

Page 1
MAKING MODERN LIVING POSSIBLE
Instruções de Utilização
FCD 300
Page 2
Guia de Design do VLT® Decentral FCD 300 Índice
Índice
1 O Conceito de Descentralização
Introdução 5
Benefícios do Projeto Descentralizado 6
Exemplos de Aplicações 13
Guia de Design do Produto 16
Formulário de Pedido 21
Ferramentas de Software de PC 22
Acessórios 22
Comunicação 24
Boas Práticas de Instalação 27
Reparo dos Produtos Descentralizados Danfoss 30
2 Introdução ao FCD 300
Segurança 32
Advertência de Alta Tensão 32
Estas regras dizem respeito à sua segurança 32
Advertência contra Partida Acidental 32
Tecnologia 33
5
31
Certificação CE 35
3 Instalação
Dimensões Mecânicas 39
Dimensões Mecânicas, Montagem do Motor 39
Dimensões Mecânicas, Montagem Independente 39
Informações gerais sobre Instalação Elétrica 42
Componentes eletrônicos adquiridos sem caixa de instalação 43
Instalação Elétrica Correta para EMC 45
Aterramento de Cabos de Controle Blindados/Encapados Metalicamente 47
Diagrama 48
Interruptores de RFI J1, J2 48
Instalação Elétrica 49
Localização dos Terminais 49
Conexão de Rede Elétrica 50
Pré-fusíveis 50
Conexão do Motor 51
Sentido da Rotação do Motor 51
39
Conexão de Rede e do Motor com a Chave de Serviço 52
Conexão do Plugue do Motor HAN 10E para T73 52
Conexão de Motores em Paralelo 52
Cabos do Motor 53
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
1
Page 3
Índice Guia de Design do VLT® Decentral FCD 300
Proteção Térmica do Motor 53
Resistor de freio 53
Controle do Freio Mecânico 54
Instalação Elétrica, Cabos de Controle 54
Conexão de Sensores a Plugues M12 do T63 e T73 55
Instalação Elétrica, Terminais de Controle 55
Comunicação com PC 56
Conexão de Relés 56
Exemplos de Conexão 57
4 Programação
Unidade de Controle LCP 63
A Unidade de Controle do LCP 2, opcional 63
Seleção de Parâmetro 67
Grupo de Parâmetros 0-** Operação e Display 69
Configuração do Setup 69
Grupo de Parâmetros 1-** Carga e Motor 76
Frenagem CC 80
Grupo de Parâmetros 2-** Referências e Limites 84
Tratamento das Referências 84
Função de Referência 87
Grupo de Parâmetros 3-** Entradas e Saídas 91
Grupo de Parâmetros 4-** Funções Especiais 98
Funções do PID 100
Tratamento do Feedback 102
Comunicação Serial 106
Control Word de acordo com o protocolo Danfoss FC 111
63
Status Word De acordo com o Perfil do FC 113
FC de E/S Rápida - Perfil 114
Control Word segundo o Perfil do Fieldbus 114
Status Word De acordo com o Protocolo Profidrive 116
Grupo de Parâmetros 5-** Comunicação serial 118
Grupo de Parâmetros 6-** Funções Técnicas 124
5 Tudo sobre o FCD 300
Resistores de Freio 127
Frenagem Dinâmica 127
Resistor Interno do Freio 131
Condições Especiais 134
Isolação galvânica (PELV) 134
Corrente de Fuga para o Terra e Relés RCD 134
Condições de Operação Extremas 135
2
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
127
Page 4
Guia de Design do VLT® Decentral FCD 300 Índice
dU/dt no Motor 135
Chaveamento na Entrada 136
Ruído Acústico 136
Frequência de Chaveamento Dependente de Temperatura 136
Derating da Pressão Atmosférica 137
Derating para Funcionamento em Baixa Velocidade 137
Comprimentos doCabo de Motor 137
Vibração e Choque 137
Umidade do Ar 137
Padrão UL 137
Eficiência 138
Interferência/Harmônicas da alimentação de rede elétrica 138
Fator de Potência 139
Resultados do Teste de Emissão de acordo com Padrões Genéricos e PDS Padrão
de Produtos 139
Resultado do Teste de Imunidade de acordo com os Padrões Genéricos, Padrões
de Produtos PDS e Padrões Básicos 139
Ambientes Agressivos 140
Limpeza 140
Mensagens de Status 143
Mensagens de Advertências/Alarme 143
Warning Words, Status Words Estendidas e Alarm Words 145
Dados Técnicos Gerais 147
Literatura Disponível 151
Configuração de Fábrica 152
Índice
156
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
3
Page 5

1
1 O Conceito de Descentralização Guia de Design do VLT® Decentral FCD 300
4
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 6

Guia de Design do VLT® Decentral FCD 300 1 O Conceito de Descentralização
1 O Conceito de Descentralização
1
1.1 Introdução
A Danfoss foi a primeira empresa no mundo a fabricar e fornecer conversores de frequência para controle de velocidade infinitamente variável de motores
CA trifásicos. Até então, os motores CA tinham de ser operados na velocidade determinada pela frequência da alimentação da rede elétrica.
A produção de conversores de frequência foi iniciada em 1968. O primeiro conversor de frequência também foi o primeiro drive descentralizado, uma
vez que foi posicionado próximo ao motor.
O primeiro conversor de frequência foi totalmente envolvido e preenchido com óleo de silicone para resfriamento, pois os semicondutores daquele tempo
eram bastante ineficientes. O projeto do gabinete metálico foi feito para montagem do drive diretamente na aplicação próximo ao motor. Temperatura,
água, agentes de limpeza, poeira e outros fatores ambientais também não eram problemas, mesmo em ambientes severos.
Semicondutores aprimorados ao longo das décadas seguintes. O resfriamento a ar demonstrou ser suficiente e o resfriamento a óleo foi abandonado.
Ao mesmo tempo, o uso de conversores de frequência cresceu de maneira significativa. Os PLCs se estabeleceram solidamente para controle de aplicações
avançadas e tornou-se prática comum instalar todos os conversores de frequência em um único gabinete e não em vários locais da fábrica.
Aprimoramento contínuo de semicondutores e tecnologias relacionadas - como a tecnologia fieldbus - agora novamente torna factível considerar a
instalação de drives próximos aos motores, obtendo os benefícios da instalação descentralizada sem as desvantagens dos primeiros conversores de
frequência preenchidos com óleo.
O desenvolvimento da automação no setor é baseado na capacidade de enviar e receber dados da aplicação necessários para controlar os processos.
Cada vez mais sensores são instalados e cada vez mais dados são enviados ao controle PLC central. Essa tendência depende do uso mais intenso de
sistemas fieldbus.
Fontes industriais geralmente declaram que até 30% de todas as instalações de drives serão descentralizadas dentro dos próximos anos e a tendência
de controle inteligente distribuído será incontestável à medida que cada vez mais componentes e aplicações forem desenvolvidos para instalação descentralizada.
Este livro é uma introdução geral aos recursos básicos das filosofias da instalação descentralizada para controles de motores e às diferenças do conceito
centralizado. Ele ajudará a escolher o conceito mais apropriado e servirá como guia ao longo do processo para selecionar os produtos adequados.
Finalmente, também foram incluídas informações amplas sobre os produtos descentralizados da Danfoss.
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
5
Page 7
1
1 O Conceito de Descentralização Guia de Design do VLT® Decentral FCD 300
1.2 Benefícios do Projeto Descentralizado
A seguir iremos nos concentrar em descrever a instalação descentralizada de conversores de frequência, denominada aqui de controles do motor.
Existem dois conceitos topológicos do layout das instalações de controle do motor em uma fábrica, denominados a seguir de "instalação centralizada" e
"instalação descentralizada". As duas topologias estão ilustradas na figura.
Em uma instalação centralizada:
- os controles do motor são posicionados em um local central
Em uma instalação descentralizada:
- os controles do motor são distribuídos pela fábrica, montados
próximos ou no motor que controlam
Descentralizada não significa
seu enorme tamanho agora pode ser reduzido graças aos projetos inovadores dos componentes que serão colocados de maneira descentralizada. Ainda haverá necessidade de gabinetes para distribuição de energia
e para inteligência global e existem áreas, particularmente no setor de
processos, com áreas como a proteção contra explosão, em que os gabinetes centralizados continuam a ser a solução preferida.
livre do gabinete de controle
, apenas que
Colocar os componentes eletrônicos avançados e confiáveis necessários
para assegurar operação suave, responsiva e econômica do motor próximo do motor- ou no motor - facilita a modularização e reduz drasticamente os custos de cabeamento e problemas de EMC. Outros benefícios:
Ilustração 1.1: Instalação centralizada x descentralizada
• Os espaçosos gabinetes de controle do motor em longas filas de painéis centralizados são eliminados
• Esforços reduzidos na construção e na instalação de longos cabos do motor blindados em que é necessária atenção especial nas terminações
de EMC
• A dissipação de calor dos componentes eletrônicos de potência muda do painel para a fábrica
• Elementos da máquina padronizados por modularização reduzem o tempo de projeto e o tempo até o mercado
• A colocação em operação é mais rápida e fácil
O controle descentralizado do motor está ganhando espaço rapidamente apesar das vantagens do conceito de controle centralizado:
• não há necessidade de espaço extra ao redor do motor ou próximo ao motor
• não há fiação de cabo de controle para a fábrica
• independência do ambiente da fábrica
1.2.1 Economias de Custo Direto
Os controles do motor nas instalações descentralizadas devem ser construídos de acordo com as condições severas das áreas de produção - especialmente
as condições encontradas nos setores de alimentos e bebidas, em que são necessárias lavagens frequentes. Isso obviamente aumenta o custo do drive.
Esse aumento será mais que compensado pela economia em gabinetes e cabos.
O potencial de economia de cabos é considerável, conforme demonstrado no exemplo a seguir.
6
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 8
Guia de Design do VLT® Decentral FCD 300 1 O Conceito de Descentralização
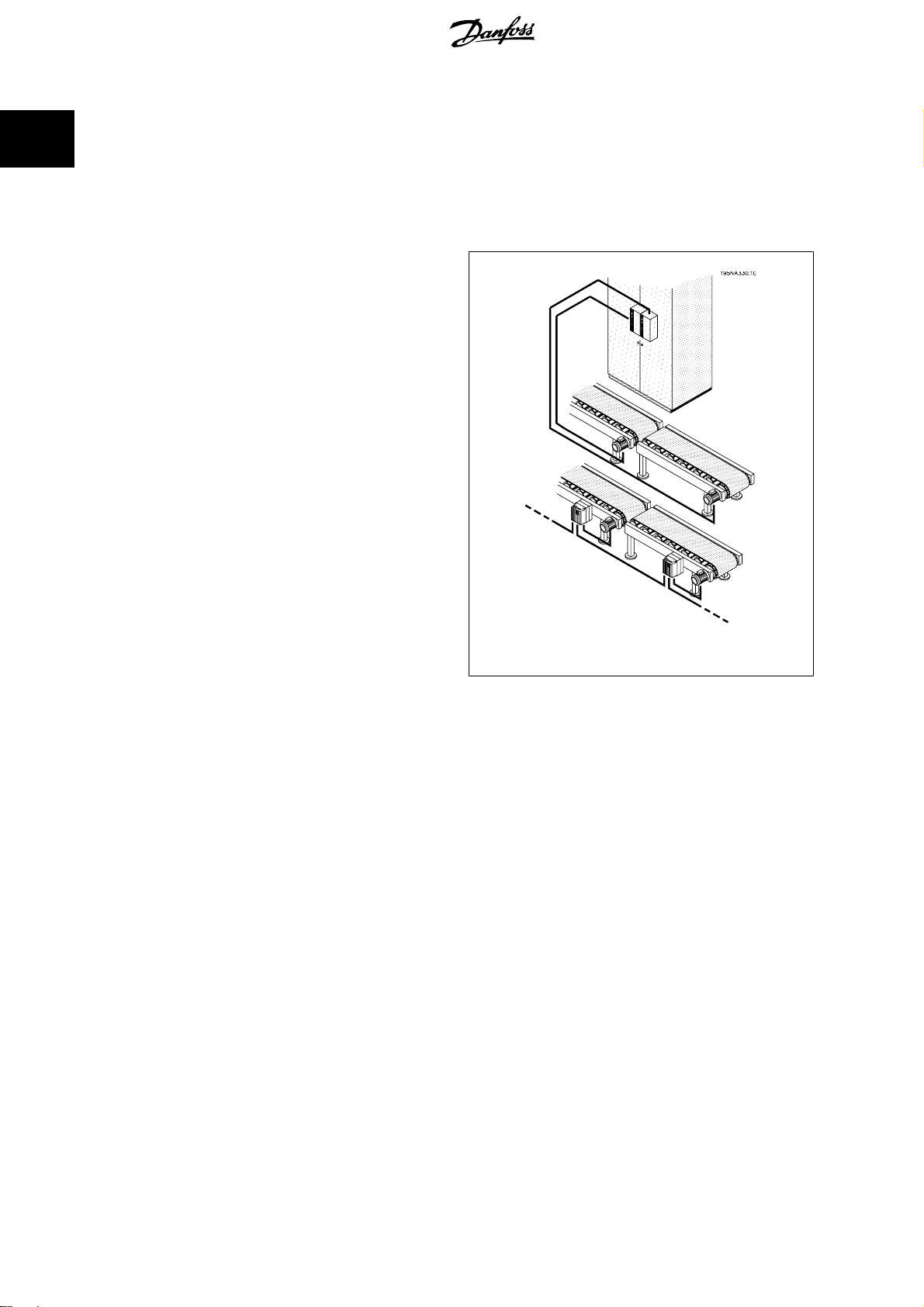
A figura ilustra uma instalação com motores distribuídos em diversas filas com vários motores em cada, conforme a situação, por exemplo, engarrafamento
paralelo ou fornos túneis no setor de Alimentos e Bebidas. Esse exemplo mostra a necessidade de cabos de energia dos drives centralizados até os
motores.
1
Ilustração 1.2: Instalação centralizada
Os drives são distribuídos equidistantes com a distância L entre cada drive e a distância h entre cada fila e também com uma distância h entre a localização
centralizada do gabinete/entrada de energia até a primeira fila. Existem n filas e N drives em cada fila.
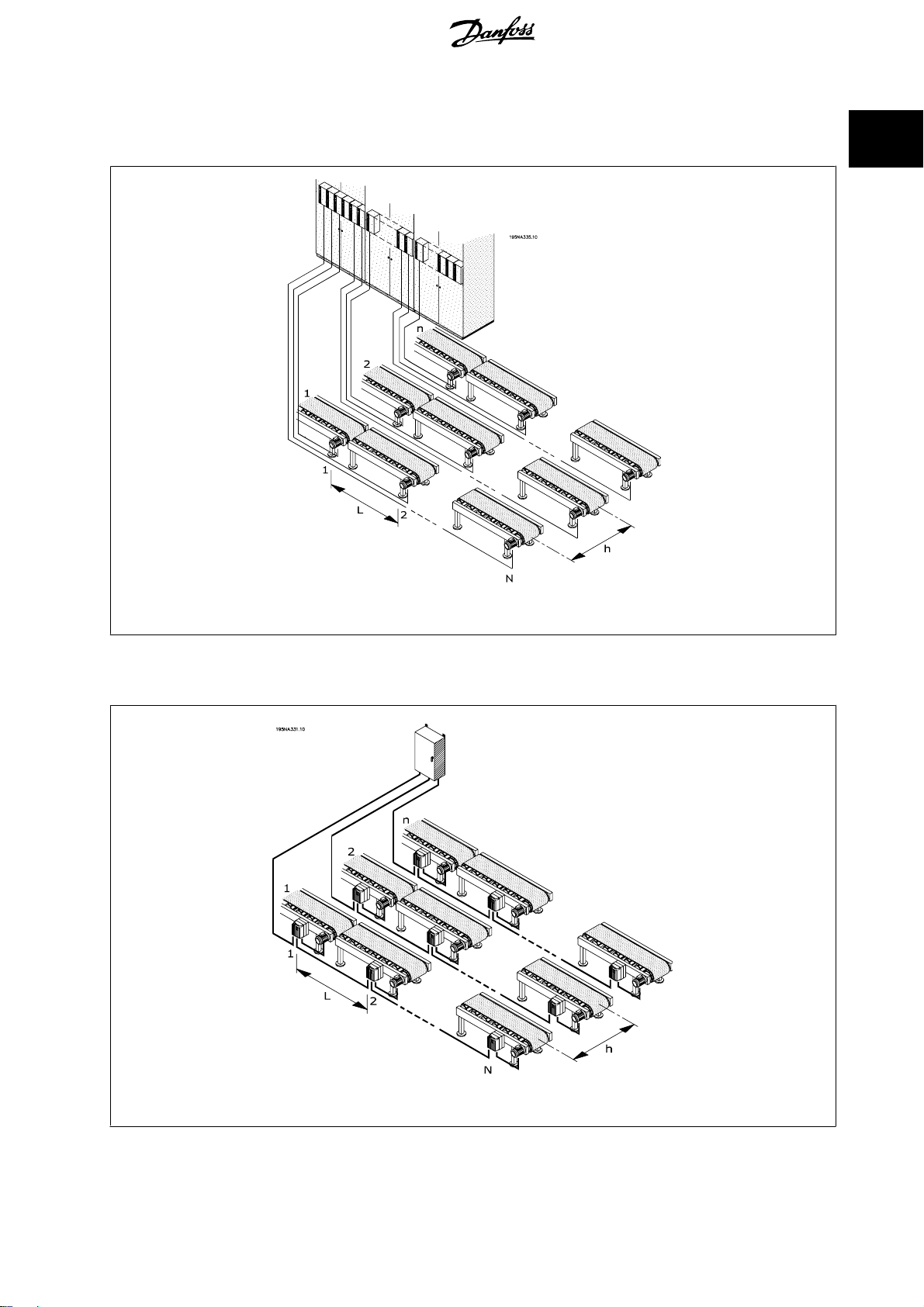
Ilustração 1.3: Instalação descentralizada
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
7
Page 9
1
1 O Conceito de Descentralização Guia de Design do VLT® Decentral FCD 300
A ilustração 1.4 mostra como o cabo de rede elétrica trifásica pode ser
distribuído com malha de energia de um motor (drive) para o seguinte.
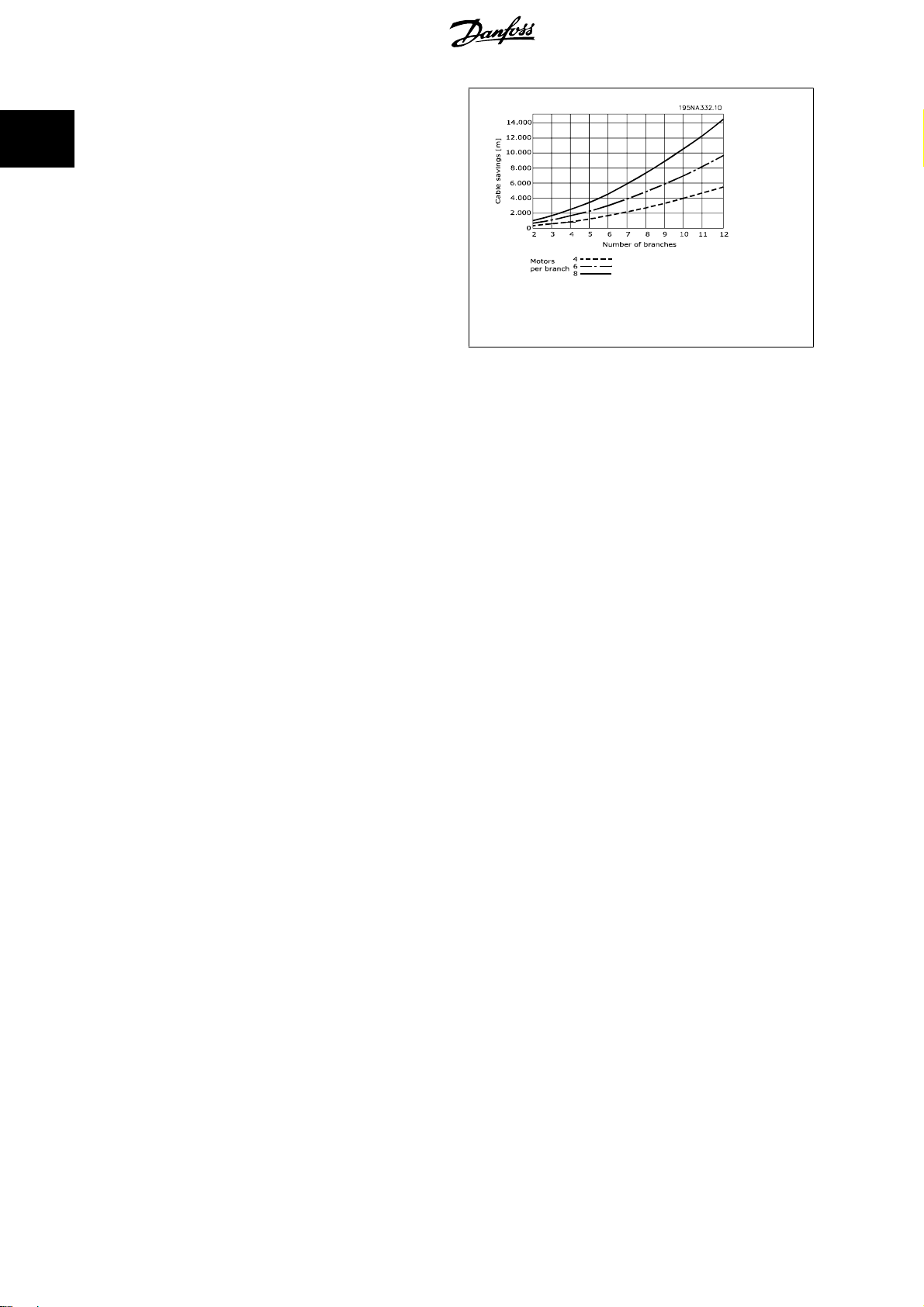
O potencial de economia do cabo é mostrado na ilustração xx. Dada uma
distância de 10 m entre cada motor e de 20 m entre cada linha, a economia de cabos em potencial como função do número de motores e número de linhas é demonstrada pelos números.
Ilustração 1.4: Potencial de economia de cabos em uma
instalação ilustrativa
O potencial de economia apenas no comprimento dos cabos de energia é substancial. A figura ilustra somente o potencial relativo aos cabos de energia.
Questões como cabos blindados/não blindados e dimensões dos cabos também contribuem para os benefícios das instalações descentralizadas.
Caso real
Cálculos em uma linha de engarrafamento típica e específica com 91 unidades de motores de 1,5 kW levando em consideração o dimensionamento dos
cabos, demonstrou o seguinte potencial de economia em cabos e terminações:
• As terminações de cabos são reduzidas de 455 para 352
• As terminações de cabos EMC são reduzidas de 364 para 182 usando controles de motor com chaves de serviço integradas
• O comprimento dos cabos de energia é reduzido de 6.468 m para 1.180 m, uma redução de 5.288 m, e são convertidos de cabos blindados
para cabos de instalação padrão
Para obter detalhes consulte o capítulo a seguir em
Boas práticas de instalação.
1.2.2 Economias em Projetos
Os usuários finais desejam adiar a decisão final do novo equipamento - e iniciar a produção o mais rápido possível assim que a decisão for tomada. O
tempo de restituição e o tempo até o mercado devem ser reduzidos. Isso comprime a fase de projeto e a fase de colocação em operação.
A modularização pode minimizar o tempo de avanço. Até mesmo fabricantes de grandes linhas ou equipamentos de produção utilizam a modularização
para reduzir o tempo de avanço. Até 40-50% do tempo total desde o projeto até a produção pode ser economizado.
O conceito de modularização é conhecido em equipamentos como PCs e carros. Módulos com funcionalidades e interfaces bem descritas são utilizados
nesses produtos. O mesmo conceito pode ser aplicado à fabricação, até mesmo limitadores físicos específicos exercem uma função.
8
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 10
Guia de Design do VLT® Decentral FCD 300 1 O Conceito de Descentralização
O equipamento de produção geralmente é construído a partir de diferentes blocos de construção, cada tipo empregado em vários locais na instalação.
Os exemplos incluem vários tipos de seções de uma esteira transportadora e maquinaria como misturadores, balanças, enchedores, paletizadores, máquinas de embalar etc.
1
Ilustração 1.5: Gabinete centralizado
Em uma máquina realmente modular, todos os elementos básicos são independentes, precisando apenas de eletricidade, água, ar comprimido ou algo
semelhante para funcionar.
Portanto, a modularização exige a distribuição de inteligência para as seções e módulos individuais.
Com certeza, as instalações centralizadas podem ser modularizadas, mas os controles do motor serão separados fisicamente do resto do módulo.
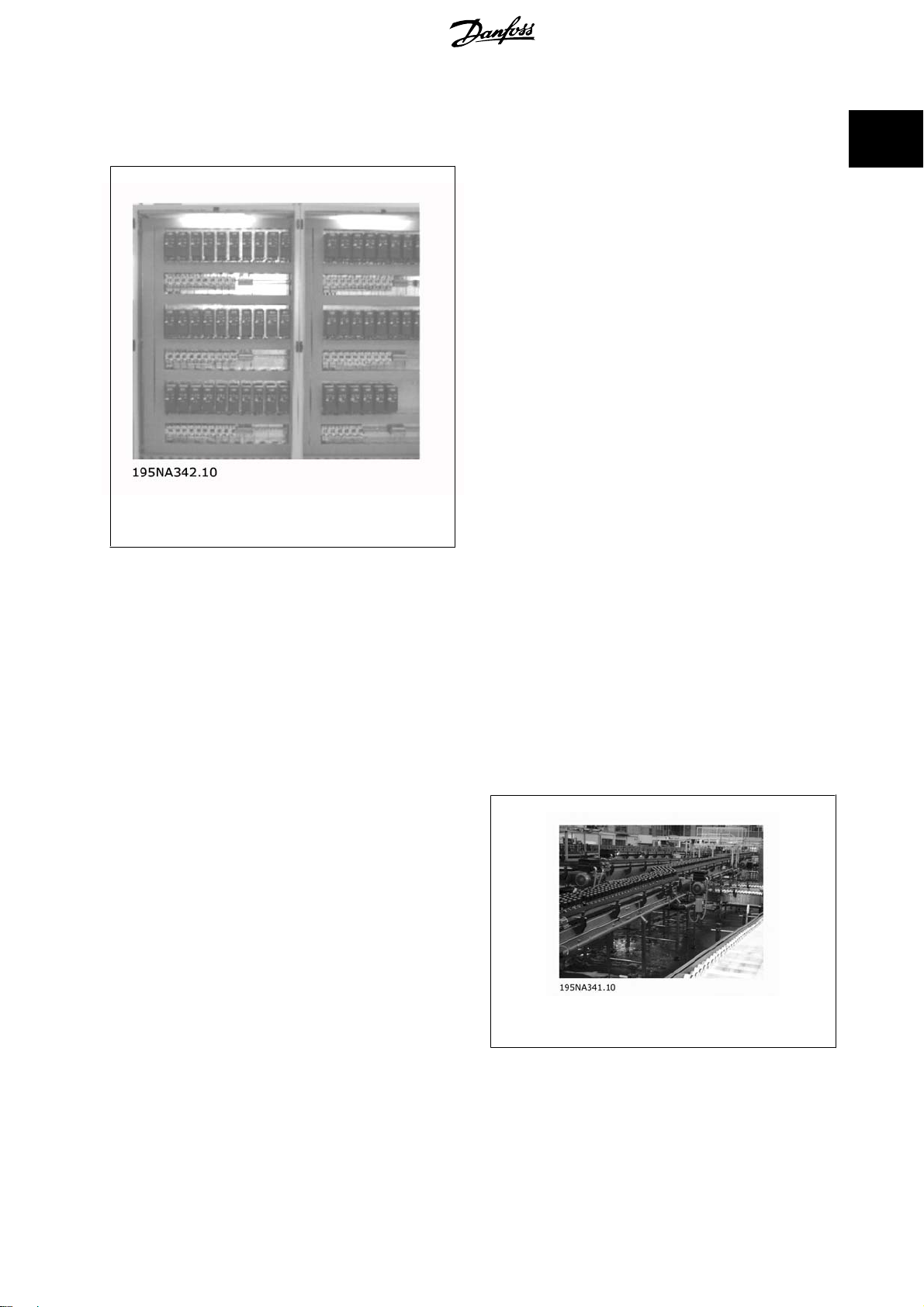
Menos gabinetes, resfriamento e leitos de cabos
Mais economias irão resultar de gabinetes menores, menos resfriamento de gabinetes e menos leitos de cabos. Os controles do motor geram calor e
geralmente são montados lado a lado devido ao espaço limitado, como mostrado na ilustração 1.5. Resfriamento forçado, portanto, é necessário para
remover o calor.
Menos Tempo para Colocação em Operação
O tempo gasto para colocar em operação no usuário final é drasticamente
reduzido com o uso de soluções descentralizadas - especialmente quando
a comunicação fieldbus é combinada com controles do motor descentralizados.
Uma cervejaria da Austrália instalou uma linha com 96 drives descentralizados da Danfoss conectados através do DeviceNet. A economia evitou
uma quantidade excessiva de tempo, pois a colocação em operação dos
drives de velocidade variável foi realizada em poucos dias. A cervejaria
estima uma economia que ultrapassa 100.000 dólares australianos em
comparação com a instalação centralizada tradicional.
Ilustração 1.6: Instalação descentralizada na cervejaria
Necessidade Mínima de Cabos Fieldbus Adicionais
As economias com cabos de energia não são prejudicadas pelo custo adicional dos cabos fieldbus de alto valor. Os cabos fieldbus serão estendidos em
uma instalação descentralizada, mas, uma vez que os cabos fieldbus serão distribuídos na fábrica de qualquer maneira para conectar as estações de E/
S remotas, a extensão será limitada. Os produtos descentralizados da Danfoss podem ser utilizados até mesmo como estações de E/S remotas para
conectar sensores ao fieldbus e reduzir ainda mais os custos.
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
9
Page 11

