

Page 1
MAKING MODERN LIVING POSSIBLE
Design Guide
VLT® Decentral Drive FCD 302
Page 2

Page 3
Indholdsfortegnelse
Indholdsfortegnelse
VLT®Decentral Drive FCD 302 Design Guide
1 Introduktion
1.1 Sådan læses Design Guiden
1.1.1 Definitioner 5
1.1.2 Symboler 8
1.2 Sikkerhedsforanstaltninger
1.3 Softwareversion
1.4 CE-mærkning
1.4.1 Overensstemmelse 9
1.4.2 Hvad er dækket? 9
1.4.3 CE-mærkning 10
1.4.4 Overholder EMC-direktivet 2004/108/EF 10
1.4.5 Overensstemmelse 10
1.5 Bortskaffelse
2 Produktoversigt
2.1 Styring
2.1.1 Styreprincip 12
2.1.2 Intern strømstyring i VVC
plus
-tilstand 12
5
5
8
9
9
10
11
11
2.2 EMC
2.2.1 Generelle forhold vedr. EMC-emission 15
2.2.2 EMC-testresultater 16
2.2.3 Emissionskrav 16
2.2.4 Immunitetskrav 17
2.3 Referencehåndtering
2.3.1 Referencegrænser 19
2.3.2 Skalering af preset-referencer og busreferencer 19
2.3.3 Skalering af analoge referencer samt pulsreferencer og feedback 20
2.3.4 Dødbånd omkring nul 21
2.5 Galvanisk adskillelse (PELV)
2.5.1 PELV - Protective Extra Low Voltage 25
2.6 Mekanisk bremse
2.6.1 Mekanisk hæve-/sænkebremse 26
2.6.2 Kabelføring for bremsemodstand 26
2.7 Bremsefunktioner
2.7.1 Mekanisk holdebremse 26
15
18
25
26
26
2.7.2 Dynamisk bremsning 27
2.7.3 Valg af bremsemodstand 27
2.7.4 Styring med bremsefunktion 28
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 1
Page 4
Indholdsfortegnelse
VLT®Decentral Drive FCD 302 Design Guide
3 Systemintegration
3.1 Introduktion
3.1.1 Montering 29
3.1.1.1 Hygiejnisk installation 29
3.2 Indgang: Dynamikken på netforsyningssiden
3.2.1 Tilslutninger 30
3.2.1.1 Kabler generelt 30
3.2.1.2 Tilslutning til netspænding og jording 30
3.2.1.3 Relætilslutning 31
3.2.2 Sikringer og afbrydere 31
3.2.2.1 Sikringer 31
3.2.2.2 Anbefalinger 31
3.2.2.3 Overholdelse af CE 32
3.2.2.4 Overholdelse af UL 32
3.3 Udgang: Dynamikken på motorsiden
3.3.1 Motortilslutning 32
3.3.2 Netafbryder 33
29
29
30
32
3.3.3 Yderligere motoroplysninger 34
3.3.3.1 Motorkabel 34
3.3.3.2 Termisk motorbeskyttelse 34
3.3.3.3 Paralleltilslutning af motorer 34
3.3.3.4 Motorisolering 35
3.3.3.5 Motorlejestrøm 35
3.3.4 Ekstreme driftsforhold 35
3.3.4.1 Termisk motorbeskyttelse 36
3.4 Frekvensomformer-/optionsvalg
3.4.1 Styrekabler og klemmer 37
3.4.1.1 Styrekabelføring 37
3.4.1.2 DIP switches 37
3.4.1.3 Grundlæggende ledningsføringseksempel 37
3.4.1.4 Elektrisk installation, Styrekabler 38
3.4.1.5 Relæudgang 39
3.4.2 Bremsemodstande 40
3.4.2.1 bremsemodstande 10% 40
37
3.4.2.2 Bremsemodstand 40% 40
3.4.3 Særlige betingelser 40
3.4.3.1 Manuel derating 40
3.4.3.2 Automatisk derating 40
3.4.3.3 Derating for kørsel ved lav hastighed 40
3.4.4 EMC 41
2 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 5
Indholdsfortegnelse
VLT®Decentral Drive FCD 302 Design Guide
3.4.4.1 EMC-korrekte kabler 41
3.4.4.2 Jording af skærmede styrekabler 43
3.4.4.3 RFI-afbryder 43
3.4.5 Netforsyningsforstyrrelse/harmoniske strømme 44
3.4.5.1 Netforsyningsforstyrrelse/harmoniske strømme 44
3.4.5.2 Påvirkning fra harmoniske strømme i strømdistributionssystemet 44
3.4.5.3 Standarder og krav vedrørende begrænsning af harmoniske strømme 45
3.4.5.4 Dæmpning af harmoniske strømme 45
3.4.5.5 Beregning af harmoniske strømme 45
3.4.6 Endelig test og opsætning 45
3.4.6.1 Højspændingstest 45
3.4.6.2 Jording 46
3.4.6.3 Sikkerhedsjordtilslutning 46
3.4.6.4 Afsluttende sikkerhedskontrol 46
3.5 Omgivelsesforhold
3.5.1 Luftfugtighed 47
3.5.2 Aggressive miljøer 47
3.5.3 Vibrationer og rystelser 47
3.5.4 Akustisk støj 47
4 Applikationseksempler
4.1 Encoderstik
4.2 Encoderretning
4.3 Frekvensomformersystem med lukket sløjfe
4.4 PID-styring
4.4.1 HastighedsPID-styring 54
4.4.2 Følgende parametre er relevante for hastighedsstyring 54
4.4.3 Optimering af hastighedsPID-styring 56
4.4.4 PID-processtyring 57
4.4.6 Eksempel på PID-processtyring 59
4.4.8 Ziegler Nichols-optimeringsmetoden 61
4.4.9 Eksempel på PID-processtyring 62
47
48
53
53
53
54
4.5 Styringsstrukturer
4.5.1 Styringsstruktur for VVC
4.5.2 Styringsstruktur for Flux Sensorless 64
4.5.3 Styringsstruktur for Flux med motorfeedback 64
plus
Avanceret vektorstyring 63
4.6 Lokal (Hand on) og fjernstyring (Auto)
4.7 Programmering af momentgrænse og stop
4.8 Mekanisk bremse
4.9 Sikker standsning
4.9.1.1 Klemme 37, Funktionen Sikker standsning 68
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 3
63
65
66
66
67
Page 6

Indholdsfortegnelse
VLT®Decentral Drive FCD 302 Design Guide
4.9.1.2 Idriftsætningstest af Sikker standsning 73
5 Typekode og Selection Guide
5.1 Typekodebeskrivelse
5.1.1 Drive Configurator 76
5.2 Bestillingsnumre
5.2.1 Bestillingsnumre: Tilbehør 77
5.2.2 Bestillingsnumre: Reservedele 77
5.3 Optioner og tilbehør
5.3.1 Fieldbus-optioner 78
5.3.2 Encoderoption MCB 102 78
5.3.3 Resolveroption MCB 103 79
6 Specifikationer
6.1 Mekaniske mål
6.2 Elektriske data og ledningsstørrelser
6.3 Generelle specifikationer
6.4 Virkningsgrad
6.5.1 Akustisk støj 89
6.6.1 dU/dt-forhold 89
75
75
77
78
82
82
83
85
89
Indeks
90
4 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 7
Introduktion
VLT®Decentral Drive FCD 302 Design Guide
1 Introduktion
1.1 Sådan læses Design Guiden
Design Guiden indeholder oplysninger, der er nødvendige
til integrering af frekvensomformeren i forskellige applikationer.
Yderligere tilgængelige ressourcer
-
Betjeningsvejledning MG04F for oplysninger, der er
nødvendige til montering og idriftsætning af
frekvensomformeren.
-
Programming Guide, MG04G, for programmering
af apparatet, herunder komplette parameterbeskrivelser.
-
Modbus RTU-betjeningsvejledning, MG92B, for
oplysninger, der er nødvendige for styring,
overvågning og programmering af frekvensomformeren via den indbyggede Modbus-Fieldbus.
-
Profibus-betjeningsvejledning, MG34N, Ethernetbetjeningsvejledning, MG90J og ProfiNetbetjeningsvejledning, MG90U, for oplysninger, der
er nødvendige for styring, overvågning og
programmering af frekvensomformeren via en
Fieldbus.
-
MCB 102-manual.
-
VLT Automation Drive FC 300-resolveroption MCB
103, MI33I.
-
Vejledning til sikker PLC-grænsefladeoption MCB
108, MI33J.
-
Design Guide for bremsemodstand, MG90O.
- Godkendelser.
Teknisk litteratur og godkendelser findes online på
www.danfoss.com/BusinessAreas/DrivesSolutions/Documentations/Technical+Documentation.
Definitioner
1.1.1
Frekvensomformer:
Friløb
Motorakslen er i free mode. Intet moment på motoren.
I
MAKS
Den maksimale udgangsstrøm.
I
N
Den nominelle udgangsstrøm leveret af frekvensomformeren.
U
MAKS
Den maksimale udgangsspænding.
Indgang:
Styrekommando
Start og stands den tilsluttede motor ved hjælp af LCP og
de digitale indgange.
Funktionerne er opdelt i to grupper.
Funktionerne i gruppe 1 har højere prioritet end
funktionerne i gruppe 2.
Gruppe1Nulstilling, Friløbsstop, Nulstilling og Friløbsstop,
Hurtigt stop, DC-bremsning, Stop og "Off"-tasten.
Gruppe2Start, Pulsstart, Reversering, Start reversering, Jog og
Fastfrys udgang
Tabel 1.1 Styrekommandofunktioner
Motor:
f
JOG
Motorfrekvensen, når jog-funktionen er aktiveret (via
digitale klemmer).
f
M
Motorfrekvens. Udgang fra frekvensomformeren. Udgangsfrekvensen er relevant for akslens hastighed i motoren
afhængigt af antallet af poler og slipfrekvensen.
fMAKS
Den maksimale udgangsfrekvens, som frekvensomformeren
kan påføre på udgangen. Den maksimale udgangsfrekvens
indstilles i grænsepar. 4-12, 4-13 og 4-19.
f
MIN
Den minimale motorfrekvens fra frekvensomformeren.
Fabriksindstillingen er 0 Hz.
f
M,N
Den nominelle motorfrekvens (typeskiltdata).
I
M
Motorstrømmen.
I
M,N
Den nominelle motorstrøm (typeskiltdata).
n
M,N
Den nominelle motorhastighed (typeskiltdata).
n
s
Synkron motorhastighed
2 ×
par
=
. 1 − 23 × 60
par
. 1 − 39
n
s
P
M,N
s
Den nominelle motoreffekt (typeskiltdata).
T
M,N
Det nominelle moment (motor).
U
M
Den aktuelle motorspænding.
1 1
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 5
Page 8
175ZA078.10
Moment
Kipgrænse
o/min
Introduktion
VLT®Decentral Drive FCD 302 Design Guide
11
U
M,N
Den nominelle motorspænding (typeskiltdata).
Ref
MIN
Bestemmer forholdet mellem referenceindgangen ved 0%
værdi (typisk 0 V, 0 mA, 4 mA) og den resulterende
Startmoment
reference. Indstil maksimumreferenceværdien i 3-02
Minimumreference.
Diverse:
Analoge indgange
De analoge indgange kan bruges til at styre forskellige
funktioner i en frekvensomformer.
Der findes to typer analoge indgange:
Strømindgang, 0-20 mA og 4-20 mA
Spændingsindgang, 0-10 V DC
Spændingsindgang, -10 til +10 V DC.
Analoge udgange
De analoge udgange kan levere et signal på 0-20 mA, 4-20
mA.
Automatisk motortilpasning, AMA
AMA-algoritmen bestemmer de elektriske parametre for
Illustration 1.1 Startmoment
den tilsluttede motor ved stilstand.
Bremsemodstand
Bremsemodstand er et modul, der kan absorbere den
η
Frekvensomformerens virkningsgrad defineres som
forholdet mellem den afgivne og den modtagne effekt.
Start-deaktivér-kommando
En stopkommando, der tilhører styrekommandoerne i
gruppe 1. Se denne gruppe.
bremseeffekt, der genereres ved regenerativ bremsning.
Denne regenerative bremseeffekt øger mellemkredsspændingen, og en bremsechopper sørger for at afsætte
effekten i bremsemodstanden.
CT-karakteristik
Konstant momentkarakteristik anvendes til alle applikationer, f.eks. transportbånd, fortrængningspumper og
kraner.
Stopkommando
Se styrekommandoer.
Digitale indgange
De digitale indgange kan bruges til styring af forskellige
funktioner i frekvensomformeren.
Referencer:
Analog reference
Et analogt signal, der påføres indgang 53 eller 54. Signalet
kan enten være spænding 0-10 V eller -10 -+10 V.
Strømsignal er 0-20 mA eller 4-10 mA.
Binær reference
Et signal, der påføres den serielle kommunikationsport
(RS-485 klemme 68-69).
Preset-reference
En defineret preset-reference, der er indstillet mellem
-100% til +100% af referenceområdet. Vælg otte presetreferencer via de digitale klemmer.
Pulsreference
En pulsreference, der påføres klemme 29 eller 33 og
vælges med parameter 5-13 eller 5-15 [32]. Skalering i par.gruppe 5-5*.
Ref
MAKS
Viser forholdet mellem referenceindgangen ved 100% fuld
skalaværdi (typisk 10 V, 20 mA) og den resulterende
reference. Indstil maksimumreferenceværdien i 3-03
Maksimumreference.
Digitale udgange
Frekvensomformeren er forsynet med solid state-udgange,
der kan levere et 24 V DC-signal (maks. 40 mA).
DSP
Digital signalprocessor.
ETR
Elektronisk termisk relæ er en beregning af termisk
belastning baseret på aktuel belastning og tid. Den har til
formål at beregne motortemperaturen.
Hiperface
®
Hiperface® er et registreret varemærke tilhørende
Stegmann.
Initialisering
Ved initialisering (14-22 Driftstilstand) vender frekvensomformeren tilbage til fabriksindstillingen.
Periodisk driftscyklus
En klassificering for periodisk drift angiver en sekvens af
driftscyklusser. Hver cyklus består af en periode med og en
periode uden belastning. Driften kan være enten periodisk
drift eller ikke-periodisk drift.
6 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 9
Introduktion
VLT®Decentral Drive FCD 302 Design Guide
LCP
LCP-betjeningspanelet udgør en komplet grænseflade til
styring og programmering af frekvensomformeren. LCP'et
er aftageligt og kan monteres op til 3 meter fra frekvensomformeren, f.eks. i et frontpanel ved hjælp af
installationssætoptionen.
lsb
Mindst betydende bit.
msb
Mest betydende bit.
MCM
Forkortelse for Mille Circular Mil, som er en amerikansk
enhed for måling af kabelareal. 1 MCM = 0,5067 mm2.
Online-/offlineparametre
Ændringer af onlineparametre aktiveres, umiddelbart efter
at dataværdien er ændret. Ændringer af offlineparametre
aktiveres, når der trykkes på [OK] på LCP'et.
Process PID
PID-regulatoren opretholder den ønskede hastighed,
temperatur, det ønskede tryk osv. ved at tilpasse udgangsfrekvensen efter den varierende belastning.
PCD
Procesdata
Pulsindgang/trinvis encoder
En ekstern, digital føler, der anvendes til feedbackoplysninger om motorhastighed og -retning. Der anvendes
encodere til nøjagtig højhastighedsfeedback og i
højdynamiske applikationer. Encodertilslutningen foregår
via klemme 32 og 33 eller encoderoptionen MCB 102.
RCD
Fejlstrømsafbryder.
Opsætning
Der kan gemmes parameterindstillinger i fire opsætninger.
Skift mellem de fire parameteropsætninger, og redigér en
af opsætningerne, mens en anden er aktiv.
SFAVM
Et switchmønster kaldet Stator Flux-orienteret asynkron
vektormodulering (14-00 Koblingsmønster).
Slipkompensering
Frekvensomformeren kompenserer for motorslippet ved at
give frekvensen et tilskud, der følger den målte motorbelastning, således at motorhastigheden holdes næsten
konstant.
Smart Logic Control (SLC)
SLC er en række brugerdefinerede handlinger, som afvikles,
når de tilknyttede brugerdefinerede hændelser evalueres
som sande af Smart Logic Controller. (Par.-gruppe 13-**
Smart Logic Control (SLC)).
STW
statusord
FC-standardbus
Omfatter RS-485-bus med FC-protokol eller MC-protokol.
Se 8-30 Protokol.
Termistor:
Temperaturafhængig modstand, der placeres, hvor
temperaturen ønskes overvåget (frekvensomformer eller
motor).
THD
Total harmonisk forvrængning. Angiver det samlede bidrag
fra harmoniske strømme.
Trip
Tilstand, der skiftes til i fejlsituationer, f.eks. hvis frekvensomformeren udsættes for en overtemperatur, eller når
frekvensomformeren beskytter motoren, processen eller
mekanismen. Genstart forhindres, indtil årsagen til fejlen er
forsvundet, og trip-tilstanden annulleres ved at aktivere
nulstilling, eller i nogle tilfælde ved at nulstilling er
programmeret til at blive udført automatisk. Trip må ikke
benyttes i forbindelse med personsikkerhed.
Triplåst
En tilstand, der skiftes til i fejlsituationer, hvor en frekvensomformer beskytter sig selv og kræver fysisk indgriben,
f.eks. hvis frekvensomformeren udsættes for kortslutning
på udgangen. En triplås kan kun annulleres ved at afbryde
netforsyningen, fjerne årsagen til fejlen og tilslutte
frekvensomformeren igen. Genstart forhindres, indtil triptilstanden annulleres ved at aktivere nulstilling, eller i
nogle tilfælde ved at nulstilling er programmeret til at
blive udført automatisk. Trip må ikke benyttes i forbindelse
med personsikkerhed.
VT-karakteristik
Variabel momentkarakteristik anvendes til pumper og
ventilatorer.
plus
VVC
Sammenlignet med almindelig spændings-/frekvensforholdsstyring giver Voltage Vector Control (VVC
plus
)
forbedret dynamik og stabilitet både ved ændring af
hastighedsreference og i forhold til belastningsmomentet.
60° AVM
Switchmønster kaldet 60°
asynkron vektormodulering
(14-00 Koblingsmønster).
Effektfaktor
Effektfaktoren er forholdet mellem I1 og I
3 x U x
l
cos
ϕ
Effekt faktor
=
3 x U x
1
l
RMS
RMS
.
Effektfaktoren til 3-faset styring:
=
l1 x cos
l
RMS
ϕ1
=
l
RMS
l
1
eftersom cos
ϕ1 = 1
Effektfaktoren angiver, i hvilken grad frekvensomformeren
belaster netforsyningen.
1 1
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 7
Page 10
Introduktion
VLT®Decentral Drive FCD 302 Design Guide
11
En lavere effektfaktor betyder højere I
kW-ydelse.
for den samme
RMS
ADVARSEL
Højspænding
2
2
l
=
l
RMS
Derudover indikerer en høj effektfaktor, at de forskellige
harmoniske strømme er lave.
Indbyggede DC-spoler i DC-linket giver en høj effektfaktor
og reducerer THD på hovedforsyningen.
+
1
2
l
+
l
+ .. +
5
7
2
l
n
1.1.2 Symboler
Følgende symboler anvendes i denne manual.
ADVARSEL
Angiver en potentielt farlig situation, som, hvis den ikke
undgås, kan medføre dødsfald eller alvorlig personskade.
FORSIGTIG
Angiver en potentielt farlig situation, som, hvis den ikke
undgås, kan medføre mindre eller moderat personskade.
Kan også bruges til at advare mod usikre fremgangsmåder.
FORSIGTIG
Angiver en situation, som kan medføre ulykker, der kun
beskadiger udstyr eller ejendom.
BEMÆRK!
Angiver fremhævede oplysninger, der skal tages hensyn til
for at undgå fejl eller for at undgå at bruge udstyret på en
måde, så det ikke fungerer optimalt.
* Angiver en fabriksindstilling
1.2
Sikkerhedsforanstaltninger
Det kan være forbundet med livsfare at berøre de
elektriske komponenter, også efter at udstyret er koblet fra
netforsyningen.
Under planlægningen skal det kontrolleres, at andre
spændingsindgange kan afbrydes, f.eks. en ekstern
forsyning på 24 V DC, belastningsfordeling (sammenkobling af DC-mellemkredse) og motortilslutning til
kinetisk back-up.
Anlæg, hvor der er monteret frekvensomformere, skal, hvis
det er nødvendigt, være udstyret med yderligere
overvågnings- og beskyttelsesanordninger i overensstemmelse med gældende sikkerhedsforskrifter, f.eks.
lovgivning om mekaniske værktøjer, bestemmelser om
forebyggelse af ulykker osv. Det er tilladt at foretage
ændringer på frekvensomformere ved hjælp af driftssoftware.
Hvis anbefalingerne for konstruktionen ikke følges, kan det
resultere i død eller alvorlig personskade.
BEMÆRK!
Farlige situationer skal identificeres af maskinproducenten/
integratoren, som er ansvarlig for at tage de nødvendige
forebyggende tiltag i betragtning. Yderligere overvågningsog beskyttelsesanordninger kan være omfattet, altid i
overensstemmelse med gældende nationale sikkerhedsforskrifter, f.eks. lovgivning om mekaniske værktøjer,
bestemmelser om forebyggelse af ulykker.
BEMÆRK!
Kraner, lifte og hejseværker:
Styring af de eksterne bremser skal altid være konstrueret
med et reservesystem. Frekvensomformeren kan under
ingen omstændigheder fungere som den primære
sikringskreds. Opfylder de relevante standarder, f.eks.
Hejseværker og kraner: IEC 60204-32
Lifte: EN 81
ADVARSEL
Frekvensomformerens spænding er farlig, når den er
tilsluttet netforsyningen. Montering af motor, frekvensomformer og Fieldbus skal planlægges korrekt. Følg
instruktionerne i denne manual samt lokale og nationale
bestemmelser og sikkerhedsforskrifter. Hvis anbefalingerne
for konstruktionen ikke følges, kan det medføre dødsfald,
alvorlige personskader eller skader på udstyr, når det er i
drift.
Beskyttelsestilstand
Når en hardwaregrænse for motorstrøm eller DClinkspænding er overskredet, skifter frekvensomformeren til
"beskyttelsestilstand". "Beskyttelsestilstand" betyder en
ændring af PWM-moduleringsstrategien og en lav switchfrekvens for at minimere tab. Dette fortsætter 10 sek. efter
den seneste fejl og øger driftssikkerheden og robustheden
for frekvensomformeren, mens fuld kontrol over motoren
genoprettes.
I hæve-/sænkeapplikationer er "beskyttelsestilstand" ikke
anvendelig, fordi frekvensomformeren normalt ikke vil
være i stand til at forlade denne tilstand igen, og den vil
derfor forlænge tiden inden aktivering af bremsen, hvilket
ikke anbefales.
8 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 11

