

Page 1
Design Guide
Decentral Solutions
FCD 300
DMS 300
Page 2

■ Contents
Decentral Solutions - Design Guide
The decentral concept
Introduction .............................................................................................................. 5
Decentral Design Benefits ........................................................................................ 6
Application Examples ............................................................................................. 13
Product Design Guide ............................................................................................ 19
Ordering form - DMS 300 ...................................................................................... 23
Ordering form - FCD 300 ....................................................................................... 26
PC Software tools .................................................................................................. 27
Accessories for DMS 300 and FCD 300 ................................................................ 27
Communication ...................................................................................................... 30
Good Installation Practice ...................................................................................... 32
Servicing the Danfoss Decentral Products ............................................................. 34
................................................................................... 5
Introduction, DMS 300 .................................................................................. 35
Operating instructions ............................................................................................ 36
Symbols used in this manual .................................................................................. 36
General warning ..................................................................................................... 36
Safety regulations .................................................................................................. 36
Warning against unintended start ........................................................................... 36
Avoiding DMS damage .......................................................................................... 36
Mechanical details, DMS 300 .................................................................... 37
Description ............................................................................................................ 37
General layout ....................................................................................................... 37
Construction ......................................................................................................... 37
Tools required ....................................................................................................... 37
Wall mounting ....................................................................................................... 37
Motor mounting .................................................................................................... 38
Ventilation ............................................................................................................. 38
Electrical connections, DMS 300 ............................................................ 39
Power Wiring ......................................................................................................... 39
Power factor correction .......................................................................................... 39
Control Wiring ........................................................................................................ 39
Motor thermistors ................................................................................................... 40
Serial communication ............................................................................................. 40
Earthing .................................................................................................................. 40
High voltage warning ............................................................................................. 40
Galvanic isolation (PELV) ........................................................................................ 40
Electrical Schematic .............................................................................................. 41
SettingupDMS300 ....................................................................................... 42
Adjustment/ Settings .............................................................................................. 42
Start/ stop profile setting ........................................................................................ 42
Start/ stop profile setting table: .............................................................................. 42
Trip Class selection: ............................................................................................... 43
Trip Class selection table: ...................................................................................... 43
Full Load Current setting: ....................................................................................... 44
FLC setting table: ................................................................................................... 44
Completing the installation: .................................................................................... 44
MG.90.F3.02 - VLT is a registered Danfoss trademark
1
Page 3

Decentral Solutions - Design Guide
Operation details, DMS 300 ....................................................................... 45
Operation ............................................................................................................... 45
Powering-up the DMS ........................................................................................... 45
Starting the motor: ................................................................................................. 45
Brake Release ........................................................................................................ 45
Operation with AS-i Interface ................................................................................ 45
Description of AS-i profiles used with DMS .......................................................... 45
Fault Procedure .................................................................................................... 47
Reading the "Alarm" LED ...................................................................................... 47
Specification and order codes, DMS 300 ........................................... 48
General Technical Data ......................................................................................... 48
Current Ratings (AC53a ratings) ............................................................................ 48
Ordering type code ................................................................................................ 49
Certifications .......................................................................................................... 49
Fuses ..................................................................................................................... 50
Special variants: ..................................................................................................... 50
Motor connection ................................................................................................... 50
Details of Profibus Connectivity .............................................................................. 52
Profibus DP Slave 6 E/DC 24 V, 4 A/DC 24 V/1A ................................................. 52
Table of bits in control and status word ................................................................. 52
Profibus connector PCB 4 x M12 .......................................................................... 53
Profibus address setting: DIP switch SW3 ............................................................. 53
Introduction to FCD 300 .............................................................................. 54
Software version .................................................................................................... 54
High voltage warning ............................................................................................. 55
These rules concern your safety ............................................................................. 55
Warning against unintended start ........................................................................... 55
Technology ............................................................................................................ 56
CE labelling ........................................................................................................... 58
Installation, FCD 300 ..................................................................................... 60
Mechanical dimensions .......................................................................................... 60
Mechanical dimensions, FCD, motor mounting ...................................................... 60
Mechanical dimensions, stand alone mounting ...................................................... 60
Mechanical installation ........................................................................................... 61
General information about electrical installation .................................................... 63
Electronics purchased without installation box ....................................................... 63
EMC-correct electrical installation .......................................................................... 64
Earthing of screened/armoured control cables ....................................................... 66
Diagram ................................................................................................................. 67
RFI switches J1, J2 ................................................................................................ 67
Location of terminals .............................................................................................. 68
Mains connection ................................................................................................... 70
Pre-fuses ................................................................................................................ 70
Motor connection ................................................................................................... 70
Direction of motor rotation ..................................................................................... 70
Mains and motor connection with service switch ................................................... 70
Connection of HAN 10E motor plug for T73 .......................................................... 70
Parallel connection of motors ................................................................................. 71
Motor cables .......................................................................................................... 71
Motor thermal protection ....................................................................................... 71
2
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 4

Decentral Solutions - Design Guide
Brake resistor ......................................................................................................... 71
Control of mechanical brake .................................................................................. 72
Electrical installation, control cables ....................................................................... 73
Connection of sensors to M12 plugs for T53, T63, T73 ........................................ 74
Electrical installation, control terminals ................................................................... 75
PC communication ................................................................................................ 75
Relay connection ................................................................................................... 75
Connection examples ............................................................................................ 76
Programming, FCD 300 ............................................................................... 80
The LCP 2 control unit, option ............................................................................... 80
Parameter selection ............................................................................................... 83
Operation & Display ............................................................................................... 85
Setup configuration ................................................................................................ 85
Load and Motor ..................................................................................................... 93
DC Braking ............................................................................................................ 97
Motortype, par, 147 - FCD 300 ........................................................................... 102
References & Limits ............................................................................................. 103
Handling of references ......................................................................................... 103
Reference function ............................................................................................... 107
Inputs and outputs ............................................................................................... 111
Special functions .................................................................................................. 120
PID functions ....................................................................................................... 122
Handling of feedback ........................................................................................... 124
Serial communication for FCD 300 ...................................................................... 131
Control Word according to FC protocol ............................................................... 135
Status Word according to FC Profile .................................................................... 137
Fast I/O FC-profile ............................................................................................... 138
Control word according to Fieldbus Profile .......................................................... 138
Status word according to Profidrive protocol ....................................................... 139
Serial communication ........................................................................................... 142
Technical functions .............................................................................................. 150
All About FCD 300 ........................................................................................ 155
Dynamic braking .................................................................................................. 155
Internal Brake Resistor .......................................................................................... 159
Special conditions ................................................................................................ 161
Galvanic isolation (PELV) ...................................................................................... 161
Earth leakage current and RCD relays ................................................................. 162
Extreme operating conditions ............................................................................... 162
dU/dt on motor .................................................................................................... 163
Switching on the input ......................................................................................... 163
Acoustic noise ...................................................................................................... 163
Temperature-dependent switch frequency ........................................................... 164
Derating for air pressure ...................................................................................... 164
Derating for running at low speed ........................................................................ 164
Motor cable lengths ............................................................................................. 164
Vibration and shock ............................................................................................. 164
Air humidity .......................................................................................................... 165
UL Standard ........................................................................................................ 165
Efficiency .............................................................................................................. 165
Mains supply interference/harmonics ................................................................... 165
Power factor ........................................................................................................ 166
Emission test results according to generic standards and PDS product standard 167
MG.90.F3.02 - VLT is a registered Danfoss trademark
3
Page 5
Decentral Solutions - Design Guide
Immunity test result according to Generic standards, PDS product standards and basic
standards ............................................................................................................. 167
Aggressive environments ...................................................................................... 169
Cleaning ............................................................................................................... 169
Status messages .................................................................................................. 171
Warnings/alarm messages ................................................................................... 171
Warning words, extended status words and alarm words ................................... 174
General technical data ......................................................................................... 175
Technical data, mains supply 3 x 380 - 480 V ..................................................... 180
Available literature ................................................................................................. 181
Supplied with the unit ........................................................................................... 181
Factory Settings ................................................................................................... 182
Index .................................................................................................................... 189
4
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 6

Decentral Solutions - Design Guide
■Introduction
Danfoss was the world’s first company to manufacture
and supply frequency converters for infinitely variable
speed control of three-phase AC motors. Until then,
AC motors had to operate at the speed determined
by the frequency of the main power supply.
Production of frequency converters started in 1968.
The first frequency converter was also the first
decentralised drive as it was placed next to the motor.
The first frequency converter was totally enclosed and
filled with silicone oil for cooling, as semiconductors
of that time were very inefficient. The enclosure
design was made for mounting the drive directly in
the application next to the motor. Temperature, water,
cleaning agents, dust and other environmental factors
were also no problem, even in harsh environments.
Semiconductors improved during the next decades.
Air-cooling showed sufficient and oil cooling was
abandoned. At the same time use of frequency
converters grew significantly. PLCs gained a footing
for advanced application control and it became
common practice to install all frequency converters in
one cabinet, rather than several places in the factory.
Finally we have included comprehensive information
about the Danfoss decentralised products.
concept
The decentral
Continuing improvements in semi-conductors and
related technologies - such as fieldbus technology
- now again makes it feasible to consider installing
drives close to the motors, achieving the benefits of
decentralised installation without the disadvantages
from the first oil-filled frequency converters.
Development of automation in industry is based on the
ability to send and receive data from the application
needed to control the processes. More and more
sensors are installed and more and more data is
submitted to the central PLC control. This trend
depends on increased use of fieldbus systems.
Industrial sources often claim that up to 30 % of
all drive installations will be installed decentrally
within the next few years and the trend towards
distributed intelligent control is undisputed as
more and more components and applications are
developed for decentralised installation.
This book is a general introduction to basic features
of decentralised installation philosophies for motor
controls and differences from the centralised
concept. It will help you choose the most suitable
concept and guide you through the process of
selecting the appropriate products.
MG.90.F3.02 - VLT is a registered Danfoss trademark
5
Page 7
■Decentralised design benefits
In the following we will concentrate on describing
decentralised installation of frequency converters and
motor starters, referred to here as motor controls.
There are two topologic concepts for the layout
of motor control installations in a plant, in
the following referred to as "centralised" and
"decentralised" installations. The two typologies
are illustrated in the figure.
In a centralised installation:
- motor controls are placed in a central place
In a decentralised installation:
- motor controls are distributed throughout the plant,
mounted on or next to the motor they control
Decentral Solutions - Design Guide
Placing the advanced and reliable electronics needed
to ensure a smooth, responsive and economical
operation of the motor next to – or on – the motor
facilitates modularisation and reduces cabling costs
and EMC problems dramatically. Further benefits:
• Space-consuming motor control cabinets in long
rows of centralised panels are eliminated
• Reduced efforts for building in and wiring long
screened motor cables where special attention
on EMC terminations is required
• Heat dissipation from power electronics is moved
from the panel into the plant
• Standardised machine elements by modularisation
reduces design time and time to market
• Commissioning is easier and faster
Decentralised does not mean "control cabinet
free", but merely that their enormous size can now
be reduced thanks to innovative designs of the
components that will be placed decentralised. There
will continue to be a need for cabinets for power
distribution and for overall intelligence, and there
are areas, particularly in the process industry with
areas such as explosion protection, where centralised
cabinets continue to be the preferred solution.
Decentralised motor control is rapidly gaining
ground despite of the advantages of the
centralised control concept:
• no need for extra space around the motor
or close to the motor
• no control cable wiring into the plant
• independence of plant environment
■Direct cost savings
Motor controls for decentralised installations must be
built to meet the harsh conditions in manufacturing
areas - especially such conditions found in the food
and beverage industry, where frequent wash downs
are required. This of course increases the cost of
thedrive. Thisincreasewillbemorethansetoffby
savings in expenses for cabinets and cables.
The cable saving potential is considerable, as will
be demonstrated by the following example.
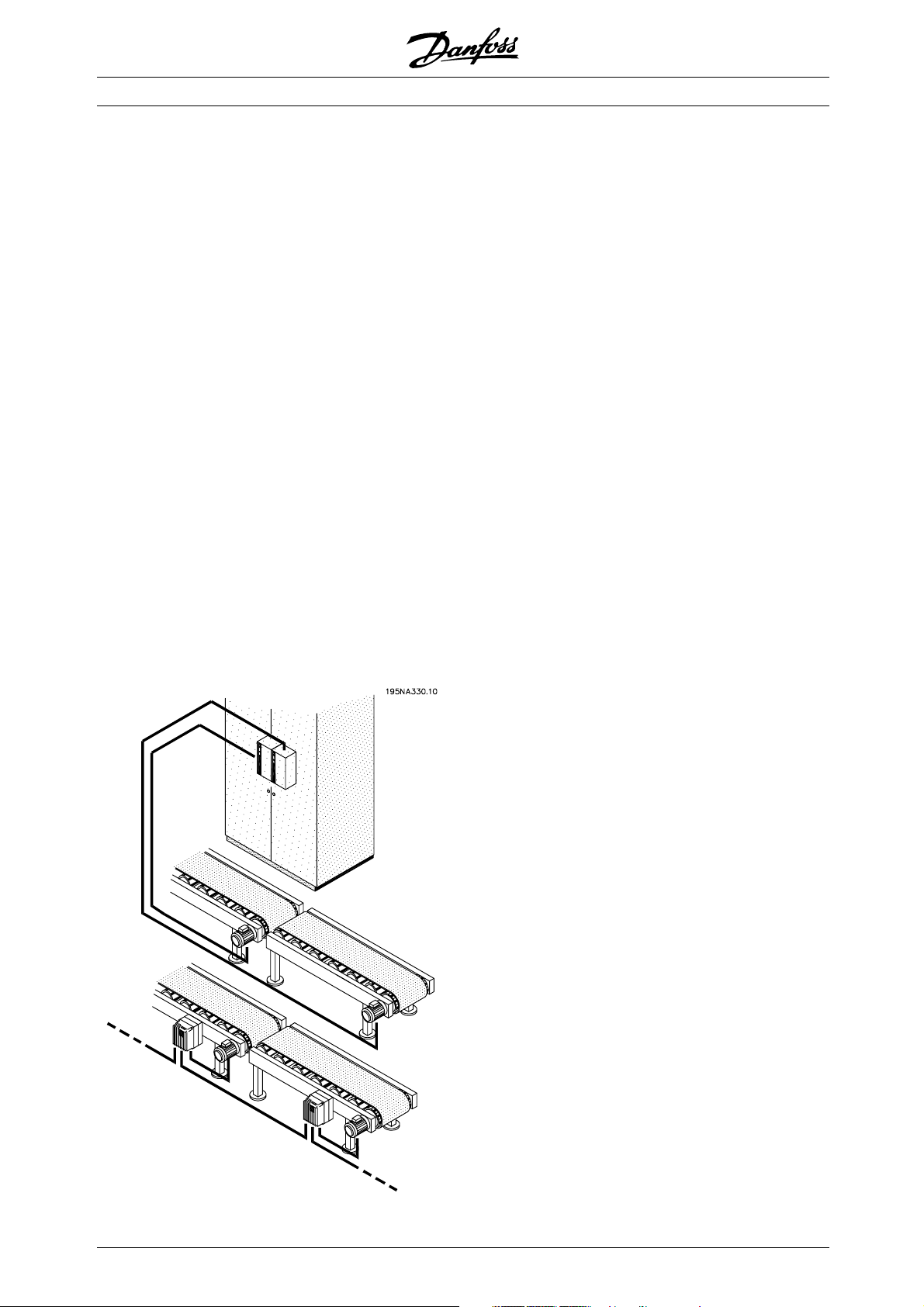
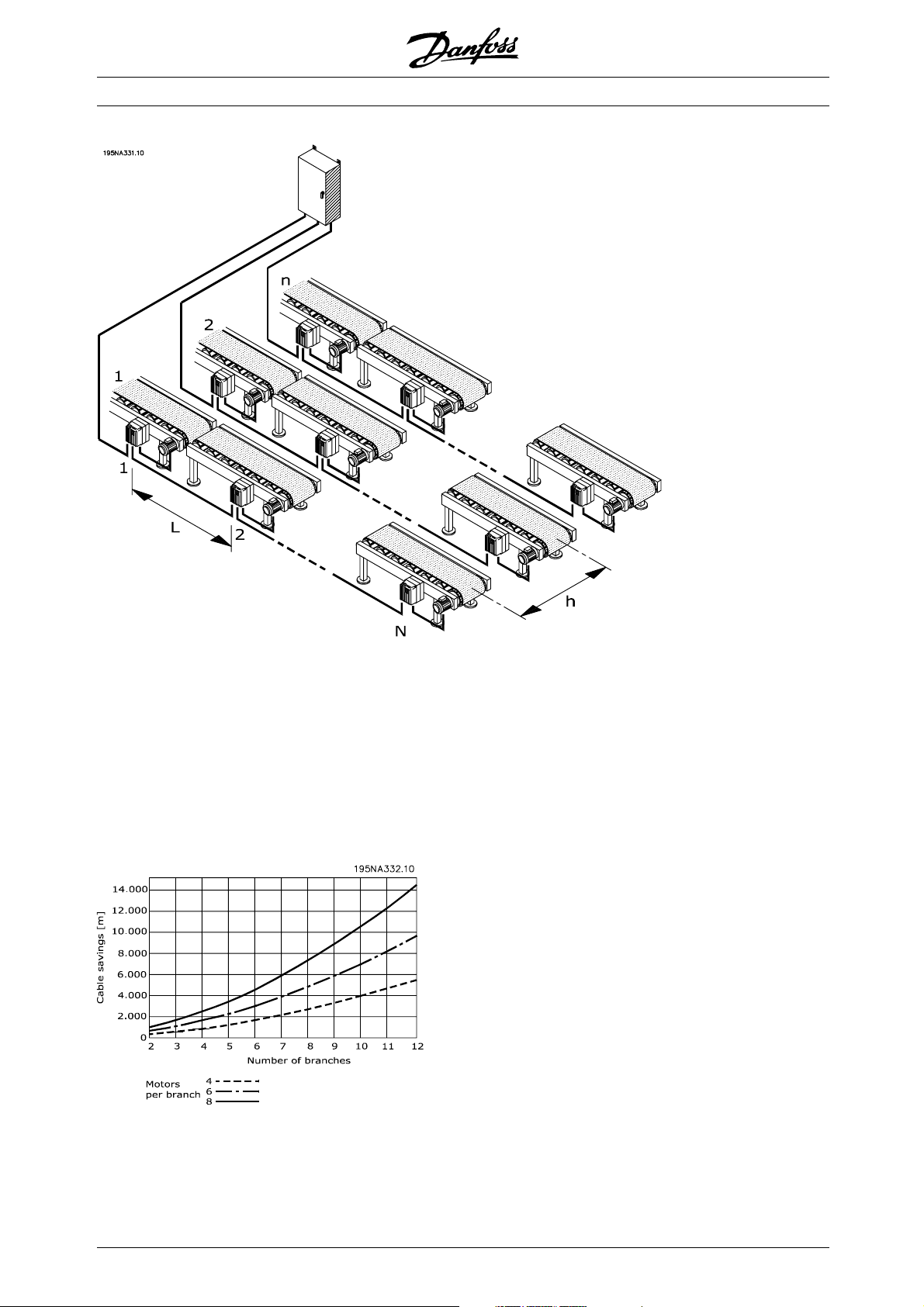
The figure illustrates an installation with motors
distributed in a number of rows with several motors in
each, as is the situation in for example parallel bottling
or baking lines in the Food and Beverage industry.
This example shows the need for power cables from
the centrally placed drives to the motors.
Centralised versus decentralised installations
6
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 8
Decentral Solutions - Design Guide
concept
The decentral
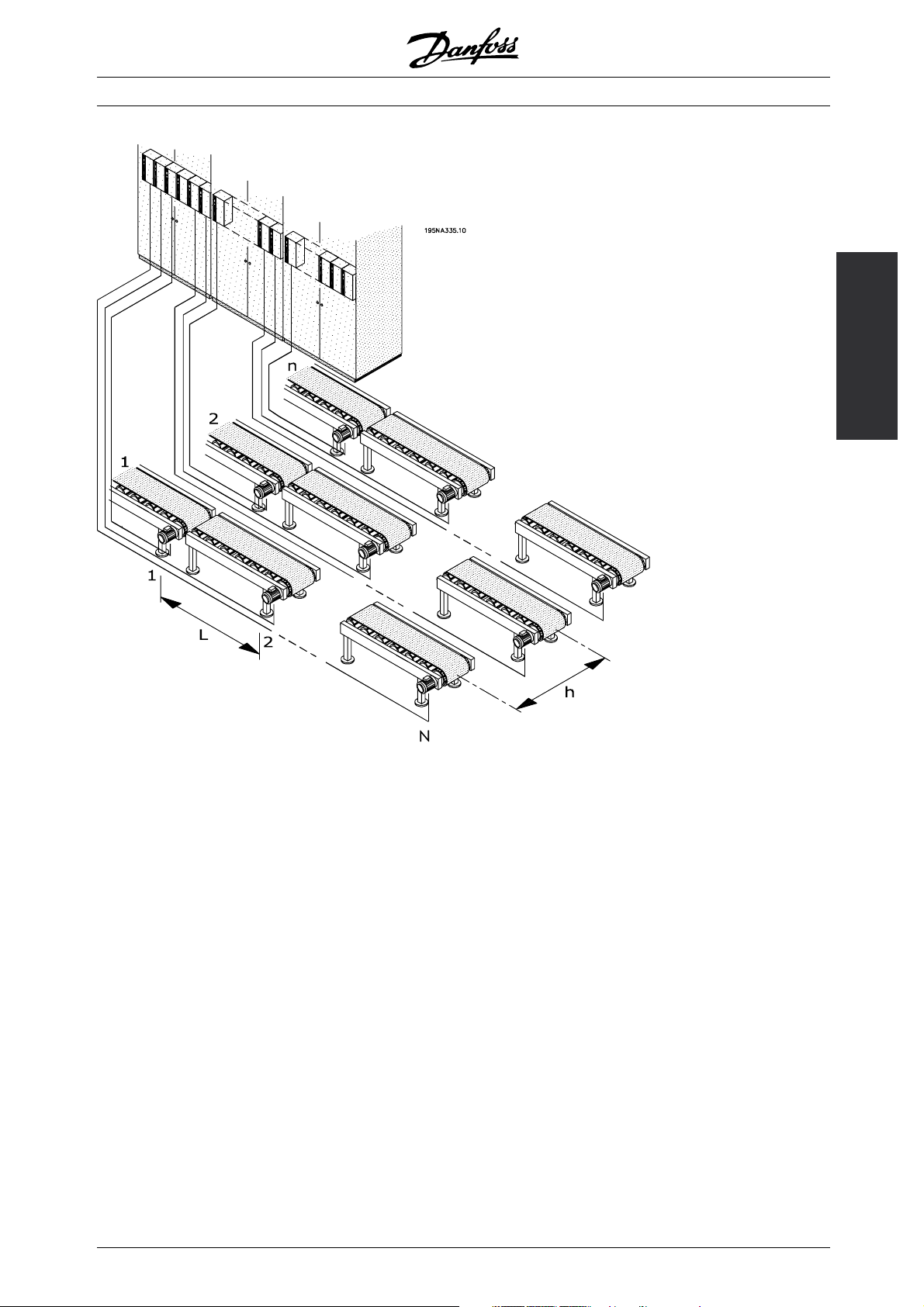
Centralised installation
The drives are distributed equidistant with the distance
L between each drive and the distance h between
each row and also with a distance h from the
centralised power entry/cabinet location to the first
row. There are n rows, and N drives in each row.
MG.90.F3.02 - VLT is a registered Danfoss trademark
7
Page 9
Decentral Solutions - Design Guide
Decentralised cabling
The figure illustrates how the three-phase mains
cable can be distributed with power looping from one
motor (drive) to the next. The cable saving potential
is illustrated in figure 4. Given a distance of 10m
between each motor and 20m between each line, the
potential cable savings as a function of the number of
motors and number of lines shows of the figure.
Cable saving potential in an illustrative installation
The saving potential in power cable length alone
is substantial. The figure only illustrates the
potential concerning power cables. Issues like
unscreened/screened cables and cable dimensions
also ads to the benefits of decentralised installations.
Real case
Calculations on a specific, typical bottling line with
91 pieces of 1.5 kW motors, taking the cable
dimensioning into account, showed the following
saving potential in cables and terminations:
• Cable terminations are reduced from 455 to 352
• EMC cable terminations are reduced from
364 to 182 by using motor controls with
integrated service switches
• Power cable length reduced from 6468m to
1180m, a reduction of 5288m, and it is converted
from screened cables to standard installation cables
For details consult the following chapter on
Good installation practice.
■Minimal need for additional fieldbus cables
Power cable savings are not offset by the additional
cost for expensive fieldbus cables. Fieldbus cables
will be extended in a decentralised installation, but
since fieldbus cables will be distributed in the plant
anyway to connect sensors or remote I/O-stations,
the extension will be limited. Decentralised products
from Danfoss can even be used as remote I/O
8
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 10
Decentral Solutions - Design Guide
stations to connect sensors to the fieldbus and
reduce direct costs even more.
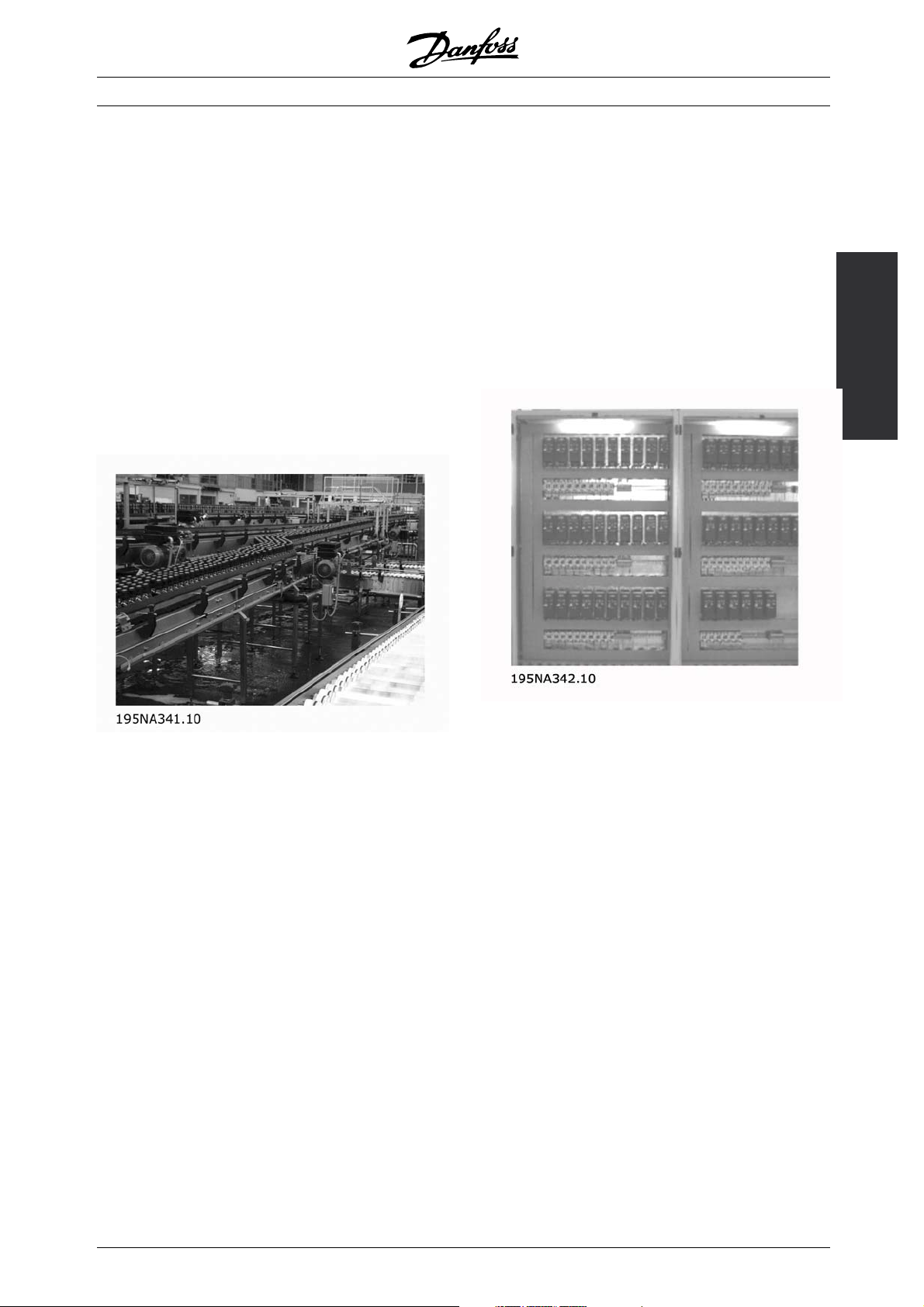
Fewer cabinets, cooling and cabletrays
Further savings will result from smaller cabinets, less
cabinet cooling and fewer cable trays. Motor controls
generate heat and are often mounted side by side due
to limited space, as illustrated in Figure 6. Forced
cooling is therefore required to remove the heat.
Less Commissioning
Time spend commissioning at the end-user is
significantly reduced using decentralised solutions especially when fieldbus communication is combined
with decentralised motor controls.
The concept of modularisation is known from
equipment like PC’s and cars. Modules with
well-described functionalities and interfaces are
used in these products. The same concept can
be applied to manufacturing, even though specific
physical constraints play a role.
Production equipment is often built from different basic
building blocks, each kind employed at several places
in the installation. Examples include various types of
conveyor sections and machinery like mixers, scales,
fillers, labellers, palletisers, packaging machines etc.
concept
The decentral
Decentralised brewery installation
An Australian brewery has installed a line of 96
decentralised drives from Danfoss connected by
DeviceNet. An excessive amount of time was saved
as the commissioning of the variable speed drives
was done in a few days. The brewery estimates
a saving exceeding AUD 100,000 compared to
traditional centralised installation.
■Design savings
End users want to postpone the final decision for new
equipment - and to start production as fast as possible
once a decision has been made. Payback time and
time to market must be reduced. This squeezes both
the design phase and the commissioning phase.
Modularisation can minimise lead-time. Even
manufacturers of large production equipment or
lines use modularisation to reduce lead-time. Up
to 40-50 % on the total time from design to
running production can be saved.
Centralised cabinet
In a truly modular machine, all basic elements are
self-confined and need nothing but electricity, water,
compressed air or similar to function.
Modularisation therefore requires the distribution of
intelligence to the individual sections and modules.
Sure, centralised installations can be modualarised,
but then motor controls will be physically separated
from the rest of the module.
■Ready-installed intelligence
The function of machinery and applications is typically
tested at the suppliers. Machines are built, tested,
calibrated and taken apart for transportation.
The process of rebuilding the application at the
production site is considerably simplified by shipping
it in modules with built-in motor controls, as rewiring
and testing is time consuming and calls for skilled
personnel. Using ready-installed, decentralised
MG.90.F3.02 - VLT is a registered Danfoss trademark
9
Page 11
Decentral Solutions - Design Guide
installations reduces both time and risk as wiring for
motor, control and sensors are already in place and
maintained during transportation. The need for highly
skilled experts is reduced and local labour can do a
larger part of the installation. The commissioning costs
and OEM resources on-site will be reduced.
■Improved EMC
Electrical noise emitted is proportional to cable
length. The very short - or eliminated - cable
between motor control and motor in decentralised
installations therefore reduces emitted electrical noise.
In decentralised installations, the machine builder
normally mounts cables between motor controls and
motors in the machine leaving only power cables
and fieldbus cables with no EMC emission to be
installed at the production site. The risk of electrical
noise from motor controls to disturb other electrical
equipment caused by a faulty installation will diminish
and you avoid time-consuming fault finding in the
commissioning phase, where time frame is tight.
■Adapts to standard and special motors
Danfoss’ decentralised motor controls, FCD 300 and
DMS 300, are designed to control standard AC
asynchronous motors. Their flexibility allows them
also to adapt to special motor types. An example
is the AMT feature (Automatic Motor Tuning) in the
FCD 300. Combining Danfoss frequency converters
to Danfoss geared motors makes it even easier
as they fit mechanically and the motor data are
already stored in the FCD 300 memory. Combined
motor-drives are provided pre-assembled directly
from Danfoss removing the need for mechanical
fitting between motor and control.
motoraresimilarorlessthanthelossesinamotor
connected to mains. Thermal losses are minimised
and overheat is prevented. At the same time, the
VVC principle ensures nominal torque at nominal
speed and eliminates bearing currents.
Slim DC-links
It takes two steps to convert the frequency to vary
the speed of an AC motor: A rectifier and an inverter.
As the rectifier itself produces a rippled DC voltage,
a capacitor is often introduced to smoothen the
voltage supplied to the inverter. A link between
rectifier and inverter with only a small capacitor to
even out the voltage is called a "slim DC link". With a
slim DC link, the inverter will not be able to provide
quite the same voltage amplitude as supplied by the
mains supply, leading to lower efficiency. A special
pulse-width-modulation can be used to compensate
the ripple from a slim DC link. In this case the output
voltage for the motor still does not reach the rated
supply voltage value leading to an over-consumption
of motor current up to 10% and this will increase
the motor heating. Low efficiency and need of an
oversized motor is the result. As torque decreases with
the square of voltage the application will be exceeding
sensible to load-changes and speed sensors might be
required. At start, only nominal torque is available.
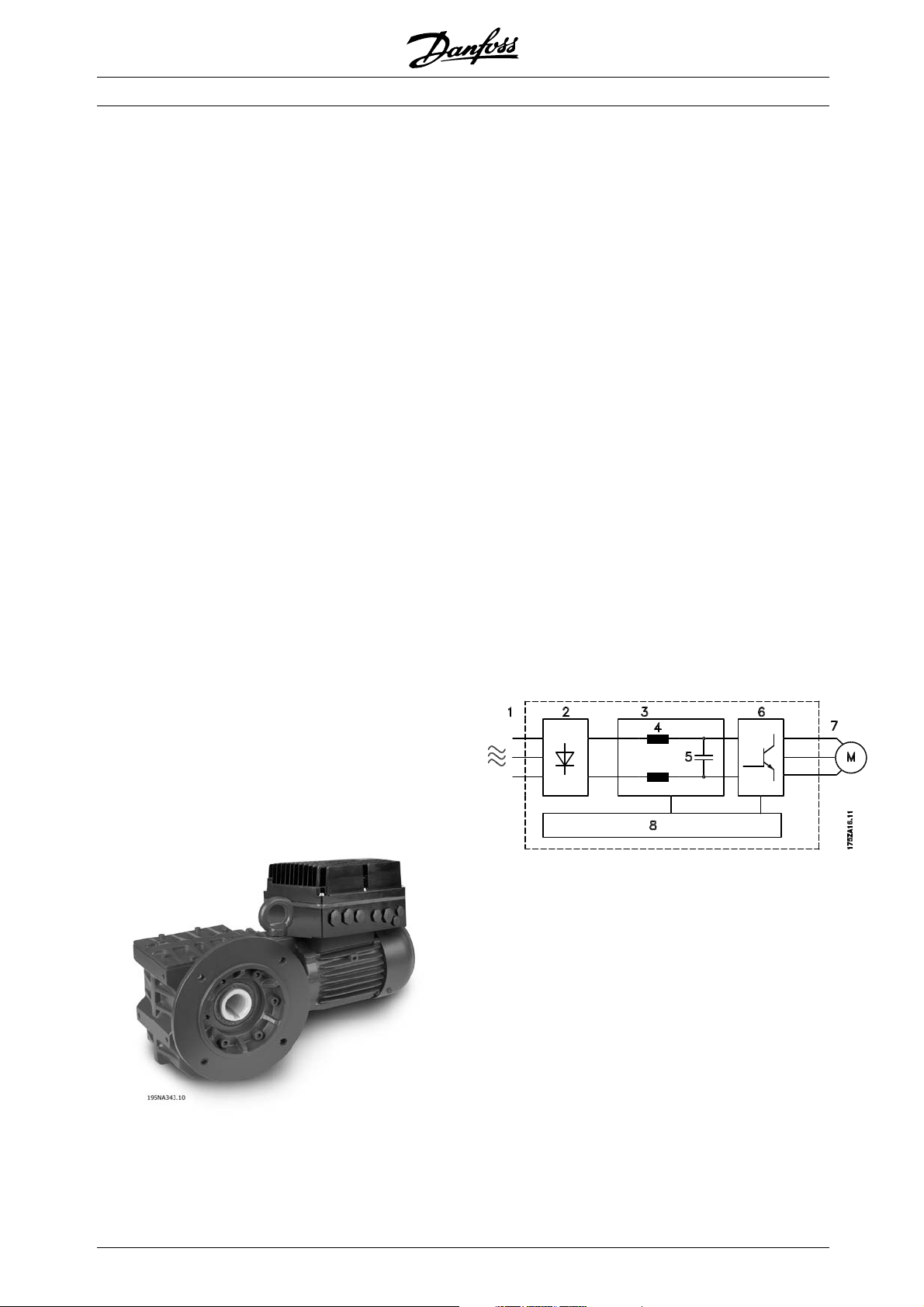
Danfoss geared motor with FCD 300
■Minimum thermal losses
Danfoss frequency converters feature the unique
VVC switch principle to generate motor voltages.
Due to the VVC principle, power losses in the
10
Principle of a frequency converter using
a DC link coil
The Danfoss option is to add coils to the DC link
inalldrivesasshowninthefigure. Thiswaya
high DC link voltage with a very low voltage ripple
is obtained and the electric strength of the drive
with regard to line transients is improved.
Further advantages are the prolonged lifetime of the
capacitors, reduced harmonic disturbance of the net
supply and presence of 150-160% start torque.
Numerous manufacturers of frequency inverters
use slim DC links leading to bad efficiency rates
– even if users due to the activity of for instance
the CEMEP now tend to use high efficiency
motors - meeting at least EFF2.
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 12
Decentral Solutions - Design Guide
Danfoss’ aim is to provide high efficiency drives that
also improve the efficiency of the motors. There
should be no need of expensive over-dimensioning
and inefficient operation.
■Environmental considerations
Drives – both centrally-mounted and distributed in the
plant - are exposed to the environment. As motor
controls handle high voltages and currents at the
same time they must be protected from dust and
humidity so that they do not fail or break down. Both
manufacturers and installers must take account of this
and Danfoss Drives have designed the decentralised
products with a deep concern in both aspects.
Decentralised motor controls must also meet
increasing demands in respect of hygiene levels in
pharmaceutical industries and in food- and beverage
production in particular, where drives are exposed to
cleaning agents for extensive periods of time, high
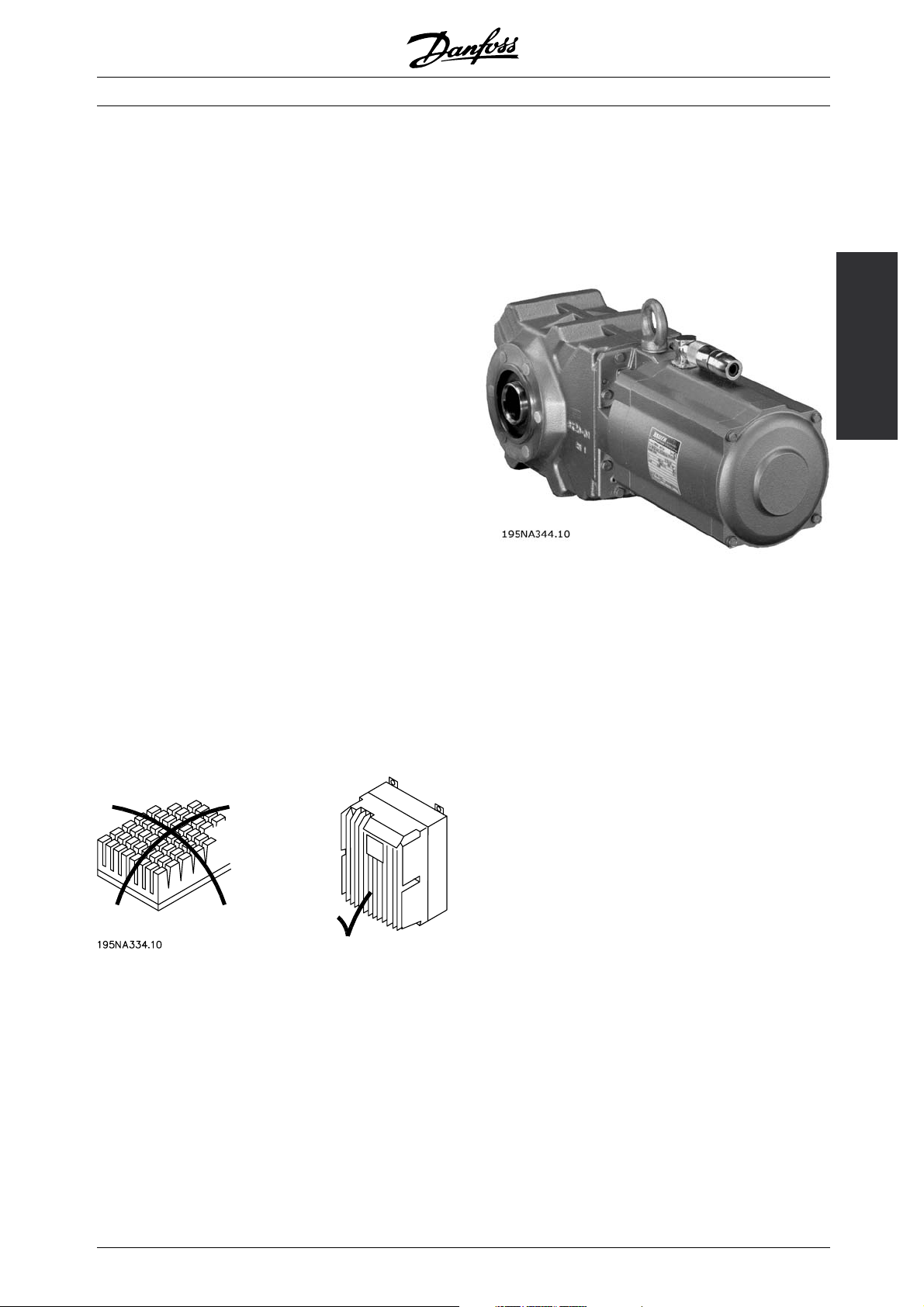
pressure hosing and the like. The exterior of the
decentralised motor controls must be designed in such
a way as to achieve this. Complicated heat sinks as
illustrated in the figure must be avoided as it is difficult
to clean and not resistant to common cleaning agents.
challenge by designing a range of aseptic geared
motors. These motors have no fans and only smooth
surfaces. An IP65 enclosure class is standard as is
the special CORO coating resistant to acid, alkali
and cleaning agents used in for instance food and
beverage industry. See the photo of an example
of the aseptic geared motor series.
concept
The decentral
Aseptic Danfoss geared motor
Danfoss decentralised drives are designed to meet
the requirements as shown in Figure 9. There
are no hard-to-clean places, blind plugs have no
notches or indentations and two-layer robust surface
treatment - tested to withstand commonly used
cleaning agents - protects the housing.
Non-cleaning friendly pin fin heat sink versus
the easy to clean Danfoss solution
All corners are rounded to prevent dust sticking, and
the distance between ribs allows high-pressure air
cleaning, hosing and easy cleaning with a brush.
These concerns are more or less irrelevant if not
applied to all elements and standard AC motors
are normally designed without these concerns in
mind – stressed by integrated fans and cooling
ribs both difficult to clean. Danfoss has met the
Electrical contact can cause galvanic corrosion under
wet or humid conditions. This can occur between
housing (Aluminium) and screws (stainless steel). One
possible consequence is that screws become stuck
and therefore impossible to unfasten in a maintenance
situation. Galvanic corrosion will not be found on
Danfoss decentralised products, as the housings
are fully coated and nylon washers underneath
the screws protects the coating. The complete
coating and the unique gasket design prevent pitting
corrosion, which can occur under gaskets.
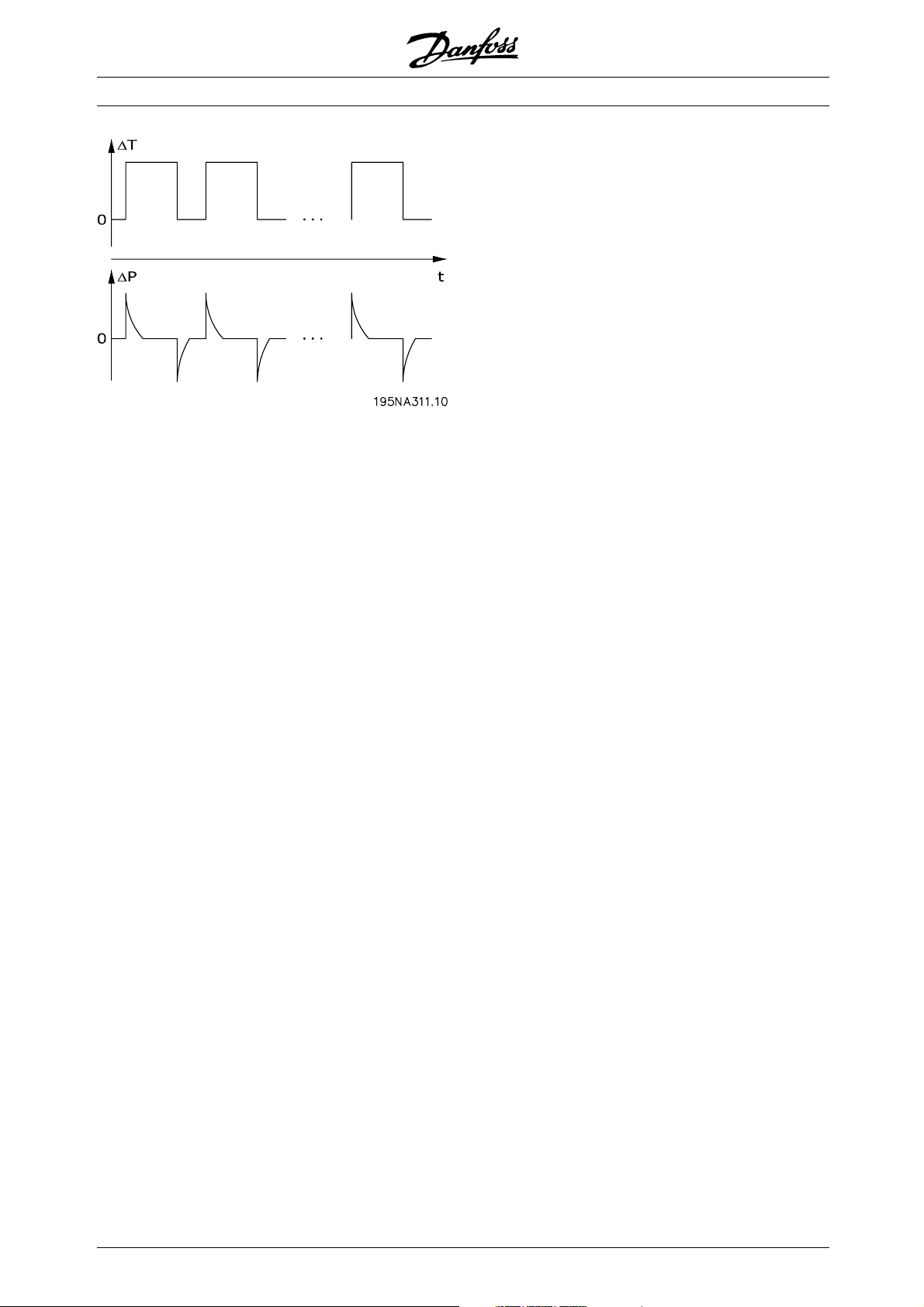
Tightly enclosed equipment is susceptible to water
build-up inside the enclosure. This is especially
the case where equipment is exposed to ambient
temperature differences under wet conditions. As a
decreasing ambient temperature lowers the surface
temperature inside the enclosure, water vapour
tendstocondensate. Atthesametimepressure
inside the enclosure will drop and cause humid
air from the outside to penetrate non-hermetic
polymer gasket materials and cable glands. When
the enclosure heats up again, only the vaporised
water will escape, leaving more and more condensed
water inside the enclosure. This can lead to water
build-up inside the enclosure and eventually cause
malfunction. The phenomenon is illustrated in the
figure, with a cyclic temperature fluctuation.
MG.90.F3.02 - VLT is a registered Danfoss trademark
11
Page 13
Decentral Solutions - Design Guide
The pumping effect in tight enclosures
Build-up of water inside enclosures can be prevented
bymembranesthatpreventsfluidstopenetrate
but allows for vapour to pass, as known from
fabrics used for outdoor clothing. A special
cable gland with this kind of material is offered
by Danfoss to eliminate this problem. The cable
glandshouldbeusedinapplicationsexposed
to frequent temperature fluctuations and humid
environments as in equipment used only during
daytimewheretheinsidetemperaturetendstofall
to the ambient temperature during the night.
■Installation flexibility
Danfoss decentralised solutions offers exceptional
installation flexibility. Flexibility is supported
by a number of benefits:
• Mountable on Danfoss geared motors
• Decentralised panel mounting possible
• Handheld control panels
• PC software for configuring and logging
• Single or double sided installation
• Service switch optional
• Brake chopper and resistor optional
• External 24 V backup supply optional
• M12 connections for external sensors optional
• Han 10E motor connector optional
• Fieldbus support (Profibus DP V1, DeviceNet,
As-Interface)
• Compatibility with standard mains systems
(TN, TT, IT, delta grounded)
For further details see the chapter on The
decentralised product range.
12
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 14

