

Page 1
MAKING MODERN LIVING POSSIBLE
Guía de Diseño
FCD 300
Page 2
Guía de diseño del VLT® descentralizado FCD
300
Índice
Índice
1 El concepto de descentralización
Introducción 5
Ventajas del diseño descentralizado 6
Ejemplos de aplicaciones 13
Guía de diseño del producto 16
Formulario de pedido 21
Herramientas de software para PC 22
Accesorios 23
Comunicación 25
Método de instalación óptima 28
Mantenimiento de los productos descentralizados Danfoss 31
2 Introducción al FCD 300
Seguridad 34
Advertencia de alta tensión 34
Estas normas están relacionadas con su seguridad 34
Advertencia contra arranques accidentales 34
Tecnología 35
5
33
Marca CE 37
3 Instalación
Dimensiones mecánicas 39
Dimensiones mecánicas, montaje del motor 39
Dimensiones mecánicas, montaje independiente 39
Información general sobre la instalación eléctrica 43
Componentes electrónicos adquiridos sin caja de instalación 44
Instalación eléctrica correcta en cuanto a EMC 46
Conexión a tierra de cables de control apantallados/blindados 48
Diagrama 49
Interruptores de interferencia de radiofrecuencia J1, J2 49
Instalación eléctrica 50
Ubicación de los terminales 50
Conexión de red 51
Fusibles previos 51
Conexión del motor 52
Dirección de giro del motor 52
39
Conexión de red y de motor con interruptor de servicio. 53
Conexión del conector de motor HAN 10E para T73 53
Conexión de motores en paralelo 53
Cables de motor 54
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
1
Page 3
Índice
Guía de diseño del VLT® descentralizado FCD
300
Protección térmica del motor 54
Resistencia de freno 54
Control del Freno mecánico 55
Instalación eléctrica, Cables de control 55
Conexión de los sensores a los conectores M12 para T63 y T73 56
Instalación eléctrica, Terminales de control 56
Comunicación con PC 57
Conexión de relés 57
Ejemplos de conexión 58
4 Programación
LCP unidad de control 65
La unidad de control LCP 2, opción 65
Selección de parámetros 69
Grupo de parámetros 0-** Funcionamiento y display 70
Configuración de ajustes 71
Grupo de parámetros 1-** Carga y motor 77
Frenado de CC 81
Grupo de parámetros 2-** Referencias y límites 85
Manejo de referencias 85
Función de referencia 88
Grupo de parámetros 3-** Entradas y salidas 91
Grupo de parámetros 4-** Funciones especiales 98
Funciones PID 100
Manejo de realimentación 102
Comunicación serie 106
Código de control según el protocolo FC 111
65
Código de estado según el perfil FC 113
Perfil FC de E/S rápida 114
Código de control según el tipo de bus de campo 114
Código de estado según el protocolo Profidrive 116
Grupo de parámetros 5-** Comunicación serie 118
Grupo de parametros 6-** Funciones técnicas 124
5 Todo sobre el FCD 300
Resistencias de freno 127
Frenado dinámico 127
Resistencia de freno interna 131
Condiciones especiales 134
Aislamiento galvánico (PELV) 134
Corriente de fuga a tierra y relés RCD 134
Condiciones de funcionamiento extremas 135
2
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
127
Page 4
Guía de diseño del VLT® descentralizado FCD
300
Relación dU/dt del motor 136
Conmutación a la entrada 136
Ruido acústico 136
Frecuencia de conmutación en función de la temperatura 137
Reducción de potencia debido a la presión atmosférica 137
Reducción de potencia en función del funcionamiento a bajas vueltas 137
Longitud de cables de motor 137
Vibración y golpe 138
Humedad atmosférica 138
Estándar UL 138
Rendimiento 138
Interferencia de la red de alimentación / Armónicos 139
Factor de potencia 139
Resultados de las pruebas de emisión según los estándares genéricos y el están-
dar de producto PDS 139
Índice
Resultado de pruebas de inmunidad según estándares genéricos, estándares de
producto PDS y estándares básicos. 140
Entornos agresivos 141
Limpieza 141
Mensajes de estado 143
Mensajes de advertencia y alarma 143
Códigos de advertencia, códigos de estado ampliados y códigos de alarma 145
Especificaciones técnicas generales 147
Documentación disponible 151
Ajustes de fábrica 152
Índice
157
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
3
Page 5

1
1 El concepto de descentralización
Guía de diseño del VLT® descentralizado FCD
300
4
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 6

Guía de diseño del VLT® descentralizado FCD
300
1 El concepto de descentralización
1 El concepto de descentralización
1.1 Introducción
Danfoss fue la primera empresa mundial en fabricar y ofrecer convertidores de frecuencia para el control variable ilimitado de la velocidad de motores
trifásicos de CA. Hasta entonces, los motores de CA funcionaban a la velocidad determinada por la frecuencia de la fuente de alimentación principal.
La fabricación de convertidores de frecuencia se inició en 1968. El primer convertidor de frecuencia fue además el primer convertidor descentralizado,
ya que se colocaba junto al motor.
El primer convertidor de frecuencia estaba totalmente protegido en una carcasa rellena de aceite de silicona para la refrigeración, puesto que los semiconductores de la época eran muy ineficaces. El diseño de la protección permitía montar directamente el convertidor en la aplicación junto al motor. La
temperatura, el agua, los productos de limpieza, el polvo y otros factores medioambientales tampoco suponían un problema, incluso en entornos difíciles.
Los semiconductores mejoraron en las siguientes décadas. La refrigeración por aire demostró ser suficiente y se abandonó la refrigeración por aceite. Al
mismo tiempo, creció considerablemente el uso de convertidores de frecuencia. Los PLC ganaron terreno en el control de aplicaciones avanzadas, y
empezó a ser habitual instalar todos los convertidores de frecuencia en un único alojamiento, en lugar de en varios lugares de la planta.
1
Las continuas mejoras en los semiconductores y las tecnologías relacionadas (como la tecnología de bus de campo) vuelven a hacer ahora factible
considerar la instalación de los convertidores cerca de los motores, logrando las ventajas de una instalación descentralizada y evitando los inconvenientes
de los primeros convertidores rellenos de aceite.
El desarrollo de la automatización en la industria se basa en la capacidad de enviar y recibir los datos de la aplicación requeridos para controlar los
procesos. Se instalan cada vez más sensores y se envían cada vez más datos al control central del PLC. Esta tendencia depende del creciente uso de los
sistemas de bus de campo.
Fuentes industriales afirman generalmente que hasta el 30 % de las instalaciones de convertidores de frecuencia se instalarán de forma descentralizada
en los próximos años, y es indiscutible la tendencia hacia un control inteligente distribuido, ya que no dejan de aparecer nuevos componentes y aplicaciones para las instalaciones descentralizadas.
Este libro es una introducción general a las características básicas de las filosofías de instalación descentralizadas para controles de motores y sus
diferencias con respecto al concepto centralizado. Le ayudará a seleccionar el concepto más adecuado y le guiará por el proceso de seleccionar los
productos apropiados.
Finalmente, hemos incluido información completa sobre los productos descentralizados de Danfoss.
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
5
Page 7

1
Guía de diseño del VLT® descentralizado FCD
1 El concepto de descentralización
1.2 Ventajas del diseño descentralizado
En las siguientes páginas, nos centraremos en la descripción de la instalación descentralizada de convertidores de frecuencia, denominados aquí controles
de motor.
Hay dos conceptos topológicos para el diseño de instalaciones de controles de motor en una planta: instalaciones «centralizadas» e instalaciones «descentralizadas». Ambas tipologías se muestran en la figura.
En una instalación centralizada:
- los controles de motor se colocan en un lugar central.
En una instalación descentralizada:
- los controles de motor se distribuyen por toda la planta, montados sobre el motor que controlan o cerca del mismo.
«Descentralizada» no quiere decir «sin alojamiento de control», sino simplemente que su enorme tamaño puede reducirse ahora gracias al innovador diseño de los componentes que se colocarán descentralizados. Seguirá siendo necesario contar con alojamientos para la distribución de la
potencia y la inteligencia general, y hay zonas —especialmente en la industria de procesos con áreas como la protección contra explosiones—
en las que los alojamientos centralizados seguirán siendo la solución predilecta.
300
Colocar los dispositivos electrónicos avanzados y fiables necesarios para
garantizar un funcionamiento suave, adaptado y económico del motor
junto a (o sobre) este facilita la modularización y reduce drásticamente
los costes de cableado y los problemas de EMC. Ventajas adicionales:
• Se eliminan los alojamientos de control de motores, que ocupan mucho espacio en largas filas de paneles centralizados.
• Se reducen los esfuerzos de insertar y colocar largos cables de motor apantallados, que requieren una atención especial en cuanto a las terminaciones de EMC.
• La disipación térmica de los dispositivos electrónicos de potencia se traslada del panel a la planta.
• Los elementos de maquinaria estandarizados gracias a la modularización reducen el tiempo de diseño y la comercialización.
• La puesta en marcha es más fácil y rápida.
El control de motor descentralizado está ganando terreno rápidamente, a pesar de las ventajas del concepto de control centralizado:
• No se requiere un espacio adicional en torno al motor o cerca del mismo.
• No se requiere la colocación de cables de control en la planta.
• Independencia del entorno de la planta.
Ilustración 1.1: Instalaciones centralizadas frente a instalaciones descentralizadas.
1.2.1 Ahorro directo
Los controles de motor de las instalaciones descentralizadas deben fabricarse de forma que respondan a los difíciles requisitos de las zonas de producción,
especialmente los impuestos por la industria alimentaria y de bebidas, en la que es necesario realizar lavados frecuentes. Sin duda, esto incrementa el
coste del convertidor de frecuencia. El incremento se verá más que compensado por el ahorro en los costes de alojamientos y cables.
El potencial ahorro de cables es considerable, como demuestra el siguiente ejemplo.
6
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 8
Guía de diseño del VLT® descentralizado FCD
300
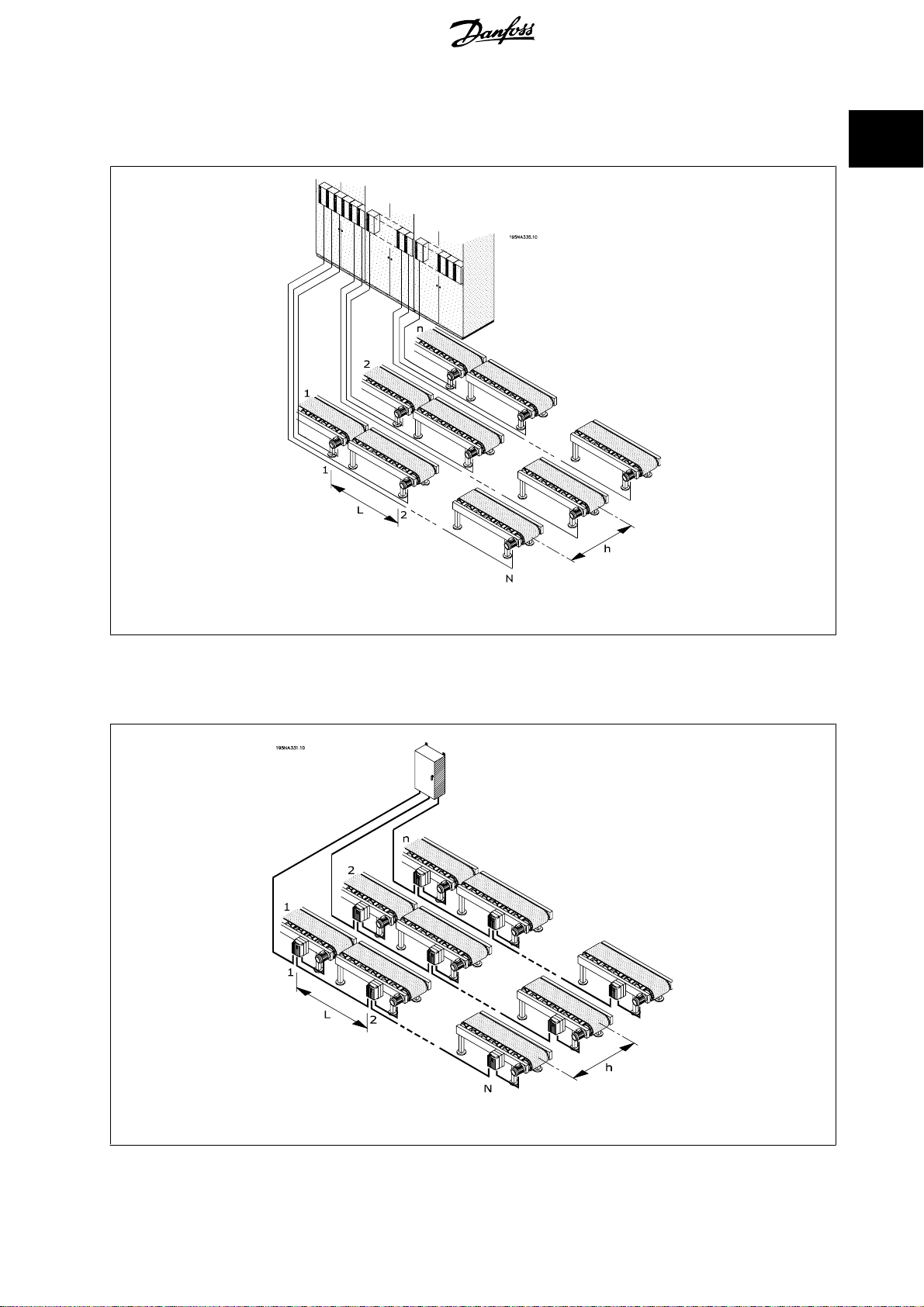
La figura muestra una instalación con motores distribuidos en varias filas con varios motores en cada una de ellas, como ocurre, por ejemplo, en cadenas
paralelas de embotellado u horneado en la industria alimentaria y de bebidas. El ejemplo muestra la necesidad de cables de alimentación desde los
convertidores colocados de forma centralizada hasta los motores.
1 El concepto de descentralización
1
Ilustración 1.2: Instalación centralizada.
Los convertidores de frecuencia se distribuyen de forma equidistante respecto a la distancia L que hay entre cada convertidor y la distancia h entre cada
fila, así como con una distancia h desde la entrada de potencia centralizada o la ubicación del alojamiento hasta la primera fila. Hay n filas y N convertidores
de frecuencia en cada fila.
Ilustración 1.3: Instalación descentralizada.
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
7
Page 9
1
Guía de diseño del VLT® descentralizado FCD
1 El concepto de descentralización
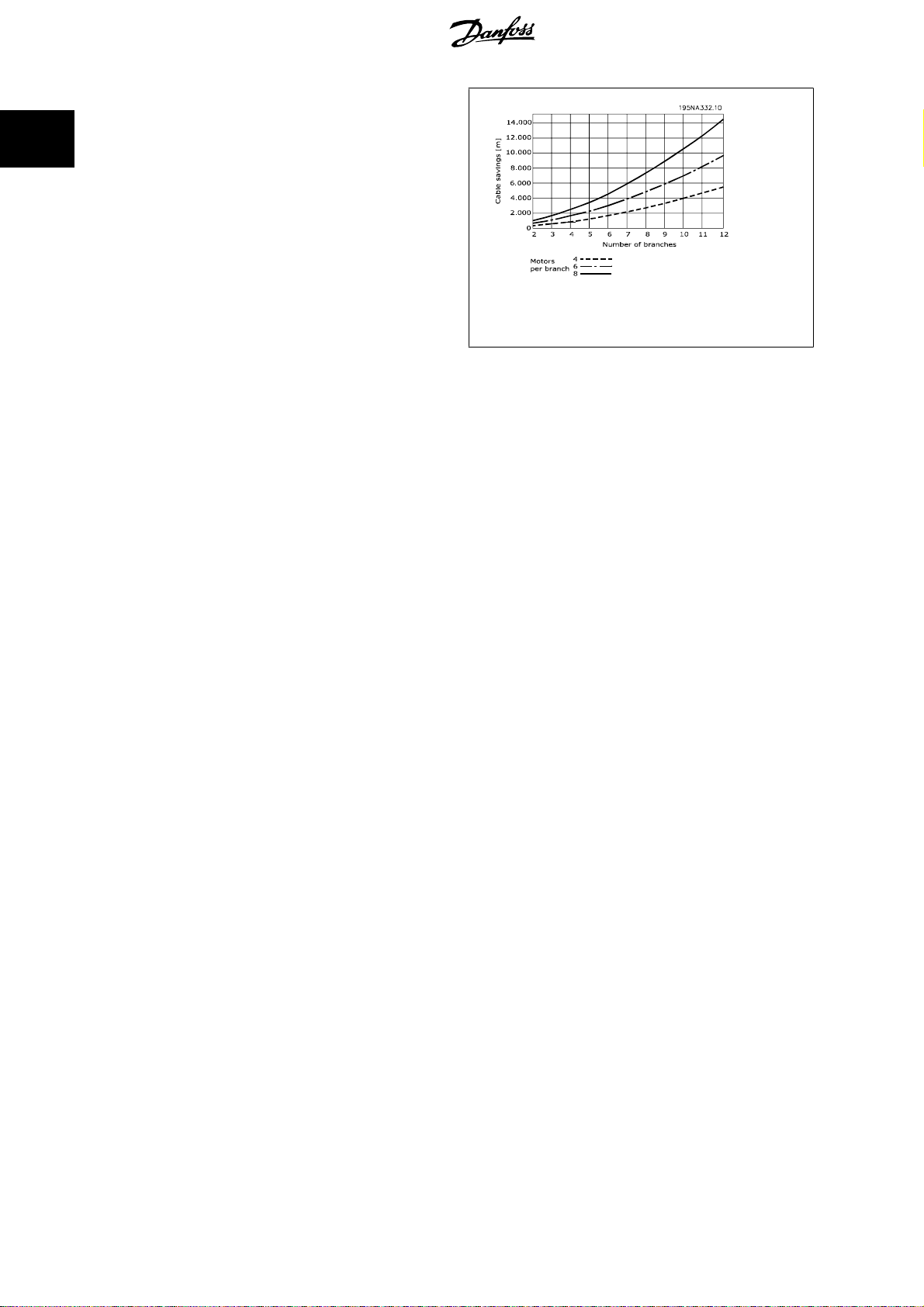
La figura 1.4 muestra cómo el cable de red trifásico puede distribuirse
con bucles de potencia de un motor (convertidor de frecuencia) al siguiente. El potencial de ahorro en cables se recoge en la figura xx. La
figura muestra una distancia dada de 10 m entre cada motor y de 20 m
entre cada línea; el ahorro de cables potencial depende del número de
motores y del número de líneas.
Ilustración 1.4: Ahorro de cables potencial en un ejemplo de
instalación.
El ahorro de cables potencial en cuanto a longitud de cable por sí solo ya es considerable. La figura solo muestra el potencial relativo a cables de
alimentación. Cuestiones como los cables apantallados o no apantallados y las dimensiones de los cables añaden otras ventajas a las instalaciones
descentralizadas.
Caso real
Los cálculos en una cadena concreta típica de embotellado de 91 piezas con motores de 1,5 kW, teniendo en cuenta las dimensiones del cable, redundan
en el siguiente ahorro potencial en cables y terminaciones:
300
• Las terminaciones de cables de reducen de 455 a 352.
• Las terminaciones de cables EMC se reducen de 364 a 182 utilizando controles de motor con interruptores de mantenimiento integrados.
• La longitud del cable de alimentación se reduce de 6468 m a 1180 m (5288 m menos), y se pasa de cables apantallados a cables de instalación
estándar.
Para obtener más detalles, consulte el siguiente capítulo acerca del
Método de instalación óptima.
1.2.2 Ahorro en diseño
Los usuarios finales desean postergar la decisión final de adquirir nuevos equipamos y empezar a producir lo antes posible, una vez que se ha tomado
dicha decisión. El tiempo de amortización y el plazo de comercialización deben reducirse. Esto condiciona tanto la fase de diseño como la fase de puesta
en marcha.
La modularización puede reducir el plazo de entrega. Incluso los fabricantes de grandes equipos o cadenas de producción utilizan la modularización para
reducir los plazos de entrega. Puede ahorrarse hasta un 40-50 % del tiempo total que va desde el diseño hasta el inicio de la producción.
El concepto de modularización ya se conoce en equipos como los ordenadores o los coches. En estos productos, se emplean módulos con funciones e
interfaces bien descritas. Este mismo concepto puede aplicarse a la producción, incluso cuando intervengan restricciones físicas concretas.
8
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 10
Guía de diseño del VLT® descentralizado FCD
300
Los equipos de producción se construyen generalmente a partir de distintos bloques básicos, empleados cada uno de ellos en diferentes lugares de la
instalación. Entre los ejemplos se incluyen algunos tipos de sección de cintas transportadoras y maquinaria, como mezcladoras, básculas, rellenadoras,
etiquetadoras, paletizadoras, empaquetadoras, etcétera.
1 El concepto de descentralización
1
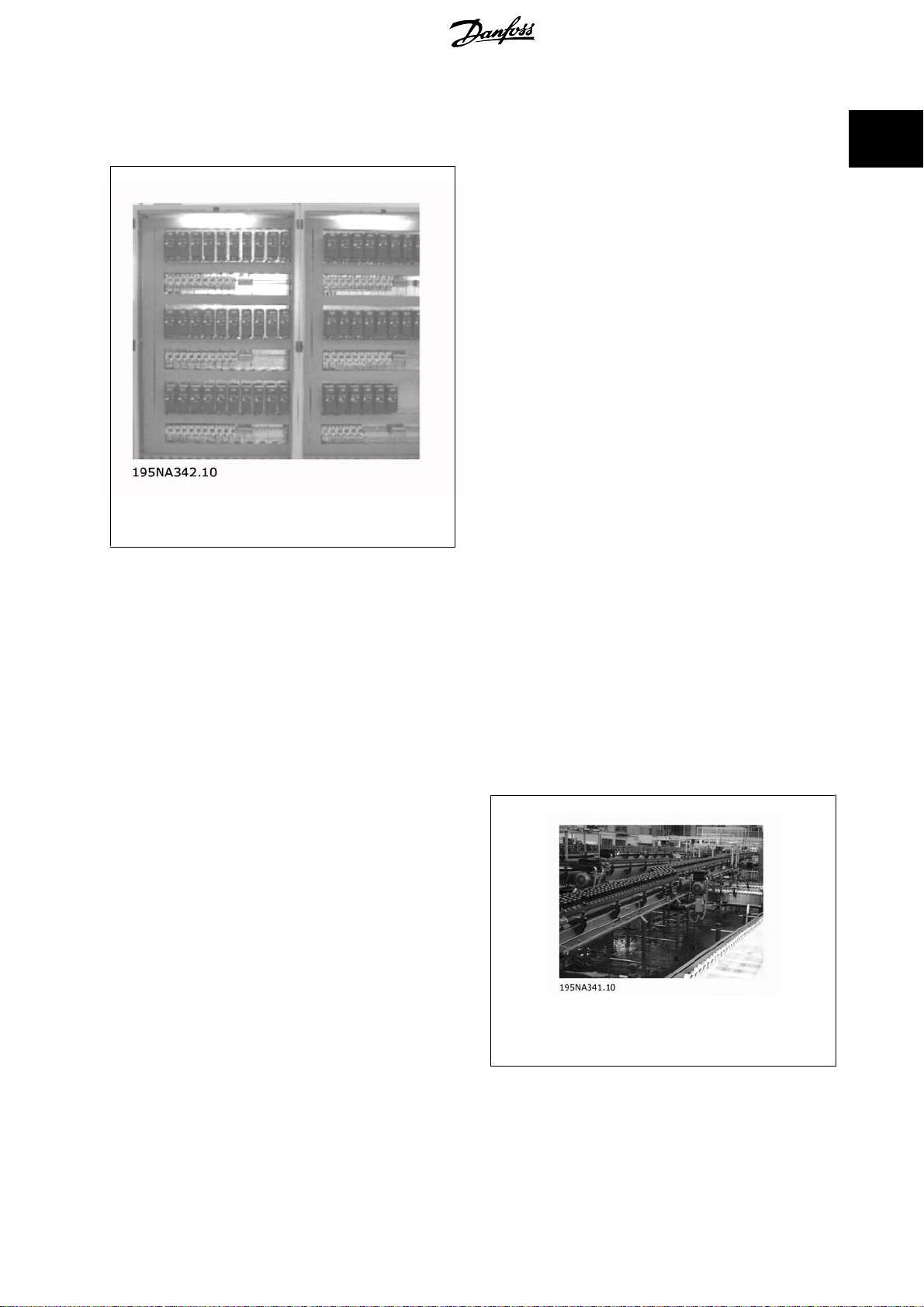
Ilustración 1.5: Alojamiento centralizado.
En una máquina genuinamente modular, todos los elementos básicos quedan contenidos en sí mismos y no requieren nada más que electricidad, agua,
aire comprimido o similar para funcionar.
Por tanto, la modularización requiere distribuir la inteligencia entre las secciones y los módulos individuales.
Claro que las instalaciones centralizadas pueden modularizarse, pero entonces los controles de motor estarán separados físicamente del resto del módulo.
Menos alojamientos, refrigeración y escalerillas portacables
El empleo de alojamientos más reducidos, la reducción de la refrigeración del alojamiento y de las escalerillas portacables conllevan un ahorro adicional.
Los controles de motor generan calor y se montan generalmente uno junto al otro debido al limitado espacio, como se muestra en la figura 1.5. Por tanto,
se requiere refrigeración obligatoriamente para disipar el calor.
Reducción del tiempo de puesta en marcha
El plazo de puesta en marcha por los usuarios finales se reduce considerablemente con el uso de soluciones descentralizadas, especialmente
cuando se combina la comunicación de bus de campo con los controles
de motor descentralizados.
Una fábrica de cervezas australiana ha instalado una cadena de 96 convertidores descentralizados de Danfoss conectados mediante DeviceNet.
Se ha conseguido ahorrar un tiempo excesivo, ya que la puesta en marcha de los convertidores de velocidad variable se hizo en unos pocos días.
La fábrica de cervezas ha estimado que el ahorro se sitúa por encima de
los 100 000 dólares australianos, en comparación con una instalación
centralizada clásica.
Ilustración 1.6: Instalación descentralizada en una fábrica
de cervezas.
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
9
Page 11

1
Guía de diseño del VLT® descentralizado FCD
1 El concepto de descentralización
Necesidad mínima de cables de bus de campo adicionales
El ahorro de cable de alimentación no compensa, debido al coste adicional de los caros cables de bus de campo. En una instalación descentralizada, se
utilizarán cables de bus de campo, pero, dado que dichos cables se distribuirán igualmente en la planta, para conectar sensores o estaciones de entrada
o salida remotas, el incremento será limitado. Los productos descentralizados de Danfoss pueden utilizarse incluso como estaciones de entrada y salida
remotas para conectar sensores con el bus de campo y reducen aún más los costes directos.
1.2.3 Inteligencia lista para usar
El funcionamiento de la maquinaria y las aplicaciones es sometido generalmente a pruebas por parte de los proveedores. Las máquinas se construyen,
prueban, calibran y desmontan para su transporte.
El proceso de reconstruir la aplicación en la planta de producción se simplifica considerablemente mediante su envío por módulos, con los controles de
motor incorporados, ya que volver a cablear y realizar pruebas requiere mucho tiempo y personal especializado. El uso de instalaciones descentralizadas
listas para usar reduce tanto el tiempo como los riesgos, ya que el cableado del motor, del control y de los sensores ya está hecho y se mantiene durante
el transporte. Se reduce la necesidad de expertos altamente cualificados, y los empleados propios pueden realizar gran parte de la instalación. Los costes
de la puesta en marcha y el recurso al fabricante original in situ se reducen.
1.2.4 EMC mejorada
300
Las perturbaciones eléctricas emitidas son proporcionales a la longitud del cable. La limitada longitud del cable entre el control de motor y el motor (o
su completa eliminación) en las instalaciones descentralizadas reduce, por tanto, las perturbaciones eléctricas emitidas. En las instalaciones descentralizadas, el constructor de la maquinaria utiliza normalmente cables entre los controles de motor y el motor de la máquina, dejando únicamente a la planta
de producción la tarea de instalar los cables de alimentación y los cables de bus de campo, sin emisiones EMC. El riesgo de que las perturbaciones
eléctricas procedentes de los controles de motor interfieran en otros equipos eléctricos, debido a una instalación defectuosa, se reduce, evitándose así
la detección de fallos, que tanto tiempo consume, en la fase de puesta en marcha, cuando se tiene un calendario muy ajustado.
1.2.5 Adaptación a motores estándar y especiales
El FCD 300 está diseñado para controlar todos los motores estándar asíncronos de CA. Su flexibilidad permite además adaptarse a tipos específicos de motor. Un ejemplo es la función de AMT (Automatic Motor Tuning).
Combinar los convertidores de frecuencia de Danfoss con los motorreductores de Danfoss es aún más sencillo, ya que encajan mecánicamente
y los datos del motor ya están almacenados en la memoria del FCD 300.
Danfoss suministra sus convertidores de motor combinados montados de
fábrica, eliminando la necesidad de un ajuste mecánico entre el motor y
su control.
Ilustración 1.7: Motorreductor Danfoss con FCD 300.
1.2.6 Pérdidas térmicas mínimas
Los convertidores de frecuencia de Danfoss cuentan con el exclusivo principio conmutador de control vectorial de tensión (VVC), que genera las tensiones
del motor. Gracias al principio VVC, las pérdidas de potencia del motor son similares o inferiores a las pérdidas de un motor conectado a la red. Las
pérdidas térmicas se reducen y se evita un recalentamiento. Al mismo tiempo, el principio VVC garantiza un par nominal a velocidad nominal y elimina
las corrientes de soporte.
10
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 12

Guía de diseño del VLT® descentralizado FCD
300
1.2.7 Consideraciones medioambientales
1 El concepto de descentralización
Los convertidores de frecuencia, ya estén instalados centralmente o distribuidos en toda la planta, están expuestos al entorno. Dado que los controles
de motor soportan altas tensiones y corrientes al mismo tiempo, deben estar protegidos del polvo y la humedad, para que no fallen o se averíen. Tanto
los fabricantes como los instaladores deben tenerlo en cuenta, y así Danfoss Drives ha diseñado sus productos descentralizados prestando la máxima
atención a ambos aspectos.
Los controles de motor descentralizados deben además responder a las crecientes demandas en cuanto a los niveles de higiene en la industria farmacéutica
(y en la producción de alimentos y bebidas, en particular), en la que los convertidores están expuestos a productos de limpieza durante períodos prolongados, mangueras de alta presión y similares. El exterior de los controles de motor descentralizados debe diseñarse teniendo esto en cuenta. Deben
evitarse los complicados disipadores de calor mostrados en la figura, ya que resultan difíciles de limpiar y no son resistentes a los productos de limpieza
habituales.
Los convertidores descentralizados de Danfoss están diseñados para responder a las exigencias recogidas en la figura 1.9. No hay zonas difíciles de
limpiar, los conectores ciegos no tienen muescas ni dientes y la superficie de la carcasa está protegida con un resistente tratamiento de doble capa,
sometido a pruebas con los productos de limpieza más comunes.
1
Ilustración 1.8: Los disipadores de calor con clavijas de aletas de difícil limpieza frente a la solución de fácil limpieza de Danfoss.
Todas las esquinas son redondeadas para evitar la acumulación de polvo, y la distancia entre las nervaduras permite la limpieza mediante aire comprimido,
con manguera o simplemente con un cepillo.
Todas estas cuestiones resultan más o menos irrelevantes si no se aplican a todos los elementos, y los motores de CA estándar, diseñados frecuentemente
sin tenerlas en cuenta, un problema que aumenta con los ventiladores integrados y las nervaduras de refrigeración, tan difíciles de limpiar. Danfoss ha
superado el reto diseñando una gama de motorreductores asépticos. Estos motores no tienen ventiladores y todas sus superficies son lisas. El barniz
especial CORO utiliza un estándar de protección IP65, resistente al ácido, álcali y productos de limpieza utilizados, por ejemplo, en la industria alimentaria
y de bebidas. La figura 1.10 reproduce un ejemplo de serie de motorreductores asépticos.
Ilustración 1.9: Motorreductores asépticos de Danfoss.
El contacto eléctrico puede provocar corrosión galvánica en condiciones húmedas. Esto puede ocurrir entre la carcasa (aluminio) y los tornillos (acero
inoxidable). Una de las posibles consecuencias es que los tornillos se atasquen y sea imposible desatornillarlos en caso de reparación. La corrosión
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
11
Page 13
Guía de diseño del VLT® descentralizado FCD
1 El concepto de descentralización
galvánica desaparece en los productos descentralizados Danfoss, ya que las carcasas están barnizadas por completo y entre el barniz y los tornillos hay
arandelas de protección de nailon. El barniz completo y el diseño exclusivo de junta evitan la corrosión localizada, que puede producirse bajo las juntas.
300
1
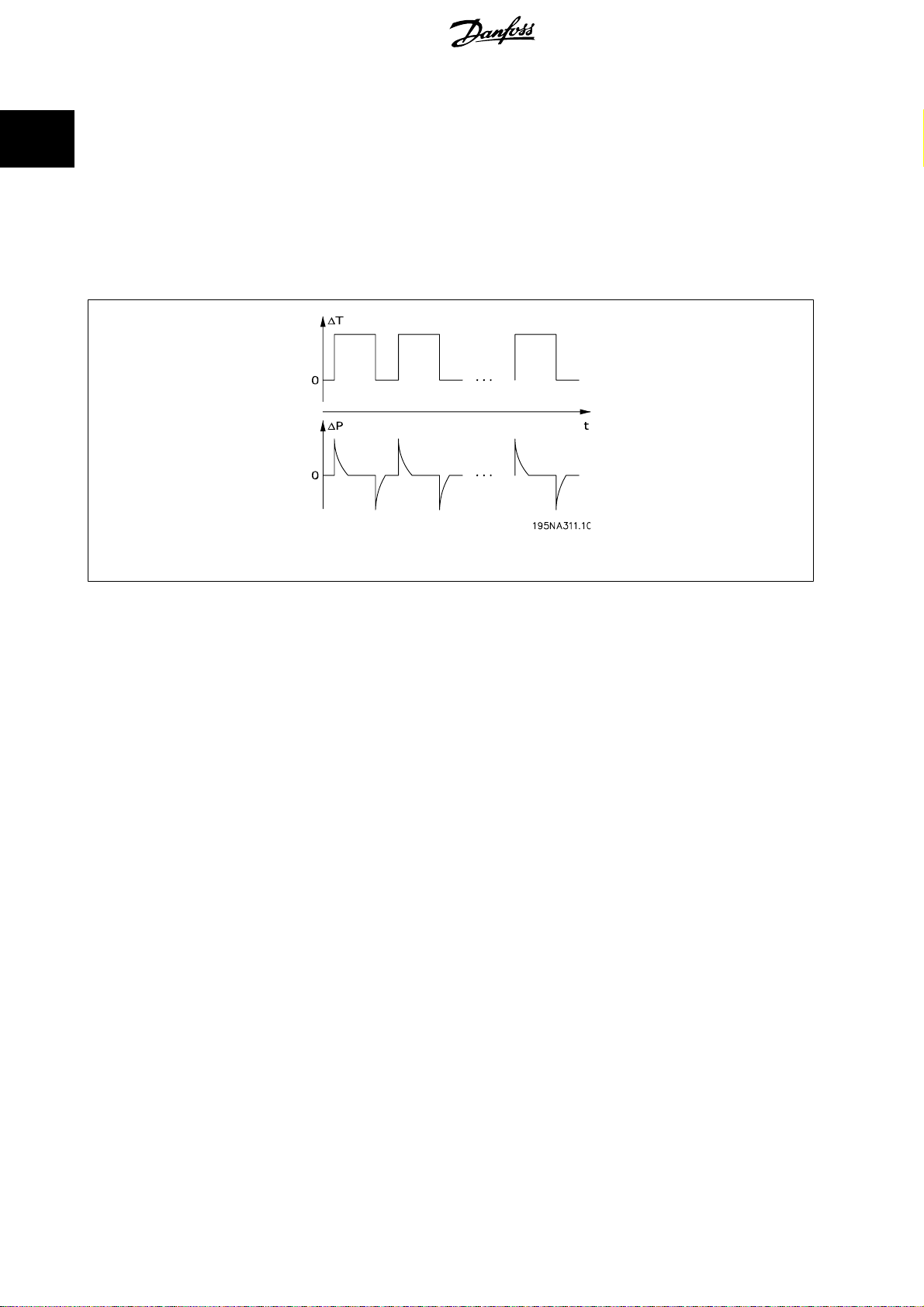
Los equipos cerrados herméticamente pueden acumular agua en el interior de la protección. Esto ocurre especialmente cuando el equipo está expuesto
a las diferencias de temperatura ambiente en condiciones húmedas. Dado que un descenso de la temperatura ambiente reduce la temperatura superficial
en el interior de la protección, tiende a condensarse el vapor de agua. Al mismo tiempo, la presión en el interior de la protección desciende y hace que
el aire húmedo del exterior penetre en los materiales polímeros no herméticos de las juntas y en los prensacables. . Cuando la protección se vuelve a
calentar, solo sale el agua en forma de vapor, condensándose cada vez más agua en el interior de la protección. Esto puede provocar la acumulación de
agua en el interior de la protección y, en ocasiones, un mal funcionamiento. El fenómeno se reproduce en la figura, con una fluctuación cíclica de la
temperatura.
Ilustración 1.10: El efecto de bombeo en protecciones cerradas.
La acumulación de agua en el interior de las protecciones puede evitarse con membranas que eviten que penetren los líquidos, pero que permitan el
paso del vapor, como lo hacen los tejidos utilizados en la ropa para exteriores. Danfoss ofrece un prensacables especial de este tipo de material para
eliminar el problema. El prensacables debe utilizarse en aplicaciones expuestas a frecuentes fluctuaciones de temperatura y entornos húmedos, al igual
que en equipos que solo se utilicen durante el día, cuando la temperatura interior tienda a caer hasta la temperatura ambiente de la noche.
1.2.8 Flexibilidad de la instalación
Las soluciones descentralizadas de Danfoss ofrecen una excepcional flexibilidad en la instalación. La flexibilidad se apoya en numerosas ventajas:
• Posibilidad de montaje en motorreductores de Danfoss
• Puede montarse en paneles descentralizados
• Paneles de control portátiles
• Software de PC para la configuración y conexión
• Instalación en uno o dos lados
• Interruptor de mantenimiento opcional
Chopper
•
• Alimentación externa de respaldo de 24 V opcional
• Conexiones M12 para sensores externos opcionales
• Conector de motor Han 10E opcional
• Compatible con bus de campo (Profibus DP V1, DeviceNet, As-interface)
• Compatibilidad con los sistemas de red estándar (TN, TT, IT, conexión a tierra en triángulo)
Para obtener más detalles, véase el capítulo acerca de
y resistencia de frenado opcionales
La gama de productos descentralizados.
12
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 14