Introduktion
VLT®Decentral Drive FCD 302 Design Guide
"Beskyttelsestilstanden" kan deaktiveres ved at indstille
14-26 Tripforsinkelse ved vekselretterfejl til nul, hvilket
betyder, at frekvensomformeren straks vil trippe, hvis en af
hardwaregrænserne overskrides.
BEMÆRK!
Det anbefales at deaktivere beskyttelsestilstand i hæve-/
sænkeapplikationer (14-26 Tripforsinkelse ved vekselret-
terfejl= 0)
1.3 Softwareversion
Kontrollér softwareversionen i 15-43 Softwareversion.
1.4 CE-mærkning
1.4.1 Overensstemmelse
Maskindirektivet (2006/42/EF)
Frekvensomformere omfattes ikke af maskindirektivet. Hvis
en frekvensomformer leveres til brug med en maskine, kan
Danfoss imidlertid tilbyde oplysninger om sikkerhedsaspekter angående frekvensomformeren.
Hvad er CE-overensstemmelse og -mærkning?
Formålet med CE-mærkningen er at undgå tekniske
handelsbarrierer inden for EFTA og EU. EU har indført CEmærket, som er en enkel metode til at vise, hvorvidt et
produkt overholder de relevante EU-direktiver. CE-mærket
angiver ikke oplysninger om produktets specifikationer
eller kvalitet. Frekvensomformere er underlagt to EUdirektiver:
Lavspændingsdirektivet (2006/95/EF)
Frekvensomformere skal CE-mærkes i overensstemmelse
med lavspændingsdirektivet af 1. januar 1997. Direktivet
finder anvendelse for alt elektrisk udstyr og apparater, der
anvendes i spændingsområderne 50-1.000 V AC og
75-1.500 V DC. Danfoss udfører CE-mærkning i overensstemmelse med direktivet og udsteder ved anmodning en
overensstemmelseserklæring.
EMC-direktivet (2004/108/EF)
EMC står for elektromagnetisk kompatibilitet (electromagnetic compatibility). Tilstedeværelsen af elektromagnetisk
kompatibilitet betyder, at den gensidige forstyrrelse
mellem forskellige komponenter/apparater ikke påvirker
apparaternes funktion.
EMC-direktivet trådte i kraft den 1. januar 1996.Danfoss
udfører CE-mærkning i overensstemmelse med direktivet
og udsteder ved anmodning en overensstemmelseserklæring. Se vejledningen i denne Design Guide for at
gennemføre en EMC-korrekt montering. Danfoss angiver
også, hvilke standarder vores produkter overholder.
Danfoss tilbyder de filtre, vi angiver i specifikationerne, og
vi kan tilbyde andre former for assistance for at sikre
optimale EMC-resultater.
Frekvensomformeren bruges oftest af fagfolk inden for
branchen som en kompleks komponent, der udgør en del
af et større apparat eller system eller en større installation.
1.4.2 Hvad er dækket?
I EU's "Retningslinjer for anvendelse af Rådets direktiv
2004/108/EF" uddybes tre typiske situationer for brug af en
frekvensomformer. Nedenfor findes oplysninger om
omfanget af EMC-direktivet og CE-mærkningen.
1. Frekvensomformeren sælges direkte til
slutbrugeren. Frekvensomformeren sælges f.eks.
til et byggemarked. Slutbrugeren er en lægmand,
der monterer frekvensomformeren med henblik
på brug med en hobbymaskine, en køkkenmaskine osv. For disse applikationer skal
frekvensomformeren CE-mærkes i overensstemmelse med EMC-direktivet.
2. Frekvensomformeren sælges til montering i et
anlæg. Installationen er konstrueret af fagfolk fra
branchen. Det kan f.eks. være et produktionsanlæg eller et varme-/ventilationsanlæg, der
er bygget og monteret af fagfolk. Hverken
frekvensomformeren eller den færdige installation
behøver at blive CE-mærket i henhold til EMCdirektivet. Apparatet skal imidlertid overholde de
grundlæggende EMC-krav i direktivet. Dette sikres
ved brug af komponenter, apparater og systemer,
der er CE-mærket i henhold til EMC-direktivet.
3. Frekvensomformeren sælges som en del af et
fuldstændigt system. Systemet markedsføres som
en helhed, f.eks. et luftkonditioneringssystem. Det
komplette system skal CE-mærkes i henhold til
EMC-direktivet. Fabrikanten kan sikre, at enheden
er CE-mærket i henhold til EMC-direktivet enten
ved at bruge CE-mærkede komponenter eller ved
at teste EMC i systemet. Hvis der kun anvendes
CE-mærkede komponenter, er det ikke
nødvendigt at teste hele systemet.
1 1
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 9
Page 12
Introduktion
VLT®Decentral Drive FCD 302 Design Guide
11
1.4.3 CE-mærkning
CE-mærkning er positivt, når det bliver brugt til sit
egentlige formål, som er at forenkle samhandlen inden for
EU og EFTA.
CE-mærkning kan dog dække mange forskellige specifikationer. Undersøg, præcist hvad en given CE-mærkning
dækker.
1.4.5
Overensstemmelse
Tabel 1.2 FCD 302-godkendelser
1.5 Bortskaffelse
Specifikationerne kan variere meget. Et CE-mærke kan
derfor give montøren en falsk tryghed, når en frekvensomformer anvendes som en komponent i et system eller et
apparat.
Danfoss CE-mærker frekvensomformerne i henhold til
lavspændingsdirektivet. Det vil sige, at hvis frekvensomformeren installeres korrekt, garanterer vi, at den
overholder lavspændingsdirektivet. Danfoss udsteder en
overensstemmelseserklæring, som bekræfter vores CEmærkning i overensstemmelse med
lavspændingsdirektivet.
CE-mærket gælder også for EMC-direktivet, under
forudsætning af at instruktionerne til EMC-korrekt installation og filtrering følges. På dette grundlag er en
overensstemmelseserklæring i henhold til EMC-direktivet
udstedt.
Tabel 1.3 Bortskaffelsesinstruktion
Udstyr, der indeholder elektriske
komponenter, må ikke smides ud sammen
med almindeligt affald.
Det skal samles separat som elektrisk og
elektronisk affald i overensstemmelse med
lokale regler og gældende lovgivning.
Design Guiden indeholder en detaljeret installationsvejledning, som sikrer EMC-korrekt installation.
Overholder EMC-direktivet
1.4.4
2004/108/EF
Frekvensomformeren anvendes hovedsageligt af fagfolk fra
branchen som en kompleks komponent, der udgør en del
af et større apparat, system eller en installation.
BEMÆRK!
Ansvaret for de endelige EMC-egenskaber i apparatet,
systemet eller installationen ligger hos montøren.
Danfoss har som en hjælp til montøren udarbejdet EMCmonteringsretningslinjer til Power Drive-systemet.
Standarderne og testniveauerne for frekvensomformersystemer overholdes, forudsat at de EMC-korrekte
instruktioner for monteringen følges. Se 3.4.4 EMC.
10 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 13
130BC963.10
Produktoversigt
2 Produktoversigt
VLT®Decentral Drive FCD 302 Design Guide
Illustration 2.1 Lille apparat
område. I disse tilfælde vejer kabelføringen alene tungere
end omkostningerne for de enkelte frekvensomformer, og
det giver mening at få styringen tættere på motorerne.
Frekvensomformeren kan styre enten hastigheden eller
momentet på motorakslen.
Hastighedsstyring
Der findes to typer hastighedsstyring:
Hastighed, åben sløjfe, som ikke kræver feedback
•
fra motoren (sensorless).
PID-styring af hastighed med lukket sløjfe kræver
•
hastighedsfeedback til en indgang. Korrekt
optimeret hastighedsstyring med lukket sløjfe er
mere nøjagtig end hastighedsstyring med åben
sløjfe.
Momentstyring
Momentstyringsfunktionen bruges i applikationer, hvor
momentet på motorens udgangsaksel styrer applikationen
som spændingsstyring.
2 2
Illustration 2.2 Stort apparat
2.1 Styring
En frekvensomformer ensretter AC-spændingen fra netforsyningen til DC-spænding. Denne DC-spænding omformes
til AC-strøm med variabel amplitude og frekvens.
Motoren forsynes med variabel spænding, strøm og
frekvens, hvilket muliggør trinløs hastighedsstyring af
trefasede AC-standardmotorer og synkrone motorer med
permanent magnet.
FCD 302-frekvensomformeren er konstrueret til installationer med flere mindre frekvensomformere, især på
transportørapplikationer - f.eks. i fødevareindustrien og
materialehåndtering. I installationer, hvor flere motorer er
placeret flere steder i et anlæg, som f.eks. tappehaller,
anlæg til tilberedning og emballering af fødevarer samt
installationer til bagagehåndtering i lufthavne, kan der
være dusinvis, måske hundredvis af frekvensomformere,
der arbejder sammen, men er fordelt over et stort fysisk
Lukket sløjfe i Flux mode med encoderfeedback
•
indeholder motorstyring baseret på feedbacksignaler fra systemet. Det forbedrer ydelsen i alle
fire kvadranter og ved alle motorhastigheder.
Åben sløjfe i VVC
•
anvendes i mekaniske robuste applikationer, men
nøjagtigheden er begrænset. Momentfunktionen
med åben sløjfe fungerer kun i én hastighedsretning. Momentet beregnes på basis af
strømmålingen indvendigt i frekvensomformeren.
Se applikationseksemplet 4.5.1 Styringsstruktur for
plus
VVC
Avanceret vektorstyring.
Hastigheds-/momentreference
Referencen til disse styreenheder kan enten være en enkelt
reference eller summen af forskellige referencer, herunder
relativt skalerede referencer. Håndteringen af referencer
uddybes nærmere i 2.3 Referencehåndtering.
plus
-tilstand. Funktionen
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 11
Page 14
R+
82
R81
Brake
Resistor
U 96
V 97
W 98
InrushR inr
P 14-50
L1 91
L2 92
L3 93
M
130BC965.10
. . .
. . .
Par. 13-43
Comparator Operator
Par. 13-43
Logic Rule Operator 2
Par. 13-51
SL Controller Event
Par. 13-51
SL Controller Action
130BB671.10
Coast
Start timer
Set Do X low
Select set-up 2
. . .
Running
Warning
Torque limit
Digital inpute X 30/2
. . .
=
TRUE longer than..
. . .
. . .
Produktoversigt
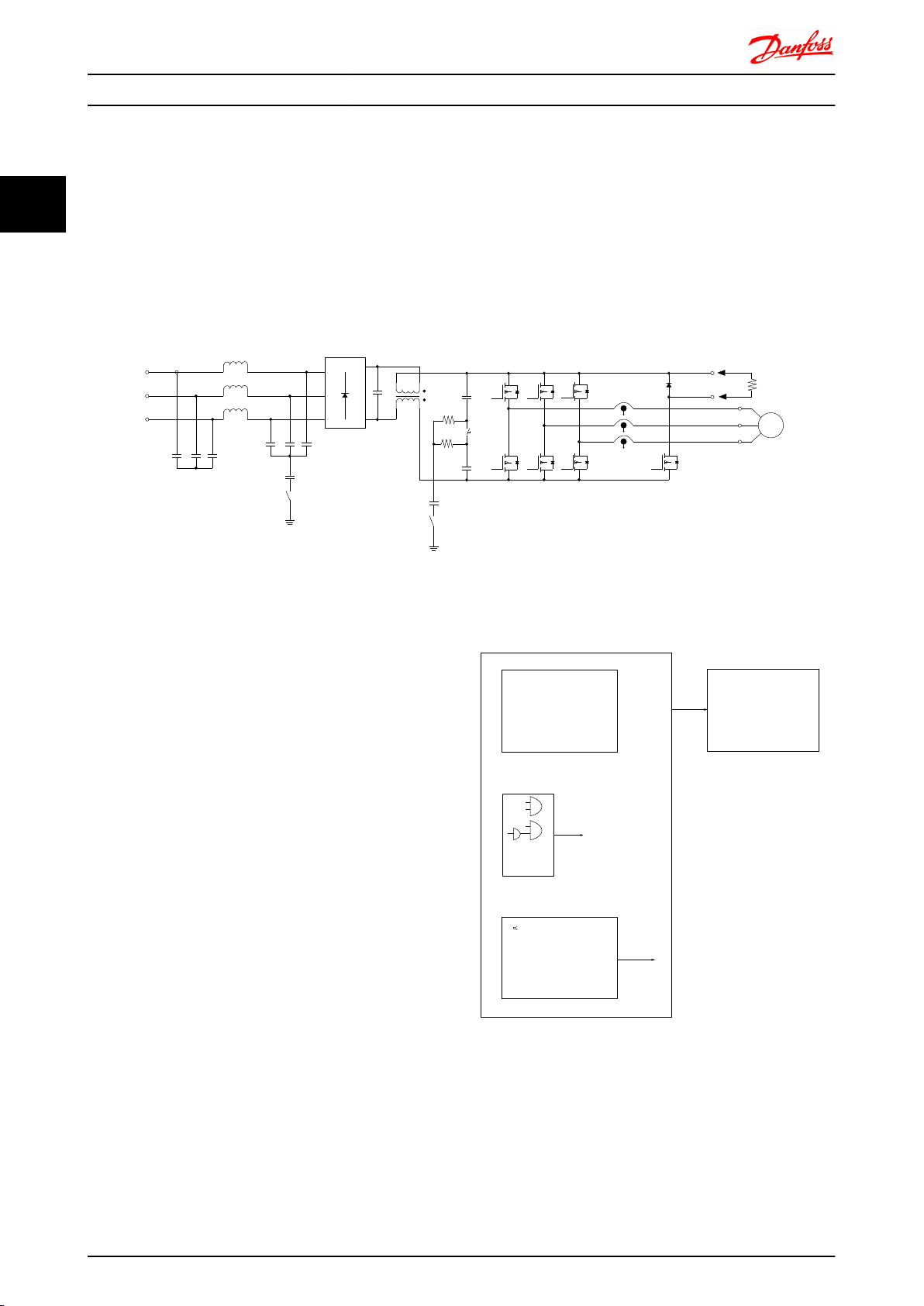
2.1.1 Styreprincip
VLT®Decentral Drive FCD 302 Design Guide
22
eller Flux Vector-motorstyring.
Frekvensomformeren er kompatibel med forskellige motorstyringsprincipper, som f.eks. speciel U/f-motortilstand, VVC
plus
Derudover er frekvensomformeren funktionsdygtig med synkrone motorer med permanent magnet (børsteløse
servomotorer) samt almindelige asynkrone kortslutningsmotorer.
Kortslutningsadfærden afhænger af de 3 strømtransducere i motorfaserne og afmætningsbeskyttelsen med feedback fra
bremsen.
Illustration 2.3 Styreprincip
2.1.2
Intern strømstyring i VVC
plus
-tilstand
Frekvensomformeren er forsynet med en integreret
strømgrænsestyring, som aktiveres, når motorstrømmen,
og dermed momentet, er højere end momentgrænserne,
der er indstillet i 4-16 Momentgrænse for motordrift,
4-17 Momentgrænse for generatordrift og 4-18 Strømgrænse.
Når frekvensomformeren har nået strømgrænsen under
motordrift eller regenerativ drift, reducerer den momentet
under de forhåndsindstillede momentgrænser så hurtigt
som muligt uden at miste kontrollen over motoren.
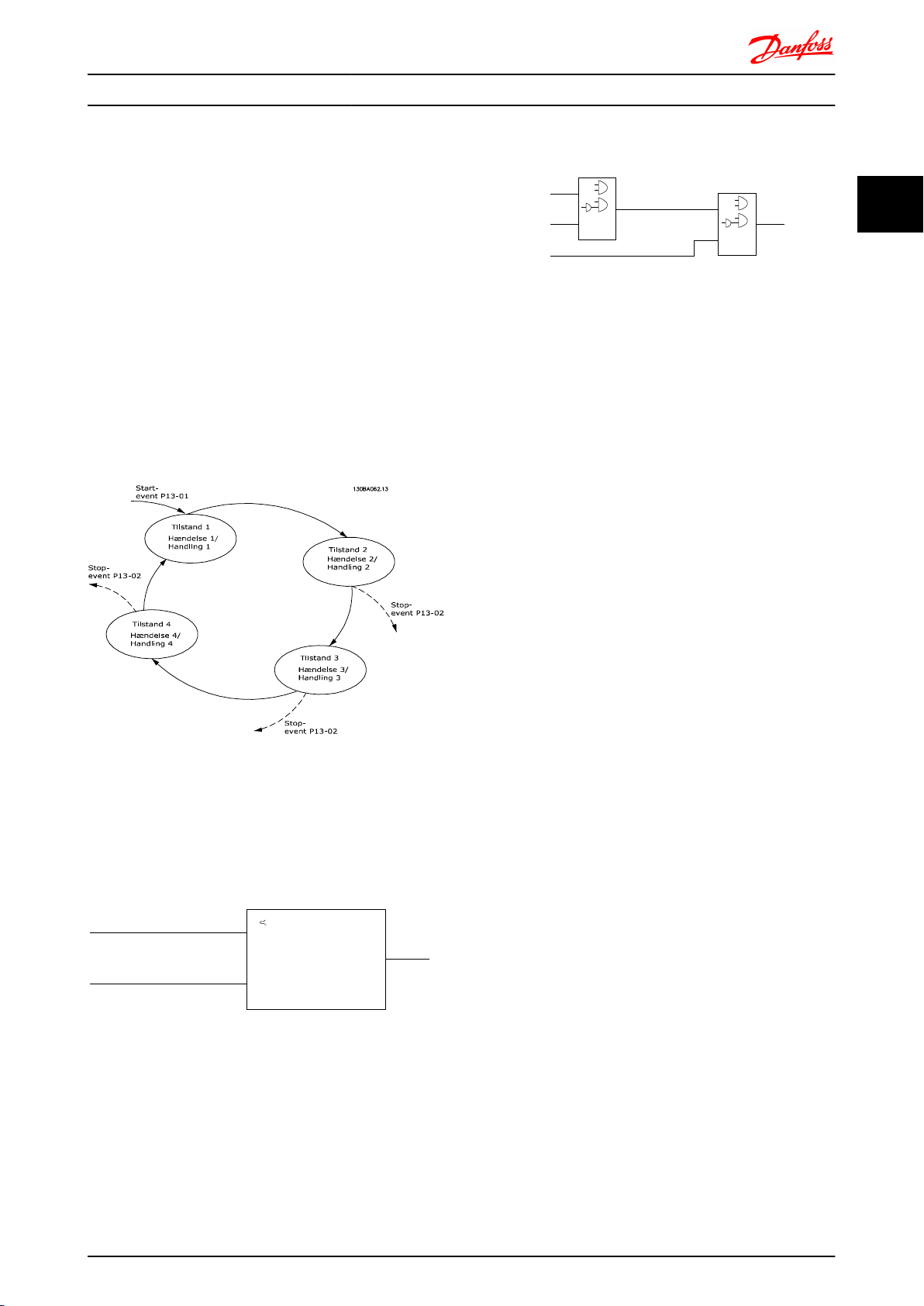
Smart Logic Control (SLC) er grundlæggende en sekvens af
brugerdefinerede handlinger (se 13-52 SL styreenh.-handling
[x]), som afvikles af SLC, når den tilknyttede brugerdefinerede hændelse (se 13-51 SL styreenhed.-hændelse [x])
evalueres som SAND af SLC.
Betingelsen for en hændelse kan være en særlig status,
eller at resultatet af en logisk regel eller en sammenligneroperand bliver SAND. Dette medfører en associeret
handling som illustreret i Illustration 2.4:
Illustration 2.4 Aktuel styrestatus/Hændelse og handling
12 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 15
Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
Produktoversigt
VLT®Decentral Drive FCD 302 Design Guide
Hver handling og hændelse nummereres og sammenkædes
i par (tilstande). Dette betyder, at når [0] hændelse opfyldes
(opnår værdien SAND), udføres [0] handling. Derefter vil
betingelserne for [1] hændelse blive evalueret, og hvis de
evalueres som SAND, vil [1] handling blive udført osv. Der
evalueres kun én hændelse ad gangen. Hvis en hændelse
evalueres som FALSK, sker der ingenting (i SLC) i løbet af
det aktuelle scanningsinterval, og der evalueres ingen
andre hændelser. Dette betyder, at SLC ved start evaluerer
[0] hændelse (og kun [0] hændelse) ved hvert scanningsinterval. Kun når [0] hændelse evalueres som SAND, vil SLC
afvikle [0] handling og begynde at evaluere hændelse. Der
kan programmeres 1 til 20 hændelser og [1] handlinger.
Når den sidste hændelse/handling er blevet afviklet, vil
sekvensen begynde forfra fra [0] hændelse/[0] handling.
Illustration 2.5 viser et eksempel med tre hændelser/
handlinger.
2 2
Illustration 2.7 Logiske regler
Illustration 2.5 Eksempel - Intern strømstyring
Sammenlignere
Sammenlignere bruges til sammenligning af kontinuerlige
variabler (dvs. udgangsfrekvens, udgangsstrøm, analog
indgang osv.) med faste preset-værdier.
Illustration 2.6 Sammenlignere
Logiske regler
Kombinerer op til tre booleske indgange (SAND-/FALSKindgange) fra timere, sammenlignere, digitale indgange,
status-bits og hændelser ved hjælp af de logiske
operatører OG, ELLER og IKKE.
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 13
Page 16
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
R1R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
130BB839.10
Produktoversigt
VLT®Decentral Drive FCD 302 Design Guide
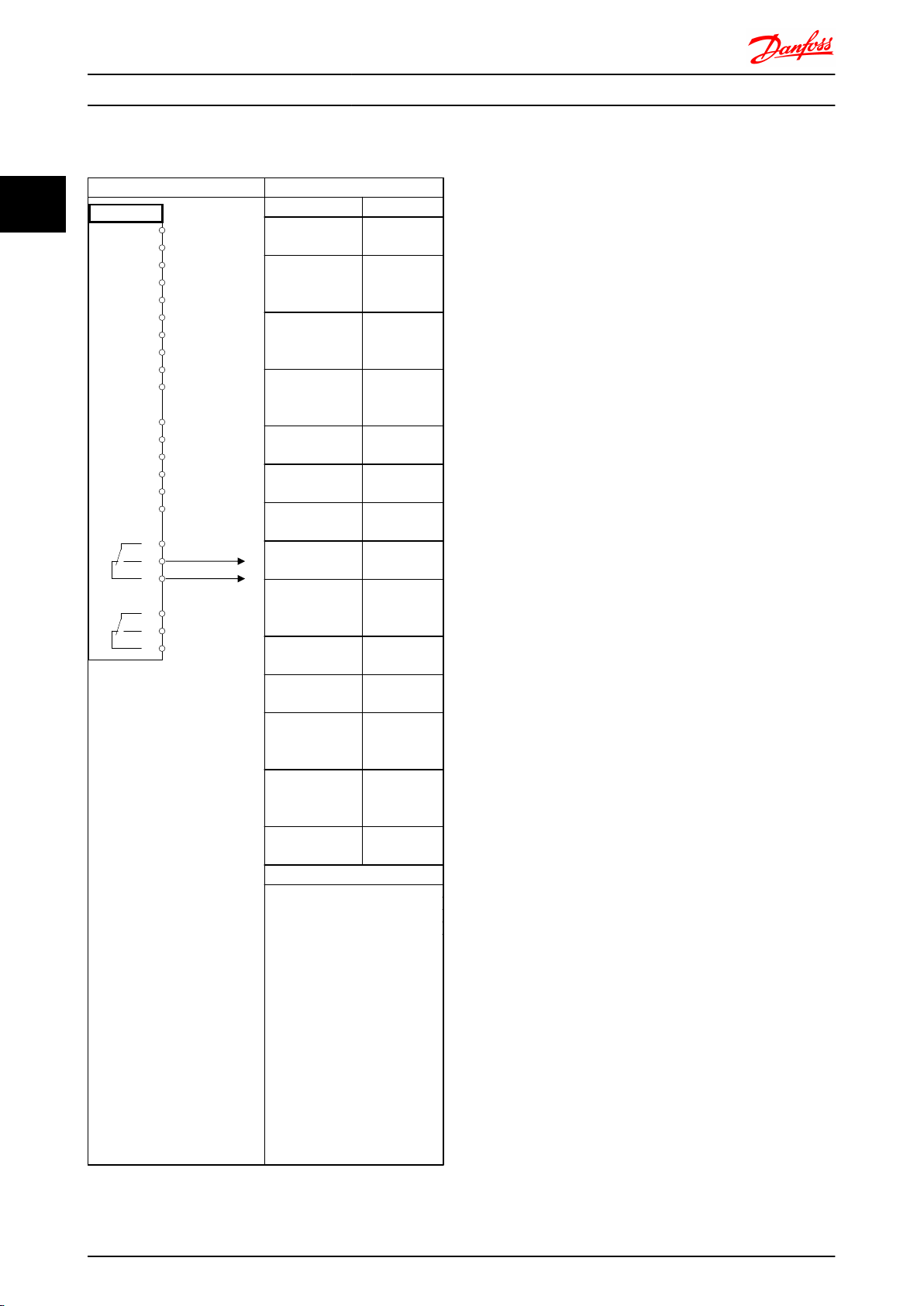
Applikationseksempel
Parametre
22
Funktion Indstilling
4-30 Motorfeedbacktabfunktion [1] Advarsel
4-31 Motorfeed-
100 O/MIN
backhastighedsf
ejl
4-32 Timeout for
5 s
motorfeedbacktab
7-00 Hastighed,
[2] MCB 102
PIDfeedbackkilde
17-11 Opløsning
1024*
(PPR)
13-00 SL
[1] Aktiv
styreenh.-tilstand
13-01 Starthænd
[19] Advarsel
else
13-02 Stophænd
else
13-10 Sammenligner, operand
[44] Reset-
tast
[21]
Advarsels-
nummer
13-11 Sammen-
[1] ≈*
ligner, operator
13-12 Sammen-
90
ligner, værdi
13-51 SL
styreenhed.hændelse
13-52 SL
styreenh.handling
5-40 Funktionsrelæ
[22]
Sammen-
ligner 0
[32] Indst.
dig. udg. A
lav
[80] SL digital
udgang A
*=Standardværdi
Bemærkninger/kommentarer:
Hvis grænsen i feedbackovervågningen overskrides,
udstedes advarsel 90. SLC'en
overvåger advarsel 90, og relæ
1 udløses, hvis advarsel 90
bliver SAND.
Eksternt udstyr kan angive, at
det er nødvendigt med service.
Hvis feedbackfejlen falder til
under grænsen inden for 5 sek.,
fortsætter frekvensomformeren,
og advarslen forsvinder. Relæ 1
er stadig trukket, indtil der
trykkes på [Reset] på LCP'et.
Tabel 2.1 Brug af SLC til indstilling af et relæ
14 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 17
1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Produktoversigt
VLT®Decentral Drive FCD 302 Design Guide
2.2 EMC
2.2.1 Generelle forhold vedr. EMC-emission
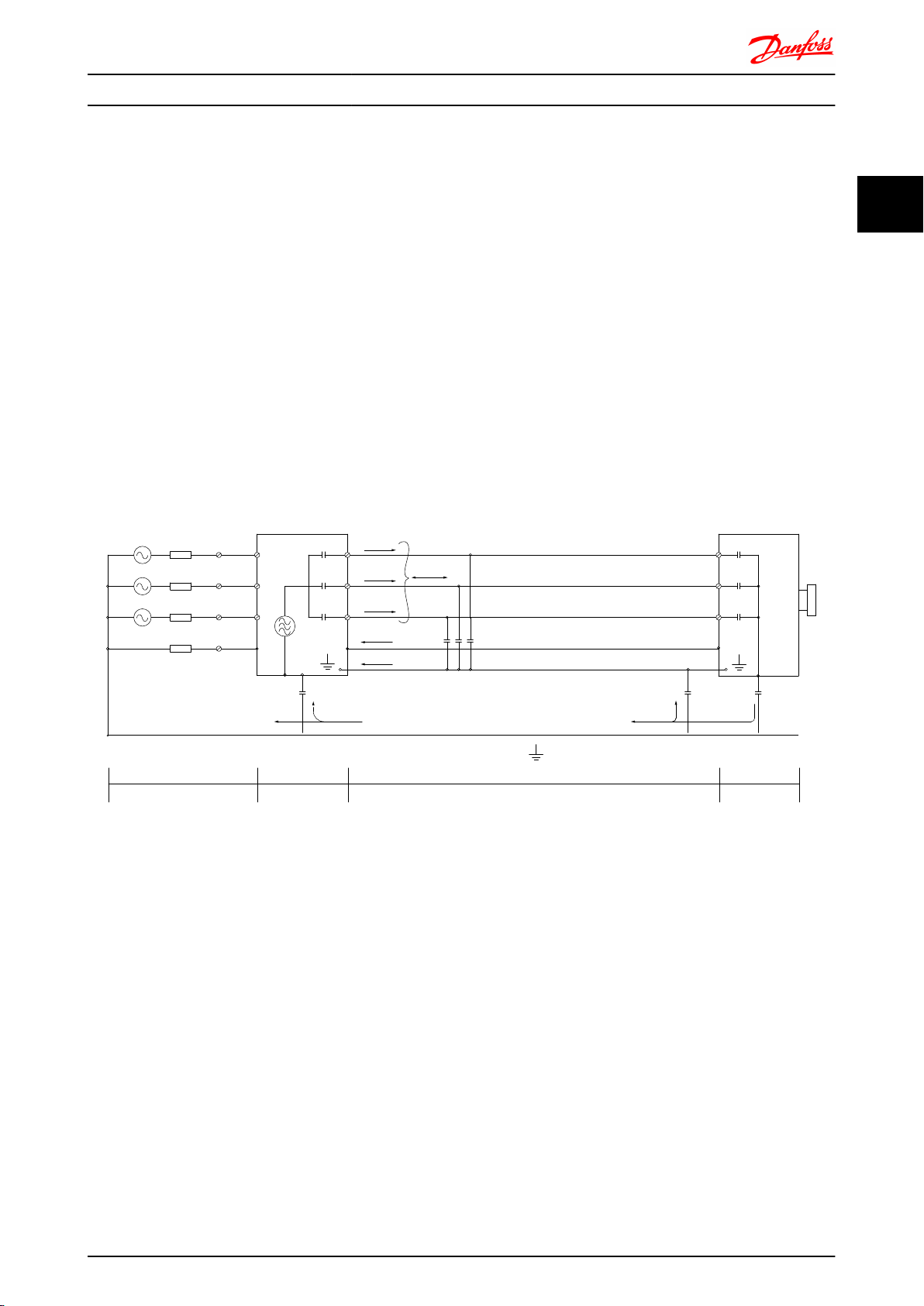
Elektriske forstyrrelser i området 150 kHz til 30 MHz er normalt kabelbårne. Luftbårne forstyrrelser fra frekvensomformersystemet i området 30 MHz til 1 GHz genereres af vekselretteren, motorkablet og motoren.
Som vist i Illustration 2.8 vil kapacitive strømme i motorkablet sammen med høj dU/dt fra motorspændingen generere
lækstrømme.
Brug af et skærmet motorkabel forøger lækstrømmen (se Illustration 2.8), fordi skærmede kabler har højere kapacitans til jord
end uskærmede kabler. Hvis lækstrømmen ikke filtreres, vil det forårsage øgede forstyrrelser på netforsyningen i radiofrekvensområdet under ca. 5 MHz. Eftersom lækstrømmen (I1) føres tilbage til apparatet gennem skærmen (I3), vil der i
princippet kun være et lille elektromagnetisk felt (I4) fra det skærmede motorkabel som vist nedenfor.
Skærmen reducerer de udstrålede forstyrrelser, men øger den lavfrekvente forstyrrelse på netforsyningen. Tilslut motorkabelskærmen til kapslingerne på frekvensomformeren og motoren. Anvend indbyggede skærmbøjler for at undgå snoede
skærmender (pigtails). Snoede skærmender øger skærmimpedansen ved højere frekvenser, hvilket reducerer skærmeffekten
og øger lækstrømmen (I4).
Når der anvendes et skærmet kabel til Fieldbusrelæ, styrekabel, signalinterface eller bremse, skal skærmen monteres på
kapslingen i begge ender. I visse situationer vil det dog være nødvendigt at bryde skærmen for at undgå strømsløjfer.
2 2
Illustration 2.8 Eksempel - Lækstrøm
Hvis der anvendes monteringsplader, skal disse være lavet af metal for at sikre, at skærmstrømmene føres tilbage til
apparatet. Der skal sikres god elektrisk kontakt fra monteringspladen gennem monteringsskruerne til frekvensomformerens
chassis.
Hvis der benyttes uskærmede kabler, overholdes enkelte emissionskrav ikke. Immunitetskravene overholdes dog.
For at begrænse forstyrrelsesniveauet fra hele systemet (apparat+installation) skal motor- og bremsekabler gøres så korte
som muligt. Undgå at placere følsomme signalkabler langs med motor- og bremsekabler. Radiofrekvensforstyrrelse over 50
MHz (luftbårne) genereres især af styreelektronikken.
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 15
Page 18
Produktoversigt
2.2.2 EMC-testresultater
VLT®Decentral Drive FCD 302 Design Guide
22
tilfælde), et skærmet styrekabel, en styreboks med potentiometer samt en motor og et skærmet motorkabel.
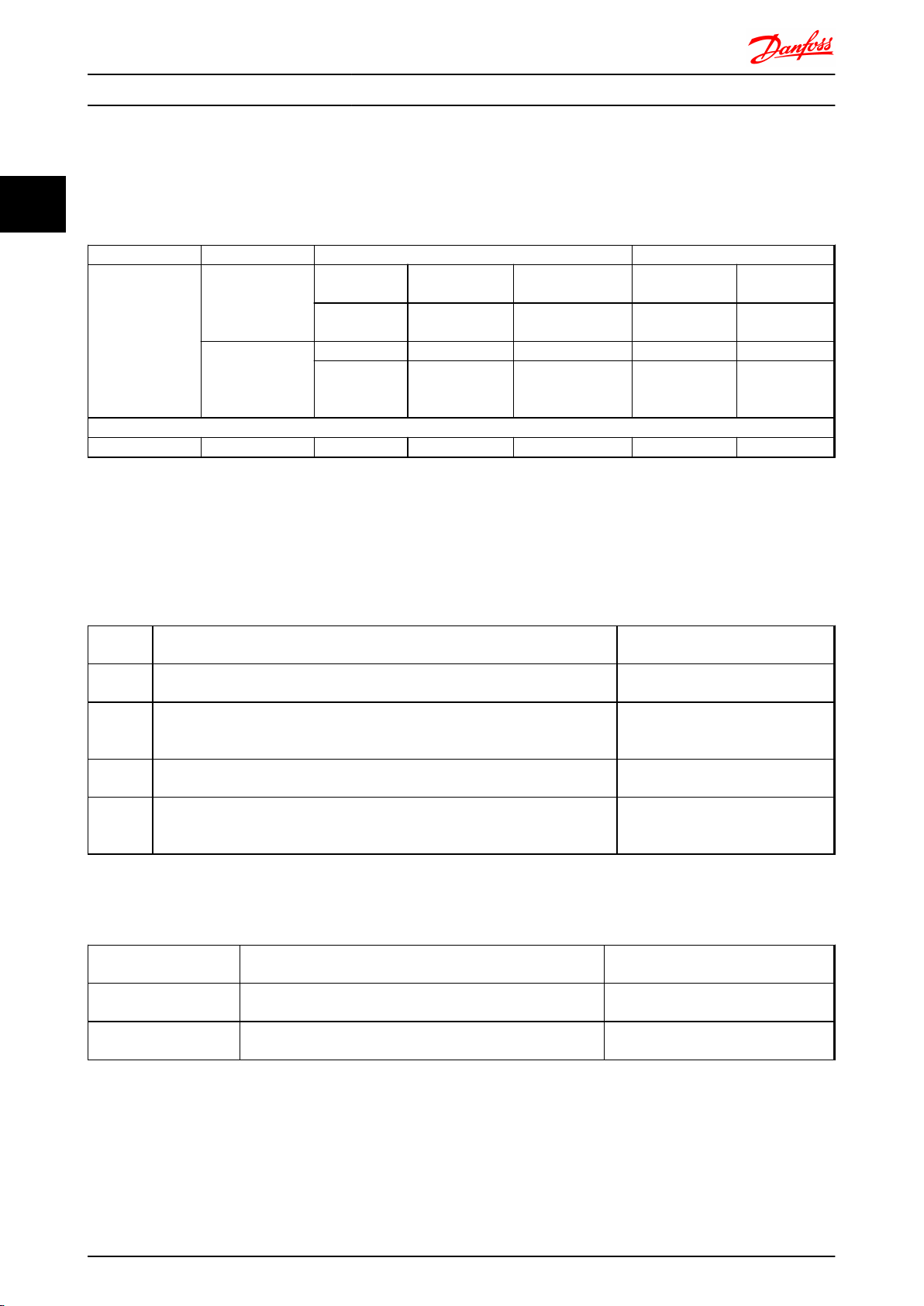
RFI-filtertype Kabelbåret emission Udstrålet emission
Standarder og krav EN 55011 Klasse B Klasse A gruppe 1 Klasse A gruppe 2 Klasse B Klasse A gruppe
1
Boliger, butikker
og let industri
EN/IEC 61800-3 Kategori C1 Kategori C2 Kategori C3 Kategori C1 Kategori C2
First
environment
bolig og kontor
H1
FCD302 0,37-3 kW Nej 10 m 10 m Nej Ja
Tabel 2.2 EMC-testresultater (emission, immunitet)
Emissionskrav
2.2.3
Industrimiljø Industrimiljø Boliger, butikker
og let industri
First environment
bolig og kontor
Second environment
industri
First environment
bolig og kontor
Industrimiljø
First
environment
bolig og kontor
I henhold til EMC-produktstandarden for frekvensomformere med justerbar hastighed EN/IEC 61800-3:2004 afhænger EMCkravene af den planlagte brug af frekvensomformeren. Der er defineret fire kategorier i EMC-produktstandarden.
Definitionerne af de 4 kategorier og kravene til kabelbåret emission for netforsyningsspændingen findes i Tabel 2.3.
Følgende testresultater er fremkommet ved brug af et system med en frekvensomformer (med optioner i de relevante
Kategori Definition
C1 Frekvensomformere monteret i first environment (bolig og kontor) med en
forsyningsspænding mindre end 1.000 V.
C2 Frekvensomformere monteret i first environment (bolig og kontor) med forsynings-
spænding mindre end 1.000 V, som hverken er flytbare eller af typen plug-in, og
som skal monteres og idriftsættes af en professionel.
C3 Frekvensomformere monteret i second environment (industri) med en forsynings-
spænding mindre end 1.000 V.
C4 Frekvensomformere monteret i second environment med en forsyningsspænding lig
med eller over 1.000 V eller nominel spænding lig med eller over 400 A eller med
henblik på brug i komplekse installationer.
Krav til kabelbåret emission i henhold
til de grænser, der angives i EN55011
Klasse B
Klasse A gruppe 1
Klasse A gruppe 2
Ingen begrænsningslinje.
Der skal udarbejdes en EMC-plan.
Tabel 2.3 Emissionskrav
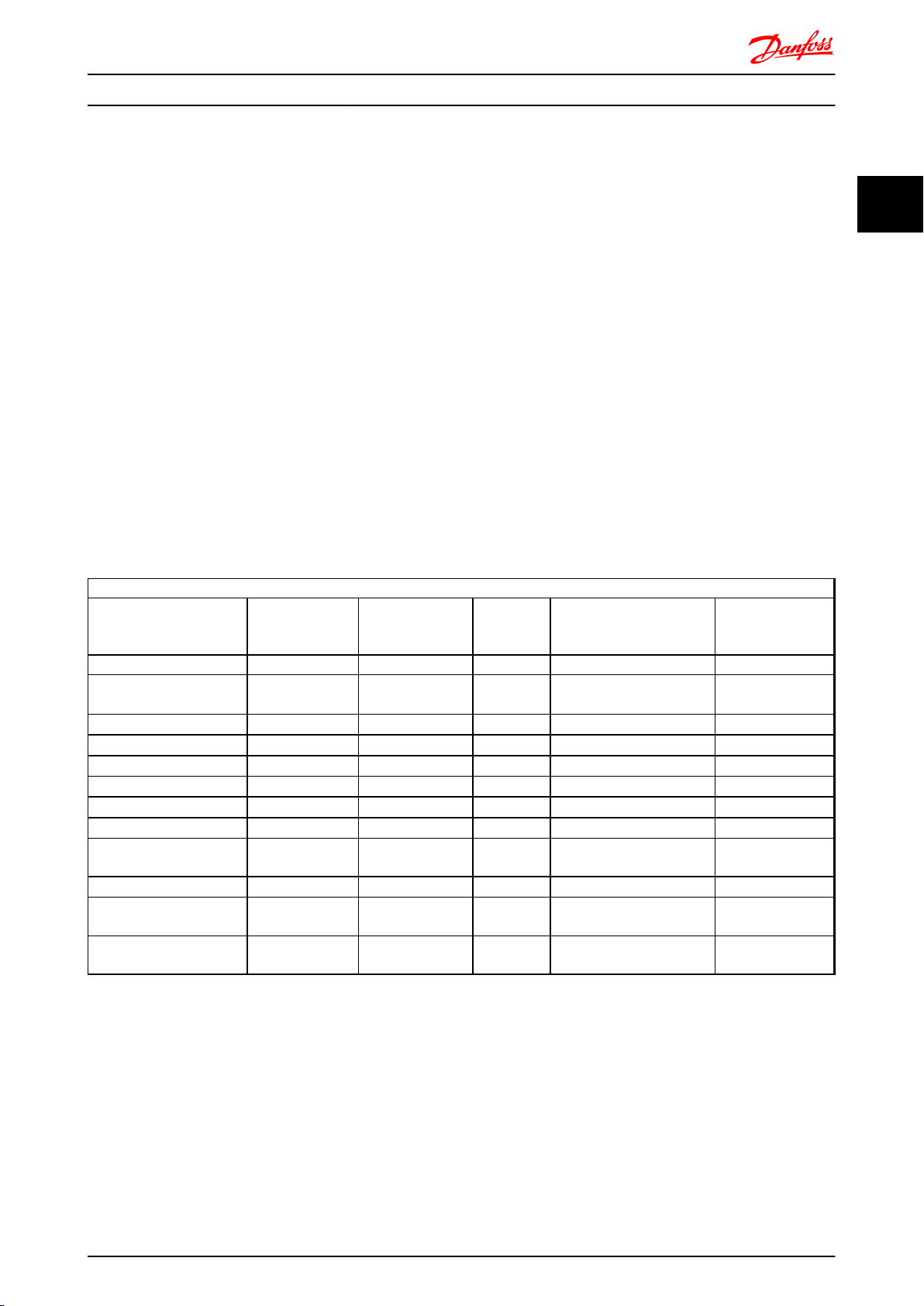
Når de generiske emissionsstandarder anvendes, skal frekvensomformerne overholde grænserne i Tabel 2.4
Miljø Generisk standard
First environment
(bolig og kontor)
Second environment
(industrimiljø)
Tabel 2.4 Emissionsgrænseklasser
16 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
EN/IEC 61000-6-3 emissionsstandard for beboelses- og erhvervsmiljøer samt lette industrimiljøer.
EN/IEC 61000-6-4 emissionsstandard for industrimiljøer. Klasse A gruppe 1
Krav til kabelbåret emission i henhold til
de grænser, der angives i EN55011
Klasse B
Page 19
Produktoversigt
VLT®Decentral Drive FCD 302 Design Guide
2.2.4 Immunitetskrav
simulering af påvirkninger fra både radar- og
radiokommunikationsudstyr og mobilt kommuni-
Immunitetskravene til frekvensomformere afhænger af det
miljø, de monteres i. Kravene til industrimiljøer er højere
end kravene til bolig- og kontormiljøer. Alle Danfoss
frekvensomformere overholder kravene til industrimiljøer
og overholder derfor også de lavere krav til bolig- og
kontormiljøer med en stor sikkerhedsmargin.
For at dokumentere immunitet mod elektrisk forstyrrelse
fra elektriske fænomener er følgende test blevet udført på
et system, der består af en frekvensomformer (med
optioner, hvis det er relevant), et skærmet styrekabel og en
styreboks med potentiometer, motorkabel og motor.
Testene blev udført i overensstemmelse med følgende
grundlæggende standarder:
EN 61000-4-2 (IEC 61000-4-2): Elektrostatiske
•
Se Tabel 2.5.
kationsudstyr.
EN 61000-4-4 (IEC 61000-4-4): Burst-transienter:
•
Simulering af forstyrrelse forårsaget af kobling af
en kontaktor, et relæ eller lignende apparater.
EN 61000-4-5 (IEC 61000-4-5): Surge-transienter:
•
Simulering af forbigående strømme forårsaget af
eksempelvis lynnedslag i nærheden af installationerne.
EN 61000-4-6 (IEC 61000-4-6): RF Common mode:
•
simulering af påvirkningen fra udstyr til
radiotransmission, som er forbundet til tilslutningskablerne.
udladninger (ESD): Simulering af elektrostatiske
udladninger fra mennesker.
EN 61000-4-3 (IEC 61000-4-3): Indgående elektro-
•
magnetisk feltudstråling, amplitudemoduleret
Spændingsområde: 200-240 V, 380-480 V
Grundlæggende standard Burst
IEC 61000-4-4
Godkendelseskriterier B B B A A
Net
Motor
Bremse 4 kV CM
Belastningsfordeling 4 kV CM
Styrekabler
Standardbus 2 kV CM
Relæledninger 2 kV CM
Applikations- og Fieldbus-
optioner
LCP-kabel
Ekstern 24 V DC
Kapsling
4 kV CM
4 kV CM
2 kV CM
2 kV CM
2 kV CM
2 V CM
— —
Surge
IEC 61000-4-5
2 kV/2 Ω DM
4 kV/12 Ω CM
1)
4 kV/2 Ω
1)
4 kV/2 Ω
1)
4 kV/2 Ω
1)
2 kV/2 Ω
1)
2 kV/2 Ω
1)
2 kV/2 Ω
1)
2 kV/2 Ω
1)
2 kV/2 Ω
0,5 kV/2 Ω DM
1 kV/12 Ω CM
ESD
IEC
61000-4-2
— —
— —
— —
— —
— —
— —
— —
— —
— —
— —
8 kV AD
6 kV CD
Udstrålet elektromagnetisk
felt
IEC 61000-4-3
10 V/m —
mode-spænding
RF-common
IEC 61000-4-6
10 V
10 V
10 V
10 V
10 V
10 V
10 V
10 V
10 V
10 V
2 2
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
Tabel 2.5 EMC-immunitet
1) Strømtilførsel på kabelafskærmning
AD: Luftafladning
CD: Kontaktafladning
CM: Common mode
DM: Differential mode
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 17
Page 20
Produktoversigt
VLT®Decentral Drive FCD 302 Design Guide
2.3 Referencehåndtering
Lokal reference
22
Den lokale reference er aktiv, når frekvensomformeren betjenes, mens knappen "Hand on" er aktiv. Justér referencen med
henholdsvis [▲]/[▼] og [◄]/[►]-pilene.
Fjernreference
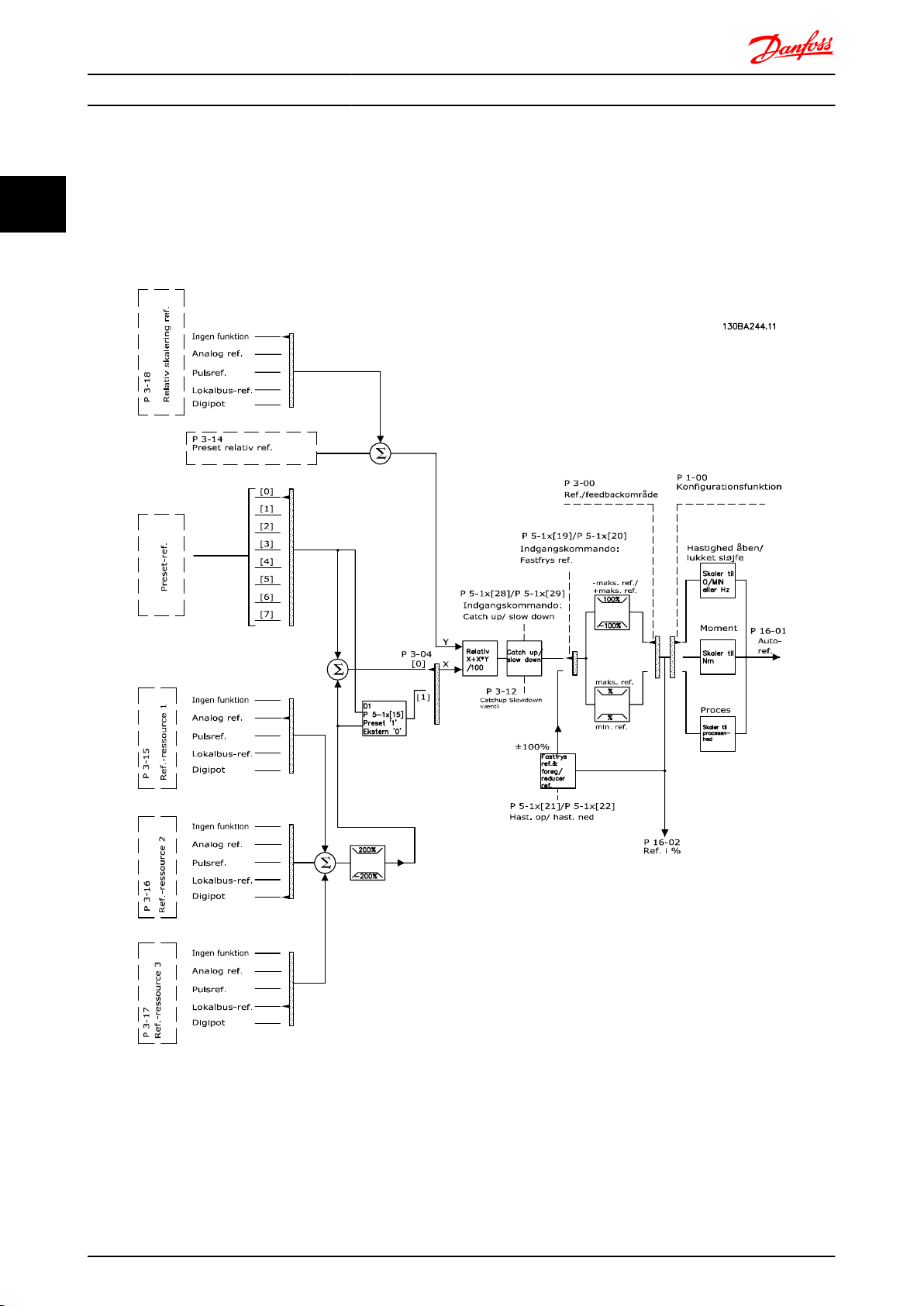
Referencehåndteringssystemet for beregning af fjernreferencen vises i Illustration 2.9.
Illustration 2.9 Fjernreference
Fjernreferencen beregnes én gang for hvert scanningsinterval og består som udgangspunkt af to typer
referenceindgange:
1. X (den eksterne reference): En sum (se
3-04 Referencefunktion) af op til fire eksternt
18 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
udvalgte referencer, der omfatter en hvilken som
helst kombination (bestemmes af indstillingen i
3-15 Referenceressource 1, 3-16 Referenceressource
2 og 3-17 Referenceressource 3) af en fast preset-
reference (3-10 Preset-reference), variable analoge
Page 21
Produktoversigt
referencer, variable digitale pulsreferencer og
forskellige serielle busreferencer i den enhed,
frekvensomformeren styres med ([Hz], [O/MIN],
[Nm] osv.).
2. Y- (den relative reference): En sum af en fast
preset-reference (3-14 Preset relativ reference) og
en variabel analog reference (3-18 Relativ
skalering, referenceressource) i [%].
De to typer referenceindgange kombineres i følgende
formular: Fjernreference=X+X*Y/100%. Hvis der ikke
anvendes en relativ reference, skal 3-18 Relativ skalering,
referenceressource indstilles til Ingen funktion og til 0%.
Funktionen Catch up/slow-down og funktionen Fastfrys
reference kan begge aktiveres ved hjælp af digitale
indgange på frekvensomformeren. Funktionerne og
parametrene beskrives i Programming Guide.
Skaleringen af de analoge referencer beskrives i parametergrupperne 6-1* og 6-2*, og skaleringen af de digitale
pulsreferencer beskrives i parametergruppe 5-5*.
Referencegrænser og områder indstilles i parametergruppe
3-0*.
VLT®Decentral Drive FCD 302 Design Guide
2 2
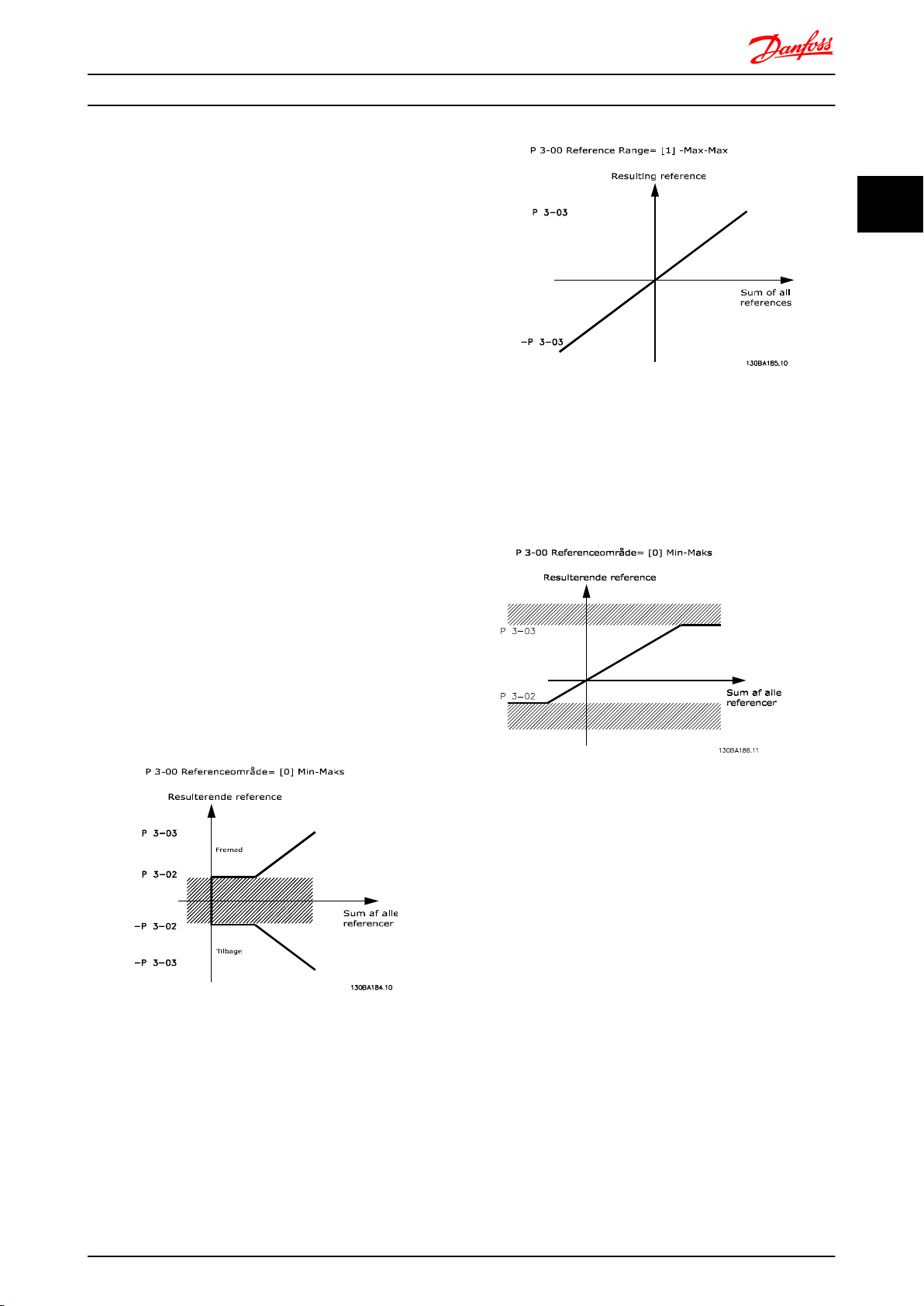
Illustration 2.11 Referenceområde=[1] Min.-Maks.
Værdien af 3-02 Minimumreference kan ikke indstilles til
mindre end 0, medmindre 1-00 Konfigurationstilstand
indstilles til [3] Proces. I dette tilfælde er følgende relationer
mellem den resulterende reference (efter fastlåsning) og
summen af alle referencer som vist i Illustration 2.12.
Referencegrænser
2.3.1
3-00 Referenceområde, 3-02 Minimumreference og
3-03 Maksimumreference definerer tilsammen det tilladte
område for summen af alle referencer. Summen af alle
referencer fastlåses, når det er nødvendigt. Relationen
mellem den resulterende reference (efter fastlåsning) vises
i Illustration 2.10/Illustration 2.11, og summen af alle
referencer vises i Illustration 2.12.
Illustration 2.10 Referenceområde=[0] Min.-Maks.
Illustration 2.12 Summen af alle referencer
Skalering af preset-referencer og
2.3.2
busreferencer
Preset-referencer skaleres i henhold til følgende regler:
Når 3-00 Referenceområde: [0] Min. til Maks. 0%
•
reference er lig 0 [enhed], hvor enhed kan være
alle enheder, f.eks. O/MIN, m/s, bar osv. 100%
reference er lig maks (abs (3-03 Maksimumre-
ference ), abs (3-02 Minimumreference)).
Når 3-00 Referenceområde: [1] -Maks. til - +Maks.
•
0% reference er lig 0 [enhed], er -100% lig med Maks. reference. 100% reference er lig Maks.
reference.
Busreferencer skaleres i henhold til følgende regler:
Når 3-00 Referenceområde: [0] Min. til Maks. For at
•
opnå maks. opløsning på busreference er
skaleringen på bussen: 0% reference er lig Min.
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 19
Page 22
Produktoversigt
VLT®Decentral Drive FCD 302 Design Guide
reference, og 100% reference er lig Maks.
reference.
Når 3-00 Referenceområde: [1] -Maks. til +Maks.
22
•
-100% reference er lig -Maks. reference. 100%
reference lig Maks. reference.
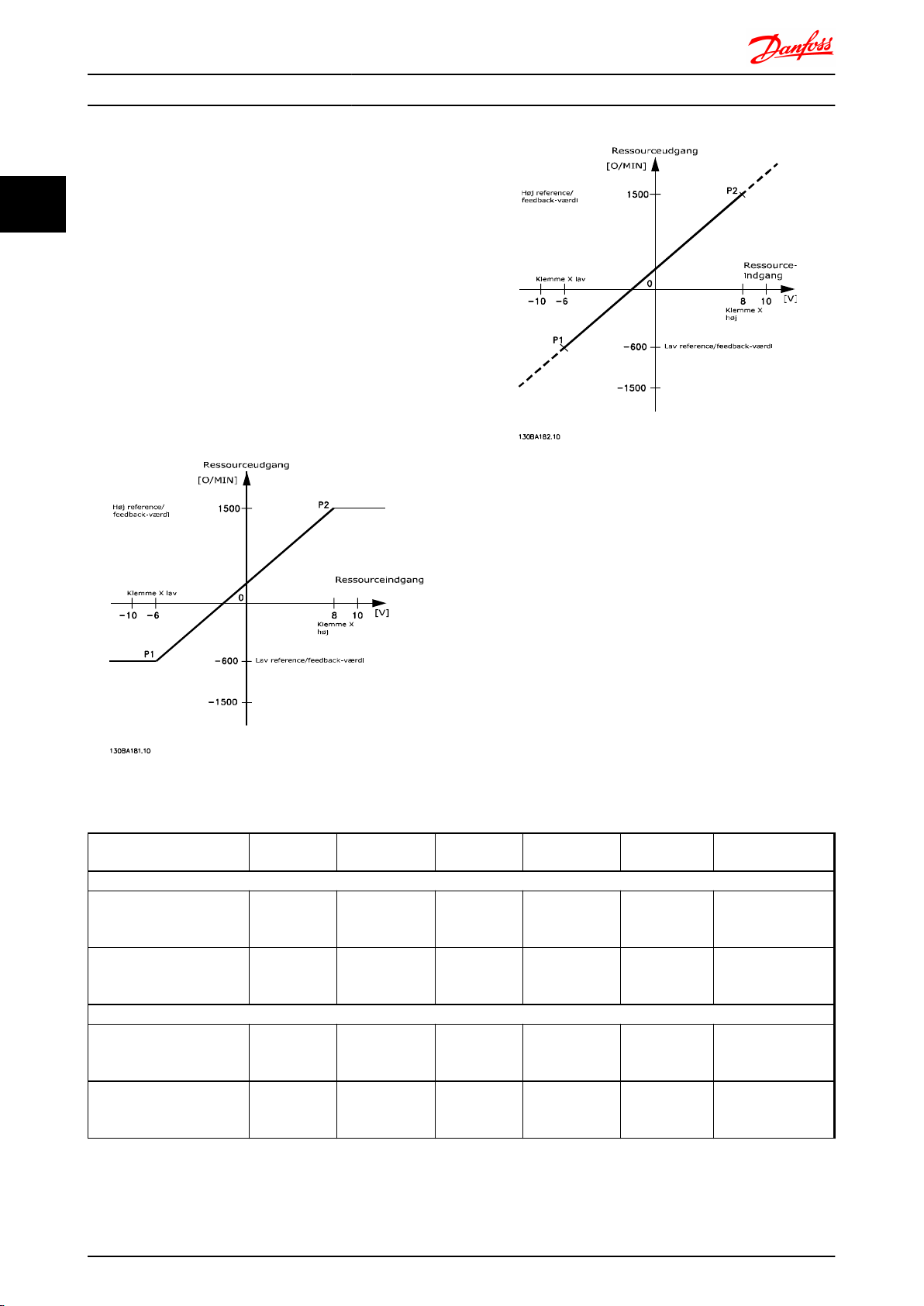
2.3.3 Skalering af analoge referencer samt
pulsreferencer og feedback
Referencer og feedback skaleres på baggrund af analoge
indgange og pulsindgange på samme måde. Den eneste
forskel er, at referencen over eller under de angivne
minimale og maksimale "slutpunkter" (P1 og P2 i
Illustration 2.13) er fastlåste, hvorimod en feedback over
eller under ikke er.
Illustration 2.14 Skalering af referenceudgang
Slutpunkterne P1 og P2 defineres af følgende parametre
afhængigt af, hvilken analog indgang eller pulsindgang der
anvendes.
Illustration 2.13 Skalering af analoge referencer samt pulsreferencer og feedback
Analog 53
S201=OFF
P1=(min. indgangsværdi, min. referenceværdi)
Min. referenceværdi
Min. indgangsværdi
P2 = (maks. indgangsværdi, maks. referenceværdi)
Maks. referenceværdi
Maks. indgangsværdi
Tabel 2.6 Indgang og referencesluktpunktsværdier
6-14 Klemme
53, lav ref./
feedb.-værdi
6-10 Klemme
53, lav
spænding [V]
6-15 Klemme
53, høj ref./
feedb.-værdi
6-11 Klemme
53, høj
spænding [V]
Analog 53
S201=ON
6-14 Klemme 53,
lav ref./feedb.værdi
6-12 Klemme 53,
lav strøm [mA]
6-15 Klemme 53,
høj ref./feedb.værdi
6-13 Klemme 53,
høj strøm [mA]
Analog 54
S202=OFF
6-24 Klemme
54, lav ref./
feedb.-værdi
6-20 Klemme
54, lav
spænding [V]
6-25 Klemme
54, høj ref./
feedb.-værdi
6-21 Klemme
54, høj
spænding[V]
Analog 54
S202=ON
6-24 Klemme 54,
lav ref./feedb.værdi
6-22 Klemme 54,
lav strøm [mA]
6-25 Klemme 54,
høj ref./feedb.værdi
6-23 Klemme 54,
høj strøm[mA]
Pulsindgang29Pulsindgang 33
5-52 Kl. 29 lav
ref/feedb.-værdi
5-50 Kl. 29 lav
frekvens [Hz]
5-53 Kl. 29 høj
ref/feedb.-værdi
5-51 Kl. 29 høj
frekvens [Hz]
5-57 Kl. 33 lav ref/
feedb.-værdi
5-55 Kl. 33 lav
frekvens [Hz]
5-58 Kl. 33 høj ref/
feedb.-værdi
5-56 Kl. 33 høj
frekvens [Hz]
20 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 23
Produktoversigt
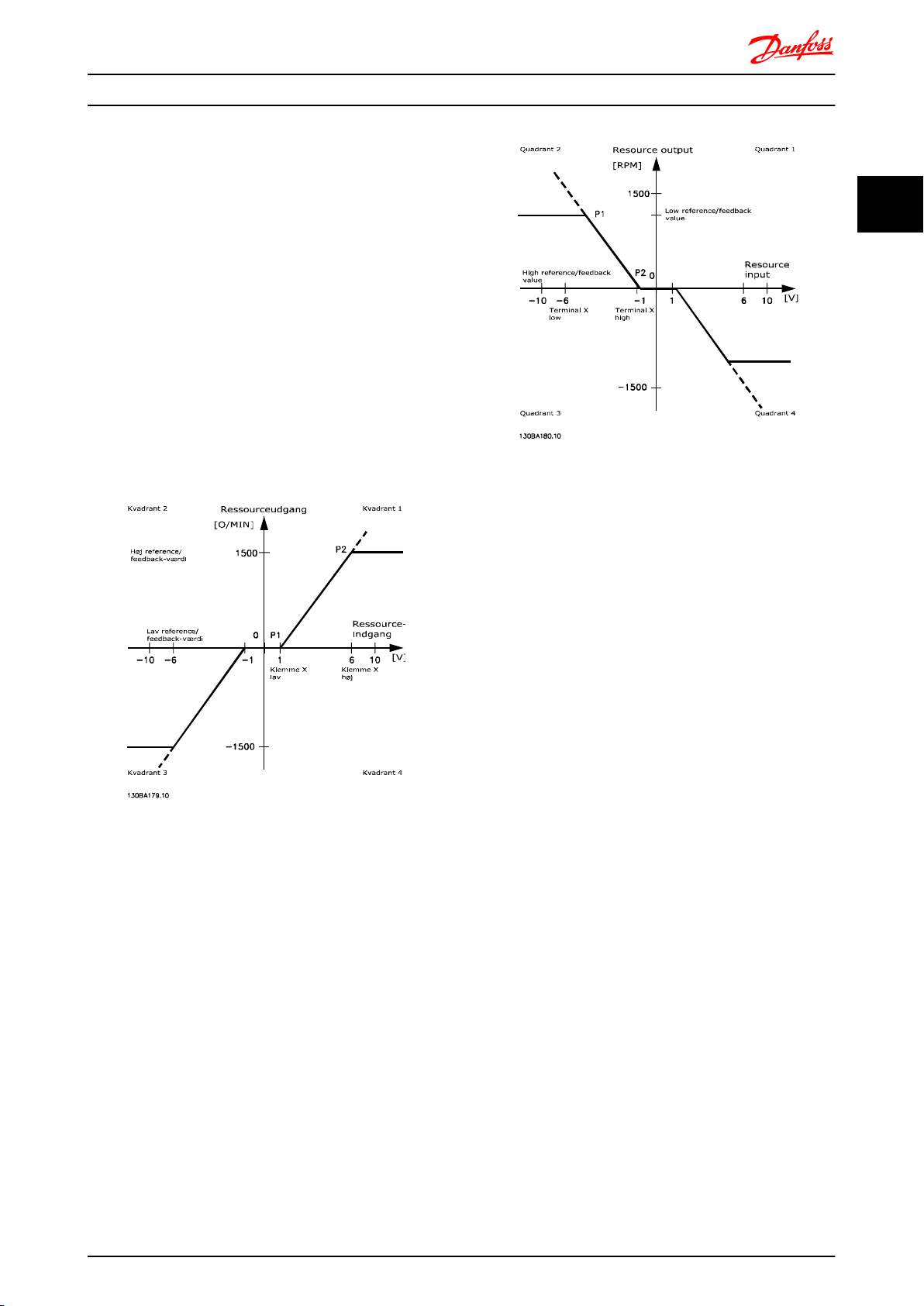
2.3.4 Dødbånd omkring nul
VLT®Decentral Drive FCD 302 Design Guide
I nogle tilfælde skal referencen (i sjældne tilfælde også
feedback) have et dødbånd omkring nul (f.eks. for at sikre,
at maskinen standses, når referencen er "nær nul").
Dødbåndet aktiveres, og omfanget af dødbåndet
indstilles, ved at gennemføre følgende indstillinger:
Enten skal min. referenceværdien (find de
•
relevante parametre i Tabel 2.6) eller maks.
referenceværdien være nul. Sagt på en anden
måde: Enten P1 eller P2 skal befinde sig på Xaksen på grafen nedenfor.
Og begge punkter, der definerer skaleringsgrafen,
•
skal være i samme kvadrant.
Størrelsen på dødbåndet defineres enten af P1 eller P2
som vist i Illustration 2.15.
2 2
Illustration 2.16 Reversér dødbånd
Derfor vil et referenceslutpunkt på P1=(0 V, 0 O/MIN) ikke
medføre dødbånd, men et referenceslutpunkt på f.eks.
P1=(1 V, 0 O/MIN) vil medføre et dødbånd på -1 V til +1 V
i dette tilfælde, hvis slutpunkt P2 er placeret enten i
kvadrant 1 eller kvadrant 4.
Illustration 2.15 Dødbånd
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 21
Page 24
Produktoversigt
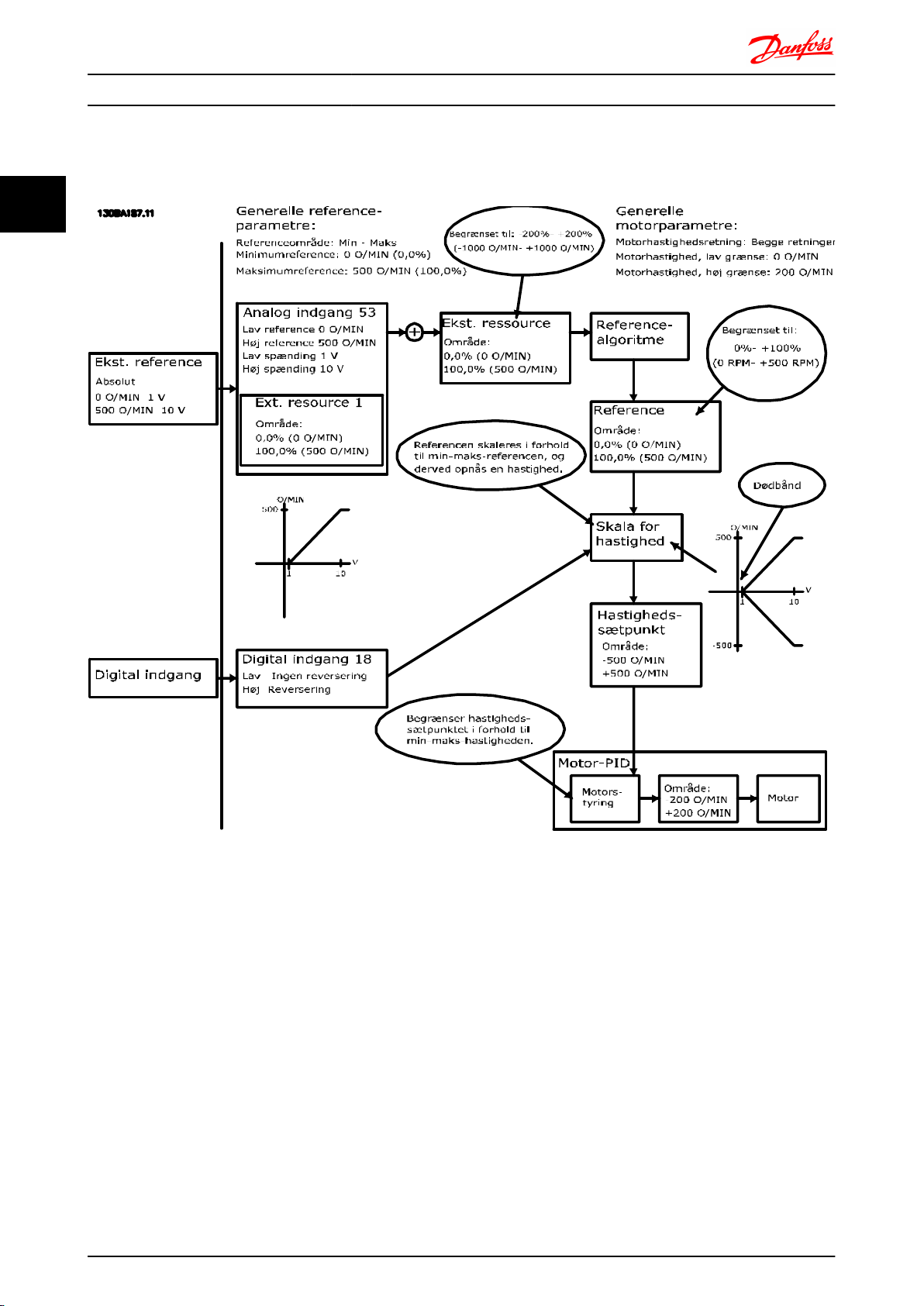
Situation 1: positiv reference med dødbånd, digital indgang til udløsning af reversering
Denne situation viser, hvordan referenceindgange med grænser inden for min.- og maks.-grænserne klemmetilsluttes.
VLT®Decentral Drive FCD 302 Design Guide
22
Illustration 2.17 Eksempel 1 - Positiv reference
22 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 25
Produktoversigt
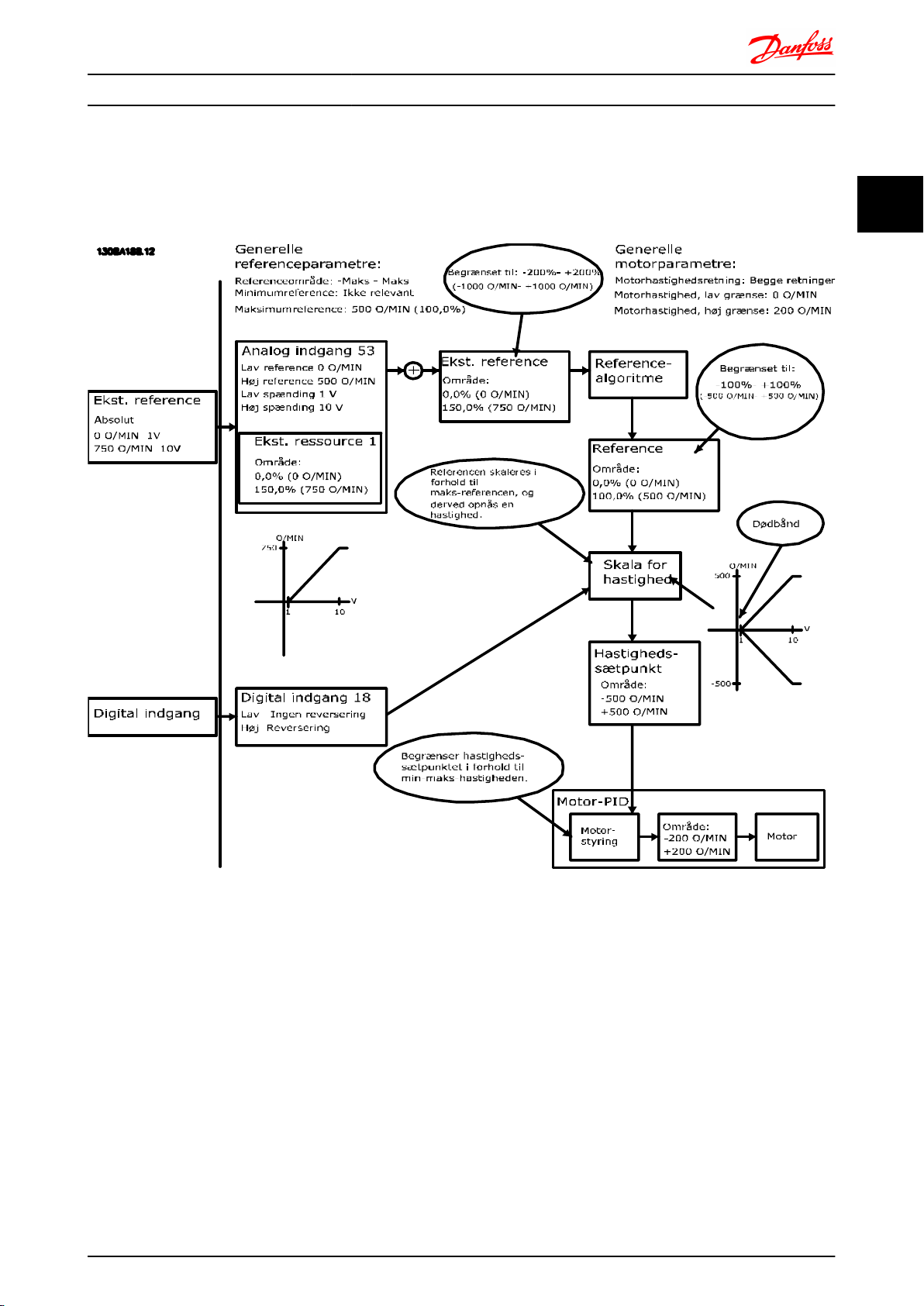
Situation 2: positiv reference med dødbånd, digital indgang til udløsning af reversering. Fastlåsningsregler.
Denne situation viser, hvordan referenceindgange med grænser uden for grænserne for -maks. til +maks. fastlåses til
indgangenes lave og høje grænser, inden de føjes til den eksterne reference. Og hvordan den eksterne reference fastlåses til
-maks. til +maks. af referencealgoritmen.
VLT®Decentral Drive FCD 302 Design Guide
2 2
Illustration 2.18 Eksempel 2 - Positiv reference
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 23
Page 26
Produktoversigt
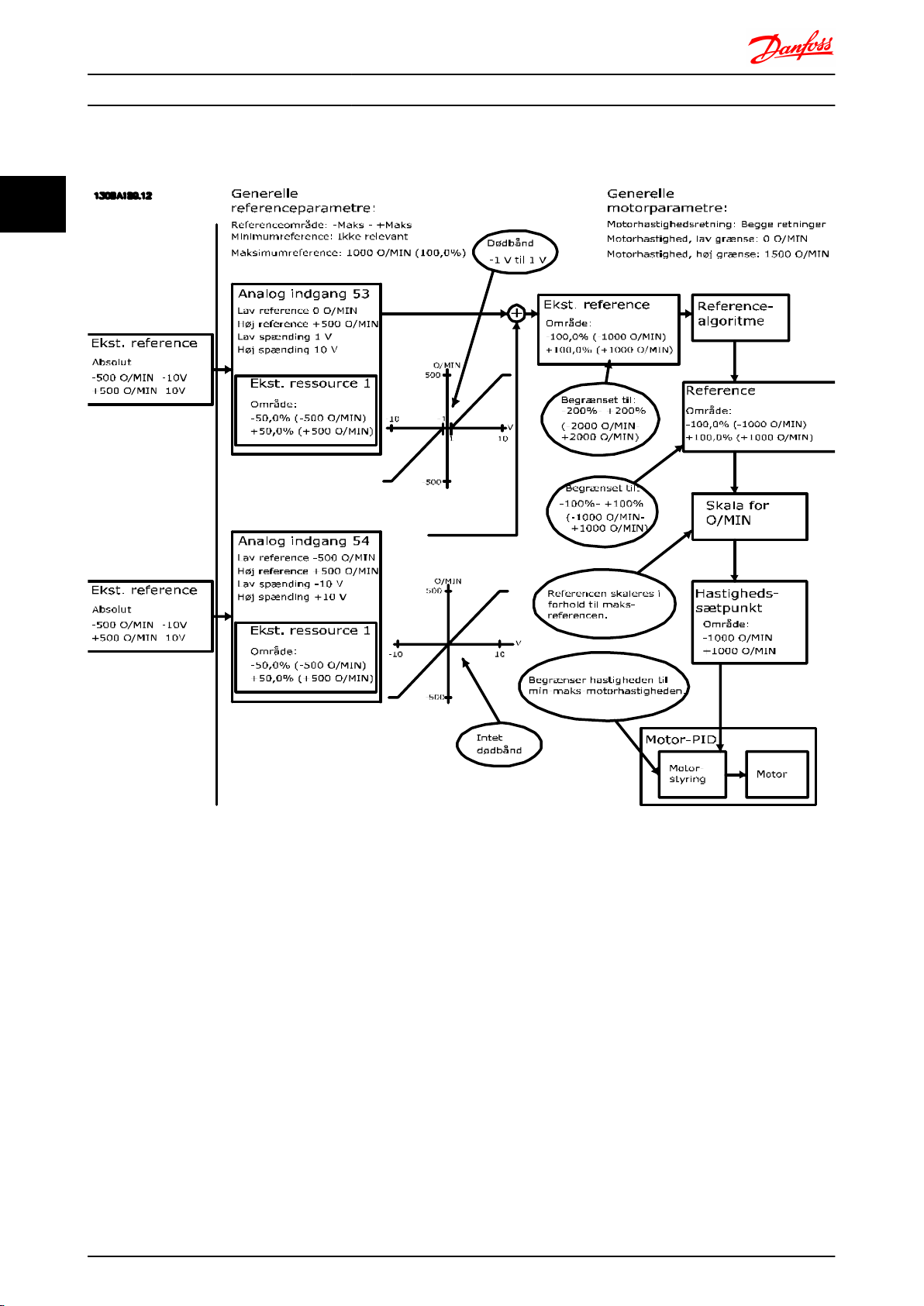
Situation 3: negativ til positiv reference med dødbånd, tegnet bestemmer retningen -maks. til +maks.
VLT®Decentral Drive FCD 302 Design Guide
22
Illustration 2.19 Eksempel 3 - Positiv til negativ reference
24 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 27
130BB955.11
a
b
Cable length [m]
Leakage current [mA]
130BB956.11
Leakage current [mA]
THVD=0%
THVD=5%
130BB958.11
L
leakage
[mA]
f [Hz]
f
sw
Cable
f
s
150 Hz
3rd harmonics
50 Hz
Mains
RCD with low f
cut-o
RCD with high f
cut-o
130BB957.11
Leakage current [mA]
100 Hz
2 kHz
100 kHz
Produktoversigt
VLT®Decentral Drive FCD 302 Design Guide
2.4.1 Lækstrøm til jord
Følg nationale og lokale forskrifter angående beskyttelsesjording af udstyr med en lækstrøm > 3,5 mA.
Frekvensomformerteknologi indebærer høj switchfrekvens
ved høj effekt. Dette genererer en lækstrøm i jordtilslutningen. En fejlstrøm i frekvensomformeren ved
udgangsklemmerne kan indeholde en DC-komponent, som
kan oplade filterkondensatorerne og skabe en forbigående
jordstrøm.
Lækstrøm til jord består af flere forskellige bidrag og
afhænger af forskellige systemkonfigurationer, herunder
RFI-filtrering, skærmede motorkabler og frekvensomformereffekt.
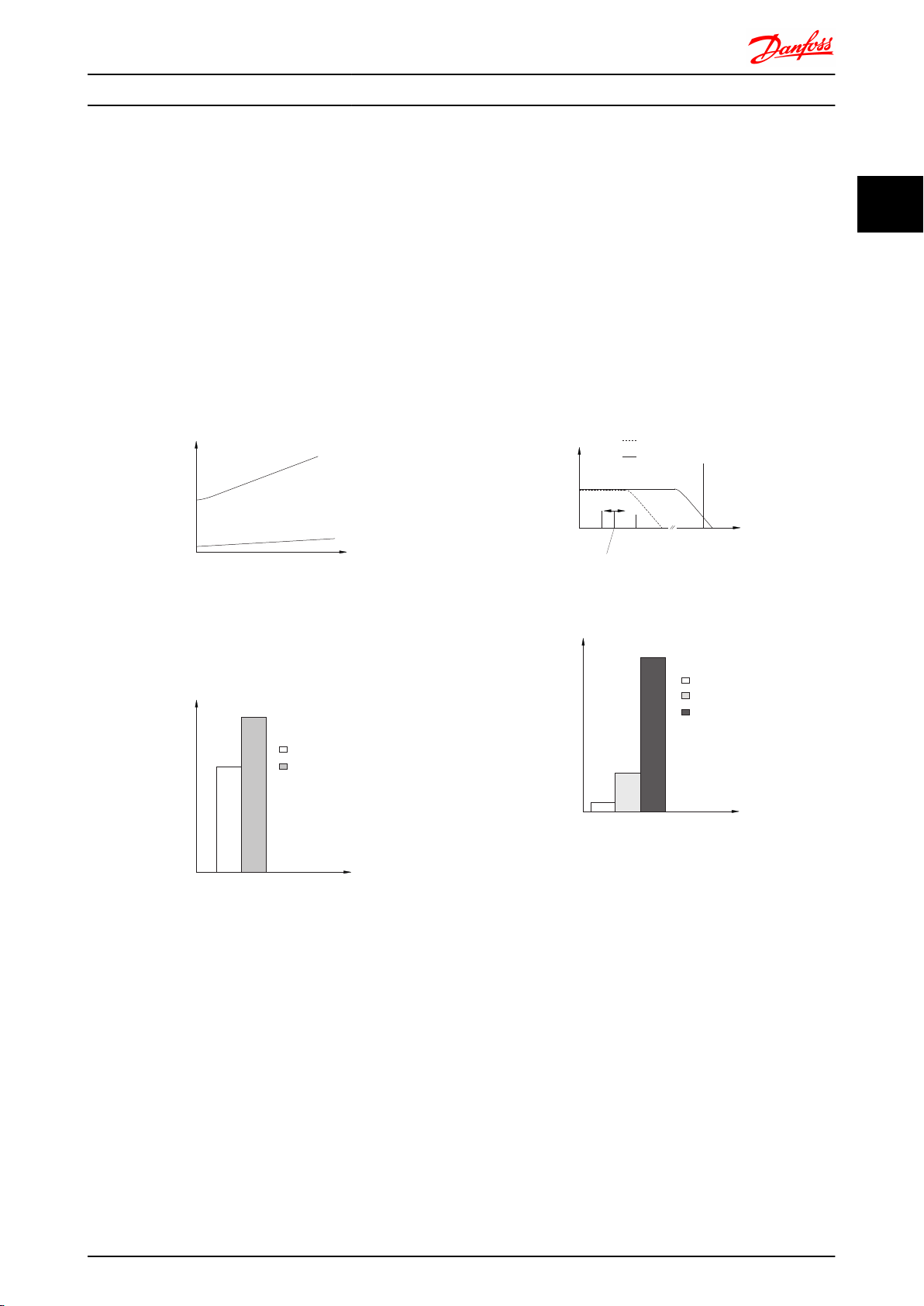
Illustration 2.20 Påvirkning af kabellængde og effektstørrelse på
lækstrøm for Pa>Pb
Se EN/IEC61800-5-1 og EN50178 for flere oplysninger.
Brug af RCD'er
Hvor fejlstrømsafbrydere (RCD'er), også kaldet fejlstrømsrelæer (ELCB'er), anvendes, skal følgende overholdes:
Der må kun anvendes fejlstrømsafbrydere af B-
•
typen, som kan registrere veksel- og
jævnstrømme
Der skal bruges fejlstrømsafbrydere med
•
indkoblingsforsinkelse for at forhindre fejl, der
skyldes forbigående jordstrømme
Fejlstrømsafbryderne skal dimensioneres i
•
henhold til systemkonfigurationen og under
hensyn til omgivelserne
Illustration 2.22 De vigtigste bidrag til lækstrøm
2 2
Lækstrømmen afhænger også af ledningsforvrængningen
Illustration 2.21 Netforvrængnings påvirkning af lækstrøm
BEMÆRK!
Når der anvendes et filter, skal 14-50 RFI-filter slås fra, når
filteret oplades, for at undgå, at en høj lækstrøm slutter
RCD-kontakten.
EN/IEC61800-5-1 (produktstandarden for frekvensomformersystemer) kræver, at der udvises særlig
opmærksomhed, hvis lækstrømmen overstiger 3,5 mA.
Jording skal forstærkes på en af følgende måder:
Jordledning (klemme 95) på mindst 10 mm
•
To separate jordledninger, der begge opfylder
•
reglerne for dimensionering
Illustration 2.23 Cut-off-frekvensens påvirkning af RDC
Se også RCD-Applikationsanvisning, MN90G.
2.5
Galvanisk adskillelse (PELV)
2.5.1 PELV - Protective Extra Low Voltage
PELV giver beskyttelse ved hjælp af en ekstra lav
spænding. Der ydes beskyttelse mod elektrisk stød, når
den elektriske forsyning er af PELV-typen, og når installationen foretages i henhold til beskrivelsen i lokale/
nationale bestemmelser om PELV-forsyninger.
Alle styreklemmer og relæklemmer 01-03/04-06 overholder
2
PELV (Protective Extra Low Voltage), undtaget jordet
trekantben på mere end 400 V.
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 25
Page 28
Produktoversigt
VLT®Decentral Drive FCD 302 Design Guide
Den galvaniske (sikre) adskillelse opnås ved at opfylde
kravene til bedre isolering og ved at sørge for de relevante
krybninger/luftafstande. Disse krav beskrives i standarden
22
EN 61800-5-1 .
De komponenter, der udgør den elektriske isolering i
henhold til beskrivelsen nedenfor, stemmer også overens
med kravene til højere isolering og de i EN 61800-5-1
beskrevne relevante test.
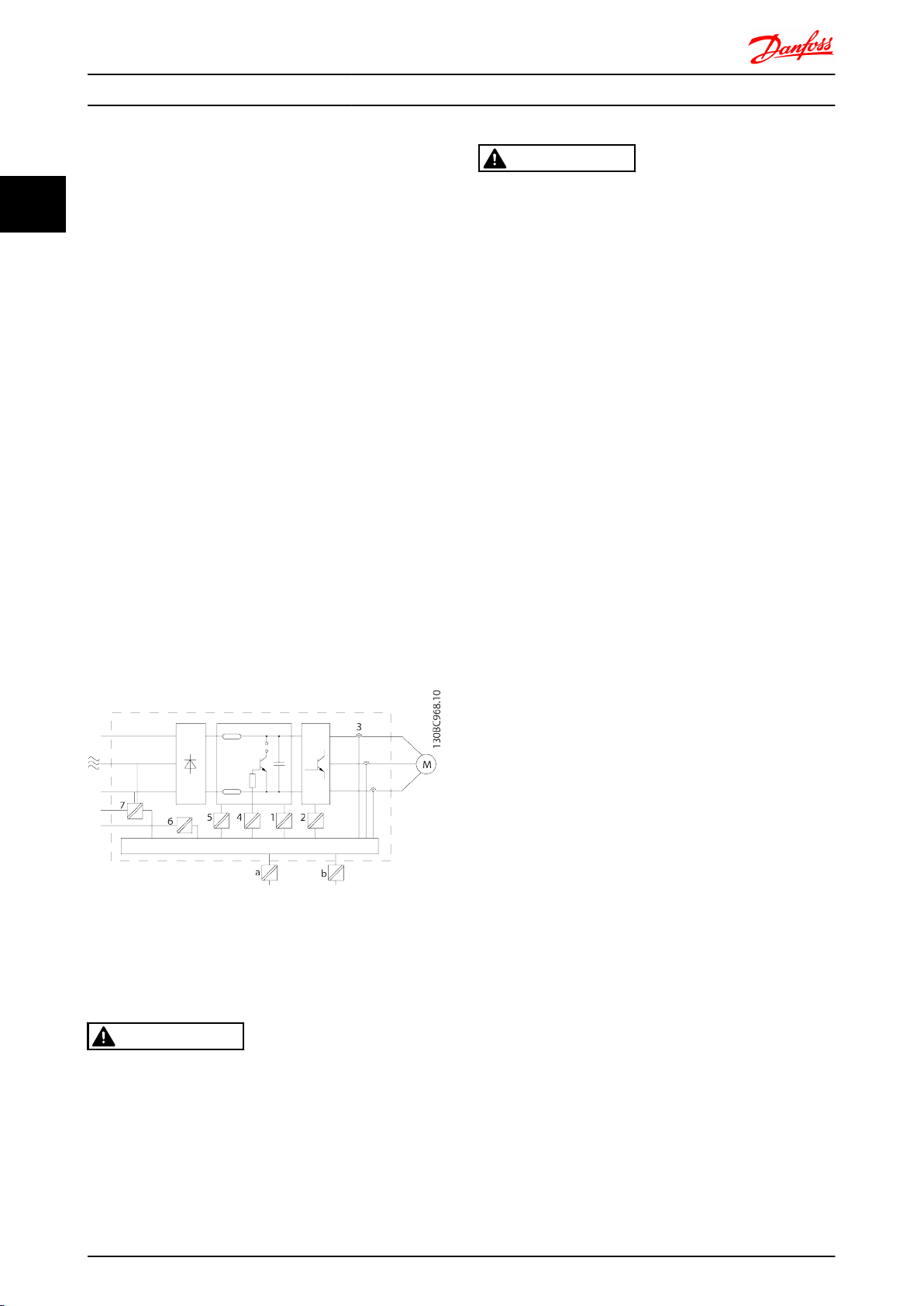
Den galvanisk adskillelse for PELV kan vises seks steder
(seIllustration 2.24):
For at bevare PELV skal alle tilslutninger til styreklemmerne
være PELV. Eksempelvis skal termistoren forstærkes/
dobbeltisoleres.
1. Strømforsyning (SMPS) inkl. signalisolering af UDC,
der angiver mellemkredsspændingen for DClinket.
2. Gate drive, som kører IGBT'er (triggertransformere/optokoblere).
3. Strømtransducere.
4. Optokoblere, bremsemodul.
5. Intern inrush, RFI og temperaturmålingskredsløb.
6. Tilpassede relæer.
7. Mekanisk bremse.
ADVARSEL
Det kan være forbundet med livsfare at berøre de
elektriske komponenter, også efter at udstyret er koblet fra
netforsyningen.
Sørg også for, at andre spændingsindgange er afbrudt,
f.eks. belastningsfordeling (sammenkobling af DC-mellemkredse) samt motortilslutning til kinetisk back-up.
Vent mindst i det tidsrum, der angives i Introduktion, i FCD
302, Betjeningsvejledning, MG04F, inden de elektriske dele
berøres.
Et kortere tidsrum er kun tilladt, hvis typeskiltet på det
pågældende apparat angiver det.
2.6 Mekanisk bremse
2.6.1 Mekanisk hæve-/sænkebremse
Se 4 Applikationseksempler for et eksempel på avanceret
mekanisk bremsestyring til hæve-/sænkeapplikationer.
Kabelføring for bremsemodstand
2.6.2
EMC (snoede kabler/skærmning)
For at reducere elektrisk støj fra ledningerne mellem
bremsemodstanden og frekvensomformeren, skal
ledningerne snos.
For forstærket EMC-ydeevne skal en metalskærm anvendes.
Illustration 2.24 Galvanisk adskillelse
Den funktionelle galvaniske adskillelse (a og b på
tegningen) er til backupoptionen på 24 V og til RS-485standardbusgrænsefladen.
ADVARSEL
Montering ved stor højde:
380-500 V: Kontakt Danfoss angående PELV ved højder
over 2 km.
380-500 V: Kontakt Danfoss angående PELV ved højder
over 3 km.
2.7
Bremsefunktioner
Bremsefunktionen påføres for at bremse belastningen på
motorakslen, enten som dynamisk bremsning eller statisk
bremsning.
Mekanisk holdebremse
2.7.1
En mekanisk holdebremse, der er direkte monteret på
motorakslen, udfører som regel statisk bremsning. I nogle
applikationer fungerer det statiske holdemoment som
statisk holder af motorakslen (som regel synkrone
permanente magnetmotorer). En holdebremse styres enten
af en PLC eller direkte ved en digital udgang fra frekvensomformeren (relæ eller solid state-relæ).
BEMÆRK!
Når holdebremsen er indbygget i en sikkerhedskæde:
En frekvensomformer kan ikke give sikker styring af en
mekanisk bremse. Der skal indbygges et redundanskredsløb til bremsestyring i hele installationen.
26 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 29
Produktoversigt
VLT®Decentral Drive FCD 302 Design Guide
2.7.2 Dynamisk bremsning
Dynamisk bremse etableret af:
Modstandsbremse: En bremse-IGBT holder
•
overspændingen under en vis grænse ved at
dirigere bremseenergien fra motoren til den
tilsluttede bremsemodstand (2-10 Bremse-
funktion=[1]).
AC-bremse: Bremseenergien distribueres i
•
motoren ved at ændre betingelserne for tab i
motoren. AC-bremsefunktionen kan ikke bruges i
applikationer med høj slutte- og brydefrekvens,
da dette vil overophede motoren (par.
2-10 Bremsefunktion=[2]).
DC-bremse: En overmoduleret DC-strøm, der
•
tilføres AC-strømmen, fungerer som en hvirvelstrømsbremse (≠0 sek).
Valg af bremsemodstand
2.7.3
Der kræves en bremsemodstand til håndtering af de højere
krav, der stilles ved generatorisk bremsning. Brug af en
bremsemodstand sikrer, at energien absorberes i bremsemodstanden og ikke i frekvensomformeren. Se Design
Guide for bremsemodstanden, MG90O, for oplysninger.
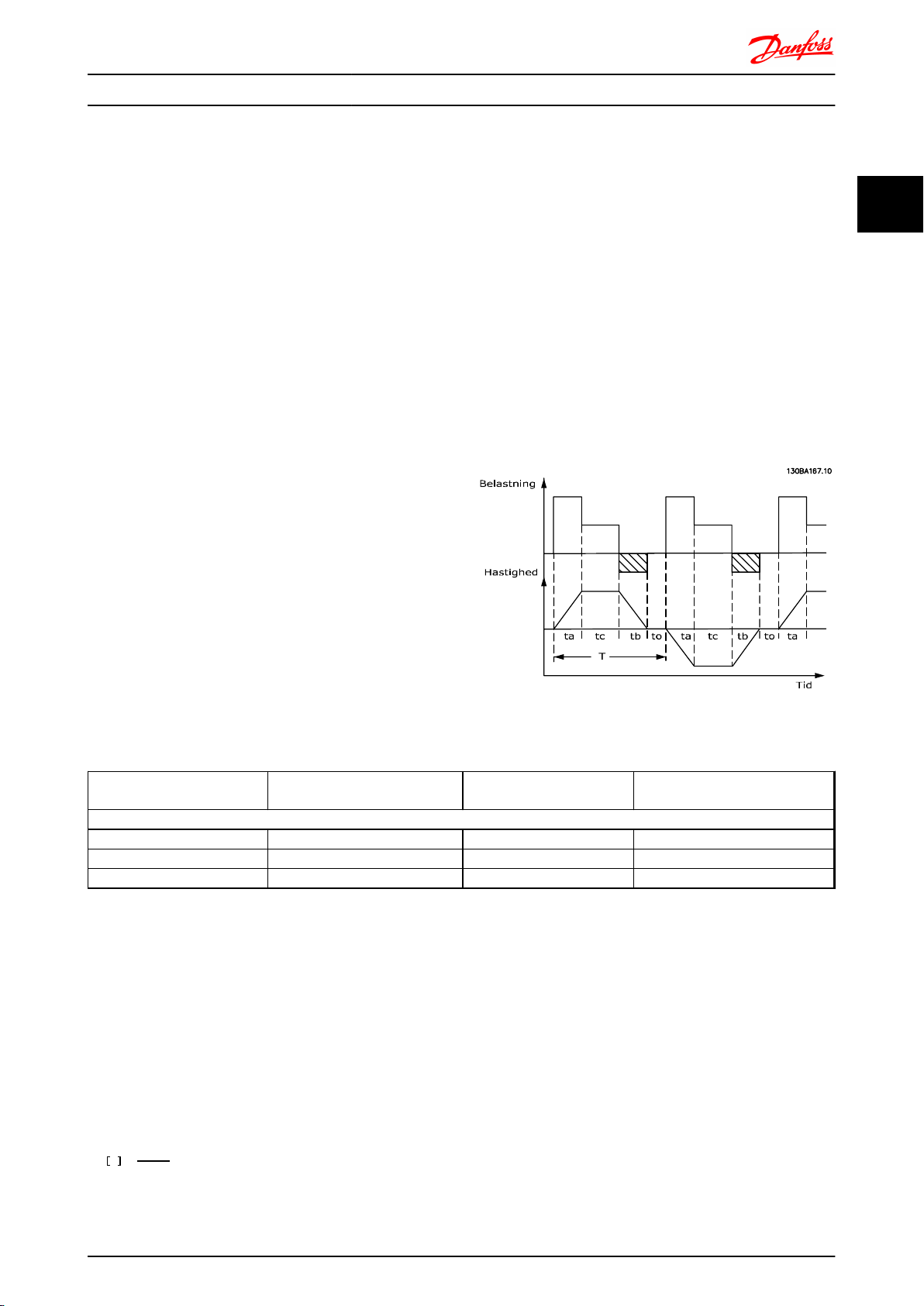
driftscyklus, hvorved modstanden er aktiv.
viser en typisk bremsecyklus.
Illustration 2.25
BEMÆRK!
Motorleverandører bruger ofte S5, når den tilladelige
belastning angives, hvilket er et udtryk for periodisk driftscyklus.
Den periodiske driftscyklus for modstanden beregnes på
følgende måde:
Driftscyklus=tb/T
T=cyklustid i sek
tb bremsetid i sek (ud af cyklustiden)
2 2
Hvis mængden af kinetisk energisk, der overføres til
modstanden i hver bremseperiode, ikke er kendt, kan
gennemsnitseffekten beregnes på baggrund af cyklustiden
og bremsetiden, hvilket også kaldes periodisk driftscyklus.
Modstandens periodiske driftscyklus er et tegn på den
Cyklustid [s]
3x380-480 V
PK37-P75K 120 Kontinuerlig 40%
P90K-P160 600 Kontinuerlig 10%
P200-P800 600 40% 10%
Tabel 2.7 Bremsning ved momentniveau med høj overbelastning
Bremsemodstande har en driftscyklus på 5%, 10% og 40%.
Hvis der anvendes en driftscyklus på 10%, kan bremsemodstandene absorbere bremseeffekten i 10% af cyklustiden.
Illustration 2.25 Cyklustid fpr dynamisk bremsning
Bremsedriftscyklus ved 100%
moment
De resterende 90% af cyklustiden bliver brugt på at sprede
overskydende varme.
Bremsedriftscyklus ved overmoment
(150/160%)
BEMÆRK!
Sørg for, at modstanden er konstrueret til at håndtere den krævede bremsetid.
Den maksimale tilladte belastning på bremsemodstanden angives som spidseffekt ved en given periodisk driftscyklus, og
den kan beregnes på følgende måde:
R
br
hvor
Ω =
U
P
spids
2
dc
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 27
P
spids=Pmotor
x Mbr [%]xη
motorxηVLT
[W]
Page 30