Decentral Solutions - Design Guide
■Application Examples
Danfoss has completed a wide range of applications
in many different industries. This has given us a
valuable experience that has influenced the latest
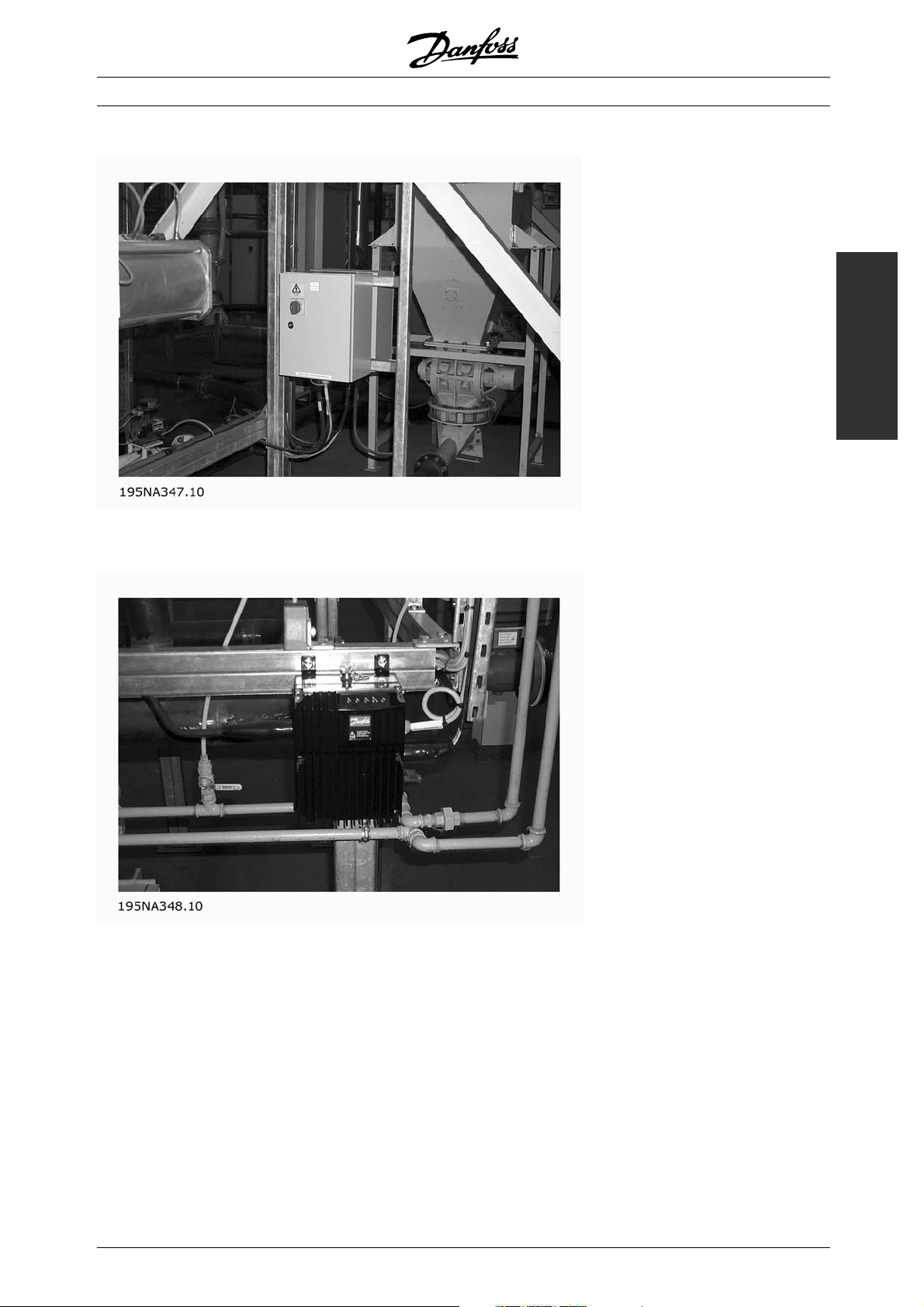
■Beverage - Bottling line
development of our decentralised products. In
the following we provide illustrative examples of
actual installations using Danfoss decentralised
products, and the benefit and value these provide
for the customer in these installations.
concept
The decentral
FCD 300 on bottling conveyor
Benefits:
• Reduced switchboard space as all drives
aremountedinthefield
• Reduced cabling as several drives can be
supplied from same circuit
• Ease of commissioning over the fieldbus as the
protocol allows for transfer of complete parameters.
Once one drive is set up, its basic program can
be copied to any other decentralised drive
• The FCD motor performance is markedly
superior to all other types
MG.90.F3.02 - VLT is a registered Danfoss trademark
• The FCD can be retrofitted to existing motors
of nearly any brand or type
• The aseptic IP 66 enclosure is ideal for
damp bottling hall conditions
• All in one box: e.g. service switch, Profibus
and power looping
13
Page 15

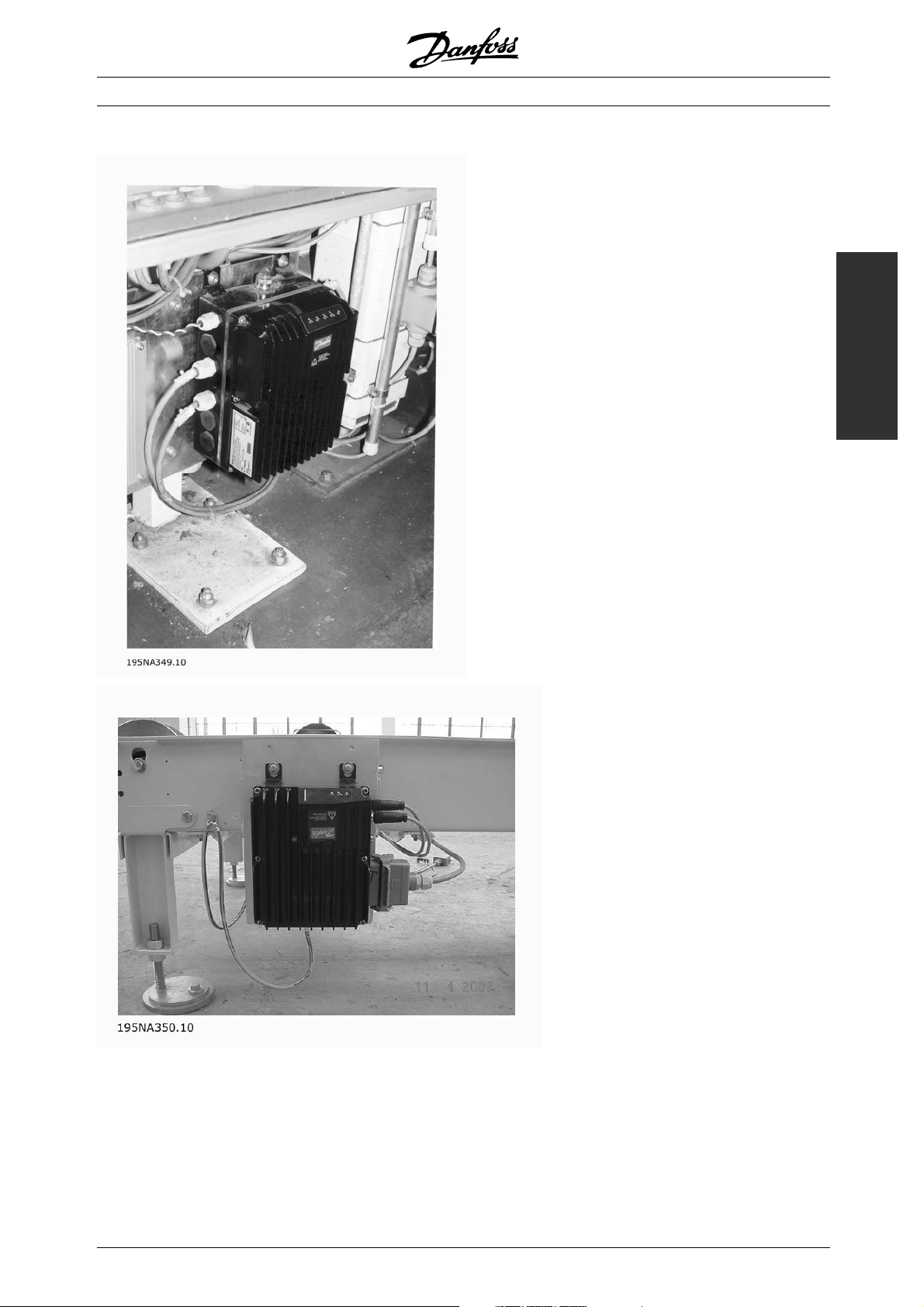
■Beverage - Packaging machine
Decentral Solutions - Design Guide
Decentral motor controls integrated in packaging machine
Benefits:
• Distributing motor controls in the application
releases space fo
the switchboard
• The number of drives in an application can be
increased with
• IP66 enclosure, easy to clean and resistant
to strong cleaning liquids
• Same flexibili
motor controls. Decentralised motor controls
can be adapted for all standard AC motors,
and feature
numbers on connectors
• Profibus integrated
r other purposes in
out extending the switchboard
ty as with centrally mounted
same user interface and same
14
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 16
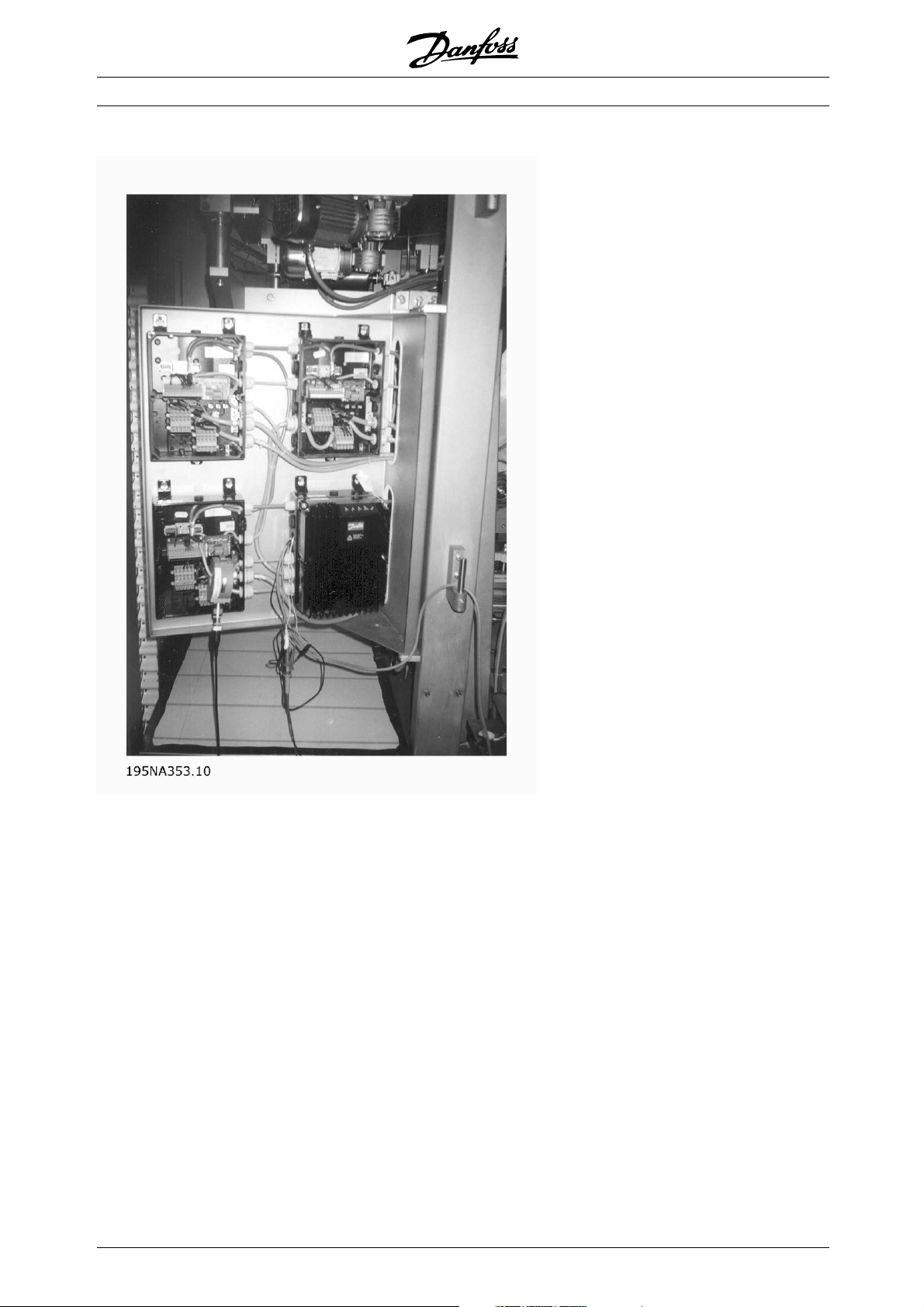
■Food - Cocoa powder plant
Decentral Solutions - Design Guide
concept
The decentral
Old solution: Motor control - panel mounted decentrally
New Solution: Genuine decentralised motor control
Benefits:
• Easy to expand plant capacity
• No need for switchboard
• Visible LED for status
• Service switch integrated in the unit
• High enclosure rating IP66
• Low cost installation
• Less space needed for the new solution
MG.90.F3.02 - VLT is a registered Danfoss trademark
15
Page 17

