

Page 1

ENGINEERING TOMORROW
Quick Guide • Kurzanleitung • Guide rapide •
Guíarápida • Guia Rápido • Краткое руководство
VLT® Micro Drive FC 51
vlt-drives.danfoss.com
Page 2

Page 3
Page 4

Page 5
Contents
Contents
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
1 Quick Guide
1.1 Introduction
1.1.1 Purpose of the Manual 6
1.1.2 Additional Resources 6
1.1.3 IT Mains 6
1.1.4 Avoid Unintended Start 6
1.2 Safety
1.3 Installation
1.3.1 Side-by-side Installation 8
1.3.2 Mechanical Dimensions 9
1.3.3 Connecting to Mains and Motor 12
1.3.4 Control Terminals 12
1.3.5 Power Circuit - Overview 14
1.3.6 Load Sharing/Brake 15
1.4 Programming
1.4.1 Programming on Automatic Motor Adaptation (AMA) 15
1.4.2 Programming on Automatic Motor Tuning (AMT) 15
6
6
7
8
15
1.5 Parameter Overview
1.6 Troubleshooting
1.7 Specications
1.8 General Technical Data
1.9 Special Conditions
1.9.1 Derating for Ambient Temperature 30
1.9.2 Derating for Low Air Pressure 30
1.9.3 Derating for Running at Low Speeds 30
1.10 Options and Spare Parts
2 Kurzanleitung
2.1 Einführung
2.1.1 Zielsetzung des Handbuchs 32
2.1.2 Zusätzliche Materialien 32
2.1.3 IT-Netz 32
2.1.4 Unerwarteten Anlauf vermeiden 32
2.2 Sicherheit
2.3 Installation
17
21
23
27
30
31
32
32
33
34
2.3.1 Seite-an-Seite-Installation 34
2.3.2 Mechanische Abmessungen 35
2.3.3 Netz- und Motoranschluss 37
2.3.4 Steuerklemmen 38
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 1
Page 6
Contents
VLT® Micro Drive FC 51
2.3.5 Elektrische Installation - Übersicht 40
2.3.6 Zwischenkreiskopplung/Bremse 41
2.4 Programmieren
2.4.1 Programmieren einer automatischen Motoranpassung (AMA) 41
2.4.2 Programmieren des Automatic Motor Tuning (AMT) 42
2.5 Parameterübersicht
2.6 Fehlersuche und -behebung
2.7 Technische Daten
2.8 Allgemeine technische Daten
2.9 Besondere Betriebsbedingungen
2.9.1 Leistungsreduzierung wegen erhöhter Umgebungstemperatur 56
2.9.2 Leistungsreduzierung wegen niedrigem Luftdruck 56
2.9.3 Leistungsreduzierung beim Betrieb mit niedriger Drehzahl 56
2.10 Optionen und Ersatzteile
3 Guide rapide
3.1 Introduction
3.1.1 Objet de ce manuel 58
3.1.2 Ressources supplémentaires 58
3.1.3 Secteur IT 58
41
43
47
49
53
56
57
58
58
3.1.4 Éviter les démarrages imprévus 58
3.2 Sécurité
3.3 Installation
3.3.1 Montage côte à côte 60
3.3.2 Encombrement 61
3.3.3 Raccordement au secteur et au moteur 64
3.3.4 Bornes de commande 64
3.3.5 Circuit d'alimentation - Vue d'ensemble 66
3.3.6 Répartition de la charge/frein 67
3.4 Programmation
3.4.1 Programmation de l'adaptation automatique au moteur (AMA) 67
3.4.2 Programmation sur Réglage auto. du moteur (AMT) 68
3.5 Vue d'ensemble des paramètres
3.6 Dépannage
3.7 Spécications
3.8 Caractéristiques techniques générales
3.9 Exigences particulières
59
60
67
69
73
75
79
82
3.9.1 Déclassement pour température ambiante 82
3.9.2 Déclassement pour basse pression atmosphérique 82
3.9.3 Déclassement pour fonctionnement à faible vitesse 82
3.10 Options et pièces détachées
2 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
83
Page 7
Contents
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
4 Guía rápida
4.1 Introducción
4.1.1 Objetivo de este manual 84
4.1.2 Recursos adicionales 84
4.1.3 Alimentación aislada de tierra (IT) 84
4.1.4 Evite los arranques accidentales 84
4.2 Seguridad
4.3 Instalación
4.3.1 Montaje lado a lado 86
4.3.2 Dimensiones mecánicas 87
4.3.3 Conexión a la alimentación y al motor 90
4.3.4 Terminales de control 90
4.3.5 Circuito de potencia - Presentación 92
4.3.6 Carga compartida / freno 93
4.4 Programación
4.4.1 Programación de la adaptación automática del motor (AMA) 93
4.4.2 Programación del ajuste automático del motor (AMT) 94
84
84
85
86
93
4.5 Resumen de parámetros
4.6 Resolución del problema
4.7 Especicaciones
4.8 Especicaciones técnicas generales
4.9 Condiciones especiales
4.9.1 Reducción de potencia en función de la temperatura ambiente 111
4.9.2 Reducción de potencia debido a la baja presión atmosférica 111
4.9.3 Reducción de potencia en función del funcionamiento a bajas vueltas 111
4.10 Opciones y repuestos
5 Guia Rápido
5.1 Introdução
5.1.1 Objetivo do manual 113
5.1.2 Recursos adicionais 113
5.1.3 Rede Elétrica IT 113
5.1.4 Evite partida acidental 113
5.2 Segurança
5.3 Instalação
95
102
104
108
111
112
113
113
114
115
5.3.1 Instalação lado a lado 115
5.3.2 Dimensões mecânicas 116
5.3.3 Conexão na Rede Elétrica e Motor 119
5.3.4 Terminais de Controle 119
5.3.5 Circuito de Alimentação - Visão Geral 121
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 3
Page 8
Contents
VLT® Micro Drive FC 51
5.3.6 Load Sharing/Freio 122
5.4 Programação
5.4.1 Programação na Adaptação Automática do Motor (AMA) 122
5.4.2 Programação na adaptação automática do motor (AMT) 122
5.5 Visão Geral dos Parâmetros
5.6 Resolução de Problemas
5.7 Especicações
5.8 Dados Técnicos Gerais
5.9 Condições Especiais
5.9.1 Derating para temperatura ambiente 138
5.9.2 Derating para pressão do ar baixa 138
5.9.3 Derating devido a funcionamento em baixas velocidades 138
5.10 Opcionais e Peças de Reposição
6 Краткое руководство
6.1 Введение
6.1.1 Цель этого руководства 140
6.1.2 Дополнительные ресурсы 140
6.1.3 Сеть IT 140
122
124
129
131
135
138
139
140
140
6.1.4 Предотвращение непреднамеренного пуска 140
6.2 Техника безопасности
6.3 Монтаж
6.3.1 Монтаж рядом вплотную 142
6.3.2 Габаритные и присоединительные размеры 143
6.3.3 Подключение к сети и к двигателю 146
6.3.4 Клеммы управления 146
6.3.5 Краткое описание силовой цепи 148
6.3.6 Распределение нагрузки/тормоз 149
6.4 Программирование
6.4.1 Программирование с помощью автоматической адаптации двигателя (ААД) 149
6.4.2 Программирование с помощью автоматической настройки двигателя (AMT) 150
6.5 Обзор параметров
6.6 Устранение неисправностей
6.7 Технические характеристики
6.8 Общие технические данные
6.9 Особые условия
141
142
149
151
158
160
164
167
6.9.1 Снижение номинальных характеристик в зависимости от температуры
окружающей среды 167
6.9.2 Снижение номинальных параметров в случае низкого атмосферного
давления 167
6.9.3 Снижение номинальных параметров при работе на низких скоростях 167
4 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 9
Contents
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
6.10 Дополнительные устройства и запасные части
Index
168
169
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 5
Page 10
089
Quick Guide
VLT® Micro Drive FC 51
11
1 Quick Guide
1.1 Introduction
1.1.1 Purpose of the Manual
This quick guide provides information for safe installation
and commissioning of the VLT® Micro Drive FC 51
frequency converter.
The frequency converter complies with UL 508C thermal
memory retention requirements. For more information,
refer to the section Motor Thermal Protection in the
product-specic design guide.
1.1.3 IT Mains
NOTICE
The quick guide is intended for use by
To use the frequency converter safely and professionally,
read and follow the operating instructions. Pay particular
attention to the safety instructions and general warnings.
Always keep this quick guide with the frequency converter.
VLT® is a registered trademark.
1.1.2 Additional Resources
Additional resources are available to understand advanced
frequency converter functions and programming:
The VLT® Micro Drive FC 51 Programming Guide
•
provides greater detail on working with
parameters and many application examples.
The VLT® Micro Drive FC 51 Design Guide provides
•
detailed information about capabilities and
functionality to design motor control systems.
Instructions for operation with optional
•
equipment and replacement of components.
Supplementary publications and manuals are available at:
drives.danfoss.com/downloads/portal/#/
qualied personnel.
IT MAINS
Installation on isolated mains source, that is IT mains.
Maximum supply voltage allowed when connected to
mains: 440 V.
As an option, Danfoss oers recommended line lters for
improved harmonics performance. See Table 1.11.
1.1.4 Avoid Unintended Start
While the frequency converter is connected to mains, the
motor can be started/stopped using digital commands, bus
commands, references, or via the LCP (local control panel).
To avoid unintended start:
Disconnect the frequency converter from mains
•
for personal safety considerations.
Always press [O/Reset] before changing
•
parameters.
Equipment containing electrical components
must not be disposed of together with domestic
waste.
It must be separately collected with electrical
and electronic waste according to local and
currently valid legislation.
6 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 11
Quick Guide
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
1.2 Safety
WARNING
HIGH VOLTAGE
Frequency converters contain high voltage when
connected to AC mains input, DC supply, or load sharing.
Failure to perform installation, start-up, and maintenance
by qualied personnel can result in death or serious
injury.
Only qualied personnel must perform instal-
•
lation, start-up, and maintenance.
Before performing any service or repair work,
•
use an appropriate voltage measuring device to
make sure that there is no remaining voltage on
the drive.
WARNING
UNINTENDED START
When the frequency converter is connected to AC mains,
the motor may start at any time, causing risk of death,
serious injury, equipment, or property damage. The
motor can start by means of an external switch, a
eldbus command, an input reference signal from the
LCP or LOP, or after a cleared fault condition.
Disconnect the frequency converter from mains
•
whenever personal safety considerations make
it necessary to avoid unintended motor start.
Press [O/Reset] on the LCP before
•
programming parameters.
The frequency converter, motor, and any driven
•
equipment must be in operational readiness
when the frequency converter is connected to
AC mains.
NOTICE
The [O/Reset] key is not a safety switch. It does not
disconnect the frequency converter from mains.
WARNING
DISCHARGE TIME
The frequency converter contains DC-link capacitors,
which can remain charged even when the frequency
converter is not powered. High voltage can be present
even when the warning LED indicator lights are o.
Failure to wait the specied time after power has been
removed before performing service or repair work can
result in death or serious injury.
Stop the motor.
•
Disconnect AC mains and remote DC-link power
•
supplies, including battery back-ups, UPS, and
DC-link connections to other frequency
converters.
Disconnect or lock PM motor.
•
Wait for the capacitors to discharge fully. The
•
minimum duration of waiting time is specied
in Table 1.1.
Before performing any service or repair work,
•
use an appropriate voltage measuring device to
make sure that the capacitors are fully
discharged.
Size Minimum waiting time (minutes)
M1, M2, and M3 4
M4 and M5 15
Table 1.1 Discharge Time
Leakage current (>3.5 mA)
Follow national and local codes regarding protective
earthing of equipment with a leakage current >3,5 mA.
Frequency converter technology implies high frequency
switching at high power. This generates a leakage current
in the ground connection. A fault current in the frequency
converter at the output power terminals might contain a
DC component, which can charge the lter capacitors and
cause a transient ground current. The ground leakage
current depends on various system congurations
including RFI ltering, screened motor cables, and
frequency converter power.
EN/IEC61800-5-1 (Power Drive System Product Standard)
requires special care if the leakage current exceeds 3.5 mA.
Reinforce Grounding in 1 of the following ways:
1 1
Grounding wire of at least 10 mm2 (8 AWG).
•
2 separate ground wires both complying with the
•
dimensioning rules.
See EN 60364-5-54 § 543.7 for further information.
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 7
Page 12

