

Page 1
MAKING MODERN LIVING POSSIBLE
Manuel de conguration
VLT® AQUA Drive FC 202
0,25-90 kW
vlt-drives.danfoss.com
Page 2

Page 3
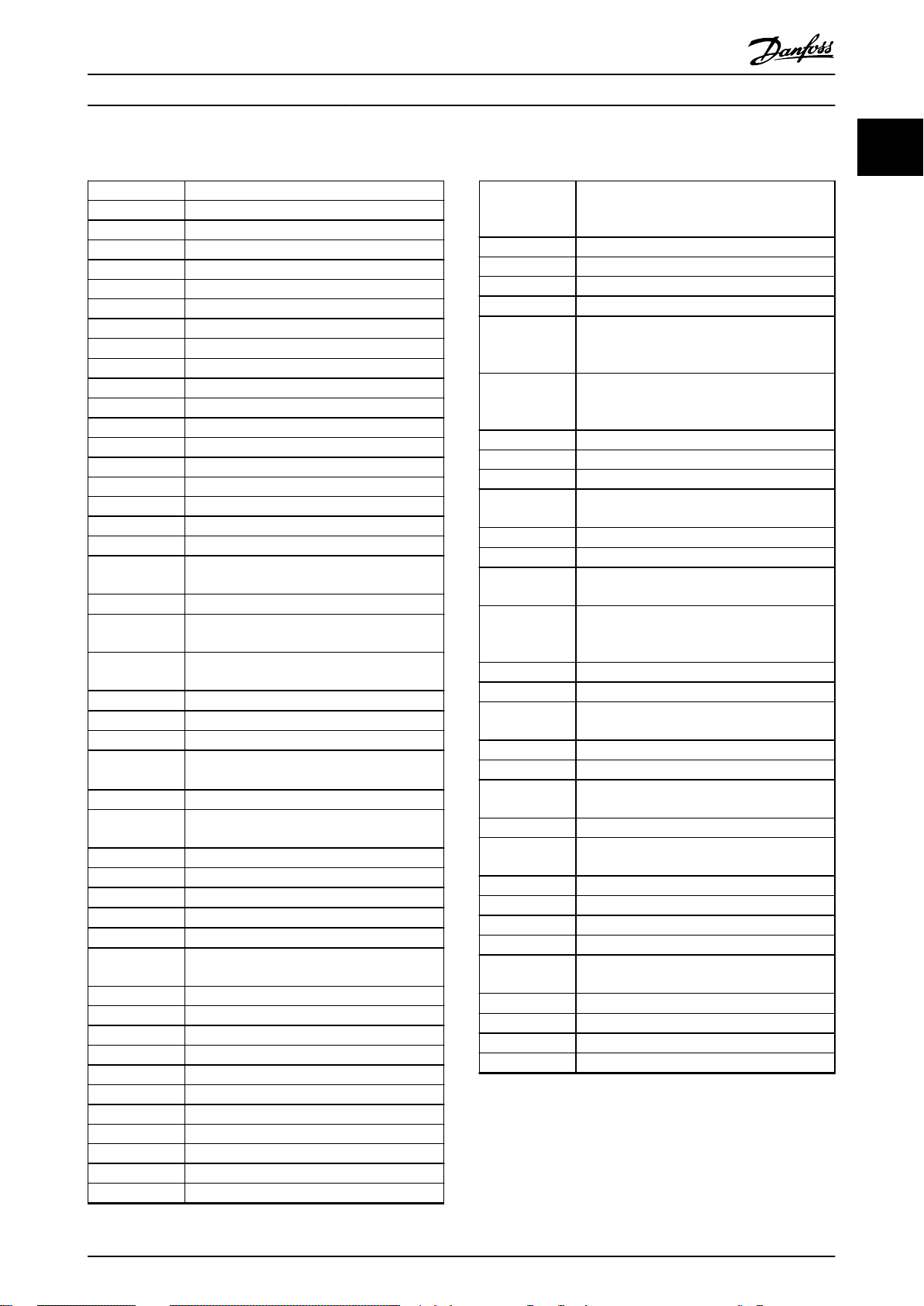
Table des matières Manuel de conguration
Table des matières
1 Introduction
1.1 Objet du Manuel de conguration
1.2 Organisation
1.3 Ressources supplémentaires
1.4 Abréviations, symboles et conventions
1.5 Dénitions
1.6 Version de document et de logiciel
1.7 Homologations et certications
1.7.1 Marquage CE 11
1.7.1.1 Directive basse tension 11
1.7.1.2 Directive CEM 11
1.7.1.3 Directive machine 12
1.7.1.4 Directive ErP 12
1.7.2 Conformité C-Tick 12
1.7.3 Conformité UL 12
1.7.4 Conformité marine 12
1.8 Sécurité
8
8
8
8
9
10
11
11
13
1.8.1 Principes de sécurité générale 13
2 Vue d'ensemble des produits
2.1 Introduction
2.2 Description du fonctionnement
2.3 Séquence de fonctionnement
2.3.1 Section redresseur 20
2.3.2 Section intermédiaire 20
2.3.3 Section d'onduleur 20
2.3.4 Option de freinage 20
2.3.5 Répartition de la charge 21
2.4 Structures de contrôle
2.4.1 Structure de contrôle en boucle ouverte 21
2.4.2 Structure de commande en boucle fermée 22
2.4.3 Contrôle local (Hand On) et distant (Auto On) 22
2.4.4 Utilisation des références 23
2.4.5 Traitement du retour 25
2.5 Fonctions opérationnelles automatisées
15
15
19
20
21
26
2.5.1 Protection contre les courts-circuits 26
2.5.2 Protection contre les surcharges 26
2.5.3 Détection de phase moteur manquante 27
2.5.4 Détection de défaut de phase secteur 27
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 1
Page 4
Table des matières
VLT® AQUA Drive FC 202
2.5.5 Commutation sur la sortie 27
2.5.6 Protection surcharge 27
2.5.7 Déclassement automatique 27
2.5.8 Optimisation automatique de l'énergie (AEO) 28
2.5.9 Modulation automatique de la fréquence de commutation 28
2.5.10 Déclassement automatique pour fréquence de commutation élevée 28
2.5.11 Déclassement automatique en cas de surchaue 28
2.5.12 Rampe automatique 28
2.5.13 Circuit de limite de courant 28
2.5.14 Performance de uctuation de la puissance 28
2.5.15 Démarrage progressif du moteur 29
2.5.16 Atténuation des résonances 29
2.5.17 Ventilateurs à température contrôlée 29
2.5.18 Conformité CEM 29
2.5.19 Mesure du courant sur les trois phases moteur 29
2.5.20 Isolation galvanique des bornes de commande 29
2.6 Fonctions personnalisées des applications
2.6.1 Adaptation automatique au moteur 29
2.6.2 Protection thermique du moteur 30
2.6.3 Panne de secteur 30
2.6.4 Régulateurs PID intégrés 31
2.6.5 Redémarrage automatique 31
2.6.6 Démarrage à la volée 31
2.6.7 Couple complet à vitesse réduite 31
2.6.8 Bipasse de fréquence 31
2.6.9 Préchauage du moteur 31
2.6.10 Quatre process programmables 31
2.6.11 Freinage dynamique 31
2.6.12 Freinage par injection de courant continu 32
2.6.13 Mode veille 32
2.6.14 Autorisation de marche 32
2.6.15 Contrôleur logique avancé (SLC) 32
29
2.6.16 Fonction STO 33
2.7 Fonctions de défaut, d'avertissement et d'alarme
34
2.7.1 Fonctionnement en surchaue 34
2.7.2 Avertissement Référence élevée et basse 34
2.7.3 Avertissement de signal de retour bas et haut 34
2.7.4 Déséquilibre de phases ou Perte de phases 34
2.7.5 Avertissement haute fréquence 34
2.7.6 Avertissement basse fréquence 34
2 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 5
Table des matières Manuel de conguration
2.7.7 Avertissement courant élevé 35
2.7.8 Avertissement courant bas 35
2.7.9 Avertissement Charge nulle/Courroie cassée 35
2.7.10 Interface série perdue 35
2.8 Interfaces utilisateur et programmation
2.8.1 Panneau de commande local 35
2.8.2 Logiciel PC 36
2.8.2.1 Logiciel de programmation MCT 10 36
2.8.2.2 Logiciel de calcul des harmoniques VLT® MCT 31 37
2.8.2.3 Logiciel de calcul des harmoniques (HCS) 37
2.9 Maintenance
2.9.1 Stockage 37
3 Intégration du système
3.1 Conditions ambiantes de fonctionnement
3.1.1 Humidité 38
3.1.2 température 38
3.1.3 Refroidissement 39
3.1.4 Surtension générée par le moteur 40
3.1.5 Bruit acoustique 40
3.1.6 Vibrations et chocs 40
3.1.7 Atmosphères agressives 40
35
37
38
38
3.1.8 Dénitions du niveau IP 42
3.1.9 Perturbations radioélectriques 42
3.1.10 Conformité en matière d'isolation galvanique et de PELV 43
3.1.11 Stockage 43
3.2 Protection CEM, contre les harmoniques et contre les fuites à la terre
3.2.1 Généralités concernant les émissions CEM 44
3.2.2 Résultats des essais CEM 45
3.2.3 Conditions d'émission 46
3.2.4 Conditions d'immunité 47
3.2.5 Isolation du moteur 48
3.2.6 Courants des paliers de moteur 48
3.2.7 Harmoniques 49
3.2.8 Courant de fuite à la terre 52
3.3 Intégration secteur
3.3.1 Congurations du secteur et eets de la CEM 53
3.3.2 Perturbation secteur basse fréquence 54
3.3.3 Analyse des perturbations secteur 55
44
53
3.3.4 Options pour réduire les perturbations secteur 55
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 3
Page 6
Table des matières
VLT® AQUA Drive FC 202
3.3.5 Perturbations radioélectriques 55
3.3.6 Classement du site d'exploitation 55
3.3.7 Utilisation avec une source d'entrée isolée 56
3.3.8 Correction du facteur de puissance 56
3.3.9 Retard de puissance d'entrée 56
3.3.10 Transitoires du réseau 56
3.3.11 Exploitation avec un générateur en veille 57
3.4 Intégration du moteur
3.4.1 Considérations relatives au choix du moteur 57
3.4.2 Filtres sinusoïdaux et dU/dt 57
3.4.3 Mise à la terre correcte du moteur 58
3.4.4 Câbles moteur 58
3.4.5 Blindage des câbles du moteur 58
3.4.6 Raccordement de plusieurs moteurs 59
3.4.7 Isolation du l de commande 61
3.4.8 Protection thermique du moteur 61
3.4.9 Contacteur de sortie 61
3.4.10 Fonctions de freinage 61
3.4.11 Freinage dynamique 61
3.4.12 Calcul de la résistance de freinage 62
3.4.13 Câblage de la résistance de freinage 63
3.4.14 Résistance de freinage et IGBT frein 63
3.4.15 Rendement énergétique 63
3.5 Entrées et sorties supplémentaires
57
65
3.5.1 Schéma de câblage 65
3.5.2 Raccordements de relais 66
3.5.3 Raccordement électrique conforme CEM 67
3.6 Planication mécanique
3.6.1 Dégagement 68
3.6.2 Montage mural 68
3.6.3 Accès 69
3.7 Options et accessoires
3.7.1 Options de communication 73
3.7.2 Options entrée/sortie, signal de retour et sécurité 73
3.7.3 Options du contrôle en cascade 73
3.7.4 Résistances de freinage 75
3.7.5 Filtres sinus 75
3.7.6 Filtres dU/dt 75
3.7.7 Filtres en mode commun 75
3.7.8 Filtres harmoniques 76
68
69
4 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 7
Table des matières Manuel de conguration
3.7.9 Kit de protection IP21/NEMA Type 1 76
3.7.10 Kit de montage externe pour LCP 78
3.7.11 Support de xation pour protections de tailles A5, B1, B2, C1 et C2 79
3.8 Interface série RS485
3.8.1 Vue d'ensemble 80
3.8.2 Raccordement du réseau 81
3.8.3 Terminaison du bus RS485 81
3.8.4 Précautions CEM 81
3.8.5 Vue d'ensemble du protocole FC 82
3.8.6 Conguration du réseau 82
3.8.7 Structure des messages du protocole FC 82
3.8.8 Exemples de protocole FC 86
3.8.9 Protocole Modbus RTU 86
3.8.10 Structure des messages du Modbus RTU 87
3.8.11 Accès aux paramètres 91
3.8.12 Prol de contrôle FC Drive 92
3.9 Liste de contrôle de la conception du système
4 Exemples d'applications
4.1 Vue d'ensemble des caractéristiques de l'application
4.2 Fonctions choisies de l'application
80
99
101
101
102
4.2.1 SmartStart 102
4.2.2 Menu rapide Eau et pompes 102
4.2.3 29-1* Fonction décolmatage 102
4.2.4 Pré/post-lubrication 103
4.2.5 29-5* Conrmation du débit 104
4.3 Exemples de conguration d'applications
4.3.1 Application de pompe immergée 107
4.3.2 Contrôleur de cascade BASIC 109
4.3.3 Démarrage de la pompe avec alternance de la pompe principale 110
4.3.4 État et fonctionnement du système 110
4.3.5 Schéma de câblage du contrôleur de cascade 111
4.3.6 Schéma de câblage de la pompe à vitesse variable/xe 112
4.3.7 Schéma de câblage d'alternance de la pompe principale 112
5 Exigences particulières
5.1 Déclassement manuel
5.2 Déclassement pour installation de câbles moteurs longs ou à section augmentée
5.3 Déclassement pour température ambiante
105
116
116
117
117
6 Code type et sélection
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 5
122
Page 8
Table des matières
VLT® AQUA Drive FC 202
6.1 Commande
6.1.1 Code de type 122
6.1.2 Langue du logiciel 124
6.2 Options, accessoires et pièces détachées
6.2.1 Options et accessoires 124
6.2.2 Pièces de rechange 126
6.2.3 Sacs d'accessoires 126
6.2.4 Sélection des résistances de freinage 127
6.2.5 Résistances de freinage recommandées 128
6.2.6 Résistances de freinage alternatives, T2 et T4 135
6.2.7 Filtres harmoniques 136
6.2.8 Filtres sinus 139
6.2.9 Filtres dU/dt 141
6.2.10 Filtres en mode commun 142
7 Spécications
7.1 Données électriques
7.1.1 Alimentation secteur 1 x 200-240 V CA 143
122
124
143
143
7.1.2 Alimentation secteur 3 x 200-240 V CA 144
7.1.3 Alimentation secteur 1 x 380-480 V CA 147
7.1.4 Alimentation secteur 3 x 380-480 V CA 148
7.1.5 Alimentation secteur 3 x 525-600 V CA 152
7.1.6 Alimentation secteur 3 x 525-690 V CA 156
7.2 Alimentation secteur
7.3 Puissance et données du moteur
7.4 Conditions ambiantes
7.5 Spécications du câble
7.6 Entrée/sortie de commande et données de commande
7.7 Fusibles et disjoncteurs
7.8 Dimensionnements puissance, poids et dimensions
7.9 Test dU/dt
7.10 Caractéristiques du bruit acoustique
7.11 Options sélectionnées
7.11.1 Module d'E/S à usage général MCB 101 VLT® 178
7.11.2 VLT® Relay Card MCB 105 178
159
159
160
160
161
164
173
175
177
178
7.11.3 Carte thermistance PTC VLT® MCB 112 180
7.11.4 VLT® Extended Relay Card MCB 113 182
7.11.5 VLT® Sensor Input Option MCB 114 183
7.11.6 Contrôleur de cascade étendu VLT® MCO 101 184
7.11.7 Contrôleur de cascade avancé VLT® MCO 102 185
6 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 9
Table des matières Manuel de conguration
8 Annexe - Schémas sélectionnés
8.1 Schémas de raccordement au secteur (3 phases)
8.2 Schéma de raccordement du moteur
8.3 Schémas des bornes relais
8.4 Orices d'entrée de câble
Indice
188
188
191
193
194
198
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 7
Page 10

