

Page 1

ENGINEERING TOMORROW
Guía de funcionamiento
VLT® Decentral Drive FCD 302
vlt-drives.danfoss.com
Page 2

Page 3
Page 4
Page 5
Índice Guía de funcionamiento
Índice
1 Introducción
1.1 Objetivo del manual
1.2 Recursos adicionales
1.3 Versión del documento y del software
1.4 Vista general de producto
1.5 Homologaciones y certicados
1.6 Símbolos y convenciones
2 Seguridad
2.1 Símbolos de seguridad
2.2 Personal cualicado
2.3 Medidas de seguridad
3 Instalación mecánica
3.1 Desembalaje
3.1.1 Elementos suministrados 10
3.1.2 Identicación del producto 10
3.2 Montaje
3
3
3
3
3
6
7
8
8
8
8
10
10
11
4 Instalación eléctrica
4.1 Instrucciones de seguridad
4.2 Instalación conforme a CEM
4.3 Conexión a tierra
4.4 Esquema de cableado
4.5 Ubicación de los terminales
4.6 Tipos de terminal
4.7 Conexión del motor
4.7.1 Conexión de varios motores 21
4.8 Conexión de red de CA
4.9 Conexión de red y de motor con conmutador de servicio
4.10 Cableado de control
4.11 Resistencia de frenado
4.12 Freno mecánico
4.13 Conexión de los sensores / actuadores a los conectores M12
4.14 Interruptores DIP
4.15 Comunicación serie RS485
14
14
14
14
17
19
20
21
22
22
22
23
23
24
24
25
4.16 Safe Torque O (STO)
4.17 Lista de vericación de la instalación
5 Puesta en servicio
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 1
25
25
27
Page 6
Índice
VLT® Decentral Drive FCD 302
5.1 Conexión de potencia
5.2 Funcionamiento del panel de control local
5.2.1 Disposición del panel de control local gráco 28
5.3 Programación básica
5.4 Arranque del sistema
5.4.1 Prueba de control local 31
5.4.2 Arranque del sistema 31
5.5 Funcionamiento
5.5.1 Cargar / descargar datos al / del LCP 32
5.5.2 Cambio de los ajustes de parámetros 32
5.5.3 Restablecimiento de los ajustes predeterminados 32
6 Mantenimiento, diagnóstico y resolución de problemas
6.1 Introducción
6.2 Mantenimiento y servicio
6.2.1 Limpieza 34
6.3 LED frontales
6.4 Mensajes de estado
27
28
30
31
32
34
34
34
34
35
6.5 Tipos de advertencias y alarmas
6.6 Lista de Advertencias y Alarmas
7 Especicaciones
7.1 Datos eléctricos
7.2 Fuente de alimentación de red
7.3 Salida del motor y datos del motor
7.4 Condiciones ambientales
7.5 Especicaciones del cable
7.6 Entrada/salida de control y datos de control
7.7 Fusibles y magnetotérmicos
8 Anexo
8.1 Parámetros del menú rápido
8.2 Estructura de menú de parámetros
Índice
37
38
48
48
49
49
49
50
50
54
55
55
58
64
2 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 7
Introducción Guía de funcionamiento
1 Introducción
1.1 Objetivo del manual
Esta guía de funcionamiento proporciona información para
la instalación y puesta en servicio del convertidor de
frecuencia de forma segura.
La guía de funcionamiento está diseñada para su
utilización por parte de personal
Lea y siga las instrucciones para utilizar el convertidor de
frecuencia de forma segura y profesional, y preste especial
atención a las instrucciones de seguridad y las advertencias
generales. Tenga siempre disponible esta guía de funcionamiento junto al convertidor de frecuencia.
VLT® es una marca registrada.
1.2 Recursos adicionales
Hay una serie de publicaciones y manuales complementarios a su disposición.
cualicado.
Vista general de producto
1.4
1.4.1 Uso previsto
El convertidor de frecuencia es un controlador electrónico
del motor diseñado para:
Regular la velocidad del motor en respuesta a la
•
realimentación del sistema o a órdenes remotas
de controladores externos. Un sistema Power
Drive consiste en un convertidor de frecuencia, el
motor y el equipo accionado por el motor.
Supervisión del estado del motor y el sistema.
•
El convertidor de frecuencia también puede utilizarse para
la protección de sobrecarga del motor.
En función de la conguración, el convertidor de
frecuencia puede utilizarse en aplicaciones independientes
o formar parte de un equipo o instalación de mayor
tamaño.
1 1
La Guía de programación del VLT® AutomationDrive
•
FC 301/302 proporciona información más
detallada sobre cómo trabajar con parámetros, así
como numerosos ejemplos de aplicación.
La Guía de diseño del VLT® Decentral Drive FCD 302
•
proporciona información detallada sobre sus
capacidades y funcionalidades para diseñar
sistemas de control de motores.
Instrucciones de funcionamiento con equipos
•
opcionales.
Consulte www.danfoss.com/BusinessAreas/DrivesSolutions/
Documentations/VLT+Technical+Documentation.htm.
Versión del documento y del software
1.3
Este manual se revisa y se actualiza de forma periódica. Le
agradecemos cualquier sugerencia de mejoras. La Tabla 1.1
muestra las versiones de documento y software.
Edición Comentarios Versión de
software
MG04F5xx Se ha actualizado la función de
STO.
Tabla 1.1 Versión del documento y del software
7.5X
El VLT® Decentral Drive FCD 302 se ha diseñado para un
montaje descentralizado, por ejemplo, en el sector de
alimentación y bebidas, o para otras aplicaciones que
manejen materiales. Con el FCD 302, es posible reducir
costes descentralizando la electrónica de potencia. Los
paneles centrales se vuelven así obsoletos y se ahorran
costes, espacio y esfuerzos en la instalación y el cableado.
El diseño básico con una parte electrónica enchufable y un
cuadro de cableado «espacioso» facilita las tareas de
mantenimiento y reparación. Permite el cambio de los
componentes electrónicos sin necesidad de desconectar el
cableado.
El FCD 302 ha sido diseñado conforme a las instrucciones
EHEDG y se puede instalar en entornos donde una fácil
limpieza sea primordial.
AVISO!
Únicamente los convertidores de frecuencia congurados
para alojamientos higiénicos, FCD 302 P XXX T4 W69,
disponen de la certicación EHEDG.
Entorno de instalación
El convertidor de frecuencia es apto para su uso en
entornos residenciales, industriales y comerciales, de
acuerdo con la legislación y la normativa locales.
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 3
Page 8
130BC379.10
3
1
4
6
5
9
10
7
2
8
Introducción
VLT® Decentral Drive FCD 302
11
AVISO!
En un entorno residencial, este producto puede producir
radiointerferencias, en cuyo caso puede que se tengan
que tomar las medidas de mitigación pertinentes.
Posible uso indebido
No utilice el convertidor de frecuencia en aplicaciones que
no cumplan con los entornos y condiciones de funcionamiento especicados. Garantice la conformidad con las
condiciones especicadas en el capétulo 7 Especicaciones.
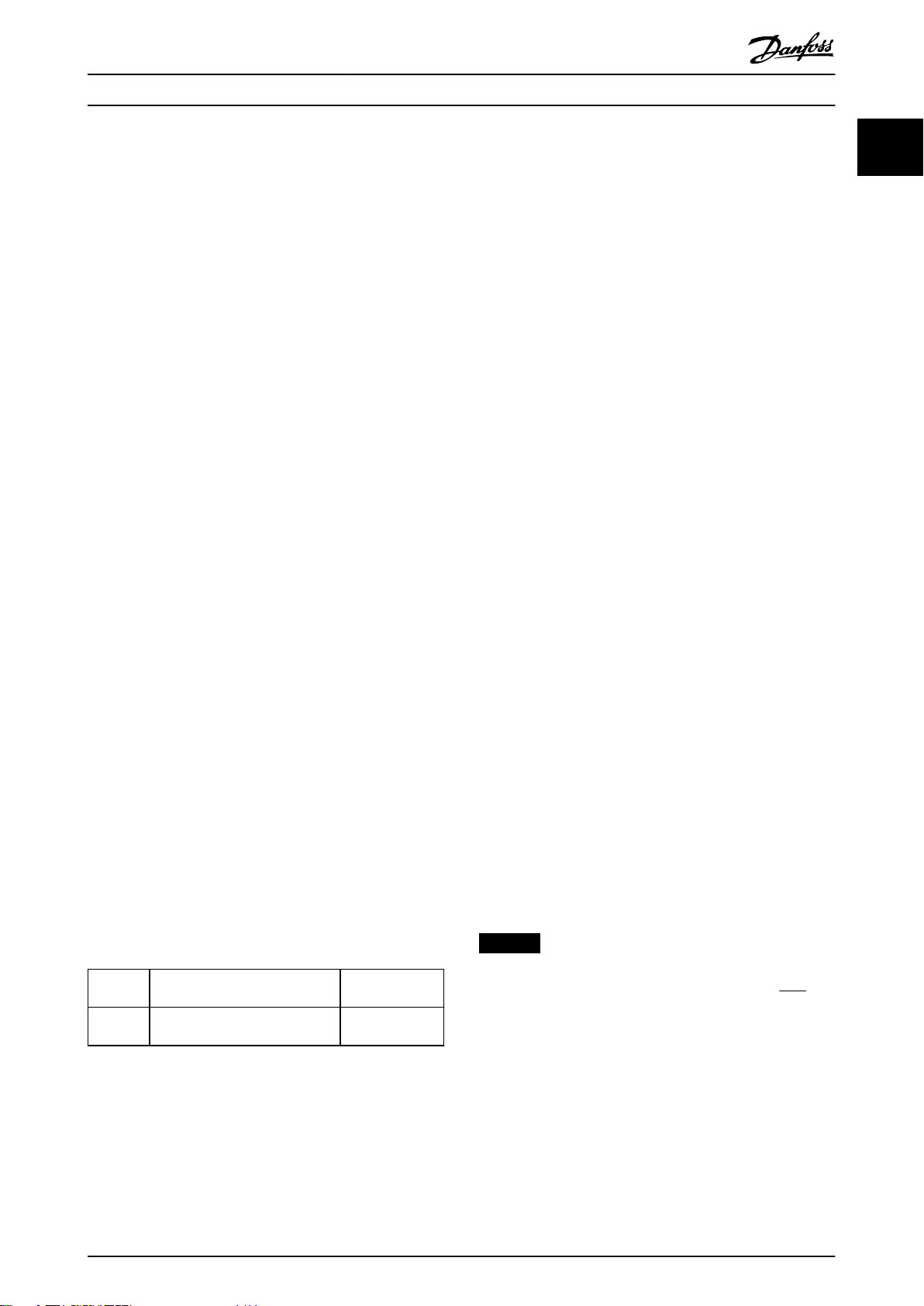
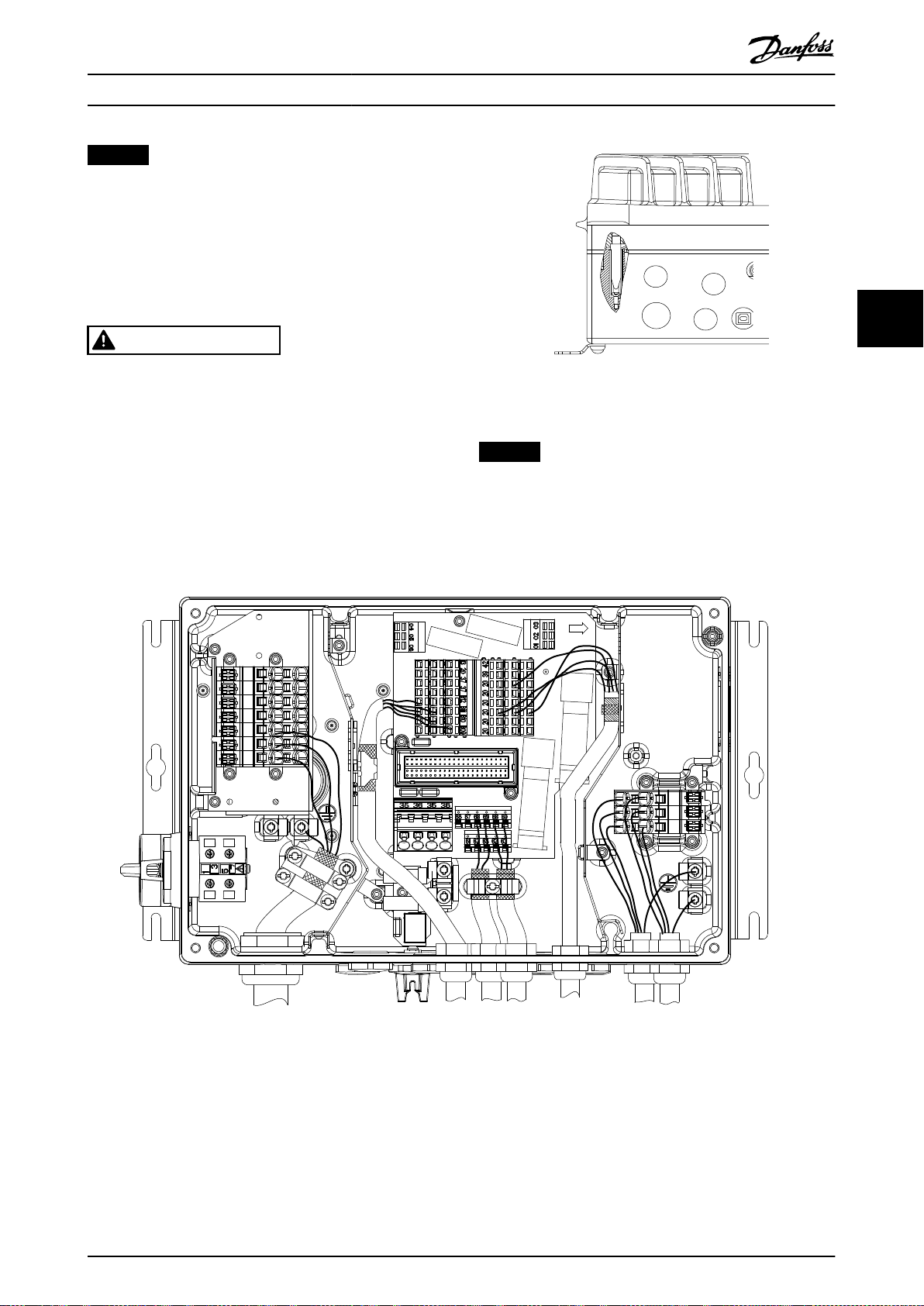
1.4.2 Despieces
1 Inversor 6 Caja de instalación
2 Tornillos (4, uno en cada esquina) 7 Conexión del display
3 Junta de sellado 8 Acceso al puerto USB
4 Tapa de plástico del inversor 9 Conmutador para mantenimiento - lado motor (también
puede ir localizado en el lado de alimentación o no ir
montado)
5 Pin de conexión a tierra 10 Soportes de montaje planos
Ilustración 1.1 Despiece de la unidad pequeña
4 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 9
130BC380.10
1
6
5
9
10
2
3
4
7
8
11
Introducción Guía de funcionamiento
1 1
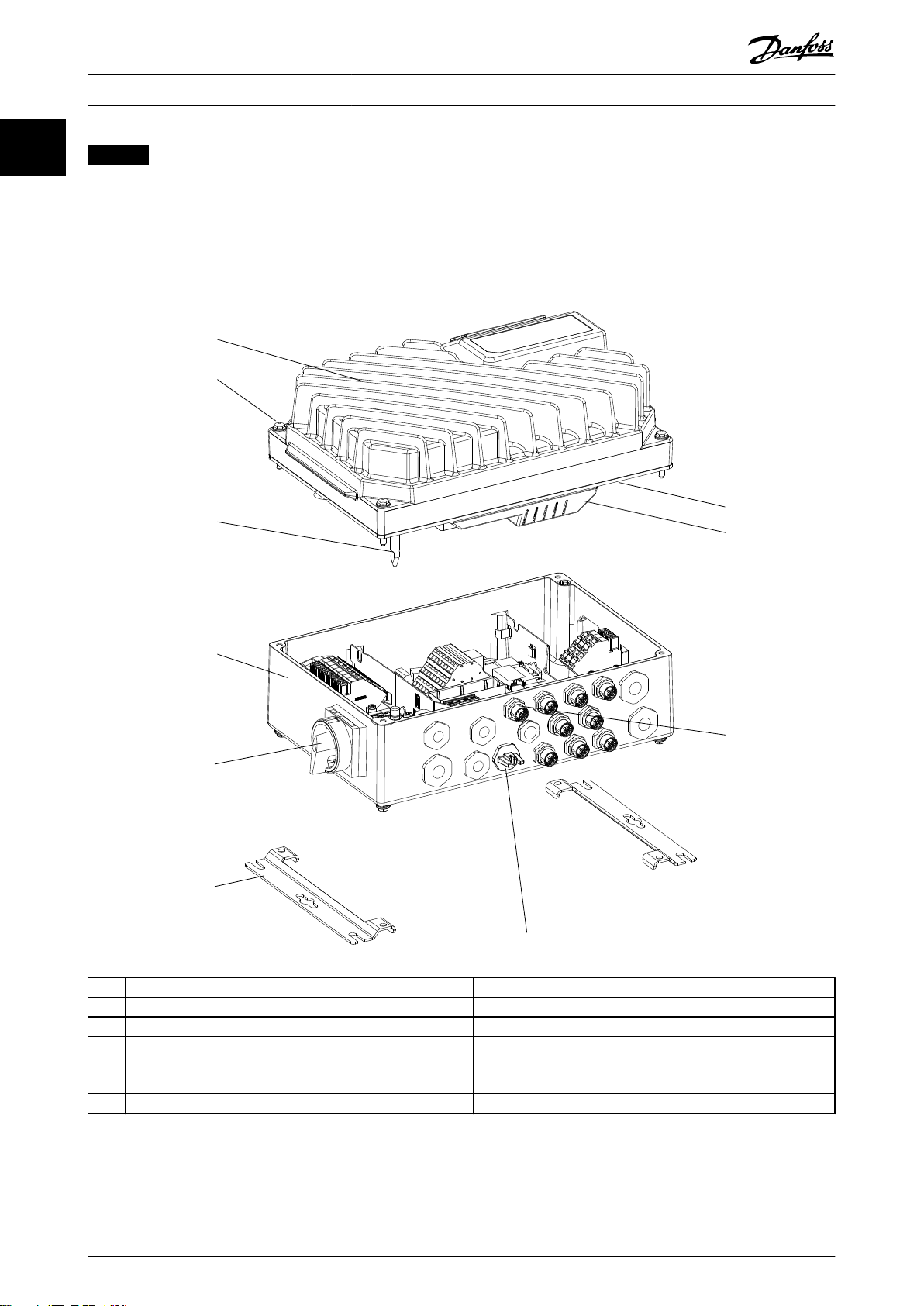
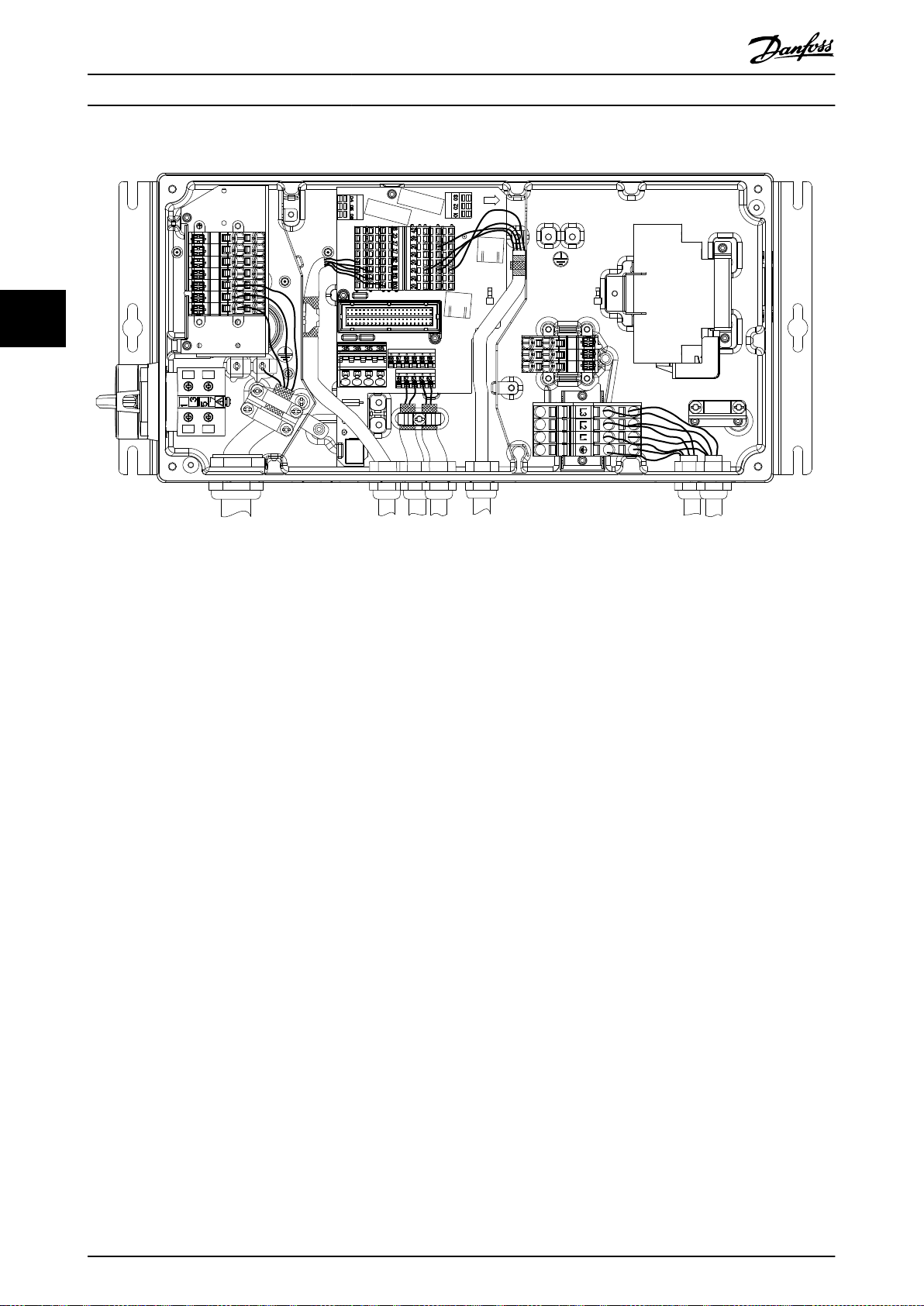
1 Inversor 7 Conexión del display
2 Tornillos (4, uno en cada esquina) 8 Acceso al puerto USB
3 Junta de sellado 9
Conmutador de mantenimiento1) - en el lado del motor (también puede
localizarse en el lado de alimentación o no ir montado)
4 Tapa de plástico del inversor 10 Soportes de montaje planos
5 Pin de conexión a tierra 11
Magnetotérmico1) (opcional)
6 Caja de instalación – –
1) La unidad puede congurarse con conmutador de mantenimiento o con magnetotérmico, no con ambos. La imagen mostrada no puede
congurarse en la práctica, pero se muestra únicamente para ilustrar las respectivas posiciones de los componentes.
Ilustración 1.2 Despiece de la unidad grande
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 5
Page 10
Introducción
VLT® Decentral Drive FCD 302
11
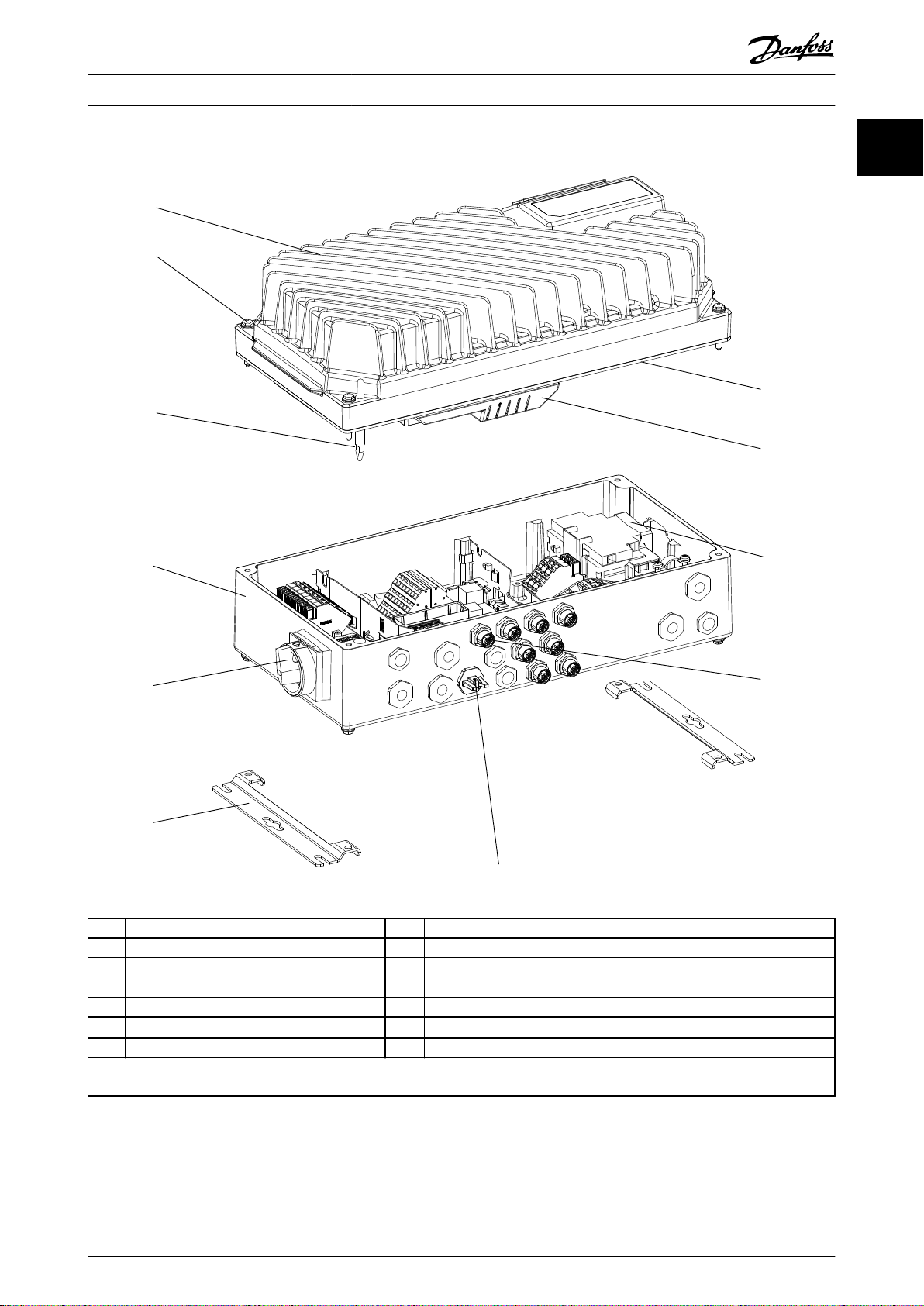
1.4.3 Diagrama de bloques
La Ilustración 1.3 es un diagrama de bloques de los
componentes internos del convertidor de frecuencia.
Área Denominación Funciones
Entrada de alimen-
1
tación
2 Recticador
3 Bus de CC
4 Bobinas de CC
Banco de conden-
5
sadores
6 Inversor
7 Salida al motor
Fuente de alimentación de la red
de CA trifásica al convertidor de
frecuencia.
El puente del recticador
convierte la entrada de CA en
corriente CC para suministrar
electricidad al inversor.
El circuito de bus de CC
intermedio gestiona la corriente
de CC.
Filtran la tensión de circuito
•
de CC intermedio.
Ofrece protección frente a
•
transitorios de red.
Reducen la corriente RMS.
•
Elevan el factor de potencia
•
reejado de vuelta a la línea.
Reducen los armónicos en la
•
entrada de CA.
Almacena la potencia de CC.
•
Proporciona protección ininte-
•
rrumpida para pérdidas de
potencia cortas.
El inversor convierte la CC en una
forma de onda de CA PWM
controlada para una salida
variable controlada al motor.
Regula la potencia de salida
trifásica al motor.
Área Denominación Funciones
La alimentación de entrada, el
•
procesamiento interno, la
salida y la intensidad del
motor se monitorizan para
proporcionar un funciona-
8 Circuitos de control
Ilustración 1.3 Diagrama de bloques de convertidor de
frecuencia
miento y un control ecaces.
Se monitorizan y ejecutan los
•
comandos externos y la
interfaz de usuario.
Puede suministrarse salida de
•
estado y control.
1.5 Homologaciones y certicados
Tabla 1.2 Homologaciones y certicados
Hay disponibles más homologaciones y certicados.
Póngase en contacto con el socio local de Danfoss. Los
convertidores de frecuencia con tipo de protección T7
(525-690 V) solo disponen de certicado UL para
525-600 V.
El convertidor de frecuencia cumple los requisitos de la
norma UL 508C de retención de memoria térmica. Si desea
obtener más información, consulte el apartado Protección
térmica del motor en la Guía de diseño especíca del
producto.
Para conocer la conformidad con el Acuerdo europeo
relativo al transporte internacional de mercancías
peligrosas por vías navegables (ADN), consulte el apartado
Instalación conforme con ADN de la guía de diseño
especíca del producto.
6 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 11
Introducción Guía de funcionamiento
1.6 Símbolos y convenciones
En este manual, se utilizan los siguientes símbolos:
ADVERTENCIA
Indica una situación potencialmente peligrosa que puede
producir lesiones graves o incluso la muerte.
PRECAUCIÓN
Indica una situación potencialmente peligrosa que puede
producir lesiones leves o moderadas. También puede
utilizarse para alertar contra prácticas inseguras.
AVISO!
Indica información importante, entre la que se incluyen
situaciones que pueden producir daños en el equipo u
otros bienes.
En este manual, se utilizan las siguientes convenciones:
Las listas numeradas indican procedimientos.
•
Las listas de viñetas indican otra información y
•
descripción de ilustraciones.
El texto en cursiva indica:
•
- Referencia cruzada.
- Enlace.
- Nota al pie.
- Nombre del parámetro.
- Nombre del grupo de parámetros.
- Opción de parámetro.
Todas las dimensiones de las guras se indican en
•
mm (in).
1 1
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 7
Page 12
Seguridad
VLT® Decentral Drive FCD 302
2 Seguridad
22
2.1 Símbolos de seguridad
Medidas de seguridad
2.3
En esta guía se han utilizado los siguientes símbolos:
ADVERTENCIA
Indica situaciones potencialmente peligrosas que pueden
producir lesiones graves o incluso la muerte.
PRECAUCIÓN
Indica una situación potencialmente peligrosa que puede
producir lesiones leves o moderadas. También puede
utilizarse para alertar contra prácticas no seguras.
AVISO!
Indica información importante, entre la que se incluyen
situaciones que pueden producir daños en el equipo u
otros bienes.
2.2 Personal cualicado
Se precisan un transporte, un almacenamiento, una
instalación, un funcionamiento y un mantenimiento
correctos y ables para que el convertidor de frecuencia
funcione de un modo seguro y sin ningún tipo de
problemas. Este equipo únicamente puede ser instalado y
manejado por personal cualicado.
El personal cualicado es aquel personal formado que está
autorizado para realizar la instalación, la puesta en marcha
y el mantenimiento de equipos, sistemas y circuitos
conforme a la legislación y la regulación vigentes.
Asimismo, el personal cualicado debe estar familiarizado
con las instrucciones y medidas de seguridad descritas en
este manual.
ADVERTENCIA
TENSIÓN ALTA
Los convertidores de frecuencia contienen tensión alta
cuando están conectados a una entrada de red de CA, a
un suministro de CC o a una carga compartida. Si la
instalación, el arranque y el mantenimiento no son
efectuados por personal cualicado, pueden causarse
lesiones graves o incluso la muerte.
La instalación, el arranque y el mantenimiento
•
deben ser realizados exclusivamente por
personal cualicado.
ADVERTENCIA
ARRANQUE ACCIDENTAL
Cuando el convertidor de frecuencia se conecta a una
red de CA, a un suministro de CC o a una carga
compartida, el motor puede arrancar en cualquier
momento. Un arranque accidental durante la programación, el mantenimiento o los trabajos de reparación
puede causar la muerte, lesiones graves o daños
materiales. El motor puede arrancar mediante un
conmutador externo, una orden de eldbus, una señal
de referencia de entrada desde el LCP o por la
eliminación de una condición de fallo.
Para evitar un arranque accidental del motor:
Desconecte el convertidor de frecuencia de la
•
alimentación.
Pulse [O/Reset] en el LCP antes de programar
•
cualquier parámetro.
Debe cablear y montar completamente el
•
convertidor de frecuencia, el motor y cualquier
equipo accionado antes de conectar el
convertidor de frecuencia a la red de CA, al
suministro de CC o a una carga compartida.
8 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 13
Seguridad Guía de funcionamiento
ADVERTENCIA
TIEMPO DE DESCARGA
El convertidor de frecuencia contiene condensadores de
enlace de CC que pueden seguir cargados incluso si el
convertidor de frecuencia está apagado. Puede haber
tensión alta presente aunque las luces del indicador de
advertencia estén apagadas. Si después de desconectar
la alimentación no espera el tiempo especicado antes
de realizar cualquier trabajo de reparación o tarea de
mantenimiento, pueden producirse lesiones graves o
incluso la muerte.
1. Pare el motor.
2. Desconecte la red de CA, los motores de
magnetización permanente y las fuentes de
alimentación de enlace de CC remotas, entre las
que se incluyen las baterías de emergencia, los
SAI y las conexiones de enlace de CC a otros
convertidores de frecuencia.
3. Espere a que los condensadores se descarguen
por completo antes de efectuar actividades de
mantenimiento o trabajos de reparación. El
tiempo de descarga se especica en la Tabla 2.1.
Tensión [V] Tiempo de espera mínimo (minutos)
ADVERTENCIA
PELIGRO DEL EQUIPO
El contacto con ejes de rotación y equipos eléctricos
puede provocar lesiones graves o la muerte.
Asegúrese de que la instalación, el arranque y
•
el mantenimiento sean realizados únicamente
por personal formado y cualicado.
Asegúrese de que los trabajos eléctricos
•
respeten las normativas eléctricas locales y
nacionales.