Produktoversigt
VLT®Decentral Drive FCD 302 Design Guide
Bremsemodstanden afhænger af mellemkredsspændingen
(Udc).
Bremsefunktionen er indstillet på fire områder af netforsy-
22
ningen.
Størrelse Bremse aktiv Advarsel
inden
Afbrydelse
(trip)
afbrydelse
FCD 302
3x380-480 V
Tabel 2.8 Grænseværdier for bremse
778 V 810 V 820 V
BEMÆRK!
Rør ikke bremsemodstanden, da den kan blive meget varm
under/efter bremsning. Bremsemodstanden skal anbringes
i et sikkert miljø for at undgå brandfare
Frekvensomformere i størrelse D-F er forsynet med mere
end én bremsechopper. Brug derfor en bremsemodstand
pr. bremsechopper til disse kapslingsstørrelser.
2.7.4 Styring med bremsefunktion
Bremsen er beskyttet mod kortslutning i bremsemod-
BEMÆRK!
Kontrollér, at bremsemodstanden kan håndtere en
spænding på 410 V, 820 V, 850 V, 975 V eller 1.130 V medmindre der anvendes bremsemodstande.
Danfoss anbefaler bremsemodstanden R
garanterer, at frekvensomformeren kan bremse ved højeste
bremsemoment (M
) på 160%. Formlen kan skrives
br(%)
sådan her:
2
U
x 100
R
Ω =
rec
η
er typisk 0,90
motor
η
er typisk 0,98
VLT
P
motor
dc
x
M
xη
VLT
x η
motor
br
(%)
rec
, dvs. en, der
standen, og bremsetransistoren overvåges for at sikre, at
en kortslutning i transistoren registreres. Et relæ/en digital
udgang kan bruges til at beskytte bremsemodstanden
mod overbelastning i forbindelse med en fejl i frekvensomformeren.
Bremsen gør det desuden muligt at udlæse den aktuelle
effekt og middeleffekten for de sidste 120 sekunder.
Bremsen kan også overvåge påførslen af strøm og sikre, at
den ikke overstiger en grænse, der vælges i 2-12 Bremseef-
fektgrænse (kW). I 2-13 Bremseeffektovervågning vælges den
funktion, der skal udføres, når effekten, som sendes til
bremsemodstanden, overstiger den grænse, der er
indstillet i 2-12 Bremseeffektgrænse (kW).
BEMÆRK!
Overvågningen af bremseeffekten er ikke en sikkerheds-
For 200 V- og 480 V-frekvensomformere kan R
bremsemoment skrives som:
ved 160%
rec
funktion. Dette vil kræve en termisk kontakt.
Bremsemodstandskredsløbet er ikke beskyttet mod
overgang til jord.
200V :
480V :
480V :
1) For frekvensomformere ≤7,5 kW akseleffekt
107780
R
=
rec
R
=
rec
R
=
rec
P
motor
375300
P
motor
428914
P
motor
Ω
Ω
Ω
1)
2)
Overspændingsstyring (OVC) (kun for bremsemodstand) kan
vælges som en alternativ bremsefunktion i 2-17 Overspæn-
dingsstyring. Denne funktion er aktiv for alle apparater.
Funktionen sikrer, at det bliver muligt at undgå et trip, hvis
DC-link-spændingen øges. Dette gøres ved at øge
udgangsfrekvensen for at begrænse spændingen fra DC-
2) For frekvensomformere 11-75 kW akseleffekt
linket. Det er en meget nyttig funktion for at undgå, at
frekvensomformeren tripper unødigt, for eksempel når
BEMÆRK!
Den valgte kredsløbsmodstand for bremsemodstanden må
rampe ned-tiden er for kort. I denne situation forlænges
rampe ned-tiden.
ikke overstige anbefalingen fra Danfoss. Hvis der vælges en
bremsemodstand med en højere ohmsk værdi, opnås
bremsemomentet på 160% muligvis ikke, da der kan være
risiko for, at frekvensomformeren afbrydes af sikkerheds-
OVC kan ikke aktiveres, når der køres en PM-motor (når
1-10 Motorkonstruktion er indstillet til [1] PM,ikkeudpræg.SPM).
årsager.
BEMÆRK!
Hvis der opstår en kortslutning i bremsetransistoren, kan
effekttab i bremsemodstanden kun undgås ved at afbryde
netforsyningen til frekvensomformeren med en netafbryder
eller kontaktor. (Kontaktoren kan styres med frekvensomformeren).
28 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 31