Introduction
VLT® AQUA Drive FC 202
1
1 Introduction
1.1 Objet du Manuel de conguration
Ce Manuel de conguration des variateurs de fréquence
Danfoss VLT® AQUA Drive a été rédigé à l'attention des :
Ingénieurs de projets et systèmes
•
Consultants en conception
•
Spécialistes des applications et produits
•
Le Manuel de conguration fournit des informations
techniques qui permettent de comprendre les capacités du
variateur de fréquence pour une intégration dans des
systèmes de contrôle et de surveillance de moteurs.
L'objectif du Manuel de
informations relatives à la conception ainsi que des
données de préparation an de pouvoir intégrer le
variateur de fréquence dans un système. Le Manuel de
conguration s'applique à plusieurs variateurs de
fréquence et options destinés à diverses applications et
installations.
La consultation des informations détaillées du produit
permet, lors de la conception, de développer un système
optimal en termes de fonctionnalité et
VLT® est une marque déposée.
1.2
Organisation
Chapitre 1 Introduction : objectif général du Manuel de
conguration et conformité aux directives internationales.
Chapitre 2 Vue d'ensemble des produits : structure interne et
fonctionnalité du variateur de fréquence ; caractéristiques
opérationnelles.
Chapitre 3 Intégration du système : conditions environnementales ; CEM, harmoniques et fuites à la terre ; entrée
secteur ; moteurs et raccordements du moteur ; autres
connexions ;
options et accessoires disponibles.
planication mécanique ; et descriptions des
conguration est de fournir des
d'ecacité.
Chapitre 7
techniques dans des tableaux ou sous la forme de
graphiques.
Chapitre 8 Annexe - Schémas sélectionnés : compilation de
graphiques illustrant les connexions électriques et du
moteur, les bornes de relais et les entrées de câble.
Spécications : compilation des caractéristiques
1.3 Ressources supplémentaires
Autres ressources disponibles pour bien comprendre les
fonctions avancées et la programmation des variateurs de
fréquence ainsi que la conformité aux directives :
Le Manuel d'utilisation du VLT® AQUA Drive FC 202
•
(appelé Manuel d'utilisation dans ce manuel)
fournit des informations détaillées sur l'installation et la mise en marche du variateur de
fréquence.
Le Manuel de conguration du VLT® AQUA Drive FC
•
202 fournit les informations nécessaires à la
conception et à la préparation visant à intégrer le
variateur de fréquence dans un système.
®
Le Guide de programmation du VLT
•
FC 202 (appelé Guide de programmation dans ce
manuel) fournit de plus amples détails sur la
gestion des paramètres et donne de nombreux
exemples d'applications.
Le Manuel d'utilisation de la fonction Safe Torque
•
O du VLT® décrit comment utiliser les
applications de sécurité fonctionnelle des
variateurs de fréquence Danfoss. Ce manuel est
fourni avec le variateur de fréquence lorsque la
fonction STO est disponible.
Le Manuel de conguration de la résistance VLT
•
Brake Resistor décrit le choix optimal de la
résistance de freinage.
Des publications et des manuels supplémentaires peuvent
être téléchargés sur le site danfoss.com/Product/Literature/
Technical+Documentation.htm.
AQUA Drive
®
Chapitre 4 Exemples d'applications : échantillons d'applications du produit et consignes d'utilisation.
Chapitre 5 Exigences particulières : détails des environnements opérationnels inhabituels.
Chapitre 6 Code type et sélection : procédures de
commande de l'équipement et des options permettant de
répondre à l'usage prévu du système.
8 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
AVIS!
La présence d'équipements optionnels peut changer
certaines des procédures décrites. Veiller à lire les
instructions fournies avec ces options pour en connaître
les exigences spéciques.
Contacter un fournisseur Danfoss ou consulter le site
www.danfoss.com pour obtenir des informations complémentaires.
Page 11
Introduction
Manuel de conguration
1.4 Abréviations, symboles et conventions
1
1
60° AVM Modulation vectorielle asynchrone 60°
A Ampère
CA Courant alternatif
AD Rejet d'air
AEO Optimisation automatique de l'énergie (AEO)
AI Entrée analogique
AMA Adaptation automatique au moteur
AWG Calibre américain des ls
°C
Degrés Celsius
CD Décharge constante
CM mode commun
TC Couple constant
CC Courant continu
DI Entrée digitale
DM mode diérentiel
D-TYPE Dépend du variateur
CEM Compatibilité électromagnétique
FEM Force électromotrice
ETR Relais thermique électronique
f
JOG
Fréquence du moteur lorsque la fonction
jogging est activée
f
f
M
MAX
Fréquence du moteur
La fréquence de sortie maximum que le
variateur de fréquence applique à sa sortie.
f
MIN
Fréquence moteur minimale du variateur de
fréquence
f
M,N
Fréquence nominale du moteur
FC Variateur de fréquence
g Gramme
Hiperface
®
Hiperface® est une marque déposée de
Stegmann
HP Cheval-puissance
HTL Impulsions du codeur HTL (10-30 V) - Haute
tension logique de transistor
Hz Hertz
I
INV
I
LIM
I
M,N
I
VLT,MAX
I
VLT,N
Courant de sortie nominal onduleur
Limite de courant
Courant nominal du moteur
Courant de sortie maximal
Courant nominal de sortie fourni par le
variateur de fréquence
kHz KiloHertz
LCP Panneau de commande local
lsb Bit de poids faible
m Mètre
mA Milliampère
MCM Mille Circular Mil
MCT Outil de contrôle du mouvement
mH Inductance en millihenry
min Minute
ms Milliseconde
msb Bit de poids fort
η
VLT
Le rendement du variateur de fréquence est
déni comme le rapport entre la puissance
dégagée et la puissance absorbée.
nF Capacité en nanofarad
NLCP panneau de commande local numérique
Nm Newton-mètre
n
s
Paramètres en
ligne/hors ligne
Vitesse moteur synchrone
Les modications apportées aux paramètres en
ligne sont activées immédiatement après
modication de la valeur des données.
P
fr,cont.
Puissance nominale de la résistance de
freinage (puissance moyenne pendant le
freinage continu)
PCB Carte à circuits imprimés
PCD Données de process
PELV Très basse tension de protection
P
m
Puissance de sortie nominale du variateur de
fréquence en surcharge élevée (HO).
P
M,N
Puissance nominale du moteur
Moteur PM Moteur à aimant permanent
Process PID Le régulateur PID maintient la vitesse, la
pression, la température choisie, etc.
R
fr,nom
Valeur de résistance nominale qui garantit une
puissance de freinage sur l'arbre moteur de
150 %/160 % pendant une minute
RCD Relais de protection diérentielle
Régén Bornes régénératives
R
min
Valeur de la résistance de freinage minimale
autorisée par variateur de fréquence
RMS Valeur quadratique moyenne
tr/min Tours par minute
R
rec
Résistance de freinage recommandée des
résistances de freinage Danfoss
s Seconde
SFAVM Modulation vectorielle asynchrone à ux
statorique orienté
STW Mot d'état
SMPS Alimentation en mode commutation
THD Taux d'harmoniques
T
LIM
Limite de couple
TTL Impulsions du codeur TTL (5 V) - Logique de
transistor
U
M,N
Tension nominale du moteur
V Volts
VT Couple variable
VVC+ Commande vectorielle de tension
Tableau 1.1 Abréviations
Conventions
Les listes numérotées correspondent à des procédures.
Les listes à puce fournissent d'autres informations et
décrivent les illustrations.
Les textes en italique indiquent :
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 9
Page 12
Introduction
VLT® AQUA Drive FC 202
1
Références croisées
•
Liens
•
Notes de bas de page
•
Nom de paramètre, nom de groupe de
•
paramètres, option de paramètre
Toutes les dimensions sont indiquées en mm (pouces).
* indique le réglage par défaut d'un paramètre.
Les symboles suivants sont utilisés dans ce document :
AVERTISSEMENT
Indique une situation potentiellement dangereuse qui
peut entraîner des blessures graves ou le décès.
ATTENTION
Indique une situation potentiellement dangereuse qui
peut entraîner des blessures supercielles à modérées.
Ce signe peut aussi être utilisé pour mettre en garde
contre des pratiques non sûres.
AVIS!
Fournit des informations importantes, notamment sur les
situations qui peuvent entraîner des dégâts matériels.
1.5 Dénitions
Résistance de freinage
La résistance de freinage est un module capable
d'absorber la puissance de freinage générée lors du
freinage par récupération. Cette puissance de freinage par
récupération augmente la tension du circuit intermédiaire
et un hacheur de freinage veille à transmettre la puissance
à la résistance de freinage.
Roue libre
L'arbre moteur se trouve en fonctionnement libre. Pas de
couple sur le moteur.
Caractéristiques CC
Caractéristiques de couple constant que l'on utilise pour
toutes les applications telles que les convoyeurs à bande,
les pompes volumétriques et les grues.
Initialisation
Si l'on eectue une initialisation (voir le par.
paramétre 14-22 Mod. exploitation), le variateur de
fréquence revient sur ses réglages par défaut.
Cycle d'utilisation intermittent
Une utilisation intermittente fait référence à une séquence
de cycles d'utilisation. Chaque cycle est composé d'une
période en charge et d'une période à vide. Le fonctionnement peut être périodique ou non périodique.
Facteur de puissance
Le facteur de puissance réelle (lambda) tient compte de
toutes les harmoniques et est toujours plus petit que le
facteur de puissance (cosPhi) qui considère uniquement les
premières harmoniques de courant et de tension.
P kW
cosϕ =
P kVA
Le CosPhi est également appelé facteur de puissance de
déphasage.
Les Lambda et cosPhi sont indiqués pour les variateurs de
fréquence Danfoss VLT® au chapitre 7.2 Alimentation
secteur.
Le facteur de puissance indique dans quelle mesure le
variateur de fréquence impose une charge à l'alimentation
secteur.
Plus le facteur de puissance est bas, plus l'I
pour la même performance en kW.
En outre, un facteur de puissance élevé indique que les
harmoniques de courant sont faibles.
Tous les variateurs de fréquence Danfoss ont des bobines
CC intégrées dans le circuit CC pour avoir un facteur de
puissance élevé et pour réduire le THD sur l'alimentation
principale.
Conguration
Enregistrement des réglages des paramètres dans quatre
process. Basculement entre les 4 process et édition d'un
process pendant qu'un autre est actif.
Compensation du glissement
Le variateur de fréquence compense le glissement du
moteur en augmentant la fréquence en fonction de la
charge du moteur mesurée, la vitesse du moteur restant
ainsi quasiment constante.
Contrôleur logique avancé (SLC)
Le SLC est une séquence d'actions dénies par l'utilisateur
exécutées lorsque les événements associés dénis par
l'utilisateur sont évalués comme étant TRUE (vrai) par le
SLC. (Groupe de par. 13-** Logique avancée).
Bus standard FC
Inclut le bus RS485 avec le protocole FC ou MC. Voir le par.
paramétre 8-30 Protocole.
Thermistance
Résistance dépendant de la température placée à l'endroit
où l'on souhaite surveiller la température (variateur de
fréquence ou moteur).
Alarme
État résultant de situations de panne, p. ex. en cas de
surchaue du variateur de fréquence ou lorsque celui-ci
protège le moteur, le processus ou le mécanisme. Le
redémarrage est impossible tant que l'origine de la panne
n'a pas été résolue et que l'état d'alarme est annulé.
Annuler l'état d'alarme en :
UλxIλxcosϕ
=
UλxIλ
RMS
est élevé
10 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 13
Introduction
activant la remise à zéro ou
•
en programmant le variateur de fréquence pour
•
une remise à zéro automatique
Ne pas utiliser l'alarme à des ns de sécurité des
personnes.
Alarme verrouillée
État résultant de situations de panne lorsque le variateur
de fréquence assure sa propre protection et nécessitant
une intervention physique, p. ex. si la sortie du variateur
de fréquence fait l'objet d'un court-circuit. Une alarme
verrouillée peut être annulée en coupant l'alimentation
secteur, en trouvant l'origine de la panne et en
reconnectant le variateur de fréquence. Le redémarrage est
impossible tant que l'état d'alarme n'a pas été annulé par
un reset ou, dans certains cas, grâce à un reset programmé
automatiquement. Ne pas utiliser l'arrêt à des ns de
sécurité des personnes.
Caractéristique VT
Caractéristiques de couple variable pour les pompes et les
ventilateurs.
Manuel de conguration
1.6 Version de document et de logiciel
Ce manuel est régulièrement révisé et mis à jour. Toutes
les suggestions d'amélioration sont les bienvenues.
Le Tableau 1.2 indique la version du document et la version
correspondante du logiciel.
Édition Remarques Version logiciel
MG20N6xx Remplace MG20N5xx 2.20 et toute version ultérieure
Tableau 1.2 Version de document et de logiciel
1.7
Homologations et certications
Les variateurs de fréquence ont été conçus conformément
aux directives décrites dans cette section.
Pour plus d'informations sur les approbations et les
certicats, accéder à la zone de téléchargement du site
http://www.danfoss.com/BusinessAreas/DrivesSolutions/
Documentations/.
conception et à la fabrication des variateurs de fréquence
sont répertoriées dans le Tableau 1.3.
AVIS!
Il ne fournit aucune information sur la qualité du
produit. Les spécications techniques ne peuvent pas
être déduites du marquage CE.
AVIS!
Les variateurs de fréquence avec fonction de sécurité
intégrée doivent être conformes à la directive sur les
machines.
Directive UE Version
Directive basse tension 2006/95/EC
Directive CEM 2004/108/EC
Directive sur les machines
Directive ErP 2009/125/EC
Directive ATEX 94/9/EC
Directive RoHS 2002/95/EC
Tableau 1.3 Directives UE applicables aux variateurs de
fréquence
1) La conformité à la directive sur les machines est requise
uniquement pour les variateurs de fréquence avec fonction de
sécurité intégrée.
Les déclarations de conformité sont disponibles à la
demande.
1.7.1.1
La directive basse tension s'applique à tous les appareils
électriques utilisés dans les plages de tension allant de 50
à 1000 V CA et de 75 à 1600 V CC.
La directive vise à garantir la sécurité individuelle et à
éviter les dégâts matériels, à condition que les
équipements électriques soient installés et entretenus
correctement, pour l'application prévue.
1.7.1.2
Directive basse tension
Directive CEM
1)
2006/42/EC
1
1
1.7.1
Marquage CE
Illustration 1.1 CE
Le marquage CE (Communauté européenne) indique que
le fabricant du produit se conforme à toutes les directives
CE applicables. Les directives UE applicables à la
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 11
La directive CEM (compatibilité électromagnétique) vise à
réduire les interférences électromagnétiques et à améliorer
l'immunité des équipements et installations électriques. Les
conditions de base relatives à la protection de la Directive
CEM 2004/108/CE indiquent que les dispositifs qui
génèrent des interférences électromagnétiques (EMI) ou
dont le fonctionnement peut être aecté par les EMI,
doivent être conçus pour limiter la génération d'interférences électromagnétiques et doivent présenter un degré
d'immunité adapté vis-à-vis des EMI lorsqu'ils sont correctement installés, entretenus et utilisés conformément à
l'usage prévu.
Page 14
Introduction
VLT® AQUA Drive FC 202
1
Les dispositifs des équipements électriques utilisés seuls ou
intégrés à un système doivent porter le marquage CE. Les
systèmes ne requièrent pas le marquage CE mais doivent
être conformes aux conditions relatives à la protection de
base de la directive CEM.
1.7.1.3 Directive machine
La directive sur les machines vise à garantir la sécurité
individuelle et à éviter les dégâts matériels de l'équipement mécanique utilisé pour l'application prévue. La
directive sur les machines s'applique aux machines
composées d'un ensemble de composants ou de dispositifs
interconnectés dont au moins un est capable de
mouvements mécaniques.
Les variateurs de fréquence avec fonction de sécurité
intégrée doivent être conformes à la directive sur les
machines. Les variateurs de fréquence sans fonction de
sécurité ne sont pas concernés par cette directive. Si un
variateur de fréquence est intégré au système de machines,
Danfoss précise les règles de sécurité applicables au
variateur de fréquence.
Lorsque les variateurs de fréquence sont utilisés sur des
machines comportant au moins une pièce mobile, le
fabricant de la machine doit fournir une déclaration
précisant la conformité avec toutes les lois et mesures de
sécurité applicables.
La norme C-tick concerne les émissions par conduction et
les émissions rayonnées. Pour les variateurs de fréquence,
appliquer les limites d'émission spéciées dans la norme
EN/CEI 61800-3.
Une déclaration de conformité peut être fournie à la
demande.
1.7.3 Conformité UL
Homologué UL
Illustration 1.3 UL
AVIS!
Les variateurs de fréquence 525-690 V ne sont pas
certiés UL.
Le variateur de fréquence est conforme aux exigences de
sauvegarde de la capacité thermique de la norme UL508C.
Pour plus d'informations, se reporter au
chapitre 2.6.2 Protection thermique du moteur.
Conformité marine
1.7.4
1.7.1.4
La directive ErP est la directive européenne Ecodesign pour
les produits liés à la production d'énergie. La directive
dénit les exigences en matière de conception écologique
pour les produits liés à la production d'énergie,
notamment les variateurs de fréquence. Cette directive vise
à augmenter l'ecacité énergétique et le niveau de
protection de l'environnement, tout en développant la
sécurité de l'approvisionnement énergétique. L'impact
environnemental des produits liés à la production
d'énergie inclut la consommation d'énergie pendant toute
la durée de vie du produit.
1.7.2
La marque C-tick indique la conformité avec les normes
techniques applicables en matière de compatibilité électromagnétique (CEM). La conformité C-tick est obligatoire
pour vendre des appareils électriques et électroniques sur
les marchés australien et néo-zélandais.
Directive ErP
Conformité C-Tick
Illustration 1.2 C-Tick
Les unités présentant une protection nominale contre les
inltrations IP55 (NEMA 12) ou supérieure empêchent la
formation d'étincelles et sont classées dans la catégorie
des appareils électriques limitant le risque d'explosion
conformément à l'Accord européen relatif au transport
international des marchandises dangereuses par voie de
navigation intérieure (ADN).
Aller sur www.danfoss.com pour obtenir des informations
complémentaires applicables au domaine marin.
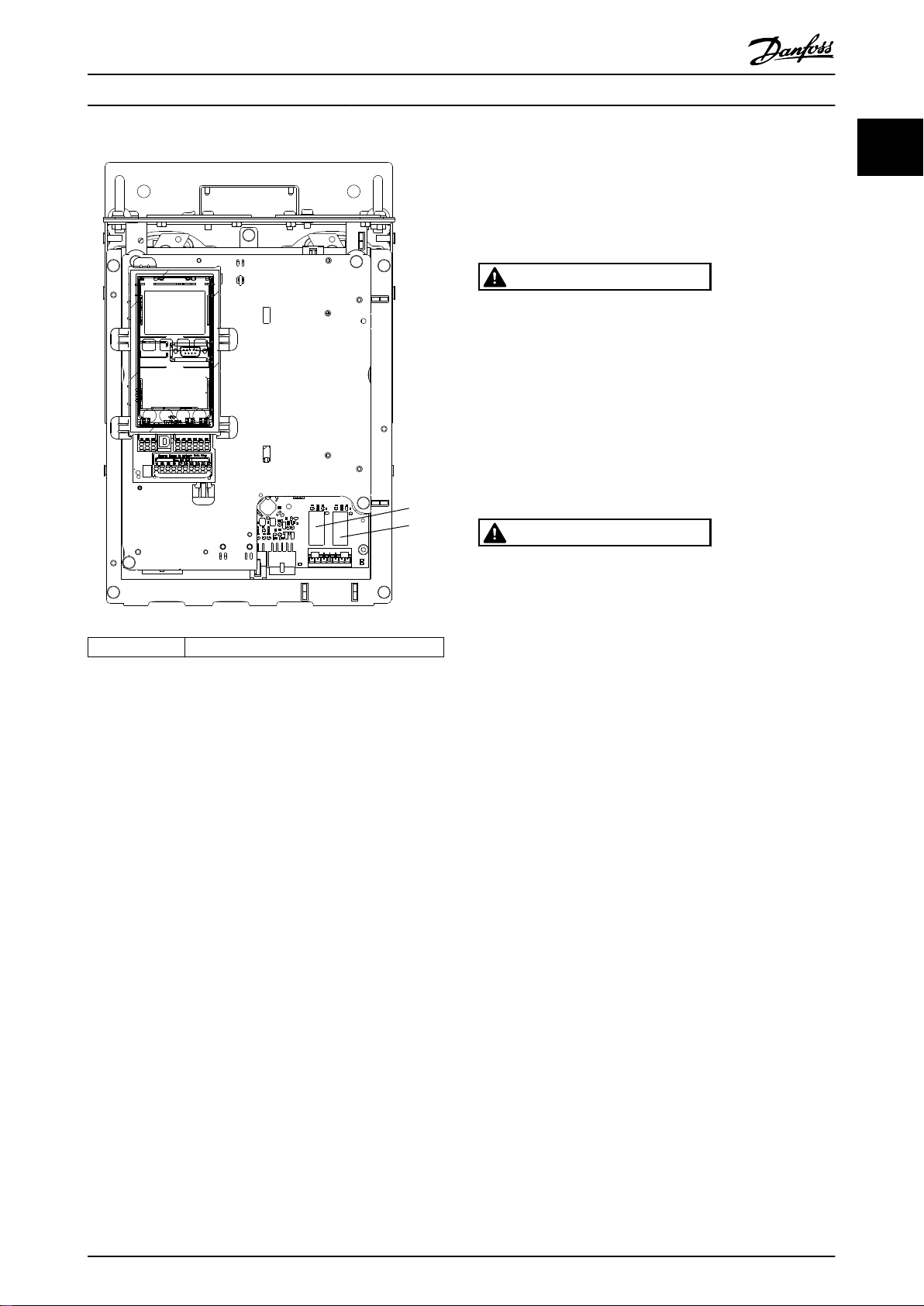
Pour les unités présentant une protection nominale IP20/
Châssis, IP21/Nema 1 ou IP54, il convient de protéger le
risque de formation d'étincelles comme suit :
Ne pas installer d'interrupteur de secteur
•
Vérier que le par. paramétre 14-50 Filtre RFI est
•
réglé sur [1] Actif.
Retirer toutes les ches relais marquées RELAY.
•
Voir le par. Illustration 1.4.
Vérier quelles options relais sont installées le cas
•
échéant. La seule option relais autorisée est la
carte relais étendue VLT®MCB 113.
12 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 15
1
2
130BD832.10
Introduction Manuel de conguration
Par dénition, le personnel qualié est un personnel formé,
autorisé à installer, mettre en service et maintenir l'équipement, les systèmes et les circuits conformément aux lois
et aux réglementations en vigueur. En outre, il doit être
familiarisé avec les instructions et les mesures de sécurité
décrites dans ce manuel d'utilisation.
HAUTE TENSION
Les variateurs de fréquence contiennent des tensions
élevées lorsqu'ils sont reliés à l'alimentation secteur CA,
à l'alimentation CC ou à la répartition de la charge. Le
non-respect de la réalisation de l'installation, du
démarrage et de la maintenance par du personnel
qualié peut entraîner la mort ou des blessures graves.
DÉMARRAGE IMPRÉVU
Lorsque le variateur de fréquence est connecté au
secteur CA, à l'alimentation CC ou est en répartition de
la charge, le moteur peut démarrer à tout moment. Un
1, 2 Fiches relais
Illustration 1.4 Emplacement des ches relais
La déclaration du fabricant est disponible sur demande.
1.8
Sécurité
démarrage imprévu pendant la programmation, une
opération d'entretien ou de réparation peut entraîner la
mort, des blessures graves ou des dégâts matériels. Le
moteur peut être démarré par un commutateur externe,
un ordre du bus série, un signal de référence d'entrée, à
partir du LCP, ou suite à la suppression d'une condition
de panne.
Pour éviter un démarrage imprévu du moteur :
1.8.1 Principes de sécurité générale
Les variateurs de fréquence contiennent des composants
haute tension qui peuvent provoquer des blessures
mortelles en cas de mauvaise manipulation. Seul un
personnel qualié est autorisé à installer et à utiliser cet
équipement. Avant toute réparation, couper d'abord
l'alimentation du variateur de fréquence et attendre la
durée indiquée que l'énergie électrique stockée se dissipe.
AVERTISSEMENT
L'installation, le démarrage et la maintenance
•
doivent être eectués uniquement par du
personnel qualié.
AVERTISSEMENT
Déconnecter le variateur de fréquence du
•
secteur.
Activer la touche [O/Reset] sur le LCP avant de
•
programmer les paramètres.
Le variateur de fréquence, le moteur et tous les
•
équipements entraînés doivent être entièrement
câblés et assemblés lorsque le variateur est
raccordé au secteur CA, à l'alimentation CC ou
en répartition de la charge.
1
1
Il convient de respecter rigoureusement les précautions et
consignes de sécurité pour garantir une exploitation sûre
du variateur de fréquence.
1.8.2
Personnel qualié
Un transport, un stockage, une installation, une exploitation et une maintenance corrects et ables sont
nécessaires au fonctionnement en toute sécurité et sans
problème du variateur de fréquence. Seul du personnel
qualié est autorisé à installer ou utiliser cet équipement.
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 13
Page 16
Introduction
VLT® AQUA Drive FC 202
1
AVERTISSEMENT
TEMPS DE DÉCHARGE
Le variateur de fréquence contient des condensateurs
dans le circuit intermédiaire qui peuvent rester chargés
même lorsque le variateur de fréquence n'est pas
alimenté. Le non-respect du temps d'attente spécié
après la mise hors tension avant un entretien ou une
réparation peut entraîner le décès ou des blessures
graves.
Arrêter le moteur.
•
Déconnecter le secteur CA et les alimentations à
•
distance du circuit CC, y compris les batteries de
secours, les alimentations sans interruption et
les connexions du circuit CC aux autres
variateurs de fréquence.
Déconnecter ou verrouiller les moteurs PM.
•
Attendre que les condensateurs soient complè-
•
tement déchargés avant de procéder à un
entretien ou à une réparation. Le temps
d'attente est indiqué dans le Tableau 1.4.
Voltage
(Tension)
[V]
200-240 0,25-3,7 kW - 5,5-45 kW
380-480 0,37-7,5 kW - 11-90 kW
525-600 0,75-7,5 kW - 11-90 kW
525-690 - 1,1-7,5 kW 11-90 kW
Une haute tension peut être présente même lorsque les voyants
d'avertissement sont éteints.
Tableau 1.4 Temps de décharge
Temps d'attente minimum
(minutes)
4 7 15
AVERTISSEMENT
RISQUE DE COURANT DE FUITE
Les courants de fuite à la terre dépassent 3,5 mA. Le fait
de ne pas mettre le variateur de fréquence à la terre
peut entraîner le décès ou des blessures graves.
L'équipement doit être correctement mis à la
•
terre par un installateur électrique certié.
AVERTISSEMENT
DANGERS LIÉS À L'ÉQUIPEMENT
Tout contact avec les arbres tournants et les matériels
électriques peut entraîner des blessures graves voire
mortelles.
L'installation, le démarrage et la maintenance
•
doivent être eectués par du personnel qualié
uniquement.
Veiller à ce que tous les travaux électriques
•
soient conformes aux réglementations
électriques locales et nationales.
Suivre les procédures décrites dans ce
•
document.
AVERTISSEMENT
ROTATION MOTEUR IMPRÉVUE
FONCTIONNEMENT EN MOULINET
La rotation imprévue des moteurs à aimant permanent
crée des tensions et peut charger l'appareil, ce qui
pourrait entraîner la mort, des blessures ou des
dommages matériels graves.
Vérier que les moteurs à magnétisation
•
permanente sont bien bloqués an d'empêcher
toute rotation imprévue.
ATTENTION
DANGER DE PANNE INTERNE
Une panne interne dans le variateur de fréquence peut
entraîner des blessures graves, si le variateur de
fréquence n'est pas correctement fermé.
Avant d'appliquer de la puissance, s'assurer que
•
tous les caches de sécurité sont en place et
fermement xés.
14 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 17
130BD889.10
60
50
40
30
20
10
H
s
0 100 200 300 400
(mwg)
1350rpm
1650rpm
0
10
20
30
(kW)
40
50
60
200100 300
(
m3 /h
)
(
m3 /h
)
400
1350rpm
1650rpm
P
shaft
1
Vue d'ensemble des produits Manuel de conguration
2 Vue d'ensemble des produits
2.1 Introduction
2.1.2
Économies d'énergie
2
2
Ce chapitre propose un aperçu des principaux assemblages
et circuits du variateur de fréquence. Il vise à décrire les
fonctions électriques internes et de traitement des signaux.
Une description de la structure interne de contrôle est
également incluse.
Sont également décrites les fonctions automatisées et
optionnelles du variateur de fréquence pour la conception
de systèmes d'exploitation robustes présentant des performances de contrôle sophistiquées et de rapports d'état.
Un produit dédié aux applications
2.1.1
d'eau et d'eaux usées
Le variateur VLT® AQUA Drive FC 202 est dédié aux
applications d'eau et d'eaux usées. L'assistant intégré
SmartStart et le menu rapide Eau et pompes guide l'utilisateur dans le processus de mise en service. La gamme de
caractéristiques standard et optionnelles comprend :
Contrôle en cascade
•
Détection de fonctionnement à sec
•
Détection de
•
Alternance moteur
•
Décolmatage
•
Rampes initiale et nale
•
Rampe clapet anti-retour
•
STO
•
Détection de débit faible
•
Pré-lubrication
•
Conrmation du débit
•
Mode de remplissage des tuyaux
•
Mode veille
•
Horloge en temps réel
•
Protection par mot de passe
•
Protection surcharge
•
Contrôleur logique avancé
•
Commande de vitesse minimale
•
Textes programmables libres pour informations,
•
avertissements et alertes
n de courbe
Comparé à des technologies et des systèmes de contrôle
alternatifs, un variateur de fréquence ore le moyen de
contrôle d'énergie optimal pour la régulation des
ventilateurs et des pompes.
En utilisant un variateur de fréquence pour commander le
débit, une réduction de 20 % de la vitesse de la pompe
permet de réaliser des économies d'énergie d'environ 50 %
sur des applications typiques. L'
Illustration 2.1 donne un exemple de réduction énergétique
possible.
1 Économie d'énergie
Illustration 2.1 Exemple : Économie d'énergie
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 15
Page 18
Vue d'ensemble des produits
VLT® AQUA Drive FC 202
2
2.1.3 Exemple d'économies d'énergie
Comme indiqué sur l'Illustration 2.2, le débit est régulé en
modiant la vitesse de la pompe mesurée en tr/min. En
diminuant la vitesse de 20 % seulement par rapport à la
vitesse nominale, le débit est également réduit de 20 % car
il est directement proportionnel à la vitesse. La consommation d'électricité est, quant à elle, réduite de presque 50
%.
Si le système en question doit fournir un débit correspondant à 100 % seulement quelques jours par an, tandis
que la moyenne est inférieure à 80 % du débit nominal le
reste de l'année, la quantité d'énergie économisée est
même supérieure à 50 %.
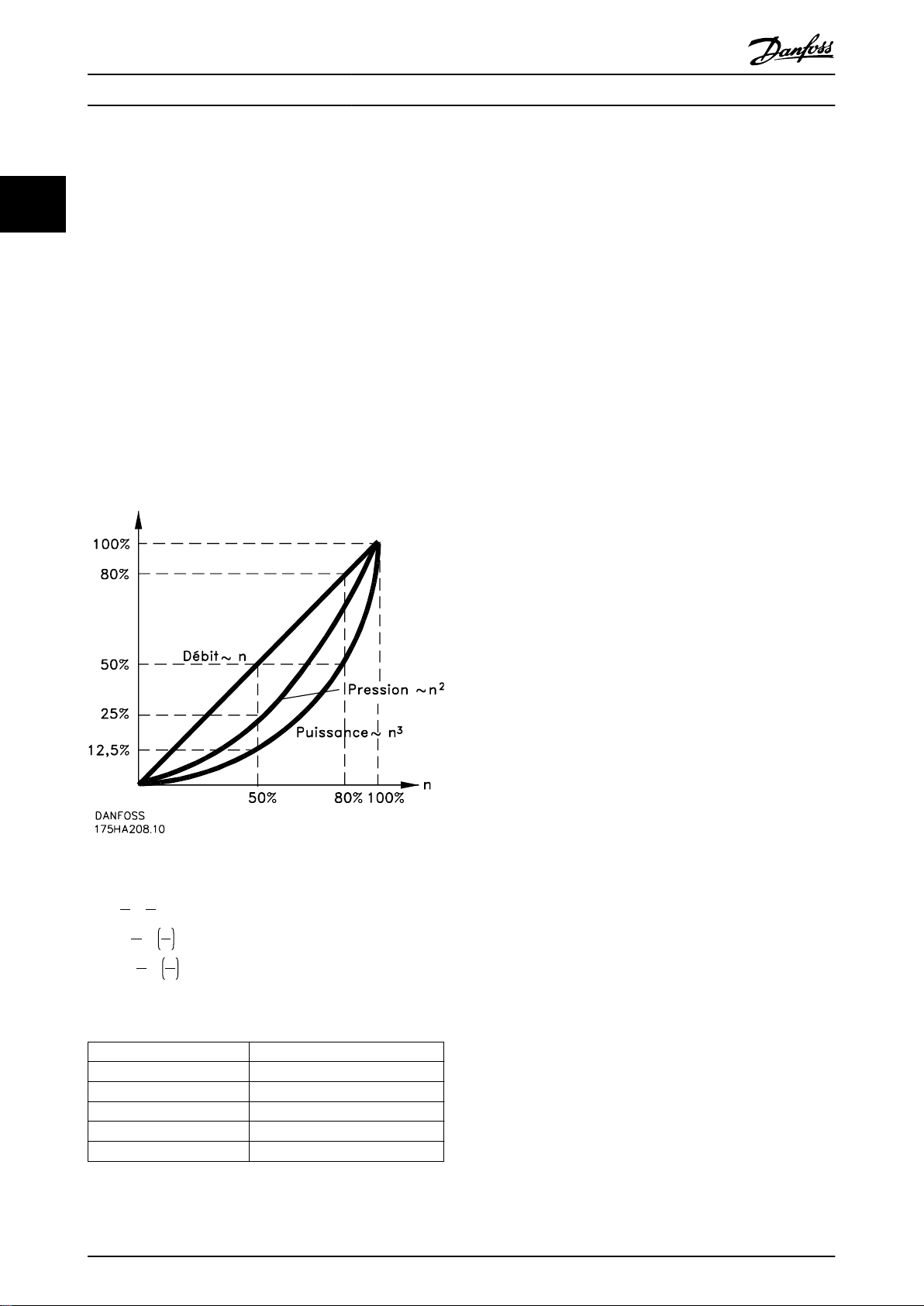
L'Illustration 2.2 décrit le rapport entre débit, pression et
puissance consommée sur la vitesse de la pompe en tr/min
pour les pompes centrifuges.
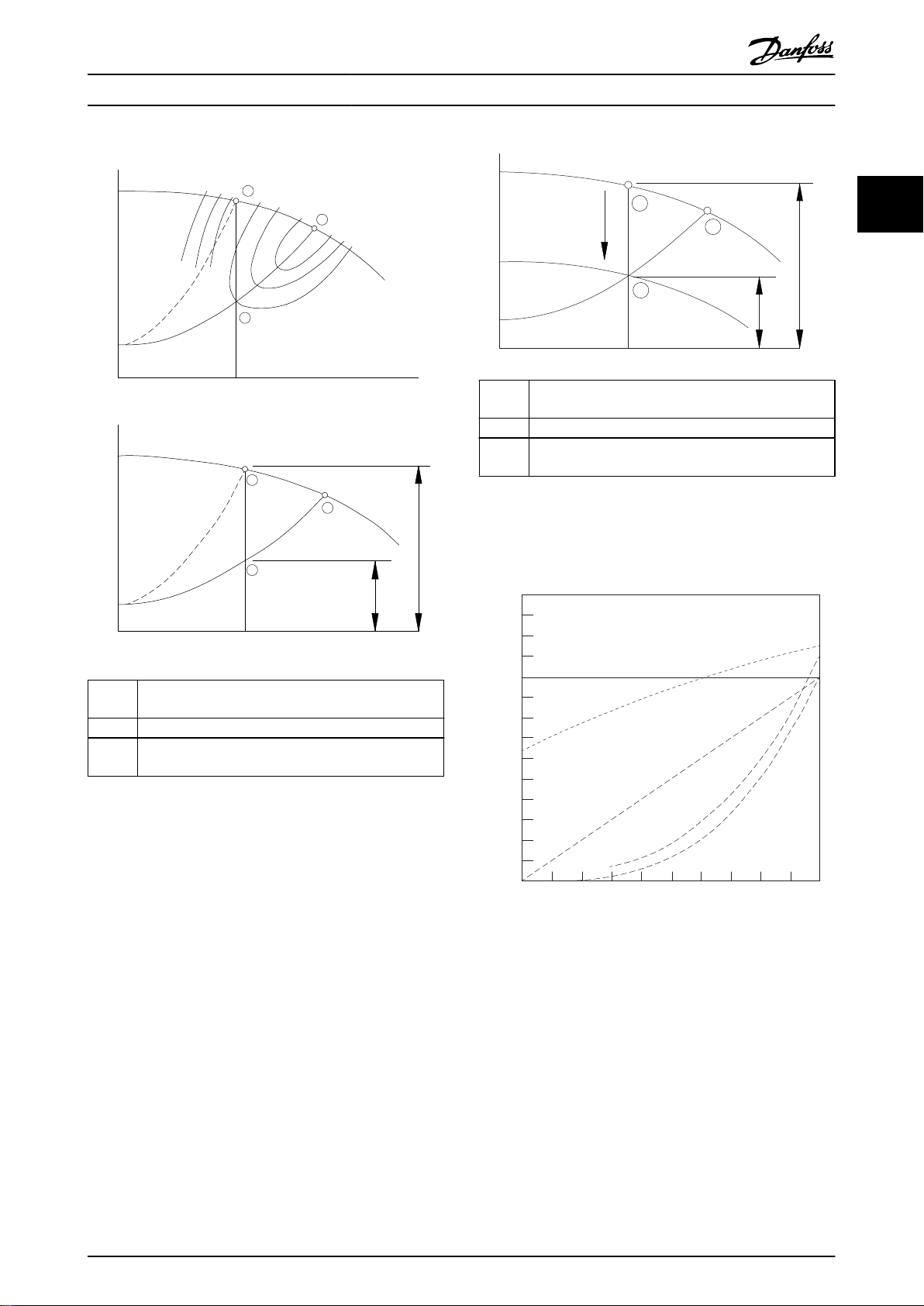
2.1.4
Commande de robinet par rapport à
la commande de vitesse des pompes
centrifuges
Commande de robinet
Comme les exigences en matière de demande de
processus des réseaux d'alimentation en eau varient, le
débit doit être ajusté en conséquence. Les méthodes
couramment utilisées pour adapter le débit sont la
régulation ou la recirculation par l'intermédiaire de vannes.
Une vanne de recirculation trop largement ouverte peut
entraîner le fonctionnement de la pompe à l'extrémité de
la courbe de la pompe, avec un débit élevé à une hauteur
d'élévation basse. Ces conditions entraînent non seulement
une perte d'énergie due à la vitesse élevée de la pompe
mais peuvent aussi provoquer une cavitation de la pompe
entraînant des dommages sur cette dernière.
La régulation du débit avec une vanne entraîne une baisse
de pression dans la vanne (HP-HS). On peut comparer cela
à une accélération et un freinage simultanés, dans le but
de réduire la vitesse de la voiture. L'Illustration 2.3 montre
que la régulation fait tourner la courbe du système du
point (2) de la courbe de la pompe à un point présentant
une ecacité sensiblement réduite (1).
Illustration 2.2 Lois d'anité des pompes centrifuges
Q
n
1
Débit :
Pression:
Puissance:
1
=
Q
n
2
2
2
H
n
1
1
=
H
n
2
2
3
P
n
1
1
=
P
n
2
2
Dans l'hypothèse d'une ecacité égale dans la plage de
vitesse.
Q = débit
Q1 = débit 1 P1 = puissance 1
Q2 = débit réduit P2 = puissance réduite
H = pression n = régulation de vitesse
H1 = pression 1 n1 = vitesse 1
H2 = pression réduite n2 = vitesse réduite
Tableau 2.1 Lois d'anité
16 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
P = puissance
Page 19
100% speed
Flow
Flow
Pump curve
Head or pressure Head or pressure
Natural
operating point
Operating
point
Throttled
Unthrottled
Throttled system
Unthrottled system
60
65
70
75
78
80
80
78
75
3
1
1
2
2
3
Hs
Hp
130BD890.10
Flow
Head or Pressure
Pump curve
Operating
point
Natural
Operating point
system
Unthrottled
Speed
reduction
1
2
3
Hp
Hs
130BD894.10
140
130
120
110
100
90
80
70
60
50
40
30
20
10
0 10 20 30 40 50 60 70 80 90 100
Recirculation
Throttle
control
Cycle
control
VSD
control
Ideal pump
control
Q(%)
P(%)
130BD892.10
Vue d'ensemble des produits
Manuel de conguration
2
2
1 Point de fonctionnement avec une vanne d'étran-
glement
2 Point de fonctionnement naturel
3 Point de fonctionnement utilisant la commande de
vitesse
Illustration 2.3 Régulation du débit par contrôle du robinet
(régulation)
Commande de vitesse
Le même débit peut être ajusté en réduisant la vitesse de
la pompe, comme indiqué sur l'Illustration 2.4. La réduction
de la vitesse entraîne la chute de la courbe de la pompe.
Le point de fonctionnement correspond au nouveau point
d'intersection de la courbe de la pompe et de celle du
système (3). Les économies d'énergie peuvent être
calculées en appliquant les lois d'anité telles qu'elles sont
décrites au chapitre 2.1.3 Exemple d'économies d'énergie.
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 17
1
Point de fonctionnement avec une vanne d'étran-
glement
2 Point de fonctionnement naturel
3 Point de fonctionnement utilisant la commande de
vitesse
Illustration 2.4 Réduction du débit par la commande de
vitesse
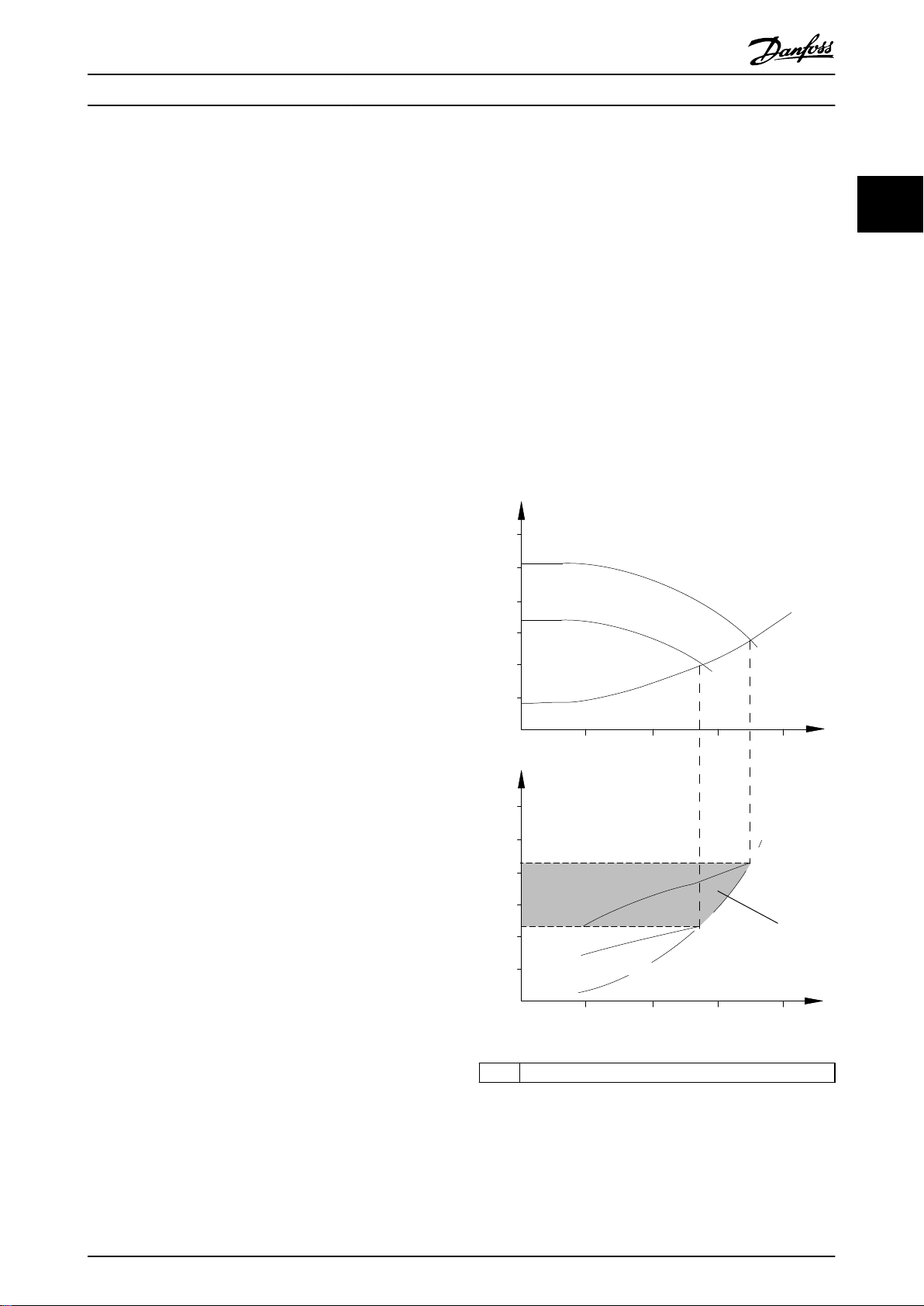
Illustration 2.5 Courbes comparatives de contrôle du débit
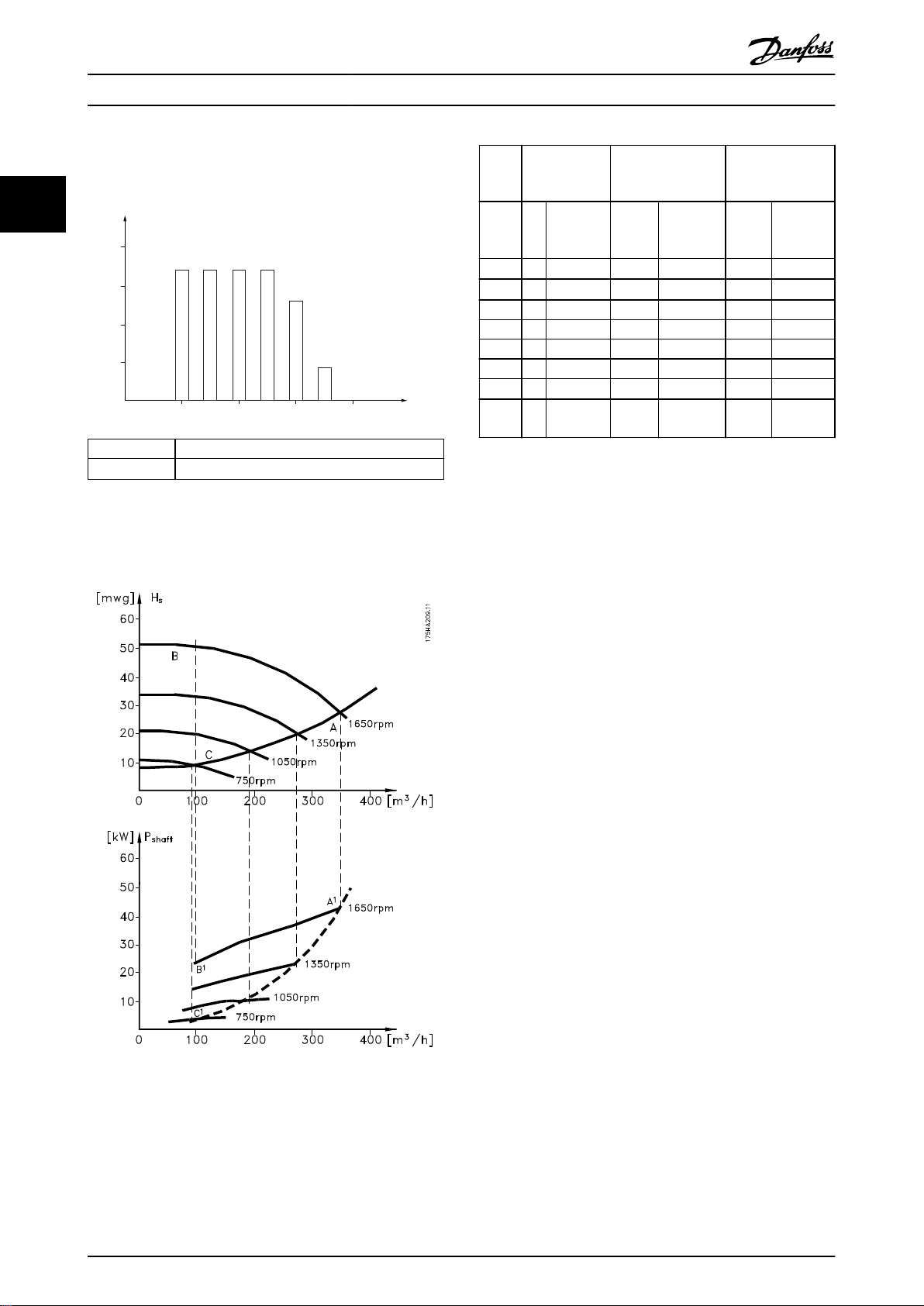
Exemple avec un débit variable sur
2.1.5
une année
Cet exemple est calculé d'après les caractéristiques d'une
pompe tirées de sa che technique et présentées sur
l'Illustration 2.7.
Le résultat obtenu révèle des économies d'énergie
supérieures à 50 % selon la répartition donnée du débit
sur l'année,
voir l'Illustration 2.6. La période de récupération dépend du
prix de l'électricité et du prix du variateur de fréquence.
Page 20
500
[h]
t
1000
1500
2000
200100 300
[m
3
/h]
400
Q
175HA210.11
Vue d'ensemble des produits
VLT® AQUA Drive FC 202
2
Dans le cas présent, elle est inférieure à une année si l'on
compare avec les systèmes à vannes et vitesse constante.
t [h]
Q [m3/h]
Illustration 2.6 Répartition du débit sur 1 année (durée par
rapport au débit)
Durée du débit. Voir aussi le Tableau 2.2.
Débit
Débit Répartition Régulation par
vanne
% Durée PuissanceConsomm
a
tion
[m3/h]
1) Relevé de puissance au point A1
2) Relevé de puissance au point B1
3) Relevé de puissance au point C1
2.1.6
[h] [kW] [kWh] [kW] [kWh]
350 5 438
300 15 1314 38,5 50,589 29,0 38,106
250 20 1752 35,0 61,320 18,5 32,412
200 20 1752 31,5 55,188 11,5 20,148
150 20 1752 28,0 49,056 6,5 11,388
100 20 1752
1008760 – 275,064 – 26,801
Σ
Tableau 2.2 Résultat
42,5
23,0
1)
18,615
2)
40,296
Contrôle amélioré
Commande du
variateur de
fréquence
Puissa
Consomm
nce
1)
42,5
3,5
18,615
3)
6,132
a
tion
L'utilisation d'un variateur de fréquence pour commander
le débit ou la pression d'un système améliore le contrôle.
Un variateur de fréquence peut faire varier la vitesse du
ventilateur ou de la pompe pour obtenir un contrôle
variable du débit et de la pression.
De plus, il peut adapter rapidement la vitesse du
ventilateur ou de la pompe aux nouvelles conditions de
débit ou de pression du système.
Obtenir un contrôle simple du procédé (débit, niveau ou
pression) en utilisant le régulateur PI intégré.
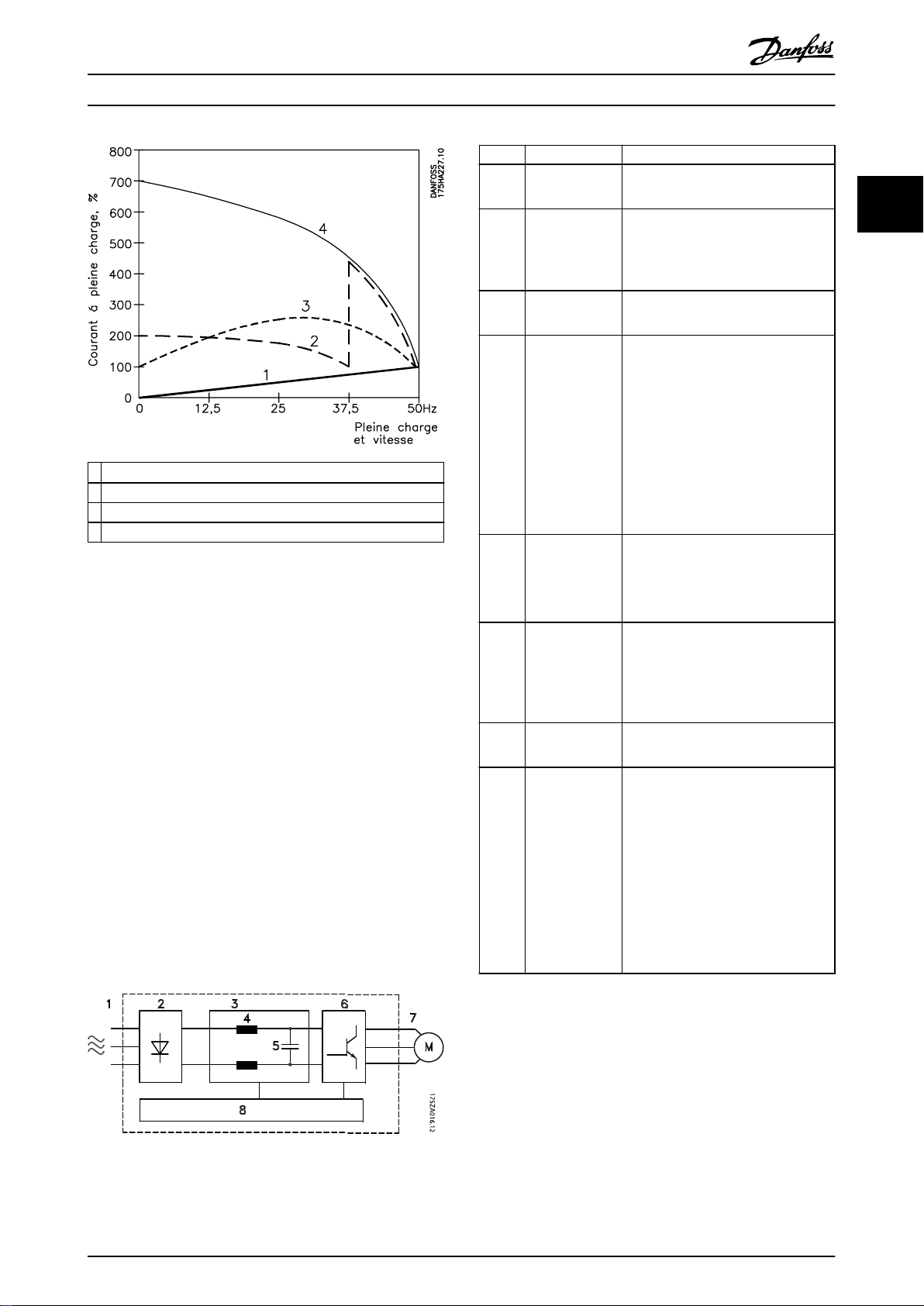
Démarreur étoile/triangle ou
2.1.7
démarreur progressif
Lors du démarrage de gros moteurs, il est nécessaire, dans
beaucoup de pays, d'utiliser un équipement qui limite le
courant de démarrage. Dans les systèmes plus
traditionnels, on utilise couramment un démarreur étoile/
triangle ou un démarreur progressif. De tels démarreurs de
moteur ne sont pas nécessaires lorsqu'on utilise un
variateur de fréquence.
Comme indiqué sur l'Illustration 2.8, un variateur de
fréquence ne consomme pas plus que le courant nominal.
Illustration 2.7 Consommation d'énergie à diérentes vitesses
18 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 21
Vue d'ensemble des produits
1
VLT® AQUA Drive FC 202
2 Démarreur étoile/triangle
3 Démarreur progressif
4 Démarrage direct sur secteur
Illustration 2.8 Courant de démarrage
2.2
Description du fonctionnement
Le variateur de fréquence fournit une quantité régulée de
puissance CA à un moteur pour contrôler sa vitesse. Le
variateur de fréquence fournit une fréquence et une
tension variables au moteur.
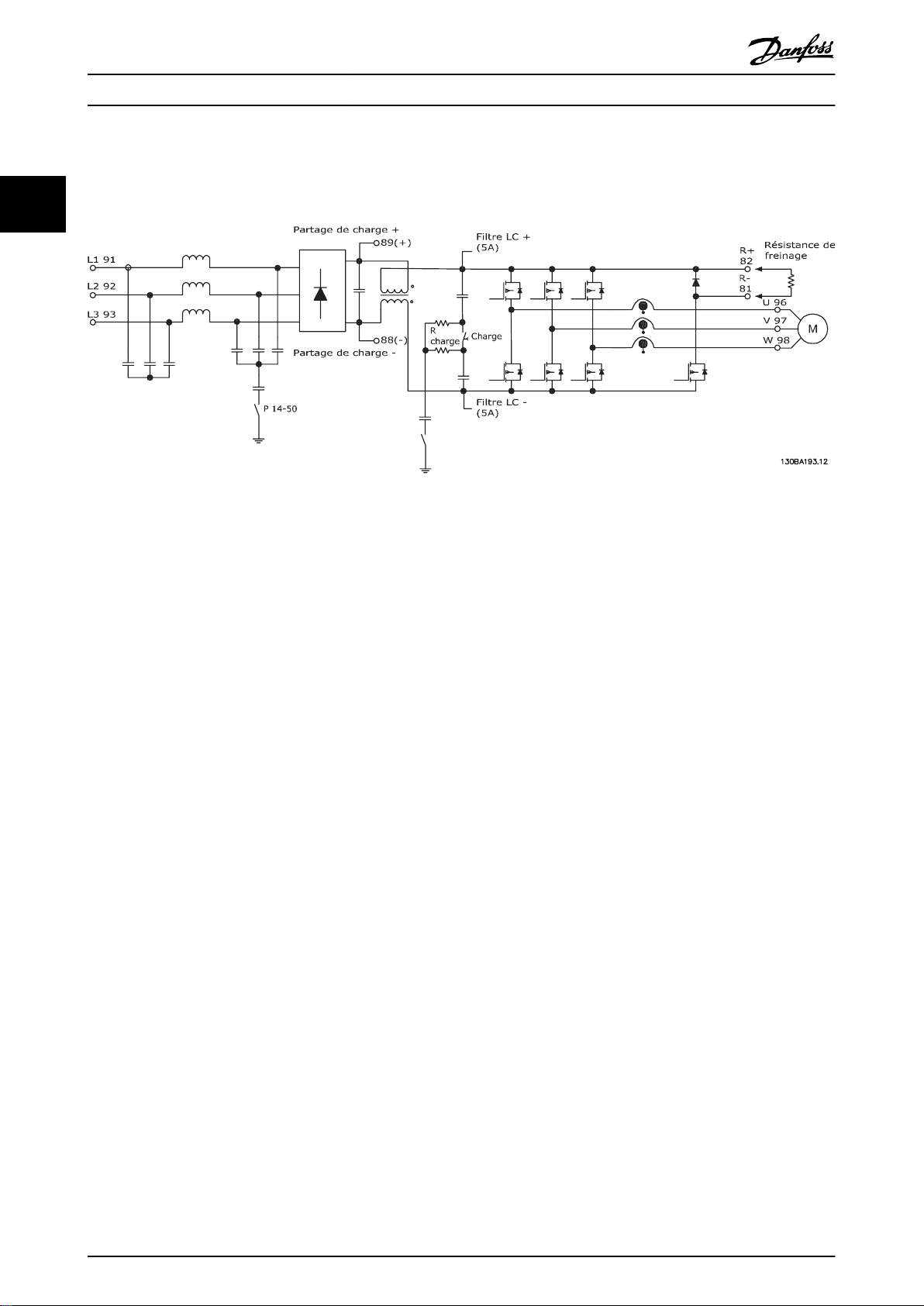
Le variateur de fréquence est divisé en 4 modules
principaux :
Redresseur
•
Circuit de bus CC intermédiaire
•
Onduleur
•
Commande et régulation
•
L'Illustration 2.9 représente un schéma fonctionnel des
composants internes du variateur de fréquence. Voir le
Tableau 2.3 pour connaître leurs fonctions.
Manuel de conguration
Zone Dénomination Fonctions
Alimentation secteur CA triphasée
1 Entrée secteur
2 Redresseur
3 Bus CC
Bobines de
4
réactance CC
Batterie de
5
condensateurs
6 Onduleur
Sortie vers le
7
moteur
Circuit de
8
commande
•
du variateur de fréquence.
Le pont redresseur convertit
•
l'entrée CA en courant CC pour
alimenter le variateur de
fréquence.
Le circuit du bus intermédiaire
•
traite le courant CC.
Filtrent la tension du circuit CC
•
intermédiaire.
Assurent la protection contre les
•
transitoires secteur.
Réduisent le courant RMS.
•
Augmentent le facteur de
•
puissance répercuté vers la ligne.
Réduisent les harmoniques sur
•
l'entrée CA.
Stocke l'énergie CC.
•
Assure une protection anti-panne
•
pendant les courtes pertes de
puissance.
Convertit le courant CC en une
•
forme d'onde CA à modulation
d'impulsions en durée (PWM)
régulée pour une sortie variable
contrôlée du moteur.
Alimentation de sortie triphasée
•
régulée vers le moteur.
La puissance d'entrée, le
•
traitement interne, la sortie et le
courant du moteur sont surveillés
pour fournir un fonctionnement et
un contrôle ecaces.
L'interface utilisateur et les ordres
•
externes sont surveillés et mis en
œuvre.
La sortie et le contrôle de l'état
•
peuvent être assurés.
2
2
Tableau 2.3 Légende de l'Illustration 2.9
1. Le variateur de fréquence redresse la tension CA
du secteur en tension CC.
2. La tension continue (CC) est convertie en un
courant CA d'amplitude et de fréquence variables.
Le variateur de fréquence alimente le moteur avec une
Illustration 2.9 Schéma fonctionnel du variateur de fréquence
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 19
tension/courant et une fréquence variables qui
possibilités de régulation de vitesse variable pour les
moteurs standard triphasés et les moteurs PM non
saillants.
orent des
Page 22
Vue d'ensemble des produits
VLT® AQUA Drive FC 202
2
Le variateur de fréquence gère divers principes de
fonctionnement des moteurs tels que le mode moteur U/f
spécial et VVC+. Le comportement relatif aux courts-circuits
Illustration 2.10 Structure du variateur de fréquence
2.3 Séquence de fonctionnement
2.3.1 Section redresseur
Lorsqu'une puissance est appliquée au variateur de
fréquence, elle entre via les bornes d'entrée (L1, L2, L3) et
arrive au sectionneur et/ou à l'option de ltre RFI, selon la
conguration de l'appareil.
2.3.2 Section intermédiaire
Après la section du redresseur, la tension passe dans la
section intermédiaire. Un circuit de ltre sinus composé de
la bobine d'induction et de la batterie de condensateurs
du bus CC lisse la tension redressée.
La bobine d'induction du bus CC fournit une impédance
série au courant changeant. Ceci participe au processus de
ltrage tout en réduisant la distorsion harmonique sur la
forme d'onde du courant CA d'entrée normalement
inhérente aux circuits redresseurs.
Section d'onduleur
2.3.3
Dès qu'un ordre de fonctionnement et la référence de
vitesse sont présents, les IGBT commencent à commuter
pour créer la forme d'onde de la sortie. Cette forme
d'onde, telle que générée par le principe PWM VVC
Danfoss de la carte de commande,
optimales et des pertes minimales dans le moteur.
ore des performances
+
de ce variateur de fréquence dépend des 3 transformateurs
de courant dans les phases moteur.
Option de freinage
2.3.4
Pour les variateurs de fréquence équipés de l'option de
freinage dynamique, un IGBT de freinage, avec les bornes
81(R-) et 82(R+), est inclus pour la connexion d'une
résistance de freinage externe.
La fonction de l'IGBT de freinage consiste à limiter la
tension du circuit intermédiaire, chaque fois que la limite
de tension maximale est dépassée. Pour ce faire, l'IGBT
commute la résistance montée en externe, au niveau du
bus CC, pour supprimer la tension CC excessive présente
dans les condensateurs du bus.
L'installation externe de la résistance de freinage présente
les avantages de pouvoir choisir la résistance en fonction
des besoins de l'application, de dissiper l'énergie hors du
panneau de commande et de protéger le variateur de
fréquence contre les
est en surcharge.
Le signal de gâchette de l'IGBT de freinage émane de la
carte de commande et est transmis à l'IGBT de freinage via
la carte de puissance et la carte de commande de
gâchette. De plus, les cartes de puissance et de commande
surveillent la connexion de l'IGBT de freinage et de la
résistance de freinage pour éviter les éventuels courtscircuits ou surcharges. Pour les spécications de fusibles
d'entrée, se reporter au chapitre 7.1 Données électriques.
Voir aussi le chapitre 7.7 Fusibles et disjoncteurs.
surchaues si la résistance de freinage
20 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 23
130BB153.10
100%
0%
-100%
100%
P 3-13
Reference
site
Local
reference
scaled to
RPM or Hz
Auto mode
Hand mode
LCP Hand on,
o and auto
on keys
Linked to hand/auto
Local
Remote
Reference
Ramp
P 4-10
Motor speed
direction
To motor
control
Reference
handling
Remote
reference
P 4-13
Motor speed
high limit [RPM]
P 4-14
Motor speed
high limit [Hz]
P 4-11
Motor speed
low limit [RPM]
P 4-12
Motor speed
low limit [Hz]
P 3-4* Ramp 1
P 3-5* Ramp 2
Vue d'ensemble des produits Manuel de conguration
2.3.5 Répartition de la charge
Les unités avec option de répartition de la charge intégrée
comportent les bornes 89 (+) CC et 88 (-) CC. Dans le
variateur de fréquence, ces bornes sont raccordées au bus
CC devant la bobine de réactance du circuit intermédiaire
et les condensateurs du bus.
Pour plus d'informations, contacter Danfoss.
Les bornes de répartition de la charge peuvent être
raccordées dans 2
1. Dans la première méthode, les bornes relient les
circuits de bus CC de plusieurs variateurs de
fréquence entre eux. Cela permet à une unité en
mode régénératif de partager sa tension du bus
excessive avec un autre variateur de fréquence en
mode entraînement moteur. La répartition de la
charge peut ainsi réduire la nécessité de
résistances de freinage dynamique externes, tout
en économisant de l'énergie. Le nombre d'unités
pouvant être raccordées de cette façon est inni
tant qu'elles présentent toutes la même tension
nominale. En outre, selon la taille et le nombre
d'unités, il peut s'avérer nécessaire d'installer des
bobines de réactance CC et des fusibles CC dans
les connexions du circuit intermédiaire et des
bobines de réactance CA sur le secteur. Cette
conguration requiert des considérations
spéciques. Contacter Danfoss pour obtenir de
l'aide.
2. Dans la seconde méthode, le variateur de
fréquence est alimenté exclusivement par une
source CC. Ceci requiert :
congurations diérentes.
2a une source CC ;
2b un moyen d'abaisser la tension dans le
bus CC lors de la mise sous tension.
À nouveau, cette conguration requiert des
considérations spéciques. Contacter Danfoss
pour obtenir de l'aide.
2.4 Structures de contrôle
2.4.1 Structure de contrôle en boucle
ouverte
En mode boucle ouverte, le variateur de fréquence répond
manuellement à des commandes d'entrée via les touches
du LCP ou à distance via les entrées analogiques et
digitales ou le bus série.
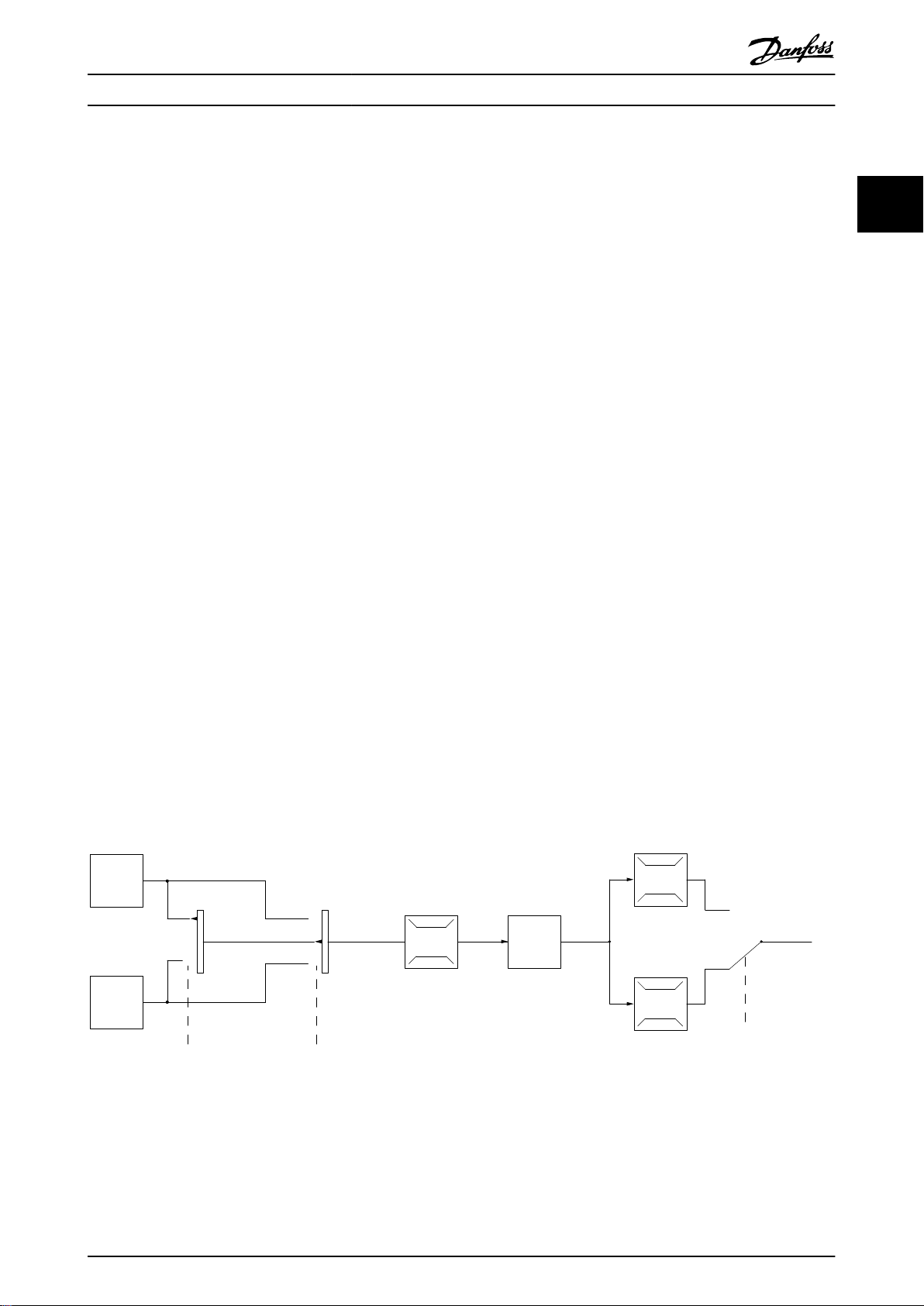
Dans la conguration présentée sur l'Illustration 2.11, le
variateur de fréquence fonctionne en mode boucle
ouverte. Il reçoit une entrée du LCP (mode Manuel) ou via
un signal distant (mode Auto). Le signal (référence de
vitesse) est reçu et conditionné par des limites de vitesse
minimum et maximum du moteur (en tr/min et Hz), des
temps d'accélération et de décélération et le sens de
rotation du moteur. La référence est ensuite transmise pour
contrôler le moteur.
2
2
Illustration 2.11 Schéma fonctionnel du mode boucle ouverte
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 21
Page 24
Vue d'ensemble des produits
VLT® AQUA Drive FC 202
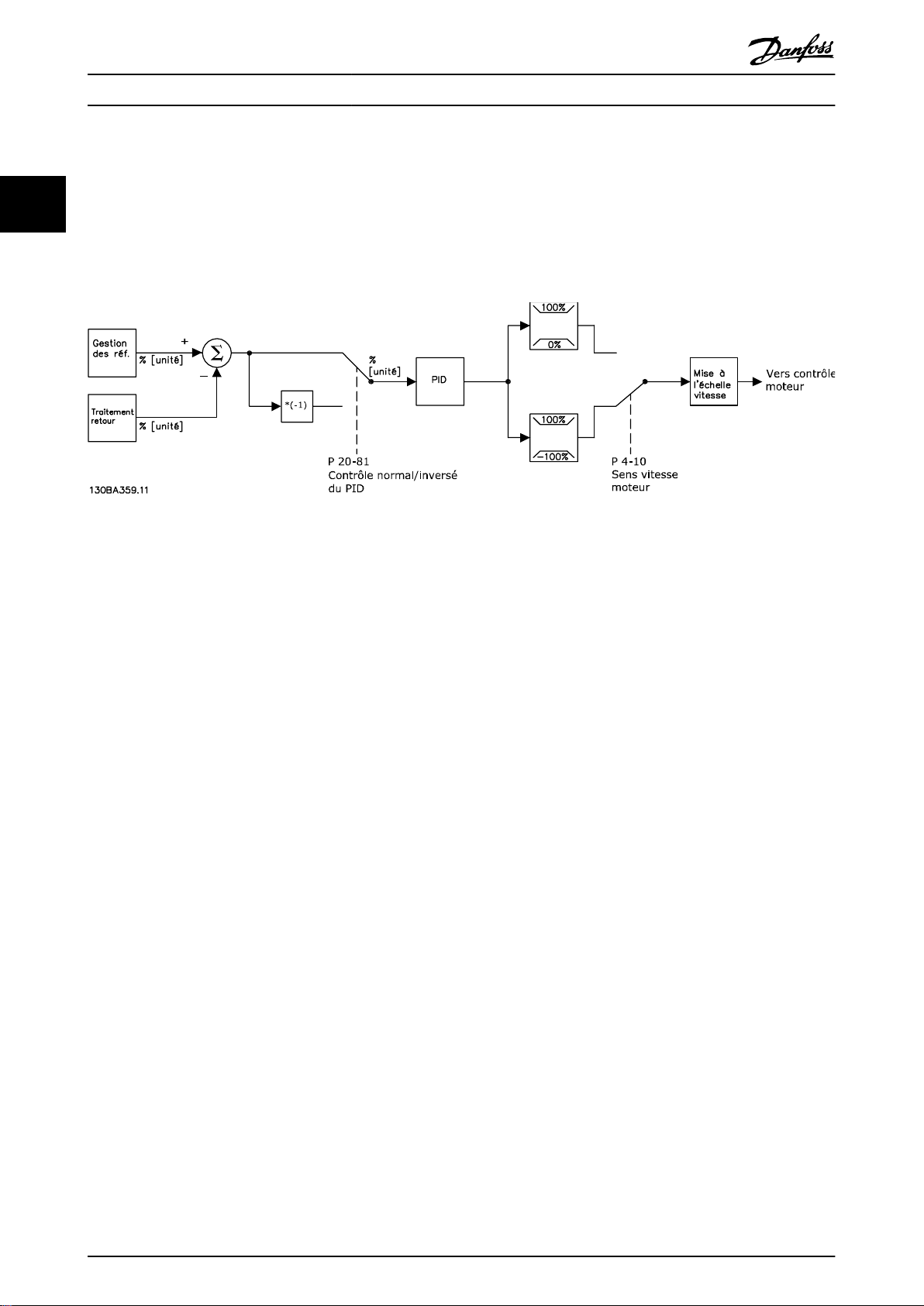
2.4.2 Structure de commande en boucle fermée
2
En mode boucle ouverte, un régulateur PID interne permet
au variateur de fréquence de calculer la référence du
système et les signaux de retour pour agir comme un
appareil de commande indépendant. Le variateur peut
fournir des messages d'état et d'alarme, avec de
Illustration 2.12 Schéma fonctionnel du contrôleur en boucle fermée
Prenons par exemple une application de pompage dans
laquelle la vitesse de la pompe est régulée de façon à ce
que la pression statique dans la conduite soit constante
(voir l'Illustration 2.12). Le variateur de fréquence reçoit un
signal de retour d'un capteur du système. Il compare ce
retour à une valeur de référence du point de consigne et
détermine l'erreur éventuelle entre ces 2 signaux. Il ajuste
alors la vitesse du moteur pour corriger cette erreur.
La consigne de la pression statique souhaitée est fournie
au variateur de fréquence comme signal de référence. Un
capteur mesure la pression statique réelle dans la conduite
et la communique au variateur de fréquence par un signal
de retour. Si le signal de retour est supérieur à la référence
du point de consigne, le variateur de fréquence décélère
pour réduire la pression. De la même façon, si la pression
de la conduite est inférieure à la référence du point de
consigne, le variateur de fréquence accélère pour
augmenter la pression de la pompe.
Alors que les valeurs par défaut du contrôleur en boucle
fermée du variateur de fréquence
performances satisfaisantes, le contrôle du système peut
souvent être optimisé en ajustant les paramètres du
régulateur PID. Le réglage automatique est fourni pour
cette optimisation.
Autres fonctions programmables :
Régulation inverse - La vitesse du moteur
•
augmente lorsqu'un signal de retour est élevé.
Fréquence de démarrage - Permet au système
•
d'atteindre rapidement un état d'exploitation
avant que le régulateur PID reprenne.
orent souvent des
nombreuses autres options programmables, pour contrôler
le système externe tout en fonctionnant de façon
indépendante en boucle fermée.
Filtre passe-bas intégré - Réduit le bruit du signal
•
de retour.
2.4.3 Contrôle local (Hand On) et distant
(Auto On)
Le variateur de fréquence peut être actionné manuellement via le LCP ou à distance via les entrées analogiques
et digitales et le bus série.
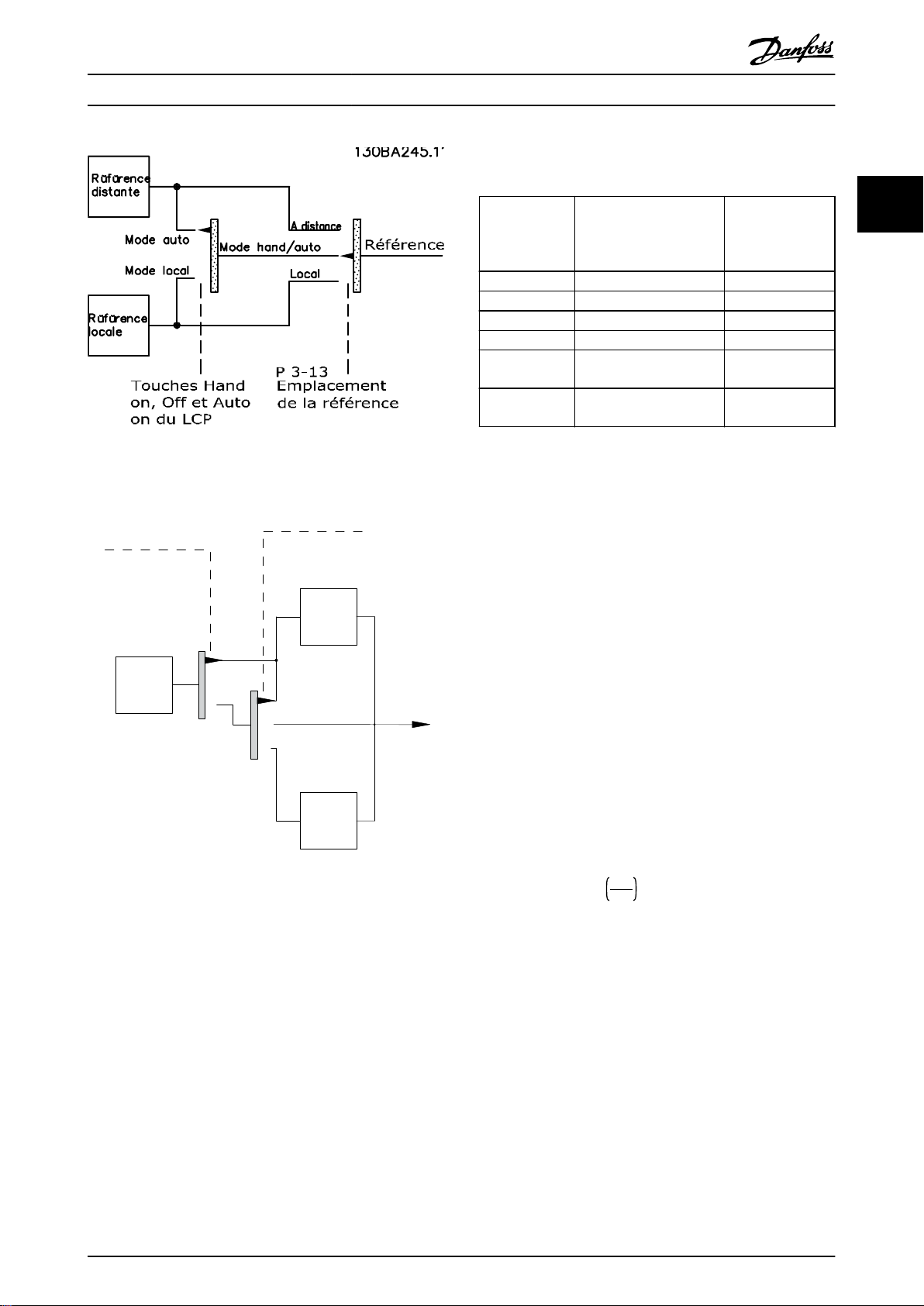
Référence active et mode de conguration
La référence active peut correspondre à la référence locale
ou distante. La référence distante est le paramètre déni
par défaut.
Pour utiliser la référence locale, congurer en
•
mode Manuel. Pour activer le mode Manuel,
adapter les réglages de paramètres dans le
groupe de paramètres 0-4* Clavier LCP. Pour plus
d'informations, se reporter au Guide de program-
mation.
Pour utiliser la référence distante,
•
mode Auto, lequel correspond au mode
défaut. En mode Auto, il est possible de contrôler
le variateur de fréquence via les entrées digitales
et plusieurs interfaces série (RS485, USB ou un
bus de terrain en option).
L'Illustration 2.13 présente le mode de
•
ration résultant de la sélection de la référence
active, locale ou distante.
L'Illustration 2.14 présente le mode de congu-
•
ration manuelle de la référence locale.
congurer en
déni par
congu-
22 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 25
130BD893.10
open loop
Scale to
RPM or
Hz
Scale to
closed loop
unit
closed loop
Local
ref.
Local
reference
Conguration
mode
P 1-00
Vue d'ensemble des produits
Manuel de conguration
Illustration 2.13 Référence active
Illustration 2.14 Mode de conguration
Principe de fonctionnement de l'application
La référence locale ou la référence distante est active à
tout moment. Les deux ne peuvent pas être actives en
même temps. Dénir le principe de fonctionnement de
l'application (en boucle ouverte ou fermée) au par.
Paramétre 1-00 Mode Cong., comme indiqué dans le
Tableau 2.4.
Lorsque la référence locale est active,
fonctionnement de l'application au par.
Paramétre 1-05 Conguration mode Local.
dénir le principe de
Dénir l'emplacement de la référence au par.
paramétre 3-13 Type référence, comme indiqué dans le
Tableau 2.4.
Pour plus d'informations, se reporter au
Guide de program-
mation.
[Hand On]
[Auto On]
Touches du LCP
Hand Mode hand/auto Local
Hand⇒O Mode hand/auto Local
Auto Mode hand/auto A distance
Auto ⇒O Mode hand/auto A distance
Toutes les
touches
Toutes les
touches
Tableau 2.4 Congurations des références locale et distante
Utilisation des références
2.4.4
Emplacement de la
référence
paramétre 3-13 Type
référence
Local Local
A distance A distance
Référence active
L'utilisation des références s'applique au fonctionnement
en boucle ouverte et en boucle fermée.
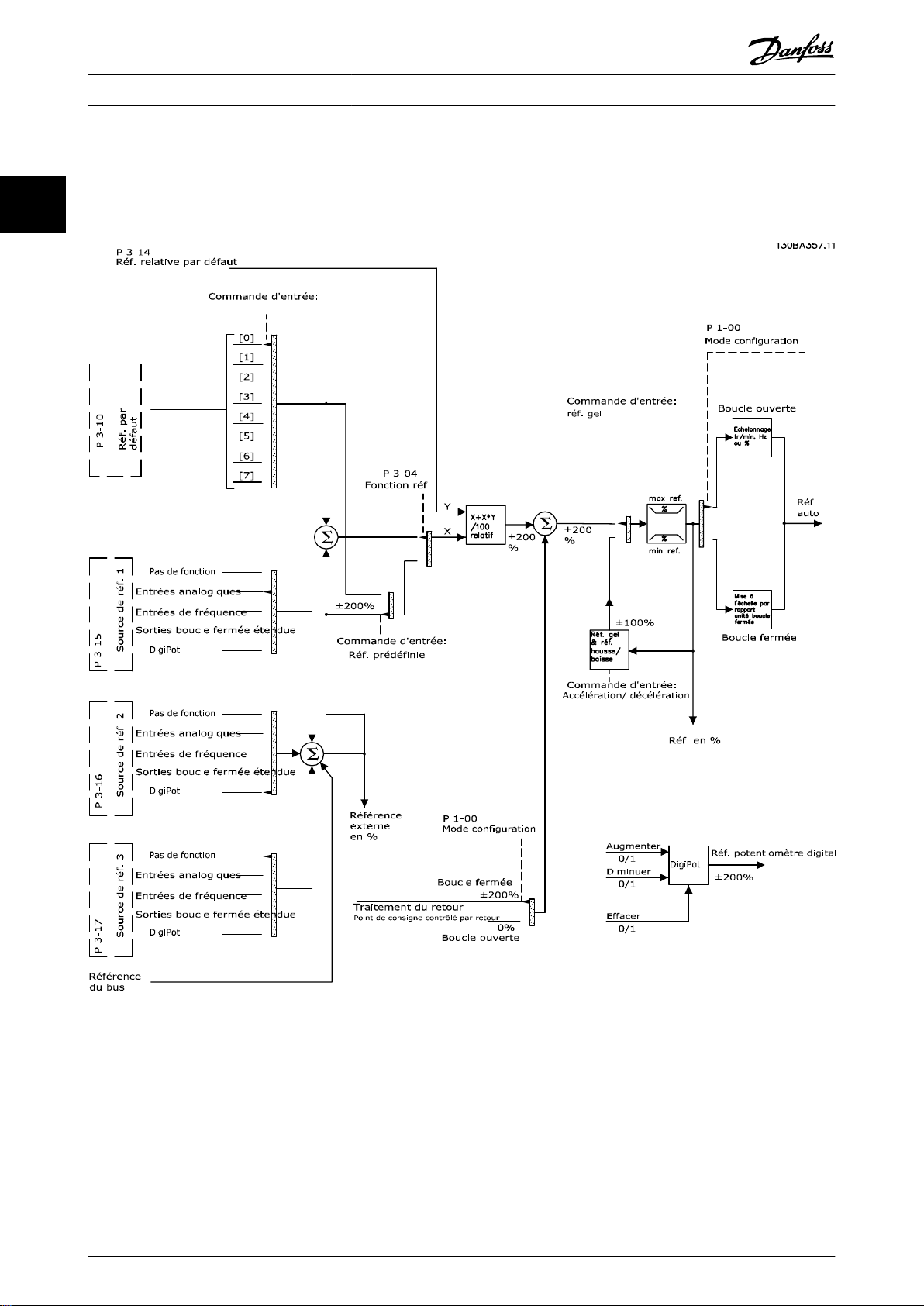
Références internes et externes
Le variateur de fréquence permet de programmer jusqu'à 8
références internes
prédénies. La référence interne
prédénie active peut être sélectionnée en externe à l'aide
des entrées de commande digitales ou du bus de
communication série.
Des références externes peuvent également être fournies
au variateur, le plus souvent via une entrée de commande
analogique. Toutes les sources de référence et la référence
du bus sont ajoutées pour produire la référence externe
totale. La référence externe, la référence prédénie, la
consigne ou la somme des 3 peut être sélectionnée en
tant que référence active. Cette référence peut être mise à
l'échelle.
La référence externe est calculée comme suit :
Ré férence = X + X ×
Y
100
Lorsque X est la référence externe, la référence prédénie
ou la somme de ces références et Y est le par.
paramétre 3-14 Réf.prédéf.relative en [%].
Lorsque Y, soit le par. paramétre 3-14 Réf.prédéf.relative, est
réglé sur 0 %, la mise à l'échelle
n'aecte pas la référence.
Référence distante
Une référence distante est composée des valeurs suivantes
(voir l'Illustration 2.15).
Références prédénies
•
Références externes :
•
Entrées analogiques
-
Entrées de fréquence d'impulsion
-
Entrées du potentiomètre digital
-
2
2
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 23
Page 26
2
Vue d'ensemble des produits
Références du bus de communication
-
série
Une référence relative prédénie
•
Un point de consigne contrôlé par le retour
•
VLT® AQUA Drive FC 202
Illustration 2.15 Schéma du bloc présentant le traitement de la référence distante
24 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 27
Vue d'ensemble des produits Manuel de conguration
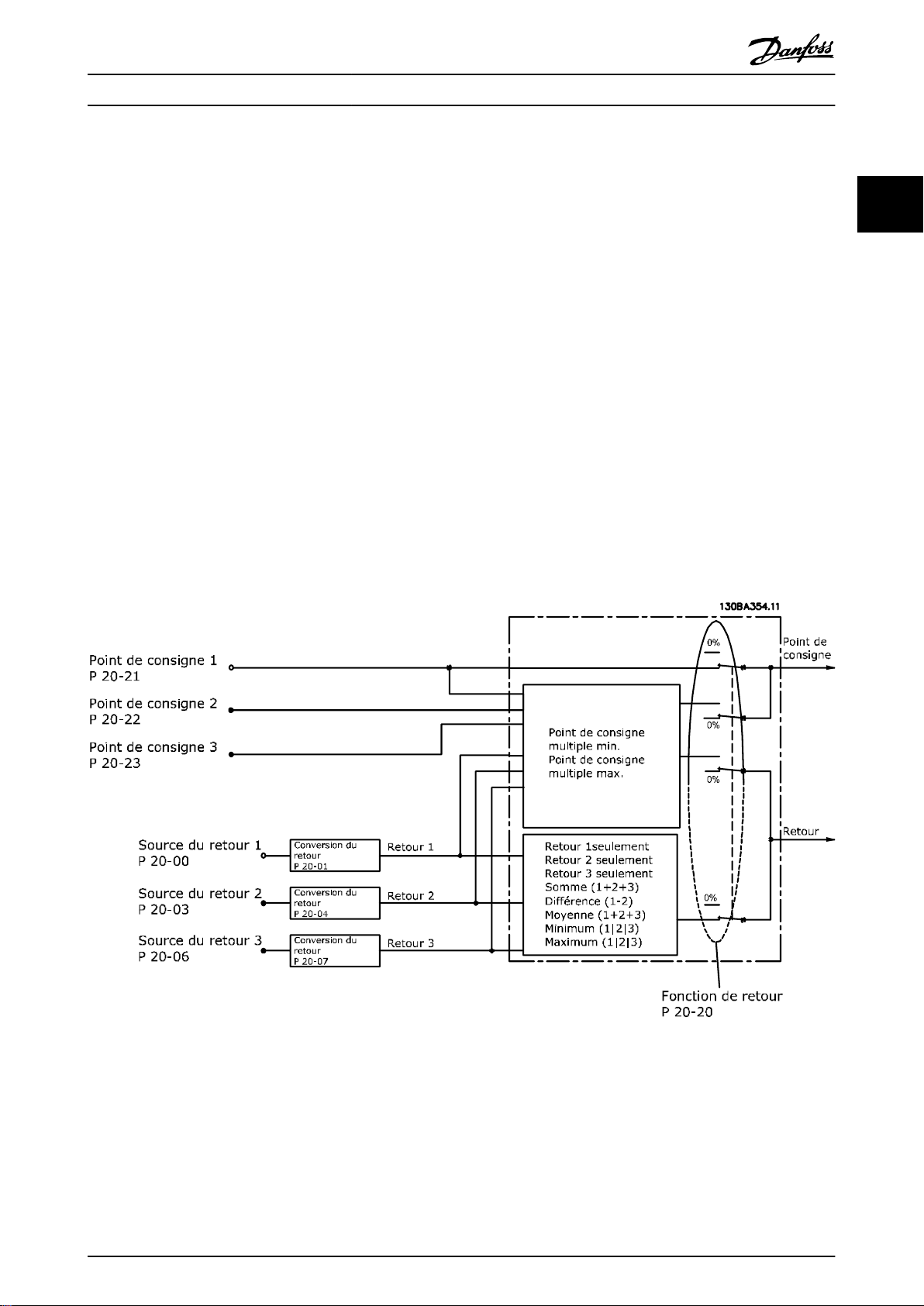
2.4.5 Traitement du retour
Le traitement du retour peut être conguré pour
fonctionner avec des applications nécessitant un contrôle
avancé, comme des points de consigne et des retours
multiples (voir l'Illustration 2.16). Trois types de contrôle
sont fréquents :
Zone unique, une seule consigne
Ce type de contrôle est une conguration de base du
retour. Le point de consigne 1 est ajouté à toute autre
référence (le cas échéant) et un signal de retour est
sélectionné.
Multizones, une seule consigne
Ce type de commande utilise deux ou trois capteurs de
retour mais un seul point de consigne. Le retour peut être
ajouté, enlevé ou réparti. De plus, la valeur maximale ou
minimale peut être utilisée. Le point de consigne 1 est
utilisé exclusivement dans cette conguration.
Multizone, consigne/retour
La paire consigne/retour avec la plus grande diérence
contrôle la vitesse du variateur de fréquence. Le maximum
tente de maintenir toutes les zones à leur point de
consigne respectif ou en dessous tandis que le minimum
tente de maintenir toutes les zones à leur point de
consigne ou au-dessus.
Exemple
Une application à 2 zones et 2 points de consigne. Le
point de consigne de la zone 1 est 15 bar et le retour est
5,5 bar. Le point de consigne de la zone 2 est 4,4 bar et le
retour est 4,6 bar. Si maximum est sélectionné, la consigne
et le signal de retour de la zone 1 sont envoyés au
régulateur PID, puisque la diérence est la plus petite (le
signal de retour est supérieur à la consigne, ce qui donne
une diérence négative). Si minimum est sélectionné, la
consigne et le signal de retour de la zone 2 sont envoyés
au régulateur PID, puisque la diérence est plus
importante (le signal de retour est inférieur à la consigne,
ce qui donne une diérence positive).
2
2
Illustration 2.16 Schéma fonctionnel du traitement du signal de retour
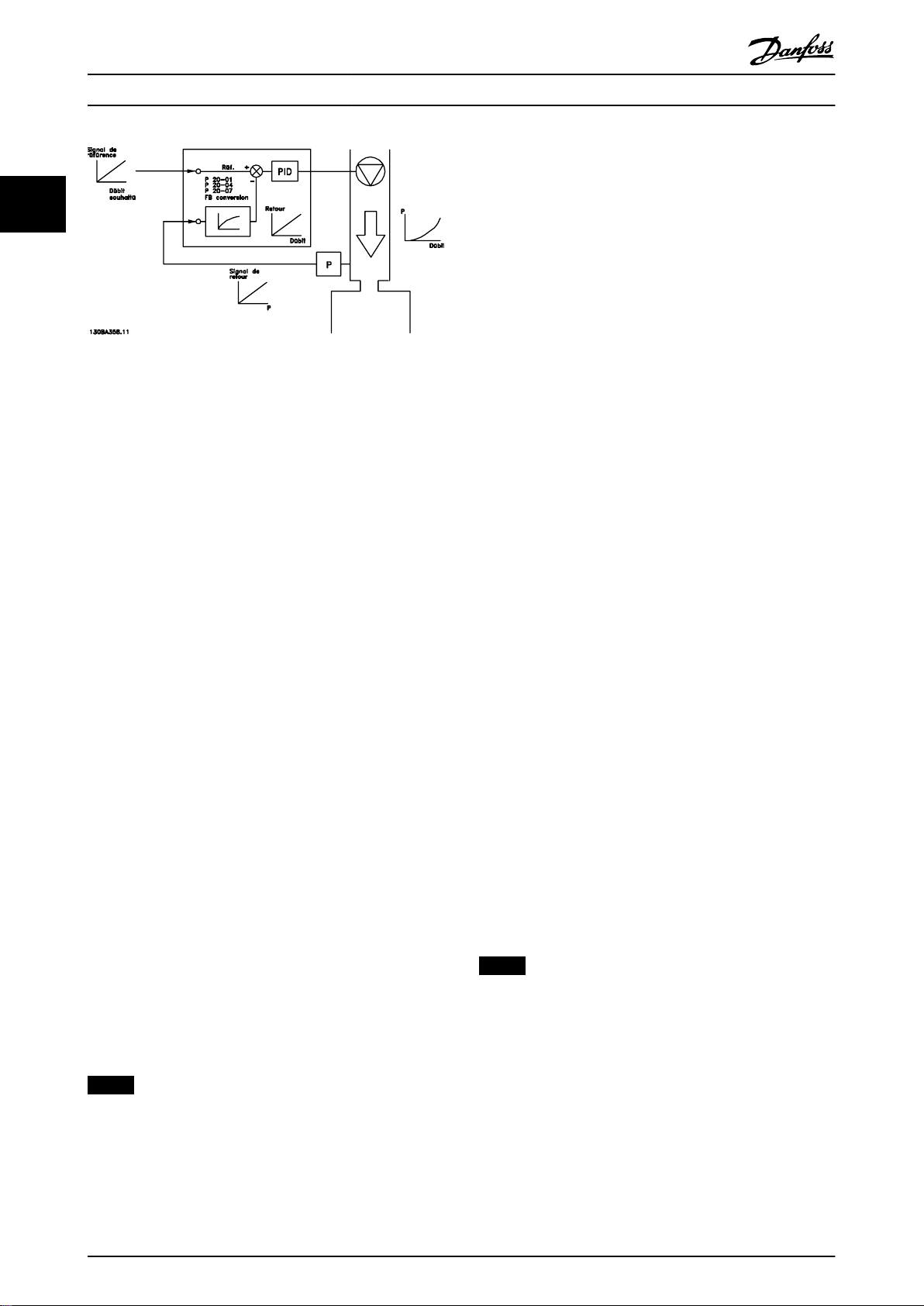
Conversion du signal de retour
Dans certaines applications, la conversion du signal de
retour est utile. Par exemple, on peut utiliser un signal de
pression pour fournir un signal de retour de débit. Puisque
la racine carrée de la pression est proportionnelle au débit,
la racine carrée du signal de pression donne une valeur
proportionnelle au débit (voir l'Illustration 2.17).
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 25
Page 28
2
Vue d'ensemble des produits
Illustration 2.17 Conversion du signal de retour
VLT® AQUA Drive FC 202
Résistance de freinage
Le variateur de fréquence est protégé contre les courtscircuits dans la résistance de freinage.
Répartition de la charge
Pour protéger le bus CC contre les courts-circuits et les
variateurs de fréquence contre les surcharges, installer des
fusibles CC en série avec les bornes de répartition de la
charge de toutes les unités connectées. Voir le
chapitre 2.3.5 Répartition de la charge pour plus d'informations.
2.5.2 Protection contre les surcharges
2.5 Fonctions opérationnelles automatisées
Les caractéristiques opérationnelles automatisées sont
actives dès que le variateur de fréquence est en fonctionnement. La plupart ne nécessitent aucune programmation
ni conguration. Le fait de savoir que ces caractéristiques
sont présentes permet d'optimiser la conception d'un
système et sans doute d'éviter l'introduction de
composants ou fonctionnalités redondants.
Pour plus d'informations sur l'une des congurations
requises, en particulier les paramètres du moteur, consulter
le Guide de programmation.
Le variateur de fréquence comporte un large éventail de
fonctions de protection intégrées
protéger également le moteur qu'il fait fonctionner.
Protection contre les courts-circuits
2.5.1
Moteur (phase-phase)
Une mesure de courant eectuée sur chacune des trois
phases moteur ou sur le circuit intermédiaire protège le
variateur de fréquence contre les courts-circuits. Un courtcircuit entre 2 phases de sortie se traduit par un
surcourant dans l'onduleur. L'onduleur est désactivé si le
courant de court-circuit dépasse la valeur limite (alarme 16
Arrêt verrouillé).
Côté secteur
Un variateur de fréquence fonctionnant correctement
limite le courant qu'il tire de l'alimentation. Il est
recommandé d'utiliser des fusibles et/ou des disjoncteurs
du côté de l'alimentation comme protection en cas de
panne d'un composant interne au variateur de fréquence
(première panne). Voir le chapitre 7.7 Fusibles et disjoncteurs
pour plus d'informations.
an de le protéger et de
Surtension générée par le moteur
La tension du circuit intermédiaire augmente lorsque le
moteur agit comme un alternateur. Ceci se produit dans
deux cas :
La charge entraîne le moteur (à une fréquence de
•
sortie constante générée par le variateur de
fréquence) : l'énergie est fournie par la charge.
Lors de la décélération (rampe descendante), si le
•
moment d'inertie est élevé, le frottement est
faible et le temps de rampe de décélération est
trop court pour que l'énergie se dissipe sous
forme de perte du variateur de fréquence, du
moteur et de l'installation.
Un réglage incorrect de la compensation du
•
glissement risque d'entraîner une tension élevée
du circuit intermédiaire.
Force contre-électromotrice FCEM issue du
•
fonctionnement du moteur PM. Si le moteur PM
est en roue libre à un régime élevé, la FCEM peut
éventuellement dépasser la tolérance de tension
maximum du variateur de fréquence et provoquer
des dommages. Pour empêcher cela, la valeur du
par. paramétre 4-19 Frq.sort.lim.hte est automatiquement limitée sur la base d'un calcul interne
reposant sur la valeur des par.
paramétre 1-40 FCEM à 1000 tr/min.,
paramétre 1-25 Vit.nom.moteur et
paramétre 1-39 Pôles moteur.
AVIS!
Pour éviter que le moteur dépasse la vitesse limite (p. ex.
en raison d'eets de moulinet excessifs ou de débit
incontrôlé), il convient d'équiper le variateur de
fréquence d'une résistance de freinage.
AVIS!
L'utilisation de fusibles et/ou de disjoncteurs est
obligatoire an d'assurer la conformité aux normes CEI
60364 pour CE et NEC 2009 pour UL.
26 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
La surtension peut être gérée en utilisant une fonction de
freinage (paramétre 2-10 Fonction Frein et Surtension) et/ou
un contrôle de surtension (paramétre 2-17 Contrôle
Surtension).
Page 29
Vue d'ensemble des produits
Manuel de conguration
Contrôle des surtensions (OVC)
L'OVC réduit le risque d'arrêt du variateur de fréquence en
raison d'une surtension sur le circuit intermédiaire. Ceci est
géré par l'extension automatique du temps de rampe.
AVIS!
L'OVC peut être activé pour les moteurs PM (PM VVC+).
Fonctions de freinage
Raccorder une résistance de freinage pour la dissipation de
l'énergie excédentaire. Le raccordement d'une résistance de
freinage permet d'éviter une tension bus CC trop élevée
lors du freinage.
Un frein CA permet d'optimiser le freinage sans utiliser de
résistance de freinage. Cette fonction commande une
surmagnétisation du moteur lorsqu'il tourne comme un
générateur créant de l'énergie supplémentaire. Cette
fonction peut améliorer l'OVC. L'augmentation des pertes
électriques dans le moteur permet aux fonctions OVC
d'augmenter le couple de freinage sans dépasser la limite
de surtension.
AVIS!
Le frein CA n'est pas aussi ecace que le freinage
dynamique par résistance.
2.5.3 Détection de phase moteur
manquante
La fonction de détection de phase moteur manquante
(paramétre 4-58 Surv. phase mot.) est activée par défaut
pour éviter l'endommagement du moteur s'il manque une
phase moteur. Le réglage par défaut est de 1000 ms, mais
il peut être ajusté pour une détection plus rapide.
Détection de défaut de phase secteur
2.5.4
Un fonctionnement dans des conditions de déséquilibre
important réduit la durée de vie de l'unité. Les conditions
sont considérées comme sévères si le moteur fonctionne
continuellement à hauteur de la charge nominale. Le
réglage par défaut déclenche le variateur de fréquence en
cas de déséquilibre du secteur (paramétre 14-12 Fonct.sur
désiqui.réseau).
2.5.6
Protection surcharge
Limite de couple
La caractéristique de limite de couple protège le moteur
contre les surcharges indépendamment de la vitesse. La
limite de couple est contrôlée au par. paramétre 4-16 Mode
moteur limite couple ou au par. paramétre 4-17 Mode
générateur limite couple et le temps avant que l'avertis-
sement de limite de couple ne se déclenche est contrôlé
au par. paramétre 14-25 Délais Al./C.limit ?.
Limite de courant
La limite de courant est contrôlée au par.
paramétre 4-18 Limite courant.
Limite vitesse
Dénir les limites inférieure et supérieure de la gamme de
vitesse d'exploitation en utilisant les paramètres suivants :
paramétre 4-11 Vit. mot., limite infér. [tr/min] ou
•
paramétre 4-12 Vitesse moteur limite basse [Hz] et
•
paramétre 4-13 Vit.mot., limite supér. [tr/min], ou
paramétre 4-14 Motor Speed High Limit [Hz]
•
Par exemple, la gamme de vitesse d'exploitation peut être
dénie entre 30 et 50/60 Hz. Le par.
paramétre 4-19 Frq.sort.lim.hte limite la vitesse de sortie
maximale que le variateur de fréquence peut fournir.
ETR
ETR est une caractéristique électronique qui simule un
relais bimétallique en s'appuyant sur des mesures internes.
La courbe caractéristique est indiquée sur l'Illustration 2.18.
Limite tension
Le variateur de fréquence s'arrête
transistors et les condensateurs du circuit intermédiaire
quand un certain niveau de tension programmé en dur est
atteint.
Surtempérature
Le variateur de fréquence comporte des capteurs de
température intégrés et réagit immédiatement aux valeurs
critiques via les limites programmées en dur.
Déclassement automatique
2.5.7
Le variateur vérie constamment les niveaux critiques :
an de protéger les
2
2
Température trop élevée sur la carte de
2.5.5
Commutation sur la sortie
Une commutation sur la sortie entre le moteur et le
variateur de fréquence est autorisée. Des messages d'erreur
peuvent apparaître. Activer le démarrage à la volée pour
« rattraper » un moteur qui tourne à vide.
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 27
•
commande ou le radiateur
charge moteur élevée ;
•
haute tension du circuit intermédiaire ;
•
vitesse du moteur faible.
•
En réponse à un niveau critique, le variateur de fréquence
ajuste la fréquence de commutation. Pour des
températures internes élevées ainsi que pour une vitesse
Page 30