Siga los procedimientos indicados en esta guía.
•
ADVERTENCIA
GIRO ACCIDENTAL DEL MOTOR
AUTORROTACIÓN
El giro accidental de los motores de magnetización
permanente puede crear tensión y cargar la unidad,
dando lugar a lesiones graves, daños materiales o
incluso la muerte.
Asegúrese de que los motores de magneti-
•
zación permanente estén bloqueados para
evitar un giro accidental.
2 2
4 7 15
200–240 0,25-3,7 kW
(0,34-5 CV)
380–500 0,25-7,5 kW
(0,34-10 CV)
525–600 0,75-7,5 kW
(1-10 CV)
525–690 – 1,5-7,5 kW
Tabla 2.1 Tiempo de descarga
– 5,5-37 kW
– 11-75 kW
(15-100 CV)
– 11-75 kW
(15-100 CV)
(2-10 CV)
(15-100 CV)
(7,5-50 CV)
11-75 kW
ADVERTENCIA
PELIGRO DE CORRIENTE DE FUGA
Las corrientes de fuga superan los 3,5 mA. No efectuar la
correcta conexión toma a tierra del convertidor de
frecuencia puede ser causa de lesiones graves e incluso
de muerte.
La correcta conexión a tierra del equipo debe
•
estar garantizada por un instalador eléctrico
certicado.
PRECAUCIÓN
PELIGRO DE FALLO INTERNO
Si el convertidor de frecuencia no está correctamente
cerrado, un fallo interno en este puede causar lesiones
graves.
Asegúrese de que todas las cubiertas de
•
seguridad estén colocadas y jadas de forma
segura antes de suministrar electricidad.
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 9
Page 14
130BF338.10
VLT®
MADE IN DENMARK
P/N: 131Z5118 S/N: 000000G000
1.5kW(400V) / 2.0HP(460V)
IN: 3x380-480V 50/60Hz, 3.7/3.1A
OUT: 3x0-Vin 0-590Hz, 4.1/3.4A
* 1 3 1
Z
5 1 1 8 0 0 0 0 0 0 G 0 0 0 *
Decentral Drive
www.danfoss.com
T/C: FCD302P1K5T4W66H1X1XMFCFXXXXA0BXXXXXXDX
1
2
4
5
6
7
3
IP66 Enclosure Tamb.
40
˚C/104 ˚F
Enclosure rating:
LISTED E134261 76X1 IND. CONT. EQ.
Type 4X Indoor Use Only
Danfoss A/S
6430 Nordborg
Denmark
8
9
10
Instalación mecánica
3 Instalación mecánica
VLT® Decentral Drive FCD 302
3.1 Desembalaje
33
3.1.1 Elementos suministrados
3.1.2 Identicación del producto
El paquete contiene:
La bolsa de accesorios se suministra solo con
•
pedido de caja de instalación. Contenido:
- 2 abrazaderas de cable
- Soporte para los cables de motor y de
carga
- Soporte de elevación para abrazadera
de cables
- Tornillo de 4 × 20 mm
- Rosca de 3,5 × 8 mm
Guía de funcionamiento
•
Convertidor de frecuencia
•
En función de los elementos opcionales instalados, la caja
contiene una o dos bolsas y uno o varios manuales.
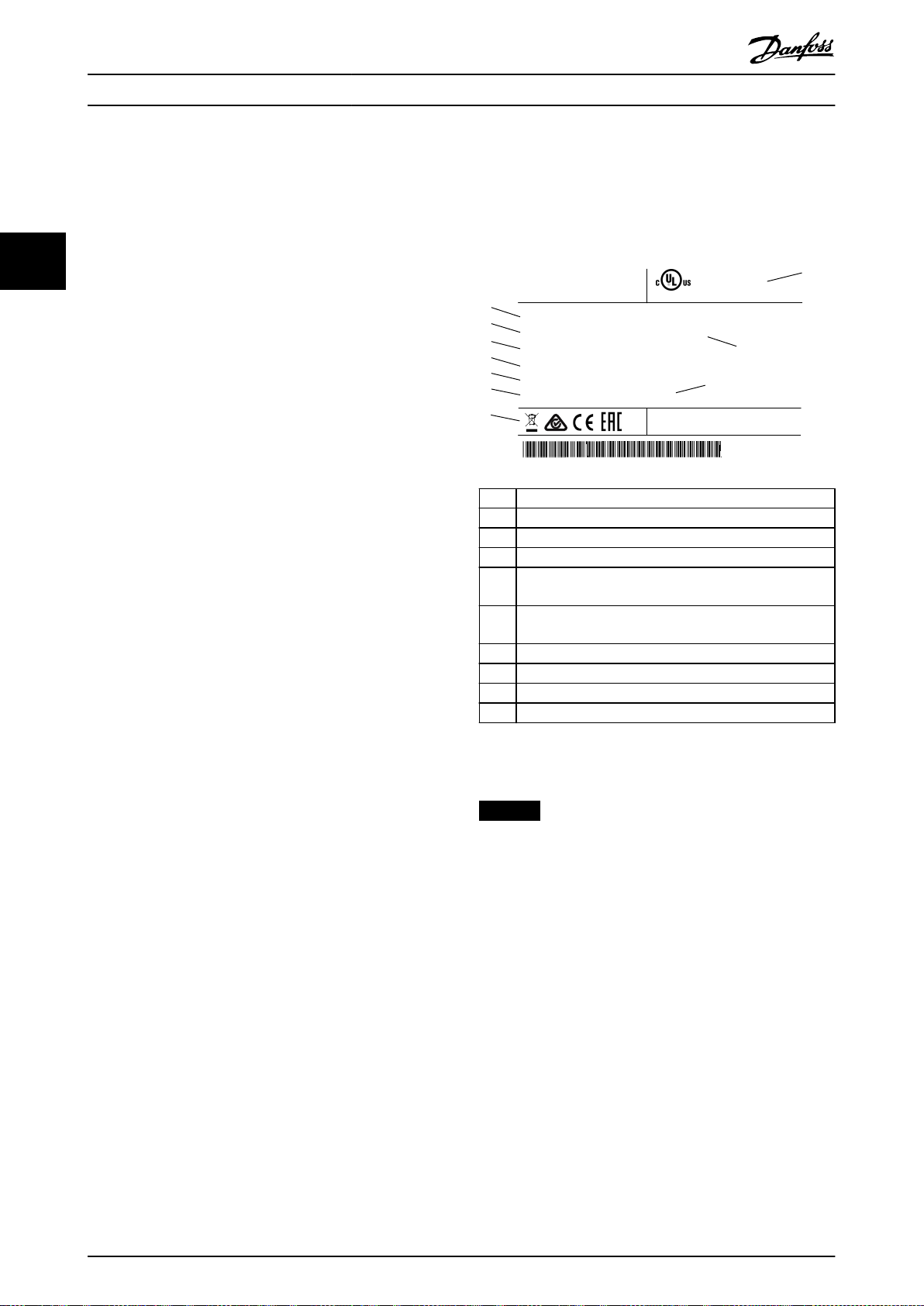
Procedimiento
1. Asegúrese de que los elementos suministrados y
la información de la placa de características
corresponden con la
conrmación del pedido.
2. Compruebe visualmente el embalaje y el
1 Código descriptivo
2 Número de pedido
3 Número de serie
4 Potencia de salida
Corriente, frecuencia y tensión de entrada (con tensión
5
baja/alta)
Corriente, frecuencia y tensión de salida (con tensión
6
baja/alta)
7 Clasicación IP
8 Temperatura ambiente máxima
9 Certicados
10 Tipo de protección NEMA
convertidor de frecuencia en busca de daños
provocados por una manipulación inadecuada
Ilustración 3.1 Placa de características del producto (ejemplo)
durante el envío. En caso de existir daños,
presente la reclamación al transportista y
conserve las piezas dañadas para poder esclarecer
el conicto.
AVISO!
No retire la placa de características del convertidor de
frecuencia (pérdida de la garantía).
10 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 15
41 mm
(1.61 in)
175 mm (6.88 in)
349.5 mm (13.75 in)
315 mm (12.4 in)
ON
WARNING
ALARM
Bus MS NS2NS1
331.5 mm (13.05 in)
280 mm (11.02 in)
178 mm (7 in)
6.5 mm
(0.25 in)
80 mm
(3.14 in)
190 mm (7.48 in)
25 mm
(0.98 in)
Ø13 mm
(0,51 in)
130BB712.10
200 mm (7.87 in)
1
2
3
4
80 mm
(3.14 in)
Instalación mecánica Guía de funcionamiento
3.2 Montaje
AVISO!
En entornos con líquidos, partículas o gases corrosivos
transmitidos por el aire, asegúrese de que la clasicación
IP / de tipo del equipo se corresponde con el entorno de
instalación. No cumplir los requisitos de las condiciones
ambientales puede reducir la vida útil del convertidor de
frecuencia. Asegúrese de que se cumplan todos los
requisitos de humedad atmosférica, temperatura y
altitud.
Vibración y golpes
El convertidor de frecuencia cumple los requisitos relativos
a estas condiciones cuando se monta en las paredes y
suelos de instalaciones de producción o en paneles atornillados a paredes o suelos.
Para obtener información detallada sobre las especica-
ciones de las condiciones ambientales, consulte el
capétulo 7.4 Condiciones ambientales.
3.2.1 Herramientas y equipo recomendados
Equipo Tamaño Descripción
Destornilladores – –
Conector (hex) 8 Para sujetar tornillos de
inversor / montaje de
soportes
Con ranura 0,4 × 2,5 Para terminales de
control y potencia
Con ranura / Torx 1,0 x 5,5 / TX20 Para abrazaderas en la
Llave 19, 24, 28 Para clavijas de conexión
LCP, número de
– Panel de control local
pedido 130B1078
Cable del LCP,
– Cable de conexión para
número de
pedido 130B5776
Tabla 3.1 Herramientas y equipo recomendados
accionados por muelle
caja de instalación
panel de control local
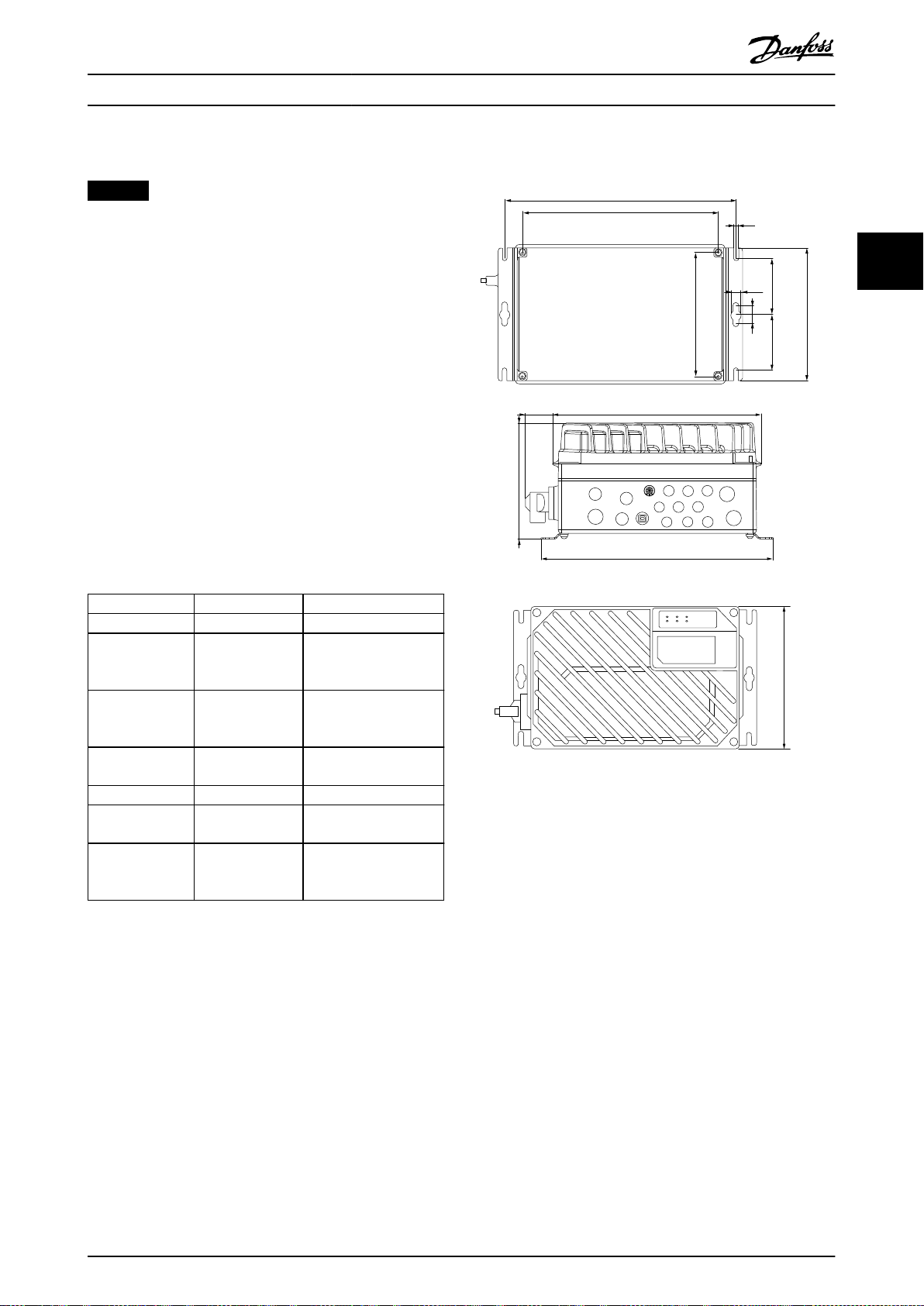
3.2.2 Dimensiones mecánicas
3 3
Ilustración 3.2 Entradas para cables y tamaños de los oricios
(unidad pequeña)
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 11
Page 16
130BC381.10
431.5 mm (16.98 in)
380 mm (14.96 in)
178 mm (7 in)
201 mm (7.91 in)
32 mm
(1.25 in)
415 mm (16.33 in)
186 mm (7.32 in)
449.5 mm (17.69 in)
6.5 mm
(0.25 in)
190 mm (7.48 in)
80 mm
(3.14 in)
80 mm
(3.14 in)
Ø13 mm
(0,51 in)
25 mm
(0.98 in)
130BC382.10
130BC383.10
Instalación mecánica
VLT® Decentral Drive FCD 302
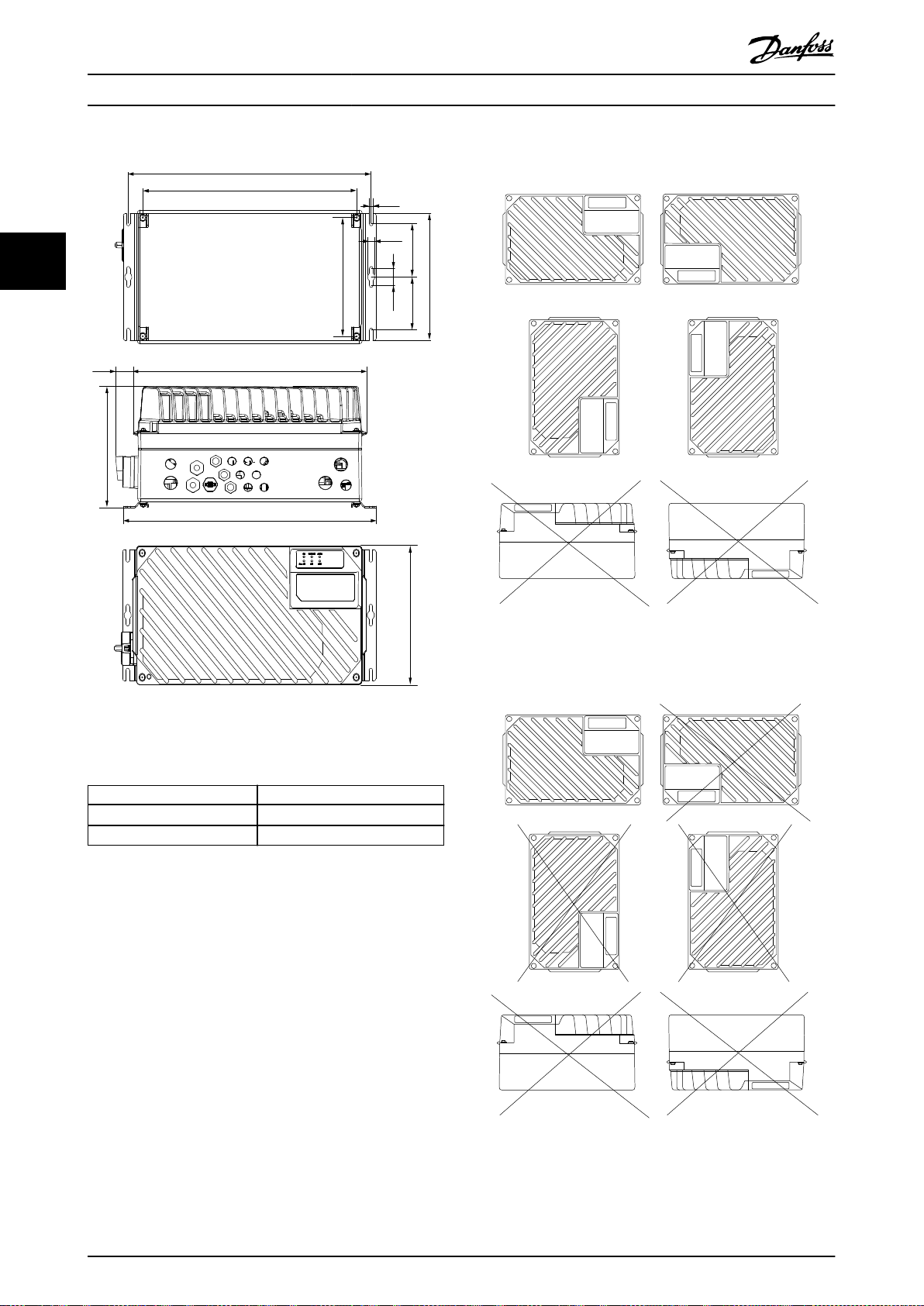
3.2.3.1 Posiciones de montaje permitidas
33
Ilustración 3.3 Entradas para cables y tamaños de los oricios
(unidad grande)
Lateral del motor 1 × M20, 1 × M25
Puesto de control
Red 2 × M25
Tabla 3.2 Dimensiones mecánicas
1) También utilizado para adaptadores de actuador / sensor 4 x
M12 / 6 x M12.
2 × M20, 9 × M16
1)
3.2.3 Montaje
El VLT® Decentral Drive FCD 302 consta de dos piezas:
La caja de instalación
•
El inversor
•
Consulte el capétulo 1.4.2 Despieces.
Ilustración 3.4 Posiciones de montaje permitidas:
aplicaciones estándar
Ilustración 3.5 Posiciones de montaje permitidas:
aplicaciones higiénicas
12 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 17
130BB701.10
Instalación mecánica Guía de funcionamiento
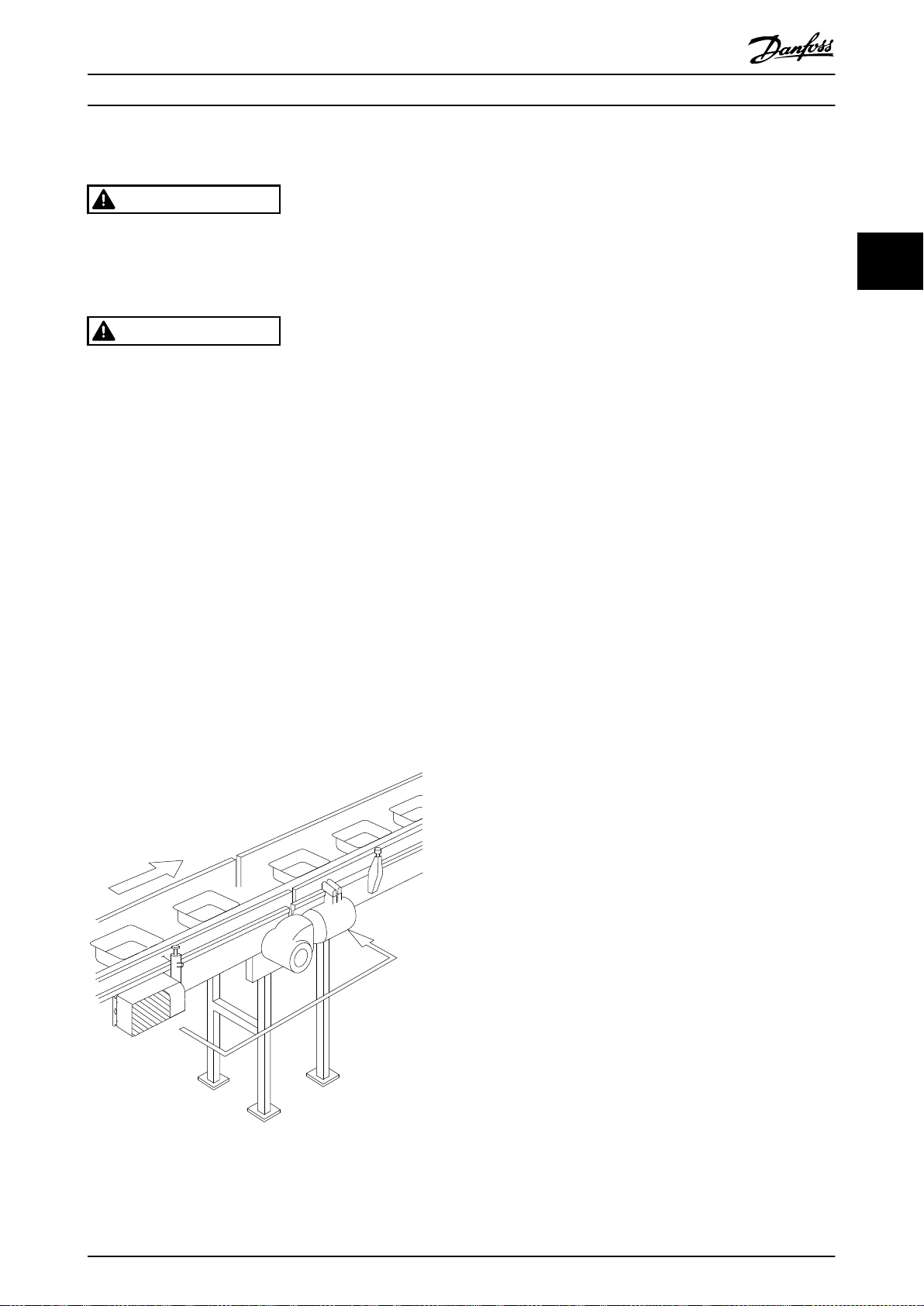
3.2.3.2 Montaje de la caja de instalación
PRECAUCIÓN
PELIGRO ELÉCTRICO
No conecte la alimentación de la unidad en este punto,
ya que podrían producirse lesiones graves o incluso la
muerte.
PRECAUCIÓN
DAÑOS MATERIALES O LESIONES PERSONALES
Si no se aprietan los cuatro tornillos, pueden producirse
lesiones personales o daños materiales.
Asegúrese de que el lugar donde va a realizar el
•
montaje soporte el peso de la unidad.
Requisitos previos:
Utilice los oricios de la parte posterior de la caja
•
de instalación para jar los soportes de montaje.
Utilice tornillos o pernos adecuados.
•
En versiones higiénicas, utilice prensacables
•
diseñados para responder a las exigencias de
aplicación higiénicas, por ejemplo, Rittal HD
2410.110/120/130.
1.
Monte verticalmente el VLT® Decentral Drive
FCD 302 en una pared o en el bastidor de la
máquina. En las versiones higiénicas, asegúrese
de el alojamiento tenga un buen drenaje de
líquidos y oriente la unidad de manera que los
prensacables estén ubicados en la base.
3 3
Ilustración 3.6 FCD 302 independiente con soportes de
montaje
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 13
Page 18
Instalación eléctrica
4 Instalación eléctrica
VLT® Decentral Drive FCD 302
4.1 Instrucciones de seguridad
Consulte el capétulo 2 Seguridad para conocer las instrucciones de seguridad generales.
Consulte el capétulo 7.1 Datos eléctricos y el
capétulo 7.5 Especicaciones del cable para obtener
información sobre los tamaños y tipos de cable
recomendados.
4.2 Instalación conforme a CEM
44
ADVERTENCIA
TENSIÓN INDUCIDA
La tensión inducida desde los cables de motor de salida
que están juntos puede cargar los condensadores del
equipo, incluso si este está apagado y bloqueado. Si no
se colocan los cables de motor de salida separados o no
se utilizan cables apantallados, pueden producirse
lesiones graves o incluso la muerte.
Coloque los cables de motor de salida
•
separados o
Utilice cables apantallados.
•
PRECAUCIÓN
RIESGO DE DESCARGA
El convertidor de frecuencia puede generar una corriente
de CC en el conductor de PE. Si no se sigue la siguiente
recomendación, puede que el RCD no proporcione la
protección prevista.
Cuando se utilice un dispositivo de protección
•
de corriente residual (RCD) como protección
antidescargas eléctricas, este solo podrá ser de
tipo B en el lado de la fuente de alimentación.
Protección de sobreintensidad
Es necesario un equipo de protección adicional,
•
como protección contra cortocircuitos o
protección térmica del motor, entre el convertidor
de frecuencia y el motor para aplicaciones con
varios motores.
Es necesario un fusible de entrada para propor-
•
cionar protección de sobreintensidad y contra
cortocircuitos. Si no vienen instalados de fábrica,
los fusibles deben ser suministrados por el
instalador. Consulte la lista de fusibles previos con
certicación UL/cUL en el capétulo 7.7 Fusibles y
magnetotérmicos.
Tipo de cable y clasicaciones
Todos los cableados deben cumplir las normas
•
nacionales y locales sobre los requisitos de
sección transversal y temperatura ambiente.
Recomendación de conexión de cable de alimen-
•
tación: cable de cobre con una temperatura
nominal mínima de 75 °C (167 °F).
Para conseguir una instalación conforme a CEM, siga las
instrucciones que se proporcionan en el
capétulo 4.3 Conexión a tierra, el capétulo 4.4 Esquema de
cableado, el capétulo 4.7 Conexión del motor y el
capétulo 4.10 Cableado de control.
4.3 Conexión a tierra
ADVERTENCIA
PELIGRO DE CORRIENTE DE FUGA
Las corrientes de fuga superan los 3,5 mA. No efectuar
una conexión toma a tierra correcta del convertidor de
frecuencia podría ser causa de lesiones graves e incluso
muerte.
La correcta conexión a tierra del equipo debe
•
estar garantizada por un instalador eléctrico
certicado.
Para seguridad eléctrica
Conecte a tierra el convertidor de frecuencia
•
según las normas y directivas vigentes.
Utilice un cable de conexión toma a tierra
•
especíco para el cableado de control, de la
alimentación de entrada y de la potencia del
motor.
No conecte a tierra un convertidor de frecuencia
•
unido a otro en un sistema de cadena.
los cables de conexión toma a tierra deben ser lo
•
más cortos posible.
Observe los requisitos de cableado del fabricante
•
del motor.
Sección transversal mínima del cable: 10 mm
•
(7 AWG) o dos cables de conexión toma a tierra
con especicación nominal terminados por
separado.
Para una instalación conforme a CEM
Establezca contacto eléctrico entre el apantalla-
•
miento de cables y el alojamiento del convertidor
de frecuencia mediante prensacables metálicos o
con las bridas suministradas con el equipo.
Para reducir los transitorios de ráfagas, utilice un
•
cable con muchos lamentos.
No utilice cables de pantalla retorcidos y
•
embornados.
2
14 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 19
130BC391.10
130BC403.10
Instalación eléctrica Guía de funcionamiento
AVISO!
ECUALIZACIÓN DE POTENCIAL
Existe riesgo de transitorios de ráfagas cuando el
potencial de conexión toma a tierra entre el convertidor
de frecuencia y el sistema de control es diferente. Instale
cables de ecualización entre los componentes del
sistema. Sección transversal del cable recomendada:
16 mm2 (5 AWG).
PRECAUCIÓN
CONEXIÓN PE
Las patillas metálicas en las esquinas de la parte
electrónica y en los oricios de la esquina de la caja de
instalación son fundamentales para la conexión a tierra
de protección. Asegúrese de que no están ojas, de que
no se han quitado ni deteriorado en modo alguno. El par
de apriete requerido es de 3 Nm (26 in-lb). Consulte el
Ilustración 4.1.
AVISO!
El terminal de conexión a tierra externo está disponible
como accesorio (referencia: 130B5833).
4 4
Ilustración 4.1 Conexión PE entre la caja de instalación y la
parte electrónica
Cable apantallado de conexión a tierra
Se suministran abrazaderas de conexión a tierra para el cableado de control y del motor (consulte la Ilustración 4.2).
Ilustración 4.2 Conexión a tierra para el cableado de control y del motor (unidad pequeña)
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 15
Page 20
130BC390.10
Instalación eléctrica
VLT® Decentral Drive FCD 302
44
Ilustración 4.3 Brida de conexión a tierra para el cableado de control y del motor (unidad grande)
1. Para retirar el aislamiento para una conexión a tierra correcta, utilice un pelacables.
2. Asegure la abrazadera de conexión a tierra a la porción pelada del cable utilizando los tornillos suministrados.
3. Fije el cable de conexión a tierra con la abrazadera de conexión a tierra suministrada.
16 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 21
130BC384.10
3-phase
power
input
Mechanical
brake
+10 V DC
-10 V DC+10 V DC
0/4-20 mA
-10 V DC+10 V DC
0/4-20 mA
91 (L1)
92 (L2)
93 (L3)
95 (PE)
122(MBR+)
123(MBR-)
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN)
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
19 (D IN)
20 (COM D IN)
27 (D IN/OUT)
29 (D IN/OUT)
24V
OV
32 (D IN)
33 (D IN)
37 (D IN)
S201
S202
ON/I=0-20mA
OFF/U=0-10V
P 5-00
24 V (NPN)
0 V (PNP)
24 V (NPN)
0 V (PNP)
24 V (NPN)
0 V (PNP)
24 V (NPN)
0 V (PNP)
24 V (NPN)
0 V (PNP)
24 V (NPN)
0 V (PNP)
Switch mode
power supply
10 V DC
15 mA
24 V DC
600 mA
(U) 96
(U) 97
(W) 98
(PE) 99
Motor
Brake
resistor
(R+) 82
(R-) 81
Relay1
Relay2
03
02
01
06
05
04
240 V AC, 2A
240 V AC, 2A
400 V AC, 2A
Analog output
0/4–20 mA
(COM A OUT) 39
(A OT) 42
ON=Terminated
OFF=Open
S801
S801
GX
(N RS485) 69
(P RS485) 68
5V
RS485
Interface
(COM RS485) 61
(PNP) = Source
(NPN) = Sink
RS485
ON
1 2
ON
1 2
ON
1 2
0 V
VCXA
PROFIBUS
interface
GND1
GND1
RS485
66
63
62
67
GX
Instalación eléctrica Guía de funcionamiento
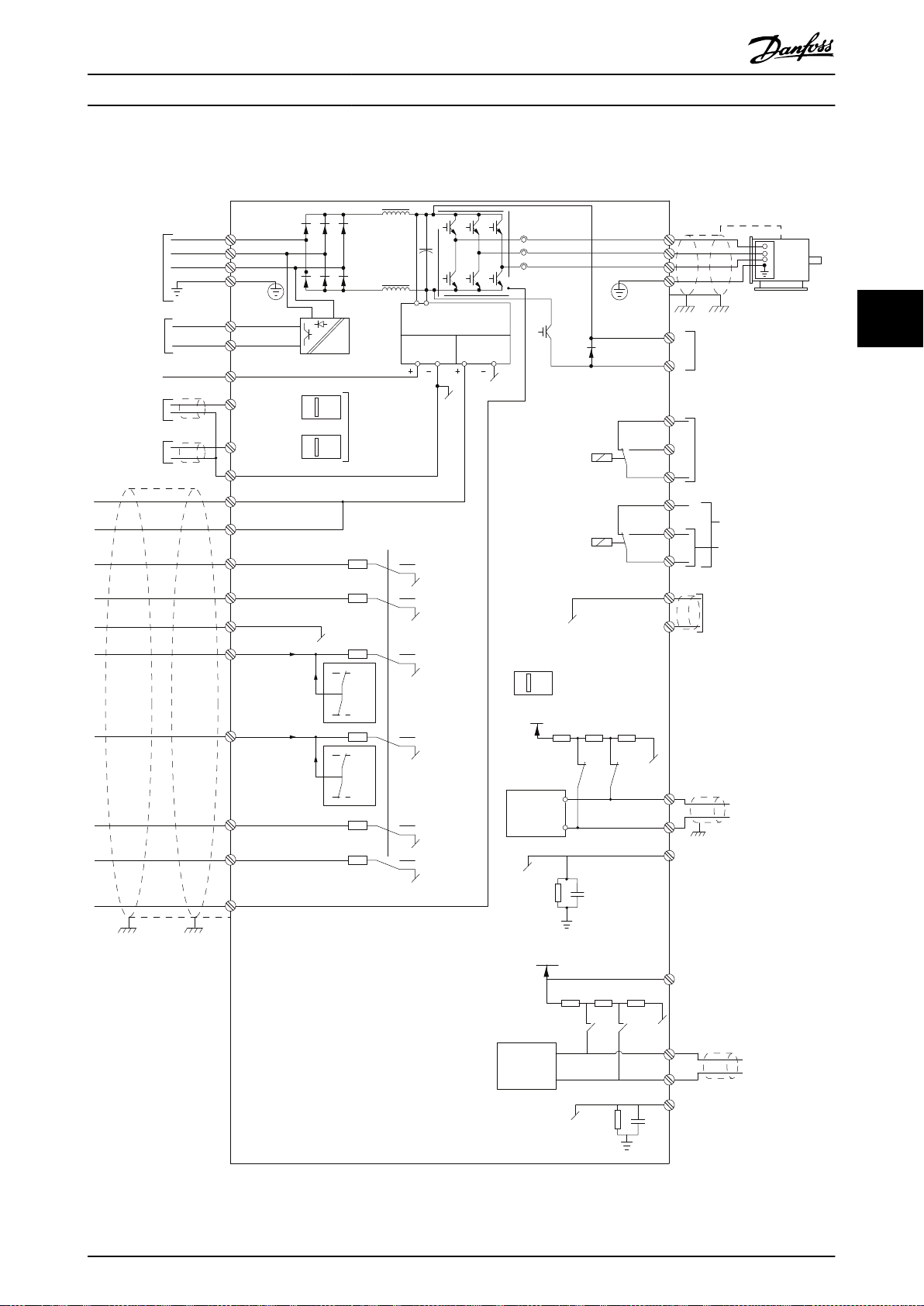
4.4 Esquema de cableado
4 4
Ilustración 4.4 Esquema básico del cableado
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 17
Page 22
130BC286.10
U
96
V
97
W
98
L1
L2
L3
L1
91
L2
92
L3
93
12
27
T1
T2
T3
NO
NC
NO
NC
L2
L3
PE
L1
41
33
5
3
1 2
4
6
34
42
1
2
L1
L2
L3
PE
U
96
V
97
W
98
L1
91
L2
92
L3
93
12
27
U
V
W
1 2
3 4
5
6
7 8
1
130BC287.10
Instalación eléctrica
VLT® Decentral Drive FCD 302
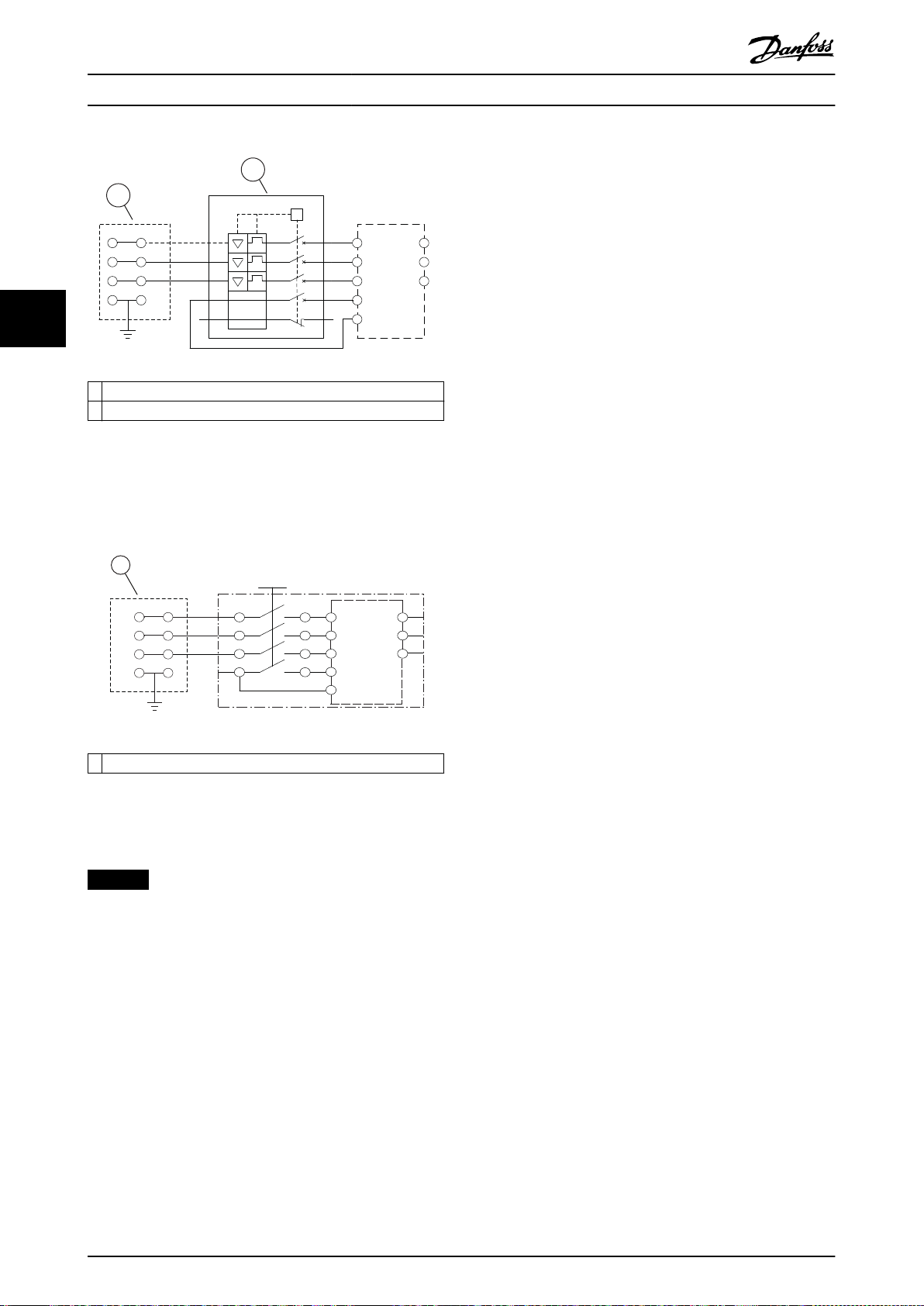
44
1 Terminales de lazos
2 Magnetotérmico
Ilustración 4.5 Solo unidad grande: magnetotérmico y
desconexión de la alimentación
1 Terminales de lazos
Ilustración 4.6 Solo unidad grande: conmutador para mantenimiento en red de alimentación con terminales de lazo
AVISO!
INTERFERENCIA DE CEM
Utilice cables apantallados para el cableado de control y
del motor, y cables separados para la alimentación de
entrada, el cableado del motor y el cableado de control.
No aislar los cables de control, del motor o de potencia
puede provocar un comportamiento inesperado o un
rendimiento inferior. Se requiere un espacio libre mínimo
de 200 mm (7,9 in) entre los cables de control, del motor
y de potencia.
18 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 23

