

Page 1

ENGINEERING TOMORROW
Projektierungshandbuch
VLT® Decentral Drive FCD 302
www.danfoss.de/vlt
Page 2

Page 3
Inhaltsverzeichnis Projektierungshandbuch
Inhaltsverzeichnis
1 Einführung
1.1 Lesen des Projektierungshandbuchs
1.1.1 Zusätzliche Materialien 6
1.2 Dokument- und Softwareversion
1.3 Definitionen
1.3.1 Frequenzumrichter 7
1.3.2 Eingang 7
1.3.3 Motor 7
1.3.4 Sollwerteinstellung 7
1.3.5 Verschiedenes 8
1.4 Sicherheitsmaßnahmen
1.5 CE-Kennzeichnungen
1.5.1 Konformität 11
1.5.2 Was fällt unter die Richtlinien? 12
1.6 Übereinstimmung mit EMV-Richtlinie 2004/108/EG
1.7 Zulassungen
1.8 Entsorgung
6
6
6
7
10
11
12
12
12
2 Produktübersicht
2.1 Galvanische Trennung (PELV)
2.1.1 PELV (Schutzkleinspannung) – Protective Extra Low Voltage 13
2.1.2 Erdableitstrom 14
2.2 Steuerung/Regelung
2.2.1 Steuerverfahren 15
2.2.2 Interner Stromgrenzenregler in Betriebsart VVC
2.3 Regelungsstrukturen
2.3.1 Regelungsstruktur bei VVC+ Advanced Vector Control 16
2.3.2 Regelungsstruktur bei Fluxvektor ohne Geber 17
2.3.3 Regelungsstruktur bei Fluxvektor mit Geber 17
2.3.4 Hand-Steuerung [Hand On] und Fern-Betrieb [Auto On] 18
2.3.5 Programmierung von Drehmomentgrenze und Stopp 19
2.4 PID-Regelung
2.4.1 PID-Drehzahlregler 20
2.4.2 Für die Drehzahlregelung relevante Parameter 21
2.4.3 Optimieren des PID-Drehzahlreglers 23
13
13
14
+
15
16
20
2.4.4 PID-Prozessregler 24
2.4.5 Relevante Parameter für die Prozessregelung 25
2.4.6 Beispiel für PID-Prozessregler 26
2.4.7 Programmierreihenfolge 27
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 1
Page 4
Inhaltsverzeichnis
VLT® Decentral Drive FCD 302
2.4.8 Optimierung des Prozessreglers 29
2.4.9 Ziegler-Nichols-Verfahren 29
2.5 Steuerleitungen und -klemmen
2.5.1 Führung von Steuerleitungen 30
2.5.2 DIP-Schalter 30
2.5.3 Einfaches Verdrahtungsbeispiel 30
2.5.4 Elektrische Installation, Steuerleitungen 31
2.5.5 Relaisausgang 32
2.6 Sollwertverarbeitung
2.6.1 Sollwertgrenzen 34
2.6.2 Skalierung von Festsollwerten und Bussollwerten 35
2.6.3 Skalierung von Analog- und Pulssollwerten und Istwert 35
2.6.4 Totzone um Null 36
2.7 Bremsfunktionen
2.7.1 Mechanische Bremse 40
2.7.1.1 Produktbroschüre für mechanische Bremse und Beschreibung des Stromkreises 40
2.7.1.2 Mechanische Bremssteuerung 42
2.7.1.3 Verdrahtung der mechanischen Bremse 44
2.7.1.4 Mechanische Bremse in Hub- und Vertikalförderanwendungen 44
30
33
40
2.7.2 Dynamische Bremse 44
2.7.2.1 Bremswiderstände 44
2.7.2.2 Auswahl des Bremswiderstands 44
2.7.2.3 Bremswiderstände 10 W 45
2.7.2.4 Bremswiderstand 40 % 46
2.7.2.5 Steuerung mit Bremsfunktion 46
2.7.2.6 Verdrahtung des Bremswiderstands 46
2.8 Safe Torque Off
2.9 EMV
2.9.1 Allgemeine Aspekte von EMV-Emissionen 46
2.9.2 Emissionsanforderungen 48
2.9.3 Störfestigkeitsanforderungen 48
2.9.4 EMV 50
2.9.4.1 EMV-gerechte Installation 50
2.9.4.2 Verwendung von EMV-gerechter Verkabelung 52
2.9.4.3 Erdung abgeschirmter Steuerleitungen 53
2.9.4.4 EMV-Schalter 54
46
46
2.9.5 Netzversorgungsstörung/-rückwirkung 54
2.9.5.1 Einfluss von Oberschwingungen in einer Energieverteilungsanlage 54
2.9.5.2 Normen und Anforderungen zur Oberschwingungsbegrenzung 55
2 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 5
Inhaltsverzeichnis Projektierungshandbuch
2.9.5.3 Reduzierung, Vermeidung oder Kompensation von Oberschwingungen 56
2.9.5.4 Oberschwingungsberechnung 56
2.9.6 Fehlerstromschutzschalter 56
2.9.7 EMV-Prüfergebnisse 56
3 Systemintegration
3.1 Umgebungsbedingungen
3.1.1 Luftfeuchtigkeit 57
3.1.2 Aggressive Umgebungsbedingungen 57
3.1.3 Vibrationen und Erschütterungen 57
3.1.4 Störgeräusche 57
3.2 Montagepositionen
3.2.1 Montagepositionen für hygienische Anwendungen 58
3.3 Eingang: Netzseitige Dynamik
3.3.1 Anschlüsse 59
3.3.1.1 Allgemeine Hinweise zu Kabeln 59
3.3.1.2 Netz- und Erdanschluss 59
3.3.1.3 Relaisanschluss 59
3.3.2 Sicherungen und Trennschalter 60
3.3.2.1 Sicherungen 60
3.3.2.2 Empfehlungen 60
3.3.2.3 CE-Konformität 60
57
57
57
59
3.3.2.4 UL-Konformität 60
3.4 Ausgang: Motorseitige Dynamik
3.4.1 Motoranschluss 60
3.4.2 Netztrennschalter 62
3.4.3 Zusätzliche Motorinformationen 62
3.4.3.1 Motorkabel 62
3.4.3.2 Thermischer Motorschutz 62
3.4.3.3 Parallelschaltung von Motoren 63
3.4.3.4 Motorisolation 63
3.4.3.5 Motorlagerströme 63
3.4.4 Extreme Betriebszustände 64
3.4.4.1 Thermischer Motorschutz 65
3.5 Erste Inbetriebnahme und Test
3.5.1 Hochspannungsprüfung 65
3.5.2 Erdung 65
3.5.3 Schutzerdungsverbindung 66
3.5.4 Testen der endgültigen Konfiguration 66
60
65
4 Anwendungsbeispiele
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 3
67
Page 6
Inhaltsverzeichnis
VLT® Decentral Drive FCD 302
4.1 Übersicht
4.2 AMA
4.2.1 AMA mit angeschlossener Kl. 27 67
4.2.2 AMA ohne angeschlossene Kl. 27 67
4.3 Analoger Drehzahlsollwert
4.3.1 Spannung Analoger Drehzahlsollwert 67
4.3.2 Strom Analoger Drehzahlsollwert 68
4.3.3 Drehzahlsollwert (Verwendung eines manuellen Potenziometers) 68
4.3.4 Drehzahl auf/Drehzahl ab 68
4.4 Start/Stopp-Anwendungen
4.4.1 Start-/Stopp-Befehl mit Safe Torque Off 69
4.4.2 Puls-Start/Stopp 69
4.4.3 Start/Stopp mit Reversierung und 4 Festdrehzahlen 70
4.5 Bus- und Relaisanschluss
4.5.1 Externe Alarmquittierung 70
4.5.2 RS485-Netzwerkverbindung 71
4.5.3 Motorthermistor 71
67
67
67
69
70
4.5.4 Verwendung von SLC zur Einstellung eines Relais 72
4.6 Bremsanwendung
4.6.1 Mechanische Bremssteuerung 73
4.6.2 Mechanische Bremse in Hub- und Vertikalförderanwendungen 73
4.7 Drehgeber
4.7.1 Drehgeberrichtung 75
4.8 Frequenzumrichtersystem mit Rückführung
4.9 Smart Logic Control
5 Besondere Betriebsbedingungen
5.1 Manuelle Leistungsreduzierung
5.1.1 Leistungsreduzierung wegen niedrigem Luftdruck 79
5.1.2 Leistungsreduzierung beim Betrieb mit niedriger Drehzahl 79
5.1.3 Umgebungstemperatur 80
5.1.3.1 Leistungsgröße 0,37–0,75 kW 80
5.1.3.2 Leistungsgröße 1,1–1,5 kW 80
5.1.3.3 Leistungsgröße 2,2–3,0 kW 81
5.2 Automatische Leistungsreduzierung
73
75
75
76
79
79
81
5.2.1 Modus mit festem Sinusfilter 83
5.2.2 Übersichtstabelle 84
5.2.3 Hohe Motorbelastung 84
5.2.4 Hohe Zwischenkreisspannung 85
5.2.5 Niedrige Motordrehzahl 85
5.2.6 Hoch intern 86
4 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 7
Inhaltsverzeichnis Projektierungshandbuch
5.2.7 Strom 86
5.3 Leistungsreduzierung beim Betrieb mit niedriger Drehzahl
6 Typencode und Auswahlhilfe
6.1 Typencodebeschreibung
6.2 Bestellnummern
6.2.1 Bestellnummern: Zubehör 90
6.2.2 Bestellnummern: Ersatzteile 90
6.3 Optionen und Zubehör
6.3.1 Feldbus-Optionen 91
6.3.2 VLT® Encoder Input MCB 102 91
6.3.3 VLT® Resolver Input MCB 103 92
7 Technische Daten
7.1 Mechanische Abmessungen
7.2 Elektrische Daten und Kabelquerschnitte
7.2.1 Übersicht 96
7.2.2 UL/cUL-zugelassene Vorsicherungen 97
7.2.3 VLT® Decentral Drive FCD 302 Gleichspannungsniveaus 97
86
88
88
90
91
95
95
96
7.3 Allgemeine technische Daten
7.4 Wirkungsgrad
7.5 dU/dt-Bedingungen
Index
98
103
103
105
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 5
Page 8
Einführung
VLT® Decentral Drive FCD 302
11
1 Einführung
1.1 Lesen des Projektierungshandbuchs
Das Projektierungshandbuch enthält die notwendigen
Informationen für die Integration des Frequenzumrichters
in einer Vielzahl von Anwendungen.
VORSICHT
Weist auf eine potenziell gefährliche Situation hin, die zu
leichten oder mittelschweren Verletzungen führen kann.
Die Kennzeichnung kann ebenfalls als Warnung vor
unsicheren Verfahren dienen.
1.1.1 Zusätzliche Materialien
HINWEIS
®
Das VLT
•
thandbuch enthält Informationen zur Installation
und Inbetriebnahme des Frequenzumrichters.
Das VLT® AutomationDrive FC 301/302 Program-
•
mierhandbuch beschreibt die Programmierung
des Frequenzumrichters und enthält die
kompletten Parameterbeschreibungen.
Das Modbus RTU Produkthandbuch enthält alle
•
notwendigen Informationen zur Steuerung,
Überwachung und Programmierung des Frequenzumrichters über den integrierten ModbusFeldbus.
Das VLT® PROFIBUS Converter MCA 114 Produk-
•
thandbuch, das VLT® EtherNet/IP MCA 121
Installationshandbuch und das VLT® PROFINET MCA
120 Installationshandbuch enthalten jeweils die
notwendigen Informationen zur Steuerung,
Überwachung und Programmierung des Frequenzumrichters über einen Feldbus.
Decentral Drive FCD 302 Produk-
Weist auf eine wichtige Information hin, z. B. eine
Situation, die zu Geräte- oder sonstigen Sachschäden
führen kann.
Dieses Handbuch verwendet folgende Konventionen:
Nummerierte Listen zeigen Vorgehensweisen.
•
Aufzählungslisten zeigen weitere Informationen
•
und Beschreibung der Abbildungen.
Kursivschrift bedeutet:
•
- Querverweise.
- Link.
- Fußnoten.
- Parametername.
- Parametergruppenname.
- Parameteroption.
Alle Abmessungen in Zeichnungen sind in mm
•
angegeben.
VLT® Encoder Option MCB 102 Installationsanwei-
•
sungen.
®
VLT
•
•
•
•
•
Technische Literatur und Zulassungen sind online
verfügbar unter www.danfoss.de/search/?filter=type
%3Adocumentation%2Csegment%3Adds.
In diesem Handbuch werden folgende Symbole verwendet:
Automation Drive FC300, Resolver Option MCB
103 Installationsanweisungen.
VLT® AutomationDrive FC300, Safe PLC Interface
Option MCB 108 Installationsanweisungen.
VLT® Brake Resistor MCE 101 Projektierungshandbuch.
VLT® Frequency Converters Safe Torque Off
Bedienungsanleitung.
Zulassungen.
WARNUNG
Weist auf eine potenziell gefährliche Situation hin, die
zum Tod oder zu schweren Verletzungen führen kann!
Dokument- und Softwareversion
1.2
Dieses Handbuch wird regelmäßig geprüft und aktualisiert.
Alle Verbesserungsvorschläge sind willkommen. Tabelle 1.1
zeigt die Dokumentversion und die entsprechende Softwareversion an.
Ausgabe Anmerkungen Software-
version
MG04H3xx Die EMV-gerechte Installation wurde
aktualisiert.
Tabelle 1.1 Dokument- und Softwareversion
7.5x
6 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 9
175ZA078.10
Kippgrenze
Drehzahi
Moment
Einführung Projektierungshandbuch
1.3 Definitionen
1.3.1 Frequenzumrichter
I
VLT,MAX
Maximaler Ausgangsstrom.
I
VLT,N
Vom Frequenzumrichter gelieferter Ausgangsnennstrom.
U
VLT,MAX
Maximale Ausgangsspannung.
1.3.2 Eingang
Steuerbefehl
Sie können den angeschlossenen Motor über das LCP und
die Digitaleingänge starten und stoppen.
Die Funktionen sind in zwei Gruppen unterteilt.
Funktionen in Gruppe 1 haben eine höhere Priorität als
Funktionen in Gruppe 2.
Gruppe 1 Reset, Freilaufstopp, Reset und Freilaufstopp,
Schnellstopp, DC-Bremse, Stopp und [Off]-Taste.
Gruppe 2 Start, Puls-Start, Reversierung, Start Rücklauf,
Festdrehzahl JOG und Ausgangsfrequenz
speichern.
n
slip
Motorschlupf.
P
M,N
Motornennleistung (Typenschilddaten in kW oder HP).
T
M,N
Nenndrehmoment (Motor).
U
M
Momentanspannung des Motors.
U
M,N
Motornennspannung (Typenschilddaten).
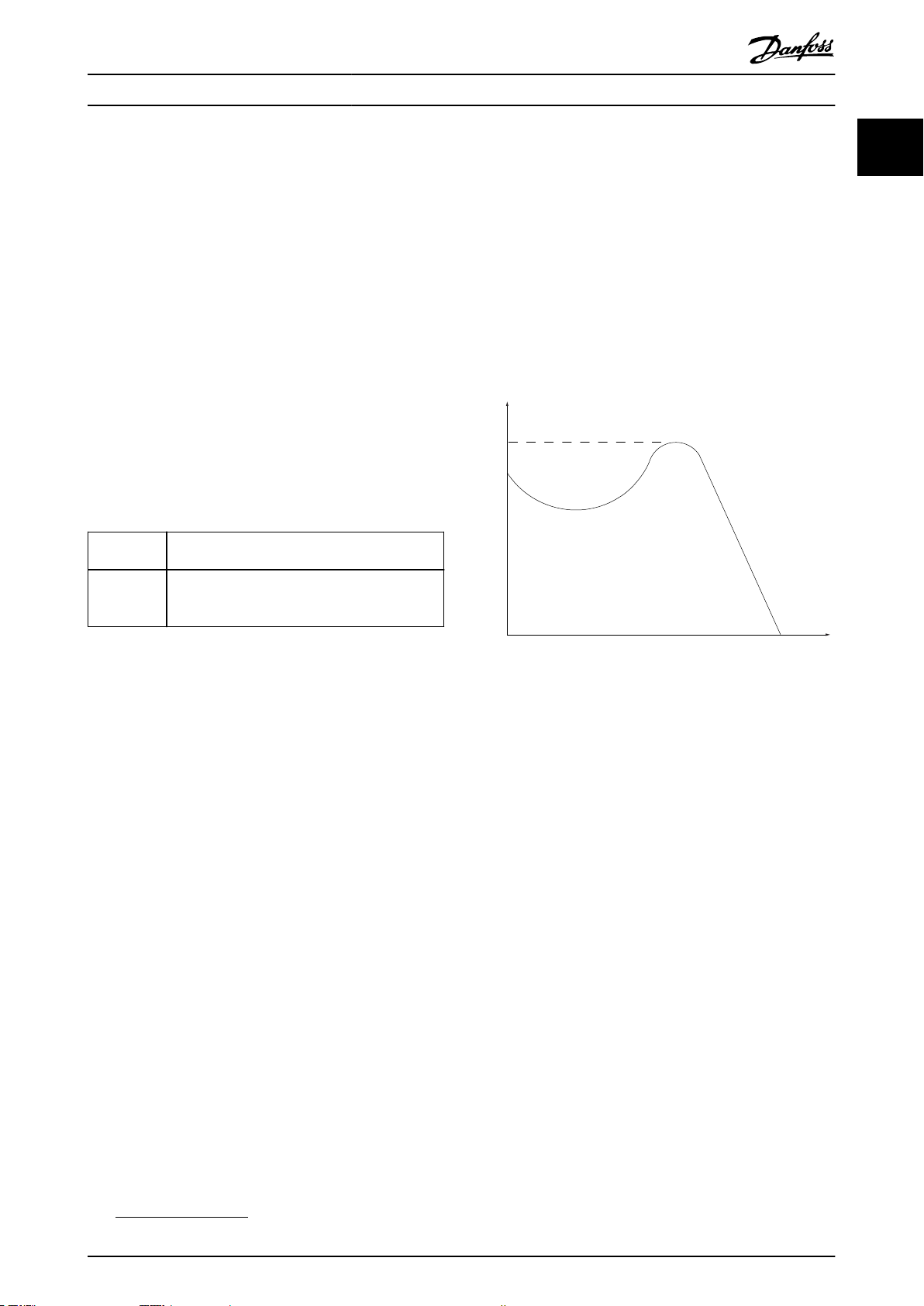
Losbrechmoment
1 1
Tabelle 1.2 Funktionsgruppen
1.3.3 Motor
Motor läuft
An der Antriebswelle erzeugtes Drehmoment und Drehzahl
von 0 U/min zur maximalen Drehzahl am Motor.
f
JOG
Motorfrequenz bei aktivierter Funktion Festdrehzahl JOG
(über Digitalklemmen).
f
M
Motorfrequenz.
f
MAX
Maximale Motorfrequenz.
f
MIN
Minimale Motorfrequenz.
f
M,N
Motornennfrequenz (Typenschilddaten).
I
M
Motorstrom (Istwert).
I
M,N
Motornennstrom (Typenschilddaten).
n
M,N
Motornenndrehzahl (Typenschilddaten).
n
s
Synchrone Motordrehzahl.
2 × Par. . 1 − 23 × 60s
ns=
Par. . 1 − 39
Abbildung 1.1 Losbrechmoment
η
VLT
Der Wirkungsgrad des Frequenzumrichters ist definiert als
das Verhältnis zwischen Leistungsabgabe und Leistungsaufnahme.
Einschaltsperrbefehl
Ein Stoppbefehl, der zur Gruppe 1 der Steuerbefehle
gehört – siehe Tabelle 1.2.
Stoppbefehl
Ein Stoppbefehl, der zur Gruppe 1 der Steuerbefehle
gehört – siehe Tabelle 1.2.
1.3.4 Sollwerteinstellung
Analogsollwert
Ein Sollwertsignal an den Analogeingängen 53 oder 54
(Spannung oder Strom).
Binärsollwert
Ein an die serielle Kommunikationsschnittstelle
übertragenes Signal.
Festsollwert
Ein definierter Festsollwert, einstellbar zwischen -100 %
und +100 % des Sollwertbereichs. Sie können bis zu 8
Festsollwerte über die Digitaleingänge auswählen.
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 7
Page 10

