

Page 1
Guia de Operação
MOTOR
REDE
ELÉTRICA
aA
B
34
*M0033902*
*M0033903*
*M0033904*
*M0033905*
VLT® Micro Drive FC 51
1 Introdução
Este Guia de Operação fornece informações necessárias para que o pessoal qualificado instale e coloque
em funcionamento o conversor de frequência. Leia e siga as instruções para usar o conversor profissionalmente
e com segurança.
VLT® é uma marca registrada da Danfoss A/S.
Não descarte equipamentos que contenham componentes elétricos junto com lixo doméstico.
Colete-os separadamente em conformidade com a legislação local e vigente.
2 Segurança
Preste atenção especial às instruções de segurança e advertências gerais para evitar riscos de morte, lesões
graves e danos ao equipamento ou à propriedade.
ADVERTÊNCIA
ALTA TENSÃO
Os converso res de frequência co ntêm alta tensão quan do estão conect ados à entrada da rede e létrica CA, alimentação CC
ou Load Sharing.
PARTIDA ACIDENTAL
O motor pode dar partida a partir do LCP, entradas de E/S , fieldbus ou do sof tware de Setup M CT 10, a qualquer momento,
quando o conversor estiver conectado à rede elétrica CA, alimentação CC ou Load Sharing.
TEMPO DE DESCARGA
O conversor contém capacitores de barramento CC, que podem permanecer carregados até mesmo quando o conversor não
estiver ligado. Pode haver alta tensão presente mesmo quando as luzes indicadoras de advertência estiverem apagadas.
– Pare o motor e desconec te a rede elétrica C A, os motores de ímã pe rmanente e as fontes de alimentaç ão do barramento CC
remoto, incluindo backups de bateria, UPS e conexões do barramento CC com outros conversores.
– Aguarde os capacitores se descar regarem totalmente e meça conf irmando isso antes de realiza r qualquer serviço
de manutenção ou reparo.
– O tempo de espera mínim o é de 4 minutos para os conver sores M1, M2 e M3, e de 15 minutos para os convers ores M4 e M5.
CORRENTE DE FUGA
As correntes de fuga do conversor excedem 3,5 mA. Certifique-se de que o conversor esteja corretamente aterrado com um fio
de aterram ento de pelo menos 10 mm2 (8 AWG) e use RCDs do tip o B com um atraso de influxo.
3 Instalação
3.1 Dimensões mecânicas
Orifício para
montag em [mm
(2)
7 (0,28)
7 (0,28)
5,5 (0,22)
4,5 (0,18)
4,5 (0,18)
1,5–2,2 (2,0–3,0)
3,0–7,5 (4,0–10)
11,0 –15,0 (15–2 0)
(pol.)]
C
Peso máximo [kg (lb)]
Ilustra ção 1: Montagem de cab o do
ponto de ate rramento, rede e létrica
efios do mo tor
55 (2,2)
59 (2,3)
69 (2,7)
97 (3,8)
Profundidade
[mm (pol.)]
148 (5, 8)
168 ( 6,6)
19 4 (7, 6)
241 (9,5 )
248 (9, 8)
0,37–0,75 (0,5–1, 0)
18,5–22,0 (25–30)
Tamanho
do
gabinete
M1
M2
M3
M4
M5
Tamanho
do
gabinete
M1
M2
M3
M4
M5
(1) Inclusão da placa d e desacoplamento. (2) Para o LCP com potenciômetro, a dicione 7,6 mm (0,3 pol.).
Altura [mm (pol.)] Largura [mm (pol.)]
A A
150 (5,9)
176 (6,9)
239 (9,4)
29 2 (11 ,5)
335 (13,2)
0,18–0,75 (0,24–1,0)
(1)
20 5 (8,1)
23 0 (9,1)
29 4 (11, 6)
34 7,5 (13 ,7)
38 7,5 (15 ,3 )
1x200 -240 V 3x2 00-24 0 V 3x380-480 V
1,5 ( 2,0)
2,2 (3,0)
–
–
a B b C D
140 ,4 (5, 5)
166,4 (6,6)
226 (8,9)
272,4 (10,7)
315 (12 ,4)
70 (2,8)
75 (3,0)
90 (3,5)
125 (4,9)
165 (6 ,5)
140 (5, 5)
Potência [ kW (hp)]
0,25–0,75 (0,34–1,0)
1,5 (2,0)
2,2–3,7 (3,0 –5,0)
–
–
3.2 Conexão à rede elétrica e ao motor
• Monte os fios de aterramento no terminal PE.
• Conecte o motor aos terminais U, V e W.
• Monte a alimentação de rede elétrica nos terminais L1/L, L2 e L3/N (trifásico)
ou L1/L e L3/N (monofásico) e aperte.
3.3 Divisão de carga/freio
Utilize plugues Faston de 6,3 mm (0,25 pol.) isolados projetados para alta tensão
para CC (load sharing e freio).
Entre em contato com a Danfoss ou consulte Instrução de Load Sharing
VLT® 5000 para load sharing e VLT® 2800/5000/5000 FLUX/FCD 300 Brake para freio.
Load sharing: Conecte os terminais -UDC e +UDC/+BR.
Freio: Conecte os terminais -BR e +UDC/+BR (não aplicável para
gabinete metálico tamanho M1).
AVISO
Níveis de tensão de até 850 V CC po dem ocorrer entre os te rminais +UDC/+BR e -UD C. Não são protegi dos contra curto-circuito.
