher abgeschaltetes Moment“ nicht
aktiviert ist. Insbesondere müssen Sie Absatz
5.3.2.5 von ISO 12100-2 2003 beachten.
2.6.2 Installation einer externen
Sicherheitsvorrichtung in
Kombination mit MCB 112
Wenn das Ex-zertifizierte Thermistormodul MCB 112, das
Klemme 37 als sicherheitsbezogenen Abschaltkanal
verwendet, angeschlossen ist, muss eine UND-Verknüpfung
des Ausgangs X44/12 von MCB 112 mit dem sicherheitsbezogenen Sensor (wie eine Not-Aus-Taste, Schalter einer
Schutzeinrichtung usw.), der „sicher abgeschaltetes
Moment“ aktiviert, erfolgen. Dies bedeutet, dass der
Ausgang für „Sicher abgeschaltetes Moment“ Klemme 37
nur aktiv (HIGH = 24 V) ist, wenn sowohl das Signal von
Ausgang X44/12 von MCB 112 und das Signal vom sicherheitsbezogenen Sensor aktiv sind. Wenn mindestens eines
der 2 Signale inaktiv (LOW = 0 V) ist, muss auch der
Ausgang zu Klemme 37 inaktiv sein. Die Sicherheitsvorrichtung mit dieser UND-Logik muss selbst IEC 61508, SIL
2, erfüllen. Die Verbindung vom Ausgang der Sicherheitsvorrichtung mit sicherer UND-Logik zu „Sicher
abgeschaltetes Moment“ Klemme 37 muss gegen
Kurzschluss geschützt werden. Siehe Abbildung 2.7.
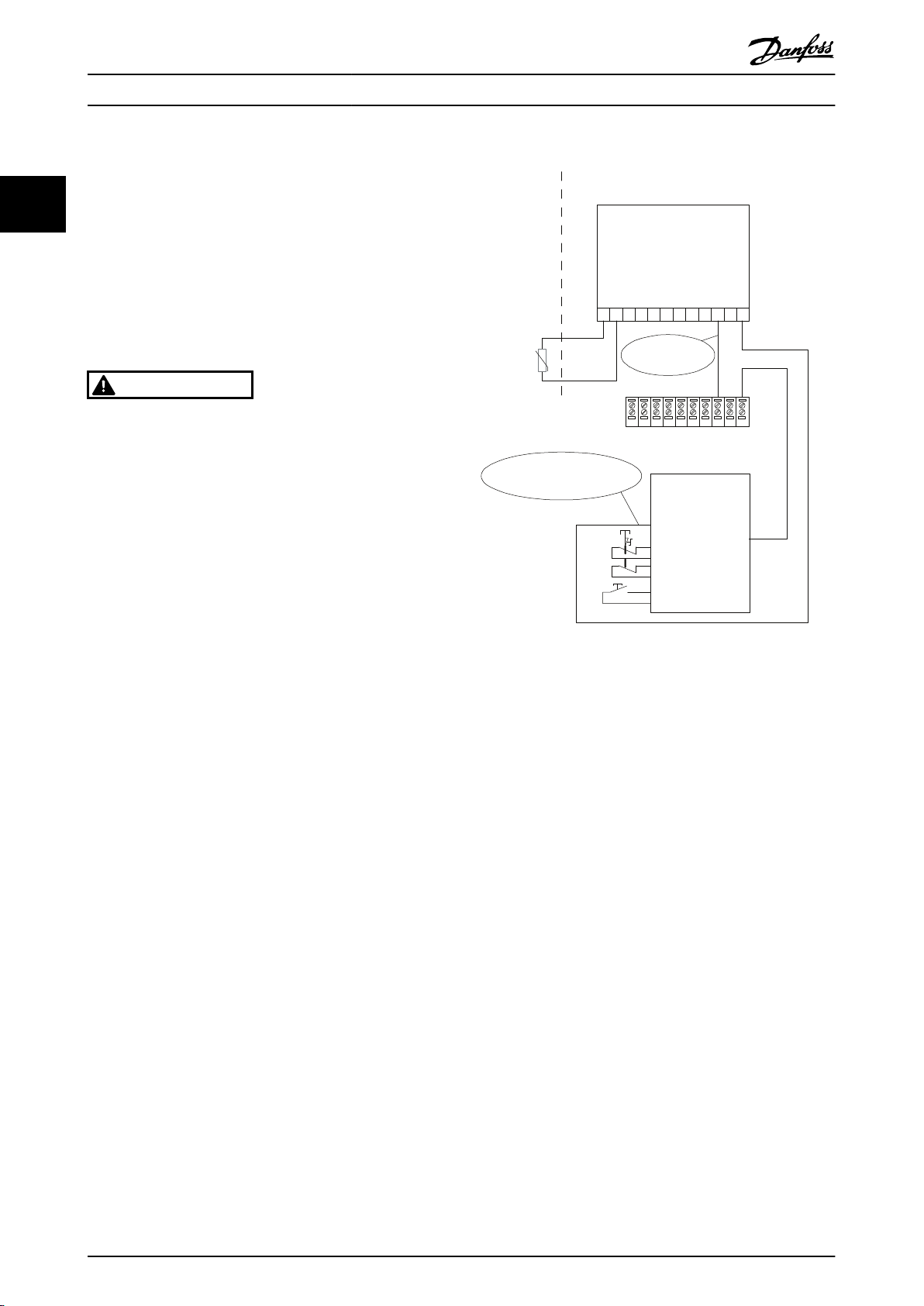
Abbildung 2.7 Abbildung der wesentlichen Aspekte zur Installation einer Kombination einer Anwendung mit „sicher
abgeschaltetes Moment“ und einer MCB 112-Anwendung. Das
Diagramm zeigt einen Neustarteingang für die externe Sicherheitsvorrichtung. Dies bedeutet, dass in dieser Installation
5-19 Klemme 37 Sicherer Stopp auf den Wert [7] PTC 1 & Relais
W oder [8] [8] PTC 1 & Relais A/W eingestellt sein könnte.
Weitere Informationen finden Sie im MCB 112 Produkthandbuch.
20 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 23
Einführung zum VLT® HVAC Dr...
Projektierungshandbuch
Parametereinstellungen für externe Sicherheitsvorrichtung in Kombination mit MCB 112
Wenn MCB 112 angeschlossen ist, wird die Auswahl zusätzlicher Optionen ([4] PTC 1 Alarm bis [9] PTC 1 & Relais W/A)
für 5-19 Klemme 37 Sicherer Stopp möglich. Optionen [1]
Sicher abgeschaltetes Moment Alarm und [3] Sicher
abgeschaltetes Moment Warnung stehen weiterhin zur
Verfügung, werden aber nicht benutzt, da diese für Installationen ohne MCB 112 oder externe
Sicherheitsvorrichtungen bestimmt sind. Wenn [1] Sicher
abgeschaltetes Moment Alarm oder [3] Sicher abgeschaltetes
Moment Warnung fälschlicherweise ausgewählt wird und
MCB 112 ausgelöst, reagiert der Frequenzumrichter mit
einem Alarm „Gefährlicher Fehler [A72]“ und lässt den
Frequenzumrichter sicher im Freilauf auslaufen, ohne
automatischen Wiederanlauf. Optionen [4] PTC 1 Alarm und
[5] PTC 1 Warnung werden nicht ausgewählt, wenn eine
externe Sicherheitsvorrichtung verwendet wird. Diese
Optionen sind dafür bestimmt, wenn nur MCB 112 die
Funktion „sicher abgeschaltetes Moment“ benutzt. Wenn
Option [4] PTC 1 Alarm oder [5] PTC 1 Warnung fälschlicherweise ausgewählt wird und die externe
Sicherheitsvorrichtung die Funktion „sicher abgeschaltetes
Moment“ auslöst, gibt der Frequenzumrichter einen Alarm
„Gefährlicher Fehler [A72]“ aus und lässt den Frequenzumrichter sicher im Freilauf auslaufen, ohne automatischen
Wiederanlauf.
Optionen [6] PTC 1 & Relais A bis [9] PTC 1 & Relais W/A
müssen für die Kombination aus externer Sicherheitsvorrichtung und MCB 112 ausgewählt werden.
HINWEIS
Beachten Sie, dass die Optionen [7] PTC 1 & Relais W und
[8] PTC 1 & Relais A/W für automatischen Wiederanlauf
öffnen, wenn die externe Sicherheitsvorrichtung wieder
deaktiviert wird.
Dies ist nur in den folgenden Fällen zulässig:
Der Schutz vor unerwartetem Anlauf wird über
•
andere Teile der Installation des „sicher
abgeschalteten Moments“ implementiert.
Ein Aufenthalt in der Gefahrenzone kann
•
mechanisch ausgeschlossen werden, wenn die
Funktion „Sicher abgeschaltetes Moment“ nicht
aktiviert ist. Insbesondere müssen Sie Absatz
5.3.2.5 von ISO 12100-2 2003 beachten.
Weitere Informationen finden Sie im MCB 112 Produk-
thandbuch.
2.6.3
Inbetriebnahmeprüfung der Funktion
„Sicher abgeschaltetes Moment“
Führen Sie nach der Installation und vor erstmaligem
Betrieb eine Inbetriebnahmeprüfung der Anlage oder der
Anwendung, die von der Funktion „sicher abgeschaltetes
Moment“ Gebrauch macht, durch.
Wiederholen Sie außerdem nach jeder Änderung der
Anlage oder Anwendung, deren Teil die Funktion „sicher
abgeschaltetes Moment“ ist, diese Prüfung.
HINWEIS
Eine bestandene Inbetriebnahmeprüfung ist nach der
ersten Installation und nach jeder Änderung der Sicherheitsinstallation Pflicht.
Inbetriebnahmeprüfung (Fall 1 oder 2 je nach
Anwendung auswählen):
Fall 1: Schutz vor Wiederanlauf bei Funktion „Sicher
abgeschaltetes Moment“ erforderlich (d. h. „sicher
abgeschaltetes Moment“ nur, wenn 5-19 Klemme 37
Sicherer Stopp auf die Werkseinstellung [1] eingestellt
ist, oder kombinierte Funktion „Sicher abgeschaltetes
Moment“ und MCB112, wenn 5-19 Klemme 37 Sicherer
Stopp auf [6] oder [9] eingestellt ist):
1.1 Trennen Sie die 24 V DC-Versorgung an
Klemme 37 über die externe Trennvorrichtung,
während der FC 102 den Motor antreibt (d. h.
Netzversorgung bleibt bestehen). Der Prüfungsschritt ist bestanden, wenn der Motor mit einem
Freilauf reagiert und die mechanische Bremse
(falls angeschlossen) aktiviert ist und, bei
angebrachtem LCP der Alarm „Sicher
abgeschaltetes Moment [A68]“ angezeigt wird.
1.2 Aktivieren Sie erneut ein Reset-Signal (über
Bus, Digitalein-/-ausgang oder [Reset]-Taste). Der
Prüfschritt ist bestanden, wenn der Motor im
Zustand „Sicher abgeschaltetes Moment“ bleibt
und die mechanische Bremse (falls
angeschlossen) geschlossen bleibt.
1.3 Legen Sie wieder die 24 V DC-Spannung an
Klemme 37 an. Der Prüfungsschritt ist bestanden,
wenn der Motor im Freilauf bleibt und die
mechanische Bremse (falls angeschlossen)
geschlossen bleibt.
1.4 Aktivieren Sie erneut ein Reset-Signal (über
Bus, Digitalein-/-ausgang oder [Reset]-Taste). Der
Prüfungsschritt ist bestanden, wenn der Motor
wieder anläuft.
Die Inbetriebnahmeprüfung ist bestanden, wenn alle 4
Prüfungsschritte 1.1, 1.2, 1.3 und 1.4 erfolgreich absolviert
wurden.
2 2
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 21
Page 24
Einführung zum VLT® HVAC Dr... Projektierungshandbuch
Fall 2: Automatischer Wiederanlauf nach Aktivieren der
Funktion „Sicher abgeschaltetes Moment“ ist erwünscht
und zulässig (d. h. nur „sicher abgeschaltetes Moment“,
22
wenn 5-19 Klemme 37 Sicherer Stopp auf [3] eingestellt
ist, oder kombinierte Funktion „Sicher abgeschaltetes
Moment“ und MCB 112, wenn 5-19 Klemme 37 Sicherer
Stopp auf [7] oder [8] eingestellt ist):
2.1 Trennen Sie die 24 V DC-Versorgung an
Klemme 37 über die externe Trennvorrichtung,
während der FC 102 den Motor antreibt (d. h.
Netzversorgung bleibt bestehen). Der Prüfungsschritt ist bestanden, wenn der Motor mit einem
Freilauf reagiert und die mechanische Bremse
(falls angeschlossen) aktiviert ist und, bei
angebrachtem LCP der Alarm „Sicher
abgeschaltetes Moment [W68]“ angezeigt wird.
2.2 Legen Sie wieder die 24 V DC-Spannung an
Klemme 37 an.
Der Prüfungsschritt ist bestanden, wenn der Motor wieder
anläuft. Die Inbetriebnahmeprüfung ist bestanden, wenn
Prüfungsschritte 2.1 und 2.2 erfolgreich absolviert wurden.
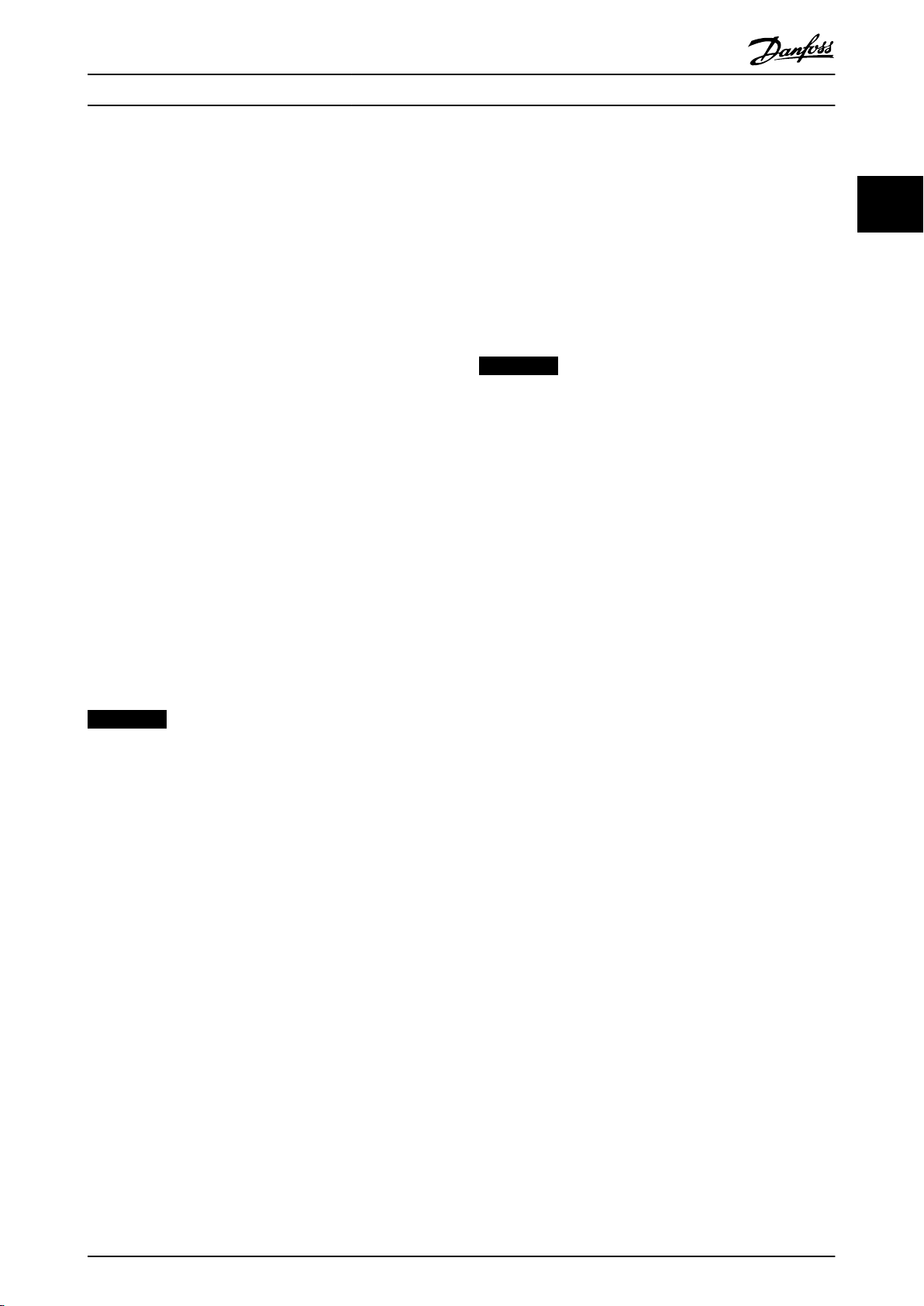
Abbildung 2.8 Lüfterkurven (A, B und C) für reduzierte Lüftervolumen
HINWEIS
Siehe Warnung zum Wiederanlaufverhalten in
Kapitel 2.6.1 Klemme 37 Funktion „Sicher abgeschaltetes
Moment“.
2.7 Vorteile
2.7.1 Gründe für den Einsatz eines
Frequenzumrichters zur Regelung von
Lüftern und Pumpen
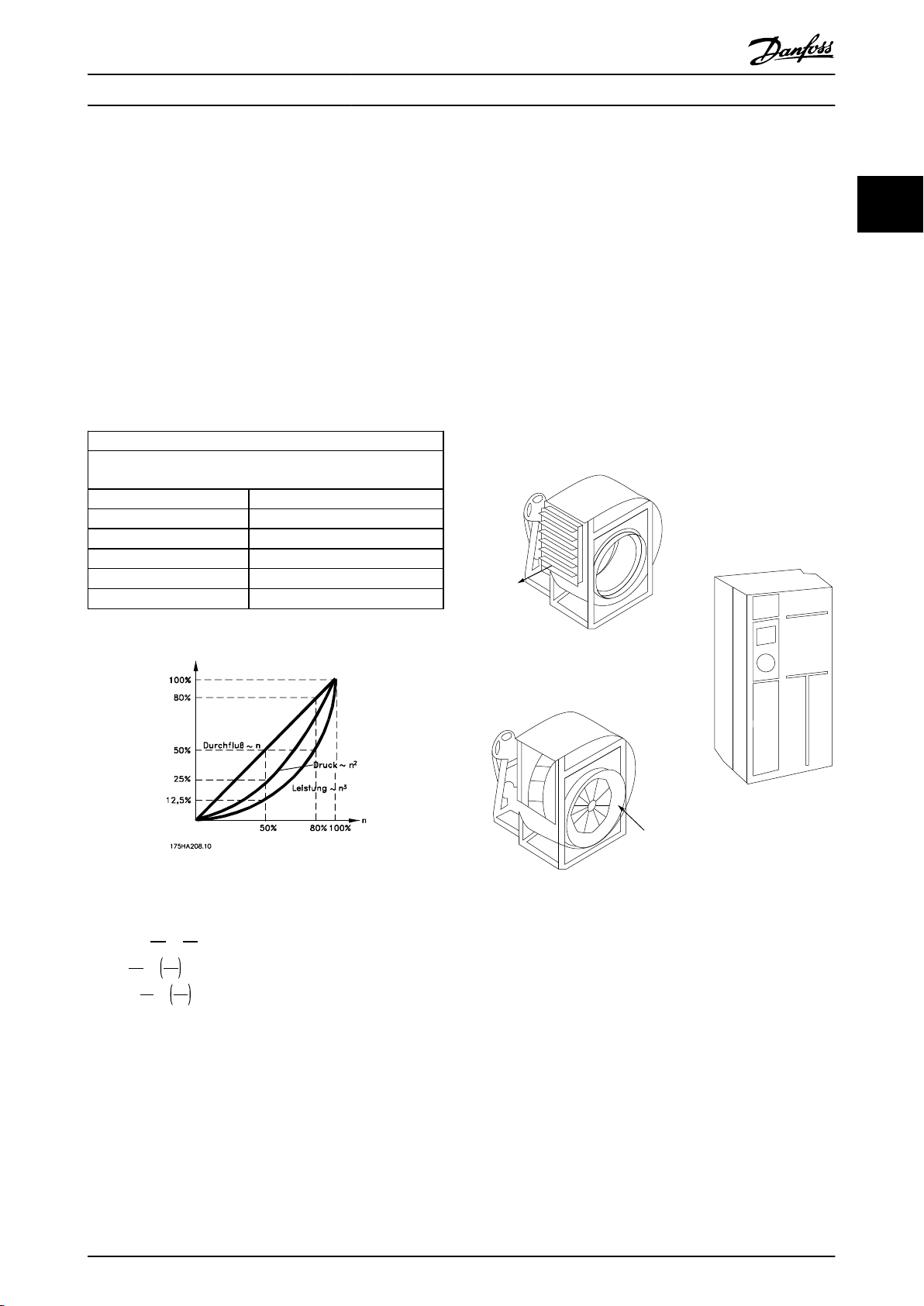
Der Frequenzumrichter nutzt die Tatsache, dass Zentrifugallüfter und Kreiselpumpen den Proportionalitätsgesetzen
für Strömungsgeräte folgen. Weitere Informationen finden
Sie im Text Die Proportionalitätsgesetze.
Der klare Vorteil: Energieeinsparung
2.7.2
Der Vorteil beim Einsatz eines Frequenzumrichters zur
Drehzahlregelung von Lüftern oder Pumpen sind die
erreichbaren Einsparungen im Hinblick auf den Energieverbrauch.
Im Vergleich zu alternativen Regelsystemen bietet ein
Frequenzumrichter die höchste Energieeffizienz zur
Regelung von Lüftungs- und Pumpenanlagen.
Abbildung 2.9 Wenn Sie die Lüfterkapazität mit einem
Frequenzumrichter auf 60 % reduzieren, können in Standardanwendungen Energieeinsparungen von mehr als 50 % erzielt
werden.
22 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 25
130BA782.10
Discharge
damper
Less energy savings
IGV
Costlier installation
Maximum energy savings
Einführung zum VLT® HVAC Dr... Projektierungshandbuch
2.7.3 Beispiele für Energieeinsparungen
Wie in der Abbildung gezeigt (Proportionalitätsgesetze),
wird der Durchfluss durch Änderung der Drehzahl geregelt.
Durch Reduzierung der Drehzahl um nur 20 % gegenüber
der Nenndrehzahl wird auch der Durchfluss um 20 %
reduziert, da der Durchfluss direkt proportional zur
Drehzahl ist. Der Stromverbrauch wird dagegen um 50 %
reduziert.
Wenn das fragliche System einen Durchfluss liefern muss,
der nur an einigen Tagen im Jahr 100 % entspricht,
während der Durchschnitt für den Rest des Jahres unter 80
% des Nenndurchflusses liegt, beträgt die gesparte Energie
mehr als 50 %.
Die Proportionalitätsgesetze
Abbildung 2.10 beschreibt die Abhängigkeit von Durchfluss,
Druck und Leistungsaufnahme von der Drehzahl.
Q = Durchfluss P = Leistung
Q1 = Nenndurchfluss P1 = Nennleistung
Q2 = Gesenkter Durchfluss P2 = Gesenkte Leistung
H = Druck n = Drehzahlregelung
H1 = Nenndruck n1 = Nenndrehzahl
H2 = Gesenkter Druck n2 = Gesenkte Drehzahl
Vergleich von Energieeinsparungen
2.7.4
Mit der Frequenzumrichter-Lösung von Danfoss können
größere Energieeinsparungen erzielt werden als mit
herkömmlichen Energiesparlösungen. So kann der
Frequenzumrichter die Lüfterdrehzahl entsprechend der
thermischen Belastung des Systems steuern. Weiterhin
weist der Frequenzumrichter eine integrierte Einrichtung
auf, mit der er die Funktion eines Gebäudeleitsystems
(BMS) übernehmen kann.
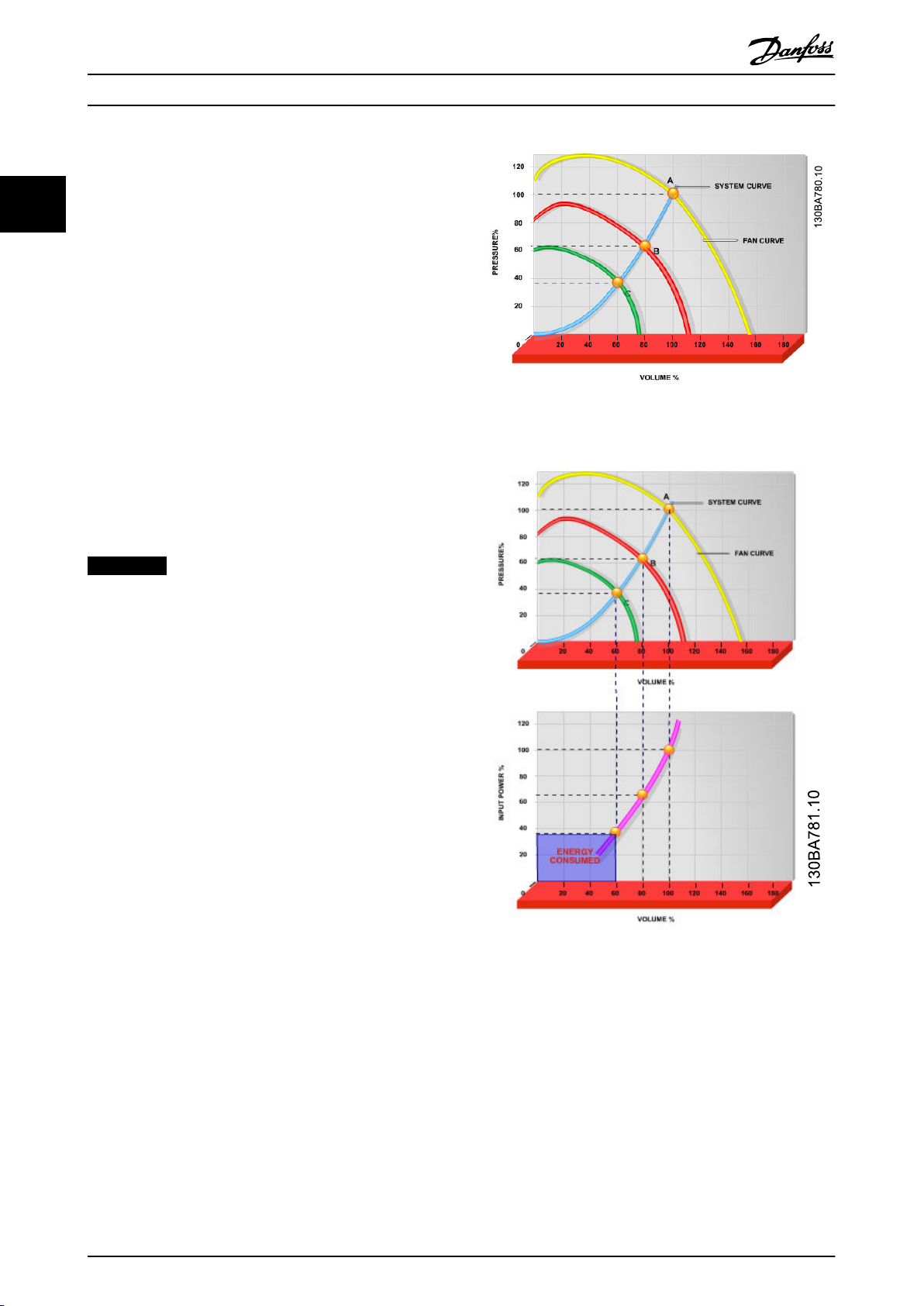
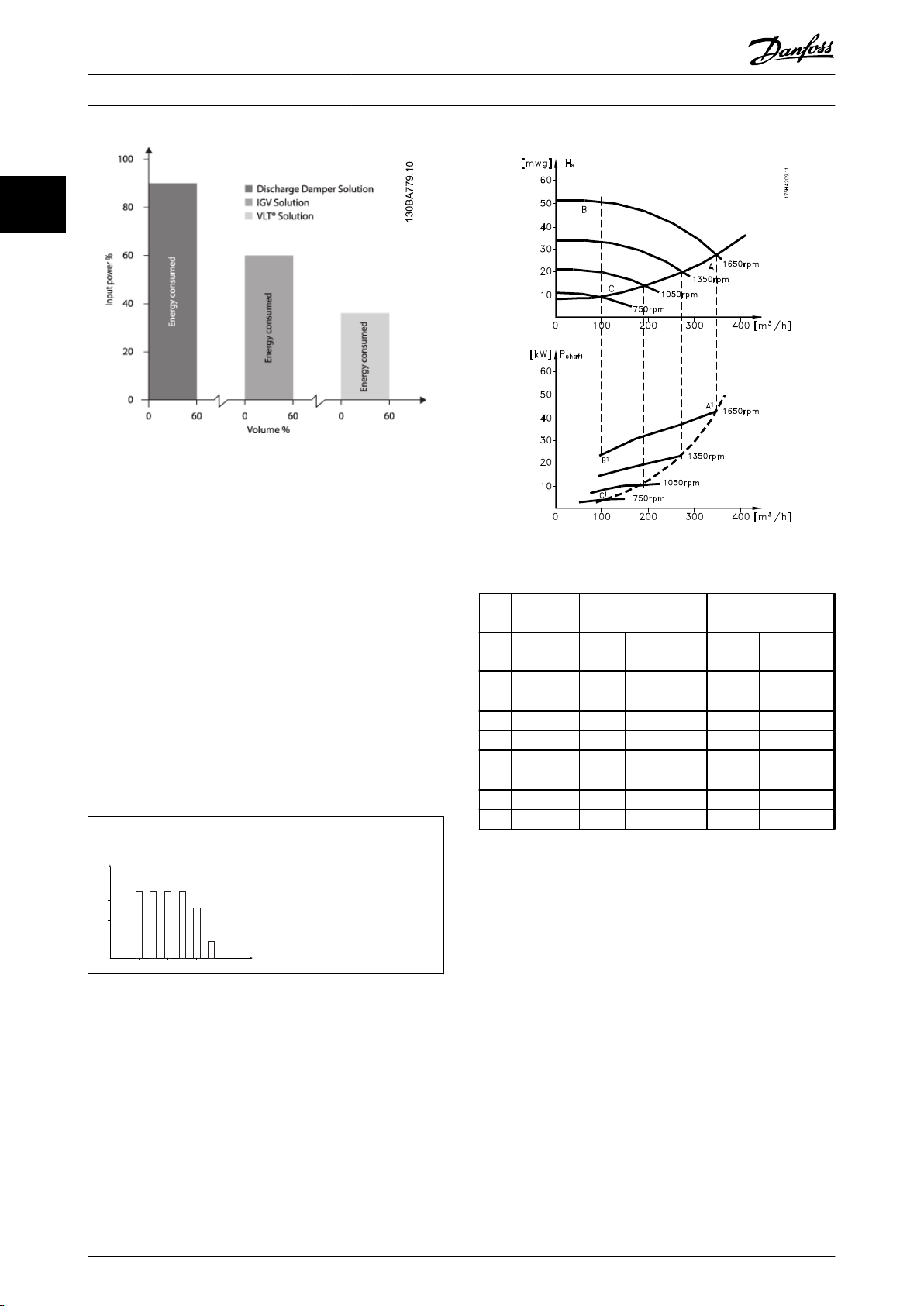
Abbildung 2.12 zeigt die typischen Energieeinsparungen,
die mit drei wohlbekannten Lösungen möglich sind, wenn
das Lüftervolumen auf beispielsweise 60 % reduziert wird.
Wie Abbildung 2.12 zeigt, können in typischen
Anwendungen mehr als 50 % Energie eingespart werden.
2 2
Tabelle 2.6 In der Gleichung verwendete Abkürzungen
Abbildung 2.10 Die Abhängigkeit von Durchfluss, Druck und
Leistungsaufnahme von der Drehzahl
Q
n
1
=
1
2
1
=
Q
n
2
2
n
2
1
n
2
n
3
1
=
n
2
Durchfluss
Druck
Leistung
:
:
:
H
1
H
2
P
P
Abbildung 2.11 Die 3 häufigsten Systeme zur Einsparung von
Energie
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 23
Page 26
500
[h]
t
1000
1500
2000
200100 300
[m
3
/h]
400
Q
175HA210.11
Einführung zum VLT® HVAC Dr...
Projektierungshandbuch
22
Abbildung 2.12 Durch Druckentlastungsklappen wird die
Leistungsaufnahme leicht gesenkt. Durch Leitschaufeln ist eine
Reduzierung um 40 % möglich; deren Installation ist
allerdings kostspielig. Mit der leicht zu installierenden
Frequenzumrichter-Lösung von Danfoss wird der Energieverbrauch um über 50 % reduziert.
Abbildung 2.13 Beispiel mit variablem Fluss
Beispiel mit variablem Fluss über 1
2.7.5
Jahr
Das Beispiel wurde auf Basis einer Pumpenkennlinie
berechnet, die von einem Pumpendatenblatt stammt.
Das erzielte Ergebnis zeigt Energieeinsparungen von über
50 % bei der gegebenen Durchflussverteilung über ein
Jahr. Die Amortisationszeit hängt vom Preis pro kWh sowie
vom Preis des Frequenzumrichters ab. In diesem Beispiel
beträgt sie weniger als ein Jahr im Vergleich zu Ventilen
und konstanter Drehzahl.
Durchflussverteilung über 1 Jahr
P
Welle=PWellenleistung
Tabelle 2.7 Energieeinsparungen
Verteilung Ventilregelung Frequenzumrichter-
m3/
ungs
Regelung
aufnahme
1
kWh
h
% Stun-
den
Leist-
ungs
A1-B
aufnahme Leist-
kWh A1-C
1
350 5 438 42,5 18.615 42,5 18.615
300 15 1314 38,5 50.589 29,0 38.106
250 20 1752 35,0 61.320 18,5 32.412
200 20 1752 31,5 55.188 11,5 20.148
150 20 1752 28,0 49.056 6,5 11.388
100 20 1752 23,0 40.296 3,5 6.132
100 8760 275.064 26.801
Σ
Tabelle 2.8 Verbrauch
Bessere Regelung
2.7.6
Durch den Einsatz eines Frequenzumrichters zur
Durchfluss- oder Druckregelung ergibt sich ein
Regelsystem, das sich sehr genau regulieren lässt.
Mit Hilfe eines Frequenzumrichters kann die Drehzahl eines
Lüfters oder einer Pumpe geändert werden, was für eine
stufenlose Regelung von Durchfluss oder Druck sorgt.
Darüber hinaus passt ein Frequenzumrichter die Lüfteroder Pumpendrehzahl schnell an die geänderten
Durchfluss- oder Druckbedingungen in der Anlage an.
Einfache Prozessregelung (Durchfluss, Pegel oder Druck)
über integrierte PID-Regelung.
24 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 27
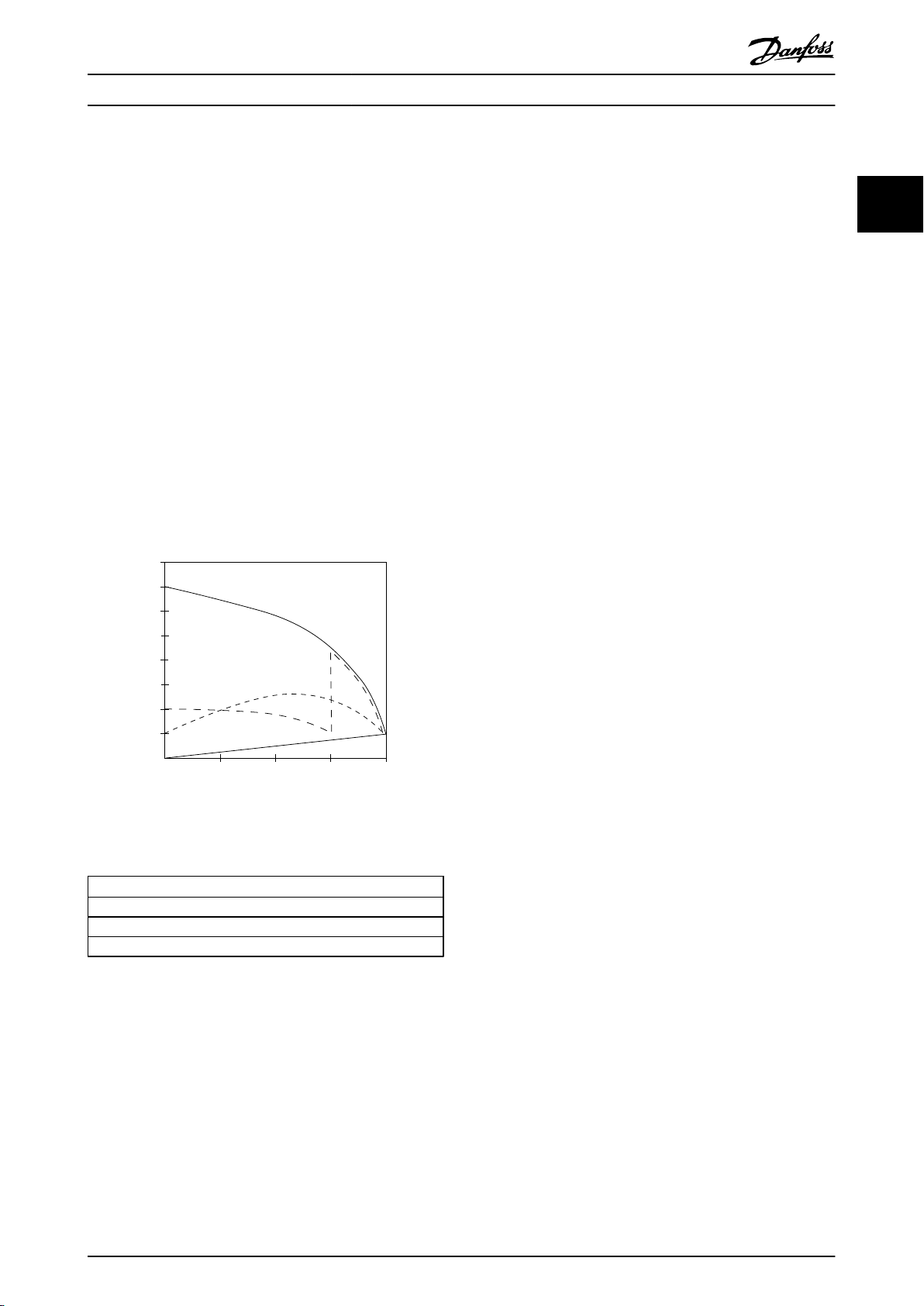
Full load
% Full load current
& speed
500
100
0
0 12,5 25 37,5 50Hz
200
300
400
600
700
800
4
3
2
1
175HA227.10
Einführung zum VLT® HVAC Dr...
2.7.7
Korrektur des Leistungsfaktors cos φ
Projektierungshandbuch
In der Regel liefert ein VLT® HVAC Drive mit einem cos φ
von 1 eine Korrektur des Leistungsfaktors cos φ des
Motors. Damit muss der cos φ des Motors bei der Dimensionierung der Kompensationsanlage nicht mehr
berücksichtigt werden.
2.7.8 Stern-/Dreieckstarter oder Softstarter
nicht erforderlich
Wenn größere Motoren gestartet werden, müssen in vielen
Ländern Geräte verwendet werden, die den Startstrom
begrenzen. In konventionelleren Systemen sind Stern-/
Dreieckstarter oder Softstarter weit verbreitet. Solche
Motorstarter sind bei Verwendung eines Frequenzumrichters nicht erforderlich.
Wie in Abbildung 2.14 gezeigt, benötigt ein Frequenzumrichter nicht mehr als den Nennstrom.
2 2
Abbildung 2.14 Ein Frequenzumrichter nimmt nicht mehr als
den Nennstrom auf.
1 VLT® HVAC Drive
2 Stern-/Dreieckstarter
3 Softstarter
4 Start direkt am Netz
Tabelle 2.9 Legende zu Abbildung 2.14
2.7.9
Das Verwenden eines
Frequenzumrichters spart Geld
Das Beispiel auf der nächsten Seite zeigt, dass zahlreiche
Bauteile beim Einsatz von Frequenzumrichtern nicht
notwendig sind. Die Höhe der Kosten für die Aufstellung
der beiden Anlagen lässt sich berechnen. Beim Beispiel auf
der folgenden Seite lassen sich die beiden Anlagen zu
ungefähr dem gleichen Preis realisieren.
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 25
Page 28
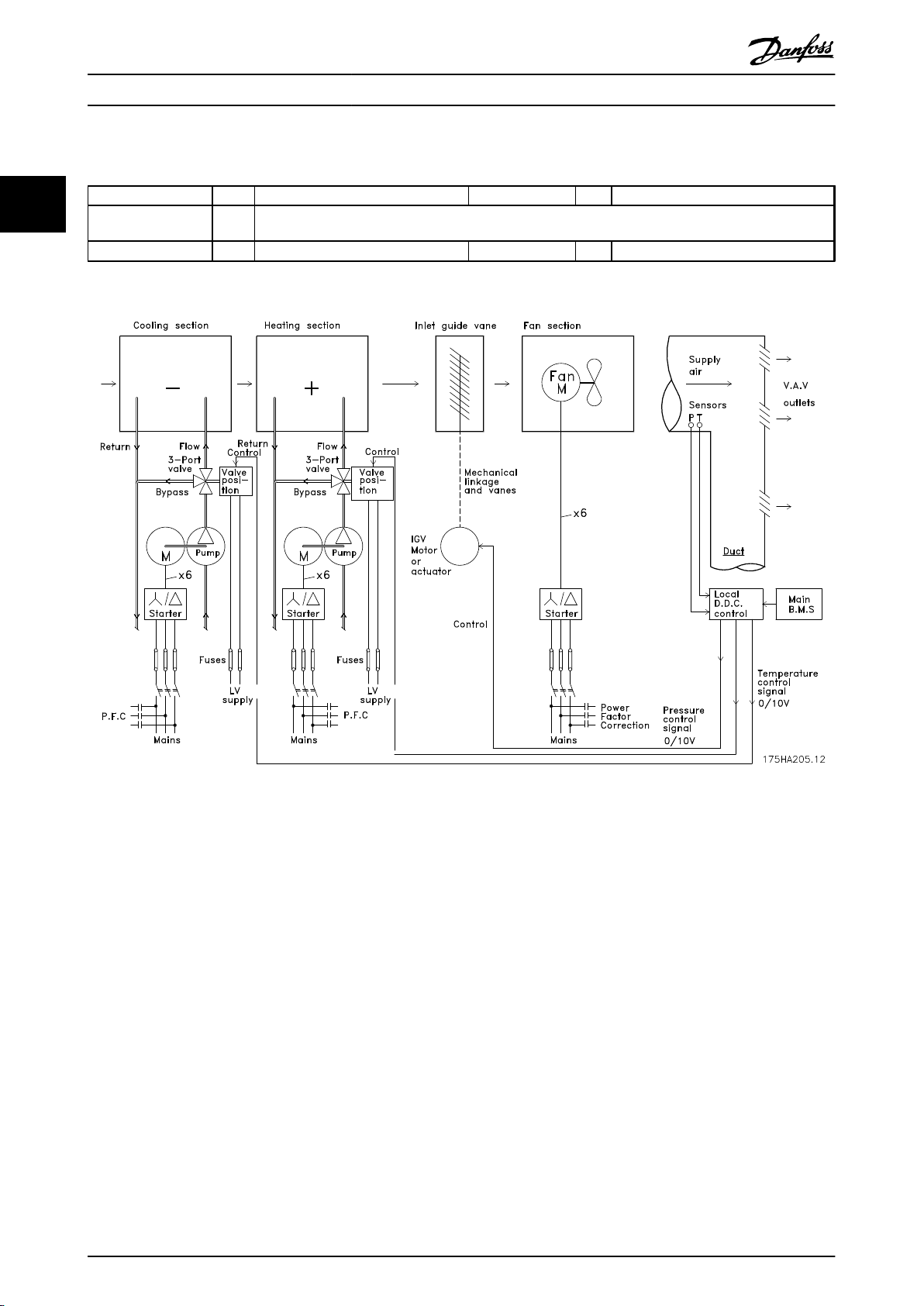
Einführung zum VLT® HVAC Dr... Projektierungshandbuch
2.7.10 Ohne einen Frequenzumrichter
D.D.C. = Direkte digitale Regelung E.M.S. = Energiemanagementsystem
22
VVS = Variabler Luftvolumenstrom
Sensor P = Druck Sensor T = Temperatur
Tabelle 2.10 In Abbildung 2.15 und Abbildung 2.16 verwendete Abkürzungen
Abbildung 2.15 Traditionelles Lüftersystem
26 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 29
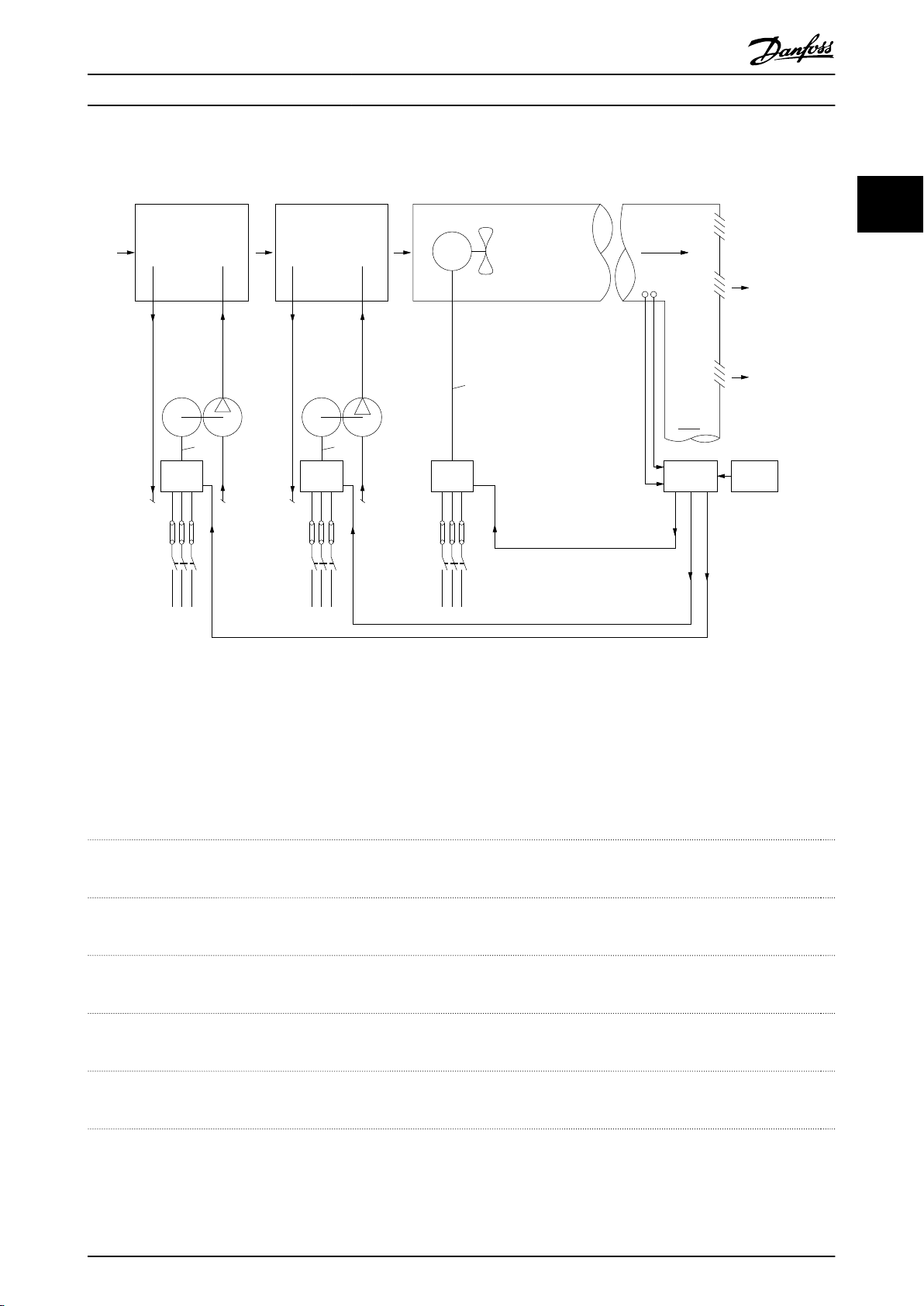
175HA206.11
Pump
Flow
Return
Supply
air
V.A.V
outlets
Duct
Mains
Pump
Return
Flow
Mains
Fan
Main
B.M.S
Local
D.D.C.
control
Sensors
Mains
Cooling section Heating section
Fan section
Pressure
control
0-10V
or
0/4-20mA
Control
temperature
0-10V
or
0/4-20mA
Control
temperature
0-10V
or
0/4-20mA
VLT
M
- +
VLT
M
M
P
T
VLT
x3 x3
x3
Einführung zum VLT® HVAC Dr...
Projektierungshandbuch
2.7.11 Mit einem Frequenzumrichter
2 2
Abbildung 2.16 Durch Frequenzumrichter geregeltes Lüftungssystem
2.7.12
Anwendungsbeispiele
Auf den folgenden Seiten finden Sie einige typische Anwendungsbeispiele aus dem Bereich HLK.
Wenn Sie weitere Informationen zu einer Anwendung benötigen, bestellen Sie bei einem Danfoss-Lieferanten ein Informationsblatt, auf dem die Anwendung komplett beschrieben ist.
Variabler Luftvolumenstrom
Fragen Sie nach The Drive to...Improving Variable Air Volume Ventilation Systems MN.60.A1.02
Konstanter Luftvolumenstrom
Fragen Sie nach The Drive to...Improving Constant Air Volume Ventilation Systems MN.60.B1.02
Kühlturmgebläse
Fragen Sie nach The Drive to...Improving fan control on cooling towers MN.60.C1.02
Kondenswasserpumpen
Fragen Sie nach The Drive to...Improving condenser water pumping systems MN.60.F1.02
Primärpumpen
Fragen Sie nach The Drive to...Improve your primary pumping in primary/secondary pumping systems MN.60.D1.02
Hilfspumpen
Fragen Sie nach The Drive to...Improve your secondary pumping in primary/secondary pumping systems MN.60.E1.02
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 27
Page 30
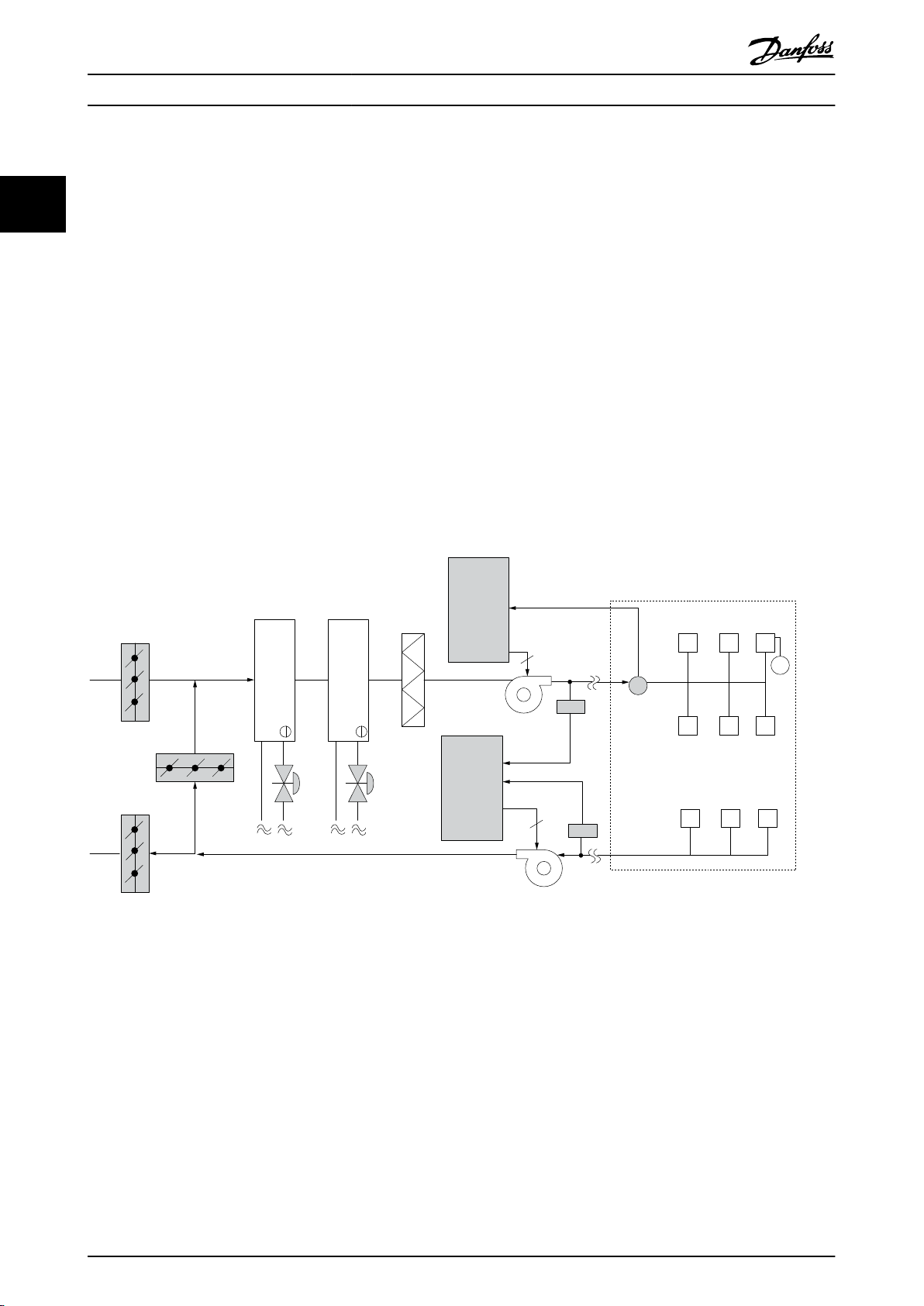
Frequency
converter
Frequency
converter
D1
D2
D3
Cooling coil
Heating coil
Filter
Pressure
signal
Supply fan
VAV boxes
Flow
Flow
Pressure
transmitter
Return fan
3
3
T
130BB455.10
Einführung zum VLT® HVAC Dr... Projektierungshandbuch
2.7.13 Variabler Luftvolumenstrom
Systeme mit variablem Luftvolumenstrom (VVS) dienen zur Regelung der Lüftungs- und Temperaturverhältnisse in
22
Gebäuden. Zentrale VVS-Systeme gelten dabei als die energiesparendste Methode zur Gebäudeklimatisierung. Durch den
Einbau zentraler Anlagen lässt sich ein höherer Energienutzungsgrad erzielen als bei verzweigten Systemen.
Der höhere Wirkungsgrad ergibt sich aus der Nutzung größerer Kühllüfter und Kälteanlagen, die einen sehr viel höheren
Wirkungsgrad haben als kleine Motoren und verzweigte luftgekühlte Kälteanlagen. Außerdem trägt der geringere Wartungsaufwand zur Kostensenkung bei.
2.7.14 Die VLT-Lösung
Während Dämpfer und IGVs (Dralldrosseln) dafür sorgen, dass der Druck im Leitungssystem konstant bleibt, kann durch eine
-Lösung viel mehr Energie eingespart und die Installation weniger komplex gehalten werden. Statt einen künstlichen
Druckabfall zu erzeugen oder den Wirkungsgrad des Lüfters zu senken, senkt der die Lüfterdrehzahl, um den vom System
geforderten Fluss und Druck zur Verfügung zu stellen.
Zentrifugalgeräte wie Lüfter verhalten sich entsprechend den Gesetzen der Zentrifugalkraft. Das bedeutet, dass die Lüfter
den von ihnen produzierten Druck und Fluss senken, während ihre Drehzahl sinkt. Dadurch wird die Leistungsaufnahme
erheblich gesenkt.
Der Abluftventilator wird laufend überwacht bzw. geregelt, um eine gleichbleibende Strömungsdifferenz zwischen Vor- und
Rücklauf aufrechtzuerhalten. Bei Einsatz des hochmodernen PID-Reglers des HVAC-s kann auf zusätzliche Regler verzichtet
werden.
Abbildung 2.17 Die VLT-Lösung
28 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 31