1 O Conceito de Descentralização Guia de Design do VLT® Decentral FCD 300
1.2.3 Inteligência Instalada e Pronta
1
A função da maquinaria e das aplicações normalmente é testada nos fornecedores. As máquinas são construídas, testadas, calibradas e desmontadas
para transporte.
O processo de reconstrução da aplicação no local de produção é consideravelmente simplificado ao ser transportada em módulos com controles de motor
integrados, pois a colocação de novos cabos e os testes são demorados e exigem pessoal habilitado. Usar instalações descentralizadas e prontas para
instalação reduz tempo e risco, uma vez que a fiação do motor, o controle e os sensores já estão posicionados e fixos durante o transporte. A necessidade
de técnicos altamente especializados é reduzida e a mão-de-obra local pode fazer a maior parte da instalação. Os custos de colocação em operação e os
recursos de OEM no local serão reduzidos.
1.2.4 EMC aprimorada
O ruído elétrico emitido é proporcional ao comprimento do cabo. O cabo muito curto - ou eliminado - entre o controle do motor e o motor nas instalações
descentralizadas reduz, portanto, o ruído elétrico. Nas instalações descentralizadas, o construtor da máquina geralmente monta cabos entre os controles
do motor e os motores na máquina, deixando apenas cabos de energia e cabos fieldbus sem emissão de EMC para ser instalados no local de produção.
O risco de o ruído elétrico dos controles do motor afetar outros equipamentos elétricos causado por uma instalação com falha será reduzido e será evitado
o consumo de tempo na detecção de falhas na fase de colocação em operação, em que o período de tempo é curto.
1.2.5 Adaptações a Motores Especiais e Padrão
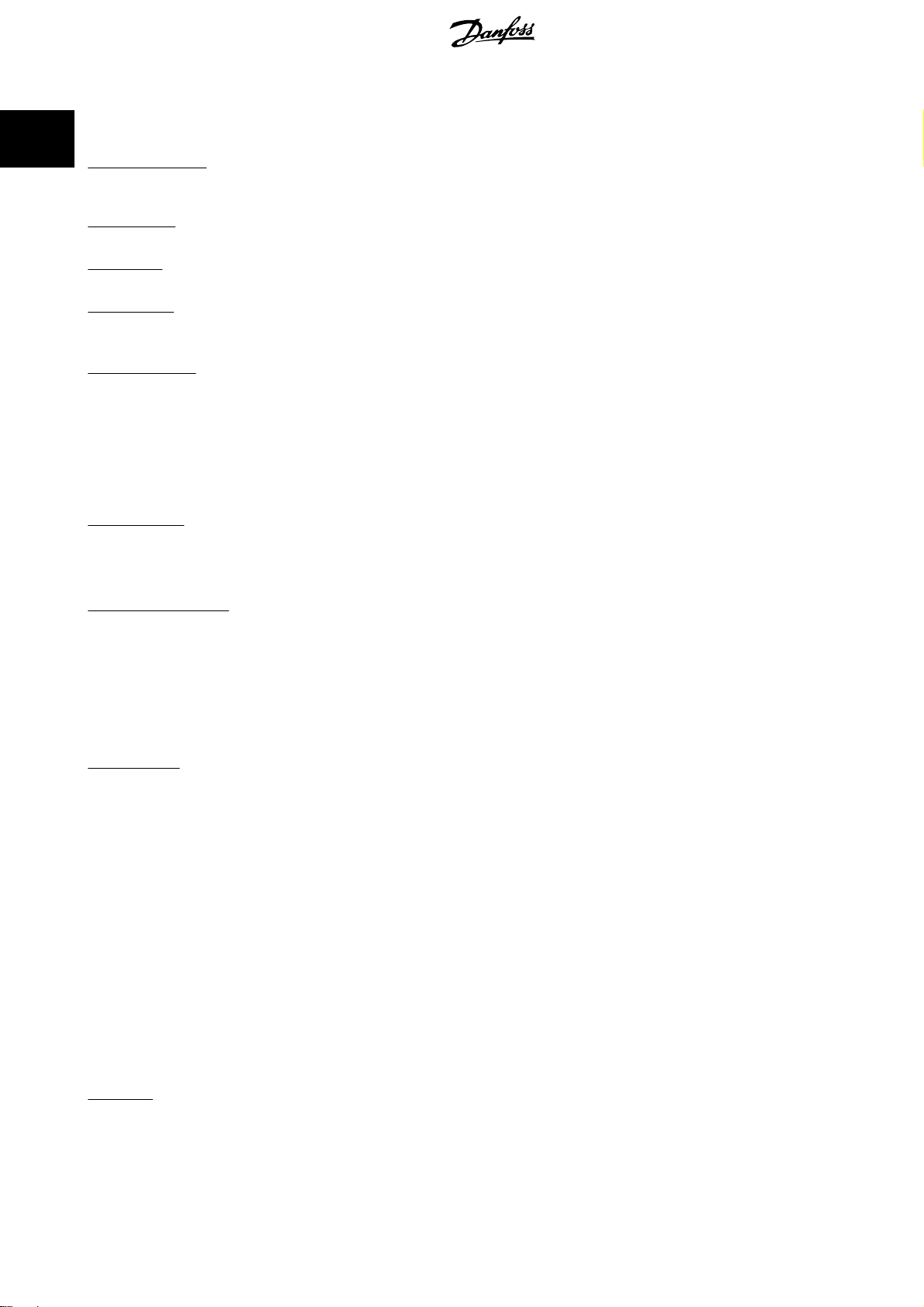
O FCD 300 foi projetado para controlar motores CA assíncronos padrão.
Sua flexibilidade permite também adaptar a motores de tipo especial. Um
exemplo é o recurso AMT (Sintonização Automática do Motor). Combinar
conversores de frequência Danfoss com motores de engrenagens Danfoss torna ainda mais fácil, uma vez que se encaixam mecanicamente e
os dados do motor já estão armazenados na memória do FCD 300. Os
motores-drives combinados são fornecidos pré-montados diretamente da
Danfoss, excluindo a necessidade de encaixe mecânico entre o motor e
o controle.
Ilustração 1.7: Motor de engrenagens Danfoss com FCD 300
1.2.6 Perdas Térmicas Mínimas
Os conversores de frequência Danfoss possuem o exclusivo princípio de chaveamento VVC (Voltage Vetor control, controle do Vetor de Tensão) para
gerar as tensões do motor. Devido ao princípio VVC, as perdas de energia no motor são semelhantes ou menores que as perdas em um motor conectado
à rede elétrica. As perdas térmicas são minimizadas e o superaquecimento é evitado. Ao mesmo tempo, o princípio VVC assegura torque nominal à
velocidade nominal e elimina correntes dos mancais.
10
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 12
Guia de Design do VLT® Decentral FCD 300 1 O Conceito de Descentralização
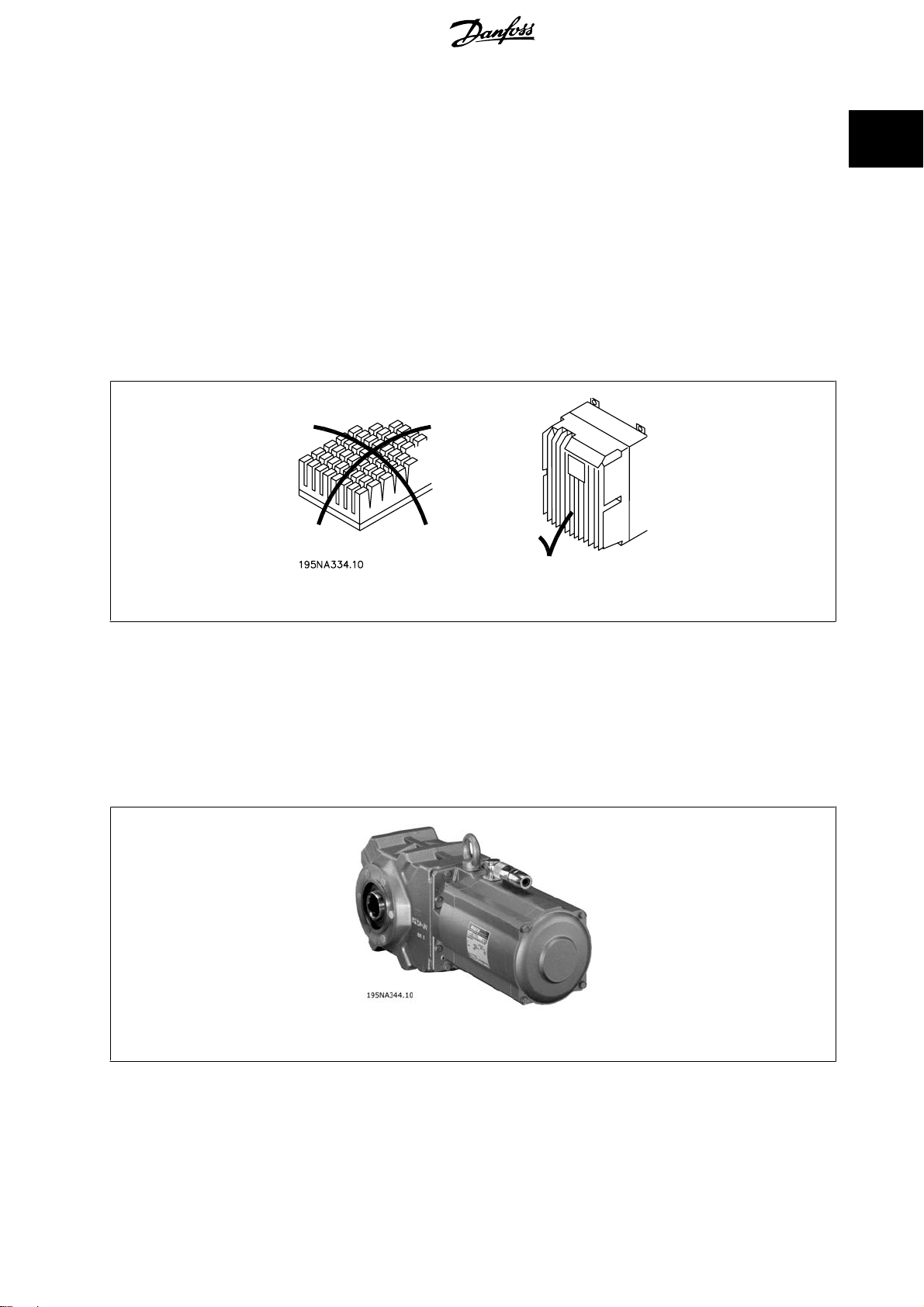
1.2.7 Considerações Ambientais
Os drives - montados em posição centralizada e distribuídos na fábrica - são expostos ao ambiente. Como os controles do motor lidam com altas tensões
e correntes ao mesmo tempo, devem ser protegidos da poeira e da umidade para que não ocorram falhas ou defeitos. Os fabricantes e os instaladores
devem considerar isso e a Drives Danfoss projetou os produtos descentralizados com profunda preocupação com esses dois aspectos.
Os controles descentralizados do motor também atendem as crescentes demandas com respeito aos níveis de higiene, particularmente na produção dos
setores farmacêuticos e de alimentos e bebidas, em que os drives são expostos a agentes de limpeza durante longos intervalos de tempo, a mangueiras
de alta pressão etc. O exterior dos controles descentralizados do motor devem ser projetados de maneira que possibilite isso. Dissipadores de calor
complexos como o da ilustração devem ser evitados porque são difíceis de limpar e não são resistentes aos agentes de limpeza comuns.
Os drives descentralizados Danfoss são projetados para atender aos requisitos como mostrado na ilustração 1.9. Não existem locais difíceis de limpar,
os plugues cegos não possuem entalhes ou indentação e o tratamento robusto da superfície em dupla camada - testado para resistir aos agentes de
limpeza normalmente utilizados - protege a caixa.
Ilustração 1.8: Dissipador de calor de aleta de pino difícil de limpar versus a solução Danfoss fácil de limpar
1
bob Todos os cantos são arredondados para evitar o acúmulo de poeira e a distância entre as nervuras permite limpeza com ar em alta pressão, com
mangueira e com escova.
Essas preocupações são mais ou menos irrelevantes se não aplicadas a todos os elementos e os motores CA padrão normalmente são projetados sem
essas preocupações - comprimidos por ventiladores integrados e nervuras de resfriamento, ambos difíceis de limpar. A Danfoss enfrentou o desafio
projetando uma variedade de motores de engrenagens assépticos. Esses motores não contêm ventiladores e possuem somente superfícies lisas. A classe
de gabinete metálico IP65 é padrão, do mesmo modo que o revestimento especial CORO resistente a agentes ácidos, alcalinos e de limpeza utilizados,
por exemplo, no setor de alimentos e bebidas. Veja a foto de um exemplo das séries de motores de engrenagens assépticos na ilustração 1.10.
Ilustração 1.9: Motor de engrenagens asséptico Danfoss
O contato elétrico pode causar corrosão galvânica em condições molhadas ou de umidade. Isso pode ocorrer entre a caixa (alumínio) e os parafusos (aço
inoxidável). Uma consequência possível é os parafusos emperrarem e ficar impossível soltá-los em uma situação de manutenção. Corrosão galvânica não
será encontrada nos produtos descentralizados Danfoss porque as caixas são completamente revestidas e há arruelas de nylon por baixo dos parafusos
protegendo o revestimento. O revestimento completo e o design exclusivo de gaxeta evita corrosão em sulcos, o que pode ocorrer embaixo das gaxetas.
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
11
Page 13
1
1 O Conceito de Descentralização Guia de Design do VLT® Decentral FCD 300
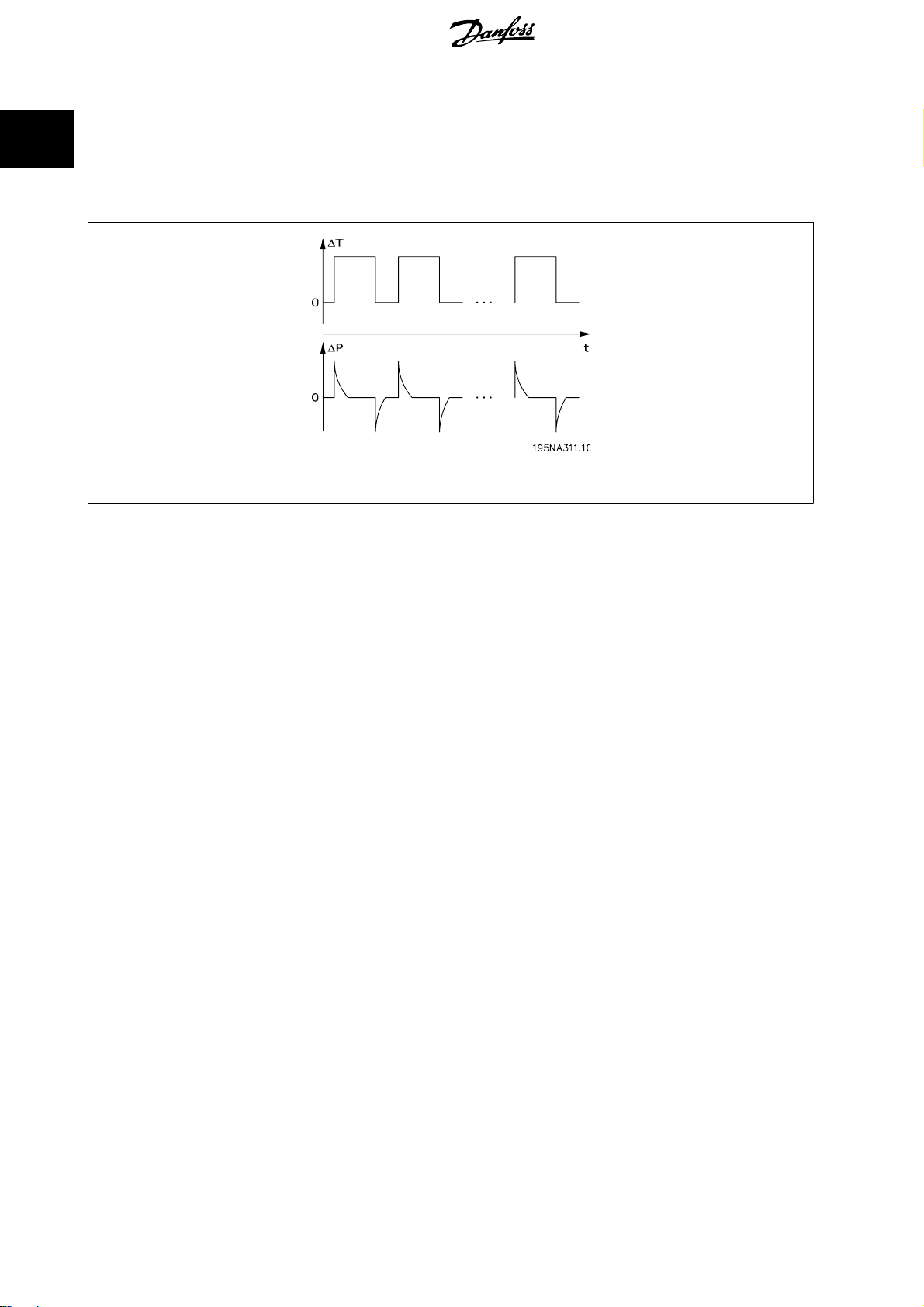
O equipamento bem envolvido é suscetível a acúmulo de água dentro do gabinete metálico. Esse é especialmente o caso quando o equipamento é exposto
a diferenças de temperatura ambiente em condições molhadas. Como uma temperatura ambiente decrescente diminui a temperatura da superfície dentro
do gabinete metálico, o vapor de água tende a condensar. Ao mesmo tempo, a pressão dentro do gabinete metálico irá cair e fazer com que o ar úmido
do exterior penetre nos materiais polímeros não herméticos da gaxeta e nas junções dos cabos com gaxeta. Quando o gabinete metálico esquentar
novamente, somente água vaporizada irá escapar, deixando cada vez mais água condensada dentro do gabinete. Isso pode levar a acúmulo de água
dentro do gabinete e no final causar mau funcionamento. O fenômeno está ilustrado na figura, com uma flutuação cíclica da temperatura.
Ilustração 1.10: O efeito do bombeamento em gabinetes metálicos apertados
O acúmulo de água dentro dos gabinetes metálicos pode ser prevenido por membranas que impedem a penetração de fluidos mas permitem que o vapor
saia, como ocorre com tecidos utilizados no revestimento externo. A Danfoss oferece uma junção especial de cabo com gaxeta com esse tipo de material
para eliminar esse problema. A junção de cabo com gaxeta deve ser usada em aplicações expostas a flutuações frequentes de temperatura e ambiente
úmidos, como em equipamento utilizado somente durante o dia onde a temperatura interna tende a cair até a temperatura ambiente durante a noite.
1.2.8 Flexibilidade de Instalação
As soluções descentralizadas Danfoss oferecem flexibilidade de instalação excepcional. A flexibilidade é suportada por uma série de benefícios:
• Montáveis em motores de engrenagens Danfoss
• Possibilidade de montagem descentralizada do painel
• Painéis de controle portáteis
• Software de PC para configuração e registros
• Instalação de lado único ou duplo
• Chave de serviço opcional
• Resistor e circuito de frenagem opcionais
• Fonte de alimentação externa de reserva de 24 V opcional
• Conexões M12 opcionais para sensores externos
• Conector opcional do motor Han 10E
• Suporte a fieldbus (Profibus DP V1, DeviceNet, Interface As)
• Compatibilidade com sistemas de rede elétrica padrão (TN, TT, IT, aterrado em delta)
Para obter mais detalhes, consulte o capítulo em
A Faixa de Produtos Descentralizados.
12
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 14

Guia de Design do VLT® Decentral FCD 300 1 O Conceito de Descentralização
1.3 Exemplos de Aplicações
1
A Danfoss completou uma ampla variedade de aplicações em vários setores diferentes. Isso nos forneceu uma experiência valiosa que influenciou o
desenvolvimento mais recente de nossos produtos descentralizados. A seguir fornecemos exemplos ilustrados das instalações atuais utilizando produtos
descentralizados Danfoss e dos benefícios e valores fornecidos ao consumidor nessas instalações.
1.3.1 Bebidas - Linha de Engarrafamento
Ilustração 1.11: FCD 300 na esteira transportadora para engarrafamento
Benefícios:
• Espaço reduzido do painel de comando uma vez que todos os drives são montados no campo
• Cabeamento reduzido porque vários drives podem ser alimentados pelo mesmo circuito
• Facilidade de colocar em operação pelo fieldbus, pois o protocolo permite a transferência de parâmetros completos. Assim que um drive estiver
montado, seu programa básico pode ser copiado para qualquer outro drive descentralizado
• O desempenho do motor FCD é notavelmente superior ao de todos os outros tipos
• O FCD pode ser adaptado a motores existentes de praticamente qualquer marca ou tipo
• O gabinete metálico IP66 asséptico é ideal para as condições úmidas do recinto de engarrafamento
• Tudo em uma caixa: chave de serviço, Profibus e malha de energia
Ilustração 1.12: FCD 300 na esteira transportadora para engarrafamento
1.3.2 Bebidas - Máquina de Embalar
Benefícios:
• Distribuir controles do motor na aplicação libera espaço para
outras finalidades no painel de controle
• O número de drives em uma aplicação pode ser aumentado sem
estender o painel de controle
• Gabinete metálico IP66, fácil de limpar e resistente a líquidos de
limpeza fortes
• A mesma flexibilidade dos controles do motor de montagem
centralizada. Os controles do motor descentralizados podem ser
adaptados para todos os motores CA padrão e oferecem a mesma interface com o usuário e os mesmos números nos conectores
•Profibus integrado
Ilustração 1.13: Controles do motor descentralizados integrados na máquina de embalar
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
13
Page 15
1
1 O Conceito de Descentralização Guia de Design do VLT® Decentral FCD 300
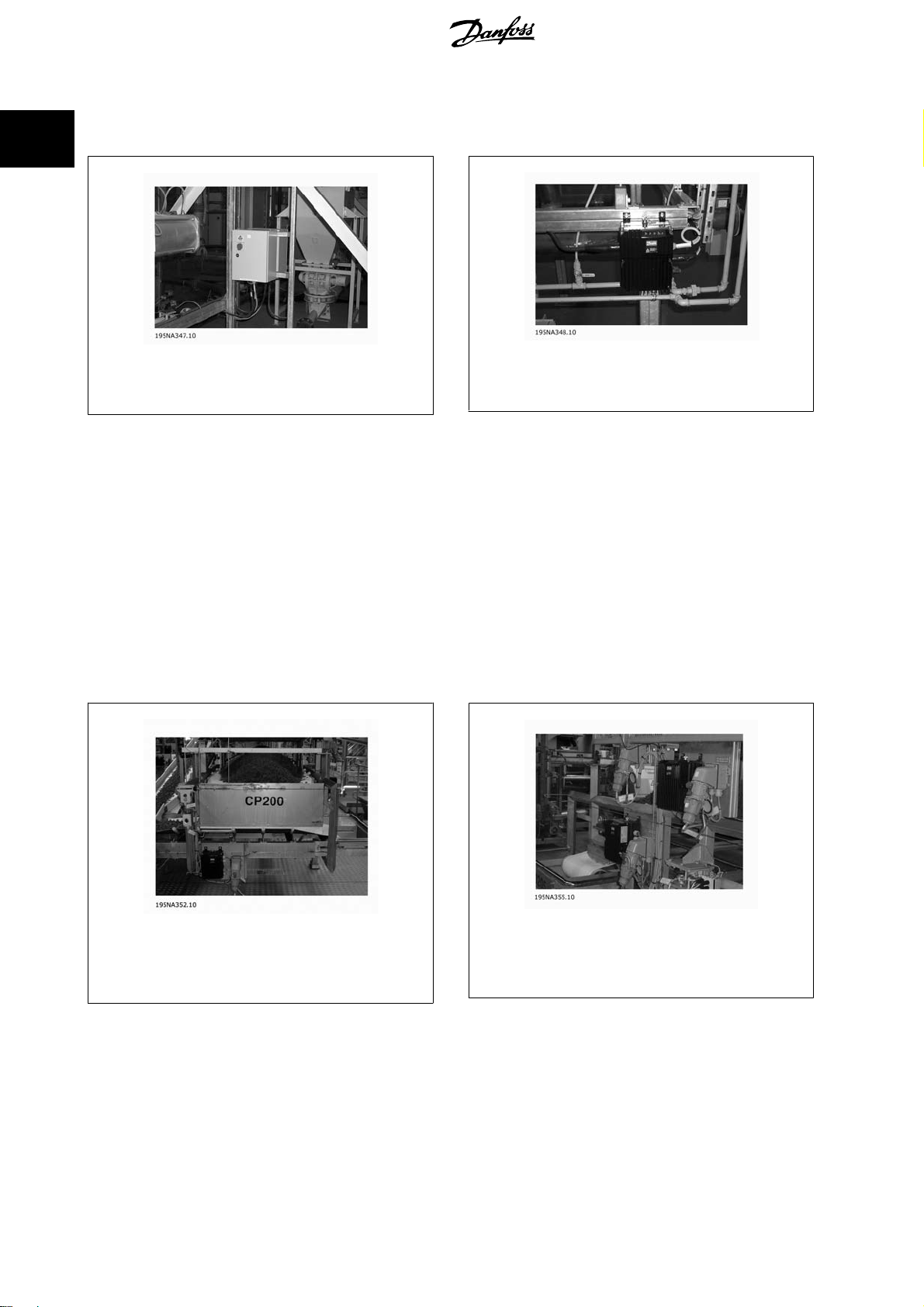
1.3.3 Alimentos - Fábrica de Cacau em Pó
Ilustração 1.14: Solução antiga: Controle do motor - painel
descentralizado
Benefícios:
• Capacidade da fábrica fácil de expandir
• Sem necessidade de painel de controle
• LED de status visível
• Chave de serviço integrada na unidade
• Gabinete metálico IP66 de alta classificação
• Instalação de baixo custo
• Menos espaço necessário para a nova solução
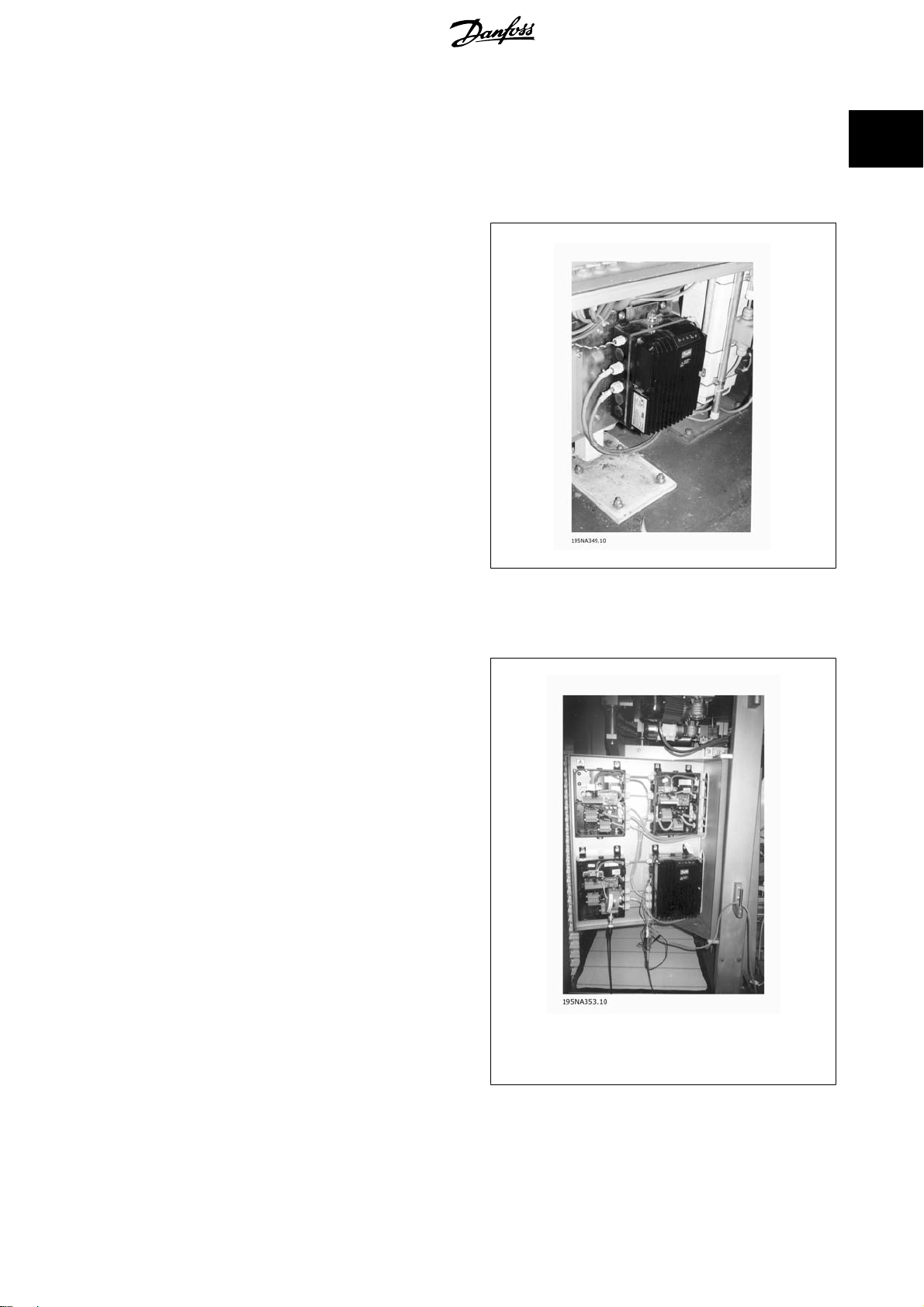
1.3.4 Esteira Transportadora de Alimentos
Ilustração 1.15: Nova Solução: Controle do motor descentralizado genuíno
Ilustração 1.16: Utilização eficiente do espaço no setor de
alimentos com controles do motor descentralizados da Danfoss
Benefícios:
• O número de drives em uma aplicação pode ser aumentado sem estender o painel de controle
• Gabinete metálico IP66, fácil de limpar e resistente a líquidos de limpeza fortes
• O projeto e a superfície repelente de sujeira impedem que sujeira e produto permaneçam no drive
• Temos unidades de montagem em parede ou no motor
14
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Ilustração 1.17: Utilização eficiente do espaço no setor de
alimentos com controles do motor descentralizados da Danfoss
Page 16
Guia de Design do VLT® Decentral FCD 300 1 O Conceito de Descentralização
• A mesma flexibilidade dos controles do motor de montagem centralizada. Os controles do motor descentralizados são adaptáveis a todos os
motores CA padrão, oferecem a mesma interface com o usuário e a mesmo numeração nos conectores
•Profibus integrado
1.3.5 Indústria Automotiva - Guindastes e Transportadores
Benefícios:
• Instalação simples
• Controle AS-i ou Profibus opcional
• Entrada de sensor disponível dentro do tamanho físico da unidade
• Alimentação de 24V separada para sensores e barramento
• Alimentação e controle de freio integrados
• Painel de controle remoto fácil de conectar
• Conectores para malha (conector T) integrados na caixa de instalação
• Baixos custos de instalação e de componentes
• Não são necessários conectores EMC adicionais de alto custo
• Compacto e economiza espaço
• Fácil de instalar e colocar em operação
• Entrada para monitoramento do termistor do motor
1
1.3.6 Adaptação em Aplicações Existentes
Benefícios:
• Não há necessidade de um grande gabinete de controle graças
aos controles do motor descentralizados.
• Fiação de baixo custo: Todos os motores utilizam cabos de
energia, tubulações e chaves locais existentes
• Todos os controles do motor podem ser controlados do gabinete
centralizado existente através do Profibus
Ilustração 1.18: Reajuste para aplicação existente com controle de velocidade
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
15
Page 17
1
1 O Conceito de Descentralização Guia de Design do VLT® Decentral FCD 300
1.4 Guia de Design do Produto
1.4.1 A Linha de Produtos Descentralizados
Os produtos descentralizados Danfoss são compostos pelos Conversores de Frequência VLD Decentral FCD 300 e VLT Drivemotor FCM 300 em seus
diferentes conceitos de montagem/instalação. Este Guia de Design oferece informações detalhadas somente sobre os produtos FCD 300. Para obter mais
informações sobre o FCM 300 consulte o Guia de Design FCM: MG03Hxyy
®
VLT
Decentral FCD 300:
0,37 - 3,3 kW, 3 x 300 - 480 V
Principais aplicações
- Esteira transportadora e áreas de lavagem
- Esteiras transportadoras de embalagens
- Esteiras de transporte de alimentação de entrada/saída
®
Drive Motor FCM 300:
VLT
0,55 - 7,5 kW, 3 x 380 - 480 V
Principais aplicações
- Ventiladores (Unidades de manipulação de ar)
- Bombas
- Transportadores de ar
1.4.2 Opções de Instalação Flexível
Os produtos descentralizados Danfoss podem ser adaptados para montagem utilizando as seguintes opções - cada uma oferecendo benefícios específicos:
FCD 300:
1. Independente próximo ao motor
• Livre escolha da marca do motor
• Fácil adaptação ao motor existente
• Fácil interface com o motor (cabo curto)
• Fácil acesso para diagnóstico e ótima funcionalidade do serviço
2. Montado diretamente no motor
• Livre escolha das marcas dos motores
• Sem necessidade se cabo blindado do motor
(montagem em parede)
(montado no motor)
16
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 18
Guia de Design do VLT® Decentral FCD 300 1 O Conceito de Descentralização
3. "Pré-montado" em motores de engrenagens Danfoss Bauer
• Uma combinação fixa de motor e componentes eletrônicos oferecida por um fornecedor
• Fácil montagem, somente uma unidade
• Sem necessidade se cabo blindado do motor
• Responsabilidade clara em relação à solução completa
Como as peças eletrônicas são comuns - a mesma função de terminais,
operação semelhante e peças e peças de substituição semelhantes para
todos os drives - você é livre para misturar os três conceitos de montagem.
FCM 300:
4. Motor integrado (Solução FCM 300)
• Motor e drive perfeitamente correspondentes
• Unidade compacta otimizada
• Sem necessidade de programar dados do motor
1
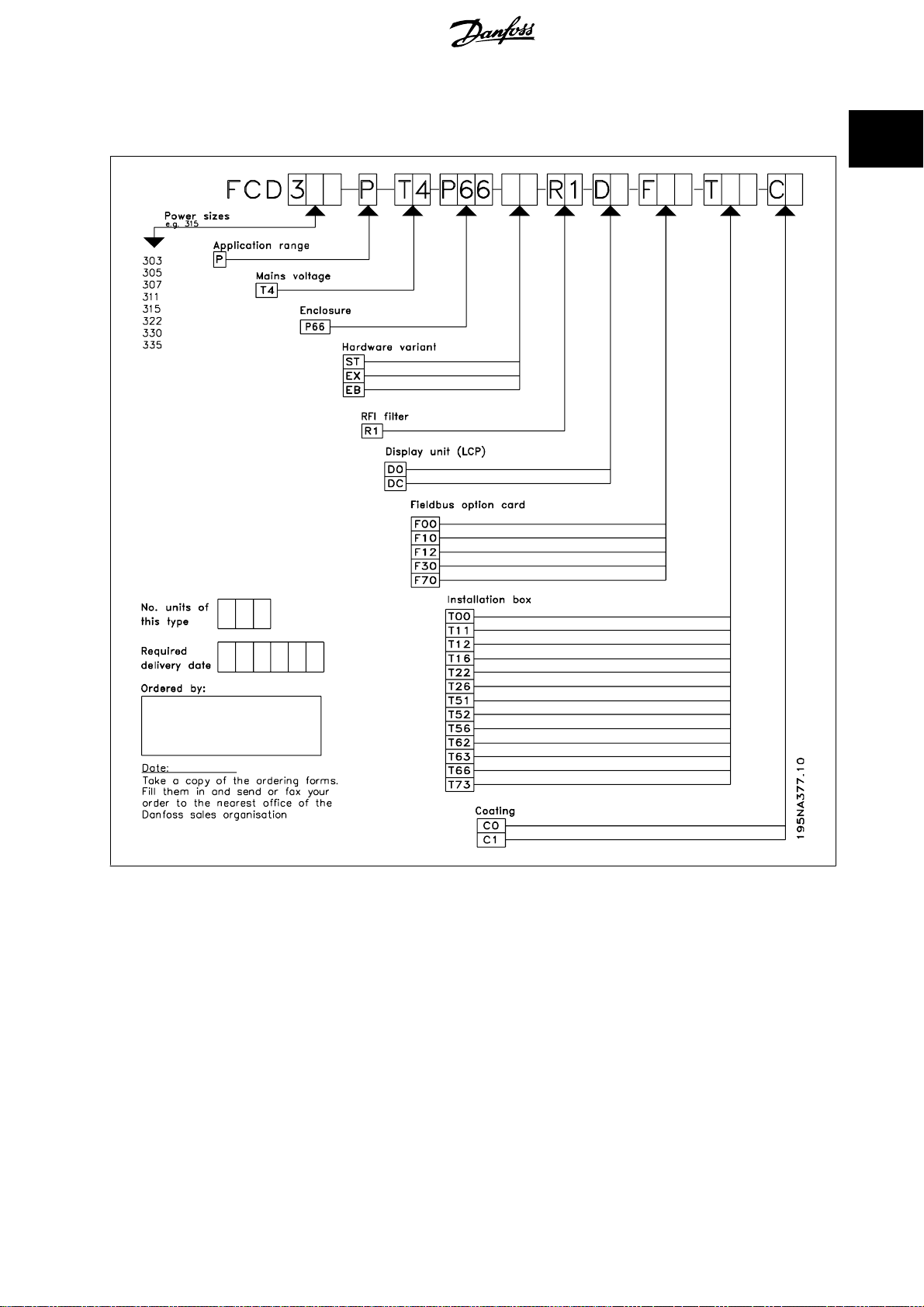
1.4.3 Configurando um Produto
O controle do motor descentralizado série FCD 300 é configurado com uma string do código do tipo (consulte também
FCD 3xx P T4 P66 R1 XX Dx Fxx Txx C0
Tensão de rede
O FCD 300 está disponível para conexão com tensão de rede elétrica trifásica de 380-480 V.
Escolha do conversor de frequência
O conversor de frequência deve ser escolhido com base na atual corrente
do motor, com a unidade sob carga máxima. A corrente de saída nominal
do conversor de frequência deve ser igual ou maior que a corrente
I
INV.
exigida pelo motor.
Tipo [kW] [HP]
303 0.37 0.50
305 0.55 0.75
307 0.75 1.0
311 1.1 1.5
315 1.5 2.0
322 2.2 3.0
330 3.0 4.0
335** 3.3 5.0*
* na tensão da rede elétrica/motor 3 x 460 - 480 V
** t
máx. 35° C
amb
Potência típica no eixo
P
INV.
1.4.4 Gabinete metálico
As unidades FCD 300 são protegidas contra poeira e água como padrão.
Consulte também a seção intitulada
Dados Técnicos
para obter mais detalhes.
Pedido
):
1.4.5 Freio
O FCD 300 está disponível com ou sem módulo de freio integrado. Consulte a seção intitulada
freio.
Versão EB incluindo controle/alimentação do freio mecânico.
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Resistores de Freio
para fazer pedido de um resistor de
17
Page 19

1
1 O Conceito de Descentralização Guia de Design do VLT® Decentral FCD 300
1.4.6 Alimentação Externa de 24 V
A alimentação de controle de reserva de 24 V CC está disponível nas versões EX e EB do FCD 300.
1.4.7 Filtro de RFI
O FCD 300 possui um filtro 1A RFI integrado. O filtro 1A RFI é compatível com as normas EMC EN 55011-1A. Consulte as seções
e Seção transversal
para obter mais detalhes.
Comprimentos de cabos
1.4.8 Filtro de Harmônicas
As correntes de harmônicas não afetam diretamente o consumo de energia elétrica, porém aumentam as perdas por calor na instalação (transformador,
cabos). É por isso que em um SISTEMA com uma porcentagem relativamente elevada de carga no retificador é importante manter as harmônicas de
corrente em um nível baixo para evitar sobrecarga no transformador e alta temperatura no cabeamento. Com a finalidade de assegurar baixas harmônicas
de corrente, as unidads FCD 300 são equipadas com bobinas no circuito intermediário como padrão. Isso geralmente reduz a corrente de entrada I
em 40 %.
RMS
1.4.9 Unidade de Exibição
Na unidade FCD 300 existem 5 luzes indicadoras de tensão (LIGADO), advertência, alarme, status e barramento.
Além disso, um plugue para a conexão de um painel de controle LCP está disponível como opção. O painel de controle LCP pode ser instalado a até 3
metros de distância do conversor de frequência; por exemplo, em um painel frontal, por intermédio de um kit de montagem.
Todos os dados são exibidos por intermédio de um display alfanumérico de quatro linhas que, em operação normal, consegue mostrar 4 itens de dados
operacionais e 3 modos de operação de forma contínua. Durante a programação, são exibidas todas as informações necessárias para uma rápida e
eficiente configuração de parâmetros do conversor de frequência. Como um suplemento ao display, o LCP possui três luzes indicadoras de tensão
(LIGADO), advertência (ADVERTÊNCIA) e alarme (ALARME). A maioria dos Setups de parâmetros do conversor de frequência podem ser imediatamente
alterados a partir do painel de controle local. Veja também a seção intitulada
A unidade de controle LCP
no Guia de Design.
1.4.10 Recursos Desejados
Os recursos desejados são selecionados especificando os campos correspondentes na string (xx). As escolhas - e explicações detalhadas - são mostradas
nas duas tabelas. As explicações resumidas de um recurso estão em
Para obter dados e detalhes técnicos, consulte
Variantes da Caixa de Instalação
Conexões no lado direito
Os orifícios de junção com a gaxeta de todas as
Essa versão é útil quando a entrada de cabo é necessária somente de um sentido.
Conexões nos dois lados
Os orifícios de
Estão disponíveis a
C
onexão
entradas de cabos
plugável
rosca métrica
e a possibilidade da malha de alimentação de energia da rede elétrica entre os drives (linha de 4 mm2).
estão usinadas nos
e a
rosca NPT
Dados técnicos.
entradas de cabos
dois lados
(variantes selecionadas).
itálico.
estão usinados somente no
para permitir entrada de cabo nos dois sentidos.
lado direito
(visto da extremidade do drive do motor).
18
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 20