130BC385.10
123
4
5
6
7 8
9
10
11
13
13
13
12
L3/93
L1/91
L2/92
8182123
122
U/96
V/97W/98
R
G
V
N
P
B04
B03
B02 B01
B08
B01 B06
B05
B12
B11 B10 B09
12
18 19 27
29 32 33
12
12
12 12
12
12
13
20
20
20
20 20
20
20
20
20
39
50 54
5355
42
37
37
Instalación eléctrica Guía de funcionamiento
4.5 Ubicación de los terminales
4 4
1 Entradas / salidas digitales y analógicas 8 Puerto USB
2 Safe Torque O (STO), conexión del LCP, opción B 9 Bus estándar / RS485
3 Relé 1 10 PROFIBUS
4 Relé 2 11 Puerto Ethernet
5 Motor, freno mecánico, resistencia de frenado 12 Puerto Ethernet
6 Alimentación 13 Conexión a tierra (PE)
7 Entrada de seguridad de 24 V CC – –
Ilustración 4.7 Ubicación de los terminales (unidad pequeña)
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 19
Page 24

130BC386.10
1
2
3
4
5
13
7
8
9
10
13
6
13
11
12
L3/93 L1/91L2/92
8182123122U/96V/97W/98
R
G
V
N
P
B04
B03
B02 B01
B08
B01 B06
B05
B12
B11 B10 B09
12
18 19 27
29 32 33
12
12
12 12
12
12
13
20
20
20
20 20
20
20
20
20
39
50 54
5355
42
37
37
Instalación eléctrica
VLT® Decentral Drive FCD 302
44
1 Entradas / salidas digitales y analógicas 8 Puerto USB
2 Safe Torque O (STO), conexión del LCP, opción B 9 Bus estándar / RS485
3 Relé 1 10 PROFIBUS
4 Relé 2 11 Puerto Ethernet
5 Motor, freno mecánico, resistencia de frenado 12 Puerto Ethernet
6 Alimentación 13 Conexión a tierra de protección (PE)
7 Entrada de seguridad de 24 V CC – –
Ilustración 4.8 Ubicación de los terminales (unidad grande)
El conmutador de mantenimiento es opcional tanto para
unidades pequeñas como grandes. El conmutador se
muestra instalado en el lado del motor. También puede
localizarse en el lado de alimentación, u omitirse.
3. Retire el destornillador para apretar el cable en el
contacto.
4. Asegúrese de que el contacto esté bien sujeto y
no esté suelto. Los cables sueltos pueden
producir fallos en el equipo o daños.
El magnetotérmico es opcional en la unidad grande. La
unidad grande puede congurarse con conmutador de
mantenimiento o con magnetotérmico, pero no con
ambos. La conguración indicada en la Ilustración 4.8 no
puede congurarse en la práctica, pero se muestra
únicamente para ilustrar las respectivas posiciones de los
componentes.
4.6 Tipos de terminal
Los terminales de alimentación, de control y del motor se
accionan por resorte (tipo abrazadera de jaula).
1. Abra el contacto introduciendo un pequeño
destornillador en la ranura situada encima del
contacto, tal y como muestra en Ilustración 4.9.
Ilustración 4.9 Apertura de los terminales
2. Introduzca el cable pelado en el contacto.
20 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 25

130BB706.10
Instalación eléctrica Guía de funcionamiento
4.7 Conexión del motor
ADVERTENCIA
TENSIÓN INDUCIDA
La tensión inducida desde los cables de motor de salida
que están juntos puede cargar los condensadores del
equipo, incluso si este está apagado y bloqueado. No
colocar los cables de motor de salida separados o no
utilizar cables apantallados puede provocar lesiones
graves o incluso la muerte.
AVISO!
PROTECCIÓN DE SOBRECARGA DEL MOTOR
La protección contra la sobrecarga del motor no está
incluida en los ajustes de fábrica. Si se necesita dicha
función, ajuste el parámetro 1-90 Protección térmica
motor en una de las opciones de desconexión o en una
de las opciones de advertencia. Consulte la Guía de
programación del VLT® AutomationDrive FC 301/302 para
obtener más información.
1. Conecte el motor a los terminales 96, 97 y 98.
2. Conecte la conexión toma a tierra al terminal PE.
3. Compruebe que la pantalla del cable del motor
esté conectada a tierra correctamente en ambos
extremos (motor y convertidor de frecuencia).
4. Para un dimensionamiento correcto de la sección
transversal de los cables, consulte
capétulo 7.1 Datos eléctricos.
4.7.1 Conexión de varios motores
Conexión en paralelo de motores
El convertidor de frecuencia puede controlar varios
motores conectados en paralelo. El consumo total de
corriente por parte de los motores no debe sobrepasar la
corriente nominal de salida I
frecuencia.
del convertidor de
M, N
AVISO!
Las instalaciones con cables conectados a un
•
punto común, como en la Ilustración 4.10,
únicamente son recomendables para longitudes
de cable cortas (máx. 10 m [32,8 ft]).
Cuando los motores se encuentran conectados
•
en paralelo, no puede utilizarse el
parámetro 1-29 Adaptación automática del motor
(AMA).
AVISO!
El relé termoelectrónico (ETR) del convertidor de
frecuencia no puede utilizarse como protección de
sobrecarga del motor para el motor individual de los
sistemas con motores conectados en paralelo.
Proporcione una mayor protección de sobrecarga del
motor mediante termistores en cada motor o relés
térmicos individuales. Los magnetotérmicos no son
adecuados como protección.
4 4
Número
96 97 98 Tensión del motor un 0-100 % de la tensión de red.
U V W Tres cables que salen del motor.
U1 V1 W1
W2 U2 V2
U1 V1 W1 6 cables de motor, conectados en estrella.
PE – – Conexión a tierra.
Tabla 4.1 Terminales 96, 97 y 98
Seis cables que salen del motor.
Conectar U2, V2 y W2 por separado (bloque de
terminales opcional).
AVISO!
No instale condensadores de corrección del factor de
potencia entre el convertidor de frecuencia y el motor.
No conecte un dispositivo de arranque o de cambio de
polaridad entre el convertidor de frecuencia y el motor.
Ilustración 4.10 Conexión en paralelo de motores
Pueden surgir problemas en el arranque y con valores de
r/min bajos si los motores tienen un tamaño muy distinto.
Los motores de potencia del motor nominal baja poseen
una resistencia óhmica relativamente alta en el estátor.
Esta alta resistencia exige una mayor tensión en el
arranque y con valores de r/min bajos.
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 21
Page 26

Instalación eléctrica
VLT® Decentral Drive FCD 302
Para solucionar este problema:
Reduzca la carga durante el arranque en aquel
•
motor que tenga una potencia nominal más baja.
Congure conexiones en paralelo solo entre
•
motores que tengan una potencia nominal
comparable.
Conexión de red y de motor con
4.9
conmutador de servicio
4.8 Conexión de red de CA
44
El tamaño del cableado se basa en la intensidad de
entrada del convertidor de frecuencia. Consulte el tamaño
máximo de cable en la Tabla 7.1 del capétulo 7 Especica-
ciones.
Cumpla los códigos eléctricos locales y nacionales en las
dimensiones de los cables.
Procedimiento
1. Conecte el cableado de alimentación de entrada
trifásica de CA a los terminales L1, L2 y L3.
2. En función de la
conecte la alimentación de entrada a los
terminales de alimentación o al dispositivo de
desconexión de entrada.
3. Conecte a tierra el cable según las instrucciones
de conexión a tierra disponibles en el
capétulo 4.3 Conexión a tierra.
4. Si la alimentación proviene de una fuente de
alimentación aislada (red eléctrica IT o triángulo
otante) o de redes TT / TN-S con toma de tierra
(triángulo de puesta a tierra), desconecte
parámetro 14-50 Filtro RFI (póngalo en OFF). En la
posición de APAGADO, se aíslan los condensadores internos del ltro RFI, situados entre el
chasis y el enlace de CC, para evitar dañar el
enlace de CC y para reducir la corriente capacitiva
a tierra conforme a la norma CEI 61800-3.
Número
91 92 93 Tensión de red 3 × 380-480 V
L1 L2 L3 –
PE – – Conexión a tierra
Tabla 4.2 Terminales 91, 92 y 93
conguración del equipo,
Ilustración 4.11 Conexión de red y de motor con conmutador
de servicio
Cableado de control
4.10
ADVERTENCIA
ARRANQUE ACCIDENTAL
Cuando el convertidor de frecuencia se conecta a una
red de CA, a un suministro de CC o a una carga
compartida, el motor puede arrancar en cualquier
momento. Un arranque accidental durante la programación, el mantenimiento o los trabajos de reparación
puede causar la muerte, lesiones graves o daños
materiales. El motor puede arrancar mediante un
conmutador externo, una orden de eldbus, una señal
de referencia de entrada desde el LCP o por la
eliminación de una condición de fallo.
Para evitar un arranque accidental del motor:
Desconecte el convertidor de frecuencia de la
•
alimentación.
Pulse [O/Reset] en el LCP antes de programar
•
cualquier parámetro.
Debe cablear y montar completamente el
•
convertidor de frecuencia, el motor y cualquier
equipo accionado antes de conectar el
convertidor de frecuencia a la red de CA, al
suministro de CC o a una carga compartida.
22 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 27

Instalación eléctrica Guía de funcionamiento
Se recomienda utilizar cableado de control para
•
600 V.
Aísle el cableado de control de los componentes
•
de alta potencia del convertidor de frecuencia.
Si el convertidor de frecuencia se conecta a un
•
termistor, para el aislamiento PELV, asegúrese de
que el cableado de control esté reforzado /
doblemente aislado.
Número de
terminal
01, 02, 03 Salida de relé 1. Se utilizan para tensión de CA o
04, 05, 06 Salida de relé 2. Se utilizan para tensión de CA o
12, 13 Tensión de alimentación digital de 24 V CC. Se
18, 19, 32, 33 Entradas digitales. Seleccionables para la función
27, 29 Entradas o salidas digitales. Programables para
35 Común (–) para fuente de alimentación de control
36 Fuente de alimentación de control externa +24 V.
37 Safe Torque O. Consulte capétulo 4.16 Safe
20 Común para entradas digitales. Para opciones
39 Común para salida analógica.
42 Salida analógica. Programable para varias
50 Tensión de alimentación analógica de 10 V CC. Se
53, 54 Entrada analógica. Seleccionables para tensión
Función
CC y cargas resistivas o inductivas.
CC y cargas resistivas o inductivas.
utilizan para entradas digitales y transductores
externos. Para utilizar los 24 V CC para opciones
comunes de entrada digital, programe el
parámetro 5-00 Modo E/S digital para funcionamiento PNP.
NPN o PNP en el parámetro 5-00 Modo E/S digital.
El valor predeterminado es PNP.
ambos. El parámetro 5-01 Terminal 27 modo E/S
para el terminal 27 y el parámetro 5-02 Terminal
29 modo E/S para el terminal 29, seleccionan la
función de entrada/salida. El ajuste predeterminado es entrada.
externa de 24 V. Opcional.
Opcional.
Torque O (STO) para obtener más información.
comunes de entrada digital, programe el
parámetro 5-00 Modo E/S digital para funcionamiento NPN.
funciones en el grupo de parámetros 6-5* Salida
analógica 1. La señal analógica es de 0-20 mA o
4-20 mA, a un máximo de 500 Ω.
utiliza normalmente un máximo de 15 mA para
un potenciómetro o termistor.
(desde 0 hasta ±10 V) o corriente (desde 0 o 4
hasta ±20 mA). Cerrado es para corriente y
abierto es para tensión. Los conmutadores están
ubicados en la tarjeta de control del convertidor
de frecuencia. Consulte capétulo 4.14 Interruptores
DIP.
Número de
terminal
55 Común para entradas analógicas.
61 Común para comunicación serie (interfaz RS485).
68 (+), 69 (-) Interfaz RS485. Cuando el convertidor de
62 RxD/TxD –P (cable rojo) para PROFIBUS. Consulte
63 RxD/TxD –N (cable verde) para PROFIBUS.
66 0 V para Probus.
67 +5 V para Probus.
B01–B12 Opción B Para obtener más información, consulte
G, R, V, N y P Conexión de LCP.
Tabla 4.3 Descripción del terminal
Función
Consulte el capétulo 4.3 Conexión a tierra
frecuencia está conectado a un bus de comunicación serie RS485, se incluye un conmutador
para la resistencia de terminación en la tarjeta de
control. Ajuste el conmutador en ON para
terminación y en OFF para no terminación.
la Guía de instalación de VLT® PROFIBUS DP
MCA 101 para obtener más detalles.
la documentación especializada.
4.11 Resistencia de frenado
Número Función
81 (función opcional) R- Terminales de resistencia de frenado
82 (función opcional) R+
Tabla 4.4 Terminales de resistencia de frenado
El cable de conexión a la resistencia de frenado debe estar
apantallado/blindado. Conecte la pantalla por medio de
abrazaderas al armario metálico del convertidor de
frecuencia y al armario metálico de la resistencia de
frenado.
Elija un cable de freno cuya sección transversal se adecue
al par de frenado.
Freno mecánico
4.12
Número Función
122 (función
opcional)
123 (función
opcional)
Tabla 4.5 Terminales de freno mecánico
En las aplicaciones de elevación / descenso, se necesita
poder controlar un freno electromecánico:
El freno se controla mediante los terminales
•
especiales 122 y 123 de control de freno
mecánico y alimentación.
Seleccione [32] Ctrl. freno mec. en el grupo de
•
parámetros 5-4* Relés, [1] Matriz, relé 2 para las
aplicaciones con freno electromecánico.
MBR+ Freno mecánico
UDC = 0,45 x RMS tensión de red
MBR-
Corriente máxima = 0,8 A
4 4
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 23
Page 28

130BC389.10
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
LCP
RL2
RL1
33
USB
3219
FB2 FB1
18
1
2
3
4
1
2
3
4
130BB708.10
1
2
4
3
5
Instalación eléctrica
El freno queda liberado cuando la intensidad del
•
VLT® Decentral Drive FCD 302
motor supera el valor preseleccionado en el
parámetro 2-20 Intensidad freno liber.
El freno se acciona cuando la frecuencia de salida
•
es inferior a la frecuencia ajustada en
parámetro 2-21 Velocidad activación freno [RPM] o
en parámetro 2-22 Activar velocidad freno [Hz]. El
freno se acciona solo cuando el convertidor de
frecuencia realiza una orden de parada.
44
Si el convertidor de frecuencia entra en modo de alarma o
en una situación de sobretensión, el freno mecánico actúa
inmediatamente. Si desea más información, consulte la
Guía de programación del VLT® AutomationDrive FC 301/302.
AVISO!
Cuando el control de freno mecánico y los terminales de
alimentación 122 y 123 están ajustados a través del
grupo de parámetros 5-4* Relés, [1] Matriz, relé 2, solo
queda una salida de relé (relé 1) para programación
libre.
4.13 Conexión de los sensores / actuadores
a los conectores M12
Patilla Color del cable Terminal Función
1 Marrón 12 +24 V
3 Azul 20 0 V
4 Negro 18, 19, 32,33 Entrada
digital
Ilustración 4.12 Conexión de los sensores / actuadores a los
conectores M12
4.14 Interruptores DIP
Seleccione los terminales de entrada analógicos
•
53 y 54 para las señales de entrada de tensión
(0-10 V) o de corriente (0-20 mA).
Ajuste los conmutadores S201 (terminal 53) y
•
S202 (terminal 54) para seleccionar el tipo de
señal. ON es para la corriente, OFF para la
tensión.
El terminal 53 predeterminado es para una
•
referencia de velocidad en lazo abierto.
El terminal 54 predeterminado es para una señal
•
de realimentación en lazo cerrado.
Tabla 4.6 4 x entrada de conexión M12
Patilla Color del cable Terminal Función
1 Marrón Reservado1)Reservado
3 Azul 20 0 V
4 Negro 02, 05 NINGUNA
(24 V)
Tabla 4.7 2 x salida de conexión M12
1) Cuando se usan cables reservados para opciones. Si no se utilizan,
pueden cortarse.
1 S201 - terminal 53
2 S202 - terminal 54
3 S801 - terminación de bus estándar
4 Terminación de Probus
5 Dirección de eldbus
Ilustración 4.13 Ubicación de los interruptores DIP
24 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 29

61
68
69
+
130BB489.10
RS485
Instalación eléctrica Guía de funcionamiento
AVISO!
Los conmutadores 4 y 5 solo son válidos para las
unidades con opciones de bus de campo.
Consulte la Guía de programación de VLT® PROFIBUS DP
MCA 101 para obtener más información.
4.15 Comunicación serie RS485
Conecte el cableado de comunicación serie RS485 a los
terminales (+)68 y (–)69.
Utilice un cable de comunicación serie
•
apantallado (recomendado).
Consulte el capétulo 4.3 Conexión a tierra para
•
realizar correctamente la conexión a tierra.
Ilustración 4.14 Diagrama de cableado de comunicación serie
Seleccione lo siguiente para congurar la comunicación
serie básica:
1. Tipo de protocolo en el parámetro 8-30 Protocolo.
2. Dirección del convertidor de frecuencia en el
parámetro 8-31 Dirección.
3. Velocidad en baudios en el
parámetro 8-32 Velocidad en baudios.
Hay dos protocolos de comunicación internos en el
convertidor de frecuencia.
Danfoss FC
•
Modbus RTU
•
Las funciones pueden programarse remotamente utilizando
el software de protocolo y la conexión RS485 o en el
grupo de parámetros 8-** Comunic. y opciones.
Si selecciona un protocolo de comunicación especíco, se
modican diferentes ajustes de parámetros por defecto
para adaptarse a las especicaciones del protocolo, y se
hacen accesibles los parámetros especícos adicionales del
protocolo.
Las tarjetas de opción para el convertidor de frecuencia
están disponibles para proporcionar protocolos de comunicación adicionales. Consulte la documentación de la tarjeta
de opción para las instrucciones de instalación y funcionamiento.
4.16 Safe Torque O (STO)
Para ejecutar la desconexión segura de par, se necesita
cableado adicional para el convertidor de frecuencia.
Consulte el Manual de funcionamiento de Safe Torque O
para los convertidores de frecuencia VLT® para obtener más
información.
4.17 Lista de vericación de la instalación
Antes de completar la instalación la unidad, inspeccione
toda la instalación tal y como se indica en la Tabla 4.8.
Compruebe y marque los elementos una vez completados.
Inspección Descripción
Equipo auxiliar•Busque los equipos auxiliares,
conmutadores, desconectores,
fusibles de entrada o magnetotérmicos que pueda haber en el
lado de la alimentación de entrada
del convertidor de frecuencia o en
el de salida al motor. Examine su
estado operativo y asegúrese de
que están listos en todos los
aspectos para su funcionamiento a
máxima velocidad.
Compruebe el estado funcional y la
•
instalación de los sensores
utilizados para la realimentación al
convertidor de frecuencia.
Elimine los condensadores de
•
corrección del factor de potencia en
los motores, si estuvieran presentes.
Tendido de los
cables
Cableado de
control
Asegúrese de que la alimentación de
entrada, el cableado del motor y el
cableado de control estén separados o
vayan por tres conductos metálicos
independientes para el aislamiento del
ruido de alta frecuencia.
Compruebe que no existan cables y
•
conexiones partidos o dañados.
Compruebe la fuente de tensión de
•
las señales, si fuera necesario.
Se recomienda el uso de un cable
•
apantallado o de par trenzado.
Asegúrese de que la pantalla está
correctamente terminada en ambos
extremos.
☑
4 4
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 25
Page 30

Instalación eléctrica
VLT® Decentral Drive FCD 302
Inspección Descripción
Consideraciones
sobre CEM
Consideraciones
ambientales
44
Espacio libre
para la refrigeración
Fusibles y
magnetotérmicos
Cableado de
entrada y
salida de
alimentación
Conmutadores Asegúrese de que todos los ajustes de
Conexión a
tierra
Caja de
instalación y
parte
electrónica
Prensacables y
conectores
ciegos
Vibración Asegúrese de que el equipo no esté
Compruebe que la instalación es
correcta en cuanto a compatibilidad
electromagnética.
Consulte en la etiqueta del equipo los
límites de temperatura de la
temperatura ambiente de funcionamiento máxima. La temperatura no
debe superar los 40 °C (104 °F). Los
niveles de humedad deben situarse
entre el 5 y el 95 %, sin condensación.
Las unidades requieren una zona
despejada adecuada por encima y por
debajo, a n de que exista el ujo de
aire correcto para su refrigeración.
Compruebe que todos los fusibles
estén bien insertados y en buen
estado, y que todos los magnetotérmicos estén en la posición abierta.
Compruebe si los fusibles o magnetotérmicos son los adecuados.
Revise posibles conexiones sueltas.
•
Compruebe si los fusibles o
•
magnetotérmicos son los
adecuados.
conmutación y desconexión se
encuentren en la posición correcta.
El equipo requiere un cable de
conexión a tierra especíco desde su
chasis hasta la toma de tierra de la
planta. Compruebe que las conexiones
a tierra son buenas y están bien
apretadas y sin óxido.
Compruebe que la caja de instalación y
la parte electrónica están cerradas
correctamente. Compruebe que los
cuatro tornillos se aprietan con el par
correcto.
Compruebe que los prensacables y
conectores ciegos están bien apretados
para conseguir el grado de protección
correcto. La entrada de líquidos o de
demasiado polvo en el convertidor
puede reducir su rendimiento o causar
daños.
expuesto a un nivel alto de vibración.
Monte el panel de manera sólida, o
bien sobre soportes que amortigüen
los golpes.
☑
PRECAUCIÓN
POSIBLE PELIGRO EN CASO DE FALLO INTERNO
Existe el riesgo de sufrir lesiones si el convertidor de
frecuencia no está correctamente cerrado.
Antes de suministrar electricidad, asegúrese de
•
que todas las cubiertas de seguridad estén
colocadas y jadas de forma segura.
4.18.1 Instalación del inversor
Para comprimir la junta entre las dos piezas:
1. Apriete los cuatro tornillos de conexión hasta un
par de 2,8-3,0 Nm (24-26 in-lb).
2. Apriete los cuatro tornillos en orden contrario
diagonalmente.
3. Apriete las dos jabalinas de puesta a tierra hasta
un par de 3,0 Nm (26 in-lb).
Tabla 4.8 Lista de vericación del arranque
26 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 31

Puesta en servicio Guía de funcionamiento
5 Puesta en servicio
5.1 Conexión de potencia
ADVERTENCIA
ARRANQUE ACCIDENTAL
Cuando el convertidor de frecuencia se conecta a una
red de CA, a un suministro de CC o a una carga
compartida, el motor puede arrancar en cualquier
momento. Un arranque accidental durante la programación, el mantenimiento o los trabajos de reparación
puede causar la muerte, lesiones graves o daños
materiales. El motor puede arrancar mediante un
conmutador externo, una orden de eldbus, una señal
de referencia de entrada desde el LCP o por la
eliminación de una condición de fallo.
Para evitar un arranque accidental del motor:
Desconecte el convertidor de frecuencia de la
•
alimentación.
Pulse [O/Reset] en el LCP antes de programar
•
cualquier parámetro.
Debe cablear y montar completamente el
•
convertidor de frecuencia, el motor y cualquier
equipo accionado antes de conectar el
convertidor de frecuencia a la red de CA, al
suministro de CC o a una carga compartida.
Consulte el capétulo 2 Seguridad para conocer las instrucciones de seguridad generales.
ADVERTENCIA
TENSIÓN ALTA
Los convertidores de frecuencia contienen tensión alta
cuando están conectados a una alimentación de entrada
de red de CA. En caso de que la instalación, el arranque
y el mantenimiento no fueran efectuados por personal
cualicado, podrían causarse lesiones graves o incluso la
muerte.
La instalación, puesta en marcha y manteni-
•
miento solo deben realizarlos personal
cualicado.
Antes de conectar la potencia:
1. Cierre correctamente la cubierta.
2. Compruebe que todos los prensacables estén
bien apretados.
3. Asegúrese de que la alimentación de entrada de
la unidad esté desactivada y bloqueada. No
confíe en los interruptores de desconexión del
convertidor de frecuencia para aislar la alimentación de entrada.
4. Compruebe que no haya tensión en los
terminales de entrada L1 (91), L2 (92) y L3 (93), ni
entre fases, ni de fase a conexión toma a tierra.
5. Compruebe que no haya tensión en los
terminales de salida 96 (U), 97(V) y 98 (W), ni
entre fases, ni de fase a conexión toma a tierra.
6. Conrme la continuidad del motor midiendo los
valores en Ω en los pares U-V (96-97), V-W (97-98)
y W-U (98-96).
7. Compruebe que la conexión a tierra del
convertidor de frecuencia y el motor sea correcta.
8. Revise el convertidor de frecuencia en busca de
conexiones sueltas en los terminales.
9. Conrme que la tensión de alimentación es
compatible con la del convertidor de frecuencia y
la del motor.
Conecte la alimentación al convertidor de frecuencia
realizando los siguientes pasos:
1. Conrme que la tensión de entrada está
equilibrada en un margen del 3 %. De no ser así,
corrija el desequilibrio de tensión de entrada
antes de continuar. Repita el procedimiento
después de corregir la tensión.
2. Asegúrese de que el cableado del equipo
opcional sea compatible con la aplicación de la
instalación.
3. Asegúrese de que todos los dispositivos del
operador están en la posición OFF. Las puertas
del panel deben estar cerradas y las cubiertas,
jadas de manera segura.
4. Encienda la alimentación de la unidad. No
arranque el convertidor de frecuencia en este
momento. Para las unidades con un interruptor
de desconexión, seleccione la posición ON para
aplicar potencia al convertidor de frecuencia.
5 5
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 27
Page 32

130BD598.10
Auto
On
Reset
Hand
On
O
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
36.4 kW
Auto Remote Ramping
0.000
On
Alarm
Warn.
A
7.83 A
799 RPM
B
C
D
53.2 %
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18 19 20 21
Puesta en servicio
VLT® Decentral Drive FCD 302
5.2 Funcionamiento del panel de control
local
El panel de control local (LCP) es la combinación de la
pantalla y el teclado de la parte frontal de la unidad.
El LCP cuenta con varias funciones de usuario:
Arranque, parada y control de velocidad cuando
•
está en control local.
Visualización de los datos de funcionamiento,
•
estado, advertencias y precauciones.
55
Programe las funciones del convertidor de
•
frecuencia.
Reinicio manual del convertidor de frecuencia tras
•
un fallo cuando el reinicio automático esté
inactivo.
AVISO!
Para la puesta en servicio a través del PC, instale el
Software de conguración MCT 10. El software se puede
descargar (versión básica) o puede hacerse un pedido
(versión avanzada, número de código 130B1000). Para
obtener más información y descargarlo, consulte
www.danfoss.com/BusinessAreas/DrivesSolutions/Software
+MCT10/MCT10+Downloads.htm.
Ilustración 5.1 GLCP
AVISO!
Durante el arranque, el LCP muestra el mensaje INITIALISING (Inicialización). Cuando deje de mostrarse dicho
mensaje, el convertidor de frecuencia estará listo para
funcionar. La adición o supresión de opciones puede
alargar la duración del arranque.
5.2.1 Disposición del panel de control local
gráco
El panel de control local gráco (GLCP) se divide en cuatro
grupos funcionales (consulte la Ilustración 5.1).
A. Área de la pantalla.
B. Teclas de menú de la pantalla.
C. Teclas de navegación y luces indicadoras.
D. Teclas de funcionamiento y reinicio.
28 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
A. Área de la pantalla
El área de la pantalla se activa cuando el convertidor de
frecuencia recibe potencia de la tensión de red, a través de
un terminal de bus de CC o de un suministro externo de
24 V CC.
La información visualizada en el LCP puede personalizarse
para las aplicaciones del usuario. Seleccione las opciones
en el Menú rápido Q3-11 Ajustes de display.
Pantalla Parámetro Ajustes predeter-
minados
1 Parámetro 0-20 Línea de
pantalla pequeña 1.1
2 Parámetro 0-21 Línea de
pantalla pequeña 1.2
3 Parámetro 0-22 Línea de
pantalla pequeña 1.3
4 Parámetro 0-23 Línea de
pantalla grande 2
5 Parámetro 0-24 Línea de
pantalla grande 3
Tabla 5.1 Leyenda de la Ilustración 5.1, área de la pantalla
[1617] Velocidad [RPM]
[1614] Intensidad motor
[1610] Potencia [kW]
[1613] Frecuencia
[1602] Referencia %
Page 33