130BB701.10
130BC382.10
Systemintegration
3 Systemintegration
VLT®Decentral Drive FCD 302 Design Guide
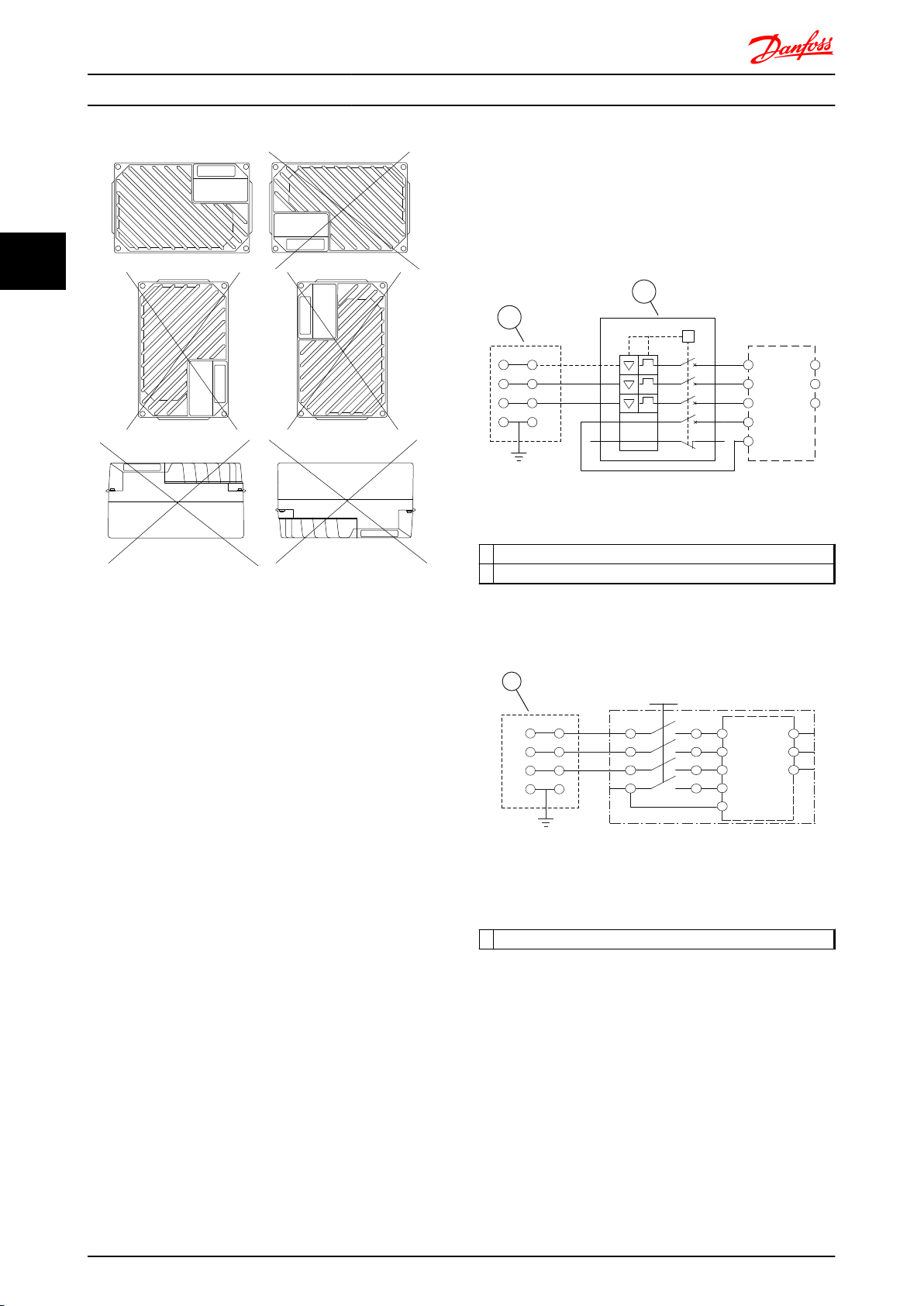
Tilladte monteringspositioner
3.1 Introduktion
3.1.1 Montering
FCD 302 består af to dele: Installationsboksen og elektronikdelen.
Enkeltstående montering
Hullerne på bagsiden af installationsboksen
•
bruges til at fastgøre monteringskonsollerne.
Kontrollér, at stedet, hvor frekvensomformeren
•
monteres, kan bære apparatets vægt.
Sørg for, at de rette monteringsskruer eller bolte
•
benyttes.
Illustration 3.2 Tilladte monteringspositioner - standardapplikationer
3
3
Illustration 3.1 Enkeltstående FCD 302 monteret med
monteringskonsoller
3.1.1.1
FCD 302 er udviklet i overensstemmelse med EHEDGretningslinjerne og er egnet til montering i miljøer med
stor fokus på nem rengøring.
Monter FCD 302 vertikalt på en væg eller en maskinkapsling for at sikre, at væsker kan løbe af kapslingen.
Anbring enheden, så kabelbøsningerne er placeret på
underdelen.
Brug kabelbøsninger, der er konstrueret til at overholde
krav til hygiejniske applikationer, for eksempel Rittal HD
2410.110/120/130. Kabelbøsninger til hygiejniske applikationer sikrer optimal renlighed i installationen.
Hygiejnisk installation
BEMÆRK!
Kun frekvensomformere, som er konfigureret under
betegnelsen hygiejniske kapslinger, FCD 302 P XXX T4
W69, har EHEDG-certificeringen.
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 29
Page 32
130BC383.10
130BC286.10
U
96
V
97
W
98
L1
L2
L3
L1
91
L2
92
L3
93
12
27
T1
T2
T3
NO
NC
NO
NC
L2
L3
PE
L1
41
33
5
3
1 2
4
6
34
42
1
2
L1
L2
L3
PE
U
96
V
97
W
98
L1
91
L2
92
L3
93
12
27
U
V
W
1 2
3 4
5
6
7 8
1
130BC287.10
3
Systemintegration
VLT®Decentral Drive FCD 302 Design Guide
3.2.1.2 Tilslutning til netspænding og
jording
Se FCD 302-betjeningsvejledning, MG04F for installationsvejledning og placering af klemmer.
Nettilslutning
Illustration 3.4 Kun stort apparat: Afbryder og netafbryder
Illustration 3.3 Tilladte monteringspositioner - Hygiejniske
applikationer
3.2
Indgang: Dynamikken på
netforsyningssiden
3.2.1 Tilslutninger
3.2.1.1 Kabler generelt
BEMÆRK!
Kabler generelt
Al kabelføring skal overholde nationale og lokale bestemmelser vedrørende kabelareal og omgivelsestemperatur.
Der anbefales kobberledere (75 °C).
1 Sløjfeklemmer
2 Afbryder
Tabel 3.1 Billedtekst
Illustration 3.5 Kun stort apparat: Serviceafbryder ved netforsyning med sløjfeklemmer
1 Sløjfeklemmer
Tabel 3.2 Billedtekst
30 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 33
Systemintegration
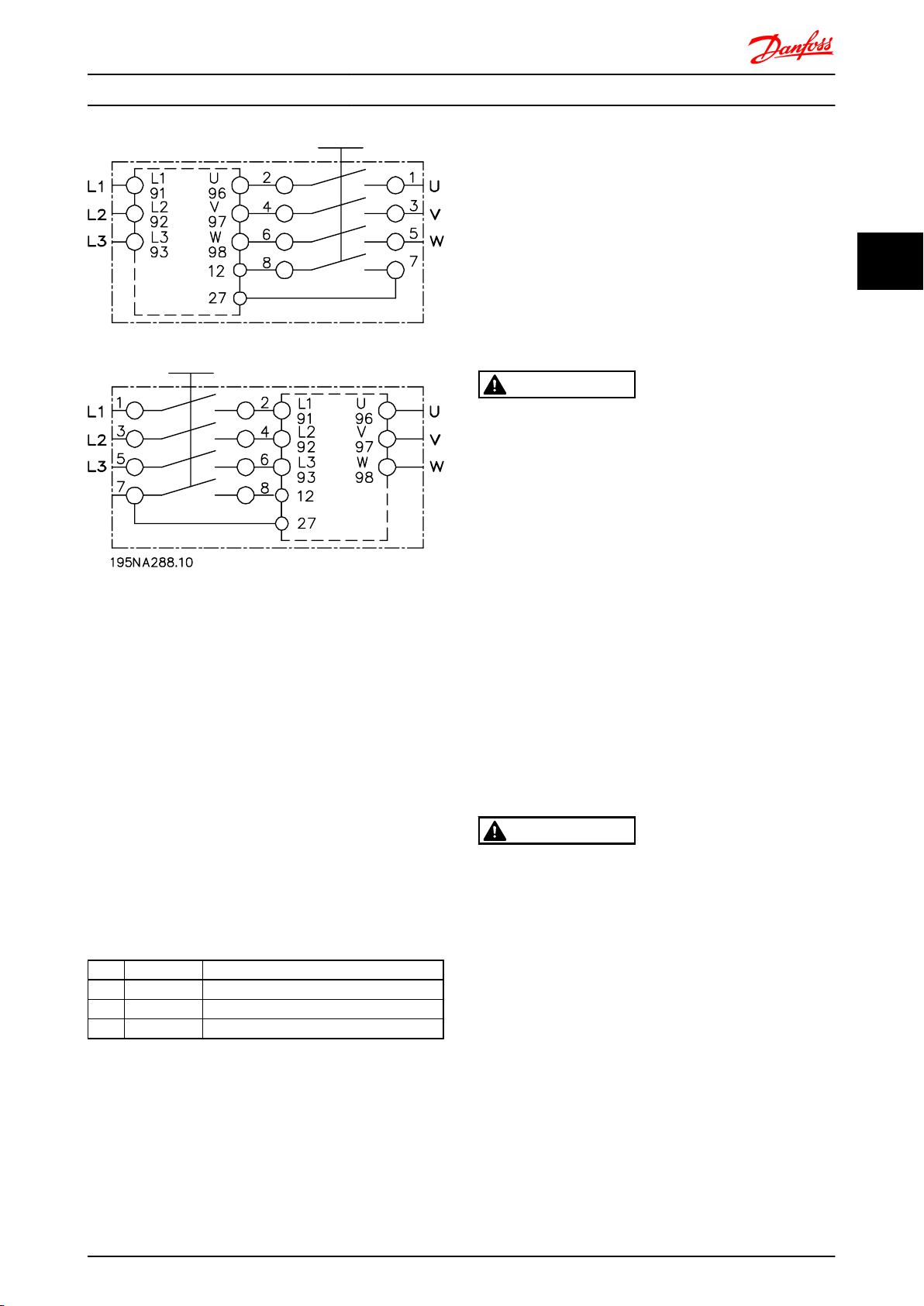
Illustration 3.6 Motor- og nettilslutning med servicekontakt
Serviceafbryder er ekstraudstyr til både små og store
apparater. Kontakten er vist monteret på motorsiden.
Alternativt kan kontakten placeres på netforsyningssiden
eller helt udelades.
Afbryderen er ekstraudstyr til det store apparat. Det store
apparat kan konfigureres med enten en servicekontakt
eller en afbryder, men ikke begge. Illustration 3.6 kan ikke
konfigureres i praksis, men vises udelukkende for at
illustrere de respektive komponenters positioner.
Strømkablerne til netforsyningen er som regel uskærmede
kabler.
3.2.1.3
Se parametergruppe 5-4* Relæer for oplysninger om
indstilling af relæudgange.
Nr.
Tabel 3.3 Relæindstillinger
Se FCD 302-betjeningsvejledning, MG04F for oplysninger om
placering af relæklemmer.
Relætilslutning
01-02 slut (som regel åben)
01-03 bryd (som regel lukket)
04-05 slut (som regel åben)
04-06 bryd (som regel lukket)
VLT®Decentral Drive FCD 302 Design Guide
3.2.2
Sikringer og afbrydere
3.2.2.1 Sikringer
Sikringer og/eller afbrydere er anbefalet beskyttelse på
forsyningssiden, hvis der skulle forekomme komponentnedbrud inden i frekvensomformeren (første fejl).
BEMÆRK!
Dette er obligatorisk for at sikre overholdelse af IEC 60364
til CE eller NEC 2009 til UL.
ADVARSEL
Personale og materiel skal beskyttes mod konsekvensen af
komponentnedbrud inden i frekvensomformeren.
Overbelastningssikring af grenledninger
For at beskytte installationen mod elektriske farer og
brandfarer skal alle grenledninger i en installation,
koblingsudstyr, maskiner osv. beskyttes mod kortslutning
og overstrøm i henhold til nationale/internationale bestemmelser.
BEMÆRK!
De givne anbefalinger omfatter ikke overbelastningssikring
af grenledninger til UL.
Kortslutningsbeskyttelse
Danfoss anbefaler brug af de sikringer/afbrydere, der er
angivet nedenfor, for at beskytte servicemedarbejdere og
materiel i tilfælde af komponentnedbrud i frekvensomformeren.
3.2.2.2
Anbefalinger
ADVARSEL
I tilfælde af en fejl kan det medføre risici for personalet og
skader på frekvensomformeren og andet udstyr, hvis
anbefalingerne ikke er blevet fulgt.
I de følgende afsnit angives den anbefalede nominelle
strøm. Danfoss anbefaler sikringstype gG og Danfoss CB
(Danfoss - CTI-25) afbrydere. Andre afbrydere kan
anvendes, hvis de begrænser energien til frekvensomformeren til et niveau, der er lig med eller lavere end
Danfoss CB-typerne.
Følg anbefalingerne for sikringer og afbrydere for at sikre,
at der kun sker skade på den indvendige side af frekvensomformeren.
Se Applikationsanvisningen Sikringer og afbrydere, MN90T
for oplysninger
3
3
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 31
Page 34
Systemintegration
VLT®Decentral Drive FCD 302 Design Guide
3
3.2.2.3 Overholdelse af CE
Det er obligatorisk at anvende sikringer eller afbrydere for
at overholde IEC 60364.
Danfoss anbefaler en sikringsstørrelse op til gG-25. Denne
sikringsstørrelse egner sig til brug i et kredsløb, der kan
levere maks. 100.000 Arms (symmetriske), 480V. Med de
passende sikringer er frekvensomformerens kortslutningsstrømklassificering (SCCR) 100.000 A rms.
3.2.2.4 Overholdelse af UL
Sikringer eller afbrydere er lovpligtige for overholdelse af
NEC 2009. For at overholde UL/cUL-krav skal for-sikringer i
Tabel 6.3 anvendes, og betingelserne angivet i 6.2 Elektriske
data og ledningsstørrelser skal overholdes.
3.3 Udgang: Dynamikken på motorsiden
3.3.1 Motortilslutning
BEMÆRK!
Det anbefales at anvende skærmede kabler for at
overholde EMC-emissionskravene.
Se 6.3 Generelle specifikationer for korrekt dimensionering af
motorkablets areal og længde.
Skærmning af kabler
Undgå montering med snoede skærmender (pigtails). De
ødelægger skærmens effekt ved høje frekvenser. Hvis det
er nødvendigt at bryde skærmen i forbindelse med
montering af en motorisolator eller en motorkontaktor,
skal skærmen videreføres med så lav en HF-impedans som
muligt.
Tilslut motorkabelskærmen til frakoblingspladen på
frekvensomformeren og til motorens metalhus.
Sørg for, at skærmforbindelserne har det størst mulige
overfladeareal (kabelbøjle). Dette sikres ved at benytte de
medfølgende installationsdele inden i frekvensomformeren.
Hvis det er nødvendigt at bryde skærmen i forbindelse
med montering af en motorisolator eller et motorrelæ, skal
skærmen videreføres med så lav en HF-impedans som
muligt.
Kabellængde og -areal
Frekvensomformeren er testet med en bestemt
kabellængde og et bestemt kabelareal. Hvis kabelarealet
øges, kan kabelkapacitansen og dermed lækstrømmen
øges, og kabellængden skal reduceres tilsvarende. Hold
motorkablet så kort som muligt for at begrænse støjniveauet og minimere lækstrømme.
Alle typer trefasede asynkrone standardmotorer kan sluttes
til frekvensomformeren. Små motorer er som regel stjerneforbundne (230/400 V, Y). Store motorer er som regel
trekantforbundne (400/690 V, Δ). Se motorens typeskilt for
korrekt tilslutningstilstand og spænding.
Se FCD 302-betjeningsvejledning, MG04F for montering af
netforsyning og motorkabler.
Klemmenr.
U V W
U1 V1 W1
U1 V1 W1
Tabel 3.4 Motortilslutningsklemmer
1)
Beskyttet jordtilslutning
96 97 98 99
W2 U2 V2 6 ledninger ud af motoren
1)
Motorspænding 0-100% af netspændingen.
PE
3 ledninger ud af motoren
Trekanttilsluttet
1)
PE
1)
Stjernetilsluttet U2, V2, W2
PE
U2, V2 og W2 skal forbindes separat.
32 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 35
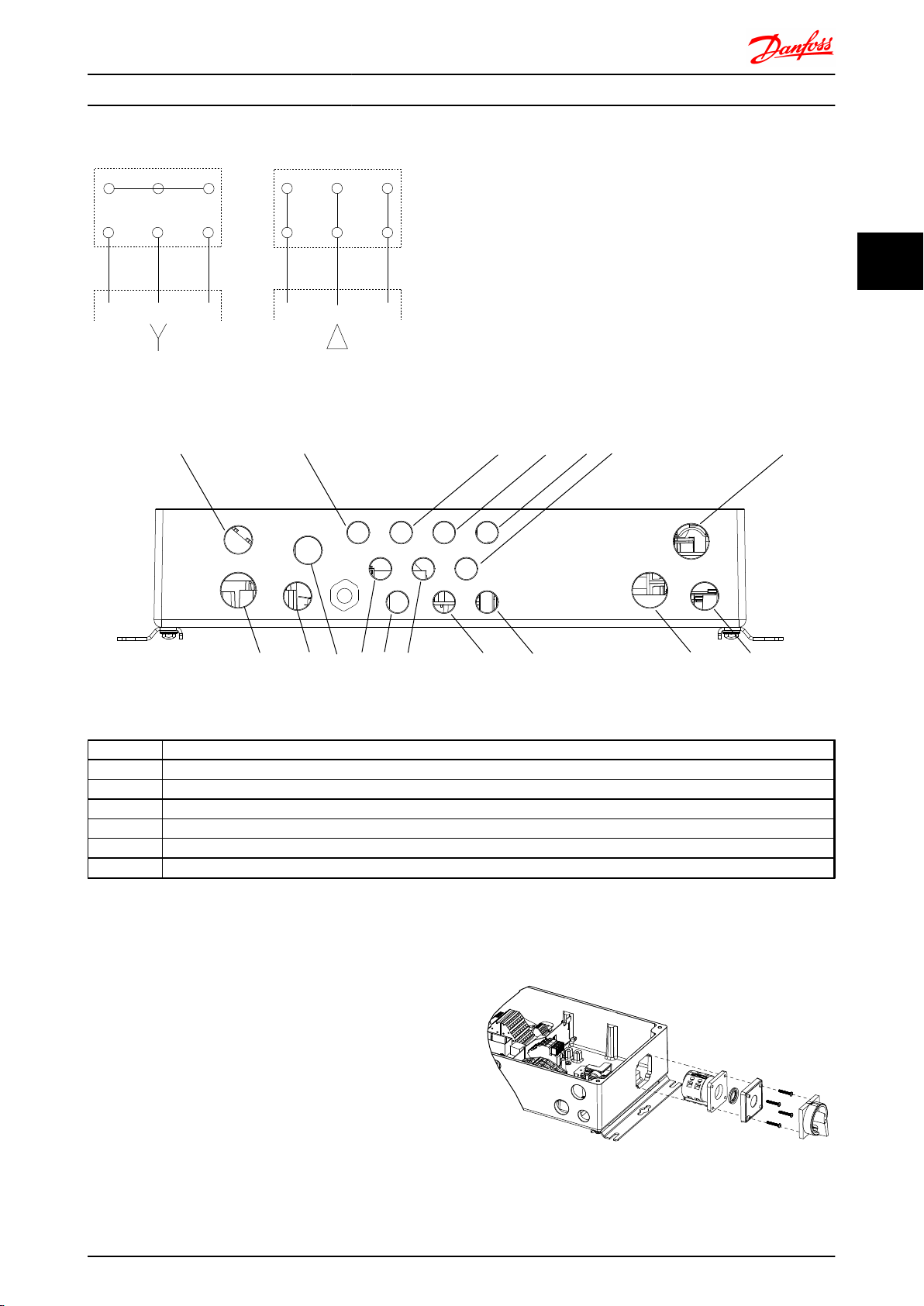
U
1
V
1
W
1
175ZA114.11
96 97 98
96 97 98
FC
FC
Motor
Motor
U
2
V
2
W
2
U
1
V
1
W
1
U
2
V
2
W
2
4
130BC981.10
1
2 2 22332
2226
67
4
5
130BC986.10
Systemintegration
Illustration 3.7 Stjerne-/trekantsjordtilslutninger
VLT®Decentral Drive FCD 302 Design Guide
BEMÆRK!
På motorer uden faseadskillelsespapir eller anden
isoleringsforstærkning, der er egnet til drift med
spændingsforsyning (f.eks. en frekvensomformer), skal der
monteres et sinusbølgefilter på udgangen på frekvensomformeren.
3
3
Illustration 3.8 Kabelindgangshuller - stort apparat
1 Bremse M20
2 8xM16
3 2xM20
4 Forsyningskabler M25
5 M20
6 24 V M20
7 Motor M25
Tabel 3.5 Billedtekst
Netafbryder
3.3.2
Frekvensomformeren fås med en
serviceafbryder (ekstraudstyr) på netforsy-
•
ningssiden eller motorsiden
indbygget afbryder på netforsyningssiden (kun
•
stort apparat).
Angiv ønsket ved bestilling.
Eksempler på konfiguration af det store apparat findes i
Illustration 3.9 og Illustration 3.10.
Illustration 3.9 Placering af serviceafbryder, netforsyningsside,
stort apparat, (IP66/type 4X indendøre)
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 33
Page 36
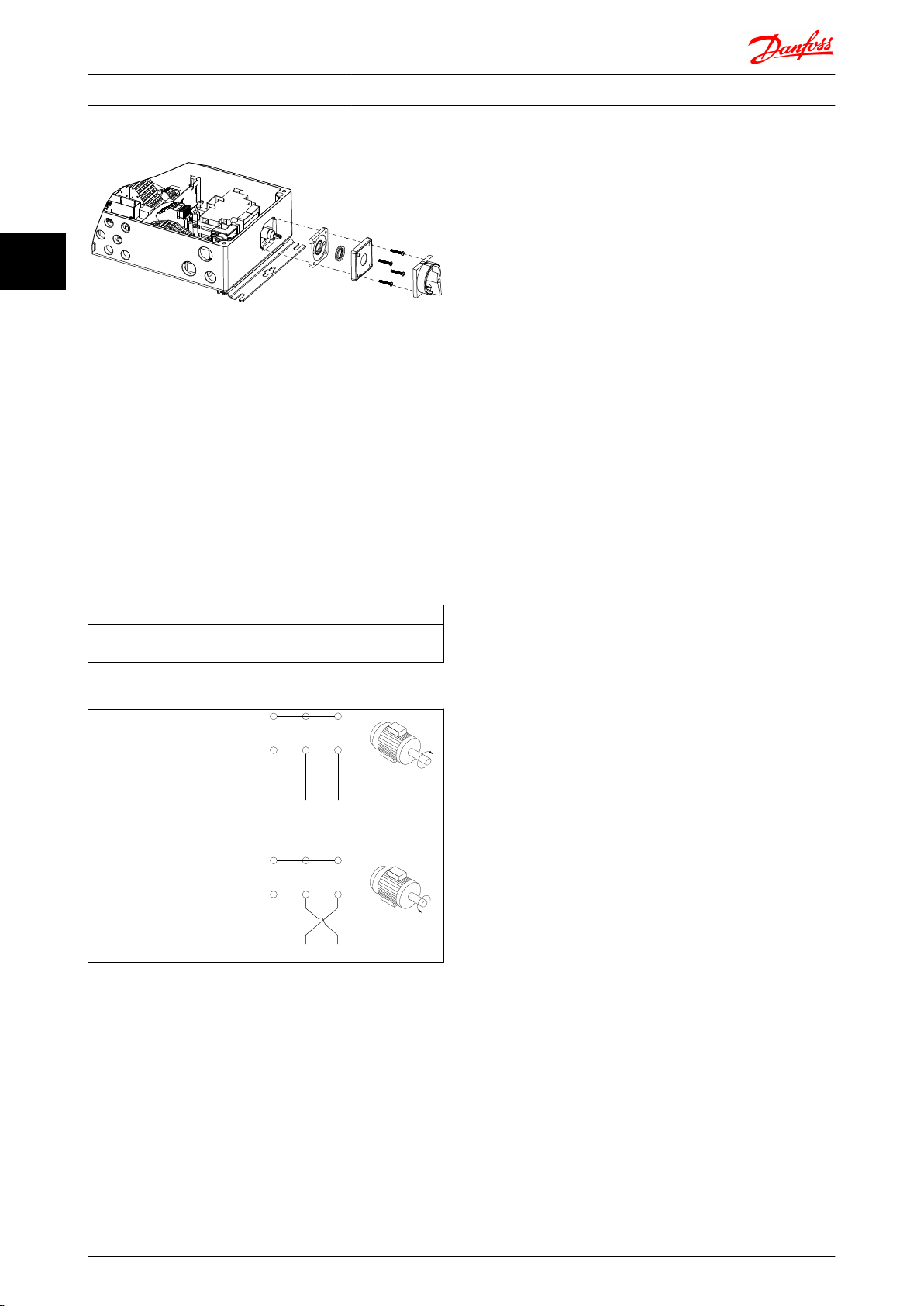
130BC983.10
96 97
U V
96 97 98
U V W
98
W
130HA036.10
Systemintegration
VLT®Decentral Drive FCD 302 Design Guide
3
Illustration 3.10 Placering af afbryder, netforsyningsside, stort
apparat
3.3.3 Yderligere motoroplysninger
3.3.3.1 Motorkabel
Motoren skal sluttes til klemmerne U/T1/96, V/T2/97 og W/
T3/98. Jordledning til klemme 99. Alle typer trefasede
asynkrone standardmotorer kan anvendes med en
frekvensomformer. Fabriksindstillingen er rotation med
uret, og frekvensomformerudgangen er tilsluttet som vist i
Tabel 3.6:
Klemmenr.
96, 97, 98, 99 Netforsyning U/T1, V/T2, W/T3
Tabel 3.6 Motortilslutning - fabriksindstilling
Klemme U/T 1/96 tilsluttet
•
U-fasen
Klemme V/T2/97 tilsluttet V-
•
fasen
Klemme W/T3/98 tilsluttet
•
W-fasen
Funktion
Jord
3.3.3.2
Det elektroniske termiske relæ i frekvensomformeren har
opnået UL-godkendelse for enkelt motorbeskyttelse, når
1-90 Termisk motorbeskyttelse er indstillet til ETR-trip, og
1-24 Motorstrøm er indstillet til nominel motorstrøm (se
motorens typeskilt).
Termisk motorbeskyttelse
3.3.3.3 Paralleltilslutning af motorer
Frekvensomformeren kan styre flere paralleltilsluttede
motorer. Ved brug af parallel motortilslutning skal der
tages højde for følgende:
Anbefalet for at køre applikationer med parallelle
•
motorer i U/F-tilstand 1-01 Motorstyringsprincip
[0]. Indstil U/F-grafen i 1-55 U/f-karakteristik - U og
1-56 U/f-karakteristik - F.
VCC+-tilstanden kan anvendes i nogle applika-
•
tioner.
Det samlede strømforbrug i motorerne må ikke
•
overskride den nominelle udgangsstrøm I
frekvensomformeren.
Hvis motorstørrelserne har meget forskellig
•
spolemodstand, kan der opstå startproblemer
pga. for lav motorspænding ved lav hastighed.
Det elektroniske termiske relæ (ETR) i frekvensom-
•
formeren kan ikke bruges som motorbeskyttelse
af den individuelle motor. Der kan opnås ekstra
motorbeskyttelse ved hjælp af eksempelvis
termistorer i hver motorvikling eller i de individuelle termiske relæer. (Afbrydere er ikke egnede
som beskyttelsesenheder).
INV
i
BEMÆRK!
Installationer med kabler, der er sluttet til en fælles
klemme som vist på det første eksempel på billedet,
anbefales kun til korte kabellængder.
BEMÆRK!
Når motorerne er parallelforbundne, kan 1-02 Flux-
motorfeedbackkilde ikke bruges, og
1-01 Motorstyringsprincip skal indstilles til Særlige motorka-
Tabel 3.7 Motortilslutning - motorens omdrejningsretning
Rotationsretningen kan ændres ved at ombytte to faser i motorkablet
eller ved at ændre indstillingen for 4-10 Motorhastighedsretning.
Der kan udføres en kontrol af motorens omdrejningsretning ved hjælp af 1-28 Motoromløbskontrol og ved at
følge de viste trin på displayet.
34 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
rakteristikker (U/f).
Den samlede motorkabellængde angivet i 6 Specifikationer
er gyldig, så længe de parallelle kabler er korte (mindre
end 10 m hver).
Page 37
Systemintegration
VLT®Decentral Drive FCD 302 Design Guide
3.3.3.4 Motorisolering
For motorkabellængder ≤ den maksimale kabellængde, der
er anført i 6.3 Generelle specifikationer, anbefales følgende
motorisoleringsklassificeringer, fordi spidsspændingen kan
være op til to gange DC-link-spændingen og 2,8 gange
netspændingen pga. påvirkninger fra transmissionsledningen i motorkablet. Hvis en motor har en lavere
isoleringsklassificering, anbefales det at bruge et du/dtsinusbølgefilter.
Nominel netspænding Motorisolering
UN≤420 V
420 V<UN≤500 V Forstærket ULL=1.600 V
Tabel 3.8 Netspænding og motorisolering
3.3.3.5
Alle motorer med FC 302'er på 90 kW eller derover bør
forsynes med NDE-isolerede lejer (Non-Drive End) for at
eliminere cirkulerende lejestrøm. For at minimere DE (Drive
End)-lejestrøm og -akselstrøm er det nødvendigt med
korrekt jording af frekvensomformer, motor, den tilkoblede
maskine og den tilkoblede maskines motor.
Standardstrategier for dæmpning
Motorlejestrøm
1. Brug et isoleret leje
2. Vær grundig med installationsprocedurer
- Kontrollér, at motoren og belastningsmotoren er justeret
- Følg EMC-installationsvejledningen
omhyggeligt
- Forstærk PE'en, så højfrekvensimpedansen er lavere i PE'en end i
forsyningskablerne.
- Sørg for en god højfrekvensforbindelse
mellem motoren og frekvensomformeren, f.eks. et skærmet kabel med
en 360° tilslutning i motoren og
frekvensomformeren.
- Sørg for, at impedansen fra frekvensomformeren til bygningens jordspyd er
lavere end maskinens jordingsimpedans.
Dette kan være svært for pumper
- Sørg for en direkte jordtilslutning
mellem motoren og belastningsmotoren
3. Reducér IGBT-switchfrekvensen
4. Modificér vekselretterens bølgeform, 60° AVM vs.
SFAVM
5. Montér et akseljordingssystem, eller anvend en
isolerende akselkobling
6. Påfør ledende smøring
Standard ULL=1.300 V
7. Brug minimumhastighedsindstillinger, hvis det er
muligt
8. Forsøg at sikre, at netspændingen er balanceret
til jord. Dette kan være svært for IT-, TT- eller TNCS-systemer eller systemer med jordben
9. Anvend et dU/dt- eller sinusfilter
3.3.4 Ekstreme driftsforhold
Kortslutning (motorfase-fase)
Frekvensomformeren beskyttes mod kortslutninger med
strømmålinger i hver af de tre motorfaser eller i DC-linket.
En kortslutning mellem to udgangsfaser medfører
overstrøm i vekselretteren. Vekselretteren slukkes
individuelt, når kortslutningsstrømmen overstiger den
tilladte værdi (Alarm 16, Triplås).
Se retningslinjerne i Design Guide for at beskytte frekvensomformeren mod en kortslutning ved
belastningsfordelings- og bremseudgangene.
Kobling på udgangen
Kobling på udgangen mellem motor og frekvensomformer
er fuldt tilladt. Frekvensomformeren kan ikke blive
beskadiget ved at slå udgangen til. Der kan imidlertid
opstå fejlmeddelelser.
Motorgenereret overspænding
Spændingen i mellemkredsen øges, når motoren fungerer
som en generator i følgende tilfælde:
1. Belastningen driver motoren (ved konstant
udgangsfrekvens fra frekvensomformeren), dvs. at
belastningen genererer energi.
2. Under en deceleration ("rampe ned") er friktionen
lav, hvis inertimomentet er højt, og rampe nedtiden er for kort til, at energien kan spredes som
et tab i frekvensomformeren, motoren og installationen.
3. En forkert indstilling af slipkompenseringen kan
medføre højere DC-link-spænding.
4. Elektromotorisk kraft fra PM-motordrift. Ved friløb
ved høje O/MIN kan PM-motorens elektromotoriske kraft muligvis overstige den maksimale
spændingstolerance i frekvensomformeren og
forårsage skader. Frekvensomformeren er
konstrueret til at forhindre, at der opstår
modelektromotorisk kraft: Værdien af 4-19 Maks.
udgangsfrekvens begrænses automatisk baseret
på en intern beregning baseret på værdien af
1-40 Modelektromot.kraft v. 1000 O/MIN,
1-25 Nominel motorhastighed og 1-39 Motorpoler.
Når overhastighed i motoren er mulig (f.eks. pga.
meget høje "vindmølle-effekter"), anbefales en
bremsemodstand.
3
3
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 35
Page 38
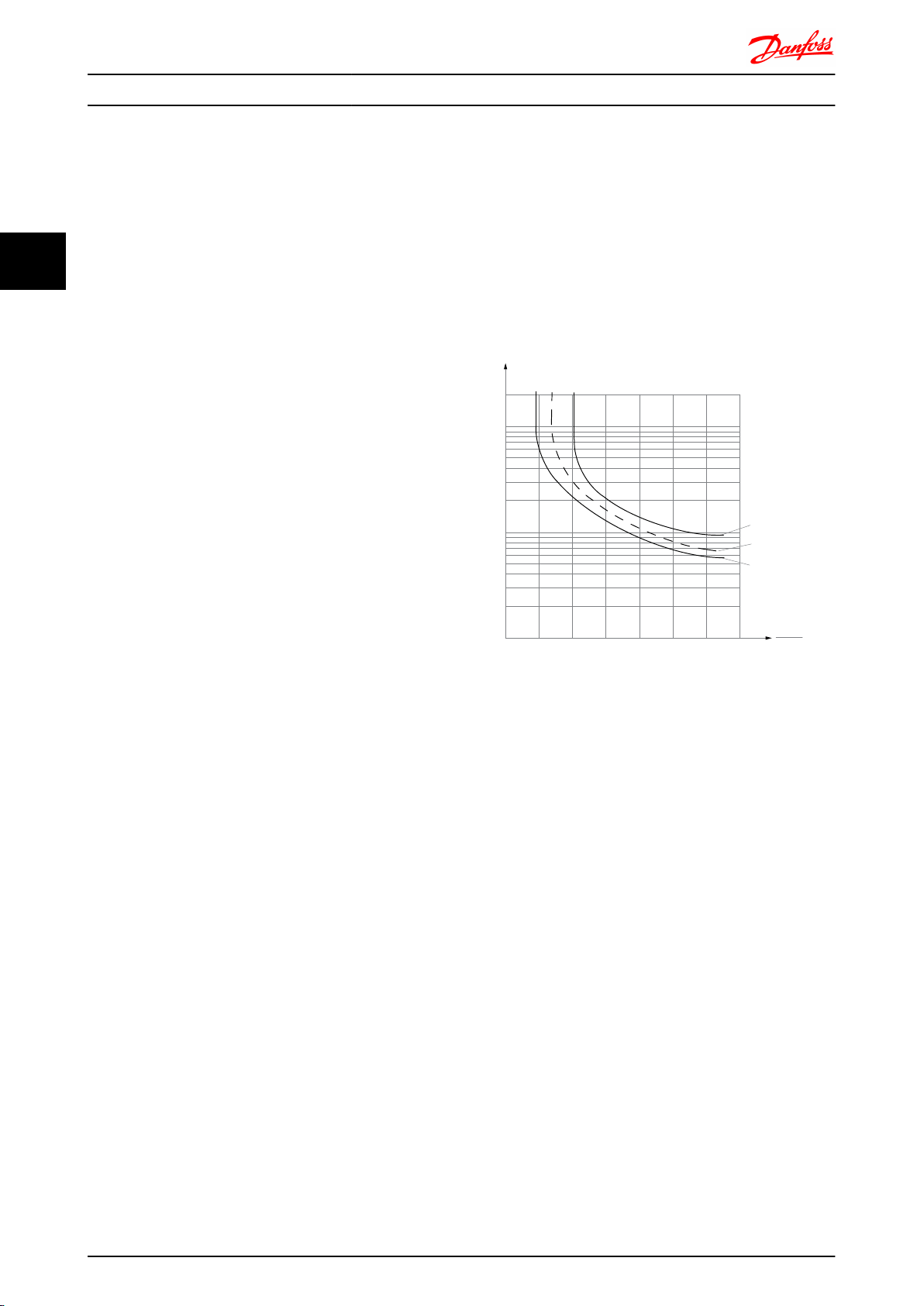
1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2000
500
200
400
300
1000
600
t [s]
175ZA052.11
fUD = 0,2 x f M,N
fUD = 2 x f M,N
fUD = 1 x f M,N
IMN
IM
Systemintegration
VLT®Decentral Drive FCD 302 Design Guide
3
BEMÆRK!
Frekvensomformeren skal forsynes med en bremsechopper.
Styreenheden forsøger måske at korrigere rampen, når det
er muligt (2-17 Overspændingsstyring).
Vekselretteren slukkes for at beskytte transistorerne og
kondensatorerne på mellemkredsene, når der nås et vist
spændingsniveau.
Se 2-10 Bremsefunktion og 2-17 Overspændingsstyring for at
vælge den metode, der skal anvendes til at styre niveauet
for mellemkredsspændingen.
BEMÆRK!
OVC kan ikke aktiveres ved drift af en PM-motor, dvs. for
parameter 1-10 Motorkonstruktion indstillet til [1] PM,ikke-
udpræg.SPM.
Netudfald
I tilfælde af netudfald fortsætter frekvensomformeren, indtil
mellemkredsspændingen kommer ned under mindste
stopniveau. Mindste stopniveau er typisk 15% under
frekvensomformerens laveste nominelle forsyningsspænding. Netspændingen før afbrydelsen bestemmer
sammen med motorbelastningen, hvor længe der skal gå,
før vekselretteren friløber.
30 og 50/60 Hz. Maks. hastighedsgrænse: (
4-13 Motorhastighed, høj grænse [O/MIN] eller 4-19 Maks.
udgangsfrekvens) begrænser den maks. udgangshastighed,
som frekvensomformeren kan yde.
ETR (elektronisk termisk relæ)
ETR-funktionen måler den faktiske strøm, hastighed og tid
for at beregne motortemperaturen og beskytte motoren
mod at blive overophedet (advarsel eller trip). Der findes
også en ekstern termistorindgang. ETR er en elektronisk
funktion, der simulerer et bimetalrelæ på basis af interne
målinger. Egenskaberne er vist i Illustration 3.11:
Konstant overbelastning i VVC
Når frekvensomformeren overbelastes, reducerer styreen-
plus
-tilstand
Illustration 3.11 ETR-funktioner
hederne udgangsfrekvensen for at reducere belastningen.
Overbelastning er, når momentgrænsen, der er indstillet i
4-16 Momentgrænse for motordrift/4-17 Momentgrænse for
generatordrift, opnås.
Ved for høj overbelastning sørger en strøm for at sikre, at
frekvensomformeren kobler ud efter ca. 5-10 s.
Illustration 3.11: X-aksen viser forholdet mellem I
I
nominel. Y-aksen viser det tidsrum i sekunder, der
motor
går, før ETR afbryder og tripper frekvensomformeren.
Kurverne viser den karakteristiske nominelle hastighed ved
motor
og
den dobbelte nominelle hastighed og ved 0,2 x den
Drift inden for momentgrænsen tidsbegrænses (0-60
sekunder) i 14-25 Trip-forsinkelse ved momenegrænse.
nominelle hastighed.
Ved lavere hastighed kobler ETR ud ved en lavere
temperatur på grund af mindre køling af motoren. Dette
3.3.4.1
Termisk motorbeskyttelse
Frekvensomformeren tilbyder forskellige dedikerede
funktioner til beskyttelse af applikationen mod alvorlige fejl
Momentgrænse
Momentgrænsefunktionen i motoren beskytter mod
forhindrer, at motoren overophedes selv ved lave
hastigheder. Funktionen ETR beregner motortemperaturen
på basis af den faktiske strøm og hastighed. Den
udregnede temperatur kan ses som en udlæsningsparameter i 16-18 Termisk motorbelastning i
frekvensomformeren.
overbelastning uafhængigt af hastigheden. Vælg momentgrænseindstillinger 4-16 Momentgrænse for motordrift og
eller 4-17 Momentgrænse for generatordrift. I 14-25 Trip-
forsinkelse ved momenegrænse indstilles det tidsrum, der
skal gå, inden momentgrænseadvarslen tripper.
Strømgrænse
Indstil strømgrænsen i 4-18 Strømgrænse. Indstil det
tidsrum, der skal gå, før strømgrænseadvarslen tripper i
14-24 Tripfors. ved strømgrænse.
Min. hastighedsgrænse
(4-11 Motorhastighed, lav grænse [O/MIN] eller
4-12 Motorhastighed, lav grænse [Hz]) begrænser det
funktionelle hastighedsområde til f.eks. et område mellem
36 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 39

130BB708.10
1
2
4
3
5
Speed
Coast inverse (27)
Coast inverse
Safe
torque off
130BC985.10
NVR B03B04P B02 B01
2012G B07B0820 B06 B05
372013 B11B1237 B10 B09
1212
12
121212 55 53
271918
33
3229 50 54
202020 202020 55 42
Systemintegration
VLT®Decentral Drive FCD 302 Design Guide
3.4 Frekvensomformer-/optionsvalg
3.4.1 Styrekabler og klemmer
3.4.1.1 Styrekabelføring
1 S201 - klemme 53
2 S202 - klemme 54
3 S801 - standard busterminering
4 Profibus-terminering
5 Fieldbus-adresser
Tabel 3.9 Billedtekst
3
3
Ekstern 24 V DC-forsyning benyttes som lavspændingsforsyning af styrekort og evt. monterede optionskort. Dette
giver mulighed for fuld drift af LCP'et (herunder parameterindstilling) uden tilslutning til netspænding.
BEMÆRK!
Der gives advarsel om lavspænding, når 24 V DC er
tilsluttet, Trip vil imidlertid ikke finde sted.
ADVARSEL
Anvend en 24 V DC-forsyning af PELV-typen for at sikre
korrekt galvanisk adskillelse (PELV-typen) på frekvensomformerens styreklemmer.
3.4.1.2 DIP switches
De analoge indgangsklemmer 53 og 54 kan
•
vælges til indgangssignaler med enten spænding
(0-10 V) eller strøm (0-20 mA).
Indstil kontakterne S201 (klemme 53) og S202
•
(klemme 54) for at vælge signaltypen. ON er for
strøm, OFF er for spænding.
Klemme 53 er som standard indstillet til en
•
hastighedsreference i åben sløjfe.
Klemme 54 er som standard indstillet til et
•
feedbacksignal i lukket sløjfe.
BEMÆRK!
Kontakterne 4 og 5 er kun gyldige til apparater, der er
udstyret med Fieldbus-optioner.
3.4.1.3 Grundlæggende
ledningsføringseksempel
Tilslut klemme 27 og 37 til +24 V-klemmer 12 og 13 som
vist i Illustration 3.13.
Fabriksindstillinger:
27=Inverteret friløb 5-10 Klemme 18, digital indgang [2]
37=Sikkert moment deaktiveret, inverteret
Illustration 3.12 Placering af DIP switches
Illustration 3.13 Grundlæggende ledningsføringseksempel
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 37
Page 40
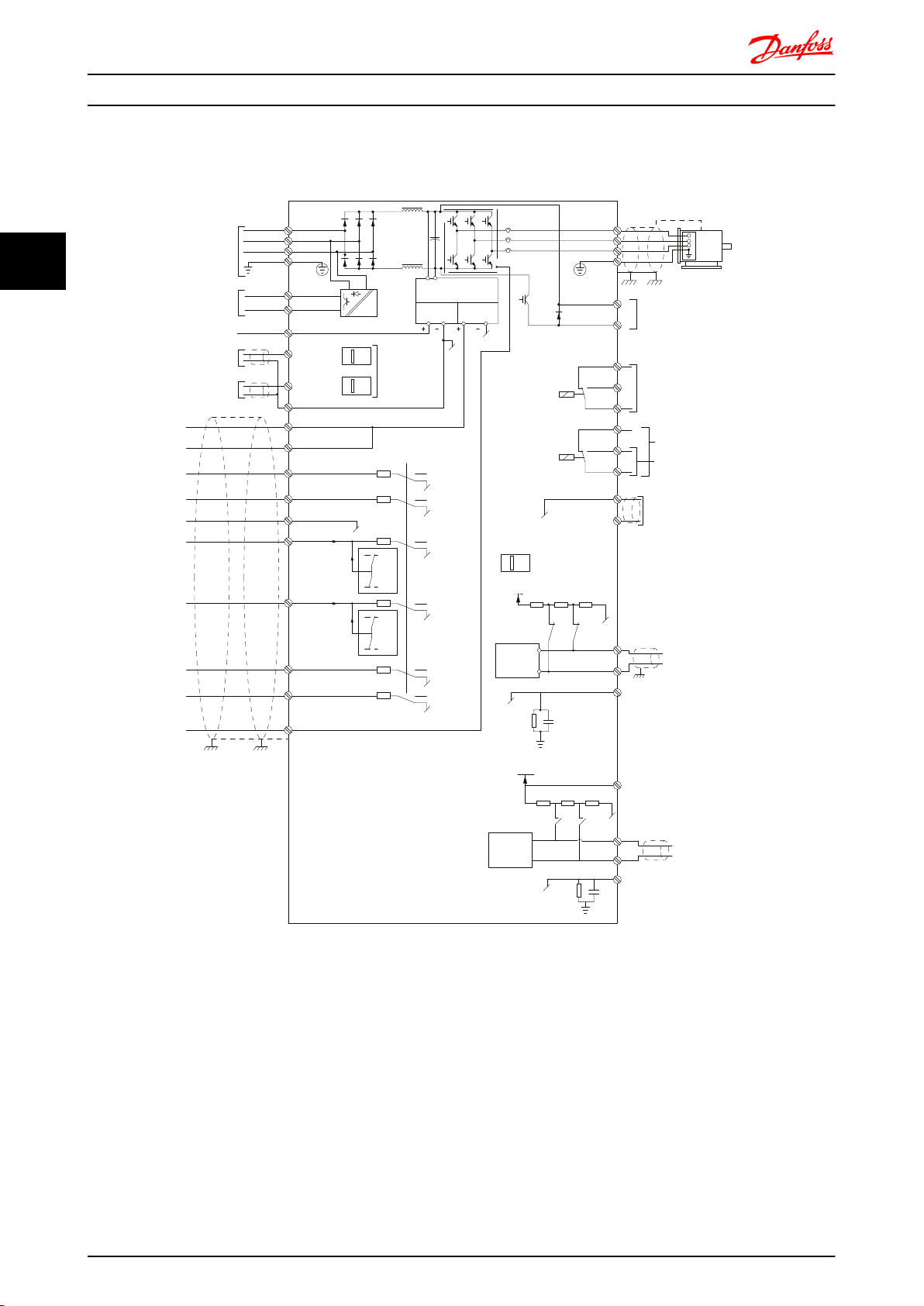
130BC384.10
3 phase
power
input
Mechanical
brake
+10Vdc
-10Vdc+10Vdc
0/4-20 mA
-10Vdc+10Vdc
0/4-20 mA
91 (L1)
92 (L2)
93 (L3)
95 (PE)
122(MBR+)
123(MBR-)
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN)
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
19 (D IN)
20 (COM D IN)
27 (D IN/OUT)
29 (D IN/OUT)
24V
OV
32 (D IN)
33 (D IN)
37 (D IN)
S201
S202
ON/I=0-20mA
OFF/U=0-10V
P 5-00
24V (NPN)
OV (PNP)
24V (NPN)
OV (PNP)
24V (NPN)
OV (PNP)
24V (NPN)
OV (PNP)
24V (NPN)
OV (PNP)
24V (NPN)
OV (PNP)
Switch Mode
Power Supply
10Vdc
15mA
24Vdc
600mA
(U) 96
(U) 97
(W) 98
(PE) 99
Motor
Brake
resistor
(R+) 82
(R-) 81
relay1
relay2
03
02
01
06
05
04
240Vac, 2A
240Vac, 2A
400Vac, 2A
Analog Output
0/4-20 mA
(COM A OUT) 39
(A OT) 42
ON=Terminated
OFF=Open
S801
S801
GX
(N RS-485) 69
(P RS-485) 68
5V
RS-485
Interface
(COM RS-485) 61
(PNP) = Source
(NPN) = Sink
RS-485
ON
1 2
ON
1 2
ON
1 2
0V
VCXA
Profibus
interface
GND1
GND1
RS485
66
63
62
67
GX
3
Systemintegration
VLT®Decentral Drive FCD 302 Design Guide
3.4.1.4 Elektrisk installation, Styrekabler
Illustration 3.14 Elektriske klemmer eksklusive optioner
A=analog, D=digital
Klemme 37 anvendes til Sikker standsning.
Relæ 2 har ingen funktion, når frekvensomformeren har en mekanisk bremseudgang.
38 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 41

130BC987.10
Safe
torque off
Safe
torque off
PNP (Source)
Digital input wiring
NPN (Sink)
Digital input wiring
NVR B03B04P B02 B01
2012G B07B0820 B06 B05
372013 B11B1237 B10 B09
1212
12
121212 55 53
271918 333229 50 54
202020 202020 55 42
NVR B03B04P B02 B01
2012G B07B0820 B06 B05
372013 B11B1237 B10 B09
1212
12
121212 55 53
271918
33
3229 50 54
202020 202020 55 42
3
7
2
0
1
3
B
1
1
B
1
2
3
7
B
1
0
B
0
9
2
0
1
2
G
B
0
7
B
0
8
2
0
B
0
6
B
0
5
N
V
R
B
0
3
B
0
4
P
B
0
2
B
0
1
Z
A
/Z
B
+5V
/B
GND
/A
A
+24V
B
GND
130BC998.10
Systemintegration
VLT®Decentral Drive FCD 302 Design Guide
Meget lange styrekabler og analoge signaler kan i sjældne
tilfælde resultere i jordsløjfer ved 50/60 Hz på grund af støj
fra netforsyningskablerne. Hvis dette forekommer, kan det
være nødvendigt at bryde skærmen eller at indsætte en
100 nF-kondensator mellem skærmen og chassiset. De
digitale og analoge indgange og udgange skal sluttes
særskilt til de fælles indgange (klemme 20, 55, 39) for at
undgå, at jordstrømme fra begge grupper påvirker andre
grupper. Indkobling på den digitale indgang kan f.eks.
forstyrre det analoge indgangssignal.
3.4.1.5 Relæudgang
Relæudgangen med klemmerne 01, 02, 03 og 04, 05, 06
har en maksimal kapacitet på 240 V AC, 2 A. Der kan
anvendes minimum 24 V DC, 10 mA eller 24 V DC, 100
mA. til at indikere status og advarsler. De to relæer er
fysisk placeret på installationskortet. Disse er programmerbare via parametergruppe 5-4*. Relæerne er Form C,
hvilket betyder, at hver har en normalt åben kontakt og en
normalt lukket kontakt på en enkelt række. Kontakterne for
hvert relæ er mærket til en maksimum belastning på 240 V
AC ved 2 amp.
Relæ 1
Klemme 01: fælles
•
Klemme 02: normalt åben 240 V AC
•
Klemme 03: normalt lukket 240 V AC
•
Relæ 2
Klemme 04: fælles
•
Klemme 05: normalt åben 240 V AC
•
Klemme 06: normalt lukket 240 V AC
•
Relæ 1 og relæ 2 programmeres i 5-40 Funktionsrelæ,
5-41 ON-forsinkelse, relæ og 5-42 OFF-forsinkelse, relæ.
3
3
Illustration 3.15 Indgangspolaritet for styreklemmerne
Illustration 3.16 Relætilslutning
BEMÆRK!
Det anbefales at anvende skærmede kabler for at
overholde EMC-emissionskravene. Hvis der anvendes et
uskærmet kabel. Se 2.2.2 EMC-testresultater for flere
oplysninger.
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 39
Page 42

Systemintegration
VLT®Decentral Drive FCD 302 Design Guide
3
3.4.2 Bremsemodstande
I nogle applikationer kræves en nedbrydning af kinetisk
energi. I denne frekvensomformer ledes energien ikke
tilbage til grid'et. I stedet skal den kinetiske energi
omdannes til varme, og dette opnås ved at bremse med
en bremsemodstand.
I applikationer, hvor motoren bruges som en bremse,
genereres energien i motoren og sendes tilbage til
frekvensomformeren. Hvis energien ikke kan sendes tilbage
til motoren, øger den spændingen i omformerens DCledning. I applikationer med jævnlig bremsning og/eller
høje inertibelastninger kan denne øgning måske medføre
et overspændingstrip i omformeren og derefter lukke den
ned. Bremsemodstande bruges til at sprede den
overskydende energi, der stammer fra den regenerative
bremsning. Modstanden vælges under hensyntagen til den
ohmske værdi, effekttabet og den fysiske størrelse. Danfoss
Bremsemodstande findes i forskellige typer til ind- eller
udvendig installation i frekvensomformeren. Kodenumre
findes i 5.2.1 Bestillingsnumre: Tilbehør.
3.4.2.1
bremsemodstande 10%
3.4.3
Særlige betingelser
Under visse særlige betingelser, hvor driften af frekvensomformeren vanskeliggøres, skal der tages højde for derating.
Under visse betingelser skal derating udføres manuelt.
Under andre betingelser vil frekvensomformeren
automatisk gennemføre en grad af derating, når det er
nødvendigt. Dette gøres for at sikre ydeevnen ved kritiske
niveauer, hvor alternativet kan være et trip.
3.4.3.1 Manuel derating
Der skal tages højde for manuel derating for:
Lufttryk – relevant for installationer i højder over
•
1 km
Motorhastighed – ved kontinuerlig drift ved lave
•
O/MIN i applikationer med konstant moment
Omgivelsestemperatur – relevant for omgivelses-
•
temperaturer over 50 °C
Kontakt Danfoss for applikationsanvisning for tabeller og
nærmere beskrivelser. Her beskrives kun tilfælde med drift
ved lave motorhastigheder.
For frekvensomformere, der er udstyret med en dynamisk
bremseoption, medfølger en bremse-IGBT sammen med
klemmerne 81 (R-) og 82 (R+) i hvert vekselrettermodul for
tilslutning af en eller flere bremsemodstande.
For indvendig bremsemodstand anvendes:
Bremsemodstand 1.750 Ω
10 W/100%
Bremsemodstand 350 Ω 10
W/100%
Tabel 3.10 bremsemodstande 10%
3.4.2.2
Ved at placere bremsemodstanden udvendigt opnås
fordelene ved at vælge modstanden baseret på applikationens behov, sprede energien uden for betjeningspanelet
og beskytte frekvensomformeren fra overophedning, hvis
bremsemodstanden er overbelastet.
Nr.
R- R+
Tabel 3.11 Bremsemodstande 40%
Bremsemodstand 40%
81 (ekstrafunktion)
Tilslutningskablet til bremsemodstanden skal
•
være skærmet. Monter afskærmningen på
frekvensomformerens metalkabinet og på
bremsemodstandens metalkabinet ved hjælp af
kabelbøjler.
Bremsekabelarealet skal matche bremsemo-
•
mentet.
82 (ekstrafunktion)
Monteres inden i installationsboksen under motorklemmerne
Monteres inden i installationsboksen under motorklemmerne
Bremsemodstandsklemmer
3.4.3.2
Frekvensomformeren undersøger hele tiden, om der er
kritiske niveauer:
Som respons på et kritisk niveau kan frekvensomformeren
justere switchfrekvensen. Ved kritisk høje interne
temperaturer og lave motorhastigheder kan frekvensomformeren også tvinge PWM-mønstret til SFAVM.
Automatisk derating
Kritisk høj temperatur på styrekortet eller
•
kølepladen
Høj motorbelastning
•
Høj DC-link-spænding
•
Lav motorhastighed
•
BEMÆRK!
Den automatiske derating er anderledes, når
14-55 Udgangsfilter er indstillet til [2] Sinusbølgefilter fast.
3.4.3.3 Derating for kørsel ved lav
hastighed
Når en motor er tilsluttet en frekvensomformer, er det
nødvendigt at kontrollere, at der er tilstrækkelig køling til
motoren.
Varmeniveauet afhænger af belastningen på motoren samt
af driftshastighed og -tid.
Applikationer med konstant moment (CT-tilstand)
Der kan opstå et problem ved lave O/MIN-værdier i
applikationer med konstant moment. I en applikation med
konstant moment kan en motor blive overophedet ved
40 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 43

10 20 30 40 50 60 70 80 90 100 110
20
40
60
80
100
120
0
v %
T %
0
1)
130BA893.10
Systemintegration
VLT®Decentral Drive FCD 302 Design Guide
lave hastigheder pga. mindre køleluft fra motorens
indbyggede ventilator. Hvis motoren kører kontinuerligt
ved en O/MIN-værdi, der er lavere end halvdelen af den
nominelle værdi, skal den derfor forsynes med ekstra
luftkøling (eller der kan anvendes en motor, der er bygget
til denne type drift). Alternativt kan belastningsniveauet til
motoren reduceres ved at vælge en større motor.
Konstruktionen af frekvensomformeren begrænser
imidlertid motorstørrelsen.
Applikationer med variabelt (kvadratisk) moment (VT)
I VT-applikationer som centrifugalpumper og ventilatorer,
er momentet proportionelt med anden potens af
hastigheden, og effekten er proportionel med tredje
potens af hastigheden. I disse applikationer er der ikke
behov for ekstra køling eller derating af motoren. I
Illustration 3.17 er den typiske VT-kurve under det
maksimale moment med derating og maks. moment med
tvungen køling ved alle hastigheder.
Illustration 3.17 VT-applikationer - Maksimumbelastning for en
standardmotor ved 40 °C
Del Beskrivelse
‒‒‒‒‒‒‒‒ Maksimummoment
─ ─ ─ ─ Typisk moment ved VT-belastning
Tabel 3.12 Billedtekst - VT-applikationer
BEMÆRK!
Drift ved oversynkron hastighed vil medføre, at det tilgængelige motormoment falder omvendt proportionalt med
hastighedsøgningen. Der skal tages højde for dette i
designfasen for at undgå overbelastning af motoren.
hvilket dog ikke anbefales. Se også
2.2.1 Generelle forhold vedr. EMC-emission og 2.2.2 EMCtestresultater.
God teknisk praksis til sikring af EMC-korrekt elektrisk
installation:
Anvend kun flettede, skærmede motorkabler og
•
flettede, skærmede styrekabler. Skærmen bør
minimum give en dækning på 80%. Skærmmaterialet skal være af metal, hvilket normalt vil sige
kobber, aluminium, stål eller bly, uden at det dog
er begrænset til disse materialer. Der er ingen
særlige krav til forsyningskablet.
Installationer med hårde metalrør kræver ikke
•
brug af skærmede kabler, men motorkablet skal
installeres i et rør for sig selv adskilt fra styre- og
forsyningskablerne. Fuld tilslutning af røret fra
frekvensomformeren til motoren er påkrævet.
EMC-ydeevnen i fleksible rør varierer meget, og
der skal skaffes oplysninger fra producenten.
Forbind skærmen/røret til jord i begge ender for
•
både motorkabler og styrekabler. I visse tilfælde
vil det ikke være muligt at tilslutte skærmen i
begge ender. Hvis dette er tilfældet, skal
skærmen tilsluttes frekvensomformeren.
Undgå terminering af skærmen med sammen-
•
snoede ender (pigtails). En sådan terminering
forøger skærmens højfrekvensimpedans, hvilket
begrænser effektiviteten ved høje frekvenser.
Benyt lavimpedante kabelbøjler eller EMCkabelbøsninger i stedet.
Undgå, hvor det er muligt, brug af uskærmede
•
motor- eller styrekabler i skabe, der indeholder
frekvensomformere.
Lad skærmen være så tæt på tilslutningspunkterne som
muligt.
I Illustration 3.18 vises et eksempel på en EMC-korrekt
elektrisk installation af en IP 20-frekvensomformer.
Frekvensomformeren er forbundet til en PLC, der er
monteret i et separat skab. Andre installationsopbygninger
kan give en tilsvarende EMC-ydeevne, hvis ovenstående
retningslinjer følges.
1.4.3 CE-mærkning,
3
3
3.4.4 EMC
3.4.4.1 EMC-korrekte kabler
Følgende er retningslinjer for god teknisk praksis ved
installation af frekvensomformere. Følg disse retningslinjer
for at overholde EN 61800-3 First environment. Hvis installationen er i EN 61800-3 Second environment, dvs. i
industrielle netværk eller i en installation med egen
transformer, er det tilladt at afvige fra disse retningslinjer,
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 41
Page 44

130BC989.10
L1
L2
L3
PE
Min. 16 mm
2
Equalizing cable
Control cables
Earthing rail
Cable insulation stripped
Output contactor etc.
Min. 200mm
between control cables,
motor cable and
Motor cable
Motor, 3 phases and
PLC etc.
Mains-supply
mains cable
PLC
Protective earth
Reinforced protective earth
3
Systemintegration
VLT®Decentral Drive FCD 302 Design Guide
Hvis installationen ikke udføres i henhold til retningslinjerne, og hvis der anvendes uskærmede kabler og styrekabler,
overholdes nogle emissionskrav ikke, selv om immunitetskravene opfyldes. Se afsnit 2.2.2 EMC-testresultater.
Illustration 3.18 EMC-korrekt elektrisk installation af en frekvensomformer
42 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 45