Guia de Design do VLT® Decentral FCD 300 1 O Conceito de Descentralização
A seção inferior contém conectores Cage Clamp e instalações de malhas para cabos de energia e de fieldbus bem protegidos contra poeira, uso de
mangueiras e agentes de limpeza.
Chave de serviço
o motor ou drive.
plugues de sensor,
4
Conexão plugável de E/S remota, como sensores e sua fonte de alimentação externa.
Plugue do motor,
montada no lado direito (visto da extremidade do drive do motor). Uma chave bloqueável integrada no gabinete metálico - desconectando
M12 no lado direito (visto da extremidade do drive do motor). Malha através de alimentação externa de 2 X 24 V.
HARTING 10 E no lado direito (visto da extremidade do drive do motor) com fiação de acordo com a norma DESINA
elétrica).
Conector do display
com PC.
para conexão plugável externa do painel de controle local para operação e programação. Também pode ser utilizado para conexão
1.4.11 Conversor de Frequência Descentralizado FCD 300
FCD 300: Combinações de versões
1
(consulte Instalação
Recursos de instalação
Montagem Motor Parede Motor Parede Motor Parede Parede Parede
Entrada de cabos Lado direito De lado duplo
Chave de manutenção ----XXX-
Plugues de sensores - - - - - - 4XM12 4XM12
Plugue do motor - - - - - - - Harting 10E
ATEX 22
Rosca métrica
(rosca NPT)
Conector do display Não disponível
Recursos funcionais
Funções básicas (ver a
Reserva ext. de + 24 EX
Reserva ext. + 24 V +
Freio dinâmico + Con-
trole de frenagem
Comunicação
Interface AS F70
Profibus 3 MB F10
Profibus12 MB F12
DeviceNet F30
*
seguir)
RS 485 F00
XXXX--- -
Códigos de pedidos FCD 3xx P T4 P66 R1 XX Dx Fxx Txx C0
T11
(-)
somente D0
T51
(-)
T12
(T16)
T52
(T56)
DC CC incluído CC incluído
ST
EB
T22
(T26)
T62
(T66)
T63
(-)
T73
(-)
* ATEX 22: Aprovado para uso em ambientes empoeirados de acordo com a diretiva ATEX (ATmosphère EXplosive)
Funções básicas
Velocidade ajustável do motor
Velocidades de aceleração e desaceleração definidas
Conceitos de recursos e operação semelhantes às outras séries VLT
Proteção eletrônica do motor e reversão são sempre incluídas
Funcionalidade Estendida
Reserva externa de 24 V
Controle de frenagem e
para controle e comunicação
alimentação da frenagem eletromecânica
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
19
Page 21
1 O Conceito de Descentralização Guia de Design do VLT® Decentral FCD 300
1
Frenagem Dinâmica
As explicações a seguir referem-se ao formulário para pedidos.
Capacidades de potência (posições 1-6):
0,37 kW – 3,3 kW (Consulte a tabela de seleção da capacidade de potência)
Faixa de aplicação (posição 7):
• Processo P
Tensão de rede (posições 8-9):
• T4 - Tensão de alimentação trifásica de 380-480 V
Gabinete metálico (posições 10-12):
O gabinete metálico oferece proteção contra poeira, umidade e ambiente agressivo.
• P66 - Gabinete metálico IP66 protegido (para saber as exceções consulte Caixa de instalação T00, T73)
Variantes de hardware (posições 13-14):
• ST - hardware padrão
• EX - alimentação externa de 24 V para reserva do cartão de controle
• EB - alimentação externa de 24 V para reserva do cartão de controle, controle e alimentação do freio mecânico e um circuito de frenagem
adicional
Filtro de RFI (posições 15-16)
• R1 - Em conformidade com o filtro classe A1
Unidade de exibição (LCP) (posições 17-18):
Possibilidade de conexão de display e teclado.
• D0 - Sem conector de display que possa ser conectado na unidade
• DC - Plugue do conector de display montado (não disponível com variantes de caixa de instalação "somente no lado direito")
Placa do opcional do Fieldbus (posições 19-21):
Há uma ampla seleção de opcionais do fieldbus de alto desempenho disponível (integrados)
• F00 - Sem opcional de fieldbus integrado
• F10 - Profibus DP V0/V1 3 Mbaud
• F12 - Profibus DP V0/V1 12 Mbaud
• F30 - DeviceNet
• F70 - Interface AS
Caixa de instalação (posições 22-24):
• T00 - Sem caixa de instalação
• T11 - Caixa de instalação, montagem no motor, rosca métrica, somente lado direito
• T12 - Caixa de instalação, montagem no motor, rosca métrica, lado duplo
• T16 - Caixa de instalação, montagem no motor, rosca NPT, lado duplo
• T22 - Caixa de instalação, montagem no motor, rosca métrica, lado duplo, chave de serviço
• T26 - Caixa de instalação, montagem no motor, rosca NPT, lado duplo, chave de serviço
• T51 - Caixa de instalação, montagem na parede, rosca métrica, somente lado direito
• T52 - Caixa de instalação, montagem na parede, rosca métrica, lado duplo
• T56 - Caixa de instalação, montagem na parede, rosca NPT, lado duplo
• T62 - Caixa de instalação, montagem na parede, rosca métrica, lado duplo, chave de serviço
• T66 - Caixa de instalação, montagem de parede, rosca NPT, lado duplo, chave de serviço
• T63 - Caixa de instalação, montagem na parede, rosca métrica, lado duplo, chave de serviço, plugues do sensor
• T73 - Caixa de instalação, montagem na parede, rosca métrica, lado duplo, plugue do motor, plugues de sensor, gaxeta Viton
Revestimento (posições 25-26):
O gabinete metálico IP66 oferece proteção do drive contra ambientes agressivos, o que praticamente elimina a necessidade de placas de circuitos
impressos revestidas.
• C0 - Placas não revestidas
(resistor do freio é opcional
ver Resistores de Freio
)
20
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 22
Guia de Design do VLT® Decentral FCD 300 1 O Conceito de Descentralização
1.4.12 Formulário de Pedido
1
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
21
Page 23
1 O Conceito de Descentralização Guia de Design do VLT® Decentral FCD 300
1.4.13 Ferramentas de Software de PC
1
Software de PC - MCT 10
Todos os drives são equipados com uma porta de comunicação serial. Uma ferramenta de PC está disponível para a comunicação entre o PC e o conversor
de frequência, o Software de Setup do MCT 10 da Ferramenta de Controle de Movimento do VLT.
Software de Instalação do MCT 10
O MCT 10 foi desenvolvido como uma ferramenta fácil de usar, para configurar os parâmetros dos conversores de frequência.
O Software de Setup do MCT 10 será útil para:
• Planejar uma rede de comunicação off-line. O MCT 10 contém um banco de dados completo do conversor de frequência
• Colocar em operação on-line os conversores de frequência
• Gravar configurações para todos os conversores de frequência
• Substituir um drive em uma rede
• Expandir uma rede existente
• Drives desenvolvidos futuramente serão suportados
MCT 10 Suporte de Software de Instalação Profibus DP-V1 através de uma conexão Masterclass 2. Isto torna possível ler/gravar parâmetros on-line em
um conversor de frequência, através de rede Profibus. Isto eliminará a necessidade de uma rede extra para comunicação.
Os Módulos do Software de Instalação do MCT 10
Os seguintes módulos estão incluídos no pacote de software:
Software de Instalação do MCT 10
Configurando parâmetros
Copiar para, e a partir de, os conversores de frequência
Documentação e impressão das configurações de parâmetros, inclusive diagramas
Código de pedido:
Encomende o CD que contém o Software de Setup do MCT 10 usando o código 130B1000.
1.4.14 Acessórios
Tipo Descrição Código n°.
unidade de controle LCP 2 Display alfanumérico para programação do conversor de frequência. 175N0131
Cabo para a unidade de controle LCP 2 Cabo pré-fabricado para ser utilizado entre o conversor de frequência e LCP2. 175N0162
Kit de montagem remota do LCP2 Kit para montagem permanente do LCP2 em um gabinete (incl. cabo de 3 m, excl. LCP2) 175N0160
LOP (Local Operation Pad) O LOP pode ser utilizado para configurar a referência
e a partida/parada através dos terminais de controle
Placa de adaptação do motor Placa de alumínio com orifícios perfurados para encaixar na caixa FCD. Deve ser encaixado
localmente no motor real. Placa de adaptação para motores não Danfoss Bauer
Membrana de Ventilação Membrana de prevenção de acúmulo de água devido a condensação dentro dos gabinetes. 175N2116
Kit de plugues para LCP2 A caixa de instalação pode ser montada com ou sem um conector vedado (IP66) para
conectar o display comum LCP2 (código CC). O conector pode ser solicitado separada-
mente (Exceto para caixas de instalação de lado único).
Terminal do motor em estrela Seis fios devem ser conectados em estrela ou em delta para alimentar um motor CA. A
conexão em delta é possível no terminal padrão do motor. A conexão em estrela requer
um terminal separado.
Kit de instalação Kit de instalação para montagem em painéis 175N2207
plugue M12 de 5 pólos da DeviceNet O plugue M12 tipo micro, pode ser montado nos orifícios de junção com gaxeta da caixa
de instalação. O plugue também pode ser usado com outras finalidades como a conexão
de sensores.
Gaxeta Viton para FCD 303-315 Com essa gaxeta, o FCD pode ser utilizado em setores de pintura, por exemplo, na indús-
tria automotiva.
Gaxeta Viton para FCD 322-335 Com essa gaxeta, o FCD pode ser utilizado em setores de pintura, por exemplo, na indús-
tria automotiva.
Cabo de Dados para comunicação de PCs Conecta um conversor (por exemplo, USB) ao conector LCP2. 175N2491
Terminal PCB Terminal para distribuição 24 V 175N2550
Terminal de ext. PE Aço inoxidável 175N2703
Cabo de conexão de 2 m da DeviceNet O cabo pode ser montado dentro da caixa do terminal e conecta à linha tronco da Devi-
ceNet através de um microconector (M12).
Plugue M12 de 5 pólos da AS-interface O plugue M12 pode ser montado nos orifícios de junta com gaxeta da caixa de instalação. 175N2281
175N0128
175N2115
175N2118
175N2119
175N2279
175N2431
175N2450
195N3113
22
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 24
Guia de Design do VLT® Decentral FCD 300 1 O Conceito de Descentralização
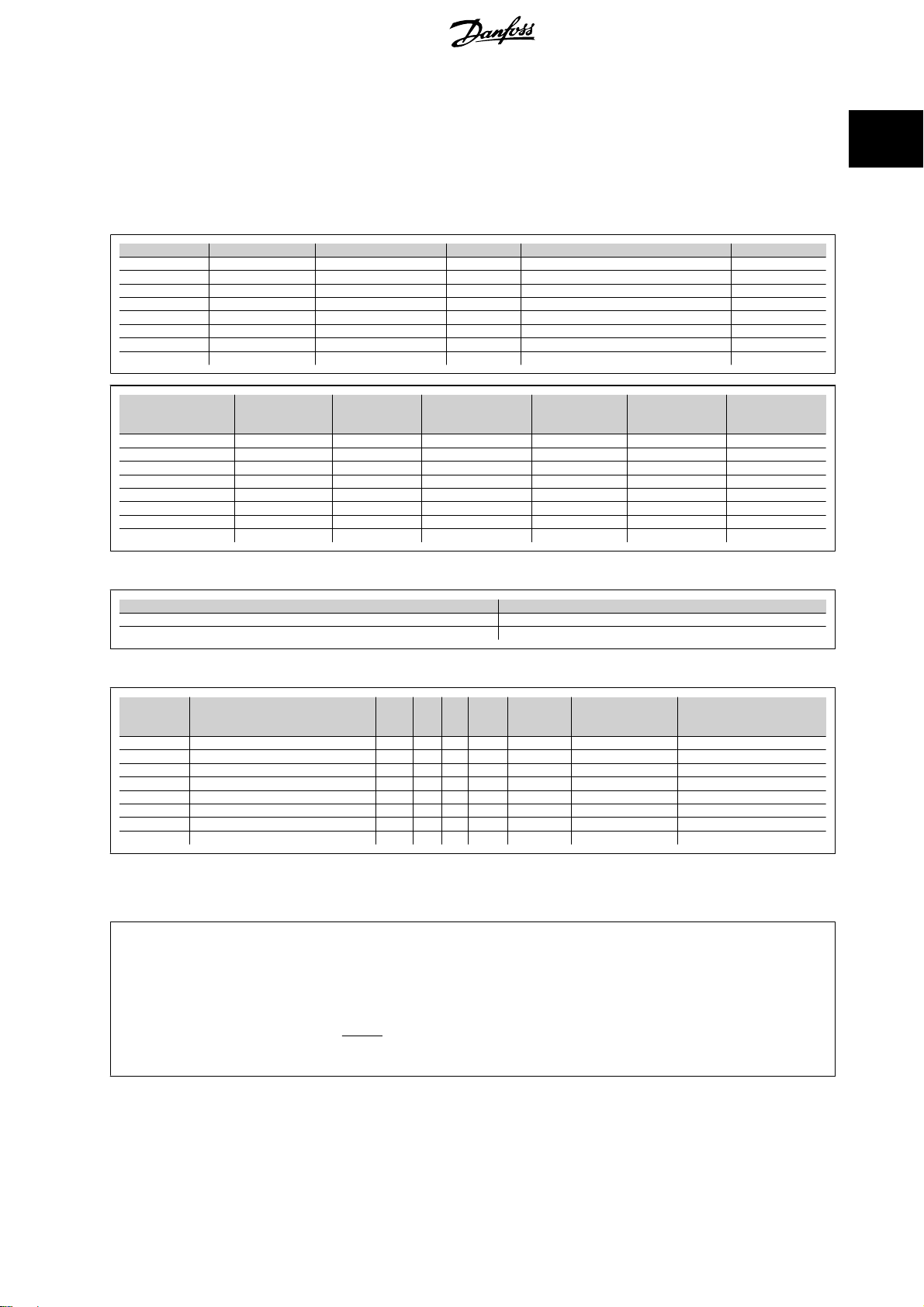
1.4.15 Resistores de Freio
1
Resistores de freio montáveis internamente para frenagem de baixo ciclo útil. Os resistores possuem autoproteção.
Frenagem de pulso único de aprox. 0,6 kJ a cada 1 - 2 minutos.
Resistores de freio internos não podem ser montados no FCD 303-315 com chave de serviço.
Tipo FCD P do motor em kW Rmin R % aprox. do ciclo útil Núm. de Código.
303 0.37 520 1720 5 175N2154
305 0.55 405 1720 3 175N2154
307 0.75 331 1720 2 175N2154
311 1.1 243 350 1.5 175N2117
315 1.5 197 350 1 175N2117
322 2.2 140 350 1 175N2117
330 3.0 104 350 0.7 175N2117
335 3.3 104 350 0.5 175N2117
Tipo P
303 (400 V) 0.37 520 830 / 100 W 20 1000 2397
305 (400 V) 0.55 405 830 / 100 W 20 1000 2397
307 (400 V) 0.75 331 620 / 100 W 14 1001 2396
311 (400 V) 1.10 243 430 / 100 W 8 1002 2395
315 (400 V) 1.50 197 310 / 200 W 16 0984 2400
322 (400 V) 2.20 140 210 / 200 W 9 0987 2399
330 (400 V) 3.00 104 150 / 200 W 5.5 0989 2398
335 (400 V) 3.30 104 150 / 200 W 5.5 0989 2398
Tabela 1.1: Resistores de freio tipo "flatpack" IP65
Tipo Código nº.: 175Nxxxx
303-315 2402
322-335 2401
Tabela 1.2: Suportes de montagem de resistores de freio
Tipo de VLT Tempo de duração da frenagem
303 (400 V) 120 0,37 520 830 0,45 0,7 1976 1,5*
305 (400 V) 120 0,55 405 830 0,45 0,7 1976 1,5*
307 (400 V) 120 0,75 331 620 0,32 0,7 1910 1,5*
311 (400 V) 120 1,1 243 430 0,85 1,4 1911 1,5*
315 (400 V) 120 1,5 197 330 0,85 1,6 1912 1,5*
322 (400 V) 120 2,2 140 220 1,00 2,1 1913 1,5*
330 (400 V) 120 3,0 104 150 1,35 3,0 1914 1,5*
335 (400 V) 120 3,3 104 150 1,35 3,0 1914 1,5*
motor
[kW]
intermitente
[segundos]
R
[]
MIN
P
[kW]
motor
R
[Ω]
Tamanho [] / [W]
por item
R
[Ω]
P
rec
b, max
[kW]
min
Ciclo útil % 2 fios
Relé térm.
[Amp]
Número do código
175Uxxxx
Código nº.
175Uxxxx
Seção transversal do cabo
Cabo blindado
Código nº.
[mm
175Nxxxx
2
]
Tabela 1.3: Resistores de freio "coiled wire" Duty-cycle 40%
*Obedeça sempre as regulamentações nacionais e locais
P
motor
R
min
R
rec
P
b, max
: Tamanho nominal de motor para o tipo VLT
: Mínimo resistor de freio permissível
: Resistor de freio recomendado (Danfoss)
: Potência nominal do resistor de freio conforme especificado pelo fornecedor
Relé térm. : Definição da corrente de freio do relé térmico
Número do código : Códigos para pedidos de resistores de freio Danfoss
Seção transversal do cabo : Valor
mínimo recomendado baseado em cabo de cobre com isolamento de PVC, 30 graus Cel-
sius de temperatura ambiente com dissipação normal de calor
Consulte as dimensões dos resistores de freio tipo bobinado nas instruções MI.90.FX.YY
Resistores de freio montados externamente em geral
Não use solventes de limpeza agressivos. Solventes de limpeza devem ter pH neutro.
Consulte
Frenagem Dinâmica
para dimensionamento dos resistores de freio.
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
23
Page 25

1
1 O Conceito de Descentralização Guia de Design do VLT® Decentral FCD 300
1.5 Comunicação
1.5.1 Informação e Comunicação
O crescimento no mundo da automação está cada vez mais baseado na tecnologia da informação. Tendo reformado hierarquias, estruturas e fluxos em
todo o mundo do escritório, a utilização da tecnologia da informação dá abertura para uma reestruturação semelhante nos setores industriais, variando
de setores de processo e fabricação até logística e automação da construção.
A capacidade de comunicação dos dispositivos e os canais de informação transparentes e contínuos são indispensáveis nos conceitos de automação do
futuro.
A TI é um meio evidente de otimização de processos de sistemas, levando à exploração otimizada da energia, de materiais e dos investimentos.
Os sistemas de comunicação industrial são uma função chave nesse aspecto.
Nível da célula
Controladores programáveis como PLC e IPC comunicam-se no nível de célula. Grandes pacotes de dados e numerosas e poderosas funções de comunicação fornecem fluxo de informações. A integração suave em sistemas de comunicação no nível da empresa, como Intranet e Internet via TCP/IP e
Ethernet são requisitos importantes.
Nível de campo
Os periféricos distribuídos, como módulos de E/S, transdutores de medição, unidades de drives, válvulas e terminais do operador comunicam com os
sistemas de automação através de um sistema de comunicação eficiente e em tempo real no nível do campo. A transmissão de dados do processo é
realizada em ciclos, enquanto que os dados de alarmes, parâmetros e diagnósticos devem ser transmitidos de maneira acíclica se necessário.
Nível do sensor/atuador
Sinais binários de sensores e atuadores são transmitidos inteiramente de maneira cíclica através da comunicação por barramento.
1.5.2 Profibus
O Profibus é um padrão de barramento de campo aberto e independente de fornecedor para utilização em uma ampla variedade de aplicações de
automação de processo e fabricação. A independência em relação a fornecedor e a abertura são asseguradas pelas normas internacionais EN 50170, EN
50254 e IEC 61158.
O Profibus comunica-se entre dispositivos de diferentes fabricantes sem ajustes específicos da interface e pode ser utilizado em aplicações críticas de
alta velocidade e em tarefas complexas de comunicação. Devido aos desenvolvimentos técnicos em andamento, o Profibus é amplamente reconhecido
como o sistema líder em comunicação industrial do futuro.
Mais de 2.000 produtos de aproximadamente 250 fornecedores Profibus estão disponíveis atualmente. Mais de 6,5 milhões de dispositivos representando
uma enorme variedade de produtos estão instalados e em uso com sucesso em mais de 500.000 aplicações de automação de processos e fabricação.
A solução Danfoss Drives oferecem uma solução Profibus de ótimo custo
• Ferramenta de software MCT-10 para acesso através de PC convencional
• Conexão simples de dois fios
• Produto universal e mundialmente aceito
• Em conformidade com a norma internacional EN 50170
• Velocidade de comunicação de 12 Mbaud
• O acesso ao arquivo mestre do drive facilita o planejamento
• Atende a diretriz PROFIDRIVE
•Solução integrada
• Todos os conversores de frequência com Profibus são certificados pela organização Profibus
24
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 26
Guia de Design do VLT® Decentral FCD 300 1 O Conceito de Descentralização
• Os conversores de frequência Danfoss oferecem suporte ao Profibus DP V1
Profibus DP V1 para duas finalidades diferentes
Os sistemas Profibus são utilizados para duas finalidades bem diferentes com dois conjuntos de essenciais bastante diferentes em aplicações modernas
de automação. Uma é a transferência de sinais relacionados ao próprio processo, o outro serviço, comunicação da colocação em operação e do setup.
A transferência de sinais de controle e de status entre os sensores e atuadores é de tempo crítico e deve ser processada de maneira confiável e em tempo
real. Isso é obtido através da comunicação cíclica em que cada nó da rede é sondado em cada ciclo e cada ciclo possui um período predeterminado. É
necessário predefinir e minimizar a extensão dos dados em cada telegrama para tornar esse trabalho o mais rápido e confiável possível.
Essa consideração contradiz a segunda utilização do fieldbus, ou seja, setup com economia de tempo e barramento de diagnósticos. Setup e diagnósticos
não são de tempo crítico, não são utilizados continuamente e necessitam de uma maior quantidade de dados em cada telegrama. Além disso, a tendência
seria controlar essas informações a partir de um PC ou de um dispositivo de interface (HMI) - e não a partir do mestre (geralmente um PLC) que controla
a comunicação cíclica. O Profibus padrão não oferece suporte a redes com vários mestres, logo, as informações de setup e diagnósticos devem estar
contidas no telegrama padrão manipulado pelo mestre, produzindo telegramas bem longos e demorados com espaço para informações utilizadas apenas
esporadicamente.
O Profibus DP V1 agora combina os dois conjuntos de requisitos acima em um único sistema fieldbus, permitindo que um segundo mestre utilize a rede
inteira em um intervalo de tempo especificado em cada ciclo. Logo, o Profibus DP V1 opera com duas classes de mestres. Masterclass 1 (geralmente um
PLC) realiza a comunicação cíclica. Masterclass 2, geralmente um dispositivo de interface (HMI ou PC), transfere informações não críticas através de
comunicação acíclica.
1
Masterclass 2 mestres podem ser conectados em qualquer lugar da rede Profibus e o canal de comunicação pode ser aberto e fechado a qualquer momento
sem afetar a comunicação cíclica. É possível ter comunicação acíclica mesmo sem comunicação cíclica para, por exemplo, transferir programas ou setups
completos.
O Profibus DP V1 é totalmente compatível com versões anteriores do Profibus DP V0. Os nós do Profibus DP V0 e do Profibus DP V1 podem ser combinados
na mesma rede, contudo, o mestre deve oferecer suporte à comunicação Masterclass 2.
Benefícios ao usuário:
• A conexão com os controles do motor é possível em qualquer parte da rede
• A rede existente pode ser utilizada para colocação em operação, setup e diagnóstico sem afetar a comunicação cíclica
• Os nós DP V1 e DP V0 podem ser conectados na mesma rede
• Sem necessidade de telegramas extensos no PLC ou IPC. Um segundo mestre que oferece suporte a DP V1 pode manipular as tarefas de setup
NOTA!
O DP V1 somente é possível para cartões de comunicação Mestre que oferecem suporte à especificação Masterclass 2.
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
25
Page 27
1 O Conceito de Descentralização Guia de Design do VLT® Decentral FCD 300
1.5.3 DeviceNet
1
O DeviceNet é um link de comunicação que conecta dispositivos industriais a uma rede. É baseado no protocolo de comunicação CAN (Controller Area
Network) orientado a broadcast.
O protocolo CAN foi desenvolvido originalmente para o mercado automotivo europeu para ser usado no lugar dos caros chicotes elétricos nos automóveis.
Como resultado, o protocolo CAN oferece resposta rápida e alta confiabilidade em aplicações exigentes como freios ABS e airbags.
O conceito Danfoss oferece a solução DeviceNet de custo ideal
• Comunicação cíclica de E/S
• Comunicação acíclica - "sistema de mensagens explícita"
• Suporte de mensagens do Gerenciador de Mensagens Não Conectado (UCMM)
•Solução integrada
• Arquivos Electronic Data sheet (EDS) garantem fácil configuração
• Fornece alimentação de tensão ao fieldbus
• Finalização do perfil do motor CS/CC DeviceNet
• Protocolo definido de acordo com a ODVA (Open DeviceNet Vendor Association)
1.5.4 Interface AS
A Interface AS (AS-i) é uma alternativa de baixo custo para o cabeamento convencional no mais baixo nível da hierarquia de automação. A rede pode
conectar a um fieldbus de nível maior, como o Profibus, para obter E/S remota de baixo custo. Conhecida pelo seu cabo amarelo; AS-I cresceu como
uma tecnologia "aberta" suportada por mais de 100 fornecedores ao redor do mundo. Aprimoramentos ao longo do tempo ampliaram sua área de
aplicações e a interface AS hoje é comprovada em centenas de milhares de produtos e aplicações abrangendo o espectro da automação.
1.5.5 Modbus
O conversor de frequência comunica-se com o formato RTU Modbus através de uma rede EIA-485 (conhecida por RS-485). O RTU Modbus permite acesso
à Control Word e à Referência de Barramento.
A Control Word permite ao Modbus mestre controlar diversas funções importantes do conversor de frequência:
•Partida
• Interromper o conversor de frequência de várias maneiras:
Parada por inércia
Parada rápida
Parada por Frenagem CC
Parada (de rampa) normal
• Reset após um desarme por falha
• Funcionamento em diversas velocidades predefinidas
• Funcionamento em reversão
• Alterar o setup ativo
• Controlar os dois relés integrados do conversor de frequência
A Referência Via Bus Serial é comumente utilizada para controle da velocidade.
Também é possível acessar os parâmetros, ler seus valores e quando possível, inserir valores. Isso permite uma faixa de possibilidades de controle,
incluindo controlar o setpoint do conversor de frequência quando seu controlador PID interno for utilizado.
26
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 28
Guia de Design do VLT® Decentral FCD 300 1 O Conceito de Descentralização
1.5.6 Protocolo FC
A interface RS-485 é padrão em todos os conversores de frequência Danfoss, permitindo até 126 unidade em uma rede. O protocolo FC possui um projeto
muito simples descrito em
fornece uma boa alternativa para a solução fieldbus mais rápida.
O protocolo FC também pode ser utilizado como um barramento de serviço para transferência de informações de status e de setup de parâmetros. Nesse
caso é combinado com o controle de E/S de tempo normal através das entradas digitais.
Comunicação Serial.
Em aplicações em que a velocidade da transmissão de dados é de importância menor, a interface RS 485
1.6 Boas Práticas de Instalação
1.6.1 Opções de Instalação Flexível
Um grande benefício do conceito descentralizado Danfoss é a economia no custo de instalação, em parte devido ao projeto inteligente em duas peças
do FCD 300.
Todas as instalações elétricas são feitas dentro da caixa de instalação antes da montagem do componente eletrônico. Subsequentemente as peças
eletrônicas são conectadas na caixa de instalação, fixadas e o drive está pronto para operação.
Malha da rede de energia
2
A série FCD 300 facilita a malha da rede de energia interna. Terminais para cabos de energia de 4 mm
de até 10 ou mais unidades. O FCD 300 pode ser misturado ao longo da linha. A carga média não deve exceder 25 A.
Reserva de controle de 24 V
Uma fonte externa de 24 V (20-30V) CC pode ser conectada nas versões EX e EB para reserva dos circuitos de controle. Dessa maneira, as possibilidades
de comunicação e programação são mantidas mesmo sem energia. Os terminais são dimensionados para até 2,5 mm
dentro do gabinete metálico permitem a conexão
2
e em dobro para malha.
1
As caixa de instalação T63 e T73 possuem terminais de malha adicionais de 2 X 24 V com 4 mm
separadamente a partir da alimentação de reserva do controle.
2
. Os sensores conectados podem ser fornecidos
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
27
Page 29
1
1 O Conceito de Descentralização Guia de Design do VLT® Decentral FCD 300
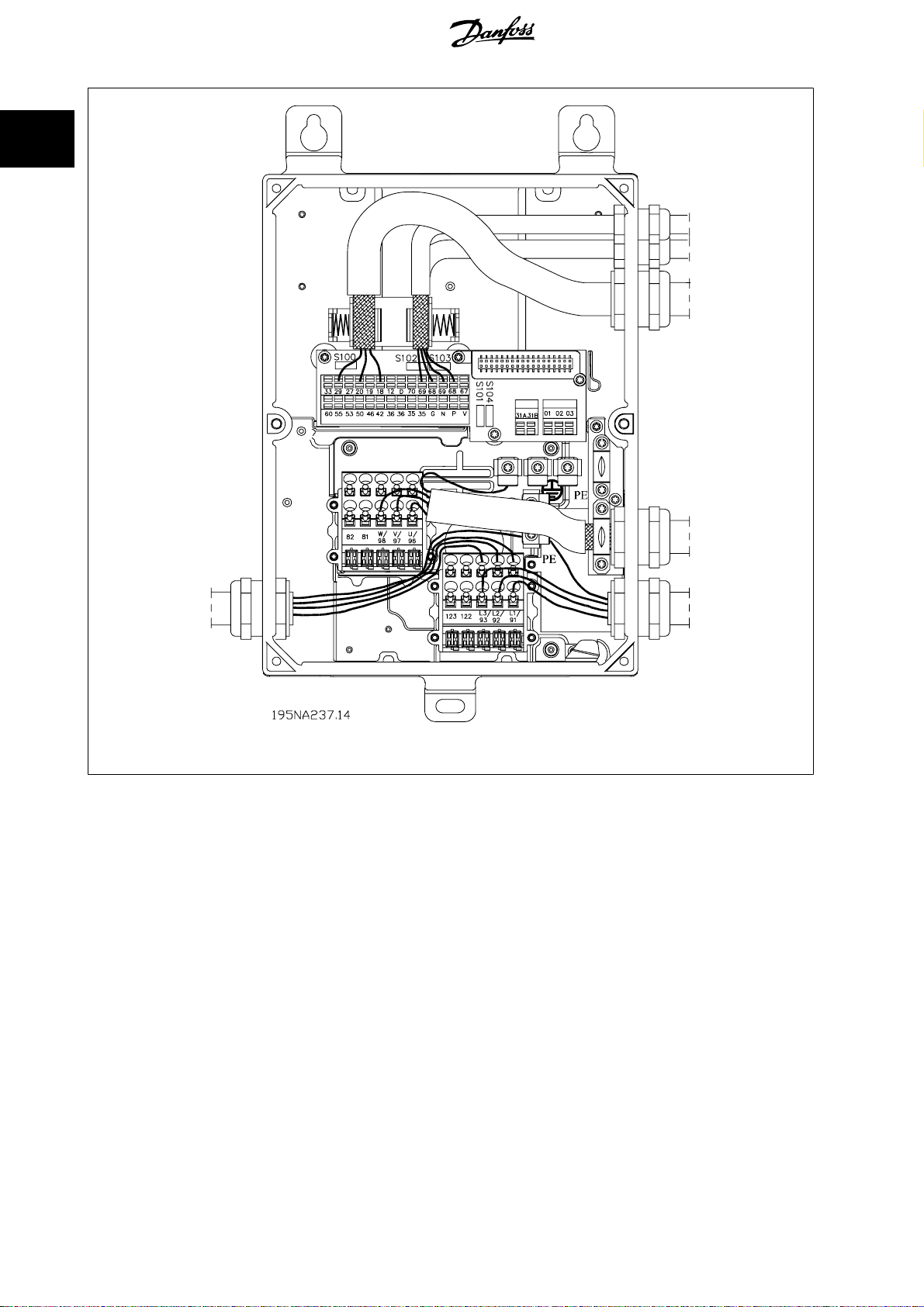
Ilustração 1.19: Exemplo de malha de energia e de barramento
28
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 30
"
Guia de Design do VLT® Decentral FCD 300 1 O Conceito de Descentralização
1.6.2 Diretrizes para Seleção de Cabos e Fusíveis na Instalação de uma Rede de Energia com
o FCD 300
Considera-se que a instalação segue a Diretiva de Baixa Tensão conforme estabelecido em HD 384 e IEC 60364. Esta seção não pode ser utilizada em
áreas explosivas e com risco de incêndio. Em geral, as dimensões dos cabos devem seguir a IEC 60364-5-523. Se a instalação for parte de uma maquinaria,
a EN 60204-1 deve ser seguida. Os cabos, conforme mencionado nos pontos 1, 2 e 3 na figura, devem ser protegidos por um gabinete metálico ou
conduíte.
Os próximos números de seção são relacionados à figura.
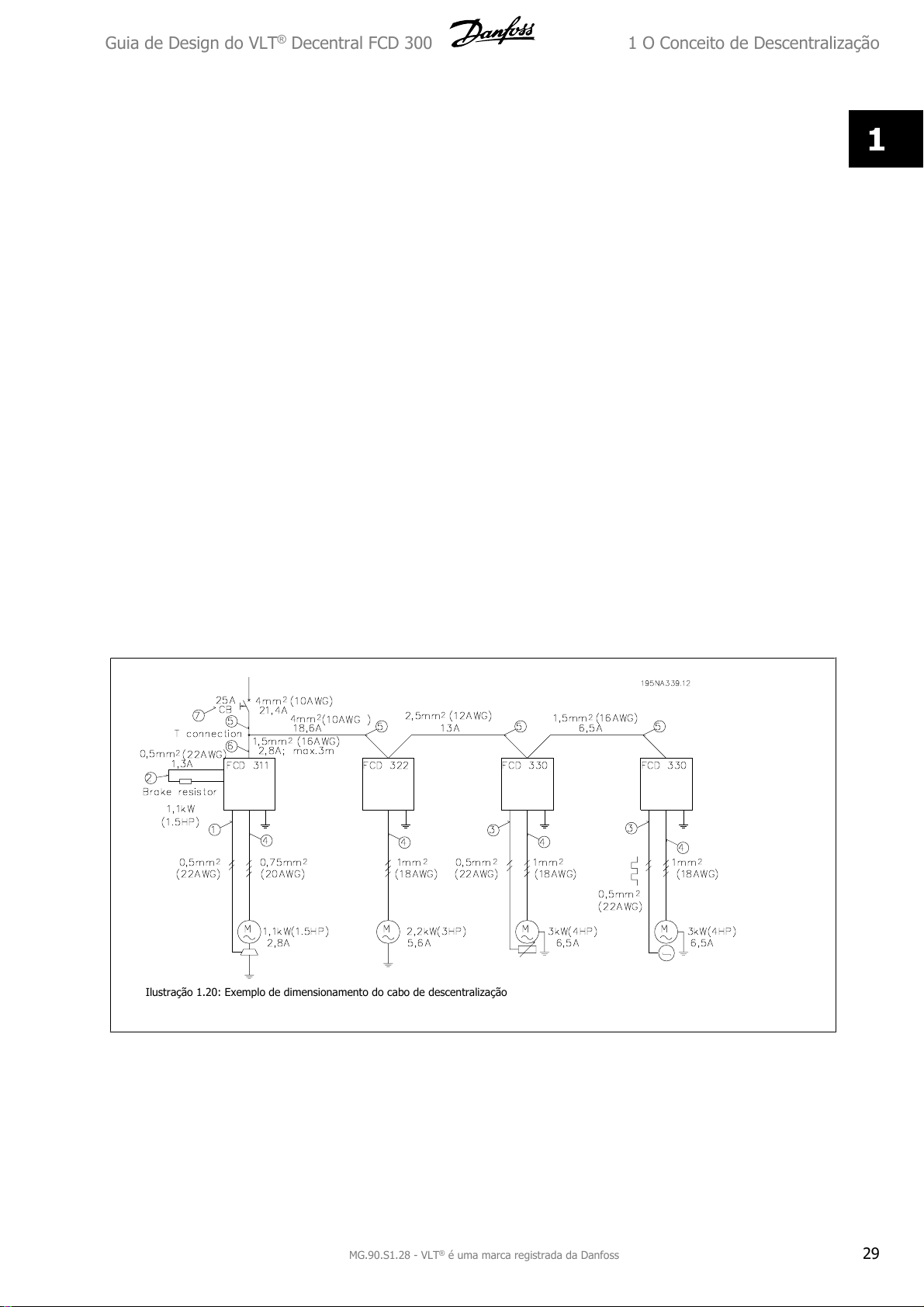
1. O cabo poderá carregar somente a corrente contínua máxima do freio de atrito. Com falha no aterramento, o circuito de proteção não renovável
no FCD irá interromper o fluxo de corrente.
2. Se os resistores de freio IP65 recomendados pela Danfoss forem usados, o cabo será exposto somente à corrente contínua do resistor do freio.
Se o resistor do freio ficar superaquecido, irá desconectar-se automaticamente. Se outro tipo ou forma do resistor do freio sem qualquer
dispositivo de limitação de energia for utilizado, a potência máxima deve ser igual à potência nominal do motor.
A corrente nos Amps deverá ser: I = 0,77/potência do motor, com potência do motor inserido em kW; [A=V/W]. A corrente nominal do motor
chega bem perto da corrente no cabo até o resistor do freio.
3. Os cabos até os encoders e termistores estão no potencial PELV. As correntes estão na faixa mA e limitados pelo FCD. Para não violar a proteção
PELV dos terminais de controle do FCD, o termistor deve possuir isolamento reforçado de acordo com as demandas PELV. Para finalidades de
EMI os cabos devem possuir sua própria blindagem elétrica e, se possível, ser mantidos separados dos cabos de energia.
4. O cabo é protegido pela função limitadora de corrente no FCD. Com falhas de aterramento e curto circuito de baixa impedância o FCD irá
interromper a corrente.
5. A corrente é limitada pelo FCD downstream. O CB faz o aterramento e a proteção contra curto-circuito. A impedância nos fios deve ser baixa a
ponto de o CB desconectar em 5 s por falhas de aterramento de baixa impedância. (alimentação TN).
6. Se a instalação for em uma máquina (EN 60204-1) e a distância entre a conexão T e o FCD for menor que 3 m, o cabo pode ser diminuído para
a capacidade de corrente necessária para o FCD downstream.
7. A corrente de desarme do CB upstream não deverá ser superior que os pré-fusíveis máximos mais altos para o menor FCD downstream.
Para finalidades de EMC os cabos nº 2, 3 e 4 devem ser blindados ou colocados em conduítes de metal.
1
%&%
"
'
!
##$!$ #
' ' ' ' '
'
'
'
'
'
'
'
Ilustração 1.20: Exemplo de dimensionamento do cabo de descentralização
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
29
Page 31

1
1 O Conceito de Descentralização Guia de Design do VLT® Decentral FCD 300
1.7 Reparo dos Produtos Descentralizados Danfoss
1.7.1 Serviço
Panes em drives ou em motores engrenados Danfoss ocorrem somente em circunstâncias excepcionais. Uma vez que o tempo de inatividade representa
falta de produção, as falhas devem ser localizadas e os componentes com defeito devem ser substituídos rapidamente.
Os produtos descentralizados Danfoss dão muita ênfase no tratamento desses problemas. Esse capítulo também descreve medidas tomadas para tornar
os produtos descentralizados Danfoss superiores em uma situação de serviço. Para obter informações detalhadas sobre problemas de serviço específicos,
consulte literatura relevante.
Os conversores de frequência centralizados Danfoss possuem conexões plugáveis para facilitar o serviço utilizando substituição rápida e livre de falhas.
O mesmo conceito é utilizado e aprimorado para os drives descentralizados.
"Plug-and-drive"
Toda a parte eletrônica, que comanda a operação do motor, fica oculta
dentro da tampa da caixa, ligada aos conectores quando montada na
seção inferior. A seção inferior contém conectores do tipo "braçadeira de
fixação", isentos de manutenção e armações para enlace dos cabos de
energia e de fieldbus, bem protegidos contra poeira, solventes e detergentes. Após a instalação, a colocação em funcionamento e a actualização podem ser executadas a qualquer momento conectando simplesmente a outra tampa de controlo. Consulte a figura abaixo.
Como a caixa de instalação contém somente plugues, conectores e pcb's
de baixa densidade, não é comum a ocorrência de falhas. Em caso de
falha no componente eletrônico, basta remover os seis parafusos, desconectar o componente eletrônico e conectar um novo.
Serão necessários somente materiais padrão de instalação como cabos de junção com gaxeta, cabos etc., para colocar em operação e realizar manutenção
em um drive descentralizado Danfoss. São necessários equipamentos especiais como cabos híbridos não apropriados para serem mantidos em estoque
por um fornecedor padrão de componentes de instalação elétrico. Isso fornece alta flexibilidade e máximo tempo de atividade.
Ilustração 1.21: Conceito do produto
30
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 32

Guia de Design do VLT® Decentral FCD 300 2 Introdução ao FCD 300
2 Introdução ao FCD 300
2.1 Versão do Software
Série FCD 300
Versão do software: 1.5.x
Este guia de design pode ser utilizado com todos os conversores de frequência Série FCD 300 com a versão de software 1.5x.
O número da versão do software pode ser encontrado no parâmetro 640 versão nº.
NOTA!
Este símbolo indica algo que deve ser observado pelo leitor.
Indica uma advertência geral.
Este símbolo indica uma advertência de alta tensão.
2
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
31
Page 33