Quick Guide
VLT® Micro Drive FC 51
11
Using RCDs
Where residual current devices (RCDs), also known as earth
leakage circuit breakers (ELCBs), are used, comply with the
following:
Use RCDs of type B that can detect AC and DC
•
currents.
Use RCDs with an inrush delay to prevent faults
•
due to transient ground currents.
Dimension RCDs according to the system congu-
•
ration and environmental considerations.
Motor thermal protection
Motor overload protection is possible by setting parameter
1-90 Motor Thermal Protection to [4] ETR trip. For the North
American market: Implemented ETR function provides class
20 motor overload protection, in accordance with NEC.
Installation at high altitudes
For altitudes above 2000 m (6562 ft), contact Danfoss
regarding PELV.
1.3.1 Side-by-side Installation
The frequency converter can be mounted side by side for
IP20 rating units and requires 100 mm (3.9 in) clearance
above and below for cooling. Refer to chapter 1.7 Speci-
cations for details on environmental ratings of the
frequency converter.
1.2.1 Safety Instructions
Make sure that the frequency converter is
•
properly grounded.
Do not remove mains connections, motor
•
connections, or other power connections while
the frequency converter is connected to power.
Protect users against supply voltage.
•
Protect the motor against overloading according
•
to national and local regulations.
The ground leakage current exceeds 3.5 mA.
•
Ground the frequency converter properly.
The [O/Reset] key is not a safety switch. It does
•
not disconnect the frequency converter from
mains.
Installation
1.3
1.
Disconnect the VLT® Micro Drive FC 51 from
mains (and external DC supply, if present).
2. Wait for 4 minutes (M1, M2, and M3) and 15
minutes (M4 and M5) for discharge of the DC-link.
See Table 1.1.
3. Disconnect the DC bus terminals and the brake
terminals (if present).
4. Remove the motor cable.
8 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 13
B
a A
a A
a A
a A
a A
C
C
C C C
b
B
b
B
b
B
b
B
b
Ø 7mm
M5
M4
M3
M2
M1
Ø 7mm Ø 5.5mm Ø 4.5mm
130BB321.11
Ø 4.5mm
Quick Guide
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
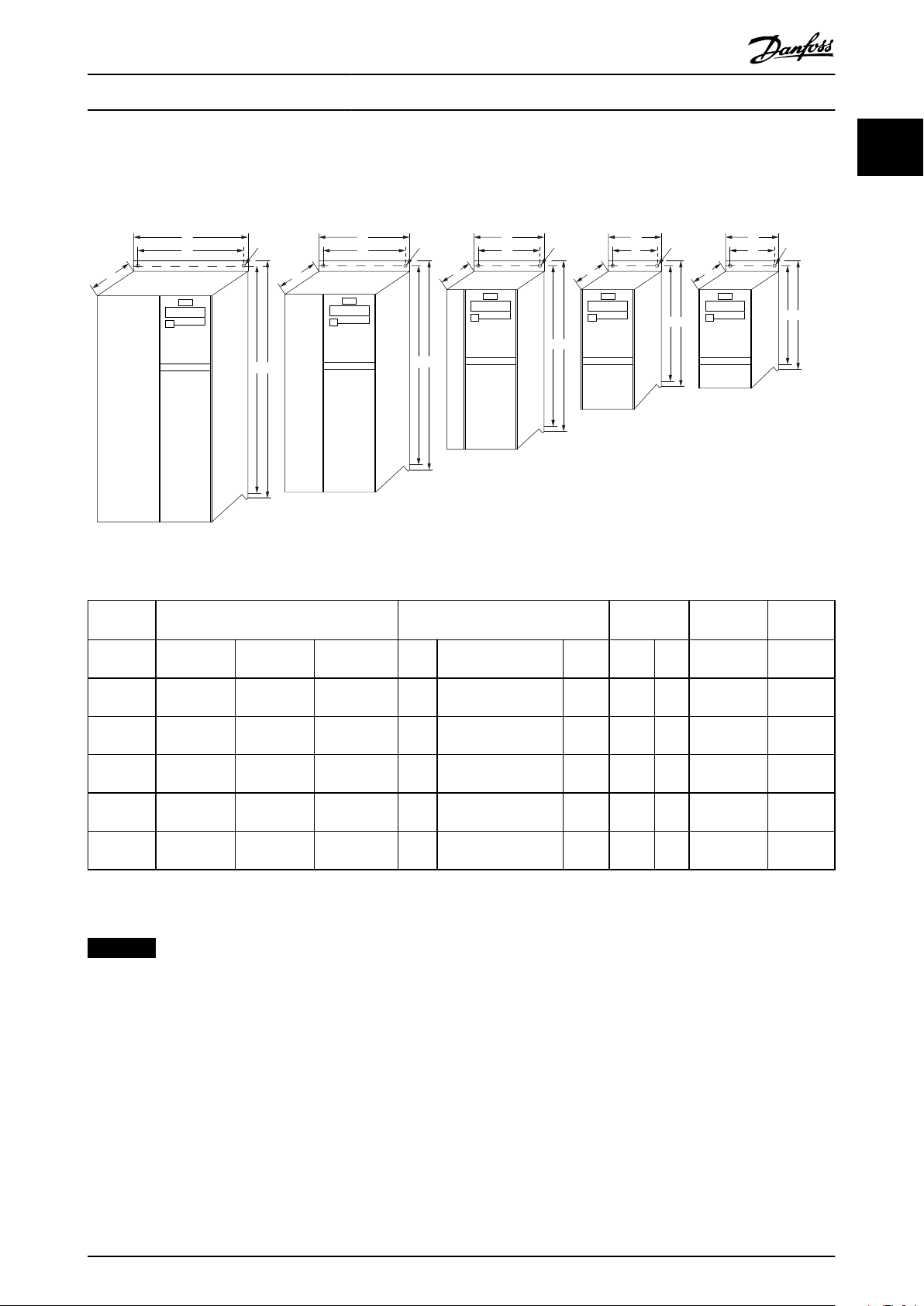
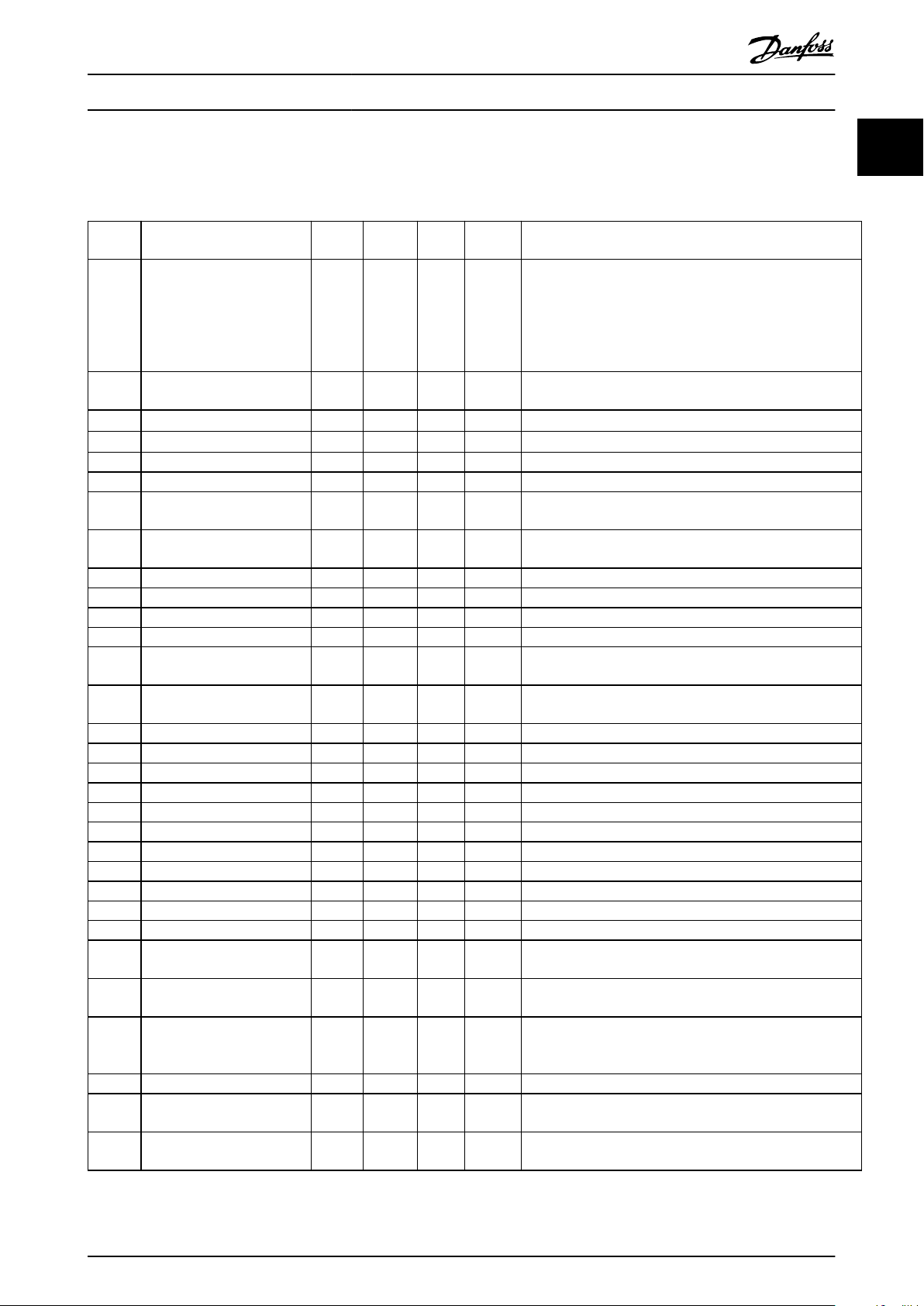
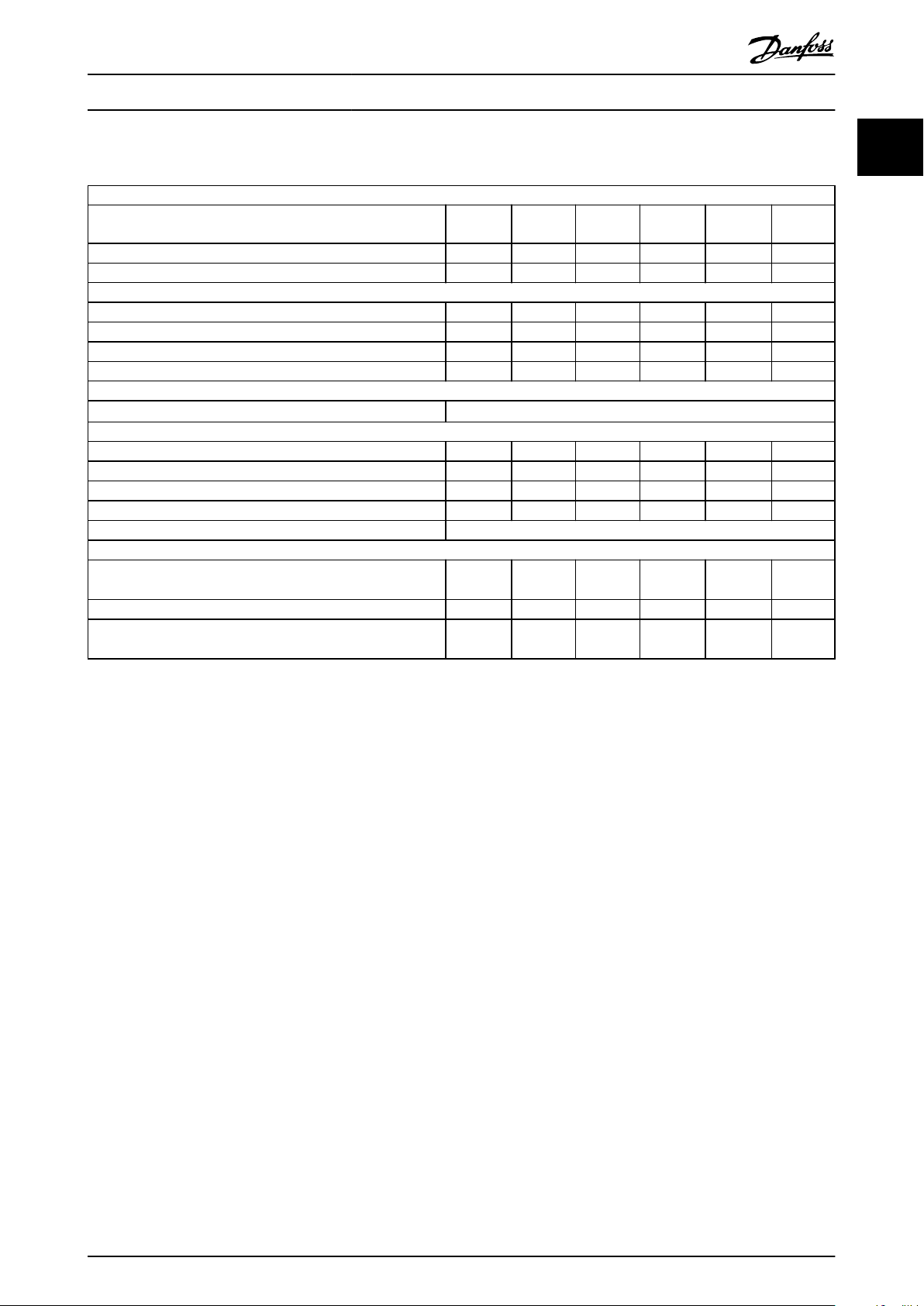
1.3.2 Mechanical Dimensions
A template for drilling is found on the ap of the packaging.
Illustration 1.1 Mechanical Dimensions
1 1
Power [kW (hp)] Height [mm (in)]
Enclosure 1x200–240 V 3x200–240 V 3x380–480 V A
M1
0.18–0.75
(0.24–1.0)
M2 1.5 (2.0) 1.5 (2.0)
M3 2.2 (3.0)
M4 – –
M5 – –
0.25–0.75
(0.34–1.0)
2.2–3.7
(3.0–5.0)
0.37–0.75
(0.5–1.0)
1.5–2.2
(2.0–3.0)
3.0–7.5
(4.0–10)
11.0–15.0
(15–20)
18.5–22.0
(25–30)
150
(5.9)
176
(6.9)
239
(9.4)
292
(11.5)
335
(13.2)
A (including
decoupling plate)
205 (8.1)
230 (9.1)
294 (11.6)
347.5 (13.7)
387.5 (15.3)
Width
[mm (in)]
a B b C [kg]
140.4
(5.5)70(2.8)55(2.2)
166.4
(6.6)75(3.0)59(2.3)
226
(8.9)90(3.5)69(2.7)
272.4
(10.7)
(12.4)
315
125
(4.9)97(3.8)
165
140
(6.5)
(5.5)
1)
Depth
[mm (in)]
Maximum
weight
148 (5.8) 1.1
168 (6.6) 1.6
194 (7.6) 3.0
241 (9.5) 6.0
248 (9.8) 9.5
Table 1.2 Mechanical Dimensions
1) For LCP with potentiometer, add 7.6 mm (0.3 in).
NOTICE
All cabling must comply with national and local regulations on cable cross-sections and ambient temperature. Copper
conductors required, 60–75 °C (140–167 °F) recommended.
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 9
Page 14
Quick Guide
VLT® Micro Drive FC 51
11
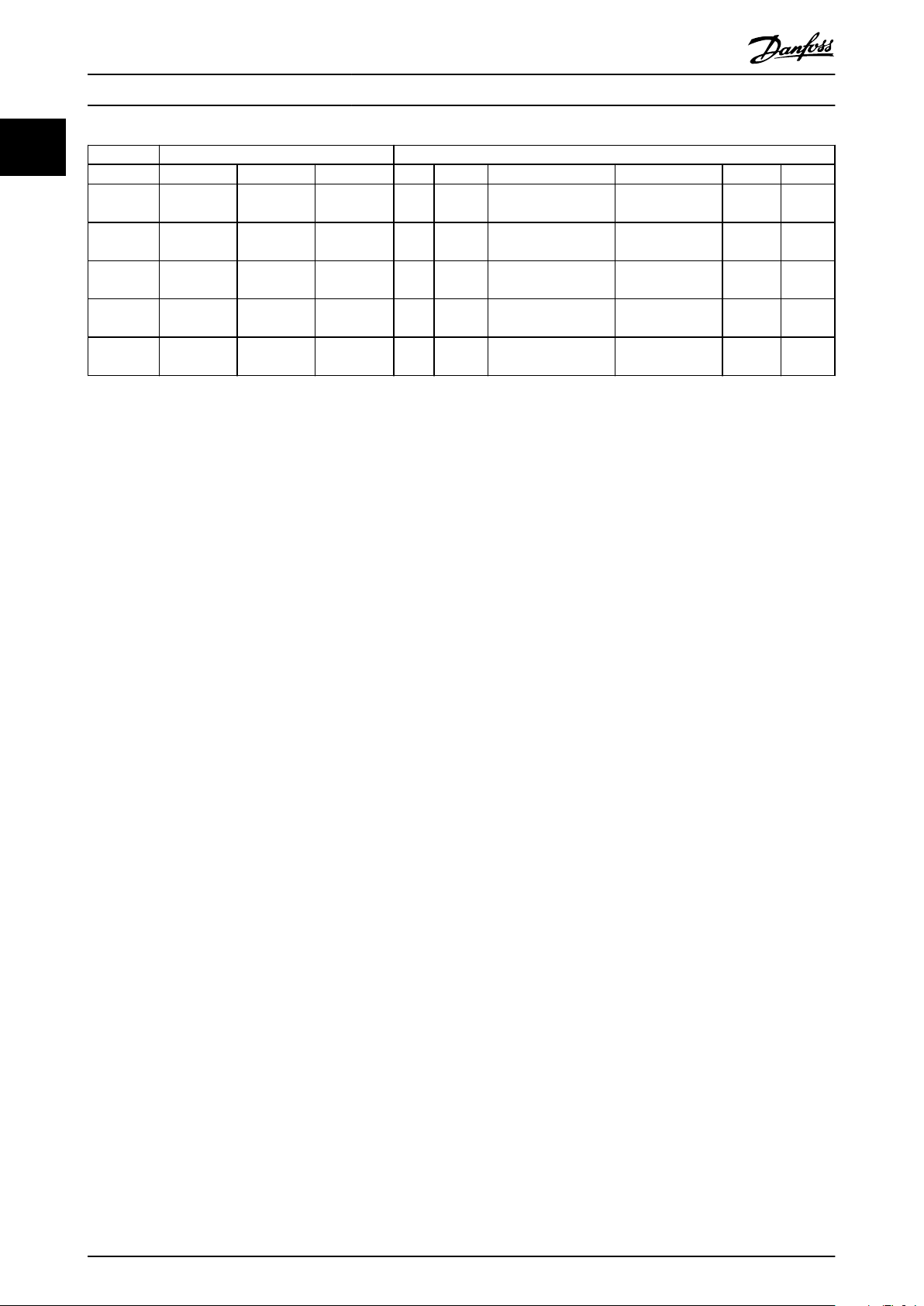
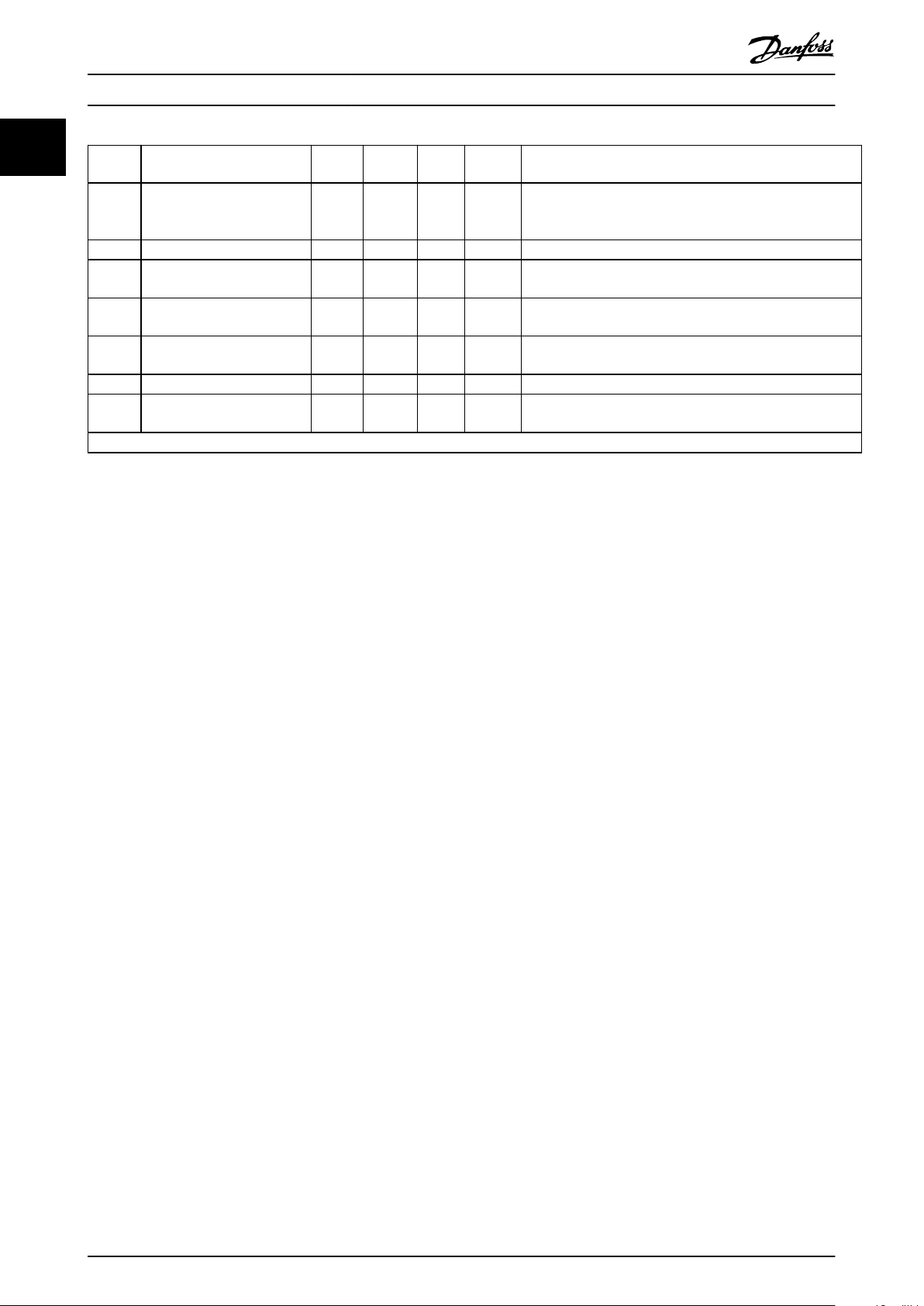
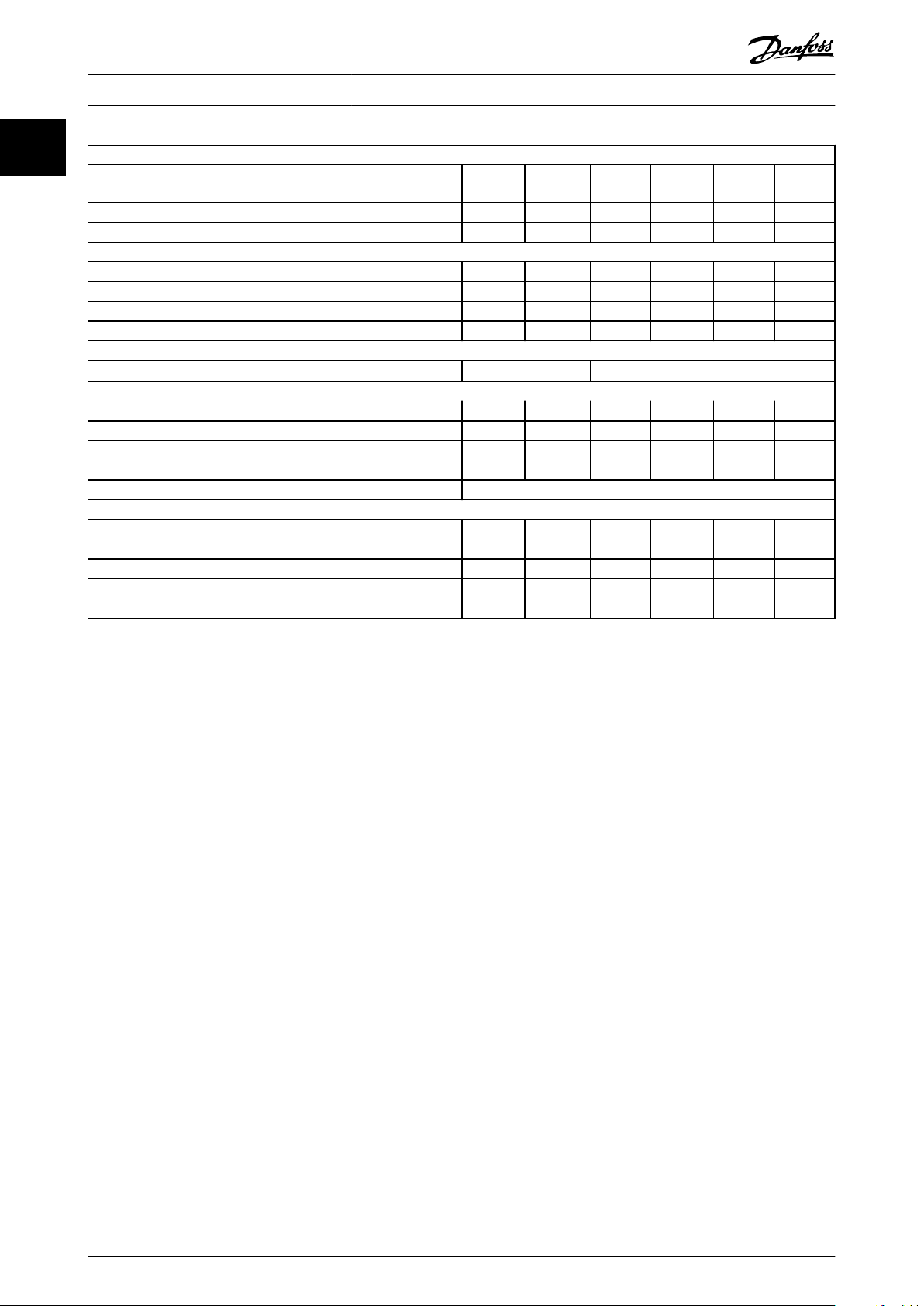
Power [kW (hp)] Torque [Nm (in-lb)]
Enclosure 1x200–240 V 3x200–240 V 3x380–480 V Line Motor DC connection/brake Control terminals Ground Relay
M1
M2 1.5 (2.0) 1.5 (2.0)
M3 2.2 (3.0)
M4 – –
M5 – –
Table 1.3 Tightening of Terminals
1) Spade connectors (6.3 mm (0.25 in) Faston plugs).
0.18–0.75
(0.24–1.0)
0.25–0.75
(0.34–1.0)
2.2–3.7
(3.0–5.0)
0.37–0.75
(0.5–1.0)
1.5–2.2
(2.0–3.0)
3.0–7.5
(4.0–10)
11.0–15.0
(15–20)
18.5–22.0
(25–30)
0.8
(7.1)
0.8
(7.1)
0.8
(7.1)
1.3
(11.5)
1.3
(11.5)
0.7
(6.2)
0.7
(6.2)
0.7
(6.2)
1.3
(11.5)
1.3
(11.5)
1)
Spade
1)
Spade
1)
Spade
1.3 (11.5) 0.15 (1.3) 3 (26.6)
1.3 (11.5) 0.15 (1.3) 3 (26.6)
0.15 (1.3) 3 (26.6)
0.15 (1.3) 3 (26.6)
0.15 (1.3) 3 (26.6)
0.5
(4.4)
0.5
(4.4)
0.5
(4.4)
0.5
(4.4)
0.5
(4.4)
10 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 15
Quick Guide
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
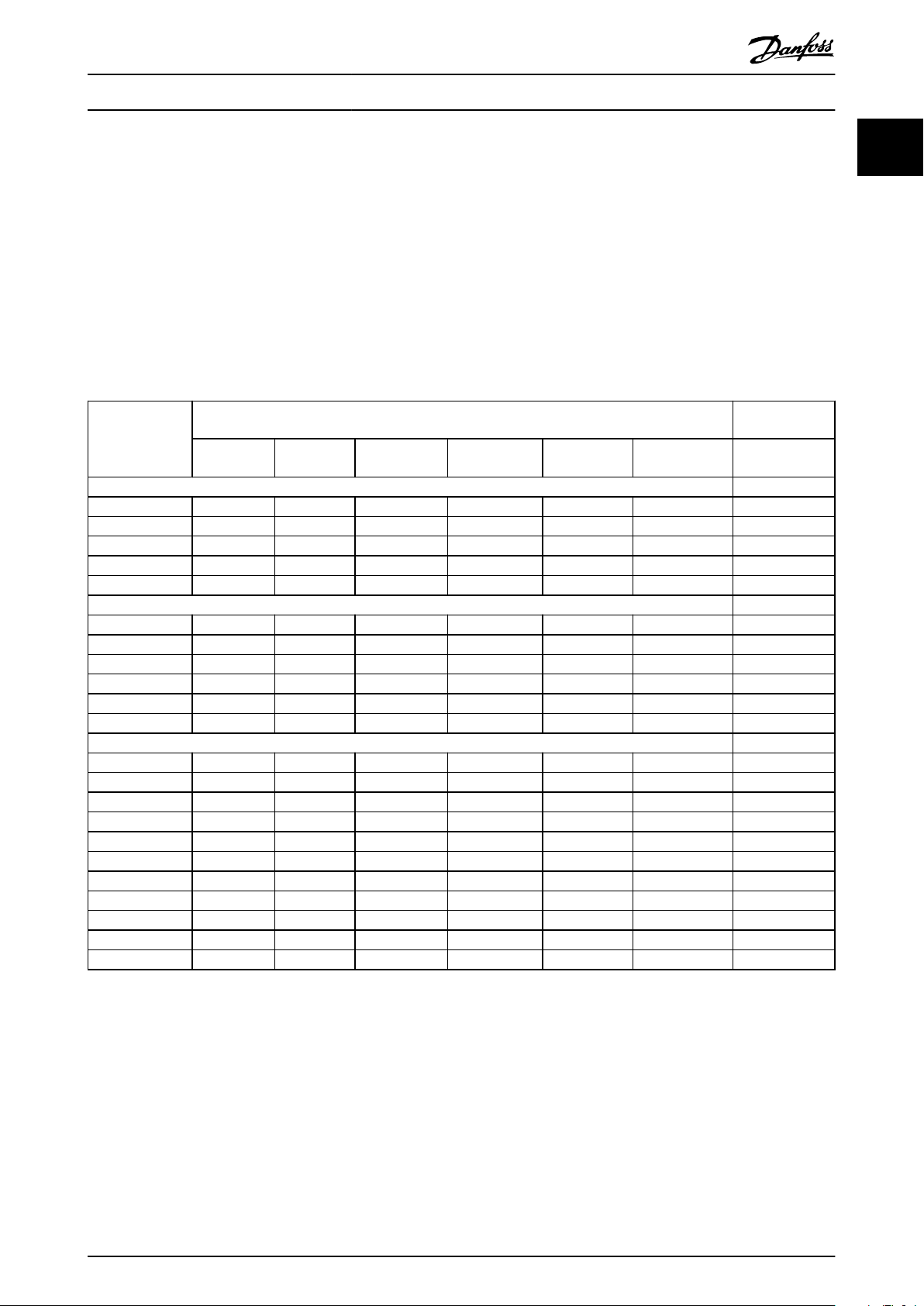
Branch circuit protection
To protect the installation against electrical and re
hazards, protect all branch circuits in an installation, switch
gear, machines, and so on, against short circuits and
overcurrent according to national/international regulations.
Short-circuit protection
Use the fuses mentioned in Table 1.4 to protect service
personnel or other equipment if there is an internal failure
in the unit or short circuit on DC-link. If there is a short
circuit on the motor or brake output, the frequency
converter provides full short-circuit protection.
Overcurrent protection
To avoid overheating of the cables in the installation,
provide overload protection. Always carry out overcurrent
protection according to national regulations. Fuses must be
designed for protection in a circuit capable of supplying a
maximum of 100000 A
(symmetrical), 480 V maximum.
rms
Non-UL compliance
If UL/cUL is not to be complied with, use the fuses
mentioned in Table 1.4, which ensure compliance with
EN50178/IEC61800-5-1:
If there is a malfunction, not following the fuse recommendation may result in damage to the frequency converter
and the installation.
Maximum fuses UL
FC 51
Bussmann Bussmann Bussmann Littelfuse
1x200–240 V
kW Type RK1 Type J Type T Type RK1 Type CC Type RK1 Type gG
0K18–0K37 KTN-R15 JKS-15 JJN-15 KLN-R15 ATM-R15 A2K-15R 16A
0K75 KTN-R25 JKS-25 JJN-25 KLN-R25 ATM-R25 A2K-25R 25A
1K5 KTN-R35 JKS-35 JJN-35 KLN-R35 – A2K-35R 35A
2K2 KTN-R50 JKS-50 JJN-50 KLN-R50 – A2K-50R 50A
3x200–240 V
0K25 KTN-R10 JKS-10 JJN-10 KLN-R10 ATM-R10 A2K-10R 10A
0K37 KTN-R15 JKS-15 JJN-15 KLN-R15 ATM-R15 A2K-15R 16A
0K75 KTN-R20 JKS-20 JJN-20 KLN-R20 ATM-R20 A2K-20R 20A
1K5 KTN-R25 JKS-25 JJN-25 KLN-R25 ATM-R25 A2K-25R 25A
2K2 KTN-R40 JKS-40 JJN-40 KLN-R40 ATM-R40 A2K-40R 40A
3K7 KTN-R40 JKS-40 JJN-40 KLN-R40 – A2K-40R 40A
3x380–480 V
0K37–0K75 KTS-R10 JKS-10 JJS-10 KLS-R10 ATM-R10 A6K-10R 10A
1K5 KTS-R15 JKS-15 JJS-15 KLS-R15 ATM-R15 A2K-15R 16A
2K2 KTS-R20 JKS-20 JJS-20 KLS-R20 ATM-R20 A6K-20R 20A
3K0 KTS-R40 JKS-40 JJS-40 KLS-R40 ATM-R40 A6K-40R 40A
4K0 KTS-R40 JKS-40 JJS-40 KLS-R40 ATM-R40 A6K-40R 40A
5K5 KTS-R40 JKS-40 JJS-40 KLS-R40 – A6K-40R 40A
7K5 KTS-R40 JKS-40 JJS-40 KLS-R40 – A6K-40R 40A
11K0 KTS-R60 JKS-60 JJS-60 KLS-R60 – A6K-60R 63A
15K0 KTS-R60 JKS-60 JJS-60 KLS-R60 – A6K-60R 63A
18K5 KTS-R60 JKS-60 JJS-60 KLS-R60 – A6K-60R 80A
22K0 KTS-R60 JKS-60 JJS-60 KLS-R60 – A6K-60R 80A
Ferraz
Shawmut
Ferraz Shawmut
Maximum fuses
non–UL
1 1
Table 1.4 Fuses
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 11
Page 16
Quick Guide
VLT® Micro Drive FC 51
11
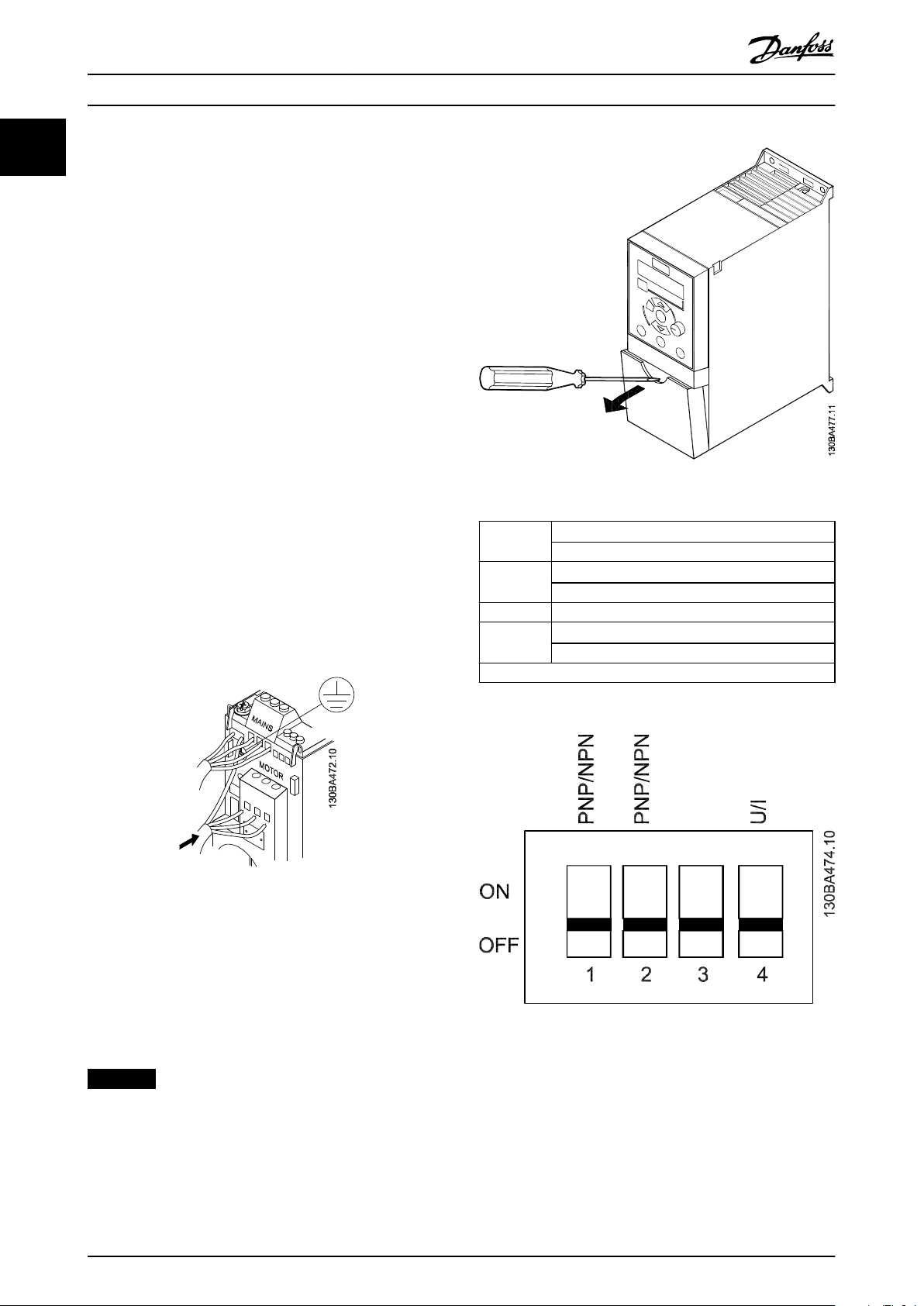
1.3.3 Connecting to Mains and Motor
The frequency converter is designed to operate all
standard 3-phased asynchronous motors.
The frequency converter is designed to accept mains/
motor cables with a maximum cross-section of 4 mm2/10
AWG (M1, M2 and M3), and a maximum cross-section of 16
mm2/6 AWG (M4 and M5).
Use a shielded/armored motor cable to comply
•
with EMC emission specications, and connect
this cable to both the decoupling plate and the
motor metal.
Keep motor cable as short as possible to reduce
•
the noise level and leakage currents.
For further details on mounting of the decoupling
•
plate, see VLT® Micro Drive FC 51 Decoupling
Mounting Plate Instructions.
Also see the chapter EMC-correct Electrical Instal-
•
lation in the VLT® Micro Drive FC 51 Design Guide.
1. Mount the ground wires to PE terminal.
2. Connect motor to terminals U, V, and W.
3. Mount mains supply to terminals L1/L, L2, and
L3/N (3-phase) or L1/L and L3/N (single-phase)
and tighten.
Illustration 1.3 Removing Terminal Cover
Switch 1
Switch 2
Switch 3 No function
Switch 4
1)=default setting
O=PNP terminals 29
On=NPN terminals 29
O=PNP terminal 18, 19, 27 and 33
On=NPN terminal 18, 19, 27 and 33
O=Terminal 53 0–10 V
On=Terminal 53 0/4-20 mA
1)
1)
1)
Illustration 1.2 Mounting of Ground Cable, Mains, and Motor
Wires
1.3.4 Control Terminals
All control cable terminals are located underneath the
terminal cover in front of the frequency converter. Remove
the terminal cover using a screwdriver.
NOTICE
See the back of the terminal cover for outlines of control
terminals and switches.
Do not operate switches with power on the frequency
converter.
Set parameter 6-19 Terminal 53 Mode according to Switch
4 position.
Table 1.5 Settings for S200 Switches 1–4
Illustration 1.4 S200 Switches 1–4
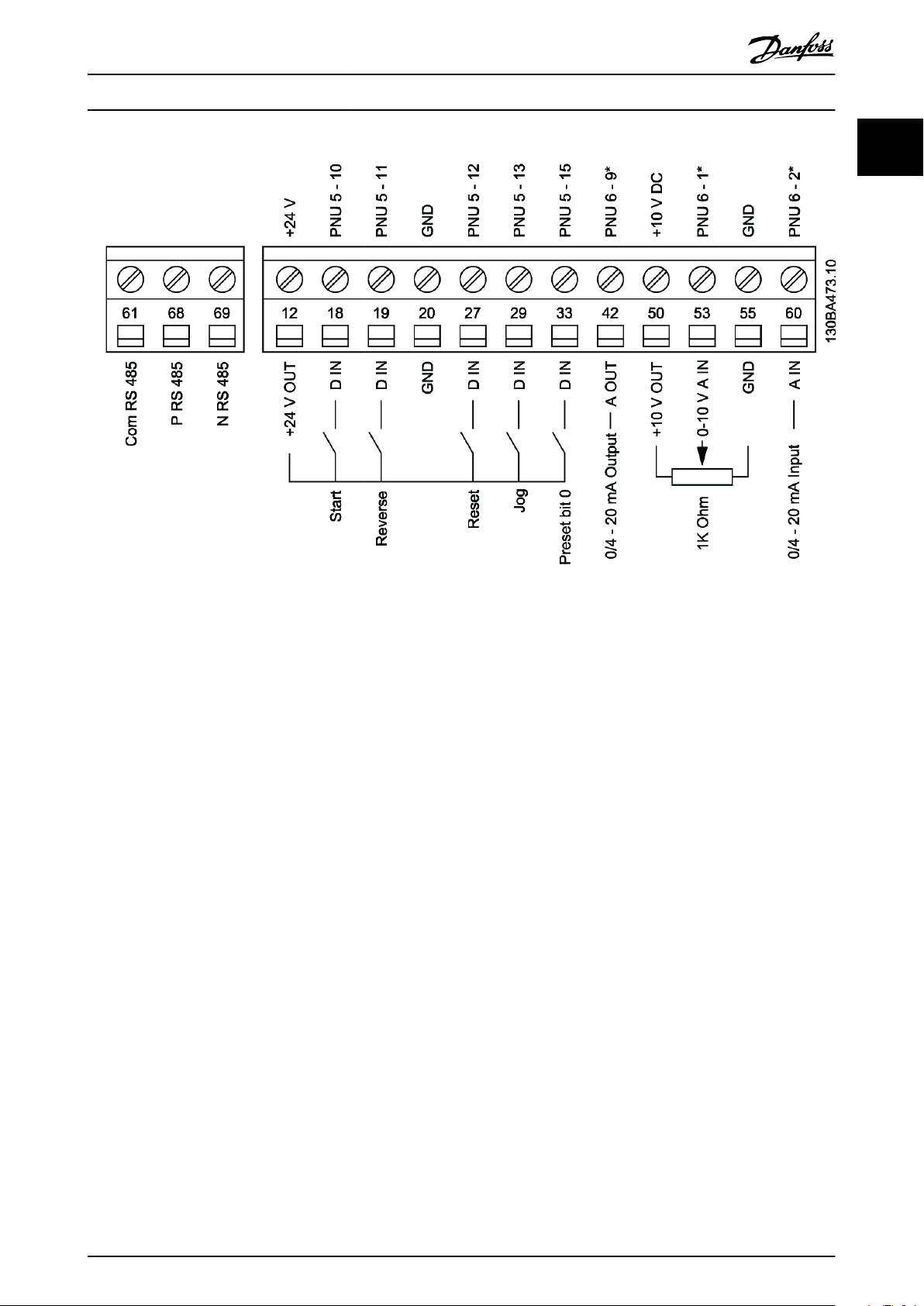
Illustration 1.5 shows all control terminals of the frequency
converter. Applying start (terminal 18) and an analog
reference (terminal 53 or 60) make the frequency converter
run.
12 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 17
Quick Guide
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
1 1
Illustration 1.5 Overview of Control Terminals in PNP-conguration with Factory Setting
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 13
Page 18
130BA242.17
1)
Quick Guide
VLT® Micro Drive FC 51
11
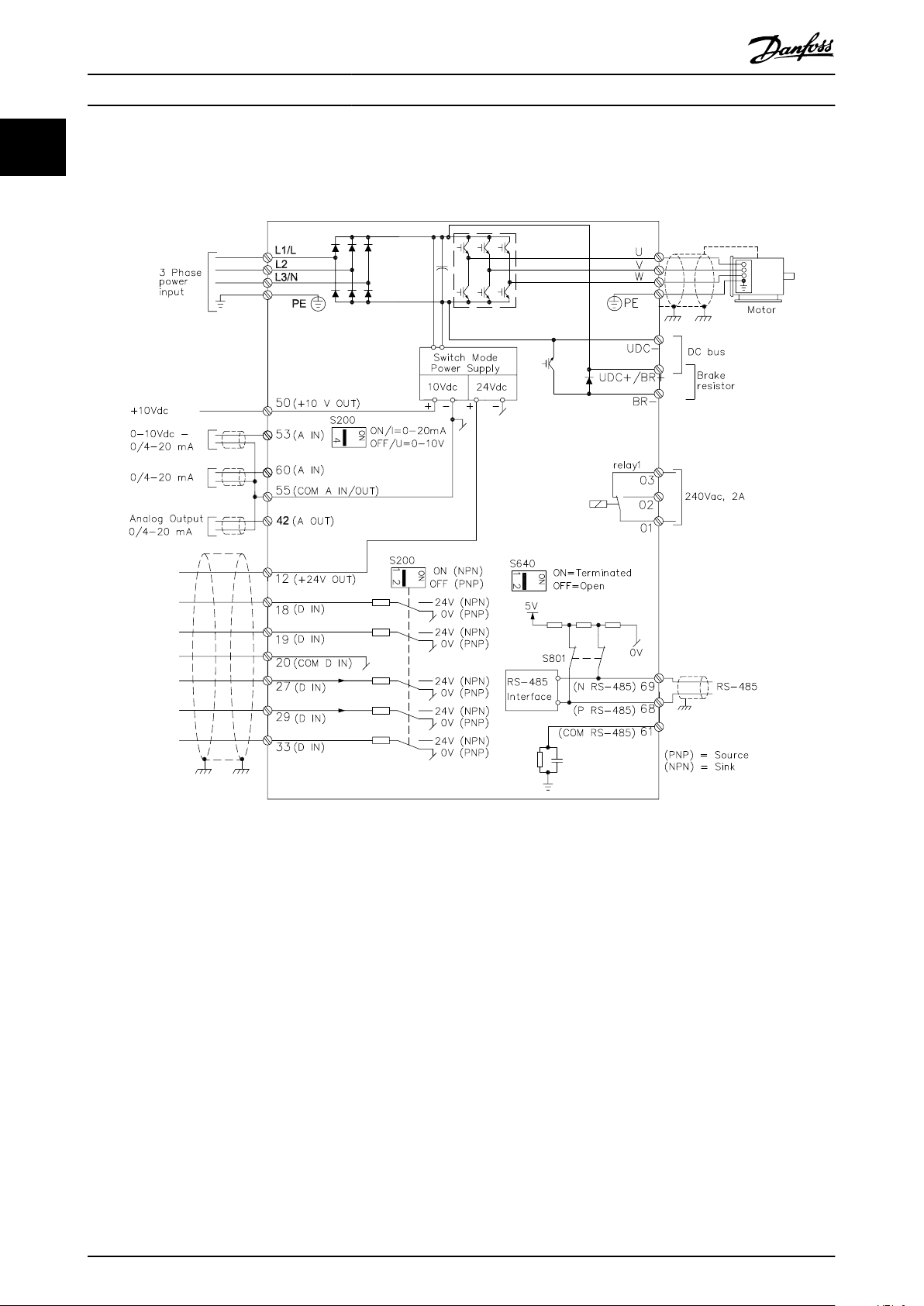
1.3.5 Power Circuit - Overview
Illustration 1.6 Diagram Showing all Electrical Terminals
1) Brakes (BR+ and BR-) are not applicable for enclosure size M1.
For information about brake resistors, see VLT® Brake Resistor MCE 101 Design Guide.
Improved power factor and EMC performance can be achieved by installing optional Danfoss line lters.
Danfoss power lters can also be used for load sharing. For more information about load sharing, see VLT® FC 51 Micro Drive
Load Sharing application note.
14 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 19
130BA605.13
Set-up
number
Parameter
number
Motor
direction
Menu
key
Indicator
lights
Value
Numeric
display
Unit
Selected
menu
Navigation
keys
Potentiometer
(LCP 12)
Operation keys
and leds
Quick Guide
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
1.3.6 Load Sharing/Brake
Use 6.3 mm (0.25 in) insulated Faston plugs designed for
high voltage for DC (load sharing and brake).
Contact Danfoss or see Load sharing instruction VLT® 5000
for load sharing and VLT® 2800/5000/5000 FLUX/FCD 300
Brake for brake.
Load sharing
Connect terminals -UDC and +UDC/+BR.
Brake
Connect terminals -BR and +UDC/+BR (not applicable for
enclosure size M1).
NOTICE
Voltage levels of up to 850 V DC may occur between
terminals +UDC/+BR and -UDC. Not short circuit
protected.
1.4 Programming
1.4.1 Programming on Automatic Motor
Adaptation (AMA)
For detailed information on programming, see VLT® Micro
Drive FC 51 Programming Guide.
NOTICE
The frequency converter can also be programmed from a
PC via RS485 com-port by installing the MCT 10 Set-up
Software.
This software can either be ordered using code number
130B1000 or downloaded from the Danfoss web site:
www.danfoss.com/BusinessAreas/DrivesSolutions/softwaredownload
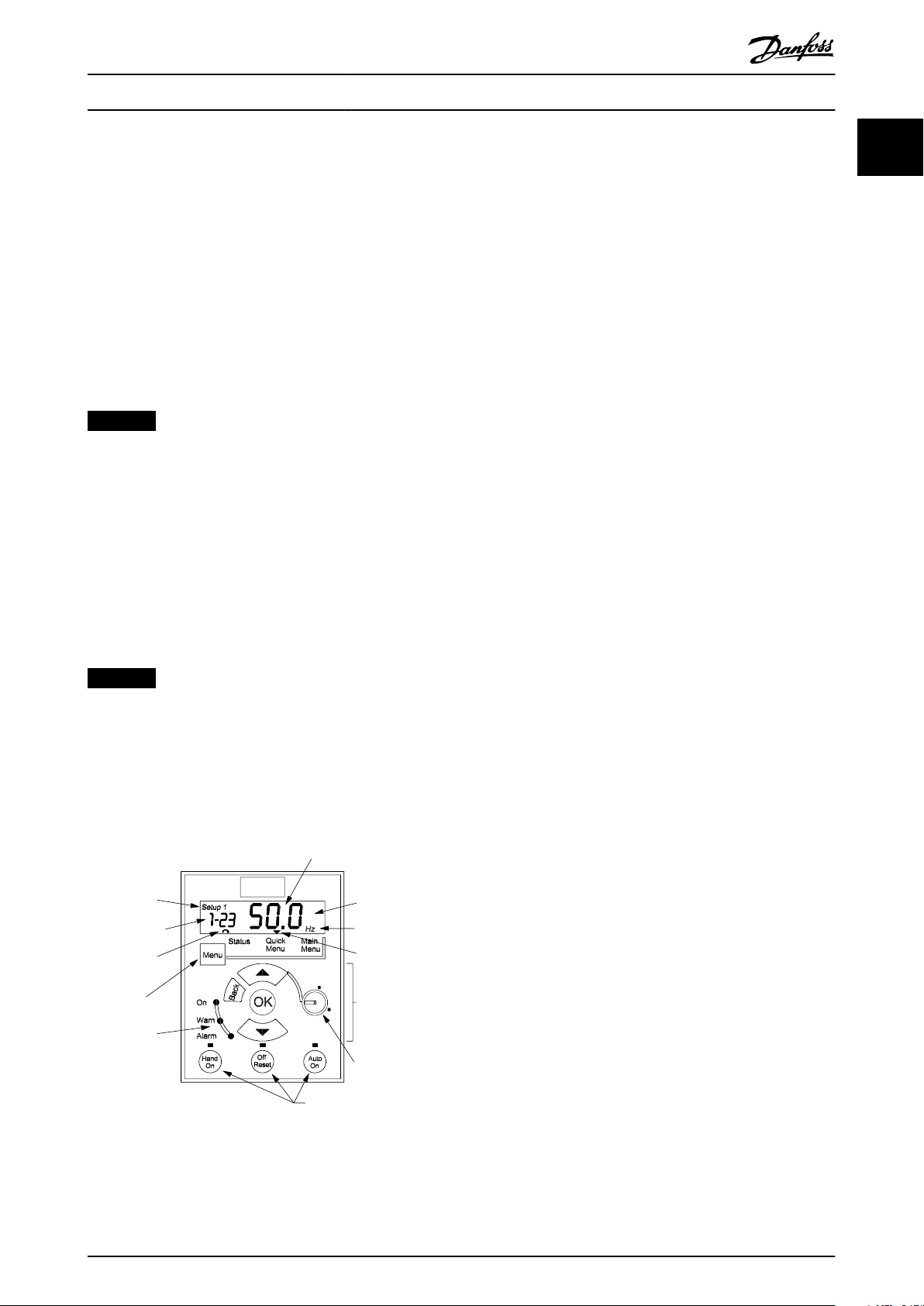
Press [Menu] to select 1 of the following menus:
Status
For readouts only.
Quick Menu
For access to Quick Menus 1 and 2.
Main Menu
For access to all parameters.
Navigation keys
[Back]: For moving to the previous step or layer in the
navigation structure.
[▲] [▼]: For manoeuvring between parameter groups,
parameters and within parameters.
[OK]: For selecting a parameter and for accepting changes
to parameter settings.
Pressing [OK] for more than 1 s enters Adjust mode. In
Adjust mode, it is possible to make fast adjustment by
pressing [▲] [▼] combined with [OK].
Press [▲] [▼] to change value. Press [OK] to shift between
digits quickly.
To exit Adjust mode, press [OK] more than 1 s again with
changes saving or press [Back] without changes saving.
Operation keys
A yellow indicator light above the operation keys indicates
the active key.
[Hand On]: Starts the motor and enables control of the
frequency converter via the LCP.
[O/Reset]: The motor stops. If in alarm mode, the motor
resets.
[Auto On]: The frequency converter is controlled either via
control terminals or serial communication.
[Potentiometer] (LCP12): The potentiometer works in 2
ways depending on the mode in which the frequency
converter is running.
In auto-on mode, the potentiometer acts as an extra
programmable analog input.
In hand-on mode, the potentiometer controls local
reference.
1 1
1.4.2 Programming on Automatic Motor
Tuning (AMT)
Run AMT to optimise compatibility between the frequency
converter and the motor in VVC+ mode.
Illustration 1.7 Description of LCP Keys and Display
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 15
The frequency converter builds a mathematical
•
model of the motor for regulating output motor
current thus enhancing motor performance.
Run this procedure on a cold motor for best
•
results. To run AMT, use the numeric LCP (NLCP).
There are 2 AMT modes for frequency converters.
Page 20
Quick Guide
VLT® Micro Drive FC 51
11
Mode 1
1. Enter the main menu.
2. Go to parameter group 1-** Load and Motor.
3. Press [OK].
4. Set motor parameters using nameplate data for
parameter group 1-2* Motor Data.
5. Go to parameter 1-29 Automatic Motor Tuning
(AMT).
6. Press [OK].
7. Select [2] Enable AMT.
8. Press [OK].
9. The test runs automatically and indicates when it
is complete.
Mode 2
1. Enter the main menu.
2. Go to parameter group 1-** Load and Motor.
3. Press [OK].
4. Set motor parameters using nameplate data for
parameter group 1-2* Motor Data.
5. Go to parameter 1-29 Automatic Motor Tuning
(AMT).
6. Press [OK].
7. Select [3] Complete AMT with Rotating motor.
8. Press [OK].
9. The test runs automatically and indicates when it
is complete.
NOTICE
In mode 2, the rotor rotates during the AMT progress.
Do not add any load on motor in this AMT progress.
16 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 21
Quick Guide
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
1.5 Parameter Overview
0-** Operation/Display
0-0* Basic Settings
0-03 Regional Settings
*[0] International
[1] US
0-04 Oper. State at Power-up
(Hand)
[0] Resume
*[1] Forced stop, ref=old
[2] Forced stop, ref=0
0-1* Set-up Handling
0-10 Active Set-up
*[1] Set-up 1
[2] Set-up 2
[9] Multi Set-up
0-11 Edit Set-up
*[1] Set-up 1
[2] Set-up 2
[9] Active Set-up
0-12 Link Set-ups
[0] Not Linked
*[20] Linked
0-31 Custom Readout Min Scale
0.00–9999.00 * 0.00
0-32 Custom Readout Max Scale
0.00–9999.00 * 100.0
0-4* LCP Keypad
0-40 [Hand on] Key on LCP
[0] Disabled
*[1] Enabled
0-41 [O / Reset] Key on LCP
[0] Disable All
*[1] Enable All
[2] Enable Reset Only
0-42 [Auto on] Key on LCP
[0] Disabled
*[1] Enabled
0-5* Copy/Save
0-50 LCP Copy
*[0] No copy
[1] All to LCP
[2] All from LCP
[3] Size indep. from LCP
0-51 Set-up Copy
*[0] No copy
[1] Copy from set-up 1
[2] Copy from set-up 2
[9] Copy from Factory set-up
0-6* Password
0-60 (Main) Menu Password
0–999 *0
1) M4 and M5 only
0-61 Access to Main/Quick Menu
w/o Password
*[0] Full access
[1] LCP:Read Only
[2] LCP:No Access
1-** Load/Motor
1-0* General Settings
1-00 Conguration Mode
*[0] Speed open loop
[3] Process
1-01 Motor Control Principle
[0] U/f
*[1] VVC+
1-03 Torque Characteristics
*[0] Constant torque
[2] Automatic Energy Optim.
1-05 Local Mode Conguration
[0] Speed Open Loop
*[2] As cong in par. 1-00
1-2* Motor Data
1-20 Motor Power [kW] [hp]
[1] 0.09 kW/0.12 hp
[2] 0.12 kW/0.16 hp
[3] 0.18 kW/0.25 hp
[4] 0.25 kW/0.33 hp
[5] 0.37 kW/0.50 hp
[6] 0.55 kW/0.75 hp
[7] 0.75 kW/1.00 hp
[8] 1.10 kW/1.50 hp
[9] 1.50 kW/2.00 hp
[10] 2.20 kW/3.00 hp
[11] 3.00 kW/4.00 hp
[12] 3.70 kW/5.00 hp
[13] 4.00 kW/5.40 hp
[14] 5.50 kW/7.50 hp
[15] 7.50 kW/10.00 hp
[16] 11.00 kW/15.00 hp
[17] 15.00 kW/20.00 hp
[18] 18.50 kW/25.00 hp
[19] 22.00 kW/29.50 hp
[20] 30.00 kW/40.00 hp
1-22 Motor Voltage
50-999 V *230–400 V
1-23 Motor Frequency
20–400 Hz *50 Hz
1-24 Motor Current
0.01–100.00 A *Motortype dep.
1-25 Motor Nominal Speed
100–9999 rpm *Motortype dep.
1-29 Automatic Motor Tuning
(AMT)
*[0] O
[2] Enable AMT
[3] Complete AMT with Rotating
motor
1-3* Adv. Motor Data
1-30 Stator Resistance (Rs)
[Ohm] * Dep. on motor data
1-33 Stator Leakage Reactance
(X1)
[Ohm] * Dep. on motor data
1-35 Main Reactance (Xh)
[Ohm] * Dep. on motor data
1-5* Load Indep. Setting
1-50 Motor Magnetisation at 0
Speed
0–300% *100%
1-52 Min Speed Norm. Magnet.
[Hz]
0.0–10.0 Hz *0.0Hz
1-55 U/f Characteristic - U
0-999.9 V
1-56 U/f Characteristic - F
0-400 Hz
1-6* Load Depen. Setting
1-60 Low Speed Load Compensation
0–199% *100%
1-61 High Speed Load Compensation
0–199% *100%
1-62 Slip Compensation
-400–399% *100%
1-63 Slip Compensation Time
Constant
0.05–5.00 s *0.10 s
1-7* Start Adjustments
1-71 Start Delay
0.0–10.0 s *0.0 s
1-72 Start Function
[0] DC hold/delay time
[1] DC brake/delay time
*[2] Coast/delay time
1-73 Flying Start
*[0] Disabled
[1] Enabled
1-8* Stop Adjustments
1-80 Function at Stop
*[0] Coast
[1] DC hold
1 1
1-82 Min Speed for Funct. at
Stop [Hz]
0.0–20.0 Hz *0.0 Hz
1-9*Motor Temperature
1-90 Motor Thermal Protection
*[0] No protection
[1] Thermistor warning
[2] Thermistor trip
[3] Etr warning
[4] Etr trip
1-93 Thermistor Resource
*[0] None
[1] Analog input 53
[6] Digital input 29
2-** Brakes
2-0* DC-Brake
2-00 DC Hold Current
0–150% *50%
2-01 DC Brake Current
0–150% *50%
2-02 DC Braking Time
0.0–60.0 s *10.0 s
2-04 DC Brake Cut In Speed
0.0–400.0 Hz *0.0Hz
2-1* Brake Energy Funct.
2-10 Brake Function
*[0] O
[1] Resistor brake
[2] AC brake
2-11 Brake Resistor (ohm)
Min/Max/default: Powersize dep.
2-14 Brake Voltage reduce
0 - Powersize dep.* 0
2-16 AC Brake, Max current
0-150% *100%
2-17 Overvoltage Control
*[0] Disabled
[1] Enabled (not at stop)
[2] Enabled
2-2* Mechanical Brake
2-20 Release Brake Current
0.00–100.0 A *0.00 A
2-22 Activate Brake Speed [Hz]
0.0–400.0 Hz *0.0 Hz
3-** Reference / Ramps
3-0* Reference Limits
3-00 Reference Range
*[0] Min - Max
[1] -Max - +Max
3-02 Minimum Reference
-4999–4999 *0.000
3-03 Maximum Reference
-4999–4999 *50.00
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 17
Page 22
Quick Guide
VLT® Micro Drive FC 51
11
3-1* References
3-10 Preset Reference
-100.0–100.0% *0.00% 3-11 Jog
Speed [Hz]
0.0–400.0 Hz *5.0 Hz
3-12 Catch up/slow Down Value
0.00–100.0% * 0.00%
3-14 Preset Relative Reference
-100.0–100.0% *0.00%
3-15 Reference Resource 1
[0] No function
*[1] Analog Input 53
[2] Analog input 60
[8] Pulse input 33
[11] Local bus ref
[21] LCP Potentiometer
3-16 Reference Resource 2
[0] No function
[1] Analog in 53
*[2] Analog in 60
[8] Pulse input 33
*[11] Local bus reference
[21] LCP Potentiometer
3-17 Reference Resource 3
[0] No function
[1] Analog Input 53
[2] Analog input 60
[8] Pulse input 33
*[11] Local bus ref
[21] LCP Potentiometer
3-18 Relative Scaling Ref.
Resource
*[0] No function
[1] Analog Input 53
[2] Analog input 60
[8] Pulse input 33
[11] Local bus ref
[21] LCP Potentiometer
3-4* Ramp 1
3-40 Ramp 1 Type
*[0] Linear
[2] Sine2 ramp
3-41 Ramp 1 Ramp up Time
0.05–3600 s *3.00 s (10.00 s1))
3-42 Ramp 1 Ramp Down Time
0.05–3600 s *3.00s (10.00s1))
3-5* Ramp 2
3-50 Ramp 2 Type
*[0] Linear
[2] Sine2 ramp
3-51 Ramp 2 Ramp up Time
0.05–3600 s *3.00 s (10.00 s1))
3-52 Ramp 2 Ramp down Time
0.05–3600 s *3.00 s (10.00 s1))
3-8* Other Ramps
3-80 Jog Ramp Time
0.05–3600 s *3.00 s (10.00s1))
1) M4 and M5 only
3-81 Quick Stop Ramp Time
0.05–3600 s *3.00 s (10.00s1))
4-** Limits/Warnings
4-1* Motor Limits 4-10 Motor
Speed Direction
*[0] Clockwise If Par. 1-00 is set
to close loop control
[1] CounterClockwise
*[2] Both if Par. 1-00 is set to
open loop control
4-12 Motor Speed Low Limit
[Hz]
0.0–400.0 Hz *0.0 Hz
4-14 Motor Speed High Limit
[Hz]
0.1–400.0 Hz *65.0 Hz
4-16 Torque Limit Motor Mode
0–400% *150%
4-17 Torque Limit Generator
Mode
0–400% *100%
4-4* Adj. Warnings 2
4-40 Warning Frequency Low
0.00–Value of 4-41 Hz *0.0 Hz
4-41 Warning Frequency High
Value of 4-40–400.0 Hz *400.00
Hz
4-5* Adj. Warnings
4-50 Warning Current Low
0.00–100.00 A *0.00 A
4-51 Warning Current High
0.0–100.00 A *100.00 A
4-54 Warning Reference Low
-4999.000–Value of 4-55
* -4999.000
4-55 Warning Reference High
Value of 4-54–4999.000
*4999.000
4-56 Warning Feedback Low
-4999.000–Value of 4-57
* -4999.000
4-57 Warning Feedback High
Value of 4-56–4999.000 *4999.000
4-58 Missing Motor Phase
Function
[0] O
*[1] On
4-6* Speed Bypass
4-61 Bypass Speed From [Hz]
0.0–400.0 Hz *0.0 Hz
4-63 Bypass Speed To [Hz]
0.0–400.0 Hz *0.0 Hz
5-1* Digital Inputs5-10 Terminal
18 Digital Input
[0] No function
[1] Reset
[2] Coast inverse
[3] Coast and reset inv.
[4] Quick stop inverse
[5] DC-brake inv.
[6] Stop inv
*[8] Start
[9] Latched start
[10] Reversing
[11] Start reversing
[12] Enable start forward
[13] Enable start reverse
[14] Jog
[16-18] Preset ref bit 0-2
[19] Freeze reference5-10
Terminal 18 Digital Input
[20] Freeze output
[21] Speed up
[22] Speed down
[23] Set-up select bit 0
[28] Catch up
[29] Slow down
[34] Ramp bit 0
[60] Counter A (up)
[61] Counter A (down)
[62] Reset counter A
[63] Counter B (up)
[64] Counter B (down)
[65] Reset counter B
5-11 Terminal 19 Digital Input
See par. 5-10. * [10] Reversing
5-12 Terminal 27 Digital Input
See par. 5-10. * [1] Reset
5-13 Terminal 29 Digital Input
See par. 5-10. * [14] Jog
5-15 Terminal 33 Digital Input
See par. 5-10. * [16] Preset ref bit
0
[26] Precise Stop Inverse
[27] Start, Precise Stop
[32] Pulse Input
5-3* Digital Outputs
5-34 On Delay, Terminal 42
Digital Output
0.00–600.00 s * 0.01 s
5-35 O Delay, Terminal 42
Digital Output
0.00–600.00 s * 0.01 s
5-4* Relays
5-40 Function Relay
[52] Remote ref. active
[53] No alarm
[54] Start cmd active
[55] Running reverse
[56] Drive in hand mode
[57] Drive in auto mode
[60-63] Comparator 0-3
[70-73] Logic rule 0-3
[81] SL digital output B
5-41 On Delay, Relay
0.00–600.00 s *0.01 s
5-42 O Delay, Relay
0.00–600.00 s *0.01 s
5-5* Pulse Input
5-55 Terminal 33 Low Frequency
20–4999 Hz *20 Hz
5-56 Terminal 33 High
Frequency
21–5000 Hz *5000 Hz
5-57 Term. 33 Low Ref./Feedb.
Value
-4999–4999 *0.000
5-58 Term. 33 High Ref./Feedb.
Value
-4999–4999 *50.000
6-** Analog In/Out
6-0* Analog I/O Mode
6-00 Live Zero Timeout Time
1-99 s *10 s
6-01 Live Zero TimeoutFunction
*[0] O
[1] Freeze output
[2] Stop
[3] Jogging
[4] Max speed
[5] Stop and trip
6-1* Analog Input 1
6-10 Terminal 53 Low Voltage
0.00–9.99 V *0.07 V
6-11 Terminal 53 High Voltage
0.01–10.00 V *10.00 V
6-12 Terminal 53 Low Current
0.00–19.99 mA *0.14 mA
6-13 Terminal 53 High Current
0.01–20.00 mA *20.00 mA
6-14 Term. 53 Low Ref./Feedb.
Value
-4999-4999 *0.000
6-15 Term. 53 High Ref./Feedb.
Value
-4999-4999 *50.000
6-16 Terminal 53 Filter Time
Constant
0.01–10.00 s *0.01 s
18 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 23
Quick Guide
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
6-19 Terminal 53 mode
*[0] Voltage mode
[1] Current mode 4
6-2* Analog Input 2
6-22 Terminal 60 Low Current
0.00–19.99 mA *0.14 mA
6-23 Terminal 60 High Current
0.01–20.00 mA *20.00 mA
6-24 Term. 60 Low Ref./Feedb.
Value
-4999-4999 *0.000
6-25 Term. 60 High Ref./Feedb.
Value
-4999–4999 *50.00
6-26 Terminal 60 Filter Time
Constant
0.01–10.00 s *0.01 s
6-8* LCP Potentiometer
6-80 LCP Potmeter Enable
[0] Disabled
*[1] Enable
6-81 LCP potm. Low Reference
-4999–4999 *0.000
6-82 LCP potm. High Reference
-4999–4999 *50.00
6-9* Analog Output xx
6-90 Terminal 42 Mode
*[0] 0-20 mA
[1] 4-20 mA
[2] Digital Output
6-91 Terminal 42 Analog Output
*[0] No operation
[10] Output Frequency
[11] Reference
[12] Feedback
[13] Motor Current
[16] Power
[19] DC Link Voltage
[20] Bus Reference
6-92 Terminal 42 Digital Output
See parameter 5-40
*[0] No Operation
[80] SL Digital Output A
6-93 Terminal 42 Output Min
Scale
0.00-200.0% *0.00%
6-94 Terminal 42 Output Max
Scale
0.00-200.0% *100.0%
7-** Controllers
7-2* Process Ctrl. Feedb
7-20 Process CL Feedback 1
Resource
*[0] NoFunction
[1] Analog Input 53
[2] Analog input 60
[8] PulseInput33
[11] LocalBusRef
7-3* Process PI
Ctrl. 7-30 Process PI Normal/
Inverse Ctrl
*[0] Normal
[1] Inverse
7-31 Process PI Anti Windup
[0] Disable
*[1] Enable
7-32 Process PI Start Speed
0.0–200.0 Hz *0.0 Hz
7-33 Process PI Proportional
Gain
0.00–10.00 *0.01
7-34 Process PI Integral Time
0.10–9999 s *9999 s
7-38 Process PI Feed Forward
Factor
0–400% *0%
7-39 On Reference Bandwidth
0–200% *5%
8-** omm. and Options
8-0* General Settings
8-01 Control Site
*[0] Digital and ControlWord
[1] Digital only
[2] ControlWord only
8-02 Control Word Source
[0] None
*[1] FC RS485
8-03 Control Word Timeout
Time
0.1–6500 s *1.0 s
8-04 Control Word Timeout
Function
*[0] O
[1] Freeze Output
[2] Stop
[3] Jogging
[4] Max. Speed
[5] Stop and trip
8-06 Reset Control Word
Timeout
*[0] No Function
[1] Do reset
8-3* FC Port Settings
8-30 Protocol
*[0] FC
[2] Modbus
8-31 Address
1-247 *1
8-32 FC Port Baud Rate
[0] 2400 Baud
[1] 4800 Baud
*[2] 9600 Baud For choose FC
Bus in 8-30
*[3] 19200 Baud For choose
Modbus in 8-30
[4] 38400 Baud
8-33 FC Port Parity
*[0] Even Parity, 1 Stop Bit
[1] Odd Parity, 1 Stop Bit
[2] No Parity, 1 Stop Bit
[3] No Parity, 2 Stop Bits
8-35 Minimum Response Delay
0.001–0.5 *0.010 s
8-36 Max Response Delay
0.100–10.00 s *5.000 s
8-4* FC MC protocol set
8-43 FC Port PCD Read Congu-
ration
*[0] None Expressionlimit
[1] [1500] Operation Hours
[2] [1501] Running Hours
[3] [1502] kWh Counter
[4] [1600] Control Word
[5] [1601] Reference [Unit]
[6] [1602] Reference %
[7] [1603] Status Word
[8] [1605] Main Actual Value [%]
[9] [1609] Custom Readout
[10] [1610] Power [kW]
[11] [1611] Power [hp]
[12] [1612] Motor Voltage
[13] [1613] Frequency
[14] [1614] Motor Current
[15] [1615] Frequency [%]
[16] [1618] Motor Thermal
[17] [1630] DC Link Voltage
[18] [1634] Heatsink Temp.
[19] [1635] Inverter Thermal
[20] [1638] SL Controller State
[21] [1650] External Reference
[22] [1651] Pulse Reference
[23] [1652] Feedback [Unit]
[24] [1660] Digital Input
18,19,27,33
[25] [1661] Digtial Input 29
[26] [1662] Analog Input 53 (V)
[27] [1663] Analog Input 53 (mA)
[28] [1664] Analog Input 60
[29] [1665] Analog Output 42
[mA]
[30] [1668] Freq. Input 33 [Hz]
[31] [1671] Relay Output [bin]
[32] [1672] Counter A
[33] [1673] Counter B
[34] [1690] Alarm Word
[35] [1692] Warning Word
[36] [1694] Ext. Status Word
8-5* Digital/Bus
8-50 Coasting Select
[0] DigitalInput
[1] Bus
[2] LogicAnd
*[3] LogicOr
8-51 Quick Stop Select
See par. 8-50 * [3] LogicOr
8-52 DC Brake Select
See par. 8-50 *[3] LogicOr
8-53 Start Select
See par. 8-50 *[3] LogicOr
8-54 Reversing Select
See par. 8-50 *[3] LogicOr
8-55 Set-up Select
See par. 8-50 *[3] LogicOr
8-56 Preset Reference Select
See parameter 8-50 * [3] LogicOr
8-8* Bus communication
Diagnostics
8-80 Bus Message Count
0-0 N/A *0 N/A
8-81 Bus Error Count
0-0 N/A *0 N/A
8-82 Slave Messages Rcvd
0-0 N/A *0 N/A
8-83 Slave Error Count
0-0 N/A *0 N/A
8-9* Bus Jog / Feedback
8-94 Bus feedback 1
0x8000-0x7FFF *0
13-** Smart Logic
13-0* SLC Settings
13-00 SL Controller Mode
*[0] O
[1] On
13-01 Start Event
[0] False
[1] True
[2] Running
[3] InRange
[4] OnReference
[7] OutOfCurrentRange
[8] BelowILow
[9] AboveIHigh
[16] ThermalWarning
[17] MainOutOfRange
[18] Reversing
[19] Warning
[20] Alarm_Trip
[21] Alarm_TripLock
[22-25] Comparator 0-3
[26-29] LogicRule0-3
[33] DigitalInput_18
[34] DigitalInput_19
[35] DigitalInput_27
[36] DigitalInput_29
[38] DigitalInput_33
*[39] StartCommand
[40] DriveStopped
13-02 Stop Event
See parameter 13-01 * [40]
DriveStopped
13-03 Reset SLC
*[0] Do not reset
[1] Reset SLC
1 1
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 19
Page 24
Quick Guide
VLT® Micro Drive FC 51
11
13-1* Comparators
13-10 Comparator Operand
*[0] Disabled
[1] Reference
[2] Feedback
[3] MotorSpeed
[4] MotorCurrent
[6] MotorPower
[7] MotorVoltage
[8] DCLinkVoltage
[12] AnalogInput53
[13] AnalogInput60
[18] PulseInput33
[20] AlarmNumber
[30] CounterA
[31] CounterB
13-11 Comparator Operator
[0] Less Than
*[1] Approximately equals
[2] Greater Than
13-12 Comparator Value
-9999–9999 *0.0
13-2* Timers
13-20 SL Controller Timer
0.0–3600 s *0.0 s
13-4* Logic Rules
13-40 Logic Rule Boolean 1
See par. 13-01 *[0] False
[30] - [32] SL Time-out 0-2
13-41 Logic Rule Operator 1
*[0] Disabled
[1] And
[2] Or
[3] And not
[4] Or not
[5] Not and
[6] Not or
[7] Not and not
[8] Not or not
13-42 Logic Rule Boolean 2
See par. 13-40 * [0] False
13-43 Logic Rule Operator 2
See par. 13-41 *[0] Disabled
13-44 Logic Rule Boolean 3
See par. 13-40 * [0] False
13-5* States
13-51 SL Controller Event
See par. 13-40 *[0] False
13-52 SL Controller Action
*[0] Disabled
[1] NoAction
[2] SelectSetup1
[3] SelectSetup2
[10-17] SelectPresetRef0-7
[18] SelectRamp1
[19] SelectRamp2
[22] Run
[23] RunReverse
[24] Stop
[25] Qstop
[26] DCstop
[27] Coast
[28] FreezeOutput
[29] StartTimer0
[30] StartTimer1
[31] StartTimer2
[32] Set Digital Output A Low
[33] Set Digital Output B Low
[38] Set Digital Output A High
[39] Set Digital Output B High
[60] ResetCounterA
[61] ResetCounterB
14-** Special Functions
14-0* Inverter Switching
14-01 Switching Frequency
[0] 2 kHz
*[1] 4 kHz
[2] 8 kHz
[4] 16 kHz not available for M5
14-03 Overmodulation
[0] O
*[1] On
14-1* Mains monitoring
14-12 Function at mains
imbalance
*[0] Trip
[1] Warning
[2] Disabled
14-2* Trip Reset
14-20 Reset Mode
*[0] Manual reset
[1-9] AutoReset 1-9
[10] AutoReset 10
[11] AutoReset 15
[12] AutoReset 20
[13] Innite auto reset
[14] Reset at power up
14-21 Automatic Restart Time
0–600s * 10s
14-22 Operation Mode
*[0] Normal Operation
[2] Initialisation 14-26 Action At
Inverter Fault
*[0] Trip
[1] Warning 14-4* Energy
Optimising
14-41 AEO Minimum Magnetisation
40–75 %*66 %
14-9* Fault Settings
14-90 Fault level[3] Trip Lock
[4] Trip with delayed reset
15-** Drive Information
15-0* Operating Data
15-00 Operating Days
15-01 Running Hours
15-02 kWh Counter
15-03 Power Ups
15-04 Over Temps
15-05 Over Volts
15-06 Reset kWh Counter
*[0] Do not reset
[1] Reset counter
15-07 Reset Running Hours
Counter
*[0] Do not reset
[1] Reset counter
15-3* Fault Log
15-30 Fault Log: Error Code
15-4* Drive Identication
15-40 FC Type
15-41 Power Section
15-42 Voltage
15-43 Software Version
15-46 Frequency Converter
Order. No
15-48 LCP Id No
15-51 Frequency Converter
Serial No
16-** Data Readouts 16-0*
General Status
16-00 Control Word
0-0XFFFF
16-01 Reference [Unit]
-4999–4999 *0.000
16-02 Reference %
-200.0–200.0% *0.0%
16-03 Status Word
0–0XFFFF
16-05 Main Actual Value [%]
-200.0–200.0% *0.0%
16-09 Custom Readout
Dep. on par. 0-31, 0-32
16-1* Motor Status
16-10 Power [kW]
16-11 Power [hp]
16-12 Motor Voltage [V]
16-13 Frequency [Hz]
16-14 Motor Current [A]
16-15 Frequency [%]
16-18 Motor Thermal [%]
16-3* Drive Status
16-30 DC Link Voltage
16-34 Heat sink Temp.
16-35 Inverter Thermal
16-36 Inv.Nom. Current
16-37 Inv. Max. Current
16-38 SL Controller State
16-5* Ref./Feedb.
16-50 External Reference
16-51 Pulse Reference
16-52 Feedback [Unit]
16-6* Inputs/Outputs
16-60 Digital Input 18,19,27,33
0-1111
16-61 Digital Input 29
0-1
16-62 Analog Input 53 (volt)
16-63 Analog Input 53 (current)
16-64 Analog Input 60
16-65 Analog Output 42 [mA]
16-68 Pulse Input [Hz]
16-71 Relay Output [bin]
16-72 Counter A
16-73 Counter B
16-8* Fieldbus/FC Port
16-86 FC Port REF 1
0x8000-0x7FFFF
16-9* Diagnosis Readouts
16-90 Alarm Word
0-0XFFFFFFFF
16-92 Warning Word
0-0XFFFFFFFF
16-94 Ext. Status Word
0-0XFFFFFFFF
18-** Extended Motor Data
18-8* Motor Resistors
18-80 Stator Resistance (High
resolution)
0.000–99.990 ohm *0.000 ohm
18-81 Stator Leakage
Reactance(High resolution)
0.000–99.990 ohm *0.000 ohm
20 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 25
Quick Guide
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
1.6 Troubleshooting
1.6.1 Warnings and Alarms
Number Description WarningAlarm Trip
Lock
2 Live zero error X X Signal on terminal 53 or 60 is less than 50% of the value set
nom
nom
1)
1)
1)
and I
nom
X X X Missing phase on supply side, or too high voltage imbalance.
X X DC-link voltage exceeds the limit.
X X DC-link voltage drops below the voltage warning limit.
X X Thermistor or thermistor connection is disconnected.
X Wrong setting for motor voltage and/or motor current.
X Motor current is too low. Check settings.
X All parameter settings are initialized to default settings.
X No communication between LCP and frequency converter.
4
7
8
9 Inverter overloaded X X More than 100% load for too long.
10 Motor ETR overtemperature X X Motor is too hot. The load has exceeded 100% for too long.
11 Motor thermistor overtem-
12 Torque limit X Torque exceeds value set in either parameter 4-16 Torque Limit
13 Overcurrent X X X Inverter peak current limit is exceeded.
14 Ground fault X X X Discharge from output phases to ground.
16 Short circuit X X Short circuit in motor or on motor terminals.
17 Control word timeout X X No communication to frequency converter.
25 Brake resistor short-circuited X X Brake resistor is short-circuited, thus the brake function is
27 Brake chopper short-circuited X X Brake transistor is short-circuited, thus the brake function is
28 Brake check X Brake resistor is not connected/working.
29 Power board over temp X X X Heat sink cutout temperature has been reached.
30 Motor phase U missing X X Motor phase U is missing. Check the phase.
31 Motor phase V missing X X Motor phase V is missing. Check the phase.
32 Motor phase W missing X X Motor phase W is missing. Check the phase.
38 Internal fault X X Contact local Danfoss supplier.
44 Ground fault X X Discharge from output phases to ground.
47 Control voltage fault X X 24 V DC is overloaded.
51 AMA check U
52 AMA low I
59 Current limit X Frequency converter overload.
63 Mechanical brake low X Actual motor current has not exceeded the release brake-
80 Frequency converter initialized
84 The connection between
85 Key disabled X See parameter group 0-4* LCP.
86 Copy fail X An error occurred while copying from frequency converter to
87 LCP data invalid X Occurs when copying from LCP if the LCP contains erroneous
Mains phase loss
DC over voltage
DC under voltage
perature
to default value
frequency converter and LCP
is lost
Error Cause of problem
in:
Parameter 6-10 Terminal 53 Low Voltage.
•
Parameter 6-12 Terminal 53 Low Current.
•
Parameter 6-22 Terminal 54 Low Current.
•
Check supply voltage.
Motor Mode or parameter 4-17 Torque Limit Generator Mode.
disconnected.
disconnected.
current within the start delay-time window.
LCP, or from LCP to frequency converter.
data - or if no data was uploaded to the LCP.
1 1
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 21
Page 26
Quick Guide
VLT® Micro Drive FC 51
11
Number Description WarningAlarm Trip
Lock
88 LCP data not compatible X Occurs when copying from LCP if data are moved between
89 Parameter read only X Occurs when trying to write to a read-only parameter.
90 Parameter database busy X LCP and RS485 connection are trying to update parameters
91 Parameter value is not valid in
this mode
92 Parameter value exceeds the
minimum/maximum limits
nw run Not while running X Parameters can only be changed when the motor is stopped.
Err. A wrong password was
entered
1) These faults are caused by mains distortions. Install a Danfoss line lter to rectify this problem.
Table 1.6 Warnings and Alarms Code List
X Occurs when trying to write an illegal value to a parameter.
X Occurs when trying to set a value outside the range.
X Occurs when using a wrong password for changing a
Error Cause of problem
frequency converters with major dierences in software
versions.
simultaneously.
password-protected parameter.
22 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 27
Quick Guide
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
1.7 Specications
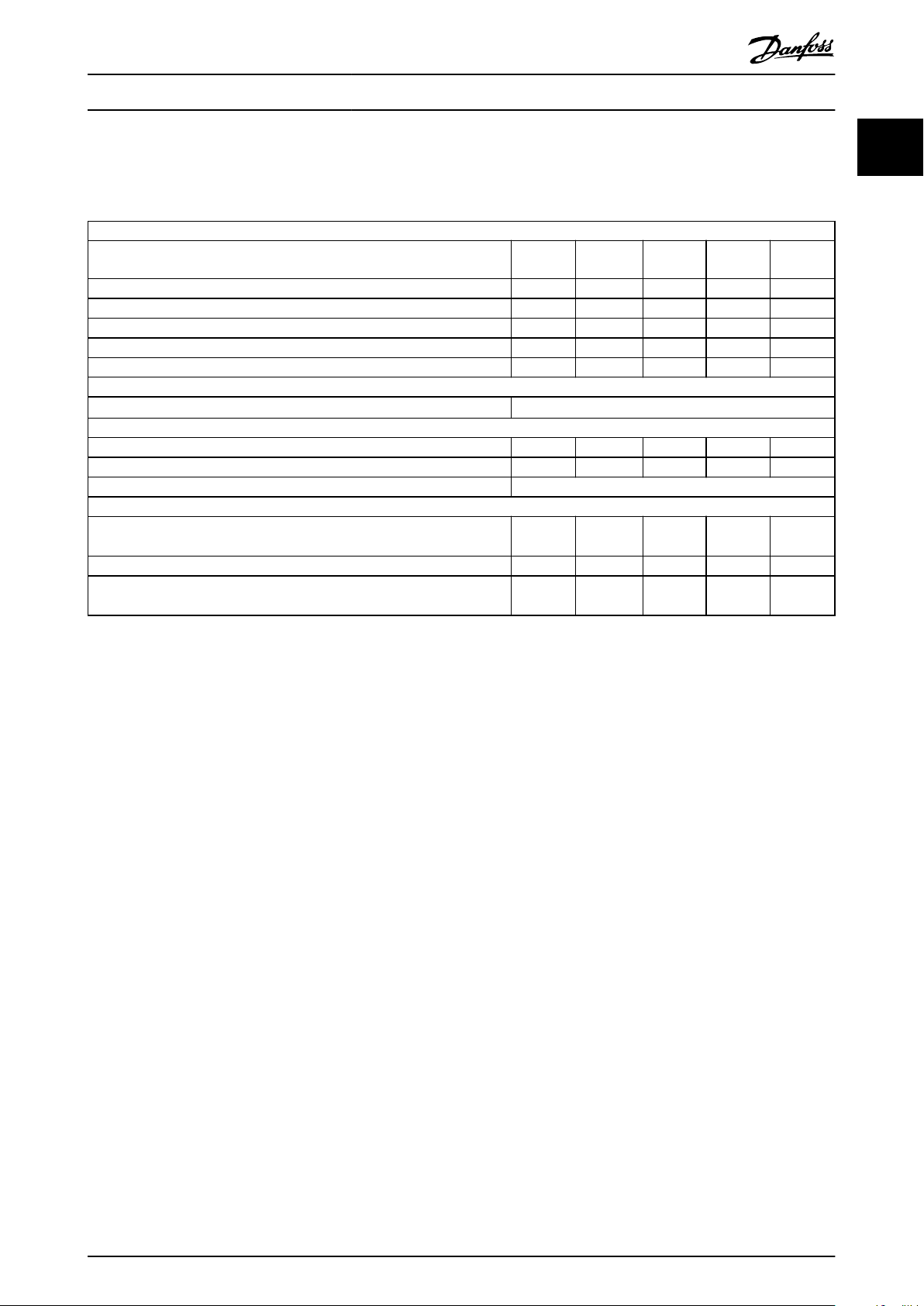
1.7.1 Mains Supply 1x200–240 V AC
Normal overload 150% for 1 minute
Frequency converter
Typical shaft output [kW]
Typical shaft output [hp] 0.25 0.5 1 2 3
Enclosure protection rating IP20 M1 M1 M1 M2 M3
Output current
Continuous (3x200–240 V AC) [A] 1.2 2.2 4.2 6.8 9.6
Intermittent (3x200–240 V AC) [A] 1.8 3.3 6.3 10.2 14.4
Maximum cable size:
(Mains, motor) [mm2/AWG]
Maximum input current
Continuous (1x200–240 V) [A] 3.3 6.1 11.6 18.7 26.4
Intermittent (1x200–240 V) [A] 4.5 8.3 15.6 26.4 37.0
Maximum mains fuses [A] See chapter 1.3.3 Fuses
Environment
Estimated power loss [W],
Best case/typical
Weight enclosure IP20 [kg] 1.1 1.1 1.1 1.6 3.0
Eciency [%],
Best case/typical
1)
2)
PK18
0.18
12.5/
15.5
95.6/
94.5
PK37
0.37
20.0/
25.0
96.5/
95.6
PK75
0.75
4/10
36.5/
44.0
96.6/
96.0
P1K5
1.5
61.0/
67.0
97.0/
96.7
P2K2
81.0/
85.1
96.9/
97.1
1 1
2.2
Table 1.7 Mains Supply 1x200–240 V AC
1) Applies for dimensioning of frequency converter cooling. If the switching frequency is higher than the default setting, the power losses may
increase. LCP and typical control card power consumptions are included. For power loss data according to EN 50598-2, refer to
drives.danfoss.com/knowledge-center/energy-eciency-directive/#/.
2) Eciency measured at nominal current. For energy eciency class, see chapter 1.8.1 Surroundings. For part load losses, see drives.danfoss.com/
knowledge-center/energy-eciency-directive/#/.
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 23
Page 28
Quick Guide
VLT® Micro Drive FC 51
11
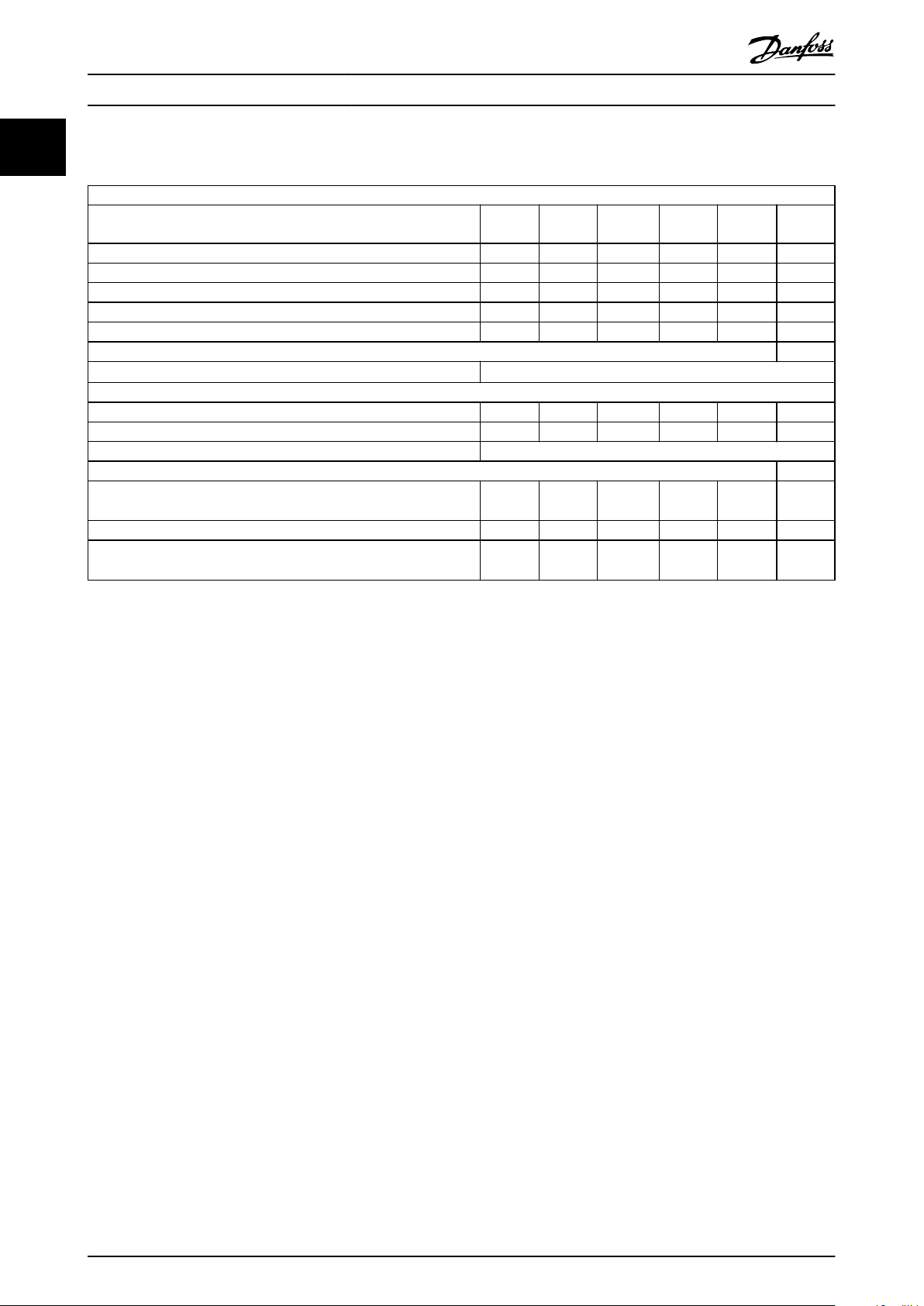
1.7.2 Mains Supply 3x200–240 V AC
Normal overload 150% for 1 minute
Frequency converter
Typical shaft output [kW]
Typical shaft output [hp] 0.33 0.5 1 2 3 5
Enclosure protection rating IP20 M1 M1 M1 M2 M3 M3
Output current
Continuous (3x200–240 V) [A] 1.5 2.2 4.2 6.8 9.6 15.2
Intermittent (3x200–240 V) [A] 2.3 3.3 6.3 10.2 14.4 22.8
Maximum cable size:
(Mains, motor) [mm2/AWG]
Maximum input current
Continuous (3x200–240 V) [A] 2.4 3.5 6.7 10.9 15.4 24.3
Intermittent (3x200–240 V) [A] 3.2 4.6 8.3 14.4 23.4 35.3
Maximum mains fuses [A] See chapter 1.3.3 Fuses
Environment
Estimated power loss [W]
Best case/typical
Weight enclosure IP20 [kg] 1.1 1.1 1.1 1.6 3.0 3.0
Eciency [%]
Best case/typical
1)
2)
PK25
0.25
14.0/
20.0
96.4/
94.9
PK37
0.37
19.0/
24.0
96.7/
95.8
PK75
0.75
31.5/
39.5
97.1/
96.3
4/10
P1K5
1.5
51.0/
57.0
97.4/
97.2
P2K2
2.2
72.0/
77.1
97.2/
97.4
P3K7
115.0/
122.8
97.3/
97.4
3.7
Table 1.8 Mains Supply 3x200–240 V AC
1) Applies for dimensioning of frequency converter cooling. If the switching frequency is higher than the default setting, the power losses may
increase. LCP and typical control card power consumptions are included. For power loss data according to EN 50598-2, refer to
drives.danfoss.com/knowledge-center/energy-eciency-directive/#/.
2) Eciency measured at nominal current. For energy eciency class, see chapter 1.8.1 Surroundings. For part load losses, see drives.danfoss.com/
knowledge-center/energy-eciency-directive/#/.
24 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 29
Quick Guide
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
1.7.3 Mains Supply 3x380–480 V AC
Normal overload 150% for 1 minute
Frequency converter
Typical shaft output [kW]
Typical shaft output [hp] 0.5 1 2 3 4 5.5
Enclosure protection rating IP20 M1 M1 M2 M2 M3 M3
Output current
Continuous (3x380–440 V) [A] 1.2 2.2 3.7 5.3 7.2 9.0
Intermittent (3x380–440 V) [A] 1.8 3.3 5.6 8.0 10.8 13.7
Continuous (3x440–480 V) [A] 1.1 2.1 3.4 4.8 6.3 8.2
Intermittent (3x440–480 V) [A] 1.7 3.2 5.1 7.2 9.5 12.3
Maximum cable size:
(Mains, motor) [mm2/AWG]
Maximum input current
Continuous (3x380–440 V) [A] 1.9 3.5 5.9 8.5 11.5 14.4
Intermittent (3x380–440 V) [A] 2.6 4.7 8.7 12.6 16.8 20.2
Continuous (3x440–480 V) [A] 1.7 3.0 5.1 7.3 9.9 12.4
Intermittent (3x440–480 V) [A] 2.3 4.0 7.5 10.8 14.4 17.5
Maximum mains fuses [A] See chapter 1.3.3 Fuses
Environment
Estimated power loss [W]
Best case/typical
Weight enclosure IP20 [kg] 1.1 1.1 1.6 1.6 3.0 3.0
Eciency [%]
Best case/typical
1)
2)
PK37
0.37
18.5/
25.5
96.8/
95.5
PK75
0.75
28.5/
43.5
97.4/
96.0
P1K5
1.5
41.5/
56.5
98.0/
97.2
4/10
P2K2
2.2
57.5/
81.5
97.9/
97.1
P3K0
3.0
75.0/
101.6
98.0/
97.2
P4K0
98.5/
133.5
98.0/
97.3
1 1
4.0
Table 1.9 Mains Supply 3x380–480 V AC
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 25
Page 30
Quick Guide
VLT® Micro Drive FC 51
11
Normal overload 150% for 1 minute
Frequency converter
Typical shaft output [kW]
Typical shaft output [hp] 7.5 10 15 20 25 30
Enclosure protection rating IP20 M3 M3 M4 M4 M5 M5
Output current
Continuous (3x380–440 V) [A] 12.0 15.5 23.0 31.0 37.0 43.0
Intermittent (3x380–440 V) [A] 18.0 23.5 34.5 46.5 55.5 64.5
Continuous (3x440–480 V) [A] 11.0 14.0 21.0 27.0 34.0 40.0
Intermittent (3x440–480 V) [A] 16.5 21.3 31.5 40.5 51.0 60.0
Maximum cable size:
(Mains, motor) [mm2/AWG]
Maximum input current
Continuous (3x380–440 V) [A] 19.2 24.8 33.0 42.0 34.7 41.2
Intermittent (3x380–440 V) [A] 27.4 36.3 47.5 60.0 49.0 57.6
Continuous (3x440–480 V) [A] 16.6 21.4 29.0 36.0 31.5 37.5
Intermittent (3x440–480 V) [A] 23.6 30.1 41.0 52.0 44.0 53.0
Maximum mains fuses [A] See chapter 1.3.3 Fuses
Environment
Estimated power loss [W]
Best case/typical
Weight enclosure IP20 [kg] 3.0 3.0
Eciency [%]
Best case/typical
1)
2)
P5K5
5.5
131.0/
166.8
98.0/
97.5
P7K5
7.5
4/10 16/6
175.0/
217.5
98.0/
97.5
P11K
11
290.0/
342.0
97.8/
97.4
P15K
15
387.0/
454.0
97.7/
97.4
P18K
18.5
395.0/
428.0
98.1/
98.0
P22K
22
467.0/
520.0
98.1/
97.9
Table 1.10 Mains Supply 3x380–480 V AC
1) Applies for dimensioning of frequency converter cooling. If the switching frequency is higher than the default setting, the power losses may
increase. LCP and typical control card power consumptions are included. For power loss data according to EN 50598-2, refer to
drives.danfoss.com/knowledge-center/energy-eciency-directive/#/.
2) Eciency measured at nominal current. For energy eciency class, see chapter 1.8.1 Surroundings. For part load losses, see drives.danfoss.com/
knowledge-center/energy-eciency-directive/#/.
26 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 31