Guía de diseño del VLT® descentralizado FCD
300
1 El concepto de descentralización
1.3 Ejemplos de aplicaciones
Danfoss ha completado una amplia gama de aplicaciones en numerosas industrias diferentes. Hemos adquirido así una valiosa experiencia que ha
condicionado los últimos desarrollos de nuestros productos descentralizados. A continuación, le ofrecemos ejemplos ilustrativos de instalaciones reales
que utilizan los productos descentralizados de Danfoss y las ventajas y el valor que estos presentan para los clientes de dichas instalaciones.
1.3.1 Bebidas: cadena de embotellado
1
Ilustración 1.11: El FCD 300 en una cinta transportadora de
embotellado.
Ventajas:
• El espacio del tablero de distribución se reduce, ya que todos los convertidores se instalan en el campo.
• El cableado se reduce, ya que pueden alimentarse varios convertidores desde el mismo circuito.
• La puesta en marcha del bus de campo es más sencilla, ya que el protocolo permite transferir parámetros completos. Una vez instalado el
convertidor de frecuencia, su programa básico puede copiarse a cualquier otro convertidor descentralizado.
• El rendimiento del motor FCD es sensiblemente superior al resto.
• El FCD puede reequiparse para motores anteriores de casi cualquier marca o tipo.
• La protección aséptica IP66 resulta ideal para las condiciones de humedad de las salas de embotellado.
• Caja todo en uno: p. ej., interruptor de mantenimiento, Profibus y bucle de alimentación.
Ilustración 1.12: El FCD 300 en una cinta transportadora de
embotellado.
1.3.2 Bebidas: empaquetadora
Ventajas:
• Distribuyendo los controles de motor de la aplicación se libera
espacio para otros fines en el tablero de distribución.
• La cantidad de convertidores de frecuencia de una aplicación
puede aumentarse sin ampliar el tablero de distribución.
• La protección IP66 es fácil de limpiar y resistente a los líquidos
de limpieza fuertes.
• Idéntica flexibilidad que en los controles de motor montados
centralmente. Los controles de motor descentralizados pueden
adaptarse a todos los motores de CA estándar y cuentan con la
misma interfaz de usuario y los mismos números en los conectores.
•Profibus integrado.
Ilustración 1.13: Controles de motor descentralizados integrados en la empaquetadora.
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
13
Page 15
1
Guía de diseño del VLT® descentralizado FCD
1 El concepto de descentralización
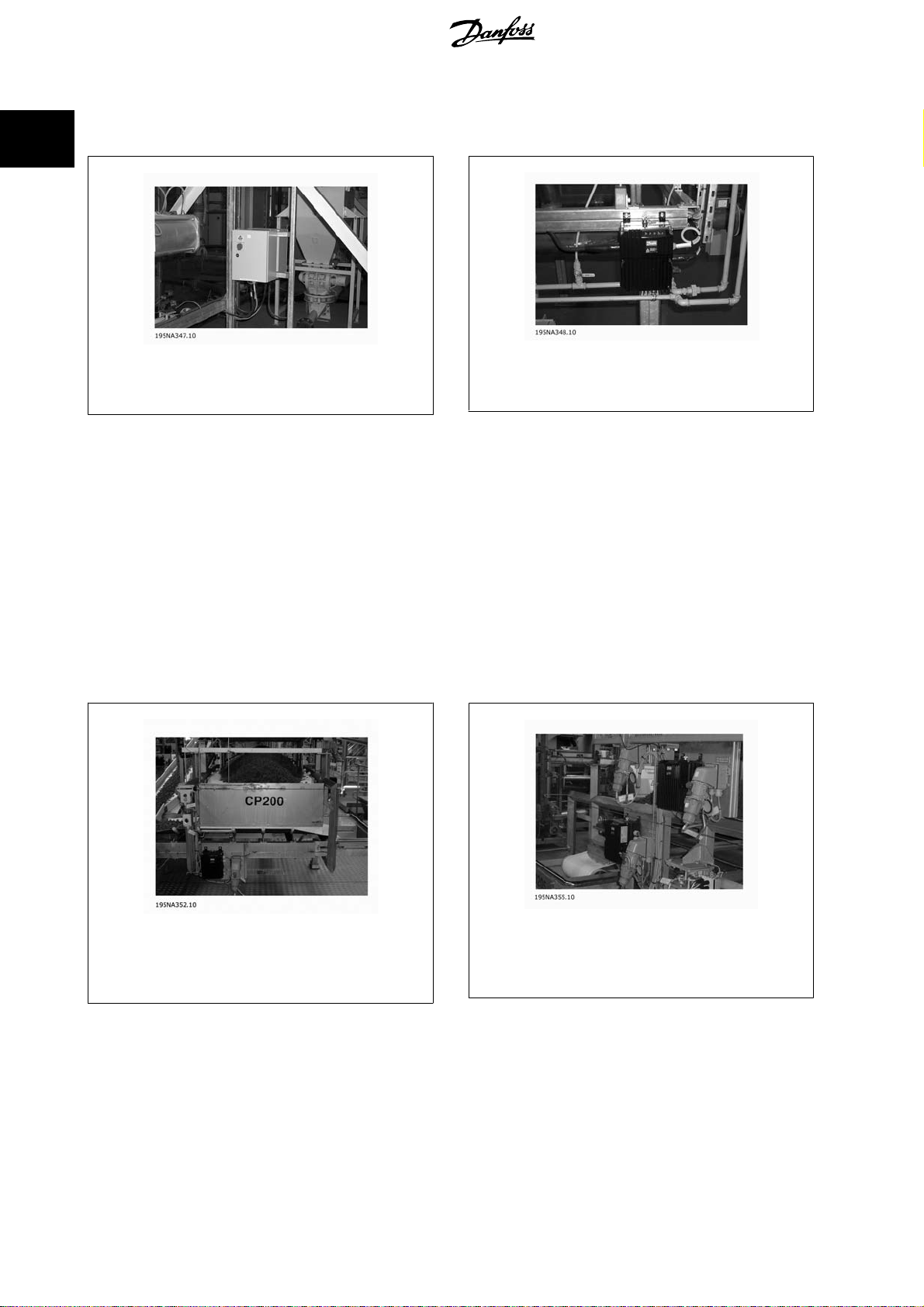
1.3.3 Alimentación: planta de fabricación de cacao en polvo
300
Ilustración 1.14: Solución tradicional: control de motor, panel montado de forma descentralizada.
Ventajas:
• Capacidad de planta fácilmente ampliable.
• No precisa tablero de distribución.
• LED de estado visible.
• Interruptor de mantenimiento integrado en la unidad.
• Alta clasificación de protección IP66.
• Bajo coste de instalación.
• Menor espacio para la nueva solución.
1.3.4 Cinta transportadora de alimentos
Ilustración 1.15: Nueva solución: control de motor genuinamente descentralizado.
Ilustración 1.16: Uso eficiente del espacio en la industria
alimentaria gracias a los controles de motor descentralizados de Danfoss.
Ventajas:
• Puede aumentarse el número de convertidores de una aplicación sin ampliar el tablero de distribución.
• La protección IP66 es fácil de limpiar y resistente a los líquidos de limpieza fuertes.
• La superficie antisuciedad y el diseño del convertidor evitan la suciedad y acumulación de sustancias.
• Disponibilidad de unidades para el montaje en motor o en pared.
14
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Ilustración 1.17: Uso eficiente del espacio en la industria
alimentaria gracias a los controles de motor descentralizados de Danfoss.
Page 16
Guía de diseño del VLT® descentralizado FCD
300
• Idéntica flexibilidad que en los controles de motor montados centralmente. Los controles de motor descentralizados se adaptan a todos los
motores de CA estándar y utilizan la misma interfaz de usuario y la misma numeración en los conectores.
•Profibus integrado.
1.3.5 Industria de la automoción: mecanismos de elevación y cintas transportadoras
Ventajas:
• Instalación sencilla.
• AS-i o control de Profibus opcional.
• Entrada de sensor disponible dentro del espacio físico de la unidad.
• Fuente de alimentación de 24 V independiente para sensores y
bus.
• Fuente de alimentación de freno y control incorporados.
• Panel de control remoto fácilmente enchufable.
• Conectores para bucles (conector en T) integrados en la caja de
instalación.
• Bajo coste de instalación y de los componentes.
• No requiere caros conectores EMC adicionales.
• Diseño compacto para un ahorro de espacio.
• Fácil de instalar y poner en marcha.
• Entrada para la supervisión del termistor motor.
1 El concepto de descentralización
1
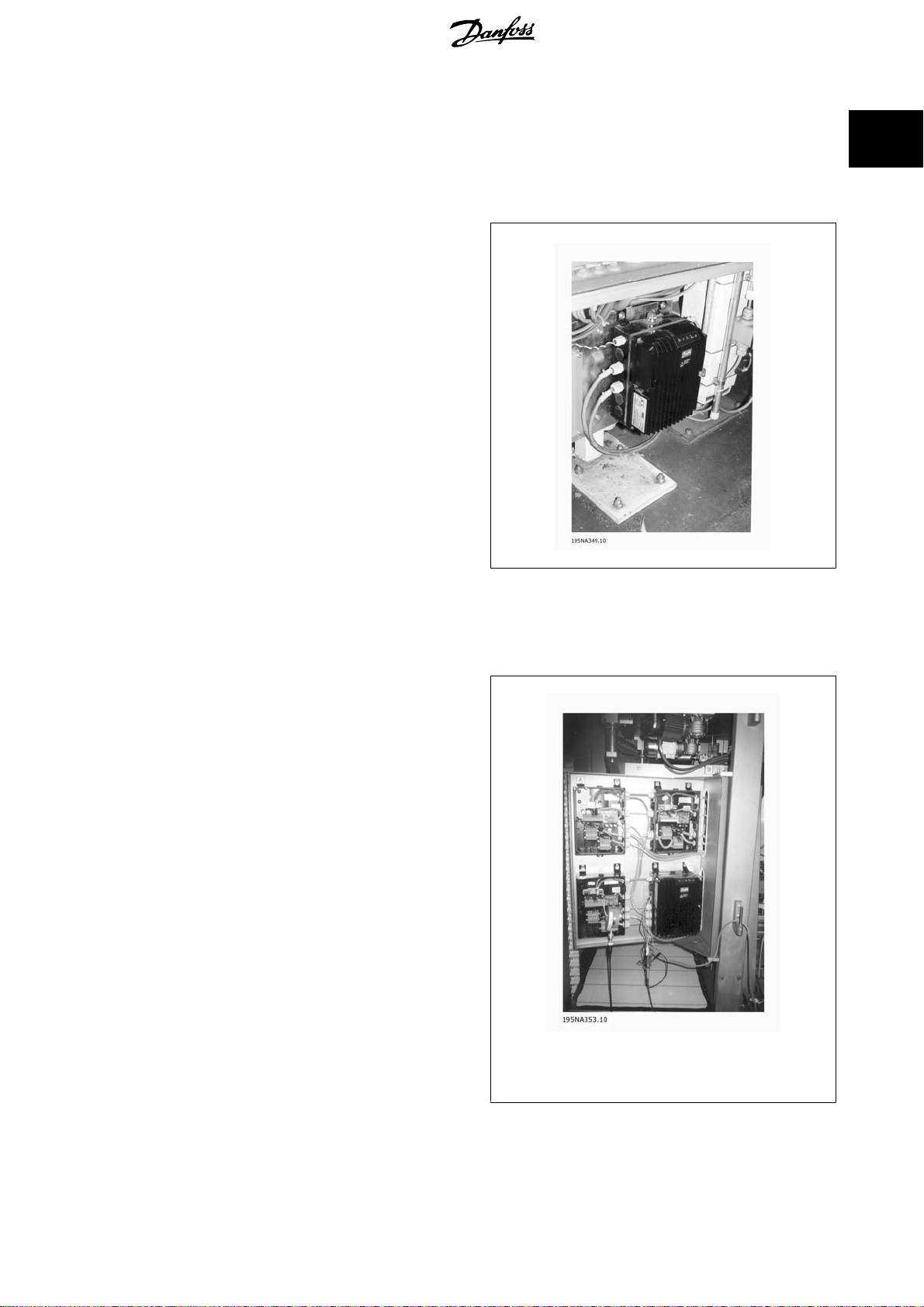
1.3.6 Reequipamiento de aplicaciones existentes
Ventajas:
• No se requiere un gran alojamiento de control, gracias a los
controles de motor descentralizados.
• No precisa caros cableados: todos los motores utilizan los cables
de alimentación, conductos e interruptores locales previos.
• Todos los controles de motor pueden controlarse desde el alojamiento centralizado previo a través de Profibus.
Ilustración 1.18: Reequipamiento en aplicaciones previas
con control de velocidad.
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
15
Page 17
1
Guía de diseño del VLT® descentralizado FCD
1 El concepto de descentralización
1.4 Guía de diseño del producto
1.4.1 Gama de productos descentralizados
La gama de productos descentralizados de Danfoss incluye los convertidores de frecuencia VLT FCD 300 descentralizados y los motores FCM 300 para
convertidores VLT en sus diversas variantes de instalación o montaje. La Guía de diseño ofrece información detallada únicamente sobre la gama FCD
300. Para obtener información más detallada sobre la gama FCM 300, consulte la Guía de diseño FCM: MG03Hxyy
®
VLT
FCD 300 descentralizado:
0,37-3,3 kW, 3 x 300-480 V
Principales aplicaciones
- Cintas transportadoras en zonas de lavado
- Cintas transportadoras de paquetes
- Cintas transportadoras de alimentación de entrada o salida
Motor FCM 300 para convertidores VLT
0,55-7,5 kW, 3 x 380-480 V
Principales aplicaciones
- Ventiladores (unidades de control de aire)
- Bombas
- Transportadores de aire
®
300
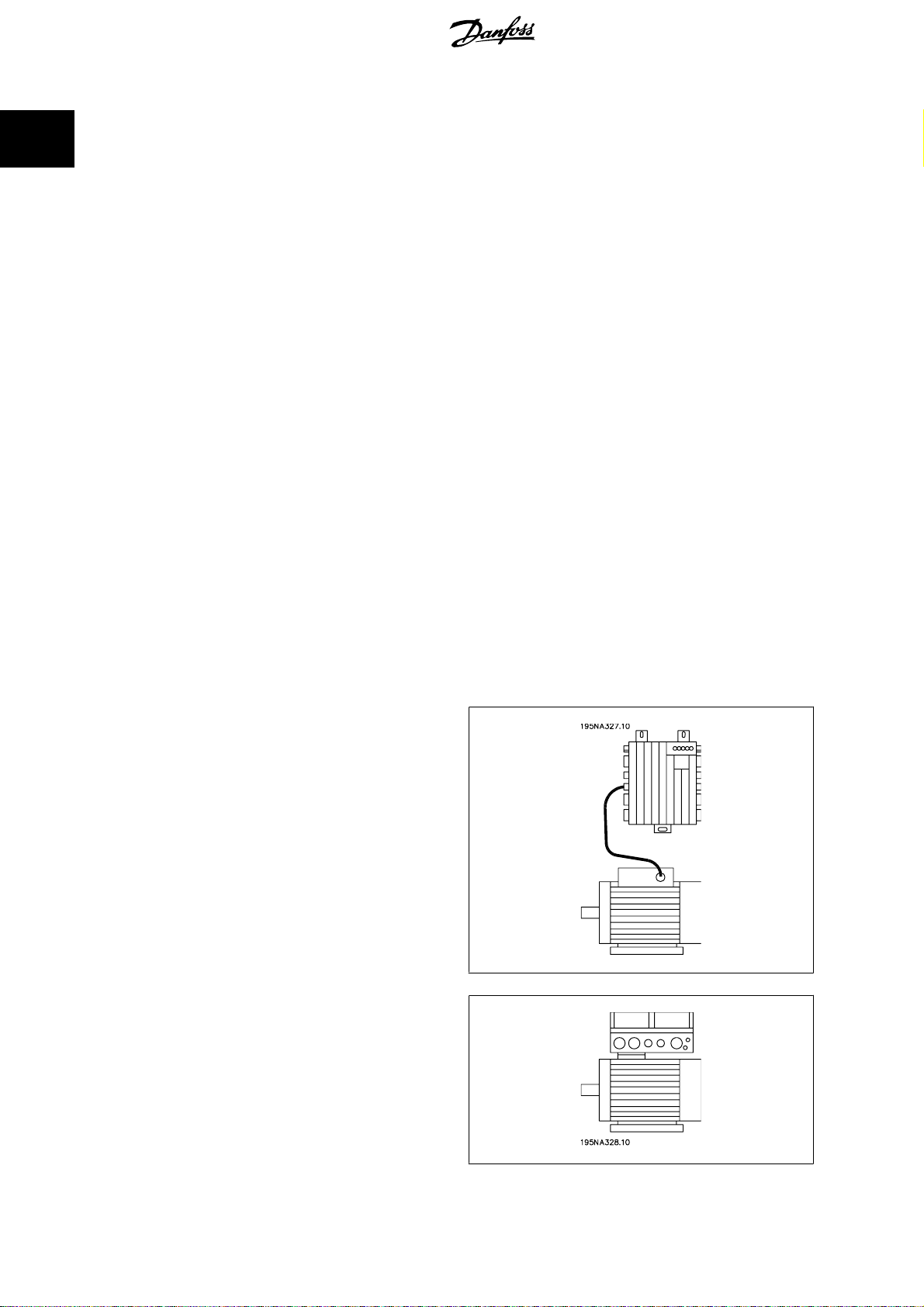
1.4.2 Opciones de instalación flexibles
Los productos descentralizados de Danfoss pueden adaptarse para su montaje de acuerdo con las siguientes opciones y sus correspondientes ventajas
específicas:
FCD 300:
1. Independiente cerca del motor
• Libre elección de la marca del motor
• Fácil reequipamiento del motor existente
• Fácil interfaz con el motor (cable corto)
• Fácil acceso para el diagnóstico y facilidad de mantenimiento
óptima
2. Montado directamente en el motor
• Buena selección de marcas de motor
• Sin necesidad de cables de motor apantallados
(montaje mural)
(montaje en motor)
16
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 18
Guía de diseño del VLT® descentralizado FCD
300
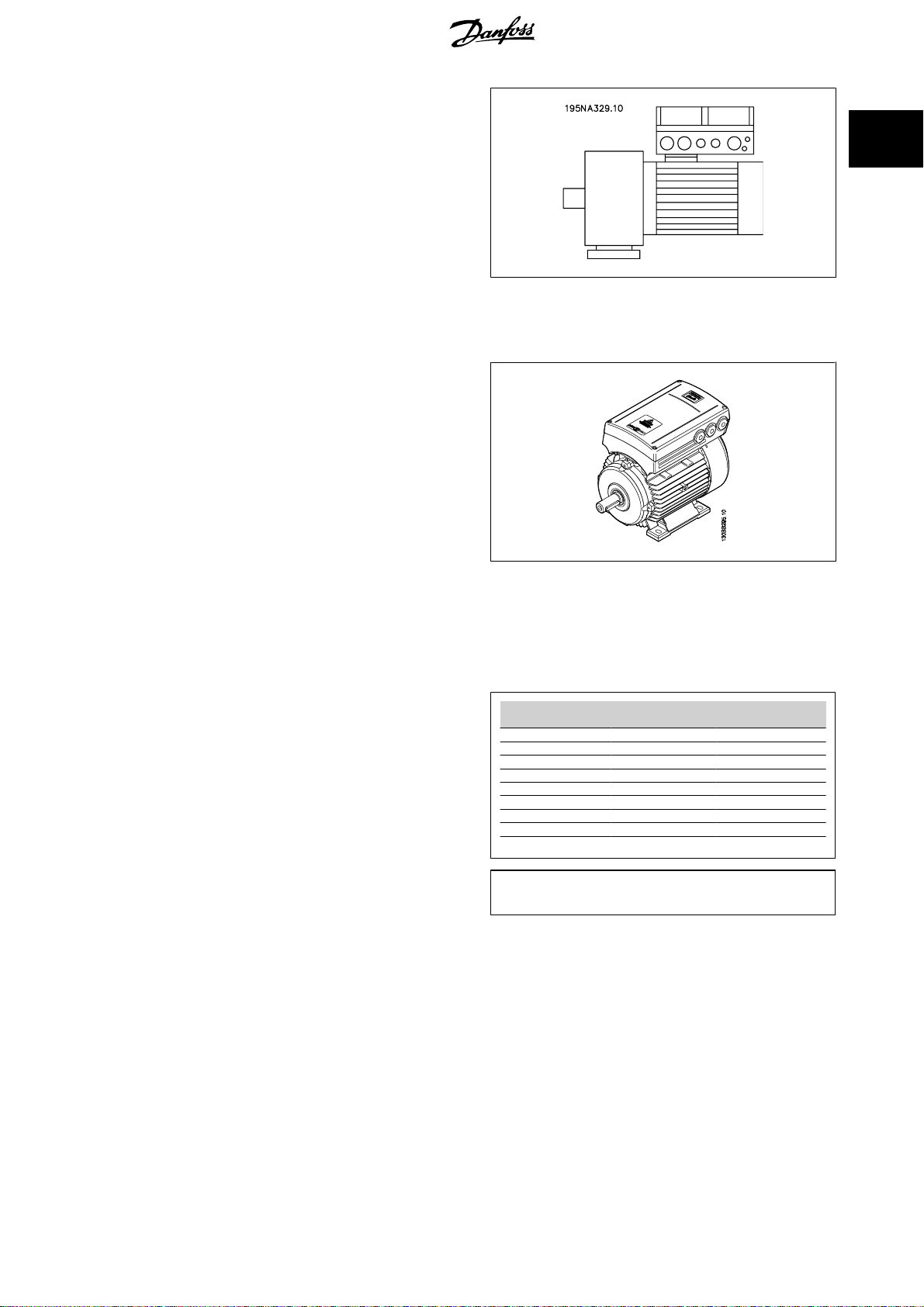
3. «Premontado» en motorreductores Danfoss Bauer
• Una combinación fija de motor y componentes electrónicos suministrados por un proveedor
• Montaje fácil en solo una unidad
• Sin necesidad de cables de motor apantallados
• Clara responsabilidad en cuanto a la solución completa
Dado que las piezas electrónicas son comunes (misma función de terminales, funcionamiento similar y piezas y recambios similares para todos
los convertidores), se pueden mezclar los tres conceptos de montaje.
FCM 300:
4. Integrado en el motor (solución FCM 300)
• El motor y el convertidor se adaptan perfectamente
• Unidad compacta optimizada
• Sin necesidad de programar los datos del motor
1 El concepto de descentralización
1
1.4.3 Configuración de un producto
La serie de controles de motor descentralizados FCD 300 está configurada con un código descriptivo
FCD 3xx P T4 P66 R1 XX Dx Fxx Txx C0
Tensión de red
El FCD 300 está disponible para la conexión al intervalo d e tensión de red
trifásica de 380 a 480 V.
Selección del convertidor de frecuencia
El convertidor de frecuencia se elige partiendo de la intensidad del motor
con la máxima carga en la unidad. La intensidad nominal de salida del
convertidor de frecuencia I
requerida por el motor.
debe ser igual o superior a la intensidad
INV.
Tipo [kW] [CV]
303 0,37 0,50
305 0,55 0,75
307 0,75 1,0
311 1,1 1,5
315 1,5 2,0
322 2,2 3,0
330 3,0 4,0
335** 3,3 5,0*
* a la tensión de red / motor 3 x 460-480 V
** t
máx. 35 °C
amb
1.4.4 Protección
Las unidades FCD 300 están protegidas de serie contra el agua y el polvo.
Consulte también el apartado
Datos técnicos
para obtener información más detallada.
(véase también
Salida típica de eje
P
INV.
Pedidos):
1.4.5 Freno
El FCD 300 está disponible con o sin módulo de freno integrado. Consulte el apartado
La versión EB incluye alimentación / control de freno mecánico.
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Resistencias de freno
si desea pedir una resistencia de freno.
17
Page 19

1 El concepto de descentralización
1.4.6 Suministro externo de 24 V
Guía de diseño del VLT® descentralizado FCD
300
1
Hay disponible un sistema de alimentación externa de control de 24 V CC en las versiones EX y EB del FCD 300.
1.4.7 Filtro RFI
El FCD 300 tiene un filtro RFI 1A integrado. El filtro RFI 1A integrado cumple las normas EMC EN 55011-1A. Consulte los apartados
cable
y
Sección de cable
para obtener más detalles.
Longitudes de
1.4.8 Filtro armónico
Las corrientes armónicas no afectan directamente al consumo de energía, aunque aumentan las pérdidas de calor en la instalación (transformador,
cables). Por ello, en los sistemas con un porcentaje alto de carga rectificada, es importante mantener las corrientes armónicas en un nivel bajo para
evitar una sobrecarga del transformador y una alta temperatura de los cables. Para mantener unas corrientes armónicas bajas, las unidades FCD 300
están provistas de serie de bobinas en el circuito intermedio. Esto reduce la corriente de entrada I
en un 40 %.
RMS
1.4.9 Unidad de display
La unidad FCD 300 cuenta con cinco luces indicadoras de tensión (ON), advertencia, alarma, estado y bus.
Además, se dispone de un conector para la conexión a un panel de control LCP como opción. El panel de control LCP se puede instalar a una distancia
de hasta 3 metros del convertidor de frecuencia, por ejemplo, en un panel delantero, mediante el kit de montaje.
Todos los datos se indican por medio de un display alfanumérico de 4 líneas que puede mostrar normalmente hasta 4 elementos de datos de funcionamiento y 3 modos de funcionamiento de manera continua. Durante la programación, se mostrará toda la información necesaria para la configuración
rápida y eficaz de los parámetros del convertidor de frecuencia. Como complemento del display, el LCP tiene tres luces indicadoras de tensión (ON),
advertencia (WARNING) y alarma (ALARM). Casi todos los parámetros del convertidor de frecuencia se pueden cambiar inmediatamente desde el panel
de control del LCP. Consulte también el apartado
Unidad de control LCP
en la Guía de diseño.
1.4.10 Funciones deseadas
Las funciones deseadas se seleccionan especificando los campos correspondientes de la cadena (xx). Las opciones (y su explicación detallada) se recogen
en las dos tablas. Las explicaciones breves de cada función se presentan en
Para obtener detalles e información técnica, véase
Variantes de la caja de instalación
Conexiones en el lado derecho
Solo se incluyen orificios para prensacables para todas las
versión resulta útil cuando se necesita la entrada de cable en una única dirección.
Conexiones en ambos lados
Se incluyen orificios para prensacables para las
Disponibles
Conexiones
La sección inferior contiene conectores de abrazadera y dispositivos de conexión para los cables de alimentación y de bus de campo, que quedan protegidos
contra el polvo, las salpicaduras y los productos de limpieza.
roscas métricas
enchufables
y
roscas NPT
y posibilidad de puesta en bucle de la fuente de alimentación de red entre convertidores (línea de 4 mm2).
(variantes seleccionadas).
Datos técnicos.
entradas de cables
entradas de cables en ambos lados
cursiva.
en el
lado derecho
para permitir la entrada de cables desde ambas direcciones.
(visto desde el extremo del convertidor del motor). Esta
18
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 20
Guía de diseño del VLT® descentralizado FCD
300
1 El concepto de descentralización
Interruptor de mantenimiento
protección que desconecta el motor o el convertidor.
conectores de sensor
4
externas de 24 V.
Conexión enchufable de E / S remota, como sensores y fuentes de alimentación externas de los mismos.
Conector de motor
(
véase Instalación eléctrica).
Conector de pantalla
para la conexión a PC.
HARTING 10 E en el lado derecho (visto desde el extremo del convertidor del motor) conectado de acuerdo con la norma DESINA
instalado en el lado derecho (visto desde el extremo del convertidor del motor). Un interruptor bloqueable integrado en la
M12 en el lado derecho (visto desde el extremo del convertidor del motor). Puesta en bucle mediante dos fuentes de alimentación
para la conexión enchufable externa del panel de control local para el funcionamiento y la programación. Puede usarse también
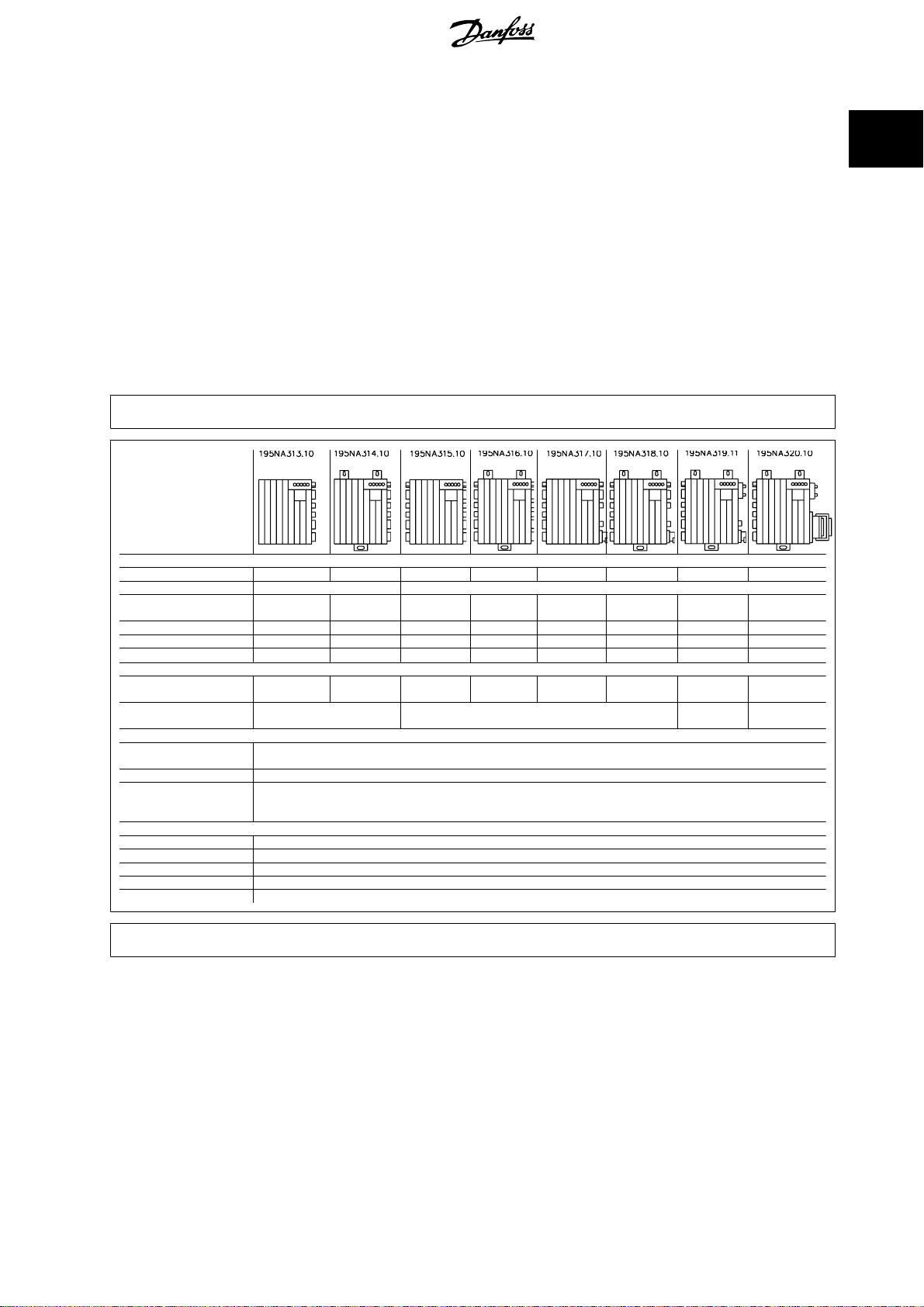
1.4.11 Convertidor de frecuencia descentralizado FCD 300
FCD 300: Combinaciones de versiones
1
Características de instalación
Montaje Motor Pared Motor Pared Motor Pared Pared Pared
Entradas de cables Lado derecho Ambos lados
Interruptor de mante-
nimiento
Conectores de sensores ------4 x M124 x M12
Conector de motor - - - - - - - Harting 10E
Rosca métrica
(rosca NPT)
Conector de pantalla No disponible,
Características funcionales
Funciones básicas
(véase más abajo)
+24 V ext. de respaldo EX
+24 ext. de respaldo +
Freno dinámico + Con-
trol de freno
Comunicación
AS-interface F70
Profibus de 3 MB F10
Profibus de 12 MB F12
DeviceNet F30
*
ATEX 22
RS 485 F00
----XXX-
XXXX--- -
Códigos de pedido FCD 3xx P T4 P66 R1 XX Dx Fxx Txx C0
T11
(-)
solo D0
T51
(-)
T12
(T16)
T52
(T56)
T22
(T26)
CC CC incluida CC incluida
ST
EB
T62
(T66)
T63
(-)
T73
(-)
* ATEX 22: Aprobado para su uso en entornos sometidos a polvo, de conformidad con la directiva ATEX (ATmosphère EXplosive)
Funciones básicas
Velocidad del motor ajustable
Rampas de aceleración y desaceleración definidas
Funciones y conceptos de funcionamiento similares al resto de series VLT
Protección electrónica del motor e inversión incluidas en todos los casos
Funcionalidad ampliada
24 V externa de respaldo
Control de freno
Frenado dinámico
y alimentación del freno electromecánico
(resistencia de freno opcional; véase
para el control y la comunicación
Resistencias de freno
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
)
19
Page 21
1 El concepto de descentralización
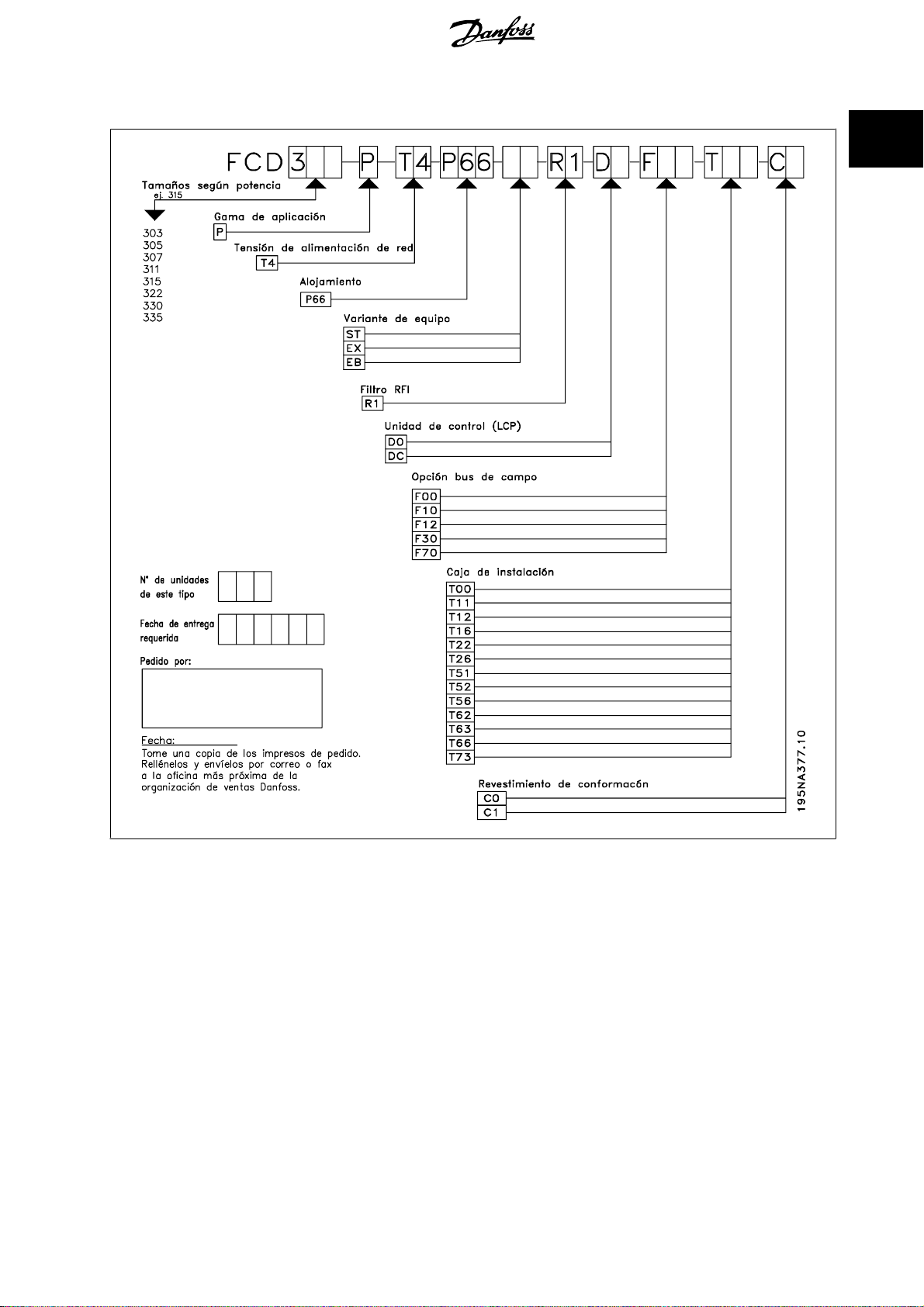
1.4.12 Pedidos
Guía de diseño del VLT® descentralizado FCD
300
1
Las siguientes explicaciones hacen referencia al formulario de pedido.
Potencias (posiciones 1-6):
0,37 kW – 3,3 kW (véase la tabla de selección de potencia)
Rango de aplicación (posición 7):
•Proceso P
Tensión de red (posiciones 8-9):
• T4 - tensión de alimentación trifásica 380-480 V
Protección (posiciones 10-12):
El alojamiento ofrece protección contra entornos con polvo, húmedos y
agresivos
• P66 - Protección IP66 (véanse las excepciones en la caja de instalación T00, T73)
Variante de hardware (posiciones 13-14):
• ST - Hardware estándar
• EX - Alimentación externa de 24 V para respaldo de la tarjeta de
control
• EB - Alimentación externa de 24 V para respaldo de la tarjeta de
control, control y alimentación del freno mecánico y limitador de
freno adicional
Filtro RFI (posiciones 15-16):
• R1 - Conformidad con filtro de clase A1
Unidad de pantalla (LCP) (posiciones 17-18):
Posibilidad de conexión para pantalla y teclado
• D0 - Sin conector de pantalla conectable en la unidad
• CC - Conector de pantalla montado (no disponible con cajas de
instalación "sólo lado derecho")
Tarjeta de opción de bus de campo (posiciones 19-21):
Hay disponible una amplia selección de opciones fieldbus de alto rendimiento (integradas)
• F00 - Sin opción fieldbus integrada
• F10 - Profibus DP V0/V1 3 Mbaudios
• F12 - Profibus DP V0/V1 12 Mbaudios
• F30 - DeviceNet
• F70 - Interfaz AS
Caja de instalación (posiciones 22-24):
• T00 - Sin caja de instalación
• T11 - Caja de instalación, soporte de motor, rosca métrica, sólo
lado derecho
• T12 - Caja de instalación, soporte de motor, rosca métrica, doble
lado
• T16 - Caja de instalación, soporte de motor, rosca NPT, doble
lado
• T22 - Caja de instalación, soporte de motor, rosca métrica, doble
lado, interruptor de servicio
• T26 - Caja de instalación, soporte de motor, rosca NPT, doble
lado, interruptor de servicio
• T51 - Caja de instalación, montaje mural, rosca métrica, solamente lado derecho
• T52 - Caja de instalación, montaje mural, rosca métrica, doble
lado
• T56 - Caja de instalación, montaje mural, rosca NPT, doble lado
• T62 - Caja de instalación, montaje mural, rosca métrica, doble
lado, interruptor de servicio
• T66 - Caja de instalación, montaje mural, rosca NPT, doble lado,
interruptor de servicio
• T63 - Caja de instalación, montaje mural, rosca métrica, doble
lado, interruptor de servicio, conectores sensor
• T73 - Caja de instalación, montaje mural, rosca métrica, doble
lado, conector motor, conectores sensor, junta Viton
Revestimiento (posiciones 25-26):
El alojamiento IP66 ofrece protección de la unidad contra ambientes
agresivos, que prácticamente elimina la necesidad de circuitos integrados
impresos con revestimiento.
• C0 - Placas sin revestimiento
20
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 22
Guía de diseño del VLT® descentralizado FCD
300
1.4.13 Formulario de pedido
1 El concepto de descentralización
1
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
21
Page 23
1 El concepto de descentralización
1.4.14 Herramientas de software para PC
Guía de diseño del VLT® descentralizado FCD
300
1
Software para PC: MCT 10
Todos los convertidores están equipados con un puerto de comunicación serie. Se proporciona una herramienta para PC, que permite la comunicación
entre un PC y un convertidor de frecuencia, el software de configuración MCT 10 de la herramienta de control de movimientos VLT.
Software de configuración MCT 10
La herramienta MCT 10 se ha diseñado como una herramienta interactiva y fácil de usar que permite configurar los parámetros de nuestros convertidores
de frecuencia.
El software de configuración MCT 10 resulta útil para:
• Planificar una red de comunicaciones sin estar conectado al sistema. El MCT 10 incluye una completa base de datos de convertidores de frecuencia
• Poner en marcha convertidores de frecuencia en línea
• Guardar la configuración de todos los convertidores de frecuencia
• Sustituir un convertidor en una red
• Ampliar una red existente
• Se añadirán también los convertidores que se desarrollen en el futuro
El software de configuración MCT 10 admite Profibus DP-V1 a través de una conexión de clase maestra 2. Esto permite escribir y leer en línea los
parámetros de un convertidor de frecuencia a través de la red Profibus, lo que elimina la necesidad de una red de comunicaciones adicional.
Módulos del software de configuración MCT 10
El paquete de software incluye los siguientes módulos:
Software de configuración MCT 10
Parámetros de configuración
Copia en y desde los convertidores de frecuencia
Documentación y listado de los ajustes de parámetros, incluidos los esquemas
Número de pedido:
Realice el pedido de su CD con el software de configuración MCT 10 mediante el código 130B1000.
22
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 24
Guía de diseño del VLT® descentralizado FCD
300
1.4.15 Accesorios
1 El concepto de descentralización
Tipo Descripción Nº de pedido
Unidad de control LCP2 Display alfanumérico para la programación del convertidor de frecuencia. 175N0131
Cable para la unidad de control LCP2 Cable preparado de fábrica para conectar el convertidor de frecuencia y el LCP2. 175N0162
Kit de montaje remoto del LCP2 Kit de montaje fijo del LCP2 con protección (incl. cable de 3 m, no incluye LCP2). 175N0160
LOP (panel de funcionamiento local) Puede utilizarse el LOP para ajustar la referencia
Placa de adaptación del motor Placa de aluminio con perforaciones para encajar la caja FCD. Debe montarse localmente
Membrana de ventilación Membrana que impide la acumulación de agua debida a la condensación en el interior de
Kit de conexión para LCP2 La caja de instalación puede montarse con o sin conector sellado (IP66) para conectar el
Terminal en estrella del motor Deben conectarse seis cables —o bien en estrella, o bien en triángulo— a un motor de CA.
Kit de instalación Kit de instalación para el montaje en paneles 175N2207
Conector M12 de cinco polos para DeviceNet
Junta Viton para FCD 303-315 Con esta junta, el FCD puede usarse en talleres de pintura, p. ej., en la industria de la
Junta Viton para FCD 322-335 Con esta junta, el FCD puede usarse en talleres de pintura, p. ej., en la industria de la
Cable de datos para comunicación conPCPara conectar un convertidor (p. ej., USB) al conector LCP2. 175N2491
Terminal PCB Terminal para distribución de 24 V 175N2550
Terminal externo PE Acero inoxidable 175N2703
Cable de derivación de 2 m para DeviceNet
Conector M12 de 5 polos para AS-interface
y arrancar o parar mediante los terminales de control.
para el motor real. Placa para la adaptación a motores que no sean Danfoss Bauer.
la protección.
display común LCP2 (CC de código). El conector puede solicitarse por separado (no para
cajas de instalación de un solo lado).
En el terminal de motor estándar, es posible la conexión en triángulo. La conexión en
estrella requiere un terminal independiente.
El conector M12, de tipo micro, puede montarse en los orificios del prensaestopas de la
caja de instalación. El conector puede utilizarse además con otros fines, como la conexión
de sensores.
automoción.
automoción.
El cable puede montarse dentro de la caja de terminales y se conecta a la línea principal
de DeviceNet a través de un microconector (M12).
El conector M12 puede montarse en los orificios del prensaestopas de la caja de instalación. 175N2281
175N0128
175N2115
175N2116
175N2118
175N2119
175N2279
175N2431
175N2450
195N3113
1
1.4.16 Resistencias de freno
Resistencias de freno de montaje interno para frenados con ciclo de trabajo bajo. Las resistencias disponen de autoprotección.
Frenado de pulso simple de aproximadamente 0,6 kJ cada 1-2 minutos.
Las resistencias de freno internas no pueden montarse en el FCD 303-315 con interruptor de servicio.
De tipo FCD Pmotor (kW) Rmin R Ciclo de trabajo aprox. % N.º de código
303 0,37 520 1720 5 175N2154
305 0,55 405 1720 3 175N2154
307 0,75 331 1720 2 175N2154
311 1,1 243 350 1,5 175N2117
315 1,5 197 350 1 175N2117
322 2,2 140 350 1 175N2117
330 3,0 104 350 0,7 175N2117
335 3,3 104 350 0,5 175N2117
Tipo P
303 (400 V) 0,37 520 830 / 100 W 20 1000 2397
305 (400 V) 0,55 405 830 / 100 W 20 1000 2397
307 (400 V) 0,75 331 620 / 100 W 14 1001 2396
311 (400 V) 1,10 243 430 / 100 W 8 1002 2395
315 (400 V) 1,50 197 310 / 200 W 16 0984 2400
322 (400 V) 2,20 140 210 / 200 W 9 0987 2399
330 (400 V) 3,00 104 150 / 200 W 5,5 0989 2398
335 (400 V) 3,30 104 150 / 200 W 5,5 0989 2398
Tabla 1.1: Resistencias de freno de encapsulado plano IP 65
motor
[kW]
R
[]
MIN
Tamaño [] / [W]
por pieza
Ciclo de trabajo % 2 cables
N.º de pedido
175Uxxxx
Cable apantallado
N.º de pedido
175Nxxxx
Tipo N.º de pedido: 175Nxxxx
303-315 2402
322-335 2401
Tabla 1.2: Soporte de montaje para resistencias de freno
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
23
Page 25
1 El concepto de descentralización
Guía de diseño del VLT® descentralizado FCD
300
1
Tipo de VLT Período de frenado intermiten-
303 (400 V) 120 0,37 520 830 0,45 0,7 1976 1,5*
305 (400 V) 120 0,55 405 830 0,45 0,7 1976 1,5*
307 (400 V) 120 0,75 331 620 0,32 0,7 1910 1,5*
311 (400 V) 120 1,1 243 430 0,85 1,4 1911 1,5*
315 (400 V) 120 1,5 197 330 0,85 1,6 1912 1,5*
322 (400 V) 120 2,2 140 220 1,00 2,1 1913 1,5*
330 (400 V) 120 3,0 104 150 1,35 3,0 1914 1,5*
335 (400 V) 120 3,3 104 150 1,35 3,0 1914 1,5*
Tabla 1.3: Resistencias de freno de hilo bobinado, ciclo de trabajo del 40 %
* Respete siempre las normativas nacionales y locales.
P
motor
R
min
R
rec
P
b, máx.
te
[segundos]
: Tamaño nominal de motor para tipo de VLT
: Resistencia de freno mínima admisible
: Resistencia de freno recomendada (Danfoss)
: Potencia nominal de resistencia de freno establecida por el proveedor
P
motor
[kW]
R
[Ω]
min
R
[Ω]
P
b, máx.
[kW]
Relé térm.
rec
[A]
Número de código
175Uxxxx
Relé térm. : Ajuste de la intensidad de freno del relé térmico
Número de código : Números de pedido para resistencias de freno de Danfoss
Sección transversal del cable : Valor
mínimo recomendado basado en el cable recubierto de aislamiento de PVC; temperatura
ambiente de 30 grados centígrados con disipación térmica normal.
Consulte el tamaño de las resistencias de freno de hilo bobinado en las instrucciones MI.90.FX.YY.
Resistencias de freno de montaje externo en general
No utilizar disolventes agresivos. Los disolventes de limpieza deben tener un pH neutro.
Sección transversal del ca-
ble
[mm
2
]
Véase
Freno dinámico
para seleccionar las dimensiones de las resistencias de freno.
24
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 26