Vue d'ensemble des produits
VLT® AQUA Drive FC 202
2
de moteur faible, le variateur de fréquence peut également
forcer le modèle PWM sur SFAVM.
AVIS!
Le déclassement automatique est diérent lorsque le par.
paramétre 14-55 Filtre de sortie est réglé sur [2] Filtre
sinusoïdal xe.
2.5.8 Optimisation automatique de
l'énergie (AEO)
L'optimisation automatique de l'énergie (AEO) s'adresse au
variateur de fréquence pour surveiller la charge sur le
moteur et ajuster la tension de sortie an de maximiser le
rendement. En charge légère, la tension est réduite et le
courant du moteur est minimisé. Le moteur bénécie d'un
meilleur rendement, d'un chauage réduit et d'un
fonctionnement plus silencieux. Il n'est pas nécessaire de
sélectionner une courbe V/Hz car le variateur de fréquence
ajuste automatiquement la tension du moteur.
Modulation automatique de la
2.5.9
fréquence de commutation
Le variateur de fréquence comporte une fonction
automatique : le contrôle de la fréquence de commutation
dépendant de la charge. Cette fonction permet au moteur
de pouvoir proter de la fréquence de commutation la
plus élevée possible permise par la charge.
2.5.11 Déclassement automatique en cas
de surchaue
Le déclassement automatique en cas de surchaue est
activé pour empêcher le déclenchement du variateur de
fréquence à température élevée. Les capteurs de
température internes mesurent les conditions de
protection des composants électriques contre la surchaue.
Le variateur de fréquence peut automatiquement réduire
sa fréquence de commutation pour maintenir sa
température de fonctionnement dans des limites sûres.
Après réduction de la fréquence de commutation, le
variateur peut également réduire la fréquence de sortie et
le courant jusqu'à 30 % an d'éviter un déclenchement
pour cause de surchaue.
2.5.12
Rampe automatique
Le variateur de fréquence génère de courtes impulsions
électriques an de former un modèle d'onde CA. La
fréquence de commutation correspond au rythme de ces
impulsions. Une fréquence de commutation faible (rythme
faible) provoque du bruit dans le moteur, il est donc
préférable d'opter pour une fréquence de commutation
plus élevée. Une fréquence de commutation élevée génère
toutefois de la chaleur dans le variateur de fréquence, ce
qui peut limiter la quantité de courant disponible pour le
moteur.
La modulation automatique de la fréquence de
commutation régule ces conditions automatiquement pour
fournir la plus haute fréquence de commutation sans
surchaue du variateur de fréquence. En fournissant une
fréquence de commutation régulée élevée, elle réduit le
son du moteur à basse vitesse, lorsque le contrôle du bruit
audible est critique et produit une puissance de sortie
totale vers le moteur lorsque la demande le requiert.
2.5.10
Déclassement automatique pour
fréquence de commutation élevée
Le variateur de fréquence a été conçu pour un fonctionnement continu à pleine charge à des fréquences de
commutation comprises entre 3,0 et 4,5 kHz (cette plage
de fréquence dépend de la puissance). Une fréquence de
commutation supérieure à la plage maximale autorisée
augmente la chaleur dans le variateur de fréquence et
requiert un déclassement du courant de sortie.
Un moteur qui tente d'accélérer une charge trop vite au
courant disponible peut entraîner l'arrêt du variateur. C'est
également vrai en cas de décélération trop rapide. La
rampe automatique protège contre ces situations en
augmentant la vitesse de montée du moteur (accélération
ou décélération) an de l'adapter au courant disponible.
2.5.13
Lorsqu'une charge dépasse la capacité de courant du
fonctionnement normal du variateur de fréquence (depuis
un variateur de fréquence ou un moteur sousdimensionné), la limite de courant réduit la fréquence de
sortie pour ralentir le moteur et réduire la charge. Un
temporisateur réglable est disponible pour limiter le
fonctionnement dans cet état pendant 60 secondes ou
moins. La limite dénie par défaut à l'usine est de 110 %
du courant nominal du moteur pour réduire les contraintes
du surcourant.
2.5.14
Circuit de limite de courant
Performance de uctuation de la
puissance
Le variateur de fréquence supporte les uctuations du
secteur telles que les :
Transitoires
•
Chutes de courant momentanées
•
Brèves chutes de tension
•
Surtensions
•
28 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 31

Vue d'ensemble des produits
Manuel de conguration
Le variateur de fréquence compense automatiquement les
tensions d'entrée de ±10 % de la valeur nominale an de
fournir une tension moteur et un couple à plein régime.
Avec le redémarrage automatique sélectionné, le variateur
de fréquence s'allume après le déclenchement de la
tension. Avec le démarrage à la volée, le variateur de
fréquence synchronise la rotation du moteur avant le
démarrage.
2.5.15 Démarrage progressif du moteur
Le variateur de fréquence envoie la bonne quantité de
courant vers le moteur pour surmonter l'inertie de charge
et augmenter la vitesse du moteur. Cela permet d'éviter
l'application de la tension secteur à un moteur stationnaire
ou au ralenti, ce qui génère un courant élevé et de la
chaleur. Cette caractéristique inhérente de démarrage
progressif réduit la charge thermique et les contraintes
mécaniques, augmente la durée de vie du moteur et
permet un fonctionnement plus silencieux du système.
2.5.16
Le bruit de résonance du moteur haute fréquence peut
être éliminé par l'atténuation des résonances. L'atténuation
des fréquences à sélection manuelle ou automatique est
disponible.
2.5.17
Des capteurs placés dans le variateur de fréquence
permettent de contrôler la température des ventilateurs de
refroidissement internes. Le ventilateur de refroidissement
ne fonctionne pas pendant le fonctionnement à faible
charge ou en mode veille ou en pause. Cela réduit le bruit,
augmente l'ecacité et prolonge la durée de vie du
ventilateur.
2.5.18
Les interférences électromagnétiques (EMI) ou les interférences radio-électriques (RFI, en cas de radiofréquences)
sont des perturbations qui peuvent
électrique à cause d'une induction ou d'un rayonnement
électromagnétique à partir d'une source externe. Le
variateur de fréquence a été conçu pour être conforme à la
norme sur les produits CEM pour les variateurs CEI
61-800-3 ainsi qu'à la norme EN 55011. Pour respecter les
niveaux d'émission de la norme EN 55011, le câble du
moteur doit être blindé et correctement terminé. Pour plus
d'informations concernant la performance CEM, consulter
le chapitre 3.2.2 Résultats des essais CEM.
Atténuation des résonances
Ventilateurs à température contrôlée
Conformité CEM
aecter un circuit
2.5.19
Mesure du courant sur les trois
phases moteur
Le courant de sortie vers le moteur est mesuré en
permanence sur les 3 phases pour protéger le variateur de
fréquence et le moteur contre les courts-circuits, les
défauts de terre et les pertes de phase. Les défauts de
terre de sortie sont immédiatement détectés. En cas de
perte de l'une des phases moteur, le variateur de
fréquence s'arrête immédiatement et indique quelle phase
manque.
2.5.20 Isolation galvanique des bornes de
commande
Toutes les bornes de commande et de relais de sortie sont
galvaniquement isolées de l'alimentation. Cela signie que
le circuit de commande est entièrement protégé du
courant d'entrée. Les bornes de relais de sortie ont besoin
de leur propre mise à la terre. Cette isolation est conforme
aux exigences strictes de PELV pour l'isolation.
Les composants de l'isolation galvanique sont les suivants :
L'alimentation, notamment l'isolation du signal.
•
La commande de gâchette des IGBT, transfor-
•
mateurs d'impulsions et optocoupleurs.
Les transducteurs de courant de sortie à eet
•
Hall.
2.6
Fonctions personnalisées des
applications
Ce sont les fonctions les plus couramment programmées
sur le variateur de fréquence pour une meilleure
performance du système. Elles nécessitent une programmation ou une conguration minimum. La disponibilité de
ces fonctions permet d'optimiser la conception d'un
système et sans doute d'éviter l'introduction de fonctionnalités ou de composants redondants. Consulter le Guide
de programmation pour obtenir des instructions sur l'activation de ces fonctions.
Adaptation automatique au moteur
2.6.1
L'adaptation automatique au moteur (AMA) est une
procédure de test automatisée qui mesure les caractéristiques électriques du moteur. L'AMA fournit un modèle
électronique précis du moteur. Elle permet au variateur de
fréquence de calculer la performance optimale et l'e-
cacité avec le moteur. Le recours à la procédure AMA
maximise par ailleurs la fonction d'optimisation
automatique de l'énergie. L'AMA est réalisée sans rotation
du moteur et sans désaccouplage de la charge du moteur.
2
2
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 29
Page 32

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2 000
500
200
400
300
1 000
600
t [s]
175ZA052.11
f
OUT
= 0,2 x f
M,N
f
OUT
= 2 x f
M,N
f
OUT
= 1 x f
M,N
I
MN
I
M
Vue d'ensemble des produits
VLT® AQUA Drive FC 202
2
2.6.2 Protection thermique du moteur
La protection thermique du moteur est disponible de 3
façons :
Via la détection directe de la température par l'un
•
des éléments suivants :
capteur PTC dans les bobines du moteur
-
et connecté à une entrée analogique ou
digitale.
capteur PT100 ou PT1000 dans les
-
bobines ou paliers du moteur, connecté
à la carte VLT® Sensor Input Card MCB
114.
L'entrée de thermistance PTC sur la carte
-
VLT® PTC Thermistor Card MCB 112
(homologuée ATEX).
Un thermocontact mécanique (type Klixon) sur
•
une entrée digitale.
Via le relais thermique électronique intégré (ETR)
•
pour les moteurs asynchrones.
L'ETR calcule la température du moteur en mesurant le
courant, la fréquence et le temps de fonctionnement. Le
variateur de fréquence
moteur en pourcentage et peut émettre un avertissement
à une consigne de surcharge programmable.
Des options programmables en cas de surcharge
permettent au variateur de fréquence d'arrêter le moteur,
de réduire la sortie ou d'ignorer la condition. Même à
faible vitesse, le variateur de fréquence satisfait aux normes
sur les surcharges de moteurs électroniques I2t de classe
20.
ache la charge thermique sur le
déclenche et fasse disjoncter le variateur de fréquence. Ces
courbes montrent la vitesse nominale caractéristique à
deux fois la vitesse nominale et à 0,2 fois la vitesse
nominale.
À vitesse plus faible, l'ETR se déclenche à une chaleur
inférieure en raison du refroidissement moindre du moteur.
De cette façon, le moteur est protégé contre les
surchaues même à une vitesse faible. La caractéristique
ETR calcule la température du moteur en fonction du
courant et de la vitesse réels. La température calculée est
visible en tant que paramètre d'achage au par.
paramétre 16-18 Thermique moteur.
Panne de secteur
2.6.3
En cas de chute de tension secteur, le variateur de
fréquence continue de fonctionner jusqu'à ce que la
tension présente sur le circuit intermédiaire chute en
dessous du seuil d'arrêt minimal, qui est généralement
inférieur de 15 % à la tension nominale d'alimentation la
plus basse. La tension secteur disponible avant la panne et
la charge du moteur déterminent le temps qui s'écoule
avant l'arrêt en roue libre du variateur de fréquence.
Le variateur de fréquence peut être
conguré
(paramétre 14-10 Panne secteur) sur diérents types de
comportement pendant les chutes de tension, par
exemple :
Alarme verrouillée lorsque le circuit intermédiaire
•
est épuisé.
Roue libre avec démarrage à la volée lors du
•
retour du secteur (paramétre 1-73 Démarr. volée).
Sauvegarde cinétique.
•
Décélération ctrlée.
•
Démarrage à la volée
Cette sélection permet de rattraper un moteur, à la volée,
p. ex. à cause d'une panne de courant. Cette option est
importante pour les centrifugeuses et les ventilateurs.
Sauvegarde cinétique
Cette sélection permet au variateur de fréquence de
fonctionner tant qu'il reste de l'énergie dans le système.
Pour les pannes courtes, le fonctionnement est rétabli dès
le retour du courant, sans arrêter l'application ou sans
perdre à aucun moment le contrôle. Plusieurs variantes de
sauvegarde cinétique peuvent être sélectionnées.
Congurer le comportement du variateur de fréquence en
cas de chute de la tension, aux par. paramétre 14-10 Panne
secteur et paramétre 1-73 Démarr. volée.
Illustration 2.18 Caractéristiques ETR
L'axe des abscisses sur l'Illustration 2.18 indique le rapport
entre I
moteur
et I
nominale. L'axe des ordonnées
moteur
représente le temps en secondes avant que l'ETR ne se
30 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 33