Frequency
converter
Frequency
converter
Pressure
signal
Cooling coil
Heating coil
D1
D2
D3
Filter
Pressure
transmitter
Supply fan
Return fan
Temperature
signal
Temperature
transmitter
130BB451.10
Einführung zum VLT® HVAC Dr... Projektierungshandbuch
2.7.15 Konstanter Luftvolumenstrom
Systeme für konstanten Luftvolumenstrom (KVS) sind zentrale Lüftungsanlagen, die in der Regel zur Belüftung großer
Gemeinschaftsbereiche mit geringen Mengen temperierter Frischluft eingesetzt werden. Sie waren die Vorläufer der
variablen Luftsysteme und sind dementsprechend auch in älteren, gewerblich genutzten Mehrzonengebäuden zu finden. Bei
diesen Anlagen wird die Luft mithilfe von Klimageräten mit eingebautem Heizregister vorgeheizt. Viele dieser Anlagen
werden auch zur Gebäudeklimatisierung eingesetzt und haben dementsprechend eine Kühlspule. Gebläsekonvektoren
werden häufig verwendet, um die Heiz- und Kühlanforderungen in den einzelnen Zonen zu unterstützen.
2.7.16 Die VLT-Lösung
Mit einem Frequenzumrichter sind erhebliche Energieeinsparungen bei gleichzeitiger angemessener Regelung des Gebäudes
möglich. Temperatur- oder CO2-Sensoren können für Istwertsignale an Frequenzumrichter verwendet werden. Ganz gleich,
ob Temperatur, Luftqualität oder beides gesteuert werden soll – bei einem konstanten Luftvolumenstromsystem kann der
Regelbetrieb den jeweiligen Verhältnissen im Gebäude angepasst werden. Je weniger Menschen sich im geregelten Bereich
befinden, desto weniger Frischluft wird benötigt. Der CO2-Sensor registriert niedrigere Werte und sorgt entsprechend für
eine Senkung der Drehzahl der Zuluftventilatoren. Der Abluftventilator moduliert zur Aufrechterhaltung eines statischen
Drucksollwerts oder einer festgelegten Differenz zwischen der Stromversorgung und Abluftströmen.
Bei der Temperaturregelung, die vorwiegend in Klimaanlagen verwendet wird, liegen unterschiedliche Kühlanforderungen
vor, da sich sowohl die Außentemperatur als auch die Anzahl der Menschen im geregelten Bereich verändern. Wenn die
Temperatur unter den Sollwert absinkt, kann der Zuluftventilator seine Drehzahl verringern. Der Abluftventilator moduliert
zur Aufrechterhaltung eines statischen Drucksollwerts. Durch Reduzierung der Luftströmung wird auch die zur Beheizung
oder Kühlung der Luft aufgewendete Energie verringert, was weitere Einsparungen zur Folge hat.
Verschiedene Funktionen des speziellen Danfoss HVAC-Frequenzumrichters können zur Verbesserung der Leistung Ihrer
Anlage mit konstantem Luftvolumenstrom verwendet werden. Ein Problem bei der Regelung eines Lüftungssystems ist
schlechte Luftqualität. Die programmierbare Mindestfrequenz kann zur Aufrechterhaltung einer Mindestmenge an Zuluft
unabhängig vom Ist- oder Sollwertsignal eingestellt werden. Der Frequenzumrichter beinhaltet auch einen 3-Zonen- und 3Sollwert-PID-Regler, was eine Überwachung der Temperatur und Luftqualität ermöglicht. Der Frequenzumrichter wird auch
dann, wenn die Temperaturanforderungen erfüllt sind, für eine ausreichende Luftzufuhr sorgen, um auch die Anforderungen
an die Luftqualität zu erfüllen. Der Frequenzumrichter kann zwei Istwertsignale zur Regelung des Abluftventilators
überwachen und vergleichen und gleichzeitig einen festgelegten Differenzluftstrom zwischen dem Zu- und Abluftkanal
aufrechterhalten.
2 2
Abbildung 2.18 Die VLT-Lösung
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 29
Page 32