■Food conveyor
Decentral Solutions - Design Guide
Efficient space utilisation in the food industry with decentralised motor controls from Danfoss
Benefits:
• The number of drives in an application can be
raised without extending the switchboard
• IP66 enclosure, easy to clean and resistant
to strong cleaning liquids
• Dirt-repelling surface and design prevents dirt
and product remains on the drive
• Motor or wall mount units available
• Same flexibility as with centrally mounted motor
controls. Decentralised motor controls adapt to all
16
standard AC motors, features same user interface
and same numbering on connectors
• Profibus integrated
• Connectors for fast service integrated in
the installation box
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 18
Decentral Solutions - Design Guide
■Automotive Industry - Hoists and conveyors Benefits:
• Simple installation
• AS-i or Profibus control optional
• Sensor input available within the physical
size of the unit
• Separate 24V supply for sensors and bus
• Brake supply and control build in
• Easy pluggable remote control panel
• Connectors for looping (T-connector) integrated
in the installation box
• Low installation and component costs
• No additional and expensive EMC
connectors needed
• Compact and space saving
• Easy to install and commission
• Input for motor thermistor monitoring
concept
The decentral
Decentral installation in the automotive industry
MG.90.F3.02 - VLT is a registered Danfoss trademark
17
Page 19
■Retrofit in existing applications
Decentral Solutions - Design Guide
Retrofitting on existing application with speed control
Benefits:
• No need for a big control cabinet thanks to
the decentralised motor controls.
• No expensive wiring: All motors use existing
power cables, pipes and local switches
ll motor controls can be controlled from the
• A
existing centralised cabinet via Profibus
18
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 20
■The decentralised product range
The Danfoss decentralised concept covers
motor controls ranging from motor starters/soft
starters to frequency converters.
Motor starters and soft starters (DMS 300) make
start and stop of your application smoother and
smarter than ordinary DOL (Direct On Line) operation
but do not affect operation further.
Frequency converters (FCD 300) are used
for following requirements:
• Adjustable speed
• Precise speed
• Defined speed ramps at start or/and stop
• Shorter stop times (braking)
Danfoss decentralised motor controls range from
0.18kWto3kW(connectstoupto4kWand
5 HP motors). This chapter lists several optional
features and accessories available.
Decentral Solutions - Design Guide
2. Mounted directly on the motor ("motor-mounted")
• Fair choice of motor brands
• No need for screened motor cable
3. "Pre-mounted" on Danfoss Bauer
geared motors
concept
The decentral
■Flexible installation options
Danfoss decentralised motor controls FCD 300 and
DMS 300 series can be adapted for mounting using
the following options - each offering specific benefits:
1. Stand alone close to the motor ("wall-mounted")
• Free choice of motor brand
• Easy retrofitting to existing motor
• Easy interfacing to motor (short cable)
• Easy access for diagnosis and optimal serviceability
• A fixed combination of motor and electronics
supplied by one supplier
• Easy mounting, only one unit
• No need for screened motor cable
• Clear responsibility regarding the complete solution
Astheelectronicpartsarecommon-samefunction
of terminals, similar operation and similar parts
and spare parts for all drives - you are free to
mix the three mounting concepts.
MG.90.F3.02 - VLT is a registered Danfoss trademark
19
Page 21
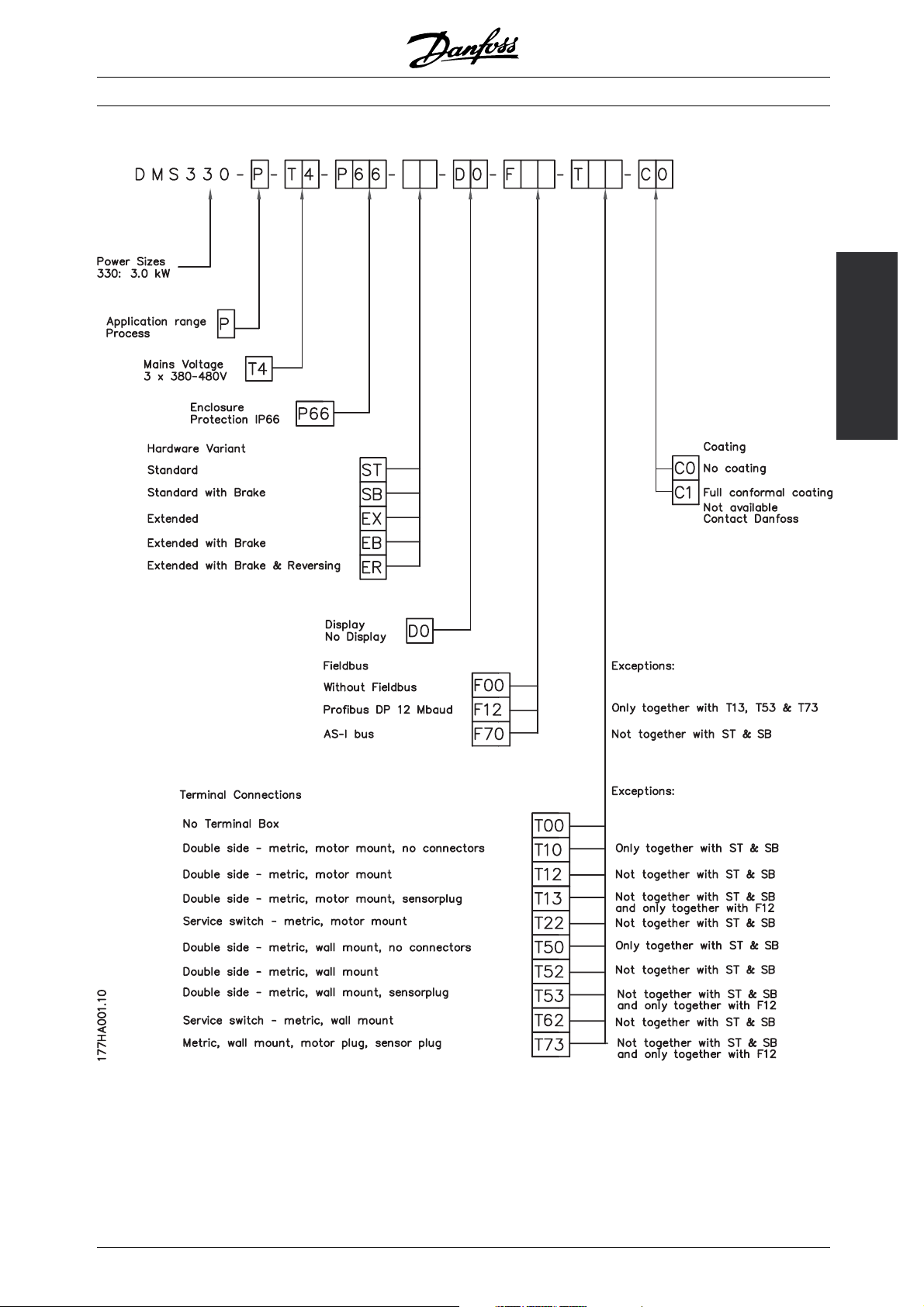
■Configuring a product
The decentralised motor controls DMS 300
and FCD 300 series are configured with a type
code string (see also Ordering):
Decentral Solutions - Design Guide
■24 V external supply
Back up of control supply with 24 V DC is available
in EX and EB versions of FCD 300.
DMS 330 P T4 P66 XX D0 Fxx Txx C0
FCD 3xx P T4 P66 R1 XX Dx Fxx Txx C0
Mains voltage
DMS 300/FCD 300 are available for connection
to mains voltage 3 phase 380-480 V.
Choice of motor starter
The motor starter DMS 300 covers the whole power
range from 0.18-3 kW in one unit.
Choice of frequency converter
The frequency converter must be chosen on the
basis of the present motor current at maximum
loading of the unit. The frequency converter’srated
output current I
must be equal to or greater
INV.
than the required motor current.
Typical shaft output
P
INV.
Type [kW] [HP]
303 0.37 0.50
305 0.55 0.75
307 0.75 1.0
311 1.1 1.5
315 1.5 2.0
322 2.2 3.0
330 3.0 4.0
335** 3.3 5.0*
* at mains/motor voltage 3 x 460 - 480 V
** t
max. 35° C
amb
■Enclosure
DMS 300 / FCD 300 units are protected against
water and dust as standard.
See also the section entitled Technical data
for further details.
■Brake
FCD 300 is available with or without an integral
brake module. See also the section entitled Brake
resistors for ordering a brake resistor.
EB version including mechanical brake control/supply.
NB!:
DMS 300 always needs 24 V external
control supply.
■RFI filter
FCD 300 has an integral 1A RFI-filter. The integral
1A RFI filter complies with EMC standards EN
55011-1A. See the sections Cable lengths and
Cross section for further details.
■Harmonic filter
The harmonic currents do not affect power
consumption directly, but they increase the heat losses
in the installation (transformer, cables). That is why in
a system with a relatively high percentage of rectifier
load it is important to keep the harmonic currents at
a low level so as to avoid a transformer overload and
high cable temperature. For the purpose of ensuring
low harmonic currents, the FCD 300 units are fitted
with coils in their intermediate circuit as standard. This
reduces the input current I
by typically 40 %.
RMS
■Display unit
On the FCD 300 unit there are 5 indicator lamps for
voltage (ON), warning, alarm, status and bus.
In addition, a plug for connecting an LCP control
panel is available as an option. The LCP control
panel can be installed up to 3 metres away from
the frequency converter, e.g. on a front panel,
by means of a mounting kit.
Alldisplaysofdataareviaa4-linealpha-numerical
display, which in normal operation is able to show
4 operating data items and 3 operation modes
continuously. During programming, all the information
required for quick, efficient parameter Setup of the
frequency converter is displayed. As a supplement
to the display, the LCP has three indicator lamps
for voltage (ON), warning (WARNING) and alarm
(ALARM). Most of the frequency converter’s parameter
Setups can be changed immediately via the LCP
control panel. See also the section entitled The
LCP control unit in the Design Guide.
20
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 22

Desired features are selected by specifying the
corresponding fields in the string (xx). The choices and detailed explanation - shown in the two tables.
Short form explanations of a feature are u
For technical details and data, see Technical data.
■Installation box variants
Connections on right side
Gland holes for all c
ight side only (seen from motor drive end). This
r
version is useful where cable inlet is required from
one direction only (only FCD 300 series).
Connections on two sides
Gland holes for c
sides allowing for cable inlet from both directions.
able inlets are machined on the
able inlets are machined on both
nderlined.
Decentral Solutions - Design Guide
concept
The decentral
Both m
(selected variants).
P
mains power supply between drives (4 mm
The bottom section contains Cage Clamp connectors
and looping facilities for power and fieldbus cables well
protected against dust, hosing and cleaning agents.
(Not in DMS 300 ST and SB versions).
S
motor drive end). A lockable switch integrated in the
enclosure – disconnecting the motor or drive.
4s
drive end). Looping through of 2 X 24 V external supply.
Pluggable connection of remote I/O such as
sensors and external supply of these.
M
from motor drive end) wired according to DESINA
standard (see electrical installation).
D
of the local control panel for operating and
programming. Can also be used for PC connection.
Only available for FCD 300.
etric thread and NPT thread is available
luggable connection and the possibility of looping
2
line).
ervice switch mounted on the right side (seen from
ensor plugs, M12 on the right side (seen from motor
otor plug, HARTING 10 E on the right side (seen
isplay connector for external pluggable connection
MG.90.F3.02 - VLT is a registered Danfoss trademark
21
Page 23
Decentral Solutions - Design Guide
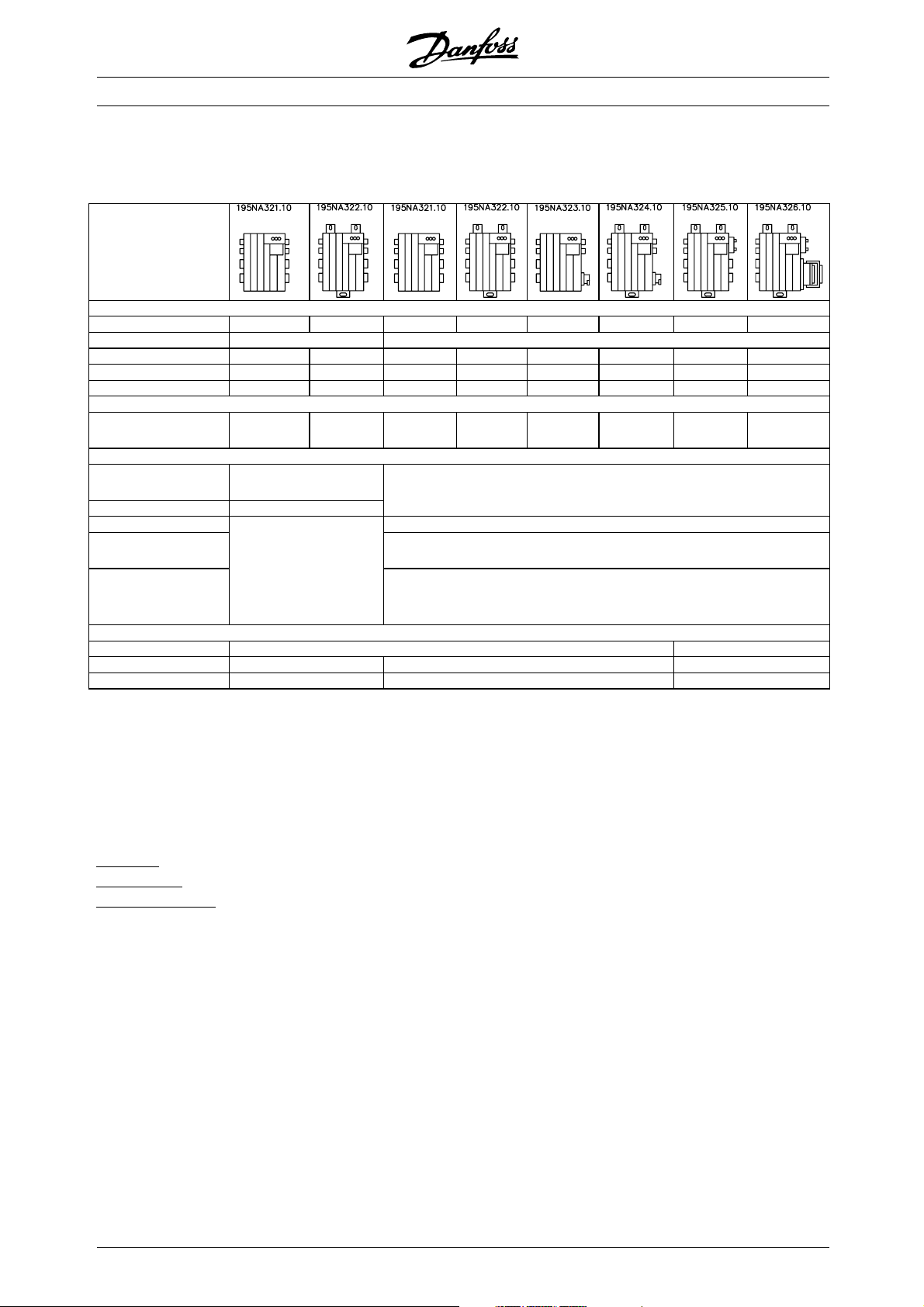
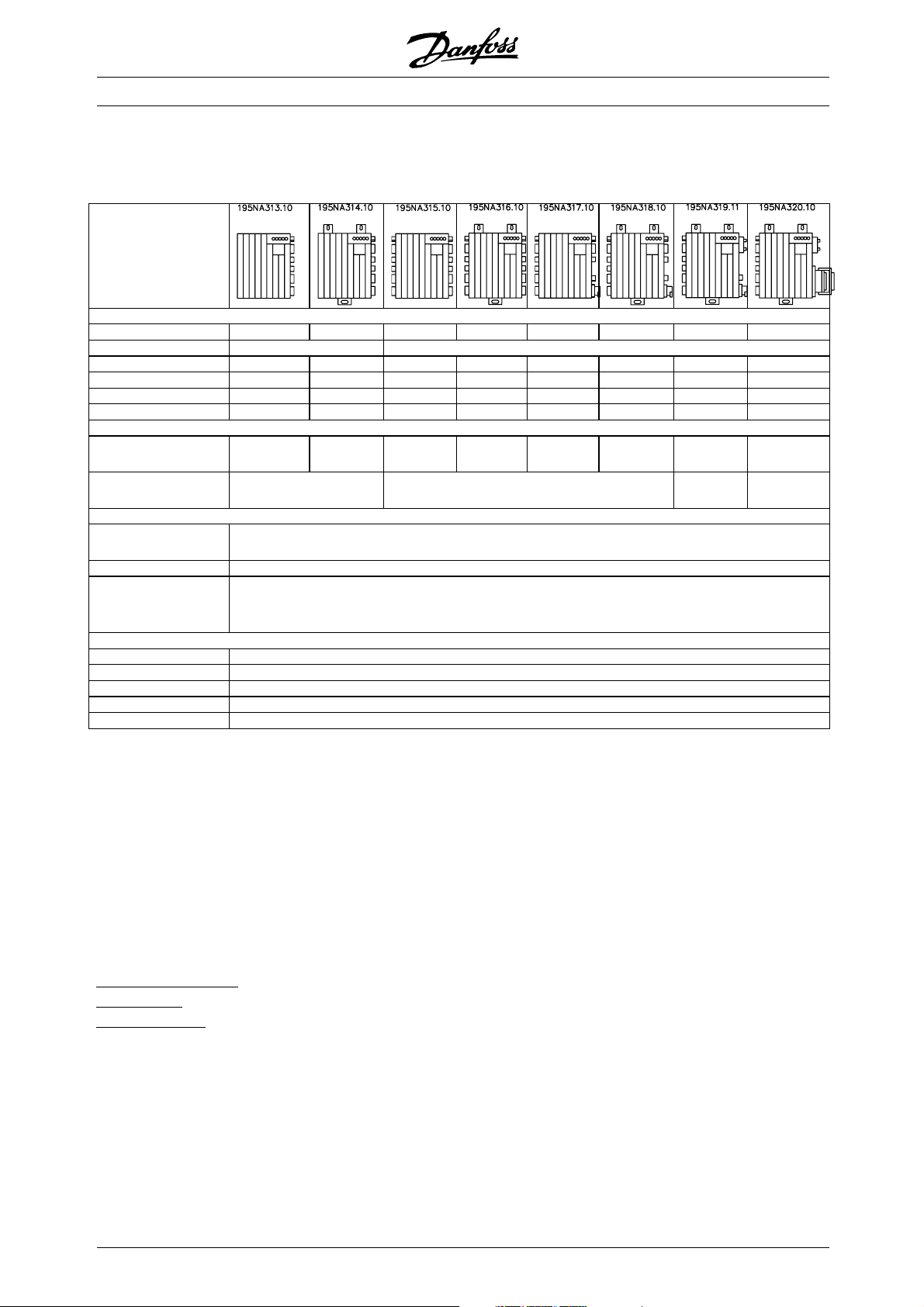
■DMS 300 Decentralised electronic Motor Starter
DMS 300 - Combinations o f versions
Installation features
Mounting Motor Wall Motor Wall Motor Wall Wall Wall
Pluggable - X
Service switch - - - - X X - -
Sensor plugs - - - - - - 4XM12 4XM12
Motor plug - - - - - - - Harting 10E
Ordering codes DMS 330 P T4 P66 XX D0 Fxx Txx C0
Metric thread
(NPT thread)
Functional features
Basic functions
(see below)
+ Brake control SB
+ Current monitoring EX
+ Current monitoring
+ Brake control
+ Current monitoring
+ Brake control +
Reversing
Communication
No bus F00 -
AS-interface - F70 -
Profibus - F12* F12
T10 T50 T12
(T16)*
ST
-
T52
(T56)*
T22
(T26)*
EB
ER
-
T62
(T66)*
T53 T73
- = not available * contact Danfoss sales org for availability
Basic functions
Electronic start/stop of a motor
Soft start/stop
Extended functionality
eversing for bi-directional
R
B
rake control and supply of electromechanical brake
urrent monitoring for electronic motor protection
C
operation of the motor
22
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 24
■Ordering form - DMS 300
Decentral Solutions - Design Guide
concept
The decentral
MG.90.F3.02 - VLT is a registered Danfoss trademark
23
Page 25
Decentral Solutions - Design Guide
■FCD 300 Decentralised Frequency Converter
FCD 300: Combinations of version s
Installation features
Mounting Motor Wall Motor Wall Motor Wall Wall Wall
Cable inlets Right side Double sided
Service switch - - - - X X X -
Sensor plugs - - - - - - 4XM12 4XM12
Motor plug - - - - - - - Harting 10E
ATEX 22
Metric thread
(NPT thread)
Display connector Not available
Functional features
Basic functions
(see below)
+ 24 ext. back up EX
+ 24 ext. back up
+ Dynamic brake +
Brake control
Communication
AS-interface F70
Profibus 3 MB F10
Profibus12 MB F12
DeviceNet F30
*
RS 485 F00
X X X X - - - -
Ordering co des FCD 3xx P T4 P66 R1 XX Dx Fxx Txx C0
T11
(-)
only D0
T51
(-)
T12
(T16)
T52
(T56)
DC DC
ST
EB
T22
(T26)
T62
(T66)
T63
(-)
included
T73
(-)
DC included
* ATEX 22: Approved for use in dusty environments according to the ATEX directive (ATmosphère EXplosive)
Basic functions
Adjustable motor speed
Defined speed ramps - up and down
Features and operation concepts similar
to other VLT series
Electronic motor protection and rev
ersing
are always included
Extended functionality
4 V external back up of control and communication
2
rake control and supply of elect
B
ynamic braking (brake resistor is optional
D
romechanical brake
see brake resistors)
24
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 26
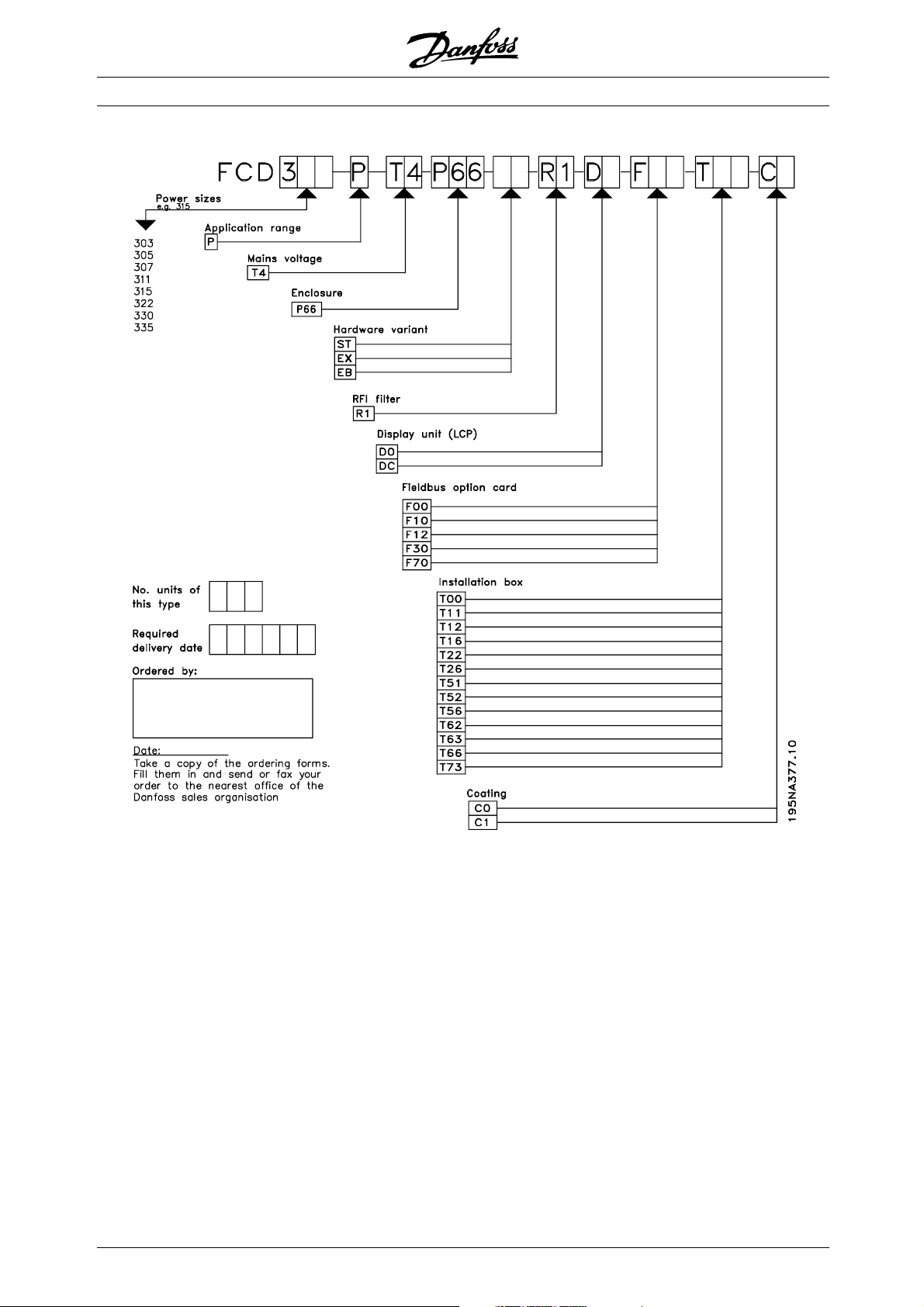
Decentral Solutions - Design Guide
The below explanations refer to the ordering form.
P
ower sizes (positions 1-6):
0,37 kW – 3,3 kW (See power size selection table)
A
pplication range (position 7):
• P-process
M
ains voltage (positions 8-9):
• T4 - 380-480 V three phase supply voltage
E
nclosure (positions 10-12):
The enclosure offers protection against dusty,
wet, and aggressive environment
• P66 - Protected IP66 enclosure (exceptions
see Installation box T00, T73)
ardware variant (positions 13-14):
H
• ST - Standard hardware
• EX - 24 V external supply for backup of control card
• EB - 24 V external supply for backup of control
card, control and supply of mechanical brake
and an additional brake chopper
FI filter (positions 15-16):
R
• R1 - Compliance with class A1 filter
nstallation box (positions 22-24):
I
• T00 - No Installation box
• T11 - Installation box, motor mount, metric
thread, only right side
• T12 - Installation box, motor mount, metric
thread, double side
• T16 - Installation box, motor mount, NPT
thread, double side
• T22 - Installation box, motor mount, metric
thread, double side, service switch
• T26 - Installation box, motor mount, NPT
thread, double side, service switch
• T51 - Installation box, wall mount, metric
thread, only right side
• T52 - Installation box, wall mount, metric
thread, double side
• T56 - Installation box, wall mount, NPT
thread, double side
• T62 - Installation box, wall mount, metric
thread, double side, service switch
• T66 - Installation box, wall mount, NPT thread,
double side, service switch
• T63 - Installation box, wall mount, metric thread,
double side, service switch, sensor plugs
• T73 - Installation box, wall mount, metric thread,
double side, motor plug, sensor plugs, Viton gasket
concept
The decentral
D
isplay unit (LCP) (positions 17-18):
Connection possibility for display and keypad
• D0 - No pluggable display connector in the unit
• DC - Display connector plug mounted (not available
with "only right side" installation box variants)
ieldbus option card (positions 19-21):
F
A wide selection of high performance fieldbus
options is available (integrated)
• F00 - No fieldbus option built in
• F10 - Profibus DP V0/V1 3 Mbaud
• F12-ProfibusDPV0/V112Mbaud
• F30 - DeviceNet
• F70 - AS-interface
oating (positions 25-26):
C
The IP66 enclosure offers protection of the drive
against aggressive environments, which practically
eliminates the need for coated printed circuit boards.
• C0 - Non coated boards
MG.90.F3.02 - VLT is a registered Danfoss trademark
25
Page 27
■Ordering form - FCD 300
Decentral Solutions - Design Guide
26
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 28
Decentral Solutions - Design Guide
■PC Software tools
PC Software - MCT 10
All drives are equipped with a serial communication
port. We provide a PC tool for communication
between PC and frequency converter, VLT Motion
Control Tool MCT 10 Set-up Software.
MCT 10 Set-up Software
MCT 10 has been designed as an easy to
use interactive tool for setting parameters in
our frequency converters.
The MCT 10 Set-up Software will be useful for:
• Planning a communication network off-line. MCT 10
contains a complete frequency converter database
• Commissioning frequency converters on line
• Saving settings for all frequency converters
• Replacing a drive in a network
• Expandinganexistingnetwork
• Future developed drives will be supported
MCT10Set-upSoftwaresupportProfibusDP-V1via
a Master class 2 connection. It makes it possible to
on line read/write parameters in a frequency converter
via the Profibus network. This will eliminate the
need for an extra communication network.
The MCT 10 Set-up Software Modules
The following modules are included in the
software package:
MCT10Set-upSoftware
Setting parameters
Copy to and from frequency converters
Documentation and print out of parameter
settings incl. diagrams
SyncPos
Creating SyncPos programme
Ordering number:
Please order your CD containing MCT 10 Set-up
Software using code number 130B10
00.
concept
The decentral
■Accessories for DMS 300 and FCD 300
Type Description Ordering no.
LCP2 control unit FCD LCP2 for programming the frequency converter 175N0131
Cable for LCP2 control unit FCD Cable from LCP2 to frequency converter 175N0162
LCP2 remote-mounting kit FCD Kit for remote-mounting of LCP2 (incl. 3 m cable, excl.
LCP2)
LOP (Local Operation Pad) FCD LOP can be used for setting the reference
and start/stop via the control terminals
Motor adaption plate DMS/FCD Plate for adapting to non Danfoss Bauer motors 175N2115
Membrane DMS/FCD Membrane for preventing condensation 175N2116
Plug kit for LCP2 FCD Plug for LCP2 for mounting in the terminal bo
Motor star terminal DMS/FCD Terminal for interconnection of motor wires (star point) 175N2119
Installation kit FCD Installation kit for mounting in panels 175N2207
M 12 plug FCD E.g. for DeviceNet 175N2279
Viton Gasket FCD 303-315 Painting shop compatible 175N2431
Viton Gasket FCD 322-335 Painting shop compatible 175N2450
Data Cable FCD For PC communication 175N2491
PCB Terminal FCD Terminal for 24 V distribution 175N2550
PE ext. terminal DMS/FCD Stainless steel 175N2703
PE external terminal DMS/FCD Nickel plated brass 175N2704
Motor mounting adaptor 175N2115
Aluminium plate with holes drilled to fit the FCD/DMS
display LCP2 (code DC). The connector can be ordered
separately (Not for single sided installation boxes).
x.
175N0160
175N0128
175N2118
box. Must be fitted locally for the actual motor.
LCP2 keyboard/Display 175N0131 (for
LCP2 connection 175N2118 (for the FCD
300 series)
The installation box can be mounted with or without
the FCD 300 series)
Alfanumeric display for programming the
frequency converter.
a sealed connector (IP66) to connect the common
MG.90.F3.02 - VLT is a registered Danfoss trademark
27
Page 29
Decentral Solutions - Design Guide
Cable for LCP2 175N0162 (for the FCD 300 series)
Preconfectioned cable to be used between
frequency converter and LCP2.
Data cable for PC communication 175N2491
(for the FCD 300 series)
connects a converter (e.g. USB) to the
LCP2 connector.
5 pole M12 plug for AS-interface 175N2281
The plug, M12, can be mounted into the gland
holes of the installation box.
Viton Gasket for FCD 303-315 175N2431
With this gasket the FCD can be used in painting
shops in e.g. the automotive industry.
Remote mounting kit for LCP2 175N0160
(for the FCD 300 series)
Kit for permanent mounting of the LCP2
in an enclosure.
Venting membrane 175N2116
Membrane preventing water build-up due to
condensation inside enclosures.
Star point terminal 175N2119
Six wires must be either star- or delta-connected
to supply an AC motor. Delta connection is
possible in the standard motor terminal. Star
connection requires a separate terminal.
5 pole M12 plug for e.g. DeviceNet 175N2279
(for the FCD 300 series)
The plug, micro type, M12 can be mounted into the
gland holes of the installation box. The plug can also be
used for other purposes such as connection of sensors.
2m drop cable for DeviceNet 195N3113
(for the FCD 300 series)
The cable can be mounted inside the terminal
box, and connects to the DeviceNet trunk line
via a micro connector (M12).
Viton Gasket for FCD 322-335 175N2450
With this gasket the FCD can be used in painting
shops in e.g. the automotive industry.
■Brake resistors (only for FCD 300)
Internally mountable brake resistors for low duty cycle
braking. The resistors are self-protecting.
Type FCD P motor kW Rmin R Duty cycle approx. % Code no.
303 0.37 520 1720 5 175N2154
305 0.55 405 1720 3 175N2154
307 0.75 331 1720 2 175N2154
311 1.1 243 350 1.5 175N2117
315 1.5 197 350 1 175N2117
322 2.2 140 350 1 175N2117
330 3.0 104 350 0.7 175N2117
335 3.3 104 350 0.5 175N2117
28
Single pulse braking approx. 0,6 kJ each 1-2 minutes.
Internal brake resistors cannot be mounted in
FCD 303-315 with service switch.
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 30
Flatpack brake resistors IP 65
Decentral Solutions - Design Guide
Type P
303 (400 V) 0.37 520 830 / 100 W 20 1000 2397
305 (400 V) 0.55 405 830 / 100 W 20 1000 2397
307 (400 V) 0.75 331 620 / 100 W 14 1001 2396
311 (400 V) 1.10 243 430 / 100 W 8 1002 2395
315 (400 V) 1.50 197 310 / 200 W 16 0984 2400
322 (400 V) 2.20 140 210 / 200 W 9 0987 2399
330 (400 V) 3.00 104 150 / 200 W 5.5 0989 2398
335 (400 V) 3.30 104 150 / 200 W 5.5 0989 2398
motor
[kW]
R
MIN
[ ]
Size [ ]/[W]
per item
Duty cycle % 2wires
Order no.
175Uxxxx
Screened cable
Order no.
175Nxxxx
Mounting bracket for brake resistors
Type Order no.
175Nxxxx
303-315 2402
322-335 2401
Coiled wire brake resistors Duty-cycle 40%
VLT type Intermit-
tent braking period
time
[seconds]
303 (400 V) 120 0,37 520 830 0,45 0,7 1976 1,5*
305 (400 V) 120 0,55 405 830 0,45 0,7 1976 1,5*
307 (400 V) 120 0,75 331 620 0,32 0,7 1910 1,5*
311 (400 V) 120 1,1 243 430 0,85 1,4 1911 1,5*
315 (400 V) 120 1,5 197 330 0,85 1,6 1912 1,5*
322 (400 V) 120 2,2 140 220 1,00 2,1 1913 1,5*
330 (400 V) 120 3,0 104 150 1,35 3,0 1914 1,5*
335 (400 V) 120 3,3 104 150 1,35 3,0 1914 1,5*
P
motor
[kW]
R
[ ]
min
R
[ ]
rec
P
b, max
[kW]
Therm.re-
lay
[Amp]
Code
number
175Uxxxx
Cable
cross
section
[mm
concept
The decentral
2
]
*Always observe national and local regulations
P
motor
R
min
R
rec
P
b, max
Therm. relay : Brake current setting of thermal relay
Code number : Order numbers for Danfoss brake resistors
Cable cross section : Recommended m
See dimensions of Coiled wire brake resistors in instructions MI.90.FX.YY
:RatedmotorsizeforVLTtype
: Minimum permissible brake resistor
: Recommended brake resistor (Danfoss)
: Brake resistor rated power as stated by supplier
inimum value based upon PVC insulated cober cable, 30 degree Celsius
ambient temperature with normal heat dissipation
Externally mounted brake resistors in general
No use of aggressive cleaning solvents. Cleaning
solvents must be pH neutral.
See Dynamic braking for dimensioning of
brake resistors.
MG.90.F3.02 - VLT is a registered Danfoss trademark
29
Page 31