1,1 (2 ,4)
1,6 ( 3,5)
3,0 (6,6)
6, 0 (13, 2)
9,5 (20,9)
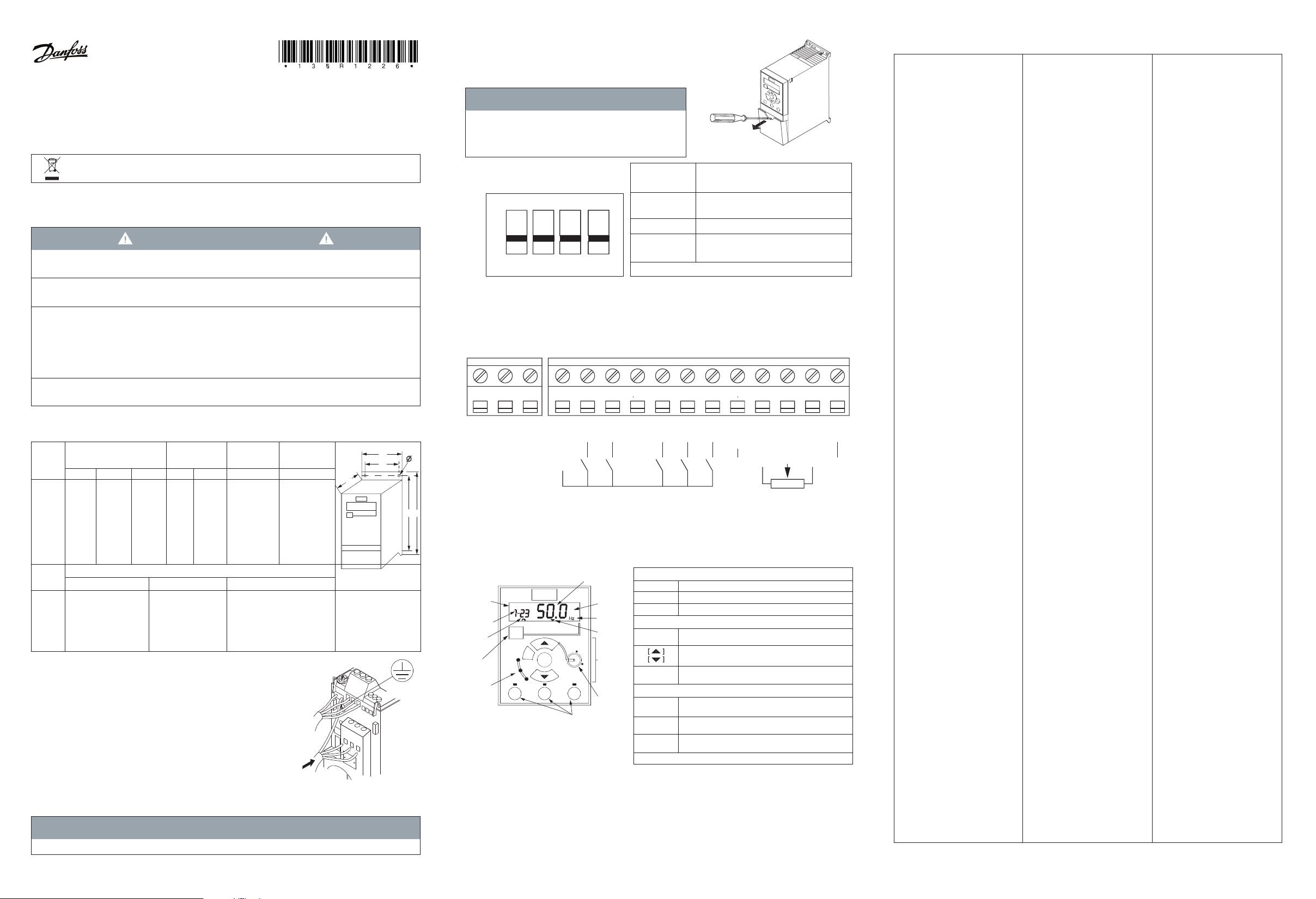
3.4 Terminais de controle
Todos os terminais dos cabos de controle estão localizados sob
a tampa de terminal na frente do conversor. Remova a tampa
de terminal utilizando uma chave de fenda.
AVISO
– Consulte a parte de trás d a tampa de terminal pa ra o diagrama
dos terminais de controle e interruptores.
– Não acione os interruptores com o conversor energizado.
– Defina o parâmetro 6 -19 Termina l 53 Mode (Modo do termina l 53)
conforme a posição do Interruptor 4.
PNP/NPN
ON
OFF
12
Ilustra ção 3: Interruptor es S200 1–4
PNP/NPN
U/I
Interruptor 1
Interruptor 2
Interruptor 3 Sem função
Interruptor 4
(1) Esta é a configur ação padrão.
Tabela 1: Config urações dos Interr uptores S200 1-4
A ilustração a seguir mostra todos os terminais de controle do conversor. Aplicar partida (terminal 18) e uma
referência analógica (terminal 53 ou 60) faz o conversor funcionar.
+24 V
PNU 5 - 10
GND
PNU 5 - 11D IN
PNU 5 - 12
61 68 69 12 18 19 20 27 29 33 42 50 53 55 60
D IN
P RS 485
N RS 485
b
D
Com RS 485
Ilustração 4: Visão geral dos terminais de controle na configuração PNP com configuração de fábrica
+24 V OUT
Partida
Reverso
GND
D IN
Reinicializar
4 Programação
4.1 Painel de controle local (LCP)
Ref./Feedback
Número
do setup
Número do
parâmetro
Sentido
do motor
Tecla
Menu
Luzes
indicadoras
Setup 1
Quick
Status
Menu
On
Warn
Alarm
Hand
On
Teclas de operação e LED
Ilustração 5: Descrição do
display e te clas do LCP
Menu
Back
OK
Off
Reset
Main
Menu
Auto
On
Display
numérico
Externa
Menu
selecionado
Teclas de
navegação
Potenciômetro
(LCP 12)
4.2 Programação na adaptação automática do motor (AMT)
Execute a AMT para otimizar a compatibilidade entre o conversor e o motor no modo VVC+. O conversor cria
um modelo matemático do motor para a regulagem da corrente de saída do motor, melhorando assim
seu desempenho.