Vue d'ensemble des produits
Manuel de conguration
2.6.4 Régulateurs PID intégrés
Les 4 régulateurs à action par dérivation, intégrale,
diérentielle (PID) intégrés sont disponibles, ce qui permet
d'éliminer le besoin de dispositifs de contrôle auxiliaires.
L'un des régulateurs PID maintient un contrôle constant
des systèmes en boucle fermée lorsque la pression, le
débit, la température régulé(e) ou toute autre congu-
ration système doit être conservé(e). Le variateur de
fréquence peut fournir un contrôle
vitesse du moteur en réponse à des signaux de retour des
capteurs distants. Le variateur de fréquence adapte 2
signaux de retour de 2 dispositifs diérents. Cette fonction
permet de réguler un système avec des conditions de
retour diérentes. Le variateur de fréquence prend des
décisions de contrôle en comparant les 2 signaux an
d'optimiser la performance du système.
Utiliser les 3 régulateurs supplémentaires et indépendants
pour commander tout autre équipement de process, tel
que les pompes d'alimentation chimiques, les commandes
de vannes ou pour l'aération avec diérents niveaux.
Redémarrage automatique
2.6.5
Le variateur de fréquence peut être programmé pour
redémarrer automatiquement le moteur après un déclenchement mineur tel qu'une perte de puissance
momentanée ou une uctuation. Cette fonction élimine le
besoin de réinitialisation automatique et améliore l'exploitation automatisée de systèmes contrôlés à distance. Le
nombre de tentatives de redémarrage ainsi que le temps
écoulé entre les tentatives peuvent être limités.
Démarrage à la volée
2.6.6
Le démarrage à la volée permet au variateur de fréquence
de se synchroniser avec une rotation du moteur en marche
jusqu'à la pleine vitesse, dans les deux sens. Cela évite les
déclenchements dus à une surintensité. Cela réduit les
contraintes mécaniques sur le système car le moteur ne
reçoit aucun changement soudain de la vitesse lorsque le
variateur de fréquence démarre.
2.6.7
Couple complet à vitesse réduite
Le variateur de fréquence suit une courbe V/Hz variable
pour fournir un couple moteur complet, même à vitesse
réduite. Le couple de sortie total peut correspondre à la
vitesse de fonctionnement maximum du moteur. Au
contraire, les convertisseurs à couple variable fournissent
un couple de moteur réduit à faible vitesse et les convertisseurs à couple constant fournissent une tension
excessive, de la chaleur et un bruit du moteur à un niveau
inférieur à la vitesse totale.
autosusant de la
2.6.8
Bipasse de fréquence
Sur certaines applications, le système peut présenter des
vitesses opérationnelles qui créent une résonance
mécanique. Cela génère un bruit excessif et endommage
certainement les composants mécaniques du système. Le
variateur de fréquence est doté de quatre largeurs de
bande de fréquence de dérivation programmables. Ces
dernières permettent au moteur de dépasser les vitesses
qui induisent une résonance du système.
2.6.9 Préchauage du moteur
Pour préchauer un moteur dans un environnement froid
ou humide, une petite quantité de courant CC peut être
chargée en continu dans le moteur pour le protéger de la
condensation et des eets d'un démarrage à froid. Cela
permet d'éliminer la nécessité d'un appareil individuel de
chauage.
2.6.10
Le variateur de fréquence possède 4 process qui peuvent
être programmés indépendamment les uns des autres.
Avec le multi process, il est possible de basculer entre les
fonctions programmées de façon indépendante et activées
par des entrées digitales ou une commande série. Des
process indépendants sont utilisés par exemple pour
modier des références, pour un fonctionnement jour/nuit
ou été/hiver ou pour contrôler plusieurs moteurs. Le
process actif est aché sur le LCP.
Les données de process peuvent être copiées d'un
variateur de fréquence à un autre en téléchargeant les
informations depuis le LCP amovible.
2.6.11
Le freinage dynamique est eectué par :
Quatre process programmables
Freinage dynamique
Freinage résistance
•
Un frein IGBT maintient la surtension sous un
certain seuil en dirigeant l'énergie du frein du
moteur vers la résistance de freinage connectée
(par. paramétre 2-10 Fonction Frein et Surtension =
[1]).
Frein CA
•
L'énergie de freinage est répartie dans le moteur
en modiant les conditions de perte dans le
moteur. La fonction de frein CA ne peut pas être
utilisée dans les applications avec une fréquence
de cycle élevée car cela entraîne une surchaue
du moteur (paramétre 2-10 Fonction Frein et
Surtension = [2]).
2
2
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 31
Page 34

. . .
. . .
Par. 13-11
Comparator Operator
Par. 13-43
Logic Rule Operator 2
Par. 13-51
SL Controller Event
Par. 13-52
SL Controller Action
130BB671.13
Coast
Start timer
Set Do X low
Select set-up 2
. . .
Running
Warning
Torque limit
Digital input X 30/2
. . .
=
TRUE longer than..
. . .
. . .
Vue d'ensemble des produits
VLT® AQUA Drive FC 202
2.6.12 Freinage par injection de courant
continu
2
Certaines applications peuvent nécessiter le freinage du
moteur pour le ralentir ou l'arrêter. L'application du courant
CC freine le moteur et permet d'éliminer le besoin d'un
freinage moteur séparé. Le freinage CC peut être déni
pour être activé à une fréquence prédéterminée ou à la
réception d'un signal. La vitesse de freinage peut aussi être
programmée.
2.6.13 Mode veille
Le mode veille arrête automatiquement le moteur lorsque
la demande est faible pendant une certaine durée. Lorsque
la demande du système augmente, le variateur redémarre
le moteur. Le mode veille permet de réaliser des
économies d'énergie et de réduire l'usure du moteur.
Contrairement à un arrêt par temporisation, le variateur est
toujours disponible pour fonctionner lorsque la demande
de réveil prédénie est atteinte.
2.6.14
Le variateur peut attendre un signal distant de système prêt
avant de commencer. Lorsque cette caractéristique est
active, le variateur de fréquence reste arrêté jusqu'à ce qu'il
reçoive l'autorisation de démarrer. L'autorisation de marche
permet de garantir que le système ou l'équipement
auxiliaire est en bon état avant d'autoriser le variateur à
démarrer le moteur.
2.6.15
Le contrôleur de logique avancé (SLC) est une séquence
d'actions dénies par l'utilisateur (voir le par.
paramétre 13-52 Action contr. logique avancé [x]) exécutées
par le SLC lorsque l'événement associé
sateur (voir le par. paramétre 13-51 Événement contr. log
avancé [x]) est évalué comme étant VRAI par le SLC.
La condition d'un événement peut être un état particulier
ou le fait qu'une sortie provenant d'une règle logique ou
d'un opérande comparateur devienne VRAI. Cela entraîne
une action associée comme indiqué sur l'Illustration 2.19.
Autorisation de marche
Contrôleur logique avancé (SLC)
déni par l'utili-
Illustration 2.19 Événement SCL et action
Les événements et actions sont numérotés et liés par
paires. Cela
signie que lorsque l'événement [0] est satisfait
(atteint la valeur VRAI), l'action [0] est exécutée. Après cela,
les conditions d'événement [1] sont évaluées et si elles
s'avèrent être TRUE (VRAI), l'action [1] est exécutée et ainsi
de suite. Un seul événement est évalué à chaque fois. Si un
événement est évalué comme étant FAUX, rien ne se passe
(dans le SLC) pendant l'intervalle de balayage en cours et
aucun autre événement n'est évalué. Cela
signie que
lorsque le SLC démarre, il évalue l'événement [0] (et
uniquement l'événement [0]) à chaque intervalle de
balayage. Uniquement lorsque l'événement [0] est évalué
comme étant vrai (TRUE), le SLC exécute l'action [0] et
commence l’évaluation de l'événement [1]. Il est possible de
programmer de 1 à 20 événements et actions.
Lorsque le dernier événement/action a été exécuté, la
séquence recommence à partir de l'événement [0]/action
[0]. L'Illustration 2.20 donne un exemple avec quatre
événements/actions :
32 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 35

Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
Vue d'ensemble des produits
Manuel de conguration
2.6.16
Le variateur de fréquence est disponible avec une fonctionnalité STO via la borne de commande 37. L'arrêt de
sécurité désactive la tension de contrôle des semiconducteurs de puissance de l'étage de sortie du variateur
de fréquence, ce qui empêche la génération de la tension
requise pour faire tourner le moteur. Lorsque la fonction
STO (borne 37) est activée, le variateur de fréquence émet
une alarme, arrête l'unité et fait tourner le moteur en roue
libre jusqu'à l'arrêt. Un redémarrage manuel est nécessaire.
La fonction STO peut être utilisée pour arrêter le variateur
de fréquence en urgence. En mode d'exploitation normal
Illustration 2.20 Ordre d'exécution lorsque 4 événements/
actions sont programmés
Comparateurs
Les comparateurs sont utilisés pour comparer des variables
continues (c.-à-d. fréquence de sortie, courant de sortie,
entrée analogique, etc.) à des valeurs prédénies xes.
Illustration 2.21 Comparateurs
Règles logiques
Associer jusqu'à trois entrées booléennes (entrées TRUE/
FALSE, VRAI/FAUX) à partir des temporisateurs,
comparateurs, entrées digitales, bits d'état et événements à
l'aide des opérateurs logiques ET, OU, PAS.
Illustration 2.22 Règles logiques
Les règles logiques, temporisateurs et comparateurs sont
également disponibles pour être utilisés hors de la
séquence SLC.
Pour un exemple de SLC, consulter le chapitre 4.3 Exemples
de
conguration d'applications.3
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 33
lorsque la STO n'est pas nécessaire, utiliser la fonction
d'arrêt habituelle. Lorsque le redémarrage automatique est
utilisé, veiller à respecter les exigences de la norme ISO
12100-2 paragraphe 5.3.2.5.
Conditions de responsabilité
Il incombe à l'utilisateur de s'assurer que le personnel qui
installe et utilise la fonction STO :
L'utilisateur est un :
Normes
L'utilisation de la STO sur la borne 37 oblige l'utilisateur à
se conformer à toutes les dispositions de sécurité, à savoir
les lois, les réglementations et les directives concernées. La
fonction STO optionnelle est conforme aux normes
suivantes :
Les informations et instructions contenues ici ne sont pas
susantes pour utiliser la fonctionnalité STO de manière
correcte et sûre. Pour plus d'informations sur la STO,
Fonction STO
a lu et compris les réglementations de sécurité
•
concernant la santé, la sécurité, et la prévention
des accidents.
dispose de bonnes connaissances concernant les
•
normes générales et de sécurité applicables à
l'application spécique.
Intégrateur
•
Opérateur
•
Technicien d'entretien
•
Technicien de maintenance
•
EN 954-1 : 1996 catégorie 3
•
CEI 60204-1 : 2005 catégorie 0 - arrêt non
•
contrôlé
CEI 61508 : 1998 SIL2
•
CEI 61800-5-2 : 2007 – Fonction STO
•
CEI 62061 : 2005 SIL CL2
•
ISO 13849-1 : 2006 catégorie 3 PL « d »
•
ISO 14118 : 2000 (EN 1037) – Prévention d'un
•
démarrage imprévu
2
2
Page 36

Vue d'ensemble des produits
VLT® AQUA Drive FC 202
2
consulter le Manuel d'utilisation de la fonction Safe Torque
O du VLT® .
Mesures de protection
Du personnel
•
nécessaire pour installer et mettre en service les
systèmes de sécurité.
L'unité doit être installée dans une armoire IP54
•
ou dans un environnement similaire. Dans des
applications spéciales, un degré de protection IP
supérieur est nécessaire.
Le câble situé entre la borne 37 et le dispositif de
•
sécurité externe doit être protégé contre les
courts-circuits conformément à la norme ISO
13849-2 tableau D.4.
Si des forces externes ont une
•
du moteur (p. ex. des charges suspendues), des
mesures supplémentaires (p. ex. frein de maintien
de sécurité) sont nécessaires pour éliminer tout
danger éventuel.
qualié et expérimenté est
inuence sur l'axe
2.7 Fonctions de défaut, d'avertissement et
d'alarme
Le variateur de fréquence surveille tous les aspects du
fonctionnement du système, notamment les conditions du
secteur, la charge moteur et la performance ainsi que l'état
du variateur. Une alarme ou un avertissement n'indique
pas nécessairement un problème dans le variateur de
fréquence lui-même. Cela peut être une condition
extérieure du variateur surveillé pour les limites de
performance. Le variateur intègre des réponses préprogrammées pour les défauts, avertissements et alarmes.
Sélectionner des caractéristiques d'alarme et d'avertissement supplémentaires pour améliorer ou modier la
performance du système.
Cette section décrit les caractéristiques des alarmes et
avertissements courants. La disponibilité de ces fonctions
permet d'optimiser la conception d'un système et sans
doute d'éviter l'introduction de fonctionnalités ou de
composants redondants.
Fonctionnement en surchaue
2.7.1
Par défaut, le variateur de fréquence émet une alarme et
un déclenchement en cas de surchaue. Si la fonction
Déclassement automatique et Avertissement est sélectionnée,
le variateur de fréquence signale l'état mais continue à
fonctionner et tente de se refroidir en réduisant seul sa
fréquence de commutation. Il réduit ensuite si nécessaire la
fréquence de sortie.
Le déclassement automatique ne remplace pas les réglages
de l'utilisateur pour le déclassement pour température
ambiante (voir le chapitre 5.3 Déclassement pour
température ambiante).
2.7.2
Avertissement Référence élevée et
basse
En mode boucle ouverte, le signal de référence détermine
directement la vitesse du variateur de fréquence. L'écran
ache un avertissement clignotant de référence élevée ou
basse lorsque le maximum ou le minimum programmé est
atteint.
2.7.3 Avertissement de signal de retour bas
et haut
Dans une conguration en boucle fermée, les valeurs de
retour élevées et basses sélectionnées sont surveillées par
le variateur de fréquence. L'écran ache un avertissement
clignotant élevé ou bas lorsque c'est nécessaire. Le
variateur peut aussi surveiller les signaux de retour en
boucle ouverte. Lorsque les signaux n'aectent pas le
fonctionnement du variateur en boucle ouverte, ils
peuvent être utiles pour indiquer l'état du système
localement ou via la communication en série. Le variateur
de fréquence gère 39 unités de mesure
Déséquilibre de phases ou Perte de
2.7.4
diérentes.
phases
Tout courant d'ondulation excessif dans le bus CC indique
soit un déséquilibre de phase du secteur ou une perte de
phase. Lorsqu'une phase de puissance vers le variateur est
perdue, l'action par défaut consiste à émettre une alarme
et à arrêter l'unité pour protéger les condensateurs de bus
CC. D'autres options permettent d'émettre un avertissement et de réduire le courant de sortie de 30 % du
courant total ou d'émettre un avertissement et de
continuer le fonctionnement normal. L'utilisation d'une
unité connectée à une ligne déséquilibrée peut être
souhaitable jusqu'à ce que le déséquilibre soit corrigé.
Avertissement haute fréquence
2.7.5
Cet avertissement se révèle utile pour démarrer un
équipement supplémentaire, comme une pompe ou un
ventilateur, lorsque la vitesse du moteur est trop élevée.
Un réglage spécique haute fréquence peut être saisi dans
le variateur. Si la sortie dépasse la fréquence dénie pour
l'avertissement, l'unité ache un avertissement haute
fréquence. Une sortie digitale du variateur peut exiger le
démarrage des dispositifs externes.
2.7.6
Avertissement basse fréquence
Cet avertissement se révèle utile pour arrêter un
équipement supplémentaire, lorsque la vitesse du moteur
est trop basse. Une fréquence basse spécique peut être
sélectionnée pour déclencher un avertissement et pour
arrêter des dispositifs externes. L'unité n'émettra pas d'aver-
34 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 37

130BP066.10
1 107tr/min
0 - ** Fonction./achage
1 - ** Charge/moteur
2 - ** Freins
3 - ** Référence/rampes
3,84A 1 (1)
Menu principal
Vue d'ensemble des produits
tissement basse fréquence une fois arrêté ou démarré tant
que la fréquence de fonctionnement n'a pas été atteinte.
Manuel de conguration
2.7.7 Avertissement courant élevé
Cette fonction est similaire à l'avertissement haute
fréquence, sauf si un réglage de courant élevé est utilisé
pour émettre un avertissement et démarrer un équipement
supplémentaire. La fonction n'est pas active lorsque l'unité
est arrêtée ou au démarrage tant que le courant de
fonctionnement
déni n'a pas été atteint.
2.7.8 Avertissement courant bas
Cette fonction est similaire à l'avertissement basse
fréquence (voir le chapitre 2.7.6 Avertissement basse
fréquence), sauf si un réglage de courant bas est utilisé
pour émettre un avertissement et arrêter l'équipement. La
fonction n'est pas active lorsque l'unité est arrêtée ou au
démarrage tant que le courant de fonctionnement déni
n'a pas été atteint.
Avertissement Charge nulle/Courroie
2.7.9
cassée
Cette fonction peut être utilisée pour surveiller une
condition d'absence de charge, par exemple une courroie
en V. Après l'enregistrement d'une limite de courant bas
dans le variateur, si une perte de la charge est détectée, le
variateur peut être programmé pour émettre une alarme et
s'arrêter ou pour continuer à fonctionner et émettre un
avertissement.
2.7.10
Le variateur de fréquence peut détecter une perte de
communication série. Un retard de 99 s peut être
sélectionné pour éviter une réponse due à des
interruptions sur le bus de communication série. Lorsque le
retard est dépassé, les options disponibles pour l'unité sont
les suivantes :
2.8
Le variateur de fréquence utilise des paramètres pour
programmer ses fonctions de l'application. Les paramètres
fournissent une description d'une fonction et un menu
d'options à sélectionner ou permettant de saisir des
valeurs numériques. Un exemple de menu de programmation est présenté sur l'Illustration 2.23.
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 35
Interface série perdue
Maintenir sa dernière vitesse.
•
Atteindre la vitesse maximale.
•
Atteindre une vitesse prédénie.
•
Arrêter et émettre un avertissement.
•
Interfaces utilisateur et programmation
Illustration 2.23 Exemple de menu de programmation
Interface utilisateur locale
Pour la programmation locale, les paramètres sont
accessibles en sélectionnant [Quick Menu] ou [Main Menu]
sur le LCP.
Le menu rapide est destiné au démarrage initial et aux
caractéristiques du moteur. Le menu principal permet
d'accéder à tous les paramètres pour programmer les
applications avancées.
Interface utilisateur distante
Pour une programmation à distance, Danfoss propose un
logiciel pour développer, stocker et transférer les
informations de programmation. Logiciel de
programmation MCT 10 permet à l'utilisateur de connecter
un PC au variateur de fréquence et de réaliser une
programmation en direct plutôt que d'utiliser le clavier LCP.
La programmation peut également être réalisée hors ligne
et simplement téléchargée sur l'unité. Le prol complet du
variateur peut être chargé sur le PC à des ns de
sauvegarde ou d'analyse. Un connecteur USB et la borne
RS485 permettent le raccordement au variateur de
fréquence.
Le Logiciel de programmation MCT 10 est disponible en
téléchargement gratuit sur www.VLT-software.com. Un CD
est également disponible sous la référence 130B1000. Un
manuel d'utilisation fournit des instructions détaillées.. Voir
aussi le chapitre 2.8.2 Logiciel PC.
Bornes de commande de programmation
Chaque borne de commande a des fonctions
•
spéciques qu'elle est capable d'exécuter.
Les paramètres associés à la borne activent les
•
fonctions spéciées.
Pour un fonctionnement correct du variateur de
•
fréquence, les bornes de commande doivent
être :
correctement câblées.
-
programmées pour la fonction
-
souhaitée.
2.8.1
Panneau de commande local
Le panneau de commande local (LCP) est un écran
graphique situé à l'avant de l'unité, qui équipe l'interface
utilisateur de boutons-poussoirs et ache des messages
2
2
Page 38

Auto
on
Reset
Hand
on
Off
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
1234rpm 10,4A 43,5Hz
Run OK
43,5Hz
On
Alarm
Warn.
130BB465.10
a
b
c
d
130BT308.10
Vue d'ensemble des produits
VLT® AQUA Drive FC 202
2
d'état, des avertissements et des alarmes, des paramètres
de programmation, etc. Un écran numérique est également
disponible avec des options d'achage limitées.
L'Illustration 2.24 présente le LCP.
contre les diérences de potentiel à la terre lors de la
connexion du PC à un variateur de fréquence via un câble
USB.
Ne pas utiliser un câble de puissance PC avec une che de
terre lorsque le PC est connecté au variateur de fréquence
via un câble USB. En eet, il réduit la diérence de
potentiel à la terre, mais ne supprime pas toutes les
diérences liées à la connexion de la terre et du blindage
au port USB du PC.
Illustration 2.25 Connexion USB
2.8.2.1
Logiciel de programmation MCT 10
Le Logiciel de programmation MCT 10 a été conçu pour la
mise en service et l'entretien du variateur avec une
programmation guidée du contrôleur de cascade, de
l'horloge temps réel et de la maintenance préventive.
Illustration 2.24 Panneau de commande local
Ce logiciel permet de contrôler facilement les détails et
réalise une présentation générale des systèmes, grands ou
petits. L'outil gère tous les modèles de variateurs, les ltres
actifs avancés ® et les données relatives au démarreur
progressif VLT®.
2.8.2
Logiciel PC
Exemple 1 : Stockage des données dans le PC via le
Logiciel de programmation MCT 10
1. Connecter un PC à l'unité via le port USB ou
Le PC est connecté via un câble USB standard (hôte/
dispositif) ou via l'interface RS485.
L'USB est un bus série utilisant 4 ls blindés dont la broche
4 (terre) est reliée au blindage du port USB du PC. Avec la
connexion d'un PC à un variateur de fréquence via le câble
USB, il existe un risque d'endommagement du contrôleur
hôte USB du PC. Tous les PC standard sont fabriqués sans
isolation galvanique au niveau du port USB.
Toute diérence de potentiel à la terre liée au non-respect
des recommandations décrites dans le Manuel d'utilisation
peut endommager le contrôleur hôte USB via le blindage
Tous les paramètres sont maintenant stockés.
l'interface RS485.
2. Ouvrir le Logiciel de programmation MCT 10.
3. Sélectionner le port USB ou l'interface RS485.
4.
Sélectionner Copier.
5.
Sélectionner la section Projet.
6.
Sélectionner Coller.
7.
Sélectionner Enregistrer sous.
du câble USB.
Il est conseillé d'utiliser un isolateur USB avec isolation
galvanique pour protéger le contrôleur hôte USB du PC
36 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 39

Vue d'ensemble des produits Manuel de conguration
Exemple 2 : Transfert de données du PC vers le variateur
de fréquence via le Logiciel de programmation MCT 10
1. Connecter un PC à l'unité via le port USB ou
l'interface RS485.
2. Ouvrir le Logiciel de programmation MCT 10.
3.
Sélectionner Ouvrir – les chiers archivés
s'achent.
4. Ouvrir le chier approprié.
5.
Choisir Écrire au variateur.
Tous les paramètres sont maintenant transférés vers le
variateur de fréquence.
Un manuel distinct pour le Logiciel de programmation
MCT 10 est disponible. Télécharger le logiciel et le manuel
du site www.danfoss.com/BusinessAreas/DrivesSolutions/
Softwaredownload/.
2.8.2.2
Logiciel de calcul des harmoniques
VLT® MCT 31
L'outil informatique de calcul des harmoniques MCT 31
simplie l'estimation de la distorsion harmonique dans une
application donnée. On peut calculer la distorsion
harmonique des variateurs de fréquence de Danfoss ou
d'une marque autre que Danfoss équipés de dispositifs de
réduction des harmoniques supplémentaires diérents, tels
que des ltres AHF Danfoss et des redresseurs à 12-18
impulsions.
Le logiciel MCT 31 peut également être téléchargé à
l'adresse www.danfoss.com/BusinessAreas/DrivesSolutions/
Softwaredownload/.
2.9.1
Stockage
Comme tout équipement électronique, les variateurs de
fréquence doivent être entreposés dans un endroit sec.
Aucune mise en forme périodique (charge du condensateur) n'est nécessaire pendant le stockage.
Il est recommandé de garder l'équipement étanche dans
son emballage jusqu'à l'installation.
2
2
2.8.2.3
Logiciel de calcul des harmoniques
(HCS)
HCS est une version avancée de l'outil de calcul d'harmoniques. Les résultats calculés sont comparés aux normes en
vigueur et peuvent être imprimés ultérieurement.
Pour plus d'informations, voir www.danfoss-hcs.com/
Default.asp?LEVEL=START
2.9
Maintenance
Les modèles de variateur de fréquence Danfoss sont sans
entretien jusqu' à 90 kW. Les variateurs de fréquence haute
puissance (110 kW ou plus) intègrent des tapis de ltre qui
doivent être nettoyés de temps en temps par l'opérateur,
selon l'exposition à la poussière et aux contaminants. Des
intervalles d'entretien des ventilateurs (environ 3 ans) et
des condensateurs (environ 5 ans) sont recommandés dans
la plupart des environnements.
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 37
Page 40

Intégration du système
3 Intégration du système
VLT® AQUA Drive FC 202
Ce chapitre décrit les considérations nécessaires pour
intégrer le variateur de fréquence dans une conguration
33
de système. Le chapitre se divise en plusieurs sections :
Chapitre 3.1 Conditions ambiantes de fonction-
•
nement
Conditions de fonctionnement du variateur de
fréquence, en termes d'environnement, de
protections, de température, de déclassement et
toutes les autres considérations.
Chapitre 3.3 Intégration secteur
•
Entrée dans le variateur de fréquence depuis le
côté secteur, notamment l'alimentation, les
harmoniques, la surveillance, le câblage, les
fusibles et autres considérations.
Chapitre 3.2 Protection CEM, contre les harmoniques
•
et contre les fuites à la terre
Entrée (régénération) depuis le variateur de
fréquence vers le réseau électrique, notamment
l'alimentation, les harmoniques, la surveillance et
autres considérations.
Chapitre 3.4 Intégration du moteur
•
Sortie du variateur de fréquence vers le moteur,
notamment les types de moteur, la charge, la
surveillance, le câblage et autres considérations.
Chapitre 3.5 Entrées et sorties supplémentaires,
•
Chapitre 3.6
Intégration de l'entrée et de la sortie du variateur
de fréquence pour une conception optimale du
système, notamment la correspondance entre le
variateur de fréquence et le moteur, les caractéristiques du système et autres considérations.
La conception complète du système permet d'anticiper les
problèmes potentiels tout en appliquant la combinaison la
plus ecace possible de caractéristiques pour le variateur.
Les informations ci-après donnent des consignes de plani-
cation et de spécication d'un système de surveillance du
moteur intégrant des variateurs de fréquence.
Les caractéristiques opérationnelles fournissent une plage
de concepts, d'une commande de vitesse simple du
moteur à un système automatisé totalement intégré avec
une gestion des retours d'information, des rapports d'état
opérationnels, des réponses de défaut automatisées, une
programmation distante, etc.
Planication mécanique
Voir le chapitre 3.9 Liste de contrôle de la conception du
système pour obtenir des informations pratiques
concernant la sélection et la conception.
La compréhension de ces caractéristiques et options stratégiques permet d'optimiser la conception d'un système et
sans doute d'éviter l'introduction de composants ou de
fonctionnalités redondants.
3.1 Conditions ambiantes de
3.1.1 Humidité
Même si le variateur de fréquence peut fonctionner
convenablement à une humidité relative élevée (jusqu'à 95
%), la condensation doit être évitée. Il existe un risque
spécique de condensation quand le variateur de
fréquence est plus froid que l'air ambiant humide.
L'humidité contenue dans l'air peut se condenser sur les
composants électroniques et provoquer des courts-circuits.
De la condensation se dépose sur les unités non
alimentées. Il est conseillé d'installer un élément thermique
dans l'armoire lorsqu'il existe un risque de condensation lié
aux conditions ambiantes. Éviter toute installation dans des
endroits exposés au gel.
Sinon, le fait d'exploiter le variateur de fréquence en mode
veille (avec le dispositif relié au secteur) peut aider à
réduire le risque de condensation. Vérier si la dissipation
de puissance est susante pour garder les circuits du
variateur de fréquence secs.
3.1.2
Exigences électriques
•
Structure de commande et programmation
•
Communication série
•
Taille, forme et poids de l'équipement
•
Exigences en matière de câbles électriques et de
•
commande ; type et longueur
Fusibles
•
Équipement auxiliaire
•
Transport et stockage
•
fonctionnement
température
Une conception complète inclut les spécications détaillées
des besoins et de l'utilisation.
Types de variateurs de fréquence
•
Moteurs
•
38 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Les limites de température ambiante minimale et maximale
sont spéciées pour tous les variateurs de fréquence. Le
fait d'éviter des températures ambiantes extrêmes
prolonge la durée de vie de l'équipement et maximise la
abilité du système global. Respecter les recommandations
Page 41

Intégration du système
Manuel de conguration
répertoriées pour une performance et une longévité
optimales de l'équipement.
Même si les variateurs de fréquence peuvent
•
fonctionner à des températures jusqu'à -10 °C, un
fonctionnement correct à charge nominale est
garanti uniquement à 0 °C ou plus.
Ne pas dépasser la limite de température
•
maximale.
La durée de vie des composants électroniques
•
baisse de 50 % tous les 10 °C lorsqu'ils sont
utilisés au-dessus de la température de
conception.
Même les dispositifs présentant des niveaux de
•
protection IP54, IP55 ou IP66 doivent être utilisés
dans les plages de température ambiante
spéciées.
Une climatisation supplémentaire de l'armoire ou
•
du site d'installation peut s'avérer nécessaire.
Refroidissement
3.1.3
Les variateurs de fréquence dissipent la puissance sous
forme de chaleur. Respecter les recommandations ci-après
pour un refroidissement ecace des unités.
La température maximum de l'air pour entrer
•
dans la protection ne doit jamais dépasser 40 °C
(104 °F).
La température moyenne jour/nuit doit être
•
inférieure à 35 °C (95 °F).
Monter l'unité de façon à permettre un débit d'air
•
libre dans les ailettes de refroidissement. Voir le
chapitre 3.6.1 Dégagement pour connaître les
espaces de montage qui conviennent.
Il convient de répondre aux exigences minimum
•
en matière de dégagement à l'avant et à l'arrière
pour le débit d'air de refroidissement. Lire le
Manuel d'utilisation pour connaître les exigences
d'installation applicables.
3.1.3.1
Des ventilateurs sont intégrés au variateur de fréquence
an de garantir un refroidissement optimal. Le ventilateur
principal force le débit d'air le long des ailettes de refroidissement du dissipateur de chaleur, ce qui garantit le
refroidissement de l'air interne. Certaines tailles de
puissance comportent un petit ventilateur secondaire près
de la carte de commande, ce qui garantit la circulation de
l'air interne et permet d'éviter les points chauds.
Le ventilateur principal est contrôlé par la température
interne du variateur de fréquence et la vitesse augmente
progressivement avec la température, réduisant le bruit et
Ventilateurs
la consommation d'énergie lorsque les besoins sont faibles
et garantissant un refroidissement maximal en cas de
besoin. Le contrôle du ventilateur peut être adapté via le
par. paramétre 14-52 Contrôle ventil pour s'ajuster à toutes
les applications, mais aussi pour une protection contre les
eets négatifs du refroidissement dans des conditions
froides. En cas de surtempérature à l'intérieur du variateur
de fréquence, il déclasse la fréquence de commutation et
le modèle. Consulter le chapitre 5.1 Déclassement pour plus
d'informations.
3.1.3.2 Calcul du débit d'air requis pour
refroidir le variateur de fréquence
Le débit d'air requis pour refroidir un variateur de
fréquence ou plusieurs variateurs de fréquence dans une
protection, peut être calculé de la façon suivante :
1. Déterminer la perte de puissance à une sortie
maximale pour tous les variateurs de fréquence à
partir des tableaux de données au
chapitre 7 Spécications.
2. Ajouter les valeurs de perte de puissance de tous
les variateurs de fréquence fonctionnant en
même temps. La somme obtenue correspond à la
chaleur Q transférée. Multiplier le résultat par le
facteur f (consulter le Tableau 3.1). Par exemple, f
= 3,1 m3 x K/Wh au niveau de la mer.
3. Déterminer la température la plus élevée de l'air
qui entre dans la protection. Ôter cette
température de la température requise à
l'intérieur de la protection, par exemple 45 °C
(113 °F).
4. Diviser le total obtenu à l'étape 2 du total obtenu
à l'étape 3.
Le calcul est exprimé selon la formule :
f xQ
V =
Ti − TA
où
V = débit d'air en m3/h
f = facteur en m3 x K/Wh
Q = chaleur transférée en W
Ti = température à l'intérieur de la protection en °C
TA = température ambiante en °C
f = cp x ρ (chaleur spécique de l'air x densité d'air)
AVIS!
La chaleur spécique de l'air (cp) et la densité d'air (ρ) ne
sont pas des constantes mais dépendent de la
température, de l'humidité et de la pression
atmosphérique. Elles dépendent donc de l'altitude.
Le Tableau 3.1 présente les valeurs typiques du facteur f,
calculées pour diérentes altitudes.
3 3
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 39
Page 42

Intégration du système
VLT® AQUA Drive FC 202
Altitude
33
1000 0,9250 1,112 3,5
1500 0,8954 1,058 3,8
2000 0,8728 1,006 4,1
2500 0,8551 0,9568 4,4
3000 0,8302 0,9091 4,8
3500 0,8065 0,8633 5,2
Tableau 3.1 Facteur f, calculé pour diérentes altitudes
Exemple
Quel est le débit d'air nécessaire pour refroidir 2 variateurs
de fréquence (pertes de chaleur de 295 W et 1430 W)
fonctionnant simultanément, montés dans une protection
avec une pointe de la température ambiante de 37 °C ?
Chaleur spécique de l'aircpDensité d'airρFacteur
[m] [kJ/kgK]
0 0,9480 1,225 3,1
500 0,9348 1,167 3,3
1. La somme des pertes de chaleur des deux
variateurs de fréquence est de 1725 W.
2.
1725 W multipliés par 3,3 m3 x K/Wh donnent
5693 m x K/h.
3.
45 °C - 37 °C est égal à 8 °C (= 8 K).
4. 5693 m x K/h divisés par 8 K donnent : 711,6
m3h.
[kg/m3] [m3⋅K/Wh]
f
3.1.5
Bruit acoustique
Le bruit acoustique du variateur de fréquence provient de
3 sources :
Bobines du circuit intermédiaire CC
•
Filtre RFI obstrué
•
Ventilateurs internes
•
Se reporter au Tableau 7.60 pour obtenir les données sur le
bruit acoustique.
3.1.6 Vibrations et chocs
Le variateur de fréquence est testé selon la procédure
basée sur les normes CEI 68-2-6/34/35 et 36. Ces tests
soumettent l'appareil à des forces de 0,7 g, dans la plage
de 18 à 1000 Hz de façon aléatoire, dans 3 directions,
pendant 2 heures. Tous les variateurs de fréquence Danfoss
répondent aux spécications correspondant à ces
conditions lorsque l'appareil est à montage mural ou au
sol, mais aussi lorsqu'il est monté dans les panneaux xes
au mur ou au sol.
Atmosphères agressives
3.1.7
3.1.7.1 Gaz
Si le débit d'air est nécessaire en pi3/min, utiliser la
conversion 1 m3/h = 0,589 pi3/min.
Dans l'exemple ci-dessus, 711,6 m3/h = 418,85 pi3/min.
Surtension générée par le moteur
3.1.4
La tension CC dans le circuit intermédiaire (bus CC)
augmente lorsque le moteur est utilisé comme générateur.
Ce phénomène survient de deux façons :
La charge entraîne le moteur lorsque le variateur
•
de fréquence fonctionne à une fréquence de
sortie constante. On appelle généralement cela
une charge trop importante.
Pendant la décélération, si l'inertie de la charge
•
est élevée et que le temps de décélération du
variateur est dénie sur une valeur courte.
Le variateur de fréquence ne peut pas restituer l'énergie
vers l'entrée. Par conséquent, cela limite l'énergie acceptée
du moteur lorsqu'il est réglé pour permettre l'accélération
automatique. Le variateur de fréquence tente cette
opération en rallongeant automatiquement la rampe de
décélération en cas de surtension pendant la décélération.
En cas d'échec ou si la charge entraîne le moteur lorsqu'il
fonctionne à une fréquence constante, le variateur s'arrête
et ache un défaut lorsqu'un niveau de tension critique
du bus CC est atteint.
Les gaz agressifs, tels que le sulfure d'hydrogène, le chlore
ou l'ammoniaque, peuvent endommager les composants
électriques et mécaniques du variateur de fréquence. La
contamination de l'air de refroidissement peut également
entraîner la décomposition graduelle des pistes de cartes
de circuit imprimé et les joints de porte. Des contaminants
agressifs sont souvent présents dans les stations
d'épuration des eaux usées ou les piscines. Un signe clair
d'atmosphère agressive est la corrosion du cuivre.
Dans des atmosphères explosives, les protections IP
restreintes sont recommandées avec les cartes de circuit
imprimé à revêtement conforme. Voir le Tableau 3.2 pour
connaître les valeurs des revêtements conformes.
AVIS!
Le variateur de fréquence est livré en standard avec un
revêtement de classe 3C2 des cartes de circuits imprimés.
Le revêtement de classe 3C3 est disponible à la
demande.
40 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 43

Intégration du système
Manuel de conguration
Classe
3C1 3C2 3C3
Type de gaz Unité
Sel marin n/a Aucun Brouillard salin Brouillard salin
Oxydes de
soufre
Sulfure
d'hydrogène
Chlore mg/
Chlorure
d'hydrogène
Fluorure
d'hydrogène
Ammoniaque mg/
Ozone mg/
Azote mg/
Tableau 3.2 Classes des revêtements conformes
1) Les valeurs maximales sont des valeurs de crête transitoires qui ne
doivent pas dépasser 30 minutes par jour.
3.1.7.2
mg/
3
m
mg/
3
m
3
m
mg/
3
m
mg/
3
m
3
m
3
m
3
m
Exposition à la poussière
Valeur
moyenne
0,1 0,3 1,0 5,0 10
0,01 0,1 0,5 3,0 10
0,01 0,1 0,03 0,3 1,0
0,01 0,1 0,5 1,0 5,0
0,003 0,01 0,03 0,1 3,0
0,3 1,0 3,0 10 35
0,01 0,05 0,1 0,1 0,3
0,1 0,5 1,0 3,0 9,0
Valeur
max.
1)
Valeur
moyenne
Valeur
max.
1)
L'installation de variateurs de fréquence dans des environnements fortement exposés à la poussière est souvent
inévitable. La poussière aecte les unités montées au mur
ou sur châssis avec un niveau de protection IP55 ou IP66
mais aussi les dispositifs à montage en armoire présentant
un niveau de protection IP21 ou IP20. Les 3 aspects décrits
ci-dessous doivent être pris en compte quand des
variateurs de fréquence sont installés dans ces environnements.
Refroidissement réduit
La poussière se dépose sur la surface du dispositif et à
l'intérieur, sur les cartes de circuit imprimé et les
composants électroniques. Ces dépôts agissent comme des
couches isolantes et gênent le transfert de chaleur dans
l'air ambiant, réduisant la capacité de refroidissement. Les
composants deviennent plus chauds. Les composants
électroniques vieillissent prématurément et la durée de vie
de l'unité diminue. Les dépôts de poussière sur le radiateur
au dos de l'unité réduisent également la durée de vie de
cette dernière.
Ventilateurs de refroidissement
Le débit d'air de refroidissement de l'unité est produit par
des ventilateurs, qui sont généralement situés au dos du
dispositif. Les rotors de ventilateur disposent de petits
roulements dans lesquels la poussière peut pénétrer et agir
comme un abrasif. Cela entraîne un endommagement des
paliers et une panne du ventilateur.
Filtres
Les variateurs de fréquence haute puissance sont équipés
de ventilateurs de refroidissement qui expulsent l'air chaud
situé à l'intérieur du dispositif. Au-dessus d'une certaine
dimension, ces ventilateurs sont équipés de tapis de ltre.
Ces ltres peuvent rapidement se boucher s'ils sont utilisés
dans des environnements poussiéreux. Des mesures de
prévention sont nécessaires dans ces conditions.
Maintenance périodique
Dans les conditions décrites ci-dessus, il est recommandé
de nettoyer le variateur de fréquence pendant la
maintenance périodique. Éliminer la poussière qui s'est
déposée sur le radiateur et les ventilateurs, puis nettoyer
les tapis de ltre.
3.1.7.3
Atmosphères potentiellement
explosives
Les systèmes utilisés dans des atmosphères potentiellement explosives doivent répondre à des conditions
particulières. La directive européenne 94/9/CE décrit le
fonctionnement des dispositifs électroniques dans des
atmosphères potentiellement explosives.
La température des moteurs contrôlés par des variateurs
de fréquence dans des atmosphères potentiellement
explosives doit être surveillée avec une sonde de
température PTC. Les moteurs avec protection de classe
« d » ou « e » sont approuvés pour cet environnement.
La classication d vise à garantir qu'en cas d'étin-
•
celles, elle sera connée dans un espace protégé.
Même s'ils ne requièrent aucune approbation, des
câblages et un connements spéciaux sont
nécessaires.
La combinaison d/e est la plus utilisée dans les
•
atmosphères potentiellement explosives. Le
moteur lui-même présente une classe de
protection contre l'inammation « e », alors que
le câblage du moteur et l'environnement de
connexion sont exécutés en conformité avec la
classe de protection « e ». La restriction sur
l'espace de connexion « e » porte sur la tension
maximale autorisée dans cet espace. La tension
de sortie d'un variateur de fréquence se limite
généralement à la tension secteur. La modulation
de la tension de sortie peut générer une tension
de crête élevée pour la classication e. Dans la
pratique, l'utilisation d'un ltre sinus au niveau de
la sortie du variateur de fréquence s'est avérée
ecace pour atténuer les grands pics de tension.
3 3
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 41
Page 44

Intégration du système
VLT® AQUA Drive FC 202
AVIS!
Ne jamais installer de variateur de fréquence dans une
atmosphère potentiellement explosive. Installer le
variateur de fréquence dans une armoire située à
l'extérieur de cette zone. L'utilisation d'un ltre sinus au
33
niveau de la sortie du variateur de fréquence est aussi
recommandée pour atténuer la tension de la montée
dv/dt et le pic de tension. Raccourcir au maximum les
câbles du moteur.
AVIS!
Les variateurs de fréquence équipés de l'option MCB 112
disposent de la surveillance par thermistance du moteur
Lettre
supplémentaire
Contre la pénétration
de corps étrangers
solides
Informations complémentaires spéciques
pour
H dispositif haute tension
M déplacement du
dispositif pendant l'essai
en eau
S dispositif xe pendant
l'essai en eau
W conditions météorolo-
giques
Contre l'accès à des
parties dangereuses
par
certiée PTB pour les atmosphères potentiellement
explosives. Des câbles de moteur blindés ne sont pas
Tableau 3.3 Dénitions CEI 60529 des niveaux IP
nécessaires quand les variateurs de fréquence sont
utilisés avec des ltres de sortie sinusoïdaux.
3.1.8 Dénitions du niveau IP
3.1.8.1
Les variateurs de fréquence Danfoss sont disponibles avec
Options d'armoire et niveaux
trois protections nominales diérentes :
Premier
chire
Second
chire
Première
lettre
Contre la pénétration
de corps étrangers
solides
0 (non protégé) (non protégé)
1
diamètre ≥50 mm
2 diamètre de 12,5 mm les doigts
3 diamètre de 2,5 mm un outil
4
diamètre ≥1,0 mm
5 protection contre la
poussière
6 étanchéité à la poussière Fil
Contre la pénétration
d'eau avec un eet
nocif
0 (non protégé)
1 gouttes tombant vertica-
lement
2 gouttes à un angle de
15°
3 vaporisation d'eau
4 projection d'eau
5 jets d'eau
6 jets d'eau puissants
7 immersion temporaire
8 immersion à long terme
Informations complé-
mentaires spéciques
pour
A le dos de la main
B les doigts
C un outil
D Fil
Contre l'accès à des
parties dangereuses
par
le dos de la main
un l
Fil
IP00 ou IP20 pour une installation dans l'armoire.
•
IP54 ou IP55 pour un montage local.
•
IP66 pour des conditions ambiantes critiques
•
telles qu'un taux d'humidité (dans l'air)
extrêmement élevé, des concentrations de
poussière élevées ou des gaz agressifs.
Perturbations radioélectriques
3.1.9
L'objectif principal en pratique est d'obtenir des systèmes
qui fonctionnent de façon stable sans perturbations
radioélectriques entre les composants. Pour atteindre un
niveau d'immunité élevé, il est recommandé d'utiliser des
variateurs de fréquence équipés de ltres RFI haute qualité.
Utiliser des ltres de Catégorie C1 spéciés dans la norme
EN 61800-3 conformes aux limites de Classe B de la norme
générale EN 55011.
Placer des notices d'avertissement sur le variateur de
fréquence si les ltres RFI ne correspondent pas à la
Catégorie C1 (Catégorie C2 ou moins). La responsabilité
relative à l'étiquetage incombe à l'opérateur.
Dans l'usage, il existe deux approches quant aux ltres
RFI :
Intégré à l'équipement
•
ltres intégrés permettent de gagner
Les
-
de la place dans l'armoire, mais
éliminent également les frais
additionnels d'installation, de câblage et
42 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 45