Einführung zum VLT® HVAC Dr... Projektierungshandbuch
2.7.17 Kühlturmgebläse
Kühlturmgebläse dienen zur Kühlung von Kondensatorwasser in wassergekühlten Kälteanlagen. Diese sind am effizientesten,
22
wenn es um die Kaltwasserbereitung geht. Sie sind bis zu 20 % effizienter als luftgekühlte Anlagen. Je nach den
klimatischen Verhältnissen sind Kühltürme häufig die energiesparendste Methode zur Kühlung des Kondensatorwassers
wassergekühlter Kühlanlagen.
Die Kühlung erfolgt durch Verdunstung.
Um die Oberfläche des Kondensatorwassers zu vergrößern, wird dieses in den Kühlturm gesprüht. Das Kühlturmgebläse
führt Luft durch den Füllbereich und unterstützt damit die Verdunstung des Wassers. Durch die Verdunstung wird dem
Wasser Energie entzogen, was eine Temperatursenkung bewirkt. Das gekühlte Wasser wird im Kühlturmbecken aufgefangen,
von wo es wieder in den Kondensator der Kühlanlage zurückgepumpt wird. Danach wiederholt sich der Kreislauf.
2.7.18 Die VLT-Lösung
Mit einem Frequenzumrichter können die Kühlturmlüfter auf die erforderliche Drehzahl zur Aufrechterhaltung der Kondensatorwassertemperatur geregelt werden. Die Frequenzumrichter können auch zum Ein- und Ausschalten des Lüfters nach
Bedarf verwendet werden.
Mehrere Funktionen des speziellen Danfoss HVAC-Frequenzumrichters können zur Leistungssteigerung von Anwendungen
mit Kühlturmlüftern verwendet werden. Wenn die Drehzahl der Kühlturmlüfter unter einen bestimmten Wert absinkt, haben
die Lüfter nur noch geringen Einfluss auf die Kühlung des Wassers. Auch bei Verwendung eines Getriebes zur Frequenzregelung des Turmlüfters kann eine Mindestdrehzahl von 40 bis 50 % erforderlich sein.
Die kundenseitig programmierbare Mindestfrequenz ermöglicht die Aufrechterhaltung der Mindestdrehzahl auch dann,
wenn der Istwert oder der Drehzahlsollwert eigentlich niedrigere Drehzahlen bewirken sollten.
Ebenfalls als Standardfunktion programmieren Sie den Frequenzumrichter so, dass er in den Energiesparmodus versetzt
wird, in dem der Lüfter angehalten wird, bis wieder eine höhere Drehzahl erforderlich ist. Darüber hinaus treten bei einigen
Kühltürmen unerwünschte Frequenzen auf, die zu Vibrationen führen können. Diese Frequenzen lassen sich durch Frequenzausblendung im Frequenzumrichter leicht vermeiden.
30 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 33

Frequency
converter
Water Inlet
Water Outlet
CHILLER
Temperature
Sensor
BASIN
Conderser
Water pump
Supply
130BB453.10
Einführung zum VLT® HVAC Dr... Projektierungshandbuch
2 2
Abbildung 2.19 Die VLT-Lösung
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 31
Page 34

Frequency
converter
Water
Inlet
Water
Outlet
BASIN
Flow or pressure sensor
Condenser
Water pump
Throttling
valve
Supply
CHILLER
130BB452.10
Einführung zum VLT® HVAC Dr... Projektierungshandbuch
2.7.19 Kondenswasserpumpen
Kondenswasserpumpen werden hauptsächlich zur Wasserzirkulation durch den Kondensatorteil wassergekühlter Kühlanlagen
22
und den dazugehörigen Kühlturm eingesetzt. Das Kondenswasser nimmt die Wärme aus dem Kondensator in sich auf und
gibt sie im Kühlturm wieder ab. Solche Systeme stellen die energiesparendste Lösung zur Kaltwasserbereitung dar - sie sind
bis zu 20 % effizienter als luftgekühlte Anlagen.
2.7.20 Die VLT-Lösung
Ein Frequenzumrichter kann als Ergänzung zu Kondenswasserpumpen eingesetzt werden, um das Drosselventil und/oder
eine Trimmung der Pumpenlaufräder zu ersetzen.
Durch den Einsatz eines Frequenzumrichters anstelle eines Drosselventils wird die Energie eingespart, die ansonsten durch
das Ventil aufgenommen würde. Das Einsparpotenzial kann dabei mindestens 15-20 % ausmachen. Die Trimmung des
Pumpenlaufrads lässt sich nicht rückgängig machen: Wenn sich daher die Bedingungen ändern und ein höherer Durchfluss
erforderlich ist, muss das Laufrad ausgetauscht werden.
Abbildung 2.20 Die VLT-Lösung
32 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 35

Einführung zum VLT® HVAC Dr... Projektierungshandbuch
2.7.21 Primärpumpen
Primärpumpen in einem Primär-/Hilfspumpsystem können zur Aufrechterhaltung einer konstanten Strömung durch Geräte
eingesetzt werden, bei denen sich Betrieb und Steuerung im Falle schwankender Strömungen schwierig gestalten. Das
primäre/sekundäre Pumpsystem bietet eine Trennung von „primärem“ Produktionskreis und „sekundärem“ Verteilerkreis.
Dadurch kann der Auslegungsdurchfluss z. B. in Kühlern konstant bleiben und die Geräte ordnungsgemäß arbeiten,
während gleichzeitig die Strömung im restlichen System variieren kann.
Wenn die Verdampfer-Strömungsgeschwindigkeit in einem Kühler abnimmt, tritt bei dem zu kühlenden Wasser eine
Überkühlung ein. Im Zuge davon versucht der Kühler, seine Kühlleistung zu verringern. Wenn die Strömungsgeschwindigkeit
weit genug oder zu schnell absinkt, kann der Kühler seine Last nicht schnell genug abwerfen, und durch die geringere
Verdampfungstemperatur des Kühlers wird der Kühler sicherheitshalber abgeschaltet; ein manueller Reset ist notwendig.
Dieser Fall tritt häufiger in großen Anlagen ein, besonders dann, wenn zwei oder mehr Kühler parallel geschaltet sind und
eine Primär-/Hilfspumpenfunktion nicht eingesetzt wird.
2 2
2.7.22
Je nach Größe des Systems und des Primärkreislaufs kann der Energieverbrauch des Primärkreislaufs sehr groß werden.
Ein Frequenzumrichter kann als Ergänzung zum Primärsystem eingesetzt werden, um das Drosselventil und/oder eine
Trimmung der Pumpenlaufräder zu ersetzen und auf diese Weise die Betriebskosten zu senken. Zwei Regelverfahren sind
dabei gebräuchlich:
Beim ersten Verfahren wird ein Durchflussmesser genutzt. Da die gewünschte Strömungsgeschwindigkeit bekannt und
konstant ist, kann am Auslass jedes Kühlers ein Durchflussmesser installiert und zur direkten Steuerung der Pumpe
eingesetzt werden. Mithilfe des eingebauten PID-Reglers erhält der Frequenzumrichter stets die passende Strömungsgeschwindigkeit aufrecht und gleicht sogar den sich ändernden Widerstand im Primärrohrkreislauf aus, wenn Kühler und ihre
Pumpen zu- und abgeschaltet werden.
Bei der anderen Methode handelt es sich um die örtliche Drehzahlbestimmung. bei der der Bediener einfach die Ausgangsfrequenz herabsetzt, bis der Auslegungsdurchfluss erreicht ist.
Das Benutzen eines Frequenzumrichters zur Senkung der Pumpendrehzahl ähnelt sehr dem Trimmen der Pumpenlaufräder,
außer dass damit keine Arbeit verbunden ist und der Pumpenwirkungsgrad höher bleibt. Man verringert einfach die
Pumpendrehzahl, bis der richtige Durchfluss erreicht ist, und hält danach die entsprechende Drehzahl konstant. Bei jedem
Zuschalten des Kühlers arbeitet die Pumpe mit dieser Drehzahl. Da der Primärkreislauf keine Regelventile oder sonstigen
Geräte hat, die die Systemkurve beeinflussen könnten, und die durch Zu- und Abschalten von Kühlern hervorgerufenen
Schwankungen im Regelfall geringfügig sind, ist eine solche konstante Drehzahl angemessen. Für den Fall, dass die
Strömungsgeschwindigkeit im System später erhöht werden muss, kann der Frequenzumrichter einfach die Pumpendrehzahl
erhöhen, sodass kein neues Pumpenlaufrad erforderlich ist.
Die VLT-Lösung
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 33
Page 36

Frequency
converter
Frequency
converter
CHILLER
CHILLER
Flowmeter
Flowmeter
F F
130BB456.10
Einführung zum VLT® HVAC Dr... Projektierungshandbuch
22
Abbildung 2.21 Die VLT-Lösung
34 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 37

Frequency
converter
Frequency
converter
CHILLER
CHILLER
3
3
P
130BB454.10
Einführung zum VLT® HVAC Dr... Projektierungshandbuch
2.7.23 Hilfspumpen
Hilfspumpen in einem gekühlten Primär-/Sekundärwasserpumpsystem dienen zur Verteilung des gekühlten Wassers aus dem
Primärproduktionskreislauf in die Lastbereiche. Das Primär-Hilfspumpsystem dient zur hydraulischen Abkopplung eines
Rohrkreislaufs vom anderen. In diesem Fall dient die Primärpumpe zur Aufrechterhaltung einer konstanten Strömung durch
die Kühler und erlaubt gleichzeitig variierende Strömungswerte in den Hilfspumpen und somit eine bessere Steuerung und
einen niedrigeren Energieverbrauch.
Wenn kein Primär-/Sekundärkonzept eingesetzt und ein System mit variablem Volumen konstruiert wird, kann der Kühler für
den Fall, dass die Strömungsgeschwindigkeit weit genug oder zu schnell absinkt, seine Last nicht schnell genug abgeben.
Das hat zur Folge, dass die bei zu niedriger Verdampfertemperatur ansprechende Sicherheitsvorrichtung den Kühler
abschaltet, worauf dieser durch einen manuellen Reset wieder aktiviert werden muss. Dieser Fall tritt häufiger in großen
Anlagen ein, besonders dann, wenn zwei oder mehr Kühler parallel geschaltet sind.
2.7.24 Die VLT-Lösung
Zwar hilft ein Primär-/Sekundärsystem mit 2-Wege-Ventilen, Energie zu sparen und Systemsteuerungsprobleme leichter zu
bewältigen, aber eine volle Nutzung des Einspar- und Steuerungspotenzials ist erst durch die Ergänzung von Frequenzumrichtern möglich.
Wenn die Sensoren an den richtigen Punkten angebracht werden, sind die Pumpen mithilfe von Frequenzumrichtern in der
Lage, ihre Drehzahl zu variieren und sie der Systemkurve statt der Pumpenkurve folgen zu lassen.
Auf diese Weise wird weniger Energie verschwendet. Darüber hinaus werden die meisten Fälle von Überdruck, dem 2-WegeVentile unterliegen können, vermieden.
Mit Erreichen der vorgegebenen Last schalten die 2-Wege-Ventile ab. Dadurch erhöht sich der an der Last und am 2-WegeVentil gemessene Differenzdruck. Mit Ansteigen dieses Drucks verlangsamt sich die Pumpe, um den Sollwert zu halten. Die
Sollwertgröße wird durch Summieren des Druckabfalls der Last und des 2-Wege-Ventils unter Auslegungsbedingungen
errechnet.
2 2
Beachten Sie, dass mehrere Pumpen im Parallelbetrieb mit gleicher Drehzahl laufen müssen, um die Energieeinsparung zu
optimieren. Diese haben entweder individuell zugeordnete Frequenzumrichter oder nur einen , der die Pumpen parallel
betreibt.
Abbildung 2.22 Die VLT-Lösung
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 35
Page 38

130BB153.10
100%
0%
-100%
100%
P 3-13
Reference
site
Local
reference
scaled to
RPM or Hz
Auto mode
Hand mode
LCP Hand on,
o and auto
on keys
Linked to hand/auto
Local
Remote
Reference
Ramp
P 4-10
Motor speed
direction
To motor
control
Reference
handling
Remote
reference
P 4-13
Motor speed
high limit [RPM]
P 4-14
Motor speed
high limit [Hz]
P 4-11
Motor speed
low limit [RPM]
P 4-12
Motor speed
low limit [Hz]
P 3-4* Ramp 1
P 3-5* Ramp 2
Einführung zum VLT® HVAC Dr...
Projektierungshandbuch
2.8 Regelungsstrukturen
2.8.1 Steuerverfahren
22
Abbildung 2.23 Regelungsstrukturen
Der Frequenzumrichter ist ein Hochleistungsgerät für anspruchsvolle Anwendungen. Er kann mit verschiedenen Arten von
Motorsteuerprinzipien arbeiten, wie U/f-Sondermotor-Modus und VVC
plus
und kann normale Käfigläufer-Asynchronmotoren
steuern.
Das Kurzschlussverhalten bei diesem Frequenzumrichter hängt von den 3 Stromwandlern in den Motorphasen ab.
Sie wählen zwischen Regelung ohne Rückführung und mit Rückführung in 1-00 Regelverfahren.
Regelungsstruktur ohne Rückführung
2.8.2
Abbildung 2.24 Struktur ohne Rückführung
In der in Abbildung 2.24 dargestellten Konfiguration ist 1-00 Regelverfahren auf [0] Regelung ohne Rückführung eingestellt. Der
Frequenzumrichter empfängt aus dem Sollwertsystem den resultierende Sollwert oder den Ortsollwert. Er verarbeitet sie in
der Rampen- und Drehzahlbegrenzung, bevor er sie an die Motorsteuerung sendet.
Der Ausgang der Motorsteuerung wird dann durch die maximale Frequenzgrenze beschränkt.
36 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 39

Einführung zum VLT® HVAC Dr... Projektierungshandbuch
2.8.3 PM/EC+ Motorsteuerung
Das Danfoss EC+ Konzept ermöglicht den Betrieb von
hocheffizienten PM-Motoren in IEC-Standardbauformen mit
Danfoss-Frequenzumrichtern.
Das Inbetriebnahmeverfahren ist mit dem für Asynchronmotoren (Induktionsmotoren) bei Nutzung der Danfoss
plus
VVC
PM-Steuerungsstrategie vergleichbar.
Vorteile für Kunden:
Freie Wahl der Motortechnologie (Permanent-
•
magnet- oder Asynchronmotor)
Installation und Betrieb wie von Asynchron-
•
motoren bekannt
Herstellerunabhängig bei Auswahl der System-
•
komponenten (z. B. Motoren)
Bester Systemwirkungsgrad durch Auswahl der
•
besten Komponenten
Mögliche Nachrüstung in vorhandenen Anlagen
•
Leistungsbereich: 1,1-22 kW
•
Strombegrenzungen:
Gegenwärtig nur bis 22 kW unterstützt
•
Gegenwärtig auf Vollpol-PM-Motoren beschränkt
•
LC-Filter in Verbindung mit PM-Motoren nicht
•
unterstützt
Der Algorithmus zur Überspannungssteuerung
•
wird bei PM-Motoren nicht unterstützt
Der Algorithmus für kinetischen Speicher wird bei
•
PM-Motoren nicht unterstützt
Der AMA-Algorithmus wird bei PM-Motoren nicht
•
unterstützt
Keine Erkennung fehlender Motorphase
•
Kein Kippschutz
•
Keine ETR-Funktion
•
Dimensionierung eines
2.8.4
Frequenzumrichters und PM Motors
Die niedrigen Motorinduktivitäten von PM Motoren können
zu Stromwelligkeiten im Frequenzumrichter führen.
Stellen Sie zur Auswahl des richtigen Frequenzumrichter
für einen bestimmten PM Motor sicher, dass:
der Frequenzumrichter die erforderliche Leistung
•
und den erforderlichen Strom unter allen
Betriebsbedingungen liefern kann.
die Nennleistung des Frequenzumrichter gleich
•
oder höher als die Nennleistung des Motors ist.
Sie den Frequenzumrichter für eine Betriebslast
•
von konstanten 100 % mit ausreichender Sicherheitsspanne dimensionieren.
Der Strom (A) und die typische Nennleistung (kW) eines
PM Motors finden Sie in Kapitel 9.1 Netzversorgungstabellen
für verschiedene Spannungen.
Dimensionierungsbeispiele für festgelegte Nennleistung
Beispiel 1
PM Motorgröße: 1,5 kW/2,9 A
•
Netz: 3 x 400 V
•
2 2
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 37
Page 40

Einführung zum VLT® HVAC Dr... Projektierungshandbuch
Frequenzum-
richter
22
P1K1 1,1 1,5 3,0 3,3 2,7 3,0
P1K5 1,5 2,0 4,1 4,5 3,4 3,7
Tabelle 2.11 Dimensionierungsdaten für 1,1- und 1,5-kW-Frequenzumrichter
Typisch
[kW]
Typische [hp]
bei 460 V (nur
nordamerikanischer
Markt)
Dauerbetrieb [A]
(3 x 380-440 V)
Überlastbetrieb [A]
(3 x 380-440 V)
Dauerbetrieb [A]
(3 x 441-480 V)
Überlastbetrieb [A]
(3 x 441-480 V)
Der Nennstrom des PM Motors (2,9 A) stimmt mit dem Nennstrom sowohl des 1,1-kW-Frequenzumrichters (3 A bei 400 V)
und des 1,5-kW-Frequenzumrichters (4,1 A bei 400 V) überein. Da die Nennleistung des Motors jedoch 1,5 kW ist, ist der 1,5kW-Frequenzumrichter die richtige Wahl.
Leistung 1,5 kW 1,5 kW
Strom 2,9 A 4,1 A bei 400 V
Tabelle 2.12 Korrekt dimensionierte Frequenzumrichter
Motor Frequenzumrichter 1,5 kW
Beispiel 2
PM Motorgröße: 5,5 kW/12,5 A
•
Netz: 3 x 400 V
•
Frequenzum-
richter
P4K0 4,0 5,0 10,0 11,0 8,2 9,0
P5K5 5,5 7,5 13,0 14,3 11,0 12,1
Typisch
[kW]
Typische [hp]
bei 460 V(nur
nordamerikanischer
Markt)
Dauerbetrieb [A]
(3 x 380-440 V)
Überlastbetrieb [A]
(3 x 380-440 V)
Dauerbetrieb [A]
(3 x 441-480 V)
Überlastbetrieb [A]
(3 x 441-480 V)
Tabelle 2.13 Dimensionierungsdaten für 4,0- und 5,5-kW-Frequenzumrichter
Der Nennstrom des PM Motors (12,5 A) stimmt mit dem Nennstrom sowohl des 5,5-kW-Frequenzumrichters (13 A bei 400 V)
und des 4,0-kW-Frequenzumrichters (10 A bei 400 V) überein. Da die Nennleistung des Motors jedoch 5,5 kW ist, ist der 5,5kW-Frequenzumrichter die richtige Wahl.
Leistung 5,5 kW 5,5 kW
Strom 12,5 A 13 A bei 400 V
Tabelle 2.14 Korrekt dimensionierte Frequenzumrichter
Motor Frequenzumrichter 5,5 kW
38 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 41

130BP046.10
Hand
on
O
Auto
on
Reset
Einführung zum VLT® HVAC Dr... Projektierungshandbuch
2.8.5 Handsteuerung (Hand On) und
Fernsteuerung (Auto On)
Der Frequenzumrichter kann manuell über die Bedieneinheit (LCP) vor Ort oder aus der Ferne über Analog-/
Digitaleingänge oder serielle Schnittstellen betrieben
werden.
Sofern in 0-40 [Hand On]-LCP Taste, 0-41 [Off]-LCP Taste,
0-42 [Auto On]-LCP Taste und 0-43 [Reset]-LCP Taste zulässig,
kann der Frequenzumrichter über das LCP mit den Tasten
[Hand on] und [Off] gestartet und gestoppt werden. Sie
können Alarme über die [Reset]-Taste quittieren. Nach
Drücken von [Hand on] schaltet der Frequenzumrichter in
den Hand-Betrieb und verwendet den Ortsollwert, den Sie
mit Hilfe der Pfeiltasten [▲] und [▼] einstellen können.
Nach Drücken von [Auto on] schaltet der Frequenzumrichter in die Betriebsart Auto und verwendet
standardmäßig den Fernsollwert. In diesem Modus lässt
sich der Frequenzumrichter über die Digitaleingänge bzw.
verschiedene serielle Schnittstellen (RS-485, USB oder einen
optionalen Feldbus) steuern. Mehr Informationen zum
Starten, Stoppen, Ändern von Rampen und Parametersätzen finden Sie in Parametergruppe 5-1* Digitaleingänge
oder Parametergruppe 8-5* Serielle Kommunikation.
Abbildung 2.25 Bedientasten
Hand Off
Auto
LCP-Tasten
Hand Umschalt. Hand/
Hand ⇒ Off
Auto Umschalt. Hand/
Auto ⇒ Off
Alle Tasten Ort Ort
Alle Tasten Fern Fern
3-13 Sollwertvorgabe
Auto
Umschalt. Hand/
Auto
Auto
Umschalt. Hand/
Auto
Aktiver Sollwert
Ort
Ort
Fern
Fern
Tabelle 2.15
zeigt, unter welchen Bedingungen der
Ortsollwert oder der Fernsollwert aktiv ist. Einer von
beiden ist immer aktiv, es können jedoch nicht beide
gleichzeitig aktiv sein.
Der Ortsollwert versetzt das Regelverfahren in eine
Regelung ohne Rückführung, die unabhängig von den
Einstellungen in 1-00 Regelverfahren ist.
Der Ortsollwert wird bei einem Ausschalten wiederhergestellt.
2.8.6 Regelungsstruktur (Regelung mit
Rückführung)
Durch den internen Regler wird der Frequenzumrichter ein
Teil des geregelten Systems. Der Frequenzumrichter
empfängt ein Istwertsignal von einem Sensor im System.
Daraufhin vergleicht er diesen Istwert mit einem Sollwert
und erkennt ggf. eine Abweichung zwischen diesen beiden
Signalen. Zum Ausgleich dieser Abweichung passt er dann
die Drehzahl des Motors an.
Beispiel: Eine Pumpanwendung, in der die Drehzahl der
Pumpe so geregelt werden muss, dass der statische Druck
in einer Leitung konstant bleibt. Der gewünschte statische
Druckwert wird als Sollwert an den Frequenzumrichter
übermittelt. Ein statischer Drucksensor misst den tatsächlichen statischen Druck in der Leitung und übermittelt
diesen als Istwertsignal an den Frequenzumrichter. Wenn
das Istwertsignal größer ist als der Sollwert, wird der
Frequenzumrichter verlangsamt und verringert so den
Druck. In dem ähnlich gelagerten Fall, dass der
Leitungsdruck niedriger ist als der Sollwert, beschleunigt
der Frequenzumrichter automatisch zur Erhöhung des von
der Pumpe gelieferten Drucks.
2 2
Tabelle 2.15 Bedingungen für den Ort- oder Fernsollwert
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 39
Page 42

Einführung zum VLT® HVAC Dr...
Projektierungshandbuch
22
Abbildung 2.26 Blockschaltbild des Reglers mit Rückführung
Auch wenn der Regler des Frequenzumrichters oft bereits mit den voreingestellten Werten für zufriedenstellende Leistung
sorgt, kann die Regelung des Systems durch Anpassung einiger Reglerparameter oft noch verbessert werden. Die PIKonstanten lassen sich auch automatisch optimieren.
Istwertverarbeitung
2.8.7
Abbildung 2.27 Blockschaltbild über die Verarbeitung von Istwertsignalen
Die Istwertverarbeitung lässt sich so konfigurieren, dass sie mit Anwendungen arbeitet, die eine erweiterte Steuerung
erfordern, wie etwa mehrere Sollwerte und mehrere Istwerte. Drei Regelverfahren sind gebräuchlich.
Einzelne Zone, einzelner Sollwert
Einzelne Zone, einzelner Sollwert ist eine grundlegende Konfiguration. Sollwert 1 wird zu einem anderen Sollwert (falls
vorhanden, siehe Sollwertverarbeitung) addiert und das Istwertsignal wird mit der 20-20 Istwertfunktion gewählt.
40 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 43

Einführung zum VLT® HVAC Dr... Projektierungshandbuch
Mehrere Zonen, 1 Sollwert
„Mehrere Zonen, einzelner Sollwert“ verwendet 2 oder 3
Istwertsensoren, aber nur einen Sollwert. Der Istwert kann
hinzugefügt, abgezogen (nur Istwert 1 und 2) oder aus ihm
kann der Durchschnitt gebildet werden. Zusätzlich kann
der maximale oder minimale Wert verwendet werden.
Sollwert 1 wird ausschließlich bei dieser Konfiguration
eingesetzt.
Wenn Sie [13] Multisollwert min. ausgewählt haben, regelt
das Sollwert-/Istwert-Paar mit der größten Differenz die
Drehzahl des Frequenzumrichters. Bei [14] Multisollwert
max. versucht der Frequenzumrichter, alle Zonen auf der
Ebene ihrer jeweiligen Sollwerte oder unter ihren
jeweiligen Sollwerten zu halten. Schließlich versucht er bei
[13] Multisollwert min., alle Zonen auf Ebene ihrer
jeweiligen Sollwerte oder über ihren jeweiligen Sollwerten
zu halten.
Beispiel
Bei einer Anwendung mit „2 Zonen, 2 Sollwerte“
Anwendung beträgt der Zone 1 Sollwert 15 bar und der
Istwert 5,5 bar. Der Sollwert der Zone 2 beträgt 4,4 bar
und der Istwert 4,6 bar. Wenn [14] Multisollwert max.
eingestellt ist, werden der Sollwert und Istwert der Zone 1
an den PID-Regler gesendet, da dies die geringere
Differenz aufweist (der Istwert ist größer als der Sollwert,
was eine negative Differenz ergibt). Wenn [13] Multisollwert
min. ausgewählt wurde, wird der Sollwert und Istwert der
Zone 2 an den PID-Regler gesendet, da dies die größere
Differenz aufweist (der Istwert ist kleiner als der Sollwert,
was eine positive Differenz ergibt).
2 2
Istwertumwandlung
2.8.8
In einigen Anwendungen kann die Umwandlung des
Istwertsignals hilfreich sein. Zum Beispiel kann ein
Drucksignal für eine Durchflussrückführung verwendet
werden. Da die Quadratwurzel des Druck proportional zum
Durchfluss ist, ergibt die Quadratwurzel des Drucksignals
einen zum Durchfluss proportionalen Wert. Dies wird in
Abbildung 2.28 gezeigt.
Abbildung 2.28 Istwertumwandlung
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 41
Page 44

Einführung zum VLT® HVAC Dr...
Projektierungshandbuch
2.8.9 Sollwertverarbeitung
Einzelheiten zum Betrieb ohne Rückführung und mit Rückführung
22
Abbildung 2.29 Blockschaltbild mit Fernsollwert
Der Fernsollwert besteht aus:
Festsollwerten
•
Externen Sollwerten (Analogeingänge, Pulsfrequenzeingänge, Eingänge des digitalen Potentiometers und Sollwerte
•
des seriellen Kommunikationsbusses)
Dem relativen Festsollwert
•
Dem durch Rückführung geregelten Sollwert
•
42 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 45