Guía de diseño del VLT® descentralizado FCD
300
1 El concepto de descentralización
1.5 Comunicación
1.5.1 Información y comunicación
El crecimiento de la industria de la automatización se basa en las tecnologías de la información. Tras revisar las jerarquías, estructuras y flujos de todo
el mundo administrativo, el uso de las tecnologías de la información permite una reestructuración similiar de sectores industriales que van desde la
industria de procesos y producción hasta la logística y la domótica.
La capacidad de comunicación de los dispositivos y los canales transparentes continuos son indispensables para el concepto de automatización del futuro.
Las TI son una forma evidente de optimizar los procesos de sistemas y conseguir aprovechar mejor la energía, los materiales y la inversión.
Los sistemas de comunicación industrial son un factor clave en este sentido.
En el ámbito celular
Los controladores programables, como PLC e IPC, se comunican en el ámbito celular. Los grandes paquetes de datos y las numerosas y potentes funciones
de comunicación ofrecen un caudal de información. La integración fluida con los sistemas de comunicación de ámbito empresarial, como intranet o
Internet a través de TCP o IP y de Ethernet, son requisitos importantes.
1
En el ámbito de campo
Los periféricos distribuidos, como los módulos de entrada y salida, transductores de medición, convertidores de frecuencia, válvulas y terminales de
operador, se comunican en tiempo real con el sistema de automatización a través de un sistema de comunicación eficaz en el ámbito de campo. La
transmisión de los datos de proceso se realiza por ciclos, mientras que las alarmas, los parámetros y los datos de diagnóstico deben transmitirse de forma
acíclica, en caso necesario.
Ámbito del sensor o actuador
Las señales binarias de los sensores y actuadores se transmiten simplemente de forma cíclica a través de la comunicación del bus.
1.5.2 Profibus
Profibus es un bus estándar de campo abierto de un proveedor independiente que puede utilizarse en una amplia gama de aplicaciones en la automatización de la producción y de procesos. La independencia del proveedor y su arquitectura abierta están garantizadas por las normas internacionales EN
50170, EN 50254 e IEC 61158.
Profibus se comunica entre dispositivos de diversos fabricantes sin necesidad de ajustes de interfaz específicos y puede usarse tanto en aplicaciones de
tiempo crítico de alta velocidad como en tareas de comunicación complejas. Debido a los continuos desarrollos técnicos, Profibus cuenta con reconocido
prestigio como sistema líder del sector de comunicación en el futuro.
En la actualidad, existen más de 2000 productos disponibles de aproximadamente 250 proveedores de Profibus. Más de 6,5 millones de dispositivos que
representan una enorme variedad de productos instalados y utilizados con éxito en más de 500 000 aplicaciones en la automatización de la producción
y de procesos.
Danfoss Drives ofrece una solución de Profibus eficaz en cuanto a costes
• Herramienta de software MCT-10 para el acceso a través de un PC convencional
• Sencilla conexión con dos cables
• Producto universal mundialmente reconocido
• Cumple la norma internacional EN 50170
• Velocidad de comunicación de 12 MBd
• El acceso al archivo maestro del convertidor facilita la planificación
• Cumplimiento de la directriz PROFIDRIVE
•Solución integrada
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
25
Page 27
1
Guía de diseño del VLT® descentralizado FCD
1 El concepto de descentralización
• Todos los convertidores de frecuencia con Profibus están certificados por la organización Profibus
• Los convertidores de frecuencia de Danfoss son compatibles con Profibus DP V1
Profibus DP V1 para dos fines distintos
Los sistemas de bus de campo tienen dos aplicaciones distintas con dos conjuntos diferentes de elementos esenciales en las aplicaciones de automatización
modernas. Una es la transferencia de señales relativas al proceso en sí; la otra es el mantenimiento, la puesta en marcha y la comunicación de configuración.
La transferencia de señales de control y estado entre los sensores y los actuadores depende de un tiempo crítico y debe procesarse de forma fiable y en
tiempo real. Esto se consigue mediante la comunicación cíclica, en la que cada nodo de la red se emite dentro de cada ciclo y cada ciclo tiene un tiempo
predeterminado. Es necesario definir previamente y minimizar el alcance de los datos de cada telegrama para que funcione de forma fiable y con la mayor
rapidez posible.
Este requisito es contrario al segundo uso del bus de campo, es decir, como bus de diagnóstico y configuración rápida. El diagnóstico y la configuración
no dependen del tiempo, no se utilizan de forma continua y requieren una mayor cantidad de datos en cada telegrama. Además, normalmente dicha
información se controla desde un PC o un dispositivo de interfaz (HMI), y no desde el maestro (normalmente, un PLC), que controla la comunicación
cíclica. El Profibus estándar no es compatible con redes con varios maestros, por lo que la información de configuración y diagnóstico debe ir contenida
en el telegrama estándar controlado por el maestro, lo que hace que los telegramas sean muy largos y consuman mucho tiempo, además de que haya
información que solo se usa esporádicamente.
Ahora, el Profibus DP V1 combina ambas exigencias en un solo sistema de bus de campo, permitiendo que un segundo maestro utilice toda la red en
una ranura de tiempo determinada en cada ciclo. El Profibus DP V1 funciona, por tanto, con dos clases de maestros. La clase maestra 1 (normalmente,
un PLC) realiza la comunicación cíclica. La clase maestra 2 (normalmente un dispositivo de interfaz [HMI o PC]) transfiere información que no tiene un
tiempo crítico a través de una comunicación acíclica.
300
Los maestros de la clase maestra 2 pueden conectarse en cualquier parte de la red de Profibus y el canal de comunicación puede abrirse y cerrarse en
cualquier momento sin interferir en la comunicación cíclica. Puede haber una comunicación acíclica incluso sin comunicación cíclica para, por ejemplo,
transferir programas o configuraciones completos.
El Profibus DP V1 es totalmente compatible con las versiones anteriores de Profibus DP V0. Los nodos del Profibus DP V0 y del Profibus DP V1 pueden
combinarse en la misma red, aunque el maestro debe ser compatible con la comunicación de la clase maestra 2.
Ventajas para el usuario:
• Es posible la conexión con el control de motor desde cualquier parte de la red.
• La red existente puede utilizarse para la puesta en marcha, la configuración y el diagnóstico sin interferir en la comunicación cíclica.
• Tanto los nodos del DP V1 como los del DP V0 pueden conectarse en la misma red.
• No son necesarios telegramas amplios en el PLC o IPC. Un segundo maestro, compatible con DP V1, puede controlar las tareas de configuración.
¡NOTA!
El DP V1 solo puede utilizarse con tarjetas de comunicación maestras compatibles con la especificación de clase maestra 2.
26
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 28

Guía de diseño del VLT® descentralizado FCD
300
1.5.3 DeviceNet
1 El concepto de descentralización
DeviceNet es un enlace de comunicaciones para conectar dispositivos industriales a la red. Se basa en el protocolo de comunicación orientado a la
transmisión CAN (Controller Area Network).
El protocolo CAN fue desarrollado originalmente para la industria europea de la automoción con el fin de reemplazar los caros arneses de cables de los
automóviles. Como resultado, el protocolo CAN ofrece una respuesta rápida y una alta fiabilidad en aplicaciones muy exigentes, como los frenos ABS o
los airbags.
El concepto de Danfoss ofrece una solución DeviceNet eficaz en cuanto a costes
• Comunicación cíclica de E / S
• Comunicación acíclica: «mensajes explícitos»
• Los mensajes del Gestor de mensajes sin conexión (UCMM) son compatibles
•Solución integrada
• Los archivos EDS garantizan una configuración sencilla
• Proporciona una fuente de tensión al bus de campo
• Compatible con el perfil de motor de CA / CC DeviceNet
• Protocolo definido de conformidad con la ODVA (Open DeviceNet Vendor Association)
1.5.4 AS-interface
AS-interface (AS-i) es una alternativa rentable al cableado tradicional en el nivel inferior de la jerarquía de automatización. La red puede vincularse a un
bus de campo de un nivel superior, como Profibus, para una E / S remota de bajo coste. AS-i, identificable por su cable amarillo, ha crecido como una
tecnología «abierta», compatible con más de 100 proveedores de todo el mundo. Las mejoras a lo largo del tiempo han ampliado su abanico de aplicaciones, y AS-interface es en la actualidad parte de los cientos de miles de productos y aplicaciones que conforman la gama de automatización.
1
1.5.5 Modbus
El convertidor de frecuencia se comunica en el formato Modbus RTU a través de la red EIA-485 (antigua RS-485). Modbus RTU proporciona acceso al
código de control y a la referencia de bus del convertidor de frecuencia.
El código de control permite al maestro del Modbus controlar varias funciones importantes del convertidor de frecuencia:
• Arranque
• Detener el convertidor de frecuencia de diversas formas:
Paro por inercia
Parada rápida
Parada por freno de CC
Parada (de rampa) normal
• Reinicio tras desconexión por avería
• Funcionamiento a velocidades predeterminadas
• Funcionamiento en sentido inverso
• Cambiar la configuración activa
• Controlar los dos relés integrados del convertidor de frecuencia
La referencia de bus se utiliza normalmente para el control de la velocidad.
También es posible acceder a los parámetros, leer sus valores y, en su caso, escribir valores en ellos. Esto permite una amplia variedad de opciones de
control, incluido el control del valor de consigna del convertidor de frecuencia cuando se utiliza el controlador PID interno.
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
27
Page 29

1 El concepto de descentralización
1.5.6 Protocolo FC
Guía de diseño del VLT® descentralizado FCD
300
1
Todos los convertidores de frecuencia de Danfoss cuentan con una interfaz estándar RS-485 que permite hasta 126 unidades por red. El protocolo FC
tiene un diseño muy sencillo, descrito en
interfaz RS-485 ofrece una buena alternativa a la solución más rápida de bus de campo.
El protocolo FC puede utilizarse además como bus de servicio para la transferencia de información de estado y la configuración de parámetros. En este
caso, se combina con el control de E / S de tiempo crítico normal a través de entradas digitales.
Comunicación serie.
En aplicaciones en las que la velocidad de transmisión de datos no es tan importante, la
1.6 Método de instalación óptima
1.6.1 Opciones de instalación flexibles
Una de las principales ventajas del concepto descentralizado de Danfoss es el ahorro en los costes de instalación, debido al inteligente diseño en dos
partes del FCD 300.
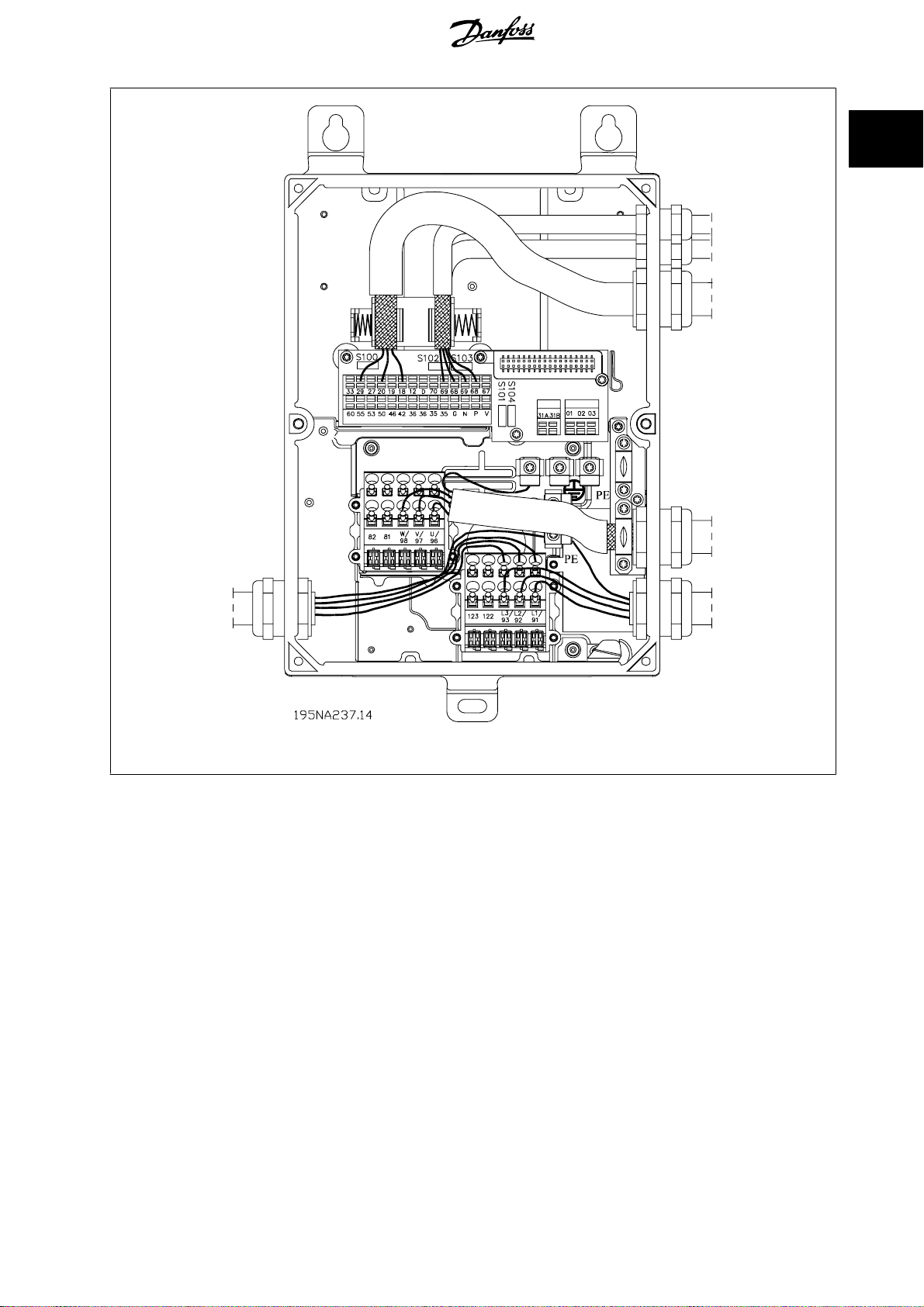
Toda la instalación eléctrica se hace dentro de la caja de instalación, antes de montar la parte electrónica. Posteriormente, la parte electrónica se conecta
a la caja de instalación y se fija, y el convertidor de frecuencia está listo para funcionar.
Bucle de la línea de alimentación
2
La serie FCD 300 facilita los bucles internos de la línea de alimentación. Los terminales para cables de alimentación de 4 mm
protección permiten conectar 10 unidades o más. La serie FCD 300 puede alternarse a lo largo de la línea. La carga media no debe superar los 25 A.
Respaldo de control de 24 V
En las versiones EX y EB, puede conectarse CC externa de 24 V (20-30 V) para el respaldo de los circuitos de control. Así, se mantiene la posibilidad de
comunicación y programación aún en caso de caídas de tensión. Los terminales han sido diseñados para tamaños de hasta 2,5 mm
su puesta en bucle.
situados dentro de la
2
y duplicados para
Las cajas de instalación T63 y T73 tienen terminales de puesta en bucle adicionales para 2 x 24 V con 4 mm
de forma independiente de la fuente de alimentación de respaldo del control.
2
. Los sensores conectados pueden alimentarse
28
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 30
Guía de diseño del VLT® descentralizado FCD
300
1 El concepto de descentralización
1
Ilustración 1.19: Ejemplo de alimentación y puesta en bucle del bus
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
29
Page 31

"
Guía de diseño del VLT® descentralizado FCD
1 El concepto de descentralización
1.6.2 Directrices para la selección de cables y fusibles en una instalación de línea de alta
tensión con FCD 300
300
1
Se supone que la instalación cumple con la directiva de baja tensión HD 384 e IEC 60364. Esta sección no puede utilizarse en zonas donde exista peligro
de explosiones o incendios. En general, las dimensiones del cable deben cumplir la norma IEC 60364-5-523. Si la instalación es parte de una maquinaria,
debe cumplirse la norma EN 60204-1. Los cables mencionados en los puntos 1, 2 y 3 de la figura deben protegerse mediante una carcasa o un conducto.
Los siguientes números de sección hacen referencia a la figura.
1. El cable solo podrá conducir la corriente continua máxima del freno de fricción. El circuito de protección no renovable del FCD interrumpirá el
caudal de corriente de fuga a tierra.
2. Si se utilizan las resistencias de freno IP 65 recomendadas por Danfoss, el cable solo estará expuesto a la corriente continua de la resistencia
de freno. Si la resistencia de freno se calienta en exceso, se desconectará por sí sola. Si se utiliza otro tipo de resistencia de freno o similar, sin
ningún dispositivo de limitación de potencia, la potencia máxima deberá ser igual a la potencia nominal del motor.
La corriente en amperios sería: I = 0,77 / potencia del motor, con la potencia del motor expresada en kW; [A = V/W]. La intensidad nominal
del motor se acerca bastante a la corriente del cable de la resistencia de freno.
encoders
3. Los cables de los
y termistores están en PELV potencial. Las intensidades están en la gama de mA y limitadas por el FCD. Con el fin
de no incumplir la norma de protección PELV de los terminales de control del FCD, el termistor debe tener un aislamiento de refuerzo de acuerdo
con las exigencias PELV. En lo que respecta a EMI, los cables deben tener su propia protección eléctrica y, si fuera posible, ir separados de los
cables de alimentación.
4. El cable está protegido por la función de límite de intensidad del FCD. El FCD interrumpirá la corriente por fugas a tierra y cortocircuitos de baja
impedancia.
5. La intensidad está limitada por el FCD descendente. El CB proporciona la protección contra fugas a tierra y cortocircuitos. La impedancia en los
cables debe ser tan baja que el CB se desconecte en 5 s por fugas a tierra de baja impedancia (alimentación de TN).
6. Si la instalación se realiza en una máquina (EN 60204-1) y la distancia entre la conexión en T y el FCD es inferior a 3 m, puede reducirse la
dimensión del cable hasta la capacidad de intensidad necesaria para el FCD descendente.
7. La corriente de disparo del CB ascendente no debe ser superior a los fusibles previos superiores de los FCD descendentes más pequeños.
En relación con EMC, los cables 2, 3 y 4 deben ir protegidos o colocados en conductos metálicos.
%&%
"
'
!
##$!$ #
' ' ' ' '
'
'
'
'
'
'
'
Ilustración 1.20: Ejemplo de dimensiones del cable descentralizado
30
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 32

Guía de diseño del VLT® descentralizado FCD
300
1 El concepto de descentralización
1.7 Mantenimiento de los productos descentralizados Danfoss
1.7.1 Mantenimiento
Los convertidores o motorreductores de Danfoss solo se averían en condiciones excepcionales. Dado que el tiempo de parada implica pérdidas de
producción, los fallos deben localizarse y los componentes defectuosos reemplazarse con rapidez.
Los productos descentralizados de Danfoss prestan especial atención a estas cuestiones. Este capítulo describe además las medidas adoptadas para que
los productos descentralizados de Danfoss sean mejores en caso de averías. Para obtener información detallada sobre cuestiones de mantenimiento
específicas, consulte la documentación específica.
Los convertidores de frecuencia centralizados de Danfoss tienen conexiones enchufables para facilitar el mantenimiento mediante una sustitución rápida
y sin fallos. Este mismo concepto se utiliza y mejora para los convertidores de frecuencia descentralizados.
Enchufar y usar
Toda la electrónica más avanzada y fiable necesaria para garantizar que
su motor responda con suavidad, sensibilidad y economía a cada orden
se encuentra bajo la tapa de la caja y se acopla a los conectores cuando
el montaje se realiza en la sección inferior. La sección inferior contiene
conectores de abrazadera sin mantenimiento y dispositivos de puesta en
bucle para los cables de alimentación y de bus de campo, que quedan
protegidos contra el polvo, las salpicaduras y los productos de limpieza.
Una vez instalada, la puesta en marcha y la actualización pueden realizarse instantáneamente con solo conectar otra tapa de control. Véase la
ilustración.
1
Dado que la caja de instalación solo contiene enchufes, conectores y placas de circuito impreso de baja densidad, es improbable que falle. En caso
de fallo del componente electrónico, basta con retirar los seis tornillos,
desconectarlo y enchufar uno nuevo.
Para poner en marcha y reparar un convertidor descentralizado de Danfoss, solo se necesitan materiales de instalación, como prensacables, cables,
etcétera. No se necesitan equipos especiales, como cables híbridos, que es probable que no estén disponibles a través de un proveedor estándar de
componentes de instalación eléctrica. De esta forma, se consigue una flexibilidad elevada y un tiempo de funcionamiento máximo.
Ilustración 1.21: Concepto del producto.
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
31
Page 33

2
2 Introducción al FCD 300
Guía de diseño del VLT® descentralizado FCD
300
32
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 34

Guía de diseño del VLT® descentralizado FCD
300
2 Introducción al FCD 300
2.1 Versión de software
2 Introducción al FCD 300
Serie FCD 300
Versión de software: 1.5.x
Esta Guía de diseño puede emplearse para todos los convertidores de frecuencia de la serie FCD 300 que incorporen la versión de software 1.5.x.
El número de dicha versión puede deducirse del número de versión del parámetro 640.
¡NOTA!
Este símbolo indica una observación importante para el lector.
Indica una advertencia de tipo general.
Este símbolo indica una advertencia de alta tensión.
2
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
33
Page 35

2 Introducción al FCD 300
2.2 Seguridad
2.2.1 Advertencia de alta tensión
Guía de diseño del VLT® descentralizado FCD
300
2
La tensión del convertidor de frecuencia es peligrosa cuando el equipo está conectado a la red. La instalación incorrecta del motor o
del convertidor de frecuencia puede producir daños en el equipo, lesiones físicas graves o mortales. Por tanto, es muy importante
respetar las instrucciones de este manual, así como las normas y reglamentos de seguridad vigentes locales y nacionales.
Los requisitos de protección de tensión extra baja (PELV) indicados en la norma IEC 61800-5-1 no se cumplen en altitudes superiores
a los 2000 m (6562 ft.). Para convertidores de frecuencia de 200 V, los requisitos no se cumplen a altitudes superiores a los 5000 m
(16404 ft.). Diríjase a Danfoss Drives para obtener más información.
2.2.2 Estas normas están relacionadas con su seguridad
1. El convertidor de frecuencia debe desconectarse de la red si es necesario realizar actividades de reparación. Compruebe que ha desconectado
el suministro eléctrico y que ha transcurrido el tiempo necesario antes de retirar el inversor de la instalación.
2. La tecla [STOP/RESET] en el panel de control opcional no desconecta el equipo de la alimentación de red, por lo que no debe utilizarse como
un interruptor de seguridad.
3. La unidad debe estar correctamente conectada a tierra, el usuario debe estar protegido contra la tensión de alimentación y el motor debe estar
protegido contra sobrecargas de acuerdo con las normas locales y nacionales en vigor.
4. La corriente de fuga a tierra es superior a 3,5 mA.
5. La protección contra las sobrecargas del motor no está incluida en los ajustes de fábrica. Si se requiere esta función, ajuste el parámetro 128
Protección térmica del motor
sobrecargas del motor de clase 20, conforme a NEC.
en el valor
Desconexión ETR
o
Advertencia ETR
. Para EE UU: Las funciones ETR proporcionan protección contra
2.2.3 Advertencia contra arranques accidentales
1. Mientras el convertidor de frecuencia esté conectado a la red eléctrica, el motor podrá pararse mediante comandos digitales, comandos de bus,
referencias o parada local por LCP. Si la seguridad de las personas requiere que no se produzca bajo ningún concepto un arranque accidental,
estas funciones de parada no son suficientes.
2. El motor podría arrancar mientras se modifican los parámetros. Por lo tanto, siempre debe estar activada la tecla de parada [STOP/RESET] del
panel de control opcional , después de lo cual pueden cambiarse los datos.
3. Un motor parado podría arrancar si se produjese un fallo en los componentes electrónicos del convertidor de frecuencia, si se produjese una
sobrecarga temporal, un fallo de la red eléctrica o un fallo en la conexión del motor.
Puede resultar extremadamente peligroso tocar los componentes eléctricos, incluso después de desconectar el suministro eléctrico de CA.
Para FCD 300: Espere al menos 4 minutos.
34
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 36

Guía de diseño del VLT® descentralizado FCD
300
2.3 Tecnología
2.3.1 Principio de control
2 Introducción al FCD 300
Los convertidores de frecuencia rectifican la tensión de CA de la alimentación de red en tensión de CC, convirtiéndola otra vez en tensión de CA
con amplitud y frecuencia variables.
Así, el motor recibe una tensión y frecuencia variables, lo que permite un
control de velocidad infinitamente variable de motores trifásicos estándar
de CA.
1. Tensión de red
3 x 380 - 480 V CA, 50/60 Hz.
Rectificador
2.
Puente trifásico rectificador de la tensión de CA en tensión de CC.
Circuito intermedio
3.
tensión de CC ≅ √2 x tensión de red [V].
Bobinas del circuito intermedio
4.
Igualan la intensidad del circuito intermedio y limitan la carga en la red eléctrica y los componentes (transformador de red, cables, fusibles y
contactores).
5.
Condensador del circuito intermedio
Iguala la tensión del circuito intermedio.
Inversor
6.
Convierte la tensión de CC en tensión de CA variable con una frecuencia variable.
Tensión del motor
7.
Tensión de CA variable que depende de la tensión de alimentación.
Frecuencia variable: 0,2 - 132/1 - 1000 Hz.
Tarjeta de control
8.
Aquí está el procesador que controla el inversor, que genera el patrón de pulsos mediante el cual se convierte la tensión de CC en tensión de
CA variable con frecuencia variable.
2
2.3.2 El concepto de descentralización
La unidad de velocidad ajustable FCD 300 se ha diseñado para montaje descentralizado, por ejemplo, en el sector de alimentación y bebidas, en el sector
de automoción o para otras aplicaciones que manejen materiales.
Con la unidad FCD 300 se puede aprovechar el potencial para ahorro de costes colocando los componentes electrónicos de alimentación de forma
descentralizada para así hacer innecesario el uso de los paneles centrales, lo que supone un ahorro de costes, espacio y tareas de instalación y cableado.
La unidad es muy flexible en lo que respecta a opciones de montaje, puede montarse de forma independiente o en motor. También se puede premontar
en un motor de engranaje de Danfoss Bauer (solución 3 en uno). El diseño básico con una parte electrónica enchufable y un cuadro de cableado
«espacioso» facilita las tareas de mantenimiento y reparación, y permite el cambio de los componentes electrónicos sin necesidad de desconectar el
cableado.
La unidad FCD 300 forma parte de la línea de convertidores de frecuencia VLT, lo que significa una funcionalidad, una programación y un funcionamiento
similares a los de los demás componentes de la gama.
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
35
Page 37