1. Acesse o menu principal.
2. Programe o g rupo do parâmetro 1-** Load and Motor (Carga e M otor), gr upo do parâmetro 1-2* Motor Data
(Dados do Motor) e parâm etro 1-29
Automatic Motor Tuning (AMT ) (Ajuste Automático do Motor (AMT)).
3. Pressione [OK]. O teste executará automaticamente e indicará quando estiver concluído.
Pressione [Menu] para selecionar 1 destes men us:
Status Somente para leituras.
Quick Menu Para acessar os Quick menus 1 e 2.
Main Men u Para acessar to dos os parâmetros .
Teclas de navegação
[Back]
[OK]
Teclas de operação
[Han d On]
[Off/Reset]
[Auto On]
LCP12 é outro LCP com potenci ômetro.
Ilustração 2: Removendo a tampa de terminal
Off=Terminais PNP 29
On=Terminais NPN 29
Off=Terminais PNP 18, 19, 27 e 33
On=Terminais NPN 18, 19, 27 e 33
Off=Terminal 53 0 –10 V
On=Terminal 53, 0/4-20 mA
PNU 5 - 15
PNU 5 - 13
D IN
Jog
Para retor nar à etapa ou camada anterior, na estrutura
de navegação.
São utiliz adas para navegar entre os grupo s de
parâmetros, pelos parâmetros e dentro dos parâmetros.
Para sele cionar um parâmetro e para conf irmar as
modificações nas programações dos parâmetros.
Dá parti da no motor e permite controlar o conve rsor
por meio d o LCP.
O motor para. Se estive r em modo de alarme,
o motor reinicializa.
O drive será controlad o por meio dos terminais
de controle ou pela comunicação serial.
PNU 6 - 9*
D IN
SAÍDA A
Saída 0/4 - 20 mA
Predef. bit 0
(1)
(1)
(1)
+10 V CC
SAÍDA +10 V
GND
PNU 6 - 1*
0 -10 V A IN
1K Oh m
GND
PNU 6 - 2*
A IN
Entrada 0/4 - 20 mA
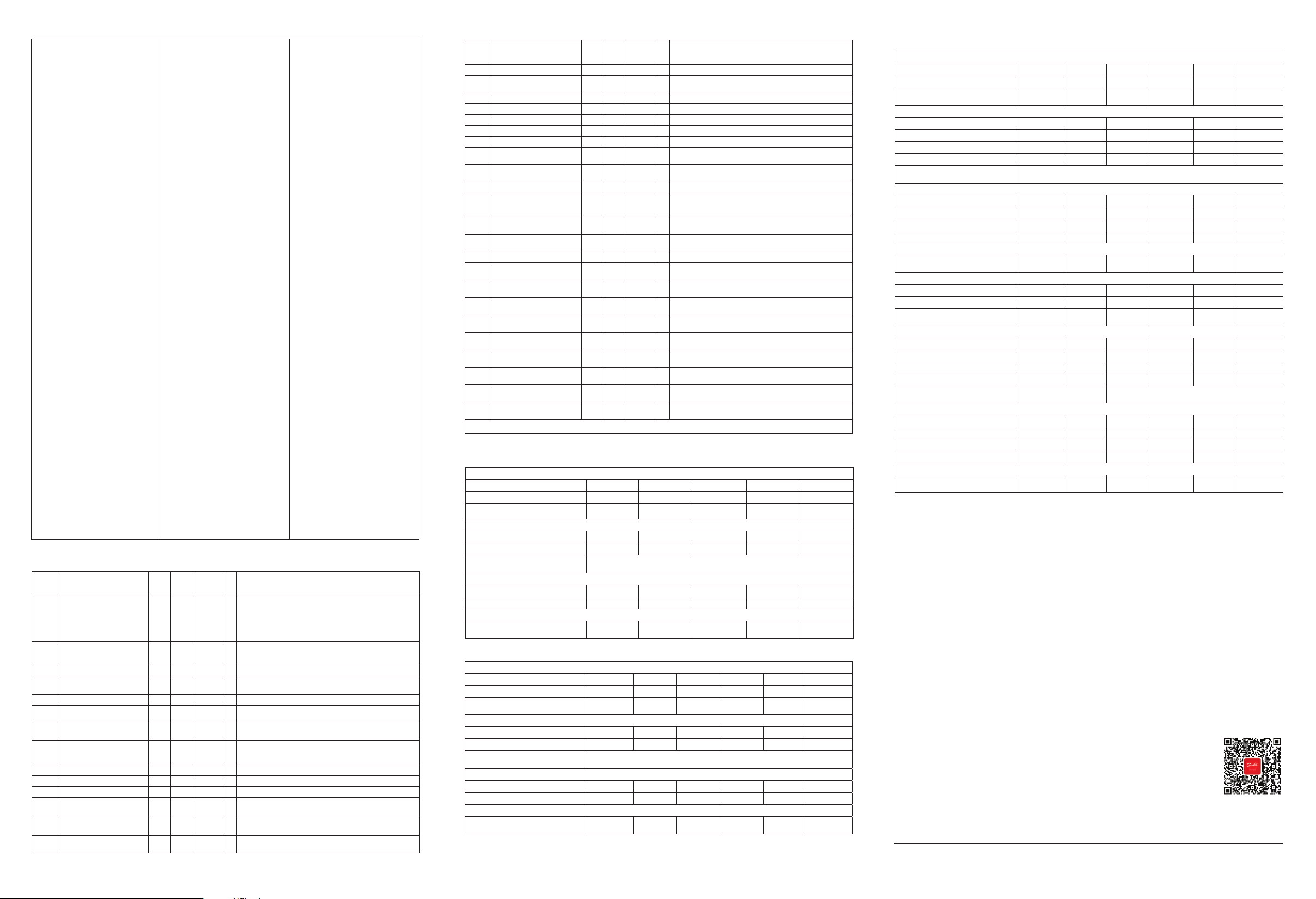
5 Visão geral do parâmetro
0-** Operação/Display
0-0* Configurações Básicas
0-03 Definições Regionais
0-04 Estado Operacional na
Energização (Manual)
0-1* Operações Set-up
0-10 Setup Ativo
0-11 Edit Setup
0-12 Setups de conexão
0-3* Leitura do LCP
0-31 Valor Mín Leitura
Personalizada
0-32 Valor Máx
Leitura Personalizada
0-4* Teclado do LCP
0-40 Tecla [Hand on] do LCP
0-41 Tecla [Off/Reset] do LCP
0-42 Tecla [Auto on] do LCP
0-5* Copiar/Salvar
0-50 Cópia do LCP
0-51 Cópia do Setup
0-6* Senha
0-60 Acesso ao Quick Menu/Menu
Principal com Senha
0-61 Acesso ao Quick Menu/Menu
Principalsem Senha
1-** Carga e Motor
1-0* Programaç Gerais
1-00 Modo Configuração
1-01Princípio de Controle do
Motor
1-03 Características do Torque
1-05Configuração Modo Manual
1-2* Dados do motor
1-20 Potência do Motor
1-22 Tensão do Motor
1-23 Frequência do Motor
1-24 Corrente do Motor
1-25 Velocidade Nominal do Motor
1-29 Ajuste Automático do Motor
(AMT)
1-3* Dados Avanç. Dados
doMotor
1-30 Resistência do Estator (Rs)
1-33 Reatância Parasita do Estator
(X1)
1-35 Reatância Principal (Xh)
1-5* Indep. Carga, Configuração
1-50 Magnetização do Motor
avelocidadezero
1-52 Velocidade Mín de
Magnetização Norm. [Hz]
1-55 Característica U/f - U
1-56 Característica U/f - F
1-6* Prog Dep. Configuração
1-60 Compensação de Carga
em Baix Velocid
1-61 Compensação de Carga
em Alta Velocid
1-62 Compensação de
Escorregamento
1-63 Compensação de Carga
em Alta Velocid
1-7* Ajustes da partida
1-71 Atraso da Partida
1-72 Função de Partida
1-73 Flying Start
1-8* Ajustes de Parada
1-80 Função na Parada
1-82 Velocidade Mín. p/ Funcionar
naParada [Hz]
1-9* Temper. do Motor
1-90 Proteção térmica do motor
1-93 Fonte do Termistor
2-** Freios
2-0* Frenagem CC
2-00 Corrente de Hold CC
2-01 Corrente de Freio CC
2-02 Tempo de Frenagem CC
2-04 Veloc. de Acionamento
Danfoss A/S © 2021.09
da Frenagem CC