Einführung
VLT® Decentral Drive FCD 302
11
Pulssollwert
Ein an die Digitaleingänge übertragenes Pulsfrequenzsignal
(Klemme 29 oder 33).
Ref
MAX
Bestimmt das Verhältnis zwischen dem Sollwerteingang bei
100 % des Gesamtskalenwerts (in der Regel 10 V, 20 mA)
und dem resultierenden Sollwert. Der maximale Sollwert
wird in Parameter 3-03 Maximaler Sollwert eingestellt.
Ref
MIN
Bestimmt das Verhältnis zwischen dem Sollwerteingang bei
0 % (normalerweise 0 V, 0 mA, 4 mA) und dem
resultierenden Sollwert. Der minimale Sollwert wird in
Parameter 3-02 Minimaler Sollwert eingestellt.
1.3.5 Verschiedenes
Analogeingänge
Die Analogeingänge können verschiedene Funktionen des
Frequenzumrichters steuern.
Es gibt zwei Arten von Analogeingängen:
Stromeingang, 0-20 mA und 4-20 mA
Spannungseingang, -10 V DC bis +10 V DC.
Analogausgang
Die Analogausgänge können ein Signal von 0-20 mA oder
4-20 mA ausgeben.
Automatische Motoranpassung, AMA
Der AMA-Algorithmus bestimmt die elektrischen Parameter
für den angeschlossenen Motor im Stillstand.
Bremswiderstand
Der Bremswiderstand wird zur Aufnahme der bei generatorischer Bremsung erzeugten Energie benötigt. Während
generatorischer Bremsung erhöht sich die Zwischenkreisspannung. Ein Bremschopper stellt sicher, dass die
generatorische Energie an den Bremswiderstand
übertragen wird.
Konstantmoment (CT)-Kennlinie
Konstantmomentkennlinie; wird für Anwendungen wie
Förderbänder, Verdrängungspumpen und Krane eingesetzt.
Digitaleingänge
Die Digitaleingänge können verschiedene Funktionen des
Frequenzumrichters steuern.
Digitalausgänge
Der Frequenzumrichter verfügt über zwei programmierbare
Ausgänge, die ein 24-V-DC-Signal (max. 40 mA) liefern
können.
DSP
Digitaler Signalprozessor.
ETR
Das elektronische Thermorelais ist eine Berechnung der
thermischen Belastung auf Grundlage der aktuellen
Belastung und Zeit. Damit lässt sich die Motortemperatur
schätzen.
Hiperface
Hiperface® ist eine eingetragene Marke von Stegmann.
Initialisierung
Eine Initialisierung (Parameter 14-22 Betriebsart) stellt die
Werkseinstellungen des Frequenzumrichters wieder her.
Arbeitszyklus für Aussetzbetrieb
Der Aussetzbetrieb bezieht sich auf eine Abfolge von
Arbeitszyklen. Jeder Zyklus besteht aus einem Belastungsund einem Entlastungszeitraum. Der Betrieb kann
periodisch oder nichtperiodisch sein.
LCP
Das LCP Bedienteil dient zum Steuern und Programmieren
des Frequenzumrichters. Die Bedieneinheit ist abnehmbar,
und Sie können sie mithilfe des optionalen Einbausatzes
bis zu 3 m (10 ft) entfernt vom Frequenzumrichter
anbringen (z. B. an einer Schaltschranktür).
lsb
Steht für „Least Significant Bit“; bei binärer Codierung das
Bit mit der niedrigsten Wertigkeit.
msb
Steht für „Most Significant Bit“; bei binärer Codierung das
Bit mit der höchsten Wertigkeit.
MCM
Steht für Mille Circular Mil; eine amerikanische Maßeinheit
für den Leitungsquerschnitt. 1 MCM ≈ 0,5067 mm2.
Online/Offline-Parameter
Änderungen an Online-Parametern sind sofort nach
Änderung des Datenwertes wirksam. Drücken Sie [OK], um
Änderungen an Offline-Parametern zu aktivieren.
PID-Prozess
Die PID-Regelung sorgt durch eine Anpassung der
Ausgangsfrequenz an die wechselnde Last für eine
Aufrechterhaltung von erforderlichen Werten wie Drehzahl,
Druck, Temperatur usw.
PCD
Process Control Data (Prozessregelungsdaten).
Aus- und Einschaltzyklus
Schalten Sie die Stromversorgung aus, bis das Display (LCP)
dunkel ist. Schalten Sie den Strom anschließend wieder
ein.
Pulseingang/Inkrementalgeber
Ein externer digitaler Impulsgeber für Istwertinformationen
über die Motordrehzahl. Der Drehgeber kommt in
Anwendungen zum Einsatz, bei denen eine große
Genauigkeit bei der Drehzahlregelung erforderlich ist.
Fehlerstromschutzschalter
Fehlerstromschutzschalter.
Parametersatz
Sie können die Parametereinstellungen in vier Parametersätzen speichern. Sie können zwischen den vier
Parametersätzen wechseln oder einen Satz bearbeiten,
während ein anderer Satz gerade aktiv ist.
®
8 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 11
Einführung Projektierungshandbuch
SFAVM
Schaltmodus mit der Bezeichnung „Statorfluss-orientierte
asynchrone Vektormodulation“ (Parameter 14-00 Schalt-
muster).
Schlupfausgleich
Der Frequenzumrichter gleicht den belastungsabhängigen
Motorschlupf aus, indem er unter Berücksichtigung des
Motorersatzschaltbildes und der gemessenen Motorbelastung die Ausgangsfrequenz anpasst (nahezu konstante
Motordrehzahl).
SLC
Der SLC (Smart Logic Control) ist eine Abfolge benutzerdefinierter Aktionen, die ausgeführt werden, wenn die
zugehörigen benutzerdefinierten Ereignisse vom SLC als
„wahr“ bewertet werden. (Siehe Kapitel 4.9.1 Smart Logic
Controller).
STW (ZSW)
Zustandswort
Frequenzumrichter-Standardbus
Schließt RS485-Bus mit FC-Protokoll oder MC-Protokoll ein.
Siehe Parameter 8-30 FC-Protokoll.
THD
Total Harmonic Distortion ist die gesamte Spannungsverzerrung, die aus den einzelnen
Spannungsoberschwingungen berechnet wird.
Thermistor
Ein temperaturabhängiger Widerstand, installiert am
Frequenzumrichter oder Motor.
Abschaltung
Ein Zustand, der in Fehlersituationen eintritt, z. B. bei einer
Übertemperatur des Frequenzumrichters oder wenn der
Frequenzumrichter den Motor, den Prozess oder den
Mechanismus schützt. Der Frequenzumrichter verhindert
einen Neustart, bis die Ursache der Störung behoben
wurde. Starten Sie den Frequenzumrichter zum Beenden
des Alarmzustands neu. Sie dürfen die Abschaltung nicht
zu Zwecken der Personensicherheit verwenden.
Abschaltblockierung
Der Frequenzumrichter wechselt in Störungssituationen
zum Selbstschutz in diesen Zustand. Der Frequenzumrichter erfordert einen Eingriff, z. B. bei einem Kurzschluss
am Ausgang. Sie können eine Abschaltblockierung nur
durch Unterbrechen der Netzversorgung, Beheben der
Fehlerursache und erneuten Anschluss des Frequenzumrichters aufheben. Der Neustart wird verzögert, bis der
Fehlerzustand über die [Reset]-Taste am LCP quittiert wird.
In einigen Fällen erfolgt die Aufhebung automatisch (durch
vorherige Programmierung). Sie dürfen die Abschaltblockierung nicht zu Zwecken der Personensicherheit
verwenden.
VT-Kennlinie
Variable Drehmomentkennlinie; typisch bei Anwendungen
mit quadratischem Lastmomentverlauf über den Drehzahlbereich, z. B. Kreiselpumpen und Lüfter.
+
VVC
Im Vergleich zur herkömmlichen U/f-Steuerung bietet die
Spannungsvektorsteuerung (VVC+) eine verbesserte
Dynamik und Stabilität, sowohl bei Änderung des
Drehzahlsollwerts als auch in Bezug auf das LastDrehmoment.
60° AVM
60° Asynchrone Vektormodulation (Parameter 14-00 Schaltmuster).
Leistungsfaktor
Der Leistungsfaktor ist das Verhältnis zwischen I1 und I
Leistungs− faktor =
3xUxI1cosϕ
3xUxI
EFF
.
eff
Der Leistungsfaktor einer 3-Phasen-Regelung ist definiert
als:
Leistungs− faktor =
I1xcosϕ1
I
EFF
=
I
I
1
dacosϕ1 = 1
EFF
Der Leistungsfaktor gibt an, wie stark ein Frequenzumrichter die Netzversorgung belastet.
Je niedriger der Leistungsfaktor, desto höher der I
bei
eff
gleicher kW-Leistung.
I
EFF
=
I
+ I
1
5
+ I
2
+ .. + I
7
2
n
2
2
Darüber hinaus weist ein hoher Leistungsfaktor darauf hin,
dass der Oberschwingungsstrom sehr niedrig ist.
Die in den Frequenzumrichtern eingebauten DC-Spulen
erzeugen einen hohen Leistungsfaktor. Dadurch wird die
Netzbelastung reduziert.
Zielposition
Die endgültige Zielposition, festgelegt durch Positionierungsbefehle. Der Profilgenerator verwendet diese Position
zur Berechnung dieses Drehzahlprofils.
Sollposition
Der vom Profilgenerator berechnete tatsächliche Positionssollwert. Der Frequenzumrichter verwendet diese
Sollposition als Sollwert für Position PI.
Istposition
Die Istposition eines Drehgebers oder ein Wert, den die
Motorsteuerung bei Regelung ohne Rückführung
berechnet. Der Frequenzumrichter verwendet die
Istposition als Istwert für Position PI.
Positionsfehler
Der Positionsfehler ist die Differenz zwischen der Ist- und
der Sollposition. Der Positionsfehler ist der Eingang für den
PI-Positionsregler.
Positionseinheit
Die physische Einheit für Positionswerte.
1 1
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 9
Page 12
Einführung
VLT® Decentral Drive FCD 302
11
1.4 Sicherheitsmaßnahmen
WARNUNG
Der Frequenzumrichter steht bei Netzanschluss unter
lebensgefährlicher Spannung. Korrekte Planung der
Installation des Motors, Frequenzumrichters oder
Feldbusses ist notwendig. Befolgen Sie daher stets die
Anweisungen in diesem Handbuch sowie die örtlichen
und nationalen Vorschriften und Sicherheitsvorschriften.
Unsachgemäße Installation des Motors, Frequenzumrichters oder Feldbusses kann zum Tod, zu schweren
Verletzungen sowie zu Schäden am Gerät führen!
WARNUNG
HOCHSPANNUNG
Das Berühren spannungsführender Teile – auch nach der
Trennung vom Netz – ist lebensgefährlich.
Achten Sie außerdem bei der Planung darauf, dass
andere Spannungseingänge, wie z. B. 24 V DC, Zwischenkreiskopplung (Zusammenschalten eines DCZwischenkreises) sowie der Motoranschluss beim
kinetischen Speicher ausgeschaltet sind.
Sie müssen Anlagen, in denen Frequenzumrichter
installiert sind, gemäß den gültigen Sicherheitsvorschriften (z. B. Bestimmungen für technische Anlagen,
Unfallverhütungsvorschriften usw.) mit zusätzlichen
Überwachungs- und Schutzeinrichtungen versehen. Sie
dürfen allerdings Änderungen an den Frequenzumrichtern über die Betriebssoftware vornehmen.
Das Nichtbeachten der Planungsempfehlungen kann bei
Betrieb der Geräte zum Tod oder zu schweren Verletzungen führen!
HINWEIS
Gefährliche Situationen sind vom Maschinenbauer/
Integrator zu identifizieren, der dann dafür verantwortlich ist, notwendige Schutzmaßnahmen zu
berücksichtigen. Zusätzliche Überwachungs- und Schutzvorrichtungen können vorgesehen werden. Dabei sind
immer geltende Sicherheitsvorschriften zu beachten, z. B.
Bestimmungen für technische Anlagen, Unfallverhütungsvorschriften usw.
HINWEIS
Vertikalförder- und Hubanwendungen:
Die Steuerung der externen Bremsen muss immer
redundant ausgelegt werden. Die Funktionen des
Frequenzumrichters sind keinesfalls als primäre Sicherheitsschaltung zu betrachten. Erfüllen Sie alle
einschlägigen Normen, z. B.
Hebezeuge: IEC 60204-32
Aufzüge: EN 81
Protection Mode
Wenn ein Hardwaregrenzwert des Motorstroms oder der
Zwischenkreisspannung überschritten wird, wechselt der
Frequenzumrichter in den Protection Mode. „Protection
mode“ bedeutet eine Änderung der PWM-Modulationsstrategie und eine niedrige Taktfrequenz, um Verluste auf
ein Minimum zu reduzieren. Dies wird nach dem letzten
Fehler 10 s fortgesetzt und erhöht die Zuverlässigkeit und
die Robustheit des Frequenzumrichters, während die
vollständige Regelung des Motors wiederhergestellt wird.
In Hub- und Vertikalförderanwendungen kann der
Protection Mode nicht eingesetzt werden, da der Frequenzumrichter diese Betriebsart in der Regel nicht wieder
verlassen kann und daher die Zeit bis zur Aktivierung der
Bremse verlängert. Dies ist nicht empfehlenswert.
Der „Protection Mode“ wird durch Einstellen von
Parameter 14-26 WR-Fehler Abschaltverzögerung auf 0
deaktiviert. Dies bedeutet, dass der Frequenzumrichter
sofort abschaltet, wenn einer der Hardwaregrenzwerte
überschritten wird.
HINWEIS
Deaktivieren Sie den Protection Mode in Hubanwendungen (Parameter 14-26 WR-Fehler
Abschaltverzögerung=0).
WARNUNG
ENTLADEZEIT
Der Frequenzumrichter enthält Zwischenkreiskondensatoren, die auch bei abgeschaltetem Frequenzumrichter
geladen sein können. Auch wenn die Warn-LED nicht
leuchten, kann Hochspannung anliegen. Das Nichteinhalten der angegebenen Wartezeit nach dem Trennen
der Stromversorgung vor Wartungs- oder Reparaturarbeiten kann zum Tod oder zu schweren Verletzungen
führen!
Stoppen Sie den Motor.
•
Trennen Sie die Netzversorgung und alle
•
externen Zwischenkreisversorgungen,
einschließlich externer Batterie-, USV- und
Zwischenkreisverbindungen mit anderen
Frequenzumrichtern.
Trennen oder verriegeln Sie den PM-Motor.
•
Warten Sie, damit die Kondensatoren
•
vollständig entladen können. Die notwendige
Wartezeit finden Sie in Tabelle 1.3 sowie auf
dem Typenschild auf der Oberseite des
Frequenzumrichters.
Verwenden Sie vor der Durchführung von
•
Wartungs- oder Reparaturarbeiten ein
geeignetes Spannungsmessgerät, um sicherzustellen, dass die Kondensatoren vollständig
entladen sind.
10 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 13
Einführung Projektierungshandbuch
Spannung [V] Mindestwartezeit (Minuten)
4 7 15
200–240 0,25–3,7 kW – 5,5–37 kW
380–500 0,25–7,5 kW – 11–75 kW
525–600 0,75–7,5 kW – 11–75 kW
525–690 – 1,5–7,5 kW 11–75 kW
Tabelle 1.3 Entladezeit
1.5 CE-Kennzeichnungen
Die CE-Kennzeichnung ist eine gute Sache, wenn sie ihrem
eigentlichen Zweck entsprechend eingesetzt wird: der
Vereinfachung des Handelsverkehrs innerhalb von EU und
EFTA.
Allerdings kann die CE-Kennzeichnung viele verschiedene
Spezifikationen abdecken. Sie müssen also prüfen, was
durch ein bestimmtes CE-Zeichen tatsächlich gedeckt ist.
Die technischen Daten können sich stark unterscheiden.
Aus diesem Grund kann ein CE-Zeichen einem Installateur
auch durchaus ein falsches Sicherheitsgefühl vermitteln,
wenn ein Frequenzumrichter als Bauteil eines Systems oder
Gerätes eingesetzt wird.
Danfoss versieht die Frequenzumrichter mit einem CEZeichen gemäß der Niederspannungsrichtlinie. Das
bedeutet, dass bei korrekter Installation des Frequenzumrichters dessen Übereinstimmung mit der
Niederspannungsrichtlinie garantiert ist. Danfoss nimmt die
CE-Kennzeichnung gemäß der Richtlinie vor und liefert auf
Wunsch eine Konformitätserklärung.
Das CE-Zeichen gilt auch für die EMV-Richtlinie, unter der
Voraussetzung, dass die Hinweise in diesem Handbuch zur
EMV-gerechten Installation und Filterung beachtet werden.
Auf dieser Grundlage wird eine Konformitätserklärung
gemäß EMV-Richtlinie ausgestellt.
Das Projektierungshandbuch bietet detaillierte
Anweisungen für eine EMV-gerechte Installation.
1.5.1 Konformität
Die Maschinenrichtlinie (2006/42/EG)
Frequenzumrichter fallen nicht unter die Maschinenrichtlinie. Wird ein Frequenzumrichter jedoch für den
Einsatz in einer Maschine geliefert, so stellt Danfoss
Informationen zu Sicherheitsaspekten des Motors zur
Verfügung.
Was ist unter CE-Konformität und dem CE-Zeichen zu
verstehen?
Sinn und Zweck der CE-Kennzeichnung ist ein Abbau
technischer Handelsbarrieren innerhalb der EFTA und der
EU. Die EU hat das CE-Zeichen als einfache Kennzeichnung
für die Übereinstimmung eines Produkts mit den
entsprechenden EU-Richtlinien eingeführt. Über die
technischen Daten oder die Qualität eines Produkts sagt
die CE-Kennzeichnung nichts aus. Frequenzumrichter fallen
unter 2 EU-Richtlinien:
Die Niederspannungsrichtlinie (2014/35/EU)
Frequenzumrichter müssen seit dem 1. Januar 2014 die CEKennzeichnung in Übereinstimmung mit der
Niederspannungsrichtlinie erfüllen. Die Niederspannungsrichtlinie gilt für alle elektrischen Geräte im
Spannungsbereich von 50–1000 V AC und 75–1500 V DC.
Der Zweck der Richtlinie ist die Gewährleistung der
Personensicherheit und die Vermeidung von Beschädigungen der Anlage und Geräte, wenn Anwender die
elektrischen Betriebsmittel bei ordnungsgemäßer Installation, Wartung und bestimmungsgemäßer Verwendung
bedienen.
Die EMV-Richtlinie (2014/30/EU)
Der Zweck der EMV-Richtlinie (elektromagnetische Verträglichkeit) ist die Reduzierung elektromagnetischer
Störungen und die Verbesserung der Störfestigkeit der
elektrischen Geräte und Installationen. Die grundlegende
Schutzanforderung der EMV-Richtlinie gibt vor, dass
Betriebsmittel, die elektromagnetische Störungen (EMV)
verursachen oder deren Betrieb durch diese Störungen
beeinträchtigt werden kann, so ausgelegt sein müssen,
dass ihre erreichten elektromagnetischen Störungen
begrenzt sind. Die Geräte müssen bei ordnungsgemäßer
Installation und Wartung sowie bestimmungsgemäßer
Verwendung einen geeigneten Grad der Störfestigkeit
gegenüber EMV aufweisen.
Elektrische Geräte, die alleine oder als Teil einer Anlage
verwendet werden, müssen eine CE-Kennzeichnung tragen.
Anlagen müssen nicht über eine CE-Kennzeichnung
verfügen, jedoch den grundlegenden Schutzanforderungen
der EMV-Richtlinie entsprechen.
Meistens werden Frequenzumrichter von Fachleuten als
komplexes Bauteil eingesetzt, das Teil eines größeren
Geräts oder Systems oder einer größeren Anlage ist.
1 1
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 11
Page 14
Einführung
VLT® Decentral Drive FCD 302
11
1.5.2 Was fällt unter die Richtlinien?
Übereinstimmung mit EMV-Richtlinie
1.6
2004/108/EG
Die EMV-Richtlinie 2014/30/EU der EU beschreibt 3 typische
Situationen für die Verwendung eines Frequenzumrichters.
Siehe unten zu EMV-Konformität und CE-Kennzeichnung.
Der Frequenzumrichter wird direkt im freien
•
Handel an den Endkunden verkauft. Der Frequenzumrichter wird beispielsweise an einen
Heimwerkerbaumarkt verkauft. Der Endanwender
ist nicht sachkundig. Er installiert den Frequenzumrichter selbst, z. B. für ein Heimwerker- oder
Haushaltsgerät o. Ä. Für derartige Anwendungen
bedarf der Frequenzumrichter der CEKennzeichnung gemäß der EMV-Richtlinie.
Der Frequenzumrichter wird für die Installation in
•
einer Anlage verkauft. Die Anlage wird von
Fachkräften installiert. Es kann sich dabei z. B. um
eine Produktionsanlage oder um eine von
Fachleuchten konstruierte und installierte
Heizungs- oder Lüftungsanlage handeln. Der
Frequenzumrichter und die fertige Anlage
bedürfen keiner CE-Kennzeichnung nach der
EMV-Richtlinie. Die Anlage muss jedoch den
grundlegenden Anforderungen der EMV-Richtlinie
entsprechen. Dies kann der Anlagenbauer durch
den Einsatz von Bauteilen, Geräten und Systemen
sicherstellen, die eine CE-Kennzeichnung gemäß
der EMV-Richtlinie besitzen.
Der Frequenzumrichter wird als Teil eines
•
Komplettsystems verkauft. Das System wird als
Kompletteinheit angeboten, z. B. eine
Klimaanlage. Das gesamte System muss gemäß
der EMV-Richtlinie die CE-Kennzeichnung tragen.
Dies kann der Hersteller entweder durch den
Einsatz CE-gekennzeichneter Bauteile gemäß
EMV-Richtlinie oder durch Überprüfung der EMVEigenschaften des Systems gewährleisten.
Entscheidet sich der Hersteller dafür, nur CEgekennzeichnete Bauteile einzusetzen, so braucht
das Gesamtsystem nicht getestet zu werden.
Meistens setzen Fachleuchte Frequenzumrichter als
komplexes Bauteil ein, das Teil eines größeren Geräts,
Systems bzw. einer Anlage ist.
HINWEIS
Der Installierende trägt die Verantwortung für die
endgültigen EMV-Eigenschaften des Geräts, Systems oder
der Installation.
Als Hilfe für den Installateur hat Danfoss EMV-Installationsrichtlinien für das Antriebssystem erstellt. Zum Einhalten
der für Antriebssysteme angegebenen Normen und
Prüfniveaus müssen die Hinweise zur EMV-gerechten Installation befolgt werden. Siehe Kapitel 2.9.4 EMV.
1.7 Zulassungen
Tabelle 1.4 FCD 302 Zulassungen
Der Frequenzumrichter erfüllt die Anforderungen der
UL508C bezüglich der thermischen Sicherung. Weitere
Informationen finden Sie unter Kapitel 3.4.3.2 Thermischer
Motorschutz.
Entsorgung
1.8
Elektrische Geräte und Komponenten
dürfen nicht zusammen mit normalem
Hausabfall entsorgt werden.
Diese müssen separat mit Elektro- und
Elektronik-Altgeräten gemäß den lokalen
Bestimmungen und den aktuell gültigen
Gesetzen gesammelt werden.
Tabelle 1.5 Entsorgungshinweise
12 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 15
130BC963.10
130BC964.10
130BC968.11
1325 4
6
9
8
M
7
Produktübersicht Projektierungshandbuch
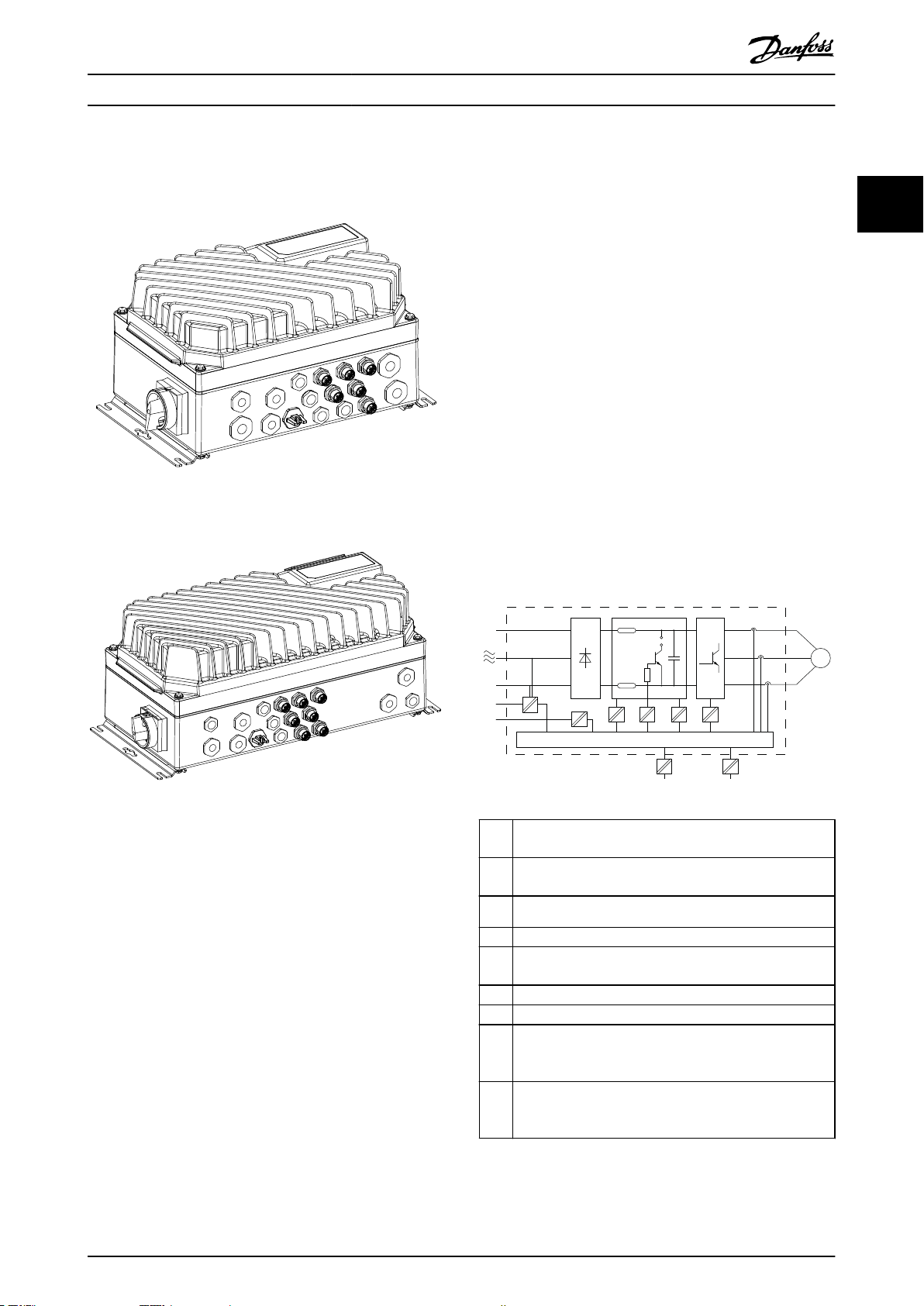
2 Produktübersicht
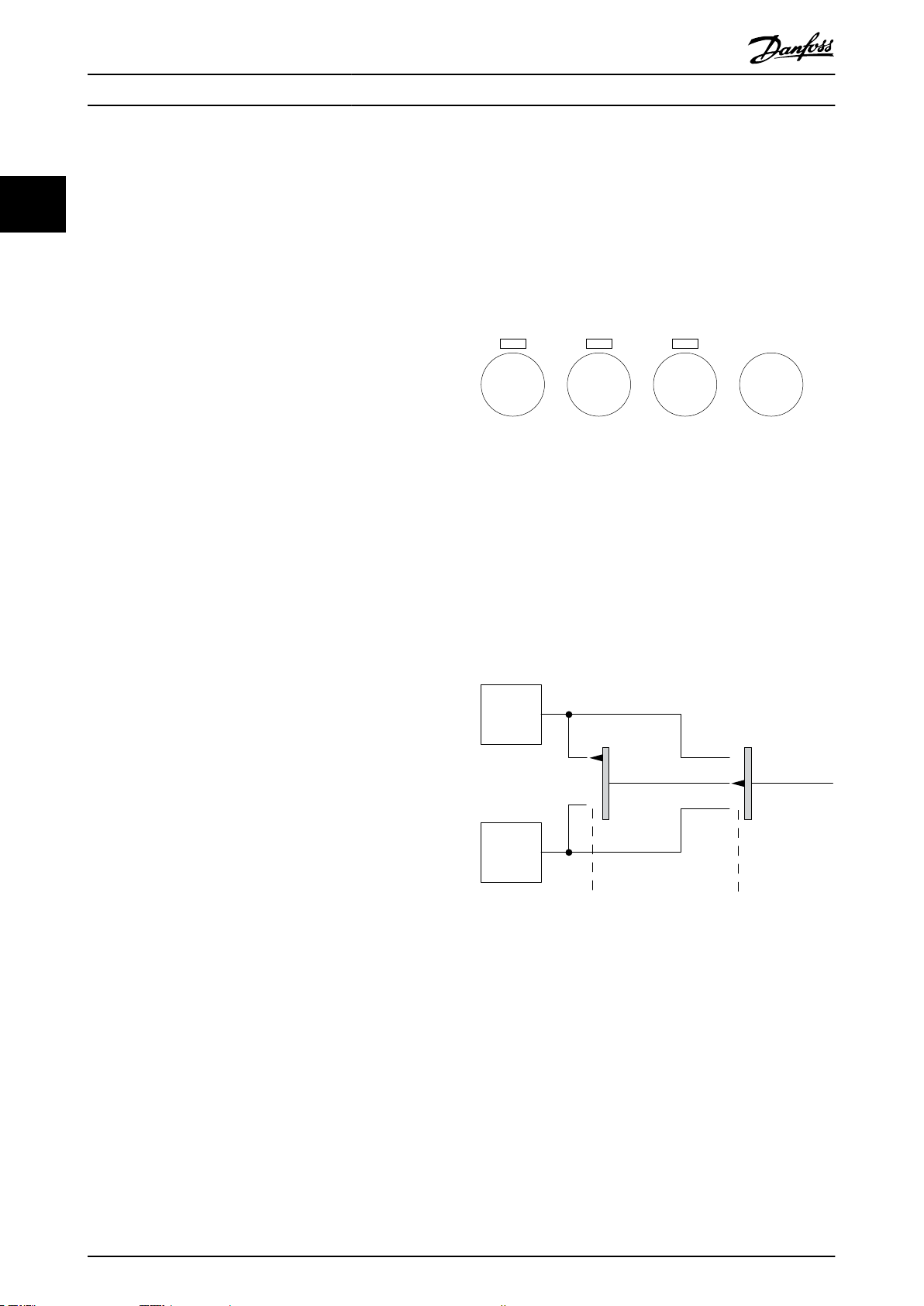
Abbildung 2.1 Kleines Gerät
Die galvanische (sichere) Trennung wird erreicht, indem die
2 2
Anforderungen für höhere Isolierung erfüllt und die
entsprechenden Kriech-/Luftstrecken beachtet werden.
Diese Anforderungen sind in der Norm EN 61800-5-1
beschrieben.
Die Bauteile, die die elektrische Trennung wie in
Abbildung 2.3 beschrieben bilden, erfüllen ebenfalls die
Anforderungen für höhere Isolierung und der
entsprechenden Tests gemäß Beschreibung in EN
61800-5-1.
Die galvanische PELV-Trennung ist an 6 Punkten vorhanden
(siehe Abbildung 2.3).
Um den PELV-Schutzgrad beizubehalten, müssen alle
steuerklemmenseitig angeschlossenen Geräte den PELVAnforderungen entsprechen, d. h. Thermistoren müssen
beispielsweise verstärkt/zweifach isoliert sein.
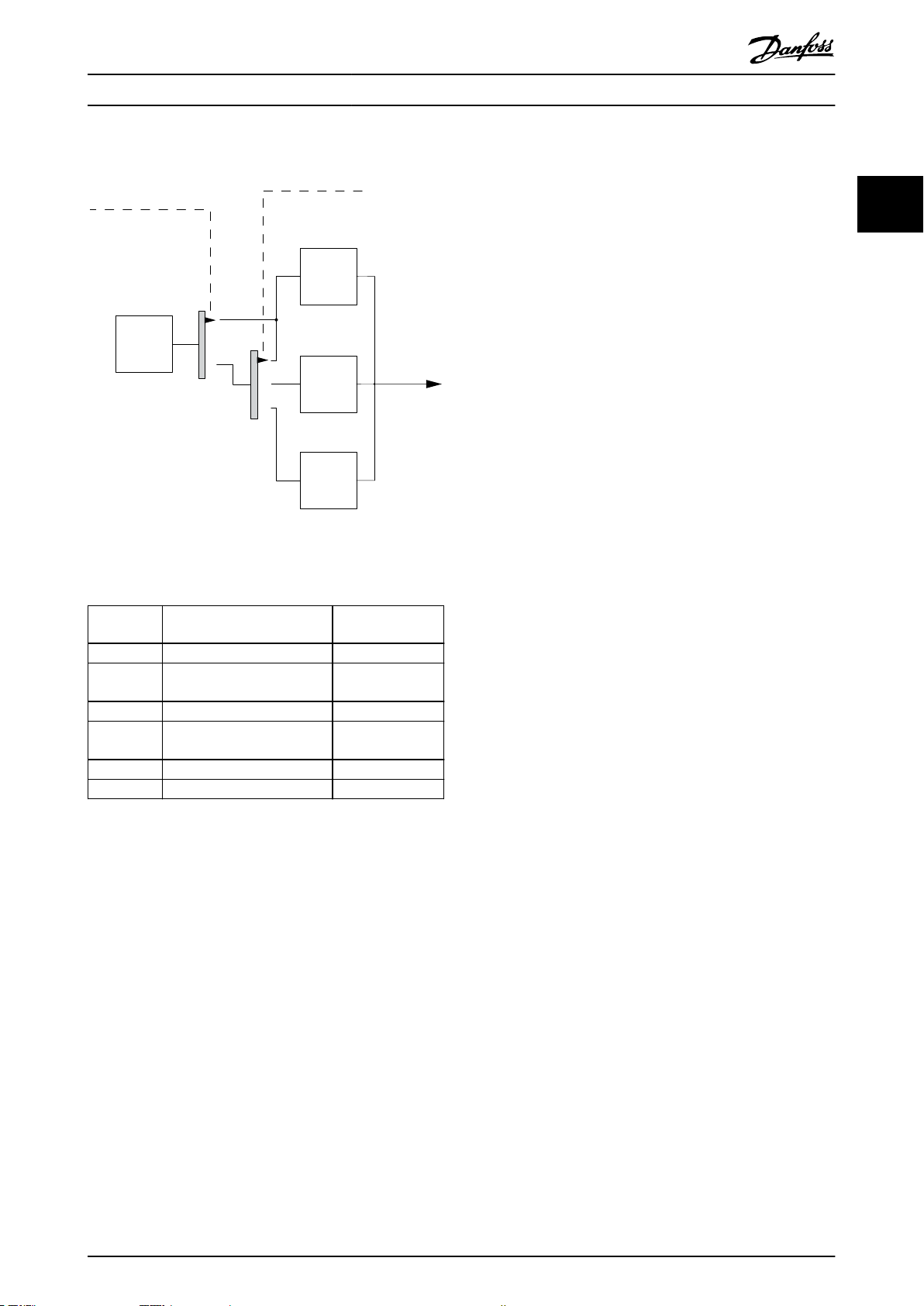
Abbildung 2.2 Großes Gerät
1 Schaltnetzteil (SMPS) einschließlich Isolation des Signals
UDC, das die Gleichstrom-Zwischenkreisspannung anzeigt.
2.1 Galvanische Trennung (PELV)
2.1.1 PELV (Schutzkleinspannung) –
2 IGBT-Ansteuerkarte zur Ansteuerung der IGBTs (Triggert-
ransformatoren/Optokoppler).
3 Stromwandler.
Protective Extra Low Voltage
4 Bremselektronik (Optokoppler).
PELV bietet Schutz durch Kleinspannung. Ein Schutz gegen
elektrischen Schlag gilt als gewährleistet, wenn die
Stromversorgung vom Typ PELV (Schutzkleinspannung –
Protective Extra Low Voltage) ist und die Installation
gemäß den örtlichen bzw. nationalen Vorschriften für PELVVersorgungen ausgeführt wurde.
Alle Steuerklemmen und die Relaisklemmen 01-03/04-06
entsprechen PELV (Protective Extra Low Voltage) – gilt
nicht bei geerdetem Dreieck-Netz größer 400 V.
5 Einschaltstrombegrenzung, Funkfrequenzstörung und
Temperaturmesskreise.
6 Ausgangsrelais.
7 Mechanische Bremse.
8 Eine funktionale galvanische Trennung für die optionale
externe 24-V-Versorgung und für die RS485-Standardbus-
schnittstelle.
9 Eine funktionale galvanische Trennung für die optionale
externe 24-V-Versorgung und für die RS485-Standardbus-
schnittstelle.
Abbildung 2.3 Galvanische Trennung
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 13
Page 16
130BB957.11
Leakage current [mA]
100 Hz
2 kHz
100 kHz
Produktübersicht
VLT® Decentral Drive FCD 302
HINWEIS
Installation in großer Höhenlage:
22
380–500 V: Bei Höhen über 2000 m wenden Sie sich
bezüglich der PELV (Schutzkleinspannung – Protective
extra low voltage) an Danfoss.
2.1.2 Erdableitstrom
Befolgen Sie im Hinblick auf die Schutzerdung von Geräten
mit einem Ableitstrom gegen Erde von mehr als 3,5 mA
alle nationalen und lokalen Vorschriften.
Die Frequenzumrichtertechnik nutzt hohe Schaltfrequenzen
bei gleichzeitig hoher Leistung. Dies erzeugt einen
Ableitstrom in der Erdverbindung. Ein Fehlerstrom im
Frequenzumrichter an den Ausgangsleistungsklemmen
kann eine Gleichstromkomponente enthalten, die die Filterkondensatoren laden und einen transienten Erdstrom
verursachen kann.
Der Ableitstrom hängt ebenfalls von der Netzverzerrung
ab.
Abbildung 2.4 Einfluss der Trennfrequenz des Fehlerstromschutzschalters
HINWEIS
Wenn Sie einen Filter verwenden, schalten Sie beim
Laden des Filters Parameter 14-50 EMV-Filter aus, um
einen hohen Ableitstrom und ein Auslösen des Fehlerstromschutzschalters zu verhindern.
Siehe auch Anwendungshinweis zum Fehlerstromschutzschalter.
Steuerung/Regelung
2.2
EN 61800-5-1 (Produktnorm für Elektrische Leistungsantriebssysteme mit einstellbarer Drehzahl) stellt besondere
Anforderungen, wenn der Erdableitstrom 3,5 mA
übersteigt. Verstärken Sie die Erdung auf eine der
folgenden Arten:
Weitere Informationen finden Sie in EN/IEC 61800-5-1 und
EN 50178.
Wenn Fehlerstromschutzschalter (RCDs), auch als
Erdschlusstrennschalter (CLCBs) bezeichnet, zum Einsatz
kommen, sind die folgenden Anforderungen einzuhalten:
Erdungskabel (Klemme 95) mit einem Querschnitt
•
von mindestens 10 mm2 (7 AWG). Hierfür ist ein
PE-Adapter erforderlich (optional erhältlich).
Zwei getrennt verlegte Erdungskabel, die die
•
vorgeschriebenen Maße einhalten.
Fehlerstromschutzschalter
Verwenden Sie netzseitig allstromsensitive Fehler-
•
stromschutzschalter (Typ B).
Verwenden Sie Fehlerstromschutzschalter mit
•
Einschaltverzögerung, um Fehler durch transiente
Erdströme zu vermeiden.
Bemessen Sie Fehlerstromschutzschalter in Bezug
•
auf Systemkonfiguration und Umgebungsbedingungen.
Ein Frequenzumrichter richtet die Netzwechselspannung in
Gleichspannung gleich. Diese Gleichspannung wird dann in
eine Wechselspannung mit variabler Amplitude und
Frequenz umgewandelt.
Spannung/Strom und Frequenz am Motorausgang sind
somit variabel, was eine stufenlose Drehzahlregelung von
herkömmlichen Dreiphasen-Wechselstrommotoren und
Permanentmagnet-Synchronmotoren ermöglicht.
Der VLT® Decentral Drive FCD 302 Frequenzumrichter ist für
Anlagen mit mehreren kleineren Antrieben ausgelegt,
insbesondere Horizontalförderanwendungen, wie z. B. in
der Nahrungsmittel- und Getränkeindustrie und in der
Fördertechnik. In Anlagen, in denen mehrere Motoren in
einer Fabrik verteilt sind, wie in Abfüllanlagen, Nahrungsmittelzubereitungs- und Verpackungsanlagen sowie
Gepäckfertigungsanlagen in Flughäfen, kann es Dutzende,
vielleicht sogar Hunderte von Frequenzumrichtern geben,
die verteilt über eine große Fläche zusammen arbeiten. In
diesen Fällen überwiegen die Verkabelungskosten allein
schon die Kosten der einzelnen Frequenzumrichter und es
ist sinnvoll, die Steuerung und Regelung näher an die
Motoren zu bringen.
Sie können den Frequenzumrichter für die Regelung der
Drehzahl oder des Drehmoments an der Motorwelle
konfigurieren.
14 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 17
R+
82
R81
Brake
Resistor
U 96
V 97
W 98
InrushR inr
P 14-50
L1 91
L2 92
L3 93
M
130BC965.10
Produktübersicht Projektierungshandbuch
Drehzahlregelung
Es gibt zwei Arten der Drehzahlregelung:
Drehzahlregelung ohne Istwertrückführung vom
•
Motor (ohne Geber).
Drehzahlregelung mit Istwertrückführung mit PID-
•
Regelcharakteristik. Eine korrekt optimierte
Drehzahlregelung mit Istwertrückführung arbeitet
wesentlich genauer als eine ohne Istwertrückführung.
Drehmomentregelung
Die Drehmomentregelung kommt in Anwendungen zum
Einsatz, in denen das Drehmoment an der Motorwelle in
der Anwendung zur Zugkraftregelung dient.
Die Regelung mit Rückführung bei Fluxvektor-
•
betrieb mit Geber ermöglicht eine
Motorsteuerung anhand der Istwertsignale vom
System. Sie bietet überragendes Drehmomentregelverhalten in allen vier Quadranten und bei
allen Motordrehzahlen.
Drehzahl-/Drehmomentsollwert
Der Sollwert für dieses Regelverhalten kann entweder ein
einzelner Sollwert oder die Summe verschiedener Sollwerte
einschließlich relativ skalierter Sollwerte sein. Die Sollwertverarbeitung wird ausführlich in
Kapitel 2.6 Sollwertverarbeitung erklärt.
VVC+-Betrieb ohne Rückführung. Die Funktion
•
wird in mechanisch robusten Anwendungen
verwendet, dabei ist jedoch die Genauigkeit
begrenzt. Die Drehmomentfunktion ohne
Rückführung funktioniert grundsätzlich nur in
einer Drehzahlrichtung. Das Drehmoment wird
anhand der internen Strommessung des Frequenzumrichters berechnet. Siehe Anwendungsbeispiel
Kapitel 2.3.1 Regelungsstruktur bei VVC+ Advanced
Vector Control.
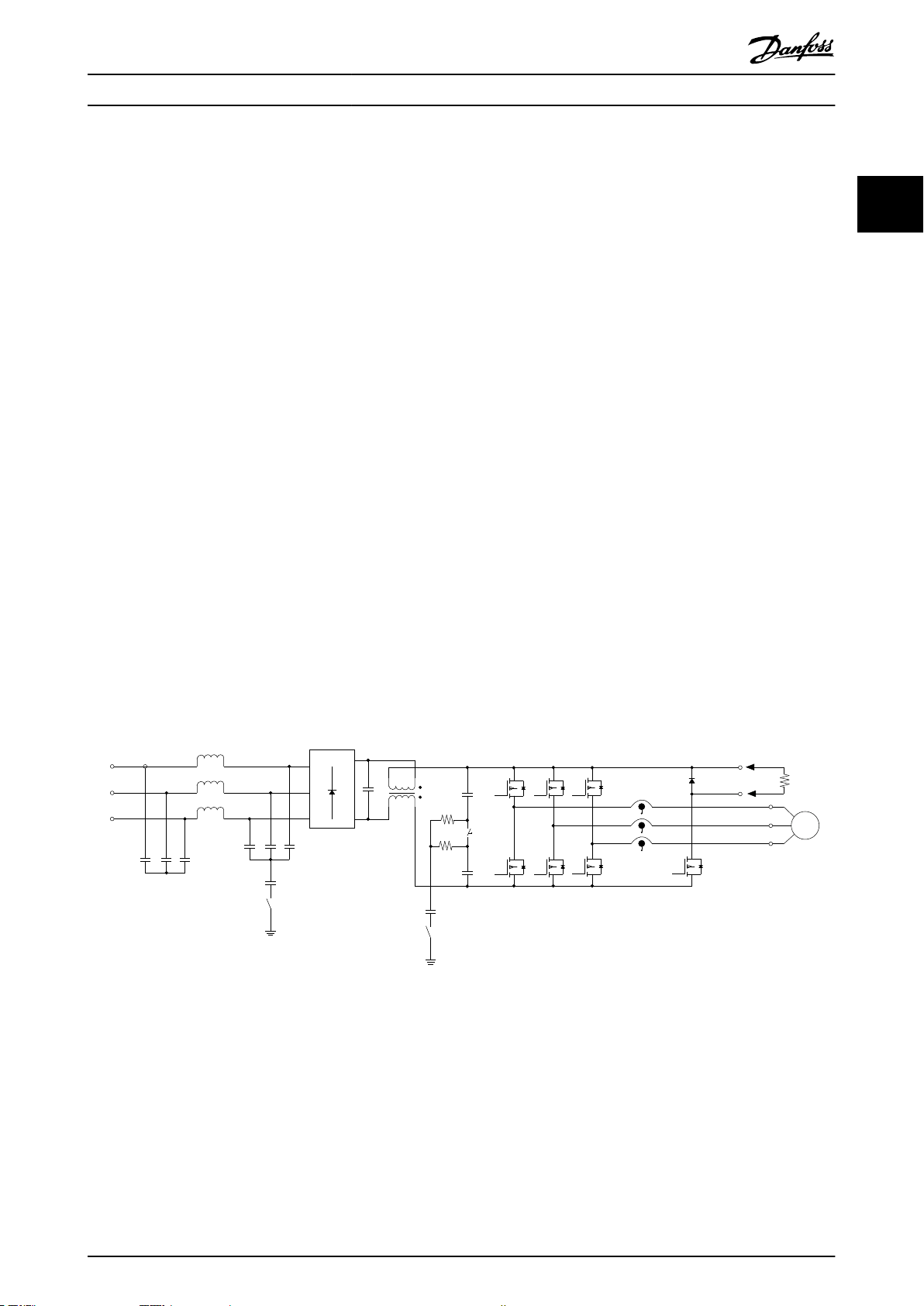
2.2.1 Steuerverfahren
Der Frequenzumrichter verfügt über verschiedene Arten von Motorsteuerprinzipen, wie U/f-Sondermotor-Modus, VVC+ oder
Flux-Vektor-Motorregelung.
Der Frequenzumrichter ist auch in der Lage, Permanentmagnet-Synchronmotoren (bürstenlose Servomotoren) sowie normale
Käfigläufer-Asynchronmotoren zu steuern.
Der Kurzschlussschutz beim Frequenzumrichter wird von Stromwandlern in allen 3 Motorphasen und einem Entsättigungsschutz mit Rückführung von der Bremse sicher realisiert.
2 2
Abbildung 2.5 Steuerverfahren
2.2.2
Interner Stromgrenzenregler in Betriebsart VVC
Der Frequenzumrichter hat einen integrierten Stromgrenzenregler, der aktiviert wird, wenn der Motorstrom und somit das
Drehmoment die in Parameter 4-16 Momentengrenze motorisch, Parameter 4-17 Momentengrenze generatorisch und
Parameter 4-18 Stromgrenze eingestellten Drehmomentgrenzen überschreitet.
Bei Erreichen der generatorischen oder motorischen Stromgrenze versucht der Frequenzumrichter schnellstmöglich, die
eingestellten Drehmomentgrenzen wieder zu unterschreiten, ohne die Kontrolle über den Motor zu verlieren.
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 15
+
Page 18
Produktübersicht
VLT® Decentral Drive FCD 302
2.3 Regelungsstrukturen
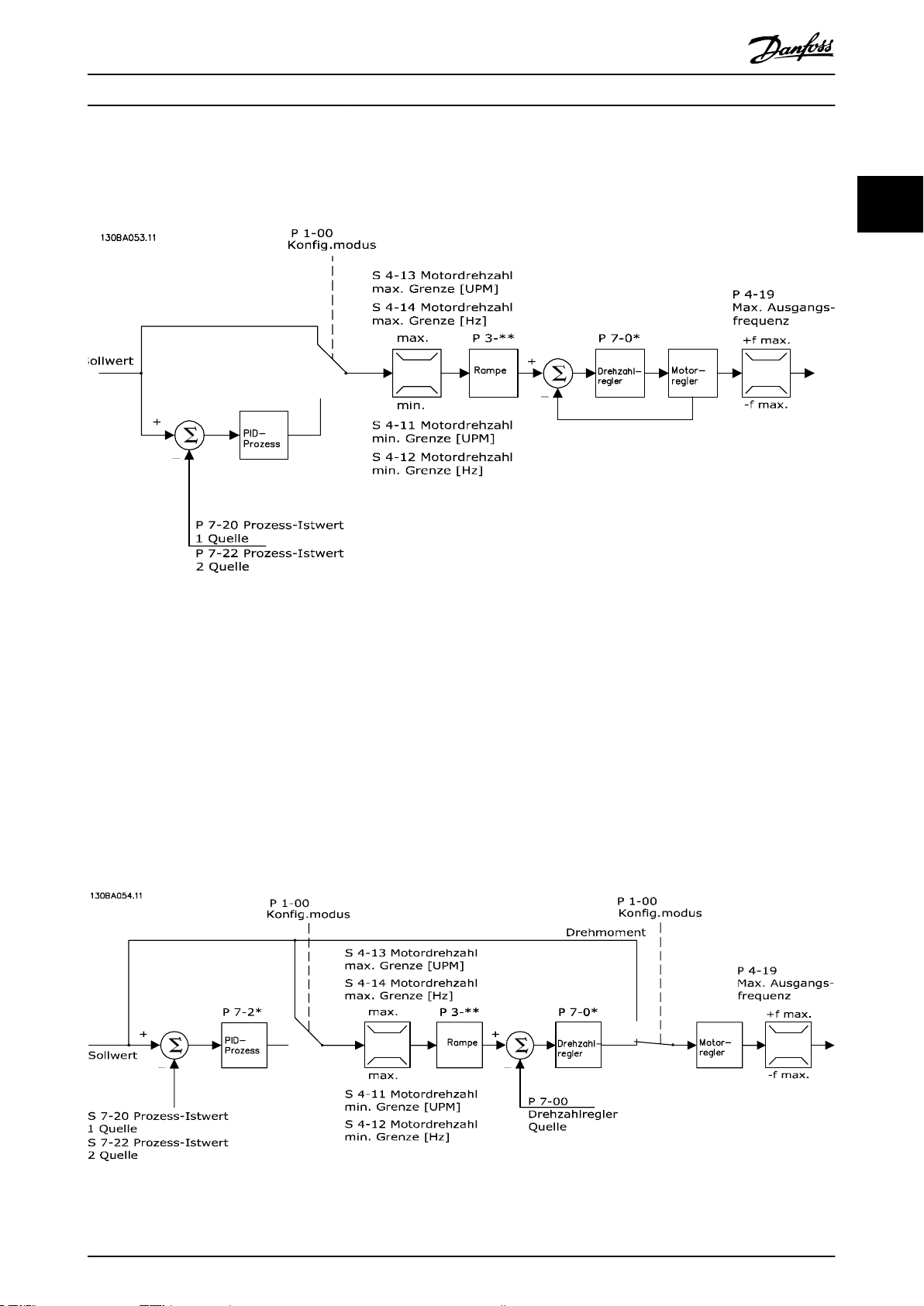
2.3.1
Regelungsstruktur bei VVC+ Advanced Vector Control
22
Abbildung 2.6 Regelungsstruktur in VVC+-Konfigurationen mit und ohne Rückführung
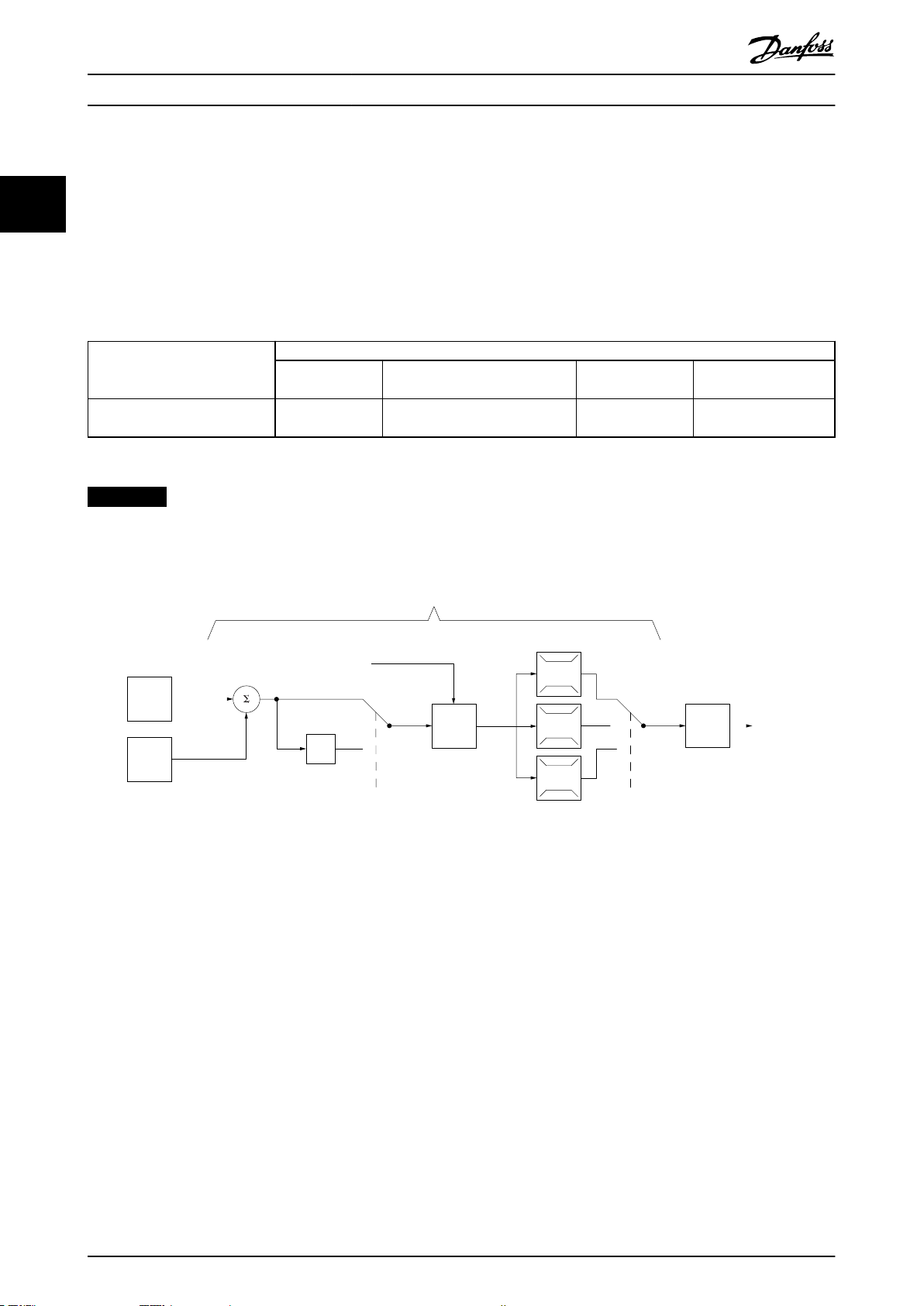
In der in Abbildung 2.6 gezeigten Konfiguration ist Parameter 1-01 Steuerprinzip auf [1] VVC+ eingestellt und
Parameter 1-00 Regelverfahren auf [0] Ohne Rückführung. Der resultierende Sollwert aus dem Sollwertsystem wird in der
Rampenbegrenzung und Drehzahlbegrenzung empfangen und durch sie geführt, bevor er an die Motorregelung übergeben
wird. Der Ausgang der Motorregelung ist dann zusätzlich durch die maximale Frequenzgrenze beschränkt.
Wenn Parameter 1-00 Regelverfahren auf [1] Mit Drehgeber eingestellt ist, wird der resultierende Sollwert von der Rampenbegrenzung an einen PID-Drehzahlregler übergeben. Die Parameter für den PID-Drehzahlregler befinden sich in
Parametergruppe 7-0* PID Drehzahlregler. Der resultierende Sollwert vom PID-Drehzahlregler wird beschränkt durch die
Frequenzgrenze an die Motorsteuerung geschickt.
Wählen Sie [3] PID-Prozess in Parameter 1-00 Regelverfahren, um den PID-Prozessregler zur Regelung mit Rückführung (z. B.
bei einer Druck- oder Durchflussregelung) zu verwenden. Die Parameter für Prozess-PID-Regelung befinden sich in Parame-
tergruppe 7-2* PID-Prozess Istw. und Parametergruppe 7-3* PID Prozessregler.
16 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 19
Produktübersicht Projektierungshandbuch
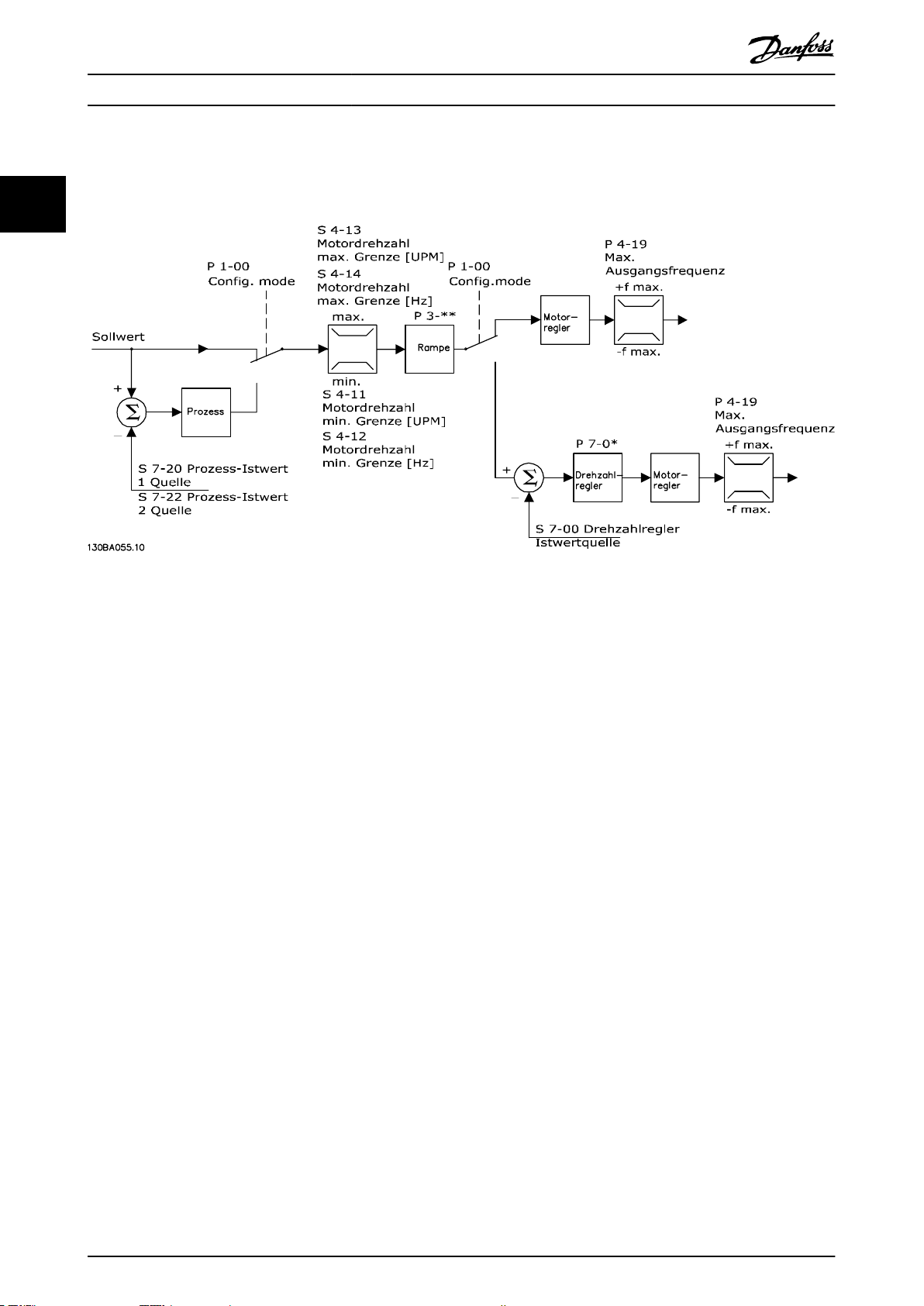
2.3.2 Regelungsstruktur bei Fluxvektor ohne Geber
Regelungsstruktur bei Konfigurationen mit Fluxvektor mit und ohne Geber.
Abbildung 2.7 Regelungsstruktur bei Fluxvektor ohne Geber
In der gezeigten Konfiguration ist Parameter 1-01 Steuerprinzip auf [2] Fluxvektor ohne Geber eingestellt und
Parameter 1-00 Regelverfahren auf [0] Ohne Rückführung. Der resultierende Sollwert aus dem Sollwertsystem wird
entsprechend der angegebenen Parametereinstellungen durch die Rampen- und Drehzahlbegrenzungen geführt.
2 2
Ein errechneter Drehzahlistwert wird zur Steuerung der Ausgangsfrequenz am PID-Drehzahlregler erzeugt.
Der Drehzahl-PID-Regler muss mit seinen Parametern P, I und D (Parametergruppe 7-0* PID Drehzahlregler) eingestellt werden.
Wählen Sie [3] PID-Prozess in Parameter 1-00 Regelverfahren, um den PID-Prozessregler zur Regelung mit Rückführung bei
einer Druck- oder Durchflussregelung zu verwenden. Die Parameter für Prozess-PID-Regelung befinden sich in Parameter-
gruppe 7-2* PID-Prozess Istw. und Parametergruppe 7-3* PID Prozessregler.
2.3.3 Regelungsstruktur bei Fluxvektor mit Geber
Abbildung 2.8 Regelungsstruktur bei Fluxvektor mit Geber
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 17
Page 20
e30bp046.12
Hand
On
Off
Auto
On
Reset
Fernsollwert
OrtSollwert
Auto-Betrieb
Hand-Betrieb
Umschalt. Hand/Auto
Ort
Fern
Sollwert
130BA245.11
Hand onHand o- und
Auto
on-LCP-Taste
P 3-13
Sollwertvorgabe
Produktübersicht
VLT® Decentral Drive FCD 302
In der gezeigten Konfiguration ist Parameter 1-01 Steuerprinzip auf [3] Fluxvektor mit Geber und
Parameter 1-00 Regelverfahren auf [1] Mit Drehgeber
22
eingestellt.
Nach Drücken der [Auto On]-Taste schaltet der Frequenzumrichter in den Auto-On-Betrieb und verwendet
standardmäßig den Fernsollwert. In diesem Modus lässt
sich der Frequenzumrichter über die Digitaleingänge bzw.
verschiedene serielle Schnittstellen (RS485, USB oder einen
In dieser Konfiguration wird der Motorregelung ein Istwertsignal von einem direkt am Motor montierten Drehgeber
zugeführt (eingestellt in Parameter 1-02 Drehgeber
Anschluss).
optionalen Feldbus) steuern. Mehr Informationen zum
Starten, Stoppen, Ändern von Rampen und Parametersätzen finden Sie in Parametergruppe 5-1* Digitaleingänge
oder Parametergruppe 8-5* Betr. Bus/Klemme.
Wählen Sie [1] Mit Drehgeber in Parameter 1-00 Regelver-
fahren, um den resultierenden Sollwert als Eingang für den
PID-Drehzahlregler zu benutzen. Die Parameter für den
PID-Drehzahlregler befinden sich in Parametergruppe 7-0*
PID Drehzahlregler.
Abbildung 2.9 LCP-Tasten
Wählen Sie [2] Drehmomentregler in
Parameter 1-00 Regelverfahren, um den resultierenden
Sollwert direkt als Drehmomentsollwert zu benutzen. Sie
können die Drehmomentregelung nur in der Konfiguration
[3] Fluxvektor mit Geber (Parameter 1-01 Steuerprinzip)
auswählen. Wenn dieser Modus gewählt wurde, erhält der
Sollwert die Einheit Nm. Er benötigt keinen Drehmomentistwert, da das Drehmoment anhand der Strommessung
des Frequenzumrichters berechnet wird.
Aktiver Sollwert und Regelverfahren
Der aktive Sollwert kann der Ortsollwert oder Fernsollwert
sein.
In Parameter 3-13 Sollwertvorgabe können Sie den
Ortsollwert durch Auswahl von [2] Ort permanent
auswählen.
Wählen Sie [1] Fern für die dauerhafte Einstellung des
Fernsollwerts. Durch Auswahl von [0] Umschalt. Hand/Auto
Wählen Sie [3] PID-Prozess in Parameter 1-00 Regelverfahren,
um die PID-Prozessregelung zur Regelung mit Rückführung
(Werkseinstellung) hängt die Sollwertvorgabe von der
aktiven Betriebsart (Hand oder Auto) ab.
z. B. der Drehzahl oder einer Prozessvariablen in der
gesteuerten Anwendung zu benutzen.
2.3.4 Hand-Steuerung [Hand On] und FernBetrieb [Auto On]
Sie können den Frequenzumrichter manuell über das LCP ()
oder aus der Ferne über Analog- und Digitaleingänge und
Feldbus bedienen. Falls in Parameter 0-40 [Hand On]-LCP
Taste, Parameter 0-41 [Off]-LCP Taste, Parameter 0-42 [Auto
On]-LCP Taste und Parameter 0-43 [Reset]-LCP Taste Aktiviert
eingestellt ist, kann der Frequenzumrichter über das LCP
mit den Tasten [Hand on] und [Off ] gesteuert werden. Sie
können Alarme über die [Reset]-Taste quittieren. Nach
Drücken der [Hand On]-Taste schaltet der Frequenzumrichter in den Hand-Betrieb und verwendet standardmäßig
den Ortsollwert, den Sie mithilfe der Navigationstasten am
LCP einstellen können.
Abbildung 2.10 Ortsollwertverarbeitung
18 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 21
Drehmoment
Drehzahl ohne/
mlt Ruckfuhrung
Skalieren
ouf UPM
oder Hz
PID-Prozess
mlt Ruckf.
OrtSollw.
OrtSollwert
P 1-00
Regelverfahren
P 1-05
Hand/Ort-Betrieb
Konguration
130BA246.10
Skalieren
ouf Nm
Skalieren
ouf
Prozesseinheit
Produktübersicht Projektierungshandbuch
2.3.5 Programmierung von
Drehmomentgrenze und Stopp
Abbildung 2.11 Fernsollwertverarbeitung
LCP-Tasten Parameter 3-13 Sollwert-
vorgabe
Hand Umschalt. Hand/Auto Hand-Betrieb
Hand⇒Off
(Aus)
Auto Umschalt. Hand/Auto Fern
Auto⇒Off
(Aus)
Alle Tasten Hand-Betrieb Hand-Betrieb
Alle Tasten Fern Fern
Tabelle 2.1 Bedingungen für Ort-/Fernsollwertverarbeitung
Umschalt. Hand/Auto Hand-Betrieb
Umschalt. Hand/Auto Fern
Aktiver Sollwert
Parameter 1-00 Regelverfahren definiert, welches Regelverfahren (d. h., Drehzahl, Drehmoment oder Prozessregelung)
bei Fern-Betrieb angewendet werden soll.
Parameter 1-05 Hand/Ort-Betrieb Konfiguration definiert,
welches Regelverfahren bei Hand (Ort)-Betrieb angewendet
werden soll. Einer von beiden ist immer aktiv, es können
jedoch nicht beide gleichzeitig aktiv sein.
Bei Anwendungen mit elektromechanischer Bremse, z. B.
Hubanwendungen, besteht die Möglichkeit, beim
Überschreiten der Drehmomentgrenzen z. B. während einer
Stopp-Rampe, den Frequenzumrichter zu stoppen und die
elektromechanische Bremse gleichzeitig zu aktivieren.
Das Beispiel unten zeigt, wie Sie die Klemmen des
Frequenzumrichters für diese Funktion programmieren
müssen.
Sie können die externe Bremse an Relais 1 oder 2
anschließen. Programmieren Sie Parameter 5-01 Klemme 27
Funktion auf [2] Motorfreilauf invers oder [3] Motorfreilauf/
Reset inverse, und programmieren Sie
Parameter 5-02 Klemme 29 Funktion auf [1] Ausgang und
[27] Mom.grenze u. Stopp.
Beschreibung
Ist ein Stoppbefehl über Klemme 18 aktiv, ohne dass sich
der Frequenzumrichter in der Drehmomentgrenze befindet,
so fährt der Frequenzumrichter den Motor über die
Rampenfunktion auf 0 Hz herunter.
Befindet sich der Frequenzumrichter an der Drehmomentgrenze und es wird ein Stoppbefehl aktiviert, so wird
Parameter 5-31 Klemme 29 Digitalausgang (auf [27]
Mom.grenze u. Stopp programmiert) aktiv. Das Signal an
Klemme 27 ändert sich von Logisch 1 zu Logisch 0, und
der Motor startet den Freilauf. Der Freilauf stellt sicher, dass
die Hubanwendung auch dann stoppt, wenn der Frequenzumrichter selbst das notwendige Drehmoment nicht
handhaben kann, etwa durch zu große Überlast.
Start/Stopp über Klemme 18
•
Parameter 5-10 Klemme 18 Digitaleingang [8] Start
Schnellstopp über Klemme 27
•
Parameter 5-12 Klemme 27 Digitaleingang [2]
Motorfreilauf (inv.)
Klemme 29 Ausgang
•
Parameter 5-02 Klemme 29 Funktion [1] Klemme 29
Funktion/Ausgang
Parameter 5-31 Klemme 29 Digitalausgang [27]
Mom.grenze u. Stopp
[0] Relaisausgang (Relais 1)
•
Parameter 5-40 Relaisfunktion [32] Mechanische
Bremse
2 2
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 19
Page 22
130BC997.10
P 5-40 [0] [32]
-
+
01 02 03
24 VDC
I max
0.1 Amp
2 3
1
Produktübersicht
VLT® Decentral Drive FCD 302
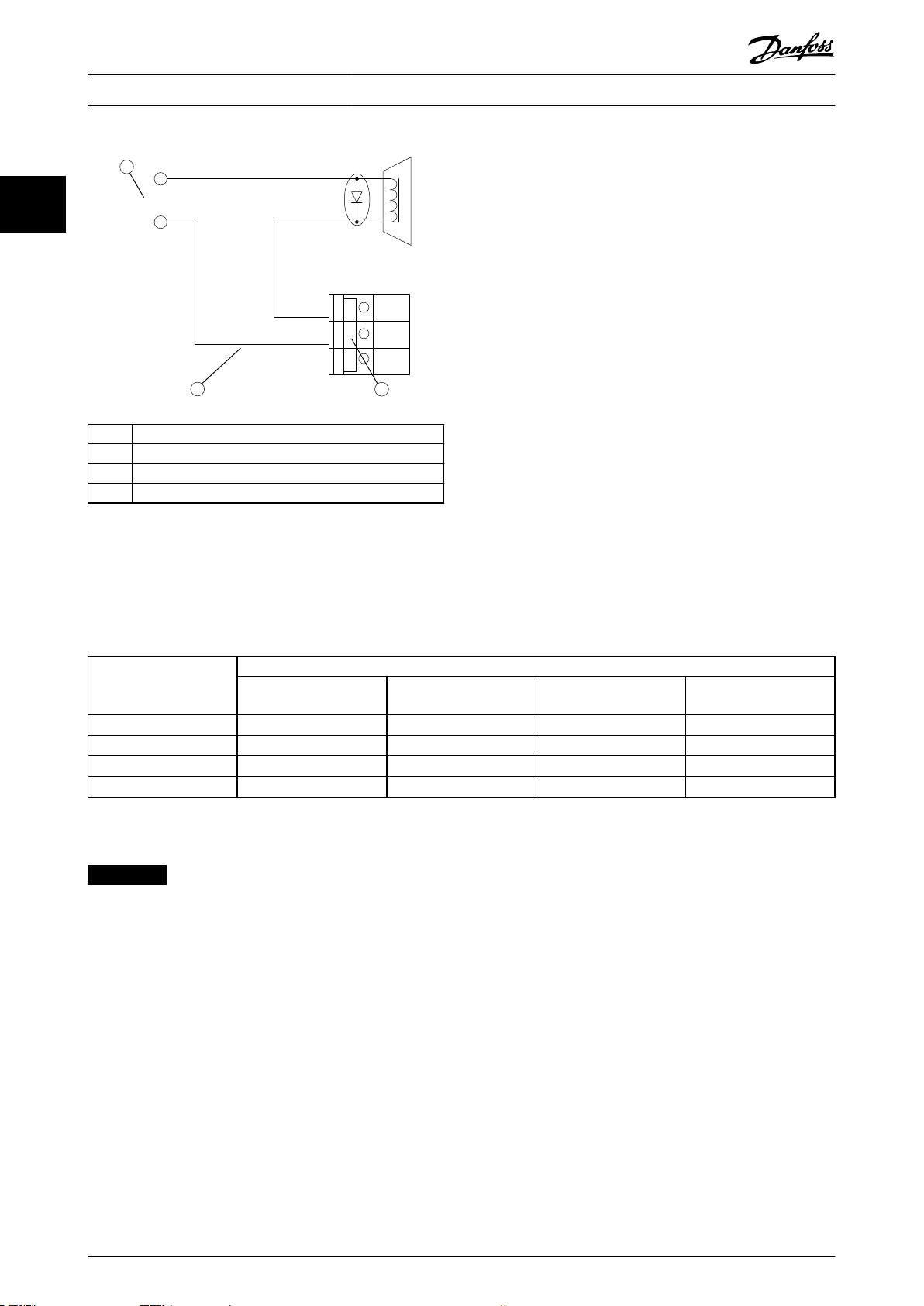
22
Pos. Beschreibung
1 Externe 24 V DC
2 Anschluss der mechanischen Bremse
3 Relais 1
Abbildung 2.12 Mechanische Bremssteuerung
2.4 PID-Regelung
2.4.1 PID-Drehzahlregler
Parameter 1-00 Regelverfahren
[0] Ohne Rückführung
[1] Mit Drehgeber – Aktiv – Aktiv
[2] Drehmoment – – –
[3] PID-Prozess –
Tabelle 2.2 Steuerkonfigurationen mit aktiver Drehzahlregelung
1) „Nicht aktiv“ bedeutet, dass der Modus verfügbar ist, aber die Drehzahlregelung in diesem Modus nicht aktiv ist.
Parameter 1-01 Steuerprinzip
U/f
Nicht aktiv
1)
+
VVC
Nicht aktiv
Nicht aktiv
Fluxvektor oh. Geber Fluxvektor mit
Geberrückführung
1)
1)
Aktiv –
Nicht aktiv
Aktiv Aktiv
1)
HINWEIS
Der PID-Drehzahlregler funktioniert mit der Standard-Parametereinstellung (Werkseinstellungen), Sie sollten ihn jedoch
zur Optimierung der Motorsteuerung anpassen. Insbesondere das Potenzial der beiden Flux-Motorsteuerprinzipien
hängt stark von der richtigen Einstellung ab.
20 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 23
M
3
96 97 9998
91 92 93 95
50
12
L1 L2L1PEL3
W PEVU
F1
L2
L3
N
PE
18
53
37
55
20
32
33
39
24 Vdc
130BA174.10
Produktübersicht Projektierungshandbuch
2.4.2 Für die Drehzahlregelung relevante Parameter
Parameter Funktionsbeschreibung
Parameter 7-00 Drehgeberrückführung Legt den Eingang fest, von dem der PID-Drehzahlregler den Istwert erhalten soll.
Parameter 30-83 Drehzahlregler P-Verstärkung Je höher der Wert, desto schneller die Regelung. Ein zu hoher Wert kann jedoch zu
Schwingungen führen.
Parameter 7-03 Drehzahlregler I-Zeit Eliminiert eine Abweichung von der stationären Drehzahl. Je niedriger der Wert, desto
schneller die Reaktion. Ein zu niedriger Wert kann jedoch zu Schwingungen führen.
Parameter 7-04 Drehzahlregler D-Zeit Liefert Zuwachs proportional zur Veränderungsrate des Istwerts. Die Einstellung 0
deaktiviert den Differentiator.
Parameter 7-05 Drehzahlregler D-Verstärk./
Grenze
Kommt es in einer Anwendung zu sehr schnellen Änderungen des Soll- oder Istwertes, so
kann der Differentiator rasch zum Überschwingen neigen. Er reagiert auf Änderungen der
Regelabweichung. Je schneller sich die Regelabweichung ändert, desto höher fällt auch die
Differentiationsverstärkung aus. Sie können die Differentiationsverstärkung daher
begrenzen, so dass sowohl eine angemessene Differentiationszeit bei langsamen
Änderungen als auch eine angemessene Verstärkung bei schnellen Änderungen eingestellt
werden kann.
Parameter 7-06 Drehzahlregler Tiefpassfilterzeit Ein Tiefpassfilter, der Schwingungen auf dem Istwertsignal dämpft und die stationäre
Leistung verbessert. Bei einer zu langen Filterzeit nimmt jedoch die dynamische Leistung
des PID-Drehzahlreglers ab.
Einstellungen von Parameter 7-06 Drehzahlregler Tiefpassfilterzeit aus der Praxis anhand der
Anzahl von Impulsen pro Umdrehung am Drehgeber (PPR):
Drehgeber-PPR Parameter 7-06 Drehzahlregler Tiefpassfilterzeit
512 10 ms
1024 5 ms
2048 2 ms
4096 1 ms
2 2
Tabelle 2.3 Für die Drehzahlregelung relevante Parameter
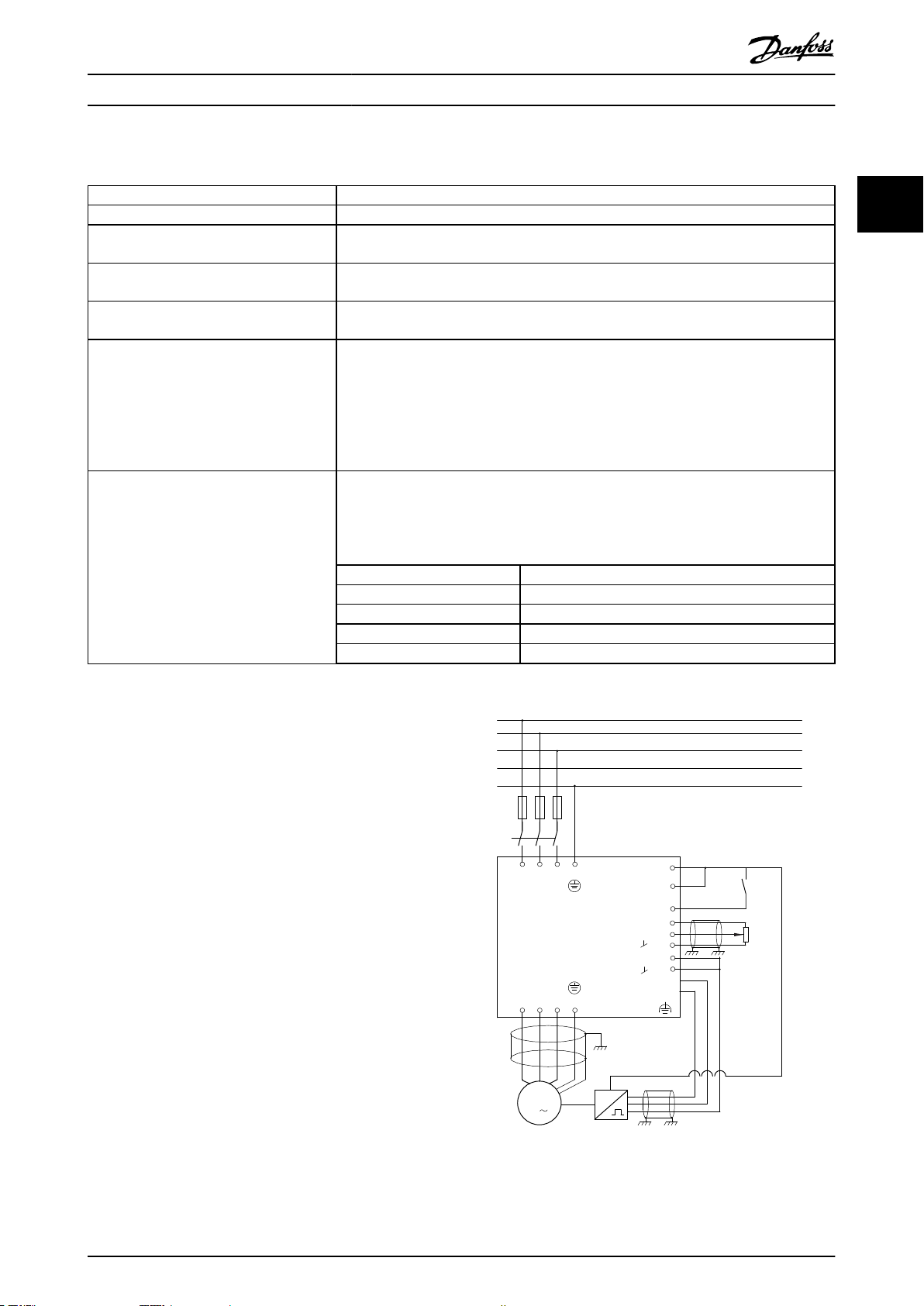
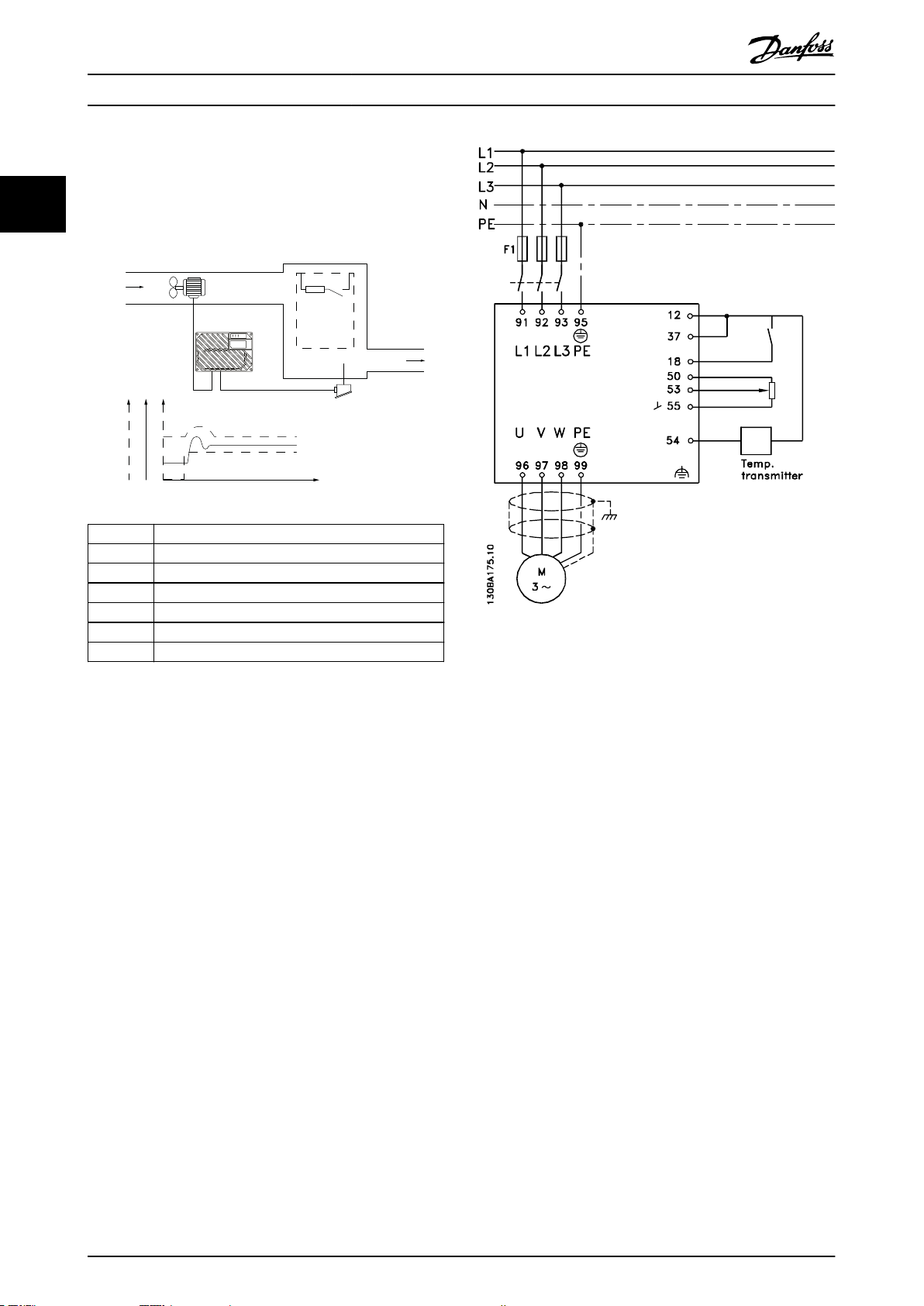
Beispiel zur Programmierung der Drehzahlregelung
In diesem Fall wird der PID-Drehzahlregler verwendet, um
eine konstante Motordrehzahl trotz veränderlicher
Motorlast aufrecht zu erhalten. Die erforderliche
Motordrehzahl wird über ein Potenziometer eingestellt, das
mit Klemme 53 verbunden ist. Der Drehzahlbereich liegt
zwischen 0 und 1500 U/min, was 0 bis 10 V über das
Potenziometer entspricht. Start und Stopp werden durch
einen mit Klemme 18 verbundenen Schalter geregelt. Der
PID-Drehzahlregler überwacht die aktuelle Drehzahl des
Motors mit Hilfe eines 24 V/HTL-Inkrementalgebers als
Istwertgeber. Der Istwertgeber (1024 Impulse pro
Umdrehung) ist mit den Klemmen 32 und 33 verbunden.
Abbildung 2.13 Beispiel - Anschlüsse für die
Drehzahlregelung
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 21
Page 24
Produktübersicht
VLT® Decentral Drive FCD 302
Folgendes ist in der genannten Reihenfolge zu programmieren (siehe Erläuterung der Einstellungen im VLT
®
AutomationDrive FC301/FC302 Programmierhandbuch).
In der nachfolgenden Liste wird davon ausgegangen, dass für alle anderen Parameter und Schalter die Werkseinstellung
22
verwendet wird.
Funktion Parameter Einstellung
1) Stellen Sie sicher, dass der Motor einwandfrei läuft. Gehen Sie wie folgt vor:
Stellen Sie die Motorparameter mithilfe der
Typenschilddaten ein.
Führen Sie eine automatische Motoranpassung durch. Parameter 1-29 Auto
2) Prüfen Sie, ob der Motor läuft und der Drehgeber ordnungsgemäß angeschlossen ist. Gehen Sie wie folgt vor:
Drücken Sie die [Hand On]-Taste am LCP. Prüfen Sie, ob
der Motor läuft und in welche Richtung er sich dreht
(nachfolgend „positive Richtung“ genannt).
Gehen Sie zu Parameter 16-20 Rotor-Winkel. Drehen Sie
den Motor langsam in die positive Richtung. Das Drehen
muss so langsam erfolgen (nur wenige U/min), dass Sie
feststellen können, ob der Wert in Parameter 16-20 Rotor-
Winkel zu- oder abnimmt.
Wenn Parameter 16-20 Rotor-Winkel abnimmt, ändern Sie
die Drehgeberrichtung in Parameter 5-71 Kl. 32/33
Drehgeber Richtung.
3) Stellen Sie sicher, dass die Grenzwerte des Frequenzumrichters auf sichere Werte eingestellt sind
Stellen Sie zulässige Grenzwerte für die Sollwerte ein. Parameter 3-02 Minim
Stellen Sie sicher, dass die Rampeneinstellungen
innerhalb des Leistungsbereichs des Frequenzumrichters
liegen und zulässigen Spezifikationen für den
Anwendungsbetrieb entsprechen.
Stellen Sie zulässige Grenzwerte für die Motordrehzahl
und -frequenz ein.
4) Konfigurieren Sie die Drehzahlregelung und wählen Sie das Motorsteuerprinzip.
Aktivierung der Drehzahlregelung. Parameter 1-00 Regelv
Auswahl des Motorsteuerprinzips. Parameter 1-01 Steuer
5) Konfigurieren und skalieren Sie den Sollwert für die Drehzahlregelung.
Stellen Sie Analogeingang 53 als Sollwertquelle ein. Parameter 3-15 Variab
Skalieren Sie den Analogeingang 53 von 0 U/min (0 V)
bis 1500 U/min (10 V).
6) Konfigurieren Sie das Signal des 24V/HTL-Drehgebers als Istwert für die Motorsteuerung und die Drehzahlregelung.
Stellen Sie Digitaleingang 32 und 33 als Drehgebereingänge ein.
Wählen Sie Klemme 32/33 als Motor-Istwert. Parameter 1-02 Drehg
Parametergruppe 1-2*
Motordaten
m. Motoranpassung
– Stellen Sie einen positiven Sollwert ein.
Parameter 16-20 Rotor
-Winkel
Parameter 5-71 Kl.
32/33 Drehgeber
Richtung
aler Sollwert
Parameter 3-03 Maxi
maler Sollwert
Parameter 3-41 Ramp
enzeit Auf 1
Parameter 3-42 Ramp
enzeit Ab 1
Parameter 4-11 Min.
Drehzahl [UPM]
Parameter 4-13 Max.
Drehzahl [UPM]
Parameter 4-19 Max.
Ausgangsfrequenz
erfahren
prinzip
ler Sollwert 1
Parametergruppe 6-1*
Analogeingang 1
Parameter 5-14 Klem
me 32 Digitaleingang
Parameter 5-15 Klem
me 33 Digitaleingang
eber Anschluss
Siehe Motor-Typenschild.
[1] Aktivieren Sie eine komplette AMA.
(Schreibgeschützter Parameter) Anmerkung: Ein
ansteigender Wert läuft bei 65535 über und startet
erneut bei 0.
[1] Links (falls Parameter 16-20 Rotor-Winkel abnimmt).
0 U/min (Werkseinstellung).
1500 U/min (Werkseinstellung).
Werkseinstellung.
Werkseinstellung.
0 U/min (Werkseinstellung).
1500 U/min (Werkseinstellung).
60 Hz (Werkseinstellung 132 Hz).
[1] Mit Drehgeber.
[3] Fluxvektor mit Geber.
Nicht notwendig (Werkseinstellung).
Nicht notwendig (Werkseinstellung).
[0] Ohne Funktion (Werkseinstellung).
Nicht notwendig (Werkseinstellung).
22 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 25
Produktübersicht Projektierungshandbuch
Funktion Parameter Einstellung
Wählen Sie Klemme 32/33 als PID-Drehzahlrückführung. Parameter 7-00 Drehg
eberrückführung
7) Stellen Sie die Parameter für die PID-Drehzahlregelung ein.
Verwenden Sie ggf. die Einstellungsanweisungen oder
stellen Sie manuell ein.
8) Fertig!
Speichern Sie die Parametereinstellung im LCP. Parameter 0-50 LCP-
Tabelle 2.4 Drehzahlregelungseinstellungen
Parametergruppe
7-0*PID Drehzahlregler
Kopie
Nicht notwendig (Werkseinstellung).
Siehe Anweisungen in Kapitel 2.4.3 Optimieren des PID-
Drehzahlreglers.
[1] Speichern in LCP.
2 2
2.4.3 Optimieren des PID-Drehzahlreglers
Die folgenden Einstellungsanweisungen sind empfehlenswert, wenn in Anwendungen mit überwiegend träger
Last (mit geringer Reibung) eines der Flux-Motorsteuerprinzipien angewendet wird.
Der Wert von Parameter 30-83 Drehzahlregler P-Verstärkung
hängt von der Gesamtträgheit von Motor und Last ab. Die
ausgewählte Bandbreite kann anhand der folgenden
Formel berechnet werden:
Par . 7 − 02 =
Gesamt−Trä gheit k gm2xPar. . 1 − 25
Par . 1 − 20x9550
xBandbreite
rad/ s
HINWEIS
Parameter 1-20 Motornennleistung [kW] ist die
Motorleistung in [kW] (d. h. für die Berechnung 4 kW
anstatt 4000 W verwenden).
Ein praktischer Wert für die Bandbreite ist 20 rad/s. Prüfen
Sie das Ergebnis der Berechnung von
Parameter 30-83 Drehzahlregler P-Verstärkung mit der
folgenden Formel (nicht erforderlich bei einem hochauflösenden Istwert wie z. B. einem SinCos-Istwert):
Ein guter Ausgangswert für Parameter 7-06 Drehzahlregler
Tiefpassfilterzeit ist 5 ms (eine niedrigere Drehgeberauflösung erfordert einen höheren Filterwert). Normalerweise
ist ein max. Drehmoment-Rippel von 3 % zulässig. Für
Inkrementalgeber finden Sie die Drehgeberauflösung in
Parameter 5-70 Kl. 32/33 Drehgeber Aufl. [Pulse/U] (24V HTL
bei Standard-Frequenzumrichter) oder
Parameter 17-11 Inkremental Auflösung [Pulse/U] (5 V TTL für
VLT® Encoder Input MCB 102).
Generell wird die passende Obergrenze von
Parameter 30-83 Drehzahlregler P-Verstärkung anhand der
Drehgeberauflösung und der Istwert-Filterzeit ermittelt.
Andere Faktoren in der Anwendung können den
Parameter 30-83 Drehzahlregler P-Verstärkung jedoch auf
einen niedrigeren Wert begrenzen.
Zum Minimieren von Übersteuerung kann
Parameter 7-03 Drehzahlregler I-Zeit (je nach Anwendung)
auf ca. 2,5 Sek. eingestellt werden.
Parameter 7-04 Drehzahlregler D-Zeit sollte auf 0 eingestellt
sein, bis alle anderen Einstellungen vorgenommen wurden.
Sie können ggf. experimentieren und diese Einstellung in
kleinen Schritten ändern.
Par . 7 − 02
0 . 01x4xGeber−Auflösung xPar . 7 − 06
MAX
=
2xπ
xMax.DrehmomentRippel %
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 23
Page 26
P 7-30
normal/invers
PID
P 7-38
*(-1)
Vorsteuerung
Sollwert−
verarbei−
tung
Istwert
verarbei−
tung
% [Einheit]]
% [Einheit]]
%
[Einheit]
%
[Drehzahl]
Drehzahl−
bereich
P 4-10
Motordrehrichtung
Zu
Motorsteuerung
Prozess H192PID
130BA178.10
_
+
0%
-100%
100%
0%
-100%
100%
−
Produktübersicht
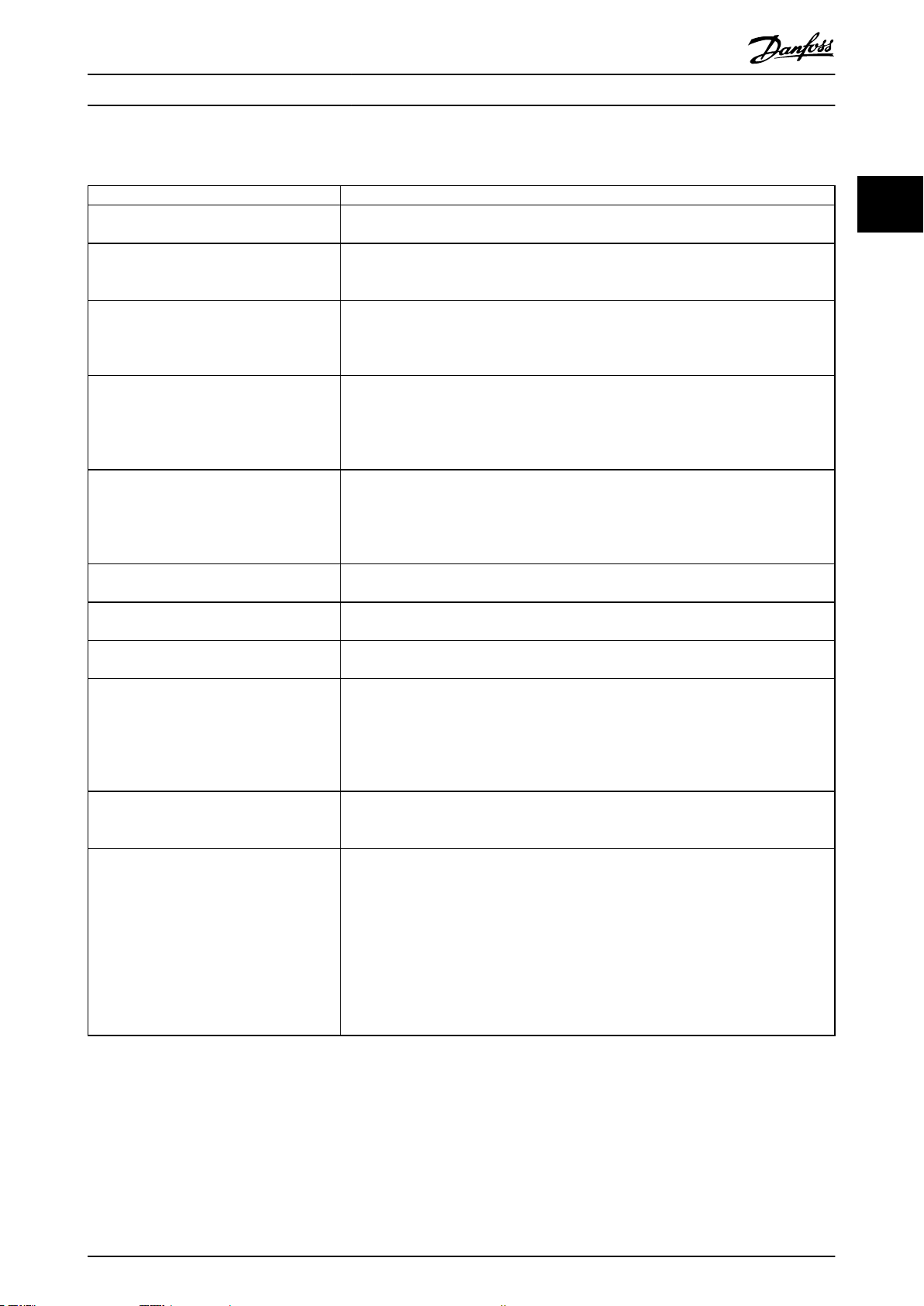
2.4.4 PID-Prozessregler
VLT® Decentral Drive FCD 302
22
Temperatur, Fluss) und vom angeschlossenen Motor über eine Pumpe, einen Lüfter oder ein anderes Gerät beeinflusst
werden können.
Tabelle 2.5 zeigt die Konfigurationen, bei denen die Prozessregelung möglich ist. Wenn ein Flux-Motorsteuerprinzip
verwendet wird, ist zu beachten, dass Sie auch die Parameter für den PID-Drehzahlregler einstellen müssen. Lesen Sie
Kapitel 2.3 Regelungsstrukturen, um zu sehen, wo die Drehzahlregelung aktiviert ist.
Mit der PID-Prozessregelung lassen sich Anwendungsparameter steuern, die mit einem Sensor messbar sind (Druck,
Parameter 1-00 Regelverfahren Parameter 1-01 Steuerprinzip
U/f
[3] PID-Prozess – PID-Prozess Prozess und
VVC
+
Fluxvektor oh.
Geber
Fluxvektor mit
Geberrückführung
Prozess und Drehzahl
Drehzahl
Tabelle 2.5 Einstellungen für PID-Prozessregelung
HINWEIS
Die PID-Prozessregelung funktioniert mit der Standard-Parametereinstellung, sollte jedoch zur Optimierung der
Anwendungssteuerung angepasst werden. Insbesondere das Potenzial der beiden Flux-Motorsteuerprinzipien hängt
stark von der richtigen Einstellung der PID-Drehzahlregelung (vor dem Einstellen der PID-Prozessregelung) ab.
Abbildung 2.14 Diagramm für PID-Prozessregler
24 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 27
Produktübersicht Projektierungshandbuch
2.4.5 Relevante Parameter für die Prozessregelung
Parameter Funktionsbeschreibung
Parameter 7-20 PID-Prozess Istwer t 1 Legt den Eingang (Analog oder Puls) fest, von dem die PID-Prozessregelung den Istwert
erhalten soll.
Parameter 7-22 PID-Prozess Istwer t 2 Gegebenenfalls: Legt fest, ob (und von woher) die PID-Prozessregelung ein zusätzliches
Istwertsignal erhält. Wenn Sie einen weiteren Istwertanschluss ausgewählt haben, werden
die beiden Istwertsignale vor der Verwendung im PID-Prozessregler addiert.
Parameter 7-30 Auswahl Normal-/InversRegelung
Parameter 7-31 PID-Prozess Anti-Windup Die Anti-Windup-Funktion bewirkt, dass im Falle des Erreichens einer Frequenz- oder
Parameter 7-32 PID-Prozess Reglerstart bei In einigen Anwendungen kann das Erreichen der gewünschten Drehzahl bzw. des
Parameter 7-33 PID-Prozess P-Verstärkung Je höher der Wert, desto schneller die Regelung. Ein zu hoher Wert kann jedoch zu
Parameter 7-34 PID-Prozess I-Zeit Eliminiert eine Abweichung von der stationären Drehzahl. Je niedriger der Wert, desto
Parameter 7-35 PID-Prozess D-Zeit Liefert Zuwachs proportional zur Veränderungsrate des Istwerts. Die Einstellung 0
Parameter 7-36 PID-Prozess D-Verstärkung/
Grenze
Parameter 7-38 PID-Prozess Vorsteuerung In Anwendungen mit einer ausgeglichenen und in etwa linearen Beziehung zwischen dem
Parameter 5-54 Pulseingang 29 Filterzeit
(Pulseingang 29), Parameter 5-59 Pulseingang
33 Filterzeit (Pulseingang 33),
Parameter 6-16 Klemme 53 Filterzeit (Analog-
eingang 53), Parameter 6-26 Klemme 54
Filterzeit (Analogeingang 54)
Im Betriebsmodus [0] Normal reagiert die Prozessregelung mit einer Erhöhung der
Motordrehzahl, wenn der Istwert den Sollwert unterschreitet. In der gleichen Situation,
jedoch im Betriebsmodus [1] Invers, reagiert die Prozessregelung stattdessen mit einer
abnehmenden Motordrehzahl.
Drehmomentgrenze der Integrator auf eine Verstärkung eingestellt wird, die der aktuellen
Frequenz entspricht. So vermeiden Sie, dass bei einer Abweichung, die mit einer Drehzahländerung ohnehin nicht auszugleichen wäre, weiter integriert wird. Sie können die
Funktion durch Auswahl von [0] Aus deaktivieren.
Sollwerts lange dauern. Bei solchen Anwendungen kann es von Vorteil sein, eine
Motorfrequenz festzulegen, auf die der Frequenzumrichter den Motor ungeregelt
hochfahren soll, bevor die Prozessregelung aktiviert wird. Dies erfolgt durch Festlegen
eines Werts für PID-Prozess Reglerstart in Parameter 7-32 PID-Prozess Reglerstart bei.
Schwingungen führen.
schneller die Reaktion. Ein zu niedriger Wert kann jedoch zu Schwingungen führen.
deaktiviert den Differentiator.
Kommt es in einer Anwendung zu sehr schnellen Änderungen des Soll- oder Istwertes, so
kann der Differentiator rasch zum Überschwingen neigen. Er reagiert auf Änderungen der
Regelabweichung. Je schneller sich die Regelabweichung ändert, desto höher fällt auch die
Differentiationsverstärkung aus. Sie können die Differentiationsverstärkung daher
begrenzen, um eine angemessene Differentiationszeit für langsame Änderungen
einzustellen.
Sollwert und der dafür erforderlichen Motordrehzahl können Sie die dynamische Leistung
der PID-Prozessregelung gegebenenfalls mit Hilfe des Vorsteuerungsfaktors steigern.
Sofern beim Istwertsignal Rippelströme bzw. -spannungen auftreten, können diese mit
Hilfe eines Tiefpassfilters gedämpft werden. Diese Zeitkonstante ist ein Ausdruck für eine
Drehzahlgrenze der Rippel, die beim Istwertsignal auftreten.
Beispiel: Ist der Tiefpassfilter auf 0,1 s eingestellt, so ist die Eckfrequenz 10 RAD/s,
(Kehrwert von 0,1), was (10/(2 x π)) = 1,6 Hz entspricht. Dies führt dazu, dass alle Ströme/
Spannungen, die um mehr als 1,6 Schwingungen pro Sekunde schwanken, herausgefiltert
werden. Es wird also nur ein Istwertsignal geregelt, das mit einer Frequenz (Drehzahl) von
unter 1,6 Hz schwankt.
Der Tiefpassfilter verbessert die stationäre Leistung, bei einer zu langen Filterzeit nimmt
jedoch die dynamische Leistung der PID-Prozessregelung ab.
2 2
Tabelle 2.6 Die folgenden Parameter sind für die Prozessregelung relevant
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 25
Page 28
130BC966.10
5
6
1
100kW
n °CW
2
3
4
ON
WARNING
ALARM
Bus MS NS2NS1
Produktübersicht
2.4.6 Beispiel für PID-Prozessregler
VLT® Decentral Drive FCD 302
22
einer Lüftungsanlage.
Pos. Beschreibung
1 Kaltluft
2 Wärmeerzeugung
3 Temperaturtransmitter
4 Temperatur
5 Gebläsedrehzahl
6 Wärme
Abbildung 2.16 Zweileiter-Transmitter
1. Start/Stopp über Schalter an Klemme 18.
Abbildung 2.15 ist ein Beispiel für den PID-Prozessregler in
Abbildung 2.15 PID-Prozessregelung in einer Lüftungsanlage
2. Temperatursollwert über Potenziometer (-5 bis
35 °C, 0 bis 10 V DC) an Klemme 53.
3.
In der Lüftungsanlage soll mit Hilfe eines 0- bis 10-VPotenziometers die Temperatur zwischen -5 und +35 °C
einstellbar sein. Die eingestellte Temperatur soll mit Hilfe
Temperaturistwert über Transmitter (-10 bis 40 °C,
4 bis 20 mA) an Klemme 54. Schalter S202 ist auf
EIN (Stromeingang) gestellt.
der Prozessregelung konstant gehalten werden.
Dabei wird mit steigender Temperatur auch die Drehzahl
des Gebläses erhöht, um einen stärkeren Luftstrom zu
erzeugen. Sinkt die Temperatur, verringert sich die
Drehzahl. Der Transmitter wird als Temperatursensor mit
einem Funktionsbereich von -10 bis +40 °C, 4-20 mA,
verwendet. Minimale/maximale Drehzahl 300/1500 UPM.
26 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 29
Produktübersicht Projektierungshandbuch
2.4.7 Programmierreihenfolge
Funktion Parameter Einstellung
Initialisieren Sie den Frequenzumrichter Parameter 14-22
Betriebsart
1) Einstellen der Motorparameter.
Stellen Sie die Motorparameter anhand der
Typenschilddaten ein.
Führen Sie eine komplette AMA aus. Parameter 1-29
2) Prüfen Sie, ob der Motor in der richtigen Richtung läuft.
Bei Anschluss des Motors an einen Frequenzumrichter mit einfacher Phasenreihenfolge wie U-U, V-V; W-W dreht sich die Motorwelle bei
Sicht auf das Wellenende im Rechtslauf.
Drücken Sie die [Hand on] LCP-Taste. Prüfen Sie die Wellendrehrichtung, indem Sie einen manuellen Sollwert anlegen.
Falls sich der Motor in die falsche Richtung
dreht:
1. Ändern Sie die Motordrehrichtung in
Parameter 4-10 Motor Drehrichtung.
2. Schalten Sie das Netz aus - warten Sie
auf
das auf Entladen der Zwischenkreisspannung - tauschen Sie zwei der
Motorphasen.
Stellen Sie das Regelverfahren ein. Parameter 1-00
Stellen Sie die Hand/Ort-Betrieb Konfiguration ein.
3) Konfigurieren Sie den Sollwert, d. h. den Bereich der Sollwertverarbeitung. Stellen Sie die Skalierung des Analogeingangs in
Parametergruppe 6-** Analoge Ein-/Ausg. ein.
Stellen Sie Soll-/Istwert-Einheiten ein.
•
Stellen Sie den min. Sollwert ein
•
(10 °C):
Stellen Sie den maximalen Sollwert ein
•
(80 °C):
Wird der Einstellwert durch einen Festwert
(Arrayparameter) bestimmt, setzen Sie
andere Sollwertquellen auf Keine Funktion.
4) Stellen Sie Grenzen für den Frequenzumrichter ein:
Stellen Sie die Rampenzeiten auf einen
ungefähren Wert von 20 s ein.
Parametergruppe 1-2*
Motordaten
Autom.
Motoranpassung
Parameter 4-10
Motor
Drehrichtung
Regelverfahren
Parameter 1-05
Hand/OrtBetrieb
Konfiguration
Parameter 3-01
Soll-/Istwerteinheit
Parameter 3-02
Minimaler
Sollwert
Parameter 3-03
Maximaler
Sollwert
Parameter 3-10
Festsollwert
Parameter 3-41
Rampenzeit Auf
1
Parameter 3-42
Rampenzeit Ab
1
[2] Initialisierung - Frequenzumrichter aus- und wieder einschalten - Reset
drücken.
Siehe Motor-Typenschild.
[1] Aktivieren Sie eine komplette AMA.
Wählen Sie die richtige Drehrichtung der Motorwelle.
[3] Prozess.
[0] Ohne Rückführung.
[60] °C Displayeinheit.
-5 °C.
35 °C.
[0] 35%.
Sollw. =
Parameter 3-14 Relativer Festsollwert bis Parameter 3-18 Relativ. Skalierungssollw. Ressource, [0] = Keine Funktion
20 s.
20 s.
Par. . 3 − 10
100
0
× Par. . 3 − 03 − par. . 3 − 02 = 24, 5°C
2 2
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 27
Page 30
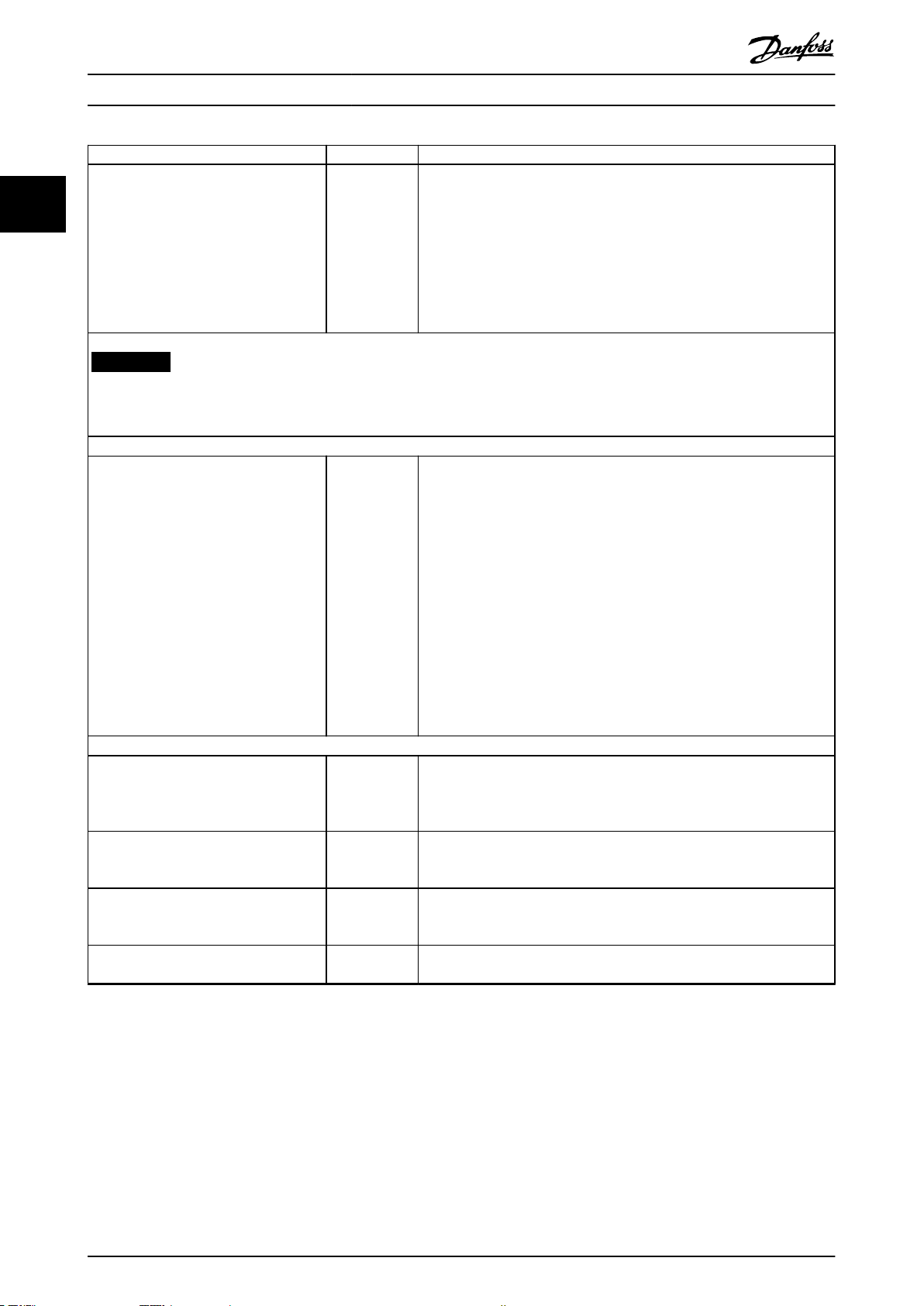
Produktübersicht
Funktion Parameter Einstellung
Stellen Sie die min. Drehzahlgrenzen
•
ein.
22
Stellen Sie die maximale Motordreh-
•
zahlgrenze ein.
Stellen Sie die maximale Ausgangs-
•
frequenz ein.
Stellen Sie S201 oder S202 auf die gewünschte Analogeingangsfunktion (Volt (V) oder Milliampere (l)) ein.
VLT® Decentral Drive FCD 302
Parameter 4-11
Min. Drehzahl
[UPM]
Parameter 4-13
Max. Drehzahl
[UPM]
Parameter 4-19
Max. Ausgangsfrequenz
300 U/min.
1500 U/min.
60 Hz.
HINWEIS
Schalter sind sehr empfindlich - Schalten Sie den Frequenzumrichter aus und wieder ein und behalten Sie dabei
Werkseinstellung V bei.
5) Skalieren Sie die für Sollwert und Istwert verwendeten Analogeingänge.
Stellen Sie Klemme 53 Skal. Min.
•
Spannung ein.
Stellen Sie Klemme 53 Skal. Max.-
•
Spannung ein.
Stellen Sie Klemme 54 Skal. Min.-Istwert
•
ein.
Stellen Sie Klemme 54 Skal. Max.-
•
Istwert ein.
Legen Sie den Istwertanschluss fest.
•
6) Grundlegende PID-Einstellungen.
PID-Prozess normal/invers Parameter 7-30
PID-Prozess Anti-Windup. Parameter 7-31
PID-Prozess Reglerstartdrehzahl. Parameter 7-32
LCP-Kopie. Parameter 0-50
Parameter 6-10
Klemme 53 Skal.
Min.Spannung
Parameter 6-11
Klemme 53 Skal.
Max.Spannung
Parameter 6-24
Klemme 54 Skal.
Min.-Soll/Istwert
Parameter 6-25
Klemme 54 Skal.
Max.-Soll/Istwert
Parameter 7-20
PID-Prozess
Istwert 1
Auswahl
Normal-/InversRegelung
PID-Prozess
Anti-Windup
PID-Prozess
Reglerstart bei
LCP-Kopie
0 V.
10 V.
-5 °C.
35 °C.
[2] Analogeingang 54.
[0] Normal.
[1] Ein.
300 U/min.
[1] Speichern in LCP.
Tabelle 2.7 Beispiel für Konfiguration des PID-Prozessreglers
28 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 31