Quick Guide
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
1.8 General Technical Data
Protection and features
Electronic motor thermal protection against overload.
•
Temperature monitoring of the heat sink ensures that the frequency converter trips if there is overtemperature.
•
The frequency converter is protected against short circuits between motor terminals U, V, W.
•
When a motor phase is missing, the frequency converter trips and issues an alarm.
•
When a mains phase is missing, the frequency converter trips or issues a warning (depending on the load).
•
Monitoring of the DC-link voltage ensures that the frequency converter trips when the DC-link voltage is too low
•
or too high.
The frequency converter is protected against ground faults on motor terminals U, V, W.
•
Mains supply (L1/L, L2, L3/N)
Supply voltage 200–240 V ±10%
Supply voltage 380–480 V ±10%
Supply frequency 50/60 Hz
Maximum imbalance temporary between mains phases 3.0% of rated supply voltage
True power factor ≥0.4 nominal at rated load
Displacement power factor (cosφ) near unity (>0.98)
Switching on input supply L1/L, L2, L3/N (power-ups) Maximum 2 times/minute
Environment according to EN60664-1 Overvoltage category III/pollution degree 2
The unit is suitable for use on a circuit capable of delivering not more than 100000 RMS symmetrical Amperes, 240/480 V
maximum.
1 1
Motor output (U, V, W)
Output voltage 0–100% of supply voltage
Output frequency 0–200 Hz (VVC+), 0–400 Hz (u/f)
Switching on output Unlimited
Ramp times 0.05–3600 s
Cable length and cross-section
Maximum motor cable length, shielded/armored (EMC-correct installation) 15 m (49 ft)
Maximum motor cable length, unshielded/unarmored 50 m (164 ft)
Maximum cross-section to motor, mains
Connection to load sharing/brake (M1, M2, M3) 6.3 mm insulated Faston plugs
Maximum cross-section to load sharing/brake (M4, M5) 16 mm2/6 AWG
Maximum cross-section to control terminals, rigid wire 1.5 mm2/16 AWG (2x0.75 mm2)
Maximum cross-section to control terminals, exible cable 1 mm2/18 AWG
Maximum cross-section to control terminals, cable with enclosed core 0.5 mm2/20 AWG
Minimum cross-section to control terminals 0.25 mm2 (24 AWG)
1) See chapter 1.7 Specications for more information.
1)
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 27
Page 32

Quick Guide
VLT® Micro Drive FC 51
11
Digital inputs (pulse/encoder inputs)
Programmable digital inputs (pulse/encoder) 5 (1)
Terminal number 18, 19, 27, 29, 33
Logic PNP or NPN
Voltage level 0–24 V DC
Voltage level, logic 0 PNP <5 V DC
Voltage level, logic 1 PNP >10 V DC
Voltage level, logic 0 NPN >19 V DC
Voltage level, logic 1 NPN <14 V DC
Maximum voltage on input 28 V DC
Input resistance, R
Maximum pulse frequency at terminal 33 5000 Hz
Minimum pulse frequency at terminal 33 20 Hz
Analog inputs
Number of analog inputs 2
Terminal number 53, 60
Voltage mode (terminal 53) Switch S200=OFF(U)
Current mode (terminal 53 and 60) Switch S200=ON(I)
Voltage level 0–10 V
Input resistance, R
Maximum voltage 20 V
Current level 0/4 to 20 mA (scaleable)
Input resistance, R
Maximum current 30 mA
i
i
i
Approximately 4000 Ω
Approximately 10000 Ω
Approximately 200 Ω
Analog output
Number of programmable analog outputs 1
Terminal number 42
Current range at analog output 0/4–20 mA
Maximum load to common at analog output 500 Ω
Maximum voltage at analog output 17 V
Accuracy on analog output Maximum error: 0.8% of full scale
Scan interval 4 ms
Resolution on analog output 8 bit
Scan interval 4 ms
Control card, RS485 serial communication
Terminal number 68 (P, TX+, RX+), 69 (N, TX-, RX-)
Terminal number 61 Common for terminals 68 and 69
Control card, 24 V DC output
Terminal number 12
Maximum load (M1 and M2) 100 mA
Maximum load (M3) 50 mA
Maximum load (M4 and M5) 80 mA
28 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 33

Quick Guide
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
Relay output
Programmable relay output 1
Relay 01 terminal number 01–03 (break), 01–02 (make)
Maximum terminal load (AC-1)1) on 01–02 (NO) (Resistive load) 250 V AC, 2 A
Maximum terminal load (AC-15)1) on 01–02 (NO) (Inductive load @ cosφ 0.4) 250 V AC, 0.2 A
Maximum terminal load (DC-1)1) on 01–02 (NO) (Resistive load) 30 V DC, 2 A
Maximum terminal load (DC-13)1) on 01–02 (NO) (Inductive load) 24 V DC, 0.1 A
Maximum terminal load (AC-1)1) on 01–03 (NC) (Resistive load) 250 V AC, 2 A
Maximum terminal load (AC-15)1) on 01–03 (NC) (Inductive load @ cosφ 0.4) 250 V AC, 0.2 A
Maximum terminal load (DC-1)1) on 01–03 (NC) (Resistive load) 30 V DC, 2 A
Minimum terminal load on 01–03 (NC), 01–02 (NO) 24 V DC 10 mA, 24 V AC 20 mA
Environment according to EN 60664-1 Overvoltage category III/pollution degree 2
1) IEC 60947 part 4 and 5
Control card, 10 V DC output
Terminal number 50
Output voltage 10.5 V ±0.5 V
Maximum load 25 mA
NOTICE
All inputs, outputs, circuits, DC supplies, and relay contacts are galvanically isolated from the supply voltage (PELV) and
other high-voltage terminals.
Surroundings
Enclosure protection rating IP20
Enclosure kit available IP21, TYPE 1
Vibration test 1.0 g
Maximum relative humidity 5%–95 % (IEC 60721-3-3; Class 3K3 (non-condensing) during operation
Aggressive environment (IEC 60721-3-3), coated class 3C3
Test method according to IEC 60068-2-43 H2S (10 days)
Ambient temperature
Minimum ambient temperature during full-scale operation 0 °C (32 °F)
Minimum ambient temperature at reduced performance -10 °C (14 °F)
Temperature during storage/transport -25 to +65/70 °C (-13 to + 149/158 °F)
Maximum altitude above sea level without derating
Maximum altitude above sea level with derating
Safety standards EN/IEC 61800-5-1, UL 508C
EMC standards, Emission EN 61800-3, EN 61000-6-3/4, EN 55011, IEC 61800-3
EMC standards, Immunity
Energy eciency class IE2
1) Refer to chapter 1.9 Special Conditions for:
Derating for high ambient temperature.
•
Derating for high altitude.
•
2) Determined according to EN 50598-2 at:
Rated load.
•
90% rated frequency.
•
Switching frequency factory setting.
•
Switching pattern factory setting.
•
1)
1)
1)
EN 61800-3, EN 61000-6-1/2, EN 61000-4-2, EN 61000-4-3,
EN 61000-4-4, EN 61000-4-5, EN 61000-4-6
Maximum 40 °C (104 °F)
1000 m (3280 ft)
3000 m (9842 ft)
1 1
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 29
Page 34