2 Introdução ao FCD 300 Guia de Design do VLT® Decentral FCD 300
2.2 Segurança
2.2.1 Advertência de Alta Tensão
2
As tensões do conversor de frequência são perigosas sempre que o equipamento estiver ligado à rede elétrica. A instalação incorreta
do motor ou do conversor de frequência pode causar danos ao equipamento, ferimentos graves em pessoas ou inclusive a morte.
Portanto, é importante atender a conformidade às instruções de segurança deste manual bem como as normas e regulamentação de
segurança, nacionais e locais.
As exigências de Tensão Protetiva Extra Baixa (Protective Extra Low Voltage--PELV) especificadas na norma IEC 61800-5-1 não são
atendidas em altitudes superiores a 2.000 m (6562 pés). Para conversores de frequência de 200 V as exigências não são atendidas
em altitudes superiores a 5.000 m (16.404 pés). Entre em contato com a Danfoss para mais informações.
2.2.2 Estas regras dizem respeito à sua segurança
1. O conversor de frequência deve ser desligado da rede elétrica sempre que houver necessidade de serviço de manutenção. Verifique se a
alimentação da rede elétrica foi desligada e se já decorreu o tempo necessário antes de remover o inversor da instalação.
2. A tecla [STOP/RESET] do painel de controle do opcional não desconecta o equipamento da rede elétrica e, por isso, não deve ser utilizada como
interruptor de segurança.
3. A unidade deve estar adequadamente conectada ao ponto de aterramento, o operador deve estar protegido da tensão de alimentação e o motor
deve estar protegido contra sobrecarga, conforme as normas nacionais e locais em vigor.
4. As correntes de fuga para o terra são superiores a 3,5 mA.
5. A proteção contra sobrecarga do motor não está incluída na configuração de fábrica. Se houver necessidade dessa função, programe o parâmetro
Proteção térmica do motor
128
Americano: As funções ETR proporcionam proteção de sobrecarga do motor, classe 20, em conformidade com a NEC.
para o valor de dados
Desarme por ETR
ou para o valor de dados
Advertência de ETR.
Para o mercado Norte
2.2.3 Advertência contra Partida Acidental
1. O motor pode ser parado por meio de comandos digitais, comandos pelo barramento, referências ou parada local, durante o período em que o
conversor de frequência estiver ligado à rede. Se, por motivos de segurança pessoal, for necessário garantir que não ocorra nenhuma partida
acidental, estas funções de parada não são suficientes.
2. Enquanto os parâmetros estiverem sendo alterados, o motor pode dar partida. Por isso, a tecla de parada [STOP/RESET] no painel de controle
do opcional deverá estar sempre acionada, após o que os dados poderão ser modificados.
3. Um motor que foi parado poderá dar partida, se ocorrerem defeitos na eletrônica do conversor de frequência ou se houver uma sobrecarga
temporária ou uma falha na alimentação de rede elétrica ou se a conexão do motor for interrompida.
Pode ser extremamente perigoso tocar nas partes energizadas, mesmo quando a alimentação da rede elétrica CA estiver desconectada.
Para FCD 300: Aguarde pelo menos 4 minutos.
32
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 34

Guia de Design do VLT® Decentral FCD 300 2 Introdução ao FCD 300
2.3 Tecnologia
2.3.1 Princípio de Controle
Um conversor de frequência retifica a tensão CA da rede para uma tensão
CC, após o que ele transforma essa tensão para uma tensão CA de amplitude e frequência variáveis.
Daí o motor recebe uma tensão e frequência variáveis que permitem um
controle de velocidade infinitamente variável dos motores CA trifásicos e
normais.
1. Tensão de rede
3 x 380 - 480 V AC, 50 / 60 Hz.
Retificador
2.
Retificador trifásico tipo ponte que retifica a corrente CA em corrente CC.
Circuito intermediário
3.
Tensão CC ≅ √2 x tensão de rede [V].
Bobinas de circuito intermediário
4.
Uniformizam a corrente do circuito intermediário e limitam a carga na tensão da rede e nos componentes (transformador de linha, cabos, fusíveis
e contactores).
5.
Capacitor do circuito intermediário
Uniformiza a tensão no circuito intermediário.
Inversor
6.
Converte a tensão CC em uma tensão CA variável de frequência variável.
Tensão do Motor
7.
Tensão CA variável, depende da tensão de alimentação.
Frequência variável: 0.2 - 132 / 1 - 1000 Hz.
Placa de controle
8.
É aqui onde o computador controla o inversor que gera o padrão de pulso pelo qual a tensão CC é convertida em uma tensão CA variável de
frequência variável.
2
2.3.2 O Conceito Decentral
O drive de velocidade ajustável do FCD 300 foi projetado para montagem descentralizada, por exemplo, no setor de alimentos e bebidas, na indústria
automotiva e em outras aplicações de manipulação de materiais.
Com o FCD 300 é possível utilizar o potencial de economia de custos colocando a eletrônica de potência descentralizada de modo a tornar os painéis
centrais obsoletos, economizando custo, espaço e trabalho de instalação e fiação.
A unidade é flexível nas suas opções de montagem para montagem independente e montagem do motor. Também é possível ter a unidade pré-montada
em um motor de engrenagens Danfoss Bauer (3 em uma solução). O design básico com uma peça eletrônica com conexão de plugue e uma caixa de
fiação flexível e "espaçosa" é extremamente fácil de manter e fácil de trocar a eletrônica sem necessidade de remover a fiação.
O FCD 300 é parte da família de conversores de frequência VLT, o que significa funcionalidade, programação e operação semelhante aos dos outros
membros da família.
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
33
Page 35

2
2 Introdução ao FCD 300 Guia de Design do VLT® Decentral FCD 300
2.3.3 Princípio de Controle FCD 300
Um conversor de frequência é uma unidade eletrônica capaz de controlar a rotação um motor CA de variação infinita. O conversor de frequência controla
a velocidade do motor, convertendo a tensão e a frequência normais da rede, 400 V / 50 Hz, por exemplo, em magnitudes variáveis. Hoje em dia, motores
CA controlados por conversores de frequência já existem em todas as fábricas automatizadas.
A Série FCD 300 contém um sistema inversor de controles chamado VVC (Conrole de Tensão de Vetor). O VVC controla um motor de indução ao energizar
com frequência variável e tensão adequada. Se a carga do motor for alterada, mudam também sua energização e velocidade. É por isso que a corrente
do motor está sendo constantemente medida e é utilizado um modelo de motor para calcular as reais necessidades de tensão do motor, e seu escorregamento.
2.3.4 Entradas e Saídas Programáveis em Quatro Setups
No FCD Série 300 é possível programar as diferentes entradas de controle e saídas de sinal, bem como selecionar quatro Setups diferentes definidos pelo
usuário para a maioria dos parâmetros. É fácil para o usuário programar as funções desejadas no painel de controle ou por intermédio da comunicação
serial.
2.3.5 Proteção da Rede Elétrica
O FCD Série 300 é protegido contra transientes que podem ocorrer na rede elétrica, como acoplar a um sistema de compensação de fase ou transientes
de fusíveis queimados ou da queda de raios.
A tensão nominal do motor e um torque pleno podem ser mantidos mesmo com valores de aproximadamente 10% abaixo da tensão da rede.
Como todas as unidades da Série 300 têm bobinas no circuito intermediário, a quantidade de interferência nas harmônicas da alimentação da rede elétrica
é muito pequena. Isto proporciona um bom fator de potência (corrente de pico mais baixa), que reduz a carga na instalação da rede.
2.3.6 Proteçãodo Conversor de Frequência
A medição de corrente no circuito intermediário constitui uma proteção perfeita do FCD Série 300 caso ocorra um curto-circuito ou uma falha no aterramento da conexão do motor.
O monitoramento constante da corrente do circuito intermediário permite chaveamento na saída do motor, por exemplo, por intermédio de um contactor.
O monitoramento eficaz da alimentação da rede elétrica significa que a unidade irá parar caso ocorra uma queda de fase (se a carga exceder aprox.
50%). Dessa maneira, o inversor e os capacitores no circuito intermediário não ficarão sobrecarregados, o que reduziria drasticamente a vida útil do
conversor de frequência.
O FCD Série 300 oferece proteção de temperatura como padrão. Se houver uma sobrecarga térmica, essa função desliga o inversor.
2.3.7 Isolamento Galvânico Confiável
No FCD 300 todas as entradas/saídas digitais, entradas/saídas analógicas e os terminais de comunicação serial são fornecidos a partir de ou em conexão
com circuitos compatíveis com os requisitos PELV. PELV também é atendido em relação aos terminais do relé no máx. de 250 V, para que possam ser
conectados ao potencial da rede elétrica.
Consulte a seção
Isolação Galvânica (PELV)
para obter mais detalhes.
34
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 36

Guia de Design do VLT® Decentral FCD 300 2 Introdução ao FCD 300
2.3.8 Proteção Avançada do Motor
O FCD Série 300 possui proteção eletrônica integral do motor.
O conversor de frequência calcula a temperatura do motor com base na corrente, na frequência e no tempo.
Ao contrário da tradicional proteção bimetálica, a proteção eletrônica é responsável pelo reduzido resfriamento em baixas frequências em função da
reduzida velocidade do ventilador (motores com ventilador interno). Essa função não pode proteger os motores individualmente quando esses motores
estão ligados em paralelo. A proteção térmica do motor pode ser comparada a um interruptor de proteção do motor, CTI.
Para dar a máxima proteção ao motor contra superaquecimento quando ele está coberto ou bloqueado ou se a ventoinha apresentar defeito, pode ser
instalado um termistor e conectá-lo à entrada do termistor do conversor de frequência (Entrada digital), consulte o parâmetro 128 Proteção térmica do
motor.
NOTA!
Esta função não protege os motores individuais no caso de motores ligados em paralelo.
2
2.4 Certificação CE
O que é Certificação CE?
O propósito da rotulagem CE é evitar obstáculos técnicos no comércio, dentro da Área de Livre Comércio Europeu e a União Européia. A U.E. introduziu
o rótulo CE como uma forma simples de mostrar se um produto está em conformidade com as orientações relevantes da U.E. A etiqueta CE não tem
informações sobre a qualidade ou especificações do produto. Os conversores de frequência são regidos por três diretivas da UE:
A diretiva de maquinário (98/37/EEC)
Todas as máquinas com peças com movimento crítico estão cobertas pela diretiva das máquinas, publicada no dia 1º de Janeiro de 1995. Como o
conversor de frequência é essencialmente elétrico, ele não se enquadra na diretriz de maquinário. Entretanto, se um conversor de frequência for destinado
a uso em uma máquina, são fornecidas informações sobre os aspectos de segurança relativos a esse conversor. Isto é feito por meio de uma declaração
do fabricante.
A diretriz de baixa tensão (73/23/EEC)
Os conversores de frequência devem ter o rótulo CE em conformidade com a diretriz de baixa tensão, que entrou em vigor em 1º de janeiro de 1997.
Esta diretriz aplica-se a todo equipamento e aparelho doméstico elétrico, usado nas faixas de tensão de 50 - 1.000 Volts CA e de 75 - 1.500 Volts CC. A
Danfoss coloca os rótulos CE em conformidade com a diretriz e emite uma declaração de conformidade mediante solicitação.
A diretriz EMC (89/336/EEC)
EMC é a sigla de compatibilidade eletromagnética. A compatibilidade eletromagnética significa que a interferência mútua entre os diferentes componentes/
aparelhos é tão pequena que não chega a afetar o funcionamento dos mesmos.
A diretiva EMC entrou em vigor no dia 1º de Janeiro de 1996. A Danfoss coloca os rótulos CE em conformidade com a diretriz e emite uma declaração
de conformidade mediante solicitação. A fim de que a instalação de EMC possa ser feita de modo correto, este manual fornece as instruções detalhadas
para esse fim. Além disso, especificamos as normas de conformidade dos nossos diferentes produtos. Oferecemos os filtros que constam nas especificações e fornecemos outros tipos de assistência para garantir um resultado de EMC otimizado.
Em muitos casos o conversor de frequência é utilizado por profissionais como um componente complexo que faz parte de uma aplicação, sistema ou
instalação de grande porte. Deve-se enfatizar que a responsabilidade pelas propriedades finais de EMC do eletrodoméstico, sistema ou instalação recai
sobre o instalador.
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
35
Page 37

2
2 Introdução ao FCD 300 Guia de Design do VLT® Decentral FCD 300
2.4.1 ATEX
O que é um ATEX?
A diretiva 94/9/EC é válida na União Européia (UE) com a finalidade de criar padrões unificados para equipamento e sistemas de proteção para uso em
atmosferas potencialmente explosivas. A diretiva é válida desde julho de 2003 e todos os equipamentos instalados e construídos para áreas potencialmente
explosivas na UE após essa data devem estar de acordo com essa diretiva. A diretiva e suas derivativas são geralmente mencionadas como a diretiva
ATEX. ATEX é um acrônimo de ATmosfera EXplosiva.
É prático classificar áreas de risco em zonas de acordo com a possibilidade de haver uma atmosfera de poeira/gás explosivo presente (ver IEC 79-10).
Essa classificação permite a especificação de tipos apropriados de proteção para cada zona.
Motores alimentados com frequência e tensão variáveis
Quando os motores elétricos forem instalados em áreas onde possam estar presentes na atmosfera quantidades perigosas de gases, vapores, fibras e
poeiras inflamáveis, medidas preventivas são aplicadas para reduzir a possibilidade de explosão resultante de ignição por arcos, faíscas ou superfícies
quentes, produzidas tanto em operações normais ou em condições de falha específicas.
Motores alimentados com frequência e tensão em variação necessitam de:
• Meios (ou equipamento) para controle direto da temperatura por sensores de temperatura integrados especificados na documentação do motor
ou outras medidas eficazes para limitar a temperatura da superfície da caixa do motor. A ação do dispositivo de proteção deverá desconectar
o motor. A combinação do motor e do conversor de frequência não precisa ser testada em conjunto, ou,
• O tipo do motor deve ter sido testado para essa tarefa como uma unidade em associação com o conversor de frequência especificado nos
documentos descritivos de acordo com a IEC 79-0 e com o dispositivo de proteção fornecido.
FCD 300 e ATEX
As seguintes variantes do FCD 300 podem ser instaladas diretamente nas áreas do Grupo II, Categoria 3 e Zona 22:
VLT Decentral FCD3xx-P-T4-P66-xx-R1-Dx-Fxx-T11-Cx
VLT Decentral FCD3xx-P-T4-P66-xx-R1-Dx-Fxx-T12-Cx
VLT Decentral FCD3xx-P-T4-P66-xx-R1-Dx-Fxx-T51-Cx
VLT Decentral FCD3xx-P-T4-P66-xx-R1-Dx-Fxx-T52-Cx
As áreas do Grupo II, Categoria 3 e Zona 22 são caracterizadas por:
• Instalações de superfícies
• Improvável ocorrer atmosfera explosiva ou, se ocorrer, provavelmente será somente por um curto período e não durante as tarefas normais
• O meio explosivo é poeira
A temperatura máxima da superfície do FCD 300 durante a tarefa normal no pior caso está limitada a 135 ºC. Essa temperatura deve ser menor que a
temperatura de ignição da poeira presente.
O instalador deverá definir as temperaturas da zona, categoria e ignição da poeira do ambiente onde o FCD 300 está instalado.
36
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 38

Guia de Design do VLT® Decentral FCD 300 2 Introdução ao FCD 300
Instalação correta do ATEX
Os seguintes problemas devem ser considerados ao instalar o FCD 300 nos ambientes ATEX da zona 22:
• O motor deve ser projetado, testado e certificado pelo fabricante do motor para aplicações de velocidade variável
• O motor deve ser projetado para operação na Zona 22. Por exemplo, com um tipo de proteção "tD" de acordo com a EN61241-0 e -1 ou
EN50281-1-1.
• O motor deve ser fornecido com proteção do termistor. A proteção do termistor deve ser conectada a um relé externo de termistor, com um
Certificado de Exame Tipo EC ou compatível com a entrada de termistor do FCD 300.
Se a proteção do termistor do FCD 300 for usada, o termistor deve possuir fiação até os terminais 31a e 31b e o desarme do termistor ativado
pelo parâmetro de programação 128 para desarme de termistor [2]. Consulte o parâmetro 128 para obter mais detalhes.
• As entradas de cabos devem ser escolhidas para a proteção do gabinete metálico que será mantido. Também deve ser assegurado que as
entradas dos cabos atendam aos requisitos de força da braçadeira e de resistências mecânicas conforme descrito na EN 50014:2000.
• O FCD deve ser instalado com conexão de aterramento adequada de acordo com as regulamentações locais/nacionais.
• A instalação, inspeção e manutenção de aparelhos elétricos para utilização em poeiras combustíveis, somente deve ser executada por pessoal
treinado e familiar com o conceito de proteção.
Para obter uma declaração de conformidade, consulte seu representante Danfoss local.
2
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
37
Page 39

3
3 Instalação Guia de Design do VLT® Decentral FCD 300
38
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 40

Guia de Design do VLT® Decentral FCD 300 3 Instalação
3Instalação
3.1 Dimensões Mecânicas
3.1.1 Dimensões Mecânicas, Montagem do Motor
3
3.1.2 Dimensões Mecânicas, Montagem Independente
Dimensões mecânicas em mm FCD 303-315 FCD 322-335
A 192 258
A1 133 170
B 244 300
B1 300 367
B2 284 346
C 142 151
C1 145 154
Tamanhos da junção com gaxeta do cabo M16, M20, M25 x 1,5 mm
Espaço para entradas de cabos e cabo da chave de serviço de 100-150 mm
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
39
Page 41

3
3 Instalação Guia de Design do VLT® Decentral FCD 300
3.1.3 Espaço para Instalação Mecânica
Todas as unidades requerem um mínimo de 100 mm de espaço para
ventilação entre os componentes que estão acima e abaixo do invólucro.
3.2 Instalação Mecânica
Esteja atento aos requisitos que se aplicam à integração e à montagem remota. A informação deve ser seguida para evitar sérios danos
ou ferimentos, especialmente na instalação de unidades grandes.
O FCD 300 consiste em duas partes: A parte de instalação e a parte eletrônica.
As duas partes deverão ser separadas e a parte da instalação deverá ser montada primeiro. Após a fiação, a parte eletrônica deverá ser presa na parte
da instalação pelos seis parafusos anexados. Para comprimir a gaxeta os parafusos deverão ser apertados com 2-2,4 Nm; aperte primeiro os dois parafusos
centrais e, em seguida, os quatro parafusos dos cantos de forma cruzada.
NOTA!
Não ligue a rede elétrica antes de os seis parafusos estarem apertados.
O FCD 300 pode ser aplicado da seguinte maneira:
- Montado de forma independente perto do motor
- Montado no motor
ou poderá ser entregue pré-montado em um motor Danfoss Bauer (de engrenagens). Entre em contato com a organização de vendas da Danfoss Bauer
para obter mais informações.
O conversor de frequência é refrigerado pela circulação do ar. Para a unidade poder liberar o ar de resfriamento, o espaço livre acima e abaixo da unidade
deverá ser
máxima especificada para o conversor de frequência e que a temperatura média de 24 horas não seja excedida. A temperatura máxima e a média de 24
horas podem ser observadas em
Consulte
temperatura ambiente.
no mínimo 100 mm
Derating da temperatura ambiente
40
. Para proteger a unidade contra superaquecimento é necessário garantir que a temperatura ambiente não exceda a
Dados Técnicos Gerais
. Observe que a vida útil do conversor de frequência será reduzida se não for considerado o derating da
. Se a temperatura ambiente for mais elevada, deverá ser feito derating do conversor de frequência.
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 42

Guia de Design do VLT® Decentral FCD 300 3 Instalação
Montagem independente (montagem em parede)
Para o melhor resfriamento a unidade deve ser montada verticalmente, mas se houver limitação de espaço é permitido montagem horizontal. Os três
suportes de montagem em parede integrados na versão de montagem em parede podem ser usados para fixar a caixa de instalação na superfície de
montagem, mantendo uma distância para limpeza entre a caixa e a superfície de montagem. Use as três arruelas fornecidas para proteger a pintura.
Os parafusos deverão ser M6 para o FCD 303 - 315 e M8 para o FCD 322 - 335.
Consulte Desenhos Dimensionais.
Montagem do motor
A caixa de instalação normalmente deve ser montada na superfície do
chassi do motor, em vez de na caixa de terminais do motor. O motor/
motor de engrenagens pode ser montado com o eixo na vertical ou horizontal. A unidade não pode ser montada de ponta-cabeça (o dissipador
de calor apontando para baixo). O resfriamento da parte eletrônica é independente do ventilador de resfriamento do motor. Para montagem diretamente nos motores de engrenagens Danfoss Bauer não é necessária
uma placa de adaptação. Para montagem em motor (motores não Danfoss Bauer) geralmente deve ser aplicada uma placa de adaptação. Para
essa finalidade existe disponível uma placa neutra incluindo gaxeta e parafusos para a caixa de instalação. As furações apropriadas e a gaxeta da
caixa do motor são aplicadas localmente. Certifique-se de que a resistência mecânica dos parafusos de montagem e das roscas é suficiente
para a aplicação. A resistência especificada contra vibrações mecânicas
não cobre a montagem em um motor não Danfoss Bauer, pois a estabilidade do chassi do motor e as roscas estão fora do controle e da responsabilidade da Danfoss Drive e o mesmo se aplica à classe de gabinete
metálico. Observe que o conversor de frequência não pode ser usado
para levantar o motor/motor de engrenagens.
1. Prepare a placa de adaptação para montagem do motor perfurando os furos de fixação e os furos dos cabos.
2. Monte a placa no motor com a gaxeta normal da caixa de terminais.
3. Perfure os quatro furos de parafuso para montagem da placa de
adaptação (furos externos).
4. Monte a caixa de terminais no motor com a gaxeta e os quatro
parafusos de vedação fornecidos.
Use as arruelas em estrelas fornecidas para prender a conexão
do PE em conformidade com EN 60204. Os parafusos devem ser
apertados com torque de 5 Nm.
3
Ilustração 3.2: Posições de montagem permitidas
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Ilustração 3.1: Placa de adaptação universal
41
Page 43

3
3 Instalação Guia de Design do VLT® Decentral FCD 300
Ilustração 3.3: Visão inferior do FCD 303-315
Ilustração 3.4: Visão inferior do FCD 322-330
3.3 Informações gerais sobre Instalação Elétrica
3.3.1 Advertência de Alta Tensão
As tensões do conversor de frequência são perigosas sempre que o equipamento estiver ligado à rede elétrica. A instalação incorreta
do motor ou do conversor de frequência pode causar danos ao equipamento, ferimentos graves ou mesmo morte. Siga as instruções
deste manual e as regras e regulamentações de segurança locais e nacionais.
Tocar as partes elétricas pode causar até a morte - mesmo depois de desligar o equipamento da rede elétrica: Aguarde pelo menos 4
minutos para a corrente dissipar.
NOTA!
É responsabilidade do usuário ou do instalador garantir aterramento correto e proteção em conformidade com as normas locais e
nacionais.
3.3.2 Cabos
O cabo de controle e o cabo de rede elétrica devem ser instalados separadamente dos cabos do motor, para prevenir a transferência de ruído. Como
regra, uma distância de 20 cm é suficiente, mas recomenda-se que a distância seja a maior possível, especialmente quando os cabos são instalados em
paralelo por grandes distâncias.
Para os cabos sensíveis aos sinais como cabos telefônicos e de transmissão de dados, recomenda-se a maior distância possível. Observe que a distância
exigida depende da instalação e da sensibilidade dos cabos de sinais e que os valores exatos, portanto, podem não ser informados.
Ao serem dispostos nas canaletas de cabos, os cabos de sinais sensíveis não podem ser colocados na mesma canaleta que o cabo do motor. Se os cabos
de sinais passarem pelos cabos de potência, isto deve ser feito em um ângulo de 90 graus. Lembre-se de que todos os cabos de entrada e saída sujeitos
a ruídos em um gabinete devem ser blindados/encapados metalicamente.
Consulte também
Junções com gaxeta para cabos
É necessário assegurar que sejam escolhidas e montadas cuidadosamente as junções com gaxeta para cabos adequadas para o ambiente.
Instalação elétrica compatível com EMC
.
42
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 44

Guia de Design do VLT® Decentral FCD 300 3 Instalação
3.3.3 Cabos blindados/encapados metalicamente
A malha de aterramento deve ter uma impedância baixa para alta frequência, que é conseguida através de uma malha de aterramento trançada de cobre,
alumínio ou ferro. Um reforço da malha de aterramento pretendido para proteção mecânica, por exemplo, não é apropriado para uma instalação correta
da EMC. Consulte também
3.3.4 Proteção extra
Uso de cabos corretos para EMC
.
Relés ELCB, aterramento de proteção múltiplo ou aterramento pode ser utilizado como proteção extra, desde que esteja em conformidade com a legislação
de segurança local. No caso de uma falha de aterramento, um componente CC pode desenvolver-se na corrente em falha. Nunca utilize um relé do tipo
A RCD (ELCB), uma vez que ele não é adequado para as componentes CC da corrente de falha. Se forem utilizados relés ELCB, as normas locais deverão
ser obedecidas.Se forem utilizados relés ELCB, eles devem ser:
- Adequados à proteção de equipamento com uma componente CC na corrente de falha (retificador tipo ponte trifásico)
- Adequados a uma rápida descarga em forma de pulso no momento da energização
- Adequados para uma corrente de fuga elevada.
Consulte também a Nota MN.90.GX.02 sobre a Aplicação do RCD.
3.3.5 Teste de Alta Tensão
Um ensaio de alta tensão poderá ser realizado aplicando curto-circuito nos terminais U, V, W, L1, L2 e L3 e aplicando uma tensão máx.de 2160 V CC
durante 1 s entre esse curto-circuito e o terminal PE.
3.3.6 Componentes eletrônicos adquiridos sem caixa de instalação
Se o componente eletrônico for adquirido sem a peça de instalação da Danfoss, a conexão de aterramento deverá ser adequada para corrente de fuga
elevada. É recomendável o uso da caixa de instalação Danfoss original ou o kit de instalação 175N2207.
3.3.7 Cuidado!
3
Conexão PE
O pino metálico no(s) canto(s) do componente eletrônico e a mola de bronze no(s) canto(s) da caixa de
instalação são essenciais para conexão do
to de proteção
dos ou violados de alguma maneira.
NOTA!
Não conecte/desconecte o componente eletrônico com
a tensão de rede ligada.
. Verifique se não estão soltos, removi-
aterramen-
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
43
Page 45

3
3 Instalação Guia de Design do VLT® Decentral FCD 300
3.3.8 Aterramento de Proteção
A conexão de aterramento serve para diversas finalidades.
• Aterramento de Segurança (Aterramento de Proteção, PE)
O equipamento deve ser aterrado corretamente de acordo com as regulamentações locais. Esse equipamento tem uma corrente de fuga > 3,5
mA CA. Deverá ser conectado a uma conexão de aterramento que atenda as regras locais para equipamento com corrente de fuga elevada.
2
Normalmente, isso significa que os condutores PE devem ser melhorados (seção transversal mínima de 10 mm
• "Travamento" do ruído (altas frequências)
A comunicação estável entre as unidades pede a blindagem dos cabos de comunicação (1). Os cabos devem ser presos corretamente às braçadeiras da tela fornecidas para essa finalidade.
• Equalização do potencial de tensão (frequências baixas)
Para reduzir as correntes de alinhamento na blindagem do cabo de comunicação, aplique sempre um cabo de treinamento curto entre as unidades
que estiverem conectadas no mesmo cabo de comunicação (2) ou conectadas a um chassi aterrado (3).
• Equalização do potencial: Todas as peças metálicas em que os motores estão presos deverão ter o potencial equalizado.
As conexões PE, os cabos de equalização de tensão e a blindagem do cabo de comunicação devem ser conectados ao mesmo potencial (4).
Mantenha o condutor o mais curto possível e use a maior área de superfície possível.
A numeração refere-se à figura.
) ou duplicados
Ilustração 3.5: Instalação correta do aterramento
44
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 46

Guia de Design do VLT® Decentral FCD 300 3 Instalação
3.3.9 Instalação Elétrica Correta para EMC
Pontos gerais a serem observados para garantir a instalação elétrica correta de EMC.
- Use somente cabos reforçados/blindados para o motor e cabos de controle reforçados/blindados.
- Conecte ambas as extremidades da malha metálica do cabo ao terra.
- Evite a instalação com as extremidades da malha metálica torcidas (espiraladas), uma vez que isto pode comprometer o efeito de blindagem
em altas frequências. Use braçadeiras para os cabos.
- Não remova a blindagem do cabo entre a braçadeira do cabo e o terminal.
3.3.10 Uso de cabos compatíveis com EMC
Para estar compatível com a imunidade EMC dos cabos de controle e as emissões EMC dos cabos de motor, recomenda-se utilizar cabos blindados/
reforçados.
A capacidade de um cabo em reduzir a quantidade de irradiação de entrada e de saída do ruído elétrico depende da impedância de transferência (Z
A blindagem de um cabo normalmente é projetada para reduzir a transferência de ruído elétrico e uma malha com Z
com Z
maior.
T
raramente é informada pelos fabricantes de cabos, porém, frequentemente é possível estimar a ZT observando e avaliando o design físico do cabo.
A Z
T
menor é mais eficaz que uma malha
T
3
).
T
A Z
pode ser avaliada com base nos seguintes fatores:
T
- a resistência de contato entre os condutores individuais da malha de aterramento.
- A abrangência da blindagem, ou seja, a área física do cabo coberta pela blindagem. Geralmente é declarada como uma porcentagem e não
deve ser menor que 85%.
- O tipo de malha de aterramento, ou seja, padrão trançado ou entrelaçado. Recomenda-se um padrão trançado ou 'closed pipe'.
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
45
Page 47

3
3 Instalação Guia de Design do VLT® Decentral FCD 300
46
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 48

Guia de Design do VLT® Decentral FCD 300 3 Instalação
3.3.11 Aterramento de Cabos de Controle Blindados/Encapados Metalicamente
Em geral, os cabos de controle devem ser blindados/encapados metalicamente e a malha metálica deve ser conectada ao gabinete metálico da unidade
por meio de uma braçadeira em cada extremidade.
O desenho abaixo mostra a forma correta de realizar o aterramento e o que fazer caso haja dúvidas.
1. Aterramento correto
Os cabos de controle e os cabos de comunicação serial devem
estar conectados com braçadeiras em ambas as extremidades
para assegurar o máximo contato elétrico possível.
2. Aterramento incorreto
Não torcer as extremidades da blindagem (rabichos), pois isso
aumenta a impedância da blindagem nas frequências altas.
3. Proteção com relação ao potencial do ponto de aterra-
mento entre o PLC e o VLT
Se houver diferença de potencial entre os pontos de aterramento do conversor de frequência VLT e o PLC (etc.), poderá ocorrer
ruído elétrico que perturbará todo o sistema. Este problema pode ser resolvido instalando-se um cabo equalizador, colocado
próximo ao cabo de controle. Seção transversal mínima do cabo:
2
16 mm
.
4. No caso de um loop de aterramento de 50/60 Hz
Se cabos de controle muito longos forem utilizados, podem
ocorrer loops de aterramento de 50/60 Hz, os quais podem causar interferência em todo o sistema. Este problema é resolvido
conectando-se uma das extremidades da malha metálica ao terra através de um capacitor de 100 nF (de terminais curtos).
3
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
47
Page 49

3
3 Instalação Guia de Design do VLT® Decentral FCD 300
3.4 Diagrama
* Controle de freio mecânico e freio integrado e 24 V externo são opcionais.
3.4.1 Interruptores de RFI J1, J2
J1 e J2 devem ser removidos em redes elétricas IT e redes com aterramento em delta com fase para tensão de aterramento > 300 V também durante
defeito do aterramento.
J1 e J2 podem ser removidos para reduzir a corrente de fuga.
Cuidado: Sem filtragem correta de RFI.
48
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 50

Guia de Design do VLT® Decentral FCD 300 3 Instalação
3.5 Instalação Elétrica
3.5.1 Localização dos Terminais
3
Ilustração 3.6: T12, T16, T52, T56
Ilustração 3.7: Versões com chave de serviço
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
49
Page 51

3
3 Instalação Guia de Design do VLT® Decentral FCD 300
Ilustração 3.8: Versão T73 com plugue do motor e plugues do sensor
A versão é entregue pela Danfoss com a fiação como mostrado.
3.5.2 Conexão de Rede Elétrica
NOTA!
Verifique se a tensão da rede ajusta-se à tensão de rede do conversor de frequência, o que pode ser visto na placa de identificação.
No. 91 92 93 Tensão de rede elétrica 3 x 380-480 V
L1 L2 L3
PE Conexão do terra
Consulte
Dados Técnicos
para obter o dimensionamento correto da seção transversal do cabo.
3.5.3 Pré-fusíveis
Consulte
Dados Técnicos
para obter o dimensionamento correto dos pré-fusíveis.
50
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 52

Guia de Design do VLT® Decentral FCD 300 3 Instalação
3.5.4 Conexão do Motor
Conecte o motor aos terminais 96, 97, 98. Conecte o terra ao terminal PE.
No.
Consulte
Dados Técnicos
Todos os tipos de motores assíncronos trifásicos padrão podem ser conectados a um conversor de frequência. Normalmente, os motores pequenos são conectados em estrela (230/400 V, / Y). Os motores grandes
são conectados em delta (400/690 V, / Y). O modo de conexão e a
tensão correta podem ser lidos na placa de identificação do motor.
96 97 98 Tensão do motor 0-100 % da tensão de rede
U V W
U1
W2
U1 V1 W1 6 fios que saem do motor, ligados em Estrela
PE Conexão do terra
NOTA!
Nos motores sem papel de isolamento de fase, deve
ser instalado um filtro LC na saída do conversor de
frequência.
V1
U2
para obter o dimensionamento correto da seção transversal do cabo.
3 fios de saída do motor
W1V26 fios que saem do motor, ligados em Delta
U2, V2, W2 deverão ser interconectados separadamente (bloco de terminais opcional)
3.5.5 Sentido da Rotação do Motor
A programação de fábrica é para a rotação no sentido horário com a saída
do transformador do conversor de frequência ligada da seguinte maneira:
3
Terminal 96 ligado â fase U.
Terminal 97 ligado â fase V.
Terminal 98 ligado â fase W.
O sentido de rotação pode ser trocado invertendo duas fases nos terminais do motor.
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
51
Page 53

3
3 Instalação Guia de Design do VLT® Decentral FCD 300
3.5.6 Conexão de Rede e do Motor com a Chave de Serviço
3.5.7 Conexão do Plugue do Motor HAN 10E para T73
HAN 10E pino nº 1 - Fase U do motor
HAN 10E pino nº 2 - Fase V do motor
HAN 10E pino nº 3 - Fase W do motor
HAN 10E pino nº 4 - Freio do motor, consulte
Utilização MG.04.BX.YY
HAN 10E pino nº 5 - Freio do motor, consulte
Utilização
HAN 10E pino nº 9 - Termistor do motor, consulte
Utilização MG.04.BX.YY
HAN 10E pino nº 10 - Termistor do motor, conslulte
de Utilização MG.04.BX.YY
PE = ponto de aterramento de proteção
MG.04.BX.YY
, terminal 122
, terminal 123
, terminal 31A
, terminal 31B
Instruções de
Instruções de
Instruções de
Instruções
3.5.8 Conexão de Motores em Paralelo
O conversor de frequência é capaz de controlar diversos motores ligados
em paralelo. Se for preciso que os motores tenham valores de rotação
diferentes, os mesmos deverão possuir valores de rotação nominais diferentes. A rotação do motor é alterada simultaneamente, o que significa
que a relação entre os valores de rotação nominal é mantida em toda a
faixa. O consumo total de corrente dos motores não deve ultrapassar a
corrente de saída nominal máxima I
do conversor de frequência.
INV
52
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 54

Guia de Design do VLT® Decentral FCD 300 3 Instalação
Se os tamanhos dos motores forem muito diferentes, poderão surgir problemas tanto na partida, quanto em baixas velocidades de rotação. Isto porque
a resistência ôhmica relativamente alta no estator de motores pequenos necessita de uma tensão mais alta na partida, e em baixos valores de rotação.
Nos sistemas com motores ligados em paralelo o relé térmico eletrônico (ETR) do conversor de frequência não pode ser utilizado como proteção de um
motor individual. Consequentemente, é necessária uma proteção adicional ao motor, tal como termistores em cada motor (ou relés térmicos individuais).
NOTA!
O parâmetro 107
O parâmetro 101
verem conectados em paralelo.
3.5.9 Cabos do Motor
Veja na seção Dados técnicos o correto dimensionamento do comprimento e da seção transversal do cabo do motor. Obedeça sempre as normas nacionais
e locais sobre a seção transversal do cabo.
NOTA!
Se for usado um cabo não blindado/não encapado metalicamente, alguns requisitos de EMC não serão atendidos; consulte
do teste de EMC
Sintonização automática do motor, AMT
Característica do torque
no Guia de Design.
deve ser programado para
não pode ser utilizado quando os motores estiverem conectados em paralelo.
Características especiais do motor
[8] quando os motores esti-
Resultados
3
Para obedecer as especificações EMC em relação à emissão, o cabo do motor deve ser blindado/encapado metalicamente, exceto quando for indicado
de modo diferente para o filtro RFI em questão. É importante manter o cabo do motor tão curto quanto possível, de modo a reduzir o nível de ruído e
as correntes de fuga a um mínimo. A blindagem do cabo do motor deve ser conectada ao gabinete do conversor de frequência e à carcaça do motor. As
ligações da blindagem devem ser efetuadas com a maior superfície possível (braçadeira de cabo). Isto é possível graças a diferentes dispositivos de
instalação em diferentes conversores de frequência. A montagem com pontas da malha de blindagem torcidas (rabicho) deve ser evitada, pois isso
reduzirá o efeito da blindagem nas altas frequências. Se for necessário cortar a blindagem para instalar uma proteção para o motor ou os relés do motor,
a blindagem deve ter continuidade com a mais baixa impedância de alta frequência que for possível.
3.5.10 Proteção Térmica do Motor
O relé térmico eletrônico dos conversores de frequência com aprovação UL recebeu a aprovação UL para proteção de um único motor quando o parâmetro
128
Proteção térmica do motor
corrente nominal do motor (consulte a plaqueta de identificação do motor).
tiver sido programado para
Desarme do ETR
e o parâmetro 105
Corrente do motor, I
tiver sido programado para a
M, N
3.5.11 Resistor de freio
No. 81 (função opcional) 82 (função opcional) Terminais do resistor de freio
O cabo de conexão do resistor de freio deve ser blindado/encapado metalicamente. Conecte a malha ao gabinete metálico do conversor de frequência
e ao gabinete metálico da resistência de freio por intermédio das braçadeiras do cabo. Dimensione a secção transversal do cabo de freio de forma a
coincidir com o torque do freio.
R- R+
Consulte o capítulo
Frenagem Dinâmica
NOTA!
Note que podem ser observadas tensões de até 850 V CC nos terminais.
no
Guia de Design MG.90.FX.YY
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
para saber o dimensionamento dos resistores de freio.
53
Page 55