1
2
PE
FC
PE
PLC
130BB922.12
PE PE
<10 mm
100nF
FC
PE
PE
PLC
<10 mm
130BB609.12
PE
FC
PE
FC
130BB923.12
PE PE
69
68
61
69
68
61
1
2
<10 mm
PE
FC
PE
FC
130BB924.12
PE PE
69
69
68
68
1
2
<10 mm
Systemintegration
VLT®Decentral Drive FCD 302 Design Guide
Illustration 3.21 Skærmning af 50/60 Hz-brumsløjfer
Undgå EMC-støj på seriel kommunikation
Denne klemme er forbundet til jord via en intern RCforbindelse. Benyt snoede kabler til at reducere
forstyrrelser mellem lederne. Den anbefalede metode vises
i Illustration 3.22.
Illustration 3.22 Skærmning af EMC-støjreduktion, seriel
kommunikation
3
3
Illustration 3.19 Diagram over elektriske tilslutninger
3.4.4.2
Jording af skærmede styrekabler
Korrekt skærmning
Den foretrukne metode er i de fleste tilfælde at sikre
styrekabler og kabler til med skærmbøjler i begge ender
for at sikre den bedst mulige højfrekvente kabelkontakt.
Hvis jordpotentialet mellem frekvensomformeren og PLC'et
afviger, kan der opstå elektrisk støj, som vil forstyrre hele
systemet. Dette løses ved at montere et udligningskabel
ved siden af styrekablet. Min. kabelareal: 16 mm2.
Illustration 3.20 Skærmning af styrekabler
1
Min. 16 mm
2 Udligningskabel
Tabel 3.13 Billedtekst
2
50/60 Hz-brumsløjfer
Der kan forekomme brumsløjfer ved meget lange
styrekabler. Brumsløjfer kan fjernes ved at forbinde den
ene ende af skærmen til jord med en 100 nF-kondensator
(kort ledningslængde).
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 43
1
Min. 16 mm
2 Udligningskabel
Tabel 3.14 Billedtekst
2
Tilslutningen til klemme 61 kan alternativt udelades:
Illustration 3.23 Skærmning for EMC-støjreduktion, seriel
kommunikation, uden klemme 61
1
Min. 16 mm
2 Udligningskabel
Tabel 3.15 Billedtekst
3.4.4.3
RFI-afbryder
2
Netforsyning isoleret fra jord
Når frekvensomformeren forsynes fra en isoleret netforsyning (IT-netforsyning, flydende trekantforbindelse og
trekantforbindelse med jord) eller TT/TN-S-netforsyning
med jordet stik, anbefales det at indstille RFI-afbryderen til
[Off] via 14-50 RFI-filter på frekvensomformeren.
Ellers skal 14-50 RFI-filter indstilles til [On].
For oplysninger se:
Page 46

175HA034.10
Systemintegration
VLT®Decentral Drive FCD 302 Design Guide
3
IEC 364-3
•
Applikationsanvisning VLT på IT-netforsyning,
•
MN90C. Det er vigtigt at bruge isoleringsovervågning, der kan anvendes sammen med
effektelektronik (IEC 61557-8).
3.4.5 Netforsyningsforstyrrelse/harmoniske
strømme
3.4.5.1 Netforsyningsforstyrrelse/
harmoniske strømme
En frekvensomformer tager en ikke-sinusformet strøm fra
netforsyningen, hvilket øger indgangsstrømmen I
ikke-sinusformet strøm omformes ved hjælp af en Fourieranalyse og opdeles i sinusbølgestrømme med forskellige
frekvenser, dvs. forskellige harmoniske strømme I N med 50
Hz som den grundlæggende frekvens:
Harmoniske strømme I
Hz 50 Hz 250 Hz 350 Hz
Tabel 3.16 Harmoniske strømme
1
I
5
RMS
. En
I
7
DC-spolerne reducerer den samlede harmoniske
forvrængning (THD) til 40%.
3.4.5.2 Påvirkning fra harmoniske strømme
i strømdistributionssystemet
I Illustration 3.25 sluttes primærsiden af en transformer til
et fælles koblingspunkt PCC1 på mellemspændingsforsyningen. Transformeren har en impedans Z
strøm til et antal belastninger. Det fælles koblingspunkt,
hvor alle belastninger sammenkobles, er PCC2. Hver
belastning tilsluttes via kabler med impedansen Z1, Z2 og
Z3.
og leverer
xfr
De harmoniske strømme påvirker ikke strømforbruget
direkte, men øger varmetabet i installationen (transformer,
kabler). Derfor skal harmoniske strømme holdes på et lavt
niveau for at undgå overbelastning af transformeren og
høje temperaturer i kablerne i installationer med en høj
procentdel af ensretterbelastning.
Illustration 3.24 Mellemkredsspoler
BEMÆRK!
Nogle af de harmoniske strømme kan forstyrre kommunikationsudstyr, der er sluttet til samme transformer, eller
skabe resonans i forbindelse med effektfaktorkorrektionsbatterier.
Indgangsstrøm
I
RMS
I
1
I
5
I
7
I
11-49
Tabel 3.17 Harmoniske strømme sammenlignet med
RMS-indgangsstrøm
Frekvensomformeren er som standard forsynet med
mellemkredsspoler for at sikre lave harmoniske strømme.
1,0
0,9
0,4
0,2
<0,1
Illustration 3.25 Lille distributionssystem
Harmoniske strømme, som tegnes af ikke-lineære belastninger, medfører forvrængning af spændingen pga.
spændingsfaldet på impedanserne i distributionssystemet.
Højere impedanser medfører højere niveauer af
spændingsforvrængning.
Strømforvrængningen afhænger af apparatets ydeevne og
af den individuelle belastning. Spændingsforvrængningen
afhænger af systemets ydeevne. Det er ikke muligt at
bestemme spændingsforvrængningen i PCC'en, hvis kun
belastningens harmoniske ydeevne er kendt. For at
forudsige forvrængningen i PCC skal konfigurationen af
distributionssystemet og de relevante impedanser være
kendt.
Et almindeligt begreb til beskrivelse af impedansen i et
grid er kortslutningsforholdet R
, som defineres som
sce
forholdet mellem kortslutningens tilsyneladende effekt for
forsyningen ved PCC (Ssc) og den nominelle tilsyneladende
effekt for belastningen (S
S
ce
R
=
sce
S
equ
2
sc
=
Z
U
forsyning
og
hvor
S
S
equ
equ
).
=U×
l
equ
44 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 47

Non-linear
Current Voltage
System
Impedance
Disturbance to
other users
Contribution to
system losses
130BB541.10
Systemintegration
VLT®Decentral Drive FCD 302 Design Guide
Den negative påvirkning fra harmoniske strømme er
dobbelt
Harmoniske strømme bidrager til systemtab (i
•
kabelføringen, transformer)
Harmonisk spændingsforvrængning medfører
•
forstyrrelser i andre belastninger og øger tabet i
andre belastninger
Illustration 3.26 Negative virkninger af harmoniske strømme
3.4.5.3 Standarder og krav vedrørende
begrænsning af harmoniske
strømme
Kravene til begrænsning af harmoniske strømme kan være:
Applikationsspecifikke krav
•
Standarder, der skal overholdes
•
Applikationsspecifikke krav er relevante for en specifik
installation, hvor der er tekniske årsager til begrænsning af
de harmoniske strømme.
Eksempel: En 250 kVa-transformer med to tilsluttede 110
kW-motorer er tilstrækkelig, hvis en af motorerne forbindes
direkte til netforsyningen, og den anden forsynes via en
frekvensomformer. Transformeren vil imidlertid være for
lille, hvis begge motorer forsynes via en frekvensomformer.
Ved at bruge ekstra metoder til reduktion af harmoniske
strømme i installationen eller ved at vælge frekvensomformervarianter med lave harmoniske strømme kan begge
motorer køre med frekvensomformere.
Der findes flere forskellige standarder, bestemmelser og
anbefalinger for dæmpning af harmoniske strømme.
Forskellige standarder finder anvendelse i forskellige
geografiske områder og inden for flere brancher. Følgende
standarder er de mest almindelige:
IEC61000-3-2
•
IEC61000-3-12
•
IEC61000-3-4
•
IEEE 519
•
G5/4
•
Se Design Guide for avanceret harmonisk filter 005/010,
MG80C for specifikke oplysninger om hver standard.
3.4.5.4
I tilfælde, hvor der kræves ekstra begrænsning af
harmoniske strømme, kan Danfoss tilbyde en lang række
dæmpningsudstyr. Disse er:
Valget af den rette løsning afhænger af flere forskellige
faktorer:
3.4.5.5
Graden af spændingsforurening på grid og de nødvendige
foranstaltninger beregnes ved hjælp af Danfoss MCT31beregningssoftware. Det gratis værktøj VLT® Harmonic
Calculation MCT 31 kan downloades på www.danfoss.com.
Softwaren er udviklet med fokus på brugervenlighed, og
det omfatter kun systemparametre, der almindeligvis er
tilgængelige.
RCD-relæer, nulling eller jording kan anvendes som ekstra
beskyttelse, forudsat at lokale sikkerhedsforskrifter
overholdes.
Ved jordingsfejl kan der opstå DC-indhold i fejlstrømmen.
Anvendes RCD-relæer skal det ske i henhold til lokale
bestemmelser. Relæerne skal være egnede til beskyttelse af
trefaset udstyr med en broensretter og til kortvarig
afladning i indkoblingsøjeblikket. Yderligere oplysninger
findes i 2.4 Lækstrøm til jord.
3.4.6
Dæmpning af harmoniske strømme
VLT 12-pulsfrekvensomformere
•
VLT AHF-filtre
•
VLT Low Harmonic Drives
•
VLT Active Filters
•
Grid (baggrundsforvrængning, netubalance,
•
resonans og forsyningstype (transformer/
generator))
Applikation (belastningsprofil, antal belastninger
•
og belastningsstørrelse)
Lokale/nationale krav/bestemmelser (IEEE519, IEC,
•
G5/4 osv.)
Samlede ejeromkostninger (anskaffelsesomkost-
•
ninger, effektivitet, vedligeholdelse osv.)
Beregning af harmoniske strømme
Endelig test og opsætning
3.4.6.1 Højspændingstest
Udfør en højspændingstest ved at kortslutte klemmerne U,
V, W, L1, L2 og L3. Påfør maks. 2,15 kV DC for 380-500 Vfrekvensomformere i et sekund mellem denne kortslutning
og chassiset.
3
3
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 45
Page 48

130BD002.10
I
Nmax
7,2 A
n
LT
0..370 rpm
f
max
250 Hz
t
amb
40 °C KTY 84-130
28 kgP3
IP 69K
155 °C (F)
178uxxxxxxxxxxb011
i 8,12
Type OGDHK231K131402L09R1S11P1A9010H1Bxx
Barcode
Made in Germany
M
LT
140-65 Nm
2,9 L Optileb GT220
I
Nmax
7,2 A
n
LT
0..370 rpm
f
max
250 Hz
t
amb
40 °C
KTY 84-130
28 kgP3
IP 69K
155 °C (F)
178uxxxxxxxxxxb011
i 8,12
Type
OGDHK231K131402L09R1S11P1A9010H1Bxx
Barcode
Made in Germany
M
LT
140-65 Nm
2,9 L Optileb GT220
130BB851.12
Systemintegration
VLT®Decentral Drive FCD 302 Design Guide
ADVARSEL
Ved gennemførsel af højspændingstest i hele installationen
afbrydes netforsyningen og motortilslutningen, hvis
lækstrømmene er for høje.
3
3.4.6.2 Jording
Følgende grundlæggende hensyn skal tages ved
montering af en frekvensomformer for at opnå elektromagnetisk kompatibilitet (EMC).
•
•
De forskellige jordforbindelsessystemer skal tilsluttes med
den lavest mulige lederimpedans. Den lavest mulige
lederimpedans opnås ved at holde lederen så kort som
muligt og ved at bruge det størst mulige areal.
Metalkabinetterne for de forskellige apparater monteres på
bagpladen på kabinettet med den lavest mulige HFimpedans. Herved undgås forskellige HF-spændinger for de
enkelte apparater, og der er ingen risiko for radioforstyrrelsesstrømme i eventuelle forbindelseskabler mellem
apparaterne. Radioforstyrrelsen er reduceret.
Lav HF-impedans opnås ved at bruge monteringsboltene
på apparaterne som HF-forbindelse til bagpladen.
Isolerende maling eller lignende skal fjernes fra tilslutningspunkterne.
3.4.6.3
Frekvensomformeren har en høj lækstrøm og skal derfor
jordes korrekt af sikkerhedsårsager i henhold til IEC
61800-5-1.
Frekvensomformerens lækstrøm til jord overstiger 3,5 mA.
For at sikre at jordkablet har god mekanisk forbindelse til
jordtilslutningen (klemme 95), skal kabelarealet være
mindst 10 mm2 eller 2 nominelle jordledninger, der er
termineret separat.
3.4.6.4 Afsluttende sikkerhedskontrol
Følg disse trin for at kontrollere opsætningen og sikre, at
frekvensomformeren kører.
Trin 1. Find motorens typeskilt
BEMÆRK!
Motoren er enten stjerne- (Y) eller trekant-koblet (Δ). Disse
oplysninger findes på motorens typeskiltdata.
46 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Sikkerhedsjording: Bemærk, at frekvensomformeren har en høj lækstrøm og derfor skal
jordes korrekt af sikkerhedsårsager. Følg de lokale
sikkerhedsforskrifter.
Højfrekvensjording: Hold jordtilslutningsledningerne så korte som muligt.
Sikkerhedsjordtilslutning
ADVARSEL
Illustration 3.27 Placering af motorens typeskilt
Illustration 3.28 Typeskilt
Trin 2. Kontrollér motorens typeskiltdata i denne parameterliste.
Tryk først på tasten [Quick Menu] på LCP'et, og vælg
derefter "Q2 Hurtig opsætning".
1.
1-20 Motoreffekt [kW]
1-21 Motoreffekt [HK]
2.
1-22 Motorspænding
3.
1-23 Motorfrekvens
4.
1-24 Motorstrøm
5.
1-25 Nominel motorhastighed
Trin 3. Vælg OGD-motordata
1.
Indstil 1-11 Motor Model til "Danfoss OGD LA10".
Trin 4. Indstil hastighedsgrænse og rampetider
Konfigurér de ønskede grænser for hastighed og
rampetid:
3-02 Minimumreference
3-03 Maksimumreference
4-11 Motorhastighed, lav grænse [O/MIN] eller
4-12 Motorhastighed, lav grænse [Hz]
4-13 Motorhastighed, høj grænse [O/MIN] eller
4-14 Motorhastighed, høj grænse [Hz]
3-41 Rampe 1, rampe-op-tid
3-42 Rampe 1, rampe-ned-tid
Page 49
Systemintegration
VLT®Decentral Drive FCD 302 Design Guide
3.5 Omgivelsesforhold
3.5.1 Luftfugtighed
Frekvensomformeren er konstrueret til at opfylde
standarden IEC/EN 60068-2-3,
EN 50178 pkt. 9.4.2.2 ved 50 °C.
3.5.2 Aggressive miljøer
Sådanne kemiske reaktioner påvirker og skader meget
hurtigt de elektroniske komponenter. I sådanne miljøer skal
udstyret monteres i et kabinet med luftventilation, hvilket
holder de aggressive gasser væk fra frekvensomformeren.
Ekstra beskyttelse i disse områder opnås ved coating af
printpladerne, som kan bestilles som en option.
BEMÆRK!
Hvis frekvensomformeren monteres i aggressive miljøer,
øges risikoen for driftsafbrydelser, og frekvensomformerens
levetid reduceres markant.
3
3
En frekvensomformer indeholder mange mekaniske og
elektroniske komponenter. De er alle i nogen udstrækning
sårbare over for miljømæssige påvirkninger.
FORSIGTIG
Frekvensomformeren må ikke monteres i miljøer, hvor der
er væsker, partikler eller gasser i luften, som kan påvirke
og ødelægge de elektriske komponenter. Hvis der ikke
træffes de nødvendige beskyttelsesforanstaltninger, er der
risiko for driftsstop, og det vil reducere levetiden for
frekvensomformeren.
Beskyttelsesgrad i henhold til IEC 60529
Funktionen Sikker standsning må kun monteres og
benyttes i et relæskab med en beskyttelsesgrad på IP54
eller mere (eller i et tilsvarende miljø). Dette er nødvendigt
for at undgå krydsfejl og kortslutninger mellem klemmer,
stik, skinner og sikkerhedsrelaterede kredsløb, forårsaget af
fremmede genstande.
Væsker kan overføres gennem luften og kondensere i
frekvensomformeren, hvilket kan medføre korrosion på
komponenter og metaldele. Damp, olie og saltvand kan
medføre korrosion på komponenter og metaldele. I
sådanne miljøer skal der bruges udstyr med kapslingsgrad
IP 54/55. Som en ekstra beskyttelse kan der bestilles
coatede printplader som en option.
Inden frekvensomformeren monteres, skal det kontrolleres,
om der er væsker, partikler og gasser i den omgivende luft.
Dette gøres ved at observere eksisterende installationer i
dette miljø. Hvis der findes vand eller olie på metaldelene,
eller hvis der er korrosion på metaldelene, er det typiske
tegn på skadelige luftbårne væsker.
Der findes ofte for høje niveauer af støvpartikler i installationens kabinetter og i de eksisterende elektriske
installationer. Et tegn på aggressive luftbårne gasser er, at
kobberskinnerne og kabelafslutningerne på de
eksisterende installationer bliver sorte.
D- og E-kapslinger er forsynet med en bagkanaloption i
rustfrit stål, som sikrer ekstra beskyttelse i aggressive
miljøer. Der er stadig behov for ordentlig ventilation for de
indvendige komponenter i frekvensomformeren. Kontakt
Danfoss for yderligere oplysninger.
Vibrationer og rystelser
3.5.3
Frekvensomformeren er afprøvet i henhold til en
procedure, der er baseret på de viste standarder:
Frekvensomformeren overholder krav, der gælder for
apparater monteret på vægge og gulve i produktionslokaler samt i tavler boltet fast til disse.
Luftbårne partikler, f.eks. støv, kan forårsage mekaniske,
elektriske eller termiske fejl i frekvensomformeren. En
typisk indikator på for høje niveauer af luftbårne partikler
er forekomsten af støvpartikler rundt om frekvensomformerens ventilator. I meget støvede miljøer skal der bruges
udstyr med kapslingsgrad med IP 54/55-klassificering eller
med et skab til IP 00/IP 20/TYPE 1-udstyr.
I miljøer med høje temperaturer og fugtighed vil ætsende
gasser, f.eks. svovl-, kvælstof- og klorforbindelser, resultere
i kemiske processer på komponenter i frekvensomformeren.
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 47
IEC/EN 60068-2-6: Vibration (sinusformet) - 1970
•
IEC/EN 60068-2-64: Tilfældig vibration, bredbånd
•
3.5.4
Akustisk støj
Den akustisk støj fra frekvensomformeren kommer fra tre
kilder:
1. DC-mellemkredsspoler.
2. Intern ventilator.
3. Drosselspole for RFI-filter.
Se 6 Specifikationer for data om akustisk støj.
Page 50

FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130BB929.10
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130BB930.10
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
A53
U - I
-10 - +10V
+
-
130BB926.10
Applikationseksempler
4 Applikationseksempler
VLT®Decentral Drive FCD 302 Design Guide
Eksemplerne i dette afsnit udgør en hurtig reference til
almindelige applikationer.
Parameterindstillinger er de regionale standard-
•
værdier, medmindre andet er angivet (valgt i
0-03 Regionale indstillinger)
44
Parametre, der er tilknyttet klemmerne og deres
•
indstillinger, er vist ved siden af tegningerne
Hvor kontaktindstillinger for de analoge klemmer
•
A53 eller A54 er påkrævet, er disse også vist
1-29 Automatisk
motortilpasning
(AMA)
5-12 Klemme 27,
digital indgang
*=Standardværdi
Bemærkninger/kommentarer:
Parametre
Funktion Indstilling
[1] Aktivér
komplet AMA
[0] Ingen
funktion
Parametergruppe 1-2* skal
indstilles i overensstemmelse
Det kan være nødvendigt at anvende en jumper-ledning
med motor
mellem klemme 12 (eller 13) og klemme 27, så frekvensomformeren kan køre under
standardprogrammeringsværdier. Se 4.9.1.1 Klemme 37,
Funktionen Sikker standsning for flere oplysninger.
Parametre
Funktion Indstilling
1-29 Automatisk
motortilpasning
(AMA)
5-12 Klemme 27,
digital indgang
[1] Aktivér
komplet AMA
[2]*
Inverteret
friløb
*=Standardværdi
Bemærkninger/kommentarer:
Parametergruppe 1-2* skal
indstilles i overensstemmelse
med motor
Tabel 4.1 AMA med T27 tilsluttet
48 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Tabel 4.2 AMA uden T27 tilsluttet
Parametre
Funktion Indstilling
6-10 Klemme 53,
lav spænding
6-11 Klemme 53,
høj spænding
6-14 Klemme 53,
lav ref./feedb.værdi
6-15 Klemme 53,
høj ref./feedb.værdi
*=Standardværdi
Bemærkninger/kommentarer:
Tabel 4.3 Analog hastighedsreference (spænding)
0,07 V*
10 V*
0 O/MIN
1.500 O/MIN
Page 51

FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
A53
U - I
4 - 20mA
+
-
130BB927.10
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130BB802.10
130BB805.11
Speed
Start (18)
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130BB803.10
Speed
130BB806.10
Latched Start (18)
Stop Inverse (27)
Applikationseksempler
Parametre
Funktion Indstilling
6-12 Klemme 53,
lav strøm
6-13 Klemme 53,
høj strøm
6-14 Klemme 53,
lav ref./feedb.værdi
6-15 Klemme 53,
høj ref./feedb.værdi
*=Standardværdi
Bemærkninger/kommentarer:
Tabel 4.4 Analog hastighedsreference (strøm)
VLT®Decentral Drive FCD 302 Design Guide
4 mA*
20 mA*
0 O/MIN
1.500 O/MIN
Illustration 4.1 Start/stop-kommando med Sikker standsning
Parametre
Funktion Indstilling
5-10 Klemme 18,
[9] Pulsstart
digital indgang
5-12 Klemme 27,
digital indgang
[6] Stop
inverteret
*=Standardværdi
Bemærkninger/kommentarer:
Hvis 5-12 Klemme 27, digital
indgang er indstillet til [0] Ingen
funktion, er der ikke brug for en
jumper-ledning til klemme 27.
4 4
Funktion Indstilling
5-10 Klemme 18,
digital indgang
5-12 Klemme 27,
digital indgang
5-19 Klemme 37
Sikker standsning
*=Standardværdi
Bemærkninger/kommentarer:
Hvis 5-12 Klemme 27, digital
indgang er indstillet til [0] Ingen
funktion, er der ikke brug for en
jumper-ledning til klemme 27.
Tabel 4.5 Start/stop-kommando med Sikker standsning
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 49
Parametre
[8] Start*
[0] Ingen
funktion
[1] Sikker
standsns.al.
Tabel 4.6 Pulsstart/-stop
Illustration 4.2 Pulsstart/-stop
Page 52

FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130BB934.10
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130BB928.10
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
A53
U - I
≈ 5kΩ
130BB683.10
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130BB804.10
Applikationseksempler
VLT®Decentral Drive FCD 302 Design Guide
Parametre
Funktion Indstilling
5-10 Klemme 18,
[8] Start
digital indgang
5-11 Klemme 19,
digital indgang
[10]
Reversering
*
44
5-12 Klemme 27,
digital indgang
5-14 Klemme 32,
digital indgang
5-15 Klemme 33,
digital indgang
3-10 Preset-
[0] Ingen
funktion
[16] Presetref. bit 0
[17] Presetref. bit 1
Parametre
Funktion Indstilling
6-10 Klemme 53,
lav spænding
6-11 Klemme 53,
0,07 V*
10 V*
høj spænding
6-14 Klemme 53,
0 O/MIN
lav ref./feedb.værdi
6-15 Klemme 53,
1.500 O/MIN
høj ref./feedb.værdi
*=Standardværdi
Bemærkninger/kommentarer:
reference
Preset-ref. 0
Preset-ref. 1
Preset-ref. 2
Preset-ref. 3
25%
50%
75%
100%
*=Standardværdi
Bemærkninger/kommentarer:
Tabel 4.9 Hastighedsreference (med et manuelt potentiometer)
Tabel 4.7 Start/stop med reversering og 4 forudindstillede
Parametre
Funktion Indstilling
hastigheder
5-10 Klemme 18,
Parametre
Funktion Indstilling
5-11 Klemme 19,
[1] Nulstil
digital indgang
*=Standardværdi
Bemærkninger/kommentarer:
Tabel 4.8 Ekstern alarmnulstilling
Tabel 4.10 Hastighed op/ned
digital indgang
5-12 Klemme 27,
digital indgang
5-13 Klemme 29,
digital indgang
5-14 Klemme 32,
digital indgang
*=Standardværdi
Bemærkninger/kommentarer:
[8] Start*
[19] Fastfrys
reference
[21]
Hastighed op
[22]
Hastighed
ned
50 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 53
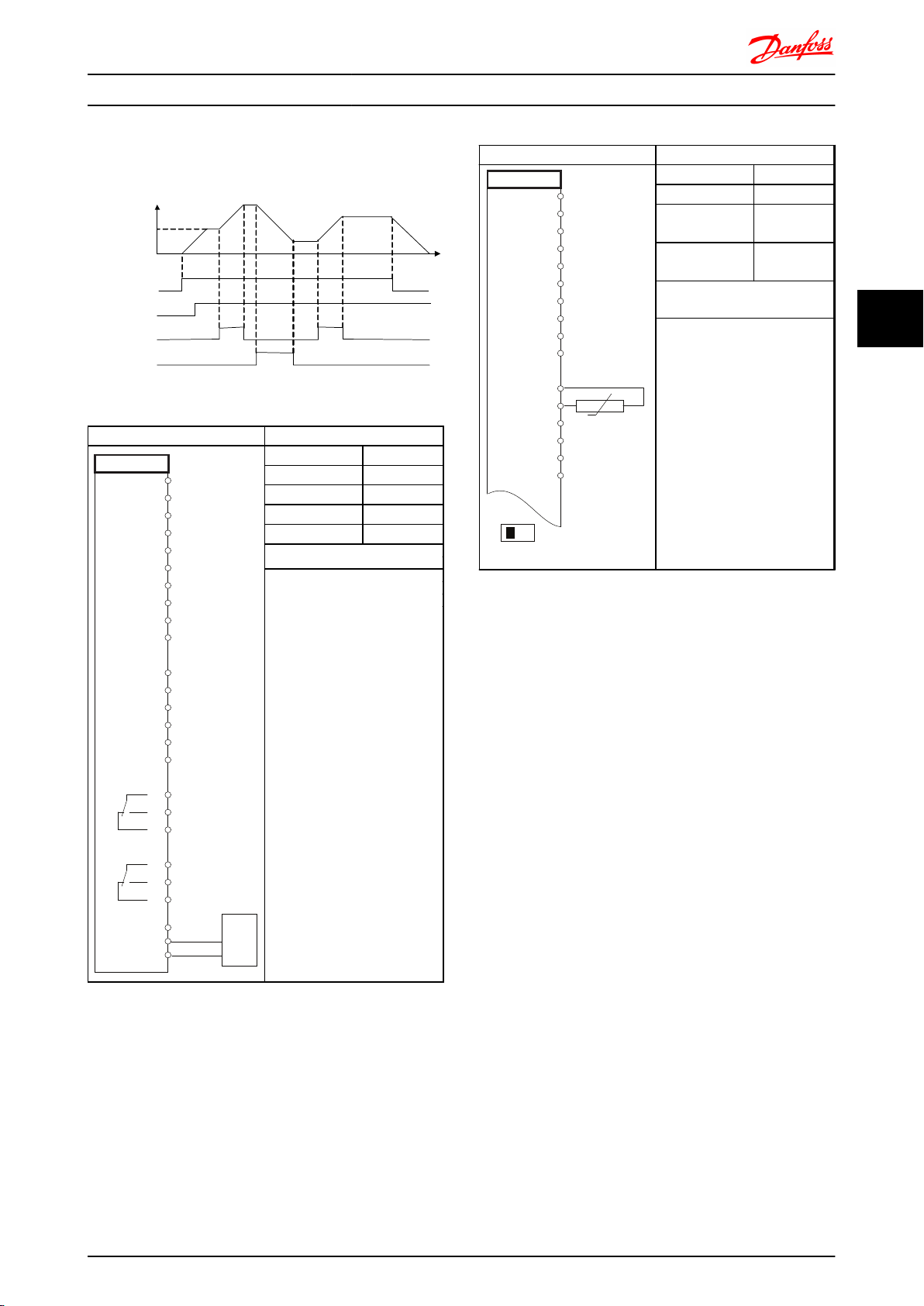
S t a r t ( 1 8 )
F r e e z e r e f ( 2 7 )
S p e e d u p ( 2 9 )
S p e e d d o w n ( 3 2 )
S p e e d
R e f e r e n c e
130BB840.10
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
V
A IN
A IN
COM
A OUT
COM
R1R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
-
61
68
69
RS-485
+
130BB685.10
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
A53
U - I
130BB686.11
Applikationseksempler
VLT®Decentral Drive FCD 302 Design Guide
Parametre
Funktion Indstilling
1-90 Termisk
motorbeskyttelse
1-93 Termistorkilde
[2] Termistortrip
[1] Analog
indgang 53
*=Standardværdi
Illustration 4.3 Hastighed op/ned
Parametre
Funktion Indstilling
8-30 Protokol
8-31 Adresse
8-32 Baud-hast.
FC*
1*
9600*
*=Standardværdi
Bemærkninger/kommentarer:
Vælg protokol, adresse og
baud-hastighed i de
ovennævnte parametre.
Tabel 4.12 Motortermistor
Bemærkninger/kommentarer:
Hvis der kun ønskes en
advarsel, skal 1-90 Termisk
motorbeskyttelse indstilles til [1]
Termistoradvarsel.
4 4
Tabel 4.11 RS-485-netværksforbindelse
FORSIGTIG
Termistorer skal anvende forstærket eller dobbelt isolering
for at overholde PELV-isoleringskravene.
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 51
Page 54
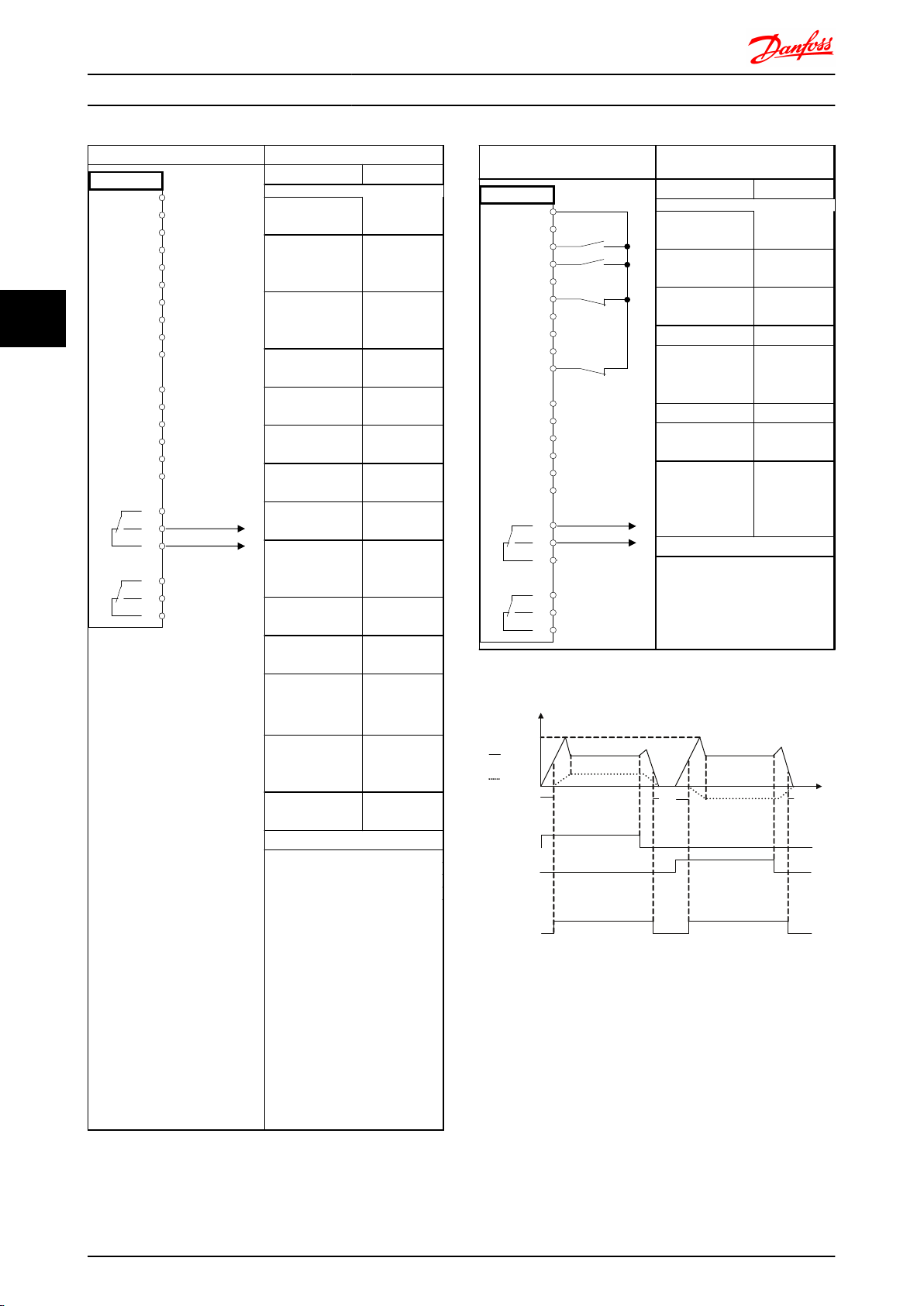
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
R1R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
130BB839.10
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
R1R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
130BB841.10
Start ( 18)
Start
reversing (19)
Relay output
Speed
Time
Current
1-71
1-71
2-21
2-21
1-76
Open
Closed
130BB842.10
Applikationseksempler
VLT®Decentral Drive FCD 302 Design Guide
44
Parametre
Tabel 4.13 Brug af SLC til indstilling af et relæ
Funktion Indstilling
4-30 Motorfeedbacktabfunktion
4-31 Motorfeed-
[1] Advarsel
100RPM
backhastighedsfej
l
4-32 Timeout for
5 s
motorfeedbacktab
7-00 Hastighed,
[2] MCB 102
PID-feedbackkilde
17-11 Opløsning
1024*
(PPR)
13-00 SL
[1] Aktiv
styreenh.-tilstand
13-01 Starthænde
[19] Advarsel
lse
13-02 Stophænde
lse
13-10 Sammenligner, operand
[44] Resettast
[21]
Advarselsnummer
13-11 Sammen-
[1] ≈*
ligner, operator
13-12 Sammen-
90
ligner, værdi
13-51 SL
styreenhed.hændelse
13-52 SL
styreenh.handling
5-40 Funktionsrelæ
[22]
Sammenligner 0
[32] Indst.
dig. udg. A
lav
[80] SL digital
udgang A
*=Standardværdi
Bemærkninger/kommentarer:
Hvis grænsen i feedbackovervågningen overskrides,
udstedes advarsel 90. SLC'en
overvåger advarsel 90, og relæ
1 udløses, hvis advarsel 90
bliver SAND.
Eksternt udstyr kan angive, at
det er nødvendigt med service.
Hvis feedbackfejlen falder til
under grænsen inden for 5 sek.,
fortsætter frekvensomformeren,
og advarslen forsvinder. Relæ 1
er dog stadig trukket, indtil der
trykkes på [Reset] på LCP.
5-40 Funktionsrelæ
5-10 Klemme 18,
digital indgang
5-11 Klemme 19,
digital indgang
1-71 Startforsink.
1-72 Startfunktio
n
1-76 Startstrøm
2-20 Bremsefrigørelsesstrøm
2-21 Bremseaktiveringshast. [O/
MIN]
*=Standardværdi
Bemærkninger/kommentarer:
Tabel 4.14 Mekanisk bremsestyring
Illustration 4.4 Mekanisk bremsestyring
Parametre
Funktion Indstilling
[32] Mek. br.
kontr.
[8] Start*
[11] Start
reverseret
0,2
plus
[5] VVC
FLUX med
uret
Im,n
App.afhængigt
Halvdelen af
motorens
nominelle
slip
/
52 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 55

130BC996.10
3 4
7
5
6
ON
WARNING
ALARM
Bus MS NS2NS1
1 2
Applikationseksempler
VLT®Decentral Drive FCD 302 Design Guide
4.1 Encoderstik
Formålet med denne retningslinje er at lette opsætningen
af encodertilslutningen til frekvensomformeren. Inden
encoderen opsættes, vises de grundlæggende indstillinger
for et hastighedsstyringssystem med lukket sløjfe.
Retningen findes ved at kigge ind i akselenden.
4.3 Frekvensomformersystem med lukket
sløjfe
Et frekvensomformersystem med lukket sløjfe består som
regel af elementer såsom:
Motor
•
Tilføjet
•
(gearkasse)
(mekanisk bremse)
Frekvensomformer
•
Encoder som feedback-system
•
Bremsemodstand til dynamisk bremsning
•
Kobling
•
Belastning
•
Applikationer, der kræver mekanisk bremsestyring, skal
som regel bruge en bremsemodstand.
4 4
Illustration 4.5 Encoderforbindelse til frekvensomformeren
Illustration 4.6 24 V trinvis encoder med maksimum kabellængde
på 5 m
4.2 Encoderretning
Encoderretningen bestemmes af den rækkefølge, som
frekvensomformeren modtager pulserne i.
Retning med uret (clockwise) betyder, at kanal A er 90
elektriske grader før kanal B.
Retning mod uret (counter clockwise) betyder, at kanal B
er 90 elektriske grader før A.
Illustration 4.7 Grundlæggende opsætning for hastighedsstyring
med lukket sløjfe
Del Beskrivelse
1 Encoder
2 Mekanisk bremse
3 Motor
4 Gearkasse
5 Kobling
6 Bremsemodstand
7 Belastning
Tabel 4.15 Billedtekst
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 53
Page 56
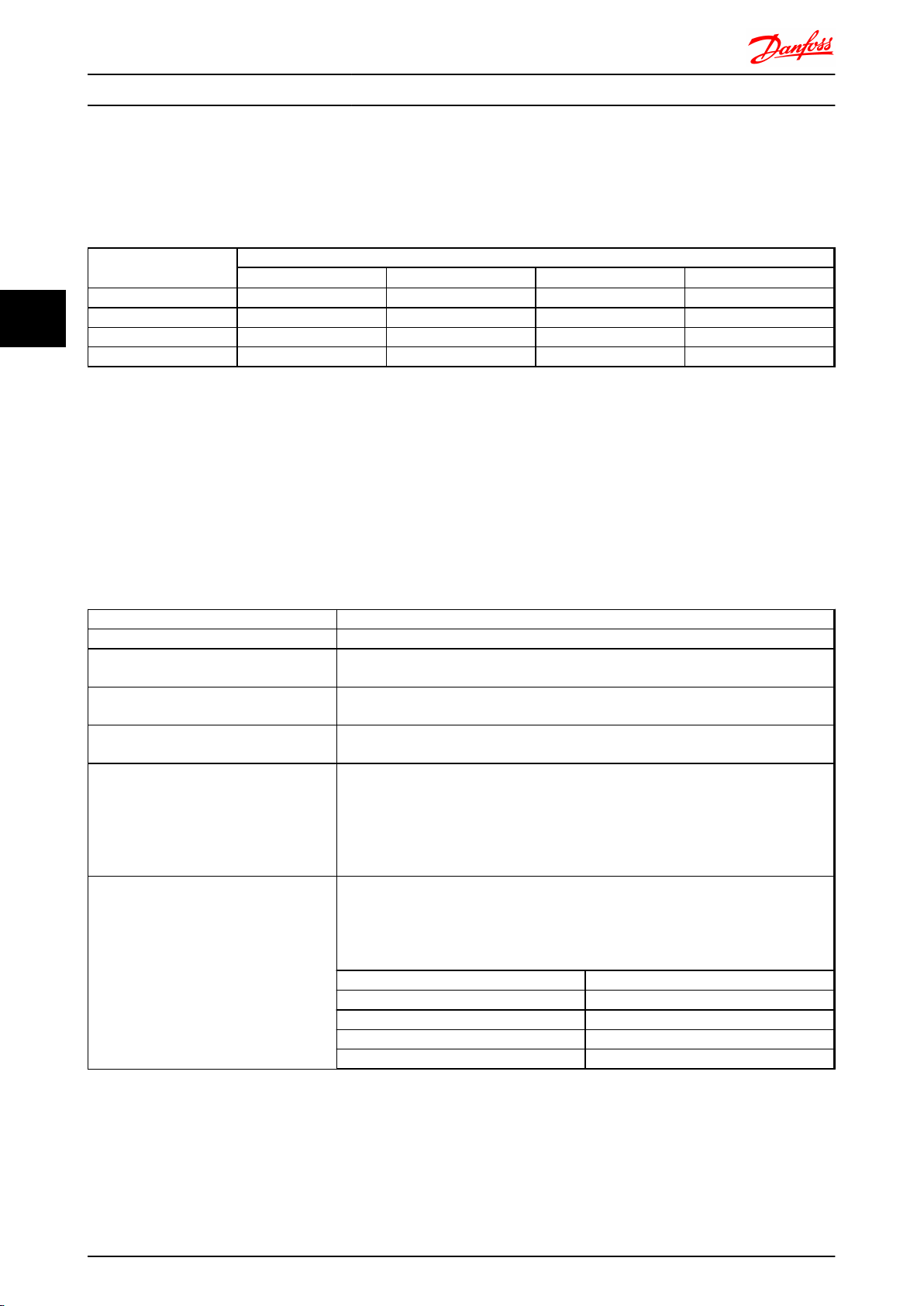
Applikationseksempler
VLT®Decentral Drive FCD 302 Design Guide
4.4 PID-styring
4.4.1 HastighedsPID-styring
1-00 Konfigurationstilstand 1-01 Motorstyringsprincip
U/f
[0] Hastighed åben sløjfe Ikke aktiv Ikke aktiv AKTIV N.A.
44
[1] Hastighed, lukket sløjfe N.A. AKTIV N.A. AKTIV
[2] Moment N.A. N.A. N.A. Ikke aktiv
[3] Proces Ikke aktiv AKTIV AKTIV
Tabel 4.16 Styrekonfigurationer, hvor hastighedsstyringen er aktiv
"N.A." betyder, at den pågældende tilstand slet ikke er tilgængelig.
"Ikke aktiv" betyder, at den pågældende tilstand er tilgængelig, men at hastighedsstyringen ikke er aktiv i den tilstand.
VVC
plus
Flux Sensorless Flux m/ enc. feedb
BEMÆRK!
Hastighedsstyrings-PID fungerer med standardparameterindstillingen, men det anbefales kraftigt at optimere parametrene
for at forbedre motorstyringsydeevnen. Især de to flux-motorstyringsprincipper er afhængige af korrekt optimering for at
yde det fulde potentiale.
4.4.2 Følgende parametre er relevante for hastighedsstyring
Parameter Beskrivelse af funktion
7-00 Hastighed, PID-feedbackkilde Vælg den indgang, hastighedsPID skal få sin feedback fra.
30-83 Hastighed, PID-proportionalforstærkning
7-03 Hastighed, PID-integrationstid Fjerner hastighedsfejl i stationær tilstand. En mindre værdi betyder en hurtig reaktion. En
7-04 Hastighed, PID-differentieringstid Giver en forstærkning, der er proportionel med ændringsfrekvensen for feedback. En
7-05 Hastighed, PID diff. forstærk.-grænse Hvis der sker hurtige ændringer i referencen eller feedback i en given applikation – hvilket
7-06 Hastighed, PID-lavpasfiltertid Et lavpasfilter dæmper oscilleringer på feedbacksignalet og forbedrer driften i stationær
Jo højere værdi, jo hurtigere styring. En for høj værdi kan imidlertid føre til oscilleringer.
for lav værdi kan imidlertid føre til oscilleringer.
indstilling på nul deaktiverer differentiatoren.
betyder, at fejlen skifter hurtigt – kan differentiatoren hurtigt blive for dominerende. Dette
sker, fordi den reagerer på ændringer i fejlen. Jo hurtigere fejlen ændres, jo stærkere er
differentiatorforstærkningen. Differentiatorforstærkningen kan derfor begrænses for at
tillade indstilling af en rimelig differentieringstid for langsomme ændringer og en passende
hurtig forstærkning for hurtige ændringer.
tilstand. Et for stort filter vil imidlertid forringe den dynamiske ydeevne for hastighedsPIDstyringen.
Praktiske indstillinger for parameter 7-06 hentet fra antallet af pulser pr. omdrejning fra
encoderen (PPR):
Encoder PPR
512 10 ms
1024 5 ms
2048 2 ms
4096 1 ms
7-06 Hastighed, PID-lavpasfiltertid
Tabel 4.17 Parametre, der er relevante for hastighedsstyringen
Eksempel på programmering af hastighedsstyringen
I dette tilfælde anvendes hastighedsPID-styringen til at
bevare en konstant motorhastighed uanset den ændrede
belastning på motoren. Den krævede motorhastighed
indstilles via et potentiometer, der er sluttet til klemme 53.
54 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Hastighedsområdet er 0-1.500 O/MIN, der svarer til 0-10 V
over potentiometeret. Start og stop styres med en kontakt,
der er sluttet til klemme 18. HastighedsPID overvåger den
faktiske O/MIN for motoren ved at bruge en 24 V (HTL)
trinvis encoder som feedback. Feedbackføleren er en
Page 57
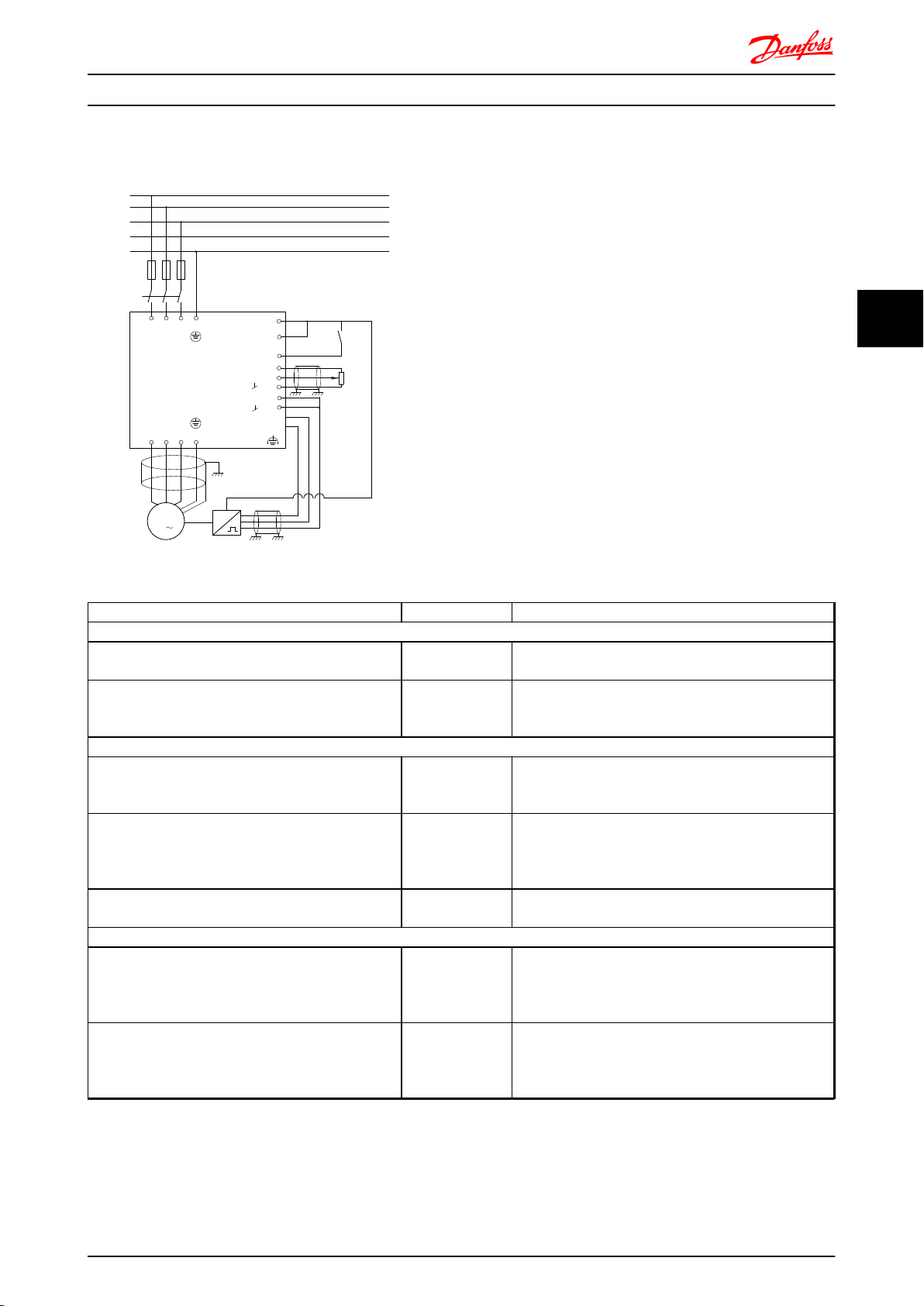
M
3
96 97 9998
91 92 93 95
50
12
L1 L2L1PEL3
W PEVU
F1
L2
L3
N
PE
18
53
37
55
20
32
33
39
24 Vdc
130BA174.10
Applikationseksempler
VLT®Decentral Drive FCD 302 Design Guide
encoder (1.024 pulseringer pr. omdrejning), der er sluttet
til klemme 32 og 33.
Illustration 4.8 Eksempel - hastighedsstyringstilslutninger
Følgende skal programmeres i den viste rækkefølge (se
forklaring på indstillinger i FCD 302 Programming Guide,
MG04G)
I listen antages det, at alle andre parametre og kontakter
forbliver ved fabriksindstillingen.
4 4
Funktion Parameternr. Indstilling
1) Sørg for, at motoren kører korrekt. Gør følgende:
Indstil motorparametrene ved hjælp af dataene på
typeskiltet
Få frekvensomformeren til at udføre automatisk motortilpasning
2) Kontrollér, om motoren kører, og om encoderen er korrekt fastgjort. Gør følgende:
Tryk på LCP-tasten "Hand on". Kontrollér, at motoren
kører, og bemærk, hvilken retning den kører i (i det
følgende benævnt som "positiv retning").
Gå til 16-20 Motorvinkel. Drej langsomt motoren i den
positive retning. Den skal drejes så langsomt (kun et par
O/MIN), at det er muligt at bestemme, om værdien i
16-20 Motorvinkel øges eller reduceres.
Hvis 16-20 Motorvinkel øges, skal encoderretningen
ændres i 5-71 Klemme 32/33, koderretning.
3) Sørg for, at frekvensomformergrænserne er indstillet til sikre værdier
Indstil acceptable grænser for referencerne. 3-02 Minimumre-
Kontrollér, at rampeindstillingerne ligger inden for
frekvensomformerens egenskaber og de tilladte driftsspecifikationer for applikationen.
1-2* Som angivet på motorens typeskilt
1-29 Automatisk
motortilpasning
(AMA)
Indstil en positiv reference.
16-20 Motorvinkel
5-71 Klemme 32/33,
koderretning
ference
3-03 Maksimumreference
3-41 Rampe 1,
rampe-op-tid
3-42 Rampe 1,
rampe-ned-tid
[1] Aktivér komplet AMA
Bemærkning om skrivebeskyttede parametre (N.A.): En
værdi, der øges, overløber ved 65.535 og starter igen ved
0.
[1] Mod uret (hvis 16-20 Motorvinkel reduceres)
0 O/MIN (standard)
1.500 O/MIN (standard)
fabriksindstilling
fabriksindstilling
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 55
Page 58