Puesta en servicio Guía de funcionamiento
B. Teclas de menú de la pantalla
Las teclas del menú se utilizan para acceder al menú de
ajuste de parámetros, alternar los modos display durante el
funcionamiento normal y visualizar los datos del registro
de fallos.
Tecla Función
6 Estado Muestra la información de funcionamiento.
7 Quick Menu Permite acceder a parámetros de progra-
mación para obtener instrucciones de
ajuste inicial, así como muchas otras
instrucciones detalladas sobre la aplicación.
8 Main Menu Permite el acceso a todos los parámetros
de programación.
9 Alarm Log Muestra una lista de advertencias actuales,
las últimas diez alarmas y el registro de
mantenimiento.
Tabla 5.2 Leyenda de la Ilustración 5.1, teclas de menú de
la pantalla
C. Teclas de navegación y luces indicadoras (LED)
Las teclas de navegación se utilizan para programar
funciones y desplazar el cursor de la pantalla. Las teclas de
navegación también permiten el control de velocidad en
funcionamiento local. También hay tres luces indicadoras
del estado del convertidor de frecuencia en esta área.
Tecla Función
10 Back Vuelve al paso o lista anterior en la
estructura del menú.
11 Cancel Cancela el último cambio u orden, siempre y
cuando no se cambie el modo display.
12 Info Pulsar para obtener una denición de la
función que se está visualizando.
13 Teclas de
navegación
14 OK Pulse para acceder a grupos de parámetros o
Tabla 5.3 Leyenda de la Ilustración 5.1, teclas de navegación
Pulse las teclas de navegación para
desplazarse entre los elementos del menú.
para activar una selección.
Indicación Color Función
15 On Verde La luz de encendido se activa
cuando el convertidor de
frecuencia recibe potencia de la
tensión de red, a través de un
terminal de bus de CC o de una
fuente de suministro externo de
24 V.
16 Warn Amarillo Cuando se cumplen las
condiciones de advertencia, la luz
de advertencia amarilla se
enciende y aparece un texto en la
pantalla que identica el
problema.
17 Alarm Rojo Un fallo hace que el LED de
alarma rojo parpadee y que
aparezca un texto de alarma.
Tabla 5.4 Leyenda de la Ilustración 5.1, luces indicadoras (LED)
D. Teclas de funcionamiento y reinicio
Las teclas de funcionamiento están en la parte inferior del
LCP.
Tecla Función
18 [Hand On] Arranca el convertidor de frecuencia en
control local.
Una señal de parada externa emitida por
•
la entrada de control o por comunicación
serie invalida la tecla [Hand on] local.
19 O Detiene el motor pero no desconecta la
potencia del convertidor de frecuencia.
20 [Auto On] Pone el sistema en modo de funcionamiento
remoto.
Responde a una orden de arranque
•
externa emitida por los terminales de
control o por comunicación serie.
21 Reinicio Reinicia el convertidor de frecuencia
manualmente una vez se ha eliminado un
alarma.
5 5
Tabla 5.5 Leyenda de la Ilustración 5.1, teclas de
funcionamiento y reinicio
AVISO!
Para ajustar el contraste de la pantalla, pulse las teclas
[Status] y [▲]/[▼].
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 29
Page 34

130BC394.10
Q1 My Personal Menu
Q2 Quick Setup
Q3 Function Setups
Q5 Changes Made
13.7% 0.75A 1 (1)
Quick Menus
Puesta en servicio
VLT® Decentral Drive FCD 302
5.3 Programación básica
Los convertidores de frecuencia necesitan una programación operativa básica antes de poder funcionar a pleno
rendimiento. La programación operativa básica requiere la
introducción de los datos de la placa de características del
motor para que este pueda ponerse en funcionamiento, así
como las velocidades del motor máxima y mínima.
Introduzca estos datos de acuerdo con el siguiente
procedimiento. Consulte el capítulo capétulo 5.2 Funciona-
miento del panel de control local para obtener instrucciones
sobre cómo introducir datos a través del LCP. Introduzca
55
los datos con la alimentación conectada, pero antes de
que empiece a funcionar el convertidor de frecuencia.
Ilustración 5.3
conguración del motor
1. Pulse la tecla [Quick Menu] en el LCP.
2. Utilice las teclas de navegación para avanzar
hasta el grupo de parámetros Q2 Ajuste rápido y
pulse [OK].
Ilustración 5.2 Grupos de parámetros Q2 Ajuste rápido
3. Seleccione el idioma y pulse [OK].
4. Introduzca los datos de motor en los parámetros
de parámetro 1-20 Potencia motor [kW]/
parámetro 1-21 Potencia motor [CV] a
parámetro 1-25 Veloc. nominal motor. Encontrará
la información en la placa de características del
motor. Encontrará todo el menú rápido en Ajustes
de parámetros internacional / EE. UU.
4a Parámetro 1-20 Potencia motor [kW]
4b Parámetro 1-21 Potencia motor [CV]
4c Parámetro 1-22 Tensión motor
4d Parámetro 1-23 Frecuencia motor
4e Parámetro 1-24 Intensidad motor
4f Parámetro 1-25 Veloc. nominal motor
5. Siga congurando los parámetros del Menú
rápido:
5a Parámetro 5-12 Terminal 27 Entrada
digital. Si el valor predeterminado del
terminal es Inercia, es posible cambiarlo
a Sin función.
5b Parámetro 1-29 Adaptación automática
del motor (AMA). Ajuste la función AMA
deseada. Se recomienda activar el AMA
completo. Consulte los detalles en el
capétulo 5.4 Arranque del sistema.
5c Parámetro 3-02 Referencia mínima.
Ajustar la velocidad mínima del eje del
motor
5d Parámetro 3-03 Referencia máxima.
Ajustar la velocidad máxima del eje del
motor
5e Parámetro 3-41 Rampa 1 tiempo acel.
rampa. Ajuste el tiempo de aceleración
de rampa en relación con la velocidad
síncrona del motor, ns
5f Parámetro 3-42 Rampa 1 tiempo desacel.
rampa. Ajustar el tiempo de desaceleración en relación con la velocidad
síncrona del motor, ns.
5g Parámetro 3-13 Lugar de referencia.
Ajuste el sitio desde el que debe
trabajar la referencia.
Consulte el capétulo 8.1 Parámetros del menú rápido para
obtener más información.
30 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 35

Puesta en servicio Guía de funcionamiento
5.4 Arranque del sistema
La adaptación automática del motor (AMA) es un procedimiento de prueba que mide las características eléctricas
del motor. El procedimiento AMA optimiza la compatibilidad entre el convertidor de frecuencia y el motor. El
convertidor de frecuencia se basa en un modelo
matemático para regular la intensidad del motor de salida.
El procedimiento también prueba el equilibrio de fase de
entrada de la potencia eléctrica y compara las características del motor con los datos introducidos en los
parámetros de 1-20 a 1-25. Ejecute este procedimiento
durante el arranque, no hace funcionar el motor y
tampoco lo daña. Ejecute este procedimiento en un motor
frío para obtener los mejores resultados.
Para ejecutar la AMA
1. Introduzca los datos de la placa de características
del motor en el convertidor de frecuencia, tal
como se describe en el capétulo 5.3 Programación
básica.
2. Conecte el terminal 37 al terminal 13.
3. Conecte el terminal 27 al terminal 12 o ajuste
parámetro 5-12 Terminal 27 Entrada digital a [0] Sin
función.
4. Active el parámetro 1-29 Adaptación automática
del motor (AMA).
5. Elija entre un AMA reducido o completo.
6. Pulse [OK]. El display muestra el mensaje Pulse
[Hand on] para arrancar.
7. Pulse [Hand On]. Una barra de progreso indica
que el AMA se está llevando a cabo.
Parada del AMA durante el funcionamiento
Pulse
[O]: el convertidor de frecuencia entrará en el modo
de alarma y la pantalla mostrará que se ha nalizado el
AMA.
AMA correcto
1. La pantalla muestra el mensaje Pulse la tecla [OK]
para nalizar el AMA.
2. Pulse [OK] para salir del estado AMA.
AMA fallida
1. El convertidor de frecuencia entra en modo de
alarma. Se puede encontrar una descripción de la
alarma capétulo 6.6 Lista de Advertencias y
Alarmas.
2. Valor de informe, en [Alarm Log] (Registro de
alarmas), muestra la última secuencia de
medición llevada a cabo por el AMA antes de que
el convertidor de frecuencia entrase en modo de
alarma. Este número, junto con la descripción de
la alarma, ayuda a solucionar problemas. Si se
pone en contacto con el servicio de asistencia de
Danfoss, asegúrese de indicar el número y la
descripción de la alarma.
AVISO!
Causas frecuentes de AMA fallido:
Registro incorrecto de los datos de la placa de
•
características del motor.
Una diferencia demasiado grande entre la
•
potencia del motor y la potencia del
convertidor de frecuencia.
5.4.1 Prueba de control local
1. Pulse [Hand On] para proporcionar una orden de
arranque local para el convertidor de frecuencia.
2.
Acelere el convertidor de frecuencia pulsando [▲]
hasta la velocidad máxima. Si se mueve el cursor
a la izquierda de la coma decimal, se consiguen
efectuar los cambios de entrada más
rápidamente.
3. Observe cualquier problema de aceleración.
4. Pulse [OFF]. Observe cualquier problema de
desaceleración.
En caso de problemas de aceleración o desaceleración,
consulte el capétulo 6 Mantenimiento, diagnóstico y
resolución de problemas. Consulte la capétulo 6.6 Lista de
Advertencias y Alarmas para reiniciar el convertidor de
frecuencia tras una desconexión.
5.4.2 Arranque del sistema
El procedimiento de esta sección requiere que se hayan
completado el cableado y la programación de la
aplicación. Se recomienda el siguiente procedimiento una
vez que se ha nalizado la conguración de la aplicación.
1. Pulse [Auto On] (Automático).
2. Aplique un comando de ejecución externo.
3. Ajuste la velocidad de referencia en todo el
intervalo de velocidad.
4. Elimine el comando de ejecución externo.
5. Compruebe los niveles de ruido y vibración del
motor para garantizar que el sistema funcione
según lo previsto.
5 5
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 31
Page 36

Puesta en servicio
VLT® Decentral Drive FCD 302
Si se producen advertencias o alarmas, consulte el
capétulo 6.5 Tipos de advertencias y alarmas o el
capétulo 6.6 Lista de Advertencias y Alarmas.
5.5 Funcionamiento
5.5.1 Cargar / descargar datos al / del LCP
1. Pulse [O] para detener el motor antes de cargar
o descargar datos.
2. Pulse [Main Menu], seleccione
parámetro 0-50 Copia con LCP y después pulse
55
[OK].
3. Seleccione [1] Trans. LCP tod. par. para cargar los
datos al LCP o seleccione [2] Tr d LCP tod. par.
para descargar datos del LCP.
4. Pulse [OK]. Una barra de progreso muestra el
proceso de carga o de descarga.
5. Pulse [Hand On] o [Auto On] para volver al
funcionamiento normal.
Visualización de los cambios
En el Menú rápido Q5, Changes Made, se muestra una lista
de todos los parámetros modicados desde los ajustes
predeterminados.
La lista muestra únicamente los parámetros que
•
se han cambiado en el ajuste de edición actual.
No se indican los parámetros que se han
•
restablecido a los valores predeterminados.
El mensaje Empty (vacío) indica que no se ha
•
cambiado ningún parámetro.
5.5.3 Restablecimiento de los ajustes
predeterminados
AVISO!
Existe el riesgo de perder los registros de monitorización,
ubicación, datos del motor y programación al restablecer
los ajustes predeterminados. Para obtener una copia de
seguridad, cargue los datos al LCP antes de la inicialización.
5.5.2 Cambio de los ajustes de parámetros
El restablecimiento de los ajustes predeterminados de los
Acceso a los ajustes de parámetros y modicación de los
mismos desde el Menú rápido o desde el Menú principal. El
Menú rápido solo permite acceder a un número limitado de
parámetros.
parámetros se lleva a cabo a través de la inicialización del
convertidor de frecuencia. La inicialización puede
efectuarse a través del parámetro 14-22 Modo funciona-
miento (recomendado) o manualmente.
1. Pulse [Quick Menu] o [Main Menu] en el LCP.
2.
Pulse [▲] [▼] para desplazarse por los grupos de
parámetros; pulse [OK] para seleccionar un grupo
de parámetros.
3.
Pulse [▲] [▼] para desplazarse por los parámetros;
pulse [OK] para seleccionar un parámetro.
4.
Pulse [▲] [▼] para cambiar el valor de ajuste de
un parámetro.
5.
Pulse [◄] [►] para saltarse un dígito cuando se
está editando un parámetro decimal.
6. Pulse [OK] para aceptar el cambio.
7. Pulse [Back] dos veces para entrar en Estado, o
bien pulse [Main Menu] una vez para entrar en el
Menú principal.
La inicialización mediante el
•
parámetro 14-22 Modo funcionamiento no
restablece los ajustes del convertidor de
frecuencia, como las horas de funcionamiento, las
selecciones de comunicación serie, los ajustes
personales del menú, el registro de fallos, el
registro de alarmas y otras funciones de monitorización.
La inicialización manual elimina todos los datos
•
del motor, programación, ubicación y monitorización y restaura los ajustes predeterminados de
fábrica.
Procedimiento de inicialización recomendado, a través
del parámetro 14-22 Modo funcionamiento
1. Pulse [Main Menu] dos veces para acceder a los
parámetros.
2. Desplácese hasta parámetro 14-22 Modo funciona-
miento y pulse [OK].
3. Desplácese hasta [2] Inicialización y pulse [OK].
4. Apague la alimentación de la unidad y espere a
que la pantalla se apague.
5. Encienda la alimentación de la unidad.
32 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 37

Puesta en servicio Guía de funcionamiento
Los ajustes predeterminados de los parámetros se
restauran durante el arranque. La puesta en marcha puede
llevar algo más de tiempo de lo normal.
6. Se visualiza la Alarma 80. Equ. inicializado a los
valores predeterminados.
7. Pulse [Reset] para volver al modo de funcionamiento.
Procedimiento de inicialización manual
1. Apague la alimentación de la unidad y espere a
que la pantalla se apague.
2. Mantenga pulsados [Status], [Main Menu] y [OK]
simultáneamente mientras suministra potencia a
la unidad (durante aproximadamente 5 s o hasta
que se oiga un clic y el ventilador arranque).
Los ajustes de parámetros predeterminados de fábrica se
restablecen durante el arranque. La puesta en marcha
puede llevar algo más de tiempo de lo normal.
5 5
La inicialización manual no reinicia la siguiente información
del convertidor de frecuencia:
Parámetro 15-00 Horas de funcionamiento.
•
Parámetro 15-03 Arranques.
•
Parámetro 15-04 Sobretemperat.
•
Parámetro 15-05 Sobretensión.
•
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 33
Page 38

130BB710.10
AlarmON
Bus MS NS1 NS2
Warning
Mantenimiento, diagnóstico ...
VLT® Decentral Drive FCD 302
6 Mantenimiento, diagnóstico y resolución de problemas
6
6.1 Introducción
Este capítulo incluye:
Pautas de mantenimiento y servicio.
•
Mensajes de estado.
•
Advertencias y alarmas.
•
Localización y resolución de problemas básicos.
•
6.2 Mantenimiento y servicio
En condiciones de funcionamiento y con perles de carga
normales, el convertidor de frecuencia no necesita
mantenimiento durante su vida útil. Deberán examinarse
los convertidores de frecuencia a intervalos periódicos,
según las condiciones de funcionamiento, para evitar
averías, riesgos o daños. Sustituya las piezas desgastadas o
dañadas por piezas de repuesto originales o piezas
estándar. Para necesidades de mantenimiento y asistencia,
póngase en contacto con el proveedor local de Danfoss.
ADVERTENCIA
ARRANQUE ACCIDENTAL
Cuando el convertidor de frecuencia se conecta a una
red de CA, a un suministro de CC o a una carga
compartida, el motor puede arrancar en cualquier
momento. Un arranque accidental durante la programación, el mantenimiento o los trabajos de reparación
puede causar la muerte, lesiones graves o daños
materiales. El motor puede arrancar mediante un
conmutador externo, una orden de eldbus, una señal
de referencia de entrada desde el LCP o el LOP, por
funcionamiento remoto mediante el Software de
conguración MCT 10 o por la eliminación de una
condición de fallo.
Para evitar un arranque accidental del motor:
Pulse [O/Reset] en el LCP antes de programar
•
cualquier parámetro.
Desconecte el convertidor de frecuencia de la
•
alimentación.
Debe cablear y montar completamente el
•
convertidor de frecuencia, el motor y cualquier
equipo accionado antes de conectar el
convertidor de frecuencia a la red de CA, al
suministro de CC o a una carga compartida.
6.2.1 Limpieza
El alojamiento (IP66 / NEMA tipo 4x interiores) ofrece
protección contra la suciedad y la entrada de agua. El
alojamiento es adecuado para métodos de limpieza y
disolventes empleados en instalaciones de alimentos y
bebidas. Utilice la concentración de disolvente
recomendada por el fabricante. Evite la limpieza con agua
caliente a mucha presión y a distancias cortas o durante
un periodo prolongado: podría deteriorar las juntas y las
marcas.
No deseche equipos que contienen
componentes eléctricos junto con los
desperdicios domésticos.
Deben recogerse de forma selectiva según
la legislación local vigente.
6.3 LED frontales
El estado real de la unidad puede leerse mediante 6 LED.
El signicado de cada LED se describe en la Tabla 6.1.
Ilustración 6.1 LED frontales
Nombre Color Estado Indicación
ON Verde Activado El convertidor de frecuencia
recibe potencia de la tensión
de red o de un suministro
externo de 24 V.
DesactivadoNo recibe potencia de la
tensión de red ni del
suministro externo de 24 V.
Advertencia
Alarm Rojo Parpadeo Hay una alarma presente.
Amarillo Activado Parpadeo mientras hay una
situación de advertencia
presente
DesactivadoNinguna advertencia
presente
DesactivadoNinguna alarma presente
34 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 39
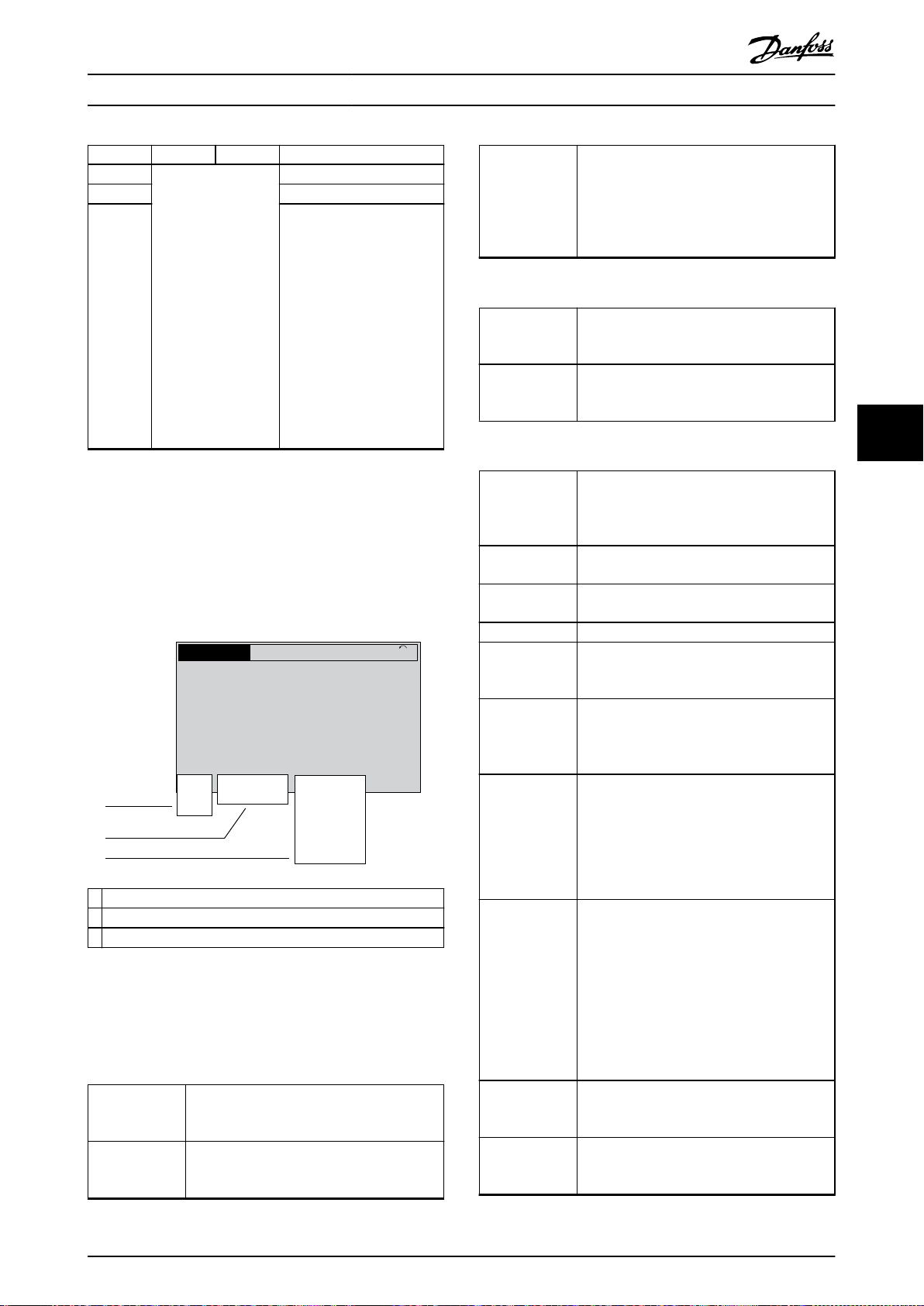
Status
799RPM 7.83A 36.4kW
0.000
53.2%
1(1)
Auto
Hand
O
Remote
Local
Ramping
Stop
Running
Jogging
.
.
.
Stand-by
130BB037.11
1
2
3
Mantenimiento, diagnóstico ... Guía de funcionamiento
Nombre Color Estado Indicación
Bus MS Solo es relevante si
Bus NS1 Estado 1 de la red del bus
Bus NS2 Estado 2 de la red del bus
Tabla 6.1 Estado de LED
hay un eldbus
opcional. Consulte el
Manual de funciona-
miento del VLT
AutomationDrive
FC 302 PROFIBUS
Converter, la Guía de
instalación de VLT
Ethernet/IP MCA 121 y
la Guía de instalación
de VLT® PROFINET
MCA 120 para obtener
información más
detallada.
®
Estado del módulo del bus
®
6.4 Mensajes de estado
Cuando el convertidor de frecuencia está en modo Estado,
los mensajes de estado se generan automáticamente y
aparecen en la línea inferior de la pantalla (consulte la
Ilustración 6.2).
1 Modo de funcionamiento (consulte la Tabla 6.2)
2 Origen de referencia (consulte Tabla 6.3)
3 Estado de funcionamiento (consulte Tabla 6.4)
Ilustración 6.2 Pantalla de estado
De la Tabla 6.2 a la Tabla 6.4 se describen los mensajes de
estado indicados.
Desactivado El convertidor de frecuencia no reacciona ante
Auto On El convertidor de frecuencia puede controlarse
ninguna señal de control hasta que se pulsa
[Auto On] (Automático) o [Hand On] (Manual).
mediante terminales de control o mediante
comunicación serie.
Hand On Controle el convertidor de frecuencia
mediante las teclas de navegación del LCP. Las
órdenes de parada, el reinicio, el cambio de
sentido, el freno de CC y otras señales
aplicadas a los terminales de control invalidan
el control local.
Tabla 6.2 Modo de funcionamiento
Remoto La velocidad de referencia procede de señales
externas, comunicación serie o referencias
internas predeterminadas.
Local El convertidor de frecuencia usa valores de
referencia o de control [Hand On] desde el
LCP.
Tabla 6.3 Origen de referencia
Freno de CA [2] Se ha seleccionado Frenado de CA en el
parámetro 2-10 Función de freno. El freno de
CA sobremagnetiza el motor para conseguir
una ralentización controlada.
Fin. AMA OK La función AMA se ha realizado correc-
tamente.
AMA listo AMA está listo para arrancar. Pulse [Hand On]
para arrancar.
AMA en func. El proceso AMA está en marcha.
Frenado El chopper de frenado está en funcionamiento.
La energía regenerativa es absorbida por la
resistencia de frenado.
Frenado máx. El chopper de frenado está en funcionamiento.
Se ha alcanzado el límite de potencia para la
resistencia de frenado denido en
parámetro 2-12 Límite potencia de freno (kW).
Inercia
Decel. contr. [1] Se ha seleccionadoDeceler. controlada en
Intens. alta La intensidad de salida del convertidor de
Intens. baja La intensidad de salida del convertidor de
[2] Se ha seleccionado Inercia como función
•
para una entrada digital (grupo de
parámetros 5-1* Entradas digitales). El
terminal correspondiente no está
conectado.
Inercia activada por comunicación serie.
•
parámetro 14-10 Fallo aliment.
La tensión de red está por debajo del valor
•
ajustado en el parámetro 14-11 Avería de
tensión de red en caso de fallo de alimen-
tación.
El convertidor de frecuencia desacelera el
•
motor utilizando una rampa de deceleración controlada.
frecuencia está por encima del límite jado en
el parámetro 4-51 Advert. Intens. alta.
frecuencia está por debajo del límite jado en
parámetro 4-52 Advert. Veloc. baja.
6
6
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 35
Page 40

Mantenimiento, diagnóstico ...
VLT® Decentral Drive FCD 302
6
CC mantenida [1] Se ha seleccionado CC mantenida en el
parámetro 1-80 Función de parada, y hay una
orden de parada activa. El motor se mantiene
por una corriente de CC jada en
parámetro 2-00 Intensidad CC mantenida/
precalent.
Parada CC El motor es mantenido con una corriente de
CC (parámetro 2-01 Intens. freno CC) durante
un tiempo especicado
(parámetro 2-02 Tiempo de frenado CC).
La velocidad de conexión del freno de CC
•
se alcanza en el parámetro 2-03 Velocidad
activación freno CC [RPM] y se activa una
orden de parada.
[5] Se ha seleccionado Freno CC como
•
función para una entrada digital (grupo de
parámetros 5-1* Entradas digitales). El
terminal correspondiente no está activo.
El freno de CC se activa a través de la
•
comunicación serie.
Realim. alta La suma de todas las realimentaciones activas
está por encima del límite de realimentación
jado en parámetro 4-57 Advertencia realimen-
tación alta.
Realim. baja La suma de todas las realimentaciones activas
está por debajo del límite de realimentación
jado en parámetro 4-56 Advertencia realimen-
tación baja.
Mant. salida La referencia remota está activa, lo que
mantiene la velocidad actual.
[20] Se ha seleccionado Mantener salida
•
como función para una entrada digital
(grupo de parámetros 5-1* Entradas
digitales). El terminal correspondiente está
activo. El control de velocidad solo es
posible mediante las opciones de terminal
[21] Aceleración y [22] Deceleración.
La rampa mantenida se activa a través de
•
la comunicación serie.
Solicitud de
mantener salida
Mantener
referencia
Solicitud de
velocidad ja
Se ha emitido una orden de mantener salida,
pero el motor permanece parado hasta que se
recibe una señal de permiso de arranque.
[19] Se ha seleccionado Mantener referencia
como función para una entrada digital (grupo
de parámetros 5-1* Entradas digitales). El
terminal correspondiente está activo. El
convertidor de frecuencia guarda la referencia
actual. Ahora, el cambio de la referencia solo
es posible a través de las opciones de terminal
[21] Aceleración y [22] Deceleración.
Se ha emitido una orden de velocidad ja,
pero el motor permanece parado hasta que se
recibe una señal de permiso de arranque a
través de una entrada digital.
Velocidad ja El motor está funcionando como se programó
en parámetro 3-19 Velocidad ja [RPM].
[14] Se ha seleccionado Velocidad ja como
•
función para una entrada digital (grupo de
parámetros 5-1* Entradas digitales). El
terminal correspondiente (por ejemplo, el
terminal 29) está activo.
La función Velocidad ja se activa a través
•
de la comunicación serie.
La función Velocidad ja se seleccionó
•
como reacción para una función de control
(por ejemplo, para la función Sin señal). La
función de control está activa.
Compr. motor En el parámetro 1-80 Función de parada, se
selecciona [2] Compr. motor. Está activa una
orden de parada. Para garantizar que haya un
motor conectado al convertidor de frecuencia,
se aplica al motor una corriente de prueba
permanente.
Ctrl sobrtens Se ha activado el control de sobretensión en
el parámetro 2-17 Control de sobretensión, [2]
Activado. El motor conectado alimenta al
convertidor de frecuencia con energía regene-
rativa. El control de sobretensión ajusta la
relación V/Hz para hacer funcionar el motor en
modo controlado y evitar que el convertidor
de frecuencia se desconecte.
Apag. un. pot. (Solo para convertidores de frecuencia que
tengan instalado un suministro externo de 24
V).
Se ha cortado la fuente de alimentación de
red al convertidor de frecuencia y la tarjeta de
control se alimenta con la fuente externa de
24 V.
Modo protect. El modo de protección está activo. La unidad
detectó un estado grave (una sobreintensidad
o una sobretensión).
Para impedir la desconexión, la frecuencia
•
de conmutación se reduce a 4 kHz.
Si es posible, el modo de protección
•
naliza tras aproximadamente 10 s.
El modo de protección puede restringirse
•
en parámetro 14-26 Ret. de desc. en fallo del
convert.
Parada rápida El motor desacelera cuando se utiliza
parámetro 3-81 Tiempo rampa parada rápida.
[4] Se ha seleccionado Parada rápida como
•
función para una entrada digital (grupo de
parámetros 5-1* Entradas digitales). El
terminal correspondiente no está activo.
La función de parada rápida se ha activado
•
a través de la comunicación serie.
36 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 41

Mantenimiento, diagnóstico ... Guía de funcionamiento
En rampa El motor acelera/desacelera utilizando la
rampa de aceleración/deceleración activa.
Todavía no se ha alcanzado la referencia, un
valor límite o una parada.
Ref. alta La suma de todas las referencias activas está
por encima del límite de referencia jado en
parámetro 4-55 Advertencia referencia alta.
Ref. baja La suma de todas las referencias activas está
por debajo del límite de referencia jado en
parámetro 4-54 Advertencia referencia baja.
Func. en ref. El convertidor de frecuencia funciona en el
intervalo de referencias. El valor de realimen-
tación coincide con el valor de consigna.
Solicitud de
ejecución
En func. El convertidor de frecuencia arranca el motor.
Modo reposo La función de ahorro de energía está activada.
Velocidad alta La velocidad del motor está por encima del
Velocidad baja La velocidad del motor está por debajo del
En espera En modo automático, el convertidor de
Retardo arr. En parámetro 1-71 Retardo arr. se ajustó un
Arr. NOR/INV. [12] Act. arranque adelante y [13] Act. arranque
Parada El convertidor de frecuencia ha recibido una
Desconexión Ha tenido lugar una alarma y el motor se ha
Se ha emitido una orden de arranque, pero el
motor permanece parado hasta que reciba
una señal de permiso de arranque a través de
una entrada digital.
El motor está parado, pero volverá a arrancar
automáticamente cuando sea necesario.
valor jado en parámetro 4-53 Advert. Veloc.
alta.
valor jado en parámetro 4-52 Advert. Veloc.
baja.
frecuencia arranca el motor con una señal de
arranque desde una entrada digital o
mediante comunicación serie.
tiempo de arranque retardado. Se ha activado
una orden de arranque y el motor arranca
cuando naliza el tiempo de retardo de
arranque.
inverso se han seleccionado como opciones
para dos entradas digitales distintas (grupo de
parámetros 5-1* Entradas digitales). El motor
arranca hacia adelante o en sentido inverso en
función del terminal que se active.
orden de parada desde el LCP, una entrada
digital o mediante comunicación serie.
parado. Una vez que se ha solucionado la
causa de la alarma, el convertidor de
frecuencia puede reiniciarse manualmente
pulsando [Reset] o remotamente a través de
los terminales de control o comunicación
serie.
Bloqueo por
alarma
Tabla 6.4 Estado de funcionamiento
Se ha emitido una alarma y el motor se ha
parado. Cuando se solucione la causa de la
alarma, conecte de nuevo la potencia al
convertidor de frecuencia. El convertidor de
frecuencia puede reiniciarse manualmente
pulsando [Reset] o remotamente mediante los
terminales de control o comunicación serie.
AVISO!
En modo automático / remoto, el convertidor de
frecuencia necesita comandos externos para ejecutar
funciones.
6.5 Tipos de advertencias y alarmas
Advert.
Se emite una advertencia cuando un estado de alarma es
inminente o cuando se da una condición de funcionamiento anormal que pueda conllevar una alarma en el
convertidor de frecuencia. Una advertencia se elimina por
sí sola cuando desaparece la causa.
Alarmas
Una alarma indica un fallo que requiere de atención
inmediata. Dicho fallo siempre genera una desconexión o
un bloqueo por alarma. Reinicie el sistema tras una alarma.
Desconexión
Una alarma se emite cuando el convertidor de frecuencia
se desconecta, es decir, cuando este suspende su funcionamiento para evitar daños en el convertidor de frecuencia o
en el sistema. El motor se pone en punto muerto hasta
que se para por inercia. La lógica del convertidor de
frecuencia continúa funcionando y monitorizando el
estado del convertidor de frecuencia. Una vez solucionada
la causa del fallo, puede reiniciarse el convertidor de
frecuencia. Entonces está listo otra vez para su funcionamiento.
Reinicio del convertidor de frecuencia tras una
desconexión / un bloqueo por alarma.
Una desconexión puede reiniciarse de 4 modos:
Pulse [Reset] en el LCP.
•
Con una orden de entrada digital de reinicio.
•
Con una orden de entrada de reinicio de comuni-
•
cación en serie.
Con un reinicio automático.
•
Bloqueo por alarma
Se conecta de nuevo la alimentación de entrada. El motor
se pone en punto muerto hasta que se para por inercia. El
convertidor de frecuencia continúa monitorizando el
estado del convertidor de frecuencia. Desconecte la
alimentación de entrada del convertidor de frecuencia,
corrija la causa del fallo y reinicie el convertidor de
frecuencia.
6
6
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 37
Page 42