130BA056.10
1
3
25 4
6
ba
M
Intégration du système
Manuel de conguration
de matériaux. Cependant, l'avantage le
plus important est la conformité CEM et
le câblage parfaits des ltres intégrés.
Options externes
•
Les ltres RFI externes en option,
-
installés à l'entrée du variateur de
fréquence, provoquent une chute de
tension. En pratique, cela signie que la
tension secteur totale n'est pas présente
à l'entrée du variateur de fréquence et
qu'un surdimensionnement peut être
nécessaire. La longueur maximale du
câble du moteur conformément aux
limites CEM est comprise entre 1 et
50 m. Les frais sont encourus pour les
matériaux, les câbles et l'assemblage. La
conformité CEM n'est pas testée.
AVIS!
Pour vérier le fonctionnement sans interférence du
système de variateur ou du moteur, toujours utiliser un
ltre RFI de catégorie C1.
AVIS!
Les unités VLT® AQUA Drive sont fournies de série avec
des ltres RFI intégrés conformes à la catégorie C1 (EN
61800-3) pour une utilisation avec des systèmes secteur
de 400 V et des puissances nominales max. de 90 kW ou
à la catégorie C2 pour des puissances nominales
comprises entre 110 et 630 kW. Les unités VLT® AQUA
Drive sont conformes à la catégorie C1 avec des câbles
de moteur blindés jusqu'à 50 m ou C2 avec des câbles
de moteur blindés jusqu'à 150 m. Se reporter au
Tableau 3.4 pour plus de détails.
3.1.10 Conformité en matière d'isolation
galvanique et de PELV
Assurer la protection contre les électrocutions lorsque
l'alimentation électrique est de type PELV (tension
extrêmement basse) et que l'installation est réalisée selon
les réglementations PELV locales et nationales.
Pour conserver l'isolation PELV au niveau de toutes les
bornes de commande, toutes les connexions doivent être
de type PELV : la thermistance doit être à isolation
renforcée. Toutes les bornes de relais et de commande des
variateurs de fréquence Danfoss sont conformes à la
norme PELV (à l'exception des unités au sol sur trépied
supérieures à 400 V).
L'isolation galvanique est obtenue en respectant les
exigences en matière d'isolation renforcée avec les lignes
de fuite et les distances correspondantes. Ces exigences
sont décrites dans la norme EN 61800-5-1.
L'isolation électrique est fournie comme indiqué sur
l'Illustration 3.1. Les composants décrits sont conformes aux
exigences en matière d'isolation galvanique et PELV.
1 Alimentation (SMPS), isolation du signal de V CC incluse,
indiquant la tension du circuit intermédiaire
2 Commande de gâchette des IGBT
3 Transformateurs de courant
4 Coupleur optoélectronique, module de freinage
5 Courant d'appel interne, RFI et circuits de mesure de la
température.
6 Relais personnalisés
a Isolation galvanique de l'option de secours de 24 V
f Isolation galvanique de l'interface de bus standard RS485
Illustration 3.1 Isolation galvanique
Installation à haute altitude
Les installations dépassant les limites d'altitude ne peuvent
pas répondre aux exigences de la norme PELV. L'isolation
entre les composants et les pièces critiques peut s'avérer
insusante. Il existe un risque de surtension. Réduire le
risque de surtension en utilisant des dispositifs de
protection externes ou une isolation galvanique.
Pour les installations en altitude, contacter Danfoss
concernant la norme PELV.
380-500 V (protections A, B et C) : au-dessus de
•
2000 m (6500 pi)
380-500 V (protections D, E et F) : au-dessus de
•
3000 m (9800 pi)
525-690 V : au-dessus de 2000 m (6500 pi)
•
3.1.11
Comme tout équipement électronique, les variateurs de
fréquence doivent être entreposés dans un endroit sec.
Aucune mise en forme périodique (charge du condensateur) n'est nécessaire pendant le stockage.
Il est recommandé de garder l'équipement étanche dans
son emballage jusqu'à l'installation.
Stockage
3 3
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 43
Page 46

Intégration du système
VLT® AQUA Drive FC 202
3.2 Protection CEM, contre les harmoniques
et contre les fuites à la terre
3.2.1 Généralités concernant les émissions
CEM
33
Les variateurs de fréquence (et autres dispositifs
électriques) génèrent des champs électroniques ou
magnétiques qui peuvent interférer avec leur environnement. La compatibilité électromagnétique (CEM) de ces
eets dépend de la puissance et des caractéristiques des
harmoniques des dispositifs.
L'interaction incontrôlée entre les dispositifs électriques
d'un système peut dégrader la compatibilité et altérer le
fonctionnement able. Les interférences peuvent prendre
la forme d'une distorsion des harmoniques, de décharges
électrostatiques, de uctuations de tension rapides ou
d'interférences haute fréquence. Les dispositifs électriques
génèrent des interférences et sont aectés par les interférences d'autres sources générées.
Les interférences électriques surviennent généralement à
des fréquences comprises entre 150 kHz et 30 MHz. Des
interférences en suspension dans l'air émanant du système
du variateur de fréquence (30 MHz-1 GHz) sont
notamment générées par l'onduleur, le câble du moteur et
le moteur.
Comme le montre l'Illustration 3.2, les courants de fuite
sont imputables aux courants capacitifs aectant le câble
moteur et au rapport dU/dt élevé de la tension du moteur.
La mise en œuvre d'un câble moteur blindé augmente le
courant de fuite (voir l'Illustration 3.2) car les câbles blindés
ont une capacité par rapport à la terre supérieure à celle
des câbles non blindés. L'absence de ltrage du courant de
fuite se traduit par une perturbation accentuée du réseau
dans la plage d'interférence radioélectrique inférieure à 5
MHz environ. Étant donné que le courant de fuite (I1) est
renvoyé vers l'unité via le blindage (I3), en principe, le
champ électromagnétique (I4) émis par le câble blindé du
moteur est donc faible, conformément à l'Illustration 3.2.
Le blindage réduit l'interférence rayonnée mais augmente
les perturbations basses fréquences sur le secteur. Relier le
blindage du câble moteur à la fois au côté moteur et au
côté variateur de fréquence. Pour cela, il convient d'utiliser
les brides pour blindage intégrées an d'éviter des
extrémités blindées torsadées (queues de cochon). Les
queues de cochon augmentent l'impédance du blindage à
des fréquences élevées, ce qui réduit l'eet du blindage et
accroît le courant de fuite (I4).
En cas d'utilisation d'un câble blindé pour le relais, le câble
de commande, l'interface signal et le frein, raccorder le
blindage à la protection, aux deux extrémités. Dans
certaines situations, il peut s'avérer nécessaire d'interrompre le blindage pour éviter les boucles de courant.
En cas de raccordement du blindage sur une plaque
destinée au montage du variateur de fréquence, cette
plaque doit être métallique
courants de blindage vers l'appareil. Il importe également
d'assurer un bon contact électrique à partir de la plaque
de montage à travers les vis de montage et jusqu'au
châssis du variateur de fréquence.
En cas d'utilisation de câbles non blindés, certaines
exigences en matière d'émission ne sont pas respectées
mais les exigences d'immunité sont respectées.
Utiliser les câbles de moteur et de la résistance de freinage
les plus courts possibles pour réduire le niveau d'interférences émises par le système dans son ensemble (unité et
installation). Éviter de placer les câbles du moteur et du
frein à côté de câbles sensibles aux perturbations. Les
interférences radioélectriques supérieures à 50 MHz
(rayonnées) sont générées en particulier par les
composants électroniques de commande.
an de pouvoir renvoyer les
44 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 47

1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Intégration du système Manuel de conguration
1 Fil de terre 3 Alimentation secteur CA 5 Câble moteur blindé
2 Écran 4 Variateur de fréquence 6 Moteur
Illustration 3.2 Génération de courants de fuite
3 3
Résultats des essais CEM
3.2.2
Les résultats des essais suivants ont été obtenus sur un système regroupant un variateur de fréquence, un câble de
commande blindé, un boîtier de commande doté d'un potentiomètre ainsi qu'un moteur et un câble moteur blindé (Ölex
Classic 100 CY) à une fréquence de commutation nominale. Le Tableau 3.4 indique les longueurs maximum de câble pour
obtenir la conformité.
AVIS!
Les conditions peuvent changer signicativement pour
les autres process.
Filtre de type RFI Émission transmise Émission par rayonnement
Longueur de câble [m] Longueur de câble [m]
Normes
et
exigen
ces
H1
FC 202
H2
EN 55011 Classe B Classe A
Groupe 1
Habitat,
commerce et
Environnement
industriel
industrie
légère
EN/CEI 61800-3 Catégorie C1 Catégorie C2 Catégorie C3 Catégorie C1 Catégorie C2 Catégorie C3
Environnement
premier
Domicile et
0,25-45 kW 200-240 V T2 50 150 150 Non Oui Oui
1,1-7,5 kW 200-240 V S2 50
0,37-90 kW 380-480 V T4 50 150 150 Non Oui Oui
7,5 kW 380-480 V S4
bureau
50 100/150
Environnement
premier
Habitat et
commerce
100/150
AVIS!
Consulter le Tableau 3.17 pour les câbles moteur
parallèles.
Classe A
Groupe 2
Environne
ment
industriel
Deuxième
environne
ment
Industriel
5)
5)
100/150
100/150
Classe B Classe A
Habitat,
commerce et
industrie
légère
Environnement
premier
Habitat et
commerce
5)
5)
Groupe 1
Environnement
industriel
Environnement
premier
Habitat et
commerce
Non Oui Oui
Non Oui Oui
Classe A
Groupe 2
Environnement
industriel
Second
environment
Industrial
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 45
Page 48

Intégration du système
Filtre de type RFI Émission transmise Émission par rayonnement
Longueur de câble [m] Longueur de câble [m]
Normes
et
exigen
ces
EN 55011 Classe B Classe A
33
EN/CEI 61800-3 Catégorie C1 Catégorie C2 Catégorie C3 Catégorie C1 Catégorie C2 Catégorie C3
FC 202 0,25-3,7 kW 200-240 V T2 Non Non 5 Non Non Non
5,5-45 kW 200-240 V T2 Non Non 25 Non Non Non
1,1-7,5 kW 200-240 V S2 Non Non 25 Non Non Non
0,37-7,5 kW 380-480 V T4 Non Non 5 Non Non Non
4)
T4 Non Non 25 Non Non Non
1, 4)
T7 Non Non 25 Non Non Non
2, 4)
T7 Non Non 25 Non Non Non
1)
T7 Non 100 100 Non Oui Oui
2)
T7 Non 150 150 Non Oui Oui
H3
FC 202
H4
FC 202
1)
Hx
FC 202
11-90 kW 380-380 V
7,5 kW 380-480 V S4 Non Non 25 Non Non Non
11-30 kW 525-690 V
37-90 kW 525-690 V
0,25-45 kW 200-240 V T2 10 50 50 Non Oui Oui
0,37-90 kW 380-480 V T4 10 50 50 Non Oui Oui
1,1-30 kW 525-690 V
37-90 kW 525-690 V
1,1-90 kW 525-600 V T6 Non Non Non Non Non Non
15-22 kW 200-240 V S2 Non Non Non Non Non Non
11-37 kW 380-480 V S4 Non Non Non Non Non Non
VLT® AQUA Drive FC 202
Groupe 1
Habitat,
commerce et
industrie
légère
Environnement
premier
Domicile et
bureau
Environnement
industriel
Environnement
premier
Habitat et
commerce
Classe A
Groupe 2
Environne
ment
industriel
Deuxième
environne
ment
Industriel
Classe B Classe A
Groupe 1
Habitat,
commerce et
industrie
légère
Environnement
premier
Habitat et
commerce
Environ-
nement
industriel
Environ-
nement
premier
Habitat et
commerce
Classe A
Groupe 2
Environnement
industriel
Second
environment
Industrial
Tableau 3.4 Résultats du test CEM (émissions) Longueur de câble du moteur maximale
1) Protection de taille B2.
2) Protection de taille C2.
3) Les versions Hx peuvent être utilisées conformément à la norme EN/CEI 61800-3 catégorie C4.
4) T7, 37-90 kW conforme à la classe A groupe 1 avec un câble moteur de 25 m. Certaines restrictions s'appliquent à l'installation (contacter
Danfoss pour plus de détails).
5) 100 m entre phase et neutre, 150 m entre phase et phase (mais pas du TT ou TT ). Les variateurs de fréquence monophasés n'ont pas été prévus
pour une alimentation à 2 phases depuis un réseau TT ou TN.
HX, H1, H2, H3, H4 ou H5 est déni dans le code de type en pos. 16-17 pour les ltres CEM.
HX - aucun ltre CEM intégré dans le variateur de fréquence.
H1 - ltre CEM intégré. Conforme à la norme EN 55011 classe A1/B et EN/CEI 61800-3 catégorie 1/2.
H2 – ltre RFI limité contenant seulement des condensateurs et sans bobine mode commun. Conforme à EN 55011 classe A2 et EN/CEI 61800-3
catégorie 3.
H3 - ltre CEM intégré. Conforme à la norme EN 55011 classe A1/B et EN/CEI 61800-3 catégorie 1/2.
H4 - ltre CEM intégré. Conforme aux normes EN 55011 classe A1 et EN/CEI 61800-3 catégorie 2.
H5 - Versions marines. Version renforcée, conforme aux mêmes niveaux d'émissions que les versions H2.
3.2.3
Conditions d'émission
fournit la dénition des 4 catégories et la classication
équivalente de la norme EN 55011.
La norme produit CEM pour les variateurs de fréquence
dénit 4 catégories (C1, C2, C3 et C4) avec des exigences
spéciques pour les émissions et l'immunité. Le Tableau 3.5
46 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 49

Intégration du système
Manuel de conguration
Classe
d'émission
Catégorie Dénition
C1 Variateurs de fréquence installés
dans un environnement premier
(habitat et commerce) avec une
tension d'alimentation inférieure à
1 000 V.
C2 Variateurs de fréquence installés
dans un environnement premier
(habitat et commerce) avec une
tension d'alimentation inférieure à
1 000 V, qui ne sont ni enchables
ni amovibles et prévus pour être
installés et mis en service par un
professionnel.
C3 Variateurs de fréquence installés
dans un environnement second
(industriel) avec une tension
d'alimentation inférieure à 1 000 V.
C4 Variateurs de fréquence installés
dans un environnement second
avec une tension d'alimentation
égale ou supérieure à 1 000 V ou
un courant nominal égal ou
supérieur à 400 A ou prévus pour
un usage dans des systèmes
complexes.
Tableau 3.5 Corrélation entre la norme CEI 61800-3 et la norme
EN 55011
équivalente
dans la norme
EN 55011
Classe B
Classe A
groupe 1
Classe A
groupe 2
Aucune limite.
Établir un plan
CEM.
Lorsque les normes d'émissions génériques (transmises)
sont utilisées, les variateurs de fréquence doivent être
conformes aux limites
Environnement
Environnement
premier
(habitat et
commerce)
dénies dans le Tableau 3.6 :
Norme d'émission
générique
Norme EN/CEI 61000-6-3
concernant les émissions
dans les environnements
résidentiels, commerciaux et
de l'industrie légère.
Classe
d'émission
équivalente
dans la norme
EN 55011
Classe B
Classe
Environnement
Environnement
second
(environnement
industriel)
Tableau 3.6 Corrélation entre la norme d'émission générique et
EN 55011
Conditions d'immunité
3.2.4
Norme d'émission
générique
Norme EN/CEI 61000-6-4
concernant les émissions
dans les environnements
industriels.
d'émission
équivalente
dans la norme
EN 55011
Classe A groupe
1
Les conditions d'immunité des variateurs de fréquence
dépendent de l'environnement dans lequel ils sont
installés. Les exigences sont plus strictes pour l'environnement industriel que pour les environnements résidentiels
et commerciaux. Tous les variateurs de fréquence Danfoss
sont conformes aux exigences pour l'environnement
industriel et par conséquent aux exigences moindres des
environnements résidentiels et commerciaux, orant ainsi
une importante marge de sécurité.
An de pouvoir documenter l'immunité à l'égard des
interférences, les essais suivants d'immunité ont été
réalisés conformément aux normes de base suivantes :
EN 61000-4-2 (CEI 61000-4-2) : décharges
•
électrostatiques (DES). Simulation de l'inuence
des décharges électrostatiques générées par le
corps humain.
EN 61000-4-3 (CEI 61000-4-3) : champ électroma-
•
gnétique rayonné à modulation d'amplitude :
simulation de
l'inuence des radars, matériels de
radiodiusion et appareils de communication
mobiles.
EN 61000-4-4 (CEI 61000-4-4) : rafales. Simulation
•
d'interférences provoquées par un contacteur en
ouverture, un relais ou un dispositif analogue.
EN 61000-4-5 (CEI 61000-4-5) : transitoires.
•
Simulation de transitoires provoquées, par
exemple, par la foudre frappant à proximité
d'installations.
EN 61000-4-6 (CEI 61000-4-6) : mode commun
•
RF. Simulation de
l'eet d'équipement de
transmission connecté par des câbles de raccordement.
Voir le par. Tableau 3.7.
3 3
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 47
Page 50

Intégration du système
VLT® AQUA Drive FC 202
Norme de base
CEI 61000-4-42
Critère d'acceptation B B B A A
33
Plage de tension : 200-240 V, 380-500 V, 525-600 V, 525-690 V
Ligne
Moteur
Frein 4 kV CM
Répartition de la charge 4 kV CM
Fils de commande
Bus standard 2 kV CM
Fils du relais 2 kV CM
Options d'application et bus 2 kV CM
Câble LCP
Alimentation externe 24 V
CC
Protection
Tableau 3.7 Schéma d'immunité CEM
1) Injection sur blindage de câble
2) Valeurs généralement obtenues par les tests
2)
Rafale
CEI 61000-4-5
4 kV CM
4 kV CM
2 kV CM
2 kV CM
2 V CM
— —
4 kV/12 Ω CM
0,5 kV/2 Ω DM
1 kV/12 Ω CM
Surtension
2 kV/2 Ω DM
4 kV/2 Ω
4 kV/2 Ω
4 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2)
Décharge
électro-
statique
CEI
61000-4-2
— —
1)
1)
1)
1)
1)
1)
1)
1)
— —
— —
— —
— —
— —
— —
— —
— —
— —
8 kV AD
6 kV CD
Champ électromagnétique
2)
rayonné
CEI 61000-4-3
10 V/m —
Tension mode
commun RF
CEI 61000-4-6
10 V
RMS
10 V
RMS
10 V
RMS
10 V
RMS
10 V
RMS
10 V
RMS
10 V
RMS
10 V
RMS
10 V
RMS
10 V
RMS
Isolation du moteur
3.2.5
Les moteurs modernes à utiliser avec des variateurs de
fréquence présentent un niveau élevé d'isolation pour
représenter la nouvelle génération d'IGBT haute fréquence
avec un dU/dt élevé. Pour un réajustement sur des
moteurs anciens, conrmer l'isolation du moteur ou
atténuer avec un ltre dU/dt ou si nécessaire un ltre
sinus.
Pour les longueurs de câble du moteur ≤ à la longueur de
câble répertoriée au chapitre 7.5 Spécications du câble,
l'isolation du moteur recommandée est indiquée dans le
Tableau 3.8. Si un moteur présente une valeur d'isolation
nominale inférieure, il est conseillé d'utiliser un ltre du/dt
ou sinus.
Tension secteur nominale [V] Isolation du moteur [V]
UN≤420
420 < UN≤ 500 ULL renforcée = 1600
500 < UN≤ 600 ULL renforcée = 1800
600 < UN≤ 690 ULL renforcée = 2000
Tableau 3.8 Isolation du moteur
ULL standard = 1300
Courants des paliers de moteur
3.2.6
Pour minimiser les courants d'entraînement des paliers et
des arbres, relier les éléments ci-dessous à la machine
entraînée :
Variateur de fréquence
•
Moteur
•
Machine entraînée
•
Stratégies d'atténuation standard
1. Utiliser un palier isolé.
2. Appliquer des procédures d'installation
rigoureuses.
2a Veiller à ce que le moteur et la charge
moteur soient alignés.
2b Respecter strictement la réglementation
CEM.
2c Renforcer le PE de façon à ce que
l'impédance haute fréquence soit
inférieure dans le PE aux ls d'alimentation d'entrée.
2d Permettre une bonne connexion haute
fréquence entre le moteur et le variateur
de fréquence par exemple avec un câble
48 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 51

175HA034.10
Intégration du système Manuel de conguration
armé muni d'un raccord à 360° dans le
moteur et le variateur de fréquence.
2e Veiller à ce que l'impédance entre le
variateur de fréquence et la mise à la
terre soit inférieure à l'impédance de la
mise à la terre de la machine. Cela peut
s'avérer dicile pour les pompes.
2f Procéder à une mise à la terre directe
entre le moteur et la charge moteur.
3. Abaisser la fréquence de commutation de l'IGBT.
4. Modier la forme de l'onde de l'onduleur, 60°
AVM au lieu de SFAVM.
5. Installer un système de mise à la terre de l'arbre
ou utiliser un raccord isolant.
6. Appliquer un lubriant conducteur.
7. Utiliser si possible des réglages minimum de la
vitesse.
8. Veiller à ce que la tension de la ligne soit
équilibrée jusqu'à la terre. Cela peut s'avérer
dicile pour les réseaux IT, TT, TN-CS ou les
systèmes de colonne mis à la terre.
9. Utiliser un ltre dU/dt ou sinus.
Harmoniques
3.2.7
Les dispositifs électriques avec redresseurs à diodes tels
que les éclairages uorescents, les ordinateurs, les copieurs,
les fax, plusieurs équipements de laboratoire et systèmes
de télécommunication, peuvent ajouter des distorsions
harmoniques à une alimentation secteur. Les variateurs de
fréquence utilisent une entrée en pont à diodes, ce qui
peut également contribuer à une distorsion des
harmoniques.
Le variateur de fréquence ne peut absorber le courant
uniformément à partir de la ligne électrique. Ce courant
non sinusoïdal comporte des composants qui sont des
multiples de la fréquence fondamentale du courant. Ces
composants sont appelés harmoniques. Il est important de
contrôler la distorsion harmonique totale de l'alimentation
secteur. Même si les harmoniques n'aectent pas
directement la consommation d'énergie électrique, elles
génèrent de la chaleur dans les câbles et les transformateurs et peuvent aecter d'autres dispositifs sur la
même ligne électrique.
de fréquence sur une installation spécique sont diciles.
Si nécessaire, analyser les harmoniques du système an de
déterminer les eets de l'équipement.
Un variateur de fréquence consomme un courant non
sinusoïdal qui accroît le courant d'entrée I
. Un courant
RMS
non sinusoïdal peut être transformé à l'aide d'une analyse
de série Fourier en une somme de courants sinusoïdaux de
fréquences diérentes, c'est-à-dire en harmoniques de
courant In
diérents dont la fréquence de base est égale à
50 ou 60 Hz.
Les harmoniques de courant ne contribuent pas
directement à la consommation de puissance mais elles
augmentent les pertes de chaleur de l'installation (transformateurs, inducteurs, câbles). De ce fait, dans les
installations électriques caractérisées par un pourcentage
élevé de charges redressées, il convient de maintenir les
harmoniques de courant à un niveau faible
an d'éviter la
surcharge du transformateur, des inducteurs et des câbles.
Abréviation Description
f
1
I
1
U
1
I
n
U
n
n ordre des harmoniques
Tableau 3.9 Abréviations associées aux harmoniques
Courant
fondamental
Courant I
Fréquence
[Hz]
Tableau 3.10 Courant non sinusoïdal transformé
Courant Harmoniques de courant
I
Courant d'entrée 1,0 0,9 0,4 0,2 < 0,1
Tableau 3.11 Comparaison entre les harmoniques de courant et
le courantCourant
fréquence fondamentale
courant fondamental
tension fondamentale
harmoniques de courant
harmoniques de tension
Harmoniques de courant (In)
(I1)
1
50 250 350 550
I
5
RMSI1
I
7
I
I
5
I
I
7
11-49
11
3 3
3.2.7.1
Analyse des harmoniques
Illustration 3.3 Bobines du circuit intermédiaire
Plusieurs caractéristiques du système électrique d'un
bâtiment déterminent la contribution exacte des
harmoniques du variateur au THD d'une installation et sa
capacité à respecter les normes IEEE. Les généralisations
concernant la contribution des harmoniques des variateurs
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 49
Page 52

Intégration du système
VLT® AQUA Drive FC 202
AVIS!
Certaines harmoniques de courant sont susceptibles de
perturber les équipements de communication reliés au
même transformateur ou de provoquer des résonances
dans les connexions avec les condensateurs de correction
33
du facteur de puissance.
Réel (typique)
Limite pour
R
≥120
sce
Pour produire des harmoniques de courant bas, le
variateur de fréquence est doté de ltres passifs. Les
bobines CC réduisent le taux d'harmoniques (THD) à 40 %.
La distorsion de la tension d'alimentation secteur dépend
de la taille des harmoniques de courant multipliée par
Réel (typique)
Limite pour
R
≥120
sce
Tableau 3.13 Résultats des essais harmoniques (émission)
Harmoniques de courant individuels In/I1 (%)
I
5
40 20 10 8
40 25 15 10
Taux de distorsion des harmoniques de
I
7
courant (%)
THD PWHD
46 45
48 46
I
11
I
13
l'impédance secteur à la fréquence concernée. La distorsion
de tension totale (THD) est calculée à partir de chacun des
harmoniques de courant selon la formule :
2
THD =
3.2.7.2
2
+ U
U
+ ... + U
5
7
U1
Conditions d'émission harmonique
2
N
Il est de la responsabilité de l'installateur ou de l'utilisateur
de l'équipement de s'assurer, en consultant l'opérateur du
réseau de distribution si nécessaire, que l'équipement est
raccordé uniquement à une alimentation avec une
puissance de court-circuit Ssc supérieure ou égale à celle
spéciée dans l'équation.
Consulter l'opérateur du réseau de distribution pour
raccorder d'autres puissances au réseau public d'alimen-
Équipements raccordés au réseau public d'alimentation
Option Dénition
1 CEI/EN 61000-3-2 Classe A pour équipement triphasé
équilibré (pour équipement professionnel
uniquement jusqu'à une puissance totale de 1 kW).
2 CEI/EN 61000-3-12 Équipement 16 A-75 A et
équipement professionnel depuis 1 kW jusqu'à un
courant de phase de 16 A.
tation.
Conformité avec les directives des diérents niveaux de
système :
Les données des harmoniques de courant dans le
Tableau 3.13 sont proposées en conformité avec la norme
CEI/EN 61000-3-12 en rapport avec la norme produit
concernant les Systèmes d'entraînement motorisés. Ces
données peuvent servir de base pour le calcul de
l'inuence des harmoniques de courant sur le système
Tableau 3.12 Normes d'émission d'harmoniques
d'alimentation et pour la documentation de conformité
aux directives régionales concernées : IEEE 519 -1992 ;
3.2.7.3
Résultats des essais harmoniques
G5/4.
(émission)
Eet des harmoniques dans un
système de distribution de
puissance
et alimente un certain
xfr
Les puissances allant jusqu'à PK75 en T2 et T4 satisfont la
norme CEI/EN 61000-3-2 Classe A. Les puissances de P1K1
à P18K en T2 et jusqu'à P90K en T4 sont conformes à la
norme CEI/EN 61000-3-12, tableau 4. Les puissances P110 P450 en T4 respectent également la norme CEI/EN
61000-3-12 même si cela n'est pas nécessaire car les
courant sont supérieurs à 75 A.
Le Tableau 3.13 décrit que la puissance du court-circuit du
Ssc d'alimentation au point d'interface entre l'alimentation
de l'utilisateur et le système public (R
) est supérieure ou
sce
égale à :
S
SC
= 3 × R
× U
SCE
secteur
× I
= 3 × 120 × 400 × I
équ
équ
3.2.7.4
Sur l'Illustration 3.4, un transformateur est connecté côté
primaire à un point de couplage commun PCC1, sur
l'alimentation en moyenne tension. Le transformateur
présente une impédance Z
nombre de charges. Le point de couplage commun où
toutes les charges sont connectées ensemble est PCC2.
Chaque charge est connectée via des câbles présentant
une impédance Z1, Z2, Z3.
50 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 53

Non-linear
Current Voltage
System
Impedance
Disturbance to
other users
Contribution to
system losses
130BB541.10
Intégration du système
Manuel de conguration
3 3
Illustration 3.4 Petit réseau de distribution
Les harmoniques de courant prélevées par des charges
non linéaires provoquent une distorsion de la tension en
raison de la baisse de cette dernière sur les impédances du
réseau de distribution. Des impédances supérieures
entraînent des niveaux plus élevés de distorsion de la
tension.
La distorsion de courant est liée aux performances des
appareils et à la charge individuelle. La distorsion de
tension est quant à elle liée aux performances du système.
Il est impossible de déterminer la distorsion de tension sur
le PCC en ne connaissant que les performances d'harmoniques de la charge. Pour prévoir la distorsion sur le PCC,
la conguration du système de distribution et les
impédances associées doivent être identiées.
Un terme couramment utilisé pour décrire l'impédance
d'un réseau est le rapport de court-circuit R
comme le rapport entre la puissance apparente du courtcircuit de l'alimentation au point PCC (Ssc) et la puissance
apparente nominale de la charge (S
S
ce
=
R
sce
S
équ
2
où
Ssc=
U
Z
alimentation
et
S
équ
= U × I
équ
L'eet négatif des harmoniques est double
Les harmoniques de courant contribuent à des
•
pertes système (dans le câblage, le transformateur).
La distorsion de tension des harmoniques
•
entraîne des perturbations sur les autres charges
et augmentent leurs pertes.
equ
).
, déni
sce
Illustration 3.5
Eets négatifs des harmoniques
3.2.7.5 Normes et exigences quant aux
limites d'harmoniques
Les exigences relatives aux limites d'harmoniques peuvent
être les suivantes :
Exigences spéciques à l'application.
•
Normes à respecter.
•
Les exigences
installation particulière où des raisons techniques limitent
les harmoniques.
Exemple
Un transformateur de 250 kVA avec deux moteurs de 2 110
kW connectés est susant si l'un des moteurs est branché
directement en ligne et que l'autre est alimenté via un
variateur de fréquence. Cependant, le transformateur est
sous-dimensionné si les deux moteurs sont alimentés par
variateur de fréquence. L'utilisation de moyens supplémentaires pour réduire les harmoniques dans l'installation ou le
choix de variantes de variateur à charge harmonique faible
permet le fonctionnement des deux moteurs avec des
variateurs de fréquence.
Il existe diverses normes, réglementations et recommandations pour atténuer les harmoniques. Diérentes normes
s'appliquent dans des zones géographiques et des
industries variées. Les normes suivantes sont les plus
courantes :
•
•
•
•
•
Voir le Manuel de conguration de l'AHF 005/010 pour
obtenir les détails spéciques à chaque norme.
En Europe, le THVD maximum est de 8 % si l'installation
est connectée via le réseau public. Si l'installation dispose
de son propre transformateur, la limite du THVD est de 10
%. Le VLT® AQUA Drive a été conçu pour supporter un
THVD de 10 %.
spéciques à l'application sont liées à une
IEC61000-3-2
IEC61000-3-12
IEC61000-3-4
IEEE 519
G5/4
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 51
Page 54

130BB955.12
a
b
Leakage current
Motor cable length
130BB956.12
THVD=0%
THVD=5%
Leakage current
Intégration du système
VLT® AQUA Drive FC 202
3.2.7.6 Atténuation des harmoniques
Lorsqu'une suppression supplémentaire des harmoniques
est nécessaire, Danfoss propose une large gamme de
matériel d'atténuation. Voici ces équipements :
variateurs à 12 impulsions,
33
•
ltres AHF
•
variateurs à charge harmonique faible,
•
Filtres actifs
•
Le choix de la solution appropriée dépend de plusieurs
facteurs :
réseau (distorsion de fond, déséquilibre du
•
réseau, résonance et type d'alimentation (transformateur/générateur)) ;
application (prol, nombre et taille des charges) ;
•
exigences/réglementations locales/nationales
•
(IEEE519, CEI, G5/4, etc.) ;
coût total de propriété (coûts initiaux, rendement,
•
maintenance, etc.).
Toujours envisager une atténuation des harmoniques si la
charge du transformateur présente une contribution non
linéaire d'au moins 40 %.
Danfoss propose des outils de calcul des harmoniques (voir
le chapitre 2.8.2 Logiciel PC).
Illustration 3.6 Inuence de la longueur de câble moteur et de
la puissance sur le courant de fuite. Puissance a > Puissance b
Le courant de fuite dépend également de la distorsion de
la ligne.
Courant de fuite à la terre
3.2.8
Respecter les réglementations locales et nationales
concernant la mise à la terre de protection de l'équipement en cas de courant de fuite supérieur à 3,5 mA.
La technologie du variateur de fréquence implique une
commutation de fréquence élevée à des puissances
importantes. Cela génère un courant de fuite dans la mise
à la terre.
Le courant de fuite à la terre provient de plusieurs sources
et dépend des diérentes congurations du système,
notamment :
Filtrage RFI
•
Longueur de câble du moteur
•
Protection du câble du moteur
•
Alimentation du variateur de fréquence
•
Illustration 3.7 Inuence de la distorsion de la ligne sur le
courant de fuite
La norme EN/CEI 61800-5-1 (norme produit concernant les
systèmes d'entraînement électriques) exige une attention
particulière si le courant de fuite dépasse 3,5 mA.
Renforcer la mise à la terre avec les exigences suivantes en
matière de protection par mise à la terre :
52 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 55

130BB958.12
f
sw
Cable
150 Hz
3rd harmonics
50 Hz
Mains
RCD with low f
cut-
RCD with high f
cut-
Leakage current
Frequency
130BB957.11
Leakage current [mA]
100 Hz
2 kHz
100 kHz
Intégration du système Manuel de conguration
Fil de mise à la terre (borne 95) d'au moins 10
•
mm2 de section.
Deux ls de terre séparés respectant les
•
consignes de dimensionnement.
Voir les normes EN/CEI 61800-5-1 et EN 50178 pour plus
d'informations.
Utilisation de RCD
Lorsque des relais de protection
diérentielle (RCD), aussi
appelés disjoncteurs de mise à la terre (ELCB), sont utilisés,
respecter les éléments suivants :
Utiliser des RCD de type B uniquement car ils
•
sont capables de détecter les courants CA et CC.
Utiliser des RCD avec un retard pour éviter les
•
pannes dues aux courants à la terre transitoires.
Dimensionner les RCD selon la conguration du
•
système et en tenant compte de l'environnement
d'installation.
Le courant de fuite comprend plusieurs fréquences
provenant de la fréquence secteur et de la fréquence de
commutation. La détection de la fréquence de
Illustration 3.9 Inuence de la fréquence de coupure des RCD
sur le courant de fuite
commutation dépend du type de RCD utilisé.
3 3
La quantité de courant de fuite détectée par les RCD
dépend de la fréquence de coupure des RCD.
Illustration 3.8 Sources principales du courant de fuite
3.3
Intégration secteur
3.3.1 Congurations du secteur et eets de
la CEM
Divers types de systèmes secteur CA sont utilisés pour
alimenter les variateurs électriques. Chacun aecte les
caractéristiques CEM du système. Les systèmes à 5 ls TN-S
sont considérés comme les meilleurs à cet égard, alors que
le système IT isolé est le moins souhaitable.
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 53
Page 56

Intégration du système
VLT® AQUA Drive FC 202
Type de
système
Systèmes
secteur TN
TN-S Il s'agit d'un système à 5 ls avec des conducteurs
33
TN-C Il s'agit d'un système à 4 ls avec un conducteur
Systèmes
secteur TT
Système
secteur IT
Tableau 3.14 Types de systèmes de secteur CA
3.3.2
3.3.2.1 Alimentation secteur non
Description
Il existe 2 types de systèmes de distribution
secteur TN : TN-S et TN-C.
neutre (N) et de terre (PE) séparés. Il fournit ainsi
les meilleures propriétés CEM et évite la
transmission d'interférences.
neutre et de protection par mise à la terre (PE)
commun au système entier. Le conducteur neutre
et de protection par mise à la terre entraîne de
mauvaises caractéristiques de CEM.
Il s'agit d'un système à 4 ls avec un conducteur
neutre mis à la terre et une mise à la terre individuelle des unités de variateurs. Il présente de
bonnes caractéristiques de CEM si la mise à la terre
est correcte.
Il s'agit d'un système à 4 ls isolé où le conducteur
neutre est mis à la terre ou non via une
impédance.
Perturbation secteur basse fréquence
Standard Dénition
EN 61000-2-2, EN
61000-2-4, EN
50160
EN 61000-3-2,
61000-3-12
EN 50178 Surveille les équipements électroniques
Tableau 3.15 Normes de conception EN pour la qualité de la
puissance du secteur
Dénit les limites de tension secteur an
de respecter les réseaux d'alimentation
industriels et publics.
Régule les interférences secteur générées
par les dispositifs connectés.
utilisés sur les installations électriques.
3.3.2.3 Variateurs de fréquence sans
interférences
Chaque variateur de fréquence génère une perturbation
secteur. Les normes actuelles dénissent uniquement les
plages de fréquences jusqu'à 2 kHz. Certains variateurs
décalent la perturbation secteur dans la zone supérieure à
2 kHz, qui n'est pas concernée par la norme, et commercialisent les dispositifs comme des dispositifs « sans
interférence ». Les limites de cette zone sont actuellement
étudiées. Les variateurs de fréquence ne décalent pas les
perturbations secteur.
3.3.2.4
Survenue d'une perturbation
secteur
sinusoïdale
La déformation due aux perturbations secteur de la forme
La tension secteur est rarement une tension sinusoïdale
uniforme avec une amplitude et une fréquence constantes.
Ceci est dû en partie à des charges qui prélèvent des
courants non sinusoïdaux sur le secteur ou qui ont des
caractéristiques non linéaires, telles que les PC, les
téléviseurs, les alimentations à découpage, les lampes à
économie d'énergie et les variateurs de fréquence. Les
écarts sont inévitables et acceptables dans certaines
limites.
3.3.2.2
Dans la plupart des pays européens, la base de l'estimation
objective de la qualité du secteur est la loi sur la compatibilité électromagnétique des dispositifs (EMVG). La
conformité à cette réglementation garantit que tous les
dispositifs et réseaux connectés aux systèmes de distribution électrique répondent à l'usage prévu sans générer
de problèmes.
Conformité aux directives CEM
d'onde sinusoïdale par les courants d'entrée à impulsion
des charges est généralement appelée harmoniques.
Dérivée de la méthode Fourier, elle est évaluée jusqu'à 2,5
kHz, ce qui correspond au 50ème harmonique de la
fréquence secteur.
Les redresseurs d'entrée des variateurs de fréquence
génèrent cette forme typique d'interférence harmonique
sur le secteur. Si les variateurs de fréquence sont reliés à
des systèmes de secteur 50 Hz, le troisième harmonique
(150 Hz), le cinquième harmonique (250 Hz) ou le
septième harmonique (350 Hz) présente les eets les plus
marqués. Le résidu harmonique total est appelé taux
d'harmoniques (THD).
3.3.2.5
Les harmoniques et les uctuations de tension sont 2
formes de perturbation secteur basse fréquence. Leur
apparence est diérente à leur origine par rapport à tout
autre point du système secteur où une charge est reliée.
Par conséquent, une plage d'inuences doit être
déterminée collectivement au moment d'évaluer les eets
de la perturbation secteur. Cela comprend l'alimentation
secteur, la structure et les charges.
Des avertissements de sous-tension et des pertes fonction-
nelles supérieures peuvent se produire suite à une
perturbation secteur.
Eets d'une perturbation secteur
54 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 57

Intégration du système
Manuel de conguration
Avertissements de sous-tension
Mesures de tension incorrectes suite à la
•
distorsion de la tension secteur sinusoïdale
Entraîne des mesures incorrectes de l'alimentation
•
car seule la mesure de courant ecace réel (RMS)
tient compte du résidu harmonique.
Pertes plus importantes
Les harmoniques réduisent la puissance active, la
•
puissance apparente et la puissance réactive.
Déforme les charges électriques entraînant des
•
perturbations audibles sur d'autres dispositifs ou,
dans le pire des cas, une destruction.
Réduit la durée de vie des dispositifs suite à une
•
surchaue.
AVIS!
Un résidu harmonique excessif place une charge sur
l'équipement de correction du facteur de puissance et
peut même entraîner sa destruction. Pour cette raison, il
convient d'installer des bobines d'arrêt sur l'équipement
de correction du facteur de puissance en présence d'un
résidu harmonique excessif.
3.3.3 Analyse des perturbations secteur
Pour éviter toute altération de la qualité de la puissance du
secteur, diverses méthodes peuvent être utilisées avec des
systèmes ou des dispositifs qui engendrent des
harmoniques de courant. Des programmes d'analyse du
secteur, tels que le logiciel de calcul des harmoniques
(HCS), analysent les conceptions du système d'harmoniques. Des contre-mesures spéciques peuvent être
testées au préalable et garantir une compatibilité
postérieure du système.
Bobines d'arrêt d'entrée ou bobines d'arrêt sur le
•
circuit intermédiaire dans les variateurs de
fréquence.
Filtres passifs.
•
Filtres actifs.
•
Circuits intermédiaires minces.
•
Application frontale active et variateurs à charge
•
harmonique faible.
Redresseurs avec 12, 18 ou 24 impulsions par
•
cycle.
Perturbations radioélectriques
3.3.5
Les variateurs de fréquence engendrent des perturbations
radioélectriques (RFI) suite à des impulsions de courant à
largeur variable. Les variateurs et les câbles du moteur
émettent des radiations de ces composants et les
conduisent dans le système de secteur.
Les ltres RFI sont utilisés pour réduire les perturbations
sur le secteur. Ils confèrent une immunité au bruit pour
protéger les dispositifs contre les perturbations haute
fréquence. Ils réduisent également les perturbations émises
dans le câble secteur ou la radiation depuis le câble
secteur. Les ltres sont prévus pour limiter les pertur-
bations à un niveau spécié. Les ltres intégrés sont
souvent des équipements standard classés pour une
immunité spécique.
AVIS!
Tous les variateurs de fréquence VLT® AQUA Drive sont
équipés de bobines d'arrêt de perturbation secteur en
standard.
3 3
Pour analyser les systèmes secteur, accéder au sitehttp://
www.danfoss-hcs.com/Default.asp?LEVEL=START pour
télécharger le logiciel.
AVIS!
Danfoss dispose d'un niveau d'expertise CEM élevé et
fournit aux clients des analyses de CEM avec une
évaluation détaillée ou des calculs sur le secteur en plus
de cours de formation, de séminaires et d'ateliers.
3.3.4 Options pour réduire les
perturbations secteur
Généralement, la perturbation secteur issue de contrôleurs
peut être réduite en limitant l'amplitude des courants
d'impulsions. Cela améliore le facteur de puissance λ
(lambda).
Plusieurs méthodes sont recommandées pour éviter les
harmoniques du secteur :
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 55
3.3.6 Classement du site d'exploitation
La connaissance des exigences relatives à l'environnement
nécessaires pour que le variateur de fréquence fonctionne
est le facteur le plus important de la conformité CEM.
3.3.6.1
Environnement 1/Classe B :
Résidentiel
Les sites d'exploitation reliés au réseau public basse
tension, y compris les zones légèrement industrialisées,
sont classés comme Environnement 1/Classe B. Ils ne
disposent pas de leurs propres transformateurs de distri-
bution haute ou moyenne tension pour un système de
secteur distinct. Les classements d'environnement
s'appliquent aux bâtiments, aussi bien à l'intérieur qu'à
l'extérieur. Quelques exemples : zones commerciales, zones
et bâtiments résidentiels, restaurants, parkings et instal-
lations de loisirs.
Page 58