Quick Guide
VLT® Micro Drive FC 51
11
1.9 Special Conditions
1.9.1 Derating for Ambient Temperature
The ambient temperature measured over 24 hours should
be at least 5 °C (41 °F) lower than the maximum ambient
temperature.
If the frequency converter is operated at high ambient
temperature, decrease the continuous output current.
The frequency converter has been designed for operation
at maximum 50 °C (122 °F) ambient temperature with 1
motor size smaller than nominal. Continuous operation at
full load at 50 °C (122 °F) ambient temperature reduces
the lifetime of the frequency converter.
Below 1000 m (3280 ft) altitude, no derating is necessary,
but above 1000 m (3280 ft), decrease the ambient
temperature or the maximum output current.
Decrease the output by 1% per 100 m (328 ft) altitude
above 1000 m (3280 ft), or reduce the maximum ambient
temperature by 1 °C (33.8 °F) per 200 m (656 ft).
1.9.3 Derating for Running at Low Speeds
When a motor is connected to a frequency converter,
check that the cooling of the motor is adequate.
A problem may occur at low speeds in constant torque
applications. Running continuously at low speeds – less
than half the nominal motor speed – may require extra air
cooling. Alternatively, select a larger motor (1 size up).
1.9.2 Derating for Low Air Pressure
The cooling capability of air is decreased at low air
pressure.
CAUTION
INSTALLATION AT HIGH ALTITUDE
For altitudes above 2000 m (6560 ft), contact Danfoss
regarding PELV.
30 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 35

Quick Guide
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
1.10 Options and Spare Parts
Ordering number Description
132B0100
132B0101
132B0102 LCP Remote Mounting Kit , w/3 m (10 ft) cable, IP55 with LCP 11, IP21 with LCP 12
132B0103 IP20 to NEMA Type 1 conversion kit, M1
132B0104 IP20 to NEMA Type 1 conversion kit, M2
132B0105 IP20 to NEMA Type 1 conversion kit, M3
132B0106 Decoupling plate mounting kit, M1 and M2
132B0107 Decoupling plate mounting kit, M3
132B0108 IP20 to IP21/Type1 conversion kit, M1
132B0109 IP20 to IP21/Type1 conversion kit, M2
132B0110 IP20 to IP21/Type1 conversion kit, M3
132B0111 DIN rail mounting kit, M1/M2
132B0120 IP20 to Nema 1 conversion kit, M4
132B0121 IP20 to Nema 1 conversion kit, M5
132B0122 Decoupling plate mounting kit, M4, M5
132B0126 Enclosure size M1 spare parts kits
132B0127 Enclosure size M2 spare parts kits
132B0128 Enclosure size M3 spare parts kits
132B0129 Enclosure size M4 spare parts kits
132B0130 Enclosure size M5 spare parts kits
132B0131 Blank cover
130B2522
130B2522
130B2533
130B2525
130B2530
130B2523
130B2523
130B2523
130B2526
130B2531
130B2527
130B2523
130B2523
130B2524
130B2526
130B2529
130B2531
130B2528
130B2527
VLT® Control Panel LCP 11 w/o potentiometer
VLT® Control Panel LCP 12 with potentiometer
VLT® Line Filter MCC 107 for 132F0001
VLT® Line Filter MCC 107 for 132F0002
VLT® Line Filter MCC 107 for 132F0003
VLT® Line Filter MCC 107 for 132F0005
VLT® Line Filter MCC 107 for 132F0007
VLT® Line Filter MCC 107 for 132F0008
VLT® Line Filter MCC 107 for 132F0009
VLT® Line Filter MCC 107 for 132F0010
VLT® Line Filter MCC 107 for 132F0012
VLT® Line Filter MCC 107 for 132F0014
VLT® Line Filter MCC 107 for 132F0016
VLT® Line Filter MCC 107 for 132F0017
VLT® Line Filter MCC 107 for 132F0018
VLT® Line Filter MCC 107 for 132F0020
VLT® Line Filter MCC 107 for 132F0022
VLT® Line Filter MCC 107 for 132F0024
VLT® Line Filter MCC 107 for 132F0026
VLT® Line Filter MCC 107 for 132F0028
VLT® Line Filter MCC 107 for 132F0030
1 1
Table 1.11 Options and Spare Parts
Danfoss line
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 31
lters and brake resistors are available upon request.
Page 36

089
Kurzanleitung
2 Kurzanleitung
VLT® Micro Drive FC 51
22
2.1 Einführung
2.1.1 Zielsetzung des Handbuchs
Diese Kurzanleitung enthält Informationen zur sicheren
Installation und Inbetriebnahme des VLT® Micro Drive FC
51 Frequenzumrichters.
Die Kurzanleitung richtet sich ausschließlich an
ziertes Personal.
Lesen Sie das Produkthandbuch vollständig, um sicher und
professionell mit dem Frequenzumrichter zu arbeiten.
Beachten Sie insbesondere die Sicherheitshinweise und
allgemeinen Warnungen. Bewahren Sie diese Bedienungsanleitung immer zusammen mit dem Frequenzumrichter
auf.
VLT® ist eine eingetragene Marke.
quali-
2.1.2 Zusätzliche Materialien
Es stehen zusätzliche Ressourcen zur Verfügung, die Ihnen
helfen, erweiterte Funktionen und Programmierungen von
Frequenzumrichtern zu verstehen:
Der Frequenzumrichter erfüllt die Anforderungen der
UL508C bezüglich der thermischen Sicherung. Weitere
Informationen können Sie dem Abschnitt Thermischer
Motorschutz im produktspezischen Projektierungshandbuch
entnehmen.
2.1.3 IT-Netz
NOTICE
IT-NETZ
Installation an isolierter Netzstromquelle (IT-Netz).
Maximal zulässige Versorgungsspannung bei Netzanschluss: 440 V.
Danfoss bietet als Option Netzlter für verbesserte
Reduzierung von Oberwellen an. Siehe Table 1.11.
2.1.4 Unerwarteten Anlauf vermeiden
Während der Frequenzumrichter an das Netz
angeschlossen ist, kann der Motor über digitale Befehle,
Busbefehle, Sollwerte oder über die LCP-Bedieneinheit
gestartet/gestoppt werden. Zur Vermeidung eines
unerwarteten Anlaufs:
Das VLT® Micro Drive FC 51 Programmier-
•
handbuch enthält umfassendere Informationen
über das Arbeiten mit Parametern sowie viele
Anwendungsbeispiele.
Das VLT® Micro Drive FC 51-Projektierung-
•
shandbuch enthält umfassende Informationen zu
Möglichkeiten und Funktionen sowie zur
Auslegung von Steuerungssystemen für Motoren.
Anweisungen für den Betrieb mit optionalen
•
Geräten und für den Austausch von
Komponenten.
Zusätzliche Veröentlichungen und Handbücher sind
verfügbar unter:
drives.danfoss.com/downloads/portal/#/
Trennen Sie den Frequenzumrichter gemäß den
•
Bestimmungen zur Personensicherheit vom Netz.
Betätigen Sie vor dem Ändern von Parametern
•
immer die Taste [O/Reset].
Sie dürfen Geräte mit elektrischen Bauteilen
nicht zusammen mit dem Hausmüll entsorgen.
Diese müssen separat mit Elektro- und
Elektronik-Altgeräten gemäß den lokalen Bestimmungen und den aktuell gültigen Gesetzen
gesammelt werden.
32 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 37

Kurzanleitung
2.2 Sicherheit
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
WARNING
HOCHSPANNUNG
Bei Anschluss an Versorgungsnetzeingang, DC-Stromversorgung oder Zwischenkreiskopplung führen
Frequenzumrichter Hochspannung. Erfolgen Installation,
Inbetriebnahme und Wartung nicht durch qualiziertes
Personal, kann dies zu schweren Verletzungen oder sogar
zum Tod führen!
Installation, Inbetriebnahme und Wartung
•
dürfen ausschließlich von qualiziertem
Personal durchgeführt werden.
Verwenden Sie vor der Durchführung von
•
Wartungs- oder Reparaturarbeiten ein
geeignetes Spannungsmessgerät, um sicherzustellen, dass der Frequenzumrichter keine
Spannung mehr führt.
WARNING
UNERWARTETER ANLAUF
Wenn der Frequenzumrichter an das Versorgungsnetz
angeschlossen ist, kann der Motor jederzeit anlaufen,
wodurch die Gefahr von schweren oder tödlichen Verletzungen sowie von Geräte- oder Sachschäden besteht.
Der Motor kann über einen externen Schalter, einen
seriellen Busbefehl, ein Sollwertsignal vom LCP oder LOP
oder einen quittierten Fehlerzustand anlaufen.
Ist ein unerwarteter Anlauf des Motors gemäß
•
den Bestimmungen zur Personensicherheit
unzulässig, trennen Sie den Frequenzumrichter
vom Netz.
Drücken Sie [O/Reset] am LCP, bevor Sie
•
Parameter programmieren.
Frequenzumrichter, Motor und alle
•
angetriebenen Geräte müssen bei Anschluss des
Frequenzumrichters an das Versorgungsnetz
betriebsbereit sein.
NOTICE
Sie können die Taste [O/Reset] nicht als Sicherheitsschalter benutzen. Sie trennt den Frequenzumrichter
nicht vom Netz.
WARNING
ENTLADEZEIT
Der Frequenzumrichter enthält Zwischenkreiskondensatoren, die auch bei abgeschaltetem Frequenzumrichter
geladen sein können. Auch wenn die Warn-LED nicht
leuchten, kann Hochspannung anliegen. Das Nichteinhalten der angegebenen Wartezeit nach dem Trennen
der Stromversorgung vor Wartungs- oder Reparaturarbeiten kann zu schweren Verletzungen oder sogar zum
Tod führen!
Stoppen Sie den Motor.
•
Trennen Sie die Netzversorgung und alle
•
externen Zwischenkreisversorgungen,
einschließlich externer Batterie-, USV- und
Zwischenkreisverbindungen mit anderen
Frequenzumrichtern.
Trennen oder verriegeln Sie den PM-Motor.
•
Warten Sie, damit die Kondensatoren
•
vollständig entladen können. Die minimale
Wartezeit nden Sie in Table 1.1.
Verwenden Sie vor der Durchführung von
•
Wartungs- oder Reparaturarbeiten ein
geeignetes Spannungsmessgerät, um sicherzustellen, dass die Kondensatoren vollständig
entladen sind.
Größe Mindestwartezeit (Minuten)
M1, M2 und M3 4
M4 und M5 15
Table 2.1 Entladezeit
Erdableitstrom (>3,5 mA)
Befolgen Sie im Hinblick auf die Schutzerdung von Geräten
mit einem Ableitstrom gegen Erde von mehr als 3,5 mA
alle nationalen und lokalen Vorschriften.
Die Frequenzumrichtertechnik nutzt hohe Schaltfrequenzen
bei gleichzeitig hoher Leistung. Dies erzeugt einen
Ableitstrom in der Erdverbindung. Ein Fehlerstrom im
Frequenzumrichter an den Ausgangsleistungsklemmen
kann eine Gleichstromkomponente enthalten, die die Filterkondensatoren laden und einen transienten Erdstrom
verursachen kann. Der Erdableitstrom hängt von
verschiedenen Faktoren bei der Systemkonguration ab,
wie EMV-Filter, abgeschirmte Motorkabel und Leistung des
Frequenzumrichters.
2 2
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 33
Page 38

Kurzanleitung
VLT® Micro Drive FC 51
EN 61800-5-1 (Produktnorm für Elektrische Leistungsantriebssysteme mit einstellbarer Drehzahl) stellt besondere
Anforderungen, wenn der Erdableitstrom 3,5 mA
22
übersteigt. Verstärken Sie die Erdverbindung auf eine der
folgenden Arten:
Erdungskabel mit einem Querschnitt von
•
mindestens 10 mm2 (8 AWG).
Zwei getrennt verlegte Erdungskabel, die die
•
vorgeschriebenen Maße einhalten
Weitere Informationen nden Sie in der Norm EN
60364-5-54 § 543.7.
Fehlerstromschutzschalter
Wenn Fehlerstromschutzschalter (RCD), auch als Erdschlusstrennschalter bezeichnet, zum Einsatz kommen, sind die
folgenden Anforderungen einzuhalten:
Verwenden Sie netzseitig allstromsensitive Fehler-
•
stromschutzschalter (Typ B).
Verwenden Sie Fehlerstromschutzschalter mit
•
Einschaltverzögerung, um Fehler durch transiente
Erdströme zu vermeiden.
Bemessen Sie Fehlerstromschutzschalter in Bezug
•
Systemkonguration und Umgebungsbedin-
auf
gungen.
Thermischer Motorschutz
Der Motorüberlastschutz ist durch Einstellung von
Parameter 1-90 Thermischer Motorschutz auf [4] ETR Alarm 1
möglich. Für den nordamerikanischen Markt: Die
implementierte ETR-Funktion beinhaltet Motorüberlastungsschutz der Klasse 20 gemäß NEC.
Installation in großen Höhenlagen
Bei Höhen über 2000 m wenden Sie sich bezüglich der
PELV (Schutzkleinspannung – Protective extra low voltage)
an Danfoss.
Installation
2.3
1.
Trennen Sie den VLT® Micro Drive FC 51 vom
Netz (und von der externen DC-Versorgung, falls
vorhanden).
2. Warten Sie 4 Minuten (M1, M2 und M3) bzw. 15
Minuten (M4 und M5), bis sich die Zwischenkreisdrosseln entladen haben. Siehe Table 1.1.
3. Klemmen Sie die DC-Bus-Zwischenkreisklemmen
und Bremsklemmen (falls vorhanden) ab.
4. Ziehen Sie das Motorkabel ab.
2.3.1 Seite-an-Seite-Installation
Der Frequenzumrichter kann bei allen Geräten in Schutzart
IP20 Seite an Seite montiert werden. Für ausreichende
Luftzirkulation zur Kühlung müssen jedoch über und unter
dem Frequenzumrichter ca. 100 mm (3,9 Zoll) Platz
gehalten werden. Einzelheiten zu den Nennwerten der
Umgebungsbedingungen des Frequenzumrichters
entnehmen Sie chapter 1.7 Specications.
2.2.1 Sicherheitshinweise
Stellen Sie sicher, dass der Frequenzumrichter
•
ordnungsgemäß geerdet ist.
Entfernen Sie keine Netzanschlüsse, Motorans-
•
chlüsse oder anderen Leistungsanschlüsse,
während der Frequenzumrichter an die Stromversorgung angeschlossen ist.
Schützen Sie die Benutzer vor der Versorgungss-
•
pannung.
Schützen Sie den Motor gemäß den
•
einschlägigen Vorschriften gegen Überlast.
Der Erdableitstrom übersteigt 3,5 mA. Erden Sie
•
den Frequenzumrichter ordnungsgemäß.
Sie können die Taste [O/Reset] nicht als Sicher-
•
heitsschalter benutzen. Sie trennt den
Frequenzumrichter nicht vom Netz.
34 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 39

B
a A
a A
a A
a A
a A
C
C
C C C
b
B
b
B
b
B
b
B
b
Ø 7mm
M5
M4
M3
M2
M1
Ø 7mm Ø 5.5mm Ø 4.5mm
130BB321.11
Ø 4.5mm
Kurzanleitung
2.3.2 Mechanische Abmessungen
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
Eine Bohrschablone ist auf der Verpackung enthalten.
Illustration 2.1 Mechanische Abmessungen
Leistung [kW (HP)] Höhe [mm]
Gehäuse
M1
M2 1,5 (2,0) 1,5 (2,0)
M3 2,2 (3,0)
M4 – –
M5 – –
1 x 200–240V3 x 200–240V3 x 380–480
V
0,18–0,75
(0,24–1,0)
0,25–0,75
(0,34–1,0)
0,37–0,75
(0,5–1,0)
1,5–2,2
(2,0–3,0)
2,2–3,7
(3,0–5,0)
3,0–7,5
(4,0–10)
11,0–15,0
(15–20)
18,5–22,0
(25–30)
A
150
(5,9)
176
(6,9)
239
(9,4)
292
(11,5)
335
(13,2)
A (mit
Abschirmblech)
205 (8,1)
230 (9,1)
294 (11,6)
347,5 (13,7)
387,5 (15,3)
Breite
[mm (in)]
1)
Tiefe
[mm (Zoll)]
Maximales
Gewicht
a B b C [kg]
140,4
(5,5)70(2,8)55(2,2)
166,4
(6,6)75(3,0)59(2,3)
226
(8,9)90(3,5)69(2,7)
272,4
(10,7)
(12,4)
315
125
(4,9)97(3,8)
165
(6,5)
148 (5,8) 1,1
168 (6,6) 1,6
194 (7,6) 3,0
241 (9,5) 6,0
140
248 (9,8) 9,5
(5,5)
2 2
Table 2.2 Mechanische Abmessungen
1) Fügen Sie bei einem LCP mit Potentiometer 7,6 mm (0,3 Zoll) hinzu.
NOTICE
Befolgen Sie stets die nationalen und lokalen Vorschriften zum Leitungsquerschnitt und zur Umgebungstemperatur.
Kupferleiter erforderlich, 60–75 °C (140–167 °F) empfohlen.
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 35
Page 40

Kurzanleitung
Leistung [kW (HP)] Drehmoment [Nm (in-lb)]
Gehäuse
22
M1
M2 1,5 (2,0) 1,5 (2,0)
M3 2,2 (3,0)
M4 – –
M5 – –
Table 2.3 Anziehen von Klemmen
1) Flachstecker (6,3-mm-Faston-Stecker).
1 x 200–240V3 x 200–240V3 x 380–480
0,18–0,75
(0,24–1,0)
0,25–0,75
(0,34–1,0)
2,2–3,7
(3,0–5,0)
VLT® Micro Drive FC 51
V
0,37–0,75
(0,5–1,0)
1,5–2,2
(2,0–3,0)
3,0–7,5
(4,0–10)
11,0–15,0
(15–20)
18,5–22,0
(25–30)
Reihe Motor
0,8
(7,1)
0,8
(7,1)
0,8
(7,1)
1,3
(11,5)
1,3
(11,5)
0,7
(6,2)
0,7
(6,2)
0,7
(6,2)
1,3
(11,5)
1,3
(11,5)
DC-Verbindung/
Bremse
Flachklemme
Flachklemme
Flachklemme
1,3 (11,5) 0,15 (1,3) 3 (26,6)
1,3 (11,5) 0,15 (1,3) 3 (26,6)
Steuerklemmen Masse Relais
1)
1)
1)
0,15 (1,3) 3 (26,6)
0,15 (1,3) 3 (26,6)
0,15 (1,3) 3 (26,6)
0,5
4,4
0,5
4,4
0,5
4,4
0,5
4,4
0,5
4,4
Schutz des Abzweigkreises
Zum Schutz der Anlage vor elektrischen Gefahren und Bränden müssen alle Abzweigkreise in einer Installation, Schaltvorrichtungen, Maschinen usw. in Übereinstimmung mit den nationalen/internationalen Vorschriften mit einem Kurzschlussund Überstromschutz versehen sein.
Kurzschlussschutz
Verwenden Sie die in Table 1.4 aufgeführten Sicherungen, um Servicepersonal und sonstige Geräte im Fall eines internen
Defekts im Frequenzumrichter oder eines Kurzschlusses im DC-Zwischenkreis zu schützen. Am Motor- oder Bremsenausgang
gewährleistet der Frequenzumrichter einen vollständigen Kurzschlussschutz.
Überspannungsschutz
Sorgen Sie für Überlastschutz, um ein Überhitzen der Kabel in der Anlage zu vermeiden. Führen Sie den Überspannungsschutz stets gemäß den nationalen Vorschriften aus. Die Sicherungen müssen für den Schutz eines Kreislaufs ausgelegt sein,
der imstande ist, höchstens 100.000 Ae (symmetrisch), 480 V max. zu liefern.
Keine UL-Konformität
Wenn keine Übereinstimmung mit der UL/cUL-Zulassung bestehen muss, verwenden Sie die Sicherungen in Table 1.4, um
Übereinstimmung mit EN50178/IEC61800-5-1 sicherzustellen:
Im Falle einer Fehlfunktion kann die Nichtbeachtung der Empfehlung zu Schäden am Frequenzumrichter führen.
Maximale
Maximale Sicherungen mit UL
FC 51
Bussmann Bussmann Bussmann Littelfuse
1 x 200–240 V
kW Typ RK1 Typ J Typ T Typ RK1 Typ CC Typ RK1 Typ gG
0K18–0K37 KTN-R15 JKS-15 JJN-15 KLN-R15 ATM-R15 A2K-15R 16A
0K75 KTN-R25 JKS-25 JJN-25 KLN-R25 ATM-R25 A2K-25R 25A
1K5 KTN-R35 JKS-35 JJN-35 KLN-R35 – A2K-35R 35A
2K2 KTN-R50 JKS-50 JJN-50 KLN-R50 – A2K-50R 50A
3 x 200–240 V
0K25 KTN-R10 JKS-10 JJN-10 KLN-R10 ATM-R10 A2K-10R 10A
0K37 KTN-R15 JKS-15 JJN-15 KLN-R15 ATM-R15 A2K-15R 16A
0K75 KTN-R20 JKS-20 JJN-20 KLN-R20 ATM-R20 A2K-20R 20A
1K5 KTN-R25 JKS-25 JJN-25 KLN-R25 ATM-R25 A2K-25R 25A
2K2 KTN-R40 JKS-40 JJN-40 KLN-R40 ATM-R40 A2K-40R 40A
3K7 KTN-R40 JKS-40 JJN-40 KLN-R40 – A2K-40R 40A
3 x 380–480 V
0K37–0K75 KTS-R10 JKS-10 JJS-10 KLS-R10 ATM-R10 A6K-10R 10A
1K5 KTS-R15 JKS-15 JJS-15 KLS-R15 ATM-R15 A2K-15R 16A
Ferraz
Shawmut
Ferraz Shawmut
Sicherungen
ohne UL
36 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 41

Kurzanleitung
FC 51
Bussmann Bussmann Bussmann Littelfuse
2K2 KTS-R20 JKS-20 JJS-20 KLS-R20 ATM-R20 A6K-20R 20A
3K0 KTS-R40 JKS-40 JJS-40 KLS-R40 ATM-R40 A6K-40R 40A
4K0 KTS-R40 JKS-40 JJS-40 KLS-R40 ATM-R40 A6K-40R 40A
5K5 KTS-R40 JKS-40 JJS-40 KLS-R40 – A6K-40R 40A
7K5 KTS-R40 JKS-40 JJS-40 KLS-R40 – A6K-40R 40A
11K0 KTS-R60 JKS-60 JJS-60 KLS-R60 – A6K-60R 63A
15K0 KTS-R60 JKS-60 JJS-60 KLS-R60 – A6K-60R 63A
18K5 KTS-R60 JKS-60 JJS-60 KLS-R60 – A6K-60R 80A
22K0 KTS-R60 JKS-60 JJS-60 KLS-R60 – A6K-60R 80A
Table 2.4 Sicherungen
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
Maximale
Maximale Sicherungen mit UL
Ferraz
Shawmut
Ferraz Shawmut
Sicherungen
ohne UL
2 2
2.3.3 Netz- und Motoranschluss
Der Frequenzumrichter kann alle dreiphasigen StandardAsynchronmotoren betreiben.
Der Frequenzumrichter ist für den Anschluss von Netz-/
Motorkabeln mit einem maximalen Querschnitt von 4
mm2/10 AWG (M1, M2 und M3) bzw. 16 mm2/6 AWG (M4
und M5) ausgelegt.
Verwenden Sie ein abgeschirmtes Motorkabel, um
•
die Vorgaben zur EMV-Störaussendung zu
erfüllen. Verbinden Sie dieses Kabel mit dem
Abschirmblech und dem Metallgehäuse des
Motors.
Das Motorkabel muss möglichst kurz sein, um
•
Störungen und Ableitströme auf ein Minimum zu
beschränken.
Weitere Informationen zur Montage des
•
Abschirmblechs nden Sie in der Anleitung für
VLT® Micro Drive FC 51 Abschirmblech und
Montageplatte.
Ziehen Sie ebenfalls die EMV-gerechte Installation
•
im VLT® Micro Drive FC 51 Projektierungshandbuch zurate.
1. Schließen Sie die Erdleitungen an die Schutzerdungsklemme an.
2. Schließen Sie die Motorleitungen an die Klemmen
U, V und W an.
3. Schließen Sie die Netzversorgung an die
Klemmen L1, L2 und L3/N (dreiphasig) bzw. L1/L
und L3/N (einphasig) an und ziehen Sie sie
anschließend fest.
Illustration 2.2 Befestigung von Erdkabel, Netz- und
Motorkabeln
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 37
Page 42

Kurzanleitung
VLT® Micro Drive FC 51
2.3.4 Steuerklemmen
22
Alle Klemmen für die Steuerkabel benden sich unter der
Klemmenabdeckung vor dem Frequenzumrichter. Entfernen
Sie diese Klemmenabdeckung mit Hilfe eines Schrauben-
Schalter 1
Schalter 2
Schalter 3 Ohne Funktion
drehers.
Schalter 4
NOTICE
1)=Werkseinstellung
Aus=PNP-Klemmen 29
Ein=NPN-Klemmen 29
Aus=PNP-Klemmen 18, 19, 27 und 33
Ein=NPN-Klemmen 18, 19, 27 und 33
Aus=Klemme 53 0-10 V
Ein=Klemme 53 0/4-20 mA
1)
1)
1)
Auf der Rückseite der Klemmenabdeckung nden Sie
einen Überblick über die Steuerklemmen und Schalter.
Table 2.5 Einstellungen für Schalter S200 1-4
Betätigen Sie die Schalter nur, wenn der Frequenzumrichter spannungsfrei geschaltet ist.
Stellen Sie 6-19 Klemme 53 Funktion gemäß der Position
von Schalter 4 ein.
Illustration 2.3 Entfernen der Klemmenabdeckung
Illustration 2.4 S200-Schalter 1–4
Illustration 1.5 zeigt alle Steuerklemmen des Frequenzumrichters. Durch Anlegen eines Startbefehls (Klemme 18)
und eines Analogsollwerts (Klemme 53 oder 60) versetzen
Sie den Frequenzumrichter in den Betriebszustand.
38 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 43

Kurzanleitung
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
2 2
Illustration 2.5 Übersicht von Steuerklemmen in PNP-Konguration mit Werkseinstellung
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 39
Page 44

130BA242.17
1)
Kurzanleitung
VLT® Micro Drive FC 51
2.3.5 Elektrische Installation - Übersicht
22
Illustration 2.6 Diagramm mit allen elektrischen Anschlüssen
1) Bremsen (BR+ und BR-) für Baugröße M1 nicht zutreend.
Weitere Informationen zu Bremswiderständen nden Sie im Projektierungshandbuch VLT® Brake Resistor MCE 101.
Eine Verbesserung des Leistungsfaktors und der EMV-Leistung ist durch Einbau optionaler Danfoss-Netzlter möglich.
Danfoss-Leistungslter können ebenfalls zur Zwischenkreiskopplung eingesetzt werden. Weitere Informationen zur
Zwischenkreiskopplung entnehmen Sie dem Anwendungshinweis VLT® FC 51 Micro Drive Zwischenkreiskopplung.
40 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 45

130BA605.13
Set-up
number
Parameter
number
Motor
direction
Menu
key
Indicator
lights
Value
Numeric
display
Unit
Selected
menu
Navigation
keys
Potentiometer
(LCP 12)
Operation keys
and leds
Kurzanleitung
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
2.3.6 Zwischenkreiskopplung/Bremse
Verwenden Sie für DC-Zwischenkreise (Zwischenkreiskopplung und Bremse) isolierte, für
Hochspannungsanwendungen geeignete 6,3-mm-FastonStecker.
Weitere Informationen erhalten Sie bei Danfoss oder in der
Anleitung Load sharing instruction VLT® 5000 für die
Zwischenkreiskopplung bzw. in der Anleitung VLT
®
2800/5000/5000 FLUX/FCD Brake 300 für die Bremse.
Zwischenkreiskopplung
Die Klemmen -UDC und +UDC/+BR verbinden.
Bremse
Verbinden Sie die Klemmen -BR und +UDC/+BR (nicht
zutreend für Baugröße M1).
NOTICE
Spannungen bis 850 V DC können zwischen den
Klemmen +UDC/+BR und -UDC auftreten. Nicht
kurzschlussgeschützt.
2.4 Programmieren
2.4.1 Programmieren einer automatischen
Motoranpassung (AMA)
Detaillierte Informationen zum Programmieren enthält das
Programmierhandbuch VLT® Micro Drive FC 51.
NOTICE
Sie können den Frequenzumrichter nach der Installation
der Kongurationssoftware MCT-10 per Computer über
eine RS485-Schnittstelle (Com-Port) programmieren.
Diese Software können Sie mit der Bestellnummer
130B1000 bestellen oder von der Danfoss-Website
www.danfoss.com/BusinessAreas/DrivesSolutions/softwaredownload
Illustration 2.7 Beschreibung der LCP-Tasten und des
Displays
Über die [Menu]-Taste können Sie eines der folgenden
Menüs auswählen:
Status
Nur für Anzeigen.
Quick Menu
Zugri auf Quick-Menüs 1 und 2.
Zum
Main Menu
Zum Programmieren sämtlicher Parameter.
Navigationstasten
[Back]: Bringt Sie zum vorherigen Schritt oder zur
vorherigen Ebene in der Navigationsstruktur zurück.
[▲] [▼]: Für den Wechsel zwischen Parametergruppen,
Parametern und innerhalb von Parametern.
[OK]: Für die Parameterauswahl und die Annahme von
Änderungen an Parametereinstellungen.
Drücken von [OK] für mehr als 1 s ruft den Modus
Einstellen auf. Im Modus Einstellen können Sie schnelle
Einstellungen vornehmen, indem Sie die Tasten [▲] [▼]
zusammen mit [OK] drücken.
2 2
Drücken Sie [▲] [▼] zum Ändern von Werten. Drücken Sie
[OK], um schnell die Ziernstellen zu wechseln.
Drücken Sie zum Verlassen des Modus Einstellen erneut
[OK] für mehr als 1 s, um die Änderungen zu speichern,
oder [Back], um die Änderungen nicht zu speichern.
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 41
Page 46

Kurzanleitung
VLT® Micro Drive FC 51
Bedientasten
Eine gelbe Anzeigeleuchte über den Bedientasten zeigt an,
welche Taste aktiv ist.
22
[Hand on]: Startet den Motor und ermöglicht die
Steuerung des Frequenzumrichters über die LCPBedieneinheit.
[O/Reset]: Der Motor wird angehalten. Im Alarmmodus
wird der Motor zurückgesetzt.
[Auto on]: Der Frequenzumrichter wird entweder über
Steuerklemmen oder per serieller Kommunikation
gesteuert.
[Potentiometer] (LCP12): Abhängig vom Modus, in dem
der Frequenzumrichter ausgeführt wird, arbeitet das
Potentiometer in zwei verschiedenen Funktionsweisen.
Im Auto On-Modus dient der Potentiometer als zusätzlicher
programmierbarer Analogeingang.
Im Hand On-Modus steuert der Potentiometer den lokalen
Sollwert.
Modus 2
1. Önen Sie das Hauptmenü.
2. Navigieren Sie zu Parametergruppe 1-** Motor/
Last.
3. Drücken Sie [OK].
4. Stellen Sie die Motorparameter in der Parametergruppe 1-2* Motordaten mithilfe der
Typenschilddaten ein.
5. Navigieren Sie zu 1-29 Autom. Motoranpassung.
6. Drücken Sie [OK].
7. Wählen Sie [3] Complete AMT with Rotating motor
(AMT im Motorleerlauf abschließen).
8. Drücken Sie [OK].
9. Der Test wird automatisch durchgeführt und zeigt
an, wann er beendet ist.
NOTICE
2.4.2 Programmieren des Automatic Motor
Tuning (AMT)
Führen Sie das Verfahren AMT zur Optimierung der
Kompatibilität zwischen Frequenzumrichter und Motor im
VVC+-Modus aus.
In Betriebsart 2 dreht sich der Rotor während der
automatischen Motoranpassung (AMT). Während dieses
Vorgangs dürfen Sie die Last am Motor nicht erhöhen.
Der Frequenzumrichter erstellt zur Regelung des
•
erzeugten Motorstroms ein mathematisches
Motormodell, wodurch die Motorleistung
verbessert werden kann.
Führen Sie dieses Verfahren bei kaltem Motor
•
durch, um das beste Ergebnis zu erzielen.
Verwenden Sie zur Durchführung des AMTVerfahrens das numerische LCP (NLCP). Es gibt
zwei AMT-Modi für Frequenzumrichter.
Modus 1
Önen Sie das Hauptmenü.
1.
2. Navigieren Sie zu Parametergruppe 1-** Motor/
Last.
3. Drücken Sie [OK].
4. Stellen Sie die Motorparameter in der Parameter-
gruppe 1-2* Motordaten mit Hilfe der
Typenschilddaten ein.
5. Navigieren Sie zu 1-29 Autom. Motoranpassung.
6. Drücken Sie [OK].
7. Wählen Sie [2] Reduz. Anpassung
8. Drücken Sie [OK].
9. Der Test wird automatisch durchgeführt und zeigt
an, wann er beendet ist.
42 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 47

Kurzanleitung
2.5 Parameterübersicht
0-** Betrieb/Display
0-0* Grundeinstellungen
0-03 Ländereinstellungen
*[0] International
[1] US
0-04 Oper. (Hand)
[0] Wiederanlauf
*[1] LCP Stop, Letzt.SW
[2] LCP Stop, Sollw.=0
0-1* Parametersätze
0-10 Aktiver Satz
*[1] Satz 1
[2] Satz 2
[9] Externe Anwahl
0-11 Programm Satz
*[1] Satz 1
[2] Satz 2
[9] Aktiver Satz
0-12 Verknüpfte Parametersätze
[0] Nicht verknüpft
*[20] Verknüpft
0-31 Min. Wert benutzerdef.
Anzeige
0,00–9999,00 * 0,00
0-32 Max. Wert benutzerdef.
Anzeige
0,00-9999,00 * 100,0
0-4* LCP-Tasten
0-40 [Hand on] LCP-Taste
[0] Deaktiviert
*[1] Aktiviert
0-41 [O/Reset]-LCP Taste
[0] Alle deaktivieren
*[1] Alle aktivieren
[2] Nur Reset aktivieren
0-42 [Auto on]-LCP Taste
[0] Deaktiviert
*[1] Aktiviert
0-5* Kopie/Speichern
0-50 LCP-Kopie
*[0] Keine Kopie
[1] Speichern in LCP
[2] Lade von LCP, Alle
[3] Lade von LCP, nur Fkt.
0-51 Parametersatz-Kopie
*[0] Keine Kopie
[1] Kopie von Satz 1
[2] Kopie von Satz 2
[9] Kopie von Werkseinstellung
0-6* Passwort
0-60 Hauptmenü Passwort
0–999 *0
1) Nur M4 und M5
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
0-61 Hauptmenü/Quick-Menü
Zugri ohne PW
*[0] Vollständig
[1] LCP:Read Only
[2] LCP:Kein Zugri
1-** Motor/Last
1-0* Grundeinstellungen
1-00 Regelverfahren
*[0] Ohne Rückführung
[3] Prozess
1-01 Steuerprinzip
[0] U/f
+
*[1] VVC
1-03 Drehmomentverhalten der
Last
*[0] Konstantes Drehmoment
[2] Autom. Energieoptim.
1-05 Hand/Ort-Betrieb Konguration
[0] Drehzahlsteuerung
*[2] Wie Par. 1-00
1-2* Motordaten
1-20 Motornennleistung [kW]
[HP]
[1] 0,09 kW/0,12 PS
[2] 0,12 kW/0,16 PS
[3] 0,18 kW/0,25 PS
[4] 0,25 kW/0,33 PS
[5] 0,37 kW/0,50 PS
[6] 0,55 kW/0,75 PS
[7] 1,75 kW/1,00 PS
[8] 1,10 kW/1,50 PS
[9] 1,50 kW/2,00 PS
[10] 2,20 kW/3,00 PS
[11] 3,00 kW/4,00 PS
[12] 3,70 kW/5,00 PS
[13] 4,00 kW/5,40 PS
[14] 5,50 kW/7,50 PS
[15] 7,50 kW/10,00 PS
[16] 11,00 kW/15,00 PS
[17] 15,00 kW/20,00 PS
[18] 18,50 kW/25,00 PS
[19] 22,00 kW/29,50 PS
[20] 30,00 kW/40,00 HP
1-22 Motornennspannung
50-999 V *230-400 V
1-23 Motornennfrequenz
20-400 Hz *50 Hz
1-24 Motorstrom
0,01-100,00 A *Abhängig vom
Motortyp
1-25 Motornenndrehzahl
100-9999 UPM * Abh. vom
Motortyp
1-29 Autom. Motoranpassung
*[0] O
[2] AMT aktivieren
[3] Complete AMT with Rotating
motor (AMT im Motorleerlauf
abschließen)
1-3* Erw. Motordaten
1-30 Statorwiderstand (Rs)
[Ohm] * Abh. von Motordaten
1-33 Statorstreureaktanz (X1)
[Ohm] * Abh. von Motordaten
1-35 Hauptreaktanz (Xh)
[Ohm] * Abh. von Motordaten
1-5* Lastunabh. Einst.
1-50 Motormagnetisierung bei 0
UPM
0-300 % *100 %
1-52 Min Drehzahl norm.
Magnetis. [Hz]
0,0–10,0 Hz *0,0 Hz
1-55 U/f-Kennlinie - U
0-999.9 V
1-56 U/f-Kennlinie - f [Hz]
0-400 Hz
1-6* Lastabh. Einstellung
1-60 Lastausgleich tief
0-199 % *100 %
1-61 Lastausgleich hoch
0-199 % *100 %
1-62 Schlupfausgleich
-400-399 % *100 %
1-63 Schlupfausgleich Zeitkonstante
0,05-5,00 s *0,10 s
1-7* Startfunktion
1-71 Startverzög.
0,0-10,0 s *0,0 s
1-72 Startfunktion
[0] DC Halten
[1] DC Bremse
*[2] Motorfreilauf/Verzögerung
1-73 Motorfangschaltung
*[0] Deaktiviert
[1] Aktiviert
1-8* Stoppfunktion
1-80 Funktion bei Stopp
*[0] Motorfreilauf
[1] DC-Halten
1-82 Ein.-Frequenz für
Stoppfunktion [Hz]
0,0–20,0 Hz *0,0 Hz
1-9*Motortemperatur
1-90 Thermischer Motorschutz
*[0] Kein Schutz
[1] Thermistor Warnung
[2] Thermistor-Abschalt.
[3] ETR-Warnung
[4] ETR-Abschaltung
1-93 Thermistoranschluss
*[0] Keine
[1] Analogeingang 53
[6] Digitaleingang 29
2-** Bremsfunktionen
2-0* DC Halt/DC Bremse
2-00 DC-Halte-/Vorwärmstrom
0-150 % *50 %
2-01 DC-Bremsstrom
0-150 % *50 %
2-02 DC-Bremszeit
0,0-60,0 s *10,0 s
2-04 DC-Bremse Ein [Hz]
0,0-400,0 Hz *0,0 Hz
2-1* Generator.Bremsen.
2-10 Bremsfunktion
*[0] O
[1] Bremswiderstand
[2] AC-Bremse
2-11 Bremswiderstand (Ohm)
Min/Max/default: Abh. von
Leistungsgröße
2-14 Brake Voltage reduce
(Bremsspannung verringern)
0 - abh. von Leistungsgröße* 0
2-16 AC-Bremse, max. Strom
0-150 % *100 %
2-17 Überspannungssteuerung
*[0] Deaktiviert
[1] Aktiv (ohne Stopp)
[2] Aktiviert
2-2* Mech. Bremse
2-20 Bremse önen bei
Motorstrom
0,00-100,0 A *0,00 A
2-22 Bremse schließen bei
Motorfrequenz
0,0–400,0 Hz *0,0 Hz
3-** Sollwert/Rampen
3-0* Sollwertgrenzen
3-00 Sollwertbereich
*[0] Min. bis Max.
[1] -Max. bis +Max
3-02 Minimaler Sollwert
-4999-4999 *0,000
3-03 Max. Sollwert
-4999–4999 *50,00
2 2
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 43
Page 48