Produktübersicht Projektierungshandbuch
2.4.8 Optimierung des Prozessreglers
Die Grundeinstellungen sind nun vorgenommen worden,
sodass jetzt nur noch eine Optimierung der Proportionalverstärkung, der Integrationszeit und der
Differentiationszeit (Parameter 7-33 PID-Prozess P-
Verstärkung, Parameter 7-34 PID-Prozess I-Zeit,
Parameter 7-35 PID-Prozess D-Zeit) aussteht. Dies kann bei
den meisten Prozessen durch Befolgen der nachstehenden
Anweisungen geschehen:
1. Starten Sie den Motor.
2. Stellen Sie Parameter 7-33 PID-Prozess P-
Verstärkung auf 0,3 und erhöhen Sie den Wert
anschließend, bis das Istwertsignal gleichmäßig
zu schwingen beginnt. Verringern Sie dann den
Wert, bis das Istwertsignal stabilisiert ist. Senken
Sie die Proportionalverstärkung jetzt um 40-60 %.
3. Stellen Sie Parameter 7-34 PID-Prozess I-Zeit auf 20
s ein und setzen Sie den Wert anschließend
herab, bis das Istwertsignal gleichmäßig zu
schwingen beginnt. Erhöhen Sie die Integrationszeit, bis sich das Istwertsignal stabilisiert,
gefolgt von einer Erhöhung um 15-50 %.
4. Verwenden Sie Parameter 7-35 PID-Prozess D-Zeit
nur bei sehr schnellen Systemen (Differentiationszeit). Der typische Wert ist das Vierfache der
eingestellten Integrationszeit. Sie sollten den
Differentiator nur benutzen, wenn Proportionalverstärkung und Integrationszeit optimal
eingestellt sind. Stellen Sie sicher, dass
Schwingungen des Istwertsignals durch den
Tiefpassfilter des Istwertsignals ausreichend
gedämpft werden.
HINWEIS
Bei Bedarf können Sie Start/Stopp mehrfach aktivieren,
um eine konstante Schwankung des Istwertsignals zu
erzielen.
2.4.9 Ziegler-Nichols-Verfahren
Zum Einstellen der PID-Regler des Frequenzumrichters
empfiehlt Danfoss das Ziegler-Nichols-Verfahren.
HINWEIS
Verwenden Sie das Ziegler-Nichols-Verfahren nicht für
Anwendungen, die durch die Schwingungen von nicht
vollkommen stabilen Steuerungseinstellungen Schaden
nehmen können.
Die Kriterien zum Einstellen der Parameter basieren auf der
Auswertung des Systems an der Stabilitätsgrenze anstelle
der Ermittlung einer Schrittreaktion. Erhöhen Sie die
Proportionalverstärkung, bis Sie eine kontinuierliche
Schwingung (gemessen am Istwert) beobachten, d. h., bis
das System annähernd stabil ist. Die entsprechende
Verstärkung (Ku) wird als kritische Verstärkung bezeichnet,
bei der die Schwingung erreicht wird. Die Schwingperiode
(Pu) (als kritische Periodendauer bezeichnet) legen Sie
gemäß Abbildung 2.17 fest. Messen sollten Sie sie, wenn
die Amplitude der Schwingung klein ist.
1. Wählen Sie nur eine proportionale Steuerung, d.
h., die Integrationszeit wird auf den maximalen
Wert eingestellt, während die Differentiationszeit
auf Null gesetzt wird.
2. Erhöhen Sie den Wert der Proportionalverstärkung, bis der Punkt der Instabilität
(kontinuierliche Schwingungen) und somit der
kritische Verstärkungswert Ku erreicht ist.
3. Messen Sie den Schwingungszeitraum, um die
kritische Zeitkonstante Pu zu erhalten.
4. Berechnen Sie anhand Tabelle 2.8 die erforder-
lichen PID-Reglerparameter.
Der Prozessoperator kann die abschließende Einstellung
der Steuerung wiederholt durchführen, um eine zufriedenstellende Steuerung zu erzielen.
2 2
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 29
Page 32

130BA183.10
y(t)
t
P
u
Speed
Coast inverse (27)
Coast inverse
Safe
torque off
130BC985.10
NVR B03B04P B02 B01
2012G B07B0820 B06 B05
372013 B11B1237 B10 B09
1212
12
121212 55 53
271918
33
3229 50 54
202020 202020 55 42
Produktübersicht
VLT® Decentral Drive FCD 302
2.5.2 DIP-Schalter
22
2.5.3 Einfaches Verdrahtungsbeispiel
Verbinden Sie die Klemmen 27 und 37 wie in
Abbildung 2.18 gezeigt mit Klemmen 12/13 (+24 V).
Werkseinstellungen:
27 = [2] Motorfreilauf invers Parameter 5-10 Klemme 18
Digitaleingang
37 = Safe Torque Off invers
Abbildung 2.17 Annähernd stabiles System
Regelungstyp Proportional-
verstärkung
PI-Regelung 0,45 x K
Exakte PIDRegelung
Geringe PIDÜbersteuerung
Tabelle 2.8 Ziegler-Nichols-Verfahren für Regler
0,6 x K
0,33 x K
u
u
u
Integrationszeit
0,833 x P
0,5 x P
u
0,5 x P
u
u
Differentiationszeit
–
0,125 x P
0,33 x P
u
u
Steuerleitungen und -klemmen
2.5
2.5.1 Führung von Steuerleitungen
Die externe 24-V-DC-Versorgung dient als Niederspannungsversorgung der Steuerkarte sowie etwaiger
eingebauter Optionskarten. Dies ermöglicht den vollen
Betrieb des LCP (einschl. Parametereinstellung) ohne
Netzanschluss.
HINWEIS
Beachten Sie, dass eine Spannungswarnung erfolgt,
wenn die 24 V DC angeschlossen wurden; es erfolgt
jedoch keine Abschaltung.
WARNUNG
GEFAHR EINES STROMSCHLAGS
Ohne galvanische Trennung (gemäß PELV) besteht an
den Steuerklemmen Stromschlaggefahr. Das Nichtbeachten der Empfehlungen kann zum Tod oder zu
schweren Verletzungen führen!
Setzen Sie zur Gewährleistung ordnungs-
•
gemäßer galvanischer Trennung (gemäß PELV)
eine 24-V-DC-Versorgung vom Typ PELV ein.
Abbildung 2.18 Einfaches Verdrahtungsbeispiel
30 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 33

130BC384.10
3-phase
power
input
Mechanical
brake
+10 V DC
-10 V DC+10 V DC
0/4-20 mA
-10 V DC+10 V DC
0/4-20 mA
91 (L1)
92 (L2)
93 (L3)
95 (PE)
122(MBR+)
123(MBR-)
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN)
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
19 (D IN)
20 (COM D IN)
27 (D IN/OUT)
29 (D IN/OUT)
24V
OV
32 (D IN)
33 (D IN)
37 (D IN)
S201
S202
ON/I=0-20mA
OFF/U=0-10V
P 5-00
24 V (NPN)
0 V (PNP)
24 V (NPN)
0 V (PNP)
24 V (NPN)
0 V (PNP)
24 V (NPN)
0 V (PNP)
24 V (NPN)
0 V (PNP)
24 V (NPN)
0 V (PNP)
Switch mode
power supply
10 V DC
15 mA
24 V DC
600 mA
(U) 96
(U) 97
(W) 98
(PE) 99
Motor
Brake
resistor
(R+) 82
(R-) 81
Relay1
Relay2
03
02
01
06
05
04
240 V AC, 2A
240 V AC, 2A
400 V AC, 2A
Analog output
0/4–20 mA
(COM A OUT) 39
(A OT) 42
ON=Terminated
OFF=Open
S801
S801
GX
(N RS485) 69
(P RS485) 68
5V
RS485
Interface
(COM RS485) 61
(PNP) = Source
(NPN) = Sink
RS485
ON
1 2
ON
1 2
ON
1 2
0 V
VCXA
PROFIBUS
interface
GND1
GND1
RS485
66
63
62
67
GX
Produktübersicht Projektierungshandbuch
2.5.4 Elektrische Installation, Steuerleitungen
2 2
Abbildung 2.19 Elektrische Klemmen ohne Optionen
A = analog, D = digital
Klemme 37 wird für die Funktion Safe Torque Off genutzt.
Relais 2 hat keine Funktion, wenn der Frequenzumrichter einen Ausgang für eine mechanische Bremse hat.
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 31
Page 34

130BC987.10
Safe
torque off
Safe
torque off
PNP (Source)
Digital input wiring
NPN (Sink)
Digital input wiring
NVR B03B04P B02 B01
2012G B07B0820 B06 B05
372013 B11B1237 B10 B09
1212
12
121212 55 53
271918 333229 50 54
202020 202020 55 42
NVR B03B04P B02 B01
2012G B07B0820 B06 B05
372013 B11B1237 B10 B09
1212
12
121212 55 53
271918
33
3229 50 54
202020 202020 55 42
3
7
2
0
1
3
B
1
1
B
1
2
3
7
B
1
0
B
0
9
2
0
1
2
G
B
0
7
B
0
8
2
0
B
0
6
B
0
5
N
V
R
B
0
3
B
0
4
P
B
0
2
B
0
1
Z
A
/Z
B
+5V
/B
GND
/A
A
+24V
B
GND
130BC998.10
Produktübersicht
VLT® Decentral Drive FCD 302
Lange Steuerleitungen und Analogsignale können in
2.5.5 Relaisausgang
seltenen Fällen aufgrund von Störungen in den Netzkabeln
zu Brummschleifen mit 50 Hz führen. In diesem Fall kann
22
es erforderlich sein, die Abschirmung zu durchbrechen
oder einen 100-nF-Kondensator zwischen Abschirmung
und Gehäuse einzubauen. Schließen Sie die Digital- und
Analogein- und -ausgänge aufgeteilt nach Signalart an die
Bezugspotenziale (Klemme 20, 55, 39) an, um Fehlerströme
auf dem Massepotenzial zu verhindern. Zum Beispiel kann
durch Schalten am Digitaleingang das Analogeingangssignal gestört werden.
Der Relaisausgang mit den Klemmen 01, 02, 03 und 04, 05,
06 hat eine Kapazität von maximal 240 V AC, 2 A. Minimal
24 V DC, 10 mA oder 24 V AC, 100 mA. Kann zur Anzeige
des Status und Warnungen verwendet werden. Die beiden
Relais befinden sich auf der Installationskarte. Ihre
Programmierung erfolgt durch Parametergruppe 5–4* Relais.
Die Relais haben Kontakte der Form C, d. h. Wechselkontakte. Die Kontakte jedes Relais sind für eine maximale
Last von 240 V AC bei 2 A ausgelegt.
Relais 1
Klemme 01: Allgemein
•
Klemme 02: Schließer 240 V AC
•
Klemme 03: Öffner 240 V AC
•
Relais 2
Klemme 04: Allgemein
•
Klemme 05: Schließer 240 V AC
•
Klemme 06: Öffner 240 V AC
•
Relais 1 und Relais 2 werden in Parameter 5-40 Relaisfunktion, Parameter 5-41 Ein Verzög., Relais und
Parameter 5-42 Aus Verzög., Relais programmiert.
Abbildung 2.20 Eingangspolarität der Steuerklemmen
HINWEIS
Zur Einhaltung der Vorgaben der EMV-Emissionsrichtlinie
werden abgeschirmte Kabel empfohlen. Bei Verwendung
eines ungeschirmten Kabels siehe Kapitel 2.9.7 EMV-
Prüfergebnisse für weitere Informationen.
32 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Abbildung 2.21 Relaisanschluss
Page 35

Produktübersicht Projektierungshandbuch
2.6 Sollwertverarbeitung
Ortsollwert
Der Ortsollwert ist aktiv, wenn der Frequenzumrichter mit aktiver [Hand On]-Taste betrieben wird. Der Sollwert wird über die
Pfeiltasten [▲]/[▼] bzw. [◄]/[►] eingestellt.
Fernsollwert
Abbildung 2.22 zeigt das Sollwertsystem zur Berechnung des Fernsollwerts.
2 2
Abbildung 2.22 Fernsollwert
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 33
Page 36
Resultlerender Sollwert
Summe aller
Sollwerte
P 3-00 Sollwertbereich= [0] Min-Max
130BA184.10
-P 3-03
P 3-03
P 3-02
-P 3-02
P 3-00 Sollwertbereich =[1]-Max-Max
Resultierender Sollwert
Summe aller
Sollwerte
-P 3-03
P 3-03
130BA185.10
Produktübersicht
VLT® Decentral Drive FCD 302
Der Fernsollwert wird bei jedem Abtastintervall
2.6.1 Sollwertgrenzen
berechnet und besteht anfänglich aus 2 Arten von
22
Sollwerteingängen:
X (der externe Sollwert): Eine Summe (siehe
•
Parameter 3-04 Sollwertfunktion) aus bis zu 4
extern ausgewählten Sollwerten. bestehend aus
einer beliebigen Kombination (bestimmt durch
die Einstellung von Parameter 3-15 Variabler
Sollwert 1, Parameter 3-16 Variabler Sollwert 2 und
Parameter 3-17 Variabler Sollwert 3) eines
Parameter 3-00 Sollwertbereich, Parameter 3-02 Minimaler
Sollwert und Parameter 3-03 Maximaler Sollwert definieren
zusammen den zulässigen Bereich der Summe aller
Sollwerte. Die Summe aller Sollwerte wird bei Bedarf
begrenzt. Die Beziehung zwischen dem resultierenden
Sollwert (nach der Klammerung) wird in Abbildung 2.23/
Abbildung 2.24 gezeigt und die Summe aller Sollwerte wird
in Abbildung 2.25 gezeigt.
Festsollwerts (Parameter 3-10 Festsollwert),
variabler Analogsollwerte, variabler digitaler
Pulssollwerte und verschiedener Feldbussollwerte
in einer beliebigen Einheit, in welcher der
Frequenzumrichter die Überwachungsfunktion
übernimmt ([Hz], [UPM], [Nm] usw.).
Y (der relative Sollwert): Eine Summe eines
•
Festsollwerts (Parameter 3-14 Relativer Festsollwert)
und eines variablen Analogsollwerts
(Parameter 3-18 Relativ. Skalierungssollw. Ressource)
in [%].
Die 2 Arten von Sollwerteingängen werden in folgender
Formel kombiniert: Fernsollwert = X+X*Y/100 %. Wenn der
relative Sollwert nicht verwendet wird, müssen Sie
Parameter 3-18 Relativ. Skalierungssollw. Ressource auf [0]
Deaktiviert und Parameter 3-14 Relativer Festsollwert auf 0 %
einstellen. Die Funktion Frequenzkorrektur Auf/Ab und die
Funktion Sollwert speichern kann durch Digitaleingänge am
Abbildung 2.23 Sollwertbereich=[0] Min. bis Max.
Frequenzumrichter aktiviert werden. Die Funktionen und
Parameter werden im VLT® AutomationDrive FC301/FC302
Programmierhandbuch beschrieben.
Die Skalierung von Analogsollwerten wird in Parameter-
gruppen 6-1* Analogeingang 1 und 6-2* Analogeingang 2
und die Skalierung digitaler Pulssollwerte in Parameter-
gruppe 5-5* Pulseingänge beschrieben.
Sollwertgrenzen und -bereiche stellen Sie in Parameter-
gruppe 3-0* Sollwertgrenzen ein.
34 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Abbildung 2.24 Sollwertbereich=[1] -Max. bis Max.
Page 37