Einführung zum VLT® HVAC Dr... Projektierungshandbuch
Im Frequenzumrichter können bis zu 8 Festsollwerte
programmiert werden. Sie können den aktiven Festsollwert
mithilfe von Digitaleingängen oder dem seriellen
Kommunikationsbus auswählen. Der Sollwert kann auch
von extern kommen, für gewöhnlich von einem Analogeingang. Diese externe Quelle wird von einem der 3
Sollwertquellparameter (3-15 Variabler Sollwert 1,
3-16 Variabler Sollwert 2 und 3-17 Variabler Sollwert 3)
ausgewählt. DigiPot ist ein digitales Potentiometer. Es wird
häufig auch als Drehzahl auf-/Drehzahl ab-Regler oder
Gleitpunktregler bezeichnet. Zur Einrichtung programmieren Sie einen Digitaleingang zur Erhöhung des
Sollwerts und einen anderen Digitaleingang zur Verringerung des Sollwerts. Ein dritter Digitaleingang kann zum
Reset des DigiPot-Sollwerts dienen. Alle variablen Sollwerte
sowie der Bus-Sollwert ergeben durch Addition den
gesamten externen Sollwert. Der externe Sollwert, der
Festsollwert oder die Summe aus beiden kann als aktiver
Sollwert ausgewählt werden. Schließlich kann dieser
Sollwert mithilfe von 3-14 Relativer Festsollwert skaliert
werden.
Der skalierte Sollwert wird wie folgt berechnet:
Sollwert
= X + X ×
Mit X als externem Sollwert ist der Festsollwert oder die
Summe aus den beiden und Y 3-14 Relativer Festsollwert in
[%].
100
Y
In einer Lüftungsanlage muss die Temperatur auf einem
konstanten Wert gehalten werden. Die gewünschte
Temperatur wird mithilfe eines 0-10 V Potenziometers
zwischen -5 und +35 °C eingestellt. Da dies eine Kühlanwendung ist, muss die Drehzahl des Lüfters erhöht
werden, wenn die Temperatur über dem Sollwert liegt, um
mehr Kühlluftströmung zu liefern. Der Temperatursensor
arbeitet in einem Bereich von -10 bis +40 °C und ist mit
einem 2-Leiter-Messumformer ausgestattet, um ein 4-20mA-Signal zu liefern. Der Ausgangsfrequenzbereich des
Frequenzumrichters beträgt 10 bis 50 Hz.
1. Start/Stopp über Schalter zwischen Klemme 12
(+24 V) und 18.
2. Temperatursollwert über ein Potenziometer (-5
bis +35 °C, 0 bis 10 V), das an Klemme 50 (+10
V), 53 (Eingang) und 55 (Masse) angeschlossen ist.
3.
Temperaturistwert über Transmitter (-10 bis 40 °C,
4 bis 20 mA) an Klemme 54. Schalter S202 hinter
dem LCP-Bedienteil ist auf ON (Stromeingang)
eingestellt.
2 2
Wenn Y, 3-14 Relativer Festsollwert, auf 0 % eingestellt ist,
wird der Sollwert von der Skalierung beeinflusst.
2.8.10
Beispiel eines PID-Reglers mit
Rückführung
Abbildung 2.30 Regelung mit Rückführung bei einer Lüftungsanlage
Abbildung 2.31 Beispiel eines PID-Reglers mit Rückführung
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 43
Page 46

Einführung zum VLT® HVAC Dr...
2.8.11 Programmierreihenfolge
Projektierungshandbuch
22
In diesem Beispiel wird davon ausgegangen, dass ein Asynchronmotor verwendet wird, d. h., dass 1-10 Motorart = [0]
Asynchron ist.
Funktion Parameter Einstellung
1) Stellen Sie sicher, dass der Motor einwandfrei läuft. Gehen Sie wie folgt vor:
Stellen Sie die Motorparameter mithilfe der
Typenschilddaten ein.
Führen Sie die Automatische Motoranpassung durch. 1-29
2) Prüfen Sie, ob der Motor in die richtige Richtung läuft.
Führen Sie eine Motordrehrichtungsprüfung durch. 1-28 Wenn sich der Motor in die falsche Richtung dreht,
3) Stellen Sie sicher, dass die Grenzwerte des Frequenzumrichters auf sichere Werte eingestellt sind
Stellen Sie sicher, dass die Rampeneinstellungen
innerhalb des Leistungsbereichs des Frequenzumrichters
liegen und zulässigen Spezifikationen für den
Anwendungsbetrieb entsprechen.
Hält den Motor von Reversierung ab (falls notwendig) 4-10
Stellen Sie zulässige Grenzwerte für die Motordrehzahl
ein.
Schalten Sie von Regelung ohne Rückführung zu
Regelung mit Rückführung.
4) Konfigurieren Sie den Istwert des PID-Reglers.
Wählen Sie das richtige Sollwert-/Istwert-Gerät aus. 20-12
5) Konfigurieren Sie den Sollwert für den PID-Regler.
Legen Sie zulässige Grenzwerte für den Sollwert fest. 20-13
Wählen Sie Strom oder Spannung mittels der Schalter S201/S202 aus
6) Skalieren Sie die für Sollwert und Istwert verwendeten Analogeingänge.
Skalieren Sie den Analogeingang 53 für den
Druckbereich des Potenziometers (0-10 bar, 0-10 V).
Skalieren Sie den Analogeingang 54 für den Drucksensor
(0-10 bar, 4-20 mA)
7) Stellen Sie die PID-Regler-Parameter ein.
Passen Sie – falls erforderlich – den Regler mit
Rückführung des Frequenzumrichters an.
8) Speichern Sie, um das Verfahren zu beenden.
Speichern Sie die Parametereinstellung im LCP 0-50
1-2* Siehe Motor-Typenschild
[1] Aktivieren Sie die komplette AMA und führen Sie
anschließend die AMA-Funktion aus.
schalten Sie ihn vorübergehend aus und tauschen Sie
zwei Motorphasen aus.
3-41
3-42
4-12
4-14
4-19
1-00
20-14
6-10
6-11
6-14
6-15
6-22
6-23
6-24
6-25
20-93
20-94
60 s
60 s
Abhängig von Motor-/Lastgröße!
Auch im Hand-Betrieb aktiv.
[0] Rechtslauf
10 Hz, Motor min. Drehzahl
50 Hz, Motor max. Drehzahl
50 Hz, Max. Ausgangsfrequenz Frequenzumrichter
[3] Mit Rückführung
[71] bar
0 bar
10 bar
0 V
10 V (Standardeinstellung)
0 bar
10 bar
4 mA
20 mA (Standardeinstellung)
0 bar
10 bar
Siehe Optimierung des PID-Reglers unten.
[1] Speichern in LCP
HINWEIS
Tabelle 2.16 Programmierreihenfolge
44 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 47

Einführung zum VLT® HVAC Dr...
Projektierungshandbuch
2.8.12 Einstellen des PID-Reglers (Regler
mit Rückführung) des
Frequenzumrichters
Nachdem der PID-Regler des Frequenzumrichters
eingestellt worden ist, sollte seine Leistung getestet
werden. In vielen Fällen kann seine Leistung unter
Verwendung der Werkseinstellungen von 20-93 PID-Propor-
tionalverstärkung und 20-94 PID Integrationszeit akzeptabel
sein. In einigen Fällen ist es jedoch ggf. hilfreich, diese
Parameterwerte zu optimieren, um ein schnelleres
Ansprechen des Systems zu ermöglichen, gleichzeitig
jedoch Übersteuern der Drehzahl zu kontrollieren.
2 2
2.8.13
Manuelle PID-Anpassung
1. Starten Sie den Motor.
2.
Stellen Sie 20-93 PID-Proportionalverstärkung auf
0,3 ein, und erhöhen Sie den Wert, bis das
Istwertsignal zu schwingen beginnt. Starten/
stoppen Sie den Frequenzumrichter ggf. oder
nehmen Sie stufenweise Änderungen am Sollwert
vor, um ein Schwingen des Istwertsignals zu
erzielen. Reduzieren Sie dann die PI-Proportionalverstärkung, bis sich das Istwertsignal stabilisiert.
Reduzieren Sie anschließend die Proportionalverstärkung um 40-60 %.
3.
Stellen Sie 20-94 PID Integrationszeit auf 20 Sek.
ein, und reduzieren Sie den Wert, bis das Istwertsignal zu schwingen beginnt. Starten/stoppen Sie
den Frequenzumrichter ggf. oder nehmen Sie
stufenweise Änderungen am Sollwert vor, um ein
Schwingen des Istwertsignals zu erzielen. Erhöhen
Sie dann die PI-Integrationszeit, bis sich das
Istwertsignal stabilisiert. Erhöhen Sie anschließend
die Integrationszeit um 15-50 %.
4.
Verwenden Sie 20-95 PID-Differentiationszeit nur
für sehr schnell reagierende Systeme. Der
typische Wert beträgt 25 % von 20-94 PID Integra-
tionszeit. Verwenden Sie die Differentialfunktion
nur dann, wenn die Proportionalverstärkung und
die Integrationszeit optimal eingestellt sind.
Stellen Sie sicher, dass Schwingungen des Istwertsignals durch das Tiefpassfilter des Istwertsignals
(bei Bedarf Parameter 6-16, 6-26, 5-54 oder 5-59)
ausreichend gedämpft werden.
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 45
Page 48

1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Einführung zum VLT® HVAC Dr...
Projektierungshandbuch
2.9 Allgemeine EMV-Aspekte
Elektromagnetische Störungen sind leitungsgeführt im Frequenzbereich von 150 kHz bis 30 MHz und als Luftstrahlung im
22
Frequenzbereich von 30 MHz bis 1 GHz zu betrachten. Störungen vom Antriebssystem in einem Bereich von 30 MHz bis1
GHz werden durch den Wechselrichter, die Motorleitung und den Motor erzeugt.
Wie in Abbildung 2.32 gezeigt, werden durch Kapazität der Motorleitung, in Verbindung mit hohem dU/dt der
Motorspannung, Ableitströme erzeugt.
Die Verwendung einer abgeschirmten Motorleitung erhöht den Ableitstrom (siehe Abbildung 2.32) ), da abgeschirmte Kabel
eine höhere Kapazität zu Erde haben als nicht abgeschirmte Kabel. Wird der Ableitstrom nicht gefiltert, verursacht dies in
der Netzzuleitung größere Störungen im Funkfrequenzbereich unterhalb von etwa 5 MHz. Der Ableitstrom (I1) kann über die
Abschirmung (I3) direkt zurück zum Gerät fließen. Es verbleibt dann gemäß Abbildung 2.32 im Prinzip nur ein geringes
elektromagnetisches Feld (I4) von der abgeschirmten Motorleitung.
Die Abschirmung verringert zwar die über die Luft abgestrahlten Störungen, erhöht jedoch die Niederfrequenzstörungen in
der Netzzuleitung. Schließen Sie den Motorleitungsschirm an den Schaltschrank des Frequenzumrichters sowie an den
Motorschaltschrank an. Dies geschieht am besten durch die Verwendung von integrierten Schirmbügeln, um verdrillte
Abschirmungsenden (Pigtails) zu vermeiden. Verdrillte Abschirmungsenden erhöhen die Abschirmungsimpedanz bei
höheren Frequenzen, wodurch der Abschirmungseffekt reduziert und der Ableitstrom (I4) erhöht wird.
Wenn abgeschirmte Kabel für Relais, Steuerkabel, Signalschnittstelle und Bremse verwendet werden, verbinden Sie die
Abschirmung an beiden Enden mit dem Gehäuse. In einigen Situationen ist zum Vermeiden von Stromschleifen jedoch eine
Unterbrechung der Abschirmung notwendig.
Abbildung 2.32 Situationen, in denen Ableitströme erzeugt werden
1 Erdungskabel 4 Frequenzumrichter
2 Schirmgeflecht 5 Abgeschirmte Motorleitung
3 Netzversorgung 6 Motor
Tabelle 2.17 Legende zu Abbildung 2.32
In den Fällen, in denen die Montage des Schirmgeflechts über eine Montageplatte für den Frequenzumrichter vorgesehen
ist, muss diese Montageplatte aus Metall gefertigt sein, um die Ableitströme zum Gerät zurückzuführen. Außerdem muss
durch die Montageschrauben stets ein guter elektrischer Kontakt von der Montageplatte zur Gehäusemasse des Frequenzumrichters gewährleistet sein.
Beim Einsatz ungeschirmter Leitungen werden einige Emissionsanforderungen nicht erfüllt. Die immunitätsbezogenen
Anforderungen werden jedoch erfüllt.
Um das Störungsniveau des gesamten Systems (Gerät+Installation) so weit wie möglich zu reduzieren, ist es wichtig, dass
die Motorleitungen und Anschlusskabel für die Bremse so kurz wie möglich gehalten werden. Steuer- und Buskabel dürfen
nicht gemeinsam mit Motor- und Bremskabeln verlegt werden. Funkstörungen von mehr als 50 MHz (in der Luft) werden
insbesondere von der Regelelektronik erzeugt. Weitere Informationen zu EMV finden Sie unter .
46 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 49

Einführung zum VLT® HVAC Dr... Projektierungshandbuch
2.9.1 Emissionsanforderungen
Gemäß der EMV-Produktnorm für drehzahlveränderbare Frequenzumrichter, EN/IEC 61800-3:2004, hängen die EMV-Anforderungen von der beabsichtigten Verwendung des Frequenzumrichters ab. In der EMV-Produktnorm sind vier Kategorien
definiert. Die Definitionen der 4 Kategorien zusammen mit den Anforderungen an leitungsgeführte Störaussendungen der
Netzversorgungsspannung zeigt Tabelle 2.18.
Anforderungen an leitungsge-
Kategorie Definition
C1 In der ersten Umgebung (Wohn-, Geschäfts- und Gewerbebereich sowie
Kleinbetriebe) installierte Frequenzumrichter mit einer Versorgungsspannung
unter 1000 V.
C2 In der ersten Umgebung (Wohn-, Geschäfts- und Gewerbebereich sowie
Kleinbetriebe) installierte Frequenzumrichter mit einer Versorgungsspannung
unter 1000 V, die weder steckbar noch beweglich sind und von Fachkräften
installiert und in Betrieb genommen werden müssen.
C3 In der zweiten Umgebung (Industriebereich) installierte Frequenzumrichter
mit einer Versorgungsspannung unter 1000 V.
C4 In der zweiten Umgebung (Industriebereich) installierte Frequenzumrichter
mit einer Versorgungsspannung gleich oder über 1000 V oder einem
Nennstrom gleich oder über 400 A oder vorgesehen für den Einsatz in
komplexen Systemen.
führte Störaussendungen gemäß
Grenzwerten in EN 55011
Klasse B
Klasse A Gruppe 1
Klasse A Gruppe 2
Keine Grenzlinie.
Es sollte ein EMV-Plan erstellt
werden.
2 2
Tabelle 2.18 Emissionsanforderungen
Wenn die Fachgrundnorm Störaussendung (leitungsgeführte Störungen) zugrunde gelegt wird, müssen die Frequenzumrichter folgende Grenzwerte einhalten.
Anforderungen an leitungsgeführte
Umgebung Fachgrundnorm
Erste Umgebung
(Wohn-, Geschäfts- und Gewerbebereich sowie Kleinbetriebe)
Zweite Umgebung
(Industriebereich)
Tabelle 2.19 Grenzwerte in Fachgrundnormen für Störaussendung
Fachgrundnorm EN/IEC 61000-6-3 für Wohnbereich,
Geschäfts- und Gewerbebereiche sowie Kleinbetriebe.
Fachgrundnorm EN/IEC 61000-6-4 für Industriebereiche. Klasse A Gruppe 1
Störaussendungen gemäß
Grenzwerten in EN 55011
Klasse B
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 47
Page 50

Einführung zum VLT® HVAC Dr...
Projektierungshandbuch
2.9.2 EMV-Prüfergebnisse
Die folgenden Ergebnisse wurden unter Verwendung eines Systems mit einem Frequenzumrichter, mit abgeschirmtem
22
Steuerkabel, eines Steuerkastens mit Potenziometer sowie einer abgeschirmten Motorleitung bei Nenntaktfrequenz erzielt. In
Tabelle 2.20 werden die maximalen Motorleitungslängen für die Konformität genannt.
EMVFiltertyp
Normen
und
Anforderungen
H1
FC 102 1,1-45 kW 200-240 V 50 150 150 Nein Ja Ja
H2
FC 102 1,1-3,7 kW 200-240 V Nein Nein 5 Nein Nein Nein
H3
FC 102 1,1-45 kW 200-240V 10 50 75 Nein Ja Ja
H4
FC 102
Hx
FC 102 1,1-90 kW 525-600 V Nein Nein Nein Nein Nein Nein
EN 55011 Klasse B
EN/IEC 61800-3 Kategorie C1
Erste Umgebung
1,1-90 kW 380-480 V 50 150 150 Nein Ja Ja
5,5-45 kW 200-240 V Nein Nein 25 Nein Nein Nein
1,1-7,5 kW 380-500 V Nein Nein 5 Nein Nein Nein
11-90 kW 380-500 V
11-22 kW
525-690 V
30-90 kW
525-690 V
1,1-90 kW 380-480V 10 50 75 Nein Ja Ja
11-30 kW 525-690 V
37-90 kW 525-690 V
3)
4)
1, 4)
2, 4)
1)
2)
Leitungsgeführte Störaussendung Gestrahlte Störaussendung
Kabellänge [m] Kabellänge [m]
Klasse A
Wohnbereich,
Geschäfts- und
Gewerbereich
sowie Kleinbe-
triebe
Wohn- und
Bürobereich
Nein Nein 25 Nein Nein Nein
Nein Nein 25 Nein Nein Nein
Nein Nein 25 Nein Nein Nein
Nein 100 100 Nein Ja Ja
Nein 150 150 Nein Ja Ja
Gruppe 1
Industrie-
bereich
Kategorie C2
Erste Umgebung
Wohn- und
Bürobereich
Klasse A
Gruppe 2
Industrie-
bereich
Kategorie C3
Zweite
Umgebung
Industrie
Klasse B
Wohnbereich,
Geschäfts- und
Gewerbereich
sowie Kleinbe-
triebe
Kategorie C1
Erste
Umgebung
Wohn- und
Bürobereich
Klasse A
Gruppe 1
Industrie-
bereich
Kategorie C2
Erste
Umgebung
Wohn- und
Bürobereich
Klasse A
Gruppe 2
Industrie-
bereich
Kategorie C3
Zweite
Umgebung
Industrie
Tabelle 2.20 EMV-Prüfergebnisse (Störaussendung)
1) Gehäusetyp B
2) Gehäusetyp C
3) Hx-Versionen können gemäß EN/IEC 61800-3 Kategorie C4 verwendet werden
4) T7, 37-90 kW erfüllt Klasse A Gruppe 1 mit 25 m Motorleitung. Es gelten einige Beschränkungen für die Installation (fragen Sie Danfoss nach
Details)
HX, H1, H2, H3, H4 oder H5 ist an Pos. 16-17 des Typencodes für EMV-Filter definiert
HX – Keine EMV-Filter im Frequenzumrichter integriert (nur 600-V-Geräte)
H1 – Integriertes EMV-Filter. Erfüllt EN 55011 Klasse A1/B und EN/IEC 61800-3 Kategorie 1/2
H2 – Kein zusätzliches EMV-Filter. Erfüllt EN 55011 Klasse A2 und EN/IEC 61800-3 Kategorie 3
H3 – Integriertes EMV-Filter. Erfüllt EN 55011 Klasse A1/B und EN/IEC 61800-3 Kategorie 1/2
H4 – Integriertes EMV-Filter. Erfüllt EN 55011 Klasse A1 und EN/IEC 61800-3 Kategorie 2
H5 – Schifffahrtsversionen. Erfüllt die gleichen Emissionswerte wie H2-Versionen
48 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 51

175HA034.10
Einführung zum VLT® HVAC Dr...
Projektierungshandbuch
2.9.3 Allgemeine Aspekte zur
Oberwellenemission
Ein Frequenzumrichter nimmt vom Netz einen nicht
sinusförmigen Strom auf, der den Eingangsstrom I
erhöht. Nicht sinusförmige Ströme werden mit einer
Fourier-Analyse in Sinusströme verschiedener Frequenz, d.
h. in verschiedene Oberwellenströme In mit einer
Grundfrequenz von 50 Hz, zerlegt:
Hz 50 250 350
Tabelle 2.21 Oberwellenströme
I
1
I
5
Die Oberwellen tragen nicht direkt zur Leistungsaufnahme
bei; sie erhöhen jedoch die Wärmeverluste bei der Installation (Transformator, Leitungen). Bei Anlagen mit einem
relativ hohen Anteil an Gleichrichterlasten ist es daher
wichtig, die Oberwellenströme auf einem niedrigen Pegel
zu halten, um eine Überlast des Transformators und zu
hohe Temperaturen in den Kabeln zu vermeiden.
RMS
I
7
2.9.4
Anforderungen an die Störfestigkeit
An das öffentliche Versorgungsnetz angeschlossene
Anlagen und Geräte
Optionen: Definition:
1 IEC/EN 61000-3-2 Klasse A für 3-Phasen-Geräte mit
symmetrischer Belastung (für professionell genutzte
Geräte nur bis zu 1 kW Gesamtleistung).
2 IEC/EN 61000-3-12 Geräte 16 A-75 A und profes-
sionell genutzte Geräte ab 1 kW bis 16 A
Phasenstrom.
Tabelle 2.22
Prüfergebnisse für Oberwellenströme
2.9.5
(Emission)
Leistungsgrößen bis zu PK75 bei T2 und T4 entsprechen
der IEC/EN 61000-3-2 Klasse A. Leistungsgrößen von P1K1
bis zu P18K bei T2 und bis zu P90K bei T4 entsprechen
IEC/EN 61000-3-12, Tabelle 4. Die Leistungsgrößen P110 bis
P450 bei T4 entsprechen außerdem IEC/EN 61000-3-12,
obwohl dies nicht erforderlich ist, da die Ströme über 75 A
haben.
2 2
Abbildung 2.33 Oberwellenströme
HINWEIS
Oberwellenströme können eventuell Kommunikationsgeräte stören, die an denselben Transformator
angeschlossen sind, oder Resonanzen bei Blindstromkompensationsanlagen verursachen.
Um die Netzrückwirkung gering zu halten, sind Danfoss
Frequenzumrichter bereits serienmäßig mit Drosseln im
Zwischenkreis ausgestattet. So wird der Eingangsstrom I
normalerweise um 40 % reduziert.
Die Spannungsverzerrung in der Netzversorgung hängt
von der Größe der Oberwellenströme multipliziert mit der
internen Netzimpedanz der betreffenden Frequenz ab. Die
gesamte Spannungsverzerrung THD wird aus den
einzelnen Spannungsoberschwingungen nach folgender
Formel berechnet:
2
2
THD
% =
U
+
5
U
+ ... +
7
2
U
N
(UN% von U)
RMS
Tatsächlich
(typisch)
Grenzwert
für R
≥120
sce
Tatsächlich
(typisch)
Grenzwert
für R
≥120
sce
Einzelner Oberwellenstrom In/I1 (%)
I
5
I
7
I
11
I
13
40 20 10 8
40 25 15 10
Oberwellenstrom Verzerrungsfaktor (%)
THD PWHD
46 45
48 46
Tabelle 2.23 Prüfergebnisse für Oberwellenströme (Emission)
Die Kurzschlussleistung der Netzversorgung Ssc muss
mindestens
S
= 3 ×
R
×
U
×
I
SC
SCE
Netz
= 3 × 120 × 400 ×
equ
I
equ
an der Schnittstelle zwischen der Benutzerversorgung und
der öffentlichen Versorgung (R
) betragen.
sce
Der Monteur oder der Benutzer des Geräts muss sicherstellen, dass das Gerät nur an eine Versorgung mit einer
Kurzschlussleistung Ssc angeschlossen wird, die mindestens
dem oben angegebenen Wert entspricht. Ggf. beim
Betreiber des Verteilernetzes nachfragen.
Andere Leistungsgrößen dürfen Sie nur nach Absprache
mit dem Betreiber des Verteilernetzes an das öffentliche
Stromversorgungsnetz anschließen.
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 49
Page 52