2
Guía de diseño del VLT® descentralizado FCD
2 Introducción al FCD 300
2.3.3 Principio de control del FCD 300
Los convertidores de frecuencia son equipos electrónicos que realizan un control variable ilimitado de las rpm de motores de CA. El convertidor de
frecuencia regula la velocidad del motor al convertir la tensión y la frecuencia de la red, por ejemplo, 400 V / 50 Hz, en magnitudes variables. Hoy en
día, los motores de CA controlados mediante convertidores de frecuencia son un elemento normal de todas las instalaciones automatizadas.
La serie FCD 300 tiene un sistema de control del inversor denominado VVC (control del vector tensión). El sistema VVC controla un motor de inducción
alimentándolo con una frecuencia variable y una tensión adecuada al mismo. Si cambia la carga del motor, también lo hace la excitación y la velocidad.
Por este motivo, la intensidad del motor se mide de manera continua y se utiliza un modelo de motor para calcular sus requisitos de tensión y deslizamiento.
2.3.4 Entradas y salidas programables en cuatro ajustes
En la serie FCD 300, se pueden programar las distintas entradas de control y salidas de señal, además de seleccionar cuatro ajustes definidos por el
usuario para la mayoría de parámetros. Es muy sencillo para el usuario programar las funciones requeridas por medio del panel de control o la comunicación serie.
2.3.5 Protección de la red
La serie FCD 300 está protegida contra los transitorios que se producen a veces en la red, por ejemplo, si se acopla a un sistema de compensación de
fase o se funden los fusibles por rayos.
300
La tensión nominal del motor y el par completo pueden mantenerse a una baja tensión de aproximadamente el 10 % en la alimentación de red.
Todas las unidades de la serie FCD 300 tienen bobinas de circuito intermedio, por lo que solo hay una reducida interferencia de los armónicos de la red
de alimentación. Esto genera un adecuado factor de potencia (intensidad pico inferior), lo que reduce la carga en la instalación de red.
2.3.6 Protección del convertidor de frecuencia
La medición de la intensidad en el circuito intermedio supone una protección idónea de la serie FCD 300, en caso de cortocircuitos o fallos de conexión
a tierra en la conexión del motor.
El control constante de la intensidad del circuito intermedio permite conmutar en la salida del motor, por ejemplo, con un contactor.
El control eficaz de la alimentación de red hará que la unidad se pare si hay una caída de fase (si la carga supera aproximadamente el 50 %). De esta
manera, el inversor y los condensadores en el circuito intermedio no se sobrecargan, lo que reduciría significativamente la vida útil del convertidor de
frecuencia.
La serie FCD 300 ofrece de fábrica una protección de temperatura. Si hay una sobrecarga térmica, esta función desconecta el inversor.
2.3.7 Aislamiento galvánico fiable
En los FCD 300, todas las entradas y salidas digitales, entradas y salidas analógicas y terminales de comunicación serie se suministran conectados a
circuitos que cumplen los requisitos de PELV. La norma PELV se cumple también con respecto a los terminales de relé a 250 V como máximo, de forma
que pueden conectarse al potencial de red.
Consulte el apartado
Aislamiento galvánico (PELV)
para obtener más detalles.
2.3.8 Protección avanzada de motor
La serie FCD 300 tiene incorporada una protección electrónica del motor.
El convertidor de frecuencia calcula la temperatura del motor a partir de la intensidad, la frecuencia y el tiempo transcurrido.
A diferencia de la tradicional protección bimetálica, la protección electrónica tiene en cuenta el menor enfriamiento a bajas frecuencias causado por la
menor velocidad del ventilador (motores con ventilador interno). Esta función no protege cada motor cuando estos se conectan en paralelo. La protección
térmica del motor es similar a un conmutador de seguridad CTI del motor.
Para que el motor tenga la máxima protección contra el sobrecalentamiento cuando quede tapado o bloqueado, o si falla el ventilador, puede instalar un
termistor y conectarlo a la entrada de termistor del convertidor de frecuencia (entrada digital). Consulte el parámetro 128
36
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Protección térmica del motor
.
Page 38

Guía de diseño del VLT® descentralizado FCD
300
¡NOTA!
Esta función no protege los motores individualmente si están conectados en paralelo.
2 Introducción al FCD 300
2.4 Marca CE
¿Qué es la marca CE?
El propósito de la marca CE es evitar los obstáculos técnicos para la comercialización en la EFTA y la UE. La UE ha introducido la marca CE como un modo
sencillo de demostrar si un producto cumple con las directivas correspondientes de la UE. La marca CE no es indicativa de la calidad o las especificaciones
de un producto. Los convertidores de frecuencia se tratan en tres directivas de la UE, que son las siguientes:
Directiva de máquinas (98/37/CEE)
Toda la maquinaria con partes móviles críticas está cubierta por la directiva de máquinas, vigente desde el 1 de enero de 1995. Teniendo en cuenta que
los convertidores de frecuencia funcionan primordialmente con electricidad, no están incluidos en esta directiva. Sin embargo, si se suministra un convertidor de frecuencia para utilizarlo con una máquina, proporcionamos información sobre los aspectos de seguridad relativos a dicho convertidor. Lo
hacemos mediante una declaración del fabricante.
Directiva sobre baja tensión (73/23/CEE)
Los convertidores de frecuencia deben contar con la marca CE según la directiva sobre baja tensión, vigente desde el 1 de enero de 1997. Esta directiva
es aplicable a todos los equipos y aparatos eléctricos utilizados en los intervalos de tensión de 50-1000 V CA y 75-1500 V CC. Danfoss otorga la marca
CE de acuerdo con esta directiva y emite una declaración de conformidad, si se solicita.
Directiva EMC (89/336/CEE)
EMC son las siglas en inglés de «compatibilidad electromagnética». La presencia de compatibilidad electromagnética significa que las interferencias mutuas
entre los diferentes componentes / aparatos es tan pequeña que no afecta al funcionamiento de dichos aparatos.
La directiva EMC entró en vigor el 1 de enero de 1996. Danfoss otorga la marca CE de acuerdo con esta directiva y emite una declaración de conformidad,
si se solicita. Este manual incluye instrucciones de montaje detalladas para realizar la instalación correcta en cuanto a EMC. Además, especificamos las
normas que cumplen nuestros distintos productos. Ofrecemos filtros que pueden encontrarse en las especificaciones y proporcionamos otros tipos de
asistencia para asegurar un resultado óptimo de EMC.
En la mayoría de los casos, los profesionales del sector utilizan el convertidor de frecuencia como un componente complejo que forma parte de un aparato,
sistema o instalación más grandes. Debe señalarse que la responsabilidad sobre las propiedades finales en cuanto a EMC del aparato, sistema o instalación
corresponde al instalador.
2
2.4.1 ATEX
¿Qué es ATEX?
La directiva 94/9/CE es válida en toda la Unión Europea (UE) con el fin de establecer normas unificadas para los equipos y sistemas de protección previstos
para su uso en atmósferas potencialmente explosivas. La directiva está en vigor desde julio de 2003 y todos los equipos instalados y construidos en zonas
potencialmente explosivas en el seno de la UE después de dicha fecha deben cumplir con la misma. La directiva y sus instrumentos derivados se conocen
generalmente como la directiva ATEX (acrónimo de ATmosphère EXplosible).
La directiva ha demostrado ser útil para clasificar áreas peligrosas en zonas de acuerdo con la probabilidad de que haya gases o polvo explosivos en la
atmósfera (véase IEC 79-10). Esta clasificación permite especificar los tipos de protección adecuada para cada zona.
Motores alimentados a una frecuencia y tensión variables
Cuando los motores eléctricos se vayan a instalar en áreas en las que haya concentraciones y cantidades peligrosas de gases, vapores, brumas, fibras o
polvo inflamables en la atmósfera, deben aplicarse las medidas protectoras que reduzcan la probabilidad de explosiones debidas a la ignición por descargas
de arco, chispas o superficies calientes, producidas tanto durante el funcionamiento normal como en condiciones de fallo determinadas.
Los motores alimentados a una frecuencia y tensión variables requieren:
• Los medios (o equipos) de control directo de la temperatura mediante sensores de temperatura integrados descritos en la documentación del
motor o cualesquiera otras medidas que limiten la temperatura superficial de la carcasa del motor. La acción del dispositivo de protección activará
la desconexión del motor. La combinación del convertidor de frecuencia y el motor no requiere someterse a una prueba conjunta; o
• El motor debe haber sido sometido a pruebas de tipo para la tarea específica como una unidad asociada al convertidor de frecuencia especificado
en los documentos descriptivos, de conformidad con la norma IEC 79-0 y con el dispositivo de protección proporcionado.
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
37
Page 39

2
Guía de diseño del VLT® descentralizado FCD
2 Introducción al FCD 300
El FCD 300 y la ATEX
En las áreas del grupo II, categoría 3, zona 22, pueden instalarse directamente las siguientes variantes del FCD 300:
VLT descentralizado FCD3xx-P-T4-P66-xx-R1-Dx-Fxx-T11-Cx
VLT descentralizado FCD3xx-P-T4-P66-xx-R1-Dx-Fxx-T12-Cx
VLT descentralizado FCD3xx-P-T4-P66-xx-R1-Dx-Fxx-T51-Cx
VLT descentralizado FCD3xx-P-T4-P66-xx-R1-Dx-Fxx-T52-Cx
Las áreas del grupo II, categoría 3, zona 22 se caracterizan por:
• Instalaciones de superficie
• No es probable que se dé una atmósfera explosiva o, en caso contrario, es probable que su duración sea corta y no durante el funcionamiento
normal
• El medio explosivo es polvo
La temperatura superficial máxima del FCD 300 durante el funcionamiento normal más desfavorable se limita a 135 °C. Dicha temperatura debe ser
inferior a la temperatura de ignición del polvo presente.
El instalador debe definir la zona, categoría y temperatura de ignición del polvo del entorno en el que se vaya a instalar el FCD 300.
300
Instalación correcta según ATEX
Las siguientes cuestiones se han de tener en cuenta cuando se instala el FCD 300 en entornos de zona ATEX 22:
• El motor debe estar diseñado, probado y certificado por el fabricante del motor para la aplicación de velocidad variable.
• El motor debe estar diseñado para su funcionamiento en la zona 22, es decir, con un tipo de protección «tD» de conformidad con las normas
EN 61241-0 y -1 o EN 50281-1-1.
• El motor debe incluir una protección de termistor. La protección del termistor debe ir conectada, o bien a un relé de termistor externo, con el
certificado de pruebas de tipo CE, o bien compatible con la entrada del termistor del FCD 300.
Si se utiliza la protección del termistor FCD 300, el termistor debe conectarse a los terminales 31a y 31b y activarse la desconexión del termistor
programando el parámetro 128 en desconexión del termistor [2]. Si desea más información, consulte el parámetro 128.
• Se deben seleccionar entradas de cable para la protección de la protección que se va a mantener. Es preciso asegurarse también de que las
entradas de cable cumplen los requisitos de fuerza de sujeción y resistencia mecánica descritos en EN 50014:2000.
• El FCD debe instalarse con una conexión a tierra apropiada según la normativa local y nacional.
• La instalación, la inspección y el mantenimiento del aparato eléctrico para su uso en entornos con polvo combustible deberán confiarse a personal
con la suficiente formación que esté familiarizado con el concepto de protección.
Si desea información sobre la declaración de conformidad, consulte a su representante local de Danfoss.
38
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 40

Guía de diseño del VLT® descentralizado FCD
300
3Instalación
3.1 Dimensiones mecánicas
3.1.1 Dimensiones mecánicas, montaje del motor
3 Instalación
3
3.1.2 Dimensiones mecánicas, montaje independiente
Dimensiones mecánicas en mm FCD 303-315 FCD 322-335
A 192 258
A1 133 170
B 244 300
B1 300 367
B2 284 346
C 142 151
C1 145 154
Tamaños de prensacables M16, M20, M25 x 1,5 mm
Espacio para entradas de cables y el dispositivo interruptor para tareas de mantenimiento: 100 a 150 mm
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
39
Page 41

3
3 Instalación
3.1.3 Espacio para instalación mecánica
Todas las unidades requieren un mínimo de 100 mm de distancia de ventilación con respecto a los componentes situados encima y debajo del
alojamiento.
Guía de diseño del VLT® descentralizado FCD
300
3.2 Instalación mecánica
Preste atención a los requisitos que se aplican a la integración y al montaje remoto. Deben cumplirse para evitar lesiones personales
graves y daños, especialmente al instalar conversores grandes.
El FCD 300 consta de dos partes: La parte de instalación y la parte de componentes electrónicos.
Hay que separar las dos partes y montar primero la de instalación. Una vez realizado el cableado, hay que acoplar la parte de componentes electrónicos
a la parte de instalación mediante los 6 tornillos que se proporcionan. Para ajustar la junta, los tornillos deben apretarse con 2-2,4 Nm; primero deben
apretarse los dos tornillos centrales y después los 4 tornillos “cruzados” de las esquinas.
¡NOTA!
No conecte la alimentación hasta que no estén apretados los 6 tornillos.
El FCD 300 puede aplicarse del siguiente modo:
- Montaje independiente cerca del motor
- Montaje en el motor
o bien podría proporcionarse premontado en un motor Danfoss Bauer (reductor). Póngase en contacto con el departamento de ventas de Danfoss Bauer
para obtener más información.
El convertidor de frecuencia se refrigera mediante circulación de aire. Para que la unidad pueda liberar aire frío, la distancia libre por encima y por debajo
de la unidad debe ser de
máxima indicada para el convertidor de frecuencia y que no se supera la temperatura media de 24 horas. Ambas temperaturas se indican en las
Especificaciones técnicas generales
de potencia en función de la temperatura ambiente
reducción de potencia en función de la temperatura ambiente.
mínimo 100 mm
40
. Para que la unidad no se sobrecaliente, compruebe que la temperatura ambiente no excede la temperatura
. Si la temperatura ambiente es más alta, hay que reducir la potencia del convertidor de frecuencia. Consulte
. Tenga en cuenta que la vida útil del convertidor de frecuencia será menor si no se considera la
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Reducción
Page 42

Guía de diseño del VLT® descentralizado FCD
300
Montaje independiente (montaje en pared)
Para una mejor refrigeración, el convertidor debe montarse verticalmente; no obstante, si las limitaciones de espacio lo exigen, se puede montar horizontalmente. Las 3 abrazaderas para montaje de la versión para montaje en pared pueden utilizarse para asegurar la caja de instalación a la superficie
de montaje, dejando espacio entre la carcasa y la superficie para posibles tareas de limpieza. Utilice las tres arandelas que se proporcionan para proteger
la pintura.
Deben utilizarse pernos M6 para el FCD 303 - 315 y M8 para el FCD 322 - 335.
Véanse los Dibujos de dimensiones.
3 Instalación
Montaje en el motor
La caja de instalación debe montarse en la superficie del bastidor del
motor, normalmente en lugar de la caja de conexiones del motor. El motor/motor de engranaje puede montarse con el eje vertical u horizontal.
El convertidor no debe montarse en posición invertida (placa de disipación térmica hacia abajo). La refrigeración de los componentes electrónicos es independiente del ventilador de refrigeración del motor. Para el
montaje directo en motores de engranaje de Danfoss Bauer no es necesaria ninguna placa de adaptación. Para el montaje de motores que no
sean Danfoss Bauer, normalmente hay que utilizar una placa de adaptación. Con este fin se incluye una placa neutra con junta y tornillos para
su acoplamiento a la caja de instalación. Los taladros y la junta para la
carcasa del motor se aplican localmente. Compruebe que la resistencia
mecánica de los tornillos de montaje y las roscas es la suficiente para la
aplicación. La resistencia especificada frente a las vibraciones mecánicas
no cubre el montaje en motores que no sean Danfoss Bauer, ya que la
estabilidad de las roscas y del bastidor del motor están fuera del control
de Danfoss Drive y no son responsabilidad suya; lo mismo se aplica al
alojamiento. Tenga en cuenta que el convertidor de frecuencia no puede
utilizarse para levantar el motor/motor de engranaje.
1. Prepare la placa de adaptación para el montaje en el motor taladrando los orificios de fijación y el orificio para los cables.
2. Monte la placa en el motor con la junta de la caja de conexiones
normal.
3. Prepare los 4 orificios para tornillo destinados al montaje de la
placa de adaptación (orificios externos).
4. Monte la caja de conexiones en el motor con los 4 tornillos de
obturación y la junta que se suministra a tal fin.
Utilice la arandela dentada para asegurar la conexión PE según
la norma EN 60204. Los tornillos deben apretarse con una fuerza
de 5 Nm.
3
Ilustración 3.1: Placa de adaptación universal
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
41
Page 43

3
3 Instalación
Ilustración 3.2: Posiciones de montaje permitidas
Guía de diseño del VLT® descentralizado FCD
300
Ilustración 3.3: Vista inferior del FCD 303-315.
Ilustración 3.4: Vista inferior del FCD 322-330.
42
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 44

Guía de diseño del VLT® descentralizado FCD
300
3.3 Información general sobre la instalación eléctrica
3.3.1 Advertencia de alta tensión
La tensión del convertidor de frecuencia es peligrosa cuando el equipo está conectado a la red. La instalación incorrecta del motor o
del convertidor de frecuencia puede producir daños en el equipo, lesiones físicas graves e incluso la muerte. Siga las instrucciones de
este manual, así como los reglamentos de seguridad locales y nacionales.
Puede resultar peligroso tocar los elementos eléctricos incluso después de desconectar la tensión. Espere 4 minutos, como mínimo,
para que se disipe la corriente.
¡NOTA!
Es responsabilidad del usuario o del instalador asegurar la conexión a tierra y protección correctas según las reglas nacionales y locales.
3.3.2 Cables
3 Instalación
3
El cable de control y el cable de red deben instalarse separados de los cables de motor para evitar la transferencia de ruido. Como regla, es suficiente
una distancia de 20 cm, aunque se recomienda que la separación sea la máxima posible, especialmente cuando los cables se instalen en paralelo en
distancias largas.
Para los cables de señal muy sensible, como los telefónicos o de datos, se recomienda la mayor distancia posible. Tome en cuenta que la distancia
requerida depende de la instalación y la sensibilidad de los cables de señal, por lo que no es posible establecer valores exactos.
Cuando se coloquen en bandejas para cables, los cables de señal no pueden situarse en la misma bandeja de cables que los cables del motor. Si un cable
de señal cruza los cables de potencia, debe hacerlo a un ángulo de 90 grados. Recuerde que los cables de entrada y salida con ruido conectados a un
armario deben ser de tipo apantallado/blindado.
Consulte también
Prensacables
Se debe asegurar que se eligen y montan cuidadosamente los prensacables apropiados para el entorno.
Instalación eléctrica conforme a EMC
.
3.3.3 Cables apantallados/blindados
El apantallamiento debe tener una baja impedancia de AF, lo que se consigue con un apantallamiento trenzado de cobre, aluminio o hierro. El refuerzo
de apantallamiento indicado para la protección mecánica, por ejemplo, no es adecuado para la correcta instalación en cuanto a EMC. Consulte también
Uso de cables correctos de EMC
.
3.3.4 Protección adicional
Para conseguir una protección adicional, se pueden utilizar relés ELCB, conexión a tierra de protección múltiple o conexión a tierra, siempre que se cumpla
la normativa local vigente en materia de seguridad. En el caso de fallo de una conexión a tierra, puede generarse una componente de CC en la corriente
de la avería. No utilice nunca un relé RCD (relé ELCB), tipo A, ya que no es adecuado para corrientes de CC defectuosas. Si utiliza relés ELCB, deberá
cumplir las normas locales.Si utiliza relés ELCB, estos tendrán que ser:
- Adecuados para la protección de equipo con contenido de CC en caso de fallo de corriente (puente rectificador trifásico)
- Adecuados para una breve descarga con forma de pulso durante el encendido
- Adecuados para una corriente de fuga alta.
Consulte también la nota sobre la aplicación RCD núm. MN.90.GX.02.
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
43
Page 45

Guía de diseño del VLT® descentralizado FCD
3 Instalación
3.3.5 Prueba de alta tensión
Es posible realizar una prueba de alta tensión poniendo en cortocircuito los terminales U, V, W, L1, L2 y L3 mientras se aplica energía entre este
cortocircuito y el terminal PE con un máximo de 2160 V CC durante un segundo.
3.3.6 Componentes electrónicos adquiridos sin caja de instalación
300
3
Si la parte de componentes electrónicos se adquiere sin el componente de instalación Danfoss, la conexión a tierra debe ser adecuada para una corriente
de fuga alta. Se recomienda la utilización de la caja de instalación Danfoss o del kit de instalación 175N2207.
3.3.7 Precaución
Conexión a tierra de protección
La patilla metálica en la/s esquina/s de la parte electrónica y en los muelles de bronce de la/s esquina/s de
la caja de instalación son fundamentales para la conexión
a tierra de protección
flojas, de que no se han quitado ni deteriorado en modo alguno.
¡NOTA!
No enchufe ni desenchufe los componentes electrónicos cuando esté activada la tensión de red.
. Asegúrese de que no están
44
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 46

Guía de diseño del VLT® descentralizado FCD
300
3.3.8 Conexión a tierra de protección
La conexión de tierra sirve para varios propósitos.
• Conexión a tierra de seguridad (Conexión a tierra de protección, PE)
El equipo debe estar conectado a tierra correctamente según las normativas locales. Este equipo tiene una corriente de fuga > 3,5 mA CA. Debe
estar conectado a una conexión de tierra que cumpla con la normativa local para equipos con alta corriente de fuga.
2
Típicamente, esto implica que los conductores PE se han de mejorar mecánicamente (sección de cable mínima 10 mm
• Amortiguación de ruido (altas frecuencias)
La comunicación estable entre unidades exige el apantallamiento de los cables de comunicación (1). Los cables se han de sujetar adecuadamente
a abrazaderas apantalladas previstas para ese propósito.
• Ecualización del potencial de tensión (bajas frecuencias)
Para reducir las tensiones de alineación en el display del cable de comunicación, coloque siempre un cable de tierra corto entre las unidades
conectadas al mismo cable de comunicación (2) o conéctelo a un punto de tierra (3).
• Ecualización potencial: Deben ecualizarse potencialmente todas las piezas metálicas donde estén fijados los motores.
Las conexiones PE, los cables de ecualización de tensión y el display del cable de comunicación se han de conectar al mismo potencial (4).
Mantenga el conductor lo más corto posible y use la mayor área de superficie posible.
) o duplicado
3 Instalación
3
La numeración hace referencia a la figura.
Ilustración 3.5: Puesta a tierra de la instalación correcta
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
45
Page 47

3
Guía de diseño del VLT® descentralizado FCD
3 Instalación
3.3.9 Instalación eléctrica correcta en cuanto a EMC
Puntos generales que deben observarse para asegurar una instalación correcta en cuanto a compatibilidad electromagnética (EMC).
- Utilice únicamente cables de motor y de control apantallados/blindados.
- Conecte el apantallamiento a tierra en ambos extremos.
- Evite una instalación con extremos de pantalla retorcidos en espiral, ya que anulará el efecto del apantallamiento a altas frecuencias. Utilice en
su lugar abrazaderas de cable.
- No quite el apantallamiento del cable entre la abrazadera de cable y el terminal.
3.3.10 Uso de cables correctos para EMC
Para cumplir con los requisitos de inmunidad EMC de los cables de control y de emisiones EMC de los cables de motor, deben utilizarse cables apantallados/
blindados.
La capacidad de un cable para reducir la radiación entrante y saliente de ruido eléctrico depende de la impedancia de transferencia (Z
un cable suele estar diseñada para reducir la transferencia de ruido eléctrico, y una pantalla con un valor inferior de Z
valor mayor.
El valor de Z
cable.
raramente suele ser declarado por los fabricantes de cables, pero a menudo es posible estimarlo mirando y evaluando el diseño físico del
T
es más eficaz que otra con un
T
). La pantalla de
T
300
El valor de Z
- La resistencia de contacto entre cada conductor del apantallamiento.
- La cubierta del apantallamiento, es decir, el área física del cable que está apantallada. Normalmente, se indica como un porcentaje y debe ser
- El tipo de apantallamiento, trenzado o retorcido. Se recomienda el tipo trenzado o de conducto cerrado.
se puede calcular a partir de los siguientes factores:
T
del 85 % como mínimo.
46
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 48

Guía de diseño del VLT® descentralizado FCD
300
3 Instalación
3
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
47
Page 49

3
Guía de diseño del VLT® descentralizado FCD
3 Instalación
3.3.11 Conexión a tierra de cables de control apantallados/blindados
En general, los cables de control deben ser apantallados/blindados, y el apantallamiento debe conectarse al armario metálico de la unidad con una
abrazadera en cada extremo.
El siguiente dibujo muestra la forma correcta de realizar la conexión a tierra y cómo solucionar las dudas.
1. Conexión a tierra correcta
Los cables de control y de comunicación serie deben fijarse con
abrazaderas en ambos extremos para asegurar el mayor contacto eléctrico posible.
2. Conexión a tierra incorrecta
No utilice extremos de pantalla retorcida en espiral que estén
entrelazados (espirales), ya que aumentan la impedancia del
apantallamiento a frecuencias altas.
3. Protección respecto al potencial de tierra entre el PLC y
el VLT
Si es distinto el potencial de tierra entre el convertidor de frecuencia VLT y el PLC, etcétera, puede producirse ruido eléctrico
que perturbará todo el sistema. Este problema se puede solucionar instalando un cable compensador, que debe estar junto
al cable de control. Sección transversal mínima del cable: 16
2
.
mm
4. En el caso de un bucle de tierra de 50 / 60 Hz
En caso de utilizar cables de control muy largos, pueden surgir
bucles de tierra de 50 / 60 Hz, que pueden interferir en todo el
sistema. Este problema se soluciona conectando a tierra un extremo del apantallamiento mediante un condensador de 100 nF
(patillas cortas).
300
48
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 50

Guía de diseño del VLT® descentralizado FCD
300
3.4 Diagrama
3 Instalación
3
* El control de freno mecánico, el freno integrado y los 24 V externos son opcionales.
3.4.1 Interruptores de interferencia de radiofrecuencia J1, J2
J1 y J2 deben eliminarse en la conexión a tierra en triángulo y los terminales de entrada de alimentación eléctrica con una tensión entre fase y tierra >
300 V también durante los fallos de conexión a tierra.
J1 y J2 pueden eliminarse para reducir la corriente de fuga.
Precaución: Sin filtro RFI.
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
49
Page 51

3
3 Instalación
3.5 Instalación eléctrica
3.5.1 Ubicación de los terminales
Guía de diseño del VLT® descentralizado FCD
300
Ilustración 3.6: T12, T16, T52, T56
Ilustración 3.7: Versiones con interruptor de servicio
50
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 52

Guía de diseño del VLT® descentralizado FCD
300
3 Instalación
3
Ilustración 3.8: T73, versión con conectores para motor y sensores
Danfoss distribuye esta versión con el cableado que se muestra a continuación
3.5.2 Conexión de red
¡NOTA!
Compruebe que la tensión de red coincide con la tensión de alimentación eléctrica del convertidor de frecuencia, que puede leerse en
la placa de características.
No. 91 92 93 Tensión de red 3 x 380-480 V
L1 L2 L3
PE Conexión a tierra
Consulte los
Datos técnicos
para averiguar las dimensiones correctas de la sección del cable.
3.5.3 Fusibles previos
Consulte Datos técnicos para elegir las dimensiones correctas de los fusibles previos.
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
51
Page 53

3 Instalación
3.5.4 Conexión del motor
Conecte el motor a losterminales 96, 97, 98. Conecte el terminal PE a tierra.
Guía de diseño del VLT® descentralizado FCD
300
3
No.
Consulte los
Todos los tipos de motores asíncronos trifásicos estándar pueden conectarse a un convertidor de frecuencia. Normalmente, los motores pequeños se conectan en estrella (230/400 V, / Y). Los motores grandes se
conectan en triángulo (400/690 V, /Y). El modo y la ten sión de co nexión
correctos se indican en la placa de características del motor.
96 97 98 Tensión de motor 0-100% de la tensión de red.
U V W
U1
W2
U1 V1 W1 6 cables de motor, conectados en estrella
PE Conexión a tierra
Datos técnicos
¡NOTA!
En motores sin papel de aislamiento de fase, debe instalarse un filtro LC en la salida del convertidor de frecuencia.
V1
U2
para averiguar las dimensiones correctas de la sección del cable.
3 cables que salen del motor
W1V26 cables de motor, en triángulo
U2, V2, W2 para conectar por separado (bloques de terminales opcionales)
3.5.5 Dirección de giro del motor
Según el ajuste de fábrica, el motor gira en el sentido de las agujas del
reloj con la salida del transformador del convertidor de frecuencia conectada del modo siguiente:
Terminal 96 conectado a la fase U.
Terminal 97 conectado a la fase V.
Terminal 98 conectado a la fase W.
El sentido de rotación puede modificarse conmutando dos fases en los
terminales del motor.
52
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 54

Guía de diseño del VLT® descentralizado FCD
300
3.5.6 Conexión de red y de motor con interruptor de servicio.
3 Instalación
3
3.5.7 Conexión del conector de motor HAN 10E para T73
HAN 10E patilla n.º 1 - Fase del motor U
HAN 10E patilla n.º 2 - Fase del motor V
HAN 10E patilla n.º 3 - Fase del motor W
HAN 10E patilla n.º 4 - Freno de motor, consulte el
Funcionamiento MG.04.BX.YY
HAN 10E patilla n.º 5 - Freno de motor, consulte el
Funcionamiento MG.04.BX.YY
HAN 10E patilla n.º 9 - Termistor de motor, consulte el
de Funcionamiento MG.04.BX.YY
HAN 10E patilla n.º 9 - Termistor de motor, consulte el
de Funcionamiento MG.04.BX.YY
PE = conexión a toma de tierra de seguridad
, terminal 122
, terminal 123
, terminal 31A
, terminal 31B
Manual de
Manual de
Manual
Manual
3.5.8 Conexión de motores en paralelo
El convertidor de frecuencia puede controlar varios motores conectados
en paralelo. Si hace falta que los motores tengan diferentes valores de
rpm, utilice motores con diferentes valores nominales de rpm. Las rpm
de los motores se cambian simultáneamente, lo que significa que la relación entre los valores de rpm nominales se mantiene en todo el intervalo. El consumo de energía total de los motores no debe sobrepasar la
intensidad de salida nominal I
para el convertidor de frecuencia.
INV
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
53
Page 55

3
Guía de diseño del VLT® descentralizado FCD
3 Instalación
Pueden surgir problemas en el arranque con valores de rpm bajos si los motores tienen un tamaño muy distinto. Esto se debe a que la resistencia óhmica
del el estátor de los motores pequeños, relativamente alta, requiere una tensión más alta en el arranque y valores de rpm más bajos.
En sistemas con motores conectados en paralelo no es posible emplear el relé termoelectrónico (ETR) del convertidor de frecuencia como protección
para cada motor. Por este motivo, debe utilizarse otra protección para los motores, como los termistores en cada uno (o un relé térmico individual).
¡NOTA!
El parámetro 107
parámetro 101
paralelo.
3.5.9 Cables de motor
Consulte los Datos técnicos para elegir las dimensiones correctas de sección y longitud del cable de motor. Respete siempre las normas nacionales y
locales sobre la sección de cables.
¡NOTA!
Si usa cable no apantallado/no blindado, no cumplirá algunos requisitos sobre EMC. Consulte
Diseño.
Adaptación automática del motor, AMT
Características de par
debe ajustarse en
, no se puede utilizar cuando los motores están conectados en paralelo. El
Características de motor especia
l [8] cuando los motores se conectan en
Resultados del test EMC
en la Guía de
300
Para cumplir las especificaciones EMC relativas a emisiones, el cable de motor debe estar apantallado/blindado a menos que se indique lo contrario para
el filtro RFI en cuestión. Es importante mantener el cable de motor lo más corto posible para reducir al mínimo el nivel de interferencias y las corrientes
de fuga. El apantallamiento del cable del motor debe conectarse al armario metálico del convertidor de frecuencia y al armario metálico del motor. Las
conexiones de apantallamiento deben hacerse utilizando una superficie lo más extensa posible (abrazadera). Esto se realiza mediante distintos dispositivos
de instalación para los diversos convertidores de frecuencia. Debe evitarse el montaje con extremos de apantallamiento retorcidos (espirales), ya que
anulan el efecto de apantallamiento a frecuencias altas. Si resulta necesario romper el apantallamiento para instalar aisladores o relés de motor, el
apantallamiento debe continuarse a la menor impedancia de AF posible.
3.5.10 Protección térmica del motor
El relé termoelectrónico (ETR) de los convertidores de frecuencia con aprobación UL ha recibido la aprobación UL para protección de un único motor con
el parámetro 128
nominal del motor (consulte la placa de características del motor).
Protección térmica del motor
ajustado en
Desconexión ETR
y el parámetro 105
Intensidad del motor I
, programado en la intensidad
M, N
3.5.11 Resistencia de freno
No. 81 (función opcional) 82 (función opcional) Terminales de resistencia de freno
El cable de conexión a la resistencia de freno debe estar apantallado/blindado. Conecte el apantallamiento al armario metálico del convertidor de frecuencia
y al de la resistencia de freno con abrazaderas de cable. Elija un cable de freno cuya sección se adecue al par de frenado.
Consulte el capítulo
Frenado dinámico
R- R+
de la
Guía de Diseño MG.04.AX.YY
para seleccionar las dimensiones de las resistencias de freno.
¡NOTA!
Tenga en cuenta que en los terminales pueden generarse tensiones de hasta 850 V CC.
54
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 56

Guía de diseño del VLT® descentralizado FCD
300
3.5.12 Control del Freno mecánico
3 Instalación
No. 122 (función opcional) 123 (función opcional)
En las aplicaciones de elevación/descenso, será necesario controlar un freno electromagnético. El freno se controla mediante los terminales especiales
122/123 de control de freno y alimentación.
Cuando la frecuencia de salida sobrepase el valor de desconexión del freno, ajustado en el parámetro 138, éste se soltará si la intensidad del motor
aumenta por encima del valor ajustado en el parámetro 140. Una vez desactivado, el freno se activará cuando la frecuencia de salida sea menor que la
frecuencia de enganche del motor, que se ajusta en el parámetro 139.
Si el convertidor emite una alarma o está en situación de sobretensión, el freno mecánico actuará inmediatamente.
Si no utiliza los terminales especiales de control/suministro del freno mecánico (122-123), seleccione
341 para aplicaciones con un freno electromagnético.
Se puede utilizar una salida de relé o digital (terminal 46). Consulte
MBR+ MBR- Freno mecánico (UDC=0,45 X tensión de red) Máx. 0,8 A
Conexión del freno mecánico
Control de freno mecánico
para más detalles.
en el parámetro 323 o
3.5.13 Instalación eléctrica, Cables de control
Los cables de control deben ser apantallados/blindados. El apantallamiento debe conectarse al chasis del convertidor de frecuencia con una abrazadera.
Normalmente, también es preciso conectar el apantallamiento al chasis de la unidad de control (siga las instrucciones de la unidad de que se trate). Si
se utilizan cables de control muy largos y señales analógicas, en raras ocasiones pueden darse lazos de tierra de 50/60 Hz, según la instalación, a causa
de las interferencias procedentes de los cables de la red eléctrica. En estas conexiones quizá sea necesario romper el apantallamiento y posiblemente
insertar un condensador de 100 nF entre el apantallamiento y el chasis.
3
Interruptores S101-104
Bobinas de línea de bus; interruptores activados.
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
55
Page 57

3
Guía de diseño del VLT® descentralizado FCD
3 Instalación
3.5.14 Conexión de los sensores a los conectores M12 para T63 y T73
300
Para las especificaciones de potencia nominal, consulte las
Los terminales 203/204 se usan para suministro del sensor.
Terminal 203 = común
Terminal 204 = +24 V
Los terminales 201/202 pueden utilizarse para un suministro de 24 V independiente.
Especificaciones técnicas generales
, terminales de entrada digital 18, 19, 29, 33.
3.5.15 Instalación eléctrica, Terminales de control
Consulte la sección titulada
cables de control.
No. Función
01-03 Las salidas de relé 01-03 se pueden utilizar paraindicar advertencias, alarmas y mensajes de estado.
12 Alimentación de tensión de 24 V CC.
18-33 Entradas digitales.
20, 55 Estructura común para la entrada y salida de terminales. Se pueden aislar con el conmutador S100
31a, 31b Termistor del motor
35 Común (-) para alimentación de control externa de 24 V. Opcional.
36 Energía de control externa + 24 V. Opcional.
42 Salida analógica para mostrar la frecuencia,la referencia, la intensidad o el par.
46 Salida digital para mostrar el estado, las advertencias o las alarmas, así como la salida de frecuencia.
50 +10 V CC de tensión de alimentación para el potenciómetro
53 Entrada de tensión analógica 0 - +/- 10 V CC.
60 Entrada de intensidad analógica 0/4 - 20 mA.
67 + 5 V CC de tensión de alimentación para Profibus.
68, 69 Comunicación serie con bus de campo*
70 Conexión a tierra para terminales 67, 68 y 69.
D Para su uso en el futuro
V+5V, rojo
P RS485(+), LCP2/PC, amarillo
N RS485(-), LCP2/PC, verde
GOV, azul
Conexión a tierra de cables de control blindados/apantallados
Normalmente, este terminal no debe utilizarse.
en la Guía de Diseño para ver la terminación correcta de los
* Consulte el manual de funcionamiento de
FCD 300 AS-interface
(MG.04.EX.YY).
56
VLT 2800/FCM 300/FCD 300 Profibus DP V1
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
(MG.90.AX.YY),
VLT 2800/FCD 300 DeviceNet
(MG.90.BX.YY) o
Page 58

Guía de diseño del VLT® descentralizado FCD
300
3.5.16 Comunicación con PC
Conecte los terminales P y N para el acceso de PC a los parámetros individuales. La comunicación del motor y el bus de campo debe detenerse antes de
realizar una transferencia automática de varios parámetros.
En las variantes sin Fieldbus y Profibus pueden utilizarse los terminales 68 y 69 si la comunicación Profibus está detenida.
3.5.17 Conexión de relés
3 Instalación
Consulte el parámetro 323
Salida de relé
para programar la salida de relé.
No. 01 - 02 1 - 2 activa (normalmente abierta)
01 - 03
1 - 3 inactiva (normalmente cerrada)
3.5.18 Enchufe LCP 2, opcional
Se puede conectar una unidad de control LCP 2 a un enchufe que se monta de forma opcional en el alojamiento. Número de pedido: 175N0131.
No deben conectarse unidades de control LCP cuyo número de código sea 175Z0401.
3.5.19 Instalación de una fuente de suministro externo de 24 V (opcional)
El suministro externo de CC de 24 voltios se utiliza como alimentación de baja tensión a la tarjeta de control. Esto permite el funcionamiento completo
del LCP2 (incluido el ajuste de parámetros) sin necesidad de realizar una conexión a la alimentación de red.
Tenga presente que se dará una advertencia de tensión baja cuando se haya conectado la alimentación de 24 V CC; sin embargo, no se producirá una
desconexión.
¡NOTA!
Utilice una alimentación de 24 V CC de tipo PELV para asegurar el correcto aislamiento galvánico (de tipo PELV) de los terminales de
control del convertidor de frecuencia VLT.
3
Tenga cuidado con un posible arranque accidental del motor si se aplica potencia de red durante el funcionamiento con un suministro
de reserva externo de 24 V.
3.5.20 Versión del software 1.5x
Un FCD equipado con bus de campo muestra el estado
CIONAMIENTO solo mediante entradas digitales hasta que se cumpla uno de los siguientes parámetros:
- El par. 502 se ajusta a
- el par. 833 o 928 se ajusta a
- el par. 678 se ajusta a Versión estándar.
El código de estado del bus de campo en el arranque puede ser diferente (normalmente, 0603h en lugar de 0607h) hasta que se envía el primer código
de estado válido. Después de enviar el primer código de estado válido (bit 10 = datos válidos), el estado es exactamente el mismo que en versiones
anteriores del software.
Entrada digital
o
Desactivar
Y lógico
, o
Unidad lista
, o
aunque haya terminales en puente 12-27 y no puede ajustarse al modo EN FUN-
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
57
Page 59