Kurzanleitung
VLT® Micro Drive FC 51
3-1* Sollwerteinstellung
3-10 Festsollwert
-100,0-100,0 % *0,00 % 3-11
22
Festdrehzahl Jog [Hz]
0,0–400,0 Hz *5,0 Hz
3-12 Frequenzkorrektur Auf/Ab
0,00-100,0 % *0,00 %
3-14 Relativer Festsollwert
-100,0-100,0 % *0,00 %
3-15 Variabler Sollwert 1
[0] Ohne Funktion
*[1] Analogeingang 53
[2] Analogeingang 60
[8] Pulseingang 33
[11] Bus Sollwert
[21] LCP-Potentiometer
3-16 Variabler Sollwert 2
[0] Ohne Funktion
[1] Analogeing. 53
*[2] Analogeing. 60
[8] Pulseingang 33
*[11] Bus Sollwert
[21] LCP Potentiometer
3-17 Reference Resource 3
[0] Ohne Funktion
[1] Analogeingang 53
[2] Analogeingang 60
[8] Pulseingang 33
*[11] Bus Sollwert
[21] LCP-Potentiometer
3-18 Relativ. Skalierungssollw.
Ressource
*[0] Ohne Funktion
[1] Analogeingang 53
[2] Analogeingang 60
[8] Pulseingang 33
[11] Bus Sollwert
[21] LCP-Potentiometer
3-4* Rampe 1
3-40 Rampentyp 1
*[0] Linear
[2] Sinusrampe 2
3-41 Rampenzeit Auf 1
0,05–3600 s *3,00 s (10,00 s1))
3-42 Rampenzeit Ab 1
0,05-3600 s *3,00 s (10,00 s1))
3-5* Rampe 2
3-50 Rampentyp 2
*[0] Linear
[2] Sinusrampe 2
3-51 Rampenzeit Auf 2
0,05–3600 s *3,00 s (10,00 s1))
3-52 Rampenzeit Ab 2
0,05-3600 s *3,00 s (10,00 s1))
3-8* Weitere Rampen
3-80 Rampenzeit JOG
0,05–3600 s *3,00 s (10,00 s1))
1) Nur M4 und M5
3-81 Rampenzeit Schnellstopp
0,05–3600 s *3,00 s (10,00 s1))
4-** Grenzen/Warnungen
4-1* Motor Grenzen 4-10 Motor
Drehrichtung
*[0] Rechtsdrehend, wenn Par.
1-00 auf Regelung mit
Rückführung eingestellt ist
[1] Linksdrehend
*[2] Beides, wenn Par. 1-00 auf
Regelung ohne Rückführung
eingestellt ist
4-12 Min. Frequenz [Hz]
0,0-400,0 Hz *0,0 Hz
4-14 Max Frequenz [Hz]
0,1–400,0 Hz *65,0 Hz
4-16 Momentengrenze
motorisch
0-400 % *150 %
4-17 Momentengrenze generatorisch
0-400 % *100 %
4-4* Warnungen Grenzen 2
4-40 Warning Freq. Low
0,00-Wert von 4-41 Hz *0,0 Hz
4-41 Warnung Frequenz hoch
Wert von 4-40-400,0 Hz *400,00
Hz
4-5* Warnungen
4-50 Warnung Strom niedrig
0,00-100,00 A *0,00 A
4-51 Warnung Strom hoch
0,0-100,00 A *100,00 A
4-54 Warnung Sollwert niedrig
-4999,000–Wert von 4-55
* -4999,000
4-55 Warnung Sollwert hoch
Wert von 4-54 -4999,000
*4999,000
4-56 Warnung Istwert niedrig
-4999,000–Wert von 4-57
* -4999,000
4-57 Warnung Istwert hoch
Wert von 4-56–4999,000
*4999,000
4-58 Motorphasen-Überwachung
[0] O
*[1] An
4-6* Drehzahl-Bypass
4-61 Ausbl. Drehzahl von [Hz]
0.0-400,0 Hz *0,0 Hz
4-63 Ausbl. Drehzahl bis [Hz]
0,0-400,0 Hz *0,0 Hz
5-1* Digitaleingänge 5-10
Klemme 18 Digitaleingang
[0] Ohne Funktion
[1] Reset
[2] Motorfreilauf invers
[3] Mot.freil./Res. inv.
[4] Schnellst.rampe (inv)
[5] DC-Bremse (invers)
[6] Stopp (invers)
*[8] Start
[9] Puls-Start
[10] Reversierung
[11] Start + Reversierung
[12] Start nur Rechts
[13] Start nur Links
[14] JOG
[16-18] Festsollwert Bit 0-2
[19] Sollwert speichern 5-10
Klemme 18 Digitaleingang
[20] Drehz. speich.
[21] Drehzahl auf
[22] Drehzahl ab
[23] Satzanwahl Bit 0
[28] Frequenzkorrektur Auf
[29] Frequenzkorrektur Ab
[34] Rampe Bit 0
[60] Zähler A (+1)
[61] Zähler A (-1)
[62] Reset Zähler A
[63] Zähler B (+1)
[64] Zähler B (-1)
[65] Reset Zähler B
5-11 Klemme 19 Digitaleingang
Siehe Par. 5-10. * [10]
Reversierung
5-12 Klemme 27 Digitaleingang
Siehe Par. 5-10. * [1] Alarm
quittieren
5-13 Klemme 29 Digitaleingang
Siehe Par. 5-10. * [14] Festdrz.
(JOG)
5-15 Klemme 33 Digitaleingang
Siehe Par. 5-10. * [16]
Festsollwert Bit 0
[26] Präziser Stopp invers
[27] Präziser Start, Stopp
[32] Pulseingang
5-3* Digitalausgänge
5-34 Ein Verzög., Klemme 42
Digitalausgang
0,00-600,00 s * 0,01 s
5-35 Aus Verzög., Klemme 42
Digitalausgang
0,00-600,00 s * 0,01 s
5-4* Relais
5-40 Relaisfunktion
[52] Fern-Sollwert aktiv
[53] Kein Alarm
[54] Startbefehl aktiv
[55] Reversierung aktiv
[56] Hand-Betrieb
[57] Autobetrieb
[60-63] Vergleicher 0-3
[70-73] Logikregel 0-3
[81] SL-Digitalausgang B
5-41 Ein Verzög., Relais
0,00-600,00 s *0,01 s
5-42 Aus Verzög., Relais
0,00–600,00 s *0,01 s
5-5* Pulseingang
5-55 Klemme 33 Min. Frequenz
20-4999 Hz *20 Hz
5-56 Klemme 33 Max. Frequenz
21-5000 Hz *5000 Hz
5-57 Kl. 33 Min. Soll-/Ist- Wert
-4999-4999 *0,000
5-58 Kl. 33 Skal. Max. Soll-/IstWert
-4999–4999 *50,000
6-** Analoge Ein-/Ausg.
6-0* Grundeinstellungen
6-00 Signalausfall Zeit
1-99 s *10 s
6-01 Signalausfall Funktion
*[0] O
[1] Drehz. speich.
[2] Stopp
[3] Festdrz. (JOG)
[4] Max. Drehzahl
[5] Stopp und Alarm
6-1* Analogeingang 1
6-10 Klemme 53 Skla. Min.
Spannung
0,00-9,99 V *0,07 V
6-11 Klemme 53 Max.Spannung
0,01-10,00 V *10,00 V
6-12 Klemme 53 Min.Strom
0,00-19,99 mA *0,14 mA
6-13 Klemme 53 Skal.
Max.Strom
0,01-20,00 mA *20,00 mA
6-14 Klemme 53 Min.-Soll-/IstWert
-4999-4999 *0,000
6-15 Klemme 53 Skal. Max.-Soll/
Ist- Wert
-4999-4999 *50,000
6-16 Klemme 53 Filterzeit
0,01–10,00 s *0,01 s
44 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 49

Kurzanleitung
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
6-19 Klemme 53 Modus
*[0] Einstellung Spannung
[1] Einstellung Strom 4
6-2* Analogeingang 2
6-22 Klemme 60 Skal. Min.Strom
0,00-19,99 mA *0,14 mA
6-23 Klemme 60 Skal.
Max.Strom
0,01-20,00 mA *20,00 mA
6-24 Klemme 60 Skal. Min.-Soll-/
Ist- Wert
-4999-4999 *0,000
6-25 Klemme 60 Skal. Max.-Soll/
Ist- Wert
-4999-4999 *50,00
6-26 Klemme 60 Filterzeitkonstante
0,01-10,00 s *0,01 s
6-8* LCP Potentiometer
6-80 LCP Potmeter Enable (LCP
Potentiometer aktivieren)
[0] Deaktiviert
*[1] Aktiviert
6-81 LC-Poti Low Reference
-4999-4999 *0,000
6-82 LCP-Poti High Reference
-4999-4999 *50,00
6-9* Analogausgang xx
6-90 Terminal 42 Mode (Klemme
42 Modus)
*[0] 0-20 mA
[1] 4-20 mA
[2] Digitalausgang
6-91 Terminal 42 Analog Output
(Klemme 42 Analogausgang)
*[0] Ohne Funktion
[10] Ausgangsfrequenz
[11] Sollwert
[12] Istwert
[13] Motorstrom
[16] Leistung
[19] DC-Zwischenkreisspannung
[20] Bussteuerung
6-92 Terminal 42 Digital Output
(Klemme 42 Digitalausgang)
Siehe Parameter 5-40
*[0] Ohne Funktion
[80] SL-Digitalausgang A
6-93 Kl. 42, Ausgang min.
Skalierung
0,00-200,0 % *0,00 %
6-94 Klemme 42 Ausgang max.
Skalierung
0,00-200,0 % *100,0 %
7-** PI-Regler
7-2* PI-Prozess Istw.
7-20 PI-Prozess Istwert 1
*[0] Ohne Funktion
[1] Analogeingang 53
[2] Analogeingang 60
[8] Pulseingang 33
[11] LocalBusRef
7-3* PI-Prozess
Geregelter 7-30 PI-Prozess
Auswahl Normal-/InversRegelung
*[0] Normal
[1] Invers
7-31 PI-Prozess Anti-Windup
[0] Deaktivieren
*[1] Aktiviert
7-32 PI-Prozess Reglerstart bei
0,0–200,0 Hz *0,0 Hz
7-33 PI-Prozess Proportionalverstärkung
0,00-10,00 *0,01
7-34 PI-Prozess I-Zeit
0,10–9999 s *9999 s
7-38 PI-Prozess Vorsteuerung
0–400 % *0 %
7-39 Bandbreite Ist=Sollwert
0–200 % *5 %
8-** Opt./Schnittstellen
8-0* Grundeinstellungen
8-01 Führungshoheit
*[0] Klemme und Steuerw.
[1] Nur Klemme
[2] Nur Steuerwort
8-02 Aktives Steuerwort
[0] Keine
*[1] FC-Seriell RS485
8-03 Steuerwort Timeout-Zeit
0,1–6500 s *1,0 s
8-04 Steuerwort TimeoutFunktion
*[0] O
[1] Ausgangsfrequenz speichern
[2] Stopp
[3] Festdrz. (JOG)
[4] Max. Drehzahl
[5] Stopp und Alarm
8-06 Timeout Steuerwort
quittieren
*[0] Deaktiviert
[1] Reset durchführen
8-3* Ser. FC-Schnittst.
8-30 FC-Protokoll
*[0] FC
[2] Modbus RTU
8-31 Adresse
1-247 *1
8-32 FC-Baudrate
[0] 2400 Baud
[1] 4800 Baud
*[2] 9600 Baud Expressionlimit
*[3] 19200 Baud
[4] 38400 Baud
8-33 Parität/Stoppbits
*[0] Gerade Parität, 1 Stoppbit
[1] Ungerade Parität, 1 Stoppbit
[2] Keine Parität, 1 Stoppbit
[3] Keine Parität, 2 Stoppbits
8-35 FC-Antwortzeit Min.-Delay
0,001–0,5 *0,010 s
8-36 FC-Antwortzeit Max.-Delay
0,100-10,00 s *5,000 s
8-4* FC/MC-Protokoll
8-43 PCD-Konguration Lesen
*[0] None
[1] [1500] Operation Hours
[2] [1501] Running Hours
[3] [1502] kWh Counter
[4] [1600] Control Word
[5] [1601] Reference [Unit]
[6] [1602] Reference %
[7] [1603] Status Word
[8] [1605] Main Actual Value [%]
[9] [1609] Custom Readout
[10] [1610] Power [kW]
[11] [1611] Power [hp]
[12] [1612] Motor Voltage
[13] [1613] Frequency
[14] [1614] Motor Current
[15] [1615] Frequency [%]
[16] [1618] Motor Thermal
[17] [1630] DC Link Voltage
[18] [1634] Heatsink Temp.
[19] [1635] Inverter Thermal
[20] [1638] SL Controller State
[21] [1650] External Reference
[22] [1651] Pulse Reference
[23] [1652] Feedback [Unit]
[24] [1660] Digital Input
18,19,27,33
[25] [1661] Digtial Input 29
[26] [1662] Analog Input 53 (V)
[27] [1663] Analog Input 53 (mA)
[28] [1664] Analog Input 60
[29] [1665] Analog Output 42
[mA]
[30] [1668] Freq. Input 33 [Hz]
[31] [1671] Relay Output [bin]
[32] [1672] Counter A
[33] [1673] Counter B
[34] [1690] Alarm Word
[35] [1692] Warning Word
[36] [1694] Ext. Status Word
8-5* Betr. Bus/Klemme
8-50 Motorfreilauf
[0] Klemme
[1] Bus
[2] Bus UND Klemme
*[3] Bus ODER Klemme
8-51 Schnellstopp
Siehe Par. 8-50* [3] Bus ODER
Klemme
8-52 Anwahl DC-Bremse
Siehe Par. 8-50 *[3] Bus ODER
Klemme
8-53 Start
Siehe Par. 8-50 *[3] Bus ODER
Klemme
8-54 Reversierung
Siehe Par. 8-50 *[3] Bus ODER
Klemme
8-55 Satzanwahl
Siehe Par. 8-50 *[3] Bus ODER
Klemme
8-56 Festsollwertanwahl
Siehe Parameter 8-50 *[3] Bus
ODER Klemme 8-8* FC-Ser.-
Diagnose
8-80 Zähler Busmeldungen
0-0 N/A *0 N/A
8-81 Zähler Busfehler
0-0 N/A *0 N/A
8-82 Zähler Followermeldungen
0-0 N/A *0 N/A
8-83 Zähler Followerfehler
0-0 N/A *0 N/A
8-9* Bus Jog / Feedback
8-94 Bus-Istwert 1
0x8000-0x7FFF *0
13-** Smart Logic13-0* SL-Controller
13-00 Smart Logic Controller
*[0] O
[1] Ein
13-01 SL-Controller Start
[0] Falsch
[1] Wahr
[2] In Betrieb
[3] Im Bereich
[4] Ist=Sollwert
[7] Außerh.Stromber.
[8] Unter Min.-Strom
[9] Über Max.-Strom
[16] Warnung Übertemp.
[17] Netzsp.auss.Bereich
[18] Reversierung
[19] Warnung
[20] Alarm (Abschaltung)
[21] Alarm (Absch.verrgl.)
[22-25] Vergleicher 0-3
[26-29] Logikregler 0-3
[33] Digitaleingang 18
[34] Digitaleingang 19
[35] Digitaleingang 27
[36] Digitaleingang 29
[38] Digitaleingang 33
*[39] Startbefehl
[40] FU gestoppt
2 2
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 45
Page 50

Kurzanleitung
VLT® Micro Drive FC 51
13-02 SL-Controller Stopp
Siehe Parameter 13-01 * [40] FU
gestoppt
22
13-03 Reset
*[0] Kein Reset
[1] Reset SLC
13-1* Vergleicher
13-10 Vergleicher-Operand
*[0] Deaktiviert
[1] Sollwert
[2] Istwert
[3] Motordrehzahl
[4] Motorstrom
[6] Motorleistung
[7] Motorspannung
[8] Zwischenkreisspann.
[12] Analogeing. 53
[13] Analogeing. 60
[18] Pulseingang 33
[20] Alarmnummer
[30] Zähler A
[31] Zähler B
13-11 Vergleicher-Funktion
[0] Less Than
*[1] Approximately equals
[2] Greater Than
13-12 Vergleicher-Wert
-9999–9999 *0,0
13-2* Timer
13-20 SL-Timer
0,0–3600 s *0,0 s
13-4* Logikregeln
13-40 Logikregel Boolsch 1
Siehe Par. 13-01 *[0] FALSCH
[30] - [32] Timeout 2
13-41 Logikregel Verknüpfung 1
*[0] Deaktiviert
[1] Und
[2] Oder
[3] Und nicht
[4] Oder nicht
[5] Nicht und
[6] Nicht oder
[7] Nicht und nicht
[8] NICHT ODER NICHT
13-42 Logikregel Boolsch 2
Siehe Par. 13-40 * [0] FALSCH
13-43 Logikregel Boolsch 2
Siehe Par. 13-41 *[0] Deaktiviert
13-44 Logikregel Boolsch 3
Siehe Par. 13-40 * [0] FALSCH
13-5* Sl-Programm
13-51 SL-Controller Ereignis
Siehe Par. 13-40 *[0] Falsch
13-52 SL-Controller Aktion
*[0] Deaktiviert
[1] Normal Betrieb
[2] Anwahl Datensatz 1
[3] Anwahl Datensatz 2
[10-17] Anwahl Festsollw.0-7
[18] Anwahl Rampe 1
[19] Anwahl Rampe 2
[22] Betrieb
[23] Start+Reversierung
[24] Stopp
[25] Schnellstopp
[26] DC-Stopp
[27] Motorfreilauf
[28] Drehz. speich.
[29] Start Timer 0
[30] Start Timer 1
[31] Start Timer 2
[32] Digitalausgang A-AUS
[33] Digitalausgang B-AUS
[38] Digitalausgang A-EIN
[39] Digitalausgang B-EIN
[60] Reset Zähler A
[61] Reset Zähler B
14-** Sonderfunktionen
14-0* IGBT-Ansteuerung
14-01 Taktfrequenz
[0] 2,0 kHz
*[1] 4,0 kHz
[2] 8,0 kHz
[4] 16,0 kHz
14-03 Übermodulation
[0] O
*[1] On
14-1* Netzausfall
14-12 Function at mains
imbalance (NetzphasenUnsymmetrie)
*[0] Abschaltung
[1] Warnung
[2] Deaktiviert
14-2* Reset/initialisieren
14-20 Quittierfunktion
*[0] Manuell Quittieren
[1-9] Autom. Quittieren 1-9
[10] 10x Autom. Quitt.
[11] 15x Autom. Quitt.
[12] 20x Autom. Quitt.
[13] Unbegr. Autom. Quitt.
[14] Reset at power up
14-21 Autom. Quittieren Zeit
0–600 s * 10 s
14-22 Betriebsart
*[0] Normalbetrieb
[2] Initialisierung 14-26 WR-
Fehler Abschaltverzögerung
*[0] Abschaltung
[1] Warnung14-4* Energieopti-
mierung
14-41 Minimale AEO-Magnetisierung
40–75 %*66 %
14-9* Fehlereinstellungen
14-90 Fehlerebenen [3] Abschalt-
blockierung
[4] Abschaltung mit verzögertem
Reset
15-** Info/Wartung
15-0* Betriebsdaten
15-00 Betriebsstunden
15-01 Motorlaufstunden
15-02 kWh-Zähler
15-03 Anzahl Netz-Ein
15-04 Anzahl Übertemperaturen
15-05 Anzahl Überspannungen
15-06 kWh-Zähler zurücksetzen
*[0] Kein Reset
[1] Reset
15-07 Reset Motorlaufstundenzähler
*[0] Kein Reset
[1] Reset
15-3* Fehlerspeicher
15-30 Fehlerspeicher:
Fehlercode
15-4* Typendaten
15-40 FC-Typ
15-41 Leistungsteil
15-42 Nennspannung
15-43 Steuerkarte SW-Version
15-46 Typ Bestellnummer.
Bestellnummer
15-48 LCP-Version
15-51 Typ Seriennummer
16-** Datenanzeigen 16-0*
Anzeigen-Allgemein
16-00 Steuerwort
0-0XFFFF
16-01 Reference [Unit]
-4999–4999 *0,000
16-02 Sollwert %
-200,0–200,0 % *0,0 %
16-03 Zustandswort
0–0XFFFF
16-05 Hauptistwert [%]
-200.0–200.0% *0.0%
16-09 Benutzerdenierte
Anzeige
Abh. von Par. 0-31, 0-32
16-1* Anzeigen-Motor
16-10 Leistung [kW]
16-11 Leistung [hp]
16-12 Motorspannung [V]
16-13 Frequenz
16-14 Motorstrom [A]
16-15 Frequenz [%]
16-18 Therm. Motorschutz [%]
16-3* Anzeigen-FU
16-30 DC-Spannung
16-34 Kühlkörpertemp.
16-35 FC Überlast
16-36 Nenn-WR- Strom
16-37 Max.- Max. Strom
16-38 SL Contr.Zustand*
16-5*Soll- & Istwerte
16-50 Externer Sollwert
16-51 Puls-Sollwert
16-52 Istwert [Einheit]
16-6* Anzeig. Ein-/Ausg.
16-60 Digitaleingänge
18,19,27,33
0-1111
16-61 Klemme 29
0-1
16-62 Analogeingang 53
(Spannung)
16-63 Analogeingang 53 (Strom)
16-64 Analogeingang 60
16-65 Analogausgang 42 [mA]
16-68 Pulseingang [Hz]
16-71 Relaisausgänge
16-72 Zähler A
16-73 Zähler B
16-8* Anzeig. Schnittst.
16-86 Bus Sollwert 1
0x8000-0x7FFFF
16-9* Bus Diagnose
16-90 Alarmwort
0-0XFFFFFFFF
16-92 Warning Word
0-0XFFFFFFFF
16-94 Ext. Zustandswort
0-0XFFFFFFFF
18-** Extended Motor Data
18-8* Motor Resistors
18-80 Stator Resistance (High
resolution)
0.000–99,990 Ohm *0,000 Ohm
18-81 Statorstreureaktanz (X1)
0,000–99,990 Ohm *0,000 Ohm
46 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 51

Kurzanleitung
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
2.6 Fehlersuche und -behebung
2.6.1 Warnungen und Alarmmeldungen
Nummer Beschreibung Warnung Alarm Abschaltung
Sperre
2 Signalfehler X X Das Signal an Klemme 53 oder 60 liegt unter
und I
1)
nom
X X X Versorgungsseitiger Phasenausfall oder zu
1)
1)
X X Die Zwischenkreisspannung überschreitet den
X X Die Zwischenkreisspannung fällt unter den
X X Der Frequenzumrichter wurde zu lange Zeit mit
X X Der Thermistor bzw. die Verbindung zum
X X Es besteht ein Kurzschluss am Bremswiderstand,
X X Es besteht ein Kurzschluss am Bremstransistor,
X X X Die Selbstabschaltungstemperatur des
X X Die 24 V DC-Versorgung ist überlastet.
X Die Einstellung von Motorspannung, Motorstrom
4
7
8
9 Wechselrichterüber-
10 Motortemperatur ETR X X Es liegt eine zu hohe Motortemperatur vor. Der
11 Übertemperatur des
12 Drehmomentgrenze X Das Drehmoment überschreitet den in
13 Überstrom X X X Die Spitzenstromgrenze des Wechselrichters ist
14 Erdschluss X X X Entladung zwischen Ausgangsphasen und Erde.
16 Kurzschluss X X Kurzschluss im Motor oder an den
17 Steuerwort-Timeout X X Es besteht keine Kommunikation zum Frequen-
25 Bremswiderstand
27 Bremschopper
28 Bremswiderstandstest X Der Bremswiderstand ist nicht angeschlossen/
29 Umrichter Übertem-
30 Motorphase U fehlt X X Die Motorphase U fehlt. Phase prüfen.
31 Motorphase V fehlt X X Die Motorphase V fehlt. Phase prüfen.
32 Motorphase W fehlt X X Die Motorphase W fehlt. Phase prüfen.
38 Interner Fehler X X Bitte wenden Sie sich an den örtlichen Danfoss-
44 Erdschluss X X Entladung zwischen Ausgangsphasen und Erde.
47 Steuerspannungs-
51 AMA U
Netzasymmetrie
DC-Überspannung
DC-Unterspannung
lastung
Motor-Thermistors
Kurzschluss
Kurzschluss
peratur
fehler
nom
überprüfen
Error Problemursache
50 % des Wertes, eingestellt in:
Parameter 6-10 Terminal 53 Low Voltage.
•
Parameter 6-12 Terminal 53 Low Current.
•
Parameter 6-22 Terminal 54 Low Current.
•
asymmetrische Netzspannung. Versorgungsspannung überprüfen.
Grenzwert.
Spannungsgrenzwert.
mehr als 100 % Ausgangsstrom belastet.
Frequenzumrichter wurde zu lange Zeit mit
mehr als 100 % Ausgangsstrom belastet.
Thermistor ist unterbrochen.
Parameter 4-16 Momentengrenze motorisch oder
Parameter 4-17 Momentgrenze generatorisch
festgelegten Wert.
überschritten.
Motorklemmen.
zumrichter.
weshalb die Bremsfunktion unterbrochen ist.
weshalb die Bremsfunktion unterbrochen ist.
funktioniert nicht.
Kühlkörpers wurde erreicht.
Händler.
und Motorleistung ist falsch.
2 2
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 47
Page 52

Kurzanleitung
VLT® Micro Drive FC 51
Nummer Beschreibung Warnung Alarm Abschaltung
Sperre
52 AMA I
zu niedrig X Der Motorstrom ist zu niedrig. Einstellungen
nom
22
59 Stromgrenze X Der Frequenzumrichter ist überlastet.
63 Mechanische Bremse
zu niedrig
80 Frequenzumrichter zu
Standardwerten
initialisiert
84 Die Verbindung
zwischen dem
Frequenzumrichter
und dem LCP wurde
unterbrochen
85 Taste deaktiviert X Siehe Parametergruppe 0-4* LCP.
86 Kopieren fehlges-
chlagen
87 LCP-Daten ungültig X Tritt beim Kopieren vom LCP auf, wenn das LCP
88 LCP-Daten nicht
kompatibel
89 Parameter schreibge-
schützt
90 Parameterdatenbank
ausgelastet
91 Parameterwert ist in
diesem Modus nicht
gültig
92 Parameterwert
überschreitet min./
max. Grenzen
nw run Nicht im Betrieb X Sie können den Parameter nur bei
Fehler Par. Es wurde ein falsches
Passwort eingegeben
1) Diese Fehler werden durch Netzspannungsverzerrungen verursacht. Bauen Sie einen Danfoss-Netzlter ein, um dieses Problem zu
beheben.
X Der Motorstrom hat den Strom für „Bremse
X Setzt alle Parametereinstellungen auf die
X Keine Kommunikation zwischen LCP und
X Beim Kopieren vom Frequenzumrichter zum LCP
X Tritt beim Kopieren vom LCP auf, wenn Daten
X Tritt auf, wenn versucht wird, einen schreibge-
X LCP- und RS485-Verbindungen versuchen gleich-
X Tritt auf, wenn versucht wird, einen ungültigen
X Tritt auf, wenn versucht wird, einen Wert
X Tritt auf, wenn beim Versuch, einen passwortge-
Error Problemursache
prüfen.
lüften“ innerhalb des Zeitfensters für die
Verzögerungszeit nicht überschritten.
Werkseinstellungen zurück.
Frequenzumrichter
oder umgekehrt ist ein Fehler aufgetreten.
fehlerhafte Daten enthält - oder wenn keine
Daten zum LCP hochgeladen wurden.
zwischen Frequenzumrichtern verschoben
werden und größere Unterschiede der Softwareversionen gegeben sind.
schützten Parameter zu ändern.
zeitig, Parameter zu aktualisieren.
Wert in einen Parameter zu schreiben.
außerhalb des Bereichs zu wählen.
angehaltenem Motor ändern.
schützten Parameter zu ändern, ein falsches
Passwort verwendet wird.
Table 2.6 Codeliste der Warnungen und Alarme
48 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 53

Kurzanleitung
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
2.7 Technische Daten
2.7.1 Netzversorgung 1x200-240 V AC
Normale Überlast 150 % für 1 Minute
Frequenzumrichter
Typische Wellenleistung [kW ]
Typische Wellenleistung [HP] 0,25 0,5 1 2 3
Schutzart IP20 M1 M1 M1 M2 M3
Ausgangsstrom
Dauerbetrieb (3 x 200-240 V AC) [A] 1,2 2,2 4,2 6,8 9,6
Überlast (3 x 200–240 V AC) [A] 1,8 3,3 6,3 10,2 14,4
Maximaler Kabelquerschnitt:
(Netz, Motor) [mm2/AWG]
Max. Eingangsstrom
Dauerbetrieb (1 x 200-240 V) [A] 3,3 6,1 11,6 18,7 26,4
Überlast (1 x 200-240 V) [A] 4,5 8,3 15,6 26,4 37,0
Maximale Netzsicherungen [A] Siehe chapter 1.3.3 Fuses
Umgebung
Geschätzte Verlustleistung [W ],
Bester Fall/Typisch
Gewicht des Gehäuses IP20 [kg] 1,1 1,1 1,1 1,6 3,0
Wirkungsgrad [%],
Bester Fall/Typisch
1)
2)
PK18
0.18
12.5/
15.5
95.6/
94.5
PK37
0.37
20.0/
25.0
96.5/
95.6
PK75
0.75
4/10
36.5/
44.0
96.6/
96.0
P1K5
1.5
61.0/
67.0
97.0/
96.7
P2K2
81.0/
85.1
96.9/
97.1
2 2
2.2
Table 2.7 Netzversorgung 1x200-240 V AC
1) Gilt für die Dimensionierung der Kühlung des Frequenzumrichters. Wenn die Taktfrequenz im Vergleich zur Werkseinstellung erhöht wird, kann
die Verlustleistung bedeutend steigen. Die Leistungsaufnahme des LCP und typischer Steuerkarten sind eingeschlossen. Verlustleistungsdaten
gemäß EN 50598-2
2) Bei Nennstrom gemessener Wirkungsgrad. Die Energieezienzklasse nden Sie unter chapter 1.8.1 Surroundings. Informationen zu Teillastver-
lusten siehe drives.danfoss.com/knowledge-center/energy-eciency-directive/#/.
nden Sie unter drives.danfoss.com/knowledge-center/energy-eciency-directive/#/.
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 49
Page 54

Kurzanleitung
VLT® Micro Drive FC 51
2.7.2 Netzversorgung 3 x 200-240 V AC
22
Normale Überlast 150 % für 1 Minute
Frequenzumrichter
Typische Wellenleistung [kW ]
Typische Wellenleistung [HP] 0,33 0,5 1 2 3 5
Schutzart IP20 M1 M1 M1 M2 M3 M3
Ausgangsstrom
Dauerbetrieb (3 x 200-240 V) [A] 1,5 2,2 4,2 6,8 9,6 15.2
Überlast (3 x 200-240 V) [A] 2.3 3,3 6,3 10,2 14,4 22.8
Maximaler Kabelquerschnitt:
(Netz, Motor) [mm2/AWG]
Max. Eingangsstrom
Dauerbetrieb (3 x 200-240 V) [A] 2.4 3.5 6.7 10.9 15.4 24.3
Überlast (3 x 200-240 V) [A] 3.2 4.6 8,3 14,4 23.4 35.3
Maximale Netzsicherungen [A] Siehe chapter 1.3.3 Fuses
Umgebung
Geschätzte Verlustleistung [W ]
Bester Fall/Typisch
Gewicht des Gehäuses IP20 [kg] 1,1 1,1 1,1 1,6 3,0 3,0
Wirkungsgrad [%]
Bester Fall/Typisch
Table 2.8 Netzversorgung 3 x 200-240 V AC
1) Gilt für die Dimensionierung der Kühlung des Frequenzumrichters. Wenn die Taktfrequenz im Vergleich zur Werkseinstellung erhöht wird, kann
die Verlustleistung bedeutend steigen. Die Leistungsaufnahme des LCP und typischer Steuerkarten sind eingeschlossen. Verlustleistungsdaten
gemäß EN 50598-2
2) Bei Nennstrom gemessener Wirkungsgrad. Die Energieezienzklasse nden Sie unter chapter 1.8.1 Surroundings. Informationen zu Teillastver-
lusten siehe drives.danfoss.com/knowledge-center/energy-eciency-directive/#/.
1)
2)
nden Sie unter drives.danfoss.com/knowledge-center/energy-eciency-directive/#/.
PK25
0.25
14.0/
20.0
96.4/
94.9
PK37
0.37
19.0/
24.0
96.7/
95.8
PK75
0.75
31.5/
39.5
97.1/
96.3
4/10
P1K5
1.5
51.0/
57.0
97.4/
97.2
P2K2
2.2
72.0/
77.1
97.2/
97.4
P3K7
3.7
115.0/
122.8
97.3/
97.4
50 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 55

Kurzanleitung
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
2.7.3 Netzversorgung 3 x 380–480 V AC
Normale Überlast 150 % für 1 Minute
Frequenzumrichter
Typische Wellenleistung [kW ]
Typische Wellenleistung [HP] 0,5 1 2 3 4 5.5
Schutzart IP20 M1 M1 M2 M2 M3 M3
Ausgangsstrom
Dauerbetrieb (3 x 380–440 V) [A] 1,2 2,2 3.7 5.3 7.2 9.0
Überlast (3 x 380–440 V) [A] 1,8 3,3 5.6 8.0 10.8 13.7
Dauerbetrieb (3 x 440–480 V) [A] 1,1 2.1 3.4 4.8 6,3 8.2
Überlast (3 x 440–480 V) [A] 1.7 3.2 5.1 7.2 9,5 12.3
Maximaler Kabelquerschnitt:
(Netz, Motor) [mm2/AWG]
Max. Eingangsstrom
Dauerbetrieb (3 x 380–440 V) [A] 1.9 3.5 5.9 8.5 11.5 14,4
Überlast (3 x 380–440 V) [A] 2.6 4.7 8.7 12.6 16.8 20.2
Dauerbetrieb (3 x 440–480 V) [A] 1.7 3,0 5.1 7.3 9.9 12.4
Überlast (3 x 440–480 V) [A] 2.3 4.0 7,5 10.8 14,4 17.5
Maximale Netzsicherungen [A] Siehe chapter 1.3.3 Fuses
Umgebung
Geschätzte Verlustleistung [W ]
Bester Fall/Typisch
Gewicht des Gehäuses IP20 [kg] 1,1 1,1 1,6 1,6 3,0 3,0
Wirkungsgrad [%]
Bester Fall/Typisch
1)
2)
PK37
0.37
18.5/
25.5
96.8/
95.5
PK75
0.75
28.5/
43.5
97.4/
96.0
P1K5
1.5
41.5/
56.5
98.0/
97.2
4/10
P2K2
2.2
57.5/
81.5
97.9/
97.1
P3K0
3.0
75.0/
101.6
98.0/
97.2
P4K0
4.0
98.5/
133.5
98.0/
97.3
2 2
Table 2.9 Netzversorgung 3 x 380–480 V AC
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 51
Page 56

Kurzanleitung
Normale Überlast 150 % für 1 Minute
Frequenzumrichter
Typische Wellenleistung [kW ]
22
Typische Wellenleistung [HP] 7,5 10 15 20 25 30
Schutzart IP20 M3 M3 M4 M4 M5 M5
Ausgangsstrom
Dauerbetrieb (3 x 380–440 V) [A] 12.0 15.5 23.0 31.0 37,0 43.0
Überlast (3 x 380–440 V) [A] 18.0 23.5 34.5 46.5 55.5 64.5
Dauerbetrieb (3 x 440–480 V) [A] 11.0 14.0 21.0 27.0 34.0 40.0
Überlast (3 x 440–480 V) [A] 16.5 21.3 31.5 40.5 51.0 60.0
Maximaler Kabelquerschnitt:
(Netz, Motor) [mm2/AWG]
Max. Eingangsstrom
Dauerbetrieb (3 x 380–440 V) [A] 19.2 24.8 33.0 42.0 34.7 41.2
Überlast (3 x 380–440 V) [A] 27.4 36.3 47.5 60.0 49.0 57.6
Dauerbetrieb (3 x 440–480 V) [A] 16.6 21.4 29.0 36.0 31.5 37.5
Überlast (3 x 440–480 V) [A] 23.6 30.1 41.0 52.0 44.0 53.0
Maximale Netzsicherungen [A] Siehe chapter 1.3.3 Fuses
Umgebung
Geschätzte Verlustleistung [W ]
Bester Fall/Typisch
Gewicht des Gehäuses IP20 [kg] 3,0 3,0
Wirkungsgrad [%]
Bester Fall/Typisch
1)
2)
VLT® Micro Drive FC 51
P5K5
5.5
131.0/
166.8
98.0/
97.5
P7K5
7.5
4/10 16/6
175.0/
217.5
98.0/
97.5
P11K
11
290.0/
342.0
97.8/
97.4
P15K
15
387.0/
454.0
97.7/
97.4
P18K
18.5
395.0/
428.0
98.1/
98.0
P22K
22
467.0/
520.0
98.1/
97.9
Table 2.10 Netzversorgung 3 x 380–480 V AC
1) Gilt für die Dimensionierung der Kühlung des Frequenzumrichters. Wenn die Taktfrequenz im Vergleich zur Werkseinstellung erhöht wird, kann
die Verlustleistung bedeutend steigen. Die Leistungsaufnahme des LCP und typischer Steuerkarten sind eingeschlossen. Verlustleistungsdaten
gemäß EN 50598-2 nden Sie unter drives.danfoss.com/knowledge-center/energy-eciency-directive/#/.
2) Bei Nennstrom gemessener Wirkungsgrad. Die Energieezienzklasse nden Sie unter chapter 1.8.1 Surroundings. Informationen zu Teillastver-
lusten siehe drives.danfoss.com/knowledge-center/energy-eciency-directive/#/.
52 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 57

Kurzanleitung
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
2.8 Allgemeine technische Daten
Schutzfunktionen und Eigenschaften
Elektronischer thermischer Motorüberlastschutz
•
Eine Temperaturüberwachung des Kühlkörpers stellt sicher, dass der Frequenzumrichter bei Erreichen einer
•
Übertemperatur abschaltet.
Der Frequenzumrichter ist gegen Kurzschlüsse zwischen den Motorklemmen U, V, W geschützt.
•
Bei fehlender Motorphase schaltet der Frequenzumrichter ab und gibt eine Warnung aus.
•
Bei fehlender Netzphase schaltet der Frequenzumrichter ab oder gibt eine Warnung aus (je nach Last).
•
Die Überwachung der Zwischenkreisspannung stellt sicher, dass das Frequenzumrichter abschaltet, wenn die
•
Zwischenkreisspannung zu niedrig oder zu hoch ist.
Der Frequenzumrichter ist an den Motorklemmen U, V und W gegen Erdschluss geschützt.
•
Netzversorgung (L1/L, L2, L3/N)
Versorgungsspannung 200–240 V ±10 %
Versorgungsspannung 380–480 V ±10 %
Netzfrequenz 50 Hz
Maximale kurzzeitige Asymmetrie zwischen Netzphasen 3,0 % der Versorgungsnennspannung
Wirkleistungsfaktor ≥0,4 bei Nennlast
Verschiebungsleistungsfaktor (cosφ) nahe 1 (>0,98)
Schalten am Netzeingang L1/L, L2, L3/N (Anzahl der Einschaltungen) max. 2 x/Min.
Umgebung nach EN 60664-1 Überspannungskategorie III/Verschmutzungsgrad 2
Das Gerät eignet sich für Netzversorgungen, die maximal 100.000 Ae (symmetrisch) bei maximal je 240/480 V liefern können.
2 2
Motorausgang (U, V, W)
Ausgangsspannung 0–100 % der Versorgungsspannung
Ausgangsfrequenz 0–200 Hz (VVC+), 0–400 Hz (u/f)
Schalten am Ausgang Unbegrenzt
Rampenzeiten 0,05–3600 s
Kabellänge und -querschnitt
Max. Motorkabellänge, abgeschirmt (EMV-gerechte Installation) 15 m (49 ft)
Max. Motorkabellänge, nicht abgeschirmt 50 m (164 ft)
Maximaler Kabelquerschnitt für Motor, Netz
Verbindung zu Zwischenkreiskopplung/Bremse (M1, M2, M3) 6,3 mm isolierte Faston-Stecker
Maximaler Querschnitt zu Zwischenkreiskopplung/Bremse (M4, M5) 16 mm2/6 AWG
Max. Querschnitt für Steuerklemmen, starrer Draht 1,5 mm2/16 AWG (2x0,75 mm2)
Max. Querschnitt für Steuerklemmen, exibles Kabel 1 mm2/18 AWG
Max. Querschnitt für Steuerklemmen, Kabel mit Aderendhülse 0,5 mm2/20 AWG
Mindestquerschnitt für Steuerklemmen 0,25 mm2 (24 AWG)
1) Siehe chapter 1.7 Specications für weitere Informationen.
Digitaleingänge (Puls/Drehgeber-Eingänge)
Programmierbare Digitaleingänge (Puls/Drehgeber) 5 (1)
Klemme Nr. 18, 19, 27, 29, 33
Logik PNP oder NPN
Spannungsniveau 0–24 V DC
Spannungsniveau, logisch 0 PNP <5 V DC
Spannungsniveau, logisch 1 PNP >10 V DC
Spannungsniveau, logisch 0 NPN >19 V DC
Spannungsniveau, logisch 1 NPN <14 V DC
Maximale Spannung am Eingang 28 V DC
Eingangswiderstand, Ri Ca. 4000 Ω
Max. Pulsfrequenz an Klemme 33 5000 Hz
1)
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 53
Page 58