130BP086.12
Status
0.0Hz 0.000kW 0.00A
0.0Hz
0
Earth Fault [A14]
Auto Remote Trip
1(1)
Back
Cancel
Info
OK
On
Alarm
Warn.
130BB467.11
Mantenimiento, diagnóstico ...
VLT® Decentral Drive FCD 302
6
Pantallas de advertencias y alarmas
Se muestra una advertencia en el LCP junto con
•
el número de advertencia.
Una alarma parpadea junto con el número de
•
alarma.
Ilustración 6.3 Ejemplo de alarma
Además del texto y el código de alarma en el LCP, hay tres
luces indicadoras de estado.
Luz indicadora de
advertencia
Advertencia On O
Alarm O On (parpadeando)
Bloqueo por
alarma
Ilustración 6.4 Luces indicadoras del estado
On On (parpadeando)
Luz indicadora de
alarma
6.6 Lista de Advertencias y Alarmas
La información sobre advertencias y alarmas que se incluye
a continuación dene cada situación de advertencia o
alarma, indica la causa probable de dicha situación y
explica con detalle la correspondiente solución o el
procedimiento de resolución de problemas.
ADVERTENCIA 1, 10 V bajo
La tensión de la tarjeta de control es inferior a 10 V desde
el terminal 50.
Elimine la carga del terminal 50, ya que la fuente de
alimentación de 10 V está sobrecargada. Máximo de 15 mA
o mínimo de 590 Ω.
Esta situación puede deberse a un cortocircuito en un
potenciómetro conectado o a un cableado incorrecto del
potenciómetro.
Resolución de problemas
Retire el cableado del terminal 50. Si la
•
advertencia se borra, el problema es del
cableado. Si la advertencia no se borra, sustituya
la tarjeta de control.
ADVERTENCIA/ALARMA 2, Error cero activo
Esta advertencia o alarma solo aparece si ha sido
programada en el parámetro 6-01 Función Cero Activo. La
señal de una de las entradas analógicas es inferior al 50 %
del valor mínimo programado para esa entrada. Esta
situación puede deberse a un cable roto o a una avería del
dispositivo que envía la señal.
Resolución de problemas
Compruebe las conexiones de todos los
•
terminales de alimentación analógica.
- Terminales de tarjeta de control 53 y 54
para señales, terminal 55 común.
-
VLT® General Purpose I/O MCB 101:
terminales 11 y 12 para señales; terminal
10 común.
-
VLT® Analog I/O Option MCB 109:
terminales 1, 3 y 5 para señales;
terminales 2, 4 y 6 comunes.
Compruebe que la programación del convertidor
•
de frecuencia y los ajustes del conmutador
concuerdan con el tipo de señal analógica.
Realice una prueba de señales en el terminal de
•
entrada.
38 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
ADVERTENCIA/ALARMA 3, Sin motor
No se ha conectado ningún motor a la salida del
convertidor de frecuencia.
Page 43

Mantenimiento, diagnóstico ... Guía de funcionamiento
ADVERTENCIA/ALARMA 4, Pérdida de fase de alim.
Falta una fase en el lado de la fuente de alimentación, o
bien el desequilibrio de tensión de red es demasiado alto.
Este mensaje también aparecerá si se produce una avería
en el recticador de entrada. Las opciones se programan
en parámetro 14-12 Función desequil. alimentación.
Resolución de problemas
Compruebe la tensión de alimentación y las
•
corrientes de alimentación del convertidor de
frecuencia.
ADVERTENCIA 5, Alta tensión de enlace CC
La tensión del enlace de CC es superior al límite de
advertencia de alta tensión. El límite depende de la clasi-
cación de tensión del convertidor de frecuencia. La unidad
sigue activa.
ADVERTENCIA 6, Tensión de CC baja
La tensión del enlace de CC es inferior al límite de
advertencia de tensión baja. El límite depende de la clasi-
cación de tensión del convertidor de frecuencia. La unidad
sigue activa.
ADVERTENCIA/ALARMA 7, Sobretensión CC
Si la tensión del enlace de CC supera el límite, el
convertidor de frecuencia se desconecta al cabo de un
rato.
Resolución de problemas
Conecte una resistencia de frenado.
•
Aumente el tiempo de rampa.
•
Cambie el tipo de rampa.
•
Active las funciones del parámetro 2-10 Función
•
de freno.
Incremente el parámetro 14-26 Ret. de desc. en
•
fallo del convert.
Si la alarma/advertencia se produce durante una
•
caída de tensión, utilice una energía regenerativa
(parámetro 14-10 Fallo aliment.).
ADVERTENCIA/ALARMA 8, Baja tensión CC
Si la tensión del enlace de CC cae por debajo del límite de
baja tensión, el convertidor de frecuencia comprobará si la
fuente de alimentación de seguridad de 24 V CC está
conectada. Si no se ha conectado ninguna fuente de
alimentación externa de 24 V CC, el convertidor de
frecuencia se desconectará transcurrido un retardo de
tiempo determinado. El retardo de tiempo en cuestión
depende del tamaño de la unidad.
Resolución de problemas
Compruebe si la tensión de alimentación coincide
•
con la del convertidor de frecuencia.
Lleve a cabo una prueba de tensión de entrada.
•
Realice una prueba del circuito de carga suave.
•
ADVERTENCIA/ALARMA 9, Sobrecar. inv.
El convertidor de frecuencia ha funcionado con una
sobrecarga superior al 100 % durante demasiado tiempo y
va a desconectarse. El contador para la protección termoelectrónica del inversor emite una advertencia al 98 % y se
desconecta al 100 % con una alarma. El convertidor de
frecuencia no se puede reiniciar hasta que el contador esté
por debajo del 90 %.
Resolución de problemas
Compare la intensidad de salida mostrada en el
•
LCP con la corriente nominal del convertidor de
frecuencia.
Compare la intensidad de salida mostrada en el
•
LCP con la intensidad del motor medida.
Visualice la carga térmica del convertidor de
•
frecuencia en el LCP y controle el valor. Al
funcionar por encima de la intensidad nominal
continua intensidad nominal del convertidor de
frecuencia, el contador aumenta. Al funcionar por
debajo de la intensidad nominal continua del
convertidor de frecuencia, el contador debería
disminuir.
ADVERTENCIA/ALARMA 10, Motor overload temperature
La protección termoelectrónica (ETR) indica que el motor
está demasiado caliente. Seleccione si el convertidor de
frecuencia debe emitir una advertencia o una alarma
cuando el contador sea >90 % si el
parámetro 1-90 Protección térmica motor se ajusta en
opciones de advertencia, o si el convertidor de frecuencia
se desconecta cuando el contador alcanza el 100 % si el
parámetro 1-90 Protección térmica motor está ajustado en
opciones de desconexión. Este fallo se produce cuando el
motor funciona con una sobrecarga superior al 100 %
durante demasiado tiempo.
Resolución de problemas
Compruebe si el motor se está sobrecalentando.
•
Compruebe si el motor está sobrecargado
•
mecánicamente.
Compruebe que la intensidad del motor
•
congurada en parámetro 1-24 Intensidad motor
esté ajustada correctamente.
Asegúrese de que los datos del motor en los
•
parámetros 1-20 a 1-25 estén ajustados correctamente.
Si se está utilizando un ventilador externo,
•
compruebe que está seleccionado en el
parámetro 1-91 Vent. externo motor.
La activación del AMA en el
•
parámetro 1-29 Adaptación automática del motor
(AMA) ajusta el convertidor de frecuencia con
respecto al motor con mayor precisión y reduce
la carga térmica.
6
6
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 39
Page 44

Mantenimiento, diagnóstico ...
VLT® Decentral Drive FCD 302
6
ADVERTENCIA/ALARMA 11, Sobretemp. del termistor del
motor
Compruebe si el termistor está desconectado. Seleccione si
el convertidor de frecuencia emite una advertencia o una
alarma en el parámetro 1-90 Protección térmica motor.
Resolución de problemas
Compruebe si el motor se está sobrecalentando.
•
Compruebe si el motor está sobrecargado
•
mecánicamente.
Cuando utilice el terminal 53 o 54, compruebe
•
que el termistor está bien conectado entre el
terminal 53 o 54 (entrada de tensión analógica) y
el terminal 50 (fuente de alimentación de +10 V)
y que el conmutador del terminal 53 o 54 está
congurado para tensión. Compruebe que el
parámetro 1-93 Fuente de termistor selecciona el
terminal 53 o 54.
Cuando se utilicen los terminales 18, 19, 31, 32 o
•
33 (entradas digitales), compruebe que el
termistor esté bien conectado entre el terminal
de entrada digital utilizado (solo entrada digital
PNP) y el terminal 50. Seleccione el terminal que
se usará en el parámetro 1-93 Fuente de termistor.
ADVERTENCIA/ALARMA 12, Límite de par
El par es más elevado que el valor en el
parámetro 4-16 Modo motor límite de par o en el
parámetro 4-17 Modo generador límite de par. El
Parámetro 14-25 Retardo descon. con lím. de par puede
cambiar esta advertencia, de forma que en vez de ser solo
una advertencia sea una advertencia seguida de una
alarma.
Resolución de problemas
Si el límite de par del motor se supera durante
•
una aceleración de rampa, amplíe el tiempo de
aceleración de rampa.
Si el límite de par del generador se supera
•
durante una deceleración de rampa, amplíe el
tiempo de deceleración de rampa.
Si se alcanza el límite de par durante el funciona-
•
miento, amplíe dicho límite. Asegúrese de que el
sistema puede funcionar de manera segura con
un par mayor.
Compruebe la aplicación para asegurarse de que
•
no haya una corriente excesiva en el motor.
ADVERTENCIA/ALARMA 13, Sobrecorriente
Se ha sobrepasado el límite de intensidad máxima del
inversor (aproximadamente, el 200 % de la corriente
nominal). La advertencia dura unos 1,5 s y entonces el
convertidor de frecuencia se desconecta y emite una
alarma. Este fallo puede deberse a una carga brusca o una
aceleración rápida con cargas de alta inercia. Si se acelera
de forma rápida durante la rampa, el fallo también puede
aparecer después de la energía regenerativa.
Si se selecciona el control ampliado de freno mecánico, es
posible reiniciar la desconexión externamente.
Resolución de problemas
Desconecte la alimentación y compruebe si se
•
puede girar el eje del motor.
Compruebe que el tamaño del motor coincide
•
con el convertidor de frecuencia.
Compruebe que los datos del motor son
•
correctos en los parámetros 1-20 a 1-25.
ALARMA 14, Earth (ground) fault
Hay corriente procedente de la fase de salida a tierra, ya
sea en el cable entre el convertidor de frecuencia y el
motor o bien en el propio motor. Los transductores de
corriente detectan el fallo a tierra al medir la corriente
saliente del convertidor de frecuencia y la corriente
entrante en el convertidor de frecuencia desde el motor.
Se emite un fallo a tierra, si el desvío entre las dos
corrientes es demasiado grande (la corriente saliente del
convertidor de frecuencia deberá ser igual a la corriente
entrante).
Resolución de problemas
Desconecte la alimentación del convertidor de
•
frecuencia y solucione el fallo a tierra.
Compruebe que no haya fallos a tierra en el
•
motor midiendo la resistencia de conexión a
tierra de los cables de motor y el motor con un
megaohmímetro.
Reinicie cualquier posible compensación
•
individual en los tres transductores de corriente
del convertidor de frecuencia. Realice la inicialización manual o ejecute un AMA completo. Este
método resulta más pertinente tras modicar la
tarjeta de potencia.
ALARMA 15, Hardware mismatch
Una de las opciones instaladas no puede funcionar con el
hardware o el software de la tarjeta de control actual.
Anote el valor de los siguientes parámetros y póngase en
contacto con Danfoss.
Parámetro 15-40 Tipo FC.
•
Parámetro 15-41 Sección de potencia.
•
Parámetro 15-42 Tensión.
•
Parámetro 15-43 Versión de software.
•
Parámetro 15-45 Cadena de código.
•
Parámetro 15-49 Tarjeta control id SW.
•
Parámetro 15-50 Tarjeta potencia id SW.
•
Parámetro 15-60 Opción instalada.
•
Parámetro 15-61 Versión SW opción (por cada
•
ranura de opción).
40 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 45

Mantenimiento, diagnóstico ... Guía de funcionamiento
ALARMA 16, Cortocircuito
Hay un cortocircuito en el motor o en su cableado.
Resolución de problemas
Desconecte la alimentación del convertidor de
•
frecuencia y repare el cortocircuito.
ADVERTENCIA
TENSIÓN ALTA
Los convertidores de frecuencia contienen tensión alta
cuando están conectados a una entrada de red de CA, a
un suministro de CC o a una carga compartida. Si la
instalación, la puesta en marcha y el mantenimiento del
convertidor de frecuencia son realizados por personal no
cualicado, pueden causarse lesiones graves o incluso la
muerte.
Desconecte la alimentación eléctrica antes de
•
continuar.
ADVERTENCIA/ALARMA 17, Cód. ctrl TO
No hay comunicación con el convertidor de frecuencia.
La advertencia solo se activará si el parámetro 8-04 Función
tiempo límite cód. ctrl. NO está en [0] No.
Si el parámetro 8-04 Función tiempo límite cód. ctrl. se ajusta
como [5] Parada y desconexión, aparecerá una advertencia
y el convertidor de frecuencia se desacelerará hasta
desconectarse y, a continuación, emitirá una alarma.
Resolución de problemas
Compruebe las conexiones del cable de comuni-
•
cación serie.
Incremente el parámetro 8-03 Valor de tiempo
•
límite cód. ctrl.
Compruebe el funcionamiento del equipo de
•
comunicaciones.
Compruebe que la instalación se haya realizado
•
correctamente en cuanto a CEM.
ADVERTENCIA/ALARMA 20, Error entrada temp.
El sensor de temperatura no está conectado.
ADVERTENCIA/ALARMA 21, Error de par.
El parámetro está fuera de intervalo. El número de
parámetro se muestra en el display.
Resolución de problemas
Ajuste el parámetro afectado a un valor válido.
•
ADVERTENCIA/ALARMA 22, Hoist mechanical brake
El valor de esta advertencia/alarma muestra el tipo de
advertencia/alarma.
0 = El par de referencia no se ha alcanzado antes de
nalizar el tiempo límite (parámetro 2-27 Tiempo de rampa
de par).
1 = No se ha recibido la realimentación de freno esperada
antes de concluir el tiempo límite (parámetro 2-23 Activar
retardo de freno, parámetro 2-25 Tiempo liberación de freno).
ADVERTENCIA 23, Internal fan fault
La función de advertencia del ventilador es una protección
que comprueba si el ventilador está funcionando o
montado. La advertencia del ventilador puede desactivarse
en parámetro 14-53 Monitor del ventilador ([0] Desactivado).
En el caso de convertidores de frecuencia que incluyen
ventiladores de CC, hay un sensor de realimentación
montado en el ventilador. Esta alarma aparece cuando el
ventilador recibe la orden de funcionar y no hay realimentación del sensor. En los convertidores de frecuencia con
ventiladores de CA, se supervisa la tensión dirigida al
ventilador.
Resolución de problemas
Compruebe que el ventilador funciona correc-
•
tamente.
Apague y vuelva a encender el convertidor de
•
frecuencia y compruebe que el ventilador se
activa al arrancar.
Compruebe los sensores de la tarjeta de control.
•
ADVERTENCIA 24, External fan fault
La función de advertencia del ventilador es una protección
que comprueba si el ventilador está funcionando o
montado. La advertencia del ventilador puede desactivarse
en parámetro 14-53 Monitor del ventilador ([0] Desactivado).
En el caso de convertidores de frecuencia que incluyen
ventiladores de CC, hay un sensor de realimentación
montado en el ventilador. Esta alarma aparece cuando el
ventilador recibe la orden de funcionar y no hay realimentación del sensor. En los convertidores de frecuencia con
ventiladores de CA, se supervisa la tensión dirigida al
ventilador.
Resolución de problemas
Compruebe que el ventilador funciona correc-
•
tamente.
Apague y vuelva a encender el convertidor de
•
frecuencia y compruebe que el ventilador se
activa al arrancar.
Compruebe los sensores del disipador.
•
ADVERTENCIA 25, Resist. freno cortocircuitada
La resistencia de frenado se controla durante el funcionamiento. Si se produce un cortocircuito, la función de freno
se desactiva y aparece la advertencia. El convertidor de
frecuencia sigue estando operativo, pero sin la función de
freno.
Resolución de problemas
Desconecte la alimentación del convertidor de
•
frecuencia y sustituya la resistencia de frenado
(consulte el parámetro 2-15 Comprobación freno).
6
6
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 41
Page 46

Mantenimiento, diagnóstico ...
VLT® Decentral Drive FCD 302
6
ADVERTENCIA/ALARMA 26, Lím. potenc. resist. freno
La potencia transmitida a la resistencia de frenado se
calcula como un valor medio durante los últimos 120 s de
tiempo de funcionamiento. El cálculo se basa en la tensión
del enlace de CC y el valor de la resistencia de frenado
congurado en parámetro 2-16 Intensidad máx. de frenado
de CA. La advertencia se activa cuando la potencia de
frenado disipada sea superior al 90 % de la potencia de
resistencia de frenado. Si se ha seleccionado la opción [2]
Desconexión en parámetro 2-13 Ctrol. Potencia freno, el
convertidor de frecuencia se desconectará cuando la
potencia de frenado disipada alcance el 100 %.
ADVERTENCIA/ALARMA 27, Fallo chopper freno
El transistor de freno se supervisa durante el funcionamiento y, si se produce un cortocircuito, se desactiva la
función de freno y aparece una advertencia. El convertidor
de frecuencia puede seguir funcionando, pero como se ha
cortocircuitado el transistor de freno, se transmite una
energía signicativa a la resistencia de frenado, aunque
esté desactivada.
Resolución de problemas
Desconecte la alimentación del convertidor de
•
frecuencia y retire la resistencia de frenado.
ADVERTENCIA/ALARMA 28, Brake check failed
La resistencia de frenado no está conectada o no funciona.
Resolución de problemas
Compruebe parámetro 2-15 Comprobación freno.
•
ALARMA 29, Heat Sink temp
Se ha superado la temperatura máxima del disipador. El
fallo de temperatura no se reinicia hasta que la
temperatura se encuentre por debajo de la temperatura
del disipador especicada. Los puntos de desconexión y de
reinicio varían en función del tamaño del convertidor de
frecuencia.
Resolución de problemas
Compruebe si se dan las siguientes condiciones:
La temperatura ambiente es demasiado alta.
•
Longitud excesiva de los cables de motor.
•
Falta de espacio por encima y por debajo del
•
convertidor de frecuencia para la ventilación.
Flujo de aire bloqueado alrededor del convertidor
•
de frecuencia.
Ventilador del disipador dañado.
•
Disipador sucio
•
ALARMA 30, Falta la fase U del motor
Falta la fase U del motor entre el convertidor de frecuencia
y el motor.
ADVERTENCIA
TENSIÓN ALTA
Los convertidores de frecuencia contienen tensión alta
cuando están conectados a una entrada de red de CA, a
un suministro de CC o a una carga compartida. Si la
instalación, la puesta en marcha y el mantenimiento del
convertidor de frecuencia son realizados por personal no
cualicado, pueden causarse lesiones graves o incluso la
muerte.
Desconecte la alimentación eléctrica antes de
•
continuar.
Resolución de problemas
Desconecte la alimentación del convertidor de
•
frecuencia y compruebe la fase U del motor.
ALARMA 31, Falta la fase V del motor
Falta la fase V del motor entre el convertidor de frecuencia
y el motor.
ADVERTENCIA
TENSIÓN ALTA
Los convertidores de frecuencia contienen tensión alta
cuando están conectados a una entrada de red de CA, a
un suministro de CC o a una carga compartida. Si la
instalación, la puesta en marcha y el mantenimiento del
convertidor de frecuencia son realizados por personal no
cualicado, pueden causarse lesiones graves o incluso la
muerte.
Desconecte la alimentación eléctrica antes de
•
continuar.
Resolución de problemas
Apague la alimentación del convertidor de
•
frecuencia y compruebe la fase V del motor.
ALARMA 32, Falta la fase W del motor
Falta la fase W del motor entre el convertidor de
frecuencia y el motor.
ADVERTENCIA
TENSIÓN ALTA
Los convertidores de frecuencia contienen tensión alta
cuando están conectados a una entrada de red de CA, a
un suministro de CC o a una carga compartida. Si la
instalación, la puesta en marcha y el mantenimiento del
convertidor de frecuencia son realizados por personal no
cualicado, pueden causarse lesiones graves o incluso la
muerte.
Desconecte la alimentación eléctrica antes de
•
continuar.
Resolución de problemas
Desconecte la alimentación del convertidor de
•
frecuencia y compruebe la fase W del motor.
42 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 47

Mantenimiento, diagnóstico ... Guía de funcionamiento
ALARMA 33, Fa. entr. corri.
Se han efectuado demasiados arranques en poco tiempo.
Resolución de problemas
Deje que la unidad se enfríe hasta la temperatura
•
de funcionamiento.
ADVERTENCIA/ALARMA 34, Fallo comunic. Fieldbus
El eldbus de la tarjeta de opción de comunicación no
funciona.
ADVERTENCIA/ALARMA 35, Fallo de opción
Se recibe una alarma de opción. La alarma depende de la
opción. La causa más probable es un encendido un fallo
de comunicación.
ADVERTENCIA/ALARMA 36, Fallo aliment.
Esta advertencia/alarma solo se activa si se pierde la
tensión de alimentación al convertidor de frecuencia y si el
parámetro 14-10 Fallo aliment. no está ajustado en la
opción [0] Sin función.
Resolución de problemas
Compruebe los fusibles del convertidor de
•
frecuencia y la fuente de alimentación de red a la
unidad.
ALARMA 37, Desequil. fase
Hay un desequilibrio entre las unidades de potencia.
ALARMA 38, Fa. corr. carga
Cuando se produce un fallo interno, se muestra un número
de código denido en la Tabla 6.5.
Resolución de problemas
Apague y vuelva a encender.
•
Compruebe que la opción está bien instalada.
•
Compruebe que no falten cables o que no estén
•
ojos.
En caso necesario, póngase en contacto con su proveedor
Danfoss o con el departamento de servicio técnico. Anote
el número de código para dar los siguientes pasos para
encontrar el problema.
Número Texto
0 El puerto de comunicación serie no puede ser
inicializado. Póngase en contacto con su proveedor
de Danfoss o con el departamento de servicio
técnico de Danfoss.
256–258 Los datos de la EEPROM de potencia son
defectuosos o demasiado antiguos. Sustituya la
tarjeta de potencia.
512–519 Fallo interno Póngase en contacto con su
proveedor de Danfoss o con el departamento de
servicio técnico de Danfoss.
783 Valor de parámetro fuera de los límites mínimo/
máximo.
1024–1284 Fallo interno Póngase en contacto con su
proveedor de Danfoss o con el departamento de
servicio técnico de Danfoss.
Número Texto
1299 El software de opción de la ranura A es demasiado
antiguo.
1300 El software de opción de la ranura B es demasiado
antiguo.
1302 El software de opción de la ranura C1 es
demasiado antiguo.
1315 El software de opción de la ranura A no es
compatible o no está autorizado.
1316 El software de opción de la ranura B no es
compatible o no está autorizado.
1318 El software de opción de la ranura C1 no es
compatible o no está autorizado.
1379–2819 Fallo interno Póngase en contacto con su
proveedor de Danfoss o con el departamento de
servicio técnico de Danfoss.
1792 Reinicio de hardware del procesador de señal
digital.
1793 Los parámetros derivados del motor no se han
transferido correctamente al procesador digital de
señal.
1794 Los datos de potencia no se han transferido
correctamente durante el arranque al procesador
digital de señal.
1795 El procesador digital de señal ha recibido
demasiados telegramas SPI desconocidos. El
convertidor de frecuencia también utilizará este
código de fallo si el MCO no se enciende correctamente. Esta situación puede producirse debido a
una protección de CEM inadecuada o a una puesta
a tierra incorrecta.
1796 Error de copia RAM.
2561 Sustituya la tarjeta de control.
2820 Desbordamiento de pila del LCP.
2821 Desbordamiento del puerto de serie.
2822 Desbordamiento del puerto USB.
3072–5122 Valor de parámetro fuera de límites.
5123 Opción en ranura A: hardware incompatible con el
hardware de la placa de control.
5124 Opción en ranura B: hardware incompatible con el
hardware de la placa de control.
5125 Opción en ranura C0: hardware incompatible con
el hardware de la placa de control.
5126 Opción en ranura C1: hardware incompatible con
el hardware de la placa de control.
5376–6231 Fallo interno Póngase en contacto con su
proveedor de Danfoss o con el departamento de
servicio técnico de Danfoss.
Tabla 6.5 Códigos de fallo interno
ALARMA 39, Sensor disipad.
No hay realimentación del sensor de temperatura del
disipador.
La señal del sensor térmico del IGBT no está disponible en
la tarjeta de potencia. El problema podría estar en la
6
6
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 43
Page 48

Mantenimiento, diagnóstico ...
VLT® Decentral Drive FCD 302
6
tarjeta de potencia, en la tarjeta de accionamiento de
puerta o en el cable plano entre la tarjeta de potencia y la
tarjeta de accionamiento de puerta.
ADVERTENCIA 40, Sobrecarga de la salida digital del
terminal 27
Compruebe la carga conectada al terminal 27 o elimine la
conexión cortocircuitada. Compruebe parámetro 5-00 Modo
E/S digital y parámetro 5-01 Terminal 27 modo E/S.
ADVERTENCIA 41, Sobrecarga de la salida digital del
terminal 29
Compruebe la carga conectada al terminal 29 o elimine la
conexión cortocircuitada. Revise asimismo el
parámetro 5-00 Modo E/S digital y el
parámetro 5-02 Terminal 29 modo E/S.
ADVERTENCIA 42, Sobrecarga de la salida digital en
X30/6 o X30/7
En el caso del terminal X30/6, compruebe la carga
conectada a dicho terminal o elimine la conexión cortocircuitada. Compruebe también el parámetro 5-32 Term. X30/6
salida dig. (MCB 101) (VLT® General Purpose I/O MCB 101).
En el caso del terminal X30/7, compruebe la carga
conectada a dicho terminal o elimine la conexión cortocircuitada. Compruebe el parámetro 5-33 Term. X30/7 salida
dig. (MCB 101) (VLT® General Purpose I/O MCB 101).
ALARMA 43, Alim. ext.
La opción de relé ampliado VLT® MCB 113 se ha montado
sin suministro externo de 24 V CC. Conecte un suministro
externo de 24 V CC o
tación externa a través del parámetro 14-80 Opción sumin.
por 24 V CC ext., [0] No. Un cambio en el
parámetro 14-80 Opción sumin. por 24 V CC ext. requerirá un
ciclo de potencia.
ALARMA 45, Fallo con. tierra 2
Fallo de conexión a tierra.
Resolución de problemas
Compruebe que la conexión a tierra es correcta y
•
revise las posibles conexiones sueltas.
Compruebe que el tamaño de los cables es el
•
adecuado.
Compruebe que los cables del motor no
•
presentan cortocircuitos ni corrientes de fuga.
ALARMA 46, Alim. tarj. alim.
La fuente de alimentación de la tarjeta de potencia está
fuera del intervalo.
Hay tres fuentes de alimentación generadas por la fuente
de alimentación de modo conmutado (SMPS) de la tarjeta
de potencia:
24 V.
•
5 V.
•
±18 V.
•
Cuando se aplica un suministro externo de 24 V CC VLT
MCB 107, solo se controlan las fuentes de alimentación de
especique que no se utiliza alimen-
®
24 V y 5 V. Cuando se utiliza la tensión de red trifásica, se
controlan las tres fuentes de alimentación.
Resolución de problemas
Compruebe si la tarjeta de potencia está
•
defectuosa.
Compruebe si la tarjeta de control está
•
defectuosa.
Compruebe si la tarjeta de opción está
•
defectuosa.
Si se utiliza un suministro externo de 24 V CC,
•
compruebe que el suministro sea correcto.
ADVERTENCIA 47, Alim. baja 24 V
La fuente de alimentación de la tarjeta de potencia está
fuera del intervalo.
Hay tres fuentes de alimentación generadas por la fuente
de alimentación de modo conmutado (SMPS) de la tarjeta
de potencia:
24 V.
•
5 V.
•
±18 V.
•
Resolución de problemas
Compruebe si la tarjeta de potencia está
•
defectuosa.
ADVERTENCIA 48, Alim. baja 1.8 V
El suministro de 1,8 V CC utilizado en la tarjeta de control
está fuera de los límites admisibles. La fuente de alimentación se mide en la tarjeta de control.
Resolución de problemas
Compruebe si la tarjeta de control está
•
defectuosa.
Si hay una tarjeta de opción, compruebe si existe
•
sobretensión.
ADVERTENCIA 49, Límite de veloc.
Esta advertencia se mostrará cuando la velocidad no esté
comprendida dentro del intervalo especicado en el
parámetro 4-11 Límite bajo veloc. motor [RPM] y el
parámetro 4-13 Límite alto veloc. motor [RPM]. Cuando la
velocidad sea inferior al límite especicado en el
parámetro 1-86 Velocidad baja desconexión [RPM] (excepto
en arranque y parada), el convertidor de frecuencia se
desconecta.
ALARMA 50, Fallo de calibración AMA
Póngase en contacto con su proveedor de Danfoss o con
el departamento de servicio técnico de Danfoss.
ALARMA 51, U
Es posible que los ajustes de tensión del motor, intensidad
del motor y potencia del motor sean erróneos.
Resolución de problemas
Compruebe los ajustes en los parámetros de 1-20
•
a 1-25.
nom
e I
de la comprobación de AMA
nom
44 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 49