Decentral Solutions - Design Guide
■Information and communication
Growth in the world of automation is increasingly
based on information technology. Having reformed
hierarchies, structures and flows in the entire office
world, use of information technology opens for a
similar restructuring of industrial sectors ranging
from process and manufacturing industries to
logistics and building automation.
Devices capability of communication and continuous
transparent channels for information are indispensable
in automation concepts of the future.
IT is an evident means for optimisation of system
processes, leading to improved exploitation of
energy, materials and investment.
Industrial communication systems are a key
function in this respect.
Cell level
Programmable controllers such as PLC and IPC
communicate at cell level. Large data packets
and numerous powerful communication functions
provide information flow. Smooth integration into
company-wide communication systems, such
as Intranet and Internet via TCP/IP and Ethernet
are important requirements.
Field level
Distributed peripherals such as I/O modules, measuring
transducers, drive units, valves and operator terminals
communicate with the automation systems via an
efficient, real-time communication system at field
level. Transmission of process data is performed in
cycles, while alarms, parameters and diagnostic data
have to be transmitted acyclically if necessary.
Sensor/actuator level
Binary signals from sensors and actuators are
transmitted purely cyclically via bus communication.
■Profibus
Profibus is a vendor-independent, open field bus
standard for use in a wide range of applications
in manufacturing and process automation.
Vendor-independence and openness are ensured
by the international standards EN 50170, EN
50254 and IEC 61158.
Profibus communicates between devices from different
manufacturers without specific interface adjustments
and can be used for both high-speed time critical
applications and complex communication tasks.
Due to ongoing technical developments, Profibus
is widely acknowledged as the leading industrial
communication system of the future.
More than 2,000 products from approximately
250 Profibus vendors are available today. More
than 6.5 million devices representing a huge
variety of products are installed and successfully
used in more than 500,000 applications in
manufacturing and process automation.
Danfoss Drives solution offers a cost
optimal Profibus solution
• MCT-10 software tool for access via standard PC
• Simple two-wire connection
• A universal, globally accepted product
• Compliance with the international standard
EN 50170
• Communication speed 12 Mbaud
• Access to drive master file makes planning easy
• Fulfilment of PROFIDRIVE guideline
• Integrated solution
• All frequency converters with Profibus are certified
by the Profibus organisation
• Danfoss frequency converters support
Profibus DP V1
Profibus DP V1 for two different purposes
Fieldbus systems are used for two very different
purposes with two very different sets of essentials in
modern automation applications. One is transfer of
signals referring to the process itself, the other service,
commissioning and set-up communication.
Transfer of control and status signals between sensors
and actuators is time critical and must be processed
reliably and in real time. This is accomplished by
cyclic communication where each node in the network
is polled within each cycle, and each cycle has a
pre-defined time. It is necessary to pre-define and
minimise the extent of data in each telegram to make
this work reliably and as fast as possible.
This consideration contradicts the second use of
the fieldbus, namely as a timesaving set-up and
diagnostics bus. Set-up and diagnostics are not
time-critical, not continuously used, and require a
larger amount of data in each telegram. Furthermore,
you would tend to control this information from a
PC or an interface device (HMI) - and not from
the master (typically a PLC) that controls the
cyclic communication. Standard Profibus does not
support networks with several masters so set-up and
diagnostics information must be contained in the
standard telegram handled by the master, making
for very long and time consuming telegrams with
room for information only sporadically used.
Profibus DP V1 now combines the two sets of
requirements from above in a single fieldbus system,
30
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 32

Decentral Solutions - Design Guide
allowing a second master to use the entire network
in a specified time slot in each cycle. Profibus
DP V1 thus operates with two classes of masters.
Masterclass 1 (typically a PLC) performs the cyclic
communication. Masterclass 2, typically an interface
device (HMI or PC), transfers non-time critical
information through non-cyclic communication.
Masterclass 2 masters can be connected anywhere
on the Profibus net and the communication channel
can be opened and closed anytime without disturbing
the cyclic communication. You can have non-cyclic
communication even without cyclic communication to
for instance transfer complete programs or set-ups.
Profibus DP V1 is fully compatible with prior
versions of Profibus DP V0. Profibus DP V0 and
Profibus DP V1 nodes can be combined in the
same network, although the master must support
Masterclass 2 communication.
User benefits:
• Connection to the motor controls is possible
from every part of the network
• Existing network can be used for commissioning,
set-up and diagnostic without disturbing of
the cyclic communication
• Both DP V1 and DP V0-nodes can be
connected in the same network
• No need for extensive telegrams in the PLC
or IPC. A second master who supports DP
V1 can handle set-up tasks
NB!:
DP V1 is only possible for Master
communication-cards which support
Masterclass 2 specification.
■DeviceNet
DeviceNet is a communications link that connects
industrial devices to a network. It is based on
the broadcast-oriented, communications protocol
CAN (Controller Area Network).
The CAN protocol was originally developed for the
European automotive market to be used in exchange
for expensive wire harnesses in automobiles. As
a result, the CAN protocol offers fast response
and high reliability for demanding applications
like ABS brakes and air bags.
• Acyclic communication – "explicit messaging"
• Unconnected Messages Manager (UCMM)
messages are supported
• Integrated solution
• Electronic Data sheet (EDS)-files secures
easy configuring
• Provides fieldbus voltage supply
• Fulfilment of DeviceNet AC/DC motor profile
• Protocol defined in accordance with the Open
DeviceNet Vendor Association (ODVA)
■AS-interface
AS-interface (AS-i) is a cost-efficient alternative
to conventional cabling at the lowest level of the
automation hierarchy. The network can link into a
higher-level fieldbus like Profibus for low-cost remote
I/O. Known by its yellow cable; AS-I has grown an
"open" technology supported by more than 100
vendors worldwide. Enhancements through time have
broadened its field of applications and AS-interface is
today proven in hundreds of thousands of products
and applications spanning the automation spectrum.
■InterBus
InterBus is an open, non-proprietary standard. It
complies with the EN 50254 standard. Using
decentralised motor controls with integrated
fieldbus communication allows you to connect
to an InterBus network.
• Easy connection
• Compliance with the international standard
EN 50254
• I/O based transmission principle, high
protocol efficiency
• Unified planning tool (e.g. CMD software)
• InterBus option is certified by the
Frauenhofer Institute
The Gateway IB-S/DP for Danfoss frequency
converters allows for up to 14 frequency converters of
different series on the same InterBus network.
■FC Protocol
An RS-485 interface is standard on all Danfoss
frequency converters allowing for up to 126 units in
one network. The FC protocol has a very simple
design described in Serial Communication.For
applications where data transmission speed is of less
importance, the RS 485 interface provides a good
alternative to the faster fieldbus solution.
concept
The decentral
Danfoss concept offers the cost optimal
DeviceNet solution
• Cyclic I/O communication
MG.90.F3.02 - VLT is a registered Danfoss trademark
The FC protocol can also be used as a service
bus for transfer of status information and parameter
setup. In this case it is combined with normal time
critical I/0 control via digital inputs.
31
Page 33

Decentral Solutions - Design Guide
■Good Installation Pr actice
■Flexible installation options
A major benefit of Danfoss’ decentralised concept
is saving installation cost partly due to the clever
two-part design of the DMS 300/FCD 300.
All electrical installation is done inside the installation
box prior to mounting the electronic part. Subsequently
the electronic part is plugged into the installation box,
fixed, and the drive is ready for operation.
Power line looping
The FCD 300 and DMS 300 series facilitates internal
2
power line looping. Terminals for 4 mm
power cables
inside the enclosure allows connection of up to 10+
units. FCD 300 and DMS 300 can be mixed along
the line. Average load must not exceed 25 A.
24 V control back up
External 24 V (20-30 V) DC can be connected
in the EX and EB versions for back-up of control
circuits. This way communication and programming
possibility are maintained even during power down.
The terminals are dimensioned for up to 2.5 mm
2
and are doubled for looping (FCD 300).
DMS 300 always needs 24 V external supply.
The T63 and T73 installation boxes have additional
2
loopingterminalsfor2X24Vwith4mm
.
Connected sensors can be supplied separately
from the control back up supply.
Example of power and bus looping
32
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 34

Decentral Solutions - Design Guide
■Guidelines for selection of cables and fuses in a
powerline installation with FCD and DMS products
It is assumed that the installation follows the Low
Voltage Directive as stated in HD 384 and IEC 60364.
This section can’tbeusedinexplosiveareasand
where fire hazard exists. In general cable dimension
has to follow IEC 60364-5-523. If the installation is
part of a machinery EN 60204-1 has to be followed.
Cables as mentioned under point 1, 2 and 3 in the
figure has to be protected by an enclosure or conduit.
The following section numbers refer to the figure.
1. The cable shall only be able to carry the maximum
continuous current of the friction brake. By
ground fault non-renewable protective circuit in
the FCD will interrupt the flow of current.
2. If the IP 65 brake resistors recommended by
Danfoss are used the cable will only be exposed
to the continuous current of the brake resistor.
If the brake resistor becomes overheated it will
disconnect itself. If another type or make of
brake resistor, without any power limitation device,
is used, the maximum power must be equal
to the rated power of the motor.
The current in Amps would be: I = 0.77/motor
power, with motor power inserted in kW; [A=V/W].
The rated motor current comes fairly close to the
current in the cable to the brake resistor.
3. The cables to encoders and thermistors are on
PELV potential. The currents are in mA range
and limited by the FCD or DMS. In order not
to violate the PELV protection of the control
terminals of FCD the thermistor has to have
reinforced insulation according to the PELV
demands. For EMI purposes the cables must
have their own electrical shielding and if possible
be kept separated from power cables.
4. The cable is protected by the current limit function
in the FCD. By ground faults and short circuit of
low impedance the FCD will interrupt the current.
5. The current is limited by the DMS*, and ground and
short circuit protected by the circuit breaker (CB).
6. The current is limited by the downstream FCD
and DMS*. The CB makes the ground and short
circuit protection. The impedance in the leads has
to be so low that the CB disconnects in 5 s by
low impedance ground faults. (TN supply).
7. If installation is on a machine (EN 60204-1) and
the distance between the T connection and
the FCD or DMS* is less than 3 m, the cable
can be downsized to the current capacity that
is needed for the down stream FCD.
8. The trip current for the CB upstream must not
be higher than the highest maximal prefuses for
the smallest FCD or DMS downstream.
See section Fuses for DMS coordination class.
For EMC purposes cable # 2, 3 & 4 has to be
shielded or placed in metal conduits.
* only extended versions
concept
The decentral
Example of de
MG.90.F3.02 - VLT is a registered Danfoss trademark
central cable dimensioning
33
Page 35

Decentral Solutions - Design Guide
■Service
Breakdown of Danfoss drives or geared motors only
occur under exceptional circumstances. As downtime
represents lack of production, failures must be located
and defective components replaced quickly.
Danfoss’ decentralised products place great
emphasis on addressing these issues. This chapter
also describes measures taken to make Danfoss
decentralised products superior in a service situation.
For detailed information on specific service issues
please consult relevant literature.
Centralised frequency converters from Danfoss have
pluggable connections to facilitate service using fast
and faultless replacement. The same concept is used
and improved for the decentralised drives.
Plug-and-drive
All the advanced and reliable electronics needed
to ensure your motors act smoothly, responsively
and economically at each command are hidden
inside the box lid and plug into connectors when
mounted onto the bottom section. The bottom section
contains maintenance-free Cage Clamp connectors
and looping facilities for power and fieldbus cables
well protected against dust, hosing and cleaning
agents. Once installed, commissioning and upgrading
can be performed in no time simply by plugging in
another control lid. See the illustration.
You only need standard installation material like cable
glands, cables, etc., to commission and service a
Danfoss decentralised drive. Special equipment like
hybrid cables not likely to be held in stock by a standard
supplier of electric installation components is needed.
This provides high flexibility and maximum uptime.
Product concept
Since the installation box only contains plugs,
connectors and low density pcb’s, it is not likely
to fail. In case of a failure in the electronic part,
just remove the six screws, unplug the electronic
part and plug in a new one.
34
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 36

Decentral Solutions - Design Guide
DMS 300 Series
195NA357.10
300
Introduction, DMS
MG.90.F3.02 - VLT is a registered Danfoss trademark
35
Page 37

■Operating instructions
DMS Version no.02
These operating instructions can be used for all
DMS 300 units with version no. 02.
The version no. can be identified from the
product serial number. The 5th and 6th digit
from left pertain to the version no.
Thus serial number xxxx-02-xxx indicates
version no. 02.
■Symbols used in this manual
When reading this manual you will come across
different symbols that require special attention.
The symbols used are the following:
NB!:
Indicates something to be noted by the reader
Indicates a general warning
Decentral Solutions - Design Guide
■Safety regulations
1. The DMS must be disconnected from the mains
if repair work is to be carried out.
2. The [COASTING STOP INVERSE] command
applied to the DMS does not disconnect the
equipment from the mains and thus is not
to be used as a safety switch.
It is the responsibility of the user or the
person installing the DMS to provide proper
grounding and branch circuit protection in
accordance with national and local regulations.
■Warning against unintended start
1. The motor can be brought to a stop by means
of digital commands, bus commands or a local
stop, while the DMS is connected to the mains. If
personal safety considerations make it necessary
to ensure that no unintended start occurs,
stop functions are not sufficient .
2. A motor that has been stopped may start if faults
occur in the electronics of the DMS.
these
Indicates a high voltage warning
■General warning
The DMS contains dangerous voltages
when connected to line voltage. Only a
competent electrician should carry out
the electrical installation. Improper installation of the
motor or the DMS may cause equipment failure,
serious injury or death. Follow this manual as well as
national and local rules and safety regulations.
■Avoiding DMS damage
Please read and follow all instructions in this manual.
Electrostatic Precaution; Electrostatic
discharge (ESD). Many electronic
components are sensitive to static
electricity. Voltages so low that they cannot be
felt, seen or heard, can reduce the life, affect
performance, or completely destroy sensitive
electronic components. When performing service,
proper ESD equipment should be used to prevent
possible damage from occurring.
36
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 38
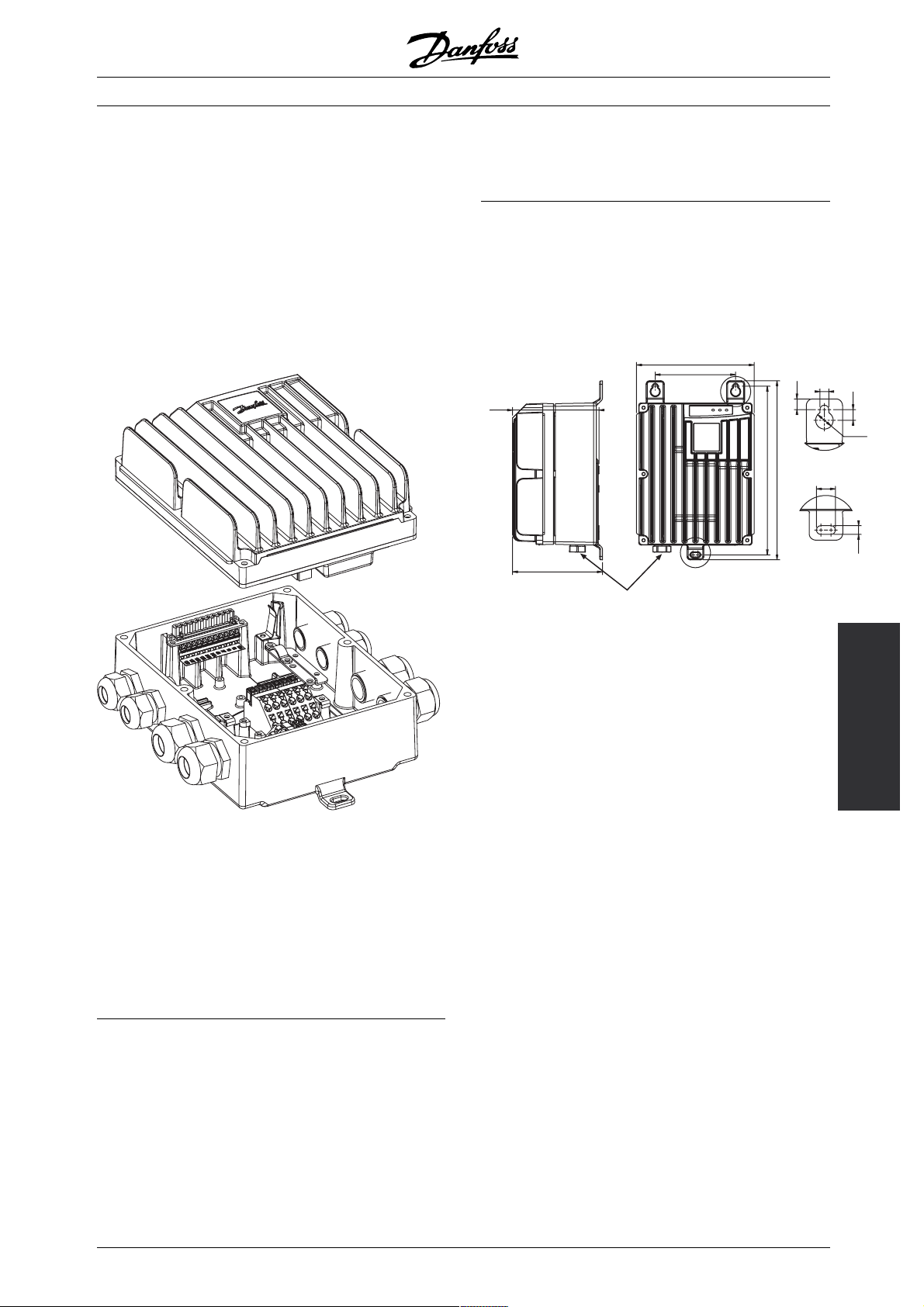
Decentral Solutions - Design Guide
■Description
The Danfoss DMS is an advanced electronic motor
starting system. It performs six main functions;
1. Start control, including soft start.
2. Stop control, including soft stop
(extendedstoptime).
3. Thermistor motor protection
4. Electronic motor protection (optional).
5. Electromechanical brake control (optional)
6. Monitoring & system interface.
■General layout
- Centre-punch for motor-mounted versions, if
not already mounted on a motor
■Wall mounting
For best cooling, the DMS unit should be mounted
vertically. If needed, horizontal mounting is allowable.
For installing, use the three eye-holes provided.
Use the nylon washers provided to avoid
scratching the protective paint.
mm (inches)
129 (5.10)
134 (5.28)
Earth plug for type T73
16 mm2 (0.63 in2) max.
176 (6.93)
120 (4.73)
252 (10.00)
267 (10.50)
8.0 (0.32)
6.5 (0.26)
14.0 (0.55)
177ha002.20
8.0 (0.32)
ø 13.0 (0.51)
6.5 (0.26)
177ha010.10
■Construction
TheDMSunitismadeoftwoseparableparts:
1. Installation box, which is the bottom half. The
installation box has all the mounting arrangement,
cable entries, and earthing studs.
2. Electronics Module, which is the top half.
The electronics module contains all the
circuitry of the DMS.
■Tools required
The DMS unit does not require any special
tools for installation.
All the power & control connections are
snap-on, spring-loaded type.
The following set of tools is adequate for
installing the DMS units:
- Screw Drivers, general (or T20 Torxslot)
- Spanners – 28 AF and 24 AF
Dimension drawing - DMS Wall mount version
300
DMS
Mechanical details,
MG.90.F3.02 - VLT is a registered Danfoss trademark
37
Page 39

■Motor mounting
1. Remove the cover of motor terminal box.
2. In the DMS Installation box, knock out 4 screw
holes to match the motor terminal box.
Two hole-patterns (4 holes each) have been
provided to suit Danfoss Bauer geared motors,
depending on the power size of the motor.
For different motors use the outer holes and the
adaption plate [Order no. 175N2115]
3. In the DMS Installation box, knockout the motor
cable gland (1 of 30 mm diameter) for the power
connection to motor terminals.
4. Mount the DMS Installation Box direct on
the motor terminal box.
98.0
60.0
60.0
98.0
Decentral Solutions - Design Guide
FLC
100%
90%
80%
70%
177ha021.10
Derating curve for temperature
FLC
100%
98%
96%
40 (140) 50 (122) 60 (140)
Temperature
40 (104)
38 (100)
°C (°F)
F) at 100% FLC
o
C (
o
177ha008.10
Dimension drawing - DMS Motor mount version
NB!:
Do not mount in direct sunlight or near
heat radiating elements.
■Ventilation
DMS cooling is by means of air circulation.
Consequently, the air needs to be able to move
freely above and below the soft starter.
If installing the DMS in a switchboard or other
enclosure, ensure there is sufficient airflow through
the enclosure to limit heat rise in the enclosure
to maintain the internal enclosure temperature
at or below 40 deg. C. (Heat loss of DMS at
rated current is 18 watts approx.).
94%
92%
177ha022.20
1000 (3300)
Altitude from Mean Sea Level
Derating curve for altitude
2000 (6600) 3000 (10000)
36 (97)
Max. ambient temperature
34 (93)
m (ft)
38
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 40

■Power Wiring
Connect the Supply voltage to the DMS input
terminals 1/L1, 3/L2 & 5/L3.The terminals in the
Extended versions of the DMS allow two cables
to loop the power line as shown.
Use of screw driver to open the connector clamp
177ha011.10
Decentral Solutions - Design Guide
For ST & SB versions, provide strain relief for power
and control cables by using the cable support
provided in the DMS unit, as shown.
■Power factor correction
3-phase Mains from
power-bus/
previous unit
3-phase Mains to
next unit
e77ha013.eps
Looping the power line - 3-phase mains
Connect the Motor terminals to the DMS output
terminals 2/T1, 4/T2 & 6/T3. Take care of the phase
sequence to have the correct direction of rotation.
The terminals in the Extended versions of the
DMS allow two cables to connect two motors
in parallel to one DMS.
Maximumcrosssection: 4mmsq. (10AWG)
If a DMS is used with static power factor
correction it must be connected to the
supply side of the DMS.
Connecting power factor correction
capacitors to the output of the DMS will result
in damage to the DMS.
■Control Wiring
Complete the Control wiring as shown in the
Electrical Schematic diagram.
Use of a screw driver to open the connector clamp
for control terminals [Press to open the clamp]
Electrical
connections, DMS 300
MG.90.F3.02 - VLT is a registered Danfoss trademark
177ha012.10
Rev310103
Connect Control Supply / AS-i Interface at
the terminals provided.
Contacts used for controlling these inputs should be
low voltage, low current rated (Gold flash or similar)
Maximum cross section: 2.5 mm2 (12 AWG)
39
Page 41