3
3 Instalación
3.6 Ejemplos de conexión
Guía de diseño del VLT® descentralizado FCD
300
58
¡NOTA!
Evite llevar los cables sobre los enchufes hasta los componentes electrónicos.
No afloje el tornillo que fija la abrazadera para la conexión PE.
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 60

Guía de diseño del VLT® descentralizado FCD
300
¡NOTA!
En los
ejemplos de conexión
interruptor S100 (activado).
3.6.1 Arranque/parada
que aparecen a continuación, se debe tener en cuenta que no hay que cambiar los ajustes de fábrica del
3 Instalación
Arranque/parada con el terminal 18 y paro por inercia con el terminal 27.
Par. 302
Entrada digital
Parám. 304
Para Arranque/parada precisos se pueden realizar los siguientes ajustes:
Par. 302
Parám. 304
Entrada digital
Entrada digital
Entrada digital
=
Arranque
[7]
=
Paro por inercia inversa
=
Arranque/parada precisos
=
Paro por inercia inversa
[2]
[27]
[2]
3.6.2 Marcha/paro por pulsos
Arranque de pulsos con el terminal 18 y parada de pulsos con el terminal 19. Además, la frecuencia de velocidad fija se activa en el terminal 29.
Par. 302
Entrada digital
Entrada digital
Par. 303
Parám. 304
Par. 305
Entrada digital
Entrada digital = Velocidad fija
=
Arranque de pulsos
=
Parada inversa
=
Paro por inercia inversa
[8]
[6]
[2]
[13]
3
3.6.3 Aceleración/deceleración
Aceleración/deceleración mediante los terminales 29/33.
Par. 302
Par. 303
Par. 305
Par. 307
Entrada digital
Entrada digital
Entrada digital
Entrada digital
=
Arranque
[7]
=
Mantener referencia
=
Aceleración
=
Deceleración
[16]
[17]
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
[14]
59
Page 61

3 Instalación
3.6.4 Referencia del potenciómetro
Referencia de tensión mediante un potenciómetro.
Guía de diseño del VLT® descentralizado FCD
300
3
Entrada analógica
Par. 308
Parám. 309
Parám. 310
Terminal 53, escalado mínimo
Terminal 53, escalado máximo
=
Referencia
[1]
= 0 voltios
= 10 voltios
3.6.5 Conexión de transmisor de 2 hilos
Conexión de un cable transmisor de 2 hilos como realimentación al terminal 60.
Par. 314
Entrada analógica
Terminal 60, escalado mínimo
Par. 315
Terminal 60, escalado máximo
Par. 316
=
Realimentación
[2]
= 4 mA
= 20 mA
3.6.6 Referencia de 4-20 mA
Referencia de 4-20 mA en el terminal 60 y señal de realimentación de velocidad en el terminal 53.
Configuración
Par. 100
Entrada analógica
Par. 308
Parám. 309
Parám. 310
Par. 314
Par. 309
Par. 310
Terminal 53, escalado mínimo
Terminal 53, escalado máximo
Entrada analógica
Terminal 60, escalado mínimo
Terminal 60, escalado máximo
=
Velocidad, modo de lazo cerrado
=
Realimentación
=
Referencia
[2]
= 0 voltios
= 10 voltios
[1]
= 4 mA
= 20 mA.
[1]
60
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 62

Guía de diseño del VLT® descentralizado FCD
300
3.6.7 50 Hz de dcha. a izqda. hasta 50 Hz de izqda. a dcha.
Con potenciómetro suministrado internamente.
3 Instalación
Parám. 100
[0]
Parám. 200
0-132 Hz
[1]
Parám. 203
Parám. 204
Parám. 205
Entrada digital
Par. 302
Parám. 304
Parám. 308
Parám. 309
Parám. 310
Configuración
Rangos de frecuencia de salida
Rangos de frecuencia
Referencia mínima
Referencia máxima
Entrada digital
Entrada analógica
Terminal 53, escalado mínimo
Terminal 53, escalado máximo
=
Control de velocidad, lazo abierto
=
Ref. mín. - Ref. máx.
= -50 Hz
= 50 Hz
=
Arranque
[7]
=
Paro por inercia inversa
=
Referencia
=
Ambos sentidos,
[1]
= 0 voltios
= 10 voltios
[2]
[0]
3
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
61
Page 63

Guía de diseño del VLT® descentralizado FCD
3 Instalación
3.6.8 Referencias internas
Puede conmutar entre 8 referencias internas mediante dos entradas digitales, el Ajuste 1 y el Ajuste 2.
300
3
Ajuste activo
Par. 004
Parám. 204
Parám. 205
Entrada digital
Par. 302
Par. 303
Entrada digital
ficativo [31]
Parám. 304
Entrada digital
Par. 305
ficativo [22]
Par. 307
Entrada digital
tivo [23]
Ajuste
1 contiene las siguientes referencias internas:
Referencia interna 1
Par. 215
Par. 216
Referencia interna 2
Referencia interna 3
Par. 217
Referencia interna 4
Par. 218
Ajuste 2
contiene las siguientes referencias internas:
Par. 215
Referencia interna 1
Referencia interna 2
Par. 216
Referencia interna 3
Par. 217
Par. 218
Referencia interna 4
=
Ajuste múltiple
Referencia mínima
Referencia máxima
=
Arranque
= Selección de ajuste, bit menos signi-
Entrada digital
=
= Referencia interna, bit menos signi-
= Referencia interna, bit más significa-
1 [5]
= 0 Hz
= 50 Hz
[7]
Paro por inercia inversa
= 5,00 %
= 10,00 %.
= 25,00 %.
= 35,00 %.
= 40,00 %.
= 50,00 %.
= 70,00 %.
= 100,00 %.
[2]
Esta tabla muestra las frecuencias de salida:
Ref. interna,
msb
000 2,5
010 5
100 10
1 1 0 17,5
001 20
011 25
101 35
111 50
Ref. interna,
lsb
Selección de
ajuste
Frecuencia de sali-
da [Hz]
3.6.9 Conexión del freno mecánico
Con el terminal 122/123
Entrada digital
Par. 302
Parám. 304
Véanse también los par. 138, 139, 140
Entrada digital
=
Arranque
[7]
=
Paro por inercia inversa
[2]
62
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 64

Guía de diseño del VLT® descentralizado FCD
300
Freno mecánico con bobinado acelerador
3 Instalación
Entrada digital
Par. 302
Parám. 304
Véanse también los par. 138, 139, 140
Utilización del relé para freno de 230 V CA
Par. 302
Parám. 304
Par. 323
Véanse también los par. 138, 139, 140
Entrada digital
Entrada digital
Entrada digital
Salida de relé
=
Arranque
=
Paro por inercia inversa
=
Arranque
=
Paro por inercia inversa
=
Control de freno mecánico
[7]
[2]
3
[7]
[2]
[25]
Control de freno mecánico
Control de freno mecánico
Para más información sobre el ajuste de parámetros, consulte
[25] = «0» => Freno cerrado.
[25] = «1» => Freno abierto.
Control de freno mecánico
¡NOTA!
No utilice el relé interno para frenos de CC o con tensiones de freno superiores a 250 V.
3.6.10 Parada de contador con el terminal 33
La señal de arranque (terminal 18) debe estar activada, es decir, debe
ser '1' lógico, hasta que la frecuencia de salida sea igual a la referencia.
Después, la señal de arranque (terminal 18 = '0' lógico) deberá suprimirse
antes de que el valor de contador del parámetro 344 pare el convertidor
VLT.
.
Par. 307
Entrada digital
Función de parada precisa
Par. 343
Valor de contador
Par. 344
=
Entrada de pulsos
=
= 100000
[30]
Parada de contador con reset
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
[1]
63
Page 65

4
4 Programación
Guía de diseño del VLT® descentralizado FCD
300
64
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 66

Guía de diseño del VLT® descentralizado FCD
300
4Programación
4.1 LCP unidad de control
4.1.1 La unidad de control LCP 2, opción
El convertidor FCD 300 se puede combinar con una unidad de control LCP
(panel de control local - LCP 2), formando una interfaz completa para el
funcionamiento y la programación del convertidor. La unidad de control
LCP 2 se puede instalar a tres metros del convertidor como máximo, por
ejemplo, en un panel delantero, mediante un kit de accesorio.
El panel de control se divide en cinco grupos de funciones:
1. Display.
2. Teclas utilizadas para cambiar la función de visualización.
3. Teclas utilizadas para cambiar los parámetros de programa.
4. Luces indicadoras.
5. Teclas de control local.
4 Programación
4
Todos los datos se visualizan en un display alfanumérico de 4 líneas, que
puede mostrar normalmente hasta 4 elementos de dato y 3 modos de
funcionamiento de manera continua. Durante la programación, se mostrará toda la información requerida para el ajuste rápido y efectivo de los
parámetros del convertidor. Como suplemento al display, hay tres luces
indicadoras de la tensión (ON), advertencias (WARNING) y alarmas
(ALARM). Todos los ajustes de parámetros del convertidor de frecuencia
se pueden cambiar inmediatamente desde el panel de control, a menos
que esta función se haya ajustado en
Bloqueo de parámetros
.
Bloqueado
[1] en el parámetro 018
4.1.2 Teclas de control para ajuste de parámetros
Las teclas de control están divididas en funciones, y las teclas entre el
display y las luces indicadoras sirven para ajustar los parámetros y el
modo de visualización del display durante el funcionamiento normal.
[DISPLAY/STATUS] se ut iliz a p ara se lec ci onar el mod o d e vi su ali za ció n
del display o para volver al modo display desde el menú rápido o el modo
menú.
[QUICK MENU] proporciona acceso a los parámetros utilizados en el
menú rápido. Se puede pasar del menú rápido al modo menú.
[MENU] da acceso a todos los parámetros. Se puede pasar del modo
menú al menú rápido.
[CHANGE DATA] se utiliza para cambiar un parámetro que haya sido
seleccionado por modo menú o menú rápido.
[CANCEL] se utiliza si no se va a implementar ningún cambio al parámetro seleccionado.
[OK] se utiliza para confirmar un cambio en un parámetro seleccionado.
[+/-] se utilizan para seleccionar parámetros y para cambiar valores de
parámetros.
Estas teclas también se utilizan en el modo display para pasar de una
lectura de datos de las variables de funcionamiento a otra.
[< >] se utilizan para seleccionar el grupo de parámetros y mover el
cursor al cambiar el valor numérico.
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
65
Page 67

4
4 Programación
4.1.3 Luces indicadoras
En la parte inferior del panel de control hay una luz de alarma roja, una
luz de advertencia amarilla, y una luz indicadora verde de tensión.
Si se sobrepasan determinados valores de umbral, las luces de alarma y/
o advertencia se activan, junto con un texto de estado o de alarma que
se muestra en el display.
4.1.4 Control local
[STOP/RESET] sirve para detener un motor conectado o para reiniciar
el convertidor de frecuencia tras un corte en la alimentación (desconexión). Puede activarse o desactivarse mediante el parámetro 014
local
.
Si se activa la parada, la línea 2 del display parpadeará.
Parada
Guía de diseño del VLT® descentralizado FCD
300
¡NOTA!
La l uz in di cadora de te ns ió n se ac ti va cu ando la te ns ió n
está conectada al convertidor de frecuencia.
¡NOTA!
Si no se selecciona la función de parada externa y la
tecla [STOP/RESET] está desactivada, el motor sólo
podrá pararse desconectando la tensión del mismo o
del convertidor.
[JOG] cambia la frecuencia de salida a una frecuencia preajustada cuando se mantiene pulsada. Se puede definir como activa o inactiva mediante
el parámetro 015
[FWD/REV] cambia el sentido de rotación del motor, que se indica por
medio de una flecha en el display. Puede activarse o desactivarse mediante el parámetro 016
solo está activa cuando el parámetro 002
se haya ajustado como
[START] se utiliza para arrancar el convertidor de frecuencia. Siempre
está activada, aunque no puede anular una orden de parada.
Velocidad fija local
Cambio de sentido local
Local control
.
. La tecla [FWD/REV]
Funcionamiento local/remoto
.
¡NOTA!
Si las teclas de control local están desactivadas, se activarán cuando el convertidor de frecuencia se ajuste
como
Control local
rámetro 002
ción de [FWD/REV], que solo está activada en Control
local.
y
Control remoto
Funcionamiento local/remoto
mediante el pa-
, a excep-
66
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 68

195NA113
10
Guía de diseño del VLT® descentralizado FCD
300
4.1.5 Modo display
4 Programación
Modo de conmutación mediante las teclas [+/-] [HAND.. AUTO]
VAR 1.1 VAR 1.2 VAR 1.3
.
VAR 2
SETUP
1
STATUS
En el funcionamiento normal, es posible mostrar opcionalmente hasta 4
elementos de dato en el display de manera continua: 1,1; 1,2; 1,3 y 2.
El estado de funcionamiento o las alarmas y advertencias generadas, se
muestran en la línea 2 como una cifra numérica.
En el caso de las alarmas, se muestra en las líneas 3 y 4 con un texto
descriptivo.
La advertencia parpadeará en la línea 2 con un texto descriptivo en la
línea 1. El Ajuste activo también se mostrará en el display.
La flecha indica el sentido de giro seleccionado. Aquí el convertidor de
frecuencia muestra que tiene una señal de cambio de sentido activada.
La forma de la flecha desaparece si se da una orden de parada, o si la
frecuencia de salida cae por debajo de 0,1 Hz.
La línea inferior indica el estado del convertidor de frecuencia. La barra
de desplazamiento muestra los valores de funcionamiento que pueden
verse en las líneas 1 y 2 en el modo display. Los cambios se realizan con
las teclas [+/-].
Conmutación entre los modos AUTO y HAND
Al activar la tecla [CHANGE DATA] en [DISPLAY MODE], el display indicará el modo del convertidor de frecuencia.
En modo [HAND], la referencia se puede cambiar con la tecla [+] o [-].
Datos de funcionamiento medida
Referencia resultante [%]
Referencia resultante [unidad]
Realimentación [unidad]
Frecuencia de salida [Hz]
Frecuencia de salida x escalado [-]
Intensidad del motor [A]
Par [%]
Potencia [kW]
Motor [HP]
Tensión del motor [V]
Tensión de CC [V]
Carga térmica del motor [%]
Carga térmica [%]
Horas de funcionamiento [horas]
Entrada digital [binario]
Entrada de pulsos 29 [Hz]
Entrada de pulsos 29 [Hz]
Entrada pulsos 33 [Hz]
Referencia externa [%]
Código de estado [hex]
Temp. del disipador [°C]
Código de alarma [hex]
Código de control [hex]
Cód. de advertencia [hex]
Código de estado ampliado [hex]
Entrada analógica 53 [V]
Entrada analógica 60 [mA]
Es posible mostrar tres datos de funcionamiento en la primera línea del
display, y una variable de operación en la segunda línea. Se programa en
los parámetros 009, 010, 011 y 012
Lectura de display
.
4
4.1.6 Modos display
La unidad de control LCP tiene distintas posibilidades de visualización,
que dependen del modo seleccionado para el convertidor de frecuencia.
Modo display I:
Este modo es estándar después de la puesta en marcha o la inicialización.
FRECUENCIA
50.0 Hz
MOTOR EN MARCHA
La línea 2 muestra el valor de un dato de funcionamiento en la unidad
seleccionada, y la línea 1 contiene un texto que explica la línea 2. En el
ejemplo, se ha seleccionado como lectura en el parámetro 009 Lectura
de display grande. En el funcionamiento normal, puede introducirse otra
variable inmediatamente con las teclas [+/-].
Modo display II:
El cambio entre los modos display I y II se realiza pulsando rápidamente
la tecla [DISPLAY/STATUS].
24,3% 30,2% 13,8A
50.0 Hz
MOTOR EN MARCHA
En este modo, se muestran todos los valores de cuatro datos de funcionamiento en la unidad elegida, consulte la siguiente tabla. En el ejemplo,
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
67
Page 69

4 Programación
Guía de diseño del VLT® descentralizado FCD
300
4
se han seleccionado:
lecturas de datos de la primera y segunda línea.
Modo display:
Este modo se activa mientras se mantiene pulsada la tecla [DISPLAY/
STATUS]. Al soltarla, el sistema vuelve al modo display II, a menos que
se haya pulsado aprox. menos de 1 seg, en cuyo caso vuelve al modo
display I.
Frecuencia, Referencia
REF% PAR% INTEN A
,
Par
e
Intensidad
como
50.0 Hz
MOTOR EN MARCHA
Aquí puede obtener la lectura del nombre de los parámetros y de la unidad en que se miden los datos de funcionamiento en la primera y segunda
línea. La línea 2 del display no cambia.
4.1.7 Ajuste de parámetros
Modo display IV:
Puede accederse a este modo durante el funcionamiento si se desea realizar un cambio en otro Ajuste sin tener que parar el convertidor. Esta
función se activa en el parámetro 005
24,3% 30,2% 13,8A
50.0 Hz
MOTOR EN MARCHA
El Ajuste 2 que se programa parpadeará a la derecha del Ajuste activo.
Editar ajuste
SETUP
12
.
Puede accederse al amplio rango de trabajo del convertidor de frecuencia
mediante un gran número de parámetros, con el fin de adaptar su funcionalidad a aplicaciones específicas. Para dar una mejor visión de los
diferentes parámetros, puede elegirse entre dos modos de programación:
modo menú y menú rápido. El primero da acceso a todos los parámetros.
El segundo permite que el usuario acceda a los parámetros necesarios
para permitir el funcionamiento del convertidor de frecuencia en la mayoría de los casos, según el Ajuste seleccionado. Independientemente del
modo de programación, el cambio de un parámetro tendrá un efecto inmediato y será visible tanto en el modo menú como en el de menú rápido.
Estructura del menú rápido y el modo menú
Además de tener un nombre, cada parámetro se vincula con un número,
que es el mismo independientemente de los modos de programación. En
4.1.8 Menú rápido con unidad de control LCP 2
Inicie la Configuración rápida pulsando la tecla [QUICK MENU], que hará
que se muestren los siguientes valores en el display:
MENU RAPIDO X OF Y
el modo menú, los parámetros se dividen en grupos, indicando el primer
dígito del número el grupo al que pertenecen.
• Con la tecla [QUICK MENU], es posible acceder a los parámetros
más importantes del convertidor de frecuencia. Después de la
programación, en la mayoría de los casos el convertidor de frecuencia estará preparado para funcionar. Desplácese por el Menú rápido con las teclas [+/-] y cambie los valores de dato pulsando las teclas [CHANGE DATA] + [OK].
• El modo menú permite elegir y cambiar todos los parámetros
que sea necesario. Sin embargo, algunos parámetros aparecerán «atenuados», según la opción elegida en el parámetro 100
Configuración
En la parte inferior, se indican el número y el nombre del parámetro, junto
con el estado/valor del primer parámetro del Menú Rápido. La primera
vez que se pulsa [QUICK MENU] después de encender la unidad, las lecturas empiezan en la posición 1, consulte la siguiente tabla.
.
68
50.0 Hz
001 LENGUAJE
ESPAÑOL
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 70

Guía de diseño del VLT® descentralizado FCD
300
Pos. N.º parámetro medida
1 001 Idioma
2 102 Potencia del motor
3 103 Tensión del motor [V]
4 104 Frecuen. del motor [Hz]
5 105 Intensidad del motor [A]
6 106 Velocidad nominal del motor [rpm]
7 107 Adaptación automática del motor
8 204 Referencia mínima
9 205 Referencia máxima [Hz]
10 207 Tiempo de rampa de aceleración [seg]
11 208 Tiempo de rampa de deceleración [seg]
12 002 Funcionamiento local/remoto
13 003 Referencia local
[kW]
[Hz]
[Hz]
4 Programación
4.1.9 Selección de parámetros
El modo menú se inicia con la tecla [MENU], que da la siguiente lectura
en el display:
FRECUENCIA
50.0 Hz
0 PANEL Y DISPLAY
La línea 3 del display muestra el número y el nombre del grupo de parámetros.
En el modo menú, los parámetros están divididos en grupos. La selección
de cada grupo se realiza con las teclas [< >].
Es posible acceder a los siguientes grupos:
N.º de grupo Grupo de parámetros
0 Funcionamiento y display
1 Carga y motor
2 Referencias y límites
3 Entradas y salidas
4 Funciones especiales
5 Comunicación serie
6 Funciones técnicas
Una vez seleccionado el grupo de parámetros requerido, puede elegirse
cada parámetro con las teclas [+/-]:
4
Cambio de datos
Tanto si se ha seleccionado un parámetro en el menú rápido como en el
modo menú, el procedimiento para cambiar los datos es el mismo. Al
presionar la tecla [CHANGE DATA], tiene acceso a cambiar el parámetro
seleccionado, después de lo cual parpadeará el subrayado en la línea 4
del display. El procedimiento para modificar los datos depende de si el
parámetro seleccionado representa un valor de dato numérico o un valor
de texto.
Cambio de un valor de dato
Si el parámetro seleccionado es un valor de texto, este valor deberá cambiarse con las teclas [+/-].
FRECUENCIA
50.0 Hz
001 LENGUAJE
ENGLISH
La línea inferior del display muestra el valor que se introduce (guarda)
cuando se confirme pulsando la tecla [OK].
Cambio del valor de dato numérico
Si el parámetro seleccionado tiene un valor de dato numérico, es necesario elegir primero un dígito con las teclas [< >].
FREKVENS
50.0 Hz
001 LENGUAJE
ENGLISH
La línea 3 del display muestra el número y nombre del parámetro seleccionado, mientras que el estado/valor del mismo se indica en la línea 4.
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
FRECUENCIA
50.0 Hz
130 FREC. ARRANQUE
09,0 HZ
El dígito seleccionado se puede modificar de manera infinitamente variable con las teclas [+/-]:
69
Page 71

4 Programación
FRECUENCIA
50.0 Hz
130 FREC. ARRANQUE
10,0 HZ
4.1.10 Inicialización manual
Guía de diseño del VLT® descentralizado FCD
300
El dígito elegido se indica mediante el dígito intermitente. La línea inferior
del display muestra el valor de dato que se introducirá (almacenará)
cuando lo confirme con [OK].
4
¡NOTA!
La inicialización manual
control LCP 2 175N0131. Sin embargo, la inicialización
se puede realizar mediante el parám. 620
funcionamiento
Los siguientes parámetros no se modifican cuando se inicializa mediante
el parám. 620
- parám. 500 Dirección
- parám. 501 Velocidad en baudios
Modo de funcionamiento
no es posible con la unidad de
Modo de
:
.
- parám. 600 Horas de funcionamiento
- parám. 601
- parám. 602 Contador de kWh
- parám. 603 N.º de puestas en marcha
- parám. 604
- parám. 605 N.º de sobretensiones
- parám. 615-617 Registro de fallos
- parám. 678 Tarjeta de control de configuración
Horas de funcionamiento
Número de sobretemperaturas
4.2 Grupo de parámetros 0-** Funcionamiento y display
001 Idioma
Valor:
Español (ENGLISH) [0]
German (DEUTSCH) [1]
French (FRANÇAIS) [2]
Danés (DANSK) [3]
Spanish (ESPAÑOL) [4]
Italian (ITALIANO) [5]
Función:
Este parámetro sirve para elegir el idioma que muestra el display cuando
se conecte el panel de control LCP.
Descripción de opciones:
Se muestran los idiomas que se pueden seleccionar. El ajuste de fábrica
puede variar.
002 Control local/remoto
Valor:
Control remoto (REMOTO) [0]
Control local (LOCAL) [1]
Función:
Hay la opción de dos modos de funcionamiento distintos del convertidor
de frecuencia:
el parámetro 013
Descripción de opciones:
Si se selecciona
trola mediante:
1. Los terminales de control o la comunicación serie.
Control remoto
Modo ref. local
Control remoto
[0] o
Control local
si
Control local
[0], el convertidor de frecuencia se con-
[1]. Consulte también
[1] se ha seleccionado.
2. La tecla [START]. Sin embargo, esta tecla no puede anular comandos de parada transmitidos por las entradas digitales o la
comunicación serie.
3. las teclas [STOP/RESET] y [JOG], siempre que estén activadas.
Si se selecciona
se controla mediante:
1. La tecla [START]. Sin embargo, esta tecla no puede anular co-
2. las teclas [STOP/RESET] y [JOG], siempre que estén activadas.
3. la tecla [FWD/REV], siempre que se haya seleccionado como
4. El parámetro 003
5. Un comando de control externo que pueda conectarse a las en-
Funcionamiento local
mandos de parada transmitidos por las entradas digitales (consulte el parámetro 013
activa en el parámetro 016
Modo ref. local
control
debe ajustarse en
ajustarse con las teclas [+] y [-].
tradas digitales (consulte el parámetro 013
esté ajustado en
[3]. El parámetro 200
Ambos sentidos
Referencia local,
¡NOTA!
Las teclas [JOG] y [FWD/REV] están situadas en la
unidad de control LCP.
[1], el convertidor de frecuencia
Modo ref. local
Cambio sentido
).
, y el parámetro 013
Local sin control
Rango de frecuencia de salida
.
donde la referencia puede
[1] o
Local con
Modo ref. local
).
70
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 72

Guía de diseño del VLT® descentralizado FCD
300
4 Programación
003 Referencia local
Valor:
(par. 205)
MAX
- Ref
MIN
Control local
Control local
MAX
El par. 013
0 - f
El par. 013
Ref
Función:
En este parámetro, la referencia local puede ajustarse manualmente. La
unidad de la referencia local depende de la configuración seleccionada
en el parámetro 100
debe ajustarse en [1] o [2]:
debe ajustarse en [3] o [4].
(par. 204-205)
Configuración
.
50 Hz
0,0
4.2.1 Configuración de ajustes
Hay la opción de cuatro Ajustes (ajustes de parámetro) que se pueden
programar individualmente. El Ajuste activo se selecciona en el parámetro
004
Activar ajuste
número del Ajuste activo se muestra en el display bajo «Ajuste». También
es posible preajustar el convertidor de frecuencia en
que se pueda cambiar de ajuste mediante las entradas digitales o la comunicación serie. El cambio de ajuste se puede utilizar, por ejemplo, en
una planta en que se utiliza un ajuste para el funcionamiento diurno y
. Cuando hay una unidad de control LCP conectado, el
Ajuste múltiple
, para
4.2.2 Cambio de Ajuste
Descripción de opciones:
Para proteger la referencia local, el parámetro 002
remoto
debe ajustarse en Local [1]. La referencia local no puede ajus-
tarse mediante comunicación serie.
otro para el funcionamiento nocturno. En el parámetro 006
te
es posible copiar valores entre los ajustes. Si se utiliza el parámetro
007
Copia con el LCP
vert idor de frecu encia a otro si se cambia de ubicación el panel de control
LCP. Primero, todos los valores de parámetros se copian al panel de control LCP, que después puede moverse a otro convertidor de frecuencia.
Aquí, todos los valores de parámetros pueden copiarse de la unidad de
control LCP al convertidor de frecuencia.
todos los ajustes, se pueden transferir de un con-
Funcionamiento local/
Copiar ajus-
4
- Selección de Ajuste mediante los terminales 29 y 33.
Parám. 305
significativo
Parám. 307
nificativo
Parám. 004
004 Ajuste activo
Valor:
Ajuste de fábrica (AJUSTE DE FÁBRICA) [0]
Ajuste 1 (ajuste 1) [1]
Ajuste 2 (ajuste 2) [2]
Ajuste 3 (ajuste 3) [3]
Ajuste 4 (ajuste 4) [4]
Ajuste múltiple (AJUSTE MULTIPLE) [5]
Función:
Aquí se selecciona el Ajuste de parámetros activo. Todos los parámetros
pueden programarse en cuatro Ajustes individuales. En este parámetro
Entrada digital
[31]
Entrada digital
[32]
Activar ajuste
=
Selección de Ajuste, bit menos
=
Selección de Ajuste, bit más sig-
=
Ajuste múltiple
[5]
es posible pasar de un Ajuste a otro mediante una entrada digital o la
comunicación serie.
Descripción de opciones:
Ajuste de fábrica
brica.
Ajustes 1-4
seleccionarse de la forma requerida.
hace falta cambiar mediante el control remoto entre los cuatro Ajustes
mediante una entrada digital o la comunicación serie.
005 Edición de ajustes
Valor:
Ajuste de fábrica (AJUSTE DE FÁBRICA) [0]
Editar ajuste 1 (ajuste 1) [1]
Editar ajuste 2 (ajuste 2) [2]
Editar ajuste 3 (ajuste 3) [3]
Editar ajuste 4 (ajuste 4) [4]
Ajuste activo (AJUSTE ACTIVO) [5]
Función:
Puede seleccionar el Ajuste que va a programar durante el funcionamiento (con el panel de control o con el puerto de comunicación serie).
Por ejemplo, es posible programar
nado como ajuste activo el
tivo
.
Descripción de opciones:
Ajuste de fábrica
lizarse como fuente de datos cuando es necesario devolver los otros
ajustes a un estado conocido.
duales que se pueden programar durante el funcionamiento. Si se selec-
Ajuste activo
ciona
metro 004
[0] contiene los valores de parámetro ajustados en fá-
[1]-[4] son los cuatro Ajustes individuales que pueden
Ajuste múltiple
Ajuste 2
Ajuste 1
[1] en el parámetro 004
[0] contiene los datos definidos en fábrica y puede uti-
Ajuste 1-4
[5], el ajuste de programación será idéntico al pará-
Ajuste activo
.
[5] se utiliza cuando
[2] aunque se haya seleccio-
[1]-[4] son los ajustes indivi-
Ajuste ac-
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
71
Page 73

4 Programación
Guía de diseño del VLT® descentralizado FCD
300
4
¡NOTA!
Si s e c am bi an o copia n d at os en el Aj us te ac ti vo, di ch os
cambios tendrán un efecto inmediato en el funcionamiento de la unidad.
006 Copia de ajustes
Valor:
Sin copia (NO COPIAR) [0]
Copiar a 1 de #
(COPIAR AL AJUSTE 1) [1]
Copiar a 2 de #
(COPIAR AL AJUSTE 2) [2]
Copiar a 3 de #
(COPIAR AL AJUSTE 3) [3]
Copiar a 4 de #
(COPIAR AL AJUSTE 4) [4]
Copiar a todos los Ajustes de # (COPIAR A TODOS) [5]
Función:
Puede copiar desde el Ajuste activo seleccionado en el parámetro 005
Editar ajuste
Descripción de opciones:
La copia comienza tras seleccionar la función de copia deseada y pulsar
la tecla [OK]/[CHANGE DATA]. La pantalla indica que la copia está en
curso.
007 Copia con el LCP
Valor:
Función:
El parámetro 007
función de copia incorporada en la unidad de control LCP 2. Esta función
sirve para copiar todos los ajustes de parámetros de un convertidor a otro
desplazando el panel de control LCP 2.
Descripción de opciones:
Seleccione
los parámetros al panel de control. Seleccione
copiar todos los valores transferidos al convertidor de frecuencia en el
que va a instalarse el panel de control. Seleccione
dependientemente del tamaño
que sean independientes del tamaño de la unidad. Se utiliza para volcar
parámetros en un convertidor con una potencia nominal distinta a la del
convertidor de frecuencia en que se creó el ajuste de parámetros.
a los ajustes seleccionados en este parámetro.
¡NOTA!
La copia sólo es posible en el modo de parada (motor
parado con un comando de parada).
Sin copia (NO COPIAR) [0]
Recibir todos los parámetros
(RECUPERAR PARAM.) [1]
Enviar todos los parámetros (VOLCAR PARAM.) [2]
Volcar parámetros independientemente del tamaño
(VOLCAR PARAM. INDP.) [3]
Copiar LCP
Recuperar parám.
se utiliza cuando es preciso hacer uso de la
[1], si desea transferir todos los valores de
Volcar parám.
[2], si desea
Volcar parámetros in-
[3], si sólo desea volcar los parámetros
¡NOTA!
La recuperación y volcado sólo pueden efectuarse en
el modo de parada. El volcado
en un convertidor que tenga el mismo número de ver-
sólo se puede realizar
sión de software, consulte el parámetro 626
Nº iden-
tificación de base de datos
008 Escalado del display de la frecuencia de salida
Valor:
0,01-100,00
Función:
En este parámetro se selecciona el factor por el que hay que multiplicar
la frecuencia de salida. El valor se muestra en el display si los parámetros
Lectura de display
009-012
[5].
escalado
Descripción de opciones:
Ajuste el factor de escalado que desee.
009 Lectura de display grande
Valor:
Sin lectura (ninguna) [0]
Referencia resultante [%]
(referencia [%]) [1]
Referencia resultante [unidad]
(referencia [unidad]) [2]
Realimentación [unidad] (realimentación [unidad]) [3]
Frecuencia [Hz] (Frecuencia [Hz]) [4]
Frecuencia de salida x escalado
(frecuencia x escala) [5]
Intensidad del motor [A] (Intensidad del motor [A]) [6]
Par [%] (Par [%]) [7]
Potencia [kW] (Potencia [kW]) [8]
Potencia [CV] (Potencia [CV][US]) [9]
Tensión del motor [V]
(Tensión del motor [V]) [11]
Tensión de CC [V]
(Tensión de CC [V]) [12]
Carga térmica del motor [%]
(Térmica del motor [%]) [13]
Carga térmica [%]
(Térmico del FC [%]) [14]
Horas de funcionamiento [Horas]
(HORAS DE FUNCIONAMIENTO]) [15]
Entrada digital [Bin]
(Entrada digital [bin]) [16]
Entrada analógica 53 [V]
(entrada analógica 53 [V]) [17]
Entrada analógica 60 [mA]
(entrada analógica 60 [mA]) [19]
Referencia de pulsos [Hz]
(ENTRADA de pulso 33. [Hz]) [20]
Referencia externa [%]
(ref. externa [%]) [21]
Código de estado [Hex] (Código de estado [hex]) [22]
Temperatura del disipador [°C]
(Temp. disipador [°C]) [25]
Código de alarma [Hex] (Código de alarma [hex]) [26]
Código de control [Hex] (Código de control [Hex]) [27]
se han ajustado en
Frecuencia de salida x
1,00
72
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 74

Guía de diseño del VLT® descentralizado FCD
300
4 Programación
Código de advertencia [Hex]
(código de advertencia [Hex]) [28]
Código de estado ampliado [Hex]
(Estado ampliado [hex]) [29]
Advertencia de tarjeta de opción de comunicación
(ADV. OPC. COM. [HEX]) [30]
Contador de pulsos
(CONTADOR PULSOS) [31]
Entrada de pulsos 29
(ENTR. PULSOS 29) [32]
Función:
En este parámetro, es posible seleccionar el valor de datos que aparecerá
en la línea 2 del display de la unidad de control LCP al arrancar el convertidor de frecuencia. También se incluirá el display en la barra de desplazamiento en modo display. En los parámetros 010-012
, puede seleccionar tres valores de datos adicionales, que se mos-
play
trarán en la línea de display 1.
Descripción de opciones:
Sin lectura
de datos de display pequeño.
Referencia resultante [%]
tante en el rango entre la referencia mínima , Ref
xima , Ref
Referencia [unidad]
to
416
Realimentación [unidad]
unidad/escalado seleccionado en el parámetro 414
ma, FB
ceso.
Frecuencia [Hz]
Frecuencia de salida x escalado [-] equivale a la frecuencia de salida actual f
del display de la frecuencia de salida.
Intensidad del motor [A]
como un valor real.
Par [%]
Potencia [kW]
Potencia [CV]
Tensión del motor [V]
Tensión de CC [V]
de frecuencia.
Carga térmica del motor [%]
motor. El 100 % es el límite de desconexión.
Carga térmica [%]
vertidor de frecuencia. El 100 % es el límite de desconexión.
Horas de ejecución [Horas]
estado funcionando desde el último reinicio del parámetro 619
contador de horas de ejecución
Entrada digital [código binario]
digitales (18, 19, 27, 29 y 33). El terminal 18 se corresponde al bit del
extremo izquierdo. «0» = sin señal, «1» = señal conectada.
Entrada analógica 53 [V]
Entrada analógica 60 [mA]
Referencia de pulsos 33 [Hz]
33.
solo puede seleccionarse en los parámetros 010-012 Lectura
ofrece un porcentaje de la referencia resul-
.
MAX
ofrece la referencia resultante en Hz en
. En
Lazo cerrado
Unidades de proceso
BAJA
multiplicada por el factor ajustado en el parámetro 008 Escalado
M
indica la carga actual del motor en relación con su par nominal.
, la unidad de referencia se selecciona en el parámetro
.
ofrece el valor de señal resultante utilizando la
, 415
Realimentación máxima, FB
ofrece la frecuencia de salida del convertidor.
ofrece la intensidad de fase del motor medida
ofrece la potencia actual absorbida por el motor en kW.
ofrece la potencia actual absorbida por el motor en CV.
ofrece la tensión suministrada al motor.
ofrece la tensión del circuito intermedio del convertidor
ofrece la carga calculada/estimada en el
ofrece la carga térmica calculada/estimada en el con-
ofrece el número de horas que el motor ha
.
of re ce el estad o d e se ña l de la s 5 e ntrada s
ofrece el valor de tensión del terminal 53.
ofrece el valor actual del terminal 60.
da la referencia en Hz conectada al terminal
ALTA
Lectura de dis-
y la referencia má-
MIN
Lazo abier-
Realimentación míni-
y 416 Unidades de pro-
Reset del
Referencia externa [%]
mo un valor porcentual (la suma de comunicación serie/analógica/pulso)
dentro del rango comprendido entre referencia mínima, Ref
rencia máxima, Ref
Código de estado [Hex]
código hexadecimal. Para obtener más información, consulte
ción serie
en la Guía de Diseño.
Temperatura del disipador de calor [°C]
disipador del convertidor de frecuencia. El límite de desconexión es
90-100 °C, mientras que la reconexión ocurre a 70 ± 5 °C.
Código de alarma [Hex]
cimal. Para obtener más información, consulte
Guía de Diseño.
Código de control [Hex]
de frecuencia. Para obtener más información, consulte
rie
en la Guía de Diseño.
Código de advertencia [Hex]
hexadecimal. Para obtener más información, consulte
rie
en la Guía de Diseño.
Código de estado ampliado [Hex]
en código hexadecimal. Para obtener más información, consulte
nicación serie
Advertencia de tarjeta de opción de comunicación [Hex]
de advertencia si ocurre un fallo en el bus de comunicación. Sólo está
activado si las opciones de comunicación están instaladas.
Si no hay opciones de comunicación, se muestra 0 Hex en el display.
Referencia de pulsos 29 [Hz]
29.
Contador de pulsos
trado.
010 Línea de display pequeña 1,1
Valor:
Consulte par. 009 Lectura de display grande
Función:
En este parámetro, es posible seleccionar el primero de tres valores de
dato que se mostrará en el display de la unidad de control LCP, línea 1,
posición 1. Es una función muy útil, por ejemplo, cuando se ajusta el
controlador PID, pues permite ver las reacciones del proceso ante los
cambios de referencia. La lectura de display se activa pulsando la tecla
[DISPLAY STATUS].
Descripción de opciones:
Consulte el parámetro 009
proporciona la suma de referencias externas co-
.
MAX
ofrece una o varias condiciones de estado en un
ofrece la temperatura actual del
ofrece una o varias alarmas en código hexade-
Comunicación serie
ofrece el código de control para el convertidor
Comunicación se-
ofrece una o varias advertencias en código
Comunicación se-
ofrece uno o varios modos de estado
en la Guía de Diseño.
ofrece un código
da la referencia en Hz conectada al terminal
ofrece el número de pulsos que la unidad ha regis-
Entrada analógica 53 [V] [17]
Lectura de display grande.
y refe-
MIN
Comunica-
en la
Comu-
4
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
73
Page 75