Mantenimiento, diagnóstico ... Guía de funcionamiento
ALARMA 52, Fa. AMA In baja
La intensidad del motor es demasiado baja.
Resolución de problemas
Compruebe los ajustes en el
•
parámetro 1-24 Intensidad motor.
ALARMA 53, Motor AMA demasiado grande
El motor es demasiado grande para que funcione el AMA.
ALARMA 54, Motor AMA demasiado pequeño
El motor es demasiado pequeño para que funcione AMA.
ALARMA 55, Parámetro del AMA fuera de rango
No se puede ejecutar el AMA porque los valores de
parámetros del motor están fuera del intervalo aceptable.
ALARMA 56, AMA interrumpido por usuario
Se interrumpe manualmente el AMA.
ALARMA 57, Fallo interno del AMA
Pruebe a reiniciar el AMA. Los reinicios repetidos pueden
recalentar el motor.
ALARMA 58, Fallo interno del AMA
Póngase en contacto con el distribuidor Danfoss.
ADVERTENCIA 59, Límite de intensidad
La corriente es superior al valor del parámetro 4-18 Límite
intensidad. Asegúrese de que los datos del motor en los
parámetros del 1-20 al 1-25 estén ajustados correctamente.
Si fuese necesario, aumente el límite de intensidad.
Asegúrese de que el sistema puede funcionar de manera
segura con un límite superior.
ADVERTENCIA 60, Parada externa
Una señal de entrada digital indica una situación de fallo
fuera del convertidor de frecuencia. Una parada externa ha
ordenado la desconexión del convertidor de frecuencia.
Elimine la situación de fallo externa. Para reanudar el
funcionamiento normal, aplique 24 V CC al terminal
programado para parada externa y reinicie el convertidor
de frecuencia.
ADVERTENCIA/ALARMA 61, Error seguim.
Error entre la velocidad calculada y la velocidad medida
desde el dispositivo de realimentación.
Resolución de problemas
Compruebe los ajustes de advertencia/alarma/
•
desactivación en el parámetro 4-30 Función de
pérdida de realim. del motor.
Ajuste el error tolerable en el parámetro 4-31 Error
•
de velocidad en realim. del motor.
Ajuste el tiempo de pérdida de realimentación
•
tolerable en el parámetro 4-32 Tiempo lím. pérdida
realim. del motor.
ADVERTENCIA 62, Output frequency at maximum limit
La frecuencia de salida ha alcanzado el valor ajustado en
parámetro 4-19 Frecuencia salida máx. Compruebe las
posibles causas en la aplicación. Es posible aumentar el
límite de la frecuencia de salida. Asegúrese de que el
sistema puede funcionar de manera segura con una
frecuencia de salida mayor. La advertencia se elimina
cuando la salida disminuye por debajo del límite máximo.
ALARMA 63, Fr. mecán. bajo
La intensidad del motor no ha sobrepasado el valor de
intensidad de liberación del freno dentro de la ventana de
tiempo de retardo de arranque.
ADVERTENCIA 64, Límite tensión
La combinación de carga y velocidad demanda una
tensión del motor superior a la tensión del enlace de CC
real.
ADVERTENCIA/ALARMA 65, Sobretemp. tarj. control
La temperatura de desconexión de la tarjeta de control es
de 85 °C (185 °F).
Resolución de problemas
Compruebe que la temperatura ambiente de
•
funcionamiento está dentro de los límites.
Compruebe que los ltros no estén obstruidos.
•
Compruebe el funcionamiento del ventilador.
•
Compruebe la tarjeta de control.
•
ADVERTENCIA 66, Heat sink temperature low
El convertidor de frecuencia está demasiado frío para
funcionar. Esta advertencia se basa en el sensor de
temperatura del módulo IGBT. Aumente la temperatura
ambiente de la unidad. También puede suministrarse una
cantidad reducida de corriente al convertidor de
frecuencia, cuando el motor se detenga, ajustando el
parámetro 2-00 Intensidad CC mantenida/precalent. al 5 % y
el parámetro 1-80 Función de parada.
ALARMA 67, Option module conguration has changed
Se han añadido o eliminado una o varias opciones desde
la última desconexión del equipo. Compruebe que el
cambio de conguración es intencionado y reinicie la
unidad.
ALARMA 68, Parada segura activada
Se ha activado Safe Torque O (STO). Para reanudar el
funcionamiento normal, aplique 24 V CC al terminal 37 y
envíe una señal de reinicio (vía bus, E/S digital o pulsando
[Reset]).
ALARMA 69, Temp. tarj.alim.
El sensor de temperatura de la tarjeta de potencia está
demasiado caliente o demasiado frío.
Resolución de problemas
Compruebe que la temperatura ambiente de
•
funcionamiento está dentro de los límites.
Compruebe que los ltros no estén obstruidos.
•
Compruebe el funcionamiento del ventilador.
•
Compruebe la tarjeta de potencia.
•
ALARMA 70, Conf. FC incor.
La tarjeta de control y la tarjeta de potencia son incompatibles. Para comprobar la compatibilidad, póngase en
contacto con el proveedor de Danfoss con el código
6
6
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 45
Page 50

Mantenimiento, diagnóstico ...
VLT® Decentral Drive FCD 302
6
descriptivo de la unidad indicado en la placa de características y las referencias de las tarjetas.
ALARMA 71, PTC 1 Par.seg.
Se ha activado la STO desde VLT® PTC Thermistor Card
MCB 112 (motor demasiado caliente). Puede reanudarse el
funcionamiento normal cuando la MCB 112 aplique de
nuevo 24 V CC al terminal 37 (cuando la temperatura del
motor descienda hasta un nivel aceptable) y cuando se
desactive la entrada digital desde la MCB 112. Cuando esto
suceda, envíe una señal de reinicio (a través de bus, E/S
digital o pulsando [Reset]).
ALARMA 72, Fallo peligroso
STO con bloqueo por alarma. Se ha producido una
combinación imprevista de órdenes de STO:
VLT® PTC Thermistor Card MCB 112 activa el
•
X44/10, pero la STO no se activa.
La MCB 112 es el único dispositivo que utiliza
•
STO (se
Alarma PTC 1 o [5] Advertencia PTC 1 del
parámetro 5-19 Terminal 37 parada segura), se
activa la STO sin que se active el X44/10.
ADVERTENCIA 73, R.aut. Par.seg.
La función STO está activada. Con el rearranque
automático activado, el motor puede arrancar cuando se
solucione el fallo.
ALARMA 74, PTC Thermistor
Alarma relativa a VLT® PTC Thermistor Card MCB 112. El
PTC no funciona.
ALARMA 75, Illegal prole sel.
No introduzca el valor del parámetro con el motor en
marcha. Detenga el motor antes de introducir el perl
MCO en el parámetro 8-10 Trama Cód. Control.
ADVERTENCIA 77, Modo de ahorro de energía
El convertidor de frecuencia está funcionando en modo de
potencia reducida (con menos del número permitido de
secciones de inversor). Esta advertencia se genera en el
ciclo de potencia cuando el convertidor de frecuencia está
congurado para funcionar con menos inversores y
permanecerá activada.
ALARMA 78, Tracking error
La diferencia entre el valor de consigna y el valor real
supera el valor indicado en el parámetro 4-35 Error de
seguimiento.
Resolución de problemas
Desactive la función o seleccione una alarma/
•
advertencia en parámetro 4-34 Func. error de
seguimiento.
Investigue la parte mecánica alrededor de la
•
carga y el motor. Compruebe las conexiones de
realimentación desde el encoder del motor hasta
el convertidor de frecuencia.
especica mediante la selección [4]
Seleccione la función de realimentación del motor
•
en parámetro 4-30 Función de pérdida de realim.
del motor.
Ajuste la banda de error de seguimiento en
•
parámetro 4-35 Error de seguimiento y
parámetro 4-37 Error de seguimiento rampa.
ALARMA 79, Illegal power section conguration
La tarjeta de escalado tiene una referencia incorrecta o no
está instalada. El conector MK102 de la tarjeta de potencia
no pudo instalarse.
ALARMA 80, Drive initialised to default value
Los parámetros se han ajustado a los ajustes predeterminados después de efectuar un reinicio manual. Para
eliminar la alarma, reinicie la unidad.
ALARMA 81, CSIV corrupt
El archivo CSIV contiene errores de sintaxis.
ALARMA 82, CSIV parameter error
CSIV no pudo iniciar un parámetro.
ALARMA 83, Illegal option combination
Las opciones montadas no son compatibles.
ALARMA 84, No safety option
La opción de seguridad fue eliminada sin realizar un
reinicio general. Conecte de nuevo la opción de seguridad.
ALARMA 88, Option detection
Se detecta un cambio en la conguración de opciones. El
Parámetro 14-89 Option Detection está ajustado a [0] Protect
Option Cong. y la conguración de opciones se ha
modicado.
Para aplicar el cambio, active las modicaciones
•
de la conguración de opciones en
parámetro 14-89 Option Detection.
De lo contrario, restablezca la conguración de
•
opciones correcta.
ADVERTENCIA 89, Mechanical brake sliding
El monitor de freno de elevación detecta una velocidad del
motor superior a 10 r/min.
ALARMA 90, Control encoder
Compruebe la conexión a la opción de resolver/encoder y,
si fuese necesario, sustituya VLT® Encoder Input MCB 102 o
VLT® Resolver Input MCB 103.
ALARMA 91, Analog input 54 wrong settings
Ajuste el conmutador S202 en posición OFF (entrada de
tensión) cuando haya un sensor KTY conectado al terminal
de entrada analógica 54.
ALARMA 99, Rotor bloqueado
El rotor está bloqueado.
46 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 51

Mantenimiento, diagnóstico ... Guía de funcionamiento
ADVERTENCIA/ALARMA 104, Mixing fan fault
El ventilador no funciona. El monitor del ventilador
comprueba que el ventilador gira cuando se conecta la
alimentación o siempre que se enciende el ventilador
mezclador. El fallo del ventilador mezclador se puede
congurar como advertencia o como desconexión de
alarma en el parámetro 14-53 Monitor del ventilador.
Resolución de problemas
Apague y vuelva a encender el convertidor de
•
frecuencia para determinar si vuelve la
advertencia/alarma.
ADVERTENCIA/ALARMA 122, Mot. rotat. unexp.
El convertidor de frecuencia ejecuta una función que
requiere que el motor esté parado; por ejemplo, CC
mantenida para motores PM.
ADVERTENCIA 163, ATEX ETR cur.lim.warning
El convertidor de frecuencia ha funcionado por encima de
la curva característica durante más de 50 s. La advertencia
se activa al 83 % y se desactiva al 65 % de la sobrecarga
térmica permitida.
ALARMA 164, ATEX ETR cur.lim.alarm
Funcionar por encima de la curva característica durante
más de
60 s en un periodo de 600 s activa la alarma y el
convertidor de frecuencia se desconecta.
ADVERTENCIA 165, ATEX ETR freq.lim.warning
El convertidor de frecuencia funciona durante más de 50 s
por debajo de la frecuencia mínima permitida
(parámetro 1-98 ATEX ETR interpol. points freq.).
ALARMA 166, ATEX ETR freq.lim.alarm
El convertidor de frecuencia ha funcionado durante más de
60 s (en un periodo de 600 s) por debajo de la frecuencia
mínima permitida (parámetro 1-98 ATEX ETR interpol. points
freq.).
ADVERTENCIA 250, Nva. pieza rec.
La alimentación o el modo interruptor de la fuente de
alimentación se han intercambiado. Restaure el código
descriptivo del convertidor de frecuencia en la EEPROM.
Seleccione el código descriptivo adecuado en el
parámetro 14-23 Ajuste de código descriptivo, según la
etiqueta del convertidor de frecuencia. No se olvide de
seleccionar «Guardar en la EEPROM» al nal.
ADVERTENCIA 251, Nvo. cód. tipo
Se sustituye la tarjeta de potencia u otros componentes y
se cambia el código descriptivo.
6
6
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 47
Page 52
ON
WARNING
ALARM
Bus MS NS2NS1
130BB800.10
ON
WARNING
ALARM
Bus MS NS2NS1
130BB799.10
Especicaciones
VLT® Decentral Drive FCD 302
7 Especicaciones
7.1 Datos eléctricos
7.1.1 Descripción general
Fuente de alimentación de red 3 × 380-480 V CA
Convertidor de frecuencia PK37 PK55 PK75 P1K1 P1K5 P2K2 P3K0
Salida de eje nominal [kW] 0,37 0,55 0,75 1,1 1,5 2,2 3,0
Salida de eje nominal [CV] 0,5 0,75 1,0 1,5 2,0 3,0 4,0
Intensidad de entrada máxima
Continua (3 × 380-440 V) [A] 1,2 1,6 2,2 2,7 3,7 5,0 6,5
Intermitente (3 × 380-440 V) [A] 1,9 2,6 3,5 4,3 5,9 8,0 10,4
Continua (3 × 441-480 V) [A] 1,0 1,4 1,9 2,7 3,1 4,3 5,7
Intermitente (3 × 441-480 V) [A] 1,6 2,2 3,0 4,3 5,0 6,9 9,1
Tamaño máximo de fusible
77
Intensidad de salida
recomendado (no UL) gG-25
Magnetotérmico integrado (unidad
grande) CTI-25M Número de referencia de Danfoss: 047B3151
Magnetotérmico recomendado
Danfoss CTI-25M (unidad pequeña y
grande). Número de referencia:
0,37 y 0,55 kW Número de referencia de Danfoss: 047B3148
0,75 y 1,1 kW Número de referencia de Danfoss: 047B3149
1,5 kW, 2,2 kW y 3 kW Número de referencia de Danfoss: 047B3151
Magnetotérmico recomendado
Danfoss CTI-45MB1) (unidad
pequeña). Número de referencia:
0,55 y 0,75 kW Número de referencia de Danfoss: 047B3160
1,1 kW Número de referencia de Danfoss: 047B3161
1,5 kW Número de referencia de Danfoss: 047B3162
2,2 kW Número de referencia de Danfoss: 047B3163
Pérdida de potencia a máxima carga
2)
[W]
Rendimiento
3)
35 42 46 58 62 88 116
0,93 0,95 0,96 0,96 0,97 0,97 0,97
Peso, unidad pequeña [kg] 9,8 (21,6 lb) –
Peso, unidad grande [kg] 13,9 (30,6 lb)
Continua (3 × 380-440 V) [A] 1,3 1,8 2,4 3,0 4,1 5,2 7,2
Intermitente (3 × 380-440 V) [A] 2,1 2,9 3,8 4,8 6,6 8,3 11,5
Continua (3 × 441-480 V) [A] 1,2 1,6 2,1 3,0 3,4 4,8 6,3
Intermitente (3 × 441-480 V) [A] 1,9 2,6 3,4 4,8 5,4 7,7 10,1
Continua kVA (400 V CA) [kVA] 0,9 1,3 1,7 2,1 2,8 3,9 5,0
Continua kVA (460 V CA) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8 5,0
Máxima dimensión del cable:
(Alimentación, motor y freno) [mm2/
AWG]
Cable sólido 6/10
Cable exible 4/12
Tabla 7.1 Salida de eje, intensidad de salida e intensidad de entrada del VLT® Decentral Drive FCD 302
1) Los magnetotérmico de tipo CTI-45MB no están disponibles para unidades de 3 kW (4 CV).
2) Se aplica para seleccionar las dimensiones de la refrigeración del convertidor de frecuencia. Si la frecuencia de conmutación es superior a los
ajustes predeterminados, las pérdidas de potencia pueden aumentar. Se incluyen los consumos de energía habituales del LCP y de la tarjeta de
control. Para conocer los datos de pérdida de potencia conforme a la norma EN 50598-2, consulte www.danfoss.com/vltenergyeciency.
3) Rendimiento medido en corriente nominal. Para conocer la clase de rendimiento energético, consulte el capétulo 7.4 Condiciones ambientales.
48 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 53

Especicaciones Guía de funcionamiento
Para conocer las pérdidas a carga parcial, consulte www.danfoss.com/vltenergyeciency.
7.2 Fuente de alimentación de red
Alimentación de red (L1, L2 y L3)
1)
Tensión de alimentación 380-480 V ±10 %
Frecuencia de alimentación 50 / 60 Hz ± 5 %
Máximo desequilibrio transitorio entre fases de red 3,0 % de la tensión de alimentación nominal
Factor de potencia real (λ) ≥0,9 nominal con carga nominal
Factor de potencia de desplazamiento (cos ϕ) Prácticamente uno (>0,98)
Conmutación en la alimentación de entrada L1, L2 y L3 (arranques) Dos veces por minuto, como máximo
1) Esta unidad es adecuada para utilizarse en un circuito capaz de proporcionar un máximo de 100 000 amperios simétricos rms,
con un máximo de 480 V.
2) Tensión de red baja / corte de red:
durante un episodio de tensión de red baja o un corte de red, el convertidor de frecuencia sigue funcionando hasta que la
tensión del enlace de CC desciende por debajo del nivel de parada mínimo, que generalmente es un 15 % inferior a la tensión de
alimentación nominal más baja del convertidor de frecuencia. No se puede esperar un arranque y un par completo con una
tensión de red inferior al 10 % por debajo de la tensión de alimentación nominal más baja del convertidor de frecuencia.
7.3 Salida del motor y datos del motor
Salida del motor (U, V y W)
Tensión de salida 0-100 % de la tensión de alimentación
Frecuencia de salida 0-590 Hz
Frecuencia de salida en modo de ujo 0-300 Hz
Conmutador en la salida Ilimitada
Tiempos de rampa 0,01-3600 s
2)
7 7
Características de par
Par de arranque (par constante) Máximo del 160 % durante 60 s
Par de arranque Máximo 180 % hasta 0,5 s
Par de sobrecarga (par constante) Máximo del 160 % durante 60 s
Par de arranque (par variable) Máximo 110 % durante 60 s
Par de sobrecarga (par variable) Máximo 110 % durante 60 s
1) Porcentaje relativo al par nominal.
7.4 Condiciones ambientales
Entorno
Clasicación de protección IP 66 /tipo 4x (interiores)
Prueba de vibración para unidades sin magnetotérmico 1,7 g RMS
Montaje de la unidad con magnetotérmico integrado en un soporte nivelado, a prueba de vibraciones y con rigidez
torsional.
Humedad relativa máxima 5-95 % (CEI 60 721-3-3; clase 3K3 [sin condensación]) durante el funcionamiento
Temperatura ambiente Máximo 40 °C (75 °F) (por promedio de 24 horas, máximo 35 °C [95 °F])
Temperatura durante el almacenamiento/transporte De –25 a +65/70 °C (de –13 a +149/158 °F)
Reducción de potencia por temperatura ambiente alta
Temperatura ambiente mínima durante el funcionamiento a escala completa 0 °C (32 °F)
Temperatura ambiente mínima con rendimiento reducido –10 °C (14 °F)
Altitud máx. sobre el nivel del mar 1000 m (3280,8 ft)
Clase de rendimiento energético
Reducción de potencia por altitud elevada
1) Determinada conforme a la norma EN 50598-2 en:
1)
IE2
1)
1)
1)
1)
1)
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 49
Page 54

Especicaciones
Carga nominal
•
90 % de la frecuencia nominal
•
Ajuste de fábrica de la frecuencia de conmutación
•
Ajuste de fábrica del patrón de conmutación
•
7.5 Especicaciones del cable
VLT® Decentral Drive FCD 302
Longitudes de cable y secciones transversales para cables de control
Longitud máxima del cable de motor, apantallado 10 m (32,8 ft)
Longitud máxima del cable de motor, no apantallado, sin cumplir la especicación sobre emisiones. 10 m (32,8 ft)
Sección transversal máxima a los terminales de control, cable rígido/exible sin manguitos en los
extremos 1,5 mm2 / 16 AWG
Sección transversal máxima a los terminales de control, cable exible con manguitos en los extremos 1,5 mm2 / 16 AWG
Sección transversal máxima a los terminales de control, cable exible con manguitos en los extremos y
abrazadera 1,5 mm2 / 16 AWG
Sección transversal mínima para los terminales de control 0,25 mm2 / 24 AWG
77
1) Para los cables de alimentación, consulte las tablas del capítulo Datos eléctricos y dimensiones de los cables en la Guía de
diseño del VLT® Decentral Drive FCD 302.
1)
7.6 Entrada/salida de control y datos de control
Entradas digitales
Entradas digitales programables 4 (6)
Número de terminal 18, 19, 271), 291), 32, 33
Lógica PNP o NPN
Nivel de tensión 0-24 V CC
Nivel de tensión, 0 lógico PNP <5 V CC
Nivel de tensión, 1 lógico PNP >10 V CC
Nivel de tensión, «0» lógico NPN
Nivel de tensión, «1» lógico NPN
Tensión máxima de entrada 28 V CC
Rango de frecuencia de pulsos 0-110 kHz
(Ciclo de trabajo) anchura de impulsos mínima 4,5 ms
Resistencia de entrada, R
Todas las entradas digitales están galvánicamente aisladas de la tensión de alimentación (PELV) y de otros terminales de tensión
alta.
1) Los terminales 27 y 29 también pueden programarse como salidas.
2)
2)
i
Aproximadamente 4 kΩ
>19 V CC
<14 V CC
1)
Terminal 37 de Safe Torque O (el terminal 37 es de lógica PNP ja)
Nivel de tensión 0-24 V CC
Nivel de tensión, 0 lógico PNP <4 V CC
Nivel de tensión, 1 lógico PNP 20 V CC
Intensidad de entrada nominal a 24 V 50 mA rms
Intensidad de entrada nominal a 20 V 60 mA rms
Capacitancia de entrada 400 nF
Entradas analógicas
N.º de entradas analógicas 2
Número de terminal 53, 54
Modos Tensión o corriente
Selección de modo Conmutador S201 y conmutador S202
Modo tensión Conmutador S201 / Conmutador S202 = OFF (U)
Nivel de tensión De –10 V a +10 V (escalable)
Resistencia de entrada, R
Tensión máxima ±20 V
50 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
i
Aproximadamente 10 kΩ
Page 55

+24V
RS485
18
37
130BD007.10
1
3
4
6
2
5
Especicaciones Guía de funcionamiento
Modo de corriente Conmutador S201 / Conmutador S202 = ON (I)
Nivel de corriente 0/4 –20 mA (escalable)
Resistencia de entrada, R
i
Aproximadamente 200 Ω
Corriente máxima 30 mA
Resolución de entradas analógicas 10 bit (signo +)
Precisión de las entradas analógicas Error máximo del 0,5 % de la escala total
Ancho de banda 100 Hz
Las entradas analógicas están galvánicamente aisladas de la tensión de alimentación (PELV) y de los demás terminales de
tensión alta.
7 7
Elemento Descripción
1 Aislamiento funcional
2 Control
3 Aislamiento PELV
4 Alimentación
5 Tensión alta
6 Motor
Ilustración 7.1 Entradas analógicas
Entradas de pulsos/encoder
Entradas de pulsos/encoder programables 2/1
Número de terminal de pulso/encoder 29, 331)/322), 33
Frecuencia máxima en los terminales 29, 32 y 33 110 kHz (en contrafase)
Frecuencia máxima en los terminales 29, 32 y 33 5 kHz (colector abierto)
Frecuencia mínima en los terminales 29, 32 y 33 4 Hz
Nivel de tensión Consulte las Entradas digitales en este apartado
Tensión máxima de entrada 28 V CC
Resistencia de entrada, R
i
Aproximadamente 4 kΩ
Precisión de la entrada de pulsos (0,1-1 kHz) Error máximo: un 0,1 % de la escala completa
Precisión de la entrada de encoder (1-110 kHz) Error máximo: 0,05 % de la escala completa
Las entradas de pulsos y encoder (terminales 29, 32 y 33) se encuentran galvánicamente aisladas de la tensión de alimentación
(PELV) y demás terminales de tensión alta.
1) Las entradas de pulsos son la 29 y la 33
2) Entradas de encoder: 32=A y 33=B
Salida analógica
Número de salidas analógicas programables 1
Número de terminal 42
Rango de intensidad en la salida analógica 0/4 a 20 mA
Carga máxima entre conexión a tierra y salida analógica inferior a 500 Ω
Precisión en la salida analógica Error máximo: un 0,5 % de la escala completa
2)
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 51
Page 56

Especicaciones
Resolución en la salida analógica 12 bits
La salida analógica está galvánicamente aislada de la tensión de alimentación (PELV) y de los demás terminales de tensión alta.
Tarjeta de control, comunicación serie RS485
Número de terminal 68 (P, TX+, RX+) y 69 (N, TX-, RX-)
N.º de terminal 61 Común para los terminales 68 y 69
El circuito de comunicación serie RS485 se encuentra separado funcionalmente de otros circuitos centrales y galvánicamente
aislado de la tensión de alimentación (PELV).
Salidas digitales
Salidas digitales / de pulsos programables 2
Número de terminal 27, 29
Nivel de tensión en la salida digital / salida de frecuencia 0–24 V
Intensidad de salida máxima (disipador o fuente) 40 mA
Carga máxima en salida de frecuencia 1 kΩ
Carga capacitiva máxima en salida de frecuencia 10 nF
Frecuencia de salida mínima en salida de frecuencia 0 Hz
Frecuencia de salida máxima en salida de frecuencia 32 kHz
77
Precisión de salida de frecuencia Error máximo: un 0,1 % de la escala completa
Resolución de salidas de frecuencia 12 bits
1) Los terminales 27 y 29 también pueden programarse como entradas.
La salida digital está galvánicamente aislada de la tensión de alimentación (PELV) y de los demás terminales de tensión alta.
Tarjeta de control, salida de 24 V CC
Número de terminal 12, 13
Tensión de salida 24 V +1, -3 V
Carga máxima 600 mA
El suministro externo de 24 V CC está galvánicamente aislado de la tensión de alimentación (PELV), aunque tiene el mismo
potencial que las entradas y salidas analógicas y digitales.
Salidas de relé
Salidas de relé programables 2
N.º de terminal del relé 01 1-3 (desconexión), 1-2 (conexión)
Máxima carga del terminal (CA-1)1) en 1-3 (NC) y 1-2 (NO) (carga resistiva) 240 V CA, 2 A
Máxima carga del terminal (CA-15)1) (carga inductiva a cosφ 0,4) 240 V CA, 0,2 A
Máxima carga del terminal (CC-1)1) en 1-2 (NO) y 1-3 (NC) (carga resistiva) 48 V CC, 1 A
Máxima carga del terminal (CC-13)1) (Carga inductiva) 24 V CC, 0,1 A
N.º de terminal del relé 02 4-6 (desconexión), 4-5 (conexión)
Máxima carga del terminal (CA-1)1) en 4-5 (NO) (Carga resistiva)
Máxima carga del terminal (CA-15 )1) en 4-5 (NO) (Carga inductiva a cosφ 0,4) 240 V CA, 0,2 A
Máxima carga del terminal (CC-1)1) en 4-5 (NO) (carga resistiva) 80 V CC, 2 A
Máxima carga del terminal (CC-13 )1) en 4-5 (NO) (carga inductiva) 24 V CC, 0,1 A
Máxima carga del terminal (CA-1)1) en 4-6 (NC) (carga resistiva) 240 V CA, 2 A
Máxima carga del terminal (CA-15)1) (carga inductiva a cosφ 0,4) 240 V CA, 0,2 A
Máxima carga del terminal (CC-1)1) en 4-6 (NO) y 4-5 (NC) (carga resistiva) 48 V CC, 1 A
Máxima carga del terminal (CC-13)1) (Carga inductiva) 24 V CC, 0,1 A
Mínima carga del terminal en 1-3 (NC), 1-2 (NO), 4-6 (NC) y 4-5 (NO) 24 V CC 10 mA, 24 V CA 20 mA
1) CEI 60947 partes 4 y 5
Los contactos del relé están galvánicamente aislados con respecto al resto del circuito con un aislamiento reforzado (PELV).
2) Categoría de sobretensión II
3) Aplicaciones UL 300 V CA 2 A
VLT® Decentral Drive FCD 302
2)3)
Sobretensión cat. II 240 V CA, 2 A
1)
52 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 57

Especicaciones Guía de funcionamiento
Tarjeta de control, salida de 10 V CC
Número de terminal ±50
Tensión de salida 10,5 V ±0,5 V
Carga máxima 15 mA
El suministro de 10 V CC está galvánicamente aislado de la tensión de alimentación (PELV) y de los demás terminales de tensión
alta.
Características de control
Resolución de frecuencia de salida a 0-590 Hz ±0,003 Hz
Precisión repetida del arranque / de la parada precisos (terminales 18 y 19) ≤±0,1 ms
Tiempo de respuesta del sistema (terminales 18, 19, 27, 29, 32 y 33) ≤2 ms
Rango de control de velocidad (lazo abierto) 1:100 de velocidad síncrona
Intervalo de control de velocidad (lazo cerrado) 1:1000 de velocidad síncrona
Precisión de velocidad (lazo abierto) 30-4000 r/min: error ±8 r/min
Precisión de la velocidad (lazo cerrado), en función de la resolución del dispositivo de
realimentación 0-6000 r/min: error ±0,15 r/min
Precisión de control de par (realimentación de velocidad) Error máximo ±5 % del par nominal
Todas las características de control se basan en un motor asíncrono de 4 polos.
Rendimiento de la tarjeta de control
Intervalo de exploración 1 ms
7 7
Tarjeta de control, comunicación serie USB
USB estándar 1,1 (Velocidad máxima)
Conector USB Conector USB tipo B
La conexión al PC se realiza por medio de un cable USB de dispositivo o host estándar.
La conexión USB se encuentra galvánicamente aislada de la tensión de alimentación (PELV) y del resto de los terminales de
tensión alta.
La conexión a tierra USB no está galvánicamente aislada de la conexión a tierra de protección. Utilice únicamente un ordenador
portátil aislado como conexión entre el PC y el terminal USB del convertidor de frecuencia.
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 53
Page 58

Especicaciones
VLT® Decentral Drive FCD 302
7.7 Fusibles y magnetotérmicos
Calibre de cables estadounidense. La sección
•
transversal máxima del cable es el mayor
diámetro de cable que puede conectarse a los
terminales. Cumpla siempre los reglamentos
locales y nacionales.
Deben utilizarse fusibles previos tipo gG. Para
•
mantener la conformidad con UL/cUL, use los
fusibles previos de estos tipos (consulte la
Tabla 7.2).
Medido con un cable de motor blindado o
•
apantallado de 10 m (32,8 ft) a la carga y
frecuencia nominales.
*Tamaño máximo de fusible previo recomendado: 25 A
Marca Tipo de fusible Número de
77
Bussmann
Bussmann
Bussmann
Bussmann
Bussmann
Bussmann
Bussmann
SIBA
Littelfuse
Ferraz
Shawmut
Ferraz
Shawmut
Ferraz
Shawmut
1)
FWH-
1)
KTS-R
1)
JKS-
1)
JJS-
FNQ-R-
1)
KTK-R-
1)
LP-CC-
5017906-
1)
KLS-R
1)
ATM-R
1)
A6K-R
1)
HSJ
1)
archivo UL
E91958 JFHR2
E4273 RK1/JDDZ
E4273 J / JDDZ
E4273 T / JDDZ
E4273 CC / JDDZ
E4273 CC / JDDZ
E4273 CC / JDDZ
1)
E180276 RK1/JDDZ
E81895 RK1/JDDZ
E2137 CC / JDDZ
E2137 RK1/JDDZ
E2137 J/HSJ
Categoría UL
(código CCN)
Nivel de tensión de CC
Desactivación del inversor por baja
tensión
Advertencia de baja tensión 410
Reactivación tras baja tensión del
inversor (reinicio advertencia)
Advertencia de sobretensión (sin
freno)
Activación de freno dinámico 778
Reactivación del inversor tras
sobretensión (reinicio advertencia)
Advertencia de sobretensión (con
freno)
Desconexión por sobretensión 820
Tabla 7.3 Nivel de tensión de CC de FCD 302
Fusibles
Esta unidad es adecuada para su uso en un circuito capaz
de proporcionar un máximo de 100 000 amperios
simétricos RMS, con un máximo de 500 V.
Magnetotérmico
Esta unidad es adecuada para su uso en un circuito capaz
de proporcionar hasta 10 000 amperios simétricos RMS,
con un máximo de 500 V.
Unidades de 380-480 V
(V CC)
373
398
778
795
810
Tabla 7.2 Fusibles previos de FCD 302 que cumplen los
requisitos UL / cUL
1) 5 A (0,37 kW/0,5 CV), 7 A (0,55 kW/0,73 CV), 9 A (0,75 kW/1 CV ),
12 A (1,1 kW/1,5 CV), 15 A (1,5 kW/2 CV), 20 A (2,2 kW/3 CV ) y 25 A
(3 kW/4 CV )
54 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 59

Anexo Guía de funcionamiento
8 Anexo
8.1 Parámetros del menú rápido
0-01 Idioma
Option: Función:
Dene el idioma de la pantalla. El
convertidor de frecuencia se suministra con
cuatro paquetes de idioma diferentes. El
inglés y el alemán se incluyen en todos los
paquetes. El inglés no puede borrarse ni
manipularse.
[0] * English En los paquetes de idiomas 1-4
[1] Deutsch En los paquetes de idiomas 1-4
[2] Francais En el paquete de idioma 1
[3] Dansk En el paquete de idioma 1
[4] Spanish En el paquete de idioma 1
[5] Italiano En el paquete de idioma 1
[6] Svenska En el paquete de idioma 1
[7] Nederlands En el paquete de idioma 1
[10] Chinese En el paquete de idioma 2
[20] Suomi En el paquete de idioma 1
[22] English US En el paquete de idioma 4
[27] Greek En el paquete de idioma 4
0-01 Idioma
Option: Función:
[52] Hrvatski En el paquete de idioma 3
1-20 Potencia motor [kW]
Range: Función:
Size
related*
[ 0.09 -
3000.00
kW]
AVISO!
Este parámetro no se puede ajustar
con el motor en marcha.
Introduzca la potencia nominal del motor
en kW conforme a los datos de la placa de
características del mismo. El valor
predeterminado se corresponde con la
salida nominal del convertidor de
frecuencia.
Este parámetro será visible en el LCP si el
parámetro 0-03 Ajustes regionales se ajusta
a [0] Internacional.
1-22 Tensión motor
Range: Función:
Size
related*
[ 10 1000 V]
Introduzca la tensión del motor nominal
conforme a los datos de la placa de
características del mismo. El valor
predeterminado se corresponde con la
salida nominal del convertidor de
frecuencia.
8 8
[28] Bras.port En el paquete de idioma 4
[36] Slovenian En el paquete de idioma 3
[39] Korean En el paquete de idioma 2
[40] Japanese En el paquete de idioma 2
[41] Turkish En el paquete de idioma 4
[42] Trad.Chinese En el paquete de idioma 2
[43] Bulgarian En el paquete de idioma 3
[44] Srpski En el paquete de idioma 3
[45] Romanian En el paquete de idioma 3
[46] Magyar En el paquete de idioma 3
[47] Czech En el paquete de idioma 3
[48] Polski En el paquete de idioma 4
[49] Russian En el paquete de idioma 3
[50] Thai En el paquete de idioma 2
[51] Bahasa
Indonesia
En el paquete de idioma 2
1-23 Frecuencia motor
Range: Función:
Size
related*
[20 -
AVISO!
1000
A partir de la versión 6.72 del software,
Hz]
la frecuencia de salida del convertidor
de frecuencia está limitada a 590 Hz.
Seleccione el valor de frecuencia del motor
según los datos de la placa de características
del mismo. Si se selecciona un valor diferente
de 50 o 60 Hz, adapte los ajustes independientes de la carga en los parámetros del
parámetro 1-50 Magnet. motor a veloc. cero al
parámetro 1-53 Modo despl. de frec. Para el
funcionamiento a 87 Hz con motores de
230/400 V, ajuste los datos de la placa de
características para 230 V/50 Hz. Para un
funcionamiento a 87 Hz, adapte el
parámetro 4-13 Límite alto veloc. motor [RPM] y
el parámetro 3-03 Referencia máxima.
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 55
Page 60