2-1* Funções do Freio
2-10 Função de Frenagem
2-11 Resistor de Freio (ohm)
2-14 Redução da Tensão do Freio
2-16 Freio CA, Corrente Máx
2-17 Controle de Sobretensão
2-2* Freio Mecânico
2-20 Corrente de Liberação do Freio
2-22 Velocidade de Ativação
do Freio [Hz]
3-** Referência/Rampas
3-0* Limites de Referênc
3-00 Intervalo de Referência
3-02 Referência Mínima
3-03 Referência Máxima
3-1* Referências
3-10 Referência Predefinida
3-11 Velocidade de Jog [Hz]
3-12 Valor de Catch Up/Slow Down
3-14 Referência Relativa Predefinida
3-15 Fonte da Referência 1
3-16 Fonte da Referência 2
3-17 Fonte da Referência 3
3-18 Recurso de Ref. de
Escalonamento Relativo
3-4* Rampa 1
3-40 Tipo de Rampa 1
3-41 Tempo de Aceleração
da Rampa 1
3-42 Tempo de Desaceleração
da Rampa 1
3-5* Rampa de velocid 2
3-50 Tipo de Rampa 2
3-51 Tempo de Aceleração
da Rampa 2
3-52 Tempo de Desaceleração
da Rampa 2
3-8* Outras rampas
3-80 Tempo de Rampa do Jog
3-81 Tempo de rampa na parada
rápida
4-** Limites/Advertências
4-1* Limites do motor
4-10 Sentido de Rotação do Motor
4-12 Lim. Inferior da Veloc. do Motor
[Hz] 4-14 Lim. Superior da Veloc. do
Motor [Hz] 4-16 Limite de Torque do
Modo Motor 4-17 Limite de Torque
do Modo
Gerador
4-4* Aj. Advertências 2
4-40 Adv. Freq. Baixa
4-41 Adv. Freq. Alta
4-5* Ajuste Advertências
4-50 Advertência de Corrente Baixa
4-51 Advertência de Corrente Alta
4-54 Advert. de Refer Baixa
4-55 Advert. de Refer
Alta 4-56 Advert. de Feedb Baixo
4-57 Advert. de Feedb Alto
4-58 Função de Fase do Motor
Ausente
4-6* Bypass de Velocidd
4-61 Bypass de Velocidade De [Hz]
4-63 Bypass de Velocidade Até [Hz]
5-** Entrada/Saída Digital
5-1* Entradas Digitais
5-10 Terminal 18 Entrada Digital
5-11 Terminal 19 Entrada Digital
5-12 Terminal 27 Entrada Digital
5-13 Terminal 29 Entrada Digital
5-15 Terminal 33 Entrada Digital
5-3* Saídas Digitais
5-34 Atraso de Ativação, Terminal 42
Saída Digital
5-35 Atraso de Desativação,
Terminal 42
Saída Digital
5-4* Relés
AQ383124996793pt-000101 / 130R1226 | 1
5-40 Relé de Função
5-41 Atraso de Ativação do Relé
5-42 Atraso de Desativação, Relé
5-5* Entrada de Pulso
5-55 Terminal 33 Baixa Frequência
5-56 Terminal 33 Alta Frequência
5-57 Terminal 33 Valor baixo
deRef./Feedback
5-58 Terminal 33 Valor alto deRef./
Feedback
6-** Entrada/Saída Analógica
6-0* Modo E/S Analógico
6-00 Timeout do Live Zero
6-01 Função Timeout do Live Zero
6-1* Entrada analógica 1
6-10 Terminal 53 Tensão Baixa
6-11 Terminal 53 Alta Tensão
6-12 Terminal 53 Corrente Baixa
6-13 Terminal 53 Corrente Alta
6-14 Terminal 53 Valor baixo
de.Ref./Feedback
6-15 Terminal 53 Valor alto
de.Ref./Feedback
6-16 Terminal 53 Const. de Tempo
do Filtro
6-19 Modo do Terminal 53
6-2* Entrada analógica 2
6-21 Reservado para Testes
6-22 Terminal 60 Corrente Baixa
6-23 Terminal 60 Corrente Alta
6-24 Terminal 60 Valor baixo
de.Ref./Feedback
6-25 Terminal 60 Valor alto
deRef./Feedback
6-26 Terminal 60 Const. de Tempo
do Filtro
6-8* Potenciômetro do LCP
6-80 Potenciômetro do LCP Ativado
6-81 Potenciômetro do LCP
Ref.Baixa
6-82 Potenciômetro do LCP Ref. Alta
6-9* Saída Analógica xx
6-90 Modo do Terminal 42
6-91 Terminal 42 Saída Analógica
6-92 Terminal 42 Saída Digital
6-93 Terminal 42 Escala Mínima
de Saída
6-94 Terminal 42 Escala Máxima
deSaída
6-98 Tipo de Drive
7-** Controladores
7-2* Feedb Ctrl. Feedb
7-20 Recurso do Feedback do CL
de Processo 1
7-3* Ctrl. PI de Processo
7-30 Controle Normal/Inverso do PI
de Processo