3 Instalação Guia de Design do VLT® Decentral FCD 300
3.5.12 Controle do Freio Mecânico
3
No. 122 (função opcional) 123 (função opcional)
Nas aplicações de elevação/abaixamento, é preciso haver a capacidade de controlar um freio eletromagnético. O freio é controlado com os terminais
especiais 122/123 de alimentação/controle do freio mecânico.
Quando a saída de frequência exceder o valor de interrupção definido no par. 138, o freio será liberado se a corrente do motor exceder o valor predefinido
no parâmetro 140. Ao parar, o freio é acionado quando a frequência de saída for inferior à frequência de acionamento do freio, que é programada no
par. 139.
Se o conversor de frequência estiver em estado de alarme ou em uma situação de sobretensão, o freio mecânico será ativado imediatamente.
Se não estiver usando os terminais especiais de alimentação/controle do freio mecânico (122/123), selecione
323 ou 341 para aplicações com freio eletromagnético.
Uma saída de relê ou saída digital (terminal 46) pode ser usada. Consulte
MBR+ MBR- Freio mecânico (UDC=0,45 X Tensão de Rede) Máx. 0,8 A
Conexão do freio mecânico
Controle do freio mecânico
para obter mais detalhes.
no parâmetro
3.5.13 Instalação Elétrica, Cabos de Controle
Os cabos de controle devem ser blindados/encapados metalicamente. A malha deve estar conectada ao chassi do conversor de frequência por intermédio
de uma braçadeira. Normalmente a malha também deve estar conectada ao chassi da unidade de controle (use as instruções da unidade em questão).
Se forem usados cabos de controle muito longos e sinais analógicos, em casos raros, dependendo da instalação, poderão ocorrer malhas de aterramento
de 50/60 Hz devido ao ruído transmitido pelos cabos de alimentação da rede. Por este motivo poderá ser necessário abrir a malha e talvez inserir um
condensador de 100 nF entre a malha e o chassi.
Interruptores S101-104
bobinas do bus serial, deixe os interruptores (ON) (Ligado)
54
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 56

Guia de Design do VLT® Decentral FCD 300 3 Instalação
3.5.14 Conexão de Sensores a Plugues M12 do T63 e T73
3
Para classificar especificações, consulte
Os terminais 203/204 são usados para alimentação do sensor.
Terminal 203 = comum
Terminal 204 = +24 V
Os terminais 201/202 podem ser usados para uma alimentação de 24 V separada.
Dados técnicos gerais
, entradas digitais terminais 18, 19, 29, 33.
3.5.15 Instalação Elétrica, Terminais de Controle
Consulte a seção intitulada
terminação correta dos cabos de controle.
No. Função
01-03 As saídas 01-03 do relé podem ser utilizadas para indicar status e alarmes/advertências.
12 Tensão de alimentação de 24 V CC.
18-33 Entradas digitais.
20, 55 Estrutura comum para terminais de entrada e saída. Pode ser separada com a chave S100
31a, 31b Termistor do motor
35 Comum (-) para a alimentação de controle externa de reserva de 24 V. Opcional.
36 Alimentação de controle externa de reserva de 24 V. Opcional.
42 Saída analógica para exibir frequência, referência, corrente ou torque.
46 Saída digital para exibir status,advertências ou alarmes, além de saída de frequência.
50 Tensão de alimentação de +10 V CC para o potenciômetro
53 Entrada de tensão analógica de 0 - +/- 10 V CC.
60 Entrada de corrente analógica 0/4 - 20 mA.
67 Tensão de alimentação de +5 V CC para o Profibus.
68, 69 Comunicação serial do fieldbus*
70 Aterramento dos terminais 67, 68 e 69.
DPara uso futuro
V+5 V, vermelho
P RS485(+), LCP2/PC, amarelo
N RS485(-), LCP2/PC, verde
GOV, azul
Aterramento de cabos de controle blindados/encapados metalicamente
Normalmente este terminal não deve ser usado.
no Guia de Design para obter informações sobre a
* Consulte
(MG.90.BX.YY) ou
ceNet
Instruções de Utilização do VLT 2800/FCM 300/FCD 300 Profibus DP V1
Instruções de Utilização da interface AS do FCD 300
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
(MG.04.EX.YY).
(MG.90.AX.YY),
Instruções de Utilização do VLT 2800/FCD 300 Devi-
55
Page 57

3 Instalação Guia de Design do VLT® Decentral FCD 300
3.5.16 Comunicação com PC
Conecte aos terminais P e N para acesso do PC a parâmetros únicos. A comunicação com o motor e o fieldbus deve ser interrompida antes da transferência
automática de vários parâmetros.
Nas variantes Profibus e não fieldbus os terminais 68 e 69 podem ser usados, desde que a comunicação do Profibus esteja parada.
3.5.17 Conexão de Relés
3
Consulte o parâmetro 323
da saída do relé.
Saída do relé
para saber sobre a programação
No. 01 - 02 1 - 2 fechar (normalmente aberto)
01 - 03
1 - 3 interromper (normalmente fechado)
3.5.18 Plug LCP 2, Opcional
Uma unidade de controle LCP 2 pode ser conectada a um plugue que é montado opcionalmente na caixa. Código de pedido: 175N0131.
As unidades de controle do Painel de controle local com número de pedido 175Z0401 não devem ser conectadas.
3.5.19 Instalação de fonte de alimentação externa de 24 V (opcional)
A alimentação CC externa de 24 V pode ser usada como alimentação de baixa tensão para o cartão de controle. Isso permite a operação total do LCP2
e do barramento serial (inclusive programação de parâmetro) sem conexão à rede elétrica.
Observe que será emitida uma advertência de baixa tensão quando a fonte de 24 V CC for conectada; no entanto, não haverá desarme.
NOTA!
Use a alimentação de 24 V do tipo PELV para assegurar isolamento galvânico correto (tipo PELV) nos terminais de controle do conversor
de frequência VLT.
Tome cuidado com partida acidental do motor se energia de rede for aplicada durante a operação com alimentação externa de reserva
de 24 V.
3.5.20 Versão de software 1.5x
Um FCD equipado com Fieldbus mostra o status
RUNNING somente pelas entradas digitais até um dos seguintes parâmetros ser configurado:
- O par. 502 é programado para
- O par. 833 ou 928 é programado para
- O par. 678 é programado para
A status word do fieldbus na energização poderá ser diferente (normalmente 0603h em vez de 0607h) até a primeira control word válida ser enviada.
Após enviar a primeira control word válida (bit 10 = Dados válidos) o status é exatamente como nas versões de software anteriores.
Unidade pronta
Entrada digital
Desativar
Versão padrão
mesmo com os terminais 12-27 em ponte e não pode ser programado para o modo
ou
Lógica E
ou
ou
56
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 58

Guia de Design do VLT® Decentral FCD 300 3 Instalação
3.6 Exemplos de Conexão
3
NOTA!
Evite passar os cabos dos componentes eletrônicos por cima dos plugues.
Não solte o parafuso que prende a mola da conexão PE.
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
57
Page 59

3 Instalação Guia de Design do VLT® Decentral FCD 300
NOTA!
Nos
exemplos de conexão
3.6.1 Partida/Parada
a seguir, observe que a Chave S100 não deve ter as configurações de fábrica (on) (Ligado) alteradas.
3
Partida/parada usando o terminal 18 e parada por inércia usando o terminal 27.
Par. 302
Entrada digital
Entrada digital = Parada por inércia invertida
Par. 304
Para a Partida/parada precisa, são feitas as seguintes configurações:
Entrada digital = Partida/parada precisa
Par. 302
Par. 304
Entrada digital = Parada por inércia invertida
=
Partida
[7]
[2]
[27]
[2]
3.6.2 Partida/Parada por Pulso
Partida de pulso usando o terminal 18 e parada de pulso usando o terminal 19. Além disso, a frequência de jog é ativada via terminal 29.
Par. 302
Entrada digital = Partida por pulso
Entrada digital
Par. 303
Entrada digital = Parada por inércia invertida
Par. 304
Entrada digital
Par. 305
=
Parada invertida
=
Jog
[13]
[8]
[6]
[2]
3.6.3 Aceleração/Desaceleração
Acelerar/desacelerar utilizando os terminais 29/33.
Entrada digital
Par. 302
Entrada digital = Congelar referência
Par. 303
Entrada digital = Acelerar
Par. 305
Par. 307
Entrada digital
=
Partida
=
Desacelerar
[7]
[16]
[17]
58
[14]
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 60

Guia de Design do VLT® Decentral FCD 300 3 Instalação
3.6.4 Referência do Potenciômetro
Referência de tensão por meio de um potenciômetro.
Entrada analógica
Par. 308
Par. 309
Terminal 53, escala mín.
Terminal 53, escala máx
Par. 310
=
Referência
[1]
= 0 Volt
. = 10 Volt.
3.6.5 Conexão de um transmissor de dois fios
Conexão de um transmissor de dois fios, como feedback para o terminal 60.
Par. 314
Entrada analógica = Feedback
Terminal 60, escala mín.
Par. 315
Terminal 60, escala máx.
Par. 316
[2]
= 4 mA
= 20 mA
3
3.6.6 Referência de 4-20 mA
Referência de 4-20 mA no terminal 60 e sinal de feedback de velocidade no terminal 53.
Par. 100
Configuração = Malha fechada de velocidade
Entrada analógica
Par. 308
Terminal 53, escala mín.
Par. 309
Terminal 53, escala máx
Par. 310
Par. 314
Entrada analógica
Terminal 60, escala mín
Par. 309
Par. 310
Terminal 60, escala máx
=
Feedback
=
Referência
. = 4 mA
[2]
= 0 Volt
. = 10 Volt.
[1]
. = 20 mA
[1]
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
59
Page 61

3
3 Instalação Guia de Design do VLT® Decentral FCD 300
3.6.7 50 Hz no sentido anti-horário a 50 Hz no sentido horário
Com potenciômetro fornecido internamente.
Configuração = Regulagem de velocidade, malha aber-
Par. 100
ta
[0]
Par. 200
Faixa de frequência de saída = Nos dois sentidos, 0-132
Hz
[1]
Faixa de referência = Ref. mín. - Ref. máx.
Par. 203
Referência mín.
Par. 204
Par. 205
Referência máx
Entrada digital
Par. 302
Entrada digital = Parada por inércia invertida
Par. 304
Par. 308
Entrada analógica = Referência
Terminal 53, escala mín.
Par. 309
Terminal 53, escala máx.
Par. 310
= - 50 Hz
. = 50 Hz
=
Partida
[7]
[1]
= 0 Volt.
= 10 Volt.
[0]
[2]
60
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 62

Guia de Design do VLT® Decentral FCD 300 3 Instalação
3.6.8 Referências Predefinidas
Comutam entre 8 referências pré-definidas através de duas entradas digitais e de Setup 1 e Setup 2.
Setup Ativo
Par. 004
Par. 204
Referência mínima
Referência máx
Par. 205
Entrada digital
Par. 302
Par. 303
Entrada digital
Entrada digital = Parada por inércia invertida
Par. 304
Par. 305
Entrada digital
Entrada digital
Par. 307
Setup 1
contém as seguintes referências predefinidas:
Referência predefinida 1
Par. 215
Par. 216
Referência predefinida 2
Referência predefinida 3
Par. 217
Referência predefinida 4
Par. 218
Setup 2
contém as seguintes referências predefinidas:
Par. 215
Referência predefinida 1
Referência predefinida 2
Par. 216
Referência predefinida 3
Par. 217
Par. 218
Referência predefinida 4
=
Setup múltiplo 1
. = 50 Hz
=
Partida
= Seleção de Setup, lsb [31]
= Referência predefinida, lsb [22]
= Ref. predefinida, msb [23]
= 0 Hz
[5]
[7]
= 5,00%.
= 10,00%
= 25,00%
= 35,00%
= 40,00%
= 50,00%
= 70,00%
= 100,00%
[2]
Esta tabela mostra qual é a frequência de saída:
Ref. predefini-
da, msb
Ref. predefini-
da, lsb
000 2.5
010 5
100 10
1 1 0 17.5
001 20
011 25
101 35
111 50
Seleção de
Setup
Frequência de saí-
3
da[Hz]
3.6.9 Conexão do Freio Mecânico
Utilizando terminais 122/123
Par. 302
Entrada digital
Entrada digital = Parada por inércia invertida
Par. 304
Consulte também par. 138, 139, 140
=
Partida
[7]
[2]
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
61
Page 63

3 Instalação Guia de Design do VLT® Decentral FCD 300
Freio mecânico com enrolamento acelerador
3
Entrada digital
Par. 302
Entrada digital = Parada por inércia invertida
Par. 304
Consulte também par. 138, 139, 140
Uso do relé para freio de 230 V CA
Entrada digital
Par. 302
Entrada digital = Parada por inércia invertida
Par. 304
Saída do relé = Freio mecânico controle
Par. 323
Consulte também par. 138, 139, 140
=
=
Partida
Partida
[7]
[2]
[7]
[2]
[25]
Controle do freio mecânico
Controle do freio mecânico
Consulte as configurações de parâmetros mais detalhadas em
[25] = '0' => O freio está fechado.
[25] = '1' => O freio está aberto.
Controle do freio mecânico
NOTA!
Não utilize o relé interno para freios CC ou tensões de frenagem > 250 V.
3.6.10 Parada do Contador via Terminal 33
O sinal de partida (terminal 18) deve estar ativo, ou seja, '1' lógico, até
que a frequência de saída seja igual à referência. O sinal de partida (terminal 18 = lógico '0') deve ser então removido antes que o valor do contador no parâmetro 344 tenha conseguido parar o conversor de frequência VLT.
.
62
Par. 307
Entrada digital
Função de parada precisa
Par. 343
Valor do contador
Par. 344
= Entrada de pulso [30]
=
Contador de paradas com reset
= 100000
[1]
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 64

Guia de Design do VLT® Decentral FCD 300 4 Programação
4 Programação
4.1 Unidade de Controle LCP
4.1.1 A Unidade de Controle do LCP 2, opcional
O FCD 300 pode ser combinado com uma unidade de controle do LCP
(Painel de controle local - LCP 2), o que forma uma interface completa
de operação e programação do conversor de frequência. A unidade de
controle LCP 2 pode ser ligada a uma distância de até três metros do
conversor de frequência, isto é, em um painel frontal, usando um kit de
acessórios.
O painel de controle é dividido em cinco grupos funcionais:
1. Display.
2. Teclas usadas para alterar a função do display.
3. Teclas usadas para alterar os parâmetros do programa.
4. Indicadores luminosos.
5. Teclas de controle local.
4
Todos os dados são exibidos por intermédio de um display alfanumérico
de 4 linhas que, em uma operação normal, consegue mostrar 4 itens de
dados operacionais e 3 modos de operação de forma contínua. Durante
a programação, são exibidas todas as informações necessárias para uma
rápida e eficaz configuração dos parâmetros do conversor de frequência.
Como suplementos do display, existem três indicadores luminosos de
tensão (ON), advertência (WARNING) e alarme (ALARM). Todos os Setups de parâmetros do conversor de frequência podem ser alterados
imediatamente no painel de controle, a menos que essa função tenha
sido programada como
alteração de dados
.
Bloqueado
[ 1] no parâmetro 018
Bloqueado para
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
63
Page 65

4 Programação Guia de Design do VLT® Decentral FCD 300
4.1.2 Teclas de controle para Setup de parâmetros
4
As teclas de controle são divididas em funções, de forma tal que as teclas
entre o display e os indicadores luminosos são usados para o Setup de
parâmetros, incluindo a seleção do modo de visualização do display durante a operação normal.
[DISPLAY/STATUS] é utilizada para selecionar o modo de visualização
do display ou voltar para o Modo display do menu rápido ou modo Menu.
[QUICK MENU] fornece acesso aos parâmetros utilizados no menu rápido. É possível alternar entre o menu rápido e o modo Menu.
[MENU] permite acesso a todos os parâmetros. É possível alternar entre
o modo Menu e o menu rápido.
[CHANGE DATA] é utilizada para alterar um parâmetro que foi selecionado no modo Menu ou menu rápido.
[CANCEL] é utilizada se uma alteração no parâmetro não deve ser implementada.
[OK] é utilizada para confirmar uma alteração em um parâmetro selecionado.
[+ / -] são utilizadas para selecionar parâmetros e alterar valores de
parâmetros.
4.1.3 Indicadores Luminosos
Uma làmpada vermelha de alarme, uma lâmpada amarela de advertência
e uma lâmpada verde indicando alimentação encontram-se na parte inferior do painel de controle.
Essas teclas são também utilizadas no modo display para alternar entre
leituras de variáveis de operação.
[< >] são utilizadas para selecionar grupo de parâmetros e movimentar
o cursor ao alterar um valor numérico.
Se determinados limiares de valores forem excedidos, a lâmpada de alarme e/ou advertência é ativada, ao mesmo tempo em que um texto de
estado ou de alarme é mostrado no display.
4.1.4 Controle Local
[STOP/RESET] é utilizada para parar o motor conectado ou reinicializar
o conversor de frequência depois de uma queda (desarme). Pode ser
configurada como ativa ou inativa por meio do parâmetro 014
.
local
Se a parada for ativada, a linha 2 do Display piscará.
NOTA!
Se nenhuma função de parada externa tiver sido selecionada e se a tecla [STOP/RESET] tiver sido definida
como inativa, o motor só poderá ser parado desligando-se a tensão do motor ou do conversor de frequência.
[JOG] muda a frequência de saída para uma frequência predefinida enquanto a tecla estiver pressionada. Pode ser programado para ativo ou
inativo por meio do parâmetro 015
Jog local
.
Parada
NOTA!
A lâmpada indicadora de alimentação é ativada quando o conversor de frequência é ligado â tensão da rede.
[FWD / REV] muda o sentido de rotação do motor, que é indicado pela
seta no display. Pode configurado para ativo ou inativo via parâmetro 016
Reversão local
tro 002
[START] é utilizada para iniciar o conversor de frequência. Está sempre
ativada, mas não pode substituir um comando de parada.
. A tecla [FWD/REV] fica ativa somente quando o parâme-
Operação local/remota
estiver programado para
Controle local
.
64
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 66

195NA113
10
Guia de Design do VLT® Decentral FCD 300 4 Programação
NOTA!
Se as teclas de controle local forem programadas como
inativas, ambas permanecerão ativas quando o conversor de frequência estiver programado para
local
e
Controle remoto
local/remota
ativa somente em Controle local.
, com exceção de [FWD/REV], que fica
via parâmetro 002
Controle
Operação
4.1.5 Modo Display
4
Alterne o modo usando a tecla [+/-] [HAND...AUTO]
VAR 1.1 VAR 1.2 VAR 1.3
.
VAR 2
SETUP
1
STATUS
No funcionamento normal, até 4 diferentes itens de dados de exibição
podem ser continuamente mostrados: 1,1, 1,2, 1,3 e 2. O estado operacional ou os alarmes e advertências atuais que foram gerados são exibidos na linha 2 na forma de um número.
Caso haja alarmes, eles são exibidos nas linhas 3 e 4 com texto explicativo.
Uma advertência aparecerá piscando na linha 2 com o texto explicativo
na linha 1. O display também mostrará o Setup ativo.
A seta indica o sentido selecionado de rotação. Aqui o conversor de frequência mostra que ele tem um sinal ativo de reversão. O corpo da seta
desaparecerá se for dado um comando de parada ou se a frequência de
saída cair para menos de 0,1 Hz.
A linha inferior exibe o estado do conversor de frequência. A barra de
rolagem mostra os dados operacionais que podem ser exibidos nas linhas
1 e 2 no modo display. As alterações são feitas através das teclas [+ / -].
Alternando entre os modos AUTO (Automático) e HAND (Manual):
Ao ativar a tecla [CHANGE DATA] no [DISPLAY MODE] o display indicará
o modo do conversor de frequência.
No modo [HAND] a referência pode ser alterada pela tecla [+] ou [-].
Dados operacionais Externa
Referência resultante [%]
Referência resultante [unidade]
Feedback [unidade]
Frequência de saída [Hz]
Frequência de saída x escala [-]
Corrente do motor [A]
Torque [%]
Referência [kW]
Referência [HP]
Tensão do motor [V]
Tensão do barramento CC [V]
Temperatura do motor [%]
Carga térmica [%]
Horas de funcionamento [horas]
Entrada digital [binário]
Entr.Pulso 29 [Hz]
Entr.Pulso 29 [Hz]
Entr.Pulso 33 [Hz]
Referência Externa [%]
Status Word [hex]
Temperatura do dissipador [ °C]
Alarm Word [hex]
Control Word [hex]
Warning word [hex]
Status word estendida [hex]
Entrada analógica 53 [V]
Entrada analógica 60 [mA]
Três itens de dados operacionais podem ser mostrados na primeira linha
do display e uma variável de operação pode ser mostrada na segunda
linha do display. É programada por meio dos parâmetros 009, 010, 011
e 012
Leitura do display
.
4.1.6 Modos Display
A unidade de controle LCP dispõe de diferentes modos display que dependem do modo selecionado para o conversor de frequência.
Modo display I:
Este modo display é padronizado após o startup ou a inicialização.
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
FREQUENCY
50.0 Hz
MOTOR IS RUNNING
65
Page 67

4
4 Programação Guia de Design do VLT® Decentral FCD 300
A linha 2 apresenta o valor dos dados de um item de dados operacionais
da unidade e a linha 1 contém um texto que explica a linha 2. No exemplo,
Frequência
tura no display grande.
pode ser lida imediatamente através das teclas [+ / -].
Modo display II:
A alternância entre os modos display I e II é realizada pressionando-se
brevemente a tecla [DISPLAY / STATUS].
foi selecionado para leitura por meio do parâmetro 009
Durante o funcionamento normal, outra variável
24.3% 30.2% 13.8A
Lei-
50.0 Hz
MOTOR IS RUNNING
Neste modo, são mostrados todos os valores de dados dos quatro itens
de dados operacionais e suas respectivas unidades, vide tabela. Neste
exemplo, foram selecionados:
rente
como leitura na primeira e segunda linhas.
Frequência>, Referência, Torque e Cor-
Aqui podem ser lidos os nomes e unidades dos parâmetros para os dados
operacionais na primeira e segunda linhas. A linha 2 do display permanece invariável.
Modo display IV:
Este modo display pode ser exibido durante a operação, se uma outra
Configuração tiver que ser alterada, sem que o conversor de frequência
seja parado. Esta função é ativada no parâmetro 005
mação
.
REF% TORQUE CURR A
50.0 Hz
MOTOR IS RUNNING
24.3% 30.2% 13.8A
50.0 Hz
SETUP
SETUP
12
1
Setup da Progra-
Modo display III:
Este modo display fica exibido enquanto a tecla [DISPLAY / STATUS] for
mantida pressionada. Quando a tecla é liberada, o sistema alterna de
volta para o modo display II, a menos que a tecla seja pressionada durante menos de 1 segundo, quando, neste caso, o sistema sempre reverte
para o modo display I.
4.1.7 Programação dos parâmetros
A abrangente área de trabalho de um conversor de frequência pode ser
acessada por meio de vários parâmetros, possibilitando a adaptação de
sua funcionalidade para uma aplicação específica. De forma a proporcionar uma melhor visão geral dos muitos parâmetros, podem ser escolhidos
dois modos de programação - Modo menu e modo Menu Rápido. O primeiro, possibilita o acesso a todos os parâmetros. O último mostra ao
usuário todos os parâmetros, o que permite iniciar o funcionamento do
conversor de frequência na maioria dos casos, de acordo com a Configuração realizada. Independente do modo de programação, uma mudança de parâmetro entrará em vigor e estará visível tanto no modo Menu
quanto no modo menu Rápido.
Estrutura do menu Rápido x modo Menu
Além de ter um nome, cada parâmetro é ligado a um número que é o
mesmo, independentemente do modo de programação. No modo Menu,
os parâmetros serão separados em grupos, com o primeiro dígito (da
esquerda) do número do parâmetro indicando o número do grupo do
parâmetro em questão.
MOTOR IS RUNNING
Aqui o segundo número de setup de programação piscará à direita da
Configuração ativa.
as teclas [+ / -] e altere os valores dos dados pressionando
[CHANGE DATA] + [OK].
• O modo Menu permite selecionar e alterar todos os parâmetros
quando necessário. No entanto, alguns parâmetros estarão "esmaecidos", dependendo da escolha no parâmetro 100
ração
.
Configu-
• Utilizando a tecla [QUICK MENU], é possível obter acesso aos
parâmetros mais importantes do conversor de frequência. Depois de programado, o conversor de frequência normalmente
está pronto para funcionar. Percorra o menu Rápido utilizando
66
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 68

Guia de Design do VLT® Decentral FCD 300 4 Programação
4.1.8 Menu Rápido com Unidade de Controle LCP 2
Inicie Quick Setup pressionando a tecla [QUICK MENU], que mostrará os
seguintes valores no display:
QUICK MENU X OF Y
50.0 Hz
001 LANGUAGE
ENGLISH
Na parte inferior do display, o número e o nome do parâmetro são dados
juntamente com o estado/valor do primeiro parâmetro abaixo do menu
Rápido. Na primeira vez que a tecla [QUICK MENU] for pressionada após
SETUP
1
4.1.9 Seleção de Parâmetro
O modo Menu é iniciado pelo pressionamento da tecla [MENU], que produz a seguinte leitura no display:
FREQUENCY
50.0 Hz
0 KEYB.&DISPLAY
A linha 3 do display mostra o número e o nome do grupo de parâmetros.
a unidade haver sido ligada, a leitura sempre começará na posição 1 ver tabela abaixo.
Pos. do parâmetro Externa
1 001 Idioma
2 102 Potência do motor
3 103 Tensão do motor [V]
4 104 Frequência do motor [Hz]
5 105 Corrente do motor [A]
6 106 Velocidade nominal do motor [rpm]
7 107 AMT
8 204 Referência mínima
9 205 Referência máxima [Hz]
10 207 Tempo de aceleração [s]
11 208 Tempo de desaceleração [s]
12 002 Operação local/remota
13 003 Referência local
A terceira linha do display mostra o número e o nome do parâmetro,
enquanto o estado/valor do parâmetro selecionado é mostrado na linha
4.
Troca de dados
Independente do modo pelo qual o parâmetro tenha sido selecionado:
menu rápido ou modo menu, o procedimento para mudar os dados é o
mesmo. Apertando a tecla [CHANGE DATA] obtém-se o acesso à troca
do parâmetro selecionado. No display a quarta linha sublinhando o estado/valor piscará habilitando a troca. O procedimento para a alteração de
dados depende do parâmetro selecionado representar um valor numérico
ou um valor de texto.
[kW]
[Hz]
[Hz]
4
No modo Menu, os parâmetros estão divididos em grupos. A seleção do
grupo de parâmetros é feita com as teclas [ < > ].
Há acesso aos seguintes grupos de parâmetros:
do grupo Grupo de parâmetros
0Operação & Display
1Carga e Motor
2 Referências & Limites
3Entradas e Saídas
4 Funções especiais
5 Comunicação serial
6 Funções técnicas
Quando o grupo de parâmetros desejado for selecionado, cada parâmetro pode ser escolhido mediante as teclas [+ / -]:
FREQUENCY
50.0 Hz
001 LANGUAGE
ENGLISH
Troca de valores
Se o parâmetro selecionado for um texto, este texto pode ser modificado
pelas teclas [+ / -].
FREQUENCY
50.0 Hz
001 LANGUAGE
ENGLISH
A linha inferior do display apresenta o valor que será memorizado quando
for confirmado pelo botão [OK].
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
67
Page 69

4
4 Programação Guia de Design do VLT® Decentral FCD 300
Troca do valor numérico dos dados
Se o parâmetro selecionado for representado por um valor de dados numéricos, um dígito é escolhido primeiro com as teclas [< >].
FREQUENCY
50.0 Hz
130 START FREQUENCY
09.0 HZ
O dígito selecionado pode então ser alterado de forma infinitamente variável por intermédio das teclas [+ / -]:
SETUP
1
4.1.10 Inicialização Manual
NOTA!
A inicialização manual
controle do LCP 2 175N0131. No entanto, é possível
realizar uma inicialização via par. 620
ção
:
não é possível na unidade de
Modo Opera-
O dígito escolhido piscará. A linha inferior do display apresenta o valor do
dado que será digitalizado (memorizado) quando for confirmado com o
botão [OK].
FREQUENCY
50.0 Hz
130 START FREQUENCY
10.0 HZ
SETUP
1
Os seguintes parâmetros não são alterados com a inicialização via par.
Modo Operação
620
- par. 500
- par. 501
- par. 600
- par. 601
- par. 602
- par. 603
- par. 604
- par. 605
- par. 615-617
- par. 678
.
Endereço
Baud rate
Horas de funcionamento
Horas de funcionamento
Contador de kWh
Número de energizações
Número de superaquecimentos
Número de sobretensões
Registro de defeitos
Configurar o Cartão de Controle
68
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 70

Guia de Design do VLT® Decentral FCD 300 4 Programação
4.2 Grupo de Parâmetros 0-** Operação e Display
001 Idioma
Valor:
Inglês (english) [0]
Alemão (deutsch) [1]
Francês (francais) [2]
Dinamarquês (dansk) [3]
Espanhol (espanhol) [4]
Italiano (italiano) [5]
Funcão:
Este parâmetro é utilizado para escolher o idioma a ser usado no display
sempre que a unidade de controle LCP estiver conectada.
Descricão da selecão:
Há uma opção dos idiomas mostrados. A programação de fábrica pode
variar.
002 Operação local/remota
Valor:
Operação remota (REMOTE) [0]
Operação local (LOCAL) [1]
Funcão:
Há dois modos de operação do conversor de freqüência;
mota
[0] ou
Operação local
se
Operação local
local
Descricão da selecão:
Se
Operação remota
controlado via:
1. Os terminais de controle ou via comunicação serial.
2. A tecla [START]. Entretanto, esta tecla não pode ignorar comandos de parada vindos das entradas digitais ou via comunicação serial.
3. As teclas [STOP/RESET] e [JOG], desde que estejam ativas.
Operação local
Se
trolado via:
1. A tecla [START]. Entretanto, esta tecla não pode ignorar co-
[1], for selecionada, o conversor de freqüência é con-
mandos de parada vindos das entradas digitais (vide parâmetro
Controle local
013
[1]. Veja também o parâmetro 013
[1] for escolhida.
[0] for selecionada, o conversor de freqüência é
).
Operação re-
Controle
2. As teclas [STOP/RESET] e [JOG], desde que estejam ativas.
3. A tecla [FWD/REV], desde que tenha sido selecionada como parâmetro ativo no parâmetro 016
metro 013
local e malha aberta
100
figurado para
4. Parâmetro 003
configurada usando-se as teclas [+] e [-].
5. Um comando de controle externo que pode ser conectado às
entradas digitais (vide o parâmetro 013
003 Referência local
Valor:
O par. 013
[2]:
0 - f
(par. 205)
MAX
O par. 013
[4].
- Ref
Ref
MIN
Funcão:
Neste parâmetro, a referência local pode ser programada manualmente.
A unidade da referência local depende da configuração selecionada no
parâmetro 100
Descricão da selecão:
Para que a referência local possa ser protegida, o parâmetro 002
ração local/remota
ferência local não pode ser programada via comunicação serial.
Controle local
[1] ou
[3]. O parâmetro 200
Ambas as direções
Referência local
NOTA!
As teclas [JOG] e [FWD/REV] estão localizadas na unidade de controle LCP.
Controle local
Controle local
(par. 204-205)
MAX
Configuração
deve ser programado para [1] ou
deve ser programado para [3] ou
.
deve ser programado como
Reversão local
tenha sido configurado como
, e que o parâ-
Controle local como parâmetro
Gama da freqüência de saída
.
onde a referência pode ser
Controle local
Operação local
Controle
é con-
).
50 Hz
0,0
Ope-
[1]. A re-
4
4.2.1 Configuração do Setup
Há uma opção entre quatro Setups (Setups de parâmetros) que podem
ser programados independentes um do outro. O Setup ativo pode ser
selecionado no parâmetro 004
trole LCP está conectada, o número da Configuração ativa aparecerá no
display abaixo de “Setup". Também é possível predefinir o conversor de
frequência para
usando entradas digitais ou comunicação serial. A mudança de setup pode ser usada em uma instalação onde, por exemplo, um setup seja usado
Setup Múltiplo
Setup Ativo
para que seja possível mudar os Setups
. Quando uma unidade de con-
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
durante o dia e outro durante a noite.No parâmetro 006
é possível copiar de um setup para outro. Usando o parâmetro 007
todos os setups podem ser transferidas de um conversor de fre-
via LCP
quência para outro movendo o painel de controle LCP. Primeiro, todos os
valores são copiados para o painel de controle local, que podem, em seguida, ser movidos para um outro conversor de frequência. Aqui, todos
os valores dos parâmetros podem ser copiados da unidade de controle
LCP para o conversor de frequência.
Cópia de setup
Cópia
69
Page 71

4 Programação Guia de Design do VLT® Decentral FCD 300
4.2.2 Mudança de Setup
4
- Seleção de Setup através dos terminais 29 e 33.
Entrada digital
Par. 305
Entrada digital
Par. 307
Par. 004
Setup Ativo
004 Ativar Setup
Valor:
Setup de fábrica (FACTORY SETUP) [0]
Setup 1 (setup 1) [1]
Setup 2 (setup 2) [2]
Setup 3 (setup 3) [3]
Setup 4 (setup 4) [4]
Setup Múltiplo (MULTI SETUP) [5]
Funcão:
O parâmetro ativo de Configuração é selecionado aqui. Todos os parâmetros podem ser programados em quatro Setups de parâmetros individuais. Pode-se alternar entre Setups neste parâmetro por meio da entrada digital ou da comunicação serial.
Descricão da selecão:
Setup de Fábrica
fábrica.
selecionadas conforme necessário.
for necessário alternar por controle remoto entre os quatro Setups através de uma entrada digital ou por comunicação serial.
005 Setup de Programação
Valor:
Setup de fábrica (FACTORY SETUP) [0]
Setup 1 (setup 1) [1]
Setup 2 (setup 2) [2]
Setup 3 (setup 3) [3]
Setup 4 (setup 4) [4]
Configuração Ativa (ACTIVE SETUP) [5]
Funcão:
Você pode selecionar o Setup que deseja programar durante a operação
(aplicado através do painel de controle e da porta de comunicação serial).
É possível, por exemplo, programar
ativa está programada como
Descricão da selecão:
Setup de Fábrica
ser usados como uma fonte de dados, se os demais Setups tiverem que
ser reinicializados em um estado conhecido.
[0] contém os valores de parâmetro configurados na
Setup 1-4
[1]-[4] são quatro Setups individuais que podem ser
[0] contém os dados programados em fábrica e podem
=
Seleção de Setup, lsb
=
Seleção de Setup
=
Setup Múltiplo
Setup múltiplo
Setup 2
Setup 1
[1], no parâmetro 004
[31]
, msb [32]
[5]
[5] é utilizado onde
[2], enquanto a Configuração
Setup Ativo.
Setup 1-4
[1]-[4] são Setups
individuais que podem ser livremente programados durante a operação.
Se
Setup Ativo
ao do parâmetro 004
006 Cópia da configuração
Valor:
Sem cópia (NO COPY) [0]
Copiar para Configuração 1 a partir de #
(COPY TO SETUP 1) [1]
Copiar para Configuração 2 a partir de #
(COPY TO SETUP 2) [2]
Copiar para Configuração 3 a partir de #
(COPY TO SETUP 3) [3]
Copiar para Configuração 4 a partir de #
(COPY TO SETUP 4) [4]
Copiar para todas as Configurações a partir
de #
(copy to all) [5]
Funcão:
Você pode copiar a partir da Configuração ativa selecionada no parâmetro
005
Configuração da programação
selecionadas neste parâmetro.
Descricão da selecão:
A cópia é iniciada quando a função de cópia requerida houver sido selecionada e a tecla [OK]/[CHANGE DATA] houver sido pressionada. O andamento da cópia é indicado no display.
007 Cópia via LCP
Valor:
Nenhuma cópia (NO COPY) [0]
Faça o upload de todos os parâmetros
(UPL. ALL PAR.) [1]
Faça o download de todos os parâmetros
(DWNL. ALL PAR.) [2]
Faça o download dos parâmetros que são independentes do tamanho
(DWNL.OUTPIND.PAR.) [3]
Funcão:
O parâmetro 007
cópia integral do LCP 2. Esta função é utilizada quando se deseja copiar
todos as configurações dos parâmetros de um conversor de freqüências
para o outro, transferindo o painel de controle LCP 2.
Descricão da selecão:
Selecione
os valores de parâmetros para o painel de controle. Selecione
[5] for selecionado, o Setup de programação será igual
Setup Ativo.
NOTA!
Se os dados forem modificados ou copiados para o
Setup ativo, as modificações têm um efeito imediato
na operação da unidade.
para a Configuração ou Configurações
NOTA!
Só é possível copiar na Parada (motor parado relacionado a um comando de parada).
LCP copy
é utilizado quando se deseja usar a função de
Fazer o upload de todos os parâmetros
[1] para transferir todos
Fazer o
70
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 72