Kurzanleitung
Min. Pulsfrequenz an Klemme 33 20 Hz
VLT® Micro Drive FC 51
22
Analogeingänge
Anzahl der Analogeingänge 2
Klemme Nr. 53, 60
Einstellung Spannung (Klemme 53) Schalter S200=AUS(U)
Einstellung Strom (Klemme 53 und 60) Schalter S200=EIN(I)
Spannungsniveau 0–10 V
Eingangswiderstand, Ri Ca. 10000 Ω
Höchstspannung 20 V
Strombereich 0/4 bis 20 Ma (skalierbar)
Eingangswiderstand, Ri Ca. 200 Ω
Maximaler Strom 30 mA
Analogausgang
Anzahl programmierbarer Analogausgänge 1
Klemme Nr. 42
Strombereich am Analogausgang 0/4–20 mA
Maximale Last zum Bezugspotential am Analogausgang 500 Ω
Maximale Spannung am Analogausgang 17 V
Genauigkeit am Analogausgang Maximale Abweichung: 0,8 % der Gesamtskala
Abtastintervall 4 ms
Auösung am Analogausgang 8 Bit
Abtastintervall 4 ms
Steuerkarte, RS485 serielle Schnittstelle
Klemme Nr. 68 (P, TX+, RX+), 69 (N, TX-, RX-)
Klemme Nr. 61 Masse für Klemmen 68 und 69
Steuerkarte, 24 V DC-Ausgang
Klemme Nr. 12
Maximale Last (M1 und M2) 100 mA
Maximale Last (M3) 50 mA
Maximale Last (M4 und M5) 80 mA
Relaisausgänge
Programmierbarer Relaisausgang 1
Klemmennummer Relais 01 01-03 (önen), 01-02 (schließen)
Maximaler Belastungsstrom der Klemme (AC-1)1) auf 01-02 (NO/Schließer) (ohmsche Last) 250 V AC, 2 A
Maximaler Belastung der Klemme (AC-15)1) auf 01–02 (NO/Schließer) (Induktive Last bei cosφ 0,4) 250 V AC, 0,2 A
Maximaler Belastungsstrom der Klemme (DC-1)1) auf 01-02 (NO/Schließer) (ohmsche Last) 30 V DC, 2 A
Maximaler Belastungsstrom der Klemme (DC-13)1) auf 01-02 (NO/Schließer) (induktive Last) 24 V DC, 0,1 A
Maximaler Belastungsstrom der Klemme (AC-1)1) auf 01-03 (NC/Öner) (ohmsche Last) 250 V AC, 2 A
Maximaler Belastungsstrom der Klemme (AC-15)1) auf 01–03 (NC/Öner) (Induktive Last bei cosφ 0,4) 250 V AC, 0,2 A
Maximaler Belastungsstrom der Klemme (DC-1)1) auf 01-03 (NC/Öner) (ohmsche Last) 30 V DC, 2 A
Minimaler Belastungsstrom der Klemme an 01-03 (NC/Öner), 01-02 (NO/Schließer) 24 V DC 10 mA, 24 V AC 20 mA
Umgebung nach EN 60664-1 Überspannungskategorie III/sVerschmutzungsgrad 2
1) IEC 60947 Teile 4 und 5
Steuerkarte, 10 V DC Ausgang
Klemme Nr. 50
Ausgangsspannung 10,5 V ±0,5 V
Maximale Last 25 mA
54 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 59

Kurzanleitung
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
NOTICE
Alle Eingänge, Ausgänge, Schaltungen, DC-Versorgungen und Relaiskontakte sind galvanisch von der Versorgungsspannung (PELV) und anderen Hochspannungsklemmen getrennt.
Umgebungen
Schutzart der Bauform IP20
Zusätzliche Gehäuseabdeckung IP21, TYP 1
Vibrationstest 1,0 g
Maximale relative Feuchtigkeit 5 %–95 % (IEC 60721-3-3; Klasse 3K3 (nicht kondensierend) bei Betrieb
Aggressive Umgebungsbedingungen (IEC 60721-3-3), beschichtet Klasse 3C3
Prüfverfahren nach IEC 60068-2-43 Hydrogensuld (10 Tage)
Umgebungstemperatur
Min. Umgebungstemperatur bei Volllast 0 °C (32 °F)
Min. Umgebungstemperatur bei reduzierter Leistung -10 °C (14 °F)
Temperatur bei Lagerung/Transport 25 bis +65/70 °C (-13 bis + 149/158 °F)
Max. Höhe über dem Meeresspiegel ohne Leistungsreduzierung1) 1000 m (3280 ft)
Max. Höhe über dem Meeresspiegel mit Leistungsreduzierung
Sicherheitsnormen EN/IEC 61800-5-1, UL 508C
EMV-Normen, Störaussendung EN 61800-3, EN 61000-6-3/4, EN 55011, IEC 61800-3
EMV-Normen, Störfestigkeit
Energieezienzklasse IE2
1) Siehe chapter 1.9 Special Conditions für:
Leistungsreduzierung aufgrund von hoher Umgebungstemperatur
•
Leistungsreduzierung aufgrund von niedrigem Luftdruck
•
2) Bestimmt gemäß EN 50598-2 bei:
Nennlast
•
90 % der Nennfrequenz
•
Taktfrequenz-Werkseinstellung.
•
Schaltmodus-Werkseinstellung
•
1)
1)
EN 61800-3, EN 61000-6-1/2, EN 61000-4-2, EN 61000-4-3,
EN 61000-4-4, EN 61000-4-5, EN 61000-4-6
Maximal 40 °C (104 °F)
3000 m (9842 ft)
2 2
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 55
Page 60

Kurzanleitung
VLT® Micro Drive FC 51
2.9 Besondere Betriebsbedingungen
2.9.1 Leistungsreduzierung wegen erhöhter Umgebungstemperatur
22
Der über 24 Stunden gemessene Durchschnittswert für die Umgebungstemperatur muss mindestens 5 °C (41 °F) unter der
maximal zulässigen Umgebungstemperatur liegen.
Betreiben Sie den Frequenzumrichter bei hoher Umgebungstemperatur, müssen Sie den Dauerausgangsstrom reduzieren.
Der Frequenzumrichter ist für den Betrieb mit einer maximalen Umgebungstemperatur von 50 °C (122 °F) mit einer
Motorgröße unter der Nenngröße ausgelegt. Dauerbetrieb bei Volllast mit einer Umgebungstemperatur von 50 °C (122 °F)
reduziert die Lebensdauer des Frequenzumrichters.
2.9.2 Leistungsreduzierung wegen niedrigem Luftdruck
Bei niedrigerem Luftdruck nimmt die Kühlfähigkeit der Luft ab.
CAUTION
INSTALLATION IN GROSSER HÖHENLAGE
Bei Höhen über 2000 m wenden Sie sich bezüglich der PELV (Schutzkleinspannung – Protective extra low voltage) an
Danfoss.
Unterhalb einer Höhe von 1000 m über NN ist keine Leistungsreduzierung erforderlich. Oberhalb einer Höhe von 1000 m
muss die Umgebungstemperatur oder der maximale Ausgangsstrom reduziert werden.
Reduzieren Sie den Ausgangsstrom um 1 % pro 100 m Höhe über 1.000 m bzw. die max. Umgebungstemperatur um 1 °C
(33.8 °F) pro 200 m.
2.9.3 Leistungsreduzierung beim Betrieb mit niedriger Drehzahl
Wenn ein Motor an den Frequenzumrichter angeschlossen ist, prüfen Sie, ob die Motorkühlung ausreicht.
In Anwendungen mit konstantem Drehmoment kann im niedrigen Drehzahlbereich ein Problem auftreten. Bei kontinuierlichem Betrieb bei niedriger Drehzahl, d. h. unterhalb der Hälfte der Motornenndrehzahl, ist ggf. zusätzliche Luftkühlung
erforderlich. Wählen Sie alternativ einen größeren Motor (eine Größe höher).
56 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 61

Kurzanleitung
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
2.10 Optionen und Ersatzteile
Bestellnummer Beschreibung
132B0100
132B0101
132B0102 Fern-Einbausatz für LCP mit 3-m-Kabel (10 ft), IP55 mit LCP 11, IP21 mit LCP 12
132B0103 IP20-Umbausatz gemäß NEMA Typ 1, M1
132B0104 IP20-Umbausatz gemäß NEMA Typ 1, M2
132B0105 IP20-Umbausatz gemäß NEMA Typ 1, M3
132B0106 Einbausatz für Abschirmblech, M1 und M2
132B0107 Einbausatz für Abschirmblech, M3
132B0108 Umbausatz für IP20 zu IP21/Typ 1, M1
132B0109 Umbausatz für IP20 zu IP21/Typ 1, M2
132B0110 Umbausatz für IP20 zu IP21/Typ 1, M3
132B0111 DIN-Hutschienen-Einbausatz, M1/M2
132B0120 IP20-Umbausatz gemäß NEMA 1, M4
132B0121 Umbausatz für IP20 zu NEMA 1, M5
132B0122 Einbausatz für Abschirmblech, M4, M5
132B0126 Ersatzteilsätze für Gerätegröße M1
132B0127 Ersatzteilsätze für Gerätegröße M2
132B0128 Ersatzteilsätze für Gerätegröße M3
132B0129 Ersatzteilsätze für Gerätegröße M4
132B0130 Ersatzteilsätze für Gerätegröße M5
132B0131 Blindabdeckung
130B2522
130B2522
130B2533
130B2525
130B2530
130B2523
130B2523
130B2523
130B2526
130B2531
130B2527
130B2523
130B2523
130B2524
130B2526
130B2529
130B2531
130B2528
130B2527
VLT® Control Panel LCP 11 ohne Potentiometer
VLT® Control Panel LCP 12 mit Potentiometer
VLT® Line Filter MCC 107 für 132F0001
VLT® Line Filter MCC 107 für 132F0002
VLT® Line Filter MCC 107 für 132F0003
VLT® Line Filter MCC 107 für 132F0005
VLT® Line Filter MCC 107 für 132F0007
VLT® Line Filter MCC 107 für 132F0008
VLT® Line Filter MCC 107 für 132F0009
VLT® Line Filter MCC 107 für 132F0010
VLT® Line Filter MCC 107 für 132F0012
VLT® Line Filter MCC 107 für 132F0014
VLT® Line Filter MCC 107 für 132F0016
VLT® Line Filter MCC 107 für 132F0017
VLT® Line Filter MCC 107 für 132F0018
VLT® Line Filter MCC 107 für 132F0020
VLT® Line Filter MCC 107 für 132F0022
VLT® Line Filter MCC 107 für 132F0024
VLT® Line Filter MCC 107 für 132F0026
VLT® Line Filter MCC 107 für 132F0028
VLT® Line Filter MCC 107 für 132F0030
2 2
Table 2.11 Optionen und Ersatzteile
Danfoss
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 57
-Netzlter und Bremswiderstände sind auf Anfrage erhältlich.
Page 62

089
Guide rapide
3 Guide rapide
VLT® Micro Drive FC 51
3.1 Introduction
33
3.1.1 Objet de ce manuel
Ce guide rapide contient des informations sur l'installation
et la mise en service sûres du variateur de fréquence VLT
Micro Drive FC 51.
Le guide rapide est réservé à du personnel
Pour utiliser le variateur de fréquence de façon sûre et
professionnelle, lire et suivre le manuel d'utilisation. Faire
particulièrement attention aux consignes de sécurité et aux
avertissements d'ordre général. Conserver ce guide rapide
à proximité du variateur de fréquence, à tout moment.
VLT® est une marque déposée.
qualié.
®
Le variateur de fréquence est conforme aux exigences de
sauvegarde de la capacité thermique de la norme UL508C.
Pour plus d'informations, se reporter au chapitre Protection
thermique du moteur du Manuel de conguration du
produit.
3.1.3 Secteur IT
NOTICE
SECTEUR IT
Installation sur une source électrique isolée de la terre,
c.-à-d. un réseau IT.
Tension d'alimentation max. autorisée en cas de
raccordement au secteur : 440 V.
Danfoss propose en option des ltres de ligne destinés à
améliorer les harmoniques. Voir le Table 1.11.
3.1.2 Ressources supplémentaires
3.1.4 Éviter les démarrages imprévus
D'autres ressources sont disponibles pour bien comprendre
les fonctions avancées et la programmation des variateurs
de fréquence :
Le Guide de programmation du VLT® Micro Drive
•
ore de plus amples détails sur la gestion
FC 51
des paramètres et donne de nombreux exemples
d'applications.
Le Manuel de conguration du VLT® Micro Drive
•
FC 51 détaille les possibilités et les fonctionnalités
pour congurer des systèmes de contrôle de
moteurs.
Instructions d'utilisation avec les équipements
•
optionnels et remplacement des composants.
Des publications et des manuels supplémentaires sont
disponibles sur :
drives.danfoss.com/downloads/portal/#/
Lorsque le variateur de fréquence est connecté au secteur,
le moteur peut être démarré/arrêté en utilisant des
commandes numériques, des commandes de réseau, des
références ou le panneau de commande local (LCP). Pour
éviter un démarrage imprévu :
Déconnecter le variateur de fréquence du secteur
•
si la sécurité des personnes l'exige.
Activer systématiquement la touche
•
avant de modier les paramètres.
Cet équipement contient des composants
électriques et ne doit pas être éliminé avec les
ordures ménagères.
Il doit être collecté séparément avec les déchets
électriques et électroniques conformément à la
législation locale en vigueur.
[O/Reset]
58 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 63

Guide rapide
3.2 Sécurité
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
WARNING
HAUTE TENSION
Les variateurs de fréquence contiennent des tensions
élevées lorsqu'ils sont reliés à l'alimentation secteur CA,
à l'alimentation CC ou à la répartition de la charge. Le
non-respect de la réalisation de l'installation, du
démarrage et de la maintenance par du personnel
qualié peut entraîner la mort ou des blessures graves.
L'installation, le démarrage et la maintenance ne
•
doivent être eectués que par du personnel
qualié.
Avant tout entretien ou toute réparation, utiliser
•
un dispositif de mesure de tension approprié
pour s'assurer que les variateurs sont
complètement déchargés.
WARNING
DÉMARRAGE IMPRÉVU
Lorsque le variateur de fréquence est relié au secteur CA,
le moteur peut démarrer à tout moment, ce qui peut
entraîner la mort, des blessures graves ou des dégâts
matériels. Le moteur peut être démarré par un
commutateur externe, un ordre du bus de terrain, un
signal de référence d'entrée, à partir du LCP ou du LOP
ou suite à la suppression d'une condition de panne.
Déconnecter le variateur de fréquence du
•
secteur si la sécurité des personnes l'exige, an
d'éviter un démarrage imprévu du moteur.
Activer la touche [O/Reset] sur le LCP avant de
•
programmer les paramètres.
Le variateur de fréquence, le moteur et tous les
•
équipements entraînés doivent être
fonctionnels lorsque le variateur est raccordé au
secteur CA.
NOTICE
La touche [O/Reset] n'est pas un commutateur de
sécurité. Elle ne déconnecte pas le variateur de
fréquence du secteur.
WARNING
TEMPS DE DÉCHARGE
Le variateur de fréquence contient des condensateurs
dans le circuit intermédiaire qui peuvent rester chargés
même lorsque le variateur de fréquence n'est pas
alimenté. Une haute tension peut être présente même
lorsque les voyants d'avertissement sont éteints. Le nonrespect du temps d'attente spécié après la mise hors
tension avant un entretien ou une réparation peut
entraîner le décès ou des blessures graves.
Arrêter le moteur.
•
Déconnecter le secteur CA et les alimentations à
•
distance du circuit intermédiaire, y compris les
batteries de secours, les alimentations sans
interruption et les connexions du circuit
intermédiaire aux autres variateurs de
fréquence.
Déconnecter ou verrouiller le moteur PM.
•
Attendre que les condensateurs soient
•
complètement déchargés. Le temps d'attente
minimum est indiqué dans le Table 1.1.
Avant tout entretien ou toute réparation, utiliser
•
un dispositif de mesure de tension approprié
pour s'assurer que les condensateurs sont
complètement déchargés.
Taille Temps d'attente minimum (minutes)
M1, M2 et M3 4
M4 et M5 15
Table 3.1 Temps de décharge
Courant de fuite (> 3,5 mA)
Suivre les réglementations locales et nationales concernant
la mise à la terre de protection de l'équipement en cas de
courant de fuite > 3,5 mA.
La technologie du variateur de fréquence implique une
commutation de fréquence élevée à des puissances
importantes. Cela génère un courant de fuite dans la mise
à la terre. Un courant de défaut dans le variateur de
fréquence au niveau du bornier de puissance de sortie
peut contenir une composante CC pouvant charger les
condensateurs du ltre et entraîner un courant à la terre
transitoire. Le courant de fuite à la terre dépend des
diérentes congurations du système, dont le ltre RFI, les
câbles du moteur blindés et la puissance du variateur de
fréquence.
3 3
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 59
Page 64

Guide rapide
VLT® Micro Drive FC 51
La norme EN/CEI 61800-5-1 (norme produit concernant les
systèmes d'entraînement électriques) exige une attention
particulière si le courant de fuite dépasse 3,5 mA.
Renforcer la mise à la terre en procédant de l'une des
manières suivantes :
Fil de mise à la terre d'au moins 10 mm² (8 AWG).
33
•
Deux ls de terre séparés respectant les
•
consignes de dimensionnement.
Voir la norme EN 60364-5-54, paragraphe 543.7 pour plus
d'informations.
Utilisation de RCD
Lorsque des relais de protection diérentielle (RCD), aussi
appelés disjoncteurs de mise à la terre (ELCB), sont utilisés,
respecter les éléments suivants :
Utiliser les RCD de type B capables de détecter
•
les courants CA et CC.
Utiliser des RCD avec un retard du courant
•
d'appel pour éviter les pannes dues aux courants
à la terre transitoires.
Dimensionner les RCD selon la
•
système et en tenant compte de l'environnement
d'installation.
Protection thermique du moteur
Pour garantir la protection du moteur contre la surcharge,
régler le par. 1-90 Protect. thermique mot. sur la valeur [4]
Alarme ETR. Pour le marché d'Amérique du Nord : la
fonction ETR mise en œuvre assure la protection de classe
20 contre la surcharge moteur, en conformité avec NEC.
Installation à haute altitude
À des altitudes supérieures à 2 000 m (6 562 pi), contacter
Danfoss en ce qui concerne la norme PELV.
conguration du
Installation
3.3
1.
Débrancher le VLT® Micro Drive FC 51 du secteur
(et de l'alimentation CC externe le cas échéant).
2. Attendre 4 minutes (M1, M2 et M3) et 15 minutes
(M4 et M5) que le circuit intermédiaire se
décharge. Voir le Table 1.1.
3. Déconnecter les connexions du circuit intermédiaire CC et les bornes du frein (le cas échéant).
4. Enlever le câble du moteur.
3.3.1 Montage côte à côte
Le variateur de fréquence peut être monté côte à côte
pour toutes les unités IP20, en prévoyant un espace libre
de 100 mm (3,9 po) au-dessus et en dessous pour le refroidissement. Se reporter au chapter 1.7 Specications pour
obtenir des précisions sur les caractéristiques environnementales du variateur de fréquence.
3.2.1 Consignes de sécurité
S'assurer que le variateur de fréquence est mis
•
correctement à la terre.
Ne pas déconnecter les connexions d'alimen-
•
tation, les raccordements du moteur ou d'autres
raccordements d'alimentation lorsque le variateur
de fréquence est relié au secteur.
Protéger les utilisateurs contre la tension
•
d'alimentation.
Protéger le moteur contre les surcharges,
•
conformément aux règlements nationaux et
locaux.
Le courant de fuite à la terre dépasse 3,5 mA.
•
Mettre le variateur de fréquence à la terre
correctement.
La touche [O/Reset] n'est pas un commutateur
•
de sécurité. Elle ne déconnecte pas le variateur
de fréquence du secteur.
60 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 65

B
a A
a A
a A
a A
a A
C
C
C C C
b
B
b
B
b
B
b
B
b
Ø 7mm
M5
M4
M3
M2
M1
Ø 7mm Ø 5.5mm Ø 4.5mm
130BB321.11
Ø 4.5mm
Guide rapide
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
3.3.2 Encombrement
Un gabarit pour le perçage est disponible dans le rabat de l'emballage.
3 3
Illustration 3.1 Encombrement
Puissance [kW (HP)] Hauteur [mm (po)]
Boîtier
M1
1 x 200-240 V3 x 200-240 V3 x 380-480
0,18-0,75
(0,24-1,0)
0,25-0,75
(0,34-1,0)
M2 1,5 (2,0) 1,5 (2,0)
M3 2,2 (3,0)
2,2-3,7
(3,0-5,0)
M4 – –
M5 – –
V
0,37-0,75
(0,5-1,0)
1,5-2,2
(2,0-3,0)
3,0-7,5
(4,0-10)
11,0-15,0
(15-20)
18,5-22,0
(25-30)
A
150
(5,9)
176
(6,9)
239
(9,4)
292
(11,5)
335
(13,2)
A (plaque de
connexion
à la terre incluse)
205 (8,1)
230 (9,1)
294 (11,6)
347,5 (13,7)
387,5 (15,3)
Largeur
[mm (po)]
Profondeur
[mm (po)]
a B b C [kg]
140,4
(5,5)70(2,8)55(2,2)
166,4
(6,6)75(3,0)59(2,3)
226
(8,9)90(3,5)69(2,7)
272,4
(10,7)
(12,4)
315
125
(4,9)97(3,8)
165
(6,5)
148 (5,8) 1,1
168 (6,6) 1,6
194 (7,6) 3,0
241 (9,5) 6,0
140
248 (9,8) 9,5
(5,5)
1)
Poids max.
Table 3.2 Encombrement
1) Pour le LCP avec potentiomètre, ajouter 7,6 mm (0,3 po).
NOTICE
L'ensemble du câblage doit être conforme aux réglementations nationales et locales en matière de sections de câble et
de température ambiante. Conducteurs en cuivre requis, 60-75 °C (140-167 °F) recommandé.
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 61
Page 66

Guide rapide
Puissance [kW (HP)] Couple [Nm (po-lb)]
Boîtier
M1
33
M2 1,5 (2,0) 1,5 (2,0)
M3 2,2 (3,0)
M4 – –
M5 – –
Table 3.3 Serrage des bornes
1) Connecteurs à lame (ches Faston 6,3 mm (0,25 po)).
1 x 200-240 V3 x 200-240 V3 x 380-480
0,18-0,75
(0,24-1,0)
0,25-0,75
(0,34-1,0)
2,2-3,7
(3,0-5,0)
VLT® Micro Drive FC 51
V
0,37-0,75
(0,5-1,0)
1,5-2,2
(2,0-3,0)
3,0-7,5
(4,0-10)
11,0-15,0
(15-20)
18,5-22,0
(25-30)
Bus Moteur Connexion CC/frein
0,8
(7,1)
0,8
(7,1)
0,8
(7,1)
1,3
(11,5)
1,3
(11,5)
0,7
(6,2)
0,7
(6,2)
0,7
(6,2)
1,3
(11,5)
1,3
(11,5)
Bornes de
commande
1)
À lame
1)
À lame
1)
À lame
1,3 (11,5) 0,15 (1,3) 3 (26,6)
1,3 (11,5) 0,15 (1,3) 3 (26,6)
0,15 (1,3) 3 (26,6)
0,15 (1,3) 3 (26,6)
0,15 (1,3) 3 (26,6)
Terre Relais
0,5
(4,4)
0,5
(4,4)
0,5
(4,4)
0,5
(4,4)
0,5
(4,4)
Protection du circuit de dérivation
Pour protéger l'installation contre les risques électriques et d'incendie, protéger tous les circuits de dérivation d'une installation, d'un appareillage de connexion, de machines, etc. contre les courts-circuits et les surcourants conformément aux
réglementations nationales et internationales.
Protection contre les courts-circuits
Utiliser les fusibles mentionnés dans le Table 1.4 an de protéger le personnel d'entretien et les autres équipements en cas
de défaillance interne de l'unité ou de court-circuit sur le circuit intermédiaire. En cas de court-circuit sur la sortie moteur ou
frein, le variateur de fréquence fournit une protection optimale.
Protection contre les surcourants
Prévoir une protection contre la surcharge pour éviter toute surchaue des câbles dans l'installation. Prévoir toujours une
protection contre les surcourants conformément aux réglementations nationales. Les fusibles doivent être conçus pour
protéger un circuit capable de délivrer un maximum de 100 000 A
(symétriques), 480 V au maximum.
rms
Pas de conformité UL
Si la conformité à UL/cUL n'est pas nécessaire, utiliser les fusibles mentionnés dans le Table 1.4 pour garantir la conformité à
la norme EN 50178/CEI 61800-5-1 :
Le non-respect des recommandations en matière de fusibles peut endommager le variateur de fréquence et l'installation en
cas de dysfonctionnement.
62 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 67

Guide rapide
FC 51
Bussmann Bussmann Bussmann LittelFuse
1 x 200-240 V
kW Type RK1 Type J Type T Type RK1 Type CC Type RK1 Type gG
0K18-0K37 KTN-R15 JKS-15 JJN-15 KLN-R15 ATM-R15 A2K-15R 16A
0K75 KTN-R25 JKS-25 JJN-25 KLN-R25 ATM-R25 A2K-25R 25A
1K5 KTN-R35 JKS-35 JJN-35 KLN-R35 – A2K-35R 35A
2K2 KTN-R50 JKS-50 JJN-50 KLN-R50 – A2K-50R 50A
3 x 200-240 V
0K25 KTN-R10 JKS-10 JJN-10 KLN-R10 ATM-R10 A2K-10R 10A
0K37 KTN-R15 JKS-15 JJN-15 KLN-R15 ATM-R15 A2K-15R 16A
0K75 KTN-R20 JKS-20 JJN-20 KLN-R20 ATM-R20 A2K-20R 20A
1K5 KTN-R25 JKS-25 JJN-25 KLN-R25 ATM-R25 A2K-25R 25A
2K2 KTN-R40 JKS-40 JJN-40 KLN-R40 ATM-R40 A2K-40R 40A
3K7 KTN-R40 JKS-40 JJN-40 KLN-R40 – A2K-40R 40A
3 x 380-480 V
0K37-0K75 KTS-R10 JKS-10 JJS-10 KLS-R10 ATM-R10 A6K-10R 10A
1K5 KTS-R15 JKS-15 JJS-15 KLS-R15 ATM-R15 A2K-15R 16A
2K2 KTS-R20 JKS-20 JJS-20 KLS-R20 ATM-R20 A6K-20R 20A
3K0 KTS-R40 JKS-40 JJS-40 KLS-R40 ATM-R40 A6K-40R 40A
4K0 KTS-R40 JKS-40 JJS-40 KLS-R40 ATM-R40 A6K-40R 40A
5K5 KTS-R40 JKS-40 JJS-40 KLS-R40 – A6K-40R 40A
7K5 KTS-R40 JKS-40 JJS-40 KLS-R40 – A6K-40R 40A
11K0 KTS-R60 JKS-60 JJS-60 KLS-R60 – A6K-60R 63A
15K0 KTS-R60 JKS-60 JJS-60 KLS-R60 – A6K-60R 63A
18K5 KTS-R60 JKS-60 JJS-60 KLS-R60 – A6K-60R 80A
22K0 KTS-R60 JKS-60 JJS-60 KLS-R60 – A6K-60R 80A
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
Fusibles max.
Fusibles max. conformes à UL
Ferraz
Shawmut
Ferraz Shawmut
non conformes
à UL
3 3
Table 3.4 Fusibles
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 63
Page 68

Guide rapide
VLT® Micro Drive FC 51
3.3.3 Raccordement au secteur et au
3.3.4 Bornes de commande
moteur
Toutes les bornes des câbles de commande sont placées
Le variateur de fréquence est conçu pour entraîner tous les
moteurs asynchrones triphasés standard.
33
Il est également prévu pour accepter des câbles d'alimentation/moteur d'une section maximale de 4 mm²/10 AWG
(M1, M2 et M3) et d'une section maximale de 16 mm²/
6 AWG (M4 et M5).
Utiliser un câble moteur blindé/armé pour se
•
conformer aux prescriptions d'émissions CEM et
raccorder ce câble à la plaque de connexion à la
terre et au métal du moteur.
Raccourcir au maximum le câble moteur
•
réduire le niveau sonore et les courants de fuite.
Pour plus de détails sur le montage de la plaque
•
de connexion à la terre, voir les instructions de
montage de la plaque de connexion du variateur
VLT® Micro Drive FC 51.
Voir également le chapitre Installation électrique
•
conforme aux normes CEM dans le Manuel de
conguration du VLT® Micro Drive FC 51.
1. Monter les câbles de terre à la borne PE.
2. Connecter le moteur aux bornes U, V et W.
3. Raccorder l'alimentation secteur aux bornes L1/L,
L2 et L3/N (triphasée) ou L1/L et L3/N
(monophasée) et serrer.
an de
sous la protection borniers à l'avant du variateur de
fréquence. Enlever la protection borniers à l'aide d'un
tournevis.
NOTICE
Regarder à l'arrière de la protection borniers la
disposition des bornes de commande et commutateurs.
Ne pas actionner les commutateurs avec le variateur de
fréquence sous tension.
Régler le par. 6-19 Mode born. 53 en fonction de la
position du commutateur 4.
Illustration 3.2 Montage du câble de terre, du secteur et des
ls du moteur
Illustration 3.3 Démontage de la protection borniers
Commutateur 1
Commutateur 2
Commutateur 3 Pas de fonction
Commutateur 4
1) = réglage par défaut
Table 3.5 Réglages des commutateurs S200 1-4
OFF = bornes PNP 29
ON = bornes NPN 29
OFF = borne PNP 18, 19, 27 et 33
ON = borne NPN 18, 19, 27 et 33
OFF = borne 53 0-10 V
ON = borne 53 0/4-20 mA
1)
1)
1)
64 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 69

Guide rapide
Illustration 3.4 Commutateurs S200 1-4
L'Illustration 1.5 montre toutes les bornes de commande du variateur de fréquence. L'application de démarrage (borne 18) et
une référence analogique (borne 53 ou 60) font fonctionner le variateur de fréquence.
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
3 3
Illustration 3.5 Vue d'ensemble des bornes de commande en conguration PNP et réglage d'usine
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 65
Page 70

130BA242.17
1)
Guide rapide
VLT® Micro Drive FC 51
3.3.5 Circuit d'alimentation - Vue d'ensemble
33
Illustration 3.6 Schéma indiquant toutes les bornes électriques
1) Les freins (BR+ et BR-) ne sont pas applicables au boîtier de taille M1.
Pour plus d'informations, consulter le Manuel de conguration de la résistance VLT® Brake Resistor MCE 101.
Il est possible d'obtenir une amélioration du facteur de puissance et de la performance CEM grâce à l'installation de ltres
de ligne Danfoss optionnels.
Des ltres de puissance Danfoss peuvent aussi être utilisés pour la répartition de la charge. Pour plus d'informations sur la
répartition de la charge, se reporter à la note applicative Répartition de la charge du VLT® FC 51 Micro Drive.
66 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 71

130BA605.13
Set-up
number
Parameter
number
Motor
direction
Menu
key
Indicator
lights
Value
Numeric
display
Unit
Selected
menu
Navigation
keys
Potentiometer
(LCP 12)
Operation keys
and leds
Guide rapide
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
3.3.6 Répartition de la charge/frein
Utiliser des ches isolées Faston 6,3 mm (0,25 po) conçues
pour une haute tension de courant continue (répartition
de la charge et frein).
Contacter Danfoss ou lire l'instruction de répartition de la
charge du VLT® 5000 pour la répartition de la charge et
Frein du VLT® 2800/5000/5000 FLUX/FCD 300 pour le frein.
Répartition de la charge
Raccorder les bornes -UDC et +UDC/+BR.
Frein
Raccorder les bornes -BR et +UDC/+BR (non applicable
pour la protection M1).
NOTICE
Noter la présence possible d'un niveau de tension aux
bornes +UDC/+BR et -UDC pouvant atteindre 850 V CC.
Pas de protection contre les courts-circuits.
3.4 Programmation
3.4.1 Programmation de l'adaptation
automatique au moteur (AMA)
Pour plus d'informations sur la programmation, se reporter
au Guide de programmation du VLT® Micro Drive FC 51.
Appuyer sur la touche [Menu] pour sélectionner l'un des
menus suivants :
État
Pour achages uniquement.
Menu rapide
Pour accéder aux menus rapides 1 et 2.
Menu principal
Pour accéder à l'ensemble des paramètres.
Touches de navigation
[Back] : renvoie à l'étape ou au niveau précédent de la
structure de navigation.
[▲] [▼] : pour se déplacer entre les groupes de paramètres,
les paramètres et au sein des paramètres.
[OK] : pour sélectionner un paramètre et pour accepter les
changements des réglages des paramètres.
Appuyer sur [OK] pendant plus d'une seconde pour
accéder au mode Réglage. Ce mode sert à eectuer des
ajustements rapides en appuyant sur les touches [▲] [▼]
associées à [OK].
Appuyer sur [▲] [▼] pour changer la valeur. Appuyer sur
[OK] pour passer rapidement d'un chire à l'autre.
Pour quitter ce mode, appuyer de nouveau sur [OK]
pendant plus d'une seconde et enregistrer les modi-
cations ou appuyer sur [Back] sans enregistrer les
modications.
3 3
NOTICE
Le variateur de fréquence peut aussi être programmé à
partir d'un PC via un port com RS485 en installant le
logiciel de programmation MCT10.
Ce logiciel peut être soit commandé à l'aide du numéro
de code 130B1000 soit téléchargé sur le site Internet de
Danfoss : www.danfoss.com/BusinessAreas/DrivesSolutions/
softwaredownload
Illustration 3.7 Description des touches et de l'achage du
LCP
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 67
Page 72

Guide rapide
VLT® Micro Drive FC 51
Touches d'exploitation
Un témoin lumineux jaune au-dessus des touches d'exploitation indique que la touche est active.
[Hand On] : démarre le moteur et permet de commander
le variateur de fréquence via le LCP.
[O/Reset] : le moteur s'arrête. En mode alarme, le moteur
33
se réinitialise.
[Auto On] : le variateur de fréquence peut être commandé
via les bornes de commande ou via la communication
série.
[Potentiomètre] (LCP12) : le potentiomètre agit de deux
façons selon le mode sur lequel le variateur de fréquence
fonctionne.
En mode Auto On, le potentiomètre joue le rôle d'une
entrée analogique programmable supplémentaire.
En mode Hand On, le potentiomètre contrôle la référence
locale.
3.4.2 Programmation sur Réglage auto. du
moteur (AMT)
Lancer l'AMT pour optimiser la compatibilité entre le
variateur de fréquence et le moteur en mode VVC+.
Mode 2
1. Entrer dans le menu principal.
2. Naviguer jusqu'au groupe de paramètres 1-**
Charge et moteur.
3. Appuyer sur [OK].
4. Régler les paramètres du moteur à l'aide des
données de la plaque signalétique pour le groupe
de paramètres 1-2* Données moteur.
5. Aller au par. 1-29 Automatic Motor Tuning (AMT)
(réglage automatique du moteur (AMT)).
6. Appuyer sur [OK].
7. Sélectionner [3] Complete AMT with Rotating motor
(AMT complète avec moteur en rotation).
8. Appuyer sur [OK].
9. Le test s'eectue automatiquement, puis un
message indique la n du test.
NOTICE
En mode 2, le rotor tourne pendant l'exécution de l'AMT.
N'ajouter aucune charge au moteur lorsque l'AMT est en
cours.
Le variateur de fréquence construit un modèle
•
mathématique du moteur pour la régulation du
courant de sortie du moteur, ce qui améliore sa
performance.
Exécuter cette procédure sur un moteur froid
•
pour de meilleurs résultats. Pour lancer l'AMT,
utiliser le LCP numérique (NLCP). Deux modes
AMT sont disponibles pour les variateurs de
fréquence.
Mode 1
1. Entrer dans le menu principal.
2. Naviguer jusqu'au groupe de paramètres 1-**
Charge et moteur.
3. Appuyer sur [OK].
4. Régler les paramètres du moteur à l'aide des
données de la plaque signalétique pour le groupe
de paramètres 1-2* Données moteur.
5. Aller au par. 1-29 Automatic Motor Tuning (AMT)
(réglage automatique du moteur (AMT)).
6. Appuyer sur [OK].
7. Sélectionner [2] Enable AMT (activer AMT).
8. Appuyer sur [OK].
9. Le test
s'eectue automatiquement, puis un
message indique la n du test.
68 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 73