7-31 Anti Windup PI de Processo
7-32 Velocidade Inicial do PI
de Processo
7-33 Ganho Proporcional do PI
de Processo
7-34 Tempo de Integr. do PI
de Processo
7-38 Fator de Feed Forward do PI
de Processo
7-39 Larg de Banda na Referência
8-** Com. e Opcionais
8-0* Com. Configurações Gerais
8-01 Local de Controle
8-02 Origem da Control Word
8-03 Tempo de Timeout
de Controle
8-04 Função Timeout de Controle
8-06 Reset do Timeout
de Control Word
8-3* Configurações da Por ta do FC
8-30 Protocolo
8-31 Endereço
8-32 Baud Rate da Porta do FC
Page 2
8-33 Paridade da Porta do FC
8-35 Atraso Mínimo de Resposta
8-36 Atraso Máx de Resposta
8-4* Protocolo FC MC Definido
8-42 Configuração de Gravação
PCD Porta do FC
8-43 Configuração de Leitura
PCD Porta do FC
8-5* Digital/Bus
8-50 Seleção de Parada por Inércia
8-51 Seleção de Parada Rápida
8-52 Seleção de Frenagem CC
8-53 Seleção da Partida
8-54 Seleção da Reversão
8-55 Seleção do Setup
8-56 Seleção da Referência
Pré-definida
8-8* Diagnósticos da Porta do FC
8-80 Contagem de Mensagens
do Bus
8-81 Contagem de Erros do Bus
8-82 Mensagens do Escravo Rcvd
8-83 Contagem de Erros do Escravo
8-9* Bus Jog/Feedback
8-94 Feedb. do Bus 1
13-** Smart Logic
13-0* Definições do SLC
13-00 Modo do Controlador SL
13-01 Iniciar Evento
13-02 Parar Evento
13-03 Reinicializar o SLC
13-1* Comparadores
13-10 Operando do Comparador
13-11 Operador do Comparador
13-12 Valor do Comparador
13-2* Temporizadores
13-20 Temporizador do SL
Controller
13-4* Regras Lógicas
13-40 Regra Lógica Booleana 1
13-41 Operador de Regra Lógica 1
13-42 Regra Lógica Booleana 2
13-43 Operador de Regra Lógica 2
13-44 Regra Lógica Booleana 3
13-5* Estados
13-51 Evento do SL Controller
13-52 Ação do Controlador do SL
14-** Funções Especiais
14-0* Chaveamento do Inversor
14-01 Frequência de Chaveamento
14-03 Sobre modulação
14-1* Monitoramento da Rede
Elétrica
14-12 Função no Desbalanceamento
da Rede
14-2* Reset do Desarme
14-20 Modo Reset
14-21 Tempo para Nova Partida
Automática
14-22 Modo Operação
14-26 Ação se Defeito Inversor
14-28 Programações de Produção
14-29 Código de Service
14-4* Otimização de Energia
14-41 Magnetização Mínima
do AEO
14-9* Configurações de Defeito
14-90 Nível de Falha
15-** Informação do Drive
15-0* Dados Operacionais
15-00 Horas de funcionamento
15-01 Horas de Funcionamento
15-02 Medidor de kWh
15-03 Energizações
15-04 Superaquecimentos
15-05 Sobretensões
15-06 Reinicializar o Medidor
de kWh
15-07 Reinicializar Contador
de Horas
de Funcionamento
15-3* Registro de falhas
15-30 Registro de falhas: Cód Falha
15-4* Identificação do drive
15-40 Tipo do FC
15-41 Seção de Potência
15- 42 Tens ão
15-43 Versão do Software
15-46 Conversor de Frequência
Código de pedido
15-48 Nº do Id do LCP
15-49 ID do Software Cartão de
Controle 15-50 ID do Sof tware
Cartão de Potência 15-51 Conversor
de Frequência
Número de Série
15-9* Informações do Parâmetro
15-92 Lista de Parâmetros
15-97 Tipo de Aplicação
15-98 String de Identificação
do Drive
16-** Leitura de Dados
16-0* Status geral
16-00 Control Word
16-01 Referência [Unidade]
16-02 Referência %
16-03 Status Word
16-05 Valor Real Principal [%]
16-09 Leitura Personalizada
16-1* Status do motor
16-10 Potência [kW]
16-11 Potência [hp]
16-12 Tensão do Motor
16-13 Frequência
16-14 Corrente do Motor
16-15 Frequência [%]
16-18 Térmico Calculado do Motor
16-3* Status do VLT
16-30 Tensão do Barramento CC
16-34 Temp. do Dissipador de Calor.