Applikationseksempler
VLT®Decentral Drive FCD 302 Design Guide
Funktion Parameternr. Indstilling
Indstil acceptable grænser for motorhastigheden og
frekvensen.
44
4) Konfigurér hastighedsstyringen, og vælg motorstyringsprincippet
Aktivering af hastighedsstyringen 1-00 Konfigurati-
Valg af motorstyringsprincip 1-01 Motorstyrings-
5) Konfigurér og skalér referencen for hastighedsstyringen
Indstil Analog indgang 53 som referencekilde 3-15 Referenceres-
Skalér Analog indgang 53 0 O/MIN (0 V) til 1.500 O/MIN
(10 V)
6) Konfigurér 24 V HTL-encodersignalet som feedback for motorstyringen og hastighedsstyringen
Indstil digital indgang 32 og 33 som encoderindgang 5-14 Klemme 32,
Vælg klemme 32/33 som motorfeedback 1-02 Flux-
Vælg klemme 32/33 som hastighedsPID-feedback 7-00 Hastighed,
7) Indstil hastighedsstyrings-PID-parametrene
Brug retningslinjerne for optimering, hvor det er
relevant, eller gennemfør optimeringen manuelt
8) Færdig!
Gem parameterindstillingen i LCP'et for at gemme den
sikkert
4-11 Motorhastighed, lav
grænse [O/MIN]
4-13 Motorhastighed, høj
grænse [O/MIN]
4-19 Maks.
udgangsfrekvens
onstilstand
princip
source 1
6-1* Ikke nødvendig (standard)
digital indgang
5-15 Klemme 33,
digital indgang
motorfeedbackkild
e
PID-feedbackkilde
7-0* Se retningslinjerne nedenfor
0-50 LCP-kopi [1] Alle til LCP
0 O/MIN (standard)
1.500 O/MIN (standard)
60 Hz (standard 132 Hz)
[1] Hastighed, lukket sløjfe
[3] Flux m motorfeedb
Ikke nødvendig (standard)
[0] Ingen betjening (standard)
Ikke nødvendig (standard)
Ikke nødvendig (standard)
Tabel 4.18 Hastighedsstyringsindstillinger
Optimering af hastighedsPID-styring
4.4.3
En praktisk værdi for båndbredden er 20 rad/s. Kontrollér
resultatet af 30-83 Hastighed, PID-proportionalforstærkning-
Følgende retningslinjer for optimering er relevante, når et
af flux-motorstyringsprincipperne benyttes i applikationer,
hvor belastningen hovedsageligt er inertial (med en lav
beregningen i henhold til følgende formular (ikke
nødvendig, hvis der bruges feedback i høj opløsning, f.eks.
SinCos-feedback):
mængde friktion).
Par
Værdien af 30-83 Hastighed, PID-proportionalforstærkning
afhænger af den kombinerede inerti for motoren og
belastningen, og den valgte båndbredde kan beregnes ved
hjælp af følgende formel:
Par
. 7 − 02 =
Samlet inerti kgm
Par
2
x
. 1 − 20 x 9550
par
. 1 − 25
x
Båndbredde rad/s
BEMÆRK!
1-20 Motoreffekt [kW] er motoreffekten i [kW] (dvs. at der
. 7 − 02
0.01 x 4 x
En god startværdi for 7-06 Hastighed, PID-lavpasfiltertid er 5
ms (en lavere encoderopløsning kræver en højere
filterværdi). En maks. momentrippel på 3% er som regel
acceptabel. For trinvise encodere findes encoderopløsningen i enten 5-70 Klemme 32/33 Pulser pr. omdrejning (24
HTL på standardfrekvensomformer) eller 17-11 Opløsning
(PPR) (5 V TTL på MCB102-option).
=
MAKS
Encoder Opløsning x Par
2 x π
skal indtastes "4" kW i stedet for "4.000" W i formularen).
56 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
. 7 − 06
x
Maks. moment ripple
%
Page 59

Applikationseksempler
VLT®Decentral Drive FCD 302 Design Guide
Den praktiske maksimumgrænse for 30-83 Hastighed, PID-
proportionalforstærkning bestemmes som regel af
encoderopløsningen og feedbackfiltertiden, men andre
faktorer i applikationen kan eventuelt begrænse
30-83 Hastighed, PID-proportionalforstærkning til en lavere
værdi.
For at minimere oversvinget kan 7-03 Hastighed, PID-
integrationstid indstilles til ca. 2,5 sek. (varierer afhængigt
af applikationen).
7-04 Hastighed, PID-differentieringstid skal indstilles til 0,
indtil alt andet er indstillet. Hvis det er nødvendigt, kan
optimeringen afsluttes ved at eksperimentere med trinvise
justeringer af indstillingen.
PID-processtyring
4.4.4
PID-processtyringen kan anvendes til at styre de applikationsparametre, der kan måles af en føler (dvs. tryk,
temperatur, flow), og påvirkes af en tilsluttet motor
gennem en pumpe, ventilator eller på anden vis.
Tabel 4.19 viser de styrekonfigurationer, hvor det er muligt
at bruge processtyring. Når der anvendes et Flux Vector-
motorstyringsprincip, skal hastighedsstyrings-PIDparametrene indstilles. Se afsnittet om styringsstrukturen
for at se, hvor hastighedsstyringen er aktiv.
1-00 Konfigurationstilstand
[3] Proces N.A. Proces Proces
Tabel 4.19 Indstillinger for PID-processtyring
1-01 Motorstyringsprincip
U/f
VVC
plus
Flux
Sensorle
ss
og
hastighe
d
Flux m/
enc. feedb
Proces og
hastighed
BEMÆRK!
Processtyringens PID fungerer med standardparameterindstillingen, men det anbefales kraftigt at optimere
parametrene for at forbedre applikationens styreydeevne.
Især de to flux-motorstyringsprincipper er afhængige af
korrekt optimering af hastighedsstyrings-PID (inden
indstilling af PID-processtyring) for at yde det fulde
potentiale.
4 4
Illustration 4.9 PID-processtyringsdiagram
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 57
Page 60

Applikationseksempler
VLT®Decentral Drive FCD 302 Design Guide
4.4.5 Relevante parametre for processtyring
Parameter Beskrivelse af funktion
7-20 Proc. lukket sløjfe, tilb. 1-signal Vælg, hvilken kilde (dvs. analog eller pulsindgang) Process PID skal få sin feedback fra
7-22 Proc. lukket sløjfe, tilb. 2-signal Alternativt: Bestem, om (og hvorfra) process PID skal have et ekstra feedbacksignal. Hvis
der vælges en ekstra feedbackkilde, kombineres de to feedbacksignaler, før de anvendes i
PID-processtyringen.
7-30 Proces PID normal/inverteret styring Ved [0] Normal drift vil processtyringen reagere ved at øge motorhastigheden, hvis
44
7-31 Proces, PID-anti windup Anti-windup-funktionerne sikrer, at integratoren indstilles til en forstærkning, der svarer til
7-32 Proces PID starthastighed I nogle applikationer kan det tage meget lang tid at nå den krævede hastighed/det
7-33 Proces PID-proportionalforstærkning Jo højere værdi, jo hurtigere styring. En for høj værdi kan imidlertid medføre oscilleringer.
7-34 Proces, PID-integrationstid Fjerner hastighedsfejl i stationær tilstand. En mindre værdi betyder en hurtig reaktion. En
7-35 Proces, PID-differentieringstid Giver en forstærkning, der er proportionel med ændringsfrekvensen for feedback. En
7-36 Proces PID diff. Forstærkningsgrænse Hvis der sker hurtige ændringer i referencen eller feedback i en given applikation – hvilket
7-38 Proces PID-feed forward-faktor I en applikation med god (og omtrent lineær) korrelation mellem procesreferencen og den
5-54 Pulsfiltertidskonstant #29 (Pulsklem. 29),
5-59 Pulsfiltertidskonstant #33 (Pulsklem. 33),
6-16 Klemme 53, filtertidskonstant (Analog
klem 53), 6-26 Klemme 54, filtertidskonstant
(Analog klem. 54)
feedbacken bliver lavere end referencen. Ved [1] Inverteret drift vil processtyringen i
samme situation reagere ved at sænke motorhastigheden i stedet.
den faktiske frekvens, når enten en frekvensgrænse eller en momentgrænse nås. Dette
forhindrer integrering med en fejl, der er umulig at kompensere for ved hjælp af en
hastighedsændring. Denne funktion kan deaktiveres ved at vælge [0] "Ikke aktiv".
krævede sætpunkt. I sådanne applikationer kan det være en fordel at indstille en fast
motorhastighed på frekvensomformeren, før processtyringen aktiveres. Dette gøres ved at
indstille en process PID-startværdi (hastighed) i 7-32 Proces PID starthastighed.
for lille værdi kan imidlertid medføre oscilleringer.
indstilling på nul deaktiverer differentiatoren.
betyder, at fejlen skifter hurtigt – kan differentiatoren hurtigt blive for dominerende. Dette
sker, fordi den reagerer på ændringer i fejlen. Jo hurtigere fejlen ændres, jo stærkere er
differentiatorforstærkningen. Differentiatorforstærkningen kan derfor begrænses for at
muliggøre indstilling af en differentieringstid for langsomme ændringer.
motorhastighed, der er nødvendig for at opnå denne reference, kan feed forward-faktoren
anvendes for at opnå bedre dynamisk ydeevne for PID-processtyringen.
Hvis der er oscilleringer på strøm-/spændingsfeedbacksignalet, kan de dæmpes ved brug
af et lavpasfilter. Denne tidskonstant repræsenterer hastighedsgrænsen for rippler, der
opstår på feedbacksignalet.
Eksempel: Hvis lavpasfilteret er indstillet til 0,1 sek., vil hastighedsgrænsen være 10 RAD/
sek. (det modsatte af 0,1 sek.), hvilket svarer til (10/(2 x π))=1,6 Hz. Dette betyder, at alle
strømme/spændinger, der varierer med mere end 1,6 oscilleringer pr. sekund, vil blive
dæmpet af filteret. Styringen udføres kun på et feedbacksignal, der varierer med en
frekvens (hastighed) på mindre end 1,6 Hz.
Lavpasfilteret forbedrer ydeevnen i stationær tilstand, men hvis der vælges en for lang
filtertid, vil den dynamiske ydeevne for PID-processtyringen blive forringet.
Tabel 4.20 Parametre, der er relevante for processtyringen
58 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 61

130BC966.10
5
6
1
100kW
n °CW
2
3
4
ON
WARNING
ALARM
Bus MS NS2NS1
Applikationseksempler
VLT®Decentral Drive FCD 302 Design Guide
4.4.6 Eksempel på PID-processtyring
Illustration 4.10 er et eksempel på en PID-processtyring, der
anvendes i et ventilationssystem:
Illustration 4.10 PID-processtyring i ventilationssystem
Del Beskrivelse
1 Kold luft
2 Varmegenererende proces
3 Temperaturtransmitter
4 Temperatur
5 Ventilatorhastighed
6 Varme
at generere mere luft. Når temperaturen falder, reduceres
hastigheden. Den anvendte transmitter er en temperaturføler med et funktionsområde på mellem -10 og +40 °C,
4-20 mA. Min.-/maks.-hastighed 300/1.500 O/MIN.
4 4
Illustration 4.11 Transmitter med to ledninger
Tabel 4.21 Billedtekst
I et ventilationssystem skal temperaturen kunne indstilles
til mellem -5 og +35 °C med et potentiometer på 0-10 V.
Processtyringens opgave er at opretholde temperaturen
ved et konstant, forudindstillet niveau.
1. Start/stop via kontakt sluttet til klemme 18.
2. Temperaturreference via potentiometer (-5 til 35
°C, 0 til 10 V DC) sluttet til klemme 53.
3.
Temperaturfeedback via transmitter (-10 til 40 °C,
4 to 20 mA) sluttet til klemme 54. Kontakt S202
indstillet til ON (strømindgang).
Styringen er den inverterede type, hvilket betyder, at
ventilationshastigheden stiger, når temperaturen stiger for
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 59
Page 62

Applikationseksempler
VLT®Decentral Drive FCD 302 Design Guide
Funktion Par. nr. Indstilling
Initialiser frekvensomformeren 14-22 [2] Initialisering - foretag en genstart - tryk på reset
1) Indstil motorparametre:
Indstil motorparametrene i henhold til dataene på
1-2* Som det fremgår af motorens typeskilt
typeskiltet
Udfør en komplet automatisk motortilpasning
1-29 [1] Aktivér komplet AMA
(Automation Motor Adaptation = AMA)
2) Kontrollér, at motoren kører i den rigtige retning.
Når motoren er sluttet til frekvensomformeren med en direkte faserækkefølge som U-U, V- V; W-W, drejer motorakslen som regel med
44
uret set fra akselenden.
Tryk på LCP-tasten "Hand on". Kontrollér akselretningen ved at påføre en manuel reference.
Hvis motoren kører modsat den krævede retning:
1.
Skift motorretningen i 4-10 Motorhastigheds-
4-10 Vælg den korrekte motorakselretning
retning
2. Sluk for netforsyningen. Vent, til DC-linket er
afladet, og kobl to af motorfaserne
Indstil konfigurationstilstand 1-00 [3] Proces
Indstil lokal konfigurationstilstand 1-05 [0] Hastighed åben sløjfe
3) Indstil referencekonfigurationen, dvs. området for referencehåndtering. Indstil skalering af analog indgang i par. 6-xx
Indstil reference-/feedbackenheder
Indstil min. reference (10 °C)
Indstil maks. reference (80 °C)
Hvis den indstillede værdi bestemmes ud fra en
forhåndsindstillet værdi (array-parameter), indstilles
de andre referencekilder til Ingen funktion
3-01
3-02
3-03
3-10
[60] °C enhed, der vises på displayet
-5 °C
35 °C
[0] 35%
Par
. 3 − 10
(0)
Ref
=
100
×
((
Par
. 3 − 03) −
(
par
. 3 − 02)) = 24, 5°
C
3-14 Preset relativ reference til 3-18 Relativ skalering, referenceressource [0]
= Ingen funktion
4) Justér grænserne for frekvensomformeren:
Indstil rampetiderne til en passende værdi, f.eks.
20 sek.
Indstil min. hastighedsgrænser
Indstil maks. grænse for motorhastighed
Indstil maks. udgangsfrekvens
3-41
3-42
4-11
4-13
4-19
20 sek
20 sek
300 O/MIN
1.500 O/MIN
60 Hz
Indstil S201 eller S202 til den ønskede analoge indgangsfunktion (spænding (V) eller milliampere (I))
BEMÆRK!
Kontakterne er følsomme. Udfør en komplet genstart, og hold fabriksindstillingen på V
5) Skalér de analoge indgange, der anvendes til reference og feedback
Indstil klemme 53, lav spænding
Indstil klemme 53, høj spænding
Indstil klemme 54, lav feedbackværdi
Indstil klemme 54, høj feedbackværdi
Indstil feedbackkilden
6-10
6-11
6-24
6-25
7-20
0 V
10 V
-5 °C
35 °C
[2] Analog indgang 54
6) Grundlæggende PID-indstillinger
Process PID normal/inverteret 7-30 [0] Normal
Process PID-anti-windup 7-31 [1] Aktiv
Proces PID-starthastighed 7-32 300 O/MIN
Gem parametrene til LCP 0-50 [1] Alle til LCP
Tabel 4.22 Eksempel på opsætning af PID-processtyring
60 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 63

130BA183.10
y(t)
t
P
u
Applikationseksempler
VLT®Decentral Drive FCD 302 Design Guide
4.4.7 Optimering af procesregulatoren
De grundlæggende indstillinger er nu foretaget. Det
mangler kun at optimere proportionalforstærkningen,
integrationstiden og differentieringstiden (7-33 Proces PID-
proportionalforstærkning, 7-34 Proces, PID-integrationstid,
7-35 Proces, PID-differentieringstid). Under de fleste
processer kan dette gøres ved at følge disse retningslinjer.
1. Start motoren
2.
Indstil 7-33 Proces PID-proportionalforstærkning til
0,3, og øg den, indtil feedbacksignalet begynder
at variere kontinuerligt. Reducér derefter værdien,
indtil feedbacksignalerne har stabiliseret sig.
Sænk nu proportionalforstærkningen til 40-60%.
3.
Indstil 7-34 Proces, PID-integrationstid til 20 sek.,
og reducér værdien, indtil feedbacksignalet
begynder at variere kontinuerligt igen. Øg
integrationstiden, indtil feedbacksignalet
stabiliserer sig, og efterfølges af en stigning på
15-50%.
4.
Brug kun 7-35 Proces, PID-differentieringstid til
meget hurtigtreagerende systemer (differentieringstid). Den typiske værdi er fire gange den
indstillede integrationstid. Differentiatoren skal
kun bruges, når indstillingen af proportionalforstærkningen og integrationstiden er blevet fuldt
optimeret. Sørg for, at oscilleringer på feedbacksignalet er tilstrækkeligt dæmpet af lavpasfilteret
på feedbacksignalet.
BEMÆRK!
Hvis det er nødvendigt, kan start/stop aktiveres et antal
gange for at provokere en variation på feedbacksignalet.
4.4.8 Ziegler Nichols-optimeringsmetoden
Der kan bruges flere forskellige indstillingsmetoder til
optimering af frekvensomformerens PID-styring. En af
metoderne er at bruge en teknik, som blev udviklet i
1950'erne, men som har vist sig langtidsholdbar og derfor
stadig bruges i dag. Denne metode kaldes Ziegler Nicholsoptimeringsmetoden.
forstærkning. Oscilleringsperioden
(Pu) (kaldes den
ultimative periode) bestemmes som vist i Illustration 4.12.
Illustration 4.12 Marginalt stabilt system
Pu skal måles, når oscilleringsamplituden er forholdsvis lille.
Derefter reduceres denne forstærkning igen som vist i
Tabel 4.23.
Ku er den forstærkning, hvorved oscillering opnås.
Styringstype
PI-styring
Fast PIDstyring
PID med noget
oversving
Tabel 4.23 Ziegler Nichols-optimering for regulator baseret på en
stabilitetsgrænse.
Proportionalforstærkning
0,45 * K
u
0,6 * K
u
0,33 * K
u
Integrationstid Differentier-
ingstid
0,833 * P
0,5 * P
u
0,5 * P
u
-
u
0,125 * P
0,33 * P
u
u
Tidligere erfaring har vist, at styreindstillingen i henhold til
Ziegler Nichols-reglen giver en god lukket sløjfe-reaktion i
mange systemer. Procesoperatøren kan udføre afsluttende
optimering af styringen gentagne gange for at opnå
tilfredsstillende styring.
Trin-for-trin-beskrivelse
4 4
BEMÆRK!
Den beskrevne metode må ikke anvendes på applikationer,
der kan skades af oscilleringer, som opstår pga. marginalt
stabile styringsindstillinger.
Kriterierne for regulering af parametrene er baseret på en
evaluering af systemet ved stabilitetsgrænsen og ikke på
en trinreaktion. Proportionalforstærkningen øges, indtil der
ses kontinuerlige oscilleringer (som målt på feedbacken),
det vil sige, indtil systemet bliver marginalt stabilt. Den
tilsvarende forstærkning (Ku) kaldes den ultimative
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 61
Trin 1: Vælg kun proportionel styring, hvilket betyder, at
der vælges den maksimale værdi for integrationstiden,
mens der vælges nul for differentieringstiden.
Trin 2: Værdien for proportionalforstærkningen øges, indtil
ustabilitetspunktet nås (vedvarende oscilleringer), og indtil
den kritiske værdi for forstærkning Ku nås.
Trin 3: Oscilleringsperioden måles for at komme frem til
den kritiske tidskonstant Pu.
Page 64

130BC966.10
5
6
1
100kW
n °CW
2
3
4
ON
WARNING
ALARM
Bus MS NS2NS1
Applikationseksempler
VLT®Decentral Drive FCD 302 Design Guide
Trin 4: Beregn de nødvendige PID-styringsparametre ved
hjælp af Tabel 4.23.
Styringen er den inverterede type, hvilket betyder, at
ventilationshastigheden stiger, når temperaturen stiger for
at generere mere luft. Når temperaturen falder, reduceres
4.4.9 Eksempel på PID-processtyring
hastigheden. Den anvendte transmitter er en temperaturføler med et funktionsområde på mellem -10 og +40 °C,
Illustration 4.10 er et eksempel på en PID-processtyring, der
4-20 mA. Min.-/maks.-hastighed 300/1.500 O/MIN.
anvendes i et ventilationssystem:
44
Illustration 4.13 PID-processtyring i ventilationssystem
Del Beskrivelse
1 Kold luft
2 Varmegenererende proces
3 Temperaturtransmitter
4 Temperatur
5 Ventilatorhastighed
6 Varme
Tabel 4.24 Billedtekst
I et ventilationssystem skal temperaturen kunne indstilles
til mellem -5 og +35 °C med et potentiometer på 0-10 V.
Processtyringens opgave er at opretholde temperaturen
ved et konstant, forudindstillet niveau.
Illustration 4.14 Transmitter med to ledninger
1. Start/stop via kontakt sluttet til klemme 18.
2. Temperaturreference via potentiometer (-5 til 35
°C, 0 til 10 V DC) sluttet til klemme 53.
3.
Temperaturfeedback via transmitter (-10 til 40 °C,
4 to 20 mA) sluttet til klemme 54. Kontakt S202
indstillet til ON (strømindgang).
62 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 65
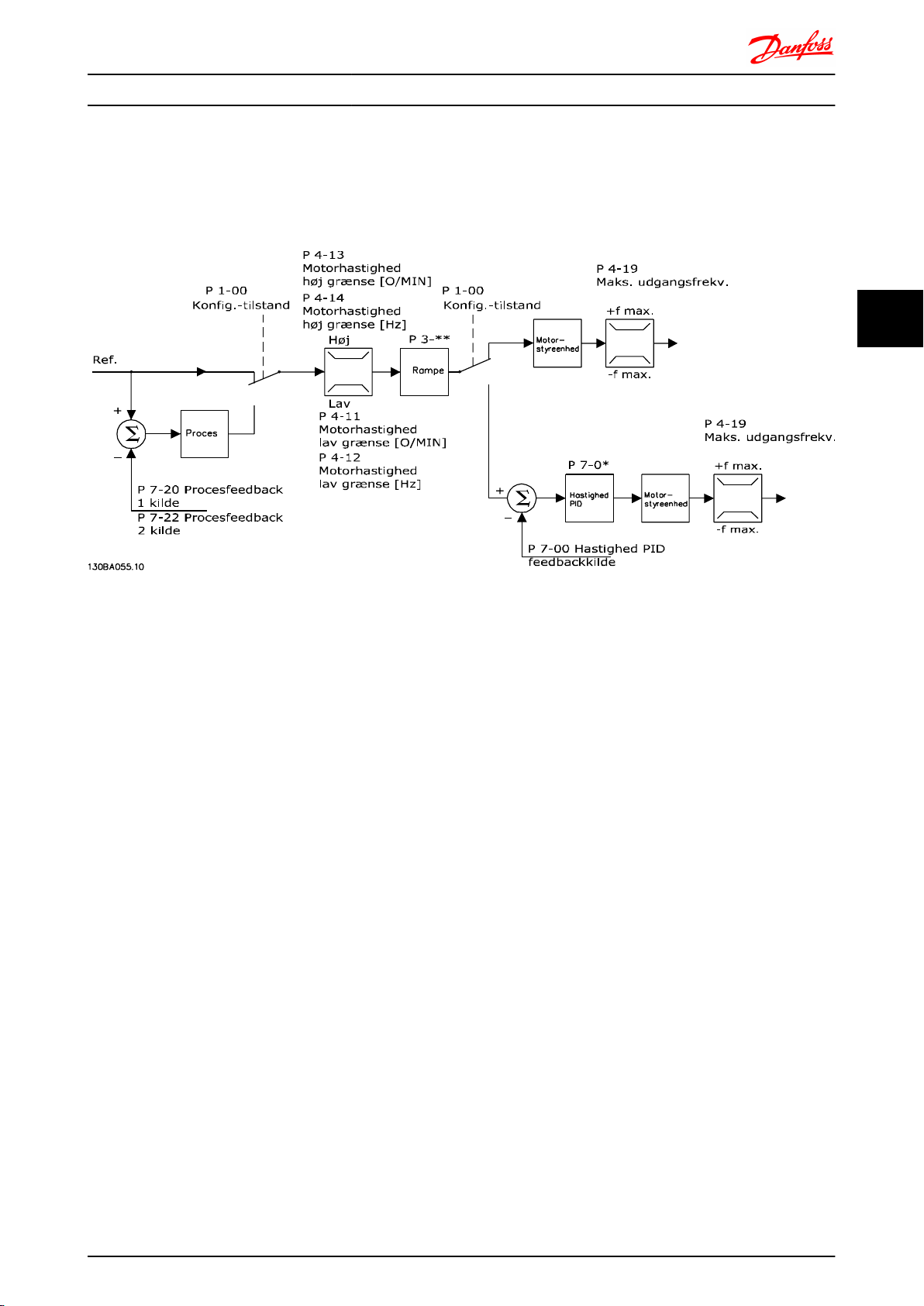
Applikationseksempler
4.5 Styringsstrukturer
VLT®Decentral Drive FCD 302 Design Guide
4.5.1
Styringsstruktur for VVC
Illustration 4.15 Styringsstruktur med VVC
I den konfiguration, der vises i Illustration 4.15, er 1-01 Motorstyringsprincip indstillet til [1] VVC
tilstand er indstillet til [0] Hastighed, åben sløjfe. Den resulterende reference fra referencehåndteringssystemet modtages og
føres gennem rampegrænsen og hastighedsgrænsen, før den sendes til motorstyringen. Motorstyringens udgang begrænses
derefter af den maksimale frekvensgrænse.
plus
Avanceret vektorstyring
plus
i konfigurationer med åben sløjfe og lukket sløjfe
plus,
og 1-00 Konfigurations-
4 4
Hvis 1-00 Konfigurationstilstand indstilles til [1] Hastighed, lukket sløjfe, sendes den resulterende reference fra rampegrænse
og hastighedsgrænse til en hastighedsPID-styring. HastighedsPID-styringsparametrene findes i parametergruppe 7-0. Den
resulterende reference fra hastighedsPID-styring sendes til motorstyringen og begrænses af frekvensgrænsen.
Vælg [3] Proces i 1-00 Konfigurationstilstand for at bruge PID-processtyring for lukket sløjfestyring af eksempelvis hastighed
eller tryk i den styrede applikation. Process PID-parametrene findes i parametergruppen 7-2* og 7-3*.
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 63
Page 66

Applikationseksempler
VLT®Decentral Drive FCD 302 Design Guide
4.5.2 Styringsstruktur for Flux Sensorless
Styringsstrukturen i konfigurationer med Flux Sensorless åben sløjfe og lukket sløjfe.
44
Illustration 4.16 Styringsstruktur for Flux Sensorless
I den viste konfiguration er 1-01 Motorstyringsprincip indstillet til [2] Flux sensorless, og 1-00 Konfigurationstilstand er indstillet
til [0] Hastighed, åben sløjfe. Den resulterende reference fra referencehåndteringssystemet føres gennem rampe- og hastighedsgrænserne, som det er bestemt i de angivne parameterindstillinger.
Der genereres en anslået hastighedsfeedback til hastighedsPID for at styre udgangsfrekvensen.
HastighedsPID skal indstilles med P-, I- og D-parametrene (parametergruppe 7-0*).
Vælg [3] Proces i 1-00 Konfigurationstilstand for at bruge PID-processtyring for lukket sløjfestyring af hastighed eller tryk i den
styrede applikation. Process PID-parametrene findes i parametergruppe 7-2* og 7-3*.
Styringsstruktur for Flux med motorfeedback
4.5.3
Illustration 4.17 Styringsstruktur for Flux med motorfeedback
64 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 67
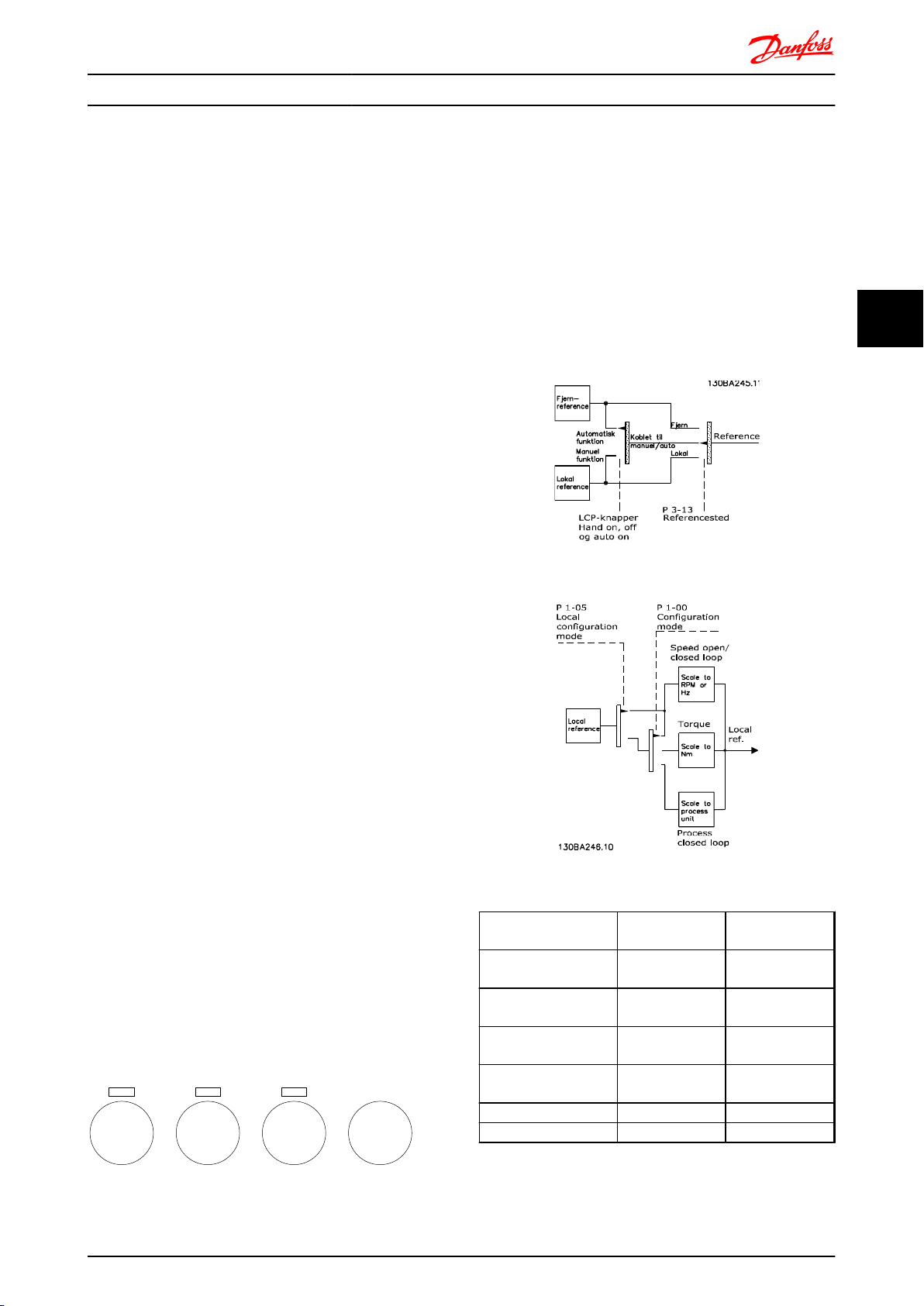
130BP046.10
Hand
on
O
Auto
on
Reset
Applikationseksempler
VLT®Decentral Drive FCD 302 Design Guide
I den viste konfiguration er 1-01 Motorstyringsprincip
indstillet til [3] Flux m. motorfeedb, og 1-00 Konfigurations-
tilstand er indstillet til [1] Hastighed, lukket sløjfe.
Motorstyringen i denne konfiguration afhænger af et
feedbacksignal fra en encoder, der er monteret direkte på
motoren (indstillet i 1-02 Flux-motorfeedbackkilde).
Vælg [1] Hastighed, lukket sløjfe i 1-00 Konfigurationstilstand
for at bruge den resulterende reference som indgang for
hastighedsPID-styringen. HastighedsPID-styringsparametrene findes i parametergruppe 7-0*.
Vælg [2] Moment i 1-00 Konfigurationstilstand for at bruge
den resulterende reference direkte som en momentreference. Momentstyring kan kun vælges i konfigurationen
Flux med motorfeedback (1-01 Motorstyringsprincip) Når
denne tilstand er valgt, bruger referencen Nm-enheden.
Det kræver ikke momentfeedback, da det faktiske moment
beregnes baseret på strømmålingen i frekvensomformeren.
Vælg [3] Proces i 1-00 Konfigurationstilstand for at bruge
PID-processtyring til lukket sløjfestyring af en procesvariabel (f.eks. hastighed) i den styrede applikation.
Aktiv reference og konfigurationstilstand
Den aktive reference kan enten være den lokale reference
eller fjernreferencen.
I 3-13 Referencested kan den lokale reference vælges
permanent ved at vælge [2] Lokal.
Vælg [1] Fjernbetjent for at vælge permanent indstilling af
fjernreferencen. Ved at vælge [0] Kædet til hand/auto
(standard) linker referencestedet til den aktive tilstand.
(Hand Mode eller Auto Mode).
Illustration 4.19 Lokal referencehåndtering
4 4
4.6
Lokal (Hand on) og fjernstyring (Auto)
Frekvensomformeren kan betjenes manuelt via LCPbetjeningspanelet (LCP) eller via fjernstyring via analoge og
digitale indgange og en seriel bus. Hvis det er tilladt i
0-40 [Hand on]-tast på LCP, 0-41 [Off]-tast på LCP, 0-42 [Auto
on] tast på LCP og 0-43 [Reset]-tast på LCP, er det muligt at
starte og standse frekvensomformeren via LCP'et ved hjælp
af tasterne [Hand On] og [Off]. Alarmer kan nulstilles med
[Reset]-tasten. Når der er trykket på tasten [Hand On], går
frekvensomformeren i Hand mode og følger (som
standard) den lokale reference, der kan indstilles ved hjælp
af piletasten på LCP'et.
Når der er trykket på tasten [Auto On], går frekvensomformeren i Auto mode og følger (som standard)
fjernreferencen. I denne tilstand er det muligt at styre
frekvensomformeren via de digitale indgange og
forskellige serielle grænseflader (RS-485, USB eller en ekstra
Fieldbus). Se flere oplysninger om start, standsning,
ændring af ramper og parameteropsætninger osv. i
parametergruppe 5-1* (digitale indgange) eller parametergruppe 8-5* (seriel kommunikation).
Illustration 4.20 Fjernreferencehåndtering
LCP-taster 3-13 Referen-
cested
Hand Kædet til Hand/
Auto
Hand⇒Off Kædet til Hand/
Auto
Auto Kædet til Hand/
Auto
Auto⇒Off Kædet til Hand/
Auto
Alle taster Lokal Lokal
Alle taster Fjernbet. Fjernbet.
Aktiv reference
Lokal
Lokal
Fjernbet.
Fjernbet.
Illustration 4.18 LCP-taster
Tabel 4.25 Betingelser for håndtering af lokal reference/fjernreference.
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 65
Page 68
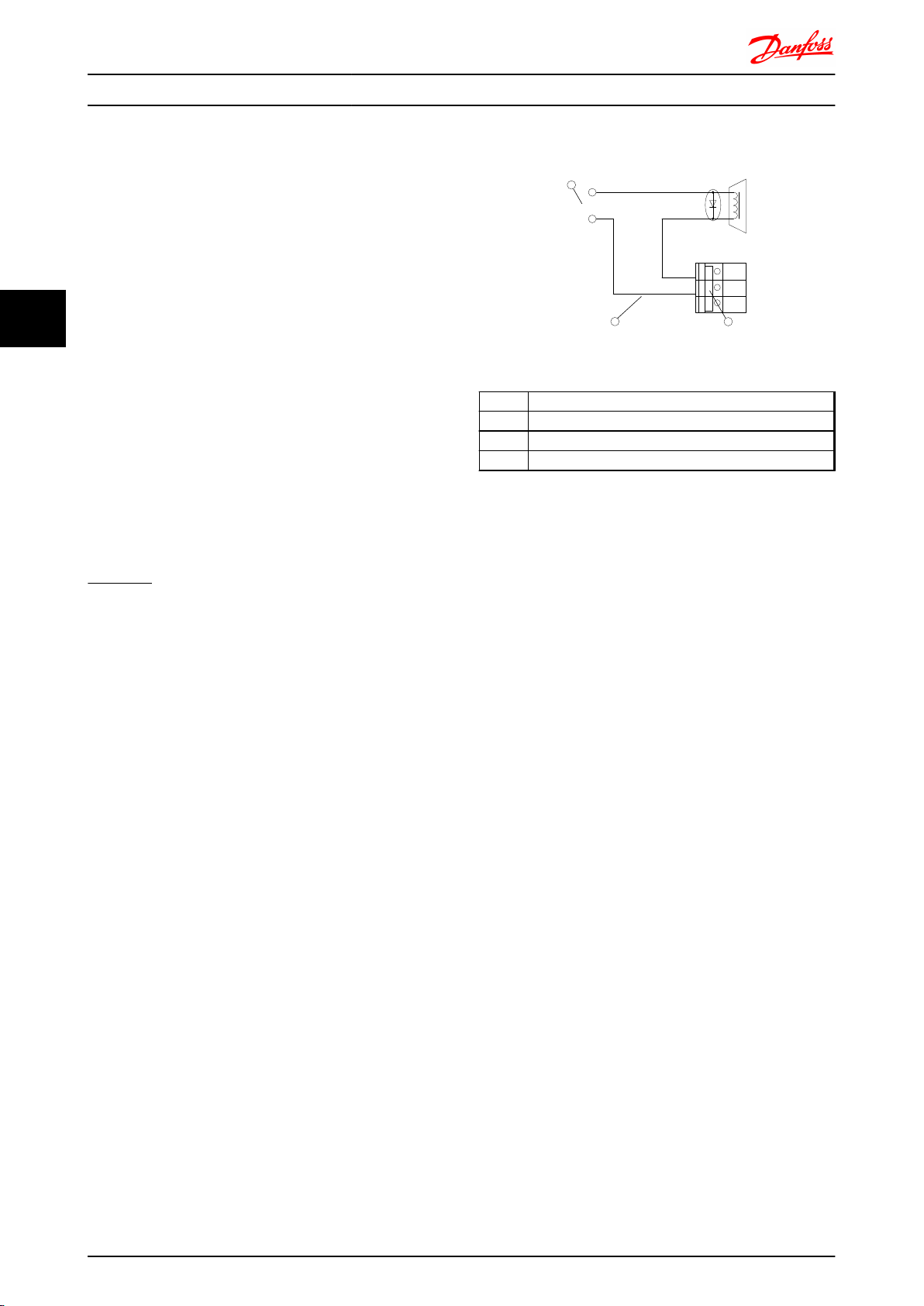
130BC997.10
P 5-40 [0] [32]
-
+
01 02 03
24 VDC
Imax
0.1 Amp
2 3
1
Applikationseksempler
VLT®Decentral Drive FCD 302 Design Guide
1-00 Konfigurationstilstand bestemmer, hvilken slags
5-40 Funktionsrelæ
[32] Mek. br. kontr.
applikationsstyreprincip (dvs. hastighed, moment eller
processtyring), der skal anvendes, når en fjernreference er
aktiv. 1-05 Lokal konfigurationstilstand bestemmer, hvilken
slags applikationsstyreprincip, der skal anvendes, når en
lokal reference er aktiv. En af dem er altid aktiv, men de
kan ikke begge være aktive på samme tid.
44
4.7 Programmering af momentgrænse og
stop
Illustration 4.21 Mekanisk bremsestyring
I applikationer med en ekstern elektromekanisk bremse,
f.eks. hæve-/sænkeapplikationer, er det muligt at standse
frekvensomformeren med en standardstopkommando og
samtidig aktivere den eksterne elektromekaniske bremse.
Eksemplet nedenfor illustrerer programmeringen af
frekvensomformertilslutningerne.
Del Beskrivelse
1 Ekstern 24 V DC
2 Mekanisk bremsetilslutning
3 Relæ 1
Den eksterne bremse kan sluttes til relæ 1 eller 2.
Programmér klemme 27 til [2] Friløb, inverteret eller [3]
Tabel 4.26 Billedtekst
Friløb og nulstil, inverteret, og programmér klemme 29 til
Klemmetilstand 29 [1] Udgang og [27] Mom.-grænse & stop.
Beskrivelse
Hvis en stopkommando er aktiv via klemme 18, og
frekvensomformeren ikke har nået momentgrænsen,
ramper motoren ned til 0 Hz.
Når frekvensomformeren har nået momentgrænsen, og en
stopkommando er aktiveret, aktiveres klemme 29 udgang
(programmeret til Mom.-grænse & stop [27]). Signalet til
klemme 27 skifter fra "logisk 1" til "logisk 0", og motoren
skifter til friløb, hvilket sikrer, at hæve-/sænkemekanismen
stopper, når frekvensomformeren selv kan håndtere det
krævede moment (dvs. pga. en for høj overbelastning).
- Start/stop via klemme 18
4.8 Mekanisk bremse
I hæve-/sænkeapplikationer er det nødvendigt at kunne
styre en elektromekanisk bremse. For at styre bremsen er
det nødvendigt med en relæudgang (relæ 1 eller relæ 2)
eller en programmeret digital udgang (klemme 27 eller 29).
Denne udgang skal som regel lukkes, så længe frekvensomformeren ikke kan "holde" motoren, f.eks. pga. en for
stor belastning. Vælg [32] Mekanisk bremsestyring for
applikationer med en elektromagnetisk bremse i en af
følgende parametre:
5-40 Funktionsrelæ (Array-parameter),
5-30 Klemme 27, digital udgang eller
5-31 Klemme 29, digital udgang
5-10 Klemme 18, digital indgang [8] Start
- Hurtigt stop via klemme 27
5-12 Klemme 27, digital indgang [2] Friløbsstop,
inverteret
- Klemme 29, udgang
5-02 Klemme 29, tilstand [1] Klemme 29, tilstand
Udgang
5-31 Klemme 29, digital udgang [27] Mom.-grænse
& stop
- [0] Relæudgang (Relæ 1)
Når [32] mekanisk bremsestyring vælges, forbliver det
mekaniske bremserelæ lukket under opstart, indtil
udgangsstrømmen er over det forudindstillede niveau.
Vælg preset-niveauet i 2-20 Bremsefrigørelsesstrøm. Under
en standsning vil den mekaniske bremse lukke, når
hastigheden er under det niveau, der vælges i 2-21 Bremse-
aktiveringshast. [O/MIN]. Hvis frekvensomformeren går i
alarmtilstand (dvs. en overspændingssituation) eller under
sikker standsning, indkobler den mekaniske bremse øjeblikkeligt.
66 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 69
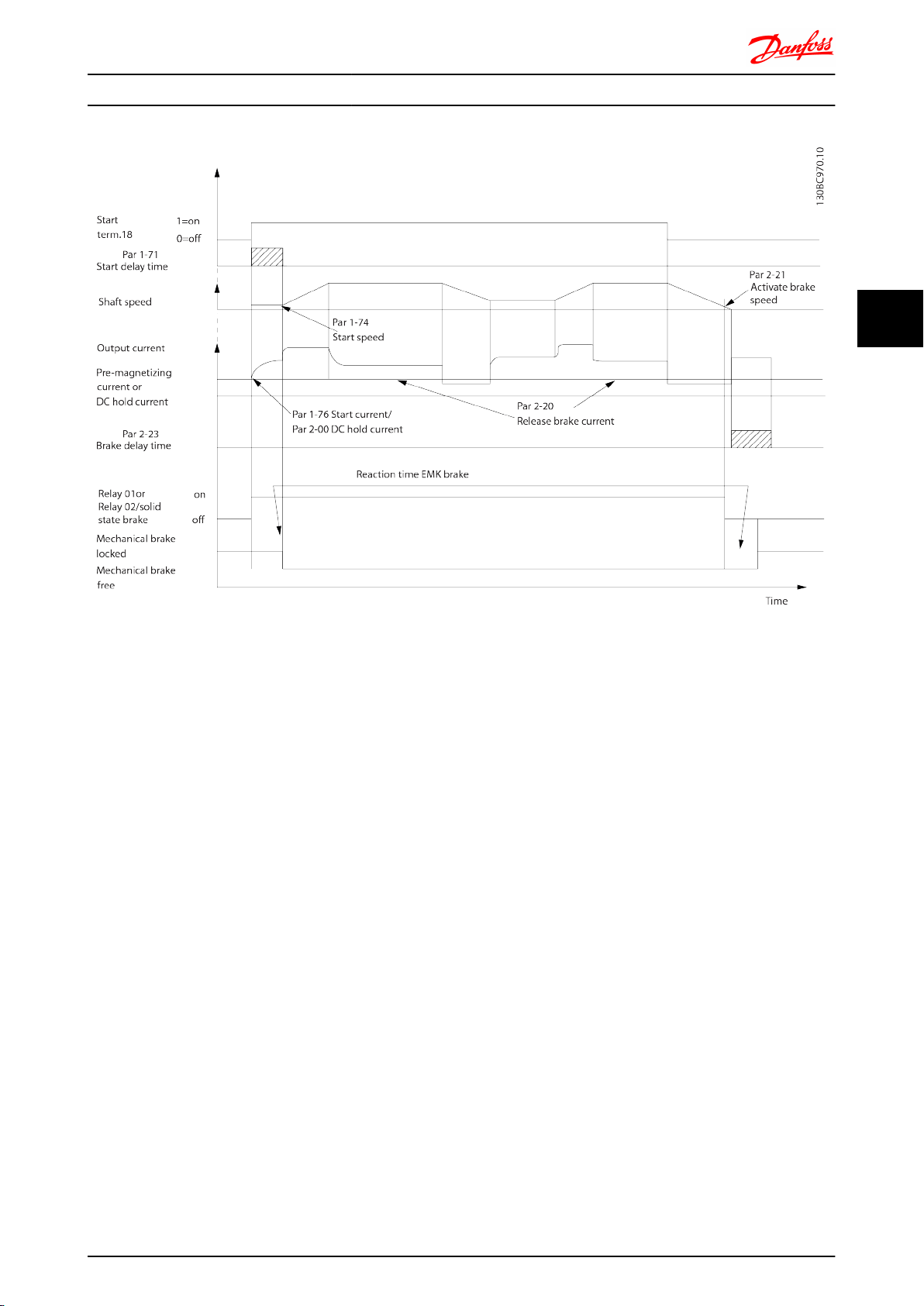
Applikationseksempler
VLT®Decentral Drive FCD 302 Design Guide
4 4
Illustration 4.22 Mekanisk bremsestyring for hæve-/sænkeapplikationer
I hæve-/sænkeapplikationer skal det være muligt at styre
en elektromekanisk bremse.
Trin-for-trin-beskrivelse
Den mekaniske bremse kan styres med alle
•
relæudgange, digitale udgange (klemme 27 eller
29) eller solid-state bremsespændingsudgange
(klemme 122-123). Brug en egnet kontaktor, hvis
det er nødvendigt.
Kontrollér, at udgangen er lukket, så længe
•
frekvensomformeren ikke kan drive motoren. For
eksempel på grund af en for tung belastning,
eller hvis motoren endnu ikke er monteret.
Vælg [32] Mekanisk bremsestyring i parameter-
•
gruppe 5-4* (eller i parametergruppe 5-3*), før
den mekaniske bremse tilsluttes.
Bremsen frigøres, når motorstrømmen overstiger
•
den indstillede værdi i 2-20 Bremsefrigørelsesstrøm.
Bremsen aktiveres, når udgangsfrekvensen er
•
lavere end en forudindstillet grænse. Indstil
grænsen i 2-21 Bremseaktiveringshast. [O/MIN]
eller 2-22 Bremseaktiveringshast. [Hz], og kun hvis
frekvensomformeren udfører en stopkommando.
BEMÆRK!
Anbefaling: Kontrollér for vertikale løfte- eller hæve-/
sænkeapplikationer, at belastningen kan standses i
nødstilfælde eller i tilfælde af fejl i en enkelt del, som f.eks.
en kontaktor.
Når frekvensomformeren går i alarmtilstand, eller der
opstår en overspændingssituation, indkobler den
mekaniske bremse.
BEMÆRK!
For hæve-/sænkeapplikationer skal det kontrolleres, at
momentgrænseindstillingerne ikke overstiger
strømgrænsen. Indstil momentgrænserne i 4-16 Moment-
grænse for motordrift og 4-17 Momentgrænse for
generatordrift. Indstil strømgrænsen i 4-18 Strømgrænse.
Anbefaling: Indstil 14-25 Trip-forsinkelse ved momenegrænse
til [0], 14-26 Tripforsinkelse ved vekselretterfejl til [0] og
14-10 Netfejl til [3] Friløb.
4.9 Sikker standsning
Frekvensomformeren kan udføre sikkerhedsfunktionen
Sikkert moment deaktiveret (STO, som angivet i EN IEC
61800-5-21) og Stopkategori 0 (som defineret i EN
60204-12).
Danfoss kalder denne funktion Sikker standsning. Forud for
integration og anvendelse af Sikker standsning i en installation skal der udføres en dybdegående risikoanalyse for at
afgøre, om funktionen Sikker standsning og sikkerhedsni-
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 67
Page 70