4 Programación
Guía de diseño del VLT® descentralizado FCD
300
4
011 Lectura de display breve 1,2
Valor:
Consulte el parámetro 009 Lectura
de display grande
Función:
Consulte la descripción funcional del parámetro 010
pequeño
.
Descripción de opciones:
Consulte el parámetro 009
012 Lectura de display breve 1,3
Valor:
Consulte el parámetro 009 Lectura de
display grande
Función:
Consulte la descripción funcional del parámetro 010
pequeño
.
Descripción de opciones:
Consulte el parámetro 009
013 Control local
Valor:
Local no activo (DESACTIVAR) [0]
Control local y lazo abierto sin compensación de deslizamiento
(LOC CTRL/OPEN LOOP) [1]
Control remoto y lazo abierto sin compensación de deslizamiento
(LOC+DIG CTRL) [2]
Control local como parámetro 100
(LOC CTRL/AS P100) [3]
Control remoto como parámetro 100
(LOC+DIG CTRL/AS P100) [4]
Función:
Aquí es donde se selecciona la función necesaria si, en el parámetro 002
Funcionamiento local/remoto
Descripción de opciones:
Si se selecciona
mediante el parámetro 003
Para poder cambiar a
Local no activo
miento local/remoto
Control local y lazo abierto
del motor mediante el parámetro 003
esta opción, el parámetro 100
Control de velocidad, lazo abierto
Control remoto y lazo abierto
local y lazo abierto
puede controlarse mediante entradas digitales.
En las selecciones [1-2] el control pasa a lazo abierto sin compensación
de deslizamiento.
Control local como parámetro
velocidad del motor mediante el parámetro 003
sin que el parámetro 100
trol de velocidad, lazo abierto
Lectura de display grande.
Lectura de display grande.
, se ha seleccionado
[0], no es posible ajustar una referencia
Referencia local
Local no activo
debe ajustarse a
[1] se utiliza si se va a establecer la velocidad
Configuración
[0].
[2] funciona del mismo modo que
[1]; sin embargo, el convertidor de frecuencia también
100 [3] se utiliza cuando va a ajustarse la
Configuración
[0].
Control remoto como parámetro 100
Control local como parámetro 100
frecuencia también puede controlarse mediante entradas digitales.
Intensidad del motor [A][6]
Lectura de display
Realimentación [unit] [3]
Lectura de display
Local
[1].
.
[0], el parámetro 002
Funcionamiento remoto
Referencia local
pasa automáticamente a
Funciona-
[0].
. Cuando se elige
Control
Referencia local
cambie automáticamente a
[4] funciona del mismo modo que
[3]; sin embargo, el convertidor de
, pero
Con-
Si se pasa de
remoto
abierto
motor. Si el sentido de giro actual no responde a la señal de cambio de
sentido (referencia negativa), la referencia se ajustará en 0.
Si se pasa de
remoto
abierto
Configuración
Si se pasa de
cuando este parámetro está ajustado a
100
[4]: Se mantendrá la referencia actual. Si la señal de referencia es
negativa, la referencia local se ajustará en 0.
Si se pasa de
remoto
La señal de referencia remota sustituirá a la referencia local.
014 Parada local
Valor:
No activo (NO) [0]
Activo (SÍ) [1]
Función:
En este parámetro es posible activar y desactivar la tecla [STOP] local del
panel de control y del panel de control LCP.
Descripción de opciones:
Si
en este parámetro se selecciona No
015 Velocidad fija local (Jog)
Valor:
No activo (DESACTIVAR) [0]
activo (ACTIVAR) [1]
Función:
En este parámetro es posible activar o desactivar la función de velocidad
fija del panel de control LCP.
Descripción de opciones:
Si en este parámetro se selecciona
016 Cambio sentido
Valor:
No (NO) [0]
Sí (SI) [1]
Función:
En este parámetro es posible seleccionar o deseleccionar la función de
cambio del sentido de giro mediante el panel de control LCP. La tecla sólo
se puede utilizar si el parámetro 002
en
Control local
en
Local sin control
Remoto
a
Local
en el parámetro 002
cuando este parámetro está ajustado a
[1]: Se mantendrán la frecuencia y el sentido de giro actuales del
Local
a
Remoto
en el parámetro 002
cuando este parámetro está ajustado a
[1 ]: Se ac tivará la con fi gur ac ión se lec ci ona da en el paráme tro 100
. El cambio será uniforme.
Remoto
a
Local
en el parámetro 002
Funcionamiento local/
Control remoto y lazo
Funcionamiento local/
Control remoto y lazo
Control local/remoto
Control remoto como parámetro
Local
a
Remoto
en el parámetro 002
cuando este parámetro está ajustado a
[0], se desactivará la tecla [STOP].
¡NOTA!
se selecciona No
Si
con la tecla [STOP].
[0], el motor no podrá detenerse
No
[0], se desactivará la tecla [JOG].
Control local/remoto
[1] y el parámetro 013
[1] o
Local con control
Funcionamiento local/
Funcionamiento remoto
Modo ref. local
[3].
se ha ajustado
se ha ajustado
:
74
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 76

Guía de diseño del VLT® descentralizado FCD
300
4 Programación
Descripción de opciones:
No
Si se selecciona
tivará. Consulte también el parámetro 200
.
da
017 Reset de fallo local
Valor:
No activo (DESACTIVAR) [0]
Activa (ACTIVAR) [1]
Función:
En este parámetro es posible activar y desactivar la función de reset del
panel de control.
Descripción de opciones:
Si en este parámetro se selecciona
cerá inactiva.
018 Bloqueo parámet.
Valor:
Desbloqueado (DESBLOQUEADO) [0]
Bloqueado (BLOQUEADO) [1]
Función:
En este parámetro es posible "bloquear" los controles para desactivar
cambios de datos mediante las teclas de control.
Descripción de opciones:
Cuando se selecciona
los parámetros; sin embargo, sí pueden realizarse cambios por comunicación serie. Los parámetros 009-012
carse con el panel de control.
019 Modo de arranque, funcionamiento local
Valor:
Rearranque automático; usar referencia guardada
(REARRANQUE AUTO.) [0]
Parada forzada, usar referencia guardada
(LOCAL = PARADA) [1]
Parada forzada; ajustar ref. en 0
(LOCAL = PARADA+REF. = 0) [2]
Función:
Ajustar el modo de funcionamiento deseado cuando se conecta la tensión
de red. Esta función solo puede activarse si se ha seleccionado
en el parámetro 002
Descripción de opciones:
Rearranque automat
ajustable con la referencia local (ajustada en el parámetro 003
local
) y el estado de arranque/parada proporcionado con las teclas de
control inmediatamente antes de desconectar la tensión de red.
Parada forzada, usa ref. almacenada
el convertidor de frecuencia ajustable permanezca parado cuando se activa la tensión de red, hasta que se acciona la tecla [Start]. Después de
un comando de arranque, aumentará la velocidad del motor hasta la referencia guardada en el parámetro 003
[0] en este parámetro, la tecla [FWD/REV] se desac-
Rango de frecuencia de sali-
No
[0], la función de reset permane-
¡NOTA!
Seleccione
señal de reset externa mediante las entradas digitales.
No
[0] únicamente si se ha conectado una
Bloqueado
Control local/remoto
[0] sirve para arrancar el convertidor de frecuencia
[1], no es posible cambiar los datos de
Lectura de display
.
pueden modifi-
Local
[1]
Referencia
[1] se selecciona si es necesario que
Referencia local
.
Parada forzada, ajustar ref. en 0
frecuencia va a permanecer parado al volver a conectarse a la tensión de
red. El parámetro 003
Referencia local
¡NOTA!
En funcionamiento remoto (parámetro 002
miento local/remoto
en el momento de la conexión de la red de alimentación dependerá de las señales de control externas. Si
se selecciona
Entrada digital
302
pués de conectar el suministro eléctrico.
020 Bloqueo del modo manual
Valor:
No activo (NO) [0]
Activo (SÍ) [1]
Función:
En este parámetro puede seleccionar si desea hacer posible el cambio
entre los modos automático y manual. En modo automático, el convertidor de frecuencia se controla mediante señales externas, mientras que
en modo manual se controla mediante una referencia local directamente
desde la unidad de control.
Descripción de opciones:
Si en este parámetro se selecciona
permanecerá inactiva. El bloqueo se puede activar a voluntad. Si se selecciona
Sí
[1], podrá cambiar entre ambos modos.
¡NOTA!
Este parámetro sólo es válido para LCP 2.
024 Menú rápido definido por el usuario
Valor:
No activo (Desactivar) [0]
activo (Activar) [1]
Función:
En este parámetro, puede seleccionar el ajuste normal de la tecla de menú rápido del panel de control y del panel LCP 2.
Con esta función, en el parámetro 025
puede elegir hasta 20 parámetros distintos para la tecla de menú rápido.
Descripción de opciones:
Si se selecciona
menú rápido.
Si se selecciona
usuario.
No
[0], estará activado el ajuste normal de la tecla de
Sí
[1], estará activado el menú rápido definido por el
[2] se selecciona si el convertidor de
debe ponerse a cero.
Funciona-
), el estado de arranque/parada
Arranque de pulsos
, el motor permanecerá parado des-
No
[0], la función de modo manual
Ajuste de menú rápido
[8] en el parámetro
el usuario
4
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
75
Page 77

4 Programación
Guía de diseño del VLT® descentralizado FCD
300
4
025 Ajuste de Menú Rápido
Valor:
[Indice 1 -20] Valor: 0 - 999
Función:
En este parámetro, se definen los que se requieren en el Menú Rápido
cuando el parámetro 024
[1].À
Es posible elegir hasta 20 parámetros para el Menú Rápido definido por
el usuario.
Descripción de opciones:
El Menú Rápido se ajusta de la siguiente manera:
1. Seleccione el parámetro 025
[CHANGE DATA].
2. El índice 1 indica el primer parámetro del Menú Rápido. Puede
desplazarse por los números de índice con las teclas [+ / -].
Seleccione el índice 1.
3. Puede[< >] desplazarse por las tres cifras. Pulse la tecla [<] una
vez y la última cifra del número de parámetro podrá elegirse con
las teclas [+ / -]. Ajuste el índice 1 en 100 para el parámetro
Configuración
100
4. Pulse [OK] cuando el índice 1 esté ajustado en 100.
5. Repita los pasos 2 - 4 hasta que todos los parámetros que desee
se hayan ajustado para la tecla Quick Menu.
6. Pulse [OK] para terminar el ajuste del Menú Rápido.
Si el parámetro 100
Rápido comenzará con este parámetro cada vez que se active la tecla
Quick Menu.
Tenga en cuenta que el parámetro 024
parámetro 025
fábrica durante la inicialización.
Ajuste de Menú Rápido
Menú Rápido del usuario
¡NOTA!
Tome en cuenta que este parámetro sólo se puede
ajustar con un panel de control LCP 2. Consulte
mulario de pedido
Configuración
.
Ajuste de Menú Rápido
.
se selecciona para el índice 1, el Menú
se restablecen en los ajustes de
se ha ajustado en
Menú Rápido del usuario
000
For-
y pulse
y el
026 Estado de LED
Valor:
Sobrecarga (Sobrecarga) [0]
Adver./alarma térmica 36 (Sobretemperaturas) [1]
Sí
Termistor/ETR (Motor térmico) [2]
Entrada digital 18 (Entrada digital 18) [3]
Entrada digital 19 (Entrada digital 19) [4]
Entrada digital 27 (Entrada digital 27) [5]
Entrada digital 29 (Entrada digital 29) [6]
Entrada digital 33 (Entrada digital 33) [7]
Según relé parám. 323 (Según relé/P323) [8]
Según salida dig. parám. 341 (Según salida digital/P341) [9]
Según salida de freno mecánico
(Según salida de freno mecánico) [10]
Función:
Este parámetro permite al usuario ver distintas situaciones con el LED
estado.
Descripción de opciones:
Seleccione la función que desee ver.
76
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 78

Guía de diseño del VLT® descentralizado FCD
300
4.3 Grupo de parámetros 1-** Carga y motor
4.3.1 Configuración
4 Programación
La selección de las características de configuración y par tiene efecto en
los parámetros que es posible ver en el display. Si se selecciona
abierto
[0], todos los parámetros relativos a la regulación PID se omiten.
Esto significa que el usuario sólo visualiza los parámetros que tienen relación con una determinada aplicación.
100 Configuración
Valor:
Control de velocidad, lazo abierto
(LAZO ABIERTO VELOC) [0]
Control de velocidad, lazo cerrado
(LAZO CERRADO VELOC) [1]
Control de proceso, lazo cerrado
(LAZO CERRADO PROCESO) [3]
Función:
Este parámetro se utiliza para seleccionar la configuración a la que se va
a adaptar el convertidor de frecuencia. Permite simplificar la adaptación
a aplicaciones determinadas, ya que los parámetros no utilizados en la
configuración permanecen ocultos (inactivos).
Descripción de opciones:
Si se selecciona
trol normal de la velocidad (sin señal de realimentación), con compensación automática de la carga y del deslizamiento, a fin de asegurar una
velocidad constante en cargas distintas. Las compensaciones están activadas, pero es posible desactivarlas en el parámetro 134
de carga
sea necesario.
Si se ha seleccionado
una velocidad más precisa. Es necesario añadir una señal de realimentación y ajustar el controlador PID en el grupo de parámetros 400
ciones especiales
Si se selecciona
proceso interno se activa para permitir el control preciso respecto a una
determinada señal de proceso. Esta señal se puede ajustar en la unidad
de proceso correspondiente o en forma de porcentaje. Es necesario añadir una señal de realimentación del proceso y también ajustar el controlador de proceso en el grupo de parámetros 400
lazo cerrado del proceso no está activo si se ha instalado una tarjeta DeviceNet y se ha seleccionado la instancia 20/70 o 21/71 en el parámetro
904
Tipos de instancia
Control de velocidad, lazo abierto
y en el parámetro 136
Control de velocidad, lazo cerrado
.
Control de proceso, lazo cerrado
.
[0], se obtiene un con-
Compensación
Compensación de deslizamiento
[1], se obtiene
[3], el controlador de
Funciones especiales
Lazo
, según
Fun-
. El
Par variable alto
(par: ALTO) [4]
Par variable bajo con arranque CT
(ARRANQ. CT VT BAJO) [5]
Par variable medio con arranque CT
(ARRANQ. CT VT MEDIO) [6]
Par variable alto con arranque CT
(ARRANQ. CT VT ALTO) [7]
Modo de motor especial
(Modo de motor especial) [8]
CT = Par constante
Función:
Este parámetro permite seleccionar el principio para adaptar la relación
U/F del convertidor de frecuencia de acuerdo con las características de
par de la carga. Consulte el parám. 135 Relación U/f.
Descripción de opciones:
Si se selecciona
pendiente de la carga en que la tensión y la frecuencia de salida aumentan al incrementarse la carga, a fin de mantener la magnetización constante del motor.
Seleccione
alto
[4], si la carga es cuadrática (bombas centrífugas y ventiladores).
Par constante
Par variable bajo
Par variable - bajo con arranque CT
alto con arranque CT
nexión mayor que el que puede obtener con las tres primeras características.
¡NOTA!
La co mpe ns ació n de la ca rga y e l de sl iza mi ent o n o es tá
activada si se ha seleccionado un par variable o el modo de motor especial.
[1], se obtiene una característica U/f de-
[2],
Par variable medio
[5], -
medio con arranque CT
[7], se seleccionan si se necesita un par de desco-
[3] o
Par variable
[6] o
4
101 Características de par
Valor:
Par constante
(Par constante) [1]
Par variable bajo
(par: bajo) [2]
Par variable medio
(par: MED.) [3]
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Seleccione
especial para adaptar el motor. Los puntos de inflexión se ajustan en los
parámetros 423-428
Modo de motor especial
Tensión/frecuencia
[8], si se necesita un ajuste de U/f
.
77
Page 79

4 Programación
Guía de diseño del VLT® descentralizado FCD
300
4
¡NOTA!
Tenga presente que si se modifica algún valor ajustado
en los parámetros 102-106 de la placa de características, cambiarán automáticamente los parámetros 108
102
Resistencia del estator
Potencia del motor P
y 109
Reactancia del estator
M,N
Valor:
0,18-4 kW
Depende de la unidad
Función:
Aquí se debe ajustar el valor de potencia [kW] P
, que corresponde a
M,N
la potencia nominal del motor. En fábrica, se habrá establecido un valor
de potencia nominal [kW] P
, que depende del tipo de unidad.
M,N
Descripción de opciones:
Ajuste el valor que corresponde al dato de la placa de características del
motor. También pueden servir los valores de tamaño dos veces inferior
y una vez superior al ajuste de fábrica.
103
Tensión del motor U
M,N
Valor:
50 -999 V
400 V
Función:
Aquí se define la tensión nominal del motor U
para la conexión en
M,N
estrella Y o triángulo delta .
Descripción de opciones:
Seleccione un valor que corresponda a los datos de la placa de características del motor, independientemente de la tensión de red del convertidor de frecuencia.
104
Frecuencia del motor f
M,N
Valor:
24 -1000 Hz
50 Hz
Función:
Aquí es donde se selecciona la frecuencia nominal f
M, N
.
Descripción de opciones:
Seleccione el valor que corresponde a los datos de la placa de características del motor.
105
Intensidad del motor l
M,N
Valor:
0,01 - I
MAX
Depende del motor seleccionado
Función:
La intensidad nominal del motor I
forma parte de los cálculos del con-
M,N
vertidor de frecuencia de funciones como el par y de la protección térmica
del motor.
Descripción de opciones:
Seleccione el valor que corresponde a los datos de la placa de características del motor. Ajuste la intensidad I
del motor, teniendo en cuenta
M,N
si está conectado en estrella Y o en triángulo.
106 Velocidad nominal del motor
Valor:
x 60
100 - f
M,N
.
(máx. 60.000
rpm)
Depende del parámetro 104
Función:
Aquí se ajusta el valor que corresponde a la velocidad nominal del motor
n
que se indica en los datos de la placa de características.
M,N
Descripción de opciones:
Seleccione el valor que corresponde a los datos de la placa de características del motor.
¡NOTA!
El valor máx. equivale a f
en el parámetro 104
x 60. f
M,N
Frecuencia de motor, f
107 Adaptación automática del motor AMT
Valor:
Autoajuste desactivado (desconexión AMT) [0]
Optimización conect (conexión AMT) [2]
Función:
La adaptación automática del motor es un algoritmo que mide la resistencia del estator R
sin que gire el eje del motor Esto significa que el
S
motor no suministra un par
La adaptación AMT es muy útil para inicializar las unidades cuando el
usuario desea optimizar el ajuste del convertidor de frecuencia al motor
utilizado Se utiliza especialmente cuando los ajustes de fábrica no son
suficientes para el motor
Para obtener la mejor adaptación posible del convertidor de frecuencia
se recomienda realizar la adaptación AMT con el motor frío Hay que tener
en cuenta que adaptaciones AMT repetidas pueden causar el calentamiento del motor lo que aumentará la resistencia del estator R
bargo esto normalmente no suele ser crítico
La adaptación AMT se realiza de la siguiente manera
Iniciar la AMT
1. Envíe una señal de PARO
2. El parámetro 107
ajustado en el valor 2
Adaptación automática del motor
Optimización conect
3. Se emite una señal de ARRANQUE y el parámetro 107
ción automática del motor
se reinicia en 0 cuando la adaptación
AMT ha finalizado
En los ajustes de fábrica el ARRANQUE necesita que los terminales 18 y
27 estén conectados al terminal 12
Completar la AMT
La adaptación AMT finaliza cuando se envía una señal de RESET El parámetro 108
Resistencia estator Rs
se actualiza con el valor optimizado
Interrumpir la AMT
La adaptación AMT se puede interrumpir en el procedimiento de optimización si se envía una señal de PARO
Al utilizar la función AMT deben observarse los siguientes puntos
- Para que la adaptación AMT pueda definir los parámetros del
motor lo más correctamente posible es necesario haber introducido los datos correctos de la placa de características del motor conectado al convertidor de frecuencia en los parámetros
102 a 106
Frecuencia de mo-
tor, f
para ajustarse
M,N
.
M,N
Sin em-
S
debe estar
Adapta-
M,N
78
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 80

Guía de diseño del VLT® descentralizado FCD
300
4 Programación
- Se mostrarán alarmas en la pantalla si ocurren fallos durante la
adaptación del motor
- Como normal general la función AMT podrá medir los valores
de motores con un tamaño 1 o 2 veces superior o inferior al
R
S
tamaño nominal del convertidor de frecuencia
- Si desea interrumpir la adaptación automática del motor pulse
la tecla STOPRESET
¡NOTA!
La función AMT no puede realizarse con motores conectados en paralelo y tampoco pueden efectuarse
cambios en los ajustes durante la adaptación
Descripción de opciones:
Seleccione
Optimización conect
2 si desea que el convertidor de frecuen-
cia realice la adaptación automática del motor
108
Resistencia del estator R
S
Valor:
0,000 - X.XXX
Depende del motor seleccionado
Función:
Después de ajustar los parámetros 102-106
rísticas,
se realiza automáticamente el ajuste de varios parámetros, in-
cluyendo la resistencia del estator R
Datos de placa de caracte-
. La RS introducida manualmente
S
siempre se debe aplicar a un motor frío. El rendimiento del eje puede
mejorarse ajustando R
y XS, consulte el siguiente procedimiento.
S
¡NOTA!
Los parámetros 108
Reactancia del estator XS
Resistencia del estator RS
no suelen cambiarse si se
y 109
han ajustados los datos de la placa de características.
Descripción de opciones:
R
se puede ajustar como sigue:
S
1. Se utilizan los ajustes de fábrica de R
, seleccionados por el
S
convertidor de frecuencia partiendo de los datos de la placa de
características.
2. El valor está definido por el proveedor del motor.
3. El valor se obtiene mediante una medición manual: R
calcularse midiendo la resistencia R
nales de fase. R
se ajusta automáticamente cuando ha finalizado la adapta-
4. R
S
= 0,5 x R
S
PHASE-PHASE
ción AMT. Consulte el parámetro 107
entre dos termi-
PHASE-PHASE
.
Adaptación automática
puede
S
del motor.
109
Reactancia del estátor X
S
Valor:
0,00 - X,XX
Depende del motor seleccionado
Función:
Después de ajustar los parámetros 102-106
terísticas del motor
, se realizan de forma automática varios ajustes de
diversos parámetros, incluida la reactancia del estátor X
del eje puede mejorarse ajustando R
Datos de la placa de carac-
. El rendimiento
S
y XS; consulte el siguiente proce-
S
dimiento.
Descripción de opciones:
X
puede ajustarse de la siguiente forma:
S
1. El proveedor del motor define el valor.
2. El valor se obtiene mediante una medición manual X
que se
S
obtiene conectando un motor a la red y midiendo la tensión fase
a fase U
X
así como la intensidad en vacío
M
=
s
U
M
3 ×
X
−
I
ϕ
L
2
XL: Ver parámetro 142.
3. Utilice los valores de fábrica de X
que el propio convertidor de
S
frecuencia selecciona partiendo de los datos de la placa de características del motor
117 Amortiguación de resonancia
Valor:
0 - 100 %
0 %
Función:
Reduce la tensión de salida cuando se funciona a velocidad lenta para
evitar fenómenos de resonancia.
Descripción de opciones:
Si se selecciona 0, no habrá reducción. Si se selecciona 100 %, la tensión
se reduce al 50% sin carga.
119 Parde arranque alto
Valor:
0,0 - 0,5 seg
0,0 seg
Función:
Para asegurar un alto par de arranque, se permite 1,8 x I
aprox. por
INV
un máximo de 0,5 seg. Sin embargo, la intensidad está restringida por el
límite de seguridad del convertidor de frecuencia (inversor). Con el valor
0 seg no hay par de arranque alto.
Descripción de opciones:
Ajuste el tiempo necesario para el que se requiere un par de arranque
alto.
120 Retraso de arranque
Valor:
0,0 - 10,0 seg
0,0 seg
Función:
Este parámetro activa el retraso del tiempo de arranque después de que
se hayan cumplido las condiciones de arranque. Cuando ha transcurrido
el correspondiente período de tiempo, la frecuencia de salida empieza a
acelerar hasta la referencia.
Descripción de opciones:
Ajuste el tiempo necesario después del que debe comenzar la aceleración.
4
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
79
Page 81

4 Programación
Guía de diseño del VLT® descentralizado FCD
300
4
121 Función de arranque
Valor:
CC mantenida durante el tiempo de retardo de arranque
(CC MANTENIDA/TIEMPO DE RETARDO) [0]
Freno de CC durante el tiempo de retardo de arranque
(FRENO CC/TIEMPO DE RETARDO) [1]
Inercia durante el tiempo de retardo de arranque
(INERCIA/TIEMPO DE RETARDO) [2]
Frecuencia/tensión de arranque en sentido horario
(FUNCIONAMIENTO SENTIDO HORARIO) [3]
Frecuencia/tensión de arranque en el sentido de la ref.
(FUNCIONAMIENTO VERTICAL) [4]
Función:
Aquí se selecciona el modo deseado durante el tiempo de retardo de
arranque (parámetro 120
Descripción de opciones:
Seleccione
para energizar el motor con una tensión de CC mantenida durante el
tiempo de retardo de arranque. Ajuste la tensión en el parámetro 137
CC mantenida durante el tiempo de retardo de arranque
Tensión de CC mantenida
Seleccione
para energizar el motor con una tensión de freno de CC durante el retardo
del arranque. Ajuste la tensión en el parámetro 132
CC
Seleccione
el motor no esté controlado por el convertidor de frecuencia ajustable
durante el tiempo de retardo de arranque (inversor desconectado).
Seleccione
obtener la función descrita en los parámetros 130
que
Independientemente del valor asumido por la señal de referencia, la frecuencia de salida es igual al ajuste del parámetro 130
arranque
Freno de CC durante el tiempo de retardo de arranque
.
Inercia durante el tiempo de retardo de arranque
Frecuencia/tensión de arranque en sentido horario
y 131
Tensión de arranque
y la tensión de salida corresponde al ajuste del parámetro 131
Tensión de arranque
Esta función se utiliza típicamente en aplicaciones de elevación. Por lo
general, en aplicaciones en que se aplica un motor con rotor cónico, en
que el sentido de giro debe empezar de derecha a izquierda, y continuar
en la dirección de la referencia.
Seleccione
para obtener la función descrita en los parámetros 130
arranque
arranque.
El sentido de giro del motor siempre continuará en la dirección de la referencia. Si la señal de referencia es cero, la frecuencia de salida será 0
Hz, mientras que la tensión de salida corresponderá al valor del parámetro 131
la frecuencia de salida será igual al parámetro 130
que
que
contrapeso. Por lo general, se utiliza en aplicaciones en que se utiliza un
motor de rotor cónico. Este motor puede hacerse arrancar con los parámetros 130
Frecuencia/tensión de arranque en sentido de referencia
y 131
Tensión de arranque
y la tensión de salida será igual al parámetro 131
. Esta función se utiliza normalmente en aplicaciones de elevación con
Frecuencia de arranque
Tiempo de retardo de arranque
.
durante el tiempo de retardo de arranque.
.
Tensión de arranque
. Si la señal de referencia es distinta de cero,
y 131
).
[0]
[1]
Tensión de freno de
[2] para que
[3] para
Frecuencia de arran-
Frecuencia de
[4]
Frecuencia de
durante el tiempo de retardo de
Frecuencia de arran-
Tensión de arran-
Tensión de arranque
.
122 Función de parada
Valor:
Inercia (COAST) [0]
CC mantenida (C.C MANTENIDA) [1]
Función:
Aquí se selecciona la función del convertidor de frecuencia cuando la frecuencia de salida ha pasado a ser inferior al valor en el parámetro 123
Frec. mín. para activar la función en parada
parada, y cuando la frecuencia de salida se ha reducido hasta 0 Hz.
Descripción de opciones:
Seleccione
(inversor desconectado).
Seleccione CC mantenida [1] si el parámetro 137
nida
En este parámetro, se ajusta la frecuencia de salida a la que la función
seleccionada en el parámetro 122
Ajustar la frecuencia de salida requerida.
Inercia
[0] si el convertidor de frecuencia debe 'soltar' el motor
debe activarse.
123 Frecuencia mín. para activar la función de parada
Valor:
0,1 - 10 Hz
Función:
Función de parada
Descripción de opciones:
¡NOTA!
Si el parámetro 123 se ajusta con un valor superior al
del parámetro 130, se saltará la función de retardo del
arranque (parámetro 120 y 121).
¡NOTA!
Si el parámetro 123 se ajusta a un valor demasiado
elevado, y se ha seleccionado CC mantenida en el parámetro 122, la frecuencia de salida saltará al valor del
parámetro 123 sin decelerar. Esto puede causar una
advertencia/alarma de sobreintensidad.
o después de una orden de
Tensión de CC mante-
0,1 Hz
debe activarse.
80
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 82

Guía de diseño del VLT® descentralizado FCD
300
4.3.2 Frenado de CC
4 Programación
Durante el frenado de CC, se suministra tensión de CC al motor, lo que
causa que se detenga el eje del mismo. En el parámetro 132
freno de CC
La tensión de freno de CC máxima depende de los datos del motor seleccionado.
En el parámetro 126
de frenado de CC, y en el parámetro 127
de CC
se programa una entrada digital en
cambia de '1' lógico a '0' lógico, se activará el frenado de CC. Cuando se
activa un comando de parada, el frenado de CC se activará cuando la
frecuencia de salida sea menor que la frecuencia de entrada del freno.
En este parámetro, se ajusta el tiempo de frenado de CC en que el parámetro 132
Ajuste el tiempo requerido.
En este parámetro, se ajusta la frecuencia de entrada en que se activará
el freno de CC en relación con una orden de parada.
Ajuste la frecuencia requerida.
, la tensión del freno de CC se puede preajustar en 0-100%.
Tiempo de frenado de CC
se determina este tiempo
Frecuencia de entrada del freno
se selecciona la frecuencia a la que se activa el frenado de CC. Si
Frenado de CC inverso
¡NOTA!
El frenado de CC no se puede utilizar si la inercia en el
eje del motor es superior a 20 veces la inercia interna
del motor.
126 Tiempo de frenado de CC
Valor:
0 -60 s
Función:
Tensión de freno de CC
Descripción de opciones:
127 Frecuencia de puesta en circuito de frenado CC
Valor:
0,0 (NO) - par. 202
Frecuencia máxima, f
Función:
Descripción de opciones:
MAX
deberá activarse.
Tensión de
[5] y ésta
10 s
NO
Función:
El convertidor de frecuencia puede controlar la temperatura del motor de
dos maneras distintas:
- Mediante un termistor PTC que se monta en el motor. El termistor se conecta entre los terminales 31a / 31b. Se debe seleccionar
Termistor
en el motor que puede parar el convertidor de frecuencia si el
motor se sobrecalienta. El valor de desconexión es 3 k.
Sin embargo, si un motor tiene un interruptor térmico Klixon,
también puede conectarse a la entrada. Si el motor funciona en
paralelo, los termistores/interruptores térmicos pueden conectarse en serie (resistencia total inferior a 3 k).
- Cálculo de la carga térmica (ETR - relé térmico electrónico), basado en el tiempo y en la carga actuales. Estos datos se comparan con la intensidad nominal I
f
del motor. Los cálculos consideran la necesidad de menos
M,N
carga a velocidades más bajas, por lo que se reduce la ventilación interna del motor.
si hay un termistor posiblemente integrado
y la frecuencia nominal
M,N
4
128 Protección térmica del motor
Valor:
Sin protección (NO) [0]
Advertencia del termistor
(AVISO TERMISTOR) [1]
Desconexión del termistor (DESCON.TERMISTOR) [2]
Advertencia ETR 1 (ADV. ETR 1) [3]
Desconexión ETR 1 (DESCON. ETR 1) [4]
Advertencia ETR 2 (ADV. ETR 2) [5]
Desconexión ETR 2 (DESCON. ETR 2) [6]
Advertencia ETR 3 (ADV. ETR 3) [7]
Desconexión ETR 3 (DESCON. ETR 3) [8]
Advertencia ETR 4 (ETR ADVERT.) [9]
Desconexión ETR 4 (DESCON. ETR 4) [10]
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Las funciones ETR 1-4 corresponden a los Ajustes 1-4. Estas funciones
no empiezan a calcular la carga hasta que se pasa al Ajuste en que se
han seleccionado. Esto significa que se puede utilizar una función ETR
incluso cuando se cambie entre dos o más motores.
81
Page 83

4 Programación
Guía de diseño del VLT® descentralizado FCD
300
4
Descripción de opciones:
Seleccione
nexión cuando se sobrecargue el motor.
Seleccione
el termistor conectado se caliente demasiado.
Seleccione
conexión cuando el termistor conectado se sobrecaliente.
Seleccione
sobrecargue según los cálculos. También puede programar el convertidor
de frecuencia para que emita una señal de advertencia mediante una de
las salidas digitales.
Seleccione
se sobrecargue según los cálculos.
Seleccione
tor esté sobrecargado según los cálculos. También puede programar el
convertidor para que emita una señal de advertencia mediante una de
las salidas digitales. Seleccione
conexión cuando el motor esté sobrecargado según los cálculos.
La frecuencia de arranque se activa durante el tiempo ajustado en el parámetro 120
La frecuencia de salida ’saltará’ a la siguiente frecuencia establecida. Determinados motores, como los de rotor cónico, necesitan una tensión/
frecuencia de arranque adicional (incremento inicial) en el momento de
arrancar para soltar el freno mecánico. Para lograr esto, se utilizan los
parámetros 130
Ajuste la frecuencia de arranque requerida. Es una condición necesaria
que el parámetro 121
Sin protección
Advertencia del termistor
Desconexión del termistor
ETR advert.
Desconexión ETR
Advertencia ETR 1-4
130 Frec. de arranque
Valor:
0,0 -10,0 Hz
Función:
Retraso de arranque
Descripción de opciones:
arranque en mismo sentido
de referencia
ajuste un período de tiempo y haya una señal de referencia presente.
131 Tensión de arranque
Valor:
0,0 - 200,0 V
Función:
Tensión inicial
tro 120
parámetro se puede utilizar, por ejemplo, en aplicaciones de elevación y
descenso (motores de rotor cónico).
Descripción de opciones:
Ajustar la tensión que se necesita para soltar el freno mecánico. Se asume
que el parámetro 121
[4] y que en el parámetro 120
está activada durante el tiempo establecido en el paráme-
Retardo de arranque
tensión de arranque en sentido horario
[0] si no desea una advertencia o una desco-
[1] si desea una advertencia cuando
[2] si desea que ocurra una des-
si desea una advertencia cuando el motor se
si desea una desconexión del motor cuando
si desea una advertencia cuando el mo-
Desconexión ETR 1-4
¡NOTA!
Esta función no protege los motores individualmente
si están conectados entre sí en paralelo.
, después de un comando de arranque.
Frecuencia de arranque
Función de arranque
[3] o
y 131
, se ajuste en
Frec./tensión de arranque en sentido
si desea una des-
0,0 Hz
Tensión de arranque
Frec./tensión de
Retraso de arranque
¡NOTA!
Si el parámetro 123 se ajusta con un valor superior al
del parámetro 130, se saltará la función de retardo del
arranque (parámetro 120 y 121).
0,0 V
, después de un comando de arranque. Este
Función de arranque
se ha ajustado en
[3] o
Frecuencia/tensión de arran-
Frecuencia/
.
se
que en sentido de referencia
se ha ajustado un periodo de tiempo y hay una señal de refe-
arranque
rencia presente.
132 Tensión de freno de CC
Valor:
0 - 100% de la máx. tensión de freno de CC
Función:
En este parámetro, se ajusta la tensión de freno de CC que debe activarse
en la parada, cuando se alcance la frecuencia de freno de CC ajustada en
el parámetro 127
Frecuencia de entrada del freno de CC
freno de CC invertido
serie. En consecuencia, la tensión de freno de CC estará activada durante
el período de tiempo ajustado en el parámetro 126
.
de CC
Descripción de opciones:
Se debe ajustar como un valor de porcentaje de la máxima tensión de
freno de CC, que depende del motor.
133 Tensión de arranque
Valor:
0,00 - 100,00 V
Función:
Puede obtenerse un par de arranque más alto si se incrementa la tensión
de arranque. Los motores pequeños (< 1,0 kW) requieren, normalmente,
una tensión de arranque alta.
Descripción de opciones:
El valor se selecciona si se observa que el motor apenas puede arrancar
con la carga actual.
Advertencia: Si se utiliza una tensión de arranque excesiva, puede ocurrir la excesiva energización y el sobrecalentamiento del motor, lo que llevará a que se
desconecte el convertidor de frecuencia.
[4], y que en el parámetro 120
mediante una entrada digital o la comunicación
, o si
Retardo de
0%
se activa el
Tiempo de frenado
Depende de la unidad
82
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 84