16-35 Térmico do Inversor
16-36 Inv. Nom. Corrente
16-37 Inv. Máx. Corrente
16-38 Estado do SLC
16-5* Ref. e Feedb.
16-50 Referência Externa
16-51 Referência de Pulso
16-52 Feedback
16-6* Entradas e Saídas
16-60 Entrada Digital 18, 19, 27, 33
16-61 Entrada Digital 29
16-62 Entrada Analógica 53 (V)
16-63 Entrada Analógica 53 (mA)
16-64 Entrada Analógica 60
16-65 Saída Analógica 42 [mA]
16-68 Entrada de Pulso 33
16-71 Saída do Relé [bin]
16-72 Contador A
16-73 Contador B
16-8* Fieldbus / Porta do FC
16-86 REF 1 da Porta Serial
16-9* Leitura dos Diagnós
16-90 Alarm Word
16-92 Warning Word
16-94 Ext. Status Word
18-** Dados Estendidos do Motor
18-8* Resistores do Motor
18-80 Resistência do Estator
(Rs em altaresolução)
18-81 Reatância Parasita do Estator
(X1 em alta resolução)
Consulte o Guia de Programação do drive para obter mais detalhes sobre as descrições dos parâmetros.
6 Resolução de problemas
Alarme
Bloqueio
por
Erro Causa do problema
desarme
O sinal no terminal 53 ou 54 é inf erior a 50% do valor
definido em:
• Parâmetro 6 -10 Terminal 53 Tensão Baixa.
• Parâmetro 6 -12 Terminal 53 Corrente Baixa.
• Parâmetro 6 -22 Ter minal 54 Corrente Baixa .
Fase ausente no l ado da alimentação o u
desbalanceamento de tensão muito alta. Verifique a tensão
de alimentação.
Tensão do barramento CC cai abaixo do limite advertê ncia
de tensão b aixa.
O motor est á muito quente devido a mais de 100%
da carga po r um longo tempo.
Torque excede o valor ajustado em qualquer parâmetro
4-16 Modo de Motor Lim ite de Torque ou parâmetro 4-17
Modo do Gera dor Limite de Torque.
O resistor d e frenagem está em cu rto-circuito, por isso
afunção de frenagem está desconectada.
O transistor do freio está em cur to-circuito, por isso
afunção de frenagem está desconectada.
Número Descrição
2 Erro de live zero X X – –
Perda de fas e da rede
4
7 Sobretensão CC
8 Subtensã o CC
9 Sobrecarga do inversor X X – – Mais de 100% de carga p or muito tempo.
10
11
12 Limite de torque X – – –
13 Sobrecorrente X X X – O limite de corrente de pico do inversor foi excedido.
14 Defeito do terra X X X – Descarga das fases de saída para ter ra.
16 Curto-circuito – X X – Cur to-circuito no m otor ou nos terminais d o motor.
17
25
27
(1)
elétrica
(1)
(1)
Superaquecimento do ETR
do motor
Superaquecimento do
termistor do motor
Timeou t da palavra
decontrole
Curto- circuito no
resistor de frenagem
Circuito de frenagem
curto-circuitado
Adver-
tência
X X X –
X X – – Tensão do barramento CC exced e o limite.
X X – –
X X – –
X X – – O termistor ou a conexão do termistor foi desconectada.
X X – – Sem comunicação com o conversor.
– X X –
– X X –
Alarme
Bloqueio
por
Erro Causa do problema
desarme
Configu ração incorreta da tensão do mo tor e/ou
dacorrente d o motor.
A corrente do motor está baixa demais. Verifique
asconfig urações.
A corrente do m otor real não excedeu a corrente
delibera ção do freio dentro da janela do tempo
de retardo de partida.
Todas as progra mações dos parâmet ros serão inicializ adas
com a confi guração padrão.
Ocorreu um erro ao copiar do drive para o LCP ou do LCP
para o drive.
Ocorre ao co piar do LCP, se o LCP conter dados errados ouse nenhum dado foi carregado n o LCP.