Einführung zum VLT® HVAC Dr...
Projektierungshandbuch
Übereinstimmung mit verschiedenen Systemwertrichtlinien:
Die in Tabelle 2.23 vorhandenen Daten zu Oberwellenströmen entsprechen IEC/EN 61000-3-12 mit Bezug zur Produktnorm
für Leistungsfrequenzumrichtersysteme. Anhand der Daten können die Einflüsse der Oberwellenströme auf das Stromversor-
22
gungssystem berechnet und die Übereinstimmung mit den relevanten regionalen Richtlinien dokumentiert werden: IEEE 519
-1992; G5/4.
2.9.6 Störfestigkeitsanforderungen
Die Störfestigkeitsanforderungen für Frequenzumrichter sind abhängig von der Installationsumgebung. In Industriebereichen
sind die Anforderungen höher als in Wohn- oder Bürobereichen. Alle Danfoss-Frequenzumrichter erfüllen die Störfestigkeitsanforderungen in Industriebereichen und dementsprechend auch die niedrigeren Anforderungen in Wohn- und
Bürobereichen.
Zum Dokumentieren der Störfestigkeit gegen elektrische Störungen durch elektrische Phänomene sind die folgenden
Störfestigkeitsprüfungen gemäß den folgenden Fachgrundnormen durchgeführt worden:
EN 61000-4-2 (IEC 61000-4-2): Elektrostatische Entladung (ESD): Simulation elektrostatischer Entladungen von
•
Personen.
EN 61000-4-3 (IEC 61000-4-3): Elektromagnetisches Einstrahlfeld, amplitudenmodulierte Simulation der Auswir-
•
kungen von Radar- und Funkgeräten sowie von mobilen Kommunikationsgeräten.
EN 61000-4-4 (IEC 61000-4-4): Schalttransienten: Simulation von Störungen, herbeigeführt durch Schalten mit
•
einem Schütz, Relais oder ähnlichen Geräten.
EN 61000-4-5 (IEC 61000-4-5): Surge-Transienten: Simulation von Transienten, z. B. durch Blitzschlag in nahe
•
gelegenen Installationen.
EN 61000-4-6 (IEC 61000-4-6): HF-Gleichtakt: Simulation der Auswirkung von Funksendegeräten, die an Verbin-
•
dungskabel angeschlossen sind.
Siehe Tabelle 2.24.
Fachgrundnorm Impulskette
IEC 61000-4-4
Abnahmekriterium B B B A A
Spannungsbereich: 200-240 V, 380-500 V, 525-600 V, 525-690 V
Leitung
Motor
Bremse 4 kV CM
Zwischenkreiskopplung 4 kV CM
Steuerkabel
Standardbus 2 kV CM
Relaisleitungen 2 kV CM
Anwendungs- und Feldbus-
Optionen
LCP-Kabel
Externe 24 V DC
Gehäuse
Tabelle 2.24 EMV-Immunitätstabelle
1) Einspritzung an Kabelschirm
AD: Luftentladung (Air Discharge)
CD: Kontaktentladung (Contact Discharge)
CM: Gleichtakt
DM: Gegentakt
4 kV CM
4 kV CM
2 kV CM
2 kV CM
2 kV CM
2 V CM
— —
Surge-Transienten
IEC 61000-4-5
2 kV/2 Ω DM
4 kV/12 Ω CM
1)
4 kV/2 Ω
1)
4 kV/2 Ω
1)
4 kV/2 Ω
1)
2 kV/2 Ω
1)
2 kV/2 Ω
1)
2 kV/2 Ω
1)
2 kV/2 Ω
1)
2 kV/2 Ω
0,5 kV/2 Ω DM
1 kV/12 Ω CM
ESD
IEC
61000-4-2
— — 10 Veff.
— — 10 Veff.
— — 10 Veff.
— — 10 Veff.
— — 10 Veff.
— — 10 Veff.
— — 10 Veff.
— — 10 Veff.
— — 10 Veff.
— — 10 Veff.
8 kV AD
6 kV CD
Abgestrahlte elektromagne-
tische Felder
IEC 61000-4-3
10 V/m —
HF-Gleichtakt-
IEC 61000-4-6
spannung
50 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 53
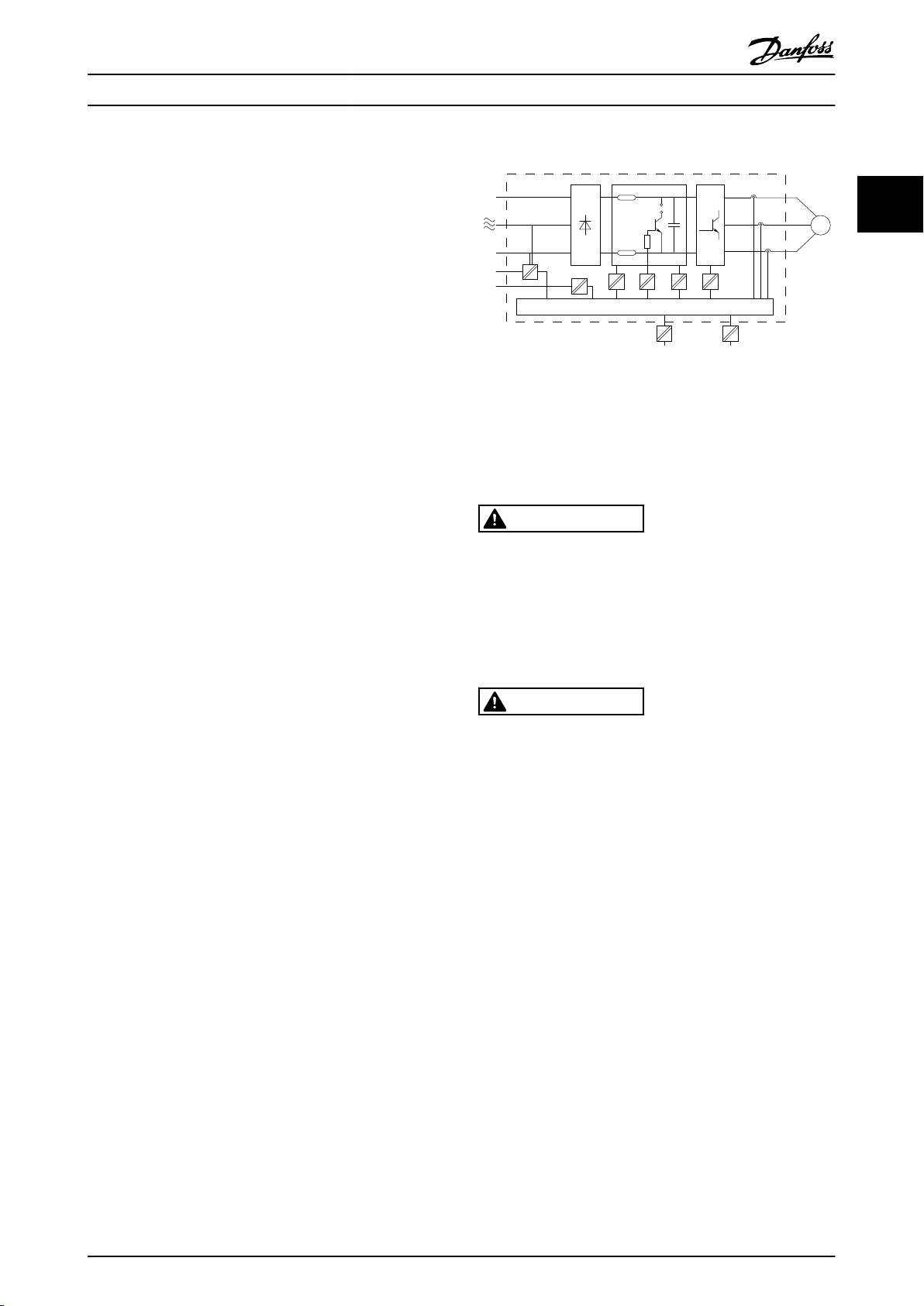
130BC968.10
1325 4
6
b
a
M
7
Einführung zum VLT® HVAC Dr... Projektierungshandbuch
2.10 Galvanische Trennung (PELV)
2.10.1 PELV (Schutzkleinspannung) –
Protective Extra Low Voltage
PELV bietet Schutz durch Kleinspannung gemäß EN 50178.
Ein Schutz gegen elektrischen Schlag gilt als gewährleistet,
wenn die Stromversorgung vom Typ PELV (Schutzkleinspannung – Protective Extra Low Voltage) ist und die
Installation gemäß den örtlichen bzw. nationalen
Vorschriften für PELV-Versorgungen ausgeführt wurde.
2 2
Alle Steuerklemmen und die Relaisklemmen 01-03/04-06
entsprechen PELV (Protective Extra Low Voltage) (gilt nicht
bei geerdetem Dreieck-Netz größer 400 V).
Die galvanische (sichere) Trennung wird erreicht, indem die
Anforderungen für höhere Isolierung erfüllt und die
entsprechenden Kriech-/Luftstrecken beachtet werden.
Diese Anforderungen sind in der Norm EN 61800-5-1
beschrieben.
Die Bauteile, die die elektrische Trennung gemäß nachstehender Beschreibung bilden, erfüllen ebenfalls die
Anforderungen für höhere Isolierung und der
entsprechenden Tests gemäß Beschreibung in EN
61800-5-1.
Die galvanische PELV-Trennung ist an 6 Punkten
vorhanden (siehe Abbildung 2.34):
Um den PELV-Schutzgrad beizubehalten, müssen alle
steuerklemmenseitig angeschlossenen Geräte den PELVAnforderungen entsprechen, d. h., Thermistoren müssen
beispielsweise verstärkt/zweifach isoliert sein.
1. Schaltnetzteil (SMPS) einschließlich Trennung des
Signals UDC, das die Gleichstrom-Zwischenkreisspannung anzeigt.
2. Gate-Treiber zur Ansteuerung der IGBTs (Triggertransformatoren/Optokoppler).
3. Stromwandler.
4. Bremselektronik (Optokoppler).
5. Einschaltstrombegrenzung, EMV und Temperaturmesskreise.
6. Ausgangsrelais.
7. Mechanische Bremse.
Abbildung 2.34 Galvanische Trennung
Eine funktionale galvanische Trennung (a und b auf der
Zeichnung) ist für die optionale externe 24 V-Versorgung
und für die RS-485-Standardbusschnittstelle vorgesehen.
WARNUNG
Installation in großer Höhenlage:
380-500 V, Gehäusetypen A, B und C: Bei Höhenlagen
von mehr als 2 km über NN ziehen Sie bitte Danfoss
bezüglich PELV (Schutzkleinspannung) zurate.
525-690 V: Bei Höhenlagen von mehr als 2 km über NN
ziehen Sie bitte Danfoss bezüglich PELV (Schutzkleinspannung) zurate.
WARNUNG
Das Berühren spannungsführender Teile – auch nach der
Trennung vom Netz – ist lebensgefährlich.
Stellen Sie ebenfalls sicher, dass andere Spannungseingänge, wie DC-Zwischenkreiskopplung, sowie der
Motoranschluss für kinetischen Speicher getrennt
worden sind.
Lassen Sie vor dem Berühren elektrischer Bauteile
mindestens die in Tabelle 2.20 angegebene Zeit
verstreichen.
Eine kürzere Wartezeit ist nur zulässig, wenn auf dem
Typenschild für das jeweilige Gerät angegeben.
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 51
Page 54

130BB955.12
a
b
Leakage current
Motor cable length
130BB956.12
THVD=0%
THVD=5%
Leakage current
130BB958.12
f
sw
Cable
150 Hz
3rd harmonics
50 Hz
Mains
RCD with low f
cut-
RCD with high f
cut-
Leakage current
Frequency
130BB957.11
Leakage current [mA]
100 Hz
2 kHz
100 kHz
Einführung zum VLT® HVAC Dr...
Projektierungshandbuch
2.11 Gefahren durch elektrischen Schlag
EN 61800-5-1 (Produktnorm für Elektrische Leistungsantriebssysteme mit einstellbarer Drehzahl) stellt besondere
Befolgen Sie im Hinblick auf die Schutzerdung von Geräten
22
mit einem Ableitstrom gegen Erde von mehr als 3,5 mA
alle nationalen und lokalen Vorschriften.
Anforderungen, wenn der Erdableitstrom 3,5 mA
übersteigt. Die Erdverbindung muss auf eine der folgenden
Arten verstärkt werden:
Die Frequenzumrichtertechnik nutzt hohe Schaltfrequenzen
bei gleichzeitig hoher Leistung. Dies erzeugt einen
Ableitstrom in der Erdverbindung. Ein Fehlerstrom im
Erdverbindung (Klemme 95) mit einem Leitungs-
•
querschnitt von mindestens 10 mm
2
Frequenzumrichter an den Ausgangsleistungsklemmen
2 getrennt verlegte Erdungskabel, die die
kann eine Gleichstromkomponente enthalten, die die
Filterkondensatoren laden und einen transienten Erdstrom
verursachen kann.
Der Ableitstrom gegen Erde setzt sich aus verschiedenen
•
vorgeschriebenen Maße einhalten
Weitere Informationen finden Sie in EN/IEC 61800-5-1 und
EN 50178.
Faktoren zusammen und hängt von verschiedenen Systemkonfigurationen ab, wie EMV-Filter, abgeschirmte
Motorleitungen und Leistung des Frequenzumrichters.
Fehlerstromschutzschalter
Wenn Fehlerstromschutzschalter (RCD), auch als
Erdschlusstrennschalter bezeichnet, zum Einsatz kommen,
sind die folgenden Anforderungen einzuhalten:
Verwenden Sie netzseitig nur allstromsensitive
•
Fehlerschutzschalter (Typ B)
Verwenden Sie Fehlerstromschutzschalter mit
•
Einschaltverzögerung, um Fehler durch transiente
Erdströme zu vermeiden.
Abbildung 2.35 Einfluss von Kabellänge und Leistungsgröße
auf Ableitstrom. Pa > Pb
Bemessen Sie Fehlerstromschutzschalter in Bezug
•
auf Systemkonfiguration und Umgebungsbedingungen.
Abbildung 2.36 Einflüsse der Netzverzerrung auf den
Ableitstrom
HINWEIS
Wenn Sie ein Filter verwenden, schalten Sie beim Laden
des Filters 14-50 EMV-Filter aus, um einen hohen
Ableitstrom und ein Auslösen des Fehlerstromschutzschalters zu verhindern.
Abbildung 2.37 Hauptbeiträge zum Ableitstrom
Abbildung 2.38 Einfluss der Grenzfrequenz des Fehlerstromschutzschalters auf das, auf was reagiert wird/was gemessen
wird
Siehe auch RCD-Anwendungshinweis, MN90G.
52 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 55

Einführung zum VLT® HVAC Dr...
Projektierungshandbuch
2.12 Bremsfunktion
2.12.1 Auswahl des Bremswiderstands
Bei bestimmten Anwendungen, z. B. in Lüftungsanlagen für
Tunnel oder U-Bahnstationen, ist es vorteilhaft, den Motor
schneller anzuhalten, als es durch die Kontrolle per Rampe
ab oder durch Freilauf möglich ist. Bei solchen
Anwendungen ist dynamisches Bremsen mit einem
Bremswiderstand empfehlenswert. Zur Wahl des korrekten
Bremswiderstands muss bekannt sein, wie oft und mit
welcher Leistung gebremst wird.
Ist der Betrag der kinetischen Energie, die in jedem
Bremszeitraum zum Widerstand übertragen wird,
unbekannt, kann die durchschnittliche Leistung auf Basis
der Zykluszeit und Bremszeit berechnet werden, was als
Arbeitszyklus für Aussetzbetrieb bezeichnet wird. Der
Aussetzbetrieb des Widerstandes gibt den Arbeitszyklus an,
für den der Widerstand ausgelegt ist. Abbildung 2.39 zeigt
einen typischen Bremszyklus.
Sie können den Arbeitszyklus für Aussetzbetrieb des
Widerstands wie folgt berechnen:
Arbeitszyklus = tb/T
Danfoss bietet Bremswiderstände mit Arbeitszyklen von
5 %, 10 % und 40 % an, die für die Benutzung mit den
Frequenzumrichtern der Serie VLT® HVAC Drive geeignet
sind. Bei Anwendung eines Arbeitszyklus von 10 % kann
dies die Bremsleistung über 10 % der Zykluszeit
aufnehmen. Die verbleibenden 90 % dienen zur Wärmeab-
leitung im Widerstand.
Wenden Sie sich für weitere Beratung zur Auswahl an
Danfoss.
2.12.2 Berechnung des Bremswiderstands
Der Bremswiderstand wird wie gezeigt berechnet:
2
U
Ω =
= P
P
Spitze
Motor
dc
x Mbr x η
Motor
x η[W]
R
br
wobei
P
Spitze
Tabelle 2.25 Berechnung des Bremswiderstands
Wie Sie sehen, hängt der Bremswiderstand von der
Zwischenkreisspannung (UDC) ab.
Es gibt 3 Schaltschwellen der Bremsfunktion des Frequen-
zumrichters:
2 2
T = Zykluszeit in Sekunden
tb ist die Bremszeit in Sekunden (als Teil der gesamten
Zykluszeit)
Abbildung 2.39 Arbeitszyklus für Aussetzbetrieb des
Widerstands
Größe [V] Bremse aktiv
[V]
3 x 200-240 390 (UDC) 405 410
3 x 380-480 778 810 820
3 x 525-600 943 965 975
3 x 525-690 1084 1109 1130
Tabelle 2.26 3 Schaltschwellen der Bremsfunktion
Warnung vor
Abschaltung
[V]
Abschaltung
(Alarm) [V]
HINWEIS
Prüfen Sie, ob der Bremswiderstand für eine Spitzen-
spannung von 410 V, 820 V bzw. 975 V zugelassen ist,
wenn Sie keine Danfoss-Bremswiderstände einsetzen.
Danfoss empfiehlt folgende Bremswiderstände R
gewährleisten, dass der mit dem maximal verfügbaren
Bremsmoment (M
) von 110 % bremst. Die entspre-
br(%)
chende Formel lässt sich wie folgt schreiben:
2
U
x 100
P
Motor
dc
x
M
x x
br
%
Motor
R
Ω =
rec
η
beträgt normalerweise 0,90
Motor
η beträgt normalerweise 0,98
: Diese
rec
Bei Frequenzumrichtern mit 200 V, 480 V und 600 V wird
R
bei einem Bremsmoment von 160 % wie folgt
rec
ausgedrückt:
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 53
Page 56

Einführung zum VLT® HVAC Dr...
Projektierungshandbuch
200V :
480V :
22
480V :
600V :
690V :
1) Bei Frequenzumrichtern ≤ 7,5 kW Wellenleistung
2) Bei Frequenzumrichtern > 7,5 kW Wellenleistung
107780
R
=
rec
R
=
rec
R
=
rec
R
=
rec
R
=
rec
P
Motor
375300
P
Motor
428914
P
Motor
630137
P
Motor
832664
P
Motor
Ω
Ω
Ω
1
2
HINWEIS
Überwachen der Bremsleistung ist keine Sicherheits-
funktion; Hierfür ist ein Thermoschalter erforderlich. Der
Bremswiderstandskreis ist nicht gegen Erdschluss
Ω
Ω
geschützt.
Überspannungssteuerung (OVC) (ohne Bremswiderstand)
kann als eine alternative Bremsfunktion in 2-17 Überspan-
nungssteuerung gewählt werden. Diese Funktion ist für alle
Geräte aktiv. Sie stellt sicher, dass bei Anstieg der
HINWEIS
Der ohmsche Widerstand der gewählten Bremswiderstandschaltung darf nicht unter dem von Danfoss
empfohlenen Wert liegen, da sonst der Frequenzumrichter beschädigt wird. Bei einem Bremswiderstand mit
höherem Ohmwert wird hingegen nicht mehr das
maximale Bremsmoment erzielt, und der Frequenzumrichter schaltet während der Bremsung möglicherweise
Zwischenkreisspannung eine Abschaltung verhindert
werden kann. Dies geschieht durch Anheben der
Ausgangsfrequenz zur Begrenzung der Zwischenkreis-
spannung. Dies ist eine nützliche Funktion, wenn z. B. die
Rampe-Ab Zeit zu kurz eingestellt wurde, da hierdurch ein
Abschalten des Frequenzumrichters vermieden wird. In
dieser Situation wird jedoch die Rampe-Ab Zeit
automatisch verlängert.
mit DC-Überspannung ab.
HINWEIS
HINWEIS
Bei einem Kurzschluss im Bremstransistor des Frequenzumrichters kann ein eventueller Dauerstrom zum
Bremswiderstand nur durch Unterbrechung der Netzversorgung zum Frequenzumrichter (Netzschalter, Schütz)
verhindert werden. (Das Schütz kann vom Frequenzumrichter gesteuert werden).
WARNUNG
Berühren Sie den Bremswiderstand nicht, da er während
bzw. nach dem Bremsen sehr heiß werden kann.
2.12.3 Steuerung mit Bremsfunktion
OVC kann nicht aktiviert werden, wenn ein PM-Motor
betrieben wird (wenn 1-10 Motorart auf [1] PM, Vollpol
eingestellt ist).
2.12.4 Verdrahtung des Bremswiderstands
EMV (Twisted-Pair-Kabel/Abschirmung)
Verdrillen Sie die Drähte, um elektrische Störgeräusche von
den Kabeln zwischen dem Bremswiderstand und dem
Frequenzumrichter zu verringern.
Verwenden Sie eine Schirmgeflecht aus Metall für
verbesserte EMV-Leistung.
2.13
Extreme Betriebsbedingungen
Die Bremse ist gegen einen Kurzschluss des Bremswiderstands geschützt. Der Bremstransistor wird auf eine
Kurzschlussbedingung hin überwacht. Eine eventuell
vorhandene thermische Überwachung (Klixon) des
Bremswiderstands kann vom Frequenzumrichter
ausgewertet werden.
Außerdem können Sie die aktuelle Bremsleistung und die
mittlere Bremsleistung der letzten 120 s auslesen. Die
Bremse kann ebenfalls die Bremsleistung überwachen und
sicherstellen, dass sie die in 2-12 Bremswiderstand Leistung
(kW) gewählte Grenze nicht überschreitet. In
2-13 Bremswiderst. Leistungsüberwachung legen Sie fest,
welche Funktion ausgeführt wird, wenn die an den
Kurzschluss (zwischen Motorphasen und Ausgangsphasen)
Der Frequenzumrichter ist durch seine Strommessung in
jeder der 3 Motorphasen oder im DC-Zwischenkreis gegen
Kurzschlüsse geschützt. Ein Kurzschluss zwischen zwei
Ausgangsphasen bewirkt einen Überstrom im Wechsel-
richter. Jedoch wird jeder Transistor des Wechselrichters
einzeln abgeschaltet, sobald sein jeweiliger
Kurzschlussstrom den zulässigen Wert (Alarm 16 Abschaltb-
lockierung) überschreitet.
Um den Frequenzumrichter gegen Kurzschlüsse bei
Zwischenkreiskopplung und an den Bremswiderstands-
klemmen zu schützen, sind die jeweiligen
Projektierungshinweise zu beachten.
Bremswiderstand übertragene Leistung den in
2-12 Bremswiderstand Leistung (kW) eingestellten Grenzwert
überschreitet.
Schalten am Ausgang
Das Schalten am Ausgang, zwischen Motor und Frequen-
zumrichter, ist zulässig. Es können Fehlermeldungen
auftreten. Aktivieren Sie die Motorfangschaltung, um einen
drehenden Motor abzufangen.
54 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 57

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2.000
500
200
400
300
1.000
600
t [s]
175ZA052.11
fOUT = 0,2 x f M,N
fOUT = 2 x f M,N
fOUT = 1 x f M,N
IMN
IM
Einführung zum VLT® HVAC Dr... Projektierungshandbuch
Vom Motor erzeugte Überspannung
Die Spannung im Zwischenkreis erhöht sich beim generatorischen Betrieb des Motors. Dies geschieht in folgenden
Fällen:
Die Last treibt den Motor an (bei konstanter
•
Ausgangsfrequenz des Frequenzumrichters), d. h.,
die Last „erzeugt“ Energie.
Während der Verzögerung (Rampe ab), bei
•
hohem Trägheitsmoment, niedriger Reibung und
zu kurzer Rampenzeit, um die Energie als Verlust
an Frequenzumrichter, Motor und der Anlage
weitergeben zu können.
Eine falsche Einstellung beim Schlupfausgleich
•
kann eine höhere Zwischenkreisspannung
hervorrufen.
Gegen-EMK durch PM-Motorbetrieb. Bei Freilauf
•
mit hoher Drehzahl kann die Gegen-EMK des PMMotors möglicherweise die maximale
Spannungstoleranz des Frequenzumrichters
überschreiten und Schäden verursachen. Um dies
verhindern zu helfen, wird der Wert von
4-19 Max. Ausgangsfrequenz automatisch
basierend auf einer internen Berechnung anhand
des Werts von 1-40 Gegen-EMK bei 1000 UPM,
1-25 Motornenndrehzahl und 1-39 Motorpolzahl
berechnet.
Wenn Überdrehzahl des Motors möglich ist (z. B.
durch den Windmühlen-Effekt, bei dem der Motor
durch die Last gedreht wird), empfiehlt Danfoss
die Verwendung eines Bremswiderstands.
Netzausfall
Während eines Netzausfalls läuft der Frequenzumrichter
weiter, bis die Spannung des Zwischenkreises unter den
minimalen Stopppegel abfällt – normalerweise 15 % unter
der niedrigsten Versorgungsnennspannung des Frequen-
zumrichters. Die Höhe der Netzspannung vor dem Ausfall
und die aktuelle Motorbelastung bestimmen, wie lange der
Wechselrichter im Freilauf ausläuft.
Statische Überlast im Modus VVC
plus
Wird der Frequenzumrichter überlastet ( Drehmoment-
grenze in 4-16 Momentengrenze motorisch/
4-17 Momentengrenze generatorisch wird überschritten),
reduziert der Frequenzumrichter automatisch die
Ausgangsfrequenz, um so die Belastung zu reduzieren.
Bei extremer Überlastung kann jedoch ein Strom auftreten,
der den Frequenzumrichter nach kurzer Zeit zum
Abschalten zwingt.
Sie können den Betrieb innerhalb der Drehmomentgrenze
in 14-25 Drehmom.grenze Verzögerungszeit zeitlich
begrenzen (0-60 s).
2.13.1
Thermischer Motorschutz
Auf diese Weise schützt Danfoss den Motor vor
Überhitzung. Dies ist eine elektronische Funktion, die ein
Bimetallrelais basierend auf internen Messungen simuliert.
Die Kennlinie ist in Abbildung 2.40 dargestellt:
2 2
WARNUNG
Der Frequenzumrichter muss über einen Bremschopper
verfügen.
Die Bedieneinheit versucht ggf. die Rampe zu kompensieren (2-17 Überspannungssteuerung).
Der Wechselrichter wird nach Erreichen eines bestimmten
Spannungsniveaus abgeschaltet, um die Transistoren und
die Zwischenkreiskondensatoren zu schützen.
Siehe 2-10 Bremsfunktion und 2-17 Überspannungssteuerung
bezüglich der Möglichkeiten zur Regelung des Zwischenkreisspannungspegels.
Abbildung 2.40 Die X-Achse zeigt das Verhältnis zwischen
I
HINWEIS
OVC kann nicht aktiviert werden, wenn ein PM-Motor
betrieben wird (wenn 1-10 Motorart auf [1] PM, Vollpol
eingestellt ist).
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 55
und Nenn-I
Motor
bevor ETR eingreift und den Frequenzumrichter abschaltet.
Die Kurven zeigen die charakteristische Nenndrehzahl bei
doppelter Nenndrehzahl und Nenndrehzahl x 0,2.
. Die Y-Achse zeigt die Zeit in Sekunden,
Motor
Page 58

Einführung zum VLT® HVAC Dr...
Projektierungshandbuch
Es ist klar, dass ETR bei niedriger Drehzahl durch die
geringere Kühlung des Motors bei niedrigerer Wärmeentwicklung abschaltet. So wird der Motor auch in niedrigen
22
Drehzahlbereichen vor Überhitzung geschützt. Die
Funktion ETR berechnet die aktuelle Motortemperatur
laufend auf Basis des aktuellen Motorstroms und der
aktuellen Motordrehzahl. Die berechnete Motortemperatur
kann in 16-18 Therm. Motorschutz im Frequenzumrichter
abgelesen werden.
Bei Verwendung eines Digitaleingangs und 10 V als
Stromversorgung:
Beispiel: Der Frequenzumrichter schaltet sich ab, wenn die
Motortemperatur zu hoch ist.
Parametereinstellung:
Stellen Sie 1-90 Thermischer Motorschutz auf [2] Thermistor
Abschalt. ein.
Stellen Sie 1-93 Thermistoranschluss auf [6] Digitaleingang
33 ein.
Der Thermistorabschaltwert liegt bei > 3 kΩ.
Integrieren Sie zum Wicklungsschutz einen Thermistor
(PTC-Sensor) im Motor.
Der Motorschutz kann über eine Reihe von Verfahren
realisiert werden: PTC-Sensor in Motorwicklungen,
mechanischer Thermoschalter (Klixon-Schalter) oder
elektronisches Thermorelais (ETR).
Abbildung 2.43 Bei Verwendung eines Digitaleingangs und
10 V als Stromversorgung
Abbildung 2.41 Die Thermistorabschaltung
Bei Verwendung eines Digitaleingangs und 24 V als
Stromversorgung:
Beispiel: Der Frequenzumrichter schaltet sich ab, wenn die
Motortemperatur zu hoch ist.
Parametereinstellung:
Stellen Sie 1-90 Thermischer Motorschutz auf [2] Thermistor
Abschalt. ein.
Stellen Sie 1-93 Thermistoranschluss auf [6] Digitaleingang
33 ein.
Bei Verwendung eines Analogeingangs und 10 V als
Stromversorgung:
Beispiel: Der Frequenzumrichter schaltet sich ab, wenn die
Motortemperatur zu hoch ist.
Parametereinstellung:
Stellen Sie 1-90 Thermischer Motorschutz auf [2] Thermistor
Abschalt. ein.
Stellen Sie 1-93 Thermistoranschluss auf [2] Analogeingang
54 ein.
Wählen Sie keine Sollwertquelle aus.
Abbildung 2.44 Bei Verwendung eines Analogeingangs und 10
V als Stromversorgung
Eingang
Digital/Analog
Digital 24
Digital 10
Analog 10
Versorgungsspannung V
Abschaltwerte
Grenzwert
Abschaltwerte
< 6,6 kΩ - > 10,8 kΩ
< 800 Ω - > 2,7 kΩ
< 3,0 kΩ - > 3,0 kΩ
Tabelle 2.27 Abschaltwerte
Abbildung 2.42 Bei Verwendung eines Digitaleingangs und 24
V als Stromversorgung
56 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 59

Einführung zum VLT® HVAC Dr... Projektierungshandbuch
HINWEIS
Prüfen Sie, ob die gewählte Versorgungsspannung der
Spezifikation des benutzten Thermistorelements
entspricht.
Fazit
Die Drehmomentgrenze schützt den Motor unabhängig
von der Drehzahl vor Überlast. Das ETR schützt den Motor
vor Überhitzung. Ein weiterer Motorüberlastschutz ist nicht
notwendig. So regelt das ETR bei Erhitzung des Motors,
wie lange der Motor mit hoher Temperatur laufen kann,
bevor er gestoppt wird, um Überhitzung zu vermeiden.
Wenn der Motor überlastet ist, ohne dass die Temperatur
erreicht wird, bei der das ETR den Motor abschaltet,
schützt die Drehmomentgrenze den Motor und die
Anwendung vor Überlast.
Das ETR wird in 1-90 Thermischer Motorschutz aktiviert und
durch 4-16 Momentengrenze motorisch gesteuert. Die
Einstellung der Verzögerungszeit, nach der der Frequenzumrichter durch die Momentgrenze-Warnung
abgeschaltet wird, erfolgt in 14-25 Drehmom.grenze
Verzögerungszeit.
2 2
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 57
Page 60

Auswahl Projektierungshandbuch
3 Auswahl
3.1 Optionen und Zubehör
33
Danfoss bietet eine breite Palette an Optionen und
Zubehör für Frequenzumrichter.
3.1.1 Einbau von Optionsmodulen in
Steckplatz B
Trennen Sie die Stromversorgung zum Frequenzumrichter.
Bei Gehäusetypen A2 und A3:
1. Entfernen Sie das LCP, die Klemmenabdeckung
und die LCP-Frontabdeckung vom Frequenzumrichter.
2. Stecken Sie die MCB1xx-Optionskarte in
Steckplatz B.
3. Verbinden Sie die Steuerkabel und entlasten Sie
das Kabel über die mitgelieferten Kabelbinder.
Entfernen Sie die Aussparung in der Frontabdeckung des LCP, sodass die Option unter die
Frontabdeckung des LCP passt.
4. Bringen Sie die tiefere Frontabdeckung des LCP
und die Klemmenabdeckung an.
5. Bringen Sie das LCP oder die Blindabdeckung an
der Frontabdeckung des LCP an.
6. Schließen Sie die Netzversorgung wieder am
Frequenzumrichter an.
7. Richten Sie die Ein-/Ausgangsfunktionen in den
entsprechenden Parametern ein, wie in
Kapitel 9.2 Allgemeine technische Daten
beschrieben.
Bei Gehäusetypen B1, B2, C1 und C2:
Abbildung 3.1 Gehäusetypen A2, A3 und B3
Abbildung 3.2 Gehäusetypen A5, B1, B2, B4, C1, C2, C3 und
C4
1. Entfernen Sie das LCP und die LCP-Halterung.
2. Stecken Sie die MCB 1xx-Optionskarte in
Steckplatz B.
3. Verbinden Sie die Steuerkabel und entlasten Sie
das Kabel über die mitgelieferten Kabelbinder.
4. Bringen Sie die Halterung an.
5. Bringen Sie das LCP an.
58 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 61