Decentral Solutions - Design Guide
Use cables complying with local regulations.
■Motor thermistors
If the motor is fitted with thermistors these may be
connected directly to the DMS. To connect the
thermistors, first remove the shorting link, and then
connect the thermistors between terminals 31A & 31B.
Use double-isolated thermistors to
retain PELV.
■Serial communication
The DMS can be equipped with either AS-i or
Profibus communication capabilities.
The AS-i and Profibus interfaces are optional.
The AS-i Fieldbus is connected at terminals 125 & 126.
The details of the Profibus connectivity are given
at the end of the manual.
NB!:
Communications and control cabling should
not be located within 300mm of power
cabling. Where this cannot be avoided
consideration should be given to providing magnetic
shielding to reduce induced common mode voltages,
for example, by laying the communication and
control cables in a separate conduit.
■Galvanic isolation (PELV)
All control terminals, and terminals for serial
communication are safely isolated from
the mains potential, i.e. they comply with
the PELV requirements of EN/ IEC 60947-1. PELV
isolation of the control card is guaranteed provided
there is max. 300 VAC between phase and earth.
■Earthing
Ensure that the DMS unit is earthed
properly. Use the chassis earth studs
provided for the purpose (4 of size M4).
For type T73 units, an external earth plug
(size M8) is provided to facilitate earthing.
To retain the IP rating of DMS, remember
to close all the unutilized cable entries
using the gland plugs (bungs) provided
loose with the DMS unit. In units with external plugs,
all plugs must be correctly mounted.
■High voltage warning
The voltage of the DMS is dangerous
whenever the equipment is connected to
the mains. Ensure the DMS is correctly
connected and that all safety measures have been
taken before switching on the supply.
40
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 42

■Electrical Schematic
Decentral Solutions - Design Guide
MG.90.F3.02 - VLT is a registered Danfoss trademark
Electrical
connections, DMS 300
41
Page 43

■Adjustment/ Settings
DMSadjustmentsaremadeusingtheDIPswitch
adjustment panel located on the underside
of the Electronics module.
Decentral Solutions - Design Guide
Section Switch no.
177ha007b.10
1
2
3
4
5
6
1
2
3
4
5
6
OFF
ON
Note: Settings marked gre
only in Extended versions.
1 Off
2 Off
A
3 Off
4
5 Off
6
1 Not used
2 3.2A Off
3 1.6A Off
B
4 0.8A Off
5 0.4A Off
6
y are applicable
Description Value Factory setting
Start/ stop profile
setting
Selection of ramp
times and start
voltage. See
table below.
Off
Trip class selection See table below
Off
Off
Full load current
setting (note:
0.1Ampsisalways
added internally)
0.2A
Off
See table below
Profile no.0
Trip class 5
FLC = 0.1A
■Start/ stop profile setting
Choose the required Start/ Stop profile which
is most suited to the application. Use DIP
7 Sec.
Start ramp Stop ramp
100%
80%
60%
Motor voltage %
40%
20%
4
8
Run
4
8
4 Sec.
Start ramp
100%
80%
60%
Motor voltage %
40%
20%
177ha025.10
26
Start-stop Profile no: 14
26
Start-stop Profile no: 7
Time, sec.
[DIP Switch settings
A1,A2,A3:ON; A4:OFF]
Time, sec.
[DIP Switch settings
A1:OFF; A2,A3,A4:ON]
Run
5 Sec.
Coast to stop
switchesA1-A4tosetthestart/stopprofile.
Some examples are shown below.
42
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 44

■Start/ stop profile setting table:
Decentral Solutions - Design Guide
Start
Start/stop
Profile
0 Equivalent to DOL Coast to stop Off Off Off Off 80 0.25 *
1 Fastest
2 |
3 |
4 |
5 |
6 |
7
8
9 Slowest
10 Fastest Fastest
11 | |
12 | |
13 | |
14 | |
15 Slowest Slowest
Start
Performance
|
|
Stop
Performance
Coast to stop
1(A1) 2(A2) 3(A3) 4(A4)
Off Off Off On 80 0.5 *
Off Off On Off 60 0.75 *
Off Off On On 60 1.5 *
Off On Off Off 60 1.0 *
Off On Off On 50 2 *
Off On On Off 40 3 *
Off On On On 50 4 *
On Off Off Off 60 6 *
On Off Off On 60 8 *
On Off On Off 60 2 1
On Off On On 50 3 2
On On Off Off 40 4 3
On On Off On 40 5 3
On On On Off 30 7 5
On On On On 30 9 7
Initial
Voltage (%)
Ramp
Time
(sec) #
Stop
Ramp
time (sec)
#
Note: * indicates Stop Ramp time is not controlled
by DMS. Motor will coast to stop.
■Trip Class selection:
This setting is applicable only for the Extended
versions of DMS.
The DMS motor overload protection is an advanced
motor thermal model. Motor temperature is
continuously calculated by the microprocessor.
This uses a sophisticated mathematical model
to accurately reflect motor heat generation and
dissipation during all stages of operation, e.g.
Starting, Running, Stopping & Stopped.
Because it operates continuously, the motor thermal
model eliminates the need for protection systems such
as Excess Start Time, Limited Starts per hour etc.
Calibrate the DMS motor thermal model for theTrip
Class of the connected motor. The Motor Trip
Class is defined as the length of time the motor
can sustain Locked Rotor Current. The motor
Trip Class can be found from the motor curves
or data sheet. For example, if a given motor can
# In some applications, actual ramp time on the
motor shaft could differ from the settings.
withstand Locked Rotor Current for 10 sec, set
Trip Class 10 (or lower) in the DMS.
If in doubt, use "Trip Class 5", which is the Factory
Default setting for this parameter. With this setting,
the DMS will trip & protect the motor if the Locked
Rotor current sustains for more than 5 secs.
Use the DIP switches A5-A6 to choose the Trip Class.
■Trip Class selection table:
Trip Class
Time (sec)5(A5)
5 Off Off Trip Class 5
10 Off On Trip Class 10
20 On Off Trip Class 20
0 On On Motor Protection off
6
(A6)
Remarks
300
Setting up DMS
MG.90.F3.02 - VLT is a registered Danfoss trademark
43
Page 45

Decentral Solutions - Design Guide
■Full Load Current setting:
This setting is applicable only for the Extended
versions of DMS and refers to the ETR function. It
may not be used for current limitation.
Calibrate the DMS for the connected motor
nameplate Full Load Current (FLC).
■FLC setting table:
DIP Switch bits Value (Amps)
2(B2) 3.2 On Off
3(B3)
4(B4) 0.8 On On
5(B5) 0.4 Off On
6(B6) 0.2 On Off
6.3Amps,whenB2-B6are
all On
1.6
Note:0.1 Amps is added internally to the
value read from DIP switches.
Use the five (5) DIP switches B2-B6 to add up to motor
nameplate FLC minus 0.1 Amps. (0.1 Amps is added
internally to the FLC amps. read from the DIP switches)
Please note that switch B1 is not used.
Example-1 for setting
FLC=4.3 Amps
Off On
0.1+3.2+0+0.8+0+0.2 = 4.3
See remark
Example-2 for setting FLC=2.9
Amps
0.1+0+1.6+0.8+0.4+0 =2.9
See remark
■Completing the installation:
To complete installation, fit the DMS Electronics
module to the DMS Installation box and secure with
the screws provided. Recommended tightening torque
for the screws is between 2.5 and 3 Nm.
44
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 46

■Operation
Once the DMS has been installed, wired and
programmed according to the instructions,
it can be operated.
Decentral Solutions - Design Guide
■Operation with AS-i Interface
The AS-i switch profile S-7.E is used, having
the following inputs and outputs:
■Powering-up the DMS
Power may now be applied to the DMS unit.
The "On" LED should glow when the 24VCD
Control Supply is turned On.
■Starting the motor:
Connect +24VDC to the "Reset/ Coasting
stop inverse input (27).
To start the motor in the Forward direction,
use the Start CW Input (18). To initiate a stop,
open the Start CW Input.
To start the motor in the Reverse direction, use the
Start CCW Input (19).This feature is optional. To
initiate a stop, open the Start CCW Input.
If the direction of rotation is wrong, change any
two of mains or motor phases.
Disconnecting the +24VDC to the "Reset/ Coasting
stop inverse input (27) will disable the DMS and
cause the motor to coast to stop.
NB!:
If both Start CW & Start CCW inputs are
active together, the motor will stop.
• Start CW (DO)
• Start CCW (D1)
• Brake Control (D2)
• Reset (D3)
• Ready output(D0)
• Run Output (D1)
• Fault Output (D2)
The profile codes with the different variants are:
• Profile 7E 1 for Extended
• Profile 7E 3 for Extended with Brake
• Profile 7E 4 for Extended with Brake & Reversing
300
Operation details, DMS
■Brake Release
(For variants with Braking function only variants SB, EB, ER).
When a Start is initiated, the DMS automatically
generates a brake release command. This will release
the brakes before the motor starts running.
The motor brake can also be released without
starting the motor by connecting +24VDC to
the Brake Release input (124).
NB!:
Mains supply to the DMS is required
for the operation of Brake Release.
The Electromechanical brake supply is
not short-circuit protected.
MG.90.F3.02 - VLT is a registered Danfoss trademark
45
Page 47

■Description of AS-i profiles used with DMS
Decentral Solutions - Design Guide
Bit Type for host Meaning
D0 output Run forward
D1 output Run reverse
D2 output Brake
D3 output Fault reset
D0 input Ready
D1 input Running
D2 input Fault
D3 input Not used
P0 parameter Not used
Host
level
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
Direct starter
Profile 7E 1
Stop - forward
Start - forward
Not used Not used
Not used
Not reset
Reset
Not ready or fault
Ready
Motor stopped
Motor running
No fault
Fault
Not used Not used Not used
Direct starter with brake
Profile 7E 3
Stop - forward
Start - forward
Motor blocked
Motor free
Not reset
Reset
Not ready or fault
Ready
Motor stopped
Motor running
No fault
Fault
Reverser with brake
Stop - forward
Start - forward
Stop - reverse
Start - reverse
Motor blocked
Not ready or fault
Motor stopped
Motor running
Profile 7E 4
Motor free
Not reset
Reset
Ready
No fault
Fault
P1 parameter Not used
P2 parameter Not used
P3 parameter Not used
It is possible to operate DMS with both the control
inputs and an AS-i Interface. It will function as follows:
• Start CW: Logically "OR"ed – DMS will Start
if either input is active.
• Start CCW: Logically "OR"ed – DMS will
Start if either input is active.
• Brake: Logically "OR"ed – DMS will generate Brake
release command if either input is active.
• Reset/Coasting stop inverse: Logically "AND"ed.
NB!:
Both inputs must be active for DMS to Start.
If AS-i bus is used for control, the binary
Reset/Coasting stop inverse input must be
held active (i.e. connected to +24 VDC)
Configuring DMS with a Slave address:
Use a standard AS-i addressing device or the AS-i
master to configure the DMS with the designated
slave address on the AS-i network.
46
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 48

Decentral Solutions - Design Guide
■Fault Procedure
Use the Reset (Reset/ Coasting stop inverse)
The "Alarm" LED (Red), when illuminated, indicates
that the DMS is in the alarm/ trip state.
input to reset any fault.
The "On" LED (Green), when illuminated, indicates
that the Control supply is on.
The "Bus" LED (Green), when illuminated, indicates
The number of Alarm LED flashes indicates the fault/
trip condition. The Alarm LED will flash a certain
number of times, depending on the nature of fault.
that AS-i bus communication is OK.
■Reading the "Alarm " LED
No. of flashes Trip Condition Cause & Action
One (1) PowerLossorShortedSCR Check supply voltages. This is a pre-start check.
Two (2) Thermal Overload Check FLC setting.
Check the Motor Trip class setting.
Remove the cause of the overload and let the motor cool
before restarting.
Three (3) Motor Thermistor Trip Identify and correct the cause of motor overheating.
If no thermistors are connected to the DMS, ensure there is
a closed circuit across the motor thermistor input (terminals
31A & 31B).
Four (4) Phase Loss Check supply for missing phase. This is active anytime during
start.
Five (5) Welded Direction Change Relay Replace unit.
300
Operation details, DMS
MG.90.F3.02 - VLT is a registered Danfoss trademark
47
Page 49

Decentral Solutions - Design Guide
■General Technical Data
Supply (L1, L2, L3, 125, 126, 127, 128):
Mains Supply voltage ........................................................................................ 3 x 380 VAC ~ 480 VAC +/- 10%
Mains Supply frequency .................................................................................................................. 45HZ ~ 65 Hz
Electronics control voltage ......................................................................... +24VDC (20V to 30V), 150mA nominal
Control Inputs
Start (Terminals 18 & 19) ....................................................................................... Binary, 24 VDC, 8mA approx.
Reset/ Coasting stop inverse(Terminal 27) ........................................................ Binary, 24 VDC, 90mA approx. #
Release Electromechanical Brake (Terminal 124) ................................................... Binary, 24 VDC, 8mA approx.
The Control inputs are suitable for connection to a device with a PNP output stage.
# 20 mA approx. for Standrad versions (SB & ST)
Outputs
Run Output (Terminal 46) ..................................................................... Binary, PNP output, 24 VDC, 20mA max.
The output is short circ uit protected.
Electromechanical Brake Supply output
Electromechanical Brake Supply Output (Terminals 122 & 123) ........................................ 180 VDC, 1.0 A max. *
* The electromechanicalbrake supply output voltage is proportional to the mains supply voltage,
which is 180 VDC for 400VAC mains, 205 VDC for 460 VAC mains.
The output is not short circuit protected.
Surroundings
Operating temperature .............................................................. -10 to +60 deg. C (above 40 deg. with derating)
Relative humidity ........................................................................................................ 5 -90% RH, non-condensing
Weight .......................................................................................................................................................... 3.5 kg
■Current Ratings (AC53a ratings)
These ratings assume Starting current of 500%
FLC. All ratings are in Amps.
Continuous Ratings ( Not bypassed) at 40 deg. C Ambient Temperature, < 1000 metres
Duty Cycle
No. of starts per hour Start Time (sec.)
10 5 8.4 8.7 9.0
50 5 7.9 8.1 8.3
100 5 7.3 7.5 7.6
300 1 7.7 8.0 8.2
70% 50% 30%
For ambient temperature or altitude conditions
beyond those listed contact Danfoss.
48
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 50

Decentral Solutions - Design Guide
■Ordering type code
The DMS is available in the following variants:
-Standard
-StandardwithBrake
-Extended
-ExtendedwithBrake
- Extended with Brake & Reversing
■Certifications
The DMS 300 has CE, UL, cUL and C-tick
certifications. The details are as under:
CE
Rated insulation voltage ........................................................................................................................... 500 VAC
Rated impulse withstand .......................................................................................... 2.0 kV (1.2/ 50 microsecond)
Conducted and radiated frequency emissions ............................................................... Class B as per EN 55011
Electrostatic discharge, 4 kV contact and 8 kV air discharge ............................................... no effect on operation
Radio frequency electromagnetic field, 0.15 MHz to 1.0 GHz ............................................. no effect on operation
Fast transients, 2.0 kV/ 5.0 kHz .......................................................................................... no effect on operation
Surges, 2.0 kV line to earth, 1.0 kV line to line ................................................................... no effect on operation
Voltage dips and short interruptions .................................................................................... no effect on operation
Short circuit tested on 5 kA supply, when protected by semiconductor fuses (Type 2 co-ordination) ................ no
damage to DMS 300, no danger to persons or installation
Short circuit tested on 5 kA supply, when protected by HRC fuses (Type 1 co-ordination) ................................ no
danger to persons or installation, DMS unit may be unsuitable for future use
The Extended varaints are available with integrated
Fieldbus AS-i interface. The extended versions can be
delivered with Profibus interface including 4 additional
M12 plugs for connection of external sensors.
Refer to the table for the Part numbers
correspondingtothevariants.
For example, the part number for a Motor Mount
DMS unit, with Reversing function, and without
Fieldbus connection would be:
DMS330PT4P66ERD0F00T12C0
Specification and
order codes, DMS 300
UL
Conforms to the requirements of UL certification (reference number E206590) .....................................................
C-tick
Conforms to IEC/EN 60947-4-2. ............................................................................................................................
IP66
Degree of protection of the enclosure conforms to IEC/EN 60947-1.. ..................................................................
To maintain certifications, the product shall not
be modified an any way, shall be used only for
the specified purpose, and must be installed
according to this manual and/or any other
authorized Danfoss instruction.
MG.90.F3.02 - VLT is a registered Danfoss trademark
49
Page 51

■Fuses
The DMS 300 should be used with suitable fusing as
per the co-ordination requirements of the circuit..
Max pre-fuses: DMS 300 meets Type 1 co-ordination
with properly rated HRC fuses.
Use type gG 25A, 415 VAC or equivalent HRC fuses.
Semiconductor fuses are required to meet
UL, C-UL Certification.
Semiconductor fuses listed below are manufactured
by Bussmann and should be ordered directly from
Bussmann or their local supplier.
Bussmann, High Speed fuse, Square body, Size 000,
660 V, 20 Amps rated - Part no: 170 M 1310
or
Bussmann, British style, BS88, Type CT, 690 V,
20 Amps rated - Part no: 20CT
■Special variants:
In addition to the installation boxes described
earlier, DMS units can be offered as variants with
additional functionality and options
Example 1
Variant T73: DMS Extended unit with Profibus
communication option, 4 x M12 sensor plugs
(as described above) plus a special Harting
connector for motor connections.
Decentral Solutions - Design Guide
■Motor connection
The motor must be connected by a Han 10E
connector according to the DESINA standard.
Pin
no.
1 Motor U 6–8 Not connected
2 Motor V 9 Motor thermistor A
3 Motor W 10 MotorthermistorB
4
5
Function
Electromechanical
brake A
Electromechanical
brake B
Example 2
Variant T22 or T62: DMS Extended unit with
an integra
ted service switch.
Pin
no.
PE Earth connection
Function
Picture of DMS Unit with Profibus card, with
4 x M12 connectors for sensors, and Harting
connector for Motor connections
50
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 52

Decentral Solutions - Design Guide
o
The service switch can either be connected between
the mains supply & DMS unit, or between DMS
unit and the motor, as shown here.
3-PHASE SUPPLY
(POWER-BUS)
SERVICE SWITCH
1/L1
3/L2
DMS Unit
5/L3
2/T1
4/T2
6/T3
To Motor
SERVICE SWITCH
SERVICE SWITCH
177ha024.10
3-PHASE SUPPLY
(POWER-BUS)
To other Decentral controllers
1/L1
3/L2
DMS Unit
5/L3
1/L1
3/L2
DMS Unit
5/L3
The service switch used for providing isolation to DMS Unit and the mot
1/L1
3/L2
DMS Unit
5/L3
The service switch used for providing isolation to only the motor.
2/T1
4/T2
6/T3
2/T1
4/T2
6/T3
SERVICE SWITCH
2/T1
4/T2
6/T3
To Motor
To Motor
To Motor
Examples of connection of Service switch
Specification and
order codes, DMS 300
MG.90.F3.02 - VLT is a registered Danfoss trademark
51
Page 53

Decentral Solutions - Design Guide
■Details of Profibus Connectivity NB!:
When using Profibus interface, the complete
control of the DMS is done by the Profibus.
he DMS control terminals cannot be used.
T
Connect 24V control supply to terminals
203(-) and 204(+).
The terminals are located on the Profibus card.
■Profibus DP Slave 6 E/DC 24 V, 4 A/DC 24 V/1A
spring terminal block 2 x 2 x 2.5sq.mm.
connection bus connection
termination switchable, SW2 both on
supply power to the module voltage range incl. ripple 20-30VDC
ripple max. 10%
current consumption nom. 90 mA
connection
69: A-Line RxD/TxD-N, green wire 68:B-Line
RxD/TxD-P, red wire
spring terminal block 2 x 2 x 2.5sq.mm.
201: DC 0 V, 202:DC 24 V
supply power input and output voltage range incl. ripple 20-30VDC
connection
galvanic isolation isolation voltage
Bus interface Bus system Profibus DP
module type Slave I/O module
standard DIN 19245
datawidthintheprocessimage 1 Byte inputs, 1 Byte outputs
fieldbus controller LSPM2
identifier 0409 hex
addressing Node ID: 1-99 set by DIP switch SW3
baud rate up to 12Mbaud, automatic detection
spring terminal block 2 x 2 x 2.5sq.mm.
203: DC 0 V, 204:DC 24 V
DC 500 V between bus and electronics
DC 2.5kV between module supply and inputs/ outputs
■Tableofbitsincontrolandstatusword
Terminal connection Function
Output 1 18 Start CW Bit 0
Output 2 19 Start CCW Bit 1
Output 3 27 Reset/ Coasting stop inverse Bit 2
0V 125 (203)
+24V 126 (204)
Input 1 M12, I1 Input Bit 0
Input 2 M12, I2 Input Bit 1
Input 3 M12, I3 Input Bit 2
Input 4 M12, I4 Input Bit 3
Input 5 46 Ready Bit 4
Profibus control
word
Profibus status word
52
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 54

The GSD file is available on the internet at
www.danfoss.com/drives
■Profibus connector PCB 4 x M12
inputs number 4xM12femalesocketIP67
M12 female socket
Pin 1: DC 24 V
connection
Pin 2: NC (not connected)
Pin 3: DC 0 V
Pin 4: input
■Profibus address setting: DIP switch SW3
Address decimal DIP 1 DIP 2 DIP 3 DIP 4 DIP 5 DIP 6 DIP 7 DIP 8
x0 1 1 1 1 x x x x
x1 0 1 1 1 x x x x
x2 1 0 1 1 x x x x
x3 0 0 1 1 x x x x
x4 1 1 0 1 x x x x
x5 0 1 0 1 x x x x
x6 1 0 0 1 x x x x
x7 0 0 0 1 x x x x
x8 1 1 1 0 x x x x
x9 0 1 1 0 x x x x
0x x x x x 1 1 1 1
1x x x x x 0 1 1 1
2x x x x x 1 0 1 1
3x x x x x 0 0 1 1
4x x x x x 1 1 0 1
5x x x x x 0 1 0 1
6x x x x x 1 0 0 1
7x x x x x 0 0 0 1
8x x x x x 1 1 1 0
9x x x x x 0 1 1 0
Decentral Solutions - Design Guide
Specification and
order codes, DMS 300
The address 00 is not allowed. Also all positions
not listed in the table are not allowed. In those
cases address 126dec is used.
MG.90.F3.02 - VLT is a registered Danfoss trademark
53
Page 55

Decentral Solutions - Design Guide
FCD 300 Series
Design guide
Software version: 1.5x
This design guide can be used for all FCD 300 Series frequency converters with software version 1.5x.
The software version number can be seen from parameter
640 Software version no.
195NA193.12
NB!:
This symbol indicates something that should
be noted b
Indica
This symbol indicates a warning
of high voltage.
y the reader.
tes a general warning.
54
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 56

Decentral Solutions - Design Guide
■High voltage warning
The voltage of the frequency converter
is dangerous whenever the converter
is connected to mains. Incorrect fitting
of the motor or frequency converter may cause
damage to the equipment, serious injury or death.
Consequently, it is essential to comply with the
instructions in this manual as well as local and
national rules and safety regulations.
■These rules concern your safety
1. The frequency converter must be disconnected from
the mains if repair work is to be carried out. Check
that the mains supply has been disconnected
and that the prescribed time has passed before
removing the inverter part from the installation.
2. The [STOP/RESET] key on the optional control
panel does not disconnect the equipment from
mains and is thus not to be used as a safety switch.
3. The unit must be properly connected to the
earth, the user must be protected against the
supply voltage and the motor must be protected
against overloading pursuant to prevailing
national and local regulations.
4. The earth leakage currents are higher than 3.5 mA.
5. Protection against motor overload is not included
in the factory setting. If this function is required,
set parameter 128 Motor thermal protection to
data value ETR trip or data value ETR warning.For
the North American market: The ETR functions
provide overload protection of the motor, class
20, in accordance with NEC.
■Warning against unintended start
1. The motor can be brought to a stop by
means of digital commands, bus commands,
references or a local stop, while the frequency
converter is connected to mains. If personal
safety considerations make it necessary to
ensure that no unintended start occurs, these
stop functions are not sufficient.
2. While parameters are being changed, the
motor may start. Consequently, the stop
key [STOP/RESET] on the optional control
panel must always be activated, following
which data can be modified.
3. A motor that has been stopped may start if faults
occur in the electronics of the frequency converter,
or if a temporary overload or a fault in the supply
mains or the motor connection ceases.
Warning:
It can be extremely dangerous to touch the electrical parts
even when the AC line supply has been disconnected.
For FCD 300: wait at least 4 minutes.
195NA194.10
300
Introduction to FCD
MG.90.F3.02 - VLT is a registered Danfoss trademark
55
Page 57

■Technology
■Control principle
A frequency converter rectifies AC voltage from
the mains supply into DC voltage, following which
it changes this voltage to an AC voltage with
variable amplitude and frequency.
The motor thus receives a variable voltage and
frequency, which enables infinitely variable speed
control of three-phase, standard AC motors.
1. Mains voltage
3 x 380 - 480 V AC, 50 / 60 Hz.
2
. Rectifier
Three-phase rectifier bridge which rectifies AC
voltage into DC voltage.
Decentral Solutions - Design Guide
■The decentral concept
The FCD 300 Adjustable speed drive is designed
for decentral mounting, e.g. in the food and
beverage industry, in the automotive industry, or
for other material handling applications.
With the FCD 300 it is possible to utilize the cost saving
potential by placing the power electronics decentrally,
and thus make the central panels obsolete saving
cost, space and effort for installation and wiring.
The unit is flexible in its mounting options for as
well stand alone mounting and motor mounting. It
is also possible to have the unit pre-mounted on
a Danfoss Bauer geared motor (3 in one solution).
The basic design with a plugable electronic part and
a flexible and "spacious" wiring box is extremely
servicefriendly and easy to change electronics
without the need for unwiring.
The FCD 300 is a part of the VLT frequency converter
family, which means similar funcionality, programming,
and operating as the other family members.
. Intermediate circuit
3
DC voltage √2 x mains voltage [V].
4
. Intermediate circuit coils
Evens out the intermediate circuit current and
limits the load on mains and components (mains
transformer, cables, fuses and contactors).
. Intermediate circuit capacitor
5
Evens out the intermediate circuit voltage.
6
. Inverter
Converts DC voltage into a variable AC voltage
withavariablefrequency.
. Motor voltage
7
Variable AC voltage depending on supply voltage.
Variable frequency: 0.2 - 132 / 1 - 1000 Hz.
. Control card
8
Here is the computer that controls the inverter
which generates the pulse pattern by which
the DC voltage is converted into variable AC
voltage with a variable frequency.
■FCD 300 control principle
A frequency converter is an electronic unit which is able
to infinitely variably control the rpm of an AC motor.
The frequency converter governs the motor speed
by converting the regular voltage and frequency from
mains, e.g. 400 V / 50 Hz, into variable magnitudes.
Today the frequency converter controlled AC motor is
a natural part of all types of automated plants.
The FCD 300 Series has an inverter control system
called VVC (Voltage Vector Control). VVC controls
an induction motor by energizing with a variable
frequency and a voltage suitable for it. If the motor
load changes, so does its energizing and speed. That
is why the motor current is measured on an ongoing
basis, and a motor model is used to calculate the
actual voltage requirement and slip of the motor.
■Programmable inputs and outputs in four Setups
In the FCD 300 Series it is possible to program the
different control inputs and signal outputs and to select
four different user-defined Setups for most parameters.
It is easy for the user to program the required functions
on the control panel or via serial communication.
56
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 58

Decentral Solutions - Design Guide
■Mains protection
The FCD 300 Series is protected against the transients
that may occur on the mains, such as coupling with
a phase compensation system or transients from
fuses blown or when lightening strikes.
Rated motor voltage and full torque can be maintained
down to approx. 10% undervoltage in the mains supply.
As all 400 V units in the FCD 300 Series have
intermediate circuit coils, there is only a low amount
of harmonic mains supply interference. This gives
a good power factor (lower peak current), which
reduces the load on the mains installation.
■Frequency converter p rotection
The current measurement in the intermediate
circuit constitutes perfect protection of the FCD
300 Series in case there is a short-circuit or an
earth fault on the motor connection.
Constant monitoring of the intermediate circuit
current allows switching on the motor output,
e.g. by means of a contactor.
Efficient monitoring of the mains supply means that
theunitwillstopinthecaseofaphasedrop-out(if
the load exceeds approx. 50%). In this way, the
inverter and the capacitors in the intermediate circuit
are not overloaded, which would dramatically reduce
the service life of the frequency converter.
The FCD 300 Series offers temperature protection
as standard. If there is a thermal overload, this
function cuts out the inverter.
at low frequencies because of reduced fan speed
(motors with internal fan). This function cannot protect
the individual motors when motors are connected in
parallel. Thermal motor protection can be compared
to a protective motor switch, CTI.
To give the motor maximum protection against
overheating when it is covered or blocked, or if the fan
should fail, you can install a thermistor and connect it
to the frequency converter’s thermistor input (Digital
input), see parameter 128 Thermal motor protection.
NB!:
This function cannot protect the individual
motors in the case of motors linked in parallel.
300
Introduction to FCD
■Reliable galvanic isolation
In the FCD 300 all digital inputs/outputs, analogue
inputs/outputs and the terminals for serial
communication are supplied from or in connection
with circuits that comply with PELV requirements.
PELV is also complied with in relation to relay
terminals at max. 250 V, so that they can be
connected to the mains potential.
See section Galvanic Isolation (PELV) for further details.
■Advanced motor protection
The FCD 300 Series has integral electronic
motor protection.
The frequency converter calculates the motor
temperature on the basis of current, frequency and time.
As opposed to traditional, bimetallic protection,
electronic protection takes account of reduced cooling
MG.90.F3.02 - VLT is a registered Danfoss trademark
57
Page 59