Guia de Design do VLT® Decentral FCD 300 4 Programação
download de todos os parâmetros
transferidos precisarem ser copiados no conversor de freqüências ao qual
o painel de controle está conectado. Selecione
que são independentes de tamanho.
metros independentes de tamanho. É utilizado ao fazer o download para
um conversor de freqüências com um valor de potência nominal diferente
daquele que deu origem à configuração de parâmetros.
NOTA!
O upload/download só pode ser realizado no modo de
parada.O download
conversor de freqüências que tenha um software com
a mesma versão. Consulte o parâmetro 626
[2], se todos os valores de parâmetros
Fazer download dos par.
[3], para copiar somente os parâ-
somente pode ser feito para um
Num. de
identificação do banco de dados.
008 Escala da frequência de saída no display
Valor:
0.01 - 100.00
Funcão:
Neste parâmetro é selecionado o fator pelo qual a frequência de saída
deve ser multiplicada. O valor é exibido no display, desde que os parâmetros 009-012
quência de saída x escala
Descricão da selecão:
Configurar o fator de escala desejado.
009 Leitura de display grande
Valor:
Nenhuma leitura (none) [0]
Referência resultante [%]
(reference [%]) [1]
Referência resultante [unidade]
(reference [unit]) [2]
Feedback [unidade] (feedback [unit]) [3]
Frequência [Hz] (Frequency [Hz]) [4]
Frequência de saída x escala
(frequency x scale) [5]
Corrente do motor [A] (Motor current [A]) [6]
Torque [%] (Torque [%]) [7]
Potência [kW] (Power [kW]) [8]
Potência [HP] (Power [HP][US]) [9]
Tensão do motor [V]
(Motor voltage [V]) [11]
Tensão do barramento CC [V]
(DC link voltage [V]) [12]
Carga térmica no motor [%]
(Motor thermal [%]) [13]
Carga térmica [%]
(FC. thermal [%]) [14]
Horas trabalhadas [Horas]
(RUNNING HOURS) [15]
Entrada digital [Bin]
(Digital input[bin]) [16]
Entrada analógica 53 [V]
(analog input 53 [V]) [17]
Leitura do display
[5].
tenham sido programados para
1.00
Fre-
Entrada analógica 60 [mA]
(analog input 60 [mA]) [19]
Referência de pulso [Hz]
(Pulse INPUT 33. [Hz]) [20]
Referência externa [%]
(external ref [%]) [21]
Status word [Hex] (Status word [hex]) [22]
Temperatura do dissipador de calor [ °C]
(Heatsink temp [ °C]) [25]
Alarm word [Hex] (Alarm word [hex]) [26]
Control word [Hex] (Control word [Hex]) [27]
Warning word [Hex]
(warning word [Hex]) [28]
Status word estendida [Hex]
(Ext. status [hex]) [29]
Advertência do cartão do opcional de comunicação
(COMM OPT WARN [HEX]) [30]
Contagem de pulsos
(PULSE COUNTER) [31]
Entr.Pulso 29
(PULSE INPUT 29) [32]
Funcão:
Neste parâmetro é possível selecionar o valor dos dados que deseja exibir
na linha 2 do display da unidade de controle LCP, quando o conversor de
frequência estiver ligado. O display também será incluído na barra de
rolagem no modo display. Nos parâmetros 010-012
possível selecionar outros três valores de dados, que são exibidos na linha
1 do display.
Descricão da selecão:
Sem leitura
tura do display pequeno
Referência resultante [%]
tante na faixa de referência Mínima, Ref
Referência [unidade]
aberta
râmetro 416
Feedback [unidade]
de/escala selecionada no parâmetro 414
FB
Frequência [Hz]
Frequência de saída x escala [-] é igual à frequência de saída atual f
multiplicada pelo fator programado no parâmetro 008 Exibir a escala da
frequência de saída.
Corrente do motor [A]
valor eficaz.
Torque [%]
do motor.
Potência [kW]
mindo.
Potência [HP]
do.
Tensão do motor [V]
Tensão do barramento CC [V]
do conversor de frequência.
Carga térmica do motor [%]
100% é o limite de desativação.
pode ser selecionado somente nos parâmetros 010-012
.
indica, em porcentagem, a referência resul-
a referência Máxima, Ref
MIN
indica a referência resultante, em Hz, em
. Em
Malha fechada
Unidades do processo
, a unidade de referência é selecionada no pa-
.
indica o valor do sinal resultante utilizando a unida-
FB
e 416
HIGH
Unidades de processo
indica a frequência de saída do conversor de frequência.
indica a corrente de fase do motor, medida como
indica a carga atual do motor em relação ao torque nominal
indica a potência atual em kW que o motor está consu-
indica a potência atual em HP que o motor está consumin-
indica a tensão fornecida ao motor.
.
indica a tensão do circuito intermediário
indica a carga calculada/estimada no motor.
LOW
,
415
Leitura do display
Lei-
MAX
Malha
Feedback máximo,
4
é
.
M
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
71
Page 73

4 Programação Guia de Design do VLT® Decentral FCD 300
4
Carga térmica [%]
sor de frequência. O limite de desativação é 100%.
Horas trabalhadas [Horas]
desde o último reset no parâmetro 619
indica a carga térmica calculada/estimada no conver-
fornece as horas de funcionamento do motor
Reinicialzar Contador de Horas de
Func.
Entrada digital [Código binário]
digitais (18, 19, 27, 29 e 33). O terminal 18 corresponde ao bit na extrema
esquerda. `0' = sem sinal, `1' = sinal conectado.
Entrada analógica 53 [V]
Entrada analógica 60 [mA]
Entrada de pulso 33[Hz]
33.
Referência externa [%]
porcentagem (soma da comunicação analógica/pulso/digital) na faixa da
Referência mínima, Ref
Status word [Hex]
hexadecimal. Consulte
outras informações.
indica uma ou várias condições de status em código
Temp. do dissipador de calor [ °C]
pador de calor do conversor de frequência. O limite de interrupção é 90
a 100 °C, enquanto a religação ocorre a 70 ± 5 °C.
Alarm word [Hex]
Consulte
adicionais.
Control word [Hex]
Consulte
mações.
Warning word [Hex]
decimal. Consulte
tras informações.
emite um ou vários alarmes em código hexadecimal.
Comunicação serial
indica a control word do conversor de frequência.
Comunicação serial
emite uma ou várias advertências em código hexa-
Comunicação serial
Status word estendida [Hex]
código hexadecimal. Consulte
obter informações adicionais.
Advertência do cartão opcional de comunicação [Hex]
word se ocorrer uma falha no barramento de comunicação. Ativo somente se os opcionais de comunicação estiverem instalados.
Caso não haja opcionais de comunicação, será exibido 0 Hex.
Entrada de pulso 29[Hz]
29.
Contagem de pulsos
010 Linha 1.1 pequena do display
Valor:
Consulte o par. 009 Leitura grande
do display
Funcão:
Neste parâmetro, o primeiro de três valores de dados pode ser selecionado para ser exibido no display da unidade de controle LCP, linha 1,
posição 1. Essa função é útil, por exemplo, ao configurar o regulador do
PID, uma vez que ela fornece uma exibição das reações do processo às
alterações da referência. A leitura do display é ativada pressionando-se
a tecla [DISPLAY STATUS].
Descricão da selecão:
Consulte o parâmetro 009
indica o número de pulsos que a unidade registrou.
indica o status do sinal das 5 entradas
indica o valor da tensão no terminal 53.
indica o valor atual do terminal 60.
indica a frequência em Hz conectada no terminal
indica a soma das referências externas como
até a Referência Máxima, Ref
MIN
Comunicação serial
no
no
indica um ou vários modos de status em
Comunicação serial
indica a frequência em Hz conectada no terminal
no
Guia de Design
indica a temperatura atual do dissi-
Guia de Design
Guia de Design
no
para obter informações
para obter outras infor-
Guia de Design
no
Entrada analógica 53 [V] [17]
Leitura do display grande
.
MAX
para obter
para obter ou-
Guia de Design
emite uma warning
.
para
011 Leitura do display menor 1.2
Valor:
Consulte o parâmetro 009 Leitura grande do display
Funcão:
Consulte a descrição funcional fornecida no parâmetro 010
display pequeno
Descricão da selecão:
Consulte o parâmetro 009
012 Leitura pequena 1.3 do display
Valor:
Consulte o parâmetro 009 Leitura grande
do display
Funcão:
Consulte a descrição funcional fornecida no parâmetro 010
display pequeno
Descricão da selecão:
Consulte o parâmetro 009
013 Controle local
Valor:
Local não ativo (DISABLE) [0]
Controle local e malha aberta sem compensação de escorrega-
mento
(LOC CTRL/OPEN LOOP) [1]
Controle operado remotamente e malha aberta, sem compensação de escorregamento.
(LOC+DIG CTRL) [2]
Controle local conforme o parâmetro 100
(LOC CTRL/AS P100) [3]
Controle operado remotamente conforme o parâmetro 100
(LOC+DIG CTRL/AS P100) [4]
Funcão:
A função necessária é selecionada ali se no parâmetro 002
cal/remota
Descricão da selecão:
Se
Local inativo
uma referência por meio do parâmetro 003
Para habilitar uma mudança para
Operação local/remota
[0].
Controle local e malha aberta
precisar ser programada por meio do parâmetro 003
Quando esta escolha for feita, o parâmetro 100
automaticamente para
.
Leitura do display grande
.
Leitura do display grande
tiver sido escolhido
[0] estiver selecionado, não será possível estabelecer
Operação local
Local não ativo
deve estar programado para
[1] é utilizado se a velocidade do motor
Regulagem de velocidade, malha aberta
Controle operado remotamente e malha aberta
maneira que
frequência ajustável também pode ser controlado por meio das entradas
digitais.
Para as alternativas [1-2], o controle é transferido para malha aberta,
sem compensação de escorregamento.
Controle local e malha aberta
Controle local conforme o parâmetro 100
cidade do motor tiver que ser programada por meio do parâmetro 003
Referência local
maticamente para
, mas sem o parâmetro 100
Regulagem da velocidade, malha aberta
Corrente do motor [A][6]
Leitura do
.
Feedback [unidade] [3]
Leitura do
.
Operação lo-
[1].
Referência local
[0], o parâmetro 002
.
Operação remota
Referência local
Configuração
[2] funciona da mesma
[1]; no entanto, o drive de
[3] é utilizado quando a velo-
Configuração
alternará
[0].
alternar auto-
[0].
.
72
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 74

Guia de Design do VLT® Decentral FCD 300 4 Programação
Controle operado remotamente como parâmetro 100
mesma maneira que
o drive de frequência ajustável também pode ser controlado por meio das
entradas digitais.
Alternar de
Operação local/remota
Controle operado remotamente e malha aberta
para
atual do motor e o sentido de rotação serão mantidas. Se o sentido de
rotação atual não responder ao sinal de reversão (referência negativa),
a referência será programada como 0.
Alternar de
Controle local/remoto
Controle operado remotamente e malha aberta
ra
selecionada no parâmetro 100
suave.
Alternar de
ração local/remota
Controle local como parâmetro 100
Operação remota
Operação local
Controle remoto
, quando esse parâmetro tiver sido programado para
para
Operação local
, quando esse parâmetro tiver sido programado
para
Operação remota
, quando esse parâmetro tiver sido programado pa-
Configuração
para
ficará ativa. A transição será
Controle local
Controle operado remotamente conforme o parâmetro 100
rência atual será mantida. Se o sinal de referência for negativo, a referência local será programada para 0.
Alternar de
Operação local
Operação local/remota
Operação remota
para
referência operado remotamente.
014 Parada local
Valor:
Não ativa (DISABLE) [0]
Ativa (ENABLE) [1]
Funcão:
Neste parâmetro, a tecla local [STOP] pode ser ativada ou desativada no
painel de controle e no painel de controle LCP.
Descricão da selecão:
Se
Não ativa
desativada.
015 Jog local
Valor:
Funcão:
Neste parâmetro, a função jog no painel de controle LCP pode ser ativada/desativada.
Descricão da selecão:
Inativo
Se
sativada.
[0] for selecionada neste parânetro, a tecla [STOP] ficará
NOTA!
Se
ser parado através da tecla [STOP].
Inativo (DISABLE) [0]
Ativo (ENABLE) [1]
[0] for selecionado nesse parâmetro, a tecla [JOG] ficará de-
para
Operação remota
, quando este parâmetro tiver sido programado
: A referência local será substituída pelo sinal de
Não ativa
[0] for selecionada, o motor não poderá
[4] funciona da
[3]; no entanto,
no parâmetro 002
[1]: A frequência
no parâmetro 002
[1]: A configuração
no parâmetro 002
[4]: a refe-
no parâmetro 002
Ope-
016 Reversão local
Valor:
Não ativa (DISABLE) [0]
Ativa (ENABLE) [1]
Funcão:
Neste parâmetro você pode selecionar/desselecionar a função de reversão no painel de controle LCP. A tecla só pode ser usada se o parâmetro
002
Operação local/remota
e se o parâmetro 013
[1] ou
Controle local como parâmetro 100
Descricão da selecão:
Se
Desativar
[0] houver sido selecionado neste parâmetro, a tecla [FWD/
REV] será desativada. Veja também o parâmetro 200
de saída
.
017 Reset local do desarme
Valor:
Inativo (DISABLE) [0]
Ativo (ENABLE) [1]
Funcão:
Neste parâmetro, a função de reinicialização do painel de controle pode
ser ativada/desativada.
Descricão da selecão:
Se
Não ativa
zação ficará inativa.
Neste parâmetro é possível 'bloquear' os controles para desativar alterações de dados por meio das teclas de controle.
Se
não poderão ser efetuadas; entretanto ainda será possível fazer alterações de dados através da comunicação serial. O parâmetro 009-012
tura do display
[0] for selecionado neste parâmetro, a função de reiniciali-
NOTA!
Selecione
de reinicialização tiver sido conectado através das entradas digitais.
018 Bloquear contra alteração dos dados
Valor:
Não bloqueado (NOT LOCKED) [0]
Bloqueado (LOCKED) [1]
Funcão:
Descricão da selecão:
Bloqueado
[1] for selecionado, as alterações de dados nos parâmetros
pode ser alterado via painel de controle.
estiver configurado como
Controle local
como
Não ativa
[0], somente se um sinal externo
Operação local
Controle local, malha aberta
[3].
Gama da freqüência
[1]
Lei-
4
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
73
Page 75

4 Programação Guia de Design do VLT® Decentral FCD 300
4
019
Valor:
Nova partida automática, utilize a referência gravada
(AUTO RESTART) [0]
Parada forçada, utilize a referência gravada
(LOCAL=STOP) [1]
Parada forçada, programe a ref. para 0
(LOCAL=STOP, REF=0) [2]
Funcão:
Configuração do modo de operação requerido, quando a tensão de rede
é conectada. Essa função poderá ficar ativa somente se
[1] tiver sido selecionado no parâmetro 002
Descricão da selecão:
Reinicialização automática, use ref. salva
frequência ajustável tiver que começar usando a referência local (configurada no parâmetro 003
dado através das teclas de controle imediatamente antes da tensão de
rede ser desativada.
Parada forçada, use ref. gravada
quência ajustável tiver que permanecer parado quando a tensão de rede
estiver ativada, até a tecla [START] ser ativada. Após um comando de
partida, a velocidade do motor é acelerada até o valor de referência salvo
no parâmetro 003
Parada forçada, programar ref. para 0
frequência ajustável precisar permanecer parado quando a tensão de rede for reativada. O parâmetro 003
020 Travar para modo Manual
Valor:
Inativo (DISABLE) [0]
Ativo (ENABLE) [1]
Funcão:
Neste parâmetro pode-se selecionar a possibilidade de alternar ou não
entre o modo Automático e o Manual. No modo Automático, o conversor
de frequências é controlado por sinais externos, enquanto no modo Manual ele é controlado por meio de uma referência local diretamente da
unidade de controle.
Descricão da selecão:
Inativo
Se
estará inativa. Este bloqueio pode ser ativado conforme for desejado. Se
Ativo
[1] for selecionado, é possível alternar entre modo Automático e
Manual.
Modo de funcionamento na energização, operação
local
Operação local
Operação local/remota
[0] é selecionado se o drive de
Referência local
Referência local
NOTA!
Na operação remota (parâmetro 002
), o estado da partida/parada no momento da
remota
conexão à rede elétrica dependerá dos sinais de controle externos. Se
no parâmetro 302
cerá parado após a conexão à rede elétrica.
[0] for selecionado nesse parâmetro, a função Modo manual
NOTA!
Esse parâmetro é válido somente para LCP 2.
) e o estado de partida/parada
[1] é selecionado se o drive de fre-
.
[2] é selecionado se o drive de
Referência local
deve ser zerado.
Operação local/
Partida por pulso
Entrada digital
[8] for selecionado
, o motor permane-
.
024 Userdefined Quick Menu
Valor:
Inativo (Disable) [0]
Ativo (Enable) [1]
Funcão:
Neste parâmetro você pode selecionar o setup padrão da tecla Quick
menu no painel de controle e no painel de controle LCP 2.
Usando esta função, no parâmetro 025 Setup do Quick Menu o usuário
pode selecionar até 20 parâmetros para a tecla Quick Menu.
Descricão da selecão:
Se
não ativo
[0] for selecionado, o setup padrão da tecla Quick Menu
estará ativo.
Se
Ativo
[1] for selecionado, o Quick Menu definido pelo usuário estará
ativo.
025 Setup do Menu Rápido
Valor:
[Index 1 - 20] Valor: 0 - 999
Funcão:
Neste parâmetro definem-se quais parâmetros são necessários ao Menu
Rápido, quando o parâmetro 024
tiver estabelecido como
Até 20 parâmetros podem ser selecionados para o Menu Rápido definido
pelo usuário.
Ativo
NOTA!
Observe que este parâmetro só pode ser definido
usando-se um painel de controle LCP 2. Consulte
mulário de colocação de pedido
Descricão da selecão:
O Menu Rápido é configurado da seguinte forma:
1. Selecione o parâmetro 025
[CHANGE DATA].
2. Index 1 indica o primeiro parâmetro no Menu Rápido. É possível
fazer a rolagem dos números do índice utilizando as teclas [+ /
-]. Selecione Index 1.
3. Utilizando [<>] você pode fazer a rolagem entre os três números. Pressione a tecla [<] uma vez e o último dígito do número
do parâmetro pode ser selecionado usando as teclas [+ / -].
Defina o Index 1 como 100, para o parâmetro 100
ção
.
4. Pressione [OK] quando o Index 1 tiver sido definido como 100.
5. Repita as etapas 2 a 4 até que todos os parâmetros obrigatórios
tenham sido definidos para a tecla Quick Menu.
6. Pressione [OK] para concluir a configuração do Menu Rápido.
Se o parâmetro 100
Rápido será iniciado com esse parâmetro sempre que o Menu Rápido for
ativado.
Observe que o parâmetro 024
parâmetro 025
definidos pela fábrica, durante a inicialização.
Configuração
Setup do Menu Rápido
Menu Rápido definido pelo usuário
[1].Â
.
Setup do Menu Rápido
for selecionado no Index 1, o Menu
Menu Rápido definido pelo usuário
são reinicializados para os valores
000
es-
For-
e pressione
Configura-
e o
74
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 76

Guia de Design do VLT® Decentral FCD 300 4 Programação
026 Status do LED
Valor:
Sobrecarga (Overload) [0]
Advertência térmica/alarme 36 (Overtemp) [1]
Termistor/ETR (Thermal Motor) [2]
Entrada digital 18 (Digital Input 18) [3]
Entrada digital 19 (Digital Input 19) [4]
Entrada digital 27 (Digital Input 27) [5]
Entr digital 29 (Digital Input 29) [6]
Entrada digital 33 (Digital Input 33) [7]
Como relé par. 323 (As relay / P323) [8]
Como saída dig. par. 341 (Ad Dig. Out. / P341) [9]
Como saída do freio mec.
(As mech. brake output) [10]
Funcão:
Esse parâmetro permite ao usuário visualizar diferentes situações usando
o LED de Status.
Descricão da selecão:
Selecione a função a ser visualizada.
4
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
75
Page 77

4 Programação Guia de Design do VLT® Decentral FCD 300
4.3 Grupo de Parâmetros 1-** Carga e Motor
4.3.1 Configuração
4
A escolha da configuração e das características do torque tem um efeito
sobre os parâmetros que podem ser vistos no display. Se
[0] for selecionado, todos os parâmetros relacionados à regulação PID
serão filtrados. Isto significa que o usuário só vê os parâmetros que forem
relevantes para uma determinada aplicação.
100 Configuração
Valor:
Controle de velocidade, malha aberta
(SPEED OPEN LOOP) [0]
Controle de velocidade, malha fechada
(SPEED CLOSED LOOP) [1]
Controle de processo, malha fechada
(PROCESS CLOSED LOOP) [3]
Funcão:
Este parâmetro é utilizado para selecionar a configuração para a qual o
conversor de frequência deve ser adaptado. Isto simplifica a adaptação
para uma determinada aplicação, porque os parâmetros não utilizados na
configuração em questão estarão ocultos (não ativos).
Descricão da selecão:
Se
Controle de velocidade, malha aberta
controle de velocidade normal (sem sinal de feedback) com compensação
automática de carga e de escorregamento para garantir velocidade constante com cargas variadas. As compensações estão ativas, mas podem
ser desativadas no parâmetro134
136
Compensação de escorregamento
Controle de velocidade, malha fechada
Se
melhor precisão de velocidade. Um sinal de feedback deve ser adicionado
e o regulador do PID deve ser programado no grupo de parâmetros 400
Funções especiais
Controle do processo, malha fechada
Se
interno do processo será ativado, permitindo o controle preciso de um
processo em relação a um sinal de processo determinado. O sinal de
processo pode ser programado na unidade do processo em questão ou
como uma porcentagem. Deverá ser adicionado um sinal de feedback do
processo e o regulador do processo deverá ser programado no grupo de
parâmetros 400
estará ativa se houver uma placa DeviceNet montada e a Instância 20/70
ou 21/71 for escolhida no parâmetro 904
.
Funções especiais
[0] for selecionado, é obtido
Compensação de carga
, conforme necessário.
[1] for selecionado, é obtida
[3] for selecionado o regulador
. A malha fechada do processo não
Tipos de instâncias
Malha aberta
e parâmetro
.
Torque variável baixo com torque de partida
(VT LOW CT START) [5]
Torque variável médio com torque de partida
(VT MED CT START) [6]
Torque variável alto com partida CT
(VT HIGH CT START) [7]
Modo motor especial
(Special motor mode) [8]
CT = Torque constante
Funcão:
Este parâmetro permite a escolha do princípio de adaptação da relação
U/f do conversor de frequência para a característica do torque da carga.
Consulte par. 135 Relação U/f.
Descricão da selecão:
Se
Torque constante
dente da carga é obtida, em que a tensão de saída e a frequência de
saída são aumentadas com o aumento das cargas para manter constante
a magnetização do motor.
Selecione
Torque variável baixo
variável alto
dores).
Torque variável - baixo com partida CT
ou
alto com partida CT
que de arranque mais levado que o torque que pode ser obtido com as
três primeiras características.
[1] for selecionado, uma característica U/f depen-
[2],
Torque variável médio
[4] se a carga for quadrada (bombas centrífugas, ventila-
[5], -
médio com partida CT
[7] deverá ser selecionado se for necessário tor-
NOTA!
A compensação de carga e de escorregamento não
estarão ativadas se o torque variável ou o modo especial do motor forem selecionados.
[3] ou
Torque
[6]
101 Características de torque
Valor:
Torque constante
(Constant torque) [1]
Torque variável baixo
(torque: low) [2]
Torque variável médio
(torque: med) [3]
Torque variável alto
(torque: high) [4]
76
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Selecione
que deve ser adaptado ao motor atual. Os pontos de interrupção são
programados nos parâmetros 423-428
Modo especial do motor
[8] se for necessário ajuste U/f especial
Tensão/frequência
.
Page 78

Guia de Design do VLT® Decentral FCD 300 4 Programação
NOTA!
Observe que se um valor programado nos parâmetros
102-106 da placa de identificação for alterado, haverá
102
uma alteração automática nos parâmetros 108
tência do estator
Potência do motor P
e 109
Reatância do estator
M,N
Resis-
.
Valor:
0.18 - 4 kW
Depende da unidade
Funcão:
Defina aqui um valor de potência [kW] P
, correspondente à potência
M,N
nominal do motor. A fábrica estabelece um valor de potência nominal
[kW] P
, que depende do tipo de unidade.
M,N
Descricão da selecão:
Selecione um valor igual ao da placa de identificação do motor. As programações entre dois tamanho abaixo e um tamanho acima da programação de fábrica são possíveis.
103
Tensão do motor U
M,N
Valor:
50 - 999 V
400 V
Funcão:
Configure aqui a tensão nominal do motor U
para estrela Y ou delta
M,N
.
Descricão da selecão:
Selecione um valor que corresponda aos dados da placa de identificação
do motor, independente da tensão de alimentação do conversor de frequência.
104
Freqüência do motor f
M,N
Valor:
24-1000 Hz
60 Hz
Funcão:
Aqui é selecionada a freqüência nominal do motor f
M,N
.
Descricão da selecão:
Selecione um valor que corresponda aos dados da placa de identificação
do motor.
105
Corrente do motor I
M,N
Valor:
0,01 - I
MAX
Depende da escolha do motor
Funcão:
A corrente nominal do motor I
faz parte dos cálculos das características
M,N
do conversor de freqüência, ou seja, do torque e da proteção térmica do
motor.
Descricão da selecão:
Selecione um valor que corresponda aos dados da placa de identificação
do motor. Programe a corrente do motor I
levando em conta se o mo-
M,N
tor está conectado em estrela Y ou em delta .
106 Velocidade nominal do motor
Valor:
x 60
100 - f
M,N
(max. 60000
rpm)
Depende do parâmetro 104
Freqüência do mo-
tor, f
M,N
Funcão:
Este é o local onde se estabelece o valor que corresponde à velocidade
nominal do motor n
, que pode ser obtido da plaqueta de identificação.
M,N
Descricão da selecão:
Selecione um valor que corresponda aos dados da plaqueta de identificação do motor.
NOTA!
O valor máx. é igual a f
no parâmetro 104
x 60. f
M,N
a ser programado
M,N
Freqüência do motor, f
M,N
.
107 Sintonização automática do motor, AMT
Valor:
Otimização desligada (AMT off) [0]
Otimização ligada (AMT start) [2]
Funcão:
A sintonização automática do motor é um algoritmo que mede a resistência do estator R
sem o eixo do motor estar girando. Isto significa que
S
o motor não está aplicando qualquer torque.
O AMT pode ser usado de forma benéfica na inicialização das unidades
quando os usuários desejam otimizar o ajuste do conversor de frequência
no motor que está sendo usado. É usado particularmente quando a programação de fábrica não abrange suficientemente o motor.
Para obter-se o melhor ajuste possível do conversor de frequência, recomenda-se que o AMT seja realizado em um motor frio. Deve-se observar que execuções repetidas do AMT podem causar aquecimento do motor, resultando em aumento da resistência do estator R
. Via de regra,
S
no entanto, isso não é um problema.
O AMT é realizado da seguinte forma:
Iniciar o AMT:
1. Dar um sinal STOP.
2. O parâmetro 107
mado no valor [2]
Sintonização automática do motor
Otimização ligada
.
3. Um sinal START é dado e o parâmetro 107
mática do motor
é reinicializado para [0] quando o AMT tiver
é progra-
Sintonização auto-
sido concluído.
Na configuração de fábrica START precisa que os terminais 18 e 27 sejam
conectados ao terminal 12.
Concluir o AMT:
O AMT é concluído dando-se um sinal RESET. O parâmetro 108
tência do estator, Rs
é atualizado com o valor otimizado.
Resis-
Interrompendo o AMT:
O AMT pode ser interrompido durante o procedimento de otimização,
dando-se um sinal STOP.
Ao usar a função AMT, os seguintes pontos devem ser observados:
- Para que o AMT possa definir o melhor possível os parâmetros
do motor, devem ser digitados nos parâmetros 102 a 106 os
dados corretos da placa de identificação do motor conectado ao
conversor de frequência.
4
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
77
Page 79

4 Programação Guia de Design do VLT® Decentral FCD 300
4
- Aparecerão alarmes no display, caso surjam falhas durante o
ajuste do motor.
- Como regra, a função AMT poderá medir os valores R
dos mo-
S
tores que forem 1 a 2 vezes maiores ou menores do que o tamanho nominal do conversor de frequência.
- Para interromper o ajuste automático do motor, pressione a tecla [STOP/RESET].
NOTA!
O AMT não pode ser realizado em motores conectados
em paralelo, nem podem ser feitas alterações na configuração enquanto o AMT estiver sendo realizado.
Descricão da selecão:
Selecione
Otimização ligada
[2] para o conversor de frequência realizar
sintonização automática do motor.
108
Resistência do estator R
S
Valor:
0,000 - X,XXX
Depende da escolha do motor
Funcão:
Após programar os parâmetros 102-106
ção
, uma série de ajustes de diversos parâmetros é realizada automati-
camente, inclusive a resistência do estator R
Dados da placa de identifica-
. Uma RS digitada manual-
S
mente deve ser aplicada a um motor frio. O desempenho do eixo pode
ser melhorado com a sintonia fina de R
e XS, consulte o procedimento a
S
seguir.
NOTA!
Os parâmetros 108
Reatância do estator XS
Resistência do estator RS
normalmente não são altera-
e 109
dos se os dados da plaqueta de identificação tiverem
sido programados.
Descricão da selecão:
pode ser programada da seguinte maneira:
R
S
1. Utilize as configurações de fábrica de R
selecionadas pelo pró-
S
prio conversor de frequência com base nos dados da plaqueta
de identificação do motor.
2. O valor é definido pelo fornecedor do motor.
3. O valor é obtido através de medição manual: R
culada medindo a resistência R
4. R
de fase. R
S
= 0,5 x R
S
é programada automaticamente quando AMT estiver con-
PHASE-PHASE
PHASE-PHASE
.
pode ser cal-
S
entre dois terminais
cluído. Vide parâmetro 107 Adaptação automática do motor.
109
Reatância do estator X
S
Valor:
0,00 - X.XX
Depende da escolha do motor
Funcão:
Após configurar os parâmetros 102-106
cação
, é feita uma série de ajustes de diversos parâmetros, automaticamente, inclusive da reatância do estator X
ser melhorado com um ajuste fino da R
Dados da plaqueta de identifi-
. O desempenho no eixo pode
S
e da X S; consulte o procedimento
S
a seguir.
Descricão da selecão:
X
pode ser programado da seguinte forma:
S
1. O valor é definido pelo fornecedor do motor.
2. O valor é obtido efetuando-se medições manuais, X
é conse-
S
guido conectando um motor à rede elétrica e medindo a tensão
, fase a fase, e a corrente de repouso I .
U
M
U
X
=
s
M
3 ×
X
L
−
I
2
ϕ
XL: Consulte o parâmetro 142.
3. Utilize as configurações de fábrica para X
, selecionadas pelo
S
próprio conversor de freqüência, com base nos dados da plaqueta de identificação do motor.
117 Amortecimento da ressonância
Valor:
0 - 100 %
0 %
Funcão:
Reduz a tensão de saída ao operar com carga baixa para evitar o fenômeno de ressonância.
Descricão da selecão:
Se 0 for selecionado, não haverá redução. Se 100% for selecionado, a
tensão será reduzida para 50% sem carga.
119 Alto torque de partida
Valor:
0,0 - 0,5 seg
0,0 seg
Funcão:
Para assegurar um alto torque de partida é permitido um valor de aprox.
1.8 x I
durante um máximo de 0,5 seg. A corrente, no entanto, está
INV.
limitada pelo limite de segurança do (inversor do) conversor de freqüência. 0 seg corresponde a nenhum alto torque de partida.
Descricão da selecão:
Defina durante quanto tempo é necessário um alto torque de partida.
120 Retardo da partida
Valor:
0,0 - 10,0 seg.
0,0 seg.
Funcão:
Este parâmetro ativa um retardo no tempo da partida depois que as condições da partida houverem sido satisfeitas. Quando o tempo houver
transcorrido, a freqüência de saída começará a acelerar até atingir a referência.
Descricão da selecão:
Programe o tempo necessário antes de iniciar a aceleração.
121 Função partida
Valor:
Retenção CC durante o tempo de retardo da partida
(DC HOLD/DELAY TIME) [0]
Freio CC durante o tempo de retardo da partida
(DC BRAKE/DELAY TIME) [1]
Movimento por inércia durante o tempo de retardo da partida
(COAST/DELAY TIME) [2]
Frequência/tensão de partida no sentido horário
(CLOCKWISE OPERATION) [3]
Frequência/tensão de partida no sentido da referência
(VERTICAL OPERATION) [4]
78
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 80

Guia de Design do VLT® Decentral FCD 300 4 Programação
Funcão:
Aqui é selecionado o modo necessário durante o tempo de atraso da
partida (parâmetro 120
Descricão da selecão:
Selecione
o motor com uma tensão de hold CC durante o tempo de atraso da partida. Programe a tensão no parâmetro 137
Escolha
o motor com uma tensão de freio CC durante o tempo de atraso da partida. Programe a tensão no parâmetro 132
Escolha
motor não será controlado pelo drive de frequência ajustável durante o
tempo de atraso da partida (inversor desligado).
Escolha
a função descrita no parâmetro 130
de partida
valor assumido pelo sinal de referência, a frequência de saída será igual
ao programado no parâmetro 130
saída corresponderá ao programado no parâmetro 131
da
Esta funcionalidade é normalmente utilizada em aplicações de içamento.
Ela é usada especialmente em aplicações de motores com armação em
cone, em que o sentido da rotação deve iniciar no sentido horário, seguida pela rotação no sentido da referência.
Selecione
obter a função descrita no parâmetro 130
Tempo de atraso da partida durante hold CC
Freio CC durante o tempo de atraso da partida
Parada por inércia durante o tempo de atraso da partida
Frequência/tensão de partida no sentido horário
durante o tempo de atraso da partida. Independentemente do
.
Frequência/tensão de partida na direção de referência
Tensão na partida
A direção da rotação do motor seguirá sempre na direção da referência.
Se o sinal de referência for igual a zero, a frequência de saída será igual
a 0 Hz, enquanto que a tensão de saída corresponderá ao programado
no parâmetro 131
de zero, a frequência de saída será igual ao parâmetro 130
de partida
partida
mento com contrapeso. Ela é usada especialmente em aplicações de motores com armação em cone. O motor com ancoragem em cone pode dar
o arranque usando o parâmetro 130
131
e a tensão de saída será igual ao parâmetro 131
. Esta funcionalidade é normalmente usada em aplicações de iça-
Tensão na partida
Tempo de atraso da partida
Frequência de partida
Frequência de partida
durante o tempo de atraso da partida.
Tensão na partida
. Se o sinal de referência for diferente
Frequência de partida
.
).
[0] para energizar
Tensão de hold CC
Tensão do freio CC
.
[1] para energizar
.
[3] para obter
e 131
e a tensão de
Tensão na parti-
Frequência de partida
Frequência
Tensão na
e o parâmetro
[2] e o
Tensão
[4] para
e 131
123 Freqüência mínima para ativar a função na parada
Valor:
0,1 - 10 Hz
Funcão:
Este parâmetro define a freqüência de saída em que a função selecionada
no parâmetro 122
Descricão da selecão:
Defina a freqüência de saída desejada.
Função na parada
NOTA!
Se o parâmetro 123 for definido com um valor maior
que no parâmetro 130, então a função de partida retardada (parâmetros 120 e 121) será ignorada.
NOTA!
Se o parâmetro 123 for definido com um valor muito
alto e a retenção em CC tiver sido selecionada no parâmetro 122, a freqüência de saída saltará diretamente
para o valor no parâmetro 123 sem acelerar. Isto poderá originar um alerta / alarme de sobrecorrente.
deve ser ativada.
0,1 Hz
4
122 Função na parada
Valor:
Parada por inércia (COAST) [0]
Retenção em CC (DC HOLD) [1]
Funcão:
É o local onde se seleciona a função do conversor de freqüência depois
que a freqüência de saída ficou menor que o valor do parâmetro 123
Freqüência mínima para ativação da função na parada
mando de parada ou quando a freqüência de saída for desacelerada para
0 Hz.
Descricão da selecão:
Selecione
'liberar' o motor (inversor desligado).
Selecione Retenção em CC [1] se o parâmetro 137
CC
Parada por inércia
precisar ser ativado.
[0] se o conversor de freqüência tiver que
ou após um co-
Tensão de retenção
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
79
Page 81

4 Programação Guia de Design do VLT® Decentral FCD 300
4.3.2 Frenagem CC
4
Durante a frenagem CC, uma tensão contínua é fornecida ao motor e isso
fará com que o eixo seja parado completamente. No parâmetro 132
são CC de freio
0-100%. Máx. A tensão de freio CC depende dos dados selecionados do
motor.
No parâmetro 126
determinado e no parâmetro 127
CC
é selecionada a freqüência na qual a frenagem CC torna-se ativa. Se
uma entrada digital for programada para
mudar do estado lógico '1' para o estado lógico '0', a frenagem CC será
ativada. Quando um comando de parada for ativado, a frenagem CC será
ativada quando a freqüência de saída for menor que a freqüência de reativação.
126 Tempo de frenagem CC
Valor:
0 - 60 seg.
Funcão:
Este parâmetro define o tempo de frenagem CC no qual o parâmetro 132
Tensão de frenagem CC
Descricão da selecão:
Programe o tempo desejado.
127 Freqüência de ativação para o freio DC
Valor:
0.0 (OFF) - par. 202
f
MAX
Funcão:
Neste parâmetro, é ajustado uma freqüência de ativação para o freio DC,
o qual deve estar ligado a um comando de parada.
Descricão da selecão:
Ajuste a frequencia desejada..
a tensão de frenagem CC pode ser pré-ajustada de
Tempo de frenagem CC
o tempo de frenagem CC é
Freqüência de ativação da frenagem
Frenagem CC inversa
NOTA!
A frenagem CC não pode ser usada se a inércia no eixo
do motor for mais de 20 vezes superior à inércia interna do motor.
deve ser ativado.
Limite máximo da freqüência de saída,
Ten-
[5] e ela
10 seg
OFF
Funcão:
O conversor de frequência pode monitorar a temperatura do motor de
duas formas diferentes:
- Via termistor PTC acoplado ao motor. O termistor é conectado
entre terminal 31a / 31b.
um possível termistor integrado no motor for capaz de parar o
conversor de frequência se o motor ficar superaquecido. O valor
de corte é de 3 k.
Por outro lado, se um motor usar um interruptor térmico Klixon,
ele também poderá ser conectado à entrada. Se os motores
operarem em paralelo, os termistores/interruptores térmicos
podem ser conectados em série (resistência total inferior a 3
k).
- Cálculo da carga térmica (ETR - Relé Térmico Eletrônico), com
base na carga atual e no tempo. Este cálculo é comparado com
a corrente nominal do motor I
do motor f
carga menor em velocidades baixas devido à redução da ventilação interna do motor.
. Os cálculos levam em conta a necessidade de uma
M,N
Termistor
deverá ser selecionado se
e com a frequência nominal
M,N
128 Proteção térmica do motor
Valor:
Sem proteção (NO PROTECTION) [0]
Advrtnc d Termistor
(THERMISTOR WARN) [1]
Desrm por Termistor (THERMISTOR TRIP) [2]
Advertência do ETR 1 (ETR WARNING 1) [3]
Desarme por ETR 1 (ETR TRIP 1) [4]
Advertência do ETR 2 (ETR WARNING 2) [5]
Desarme por ETR 2 (ETR TRIP 2) [6]
Advertência do ETR 3 (ETR WARNING 3) [7]
Desarme por ETR 3 (ETR TRIP 3) [8]
Advertência do ETR 4 (ETR WARNING 4) [9]
Desarme por ETR 4 (ETR TRIP 4) [10]
80
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
As funções ETR 1-4 correspondem ao Setup 1-4. As funções ETR 1-4 não
começam a calcular a carga até você alternar para o Setup em que foram
selecionados. Isto significa que é possível utilizar a função ETR inclusive
ao alternar entre dois ou mais motores.
Page 82