130BA209.10
1
2 3
4 5
6
7
8
9 10
11
12
COM DIN
DIN7
DIN8
DIN9
GND(1)
DOUT3
0/24VDC
DOUT4
0/24VDC
AOUT2
0/4-20mA
24V
GND(2)
AIN3
AIN4
RIN=
5kohm
RIN=
10kohm
0-10
VDC
0-10
VDC
0V 24V
0V 24V
24V DC0V
0V24V DC
<500 ohm
>600 ohm
>600 ohm
X30/
DIG IN
DIG &
ANALOG
OUT
ANALOG
IN
CPU
CAN BUS
CPU
Control card (FC 100/200/300)
General Purpose
I/O option MCB 101
PLC
(PNP)
PLC
(NPN)
Auswahl Projektierungshandbuch
3.1.2 Universal-E/A-Modul MCB 101
MCB 101 wird verwendet, um die Anzahl der Digitaleingänge und -ausgänge, der Analogeingänge und ausgänge und der Frequenzumrichterausgänge zu
erhöhen.
MCB 101 muss in Steckplatz B des Frequenzumrichters
gesteckt werden. Inhalt:
MCB 101 Optionsmodul
•
Erweitertes LCP-Gehäuse
•
Klemmenabdeckung
•
3 3
Abbildung 3.3
Galvanische Trennung im MCB 101
Digital-/Analogeingänge sind von anderen Ein-/Ausgängen
am MCB 101 und in der Steuerkarte des Frequenzumrichters galvanisch getrennt. Digital-/Analogausgänge im
MCB 101 sind von anderen Ein-/Ausgängen am MCB 101
galvanisch getrennt, aber nicht von denen auf der
Steuerkarte des Frequenzumrichters.
Wenn die Digitaleingänge 7, 8 oder 9 durch Verwendung
der internen 24-V-Spannungsversorgung (Klemme 9)
geschaltet werden sollen, muss die Verbindung zwischen
Klemme 1 und 5, die in Abbildung 3.4 gezeigt wird,
hergestellt werden.
Abbildung 3.4 Prinzipschema
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 59
Page 62

Auswahl Projektierungshandbuch
3.1.3 Digitaleingänge – Klemme X30/1–4
Anzahl Digitaleingänge
3 0-24 V DC PNP-Typ:
33
Tabelle 3.1 Parameter für Inbetriebnahme: 5-16, 5-17 und 5-18
Analoge Spannungseingänge – Klemme X30/10–12
3.1.4
Anzahl analoge Spannungseingänge Standardisiertes Eingangs-
2 0-10 V DC
Tabelle 3.2 Parameter für Inbetriebnahme: 6-3*, 6-4* und 16-76
Digitalausgänge – Klemme X30/5–7
3.1.5
Anzahl Digitalausgänge Ausgangsniveau Toleranz Max. Impedanz
2 0 oder 2 V DC
Spannungsniveau
Spannungsniveaus Toleranz Max. Eingangsimpedanz
Masse = 0 V
Logik „0“: Eingang < 5 V DC
Logik „0“: Eingang > 10 V DC
NPN-Typ:
Masse = 24 V
Logik „0“: Eingang > 19 V DC
Logik „0“: Eingang < 14 V DC
signal
± 28 V Dauerbetrieb
± 37 V in mindestens
10 s
Toleranz Auflösung Max. Eingangsimpedanz
± 20 V Dauerbetrieb
± 4 V ≥ 600 Ω
10 Bit
Ca. 5 kΩ
Ca. 5 KΩ
Tabelle 3.3 Parameter für Inbetriebnahme: 5-32 und 5-33
Analogausgänge – Klemme X30/5+8
3.1.6
Anzahl Analogausgänge Ausgangssignalpegel Toleranz Max. Impedanz
1 0/4–20 mA
Tabelle 3.4 Parameter für Inbetriebnahme: 6-6* und 16-77
±0,1 mA < 500 Ω
60 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 63

2
130BA709.11
1
LABEL
Remove jumper to activate Safe Stop
12
13
18
19
27
29
33
32
20
39
42
50
53
54
61
68
CAUTION:
SEE MANUAL / RCD and high leakage current
VOIR MANUAL / Fransk tekst
WARNING:
Stored charge / “Fransk tekst” (4 min.)
LISTED 76x1 134261
INDUSTRIAL CONTROL EQUIPMENT
SEE MANUAL FOR PREFUSE TUPE IN UL
APPLICATIONS
T/C : CIAXXXPT5B20BR1DBF00A00
P/N : XXXN1100 S/N: 012815G432
IN: 3x380-480V 50/60Hz 14.9A
OUT: 3x0-Uin 0-1000Hz 16.0A 11.1 kVA
CHASIS/IP20 Tamb Max 45C/113F
MADE IN DENMARK
9Ø
9Ø
Ø6
Auswahl
Projektierungshandbuch
3.1.7 Relais-Option MCB 105
Die Option MCB 105 umfasst 3 einpolige Lastrelaiskontakte (Wechslerkontakte) und muss in Optionssteckplatz B gesteckt
werden.
Elektrische Daten:
Max. Belastungsstrom der Klemme (AC-1)
Max. Belastungsstrom der Klemme (AC-15 )
Max. Belastungsstrom der Klemme (DC-1)
Max. Belastungsstrom der Klemme (DC-13)
1)
(ohmsche Last) 240 V AC 2A
1)
(induktive Last bei cosφ 0,4) 240 V AC, 0,2 A
1)
(ohmsche Last) 24 V DC 1 A
1)
(induktive Last) 24 V DC 0,1 A
Min. Belastungsstrom der Klemme (DC) 5 V 10 mA
Max. Schaltfrequenz bei Nennlast/Min.-Last 6 min-1/20 s
1) IEC 947 Teil 4 und 5
Wenn das Relais-Optionskit separat bestellt wird, enthält der Satz Folgendes:
Relaismodul MCB 105
•
LCP-Frontabdeckung und vergrößerte Klemmenabdeckung
•
Etikett für den Zugriff zu den Schaltern S201, S202 und S801
•
Kabelbinder zur Befestigung von Kabeln am Relaismodul
•
3 3
-1
Abbildung 3.5 Relaisoption MCB 105
A2-A3-A4-B3 A5-B1-B2-B4-C1-C2-C3-C4
VORSICHT
1)
WICHTIG! Sie MÜSSEN den Aufkleber wie gezeigt an der oberen Frontabdeckung des LCP anbringen (UL-Zulassung).
Tabelle 3.5 Legende zu Abbildung 3.5 und Abbildung 3.6
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 61
Page 64

2
130BA710.11
1
LABEL
Remove jumper to activate Safe Stop
13
12
18
19
27
32
38
2
28
42
39
53
50
5
61
6
9Ø
9Ø
DC-
DC+
130BA177.10
8-9mm
2mm
Auswahl
Projektierungshandbuch
33
Abbildung 3.6 Relaisoptionssatz
WARNUNG
Vorsicht! Doppelte Stromversorgung.
Anschließen der MCB 105 Option:
Siehe Montageanleitung am Anfang von Abschnitt Optionen und Zubehör.
•
Trennen Sie die spannungsführenden Anschlüsse an den Relaisklemmen von der Stromversorgung.
•
Verbinden Sie nie spannungsführende Teile mit Steuersignalen (PELV).
•
Wählen Sie die Relaisfunktionen unter 5-40 Relaisfunktion [6-8], 5-41 Ein Verzög., Relais [6-8] und 5-42 Aus Verzög.,
•
Relais [6-8] aus.
HINWEIS
Index [6] ist Relais 7, Index [7] ist Relais 8 und Index [8] ist Relais 9
Abbildung 3.7 Relais 7, Relais 8 und Relais 9
Abbildung 3.8 Montage
62 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 65

1 1 1
1 102 3 4 5 6 7 8 9 1211
2 2 3
1 1 1
1 102 3 4 5 6 7 8 9 1211
3 3 3
1 1 1
1 102 3 4 5 6 7 8 9 1211
2 2
2
130BA176.11
35
36
35
36
130BA028.11
Auswahl Projektierungshandbuch
Abbildung 3.9 Anschluss
1 NC
2 Spannungsführendes Teil
3 PELV
Tabelle 3.6 Legende zu Abbildung 3.9
WARNUNG
Kombinieren Sie keine Niederspannungsteile und PELVSysteme. Bei einem Einfachfehler könnte es gefährlich
sein, das System zu berühren; Berührung kann zu
schweren Verletzungen oder zum Tod führen.
Eingangsspannungsbereich
Max. Eingangsstrom 2,2 A
Durchschnittlicher Eingangsstrom
für den Frequenzumrichter
Max. Kabellänge 75 m
Eingangskapazitätslast
Einschaltverzögerung
Tabelle 3.7 Technische Daten für externe 24 V DC-Versorgung
24 V DC ±15 % (max. 37 V in
10 s)
0,9 A
<10 uF
<0,6 s
Die Eingänge sind geschützt.
Klemmen Nr.:
Klemme 35: - externe 24 V DC-Versorgung
Klemme 36: + externe 24 V DC-Versorgung
Führen Sie folgende Schritte durch:
1. Entfernen Sie das LCP oder die Blindabdeckung.
2. Nehmen Sie die Klemmenabdeckung ab.
3. Entfernen Sie die Kabel-Abfangplatte und die
darunterliegende Kunststoffabdeckung.
4. Stecken Sie die externe 24 V DC-Spannungsversorgung in den Optionssteckplatz.
5. Montieren Sie das Kabelabschirmblech.
6. Befestigen Sie die Klemmenabdeckung und das
LCP oder die Blindabdeckung.
Wenn die externe 24-V-Spannungsversorgung MCB 107 das
Steuerteil versorgt, wird die interne 24-V-Stromversorgung
automatisch getrennt.
3 3
3.1.8 24-V-Notstromoption MCB 107
(Option D)
Externe 24 V DC-Versorgung
Die externe 24 V DC-Versorgung kann die Niederspannungsversorgung der Steuerkarte sowie etwaiger
eingebauter Optionskarten übernehmen. Dies ermöglicht
den Betrieb des LCP (einschließlich der Parametereinstellung) und des Feldbusses ohne Netzversorgung zum
Leistungsteil.
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 63
Abbildung 3.10 Verbindung mit externer 24-V-Versorgung
(A2-A3)
Page 66

9
9
6
311
130BA216.10
35 36
Auswahl
Projektierungshandbuch
33
Abbildung 3.11 Verbindung mit externer 24-V-Versorgung
(A5-C2)
Analoge I/O-Option MCB 109
3.1.9
Sie sollten die analoge E/A-Karte z. B. in den folgenden
Fällen verwenden:
Als Batteriepufferung der Uhrfunktion auf der
•
Steuerkarte
Als allgemeine Erweiterung der auf der
•
Steuerkarte verfügbaren analogen I/O-Schnittstellen, z. B. zur Mehrzonensteuerung mit 3
Druckgebern
Nutzung des Frequenzumrichters als dezentraler
•
I/O-Baustein für ein Gebäudemanagementsystem
mit Eingängen für Sensoren und Ausgängen für
Drosselklappen und Ventilstellglieder
Unterstützung erweiterter PID-Regler mit I/O-
•
Schnittstellen für Sollwerteingänge, Geber-/
Sensoreingänge und Ausgänge für Stellglieder
Abbildung 3.12 Prinzipschaltbild für im Frequenzumrichter
integrierte analoge I/O
Analog-I/O-Konfiguration
3 Analogeingänge für:
0-10 V DC
•
ODER
0-20 mA (Spannungseingang 0-10 V) durch Instal-
•
lation eines 510 Ω Widerstands an Klemmen
(siehe HINWEIS)
4-20 mA (Spannungseingang 2-10 V) durch Instal-
•
lation eines 510 Ω Widerstands an Klemmen
(siehe HINWEIS)
Ni1000-Temperaturfühler mit 1000 Ω bei 0 °C.
•
Technische Daten gemäß DIN 43760
Pt1000-Temperaturfühler mit 1000 Ω bei 0 °C.
•
Technische Daten gemäß IEC 60751
3 Analogausgänge, die 0–10 V DC liefern.
64 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 67

Auswahl
Projektierungshandbuch
HINWEIS
Bitte beachten Sie die Werte, die innerhalb der
verschiedenen Widerstandstandardgruppen verfügbar
sind:
E12: Nächster Standardwert ist 470 Ω, wodurch sich ein
Eingang von 449,9 Ω und 8,997 V ergibt.
E24: Nächster Standardwert ist 510 Ω, wodurch sich ein
Eingang von 486,4 Ω und 9,728 V ergibt.
E48: Nächster Standardwert ist 511 Ω, wodurch sich ein
Eingang von 487,3 Ω und 9,746 V ergibt.
E96: Nächster Standardwert ist 523 Ω, wodurch sich ein
Eingang von 498,2 Ω und 9,964 V ergibt.
Analogeingänge – Klemme X42/1-6
Parametergruppe: 18-3*. Siehe auch VLT® HVAC Drive
Programmierungshandbuch.
Parametergruppe für Konfiguration: 26-0*, 26-1*, 26-2* und
26-3*. Siehe auch VLT® HVAC Drive Programmierungs-
handbuch.
3 Analogeingänge
Arbeitsbereich
Auflösung
Genauigkeit
Abtastung
Max. Last
Impedanz
Tabelle 3.8 Analogeingänge – Klemme X42/1-6
Verwendung als
Temperaturfühlereingang
-50 bis +150 °C 0–10 V DC
11 Bit 10 Bit
-50 °C
±1 Kelvin
+150 °C
±2 Kelvin
3 Hz 2,4 Hz
- ± 20 V Dauerbetrieb
-
Verwendung als
Spannungseingang
0,2 % der Gesamtskala bei kal.
Temperatur
Ca. 5 kΩ
Analogausgänge – Klemme X42/7-12
Parametergruppe: 18-3*. Siehe auch VLT® HVAC Drive
Programmierungshandbuch.
Parametergruppe für Konfiguration: 26-4*, 26-5* und 26-6*.
Siehe auch VLT
3 Analogausgänge
Volt 0-10 V DC 11 Bit 1 % der
Tabelle 3.9 Analogausgänge – Klemme X42/7-12
®
HVAC Drive Programmierungshandbuch.
Ausgangssignalpe
gel
Auflösung Linearität Max.
Gesamtskala
Last
1 mA
Analogausgänge sind über Parameter für jeden Ausgang
skalierbar.
Die Funktionszuordnung erfolgt über Parameter und hat
die gleichen Optionen wie die Analogausgänge auf der
Steuerkarte.
Nähere Informationen zu den Parametern finden Sie im
®
VLT
HVAC Drive Programmierungshandbuch.
Echtzeituhr (RTC) mit Batteriepufferung
Das Datumsformat der Echtzeituhr umfasst Jahr, Monat,
Datum, Stunde, Minuten und Wochentag.
Die Genauigkeit der Uhr ist höher als ± 20 ppm bei 25 °C.
Die integrierte Lithium-Pufferbatterie hat eine
durchschnittliche Lebensdauer von mind. 10 Jahren bei
Betrieb des Frequenzumrichters bei einer Umgebungstemperatur von 40 °C. Fällt die Batteriepufferung aus, müssen
Sie die analoge I/O-Option austauschen.
3 3
Bei Verwendung als Spannungseingang sind
3.1.10
PTC-Thermistorkarte MCB 112
Analogeingänge für jeden Eingang über Parameter
skalierbar.
Die MCB 112-Option ermöglicht die Überwachung der
Temperatur eines elektrischen Motors über einen
Bei Verwendung für Temperaturfühler ist die Skalierung
der Analogeingänge auf den notwendigen Signalpegel für
den vorgegebenen Temperaturbereich voreingestellt.
Bei Verwendung von Analogeingängen für Temperaturfühler kann der Umrichter den Istwert in °C und °F
anzeigen.
galvanisch getrennten PTC-Thermistoreingang. Sie ist eine
B-Option für Frequenzumrichter mit der Funktion „Sicher
abgeschaltetes Moment“.
Weitere Informationen zu Montage und Installation der
Option finden Sie unter Kapitel 3.1.1 Einbau von Options-
modulen in Steckplatz B. Siehe auch
Kapitel 7 Anwendungsbeispiele für verschiedene
Beim Einsatz mit Temperaturfühlern beträgt die max.
Anwendungsmöglichkeiten.
Kabellänge zum Anschluss von Sensoren 80 m bei nicht
abgeschirmten/nicht verdrillten Leitern.
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 65
Page 68

MS 220 DA
11
10
20-28 VDC 10 mA
12
20-28 VDC
60 mA
com
ZIEHL
X44
12 13 18 19 27 29 32 33 20 37
3
NC
4NC5NC6NC7NC8NC9NC10 11NC121
T1
2
T2
T
P
T
P
PTC
M3~
130BA638.10
DO
Motor protection
MCB 112 PTC Thermistor Card
Option B
Reference for 10, 12
DO FOR SAFE
STOP T37
Code No.130B1137
Control Terminals of FC302
Auswahl Projektierungshandbuch
X44/1 und X44/2 sind die Thermistoreingänge. X44/12
ermöglicht die Funktion „Sicher abgeschaltetes Moment“
des Frequenzumrichters (T-37), wenn dies die Thermistorwerte erfordern, und X44/10 informiert den
Frequenzumrichter, dass eine Anforderung für sicher
abgeschaltetes Moment von MCB 112 gesendet wurde, um
33
eine geeignete Alarmhandhabung sicherzustellen. Einer der
Digitaleingangsparameter (oder ein Digitaleingang einer
montierten Option) muss auf [80] PTC-Karte 1 eingestellt
werden, um Informationen von X44/10 zu nutzen. Konfigurieren Sie 5-19 Klemme 37 Sicherer Stopp auf die
gewünschte Funktionalität für „sicher abgeschaltetes
Moment“ (Werkseinstellung ist „Sicherer Stopp Alarm“).
Abbildung 3.13 Installation von MCB 112
ATEX-Zertifizierung mit FC 102
Die MCB 112 wurde nach ATEX zertifiziert. Dies bedeutet,
dass der Frequenzumrichter mit der MCB 112 jetzt mit
Motoren in explosionsgefährdeten Atmosphären eingesetzt
werden kann. Weitere Informationen finden Sie im Produkthandbuch für die MCB 112.
Abbildung 3.14 ATmosphère EXplosive (ATEX)
66 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 69

Auswahl
Elektrische Daten
Widerstandsanschluss
PTC erfüllt DIN 44081 und DIN 44082
Nummer 1-6 Widerstände in Serie
Abschaltwert 3,3 Ω.... 3,65 Ω ... 3,85 Ω
Reset-Wert 1,7 Ω .... 1,8 Ω ... 1,95 Ω
Auslösetoleranz ± 6 °C
Gesamtwiderstand der Sensorschleife < 1,65 Ω
Klemmenspannung ≤ 2,5 V bei R ≤ 3,65 Ω, ≤ 9 V bei R = ∞
Sensorstrom ≤ 1 mA
Kurzschluss 20 Ω ≤ R ≤ 40 Ω
Leistungsaufnahme 60 mA
Prüfbedingungen
EN 60947-8
Messspannung Surge-Widerstand 6000 V
Überspannungskategorie III
Verschmutzungsgrad 2
Gemessene Isolationsspannung Vbis 690 V
Galvanische Trennung zuverlässig bis Vi 500 V
Dauerhafte Umgebungstemperatur -20 °C - +60 °C
Feuchtigkeit 5-95 %, keine Kondensation zulässig
EMV-Widerstand EN61000-6-2
EMV-Emissionen EN61000-6-4
Schüttelfestigkeit 10-1000 Hz 1,14 g
Erschütterungsfestigkeit 50 g
Projektierungshandbuch
EN 60068-2-1 Trockene Hitze
3 3
Sicherheitssystemwerte
EN 61508 für Tu = 75 °C dauerhaft
SIL 2 bei Wartungszyklus von 2 Jahren
1 bei Wartungszyklus von 3 Jahren
HFT 0
PFD (für jährlichen Funktionstest) 4,10 *10
SFF 78%
λs + λ
DD
λ
DU
Bestellnummer 130B1137
8494 FIT
934 FIT
3.1.11 Sensoreingangsoption MCB 114
Die Sensoreingangsoptionskarte MCB 114 kann in den folgenden Fällen verwendet werden:
Sensoreingang für Temperaturtransmitter PT100 und PT1000 zur Überwachung von Lagertemperaturen
•
Als allgemeine Erweiterung der Analogeingänge mit einem zusätzlichen Eingang zur Mehrzonenregelung oder für
•
Differenzdruckmessungen
Unterstützung erweiterter PID-Regler mit I/O für Sollwert, Transmitter-/Sensoreingänge
•
-3
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 67
Page 70

Auswahl Projektierungshandbuch
Typische Motoren, ausgelegt mit Temperatursensoren zum Schutz von Lagern vor Überlast, verfügen über 3 PT100/1000Temperatursensoren: einer im vorderen Lager, einer im hinteren Lager und einer in den Motorwicklungen. Die
Sensoreingangsoption MCB 114 unterstützt 2- oder 3-Leiter-Sensoren mit individuellen Temperaturgrenzwerten für Unter-/
Übertemperatur. Eine automatische Erkennung des Sensortyps, PT100 oder PT1000, erfolgt bei Netz-Einschaltung.
Die Option kann einen Alarm erzeugen, wenn die gemessene Temperatur unter dem minimalen Grenzwert oder über dem
33
maximalen Grenzwert liegt, der vom Benutzer vorgegeben ist. Die individuell gemessene Temperatur an jedem Sensoreingang kann im Display oder durch Anzeigeparameter abgelesen werden. Tritt ein Alarm auf, können die Relais oder
Digitalausgänge programmiert werden, aktiv hoch zu sein, indem [21] Thermische Warnung in Parametergruppe 5-**
ausgewählt wird.
Mit einer Fehlerbedingung ist eine allgemeine Warnungs-/Alarmnummer verknüpft. Dies ist Alarm/Warnung 20, Temp.
Eingangsfehler. Jeder vorhandene Ausgang kann programmiert werden, aktiv zu sein, falls die Warnung oder der Alarm
angezeigt wird.
3.1.11.1
Standardversion, Best.-Nr.: 130B1172.
Beschichtete Version, Best.-Nr.: 130B1272.
3.1.11.2
Analogeingang
Anzahl Analogeingänge 1
Format 0-20 mA oder 4-20 mA
Leitungen 2
Eingangsimpedanz <200 Ω
Abtastrate 1 kHz
Filter 3. Ordnung 100 Hz bei 3 dB
Die Option kann den analogen Sensor mit 24 V DC
versorgen (Klemme 1).
Temperatursensoreingang
Anzahl Analogeingänge, die PT100/1000 unterstützen 3
Signaltyp PT100/1000
Anschluss PT 100 2 oder 3-Leiter/PT1000 2- oder 3-Leiter
Frequenz PT100- und PT1000-Eingang 1 Hz für jeden Kanal
Auflösung 10 Bit
Temperaturbereich
Bestellnummern und gelieferte Teile
Elektrische und mechanische Daten
-50 - 204 °C
-58 - 399 °F
Galvanische Trennung
Die anzuschließenden Sensoren sollten galvanisch vom Netzspannungsniveau getrennt sein IEC 61800-5-1 und UL508C
Verdrahtung
Maximale Signalkabellänge 500 m
68 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 71

MCB 114
Sensor Input Option B
SW. ver. xx.xx Code No. 130B1272
VDD
I IN
GND
TEMP
1
WIRE
1
GND
TEMP 2 WIRE
2
GND
TEMP 3 WIRE
3
GND
X48/
1 2 3 4 5 6 7 8 9
10
11
12
4-20mA
2 or 3
wire
2 or 3
wire
2 or 3
wire
2 or 3
wire
130BB326.10
130BA138.10
130BA200.10
Auswahl Projektierungshandbuch
3.1.11.3 Elektrische Verdrahtung
3 3
Abbildung 3.15 Elektrische Verdrahtung
Klemme Bezeichnung Funktion
1 VDD 24 V DC zur Versorgung
eines 4-20-mA-Sensors
2 I in 4-20m-A-Eingang
3 GND Analogeingang GND
4, 7, 10 Temp. 1, 2, 3 Temperatureingang
5, 8, 11 Draht 1, 2, 3 3. Drahteingang, wenn
3-Leiter-Sensoren
verwendet werden
6, 9, 12 GND Temp.-Eingang GND
Tabelle 3.10 Klemmen
3.1.12
LCP-Einbausatz
Sie können die LCP Bedieneinheit durch Verwendung eines
Fern-Einbausatzes in die Vorderseite eines Schaltschranks
integrieren. Die Schutzart ist IP66. Sie müssen die Befestigungsschrauben mit einem Drehmoment von max. 1 Nm
anziehen.
Gehäuse Vorderseite IP66
Max. Kabellänge zwischen und Gerät 3 m
Kommunikationsstandard RS-485
Abbildung 3.16 LCP-Einbausatz mit grafischer LCP-Bedieneinheit, Befestigungselementen, 3-m-Kabel und Dichtung
Bestellnummer 130B1113
Abbildung 3.17 LCP-Einbausatz mit numerischer LCP-Bedieneinheit, Befestigungselementen und Dichtung
Bestellnummer 130B1114
Tabelle 3.11 Technische Daten
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 69
Page 72

A
B
C
D
E
130BT323.10
Auswahl Projektierungshandbuch
3.1.14
Gehäuseabdeckung IP21
33
Abbildung 3.18 Abmessungen
3.1.13
Die obere IP21/IP41-Gehäuseabdeckung ist ein optionales,
für IP20-Einheiten im Kompaktformat, Gehäusegröße A2A3, B3+B4 und C3+C4, verfügbares Gehäuseelement.
Wenn der Gehäusesatz verwendet wird, wird die IP20Einheit aktualisiert, um der Schutzart IP21/41 (obere
Gehäuseabdeckung) zu entsprechen.
IP21/IP41-Gehäuseabdeckung
Die obere IP41-Gehäuseabdeckung kann bei allen IP20
VLT® HVAC Drive-Standardvarianten angewendet werden.
Abbildung 3.19 Gehäusetyp A2
70 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 73

B
A
E
C
D
130BT324.10
E
F
D
C
B
A
130BT620.12
Auswahl Projektierungshandbuch
Gehäusetyp
A2 372 90 205
A3 372 130 205
B3 475 165 249
B4 670 255 246
C3 755 329 337
C4 950 391 337
Tabelle 3.13 Abmessungen
* Bei Verwendung von Option A/B erhöht sich die Tiefe (weitere
Informationen siehe Kapitel 5.1.2 Abmessungen)
Höhe A
[mm]
Breite B
[mm]
Tiefe C*
[mm]
3 3
Abbildung 3.20 Gehäusetyp A3
Obere Abdeckung
A
B Rand
C Bodenplatte
D Bodenabdeckung
E Schraube(n)
Tabelle 3.12 Legende zu Abbildung 3.19 und Abbildung 3.20
Platzieren Sie die obere Abdeckung wie abgebildet. Bei
Verwendung einer A- oder B-Option müssen Sie den Rand
anbringen, um den oberen Einlass abzudecken. Setzen Sie
die Bodenplatte C an den Boden des Frequenzumrichters
und befestigen Sie die Kabel korrekt mit den Schellen aus
dem Beutel mit Zubehör. Löcher für Kabelverschraubungen:
Abbildung 3.21 Gehäusetyp B3
Größe A2: 2 x M25 und 3 x M32
Größe A3: 3 x M25 und 3 x M32
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 71
Page 74

130BT621.12
D
C
A
G
Auswahl
Projektierungshandbuch
Bei Verwendung von Optionsmodul A und/oder
Optionsmodul B muss der Rand (B) an der oberen
Abdeckung (A) angebracht werden.
HINWEIS
33
Montage Seite-an-Seite ist bei Verwendung der oberen
IP21/IP4X-Gehäuseabdeckung nicht möglich
3.1.15 Ausgangsfilter
Durch die schnelle Taktfrequenz des Frequenzumrichters
entstehen Nebeneffekte, die sich auf den Motor und das
lokale Netz auswirken. Diese Nebeneffekte werden durch 2
verschiedene Filtertypen behoben, das dU/dt- und das
Sinusfilter.
dU/dt-Filter
Die Kombination aus schnellen Spannungs- und Stromanstiegen gefährden die Motorisolation bis hin zur Zerstörung.
Diese schnellen Energieänderungen können ebenfalls in
den Zwischenkreis des Wechselrichters rückgespeist
werden und zur Abschaltung führen. Das dU/dt-Filter
reduziert die Anstiegzeit der Spannung, die maximale
Amplitude der Spannungsspitzen und Ladestromspitzen
bei langen Motorleitungen. Es vermeidet so vorzeitige
Alterung und Überschlag in der Motorisolierung. dU/dtFilter reduzieren damit elektromagnetische Störungen in
den Motorleitungen. Der Spannungsverlauf ist noch immer
impulsförmig, der dU/dt-Anteil wird jedoch im Vergleich
zur Installation ohne Filter reduziert.
Sinusfilter
Sinusfilter sind nur für niedrige Frequenzen passierbar. Sie
filtern daher hohe Frequenzen heraus und machen Strom
und Spannung nahezu sinusförmig.
Durch den sinusförmigen Verlauf von Spannung und Strom
entfällt der Einsatz spezieller Frequenzumrichtermotoren
mit verstärkter Isolierung. Zudem dämpfen die Sinusfilter
die Motorstörgeräusche.
Neben den Funktionen des dU/dt-Filters senkt das
Sinusfilter ebenfalls die Belastung der Motorisolierung und
Abbildung 3.22 Gehäusetypen B4 - C3 - C4
Lagerströme im Motor. Dies verlängert die Motorlebensdauer und die Wartungsintervalle. Sinusfilter
ermöglichen den Anschluss langer Motorkabel in
Obere Abdeckung
A
B Rand
C Bodenplatte
D Bodenabdeckung
E Schraube(n)
F Lüfterabdeckung
G Oberer Clip
Tabelle 3.14 Legende zu Abbildung 3.21 und Abbildung 3.21
Anwendungen, bei denen der Motor in größerer
Entfernung vom Frequenzumrichter installiert ist. Die
Länge der Motorkabel ist jedoch nicht unbeschränkt, da
das Filter die Ableitströme in den Kabeln nicht reduziert.
72 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 75