■CE labelling
What is CE labelling?
The purpose of CE labelling is to avoid technical
obstacles to trade within EFTA and the EU. The EU
has introduced the CE label as a simple way of
showing whether a product complies with the relevant
EU directives. The CE label says nothing about the
specifications or quality of the product. Frequency
converters are regulated by three EU directives:
The machinery directive (98/37/EEC)
All machines with critical moving parts are covered
by the machinery directive, which came into force
on 1 January 1995. Since a frequency converter is
largely electrical, it does not fall under the machinery
directive. However, if a frequency converter is supplied
for use in a machine, we provide information on safety
aspects relating to the frequency converter. We do
this by means of a manufacturer’sdeclaration.
The low-voltage directive (73/23/EEC)
Frequency converters must be CE labelled in
accordance with the low-voltage directive, which
came into force on 1 January 1997. The directive
applies to all electrical equipment and appliances
used in the 50 - 1000 Volt AC and the 75 1500 Volt DC voltage ranges. Danfoss CE labels
in accordance with the directive and issues a
declaration of conformity upon request.
The EMC directive (89/336/EEC)
EMC is short for electromagnetic compatibility. The
presence of electromagnetic compatibility means
that the mutual interference between different
components/appliances is so small that the functioning
of the appliances is not affected.
The EMC directive came into force on 1 January 1996.
Danfoss CE labels in accordance with the directive and
issues a declaration of conformity upon request. In
order that EMC-correct installation can be carried out,
this manual gives detailed instructions for installation.
In addition, we specify the standards which our
different products comply with. We offer the filters that
can be seen from the specifications and provide other
types of assistance to ensure the optimum EMC result.
In the great majority of cases, the frequency converter
is used by professionals of the trade as a complex
component forming part of a larger appliance, system
or installation. It must be noted that the responsibility
for the final EMC properties of the appliance, system
or installation rests with the installer.
Decentral Solutions - Design Guide
■ATEX
What is ATEX?
Directive 94/9/EC is valid in the European Union (EU)
with the purpose of creating unified standards for
equipment and protective systems intended for use in
potentially explosive atmospheres. The directive was
valid from July 2003, and all equipment installed and
built into potentially explosive areas in EU after this date,
must comply with this directive. The directive and its
derivatives are often referred to as the ATEX-directive.
ATEX is an acronym for ATmosphere Explosible.
It has been found practical to classify hazardous
areas into zones according to the likelihood of an
explosivegas/dustatmospherebeingpresent(seeIEC
79-10). Such classification allows appropriate types
of protection to be specified for each zone.
Motors supplied at variable frequency and voltage
When electrical motors are to be installed in areas
where dangerous concentrations and quantities of
flammable gases, vapours, mists, ignitable fibres or
dusts may be present in the atmosphere, protective
measures are applied to reduce the likelihood of
explosion due to ignition by arcs, sparks or hot
surfaces, produced either in normal operation or
under specified fault conditions.
Motors supplied at varying frequency and
voltage require either:
• Means (or equipment) for direct temperature control
by embedded temperature sensors specified in the
motor documentation or other effective measures
for limiting the surface temperature of the motor
housing. The action of the protective device
shall be to cause the motor to be disconnected.
The motor and frequency converter combination
does not need to be tested together, or
• The motor must have been type-tested for this duty
as a unit in association with the frequency converter
specified in the descriptive documents according to
IEC 79-0 and with the protective device provided.
FCD 300 and ATEX
The following variants of the FCD 300 can be installed
directly in Group II, Category 3, and Zone 22 areas:
®
Decentral FCD3xx-P-T4-P66-xx-R1-
VLT
Dx-Fxx-T11-Cx
®
Decentral FCD3xx-P-T4-P66-xx-R1-
VLT
Dx-Fxx-T12-Cx
®
Decentral FCD3xx-P-T4-P66-xx-R1-
VLT
Dx-Fxx-T51-Cx
®
Decentral FCD3xx-P-T4-P66-xx-R1-
VLT
Dx-Fxx-T52-Cx
58
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 60

Decentral Solutions - Design Guide
Group II, Category 3, and Zone 22 areas
are characterised by:
• Surface installations
• Explosive atmosphere is unlikely to occur or,
if it does, is likely to only be of short duration
and not in normal duty
• The explosive media is dust
ThemaximumsurfacetemperatureoftheFCD
300 during worst-case normal duty is limited to
135°C. This temperature must be lower than the
ignition temperature of the present dust.
The installer must define the zone, category and
dust ignition temperature of the environment
where the FCD 300 is installed.
ATEX correct installation
The following issues must be taken into account when
installing the FCD 300 in ATEX zone 22 environments:
• Motor must be designed, tested and certified by the
motor manufacturer for variable speed application
• Motor must be designed for Zone 22 operation.
I.e. with type of protection "tD" acc. to
EN61241-0 and -1 or EN50281-1-1.
• Motor must be provided with thermistor protection.
The thermistor protection must either be connected
to an external thermistor relay, with EC Type
Examination Certificate or compatible with
the FCD 300 thermistor input.
If the FCD 300 thermistor protection is used,
the thermistor must be wired to terminals
31a and 31b, and thermistor trip activated by
programming parameter 128 to thermistor trip
[2]. See parameter 128 for further details.
• Cable entries must be chosen for the enclosure
protection to be maintained. It must also be
ensured that the cable entries comply with the
requirements for clamping force and mechanical
strengths as described in EN 50014:2000.
• The FCD must be installed with appropriate earth
connecting according to local/national regulations.
• The installation, inspection and maintenance of
electrical apparatus for use in combustible dusts,
must only be carried out by personnel that is
trained and familiar with the concept of protection.
300
Introduction to FCD
For a declaration of conformity, please consult
your local Danfoss representative.
MG.90.F3.02 - VLT is a registered Danfoss trademark
59
Page 61

■Mechanical dimensions, FCD, motor mounting
■Mechanical dimensions, stand alone mounting
Decentral Solutions - Design Guide
Mechanical dimensions inmmFCD 303-315 FCD 322-335
A 192 258
A1 133 170
B 244 300
B1 300 367
B2 284 346
C 142 151
C1 145 154
Cable Gland sizes M16, M20, M25 x 1.5 mm
Space for cable inlets and service switch handle 100-150 mm
■Spacing for mechanical installation
All units require a minimum of 100 mm air from other
components above and below the enclosure.
60
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 62

Decentral Solutions - Design Guide
■Mechanical installation
Please pay attention to the requirements
that apply to integration and remote
mounting. These must be complied
with to avoid serious injury or damage, especially
when installing large units.
The FCD 300 consists of two parts: The installation
part and the electronics part.
The two parts must be separated, and the installation
part is to be mounted first. After wiring, the electronics
is to be fixed to the installation part by the attached
6 screws. For compressing the gasket the screws
must be tightened with 2-2.4 Nm, tighten both centre
screws first, thereafter the 4 corner srews "cross over".
NB!:
Do not switch on the mains before the
6 screws are tightened.
The FCD 300 can be applied as following:
- Stand alone mounted close to the motor
- Motor mounted
or might be delivered pre mounted on a Danfoss
Bauer (geared) motor. Please contact the Danfoss
Bauer sales organisation for further information.
The frequency converter is cooled by means of air
circulation. For the unit to be able to release its
cooling air, the minimum free distance above and
below the unit must be m
the unit from overheating, it must be ensured that the
ambient temperature does not rise above the max.
temperature stated for the frequency converter and
that the 24-hour average temperature is not exceeded.
The max. temperature and 24-hour average can
be seen in General technical data. If the ambient
temperature is higher, derating of the frequency
converter is to be carried out. See Derating for
ambient temperature.Pleasenotethattheservicelife
of the frequency converter will be reduced if derating
for ambient temperature is not considered.
inimum 100 mm.Toprotect
Bolts must be M6 for the FCD 303 - 315
and M8 for FCD 322 - 335.
See Dimensional Drawings.
otor mounting
M
The installation box should be mounted on the
surface of the motor frame, typically instead of the
motor terminal box. The motor/geared motor may
be mounted with the shaft vertically or horizontally.
The unit mustnot be mounted upside down (the heat
sink pointing down). The cooling of the electronics is
independent on the motor cooling fan. For mounting
directly on Danfoss Bauer geared motors no adaption
plate is necessary. For motor mounting (non Danfoss
Bauer motors), an adaptor plate should usually be
applied. For that purpose a neutral plate incl gasket
and screws for attaching to the installation box is
available. The appropriate drillings and gasket for the
motor housing are applied locally. Please make sure,
that the mechanical strength of the mounting screws
and the threads are sufficient for the application. The
specified resistance against mechanical vibrations
does not cover the mounting onto a non Danfoss
Bauer motor, as the stability of the motor frame
and threads are outside Danfoss Drive’s control and
responsibility and the same applies to the enclosure
class. Please be aware, that the frequency converter
may not be used to lift the motor/geared motor.
300
Installation, FCD
tand alone mounting ("wall mounting")
S
For best cooling the unit should be mounted vertically,
however where space limitations require it, horizontal
mounting is allowable. The integrated 3 wall mounting
brackets in the wall mounting version can be used
for fixing the installation box to the mounting surface,
keeping a distance for possible cleaning between
the box and the mounting surface. Use the three
supplied washers to protect the paint.
MG.90.F3.02 - VLT is a registered Danfoss trademark
61
Page 63

Decentral Solutions - Design Guide
1. Prepare the adaptor plate for mounting on the motor by
drilling the fixing holes and the hole for the cables.
2. Mount the plate on the motor with the normal terminal
box gasket.
3. Knock out the 4 screw holes for mounting the adaptor
plate (outer holes).
4. Mount the terminal box onto the motor by the 4 sealing
screws and the gasket supplied.
Use the supplied star washers for securing PE
connection according to EN 60204. The screws must
be tightened with 5 Nm.
Universal adaptorplate
Allowed mounting positions
tom view of FCD 303-315
Bot
62
tom view of FCD 322-330
Bot
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 64

Decentral Solutions - Design Guide
■General information about electrical installation
■High voltage warning
The voltage of the frequency converter
is dangerous whenever the equipment is
connected to mains. Incorrect installation
of the motor or frequency converter may cause
damage to the equipment, serious injury or death.
Comply with the instructions in this manual, as well as
national and local rules and safety regulations.
Touching the electrical parts may be fatal - even after
the equipment has been disconnected from mains:
Wait at least 4 minutes for current dissipate.
NB!:
It is the responsibility of the user or installer
to ensure correct earthing and protection in
accordance with national and local standards.
■Cables
The control cable and the mains cable should be
installed separately from motor cables to prevent
noisetransfer. Asaruleadistanceof20cmis
sufficient, but it is recommended that the distance
is as great as possible, particularly when cables are
installed in parallel over large distances.
For sensitive signal cables such as telephone or data
cables the greatest possible distance is recommended.
Please note that the required distance depends on
installation and the sensitivity of the signal cables, and
that for this reason exact values cannot be given.
■Extra p rotection
ELCB relays, multiple protective earthing or earthing
can be used as extra protection, provided that local
safety regulations are complied with. In the case of an
earth fault, a DC content may develop in the faulty
current. Never use an RCD (ELCB relay), type A, as
it is not suitable for DC faulty currents. If ELCB relays
are used, local regulations must be complied with.
If ELCB relays are used, they must be:
- Suitable for protecting equipment with a DC content
in the faulty current (3-phase bridge rectifier)
- Suitable for a pulse-shaped, brief discharge
on power-up
- Suitable for a high leakage current.
See also RCD Application Note MN.90.GX.02.
■High voltage test
A high voltage test can be performed by
short-circuitingterminalsU,V,W,L1,L2andL3,
and applying max. 2160 V DC in 1 sec. between
this short-circuit and PE-terminal.
■Electronics purchased without installation box
If the electronic part is purchased without the
Danfoss installation part, the earth connection
the
must be suitable for high leakage current. Use
of original Danfoss installation box or installation
kit 175N2207 is recommended.
When being placed in cable trays, sensitive cables
may not be placed in the same cable tray as t
motor cable. If signal cables run across power
cables, this is done at an angle of 90 degrees.
Remember that all noise-filled inlet
to a cabinet must be screened/armoured.
See also EMC-compliant electrical installation.
Cable glands
It must be assured that appropriat
glands needed for the environment are chosen
and carefully mounted.
■Screened/armoured cables
The screen must have low HF impe
achieved by a braided screen of copper, aluminium or
iron. Screen reinforcement intended for mechanical
protection, for example, is
installation. See also Use of EMC-correct cables.
MG.90.F3.02 - VLT is a registered Danfoss trademark
not suitable for EMC-correct
and outlet cables
e cable
dance, which is
he
■Caution
PE connection
he metal pin in the corner(s) of the
T
electronic part and the bronze spring in the
corner(s) of the installation box are essential
for the protective earth connection. Mak
are not loosened, removed, or violated in any way.
e sure they
300
Installation, FCD
63
Page 65

Decentral Solutions - Design Guide
NB!:
Do not plug/unplug the electronic part with
mains voltage switched on.
■Protective ear th
The earth connection serves several purposes.
• Safety earth (Protective earth, PE)
The equipment must be properly earthed according
to local regulation. This equipment has a leakage
current > 3.5 mA AC. It must be connected to
an earth connection complying with the local
rules for high leakage current equipment.
Typically, this implies that the PE conductors
must be mechanically enhanced (minimum cross
2
section 10 mm
) or duplicated
• Noise "clamping" (high frequencies)
Stable communication between units call for
screening of the communication cables (1).
Cables must be properly attached to screen
clamps provided for that purpose.
• Equalisation of voltage potential (low frequencies)
To reduce alignment currents in the screen
of the communication cable, always apply a
short earthing cable between units that are
connected to the same communication cable (2)
or connect to an earthed frame (3).
• Potential equalization: All metal parts, where the
motors are fastened, must be potential equalized
PE connections, voltage equalising cables and the
screen of the communication cable should be
connected to the same potential (4).
Keep the conductor as short as possible and use
the greatest possible surface area.
The numbering refers to the figure.
Proper installation earthing
■EMC-correct elec
trical installation
General points to be observed to ensure
EMC-correct electrical installation.
- Use only screened/armoured motor cables and
screened/armou
red control cables.
- Connect the screen to earth at both ends.
64
- Avoid installati
on with twisted screen ends (pigtails),
since this ruins the screening effect at high
frequencies. Use cable clamps instead.
-Don’tremovethe
cable screen between the
cable clamp and the terminal.
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 66

Decentral Solutions - Design Guide
■Use of EMC compliant cables
In order to comply with requirements for EMC immunity
of the control cables and EMC emissions from the
motor cables screened/armoured cables must be used.
The ability of a cable to reduce the amount of ingoing
and outgoing radiation of electric noise depends
on the transfer impedance (Z
). The screen of a
T
cable is normally designed to reduce the transfer of
electric noise, and a screen with a lower Z
effective than a screen with a higher Z
is rarely stated by cable manufacturers, but it
Z
T
is often possible to estimate Z
by looking at and
T
is more
T
.
T
assessing the physical design of the cable.
can be assessed on the basis of the following factors:
Z
T
- the contact resistance between the individual
screen conductors.
- Screen coverage, i.e. the physical area of the
cable covered by the screen. Is often stated as a
percentage and should be no less than 85%.
- The screen type, i.e. braided or twisted pattern. A
braided pattern or closed pipe is recommended.
MG.90.F3.02 - VLT is a registered Danfoss trademark
300
Installation, FCD
65
Page 67

■Earthing of screened/armoured control cables
In general control cables must be screened/armoured,
and the screen must be connected to the unit’s metal
cabinet with a cable clamp at each end.
The drawing below shows the correct way to perform
the earthing, and what to do when in doubt.
1. Correct earthing
Control cables and cables for serial
communication must be attached with cable
clamps at both ends to ensure maximum
possible electrical contact.
2. Incorrect earthing
Do not use twisted screen ends that
are plaited together (pigtails), as these increase
screen impedance at higher frequencies.
3. Protection with respect to earth
potential between PLC and VLT
If the earth potential between the VLT
frequency converter and the PLC (etc.) is different,
electric noise may occur that will disturb the whole
system. This problem can be solved by fitting an
equalising cable, to be placed next to the control
cable. Minimum cable cross-section: 16 mm
4. In the event of a 50/60 Hz earth loop
If very long control cables are used, 50/60 Hz
earth loops can arise, and these can interfere
with the whole system. This problem is resolved
by attaching one end of the screen to the earth
via a 100 nF capacitor (short pin length).
Decentral Solutions - Design Guide
2
.
66
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 68

■Diagram
Decentral Solutions - Design Guide
* Integrated brake and mechanical brake control
and external 24 V are options.
■RFI switches J1, J2
J1 and J2 must be removed at IT mains and
delta grounded mains with phase to earth voltage
> 300 V also during earth failure.
J1 and J2 can be removed to reduce leakage current.
Caution: No correct RFI filtering.
300
Installation, FCD
MG.90.F3.02 - VLT is a registered Danfoss trademark
67
Page 69

■Location of terminals
Decentral Solutions - Design Guide
T11, T12, T16, T52, T56
T22, T26, T62, T66versions with service switch
68
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 70

Decentral Solutions - Design Guide
T73 version with motor plug and sensor plugs
Version is supplied from Danfoss with wiring as shown
versionwithserviceswitch(nomotorplug)
T63
MG.90.F3.02 - VLT is a registered Danfoss trademark
300
Installation, FCD
69
Page 71

Decentral Solutions - Design Guide
■Mains connection
No. 91 92 93 Mains voltage 3 x 380-480 V
L1 L2 L3
PE Earth connection
NB!:
Please check that the mains voltage fits the
mains voltage of the frequency converter, which
can be seen from the nameplate.
See Technical data for correct dimensioning
of cable cross-section.
■Pre-fuses
See Technical data for correct dimensioning
of pre-fuses.
■Motor connection
Connect the motor to terminal
s 96, 97, 98.
Connect earth to PE-terminal.
No. 96 97 98 Motor voltage 0-100% of mains voltage
UVW3 wires out of motor
U1W2V1U2W1V26 wires out of motor, Delta connected
■Direction of motor rotation
The factory setting is for clockwise rotation
with the frequency converter transformer output
connected as follows:
Terminal 96 connected to U-phase.
Terminal 97 connected to V-phase.
Terminal 98 connected to W-phase.
The direction of rotation can be changed by switching
two phases on the motor terminals.
U1 V1 W1 6 wires out of motor, Star connected
U2, V2, W2 to be interconnected
separately (optional terminal block)
PE Earth connection
See Technical data for correct dimensioning
of cable cross-section.
All types of three-phase asynchronous standard
motors can be connected to a frequency converter.
Normally, small motors are star-connected (230/400
/ Y). Large motors are delta-connected (400/690
V,
/ Y). The correct connection mode and voltage
V,
can be read from the motor nameplate.
NB!:
In motors without phase insulation paper,
an LC filter should be fitted on the output
of the frequency converter.
■Mains and motor connection with service switch
70
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 72

Decentral Solutions - Design Guide
■Connection of HAN 10E motor plug for T73
HAN 10E pin no 1 - Motor phase U
HAN 10E pin no 2 - Motor phase V
HAN 10E pin no 3 - Motor phase W
HAN 10E pin no 4 - Motor brake, see Operating
Instructions MG.04.BX.YY, terminal 122
HAN 10E pin no 5 - Motor brake, see Operating
Instructions MG.04.BX.YY, terminal 123
HAN 10E pin no 9 - Motor thermistor, see Operating
Instructions MG.04.BX.YY, terminal 31A
HAN 10E pin no 10 - Motor thermistor, see
Operating Instructions MG.04.BX.YY, terminal 31B
PE = protective earth
■Parallel connection of motors
The frequency converter is able to control several
motors connected in parallel. If the motors are
to have different rpm values, use motors with
different rated rpm values. Motor rpm is changed
simultaneously, which means that the ratio between
the rated rpm values is maintained across the range.
The total current consumption of the motors is
not to exceed the maximum rated output current
for the frequency converter.
I
INV
Problems may arise at the start and at low rpm
values if the motor sizes are widely different. This
is because the small motors’ relatively high ohmic
resistance in the stator calls for a higher voltage
at the start and at low rpm values.
converter cannot be used as motor protection for
the individual motor. For this reason further motor
protection must be used, e.g. thermistors in each
motor (or an individual thermal relay).
NB!:
Parameter 107 Automatic motor tuning, AMT
cannot be used when motors are connected
in parallel. Parameter 101 Torque characteristic
must be set to Special motor characteristics [8]
when motors are connected in parallel.
■Motor cables
See Technical data for correct dimensioning of motor
cable cross-section and length. Always comply with
national and local regulations on cable cross-section.
NB!:
If an unscreened/unarmoured cable is used,
some EMC requirements are not complied with,
see EMC test results in the Design Guide.
If the EMC specifications regarding emission are
to be complied with, the motor cable must be
screened/armoured, unless otherwise stated for the
RFI filter in question. It is important to keep the motor
cable as short as possible so as to reduce the noise
level and leakage currents to a minimum. The motor
cable screen must be connected to the metal cabinet
of the frequency converter and to the metal cabinet of
the motor. The screen connections are to be made
with the biggest possible surface area (cable clamp).
This is enabled by different installation devices in
different frequency converters. Mounting with twisted
screen ends (pigtails) is to be avoided, since these
spoil the screening effect at high frequencies. If it
is necessary to break the screen to install a motor
isolator or motor relay, the screen must be continued
at the lowest possible HF impedance.
■Motor thermal protection
The electronic thermal relay in UL-approved frequency
converters has received the UL-approval for single
motor protection, when parameter 128 Motor thermal
protection has been set for ETR Trip and parameter
105 Motor current, I
has been programmed to
M, N
the rated motor current (see motor nameplate).
300
Installation, FCD
In systems with motors connected in parallel, the
electronic thermal relay (ETR) of the frequency
MG.90.F3.02 - VLT is a registered Danfoss trademark
71
Page 73

■Brake resistor
Decentral Solutions - Design Guide
No. 81 (optional
function)
R- R+
82 (optional
function)
Brake resistor
terminals
The connection cable to the brake resistor must
be screened/armoured. Connect the screen to the
metal cabinet of the frequency conver
ter and to the
metal cabinet of the brake resistor by means of
cable clamps. Dimension the cross-section of the
brake cable to match the brake to
See chapter Dynamic Brak
ing in the Design Guide
rque.
MG.90.FX.YY for dimensionering of brake resistors.
NB!:
Please note that voltages up to 850 V
DC occur on the te
rminals.
■Control of mechanical brake
No. 122 (optional
function)
MBR+ MBR- Mechanical brake
123
(optional
function)
(UDC=0.45 X Mains
Voltage) Max 0.8 A
In lifting/lowering applications you need to be able
to control an electromagnetic brake. The brake
is controlled using the special mechanical brake
control/supply terminals 122/123.
When the output frequency exceeds the brake cut
out value set in par. 138, the brake is released if the
motor current exceeds the preset value in parameter
140. When stopping the brake is engaged when
the output frequency is less than the brake engaging
frequency, which is set in par. 139.
If the frequency converter is at alarm status
or in an overvoltage situation the mechanical
brake is cut in immediately.
If not using the special mechanical brake control/supply
terminals (122-123), select Mechanical brake control
in parameter 323 or 341 for applications with
an electromagnetic brake.
A relay output or digital output (terminal 46)
can be used. See Connection of mechanical
brake for further details.
72
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 74

Decentral Solutions - Design Guide
■Electrical installation, control cables
Control cables must be screened/armoured. The
screen must be connected to the frequency converter
chassis by means of a clamp. Normally, the screen
must also be connected to the chassis of the
controlling unit (use the instructions for the unit in
question). In connection with very long control cables
and analogue signals, in rare cases depending on
the installation, 50/60 Hz earth loops may occur
because of noise transmitted from mains supply
cables. In this connection, it may be necessary
to break the screen and possibly insert a 100 nF
capacitor between the screen and the chassis.
Switches S101-104
Bus line coils, leave switches ON
300
Installation, FCD
MG.90.F3.02 - VLT is a registered Danfoss trademark
73
Page 75

■Connection of sensors to M12 plugs for
T53, T63, T73
Decentral Solutions - Design Guide
For rating specifications see the Operating Instructions
MG.04.BX.YY, digital inputs terminals 18, 19, 29, 33.
Terminals 203/204 are used for sensor supply.
Terminal 203 = common
Terminal 204 = +24 V
Terminals 201/202 can be used for a
separate 24 V supply.
74
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 76

Decentral Solutions - Design Guide
■Electrical installation, control terminals
See section entitled Earthing of screene d/armoured
control cables in the Design Guide for the correct
termination of control cables.
No. Function
01-03 Relay outputs 01-03 can be used for
indicating status and alarms/warnings.
12 24 V DC voltage supply.
18-33 Digital inputs.
20, 55 Common frame for input
and output terminals. Can be separated with switch
S100
31a,
31b
35 Common (-) for external 24 V control back up
36 External + 24 V control back up supply. Optional.
42 Analog output for displaying frequency,
46 Digital output for displaying status,
50 +10 V DC supply
53 Analogue voltage input 0 - +/- 10 V DC.
60 Analogue current input 0/4 - 20 mA.
67 + 5 V DC supply voltage
68, 69 Fieldbus serial communication*
70 Ground for terminals 67, 68 and 69.
D For future use
V +5V, red
P RS485(+), LCP2/PC, yellow
N RS485(-), LCP2/PC, green
G OV, blue
*SeeVLT 2800/FCM 300/
Motor thermistor
supply. Optional.
reference, current or torque.
warnings or alarms, as well as
frequency output.
voltage for potentiometer
to Profibus.
Normally this terminal is not to be used.
FCD 300 Profibus DP
V1 Operating Instructions (MG.90.AX.YY), VLT
2800/FCD 300 DeviceNet Operating Instructions
(MG.90.BX.YY) or FC
D 300 AS-interface Operating
Instructions (MG.04.EX.YY).
■PC communication
Connect to terminals P and N for PC-access to single
parameters. Mot
or and field bus communication
should be stopped before performing automatic
transfer of multiple parameters.
On non-fieldb
us and Profibus variants, terminals
68 and 69 can be used provided Profibus
communication is stopped.
■Relay connection
See parameter 323 Relay output for programming
of relay output.
No. 01 - 02 1 - 2 make (normally open)
01 - 03 1-3break(normallyclosed)
■LCP 2 plug, optional
An LCP 2 control unit can be connected to a
plug which is optionally mounted in the housing.
Ordering number: 175N0131.
LCP control units with ordering number 175Z0401
are not to be connected.
■Installation of 24 Volt external supply (optional)
24 V external DC supply can be use
d as low-voltage
supply to the control card. This enables full
operation of the LCP2 and serial bus (incl. parameter
setting) without connecti
on to mains.
Please note that a warning of low voltage will
be given when 24 V DC has been connected;
however there will be n
o tripping.
NB!:
Use24VDCsupplyoftypePELVtoensure
correct galvanic isolation (type PELV) on the
control terminal
Beware of unin
s of the VLT frequency converter.
tended start of the motor, if
the mains power is applied during operation
on the external 24 V back up supply.
■Software version 1.5x
A Field bus equipped FCD shows the status Unit
ready even with bridged terminals 12-27 and cannot
be set into RUNNING mode by digital inputs alone
until one of the following parameters is set:
- Par. 502 is set to Digital input or Logic and or
- Par. 833 or 928 is set to Disable or
- Par. 678 is set to Standard version
The field bus status word at power up might be
different (typically 0603h instead of 0607h) until the
first valid control word is sent. After sending the first
valid control word (bit 10 = Data valid) the status
is exactly as in earlier software versions.
300
Installation, FCD
MG.90.F3.02 - VLT is a registered Danfoss trademark
75
Page 77

■Connection examples
Decentral Solutions - Design Guide
NB!:
Avoid leading the cables over the plugs
to the electronics.
Dont loosen screw fixing the spring
for the PE connection.
76
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 78

NB!:
In the connection examples below, it should
be noted, that the Switch S100 must not be
changed from factory settings (on).
■Start/stop
Start/stop using terminal 18 and coasting
stop using terminal 27.
Decentral Solutions - Design Guide
■Speed up/down
Speed up/down using terminals 29/33.
Par. 302 Digital input = Start [7]
Par. 303 Digital input = Freeze reference [14]
Par. 305 Digital input = Speed up [16]
Par. 307 Digital input = Speed down [17]
Par. 302 Digital input = Start [7]
Par. 304 Digital input = Coasting stop inverted [2]
For Precise start/stop the following settings are made:
Par. 302 Digital input = Precise start/stop [27]
Par. 304 Digital input = Coasting stop inverted [2]
■Pulse start/stop
Pulse start using terminal 18 and pulse stop
using terminal 19. In addition, the jog frequency
is activated via terminal 29.
Par. 302 Digital input = Pulse start [8]
Par. 303 Digital input = Stop inverted [6]
Par. 304 Digital input = Coasting stop inverted [2]
Par. 305 Digital input = Jog [13]
■Potentiometer reference
Voltage reference via a potentiometer.
Par. 308 Analog input = Reference [1]
Par. 309 Terminal 53, min. scaling =0Volt
Par. 310 Terminal 53, max. scaling =10Volt
■Connection of a 2-wire transmitter
Connection of a 2-wire transmitter as feedback
to terminal 60.
300
Installation, FCD
MG.90.F3.02 - VLT is a registered Danfoss trademark
Par. 314 Analog input = Feedback [2]
Par. 315 Terminal 60, min. scaling =4mA
Par. 316 Terminal 60, max. scaling =20mA
77
Page 79

■4-20 mA reference
4-20 mA reference on terminal 60 and speed
feedback signal on terminal 53.
Par. 100 Configuration = Speedclosedloop[1]
Par. 308 Analog input = Feedback [2]
Par. 309 Terminal 53, min. scaling =0Volt
Par. 310 Terminal 53, max. scaling =10Volt
Par. 314 Analog input = Reference [1]
Par. 309 Terminal 60, min. scaling =4mA
Par. 310 Teminal 60, max. scaling =20mA
Decentral Solutions - Design Guide
Par. 100 Configuration = Speed regulation
open loop [0]
Par. 200 Output frequency range = Both
directions, 0-132 Hz [1]
Par. 203 Reference range = Min. ref. - Max. ref. [0]
Par. 204 Min. reference =-50Hz
Par. 205 Max. reference =50Hz
Par. 302 Digital input = Start [7]
Par. 304 Digital input = Coasting stop inverted [2]
Par. 308 Analogue input = Reference [1]
Par. 309 Terminal 53, min. scaling =0Volt.
Par. 310 Terminal 53, max. scaling =10Volt.
■Preset references
Switch between 8 preset references via two digital
inputs and Setup 1 and Setup 2.
■ 50 Hz anti-clockwise to 50 Hz clockwise.
With internally supplied potentiometer.
Par. 004 Active Setup = Multisetup 1 [5]
Par. 204 Min. reference =0Hz
Par. 205 Max. reference =50Hz
Par. 302 Digital input = Start [7]
Par. 303 Digital input = Choice of Setup, lsb [31]
Par. 304 Digital input = Coasting stop inverted [2]
Par. 305 Digital input = Preset ref., lsb [22]
Par. 307 Digital input = Preset ref., msb [23]
Setup 1 contains the following preset references:
Par. 215 Preset reference 1 = 5.00%
Par. 216 Preset reference 2 = 10.00%
Par. 217 Preset reference 3 = 25.00%
Par. 218 Preset reference 4 = 35.00%
78
Setup 2 contains the following preset references:
Par. 215 Preset reference 1 = 40.00%
Par. 216 Preset reference 2 = 50.00%
Par. 217 Preset reference 3 = 70.00%
Par. 218 Preset reference 4 = 100.00%
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 80