Anexo
VLT® Decentral Drive FCD 302
1-24 Intensidad motor
Range: Función:
Size
related*
[ 0.10 -
10000.00 A]
AVISO!
Este parámetro no se puede
ajustar con el motor en marcha.
Introduzca el valor de la corriente
nominal del motor según los datos de
la placa de características del mismo.
Los datos se utilizan para calcular el
par motor, la protección térmica del
motor, etc.
5-12 Terminal 27 Entrada digital
Option: Función:
Enganche arriba [28]
Enganche abajo [29]
Entrada de pulsos [32]
Bit rampa 0 [34]
Bit rampa 1 [35]
Mains failure inverse [36]
Increm. DigiPot [55]
Dismin. DigiPot [56]
Borrar DigiPot [57]
Reset del contador A [62]
Reset del contador B [65]
1-25 Veloc. nominal motor
Range: Función:
Size
related*
88
[100 60000
RPM]
AVISO!
Este parámetro no se puede
ajustar con el motor en marcha.
Introduzca el valor de la velocidad
nominal del motor según los datos de
la placa de características del mismo.
Estos datos se utilizan para calcular las
compensaciones automáticas del motor.
5-12 Terminal 27 Entrada digital
Option: Función:
Seleccione la func. del intervalo de entrada digital
disponible.
Sin función [0]
Reinicio [1]
Inercia [2]
Inercia y reinicio [3]
Parada rápida [4]
Freno CC [5]
Parada [6]
Arranque [8]
Arranque por pulsos [9]
Cambio de sentido [10]
Arranque e inversión [11]
Act. arranque adelante [12]
Act. arranque inverso [13]
Velocidad ja [14]
Ref.interna LSB [16]
Ref.interna MSB [17]
Ref.interna EXB [18]
Mantener referencia [19]
Mantener salida [20]
Aceleración [21]
Deceleración [22]
Selec.ajuste LSB [23]
Selec.ajuste MSB [24]
1-29 Adaptación automática del motor (AMA)
Option: Función:
La función AMA optimiza el rendimiento
dinámico del motor optimizando automáticamente los parámetros avanzados del motor
(del parámetro 1-30 Resistencia estator (Rs) al
parámetro 1-35 Reactancia princ. (Xh)) con el
motor parado.
Active la función de AMA pulsando [Hand on]
después de seleccionar [1] o [2]. Consulte
también el capétulo 5.4 Arranque del sistema.
Después de una secuencia normal, aparece en
pantalla lo siguiente: «Pulse [OK] para nalizar
AMA». Después de pulsar la tecla [OK], el
convertidor de frecuencia está listo para su uso.
AVISO!
Este parámetro no se puede ajustar con
el motor en marcha.
[0]*No
[1] Act. AMA
completo
[2] Act. AMA
reducido
Nota:
•
•
•
Realiza un AMA de la resistencia del estátor RS,
la resistencia del rotor Rr, la reactancia de fuga
del estátor X1, la reactancia de fuga del rotor X
y la reactancia principal Xh.
Realiza un AMA reducido de la resistencia del
estátor Rs únicamente en el sistema. Seleccione
esta opción si se utiliza un ltro LC entre el
convertidor de frecuencia y el motor.
Para obtener la mejor adaptación posible del
convertidor de frecuencia, ejecute el AMA con el
motor frío.
El AMA no puede realizarse mientras el motor
esté en funcionamiento.
El AMA no puede realizarse en motores de
magnetización permanente.
2
56 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 61

Anexo Guía de funcionamiento
AVISO!
Es importante ajustar correctamente el grupo de
parámetros 1-2* Datos de motor, ya que estos parámetros
forman parte del algoritmo AMA. Se debe llevar a cabo
un AMA para conseguir el rendimiento dinámico óptimo
del motor. En función de la potencia de salida del motor,
puede tardar hasta 10 minutos
AVISO!
Evite la generación externa de par durante el AMA
desconectando el eje del motor de la aplicación.
AVISO!
Si se modica alguno de los ajustes del grupo de
parámetros 1-2* Datos de motor, del
parámetro 1-30 Resistencia estator (Rs) al
parámetro 1-39 Polos motor, los parámetros avanzados
del motor volverán a los ajustes predeterminados.
3-02 Referencia mínima
Range: Función:
Size
related*
3-03 Referencia máxima
Range: Función:
Size
related*
[ -999999.999 par. 3-03
ReferenceFeedbackUnit]
[ par. 3-02 -
999999.999
ReferenceFeedbackUnit]
Introduzca la referencia mínima. La
referencia mínima es el valor mínimo
que puede obtenerse sumando todas
las referencias.
La referencia mínima solo se activa si
el parámetro 3-00 Rango de referencia
se ajusta a [0] Mín - Máx.
La unidad de referencia mínima
coincide con:
La conguración del
•
parámetro 1-00 Modo
Conguración: para [1] Veloc.
lazo cerrado, r/min; para [2]
Par, Nm.
La unidad seleccionada en
•
el
parámetro 3-01 Referencia/
Unidad realimentación.
Si se selecciona la opción [10]
Synchronization en el
parámetro 1-00 Modo Conguración,
este parámetro dene el desvío
máximo de la velocidad cuando se
realiza el desplazamiento de posición
denido en el parámetro 3-26 Master
Oset.
Introduzca la referencia máxima. La
referencia máxima es el valor más
alto que puede obtenerse sumando
todas las referencias.
3-03 Referencia máxima
Range: Función:
La unidad de referencia máxima
coincide:
La conguración
•
seleccionada en el
parámetro 1-00 Modo
Conguración: para [1] Veloc.
lazo cerrado, r/min; para [2]
Par, Nm.
La unidad seleccionada en
•
el parámetro 3-00 Rango de
referencia.
Si se selecciona la opción [9]
Positioning en el
parámetro 1-00 Modo Conguración,
este parámetro dene la velocidad
predeterminada para el posicionamiento.
3-41 Rampa 1 tiempo acel. rampa
Range: Función:
Size
related*
[ 0.01 3600 s]
Introduzca el tiempo de aceleración de
rampa, es decir, el tiempo de aceleración
desde 0 r/min hasta la velocidad del motor
síncrona nS. Seleccione un tiempo de
aceleración tal que la intensidad de salida
no supere el límite de intensidad del
parámetro 4-18 Límite intensidad durante la
rampa. El valor 0,00 corresponde a 0,01 s en
modo de velocidad. Consulte el tiempo de
deceleración en el parámetro 3-42 Rampa 1
tiempo desacel. rampa.
t
s xns r/ min
Par . 3 − 41 =
acel.
ref . r/ min
3-42 Rampa 1 tiempo desacel. rampa
Range: Función:
Size
related*
[ 0.01
- 3600
s]
Introduzca el tiempo de deceleración, es
decir, el tiempo de desaceleración desde la
velocidad del motor síncrono, ns hasta 0 r/
min. Seleccione un tiempo de deceleración
tal que no se produzca una sobretensión en
el inversor debido al funcionamiento regenerativo del motor, y tal que la corriente
generada no supere el límite establecido en
el parámetro 4-18 Límite intensidad. El valor
0,00 corresponde a 0,01 s en modo de
velocidad. Consulte el tiempo de aceleración
en el parámetro 3-41 Rampa 1 tiempo acel.
rampa.
t
s xns r/ min
Par . 3 − 42 =
desac.
ref . r/ min
8 8
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 57
Page 62

Anexo
VLT® Decentral Drive FCD 302
8.2 Estructura de menú de parámetros
Cambios durante el funcionamiento
«True» (verdadero) signica que el parámetro puede ser
modicado mientras el convertidor de frecuencia se
encuentra en funcionamiento y «False» (falso) signica que
se debe parar para poder realizar una modicación.
4 ajustes
Todos los ajustes: los parámetros se pueden ajustar de
forma independiente en cada uno de los cuatro ajustes, es
decir, un mismo parámetro puede tener cuatro valores de
datos diferentes.
En todos los ajustes, uno de los ajustes: valor de dato, es
idéntico.
Índice de conversión
Este número se reere a un número de conversión que se
utiliza al escribir o leer en o desde el convertidor de
frecuencia.
Índice de conversión Factor de conversión
100 1
88
67 1/60
6 1000000
5 100000
4 10000
3 1000
2 100
1 10
0 1
-1 0,1
-2 0,01
-3 0,001
-4 0,0001
-5 0,00001
-6 0,000001
Tipo de
dato
2 Entero 8 Int8
3 Entero 16 Int16
4 Entero 32 Int32
5 Sin signo 8 Uint8
6 Sin signo 16 Uint16
7 Sin signo 32 Uint32
9 Cadena visible VisStr
33 Valor normalizado de 2 bytes N2
35 Secuencia de bits de 16 variables booleanas V2
54 Diferencia de tiempo sin fecha TimD
Descripción Tipo
Consulte la Guía de diseño del VLT® Decentral Drive FCD 302
para obtener información más detallada acerca de los tipos
de datos 33, 35 y 54.
58 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 63

Anexo Guía de funcionamiento
3-77 Rel. Rampa 4/Rampa-S comienzo
2-30 Position P Start Proportional Gain
Arranque
3-78 Rel. Rampa 4/Rampa-S comienzo Fin
2-32 Speed PID Start Integral Time
2-31 Speed PID Start Proportional Gain
3-8* Otras rampas
3-80 Tiempo rampa veloc. ja
2-33 Speed PID Start Lowpass Filter Time
3-** Ref./Rampas
3-81 Tiempo rampa parada rápida
3-82 Tipo rampa de parada rápida
3-0* Límites referencia
3-00 Rango de referencia
3-83 Rel. rampa-S paro ráp. Arranque
3-84 Rel. rampa-S paro ráp. Fin
3-01 Referencia/Unidad realimentación
3-02 Referencia mínima
3-89 Ramp Lowpass Filter Time
3-9* Potencióm. digital
3-04 Función de referencia
3-03 Referencia máxima
3-91 Tiempo de rampa
3-90 Tamaño de paso
3-1* Referencias
3-10 Referencia interna
3-93 Límite máximo
3-92 Restitución de Energía
3-12 Valor de enganche/arriba-abajo
3-11 Velocidad ja [Hz]
3-94 Límite mínimo
3-95 Retardo de rampa
3-13 Lugar de referencia
3-14 Referencia interna relativa
4-** Lím./Advert.
3-15 Fuente 1 de referencia
4-1* Límites motor
3-16 Fuente 2 de referencia
4-10 Dirección veloc. motor
3-17 Fuente 3 de referencia
velocidad
4-19 Frecuencia salida máx.
4-17 Modo generador límite de par
4-18 Límite intensidad
4-16 Modo motor límite de par
4-14 Límite alto veloc. motor [Hz]
4-13 Límite alto veloc. motor [RPM]
4-12 Límite bajo veloc. motor [Hz]
4-11 Límite bajo veloc. motor [RPM]
3-19 Velocidad ja [RPM]
3-18 Recurso refer. escalado relativo
3-4* Rampa 1
3-40 Rampa 1 tipo
3-41 Rampa 1 tiempo acel. rampa
3-45 Rel. Rampa 1/Rampa-S al nal de
3-42 Rampa 1 tiempo desacel. rampa
4-2* Fact. limitadores
Arranque
3-46 Rel. Rampa 1/Rampa-S al nal de Fin
4-20 Fuente del factor de límite de par
3-47 Rel. Rampa 1/Rampa-S comienzo
4-21 Fuente del factor de límite de
Arranque
3-48 Rel. Rampa 1/Rampa-S comienzo Fin
4-24 Brake Check Limit Factor
4-23 Brake Check Limit Factor Source
4-3* Mon. veloc. motor
3-5* Rampa 2
3-50 Rampa 2 tipo
3-51 Rampa 2 tiempo acel. rampa
[Hz]
motor
4-30 Función de pérdida de realim. del
3-55 Rel. Rampa 2/Rampa-S al nal de
3-52 Rampa 2 tiempo desacel. rampa
motor
4-31 Error de velocidad en realim. del
Arranque
3-56 Rel. Rampa 2/Rampa-S al nal de Fin
4-32 Tiempo lím. pérdida realim. del motor
3-57 Rel. Rampa 2/Rampa-S comienzo
4-34 Func. error de seguimiento
4-35 Error seguim.
Arranque
3-58 Rel. Rampa 2/Rampa-S comienzo Fin
4-36 T. lím. error de seguimiento
3-6* Rampa 3
4-37 Error de seguimiento rampa
4-38 T. lím. error de seguimiento rampa
3-60 Rampa 3 tipo
3-61 Rampa 3 tiempo acel. rampa
4-39 Error seguim. tras tiempo lím. rampa
4-4* Speed Monitor
3-65 Rel. Rampa 3/Rampa-S al nal de
3-62 Rampa 3 tiempo desacel. rampa
4-43 Motor Speed Monitor Function
4-44 Motor Speed Monitor Max
Arranque
3-66 Rel. Rampa 3/Rampa-S al nal de Fin
4-45 Motor Speed Monitor Timeout
4-5* Ajuste Advert.
Arranque
3-67 Rel. Rampa 3/Rampa-S comienzo
4-50 Advert. Intens. baja
3-68 Rel. Rampa 3/Rampa-S comienzo Fin
4-51 Advert. Intens. alta
3-7* Rampa 4
4-52 Advert. Veloc. baja
3-70 Rampa 4 tipo
4-53 Advert. Veloc. alta
4-54 Advertencia referencia baja
3-71 Rampa 4 tiempo acel. rampa
3-72 Rampa 4 tiempo desacel. rampa
4-55 Advertencia referencia alta
3-75 Rel. Rampa 4/Rampa-S comienzo
4-57 Advertencia realimentación alta
4-56 Advertencia realimentación baja
Arranque
3-76 Rel. Rampa 4/Rampa-S comienzo Fin
8 8
1-69 Inercia máxima
1-7* Ajustes arranque
1-05 Conguración modo local
1-06 En sentido horario
8.2.1 Software 7.XX
1-70 Modo de inicio PM
1-07 Motor Angle Oset Adjust
0-** Func./Display
1-71 Retardo arr.
1-1* Selección de motor
1-72 Función de arranque
1-10 Construcción del motor
0-0* Ajustes básicos
0-01 Idioma
1-73 Motor en giro
1-74 Veloc. arranque [RPM]
1-11 Fabricante motor
1-14 Factor de ganancia de amortiguación
0-02 Unidad de velocidad del motor
1-76 Intensidad arranque
1-75 Veloc. arranque [Hz]
1-16 Const. tiempo ltro a alta velocidad
1-15 Const. tiempo ltro a baja velocidad
0-03 Ajustes regionales
0-04 Estado operación en arranque (Manual)
1-8* Ajustes de parada
1-17 Const. de tiempo del ltro de tensión
0-09 Control de rendimiento
0-1* Operac. de ajuste
1-80 Función de parada
1-18 Min. Current at No Load
0-10 Ajuste activo
1-81 Vel. mín. para func. parada [RPM]
1-2* Datos de motor
1-82 Vel. mín. para func. parada [Hz]
1-20 Potencia motor [kW ]
0-11 Edit Set-up
0-12 Ajuste actual enlazado a
1-84 Valor de contador para parada precisa
1-85 Demora comp. veloc. det. precisa
1-83 Función de parada precisa
1-21 Potencia motor [CV ]
1-22 Tensión motor
1-23 Frecuencia motor
0-14 Lectura: Editar ajustes / canal
0-13 Lectura: Ajustes relacionados
0-15 Lectura: Ajuste real
2-18 Estado comprobación freno
1-99 ATEX ETR interpol points current
1-98 ATEX ETR interpol. points freq.
1-95 Tipo de sensor KTY
1-96 Fuente de termistor KTY
1-93 Fuente de termistor
1-9* Temperatura motor
1-90 Protección térmica motor
(AMA)
1-29 Adaptación automática del motor
1-26 Par nominal continuo
1-25 Veloc. nominal motor
1-24 Intensidad motor
0-2* Display LCP
0-20 Línea de pantalla pequeña 1.1
0-21 Línea de pantalla pequeña 1.2
0-22 Línea de pantalla pequeña 1.3
1-3* Dat avanz. motor
1-30 Resistencia estator (Rs)
0-24 Línea de pantalla grande 3
0-23 Línea de pantalla grande 2
1-33 Reactancia fuga estátor (X1)
1-31 Resistencia rotor (Rr)
0-25 Mi menú personal
0-3* Lectura LCP
0-30 Unidad lectura def. por usuario
1-34 Reactancia de fuga del rotor (X2)
2-** Frenos
1-35 Reactancia princ. (Xh)
0-31 Valor mín. de lectura def. por usuario
2-02 Tiempo de frenado CC
2-00 CC mantenida
1-37 Inductancia eje d (Ld)
0-33 Fuente para lectura denida por el
2-03 Velocidad activación freno CC [RPM]
2-01 Intens. freno CC
2-04 Velocidad de conexión del freno CC
1-41 Ángulo desplazamiento motor (Oset)
1-39 Polos motor
1-40 fcem a 1000 RPM
1-38 Inductancia eje q (Lq)
usuario
0-39 Texto display 3
0-38 Texto display 2
0-37 Texto display 1
2-0* Freno CC
1-36 Resistencia pérdida hierro (Rfe)
0-32 Valor máx. de lectura den. usuario
1-44 d-axis Inductance Sat. (LdSat)
0-4* Teclado LCP
2-06 Intensidad estacionamiento
2-05 Referencia máxima
1-46 Ganancia de detecc. de posición
1-45 q-axis Inductance Sat. (LqSat)
0-41 Botón [O] en LCP
0-40 Botón [Hand On] en LCP
2-07 Tiempo estacionamiento
2-1* Func. energ. freno
2-10 Función de freno
1-48 Inductance Sat. Point
1-47 Calibrac. de par baja veloc.
1-5* Aj. indep. carga
0-44 Botón [O/Reset] en LCP
0-43 Botón [Reset] en LCP
0-42 Botón [Auto on] en LCP
1-97 Nivel del umbral KTY
1-94 ATEX ETR cur.lim. speed reduction
1-91 Vent. externo motor
2-12 Límite potencia de freno (kW)
2-11 Resistencia freno (ohmios)
1-51 Veloc. mín. con magn. norm. [RPM]
1-50 Magnet. motor a veloc. cero
0-45 Botón [Drive Bypass] en LCP
0-5* Copiar/Guardar
0-50 Copia con LCP
2-13 Ctrol. Potencia freno
1-52 Magnetización normal veloc. mín. [Hz]
2-15 Comprobación freno
1-53 Modelo despl. de frec.
0-51 Copia de ajuste
2-17 Control de sobretensión
2-16 Intensidad máx. de frenado de CA
1-55 Característica u/f - U
1-54 Reducción tensión en debilit. campo
0-6* Contraseña
0-60 Contraseña menú principal
2-19 Ganancia sobretensión
1-58 Intens. imp. prueba con motor en giro
1-56 Característica u/f - F
0-65 Contraseña Menú rápido
0-61 Acceso a menú princ. sin contraseña
2-2* Freno mecánico
1-59 Frec. imp. prueba con motor en giro
0-67 Contraseña acceso al bus
0-66 Acceso a menú rápido sin contraseña
2-20 Intensidad freno liber.
1-6* Aj. depend. carga
2-21 Velocidad activación freno [RPM]
1-60 Compensación carga baja veloc.
0-68 Safety Parameters Password
2-23 Activar retardo de freno
2-22 Activar velocidad freno [Hz]
1-62 Compensación deslizam.
1-61 Compensación carga alta velocidad
Parameters
0-69 Password Protection of Safety
2-24 Retardo parada
2-25 Tiempo liberación de freno
2-26 Ref par
1-65 Const. tiempo amortigua. de
1-64 Amortiguación de resonancia
1-63 Tiempo compens. deslizam. constante
1-** Carga y motor
1-0* Ajustes generales
1-00 Modo Conguración
2-29 Torque Ramp Down Time
2-28 Factor de ganancia de refuerzo
2-27 Tiempo de rampa de par
resonancia
1-67 Tipo de carga
1-66 Intens. mín. a baja veloc.
1-01 Principio control motor
1-02 Realimentación encoder motor Flux
1-03 Características de par
2-3* Dat Mech Brake
1-68 Inercia mínima
1-04 Modo sobrecarga
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 59
Page 64

Anexo
9-07 Valor
9-15 Cong. escritura PCD
9-16 Cong. lectura PCD
9-18 Dirección de nodo
9-23 Parám. para señales
9-22 Selección de telegrama
9-19 Drive Unit System Number
VLT® Decentral Drive FCD 302
10-14 Referencia de red
9-28 Control de proceso
9-63 Veloc. Transmisión
9-64 Identicación dispositivo
9-65 Número perl Probus
9-72 Reiniciar unidad
9-75 Identicación DO
9-70 Edit Set-up
9-71 Grabar valores de datos
9-67 Cód. control 1
9-68 Cód. estado 1
9-80 Parámetros denidos (1)
9-81 Parámetros denidos (2)
9-82 Parámetros denidos (3)
9-83 Parámetros denidos (4)
9-91 Parámetros cambiados (2)
9-84 Parámetros denidos (5)
9-85 Dened Parameters (6)
9-90 Parámetros cambiados (1)
9-99 Contador revisión de Probus
9-93 Parámetros cambiados (4)
9-94 Parámetros cambiados (5)
9-92 Parámetros cambiados (3)
10-** Fieldbus CAN
10-0* Ajustes comunes
10-00 Protocolo CAN
10-01 Selecc. velocidad en baudios
10-02 ID MAC
10-05 Lectura contador errores transm.
10-06 Lectura contador errores recepción
10-07 Lectura contador bus desac.
10-11 Escritura cong. datos proceso
10-1* DeviceNet
10-10 Selección tipo de datos proceso
9-52 Contador situación fallo
9-53 Cód. de advert. Probus
9-45 Código de fallo
9-47 Número de fallo
9-44 Contador mensajes de fallo
9-27 Editar parámetros
10-12 Lectura cong. datos proceso
10-13 Parámetro de advertencia
10-15 Control de red
10-2* Filtro COS
10-22 Filtro COS 3
10-23 Filtro COS 4
10-20 Filtro COS 1
10-21 Filtro COS 2
10-3* Acceso parám.
10-32 Revisión Devicenet
10-30 Índice Array
10-31 Grabar valores de datos
88
7-52 Aceleración FF de PID de proceso
6-7* Salida analógica 3
5-71 Term. 32/33 direc. encoder
7-53 Desaceleración FF de PID de proceso
6-70 Terminal X45/1 salida
5-8* Salida de encoder
7-57 Tiempo ltro realim. PID de proc.
7-56 Tiempo ltro ref. PID de proc.
8-** Comunic. y opciones
8-0* Ajustes generales
6-74 T. X45/1 Tiempo lím. sal. predet.
6-71 Terminal X45/1 Escala mín.
6-72 Terminal X45/1 Escala máx.
6-73 Terminal X45/1 Control bus salida
AHF
5-90 Control de bus digital y de relé
5-80 Retardo de reconexión de condensador
5-9* Controlado por bus
8-01 Puesto de control
6-8* Salida analógica 4
5-93 Control de bus salida de pulsos #27
8-03 Valor de tiempo límite cód. ctrl.
8-02 Fuente código control
6-80 Terminal X45/3 salida
6-81 Terminal X45/3 Escala mín.
5-95 Control de bus salida de pulsos #29
5-94 Tiempo lím. predet. salida pulsos #27
8-04 Función tiempo límite cód. ctrl.
6-82 Terminal X45/3 Escala máx.
5-96 Tiempo lím. predet. salida pulsos #29
8-05 Función tiempo límite
8-06 Reiniciar si tiempo límite cód. ctrl.
6-84 T. X45/3 Tiempo lím. sal. predet.
6-83 Terminal X45/3 Control bus de salida
5-98 Tiempo lím. predet. salida pulsos
5-97 Control de bus salida de pulsos #X30/6
8-08 Filtro lectura de datos
8-07 Accionador diagnóstico
7-** Controladores
7-0* Ctrlador PID vel.
#X30/6
6-** E/S analógica
8-34 Tiempo de ciclo estimado
8-35 Retardo respuesta mín.
8-36 Retardo respuesta máx.
7-10 Torque PI Feedback Source
7-12 Ganancia proporcional PI de par
7-1* Control de PI de par
6-21 Terminal 54 escala alta V
6-2* Entrada analógica 2
6-20 Terminal 54 escala baja V
8-37 Retardo máx. intercarac.
7-13 Tiempo integral PI de par
6-22 Terminal 54 escala baja mA
8-4* Conf. protoc. FC MC
7-16 Torque PI Lowpass Filter Time
6-23 Terminal 54 escala alta mA
8-41 Parám. para señales
8-40 Selección de telegrama
7-19 Current Controller Rise Time
7-18 Torque PI Feed Forward Factor
6-25 Term. 54 valor alto ref./realim
6-24 Term. 54 valor bajo ref./realim
8-42 Cong. escritura PCD
7-2* Ctrl. realim. proc.
6-26 Terminal 54 tiempo ltro constante
8-43 Cong. lectura PCD
7-20 Fuente 1 realim. lazo cerrado proceso
6-3* Entrada analógica 3
8-45 Orden de transacción de refuerzo
7-22 Fuente 2 realim. lazo cerrado proceso
6-30 Terminal X30/11 baja tensión
8-14 Código de control congurable CTW
8-17 Congurable Alarm and Warningword
8-13 Código de estado congurable STW
8-1* Cód. cód. ctrl.
8-10 Trama Cód. Control
7-01 Speed PID Droop
7-00 Fuente de realim. PID de veloc.
6-0* Modo E/S analógico
6-00 Tiempo Límite Cero Activo
8-19 Product Code
8-3* Ajuste puerto FC
7-06 Tiempo ltro paso bajo PID veloc.
7-05 Límite ganancia dif. PID proceso.
7-04 Tiempo diferencial PID veloc.
7-03 Tiempo integral PID veloc.
7-02 Ganancia proporc. PID veloc.
6-01 Función Cero Activo
6-12 Terminal 53 escala baja mA
6-11 Terminal 53 escala alta V
6-1* Entrada analógica 1
6-10 Terminal 53 escala baja V
8-31 Dirección
8-30 Protocolo
velocidad
7-07 Relación engranaje realim. PID
6-14 Term. 53 valor bajo ref./realim
6-13 Terminal 53 escala alta mA
8-33 Paridad / Bits parada
8-32 Veloc. baudios port FC
7-09 Speed PID Error Correction w/ Ramp
7-08 Factor directo de alim. PID de veloc.
6-16 Terminal 53 tiempo ltro constante
6-15 Term. 53 valor alto ref./realim
8-46 Estado transacción refuerzo
8-47 BTM tiempo sobrepasado
7-3* Ctrl. PID proceso
7-30 Ctrl. normal/inverso de PID de proceso.
6-31 Terminal X30/11 alta tensión
6-34 Term. X30/11 valor bajo ref./realim
8-49 BTM Error Log
8-48 BTM Maximum Errors
7-32 Valor arran. para ctrldor. PID proceso.
7-31 Saturación de PID de proceso
6-36 Term. X30/11 const. tiempo ltro
6-35 Term. X30/11 valor alto ref./realim
8-5* Digital/bus
8-50 Selección inercia
7-34 Tiempo integral PID proc.
7-33 Ganancia proporc. PID de proc.
6-4* Entrada analógica 4
6-40 Terminal X30/12 baja tensión
8-51 Selección parada rápida
8-52 Selección freno CC
7-36 Límite ganancia diferencial PID
7-35 Tiempo diferencial PID proc.
6-41 Terminal X30/12 alta tensión
6-44 Term. X30/12 valor bajo ref./realim
8-53 Selec. arranque
8-54 Selec. sentido inverso
proceso.
7-38 Factor directo aliment. PID de proc.
6-46 Term. X30/12 const. tiempo ltro
6-45 Term. X30/12 valor alto ref./realim
8-55 Selec. ajuste
7-39 Ancho banda En Referencia
6-5* Salida analógica 1
8-57 Prodrive OFF2 Selección
8-56 Selec. referencia interna
7-40 Reinicio parte I de PID proc.
7-4* Dat proc. av. I
6-50 Terminal 42 salida
6-51 Terminal 42 salida esc. mín.
8-58 Prodrive OFF3 Selección
7-41 Grapa salida PID de proc. Brida
6-52 Terminal 42 salida esc. máx.
8-8* Diagnóstico puerto FC
8-80 Contador mensajes de bus
7-43 Esc. ganancia PID proc. con ref. mín.
7-42 Grapa salida PID de proc. Brida
6-54 Terminal 42 Tiempo lím. salida predet.
6-53 Terminal 42 control bus de salida
8-82 Msjs. escl. recibidos
8-81 Contador errores de bus
7-45 Recurso FF de PID de proceso
7-44 Esc. ganancia PID proc. con ref. máx.
6-55 Filtro de salida analógica
6-6* Salida analógica 2
8-83 Contador errores de esclavo
8-9* Vel. ja bus
7-48 PCD Feed Forward
7-46 Feed Forward PID Proceso Cód.
6-60 Terminal X30/8 salida
6-61 Terminal X30/8 Escala mín.
8-90 Veloc Bus Jog 1
7-49 Ctrl. salida PID de proc. Cód.
6-62 Terminal X30/8 Escala máx.
8-91 Veloc Bus Jog 2
9-** PROFIdrive
7-50 PID de proceso PID ampliado
7-5* Dat proc. av. II
6-64 Terminal X30/8 Tiempo lím. salida
6-63 Terminal X30/8 Control bus salida
9-00 Valor de consigna
7-51 Ganancia FF de PID de proc.
predet
4-58 Función Fallo Fase Motor
4-59 Motor Check At Start
4-6* Bypass veloc.
4-60 Velocidad bypass desde [RPM]
4-61 Velocidad bypass desde [Hz]
4-62 Velocidad bypass hasta [RPM]
4-63 Veloc. bypass hasta [Hz]
5-** E/S digital
5-0* Modo E/S digital
5-00 Modo E/S digital
5-01 Terminal 27 modo E/S
5-02 Terminal 29 modo E/S
5-1* Entradas digitales
5-10 Terminal 18 Entrada digital
5-11 Terminal 19 entrada digital
5-14 Terminal 32 entrada digital
5-3* Salidas digitales
5-16 Terminal X30/2 Entrada digital
5-15 Terminal 33 entrada digital
5-12 Terminal 27 Entrada digital
5-13 Terminal 29 Entrada digital
5-30 Terminal 27 salida digital
5-31 Terminal 29 salida digital
5-32 Term. X30/6 salida dig. (MCB 101)
5-33 Term. X30/7 salida dig. (MCB 101)
5-4* Relés
5-40 Relé de función
5-41 Retardo conex, relé
5-42 Retardo desconex, relé
5-5* Entrada de pulsos
5-50 Term. 29 baja frecuencia
5-53 Term. 29 valor alto ref./realim
5-52 Term. 29 valor bajo ref./realim
5-51 Term. 29 alta frecuencia
5-54 Tiempo ltro pulsos constante #29
5-20 Terminal X46/1 Entrada digital
5-18 Terminal X30/4 Entrada digital
5-19 Terminal 37 parada segura
5-17 Terminal X30/3 Entrada digital
5-57 Term. 33 valor bajo ref./realim
5-56 Term. 33 alta frecuencia
5-55 Term. 33 baja frecuencia
5-58 Term. 33 valor alto ref./realim
5-59 Tiempo ltro pulsos constante #33
5-6* Salida de pulsos
5-60 Terminal 27 salida pulsos variable
5-62 Frec. máx. salida de pulsos #27
5-63 Terminal 29 salida pulsos variable
5-65 Frec. máx. salida de pulsos #29
5-68 Frec. máx. salida de pulsos #X30/6
5-66 Terminal X30/6 var. salida pulsos
5-7* Entr. encoder 24V
5-70 Term. 32/33 resolución encoder
5-26 Terminal X46/13 Entrada digital
5-24 Terminal X46/9 Entrada digital
5-25 Terminal X46/11 Entrada digital
5-23 Terminal X46/7 Entrada digital
5-22 Terminal X46/5 Entrada digital
5-21 Terminal X46/3 Entrada digital
60 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 65