Ocorre ao co piar do LCP se os dados fore m movidos entre
drives com grandes diferenças nas versões de software.
Ocorre ao te ntar gravar para um parâmetro somente
deleitur a.
Conexões RS485 e LCP estão tentando atualiz ar
osparâmetros simultaneamente.
Os parâme tros só podem ser alterados quando o motor
está parado.
Ocorre qua ndo é usada uma senha incorreta a o modificar
um parâmetro protegido por senha.
Número Descrição
28 Verif icação do freio – X – – Resistor de frenagem não conectado/funcionando.
Superaquecimento da placa
29
de potência
30 Fase U do motor ausente – X X – Perda de fase U do motor. Verif ique a fase.
31 Fase V do motor ause nte – X X – Perda de fas e V do motor. Verifique a fas e.
32 Fase W do motor ausente – X X – Perda de fase W do motor. Verifique a fase.
38 Defeito interno – X X – Entr e em contato com o represe ntante Danfoss local.
47 Falha na tensão de controle – X X – A alimentação de 24 V CC est á sobrecarregada.
AMA verificação U
51
52 AMA I
59 Limite de Corrente X – – – O conversor está sobrecarregado.
63 Freio mecânico baixo – X – –
80
84
85 Tecla desabilitada – – – X Consulte o grupo do parâ metro 0-4* LCP.
86 Falha da cópia – – – X
87 Dados inválidos do LCP – – – X
88 Dados incompatíveis do LCP – – – X
89
90
91
92
nw run
Err.
(1) Essas falhas são causadas por distorçõ es na rede elétrica. Instale um filtro d e linha Danfoss para cor rigir esse problema.
nom
Drive inicializado no valor
padrão
A conexão entre o drive e o LCP
foi perdida
Parâmetros somente
deleitur a:
Banco de dados dos
parâmetros ocupado
O valor do parâmetro não
éválido neste modo
O valor excede os limites mín./
máx. do parâmetro
Não durante o
funcionamento
Uma senha in correta foi
fornecida
nom
baixa – X – –
Adver-
tência
X X X – A temperatura de corte do dissipador de calor foi atingida.
e I
– X – –
nom
– X – –
– – – X Sem comu nicação entre o LCP e o drive .
– – – X
– – – X
– – – X Ocorre ao tentar gravar um valor i legal no parâmetro.
– – – X Ocorre ao tentar de finir um valor for a da faixa válida.
– – – X
– – – X
7 Especificações
Tabela 2: Alim entação de rede e létrica 1x200–24 0 V CA
Sobrec arga normal de 150% dur ante 1 minuto
Drive PK18 PK37 PK75 P1K 5 P2K2
Potência no eixo típica [kW (hp)] 0 ,18 (0,25) 0,37 (0,5) 0,75 (1) 1,5 (2) 2,2 (3)
Características nominais de proteção
do gabinete metálico IP20
Corrente de saída
Contínua (3x 200–240 V) [A] 1,2 2,2 4,2 6,8 9,6
Intermitente (3x200-240 V) [A] 1, 8 3,3 6,3 10,2 14 ,4
Máximo t amanho do cabo
(Rede elétrica, motor) [mm2/AWG]
Corrente de entrada máxima
Contínua (1x200 –240 V CA) [A] 3, 3 6,1 11, 6 18,7 26,4
Intermitente (1x200-240 V) [A] 4,5 8,3 15,6 26,4 37
Ambiente
Perda de ene rgia estimada [W ],
melhorcaso/típica
Tabela 3: Alime ntação de rede el étrica 3x200 –240 V CA
Sobrec arga normal de 150% dur ante 1 minuto
Drive PK25 PK37 PK 75 P1K 5 P2K2 P3K7
Potência no eixo típica [kW (hp)] 0,25 (0,33) 0,37 (0,5) 0 ,75 ( 1) 1, 5 (2) 2,2 (3) 3,7 (5)
Características nominais de proteção
do gabinete metálico IP20
Corrente de saída
Contínua (3x 200–240 V) [A] 1,5 2,2 4,2 6,8 9,6 15, 2
Intermitente (3x200-240 V) [A] 2,3 3,3 6,3 10,2 14, 4 22,8
Máximo t amanho do cabo
(Rede elétrica, motor) [mm2/AWG]
Corrente de entrada máxima
Contínua (3x 200–240 V) [A] 2,4 3,5 6,7 10,9 15, 4 24,3
Intermitente (3x200-240 V) [A] 3,2 4,6 8,3 14, 4 23,4 35,3
Ambiente
Perda de ene rgia estimada [W ],
melhorcaso/típica
(1)
(1)
M1 M1 M1 M2 M3
4/10
12,5/15,5 20/25 36,5/4 4 61/67 81/ 85,1
M1 M1 M1 M2 M3 M3
4/10
14/20 19/2 4 31,5/39,5 51/5 7 7 2/ 77,1 115/12 2, 8
Tabela 4: Alim entação de rede e létrica 3x380 –480 V CA
Sobrec arga normal de 150% dur ante 1 minuto
Drive PK37 PK75 P1K 5 P2K 2 P3K0 P4K0
Potência no eixo típica [kW (hp)] 0,37 (0,5) 0,7 5 (1) 1, 5 (2) 2,2 (3) 3 ,0 (4) 4, 0 (5,5)
Características nominais de proteção
do gabinete metálico IP20
Corrente de saída
Contínua (3x380– 440 V) [A] 1,2 2,2 3,7 5,3 7,2 9,0
Intermitente (3x380- 440 V) [A] 1,8 3, 3 5,6 8,0 10, 8 13, 7
Contínua (3x4 40–480 V ) [A] 1,1 2 ,1 3,4 4,8 6,3 8,2
Intermitente (3x440-480 V) [A] 1,7 3,2 5,1 7,2 9,5 12,3
Máximo t amanho do cabo
(Rede elétrica, motor) [mm2/AWG]
Corrente de entrada máxima