Guia de Design do VLT® Decentral FCD 300 4 Programação
Descricão da selecão:
Selecione
desarme quando o motor ficar sobrecarregado.
Selecione
quando o termistor conectado esquentar em excesso.
Selecione
o termistor conectado esquentar em excesso.
Selecione
quando o motor ficar sobrecarregado de acordo com os cálculos. Também é possível programar o conversor de frequência para enviar um sinal
de advertência através da saída digital.
Selecione
ficar sobrecarregado de acordo com os cálculos.
Selecione
quando o motor ficar sobrecarregado de acordo com os cálculos. Também é possível programar o conversor de frequência para enviar um sinal
de advertência através de uma das saídas digitais. Selecione
ETR 1-4
gado de acordo com os cálculos.
A freqüência da partida é ativada durante o tempo definido no parâmetro
120
saída 'saltará' para o próximo valor pré-definido. Alguns motores do tipo
de rotor cônico precisam de uma tensão / freqüência de partida adicional
(reforço) na partida de forma a desengatar o freio mecànico. Para este
propósito, são utilizados os parâmetros 130
Tensão inicial
Defina a freqüência de partida necessária. Como pré-condição, o parâmetro 121
Sem proteção
Advertência do termistor
Desarme por termistor
Advertência de ETR
Desarme do ETR
Advertência de ETR 1-4
para que ocorra um desarme quando o motor ficar sobrecarre-
130 Freqüência de partida
Valor:
0,0 - 10,0 Hz
Funcão:
Retardo na partida
.
Descricão da selecão:
Função na partida
são de partida no sentido horário
direção da referência
tenha sido definido um tempo e que um sinal de referência esteja presente.
[0] para que não ocorra uma advertência ou um
[1] para receber uma advertência
[2] para que ocorra um desarme quando
para que seja emitida uma advertência
para que ocorra um desarme quando o motor
para que seja emitida uma advertência
Desarme do
NOTA!
Esta função não protege os motores individuais no caso de motores ligados em paralelo.
0,0 Hz
, após um comando de partida. A freqüência de
Freqüência de partida
deve estar definido como
[3] ou
Freqüência/tensão de partida na
[4] e que no parâmetro 120
NOTA!
Se o parâmetro 123 for definido com um valor maior
que no parâmetro 130, então a função de partida retardada (parâmetros 120 e 121) será ignorada.
Retardo de partida
e 131
Freqüência/ten-
131 Tensão de partida
Valor:
0.0 - 200.0 V
Funcão:
Tensão inicial
120
Atraso da partida
ser usado, por exemplo, em aplicações de içamento/abaixamento (motores de rotor cônico).
Descricão da selecão:
Programe a tensão necessária para desligar o freio mecânico. Considera-
-se que o parâmetro 121
quência/tensão de partida no sentido horário
de partida no sentido da referência
da Partida
presente.
132 Tensão de frenagem CC
Valor:
0 - 100% da tensão máx. de frenagem CC
Funcão:
Este parâmetro é utilizado para programar a tensão de frenagem CC que
deve ser ativada na parada quando a freqüência de frenagem CC programada no parâmetro 127
alcançada ou se
digital ou de uma comunicação serial. A partir daí, a tensão de frenagem
CC estará ativa durante o tempo programado no parâmetro 126
de frenagem CC
Descricão da selecão:
Para ser programado como um valor percentual da tensão máxima de
frenagem CC, que depende do motor.
133 Tensão de partida
Valor:
0,00 - 100,00 V
Funcão:
É possível obter-se um torque maior de partida, aumentando-se a tensão
da partida. Os motores pequenos (< 1,0 kW) normalmente requerem
uma tensão de partida alta.
estará ativo durante o tempo programado no parâmetro
após um comando de partida. Este parâmetro pode
Função partida
está programado um tempo e que um sinal de referência está
, está programado para
[3] ou
Frequência/tensão
[4] e que no parâmetro 120
Freqüência de ativação da frenagem CC
Frenagem CC inversa
.
for ativado através de uma entrada
Depende da unidade
0.0 V
Fre-
Atraso
for
Tempo
4
0
Descricão da selecão:
O valor é selecionado prestando-se atenção ao fato de que a partida do
motor com a carga atual é pouco provável.
Advertência: Se houver exagero no uso da tensão de
partida, isto pode levar a um excesso de energização
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
81
Page 83

4 Programação Guia de Design do VLT® Decentral FCD 300
4
e a um superaquecimento do motor e o conversor de
freqüência pode parar de funcionar.
134 Compensação de carga
Valor:
0,0 - 300,0%
Funcão:
Neste parâmetro é programada a característica da carga. Pelo aumento
da compensação de carga, o motor recebe um suplemento adicional de
tensão e freqüência em valores crescentes de carga. Usado em motores/
aplicações em que há uma grande diferença entre a corrente de carga
total e a corrente de carga neutra do motor.
NOTA!
Se o valor programado for alto demais, o conversor de
freqüência pode parar de funcionar por causa da sobrecorrente.
Descricão da selecão:
Se a programação de fábrica não for adequada, a compensação de carga
deve ser programada para permitir que o motor parta com aquela determinada carga.
Advertência: Uma compensação de carga demasiadamente alta pode levar a uma instabilidade.
100,0%
Descricão da selecão:
Digite um valor de %.
137 Tensão de retenção CC
Valor:
0 - 100% da tensão máx. de retenção CC
Funcão:
Este parâmetro é utilizado para manter o motor (torque de retenção) em
partida/parada.
Descricão da selecão:
Este parâmetro só pode ser utilizado se for selecionado
parâmetro 121
programado como um valor percentual da tensão máxima de retenção
CC, que depende da escolha do motor.
138 Valor de corte do freio
Valor:
0.5 - 132.0/1000.0 Hz
Funcão:
Aqui você pode selecionar a frequência na qual o freio externo é liberado,
por meio da saída definida no parâmetro 323
Saída digital, terminal 46
Descricão da selecão:
Programe a frequência desejada.
Função da partida
(opcionalmente também terminais 122 e 123).
ou 122
Função na parada
Retenção CC
Saída do relé 1-3
0%
no
. Para ser
3.0 Hz
ou 341
135 Relação U/f
Valor:
0,00 - 20,00 V/Hz
Funcão:
Este parâmetro permite mudanças na relação entre a tensão de saída (U)
e a frequência de saída (f) de modo linear, de forma a garantir a correta
energização do motor, garantindo portanto a dinâmica, precisão e eficiência ideais. A relação U/f afeta somente a característica da tensão se
tiver sido selecionado
Torque constante
[1] parâmetro 101
Depende da unidade
Característica
de torque.
Descricão da selecão:
A relação U/f só deve ser modificada se não for possível programar os
dados corretos do motor no parâmetro 102-109. O valor programado na
configuração de fábrica é baseado na operação normal.
136 Compensação de escorregamento
Valor:
-500 - +500% da compensação nominal de escorregamento
Funcão:
A compensação de escorregamento é calculada automaticamente, com
base na velocidade nominal do motor n
sação de escorregamento pode ser ajustada, compensando, portanto, as
tolerâncias no valor de n
tará ativa se for selecionada
no parâmetro
Configuração
Característica do torque
. A compensação de escorregamento só es-
M,N
Regulaçãode velocidade, malha aberta
e
Torque constante
.
. Neste parâmetro, a compen-
M,N
[1] no parâmetro 101
100%
[0]
139 Frequência de ativação do freio
Valor:
0.5 - 132.0/1000.0 Hz
Funcão:
Aqui você pode selecionar a frequência em que o freio externo é ativado;
isso corre através da saída definida no parâmetro 323
ou 341
Saída digital terminal 46
Descricão da selecão:
Programe a frequência desejada.
140 Corrente, valor mínimo
Valor:
0 % - 100 % da corrente de saída do inversor
Funcão:
Este é o local onde o usuário seleciona a corrente mínima do motor funcionando, para que o freio seja liberado. O monitoramento da corrente
somente fica ativo no período desde a parada até o instante em que o
freio é liberado.
Descricão da selecão:
Esta é uma precaução adicional de segurança que objetiva garantir que
a carga não seja perdida durante o início de uma operação de içamento/
abaixamento.
(opcionalmente também 122 e 123).
Saída do relé 1-3
3.0 Hz
0 %
82
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 84

Guia de Design do VLT® Decentral FCD 300 4 Programação
142
Valor:
0,000 - XXX.XXX
Funcão:
Após a configuração dos parâmetros 102-106
tificação
camente, inclusive da reatância de fuga X
ser melhorado pelo ajuste fino da reatância de fuga X
Descricão da selecão:
X
pode ser programada da seguinte forma:
L
1. O valor é definido pelo fornecedor do motor.
2. Utilize as programações de fábrica de X
144 Ganho do freio CA
Valor:
1,00 - 1,50
Funcão:
Este parâmetro é usado para configurar o freio CA. Usando o par. 144, é
possível ajustar o valor do torque do gerador que pode ser aplicado ao
motor, sem que a tensão do circuito intermediário ultrapasse o nível de
advertência.
Descricão da selecão:
O valor é aumentado se for necessário um torque de freio maior possível.
Se for selecionado 1,0, isto corresponde a inativar o freio CA.
Reatância de fuga X
X
é a soma das reatâncias de fuga do rotor e do
L
L
Depende da escolha do motor
estator.
Dados da plaqueta de iden-
, vários ajustes de diversos parâmetros são efetuados automati-
. O desempenho do eixo pode
L
.
L
NOTA!
O parâmetro 142
modificada, normalmente, se os dados da plaqueta de
identificação tiverem sido programados, parâmetros
102-106.
de freqüência seleciona, com base na plaqueta de identificação
do motor.
NOTA!
Se o valor do par. 144 for aumentado, simultaneamente aumentará a corrente do motor quando forem
aplicadas cargas ao gerador. Portanto, esse parâmetro
só deve ser mudado se for garantido, durante a medição, que a corrente do motor em todas as situações
operacionais jamais excederá a corrente máxima permitida no motor.
lida a partir do display.
A reatância de fuga X
L
Observe
: a corrente não pode ser
não deve ser
L
que o próprio conversor
1,30
146 Tensão de reset, Vetor
Valor:
*Desligado (OFF) [0]
Reset (RESET) [1]
Funcão:
Quando o vetor de tensão é resetado, ele é definido para o mesmo ponto
de partida cada vez que começa um novo processo.
Descricão da selecão:
Selecione reset (1) ao executar processos exclusivos cada vez que eles
surgirem. Isto permitirá uma precisão repetitiva ao parar para melhorar.
Selecione Desligado (0), por exemplo, para operações de levantamento/
abaixamento ou de motores síncronos. É sempre vantajoso que o motor
e o conversor de freqüência estejam sempre sincronizados.
147 Tipo do motor
Valor:
*Geral (GENERAL) [0]
Danfoss Bauer (DANFOSS BAUER) [1]
Funcão:
Este parâmetro seleciona o tipo de motor conectado ao conversor de frequência.
Descricão da selecão:
O valor pode ser selecionado como geral para a maioria das marcas de
motores. Selecione Danfoss Bauer para obter os ajustes ideais dos motores de engrenagens Danfoss Bauer.
4
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
83
Page 85

4 Programação Guia de Design do VLT® Decentral FCD 300
4.4 Grupo de Parâmetros 2-** Referências e Limites
4
200 Faixa da frequência de saída
Valor:
Somente no sentido horário, de 0 a 132 Hz
(132 Hz CLOCK WISE) [0]
Ambos os sentidos, de 0 a 132 Hz
(132 Hz BOTH DIRECT) [1]
Somente no sentido anti-horário, 0 a 132 Hz
(132 Hz COUNTER CLOCK) [2]
Clockwise only, 0 - 1000 Hz
(1000 Hz CLOCK WISE) [3]
Ambos os sentidos, de 0 a 1.000 Hz
(1000 HZ BOTH DIRECT) [4]
Anti-clockwise only, 0 - 1000 Hz
(1000HZ COUNTER CLOCK) [5]
Funcão:
Este parâmetro garante proteção contra inversões indesejadas. Além disso, pode ser selecionada a frequência máxima de saída a ser aplicada
independentemente das programações dos outros parâmetros. Esse parâmetro não tem função se
sido selecionado no parâmetro 100
Descricão da selecão:
Selecione o sentido desejado da rotação, bem como a frequência máxima
de saída. Observe que se Clockwise only [0]/[3] ou Anti-clockwise only
[2]/[5] for selecionado, a frequência de saída ficará limitada à faixa f
f
. Se Both directions [1]/[4] for selecionado, a frequência de saída
MAX
estará limitada à faixa ± f
Regulagem do processo, malha fechada
Configuração
(a frequência mínima não é significativa).
MAX
.
tiver
MIN
201
Valor:
0,0 - f
Funcão:
Neste parâmetro, pode ser selecionado um limite mínimo de freqüência
do motor que corresponde à velocidade mínima na qual o motor funciona.
Se
ambas direções
freqüência de saída
Descricão da selecão:
O valor escolhido pode variar de 0,0 Hz até a freqüência máxima selecionada no parâmetro 202
202
Valor:
f
MIN
da)
Funcão:
Neste parâmetro pode ser selecionado um limite máximo de frequência
de saída que corresponde à maior velocidade na qual o motor funciona.
-
Descricão da selecão:
Pode-se selecionar um valor de f
200 Faixa de frequências de saída.
Limite mínimo da freqüência de saída, f
MAX
tiver sido selecionado no parâmetro 200
, a freqüência mínima não será significativa.
Limite máximo da freqüência de saída, f
Limite superior da frequência de saída, f
- 132/1000 Hz (par. 200 Faixa da Frequência de Saí-
NOTA!
A frequência de saída do conversor de frequência nunca poderá assumir um valor superior a 1/10 da frequência de chaveamento (parâmetro 411
de chaveamento
).
para o valor escolhido no parâmetro
MIN
MIN
0,0 Hz
Gama da
MAX
MAX
132 Hz
Frequência
.
4.4.1 Tratamento das Referências
O tratamento das referências está descrito no diagrama de blocos abaixo.
O diagrama de blocos mostra como uma mudança em um parâmetro pode afetar a referência resultante.
Os parâmetros 203 a 205
rência
definem como pode ser realizado o tratamento das referências. Os
parâmetros mencionados podem estar ativos nos casos de malha aberta
ou fechada.
Referência
84
e o parâmetro 214
Função de refe-
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
As referências controladas remotamente são definidas como:
- Referências externas como, por exemplo, as entradas analógicas 53 e 60, referências de pulso via terminal 33 e as referências
da comunicação serial.
- Referências predefinidas.
A referência resultante pode ser mostrada no display da unidade de controle do LCP selecionando
tura do display
e pode ser mostrada como uma unidade selecionando
Referência
[%] nos parâmetros 009-012
Lei-
Page 86

Guia de Design do VLT® Decentral FCD 300 4 Programação
Referência [unidade]
da no display da unidade de controle do LCP como uma porcentagem da
área de Referência mínima,
Referência externa, %
cione
display
para realizar uma leitura.
É possível ter as ambas as referências e as referências externas simultaneamente. No parâmetro 214
seleção para determinar como as referências predefinidas devem ser adicionadas às referências externas.
. A soma das referências externas pode ser mostra-
Ref
a Referência máxima, Ref
MIN
[25] nos parâmetros 009-012 L
Função de referência
pode ser feita uma
.
Sele-
MAX
eitura do
Há também uma referência local independente no parâmetro 003
rência local
Quando a referência local tiver sido selecionada, a faixa de frequência de
saída fica limitada pelo parâmetro 201
saída, f
A unidade de referência local depende da seleção do parâmetro 100 Configuração.
, em que a referência resultante é definida com as teclas [+/-].
Limite mínimo da frequência de
e parâmetro 202
MIN
Limite máximo da frequência de saída, f
Refe-
MAX
.
4
203 Gama de referência
Valor:
Referência mín -Referência máx (min - max) [0]
-Referência máx.- Referência máx.
(-max - +max) [1]
Funcão:
Neste parâmetro você seleciona se o sinal de referência deve ser positivo
ou se ele pode ser tanto positivo como negativo. O limite mínimo pode
ser um valor negativo, a menos que no parâmetro 100
nha sido selecionado
selecionar
fechada
Selecione a gama desejada.
Ref. mín. - Ref. máx.
[3] tiver sido selecionada no parâmetro 100
Descricão da selecão:
204
Valor:
Par. 100
205 Ref
MAX
Par. 100
Feedback mínimo
Funcão:
A referência mínima indica o valor mínimo que pode ser assumido pelo
soma de todas as referências. Se no parâmetro 100
sido selecionado
lação de processo, malha fechada
Regulação de velocidade, malha fechada
[0], se
Regulação de processo, malha
Referência mínima , Ref
Config.
=
Malha aberta
Config.
=
Malha fechada
- par. 205
Ref
MIN
[0].-100.000,000 - par.
[1]/[3].-Par. 414
MAX
Regulação de velocidade, malha fechada
[3], a referência mínima será limitada
Configuração
. Você deve
Configuração
rpm/par 416
Configuração
[1] ou
te-
.
0,000 Hz
0,000
, houver
Regu-
pelo parâmetro 414
se a referência local estiver ativa.
A unidade de referência pode ser determinada a partir da seguinte tabela:
Par. 100
Malha aberta [0] Hz
Reg velocidade, malha fechada [1] rpm
Reg processo, malha fechada [3] Par. 416
Descricão da selecão:
A referência mínima é pré-ajustada se o motor tiver que funcionar a uma
velocidade mínima, independente da referência resultante ser 0.
205
Valor:
Par. 100
1000,000 Hz
Par. 100
- Par. 415
Ref
MIN
Funcão:
A referência máxima indica uma expressão do maior valor que pode ser
assumido pela soma de todas as referências. Se
selecionada no parâmetro 100
deve exceder o valor selecionado no parâmetro 415
A referência máxima será ignorada se a referência local estiver ativa.
A unidade de referência pode ser definida a partir da seguinte tabela:
Feedback mínimo
Configuração
Referência máxima, Ref
Config.
=
Malha aberta
Config.
=
Malha fechada
Feedback máximo
Configuração,
. A referência mínima será ignorada
Unidade
MAX
[0].Par. 204
[1]/[3]. Par. 204
Ref
-
MIN
50,000 Hz
50,000 rpm/
par 416
Malha fechada
a referência máxima não
[1]/[3] é
Feedback máximo
.
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
85
Page 87

4
4 Programação Guia de Design do VLT® Decentral FCD 300
Par. 100
Configuração
Malha aberta [0] Hz
Reg velocidade, malha fechada [1] rpm
Reg processo, malha fechada [3] Par. 416
Descricão da selecão:
A referência máxima será configurada se a velocidade do motor tiver que
assumir o o valor máximo definido, independente da referência resultante
ser maior que a referência máxima.
206 Tipo de rampa
Valor:
Linear (Linear) [0]
Em forma de S (S-SHAPED) [1]
2
(S 2) [2]
Senoidal
Funcão:
Você pode escolher entre um processo de rampa linear, em forma S e
2
S
.
Descricão da selecão:
Selecione o tipo de rampa desejado, dependendo do processo de aceleração/desaceleração.
Unidade
Descricão da selecão:
Defina o tempo de aceleração desejado.
208 Tempo de desaceleração 1
Valor:
0,02 - 3600,00 seg
Funcão:
O tempo de desaceleração é o tempo necessário para desacelerar da frequência nominal do motor f
não haja sobretensão no inversor resultante de o motor atuar como gerador.
Descricão da selecão:
Programe o tempo desejado de desaceleração.
(parâmetro 104
M,N
f
) até 0 Hz, desde que
M,N
3,00 s
207 Tempo de aceleração 1
Valor:
0,02 - 3600,00 seg
Funcão:
O tempo de aceleração é o tempo necessário para acelerar de 0 Hz até
a frequência nominal do motor f
f
)
. Considera-se que a corrente de saída não alcançará o limite de cor-
M,N
rente (programado no parâmetro 221
(parâmetro 104
M,N
Limite de corrente I
Frequência do motor,
LIM
3,00 s
)
.
209 Tempo de aceleração 2
Valor:
0,02 - 3600,00 seg.
Funcão:
Consulte a descrição do parâmetro 207
Descricão da selecão:
Defina o tempo de aceleração desejado. Alternar da rampa 1 para rampa
2 ativando
Consulte a descrição do parâmetro 208
Programe o tempo desejado de desaceleração. Alternar da rampa 1 para
rampa 2 ativando
Rampa 2
através de uma entrada digital.
210 Tempo de desaceleração 2
Valor:
0,02 - 3600,00 seg.
Funcão:
Descricão da selecão:
Rampa 2
através de uma entrada digital.
Tempo de aceleração 1
Tempo de desaceleração 1
3,00 s
.
3,00 s
.
86
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 88

Guia de Design do VLT® Decentral FCD 300 4 Programação
211 Tempo de rampa do jog
Valor:
0,02 - 3600,00 seg.
Funcão:
O tempo de rampa do jog é o tempo necessário para acelerar/desacelerar
de 0 Hz até a frequência nominal do motor f
)
cia do motor, f
o limite de corrente (programado no parâmetro 221
)
.
I
LIM
O tempo de rampa para o jog inicia se um sinal de jog for dado através
do painel de controle local, de uma das entradas digitais ou via porta de
comunicação serial.
Descricão da selecão:
Defina o tempo de rampa de velocidade desejado.
. Considera-se que a corrente de saída não alcançará
M,N
(parâmetro 104
M,N
Limite de corrente
3,00 s
Frequên-
212 Tempo de parada rápida
Valor:
0,02 - 3600,00 seg.
Funcão:
O tempo de desaceleração para parada rápida é o tempo de desaceleração da frequência nominal do motor até 0 Hz, desde que não ocorra sobretensão no inversor por causa da operação de geração do motor ou se
a corrente gerada ultrapassar o limite de corrente do parâmetro 221
Limite de corrente I
entradas digitais ou da comunicação serial.
Descricão da selecão:
Programe o tempo desejado de desaceleração.
213 Frequência de jog
Valor:
0.0 - Par. 202 Limite superior da frequência de saída, f
MAX
Funcão:
Frequência de jog fJOG significa uma frequência de saída fixa fornecida
pelo conversor de frequência ao motor quando a função de Jog estiver
ativada. Jog pode ser ativado por meio das entradas digitais, comunicação serial ou painel de controle LCP, na condição de que esteja ativo no
parâmetro 015
Descricão da selecão:
Programe a frequência desejada.
.
A parada rápida é ativada através de uma das
LIM
Jog local
.
3,00 s
10.0 Hz
4
4.4.2 Função de Referência
O exemplo mostra como a referência resultante é calculada quando
ferências predefinidas
214
Função de referência.
tante pode ser vista na seção
o desenho em
é usado junto com
A fórmula para o cálculo da referência resul-
Tratamento das referências
Tudo sobre o FCD 300
Soma
.
e
Relativo
no parâmetro
. Consulte também
Os seguintes parâmetros são predefinidos:
Par. 204
Par. 205
Par. 215
Par. 308
Par. 309
Par. 310
Quando o parâmetro 214
ma
[0], uma das
adicionada às referências externas como uma porcentagem da faixa da
referência. Se for aplicada uma corrente na entrada analógica no terminal
53, uma tensão de 4 Volts será a referência resultante:
Par. 214
Par. 204
Referência mínima
Referência máxima
Preset reference
Term.53, Analogue input
Term.53, min. scaling
Term.53, max. scaling
Função de referência
Referências predefinidas
Função Referência
= Sum [0]:
Referência mínima
(par. 215-218) predefinida é
10 Hz
50 Hz
15 %
Ext.
0 V
10 V
é programado para
Contribuição da referência em 4 Volts 16.0 Hz
Par. 215
Referência predefinida
Referência resultante 32.0 Hz
Re-
So-
10.0 Hz
6.0 Hz
Quando o parâmetro 214
[1], as Referências predefinidas (par. 215-218) definidas são adi-
lativo
cionadas como uma porcentagem do total das referências externas atuais. Se for aplicada uma corrente na entrada analógica no terminal 53,
uma tensão de 4 Volts será a referência resultante:
Par. 214
Função Referência
Par. 204
Referência mínima
Função de referência
= Relativa [1]:
é programado para
10.0 Hz
Re-
Efeito da referência em 4 Volts 16.0 Hz
Par. 215
Referência predefinida
2.4 Hz
Referência resultante 28.4 Hz
O gráfico mostra a referência resultante com relação à referência externa,
que varia de 0 a 10 Volts. O parâmetro 214
programado para
mostrado um gráfico em que o parâmetro 215
está programado para 0 %.
Soma
[0] e
Relativo
Função de referência
[1] respectivamente. Também é
Referência predefinida
está
1
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
87
Page 89

4
4 Programação Guia de Design do VLT® Decentral FCD 300
215 Referência predefinida 1 (PRESET REF. 1)
216 Referência pré-ajustada 2 (PRESET REF. 2)
217 Referência pré-ajustada 3 (PRESET REF. 3)
218 Referência pré-ajustada 4 (PRESET REF. 4)
Valor:
214 Função de referência
Valor:
Soma (SUM) [0]
Relativo (RELATIVE) [1]
Externo/pré-ajustado (EXTERNAL/PRESET) [2]
Funcão:
É possível definir como as referências pré-ajustadas devem ser somadas
às outras referências; para esta finalidade, use
disso, também é possível - utilizando a função
selecionar se deve ser feita uma comutação entre as referências externas
e as referências pré-ajustadas.
A referência externa é o somatório das referências analógicas, referências
de pulso e qualquer referência oriunda da comunicação serial.
Descricão da selecão:
Se for selecionado
metros 215-218
porcentagem da gama de referência (Ref
referências externas.
Se for selecionado
-ajustadas (parâmetros 215-218
na forma de uma porcentagem da soma das atuais referências externas.
Se for selecionado
digital comutar entre referências externas e referências ajustadas. As referências pré-ajustadas são um valor percentual da gama de referência.
Soma
[0], uma das referências pré-ajustadas (parâ-
Referência pré-ajustada
Relativo
[1] for selecionado, uma das referêncisa pré-
Referênica pré-ajustada
Externo/pré-ajustado
NOTA!
Se for selecionado Soma ou Relativo, uma das referências pré-ajustadas sempre estará ativada. Se as referências pré-ajustadas não tiverem que ter influência,
elas devem ser programadas para 0% (como na programação de fábrica).
Soma
ou
Relativo
. Além
Externo/pré-ajustado
) é sumarizada na forma de uma
- Ref
MIN
[2], é possível via uma entrada
), somada às outras
MAX
) é sumarizada
-100.00% - +100.00%
da gama de referência/referência externa
Funcão:
Quatro referências predefinidas diferentes podem ser programadas nos
parâmetros 215-218
A referência predefinida é apresentada como uma porcentagem da faixa
de referência (Ref
referências externas, dependendo da opção feita no parâmetro 214
ção de Referência
feita via entradas digitais ou via comunicação serial.
Ref. predefinida, msb Referência predefini-
Descricão da selecão:
Programe a(s) referência(s) pré-ajustada(s) que deve(m) ser as opções.
-
219 Referência Catch up/ Slow down
Valor:
0,00 - 100% da referência em questão
Funcão:
Este parâmetro possibilita a introdução de um valor percentual que pode
ser somado ou subtraído das referências controladas remotamente.
A referência controlada remotamente é a soma das referências pré-ajustadas, referências analógicas, referências de pulso e qualquer referência
oriunda da comunicação serial.
Descricão da selecão:
Se
Catch up
no parâmetro 219
da referência controlada remotamente.
Se
Slow down
centual no parâmetro 219
da referência remotamente controlada.
221
Valor:
0 - XXX,X % de par. 105
Funcão:
Este é o local onde deve ser programada a máxima corrente de saída
I
. O valor programado de fábrica corresponde à máxima corrente de
LIM
saída I
motor, programe a corrente nominal do motor. Se o limite de corrente
for programado acima de 100% (a corrente nominal de saída do conversor de freqüência, I
carga intermitentemente, ou seja, durante curtos intervalos de tempo.
Depois que a carga consumir mais que I
rante um intervalo de tempo ela seja inferior a I
de corrente for programado com um valor inferior a I
aceleração será reduzido na mesma proporção.
. Se o limite de corrente tiver que ser usado como proteção do
MAX
Referência Predefinida
- Ref
MIN
. A seleção entre as referências pré-ajustadas pode ser
0 0 Ref. predefinida 1
0 1 Ref. predefinida 2
1 0 Ref. predefinida 3
1 1 Ref. predefinida 4
estiver ativo mediante uma entrada digital, o valor percentual
) ou como uma porcentagem das outras
MAX
da lsb
Referência Catch up/Slow down
estiver ativo mediante uma entrada digital, o valor per-
.
será somado ao valor
Referência Catch up/Slow down
Limite de corrente, I
), o conversor de freqüência só pode lidar com uma
INV.
LIM
, deve-se assegurar que du-
INV.
INV.
Note que se o limite
INV.
0.00%
Fun-
0
será subtraído
160 %
, o torque de
88
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 90

Guia de Design do VLT® Decentral FCD 300 4 Programação
Descricão da selecão:
Programe a necessária corrente máxima de saída I
223
Advertência: Baixa corrente, I
LIM
LOW
.
Valor:
0,0 - par. 224
Corrente alta, I
Advertência:
HIGH
0,0 A
Funcão:
Se a corrente de saída ficar abaixo do limite pré-ajustado I
será dada
LOW
uma advertência.
Os parâmetros 223-228
Funções de advertência
estão sem função durante a aceleração após um comando de partida e após um comando de
parada ou durante a parada. As funções de advertência são ativadas
quando a freqüência de saída houver atingido a referência resultante. As
saídas de sinal podem ser programadas para um sinal de advertência no
terminal 46 e na saída do relé.
Descricão da selecão:
O limite inferior de sinal da corrente de saída I
deve ser programado
LAV
dentro da gama normal de operação do conversor de freqüência.
224
Advertência: Alta corrente, I
HIGH
Valor:
Par. 223
Advert.: Baixa corrente, I
LOW
- I
MAX
I
MAX
Funcão:
Se a corrente de saída exceder o limite pré-ajustado I
uma adver-
HIGH
tência será dada.
Os parâmetros 223-228
Funções de advertência
ficam sem função durante a aceleração após um comando de partida e após um comando de
parada ou durante a parada. As funções de advertência são ativadas
quando a saída de freqüência houver alcançado a referência resultante.
As saídas de sinal podem ser programadas para dar um sinal de advertência no terminal 46 e na saída do relé.
Descricão da selecão:
O limite superior do sinal da corrente de saída I
deve ser programado
HIGH
dentro da gama normal de operação do conversor de freqüência. Vide
desenho no parâmetro 223
Advertência: Baixa corrente, I
LOW
.
225
Advertência: Baixa freqüência, f
LOW
Valor:
0,0 - par. 226
Advert.: Freqüência alta, f
HIGH
0,0 Hz
Funcão:
Se a freqüência de saída estiver abaixo do limite pré-ajustado f
LOW
, uma
advertência é dada.
Os parâmetros 223-228
Funções de advertência
ficam sem função durante a aceleração após um comando de partida e após um comando de
parada ou durante a parada. As funções de advertência são ativadas
quando a saída de freqüência houver alcançado a referência resultante.
As saídas de sinal podem ser programadas para dar um sinal de advertência no terminal 46 e na saída do relé.
Descricão da selecão:
O limite inferior do sinal da freqüência de saída f
deve ser programado
LOW
dentro da gama normal de operação do conversor de freqüência. Vide
desenho no parâmetro 223
226
Advertência: Alta freqüência f
Advertência: Baixa corrente, I
HIGH
LOW
.
Valor:
Par. 200
Gama de freqüência
225 f
- 132 Hz
LOW
Par. 200
Gama de freqüência
225 f
- 1000 Hz
LOW
= 0-132 Hz [0]/[1].par.
132,0 Hz
= 0-1000 Hz [2]/[3].par.
132,0 Hz
Funcão:
Se a freqüência de saída estiver acima do limite pré-ajustado f
HIGH
será
dada uma advertência.
Os parâmetros 223-228
Funções de advertência
não funcionam durante
a aceleração após um comando de partida e após um comando de parada
ou durante a parada. As funções de advertência são ativadas quando a
saída de freqüência houver alcançado a referência resultante. As saídas
de sinal podem ser programadas para dar um sinal de advertência no
terminal 46 e na saída do relé.
Descricão da selecão:
O limite superior do sinal da freqüência de saída f
deve ser progra-
HIGH
mado dentro da gama normal de operação do conversor de freqüência.
Vide desenho no parâmetro 223
227
Advertência: Baixo feedback, FB
Advertência: Baixa corrente, I
LOW
LOW
.
Valor:
-100.000,000 - par. 228
Advert.:FB
HIGH
-4000,000
Funcão:
Se o sinal de realimentacão estiver abaixo do limite pré-ajustado FB
LOW
uma advertência é dada.
Os parâmetros 223-228
Funções de advertência
ficam sem função durante a aceleração após um comando de partida e após um comando de
parada ou durante a parada. As funções de advertência são ativadas
quando a saída de freqüência houver alcançado a referência resultante.
As saídas de sinal podem ser programadas para dar um sinal de advertência no terminal 46 e na saída do relé. A unidade de realimentacão em
malha fechada é programada no parâmetro 416
Unidades de processo
Descricão da selecão:
Programe o valor necessário dentro da gama de realimentacão (parâmetro 414
Feedback mínimo, FB
MIN
e 415
Feedback máximo, FB
MAX
).
4
,
.
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
89
Page 91

4 Programação Guia de Design do VLT® Decentral FCD 300
4
228
Valor:
Par. 227
Funcão:
Se o sinal de realimentacão estiver acima do limite pré-ajustado FB
será dada uma advertência.
Os parâmetros 223-228
rante a aceleração após um comando de partida e após um comando de
parada ou durante a parada. As funções de advertência são ativadas
quando a saída de freqüência houver alcançado a referência resultante.
As saídas de sinal podem ser programadas para dar um sinal de advertência no terminal 46 e na saída do relé. A unidade de realimentacão em
malha fechada é programada no parâmetro 416
Descricão da selecão:
Programe o valor requerido dentro da gama de realimentacão (parâmetro
414
Feedback mínimo, FB
Advertência: Alto feedback, FB
Advert.: FB
- 100.000,000
LOW
Funções de advertência
e 415
MIN
Feedback máximo, FB
HIGH
4000,000
HIGH
ficam sem função du-
Unidades de processo
).
MAX
229 Freqüência de bypass, largura de banda
Valor:
0 (OFF) - 100 Hz
Funcão:
Alguns sistemas precisam evitar algumas freqüências de saída devido a
,
problemas de ressonância mecânica no sistema. Nos parâmetros 230-231
Bypass de freqüência
das. Neste parâmetro pode-se definir uma largura de banda abaixo ou
acima dessas freqüências.
Descricão da selecão:
A freqüência programada neste parâmetro será centralizada em torno
dos parâmetros 230
.
2.
230 Freqüência de bypass 1 (FREQ. BYPASS 1)
231 Freqüência de bypass 2 (FREQ. BYPASS 2)
Valor:
0 - 1000 Hz
Funcão:
Alguns sistemas precisam evitar algumas freqüências de saída por causa
de problemas de ressonância mecânica no sistema.
Descricão da selecão:
Introduza as freqüências a serem evitadas. Vide também o parâmetro
229
Freqüência de bypass, largura de faixa
essas freqüências de saída podem ser programa-
Freqüência de bypass 1
e 231
Freqüência de bypass
.
0 Hz
0,0 Hz
90
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 92

Guia de Design do VLT® Decentral FCD 300 4 Programação
4.5 Grupo de Parâmetros 3-** Entradas e Saídas
Entradas digitais Term. nº 18 19 27 29 33
Valor:
Sem função (NO OPERATION) [0] [0] [0] [0]
Reset (RESET) [1] [1] [1] [1] [1]
Parada por inércia inversa (MOTOR COAST INVERSE) [2] [2] [2] [2] [2]
Reset e parada por inércia inversa (RESET AND COAST INV.) [3] [3]
Parada rápida inversa (QUICK-STOP INVERSE) [4] [4] [4] [4] [4]
Frenagem CC inversa (DC-BRAKE INVERSE) [5] [5] [5] [5] [5]
Parada - Ativo em 0 (STOP INVERSE) [6] [6] [6] [6] [6]
Partida (START)
Partida por pulso (LATCHED START) [8] [8] [8] [8] [8]
Reversão (REVERSING) [9]
Reversão e partida (START REVERSING) [10] [10] [10] [10] [10]
Partida no sentido horário (ENABLE FORWARD) [11] [11] [11] [11] [11]
Partida no sentido anti-horário (ENABLE REVERSE) [12] [12] [12] [12] [12]
Jog (JOGGING) [13] [13] [13]
Congelar referência (FREEZE REFERENCE) [14] [14] [14] [14] [14]
Congelar frequência de saída (FREEZE OUTPUT) [15] [15] [15] [15] [15]
Acelerar (SPEED UP) [16] [16] [16] [16] [16]
Desacelerar (SPEED DOWN) [17] [17] [17] [17] [17]
Catch-up (CATCH-UP) [19] [19] [19] [19] [19]
Desacelerar (SLOW-DOWN) [20] [20] [20] [20] [20]
Rampa 2 (RAMP 2) [21] [21] [21] [21] [21]
Ref pré-definida, LSB (PRESET REF, LSB) [22] [22] [22] [22] [22]
Ref predefinida, MSB (PRESET REF, MSB) [23] [23] [23] [23] [23]
Ref. predef. ligada (PRESET REFERENCE ON) [24] [24] [24] [24] [24]
Parada precisa, inversa (PRECISE STOP INV.) [26] [26]
Partida/parada precisa (PRECISE START/STOP) [27] [27]
Referência de pulso (PULSE REFERENCE)
Referência de pulso (PULSE FEEDBACK)
Entrada de pulso (PULSE INPUT) [30]
Seleção de Setup, lsb (SETUP SELECT LSB) [31] [31] [31] [31] [31]
Seleção de configuração, msb (SETUP SELECT MSB) [32] [32] [32] [32] [32]
Reinicialização e partida (RESET AND START) [33] [33] [33] [33] [33]
Referência do encoder (ENCODER REFERENCE)
Feedback do encoder (ENCODER FEEDBACK)
Entrada do encoder (ENCODER INPUT)
par. nº 302 303 304 305 307
[3] [3]
[3]
[7] [7] [7] [7]
[7]
[9] [9] [9]
[9]
[13]
[13]
1
[28]
[29]
[34]
[35]
[36]
[28]
1
[29]
2
[34]
2
[35]
2
[36]
[0]
2
2
2
4
1
Não pode ser selecionada se
e 33.
Funcão:
Nesses parâmetros 302-307
diferentes funções ativadas relativas às entradas digitais (terminais
18-33).
Descricão da selecão:
Sem operação
reagir aos sinais transmitidos para o terminal.
Reset
alguns alarmes não podem ser reinicializados (bloqueados por desarme)
sem primeiro desconectar da alimentação de rede e conectar novamente.
Consulte a tabela em
de ataque do sinal.
é selecionado se o conversor de frequência não precisar
reinicializa o conversor de frequência após um alarme; no entanto,
Parada por inércia inversa
"liberar" o motor imediatamente (os transistores de saída são "desligados"), o que significa que o motor gira livremente até parar. O '0' lógico
conduz à inércia para parar.
Reset
e
parada por inércia inversa
inércia do motor simultaneamente com reset. O '0' lógico significa parada
por inércia e reinicialização. Reset é ativada na borda de descida do sinal.
Parada rápida inversa
rápida programada no parâmetro 212
rada rápida.
O '0' lógico leva a uma parada rápida.
Saída de pulso
Entradas digitais
Lista de avisos e alarmes
é usado para fazer o conversor de frequência
são usadas para ativar a parada por
é usada para ativar a desaceleração com parada
for selecionada no par. 341
é possível escolher entre as
. Reset é ativado na borda
Tempo de desaceleração com pa-
Terminal de saída digital 46
Frenagem CC inversa
tensão CC durante um tempo determinado; consulte os parâmetros 126,
127 e 132
valor no parâmetro 126
gem CC
Freio CC
for diferente de 0. O '0' lógico aciona a frenagem CC.
Parada inversa
desacelerada até parar por meio da rampa selecionada.
Partida
é selecionada se for necessário um comando de partida/parada.
'1' lógico = partida, '0' lógico = parada.
.2 As programações são idênticas dos terminais 29
é utilizada para parar o motor energizando-o com
. Observe que essa função estará ativa somente se o
Tempo de frenagem CC
, onde um '0' lógico significa que a velocidade do motor é
Nenhum dos comandos de parada mencionados acima
deverão ser usados como interruptores de reparo. Verifique se todas as entradas de tensão estão desconectadas e se foi aguardado o tempo previsto (4 minutos) antes de iniciar o trabalho de reparo.
e 132
Tensão de frena-
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
91
Page 93