Anexo Guía de funcionamiento
16-15 Frecuencia [%]
16-25 Par [Nm] alto
16-24 Calibrated Stator Resistance
16-23 Motor Shaft Power [kW]
16-20 Ángulo motor
16-21 Par [%] res. alto
16-17 Velocidad [RPM]
16-18 Térmico motor
16-16 Par [Nm]
16-22 Par [%]
16-19 Temperatura del sensor KTY
16-3* Estado Drive
16-30 Tensión Bus CC
16-34 Temp. disipador
16-35 Térmico inversor
16-36 Int. Nom. Inv.
16-33 Energía freno / 2 min
16-31 System Temp.
16-32 Energía freno / s
16-40 Buer de registro lleno.
16-39 Temp. tarjeta control
16-37 Máx. Int. Inv.
16-38 Estado ctrlador SL
16-45 Motor Phase U Current
16-41 Línea estado inf. LCP
16-49 Origen del fallo de intensidad
16-48 Speed Ref. After Ramp [RPM]
16-47 Motor Phase W Current
16-46 Motor Phase V Current
16-5* Ref. & realim.
16-50 Referencia externa
16-51 Referencia de pulsos
16-53 Referencia Digi pot
16-52 Realimentación [Unit]
16-57 Feedback [RPM]
16-6* Entradas y salidas
16-60 Entrada digital
ventilador
16-71 Salida Relé [bin]
16-74 Contador de parada precisa
16-82 Bus campo REF 1
16-8* Fieldb. y puerto FC
16-80 Bus campo CTW 1
16-70 Salida pulsos 29# [Hz]
16-69 Salida pulsos #27 [Hz]
16-68 Entrada de frecuencia #33 [Hz]
16-66 Salida digital [bin]
16-67 Entrada de frecuencia #29 [Hz]
16-65 Salida analógica 42 [mA]
16-63 Terminal 54 ajuste conex.
16-64 Entrada analógica 54
16-62 Entrada analógica 53
16-61 Terminal 53 ajuste conex.
16-77 Salida analógica X30/8 [mA]
16-78 Salida analógica X45/1 [mA]
16-79 Salida analógica X45/3 [mA]
16-76 Entr. analóg. X30/12
16-75 Entr. analóg. X30/11
16-72 Contador A
16-73 Contador B
15-22 Registro histórico: Tiempo
15-3* Registro de fallos
14-2* Reinicio desconex.
14-20 Modo Reset
12-69 Ethernet PowerLink Status
12-68 Cumulative Counters
15-31 Registro fallos: Valor
15-30 Registro fallos: Código de fallo
14-22 Modo funcionamiento
14-21 Tiempo de reinicio automático
12-8* Otros servicios Ethernet
12-80 Servidor FTP
15-32 Registro fallos: Tiempo
15-4* Id. dispositivo
14-25 Retardo descon. con lím. de par
14-24 Retardo descon. con lím. de int.
12-81 Servidor HTTP
12-82 Servicio SMTP
15-54 Cong File Name
15-46 Nº pedido convert. frecuencia
14-32 Control lím. intens., tiempo ltro
14-35 Protección de Bloqueo
14-36 Field-weakening Function
12-91 Cruce automático
12-92 Vigilante IGMP
12-93 Long. de cable errónea
15-49 Tarjeta control id SW
14-37 Fieldweakening Speed
14-40 Nivel VT
14-4* Optimización energ.
12-96 Cong. puerto
12-95 Filtro transmisión múltiple
12-94 Protección transmisión múltiple
14-41 Mínima magnetización AEO
12-97 QoS Priority
15-59 Nombre de archivo CSIV
14-43 Cosphi del motor
14-42 Frecuencia AEO mínima
12-99 Contadores de medios
12-98 Contadores de interfaz
15-6* Identic. de opción
15-60 Opción instalada
14-5* Ambiente
14-50 Filtro RFI
13-** Lógica inteligente
13-0* Ajustes SLC
15-62 Nº pedido opción
15-61 Versión SW opción
14-52 Control del ventilador
14-51 Comp. del enlace de CC
13-00 Modo Controlador SL
13-01 Evento arranque
15-63 Nº serie opción
14-53 Monitor del ventilador
13-02 Evento parada
15-45 Cadena de código
15-43 Versión de software
15-44 Tipo cód. cadena solicitado
15-42 Tensión
15-40 Tipo FC
15-41 Sección de potencia
14-26 Ret. de desc. en fallo del convert.
14-29 Código de servicio
14-28 Aj. producción
12-83 SNMP Agent
12-84 Address Conict Detection
14-3* Ctrl. lím. intens.
12-85 ACD Last Conict
12-89 Puerto de canal de zócalo transparente
14-31 Control lím. intens., Tiempo integrac.
14-30 Ctrl. lím. intens., Ganancia proporc.
12-9* Servicios Ethernet avanzados
12-90 Diagnóstico de cableado
15-71 Versión SW de opción en ranura A
15-70 Opción en ranura A
14-55 Filtro de salida
14-56 Capacitancia del ltro de salida
13-03 Reiniciar SLC
13-1* Comparadores
15-73 Versión SW de opción en ranura B
15-72 Opción en ranura B
14-59 Número real de inversores
14-57 Inductancia del ltro de salida
13-10 Operando comparador
13-11 Operador comparador
15-53 Número serie tarjeta potencia
15-51 Nº serie convert. frecuencia
15-50 Tarjeta potencia id SW
15-47 Código tarjeta potencia
15-48 No id LCP
15-77 Versión SW opción en ranura C1/E1
15-76 Opción en ranura C1/E1
15-75 Versión SW opción en ranura C0/E0
15-74 Opción en ranura C0/E0
14-7* Compatibilidad
13-12 Valor comparador
14-72 Código de alarma del VLT
13-1* RS Flip Flops
14-73 Código de advertencia del VLT
13-15 RS-FF Operand S
15-8* Datos func. II
14-74 Código Alim. Código de estado
14-8* Opciones
13-16 RS-FF Operand R
13-2* Temporizadores
15-80 Horas de funcionamiento del
14-80 Opción sumin. por 24 V CC ext.
13-20 Temporizador Smart Logic Controller
14-88 Option Data Storage
13-4* Reglas lógicas
15-81 Horas funcionam. ventilador presel.
14-89 Option Detection
13-40 Regla lógica booleana 1
15-89 Conguration Change Counter
14-9* Ajustes de fallo
13-41 Operador regla lógica 1
15-9* Inform. parámetro
15-92 Parámetros denidos
14-90 Nivel de fallos
15-** Información drive
13-43 Operador regla lógica 2
13-42 Regla lógica booleana 2
15-93 Parámetros modicados
15-98 Id. dispositivo
15-99 Metadatos parám.
16-** Lecturas de datos
15-0* Datos func.
15-00 Horas de funcionamiento
15-01 Horas funcionam.
15-02 Contador kWh
13-44 Regla lógica booleana 3
13-5* Estados
13-51 Evento Controlador SL
13-52 Acción Controlador SL
16-01 Referencia [Unidad]
16-0* Estado general
16-00 Código de control
15-05 Sobretensión
15-03 Arranques
15-04 Sobretemperat.
14-** Funcs. especiales
14-0* Conmut. inversor
14-00 Patrón conmutación
16-06 Posición real
16-03 Código de estado
16-05 Valor real princ. [%]
16-02 Referencia %
15-07 Reinicio contador de horas funcionam.
15-06 Reiniciar contador KWh
15-1* Ajustes reg. datos
15-10 Variable a registrar
14-03 Sobremodulación
14-04 PWM aleatorio
14-06 Compensación de tiempo muerto
14-01 Frecuencia conmutación
16-09 Lectura personalizada
16-1* Estado motor
16-10 Potencia [kW]
16-11 Potencia [HP]
16-12 Tensión motor
15-13 Modo de registro
15-11 Intervalo de registro
15-12 Evento de disparo
15-14 Muestras antes de disp.
15-2* Registro histórico
14-12 Función desequil. alimentación
14-1* Fallo aliment.
14-14 Kin. Back-up Time-out
14-10 Fallo aliment.
14-11 Avería de tensión de red
16-13 Frecuencia
16-14 Intensidad del motor
15-21 Registro histórico: ref./realim
15-20 Registro histórico: Evento
14-15 Kin. Back-up Trip Recovery Level
14-16 Kin. Back-up Gain
8 8
esclavo
12-29 Almacenar siempre
12-27 Maestro primario
12-08 Nombre de host
12-04 Servidor DHCP
12-05 Caducidad arriendo
12-06 Servidores de nombres
12-07 Nombre de dominio
12-1* Parámetros enlace Ethernet
12-10 Estado del vínculo
12-12 Negociación automática
12-11 Duración del vínculo
12-01 Dirección IP
12-02 Máscara de subred
10-51 Lectura cong. datos proceso
10-39 Parámetros Devicenet F
10-33 Almacenar siempre
10-34 Código de producto DeviceNet
10-5* CANopen
10-50 Escritura cong. datos proceso
12-** Ethernet
12-0* Ajustes de IP
12-03 Puerta enlace predet.
12-00 Asignación de dirección IP
12-09 Dirección física
12-13 Velocidad vínculo
12-14 Vínculo Dúplex
12-19 Supervisor IP Addr.
12-18 Supervisor MAC
12-2* Datos de proceso
12-22 Lectura cong. datos proceso
12-20 Instancia de control
12-21 Escritura cong. datos proceso
12-28 Grabar valores de datos
12-24 Process Data Cong Read Size
12-23 Process Data Cong Write Size
12-3* EtherNet/IP
12-30 Parámetro de advertencia
12-33 Revisión CIP
12-32 Control de red
12-31 Referencia de red
12-34 Código de producto CIP
12-35 Parámetro EDS
12-37 Temporizador de inhibición COS
12-38 Filtro COS
12-4* Modbus TCP
12-40 Parám. de estado
12-41 Recuento mensajes de esclavo
12-42 Recuento mensajes de excep. de
12-59 EtherCAT Status
12-5* EtherCAT
12-50 Congured Station Alias
12-51 Congured Station Address
12-6* Ethernet PowerLink
12-60 ID MAC
12-63 Basic Ethernet Timeout
12-62 SDO Timeout
12-66 Threshold
12-67 Threshold Counters
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 61
Page 66

Anexo
VLT® Decentral Drive FCD 302
X60
34-09 PCD 9 escritura en MCO
33-88 Código estado en alarma
33-87 Estado term. en alarma
33-63 Salida digital Terminal X59/1
33-64 Salida digital Terminal X59/2
33-65 Salida digital Terminal X59/3
33-66 Salida digital Terminal X59/4
33-67 Salida digital Terminal X59/5
33-68 Salida digital Terminal X59/6
33-69 Salida digital Terminal X59/7
33-70 Salida digital Terminal X59/8
33-8* Parám. globales
33-80 Núm. prog. activado
33-81 Estado de arranque
HOME
88
32-90 Origen depuración
32-06 Frec. reloj de encoder absoluto
33-** Ajustes MCO avanz.
32-07 Gener. de reloj encoder absol.
33-00 Forzar HOME
33-0* Movimiento inicial
absoluto
32-08 Longitud del cable del encoder
33-02 Rampa para movimiento HOME
33-01 Desplaz. del punto cero desde HOME
32-09 Control del encoder
32-10 Dirección rotacional
33-04 Comport. durante el movimiento
33-03 Velocidad del movimiento HOME
32-12 Numerador de unidades del usuario
32-11 Denominador de la unidad de usuario
33-1* Sincronización
32-13 Enc.2 Control
32-14 Enc.2 node ID
33-10 Factor de sincronización maestro (M: S)
32-15 Enc.2 CAN guard
33-82 Control del estado del convertidor
33-11 Factor de sincronización esclavo (M: S)
32-3* Encoder 1
33-83 Comportam. tras error
33-12 Desplaz. posic. para sincroniz.
32-30 Tipo de señal incremental
33-85 MCO sumin. por 24 VCC ext.
33-15 Número de marcador para Maestro
33-14 Lím. veloc. de esclavo relativo
33-13 Ventana precis. para sincroniz. posición
32-33 Resolución absoluta
32-32 Protocolo absoluto
32-31 Resolución incremental
33-16 Número de marcador para Esclavo
32-35 Longitud de datos del encoder
33-17 Distancia del marcador maestro
absoluto
33-94 Terminación serie RS485 MCO X60
33-95 Velocidad en baudios serie RS485 MCO
33-91 X62 MCO CAN baud rate
33-90 X62 MCO CAN node ID
33-9* Aj. puerto MCO
33-23 Comp. arran. para sincr. marc.
33-22 Ventana de toler. del marcad. esclavo
33-21 Ventana toler. del marcad. maestro
33-20 Tipo de marcador esclavo
33-18 Distancia del marcador esclavo
33-19 Tipo de marcador maestro
absoluto
32-39 Control del encoder
32-38 Longitud del cable del encoder
32-40 Terminación del encoder
32-37 Gener. de reloj encoder absol.
32-36 Frec. reloj de encoder absoluto
34-** Lectura datos MCO
33-24 Número de marcador para Fallo
32-43 Enc.1 Control
34-0* Par. escr. PCD
34-01 PCD 1 escritura en MCO
33-25 Número de marcador para Listo
33-26 Filtro de velocidad
32-44 Enc.1 node ID
32-45 Enc.1 CAN guard
34-02 PCD 2 escritura en MCO
33-27 Tiempo de ltro de desplazamiento
32-5* Fuente realiment.
33-86 Terminal en alarma
33-84 Comportamiento tras Esc.
34-06 PCD 6 escritura en MCO
34-04 PCD 4 escritura en MCO
34-05 PCD 5 escritura en MCO
34-03 PCD 3 escritura en MCO
33-28 Conguración del ltro de marcadores
33-31 Tipo de sincronización
33-30 Corrección de marcadores máxima
33-29 Tiempo ltro para ltro de marc.
32-51 Última voluntad MCO 302
32-52 Source Master
32-50 Esclavo fuente
32-6* Controlador PID
34-08 PCD 8 escritura en MCO
34-07 PCD 7 escritura en MCO
33-33 Velocity Filter Window
33-34 Slave Marker lter time
33-32 Feed Forward Velocity Adaptation
32-60 Factor proporcional
32-61 Factor de derivación
32-62 Factor integral
34-10 PCD 10 escritura en MCO
33-4* Gestión de límites
32-63 Valor límite para la suma integral
34-2* Par. lectura PCD
34-21 PCD 1 lectura desde MCO
33-40 Comport. en conmut. de lím. nal
33-41 Límite nal de software negativo
32-65 Avance de velocidad
32-64 Ancho de banda del PID
34-22 PCD 2 lectura desde MCO
33-42 Límite nal de software positivo
32-66 Avance aceleración
34-23 PCD 3 lectura desde MCO
33-43 Lím. nal software neg. activado
32-67 Máx. Error de posición tolerado
34-24 PCD 4 lectura desde MCO
33-44 Lím. nal software pos. activado
32-68 Comport. inverso para esclavo
34-26 PCD 6 lectura desde MCO
34-25 PCD 5 lectura desde MCO
33-46 Valor de límite de la ventana de
33-45 Tiempo en la ventana de destino
32-70 Tiempo explor. gener. perf.
32-69 Tiempo de muestra para el control PID
34-28 PCD 8 lectura desde MCO
34-27 PCD 7 lectura desde MCO
destino
33-47 Tamaño de la ventana de destino
32-71 Tam. ventana control (activ.)
32-72 Tam. ventana control (desact.)
34-29 PCD 9 lectura desde MCO
33-5* Conguración E/S
32-73 Integral limit lter time
34-30 PCD 10 lectura desde MCO
34-4* Entradas y salidas
33-50 Entrada digital Terminal X57/1
33-51 Entrada digital Terminal X57/2
32-74 Position error lter time
32-8* Velocidad y Acel.
34-41 Salidas digitales
34-40 Entradas digitales
33-52 Entrada digital Terminal X57/3
33-53 Entrada digital Terminal X57/4
32-80 Velocidad máxima (encoder)
32-81 Rampa más corta
34-5* Datos de proceso
34-50 Posición real
33-54 Entrada digital Terminal X57/5
33-55 Entrada digital Terminal X57/6
32-82 Tipo de rampa
32-83 Resolución de velocidad
34-51 Posición ordenada
34-52 Posición real del maestro
33-56 Entrada digital Terminal X57/7
33-57 Entrada digital Terminal X57/8
32-84 Velocidad predeterminada
32-85 Aceleración predeterminada
34-54 Posición de índice del maestro
34-53 Posición de índice del esclavo
33-58 Entrada digital Terminal X57/9
33-59 Entrada digital Terminal X57/10
32-86 Acc. up for limited jerk
32-87 Acc. down for limited jerk
34-55 Posición de curva
34-56 Error de pista
33-61 Entrada digital Terminal X59/1
33-60 Modo Terminal X59/1 y X59/2
32-89 Dec. down for limited jerk
32-88 Dec. up for limited jerk
34-57 Error de sincronización
33-62 Entrada digital Terminal X59/2
32-9* Desarrollo
18-9* Lecturas PID
16-84 Opción comun. STW
18-90 Error PID proceso
16-85 Puerto FC CTW 1
18-91 Salida PID de proceso
16-86 Puerto FC REF 1
18-92 Salida grapada PID de proc.
16-87 Bus Readout Alarm/Warning
[%]
30-10 Relación vaivén
17-25 Velocidad del reloj
30-11 Rel. vaivén aleatoria máx.
17-26 Formato de datos SSI
30-19 Recurso escalado frec. escalada
30-12 Rel. vaivén aleatoria mín.
17-34 Veloc. baudios HIPERFACE
17-5* Interfaz resolver
30-2* Ajuste arranq. av.
17-50 Polos
30-20 Tiempo par arranque alto
17-51 Tensión de entrada
30-22 Protecc. rotor bloqueado
30-21 Intens. par arranque alto [%]
17-52 Frecuencia de entrada:
17-53 Proporción de transformación
30-24 Locked Rotor Detection Speed Error
30-23 Tiempo detecc. rotor bloqueado [s]
17-56 Encoder Sim. Resolución
17-59 Interfaz resolver
18-93 Salida con ganancia escal. PID de proc.
22-** Funciones apl.
22-0* Varios
22-00 Retardo parada ext.
30-** Características especiales
30-0* Vaivén
30-00 Modo vaivén
30-01 Frecuencia Vaivén [Hz]
30-02 Frecuencia Vaivén [%]
16-89 Congurable Alarm/Warning Word
16-9* Lect. diagnóstico
16-90 Código de alarma
16-94 Alim. Código de estado
16-91 Código de alarma 2
16-92 Código de advertencia
16-93 Código de advertencia 2
17-** Opcs. realim. motor
17-1* Interfaz inc. abs.
30-03 Recurso escalado frec. vaivén
17-10 Tipo de señal
30-04 Frec. salto vaivén [Hz]
17-11 Resolución (PPR)
30-05 Frecuencia escalón Vaivén [%]
17-2* Interfaz encod. abs.
30-06 Tiempo escalón Vaivén
17-20 Selección de protocolo
17-21 Resolución (Pulsos/Rev.)
17-24 Longitud de datos SSI
17-22 Revoluciones multivuelta
30-09 Función aleatoria vaivén
30-07 Tiempo secuencia vaivén
30-08 Tiempo acel./decel. vaivén
30-25 Light Load Delay [s]
30-26 Light Load Current [%]
17-6* Ctrl. y aplicación
17-60 Dirección de realimentación
17-61 Control de señal de realimentación
30-27 Light Load Speed [%]
30-5* Unit Conguration
30-50 Heat Sink Fan Mode
30-8* Compatibilidad (I)
17-72 Position Unit Numerator
17-71 Position Unit Scale
17-7* Position Scaling
17-70 Position Unit
30-81 Resistencia freno (ohmios)
30-80 Inductancia eje d (Ld)
17-74 Position Oset
17-73 Position Unit Denominator
30-83 Ganancia proporc. PID veloc.
18-** Lecturas de datos 2
30-84 Ganancia proporc. PID de proc.
31-** Opción Bypass
18-3* Entradas y salidas
18-36 Entrada analógica X48/2 [mA]
31-00 Modo bypass
31-01 Retardo arranque bypass
18-38 Temp. temp. X48/7
18-37 Temp. temp. X48/4
31-03 Activación modo test
31-02 Retardo descon. bypass
18-39 Temp. temp. X48/10
18-4* Lect. datos PGIO
31-10 Cód. estado bypass
31-11 Horas func. bypass
18-44 Salida analógica X49/9
18-43 Salida analógica X49/7
31-19 Activación remota de bypass
32-** Aj. MCO básicos
18-45 Salida analógica X49/11
18-5* Alarmas/Advertencias activas
32-0* Encoder 2
32-00 Tipo de señal incremental
32-01 Resolución incremental
18-55 Active Alarm Numbers
18-56 Active Warning Numbers
18-6* Inputs & Outputs 2
32-03 Resolución absoluta
32-02 Protocolo absoluto
18-60 Digital Input 2
18-7* Rectier Status
absoluto
baudios X55
32-04 Encoder absoluto de velocidad en
32-05 Longitud de datos del encoder
18-75 Rectier DC Volt.
18-70 Tensión de red
18-71 Frecuencia red
18-72 Desequil. de red
62 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 67
Anexo Guía de funcionamiento
42-89 Versión del archivo de personalización
42-9* Especial
42-90 Opción de seguridad del rearranque
43-** Unit Readouts
43-0* Component Status
36-62 Terminal X49/11 escala mín.
36-63 Terminal X49/11 escala máx.
36-64 Terminal X49/11 control de bus
36-65 Term. X49/11 Tiempo lím. sal. pred.
36-60 Terminal X49/11 Salida analógica
43-01 Auxiliary Temp.
43-00 Component Temp.
43-1* Power Card Status
42-10 Fuente de velocidad medida
42-** Funciones de seguridad
42-1* Supervisión de la velocidad
43-10 HS Temp. ph.U
42-11 Resolución del encoder
43-11 HS Temp. ph.V
42-12 Dirección de encoder
43-12 HS Temp. ph.W
42-13 Relación de reducción
43-13 PC Fan A Speed
43-14 PC Fan B Speed
42-14 Tipo de realimentación
42-15 Filtro de realimentación
43-15 PC Fan C Speed
43-2* Fan Pow.Card Status
42-17 Error de tolerancia
42-18 Temporizador de velocidad cero
43-21 FPC Fan B Speed
43-20 FPC Fan A Speed
42-19 Límite de velocidad cero
42-2* Entrada segura
43-22 FPC Fan C Speed
43-23 FPC Fan D Speed
42-21 Tipo
42-20 Función de seguridad
43-24 FPC Fan E Speed
43-25 FPC Fan F Speed
42-22 Tiempo de discrepancia
42-23 Tiempo de señal estable
600-** PROFIsafe
600-22 PROFIdrive/safe Tel. seleccionado
42-24 Comportamiento de reinicio
42-3* General
600-44 Contador mensajes de fallo
42-30 Reacción de fallo externo
600-52 Contador situación fallo
600-47 Número de fallo
42-33 Nombre de ajuste de parámetro
42-31 Fuente de reinicio
8 8
N.º
601-** PROFIdrive 2
601-22 N.º de tel. del canal de seguridad de
Fin
Arranque
42-88 Vers. archivo de personaliz. compatible
42-35 Valor de S-CRC
42-36 Contraseña de nivel 1
42-4* SS1
42-40 Tipo
42-41 Perl de rampa
42-42 Tiempo de retardo
42-43 Triángulo T
42-44 Ratio de deceleración
42-48 Relación de rampa S en deceleración
42-47 Tiempo de rampa
42-49 Relación de rampa S en deceleración
42-5* SLS
42-50 Velocidad de desconexión
42-46 Velocidad cero
42-45 Triángulo V
42-53 Rampa de arranque
42-51 Límite de velocidad
42-52 Reacción a prueba de fallos
42-54 Tiempo de rampa de deceleración
42-61 Dirección de destino
42-6* Bus de campo seguro
42-60 Selección de telegrama
42-8* Estado
42-80 Estado de la opción de seguridad
42-81 Estado 2 de la opción de seguridad
42-82 Código de control seguro
42-87 Tiempo hasta prueba manual
42-86 Información de opción de seguridad
42-83 Código de estado seguro
42-85 Función de seguridad activa
34-58 Velocidad real
34-60 Estado de sincronización
34-59 Velocidad real del maestro
34-61 Estado del eje
34-62 Estado del programa
34-64 Estado MCO 302
34-65 Control MCO 302
35-06 Func. alarma sensor temp.
35-03 Term. X48/7 tipo entr.
35-04 Term. X48/10 unidad temp.
34-66 SPI Error Counter
34-71 Cód. alarma MCO 2
34-7* Lect. diagnóstico
34-70 Cód. alarma MCO 1
35-** Op. entr. sensor
35-0* Modo entrada temp.
35-01 Term. X48/4 tipo entr.
35-00 Term. X48/4 unidad temp.
35-05 Term. X48/10 tipo entr.
35-02 Term. X48/7 unidad temp.
35-1* Temp. temp. X48/4
35-14 Term. X48/4 const. tiempo ltro
35-17 Term. X48/4 límite alta Límite
35-16 Term. X48/4 límite baja Límite
35-15 Term. X48/4 monitor temp.
35-2* Entrada temp. X48/7
35-24 Term. X48/7 const. tiempo ltro
35-27 Term. X48/7 límite alta temp.
35-26 Term. X48/7 límite baja temp.
35-25 Term. X48/7 monitor temp.
35-3* Entrada temp. X48/10
35-34 Term. X48/10 const. tiempo ltro
35-37 Term. X48/10 límite alto temp.
35-36 Term. X48/10 límite bajo temp.
35-35 Term. X48/10 monitor temp.
35-4* Entrada analógica X48/2
35-42 Term. X48/2 escala baja mA
35-43 Term. X48/2 escala alta mA
35-44 Term. X48/2 valor bajo ref./realim
35-45 Term. X48/2 valor alto ref./realim
36-** Op. E/S program.
36-0* Modo E/S
36-03 Modo Terminal X49/7
36-04 Modo Terminal X49/9
36-05 Modo Terminal X49/11
36-4* Salida X49/7
36-40 Terminal X49/7 Salida analógica
36-42 Terminal X49/7 escala mín.
36-43 Terminal X49/7 escala máx.
36-44 Terminal X49/7 control de bus
36-45 Term. X49/7 Tiempo lím. sal. pred.
36-5* Salida X49/9
36-50 Terminal X49/9 Salida analógica
36-52 Terminal X49/9 escala mín.
36-53 Terminal X49/9 escala máx.
36-54 Terminal X49/9 control de bus
36-55 Term. X49/9 Tiempo lím. sal. pred.
36-6* Salida X49/11
35-46 Term. X48/2 const. tiempo ltro
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 63
Page 68

Índice
VLT® Decentral Drive FCD 302
Índice
A
Advert....................................................................................................... 37
Aislamiento del ruido.......................................................................... 25
Ajuste........................................................................................................ 31
Ajustes predeterminados........................................................... 32, 58
Alarmas.................................................................................................... 37
Alimentación
Fuente de alimentación de red (L1, L2 y L3)........................... 49
Tensión de red............................................................................ 28, 35
AMA
Adaptación automática del motor..................................... 31, 56
Advertencia........................................................................................ 44
AMA............................................................................................... 31, 35
Analógica
Entrada analógica............................................................................ 50
Salida analógica................................................................................ 51
Señal..................................................................................................... 38
Arranque.................................................................................................. 33
Arranque accidental.......................................................... 8, 22, 27, 34
Auto on................................................................................ 29, 31, 35, 37
Autorrotación........................................................................................... 9
C
Cable apantallado......................................................................... 18, 25
Cable de conexión toma a tierra..................................................... 14
Carga compartida..................................................................... 8, 22, 27
CEM..................................................................................................... 14, 25
Certicación.............................................................................................. 6
Circuito intermedio.............................................................................. 39
consulte también Enlace de CC
Clase de rendimiento energético................................................... 49
Comunicación serie
Comunicación serie...................................... 29, 35, 36, 37, 52, 53
RS485.................................................................................................... 52
Conducto................................................................................................. 25
Conexión a tierra............................................................................ 25, 27
Conexión de red de CA....................................................................... 22
Control
Cableado de control................................................... 14, 18, 22, 25
Características de control.............................................................. 53
Cód. ctrl TO......................................................................................... 41
local......................................................................................... 28, 29, 35
Señal de control................................................................................ 35
Terminal de control........................................................... 29, 35, 37
Controlador externo.............................................................................. 3
Corriente
de CC.............................................................................................. 14, 36
de fuga................................................................................................. 14
Intensidad de salida................................................................. 35, 39
Intensidad nominal......................................................................... 39
Protección de sobreintensidad................................................... 14
Corriente de fuga.................................................................................... 9
Cortocircuito.......................................................................................... 41
D
Datos eléctricos..................................................................................... 48
De par
Características de par..................................................................... 49
Límite.................................................................................................... 40
Desconexión
Bloqueo por alarma......................................................................... 37
Desconexión...................................................................................... 37
Desequilibrio de tensión.................................................................... 39
Dimensiones mecánicas.................................................................... 11
Disipador................................................................................................. 43
E
Ecualización potencial........................................................................ 15
Ejecutar orden....................................................................................... 31
Elementos suministrados.................................................................. 10
Enlace de CC........................................................................................... 39
Entorno..................................................................................................... 49
Entrada
Alimentación de entrada................................................. 14, 18, 25
Analógica............................................................................................ 38
Digital................................................................................................... 40
analógica............................................................................................. 50
de pulsos/encoder........................................................................... 51
digital............................................................................................ 37, 50
Potencia de entrada........................................................................ 37
Tensión de entrada.......................................................................... 27
Terminal de entrada........................................................................ 27
Entrada digital....................................................................................... 50
Equipo...................................................................................................... 11
Equipo opcional.................................................................................... 27
Espacio libre para la refrigeración.................................................. 25
Especicaciones.................................................................................... 25
Esquema de cableado......................................................................... 17
Estructura de menú............................................................................. 29
F
FC................................................................................................................ 25
Frecuencia de conmutación............................................................. 36
64 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 69

Índice Guía de funcionamiento
Freno
Control de freno............................................................................... 40
Frenado................................................................................................ 35
mecánico............................................................................................. 23
Límite de frenado............................................................................. 42
Resist. freno........................................................................................ 39
Resistencia de frenado................................................................... 23
Freno mecánico..................................................................................... 23
Fusible.................................................................................. 14, 25, 43, 54
Fusibles..................................................................................................... 25
G
Golpe......................................................................................................... 11
H
Hand on............................................................................................. 29, 35
Herramientas.......................................................................................... 11
I
Información complementaria............................................................. 3
Inicialización........................................................................................... 32
Inicialización manual........................................................................... 33
Instalación
Entorno de instalación................................................................... 11
Instalación.......................................................................................... 25
Instalación............................................................................................... 25
Instalación higiénica............................................................................ 12
Interferencia EMC................................................................................. 18
Interruptor de desconexión.............................................................. 27
Interruptores DIP.................................................................................. 24
L
LCP............................................................................................................. 28
LED............................................................................................................. 34
Limpieza................................................................................................... 34
Longitudes de los cables................................................................... 50
M
Magnetotérmico................................................................................... 54
Mantenimiento...................................................................................... 34
MCT 10...................................................................................................... 28
Menú principal...................................................................................... 29
Menú rápido.................................................................................... 28, 29
Modbus RTU........................................................................................... 25
Modo de Estado.................................................................................... 35
Modo reposo.......................................................................................... 37
Montaje.................................................................................................... 12
Motor
Cable de motor.......................................................................... 14, 21
Cableado del motor................................................................. 18, 25
Conexión motor................................................................................ 21
Datos de motor.......................................................................... 39, 45
Estado del motor................................................................................ 3
Giro accidental del motor................................................................ 9
Intensidad del motor...................................................................... 44
Intensidad motor............................................................................. 28
Potencia del motor............................................................ 14, 28, 44
Protección contra sobrecarga del motor................................... 3
Salida del motor............................................................................... 49
N
Nivel de tensión.................................................................................... 50
O
Opción de comunicación.................................................................. 43
Orden externa........................................................................................ 37
Orden remota........................................................................................... 3
P
Panel de control local.......................................................................... 28
Pantalla de estado................................................................................ 35
Paquete de idioma............................................................................... 55
Pares de apriete..................................................................................... 26
Pérdida de fase...................................................................................... 39
Permiso de arranque........................................................................... 36
Personal cualicado............................................................................... 8
Placa de características....................................................................... 10
Potencia
Alimentación de entrada............................................................... 27
Conexión eléctrica........................................................................... 14
Factor de potencia........................................................................... 25
Programación.................................................................................. 28, 29
Protección térmica
Protección térmica............................................................................. 6
R
Reactancia de fuga del estátor........................................................ 56
Reactancia principal............................................................................ 56
Realimentación....................................................................... 25, 36, 43
Realimentación del sistema................................................................ 3
Referencia
Referencia...................................................................... 28, 35, 36, 37
remota.................................................................................................. 36
Velocidad de referencia................................................................. 35
Registro de alarmas............................................................................. 29
Registro de fallos.................................................................................. 29
Reinicio........................................................... 28, 29, 33, 37, 39, 40, 45
Reinicio automático............................................................................. 28
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 65
Page 70

Índice
VLT® Decentral Drive FCD 302
Rendimiento........................................................................................... 48
Rendimiento de salida (U, V y W).................................................... 49
RS485
Comunicación serie RS485........................................................... 25
RS485.................................................................................................... 52
S
Safe Torque O...................................................................................... 25
Salida
analógica............................................................................................. 51
Salidas digitales................................................................................ 52
Salida de CC, 10 V................................................................................. 53
Salida de relé.......................................................................................... 52
Salidas digitales..................................................................................... 52
Secciones transversales...................................................................... 50
Seguridad................................................................................................... 9
Servicio..................................................................................................... 34
Sobrecalentamiento............................................................................ 40
Sobretemperatura................................................................................ 40
Sobretensión.......................................................................................... 36
STO............................................................................................................. 25
Velocidad de referencia...................................................................... 31
Vibración.................................................................................................. 11
T
Tamaño de cable................................................................................... 14
Tarjeta de control
Comunicación serie......................................................................... 52
Comunicación serie USB................................................................ 53
Error cero activo............................................................................... 38
Rendimiento de la tarjeta de control........................................ 53
RS485.................................................................................................... 52
Salida de CC, 10 V............................................................................. 53
Tarjeta de control, salida de 24 V CC......................................... 52
Tecla de funcionamiento................................................................... 28
Tecla de navegación.............................................................. 28, 29, 35
Tecla Menú....................................................................................... 28, 29
Tensión alta........................................................................................ 8, 27
Tensión de alimentación............................................................. 27, 43
Terminal
de salida.............................................................................................. 27
Tipos de terminales......................................................................... 20
Ubicación de los terminales......................................................... 19
Tiempo de descarga............................................................................... 9
Transitorio de ráfagas.......................................................................... 14
U
Uso previsto.............................................................................................. 3
V
Valor de consigna................................................................................. 37
Varios convertidores de frecuencia................................................ 21
66 Danfoss A/S © 11/2016 Reservados todos los derechos. MG04F505
Page 71

Índice Guía de funcionamiento
MG04F505 Danfoss A/S © 11/2016 Reservados todos los derechos. 67
Page 72

Danfoss no acepta ninguna responsabilidad por posibles errores que pudieran aparecer en sus catálogos, folletos o cualquier otro material impreso y se reserva el derecho de alterar sus productos
sin previo aviso, incluidos los que estén bajo pedido, si estas modicaciones no afectan las características convenidas con el cliente. Todas las marcas comerciales de este material son propiedad de
las respectivas compañías. Danfoss y el logotipo Danfoss son marcas comerciales de Danfoss A/S. Reservados todos los derechos.
Danfoss A/S
Ulsnaes 1
DK-6300 Graasten
vlt-drives.danfoss.com
130R0208 MG04F505 11/2016
*MG04F505*
 Loading...
Loading...