130BA186.11
P 3-03
P 3-02
Summe aller
Sollwerte
P 3-00 Sollwertbereich= [0] Min to Max
Resultierender Sollwert
Produktübersicht Projektierungshandbuch
Sie können den Wert von Parameter 3-02 Minimaler Sollwert
nicht unter 0 einstellen, sofern Parameter 1-00 Regelver-
fahren nicht auf [3] PID-Regler eingestellt ist. In diesem Fall
ergibt sich das Verhältnis zwischen dem resultierenden
Sollwert (nach der Befestigung) und der Summe aller
Sollwerte wie in Abbildung 2.25 gezeigt.
Abbildung 2.25 Summe aller Sollwerte
2.6.2 Skalierung von Festsollwerten und
Bussollwerten
Festsollwerte werden gemäß den folgenden Regeln
skaliert:
Wenn Parameter 3-00 Sollwertbereich auf [0] Min.
•
bis Max. eingestellt ist: ein Sollwert von 0 %
entspricht dem Wert 0 [Einheit], wobei eine
beliebige Einheit (UPM, m/s, bar usw.) zulässig ist,
und ein Sollwert von 100 % entspricht dem
Maximum (abs. Parameter 3-03 Maximaler
Sollwert), abs (Parameter 3-02 Minimaler Sollwert)).
Wenn Parameter 3-00 Sollwertbereich: [1] -Max. bis
•
+Max. ist, entspricht der Sollwert 0 % dem Wert 0
[Einheit], der Sollwert -100 % entspricht dem
Sollwert -Max. und der Sollwert 100 % entspricht
dem Sollwert Max.
Bussollwerte werden gemäß den folgenden Regeln
skaliert:
Wenn Parameter 3-00 Sollwertbereich: [0] Min bis
•
Max. eingestellt ist, gilt für eine maximale
Auflösung des Bussollwerts folgende Busskalierung: ein Sollwert von 0 % entspricht dem
minimalen Sollwert und ein Sollwert von 100%
dem maximalen Sollwert.
Wenn Parameter 3-00 Sollwertbereich: [1] -Max. bis
•
+Max., entspricht der Sollwert -100 % dem
Sollwert -Max. und der Sollwert 100 % entspricht
dem Sollwert Max.
2.6.3 Skalierung von Analog- und
Pulssollwerten und Istwert
Soll- und Istwerte werden auf gleiche Weise von Analogund Pulseingängen skaliert. Einziger Unterschied ist, dass
Sollwerte, die über oder unter den angegebenen
Endpunkten liegen (P1 und P2 in Abbildung 2.26),
eingegrenzt werden, während dies bei Istwerten nicht der
Fall ist.
Abbildung 2.26 Skalierung von Analog- und
Pulssollwerten und Istwert
Abbildung 2.27 Skalierung des Sollwertausgangs
2 2
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 35
Page 38
Produktübersicht
VLT® Decentral Drive FCD 302
Die Endpunkte P1 und P2 werden durch die Parameter in Tabelle 2.9 definiert. Die Definition hängt davon ab, ob ein Analogoder Pulseingang verwendet wird.
22
P1 = (Minimaler Eingangswert, minimaler Sollwert)
Minimaler Sollwert Parameter 6-14
Minimaler Eingangswert Parameter 6-10
P2=(Minimaler Eingangswert, maximaler Sollwert)
Maximaler Sollwert Parameter 6-15
Maximaler Eingangswert Parameter 6-11
Tabelle 2.9 Endpunktwerte für Eingang und Sollwert
Analog 53
S201=AUS
Klemme 53
Skal. Min.-Soll/
Istwert
Klemme 53
Skal.
Min.Spannung
[V]
Klemme 53
Skal. Max.-Soll/
Istwert
Klemme 53
Skal.
Max.Spannung
[V]
Analog 53
S201=EIN
Parameter 6-14 Kl
emme 53 Skal.
Min.-Soll/Istwert
Parameter 6-12 Kl
emme 53 Skal.
Min.Strom [mA]
Parameter 6-15 Kl
emme 53 Skal.
Max.-Soll/Istwert
Parameter 6-13 Kl
emme 53 Skal.
Max.Strom [mA]
Analog 54
S202=AUS
Parameter 6-24
Klemme 54 Skal.
Min.-Soll/Istwert
Parameter 6-20
Klemme 54 Skal.
Min.Spannung
[V]
Parameter 6-25
Klemme 54 Skal.
Max.-Soll/Istwert
Parameter 6-21
Klemme 54 Skal.
Max.Spannung[
V]
Analog 54
S202=EIN
Parameter 6-24 K
lemme 54 Skal.
Min.-Soll/Istwert
Parameter 6-22 K
lemme 54 Skal.
Min.Strom [mA]
Parameter 6-25 K
lemme 54 Skal.
Max.-Soll/Istwert
Parameter 6-23 K
lemme 54 Skal.
Max.Strom[mA]
Pulseingang 29 Pulseingang 33
Parameter 5-52
Klemme 29 Min.
Soll-/Istwert
Parameter 5-50
Klemme 29 Min.
Frequenz [Hz]
Parameter 5-53
Klemme 29
Max. Soll-/
Istwert
Parameter 5-51
Klemme 29
Max. Frequenz
[Hz]
Parameter 5-57 Klem
me 33 Min. Soll-/
Istwert
Parameter 5-55 Klem
me 33 Min. Frequenz
[Hz]
Parameter 5-58 Klem
me 33 Max. Soll-/
Istwert
Parameter 5-56 Klem
me 33 Max. Frequenz
[Hz]
2.6.4 Totzone um Null
In einigen Fällen sollte der Sollwert (gelegentlich auch der Istwert) eine Totzone um Null haben, um sicherzustellen, dass die
Maschine gestoppt wird, wenn der Sollwert nahe Null liegt.
Gehen Sie wie folgt vor, um die Totzone zu aktivieren und den Umfang der Totzone zu definieren:
Der minimale Sollwert (siehe Tabelle 2.9 für relevanten Parameter) oder der maximale Sollwert muss Null sein. Mit
•
anderen Worten:P1 oder P2 muss auf der X-Achse in Abbildung 2.28 liegen.
Außerdem müssen sich beide Punkte im selben Quadranten befinden.
•
36 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 39

Produktübersicht Projektierungshandbuch
Die Größe der Totzone wird von P1 oder P2 definiert, wie dies in Abbildung 2.28 gezeigt wird.
2 2
Abbildung 2.28 Totzone
Abbildung 2.29 Reversierte Totzone
Falls Endpunkt 2 in Quadrant 1 oder Quadrant 4 gelegt wird, führt ein Sollwertendpunkt von P1 = (1 V, 0 U/min) zu einer
Totzone von -1 V bis +1 V.
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 37
Page 40

Produktübersicht
Fall 1: Positiver Sollwert mit Totzone, Digitaleingang zum Triggern der Reversierung
Dieser Fall zeigt die Wirkung der Min.-Max.-Begrenzungen an einem Sollwerteingang.
VLT® Decentral Drive FCD 302
22
Abbildung 2.30 Beispiel 1 - positiver Sollwert
38 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 41

Allgemeine
Sollwertparameter:
Sollwerttbereich: - Max bis Max
Minimaler Sollwert: unwichitig
Maximaler Sollwert: 500 UPM (100,0 %)
Begrenzt auf: -200% bis +200%
(-1000 UPM - +1000UPM)
Allgemeine
Motorparameter:
Motordrehrichtung: beide Richtungen
Motordrehzahl-Untergrenze: 0 UPM
Motordrehzahl-Obergrenze: 200 UPM
Ext. Sollwert
Absolutwert
0 UPM 1V
750 UPM 10V
Analogeingang 53
Min. Sollwert 0 UPM
Max. Sollwert 500 UPM
Min. Spannung 1 V
Max. Spannung 10 V
Ext. Ressource 1
Bereich:
0,0% (0 UPM)
150,0% (750 UPM)
Ext. Sollwert
Bereich:
0,0% (0 UPM)
150,0% (750 UPM)
Sollwertalgorithmus
Begrenzt auf:
-100% - +100%
(-500 UPM - +500 UPM)
Reference
Bereich:
0,0% (0 UPM)
100,0% (500 UPM)
Sollwert wird gemäß
Max-Drehzahlsollwert
skaliert
Drehzahlbereich
Neutraler
Bereich
Digitaleingang
Digitaleingang 18
Aus: Keine Reversierung
Ein: Reversierung
Begrenzt Drenhzahlsollwert
Gemäß Min-Max-Sollwert
Drehzahl
Sollwert
Bereich:
-500 UPM
+500 UPM
Motor-PID
Motor
Motorsteuerung
Bereich:
-200 UPM
+200 UPM
UPM
UPM
750
10
10
V
V
1
1
500
-500
130BA188.13
Produktübersicht Projektierungshandbuch
Fall 2: Positiver Sollwert mit Totzone, Digitaleingang zum Triggern der Reversierung. Begrenzungsregeln.
Dieser Fall zeigt, wie der Sollwerteingang mit Werten, die außerhalb der Grenzen für -Max und +Max liegen, die Unter- und
Obergrenzen der Eingänge begrenzt, bevor der externe Sollwert addiert wird. Der Fall zeigt auch, wie der externe Sollwert
vom Sollwertalgorithmus auf -Max und +Max begrenzt wird.
2 2
Abbildung 2.31 Beispiel 2 - positiver Sollwert
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 39
Page 42
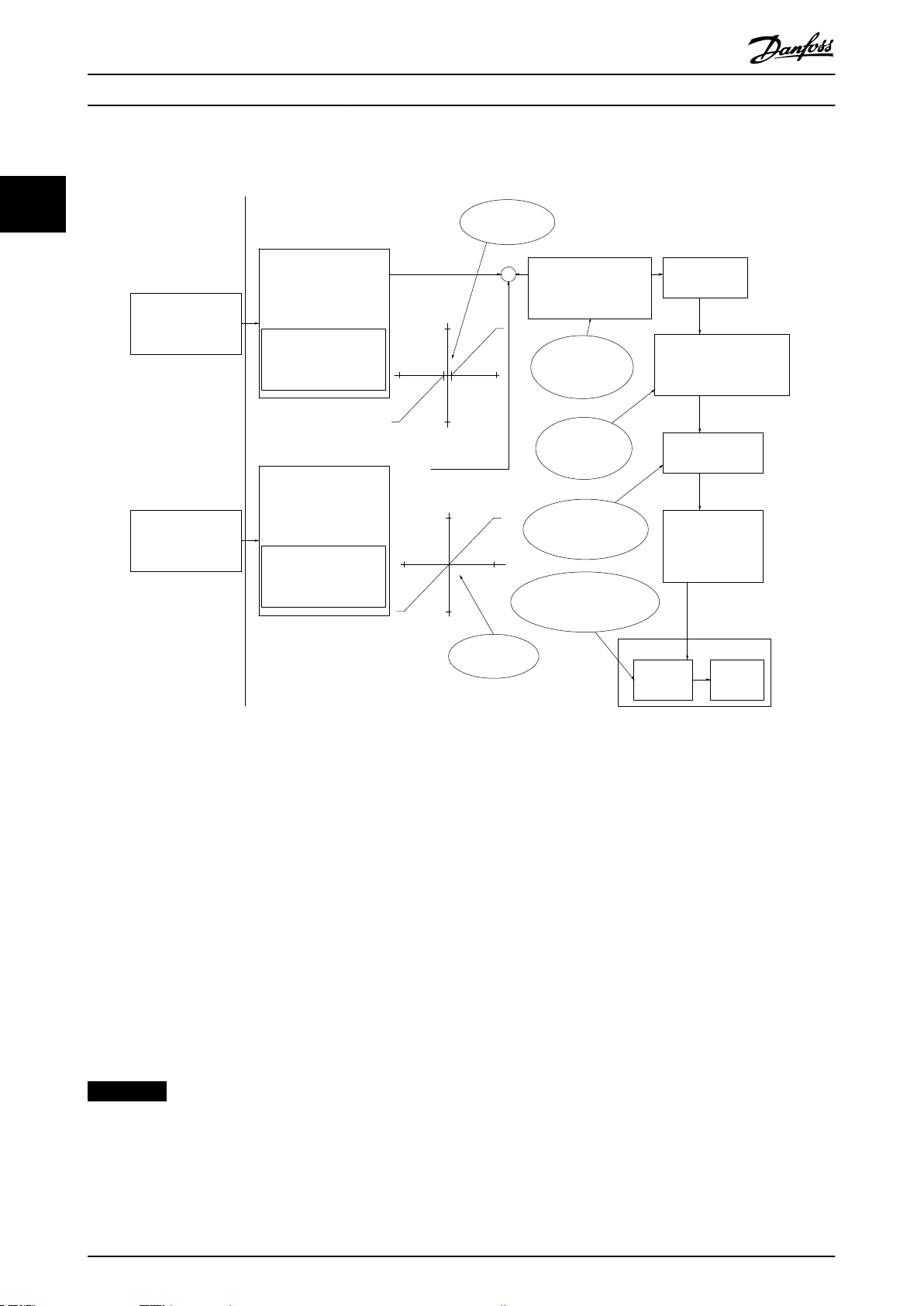
Allgemeine
Sollwertparameter:
Sollwerttbereich: - Max bis Max
Minimaler Sollwert: unwichitig
Maximaler Sollwert: 500 UPM (100,0 %)
Neutraler
Bereich
-1 V bis 1 V
Allgemeine
Motorparameter:
Motordrehrichtung: beide Rihtungen
Motordrehzahl-Utergrenze: 0 UPM
Motordrehzahl Obergrenze: 1500 UPM
Sollwertalgorithmus
Ext. Sollwert
Bereich:
-100,0% (-1000 UPM)
+100,0% (+1000 UPM)
Sollwert
Bereich:
-100,0% (-1000 UPM)
+100,0% (+1000 UPM)
Ext. Sollwert
Absolutwert
- 500 UPM -10V
+500 UOM 10v
Analogeingang 53
Min. Sollwert 0 UPM
Max. Solwert +500 UPM
Min. Spannung 1 V
Max. Spannung 10 V
Ext. Ressource 1
Bereuch:
-50,0 (-500 UPM)
+50% (+500 UPM)
Analogeingang 54
Min. Sollwert -500 UPM
Max. Solwert +500 UPM
Min. Spannung -10 V
Max. Spannung +10 V
Ext. Ressource 1
Bereuch:
-50,0 (-500 UPM)
+50% (+500 UPM)
Ext. Sollwert
Absolutwert
- 500 UPM -10V
+500 UOM 10v
Keine
neutraler
Bereich
Begrenzt Drehzahl auf
Min- Max-Motordrehzahl
Sollwert wird gema
Max-Sollwert skaliert
Berenzt auf
-100% bis +100%
(-1000UPM–
+1000UPM)
Berenzt auf
-200% bis +200%
(-2000UPM–
+2000UPM)
UPM
bereich
Drehzahl
Sollwert
bereich:
-1000 UPM
+1000 UPM
Motor–PID
Motorsteuerung
Motor
-10 10
-500
500
UPM
V
500
-500
10
-10
V
UPM
-1
1
e30ba189.12
Produktübersicht
VLT® Decentral Drive FCD 302
Fall 3: Bipolarer Sollwert mit Totzone. Vorzeichen bestimmt die Richtung, -Max. bis +Max.
22
Abbildung 2.32 Beispiel 3 - Bipolarer Sollwert
Bremsfunktionen
2.7
Die Bremsfunktion wird zum Bremsen der Last an der
Motorwelle angewendet, entweder als dynamische oder
statische Bremse.
2.7.1 Mechanische Bremse
Eine direkt an der Motorwelle befestigte mechanische
Haltebremse führt in der Regel eine statische Bremsung
durch. In einigen Anwendungen wird durch das statische
Haltemoment die Motorwelle statisch gehalten (in der
Regel bei permanenterregten Synchronmotoren). Die
Haltebremse wird entweder über eine SPS oder direkt über
einen Digitalausgang des Frequenzumrichters gesteuert.
HINWEIS
Eine Steuerung per Safe Torque Off einer mechanischen
Bremse über einen Frequenzumrichter ist nicht möglich.
In der Installation muss eine Redundanzschaltung für die
Bremsansteuerung vorhanden sein.
2.7.1.1 Produktbroschüre für mechanische
Bremse und Beschreibung des
Stromkreises
Sie können den VLT® Decentral Drive FCD 302 mit oder
ohne Bremse konfigurieren (siehe Position 18 in
Abbildung 6.1).
Wenn der Wechselrichterteil mit Bremse konfiguriert ist,
können Sie Relais 1 für verschiedene Anwendungen
konfigurieren, während Relais 2 ausschließlich für die
mechanische Bremse vorgesehen sein soll. Relais 2 ist im
Installationskasten montiert, in diesem Konfigurationszustand ist es jedoch nicht aktiv.
Die Drossel der mechanischen Bremse kann mit niedriger
Spannung (24 V DC) oder über Netzspannung versorgt
werden.
Wenn die mechanische Bremse vom Typ 24 V DC ist, kann
eines der beiden benutzerdefinierten Relais, Relais 1 oder
ein funktionierendes Relais 2, innerhalb der elektrischen
Spezifikation (Spannung, Strom usw.) oder mit externen
Relais verwendet werden. Wenn der Frequenzumrichter
ohne Bremse konfiguriert ist, ist das interne elektrische
Steuersignal für Relais 2 aktiv.
40 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 43
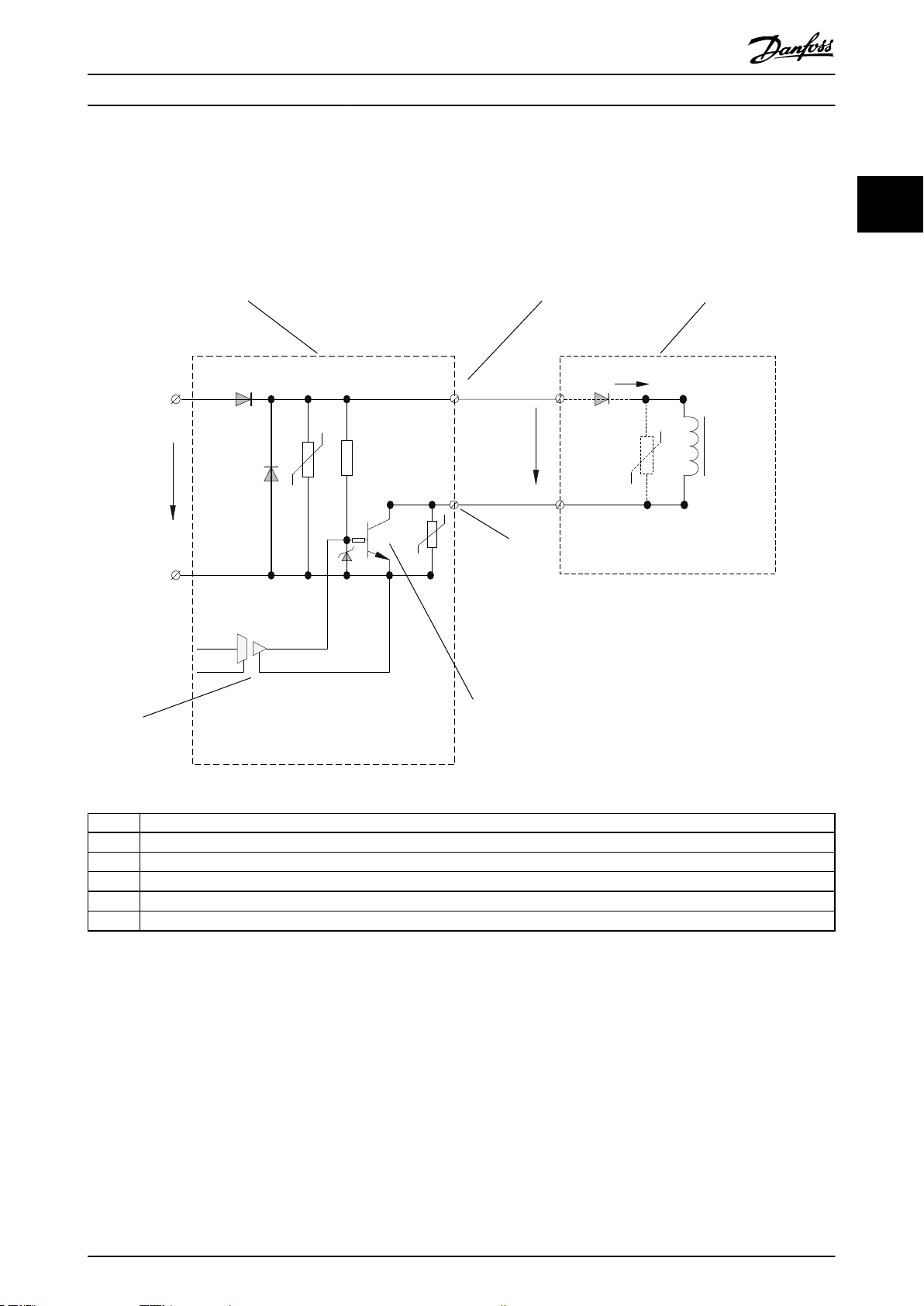
I
Lm
D
L
MOV
MOV
L 3
L2
MBR +
MBR -
1
2
3
4
5
6
V
MBR
V
L3-L2
130BD547.11
MOV
Produktübersicht Projektierungshandbuch
Wird die Bremse über das Netz oder eine gleichgerichtete Netz-Gleichspannung versorgt, wird empfohlen, den FCD 302 mit
mechanischer Bremse zu bestellen. In diesem Fall steuern alle Parametereinstellungen für Relais 2 den internen programmierbaren Schalter, der die Ausgangsspannung an den Klemmen MBR+ und MBR- bestimmt. In bestimmten Motoren kann
diese mechanische Bremse vom Typ AC oder DC sein. Ist die Bremse vom Typ AC, verfügt die mechanische Bremse über
eine interne Diode D und den internen Metalloxidvaristor (MOV), wie im elektrischen Diagramm in Abbildung 2.33
beschrieben.
2 2
1 Wechselrichterteil
2 MBR+ Klemme 122
3 Mechanische Bremsdrossel
4 MBR- Klemme 123
5 Programmierbarer Schalter
6 Galvanisch getrenntes Steuerteil
Abbildung 2.33 Elektrisches Diagramm der mechanischen Bremse
Die Versorgungsspannung ergibt sich aus der Netzspannung zwischen den Phasen L2 und L3, die eine Einzelpuls-Diodengleichrichtung durchläuft.
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 41
Page 44

VMBR
VL1-L2
VMBR
ILm
130BD199.10
300; 135
320; 144
340; 153
380; 171
400; 180
440;198
480; 216
500; 225
520; 234
100
120
140
160
180
200
220
240
260
300 350 400 450 500 550
Average Output Voltage (Vdc)
Input Mains Line Voltag e (Vrms)
130BD200.10
Produktübersicht
VLT® Decentral Drive FCD 302
Die Ausgangsspannung der programmierbaren Versorgung
ist kein konstanter Wert, sondern vielmehr eine gepulste
Spannung mit einem durchschnittlichen Pegel, der direkt
22
von der Netzspannung abhängig ist, wie in Abbildung 2.34
gezeigt:
Abbildung 2.35 Durchschnittliche Ausgangsspannung
Die mechanische Bremse im Motor kann sowohl mit
Gleich- als auch Wechselspannung versorgt werden. Die
Ausgangsspannung wird von der internen Diode in der
Schaltung der mechanischen Bremse gleichgerichtet. Die
durchschnittliche an der Bremsdrossel anliegende
Spannung behält ihren Wert.
V
ILm Netz-Momentanspannung
Spannung der mechanischen Bremse
MBR
Abbildung 2.34 Momentanspannung V
Durchschnittspegel von V
MBR
mit einem
MBR
Diese gleichgerichtete Spannung wird an der Drossel der
mechanischen Bremse angelegt, mit dem geglätteten
Stromverlauf ILm.
Die in Abbildung 2.33 gezeigte Spannung hat die
Amplitude der Netzspannung und ein durchschnittliches
Spannungsniveau berechnet als:
V
= 0,45 x V
MBR(DC)
AC
Beispiele:
VAC = 400 V
VAC = 480 V
eff
eff
⇒ V
⇒ V
= 180 VDC.
MBR
= 216 VDC.
MBR
Das durchschnittliche Ausgangsspannungsniveau wird
direkt durch die Amplitude der zwischen den Phasen L1
und L2 gemessenen Netzspannung bestimmt.
HINWEIS
Maximale Nennspannung = 480 V AC.
2.7.1.2 Mechanische Bremssteuerung
In Hubanwendungen muss eine elektromechanische
Bremse gesteuert werden können. Zur Ansteuerung der
Bremse kann ein Relaisausgang (Relais 1 oder Relais 2/
digitale Bremse) oder ein programmierter Digitalausgang
(Klemme 27 oder 29) dienen. Halten Sie den Ausgang
normalerweise geschlossen (spannungsfrei), so lange der
Frequenzumrichter den Motor nicht halten kann, z. B., weil
die Last zu schwer ist. Wählen Sie bei Anwendungen mit
elektromagnetischer Bremse die Option [32] Mechanische
Bremse in einem der folgenden Parameter:
Parameter 5-40 Relaisfunktion (Arrayparameter),
•
Parameter 5-30 Klemme 27 Digitalausgang, oder
•
Parameter 5-31 Klemme 29 Digitalausgang
•
Wird [32] Mechanische Bremse gewählt, so wird die
mechanische Bremse beim Start normalerweise
geschlossen, bis der Ausgangsstrom über einem voreingestellten Wert liegt. Wählen Sie diesen Wert in
Parameter 2-20 Bremse öffnen bei Motorstrom. Beim Stopp
wird die mechanische Bremse geschlossen, wenn die
Drehzahl unter den in Parameter 2-21 Bremse schliessen bei
Motordrehzahl gewählten Wert sinkt. Tritt am Frequenzumrichter ein Alarmzustand (z. B. ein Überstrom, eine
Überspannung usw.) oder ein Safe Torque Off ein, so wird
umgehend die mechanische Bremse geschlossen.
42 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 45

130BC970.10
Start
term.18
1=on
Shaft speed
Start delay time
on
Brake delay time
Time
Output current
Relay 01or
Relay 02/solid
state brake
Pre-magnetizing
current or
DC hold current
Reaction time EMK brake
Par 2-20
Release brake current
Par 1-76 Start current/
Par 2-00 DC hold current
Par 1-74
Start speed
Par 2-21
Activate brake
speed
Mechanical brake
locked
Mechanical brake
free
Par 1-71
Par 2-23
o
0=o
Produktübersicht Projektierungshandbuch
2 2
Abbildung 2.36 Mechanische Bremssteuerung für Hubanwendungen
In Hub- und Vertikalförderanwendungen muss eine elektromechanische Bremse gesteuert werden können.
Schrittweise Beschreibung
Zur Ansteuerung der mechanischen Bremse
•
können Sie jeden Relaisausgang, Digitalausgang
(Klemme 27 oder 29) oder digitalen Bremsspannungsausgang (Klemme 122-123) verwenden, falls
notwendig mit einem geeigneten Schütz.
Stellen Sie sicher, dass der Ausgang ausgeschaltet
•
ist, solange der Frequenzumrichter den Motor
nicht ansteuern kann, z. B., weil die Last zu
schwer ist oder der Motor noch nicht montiert ist.
Wählen Sie vor dem Anschließen der
•
mechanischen Bremse in Parametergruppe 5-4*
Relais (oder in Parametergruppe 5-3* Digitalausgänge) die Option [32] Mechanische Bremse.
Die Bremse wird gelöst, wenn der Motorstrom
•
den eingestellten Wert in Parameter 2-20 Bremse
öffnen bei Motorstrom überschreitet.
Die Bremse wird geschlossen, wenn die
•
Ausgangsdrehzahl niedriger als die in
HINWEIS
Empfehlung: Stellen Sie bei Vertikalförder- oder
Hubanwendungen sicher, dass die Last im Notfall oder
aufgrund einer Fehlfunktion eines einzelnen Bauteils wie
einem Schütz usw. gestoppt werden kann.
Befindet sich der Frequenzumrichter im Alarmmodus
oder besteht eine Überspannungssituation, greift die
mechanische Bremse sofort ein.
HINWEIS
Stellen Sie bei Hubanwendungen sicher, dass die
Drehmomentgrenzen niedriger als die Stromgrenze
eingestellt sind. Diese stellen Sie in
Parameter 4-16 Momentengrenze motorisch und
Parameter 4-17 Momentengrenze generatorisch ein. Stellen
Sie die Stromgrenze in Parameter 4-18 Stromgrenze ein.
Empfehlung: Stellen Sie Parameter 14-25 Drehmom.grenze
Verzögerungszeit auf [0], Parameter 14-26 WR-Fehler
Abschaltverzögerung auf [0] und
Parameter 14-10 Netzausfall-Funktion auf [3] Motorfreilauf.
Parameter 2-21 Bremse schliessen bei Motordrehzahl
oder Parameter 2-22 Bremse schließen bei
Motorfrequenz eingestellte Drehzahl ist und der
Frequenzumrichter einen Stoppbefehl durchführt.
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 43
Page 46
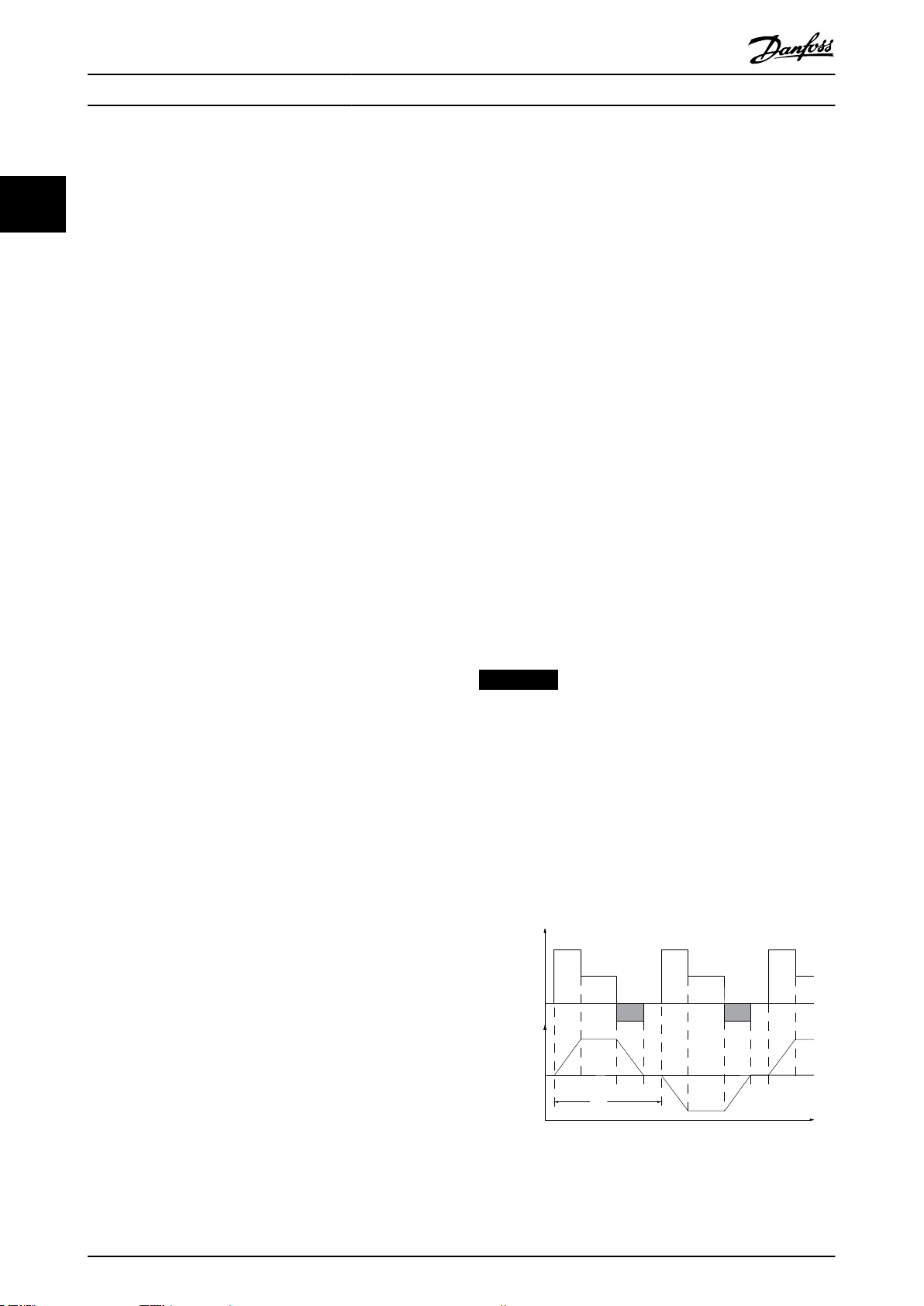
T
ta
tc
tb
to ta
tc
tb
to ta
130BA167.10
Last
Zeit
Drehzahl
Produktübersicht
VLT® Decentral Drive FCD 302
2.7.1.3 Verdrahtung der mechanischen
Bremse
22
EMV (Twisted-Pair-Kabel/Abschirmung)
Um elektrische Störgeräusche von den Kabeln zwischen
der mechanischen Bremse und dem Frequenzumrichter zu
verringern, müssen Sie die Drähte verdrillen.
Verwenden Sie eine Metallabschirmung für verbesserte
EMV-Leistung.
Kabel mit verdrillten Aderpaaren, die die Motorkabel sowie
Anschlusskabel für Bremse enthalten, können verwendet
werden.
2.7.1.4 Mechanische Bremse in Hub- und
Vertikalförderanwendungen
Ein Beispiel der erweiterten mechanischen Bremssteuerung
für Hubanwendungen finden Sie unter
Kapitel 4 Anwendungsbeispiele.
2.7.2 Dynamische Bremse
Dynamische Bremse durch:
Bremswiderstand: Ein Brems-IGBT leitet die
•
Bremsenergie vom Motor an den
angeschlossenen Bremswiderstand
(Parameter 2-10 Bremsfunktion = [1] Bremswi-
derstand) und verhindert so, dass die
Überspannung einen bestimmten Grenzwert
überschreitet.
AC-Bremse: Durch Ändern der Verlustbedin-
•
gungen im Motor wird die Bremsenergie im
Motor verteilt. Sie dürfen die AC-Bremsfunktion
nicht in Anwendungen mit einer hohen Ein-/
Ausschaltfrequenz verwenden, da dies zu einer
Überhitzung des Motors führen würde
(Parameter 2-10 Bremsfunktion = [2] AC-Bremse).
DC-Bremse: Ein übermodulierter Gleichstrom
•
verstärkt den Wechselstrom und funktioniert als
Wirbelstrombremse (Parameter 2-02 DC-Bremszeit
≠ 0 s).
zur Abschaltung des Frequenzumrichters aufgrund von
Überspannung führen. Bremswiderstände dienen zur
Ableitung der bei generatorischer Bremsung erzeugten
Energie. Die Auswahl des Bremswiderstands erfolgt anhand
seines ohmschen Widerstands, seines Leistungsverlusts und
seiner Größe. Danfoss Bremswiderstände sind in mehreren
Ausführungen erhältlich, zur internen oder externen
Montage am Frequenzumrichter. Artikelnummern finden
Sie in Kapitel 6.2.1 Bestellnummern: Zubehör.
2.7.2.2 Auswahl des Bremswiderstands
Wenn erhöhte Anforderungen mit generatorischem
Bremsen bewältigt werden sollen, ist ein Bremswiderstand
erforderlich. Die Verwendung eines Bremswiderstands
gewährleistet, dass die Energie im Bremswiderstand und
nicht im Frequenzumrichter absorbiert wird. Weitere
Informationen finden Sie im Projektierungshandbuch VLT
Brake Resistor MCE 101.
Ist der Betrag der kinetischen Energie, die in jedem
Bremszeitraum zum Widerstand übertragen wird,
unbekannt, können Sie die durchschnittliche Leistung auf
Basis der Zykluszeit und Bremszeit berechnen, was auch als
Arbeitszyklus für Aussetzbetrieb bezeichnet wird. Der
Arbeitszyklus für Aussetzbetrieb des Widerstandes gibt den
Arbeitszyklus an, für den der Widerstand ausgelegt ist.
Abbildung 2.37 zeigt einen typischen Bremszyklus.
®
HINWEIS
Der von den Motorlieferanten bei der Angabe der
zulässigen Belastung häufig benutzte Betrieb S5 des
Widerstands ist ein Ausdruck für den Arbeitszyklus für
Aussetzbetrieb.
Sie können den Arbeitszyklus für Aussetzbetrieb des
Widerstands wie folgt berechnen:
Arbeitszyklus = tb/T
T = Zykluszeit in Sekunden.
tb ist die Bremszeit in Sekunden (als Teil der gesamten
Zykluszeit).
2.7.2.1 Bremswiderstände
In bestimmten Anwendungen ist der Abbau kinetischer
Energie erforderlich. Bei diesem Frequenzumrichter wird
die Energie nicht in das Netz zurückgespeist. Stattdessen
muss die kinetische Energie in Wärme umgewandelt
werden und dies wird durch Bremsung mit einem
Bremswiderstand erreicht.
In Anwendungen mit motorischem Bremsen wird Energie
im Motor erzeugt und an den Frequenzumrichter zurückgegeben. Ist diese Energierückspeisung an den Motor nicht
möglich, erhöht sich die Spannung im Zwischenkreis des
Frequenzumrichters. In Anwendungen mit häufigem
Bremsen oder hoher Trägheitsmasse kann diese Erhöhung
44 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Abbildung 2.37 Dynamische Bremszykluszeit
Page 47

Produktübersicht Projektierungshandbuch
Bremsar-
Zykluszeit [s]
3 x 380–480 V
PK37–P3K0 120 Dauerlast 40%
Tabelle 2.10 Bremsung bei hohem Überlastmoment
beitszyklus
bei 100 %
Drehmoment
Bremsarbeits-
zyklus bei
Übermoment
(150/160 %)
Bremswiderstände haben einen Arbeitszyklus von 5 %,
10 % und 40 %. Bei Anwendung eines Arbeitszyklus von
10 % können die Bremswiderstände die Bremsleistung
über 10 % der Zykluszeit aufnehmen. Die übrigen 90 % der
Zykluszeit werden zum Abführen überschüssiger Wärme
genutzt.
HINWEIS
Stellen Sie sicher, dass der Bremswiderstand für die
erforderliche Bremszeit ausgelegt ist.
Die maximal zulässige Last am Bremswiderstand wird als
Spitzenleistung bei einem gegebenen Arbeitszyklus für
Aussetzbetrieb ausgedrückt und wird berechnet als:
2
U
P
Höchstwert
dc
Ω =
R
br
wenn
P
Spitze
= P
x Mbr [%] x η
Motor
Motor
x η
VLT
[W]
Der Bremswiderstand hängt von der Zwischenkreisspannung (Udc) ab.
Es gibt 4 Schaltschwellen der Bremsfunktion.
Größe Bremse aktiv Warnung vor
Abschaltung
FCD 302
3x380–480 V
Tabelle 2.11 Schwellwerte
778 V 810 V 820 V
Cutout
(Abschaltung)
HINWEIS
Prüfen Sie, ob Ihr Bremswiderstand für eine Spitzenspannung von 820 V zugelassen ist, wenn Sie keine Bremswiderstände einsetzen.
Danfoss empfiehlt folgende Bremswiderstände R
gewährleisten, dass der Frequenzumrichter mit dem
maximal verfügbaren Bremsmoment (M
br(%)
bremst. Die entsprechende Formel lässt sich wie folgt
schreiben:
2
U
x100
Ω =
R
η
η
rec
motor
VLT
P
Motor,
beträgt in der Regel 0,90
beträgt in der Regel 0,98
xM
dc
br( % )
xη
VLT
xη
Motor,
: Diese
rec
) von 160 %
Bei Frequenzumrichtern mit 480 V wird R
bei einer
rec
Bremsleistung von 160 % wie folgt ausgedrückt:
480V: R
rec
375300
=
P
Motor,
Ω
HINWEIS
Der Widerstand in der Bremswiderstandsschaltung sollte
den von Danfoss empfohlenen Wert nicht überschreiten.
Bei einem Bremswiderstand mit höherem Ohmwert wird
hingegen nicht mehr die maximale Bremsleistung von
160 % erzielt, und der Frequenzumrichter schaltet
während der Bremsung möglicherweise mit DCÜberspannung ab.
HINWEIS
Bei einem Kurzschluss im Bremstransistor des Frequenzumrichters kann ein eventueller Leistungsverlust im
Bremswiderstand nur durch Unterbrechung der Netzversorgung zum Frequenzumrichter (Netzschalter, Schütz)
verhindert werden (das Schütz kann vom Frequenzumrichter gesteuert werden).
HINWEIS
Berühren Sie den Bremswiderstand nicht, da er während
bzw. nach dem Bremsen sehr heiß werden kann. Um
einer Brandgefahr zu entgehen, müssen Sie den
Bremswiderstand in einer sicheren Umgebung platzieren.
2.7.2.3 Bremswiderstände 10 W
Bei Frequenzumrichtern mit der dynamischen Bremsoption
ist ein Brems-IGBT zusammen mit den Klemmen 81 (R-)
und 82 (R+) in jedem Wechselrichtermodul zum Anschluss
an einen Bremswiderstand vorgesehen.
Ein interner 10-W-Bremswiderstand kann im Installationskasten (Unterseite) installiert werden. Dieser optionale
Widerstand eignet sich für Anwendungen, bei denen die
Brems-IGBT nur für sehr kurze Arbeitszyklen aktiv ist, z. B.
zur Vermeidung von Warnungen und Abschaltereignissen.
Zur Verwendung als interner Bremswiderstand:
Bremswiderstand 1750 Ω
10 W/100 %
Bremswiderstand 350 Ω
10 W/100 %
Tabelle 2.12 Bremswiderstände 10 W
Zum Einbau in einem Installationskasten unter Motorklemmen.
Zum Einbau in einem Installationskasten unter Motorklemmen.
2 2
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 45
Page 48

Produktübersicht
VLT® Decentral Drive FCD 302
2.7.2.4 Bremswiderstand 40 %
22
Eine externe Anbringung des Bremswiderstand bietet die
Vorteile, dass der Widerstand basierend auf Anwendungsanforderungen ausgewählt wird, die Energie aus dem
Schaltschrank heraus leitet und den Frequenzumrichter vor
Überhitzung schützt, falls der Bremswiderstand überlastet.
Nummer Funktion
81 (optionale Funktion) R- Bremswiderstandsklemmen
82 (optionale Funktion) R+
Tabelle 2.13 Bremswiderstände 40 %
Das Verbindungskabel zum Bremswiderstand
•
muss abgeschirmt sein. Schließen Sie die
Abschirmung mit Kabelschellen am Metallgehäuse des Frequenzumrichters und am
Metallgehäuse des Bremswiderstands an.
Dimensionieren Sie den Querschnitt des
•
Anschlusskabels für Bremse passend zum
Bremsmoment.
2.7.2.5 Steuerung mit Bremsfunktion
wenn die Rampe-ab-Zeit zu kurz ist, da ein Abschalten des
Frequenzumrichters vermieden wird. In dieser Situation
wird jedoch die Rampe-Ab-Zeit automatisch verlängert.
HINWEIS
Sie können OVC nicht aktivieren, wenn Sie einen PMMotor betreiben (wenn Parameter 1-10 Motorart auf [1]
PM, Vollpol SPM eingestellt ist).
2.7.2.6 Verdrahtung des Bremswiderstands
EMV (Twisted-Pair-Kabel/Abschirmung)
Um elektrische Störgeräusche von den Kabeln zwischen
dem Bremswiderstand und dem Frequenzumrichter zu
verringern, müssen Sie die Drähte verdrillen.
Verwenden Sie eine Metallabschirmung für verbesserte
EMV-Leistung.
2.8 Safe Torque Off
Zur Ausführung der Funktion Safe Torque Off (STO) ist eine
zusätzliche Verkabelung des Frequenzumrichters
erforderlich. Nähere Informationen finden Sie in der
Bedienungsanleitung der Funktion Safe Torque Off (STO) für
VLT® Frequency Converters.
Die Bremse ist gegen einen Kurzschluss des Bremswiderstands geschützt. Der Bremstransistor wird auf eine
Kurzschlussbedingung hin überwacht. Eine eventuell
vorhandene thermische Überwachung (Klixon) des
Bremswiderstands kann vom Frequenzumrichter
ausgewertet werden.
Außerdem ermöglicht die Bremse ein Auslesen der
aktuellen Leistung und der mittleren Leistung der letzten
120 s. Die Bremse kann ebenfalls die Bremsleistung
überwachen und sicherstellen, dass sie die in
Parameter 2-12 Bremswiderstand Leistung (kW) gewählte
Grenze nicht überschreitet. In Parameter 2-13 Bremswiderst.
Leistungsüberwachung legen Sie fest, welche Funktion
ausgeführt wird, wenn die an den Bremswiderstand
übertragene Leistung den in Parameter 2-12 Bremswi-
derstand Leistung (kW) eingestellten Grenzwert
überschreitet.
HINWEIS
Überwachen der Bremsleistung ist keine Sicherheitsfunktion; Hierfür ist ein Thermoschalter erforderlich. Der
Bremswiderstandskreis ist nicht gegen Erdableitstrom
geschützt.
Sie können Überspannungssteuerung (OVC) (ohne Bremswi-
derstand) als alternative Bremsfunktion in
Parameter 2-17 Überspannungssteuerung wählen. Diese
Funktion ist für alle Geräte aktiv. Sie stellt sicher, dass bei
Anstieg der Zwischenkreisspannung eine Abschaltung
verhindert werden kann. Dies erfolgt durch Anheben der
Ausgangsfrequenz zur Begrenzung der Zwischenkreisspannung. Es ist eine sehr nützliche Funktion, z. B.
EMV
2.9
2.9.1 Allgemeine Aspekte von EMVEmissionen
Schalttransienten sind in der Regel leitungsgeführt im
Frequenzbereich von 150 kHz bis 30 MHz. Durch die Luft
übertragene Störungen des Frequenzumrichtersystems im
Frequenzbereich von 30 MHz bis 1 GHz werden durch den
Wechselrichter, das Motorkabel und den Motor erzeugt.
Durch kapazitive Ströme des Motorkabels, in Verbindung
mit hohem dU/dt der Motorspannung, werden Ableitströme erzeugt.
Die Verwendung eines abgeschirmten Motorkabels erhöht
den Ableitstrom (siehe Abbildung 2.38), da abgeschirmte
Kabel eine höhere Kapazität zu Erde haben als nicht
abgeschirmte Kabel. Wird der Ableitstrom nicht gefiltert,
verursacht dies in der Netzzuleitung größere Störungen im
Funkfrequenzbereich unterhalb von etwa 5 MHz. Der
Ableitstrom (I1) kann über die Abschirmung (I3) direkt
zurück zum Gerät fließen. Es verbleibt dann nur ein kleines
elektromagnetisches Feld (I4) vom abgeschirmten
Motorkabel.
46 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 49
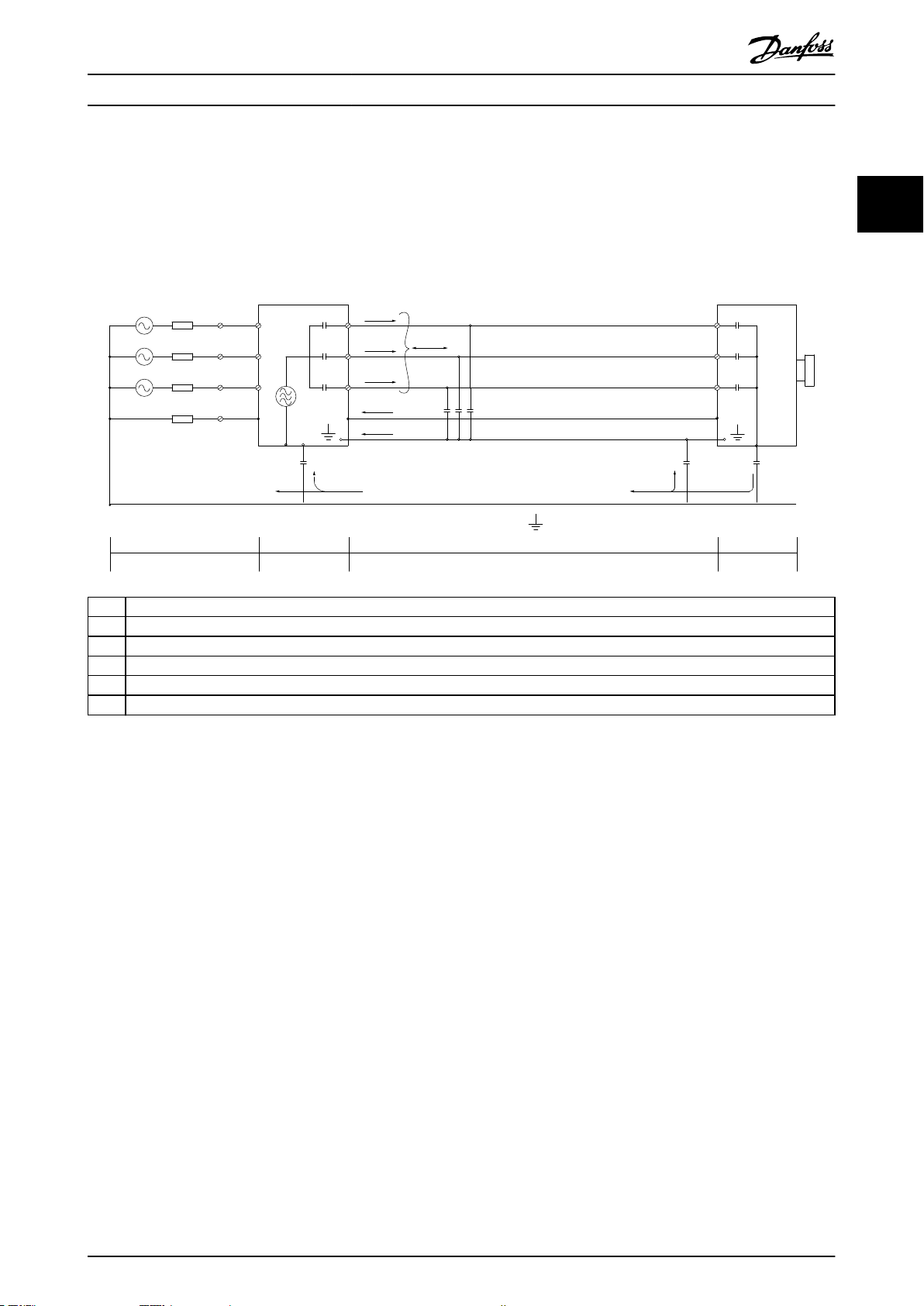
1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Produktübersicht Projektierungshandbuch
Die Abschirmung verringert zwar die abgestrahlte Störung, erhöht jedoch die Niederfrequenzstörungen am Netz. Schließen
Sie den Motorkabelschirm an das Gehäuse des Frequenzumrichters sowie an das Motorgehäuse an. Verwenden Sie hierzu
integrierte Schirmbügel um verdrillte Abschirmungsenden (Pigtails) zu vermeiden. Die verdrillten Schirmenden erhöhen die
Abschirmungsimpedanz bei höheren Frequenzen, was den Abschirmungseffekt reduziert und den Ableitstrom (I4) erhöht.
Wenn Sie abgeschirmte Kabel für Feldbus-Relais, Steuerleitungen, Signalschnittstelle und Bremse verwenden, ist die
Abschirmung an beiden Enden niederimpedant mit Masse zu verbinden. In einigen Situationen ist zum Vermeiden von
Stromschleifen jedoch eine Unterbrechung der Abschirmung notwendig.
2 2
1 Schutzleiter
2 Abschirmung
3 Netzversorgung
4 Frequenzumrichter
5 Abgeschirmtes Motorkabel
6 Motor
Abbildung 2.38 Beispiel - Erdableitstrom
In den Fällen, in denen die Montage der Abschirmung über eine Montageplatte für den Frequenzumrichter vorgesehen ist,
muss diese Montageplatte aus Metall gefertigt sein, da die Ableitströme zum Gerät zurückgeführt werden müssen.
Außerdem muss stets ein guter elektrischer Kontakt von der Montageplatte durch die Montageschrauben zur Masse des
Frequenzumrichters gewährleistet sein.
Beim Einsatz ungeschirmter Leitungen werden einige Anforderungen hinsichtlich Störaussendung nicht erfüllt. Die Störfestigkeitsanforderungen werden jedoch erfüllt.
Halten Sie Motorkabel und Anschlusskabel für Bremse so kurz wie möglich, um das Störungsniveau des gesamten Systems
(Frequenzwandler und Installation) so weit wie möglich zu reduzieren. Sie dürfen Steuer- und Buskabel nicht gemeinsam mit
Motorkabeln und Anschlusskabeln für Bremse verlegen. Funkstörfrequenzen über 50 MHz (Luftstrahlung) werden
insbesondere von der Regelelektronik erzeugt.
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 47
Page 50