Applikationseksempler
VLT®Decentral Drive FCD 302 Design Guide
veauerne er passende og tilstrækkelige. Sikker standsning
er udviklet og godkendt i henhold til kravene i:
- Sikkerhedskategori 3 i EN 954-1 (og EN ISO
13849-1)
- Ydeevneniveau "d" i EN ISO 13849-1:2008
- SIL 2-funktion i IEC 61508 og EN 61800-5-2
- SILCL 2 i EN 62061
44
1) Se EN IEC 61800-5-2 for oplysninger om funktionen
Sikker deaktivering af moment (STO).
2) Se EN IEC 60204-1 for oplysninger om stopkategori 0 og
1.
Aktivering og terminering af Sikker standsning
Funktionen Sikker standsning (STO) aktiveres ved at fjerne
spændingen på klemme 37 i sikkerhedsvekselretteren. Ved
at slutte sikkerhedsvekselretteren til eksternt sikkerhedsudstyr, der giver en sikkerhedsforsinkelse, opnås en
installation i Sikker standsningskategori 1. Funktionen
Sikker standsning kan anvendes til asynkrone, synkrone og
permanente magnetmotorer.
ADVARSEL
Efter installation af Sikker standsning (STO) skal der
gennemføres en idriftsætningstest. En bestået idriftsætningstest er obligatorisk efter den første montering og
derefter hver gang, sikkerhedsinstallationen ændres.
Tekniske data for Sikker standsning
Følgende værdier er forbundet med de forskellige typer
sikkerhedsniveauer:
Reaktionstid for klemme 37
- Typisk reaktionstid: 10 ms
Reaktionstid=forsinkelse mellem afkobling af STOindgangen og afbrydelse af frekvensomformerens
udgangsbro.
Data for EN ISO 13849-1
- Ydeevneniveau "d"
- MTTFd (gennemsnitstid til farlig fejl): 24.816 år
- DC (diagnosticeringsomfang): 99%
- Kategori 3
Data for EN IEC 61508 lav efterspørgsel
- PFDavg for et års overbelastningsforsøg: 3, 07E-14
- PFDavg for tre års overbelastningsforsøg: 9,
20E-14
- PFDavg for fem års overbelastningsforsøg: 1,
53E-13
SISTEMA-data
Funktionelle sikkerhedsdata kan fås i et databibliotek, som
bruges med SISTEMA-beregningsværktøjet fra IFA
(instituttet for arbejdsmiljø under den lovpligtige tyske
ulykkesforsikring) og data til manuel beregning. Biblioteket
suppleres og udvides hele tiden.
Forkort. Ref. Beskrivelse
Kat. EN 954-1 Kategori, niveau "B, 1-4"
FIT Fejl i tid: 1E-9 timer
HFT IEC 61508 Hardwarefejltolerance: HFT=n betyder, at
n+1 fejl kan medføre tab af sikkerhedsfunktionen
MTTFd EN ISO
13849-1
PFH IEC 61508 Sandsynlighed for farlige fejl pr. time.
PL EN ISO
13849-1
SFF IEC 61508 Andel af sikre fejl [%]; Den procentvise
SIL IEC 61508 Sikkerhedsintegritetsniveau
STO EN
61800-5-2
SS1 EN 61800
-5-2
Tabel 4.27 Forkortelser, der er relevante for funktionssikkerheden
Gennemsnitstid til farlig fejl. Enhed: år
Der skal tages højde for PFH-værdien,
når sikkerhedsudstyret benyttes tit
(oftere end én gang om året) eller
kontinuerligt, hvor anvendelseshyppigheden for et sikkerhedsrelateret
system er mere end én anvendelse pr. år
Diskret niveau, der anvendes til at
specificere de sikkerhedsrelaterede dele i
et styresystems evne til at udføre en
sikkerhedsfunktion under forudsigelige
betingelser. Niveau a-e.
del af sikre fejl og registrerede farlige
fejl for en sikkerhedsfunktion eller et
undersystem i forhold til alle fejl.
Sikker deaktivering af moment
Sikker standsning 1
- Levetid 20 år
Data for EN IEC 62061, EN IEC 61508, EN IEC 61800-5-2
- SIL 2-funktion, SILCL 2
- PFH (sandsynlighed for farlig fejl pr. time) =
7e-10FIT = 7e-19/t
- SFF (andel af sikre fejl) >99%
PFDavg-værdien (sandsynlighed for fejl ved krav)
Sandsynligheden for fejl i tilfælde af, at sikkerhedsfunktionen skal anvendes.
4.9.1.1
Klemme 37, Funktionen Sikker
standsning
- HFT (hardwarefejltolerance)=0 (1oo1-arkitektur)
- Levetid 20 år
Frekvensomformeren fås med funktionen Sikker standsning
via styreklemme 37. Sikker standsning deaktiverer
styrespændingen til effekthalvlederne på frekvensomformerens udgangsfase. Dette forhindrer så, at den spænding,
der kræves for at rotere motoren, genereres. Når
68 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 71
Applikationseksempler
VLT®Decentral Drive FCD 302 Design Guide
funktionen Sikker standsning (T37) aktiveres, afgiver
frekvensomformeren en alarm, tripper apparatet og får
motoren til at køre friløb indtil standsning. Der kræves en
manuel genstart. Funktionen Sikker standsning kan
benyttes som nødstop af frekvensomformeren. I den
normale driftstilstand, når sikker standsning ikke er
påkrævet, skal den almindelige stopfunktion benyttes. Når
automatisk genstart benyttes, skal kravene fra ISO 12100-2
paragraf 5.3.2.5 opfyldes.
Ansvarsbetingelser
Det er brugerens ansvar at sikre, at det personale, der
monterer og betjener funktionen Sikker standsning:
har læst og forstået sikkerhedsforskrifterne
•
vedrørende helbred og sikkerhed/forebyggelse af
ulykker
har forstået de generiske og sikkerhedsmæssige
•
retningslinjer i denne beskrivelse og den
udvidede beskrivelse i denne manual
har et godt kendskab til de generiske og sikker-
•
hedsmæssige standarder, der gælder for den
specifikke applikation.
Bruger er defineret som: integrator, operatør, servicetekniker, vedligeholdelsestekniker.
Standarder
Brug af Sikker standsning på klemme 37 kræver, at
brugeren følger alle sikkerhedsforanstaltninger, herunder
relevante love, bestemmelser og retningslinjer. Den valgfri
funktion Sikker standsning overholder følgende standarder.
EN 954-1: 1996 Kategori 3
•
IEC 60204-1: 2005 kategori 0 - ukontrolleret
•
standsning
IEC 61508: 1998 SIL2
•
IEC 61800-5-2: 2007 - funktionen Sikkert moment
•
deaktiveret (STO)
IEC 62061: 2005 SIL CL2
•
ISO 13849-1: 2006 Kategori 3 PL d
•
ISO 14118: 2000 (EN 1037) – forebyggelse af
•
utilsigtet opstart
Oplysningerne og instruktionerne i betjeningsvejledningen
er ikke tilstrækkelige til at sikre korrekt og sikker brug af
funktionen Sikker standsning. De relaterede oplysninger og
instruktioner fra den relevante Design Guide skal følges.
Beskyttelsesforanstaltninger
Kun kvalificeret og uddannet personale må
•
montere og idriftsætte tekniske sikkerhedssystemer
Apparatet skal monteres i et IP54-skab eller i et
•
tilsvarende miljø. For særlige applikationer kræves
en højere IP-grad
Kablet mellem klemme 37 og det eksterne sikker-
•
hedsudstyr skal beskyttes mod kortslutning i
overensstemmelse med ISO 13849-2 tabel D.4
Når eksterne kræfter påvirker motoren (f.eks.
•
hængende belastninger), kræves der yderligere
foranstaltninger (f.eks. en sikkerhedsreguleringsbremse) for at undgå farlige situationer.
Installation og opsætning af Sikker standsning
ADVARSEL
FUNKTIONEN SIKKER STANDSNING!
Funktionen Sikker standsning isolerer IKKE netspændingen
til frekvensomformeren eller hjælpekredsløb. Udfør kun
arbejde på frekvensomformerens eller motorens elektriske
dele, når netspændingen er isoleret, og vent, indtil tiden,
der er angivet under Sikkerhed i denne vejledning, er gået.
Hvis netspændingen ikke isoleres fra apparatet, eller der
ikke ventes i det angivne tidsrum, kan det resultere i død
eller alvorlig personskade.
Det frarådes at standse frekvensomformeren ved
•
hjælp af funktionen Sikkert moment deaktiveret.
Hvis en kørende frekvensomformer stoppes med
denne funktion, tripper apparatet og standser ved
friløb. Hvis dette ikke er acceptabelt, eller hvis det
er farligt, skal der bruges en anden standsningstilstand til standsning af frekvensomformeren og
maskineriet, før denne funktion benyttes.
Afhængigt af applikationen kan det være
nødvendigt at anvende en mekanisk bremse.
For synkrone og permanente magnetmotorfre-
•
kvensomformere ved flere fejl i IGBTeffekthalvlederen: På trods af aktiveringen af
funktionen Sikkert moment deaktiveret kan
systemet producere et justeringsmoment, som
roterer motorakslen maksimalt ved 180/p grader.
p betegner polparnummeret.
Denne funktion er egnet til at udføre mekanisk
•
arbejde på systemet eller udelukkende på det
påvirkede område af maskinen. Det giver ikke
elektrisk sikkerhed. Denne funktion må ikke
anvendes til at styre start/standsning af frekvensomformeren.
Følg disse trin for at udføre en sikker montering af
frekvensomformeren:
1. Fjern jumper-ledningen mellem styreklemmerne
37 og 12 eller 13. Det er ikke tilstrækkeligt at
skære jumperen over eller afbryde den for at
undgå kortslutning (se jumper i Illustration 4.23).
2. Tilslut et eksternt sikkerhedsovervågningsrelæ via
en NO-sikkerhedsfunktion til klemme 37 (Sikker
standsning) og enten klemme 12 eller 13 (24 V
DC). Følg instruktionen til sikkerhedsudstyret.
Sikkerhedsovervågningsrelæet skal overholde
4 4
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 69
Page 72
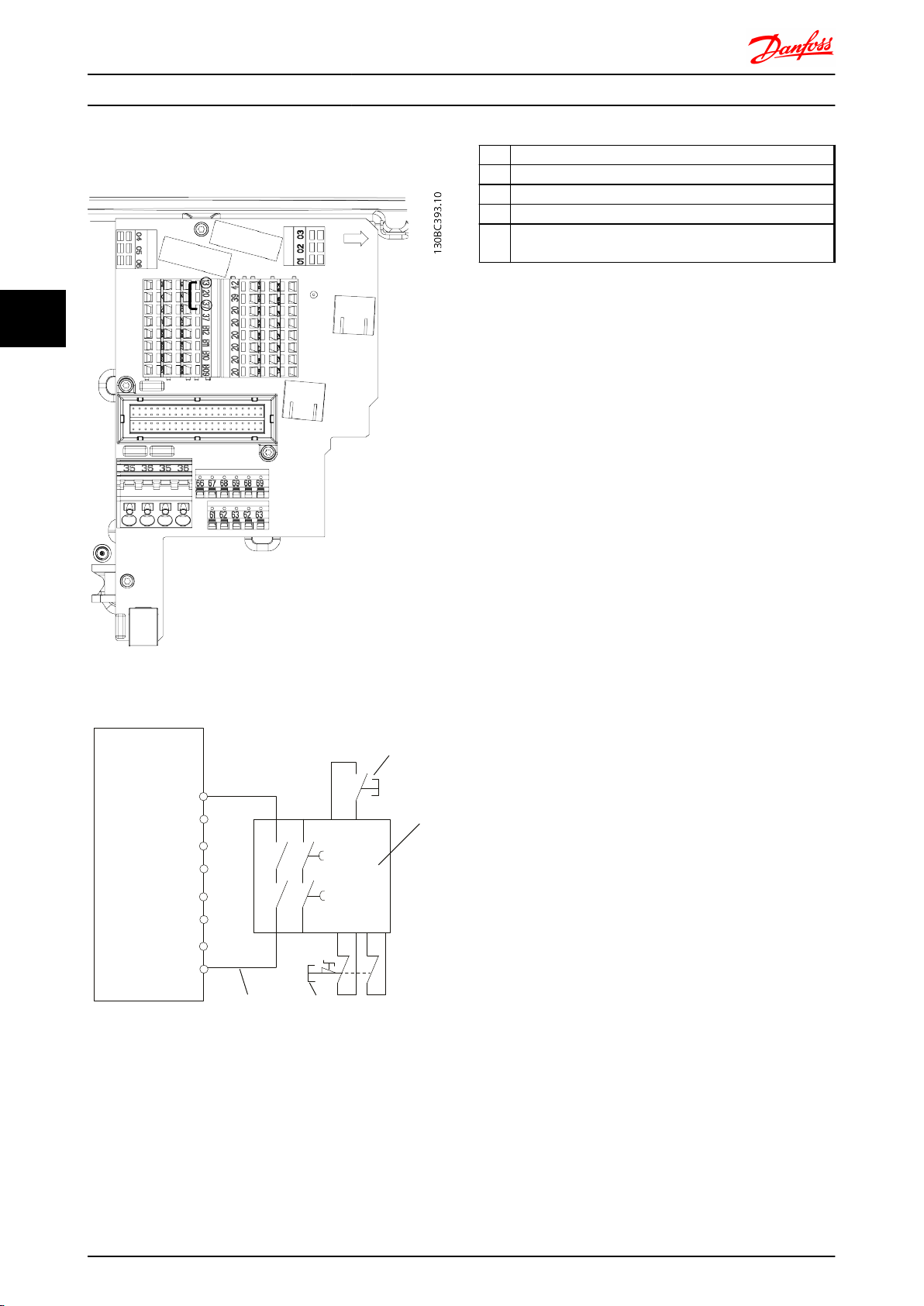
130BC971.10
12
2
4
1
5
3
37
Applikationseksempler
VLT®Decentral Drive FCD 302 Design Guide
kategori 3 (EN 954-1)/PL "d" (ISO 13849-1) eller SIL
2 (EN 62061).
44
1 Frekvensomformer
2 Nulstillingsknap
3 Sikkerhedsrelæ (kat. 3, PL d eller SIL2)
4 Nødstopknap
5 Kortslutningssikret kabel (hvis det ikke er placeret i et
IP54-monteringsskab)
Tabel 4.28 Billedtekst
Idriftsætningstest af Sikker standsning
Efter installation og før første driftskørsel skal der
gennemføres en idriftsætningstest af installationen vha.
Sikker standsning. Desuden skal der gennemføres en test
efter enhver type ændring af installationen.
Eksempel med STO
Et sikkerhedsrelæ evaluerer signalerne fra nødstopknappen
og udløser en STO-funktion på frekvensomformeren, hvis
nødstopknappen aktiveres (se Illustration 4.25). Denne
sikkerhedsfunktion svarer til en kategori 0-standsning
(ukontrolleret standsning) i overensstemmelse med IEC
60204-1. Hvis funktionen udløses under driften, sænker
motoren farten på en ukontrolleret måde. Strømmen til
motoren fjernes sikkert, så den ikke længere kan køre. Det
er ikke nødvendigt at overvåge installationen, når den ikke
er i drift. Hvis der kan opstå en ekstern krafteffekt, skal der
træffes ekstra foranstaltninger for at forhindre potentiel
bevægelse (f.eks. mekaniske bremser).
Illustration 4.23 Jumper mellem klemme 12/13 (24 V) og 37
BEMÆRK!
For alle applikationer med Sikker standsning er det vigtigt,
at en kortslutning i ledningsføringen til klemme 37 kan
udelukkes. Udeluk kortslutningen som beskrevet i EN ISO
13849-2 D4 ved brug af beskyttede ledninger (skærmede
eller adskilte).
Illustration 4.24 Installation for at opnå standsningskategori 0
(EN 60204-1) med sikkerhedskategori 3 (EN 954-1)/PL "d" (ISO
13849-1) eller SIL 2 (EN 62061).
70 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 73
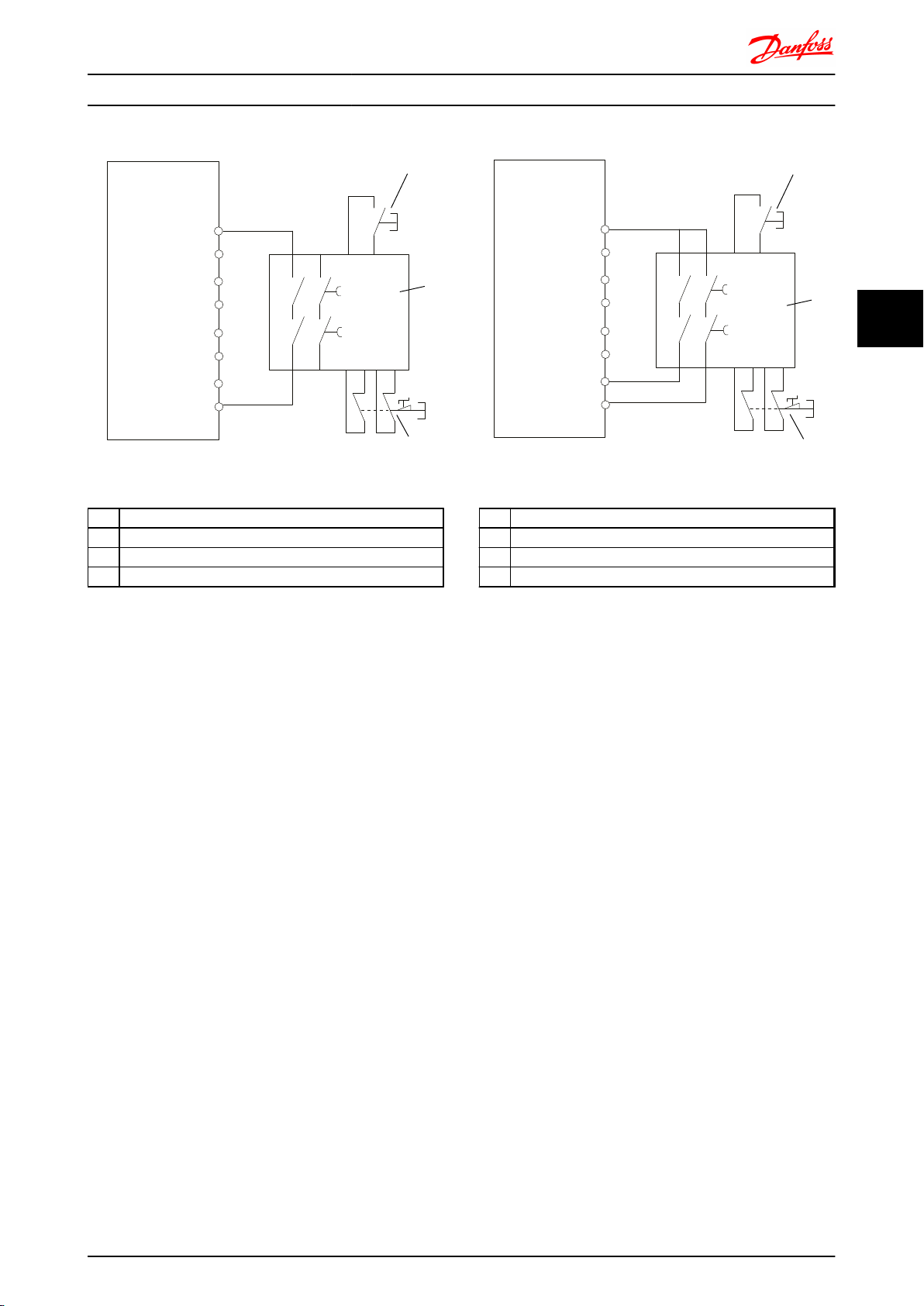
130BC972.10
12
37
1
3
4
2
130BC973.10
18
37
4
1
2
12
3
Applikationseksempler
VLT®Decentral Drive FCD 302 Design Guide
4 4
Illustration 4.25 STO-eksempel
1 Frekvensomformer
2 [Reset]-tast
3 Sikkerhedsrelæ
4 Nødstop
Tabel 4.29 Billedtekst
Eksempel med SS1
SS1 svarer til en kontrolleret standsning i standsningskategori 1 i henhold til IEC 60204-1 (se Illustration 4.26). Når
sikkerhedsfunktionen aktiveres, udfører frekvensomformeren en normal kontrolleret standsning. Denne kan
aktiveres gennem klemme 27. Når sikkerhedsforsinkelsestiden er udløbet for det eksterne sikkerhedsmodul, vil
STO blive udløst, og klemme 37 indstilles lavt. Ramp ned
som konfigureret i frekvensomformeren. Hvis frekvensomformeren ikke standses efter sikkerhedsforsinkelsestiden,
skifter frekvensomformeren til friløb, når STO aktiveres.
BEMÆRK!
Ved brug af SS1-funktionen overvåges sikkerhedsaspekterne ved frekvensomformerens bremserampe ikke.
Illustration 4.26 SS1-eksempel
1 Frekvensomformer
2 [Reset]-tast
3 Sikkerhedsrelæ
4 Nødstop
Tabel 4.30 Billedtekst
Eksempel med en kategori 4/PL e-applikation
Når designet af sikkerhedskontrolsystemet kræver to
kanaler, for at STO-funktionen kan opnå kategori 4/PL e,
kan der implementeres en kanal ved hjælp af Sikker
standsning klemme 37 (STO) og en anden ved hjælp af en
kontaktor. Slut kontaktoren til enten frekvensomformerindgangen eller udgangsstrømkredsløbene. Den styres af
sikkerhedsrelæet (se Illustration 4.27). Kontaktoren skal
overvåges via en ekstra styret kontakt og sluttes til nulstillingsindgangen på sikkerhedsrelæet.
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 71
Page 74

130BC974.10
12
37
K 1
K 1
K 1
4
1
3
2
130BC975.10
12
37
1
20
1
1
3
4
5
2
37
20
37
20
Applikationseksempler
VLT®Decentral Drive FCD 302 Design Guide
44
Illustration 4.27 STO-kategori 4 eksempel
1 Frekvensomformer
2 [Reset]-tast
3 Sikkerhedsrelæ
4 Nødstop
Tabel 4.31 Billedtekst
Illustration 4.28 Eksempel på parallelkobling af flere frekvensom-
Parallelkobling af Sikker standsning-indgang til et sikkerhedsrelæ
Sikker standsning-indgange på klemme 37 (STO) kan
forbindes med hinanden direkte, hvis det er nødvendigt at
styre flere frekvensomformere fra samme styrekabel via et
sikkerhedsrelæ (se Illustration 4.28). Ved at forbinde
indgangene øges muligheden for, at der opstår en fejl i
usikker retning. En fejl i én frekvensomformer kan medføre,
at alle frekvensomformere aktiveres. Muligheden for en fejl
på klemme 37 er så lav, at den resulterende sandsynlighed
stadig overholder kravene til SIL2.
formere
Frekvensomformer
1
2 24 V DC
3 [Reset]-tast
4 Sikkerhedsrelæ
5 Nødstop
Tabel 4.32 Billedtekst
ADVARSEL
Aktivering af Sikker standsning (dvs. fjernelse af 24 V DCspændingsforsyning til klemme 37) yder ikke elektrisk
sikkerhed. Selve Sikker standsning-funktionen er derfor ikke
tilstrækkelig til at implementere nødstopfunktionen som
defineret i EN 60204-1. Nødstop kræver elektrisk isolering,
f.eks. ved afbrydelse af netforsyningen via en ekstra
kontaktor.
1. Aktivér Sikker standsning-funktionen ved at fjerne
24 V DC-spændingsforsyningen til klemme 37.
2. Efter aktivering af Sikker standsning (dvs. efter
72 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
responstiden) friløber frekvensomformeren
Page 75

Applikationseksempler
VLT®Decentral Drive FCD 302 Design Guide
(skaber ikke længere et rotationsfelt i motoren).
Responstiden er typisk mindre end 10 ms.
Det kan garanteres, at frekvensomformeren ikke begynder
at skabe et rotationsfelt igen ved en intern fejl (i overensstemmelse med kat. 3 af EN 954-1, PL d acc. EN ISO
13849-1 og SIL 2 acc. EN 62061). Efter aktivering af Sikker
standsning viser displayet teksten "Sikker standsning aktiv".
Den tilhørende hjælpetekst viser "Sikker standsning er
aktiveret. Dette betyder, at Sikker standsning er blevet
aktiveret, eller at normal drift ikke er genoptaget endnu
efter aktivering af Sikker standsning".
BEMÆRK!
Krav til kat. 3 (EN 954-1)/PL "d" (ISO 13849-1) opfyldes kun,
mens 24 V DC-forsyningen til klemme 37 er fjernet eller
holdes lav ved hjælp af sikkerhedsudstyr, som selv skal
opfylde kat. 3 (EN 954-1)/PL "d" (ISO 13849-1). Hvis
eksterne kræfter påvirker motoren, må den ikke køre uden
yderligere faldsikkerhedsforanstaltninger. Eksterne kræfter
kan opstå, f.eks. i tilfælde af en vertikal akse (ophængt
belastning), hvor der kan opstå fare pga. en uønsket
bevægelse, f.eks. pga. tyngdekraften. Faldsikkerhedsforanstaltninger kan være yderligere mekaniske bremser.
Sikker standsning-funktionen er som standard indstillet til
forebyggelse mod utilsigtet genstart. For at genoptage
driften efter aktivering af Sikker standsning
1. skal der derfor påføres 24 V DC spænding til
klemme 37 igen (teksten Sikker standsning
aktiveret vises stadig)
2. indstil et nulstillingssignal (via bus, digital I/O
eller tasten [Reset]).
Sikker standsning-funktionen kan indstilles til automatisk
genstart. Indstil værdien for 5-19 Klemme 37 Sikker
standsning fra standardværdien [1] til værdien [3].
Automatisk genstart betyder, at Sikker standsning afbrydes,
og at normal drift genoptages, så snart der påføres 24 V
DC på klemme 37. Der kræves intet nulstillingssignal.
ADVARSEL
Automatisk genstart er kun tilladt i en af to situationer:
1. Beskyttelsen mod utilsigtet genstart
implementeres af andre dele i installationen
Sikker standsning.
2. En tilstedeværelse i det farlige område kan
udelukkes fysisk, når Sikker standsning ikke er
aktiveret. Der skal især tages højde for artikel
5.3.2.5 of ISO 12100-2 2003.
4.9.1.2 Idriftsætningstest af Sikker
standsning
Efter montering og før første driftskørsel skal der
gennemføres en idriftsætningstest af den installation eller
applikation, der anvender Sikker standsning.
Udfør testen igen, hver gang installationen eller applikationen, som Sikker standsning er en del af, ændres.
BEMÆRK!
En bestået idriftsætningstest er obligatorisk efter den første
montering og derefter hver gang, sikkerhedsinstallationen
ændres.
Idriftsætningstest (vælg en af situationerne 1 eller 2 efter
relevans):
Situation 1: Genstartsforebyggelse for Sikker standsning er
påkrævet (dvs. kun Sikker standsning, hvor 5-19 Klemme
37 Sikker standsning er indstillet til standardværdien [1]
eller er kombineret med Sikker standsning, og MCB112,
hvor 5-19 Klemme 37 Sikker standsning er indstillet til [6]
eller [9]:
1.1 Fjern 24 V DC-spændingsforsyningen til
klemme 37 med afbryderenheden, mens motoren
drives af frekvensomformeren (dvs. at netforsyningen ikke afbrydes). Testtrinnet er bestået, hvis
motoren reagerer med friløb, og
•
den mekaniske bremse er aktiveret (hvis
•
den er tilsluttet)
alarmen "Sikker stands. [A68]" vises i
•
LCP'et, hvis det er monteret
1.2 Send et nulstillingssignal (via bus, digital I/O
eller tasten [Reset]). Testtrinnet er bestået, hvis
motoren forbliver i Sikker standsning-tilstand, og
den mekaniske bremse (hvis tilsluttet) forbliver
aktiv.
1.3 Påfør 24 V DC til klemme 37 igen. Testtrinnet
er bestået, hvis motoren forbliver i friløbstilstand,
og den mekaniske bremse (hvis tilsluttet) forbliver
aktiv.
1.4 Send et nulstillingssignal (via bus, digital I/O
eller tasten [Reset]). Testtrinnet er bestået, når
motoren bliver funktionsdygtig igen.
Idriftsætningstesten er bestået, hvis alle fire testtrin 1.1, 1.2,
1.3 og 1.4 er bestået.
4 4
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 73
Page 76

Applikationseksempler
Situation 2: Der ønskes og tillades automatisk genstart af
Sikker standsning (dvs. kun Sikker standsning i tilfælde,
hvor 5-19 Klemme 37 Sikker standsning er indstillet til [3]
eller kombineret Sikker standsning og MCB112, hvor
5-19 Klemme 37 Sikker standsning er indstillet til [7] eller
[8]):
2.1 Fjern 24 V DC-spændingsforsyningen til
klemme 37 med afbryderen, mens motoren drives
af frekvensomformeren (dvs. at netforsyningen
44
Testtrinnet er bestået, hvis motoren bliver funktionsdygtig
igen. Idriftsætningstesten er bestået, hvis begge testtrin 2.1
og 2.2, bestås.
ikke afbrydes). Testtrinnet er bestået, hvis
motoren reagerer med friløb, og
•
den mekaniske bremse er aktiveret (hvis
•
den er tilsluttet)
alarmen "Sikker stands. [A68]" vises i
•
LCP'et, hvis det er monteret
2.2 Påfør 24 V DC på klemme 37 igen.
VLT®Decentral Drive FCD 302 Design Guide
BEMÆRK!
Se advarsel om genstartsadfærd i Klemme 37, Funktionen
Sikker standsning .
BEMÆRK!
Sikker standsning-funktionen kan anvendes til asynkrone,
synkrone og permanente magnetmotorer. Der kan opstå to
fejl i frekvensomformerens effekthalvleder. Ved brug af
synkrone eller permanente magnetmotorer kan der opstå
resterende rotation fra fejlene. Rotationen kan beregnes
som vinkel=360/(antal poler). For applikationer, der
anvender synkrone eller permanente magnetmotorer, skal
der tages højde for denne resterende rotation, og det skal
kontrolleres, at dette ikke udgør en sikkerhedsmæssig
risiko. Denne situation er ikke relevant for asynkrone
motorer.
74 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 77

Position 2 4 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 39 39
F C D 3 0 2 P T 4 H 1 X A B X X X X X D
1 3 5
130BB797.10
Typekode og Selection Guide
VLT®Decentral Drive FCD 302 Design Guide
5 Typekode og Selection Guide
5.1 Typekodebeskrivelse
Illustration 5.1 Typekodebeskrivelse
Position Beskrivelse Valg/optioner
01-03 Produktgruppe FCD
04-06
07-10 Effektstørrelse
11-12
13-15 Kapsling
16-17 RFI-filter H1 RFI-filter, klasse A1/C2
18 Bremse
Frekvensomformerserie
Faser,
netspænding
302 Avanceret ydelse
PK37 0,37 kW/0,5 HK
PK55 0,55 kW/0,75 HK
PK75 0,75 kW/1,0 HK
P1K1 1,1 kW/1,5 HK
P1K5 1,5 kW/2,0 HK
P2K2 2,2 kW/3,0 HK
P3K0
PXXX
T Trefaset
4 380-480 V AC
B66
W66
W69
X Ingen bremse
S
Decentral frekvensomformer
3,0 kW/4,0 HK (kun store
apparater)
Kun installationsboks (uden
effektdel)
Standard sort IP66/Type 4X
Standard hvid IP66/Type 4X
Hygiejnisk hvid IP66K/Type 4X
Bremsechopper + mekanisk
bremse
Position Beskrivelse Valg/optioner
Komplet produkt, lille
19
20 Konsoller
21 Gevind
22 Kontaktoptioner
23 Display
Hardwarekonfiguration
1
3
X
Y
R
T
X Ingen konsoller
E Flade konsoller
F 40 mm konsoller
X Ingen installationsboks
M Metriske gevind
X Ingen kontaktoptioner
E
F
H
K
X
C Med displayconnector
apparat, enkeltstående
montering
Komplet produkt, stort
apparat, enkeltstående
montering
Frekvensomformerdel, lille
apparat (ingen installationsboks)
Frekvensomformerdel, stort
apparat (ingen installationsboks)
Installationsboks, lille
apparat, enkeltstående
montering (ingen frekvensomformerdel)
Installationsboks, stort
apparat, enkeltstående
montering (ingen frekvensomformerdel)
Servicekontakt på netforsyningsindgang
Serviceafbryder på
motorudgang
Afbryder og netafbryder,
sløjfeklemmer (kun store
apparater)
Servicekontakt på netforsyningsindgang med ekstra
sløjfeklemmer (kun store
apparater)
Intet displaystik (ingen
installationsboks)
5 5
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 75
Page 78

Typekode og Selection Guide
VLT®Decentral Drive FCD 302 Design Guide
Position Beskrivelse Valg/optioner
X Intet følerstik
E
24 Følerstik
F
25 Motorstik X Intet motorstik
26
27 Fieldbus-stik
55
28 Reserveret X Til fremtidig brug
29-30 A-option
31-32 B-option
33-37 Reserveret XXXXX Til fremtidig brug
38-39 D-option
Netforsyningsstik
X Intet netforsyningsstik
X Intet Fieldbus-stik
E M12 Ethernet
P M12 Profibus
AX Ingen A-option
A0 Profibus DP
AN Ethernet IP
AL ProfiNet
BX Ingen B-option
BR Encoderoption
BU Resolveroption
BZ
DX Ingen D-option
D0 24 V DC backupindgang
Direkte montering 4xM12:
4 digitale indgange
Direkte montering 6xM12:
4 digitale indgange, 2
relæudgange
PLC-sikkerhedsbrugergrænseflade
5.1.1 Drive Configurator
Konstruér frekvensomformeren i henhold til applikationskravene ved at bruge bestillingsnummersystemet.
Standardfrekvensomformere og frekvensomformere med
indbyggede optioner bestilles ved at sende en typekodestreng, der beskriver produktet, til det lokale Danfosssalgskontor, f.eks.:
FCD302P2K2T4B66H1X1XMXCXXXXXA0BXXXXXXDX
Betydningen af tegnene i strengen kan findes på siderne
med bestillingsnumrene i dette kapitel. I eksemplet
ovenfor omfatter frekvensomformeren en Profibus DP V1
og en 24 V backupoption.
Ud fra den internetbaserede Drive Configurator er det
muligt at konfigurere den ønskede frekvensomformer til
den relevante applikation og generere typekodestrengen.
Drive Configurator genererer automatisk et ottecifret
salgsnummer, der skal afleveres til den lokale salgsafdeling.
Der kan desuden oprettes en projektliste med flere
produkter, som efterfølgende sendes til en Danfoss-salgsrepræsentant.
Drive Configurator kan findes på den globale internetside:
www.danfoss.com/drives.
Tabel 5.1 Typekodebeskrivelse
Frekvensomformeren leveres automatisk med en
Det er ikke alle valg/optioner, der kan fås til hver variant af
FCD 302. Gå til Drive Configurator på internettet for at
kontrollere, om den rigtige version er tilgængelig:
http://driveconfig.danfoss.com.
sprogpakke, der er relevant for den region, den bestilles
fra.
Kontakt det lokale Danfoss-salgskontor for at bestille en
anden sprogpakke.
BEMÆRK!
A- og D-optioner for FCD 302 er integrerede på styrekortet.
Derfor kan optioner til frekvensomformere, som er tilsluttet
med stik, ikke anvendes her. Fremtidig eftermontering
kræver, at hele styrekortet skiftes. B-optioner er tilsluttet
med stik og bruger det samme koncept som for frekvensomformere.
76 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 79

Typekode og Selection Guide
VLT®Decentral Drive FCD 302 Design Guide
5.2 Bestillingsnumre
5.2.1 Bestillingsnumre: Tilbehør
Tilbehør Beskrivelse Bestillingsnr.
Udvidede monteringskonsoller 40 mm konsoller 130B5771
Monteringskonsoller Flade konsoller 130B5772
LCP-kabel Kabel, der sidder mellem vekselretteren og LCP'et 130B5776
Bremsemodstand 1.750 Ω 10 W/100% Monteres inden i installationsboksen under motorklemmerne 130B5778
Bremsemodstand 350 Ω 10 W/100% Monteres inden i installationsboksen under motorklemmerne 130B5780
VLT LCP-betjeningspanel 102 Grafisk display til programmering og udlæsning 130B1078
Ventilationsmembran, goretex Forhindrer kondensering inden i kapslingen 175N2116
PE-terminering, M20 Rustfrit stål 175N2703
PE-terminering, M16 Rustfrit stål 130B5833
Tabel 5.2 Bestillingsnumre: Tilbehør
Bestillingsnumre: Reservedele
5.2.2
Reservedele Beskrivelse Bestillingsnr.
Beskyttelsesafdækning Plastikbeskyttelsesafdækning til vekselretterdel 130B5770
Pakning Pakning mellem installationsboks og vekselretterdel 130B5773
Tilbehørspose Reservekabelbøjle og skruer til skærmningsterminering 130B5774
Servicekontakt Reservekontakt til afbrydning af netforsyning eller motor 130B5775
LCP-stik Reservestik til montering i installationsboks 130B5777
Hovedtermineringskort Til montering i installationsboks 130B5779
M12 følerstik Sæt med to M12-følerstik til montering i kabelbøsningshul 130B5411
Styrekort Styrekort med backup på 24 V 130b5783
Styrekort, Profibus Styrekort, Profibus med backup på 24 V 130b5781
Styrekort, Ethernet Ethernet-styrekort med backup på 24 V 130b5788
Styrekort, Profinet Styrekort, Profinet med 24 V backup 130b5794
5 5
Tabel 5.3 Bestillingsnumre: Reservedele
Pakken indeholder:
Tilbehørspose, kun udstyret med installationsboks. Indhold:
•
- 2 kabelbøjler
- konsol til motor-/belastningskabler
- hævekonsol til kabelbøjle
- skrue 4 mm 20 mm
- gevindformning 3,5 mm 8 mm
Dokumentering
•
Afhængigt af hvilke optioner, der er monteret, indeholder boksen en eller to poser og en eller flere brochurer.
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 77
Page 80
Typekode og Selection Guide
5.3 Optioner og tilbehør
Danfoss tilbyder et stort udvalg af optioner og tilbehør til
frekvensomformeren.
5.3.1 Fieldbus-optioner
Vælg Fieldbus-optionen ved bestilling af frekvensomformeren. Alle Fieldbus-optioner medfølger på styrekortet.
Der er ikke en separat A-option tilgængelig.
Udskift styrekortet for at skifte Fieldbus-optionen på et
senere tidspunkt. Følgende styrekort med forskellige
55
Fieldbus-optioner er tilgængelige. Alle styrekort har som
standard 24 V-backup.
Del Bestillingsnummer
Styrekort PROFIBUS 130B5781
Styrekort Ethernet 130B5788
Styrekort PROFINET 130B5794
Tabel 5.4 Styrekort med Fieldbus-optioner
Encoderoption MCB 102
5.3.2
Encodermodulet kan både bruges som feedbackkilde for
fluxstyring med lukket sløjfe (1-02 Flux-motorfeedbackkilde)
og som hastighedsstyring med lukket sløjfe
(7-00 Hastighed, PID-feedbackkilde). Encoderoptionen
konfigureres i parametergruppe 17-**
VLT®Decentral Drive FCD 302 Design Guide
plus
VVC
•
•
•
•
Understøttede encodertyper:
Trinvise encodere: 5 V TTL type, RS422, maks. frekvens: 410
kHz
Trinvise encodere: 1Vpp, sinus-cosinus
Hiperface® Encoder: absolut og sinus-cosinus (Stegmann/
SICK)
EnDat-encoder: absolut og sinus-cosinus (Heidenhain)
understøtter version 2.1
SSI-encoder: Absolut
Encoder-overvåger:
De fire encoder-kanaler (A, B, Z og D) overvåges, og åbne
kredsløb og kortslutninger kan registreres. Der er en grøn
LED-lampe for hver kanal, som lyser, når kanalen er OK.
med lukket sløjfe
Flux Vector-hastighedsstyring
Flux Vector-momentstyring
Permanent magnetmotor
BEMÆRK!
LED'erne er ikke synlige, når de er monteret i en FCD302frekvensomformer. I 17-61 Feedbacksignalovervågning
vælges en reaktion i tilfælde af en encoder-fejl: ingen,
advarsel eller trip.
Encoderoptionssættet indeholder
Encoderoption MCB 102
•
Kabel til at tilslutte kundeklemmer til styrekort
•
Encoderoptionen MCB 102 anvendes til:
Stikbetegnelse
X31
1 NC 24 V* 24 V-udgang (21-25 V, I
2 NC 8 VCC 8 V-udgang (7-12 V, I
3 5 VCC 5 VCC 5 V* 5 V-udgang (5 V ±5%, I
4 GND GND GND GND
5 A-indgang +COS +COS A-indgang
6 A-inv.
7 B-indgang +SIN +SIN B-indgang
8 B. inv.
9 Z-indgang +Data RS-485 Urudgang Urudgang Z-indgang ELLER +Data RS-485
10 Z inv.-indgang -Data RS-485 Urudgang inv. Urudgang inv. Z-indgang ELLER -Data RS-485
11 NC NC Data ind Data ind Fremtidig brug
12 NC NC Data ind, inv. Data ind, inv. Fremtidig brug
Maks. 5 V på X31.5-12
Tabel 5.5 Tilslutningsklemmer til encoderoption MCB 102
* Forsyning til encoder: Se data på encoder
Trinvis
encoder (se
grafik A)
indgang
indgang
SinCos-encoder
Hiperface ®(se
grafik B)
REFCOS REFCOS A-inv. indgang
REFSIN REFSIN B. inv. indgang
EnDat-encoder SSI-encoder Beskrivelse
maks
maks
maks
:125 mA)
: 200 mA)
: 200 mA)
78 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 81