Guía de diseño del VLT® descentralizado FCD
300
4 Programación
134 Compensación de arranque
Valor:
0,0 - 300,0%
Función:
En este parámetro, se ajusta la característica de la carga. Al incrementar
esta compensación, el motor recibe una tensión adicional y una frecuencia suplementaria a medida que aumenta la carga. Esto se utiliza, por
ejemplo, en motores y aplicaciones en que hay una gran diferencia entre
la intensidad de carga máxima y la intensidad de carga en vacío del motor.
¡NOTA!
Si el valor ajustado es demasiado alto, el convertidor
de frecuencia puede desconectarse debido a la sobreintensidad.
Descripción de opciones:
Si el ajuste de fábrica no es adecuado, es necesario compensar la carga
para que el motor arranque con la carga correspondiente.
Advertencia: Una compensación excesiva de la carga
puede producir inestabilidad.
135 Relación U/f
Valor:
0,00 - 20,00 V/Hz
Función:
Este parámetro permite cambiar linealmente la relación entre la tensión
de salida (U) y la frecuencia de salida (f), con el fin de energizar correctamente el motor y obtener una dinámica, precisión y eficacia óptimas.
La relación U/f sólo tiene efecto en la característica de tensión si se ha
seleccionado
Descripción de opciones:
La relación U/f sólo debe modificarse si no es posible ajustar los datos
correctos del motor en los parámetros 102-109. El valor programado en
el ajuste de fábrica se basa en el funcionamiento en vacío.
Par constante
[1] en el parámetro 101
Depende de la unidad
Característica de par.
100,0%
137 Tensión de CC mantenida
Valor:
0 - 100% de máx. tensión CC mantenida
Función:
Este parámetro se utiliza para mantener el motor en arranque/parada
(par mantenido).
Descripción de opciones:
Este parámetro sólo se puede utilizar si se ha seleccionado una
tenida
en el parámetro 121
Función en parada
máx. tensión de CC mantenida, que depende del motor seleccionado.
138 Valor de desconexión de freno
Valor:
0,5 - 132,0/1000,0 Hz
Función:
Aquí puede seleccionar la frecuencia a la que se libera el freno externo,
mediante la salida definida en el parámetro 323
.Se debe ajustar como un valor de porcentaje de la
Salida digital, terminal 46
y 123).
Descripción de opciones:
Ajuste la frecuencia requerida.
139 Frecuencia de conexión de freno
Valor:
0,5 - 132,0/1000,0 Hz
Función:
Aquí puede seleccionar la frecuencia a la que se libera el freno externo,
mediante la salida definida en el parámetro 323
Salida digital, terminal 46
y 123).
Descripción de opciones:
Ajuste la frecuencia requerida.
Función de arranque
o el parámetro 122
Relés 1-3, salida
(de forma opcional, también los terminales 122
Relés 1-3, salida
(de forma opcional, también los terminales 122
0%
CC man-
3,0 Hz
o 341
3,0 Hz
o 341
4
136 Compensación de deslizamiento
Valor:
-500 - +500% de la compensación nominal de deslizamiento
Función:
La compensación de deslizamiento se calcula automáticamente, a partir
de datos como la velocidad nominal del motor n
puede ajustarse con precisión la compensación de deslizamiento, por lo
que se compensa la tolerancia del valor de n
deslizamiento sólo está activada si se ha seleccionado
en lazo abierto
[1] en el parámetro 101
Descripción de opciones:
Escriba un valor de %.
[0] en el parámetro 100
Características de par
Configuración
. En este parámetro,
M,N
. La compensación de
M,N
Velocidad, modo
, y
.
100%
Par constante
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
83
Page 85

4 Programación
Guía de diseño del VLT® descentralizado FCD
300
4
140 Corriente, valor mínimo
Valor:
0 % - 100 % de intensidad de salida del convertidor
Función:
Aquí es donde el usuario selecciona la intensidad mínima del motor a la
que se soltará el freno mecánico. El control de corriente sólo está activado
desde la parada hasta el punto en que se suelta el freno.
Descripción de opciones:
Es una precaución de seguridad añadida para asegurar que la carga no
se pierda durante una actividad de elevación/descenso.
142
Valor:
0,000 - XXX,XXX
Función:
Una vez ajustados los parámetros 102-106
rísticas
tancia de fuga X
la reactancia irregular X
Descripción de opciones:
X
puede ajustarse como sigue:
L
1. El proveedor del motor define el valor.
2. Utilice los ajustes de fábrica de X
Reactancia de fuga X
X
es la suma de la reactancia de fuga del rotor
L
L
Depende del motor seleccionado
Datos de la placa de caracte-
, se ajustan varios parámetros automáticamente, incluida la reac-
. El funcionamiento del eje se puede mejorar ajustando
L
.
L
¡NOTA!
Normalmente, el parámetro 142
X
no tiene que cambiarse si los datos de la placa de
L
características se han ajustado (parámetros 102-106).
tidor de frecuencia partiendo de los datos de la placa de características.
Reactancia de fuga
seleccionados por el conver-
L
0 %
y del estator.
146 Vector de reinicialización de tensión
Valor:
*Desactivado (NO) [0]
Reinicio (RESET) [1]
Función:
Cuando se reinicia el vector de tensión, se ajusta en el mismo punto de
arranque cada vez que empieza un nuevo proceso.
Descripción de opciones:
Seleccione Reinicio (1) si se deben utilizar procesos especiales cada vez
que surjan. Esto permitirá una precisión repetida cuando se pare el convertidor para mejorarlos. Seleccione Desactivado (0) para operaciones de
elevación/descenso, por ejemplo, o en motores síncronos. Es recomendable que el motor y el convertidor de frecuencia siempre estén sincronizados.
147 Tipo de motor
Valor:
*General (GENERAL) [0]
Danfoss Bauer (DANFOSS BAUER) [1]
Función:
Con este parámetro se selecciona el tipo de motor conectado al convertidor de frecuencia.
Descripción de opciones:
Se puede seleccionar el valor general para la mayoría de las marcas de
motor. Seleccione Danfoss Bauer para una configuración óptima en motores reductores Danfoss Bauer.
144 Ganancia del freno CA
Valor:
1,00 - 1,50
Función:
Este parámetro se utiliza para ajustar el freno de CA. Con el parám. 144,
es posible ajustar el valor del par de regeneración que se puede aplicar
al motor sin que la tensión del circuito intermedio sobrepase el nivel de
advertencia.
Descripción de opciones:
El valor se debe aumentar si se requiere un par de frenado mayor. Si
selecciona 1,0 el freno de CA permanece inactivo.
¡NOTA!
Si se incrementa el valor en el parám. 144, la intensidad del motor aumentará significativamente al aplicar
cargas regeneradoras. Por ello, sólo se debe cambiar
el parámetro si se garantiza que durante la medición,
la intensidad del motor en todas las situaciones de
funcionamiento no sobrepasará el valor máximo per-
Tome en cuenta
mitido.
leerse en el display.
que la intensidad no puede
1,30
84
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 86

Guía de diseño del VLT® descentralizado FCD
300
4.4 Grupo de parámetros 2-** Referencias y límites
4 Programación
200 Rangos de frecuencia de salida
Valor:
Sólo sentido horario, 0-132 Hz
(132 Hz SENTIDO HORA.) [0]
Ambos sentidos, 0-132 Hz
(132 Hz AMBOS SENTID.) [1]
Sentido antihorario, 0 - 132 Hz
(132 Hz ANTIHORA.) [2]
Sólo sentido horario, 0-1000 Hz
(1000Hz SENTIDO HORA.) [3]
Ambos sentidos, 0-1000 Hz
(1000Hz AMBOS SENTID.) [4]
Sólo sentido antihorario, 0-1000 Hz
(1000Hz SENT. ANTIHO.) [5]
Función:
Este parámetro garantiza protección contra inversión no deseada. Además, se puede seleccionar la frecuencia de salida máxima que se aplica,
sin tener en cuenta los ajustes realizados en otros parámetros. Este parámetro no tiene función si se ha seleccionado
cerrado
en el parámetro 100
Descripción de opciones:
Seleccionar el sentido de rotación necesario y la frecuencia de salida máxima. Observe que si selecciona Sólo sentido horario [0]/[3] o Sólo sentido antihorario [2]/[5], la frecuencia de salida se limitará al rango f
f
. Si selecciona Ambos sentidos [1]/[4], la frecuencia de salida se li-
MAX
mitará al rango ± f
MAX
Configuración
(la frecuencia mínima no es significativa).
Control de proceso, lazo
.
MIN
201
Valor:
0,0 - f
Función:
En este parámetro, puede seleccionarse un límite de frecuencia mínima
de motor que corresponda a la velocidad mínima a que puede funcionar
el motor. Si se ha seleccionado
Rango de frecuencia de salida
cia.
Descripción de opciones:
El valor elegido puede estar entre 0,0 Hz y la frecuencia ajustada en el
parámetro 202
202
Valor:
f
MIN
lida)
Función:
En este parámetro, puede seleccionarse un límite máximo de frecuencia
de salida, que corresponda a la velocidad más alta a que puede funcionar
el motor.
-
Descripción de opciones:
Puede seleccionar un valor entre f
frecuencia de salida
Frecuencia mínima, f
MAX
, la frecuencia mínima no tendrá importan-
Frecuencia máxima, f
Frecuencia de salida máxima, f
- 132/1000 Hz (par. 200 Rangos de frecuencia de sa-
¡NOTA!
La frecuencia de salida del convertidor nunca puede
tener un valor más alto que 1/10 de la frecuencia de
conmutación (parám. 411
ción
).
.
MIN
Ambos sentidos
MAX
en el parámetro 200
.
MAX
Frecuencia de conmuta-
y el del parámetro 200 Rangos de
MIN
0,0 Hz
4
132 Hz
4.4.1 Manejo de referencias
El manejo de referencias se describe en el siguiente diagrama de bloques.
Este diagrama muestra cómo afecta el cambio en un parámetro a la referencia resultante.
Los parámetros 203 a 205
ferencia
definen la manera en que es posible manejar las referencias. Los
parámetros mencionados se pueden activar tanto en lazo cerrado como
en lazo abierto.
Las referencias controladas remotas se definen como:
Referencia
y el parámetro 214
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Función de re-
- Referencias externas, como las entradas analógicas 53 y 60, referencias de pulso mediante el terminal 33 y referencias de la
comunicación serie.
- Referencias internas.
La referencia resultante se puede mostrar en el display de la unidad de
control LCP si se selecciona
Lectura de display
[unidad]
display de la unidad de control LCP como un % del área entre la
rencia mínima, Ref
y puede aparecer con una unidad si se elige
. La suma de las referencias externas se puede mostrar en el
MIN
Referencia
y la
Referencia máxima, Ref
[%] en los parámetros 009-012
Referencia
Refe-
. Seleccione
MAX
Refe-
85
Page 87

4 Programación
Guía de diseño del VLT® descentralizado FCD
300
4
rencia externa
desea que se muestre la lectura.
Es posible obtener simultáneamente las referencias internas y externas.
En el parámetro 214
determinar cómo se suman las referencias internas a las externas.
También hay una referencia local independiente en el parámetro 003
Referencia local
, % [25] en los parámetros 009-012
Función de referencia
, en que la diferencia de resultado se ajusta con las teclas
Lectura de display
se puede elegir la manera de
[+/-]. Cuando se ha seleccionado la referencia local, los rangos de fre-
si
cuencia de salida están limitados por el parámetro 201
salida mínima
.
f
MAX
La unidad de la referencia local depende de la selección en el parámetro
100
,
f
Configuración
y el parámetro 202
MIN
.
Frecuencia de salida máxima,
Frecuencia de
203 Area de referencia
Valor:
Referencia mín. - Referencia máx. (mín - máx) [0]
-Referencia máx. - Referencia máx.
(-máx - +máx) [1]
Función:
En este parámetro, se selecciona si la señal de referencia debe ser positiva o si puede ser tanto positiva como negativa. El límite mínimo puede
ser un valor negativo, a menos que en el parámetro 100
se haya seleccionado
Ref. mín. - Ref. máx.
cerrado
[3] en el parámetro 100
Descripción de opciones:
Seleccione el rango requerido.
204
Valor:
Parám. 100
parám. 205 Ref
Parám. 100
Realimentación mín.
Función:
La referencia mínima es una expresión del valor más pequeño posible de
la suma de todas las referencias. Si en el parámetro 100
se ha seleccionado
de lazo cerrado
414
Realimentación mínima
tivada la referencia local.
Velocidad, modo en lazo cerrado
[0], si se ha seleccionado
Configuración
Referencia mínima, Ref
Config.
=
Lazo abierto
MAX
Config.
=
Lazo cerrado
- parám. 205
[1]/[3].-Parám. 414
Ref
.
MIN
[0].-100.000,000 -
MAX
Velocidad, modo de lazo cerrado
[3], la referencia mínima está limitada por el parámetro
. La referencia mínima se ignora si está ac-
Configuración
. Debe seleccionar
Proceso, modo en lazo
0,000 Hz
0,000
rpm/par 416
Configuración
[1] o
Proceso, modo
La unidad de la referencia puede definirse mediante la siguiente tabla:
Parám. 100
Lazo abierto [0] Hz
Velocidad, modo de lazo cerrado [1] rpm
Proceso, modo de lazo cerrado [3] Parám. 416
Descripción de opciones:
La referencia mínima se ajusta si el motor debe funcionar a una velocidad
mínima, indpendientemente de si la referencia de resultado es 0.
205
Valor:
Parám. 100
Ref
Parám. 100
204 Ref
Función:
La referencia máxima indica el valor más alto que puede tener la suma
de todas las referencias. Si se selecciona
rámetro 100
que el valor en el parámetro 415
La referencia máxima se ignora si la referencia local está activada.
La unidad de la referencia puede definirse mediante la siguiente tabla:
- 1000,000 Hz
MIN
- Parám. 415
MIN
Configuración
Configuración
Referencia máxima, Ref
Config.
=
Config.
Lazo abierto
=
Lazo cerrado
[0].Parám. 204
[1]/[3]. Parám.
Realimentación máx
, la referencia máxima no puede ser mayor
Realimentación máxima
MAX
Lazo cerrado
Unidad
50,000 Hz
50,000
rpm/par 416
[1]/[3] en el pa-
.
86
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 88

Guía de diseño del VLT® descentralizado FCD
300
4 Programación
Parám. 100
Lazo abierto [0] Hz
Velocidad, modo de lazo cerrado [1] rpm
Proceso, modo de lazo cerrado [3] Parám. 416
Descripción de opciones:
La referencia máxima se ajusta si la velocidad del motor debe ser el valor
máx. que puede ajustarse, independientemente de si la referencia de resultado es mayor que la referencia máxima.
206 Tipo de rampa
Valor:
Lineal (LINEAL) [0]
Curvado en S (S1) [1]
Forma
Función:
Se puede elegir entre un proceso de rampa lineal, curvado en S o senoidal
2
S
.
Descripción de opciones:
Seleccione el tipo de rampa según el proceso de aceleración/deceleración
requerido.
Configuración
2
senoidal (S 2) [2]
Unidad
Descripción de opciones:
Ajuste el tiempo de aceleración requerido.
208 Tiempo de rampa de deceleración 1
Valor:
0,02 - 3600,00 seg
Función:
El tiempo de rampa de deceleración es el tiempo que se tarda en desacelerar desde la frecuencia nominal del motor f
cuencia del motor, f
tensión en el inversor debido al funcionamiento regenerativo del motor.
Descripción de opciones:
Ajuste el tiempo de deceleración requerido.
) hasta 0 Hz, siempre que no surja una sobre-
M,N
(parámetro 104
M,N
3,00 seg
Fre-
4
207 Tiempo de rampa de aceleración 1
Valor:
0,02 - 3600,00 seg
Función:
El tiempo de rampa de aceleración es el tiempo que se tarda en acelerar
de 0 Hz hasta la frecuencia nominal del motor f
cuencia del motor, f
el límite de intensidad (ajustado en el parámetro 221
).
I
LIM
). Se asume que la intensidad de salida no alcanza
M,N
(parámetro 104
M,N
Límite de intensidad
3,00 seg
Fre-
209 Tiempo de rampa de aceleración 2
Valor:
0,02 - 3600,00 seg
Función:
Consulte la descripción del parámetro 207
ción 1
.
Descripción de opciones:
Ajuste el tiempo de aceleración requerido. Cambie de la rampa 1 a la
rampa 2 activando la
210 Tiempo de rampa de deceleración 2
Valor:
0,02 - 3600,00 seg
Función:
Consulte la descripción del parámetro 208
ración 1
.
Descripción de opciones:
Ajuste el tiempo de deceleración requerido. Cambie de la rampa 1 a la
rampa 2 activando la
211 Tiempo de rampa de velocidad fija
Valor:
0,02 - 3600,00 seg
Función:
El tiempo de rampa de velocidad fija es el tiempo de aceleración o deceleración desde 0 Hz hasta la frecuencia nominal del motor f
104
Frecuencia del motor, f
alcanza el límite de intensidad (definido en el parámetro 221
intensidad I
LIM
Rampa 2
mediante una entrada digital.
Rampa 2
mediante una entrada digital.
). Se asume que la intensidad de salida no
M,N
).
Tiempo de rampa de acelera-
Tiempo de rampa de decele-
3,00 seg
3,00 seg
3,00 seg
(parámetro
M,N
Límite de
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
87
Page 89

4 Programación
Guía de diseño del VLT® descentralizado FCD
Función:
El tiempo de rampa de deceleración de parada rápida es el tiempo que
se tarda en desacelerar desde la frecuencia nominal del motor hasta 0
Hz, siempre que no haya una sobretensión en el inversor por el funcionamiento regenerativo del motor, y que la intensidad generada no sobrepase el límite de intensidad del parámetro 221
. La parada rápida se activa mediante una de las entradas digitales
I
LIM
o la comunicación serie.
Descripción de opciones:
Ajuste el tiempo de rampa de deceleración requerido.
Límite de intensidad
300
4
El tiempo de rampa de velocidad fija empieza si se da una señal de velocidad fija mediante el panel de control LCP, una de las entradas digitales
o el puerto de comunicación serie.
Descripción de opciones:
Ajuste el tiempo de rampa requerido.
212 Tiempo rampa deceler. paro rápido
Valor:
0,02 - 3600,00 seg
3,00 seg
4.4.2 Función de referencia
El ejemplo muestra cómo se calcula la referencia resultante cuando se
utilizan
Referencias internas
214
Función de referencia
tante puede consultarse en la sección titulada
Consulte también el dibujo en
Se han preajustado los siguientes parámetros:
Parám. 204
Parám. 205
Parám. 215
Parám. 308
Parám. 309
Parám. 310
Referencia mínima
Referencia máxima
Referencia interna
Term. 53, entrada analógica
Term. 53, escalado mín.
Term. 53, escalado máx.
junto con
. La fórmula para calcular la referencia resul-
Suma
y
Relativa
Todo acerca del FCD 300
Manejo de referencias
en el parámetro
.
10 Hz
50 Hz
15 %
Máx.
0 V
10 V
213 Frecuencia de velocidad fija
Valor:
0,0 - Parám. 202 Frecuencia de salida máxima, f
Función:
Frecuencia de velocidad fija f
ministra el convertidor de frecuencia al motor cuando la función de velocidad fija está activada. La velocidad fija se puede activar mediante las
entradas digitales, la comunicación serie o el panel de control LCP, siempre que esté activada en el parámetro 015
Descripción de opciones:
Ajuste la frecuencia deseada.
Parám. 214
Parám. 204
Función de referencia
Referencia mínima
es una frecuencia de salida fija que su-
JOG
= Relativa [1]:
MAX
Velocidad fija local
Efecto de referencia a 4 V 16,0 Hz
.
Parám. 215 Referencia interna 2,4 Hz
Referencia resultante 28,4 Hz
El gráfico muestra la referencia resultante en relación con la referencia
externa, que varía de 0 a 10 V. Parámetro 214
programa en
tra un gráfico en el que el parámetro 215
gramado en el 0 %.
Suma
[0] y
Relativa
[1] respectivamente. También se mues-
Función de referencia
Referencia interna
10,0 Hz
.
10,0 Hz
se
1 se ha pro-
Cuando el parámetro 214
una de las
las referencias externas como un porcentaje del rango de referencia. Si
se aplica al terminal 53 una tensión de entrada analógica de 4 V, la referencia resultante será la siguiente:
Referencias internas
Parám. 214
Función de referencia
Parám. 204
Función de referencia
preajustadas (par. 215-218) se suma a
Referencia mínima
se ajusta en
= Suma [0]:
Suma
10,0 Hz
[0]
Contribución de referencia a 4 V 16,0 Hz
Parám. 215 Referencia interna 6,0 Hz
Referencia resultante 32,0 Hz
Cuando el parámetro 214
las
Referencias internas definidas
centaje del total de referencias externas actuales. Si el terminal 53 se
aplica a una tensión de entrada analógica de 4 V, la referencia resultante
será la siguiente:
88
Función de referencia
(par. 215-218) se suman como un por-
se ajusta en
Relativa
[1]
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 90

Guía de diseño del VLT® descentralizado FCD
300
4 Programación
214 Tipo de referencia
Valor:
Suma (SUMA) [0]
Relativa (RELATIVA) [1]
Externa sí/no (EXTERNA SI/NO) [2]
Función:
Es posible definir cómo se suman las referencias internas a las demás
referencias. Para este propósito, utilice
In addition, using the
entre las referencias externas e internas.
La referencias externas son la suma de la referencias analógicas, referencias de pulso y cualquier referencia de la comunicación serie.
Descripción de opciones:
Si se selecciona
Referencia interna
215-218
referencias (Ref
Si se selecciona
215-218
Referencia interna
de las referencias externas presentes.
Si se selecciona
trada digital entre las referencias externas e internas. Las referencias internas son un valor de porcentaje del rango de referencias.
215 Referencia interna 1 (REF. INTERNA 1)
216 Referencia interna 2 (REF. INTERNA 2)
217 Referencia interna 3 (REF. INTERNA 3)
218 Referencia interna 4 (REF. INTERNA 4)
Valor:
-100,00% - +100,00%
del rango de referencias/referencia externa
Función:
Es posible programar hasta cuatro referencias internas en los parámetros
215-218
Referencia interna
La referencia interna se indica como un porcentaje del valor (Ref
) o como porcentaje de otras referencias externas, dependiendo
Ref
MAX
de la selección realizada en el parámetro 214
selección entre las referencias internas puede realizarse mediante las entradas digitales o la comunicación serie.
Ref. interna, msb Ref. interna, lsb
Descripción de opciones:
Ajustelas referencias internas que deben utilizarse como opciones.
Externa sí/no
Suma
[0], una de las referencias internas (parámetros
) se define como un porcentaje del rango de
- Ref
MIN
Relativa
), sumado a las otras referencias externas.
MAX
[1], una de las referencias internas (parámetros
) se define como un porcentaje de la suma
Externa sí/no
¡NOTA!
Si se selecciona Suma o Relativa, una de las referencias internas siempre estará activada. Si las referencias
internas no deben tener ninguna influencia, es necesario ajustarlas en 0% (ajuste de fábrica).
.
0 0 Ref. interna 1
0 1 Ref. interna 2
1 0 Ref. interna 3
1 1 Ref. interna 4
Suma
o
Relativa
. Con la función
es posible elegir si se debe cambiar
[2], es posible cambiar mediante una en-
0,00%
MIN
Función de referencia
. La
219 Valor de enganche/ arriba- abajo
Valor:
0,00 - 100% de una referencia dada
Función:
En este parámetro, se puede seleccionar el valor porcentual que se sumará o restará a las referencias controladas remotamente.
La referencia controlada remotamente es la suma de las referencias internas, referencias analógicas, referencias de pulso, y todas las referencias de comunicación serie.
Descripción de opciones:
Si
Enganche arriba
centual del parámetro 219
la referencia controlada remotamente.
Si
Enganche abajo
centual del parámetro 219
la referencia controlada remotamente.
221
Valor:
0 - XXX,X % de par. 105
Función:
Aquí se ajusta la máxima intensidad de salida I
fábrica corresponde a la máxima intensidad de salida I
utilizar este límite como protección del motor, utilice el valor de la intensidad nominal del motor. Si el límite de intensidad se ajusta por encima
del 100% (intensidad de salida nominal del convertidor), I
podrá manejar una carga intermitentemente, es decir, en períodos de
tiempo cortos. Después de que la carga sea más alta que I
rantizarse que durante un período la carga sea más baja que I
en cuenta que si el límite de intensidad se ajusta en un valor inferior a
I
, el par de aceleración se reducirá en la misma proporción.
INV.
Descripción de opciones:
Ajuste la intensidad de salida máxima I
223
Valor:
0,0 - parám. 224
Función:
Si la intensidad de salida cae por debajo del límite preajustado I
emite una advertencia.
Los parámetros 223-228
durante la aceleración después de una orden de arranque, o después de
una orden de parada y durante la parada. Las funciones de advertencia se activan cuando la frecuencia de salida ha alcanzado la referencia
de resultado. Las salidas de señal se pueden programar para que se dé
una señal de advertencia mediante el terminal 46 y la salida de relé.
Descripción de opciones:
El límite inferior de la señal de intensidad de salida I
en el rango de funcionamiento normal del convertidor de frecuencia.
se activa mediante una entrada digital, el valor por-
Valor de enganche/arriba-abajo
se activa mediante una entrada digital, el valor por-
Valor de enganche/arriba-abajo
Límite de intensidad, I
Advertencia: Intensidad baja, I
Advertencia: Alta intensidad, I
LIM
requerida.
LIM
. El valor ajustado en
LIM
LOW
HIGH
Funciones de advertencia
LAV
0,00%
se sumará a
se restará de
160 %
. Si se va a
MAX
), éste sólo
INV.
, debe ga-
INV
Tenga
INV.
0,0 A
, se
LOW
están desactivados
debe programarse
4
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
89
Page 91

4 Programación
Guía de diseño del VLT® descentralizado FCD
300
4
224
Advertencia: Alta intensidad, I
HIGH
Valor:
0 - I
MAX
l
MAX
Función:
Si la intensidad de salida sobrepasa el límite ajustado I
se emite una
ALTO
alarma.
Los parámetros 223-228
Funciones de advertencia
no funcionan durante
la aceleración después de un comando de arranque, después de un comando de parada, o durante la parada. Las funciones de advertencia se
activan cuando la frecuencia de salida ha alcanzado la referencia de resultado. Las salidas de señal se pueden programar para que se dé una
señal de advertencia mediante el terminal 46 y la salida de relé.
Descripción de opciones:
El límite de señal superior de la intensidad de salida I
se debe pro-
ALTO
gramar dentro del rango de funcionamiento normal del convertidor de
frecuencia. Consulte el dibujo en el parámetro 223
tensidad, I
225
.
LOW
Advertencia: Baja frecuencia, f
Advertencia: Baja in-
LOW
Valor:
0,0 - parám. 226
f
HIGH
Adver.: Alta frecuencia,
0,0 Hz
Función:
Si la frecuencia de salida cae por debajo del límite ajustado f
LOW
se emite
una alarma.
Los parámetros 223-228
Funciones de advertencia
están desactivados
durante la aceleración después de un comando de arranque, y después
de un comando de parada o durante la parada. Las funciones de advertencia se activan cuando la frecuencia de sa li da ha alcan za do la re feren ci a
de resultado. Las salidas de señal pueden programarse para emitir una
señal de advertencia mediante el terminal 46 y mediante la salida de relé.
Descripción de opciones:
El límite de señal inferior de la frecuencia de salida f
debe programarse
LOW
en el rango de funcionamiento normal del convertidor de frecuencia.
Consulte el dibujo en el parámetro 223
I
.
LOW
Advertencia: Intensidad baja,
226
Advertencia: Alta frecuencia, f
HIGH
Valor:
Parám. 200
rám. 225 f
Parám. 200
[3].parám. 225 f
Rango de frecuencia
- 132 Hz
LOW
Rango de frecuencia
- 1000 Hz
LOW
= 0-132 Hz [0]/[1].pa-
132,0 Hz
= 0-1000 Hz [2]/
132,0 Hz
Función:
Si la frecuencia de salida sobrepasa el límite ajustado f
se emite una
HIGH
alarma.
Los parámetros 223-228
Funciones de advertencia
no funcionan durante
la aceleración después de un comando de arranque, después de un comando de parada, o durante la parada. Las funciones de advertencia se
activan cuando la frecuencia de salida ha alcanzado la referencia de resultado. Las salidas de señal pueden programarse para emitir una señal
de advertencia mediante el terminal 46 y mediante la salida de relé.
Descripción de opciones:
El límite de señal superior de la frecuencia de salida f
se debe pro-
HIGH
gramar dentro del rango de funcionamiento normal del convertidor de
frecuencia. Consulte el dibujo en el parámetro 223
dad baja, I
227
.
LOW
Advertencia: Baja retroalimentación, FB
Advertencia: Intensi-
LOW
Valor:
-100.000,000 - parám.
Adver.:FB
ALTO
-4000.000
Función:
Si la señal de retroalimentación cae por debajo del límite preajustado
R
, se emite una advertencia.
BAJO
Los parámetros 223-228
Funciones de advertencia
están desactivados
durante la aceleración después de una orden de arranque, y de una orden
de parada o durante la parada. Las funciones de advertencia se activan
cuando la frecuencia de salida ha alcanzado la referencia de resultado.
Las señales de salida pueden programarse para emitir una señal de advertencia mediante el terminal 46 y la salida de relé. Las unidades para
la retroalimentación en bucle cerrado se programan en el parámetro 416
Unidad de proceso
.
Descripción de opciones:
Ajuste el valor requerido en el rango de retroalimentación (parámetro 414
Realimentación mínima, FB
228
Advertencia: Alta retroalimentación, FB
MIN
, y 415
Realimentación máxima, FB
HIGH
MAX
Valor:
Parám.
Adver: FB
-100.000,000
BAJA
4000.000
Función:
Si la señal de retroalimentación sube por encima del límite preajustado
R
, se emite una advertencia.
ALTO
Los parámetros 223-228
Funciones de advertencia
están desactivados
durante la aceleración después de una orden de arranque, y de una orden
de parada o durante la parada. Las funciones de advertencia se activan
cuando la frecuencia de salida ha alcanzado la referencia de resultado.
Las salidas de señal se pueden programar para que se dé una señal de
advertencia mediante el terminal 46 y la salida de relé. Las unidades para
la retroalimentación en bucle cerrado se programan en el parámetro 416
Unidad de proceso
.
).
90
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 92

Guía de diseño del VLT® descentralizado FCD
300
4 Programación
Descripción de opciones:
Ajuste el valor requerido en el rango de retroalimentación (parámetro 414
Realimentación mínima, FB
229 Bypass de frecuencia, ancho de banda
Valor:
0 (NO) - 100 Hz
Función:
Algunos sistemas requieren que se eviten algunas frecuencias de salida
debido a los problemas de resonancia mecánica de los mismos. En los
parámetros 230-231
frecuencias de salida. En este parámetro, se puede definir un ancho de
banda para cada una de las frecuencias.
, y 415
MIN
Realimentación máxima, FB
Bypass de frecuencia
).
MAX
0 Hz
es posible programar estas
Descripción de opciones:
La frecuencia ajustada en este parámetro se basa en los parámetros 230
Bypass de frecuencia 1
230 Bypass de frecuencia 1 (FREC. BYPASS 1)
231 Bypass de frecuencia 2 (FREC. BYPASS 2)
Valor:
0 -1000 Hz
Función:
Algunos sistemas requieren que se eviten algunas frecuencias de salida
debido a los problemas de resonancia de los mismos.
Descripción de opciones:
Introduzca las frecuencias que es necesario evitar. Consulte además el
parámetro 229
y 231
Bypass de frecuencia 2
Bypass de frecuencia, ancho de banda
.
.
4.5 Grupo de parámetros 3-** Entradas y salidas
Entradas digitales N.º terminal 18 19 27 29 33
Valor:
Sin función (SIN OPERACIÓN) [0] [0] [0] [0]
Reset (RESET) [1] [1] [1] [1] [1]
Paro por inercia (INERCIA) [2] [2] [2] [2] [2]
Reset y paro por inercia inversa (RESET E INERCIA INV.) [3] [3]
Parada rápida inversa (PARADA RAPIDA INV.) [4] [4] [4] [4] [4]
Freno de CC inverso (FRENO CC) [5] [5] [5] [5] [5]
Parada (PARADA) [6] [6] [6] [6] [6]
Arranque (ARRANQUE)
Arranque de pulsos (ARRANQUE DE PULSOS) [8] [8] [8] [8] [8]
Cambio de sentido (CAMBIO SENTIDO) [9]
Arranque y cambio de sentido (ARRANQ.+CAMB.SENT.) [10] [10] [10] [10] [10]
Arranque adelante (ARRANQUE ADELAN.,SI) [11] [11] [11] [11] [11]
Arranque inverso (ARRANQUE INVERSO, SI) [12] [12] [12] [12] [12]
Velocidad fija (VELOCIDAD FIJA) [13] [13] [13]
Mantener referencia (MANTENER REFERENCIA) [14] [14] [14] [14] [14]
Mantener frecuencia de salida (MANTENER SALIDA) [15] [15] [15] [15] [15]
Aceleración (ACELERACIÓN) [16] [16] [16] [16] [16]
Deceleración (DECELERACIÓN) [17] [17] [17] [17] [17]
Enganche arriba (ENGANCHE ARRIBA) [19] [19] [19] [19] [19]
Enganche abajo (ENGANCHE ABAJO) [20] [20] [20] [20] [20]
Rampa 2 (RAMPA 2) [21] [21] [21] [21] [21]
Referencia interna, bit menos significativo (REF. INTERNA, BIT MENOS SIGNIFI-
Referencia interna, BIT MÁS SIGNIFICATIVO (REF. INTERNA, BIT MÁS SIGNIFICA-
Ref. interna, sí (REF. INTERNA, SI) [24] [24] [24] [24] [24]
Parada precisa inversa (PARADA PRECISA INV.) [26] [26]
Arranque/parada precisos (ARRANQUE/PARADA PREC.) [27] [27]
Referencia de pulsos (REF. PULSOS)
Realimentación por pulsos (REALIM. PULSOS)
Entrada de pulsos (ENTR. PULSOS) [30]
Selección de ajuste, lsb (CAMBIO AJUSTE, LSB) [31] [31] [31] [31] [31]
Selección de ajuste, msb (CAMBIO AJUSTE, MSB) [32] [32] [32] [32] [32]
Reset y arranque (RESET AND START) [33] [33] [33] [33] [33]
Referencia de encoder (REF. ENCODER)
Realimentación de encoder (REALIM. ENCODER.)
Entrada de encoder (ENTR. ENCODER)
N.º parám. 302 303 304 305 307
[3] [3]
[3]
[7] [7] [7] [7]
[7]
[9] [9] [9]
[9]
[13]
CATIVO)
TIVO)
[22] [22] [22] [22] [22]
[23] [23] [23] [23] [23]
1
[28]
1
[29]
2
[34]
2
[35]
2
[36]
[13]
[28]
[29]
[34]
[35]
[36]
0,0 Hz
4
[0]
2
2
2
1
No se puede seleccionar si la opción Salida de pulsos está seleccionada en el parámetro 341 Salida digital terminal 46, 2 Los ajustos son los mismos
para los terminales 29 y 33.
Función:
En los parámetros 302-307
distintas funciones activadas relativas a las entradas digitales (terminales
18-33).
Entradas digitales,
es posible elegir entre las
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Descripción de opciones:
Sin función
cionar a señales transmitidas al terminal.
Reset
no es posible reiniciar algunas alarmas (bloqueo por alarma) sin desconectar y volver a conectar la alimentación de red. Consulte la tabla de la
se selecciona si el convertidor de frecuencia no debe reac-
reinicia el convertidor de frecuencia después de una alarma, pero
91
Page 93