Produktübersicht
2.9.2 Emissionsanforderungen
VLT® Decentral Drive FCD 302
22
rungen von der beabsichtigten Verwendung des Frequenzumrichters ab. In der EMV-Produktnorm sind vier Kategorien
definiert. Die Definitionen der 4 Kategorien zusammen mit den Anforderungen an leitungsgeführte Störaussendungen der
Netzversorgungsspannung zeigt Tabelle 2.14.
Gemäß der EMV-Produktnorm für drehzahlveränderbare Frequenzumrichter, EN/IEC 61800-3:2004, hängen die EMV-Anforde-
Anforderungen an leitungsgeführte
Kategorie Definition
C1 In der ersten Umgebung (Wohn-, Geschäfts- und Gewerbebereich sowie Kleinbe-
triebe) installierte Frequenzumrichter mit einer Versorgungsspannung unter 1000 V.
C2 In der ersten Umgebung (Wohn-, Geschäfts- und Gewerbebereich sowie Kleinbe-
triebe) installierte Frequenzumrichter mit einer Versorgungsspannung unter 1000 V,
die weder steckerfertig noch beweglich sind und von Fachkräften installiert und in
Betrieb genommen werden müssen.
C3 In der zweiten Umgebung (Industriebereich) installierte Frequenzumrichter mit einer
Versorgungsspannung unter 1000 V.
C4 In der zweiten Umgebung (Industriebereich) installierte Frequenzumrichter mit einer
Versorgungsspannung gleich oder über 1000 V oder einem Nennstrom gleich oder
über 400 A oder vorgesehen für den Einsatz in komplexen Systemen.
Tabelle 2.14 Emissionsanforderungen
Störaussendungen gemäß
Grenzwerten in EN 55011
Klasse B
Klasse A Gruppe 1
Klasse A Gruppe 2
Keine Begrenzung.
Es sollte ein EMV-Plan erstellt werden.
Wenn die Fachgrundnorm Störungsaussendung zugrunde gelegt wird, müssen die Frequenzumrichter die Grenzwerte in
Tabelle 2.15 einhalten.
Anforderungen an leitungsgeführte
Umgebung Fachgrundnorm
Erste Umgebung
(Wohnung und Büro)
Zweite Umgebung
(Industriebereich)
Tabelle 2.15 Grenzwertklassen der Störaussendung
Fachgrundnorm EN/IEC 61000-6-3 für Wohnbereich, Geschäfts- und
Gewerbebereiche sowie Kleinbetriebe.
Fachgrundnorm EN/IEC 61000-6-4 für Industriebereiche. Klasse A Gruppe 1
Störaussendungen gemäß Grenzwerten
in EN 55011
Klasse B
2.9.3 Störfestigkeitsanforderungen
Die Störfestigkeitsanforderungen für Frequenzumrichter sind abhängig von der Installationsumgebung. In Industriebereichen
sind die Anforderungen höher als in Wohn- oder Bürobereichen. Alle Danfoss-Frequenzumrichter erfüllen die Störfestigkeitsanforderungen in Industriebereichen und dementsprechend auch die niedrigeren Anforderungen in Wohn- und
Bürobereichen.
Um die Störfestigkeit gegenüber Schalttransienten durch andere zugeschaltete elektrische Geräte zu dokumentieren, wurde
der nachfolgende Störfestigkeitstest durchgeführt, und zwar in einem System bestehend aus Frequenzumrichter (mit
Optionen, falls relevant), abgeschirmter Steuerleitung und Steuerkasten mit Potenziometer, Motorkabel und Motor.
Die Prüfungen wurden nach den folgenden Fachgrundnormen durchgeführt:
EN 61000-4-2 (IEC 61000-4-2): Elektrostatische Entladung (ESD): Simulation elektrostatischer Entladung von
•
Personen.
EN 61000-4-3 (IEC 61000-4-3): Elektromagnetisches Einstrahlfeld, amplitudenmodulierte Simulation der Auswir-
•
kungen von Radar- und Funkgeräten sowie von mobilen Kommunikationsgeräten.
48 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 51
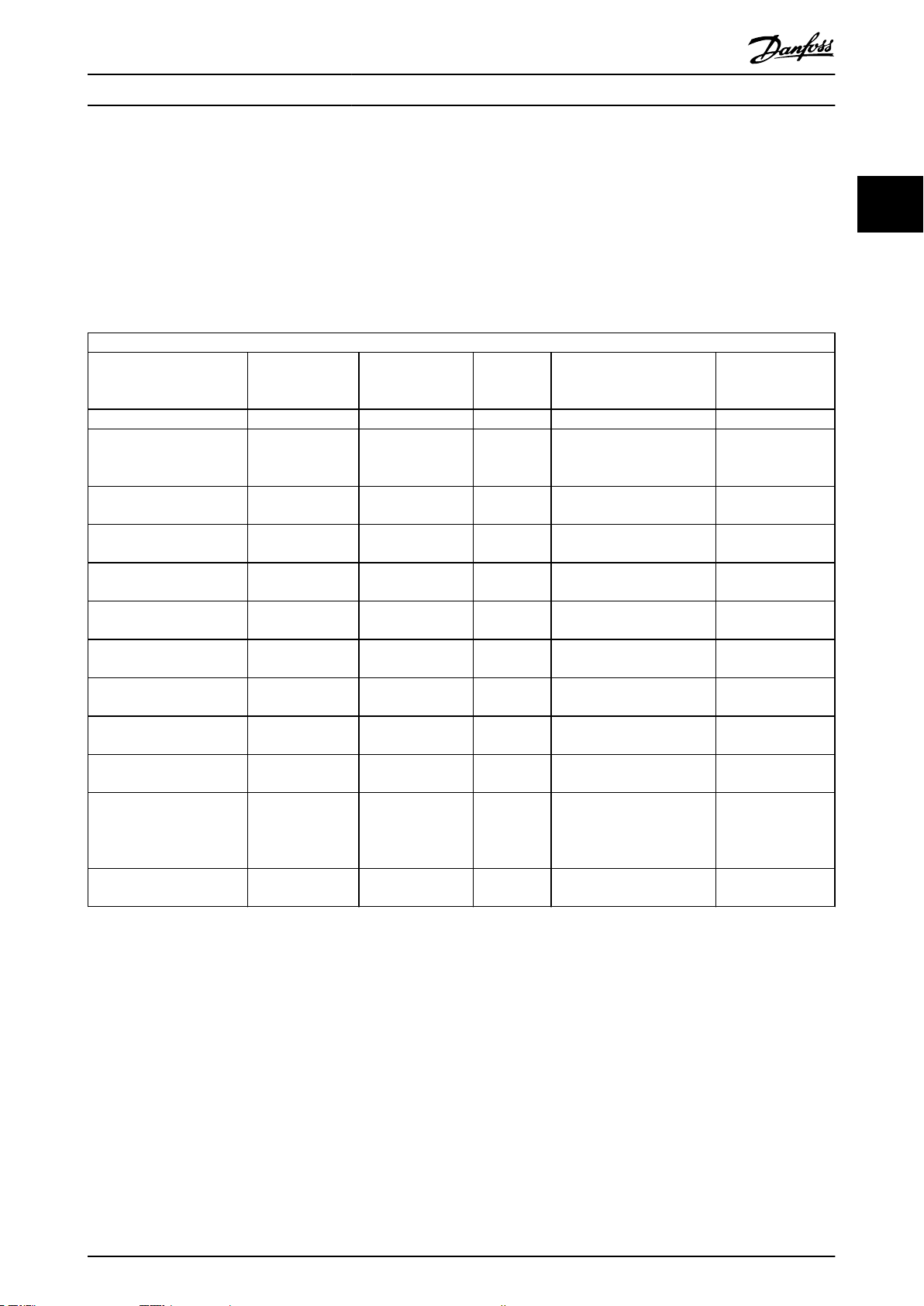
Produktübersicht Projektierungshandbuch
EN 61000-4-4 (IEC 61000-4-4): Schalttransienten: Simulation von Störungen, herbeigeführt durch Schalten mit
•
einem Schütz, Relais oder ähnlichen Geräten.
EN 61000-4-5 (IEC 61000-4-5): Überspannungen: Simulation von Transienten, z. B. durch Blitzschlag in nahe
•
gelegenen Anlagen.
EN 61000-4-6 (IEC 61000-4-6): HF-Gleichtakt: Simulation der Auswirkung von Funksendegeräten, die an Verbin-
•
dungskabel angeschlossen sind.
Siehe Tabelle 2.16.
Spannungsbereich: 200–240 V, 380–480 V
Stoßspannungst-
ransienten
IEC 61000-4-5
Fachgrundnorm
Impulskette
IEC 61000-4-4
Abnahmekriterium B B B A A
2 kV/2 Ω Differenz-
betrieb
4 kV/12 Ω CM
4 kV/2 Ω
4 kV/2 Ω
4 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
1)
1)
1)
1)
1)
1)
1)
1)
Reihe
Motor
Bremse
Zwischenkreiskopplung
Steuerkabel
Standardbus
Relaisleitungen
Anwendungs- und FeldbusOptionen
LCP-Kabel
4 kV CM (Common
Mode)
4 kV CM (Common
Mode)
4 kV CM (Common
Mode)
4 kV CM (Common
Mode)
2 kV CM (Common
Mode)
2 kV CM (Common
Mode)
2 kV CM (Common
Mode)
2 kV CM (Common
Mode)
2 kV CM (Common
Mode)
0,5 kV/2 Ω
Externe 24 V DC
2 V CM (Common
Mode)
Differenzbetrieb
1 kV/12 Ω CM
(Common Mode)
Gehäuse — —
ESD
IEC
61000-4-2
Abgestrahlte elektromagne-
tische Felder
IEC 61000-4-3
— — 10 V
— — 10 V
— — 10 V
— — 10 V
— — 10 V
— — 10 V
— — 10 V
— — 10 V
— — 10 V
— — 10 V
8 kV AD
6 kV CD
10 V/m —
HF-Gleichtakt-
spannung
IEC 61000-4-6
2 2
eff
eff
eff
eff
eff
eff
eff
eff
eff
eff
Tabelle 2.16 EMV-Immunität
1) Einkopplung auf den Kabelschirm
AD: Luftentladung (Air Discharge)
CD: Kontaktentladung (Contact Discharge)
CM (Common Mode): Gleichtakt (Common Mode)
DM: Differenzbetrieb (Differential Mode)
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 49
Page 52

Produktübersicht
2.9.4 EMV
VLT® Decentral Drive FCD 302
22
2.9.4.1 EMV-gerechte Installation
Nachstehend sind Hinweise für eine EMV-gerechte Installation von Frequenzumrichtern aufgeführt. Bitte halten Sie sich an
diese Vorgaben, wenn eine Einhaltung der Ersten Umgebung nach EN 61800-3 gefordert ist. Handelt es sich um eine Installation in einer Zweiten Umgebung nach EN 61800-3, zum Beispiel industrielle Netze, oder wird die Installation von einem
eigenen Trafo versorgt, dürfen Sie von diesen Richtlinien abweichen, was jedoch nicht empfohlen wird.. Siehe auch
Kapitel 1.5.1 CE-Kennzeichnungen, Kapitel 2.9.1 Allgemeine Aspekte von EMV-Emissionen und Kapitel 2.9.7 EMV-Prüfergebnisse.
EMV-gerechte elektrische Installation:
Verwenden Sie nur geflochtene abgeschirmte Motorkabel und abgeschirmte Steuerleitungen. Die Schirmab-
•
deckung muss mindestens 80 % betragen. Die Abschirmung muss aus Metall – in der Regel Kupfer, Aluminium,
Stahl oder Blei – bestehen. Für das Netzkabel gelten keine speziellen Anforderungen.
Bei Installationen mit starren Metallrohren sind keine abgeschirmten Kabel erforderlich; Sie müssen das Motorkabel
•
jedoch in einem anderen Installationsrohr als die Steuer- und Netzkabel installieren. Es ist ein durchgehendes
Metallrohr vom Frequenzumrichter bis zum Motor erforderlich. Die EMV-Leistung flexibler Installationsrohre variiert
sehr stark; hier sind entsprechende Herstellerangaben einzuholen.
Erden Sie Abschirmung/Installationsrohr bei Motorkabeln und Steuerleitungen beidseitig. In einigen Fällen ist es
•
nicht möglich, die Abschirmung an beiden Enden anzuschließen (fehlender Potenzialausgleich). Schließen Sie in
diesem Fall zumindest die Abschirmung am Frequenzumrichter an.
Vermeiden Sie verdrillte Abschirmungsenden (Pigtails). Sie erhöhen die Impedanz der Abschirmung und
•
beeinträchtigen so den Abschirmeffekt bei hohen Frequenzen. Verwenden Sie stattdessen niederohmige
Kabelschellen oder EMV-Kabelverschraubungen.
Verwenden Sie nach Möglichkeit in Schaltschränken, in denen der Frequenzumrichter untergebracht ist, ebenfalls
•
nur abgeschirmte Motor- und Steuerleitungen.
Führen Sie die Abschirmung möglichst dicht an den elektrischen Anschluss.
Abbildung 2.39 zeigt ein Beispiel einer EMV-gerechten elektrischen Installation des VLT® Decentral Drive FCD 302. Der
Frequenzumrichter ist an eine SPS angeschlossen, die in einem separaten Schrank installiert ist. Auch andere Installationsweisen können ggf. eine ebenso gute EMV-Leistung erzielen, sofern Sie die vorstehenden Hinweise für eine
ordnungsgemäße Installation befolgt haben.
Wenn die Installation nicht gemäß den Vorgaben erfolgt oder wenn Sie nicht abgeschirmte Kabel verwenden, können
bestimmte Anforderungen hinsichtlich der Störaussendung voraussichtlich nicht erfüllt werden, auch wenn die Anforderungen an die Störfestigkeit erfüllt bleiben. Siehe Kapitel 2.9.7 EMV-Prüfergebnisse.
50 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 53

130BC989.10
L1
L2
L3
PE
Min. 16 mm
2
Equalizing cable
Control cables
Earthing rail
Cable insulation stripped
Output contactor etc.
Min. 200mm
between control cables,
motor cable and
Motor cable
Motor, 3 phases and
PLC etc.
Mains-supply
mains cable
PLC
Protective earth
Reinforced protective earth
Produktübersicht Projektierungshandbuch
2 2
Abbildung 2.39 EMV-gerechte elektrische Installation eines Frequenzumrichters
Zwischen dem Feldbuskabel und dem Motorkabel sowie zwischen dem Feldbuskabel und dem Netzkabel muss ein Mindestabstand von 200 mm (7.87 in) eingehalten werden. Falls dies nicht möglich ist, verwenden Sie die optionale Erdverbindung
(PE) an der Unterseite des VLT® Decentral Drive FCD 302.
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 51
Page 54
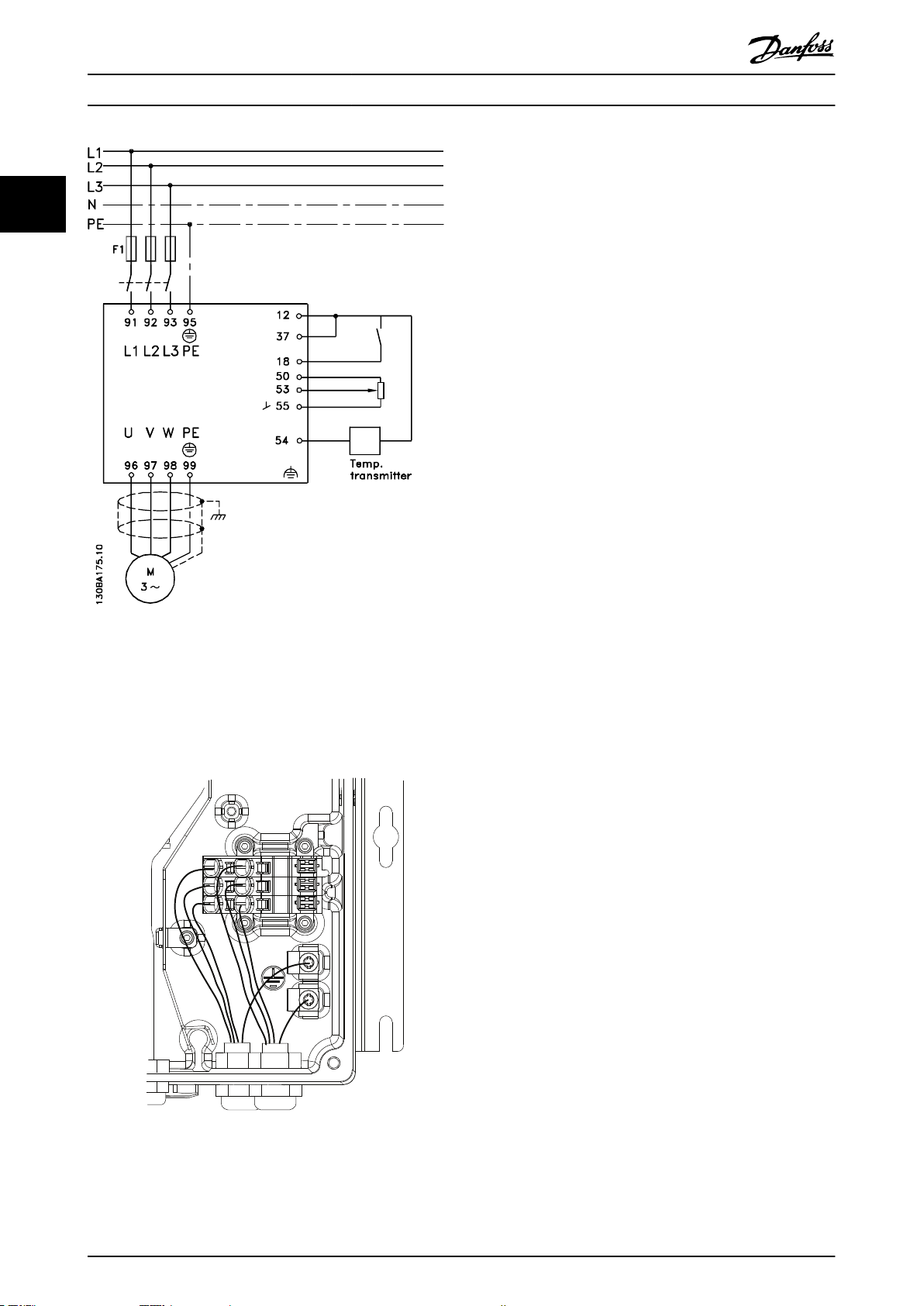
130BG474.10
Produktübersicht
22
VLT® Decentral Drive FCD 302
Potenzialausgleichskabel
Da die Abschirmung des Kommunikationskabels über
jeden Frequenzumrichter/jedes Gerät mit der Erde
verbunden werden muss, besteht die Gefahr, dass am
Kommunikationskabel Strom anliegt. Dies kann Kommunikationsprobleme verursachen, da der Ausgleichsstrom
möglicherweise die Kommunikation stört. Bringen Sie zur
Reduzierung der Ströme in der Abschirmung des
Kommunikationskabels immer ein kurzes Erdungskabel
zwischen den Geräten an, die mit demselben Kommunikationskabel verbunden sind. Danfoss empfiehlt die
Verwendung eines Ausgleichskabels mit einem Kabelquerschnitt von mindestens 16 mm2 (6 AWG), das parallel zum
Kommunikationskabel zu installieren ist.
Verwenden Sie für einen einwandfreien Ausgleich zwischen
®
Decentral Drive FCD 302 in einer dezentralen Instal-
VLT
lation die externe Ausgleichsklemme von Danfoss
(Bestellnummer 130B5833).
2.9.4.2 Verwendung von EMV-gerechter
Verkabelung
Abbildung 2.40 Netzanschluss-Schaltbild
Elektrische Erdanschlüsse
Schließen Sie die Schutzerdung zur Gewährleistung der
elektrischen Sicherheit immer an den dafür vorgesehenen
Anschlüssen im Installationskasten des VLT® Decentral Drive
FCD 302 an. Siehe Abbildung 2.41.
Danfoss empfiehlt die Verwendung abgeschirmter Kabel,
um die EMV-Immunität der Steuerleitungen zu optimieren
und die EMV-Störaussendung der Motorkabel zu
verhindern.
Die Fähigkeit eines Kabels, ein- und ausstrahlende
elektrische Störstrahlung zu reduzieren, hängt von der
Übertragungsimpedanz (ZT) ab. Die Abschirmung von
Kabeln ist normalerweise darauf ausgelegt, die
Übertragung elektrischer Störungen zu mindern, wobei
allerdings Abschirmungen mit niedrigerem (ZT) wirksamer
sind als Abschirmungen mit höherer Übertragungsimpedanz (ZT).
Die Übertragungsimpedanz (ZT) wird von den Kabelherstellern selten angegeben. Durch Sichtprüfung und
Beurteilung der mechanischen Eigenschaften des Kabels
lässt sich die Übertragungsimpedanz jedoch einigermaßen
abschätzen.
Sie können die Übertragungsimpedanz (ZT) anhand
folgender Faktoren beurteilen:
Die Leitfähigkeit des Abschirmmaterials.
•
Den Kontaktwiderstand zwischen den Leitern des
•
Abschirmmaterials.
Die Schirmabdeckung, d. h. die physische Fläche
•
des Kabels, die durch den Schirm abgedeckt ist;
wird häufig in Prozent angegeben.
Art der Abschirmung (geflochten oder verdrillt).
•
Abbildung 2.41 Elektrische Erdanschlüsse
52 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 55

1
2
PE
FC
PE
PLC
130BB922.12
PE PE
<10 mm
100nF
FC
PE
PE
PLC
<10 mm
130BB609.12
PE
FC
PE
FC
130BB923.12
PE PE
69
68
61
69
68
61
1
2
<10 mm
Produktübersicht Projektierungshandbuch
Abbildung 2.43 Abschirmung von Steuerleitungen
50-Hz-Brummschleifen
Bei sehr langen Steuerleitungen können Brummschleifen
auftreten. Beheben Sie dieses Problem durch Anschluss
eines Schirmendes an Erde über einen 100-nF-Kondensator
(mit möglichst kurzen Leitungen).
1
Mindestens 16 mm2 (6 AWG)
2 Potenzialausgleichskabel
2 2
a. Aluminium-Ummantelung mit Kupferdraht
b. Verdrillter Kupferdraht oder bewehrtes (abgeschirmtes)
Stahldrahtkabel
c. Einlagiges Kupferdrahtgeflecht mit prozentual schwankender
Schirmabdeckung. Mindestanforderung.
d. Zweilagiges Kupferdrahtgeflecht
e. Zweilagiges Kupferdrahtgeflecht mit magnetischer,
abgeschirmter Zwischenlage
f. In Kupfer- oder Stahlrohr geführtes Kabel
g. Bleikabel mit 1,1 mm (0.04 inch) Wandstärke
Abbildung 2.42 Übertragungsimpedanz
2.9.4.3 Erdung abgeschirmter
Steuerleitungen
Korrekte Abschirmung
Die bevorzugte Methode zur Abschirmung ist in den
meisten Fällen die beidseitige Befestigung von Steuerleitungen und Kabeln mit Schirmbügeln, um möglichst
großflächigen Kontakt von Hochfrequenzkabeln zu
erreichen.
Besteht zwischen dem Frequenzumrichter und der SPS ein
unterschiedliches Erdpotenzial, können Ausgleichsströme
auftreten, die das gesamte System stören. Schaffen Sie
Abhilfe durch das Anbringen eines Potenzialausgleichskabels neben der Steuerleitung.
Mindestleitungsquerschnitt: 16 mm2 (6 AWG).
Abbildung 2.44 Abschirmung für 50-Hz-Brummschleifen
Vermeidung von EMV-Störungen auf der seriellen
Kommunikation
Diese Klemme ist intern über ein RC-Glied mit Erde
verbunden. Verwenden Sie verdrillte Aderpaare zur
Reduzierung von Störungen zwischen Leitern. Die
empfohlene Methode ist in Abbildung 2.45 dargestellt.
1
Mindestens 16 mm2 (6 AWG)
2 Potenzialausgleichskabel
Abbildung 2.45 Abschirmung zur Vermeidung von EMVStörungen, serielle Kommunikation
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 53
Page 56

PE
FC
PE
FC
130BB924.12
PE PE
69
69
68
68
1
2
<10 mm
175HA034.10
Produktübersicht
VLT® Decentral Drive FCD 302
Alternativ können Sie die Verbindung zu Klemme 61 lösen:
22
Abbildung 2.47 Zwischenkreisspulen
1
Mindestens 16 mm2 (6 AWG)
2 Potenzialausgleichskabel
Abbildung 2.46 Abschirmung zur Vermeidung von EMVStörungen, serielle Kommunikation, ohne Klemme 61
2.9.4.4 EMV-Schalter
Ungeerdete Netzversorgung
Wird der Frequenzumrichter von einer isolierten Netzstromquelle (IT-Netz, potenzialfreie Dreieckschaltung und
geerdete Dreieckschaltung) oder TT/TNS-Netz mit
geerdetem Zweig versorgt, stellen Sie den EMV-Schalter
über Parameter 14-50 EMV-Filter auf [Off ].
Stellen Sie andernfalls Parameter 14-50 EMV-Filter auf [On].
Weitere Informationen finden Sie in:
IEC 364-3.
•
Anwendungshinweis VLT
•
wichtig, Isolationsmonitore zu verwenden, die
zusammen mit der Leistungselektronik (IEC
61557-8) einsetzbar sind.
®
am IT-Netz. Es ist
HINWEIS
Oberschwingungsströme können eventuell Kommunikationsgeräte stören, die an denselben Transformator
angeschlossen sind, oder Resonanzen in Verbindung mit
Blindstromkompensationsanlagen verursachen.
Eingangsstrom
I
eff
I
1
I
5
I
7
I
11-49
Tabelle 2.18 Oberschwingungsströme und
Effektiv-Eingangsstrom
Um Oberschwingungsströme gering zu halten, sind
Frequenzumrichter bereits serienmäßig mit Zwischenkreisspulen ausgestattet. Zwischenkreisspulen verringern die
gesamte Spannungsverzerrung THD um 40 %.
2.9.5.1 Einfluss von Oberschwingungen in
einer Energieverteilungsanlage
1,0
0,9
0,4
0,2
<0,1
2.9.5 Netzversorgungsstörung/rückwirkung
In Abbildung 2.48 ist ein Transformator auf der Primärseite
mit einem Verknüpfungspunkt PCC1 an der Mittelspannungsversorgung verbunden. Der Transformator hat eine
Ein Frequenzumrichter nimmt vom Netz einen nicht
sinusförmigen Strom auf, der den Eingangsstrom I
eff
erhöht. Nicht sinusförmige Ströme können mithilfe einer
Fourier-Analyse in Sinusströme verschiedener Frequenz, d.
h. in verschiedene Oberschwingungsströme IN mit einer
Impedanz Z
PCC (Point of Common Coupling, Verknüpfungspunkt), an
dem alle Verbraucher angeschlossen sind, ist PCC2. Jeder
Verbraucher wird durch Kabel mit einer Impedanz Z1, Z2, Z
angeschlossen.
und speist eine Reihe von Verbrauchern. Der
xfr
Grundfrequenz von 50 Hz, zerlegt werden:
Oberschwingungsströme I
Hz 50 Hz 250 Hz 350 Hz
Tabelle 2.17 Oberschwingungsströme
1
I
5
I
7
Die Oberschwingungen tragen nicht direkt zur Leistungsaufnahme bei; sie erhöhen jedoch die Wärmeverluste bei
der Installation (Transformator, Leitungen). Bei Anlagen mit
einem hohen Anteil an Gleichrichterlasten ist es daher
wichtig, die Oberschwingungsströme auf einem niedrigen
Pegel zu halten, um eine Überlast des Transformators und
zu hohe Temperaturen in den Kabeln zu vermeiden.
54 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
3
Page 57

Non-linear
Current Voltage
System
Impedance
Disturbance to
other users
Contribution to
system losses
130BB541.10
Produktübersicht Projektierungshandbuch
Abbildung 2.49 Störende Wirkungen von Oberschwingungen
2.9.5.2 Normen und Anforderungen zur
2 2
Oberschwingungsbegrenzung
Abbildung 2.48 Kleine Verteilanlage
Von nichtlinearen Verbrauchern aufgenommene
Oberschwingungsströme führen durch den Spannungsabfall an den Impedanzen des Stromverteilungssystems zu
einer Spannungsverzerrung. Höhere Impedanzen ergeben
höhere Grade an Spannungsverzerrung.
Die Stromverzerrung steht mit der Geräteleistung und der
individuellen Last in Verbindung. Spannungsverzerrung
steht mit der Systemleistung in Verbindung. Die
Spannungsverzerrung im PCC kann nicht ermittelt werden,
wenn nur die Oberschwingungsleistung der Last bekannt
ist. Um die Verzerrung im PCC vorhersagen zu können,
müssen die Konfiguration des Verteilungssystems und die
entsprechenden Impedanzen bekannt sein.
Ein häufig verwendeter Begriff, um die Impedanz eines
Stromnetzes zu beschreiben, ist das Kurzschlussverhältnis
R
, definiert als das Verhältnis zwischen Kurzschluss-
sce
Scheinleistung der Versorgung am PCC (Ssc) und der
Nennscheinleistung der Last (S
S
R
wenn
ce
=
sce
S
equ
Ssc=
Die störende Wirkung von Oberschwingungen hat zwei
Faktoren
•
•
2
U
Z
Versorgung
Oberschwingungsströme tragen zu Systemverlusten bei (in Verkabelung, Transformator).
Spannungsverzerrung durch Oberschwingungen
führt zu Störungen anderer Verbraucher und
erhöht Verluste in anderen Verbrauchern.
und
S
equ
).
equ
= U × I
equ
Die Anforderungen an die Oberschwingungsbegrenzungen
können folgende sein:
Anwendungsspezifische Anforderungen
•
Einzuhaltende Normen
•
Die anwendungsspezifischen Anforderungen beziehen sich
auf eine konkrete Anlage, in der technische Gründe für die
Begrenzung der Oberschwingungen vorliegen.
Beispiel: Ein 250-kVA-Transformator mit zwei
angeschlossenen 110-kW-Motoren reicht aus, wenn einer
der Motoren direkt an das Netz geschaltet und der andere
über einen Frequenzumrichter gespeist wird. Der
Transformator ist jedoch unterdimensioniert, wenn beide
Motoren über einen Frequenzumrichter gespeist werden.
Durch Verwendung zusätzlicher Maßnahmen zur
Oberschwingungsreduzierung in der Anlage oder Wahl von
Low Harmonic Drives ermöglichen den Betrieb beider
Motoren mit Frequenzumrichtern.
Es gibt verschiedene Normen, Vorschriften und Empfehlungen zur Reduzierung von Oberschwingungen. Normen
unterscheiden sich je nach Land und Industrie. Die
folgenden Normen sind am häufigsten anwendbar:
IEC61000-3-2
•
IEC61000-3-12
•
IEC61000-3-4
•
IEEE 519
•
G5/4
•
Genaue Angaben zu jeder Norm enthält das VLT® Advanced
Harmonic Filter AHF-Projektierungshandbuch 005/010.
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 55
Page 58
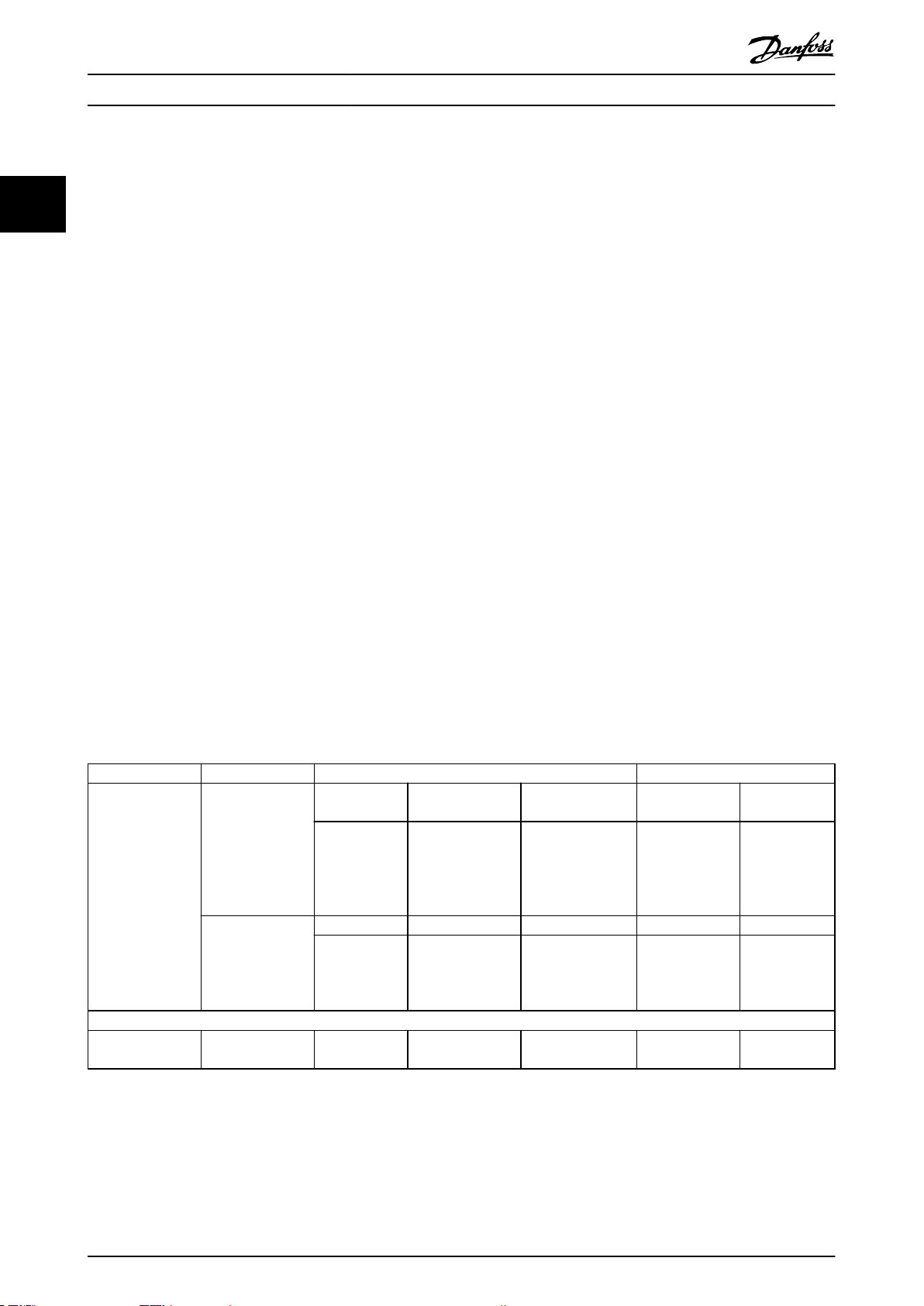
Produktübersicht
VLT® Decentral Drive FCD 302
2.9.5.3 Reduzierung, Vermeidung oder
2.9.5.4 Oberschwingungsberechnung
Kompensation von
Oberschwingungen
22
In Fällen, in denen zusätzliche Oberschwingungsunterdrückung gefordert ist, bietet Danfoss eine Vielzahl von
Geräten zur Reduzierung, Vermeidung oder Kompensation
von Netzrückwirkungen an. Diese sind:
VLT® 12-Puls-Frequenzumrichter.
•
VLT® AHF-Filter.
•
VLT® Low Harmonic Drives.
•
VLT® Advanced Active Filters.
•
Die Wahl der richtigen Lösung hängt von verschiedenen
Faktoren ab:
Das Stromnetz (Hintergrundverzerrung, Netzasym-
•
metrie, Resonanz und Art der Versorgung
(Transformator/Generator))
Anwendung (Lastprofil, Anzahl Lasten und
•
Lastgröße)
Örtliche/nationale Anforderungen/Vorschriften
•
(IEEE 519, IEC, G5/4 usw.)
Gesamtkosten für den Eigentümer (Anschaffungs-
•
kosten, Wirkungsgrad, Wartung usw.)
Die Danfoss VLT® Harmonic Calculation MCT31-Software
kann das Maß an Spannungsverzerrung am Netz sowie
notwendige Gegenmaßnahmen bestimmen. Das
kostenfreie Tool MCT 31 können Sie herunterladen unter
www.danfoss.com. Die Software ist äußerst benutzerfreundlich ausgelegt und beschränkt sich nur auf
Systemparameter, die normalerweise zugänglich sind.
2.9.6 Fehlerstromschutzschalter
Je nach Anforderung der örtlichen Sicherheitsvorschriften
kann als zusätzliche Schutzmaßnahme eine zusätzliche
Schutzerdung, Nullung oder der Einsatz eines FI-Schutzschalters (Fehlerstromschutzschalter) vorgeschrieben sein.
Bei einem Erdschluss kann im Fehlerstrom ein Gleichstromanteil enthalten sein.
Fehlerstromschutzschalter sind gemäß den örtlichen
Vorschriften anzuwenden. Die Relais müssen für die
Absicherung von Geräten mit dreiphasigem Brückengleichrichter und für einen kurzzeitigen Impulsstrom bei NetzEinschaltung unter Verwendung von
Fehlerstromschutzschaltern zugelassen sein.
2.9.7 EMV-Prüfergebnisse
Folgende Ergebnisse wurden unter Verwendung eines Systems mit einem Frequenzumrichter (mit Optionen, falls
erforderlich), einer abgeschirmten Steuerleitung, eines Steuerkastens mit Potenziometer sowie eines Motors und geschirmten
Motorkabels erzielt.
EMV-Filtertyp Leitungsgeführte Störaussendung Abgestrahlte Störaussendung
Normen und
Anforderungen
H1
FCD 302
Tabelle 2.19 EMV-Prüfergebnisse (Störaussendung, Störfestigkeit)
EN 55011 Klasse B Klasse A Gruppe 1 Klasse A Gruppe 2 Klasse B Klasse A
Gruppe 1
Wohnbereich,
Geschäfts- und
Gewerbereich
sowie Kleinbe-
triebe
EN/IEC 61800-3 Kategorie C1 Kategorie C2 Kategorie C3 Kategorie C1 Kategorie C2
Erste
Umgebung
Wohnungen
und Büro
0,37–3 kW
(0,5–4 HP)
Nein 10 m (32,8 ft) 10 m (32,8 ft) Nein Ja
Industriebereich Industriebereich Wohnbereich,
Geschäfts- und
Gewerbereich
sowie Kleinbe-
triebe
Erste Umgebung
Wohnungen und
Büro
Zweite Umgebung
Industrie
Erste Umgebung
Wohnungen und
Büro
Industriebereich
Erste
Umgebung
Wohnungen
und Büro
56 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 59

Systemintegration Projektierungshandbuch
3 Systemintegration
3.1 Umgebungsbedingungen
3.1.1 Luftfeuchtigkeit
Der Frequenzumrichter erfüllt die Norm IEC/EN 60068-2-3,
EN 50178 Pkt. 9.4.2.2 bei 50 °C (122 °F).
3.1.2 Aggressive Umgebungsbedingungen
Ein Frequenzumrichter besteht aus vielen mechanischen
und elektronischen Komponenten. Alle reagieren mehr
oder weniger empfindlich auf Umwelteinflüsse.
HINWEIS
Der Frequenzumrichter darf nicht in Umgebungen
installiert werden, deren Atmosphäre Aerosol-Flüssigkeiten, Stäube oder Gase enthält, die die elektronischen
Bauteile beeinflussen oder beschädigen können. Werden
in solchen Fällen nicht die erforderlichen Schutzmaßnahmen getroffen, so verkürzt sich die Lebensdauer des
Frequenzumrichters und es erhöht sich das Risiko von
Ausfällen.
Schutzart gemäß IEC 60529
In Umgebungen mit hohen Temperaturen und viel
Feuchtigkeit lösen korrosionsfördernde Gase, z. B. Schwefel,
Stickstoff und Chlorgemische, chemische Prozesse aus, die
sich auf die Bauteile des Frequenzumrichters auswirken.
Derartige chemische Reaktionen können die elektronischen
Bauteile sehr schnell in Mitleidenschaft ziehen und
zerstören. In solchen Umgebungen empfiehlt es sich, die
Geräte in einen extern belüfteten Schaltschrank
einzubauen, sodass die aggressiven Gase vom Frequenzumrichter ferngehalten werden.
Als zusätzlichen Schutz in solchen Bereichen können Sie als
Option eine bessere Beschichtung der Platinen bestellen.
HINWEIS
Die Aufstellung eines Frequenzumrichters in aggressiven
Umgebungsbedingungen verkürzt die Lebensdauer des
Geräts erheblich und erhöht das Risiko von Ausfällen.
Vor der Installation des Frequenzumrichters muss die
Umgebungsluft auf Flüssigkeiten, Stäube und Gase geprüft
werden. Dies kann z. B. geschehen, indem man in der
jeweiligen Umgebung bereits vorhandene Installationen
näher in Augenschein nimmt. Typische Anzeichen für
schädliche Aerosol-Flüssigkeiten sind an Metallteilen
haftendes Wasser oder Öl oder Korrosionsbildung an
Metallteilen.
Übermäßige Mengen Staub finden sich häufig an Schaltschränken und vorhandenen elektrischen Installationen. Ein
Anzeichen für aggressive Schwebegase sind Schwarzverfärbungen von Kupferstäben und Kabelenden bei
vorhandenen Installationen.
3.1.3 Vibrationen und Erschütterungen
Der Frequenzumrichter wurde Prüfverfahren gemäß den
folgenden Normen unterzogen:
Der Frequenzumrichter entspricht den Anforderungen für
Geräte zur Wandmontage, sowie bei Montage an Maschinengestellen oder in Schaltschränken.
IEC/EN 60068-2-6: Schwingung (sinusförmig) -
•
1970
IEC/EN 60068-2-64: Schwingung, Breitband-
•
rauschen (digital geregelt)
3.1.4 Störgeräusche
Störgeräusche von Frequenzumrichtern haben die
folgenden Ursachen:
DC-Zwischenkreisdrosseln.
•
EMV-Filterdrossel.
•
Der VLT® Decentral Drive FCD 302 weist keine erhebliche
Störaussendung auf. Angaben zu Störgeräuschen finden
Sie in Kapitel 7 Technische Daten.
Montagepositionen
3.2
Der VLT® Decentral Drive FCD 302 besteht aus 2 Teilen:
Dem Installationskasten
•
Dem Elektronikteil
•
Einzelmontage
Die Löcher an der Rückseite des Installations-
•
kastens dienen zur Befestigung der Halterungen.
Stellen Sie sicher, dass die Festigkeit der
•
Montageposition zum Tragen des Gerätegewichts
ausreicht.
Stellen Sie sicher, dass geeignete Schrauben
•
verwendet werden.
3 3
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 57
Page 60

130BB701.10
130BC382.10
130BC383.10
Systemintegration
VLT® Decentral Drive FCD 302
3.2.1 Montagepositionen für hygienische
Anwendungen
Der VLT® Decentral Drive FCD 302 wurde gemäß EHEDGRichtlinien entwickelt und ist damit zum Einbau in
33
Umfeldern mit starkem Schwerpunkt auf einfacher
Reinigung geeignet.
Befestigen Sie den FCD 302 senkrecht an einer Wand oder
einem Maschinenrahmen, um sicherzustellen, dass Flüssigkeiten aus dem Gehäuse ablaufen. Richten Sie das Gerät so
aus, dass sich die Kabelanschlüsse am Unterteil befinden.
Verwenden Sie Kabelanschlüsse, die für hygienische
Anwendungsanforderungen ausgelegt sind, z. B. Rittal HD
2410.110/120/130. Kabelanschlüsse in Hygieneausführung
sorgen für optimale Reinigungsfreundlichkeit der Anlage.
Abbildung 3.1 FCD 302 in Einzelmontage mit Halterungen
Zulässige Montagepositionen
HINWEIS
Nur Frequenzumrichter mit hygienischer Bauform,
Bezeichnung FCD 302 P XXX T4 W69, sind nach EHEDG
zertifiziert.
Abbildung 3.2 Zulässige Montagepositionen –
Standardanwendungen
58 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Abbildung 3.3 Zulässige Montagepositionen für
hygienische Anwendungen
Page 61