Bestellen Projektierungshandbuch
4 Bestellen
4.1 Bestellformular
4.1.1 Antriebskonfigurator
Sie können einen Frequenzumrichter entsprechend den
Anwendungsanforderungen entwerfen, indem Sie das
Bestellnummernsystem verwenden.
Bestellen Sie entweder einen Standard-Frequenzumrichter
oder einen Frequenzumrichter mit eingebauten Optionen,
indem Sie den Typencode, der das Produkt beschreibt, an
die Danfoss-Vertretung vor Ort senden.
FC-102P18KT4E21H1XGCXXXSXXXXAGBKCXXXXDX
Die Bedeutung der Zeichen in diesem Code ist auf den
Seiten mit den Bestellnummern in Kapitel 3 Auswahl
dargestellt. Im obigen Beispiel sind die Option Profibus
LON und die Universal-E/A-Option im Frequenzumrichter
enthalten.
Die Bestellnummern für die Standardausführungen der
Frequenzumrichter finden Sie auch in Kapitel 4 Bestellen.
Stellen Sie den geeigneten Frequenzumrichter für Ihre
Anwendung zusammen und erzeugen Sie den
entsprechenden Typencode mit dem Antriebskonfigurator
im Internet. Der Antriebskonfigurator erzeugt automatisch
eine 8-stellige Bestellnummer, die an Ihre Vertretung vor
Ort gesendet wird.
Außerdem können Sie eine Projektliste mit mehreren
Produkten aufstellen und ggf. an den Danfoss-Vertriebsbeauftragten senden.
Der Antriebskonfigurator ist auf der globalen Internetseite
zu finden: www.danfoss.com/drives.
Beispiel der Schnittstellenkonfiguration des Antriebskonfigurators:
Die Zahlen in den Feldern beziehen sich auf den
Buchstaben bzw. die Ziffer des Typencodes, gelesen von
links nach rechts.
4 4
Produktgruppen 1-3
Frequenzumrichter-Baureihe 4-6
Nennleistung 8-10
Phasen 11
Netzspannung 12
Gehäuse 13-15
Gehäusetyp
Schutzart
Steuerversorgungsspannung
Hardwarekonfiguration
EMV-Filter 16-17
Bremse 18
Display (LCP) 19
Beschichtung der Platine 20
Netzoption 21
Anpassung A 22
Anpassung B 23
Software-Version 24-27
Software-Sprache 28
A-Optionen 29-30
B-Optionen 31-32
C0-Optionen, MCO 33-34
C1 Optionen 35
Software für die C-Option 36-37
D-Optionen 38-39
Tabelle 4.1 Beispiel der Schnittstellenkonfiguration des
Antriebskonfigurators
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 73
Page 76

F C - P T H
130BA052.14
X S A B CX X X X
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 302221 23 272524 26 28 29 31 373635343332 38 39
X0 D
Bestellen Projektierungshandbuch
4.1.2 Typencode niedrige und mittlere Leistung
Abbildung 4.1 Typencode
44
Beschreibung Pos. Mögliche Auswahl
Produktgruppe und FC-Baureihe 1-6 FC 102
Nennleistung 8-10 1,1- 90 kW (P1K1 - P90K)
Phasenzahl 11 3 Phasen (T)
T 2: 200-240 V AC
Netzspannung 11-12
Gehäuse 13-15
EMV-Filter 16-17
Bremse 18
Display 19
Beschichtung der Platine 20
Netzoption 21
Anpassung 22
Anpassung 23 Reserviert
Software-Version 24-27 Aktuelle Software
Software-Sprache 28
T 4: 380-480 V AC
T 6: 525-600 V AC
T 7: 525-690 V AC
E20: IP20
E21: IP21
E55: IP55
E66: IP66
P21: IP21 mit Rückplatte
P55: IP55 mit Rückplatte
Z55: Baugröße A4 IP55
Z66: Baugröße A4 IP66
H1: EMV-Filter, Klasse A1/B
H2: EMV-Filter, Klasse A2
H3: EMV-Filter, Klasse A1/B (reduzierte Kabellänge)
Hx: Kein EMV-Filter
X: Kein Bremschopper integriert
B: Bremschopper integriert
T: Sich. Stopp
U: Sicher + Bremse
G: Grafisches LCP Bedienteil (LCP 102)
N: Numerisches LCP Bedienteil (LCP 101)
X: Ohne LCP Bedienteil
X. Keine beschichtete Platine
C: Beschichtete Platine
X: Kein Netztrennschalter und keine Zwischenkreiskopplung
1: Einschließlich Netztrennschalter (nur IP55)
8: Netztrennschalter und Zwischenkreiskopplung
D: Zwischenkreiskopplung
Siehe Kapitel 9 zu max. Kabelquerschnitten.
X: Standard-Kabeleinführungen
O: Europäisches metrisches Gewinde in Kabeleinführungen (nur
A4, A5, B1, B2).
S: Imperiale Kabeleinführungen (nur A5, B1, B2)
74 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 77

Bestellen Projektierungshandbuch
Beschreibung Pos. Mögliche Auswahl
AX: Keine Optionen
A0: MCA 101 Profibus DP V1
A4: MCA 104 DeviceNet
A-Optionen 29-30
B-Optionen 31-32
C0-Optionen MCO 33-34 CX: Keine Optionen
C1 Optionen 35 X: Keine Optionen
Software für die C-Option 36-37 XX: Standard-Software
D-Optionen 38-39
AG: MCA 108 LonWorks
AJ: MCA 109 BACnet-Gateway
AL: MCA 120 Profinet
AN: MCA 121 EtherNet/IP
AQ: MCA 122 Modbus TCP
BX: Keine Option
BK: MCB 101 Universal-E/A-Option
BP: MCB 105 Relaisoption
BO: MCB 109 Analog-I/O-Option
B2: MCB 112 PTC-Thermistorkarte
B4: MCB 114 Sensoreingangsoption
DX: Keine Option
D0: externe 24-V-Versorgung
4 4
Tabelle 4.2 Typencodebeschreibung
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 75
Page 78

Bestellen Projektierungshandbuch
4.2 Bestellnummern
4.2.1 Bestellnummern: Optionen und Zubehör
Typ Beschreibung Bestellnummer
Diverse Ausrüstung I
Zwischenkreisanschluss Klemmenblock für Zwischenkreisverbindung bei A2/A3 130B1064
Gehäuseabdeckung IP21/4X Obere + untere Gehäuseabdeckung IP21 A2 130B1122
Gehäuseabdeckung IP21/4X Obere + untere Gehäuseabdeckung IP21 A3 130B1123
44
Gehäuseabdeckung IP21/4X Obere + untere Gehäuseabdeckung IP21 B3 130B1187
Gehäuseabdeckung IP21/4X Obere + untere Gehäuseabdeckung IP21 B4 130B1189
Gehäuseabdeckung IP21/4X Obere + untere Gehäuseabdeckung IP21 C3 130B1191
Gehäuseabdeckung IP21/4X Obere + untere Gehäuseabdeckung IP21 C4 130B1193
IP21/4X oben Obere Abdeckung IP21 A2 130B1132
IP21/4X oben Obere Abdeckung IP21 A3 130B1133
IP21/4X oben Obere Abdeckung IP21 B3 130B1188
IP21/4X oben Obere Abdeckung IP21 B4 130B1190
IP21/4X oben Obere Abdeckung IP21 C3 130B1192
IP21/4X oben Obere Abdeckung IP21 C4 130B1194
Einbausatz für Schaltschrankinstallation mit Durchsteck-Kit
Einbausatz für Schaltschrankinstallation mit Durchsteck-Kit
Einbausatz für Schaltschrankinstallation mit Durchsteck-Kit
Einbausatz für Schaltschrankinstallation mit Durchsteck-Kit
Einbausatz für Schaltschrankinstallation mit Durchsteck-Kit
Profibus D-Sub 9 Anschlussset für IP20 130B1112
Bausatz für obere Einführung der
Profibuskabel
Klemmenleisten Schraubanschlussklemmen zum Austausch von Federzugklemmen
Rückwand A5 IP55 130B1098
Rückwand B1 IP21/IP55 130B3383
Rückwand B2 IP21/IP55 130B3397
Rückwand C1 IP21/IP55 130B3910
Rückwand C2 IP21/IP55 130B3911
Rückwand A5 IP66 130B3242
Rückwand B1 IP66 130B3434
Rückwand B2 IP66 130B3465
Rückwand C1 IP66 130B3468
Rückwand C2 IP66 130B3491
LCPs und Bausätze
LCP 101 Numerisches LCP Bedienteil (LCP 101) 130B1124
102 Grafisches LCP Bedienteil (LCP 102) 130B1107
-Kabel Separates -Kabel, 3 m 175Z0929
-Bausatz Einbausatz für Schaltschrankeinbau einschließlich grafischem LCP, Befesti-
LCP-Einbausatz Einbausatz für Schaltschrankeinbau einschließlich numerischem LCP, Befesti-
-Bausatz Einbausatz für Schaltschrankeinbau für alle LCPs, einschließlich Befesti-
Gehäuse, Gehäusetyp A5 130B1028
Gehäuse, Gehäusetyp B1 130B1046
Gehäuse, Gehäusetyp B2 130B1047
Gehäuse, Gehäusetyp C1 130B1048
Gehäuse, Gehäusetyp C2 130B1049
Bausatz für obere Einführung der Profibus-Verbindung – Gehäusetypen D + E 176F1742
1x 10, 1x 6 und 1x 3 Stiftverbinder 130B1116
130B1113
gungen, 3 m langem Kabel und Dichtung
130B1114
gungen und Dichtung
130B1117
gungen, 3 m langem Kabel und Dichtung
76 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 79

Bestellen Projektierungshandbuch
Typ Beschreibung Bestellnummer
Diverse Ausrüstung I
-Bausatz Frontmontage-Einbausatz, IP55-Gehäuse 130B1129
-Bausatz Einbausatz für Schaltschrankeinbau für alle LCPs, einschließlich Befestigungen
und Dichtung – ohne Kabel
Tabelle 4.3 Sie können die Optionen bereits werkseitig montiert bestellen, siehe Bestellinformationen.
Typ Beschreibung Bemerkung
Optionen für Steckplatz A Bestellnummer
MCA 101 Profibus-Option DP V0/V1 130B1200
MCA 104 DeviceNet-Option 130B1202
MCA 108 LonWorks 130B1206
MCA 109 BACnet-Gateway zum Einbau. Bei Relaisoptionskarte MCB 105 nicht zu verwenden 130B1244
MCA 120 Profinet 130B1135
MCA 121 Ethernet 130B1219
Optionen für Steckplatz B
MCB 101 Universal-Ein-/Ausgangsoption
MCB 105 Relaisoption
MCB 109 Analog-I/O-Option und Batteriereserve für Echtzeituhr 130B1243
MCB 112 ATEX PTC 130B1137
MCB 114
Option für Steckplatz D
MCB 107 Externe 24 V DC-Spannungsversorgung 130B1208
Externe Optionen
EtherNet/IP Ethernet-Master
Sensoreingang – unbeschichtet 130B1172
Sensoreingang – beschichtet 130B1272
130B1170
Beschichtet
4 4
Tabelle 4.4 Bestellinformationen für Optionen
Informationen zur Kompatibilität von Feldbus- und Anwendungsoptionen mit älteren Software-Versionen erhalten Sie von Ihrem Danfoss-Händler.
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 77
Page 80

Bestellen Projektierungshandbuch
Typ Beschreibung
Ersatzteile Bestellnummer Bemerkung
Steuerkarte FC Mit Funktion „Sicherer Stopp“ 130B1150
Steuerkarte FC Mit Funktion „Sicherer Stopp“ 130B1151
Lüfter A2 Lüfter, Gehäusetyp A2 130B1009
Lüfter A3 Lüfter, Gehäusetyp A3 130B1010
Lüfter A5 Lüfter, Gehäusetyp A5 130B1017
Lüfter B1 Lüfter extern, Gehäusetyp B1 130B3407
44
Lüfter B2 Lüfter extern, Gehäusetyp B2 130B3406
Lüfter B3 Lüfter extern, Gehäusetyp B3 130B3563
Lüfter B4 Lüfter extern, 18,5/22 kW 130B3699
Lüfter B4 Lüfter extern, 22/30 kW 130B3701
Lüfter C1 Lüfter extern, Gehäusetyp C1 130B3865
Lüfter C2 Lüfter extern, Gehäusetyp C2 130B3867
Lüfter C3 Lüfter extern, Gehäusetyp C3 130B4292
Lüfter C4 Lüfter extern, Gehäusetyp C4 130B4294
Diverse Ausrüstung II
Beutel mit Zubehör A2 Beutel mit Zubehör, Gehäusetyp A2 130B1022
Beutel mit Zubehör A3 Beutel mit Zubehör, Gehäusetyp A3 130B1022
Beutel mit Zubehör A4 Beutel mit Zubehör für Baugröße A4 ohne Gewinde 130B0536
Beutel mit Zubehör A5 Beutel mit Zubehör, Gehäusetyp A5 130B1023
Beutel mit Zubehör B1 Beutel mit Zubehör, Gehäusetyp B1 130B2060
Beutel mit Zubehör B2 Beutel mit Zubehör, Gehäusetyp B2 130B2061
Beutel mit Zubehör B3 Beutel mit Zubehör, Gehäusetyp B3 130B0980
Beutel mit Zubehör B4 Beutel mit Zubehör, Gehäusetyp B4 130B1300 Klein
Beutel mit Zubehör B4 Beutel mit Zubehör, Gehäusetyp B4 130B1301 Groß
Beutel mit Zubehör C1 Beutel mit Zubehör, Gehäusetyp C1 130B0046
Beutel mit Zubehör C2 Beutel mit Zubehör, Gehäusetyp C2 130B0047
Beutel mit Zubehör C3 Beutel mit Zubehör, Gehäusetyp C3 130B0981
Beutel mit Zubehör C4 Beutel mit Zubehör, Gehäusetyp C4 130B0982 Klein
Beutel mit Zubehör C4 Beutel mit Zubehör, Gehäusetyp C4 130B0983 Groß
Tabelle 4.5 Bestellinformationen für Zubehör
78 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 81

Bestellen Projektierungshandbuch
4.2.2 Bestellnummern: Oberwellenfilter
Oberwellenfilter dienen zur Reduzierung von Netzoberwellen.
AHF 010: 10 % Stromverzerrung
•
AHF 005: 5 % Stromverzerrung
•
I
[A]
AHF,N
10 1,1-4 175G6600 175G6622 P1K1, P4K0
19 5.5-7.5 175G6601 175G6623 P5K5-P7K5
26 11 175G6602 175G6624 P11K
35 15-18,5 175G6603 175G6625 P15K-P18K
43 22 175G6604 175G6626 P22K
72 30-37 175G6605 175G6627 P30K-P37K
101 45-55 175G6606 175G6628 P45K-P55K
144 75 175G6607 175G6629 P75K
180 90 175G6608 175G6630 P90K
217 110 175G6609 175G6631 P110
289 132 175G6610 175G6632 P132-P160
324 160 175G6611 175G6633
370 200 175G6688 175G6691 P200
506 250
578 315 2x 175G6610 2x 175G6632 P315
648 355 2x175G6611 2x175G6633 P355
694 400
740 450 2x175G6688 2x175G6691 P450
Tabelle 4.6 380-415 V AC, 50 Hz
Typischer verwendeter Motor
[kW]
Danfoss-Bestellnummer
AHF 005 AHF 010
175G6609
+ 175G6610
175G6611
+ 175G6688
175G6631
+ 175G6632
175G6633
+ 175G6691
Frequenzumrichtergröße
4 4
P250
P400
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 79
Page 82

Bestellen
Projektierungshandbuch
Typischer verwendeter
I
[A]
AHF,N
10 1,1-4 130B2540 130B2541 P1K1-P4K0
19 5.5-7.5 130B2460 130B2472 P5K5-P7K5
26 11 130B2461 130B2473 P11K
35 15-18,5 130B2462 130B2474 P15K, P18K
43 22 130B2463 130B2475 P22K
44
72 30-37 130B2464 130B2476 P30K-P37K
101 45-55 130B2465 130B2477 P45K-P55K
144 75 130B2466 130B2478 P75K
180 90 130B2467 130B2479 P90K
217 110 130B2468 130B2480 P110
289 132 130B2469 130B2481 P132
324 160 130B2470 130B2482 P160
370 200 130B2471 130B2483 P200
506 250
578 315 2x 130B2469 2x 130B2481 P315
648 355 2x130B2470 2x130B2482 P355
694 400
740 450 2x130B2471 130B2483 P450
Motor [hp] (nur nordameri-
kanischer Markt)
+ 130B2469
+ 130B2471
Danfoss-Bestellnummer
AHF 005 AHF 010
130B2468
130B2470
130B2480
+ 130B2481
130B2482
+ 130B2483
Frequenzumrichtergröße
P250
P400
Tabelle 4.7 380-415 V AC, 60 Hz
Typischer verwendeter
I
[A]
AHF,N
10 1.5-7.5 130B2538 130B2539 P1K1-P5K5
19 10-15 175G6612 175G6634 P7K5-P11K
26 20 175G6613 175G6635 P15K
35 25-30 175G6614 175G6636 P18K-P22K
43 40 175G6615 175G6637 P30K
72 50-60 175G6616 175G6638 P37K-P45K
101 75 175G6617 175G6639 P55K
144 100-125 175G6618 175G6640 P75K-P90K
180 150 175G6619 175G6641 P110
217 200 175G6620 175G6642 P132
289 250 175G6621 175G6643 P160
370 350 175G6690 175G6693 P200
434 350 2x175G6620 2x175G6642 P250
506 450 175G6620 + 175G6621 175G6642 + 175G6643 P315
578 500 2x 175G6621 2x 175G6643 P355
648 550-600 2x175G6689 2x175G6692 P400
694 600 175G6689 + 175G6690 175G6692 + 175G6693 P450
740 650 2x175G6690 2x175G6693 P500
Motor [hp] (nur nordameri-
kanischer Markt)
Danfoss-Bestellnummer
AHF 005 AHF 010
Frequenzumrichtergröße
Tabelle 4.8 440-480 V AC, 60 Hz
Die Anpassung von Frequenzumrichter und Filter wird basierend auf 400 V/480 V und einer typischen Motorbelastung
(4 Pole) sowie 110 % Drehmoment vorberechnet.
80 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 83

Bestellen Projektierungshandbuch
I
[A]
AHF,N
10 1.1-7.5 175G6644 175G6656 P1K1-P7K5
19 11 175G6645 175G6657 P11K
26 15-18,5 175G6646 175G6658 P15K-P18K
35 22 175G6647 175G6659 P22K
43 30 175G6648 175G6660 P30K
72 37-45 175G6649 175G6661 P45K-P55K
101 55 175G6650 175G6662 P75K
144 75-90 175G6651 175G6663 P90K-P110
180 110 175G6652 175G6664 P132
217 132 175G6653 175G6665 P160
289 160-200 175G6654 175G6666 P200-P250
324 250 175G6655 175G6667 P315
397 315 175G6652 + 175G6653 175G6641 + 175G6665 P400
434 355 2x175G6653 2x175G6665 P450
506 400 175G6653 + 175G6654 175G6665 + 175G6666 P500
578 450 2x 175G6654 2x 175G6666 P560
613 500 175G6654 + 175G6655 175G6666 + 175G6667 P630
Tabelle 4.9 500-525 V AC, 50 Hz
I
[A]
AHF,N
43 45 130B2328 130B2293
72 45-55 130B2330 130B2295 P37K-P45K
101 75-90 130B2331 130B2296 P55K-P75K
144 110 130B2333 130B2298 P90K-P110
180 132 130B2334 130B2299 P132
217 160 130B2335 130B2300 P160
288 200-250 2x130B2333 130B2301 P200-P250
324 315 130B2334 + 130B2335 130B2302 P315
397 400 130B2334 + 130B2335 130B2299 + 130B2300 P400
434 450 2x130B2335 2x130B2300 P450
505 500 * 130B2300 + 130B2301 P500
576 560 * 2x130B2301 P560
612 630 * 130B2301 + 130B2300 P630
730 710 * 2x130B2302 P710
Typischer verwendeter Motor
[kW]
Typischer verwendeter Motor
[kW]
Danfoss-Bestellnummer
AHF 005 AHF 010
Danfoss-Bestellnummer
AHF 005 AHF 010
Frequenzumrichtergröße
Frequenzumrichtergröße
4 4
Tabelle 4.10 690 VAC, 50 Hz
* Wenden Sie sich bei höheren Strömen an Danfoss.
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 81
Page 84

Bestellen Projektierungshandbuch
4.2.3 Bestellnummern: Sinusfiltermodule, 200-500 V AC
Frequenzumrichtergröße
200-240
[V AC]
P1K1 P1K1 5 120 130B2441 130B2406 4,5
P1K5 P1K5 5 120 130B2441 130B2406 4,5
44
P1K5 P3K0 P3K0 5 120 130B2443 130B2408 8
P4K0 P4K0 5 120 130B2444 130B2409 10
P2K2 P5K5 P5K5 5 120 130B2446 130B2411 17
P3K0 P7K5 P7K5 5 120 130B2446 130B2411 17
P4K0 5 120 130B2446 130B2411 17
P5K5 P11K P11K 4 100 130B2447 130B2412 24
P7K5 P15K P15K 4 100 130B2448 130B2413 38
P18K P18K 4 100 130B2448 130B2413 38
P11K P22K P22K 4 100 130B2307 130B2281 48
P15K P30K P30K 3 100 130B2308 130B2282 62
P18K P37K P37K 3 100 130B2309 130B2283 75
P22K P45K P55K 3 100 130B2310 130B2284 115
P30K P55K P75K 3 100 130B2310 130B2284 115
P37K P75K P90K 3 100 130B2311 130B2285 180
P45K P90K P110 3 100 130B2311 130B2285 180
P110 P132 3 100 130B2312 130B2286 260
P132 P160 3 100 130B2313 130B2287 260
P160 P200 3 100 130B2313 130B2287 410
P200 P250 3 100 130B2314 130B2288 410
P250 P315 3 100 130B2314 130B2288 480
P315 P315 2 100 130B2315 130B2289 660
P355 P355 2 100 130B2315 130B2289 660
P400 P400 2 100 130B2316 130B2290 750
P450 2 100 130B2316 130B2290 750
P450 P500 2 100 130B2317 130B2291 880
P500 P560 2 100 130B2317 130B2291 880
P560 P630 2 100 130B2318 130B2292 1200
P630 P710 2 100 130B2318 130B2292 1200
P710 P800 2 100 2x130B2317 2x130B2291 1500
P800 P1M0 2 100 2x130B2317 2x130B2291 1500
P1M0 2 100 2x130B2318 2x130B2292 1700
380-440
[V AC]
P2K2 P2K2 5 120 130B2443 130B2408 8
440-480
[V AC]
Minimale
Taktfrequenz [kHz]
Maximale
Ausgangs-
frequenz [Hz]
Teilenummer
IP20
Teilenummer
IP00
Filternennstrom
bei 50 Hz [A]
Tabelle 4.11 Netzversorgung 3 x 200 bis 480 V AC
Bei Verwendung von Sinusfiltern sollte die Taktfrequenz mit den Filterspezifikationen in 14-01 Taktfrequenz übereinstimmen.
HINWEIS
Siehe auch das Projektierungshandbuch für Ausgangsfilter.
82 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 85

Bestellen Projektierungshandbuch
4.2.4 Bestellnummern: Sinusfiltermodule 525-600/690 V AC
Frequenzumrichtergröße
525-600 [V AC] 690 [V AC]
P1K1 2 100 130B2341 130B2321 13
P1K5 2 100 130B2341 130B2321 13
P2k2 2 100 130B2341 130B2321 13
P3K0 2 100 130B2341 130B2321 13
P4K0 2 100 130B2341 130B2321 13
P5K5 2 100 130B2341 130B2321 13
P7K5 2 100 130B2341 130B2321 13
P11K 2 100 130B2342 130B2322 28
P15K 2 100 130B2342 130B2322 28
P18K 2 100 130B2342 130B2322 28
P22K 2 100 130B2342 130B2322 28
P30K 2 100 130B2343 130B2323 45
P37K P45K 2 100 130B2344 130B2324 76
P45K P55K 2 100 130B2344 130B2324 76
P55K P75K 2 100 130B2345 130B2325 115
P75K P90K 2 100 130B2345 130B2325 115
P90K P110 2 100 130B2346 130B2326 165
P132 2 100 130B2346 130B2326 165
P160 2 100 130B2347 130B2327 260
P200 2 100 130B2347 130B2327 260
P250 2 100 130B2348 130B2329 303
P315 2 100 130B2370 130B2341 430
P355 1,5 100 130B2370 130B2341 430
P400 1,5 100 130B2370 130B2341 430
P450 1,5 100 130B2371 130B2342 530
P500 1,5 100 130B2371 130B2342 530
P560 1,5 100 130B2381 130B2337 660
P630 1,5 100 130B2381 130B2337 660
P710 1,5 100 130B2382 130B2338 765
P800 1,5 100 130B2383 130B2339 940
P900 1,5 100 130B2383 130B2339 940
P1M0 1,5 100 130B2384 130B2340 1320
P1M2 1,5 100 130B2384 130B2340 1320
P1M4 1,5 100 2x130B2382 2x130B2338 1479
Minimale Taktfrequenz
[kHz]
Maximale
Ausgangsfrequenz
[Hz]
Teilenummer
IP20
Teilenummer
IP00
Filternennstrom
bei 50 Hz [A]
4 4
Tabelle 4.12 Netzversorgung 3 x 525-690 V AC
HINWEIS
Bei Verwendung von Sinusfiltern sollte die Taktfrequenz mit den Filterspezifikationen in 14-01 Taktfrequenz übereinstimmen.
HINWEIS
Siehe auch das Projektierungshandbuch für Ausgangsfilter.
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 83
Page 86

Bestellen Projektierungshandbuch
4.2.5 Bestellnummern: dU/dt-Filter, 380-480 V AC
Frequenzumrichtergröße
380-439 [V AC] 440-480 [V AC]
P11K P11K 4 100 130B2396 130B2385 24
P15K P15K 4 100 130B2397 130B2386 45
P18K P18K 4 100 130B2397 130B2386 45
44
P22K P22K 4 100 130B2397 130B2386 45
P30K P30K 3 100 130B2398 130B2387 75
P37K P37K 3 100 130B2398 130B2387 75
P45K P45K 3 100 130B2399 130B2388 110
P55K P55K 3 100 130B2399 130B2388 110
P75K P75K 3 100 130B2400 130B2389 182
P90K P90K 3 100 130B2400 130B2389 182
P110 P110 3 100 130B2401 130B2390 280
P132 P132 3 100 130B2401 130B2390 280
P160 P160 3 100 130B2402 130B2391 400
P200 P200 3 100 130B2402 130B2391 400
P250 P250 3 100 130B2277 130B2275 500
P315 P315 2 100 130B2278 130B2276 750
P355 P355 2 100 130B2278 130B2276 750
P400 P400 2 100 130B2278 130B2276 750
P450 2 100 130B2278 130B2276 750
P450 P500 2 100 130B2405 130B2393 910
P500 P560 2 100 130B2405 130B2393 910
P560 P630 2 100 130B2407 130B2394 1500
P630 P710 2 100 130B2407 130B2394 1500
P710 P800 2 100 130B2407 130B2394 1500
P800 P1M0 2 100 130B2407 130B2394 1500
P1M0 2 100 130B2410 130B2395 2300
Minimale
Taktfrequenz [kHz]
Maximale
Ausgangsfrequenz
[Hz]
Teilenummer IP20 Teilenummer IP00
Filternennstrom bei
50 Hz [A]
Tabelle 4.13 Netzversorgung 3 x 380 bis 3 x 480 V AC
HINWEIS
Siehe auch das Projektierungshandbuch für Ausgangsfilter.
84 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 87