4 Programación
Guía de diseño del VLT® descentralizado FCD
300
4
Lista de advertencias y alarmas
la señal.
Paro por inercia inverso
«suelte» el motor inmediatamente (los transistores de potencia se «apagan»), por lo que el motor gira libremente hasta detenerse. El "0" lógico
lleva al paro por inercia.
Reset y paro por inercia inverso
junto con un reset. El «0» lógico conduce al paro por inercia y el reset
del motor. Reset se activa en el flanco de bajada de la señal.
Parada rápida inversa
rápida ajustada en el parámetro 212
de parada rápida
Freno de CC inverso
sión de CC durante un espacio de tiempo; consulte los parámetros 126,
127 y 132
tivada si el valor de los parámetros 126
El «0» lógico conduce a una parada rápida.
se utiliza para parar el motor energizándolo con ten-
Freno de CC
Tensión de freno de CC
de CC.
Parada inversa
duce hasta pararlo mediante la rampa seleccionada.
Arranque
"1" lógico = arranque, "0" lógico = parada.
: un «0» lógico significa que la velocidad del motor se re-
Ninguno de los comandos de parada anteriores se debe utilizar como interruptores para reparaciones. Antes
de comenzar las actividades de reparación, compruebe
que se han desconectado todas las entradas de tensión
y que ha transcurrido el tiempo necesario (4 minutos).
se selecciona si se requiere un comando de arranque/parada.
. Reset se activa en el flanco de subida de
se utiliza para que el convertidor de frecuencia
se utiliza para activar la inercia del motor
se utiliza para activar la deceleración de parada
Tiempo de rampa de deceleración
. Tenga en cuenta que esta función solo está ac-
Tiempo de frenado de CC
son distintos de 0. El "0" lógico lleva al frenado
y 132
Arranque inverso
contrario a las agujas del reloj al arrancar. No se debe utilizar con
de proceso, lazo cerrado
se ut il iz a p ara que e l e je de l motor s ol o g ir e en el s en ti do
Control
. Consulte además el parámetro 200
Rangos/
dirección de frecuencia de salida.
Velocidad fija se utiliza para anular la frecuencia de salida y hacer uso de
la frecuencia de velocidad fija del parámetro 213
. Velocidad fija está activada independientemente de si se ha dado o
fija
no una orden de arranque, aunque está desactivada si se han activado
Paro por inercia, Parada rápida o Frenado de CC
Mantener referencia
ferencia solo se puede cambiar mediante
Mantener referencia
parada o si hay un fallo de red.
Mantener salida
Ahora, la frecuencia de salida solo se puede cambiar mediante
y
Deceleración
ción
Aceleración
de la aceleración o deceleración. Esta función solo está activada si
tener referencia
Si
Aceleración
salida y, si lo está
de salida. La frecuencia de salida se cambia mediante los tiempos de
rampa ajustados en los parámetros 209-210
Un pulso ("1" lógico alto al menos durante14 ms y con un tiempo de
mínimo de desactivación de 14 ms) producirá un cambio de velocidad del
0,1 % (referencia) o 0,1 Hz (frecuencia de salida). Ejemplo:
permite mantener la referencia actual. Ahora la re-
está activada, se guardará después de una orden de
permite mantener la frecuencia de salida actual (en Hz).
.
¡NOTA!
Si
Mantener salida
puede parar si se ha seleccionado
Parada rápida
digital.
y
Deceleración
o
Mantener frecuencia de salida
está activada, aumentarán la referencia o la frecuencia de
Deceleración
está activada, el convertidor solo se
o
Frenado de CC
se seleccionan si se requiere el control digital
, disminuirán la referencia o la frecuencia
Frecuencia de velocidad
.
Aceleración
y
Deceleración
Inercia del motor
mediante una entrada
se han seleccionado.
Rampa 2
.
. Si
Acelera-
Man-
,
Arranque de pulsos
el convertidor de frecuencia arranca el motor, siempre que no se haya
dado un comando de parada. El motor se puede parar si se activa momentáneamente
Cambio de sentido
del motor. El «0» lógico no produce el cambio de sentido. El '1' lógico
llevará al cambio de sentido. La señal de inversión sólo cambia el sentido
de giro, sin activar el arranque. Esta función no está activada en
de proceso, lazo cerrado
: si se aplica un pulso durante 14 ms como mínimo,
Parada inversa
se utiliza para cambiar el sentido de rotación del eje
.
Control
. Consulte además el parámetro 200
Rangos/
dirección de frecuencia de salida.
Cambio de sentido y arranque
versión con la misma señal. No se permite al mismo tiempo una orden
de arranque activada. No se activa si se ha seleccionado
ceso, lazo cerrado.
de frecuencia de salida.
Consulte además el parámetro 200 Rangos/dirección
Arranque en el sentido de las agujas del reloj
el eje del motor solo gire en el sentido de las agujas del reloj al arrancar.
No se debe utilizar con
se utiliza para el arranque/parada y la in-
se utiliza si se quiere que
Control de proceso, lazo cerrado
.
Control de pro-
Term.29Term.33Mant. ref. /Mant.
0 0 1 Sin cambio de velocidad
0 1 1 Aceleración
1 0 1 Deceleración
1 1 1 Deceleración
Mantener referencia
vertidor de frecuencia. La referencia se guarda en caso de desconexión
de la alimentación eléctrica
Enganche arriba/abajo
crementar o reducir en un valor de porcentaje programable ajustado en
el parámetro 219
Enganche
abajo
salida
se puede cambiar aunque se haya parado el con-
se selecciona si el valor de referencia se va a in-
Valor de enganche/arriba-abajo
Enganche
arriba
Función
.
Función
0 0 Sin cambio de velocidad
0 1 Incrementar valor en %
1 0 Reducir valor en %
1 1 Reducir valor en %
Rampa 2
se selecciona si se requiere el cambio entre la rampa 1 (parámetros 207-208) y la rampa 2 (parámetros 209-210). El "0" lógico lleva
a la rampa 1 y el "1" lógico lleva a la rampa 2.
Referencia interna, bit menos significativo (lsb) y Referencia interna, bit
más significativo (msb)
rencias internas; consulte la siguiente tabla:
hace posible seleccionar una de las cuatro refe-
92
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 94

Guía de diseño del VLT® descentralizado FCD
300
4 Programación
Ref. interna
msb
Ref. interna
lsb
Función
00Ref. interna 1
01Ref. interna 2
10Ref. interna 3
11Ref. interna 4
Referencia interna sí
remoto y la referencia interna. Se asume que está seleccionada Externa/
predeterminada [2] en el parámetro 214
= están activadas las referencias controladas remotamente, "1" lógico =
hay activada una de las cuatro referencias internas, que pueden consultarse en la tabla anterior.
Parada precisa inversa
cuando se repite un comando de parada. El "0" lógico significa que el
motor se desacelera hasta la parada mediante la rampa seleccionada.
Arranque/parada precisos
cuando se repite un comando de arranque y parada.
Referencia de pulsos
(frecuencia). 0 Hz corresponde al parámetro 204
Ref
. La frecuencia ajustada en el parámetro 327/328
MIN
33/29
se corresponde con el parámetro 205
Realimentación por pulsos
lizada es una secuencia de pulsos (frecuencia). En el parámetro 327/328
Pulso máx. 33/29
pulsos.
Entrada de pulsos
be conducir a una
cisa
y el parámetro 344
Selección de ajuste, bit menos significativo (lsb)
bit más significativo (msb)
sibles. Sin embargo, es necesario que el parámetro 004 esté establecido
en
Varios ajustes
Reset y arranque
24 V conectados a la entrada digital, esto causará que el convertidor de
frecuencia se reinicie, y el motor acelerará hasta la referencia interna.
Referencia de encoder
(frecuencia). 0 Hz se corresponde al parámetro 204
Ref
. La frecuencia ajustada en el parámetro 327/328
MIN
33/29
se corresponde con el parámetro 205
Realimentación de encoder
utilizada es una secuencia de pulsos (frecuencia). En el parámetro
327/328
Pulso máx. 33/29
tación por pulsos.
Entrada de encoder
debe conducir a la
y el parámetro 344
precisa
Todos los ajustes del codificador se utilizan en relación con codificadores
de pista doble con reconocimiento de dirección.
Pista A conectada al terminal 29.
Pista B conectada al terminal 33.
, se utiliza para cambiar entre la referencia de control
Función de referencia
se selecciona para obtener una gran precisión
se selecciona para obtener una alta precisión
se selecciona si se aplica una secuencia de pulsos
. "0" lógico
Referencia mínima,
Pulso máx.
Referencia máxima Ref
se selecciona si la señal de realimentación uti-
se ajusta la frecuencia máxima de realimentación por
se selecciona si un número determinado de pulsos de-
Parada precisa
.
se puede utilizar como una función de arranque. Si hay
se selecciona si se aplica una secuencia de pulsos
; consulte el parámetro 343
Valor de contador
permiten elegir uno de los cuatro ajustes po-
.
y
Selección de ajuste,
MAX
Parada pre-
Referencia mínima
Pulso máx.
Referencia máxima Ref
se selecciona si la señal de realimentación
se ajusta la frecuencia máxima de realimen-
se selecciona si un número determinado de pulsos
Parada precisa
; consulte el parámetro 343
Valor de contador
.
MAX
Parada
308 Terminal 53, tensión de entrada analógica
Valor:
Sin función (NO) [0]
Referencia (referencia) [1]
Realimentación (realimentación) [2]
Vaivén (WOBB. DELTA FREQ [%]) [10]
Función:
En este parámetro, se puede seleccionar la función requerida que se conectará al terminal 53. El escalado de la señal de entrada se realiza en el
parámetro 309
Terminal 53, escalado mín.
y el parámetro 310
53, escalado máx.
Descripción de opciones:
Sin funcionamiento
a señales conectadas al terminal.
función, la referencia puede cambiarse mediante una señal de referencia
analógica. Si hay señales de referencia conectadas a más de una entrada,
dichas señales deben sumarse.Si hay una señal de realimentación de
tensión conectada, seleccione
Vaivén
[10]
La frecuencia de triángulo puede controlarse mediante la entrada analó-
.
gica. Si se selecciona
314), el valor seleccionado en el par. 702 equivale al 100% de la entrada
analógica.
Ejemplo: entrada analógica = 4-20 mA, frecuencia triángulo par. 702 =
5 Hz → 4 mA = 0 Hz y 20 mA = 5 Hz. Si se selecciona esta función,
consulte el Manual de vaivén MI28JXYY para obtener más información.
309 Terminal 53, escalado mín.
Valor:
0,0 - 10,0 voltios
Función:
Este parámetro se utiliza para ajustar el valor de señal que corresponde
a la referencia mínima o la retroalimentación mínima, parámetro 204
Referencia mínima, Ref
Descripción de opciones:
Ajuste el valor de tensión requerido. Por motivos de precisión, debe rea-
,
lizarse una compensación para pérdida de tensión en cables de señal largos. Si va a utilizarse la función de intervalo de tiempo (parámetros 317
.
Intervalo de tiempo
valor ajustado debe ser mayor de 1 Voltio.
[0 ]. Se se le cci on a si el conv er tid or no de be rea cc ion ar
Referencia
Realimentación
DELTA FRE
y 318
como entrada analógica (par. 308 o par.
/ 414
Realimentación mínima, FB
MIN
Función después de intervalo de tiempo
[1]. Si se selecciona esta
[2] en el terminal 53.
Terminal
0,0 voltios
.
MIN
), el
4
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
93
Page 95

4 Programación
Guía de diseño del VLT® descentralizado FCD
300
4
310 Terminal 53, escalado máx.
Valor:
0 - 10,0 voltios
Función:
Este parámetro se utiliza para ajustar el valor de señal que corresponde
a la referencia máxima o la retroalimentación máxima, parámetro 205
Referencia máxima, Ref
Descripción de opciones:
Ajuste el valor de tensión requerido. Por motivos de precisión, debe realizarse una compensación para pérdidas de tensión en cables de señal
largos.
314 Terminal 60, intensidad de entrada analógica
Valor:
Sin función (NO) [0]
Referencia (MANTENER REFERENCIA) [1]
Realimentación (PULSE FEEDBACK) [2]
Vaivén (WOBB. DELTA FREQ [%]) [10]
Función:
Este parámetro permite elegir entre las distintas funciones disponibles
para la entrada, terminal 60. El escalado de la señal de entrada se realiza
en el parámetro 315
/ 414
MAX
Realimentación máxima, FB
Terminal 60, escalado mín.
y el parámetro 316
10.0 Voltios
.
MAX
Ter-
minal 60, escalado máx.
Descripción de opciones:
Sin funcionamiento
a señales conectadas al terminal.
función, la referencia puede cambiarse mediante una señal de referencia
analógica. Si hay señales de referencia conectadas a varias entradas, dichas señales deben sumarse.
Si se conecta una señal de realimentación de intensidad, seleccione
limentación
Vaivén
[10]
La frecuencia de triángulo puede controlarse mediante la entrada analógica. Si se selecciona
314), el valor seleccionado en el par. 702 equivale al 100% de la entrada
analógica.
Ejemplo: entrada analógica = 4-20 mA, frecuencia triángulo par. 702 =
5 Hz → 4 mA = 0 Hz y 20 mA = 5 Hz. Si se selecciona esta función,
consulte el Manual de vaivén MI28JXYY para obtener más información.
315 Escalado mín. Terminal 60
Valor:
0,0 - 20,0 mA
Función:
En este parámetro puede ajustar el valor de señal que corresponderá a
la referencia mínima o realimentación mínima, parámetro 204
mínima, Ref
Descripción de opciones:
Ajuste el valor de intensidad requerido. Si se va a utilizar la función de
intervalo de tiempo (parámetros 317
después de intervalo de tiempo
mA.
[0]. Se selecciona si el convertidor no debe reaccionar
[2] en el terminal 60.
DELTA FRE
/ 414
MIN
Retroalimentación mínima, FB
Referencia
como entrada analógica (par. 308 o par.
[1]. Si se selecciona esta
MIN
Intervalo de tiempo y
) el valor ajustado debe ser superior a 2
.
4,0 mA
Referencia
318
Función
Rea-
316 Terminal 60, escalado máx.
Valor:
0,0 - 20,0 mA
Función:
Este parámetro se utiliza para ajustar el valor de señal que debe corresponder al valor de referencia máxima, parámetro 205 Referencia máxima,
Ref
.
MAX
Descripción de opciones:
Ajuste el valor de intensidad requerido.
317 Intervalo de tiempo
Valor:
1 - 99 seg
Función:
Si el valor de la señal de referencia o realimentación conectada a uno de
los terminales de entrada 53 o 60 cae por debajo del 50% del escalado
mínimo durante un período de tiempo superior al seleccionado, se activará la función elegida en el parámetro 318
de tiempo
minal 53, escalado mín.
si en el parámetro 315
mayor de 2 mA.
Ajuste el tiempo requerido.
Este parámetro permite elegir la función que se activará cuando ha transcurrido el intervalo de tiempo (parámetro 317
función de intervalo de tiempo se activa a la vez que la función de intervalo de tiempo de bus (parámetro 513
bus
La frecuencia de salida del convertidor de frecuencia ajustable puede ser:
. Esta función sólo está activada si en el parámetro 309
se ha seleccionado un valor mayor de 1 voltio, o
Terminal 60, escalado mín.
Descripción de opciones:
318 Función transcurrido el tiempo límite
Valor:
Sin función (SIN FUNCIONAMIENTO) [0]
Mantener frecuencia de salida
(MANTENER SALIDA FREC.) [1]
Parada (parada) [2]
Velocidad fija (Velocidad fija) [3]
Velocidad máx. (MÁXIMA VELOCIDAD) [4]
Parada y desconexión (PARADA Y DESCONEXIÓN) [5]
Función:
), la función de intervalo de tiempo del parámetro 318 se activará.
Descripción de opciones:
- mantenerse en la frecuencia actual [1]
- ir a parada [2]
- ir a la frecuencia de velocidad fija [3]
- ir a la frecuencia de salida máxima [4]
- pararse y activar una desconexión [5]
Función después de intervalo
se ha elegido un valor
Tiem. cero activo
Función intervalo de tiempo de
20,0 mA
10 seg
Ter-
). Si la
94
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 96

Guía de diseño del VLT® descentralizado FCD
300
4 Programación
319 Salida analógica terminal 42
Valor:
Sin función (Sin función) [0]
Ref. externa mín.-máx. 0-20 mA
(ref mín-máx = 0-20 mA) [1]
Ref. externa mín.-máx. 4-20 mA
(ref mín-máx = 4-20 mA) [2]
Realiment. mín.-máx. 0-20 mA
(fb mín-máx = 0-20 mA) [3]
Realiment. mín.-máx. 4-20 mA
(fb mín-máx = 4-20 mA) [4]
Frecuencia de salida 0-máx. 0-20 mA
(0-fmáx = 0-20 mA) [5]
Frecuencia de salida 0-máx. 4-20 mA
(0-fmáx = 4-20 mA) [6]
Intensidad de salida 0-I
0-20 mA
INV
(0-iinv = 0-20 mA) [7]
Intensidad de salida 0-I
4-20 mA
IINV
(0-iinv = 4-20 mA) [8]
Potencia de salida 0-P
0-20 mA
M,N
(0-Pnom = 0-20 mA) [9]
Potencia de salida 0-P
4-20 mA
M,N
(0-Pnom = 4-20 mA) [10]
Temperatura del inversor 20-100 °C 0-20 mA
(TEMP 20-100 C=0-20 mA) [11]
Temperatura del inversor 20-100 °C 4-20 mA
(TEMP 20-100 C=4-20 mA) [12]
Función:
La salida analógica se puede utilizar para establecer un valor de proceso.
Es posible elegir dos tipos de señales de salida, 0 - 20 mA y 4 - 20 mA.
Si esta salida se utiliza para la tensión (0 - 10 V), es necesario instalar
una resistencia de caída de 500 al terminal común (terminal 55). Si la
salida se utiliza como salida de intensidad, la impedancia resultante del
equipo conectado no debe ser mayor de 500 .
Descripción de opciones:
Sin función.
Ref externa
Se selecciona si no se va a utilizar la salida analógica.
- Ref
MIN
0-20 mA/4-20 mA.
MAX
Se genera una señal de salida proporcional al valor de referencia resultante en el intervalo Referencia mínima, Ref
Ref
(parámetros 204/205).
MAX
FB
-FB
0-20 mA/ 4-20 mA.
MIN
MAX
- Referencia máxima,
MIN
Se obtiene una señal de salida proporcional al valor de realimentación en
el intervalo Realimentación mínima, FB
FB
(parámetros 414/415).
MAX
0-f
0-20 mA/4-20 mA.
MAX
- Realimentación máxima,
MIN
Se genera una señal de salida proporcional a la frecuencia de salida en
el intervalo 0 - f
f
).
MAX
0 - I
0-20 mA/4-20 mA.
INV
(parámetro 202
MAX
Límite superior de frec. de salida,
Se obtiene una señal de salida proporcional a la intensidad de salida del
intervalo 0 - I
0 - P
INV
0-20 mA/4-20 mA.
M,N
Se obtiene una señal de salida que es proporcional a la potencia de salida
ac tu al. 20 mA c or resp onde a l v alor aj ust ad o en el pará me tro 102
del motor, P
M,N
.
Potencia
0 - Temp.
0-20 mA/4-20 mA.
MAX
Se obtiene una señal de salida que es proporcional a la temperatura del
disipador actual. 0/4 mA corresponde a una temperatura del disipador
inferior a 20 °C y 20 mA corresponde a 100 °C.
323 Relé 1-3 salida
Valor:
Sin función (sin función) [0]
Unidad lista (unidad lista) [1]
Listo/sin advertencia (listo/sin adverten.) [2]
En funcionamiento (EN MARCHA) [3]
Func. en referencia, sin advertencia
(EN REF./SIN ADVERT.) [4]
En funcionamiento, sin advertencia
(MARCHA/SIN ADVERT.)) [5]
Funcionando en rango, sin advertencia
(EN RANGO/SIN ADVERT.) [6]
Preparado, tensión de red en rango
(LISTO/NO SOBRE-BAJA) [7]
Alarma o advertencia
(ALARMA O ADVERTENCIA) [8]
Intens. mayor que límite intensidad, par. 221
(Límite de intensidad) [9]
Alarma (ALARM) [10]
Frecuencia de salida mayor que f
BAJA
par. 225
(nivel alto de frec.) [11]
Frecuencia de salida menor que f
ALTA
par. 226
(nivel bajo de frec.) [12]
Intensidad de salida mayor que I
BAJA
par. 223
(nivel alto de inten.) [13]
Intensidad de salida menor que I
ALTA
par. 224
(nivel bajo de inten.) [14]
Realim. mayor que FB
BAJA
par. 227
(nivel alto de reali.) [15]
Realim. menor que FB
ALTA
par. 228
(nivel bajo de reali.) [16]
Relé 123 (RELE 123) [17]
Cambio de sentido (CAMBIO SENTIDO) [18]
Advertencia térmica (ADVERTENCIA TERMICO) [19]
Control local (MODO LOCAL) [20]
Fuera de rango frecuen., par. 225/226
(fuera rango frec.) [22]
Fuera de rango de intens.
(fuera de rango de intensidad) [23]
Fuera de rango de realim.
(FUERA RANGO REALIM.) [24]
Control de freno mecánico
(Control de freno mecánico) [25]
Bit de código de control 11
(BIT COD. CTRL.11) [26]
4
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
95
Page 97

4 Programación
Guía de diseño del VLT® descentralizado FCD
300
4
Función:
La salida de relé se puede utilizar para dar el estado o advertencia actuales. Esta salida se activa (contacto 1–2) cuando se cumple una determinada condición.
Descripción de opciones:
Sin función
cionar a señales.
Unidad lista
convertidor de frecuencia y éste está preparado para funcionar.
Listo/sin advertencia
funcionar, pero no se ha dado un comando de arranque. No hay advertencia.
En funcionamiento
Func. en referencia, sin advertencia
Funcionando, sin advertencia
hay advertencia.
Preparado, tensión de red en rango
preparado para funcionar; la tarjeta de control recibe tensión de red; y
no hay señales de control activas en las entradas. La tensión de red está
dentro de los límites de tensión.
Alarma o advertencia
Límite de intensidad
parámetro 221 Límite de intensidad I
Alarma
Frecuencia de salida mayor que f
que el valor ajustado en el parámetro 225
f
BAJA
Frecuencia de salida menor que f
que el valor ajustado en el parámetro 226
f
ALTA
Intensidad de salida mayor que I
que el valor ajustado en el parámetro 223
I
BAJA
Intensidad de salida menor que I
que el valor ajustado en el parámetro 224
I
ALTA
Realim. mayor que FB
valor ajustado en el parámetro 227
FB
Realim. menor que FB
valor ajustado en el parámetro 228
Relé 123
Cambio de sentido
del motor es de derecha a izquierda. Cuando el sentido de giro del motor
es de izquierda a derecha, el valor es 0 V CC.
Advertencia térmica
o el convertidor de frecuencia, o desde un termistor conectado a una
entrada digital.
Control local,
local/remoto,
Fuera de rango de frecuencia,
de frecuencia programado en los parámetros 225 y 226.
Fuera de rango de intensidad,
rango programado en los parámetros 223 y 224.
Fuera de rango de realimentación,
del rango programado en los parámetros 227 y 228.
. Se selecciona si el convertidor de frecuencia no debe reac-
, existe tensión de alimentación en la tarjeta de control del
, el convertidor de frecuencia está preparado para
, se ha dado un comando de arranque.
velocidad según la referencia.
, se ha dado un comando de arranque. No
, el convertidor de frecuencia está
, la salida es activada por una alarma o advertencia.
, la intensidad de salida es mayor que el valor del
.
LIM
, la salida está activada por una alarma.
, la frecuencia de salida es mayor
BAJA
Advertencia: Baja frecuencia,
.
,
la frecuencia de salida es menor
ALTA
Advertencia: Alta frecuencia,
.
, la intensidad de salida es mayor
BAJA
Advertencia: Baja intensidad,
.
, la intensidad de salida es menor
ALTA
Advertencia: Alta intensidad,
.
, el valor de realimentación es mayor que el
BAJA
Advertencia: Baja realimentación,
.
BAJA
, el valor de realimentación es menor que el
ALTA
Advertencia: Alta intensidad, I
sólo se utiliza en relación con Profidrive.
, la salida de relé se activa cuando el sentido de giro
, si se sobrepasa el límite de temperatura en el motor
si la salida está activada cuando el parámetro 002
Control local
[1] está seleccionado.
la frecuencia de salida está fuera del rango
si la intensidad del motor está fuera del
si la señal de realimentación está fuera
ALTA
Control
Control de freno mecánico,
(consulte la sección Control de freno mecánico en la Guía de Diseño).
Bit de código de control 11,
se establecerá/restablecerá según el bit 11.
327 Pulso máx. 33
Valor:
150 -110000 Hz
Función:
Este parámetro se utiliza para ajustar el valor de señal que corresponde
al valor máximo ajustado en el parámetro 205
o al valor de realimentación máximo ajustado en el parámetro 415
limentación máxima, FB
Descripción de opciones:
Ajuste la referencia de pulso o la realimentación de pulso requerida que
se conectará al terminal 33.
328 Pulso máx. 29
Valor:
1000 -110000 Hz
Función:
Este parámetro se utiliza para ajustar el valor de señal que corresponde
al valor máximo ajustado en el parámetro 205
o al valor de realimentación máximo ajustado en el parámetro 415
limentación máxima, FB
Descripción de opciones:
Ajuste la referencia de pulso o la realimentación de pulso requerida que
se conectará al terminal 29.
341 Salida digital terminal 46
Valor:
Sin función (SIN OPERACION) [0]
Valor [0] - [20] consulte el parámetro 323
Referencia de pulsos (REF. PULSOS) [21]
Valor [22] - [25] consulte el parámetro 323
Real. de entrada de pulsos (REALIM. PULSOS) [26]
Frecuencia de salida (SALIDA PULSO) [27]
Intensidad de pulsos (INTENSIDAD DE PULSOS) [28]
Potencia de pulsos (POTENCIA DE PULSOS) [29]
.
Temperatura de pulsos
(TEMPERATURA DE PULSOS) [30]
Bit de código de control 12 (BIT COD. CTRL.12) [31]
Función:
La salida digital se puede utilizar para dar el estado o advertencia actuales. La salida digital (terminal 46) proporciona una señal de 24 V CC
cuando se cumple una determinada condición.
Descripción de opciones:
Referencia ext.
Se obtiene una señal de salida que es proporcional al valor de referencia
de resultado en el intervalo de referencia mínima, Ref
máxima, Ref
FB
MIN
Se obtiene una señal de salida que es proporcional al valor de realimentación en el intervalo de realimentación mínima, FB
máxima, FB
-FB
MIN
(parámetros 204/205).
MAX
Par. 0-342.
MAX
(parámetro 414/415).
MAX
permite controlar un freno mecánico externo
bit 11 del código de control, la salida de relé
Referencia máxima, Ref
.
MAX
Referencia máxima, Ref
.
MAX
- Ref
Par. 0-342.
MAX
5000 Hz
5000 Hz
- Referencia
MIN
- Realimentación
MIN
MAX
Rea-
MAX
Rea-
96
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 98

Guía de diseño del VLT® descentralizado FCD
300
4 Programación
0-f
Par. 0-342.
MAX
Se obtiene una señal de salida que es proporcional a la frecuencia de
salida en el intervalo 0 - f
de salida, f
0 - I
INV.
Se obtiene una señal de salida que es proporcional a la intensidad de
salida en el intervalo 0 - I
0 - P
M,N
Se obtiene una señal de salida que es proporcional a la potencia de salida
actuaL. Par. 342 corresponde al valor ajustado en el parámetro 102
).
MAX
Par. 0-342.
Par. 0-342.
tencia del motor, P
0 - Temp.
Se obtiene una señal de salida proporcional a la temperatura actual del
disipador de calor. 0 Hz corresponde a una temperatura del disipador de
calor inferior a los 20 °C, y 20 mA corresponde a 100 °C.
Par. 0-342.
MAX
Bit de código de control 12,
se establecerá/restablecerá según el bit 12.
342 Terminal 46, escalado de pulsos máx.
Valor:
150 - 10000 Hz
Función:
Este parámetro se utiliza para ajustar la frecuencia máxima de la señal
de salida de pulsos.
Descripción de opciones:
Ajuste la frecuencia deseada.
343 Función de parada precisa
Valor:
Parada de rampa precisa (normal) [0]
Parada de contador con reset
(Parada cont. reset) [1]
Parada de contador sin reset
(Parada cont. no reset) [2]
Parada compensada con velocidad
(Parada comp. vel.) [3]
Parada de contador compensada con velocidad y reset
(Parada cont. comp. vel. y reset) [4]
Parada de contador compensada con velocidad sin reset
(Parada cont. comp. vel. sin reset) [5]
Función:
En este parámetro se selecciona la función de parada que se utilizará en
respuesta a un comando de parada. Las seis selecciones de datos incluyen una rutina de parada precisa que asegura un alto nivel de precisión
repetida.
Estas opciones combinan las funciones descritas a continuación.
(parámetro 202
MAX
.
INV
.
M,N
bit 12 del código de control. La salida digital
Límite superior de frecuencia
Po-
5000 Hz
parada interna activa el intervalo de rampa de deceleración normal (parámetro 208).
La función de contador se activa (empieza a temporizar) en el fleco de la
señal de arranque (cuando cambia de parada a arranque).
Parada compensada con velocidad
en el mismo punto, con independencia de la velocidad actual, la señal de
parada recibida se retrasará internamente cuando la velocidad sea menor
que la máxima (ajustada en el parámetro 202).
Reset. Parada de contador
den combinar con o sin el reset.
Parada de contador con reset
número de pulsos contados en la deceleración a 0 Hz se reinicia.
Parada de contador sin reset
deceleración a 0 Hz se calcula con el valor de contador del parámetro
344.
344 Valor de contador
Valor:
0 - 999999
Función:
En este parámetro, puede seleccionar el valor de contador utilizado en la
función de parada precisa integrada (parámetro 343).
Descripción de opciones:
El ajuste de fábrica es 100.000 pulsos. La frecuencia más alta (máx. resolución) que puede registrarse en el terminal 33 es de 67,6 kHz.
349 Retardo compensación de parada
Valor:
0 ms - 100 ms
Función:
En este parámetro, el usuario puede seleccionar el tiempo de retardo del
sistema (sensor, PLC, etc.). Si se utiliza la parada compensada con velocidad, el retardo en las distintas frecuencias tendrá un gran efecto en la
manera que ocurra una parada.
Descripción de opciones:
El ajuste de fábrica es 10 ms. Esto significa que el retardo total del sensor,
el PLC y otros equipos corresponderá a dicho ajuste.
¡NOTA!
Sólo se puede utilizar en la parada compensada con
velocidad.
. Para detener el motor exactamente
y
Parada compensada con velocidad
[1]. Después de cada parada precisa, el
[2]. El número de pulsos contados en la
se pue-
100.000 pulsos
10 ms
4
¡NOTA!
Arranque de pulsos [8]
función de parada precisa.
Descripción de opciones:
Parada de rampa normal
repetida en el punto de parada.
Parada de contador
el convertidor sigue funcionando hasta recibir el número de pulsos programado por el usuario en el terminal de entrada 33. Así, una señal de
[0] se selecciona para obtener una alta precisión
. Una vez recibida una señal de arranque de pulsos,
no se puede utilizar con la
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
97
Page 99

4
Guía de diseño del VLT® descentralizado FCD
4 Programación
4.6 Grupo de parámetros 4-** Funciones especiales
400 Función de freno
Valor:
Off (no) [0]
Freno con resistencia
(Resistencia) [1]
Freno de CA (FRENO CA) [4]
Función:
Freno con resistencia
una resistencia conectada a los terminales 81 y 82 Se permite una tensión
del circuito intermedio más alta durante el frenado funcionamiento regenerativo cuando hay conectada una resistencia de freno
Freno de CA
cias de freno Tenga presente que
Freno con resistencia
Descripción de opciones:
Seleccione
tada
Seleccione
Consulte el parámetro 144
Este parámetro permite seleccionar si el reinicio y el rearranque después
de una desconexión deben realizarse manualmente, o si el convertidor
de frecuencia ajustable debe reiniciarse y volver a arrancar automáticamente. Además, se puede seleccionar el número de veces que se intenta
realizar el rearranque. El intervalo de tiempo entre cada intento se ajusta
en el parámetro 406
Si se selecciona
[STOP/RESET], una entrada digital o la comunicación serie. Si el convertidor de frecuencia ajustable se debe reiniciar y rearrancar automáticamente después de una desconexión, seleccione el valor de dato [1], [3]
o [10].
Si se selecciona
ajustable se reinicia si se produce un fallo en relación con un fallo de red.
Freno con resistencia
Freno de CA
405 Función de reset
Valor:
Reset manual (RESET MANUAL) [0]
Reset autom. x 1
(AUTOMATICO x 1) [1]
Reset autom. x 3
(AUTOMÁTICO x 3) [3]
Reset autom. x 10
(AUTOMÁTICO x 10) [10]
Reset en encendido
(RESET AL ENCENDER) [11]
Función:
Descripción de opciones:
1 se selecciona si el convertidor de frecuencia tiene
4 se selecciona para mejorar el frenado sin utilizar resisten-
Freno de CA
1
1 si hay una resistencia de freno conec-
4 si se producen cargas generadas a corto plazo
Ganancia del freno CA
¡NOTA!
El cambio de opción no se activará hasta que no se
haya desconectado y vuelto a conectar la tensión de
alimentación eléctrica
Tiempo de rearranque automático
Reset manual
Reset al encender
[0], el reinicio debe efectuarse con la tecla
[11], el convertidor de frecuencia
4 no es tan eficaz como
para ajustar este freno
.
406 Tiempo de rearranque automático
Valor:
0 - 10 seg
Función:
Este parámetro permite ajustar el período de tiempo desde la desconexión hasta que comienza la función de reinicio automático. Se presupone
que se ha seleccionado el reinicio automático en el parámetro 405
ción de reset
Descripción de opciones:
Ajuste el tiempo requerido.
409
Valor:
0 - 60 seg. (61=NO)
Función:
Cuando el convertidor de frecuencia ajustable detecta que la intensidad
de salida ha llegado al límite I
permanece en él durante el tiempo seleccionado, se produce una desconexión. Se puede utilizar para proteger la aplicación, al igual que ETR
protegerá el motor, si se selecciona.
Descripción de opciones:
Seleccione el tiempo que el convertidor de frecuencua ajustable debe
mantener la intensidad de salida en el límite I
En OFF, el parámetro 412
está desactivado; es decir, no se producen desconexiones.
I
LIM
411 Frecuencia de conmutación
Valor:
3000 -14000 Hz
Función:
El valor ajustado determina la frecuencia de conmutación del inversor. Si
la frecuencia de conmutación se cambia, puede ayudar a minimizar el
posible ruido acústico procedente del motor.
Descripción de opciones:
Cuando el motor está en funcionamiento, la frecuencia de conmutación
se ajusta en el parámetro 411
obtiene la frecuencia en que el motor hace el menor ruido posible.
El motor puede arrancar sin advertencia previa.
.
Sobreintensidad de retardo de desconexión, I
Sobreintensidad de retardo de desconexión,
¡NOTA!
La frecuencia de salida del convertidor de frecuencia
no puede tener un valor superior a 1/10 de la frecuencia de conmutación.
¡NOTA!
La frecuencia de conmutación se reduce automáticamente en función de la carga. Consulte
conmutación dependiente de la temperatura
ción
Condiciones especiales
(parámetro 215
LIM
Límite de intensidad
antes de desconectarse.
LIM
Frecuencia de conmutación
.
300
5 seg
Fun-
LIM
OFF
) y
4500 Hz
hasta que se
Frecuencia de
en la sec-
98
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
Page 100

Guía de diseño del VLT® descentralizado FCD
300
4 Programación
413 Función de sobremodulación
Valor:
Off (off) [0]
On (on) [1]
Función:
Este parámetro permite ajustar la función de sobremodulación de la tensión de salida.
Descripción de opciones:
No
[0] significa que no hay sobremodulación de la tensión de salida, por
lo que se evita el rizado del par en el eje del motor. Esto puede ser una
función útil, por ejemplo, en máquinas rectificadores.
puede obtenerse una tensión de salida superior a la tensión de red (hasta
el 5 %).
414
Valor:
- 100.000.000 - parám. 415 FB
Función:
Los parámetros 414
máxima, FB
gurando con ello que se muestre la señal de retroalimentación en una
unidad de proceso proporcional a la señal de la entrada.
Descripción de opciones:
Ajuste el valor que va a mostrarse en la pantalla como el valor de señal
de retroalimentación mínima en la entrada de retroalimentación seleccionada (parámetros 308/314
415
Valor:
FB
MIN
Función:
Consulte la descripción del parám. 414
Descripción de opciones:
Ajuste el valor que se mostrará en la pantalla cuando se obtenga la máxima retroalimentación en la entrada de retroalimentación seleccionada
(parámetros 308/314
416 Unidades de proceso
Valor:
Sin unidad (Sin unidad) [0]
% (%) [1]
ppm (ppm) [2]
rpm (rpm) [3]
bar (bar) [4]
Ciclos/min (CICLO/mi) [5]
Pulsos/seg (PULSO/s) [6]
Unidades/seg (UNID/s) [7]
Unidades/min (UNID/mi) [8]
Unidades/hora (Unidades/hora) [9]
°C (°C) [10]
Pa (pa) [11]
l/s (l/s) [12]
3
m
Realimentación mínima, FB
MAX
Realimentación mínima, FB
se utilizan para escalar la indicación de la pantalla, ase-
MAX
Entradas digitales
Realimentación máxima, FB
-100.000,000
Realimentación mínima, FB
Entradas analógicas
/s (m3/s) [13]
).
MIN
MIN
MAX
).
y 415
Sí
[1], significa que
0.000
Realimentación
1500.000
MIN
l/min (l/m) [14]
3
m
/min. (m3/min) [15]
l/h (l/h) [16]
3
m
/h (m3/h) [17]
Kg/seg (kg/s) [18]
Kg/min (kg/min) [19]
Kg/hora (kg/h) [20]
Toneladas/min (T/min) [21]
Toneladas/hora (T/h) [22]
Metros (m) [23]
Nm (nm) [24]
m/s (m/s) [25]
m/min (m/min) [26]
°F (°F) [27]
pulg WG (pulg WG) [28]
gal/s (gal/s) [29]
3
/s (pies3 /s) [30]
Pies
Gal/min (gal/min) [31]
3
Pies
/min. (Pies3/min) [32]
Gal/hora (gal/h) [33]
3
/h (Pies3/h) [34]
Pies
Libras/seg (lb/s) [35]
Libras/min (lb/min) [36]
Libras/hora (lb/h) [37]
Libras/pie (lb ft) [38]
Pies/seg (pies/s) [39]
Pies/min (pies/m) [40]
Psi (Psi) [41]
.
Función:
Seleccione las unidades a mostrar en la pantalla. Las unidades pueden
leerse cuando se ha conectado una unidad de control LCP, se ha selec-
Referencia [unidad]
cionado
los parámetros 009-012
Las unidades se utilizan en
mín./máx. y la Realimentación mín./máx.
Descripción de opciones:
Seleccione la unidad requerida para la señal de referencia/realimentación.
[2] o
Realimentación [unidad]
Lectura de display
Lazo cerrado
y como unidades de la Referencia
, y están en el modo display.
4
[3] en uno de
MG.90.O1.05 - VLT® es una marca registrada de Danfoss.
99
 Loading...
Loading...