4 Programação Guia de Design do VLT® Decentral FCD 300
Um pulso (estado '1' lógico alto, durante um mínimo de 14 ms e um período de interrupção mínimo de 14 ms) levarão a uma alteração de velocidade de 0,1 % (referência) ou 0,1 Hz (frequência de saída). Exemplo:
4
Partida por pulso
conversor de frequência dará partida no motor desde que não tenha sido
aplicado um comando de parada. O motor pode ser parado ao se ativar
brevemente
Reversão
'0' lógico não conduzirá à reversão. O estado '1' lógico levará à reversão.
O sinal de reversão modifica somente o sentido de rotação. Ele não ativa
a partida. Não está ativo em
Consulte também o parâmetro 200
saída
.
Reversão e partida
mesmo sinal. Nenhum comando de partida ativo é permitido ao mesmo
tempo. Não está ativo para
Consulte também o parâmetro 200
, se um pulso for aplicado durante 14 ms no mínimo, o
Parada inversa
é usado para alterar o sentido de rotação do eixo do motor. O
.
Regulagem do processo, malha fechada.
Intervalo/direção da frequência de
é usado para partida/parada e para reverter com o
Regulagem do processo, malha fechada.
Intervalo/direção da frequência de
saída.
Partida no sentido horário
somente no sentido horário ao ser dada a partida. Não deve ser usado
para
Regulagem do processo, malha fechada.
Partida no sentido anti-horário
girar somente no sentido anti-horário quando for dada a partida. Não
deve ser usado para
também o parâmetro 200
Jog é usado para substituir a frequência de saída pela frequência de jog
definida no parâmetro 213
dentemente de ter sido dado um comando de partida, porém não quando
Parada por inércia, Parada rápida
Congelar referência
derá ser alterada por meio de
referência
de falha de rede elétrica.
Congelar saída
de saída agora só pode ser alterada por meio de
ração
Aceleração
trole digital da velocidade de aceleração/desaceleração. Esta função estará ativa somente se
ída
Se
mentará e se
de saída será reduzida. A frequência de saída é alterada por meio dos
tempos de rampa predefinidos nos parâmetros 209-210
es tiv er at ivo , ser á sal vo a pós u m co man do de par ada e no c aso
congela a frequência de saída atual (em Hz). A frequência
.
e
Desaceleração
tiver sido selecionado.
Aceleração
estiver ativo, a referência ou a frequência de saída au-
Desaceleração
é usado para que o eixo do motor possa girar
é usado para que o eixo do motor possa
Regulagem do processo, malha fechada.
Intervalo/direção da frequência de saída
Frequência de jog.
ou
Frenagem CC
congela a referência atual. A referência agora só po-
Aceleração
Jog está ativo indepen-
estiver ativa.
e
Desaceleração
Aceleração
NOTA!
Congelar saída
Se
quência somente poderá ser parado se for selecionado
estiver ativo, o conversor de fre-
Parada por inércia do motor, Parada rápida
através de uma entrada digital.
gem CC
estarão selecionados se for necessário con-
Congelar referência
estiver ativo, a referência ou a frequência
ou
Congelar frequência de sa-
Consulte
. Se
e
Desacele-
ou
Rampa 2
.
Congelar
Frena-
.
Term.29Term.33Congelar ref/con-
0 0 1 Sem alteração de velocidade
01 1 Acelerar
1 0 1 Desacelerar
1 1 1 Desacelerar
Congelar referência
cia tiver parado. A referência também será salva em caso de desligamento da rede elétrica
Catch-up/Desacelerar
tado ou reduzido por um valor de porcentagem programável, definido no
parâmetro 219
gelar saída.
pode ser alterado mesmo se o conversor de frequên-
é selecionado se o valor de referência for aumen-
Referência de catch-up/desaceleração.
Função
Desacelerar Catch-up Função
0 0 Velocidade inalterada
0 1 Aumentar em % do valor
1 0 Reduzir em % do valor
1 1 Reduzir em % do valor
Rampa 2
é selecionado se for necessária uma mudança entre rampa 1
(parâmetros 207-208) e rampa 2 (parâmetros 209-210). O '0' lógico conduz à rampa de velocidade 1 e o '1' lógico à rampa de velocidade 2.
Referência predefinida, lsb
lecionar uma das quatro referências predefinidas, consulte a tabela a seguir:
Ref. predefinida
msb
e
Referência predefinida, msb
Ref. predefinida
lsb
permitem se-
Função
0 0 Ref. predefinida 1
0 1 Ref. predefinida 2
1 0 Ref. predefinida 3
1 1 Ref. predefinida 4
Referência predefinida ativa
controle remoto e referência predefinida. Presume-se que Externo/predefinido [2] tenha sido selecionado no parâmetro 214
rência
. '0' lógico = referências de controle remoto estão ativas, '1' lógico
= uma das quatro referências pré-definidas está ativa, como pode ser
visto na tabela acima.
Parada precisa, inversa
quando um comando de parada é repetido. Um 0 lógico significa que a
velocidade do motor é reduzida até parar por meio da rampa de velocidade selecionada.
Partida/parada precisa
precisão quando um comando de partida e parada for repetido.
Referência de pulso
um trem de pulsos (frequência). 0 Hz corresponde ao parâmetro 204
Referência mínima, Ref
Pulso Máx. 33/29
.
Ref
MAX
corresponde ao parâmetro 205
Feedback de pulso
trem de pulsos (frequência). No parâmetro 327/328
frequência máxima de feedback de tensão é programada.
Entrada de pulso
duzir a uma
o parâmetro 344
é selecionado se um número de pulsos específico con-
Parada precisa
Valor do contador
é usado para alternar entre referência de
Função de refe-
é selecionado para obter um alto grau de precisão
é selecionado para conseguir um alto grau de
é selecionado se o sinal de referência aplicado for
. A frequência definida no parâmetro 327/328
MIN
Referência máxima,
é selecionado se o sinal de feedback usado for um
Pulso Máx. 33/29
, consulte o parâmetro 343
.
Parada precisa
a
e
92
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 94

Guia de Design do VLT® Decentral FCD 300 4 Programação
Seleção de Setup, lsb e Seleção de Setup, msb
selecionar um dos quatro setups. Uma condição para isso, porém, é que
o parâmetro 004 esteja programado para
Reset e partida
estiver conectado à entrada digital, o conversor de frequência sofrerá um
reset e o motor irá acelerar até a referência predefinida.
Referência do encoder
for um trem de pulsos (frequência). 0 Hz corresponde ao parâmetro 204
Referência minima, Ref
Pulso Máx. 33/29
Ref
MAX
Feedback do
trem de pulsos (frequência). No parâmetro 327/328
frequência máxima de feedback de tensão é programada.
Entrada do encoder
conduzir a uma
sa
e o parâmetro 344
Todas as programações do encoder são usadas em conexão com encoders de trilha dupla com reconhecimento de direção.
Uma trilha conectada ao terminal 29.
Trilha B conectada ao terminal 33.
308 Terminal 53, tensão de entrada analógica
Valor:
Sem função (NO OPERATION) [0]
Referência (REFERENCE) [1]
Feedback (FEEDBACK) [2]
Opcional Wobble (WOBB.DELTA FREQ [%]) [10]
Funcão:
Neste parâmetro, é possível selecionar a função que precisa ser conectada ao terminal 53. A escala do sinal de entrada é estabelecida no parâmetro 309
escala máx.
Descricão da selecão:
Sem função
versor de freqüência não responda a sinais conectados ao terminal.
ferência
rada por meio de um sinal analógico de referência. Se os sinais de referência estiverem conectados a mais de uma entrada, esses sinais devem
ser somados.Se um sinal de feedback de tensão estiver conectado, selecione
Wobble
A freqüência delta pode ser controlada por meio da entrada analógica.
Se
WOBB.DELTA FREQ
ou par. 314), o valor selecionado no par. 702 será igual a 100% da entrada analógica.
Exemplo: Entrada analógica = 4-20 mA, Freq. delta par. 702 = 5 Hz →
4 mA = 0 Hz e 20 mA = 5 Hz. Se esta função for selecionada, consulte
Instruções sobre o Wobble MI28JXYY para detalhes adicionais.
pode ser usado como uma função de partida. Se 24 V
is é selecionado se o sinal de referência aplicado
.
A frequência definida no parâmetro 327/328
MIN
corresponde ao parâmetro 205
.
e
ncoder
é selecionado se o sinal de feedback usado for um
é selecionado se um número específico de pulsos
Parada precisa
, consulte o parâmetro 343
Valor do contador
Terminal 53, escala mín.
.
[0]. Seleciona-se esta alternativa caso se deseje que o con-
[1]. Se esta função for selecionada, a referência pode ser alte-
Feedback
[2] no terminal 53.
[10]
for selecionado como entrada analógica (par. 308
fornece a possibilidade de
Setup múltiplo
.
Referência máxima,
Pulso Máx. 33/29
.
e no parâmetro 310
Parada preci-
Terminal 53,
Re-
309 Terminal 53 Escala mín.
Valor:
0,0 - 10,0 Volts
Funcão:
Este parâmetro é utilizado para programação do valor do sinal que deve
corresponder à referência mínima ou ao feedback mínimo, parâmetro 204
Referência mínima, Ref
Descricão da selecão:
Configurar o valor de tensão desejado. Por razões de exatidão, as perdas
de tensão no sinal em cabos longos devem ser compensadas. Se a função
time out tiver que ser utilizada (parâmetro 317
após o time out
a
310 Terminal 53 Escala máx.
Valor:
0 - 10,0 Volts
Funcão:
Este parâmetro é utilizado para programar o valor do sinal que deve corresponder ao valor da referência máxima ou ao feedback máximo, parâmetro 205
Descricão da selecão:
Configurar o valor da tensão desejada. Por razões de exatidão, as perdas
de tensão de sinal em cabos longos devem ser compensadas.
314 Terminal 60, corrente de entrada analógica
Valor:
Sem função (NO OPERATION) [0]
Referência (REFERENCE) [1]
Feedback (FEEDBACK) [2]
Opcional Wobble (WOBB.DELTA FREQ [%]) [10]
Funcão:
Este parâmetro permite uma seleção entre as diferentes funções disponíveis no terminal 60. A escala do sinal de entrada é estabelecida no parâmetro 315
escala máx.
Descricão da selecão:
Sem função
versor de freqüência não responda a sinais conectados ao terminal.
ferência
rada por meio de um sinal analógico de referência. Se os sinais de referência estiverem conectados a diversas entradas, eles deverão ser somados.
Se um sinal de feedback de corrente estiver conectado, selecione
back
[2] no terminal 60.
Wobble
A freqüência delta pode ser controlada por meio da entrada analógica.
Se
WOBB.DELTA FREQ
ou par. 314), o valor selecionado no par. 702 será igual a 100% da entrada analógica.
Exemplo: Entrada analógica = 4-20 mA, Freq. delta par. 702 = 5 Hz →
4 mA = 0 Hz e 20 mA = 5 Hz. Se esta função for selecionada, consulte
Instruções sobre o Wobble MI28JXYY para mais detalhes.
), o valor programado deve ser superior a 1 Volt.
Referência máxima, Ref
Terminal 60, escala mín.
.
[0]. Seleciona-se esta alternativa caso se deseje que o con-
[1]. Se esta função for selecionada, a referência pode ser alte-
[10]
/ 414
Feedback mínimo, FB
MIN
Time out
/414
Feedback máximo, FB
MAX
e no parâmetro 316
for selecionado como entrada analógica (par. 308
.
MIN
e 318
10,0 Volts
Terminal 60,
0,0 Volts
Função
MAX
Re-
Feed-
4
.
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
93
Page 95

4 Programação Guia de Design do VLT® Decentral FCD 300
4
315 Terminal 60 Escala mínima
Valor:
0,0 - 20,0 mA
4,0 mA
Funcão:
Neste parâmetro pode-se definir o valor do sinal que corresponderá à
referência mínima ou ao feedback mínimo, parâmetro 204
mínima, Ref
MIN
/ 414
Feedback mínimo, FB
MIN
.
Referência
Descricão da selecão:
Programar o valor da corrente requerida. Se for necessário utilizar a função Time out (parâmetro 317
Função após o time out
) o
Time out
e 318
valor programado deve ser superior a 2 mA.
316 Terminal 60 Máxima escala
Valor:
0.0 - 20.0 mA
20.0 mA
Funcão:
Este parâmetro é utilizado para definir o valor do sinal que corresponde
ao valor de referência máxima, parâmetro 205 Valor da referência máxima, Ref
MAX
.
Descricão da selecão:
Programar o valor da corrente requerida.
317 Time out
Valor:
1 - 99 seg.
10 seg.
Funcão:
Se o valor do sinal de referência ou o sinal de feedback conectado a um
dos terminais de entrada 53 ou 60 cair abaixo de 50 % da escala mínima
por um período mais longo do que o tempo programado, a função selecionada no parâmetro 318
função só está ativa se no parâmetro 309
Função após o time-out
Terminal 53, escala mínima
será ativada. Esta
houver sido selecionado um valor superior a 1 Volt ou se no parâmetro
315
Terminal 60, escala mínima
houver sido selecionado um valor supe-
rior a 2 mA.
Descricão da selecão:
Configurar o tempo desejado.
318 Função após o timeout
Valor:
Sem operação (NO OPERATION) [0]
Congelar frequência de saída
(FREEZE OUTPUT FREQ.) [1]
Parada (stop) [2]
Jog (jog) [3]
Velocidade máx. (MAX SPEED) [4]
Parada e desarme (STOP AND TRIP) [5]
Funcão:
Este parâmetro permite a escolha da função a ser ativada após a expiração do timeout (parâmetro 317
Timeout
). Se ocorrer uma função de
timeout ao mesmo tempo em que uma função de timeout do bus (parâmetro 513
Função de intervalo de tempo do bus
), a função de timeout
no parâmetro 318 será ativada.
Descricão da selecão:
A frequência de saída do drive de frequência ajustável pode ser:
- congelada na frequência atual [1]
- substituída por uma parada [2]
- substituída pela frequência de jog [3]
- substituída pela frequência máxima de saída [4]
- substituída por uma parada com um desarme subsequente [5]
319 Saída analógica terminal 42
Valor:
Sem função (NO OPERATION) [0]
Referência externa mín.-máx. 0-20 mA
(ref mín-máx = 0-20 mA) [1]
Referência externa mín.-máx. 4-20 mA
(ref mín-máx = 4-20 mA) [2]
Feedback mín.-máx. 0-20 mA
(fb mín-máx = 0-20 mA) [3]
Feedback mín.-máx. 4-20 mA
(fb mín-máx = 4-20 mA) [4]
Freqüência de saída 0-máx 0-20 mA
(0-fmáx = 0-20 mA) [5]
Freqüência de saída 0-máx 4-20 mA
(0-fmáx = 4-20 mA) [6]
Corrente de saída 0 até I
0-20 mA
INV
(0-Iinv = 0-20 mA) [7]
Corrente de saída 0 até I
IINV
4-20 mA
(0-Iinv = 4-20 mA) [8]
Potência de saída 0 até P
0-20 mA
M,N
(0-Pnom = 0 até 20 mA) [9]
Potência de saída 0 até P
4 até 20 mA
M,N
(0-Pnom = 4 até 20 mA) [10]
Temperatura do inversor 20-100 °C 0-20 mA
(TEMP 20-100 C=0-20 mA) [11]
Temperatura do inversor 20-100 °C 4-20 mA
(TEMP 20-100 C=4-20 mA) [12]
Funcão:
A saída analógica pode ser utilizada para determinar um valor de processo. É possível escolher dois tipos de sinais de saída 0 - 20 mA ou 4 20 mA.
Se for utilizada como saída de tensão (0 - 10 V), deve ser instalado um
resistor de pull-down de 500 ao comum (terminal 55). Se a saída for
usada como saída de corrente, a impedância resultante do equipamento
conectado não deve exceder 500 .
Descricão da selecão:
Sem operação
External Ref
. É selecionada se a saída analógica não precisar ser usada.
- Ref
MIN
0-20 mA/4-20 mA.
MAX
Obtém-se um sinal de saída, que é proporcional ao valor da referência
resultante, no intervalo Referência Mínima, Ref
Ref
(parâmetros 204/205).
MAX
FB
-FB
0-20 mA/ 4-20 mA.
MIN
MAX
- Referência máxima,
MIN
Obtém-se um sinal de saída, que é proporcional ao valor de referência,
no intervalo Feedback Mínimo, FB
- Feedback máximo, FB
MIN
MAX
(parâ-
metros 414/415).
0-f
0-20 mA/4-20 mA.
MAX
Obtém-se um sinal de saída, que é proporcional à freqüência de saída,
no intervalo 0 até f
rior, f
) .
MAX
(parâmetro 202
MAX
Freqüência de saída, limite supe-
94
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 96

Guia de Design do VLT® Decentral FCD 300 4 Programação
0 - I
0-20 mA/4-20 mA.
INV
Obtém-se um sinal de saída, que é proporcional à corrente de saída, no
intervalo 0 até I
0 até P
INV
0-20 mA/4-20 mA.
M,N
Obtém-se um sinal de saída, que é proporcional à potência de saída atual.
20 mA corresponde ao valor programado no parâmetro 102
motor, P
0 - Temp.
.
M,N
0-20 mA/4-20 mA.
MAX
Potência do
Obtém-se um sinal de saída, que é proporcional à temperatura atual do
dissipador de calor. 0/4 mA corresponde a uma temperatura do dissipador de calor inferior a 20 °C e 20 mA corresponde a 100 °C.
323 Saídas 1-3 do relé
Valor:
Sem função (no operation) [0]
Unidade pronta (unit ready) [1]
Ativar/sem advertência (enable/no warning) [2]
Em funcionamento (RUNNING) [3]
Funcionando na referência, sem advertência
(run on ref/no warn) [4]
Funcionando, sem advertências
(RUNNING/NO WARNING) [5]
Funcionando na faixa de referência, sem advertências
(RUN IN RANGE/ NO WARN) [6]
Pronto - tensão de rede elétrica dentro da faixa
(RDY NO OVER/UNDERVOL) [7]
Alarme ou advertência
(ALARM OR WARNING) [8]
Corrente maior que o limite de corrente, par. 221
(Current limit) [9]
Alarme (ALARM) [10]
Frequência de saída mais alta que f
LOW
par. 225
(above frequency low) [11]
Frequência de saída mais baixa que f
HIGH
par. 226
(below frequency high) [12]
Corrente de saída maior que I
LOW
par. 223
(above current low) [13]
Corrente de saída menor que I
HIGH
par. 224
(below current high) [14]
Feedback maior que FB
par. 227
LOW
(above feedback low) [15]
Feedback menor que FB
HIGH
par. 228
(under feedback high) [16]
Relé 123 (RELAY 123) [17]
Reversão (REVERSE) [18]
Advrtênc térmic (THERMAL WARNING) [19]
Operação local (LOCAL MODE) [20]
Fora do intervalo de frequência par. 225/226
(out of freq range) [22]
Fora da faixa de corrente
(out of current range) [23]
Fora da faixa d feedb
(out of fdbk. range) [24]
Ctrlfreio mecân
(Mech. brake control) [25]
Control word bit 11
(CTRL W. BIT 11) [26]
Funcão:
A saída do relé pode ser utilizada para fornecer o status atual ou a advertência. A saída é ativada (1–2 make) quando uma condição determinada é atendida.
Descricão da selecão:
Sem função
. É selecionado se o conversor de frequência não precisar
responder aos sinais.
Unidade pronta
, há uma tensão de alimentação no cartão de controle do
conversor de frequência e o conversor de frequência está pronto para
entrar em funcionamento.
Ativar, sem advertência
, o conversor de frequência está pronto para entrar em funcionamento, porém, não foi dado nenhum comando de partida. Sem advertência.
Em funcionamento
Funcionando na referência, sem advertência
, foi dado um comando de partida.
, velocidade de acordo com
a referência.
Funcionando, sem advertência
, foi dado um comando de partida. Sem
advertência.
Pronto - tensão de rede dentro da faixa
, o conversor de frequência está
pronto para ser usado; o cartão de controle está recebendo tensão de
alimentação e não há sinais de controle ativos nas entradas. A tensão de
rede está dentro dos limites de tensão.
Alarme ou advertência
, a saída é ativada por um alarme ou uma advertência.
Limite de corrente, a corrente de saída é maior que o valor programado
no parâmetro 221 Limite de corrente I
Alarme
, a saída é ativada por um alarme.
Frequência de saída mais alta que f
que o valor programado no parâmetro 225
f
.
LOW
Frequência de saída mais baixar que f
baixa que o valor definido no parâmetro 226
f
.
HIGH
Corrente de saída mais alta que I
o valor definido no parâmetro 223
Corrente de saída mais baixa que I
que o valor programado no parâmetro 224
I
.
HIGH
Feedback maior que FB
gramado no parâmetro 227
Feedback mais baixo que FB
, o valor de feedback é maior que o valor pro-
LOW
Advertência: Feedback baixo, FB
HIGH
valor programado no parâmetro 228
O
Relé 123
é usado somente em conexão com o Profidrive.
Reversão
, A saída do relé é ativada quando a rotação do motor for no
.
LIM
, a frequência de saída é mais alta
LOW
Advertência: Baixa frequência,
,
a frequência de saída é mais
HIGH
Advertência: Alta frequência,
, a corrente de saída é mais alta que
LOW
Advertência: Baixa corrente, I
, a corrente de saída é mais baixa
HIGH
LOW
.
Advertência: Corrente alta,
.
LOW
, o valor de feedback é mais baixo que o
Advertência: Corrente alta, I
HIGH
sentido anti-horário. Quando o sentido da rotação do motor for horário,
o valor é 0 V CC.
Advertência térmica
, acima do limite de temperatura do motor ou do
conversor de frequência ou de um termistor conectado a uma entrada
digital.
Operação local
selecionado no parâmetro 002
Fora da faixa de frequência
, a saída estará ativa quando
Operação local/remota
, a frequência de saída está fora da faixa de
Operação local
.
[1] estiver
frequência programada nos parâmetros 225 e 226.
4
.
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
95
Page 97

4 Programação Guia de Design do VLT® Decentral FCD 300
4
Fora da faixa de corrente
, a corrente do motor está fora da faixa progra-
mada nos parâmetros 223 e 224.
Fora da faixa de feedback
, o sinal de feedback está fora da faixa progra-
mada nos parâmetros 227 e 228.
Controle do freio mecânico
, permite controlar um freio mecânico externo
(consulte a seção sobre controle do freio mecânico no Guia de Design).
Control word bit 11,
bit 11 da control word, a saída de relé será progra-
mada/reinicializada de acordo com o bit 11.
327 Pulso Máx. 33
Valor:
150 - 110000 Hz
5000 Hz
Funcão:
Esse parâmetro é utilizado para definir o valor do sinal que corresponde
ao valor máximo definido no parâmetro 205
ou ao valor máximo de feedback definido no parâmetro 415
máximo, FB
MAX
.
Referência máxima, Ref
Feedback
MAX
Descricão da selecão:
Configurar a referência desejada de pulso ou o feedback de pulso para
ser conectado ao terminal 33.
328 Pulso Máx. 29
Valor:
1000 - 110000 Hz
5000 Hz
Funcão:
Esse parâmetro é utilizado para definir o valor do sinal que corresponde
ao valor máximo definido no parâmetro 205
ou ao valor máximo de feedback definido no parâmetro 415
máximo, FB
MAX
.
Referência máxima, Ref
Feedback
MAX
Descricão da selecão:
Configure a referência de pulso ou o feedback de pulso desejado a ser
conectado ao terminal 29.
341 Saída digital terminal 46
Valor:
Sem função (NO OPERATION) [0]
Valor [0] - [20] consulte parâmetro 323
Referência de pulso (PULSE REFERENCE) [21]
Valor [22] - [25] consulte parâmetro 323
Referência de pulso (PULSE FEEDBACK) [26]
Frequência de saída (PULSE OUTPUTFREQ) [27]
Corrente de pulso (PULSE CURRENT) [28]
Potência de pulso (PULSE POWER) [29]
Temperatura de pulso (PULSE TEMP) [30]
Control word bit 12 (CTRL. W. BIT 12) [31]
Funcão:
A saída digital pode ser usada para fornecer o status atual ou advertência.
A saída digital (terminal 46) fornece um sinal de 24 V CC quando uma
determinada condição é satisfeita.
Descricão da selecão:
Ref
- Ref
MIN
Externa Par. 0-342.
MAX
Obtém-se um sinal de saída, que é proporcional ao valor da referência
resultante, no intervalo Referência mínima, Ref
Ref
(parâmetros 204/205).
MAX
FB
-FB
Par. 0-342.
MIN
MAX
- Referência máxima,
MIN
Obtém-se um sinal de saída, que é proporcional ao valor de referência,
no intervalo Feedback Mínimo, FB
- Feedback máximo, FB
MIN
MAX
(parâ-
metros 414/415).
0-f
Par. 0-342.
MAX
Um sinal de saída é obtido, que é proporcional à frequência de saída no
intervalo 0 - f
f
).
MAX
0 - I
INV.
MAX
Par. 0-342.
(parâmetro 202
Frequência de saída, limite superior,
Um sinal de saída é obtido, que é proporcional à corrente de saída no
intervalo 0 - I
0 - P
M,N
.
INV
Par. 0-342.
Obtém-se um sinal de saída que é proporcional à potência de saída atual.
O par. 342 corresponde ao valor programado no parâmetro 102
do motor,
0 - Temp.
P
.
M,N
Par. 0-342.
MAX
Potência
Um sinal de saída é obtido, que é proporcional à temperatura atual do
dissipador de calor. 0 Hz corresponde a uma temperatura do dissipador
de calor inferior a 20 °C e 20 mA corresponde a 100 °C.
Control word bit 12,
bit 12 da control word. A saída é digital será pro-
gramada/resetada de acordo com o bit 12.
342 Terminal 46, saída máxima de pulso
Valor:
150 - 10000 Hz
5000 Hz
Funcão:
Este parâmetro é utilizado para programar a máxima freqüência do sinal
de saída de pulso.
Descricão da selecão:
Programe a freqüência desejada.
343 Função de parada precisa
Valor:
Parada precisa de rampa (normal) [0]
Contador de paradas com reset
(Count stop reset) [1]
Contador de paradas sem reset
(Count stop no reset) [2]
Parada compensada por velocidade
(Spd cmp stop) [3]
Contador de paradas compensadas por velocidade com reset
(Spd cmp cstop w. res) [4]
Contador de paradas compensadas por velocidade sem reset
(Spd cmp cstop no res) [5]
Funcão:
Neste parâmetro você seleciona a função de parada que é realizada em
resposta a um comando de parada. Todas as seis seleções de dados contêm uma rotina de parada precisa, daí assegurando um alto nível de exatidão na repetição.
As seleções são uma combinação das funções descritas abaixo.
NOTA!
A partida de pulso [8]
não pode ser usada juntamente
com a função de parada precisa.
Descricão da selecão:
Parada precisa de rampa
[0] é selecionada para alcançar um alto nível de
precisão da repetição no ponto de parada.
96
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 98

Guia de Design do VLT® Decentral FCD 300 4 Programação
Contador de parada
conversor de freqüência funcionará até que o número de pulsos programados pelo usuário tenha sido recebido no terminal 33 de entrada. Desta
forma, um sinal de parada interna ativará o tempo normal de desaceleração (parâmetro 208).
A função do contador é ativada (começa a cronometrar) na transição do
sinal de partida (quando ele começa a mudar de parada para partida).
Parada compensada por velocidade
ponto, independentemente da velocidade atual, um sinal de parada recebido será atrasado internamente quando a velocidade atual for menor
que a velocidade máxima (definida no parâmetro 202).
Reset. Contador de paradas
ser combinadas com ou sem reset.
Contador de paradas com reset
de pulsos contados durante a desaceleração até 0 Hz é resetado.
Contador de paradas sem reset
rante a desaceleração até 0 Hz é deduzido do valor do contador no parâmetro 344.
344 Valor do contador
Valor:
0 - 999.999
Funcão:
Neste parâmetro, você pode selecionar o valor do contador a ser usado
na função integrada de parada precisa (parâmetro 343).
Descricão da selecão:
A configuração de fábrica estabelece 100.000 pulsos. A freqüência mais
alta (máx. resolução) que pode ser registrada no terminal 33 é 67,6 kHz.
. Assim que receber um sinal de partida de pulsos, o
. Para parar exatamente no mesmo
e
Parada compensada por velocidade
[1]. Após cada parada precisa, o número
[2]. O número de pulsos contados du-
podem
100.000 pulsos
4
349 Retardo comp velocidade
Valor:
0 ms - 100 ms
Funcão:
Neste parâmetro, o usuário pode definir o tempo de retardo do sistema
(Sensor, PLC, etc.). Se você estiver executando uma parada compensada
por velocidade, o tempo de retardo em diferentes freqüências tem uma
maior influência na forma como você efetua a parada.
Descricão da selecão:
A programação de fábrica vem com 10 ms. Isto significa que fica presumido que o retardo total do Sensor, PLC e outros elementos do hardware
correspondem a esta configuração.
NOTA!
Só é ativo para a parada compensada por velocidade.
10 ms
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
97
Page 99

4
4 Programação Guia de Design do VLT® Decentral FCD 300
4.6 Grupo de Parâmetros 4-** Funções Especiais
400 Função de Frenagem
Valor:
Desligado (off) [0]
Resistor de freio
(Resistor) [1]
Freio CA (AC Brake) [4]
Funcão:
Freio do resistor
resistor de freio conectado aos terminais 81, 82. Uma tensão mais alta
do circuito intermediário é permitida durante a frenagem (operação gerada) quando um resistor de freio estiver conectado.
Freio CC
resistores de freio. Observe que
Freio de resistor
Descricão da selecão:
Selecione
Selecione
sulte o parâmetro 144
405 Função reset
Valor:
Reset manual (manual reset) [0]
Reset automático x1
(AUTOMATIC x 1) [1]
Reset automático x3
(AUTOMATIC x 3) [3]
Reset automátco x10
(AUTOMATIC x 10) [10]
Reset na alimentação
(RESET AT POWER UP) [11]
Funcão:
Este parâmetro permite selecionar se o reset e o reinício após um desarme devem ser manuais ou se o drive de frequência ajustável deve ser
reajustado e reiniciado automaticamente. Além do mais, é possível selecionar o número de vezes que um reinício deve ser tentado. O tempo
entre cada tentativa é programado no parâmetro 406
partida automática
Descricão da selecão:
Se
Reajuste manual
através da tecla [STOP/RESET], de uma entrada digital ou da comunicação serial. Se o drive de frequência ajustável for realizar um reset automático e dar nova partida após um desarme, selecione os valores de dados [1], [3] ou [10].
Se
Reajuste na energização
ajustável fará um reset se houver uma falha associada à rede elétrica.
[1] é selecionado se o conversor de frequência tiver um
[4] pode ser selecionado para melhorar a frenagem sem usar
Freio CA
[4] não é tão eficaz quanto
[1].
Freio de resistor
Freio CA
[1] se um resistor de freio estiver conectado.
[4] se forem geradas cargas de curta duração. Con-
Ganho do Freio CA
NOTA!
Uma mudança na seleção não estará ativa até que a
tensão da rede tenha sido desconectada e reconectada.
para programar o freio.
Tempo para nova
.
[0] for selecionado, o reajuste deve ser realizado
[11] for selecionado, o drive de frequência
406 Tempo de uma nova partida automática
Valor:
0 - 10 seg.
Funcão:
Este parâmetro permite a programação do tempo depois do trip até que
a função de reset automático inicie. Supõe-se que o reset automático
tenha sido selecionado no parâmetro 405
Descricão da selecão:
Programe o tempo desejado.
409
Valor:
0 - 60 s (61=OFF)
Funcão:
Quando o drive de frequência ajustável registrar que a corrente de saída
atingiu o limite de corrente I
permanece ali durante o tempo predefinido, ele está desconectado. Pode
ser usado para proteger a aplicação, como o ETR protegerá o motor se
for selecionado.
Descricão da selecão:
Selecione quanto tempo o drive de frequência deve manter a corrente de
saída no limite de corrente I
o parâmetro 409
está operando, ou seja, a desconexão não será realizada.
411 Frequência de chaveamento
Valor:
3000 - 14000 Hz
Funcão:
O valor programado determina a frequência da portadora do inversor. Se
a frequência de chaveamento for alterada, isso poderá ajudar a minimizar
possíveis ruídos acústicos do motor.
Descricão da selecão:
Quando o motor estiver funcionando, a frequência de chaveamento é
ajustada no parâmetro 411
frequência em que o motor tiver o ruído mais baixo possível.
O motor pode partir sem advertência.
5 seg.
Função de reset
Sobrecarga de corrente por atraso do desarme,
I
LIM
(parâmetro 221
LIM
antes de desconectar. Em OFF (Desligado)
LIM
Sobrecarga de corrente por atraso do desarme, I
NOTA!
A frequência de saída do conversor de frequência nunca pode assumir um valor superior a 1/10 da frequência de chaveamento.
Frequência de chaveamento
NOTA!
A frequência de chaveamento é automaticamente reduzida em função da carga. Consulte
Chaveamento Dependente da Temperatura
.
Off (Desligado)
Limite de corrente
LIM
4500 Hz
até ser obtida a
Frequência de
em
Con-
dições Especiais.
) e
não
98
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
Page 100

Guia de Design do VLT® Decentral FCD 300 4 Programação
413 Função de sobremodulação
Valor:
Off (Desligado) (off) [0]
On (on) [1]
Funcão:
Este parâmetro permite a programação do fator de sobremodulação da
tensão de saída.
Descricão da selecão:
Off
(Desligado) [0] indica que não há sobremodulação da tensão de saída, o que significa que o ripple do torque do eixo do motor é evitado.
Este pode ser um bom recurso, por exemplo nas máquinas lixadeiras.
On
(Ligado) [1] significa que pode ser obtida uma tensão de saída maior
que a tensão de rede (até 5%).
414
Feedback mínimo, FB
MIN
Valor:
-100.000,000 - par. 415 FB
MAX
Funcão:
Parâmetro 414
Feedback mínimo, FB
MIN
e 415
Feedback máximo, FB
MAX
são utilizados para alternar o texto do display de forma a fazê-lo mostrar
o sinal de feedback em uma unidade de processo proporcional ao sinal
de entrada.
Descricão da selecão:
Programe o valor a ser exibido no display como o valor de sinal de feedback mínimo na entrada de feedback selecionada (parâmetros 308/314
Entradas analógicas
415
).
Feedback máximo, FB
MAX
Valor:
FB
- 100.000,000
MIN
1500,000
Funcão:
Vide a descrição do parâmetro 414
Feedback mínimo, FB
MIN
.
Descricão da selecão:
Programe o valor a ser exibido no display quando o feedback máximo
houver sido obtido na entrada de feedback selecionada (parâmetro
308/314
Entradas analógicas
).
416 Unidades de processo
Valor:
Sem unidade (Sem unidade) [0]
% (%) [1]
ppm (ppm) [2]
rpm (rpm) [3]
bar (bar) [4]
ciclos/min (CYCLE/MI) [5]
Pulsos/s (PULSE/S) [6]
Unidades/s (UNITS/S) [7]
Unidades/min. (UNITS/MI) [8]
Units/h (Units/h) [9]
°C (°C) [10]
Pa (pa) [11]
l/s (l/s) [12]
3
m
/s (m3/s) [13]
l/min. (l/m) [14]
3
m
/min. (m3/min) [15]
l/h (l/h) [16]
3
m
/h (m3/h) [17]
Kg/s (kg/s) [18]
Kg/min. (kg/mín) [19]
Kg/hora (kg/h) [20]
Ton/min. (T/min) [21]
Ton/hora (T/h) [22]
Metros (m) [23]
Nm (nm) [24]
m/s (m/s) [25]
m/min. (m/min) [26]
°F (°F) [27]
Pol wg (pol wg) [28]
0
galão/s (galão/s) [29]
3
/s (pés3/s) [30]
Pés
Gal/min. (galão/min) [31]
3
Pés
/min. (Pés3/min) [32]
Gal/h (galão/h) [33]
3
/h (Pés3/h) [34]
Pés
Lb/s (lb/s) [35]
Lb/min. (lb/min) [36]
Lb/hora (lb/h) [37]
Lb pé (lb pé) [38]
Pés/s (pés/s) [39]
Pés/min. (pés/min) [40]
Psi (Psi) [41]
Funcão:
Escolha entre as diferentes unidades a serem mostradas no display. A
unidade será lida se uma unidade de controle LCP puder ser conectada
Referência [unidade]
e se
lecionada em um dos parâmetros 009-012
display. A unidade é utilizada em
[2] ou
Feedback [unidade]
Malha fechada
Leitura do display
também como uma uni-
dade para referência Mínima/Máxima e feedback Mínimo/Máximo.
Descricão da selecão:
Selecione a unidade desejada para o sinal de referência/ feedback.
4
[3] houver sido se-
, e no Modo
MG.90.S1.28 - VLT® é uma marca registrada da Danfoss
99
 Loading...
Loading...