130BC286.10
U
96
V
97
W
98
L1
L2
L3
L1
91
L2
92
L3
93
12
27
T1
T2
T3
NO
NC
NO
NC
L2
L3
PE
L1
41
33
5
3
1 2
4
6
34
42
1
2
L1
L2
L3
PE
U
96
V
97
W
98
L1
91
L2
92
L3
93
12
27
U
V
W
1 2
3 4
5
6
7 8
1
130BC287.10
Systemintegration Projektierungshandbuch
3.3 Eingang: Netzseitige Dynamik
3.3.1 Anschlüsse
3.3.1.1 Allgemeine Hinweise zu Kabeln
HINWEIS
Allgemeine Hinweise zu Kabeln
Befolgen Sie stets die nationalen und lokalen
Vorschriften zum Leitungsquerschnitt und zur
Umgebungstemperatur. Kupferleiter (75 °C (175 °F))
werden empfohlen.
3.3.1.2 Netz- und Erdanschluss
Zu Montageanweisungen und zur Lage der Klemmen siehe
®
Decentral Drive FCD 302 Bedienungsanleitung.
VLT
Netzanschluss
1 Durchschleifklemmen
2 Trennschalter
Abbildung 3.4 Nur große Bauform: Trennschalter und
Netztrenner
3 3
Abbildung 3.6 Motor- und Netzanschluss mit Wartungsschalter
Der Wartungsschalter ist sowohl bei kleinen als auch bei
großen Geräten optional. Der Schalter ist auf der
Motorseite montiert. Alternativ können Sie den Schalter an
der Netzseite anbringen oder auslassen.
Beim großen Gerät ist der Trennschalter optional. Sie
können das große Gerät entweder mit Wartungsschalter
oder Trennschalter konfigurieren, aber nicht mit beidem.
Abbildung 3.6 ist in der Praxis nicht konfigurierbar, sondern
dient nur dazu, die jeweilige Position der Einzelteile zu
zeigen.
In der Regel handelt es sich bei den Netzleistungskabeln
um ungeschirmte Kabel.
3.3.1.3 Relaisanschluss
Um den Relaisausgang einzustellen, siehe Parametergruppe
5-4* Relais.
Nummer Beschreibung
01-02 Schließer (normal offen)
01-03 Öffner (normal geschlossen)
04-05 Schließer (normal offen)
04-06 Öffner (normal geschlossen)
Abbildung 3.5 Nur große Bauform: Wartungsschalter am Netz
1 Durchschleifklemmen
mit Durchschleifklemmen
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 59
Tabelle 3.1 Relaiseinstellungen
Zur Lage der Relaisklemmen siehe VLT® Decentral Drive FCD
302-Bedienungsanleitung.
Page 62
Systemintegration
VLT® Decentral Drive FCD 302
3.3.2 Sicherungen und Trennschalter
3.3.2.1 Sicherungen
Sicherungen und/oder Trennschalter sind versorgungsseitig
33
als Schutz für den Fall einer Bauteilstörung im Inneren des
Frequenzumrichters (erster Fehler) empfohlen.
HINWEIS
Die Verwendung von Sicherungen bzw. Trennschaltern
ist zur Übereinstimmung mit IEC 60364 für CE oder NEC
2009 für UL zwingend erforderlich.
HINWEIS
Sie müssen Personen und Gegenstände vor den Auswirkungen einer Bauteilstörung im Inneren des
Frequenzumrichters schützen.
Schutz des Abzweigkreises
Zum Schutz der Installation vor elektrischen Gefahren und
Bränden müssen alle Abzweigkreise in einer Installation, in
Getrieben, Maschinen usw. gemäß nationalen und internationalen Richtlinien vor Kurzschluss und Überstrom
geschützt sein.
HINWEIS
Die gegebenen Empfehlungen bieten keinen Schutz des
Abzweigkreises zur Erfüllung der UL-Anforderungen.
Kurzschlussschutz
Danfoss empfiehlt die Verwendung der unten aufgeführten
Sicherungen/Trennschalter zum Schutz von Wartungspersonal und Gegenständen im Falle einer Bauteilstörung
im Frequenzumrichter.
3.3.2.2 Empfehlungen
VORSICHT
Im Falle einer Fehlfunktion kann das Nichtbeachten der
Empfehlung zu Gefahren für den Bediener und Schäden
am Frequenzumrichter und anderen Geräten führen.
Die folgenden Abschnitte führen den empfohlenen
Nennstrom auf. Danfoss empfiehlt Sicherungstyp gG und
Danfoss-Trennschalter CB (Danfoss - CTI-25M). Andere
Arten von Trennschaltern können unter der Voraussetzung
verwendet werden, dass sie die dem Frequenzumrichter
zugeführte Energie auf ein Niveau begrenzen, das dem der
Danfoss-Sicherungen entspricht oder niedriger ist.
Befolgen Sie die Empfehlungen für Sicherungen und
Trennschalter, um sicherzustellen, dass Beschädigungen am
Frequenzumrichter nur intern auftreten.
Weitere Informationen finden Sie im Anwendungshinweis
Sicherungen und Trennschalter.
3.3.2.3 CE-Konformität
Sicherungen und Trennschalter müssen zwingend der IEC
60364 entsprechen.
Danfoss empfiehlt Sicherungen bis Größe gG-25. Diese
Sicherungsgröße ist für einen Kurzschlussstrom von max.
100.000 A
korrekten Sicherung liegt der Nennkurzschlussstrom (SCCR)
des Frequenzumrichters bei 100.000 A
. (symmetrisch) bei 480 V geeignet. Mit der
eff
.
eff
3.3.2.4 UL-Konformität
Sicherungen und Trennschalter müssen zwingend der NEC
2009 entsprechen. Verwenden Sie zur Erfüllung der UL/
cUL-Anforderungen die Vorsicherungen in Tabelle 7.2 und
halten Sie sich an die in Kapitel 7.2 Elektrische Daten und
Kabelquerschnitte aufgeführten Bedingungen.
Die Strom- und Spannungsnennwerte gelten auch für UL.
3.4 Ausgang: Motorseitige Dynamik
3.4.1 Motoranschluss
HINWEIS
Zur Einhaltung der Vorgaben der EMV-Emissionsrichtlinie
werden abgeschirmte Kabel empfohlen.
Zur korrekten Dimensionierung von Motorkabelquerschnitt
und -länge siehe Kapitel 7.3 Allgemeine technische Daten.
Abschirmung von Kabeln
Vermeiden Sie verdrillte Abschirmungsenden (Pigtails), die
hochfrequent nicht ausreichend wirksam sind. Wenn Sie
den Kabelschirm unterbrechen müssen (z. B. um ein
Motorschütz oder einen Reparaturschalter zu installieren),
müssen Sie die Abschirmung hinter der Unterbrechung mit
der geringstmöglichen HF-Impedanz fortführen.
Schließen Sie den Motorkabelschirm am Abschirmblech
des Frequenzumrichters und am Metallgehäuse des Motors
an.
Stellen Sie die Schirmverbindungen mit einer möglichst
großen Kontaktfläche (Kabelschellen) her. Dies kann unter
Verwendung des im Lieferumfang des Frequenzumrichters
enthaltenen Zubehörs erfolgen.
Wenn Sie den Kabelschirm unterbrechen müssen (z. B. um
ein Motorschütz oder einen Reparaturschalter zu installieren), müssen Sie die Abschirmung hinter der
Unterbrechung mit der geringstmöglichen HF-Impedanz
fortführen.
Kabellänge und -querschnitt
Der Frequenzumrichter ist mit einer bestimmten
Kabellänge und einem bestimmten Kabelquerschnitt
getestet worden. Wird der Kabelquerschnitt erhöht, so
erhöht sich auch der kapazitive Widerstand des Kabels und damit der Ableitstrom - sodass die Kabellänge dann
entsprechend verringert werden muss. Das Motorkabel
60 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 63
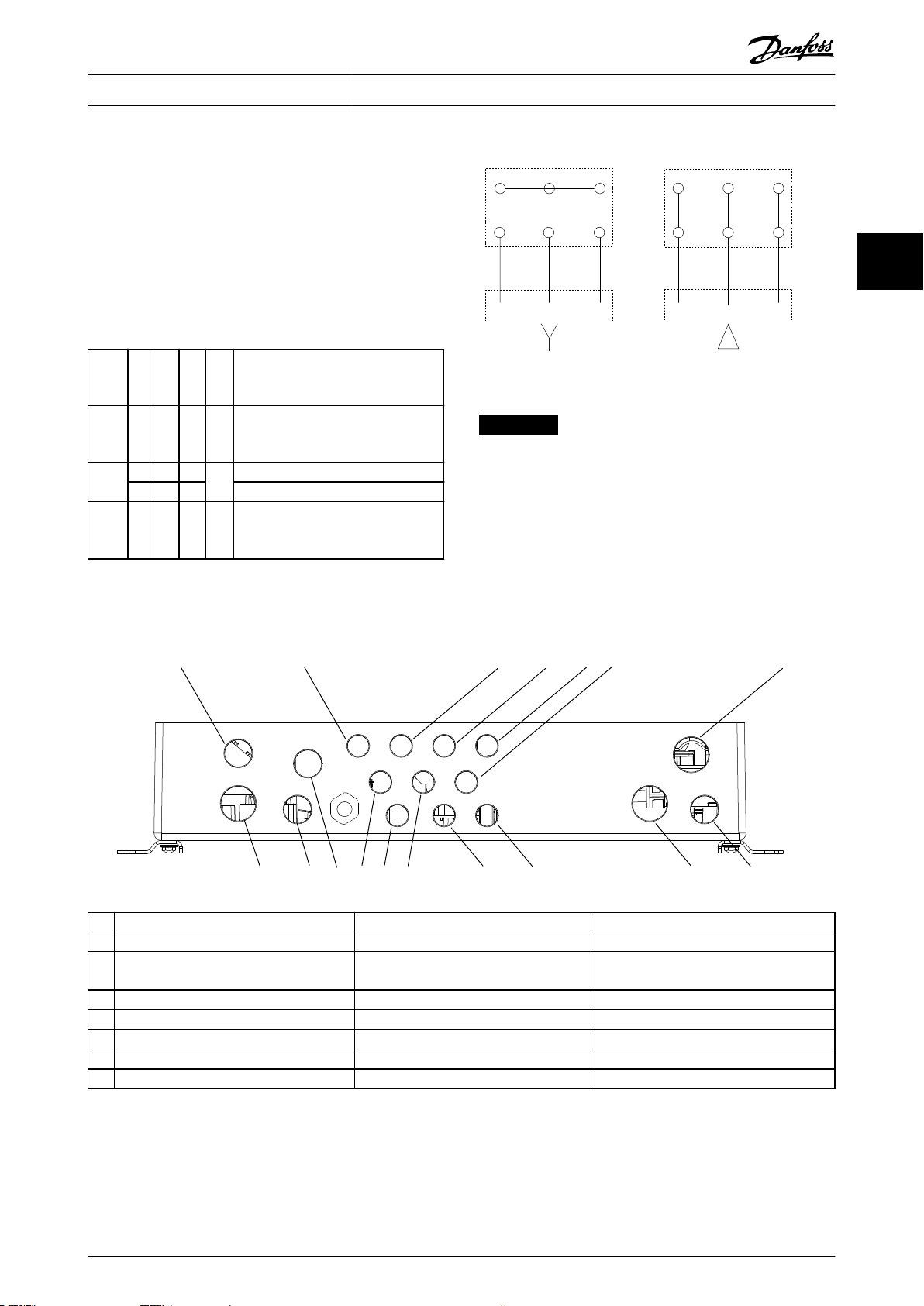
U
1
V
1
W
1
175ZA114.11
96 97 98
96 97 98
FC
FC
Motor
Motor
U
2
V
2
W
2
U
1
V
1
W
1
U
2
V
2
W
2
4
130BC981.10
1
2 2 22332
2226
67
4
5
Systemintegration Projektierungshandbuch
muss möglichst kurz sein, um das Geräuschniveau und
Ableitströme auf ein Minimum zu beschränken.
Sie können alle 3-phasigen Standard-Asynchronmotoren an
einen Frequenzumrichter anschließen. Normalerweise wird
für kleine Motoren Sternschaltung verwendet (230/400 V,
Y), für große Motoren Dreieckschaltung (400/690 V, Δ).
Schaltungsart (Stern/Dreieck) und Anschlussspannung sind
auf dem Motor-Typenschild angegeben.
Zu Montageanweisungen für Netz- und Motorkabel siehe
®
die VLT
Decentral Drive FCD 302-Bedienungsanleitung.
Klem
96 97 98 99
me
Abbildung 3.7 Stern-/Dreieck-Erdverbindungen
Nr.
U V W
U1 V1 W1
W2 U2 V2 6 Leiter vom Motor.
U1 V1 W1
1)
Motorspannung 0-100 % der
PE
Netzspannung
3 Leiter vom Motor.
Dreieckschaltung.
1)
PE
1)
Sternschaltung (U2, V2, W2)
PE
U2, V2 und W2 sind miteinander zu
HINWEIS
Bei Motoren ohne Phasentrennpapier oder eine andere
geeignete Isolationsverstärkung für den Betrieb mit
Spannungsversorgung (wie ein Frequenzumrichter)
bringen Sie einen Sinusfilter am Ausgang des Frequenzumrichters an.
verbinden.
Der VLT® Decentral Drive FCD 302 ist auch als NPT-
Tabelle 3.2 Motoranschlussklemmen
1) Erdung
Ausführung in 2 verschiedenen Varianten erhältlich.
3 3
Metrisch NPT 1 für USA NPT 2 für USA
1 Bremse M20 1/2” NPT 1/2” NPT
2 8xM16 8xM16 3/8” NPT (mit Ausnahme des Erdsteckers,
3 2xM20 2xM20 1/2” NPT
4 Netzkabel M25 3/4” NPT 3/4” NPT
5 M20 M20 1/2” NPT
6 24 V M20 1/2” NPT 1/2” NPT
7 Motor M25 3/4” NPT 3/4” NPT
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 61
Abbildung 3.8 Kabeleinführungsöffnungen - große Bauform
dieser ist M16)
Page 64

130BC986.10
130BC983.10
175HA036.11
U
1
V
1
W
1
96 97 98
FC
Motor
U
2
V
2
W
2
U
1
V
1
W
1
96 97 98
FC
Motor
U
2
V
2
W
2
Systemintegration
VLT® Decentral Drive FCD 302
3.4.2 Netztrennschalter
Der Frequenzumrichter ist mit den folgenden optionalen
Schaltern lieferbar:
Wartungsschalter auf Netzseite oder Motorseite
•
Klemme U/T1/96 angeschlossen an Phase U.
•
Klemme V/T2/97 angeschlossen an Phase V.
•
Klemme W/T3/98 angeschlossen an Phase W.
•
oder
33
integrierter Trennschalter auf der Netzseite (nur
•
große Bauform)
Geben Sie die jeweilige Anforderung bei der Bestellung an.
Abbildung 3.9 und Abbildung 3.10 zeigen Beispiele der
Konfiguration für die große Bauform.
Abbildung 3.9 Lage von Wartungsschalter, Netzseite, große
Bauform (IP66/Innenräume)
Abbildung 3.10 Lage von Trennschalter, Netzseite, große
Bauform
3.4.3 Zusätzliche Motorinformationen
3.4.3.1 Motorkabel
Sie müssen den Motor an die Klemmen U/T1/96, V/T2/97,
W/T3/98 anschließen; Das Erdungskabel gehört an Klemme
99. Sie können alle Arten dreiphasiger Standard-Asynchronmotoren mit einem Frequenzumrichter verwenden. Die
Werkseinstellung ist Rechtslauf, wobei der Frequenzumrichterausgang wie in Tabelle 3.3 angeschlossen ist:
Klemme Nr. Funktion
96, 97, 98, 99 Netz U/T1, V/T2, W/T3
Abbildung 3.11 Motoranschluss - Drehrichtung
Sie können die Drehrichtung durch Vertauschen von zwei
Phasen im Motorkabel oder durch Ändern der Einstellung
von Parameter 4-10 Motor Drehrichtung ändern.
Eine Motordrehrichtungsprüfung können Sie über
Parameter 1-28 Motordrehrichtungsprüfung und die am
Display gezeigten Schritte durchführen.
3.4.3.2 Thermischer Motorschutz
Das elektronische Thermorelais im Frequenzumrichter hat
die UL-Zulassung für Einzelmotorüberlastschutz, wenn
Parameter 1-90 Thermischer Motorschutz auf ETRAbschaltung und Parameter 1-24 Motornennstrom auf den
Motornennstrom (siehe Motor-Typenschild) eingestellt ist.
Masse
Tabelle 3.3 Motoranschluss - Werkseinstellung
62 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 65

Systemintegration Projektierungshandbuch
3.4.3.3 Parallelschaltung von Motoren
Der Frequenzumrichter kann mehrere parallel geschaltete
Motoren steuern/regeln. Bei parallelem Motoranschluss
müssen Sie die folgenden Punkte beachten:
Es wird empfohlen, Anwendungen mit parallelen
•
Motoren im U/f-Modus, Parameter 1-01 Steuerprinzip [0], auszuführen. Die U/f-Kennlinie
programmieren Sie in Parameter 1-55 U/f-Kennlinie
- U [V] und Parameter 1-56 U/f-Kennlinie - f [Hz].
VVC+-Modus kann in einigen Anwendungen
•
verwendet werden.
Der Gesamtstrom der Motoren darf den
•
maximalen Ausgangsnennstrom I
zumrichters nicht übersteigen.
Beim Start und bei niedrigen Drehzahlen können
•
möglicherweise Probleme auftreten, wenn die
Motorgrößen sehr unterschiedlich sind, da bei
kleinen Motoren der relativ hohe ohmsche
Widerstand im Stator eine höhere Spannung
beim Start und bei niedrigen Drehzahlen
erfordert.
Das elektronische Thermorelais (ETR) des Frequen-
•
zumrichters kann nicht als Motorüberlastschutz
für die einzelnen Motoren des Systems verwendet
werden. Ein zusätzlicher Motorüberlastschutz,
beispielsweise durch Thermistoren in jeder
Motorwicklung, oder einzelne thermische Relais
ist deshalb vorzusehen. Trennschalter sind als
Schutzvorrichtung nicht geeignet.
des Frequen-
INV
HINWEIS
Installationen mit gemeinsamem Anschluss wie im ersten
Beispiel in der Abbildung gezeigt werden nur bei kurzen
Kabellängen empfohlen.
HINWEIS
Bei parallel geschalteten Motoren kann
Parameter 1-02 Drehgeber Anschluss nicht verwendet
werden, und Parameter 1-01 Steuerprinzip muss auf
Sondermotorkennlinie U/f eingestellt sein.
Die in Kapitel 7 Technische Daten angegebene Gesamtlänge
des Motorkabels ist gültig, solange die Parallelkabel kurz
gehalten werden und 10 m (32,8 ft) nicht überschreiten.
3.4.3.4 Motorisolation
Bei Motorkabellängen ≤ der maximalen Kabellänge laut
Angabe in Kapitel 7.3 Allgemeine technische Daten werden
die folgenden Motorisolationswerte empfohlen, da die
Spitzenspannung aufgrund von Übertragungsleitungswirkungen im Motorkabel bis zu maximal das Doppelte der
Zwischenkreisspannung, das 2,8-Fache der Netzspannung,
betragen kann. Bei einem geringeren Isolationswert eines
Motors wird die Verwendung eines dU/dt- oder Sinusfilters
empfohlen.
Netznennspannung Motorisolation
UN≤420 V
420 V<UN≤500 V Verstärkte ULL=1600 V
Tabelle 3.4 Netzspannung und Motorisolation
Standard ULL=1300 V
3.4.3.5 Motorlagerströme
Um A-seitige (antriebsseitige) Lager- und Wellenströme auf
ein Minimum zu beschränken, ist richtige Erdung von
Frequenzumrichter, Motor, angetriebener Maschine und
Motor zur angetriebenen Maschine erforderlich.
Vorbeugende Standardmaßnahmen
1. Verwenden Sie ein isoliertes Lager.
2. Wenden Sie strenge Installationsverfahren an:
2a Stellen Sie sicher, dass Motor und
Antriebslast korrekt ausgerichtet sind.
2b Befolgen Sie die EMV-Installations-
richtlinie streng.
2c Verstärken Sie den Schutzleiter (PE),
sodass die hochfrequent wirksame
Impedanz im PE niedriger als bei den
Versorgungsleitungen ist.
2d Stellen Sie eine hochfrequent gut
wirksame Verbindung zwischen Motor
und Frequenzumrichter her, zum Beispiel
über ein abgeschirmtes Kabel mit einer
360°-Verschraubung am Motor und
Frequenzumrichter.
2e Stellen Sie sicher, dass die Impedanz
vom Frequenzumrichter zur Gebäudeerdung niedriger als die
Erdungsimpedanz der Maschine ist. Dies
kann bei Pumpen schwierig sein.
2f Stellen Sie eine direkte Erdverbindung
zwischen Motor und Last her.
3. Senken Sie die IGBT-Taktfrequenz.
4.
Ändern Sie die Wechselrichtersignalform, 60° AVM
oder SFAVM.
5. Installieren Sie ein Wellenerdungssystem oder
verwenden Sie eine Trennkupplung.
3 3
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 63
Page 66

Systemintegration
VLT® Decentral Drive FCD 302
6. Tragen Sie leitfähiges Schmierfett auf.
7. Verwenden Sie, sofern möglich, minimale
Drehzahleinstellungen.
8. Versuchen Sie sicherzustellen, dass die
Netzspannung zur Erde symmetrisch ist. Dies
33
kann bei IT-, TT-, TN-CS-Netzen oder Systemen
mit geerdetem Zweig schwierig sein.
9. Verwenden Sie einen du/dt- oder Sinusfilter.
HINWEIS
Der Frequenzumrichter muss über einen Bremschopper
verfügen.
Parameter 1-40 Gegen-EMK bei 1000 UPM,
Parameter 1-25 Motornenndrehzahl und
Parameter 1-39 Motorpolzahl berechnet.
Wenn Überdrehzahl des Motors möglich ist (z. B.
durch den Windmühlen-Effekt, bei dem der Motor
durch die Last gedreht wird), wird ein Bremswiderstand empfohlen.
3.4.4 Extreme Betriebszustände
Die Bedieneinheit versucht, die Rampe, wenn möglich, zu
Kurzschluss (Motorphase – Phase)
Der Frequenzumrichter ist durch seine Strommessung in
jeder der drei Motorphasen oder im DC-Zwischenkreis
gegen Kurzschlüsse geschützt. Ein Kurzschluss zwischen
zwei Ausgangsphasen bewirkt einen Überstrom im
Wechselrichter. Jedoch wird der Wechselrichter
abgeschaltet, sobald sein Kurzschlussstrom den zulässigen
Wert (Alarm 16, Abschaltblockierung) überschreitet.
Um den Frequenzumrichter gegen Kurzschlüsse bei
Zwischenkreiskopplung und an den Bremswiderstandsklemmen zu schützen, sind die jeweiligen
Projektierungshandbücher zu beachten.
Schalten am Ausgang
Das Schalten am Ausgang zwischen Motor und Frequenzumrichter ist uneingeschränkt zulässig. Der
Frequenzumrichter kann durch Schalten am Ausgang in
keiner Weise beschädigt werden. Es können allerdings
Fehlermeldungen auftreten.
Vom Motor erzeugte Überspannung
Die Spannung im Zwischenkreis erhöht sich beim generatorischen Betrieb des Motors. Dies geschieht in folgenden
Fällen:
Die Last treibt den Motor an (bei konstanter
•
Ausgangsfrequenz des Frequenzumrichters), d. h.,
die Last „erzeugt“ Energie.
Während der Verzögerung (Rampe Ab) ist die
•
Reibung bei hohem Trägheitsmoment niedrig und
die Rampenzeit zu kurz, um die Energie als
Verlustleistung im Frequenzumrichter, Motor oder
in der Anlage abzugeben.
Eine falsche Einstellung beim Schlupfausgleich
•
kann eine höhere Zwischenkreisspannung
hervorrufen.
Gegen-EMK durch PM-Motorbetrieb. Bei Freilauf
•
mit hoher Drehzahl kann die Gegen-EMK des PMMotors möglicherweise die maximale
Spannungstoleranz des Frequenzumrichters
überschreiten und Schäden verursachen. Der
Frequenzumrichter ist ausgelegt, das Auftreten
von Gegen-EMK zu verhindern: Der Wert von
Parameter 4-19 Max. Ausgangsfrequenz wird
automatisch basierend auf einer internen
Berechnung anhand des Werts von
korrigieren (Parameter 2-17 Überspannungssteuerung).
Wenn ein bestimmtes Spannungsniveau erreicht ist, wird
der Frequenzumrichter abgeschaltet, um die Transistoren
und die Zwischenkreiskondensatoren zu schützen.
Zur Auswahl der Methode zur Regelung des ZwischenkreisSpannungsniveaus siehe Parameter 2-10 Bremsfunktion und
Parameter 2-17 Überspannungssteuerung.
HINWEIS
Überspannungssteuerung kann bei Betrieb eines PMMotors nicht aktiviert werden, d. h., wenn
Parameter 1-10 Motorart auf [1] PM, Vollpol eingestellt ist.
Netzausfall
Während eines Netzausfalls arbeitet der Frequenzumrichter
weiter, bis die Zwischenkreisspannung unter das minimale
Niveau abfällt. typischerweise 15 % unter der niedrigsten
Versorgungsnennspannung des Frequenzumrichters. Die
Höhe der Netzspannung vor dem Ausfall und die aktuelle
Motorbelastung bestimmen, wie lange der Wechselrichter
im Freilauf ausläuft.
Statische Überlast im Modus VVC
Wird der Frequenzumrichter überlastet, reduziert der
Frequenzumrichter automatisch die Ausgangsfrequenz, um
so die Belastung zu reduzieren. Mit Überlast ist das
Erreichen der Drehmomentgrenze aus
Parameter 4-16 Momentengrenze motorisch/
Parameter 4-17 Momentengrenze generatorisch definiert.
Bei extremer Überlastung kann jedoch ein Strom auftreten,
der den Frequenzumrichter nach kurzer Zeit (5-10 s) zum
Abschalten zwingt.
Sie können den Betrieb innerhalb der Drehmomentgrenze
in Parameter 14-25 Drehmom.grenze Verzögerungszeit
zeitlich begrenzen (0–60 s).
+
64 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 67

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2.000
500
200
400
300
1.000
600
t [s]
175ZA052.11
fOUT = 0,2 x f M,N
fOUT = 2 x f M,N
fOUT = 1 x f M,N
IMN
IM
Systemintegration Projektierungshandbuch
3.4.4.1 Thermischer Motorschutz
Zum Schutz der Anwendung vor schwerer Beschädigung
bietet der Frequenzumrichter verschiedene spezielle
Funktionen:
Drehmomentgrenze
Die Drehmomentgrenze schützt den Motor unabhängig
von der Drehzahl vor Überlast. Wählen Sie die Einstellungen der Drehmomentgrenze in
Parameter 4-16 Momentengrenze motorisch oder
Parameter 4-17 Momentengrenze generatorisch. In
Parameter 14-25 Drehmom.grenze Verzögerungszeit stellen
Sie ein, wie lange die Grenze vor Abschaltung
überschritten werden darf.
Stromgrenze
Stellen Sie die Stromgrenze in Parameter 4-18 Stromgrenze
ein. In Parameter 14-24 Stromgrenze Verzögerungszeit stellen
Sie ein, wie lange die Grenze vor Abschaltung
überschritten werden darf.
Minimale Drehzahlgrenze
Parameter 4-11 Min. Drehzahl [UPM] oder
Parameter 4-12 Min. Frequenz [Hz] begrenzt den Betriebs-
drehzahlbereich, beispielsweise zwischen 30 und 50/60 Hz.
Maximale Drehzahlgrenze: Parameter 4-13 Max. Drehzahl
[UPM] oder Parameter 4-19 Max. Ausgangsfrequenz legt die
maximal Ausgangsdrehzahl fest, die der Frequenzumrichter
liefern kann.
ETR (Elektronisches Thermorelais)
Die ETR-Funktion des Frequenzumrichters misst den
aktuellen Strom, die aktuelle Drehzahl und Zeit zur
Berechnung der Motortemperatur und zum Schutz des
Motors vor Überhitzung (Warnung oder Abschaltung). Ein
externer Thermistoreingang ist ebenfalls verfügbar. Bei ETR
handelt es sich um eine elektronische Funktion, die anhand
interner Messungen ein Bimetallrelais simuliert. Die
Kennlinie wird in Abbildung 3.12 gezeigt.
Die X-Achse in Abbildung 3.12 zeigt das Verhältnis zwischen
Motorstrom (I
) und Motornennstrom (I
motor
, nom). Die
motor
Y-Achse zeigt die Zeit in Sekunden, bevor ETR eingreift und
den Frequenzumrichter abschaltet. Die Kurven zeigen das
Verhalten der Nenndrehzahl bei Nenndrehzahl x 2 und
Nenndrehzahl x 0,2.
Bei geringerer Drehzahl schaltet das ETR aufgrund einer
geringeren Kühlung des Motors schon bei geringerer
Wärmeentwicklung ab. So wird der Motor auch in
niedrigen Drehzahlbereichen vor Überhitzung geschützt.
Die ETR-Funktion berechnet die Motortemperatur anhand
der Istwerte von Strom und Drehzahl. Die berechnete
Motortemperatur kann in Parameter 16-18 Therm.
Motorschutz im Frequenzumrichter abgelesen werden.
3.5 Erste Inbetriebnahme und Test
3.5.1 Hochspannungsprüfung
Eine Hochspannungsprüfung darf nur nach Kurzschließen
der Anschlüsse U, V, W, L1, L2 und L3 für ein maximal 1
Sekunde langes Anlegen von max. 2,15 kV DC bei 380-500V-Frequenzumrichtern zwischen dieser Verbindung und der
Masse erfolgen.
Die Grenzen für die Hochspannungsprüfung sind:
LVD (CE) = 1500 V AC = 2150 V DC
•
UL = (2 x 500) + 1000 = 2000 V AC = 2850 V DC
•
WARNUNG
HOHER ABLEITSTROM
Bei der Durchführung von Hochspannungsprüfungen für
die gesamte Installation können die Ableitströme hoch
sein. Das Nichtbeachten der Empfehlungen kann zum
Tod oder zu schweren Verletzungen führen!
Unterbrechen Sie den Netz- und Motoran-
•
schluss, wenn die Ableitströme zu hoch sind.
3 3
3.5.2 Erdung
Sie müssen folgende grundlegende Punkte bei der
Installation eines Frequenzumrichters beachten, um die
elektromagnetische Verträglichkeit (EMV) sicherzustellen.
Schutzerdung: Beachten Sie, dass der Frequen-
•
zumrichter einen hohen Ableitstrom hat und aus
Sicherheitsgründen richtig geerdet werden muss.
Schließen Sie die verschiedenen Erdungssysteme mit
geringstmöglicher Leiterimpedanz an. Die geringst-
Abbildung 3.12 ETR-Funktionen
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 65
mögliche Leiterimpedanz ergibt sich bei Verwendung
möglichst kurzer Motorkabel mit möglichst großer Leiteroberfläche.
Wenden Sie geltende Sicherheitsvorschriften an.
Hochfrequenzerdung: Halten Sie die Erdungskabel
•
so kurz wie möglich.
Page 68

130BD002.10
I
Nmax
7,2 A
n
LT
0..370 rpm
f
max
250 Hz
t
amb
40 °C KTY 84-130
28 kgP3
IP 69K
155 °C (F)
178uxxxxxxxxxxb011
i 8,12
Type OGDHK231K131402L09R1S11P1A9010H1Bxx
Barcode
Made in Germany
M
LT
140-65 Nm
2,9 L Optileb GT220
130BB851.15
I
N/max
5.5/9.0 A
n
max
=212 rpm
f
max
250 Hz
t
amb
40 °C
KTY 84-130
24 kg P3
IP 69K
150 °C (F)
178uxxxxxxxxxxb011
i 14.13
Type
OGDHK214K13140L06XXS31P3A9010H1BXX
Barcode
Made in Germany
M
HST/n
=280/180..131 Nm
3.1 L Optileb GT220
Systemintegration
VLT® Decentral Drive FCD 302
Die Metallgehäuse der verschiedenen Geräte werden mit
geringstmöglicher HF-Impedanz an der Schrankrückwand
montiert. Dies vermeidet, unterschiedliche HF-Spannungen
für die einzelnen Geräte und vermeidet ebenfalls die
Gefahr von Funkstörströmen, die in Verbindungskabeln
auftreten, die Sie zwischen den Geräten verwenden.
33
Funkstörungen werden reduziert.
Verwenden Sie zum Erreichen einer niedrigen HF-Impedanz
die Befestigungsschrauben der Geräte als HF-Verbindungen
zur Rückwand. Es ist dabei notwendig, den isolierenden
Lack oder Sonstiges von den Befestigungspunkten zu
entfernen.
3.5.3 Schutzerdungsverbindung
Abbildung 3.14 Typenschild
Der Frequenzumrichter weist hohe Ableitströme auf und ist
deshalb aus Sicherheitsgründen gemäß IEC 61800-5-1 zu
erden.
WARNUNG
GEFAHR DURCH ABLEITSTRÖME
Die Ableitströme überschreiten 3,5 mA. Eine nicht
vorschriftsgemäße Erdung des Frequenzumrichters kann
zum Tod oder zu schweren Verletzungen führen!
Lassen Sie die ordnungsgemäße Erdung der
•
Geräte durch einen zertifizierten Elektroinstallateur überprüfen.
3.5.4 Testen der endgültigen Konfiguration
Gehen Sie folgendermaßen vor, um die Konfiguration zu
testen und sicherzustellen, dass der Frequenzumrichter
funktioniert.
1. Überprüfen Sie das Motor-Typenschild.
HINWEIS
Der Motor ist entweder im Stern (Y) oder im Dreieck (Δ)
geschaltet. Diese Information ist auf dem MotorTypenschild zu finden.
2. Überprüfen Sie die Motor-Typenschilddaten in
dieser Parameterliste.
Um diese Liste aufzurufen, drücken Sie erst die
Taste [Quick Menu] am LCP und wählen Sie dann
„Q2 Inbetriebnahme-Menü“.
2a Parameter 1-20 Motornennleistung [kW].
Parameter 1-21 Motornennleistung [PS].
2b Parameter 1-22 Motornennspannung.
2c Parameter 1-23 Motornennfrequenz.
2d Parameter 1-24 Motornennstrom.
2e Parameter 1-25 Motornenndrehzahl.
3. Wählen Sie OGD-Motordaten.
3a Stellen Sie 1-11 Motor Model auf
„Danfoss OGD LA10“.
4. Stellen Sie Drehzahlgrenzen und Rampenzeiten
ein.
Stellen Sie die gewünschten Grenzwerte für
Drehzahl und Rampenzeit ein:
4a Parameter 3-02 Minimaler Sollwert.
4b Parameter 3-03 Maximaler Sollwert.
4c Parameter 4-11 Min. Drehzahl [UPM] oder
Parameter 4-12 Min. Frequenz [Hz].
4d Parameter 4-13 Max. Drehzahl [UPM] oder
Parameter 4-14 Max Frequenz [Hz].
4e Parameter 3-41 Rampenzeit Auf 1.
4f Parameter 3-42 Rampenzeit Ab 1.
66 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Abbildung 3.13 Position des Motor-Typenschilds
Page 69

FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130BB929.10
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130BB930.10
+10
V
A IN
A IN
COM
A OUT
COM
50
53
54
55
42
39
A53
U - I
0 – 10 V
+
-
e30bb926.11
FC
Anwendungsbeispiele Projektierungshandbuch
4 Anwendungsbeispiele
4.1 Übersicht
Die Beispiele in diesem Abschnitt sollen als Schnellreferenz
für häufige Anwendungen dienen.
Parametereinstellungen sind die regionalen
•
Werkseinstellungen, sofern nicht anders
angegeben (in Parameter 0-03 Ländereinstellungen
ausgewählt).
Neben den Zeichnungen sind die Parameter für
•
die Klemmen und ihre Einstellungen aufgeführt.
Wenn Schaltereinstellungen für die analogen
•
Klemmen A53 und A54 erforderlich sind, werden
diese ebenfalls dargestellt.
HINWEIS
4.2.2 AMA ohne angeschlossene Kl. 27
Parameter
Funktion Einstellung
Parameter 1-29
Autom.
Motoranpassung
Parameter 5-12
Klemme 27
Digitaleingang
*=Werkseinstellung
Hinweise/Anmerkungen: Sie
müssen Parametergruppe 1-2*
Motordaten entsprechend dem
Motor einstellen.
[1] Komplette
AMA
[0] Ohne
Funktion
4 4
Um den Frequenzumrichter in Werkseinstellung zu
betreiben, benötigen Sie ggf. Drahtbrücken zwischen
Klemme 12 (oder 13) und Klemme 27. Nähere Informationen finden Sie im Produkthandbuch der Funktion Safe
Torque Off (STO) für VLT® Frequenzumrichter.
Tabelle 4.2 AMA ohne angeschlossene Kl. 27
4.2 AMA
Analoger Drehzahlsollwert
4.3
4.2.1 AMA mit angeschlossener Kl. 27
4.3.1 Spannung Analoger Drehzahlsollwert
Parameter
Funktion Einstellung
Parameter 1-29
Autom.
[1] Komplette
AMA
Motoranpassung
Parameter 5-12
Klemme 27
Digitaleingang
[2]*
Motorfreilauf
invers
*=Werkseinstellung
Hinweise/Anmerkungen: Sie
müssen Parametergruppe 1-2*
Motordaten entsprechend dem
Motor einstellen.
Tabelle 4.1 AMA mit angeschlossener Kl. 27
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 67
Tabelle 4.3 Spannung Analoger Drehzahlsollwert
Parameter
Funktion Einstellung
Parameter 6-10
0,07 V
Klemme 53 Skal.
Min.Spannung
Parameter 6-11
10 V*
Klemme 53 Skal.
Max.Spannung
Parameter 6-14
0 U/min
Klemme 53 Skal.
Min.-Soll/Istwert
Parameter 6-15
1500 U/min
Klemme 53 Skal.
Max.-Soll/
Istwert
*=Werkseinstellung
Hinweise/Anmerkungen:
Page 70

+10
V
A IN
A IN
COM
A OUT
COM
50
53
54
55
42
39
+
-
FC
e30bb927.11
A53
U - I
4 - 20mA
130BB840.12
Speed
Reference
Start (18)
Freeze ref (27)
Speed up (29)
Speed down (32)
+10
V
A IN
A IN
COM
A OUT
COM
50
53
54
55
42
39
A53
U - I
≈ 5kΩ
e30bb683.11
FC
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
12
13
18
19
20
27
29
32
33
37
e30bb804.12
Anwendungsbeispiele
VLT® Decentral Drive FCD 302
4.3.2 Strom Analoger Drehzahlsollwert
4.3.3 Drehzahlsollwert (Verwendung eines
manuellen Potenziometers)
Parameter
Funktion Einstellung
Parameter 6-12
4 mA*
Klemme 53 Skal.
Min.Strom
Parameter 6-13
20 mA*
Klemme 53 Skal.
44
Max.Strom
Parameter 6-14
0 U/min
Klemme 53 Skal.
Min.-Soll/Istwert
Parameter 6-15
1500 U/min
Klemme 53 Skal.
Max.-Soll/
Istwert
*=Werkseinstellung
Hinweise/Anmerkungen:
Tabelle 4.4 Strom Analoger Drehzahlsollwert
Tabelle 4.5 Drehzahlsollwert (Verwendung eines manuellen
Potenziometers)
Parameter
Funktion Einstellung
Parameter 6-10
0,07 V
Klemme 53 Skal.
Min.Spannung
Parameter 6-11
10 V*
Klemme 53 Skal.
Max.Spannung
Parameter 6-14
0 U/min
Klemme 53 Skal.
Min.-Soll/Istwert
Parameter 6-15
1500 U/min
Klemme 53 Skal.
Max.-Soll/
Istwert
*=Werkseinstellung
Hinweise/Anmerkungen:
4.3.4 Drehzahl auf/Drehzahl ab
Parameter
Funktion Einstellung
Parameter 5-10
Klemme 18
Digitaleingang
Abbildung 4.1 Drehzahl auf/Drehzahl ab
Parameter 5-12
Klemme 27
Digitaleingang
Parameter 5-13
Klemme 29
Digitaleingang
Parameter 5-14
Klemme 32
Digitaleingang
*=Werkseinstellung
Hinweise/Anmerkungen:
Tabelle 4.6 Drehzahl auf/Drehzahl ab
68 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
[8] Start*
[19] Sollw.
speich.
[21] Drehzahl
auf
[22] Drehzahl
ab
Page 71

FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130BB802.10
130BB805.12
Speed
Start/Stop (18)
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130BB803.10
Speed
130BB806.10
Latched Start (18)
Stop Inverse (27)
Anwendungsbeispiele Projektierungshandbuch
4.4 Start/Stopp-Anwendungen
4.4.1 Start-/Stopp-Befehl mit Safe Torque
Off
Parameter
Funktion Einstellung
Parameter 5-10
Klemme 18
Digitaleingang
Parameter 5-12
Klemme 27
Digitaleingang
Parameter 5-19
Klemme 37
Sicherer Stopp
*=Werkseinstellung
Hinweise/Anmerkungen:
Wenn Parameter 5-12 Klemme
27 Digitaleingang auf [0] Ohne
Funktion programmiert ist, wird
keine Drahtbrücke zu Klemme
27 benötigt.
Tabelle 4.7 Start-/Stopp-Befehl mit Safe Torque Off
[8] Start*
[0] Ohne
Funktion
[1] S.Stopp/
Alarm
4.4.2 Puls-Start/Stopp
Parameter
Tabelle 4.8 Puls-Start/Stopp
Funktion Einstellung
Parameter 5-10
[9] Puls-Start
Klemme 18
Digitaleingang
Parameter 5-12
Klemme 27
[6] Stopp
(invers)
Digitaleingang
*=Werkseinstellung
Hinweise/Anmerkungen:
Wenn Parameter 5-12 Klemme
27 Digitaleingang auf [0] Ohne
Funktion programmiert ist, wird
keine Drahtbrücke zu Klemme
27 benötigt.
4 4
Abbildung 4.2 Start-/Stopp-Befehl mit Safe Torque Off
Abbildung 4.3 Puls-Start/Stopp
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 69
Page 72

FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
50
53
54
55
42
39
130BB934.11
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
130BB928.11
Anwendungsbeispiele
VLT® Decentral Drive FCD 302
4.4.3 Start/Stopp mit Reversierung und 4
Bus- und Relaisanschluss
4.5
Festdrehzahlen
4.5.1 Externe Alarmquittierung
Parameter
Funktion Einstellung
Parameter 5-10
[8] Start
Klemme 18
Digitaleingang
44
Klemme 19
Parameter 5-11
[10]
Reversierung*
Digitaleingang
Parameter 5-12
Klemme 27
[0] Ohne
Funktion
Digitaleingang
Parameter 5-14
Klemme 32
Digitaleingang
Parameter 5-15
Klemme 33
Digitaleingang
Parameter 3-10
[16]
Festsollwert Bit
0
[17]
Festsollwert Bit
1
Festsollwert
Festsollwert 0
Festsollwert 1
Festsollwert 2
Festsollwert 3
25%
50%
75%
100%
Tabelle 4.10 Externe Alarmquittierung
*=Werkseinstellung
Hinweise/Anmerkungen:
Parameter
Funktion Einstellung
Parameter 5-11
[1] Reset
Klemme 19
Digitaleingang
*=Werkseinstellung
Hinweise/Anmerkungen:
Tabelle 4.9 Start/Stopp mit Reversierung und 4 Festdrehzahlen
70 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 73

FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
V
A IN
A IN
COM
A OUT
COM
R1R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
-
61
68
69
RS-485
+
130BB685.10
130BB686.12
VLT
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
50
53
54
55
42
39
A53
U - I
D IN
37
Anwendungsbeispiele Projektierungshandbuch
4.5.2 RS485-Netzwerkverbindung
Parameter
Funktion Einstellung
Parameter 8-30
FC-Protokoll
Parameter 8-31
Adresse
Parameter 8-32
Baudrate
*=Werkseinstellung
Hinweise/Anmerkungen:
Wählen Sie in den oben
genannten Parametern
Protokoll, Adresse und
Baudrate.
[0] FC-Profil*
1*
9600*
4.5.3 Motorthermistor
HINWEIS
Sie müssen Thermistoren verstärkt oder zweifach
isolieren, um die entsprechenden Anforderungen zu
erfüllen.
Parameter
Funktion Einstellung
Parameter 1-90
Thermischer
Motorschutz
Parameter 1-93
Thermistoranschluss
*=Werkseinstellung
Hinweise/Anmerkungen:
Wenn Sie nur eine Warnung
wünschen, sollten Sie
Parameter 1-90 Thermischer
Motorschutz auf [1] Thermistor
Warnung programmieren.
[2] ThermistorAbschalt.
[1] Analogeingang 53
4 4
Tabelle 4.11 RS485-Netzwerkverbindung
Tabelle 4.12 Motorthermistor
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 71
Page 74
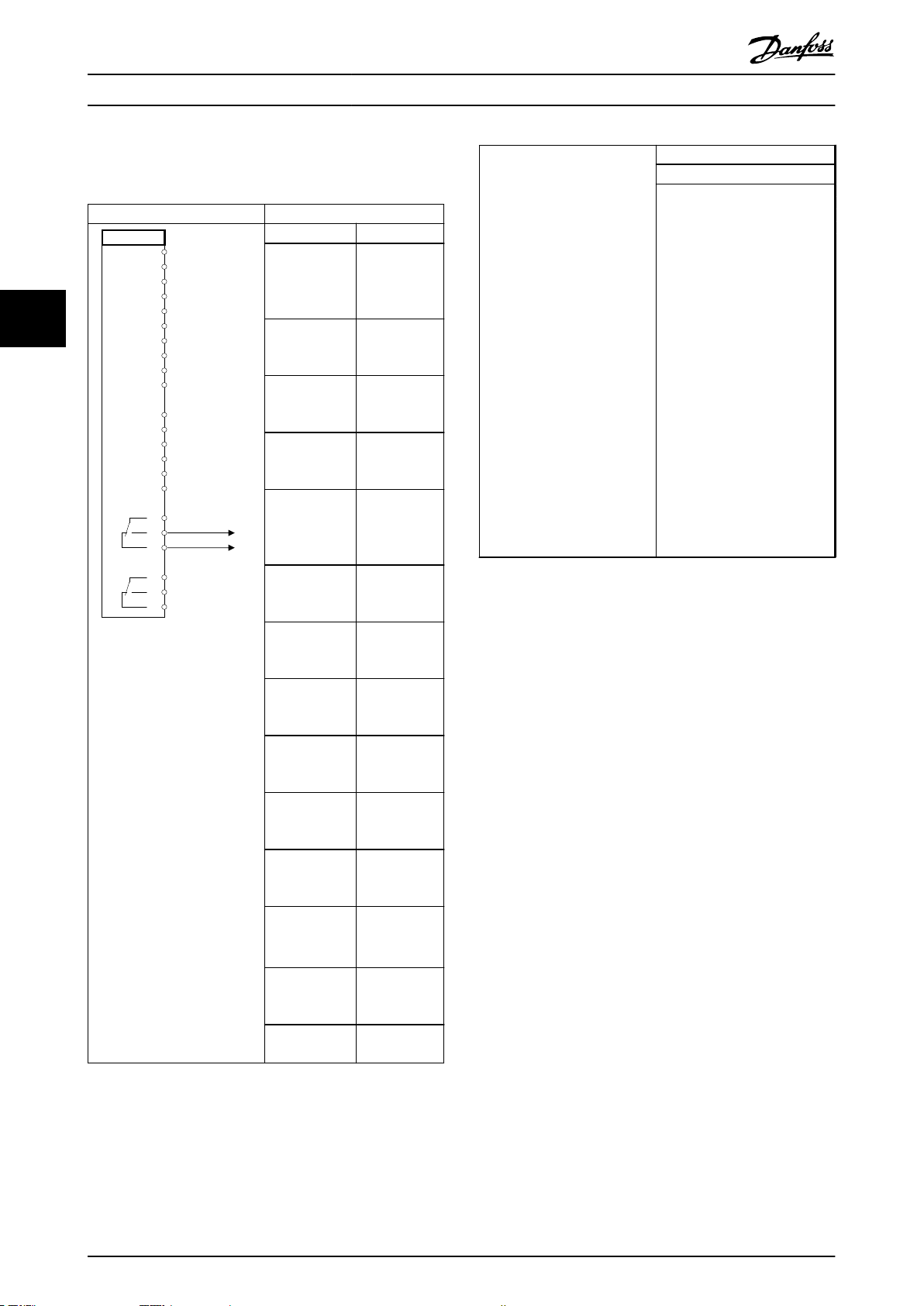
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
R1R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
130BB839.10
Anwendungsbeispiele
VLT® Decentral Drive FCD 302
4.5.4 Verwendung von SLC zur Einstellung
eines Relais
Parameter
*=Werkseinstellung
Hinweise/Anmerkungen:
Parameter
Funktion Einstellung
Parameter 4-30
[1] Warnung
Drehgeberüberwachung
Funktion
44
Parameter 4-31
100 U/min
Drehgeber max.
Fehlabweichung
Parameter 4-32
5 s
Drehgeber
Timeout-Zeit
Parameter 7-00
[2] MCB 102
Drehgeberrückführung
Parameter 17-11
1024*
Inkremental
Auflösung
[Pulse/U]
Parameter 13-00
[1] On
Tabelle 4.13 Relaiskonfiguration mit Smart Logic Controller
Wenn der Grenzwert der
Drehgeberüberwachung
überschritten wird, wird
Warnung 90 Istwertüberwachung
ausgegeben. Der SLC
überwacht Warnung 90, und
wenn diese Warnung WAHR
wird, wird Relais 1 ausgelöst.
Externe Geräte können dann
anzeigen, dass ggf. eine
Wartung erforderlich ist. Wenn
der Istwertfehler innerhalb von
5 s wieder unter diese Grenze
fällt, läuft der Frequenzumrichter weiter, und die Warnung
wird ausgeblendet. Relais 1
bleibt hingegen ausgelöst, bis
Sie [Reset] auf dem LCP
drücken.
Smart Logic
Controller
Parameter 13-01
[19] Warnung
SL-Controller
Start
Parameter 13-02
SL-Controller
[44] [Reset]-
Taste
Stopp
Parameter 13-10
Vergleicher-
[21] Nr. der
Warnung
Operand
Parameter 13-11
[1] ≈*
VergleicherFunktion
Parameter 13-12
90
VergleicherWert
Parameter 13-51
SL-Controller
Ereignis
Parameter 13-52
SL-Controller
Aktion
Parameter 5-40
Relaisfunktion
[22] Vergleicher
0
[32] Digital-
ausgang A-AUS
[80] SL-Digital-
ausgang A
72 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 75
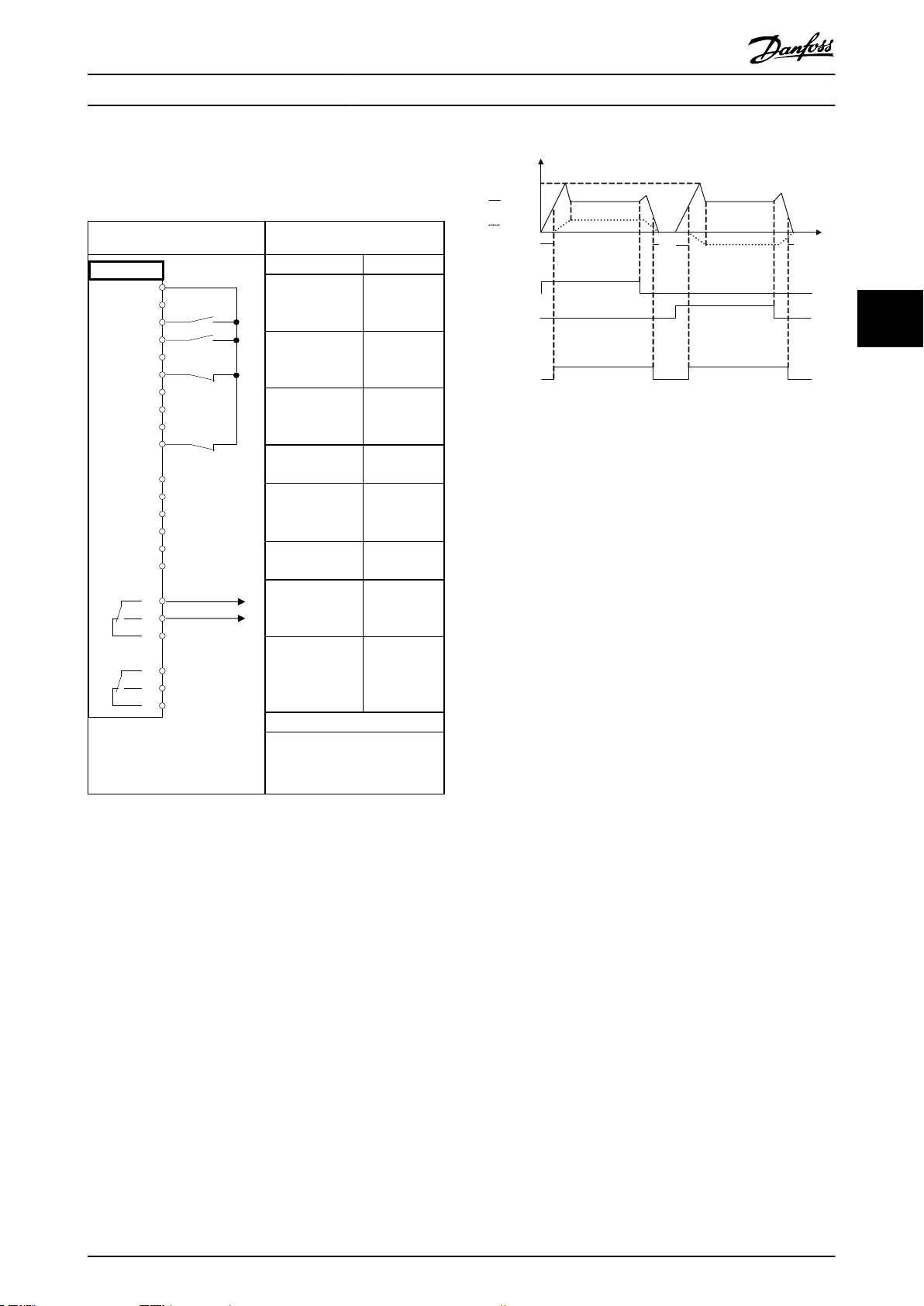
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
R1R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
130BB841.10
Start ( 18)
Start
reversing (19)
Relay output
Speed
Time
Current
1-71
1-71
2-21
2-21
1-76
Open
Closed
130BB842.10
Anwendungsbeispiele Projektierungshandbuch
4.6 Bremsanwendung
4.6.1 Mechanische Bremssteuerung
Parameter
Funktion Einstellung
Parameter 5-40 R
elaisfunktion
Parameter 5-10 Kl
[32]
Mechanische
Bremse
[8] Start*
4 4
emme 18 Digitaleingang
Parameter 5-11 Kl
emme 19 Digital-
[11] Start +
Reversierung
Abbildung 4.4 Mechanische Bremssteuerung
eingang
Parameter 1-71 S
0,2
tartverzög.
Parameter 1-72 S
tartfunktion
[5] VVC+/
FLUX
Rechtslauf
Parameter 1-76 S
I
m,n
tartstrom
Parameter 2-20 B
remse öffnen bei
Anwendungsabhängig
Motorstrom
Parameter 2-21 B
remse schliessen
bei
Hälfte des
Nennschlupfs
des Motors
Motordrehzahl
*=Werkseinstellung
Hinweise/Anmerkungen:
Tabelle 4.14 Mechanische Bremssteuerung
4.6.2 Mechanische Bremse in Hub- und Vertikalförderanwendungen
Der VLT® Decentral Drive FCD 302 besitzt eine mechanische Bremssteuerung, die speziell für Hubanwendungen ausgelegt ist.
Die mechanische Bremse für Hub- und Vertikalförderanwendungen wird über Option [6] Mech. Bremse in
Parameter 1-72 Startfunktion aktiviert. Der Hauptunterschied zur normalen mechanischen Bremssteuerung, bei der eine
Relaisfunktion den Ausgangsstrom überwacht, besteht darin, dass die mechanische Bremsfunktion für Vertikalförder- und
Hubanwendungen das Bremsrelais direkt steuern kann. Dies bedeutet, dass kein Strom für das Lüften der Bremse eingestellt
wird, sondern das Drehmoment auf die geschlossene Bremse ausgeübt wird, bevor das Lüften definiert wird. Durch die
direkte Drehmomentfestlegung ist die Konfiguration für Hubanwendungen weitaus unkomplizierter.
Verwenden Sie Parameter 2-28 Verstärkungsfaktor, um eine schnellere Regelung beim Lösen der Bremse zu erzielen. Die
Strategie der mechanischen Bremse für Vertikalförder- und Hubanwendungen basiert auf einem 3-stufigen Prozess, wobei
Motorsteuerung und Lüften der Bremse synchronisiert werden, um ein möglichst reibungsloses Öffnen der Bremse zu
erreichen.
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 73
Page 76