Decentral Solutions - Design Guide
This table shows what the output frequency is:
Preset ref.,
msb
0 0 0 2.5
0 1 0 5
1 0 0 10
1 1 0 17.5
0 0 1 20
0 1 1 25
1 0 1 35
1 1 1 50
Preset ref.,
lsb
Selection of
Setup
■Connection of mechanical brake
Using terminal 122/123
Use of the relay for 230 V AC brake
Output
frequency[Hz]
Par. 302 Digital input = Start [7]
Par. 304 Digital input = Coasting stop inverted [2]
Par. 323 Relay output = Mechanical
brake control [25]
See also par. 138, 139, 140
Mechanical brake control [25] = ’0’ => Brake is closed.
Mechanical brake control [25] = ’1’ => The
brake is open.
See more detailed parameter settings under
Control of mechanical brake.
Par. 302 Digital
input = Start [7]
Par. 304 Digital input = Coasting stop inverted [2]
See also par. 138, 139, 140
Mechanical brake with accelerator winding
Par. 302 Digital input = Start [7]
Par. 304 Digital input = Coasting stop inverted [2]
See also par. 138, 139, 140
NB!:
Do not use the internal relay for DC brakes
or brake voltages > 250 V.
■Counter stop via terminal 33
The start signal (terminal 18) must be active, i.e. logical
’1’, until the output frequency is equal to the reference.
The start signal (terminal 18 = logical ’0’) must then be
removed before the counter value in parameter 344
has managed to stop the VLT frequency converter.
300
Installation, FCD
Par. 307 Digital input = Pulse input [30]
Par. 343 Precise stop function = Counter
stop with reset [1]
Par. 344 Counter value = 100000
MG.90.F3.02 - VLT is a registered Danfoss trademark
79
Page 81

Decentral Solutions - Design Guide
■The LCP 2 control unit, option
■Control keys for parameter Setup
The control keys are divided into functions, in
such a way that the keys between the display
and the indicator lamps are used for parameter
Setup, including selection of the display’sview
mode during normal operation.
[DISPLAY/STATUS] is used to select the display’s
view mode or to change back to Display mode
from either Quick Menu or Menu mode.
[QUICK MENU] provides access to the parameters
used in the Quick Menu. It is possible to switch
between Quick Menu and Menu mode.
The FCD 300 can be combined with an LCP control
unit (Local Control Panel - LCP 2) which makes up a
complete interface for operation and pro
the frequency converter. The LCP 2 control unit can
be attached up to three metres from the frequency
converter, e.g. on a front panel, usin
The control panel is divided into f
1. Display.
2. Keys used to change the display function.
3. Keys used to change the programme par
4. Indicator lamps.
5. Local control keys.
Alldataisdisplayedviaa4-linealphanumeric
display, which during normal ope
to continuously display 4 items of operating data
and 3 operating modes. During programming all
information needed for quick,
setup of the frequency converter will be displayed. As
asupplementtothedisplay,therearethreeindicator
lamps for voltage (ON), w
(ALARM). All frequency converter parameter Setups
can be changed immediately from the control panel,
unless this function h
[1] via parameter 018 Lock for data c hanges.
arning (WARNING) and alarm
as been programmed as Locked
ive functional groups:
ration will be able
effective parameter
gramming of
g an accessory kit.
ameters.
[MENU] givesaccesstoallparameters. Itispossible
to switch between Menu mode and Quick Menu.
[CHANGE DATA] is used to change a parameter that
has been selected either in Menu mode or Quick Menu.
[CANCEL] is used if a change to the selected
parameter is not to be implemented.
[OK] is used to confirm a change to a
selected parameter.
[+ / -] are used for selecting parameters and
for changing parameter values.
These keys are also used in Display mode to switch
between the readouts of operating variables.
[< >] are used for selecting parameter group and to
move the cursor when changing a numerical value.
80
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 82

Decentral Solutions - Design Guide
■Indicator lamps
At the bottom of the control panel are a red
alarm lamp, a yellow warning lamp and a
green voltage indicator lamp.
If certain threshold values are exceeded, the alarm
and/or warning lamp are activated, while a status
or alarm text is shown on the display.
NB!:
The voltage indicator lamp is activated when
voltage is connected to the frequency converter.
■Local control
[STOP/RESET] is used for stopping the motor
connected or for resetting the frequency converter
after a drop-out (trip). Can be set to active or
inactive via parameter 014 Local stop.
If stop is activated Display line 2 will flash.
NB!:
If an external stop function is not selected and
the [STOP/RESET] key is set to inactive, the
motor can only be stopped by disconnecting
the voltage to the motor or the frequency converter.
[JOG] changes the output frequency to a preset
frequency while the key is held down. Can be set to
active or inactive via parameter 015 Local jog.
NB!:
If the local control keys are set to inactive,
these will both become active when the
frequency converter is set to Local control
and Remote control via parameter 002 Local/remote
operation, with the exception of [FWD/REV], which
is only active in Local control.
■Display m ode
VAR 1.1 VAR 1.2 VAR 1.3
SETUP
VAR 2
1
STATUS
In normal operation, up to 4 different display data
items can optionally be shown continuously: 1,1,
1,2, 1,3 and 2. The present operation status or
alarms and warnings that have been generated are
displayed in line 2 in the form of a number.
In the event of alarms this is displayed in lines
3and4withexplanatorytext.
A warning will appear flashing in line 2 with
explanatory text in line 1. The active Setup
will also appear on the display.
The arrow indicates the selected direction of rotation.
Here the frequency converter shows that it has
an active reversing signal. The body of the arrow
will disappear if a stop command is given, or if the
output frequency drops below 0.1 Hz.
The bottom line displays the frequency transformer’s
status. The scrollbar shows which operating values
can be displayed in lines 1 and 2 in Display mode.
Changes are made using the [+ / -] keys.
195NA113.10
[FWD / REV] changes the direction of rotation of
the motor, which is indicated by means of the arrow
on the display. Can be set to active or inactive via
parameter 016 Local reversing.The[FWD/REV]key
is only active when parameter 002 Local/remote
operation is set to Local control.
[START] is used to start the frequency converter. Is
always active, but cannot override a stop command.
MG.90.F3.02 - VLT is a registered Danfoss trademark
Switching between AUTO and HAND modes
By activating the [CHANGE DATA] key in [DISPLAY
MODE] the display will indicate the mode of
the frequency converter.
Switch mode by using [+/-] key [HAND...AUTO]
In [HAND] mode the reference can be changed
by [+] or [-] keys.
300
Programming, FCD
81
Page 83

Decentral Solutions - Design Guide
Operating data Unit
Resulting reference [%]
Resulting reference [unit]
Feedback [unit]
Output frequency [Hz]
Output frequency x scaling [-]
Motor current [A]
Torque [%]
Power [kW]
Power [HP]
Motor voltage [V]
DC link voltage [V]
Thermal load motor [%]
Thermal load [%]
Hours run [hours]
Digital input [binary]
Pulse input 29 [Hz]
Pulse input 29 [Hz]
Pulse input 33 [Hz]
External reference [%]
Status word [hex]
Heatsink temperature [°C]
Alarm word [hex]
Control word [hex]
Warning word [hex]
Extended status word [hex]
Analogue input 53 [V]
Analogue input 60 [mA]
Three operating data items can be shown in the
first display line, and one operating variable can be
shown in the second display line. Is programmed via
parameters 009, 010, 011 and 012 Display readout .
■Display modes
The LCP control unit has different display
modes, which depend on the mode selected
for the frequency converter.
Display mode I:
This display mode is standard after startup
or initialisation.
FREQUENCY
50.0 Hz
MOTOR IS RUNNING
Line 2 shows the data value of an operating data item
with unit, and line 1 contains a text that explains line
2. In the example, Frequency has been selected as
readout via parameter 009 Large display readout.In
normal operation, another variable can be entered
immediately using the [+ / -] keys.
Display mode II:
Switch between Display modes I and II is performed
by briefly pressing the [DISPLAY / STATUS] key.
24.3% 30.2% 13.8A
50.0 Hz
MOTOR IS RUNNING
In this mode, all data values for four operating
data items with any pertaining units are shown,
see table. In the example, the following have been
selected: Frequency, Reference, Torque and Current
as readout in the first and second line.
82
Display mode III:
This display mode is called up as long as the [DISPLAY
/ STATUS] key is held down. When the key is released
it switches back to Display mode II, unless
the key is
held down for less than approx. 1 sec., in which case
the system always reverts to Display mode I.
REF% TORQUE CURR A
50.0 Hz
MOTOR IS RUNNING
SETUP
1
Here you can read out the parameter names and
units for operating data in the first and second lines.
Line 2 in the display remains unchanged.
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 84

DisplaymodeIV:
This display mode can be called up during operation
if a change has to be made in another Setup without
stopping the frequency converter. This function is
activated in parameter 005 Programming Setup.
24.3% 30.2% 13.8A
SETUP
50.0 Hz
MOTOR IS RUNNING
12
Here the programming Setup number 2 will flash
to the right of the active Setup.
■Parameter Setup
A frequency converter’s comprehensive work area can
be accessed via a large number of parameters, making
it possible to adapt its functionality for a specific
application. To provide a better overview of the many
parameters, there is a choice of two programming
modes - Menu mode and Quick Menu mode. The
former provides access to all parameters. The latter
takes the user through the parameters, which make
it possible to start operating the frequency converter
in most cases, in accordance with the Setup made.
Regardless of the mode of programming, a change
of a parameter will take effect and be visible both in
the Menu mode and in the Quick menu mode.
Structure for Quick menu mode v Menu mode
In addition to having a name, each parameter is linked
up with a number which is the same regardless of
the programming mode. In Menu mode, paramet
will be split into groups, with the first digit (left)
of the parameter number indicating the group
number of the parameter in question.
Decentral Solutions - Design Guide
■Quick menu with LCP 2 control unit
Start Quick Setup by pressing the [QUICK MENU] key,
which will bring out the following display values:
QUICK MENU X OF Y
50.0 Hz
001 LANGUAGE
ENGLISH
SETUP
1
At the bottom of the display, the parameter number
and name are given together with the status/value
of the first parameter under the Quick menu. The
first time the [QUICK MENU] key is pressed after
the unit has been switched on, the readouts always
start in pos. 1 - see table below.
Pos. Parameter no. Unit
1 001 Language
2 102 Motor power [kW]
3 103 Motor voltage [V]
4 104 Motor frequency [Hz]
5 105 Motor current [A]
6 106 Rated motor speed [rpm]
7 107 AMT
8 204 Minimum reference [Hz]
9 205 Maximum reference [Hz]
10 207 Ramp-up time [sec]
11 208 Ramp-down time [sec]
12 002 Local/remote operation
13 003 Local reference [Hz]
■Parameter selection
Menu mode is started by pressing the [MENU] key,
which produces the following readout on the display:
ers
FREQUENCY
50.0 Hz
0 KEYB.&DISPLAY
• Using the [QUICK MENU] key, it is possibl
eto
get access to the most important parameters
of the frequency converter. After programming,
the frequency converter is in most
cases ready
for operation. Scroll through the Quick menu
using the [+ / -] keys and change the data values
by pressing [CHANGE DATA] + [OK
].
• The Menu mode allows choosing and changing
all parameters as required. However, some
parameters will be "shaded
off", depending on the
choice in parameter 100 Configuration .
MG.90.F3.02 - VLT is a registered Danfoss trademark
Line 3 on the display shows the parameter
group number and name.
In Menu mode, the parameters are divided
into groups. Selection of parameter group is
effected using the [< >] keys.
The following parameter groups will be accessible:
Group no. Parameter group
0 Operation & Display
1Load&Motor
2 References & Limits
3 Inputs & Outputs
4 Special functions
5 Serial communication
6 Technical functions
300
Programming, FCD
83
Page 85

Decentral Solutions - Design Guide
When the required parameter group has been
selected, each parameter can be chosen by
means of the [+ / -] keys:
FREQUENCY
50.0 Hz
001 LANGUAGE
ENGLISH
The 3rd line of the display shows the parameter
number and name, while the status/value of the
selected parameter is shown in line 4.
Changing data
Regardless of whether a parameter has been
selected under the Quick menu or the Menu mode,
theprocedureforchangingdatawillbethesame.
Pressing the [CHANGE DATA] key gives access
to changing the selected parameter, following
which the underlining in line 4 will flash on the
display. The procedure for changing data depends
on whether the selected parameter represents a
numerical data value or a text value.
Changing a data value
If the selected parameter is a text value, the text
value is changed by means of the [+ / -] keys.
The chosen digit is indicated by the digit flashing. The
bottom display line shows the data value that will be
entered (saved) when signing off with [OK].
■ Manual initialisation
NB!:
Manual initialisation is n
the LCP 2 175N0131 control unit. It is,
however, possible to perform an initialisation
via par. 620 Operation mode:
The following parameters are not changed when
initialising via par. 620 Operation mode .
- par. 500 Address
- par. 501 Baud rate
- par. 600 Operating hours
- par. 601 Hours run
- par. 602 kWh counter
- par. 603 Number of power-ups
- par. 604 Number of overtemperatures
- par. 605 Number of overvoltages
- par. 615-617 Fault log
- par. 678 Configure Control Card
ot possible on
FREQUENCY
50.0 Hz
001 LANGUAGE
ENGLISH
The bottom display line will show the value that will be
entered (saved) when acknowledgment is given [OK].
Changeofnumericdatavalue
If the selected parameter is represented by a numerical
data value, a digit is first chosen using the [< >] keys.
FREQUENCY
50.0 Hz
130 START FREQUENCY
09.0 HZ
The selected digit can then be changed infinitely
variably using the [+ / -] keys:
FREQUENCY
50.0 Hz
130 START FREQUENCY
10.0 HZ
SETUP
1
SETUP
1
84
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 86

Decentral Solutions - Design Guide
■Operation & Display
001 Language
(LANGUAGE)
Value:
✭English (ENGLISH)
German (DEUTSCH)
French (FRANCAIS)
Danish (DANSK)
Spanish (ESPANOL)
Italian (ITALIANO)
Function:
This parameter is used to choose the language
to be shown in the display whenever the LCP
control unit is connected.
Description of choice:
There is a choice of the languages shown.
The factory setting may vary.
002 Local/remote operation
(OPERATION SITE)
Value:
✭Remote operation (REMOTE)
Local operation (LOCAL)
Function:
There is a choice of two different modes of operation
of the frequency converter; Remote operation [0] or
Local operation [1]. See also parameter 013 Local
control if Local operation [1] is selected.
Description of choice:
If Remote operation [0] is selected, the frequency
converter is controlled via:
1. the control terminals or via serial communication.
2. the [START] key. This cannot, however, override
stop commands transmitted via the digital
inputs or via serial communication.
3. the [STOP/RESET] and [JOG] keys, on the
condition that these are active.
If Local operation [1], is selected, the frequency
converter is controlled via:
1. the [START] key. This cannot, however, override
stop commands via the digital inputs (see
parameter 013 Local control).
2. the [STOP/RESET] and [JOG] keys, on the
condition that these are active.
3. the [FWD/REV] key, on the condition that is has
been selected as active in parameter 016 Local
reversing, and that parameter 013 Local control
is set at Local control and open loop [1] or Local
control as parameter 100 [3]. Parameter 200
Output frequency range is set at Both directions.
4. parameter 003 Local reference where the reference
can be set using the [+] and [-] keys.
[0]
[1]
[2]
[3]
[4]
[5]
5. an external control command that can be
connected to the digital inputs (see parameter
013 Local control).
NB!:
The [JOG] and [FWD/REV] keys are located
on the LCP control unit.
003 Local reference
(LOCAL REFERENCE)
Value:
Par. 013 Loca l control must be set to [1] or [2]:
0-f
MAX
Par. 013 Loca l control must be set to [3] or [4].
Ref
MIN
[0]
[1]
Function:
In this parameter, the local reference can be set
manually. The unit of the local reference depends on the
configuration selected in parameter 100 Configuration.
Description of choice:
In order to protect the local reference, parameter
002 Local/remote operation must be set to
Local operation [1]. Local reference cannot be
set via serial communication.
■Setup configuration
There is a choice of four Setups (parameter Setups),
which can be programmed independently of one
another. The active Setup can be selected in
parameter 004 Active Setup. WhenanLCPcontrol
unit is connected, the active Setup number will be
appear in the display under "Setup". It is also possible
to preset the frequency converter to Multisetup,sothat
it is possible to shift Setups using the digital inputs
or serial communication. Setup shift can be used in
a plant in which, for example, one Setup is used for
daytime operation and another one at night time.
In parameter 006 Setup copying it is possible to copy
from one Setup to another. Using parameter 007 LCP
copy all Setups can be transferred from one frequency
converter to another by moving the LCP control panel.
(par. 202)
-Ref
MAX
(par. 204-205)
✭ 50 Hz
✭ 0,0
300
Programming, FCD
= factory setting. () = display text [] = value for use in communication via serial communication port
✭
MG.90.F3.02 - VLT is a registered Danfoss trademark
85
Page 87

Decentral Solutions - Design Guide
First all parameter values are copied to the LCP control
panel, which can then be moved to another frequency
converter. Here all parameter values can be copied
from the LCP control unit to the frequency converter.
■Setup shift
- Selection of Setup via terminals 29 and 33.
Par. 305 Digital input = Selection of Setup, lsb [31]
Par. 307 Digital input = Selection of Setup, msb [32]
Par. 004 Active setup = Multi Setup [5]
004 Active Setup
(ACTIVE SETUP)
Value:
Factory Setup (FACTORY SETUP)
✭Setup 1 (SETUP 1)
Setup 2 (SETUP 2)
Setup 3 (SETUP 3)
Setup 4 (SETUP 4)
Multi Setup (MULTI SETUP)
Function:
The active parameter Setup is selected here. All
parameters can be programmed in four individual
parameter Setups. Shifts between Setups can
be made in this parameter via a digital input
or via serial communication.
Description of choice:
Factory Setup [0] contains the factory-set parameter
values. Setup 1-4 [1]-[4] are four individual
Setups which can be selected as required. Multi
Setup [5] is used where remote-controlled shifts
between the four Setups via a digital input or via
serial communication is required.
005 Programming Setup
(EDIT SETUP)
Value:
Factory Setup (FACTORY SETUP)
Setup 1 (SETUP 1)
Setup 2 (SETUP 2)
= factory setting. () = display text [] = value for use in communication via serial communication port
✭
[0]
[1]
[2]
[3]
[4]
[5]
[0]
[1]
Setup 3 (SETUP 3)
Setup 4 (SETUP 4)
✭Active Setup (ACTIVE SETUP)
Function:
You can select which Setup you want to programme
during operation (applies both via the control
panel and the serial communication port). It is,
for example, possible to programme Setup 2
[2], while the active Setup is set to Setup 1 [1]
in parameter 004 Active Setup .
Description of choice:
Factory Setup [0] contains the factory-set data
and can be used as a source of data if the
other Setups are to be reset to a known status.
Setup 1-4 [1]-[4] are individual Setups that can
be programmed freely during operation. If Active
Setup [5] is selected, the programming Setup will
be equal to parameter 004 Active Setup.
NB!:
If data is modified or copied to the active
Setup, the modifications have an immediate
effect on the unit’soperation.
006 Setup copying
(SETUP COPY)
Value:
✭No copying (NO COPY)
Copy to Setup 1 from #
(COPY TO SETUP 1)
Copy to Setup 2 from #
(COPY TO SETUP 2)
Copy to Setup 3 from #
(COPY TO SETUP 3)
Copy to Setup 4 from #
(COPY TO SETUP 4)
Copy to all Setups from # (COPY TO ALL)
Function:
You can copy from the selected active Setup in
parameter 005 Programming setup to the selected
Setup or Setups in this parameter.
NB!:
Copying is only possible in Stop (motor stopped
in connection with a stop command).
Description of choice:
Copying begins when the required copying function
has been selected and the [OK]/[CHANGE DATA]
[2]
[3]
[4]
[5]
[0]
[1]
[2]
[3]
[4]
[5]
86
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 88

Decentral Solutions - Design Guide
key has been pushed. The display indicates
when copying is in progress.
007 LCP copy
(LCP COPY)
Value:
✭No copying (NO COPY)
Upload all parameters (UPL. ALL PAR.)
Download all parameters (DWNL. ALL PAR.)
Download size-independent parameters
(DWNL.OUTPIND.PAR.)
Function:
Parameter 007 LCP copy is used if you want to use
the LCP 2 control panel’s integral copy function. The
function is used if you want to copy all parameter
setups from one frequency converter to another
by moving the LCP 2 control panel.
Description of choice:
Select Upload all parameters [1] if you want all
parameter values to be transferred to the control
panel. Select Download all parameters [2] if all
parameter values transferred are to be copied to the
frequency converter to which the control panel is
attached. Select Download size-independent par. [3]
if you only want to downloade the size-independent
parameters. This is used when downloading to a
frequency converter with a different rated power size
than that from which the parameter setup originates.
NB!:
Upload/download can only be performed
in stop mode. Download can o
performed to a frequency converter with
the same software version number, see parameter
626 Database identification no.
008 Display scaling of output frequency
(FREQUENCY SCALE)
Value:
0.01 - 100.00
Function:
In this parameter, the factor is selected by which the
output frequency is to be multiplied. The value is shown
in the display, provided parameters 009-012 Disp
readout have been set to Output frequency x scaling [5].
Description of choice:
Set the required scaling factor.
nly be
✭ 1.00
lay
[0]
[1]
[2]
[3]
009 Large display readout
(DISPLAY LINE 2)
Value:
No readout (NONE)
Resulting reference [%]
(REFERENCE [%])
Resulting reference [unit]
(REFERENCE [UNIT])
Feedback [unit] (FEEDBACK [UNIT])
✭Frequency [Hz] (FREQUENCY [HZ])
Output frequency x scaling
(FREQUENCY X SCALE)
Motor current [A] (MOTOR CURRENT [A])
Torque [%] ( TORQUE [%])
Power [kW] (POWER [KW])
Power [HP] (POWER [HP][US])
Motor voltage [V]
(MOTOR VOLTAGE [V])
DC link voltage [V]
(DC LINK VOLTAGE [V])
Thermal load motor [%]
(MOTOR THERMAL [%])
Thermal load [%]
(FC. THERMAL[%])
Running hours [Hours]
(RUNNING HOURS])
Digital input [Bin]
(DIGITAL INPUT[BIN])
Analog input 53 [V]
(ANALOG INPUT 53 [V])
Analog input 60 [mA]
(ANALOG INPUT 60 [MA])
Pulse reference [Hz]
(PULSE INPUT 33. [HZ])
External reference [%]
(EXTERNAL REF. [%])
Status word [Hex] (STATUS WORD [HEX])
Heatsink temperature [°C]
(HEATSINK TEMP [°C])
Alarm word [Hex] (ALARM WORD [HEX])
Control word [Hex] (CONTROL WORD [HEX])
Warning word [Hex]
(WARNING WORD [HEX])
Extended status word [Hex]
(EXT. STATUS [HEX])
Communication option card warning
(COMM OPT WARN [HEX])
Pulse count
(PULSE COUNTER)
Pulse input 29
(PULSE INPUT 29)
[0]
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[11]
[12]
[13]
[14]
[15]
[16]
[17]
[19]
[20]
[21]
[22]
[25]
[26]
[27]
[28]
[29]
[30]
[31]
[32]
300
Programming, FCD
= factory setting. () = display text [] = value for use in communication via serial communication port
✭
MG.90.F3.02 - VLT is a registered Danfoss trademark
87
Page 89

Decentral Solutions - Design Guide
Function:
In this parameter you can select the data value that
you wis h to display in t h e LCP control unit display
line 2 when the frequency converter is switched on.
The display will also be included in the scrollbar
in display mode. In parameters 010-012 Display
readout you can select a further three data values,
whicharedisplayedindisplayline1.
Description of choice:
No readout can only be selected in parameters
010-012 Small display readout.
Resulting reference [%] gives, as a percentage,
the resulting reference in the range from Minimum
reference, Ref
to Maximum reference, Ref
MIN
MAX
.
Reference [unit] gives the resulting reference with unit
Hz in Open loop.InClosed loop the reference unit
is selected in parameter 416 Process units.
Feedback [unit] gives the resulting signal value
using the unit/scaling selected in parameter 414
Minimum feedback, FB
FB
and 416 Process units.
HIGH
, 415 Maximum feedback,
LOW
Freque ncy [Hz] gives the output frequency of
the frequency converter.
Output frequency x scaling [-] equals the present
output frequency f
multiplied by the factor set in
M
parameter 008 Display scaling of output frequency .
Running hours [Hours] gives the number of hours that
the motor has tun since the last reset in parameter
619 Reset of running hours counter.
Digital input [Binary code] gives the signal status
from the 5 digital inputs (18, 19, 27, 29 and 33).
Terminal 18 corresponds to the bit on the extreme
left. ‘0’ = no signal, ‘1’ = signal connected.
Analog input 53 [V] gives the voltage value
of terminal 53.
Analog input 60 [mA] gives the present
value of terminal 60.
Pulse input 33[Hz] gives the frequency in Hz
connected to terminal 33.
External reference [%] gives the sum of
external references as a percentage (sum of
analogue/pulse/serial communication) in the
range from Minimum reference, Ref
Maximum reference, Ref
MAX
.
MIN
to
Status word [Hex] gives one or several status
conditions in a Hex code. See Serial communication
in the Design Guide for further information.
Heatsink temp.[°C] gives the present heatsink
temperature of the frequency converter. The
cut-out limit is 90-100 °C, while cutting back
in occurs at 70 ± 5 °C.
Motor current [A] gives the phase current of the
motor measured as an effective value.
Torque [%] denotes the motor’s present load in
relation to the motor’s rated torque.
Power [kW] gives the present power that
the
motor is absorbing in kW.
Power [HP] gives the present power that the
motor is absorbing in HP.
Motor voltage[V] gives the voltage supplied to the motor.
DC link voltage [V] gives the intermediate circuit
voltage of the frequency conve
Thermal load motor [%] gives th
rter.
e calculated/estimated
load on the motor. 100 % is the cut-out limit.
Thermal load [%] gives the calculated/estimated
thermal load on the frequency converter. 100
% is the cut-out limit.
Alarm w ord [Hex] gives one or several alarms
in hex code. See Serial communication in the
Design Guide for further information.
Control word [Hex] gives the control word for the
frequency converter. See Serial communication in
the Design G u ide for further information.
Warning word [Hex] gives one or several warnings
in hex code. See Serial communication in the
Design Guide for further information.
Extended status word [Hex] gives one or several status
modes in Hex code. See Serial communication in
the Design G u ide for further information.
Communication option card warning [Hex] gives a
warning word if there is a fault in the communication
bus. Only active if communication options are installed.
If there are no communication options 0
Hex is displayed.
= factory setting. () = display text [] = value for use in communication via serial communication port
✭
88
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 90

Decentral Solutions - Design Guide
Pulse input 29[Hz] gives the frequency in Hz
connected to terminal 29.
Pulse count gives the number of pulses that
the unit has registered.
010 Small display line 1.1
(DISPLAY LINE 1.1)
Value:
See par. 009 Large display readout
✭ Analog input 53 [V] [17]
Function:
In this parameter, the first of three data values
can be selected that is to be displayed in the
LCP control unit display, line 1, position 1. This
is a useful function, e.g. when setting the PID
regulator, as it gives a view of process reactions to
reference changes. The display readout is activated
by pushing the [DISPLAY STATUS] key.
Description of choice:
See parameter 009 Large display readout.
011 Small display readout 1.2
(DISPLAY LINE 1.2)
Value:
See parameter 009 Large display readout
✭ Motor current [A][6]
Function:
See the functional description given under parameter
010 Small display readout.
Description of choice:
See parameter 009 Large display readout.
Description of choice:
See parameter 009 Large display readout.
013 Local control
(LOC CTRL/CONFIG.)
Value:
Local not active (DISABLE)
Local control and open loop without slip
compensation
(LOC CTRL/OPEN LOOP)
Remote-operated control and open loop
without slip compensation
(LOC+DIG CTRL)
Local control as parameter 100
(LOC CTRL/AS P100)
✭Remote-operated control as parameter 100
(LOC+DIG CTRL/AS P100)
Function:
This is where the required function is selected if,
in parameter 002 Local/remote operation, Local
operation [1] has been chosen.
Description of choice:
If Loc al not active [0] is selected, it is not possible to
set a reference via parameter 003 Local reference.
In order to enable a shift to Local not ac t ive
[0], parameter 002 Local/remote operation must
be set to Remote operation [0].
Local control and open loop [1] is used if the motor
speed is to be set via parameter 003 Local reference.
When this choice is made, parameter 100 Configuration
automatically shifts to Speed regulation, open loop [0].
Remote-operated control and open loop [2] functions
in the same way as Local control a nd open loop
[1]; however, the frequency converter can also
be controlled via the digital inputs.
[0]
[1]
[2]
[3]
[4]
For selections [1-2] control is shifted to open
012 Small display readout 1.3
(DISPLAY LINE 1.3)
Value:
See parameter 009 Large display readout
✭ Feedback [unit] [3]
Function:
See the functional description given under parameter
010 Small display readout.
= factory setting. () = display text [] = value for use in communication via serial communication port
✭
MG.90.F3.02 - VLT is a registered Danfoss trademark
loop, no slip compensation.
Local control as parameter 100 [3] is used when
the motor speed is to be set via parameter
003 Local referen ce,butw
Configuration automatically shifting to Speed
regulation, open loop [0].
Remote-operated control as parameter 100 [4]
works the same way as Local control as parameter
100 [3]; however, the frequency converter can also
be controlled via the digital inputs.
ithout parameter 100
300
Programming, FCD
89
Page 91