Bestellen Projektierungshandbuch
4.2.6 Bestellnummern: dU/dt-Filter, 525-600/690 V AC
Frequenzumrichtergröße
525-600 [V AC] 690 [V AC]
P1K1 4 100 130B2423 130B2414 28
P1K5 4 100 130B2423 130B2414 28
P2K2 4 100 130B2423 130B2414 28
P3K0 4 100 130B2423 130B2414 28
P4K0 4 100 130B2424 130B2415 45
P5K5 4 100 130B2424 130B2415 45
P7K5 3 100 130B2425 130B2416 75
P11K 3 100 130B2425 130B2416 75
P15K 3 100 130B2426 130B2417 115
P18K 3 100 130B2426 130B2417 115
P22K 3 100 130B2427 130B2418 165
P30K 3 100 130B2427 130B2418 165
P37K P45K 3 100 130B2425 130B2416 75
P45K P55K 3 100 130B2425 130B2416 75
P55K P75K 3 100 130B2426 130B2417 115
P75K P90K 3 100 130B2426 130B2417 115
P90K P110 3 100 130B2427 130B2418 165
P132 2 100 130B2427 130B2418 165
P160 2 100 130B2428 130B2419 260
P200 2 100 130B2428 130B2419 260
P250 2 100 130B2429 130B2420 310
P315 2 100 130B2238 130B2235 430
P400 2 100 130B2238 130B2235 430
P450 2 100 130B2239 130B2236 530
P500 2 100 130B2239 130B2236 530
P560 2 100 130B2274 130B2280 630
P630 2 100 130B2274 130B2280 630
P710 2 100 130B2430 130B2421 765
P800 2 100 130B2431 130B2422 1350
P900 2 100 130B2431 130B2422 1350
P1M0 2 100 130B2431 130B2422 1350
P1M2 2 100 130B2431 130B2422 1350
P1M4 2 100 2x130B2430 2x130B2421 1530
Minimale
Taktfrequenz [kHz]
Maximale
Ausgangsfrequenz
[Hz]
Teilenummer IP20 Teilenummer IP00
Filternennstrom bei
50 Hz [A]
4 4
Tabelle 4.14 Netzversorgung 3 x 525 bis 3 x 690 V AC
HINWEIS
Siehe auch das Projektierungshandbuch für Ausgangsfilter.
4.2.7 Bestellnummern: Bremswiderstände
HINWEIS
Siehe Bremswiderstand-Projektierungshandbuch.
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 85
Page 88

Mechanische Installation Projektierungshandbuch
5 Mechanische Installation
5.1 Mechanische Installation
5.1.1 Sicherheitstechnische Anforderungen
für die Aufstellung
WARNUNG
Beachten Sie die für die Integration und den Einbausatz
55
zur Montage vor Ort geltenden Anforderungen. Beachten
Sie die Informationen in der Liste, um schwere Verletzungen oder Geräteschäden zu vermeiden, insbesondere
bei Installation großer Einheiten.
VORSICHT
Der Frequenzumrichter ist luftgekühlt.
Um das Gerät vor Überhitzung zu schützen, achten Sie
darauf, dass die Umgebungstemperatur die für den
Frequenzumrichter festgelegte maximale Nenntemperatur
nicht überschreitet und dass die 24-Stunden-
Durchschnittstemperatur nicht überschritten wird. Sie
finden die maximale Temperatur und den 24-StundenDurchschnitt in Kapitel 9.6.2 Leistungsreduzierung wegen
erhöhter Umgebungstemperatur.
Bei Umgebungstemperaturen zwischen 45 °C und 55 °C
kommt es zu einer Leistungsreduzierung des Frequenzumrichters (siehe Kapitel 9.6.2 Leistungsreduzierung
wegen erhöhter Umgebungstemperatur).
Die Lebensdauer des Frequenzumrichters wird reduziert,
wenn Leistungsreduzierung wegen erhöhter
Umgebungstemperatur nicht berücksichtigt wird.
86 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 89

130BA809.10
130BA810.10
130BB458.10
130BA811.10
130BA812.10
130BA813.10
130BA826.10
130BA827.10
130BA814.10
130BA815.10
130BA828.10
130BA829.10
C
a
b
130BA648.12
f
e
B
A
a
d
e
b
c
a
e
f
130BA715.12
Mechanische Installation Projektierungshandbuch
5.1.2 Abmessungen
und C4)
5 5
Obere und untere Bohrungen (nur B4, C3
* Nur A5 in IP55/66
Beutel mit Zubehör mit den notwendigen Halterungen, Schrauben und Verbindern werden mit den Frequenzumrichtern mitgeliefert.
A2 A3 A4 A5 B1 B2 B3 B4 C1 C2 C3 C4
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 87
IP20/21 IP20/21 IP55/66 IP55/66 IP21/55/66 IP21/55/66 IP20 IP20 IP21/55/66 IP21/55/66 IP20 IP20
Tabelle 5.1 Abmessungen
Page 90

Mechanische Installation Projektierungshandbuch
20
Chassis
20
Chassis
NEMA 1/
21/55/66
NEMA 12
55
NEMA 1/
21/55/66
NEMA 12
20
Chassis
20
Chassis
NEMA 1/
21/55/66
NEMA 1/
21/ 55/66
55/66
NEMA 12
55/66
NEMA 12
21
NEMA 1
20
Chassis
NEMA 12
NEMA 12
Klicken Klicken Klicken Klicken 2,0 2,0
Klicken
Klicken
-
21
NEMA 1
Klicken Klicken -
20
Chassis
Mit Option A/B C 220 222 220 222 175 200 260 260 262 242 310 335 333 333
Schraubenlöcher [mm]
c 8,0 8,0 8,0 8,0 8,25 8,25 12 12 8 12,5 12,5
d ø11 ø11 ø11 ø11 ø12 ø12 ø19 ø19 12 ø19 ø19
a 257 350 257 350 401 402 454 624 380 495 648 739 521 631
A 374 374 - - - - - 420 595 630 800
200-240 V 1.1-2.2 3-3,7 1.1-2.2 1.1-3.7 5,5-11 15 5,5-11 15-18 18-30 37-45 22-30 37-45
380-480/500 V 1.1-4.0 5.5-7.5 1,1-4 1.1-7.5 11-18 22-30 11-18 22-37 37-55 75-90 45-55 75-90
525-690 V 11-30 37-90
525-600 V 1.1-7.5 1.1-7.5 11-18 22-30 11-18 22-37 37-55 75-90 45-55 75-90
Gehäusetyp A2 A3 A4 A5 B1 B2 B3 B4 C1 C2 C3 C4
Nennleis-
tung [kW]
88 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
IP
NEMA (US-
Schutzart)
Höhe [mm]
Höhe der Rückwand A 268 375 268 375 390 420 480 650 399 520 680 770 550 660
Höhe mit Abschirmblech
für Feldbus-Kabel
Abstand zwischen
Bohrungen
Breite [mm]
Breite der Rückwand B 90 90 130 130 200 242 242 242 165 230 308 370 308 370
B 130 130 170 170 242 242 242 205 230 308 370 308 370
Breite der Rückwand mit
B 150 150 190 190 242 242 242 225 230 308 370 308 370
einer C-Option
Breite der Rückwand mit 2
b 70 70 110 110 171 215 210 210 140 200 272 334 270 330
Abstand zwischen
Bohrungen
C-Optionen
Tiefe [mm]
Tiefe ohne Option A/B C 205 207 205 207 175 200 260 260 249 242 310 335 333 333
e ø5,5 ø5,5 ø5,5 ø5,5 ø6,5 ø6,5 ø9 ø9 6,8 8,5 ø9 ø9 8,5 8,5
f 9 9 6,5 6,5 6 9 9 9 7,9 15 9,8 9,8 17 17
4,9 5,3 6,6 7,0 9,7 13.5/14.2 23 27 12 23,5 45 65 35 50
Max. Gewicht [kg]
Anzugsdrehmoment für Frontabdeckung [Nm]
Kunststoffabdeckung
(niedrige IP-Schutzart)
Metallabdeckung (IP55/66) - - 1,5 1,5 2,2 2,2 - - 2,2 2,2 2,0 2,0
Tabelle 5.2 Gewicht und Abmessungen
Page 91

U
96
97
98
L1
L2
L3
91
92
93
V
W
RELAY 1
RELAY 1
03
02
01
06
05
04
10
10
06
06
130BT309.10
130BT339.10
130BT330.10
130BA406.10
61 68 6
39 42 50 53 54 5
03 02 01
06 05 04
A
B
C D
E
F
G
H
I
J K
WARNING:
Risk of Electric Shock - Dual supply
Disconnect mains and loadsharing before service
ISOA0021
61
68
39
42
50
53
54
RELAY 1
RELAY 2
03
02
01
06
05
04
130BT346.10
WARNING:
Risk of Electric Shock - Dual supply
Discunnect mains and loadsharing before service
61
68
39
50
53
54
5
42
03
02
01
06
05
04
99
95
130BT347.10
WARNING:
Risk of Electric Shock - Dual supply
Disconnect mains and loadsharing before service
99
95
61
68
39
50
53
54
5
42
03
02
01
06
05
04
130BT348.10
Risk of Electric Shock - Dual supply
Disconnect mains and loadsharing before service
WARNING:
RELAY 1
RELAY 2
61
68
39
50
53
54
5
42
03
02
01
06
05
04
130BT349.10
RELAY 1
RELAY 2
WARNING
STORED CHARGE DO NOT TOUCH UNTIL
15 MIN. AFTER DISCONNECTION
CHARGE RESIDUELLE.
ATTENDRE 15 MIN. APRES DECONNEXION
WARNING
:
Risk of Electric Shock - Dual supply
Disconnect mains and loadsharing before service
Mechanische Installation Projektierungshandbuch
5.1.3 Beutel mit Zubehör
5 5
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 89
Gehäusetyp A1, A2 und A3 Gehäusetyp A5 Gehäusetyp B1 und B2 Gehäusetyp C1 und C2
Gehäusetyp B3 Gehäusetyp B4 Gehäusetyp C3 Gehäusetyp C4
1 + 2 nur bei Geräten mit Bremschopper lieferbar. Für den Anschluss der Zwischenkreiskopplung kann Verbinder 1 getrennt bestellt werden (Bestellnummer 130B1064).
Tabelle 5.3 In Beuteln mit Zubehör enthaltene Teile
Ein 8-poliger Verbinder ist im Beutel mit Zubehör für FC 102 ohne Funktion „Sicher abgeschaltetes Moment“ enthalten.
Page 92

130BD389.11
A2
B3 B3
A2
a
b
130BA419.10
130BA219.11
1
Mechanische Installation Projektierungshandbuch
5.1.4 Aufstellung
Alle Gehäusetypen erlauben die Aufstellung Seite-an-Seite,
ausgenommen bei Verwendung von IP21/IP4X-Gehäuseab-
deckungen (siehe Kapitel 3.1 Optionen und Zubehör).
Aufstellung Seite-an-Seite
Sie können Bauformen A und B mit Schutzart IP20 Seitean-Seite ohne Abstand zueinander anordnen, allerdings ist
die Montagereihenfolge wichtig. Abbildung 5.1 zeigt, wie
Sie die Rahmen korrekt montieren.
55
Abbildung 5.1 Richtige Aufstellung Seite-an-Seite
Wenn Sie die IP21-Gehäuseabdeckungen bei Gehäusetyp
A2 oder A3 verwenden, muss zwischen den Frequenzumrichter ein Abstand von mindestens 50 mm eingehalten
werden.
Lassen Sie für optimale Kühlbedingungen Platz für freie
Luftströmung über und unter dem Frequenzumrichter.
Siehe Tabelle 5.4.
Abbildung 5.2 Abstand
Gehäusetyp A2/A3/A4/A5/B1
a [mm] 100 200 225
b [mm] 100 200 225
Tabelle 5.4 Erforderliche Abstände für Luftzirkulation bei
verschiedenen Gehäusetypen
B2/B3/B4/C1
/C3
C2/C4
1. Bohren Sie Löcher gemäß den angegebenen
Maßen.
2. Verwenden Sie Schrauben, die für die jeweilige
Montagefläche des Frequenzumrichters geeignet
sind. Ziehen Sie alle 4 Schrauben fest an.
Abbildung 5.3 Ordnungsgemäße Montage mit Rückwand
90 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 93

130BA228.11
1
130BA392.11
2
1
3
4
Mechanische Installation Projektierungshandbuch
Gehäuse IP20 IP21 IP55 IP66
A2 * * - A3 * * - A4/A5 - - 2 2
B1 - * 2,2 2,2
B2 - * 2,2 2,2
B3 * - - B4 2 - - C1 - * 2,2 2,2
C2 - * 2,2 2,2
C3 2 - - C4 2 - - * = Keine anzuziehenden Schrauben
- = Nicht vorhanden
Abbildung 5.4 Ordnungsgemäße Montage an einem
Montagerahmen
Tabelle 5.6 Anzugsdrehmoment für Abdeckungen (Nm)
5.1.5
Pos. Beschreibung
1 Rückwand
Tabelle 5.5 Legende zu Abbildung 5.4
Zur Montage vor Ort werden die oberen IP21/IP4XGehäuseabdeckungen oder IP54/55-Geräte empfohlen.
5 5
Montage vor Ort
Abbildung 5.5 Montage an einer nicht stabilen Rückwand
Bei Montage der Gehäusetypen A4, A5, B1, B2, C1 und C2
an einer nicht stabilen Rückwand müssen Sie den Frequenzumrichter aufgrund von unzureichendem Kühlluftstrom
über dem Kühlkörper mit einer Rückwand, „1“, versehen.
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 91
Page 94

Elektrische Installation
Projektierungshandbuch
6 Elektrische Installation
6.1 Anschlüsse – Gehäusetypen A, B und C
6.1.1 Anzugsdrehmoment
HINWEIS
Allgemeine Hinweise zu Kabeln
Befolgen Sie stets die nationalen und lokalen Vorschriften zum Kabelquerschnitt und zur Umgebungstemperatur.
Verwenden Sie nach Möglichkeit Kupferleiter (75 °C).
Aluminiumleiter
66
Die Klemmen können zwar Aluminiumleiter aufnehmen, aber die Leiteroberfläche muss sauber sein, und Sie müssen zuvor
Oxidation entfernen und durch neutrales, säurefreies Vaselinefett zukünftig verhindern.
Außerdem muss die Klemmenschraube wegen der Weichheit des Aluminiums nach zwei Tagen nachgezogen werden. Es ist
wichtig, dass der Anschluss gasdicht eingefettet ist, um erneute Oxidation der Aluminiumfläche zu verhindern.
Gehäusetyp
A2 1.1-2.2 1,1-4 -
A3 3-3,7 5.5-7.5 A4 1.1-2.2 1,1-4
A5 1.1-3.7 1.1-7.5 B1 5,5-11 11-18 - Netz-, Bremswiderstands-, Zwischenkreiskopplungskabel,
B2 15 22-30 11-30 Netz-, Bremswiderstands-, Zwischenkreiskopplungskabel 4,5
B3 5,5-11 11-18 - Netz-, Bremswiderstands-, Zwischenkreiskopplungskabel,
B4 15-18 22-37 - Netz-, Bremswiderstands-, Zwischenkreiskopplungskabel,
C1 18-30 37-55 - Netz-, Bremswiderstands-, Zwischenkreiskopplungskabel 10
C2 37-45 75-90 37-90 Netzkabel, Motorleitungen
C3 22-30 45-55 - Netz-, Bremswiderstands-, Zwischenkreiskopplungskabel,
C4 37-45 75-90 - Netzkabel, Motorleitungen
200-240 V
[kW]
380-480 V
[kW]
525-690 V
[kW]
Kabel für Anzugsdrehmoment
[Nm]
1,8
Motorleitungen
Relais 0.5-0.6
Masse 2-3
Motorleitungen 4,5
Relais 0.5-0.6
Masse 2-3
1,8
Motorleitungen
Relais 0.5-0.6
Masse 2-3
4,5
Motorleitungen
Relais 0.5-0.6
Masse 2-3
Motorleitungen 10
Relais 0.5-0.6
Masse 2-3
14 (bis zu 95 mm2)
24 (über 95 mm2)
Zwischenkreiskopplungskabel, Anschlusskabel für Bremse 14
Relais 0.5-0.6
Masse 2-3
10
Motorleitungen
Relais 0.5-0.6
Masse 2-3
14 (bis zu 95 mm2)
24 (über 95 mm2)
Zwischenkreiskopplungskabel, Anschlusskabel für Bremse 14
Relais 0.5-0.6
Masse 2-3
Tabelle 6.1 Anzugsdrehmoment
92 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 95

-DC+DC
BR- BR+ U V W
99
M A I N S
95
RELAY 1 RELAY 2
- LC +
130BA261.10
Elektrische Installation Projektierungshandbuch
6.1.2 Öffnen von Aussparungen für
zusätzliche Kabel
1. Entfernen Sie die Kabeleinführung vom Frequenzumrichter (es dürfen beim Öffnen der
Aussparungen keine Fremdkörper in den
Frequenzumrichter gelangen).
2. Sie müssen die Kabeleinführung rund um die zu
öffnende Aussparung abstützen.
3. Die Aussparung kann nun mit einem starken
Dorn und Hammer ausgeschlagen werden.
4. Entgraten Sie das Loch.
5. Befestigen Sie die Kabel am Frequenzumrichter.
Netzanschluss und Erdung
6.1.3
HINWEIS
Der Netzanschlussstecker ist bei Frequenzumrichtern bis
zu 7,5 kW steckbar.
1. Befestigen Sie die beiden Schrauben im
Abschirmblech, schieben Sie dieses auf und
ziehen Sie die Schrauben fest.
2. Stellen Sie sicher, dass der Frequenzumrichter
ordnungsgemäß geerdet ist. Schließen Sie ihn an
den Erdanschluss an (Klemme 95). Verwenden Sie
hierzu die mitgelieferte Schraube aus dem Beutel
mit Zubehör.
3. Stecken Sie den Netzanschlussstecker 91 (L1), 92
(L2), 93 (L3) aus dem Beutel mit Zubehör auf die
Klemmen mit der Bezeichnung MAINS unten am
Frequenzumrichter.
4. Befestigen Sie die Netzphasen am mitgelieferten
Netzanschlussstecker.
5. Stützen Sie das Kabel mit den beiliegenden
Stützhalterungen ab.
VORSICHT
Der Querschnitt des Erdungskabels muss mindestens 10
mm2 betragen, oder es müssen zwei getrennt verlegte
und gemäß EN 50178 angeschlossene Erdverbindungen
verwendet werden.
Bei Varianten mit Netzschalter ist dieser auf der Netzseite
vorverdrahtet.
6 6
Abbildung 6.1 Netzanschluss
Netzanschluss bei Gehäusetypen A1, A2 und A3:
Abbildung 6.2 Montage der Montageplatte
HINWEIS
Prüfen Sie, ob die Netzspannung der auf dem
Typenschild angegebenen Netzspannung entspricht.
VORSICHT
IT-Netz
Schließen Sie 400-V-Frequenzumrichter mit EMV-Filtern
nicht an ein Stromnetz mit einer Spannung zwischen
Phase und Erde von mehr als 440 V an.
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 93
Page 96

130BA262.10
M
I N S
+DC
BR-
BR+
U
V
W
RELAY 1 RELAY 2
95
130BA263.10
95
M
A
INS
+DC
BR-
BR+
U
V
W
91
92
93
L1
L2
L3
RELAY 1 RELAY 2
+DC
BR-
BR+
U
V
W
MAINS
L1 L2 L3
91 92 93
RELAY 1 RELAY 2
99
- LC -
130BA264.10
L 1
L 2
L 3
91
92
93
130BT336.10
130BT335.10
130BT332.10
Elektrische Installation Projektierungshandbuch
Netzanschluss Gehäusetyp A4/A5 (IP55/66)
Abbildung 6.6 Netz- und Erdanschluss ohne
Trennschalter
66
Abbildung 6.3 Anziehen des Erdkabels
Abbildung 6.4 Montage von Netzstecker und
Anziehen der Kabel
Abbildung 6.7 Netz- und Erdanschluss mit
Trennschalter
Bei Verwendung eines Trennschalters (Gehäusetyp A4/A5)
muss der PE-Leiter auf der linken Seite des Frequenzumrichters montiert werden.
Abbildung 6.8 Netzanschluss Gehäusetypen B1 und B2
(IP21 und IP55/66)
Abbildung 6.5 Ziehen Sie die Stützhalterung an
94 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 97

130BA725.10
L1 91
L2 92
L3 93
L1 91
L2 92
L3 93
U 96
V 97
W 98
DC-88
DC+89
R-81
R+82
130BA714.10
95
99
130BA389.10
95
91
L1
92
L2
93
L3
91 92 93
91 92 93
96 97 98
88 89
81 82
99
95
130BA718.10
Elektrische Installation Projektierungshandbuch
Abbildung 6.9 Netzanschluss Gehäusetyp B3 (IP20)
6 6
Abbildung 6.10 Netzanschluss Gehäusetyp B4 (IP20)
Abbildung 6.11 Netzanschluss Gehäusetypen C1 und C2 (IP21
und IP55/66)
Abbildung 6.12 Netzanschluss Gehäusetyp C3 (IP20)
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 95
Page 98

91
L1
L2
L3
92
93
91
L1
L2
L3
92
93
99
95
96
97
98
88
89
81
82
U
V
W
DC-
DC+
R-
R+
130BA719.10
Elektrische Installation
Projektierungshandbuch
Kabellänge und -querschnitt
Der Frequenzumrichter ist mit einer bestimmten
Kabellänge und einem bestimmten Kabelquerschnitt
getestet worden. Wird der Kabelquerschnitt erhöht, so
erhöht sich auch der kapazitive Widerstand des Kabels und damit der Ableitstrom - sodass die Kabellänge dann
entsprechend verringert werden muss. Die Motorleitung
muss möglichst kurz sein, um Störungen und Ableitströme
auf ein Minimum zu beschränken.
Taktfrequenz
Wenn Sie den Frequenzumrichter mit einem Sinusfilter
Abbildung 6.13 Netzanschluss Gehäusetyp C4 (IP20)
verwenden, um die Störgeräusche des Motors zu
reduzieren, müssen Sie die Taktfrequenz entsprechend den
Anweisungen zu dem verwendeten Sinusfilter unter
66
Die Leistungskabel für das Netz sind in der Regel
14-01 Taktfrequenz einstellen.
ungeschirmte Leitungen.
1. Montieren Sie das Abschirmblech unten am
Motoranschluss
6.1.4
Frequenzumrichter mit den Schrauben und
Unterlegscheiben aus dem Beutel mit Zubehör.
HINWEIS
Zur Einhaltung der Vorgaben zur EMV-Störaussendung
müssen Sie abgeschirmte Kabel verwenden. Weitere
Informationen finden Sie unter Kapitel 2.9.2 EMV-Prüfer-
gebnisse.
2. Schließen Sie die drei Phasen der Motorleitung an
den Klemmen 96 (U), 97 (V), 98 (W) an.
3. Schließen Sie den Schutzleiter mit den passenden
Schrauben aus dem Beutel mit Zubehör an
Klemme 99 auf dem Abschirmblech an.
4. Stecken Sie die steckbaren Klemmen 96 (U), 97
Zur korrekten Dimensionierung von Motorleitungsquerschnitt und -länge siehe Kapitel 9 Allgemeine technische
Daten und Fehlersuche und -behebung.
Abschirmung von Kabeln:
Vermeiden Sie verdrillte Abschirmungsenden (Pigtails), die
hochfrequent nicht ausreichend wirksam sind. Wenn der
Kabelschirm unterbrochen werden muss (z. B. um ein
Motorschütz oder einen Reparaturschalter zu installieren),
müssen Sie die Abschirmung hinter der Unterbrechung mit
der geringstmöglichen HF-Impedanz fortführen.
Schließen Sie den Motorkabelschirm am Abschirmblech
des Frequenzumrichters und am Metallgehäuse des Motors
Sie können alle dreiphasigen Standard-Asynchronmotoren
an einen Frequenzumrichter anschließen. Normalerweise
wird für kleine Motoren Sternschaltung verwendet
(230/400 V, Y), für große Motoren Dreieckschaltung
(400/690 V, Δ). Schaltungsart (Stern/Dreieck) und
Anschlussspannung sind auf dem Motortypenschild
angegeben.
(V), 98 (W) (bis zu 7,5 kW) und die Motorleitung
auf die Klemmen mit der Bezeichnung MOTOR.
5. Befestigen Sie das abgeschirmte Kabel mit
Schrauben und Unterlegscheiben aus dem Beutel
mit Zubehör am Abschirmblech.
an.
Stellen Sie die Schirmverbindungen mit einer möglichst
großen Kontaktfläche (Kabelschellen) her. Dies kann unter
Verwendung des im Lieferumfang des Frequenzumrichters
enthaltenen Zubehörs erfolgen.
Wenn Sie das Schirmgeflecht unterbrechen müssen (z. B.
um ein Motorschütz oder einen Reparaturschalter zu installieren), müssen Sie das Schirmgeflecht hinter der
Unterbrechung mit der geringstmöglichen HF-Impedanz
fortführen.
Verfahrensweise
1. Isolieren Sie einen Abschnitt der äußeren
Kabelisolierung ab.
2. Positionieren Sie das abisolierte Kabel unter die
Kabelschelle, um eine mechanische Befestigung
und elektrischen Kontakt zwischen Kabelschirm
und Erde herzustellen.
3. Schließen Sie den Schutzleiter entsprechend den
Erdungsanweisungen an die nächste Erdungsklemme an.
4. Schließen Sie die 3 Phasen des Motorkabels an
die Klemmen 96 (U), 97 (V) und 98 (W) an (siehe
Abbildung 6.14).
96 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Page 99

130BD531.10
U
V
W
96
97
98
130BT333.10
130BA726.10
U
96
V
97
W
98
U
96
V
97
W
98
L1
91
L2
92
L3
93
DC-
88
DC+
89
R-
81
R+
82
130BA721.10
99
Elektrische Installation Projektierungshandbuch
5. Ziehen Sie die Klemmen gemäß den Anzugsdreh-
momenten in Kapitel 6.1.1 Anzugsdrehmoment an.
6 6
Abbildung 6.14 Motoranschluss
Abbildung 6.16 Motoranschluss bei Gehäusetyp B3
Abbildung 6.15 Motoranschluss bei Gehäusetyp B1 und B2
(IP21, IP55 und IP66)
Abbildung 6.17 Motoranschluss bei Gehäusetyp B4
MG11BC03 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. 97
Page 100

91
L1
92
L2
93
L3
96
U
97
V
98
W
88
DC-
89
DC+
81
R-
8
R+
130BA390.11
99
95
130BA740.10
DC-
DC+
R-
R+
88
89
81
82
97
U
V
W
99
96
98
L1
91
L2
92
L3
93
97
U
V
W
96
98
U
1
V
1
W
1
175ZA114.11
96 97 98
96 97 98
FC
FC
Motor
Motor
U
2
V
2
W
2
U
1
V
1
W
1
U
2
V
2
W
2
[4]
[5]
[1]
[3]
[2]
130BB656.10
Elektrische Installation
Projektierungshandbuch
Abbildung 6.20 Stern- und Dreieckschaltung
HINWEIS
Abbildung 6.18 Motoranschluss Gehäusetyp C1 und C2 (IP21
66
und IP55/66)
Bei Motoren ohne Phasentrennpapier oder eine andere
geeignete Isolationsverstärkung für den Betrieb mit
Spannungsversorgung (wie ein Frequenzumrichter)
verbinden Sie ein Sinusfilter mit dem Ausgang des
Frequenzumrichters.
Kabeleinführungsöffnungen
Die vorgeschlagene Verwendung der Bohrungen ist eine
reine Empfehlung und es sind andere Lösungen möglich.
Sie können Kabeleinführungsöffnungen mit Gummitüllen
abdichten (für IP21).
* Toleranz ± 0,2 mm
Abbildung 6.19 Motoranschluss bei Gehäusetyp C3 und C4
Klem
96 97 98 99
men-
Nr.
U V W
1)
Motorspannung 0–100 % der
PE
Netzspannung.
Abbildung 6.21 A2 - IP21
3 Leiter vom Motor
U1 V1 W1
W2 U2 V2 6 Leiter vom Motor
U1 V1 W1
Tabelle 6.2 Klemmenbezeichnungen
1) Schutzleiteranschluss
98 Danfoss A/S © Version 06/2014 Alle Rechte vorbehalten. MG11BC03
Dreieckschaltung
1)
PE
1)
Sternschaltung (U2, V2, W2)
PE
U2, V2, W2 sind miteinander zu
verbinden.
Bohrungszahl und
empfohlene Verwendung
Abmessungen
UL [in] [mm]
1)
Nächste
metrische Zahl
1) Netz 3/4 28,4 M25
2) Motor 3/4 28,4 M25
3) Bremse/Zwischenkreisk. 3/4 28,4 M25
4) Steuerkabel 1/2 22,5 M20
5) Steuerkabel 1/2 22,5 M20
Tabelle 6.3 Legende zu Abbildung 6.21
1) Toleranz ± 0,2 mm
 Loading...
Loading...