Mech.Bremse
Relais
Drehmoment-Sollw.
Motor-drehzahl
Vormagnetis. Drehmomen-
trampenzeit
P. 2-27
Drehmomentsollw. 2-26
Verstärkungsfaktor
P. 2-28
Bremsfreigabezeit
P. 2-25
Rampe 1 Auf
P. 3-41
Rampe 1 Ab
P. 3-42
Stoppverzögerung
P. 2-24
Bremsverzögerung
aktivieren
P. 2-23
1 2 3
130BA642.12
II
B
Anwendungsbeispiele
VLT® Decentral Drive FCD 302
3-stufiger Prozess
1. Den Motor vormagnetisieren
Um sicherzustellen, dass der Motor gehalten wird, und auch, um seine richtige Befestigung zu überprüfen, wird der
Motor zuerst vormagnetisiert.
2. Drehmoment auf geschlossene Bremse ausüben
Wenn die Last von der mechanischen Bremse gehalten wird, kann ihre Größe nicht ermittelt werden, sondern nur
ihre Richtung. In dem Moment, in dem sich die Bremse öffnet, muss die Last vom Motor übernommen werden. Um
diese Übernahme zu erleichtern, wird ein vom Anwender definiertes Drehmoment (Parameter 2-26 Drehmo-
mentsollw.) in Hubrichtung angewendet. Dadurch wird der Drehzahlregler initialisiert, der schließlich die Last
44
übernimmt. Um den Verschleiß des Getriebes aufgrund von Spiel zu reduzieren, wird das Drehmoment
beschleunigt.
3. Bremse öffnen
Wenn das Drehmoment den in Parameter 2-26 Drehmomentsollw. festgesetzten Wert erreicht hat, wird die Bremse
gelöst. Der in Parameter 2-25 Bremse lüften Zeit eingestellte Wert bestimmt die Verzögerung, bevor die Last
freigegeben wird. Um so schnell wie möglich auf die Laststufe zu reagieren, die dem Lösen der Bremse folgt, kann
der PID-Drehzahlregler durch Erhöhung der Proportionalverstärkung verstärkt werden.
Abbildung 4.5 Sequenz zum Lüften der Bremse bei mechanischer Bremsansteuerung für Vertikalförder- und Hubanwendungen
I) Mech. Bremse Verzögerungszeit: Der Frequenzumrichter beginnt erneut ab der Position mechanische Bremse aktiviert.
II) Stopp-Verzögerung: Wenn die Zeit zwischen aufeinander folgenden Starts kürzer ist als durch die Einstellung in
Parameter 2-24 Stopp-Verzögerung festgelegt, startet der Frequenzumrichter ohne Betätigung der mechanischen Bremse
(Reversierung).
Die Relais 1 und 2 können zur Steuerung der Bremse verwendet werden.
74 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 77
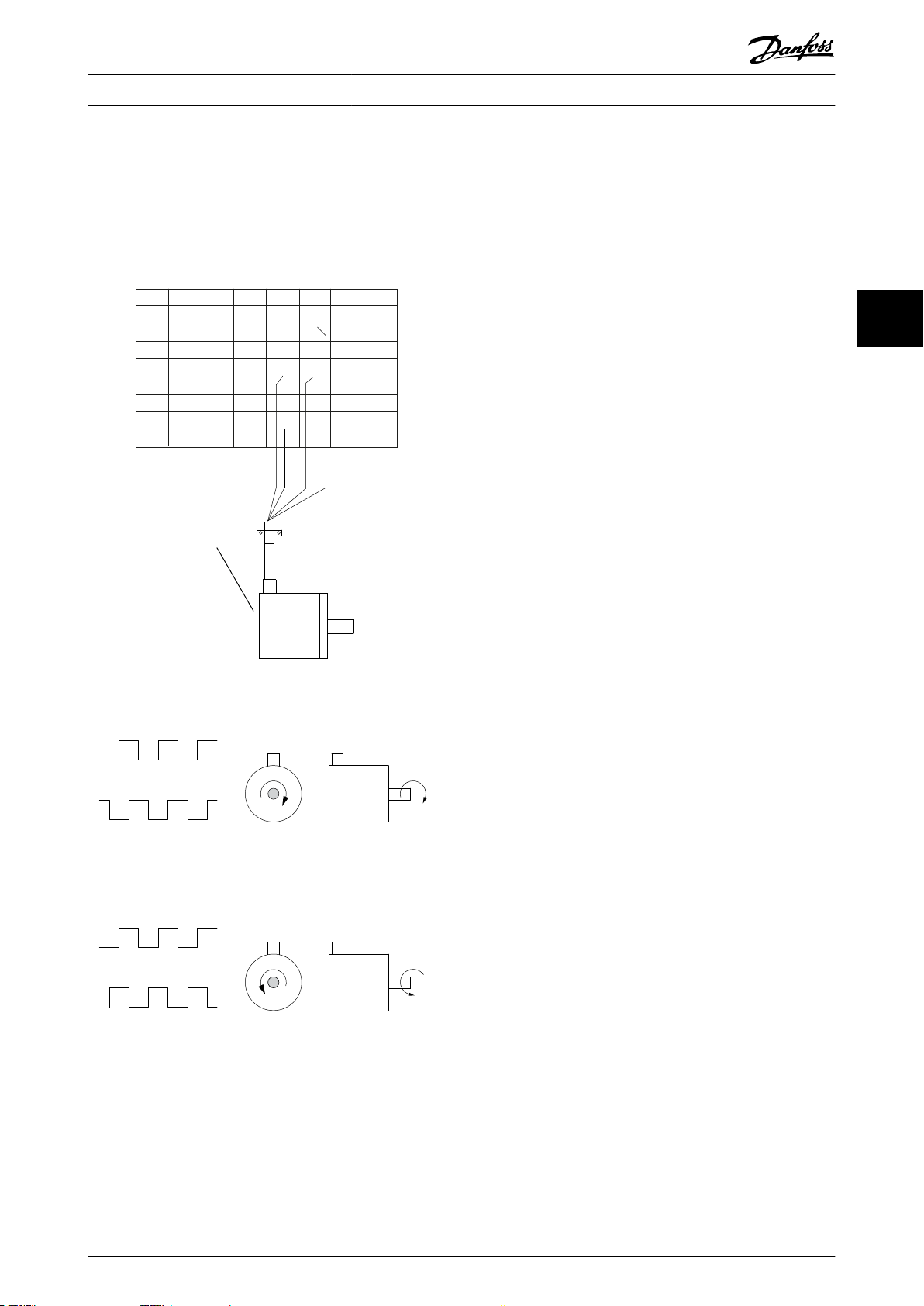
121212 121212 55 53
271918 333229 50 54
202020 202020 55 42
A
+24V
B
GND
130BC995.10
1
B
A
B
A
130BA646.10
RECHTS
LINKS
Anwendungsbeispiele Projektierungshandbuch
4.7 Drehgeber
Diese Anleitung soll die Konfiguration der Drehgeberverbindung mit dem Frequenzumrichter erleichtern. Vor der
Konfiguration des Drehgebers werden die Grundeinstellungen für eine Drehzahlregelung mit Rückführung gezeigt.
Abbildung 4.6 Drehgeberverbindung zum Frequenzumrichter
4.7.1 Drehgeberrichtung
Die Drehrichtung des Drehgebers hängt von der
Auswertung der Pulse durch den Frequenzumrichter ab.
Auswertung im Rechtslauf bedeutet, dass sich der
•
A-Kanal 90 elektrische Grad vor Kanal B befindet.
Auswertung im Linkslauf bedeutet, dass sich der
•
B-Kanal 90 elektrische Grad vor Kanal A befindet.
Die Drehrichtung bezieht sich auf den Blick von vorne auf
das Wellenende.
4.8 Frequenzumrichtersystem mit
Rückführung
Ein Frequenzumrichtersystem mit PID-Regelung besteht in
der Regel aus Elementen wie:
Motor.
•
Zusätzliche Geräte:
•
- Getriebe
- Mechanische Bremse
Frequenzumrichter
•
Drehgeber als Rückführung.
•
Bremswiderstand für dynamische Bremse.
•
Kupplung.
•
Belastung
•
Anwendungen mit mechanischer Bremsansteuerung
erfordern häufig auch einen Bremswiderstand für generatorisches Bremsen.
4 4
Abbildung 4.7 24-V-Inkrementalgeber mit einer maximalen
Kabellänge von 5 m (16,4 ft)
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 75
Page 78
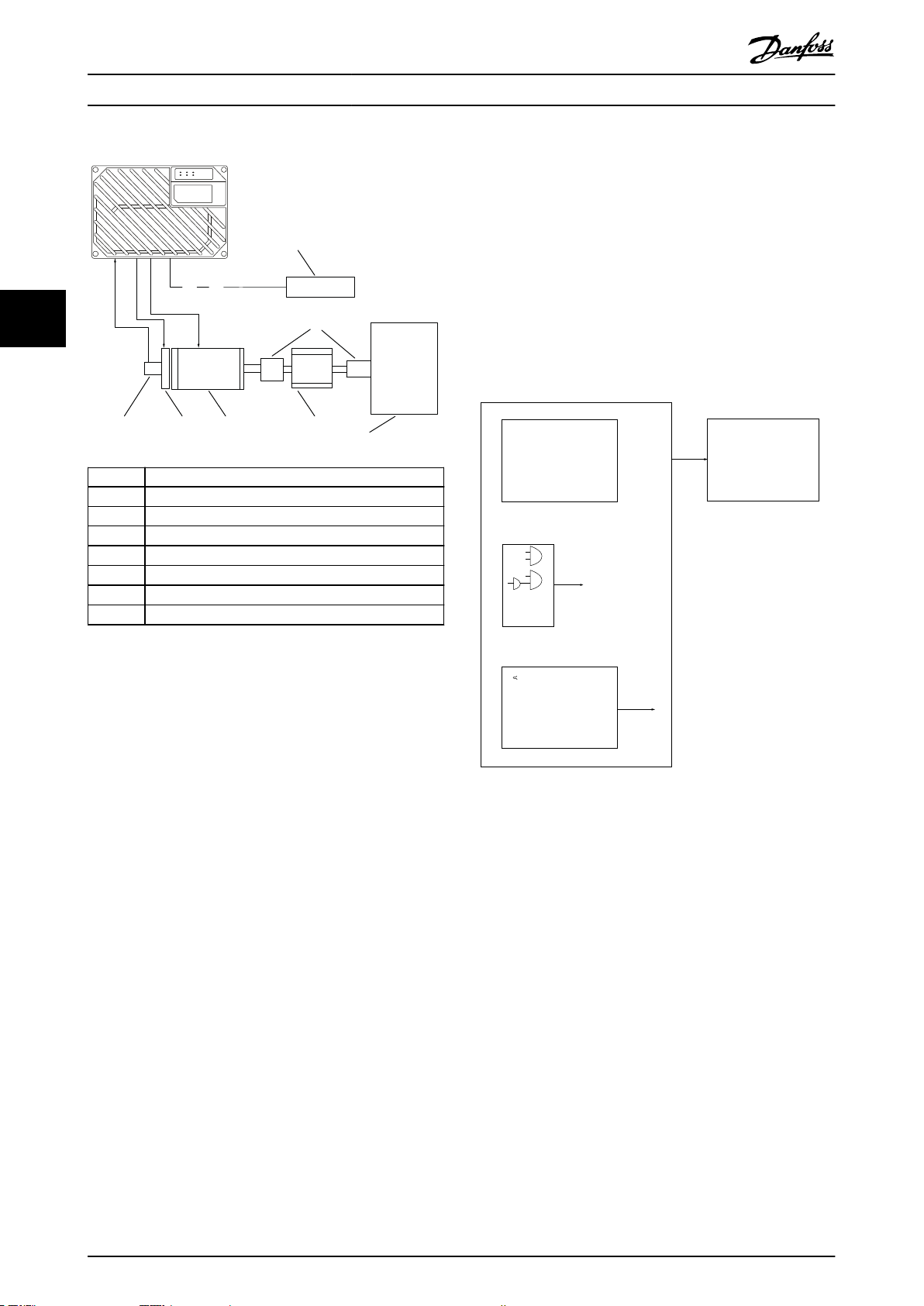
130BC996.10
3 4
7
5
6
ON
WARNING
ALARM
Bus MS NS2NS1
1 2
. . .
. . .
Par. 13-11
Comparator Operator
Par. 13-43
Logic Rule Operator 2
Par. 13-51
SL Controller Event
Par. 13-52
SL Controller Action
130BB671.13
Coast
Start timer
Set Do X low
Select set-up 2
. . .
Running
Warning
Torque limit
Digital input X 30/2
. . .
=
TRUE longer than..
. . .
. . .
Anwendungsbeispiele
VLT® Decentral Drive FCD 302
Smart Logic Control
4.9
Der SLC ist im Wesentlichen eine Folge benutzerdefinierter
Aktionen (siehe Parameter 13-52 SL-Controller Aktion [x]), die
ausgeführt werden, wenn das zugehörige Ereignis (siehe
Parameter 13-51 SL-Controller Ereignis [x]) vom SLC als Wahr
ermittelt wird.
Die Bedingung für ein Ereignis kann ein bestimmter Status
sein oder wenn der Ausgang einer Logikregel oder eines
44
Vergleicher-Funktion wahr wird. Dies führt zu einer
zugehörigen Aktion, wie in Abbildung 4.9 abgebildet.
Pos. Beschreibung
1 Geber2 Mechanische Bremse
3 Motor
4 Getriebe
5 Kupplungen
6 Bremswiderstand
7 Last
Abbildung 4.8 Basiseinstellung für Drehzahlregelung mit
Istwertrückführung
Abbildung 4.9 Aktueller Steuerstatus/Ereignis und Aktion
Ereignisse und Aktionen sind jeweils nummeriert und
paarweise verknüpft (Zustände). Wenn also Ereignis [0]
erfüllt ist (d. h. WAHR ist), wird die Aktion [0] ausgeführt.
Danach werden die Bedingungen von Ereignis [1]
ausgewertet, und wenn WAHR, wird Aktion [1] ausgeführt
usw. Es wird jeweils nur ein Ereignis ausgewertet. Ist das
Ereignis FALSCH, wird während des aktuellen Abtastintervalls keine Aktion (im SLC) ausgeführt und es werden
keine anderen Ereignisse ausgewertet. Dies bedeutet, dass
der SLC, wenn er startet, Ereignis [0] (und nur Ereignis [0])
in jedem Abtastintervall auswertet. Nur wenn Ereignis [0]
als WAHR bewertet wird, führt der SLC Aktion [0] aus und
beginnt, das Ereignis auszuwerten. Sie können 1 bis 20
Ereignisse und Aktionen programmieren.
76 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 79
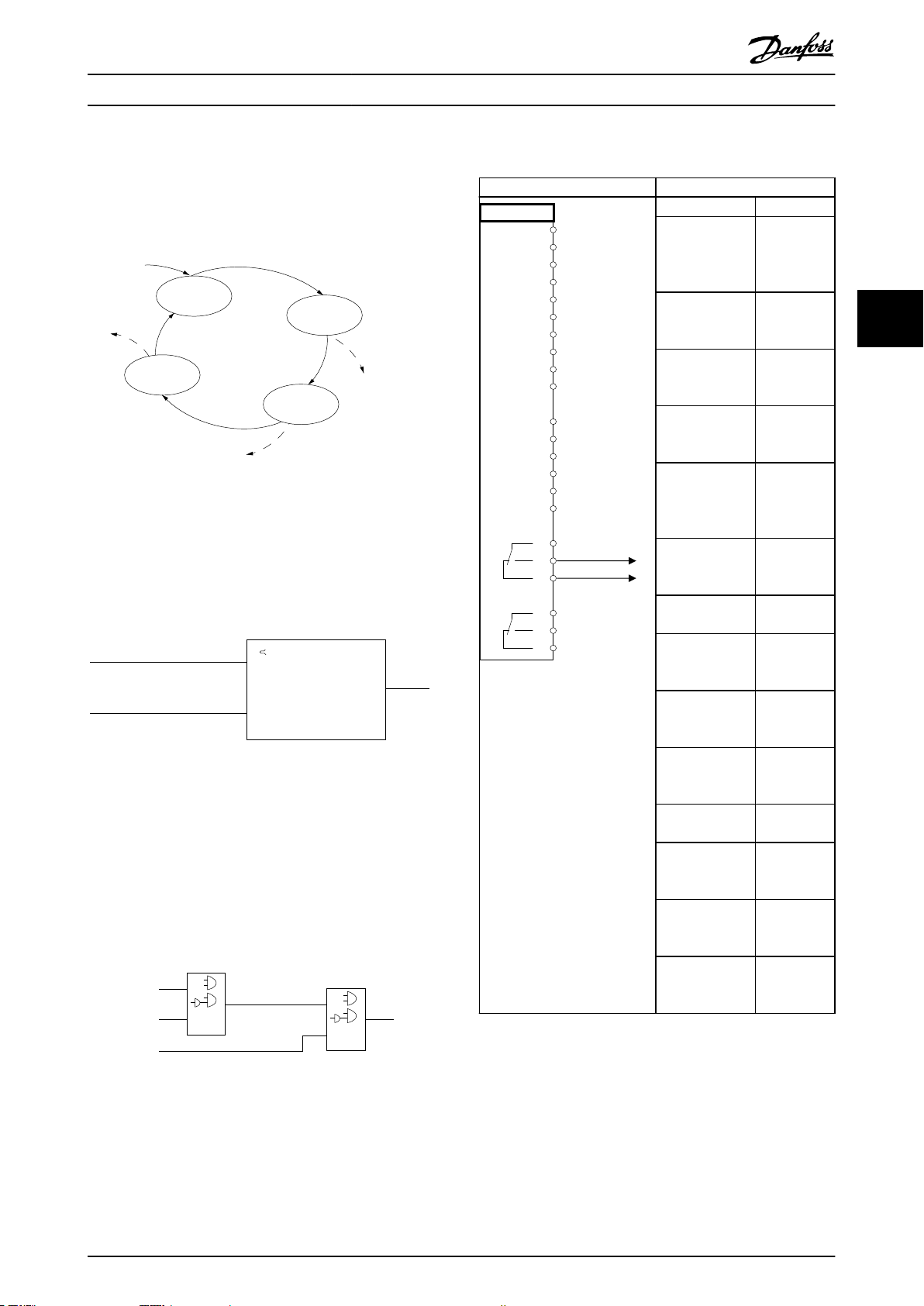
130BA062.13
Zustand 1
Ereignis 1/
Aktion 1
Zustand 2
Ereignis 2/
Aktion 2
Start
Ereignis P13-01
Zustand 3
Ereignis 3/
Aktion 3
Zustand 4
Ereignis 4/
Aktion 4
Stop
Ereignis P13-02
Stop
Ereignis P13-02
Stop
Ereignis P13-02
Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
R1R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
130BB839.10
Anwendungsbeispiele Projektierungshandbuch
Wenn das letzte Ereignis/die letzte Aktion durchgeführt
Anwendungsbeispiel
wurde, startet die Sequenz ausgehend von Ereignis [0]/
Aktion [0] erneut. Abbildung 4.10 zeigt ein Beispiel mit drei
Ereignissen/Aktionen:
Abbildung 4.10 Beispiel - interne Stromregelung
Vergleicher
Vergleicher dienen zum Vergleichen von Betriebsvariablen
(z. B. Ausgangsfrequenz, Ausgangsstrom, Analogeingang
usw.) mit festen Sollwerten.
Abbildung 4.11 Vergleicher
Logikregeln
Parameter zur freien Definition von binären Verknüpfungen
(boolesch). Es ist möglich, 3 boolesche Zustände in einer
Logikregel über UND, ODER und NICHT miteinander zu
verknüpfen. Das Ergebnis (WAHR/FALSCH) können Sie von
Timern, Vergleichern, Digitaleingängen, Statusbits und
Ereignissen verwenden.
Parameter
Funktion Einstellung
Parameter 4-30 D
[1] Warnung
rehgeberüberwachung
Funktion
Parameter 4-31 D
100 U/min
rehgeber max.
Fehlabweichung
Parameter 4-32 D
5 s
rehgeber
Timeout-Zeit
Parameter 7-00 D
[2] MCB 102
rehgeberrückführung
Parameter 17-11 I
1024*
nkremental
Auflösung
[Pulse/U]
Parameter 13-00
[1] On
Smart Logic
Controller
Parameter 13-01
[19] Warnung
SL-Controller Star t
Parameter 13-02
SL-Controller
[44] [Reset]-
Taste
Stopp
Parameter 13-10
Vergleicher-
[21] Nr. der
Warnung
Operand
Parameter 13-11
[1] ≈*
VergleicherFunktion
Parameter 13-12
90
Vergleicher-Wert
Parameter 13-51
SL-Controller
[22]
Vergleicher 0
Ereignis
Parameter 13-52
SL-Controller
Aktion
Parameter 5-40 R
elaisfunktion
[32] Digital-
ausgang A-
AUS
[80] SL-
Digitalausgan
g A
4 4
Abbildung 4.12 Logikregeln
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 77
Page 80
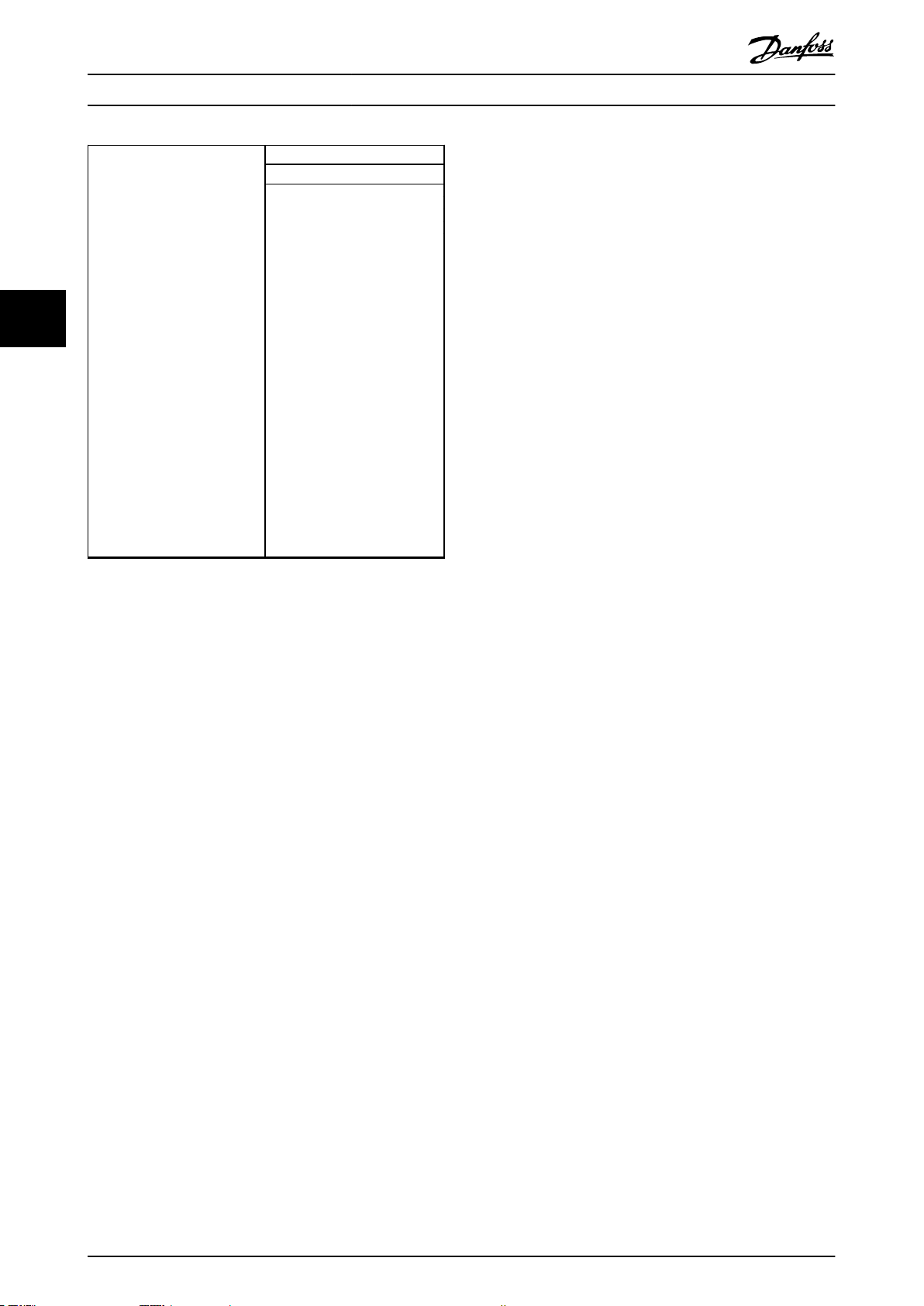
Anwendungsbeispiele
Parameter
*=Werkseinstellung
Hinweise/Anmerkungen:
Wenn der Grenzwert der
Drehgeberüberwachung
überschritten wird, wird
Warnung 90 Istwertüberwachung
ausgegeben. Der SLC
überwacht Warnung 90, und
44
wenn diese Warnung WAHR
wird, wird Relais 1 ausgelöst.
Externe Geräte können dann
anzeigen, dass ggf. eine
Wartung erforderlich ist. Wenn
der Istwertfehler innerhalb von
5 s wieder unter diese Grenze
fällt, läuft der Frequenzumrichter weiter, und die Warnung
wird ausgeblendet. Relais 1
bleibt hingegen ausgelöst, bis
Sie [Reset] auf dem LCP
drücken.
VLT® Decentral Drive FCD 302
Tabelle 4.15 Verwendung von SLC zur Einstellung eines Relais
78 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 81

130BD549.11
Max.I
out
(%)
at T
AMB, MAX
Altitude (m)
FCD
enclosure
T
at 100% I
out
D
100%
91%
82%
0 K
-5 K
-9 K
1000 2000 3000
AMB, MAX
(K)
3280 6561 9842 Altitude (ft)
Besondere Betriebsbedingung... Projektierungshandbuch
5 Besondere Betriebsbedingungen
Unter einigen besonderen Bedingungen, bei denen der
Betrieb des Frequenzumrichters schwieriger ist, müssen Sie
die Leistungsreduzierung berücksichtigen. Bei bestimmten
Bedingungen muss die Leistungsreduzierung manuell
erfolgen.
Unter anderen Bedingungen führt der Frequenzumrichter
bei Bedarf automatisch eine Leistungsreduzierung durch.
Dies soll ein ordnungsgemäßes Funktionieren in kritischen
Phasen sicherstellen, in denen die Alternative eine
Abschaltung sein könnte.
5.1 Manuelle Leistungsreduzierung
Manuelle Leistungsreduzierung müssen Sie in folgenden
Fällen in Betracht ziehen:
Luftdruck – für Installationen in Höhenlagen über
•
1000 m (3280 ft).
Motordrehzahl – bei Dauerbetrieb mit niedriger
•
Drehzahl in Anwendungen mit konstantem
Drehmoment
Umgebungstemperatur – relevant für
•
Umgebungstemperaturen über 40 °C (104 °F)
Fragen Sie Danfoss nach dem Anwendungshinweis mit
Tabellen und weiteren Erläuterungen. An dieser Stelle wird
nur der Betrieb mit niedrigen Motordrehzahlen
beschrieben.
5.1.1 Leistungsreduzierung wegen
niedrigem Luftdruck
Bei niedrigerem Luftdruck nimmt die Kühlfähigkeit der Luft
ab.
Unterhalb einer Höhe von 1000 m (3280 ft) ist keine
Leistungsreduzierung erforderlich. Oberhalb von 1000 m
(3280 ft) muss die Umgebungstemperatur (T
max. Ausgangsstrom (I
) entsprechend dem Diagramm in
out
Abbildung 5.1 reduziert werden.
) oder der
AMB
Abbildung 5.1 Höhenabhängige Reduzierung des Ausgangsstroms bei T
Höhen über 2000 m wenden Sie sich bezüglich der PELV
(Schutzkleinspannung – Protective extra low voltage) an
Danfoss.
Eine Alternative ist die Reduzierung der Umgebungstemperatur und die Sicherstellung von 100 % Ausgangsstrom
bei großen Höhen. Zur Veranschaulichung, wie sich die
Grafik lesen lässt, wird die Situation bei 2.000 m (6561 ft)
Höhe für einen 3-kW-Frequenzumrichter (4 HP) mit T
MAX
36 °C (96,8 °F) (T
nennstroms verfügbar. Bei einer Temperatur von 41,7 °C
(107 °F) sind 100% des Ausgangsnennstroms verfügbar.
5.1.2 Leistungsreduzierung beim Betrieb
Wenn ein Motor an den Frequenzumrichter angeschlossen
ist, muss für eine ausreichende Motorkühlung gesorgt sein.
Der Grad der Erwärmung hängt von der Last am Motor
sowie von der Betriebsdrehzahl und -dauer ab.
für den VLT® Decentral Drive FCD 302. Bei
AMB, MAX
AMB,
= 40 °C (104 °F) dargestellt. Bei einer Temperatur von
- 3,3 K) sind 91 % des Ausgangs-
AMB, MAX
mit niedriger Drehzahl
5 5
Anwendungen mit konstantem Drehmoment (CT-Modus)
In Anwendungen mit konstantem Drehmoment kann im
niedrigen Drehzahlbereich ein Problem auftreten. Bei
Anwendungen mit konstantem Drehmoment kann es bei
niedriger Drehzahl aufgrund einer geringeren Kühlleistung
des Motorlüfters zu einer Überhitzung des Motors
kommen.
Soll der Motor kontinuierlich mit weniger als der Hälfte der
Nenndrehzahl laufen, so müssen Sie dem Motor zusätzliche
Kühlluft zuführen (oder es ist ein für diese Betriebsart
geeigneter Motor zu verwenden).
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 79
Page 82
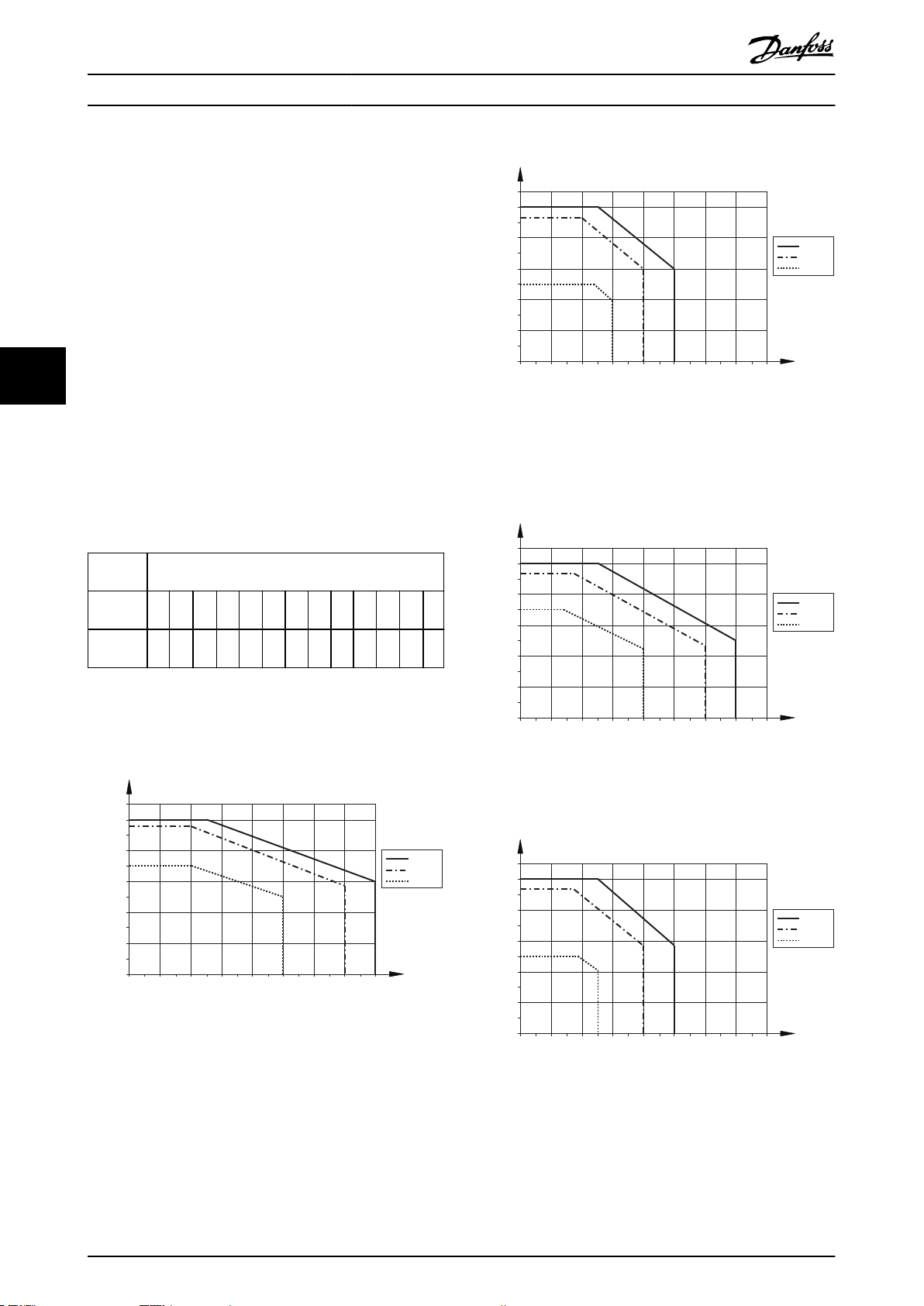
110%
100%
60%
80%
40%
20%
0
0
2 4 6 8 10
12 14
16
I (%)
out
f
sw
(kHz)
40 C
0
45 C
0
50 C
0
130BD210.10
110%
100%
60%
80%
40%
20%
0
0
2 4 6 8 10
12 14
16
I (%)
out
f
sw
(kHz)
40 C
0
45 C
0
50 C
0
130BD211.10
110%
100%
60%
80%
40%
20%
0
0
2 4 6 8 10
12 14
16
I (%)
out
f
sw
(kHz)
40 C
0
45 C
0
50 C
0
130BD208.10
110%
100%
60%
80%
40%
20%
0
0
2 4 6 8 10
12 14
16
I (%)
out
f
sw
(kHz)
40 C
0
45 C
0
50 C
0
130BD209.10
Besondere Betriebsbedingung...
VLT® Decentral Drive FCD 302
Eine Alternative ist, die Belastung des Motors durch die
SFAVM - Statorfrequenz Asynchron Vector Modulation
Auswahl eines größeren Motors zu reduzieren, was jedoch
durch die Leistungsgröße des Frequenzumrichters
eingeschränkt ist.
Anwendungen mit variablem (quadratischem)
Drehmoment (VT)
Bei Anwendungen mit variablem Drehmoment (z. B. Zentrifugalpumpen und Lüfter), bei denen das Drehmoment in
quadratischer und die Leistung in kubischer Beziehung zur
Drehzahl steht, ist keine Steigerung der Kühlung oder der
Leistungsreduzierung des Motors erforderlich.
55
5.1.3 Umgebungstemperatur
Abbildung 5.3 Leistungsreduzierung von I
T
für FCD 302 0,37–0,55–0,75 kW, bei SFAVM
AMB, MAX
für abweichende
out
Diagramme werden einzeln für 60°AVM und SFAVM
aufgeführt. 60° AVM schaltet nur 2/3 der Zeit, während
SFAVM während des gesamten Zeitraums schaltet. Die
5.1.3.2 Leistungsgröße 1,1–1,5 kW
maximal zulässige Taktfrequenz liegt bei 16 kHz für 60°
AVM und 10 kHz für SFAVM. Die diskreten Taktfrequenzen
werden in Tabelle 5.1 dargestellt.
Schaltmo
dus
60° AVM
2 2,5 3 3,54 5 6 7 8 10 12 14 16
Diskrete Taktfrequenzen
60° AVM - Pulsbreitenmodulation
SFAVM 2 2,5 3 3,54 5 6 7 8 10 – – –
Tabelle 5.1 Diskrete Taktfrequenzen
5.1.3.1 Leistungsgröße 0,37–0,75 kW
60° AVM - Pulsbreitenmodulation
Abbildung 5.2 Leistungsreduzierung von I
T
für FCD 302 0,37–0,55–0,75 kW, bei 60° AVM
AMB, MAX
für abweichende
out
Abbildung 5.4 Leistungsreduzierung von I
T
für FCD 302 1,1–1,5 kW, bei 60° AVM
AMB, MAX
für abweichende
out
SFAVM - Statorfrequenz Asynchron Vector Modulation
Abbildung 5.5 Leistungsreduzierung von I
T
für FCD 302 1,1–1,5 kW, bei SFAVM
AMB, MAX
für abweichende
out
80 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 83

110%
100%
60%
80%
40%
20%
0
0
2 4 6 8 10
12 14
16
I (%)
out
f
sw
(kHz)
40 C
0
45 C
0
50 C
0
130BD206.10
110%
100%
60%
80%
40%
20%
0
0
2 4 6 8 10
12 14
16
I (%)
out
f
sw
(kHz)
40 C
0
45 C
0
50 C
0
130BD207.10
Besondere Betriebsbedingung... Projektierungshandbuch
5.1.3.3 Leistungsgröße 2,2–3,0 kW
60° AVM - Pulsbreitenmodulation
Abbildung 5.6 Leistungsreduzierung von I
T
für FCD 302 2,2–3,0 kW, bei 60° AVM
AMB, MAX
SFAVM - Statorfrequenz Asynchron Vector Modulation
für abweichende
out
5.2 Automatische Leistungsreduzierung
Der Frequenzumrichter prüft beständig, ob die folgenden
Parameter ein kritisches Niveau aufweisen:
Kritisch hohe Temperatur an Steuerkarte oder
•
Kühlkörper
Hohe Motorbelastung
•
Hohe Zwischenkreisspannung
•
Niedrige Motordrehzahl
•
Als Reaktion auf einen kritischen Wert passt der Frequenzumrichter die Taktfrequenz an. Bei kritisch hohen internen
Temperaturen und niedriger Motordrehzahl kann der
Frequenzumrichter ebenfalls den PWM-Schaltmodus auf
SFAVM setzen.
HINWEIS
Die automatische Leistungsreduzierung erfolgt anders,
wenn Parameter 14-55 Ausgangsfilter auf [2] Fester
Sinusfilter programmiert ist.
Die automatische Leistungsreduzierung besteht aus
Beträgen einzelner Funktionen, die den Bedarf ermitteln.
Ihre Wechselbeziehung ist in Abbildung 5.9 grafisch
dargestellt.
5 5
Abbildung 5.7 Leistungsreduzierung von I
T
für FCD 302 2,2–3,0 kW, bei SFAVM
AMB, MAX
für abweichende
out
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 81
Page 84
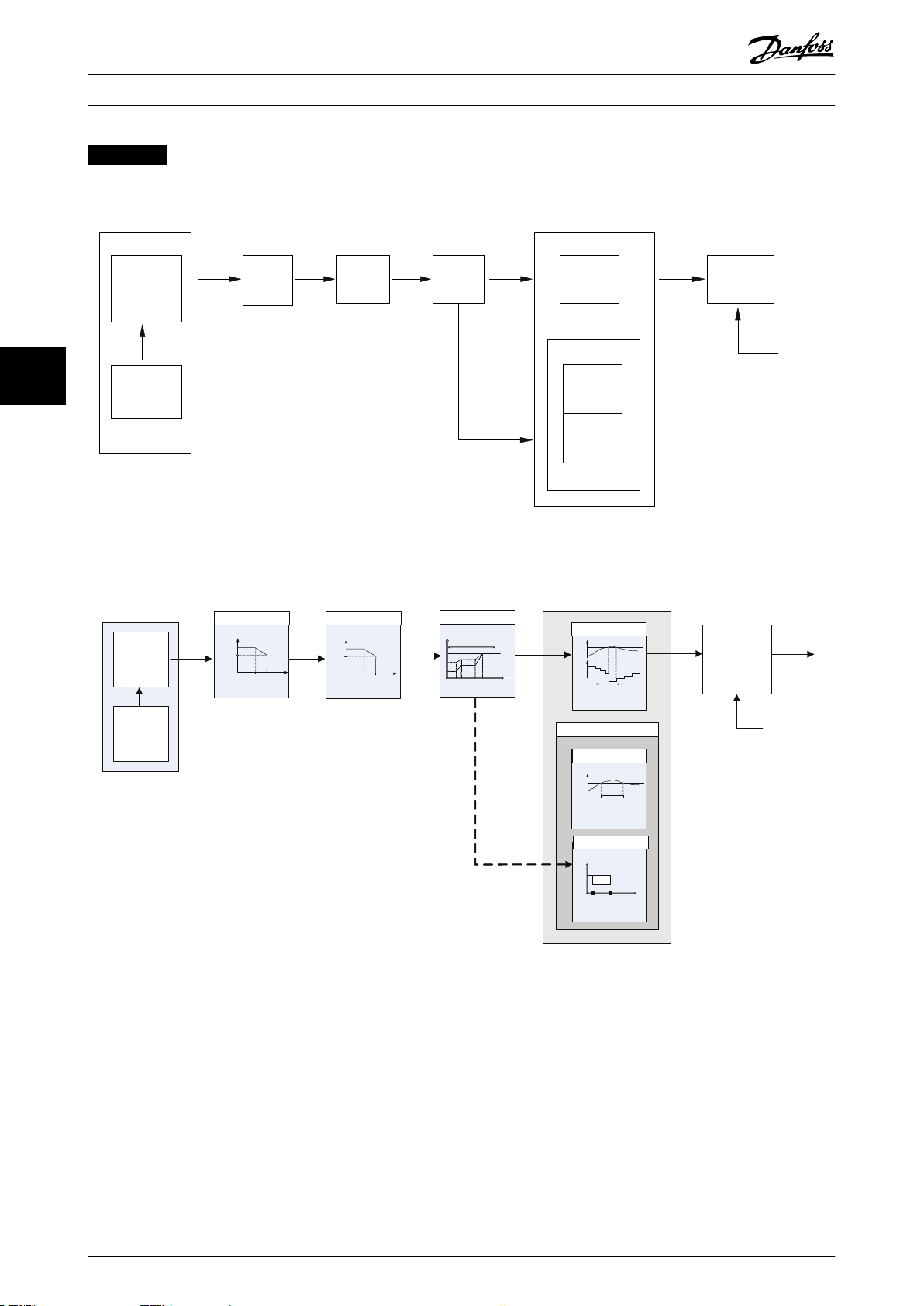
CTRL/
Modulation
Limit
f
SW
Setting
from LCP
f
SW, ref
f
SW
(load)
f
SW
(UDC)
f
SW
( fm )
f
SW
(T)
Ramp
PWM
PWM (T)
PWM (f)
Protection
ag
f
SW, ref
f
SW, ref
130BD550.10
70%
f
sw
160%
I
m
16 kHz @ 60PWM
10 kHz @ SFAVM
10 kHz @ 60PWM
7 kHz @ SFAVM
CTRL/
modul ation
limi t
f
sw
setting
from LCP
f
sw, ref
f
sw, I
f
sw, UD C
fmot
or
[
H
z
]
fs
w
[
kH
z
]
1
0
SF AV
M only
1
5
3.9 4 9.9
f
s
w
,
f
m
2
, f
s
w
,
f
m
3
f
s
w
,
f
m
4
f
s
w
,
f
m
1
f
sw
U
DC,TRIP
U
DC
Requested f
sw
U
DC, START DERATING
PWM
fmotor[Hz]
SFAVM
60PWM
optional
80%-86% of
fmotor,nom
10Hz-15Hz
T
AMB
T
PWM SWITCH
60PWM
SFAVM
τ
2
τ
1
T
AMB
High warning
Low warning
f
sw
f
sw, fs
f
sw , TAS
f
s
Ramp
f
sw, DSP
fsw(I
load
) fsw(UDC)
fsw(fm)
fsw(T)
PWM(T)
PWM(fs)
PWM
130BB971.10
Protection flag
(drop to f
sw,min
immediately)
Besondere Betriebsbedingung...
VLT® Decentral Drive FCD 302
HINWEIS
Im Modus mit festem Sinusfilter unterscheidet sich die Struktur. Siehe Kapitel 5.2.1 Modus mit festem Sinusfilter.
55
Abbildung 5.8 Funktionsblock Automatische Leistungsreduzierung
Abbildung 5.9 Wechselbeziehung zwischen den Beiträgen der automatischen Leistungsreduzierung
Die Taktfrequenz wird zuerst aufgrund des Motorstroms reduziert, gefolgt von Zwischenkreisspannung, Motorfrequenz und
Temperatur. Wenn in einem Schritt mehrere Leistungsreduzierungen stattfinden, entspricht die resultierende Taktfrequenz
dem Ergebnis, das bei lediglich der größten Leistungsreduzierung aufgetreten wäre (die Leistungsreduzierungen sind nicht
kumulativ). Jede dieser Funktionen wird in den folgenden Abschnitten beschrieben.
82 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 85

TAS limit
fm limit
LCP
setting
Contr ol /
Modulation
limi t
Ramp
Protection ag
( drop to fswmin
immediately )
Fsw, DSP
SFA VM 60 PWM
fsw, ref
fsw, TAS
fsw, fm
1[ms] DSP task
1[ms] task time of microcontroller
Fsw, LCP
fsw, max
fsw, minor
130BB972.11
Besondere Betriebsbedingung... Projektierungshandbuch
5.2.1 Modus mit festem Sinusfilter
Wird der Frequenzumrichter mit einem Sinusfilter mit fester Frequenz betrieben, wird die Taktfrequenz aufgrund des
Motorstroms oder der Zwischenkreisspannung nicht reduziert. Die Taktfrequenz wird weiterhin aufgrund der Motorfrequenz
und -temperatur reduziert; die Reihenfolge dieser beiden Vorgänge wird jedoch umgekehrt. Beachten Sie, dass die auf der
Motorfrequenz basierende Leistungsreduzierung in dieser Situation nichts bewirkt, sofern der Parameter
LC_Low_Speed_Derate_Enable PUD des Frequenzumrichters nicht auf „Wahr“ gesetzt ist. Zudem unterscheidet sich die
Funktion der auf der Temperatur basierenden Leistungsreduzierung geringfügig. Im Modus mit festem Sinusfilter wird eine
andere Protection Mode-Taktfrequenz an das DSP gesendet.
5 5
Abbildung 5.10 Der Taktfrequenz-Begrenzungsalgorithmus beim Betrieb des Frequenzumrichters mit einem Sinusfilter mit fester
Frequenz
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 83
Page 86

70%
f
sw
160%
I
m
16 kHz @ 60 PWM
10 kHz @ SFAVM
10 kHz @ 60PWM
7 kHz @ SFAVM
130BB973.10
f
sw
U
DC,TRIP
U
DC
Requested f
sw
U
DC, START DERATING
130BB974.10
PWM
fmotor[Hz]
SFAVM
60 PWM
optional
80%-86% of
fmotor,nom
10Hz-15Hz
130BC143.10
fsw [kHz]
10
SFAVM only
153.9 4 9.9
f
sw,fm2
, f
sw,fm3
f
sw,fm4
f
sw,fm1
130BB975.10
T
AMB
T
PWM SWITCH
60PWM
SFAVM
130BC142.10
τ
2
τ
1
T
AMB
High warning
Low warning
f
sw
130BB976.10
fsw [kHz]
Iout [%]
I1
I2
f1
f2
130BB977.10
Besondere Betriebsbedingung...
5.2.2 Übersichtstabelle
VLT® Decentral Drive FCD 302
Hintergrund für
Leistungsreduzierung
I
↑
load
Udc ↑
PWM – Funktionen zur Justierung des
Schaltmodus
Keine automatische Leistungsreduzierung
Keine automatische Leistungsreduzierung
fsw – Funktionen zur Reduzierung der Taktfrequenz
55
f
s
T ↑
Tabelle 5.2 Übersicht – Leistungsreduzierung
5.2.3 Hohe Motorbelastung
Die Taktfrequenz wird entsprechend dem Motorstrom
automatisch justiert.
Wenn ein bestimmter Prozentwert der HO-Motornennbelastung erreicht wird, wird die Taktfrequenz reduziert.
Dieser Prozentwert ist für jede Baugröße unterschiedlich,
und im EEPROM ist neben den anderen Punkten, die die
Leistungsreduzierung begrenzen, ein Wert codiert.
84 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Abbildung 5.11 Leistungsreduzierung der Taktfrequenz
entsprechend der Motorbelastung. f1, f2, I1 und I2 sind im
EEPROM codiert.
Im EEPROM hängen die Grenzen vom Modulationsmodus
ab. Bei 60° AVM sind f1 und f2 höher als für SFAVM. I1 und
I2 sind vom Modulationsmodus unabhängig.
Page 87

fsw [kHz]
Udc [V ]
U2
U1
f1
f2
130BB978.10
PWM
fm[Hz]
SFAVM
60PWM
optional
fm,switch2fm,switch1
130BB979.10
fm [HZ]
fsw [kHz]
fm4
SFAVM only
fm5 (fm, switch 1)fm1 fm2 fm3
f
sw,fm2
,
f
sw,fm3
f
sw,fm 4
f
sw,fm1
Is< K
Is1*Inom ,h o
K
Is1*Inom,ho
<= Is< K
Is2*Inom,ho
Is>= K
Is2*Inom,ho
130BB980.10
Besondere Betriebsbedingung... Projektierungshandbuch
5.2.4 Hohe Zwischenkreisspannung
Die Taktfrequenz wird entsprechend der Spannung im
Zwischenkreis automatisch justiert.
Wenn der Zwischenkreis eine gewisse Größe erreicht, wird
die Taktfrequenz reduziert. Die Punkte, die die Leistungsreduzierung begrenzen, sind für jede Baugröße
unterschiedlich und sind im EEPROM codiert.
Abbildung 5.12 Reduzierung der Taktfrequenz entsprechend
der Spannung im Zwischenkreis. f1, f2, U1 und U2 sind im
EEPROM codiert.
Im EEPROM hängen die Grenzen vom Modulationsmodus
ab. Bei 60° AVM sind f1 und f2 höher als für SFAVM. U1
und U2 sind vom Modulationsmodus unabhängig.
5.2.5 Niedrige Motordrehzahl
Dies bedeutet, dass sich die erwartete Lebensdauer der
Komponente bei kleinen Statorfrequenzen verkürzt, wenn
keine Kompensation verwendet wird. Daher kann die
Taktfrequenz bei geringen Werten der Statorfrequenz, bei
denen die Temperaturschwankungen hoch sind, reduziert
werden, um die Spitzentemperatur und somit die Temperaturschwankungen zu reduzieren.
Bei VT-Anwendungen ist der Laststrom bei kleinen Statorfrequenzen relativ gering, und die
Temperaturschwankungen sind somit nicht so groß wie bei
CT-Anwendungen. Aus diesem Grund wird auch der
Laststrom berücksichtigt.
5 5
Abbildung 5.14 Schwankungen der Taktfrequenz (fsw) für
verschiedene Statorfrequenzen (fm)
Die Option der PWM-Strategie hängt von der Statorfrequenz ab. Zur Vermeidung, dass dasselbe IGBT zu lange
leitet (thermische Betrachtung), wird fm, switch1 als
minimale Statorfrequenz für 60° PWM festgelegt, während
fm, switch2 als maximale Statorfrequenz für SFAVM zum
Schutz des Frequenzumrichters festgelegt wird. 60° PWM
unterstützt die Reduzierung des Wechselrichterverlusts
über f
, da der Schaltverlust durch den Wechsel von
m, switch1
SFAVM zu 60° AVM um 1/3 reduziert wird.
Abbildung 5.13 Reduzierung des Wechselrichterverlusts
Die Form der Durchschnittstemperatur ist unabhängig von
der Statorfrequenz konstant. Die Spitzentemperatur folgt
jedoch der Form des Ausgangsstroms für kleine Statorfrequenzen und bewegt sich in Richtung der
Durchschnittstemperatur für eine ansteigende
Statorfrequenz. Dies führt zu höheren
Temperaturschwankungen bei kleinen Statorfrequenzen.
Die Punkte, die die Leistungsreduzierung begrenzen, sind
für jede Baugröße unterschiedlich und sind im EEPROM
codiert.
HINWEIS
Der VLT® Decentral Drive FCD 302 reduziert den Strom
niemals automatisch. Eine automatische Leistungsreduzierung bezieht sich auf die Anpassung der Taktfrequenz
und des Schaltmodus.
Bei VT-Anwendungen wird der Laststrom vor der
Reduzierung der Taktfrequenz bei niedriger Motordrehzahl
berücksichtigt.
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 85
Page 88