Contínua (3x380– 440 V) [A] 1,9 3,5 5,9 8,5 11, 5 14 ,4
Intermitente (3x380- 440 V) [A] 2, 6 4,7 8,7 12, 6 16 ,8 20,2
Contínua (3x4 40–480 V ) [A] 1,7 3,0 5 ,1 7, 3 9,9 12, 4
Intermitente (3x440-480 V) [A] 2,3 4,0 7,5 10 ,8 14,4 17,5
Ambiente
Perda de ene rgia estimada [W ],
melhorcaso/típica
Sobrec arga normal de 150% dur ante 1 minuto
Drive P5K5 P7K5 P11 K P 15K P 18K P22K
Potência no eixo típica [kW (hp)] 5,5 (7,5) 7, 5 (10 ) 11 (15) 15 ( 20) 18, 5 (25) 22 (30)
Características nominais de proteção
do gabinete metálico IP20
Corrente de saída
Contínua (3x380– 440 V) [A] 12 15,5 23 31 37 43
Intermitente (3x380- 440 V) [A] 18 23, 5 34,5 46,5 55, 5 64,5
Contínua (3x4 40–480 V ) [A] 11 14 21 27 34 40
Intermitente (3x440-480 V) [A] 16,5 21, 3 31, 5 40,5 51 60
Máximo t amanho do cabo
(Rede elétrica, motor) [mm2/AWG]
Corrente de entrada máxima
Contínua (3x380– 440 V) [A] 19,2 24,8 33 42 34,7 41, 2
Intermitente (3x380- 440 V) [A] 27, 4 36,3 47, 5 60 49 57, 6
Contínua (3x4 40–480 V ) [A] 16 ,6 21,4 29 36 31, 5 37, 5
Intermitente (3x440-480 V) [A] 23,6 30 ,1 41 52 44 53
Ambiente
Perda de ene rgia estimada [W ],
melhorcaso/típica
(1) Aplica-se para dimensionamento do arrefecimento do conversor. Se a frequência de chaveamento for maior do que a configuração
padrão, as perdas de energia podem aumentar. Os consumos de potência típicos do LCP e o do cartão de controle estão incluídos. Para saber
sobre os dados de perda de energia de acordo com a EN 50598-2, consulte o site Danfoss MyDrive®ecoSmart™.
(1)
(1)
M1 M1 M2 M2 M3 M3
4/10
18,5/25.,5 28 ,5/43,5 41,5/56,5 57,5/81,5 75/101,6 98,5/133,5
M3 M3 M4 M4 M5 M5
4/10 16/6
131/166 ,8 175/ 217,5 29 0/342 387/ 454 395/428 4 67/520
8 Condições especiais
8.1 Derating para a temperatura ambiente
A temperatura ambiente medida durante 24 horas deve ser pelo menos 5 °C (9 °F) menor do que a temperatura
ambiente máxima. Se o drive estiver funcionando a uma temperatura ambiente elevada, diminua a corrente de
saída contínua.
O drive foi projetado para operar a uma temperatura ambiente de no máximo 50 °C (122 °F), com 1 tamanho
demotor menor do que o nominal. Operação contínua, com carga máxima, em temperatura ambiente de 50 °C
(122 °F), reduz a vida útil do drive.
8.2 Derating para pressão do ar baixa
A capacidade de arrefecimento do ar diminui em condições de baixa pressão do ar. Abaixo da altitude de
1.000m (3.280 pés), não é necessária derating, mas acima de 1.000 m (3.280 pés), diminua a temperatura
ambiente ou a corrente máxima de saída. Para altitudes acima de 2.000 m (6.560 pés), entre em contato
comaDanfoss referente ao PELV.
Diminua a saída em 1% a cada 100 m (328 pés) de altitude acima de 1.000 m (3.280 pés) ou diminua
atemperatura ambiente máxima em 1 °C (1,8 °F) a cada 200 m (656 pés).
8.3 Derating devido a funcionamento em baixas velocidades
Quando um motor estiver conectado a um drive, verifique se o resfriamento do motor está adequado.
Poderá ocorrer um problema em baixas velocidades, em aplicações de torque constante. Funcionando
continuamente a baixas velocidades – menos da metade da velocidade nominal do motor, pode exigir
umresfriamento de ar adicional.
Alternativamente, selecione um motor maior (1 tamanho acima).
9 Documentação técnica
Leia o código QR para acessar literaturas mais técnicas para o FC 51. Ou, depois de ler o código
QR, clique em Global English (Inglês Global) no site para selecionar o site da sua região,
pesquise FC 51 para encontrar os documentos com seus próprios idiomas.
Danfoss A /S
Ulsnaes 1
DK-6300 Graasten
vlt-drives.danfoss.com
Danfoss A/S © 2021.09
A Danfoss não se responsabiliza por possíveis erros em catálogos, folhetos e outros materiais impressos.
A Danfoss reserva-se o direito de alterar seus produtos sem aviso prévio. Isto também se aplica
aprodutos já encomendados desde que tais alterações possam ser executadas sem que seja necessário
mudar, subsequentemente, especificações já acordadas. Todas as marcas registradas, neste material,
sãopropriedades das respectivas empresas.
Danfoss e a logomarca da Danfoss são marcas registradas da Danfoss A/S. Todos os direitos reservados.
AQ383124996793pt-000101 / 130R1226 | 2
 Loading...
Loading...