Guide rapide
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
3.5 Vue d'ensemble des paramètres
0-** Fonction./Achage
0-0* Réglages de base
0-03 Réglages régionaux
*[0] International
[1] US
0-04 Etat exploi. à mise ss
tension (manuel)
[0] Redém auto
*[1] Arr.forcé, réf.mémor
[2] Arrêt forcé, réf = 0
0-1* Gestion process
0-10 Process actif
*[1] Proc.1
[2] Proc.2
[9] Multi process
0-11 Edit process
*[1] Proc.1
[2] Proc.2
[9] Process actif
0-12 Process liés
[0] Non lié
*[20] Lié
0-31 Val.min.lecture déf.par
utilis.
0,00-9999,00 * 0,00
0-32 Val. max. dénie par
utilisateur
0,00-9999,00 * 100,0
0-4* Clavier LCP
0-40 Touche [Hand on] sur LCP
[0] Désactivé
*[1] Activé
0-41 Touche [O/Reset] sur LCP
[0] Tout désactiver
*[1] Tout activer
[2] Activer Reset seulement
0-42 Touche [Auto on] sur LCP
[0] Désactivé
*[1] Actif
0-5* Copie/Sauvegarde
0-50 Copie LCP
*[0] Pas de copie
[1] Lect.PAR.LCP
[2] Ecrit.PAR. LCP
[3] Ecrit.LCP sans puis.
0-51 Copie process
*[0] Pas de copie
[1] Copie de Process 1
[2] Copie de Process 2
[9] Copie vers tous
0-6* Mot de passe
0-60 Mt de passe menu princ.
0-999 *0
1) M4 et M5 uniquement
0-61 Accès menu princ./rapide
ss mt de passe
*[0] Accès complet
[1] LCP:lecture seule
[2] LCP:pas d'accès
1-** Charge et moteur
1-0* Réglages généraux
1-00 Mode Cong.
*[0] Boucle ouv. vit.
[3] Process
1-01 Principe Contrôle Moteur
[0] U/f
+
*[1] VVC
1-03 Caract.couple
*[0] Couple constant
[2] Optim.AUTO énergie
1-05 Conguration mode Local
[0] Boucle ouv. vit.
*[2] Tel que conguré au par.
1-00
1-2* Données moteur
1-20 Puissance moteur [kW] [HP]
[1] 0,09 kW/0,12 HP
[2] 0,12 kW/0,16 HP
[3] 0,18 kW/0,25 HP
[4] 0,25 kW/0,33 HP
[5] 0,37 kW/0,50 HP
[6] 0,55 kW/0,75 HP
[7] 0,75 kW/1,00 HP
[8] 1,10 kW/1,50 HP
[9] 1,50 kW/2,00 HP
[10] 2,20 kW/3,00 HP
[11] 3,00 kW/4,00 HP
[12] 3,70 kW/5,00 HP
[13] 4,00 kW/5,40 HP
[14] 5,50 kW/7,50 HP
[15] 7,50 kW/10,00 HP
[16] 11,00 kW/15,00 HP
[17] 15,00 kW/20,00 HP
[18] 18,50 kW/25,00 HP
[19] 22,00 kW/29,50 HP
[20] 30,00 kW/40,00 HP
1-22 Tension moteur
50-999 V *230 - 400 V
1-23 Fréquence moteur
20-400 Hz * 50 Hz
1-24 Courant moteur
0,01-100,00 A * Selon type
moteur
1-25 Vit.nom.moteur
100-9999 tr/min * Selon type
moteur
1-29 Réglage auto. du moteur
(AMT)
*[0] Inactif
[2] AMT activé
[3] Compléter AMT avec moteur
en rotation
1-3* Données av. moteur
1-30 Résistance stator (Rs)
[Ohm] * Dép. données moteur
1-33 Réactance fuite stator (X1)
[Ohm] * Dép. données moteur
1-35 Réactance secteur (Xh)
[Ohm] * Dépend données
moteur
1-5* Proc.indép. charge
1-50 Magnétisation moteur à
vitesse nulle
0-300 % * 100 %
1-52 Magnétis. normale vitesse
min [Hz]
0,0-10,0 Hz * 0,0 Hz
1-55 Caract. U/f - U
0-999,9 V
1-56 Caract. U/f - F
0-400 Hz
1-6* Proc.dépend. charge
1-60 Comp.charge à vit.basse
0-199 % * 100 %
1-61 Compens. de charge à
vitesse élevée
0-199 % * 100 %
1-62 Comp. gliss.
-400-399 % * 100 %
1-63 Cste tps comp.gliss.
0,05-5,00 s *0,10 s
1-7* Réglages dém.
1-71 Retard démar.
0,0-10,0 s *0,0 s
1-72 Fonction au démar.
[0] Tempo.maintien CC</indexterm
[1] Tempo.frein CC
*[2] Roue libre temporisé
1-73 Démarr. volée
*[0] Désactivé
[1] Activé
1-8* Réglages arrêt
1-80 Fonction à l'arrêt
*[0] Roue libre
[1] Maintien CC
1-82 Vit. min. pour fonct. à
l'arrêt [Hz]
0,0-20,0 Hz * 0,0 Hz
1-9* T° moteur
1-90 Protect. thermique mot.
*[0] Aucune protection
[1] Avertis. Thermist.
[2] Arrêt thermistance
[3] Avertis. ETR
[4] Alarme ETR
1-93 Source thermistance
*[0] Néant
[1] Entrée ANA 53
[6] Entrée digitale 29
2-** Freins
2-0* Freinage CC
2-00 CC maintien
0-150 % * 50 %
2-01 CC de freinage
0-150 % * 50 %
2-02 Temps frein CC
0,0-60,0 s * 10,0 s
2-04 Vitesse freinage CC
0,0-400,0 Hz * 0,0 Hz
2-1* Fonct.Puis.Frein.
2-10 Fonction de freinage
*[0] Inactif
[1] Freinage résistance
[2] Freinage CA
2-11 Résist. freinage (ohm)
Min/Max/défaut : Dépend de la
puissance
2-14 Réduc.tens.frein
0 - Dépend de la puissance * 0
2-16 Courant max. freinage CA
0-150 % *100 %
2-17 Contrôle de surtension
*[0] Désactivé
[1] Activé (pas à l'arrêt)
[2] Activé
2-2* Frein mécanique
2-20 - Activation courant frein.
0,00-100,0 A * 0,00 A
2-22 Activation vit. Frein [Hz]
0,0-400,0 Hz *0,0 Hz
3-** Référence / rampes
3-0* Limites de réf.
3-00 Plage de référence
*[0] Min-Max
[1] -Max à +Max
3-02 Référence minimale
-4999-4999 * 0,000
3-03 Réf. max.
-4999-4999 *50,00
3 3
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 69
Page 74

Guide rapide
VLT® Micro Drive FC 51
3-1* Consignes
3-10 Réf.prédénie
-100,0-100,0 % *0,00 % 3-11
Fréq.Jog. [Hz]
0,0-400,0 Hz *5,0 Hz
3-12 Rattrap/ralentiss
33
0,00-100,0 % * 0,00 %
3-14 Réf.prédéf.relative
-100,0-100,0 % *0,00 %
3-15 Source référence 1
[0] Pas de fonction
*[1] Entrée ANA 53
[2] Entrée analogique 60
[8] Entrée impulsions 33
[11] Référence bus locale
[21] Potentiomètre LCP
3-16 Source référence 2
[0] Pas de fonction
[1] Entrée ANA 53
*[2] Entrée ANA 60
[8] Entrée impulsions 33
*[11] Référence bus locale
[21] Potentiomètre LCP
3-17 Source référence 3
[0] Pas de fonction
[1] Entrée ANA 53
[2] Entrée analogique 60
[8] Entrée impulsions 33
*[11] Référence bus locale
[21] Potentiomètre LCP
3-18 Échelle réf.relative Source
*[0] Pas de fonction
[1] Entrée ANA 53
[2] Entrée analogique 60
[8] Entrée impulsions 33
[11] Référence bus locale
[21] Potentiomètre LCP
3-4* Rampe 1
3-40 Type rampe 1
*[0] Linéaire
[2] Rampe sinus2
3-41 Temps d'accél. rampe 1
0,05-3600 s *3,00 s (10,00 s1))
3-42 Temps décél. rampe 1
0,05-3600 s *3,00s (10,00s1))
3-5* Rampe 2
3-50 Type rampe 2
*[0] Linéaire
[2] Rampe sinus2
3-51 Temps d'accél. rampe 2
0,05-3600 s *3,00 s (10,00 s1))
3-52 Temps décél. rampe 2
0,05-3600 s *3,00 s (10,00 s1))
3-8* Autres rampes
3-80 Tps rampe Jog.
0,05-3 600 s *3,00 s (10,00 s1))
1) M4 et M5 uniquement
3-81 Temps rampe arrêt rapide
0,05-3600 s *3,00 s (10,00s1))
4-** Limites/avertis.
4-1* Limites moteur 4-10
Direction vit. moteur
*[0] Sens horaire si le par. 1-00
est réglé sur le contrôle en
boucle fermée
[1] Sens anti-horaire
*[2] Les deux directions si le par.
1-00 est réglé sur le contrôle en
boucle ouverte
4-12 Vitesse moteur limite basse
[Hz]
0,0-400,0 Hz *0,0 Hz
4-14 Vitesse moteur limite haute
[Hz]
0,1-400,0 Hz *65,0 Hz
4-16 Mode moteur limite couple
0-400 % *150 %
4-17 Mode générateur limite
couple
0-400 % *100 %
4-4* Rég. Avertis. 2
4-40 Avertis. fréq. bas
0,00 - valeur du par. 4-41 Hz *
0,0 Hz
4-41 Avertis. fréq. haut
Valeur du par. 4-40 - 400,0 Hz *
400,00 Hz
4-5* Rég. Avertissements
4-50 Avertis. courant bas
0,00-100,00 A *0,00 A
4-51 Avertis. courant haut
0,0-100,00 A *100,00 A
4-54 Avertis. référence basse
-4999,000–Valeur de 4-55
* -4999,000
4-55 Avertis. référence haute
Valeur de 4-54 -4999,000
*4999,000
4-56 Avertis. retour bas
-4999,000 - Valeur de 4-57
* -4999,000
4-57 Avertis. retour haut
Valeur de 4-56-4999,000*4999,000
4-58 Surv. phase mot.
[0] Inactif
*[1] Actif
4-6* Bipasse vit.
4-61 Bipasse vitesse de [Hz]
0,0-400,0 Hz *0,0 Hz
4-63 Bipasse vitesse à [Hz]
0,0-400,0 Hz *0,0 Hz
5-1* Entrées digitales5-10
E.digit.born.18
[0] Pas de fonction
[1] Reset
[2] Roue libre inv.
[3] Roue libre et reset inv.
[4] Arrêt rapide NF
[5] Frein-CC NF
[6] Arrêt NF
*[8] Démarrage
[9] Impulsion démarrage
[10] Inversion
[11] Démarrage avec inv.
[12] Marche sens hor.
[13] Marche sens antihor.
[14] Jogging
[16-18] Réf prédénie bit 0-2
[19] Gel référence5-10
E.digit.born.18
[20] Gel sortie
[21] Accélération
[22] Décélération
[23] Sélect.proc.bit 0
[28] Rattrapage
[29] Ralentis.
[34] Bit rampe 0
[60] Compteur A (haut)
[61] Compteur A (bas)
[62] Reset compteur A
[63] Compteur B (haut)
[64] Compteur B (bas)
[65] Reset compteur B
5-11 E.digit.born.19
Voir par. 5-10. * [10] Inversion
5-12 E.digit.born.27
Voir par. 5-10. * [1] Reset
5-13 E.digit.born.29
Voir par. 5-10. * [14] Jogging
5-15 E.digit.born.33
Voir par. 5-10. * [16] Réf
prédénie bit 0
[26] Arrêt précis (contact NF)
[27] Démar./Stop préc.
[32] Entrée impulsions
5-3* Sorties digitales
5-34 S.digit.born. 42, retard ON
0,00-600,00 s * 0,01 s
5-35 S.digit.born.42, retard OFF
0,00-600,00 s * 0,01 s
5-4* Relais
5-40 Fonction relais
[52] Réf.dist.active
[53] Pas d'alarme
[54] Ordre dém. actif
[55] Fonct. inversé
[56] Variateur en mode Hand
[57] Var.en mode auto.
[60-63] Comparateur 0-3
[70-73] Règle logique 0-3
[81] Sortie digitale B ctrl av
5-41 Relais, retard ON
0,00-600,00 s *0,01 s
5-42 Relais, retard OFF
0,00-600,00 s *0,01 s
5-5* Entrée impulsions
5-55 Basse fréquence borne 33
20-4999 Hz *20 Hz
5-56 F.haute born.33
21-5000 Hz *5000 Hz
5-57 Val.ret./Réf.bas.born.33
Valeur
-4999-4999 * 0,000
5-58 Val.ret./Réf.haut.born.33
Valeur
-4999-4999 *50,000
6-** E/S ana.
6-0* Mode E/S ana.
6-00 Temporisation/60
1-99 s *10 s
6-01 Fonction/Tempo60
*[0] Inactif
[1] Gel sortie
[2] Arrêt
[3] Jogging
[4] Max speed
[5] Arrêt et alarme
6-1* Entrée ANA 1
6-10 Éch.min.U/born.53
0,00-9,99 V *0,07 V
6-11 Éch.max.U/born.53
0,01-10,00 V *10,00 V
6-12 Éch.min.I/born.53
0,00-19,99 mA *0,14 mA
6-13 Éch.max.I/born.53
0,01-20,00 mA *20,00 mA
6-14 Val.ret./Réf.bas.born.53
Valeur
-4999-4999 *0,000
6-15 Val.ret./Réf.haut.born.53
Valeur
-4999-4999 *50,000
6-16 Const.tps.l.born.53
0,01-10,00 s *0,01 s
70 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 75

Guide rapide
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
6-19 Terminal 53 mode
*[0] Mode tension
[1] Mode courant 4
6-2* Entrée ANA 2
6-22 Éch.min.X/born.60
0,00-19,99 mA *0,14 mA
6-23 Éch.max.I/born.60
0,01-20,00 mA *20,00 mA
6-24 Val.ret./Réf.bas.born.60
Valeur
-4999-4999 *0,000
6-25 Val.ret./Réf.haut.born.60
Valeur
-4999-4999 *50,00
6-26 Const.tps.l.born.60
0,01-10,00 s *0,01 s
6-8* Potentiomètre LCP
6-80 Potentiomètre LCP activé
[0] Désactivé
*[1] Activé
6-81 Réf. basse Potm. LCP
-4999-4999 *0,000
6-82 Réf. haute potm. LCP
-4999-4999 *50,00
6-9* Sortie ANA xx
6-90 Mode borne 42
*[0] 0-20 mA
[1] 4-20 mA
[2] Sortie digitale
6-91 Sortie ANA borne 42
*[0] Inactif
[10] fréquence de sortie
[11] Référence
[12] Retour
[13] Courant moteur
[16] Alimentation
[19] Tension circ. interm.
[20] Contrôle du bus
6-92 Sortie digitale borne 42
Voir le paramètre 5-40
*[0] Inactif
[80] Sortie digitale A ctrl av
6-93 Échelle min s.born.42
0,00-200,0 % *0,00 %
6-94 Échelle max s.born.42
0,00-200,0 % *100,0 %
7-** Contrôleurs
7-2* PIproc/ctrl retour
7-20 PI proc./1 retour
*[0] Pas de fonction
[1] Entrée ANA 53
[2] Entrée analogique 60
[8] Entrée impuls FI33
[11] Réf. bus local
7-3* PID proc./Régul.
7-30 PID proc./Norm.Inv.
*[0] Normal
[1] Inversé
7-31 PI proc./Anti satur.
[0] Désactiver
*[1] Activé
7-32 PI proc./Fréq.dém.
0,0-200,0 Hz *0,0 Hz
7-33 PI proc./Gain P
0,00-10,00 *0,01
7-34 PI proc./Tps intégral.
0,10-9999 s *9999 s
7-38 Facteur d'anticipation PI
process
0-400 % *0 %
7-39 Largeur de bande sur réf.
0-200 % *5 %
8-** Comm. et options
8-0* Réglages généraux
8-01 Type contrôle
*[0] Digital et mot ctrl.
[1] Seulement digital
[2] Mot contr. seulement
8-02 Source mot de contrôle
[0] Néant
*[1] FC RS485
8-03 Délai tempo. mot contrôle
0,1-6500 s *1,0 s
8-04 Fonction tempo. mot
contrôle
*[0] Inactif
[1] Gel sortie
[2] Arrêt
[3] Jogging
[4] Vitesse max.
[5] Arrêt et alarme
8-06 Reset tempo. mot contrôle
*[0] Pas de fonction
[1] Reset
8-3* Réglage Port FC
8-30 Protocole
*[0] FC
[2] Modbus
8-31 Adresse
1-247 *1
8-32 Vit. Trans. port FC
[0] 2400 bauds
[1] 4800 bauds
*[2] 9600 bauds si FC est choisi
au par. 8-30
*[3] 19200 bauds si Modbus est
choisi au par. 8-30
[4] 38400 bauds
8-33 Parité port FC
*[0] Parité paire, 1 bit d'arrêt
[1] Parité impaire, 1 bit d'arrêt
[2] Pas de parité, 1 bit d'arrêt
[3] Pas de parité, 2 bits d'arrêt
8-35 Retard réponse min.
0,001-0,5 *0,010 s
8-36 Retard réponse max
0,100-10,00 s *5,000 s
8-4* Déf. protocol FCMC
8-43 Cong. lecture PCD port FC
*[0] None Expressionlimit
[1] [1500] Heures d'exploitation
[2] [1501] Heures de
fonctionnement
[3] [1502] Compteur kWh
[4] [1600] Mot contrôle
[5] [1601] Réf. [unité]
[6] [1602] Référence %
[7] [1603] Mot d'état
[8] [1605] Valeur réelle princ. [%]
[9] [1609] Lect.paramétr
[10] [1610] Puissance [kW]
[11] [1611] Puissance moteur[CV]
[12] [1612] Tension moteur
[13] [1613] Fréquence
[14] [1614] Courant moteur
[15] [1615] Fréquence [%]
[16] [1618] Thermique moteur
[17] [1630] Tension circ. interm.
[18] [1634] Temp. radiateur
[19] [1635] Thermique onduleur
[20] [1638] État contr. log avancé
[21] [1650] Réf.externe
[22] [1651] Réf. impulsions
[23] [1652] Signal de retour
[Unité]
[24] [1660] Entrée dig.
18,19,27,33
[25] [1661] Entrée dig. 29
[26] [1662] Entrée ANA 53 (V)
[27] [1663] Entrée ANA 53 (mA)
[28] [1664] Entrée ANA 60
[29] [1665] Sortie ANA 42 [mA]
[30] [1668] Fréqu. entrée #33 [Hz]
[31] [1671] Sortie relais [bin]
[32] [1672] Compteur A
[33] [1673] Compteur B
[34] [1690] Mot d’alarme
[35] [1692] Mot avertis.
[36] [1694] Mot d'état élargi
8-5* Digital/Bus
8-50 Sélect. Roue libre
[0] Entrée dig.
[1] Bus
[2] Digital et bus
*[3] Digital ou bus
8-51 Sélect. arrêt rapide
Voir par. 8-50 *[3] Digital ou bus
8-52 Sélect.freinage CC
Voir par. 8-50 * [3] Digital ou bus
8-53 Sélect.dém.
Voir par. 8-50 *[3] Digital ou bus
8-54 Sélect.Invers.
Voir par. 8-50 *[3] Digital ou bus
8-55 Sélect.proc.
Voir par. 8-50 *[3] Digital ou bus
8-56 Sélect. réf. prédéf.
Voir par. 8-50 * [3] Digital ou bus
8-8* Diagnostics communication
bus
8-80 Compt.message bus
0-0 N/A *0 N/A
8-81 Compt.erreur bus
0-0 N/A *0 N/A
8-82 Messages esclaves reçus
0-0 N/A *0 N/A
8-83 Compt.erreur esclave
0-0 N/A *0 N/A
8-9* Jogging bus / Feedback
8-94 Retour du bus 1
0x8000-0x7FFF *0
13-** Logique avancée
13-0* Réglages SLC
13-00 Mode contr. log avancé
*[0] Inactif
[1] Actif
13-01 Événement de démarrage
[0] Faux
[1] Vrai
[2] MOTEUR TOURNE
[3] Dans gamme
[4] Sur réf.
[7] Hors gamme courant
[8] I inf. basse
[9] I sup. haute
[16] Avertis.thermiq.
[17] Tens.sect.horsplage
[18] Inversion
[19] Avertissement
[20] Alarme(Déf.)
[21] Alarme(Verrou déf.)
[22-25] Comparateur 0-3
[26-29] Règle logique 0-3
[33] Entrée dig. DI18
[34] Entrée dig. DI19
[35] Entrée dig. DI27
[36] Entrée dig. DI29
[38] Entrée dig. DI33
*[39] Ordre de démarrage
[40] Variateur arrêté
13-02 Événement d'arrêt
Voir paramètre 13-01 * [40]
Variateur arrêté
13-03 Reset SLC
*[0] Pas de reset
[1] Reset SLC
3 3
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 71
Page 76

Guide rapide
VLT® Micro Drive FC 51
13-1* Comparateurs
13-10 Opérande comparateur
*[0] Désactivé
[1] Référence
[2] Retour
[3] Vit. moteur
33
[4] Courant moteur
[6] Puiss. moteur
[7] Tension moteur
[8] Tension bus-CC
[12] Entrée ANA AI53
[13] Entrée ANA AI60
[18] Entrée impuls FI33
[20] Numéro alarme
[30] Compteur A
[31] Compteur B
13-11 Opérateur comparateur
[0] Inférieur à
*[1] ≈ égal
[2] >
13-12 Valeur comparateur
-9999-9999 *0,0
13-2* Temporisations
13-20 Tempo.contrôleur de
logique avancé
0,0-3600 s *0,0 s
13-4* Règles de Logique
13-40 Règle de Logique
Booléenne 1
Voir par. 13-01 *[0] Faux
[30] - [32] Temporisation du
contrôleur logique avancé 0-2
13-41 Opérateur de Règle
Logique 1
*[0] Désactivé
[1] Et
[2] Ou
[3] Et pas
[4] Ou pas
[5] Pas et
[6] Pas ou
[7] Pas et pas
[8] Pas ou pas
13-42 Règle de Logique
Booléenne 2
Voir par. 13-40 * [0] Faux
13-43 Opérateur de Règle
Logique 2
Voir par. 13-41 *[0] Désactivé
13-44 Règle de Logique
Booléenne 3
Voir par. 13-40 * [0] Faux
13-5* États
13-51 Événement contr. log
avancé
Voir par. 13-40 *[0] Faux
13-52 Action contr. logique
avancé
*[0] Désactivé
[1] Aucune action
[2] Sélect.proc.1
[3] Sélect.proc.2
[10-17] Réf. prédéf. 0-7
[18] Sélect. Rampe 1
[19] Sélect. Rampe 2
[22] Run (fonctionne)
[23] Fonction sens antihor
[24] Arrêt
[25] Arrêt rapide
[26] Arrêt CC
[27] Roue libre
[28] Gel sortie
[29] Tempo début 0
[30] Tempo début 1
[31] Tempo début 2
[32] Déf. sort. dig. A bas
[33] Déf. sort. dig. B bas
[38] Déf. sort. dig. A haut
[39] Déf. sort. dig. B haut
[60] Reset compteur A
[61] Reset compteur B
14-** Fonct.particulières
14-0* Commut.onduleur
14-01 Fréq. commut.
[0] 2 kHz
*[1] 4 kHz
[2] 8 kHz
[4] 16 kHz non disponible pour
M5
14-03 Surmodulation
[0] Inactif
*[1] Actif
14-1* Secteur On/O
14-12 Fonct.sur désiqui.réseau
*[0] Arrêt
[1] Avertissement
[2] Désactivé
14-2* Reset alarme
14-20 Mode reset
*[0] Reset manuel
[1-9] Reset auto 1-9
[10] Reset auto. x 10
[11] Reset auto x 15
[12] Reset auto. x 20
[13] Reset auto. inni
[14] Reset à la mise sous tension
14-21 Temps reset auto.
0-600 s * 10 s
14-22 Mod. exploitation
*[0] Fonctionnement normal
[2] Initialisation 14-26 Action en
U limit.
*[0] Arrêt
[1] Avertissement 14-4* Optimi-
sation énerg.
14-41 Magnétisation minimale
AEO
40-75 %*66 %
14-9* Régl. panne
14-90 Niveau panne[3] Alarme
verr.
[4] Arrêt et reset tempo.
15-** Info. variateur
15-0* Données exploit.
15-00 Jours mise ss tension
15-01 Heures fonction.
15-02 Compteur kWh
15-03 Mise sous tension
15-04 Surtemp.
15-05 Surtension
15-06 Reset comp. kWh
*[0] Pas de reset
[1] Reset compteur
15-07 Reset compt. heures de
fonction.
*[0] Pas de reset
[1] Reset compteur
15-3* Mémoire déf.
15-30 Mémoire déf. : Code
15-4* Type. VAR.
15-40 Type. FC
15-41 Partie puiss.
15-42 Tension
15-43 N°logic.carte ctrl.
15-46 Code variateur fréq.
15-48 Version LCP
15-51 N° série variateur
16-** Lecture données 16-0* État
général
16-00 Mot contrôle
0-0XFFFF
16-01 Réf. [unité]
-4999-4999 *0,000
16-02 Référence %
-200,0-200,0 % *0,0 %
16-03 Mot d'état
0-0XFFFF
16-05 Valeur réelle princ. [%]
-200,0-200,0 % *0,0 %
16-09 Lect.paramétr.
Dép. des par. 0-31, 0-32
16-1* État Moteur
16-10 Puissance moteur [kW]
16-11 Puissance moteur [hp]
16-12 Tension moteur [V]
16-13 Fréquence moteur [Hz]
16-14 Courant moteur [A]
16-15 Fréquence [%]
16-18 Thermique moteur [%]
16-3* Etat variateur
16-30 Tension circ. interm.
16-34 Temp. radiateur
16-35 Thermique onduleur
16-36 InomVLT
16-37 I
16-38 État ctrl log avancé
16-5* Réf. retour
16-50 Réf. externe
16-51 Réf. impulsions
16-52 Signal de retour [Unité]
16-6* Entrées et sorties
16-60 Entrée dig. 18,19,27,33
0-1111
16-61 Entrée dig. 29
0-1
16-62 Entrée ANA 53 (V)
16-63 Entrée ANA 53 (mA)
16-64 Entrée ANA 60
16-65 Sortie ANA 42 [mA]
16-68 Entrée impulsions [Hz]
16-71 Sortie relais [bin]
16-72 Compteur A
16-73 Compteur B
16-8* Bus et port FC
16-86 Réf.1 port FC
0x8000-0x7FFFF
16-9* Ach. diagnostics
16-90 Mot d'alarme
0-0XFFFFFFFF
16-92 Mot avertis.
0-0XFFFFFFFF
16-94 Mot d'état Mot état
[binaire]
0 - 0XFFFFFFFF
18-** Données moteur avancées
18-8* Résistances moteur
18-80 Résistance stator (haute
résolution)
0,000-99,990 ohm *0,000 ohm
18-81 Réactance fuite stator
(haute résolution)
0,000-99,990 ohm *0,000 ohm
max.
VLT
72 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 77

Guide rapide
3.6 Dépannage
3.6.1 Avertissements et alarmes
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
Numéro Description Avertiss
ement
2 Défaut zéro signal X X Le signal sur la borne 53 ou 60 équivaut à moins de 50 % de
4
7
8
9 Surcharge onduleur X X Durée trop longue de charge supérieure à 100 %.
10 Surtempérature moteur ETR X X Le moteur est trop chaud. La charge a dépassé 100 %
11 Surchaue therm. mot. X X La thermistance ou la liaison de la thermistance est
12 Limite de couple X Le couple dépasse la valeur dénie au paramètre 4-16 Mode
13 Surcourant X X X La limite de courant de pointe de l'onduleur est dépassée.
14 Défaut de mise à la terre X X X Présence fuite à la masse d'une phase de sortie.
16 Court-circuit X X Court-circuit dans le moteur ou aux bornes du moteur.
17 Dépas. tps mot de contrôle X X Absence de communication avec le variateur de fréquence.
25 Résistance de freinage court-
27 Hâcheur de freinage court-
28 Contrôle de freinage X La résistance de freinage n'est pas connectée/ne marche pas.
29 Surcharge variateur X X X La température de coupure du radiateur est atteinte.
30 Phase U moteur absente X X Phase U moteur absente. Vérier la phase.
31 Phase V moteur absente X X Phase V moteur absente. Vérier la phase.
32 Phase W moteur absente X X Phase W moteur absente. Vérier la phase.
38 Erreur interne X X Contacter le fournisseur Danfoss local.
44 Défaut de mise à la terre X X Présence fuite à la masse d'une phase de sortie.
47 Panne de tension de contrôle X X 24 V CC est en surcharge.
51 AMA U
52 AMA I
59 Limite de courant X Variateur de fréquence en surcharge.
63 Frein méca. bas X Le courant moteur eectif n'a pas dépassé le courant d'acti-
80 Variateur de fréquence
84 La connexion entre le
85 Touche désactivée X Voir le groupe de paramètres 0-4* LCP.
86 Échec de copie X Une erreur s'est produite au cours de la copie du variateur de
Perte phase secteur
Surtension CC
Soustension CC
circuitée
circuité
et I
nom
bas X Le courant moteur est trop bas. Vérier les réglages.
nom
initialisé à la valeur par défaut
variateur de fréquence et le
LCP est perdue
1)
1)
1)
. X Conguration erronée pour tension et/ou courant du moteur.
nom
Alarme Arrêt
verroui
llée
X X X Absence de l'une des phases secteur ou uctuations trop
X X La tension du circuit intermédiaire dépasse la limite.
X X La tension du circuit intermédiaire est inférieure à la limite
X X Résistance de freinage court-circuitée et fonction de freinage
X X Transistor de freinage court-circuité et fonction de freinage
X Tous les réglages des paramètres sont initialisés aux réglages
X Pas de communication entre le LCP et le variateur de
Error Cause du problème
la valeur dénie aux par. :
Parameter 6-10 Terminal 53 Low Voltage.
•
Parameter 6-12 Terminal 53 Low Current.
•
Parameter 6-22 Terminal 54 Low Current.
•
importantes de la tension. Vérier tension d'alimentation.
d'avertissement basse tension.
pendant trop longtemps.
interrompue.
moteur limite couple ou paramètre 4-17 Mode générateur limite
couple.
déconnectée.
déconnectée.
vation du frein au cours de la temporisation du démarrage.
d'usine par défaut.
fréquence
fréquence sur le LCP ou inversement.
3 3
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 73
Page 78

Guide rapide
VLT® Micro Drive FC 51
Numéro Description Avertiss
ement
87 Données LCP non valides X Survient lors d'une copie à partir du LCP si ce dernier
33
88 Données LCP non compatibles X Survient lors d'une copie à partir du LCP si des données sont
89 Paramètre en lecture seule X Se produit lors d'une tentative d'écriture sur un paramètre en
90 Base de données paramètres
occupée
91 Valeur de paramètre non
valide dans ce mode
92 La valeur du paramètre
dépasse les limites minimales/
maximales
nw run Pas en fonction. X Les paramètres ne peuvent être modiés qu'avec le moteur à
Err. Saisie d'un mot de passe
erroné
1) Ces pannes proviennent de perturbations du secteur. Installer un ltre de ligne Danfoss pour rectier ce problème.
Alarme Arrêt
verroui
llée
X Le LCP et la connexion RS485 cherchent à mettre à jour
X Se produit lors d'une tentative d'écriture de valeur non
X Se produit lors d'une tentative de conguration d'une valeur
X Se produit lors de l'utilisation d'un mot de passe erroné pour
Error Cause du problème
contient des données erronées ou si aucune donnée n'a été
chargée sur le LCP.
déplacées entre des variateurs de fréquence présentant de
grandes diérences au niveau des versions logicielles.
lecture seule.
simultanément des paramètres.
autorisée sur un paramètre.
en dehors des limites.
l'arrêt.
modier un paramètre protégé par mot de passe.
Table 3.6 Liste des codes d'avertissements et alarmes
74 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 79

Guide rapide
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
3.7 Spécications
3.7.1 Alimentation secteur 1 x 200-240 V CA
Surcharge normale (150 %) pendant 1 minute
Variateur de fréquence
Sortie d'arbre typique [kW]
Sortie d'arbre typique [HP] 0,25 0,5 1 2 3
Protection nominale IP20 M1 M1 M1 M2 M3
Courant de sortie
Continu (3 x 200-240 V CA) [A] 1,2 2,2 4,2 6,8 9,6
Intermittent (3 x 200-240 V CA) [A] 1,8 3,3 6,3 10,2 14,4
Section du câble maximale :
(secteur, moteur) [mm²/AWG] 4/10
Courant d'entrée maximal
Continu (1 x 200-240 V ) [A] 3,3 6,1 11,6 18,7 26,4
Intermittent (1 x 200-240 V) [A] 4,5 8,3 15,6 26,4 37,0
Fusibles secteur maximum [A] Voir le chapter 1.3.3 Fuses
Environnement
Perte de puissance estimée [ W],
Meilleur cas/typique
Poids de la protection IP20 [kg] 1,1 1,1 1,1 1,6 3,0
Rendement [%],
Meilleur cas/typique
1)
2)
PK18
0.18
12.5/
15.5
95.6/
94.5
PK37
0.37
20.0/
25.0
96.5/
95.6
PK75
0.75
36.5/
44.0
96.6/
96.0
P1K5
1.5
61.0/
67.0
97.0/
96.7
P2K2
81.0/
85.1
96.9/
97.1
2.2
3 3
Table 3.7 Alimentation secteur 1 x 200-240 V CA
1) S'applique au dimensionnement du refroidissement de variateur de fréquence. Si la fréquence de commutation est supérieure au réglage par
défaut, les pertes de puissance peuvent augmenter. Les puissances consommées par le LCP et la carte de commande sont incluses. Pour les
données des pertes de puissance selon la norme EN 50598-2, consulter
2) Rendement mesuré au courant nominal. Pour la classe d'ecacité énergétique, voir le chapter 1.8.1 Surroundings. Pour connaître les pertes de
charge partielles, voir drives.danfoss.com/knowledge-center/energy-eciency-directive/#/.
drives.danfoss.com/knowledge-center/energy-eciency-directive/#/.
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 75
Page 80

Guide rapide
VLT® Micro Drive FC 51
3.7.2 Alimentation secteur 3 x 200-240 V CA
Surcharge normale (150 %) pendant 1 minute
Variateur de fréquence
Sortie d'arbre typique [kW]
33
Sortie d'arbre typique [HP] 0,33 0,5 1 2 3 5
Protection nominale IP20 M1 M1 M1 M2 M3 M3
Courant de sortie
Continu (3 x 200-240 V ) [A] 1,5 2,2 4,2 6,8 9,6 15,2
Intermittent (3 x 200-240 V) [A] 2,3 3,3 6,3 10,2 14,4 22,8
Section du câble maximale :
(secteur, moteur) [mm²/AWG] 4/10
Courant d'entrée maximal
Continu (3 x 200-240 V ) [A] 2,4 3,5 6,7 10,9 15,4 24,3
Intermittent (3 x 200-240 V) [A] 3,2 4,6 8,3 14,4 23,4 35,3
Fusibles secteur maximum [A] Voir le chapter 1.3.3 Fuses
Environnement
Perte de puissance estimée [ W]
Meilleur cas/typique
Poids de la protection IP20 [kg] 1,1 1,1 1,1 1,6 3,0 3,0
Rendement [%]
Meilleur cas/typique
1)
2)
PK25
0.25
14.0/
20.0
96.4/
94.9
PK37
0.37
19.0/
24.0
96.7/
95.8
PK75
0.75
31.5/
39.5
97.1/
96.3
P1K5
1.5
51.0/
57.0
97.4/
97.2
P2K2
2.2
72.0/
77.1
97.2/
97.4
P3K7
3.7
115.0/
122.8
97.3/
97.4
Table 3.8 Alimentation secteur 3 x 200-240 V CA
1) S'applique au dimensionnement du refroidissement de variateur de fréquence. Si la fréquence de commutation est supérieure au réglage par
défaut, les pertes de puissance peuvent augmenter. Les puissances consommées par le LCP et la carte de commande sont incluses. Pour les
données des pertes de puissance selon la norme EN 50598-2, consulter
2) Rendement mesuré au courant nominal. Pour la classe d'ecacité énergétique, voir le chapter 1.8.1 Surroundings. Pour connaître les pertes de
charge partielles, voir drives.danfoss.com/knowledge-center/energy-eciency-directive/#/.
drives.danfoss.com/knowledge-center/energy-eciency-directive/#/.
76 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 81

Guide rapide
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
3.7.3 Alimentation secteur 3 x 380-480 V CA
Surcharge normale (150 %) pendant 1 minute
Variateur de fréquence
Sortie d'arbre typique [kW]
Sortie d'arbre typique [HP] 0,5 1 2 3 4 5,5
Protection nominale IP20 M1 M1 M2 M2 M3 M3
Courant de sortie
Continu (3 x 380-440 V ) [A] 1,2 2,2 3,7 5,3 7,2 9,0
Intermittent (3 x 380-440 V) [A] 1,8 3,3 5,6 8,0 10,8 13,7
Continu (3 x 440-480 V ) [A] 1,1 2,1 3,4 4,8 6,3 8,2
Intermittent (3 x 440-480 V) [A] 1,7 3,2 5,1 7,2 9,5 12,3
Section du câble maximale :
(secteur, moteur) [mm²/AWG] 4/10
Courant d'entrée maximal
Continu (3 x 380-440 V ) [A] 1,9 3,5 5,9 8,5 11,5 14,4
Intermittent (3 x 380-440 V) [A] 2,6 4,7 8,7 12,6 16,8 20,2
Continu (3 x 440-480 V ) [A] 1,7 3,0 5,1 7,3 9,9 12,4
Intermittent (3 x 440-480 V) [A] 2,3 4,0 7,5 10,8 14,4 17,5
Fusibles secteur maximum [A] Voir le chapter 1.3.3 Fuses
Environnement
Perte de puissance estimée [ W]
Meilleur cas/typique
Poids de la protection IP20 [kg] 1,1 1,1 1,6 1,6 3,0 3,0
Rendement [%]
Meilleur cas/typique
1)
2)
PK37
0.37
18.5/
25.5
96.8/
95.5
PK75
0.75
28.5/
43.5
97.4/
96.0
P1K5
1.5
41.5/
56.5
98.0/
97.2
P2K2
2.2
57.5/
81.5
97.9/
97.1
P3K0
3.0
75.0/
101.6
98.0/
97.2
P4K0
98.5/
133.5
98.0/
97.3
4.0
3 3
Table 3.9 Alimentation secteur 3 x 380-480 V CA
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 77
Page 82

Guide rapide
Surcharge normale (150 %) pendant 1 minute
Variateur de fréquence
Sortie d'arbre typique [kW]
Sortie d'arbre typique [HP] 7,5 10 15 20 25 30
Protection nominale IP20 M3 M3 M4 M4 M5 M5
33
Courant de sortie
Continu (3 x 380-440 V ) [A] 12,0 15,5 23,0 31,0 37,0 43,0
Intermittent (3 x 380-440 V) [A] 18,0 23,5 34,5 46,5 55,5 64,5
Continu (3 x 440-480 V ) [A] 11,0 14,0 21,0 27,0 34,0 40,0
Intermittent (3 x 440-480 V) [A] 16,5 21,3 31,5 40,5 51,0 60,0
Section du câble maximale :
(secteur, moteur) [mm²/AWG] 4/10 16/6
Courant d'entrée maximal
Continu (3 x 380-440 V ) [A] 19,2 24,8 33,0 42,0 34,7 41,2
Intermittent (3 x 380-440 V) [A] 27,4 36,3 47,5 60,0 49,0 57,6
Continu (3 x 440-480 V ) [A] 16,6 21,4 29,0 36,0 31,5 37,5
Intermittent (3 x 440-480 V) [A] 23,6 30,1 41,0 52,0 44,0 53,0
Fusibles secteur maximum [A] Voir le chapter 1.3.3 Fuses
Environnement
Perte de puissance estimée [ W]
Meilleur cas/typique
Poids de la protection IP20 [kg] 3,0 3,0
Rendement [%]
Meilleur cas/typique
1)
2)
VLT® Micro Drive FC 51
P5K5
5.5
131.0/
166.8
98.0/
97.5
P7K5
7.5
175.0/
217.5
98.0/
97.5
P11K
11
290.0/
342.0
97.8/
97.4
P15K
15
387.0/
454.0
97.7/
97.4
P18K
18.5
395.0/
428.0
98.1/
98.0
P22K
22
467.0/
520.0
98.1/
97.9
Table 3.10 Alimentation secteur 3 x 380-480 V CA
1) S'applique au dimensionnement du refroidissement de variateur de fréquence. Si la fréquence de commutation est supérieure au réglage par
défaut, les pertes de puissance peuvent augmenter. Les puissances consommées par le LCP et la carte de commande sont incluses. Pour les
données des pertes de puissance selon la norme EN 50598-2, consulter
2) Rendement mesuré au courant nominal. Pour la classe d'ecacité énergétique, voir le chapter 1.8.1 Surroundings. Pour connaître les pertes de
charge partielles, voir drives.danfoss.com/knowledge-center/energy-eciency-directive/#/.
drives.danfoss.com/knowledge-center/energy-eciency-directive/#/.
78 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 83