Intégration du système
VLT® AQUA Drive FC 202
3.3.6.2 Environnement 2/classe A :
Industriel
Les environnements industriels ne sont pas reliés au réseau
électrique public. Au lieu de cela, ils disposent de leurs
propres transformateurs de distribution haute ou moyenne
33
tension. Les classements d'environnement s'appliquent aux
bâtiments, aussi bien à l'intérieur qu'à l'extérieur.
Ils sont dénis comme industriels et sont caractérisés par
des conditions électromagnétiques spéciques :
Présence de dispositifs scientiques, médicaux ou
•
industriels.
Commutation de grandes charges inductives et
•
capacitives.
Survenue de champs magnétiques forts (par
•
exemple, suite à des courants élevés).
3.3.6.3
Dans les zones où les transformateurs moyenne tension se
sont clairement démarqués d'autres endroits, l'utilisateur
décide du type d'environnement pour le classement de ses
installations. L'utilisateur est responsable de la compatibilité
électromagnétique nécessaire pour permettre une exploitation sans diculté de tous les dispositifs dans certaines
conditions. Quelques exemples d'environnements
spéciaux : centres commerciaux, supermarchés, stationsservice, immeubles de bureaux et entrepôts.
3.3.6.4
Environnements spéciaux
Étiquettes de mise en garde
Ceci est nécessaire quand un nombre élevé de charges
inductives, telles que des moteurs ou des régulateurs de
puissance, sont utilisées dans un système de distribution
électrique. Les variateurs de fréquence dotés d'un circuit
intermédiaire isolé ne prélèvent pas de puissance réactive
du système de secteur et ne génèrent pas non plus de
déphasage. Ils ont un cos φ d'environ 1.
Pour cette raison, les moteurs à vitesse variable ne doivent
pas en tenir compte lors du dimensionnement d'un
équipement de correction du facteur de puissance.
Cependant, le courant prélevé par l'équipement de
correction de phase augmente parce que les variateurs de
fréquence engendrent des harmoniques. La charge et le
facteur de chaleur sur les condensateurs augmentent
proportionnellement au nombre de générateurs d'harmo-
niques. Par conséquent, il convient d'installer des bobines
d'arrêt dans l'équipement de correction du facteur de
puissance. Ces bobines empêchent aussi les résonances
entre les inductances de charge et la capacitance. Les
variateurs avec cos φ < 1 requièrent aussi des bobines
d'arrêt dans l'équipement de correction du facteur de
puissance. Il convient aussi de tenir compte du niveau de
puissance réactive supérieur, pour les dimensions des
câbles.
Retard de puissance d'entrée
3.3.9
Pour garantir que le circuit de suppression des surcharges
d'entrée fonctionne correctement, il convient de respecter
un délai entre les applications successives de puissance
d'entrée.
Lorsqu'un variateur de fréquence n'est pas conforme à la
catégorie C1, un avertissement doit être fourni. Cette
opération incombe à l'utilisateur. L'élimination des perturbations est basée sur les classes A1, A2 et B de la norme
EN 55011. L'utilisateur est le responsable nal du
classement approprié des dispositifs et des frais dérivés de
la correction des problèmes de CEM.
Utilisation avec une source d'entrée
3.3.7
isolée
De nombreuses installations électriques aux États-Unis sont
reliées à la terre. Même si ce n'est généralement pas le cas
aux États-Unis, l'alimentation d'entrée peut être une source
isolée. Tous les variateurs de fréquence Danfoss peuvent
être utilisés avec une source d'entrée isolée mais aussi avec
des lignes électriques reliées à la terre.
3.3.8
Correction du facteur de puissance
L'équipement de correction du facteur de puissance sert à
réduire le déphasage (φ) entre la tension et le courant an
de rapprocher le facteur de puissance de l'unité (cos φ).
Le Tableau 3.16 ache le temps minimum à respecter
entre les applications de puissance d'entrée.
Tension d'entrée [V]
Temps d'attente [s]
Tableau 3.16 Retard de puissance d'entrée
3.3.10
Les transitoires sont de brefs pics de tension dans une
plage de quelques milliers de volts. Ils peuvent avoir lieu
dans tous les types de systèmes de distribution de
puissance, dans des environnements industriels et
résidentiels.
La foudre est une cause courante de transitoires.
Cependant, ils sont aussi causés par la commutation en
ligne/hors ligne de grandes charges ou la commutation
d'un autre équipement de transitoires du réseau, comme
un équipement de correction du facteur de puissance. Les
transitoires peuvent aussi être provoqués par des courts-
circuits, le déclenchement de disjoncteurs dans des
Transitoires du réseau
380 415 460 600
48 65 83 133
56 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 59

Intégration du système
Manuel de conguration
systèmes de distribution électrique et le couplage inductif
entre des câbles parallèles.
La norme EN 61000-4-1 décrit les formes de ces transitoires
et la quantité d'énergie qu'ils contiennent. Leurs eets
nocifs peuvent être limités par diverses méthodes. Les
parafoudres ioniques et les éclateurs fournissent une
protection de premier niveau contre les transitoires à haute
énergie. Pour une protection de deuxième niveau, la
plupart des dispositifs électroniques, notamment les
variateurs de fréquence, utilisent des varistances pour
atténuer les transitoires.
3.3.11
Exploitation avec un générateur en
veille
Utiliser des systèmes d'énergie de secours quand l'exploitation continue est nécessaire, même en cas de défaut
secteur. Ils sont également utilisés en parallèle avec le
réseau public pour obtenir une puissance secteur
supérieure. Il s'agit d'une pratique courante pour les unités
combinées de
prot du rendement élevé qui peut être obtenu avec cette
forme de conversion d'énergie. Quand l'énergie de secours
est fournie par un générateur, l'impédance du secteur est
généralement supérieure à celle obtenue lorsque la
puissance provient du réseau public. Ceci fait augmenter le
taux d'harmoniques. Avec une conception adéquate, les
générateurs peuvent fonctionner dans un système
contenant des dispositifs générant des harmoniques.
Il est recommandé de concevoir le système avec un
générateur autonome.
•
•
•
•
•
chauage et d'alimentation, lesquelles tirent
Lorsque le système est basculé du secteur à une
alimentation par générateur, généralement la
charge harmonique augmente.
Les concepteurs doivent calculer ou mesurer
l'augmentation de la charge harmonique pour
s'assurer que la qualité de la puissance est
conforme aux réglementations an d'empêcher
des problèmes d'harmoniques et une défaillance
de l'équipement.
La charge asymétrique du générateur doit être
évitée, car elle accentue les pertes et peut faire
augmenter le taux d'harmoniques.
Un décalage 5/6 de l'enroulement du générateur
atténue les cinquième et septième harmoniques,
mais laisse le troisième harmonique augmenter.
Un décalage 2/3 réduit le troisième harmonique.
Si possible, l'opérateur doit déconnecter l'équipement de correction du facteur de puissance,
car il provoque des résonances dans le système.
Les bobines d'arrêt ou les ltres d'absorption
•
actifs peuvent atténuer les harmoniques ainsi que
les charges résistives utilisées en parallèle.
Des charges capacitives exploitées en parallèle
•
créent une charge additionnelle suite à des eets
de résonance imprévisibles.
Une analyse plus précise est possible en utilisant un
logiciel d'analyse de secteur, tel que le HCS. Pour analyser
les systèmes secteur, accéder au site http://www.danfoss-
hcs.com/Default.asp?LEVEL=START pour télécharger le
logiciel.
En cas d'exploitation avec des dispositifs générant des
harmoniques, les charges maximales basées sur un
fonctionnement sans problèmes des installations sont
indiquées dans le tableau des limites d'harmoniques.
Limites d'harmoniques
Redresseurs B2 et B6⇒maximum 20 % de la
•
charge nominale du générateur.
Redresseur B6 avec bobine d'arrêt⇒maximum
•
20-35 % de la charge nominale du générateur,
selon la composition.
Redresseur B6 contrôlé⇒maximum 10 % de la
•
charge nominale du générateur.
3.4
Intégration du moteur
3.4.1 Considérations relatives au choix du
moteur
Le variateur de fréquence peut induire une contrainte
électrique sur un moteur. Considérer donc les eets
suivants sur le moteur au moment de choisir un moteur
pour le variateur de fréquence :
Contrainte d'isolation
•
Contrainte de paliers
•
Contrainte thermique
•
Filtres sinusoïdaux et dU/dt
3.4.2
Les ltres de sortie protent à certains moteurs pour
réduire la contrainte électrique et permettre une plus
grande longueur de câble. Les options de sortie incluent
des ltres sinusoïdaux (également appelés ltres LC) et des
ltres dU/dt. Les ltres dU/dt réduisent la hausse marquée
de l'impulsion. Les ltres sinus lissent les impulsions de
tension pour les convertir en tension de sortie sinusoïdale.
Avec certains variateurs de fréquence, les ltres sinus sont
conformes à la norme EN 61800-3 RFI catégorie C2 pour
les câbles moteur non blindés (voir le chapitre 3.7.5 Filtres
sinus).
3 3
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 57
Page 60

175HA036.11
U
1
V
1
W
1
96 97 98
FC
Motor
U
2
V
2
W
2
U
1
V
1
W
1
96 97 98
FC
Motor
U
2
V
2
W
2
Intégration du système
VLT® AQUA Drive FC 202
Pour en savoir plus sur les options de ltres sinus et dU/dt,
se reporter aux chapitre 3.7.5 Filtres sinus et
chapitre 3.7.6 Filtres dU/dt.
Pour plus d'informations sur les références des ltres sinus
et dU/dt, se reporter aux et chapitre 6.2.9 Filtres dU/dt.
33
3.4.3 Mise à la terre correcte du moteur
Une mise à la terre correcte du moteur est essentielle à la
sécurité personnelle et pour répondre aux exigences
électriques de CEM des équipements basse tension. Une
mise à la terre correcte est nécessaire pour l'utilisation
ecace des blindages et ltres. Les détails de conception
doivent être vériés pour une mise en œuvre correcte de
la CEM.
Câbles moteur
3.4.4
Les recommandations et spécications relatives au câble
du moteur sont fournies au chapitre 7.5 Spécications du
câble.
Le variateur de fréquence permet d'utiliser tous les types
de moteurs asynchrones triphasés standard. Le réglage
eectué en usine correspond à une rotation dans le sens
horaire quand la sortie du variateur de fréquence est
raccordée comme suit :
Illustration 3.10 Connexions des bornes pour une rotation
dans le sens horaire et dans le sens antihoraire
Modier le sens de rotation en inversant 2 phases côté
moteur ou en modiant le réglage du par.
paramétre 4-10 Direction vit. moteur.
Blindage des câbles du moteur
3.4.5
Les variateurs de fréquence génèrent des fronts
d'impulsions forts sur leurs sorties. Ces impulsions
contiennent des composants haute fréquence (s'étendant
jusqu'à la plage des gigahertz), qui provoquent le
rayonnement indésirable du câble du moteur. Les câbles
blindés du moteur réduisent ce rayonnement.
Le blindage vise à :
Réduire la magnitude des interférences
•
rayonnées.
Améliorer l'immunité aux interférences des
•
dispositifs individuels.
Le blindage capture les composants haute fréquence et les
renvoie à la source de l'interférence (dans ce cas, le
variateur de fréquence). Les câbles blindés du moteur
fournissent également une immunité aux interférences des
sources externes proches.
58 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 61

130BD774.10
130BD775.10
130BD776.10
Intégration du système Manuel de conguration
Même un blindage correct n'élimine pas complètement le
rayonnement. Les composants du système situés dans les
environnements de rayonnement doivent fonctionner sans
dégradation.
3.4.6 Raccordement de plusieurs moteurs
AVIS!
Des problèmes peuvent survenir au démarrage et à
vitesse réduite, si les dimensions des moteurs sont très
diérentes, parce que la résistance ohmique relativement
grande dans le stator des petits moteurs entraîne une
tension supérieure au démarrage et à vitesse réduite.
Le variateur de fréquence peut commander plusieurs
moteurs montés en parallèle. Il convient de noter les
points suivants en cas d'utilisation d'un raccordement en
parallèle des moteurs :
Le mode VCC+ peut être utilisé dans certaines
•
applications.
La valeur du courant total consommé par les
•
moteurs ne doit pas dépasser la valeur du
courant de sortie nominal I
fréquence.
Ne pas utiliser de raccord commun des joints
•
pour les câbles longs (voir l'Illustration 3.12).
La longueur totale de câble du moteur
•
dans le Tableau 3.4 est valable tant que les câbles
parallèles restent courts (moins de 10 m chacun)
(voir les Illustration 3.14 et Illustration 3.15).
Tenir compte de la chute de tension dans les
•
câbles du moteur (voir l'Illustration 3.15).
Pour les longs câbles parallèles, utiliser un
•
LC (voir l'Illustration 3.15).
Pour les longs câbles sans raccordement parallèle,
•
voir l'Illustration 3.16.
du variateur de
INV
spéciée
ltre
3 3
Illustration 3.11 Raccord commun des joints pour câbles courts
Illustration 3.12 Raccord commun des joints pour câbles longs
AVIS!
Quand les moteurs sont connectés en parallèle, régler le
par. paramétre 1-01 Principe Contrôle Moteur sur [0] U/f.
Illustration 3.13 Câbles parallèles sans charge
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 59
Page 62

130BD777.10
130BD778.10
130BD779.10
Intégration du système
VLT® AQUA Drive FC 202
33
Illustration 3.14 Câbles parallèles avec charge
Illustration 3.16 Longs câbles des connexions en série
Illustration 3.15 Filtre LC pour longs câbles parallèles
Tailles de
protection
A1, A2, A4, A5 0,37–0,75
A2, A4, A5 1,1–1,5
A2, A4, A5 2,2–4
A3, A4, A5 5,5–7,5
B1, B2, B3, B4,
C1, C2, C3, C4
A3 1,1–7,5 525–690 100 50 33 25
B4 11–30 525–690 150 75 50 37
C3 37–45 525–690 150 75 50 37
Tableau 3.17 Longueur max. de chaque câble parallèle
Puissance [kW]
11–90
Tension [V] 1 câble [m] 2 câbles [m] 3 câbles [m] 4 câbles [m]
400 150 45 8 6
500 150 7 4 3
400 150 45 20 8
500 150 45 5 4
400 150 45 20 11
500 150 45 20 6
400 150 45 20 11
500 150 45 20 11
400 150 75 50 37
500 150 75 50 37
60 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 63

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2 000
500
200
400
300
1 000
600
t [s]
175ZA052.11
f
OUT
= 0,2 x f
M,N
f
OUT
= 2 x f
M,N
f
OUT
= 1 x f
M,N
I
MN
I
M
Intégration du système
Manuel de conguration
3.4.7 Isolation du l de commande
Les perturbations harmoniques générées par le câblage du
moteur peuvent altérer les signaux de commande dans le
câblage de commande du variateur et provoquer des
défauts de commande. Les câbles du moteur et le câblage
de commande doivent être séparés. Les eets des interférences diminuent nettement avec la séparation.
La distance entre le câblage de commande et les
•
câbles du moteur doit être supérieure à 200 mm.
Les barrettes de division sont essentielles avec
•
des séparations plus restreintes ou la perturbation
peut être couplée ou transférée.
Les blindages du câble de commande doivent
•
être raccordés à chaque extrémité, comme pour
les blindages de câble de moteur.
Des câbles blindés avec des conducteurs torsadés
•
permettent d'augmenter l'atténuation. L'atténuation du champ magnétique augmente
d'environ 30 dB avec un seul blindage, à 60 dB
avec un double blindage et à environ 75 dB si les
conducteurs sont également torsadés.
Protection thermique du moteur
3.4.8
Le variateur de fréquence confère une protection
thermique du moteur de plusieurs façons :
La limite de couple protège le moteur des
•
surcharges indépendamment de la vitesse.
La vitesse minimum limite la plage de vitesse
•
d'exploitation minimum, par exemple entre 30 et
50/60 Hz.
La vitesse maximale limite la vitesse de sortie
•
maximale.
L'entrée est disponible pour une thermistance
•
externe.
Le relais thermique électronique (ETR) des
•
moteurs asynchrones simule un relais
bimétallique en s'appuyant sur des mesures
internes. L'ETR mesure le courant, la vitesse et la
durée en cours an de calculer la température du
moteur et le protéger de toute surchaue en
émettant un avertissement ou en coupant
l'alimentation du moteur. Les caractéristiques de
l'ETR sont indiquées sur l'Illustration 3.17.
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 61
Illustration 3.17 Caractéristiques du relais thermique
électronique
L'axe des abscisses indique le rapport entre I
moteur
et I
moteur
nominale. L'axe des ordonnées représente le temps en
secondes avant que l'ETR ne se déclenche et ne disjoncte.
Ces courbes montrent la vitesse nominale caractéristique à
deux fois la vitesse nominale et à 0,2 fois la vitesse
nominale.
À vitesse plus faible, l'ETR se déclenche à une chaleur
inférieure en raison du refroidissement moindre du moteur.
De cette façon, le moteur est protégé contre les
surchaues même à une vitesse faible. La caractéristique
ETR calcule la température du moteur en fonction du
courant et de la vitesse réels.
Contacteur de sortie
3.4.9
Même s'il ne s'agit pas d'une pratique conseillée, le
fonctionnement d'un contacteur de sortie entre le moteur
et le variateur de fréquence ne risque pas d'endommager
le variateur de fréquence. La fermeture d'un contacteur de
sortie préalablement ouvert peut connecter le variateur de
fréquence en marche à un moteur arrêté. Cela peut
entraîner le déclenchement du variateur de fréquence et
l'achage d'un défaut par ce dernier.
3.4.10
Fonctions de freinage
Pour freiner la charge sur l'arbre moteur, utiliser un frein
statique (mécanique) ou dynamique.
3.4.11
Freinage dynamique
Le freinage dynamique est eectué par :
Freinage résistance : un frein IGBT maintient la
•
surtension sous un seuil déni en dirigeant
3 3
Page 64

Intégration du système
VLT® AQUA Drive FC 202
l'énergie du frein du moteur vers la résistance de
freinage.
Freinage CA : l'énergie de freinage est répartie
•
dans le moteur en modiant les conditions de
perte dans le moteur. La fonction de frein CA ne
peut pas être utilisée dans les applications avec
33
une fréquence de cycle élevée car cela entraîne
une surchaue du moteur.
Freinage CC : un courant CC en surmodulation
•
ajouté au courant CA fonctionne comme un frein
magnétique.
Danfoss propose des résistances de freinage avec des
cycles d'utilisation de 5 %, 10 % et 40 %. Lorsqu'un cycle
d'utilisation de 10 % est appliqué, les résistances de
freinage absorbent la puissance de freinage pendant 10 %
du temps du cycle. Les 90 % restants du temps de cycle
sont utilisés pour évacuer la chaleur excédentaire.
Vérier que la résistance de freinage est dimensionnée
pour le temps de freinage requis.
Calcul de la résistance de freinage
Pour éviter que le variateur de fréquence ne disjoncte pour
se mettre en sécurité, lorsque le moteur est freiné,
sélectionner les valeurs de la résistance en fonction de la
3.4.12 Calcul de la résistance de freinage
puissance de pointe et de la tension du circuit intermédiaire. Calculer la résistance de freinage en procédant
Une résistance de freinage est nécessaire pour gérer la
dissipation de chaleur et l'augmentation de la tension bus
CC lors du freinage électrique. L'utilisation d'une résistance
de freinage garantit que l'énergie est absorbée par celle-ci
et non par le variateur de fréquence. Pour plus d'informations, consulter le Manuel de conguration de la
résistance de freinage.
comme suit :
Rfr =
Ω
P
pic
2
Ucc
Le rendement de la résistance de freinage dépend de la
tension bus CC (Ucc).
L'Ucc est la tension à laquelle le frein est activé. La fonction
de freinage des variateurs FC est réglée selon l'alimentation secteur :
Calcul du cycle d'utilisation
Lorsque la quantité d'énergie cinétique transférée à la
résistance à chaque période de freinage est inconnue,
calculer la puissance moyenne à partir du temps de cycle
et du temps de freinage (cycle d'utilisation intermittent). Le
cycle d'utilisation intermittent de la résistance indique le
cycle d'utilisation pendant lequel la résistance est active
(voir l'Illustration 3.18). Les fournisseurs de moteurs utilisent
souvent S5 pour indiquer la charge autorisée qui
correspond au cycle d'utilisation intermittent.
Entrée de l'alimentation
[V CA]
FC 202 3 x 200-240 390 405 410
FC 202 3 x 380-480 778 810 820
FC 202 3 x 525-600
FC 202 3 x 525-600
FC 202 3 x 525-690 1099 1109 1130
1)
2)
Frein
actif
[V CC]
943 965 975
1099 1109 1130
Avertissement
haute
tension
[V CC]
Alerte
de
surtension
[V CC]
Tableau 3.18 Tension CC du circuit intermédiaire (Ucc)
1) Protections de tailles A, B, C
2) Protections de tailles D, E, F
Utiliser la résistance de freinage R
qui garantit que le
rec
variateur de fréquence peut freiner au couple de freinage
Illustration 3.18 Cycle d'utilisation de la résistance de freinage
Calculer le cycle d'utilisation intermittent de la résistance
en procédant comme suit :
Cycle d'utilisation = tb/T
T = durée du cycle en secondes
le plus élevé (M
R
Ω =
rec
P
motor
La valeur typique de η
La valeur typique de η
Lorsqu'une résistance de freinage plus grande est
sélectionnée, un couple de freinage de 160 %, 150 % ou
110 % ne pourra être atteint et le variateur de fréquence
risque de disjoncter en cas de surtension du circuit
intermédiaire par mesure de sécurité.
) de 160 %. La formule peut s'écrire :
fr(%)
2
U
x100
xM
cc
fr( % )
xη
xη
VLT
est de 0,90.
moteur
est de 0,98.
VLT
moteur
tb est le temps de freinage en secondes (du temps de
cycle)
Pour freiner à un couple plus faible, 80 % par exemple, il
est possible d'installer une résistance de freinage avec un
62 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 65

1.0
0.99
0.98
0.97
0.96
0.95
0.93
0.92
0% 50% 100% 200%
0.94
Relative Eciency
130BB252.11
1.01
150%
% Speed
100% load 75% load 50% load 25% load
Intégration du système
Manuel de conguration
dimensionnement puissance plus faible. Calculer la taille en
utilisant la formule de calcul de R
Les variateurs de fréquence de tailles D et F contiennent
plusieurs hacheurs de freinage. Utiliser une résistance de
freinage pour chaque hacheur dans ces tailles de
protection.
Le Manuel de Conguration de la résistance VLT® Brake
Resistor MCE 101 contient les toutes dernières données de
sélection et décrit dans le détail la procédure de calcul,
notamment :
Calcul de la puissance de freinage
•
Calcul de la puissance de pointe de la résistance
•
de freinage
Calcul de la puissance moyenne de la résistance
•
de freinage
Freinage par inertie
•
3.4.13
CEM (câbles torsadés/blindage)
Pour répondre aux normes de performance CEM spéciées
du variateur de fréquence, utiliser des câbles/ls blindés. Si
des ls non blindés sont utilisés, il est recommandé de
torsader les ls pour réduire le bruit électrique émis par
ces derniers entre la résistance de freinage et le variateur
de fréquence.
Pour une performance CEM améliorée, utiliser un blindage
métallique.
3.4.14
Câblage de la résistance de freinage
Résistance de freinage et IGBT frein
.
rec
surcharge en générant une panne du variateur de
fréquence.
Le contrôle de surtension (OVC) peut être sélectionné
comme fonction de freinage de remplacement au par.
paramétre 2-17 Contrôle Surtension. Si la tension du circuit
intermédiaire augmente, cette fonction est active pour
toutes les unités et permet d'éviter un arrêt. Elle génère
une augmentation de la fréquence de sortie pour limiter la
tension du circuit intermédiaire. Cette fonction est utile car
elle évite l'arrêt du variateur de fréquence, si la durée de
descente de rampe est trop courte par exemple. La durée
de descente de rampe est alors rallongée.
3.4.15
Rendement du variateur de fréquence
La charge du variateur de fréquence a peu d'inuence sur
son rendement.
Cela signie aussi que le rendement du variateur de
fréquence n'est pas modié en choisissant d'autres caractéristiques U/f. Ces dernières aectent cependant le
rendement du moteur.
Le rendement baisse un peu lorsque la fréquence de
commutation est réglée sur une valeur supérieure à 5 kHz.
Le rendement baisse également un peu lorsque le câble
moteur dépasse 30 m.
Calcul du rendement
Calculer le rendement du variateur de fréquence à
diérentes charges selon l'Illustration 3.19. Multiplier le
facteur de ce graphique par le facteur de rendement
spécique répertorié au chapitre 7.1 Données électriques.
Rendement énergétique
3 3
Surveillance de la puissance de la résistance de freinage
La fonction de freinage permet également
puissance instantanée et la puissance moyenne pendant
une période de temps limitée. Le frein peut également
surveiller que la puissance dégagée ne dépasse pas une
xée par l'intermédiaire du par. paramétre 2-12 P. kW
limite
Frein Res.. Au par. paramétre 2-13 Frein Res Therm,
sélectionner la fonction à exécuter lorsque la puissance
transmise à la résistance de freinage dépasse la limite
dénie au par. paramétre 2-12 P. kW Frein Res..
AVIS!
La surveillance de la puissance de freinage n'est pas une
fonction de sécurité. La résistance de freinage n'est pas
protégée contre les fuites à la terre.
Le frein est protégé contre les courts-circuits de la
résistance de freinage. D'autre part, le transistor de
freinage est contrôlé de manière à garantir la détection du
court-circuit du transistor. Utiliser un relais ou une sortie
digitale pour protéger la résistance de freinage contre la
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 63
d'acher la
Illustration 3.19 Courbes de rendement typique
Exemple : prenons comme hypothèse un variateur de
fréquence 55 kW, 380-480 V CA avec une charge de 25 %,
à 50 % de sa vitesse. Le graphique montre 0,97 ; le
rendement nominal pour le variateur 55 kW est de 0,98. Le
rendement réel est donc : 0,97 x 0,98 = 0,95.
Rendement du moteur
Le rendement d'un moteur raccordé à un variateur de
fréquence est lié au niveau de magnétisation. Le
rendement du moteur dépend de son type.
Page 66
Intégration du système
Dans la plage de 75 à 100 % du couple nominal,
•
le rendement du moteur sera pratiquement
constant dans les deux cas d'exploitation avec le
variateur de fréquence et avec l'alimentation
directe par le secteur.
L'inuence de la caractéristique tension/fréquence
33
•
sur les petits moteurs est marginale, mais avec
des moteurs de 11 kW et plus, les avantages sur
le rendement sont signicatifs.
La fréquence de commutation
•
rendement des petits moteurs. Les moteurs de 11
kW et plus ont un meilleur rendement (1 à 2 %).
Le rendement est amélioré puisque la sinusoïde
du courant du moteur est presque parfaite à
fréquence de commutation élevée.
Rendement du système
Pour calculer le rendement du système, multiplier le
rendement du variateur de fréquence par le rendement du
moteur.
VLT® AQUA Drive FC 202
n'aecte pas le
64 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 67

+ - + -
S202
**
*
Moteur
Sortie analogique
Relais 1
Relais 2
ON = terminé
OFF = ouvert
50 (+10 V SORTIE)
53 (A ENTRÉE)
54 (A ENTRÉE)
55 (COM A ENTRÉE)
12 (+24 V SORTIE)
13 (+24 V SORTIE)
37 (D ENTRÉE)
18 (D ENTRÉE)
(COM D ENTRÉE)
(COM A SORTIE) 39
(A SORTIE) 42
(P RS-485) 68
(N RS-485) 69
(COM RS-485) 61
0/4-20 mA
240 V CA, 2 A
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D ENTRÉE)
24 V (NPN)
0 V (PNP)
(D E/S)
0 V (PNP)
24 V (NPN)
(D E/S)
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D ENTRÉE)
32 (D ENTRÉE)
: Châssis
: Terre
240 V CA, 2 A
400 V CA, 2 A
91 (L1)
92 (L2)
93 (L3)
PE
88 (-)
89 (+)
20
10 V CC
15 mA 130/200 mA
(U) 96
(V) 97
(W) 98
(PE) 99
0 V
5V
S801
RS-485
03
24 V CC
02
01
05
04
06
27
24 V
0 V
0 V
24 V
29
1 2
ON
S201
ON
21
ON = 0/4-20 mA
OFF = 0/-10 V CC
- +10 V CC
95
P 5-00
21
ON
S801
(R+) 82
(R-) 81
130BD552.10
Entrée de
puissance
triphasée
Bus CC
+10 V CC
0/-10 V CC +10 V CC
0/4-20 mA
0/-10 V CC +10 V CC
0/4-20 mA
Alimentation en mode
commutation
Résist.
frein.
Interface
RS-485
Intégration du système
Manuel de conguration
3.5 Entrées et sorties supplémentaires
3.5.1 Schéma de câblage
Lorsqu'elles sont câblées et correctement programmées, les bornes de commande fournissent
un retour, une référence et d'autres signaux d'entrée au variateur de fréquence,
•
État de sortie et conditions de panne du variateur de fréquence.
•
Relais pour exploiter l'équipement auxiliaire.
•
Une interface de communication série.
•
24 V communs.
•
Les bornes de commande sont programmables pour plusieurs fonctions en sélectionnant des options de paramètres via le
panneau de commande local (LCP) à l'avant de l'unité ou de sources externes. La plupart des câbles de commande sont
fournis par le client, sauf mention contraire spéciée dans la commande passée en usine.
3 3
Illustration 3.20 Schéma de câblage de base
A = analogique, D = digitale
*La borne 37 (en option) est utilisée pour la fonction STO. Pour obtenir les instructions d'installation de la fonction STO, se
reporter au Manuel d'utilisation de la fonction Safe Torque O du VLT®.
**Ne pas connecter le blindage.
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 65
Page 68

Intégration du système
VLT® AQUA Drive FC 202
3.5.2 Raccordements de relais
33
Relais
1 1 commune
2 4 commune
1 01-02 Établissement (normalement
2 04-05 Établissement (normalement
Illustration 3.21 Sorties de relais 1 et 2, tensions maximales
1)
Borne
2 normalement ouverte
3 normalement fermée
5 normalement fermée
6 normalement fermée
01-03 Interruption (normalement
04-06 Interruption (normalement
Description
240 V maximum
240 V maximum
240 V maximum
240 V maximum
ouvert)
fermé)
ouvert)
fermé)
1) Pour ajouter d'autres sorties relais, installer le module
d'option de relais VLT® MCB 105 ou VLT® MCB 113.
Pour plus d'informations concernant les relais, se reporter
au chapitre 7 Spécications et au chapitre 8.3 Schémas des
bornes relais.
Pour plus d'informations concernant les options de relais,
se reporter au chapitre 3.7 Options et accessoires.
66 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 69

130BD529.12
1
2
3
4
5
6
7
8
9
L1
L2
L3
PE
10
11
PE
u
v
w
Intégration du système
Manuel de conguration
3.5.3 Raccordement électrique conforme CEM
3 3
1 PLC 7 Moteur, triphasé avec terre de protection (blindé)
2 Variateur de fréquence 8 Secteur, triphasé et terre de protection renforcée (non blindé)
3 Contacteur de sortie 9 Câblage de commande (blindé)
4 Étrier de serrage 10
5 Isolation de câble (dénudé)
6 Presse-étoupe
Illustration 3.22 Raccordement-électrique conforme CEM
11
Égalisation de potentiel, 16 mm2 min. (0,025 po)
Espace entre le câble de commande, le câble moteur et le câble
secteur :
minimum 200 mm
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 67
Page 70

130BD389.11
A2
B3 B3
A2
a
b
130BA419.10
Intégration du système
VLT® AQUA Drive FC 202
Pour plus d'informations sur la CEM, voir le
chapitre 2.5.18 Conformité CEM et le chapitre 3.2 Protection
CEM, contre les harmoniques et contre les fuites à la terre.
AVIS!
33
INTERFÉRENCES CEM
Utiliser des câbles blindés pour le câblage de commande
et du moteur, et des câbles séparés pour le câblage de
commande, d'alimentation et du moteur. Toute mauvaise
isolation des câblages de l'alimentation, du moteur et de
commande risque de provoquer une baisse de la
performance ou un comportement inattendu. Au moins
200 mm (7,9 po) d'espace entre les câbles d'alimentation,
du moteur et de commande sont nécessaires.
Dégagement vertical
Pour des conditions de refroidissement optimales, il
convient de veiller à ce que l'air circule librement audessus et en dessous du variateur de fréquence. Voir
l'Illustration 3.24.
3.6 Planication mécanique
3.6.1 Dégagement
Une installation côte à côte convient à toutes les tailles de
protection, sauf lorsqu'un kit de protection IP21/IP4X/ TYPE
1 est utilisé (voir le chapitre 3.7 Options et accessoires).
Dégagement horizontal, IP20
Tous les châssis de tailles IP20 A et B permettent l'installation côte à côte sans dégagement. L'ordre de montage
est toutefois important. L'Illustration 3.23 montre comment
procéder à un montage correct.
Taille de
protection
a [mm] 100 200 225
b [mm] 100 200 225
Illustration 3.24 Dégagement vertical
Montage mural
3.6.2
Pour un montage sur un mur plat, aucune plaque arrière
n'est nécessaire.
Lors d'un montage sur un mur irrégulier, utiliser une
plaque arrière pour garantir un air de refroidissement
susant au-dessus du dissipateur de chaleur. Utiliser la
plaque arrière avec des protections A4, A5, B1, B2, C1 et C2
uniquement.
A1*/A2/A3/A4/
A5/B1
B2/B3/B4/
C1/C3
C2/C4
Illustration 3.23 Montage côte à côte correct sans dégagement
Dégagement horizontal, kit de protection IP21
Lorsque le kit de protection IP21 est utilisé sur une
protection de type A1, A2 ou A3, l'espace entre les
variateurs de fréquence doit être de 50 mm minimum.
68 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 71

130BA219.11
1
130BA392.11
2
1
3
4
Intégration du système
1 Plaque arrière
Illustration 3.25 Montage avec plaque arrière
Pour des variateurs de fréquence avec une protection
nominale IP66, utiliser une rondelle en nylon pour protéger
le revêtement époxy.
1 Plaque arrière
2 Variateur de fréquence avec protection IP66
3 Plaque arrière
4 Rondelle en bre
Illustration 3.26 Montage avec plaque arrière pour protection
nominale IP66
Manuel de conguration
3.7
Options et accessoires
Options
Pour les références, consulter le chapitre 6 Code type et
sélection.
Blindage secteur
Une plaque de protection Lexan® est montée
•
devant les bornes et barres de puissance pour
prévenir tout contact accidentel lorsque la porte
de l’armoire est ouverte.
Appareils de chauage et thermostat : montés à
•
l'intérieur de l'armoire des châssis F, les appareils
de chauage contrôlés via un thermostat
automatique empêchent la condensation dans le
boîtier. Les réglages par défaut du thermostat
activent les appareils de chauage à 10 °C (50 °F)
et les éteignent à 15,6 °C (60 °F).
Filtres RFI
Le variateur comporte en standard des ltres RFI
•
classe A2 intégrés. Si des niveaux supplémentaires
de protection RFI/CEM sont requis, ils peuvent
être obtenus en utilisant des ltres RFI classe A1
qui assurent la suppression des interférences aux
fréquences radio électriques et des rayonnements
électromagnétiques conformément à EN 55011.
Relais de protection diérentielle (RCD)
Utilise la méthode d'équilibrage des noyaux pour surveiller
les courants de défaut à la terre des systèmes mis à la terre
et des systèmes à haute résistance vers la terre (systèmes
TN et TT dans la terminologie CEI). Il existe un pré-avertissement (50 % de la consigne d'alarme principale) et une
consigne d'alarme principale. Un relais d'alarme SPDT est
associé à chaque consigne pour un usage externe, ce qui
nécessite un transformateur de courant à fenêtre externe
(fourni et installé par le client).
Intégré au circuit de Safe Torque O du variateur
•
de fréquence.
Le dispositif CEI 60755 de type B contrôle les
•
courants de défaut à la terre CC à impulsions et
CC purs.
Indicateur à barres LED du niveau de courant de
•
défaut à la terre, compris entre 10 et 100 % de la
consigne
Mémoire des pannes
•
Touche TEST/RESET
•
3 3
Accès
3.6.3
Pour planier l'accessibilité des câbles avant le montage,
consulter les dessins au chapitre 8.1 Schémas de raccor-
dement au secteur (3 phases) et au chapitre 8.2 Schéma de
raccordement du moteur.
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 69
Page 72

Intégration du système
VLT® AQUA Drive FC 202
IRM (dispositif de surveillance de la résistance
d'isolation)
Surveille la résistance d'isolation des systèmes non reliés à
la terre (systèmes IT selon la terminologie CEI) entre les
conducteurs de phase du système et la terre. Il existe un
33
pré-avertissement ohmique et une consigne d'alarme
principale pour le niveau d'isolation. Un relais d'alarme
unipolaire bidirectionnel est associé à chaque consigne
pour une utilisation externe. Remarque : Il n'est possible de
connecter qu'un seul dispositif de surveillance de la
résistance d'isolation à chaque système non relié à la terre
(IT).
Intégré au circuit d'arrêt de sécurité du variateur
•
de fréquence
Achage LCD de la résistance d'isolation
•
Mémoire des pannes
•
Touches INFO, TEST et RESET
•
Hacheur de freinage (IGBT)
Les bornes de freinage avec circuit de hacheur de
•
freinage IGBT permettent la connexion de
résistances de freinage externes. Pour en savoir
plus sur les résistances de freinage, consulter le
chapitre 3.4.12 Calcul de la résistance de freinage et
le .
bornes régénératrices
Ces bornes rendent possible la connexion des
•
unités régénératrices au bus CC du côté batterie
des condensateurs des bobines de réactance du
circuit CC pour le freinage par récupération. Pour
la taille F, les bornes sont dimensionnées pour
environ ½ de la puissance nominale du variateur
de fréquence. Consulter l'usine pour connaître les
limites de puissance régénératrice en fonction des
tailles et tensions des variateurs
Bornes de répartition de la charge
Ces bornes se raccordent au bus CC sur le côté
•
redresseur de la bobine de réactance du circuit
CC et permettent de répartir la puissance du bus
CC entre plusieurs variateurs. Les bornes de
répartition de la charge du châssis F sont
dimensionnées pour environ 1/3 de la puissance
nominale du variateur de fréquence. Consulter
l'usine pour connaître les limites de répartition de
la charge en fonction des tailles et tensions des
variateurs de fréquence spéciques.
Fusibles
Des fusibles sont recommandés pour assurer une
•
protection à action rapide du variateur de
fréquence contre les surcharges du courant. La
protection par fusibles limite les dégâts sur le
variateur et minimise le temps d'intervention en
cas de panne. Les fusibles sont nécessaires pour
répondre à la certication maritime.
spéciques.
Sectionneur
Une poignée montée sur la porte permet
•
d'actionner manuellement le sectionneur secteur
pour activer et désactiver l'alimentation du
variateur de fréquence, renforçant la sécurité lors
de l'entretien. Le sectionneur est indissociable des
portes de l'armoire pour éviter qu'elles ne soient
ouvertes alors que l'alimentation n'est pas
déconnectée.
Disjoncteurs
Un disjoncteur peut être déclenché à distance
•
mais il doit être réinitialisé manuellement. Les
disjoncteurs sont indissociables des portes de
l'armoire pour éviter qu'elles ne soient ouvertes
alors que l'alimentation n'est pas déconnectée.
Lorsqu'un disjoncteur est commandé en option,
des fusibles sont également inclus pour assurer
une protection à action rapide du variateur de
fréquence contre les surcharges du courant.
Contacteurs
Un interrupteur à contact contrôlé électroni-
•
quement assure l'activation et la désactivation à
distance de l'alimentation du variateur de
fréquence. Un contact auxiliaire sur le contacteur
est surveillé par la sécurité Pilz si l'option d'arrêt
d'urgence CEI est demandée.
Démarreurs manuels
Ils fournissent une alimentation triphasée pour les
ventilateurs de refroidissement électriques souvent requis
pour les gros moteurs. L'alimentation des démarreurs est
fournie côté charge de tout contacteur, disjoncteur ou
sectionneur fourni et du côté de l'entrée du
1 (en option). Elle comporte un fusible pour chaque
démarreur de moteur et est coupée lorsque le variateur de
fréquence est hors tension. Deux démarreurs maximum
sont autorisés (un seul si un circuit protégé par fusible 30
A est commandé). Intégré au circuit de Safe Torque O du
variateur de fréquence.
Fonctions de l'unité :
Interrupteur marche-arrêt.
•
Protection contre court-circuit et surcharge avec
•
fonction de test.
Mode de reset manuel.
•
Bornes protégées par fusible 30 A
Alimentation triphasée correspondant à la tension
•
secteur en entrée pour l'alimentation des
équipements auxiliaires du client.
Non disponibles si 2 démarreurs manuels sont
•
sélectionnés.
Les bornes sont désactivées lorsque le variateur
•
de fréquence est hors tension.
L'alimentation des bornes protégées par fusible
•
est fournie côté charge de tout contacteur,
ltre RFI classe
70 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 73

Intégration du système
Manuel de conguration
disjoncteur ou sectionneur fourni et côté entrée
du ltre RFI classe 1 (en option).
Alimentation 24 V CC
5 A, 120 W, 24 V CC.
•
Protégée contre les surintensités, surcharges,
•
courts-circuits et surtempératures.
Pour alimenter les dispositifs fournis par le client
•
tels que des capteurs, E/S PLC, contacteurs,
sondes de température, témoins lumineux ou
tout autre matériel électronique.
Les diagnostics comprennent un contact CC-ok
•
sec, une LED CC-ok verte et une LED surcharge
rouge.
Surveillance de la température extérieure
Conçue pour surveiller les températures des
•
composants du système externes tels que
bobinages ou paliers du moteur. Inclut 8 modules
d'entrées universelles plus 2 modules d'entrées de
thermistance dédiées. Les 10 modules sont tous
intégrés dans le circuit d'arrêt de sécurité du
variateur de fréquence et peuvent être surveillés
via un réseau de bus de terrain (nécessite l'acquisition d'un coupleur module/bus séparé).
Commander une option de Safe Torque
sélectionner la surveillance de la température
extérieure.
Communication série
PROFIBUS DP V1 MCA 101
PROFIBUS DP V1 ore un haut niveau de disponi-
•
bilité et de compatibilité, un support pour tous
les principaux fournisseurs PLC, compatible avec
les versions futures.
Communication rapide et ecace, installation
•
transparente, diagnostic avancé, paramétrage et
autoconguration des données de process via des
chiers GSD.
Paramétrage acyclique à l'aide de PROFIBUS DP
•
V1, PROFIdrive ou des automates nis prol FC
Danfoss, PROFIBUS DP V1, maître de classe 1 et 2.
Référence 130B1100 non tropicalisé – 130B1200
tropicalisé (Classe G3/ISA S71.04-1985).
DeviceNet MCA 104
Ce modèle de communication moderne ore des
•
fonctions clés qui permettent aux opérateurs de
déterminer quelles informations sont nécessaires
et à quel moment.
Il bénécie aussi des politiques de tests de
•
conformité ODVA qui garantissent que les
produits sont interexploitables. Référence
130B1102 non tropicalisé - 130B1202 tropicalisé
(classe G3/ISA S71.04-1985).
O pour
PROFINET RT MCA 120
L'option PROFINET ore une connectivité aux réseaux
PROFINET via le protocole PROFINET. L'option est capable
de gérer une connexion simple avec un intervalle de
connexion réel jusqu'à 1 ms dans les deux sens.
Serveur Web intégré pour un diagnostic à
•
distance et une lecture des paramètres de base
du variateur de fréquence.
Un
•
•
•
•
EtherNet IP MCA 121
Ethernet devient la future norme de communication de
l'usine. L'option EtherNet s'appuie sur les nouvelles technologies disponibles pour un usage industriel et gère même
les exigences les plus strictes. EtherNet/IP étend l'EtherNet
commercial standard au protocole industriel courant
(CIP™), le même protocole en deux couches et le même
modèle objet qu'avec DeviceNet. Le MCA 121 ore les
fonctions avancées suivantes :
•
•
•
•
Modbus TCP MCA 122
L'option Modbus ore une connectivité aux réseaux TCP
Modbus tels que le système PLC Groupe Schneider via le
protocole TCP Modbus. L'option est capable de gérer une
connexion simple avec un intervalle de connexion réel
jusqu'à 5 ms dans les deux sens.
•
•
•
•
noticateur d'e-mail peut être conguré pour
l'envoi d'un mail vers un ou plusieurs émetteursrécepteurs si certains avertissements ou alertes
sont émis ou eacés.
TCP/IP pour un accès facile aux données de
conguration du variateur de fréquence depuis
Logiciel de programmation MCT 10.
Fichier FTP (protocole de transfert de chier)
chargé et téléchargé.
Support de DCP (protocole de découverte et de
conguration).
Répartiteur haute performance intégré
permettant une topologie en ligne sans besoin
d'interrupteurs externes.
Fonctions de commutation et de diagnostic
avancées.
Serveur Web intégré.
Client e-mail pour notication d'intervention.
Serveur Web intégré pour le diagnostic à distance
et lecture des paramètres de base du variateur de
fréquence.
Un noticateur d'e-mail peut être conguré pour
l'envoi d'un mail vers un ou plusieurs émetteursrécepteurs si certains avertissements ou alertes
sont émis ou eacés.
2 ports Ethernet avec commutateur intégré.
Fichier FTP (protocole de transfert de chier)
chargé et téléchargé.
3 3
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 71
Page 74