Decentral Solutions - Design Guide
Shifting from Remote operation to Local operation
in parameter 002 Local/remote operation,whilethis
parameter has been set to Remote-operated control
and open loop [1]: The present motor frequency and
direction of rotation will be maintained. If the present
direction of rotation does not respond to the reversing
signal (negative reference), the reference will be set to 0.
Shifting from Local operat ion to Remote operation
in parameter 002 Local/remote control,while
this parameter has been set to Remote-operated
control and open loop [1]: The configuration
selected in parameter 100 Configuration will be
active. The shift will be smooth.
Shifting from Remote control to Local control in
parameter 002 Local/remote operation ,whilethis
parameter has been set to Remote-operated control
as parameter 100 [4]: the present reference will
be maintained. If the reference signal is negative,
thelocalreferencewillbesetto0.
Shifting from Local operat ion to Remote operation
in parameter 002 Local/remote operation, while
this parameter has been set to Remote operation:
The local reference will be replaced by the
remote-operated reference signal.
Function:
In this parameter, the jog function on the LCP
control panel can be engaged/disengaged.
Description of choice:
If Not active [0] is selected in this parameter,
the [JOG]-key will be inactive.
016 Local reversing
(LOCAL REVERSING)
Value:
✭Not active (DISABLE)
Active (ENABLE)
Function:
In this parameter you can select/deselect the reversing
function on the LCP control panel. The key can only
be used if parameter 002 Local/remote operation
is set to Local operation [1] and parameter 013
Localcontrol to Local control, open loop [1] or
Local control as parameter 100 [3].
Description of choice:
If Disable [0] is selected in this parameter, the
[FWD/REV] key will be disabled. See also parameter
200 Output frequency range.
[0]
[1]
014 Local stop
(LOCAL STOP)
Value:
Not active (DISABLE)
✭Active (ENABLE)
Function:
In this parameter, the local [STOP]-key can be
engaged or disengaged on the control panel
and on the LCP control panel.
Description of choice:
If Not active [0] is selected in this parame
the [STOP]-key will be inactive.
NB!:
If Not active [0] is selected, the motor cannot
be stopped by means of the [STOP]-key.
015 Local jog
(LOCAL JOGGING)
Value:
✭Not active (DISABLE)
Active (ENABLE)
ter,
[0]
[1]
[0]
[1]
017 Local reset of trip
(LOCAL RESET)
Value:
Not active (DISABLE)
✭Active (ENABLE)
Function:
In this parameter, the reset function on the control
panel can be engaged/disengaged.
Description of choice:
If Not active [0] is selected in this parameter,
the reset function will be inactive.
NB!:
Select Not active [0], only if an external reset
signal has been connected via the digital inputs.
018 Lock for data changes
(DATA CHANGE L OCK )
Value:
✭Not locked (NOT LOCKED)
Locked (LOCKED)
[0]
[1]
[0]
[1]
✭
= factory setting. () = display text [] = value for use in communication via serial communication port
90
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 92

Decentral Solutions - Design Guide
Function:
In this parameter, it is possible to ’lock’ the controls
to disable data changes via the control keys.
Description of choice:
If Locked [1] is selected, data changes in the
parameters cannot be made; however, it will
still be possible to make data changes via serial
communication. Parameter 009-012 Display readout
can be changed via the control panel.
019 Operating m ode at power-up, local
operation
(POWER UP ACTION)
Value:
Auto restart, use saved reference
(AUTO RESTART)
✭Forced stop, use saved reference
(LOCAL=STOP)
Forced stop, set ref. to 0
(LOCAL=STOP, REF=0)
[0]
[1]
[2]
020 Lock for Hand mode
(LOCK HAND MODE)
Value:
✭Not active (DISABLE)
Active (ENABLE)
Function:
In this parameter you can select whether it should
be possible or not to switch between Auto- and
Hand mode. In Auto mode the frequency converter is
controlled by external signals whereas the frequency
converter in Hand mode is controlled via a local
reference directly from the control unit.
Description of choice:
If Not active [0] is selected in this parameter, the Hand
mode function will be inactive. This blocking can be
activated as desired. If Active [1] is selected you can
switch between Auto- and Hand mode.
NB!:
ThisparameterisonlyvalidforLCP2.
[0]
[1]
Function:
Setting of the required operating mode when the
mains voltage is engaged. This function can only
be active if Local operat ion [1] has been selected
in parameter 002 Local/remote operation.
Description of choice:
Auto restart, use saved ref. [0] is selected if the
frequency converter is to start using the local reference
(set in parameter 003 Local reference)andthe
start/stop state given via the control keys immediately
prior to the mains voltage being cut out.
Forced stop, use saved ref. [1] is selected if the
frequency converter is to remain stopped when the
mains voltage is engaged, until the [START]-key
is activated. After a start command the motor
speed is ramped up to the saved reference in
parameter 003 Local reference.
Forced stop, set ref. to 0 [2] is selected if the
frequency converter is to remain stopped when
the mains voltage is cut back in. Parameter 003
Local reference is to b e zeroed.
024 Userdefined Quick Menu
(USER QUICKMENU)
Value:
✭Not active (DISABLE)
Active (ENABLE)
Function:
In this parameter you can select the standard
setup of the Quick menu key on the control
panel and the LCP 2 control panel.
Using this function, in parameter 025 Quick Menu
setup the user can select up to 20 parameters
for the Quick Menu key.
Description of choice:
If not active [0] is selected, the standard setup
of the Quick Menu key is active.
If Active [1] is selected, the user-defined
Quick Menu is active.
[0]
[1]
NB!:
In remote operation (parameter 002
Local/remote operation) the start/stop state
at the time of mains connection will depend
on the external control signals. If Pulse start [8] is
selected in parameter 302 Digital input,themotor
will remain stopped after mains connection.
✭ = factory setting. () = display text [] = value for use in communication via serial communication port
MG.90.F3.02 - VLT is a registered Danfoss trademark
300
Programming, FCD
91
Page 93

Decentral Solutions - Design Guide
025 Quick M enu setup
(QUICK MENU SETUP)
Value:
[Index 1 - 20] Value: 0 - 999
Function:
In this parameter you define which parameters are
required in the Quick Menu when parameter 024
User-defined Quick Menu is se t to Active [1]´.
Up to 20 parameters can be selected for the
user-defined Quick Menu.
NB!:
Please note that this parameter can only be set
using an LCP 2 control panel. See Order form.
Description of choice:
The Quick Menu is set up as follows:
1. Select parameter 025 Quick Menu setup
and press [CHANGE DATA].
2. Index 1 indicates the first parameter in Quick
Menu. You can scroll between the index numbers
using the [+ / -] keys. Select Index 1.
3. Using [< >] you can scroll between the
three figures. Press the [<] key once ad
the last number in the parameter number
can be selected using the [+ / -] keys.
Set Index 1 to 100 for parameter 100 Configuration.
4. Press [OK] when Index 1 has been set to 100.
5. Repeat steps 2 - 4 until all parameters required
have been set to the Quick Menu key.
6. Press [OK] to complete the Quick Menu setup.
If parameter 100 Configuration is selected at
Index 1, Quick Menu will start with this parameter
every time Quick Menu is activated.
✭ 000
As dig.outp. par. 341 (AD DIG. OUT. / P341)
As mech.brake output
(AS MECH. BRAKE OUTPUT)
Function:
This parameter enables the user to visualize different
situations using the Status LED.
Description of choice:
Select the function to be visualized.
[9]
[10]
Please note that parameter 024 User-defined Quick
Menu and parameter 025 Quick Menu setup are
reset to the factory setting during initialisation.
026 LED Status
(LED STATUS)
Value:
✭Overload (OVERLOAD)
Therm. warn/alarm 36 (OVERTEMP)
Thermistor/ETR (THERMAL MOTOR)
Digital input 18 (DIGITAL INPUT 18)
Digital input 19 (DIGITAL INPUT 19)
Digital input 27 (DIGITAL INPUT 27)
Digital input 29 (DIGITAL INPUT 29)
Digital input 33 (DIGITAL INPUT 33)
As relay par. 323 (AS RELAY / P323)
✭ = factory setting. () = display text [] = value for use in communication via serial communication port
92
[0]
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 94

Decentral Solutions - Design Guide
■Load and Motor
■Configuration
Selection of configuration and torque characteristics
has an effect on which parameters can be seen in the
display. If Open loop [0] is selected, all parameters
relating to PID regulation will be filtered out. This
means that the user only sees the parameters that
are relevant for a given application.
100 Configuration
(CONFIGURATION)
Value:
✭Speed control, open loop
(SPEED OPEN LOOP)
Speed control, closed loop
(SPEED CLOSED LOOP)
Process control, closed loop
(PROCESS CLOSED LOOP)
Function:
This parameter is used to select the configuration
to which the frequency converter is to be adapted.
This makes adaptation to a given application
simple, since the parameters not used in a given
configuration are hidden (not active).
[0]
[1]
[3]
101 Torque characteristic
(TORQUE CHARACT)
Value:
✭Constant torque
(CONSTANT TORQUE)
Variable torque low
(TORQUE: LOW)
Variable torque medium
(TORQUE: MED)
Variable torque high
(TORQUE: HIGH)
Variable torque low with CT start
(VT LOW CT START)
Variable torque medium with CT start
(VT MED CT START)
Variable torque high with CT start
(VTHIGHCTSTART)
Special motor mode
(SPECIAL MOTOR MODE)
CT = Constant torque
Function:
This parameter enables a choice of principle
for adaptation of the U/f ratio of the frequency
converter to the torque characteristic of the
load. See par. 135 U/f ratio.
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
Description of choice:
If Speed control, open loop [0] is selected, normal
speed control is obtained (without feedback
signal) with automatic load and slip compensation
to ensure a constant speed at varying loads.
Compensations are active, but may be disabled in
parameter 134 Load compensation and parameter
136 Slip compensation as required.
If Speed control, closed loop [1] is selected, better
speed accuracy is obtained. A feedback signal must
be added, and the PID regulator must be set in
parameter group 400 Special functions.
If Process control, closed loop [3] is selected, the
internal process regulator is activated to enabl
control of a process in relation to a given process
signal. The process signal can be set to the relevant
process unit or as a percentage. A feedback sign
must be added from the process and the process
regulator must be set in parameter group 400 Special
functions. Process closed loop is not ac
DeviceNet card is mounted and Instance 20/70 or
21/71 is chosen in parameter 904 Instance types.
eprecise
al
tive if a
Description of choice:
If Constant torque [1] is selected, a load-dependent U/f
characteristic is obtained, in which output voltage and
output frequency are increased at increasing loads in
order to maintain constant magnetization of the motor.
Select Variable torque low [2], Variable torque
medium [3] or Variable torque high [4], if the load
is square (centrifugal pumps, fans).
Variable torque - low with CT start [5], -mediumwith
CT start [6] or high with CT start [7], are selected if
you need a greater breakaway torque than can be
achieved with the three first characteristics.
NB!:
Load and slip compensation are not
active if variable torque or special motor
mode have been selected.
300
Programming, FCD
= factory setting. () = display text [] = value for use in communication via serial communication port
✭
MG.90.F3.02 - VLT is a registered Danfoss trademark
93
Page 95
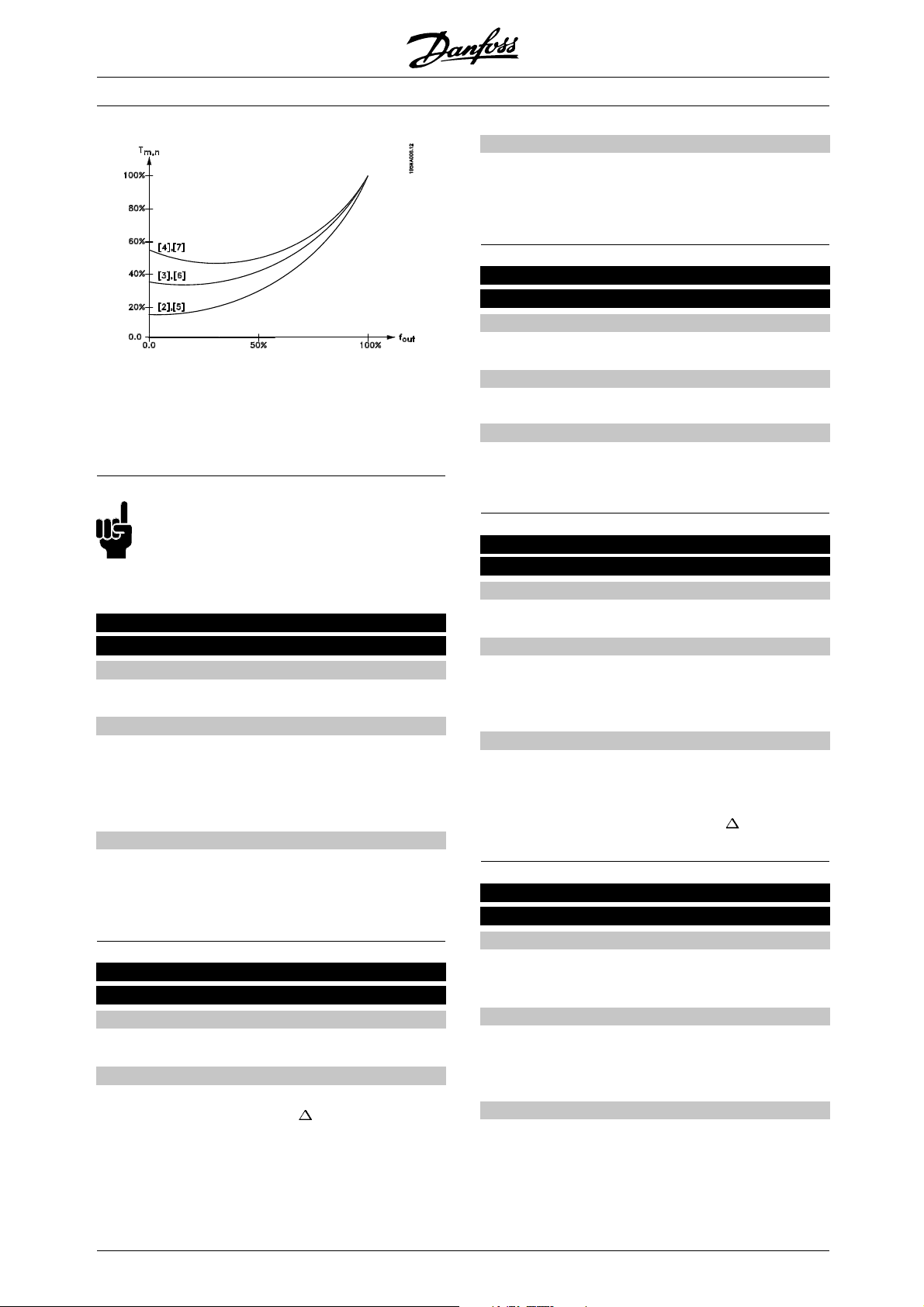
Decentral Solutions - Design Guide
Description of choice:
Select a value that corresponds to the nameplate
data on the motor, regardless of the frequency
converter’s mains voltage.
Select Special motor mode [8], if a special U/f
setting is needed that is to be adapted to the
present motor. The break points are set in
parameters 423-428 Voltage/frequency .
NB!:
Pleasenotethatifavaluesetinthenameplate
parameters 102-106 is changed, there will
be an automatic change of parameter 108
Stator resistance and 109 Stator reactance.
102 Motor power P
M,N
(MOTOR POWER)
Value:
0.18 - 4 kW
✭ Depends on unit
Function:
Here you must set a power value [kW] P
M,N
,
corresponding to the motor’s rated power. The
factory sets a rated power value [kW] P
M,N
,
that depends on the type of unit.
Description of choice:
Set a value that matches the nameplate data on the
motor. Settings between two sizes below and one
size over the factory setting are possible.
103 Motor voltage U
M,N
(MOTOR VOLTAGE)
Value:
50 - 999 V
✭ 400 V
Function:
This is where to set the rated motor voltage
U
foreitherstarYordelta .
M,N
104 Motor frequency f
M,N
(MOTOR FREQUENCY)
Value:
24-1000 Hz
✭ 50 Hz
Function:
This is where to select the rated motor frequency f
M,N
Description of choice:
Select a value that corresponds to the nameplate
data on the motor.
105 Motor current I
M,N
(MOTOR CURRENT)
Value:
0,01 - I
MAX
✭ Depends on choice of motor
Function:
The nominal, rated current of the motor I
M,N
forms
part of the frequency converter calculation of features
such as torque and motor thermal protection.
Description of choice:
Setavaluethatcorrespondstothenameplate
data on the motor. Set the motor current
taking into account whether the motor is
I
M,N
star-connected Y or delta-connected
.
106 Rated motor speed
(MOTOR NOM. SPEED)
Value:
100 - f
✭ Depends on parameter 104 Motor frequency, f
x 60 (max. 60000 rpm)
M,N
M,N
Function:
This is where to set the value that corresponds
to the rated motor speed n
that can be
M,N
seen from the nameplate data.
Description of choice:
Select a value that corresponds to the nameplate
data on the motor.
.
= factory setting. () = display text [] = value for use in communication via serial communication port
✭
94
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 96

Decentral Solutions - Design Guide
NB!:
The max. value equals f
M,N
x 60. f
set in parameter 104 Motor frequency, f
M,N
to be
M,N
.
107 Automatic motor tuning, AMT
(AUTO MOTOR TUN.)
Value:
✭Optimisation off (AMT OFF)
Optimisation on (AMT START)
Function:
Automatic motor tuning is an algorithm that measures
stator resistance R
without the motor axle turning.
S
This means that the motor is not delivering any torque.
AMT can be used with benefit when initialising units
where the user wishes to optimise adjustment of
the frequency converter to the motor being used.
This is used in particular when the factory setting
does not sufficiently cover the motor.
For the best possible tuning of the frequency converter
it is recommended that AMT is performed on a
cold motor. It should be noted that repeated AMT
runs can cause heating of the motor, resulting
in an increase in the stator resistance R
.Asa
S
rule, however, this is not critical.
AMT is performed as follows:
S
tart AMT:
1. Give a STOP signal.
2. Parameter 107 Automatic motor tuning is se t
at value [2] Optimisation on.
3. A START signal is given and parameter 107
Automatic motor tuning is reset to [0] when
AMT has been completed.
In factory setting START requires terminals 18 and
27 to be connected to terminal 12.
omplete AMT:
C
AMT is completed by giving a RESET signal.
Parameter 108 Stator resistance, Rs is updated
with the optimised value.
nterrupting AMT:
I
AMT can be interrupted during the optimisation
procedure by giving a STOP signal.
When using the AMT function the following
points should be observed:
- For AMT to be able to define the motor paramete
as well as possible, the correct type plate data for
[0]
[2]
the motor connected to the frequency converter
must be keyed into parameters 102 to 106.
- Alarms will appear in the display if faults arise
during tuning of the motor.
- As a rule the AMT function will be able to measure
values for motors that are 1-2 times larger or
the R
S
smaller than the frequency converter’snominalsize.
- If you wish to interrupt automatic motor tuning,
press the [STOP/RESET] key.
NB!:
AMT may not be performed on motors
connected in parallel, nor may setup changes
be made while AMT is running.
Description of choice:
Select Optimisation on [2] if you want the frequency
converter to perform automatic motor tuning.
108 Stator res istance R
S
(STATOR RESISTAN)
Value:
0.000 - X.XXX
✭ Depends on choice of motor
Function:
After setting of parameters 102-106 Nameplate data,
a number of adjustments of various parameters is
carried out automatically, including stator resistance
. A manually entered RSmust apply to a cold
R
S
motor. The shaft performance can be improved by
fine-tuning R
and XS, see procedure below.
S
NB!:
Parameters 108 Stator resistance R
Stator reactance X
are normally not to be
S
and 109
S
changed if nameplate data has been set.
Description of choice:
can be set as follows:
R
S
1. Use the factory settings of R
which the
S
frequency converter itself chooses on the basis
of the motor nameplate data.
2. The value is stated by the motor supplier.
3. The value is obtained through manual
measurements: R
theresistanceR
terminals. R
is set automatically when AMT has
4. R
rs
S
been completed. See parameter 107
can be calculated by measuring
S
PHASE-PHASE
=0.5xR
S
between two phase
PHASE-PHASE
300
.
Programming, FCD
Auto motor adaption.
✭ = factory setting. () = display text [] = value for use in communication via serial communication port
MG.90.F3.02 - VLT is a registered Danfoss trademark
95
Page 97
Decentral Solutions - Design Guide
109 Stator reactance X
S
(STATOR REACTANCE)
Value:
0.00 - X,XX
✭ Depends on choice of motor
Function:
After setting of parameters 102-106 Nameplate data,
a number of adjustments of various parameters
are made automatically, including stator reactance
. The shaft performance can be improved by
X
S
fine-tuning R
and XS, see procedure below.
S
Description of choice:
can be set as follows:
X
S
1. The value is stated by the motor supplier.
2. The value is obtained through manual
measurements X
is obtained by connecting a
S
motor to mains and measuring the phase-phase
voltage U
and the idle current .
M
XL: See parameter 142.
3. Use the factory settings of X
which the
S
frequency converter itself chooses on the basis
of the motor nameplate data.
117 Resonance dampening
(RESONANCE DAMP.)
Value:
0 - 100 %
✭ 0%
Function:
Reduces the output voltage when running at low
load for avoiding resonance phenomena.
Description of choice:
If 0 is selected, there will be no reduction. If 100 % is
selected, the voltage is reduced to 50% at no load.
119 High start torque
(HIGH START TORQ.)
Value:
0.0 - 0.5 sec.
✭ 0.0 sec.
Function:
To ensure a high start torque approx. 1.8 x I
INV.
can be
permitted for max. 0.5 sec. The current is, however,
limited by the frequency converter’s(inverter’s) safety
limit. 0 sec. corresponds to no high start torque.
Description of choice:
Set the necessary time for which a high
start torque is required.
120 Start delay
(START DELAY)
Value:
0.0 - 10.0 sec.
✭ 0.0 sec.
Function:
This parameter enables a delay of the start-up time
after the conditions for start have been fulfilled.
When the time has passed, the output frequency
will start by ramping up to the reference.
Description of choice:
Set the necessary time before commencing
to accelerate.
121 Start function
(START FUNCTION)
Value:
DC hold during start delay time
(DC HOLD/DELAY TIME)
DC brake during start delay time
(DC BRAKE/DELAY TIME)
✭Coasting during start delay time
(COAST/DELAY TIME)
Start frequency/voltage clockwise
(CLOCKWISE OPERATION)
Start frequency/voltage in reference direction
(VERTICAL OPERATION)
Function:
This is where to choose the required mode during the
start delay time (parameter 120 Start delay time).
Description of choice:
Select DC hold during start delay time [0] to energize
the motor with a DC hold voltage during the start delay
time. Set voltage in parameter 137 DC hold voltage.
Choose DC brake during start delay time [1] to energize
the motor with a DC brake voltage during the start delay
time. Set voltage in parameter 132 DC brake voltage.
Choose Coasting during start delay time [2] and the
motor will not be controlled by the frequency converter
during the start delay time (inverter turned off).
[0]
[1]
[2]
[3]
[4]
= factory setting. () = display text [] = value for use in communication via serial communication port
✭
96
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 98

Decentral Solutions - Design Guide
Choose Start frequency/voltage clockwise [3] to
obtain the function described in parameter 130
Start frequency and 131 Voltage at start during start
delay time. Regardless of the value assumed by
the reference signal, the output frequency equals
the setting in parameter 130 Start frequency and
the output voltage will correspond to the setting
in parameter 131 Voltage at start .
This functionality is typically used in hoist applications.
It is used in particular in applications in which a cone
anchor motor is applied, where the direction of rotation
is to start clockwise followed by the reference direction.
Select Start frequency/voltage in reference direction
[4] to obtain the function described in parameter
130 Start frequency and 131 Voltage at start
during the start delay time.
The direction of rotation of the motor will always
follow in the reference direction. If the reference signal
equals zero, the output frequency will equal 0 Hz,
while the output voltage will correspond to the setting
in parameter 131 Voltageatstart. If the reference
signal is different from zero, the output frequency will
equal parameter 130 Start frequency and the output
voltage will equal parameter 131 Voltage at start.This
functionality is used typically for hoist applications with
counterweight. It is used in particular for applications
in which a cone anchor motor is applied. The cone
anchor motor can break away using parameter 130
Start frequency and parameter 131 Voltage a t start.
122 Function at stop
(FUNCTION AT STOP)
Value:
✭Coasting (COAST)
DC hold (DC HOLD)
Function:
This is where to choose the function of the frequency
converter after the output frequency has become
lower than the value in parameter 123 The min.
freque ncy for activation of function at stop or after
a stop command and when the output frequency
has been ramped down to 0 Hz.
[0]
[1]
123 Min. frequency for activation of
function at stop
(MIN.F.FUNC.STOP)
Value:
0,1 - 10 Hz
Function:
In this parameter, the output frequency is set at
which the function selected in parameter 122
Function at stop is to be activated.
Description of choice:
Set the required output frequency.
NB!:
If parameter 123 is set higher than parameter
130, then the start delay function (parameter
120 and 121) will be skipped.
NB!:
If parameter 123 is set too high, and DC
hold has been chosen in parameter 122,
the output frequency will jump to the value
in parameter 123 without ramping up. This may
cause an overcurrent warning / alarm.
■DC Braking
During DC braking DC voltage is supplied to the
motor, and this will cause the shaft to be brought to
a standstill. In parameter 132 DC brake voltage DC
brake voltage can be preset from 0-100%. Max. DC
brake voltage depends on the motor data selected.
In parameter 126 DC b raking time DC braking time
is determined and in parameter 127 DC brake cut-in
frequency the frequency at which DC braking becomes
active is selected. If a digital input is programmed to DC
braking inverse [5] and shifts from logic ’1’ to logic ’0’,
DC braking will be activated. When a stop command
becomes active, DC braking is activated when the
output frequency is less than the brake cut-in frequency.
NB!:
DC braking may not be used if the inertia in
the motor shaft is more than 20 times greater
than the motor’s internal inertia.
✭ 0,1 Hz
Description of choice:
Select Coasting [0] if the frequency converter is to
’let go’ of the motor (inverter turned off).
Select DC hold [1] if parameter 137 DC hold
voltage is to be activated.
✭ = factory setting. () = display text [] = value for use in communication via serial communication port
MG.90.F3.02 - VLT is a registered Danfoss trademark
300
Programming, FCD
97
Page 99

Decentral Solutions - Design Guide
126 DC brake time
(DC BRAKING TIME)
Value:
0 - 60 sec.
✭ 10 sec
Function:
In this parameter, the DC brake time is set at which
parameter 132 DC brake voltage is to be active.
Description of choice:
Set the required time.
127 DC brake cut-in frequency
(DC BRAKE CUT-IN)
Value:
0.0 (OFF) - par. 202
Output frequency high limit, f
MAX
✭ OFF
Function:
In this parameter, the DC brake cut-in frequency
is set at which the DC brake is to be activated
in connection with a stop command.
Description of choice:
Set the required frequency.
to stop the frequency converter if the motor
overheats. The cut-out value is 3 k
.
If a motor features a Klixon thermal switch instead,
this can also be connected to the input. If
motors operate in parallel, the thermistors/thermal
switches can be connected in series (total
resistance lower than 3 k
).
- Thermal load calculation (ETR - Electronic
Thermal Relay), based on present load and
time. This is compared with the rated motor
current I
and rated motor frequency f
M,N
M,N
The calculations take into account the need for
lower loading at low speeds due to the motor’s
internal ventilation being reduced.
.
128 Thermal motor protection
(MOT.THERM PROTEC)
Value:
✭No protection (NO PROTECTION)
Thermistor warning
(THERMISTOR WARN)
Thermistor trip (THERMISTOR TRIP)
ETR warning 1 (ETR WARNING 1)
ETR trip 1 (ETR TRIP 1)
ETR warning 2 (ETR WARNING 2)
ETR trip 2 (ETR TRIP 2)
ETR warning 3 (ETR WARNING 3)
ETR trip 3 (ETR TRIP 3)
ETR warning 4 (ETR WARNING 4)
ETR trip 4 (ETR TRIP 4)
[10]
Function:
The frequency converter can monitor the motor
temperature in two different ways:
- Via a PTC thermistor that is mounted on the motor.
The thermistor is connected between terminal 31a
/ 31b. Thermistor is to be selected if a possibly
integrated thermistor in the motor is to be able
[0]
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
ETR functions 1-4 correspond to Setup 1-4. ETR
functions 1-4 do not begin to calculate the load until
you switch to the Setup in which they have been
selected. This means that you can use the ETR function
even when changing between two or more motors.
Description of choice:
Select No protection [0] if you do not want a warning
or trip when a motor is overloaded.
Select Thermistor warning [1] if you want a warning
when the connected becomes too hot.
Select Thermistor trip [2] if you want a trip when the
connected thermistor becomes too hot.
= factory setting. () = display text [] = value for use in communication via serial communication port
✭
98
MG.90.F3.02 - VLT is a registered Danfoss trademark
Page 100

Decentral Solutions - Design Guide
Select ETR warning if you want a warning when the
motor is overloaded according to the calculations.
You can also programme the frequency converter to
give a warning signal via the digital output.
Select ETR Trip ifyouwantatripwhenthemotor
is overloaded according to the calculations.
Select ETR warning 1-4 if you want a warning when
the motor is overloaded according to the calculations.
You can also programme the frequency converter to
give a warning signal via one of the digital outputs.
Select ETR Trip 1-4 if you want a trip when the motor
is overloaded according to the calculations.
NB!:
This function cannot protect the individual
motors in the case of motors linked in parallel.
130 Start frequency
(START FREQUENCY)
Value:
0.0 - 10.0 Hz
Function:
Thestartfrequencyisactiveforthetimesetin
parameter 120 Start delay, after a start command.
The output frequency will ’jump’ tothenextpreset
frequency. Certain motors, such as conical anchor
motors, need an extra voltage/start frequency
(boost) at start to disengage the mechanical brake.
To achieve this parameters 130 Start frequency
and 131 Initial voltage are used.
Description of choice:
Set the required start frequency. It is a precondition
that parameter 121 Start function,issetto
Start frequency/voltage clockwise [3] or Start
frequency voltage in reference direction [4] and
that in parameter 120 Start delay atimeisset
and a reference signal is present.
NB!:
If parameter 123 is set higher than parameter
130, the start delay function (parameter
120 and 121) will be skipped.
✭ 0.0 Hz
parameter can be used for example for lifting/dropping
applications (conical anchor motors).
Description of choice:
Set the required voltage necessary to cut out the
mechanical brake. It is assumed that parameter
121 Start function,issettoStart frequency/voltage
clockwise [3] or Start frequency/voltage in reference
direction [4] and that in parameter 120 Start delay a
time is set, and that a reference signal is present.
132 DC brake voltage
(DC BRAKE VOLTAGE)
Value:
0 - 100% of max. DC brake voltage
Function:
In this parameter, the DC brake voltage is set which is
to be activated at stop when the DC brake frequency
set in parameter 127 DC brake cut-in frequency is
reached, or if DC braking inverse isactiveviaadigital
input or via serial communication. Subsequently,
the DC brake voltage will be active for the time
set in parameter 126 DC brake time.
Description of choice:
To be set as a percentage value of the max. DC
brake voltage, which depends on the motor.
133 Start voltage
(START VOLTAGE)
Value:
0.00 - 100.00 V
Function:
A higher start torque can be obtained by increasing
the start voltage. Small motors (< 1.0 kW)
normally require a high start voltage.
✭ Depends on unit
✭ 0%
131 Initial voltage
(INITIAL VOLTAGE)
Value:
0.0 - 200.0 V
Function:
Initial v oltage is active for the time set in parameter
120 Start delay , after a start command
✭ = factory setting. () = display text [] = value for use in communication via serial communication port
MG.90.F3.02 - VLT is a registered Danfoss trademark
✭ 0.0 V
.This
300
Programming, FCD
99
 Loading...
Loading...