3
7
2
0
1
3
B
1
1
B
1
2
3
7
B
1
0
B
0
9
2
0
1
2
G
B
0
7
B
0
8
2
0
B
0
6
B
0
5
N
V
R
B
0
3
B
0
4
P
B
0
2
B
0
1
Z
A
/Z
B
+5V
/B
GND
/A
A
+24V
B
GND
130BC998.10
Us 7-12V (red)
GND (blue)
+COS (pink)
REFCOS (black)
+SIN (white)
REFSIN (brown)
Data +RS 485 (gray)
Data -RS 485 (green)
1 2 3 12754 6 8 9 10 11
130BA164.10
+RS485
+cos
-RS485
+sin
-sin
GND
7-12V
-cos
3
7
2
0
1
3
B
1
1
B
1
2
3
7
B
1
0
B
0
9
2
0
1
2
G
B
0
7
B
0
8
2
0
B
0
6
B
0
5
N
V
R
B
0
3
B
0
4
P
B
0
2
B
0
1
130BC999.10
1
Typekode og Selection Guide
VLT®Decentral Drive FCD 302 Design Guide
Illustration 5.2 Tilslutninger til 5 V trinvis encoder
Maks. kabellængde 10 m.
Illustration 5.4 Tilslutninger for Hiperface Encoder - 2
Del Beskrivelse
1 Hiperface encoder
Tabel 5.6 Billedtekst
Resolveroption MCB 103
5.3.3
MCB 103-resolveroptionen bruges til tilknytning af resolvermotorfeedback til frekvensomformeren. Resolvere
anvendes grundlæggende som motorfeedbackenhed til
børsteløse synkrone motorer med permanent magnet.
Resolveroptionssættet består af:
MCB 103 Resolver-option
•
Kabel til at tilslutte kundeklemmer til styrekort
•
Valg af parametre: 17-5x-resolvergrænseflade.
MCB 103-resolveroptionen understøtter flere slags
resolvertyper.
5 5
Illustration 5.3 Tilslutninger for Hiperface Encoder - 1
17-50 Poler: 2 *2
17-51 Indgangsspæn.: 2,0-8,0 Vrms *7,0
Vrms
17-52 Indgangsfrekvens: 2–15 kHz
*10,0 kHz
17-53 Transformationsforh.: 0,1–1,1 *0,5
Maks. 4 V RMS
Resolverpoler
Resolverindgangsspænding
Resolverindgangsfrekvens
Transformationsforhold
Sekundær indgangsspænding
Sekundær
Ca. 10 kΩ
belastning
Tabel 5.7 Specifikationer for resolveroption MCB 103
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 79
Page 82
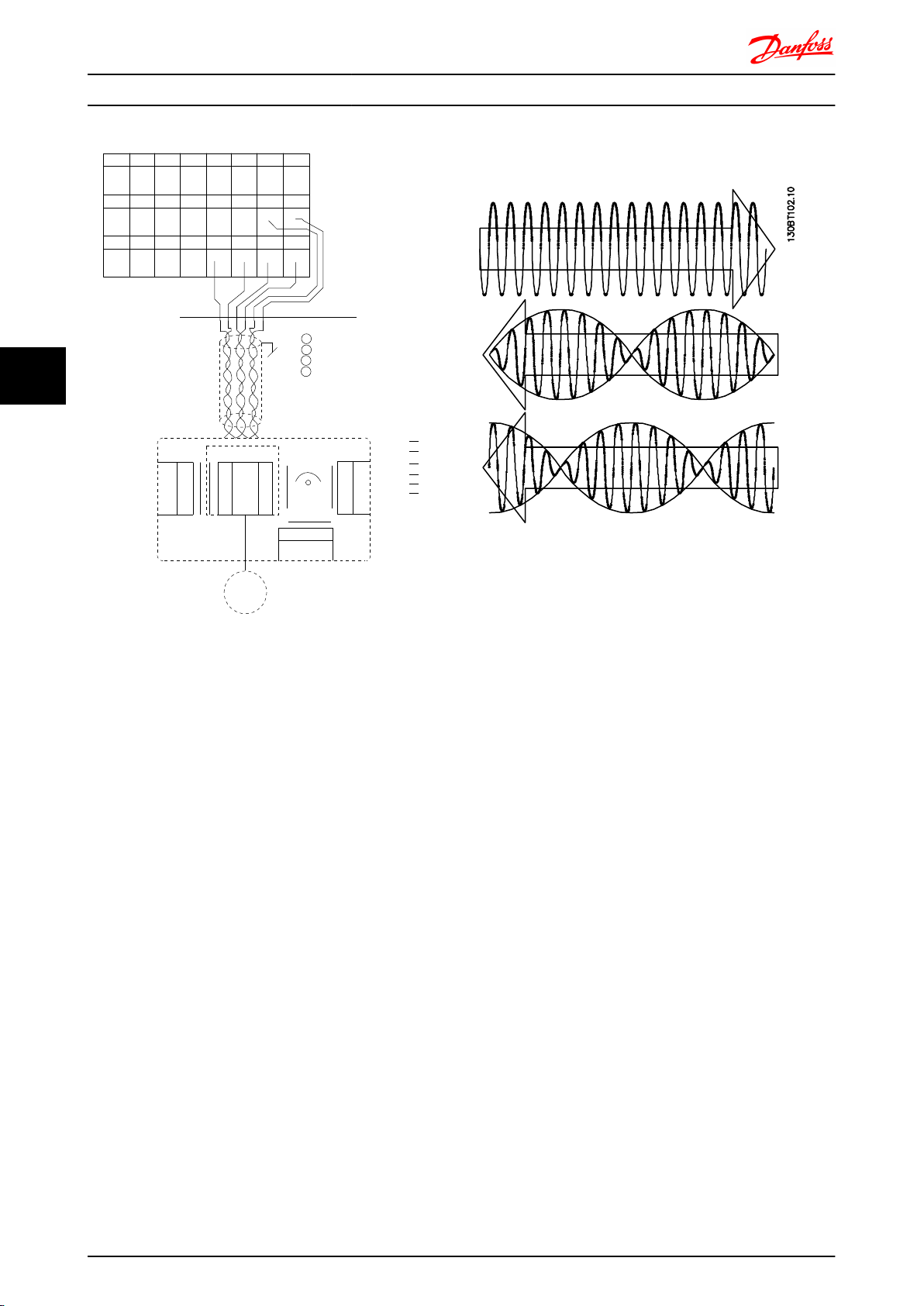
130BD001.10
Resolver
stator
Rotor
R1
R2
S1
S2
S3
S4
REF+
REFCOS+
COSSIN+
SIN-
LED 1 REF OK
LED 2 COS OK
LED 3 SIN OK
LED NA
R1
R2
S1
S2
S3
S4
Motor
37201
3
B11
B12
3
7
B
1
0
B
0
9
2
0
1
2
G
B
0
7
B
0
8
2
0
B
0
6
B05
N
V
R
B03
B
0
4
P
B
0
2
B
0
1
B01 REF+
B06 Sin-
B05 Sin+
B04 Cos-
B03 Cos+
B02 REF-
Typekode og Selection Guide
VLT®Decentral Drive FCD 302 Design Guide
55
Illustration 5.6 Resolversignaler
Eksempel på opsætning
I dette eksempel anvendes der en motor med permanent
Illustration 5.5 Tilslutninger for MCB 103 Resolveroption
magnet (PM) med en resolver som hastighedsfeedback. En
PM-motor skal som regel køre i flux mode.
Kabelføring
BEMÆRK!
Resolveroptionen MCB 103 kan kun bruges med rotorfor-
Den maksimale kabellængde er 150 m, når der anvendes
et snoet kabel.
synede resolvertyper. Statorforsynede resolvere kan ikke
bruges.
BEMÆRK!
Resolverkablerne skal være skærmede og adskilt fra
BEMÆRK!
motorkablerne.
LED-indikatorer er ikke synlige ved resolveroptionen.
BEMÆRK!
LED-lamper
LED-lampe 1 lyser, når referencesignalet er OK for
resolveren
LED 2 lyser, når cosinus-signalet er OK fra resolveren
LED 3 lyser, når sinus-signalet er OK fra resolveren
LED-lamperne lyser, når 17-61 Feedbacksignalovervågning er
indstillet til Advarsel eller Trip.
Afskærmningen på resolverkablet skal sluttes korrekt til
afkoblingspladen og til chassiset (jord) på motorsiden.
BEMÆRK!
Brug altid afskærmede motorkabler og bremsechopperkabler.
80 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 83
Typekode og Selection Guide
1-00 Konfigurationstilstand [1] Hastighed, lukket sløjfe
1-01 Motorstyringsprincip [3] Flux med feedback
1-10 Motorkonstruktion [1] PM,ikke-udpræg.SPM
1-24 Motorstrøm Typeskilt
1-25 Nominel motorhastighed Typeskilt
1-26 Kont. nominelt motormoment Typeskilt
AMA kan ikke bruges på PM-motorer
1-30 Statormodstand (Rs) Motordatablad
30-80 d-akseinduktans (Ld) Motordatablad (mH)
1-39 Motorpoler Motordatablad
1-40 Modelektromot.kraft v. 1000 O/MIN Motordatablad
1-41 Motorvinkelforskydning Motordatablad (som regel nul)
17-50 Poler Resolverdatablad
17-51 Indgangsspæn. Resolverdatablad
17-52 Indgangsfrekvens Resolverdatablad
17-53 Transformationsforh. Resolverdatablad
17-59 Resolver-grænseflade [1] Aktiveret
Tabel 5.8 Justér følgende parametre
VLT®Decentral Drive FCD 302 Design Guide
5 5
24 V backupoption MCB 107
5.3.4
Ekstern 24 V DC-forsyning
Der kan monteres en ekstern 24 V DC-forsyning for at forsyne styrekortet og eventuelle optionskort med lavspænding. Dette
giver mulighed for fuld drift af LCP'et (herunder parameterindstillingen) uden tilslutning til netspænding.
Specifikationer for ekstern 24 V DC-forsyning
Indgangsspændingsområde 24 V DC ±15% (maks. 37 V i 10 sek)
Maks. indgangsstrøm 2,2 A
Gennemsnitlig indgangsstrøm 0,9 A
Maks. kabellængde 75 m
Indgangskapacitansbelastning <10 uF
Opstartsforsinkelse <0,6 sek
Indgangene er beskyttet.
Klemmenumre
Klemme 35: - ekstern 24 V DC-forsyning.
Klemme 36: + ekstern 24 V DC-forsyning.
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 81
Page 84
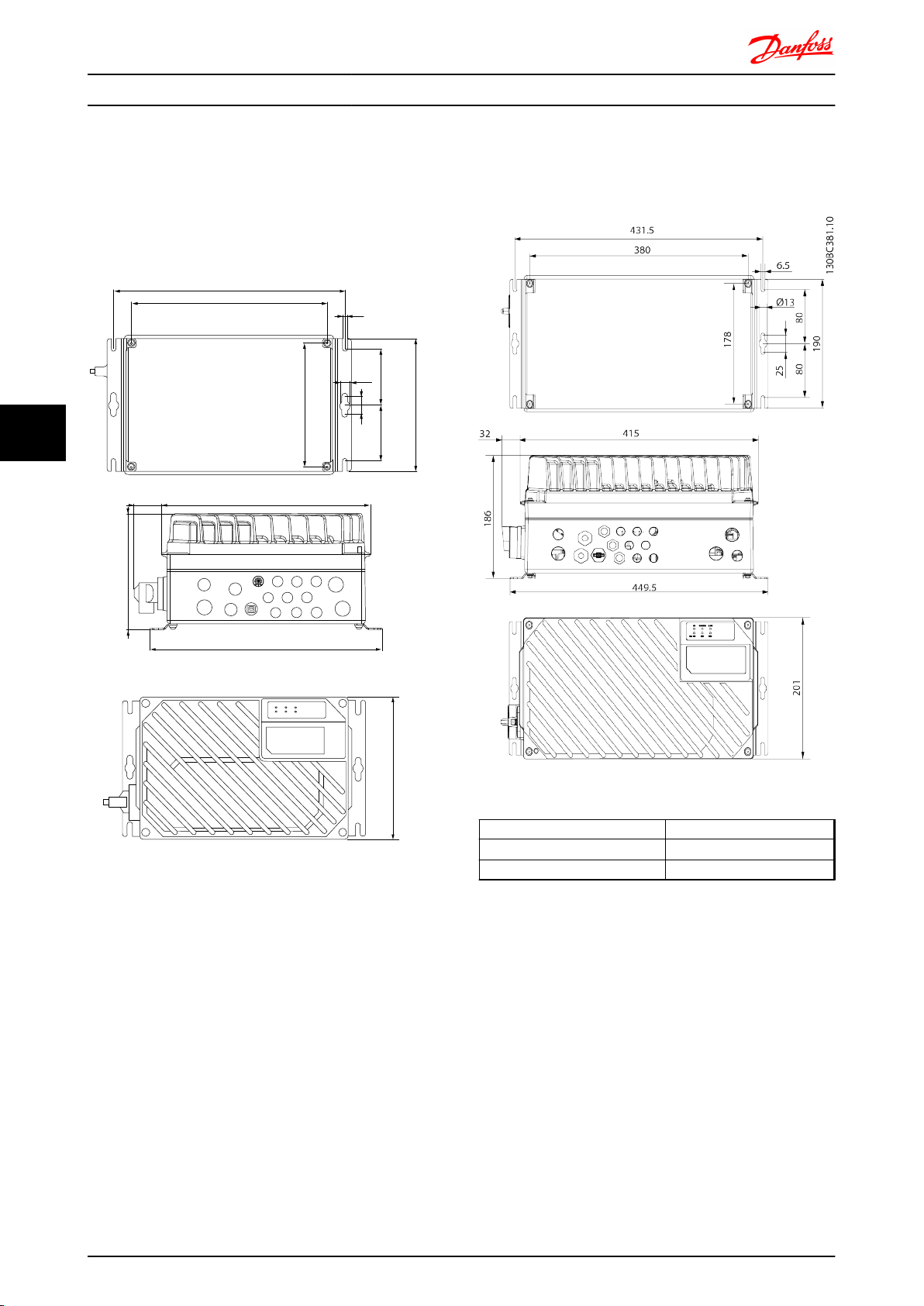
41
175
349.5
315
ON
WARNING
ALARM
Bus MS NS2NS1
331.5
280
178
6.5
80
80
190
25
Ø13
130BB712.10
200
1
2
3
4
6
Specifikationer
6 Specifikationer
6.1 Mekaniske mål
VLT®Decentral Drive FCD 302 Design Guide
Illustration 6.1 Lille apparat
Illustration 6.2 Stort apparat
Motorside
Styreside
Netforsyningsside 2xM25
Tabel 6.1 Billedtekst
1)
Også anvendt til 4xM12/6xM12 føler-/aktuatormuffer.
1xM20, 1xM25
2xM20, 9xM16
1)
82 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 85
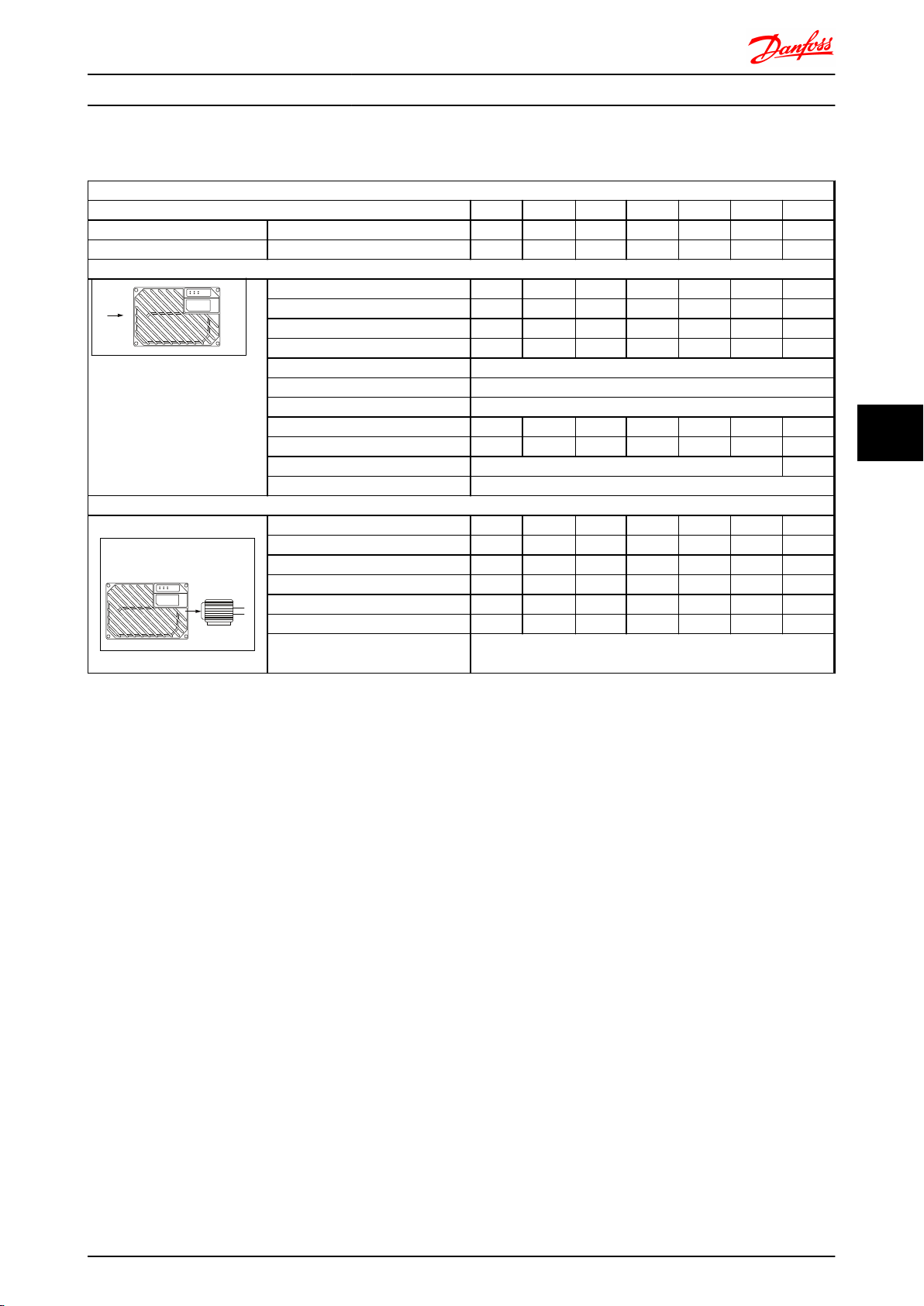
ON
WARNING
ALARM
Bus MS NS2NS1
130BB800.10
ON
WARNING
ALARM
Bus MS NS2NS1
130BB799.10
Specifikationer
VLT®Decentral Drive FCD 302 Design Guide
6.2 Elektriske data og ledningsstørrelser
Netforsyning 3 x 380-480 V AC
Frekvensomformer PK37 PK55 PK75 P1K1 P1K5 P2K2 P3K0
Nominel akseleffekt [kW] 0,37 0,55 0,75 1,1 1,5 2,2 3,0
Nominel akseleffekt [hk] 0,5 0,75 1,0 1,5 2,0 3,0 4,0
Maks. indgangsstrøm
Kontinuerlig (3x380-440 V) [A] 1,2 1,6 2,2 2,7 3,7 5,0 6,5
Periodisk (3x380-440 V) [A] 1,9 2,6 3,5 4,3 5,9 8,0 10,4
Kontinuerlig (3x441-480 V) [A] 1,0 1,4 1,9 2,7 3,1 4,3 5,7
Periodisk (3x441-480 V) [A] 1,6 2,2 3,0 4,3 5,0 6,9 9,1
Anbefalet maks. sikringsstørrelse* gG-25
Indbygget afbryder (stort apparat) CTI-25M Danfoss delnr.: 047B3151
Anbefalet afbryder (lille apparat) CTI-45MB Danfoss delnr.: 047B3164
Effekttab ved maks. belastning [W] 35 42 46 58 62 88 116
Virkningsgrad 0,93 0,95 0,96 0,96 0,97 0,97 0,97
Vægt, lille apparat [kg] 9,8 N/A
Vægt, stort apparat [kg] 13,9
Udgangsstrøm
Kontinuerlig (3x380-440 V) [A] 1,3 1,8 2,4 3,0 4,1 5,2 7,2
Periodisk (3x380-440 V) [A] 2,1 2,9 3,8 4,8 6,6 8,3 11,5
Kontinuerlig (3x441-480 V) [A] 1,2 1,6 2,1 3,0 3,4 4,8 6,3
Periodisk (3x441-480 V) [A] 1,9 2,6 3,4 4,8 5,4 7,7 10,1
Kontinuerlig kVA (400 V AC) [kVA] 0,9 1,3 1,7 2,1 2,8 3,9 5,0
Kontinuerlig kVA (460 V AC) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8 5,0
Maks. kabelstørrelse: (netforsyning,
motor, bremse) [mm2/AWG]
fast kabel 6/10
blød ledning 4/12
6
6
Tabel 6.2 FCD 302 Akseleffekt, udgangsstrøm og indgangsstrøm
*For at overholde UL/cUL-krav skal følgende for-sikringer anvendes.
1. American Wire Gauge. Maks. kabelareal er det største kabelareal, der kan tilsluttes klemmerne. Overhold altid
nationale og lokale bestemmelser.
2. Der skal anvendes for-sikringer af typen gG. Anvend denne type for-sikringer for at opretholde UL/cUL (se
Tabel 6.3).
3. Målt med et 10 m skærmet motorkabel ved nominel belastning og frekvens.
Anbefalet maksimum for-sikringsstørrelse 25 A
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 83
Page 86
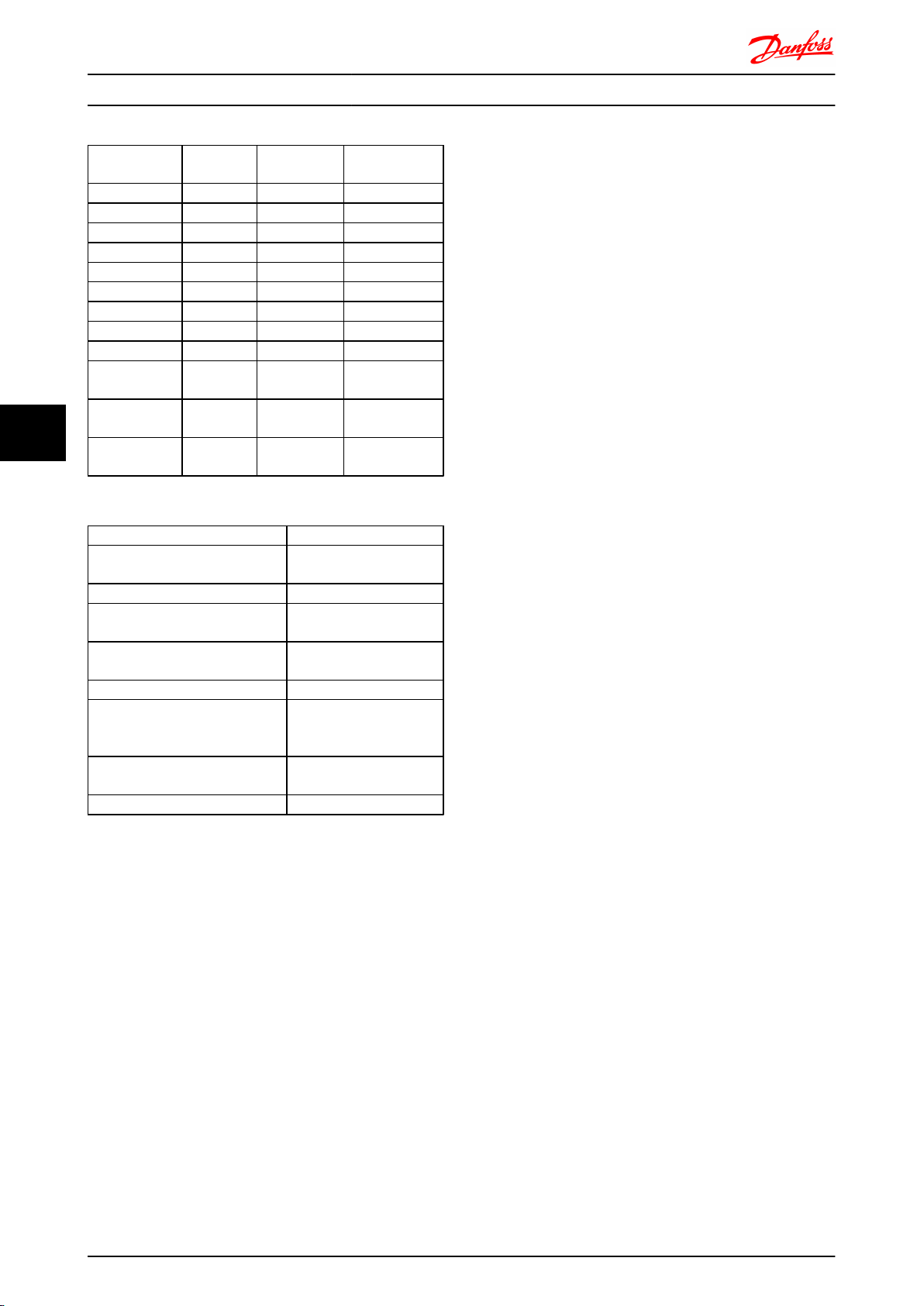
6
Specifikationer
Mærke Sikringstype UL-fil nr. UL-kategori
Bussmann FWH-25 E91958 JFHR2
Bussmann KTS-R25 E52273 RK1/JDDZ
Bussmann JKS-25 E4273 J/JDDZ
Bussmann JJS-25 E4273 T/JDDZ
Bussmann FNW-R-25 E4273 CC/JDDZ
Bussmann KTK-R-25 E4273 CC/JDDZ
Bussmann LP-CC-25 E4273 CC/JDDZ
SIBA 5017906-025 E180276 RK1/JDDZ
LITTEL-SIKRING KLS-R25 E81895 RK1/JDDZ
FERRAZSHAWMUT
FERRAZSHAWMUT
FERRAZSHAWMUT
Tabel 6.3 FCD 302 For-sikringer, der overholder UL/cUL-krav
DC-spændingsniveau 380-480 V-apparater (V DC)
Deaktiver underspænding for
vekselretter
Underspændingsadvarsel 410
Genaktivering ved underspænding
på vekselretter (nulstil advarsel)
Overspændingsadvarsel (uden
bremse)
Aktivering af dynamisk bremse 778
Genaktivering ved overspænding
på vekselretter (nulstilling af
advarsel)
Overspændingsadvarsel (med
bremse)
Overspændingstrip 820
ATM-R25 E163267/
E2137
A6K-25R E163267/
E2137
HSJ25 E2137 J/HSJ
VLT®Decentral Drive FCD 302 Design Guide
(CCN-kode)
CC/JDDZ
RK1/JDDZ
373
398
778
795
810
Tabel 6.4 FCD 302 DC-spændingsniveau
Sikringer
Apparatet egner sig til brug i et kredsløb, der kan levere
maks. 100,000 RMS symmetriske ampere, 500 V maks.
Afbryder
Apparatet egner sig til brug i et kredsløb, der kan levere
maks. 10,000 RMS symmetriske ampere, 500 V maks.
84 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 87
Specifikationer
VLT®Decentral Drive FCD 302 Design Guide
6.3 Generelle specifikationer
Netforsyning (L1, L2, L3)
Forsyningsspænding 380-480 V ±10%
Netspænding lav/netudfald:
I tilfælde af lav netspænding eller netudfald fortsætter frekvensomformeren, indtil mellemkredsspændingen kommer ned under
mindste stopniveau, hvilket typisk svarer til 15% under frekvensomformerens laveste nominelle forsyningsspænding. Opstart og
fuldt moment kan ikke forventes ved netspænding lavere end 10% under frekvensomformerens laveste nominelle forsyningsspænding.
Forsyningsfrekvens 50/60 Hz ± 5%
Maks. midlertidig ubalance mellem netfaser 3,0% af nominel forsyningsspænding
Reel effektfaktor (λ) ≥ 0,9 nominelt ved nominel belastning
Effektforskydningsfaktor (cos ϕ) nær apparat (> 0,98)
Kobling på forsyningsindgang L1, L2, L3 (opstarter) maksimum 2 gange/min.
Apparatet egner sig til brug i et kredsløb, der kan levere maks. 100,000 RMS symmetriske ampere, 480 V maks.
Motorudgang (U, V, W)
Udgangsspænding 0-100% af forsyningsspændingen
Udgangsfrekvens 0-1.000 Hz
Udgangsfrekvens i Flux Mode 0-300 Hz
Kobling på udgang Ubegrænset
Rampetider 0,01-3600 s
6
6
Momentkarakteristikker
Startmoment (konstant moment) maksimum 160% i 60 s
Startmoment maksimum 180% op til 0,5 s
Overmoment (konstant moment) maksimum 160% i 60 s
Startmoment (variabelt moment) maksimum 110% i 60 s
Overmoment (variabelt moment) maksimum 110% i 60 s
1)
Procentangivelsen viser det nominelle moment.
Kabellængder og kabelareal for styrekabler
Maks. motorkabellængde, skærmet 10 m
Maks. motorkabellængde, uskærmet, uden at overholde emissionskravene. 10 m
Maks. tværsnit til styreklemmer, blød/ubøjelig ledning uden kabelendemuffer 1,5 mm2/16 AWG
Maks. tværsnit til styreklemmer, blød ledning med kabelendemuffer 1,5 mm2/16 AWG
Maks. tværsnit til styreklemmer, blød ledning med kabelendemuffer med krave 1,5 mm2/16 AWG
Minimumtværsnit til styreklemmer 0,25 mm2/24 AWG
1)
Strømkabler, se tabellerne i 6.2 Elektriske data og ledningsstørrelser i FCD 302 Design Guide, MG04H
Beskyttelse og funktioner
Elektronisk termisk motorbeskyttelse mod overbelastning.
•
Temperaturovervågning af kølepladen sikrer, at frekvensomformeren tripper, hvis temperaturen når et niveau, der
•
er angivet på forhånd.
Frekvensomformeren er beskyttet mod kortslutninger på motorklemmerne U, V og W.
•
Hvis der mangler en netfase, tripper frekvensomformeren eller afgiver en advarsel (afhænger af belastningen).
•
Overvågning af mellemkredsspændingen sikrer, at frekvensomformeren tripper, hvis mellemkredsspændingen er for
•
lav eller for høj.
Frekvensomformeren kontrollerer hele tiden, om interne temperaturer, belastningsstrøm, højspænding på mellem-
•
kredsspændingen eller lave motorhastigheder har nået et kritisk niveau. Som en reaktion på et kritisk niveau kan
frekvensomformeren justere switchfrekvensen og/eller skifte switchmønsteret med henblik på at sikre frekvensomformerens virkningsgrad.
1)
1)
1)
1)
1)
1)
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 85
Page 88
6
Specifikationer
Digitale indgange
Programmerbare digitale indgange 4 (6)
Klemmenummer 18, 19, 271), 291), 32, 33,
Logik PNP eller NPN
Spændingsniveau 0-24 V DC
Spændingsniveau, logisk '0' PNP <5 V DC
Spændingsniveau, logisk '1' PNP >10 V DC
Spændingsniveau, logisk '0' NPN2) >19 V DC
Spændingsniveau, logisk '1' NPN2) <14 V DC
Maksimumspænding på indgang 28 V DC
Pulsfrekvensområde 0-110 kHz
(Driftscyklus) min. pulsbredde 4,5 ms
Indgangsmodstand, Ri ca. 4 kΩ
Alle digitale indgange er galvanisk adskilt fra forsyningsspændingen (PELV) og andre højspændingsklemmer.
1) Klemme 27 og 29 kan også programmeres som udgange.
Sikker standsning, klemme 37 (Klemme 37 er fast PNP-logik)
Spændingsniveau 0-24 V DC
Spændingsniveau, logisk '0' PNP < 4 V DC
Spændingsniveau, logisk '1' PNP 20 V DC
Nominel indgangsstrøm ved 24 V 50 mA rms
Nominel indgangsstrøm ved 20 V 60 mA rms
Indgangskapacitans 400 nF
VLT®Decentral Drive FCD 302 Design Guide
1)
Analoge indgange
Antal analoge indgange 2
Klemmenummer 53, 54
Tilstande Spænding eller strøm
Tilstandsvalg Kontakt S201 og kontakt S202
Spændingstilstand Kontakt S201/kontakt S202 = OFF (U)
Spændingsniveau -10 til +10 V (skalérbar)
Indgangsmodstand, Ri ca. 10 kΩ
Maks. spænding ±20 V
Strømtilstand Kontakt S201/kontakt S202=ON (I)
Strømniveau 0/4 til 20 mA (skalérbar)
Indgangsmodstand, Ri ca. 200Ω
Maks. strøm 30 mA
Opløsning for analoge indgange 10 bit (+ fortegn)
Nøjagtighed for analoge indgange Maks. fejl 0,5% af fuld skala
Båndbredde 100 Hz
Alle analoge indgange er galvanisk adskilt fra forsyningsspændingen (PELV) og andre højspændingsklemmer.
86 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 89

+24V
RS485
18
37
130BD007.10
1
3
4
6
2
5
Specifikationer
Illustration 6.3 Analoge indgange
VLT®Decentral Drive FCD 302 Design Guide
Del Beskrivelse
1 Funktionel adskillelse
2 Styring
3 PELV-isolering
4 Netforsyning
5 Højspænding
6 Motor
Tabel 6.5 Billedtekst
Puls-/encoder-indgange
Programmerbare puls-/encoder-indgange 2/1
Klemmenummer, puls/encoder 29, 331)/322), 33
Maks. frekvens på klemme 29, 32, 33 110 kHz (push-pull-styret)
Maks. frekvens på klemme 29, 32, 33 5 kHz (åben kollektor)
Min. frekvens på klemme 29, 32, 33 4 Hz
Spændingsniveau se 6.3.1 Digitale indgange
Maksimumspænding på indgang 28 V DC
Indgangsmodstand, Ri ca. 4 kΩ
Pulsindgangsnøjagtighed (0,1 til 1 kHz) Maks. fejl: 0,1% af fuld skala
Encoderindgangsnøjagtighed (1 til 110 kHz) Maks. fejl: 0,05% af fuld skala
Puls- og encoderindgangene (klemme 29, 32, 33) er galvanisk adskilt fra forsyningsspændingen (PELV) og andre højspændingsklemmer.
1)
Pulsindgange 29 og 33
2)
Encoderindgange: 32=A og 33=B
Analog udgang
Antal programmerbare analoge udgange 1
Klemmenummer 42
Strømområde ved analog udgang 0/4 til 20 mA
Maks. belastning GND – analog udgang mindre end 500 Ω
Nøjagtighed på analog udgang Maks. fejl: 0,5% af fuld skala
Opløsning på analog udgang 12 bit
Den analoge udgang er galvanisk adskilt fra forsyningsspændingen (PELV) og andre højspændingsklemmer.
Styrekort, RS-485 seriel kommunikation
Klemmenummer 68 (P,TX+, RX+), 69 (N,TX-, RX-)
Klemmenummer 61 Fælles for klemme 68 og 69
Den serielle RS-485-kommunikationskreds er funktionelt adskilt fra andre centrale kredsløb og galvanisk adskilt fra forsyningsspændingen (PELV).
Digital udgang
Programmerbare digital-/pulsudgange 2
Klemmenummer 27, 29
Spændingsniveau ved digital udgang/frekvensudgang 0-24 V
Maks. udgangsstrøm (plade eller kilde) 40 mA
Maks. belastning ved udgangsfrekvens 1 kΩ
Maks. kapacitiv belastning ved udgangsfrekvens 10 nF
Min. udgangsfrekvens ved udgangsfrekvens 0 Hz
Maks. udgangsfrekvens ved udgangsfrekvens 32 kHz
Nøjagtighed på udgangsfrekvens Maks. fejl: 0,1% af fuld skala
6
6
2)
1)
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 87
Page 90

6
Specifikationer
Opløsning på udgangsfrekvenser 12 bit
1) Klemme 27 og 29 kan også programmeres som indgange.
Den digitale udgang er galvanisk adskilt fra forsyningsspændingen (PELV) og andre højspændingsklemmer.
Styrekort, 24 V DC-udgang
Klemmenummer 12, 13
Udgangsspænding 24 V +1, -3 V
Maks. belastning 600 mA
24 V DC-forsyningen er galvanisk adskilt fra forsyningsspændingen (PELV), men har samme jordpotentiale som de analoge og
digitale indgange og udgange.
Relæudgange
Programmerbare relæudgange 2
Relæ 01 klemmenummer 1-3 (bryde), 1-2 (slutte)
Maks. klemmebelastning (AC-1)1) på 1-3 (NC), 1-2 (NO) (resistiv belastning) 240 V AC, 2A
Maks. klemmebelastning (AC-15)1) (induktiv belastning @ cosφ 0,4) 240 V AC, 0,2 A
Maks. klemmebelastning (DC-1)1) på 1-2 (NO), 1-3 (NC) (resistiv belastning) 48 V DC, 1A
Maks. klemmebelastning (DC-13)1) (induktiv belastning) 24 V DC, 0,1 A
Relæ 02 klemmenummer 4-6 (bryde), 4-5 (slutte)
Maks. klemmebelastning (AC-1)1) på 4-5 (NO) (resistiv belastning)
Maks. klemmebelastning (AC-15)1) på 4-5 (NO) (induktiv belastning @ cosφ 0,4) 240 V AC, 0,2A
Maks. klemmebelastning (DC-1)1) på 4-5 (NO) (resistiv belastning) 80 V DC, 2 A
Maks. klemmebelastning (DC-13)
Maks. klemmebelastning (AC-1)
Maks. klemmebelastning (AC-15)1) (induktiv belastning @ cosφ 0,4) 240 V AC, 0,2A
Maks. klemmebelastning (DC-1)1) på 4-6 (NO), 4-5 (NC) (resistiv belastning) 48 V DC, 1A
Maks. klemmebelastning (DC-13)1) (induktiv belastning) 24 V DC, 0,1 A
Min. klemmebelastning på 1-3 (NC), 1-2 (NO), 4-6 (NC), 4-5 (NO) 24 V DC 10 mA, 24 V AC 20 mA
1) IEC 60947 del 4 og 5
Relækontakterne er galvanisk adskilt fra resten af kredsløbet ved forstærket isolering (PELV).
2) Overspændingskategori II
3) UL-applikationer 300 V AC 2A
Styrekort, 10 V DC-udgang
Klemmenummer ±50
Udgangsspænding 10,5 V ±0,5 V
Maks. belastning 15 mA
Forsyningen på 10 V DC er galvanisk adskilt fra forsyningsspændingen (PELV) og andre højspændingsklemmer.
Styrekarakteristik
Opløsning for udgangsfrekvens ved 0-1.000 Hz ±0,003 Hz
Gentaget nøjagtighed for Præcis start/stop (klemme 18, 19) ≤±0,1 ms
Systemresponstid (klemme 18, 19, 27, 29, 32, 33) ≤ 2 ms
Hastighedsstyringsområde (åben sløjfe) 1:100 af synkron hastighed
Hastighedsstyringsområde (lukket sløjfe) 1:1.000 af synkron hastighed
Hastighedsnøjagtighed (åben sløjfe) 30-4.000 O/MIN: fejl ±8 O/MIN
Hastighedsnøjagtighed (lukket sløjfe), afhængigt af opløsningen for feedbackapparatet 0-6.000 O/MIN: fejl ±0,15 O/MIN
Momentstyringsnøjagtighed (hastighedsfeedback) maks. fejl ±5% af nominelt moment
Alle styrekarakteristikker er baserede på en 4-polet asynkron motor
Ydelse for styrekort
Scanningsinterval 1 ms
1)
på 4-5 (NO) (induktiv belastning) 24 V DC, 0,1 A
1)
på 4-6 (NC) (resistiv belastning) 240 V AC, 2 A
VLT®Decentral Drive FCD 302 Design Guide
2)3)
Overspændingskategori II 240 V AC, 2 A
Omgivelser
Kapslingsgrad IP66/Type 4X (indendørs)
Vibrationstest for apparater uden afbryder 1,7 g RMS
Dæmper apparater med integreret afbryder på en plan, vibrationssikker og fast supportstruktur.
Maks. relativ luftfugtighed 5%-95% (IEC 60 721-3-3; Klasse 3K3 (ikkekondenserende) under drift
88 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 91

Specifikationer
Omgivelsestemperatur Maks. 40 °C (døgngennemsnit maksimum 35 °C)
Temperatur ved lager/transport -25 til +65/70 °C
Derating for høj omgivelsestemperatur
Minimumomgivelsestemperatur ved fuld drift 0 °C
Minimumomgivelsestemperatur med reduceret ydeevne -10 °C
Maks. højde over havet 1.000 m
Derating ved højde over havet
Styrekort, seriel kommunikation via USB:
USB-standard 1.1 (fuld hastighed)
USB-stik USB-stik, type B
Tilslutning til pc foretages via et standard værts-/apparats-USB-kabel.
USB-tilslutningen er galvanisk adskilt fra forsyningsspændingen (PELV) og andre højspændingsklemmer.
USB-tilslutningen er ikke galvanisk adskilt fra jordbeskyttelsen. Benyt kun en isoleret bærbar som pc-tilslutning til USB-stikket på
frekvensomformeren.
VLT®Decentral Drive FCD 302 Design Guide
6.6.1 dU/dt-forhold
6
6
6.4 Virkningsgrad
Kontakt Danfoss Hotline for effektivitetsdata.
6.5.1 Akustisk støj
Kontakt Danfoss Hotline for data om akustisk støj.
BEMÆRK!
380-690 V
For at undgå for tidlig ældning af motorer (uden faseadskillelsespapir eller anden isoleringsforstærkning), der ikke
er bygget til frekvensomformerdrift, anbefaler Danfoss
kraftigt at montere et du/dt-filter eller et sinusbølgefilter
på frekvensomformerens udgang. Se Design Guide for
udgangsfiltre for oplysninger om du/dt- og sinusbølgefiltre.
Når en transistor i vekselretterbroen skifter, vil
spændingen i motoren øges med et du/dt-forhold, der
afhænger af:
- motorkablet (type, areal, længde, skærmet eller
uskærmet)
- induktansen
Den naturlige induktion medfører oversving U
motorspændingen, før den stabiliserer sig selv ved et
niveau, der afhænger af spændingen i mellemkredsen.
Stigetiden og spidsspændingen U
levetid. Hvis spidsspændingen er for høj, påvirkes primært
motorer uden faseadskillelsespapir i spolerne. Når
motorkablet er kort (få meter), er stigetiden og spidsspændingen lavere.
påvirker motorens
SPIDS
SPIDS
i
Spidsspændingen på motorklemmerne forårsages af
afbrydelse af IGBT'erne. Frekvensomformeren overholder
kravene i IEC 60034-25 angående motorer, der er bygget til
at blive styret af frekvensomformere. Frekvensomformeren
overholder også IEC 60034-17 angående standardmotorer,
der styres af frekvensomformere.
Kontakt Danfoss Hotline for målte værdier i laboratorietest.
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 89
Page 92

Indeks
VLT®Decentral Drive FCD 302 Design Guide
Indeks
A
Aggressive Miljøer................................................................................ 47
Akustisk Støj.................................................................................... 47, 89
AMA
Med T27 Tilsluttet............................................................................ 48
Uden T27 Tilsluttet.......................................................................... 48
Analog Udgang..................................................................................... 87
Analoge Indgange............................................................................... 86
B
Beskyttelse
Beskyttelse................................................................................... 25, 47
Og Funktioner................................................................................... 85
Beskyttelsestilstand................................................................................ 8
Bestillingsnumrene.............................................................................. 76
Bortskaffelsesinstruktion................................................................... 10
Bremseeffekt...................................................................................... 5, 28
Bremsefunktion..................................................................................... 28
Bremsemodstand................................................................................. 27
Bremsemodstande............................................................................... 40
Fastfrys
Reference............................................................................................ 18
Udgang.................................................................................................. 5
Fejlstrømsafbryder............................................................................... 45
Flux............................................................................................................ 64
Friløb............................................................................................................ 5
G
Generelle Forhold Vedr. EMC-emission........................................ 15
H
HastighedsPID....................................................................................... 63
Hastigheds-PID...................................................................................... 11
HastighedsPID-styring........................................................................ 54
Hastighedsreference........................................................................... 48
I
Immunitetskrav..................................................................................... 17
Inertimoment......................................................................................... 35
Intern Strømstyring I VVCplus-tilstand......................................... 12
IT-netforsyning...................................................................................... 43
C
Catch Up/slow-down.......................................................................... 18
CE-overensstemmelse Og -mærkning............................................ 9
D
Definitioner............................................................................................... 5
DeviceNet.................................................................................................. 5
Digital Udgang...................................................................................... 87
Digitale Indgange................................................................................. 86
Dødbånd
Dødbånd............................................................................................. 21
Omkring Nul...................................................................................... 21
Drive Configurator............................................................................... 76
E
Ekstern 24 V DC-forsyning................................................................. 81
Elektro-..................................................................................................... 66
EMC-direktiv (2004/108/EF)................................................................ 9
EMC-direktivet 2004/108/EF............................................................. 10
EMC-testresultater............................................................................... 16
Emissionskrav......................................................................................... 16
F
Fælles Forbindelsespunkt................................................................. 44
J
Jog................................................................................................................ 5
K
Kabelbåret Emission............................................................................ 16
Kabelføring For Bremsemodstand................................................. 26
Kabellængder Og Kabelareal........................................................... 85
Kobling På Udgang.............................................................................. 35
Konstant Overbelastning I VVCplus-tilstand.............................. 35
Kortslutning (motorfase-fase).......................................................... 35
Kortslutningsforhold........................................................................... 44
L
Lækstrøm
Lækstrøm............................................................................................ 25
Til Jord.................................................................................................. 25
Lavspændingsdirektiv (2006/95/EF)................................................ 9
LCP......................................................................................................... 5, 65
Lokalbetjening (Hand On) Og Fjernbetjening (Auto On)...... 65
Luftfugtighed......................................................................................... 47
M
Maskindirektiv (2006/42/EF)............................................................... 9
Mekanisk
Hæve-/sænkebremse..................................................................... 26
Holdebremse..................................................................................... 26
90 MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss
Page 93

Indeks
VLT®Decentral Drive FCD 302 Design Guide
Mekaniske Mål....................................................................................... 82
Mellemkredsspænding......................................................... 35, 47, 89
Modbus....................................................................................................... 5
Momentkarakteristikker..................................................................... 85
Momentstyring...................................................................................... 11
Motorens Typeskilt.............................................................................. 46
Motorfaser............................................................................................... 35
Motorfeedback...................................................................................... 64
Motorgenereret Overspænding...................................................... 35
Motorspænding.................................................................................... 89
Motorudgang......................................................................................... 85
N
Netafbryder............................................................................................ 33
Netforsyning
Netforsyning........................................................................................ 5
(L1, L2, L3)........................................................................................... 85
Netforsyningsforstyrrelse.................................................................. 44
Netudfald................................................................................................. 35
Nominel Motorhastighed.................................................................... 5
O
Omgivelser.............................................................................................. 88
Overbelastningssikring Af Grenledninger................................... 31
Startmoment............................................................................................ 5
Stigetid..................................................................................................... 89
Styrekarakteristik.................................................................................. 88
Styrekort.................................................................................................. 76
Styrekort,
+10 V DC-udgang............................................................................ 88
24 V DC-udgang............................................................................... 88
RS-485 Seriel Kommunikation..................................................... 87
Seriel Kommunikation Via USB................................................... 89
Symboler.................................................................................................... 8
Synkron Motorhastighed..................................................................... 5
T
Termistor............................................................................................. 5, 51
Typeskiltdata.......................................................................................... 46
U
Udgangseffektivitet (U, V, W)........................................................... 85
Udstrålet Emission............................................................................... 16
V
Vibrationer Og Rystelser.................................................................... 47
Virkningsgrad......................................................................................... 89
VVC............................................................................................................... 7
VVCplus.................................................................................................... 63
P
PELV
PELV...................................................................................................... 51
- Protective Extra Low Voltage.................................................... 25
PID-processtyring................................................................................. 57
Profibus....................................................................................................... 5
Programmering Af Momentgrænse Og Stop............................. 66
Puls-/encoder-indgange.................................................................... 87
R
RCD............................................................................................................... 5
Referencegrænser................................................................................ 19
Relæudgange......................................................................................... 88
S
Seriel Kommunikation........................................................................ 89
Sikkerhedsforanstaltninger................................................................. 8
Skærmet................................................................................................... 32
Skalering
Af Analoge Referencer Samt Pulsreferencer Og Feedback....
20
Af Preset-referencer Og Busreferencer.................................... 19
Spændingsniveau................................................................................. 86
Y
Ydelse For Styrekort............................................................................. 88
MG04H101 - VLT® er et registreret varemærke tilhørende Danfoss 91
Page 94

www.danfoss.com/drives
130R0320 MG04H101 Rev. 2013-02-28
*MG04H101*
 Loading...
Loading...