Intégration du système
VLT® AQUA Drive FC 202
Conguration automatique de l'adresse IP du
•
protocole.
Autres options
E/S à usage général MCB 101
L'option d'E/S ore un large éventail d'entrées et de sorties
33
de commande.
3 entrées digitales 0-24 V : Logique 0 < 5 V ;
•
Logique 1 > 10 V
2 entrées analogiques 0-10 V : Résolution 10 bits
•
plus signe
2 sorties digitales NPN/PNP push pull
•
1 sortie analogique 0/4-20 mA
•
Raccord à ressort
•
Réglages séparés du paramètre Référence
•
130B1125 non tropicalisé - 130B1212 tropicalisé
(classe G3/ISA S71.04-1985)
Option de relais MCB 105
Permet d'étendre les fonctions relais avec 3 sorties relais
supplémentaires.
Charge max. sur les bornes : Charge résistive
•
CA-1 : 240 V CA 2 A CA-15
Charge inductive à cos φ 0,4 : 240 V CA 0,2 A
•
CC-1
Charge résistive : 24 V CC 1 A CC-13
•
Charge inductive : à cos φ 0,4 : 24 V CC 0,1 A
•
Charge min. sur les bornes : CC 5 V : 10 mA
•
Vitesse de commutation max. à charge nominale/
•
min. : 6 min-1/20 s-1
Référence 130B1110 non tropicalisé –130B1210
•
tropicalisé (Classe G3/ISA S71.04-1985)
Option E/S analogique MCB 109
Cette option E/S analogique convient facilement au
variateur de fréquence pour une mise à niveau du
rendement avancé et un contrôle via les entrées/sorties
supplémentaires. Cette option actualise le variateur de
fréquence avec une alimentation de secours sur batterie
pour l'horloge intégrée au variateur de fréquence. Cela
permet une utilisation stable de toutes les fonctions
d'horloge du variateur de fréquence, comme des actions
temporisées.
3 entrées analogiques, chacune étant
•
congurable comme entrée de tension et de
température.
Connexion de signaux analogiques 0-10 V mais
•
aussi d'entrées de température PT1000 et NI1000.
3 sorties analogiques congurables individuel-
•
lement comme sorties 0-10 V.
Carte thermistance PTC MCB 112
Avec la carte thermistance PTC MCB 112, tous les
variateurs de fréquence Danfoss avec STO peuvent être
utilisés pour superviser les moteurs dans des atmosphères
potentiellement explosives. MCB 112 ore un rendement
supérieur à celui de la fonction ETR intégrée et à la borne
de thermistance.
Sensor input card MCB 114
Cette option protège le moteur contre les surchaues en
surveillant la température des paliers et des enroulements
dans le moteur. Les limites et l'action sont réglables et la
température mesurée par chaque capteur se lit sur l'écran
ou via le bus de terrain.
Contrôleur de cascade étendu MCO 101
Facile à installer et mise à niveau du contrôleur de cascade
pour faire fonctionner plus de pompes et pour contrôler
les pompes en mode maître/esclave.
Carte relais étendue MCB 113
La carte relais étendue MCB 113 ajoute des entrées/sorties
au VLT® AQUA Drive pour une plus grande exibilité.
Alimentation de sauvegarde incluse pour la
•
fonction d'horloge standard dans le variateur de
fréquence. La batterie de secours dure généralement 10 ans selon l'environnement. Référence
130B1143 non tropicalisé - 130B1243 tropicalisé
(classe G3/ISA S71.04-1985).
Protège le moteur contre les surchaues.
•
Homologation ATEX pour une utilisation avec des
•
moteurs EX d et EX e.
Utilise la fonction Safe Torque
•
de fréquence Danfoss pour arrêter le moteur en
cas de surchaue.
Certié pour protéger les moteurs des zones 1, 2,
•
21 et 22.
Certié jusqu'à la norme SIL2.
•
Protège le moteur contre les surchaues.
•
3 entrées de capteur autodétectrices pour les
•
capteurs PT100/PT1000 à 2 ou 3
Une entrée analogique supplémentaire 4-20 mA.
•
Jusqu'à 6 pompes dans la conguration en
•
cascade standard
Jusqu'à 6 pompes dans la conguration maître/
•
esclave
Spécications techniques : voir l'option de relais
•
MCB 105
7 entrées digitales : 0–24 V
•
2 sorties analogiques : 0/4–20 mA
•
4 relais unipolaires bidirectionnels
•
O des variateurs
ls.
72 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 75

Intégration du système
Manuel de conguration
Caractéristiques nominales de relais de charge :
•
240 V CA/2 A (Ohm)
Conforme aux recommandations NAMUR
•
Capacité d'isolation galvanique Référence
•
130B1164 non tropicalisé – 130B1264 tropicalisé
(classe G3/ISA S71.04-1985)
Contrôleur de cascade avancé MCO 102
Étend les capacités du contrôleur de cascade standard
intégré dans les variateurs de fréquence.
Fournit 8 relais supplémentaires pour le
•
démarrage de moteurs supplémentaires.
Apporte un contrôle précis du niveau, de la
•
pression et du débit pour optimiser le rendement
des systèmes qui utilisent des pompes ou des
ventilateurs multiples.
Le mode maître/esclave fait fonctionner tous les
•
ventilateurs/pompes à la même vitesse, ce qui
ramène potentiellement l'énergie consommée à
moins de la moitié par rapport à une soupape
d'étranglement ou une mise hors/sous tension
traditionnelle directement sur le secteur.
L'alternance de la pompe principale garantit un
•
usage également réparti des pompes ou
ventilateurs multiples.
Option d'alimentation 24 V CC MCB 107
L'option est utilisée pour raccorder une alimentation CC
externe an de maintenir la section de commande et toute
option installée en direct pendant une panne d'alimentation.
Plage tension d'entrée : 24 V CC ±15 % (max. 37
•
V en 10 s)
Courant d'entrée maximal : 2,2 A.
•
Longueur de câble max. : 75 m.
•
Charge capacitive d'entrée : < 10 uF.
•
Retard mise sous tension : < 0,6 s.
•
Facile à installer sur les variateurs de fréquence
•
de machines existantes.
Maintient la carte de commande et les options
•
actives en cas de coupures de courant.
Maintient les bus de terrain actifs en cas de
•
coupures de courant. Référence 130B1108 non
tropicalisé – 130B1208 tropicalisé (classe G3/ISA
S71.04-1985).
3.7.1
Options de communication
VLT® PROFIBUS DP V1 MCA 101
•
VLT® DeviceNet MCA 104
•
VLT® PROFINET MCA 120
•
VLT® EtherNet/IP MCA 121
•
VLT® Modbus TCP MCA 122
•
Pour plus d'informations, se reporter au chapitre 7
cations :
Spéci-
3.7.2 Options entrée/sortie, signal de retour
et sécurité
Module d'E/S à usage général MCB 101 VLT®
•
VLT® Relay Card MCB 105
•
Carte thermistance PTC VLT® MCB 112
•
VLT® Extended Relay Card MCB 113
•
VLT® Sensor Input Option MCB 114
•
Pour plus d'informations, se reporter au chapitre 7
cations.
Options du contrôle en cascade
3.7.3
Les options du contrôleur de cascade augmentent le
nombre de relais disponibles. Lorsque l'une des options est
installée, les paramètres nécessaires pour gérer les
fonctions du contrôleur de cascade sont disponibles via le
panneau de commande.
Les MCO 101 et 102 sont des options qui étendent le
nombre de pompes prises en charge et les fonctionnalités
du contrôleur de cascade intégré du VLT® AQUA Drive.
Les options de contrôle en cascade suivantes sont
disponibles avec le VLT® AQUA Drive :
Contrôleur de cascade de base intégré (contrôleur
•
de cascade)
MCO 101 (contrôleur de cascade étendu)
•
MCO 102 (contrôleur de cascade avancé)
•
Pour plus d'informations, se reporter à la section
chapitre 7
Le contrôleur de cascade étendu peut être utilisé dans 2
modes diérents :
Le MCO 101 permet d'utiliser un total de 5 relais pour le
contrôle en cascade. Le MCO 102 permet de contrôler un
Spécications.
Avec les fonctions étendues contrôlées par le
•
groupe de paramètres 27-** Cascade CTL Option.
Pour étendre le nombre de relais disponibles
•
pour la cascade de base contrôlée par le groupe
de
paramètres 25-**. Contrôleur cascade.
Spéci-
3 3
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 73
Page 76

Intégration du système
total de 8 pompes. Les options peuvent permettre
d'alterner la pompe principale avec 2 relais par pompe.
VLT® AQUA Drive FC 202
AVIS!
Si le MCO 102 est installé, l'option relais MCB 105 peut
33
faire passer le nombre de relais à 13.
Application
Le contrôle en cascade est un système de contrôle courant
utilisé pour commander des pompes ou des ventilateurs
en parallèle, de façon
énergétique.
L'option de contrôleur de cascade permet de commander
plusieurs pompes congurées en parallèle :
En activant ou en désactivant automatiquement
•
les pompes individuelles.
En contrôlant la vitesse des pompes.
•
Grâce aux contrôleurs de cascade, les pompes individuelles
sont automatiquement activées (démarrées) et désactivées
(arrêtées) selon les besoins, et ce an de maintenir le débit
ou la pression nécessaire au système. La vitesse des
pompes raccordées au VLT® AQUA Drive est également
commandée de façon à fournir une plage continue de
puissance système.
ecace d'un point de vue
Intégré
MCO 101
MCO 102
Illustration 3.27 Présentation de l'application
1 VSP + 2 FSP
Groupe de paramètres 25-** Contrôleur cascade
1 VSP + 5 FSP
Groupe de paramètres 25-** Contrôleur cascade
1 VSP + 8 FSP
Groupe de paramètres 25-** Contrôleur cascade
Usage prévu
Les options du contrôleur de cascade ont été conçues pour
des applications de pompage. Il est toutefois également
possible d'utiliser les contrôleurs de cascade pour toute
application requérant plusieurs moteurs
parallèle.
Principe de fonctionnement
Le logiciel du contrôleur de cascade fonctionne à partir
d'un variateur de fréquence unique avec l'option de
contrôleur de cascade. Il contrôle un ensemble de pompes
commandées séparément par un variateur de fréquence ou
raccordées à un contacteur ou un démarreur progressif.
Les variateurs de fréquence supplémentaires dans le
système (variateurs de fréquence esclaves) n'ont pas besoin
de carte option de contrôleur de cascade. Ils sont exploités
en mode boucle ouverte et reçoivent leur référence de
vitesse à partir du variateur de fréquence maître. Les
pompes raccordées aux variateurs de fréquence esclaves
sont appelées pompes à vitesse variable.
Les pompes raccordées au secteur via un contacteur ou un
démarreur progressif sont appelées pompes à vitesse xe.
Chaque pompe à vitesse xe ou variable est commandée
par un relais du variateur de fréquence maître.
Les options du contrôleur de cascade peuvent commander
un mélange de pompes à vitesse xe et à vitesse variable.
congurés en
Intégré
1 vers 6 VSP + 1 vers 5 FSP
MCO 101
MCO 102
Illustration 3.28 Présentation de l'application
(6 pompes maximum)
Groupe de paramètres 27-** Cascade CTL Option
1 vers 8 VSP + 1 vers 7 FSP
(8 pompes maximum)
Groupe de paramètres 27-** Cascade CTL Option
-
74 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 77

Intégration du système
Manuel de conguration
construction du moteur, se produit à chaque commutation
de l'onduleur du variateur de fréquence. La fréquence du
bruit des résonances correspond ainsi à la fréquence de
commutation du variateur de fréquence.
Danfoss peut proposer un ltre sinus qui atténue le bruit
acoustique du moteur.
Le ltre réduit le temps de rampe d'accélération de la
tension, la tension de charge de pointe U
courant d'ondulation ΔI vers le moteur, ce qui signie que
le courant et la tension deviennent quasiment sinusoïdaux.
Le bruit acoustique du moteur est ainsi réduit au strict
minimum.
POINTE
3 3
et le
Intégré -
MCO 101
MCO 102
Illustration 3.29 Présentation de l'application
VSP = Pompe à vitesse variable (directement connectée au
variateur de fréquence)
FSP = Pompe à vitesse xe (le moteur peut être connecté via
un contacteur, un démarreur progressif ou un démarreur
étoile/triangle)
3.7.4
Dans les applications où le moteur est utilisé comme un
frein, l'énergie est générée dans le moteur et renvoyée vers
le variateur de fréquence. La tension du circuit CC du
variateur de fréquence augmente lorsque l'énergie ne peut
pas être transportée à nouveau vers le moteur. Dans les
applications avec freinage fréquent et/ou charges à inertie
élevée, cette augmentation peut entraîner une alarme de
surtension du variateur de fréquence puis un arrêt. Les
résistances de freinage sont utilisées pour dissiper l'énergie
excédentaire liée au freinage par récupération. La
résistance est sélectionnée en fonction de sa valeur
ohmique, de son taux de dissipation de puissance et de sa
taille physique. Danfoss propose une gamme complète de
résistances de freinage spécialement conçues pour les
variateurs de fréquence Danfoss. Voir le
chapitre 3.4.12 Calcul de la résistance de freinage pour le
dimensionnement des résistances de freinage. Pour obtenir
les références, se reporter au chapitre 6.2 Options,
accessoires et pièces détachées.
3.7.5
Lorsqu'un moteur est contrôlé par un variateur de
fréquence, il émet un bruit de résonance. Ce bruit, dû à la
6 VSP
Groupe de paramètres 27-** Cascade CTL Option
8 VSP
Groupe de paramètres 27-** Cascade CTL Option
Résistances de freinage
Filtres sinus
Le courant d'ondulation des bobines du ltre sinus génère
aussi un certain bruit. Remédier au problème en intégrant
le ltre dans une armoire ou une installation similaire.
Filtres dU/dt
3.7.6
Danfoss fournit des ltres dU/dt qui sont des ltres passebas à mode diérentiel qui réduisent les pics de tensions
entre phases de la borne du moteur et diminuent le temps
de montée jusqu'à un niveau qui réduit la contrainte sur
l'isolation des bobinages du moteur. Ce problème est
particulièrement important pour les câbles courts du
moteur.
Comparés aux
sinus), les ltres dU/dt comportent une fréquence d'arrêt
supérieure à la fréquence de commutation.
3.7.7
Les noyaux hautes fréquences en mode commun (noyaux
HF-CM) réduisent les interférences électromagnétiques et
éliminent les dommages dus aux décharges électriques. Ce
sont des noyaux magnétiques spéciques nanocristallins
qui présentent une performance de ltrage supérieure par
rapport aux noyaux de ferrite courants. Le noyau HF-CM
agit comme un inducteur en mode commun entre les
phases et la terre.
Installés autour des 3 phases du moteur (U, V, W), ils
réduisent les courants en mode commun haute fréquence.
Ainsi, l'interférence électromagnétique haute fréquence
provenant du câble du moteur s'en trouve réduite.
Le nombre de noyaux nécessaire dépend de la longueur
du câble du moteur et de la tension du variateur de
fréquence. Chaque kit contient 2 noyaux. Consulter le
Tableau 3.19 pour déterminer le nombre de noyaux
nécessaire.
ltres sinus (voir le chapitre 3.7.5 Filtres
Filtres en mode commun
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 75
Page 78

PE U V W
130BD839.10
A
B
C
D
E
130BT323.10
Intégration du système
VLT® AQUA Drive FC 202
Longueur de câble
[m] A et B C D
50 2 4 2 2 4
100 4 4 2 4 4
33
150 4 6 4 4 4
300 4 6 4 4 6
Tableau 3.19 Nombre de noyaux
1) Lorsque des câbles plus longs sont nécessaires, empiler des noyaux
HF-CM.
1)
Taille de protection
T2/T4 T7 T2/T4 T7 T7
La protection IP4X top peut s'appliquer à toutes les
variantes FC 202 IP20 standard.
Installer les noyaux HF-CM en faisant passer les 3 câbles
phases moteur (U, V, W) dans chaque noyau, comme
indiqué sur l'Illustration 3.30.
Illustration 3.30 Noyau HF-CM avec phases moteur
Filtres harmoniques
3.7.8
Les ltres Danfoss AHF 005 et AHF 010 sont des ltres
harmoniques avancés, sans comparaison possible avec les
ltres électroniques harmoniques traditionnels. Les ltres
harmoniques Danfoss ont été spécialement conçus pour
s'adapter aux variateurs de fréquence Danfoss.
En raccordant les ltres harmoniques Danfoss AHF 005 ou
AHF 010 face à un variateur de fréquence Danfoss, la
distorsion de courant harmonique renvoyée vers le secteur
est réduite à 5 % et 10 %.
3.7.9
Kit de protection IP21/NEMA Type 1
IP20/IP4X top/NEMA TYPE 1 est une protection optionnelle
disponible pour les appareils compacts IP20.
En cas d'utilisation du kit de protection, l'unité IP20 est
améliorée de manière à respecter la protection IP21/4X
top/TYPE 1.
Illustration 3.31 Protection de taille A2
76 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 79

B
A
E
C
D
130BT324.10
E
F
D
C
B
A
130BT620.12
Intégration du système Manuel de conguration
Type de protection
A2 372 90 205
A3 372 130 205
B3 475 165 249
B4 670 255 246
C3 755 329 337
C4 950 391 337
Tableau 3.20 Dimensions
1) Si l'option A/B est utilisée, la profondeur augmente (voir le
chapitre 7.8 Dimensionnements puissance, poids et dimensions pour
plus de détails).
Hauteur A
[mm]
Largeur B
[mm]
Profondeur C
[mm]
1)
3 3
A Couvercle supérieur
B Bord
C Base
D Couvercle inférieur
E Vis
Illustration 3.32 Protection de taille A3
Placer le couvercle supérieur comme illustré. Si une option
A ou B est utilisée, le bord doit recouvrir l'entrée
supérieure. Placer la base C au bas du variateur de
fréquence et utiliser les brides présentes dans le sac
d'accessoires pour attacher correctement les câbles.
Orices pour presse-étoupes :
Taille A2 : 2 x M25 et 3 x M32
•
Taille A3 : 3 x M25 et 3 x M32
•
Illustration 3.33 Protection de taille B3
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 77
Page 80

130BT621.12
D
C
A
G
130BA138.10
Intégration du système
VLT® AQUA Drive FC 202
AVIS!
Le montage côte à côte n'est pas possible lorsque l'on
utilise le Kit de protection IP21/IP4X/TYPE 1.
3.7.10 Kit de montage externe pour LCP
33
Le LCP peut être déplacé vers l'avant d'une protection à
l'aide du kit de montage externe. Les vis de xation
doivent être serrées à un couple max. d'1 Nm.
La protection du LCP est IP66.
Protection avant, IP66
Longueur de câble max. entre le LCP et
l'unité 3 m
Communication standard RS485
Tableau 3.22 Caractéristiques techniques
Illustration 3.35 Kit LCP comprenant LCP graphique, xations,
câble de 3 m et joint
Référence 130B1113
Illustration 3.34 Protections de tailles B4, C3 et C4
Couvercle supérieur
A
B Bord
C Base
D Couvercle inférieur
E Vis
F Protection du ventilateur
G Fixation supérieure
Tableau 3.21 Légende de l'Illustration 3.33 et de l'Illustration 3.34
Lorsqu'un module d'option A et/ou B est utilisé, le bord (B)
doit être xé sur le couvercle supérieur (A).
78 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 81

130BA200.10
130BA844.10
130BA845.10
A
B
Intégration du système
Manuel de conguration
Illustration 3.36 Kit LCP comprenant LCP numérique, xations
et joint
Référence 130B1114
3.7.11
Support de xation pour protections
de tailles A5, B1, B2, C1 et C2
Illustration 3.38 Support inférieur
3 3
Illustration 3.37 Dimensions du kit LCP
Illustration 3.39 Support supérieur
Voir les dimensions dans le Tableau 3.23.
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 79
Taille de protection IP A [mm] B [mm] Référence
A5 55/66 480 495 130B1080
B1 21/55/66 535 550 130B1081
B2 21/55/66 705 720 130B1082
B3 21/55/66 730 745 130B1083
B4 21/55/66 820 835 130B1084
Tableau 3.23 Détails des supports de montage
Page 82

Intégration du système
VLT® AQUA Drive FC 202
3.8 Interface série RS485
(STP) pour le câblage du bus et suivre les règles habituelles
en matière d'installation.
3.8.1 Vue d'ensemble
Il est important de disposer d'une mise à la terre de faible
Le RS485 est une interface de bus à deux ls compatible
avec une topologie de réseau multipoints, c.-à-d. que des
33
nœuds peuvent être connectés comme un bus ou via des
câbles de dérivation depuis un tronçon de ligne commun.
Un total de 32 nœuds peuvent être connectés à 1 segment
de réseau.
Les répéteurs divisent les segments de réseaux (voir
l'Illustration 3.40).
AVIS!
Chaque répéteur fonctionne comme un nœud au sein du
segment sur lequel il est installé. Chaque nœud connecté
au sein d'un réseau donné doit disposer d'une adresse
de nœud unique pour tous les segments.
Terminer chaque segment aux deux extrémités, à l'aide du
commutateur de terminaison (S801) du variateur de
fréquence ou d'un réseau de résistances de terminaison
polarisé. Utiliser toujours un câble blindé à paire torsadée
impédance du blindage à chaque nœud, y compris à
hautes fréquences. Relier alors une grande surface du
blindage à la terre, par exemple à l'aide d'un étrier de
serrage ou d'un presse-étoupe conducteur. Il peut être
nécessaire d'appliquer des câbles d'égalisation de potentiel
pour maintenir le même potentiel de terre dans tout le
réseau, en particulier dans les installations comportant des
câbles longs.
Pour éviter toute disparité d'impédance, utiliser toujours le
même type de câble dans l'ensemble du réseau. Lors du
raccordement d'un moteur au variateur de fréquence,
utiliser toujours un câble de moteur blindé.
Câble Paire torsadée blindée (STP)
Impédance [Ω]
Longueur de
câble [m]
Tableau 3.24 Spécications du câble
120
1 200 max. (y compris les câbles de dérivation)
500 max. de poste à poste
Illustration 3.40 Interface bus RS485
80 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 83

FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10
V
A IN
A IN
COM
A OUT
COM
R1R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
-
61
68
69
RS-485
+
130BB685.10
130BA060.11
68 69 68 69 68 69
RS 485
RS 232
USB
+
-
130BB021.10
12 13 18 19 27 29 32
33 20 37
Remove jumper to enable Safe Stop
61 68 69 39 42 50 53 54 55
Intégration du système
Manuel de conguration
Paramétre 8-30
Protocole FC*
Paramétre 8-31
Adresse
Paramétre 8-32
Vit. transmission
* = valeur par défaut
Remarques/commentaires :
Sélectionner le protocole,
l'adresse et la vitesse de
transmission dans les
paramètres mentionnés cidessus.
D IN 37 est une option.
Paramètres
Fonction charge
1*
9600*
Pour éviter des courants d'équilibrage de tension à l'écran,
raccorder selon l'Illustration 3.20.
3 3
Illustration 3.42 Bornes de la carte de commande
Tableau 3.25 Raccordement du réseau RS485
Raccordement du réseau
3.8.2
Un ou plusieurs variateurs de fréquence peuvent être
raccordés à un contrôleur (ou maître) à l'aide de l'interface
normalisée RS485. La borne 68 est raccordée au signal P
(TX+, RX+) tandis que la borne 69 est raccordée au signal
N (TX-, RX-). Voir les dessins au chapitre 3.5.1 Schéma de
câblage.
Utiliser des liaisons parallèles pour raccorder plusieurs
variateurs de fréquence au même maître.
Illustration 3.41 Connexions parallèles
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 81
Terminaison du bus RS485
3.8.3
Terminer le bus RS485 par un réseau de résistances à
chaque extrémité. À cette n, mettre le commutateur S801
de la carte de commande sur ON.
Régler le protocole de communication au par.
paramétre 8-30 Protocole.
Précautions CEM
3.8.4
Les précautions CEM suivantes sont recommandées pour
assurer une exploitation sans interférence du réseau RS485.
Respecter les réglementations nationales et locales en
vigueur, par exemple à l'égard de la protection par mise à
la terre. Maintenir le câble de communication RS485 à
l'écart des câbles du moteur et de résistance de freinage,
an d'éviter une nuisance réciproque des bruits liés aux
hautes fréquences. Normalement, une distance de 200 mm
(8 pouces) est susante, mais il est recommandé de garder
la plus grande distance possible, notamment en cas
d'installation de câbles en parallèle sur de grandes
distances. Si le câble RS485 doit croiser un câble de
moteur et de résistance de freinage, il doit le croiser
suivant un angle de 90°.
Page 84

Fieldbus cable
Min. 200 mm
90° crossing
Brake resistor
130BD507.11
STX LGE ADR D ATA BCC
195NA099.10
Intégration du système
33
VLT® AQUA Drive FC 202
Numéro de paramètre Réglage
Paramétre 8-30 Protocole FC
Paramétre 8-31 Adresse 1–126
Paramétre 8-32 Vit. Trans.
port FC
Paramétre 8-33 Parité/bits
arrêt
2400–115200
Parité à nombre pair, 1 bit d'arrêt
(défaut)
Tableau 3.26 Paramètres du protocole FC
3.8.7 Structure des messages du protocole
FC
3.8.7.1 Contenu d'un caractère (octet)
Chaque caractère transmis commence par un bit de
départ. Ensuite, 8 bits de données, correspondant à un
octet, sont transmis. Chaque caractère est sécurisé par un
bit de parité. Ce bit est réglé sur 1 lorsqu'il atteint la parité.
La parité est atteinte en présence d'un nombre égal de 1 s
Illustration 3.43 Passage des câbles
dans les 8 bits de données et le bit de parité au total. Le
caractère se termine par un bit d'arrêt et se compose donc
au total de 11 bits.
Vue d'ensemble du protocole FC
3.8.5
Le protocole FC, également appelé bus FC ou bus
standard, est le bus de terrain standard de Danfoss. Il
dénit une technique d'accès selon le principe maîtreesclave pour les communications via le bus série.
Un maître et un maximum de 126 esclaves peuvent être
raccordés au bus. Le maître sélectionne chaque esclave
grâce à un caractère d'adresse dans le télégramme. Un
esclave ne peut jamais émettre sans y avoir été autorisé au
préalable, et le transfert direct de messages entre les
diérents esclaves n'est pas possible. Les communications
ont lieu en mode semi-duplex.
La fonction du maître ne peut pas être transférée vers un
autre nœud (système à maître unique).
La couche physique est la RS485, qui utilise le port RS485
intégré au variateur de fréquence. Le protocole FC prend
en charge diérents formats de télégramme :
Un format court de 8 octets pour les données de
•
process.
Un format long de 16 octets qui comporte
•
également un canal de paramètres.
Un format utilisé pour les textes.
•
Illustration 3.44 Contenu d'un caractère
3.8.7.2 Structure du télégramme
Chaque télégramme présente la structure suivante :
Caractère de départ (STX) = 02 Hex.
•
Un octet indiquant la longueur du télégramme
•
(LGE).
Un octet indiquant l'adresse (ADR) du variateur
•
de fréquence.
Viennent ensuite plusieurs octets de données (nombre
variable, dépend du type de télégramme).
Un octet de contrôle des données (BCC) termine le
télégramme.
Illustration 3.45 Structure du télégramme
3.8.6
Conguration du réseau
Dénir les paramètres suivants pour activer le protocole FC
du variateur de fréquence :
82 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 85

ADRLGESTX PCD1 PCD2 BCC
130BA269.10
Intégration du système Manuel de conguration
3.8.7.3 Longueur du télégramme (LGE)
La longueur du télégramme comprend le nombre d'octets
de données auquel s'ajoutent l'octet d'adresse ADR et
l'octet de contrôle des données BCC.
4 octets de données LGE = 4 + 1 + 1 = 6 octets
12 octets de données LGE = 12 + 1 + 1 = 14 octets
Télégrammes contenant des textes
Tableau 3.27 Longueur des télégrammes
1) 10 correspond aux caractères
(dépend de la longueur du texte).
3.8.7.4
Adresse (ADR) du variateur de
101) + n octets
xes tandis que n est variable
L'esclave renvoie l'octet d'adresse sans modication dans le
télégramme de réponse au maître.
fréquence
3.8.7.5
Deux formats d'adresse diérents sont utilisés.
La plage d'adresse du variateur est soit de 1-31 soit de
1-126.
•
Format d'adresse 1-31
Bit 7 = 0 (format adresse 1-31 actif ).
-
Bit 6 non utilisé.
-
La somme de contrôle est calculée comme une fonction
XOR. Avant de recevoir le premier octet du télégramme, la
somme de contrôle calculée est égale à 0.
Bit 5 = 1 : diusion, les bits d'adresse
-
(0-4) ne sont pas utilisés.
Bit 5 = 0 : pas de diusion.
-
Bit 0-4 = adresse du variateur de
-
fréquence 1-31.
Format d'adresse 1-126
•
Bit 7 = 1 (format adresse 1-126 actif ).
-
Bit 0-6 = adresse du variateur de
-
fréquence 1-126.
Bit 0-6 = 0 diusion.
-
Octet de contrôle des données
(BCC)
3 3
3.8.7.6
La construction de blocs de données dépend du type de télégramme. Il existe trois types de télégrammes et le type de
télégramme est valable aussi bien pour les télégrammes de commande (maître⇒esclave) que pour les télégrammes de
réponse (esclave⇒maître).
Voici les 3 types de télégramme :
Bloc de process (PCD)
Un PCD est composé d'un bloc de données de 4 octets (2 mots) et comprend :
Illustration 3.46 Bloc de process
Champ de données
Mot de contrôle et valeur de référence (du maître à l'esclave).
•
Mot d'état et fréquence de sortie actuelle (de l'esclave au maître).
•
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 83
Page 86

PKE IND
130BA270.10
ADRLGESTX PCD1 PCD2 BCCCh1 Ch2 Chn
Intégration du système
VLT® AQUA Drive FC 202
Bloc de paramètres
Un bloc de paramètres est utilisé pour le transfert de paramètres entre le maître et l'esclave. Le bloc de données est
composé de 12 octets (6 mots) et contient également le bloc de process.
33
Illustration 3.47 Bloc de paramètres
Bloc de texte
Un bloc de texte est utilisé pour lire ou écrire des textes via le bloc de données.
Illustration 3.48 Bloc de texte
3.8.7.7 Champ PKE
Le champ PKE contient deux sous-champs :
Ordre et réponse de paramètres AK.
•
Numéro de paramètre PNU.
•
Numéro bit Ordre de paramètre
15 14 13 12
0 0 0 0 Pas d'ordre
0 0 0 1 Lire valeur du paramètre
0 0 1 0 Écrire valeur du paramètre en RAM (mot)
0 0 1 1 Écrire valeur du paramètre en RAM (mot
double)
1 1 0 1 Écrire valeur du paramètre en RAM et
EEPROM (mot double)
1 1 1 0 Écrire valeur du paramètre en RAM et
EEPROM (mot)
1 1 1 1 Lire/écrire texte
Illustration 3.49 Champ PKE
Les bits 12 à 15 sont utilisés pour le transfert d'ordres de
paramètres du maître à l'esclave ainsi que pour la réponse
traitée par l'esclave et renvoyée au maître.
Tableau 3.28 Ordres de paramètres maître ⇒ esclave
Numéro bit Réponse
15 14 13 12
0 0 0 0 Pas de réponse
0 0 0 1 Valeur du paramètre transmise (mot)
0 0 1 0 Valeur du paramètre transmise (mot
double)
0 1 1 1 Ordre impossible à exécuter
1 1 1 1 Texte transmis
Tableau 3.29 Réponse esclave ⇒ maître
S'il est impossible d'exécuter l'ordre, l'esclave envoie cette
réponse :
0111 Ordre impossible à exécuter
- et publie un rapport de défauts (voir le Tableau 3.30)
dans la valeur de paramètre (PWE) :
PWE bas
(Hex)
Message d'erreur
0 Le numéro de paramètre utilisé n'existe pas.
1 Aucun accès en écriture au paramètre déni.
2 La valeur des données dépasse les limites du
paramètre.
84 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 87

Intégration du système
Manuel de conguration
3 L'indice utilisé n'existe pas.
4 Le paramètre n'est pas de type tableau.
5 Le type de données ne correspond pas au
paramètre déni.
11 La modication des données dans le paramètre
déni n'est pas possible dans l'état actuel du
variateur de fréquence. Certains paramètres ne
peuvent être modiés qu'avec le moteur à l'arrêt.
82 Aucun accès du bus au paramètre déni.
83 La modication des données est impossible car les
réglages d'usine ont été sélectionnés
Tableau 3.30 Rapports d'erreur des valeurs de paramètre
3.8.7.8
Les bits n° 0 à 11 sont utilisés pour le transfert des
numéros de paramètre. La fonction du paramètre concerné
est dénie dans la description des paramètres dans le
Guide de programmation.
3.8.7.9
L'indice est utilisé avec le numéro de paramètre pour
l'accès lecture/écriture aux paramètres dotés d'un indice, p.
ex. le par. paramétre 15-30 Journal alarme : code. L'indice
est composé de 2 octets, un octet de poids faible et un
octet de poids fort.
Seul l'octet de poids faible est utilisé comme un indice.
3.8.7.10
Le bloc valeur du paramètre se compose de 2 mots (4
octets) et la valeur dépend de l'ordre donné (AK). Le maître
exige une valeur de paramètre lorsque le bloc PWE ne
contient aucune valeur. Pour modier une valeur de
paramètre (écriture), écrire la nouvelle valeur dans le bloc
PWE et l'envoyer du maître à l'esclave.
Lorsqu'un esclave répond à une demande de paramètre
(ordre de lecture), la valeur actuelle du paramètre du bloc
PWE est transmise et renvoyée au maître. Si un paramètre
ne contient pas de valeur numérique, mais plusieurs
options de données, par exemple paramétre 0-01 Langue
où [0] Anglais et [4] Danois, il convient de choisir la valeur
de données en saisissant la valeur dans le bloc PWE. La
communication série permet de lire uniquement les
paramètres de type de données 9 (séquence de texte).
Les par. Paramétre 15-40 Type. FC à paramétre 15-53 N° série
carte puissance contiennent le type de données 9.
À titre d'exemple, le par. paramétre 15-40 Type. FC permet
de lire l'unité et la plage de tension secteur. Lorsqu'une
séquence de texte est transmise (lue), la longueur du
télégramme est variable et les textes présentent des
longueurs variables. La longueur du télégramme est
indiquée dans le 2e octet du télégramme, LGE. Lors d'un
Numéro de paramètre (PNU)
Indice (IND)
Valeur du paramètre (PWE)
transfert de texte, le caractère d'indice indique s'il s'agit
d'un ordre de lecture ou d'écriture.
An de pouvoir lire un texte via le bloc PWE, régler l'ordre
de paramètre (AK) sur F Hex. L'octet haut du caractère
d'indice doit être 4.
Certains paramètres contiennent du texte qui peut être
écrit via le bus série. Pour écrire un texte via le bloc PWE,
régler l'ordre de paramètre (AK) sur F Hex. L'octet haut du
caractère d'indice doit être 5.
Illustration 3.50 Texte via le bloc PWE
3.8.7.11 Types de données pris en charge
Non signé signie que le télégramme ne comporte pas de
signe.
Types de données Description
3 Nombre entier 16 bits
4 Nombre entier 32 bits
5 Non signé 8 bits
6 Non signé 16 bits
7 Non signé 32 bits
9 Séquence de texte
10 Chaîne d'octets
13 Diérence de temps
33 Réservé
35 Séquence de bits
Tableau 3.31 Types de données pris en charge
3.8.7.12
Le chapitre Réglage d'usine montre les caractéristiques de
chaque paramètre. Les valeurs de paramètre ne sont
transmises que sous la forme de nombres entiers. Les
facteurs de conversion sont donc utilisés pour transmettre
des nombres décimaux.
Le par. Paramétre 4-12 Vitesse moteur limite basse [Hz] a un
facteur de conversion de 0,1. Pour prérégler la fréquence
minimale sur 10 Hz, transmettre la valeur 100. Un facteur
de conversion de 0,1 signie que la valeur transmise est
multipliée par 0,1. La valeur 100 est donc lue sous la forme
10,0.
Exemples :
0 s⇒indice de conversion 0
0,00 s⇒indice de conversion -2
0 ms⇒indice de conversion -3
0,00 ms⇒indice de conversion -5
Conversion
3 3
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 85
Page 88

E19E H
PKE IND PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA092.10
119E H
PKE
IND
PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA093.10
1155 H
PKE IND PWE
high
PWE
low
0000 H 0000 H 0000 H
130BA094.10
Intégration du système
VLT® AQUA Drive FC 202
3.8.7.13 Mots de process (PCD)
PWEBAS = 0000 hex
Le bloc de mots de process est divisé en deux blocs,
chacun de 16 bits, qui apparaissent toujours dans l'ordre
indiqué.
33
PCD 1 PCD 2
Télégramme de contrôle (mot de contrôle
maître⇒esclave)
Télégramme de contrôle (esclave⇒maître)
Mot d'état
Tableau 3.32 Mots de process (PCD)
Exemples de protocole FC
3.8.8
Référence-valeur
Fréquence de
sortie actuelle
3.8.8.1 Écriture d'une valeur de paramètre
Changer le par. paramétre 4-14 Vitesse moteur limite haute
[Hz] sur 100 Hz.
Écrire les données en EEPROM.
PKE = E19E Hex - Écriture d'un mot unique au par.
paramétre 4-14 Vitesse moteur limite haute [Hz] :
Illustration 3.53 Valeur de paramètre
Si la valeur au par. paramétre 3-41 Temps d'accél. rampe 1
est égale à 10 s, la réponse de l'esclave au maître est :
Illustration 3.54 Réponse de l'esclave
3E8 Hex correspond à 1000 au format décimal. L'indice de
conversion du par. paramétre 3-41 Temps d'accél. rampe 1
est -2, c.-à-d. 0,01.
Le par. paramétre 3-41 Temps d'accél. rampe 1 est du type
Non signé 32 bits.
IND = 0000 Hex
PWEHAUT = 0000 hex
PWEBAS = 03E8 Hex - Valeur de données 1000 corres-
Protocole Modbus RTU
3.8.9
pondant à 100 Hz, voir le chapitre 3.8.7.12 Conversion.
3.8.9.1 Hypothèses de départ
Le télégramme présente l'apparence suivante :
Danfoss part du principe que le contrôleur installé prend
en charge les interfaces mentionnées dans ce document et
que toutes les exigences et restrictions concernant le
Illustration 3.51 Écrire les données en EEPROM
AVIS!
Paramétre 4-14 Vitesse moteur limite haute [Hz] est un
mot unique, et l'ordre de paramètre pour l'écriture dans
l'EEPROM est E. Le numéro de paramètre 4-14 est 19E au
format hexadécimal.
contrôleur et le variateur de fréquence sont strictement
respectées.
Le Modbus RTU intégré (terminal distant) est conçu pour
communiquer avec n'importe quel contrôleur prenant en
charge les interfaces dénies dans ce document. Il est
entendu que l'utilisateur connaît parfaitement les capacités
et les limites du contrôleur.
3.8.9.2
Vue d'ensemble du Modbus RTU
La réponse de l'esclave au maître est :
Illustration 3.52 Réponse de l'esclave
3.8.8.2 Lecture d'une valeur de paramètre
Lire la valeur au par. paramétre 3-41 Temps d'accél. rampe 1.
PKE = 1155 Hex - Lire la valeur au par.
paramétre 3-41 Temps d'accél. rampe 1.
IND = 0000 Hex
PWEHAUT = 0000 hex
86 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
La présentation du Modbus RTU décrit le procédé qu'utilise
un contrôleur pour accéder à un autre dispositif, indépendamment du type de réseau de communication physique.
Cela inclut la manière dont le Modbus RTU répond aux
demandes d'un autre dispositif et comment les erreurs
sont détectées et signalées. Il établit également un format
commun pour la structure et le contenu des champs de
message.
Pendant les communications sur un réseau Modbus RTU, le
protocole :
détermine la façon dont chaque contrôleur
•
apprend l'adresse de son dispositif.
détermine la façon dont il reconnaît un message
•
qui lui est adressé.
Page 89

Intégration du système Manuel de conguration
détermine les actions à entreprendre.
•
extrait les données et les informations contenues
•
dans le message.
Si une réponse est nécessaire, le contrôleur élabore et
envoie le message de réponse.
Les contrôleurs communiquent à l'aide d'une technique
maître-esclave dans lequel le maître peut initier des
transactions (appelées requêtes). Les esclaves répondent en
fournissant au maître les données demandées ou en
eectuant l'action demandée dans la requête.
Le maître peut s'adresser à un esclave en particulier ou
transmettre un message à diusion générale à tous les
esclaves. Les esclaves renvoient une réponse aux requêtes
qui leur sont adressées individuellement. Aucune réponse
n'est renvoyée aux requêtes à diusion générale du maître.
Le protocole Modbus RTU établit le format de la requête
du maître en indiquant :
L'adresse du dispositif (ou diusion).
•
Un code de fonction
•
Toutes les données à envoyer.
•
Un champ de contrôle d'erreur.
•
Le message de réponse de l'esclave est également
construit en utilisant le protocole Modbus. Il contient des
champs conrmant l'action entreprise, toute donnée à
renvoyer et un champ de contrôle d'erreur. Si une erreur se
produit lors de la réception du message ou si l'esclave est
incapable d'eectuer l'action demandée, ce dernier élabore
et renvoie un message d'erreur ou bien une temporisation
se produit.
dénissant l'action requise.
Changement du process actif
•
Contrôle du relais intégré du variateur de
•
fréquence
La référence du bus est généralement utilisée pour
commander la vitesse. Il est également possible d'accéder
aux paramètres, de lire leurs valeurs et le cas échéant,
d'écrire leurs valeurs. Cela permet de disposer d'une
gamme d'options de contrôle, comprenant le contrôle du
point de consigne du variateur de fréquence lorsque le
régulateur PI interne est utilisé.
3.8.9.4 Conguration du réseau
Pour activer le Modbus RTU sur le variateur de fréquence,
régler les paramètres suivants :
Paramètre Réglage
Paramétre 8-30 Protocole Modbus RTU
Paramétre 8-31 Adresse 1-247
Paramétre 8-32 Vit.
transmission
Paramétre 8-33 Parité/bits
arrêt
Tableau 3.33 Paramètres du Modbus RTU
3.8.10
Structure des messages du Modbus
2400-115200
Parité à nombre pair, 1 bit d'arrêt
(défaut)
RTU
3.8.10.1 Variateur de fréquence avec
Modbus RTU
3 3
3.8.9.3
Variateur de fréquence avec
Modbus RTU
Le variateur de fréquence communique au format Modbus
RTU sur l'interface intégrée RS485. Le Modbus RTU ore
l'accès au mot de contrôle et à la référence du bus du
variateur de fréquence.
Le mot de contrôle permet au maître Modbus de contrôler
plusieurs fonctions importantes du variateur de fréquence.
Start
•
Arrêt du variateur de fréquence de plusieurs
•
façons :
Arrêt en roue libre
-
Arrêt rapide
-
Arrêt avec freinage par injection de
-
courant continu
Arrêt normal (rampe)
-
Reset après une coupure
•
Fonctionnement à plusieurs vitesses prédénies
•
Fonctionnement en sens inverse
•
Les contrôleurs sont congurés pour communiquer sur le
réseau Modbus à l'aide du mode RTU ; chaque octet d'un
message contient 2 caractères de 4 bits hexadécimaux. Le
format de chaque octet est indiqué dans le Tableau 3.34.
Bit de
démar
rage
Tableau 3.34 Format de chaque octet
Système de
codage
Bits par octet 1 bit de démarrage.
Champ de contrôle
d'erreur
Octet de données Arrêt/
parité
Binaire 8 bits, hexadécimal 0-9, A-F.
2 caractères hexadécimaux contenus dans
chaque champ à 8 bits du message.
8 bits de données, bit de plus faible poids
envoyé en premier ;
1 bit pour parité paire/impaire ; pas de bit
en l'absence de parité.
1 bit d'arrêt si la parité est utilisée ; 2 bits
en l'absence de parité.
Contrôle de redondance cyclique (CRC).
Arrêt
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 87
Page 90

Intégration du système
VLT® AQUA Drive FC 202
3.8.10.2 Structure des messages Modbus
3.8.10.4
Champ d'adresse
RTU
Le champ d'adresse d'une structure de message contient 8
Le dispositif de transmission place un message Modbus
RTU dans un cadre avec un début connu et un point nal.
Cela permet aux dispositifs de réception de commencer au
33
début du message, de lire la portion d'adresse, de
déterminer à quel dispositif il s'adresse (ou tous les
dispositifs si le message est à diusion générale) et de
reconnaître la n du message. Les messages partiaux sont
détectés et des erreurs apparaissent. Les caractères pour la
transmission doivent être au format hexadécimal 00 à FF
dans chaque champ. Le variateur de fréquence surveille en
permanence le bus du réseau, même pendant les
intervalles silencieux. Lorsqu'un variateur de fréquence ou
un dispositif reçoit le premier champ (le champ d'adresse),
il le décode pour déterminer à quel dispositif le message
s'adresse. Les messages du Modbus RTU adressés à zéro
sont les messages à diusion générale. Aucune réponse
n'est permise pour les messages à diusion générale. Une
structure de message typique est présentée dans le
Tableau 3.35.
DémarrageAdresse Fonction Données Contrôle
CRC
T1-T2-T3-T48 bits 8 bits N x 8 bits 16 bits T1-T2-T3-
Tableau 3.35 Structure typique des messages du Modbus RTU
3.8.10.3
Les messages commencent avec une période silencieuse
d'au moins 3,5 intervalles de caractère. Ceci est eectué
grâce à un multiple d'intervalles de caractère en fonction
de la vitesse de transmission du réseau sélectionnée
(indiqué comme démarrage T1-T2-T3-T4). Le premier
champ transmis est l'adresse du dispositif. Après transfert
du dernier caractère, une période similaire d'au moins 3,5
intervalles de caractère marque la n du message. Un
nouveau message peut commencer après cette période. La
structure entière du message doit être transmise comme
une suite ininterrompue. Si une période silencieuse de plus
de 1,5 intervalle de caractère se produit avant achèvement
de la structure, le dispositif de réception élimine le
message incomplet et considère que le prochain octet est
le champ d'adresse d'un nouveau message. De même, si
un nouveau message commence avant 3,5 intervalles de
caractère après un message, le dispositif de réception le
considère comme la suite du message précédent. Cela
entraîne une temporisation (pas de réponse de l'esclave),
puisque la valeur du champ CRC nal n'est pas valide pour
les messages combinés.
Champ démarrage/arrêt
End
T4
bits. Les adresses des dispositifs esclaves valides sont
comprises dans une plage de 0 à 247 décimal. Chaque
dispositif esclave dispose d'une adresse dans la plage de 1
à 247 (0 est réservé pour le mode de diusion générale,
que tous les esclaves reconnaissent). Un maître s'adresse à
un esclave en plaçant l'adresse de l'esclave dans le champ
d'adresse du message. Lorsque l'esclave envoie sa réponse,
il place sa propre adresse dans ce champ d'adresse pour
faire savoir au maître quel esclave est en train de répondre.
3.8.10.5
Le champ de fonction d'une structure de message contient
8 bits. Les codes valides gurent dans une plage comprise
entre 1 et FF. Les champs de fonction sont utilisés pour le
transfert de paramètres entre le maître et l'esclave.
Lorsqu'un message est envoyé par un maître à un
dispositif esclave, le champ de code de fonction indique à
l'esclave le type d'action à
répond au maître, il utilise le champ de code de fonction
pour indiquer soit une réponse normale (sans erreur) soit
le type d'erreur survenue (appelée réponse d'exception).
Pour une réponse normale, l'esclave renvoie simplement le
code de fonction d'origine. Pour une réponse d'exception,
l'esclave renvoie un code équivalent au code de fonction
d'origine avec son bit de plus fort poids réglé sur "1"
logique. De plus, l'esclave place un code unique dans le
champ de données du message de réponse. Cela indique
au maître le type d'erreur survenue ou la raison de
l'exception. Se reporter également au
chapitre 3.8.10.10 Codes de fonction pris en charge par le
Modbus RTU et au chapitre 3.8.10.11 Codes d'exceptions
Modbus.
3.8.10.6
Le champ de données est construit en utilisant des
ensembles de 2 chires hexadécimaux, dans la plage de 00
à FF au format hexadécimal. Ceux-ci sont composés d'un
caractère RTU. Le champ de données des messages
envoyés par le maître au dispositif esclave contient des
informations complémentaires que l'esclave doit utiliser
pour eectuer l'action dénie par le code de fonction. Cela
peut inclure des éléments tels que des adresses de
bobines ou de registres, la quantité d'éléments à manier et
le comptage des octets de données réels dans le champ.
3.8.10.7
Champ de fonction
eectuer. Lorsque l'esclave
Champ de données
Champ de contrôle CRC
Les messages comportent un champ de contrôle d'erreur,
fonctionnant sur la base d'une méthode de contrôle de
redondance cyclique (CRC). Le champ CRC vérie le
88 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 91