TasTRefHigh
TasTRefNormal
TasTHys
fswMax
fswMin
T [ºC]
fsw [kHz]
Time
Δt
130BB981.10
Δt
Δt
PWM
60 PWM
10 20 30 40 50 60 70 80 90 100 110
20
40
60
80
100
120
0
v %
T %
0
1)
130BA893.10
Besondere Betriebsbedingung...
VLT® Decentral Drive FCD 302
5.2.6 Hoch intern
Leistungsreduzierung beim Betrieb mit
5.3
niedriger Drehzahl
Die Taktfrequenz wird entsprechend der Steuerkarten- und
Kühlkörpertemperatur reduziert. Diese Funktion wird
gelegentlich auch als temperaturadaptiveTaktfrequenzfunktion (TAS) bezeichnet.
Wenn ein Motor an den Frequenzumrichter angeschlossen
ist, muss für eine ausreichende Motorkühlung gesorgt sein.
Der Grad der Erwärmung hängt von der Last am Motor
sowie von der Betriebsdrehzahl und -dauer ab.
HINWEIS
Abbildung 5.15 zeigt eine Temperatur, die die Leistungs-
reduzierung beeinflusst. Tatsächlich sind 2 begrenzende
Temperaturen vorhanden: Steuerkartentemperatur und
55
Kühlkörpertemperatur. Beide verfügen über eigene
Regeltemperaturen.
Abbildung 5.15 Taktfrequenzreduzierung aufgrund einer
hohen Temperatur
HINWEIS
dt ist 10 s, wenn die Steuerkarte zu heiß ist, jedoch 0 s,
wenn der Kühlkörper zu heiß ist (kritischer).
Anwendungen mit konstantem Drehmoment (CT-Modus)
In Anwendungen mit konstantem Drehmoment kann im
niedrigen Drehzahlbereich ein Problem auftreten. Bei
Anwendungen mit konstantem Drehmoment kann es bei
niedrigen Drehzahlen aufgrund einer geringeren
Kühlleistung des Motorlüfters zu einer Überhitzung des
Motors kommen. Soll der Motor kontinuierlich mit weniger
als der Hälfte der Nenndrehzahl laufen, so müssen Sie dem
Motor zusätzliche Kühlluft zuführen (oder es ist ein für
diese Betriebsart geeigneter Motor zu verwenden).
Eine Alternative ist, die Belastung des Motors durch die
Auswahl eines größeren Motors zu reduzieren, was jedoch
durch die Leistungsgröße des Frequenzumrichters
eingeschränkt ist.
Anwendungen mit variablem (quadratischem)
Drehmoment (VT)
In Anwendungen mit variablem Drehmoment (z. B. Zentrifugalpumpen und Lüfter), in denen das Drehmoment in
quadratischer und die Leistung in kubischer Beziehung zur
Drehzahl steht, Bei diesen Anwendungen ist eine
zusätzliche Kühlung oder Leistungsreduzierung des Motors
nicht erforderlich. In Abbildung 5.16 liegt die typische
Kurve für das variable Drehmoment in allen Drehzahlbereichen unter dem maximalen Drehmoment bei
Leistungsreduzierung und dem maximalen Drehmoment
bei Zwangskühlung.
Die Warnung hoch kann nur für eine gewisse Zeit verletzt
werden, bevor der Frequenzumrichter abschaltet.
5.2.7 Strom
Die Funktion der endgültigen Leistungsreduzierung ist eine
Leistungsreduzierung des Ausgangsstroms aufgrund von
hohen Temperaturen. Diese Berechnung wird nach den
Berechnungen für die Leistungsreduzierung der
Taktfrequenz durchgeführt. Dies führt zu einem Versuch,
die Temperaturen zu senken, indem zunächst die
Taktfrequenz und anschließend der Ausgangsstrom
reduziert wird. Die Stromreduzierung wird nur
durchgeführt, wenn das Gerät darauf programmiert ist, in
Übertemperatursituationen zu reduzieren. Falls der
Benutzer eine Abschaltfunktion für Übertemperatursituationen ausgewählt hat, wird der Stromreduzierungsfaktor
nicht gesenkt.
86 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Pos. Beschreibung
‒‒‒‒‒‒‒‒ Maximales Drehmoment
─ ─ ─ ─ Typisches Drehmoment bei variabler Last
Abbildung 5.16 VT-Anwendungen – Max. Last eines Standardmotors bei 40 °C (104 °F)
Page 89

Besondere Betriebsbedingung... Projektierungshandbuch
HINWEIS
Im übersynchronen Drehzahlbetrieb nimmt das
verfügbare Motordrehmoment umgekehrt proportional
zur Drehzahlerhöhung ab. Dies muss in der
Auslegungsphase beachtet werden, um eine Motorüberlastung zu vermeiden.
5 5
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 87
Page 90

Position 2 4 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 39 39
F C D 3 0 2 P T 4 H 1 X A B X X X X X D
1 3 5
130BB797.10
6
Typencode und Auswahlhilfe
VLT® Decentral Drive FCD 302
6 Typencode und Auswahlhilfe
6.1 Typencodebeschreibung
Position Beschreibung Optionen
01–03 Produktgruppe FCD Decentral Drive
04–06 Frequenzumrichter-Serie 302 Erweiterte Leistung
PK37 0,37 kW
PK55 0,55 kW/0,75 HP
PK75 0,75 kW/1,0 HP
07–10 Nennleistung
11–12 Phasen, Netzspannung
13–15 Gehäuse
16–17 EMV-Filter H1 EMV-Filter, Klasse A1/C2
18 Bremse
19 Hardwarekonfiguration
20 Halterungen
21 Gewinde
22 Schalteroption
23 Display
P1K1 1,1 kW/1,5 HP
P1K5 1,5 kW/2,0 HP
P2K2 2,2 kW/3,0 HP
P3K0 3,0 kW/4,0 HP (nur große Bauform)
PXXX Nur Installationskasten (ohne Leistungsteil)
T 3-phasig
4 380–480 V AC
Standardausführung Schwarz –
B66
IP66/Type 4X
Standardausführung Weiß –
W66
IP66/Type 4X
Hygienische Ausführung Weiß –
W69
IP66K
X Keine Bremse
S Versorgung Bremschopper + mechanische Bremse
1 Komplettprodukt, kleine Bauform, Einzelmontage
3 Komplettprodukt, große Bauform, Einzelmontage
X Frequenzumrichterteil, kleine Bauform (kein Installationskasten)
Y Frequenzumrichterteil, große Bauform (kein Installationskasten)
R Installationskasten, kleine Bauform, Einzelmontage (kein Frequenzumrichterteil)
T Installationskasten, große Bauform, Einzelmontage (kein Frequenzumrichterteil)
X Keine Halterungen
E Flachhalterungen
F Halterungen (40 mm)
X Kein Installationskasten
M Metrische Gewinde
X Keine Schalteroption
E Wartungsschalter am Netzeingang
F Wartungsschalter am Motorausgang
L Trennschalter und Netztrenner, Durchschleifklemmen (nur große Bauform)
Wartungsschalter am Netzeingang mit zusätzlichen Durchschleifklemmen (nur große
K
Bauform)
X Kein Displaystecker (kein Installationskasten)
C Mit Displaystecker
88 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 91

Typencode und Auswahlhilfe Projektierungshandbuch
Position Beschreibung Optionen
X Keine Sensorstecker
24 Sensorstecker
25 Motorstecker X Kein Motorstecker
26 Netzstecker X Kein Netzstecker
27 Feldbusstecker
28 Reserviert X Zur zukünftigen Verwendung
29–30 A-Option
31–32 B-Option
33–37 Reserviert XXXXX Zur zukünftigen Verwendung
38–39 D-Option
E Direktmontage 4 x M12: 4 Digitaleingänge
F Direktmontage 6 x M12: 4 Digitaleingänge, 2 Relaisausgänge
X Kein Feldbusstecker
E M12 Ethernet
P M12 PROFIBUS
AX Keine A-Option
A0 PROFIBUS DP
AN EtherNet/IP
AL PROFINET
BX Keine B-Option
BR Drehgeberoption
BU Resolver-Option
BZ Sicherheits-SPS-Schnittstelle
DX Keine D-Option
D0 Externe 24 V DC Versorgung
6
6
Abbildung 6.1 Typencodebeschreibung
Nicht alle Optionen sind für jede Varianten des VLT® Decentral Drive FCD 302 erhältlich. Um zu bestätigen, ob die richtige
Version erhältlich ist, gehen Sie bitte zum Antriebskonfigurator im Internet: vltconfig.danfoss.com/.
HINWEIS
A- und D-Optionen für den FCD 302 sind in die Steuerkarte integriert. Verwenden Sie keine steckbaren Optionen für
Frequenzumrichter. Bei einer späteren Nachrüstung müssen Sie die gesamte Steuerkarte austauschen. B-Optionen sind
steckbar, da diese dasselbe Konzept wie bei Frequenzumrichtern verwenden.
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 89
Page 92

Typencode und Auswahlhilfe
VLT® Decentral Drive FCD 302
6.2 Bestellnummern
6.2.1 Bestellnummern: Zubehör
Zubehör Beschreibung Bestellnummer
Halterungen, verlängert Halterungen (40 mm) 130B5771
Halterungen Flachhalterungen 130B5772
LCP-Kabel Vorkonfektioniertes Kabel zur Verwendung zwischen Frequenzumrichter und LCP 130B5776
Bremswiderstand 1750 Ω 10 W/100 %
Bremswiderstand 350 Ω 10 W/100 %
VLT® Control Panel LCP 102
Entlüftungsmembran, Goretex Verhindert Kondensation im Schaltschrank/Gehäuse 175N2116
Chassis-Bausatz aus Edelstahl, M16 Edelstahl 130B5833
Zum Einbau in einem Installationskasten unter Motorklemmen 130B5778
Zum Einbau in einem Installationskasten unter Motorklemmen 130B5780
Grafisches LCP zur Programmierung und Anzeige 130B1078
6
Tabelle 6.1 Bestellnummern: Zubehör
6.2.2 Bestellnummern: Ersatzteile
Ersatzteile Beschreibung Bestellnummer
Schutzabdeckung Schutzabdeckung aus Kunststoff für das Wechselrichterteil 130B5770
Dichtung Dichtung zwischen Installationskasten und Wechselrichterteil 130B5773
Beutel mit Zubehör Reserve-Zugentlastungsklemmen und Schrauben zum Schirmabschluss 130B5774
Wartungsschalter Reserveschalter für Netz- oder Motortrennung 130B5775
LCP-Stecker Reservestecker zur Montage im Installationskasten 130B5777
Hauptanschlussplatine Zum Einbau im Installationskasten 130B5779
M12-Sensorstecker Zwei Paar M12-Sensorstecker zur Befestigung in Kabelanschlussbohrung 130B5411
Steuerkarte Steuerkarte mit externer 24-V-Versorgung 130B5783
Steuerkarte PROFIBUS Steuerkarte PROFIBUS mit externer 24-V-Versorgung 130B5781
Steuerkarte Ethernet Steuerkarte Ethernet mit externer 24-V-Versorgung 130B5788
Steuerkarte PROFINET Steuerkarte PROFINET mit externer 24-V-Versorgung 130B5794
Tabelle 6.2 Bestellnummern: Ersatzteile
Verpackungsinhalt:
Montagezubehör, nur bei Bestellung des Installationskastens mitgeliefert Inhalt:
•
- 2 Zugentlastungsschellen
- Halterung für Motor-/Lastkabel
- Erhöhungskonsole für Kabelschelle
- Schraube 4 mm x 20 mm
- Schneidschraube 3,5 mm x 8 mm
Dokumentation
•
Abhängig von den eingebauten Optionen enthält der Installationskasten einen oder zwei Beutel mit Montagezubehör und
ein oder mehrere Handbücher bzw. Anleitungen.
90 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 93
Typencode und Auswahlhilfe Projektierungshandbuch
VVC+ mit Rückführung.
6.3 Optionen und Zubehör
Danfoss bietet für die Frequenzumrichter umfangreiche
Erweiterungsmöglichkeiten und Zubehör an.
6.3.1 Feldbus-Optionen
Wählen Sie bei der Bestellung des Frequenzumrichters die
Feldbus-Option. Alle Feldbus-Optionen sind auf der
Steuerkarte enthalten. Eine getrennte A-Option ist nicht
erhältlich.
Wechseln Sie zum späteren Ändern der Feldbus-Option die
Steuerkarte. Die folgenden Steuerkarten mit verschiedenen
Feldbus-Optionen sind erhältlich. Alle Steuerkarten haben
serienmäßig eine externe 24-V-Versorgung.
Pos. Bestellnummer
Steuerkarte PROFIBUS 130B5781
Steuerkarte Ethernet 130B5788
Steuerkarte PROFINET 130B5794
Tabelle 6.3 Steuerkarten mit Feldbus-Optionen
•
Flux-Vektor-Drehzahlregelung.
•
Flux-Vektor-Drehmomentregelung.
•
Permanentmagnetmotor.
•
Unterstützte Drehgebertypen:
Inkrementalgeber: 5 V TTL-Typ, RS422, max.
•
Frequenz: 410 kHz
Inkrementalgeber: 1 Vpp, Sinus/Cosinus
•
Hiperface®-Drehgeber: Absolut- und SinCos-
•
Drehgeber (Stegmann/SICK)
EnDat-Drehgeber: Absolut- und SinCos-Drehgeber
•
(Heidenhain), unterstützt Version 2.1
SSI-Drehgeber: Absolut
•
Drehgeberüberwachung: Die 4 Drehgeberkanäle
•
(A, B, Z und D) werden auf Kurzschluss und
offenen Stromkreis überwacht. Jeder Kanal besitzt
eine grüne LED-Leuchte, die aufleuchtet, wenn
der Kanal in Ordnung ist.
HINWEIS
6.3.2
VLT® Encoder Input MCB 102
Das Drehgebermodul wird als Istwertanschluss für eine
Flux-Steuerung mit Rückführung (Parameter 1-02 Drehgeber
Anschluss) und für eine Drehzahlsteuerung mit
Rückführung (Parameter 7-00 Drehgeberrückführung)
verwendet. Konfigurieren Sie die Drehgeber-Option in
Parametergruppe 17-** Drehgeber Opt.
Die Drehgeber-Option MCB 102 wird verwendet für:
Stecker
Bezeichnung
X31
1 NC – –
2 NC 8 VCC – – 8-V-Ausgang (7-12 V, I
3 5 VCC – 5 VCC
4 GND – GND GND GND
5 Eingang A +COS +COS – Eingang A
6 Eingang A inv. REFCOS REFCOS – Eingang A inv.
7 Eingang B +SIN +SIN – Eingang B
8 Eingang B inv. REFSIN REFSIN – Eingang B inv.
9 Eingang Z +Daten RS485 Taktausgang Taktausgang Eingang Z ODER +Daten RS485
10 Eingang Z inv. -Daten RS485 Taktausgang inv. Taktausgang inv. Eingang Z ODER -Daten RS485
11 NC NC Dateneingang Dateneingang Künftiger Gebrauch
12 NC NC Dateneingang
Maximal 5 V an X31.5-12 – – – –
Inkrementalgeber
(siehe Grafik
A)
SinCosDrehgeber
HIPERFACE
(siehe Grafik B)
®
EnDatDrehgeber
inv.
Die LED sind bei Einbau in einem VLT® Decentral Drive
FCD 302 Frequenzumrichter nicht zu sehen. Die Reaktion
im Falle eines Drehgeberfehlers kann in
Parameter 17-61 Drehgeber Überwachung gewählt
werden: [0] Deaktiviert, [1] Warnung oder [2] Alarm.
Der Bausatz der Drehgeber-Option enthält:
Drehgeber-Option MCB 102
•
Kabel zum Anschluss von Kundenklemmen an die
•
Steuerkarte
SSI-Drehgeber Beschreibung
1)
24 V
1)
5 V
Dateneingang
inv.
24-V-Ausgang (21–25 V, I
max
5-V-Ausgang (5 V ± 5 %, I
Künftiger Gebrauch
max
: 200 mA)
max
125 mA)
: 200 mA)
6
6
Tabelle 6.4 Anschlussklemmen der Drehgeber-Option MCB 102
1) Versorgung für Drehgeber: siehe Daten an Drehgeber.
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 91
Page 94
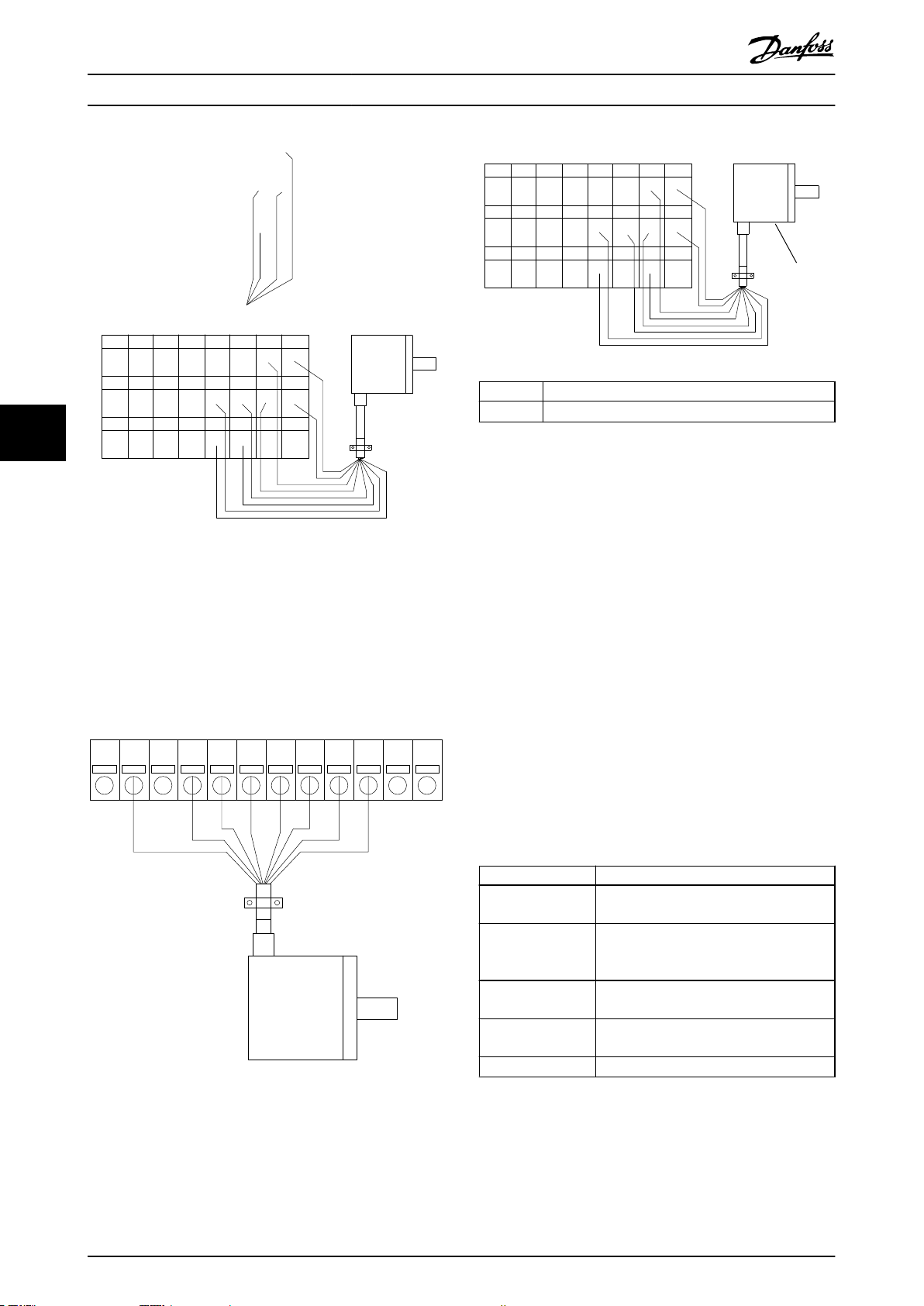
3
7
2
0
1
3
B
1
1
B
1
2
3
7
B
1
0
B
0
9
2
0
1
2
G
B
0
7
B
0
8
2
0
B
0
6
B
0
5
N
V
R
B
0
3
B
0
4
P
B
0
2
B
0
1
Z
A
/Z
B
+5V
/B
GND
/A
A
+24V
B
GND
130BC998.10
Us 7-12V (red)
GND (blue)
+COS (pink)
REFCOS (black)
+SIN (white)
REFSIN (brown)
Data +RS 485 (gray)
Data -RS 485 (green)
1 2 3 12754 6 8 9 10 11
130BA164.10
+RS485
+cos
-RS485
+sin
-sin
GND
7-12V
-cos
3
7
2
0
1
3
B
1
1
B
1
2
3
7
B
1
0
B
0
9
2
0
1
2
G
B
0
7
B
0
8
2
0
B
0
6
B
0
5
N
V
R
B
0
3
B
0
4
P
B
0
2
B
0
1
130BC999.10
1
6
Typencode und Auswahlhilfe
VLT® Decentral Drive FCD 302
Pos. Beschreibung
1
Abbildung 6.4 Anschlüsse für HIPERFACE®-Drehgeber - 2
6.3.3
HIPERFACE® Drehgeber
VLT® Resolver Input MCB 103
Abbildung 6.2 Anschlüsse für 5-V-Inkrementalgeber
Maximale Kabellänge 10 m (32,8 ft)
Abbildung 6.3 Anschlüsse für HIPERFACE®-Drehgeber - 1
Die Option MCB 103 dient zur Rückführung eines ResolverIstwertsignals vom Motor zum Frequenzumrichter. Resolver
werden im Wesentlichen als Motor-Istwertgeber für
bürstenlose Permanentmagnet-Synchronmotoren
verwendet.
Der Bausatz der Resolver-Option enthält:
MCB 103 Resolver-Option.
•
Kabel zum Anschluss von Kundenklemmen an die
•
Steuerkarte.
Finden Sie die entsprechenden Parameter in Parameter-
gruppe 17-5* Resolver.
Die Option MCB 103 unterstützt zahlreiche verschiedene
Resolver-Arten.
Resolver-Pole Parameter 17-50 Resolver Pole: 2 *2
Resolver-Eingangsspannung
Resolver-Eingangsfrequenz
Übersetzungsverhältnis
Sekundäre
Eingangsspannung
Sekundäre Last
Tabelle 6.5 Technische Daten der Resolver-Option MCB 103
Parameter 17-51 Resolver Eingangsspannung:
2,0–8,0 V
*7,0 V
eff
eff
Parameter 17-52 Resolver Eingangsfrequenz:
2-15 kHz
10,0 kHz
Parameter 17-53 Übersetzungsverhältnis:
0,1–1,1 *0,5
Maximal 4 V
eff
Ca. 10 kΩ
92 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 95
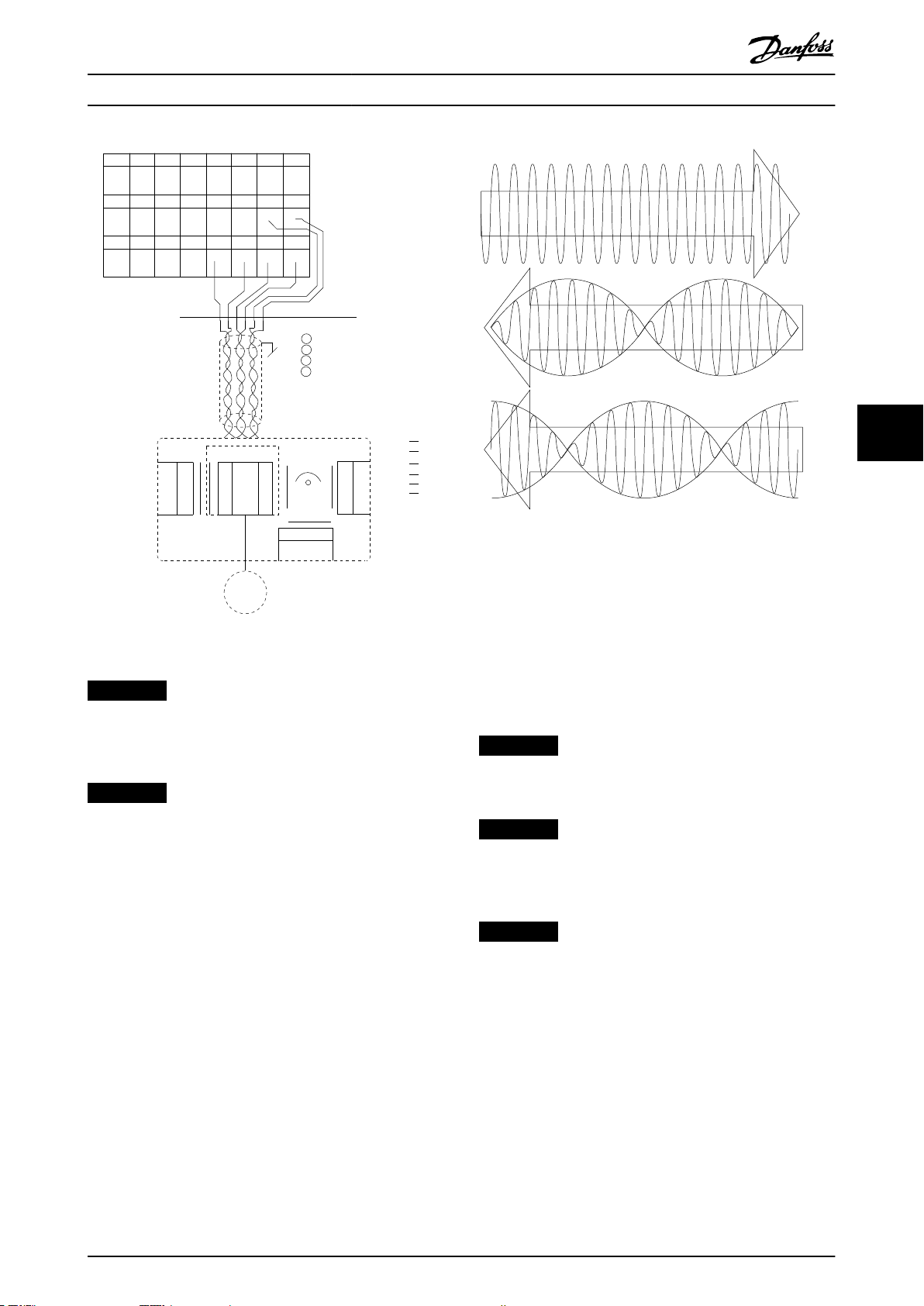
130BD001.10
Resolver
stator
Rotor
R1
R2
S1
S2
S3
S4
REF+
REFCOS+
COS-
SIN+
SIN-
LED 1 REF OK
LED 2 COS OK
LED 3 SIN OK
LED NA
R1
R2
S1
S2
S3
S4
Motor
37201
3
B11
B12
3
7
B
1
0
B
0
9
2
0
1
2
G
B
0
7
B
0
8
2
0
B
0
6
B05
N
V
R
B03
B
0
4
P
B
0
2
B
0
1
B01 REF+
B06 Sin-
B05 Sin+
B04 Cos-
B03 Cos+
B02 REF-
130BT102.10
Typencode und Auswahlhilfe Projektierungshandbuch
Abbildung 6.6 Resolver-Signale
6
6
Konfigurationsbeispiel
In diesem Beispiel wird ein Permanentmagnet-Motor (PM)
Abbildung 6.5 Anschlüsse für Resolver-Option MCB 103
mit Resolver als Drehzahlrückführung verwendet. Ein PMMotor muss normalerweise im Fluxvektorbetrieb betrieben
werden.
HINWEIS
Die Resolver-Option MCB 103 kann nur mit Resolver-
Verdrahtung
Die maximale Kabellänge ist 150 m bei Verwendung eines
Kabels mit verdrillten Leitern.
Arten mit Rotorversorgung verwendet werden. Resolver
mit Statorversorgung können Sie nicht benutzen.
HINWEIS
Resolver-Kabel müssen abgeschirmt sein und sollten von
HINWEIS
den Motorkabeln getrennt verlegt werden.
LED-Anzeigen sind an der Resolver-Option nicht zu
sehen.
LED-Anzeigen
Die LED sind aktiv, wenn Parameter 17-61 Drehgeber
Überwachung auf [1] Warnung oder [2] Alarm programmiert
ist.
•
•
•
LED 1 leuchtet, wenn das Sollwertsignal zum
Resolver i. O. ist.
LED 2 leuchtet, wenn das Cosinus-Signal vom
Resolver i. O. ist.
LED 3 leuchtet, wenn das Sinus-Signal vom
Resolver i. O. ist.
HINWEIS
Die Abschirmung des Resolver-Kabels muss richtig am
Abschirmblech aufgelegt und auf der Motorseite mit
dem Gehäuse (Erde) verbunden werden.
HINWEIS
Verwenden Sie immer abgeschirmte Motor- und
Bremschopperkabel.
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 93
Page 96

6
Typencode und Auswahlhilfe
Parameter 1-00 Regelverfahren [1] Mit Drehgeber
Parameter 1-01 Steuerprinzip [3] Fluxvektor mit Geber
Parameter 1-10 Motorart [1] PM, Rotor mit aufgesetzten Magneten
Parameter 1-24 Motornennstrom Typenschild
Parameter 1-25 Motornenndrehzahl Typenschild
Parameter 1-26 Dauer-Nenndrehmoment Typenschild
AMA ist bei PM-Motoren nicht möglich
Parameter 1-30 Statorwiderstand (Rs) Motordatenblatt
Parameter 30-80 D-Achsen-Induktivität (Ld) Motordatenblatt (mH)
Parameter 1-39 Motorpolzahl Motordatenblatt
Parameter 1-40 Gegen-EMK bei 1000 UPM Motordatenblatt
Parameter 1-41 Geber-Offset Motordatenblatt (gewöhnlich Null)
Parameter 17-50 Resolver Pole Resolver-Datenblatt
Parameter 17-51 Resolver Eingangsspannung Resolver-Datenblatt
Parameter 17-52 Resolver Eingangsfrequenz Resolver-Datenblatt
Parameter 17-53 Übersetzungsverhältnis Resolver-Datenblatt
Parameter 17-59 Resolver aktivieren [1] Aktiviert
Tabelle 6.6 Anzupassende Parameter
VLT® Decentral Drive FCD 302
6.3.4
VLT® 24 V DC Supply MCB 107
Externe 24 V DC-Versorgung
Die externe 24-V-DC-Versorgung dient als Niederspannungsversorgung der Steuerkarte sowie etwaiger eingebauter Optionskarten. Dies ermöglicht den Betrieb des LCP-Bedienteils (einschließlich Parametereinstellung) auch bei abgeschalteter
Netzversorgung.
Technische Daten für externe 24 V-DC-Versorgung
Eingangsspannungsbereich 24 V DC ±15 % (maximal 37 V in 10 s)
Max. Eingangsstrom 2,2 A
Durchschnittl. Eingangsstrom 0,9 A
Maximale Kabellänge 75 m
Eingangskapazitätslast <10 uF
Netz-Einschaltungsverzögerung <0,6 s
Die Eingänge sind geschützt.
Klemmennummern
Klemme 35: Externe -24-V-DC-Versorgung.
•
Klemme 36: Externe +24-V-DC-Versorgung.
•
94 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 97
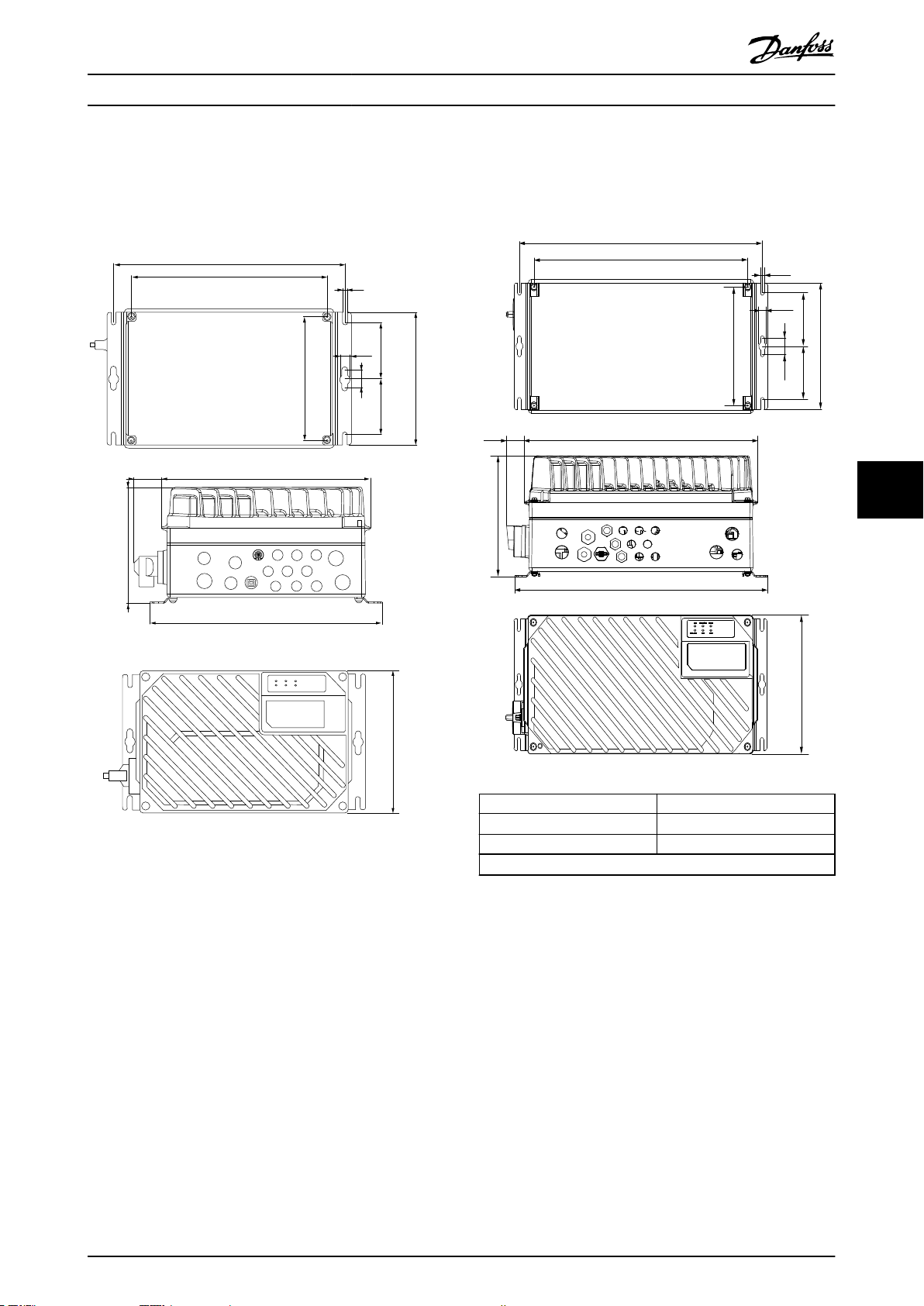
41 mm
(1.61 in)
175 mm (6.88 in)
349.5 mm (13.75 in)
315 mm (12.4 in)
ON
WARNING
ALARM
Bus MS NS2NS1
331.5 mm (13.05 in)
280 mm (11.02 in)
178 mm (7 in)
6.5 mm
(0.25 in)
80 mm
(3.14 in)
190 mm (7.48 in)
25 mm
(0.98 in)
Ø13 mm
(0,51 in)
130BB712.10
200 mm (7.87 in)
1
2
3
4
80 mm
(3.14 in)
130BC381.10
431.5 mm (16.98 in)
380 mm (14.96 in)
178 mm (7 in)
201 mm (7.91 in)
32 mm
(1.25 in)
415 mm (16.33 in)
186 mm (7.32 in)
449.5 mm (17.69 in)
6.5 mm
(0.25 in)
190 mm (7.48 in)
80 mm
(3.14 in)
80 mm
(3.14 in)
Ø13 mm
(0,51 in)
25 mm
(0.98 in)
Technische Daten Projektierungshandbuch
7 Technische Daten
7.1 Mechanische Abmessungen
7 7
Abbildung 7.1 Kleines Gerät
Motorseite 1xM20, 1xM25
Steuerungsseite
2xM20, 9xM16
1)
Netzseite 2xM25
1)
Ebenfalls für 4xM12/6xM12 Sensor/Stellglied-Buchsen verwendet.
Abbildung 7.2 Großes Gerät
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 95
Page 98

ON
WARNING
ALARM
Bus MS NS2NS1
130BB800.10
ON
WARNING
ALARM
Bus MS NS2NS1
130BB799.10
Technische Daten
VLT® Decentral Drive FCD 302
7.2 Elektrische Daten und Kabelquerschnitte
7.2.1 Übersicht
Netzversorgung 3 x 380–480 V AC
Frequenzumrichter PK37 PK55 PK75 P1K1 P1K5 P2K2 P3K0
Wellennennleistung [kW] 0,37 0,55 0,75 1,1 1,5 2,2 3,0
Wellennennleistung [HP] 0,5 0,75 1,0 1,5 2,0 3,0 4,0
Max. Eingangsstrom
Dauerbetrieb (3 x 380–440 V) [A] 1,2 1,6 2,2 2,7 3,7 5,0 6,5
Überlast (3 x 380–440 V) [A] 1,9 2,6 3,5 4,3 5,9 8,0 10,4
Dauerbetrieb (3 x 441–480 V) [A] 1,0 1,4 1,9 2,7 3,1 4,3 5,7
Überlast (3 x 441–480 V) [A] 1,6 2,2 3,0 4,3 5,0 6,9 9,1
Empfohlene maximale
Sicherungsgröße (Nicht-UL) gG-25
Eingebauter Trennschalter (große
Bauform) CTI-25M Danfoss-Teilenummer: 047B3151
77
Ausgangsstrom
Empfohlener Trennschalter Danfoss
CTI-25M (kleine und große Bauform)
Teilenummer:
0,37, 0,55 kW Danfoss-Teilenummer: 047B3148
0,75, 1,1 kW Danfoss-Teilenummer: 047B3149
1,5 kW, 2,2 kW und 3 kW Danfoss-Teilenummer: 047B3151
Empfohlener Trennschalter Danfoss
CTI-45MB1) (kleine Bauform)
Teilenummer:
0,55, 0,75 kW Danfoss-Teilenummer: 047B3160
1,1 kW Danfoss-Teilenummer: 047B3161
1,5 kW Danfoss-Teilenummer: 047B3162
2,2 kW Danfoss-Teilenummer: 047B3163
Verlustleistung bei maximaler Last
2)
[W]
Wirkungsgrad
3)
35 42 46 58 62 88 116
0,93 0,95 0,96 0,96 0,97 0,97 0,97
Gewicht, kleine Bauform [kg] 9,8 (21,6 lb) –
Gewicht, große Bauform [kg] 13,9 (30,6 lb)
Dauerbetrieb (3 x 380–440 V) [A] 1,3 1,8 2,4 3,0 4,1 5,2 7,2
Überlast (3 x 380–440 V) [A] 2,1 2,9 3,8 4,8 6,6 8,3 11,5
Dauerbetrieb (3 x 441–480 V) [A] 1,2 1,6 2,1 3,0 3,4 4,8 6,3
Überlast (3 x 441–480 V) [A] 1,9 2,6 3,4 4,8 5,4 7,7 10,1
Dauerbetrieb kVA (400 V AC) [kVA] 0,9 1,3 1,7 2,1 2,8 3,9 5,0
Dauerbetrieb kVA (460 V AC) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8 5,0
Maximaler Kabelquerschnitt:
(Netz, Motor, Bremse) [mm2/AWG]
Massives Kabel 6/10
Flexibles Kabel 4/12
Tabelle 7.1 VLT® Decentral Drive FCD 302 Wellenleistung, Ausgangsstrom und Eingangsstrom
1) Trennschalter vom Typ CTI-45MB sind nicht für 3-kW-Einheiten (4 HP) erhältlich.
2) Gilt für die Dimensionierung der Kühlung des Frequenzumrichters. Wenn die Taktfrequenz im Vergleich zur Werkseinstellung erhöht wird, kann
die Verlustleistung bedeutend steigen. Die Leistungsaufnahme des LCP und typischer Steuerkarten sind eingeschlossen. Verlustleistungsdaten
gemäß EN 50598-2 finden Sie unter drives.danfoss.com/knowledge-center/energy-efficiency-directive/#/.
3) Bei Nennstrom gemessener Wirkungsgrad. Die Energieeffizienzklasse finden Sie unter Kapitel 7.3 Allgemeine technische Daten. Informationen zu
Teillastverlusten finden Sie unter drives.danfoss.com/knowledge-center/energy-efficiency-directive/#/.
96 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
Page 99

Technische Daten Projektierungshandbuch
7.2.2 UL/cUL-zugelassene Vorsicherungen
American Wire Gauge = Amerikanisches
•
Drahtmaß. Der maximale Leitungsquerschnitt ist
der größte Leitungsquerschnitt, den Sie an die
Klemmen anschließen können. Beachten Sie
immer nationale und örtliche Vorschriften.
Sie müssen Vorsicherungen des Typs gG
•
verwenden. Zur Beibehaltung von UL/cUL
verwenden Sie Vorsicherungen dieses Typs (siehe
Tabelle 7.2).
Gemessen mit 10 m (32,8 ft) abgeschirmtem
•
Motorkabel bei Nennlast und Nennfrequenz.
Empfohlene maximale Vorsicherungsgröße 25 A
Marke Sicherungstyp UL-
Dateinummer
Bussmann
Bussmann
Bussmann
Bussmann
Bussmann
Bussmann
Bussmann
SIBA
Littelfuse
Ferraz
Shawmut
Ferraz
Shawmut
Ferraz
Shawmut
1)
FWH-
1)
KTS-R
1)
JKS-
1)
JJS-
FNQ-R-
1)
KTK-R-
1)
LP-CC-
5017906-
1)
KLS-R
1)
ATM-R
1)
A6K-R
1)
HSJ
E91958 JFHR2
E4273 RK1/JDDZ
E4273 J/JDDZ
E4273 T/JDDZ
1)
E4273 CC/JDDZ
E4273 CC/JDDZ
E4273 CC/JDDZ
1)
E180276 RK1/JDDZ
E81895 RK1/JDDZ
E2137 CC/JDDZ
E2137 RK1/JDDZ
E2137 J/HSJ
UL-Kategorie
(CCN-Code)
7.2.3
VLT® Decentral Drive FCD 302
Gleichspannungsniveaus
Gleichspannungsniveau 380-480-V-Geräte (V DC)
Unterspannungsdeaktivierung des
Wechselrichters
Unterspannungswarnung 410
Unterspannungsaktivierung des
Frequenzumrichters (Zurücksetzen
der Warnung)
Überspannungswarnung (ohne
Bremse)
Einschalten der dynamischen
Bremse
Überspannungsaktivierung des
Wechselrichters (Zurücksetzen der
Warnung)
Überspannungswarnung (mit
Bremse)
Überspannungsabschaltung 820
Tabelle 7.3 FCD 302 Gleichspannungsniveau
Sicherungen
Das Gerät eignet sich für Netzversorgungen, die maximal
100.000 Aeff (symmetrisch) je 500 V liefern können.
Trennschalter
Das Gerät eignet sich für Netzversorgungen, die maximal
10.000 Aeff (symmetrisch) je 500 V liefern können.
373
398
778
778
795
810
7 7
Tabelle 7.2 VLT® Decentral Drive FCD 302 Vorsicherungen
erfüllenUL/cUL-Anforderungen
1) 5 A (0,37 kW/0,5 HP), 7 A (0,55 kW/0,37 HP), 9 A (0,75 kW/1 HP),
12 A (1,1 kW/1,5 HP), 15 A (1,5 kW/2 HP), 20 A (2,2 kW/3 HP), 25 A
(3 kW/4 HP)
MG04H303 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. 97
Page 100

Technische Daten
7.3 Allgemeine technische Daten
VLT® Decentral Drive FCD 302
Netzversorgung (L1, L2, L3)
Versorgungsspannung 380–480 V ±10 %
Netzfrequenz 50/60 Hz ± 5 %
Maximale kurzzeitige Asymmetrie zwischen Netzphasen 3,0 % der Versorgungsnennspannung
Wirkleistungsfaktor (λ) ≥ 0,9 bei Nennlast
Verschiebungs-Leistungsfaktor (cos ϕ) Nahe 1 (> 0,98)
Schalten am Netzeingang L1, L2, L3 (Anzahl der Einschaltungen) max. 2 x/Min.
1) Das Gerät eignet sich für Netzversorgungen, die maximal 100.000 Aeff (symmetrisch) bei maximal 480 V liefern können.
2) Niedrige Netzspannung/Netzausfall:
Bei einer niedrigen Netzspannung oder einem Netzausfall arbeitet der Frequenzumrichter weiter, bis die Zwischenkreisspannung
unter den minimalen Stopppegel abfällt, der normalerweise 15 % unter der niedrigsten Versorgungsnennspannung des Frequenzumrichters liegt. Bei einer Netzspannung von weniger als 10 % unterhalb der niedrigsten Versorgungsnennspannung des
Frequenzumrichters erfolgt keine Netz-Einschaltung und es wird kein volles Drehmoment erreicht.
Motorausgang (U, V, W)
Ausgangsspannung 0–100 % der Versorgungsspannung
77
Ausgangsfrequenz 0–590 Hz
Ausgangsfrequenz bei Fluxvektorbetrieb 0–300 Hz
Schalten am Ausgang Unbegrenzt
Rampenzeiten 0,01–3600 s
Drehmomentkennlinie
Startmoment (konstantes Drehmoment) Maximal 160 %/60 s
Startmoment Maximal 180 % bis zu 0,5 s
Überlastmoment (konstantes Drehmoment) Maximal 160 %/60 s
Startmoment (variables Drehmoment) Maximal 110 %/60 s
Überlastmoment (variables Drehmoment) Maximal 110 %/60 s
1) Prozentwert bezieht sich auf das Nenndrehmoment.
Kabellängen und -querschnitte für Steuerleitungen
Maximale Motorkabellänge, mit Abschirmung 10 m (32,8 ft)
Maximale Motorkabellänge, ungeschirmt, keine Erfüllung der Emissionsspezifikation 10 m (32,8 ft)
Maximaler Querschnitt zu Steuerklemmen, flexibler/starrer Draht ohne Aderendhülsen 1,5 mm2/16 AWG
Maximaler Querschnitt für Steuerklemmen, flexibles Kabel mit Aderendhülsen 1,5 mm2/16 AWG
Maximaler Querschnitt für Steuerklemmen, flexibles Kabel mit Aderendhülsen mit Bund 1,5 mm2/16 AWG
Mindestquerschnitt für Steuerklemmen 0,25 mm2/24 AWG
1) Für Leistungskabel siehe die Tabellen in Kapitel 7.2 Elektrische Daten und Kabelquerschnitte.
Schutzfunktionen und Eigenschaften
Elektronischer thermischer Motorüberlastschutz
•
Die Temperaturüberwachung des Kühlkörpers stellt sicher, dass der Frequenzumrichter abschaltet, wenn die
•
Temperatur einen vordefinierten Wert erreicht.
Der Frequenzumrichter ist gegen Kurzschlüsse an den Motorklemmen U, V, W geschützt.
•
Bei fehlender Netzphase schaltet der Frequenzumrichter ab oder gibt eine Warnung aus (je nach Last).
•
Die Überwachung der Zwischenkreisspannung stellt sicher, dass das Frequenzumrichter abschaltet, wenn die
•
Zwischenkreisspannung zu niedrig oder zu hoch ist.
Der Frequenzumrichter überprüft ständig, ob kritische Werte bei Innentemperatur, Laststrom, Hochspannung im
•
Zwischenkreis und niedrige Motordrehzahlen vorliegen. Als Reaktion auf einen kritischen Wert kann der Frequenzumrichter die Taktfrequenz anpassen und/oder den Schaltmodus ändern, um die Leistung des Frequenzumrichters
zu sichern.
1)
2)
1)
1)
1)
1)
1)
1)
98 Danfoss A/S © 05/2018 Alle Rechte vorbehalten. MG04H303
 Loading...
Loading...