Intégration du système
Manuel de conguration
contenu du message entier. Il s'applique indépendamment
de la méthode de contrôle de la parité utilisée pour
chaque caractère du message. La valeur CRC est calculée
par le dispositif de transmission, qui joint le CRC sous la
forme du dernier champ du message. Le dispositif de
réception recalcule un CRC lors de la réception du message
et compare la valeur calculée à la valeur réelle reçue dans
le champ CRC. Si les deux valeurs ne sont pas égales, une
temporisation du temps du bus se produit. Le champ de
contrôle d'erreur contient une valeur binaire de 16 bits
mise en œuvre sous la forme de deux octets de 8 bits.
Ensuite, l'octet de poids faible du champ est joint en
premier, suivi de l'octet de poids fort. L'octet de poids fort
du CRC est le dernier octet envoyé dans le message.
3.8.10.8
Adresse de registre des bobines
En Modbus, toutes les données sont organisées dans des
registres de bobines et de maintien. Les bobines
contiennent un seul bit, tandis que les registres de
maintien contiennent un mot à 2 octets (16 bits). Toutes
les adresses de données des messages du Modbus sont
référencées sur zéro. La première occurrence d'un élément
de données est adressée comme un élément 0. Par
exemple : la bobine connue comme bobine 1 dans un
contrôleur programmable est adressée dans le champ
d'adresse de données d'un message du Modbus. La bobine
127 décimal est adressée comme bobine 007EHEX (126
décimal).
Le registre de maintien 40001 est adressé comme registre
0000 dans le champ d'adresse de données du message. Le
champ de code de fonction
spécie déjà une exploitation
de registre de maintien. La référence 4XXXX est donc
implicite. Le registre de maintien 40108 est adressé comme
registre 006BHEX (107 décimal).
Numéro
de
bobine
1–16 Mot de contrôle du variateur de
17–32 Référence de vitesse ou de point de
33–48 Mot d'état du variateur de fréquence
49–64 Mode boucle ouverte : fréquence de
65 Contrôle d'écriture du paramètre
66-65536 Réservé
Tableau 3.36 Descriptions de la bobine
Bobine 0 1
01 Référence prédénie LSB
02 Référence prédénie MSB
03 Freinage CC Pas de freinage CC
04 Arrêt en roue libre Pas d'arrêt en roue libre
05 Arrêt rapide Pas d'arrêt rapide
06 Gel fréquence Pas de gel fréquence
07 Arrêt rampe Démarrage
08 Pas de reset Reset
09 Pas de jogging Jogging
10 Rampe 1 Rampe 2
11 Données non valides Données valides
12 Relais 1 inactif Relais 1 actif
13 Relais 2 inactif Relais 2 actif
14 Process LSB
15 Process MSB
16 Pas d'inversion Inversion
Description Sens du signal
Maître vers
fréquence.
consigne du variateur Plage 0x0 0xFFFF (-200 %... ~200 %).
(voir le Tableau 3.38)
sortie du variateur de fréquence.
Mode boucle fermée : signal de
retour du variateur de fréquence.
(maître vers esclave)
0=Les modications de paramètres
sont écrites dans la RAM du
variateur de fréquence.
1=Les modications de paramètres
sont écrites dans la RAM et
l'EEPROM du variateur de
fréquence
esclave
Maître vers
esclave
Esclave vers
maître
Esclave vers
maître
Maître vers
esclave
3 3
Tableau 3.37 Mot de contrôle du variateur de fréquence
(prol FC)
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 89
Page 92

Intégration du système
VLT® AQUA Drive FC 202
Bobine 0 1
33 Commande non prête Commande prête
34 Variateur de fréquence
non prêt
35 Arrêt en roue libre Arrêt de sécurité
36 Pas d'alarme Alarme
33
37 Non utilisé Non utilisé
38 Non utilisé Non utilisé
39 Non utilisé Non utilisé
40 Absence d'avertissement Avertissement
41 Pas à référence À référence
42 Mode manuel Mode automatique
43 Hors de la plage de
fréquence
44 Arrêté Fonctionne
45 Non utilisé Non utilisé
46 Pas d'avertis. de tension Avertissement de tension
47 Pas dans limite de courant Limite de courant
48 Sans avertis. thermique Avertis.thermiq.
Tableau 3.38 Mot d'état du variateur de fréquence (prol FC)
Numéro de
registre
00001-00006 Réservé
00007 Dernier code d'erreur depuis une interface d'objet
00008 Réservé
00009
00010-00990 Groupe de paramètres 000 (paramètres 0-01 à
01000-01990 Groupe de paramètres 1-00 (paramètres 1-00 à
02000-02990 Groupe de paramètres 2-00 (paramètres 2-00 à
03000-03990 Groupe de paramètres 3-00 (paramètres 3-00 à
04000-04990 Groupe de paramètres 4-00 (paramètres 4-00 à
... ...
49000-49990 Groupe de paramètres 49-00 (paramètres 49-00 à
50000 Données d'entrée : registre du mot de contrôle
50010 Données d'entrée : registre de référence du bus
... ...
50200 Données de sortie : registre du mot d'état du
50210 Données de sortie : registre de la valeur réelle
Tableau 3.39 Registres de stockage
1) Sert à spécier le numéro d'indice à utiliser lors de l'accès à un
paramètre indexé.
Description
de données FC
Indice de paramètres
0-99)
1-99)
2-99)
3-99)
4-99)
49-99)
du variateur de fréquence (CTW)
(REF)
variateur de fréquence (STW)
principale du variateur (MAV)
Variateur de fréquence prêt
Dans plage de fréq.
1)
3.8.10.9
Comment contrôler le variateur de
fréquence
Les codes disponibles pouvant être utilisés dans les
champs de fonction et de données d'un message du
Modbus RTU sont répertoriés au chapitre 3.8.10.10 Codes de
fonction pris en charge par le Modbus RTU et au
chapitre 3.8.10.11 Codes d'exceptions Modbus.
3.8.10.10 Codes de fonction pris en charge
par le Modbus RTU
Le Modbus RTU prend en charge l'utilisation des codes de
fonction (voir le Tableau 3.40) dans le champ de fonction
d'un message.
Fonction Code de fonction (hex)
Lecture bobines 1
Lecture registres de maintien 3
Écriture bobine unique 5
Écriture registre unique 6
Écriture bobines multiples F
Écriture registres multiples 10
Obtenir le compteur d'événements de
communication
Rapport ID esclave 11
Tableau 3.40 Codes de fonction
Fonction Code de
fonction
Diagnostics 8 1 Redémarrer communi-
Tableau 3.41 Codes de fonction et codes de sous-fonction
3.8.10.11
Codes d'exceptions Modbus
Code de
sousfonction
2 Renvoyer registre de
10 Nettoyer compteurs et
11 Renvoyer comptage
12 Renvoyer comptage erreur
13 Retourner le compteur
14 Renvoyer comptage
Pour plus d'informations sur la structure d'une réponse
d'exception, se reporter auchapitre 3.8.10.5 Champ de
fonction.
B
Sous-fonction
cation
diagnostic
registre de diagnostic
message bus
communication bus
d'erreurs esclave
message esclave
90 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 93

Intégration du système
Manuel de conguration
Code Nom Signication
1 Fonction non
autorisée
2 Adresse de
données
illégale
3 Valeur de
données
illégale
4 Échec du
dispositif
esclave
Tableau 3.42 Codes d'exceptions Modbus
Le code de fonction reçu dans la requête
ne correspond pas une action autorisée
pour le serveur (ou esclave). Cela peut
venir du fait que le code de fonction n'est
applicable qu'à des dispositifs plus récents
et n'a pas été implémenté dans l'unité
sélectionnée. Cela peut également
signier que le serveur (ou esclave) est
dans un état incorrect pour traiter une
demande de ce type, par exemple parce
qu'il n'est pas conguré pour renvoyer les
valeurs du registre.
L'adresse de données reçue dans la
requête n'est pas une adresse autorisée
pour le serveur (ou esclave). Plus spéci-
quement, la combinaison du numéro de
référence et de la longueur du transfert
n'est pas valide. Pour un contrôleur avec
100 registres, une requête avec oset de
96 et longueur de 4 peut réussir, une
requête avec oset de 96 et longueur de
5 génère l'exception 02.
Une valeur contenue dans le champ de
données de la requête n'est pas autorisée
pour le serveur (esclave). Cela signale une
erreur dans la structure du reste d'une
requête complexe, p. ex. la longueur
impliquée est incorrecte. Cela NE signie
PAS spéciquement qu'un élément de
données envoyé pour stockage dans un
registre présente une valeur en dehors de
l'attente du programme d'application,
puisque le protocole Modbus n'a pas
connaissance de la signication d'une
valeur particulière dans un registre
particulier.
Une erreur irréparable s'est produite alors
que le serveur (ou esclave) tentait
d'eectuer l'action demandée.
des paramètres. Une valeur de 11300 (décimale) signie
que le paramètre est réglé sur 1113,00.
Pour plus d'informations sur les paramètres, la taille et
l'indice de conversion, consulter le guide de programmation.
3.8.11.2 Stockage des données
La bobine 65 décimal détermine si les données écrites sur
le variateur de fréquence sont enregistrées dans l'EEPROM
et dans la RAM (bobine 65 = 1) ou uniquement dans la
RAM (bobine 65 = 0).
3.8.11.3 IND (Index)
Certains paramètres du variateur de fréquence sont des
paramètres de tableau, par exemple le par.
paramétre 3-10 Réf.prédénie. Comme le Modbus ne prend
pas en charge les tableaux dans les registres de maintien,
le variateur de fréquence a réservé le registre de maintien
9 comme pointeur vers le tableau. Avant de lire ou d'écrire
dans un paramètre de tableau, régler le registre de
maintien 9. Le réglage du registre de maintien sur la valeur
2 entraîne le placement de la lecture/écriture suivante dans
les paramètres de tableau de l'indice 2.
3.8.11.4
On accède aux paramètres stockés sous forme de chaînes
de texte comme on le fait pour les autres paramètres. La
taille maximum d'un bloc de texte est de 20 caractères. Si
une demande de lecture d'un paramètre contient plus de
caractères que n'en contient le paramètre, la réponse est
tronquée. Si la demande de lecture d'un paramètre
contient moins de caractères que n'en contient le
paramètre, la réponse comporte des espaces.
3.8.11.5
Une valeur de paramètre ne pouvant être transmise que
sous la forme d'un nombre entier, il faut utiliser un facteur
de conversion pour transmettre des chires à décimales.
Blocs de texte
Facteur de conversion
3 3
3.8.11
Accès aux paramètres
3.8.11.6
Valeurs de paramètre
3.8.11.1 Gestion des paramètres
Types de données standard
Le PNU (numéro de paramètre) est traduit depuis l'adresse
du registre contenue dans le message lecture ou écriture
Modbus. Le numéro du paramètre est traduit vers le
Modbus en tant que décimal (10 x numéro de paramètre).
Exemple : Achage par. paramétre 3-12 Rattrap/ralentiss (16
bits) : Le registre de maintien 3120 conserve la valeur des
paramètres. Une valeur de 1352 (décimale) signie que le
paramètre est réglé sur 12,52 %.
Achage par. paramétre 3-14 Réf.prédéf.relative (32 bits) :
Les registres de maintien 3410 et 3411 conservent la valeur
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 91
Les types de données standard sont int16, int32, uint8,
uint16 et uint32. Ils sont stockés comme 4x registres
(40001-4FFFF). Les paramètres sont lus à l'aide de la
fonction 03HEX Lecture registres de maintien. Ils sont écrits
à l'aide de la fonction 6HEX Prédénir registre unique pour 1
registre (16 bits) et de la fonction 10HEX Prédénir registres
multiples pour 2 registres (32 bits). Les tailles lisibles vont
de 1 registre (16 bits) à 10 registres (20 caractères).
Page 94

Speed ref.CTW
Master-follower
130BA274.11
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bit
no.:
Intégration du système
VLT® AQUA Drive FC 202
Types de données non standard
Les types de données non standard sont des chaînes de
texte et sont stockés comme registres 4x (40001–4FFFF).
Valeur de réf.
programmée
1
Les paramètres sont lus à l'aide de la fonction 03HEX
Lecture registres de maintien et écrits à l'aide de la fonction
10HEX Prédénir registres multiples. Les tailles lisibles vont
33
de 1 registre (2 caractères) à 10 registres (20 caractères).
3.8.12 Prol de contrôle FC Drive
2
3
3.8.12.1 Mot de contrôle selon le prol FC
(paramétre 8-10 Prol de ctrl =
4
prol FC)
Tableau 3.44 Valeurs de référence
Paramètre Bit 01 Bit 00
Paramétre 3-10
Réf.prédénie
[0]
Paramétre 3-10
Réf.prédénie
[1]
Paramétre 3-10
Réf.prédénie
[2]
Paramétre 3-10
Réf.prédénie
[3]
0 0
0 1
1 0
1 1
AVIS!
Faire une sélection au par. paramétre 8-56 Sélect. réf. par
Illustration 3.55 Mot contrôle
Bit Valeur de bit = 0 Valeur de bit = 1
00 Valeur de référence Sélection externe lsb
01 Valeur de référence Sélection externe msb
02 Freinage CC Rampe
03 Roue libre Pas de roue libre
04 Arrêt rapide Rampe
05 Maintien fréquence de
sortie
06 Arrêt rampe Démarrage
07 Pas de fonction Reset
08 Pas de fonction Jogging
09 Rampe 1 Rampe 2
10 Données non valides Données valides
11 Pas de fonction Relais 01 actif
12 Pas de fonction Relais 02 actif
13 Conguration des
paramètres
14 Conguration des
paramètres
15 Pas de fonction Inversion
Tableau 3.43 Bits du mot de contrôle
Utiliser rampe
Sélection lsb
Sélection msb
Signication des bits de contrôle
contrôle 00/01
Utiliser les bits 00 et 01 pour choisir entre les quatre
valeurs de référence préprogrammées au par.
paramétre 3-10 Réf.prédénie selon le Tableau 3.44 :
défaut an d'établir la liaison entre les bits 00/01 et la
fonction correspondante des entrées digitales.
Bit 02, Freinage CC
Bit 02 = 0 entraîne le freinage CC et l'arrêt. Le courant de
freinage et la durée sont dénis aux par.
paramétre 2-01 Courant frein CC et paramétre 2-02 Temps
frein CC.
Bit 02 = 1 mène à la rampe.
Bit 03, Roue libre
Bit 03 = 0 : le variateur de fréquence lâche immédiatement
le moteur (les transistors de sortie s'éteignent) et il s'arrête
en roue libre.
Bit 03 = 1 : le variateur de fréquence lance le moteur si les
autres conditions de démarrage sont remplies.
Faire une sélection au par. paramétre 8-50 Sélect.roue libre
an d'établir la liaison entre le bit 03 et la fonction correspondante d'une entrée digitale.
Bit 04, Arrêt rapide
Bit 04 = 0 : entraîne la vitesse du moteur à suivre la rampe
de décélération rapide jusqu'à l'arrêt (réglé au par.
paramétre 3-81 Temps rampe arrêt rapide).
Bit 05, Maintien fréquence de sortie
Bit 05 = 0 : la fréquence de sortie actuelle (en Hz) est
gelée. Modier la fréquence de sortie gelée uniquement à
l'aide des entrées digitales (paramétre 5-10 E.digit.born.18 à
paramétre 5-15 E.digit.born.33) programmées sur Accélération et Décélération.
92 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 95

Output freq.STW
Bit
no.:
Follower-master
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BA273.11
Intégration du système Manuel de conguration
AVIS!
Si la fonction Gel sortie est active, le variateur de
fréquence ne peut s'arrêter qu'en procédant comme
suit :
Bit 06, Arrêt/marche rampe
Bit 06 = 0 : entraîne l'arrêt, la vitesse du moteur suit la
rampe de décélération jusqu'à l'arrêt via le paramètre de
rampe de décélération sélectionné.
Bit 06 = 1 : permet au variateur de fréquence de lancer le
moteur si les autres conditions de démarrage sont
remplies.
Faire une sélection au par. paramétre 8-53 Sélect.dém.
d'établir la liaison entre le bit 06 Arrêt/marche rampe et la
fonction correspondante d'une entrée digitale.
Bit 07, Reset
Bit 07 = 0 : pas de reset.
Bit 07 = 1 : remet à zéro un état de défaut. Le reset est
activé au début du signal, lors du changement de 0
logique pour 1 logique, par exemple.
Bit 08, Jogging
Bit 08 = 1 : la fréquence de sortie est déterminée par le
par. paramétre 3-19 Fréq.Jog. [tr/min].
Bit 09, Choix de rampe 1/2
Bit 09 = 0 : la rampe 1 est active (paramétre 3-41 Temps
d'accél. rampe 1 à paramétre 3-42 Temps décél. rampe 1).
Bit 09 = 1 : la rampe 2 (paramétre 3-51 Temps d'accél.
rampe 2 à paramétre 3-52 Temps décél. rampe 2) est active.
Bit 10, Données non valides/valides
Indique au variateur de fréquence dans quelle mesure le
mot de contrôle doit être utilisé ou ignoré.
Bit 10 = 0 : le mot de contrôle est ignoré.
Bit 10 = 1 : le mot de contrôle est utilisé. Cette fonction
est pertinente car le télégramme contient toujours le mot
de contrôle, indépendamment du type de télégramme.
Désactiver le mot de contrôle si l'on ne souhaite pas
l'utiliser pour mettre des paramètres à jour ou les lire.
Bit 11, Relais 01
Bit 11 = 0 : le relais n'est pas activé.
Bit 11 = 1 : le relais 01 est activé à condition d'avoir
sélectionné Mot contrôle bit 11 au par.
paramétre 5-40 Fonction relais.
Bit 12, Relais 04
Bit 12 = 0 : le relais 04 n'est pas activé.
Bit 12 = 1 : le relais 04 est activé à condition d'avoir
sélectionné Mot contrôle bit 12 au par.
paramétre 5-40 Fonction relais.
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 93
Bit 03, Arrêt en roue libre
•
Bit 02, Freinage CC
•
Entrée digitale (paramétre 5-10 E.digit.born.18 à
•
paramétre 5-15 E.digit.born.33) programmée sur
Freinage CC, Arrêt roue libre ou Reset et Arrêt
roue libre.
an
Bits 13/14, Sélection de process
Utiliser les bits 13 et 14 pour choisir entre les quatre
process selon le Tableau 3.45
Process Bit 14 Bit 13
1 0 0
2 0 1
3 1 0
4 1 1
Tableau 3.45 Spécication des process de menu
Cette fonction n'est possible que lorsque [9] Multi process
est sélectionné au par. paramétre 0-10 Process actuel.
Faire une sélection au par. paramétre 8-55 Sélect.proc. an
d'établir la liaison entre les bits 13/14 et la fonction correspondante des entrées digitales.
Bit 15 Inverse
Bit 15 = 0 : pas d'inversion.
Bit 15 = 1 : Inversion. Dans le réglage par défaut,
l'inversion est réglée sur Entrée dig. au par.
paramétre 8-54 Sélect.Invers.. Le bit 15 n'implique une
inversion qu'à condition d'avoir sélectionné Communication
série, Logique ou Logique et.
3.8.12.2
Mot d'état selon le prol FC (STW)
(paramétre 8-10 Prol de ctrl= prol
FC)
Illustration 3.56 Mot d'état
3 3
Page 96

Intégration du système
VLT® AQUA Drive FC 202
Bit Bit = 0 Bit = 1
00 Commande non prête Commande prête
01 Var. pas prêt Variateur prêt
02 Roue libre Activé (démarrage
possible)
03 Pas d'erreur Alarme
33
04 Pas d'erreur Erreur (pas de déclen-
chement)
05 Réservé 06 Pas d'erreur Alarme verrouillée
07 Absence d'avertissement Avertissement
08 Vitesse ≠ référence Vitesse = référence
09 Commande locale Contrôle par bus
10 Hors limite fréquence Limite de fréquence OK
11 Inactif Fonctionne
12 Variateur OK Arrêté, démarrage
automatique
13 Tension OK Tension dépassée
14 Couple OK Couple dépassé
15 Temporisation OK Temporisation dépassée
Tableau 3.46 Bits de mot d'état
Explication des bits d'état
Bit 00, Commande non prête/prête
Bit 00 = 0 : le variateur de fréquence disjoncte.
Bit 00 = 1 : le variateur de fréquence est prêt à fonctionner
mais l'étage de puissance n'est pas forcément alimenté (en
cas d'alimentation 24 V externe de la commande).
Bit 01, Variateur prêt
Bit 01 = 1 : le variateur de fréquence est prêt à fonctionner
mais un ordre de roue libre est actif via les entrées
digitales ou la communication série.
Bit 02, Arrêt roue libre
Bit 02 = 0 : le variateur de fréquence lâche le moteur.
Bit 02 = 1 : le variateur de fréquence démarre le moteur à
l'aide d'un ordre de démarrage.
Bit 03, Pas d'erreur/alarme
Bit 03 = 0 : le variateur de fréquence n'est pas en état de
panne.
Bit 03 = 1 : le variateur de fréquence disjoncte. Pour
rétablir le fonctionnement, appuyer sur [Reset].
Bit 04, Pas d'erreur/erreur (pas de déclenchement)
Bit 04 = 0 : le variateur de fréquence n'est pas en état de
panne.
Bit 04 = 1 : le variateur de fréquence indique une erreur
mais ne disjoncte pas.
Bit 05, Inutilisé
Le bit 05 du mot d'état n'est pas utilisé.
Bit 06, Pas d'erreur/alarme verrouillée
Bit 06 = 0 : le variateur de fréquence n'est pas en état de
Bit 07, Absence d'avertissement/avertissement
Bit 07 = 0 : Il n'y a pas d'avertissements.
Bit 07 = 1 : un avertissement s'est produit.
Bit 08, Vitesse ≠ référence/vitesse = référence
Bit 08 = 0 : le moteur tourne mais la vitesse actuelle est
diérente de la référence de vitesse réglée. Ceci peut par
exemple être le cas au moment des accélérations et
décélérations de rampe en cas d'arrêt/marche.
Bit 08 = 1 : la vitesse du moteur est égale à la référence de
vitesse réglée.
Bit 09, Commande locale/contrôle par bus
Bit 09 = 0 : [Stop/Reset] est activé sur l'unité de
commande ou Commande locale est sélectionné au par.
paramétre 3-13 Type référence. Le contrôle via la communication série est impossible.
Bit 09 = 1 : il est possible de commander le variateur de
fréquence via le bus de terrain/la communication série.
Bit 10, Hors limite fréquence
Bit 10 = 0 : la fréquence de sortie a atteint la valeur réglée
au par. paramétre 4-11 Vit. mot., limite infér. [tr/min] ou
paramétre 4-13 Vit.mot., limite supér. [tr/min].
Bit 10 = 1 : la fréquence de sortie gure dans les limites
mentionnées.
Bit 11, Pas d'exploitation/exploitation
Bit 11 = 0 : le moteur ne fonctionne pas.
Bit 11 = 1 : le variateur de fréquence a reçu un signal de
démarrage ou la fréquence de sortie est supérieure à 0 Hz.
Bit 12, Variateur OK/arrêté, démarrage auto
Bit 12 = 0 : l'onduleur n'est pas soumis à une surtempérature temporaire.
Bit 12 = 1 : l'onduleur est arrêté à cause d'une surtempérature mais l'unité n'a pas disjoncté et poursuit son
fonctionnement dès que la surtempérature disparaît.
Bit 13, Tension OK/limite dépassée
Bit 13 = 0 : absence d'avertissement de tension.
Bit 13 = 1 : la tension CC du circuit intermédiaire du
variateur de fréquence est trop faible ou trop élevée.
Bit 14, Couple OK/limite dépassée
Bit 14 = 0 : le courant du moteur est inférieur à la limite de
couple sélectionnée au par. paramétre 4-18 Limite courant.
Bit 14 = 1 : la limite de couple du par.
paramétre 4-18 Limite courant a été dépassée.
Bit 15, Temporisation OK/limite dépassée
Bit 15 = 0 : les temporisations de protection thermique du
moteur et de protection thermique n'ont pas dépassé 100
%.
Bit 15 = 1 : l'une des temporisations a dépassé 100 %.
Tous les bits du STW sont réglés sur 0 si la connexion
entre l'option Interbus et le variateur de fréquence est
perdue ou si un problème de communication interne est
survenu.
panne.
Bit 06 = 1 : le variateur de fréquence a disjoncté et est
verrouillé.
94 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 97

Actual output
freq.
STW
Follower-master
Speed ref.CTW
Master-follower
16bit
130BA276.11
Reverse Forward
Par.3-00 set to
(1) -max- +max
Max reference Max reference
Par.3-00 set to
(0) min-max
Max reference
Forward
Min reference
100%
(4000hex)
-100%
(C000hex)
0%
(0hex)
Par.3-03 0 Par.3-03
Par.3-03
(4000hex)(0hex)
0% 100%
Par.3-02
130BA277.10
Intégration du système
Manuel de conguration
3.8.12.3 Valeur de référence de vitesse du
bus
Bit Bit = 0 Bit = 1
00 O 1 On 1
01 O 2 On 2
La vitesse de référence est transmise au variateur de
fréquence par une valeur relative en %. La valeur est
transmise sous forme d'un mot de 16 bits ; en nombres
entiers (0-32767), la valeur 16384 (4000 hexadécimal)
correspond à 100 %. Les nombres négatifs sont exprimés
en complément de 2. La fréquence de sortie réelle (MAV)
est mise à l'échelle de la même façon que la référence du
bus.
02 O 3 On 3
03 Roue libre Pas de roue libre
04 Arrêt rapide Rampe
05 Maintien fréquence de sortie Utiliser rampe
06 Arrêt rampe Start
07 Pas de fonction Reset
08 Jogging 1 OFF Jogging 1 ON
09 Jogging 2 OFF Jogging 2 ON
10 Données non valides Données valides
11 Pas de fonction Ralentis.
12 Pas de fonction Rattrapage
13 Conguration des
Sélection lsb
paramètres
14 Conguration des
Sélection msb
paramètres
Illustration 3.57 Fréquence de sortie réelle (MAV)
15 Pas de fonction Inversion
Tableau 3.47 Bits du mot de contrôle
La référence et la MAV sont toujours mises à l'échelle de la
façon suivante :
Signication des bits de contrôle
contrôle 00, OFF 1/ON 1
La rampe normale s'arrête via les temps de la rampe en
cours de sélection.
Bit 00 = 0 implique l'arrêt et l'activation du relais de sortie
1 ou 2 si la fréquence de sortie est de 0 Hz et si [Relais
123] est sélectionné au par. paramétre 5-40 Fonction relais.
Bit 0 = 1
signie que le variateur de fréquence est en État
1 : Commutation sur inhibée.
Bit 01, OFF 2/ON 2
Arrêt en roue libre
Bit 01 = 0 : arrêt en roue libre et activation du relais de
Illustration 3.58 Référence et MAV
sortie 1 ou 2 si la fréquence de sortie est de 0 Hz et si
[Relais 123] a été sélectionné au par.
paramétre 5-40 Fonction relais.
3.8.12.4
Mot de contrôle selon le Prol
PROFIdrive (CTW)
Bit 02, OFF 3/ON 3
Arrêt rapide utilisant le temps de rampe du
paramétre 3-81 Temps rampe arrêt rapide. Bit 02 = 0 : arrêt
Le mot de contrôle est utilisé pour envoyer des
commandes à un esclave à partir d'un maître (p. ex. un
PC).
rapide et activation du relais de sortie 1 ou 2 si la
fréquence de sortie est de 0 Hz et si [Relais 123] a été
sélectionné au par. paramétre 5-40 Fonction relais.
Bit 02 = 1
signie que le variateur de fréquence est en
État 1 : Commutation sur inhibée.
Bit 03, Roue libre/pas de roue libre
Le bit d'arrêt en roue libre 03 = 0 génère un arrêt.
Lorsque le bit 03 = 1, le variateur de fréquence peut
démarrer si les autres conditions de démarrage sont
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 95
remplies.
3 3
Page 98

Intégration du système
VLT® AQUA Drive FC 202
AVIS!
La sélection dans le par. paramétre 8-50 Sélect.roue libre
détermine comment le bit 03 est lié à la fonction correspondante des entrées digitales.
33
Bit 04, Arrêt rapide/rampe
Arrêt rapide utilisant le temps de rampe du
paramétre 3-81 Temps rampe arrêt rapide.
Bit 04 = 0 : un arrêt rapide se produit.
Lorsque le bit 04 = 1, le variateur de fréquence peut
démarrer si les autres conditions de démarrage sont
remplies.
AVIS!
La sélection au par. paramétre 8-51 Sélect. arrêt rapide
détermine comment le bit 04 est relié à la fonction
correspondante des entrées digitales.
Bit 05, Maintien fréquence sortie/utiliser rampe
Bit 05 = 0 : la fréquence de sortie actuelle peut être
maintenue même si la référence est modiée.
Lorsque le bit 05 = 1, le variateur de fréquence peut
assurer à nouveau sa fonction de réglage ; le fonctionnement s'eectue selon la référence respective.
Bit 06, Arrêt/marche rampe
L'arrêt normal de rampe utilise les temps de la rampe
eective sélectionnée. En outre, activation du relais de
sortie 01 ou 04 si la fréquence de sortie est de 0 Hz et si
Relais 123 est sélectionné au par. paramétre 5-40 Fonction
relais.
Bit 06 = 0 entraîne un arrêt.
Bit 06 = 1
démarrer si les autres conditions de démarrage sont
remplies.
signie que le variateur de fréquence peut
AVIS!
La sélection au par. paramétre 8-53 Sélect.dém. détermine
comment le bit 06 est relié à la fonction correspondante
des entrées digitales.
Bit 07, Pas de fonction/réinitialisation
Réinitialisation après déconnexion.
Accuse réception de l'événement dans le tampon des
pannes.
Quand bit 07=0, aucun reset n'a lieu.
En cas de changement de pente du bit 07 à 1, une réinitialisation a lieu après la mise hors tension.
Bit 08, Jogging 1 OFF/ON
Activation de la vitesse prédénie au paramétre 8-90 Vitesse
Bus Jog 1. Jogging 1 est possible seulement si bit 04 =0 et
bit 00-03 =1.
Bit 09, Jogging 2 OFF/ON
Activation de la vitesse préprogrammée au par.
paramétre 8-91 Vitesse Bus Jog 2. Jogging 2 n'est possible
que si bit 04 = 0 et bit 00-03 = 1.
Bit 10, Données non valides/valides
S'utilise pour indiquer au variateur de fréquence dans
quelle mesure le mot de contrôle doit être utilisé ou
ignoré.
Bit 10 = 0 implique que le mot de contrôle est ignoré.
Bit 10 = 1 implique que le mot de contrôle est utilisé.
Cette fonction est pertinente du fait que le mot de
contrôle est toujours contenu dans le message quel que
soit le type de télégramme utilisé. On peut ainsi désactiver
le mot de contrôle s'il n'est pas utilisé pour mettre des
paramètres à jour ou les lire.
Bit 11, Pas de fonction/ralentissement
Sert à diminuer la référence de vitesse d’un montant égal à
la valeur gurant au par. paramétre 3-12 Rattrap/ralentiss.
Lorsque le bit 11 = 0, la référence n'est pas modiée.
Bit 11 = 1 : la référence est diminuée.
Bit 12, Pas de fonction/rattrapage
Sert à augmenter la référence de vitesse d’un montant
égal à la valeur gurant au par. paramétre 3-12 Rattrap/
ralentiss.
Lorsque le bit 12 = 0, la référence n'est pas modiée.
Bit 12 = 1 : la référence est augmentée.
Si les fonctions de ralentissement et d'accélération sont
activées (bits 11 et 12 = 1), le ralentissement a la priorité,
c'est-à-dire que la valeur de référence de la vitesse sera
diminuée.
Bits 13/14, Sélection de process
Les bits 13 et 14 sont utilisés pour choisir entre les 4
congurations de paramètres selon le Tableau 3.48 :
Cette fonction n'est possible que lorsque [9] Multi process
est sélectionné au par. paramétre 0-10 Process actuel. La
sélection au par. paramétre 8-55 Sélect.proc. détermine
comment les bits 13 et 14 sont reliés à la fonction correspondante des entrées digitales. Il est seulement possible
de changer le process en cours si les process ont été reliés
au par. paramétre 0-12 Ce réglage lié à.
Conguration Bit 13 Bit 14
1 0 0
2 1 0
3 0 1
4 1 1
Tableau 3.48 Sélection de process
Bit 15, Pas de fonction/inverse
Bit 15 = 0 implique une absence d'inversion.
Bit 15 = 1 implique une inversion.
AVIS!
Dans le réglage d'usine, l'inversion est réglée sur Entrée
dig. au par. paramétre 8-54 Sélect.Invers..
96 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
Page 99

Intégration du système
Manuel de conguration
AVIS!
Le bit 15 n'implique une inversion qu'à condition d'avoir
sélectionné Communication série, Logique ou Logique et.
3.8.12.5 Mot d'état selon le Prol
PROFIdrive (STW)
Le mot d'état sert à communiquer l'état d'un esclave à un
maître (par exemple un PC).
Bit Bit = 0 Bit = 1
00 Commande non prête Commande prête
01 Var. pas prêt Variateur prêt
02 Roue libre Activé (démarrage possible)
03 Pas d'erreur Alarme
04 OFF 2 ON 2
05 OFF 3 ON 3
06 Démarrage possible Démarrage impossible
07 Absence d'avertis-
sement
08
09 Commande locale Contrôle par bus
10 Hors limite fréquence Limite de fréquence OK
11 Inactif Fonctionne
12 Variateur OK Arrêté, démarrage
13 Tension OK Tension dépassée
14 Couple OK Couple dépassé
15 Temporisation OK Temporisation dépassée
Tableau 3.49 Bits de mot d'état
Vitesse ≠ référence
Explication des bits d'état
Bit 00, Commande non prête/prête
Lorsque le bit 00 = 0, le bit 00, 01 ou 02 du mot de
contrôle est sur 0 (OFF 1, OFF 2 ou OFF 3) - ou le variateur
de fréquence est déconnecté (arrêt).
Lorsque le bit 00 = 1, la commande du variateur de
fréquence est prête, mais on ne dispose pas obligatoirement d'une alimentation vers le bloc présent (dans le cas
d'une alimentation externe de 24 V du système de
contrôle).
Bit 01, Variateur pas prêt/prêt
Même
signication que le bit 00 ; toutefois, on dispose ici
d'une alimentation vers le bloc de puissance. Le variateur
de fréquence est prêt lorsqu'il reçoit les signaux de
démarrage requis.
Bit 02, Roue libre/activer
Lorsque le bit 02 = 0, le bit 00, 01 ou 02 du mot de
contrôle est sur 0 (OFF 1, OFF 2 ou OFF 3 ou roue libre) ou le variateur de fréquence est déconnecté (arrêt).
Lorsque le bit 02 = 1, le bit 00, 01 ou 02 du mot de
contrôle est sur 1 ; le variateur de fréquence ne s'est pas
arrêté.
Avertissement
Vitesse = référence
automatique
Bit 03, Pas d'erreur/alarme
Lorsque le bit 03 = 0, le variateur de fréquence n'est pas
en état d'erreur.
Lorsque le bit 03 = 1, le variateur de fréquence s'est arrêté
et requiert un signal de réinitialisation pour pouvoir
redémarrer.
Bit 04, ON 2/OFF 2
Bit 04 = 0 : le bit 01 du mot de contrôle est sur « 0 ».
Bit 04 = 1 : le bit 01 du mot de contrôle est sur 1.
Bit 05, ON 3/OFF 3
Bit 05 = 0 : le bit 02 du mot de contrôle est sur « 0 ».
Bit 05 = 1 : le bit 02 du mot de contrôle est sur 1.
Bit 06, Démarrage possible/impossible
Si [1] PROFIdrive a été sélectionné au par.
paramétre 8-10
Prol mot contrôle, le bit 06 est sur 1 après
un acquittement de déconnexion, après activation de OFF2
et OFF3 et après enclenchement de la tension de réseau.
Démarrage impossible est réinitialisé, avec le bit 00 du mot
de contrôle réglé sur 0 et les bits 01, 02 et 10 réglés sur 1.
Bit 07, Absence d'avertissement/avertissement
Bit 07 = 0 signie qu'il n'y a pas d'avertissements.
Bit 07 = 1 signie l'apparition d'un avertissement.
Bit 08, Vitesse ≠ référence/vitesse = référence
Bit 08 = 0 signie que la vitesse eective du moteur dévie
de la référence de vitesse dénie. Cela peut être par
exemple le cas si la vitesse a été modiée au démarrage/à
l'arrêt par la rampe d'accélération/de décélération.
Bit 08 = 1 signie que la vitesse eective du moteur
correspond à la référence de vitesse dénie.
Bit 09, Exploitation locale/contrôle du bus
Bit 09 = 0 indique que le variateur de fréquence a été
arrêté au moyen de la touche [Stop] du LCP ou que [Mode
hand/auto] ou [Local] a été sélectionné au par.
paramétre 3-13 Type référence.
Bit 09 = 1 indique que le variateur de fréquence est
commandé par l'interface série.
Bit 10, Hors limite fréquence/limite de fréquence OK
Lorsque le bit 10 = 0, cela indique que la fréquence de
sortie se trouve en dehors des limites dénies aux par.
paramétre 4-52 Avertis. vitesse basse et
paramétre 4-53 Avertis. vitesse haute.
Bit 10 = 1 indique que la fréquence de sortie se trouve
dans les limites mentionnées.
Bit 11, Pas d'exploitation/exploitation
Bit 11 = 0 indique que le moteur ne tourne pas.
Bit 11 = 1 indique que le variateur de fréquence dispose
d'un signal de démarrage, ou que la fréquence de sortie
est supérieure à 0 Hz.
Bit 12, Variateur OK/arrêté, démarrage auto
Bit 12 = 0, l'onduleur n'est soumis à aucune surcharge
temporaire.
3 3
MG20N604 Danfoss A/S © 09/2014 Tous droits réservés. 97
Page 100
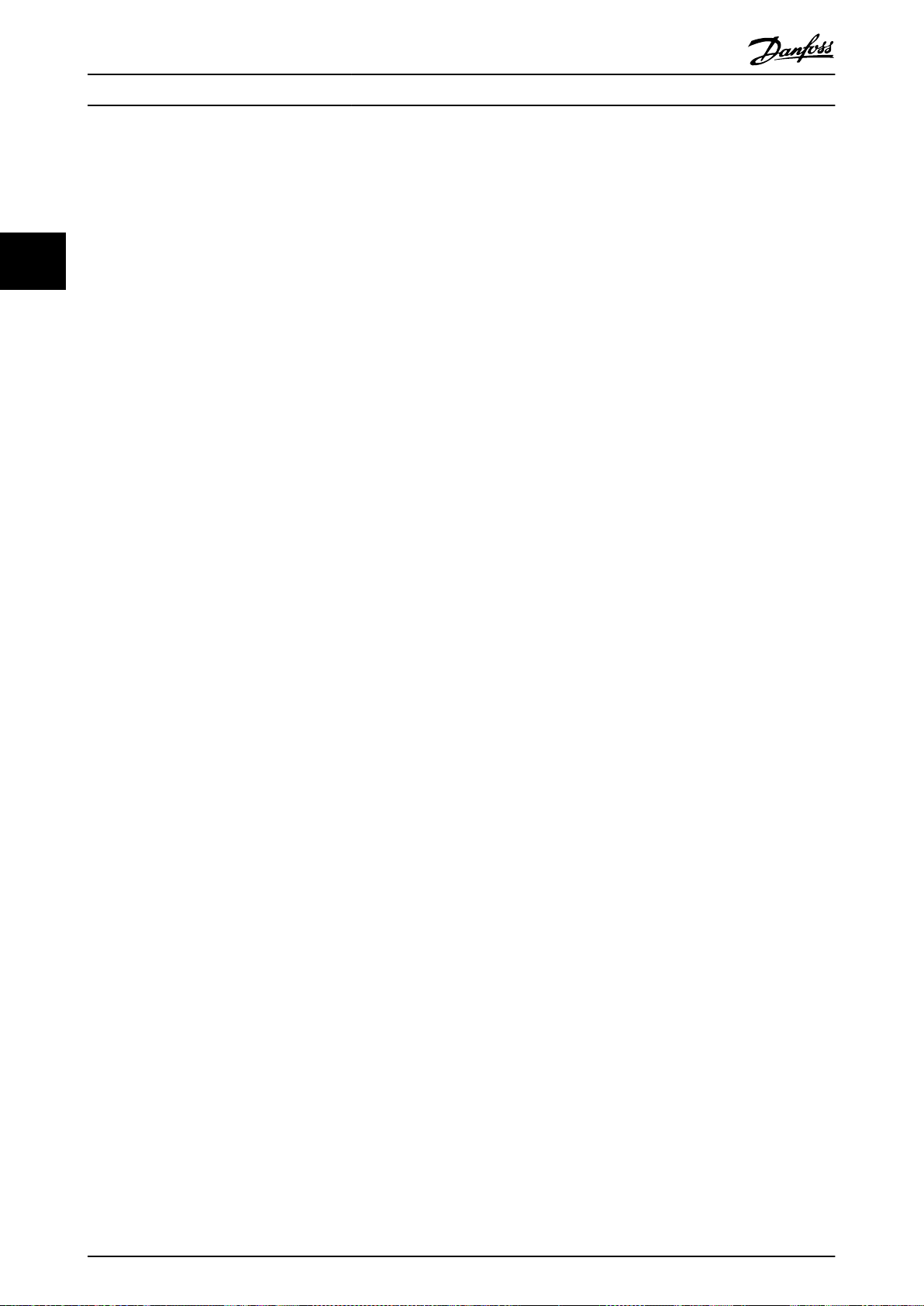
Intégration du système
Bit 12 = 1 indique que l'onduleur s'est arrêté en raison
d'une surcharge. Toutefois, le variateur de fréquence ne
s'est pas déconnecté (avec mise en défaut) et redémarre
dès la disparition de la surcharge.
Bit 13, Tension OK/tension dépassée
33
Bit 13 = 0 indique que les limites de tension du variateur
de fréquence ne sont pas dépassées.
Bit 13 = 1 indique que la tension continue dans le circuit
intermédiaire du variateur de fréquence est trop faible ou
trop élevée.
Bit 14, Couple OK/couple dépassé
Bit 14 = 0 signie que le couple du moteur est inférieur à
la limite sélectionnée aux par. paramétre 4-16 Mode moteur
limite couple et paramétre 4-17 Mode générateur limite
couple.
Bit 14 = 1 : la limite du couple sélectionnée aux par.
paramétre 4-16 Mode moteur limite couple et
paramétre 4-17 Mode générateur limite couple est dépassée.
Bit 15, Temporisation OK/temporisation dépassée
Bit 15 = 0 indique que les temporisations de la protection
thermique du moteur et de la protection thermique du
variateur de fréquence n'ont pas dépassé 100 %.
Bit 15 = 1 indique que l'une des temporisations a dépassé
100 %.
VLT® AQUA Drive FC 202
98 Danfoss A/S © 09/2014 Tous droits réservés. MG20N604
 Loading...
Loading...