Guide rapide
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
3.8 Caractéristiques techniques générales
Protection et caractéristiques
Protection thermique électronique du moteur contre les surcharges.
•
La surveillance de la température du dissipateur de chaleur assure l'arrêt du variateur de fréquence en cas de
•
surtempérature.
Le variateur de fréquence est protégé contre les courts-circuits entre les bornes U, V, W du moteur.
•
En cas d'absence de l'une des phases moteur, le variateur de fréquence s'arrête et émet une alarme.
•
En cas d'absence de l'une des phases secteur, le variateur de fréquence s'arrête ou émet un avertissement (en
•
fonction de la charge).
Le contrôle de la tension du circuit intermédiaire assure que le variateur de fréquence s'arrête si la tension de
•
circuit intermédiaire est trop basse ou trop élevée.
Le variateur de fréquence est protégé contre les défauts de mise à la terre sur les bornes U, V, W du moteur.
•
Alimentation secteur (L1/L, L2, L3/N)
Tension d'alimentation 200–240 V ±10 %
Tension d'alimentation 380–480 V ±10 %
Fréquence d'alimentation 50/60 Hz
Écart temporaire maximum entre phases secteur 3,0 % de la tension nominale d'alimentation
Facteur de puissance réelle ≥ 0,4 à charge nominale
Facteur de puissance de déphasage (cosφ) à proximité de l'unité (> 0,98)
Commutation sur l'entrée d'alimentation L1/L, L2, L3/N (mises sous tension) Maximum 2 fois/minute
Environnement conforme à la norme EN 60664-1 Catégorie de surtension III/degré de pollution 2
L'utilisation de l'unité convient sur un circuit limité à 100 000 ampères symétriques (rms), 240/480 V maximum.
3 3
Puissance du moteur (U, V, W)
Tension de sortie 0-100 % de la tension d'alimentation
Fréquence de sortie 0–200 Hz (VVC+), 0–400 Hz (u/f)
Commutation sur la sortie Illimitée
Temps de rampe 0,05–3600 s
Longueur et section des câbles
Longueur max. du câble moteur, blindé/armé (installation conforme CEM) 15 m (49 pi)
Longueur max. du câble du moteur, non blindé/non armé 50 m (164 pi)
Section max. pour moteur, secteur
Raccordement à la répartition de la charge/au frein (M1, M2, M3) Fiches Faston isolées 6,3 mm
Section maximum pour répartition de la charge/frein (M4, M5) 16 mm2/6 AWG
Section max. des bornes de commande, l rigide 1,5 mm2/16 AWG (2 x 0,75 mm2)
Section max. des bornes de commande, l souple 1 mm2/18 AWG
Section max. des bornes de commande, l avec noyau blindé 0,5 mm2/20 AWG
Section minimale des bornes de commande 0,25 mm2 (24 AWG)
1) Voir le chapter 1.7 Specications pour plus d'informations.
Entrées digitales (entrées codeur/impulsions)
Entrées digitales programmables (impulsions/codeur) 5 (1)
N° de borne 18, 19, 27, 29, 33
Logique PNP ou NPN
Niveau de tension 0-24 V CC
Niveau de tension, 0 logique PNP < 5 V CC
Niveau de tension, 1 logique PNP > 10 V CC
Niveau de tension, 0 logique NPN > 19 V CC
Niveau de tension, 1 logique NPN < 14 V CC
Tension maximale sur l'entrée 28 V DC
Résistance d'entrée, R
i
1)
Environ 4000 Ω
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 79
Page 84

Guide rapide
Fréquence impulsionnelle max. à la borne 33 5000 Hz
Fréquence impulsionnelle min. à la borne 33 20 Hz
Entrées analogiques
Nombre d'entrées analogiques 2
33
N° de borne 53, 60
Mode tension (borne 53) Commutateur S200=OFF(U)
Mode courant (bornes 53 et 60) Commutateur S200=ON(I)
Niveau de tension 0–10 V
Résistance d'entrée, R
Tension maximale 20 V
Niveau de courant 0/4 à 20 mA (échelonnable)
Résistance d'entrée, R
Courant maximal 30 mA
Sortie analogique
Nombre de sorties analogiques programmables 1
N° de borne 42
Plage de courant de la sortie analogique 0/4–20 mA
Charge maximale à la masse à la sortie analogique 500 Ω
Tension maximale à la sortie analogique 17 V
Précision de la sortie analogique Erreur maximale : 0,8 % de l'échelle totale
Intervalle de balayage 4 ms
Résolution de la sortie analogique 8 bits
Intervalle de balayage 4 ms
i
i
VLT® Micro Drive FC 51
Environ 10000 Ω
Environ 200 Ω
Carte de commande, communication série RS485
N° de borne 68 (P, TX+, RX+), 69 (N, TX-, RX-)
Borne n° 61 Commun des bornes 68 et 69
Carte de commande, sortie 24 V CC
N° de borne 12
Charge maximale (M1 et M2) 100 mA
Charge maximale (M3) 50 mA
Charge maximale (M4 et M5) 80 mA
Sortie relais
Sortie relais programmable 1
N° de borne relais 01 01-03 (interruption), 01-02 (établissement)
Charge maximale sur les bornes (CA-1)1) sur 01-02 (NO) (charge résistive) 250 V CA, 2 A
Charge maximale sur les bornes (CA-15)1) sur 01-02 (NO) (charge inductive à cosφ 0,4) 250 V CA, 0,2 A
Charge maximale sur les bornes (CC-1)1) sur 01-02 (NO) (charge résistive) 30 V CC, 2 A
Charge maximale sur les bornes (CC-13)1) sur 01-02 (NO) (charge inductive) 24 V CC, 0,1 A
Charge maximale sur les bornes (CA-1)1) sur 01-03 (NF) (charge résistive) 250 V CA, 2 A
Charge maximale sur les bornes (CA-15)1) sur 01-03 (NF) (charge inductive à cosφ 0,4) 250 V CA, 0,2 A
Charge maximale sur les bornes (CC-1)1) sur 01-03 (NF) (charge résistive) 30 V CC, 2 A
Charge minimale sur les bornes sur 01-03 (NF), 01-02 (NO) 24 V CC 10 mA, 24 V CA 20 mA
Environnement conforme à la norme EN 60664-1 Catégorie de surtension III/degré de pollution 2
1) CEI 60947 parties 4 et 5
Carte de commande, sortie 10 V CC
N° de borne 50
Tension de sortie 10,5 V ± 0,5 V
Charge maximale 25 mA
80 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 85

Guide rapide
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
NOTICE
La totalité des entrées, sorties, circuits, alimentations CC et contacts de relais sont isolés galvaniquement de la tension
d'alimentation (PELV) et d'autres bornes haute tension.
Environnement
Protection nominale des boîtiers IP20
Kit de boîtier disponible IP21, TYPE 1
Essai de vibration 1,0 g
Humidité relative max. 5-95 % (CEI 60721-3-3 ; classe 3K3 (non condensante) pendant le fonctionnement)
Environnement agressif (CEI 60721-3-3), tropicalisé classe 3C3
Méthode d'essai conforme à la norme CEI 60068-2-43 H2S (10 jours)
Température ambiante
Température ambiante min. en pleine exploitation 0 °C (32 °F)
Température ambiante min. en exploitation réduite -10 °C (14 °F)
Température durant le stockage/transport -25 à +65/70 °C (-13 à +149/158 °F)
Altitude max. au-dessus du niveau de la mer sans déclassement
Altitude max. au-dessus du niveau de la mer avec déclassement
Normes de sécurité EN/CEI 61800-5-1, UL 508C
Normes CEM, Émission EN 61800-3, EN 61000-6-3/4, EN 55011, CEI 61800-3
Normes CEM, Immunité
Classe d'ecacité énergétique IE2
1) Se reporter au chapter 1.9 Special Conditions pour :
Déclassement pour température ambiante élevée
•
Déclassement à haute altitude
•
2) Déterminée d'après la norme EN 50598-2 à :
Charge nominale
•
90 % de la fréquence nominale
•
Fréquence de commutation au réglage d'usine
•
Type de modulation au réglage d'usine
•
1)
1)
1)
EN 61800-3, EN 61000-6-1/2, EN 61000-4-2, EN 61000-4-3,
EN 61000-4-4, EN 61000-4-5, EN 61000-4-6
Maximum 40 °C (104 °F)
1000 m (3280 pi)
3 000 m (9 842 pi)
3 3
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 81
Page 86

Guide rapide
VLT® Micro Drive FC 51
3.9 Exigences particulières
3.9.1 Déclassement pour température ambiante
La température ambiante mesurée sur 24 heures doit être inférieure d'au moins 5 °C (41 °F) à la température ambiante
maximale.
33
Si le variateur de fréquence est en service à des températures ambiantes élevées, réduire le courant de sortie continu.
Le variateur de fréquence a été conçu pour un fonctionnement à une température ambiante maximum de 50 °C (122 °F)
avec une taille de moteur inférieure à la taille nominale. Le fonctionnement en continu à pleine charge à une température
ambiante de 50 °C (122 °F) raccourcit la durée de vie du variateur de fréquence.
3.9.2 Déclassement pour basse pression atmosphérique
La capacité de refroidissement de l'air est amoindrie en cas de faible pression atmosphérique.
CAUTION
INSTALLATION À HAUTE ALTITUDE
À des altitudes supérieures à 2000 m (6560 pi), contacter Danfoss en ce qui concerne la norme PELV.
Au-dessous de 1000 m (3280 pi) d'altitude, aucun déclassement n'est nécessaire, mais au-dessus de 1000 m (3280 pi),
diminuer la température ambiante ou le courant de sortie maximal.
Diminuer la sortie de 1 % par 100 m (328 pi) d'altitude au-dessus de 1 000 m (3 280 pi) ou réduire la température ambiante
maximale d'1 °C (33,8 °F) par 200 m (656 pi).
3.9.3 Déclassement pour fonctionnement à faible vitesse
Lorsqu'un moteur est raccordé à un variateur de fréquence, veiller à ce qu'il soit susamment refroidi.
Un problème peut survenir à faible vitesse de rotation dans des applications de couple constant. Le fonctionnement en
continu à faible vitesse - en dessous de la moitié de la vitesse nominale du moteur - peut nécessiter un refroidissement par
air supplémentaire. Sinon, choisir un moteur plus gros (une taille au-dessus).
82 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 87

Guide rapide
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
3.10 Options et pièces détachées
Référence Description
132B0100
132B0101
132B0102 Kit de montage externe pour LCP comprenant câble de 3 m (10 pi), IP55 avec LCP 11, IP21 avec
132B0103 Kit de conversion IP20 vers NEMA Type 1, M1
132B0104 Kit de conversion IP20 vers NEMA Type 1, M2
132B0105 Kit de conversion IP20 vers NEMA Type 1, M3
132B0106 Kit de montage de la plaque de connexion à la terre, M1 et M2
132B0107 Kit de montage de la plaque de connexion à la terre, M3
132B0108 Kit de conversion IP20 vers IP21/Type 1, M1
132B0109 Kit de conversion IP20 vers IP21/Type 1, M2
132B0110 Kit de conversion IP20 vers IP21/Type 1, M3
132B0111 Kit de montage sur rail DIN, M1/M2
132B0120 Kit de conversion IP20 vers Nema 1, M4
132B0121 Kit de conversion IP20 vers Nema 1, M5
132B0122 Kit de montage de la plaque de connexion à la terre, M4, M5
132B0126 Kits de pièces de rechange pour protection M1
132B0127 Kits de pièces de rechange pour protection M2
132B0128 Kits de pièces de rechange pour protection M3
132B0129 Kits de pièces de rechange pour protection M4
132B0130 Kits de pièces de rechange pour protection M5
132B0131 Cache blanc
130B2522
130B2522
130B2533
130B2525
130B2530
130B2523
130B2523
130B2523
130B2526
130B2531
130B2527
130B2523
130B2523
130B2524
130B2526
130B2529
130B2531
130B2528
130B2527
VLT® Control Panel LCP 11 sans potentiomètre
VLT® Control Panel LCP 12 avec potentiomètre
LCP 12
VLT® Line Filter MCC 107 pour 132F0001
VLT® Line Filter MCC 107 pour 132F0002
VLT® Line Filter MCC 107 pour 132F0003
VLT® Line Filter MCC 107 pour 132F0005
VLT® Line Filter MCC 107 pour 132F0007
VLT® Line Filter MCC 107 pour 132F0008
VLT® Line Filter MCC 107 pour 132F0009
VLT® Line Filter MCC 107 pour 132F0010
VLT® Line Filter MCC 107 pour 132F0012
VLT® Line Filter MCC 107 pour 132F0014
VLT® Line Filter MCC 107 pour 132F0016
VLT®Line Filter MCC 107 pour 132F0017
VLT® Line Filter MCC 107 pour 132F0018
VLT® Line Filter MCC 107 pour 132F0020
VLT® Line Filter MCC 107 pour 132F0022
VLT® Line Filter MCC 107 pour 132F0024
VLT® Line Filter MCC 107 pour 132F0026
VLT® Line Filter MCC 107 pour 132F0028
VLT® Line Filter MCC 107 pour 132F0030
3 3
Table 3.11 Options et pièces détachées
Les
ltres de ligne et résistances de freinage Danfoss sont disponibles sur demande.
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 83
Page 88

089
Guía rápida
4 Guía rápida
VLT® Micro Drive FC 51
4.1 Introducción
4.1.1 Objetivo de este manual
Esta guía rápida proporciona información para la
44
instalación y puesta en servicio del convertidor de
frecuencia VLT® Micro Drive FC 51.
La Guía rápida está diseñada para su uso por parte de
personal
Para utilizar el convertidor de frecuencia de forma segura y
profesional, lea y siga las instrucciones del manual de
funcionamiento. Preste especial atención a las instrucciones
de seguridad y advertencias generales. Conserve esta guía
rápida junto con el convertidor de frecuencia en todo
momento.
VLT® es una marca registrada.
cualicado.
4.1.2 Recursos adicionales
Tiene a su disposición recursos adicionales para
comprender la programación y las funciones avanzadas del
convertidor de frecuencia:
La Guía de programación del VLT® Micro Drive FC
•
51 proporciona información detallada sobre cómo
trabajar con parámetros, así como numerosos
ejemplos de aplicación.
La Guía de diseño del VLT® Micro Drive FC 51
•
proporciona información detallada sobre las
capacidades y las funcionalidades para diseñar
sistemas de control de motores.
Instrucciones para el funcionamiento con equipos
•
opcionales y la sustitución de componentes.
Existen publicaciones y manuales complementarios
disponibles en:
drives.danfoss.com/downloads/portal/#/
El convertidor de frecuencia cumple los requisitos de la
norma UL 508C de retención de memoria térmica. Si desea
obtener más información, consulte el apartado Protección
térmica del motor en la Guía de diseño especíca del
producto.
4.1.3 Alimentación aislada de tierra (IT)
NOTICE
RED AISLADA DE TIERRA (IT)
Instalación con una fuente de red aislada, es decir, una
red IT.
Máxima tensión de alimentación permitida al estar
conectado a la red: 440 V.
De manera opcional, Danfoss ofrece ltros de línea
recomendados para mejorar el comportamiento en cuanto
a armónicos. Consulte Table 1.11.
4.1.4 Evite los arranques accidentales
Cuando el convertidor de frecuencia está conectado a la
red de alimentación, el motor puede arrancarse o pararse
mediante órdenes digitales, comandos de bus, referencias
o a través del LCP (panel de control local). Para evitar
arranques accidentales:
Desconecte el convertidor de frecuencia de la red
•
cuando así lo dicten las consignas de seguridad
personal.
Pulse siempre
•
cualquier parámetro.
Los equipos que contienen componentes
eléctricos no deben desecharse junto con los
desperdicios domésticos.
Deben recogerse de forma independiente con
los residuos electrónicos y eléctricos de acuerdo
con la legislación local actualmente vigente.
[O/Reset] antes de modicar
84 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 89

Guía rápida
4.2 Seguridad
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
WARNING
TENSIÓN ALTA
Los convertidores de frecuencia contienen tensión alta
cuando están conectados a una entrada de red de CA, a
un suministro de CC o a una carga compartida. Si la
instalación, el arranque y el mantenimiento no son
efectuados por personal cualicado, pueden causarse
lesiones graves o incluso la muerte.
La instalación, el arranque y el mantenimiento
•
deben ser realizados exclusivamente por
personal cualicado.
Antes de realizar cualquier trabajo de
•
reparación o mantenimiento, utilice un
dispositivo de medición de tensión adecuado
para asegurarse de que el convertidor se haya
descargado por completo.
WARNING
ARRANQUE ACCIDENTAL
Cuando el convertidor de frecuencia se conecta a la red
de CA, el motor podría arrancar en cualquier momento,
ocasionando el riesgo de sufrir lesiones graves o incluso
la muerte, así como daños al equipo u otros objetos. El
motor puede arrancar mediante un conmutador externo,
una orden de eldbus, una señal de referencia de
entrada desde el LCP o el LOP o por la eliminación de
una condición de fallo.
Desconecte el convertidor de frecuencia de la
•
red cuando así lo dicten las consignas de
seguridad personal para evitar arranques
accidentales del motor.
Pulse [O/Reset] en el LCP antes de programar
•
cualquier parámetro.
El convertidor de frecuencia, el motor y
•
cualquier equipo accionado deben estar
preparados para el funcionamiento cuando se
conecta el convertidor de frecuencia a la red de
CA.
NOTICE
La tecla [O/Reset] no es un conmutador de seguridad.
No desconecta el convertidor de frecuencia de la red.
WARNING
TIEMPO DE DESCARGA
El convertidor de frecuencia contiene condensadores en
el bus de corriente continua que pueden seguir cargados
incluso cuando el convertidor de frecuencia está
apagado. Puede haber tensión alta presente aunque las
luces del indicador LED de advertencia estén apagadas.
Si, después de desconectar la alimentación, no espera el
tiempo especicado antes de realizar cualquier trabajo
de reparación o tarea de mantenimiento, pueden
producirse lesiones graves o incluso la muerte.
Pare el motor.
•
Desconecte la red de CA y las fuentes de
•
alimentación de enlace de CC remotas, entre las
que se incluyen baterías de emergencia, SAI y
conexiones de enlace de CC a otros convertidores de frecuencia.
Desconecte o bloquee el motor PM.
•
Espere a que los condensadores se descarguen
•
por completo. El tiempo de espera mínimo se
especica en la Table 1.1.
Antes de realizar cualquier trabajo de
•
reparación o mantenimiento, utilice un
dispositivo de medición de tensión adecuado
para asegurarse de que los condensadores se
han descargado por completo.
Tamaño Tiempo de espera mínimo (minutos)
M1, M2 y M3 4
M4 y M5 15
Table 4.1 Tiempo de descarga
Corriente de fuga (>3,5 mA)
Siga las normas locales y nacionales sobre la conexión a
tierra de protección del equipo con una corriente de fuga
>3,5 mA.
La tecnología del convertidor de frecuencia implica una
conmutación de alta frecuencia con alta potencia. Esto
genera una corriente de fuga en la conexión a tierra. Es
posible que una intensidad a tierra en los terminales de
potencia de salida del convertidor de frecuencia contenga
un componente de CC que pueda cargar los condensadores de ltro y provocar una intensidad a tierra
transitoria. La corriente de fuga a tierra depende de las
diversas conguraciones del sistema, incluidos el ltro RFI,
los cables de motor apantallados y la potencia del
convertidor de frecuencia.
4 4
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 85
Page 90

Guía rápida
VLT® Micro Drive FC 51
La norma EN/CEI 61800-5-1 (estándar de producto de
sistemas Power Drive) requiere una atención especial si la
corriente de fuga supera los 3,5 mA. Refuerce la toma de
tierra 1 de una de las siguientes maneras:
Cable de conexión a tierra de al menos 10 mm
•
(8 AWG).
Dos cables de conexión a tierra independientes
•
que cumplan con las normas de dimensiona-
44
Para obtener más información, consulte el apartado 543.7
de la norma EN 60364-5-54.
Uso de RCD
En caso de que se usen dispositivos de corriente
diferencial (RCD), llamados también disyuntores de fuga a
tierra (ELCB), habrá que cumplir las siguientes indicaciones:
Protección térmica del motor
La protección de sobrecarga del motor es posible
mediante el ajuste del parámetro 1-90 Motor Thermal
Protection (Protección térmica del motor) como [4] ETR trip
(Desconexión ETR). Para el mercado norteamericano: la
función ETR proporciona protección de sobrecarga del
motor de clase 20, de acuerdo con el Código Nacional de
Seguridad Eléctrica (NEC).
Instalación en altitudes elevadas
Para altitudes superiores a los 2000 m (6562 ft), póngase
en contacto con Danfoss en relación con la PELV.
miento.
Utilice RCD de tipo B capaces de detectar
•
intensidades de CA y CC.
Utilice RCD con retardo de carga de arranque
•
para evitar fallos provocados por las intensidades
a tierra de los transitorios.
La dimensión de los RCD debe ser conforme a la
•
conguración de sistema y las consideraciones
medioambientales.
2
4.3 Instalación
4.3.1 Montaje lado a lado
El convertidor de frecuencia puede montarse lado a lado
en unidades IP20 y requiere 100 mm (3,9 in) de espacio
libre por encima y por debajo para su refrigeración.
Consulte en el chapter 1.7 Specications los detalles de
valores nominales ambientales del convertidor de
frecuencia.
La corriente de fuga a tierra sobrepasa los 3,5
•
mA. Conecte a tierra correctamente el convertidor
de frecuencia.
La tecla [O/Reset] no es un conmutador de
•
seguridad. No desconecta el convertidor de
frecuencia de la red.
1.
Desconecte el VLT® Micro Drive FC 51 de la
alimentación (y del suministro de CC externo, si lo
hubiera).
2. Espere 4 minutos (M1, M2 y M3) o 15 minutos
(M4 y M5) para que se descargue el enlace de CC.
Consulte Table 1.1.
3. Desconecte los terminales de bus de CC y de
freno (si existen).
4. Retire el cable de motor.
4.2.1 Instrucciones de seguridad
Asegúrese de que el convertidor de frecuencia
•
esté conectado a tierra correctamente.
No retire las conexiones de la red, ni las del
•
motor u otras conexiones de alimentación
mientras el convertidor de frecuencia esté
conectado a la red de alimentación.
Proteja a los usuarios de la tensión de alimen-
•
tación.
Proteja el motor frente a las sobrecargas
•
conforme a la normativa vigente local y nacional.
86 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 91

B
a A
a A
a A
a A
a A
C
C
C C C
b
B
b
B
b
B
b
B
b
Ø 7mm
M5
M4
M3
M2
M1
Ø 7mm Ø 5.5mm Ø 4.5mm
130BB321.11
Ø 4.5mm
Guía rápida
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
4.3.2 Dimensiones mecánicas
En la solapa del embalaje encontrará una plantilla para taladrar.
4 4
Illustration 4.1 Dimensiones mecánicas
Profundidad
[mm (in)]
148 (5,8) 1,1
168 (6,6) 1,6
194 (7,6) 3,0
241 (9,5) 6,0
140
248 (9,8) 9,5
(5,5)
1)
Peso
máximo
Potencia (kW [CV]) Altura [mm (in)]
Protección
M1
1 × 200-240 V3 × 200-240 V3 × 380-480
0,18-0,75
(0,24-1,0)
M2 1,5 (2,0) 1,5 (2,0)
M3 2,2 (3,0)
M4 – –
M5 – –
0,25-0,75
(0,34-1,0)
2,2-3,7
(3,0-5,0)
V
0,37-0,75
(0,5-1,0)
1,5-2,2
(2,0-3,0)
3,0-7,5
(4,0-10)
11,0-15,0
(15-20)
18,5-22,0
(25-30)
A
150
(5,9)
176
(6,9)
239
(9,4)
292
(11,5)
335
(13,2)
A (placa de
desacoplamiento
incluida)
205 (8,1)
230 (9,1)
294 (11,6)
347,5 (13,7)
387,5 (15,3)
Anchura
[mm (in)]
a B b C [kg]
140,4
(5,5)70(2,8)55(2,2)
166,4
(6,6)75(3,0)59(2,3)
226
(8,9)90(3,5)69(2,7)
272,4
(10,7)
(12,4)
315
125
(4,9)97(3,8)
165
(6,5)
Table 4.2 Dimensiones mecánicas
1) Para LCP con potenciómetro, añadir 7,6 mm (0,3 in).
NOTICE
Todos los cableados deben cumplir las normas locales y nacionales sobre las secciones transversales de cables y la
temperatura ambiente. Se requieren conductores de cobre. Se recomienda una temperatura de 60-75 °C (140-167 °F).
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 87
Page 92

Guía rápida
Potencia (kW [CV]) Par [Nm (in-lb)]
Protección
M1
M2 1,5 (2,0) 1,5 (2,0)
M3 2,2 (3,0)
1 × 200-240 V3 × 200-240 V3 × 380-480
0,18-0,75
(0,24-1,0)
0,25-0,75
(0,34-1,0)
2,2-3,7
(3,0-5,0)
44
M4 – –
M5 – –
Table 4.3 Apriete de los terminales
1) Conectores de horquilla (terminales Faston de 6,3 mm [0,25 in])
VLT® Micro Drive FC 51
V
0,37-0,75
(0,5-1,0)
1,5-2,2
(2,0-3,0)
3,0-7,5
(4,0-10)
11,0-15,0
(15-20)
18,5-22,0
(25-30)
Línea Motor Conexión CC/freno
0,8
(7,1)
0,8
(7,1)
0,8
(7,1)
1,3
(11,5)
1,3
(11,5)
0,7
(6,2)
0,7
(6,2)
0,7
(6,2)
1,3
(11,5)
1,3
(11,5)
Terminales de
control
Horquilla
Horquilla
Horquilla
1)
1)
1)
1,3 (11,5) 0,15 (1,3) 3 (26,6)
1,3 (11,5) 0,15 (1,3) 3 (26,6)
0,15 (1,3) 3 (26,6)
0,15 (1,3) 3 (26,6)
0,15 (1,3) 3 (26,6)
Tierra Relé
0,5
(4,4)
0,5
(4,4)
0,5
(4,4)
0,5
(4,4)
0,5
(4,4)
Protección de circuito derivado
Para proteger la instalación frente a riesgos eléctricos y de incendios, proteja todos los circuitos derivados de una
instalación, los conmutadores, las máquinas y otros componentes frente a cortocircuitos y sobreintensidades de acuerdo con
las normativas nacionales e internacionales.
Protección ante cortocircuitos
Utilice los fusibles que se indican en la Table 1.4 para proteger al personal de servicio y el resto de los equipos en caso de
que se produzca un fallo interno de la unidad o un cortocircuito en el enlace de CC. Si se produce un cortocircuito en la
salida del motor o del freno, el convertidor de frecuencia proporciona protección total contra cortocircuitos.
Protección de sobreintensidad
Para evitar el recalentamiento de los cables de la instalación, utilice algún tipo de protección de sobrecarga. Aplicar siempre
protección de sobreintensidad conforme a la normativa vigente. Los fusibles deben estar diseñados para aportar protección
a un circuito capaz de suministrar un máximo de 100 000 A
(simétricos), 480 V máx.
rms
No conformidad con UL
Si no es necesario cumplir las normas UL/cUL, utilice los fusibles que se indican en la Table 1.4, que garantizan la
conformidad con la norma EN 50178/CEI 61800-5-1:
Si se produce una avería y no se sigue esta recomendación, podrían producirse daños en el convertidor de frecuencia y en
la instalación.
88 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 93

Guía rápida
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
Fusibles máximos UL
FC 51
Bussmann Bussmann Bussmann Littelfuse
1 × 200-240 V
kW Tipo RK1 Tipo J Tipo T Tipo RK1 Tipo CC Tipo RK1 Tipo gG
0K18-0K37 KTN-R15 JKS-15 JJN-15 KLN-R15 ATM-R15 A2K-15R 16A
0K75 KTN-R25 JKS-25 JJN-25 KLN-R25 ATM-R25 A2K-25R 25A
1K5 KTN-R35 JKS-35 JJN-35 KLN-R35 – A2K-35R 35A
2K2 KTN-R50 JKS-50 JJN-50 KLN-R50 – A2K-50R 50A
3 × 200-240 V
0K25 KTN-R10 JKS-10 JJN-10 KLN-R10 ATM-R10 A2K-10R 10A
0K37 KTN-R15 JKS-15 JJN-15 KLN-R15 ATM-R15 A2K-15R 16A
0K75 KTN-R20 JKS-20 JJN-20 KLN-R20 ATM-R20 A2K-20R 20A
1K5 KTN-R25 JKS-25 JJN-25 KLN-R25 ATM-R25 A2K-25R 25A
2K2 KTN-R40 JKS-40 JJN-40 KLN-R40 ATM-R40 A2K-40R 40A
3K7 KTN-R40 JKS-40 JJN-40 KLN-R40 – A2K-40R 40A
3 × 380-480 V
0K37-0K75 KTS-R10 JKS-10 JJS-10 KLS-R10 ATM-R10 A6K-10R 10A
1K5 KTS-R15 JKS-15 JJS-15 KLS-R15 ATM-R15 A2K-15R 16A
2K2 KTS-R20 JKS-20 JJS-20 KLS-R20 ATM-R20 A6K-20R 20A
3K0 KTS-R40 JKS-40 JJS-40 KLS-R40 ATM-R40 A6K-40R 40A
4K0 KTS-R40 JKS-40 JJS-40 KLS-R40 ATM-R40 A6K-40R 40A
5K5 KTS-R40 JKS-40 JJS-40 KLS-R40 – A6K-40R 40A
7K5 KTS-R40 JKS-40 JJS-40 KLS-R40 – A6K-40R 40A
11K0 KTS-R60 JKS-60 JJS-60 KLS-R60 – A6K-60R 63A
15K0 KTS-R60 JKS-60 JJS-60 KLS-R60 – A6K-60R 63A
18K5 KTS-R60 JKS-60 JJS-60 KLS-R60 – A6K-60R 80A
22K0 KTS-R60 JKS-60 JJS-60 KLS-R60 – A6K-60R 80A
Ferraz
Shawmut
Ferraz Shawmut
Fusibles
máximos no UL
4 4
Table 4.4 Fusibles
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 89
Page 94

Guía rápida
VLT® Micro Drive FC 51
4.3.3 Conexión a la alimentación y al motor
El convertidor de frecuencia está diseñado para controlar
todos los motores estándar trifásicos asíncronos.
El convertidor de frecuencia está diseñado para aceptar
cables de red y de motor con una sección transversal
máxima de 4 mm2/10 AWG (M1, M2 y M3) y de 16 mm2/6
AWG (M4 y M5).
44
Utilice un cable de motor apantallado / blindado
•
para cumplir con las especicaciones de emisión
CEM y conecte este cable tanto a la placa de
desacoplamiento como al metal del motor.
Mantenga el cable de motor tan corto como sea
•
posible para reducir el nivel de interferencias y las
corrientes de fuga.
Para obtener más información sobre el montaje
•
de la placa de desacoplamiento, consulte las
Instrucciones de la placa de montaje de desacoplamiento del VLT® Micro Drive FC 51.
Consulte asimismo el apartado Una correcta
•
instalación eléctrica en cuanto a CEM de la Guía de
diseño del VLT® Micro Drive FC 51.
1. Monte los cables de toma de tierra al terminal PE.
2. Conecte el motor a los terminales U, V y W.
3. Conecte la fuente de alimentación de red a los
terminales L1/L, L2 y L3/N (trifásico) o L1/L y L3/N
(monofásico) y apriétela.
4.3.4 Terminales de control
Todos los terminales de los cables de control se
encuentran situados en la parte delantera del convertidor
de frecuencia, bajo la tapa de terminales. Desmonte la tapa
de terminales utilizando un destornillador.
NOTICE
Consulte en la parte posterior de la tapa de terminales
un esquema de los terminales y conmutadores de
control.
No deben accionarse los conmutadores con la alimentación del convertidor de frecuencia conectada.
Ajuste el parámetro 6-19 Terminal 53 Mode (Modo
Terminal 53) de acuerdo con la posición del
conmutador 4.
Illustration 4.2 Montaje del cable de toma de tierra, de la red
eléctrica y de los cables de motor
Illustration 4.3 Desmontaje de la tapa de terminales
Conmutador 1
Conmutador 2
Conmutador 3 Sin función
Conmutador 4
1) = ajustes predeterminados
Table 4.5 Ajustes de los conmutadores S200 1-4
O = terminales PNP, 29
On = terminales NPN, 29
O = terminales PNP, 18, 19, 27 y 33
On = terminales NPN 18, 19, 27 y 33
O = Terminal 53 de 0-10 V
On = Terminal 53 de 0/4-20 mA
1)
1)
1)
90 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 95

Guía rápida
Illustration 4.4 Conmutadores S200 1-4
Illustration 1.5 muestra todos los terminales de control del convertidor. Al aplicar Arrancar (terminal 18) y una referencia
analógica (terminal 53 o 60), el convertidor de frecuencia se pone en funcionamiento.
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
4 4
Illustration 4.5 Visión general de los terminales de control con conguración PNP y ajustes de fábrica
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 91
Page 96

130BA242.17
1)
Guía rápida
VLT® Micro Drive FC 51
4.3.5 Circuito de potencia - Presentación
44
Illustration 4.6 Diagrama que muestra todos los terminales eléctricos
1) Los frenos (BR+ y BR–) no son aplicables para el alojamiento de tamaño M1.
Para obtener más información sobre las resistencias de frenado, consulte la Guía de diseño de la VLT® Brake Resistor MCE 101.
Se puede mejorar el factor de potencia y el rendimiento de CEM instalando los ltros de línea opcionales de Danfoss.
También pueden utilizarse los ltros de potencia de Danfoss para carga compartida. Para obtener más información sobre
carga compartida, consulte la Nota sobre la aplicación de la carga compartida del VLT® FC 51 Micro Drive.
92 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 97

130BA605.13
Set-up
number
Parameter
number
Motor
direction
Menu
key
Indicator
lights
Value
Numeric
display
Unit
Selected
menu
Navigation
keys
Potentiometer
(LCP 12)
Operation keys
and leds
Guía rápida
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
4.3.6 Carga compartida / freno
Utilice conectores Faston aislados de 6,3 mm (0,25 in)
diseñados para soportar altas tensiones de CC (carga
compartida y freno).
Póngase en contacto con Danfoss o consulte la Instrucción
de carga compartida VLT® 5000 para carga compartida y la
Instrucción de freno VLT® 2800/5000/5000 FLUX/FCD 300 para
el freno.
Carga compartida
conecte terminales -UDC y +UDC / +BR.
Freno
Conecte los terminales -BR y +UDC/+BR (no aplicable para
tamaño de protección M1).
NOTICE
Entre los terminales +UDC/+BR y -UDC pueden
producirse niveles de tensión de hasta 850 V CC. No
están protegidos frente a cortocircuitos.
4.4 Programación
4.4.1 Programación de la adaptación
automática del motor (AMA)
Pulse [Menu] para seleccionar uno de los siguientes menús:
Status
Solo para lectura de datos.
Menú rápido
Para acceder a los menús rápidos 1 y 2.
Menú principal
Para acceder a todos los parámetros.
Teclas de navegación
[Back]: para ir al paso o nivel anterior en la estructura de
navegación.
[▲] [▼]: se utilizan para desplazarse entre grupos de
parámetros, entre parámetros y dentro de estos.
[OK]: para seleccionar un parámetro y aceptar los cambios
en ajustes de parámetros.
Si pulsa [OK] durante más de 1 s entrará en el modo
Adjust. En el modo Adjust (Ajustar), podrá hacer un ajuste
rápido pulsando [▲] [▼] combinado con [OK].
Pulse [▲] [▼] para cambiar el valor. Pulse [OK] para cambiar
rápidamente entre dígitos.
Para salir del modo Adjust, vuelva a pulsar [OK] durante
más de 1 s para guardar los cambios o pulse [Back] para
no guardarlos.
4 4
Si desea obtener información detallada acerca de la
programación, consulte la Guía de programación del VLT
®
Micro Drive FC 51.
NOTICE
El convertidor de frecuencia puede programarse también
desde un PC a través del puerto de comunicaciones
RS485, instalando el software de conguración MCT 10.
Este software puede bien solicitarse usando el número
de código 130B1000, o bien descargarse desde el sitio
web de Danfoss: www.danfoss.com/BusinessAreas/Drives-
Solutions/softwaredownload
Illustration 4.7 Descripción de las teclas y el display del LCP
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 93
Page 98

Guía rápida
VLT® Micro Drive FC 51
Teclas de funcionamiento
Una luz amarilla encima de las teclas de funcionamiento
indica cuál es la tecla activa.
[Hand On]: arranca el motor y activa el control del
convertidor de frecuencia a través del LCP.
[O / Reset]: El motor se para. Si está en el modo alarma,
el motor se reinicia.
[Auto On]: el convertidor de frecuencia puede controlarse
mediante terminales de control o mediante comunicación
44
serie.
[Potentiometer] (LCP12): el potenciómetro funciona de
dos maneras, dependiendo del modo en que se esté
utilizando el convertidor de frecuencia.
En modo Auto On (automático), el potenciómetro actúa
como una entrada analógica programable adicional.
En el modo Hand On (manual), el potenciómetro controla
la referencia local.
4.4.2 Programación del ajuste automático
del motor (AMT)
Ejecute el AMT para optimizar la compatibilidad entre el
convertidor de frecuencia y el motor en modo VVC+.
Modo 2
1. Entre en el menú principal.
2. Diríjase al grupo de parámetros 1-** Load and
Motor (Carga y motor).
3. Pulse [OK].
4. Ajuste los parámetros del motor usando los datos
de la placa de características para el grupo de
parámetros 1-2* Motor Data (Datos motor).
5. Diríjase al parámetro 1-29 Automatic Motor Tuning
(AMT) (Ajuste automático del motor).
6. Pulse [OK].
7. Seleccione [3] Complete AMT with Rotating motor
(AMT completo con motor en giro)
8. Pulse [OK].
9. La prueba empieza automáticamente e indica
cuándo ha nalizado.
NOTICE
En el modo 2, el rotor gira durante el progreso del AMT.
No añadir ninguna carga al motor durante este progreso
del AMT.
El convertidor de frecuencia se basa en un
•
modelo matemático para regular la intensidad del
motor de salida, por lo que mejora el
rendimiento del motor.
Ejecute este procedimiento en un motor frío para
•
obtener los mejores resultados. Para ejecutar el
AMT, utilice el LCP numérico (NLCP). Hay dos
modos AMT para convertidores de frecuencia.
Modo 1
1. Entre en el menú principal.
2. Diríjase al grupo de parámetros 1-** Load and
Motor (Carga y motor).
3. Pulse [OK].
4. Ajuste los parámetros del motor usando los datos
de la placa de características para el grupo de
parámetros 1-2* Motor Data (Datos motor).
5. Diríjase al parámetro 1-29 Automatic Motor Tuning
(AMT) (Ajuste automático del motor).
6. Pulse [OK].
7. Seleccione [2] Enable AMT (Activar AMT).
8. Pulse [OK].
9. La prueba empieza automáticamente e indica
cuándo ha
nalizado.
94 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
Page 99

Guía rápida
4.5 Resumen de parámetros
0-** Operation/Display (Func. /
Display)
0-0* Basic Settings (Ajustes
básicos)
0-03 Regional Settings (Ajustes
regionales)
*[0] International (Internacional)
[1] US (EE. UU.)
0-04 Oper. State at Power-up
(Hand) (Estado operación en
arranque [Manual])
[0] Resume (Auto-arranque)
*[1] Forced stop, ref=old (Par.
forz., ref. guard.)
[2] Forced stop, ref=0 (Par. forz.,
ref.=0)
0-1* Set-up Handling (Operac. de
ajuste)
0-10 Active Set-up (Ajuste
activo)
*[1] Set-up 1 (Ajuste activo 1)
[2] Set-up 2 (Ajuste activo 2)
[9] Multi Set-up (Ajuste múltiple)
0-11 Edit Set-up (Editar ajuste)
*[1] Set-up 1 (Ajuste activo 1)
[2] Set-up 2 (Ajuste activo 2)
[9] Active Set-up (Ajuste activo)
0-12 Link Set-ups (Ajustes
enlazados)
[0] Not Linked (Sin relacionar)
*[20] Linked (Relacionar)
0-31 Custom Readout Min Scale
(Valor mín. de lectura personalizada)
0,00-9999,00 * 0,00
0-32 Custom Readout Max Scale
(Valor máx. de lectura personalizada)
0,00-9999,00 * 100,0
0-4* LCP Keypad (Teclado del
LCP)
0-40 [Hand on] Key on LCP
(Tecla [Hand on] del LCP)
[0] Disabled (Desactivado)
*[1] Enabled (Activado)
0-41 [O / Reset] Key on LCP
(Tecla [O / Reset] del LCP)
[0] Disable All (Desactivar todo)
*[1] Enable All (Activar todo)
[2] Enable Reset Only (Sólo
activar Reset)
0-42 Tecla [Auto on] Key on LCP
(Tecla [Auto on] del LCP)
[0] Disabled (Desactivado)
*[1] Enabled (Activado)
1) Solo M4 y M5
0-5* Copy/Save (Copiar/Grabar)
0-50 LCP Copy (Copia con el
LCP)
*[0] No copy (No copiar)
[1] All to LCP (Trans. LCP tod.
par.)
[2] All from LCP (Tr d LCP tod.
par.)
[3] Size indep. from LCP (Tr d LCP
par ind tam)
0-51 Set-up Copy (Copia de
ajuste)
*[0] No copy (No copiar)
[1] Copy from set-up 1 (Copiar
desde el ajuste 1)
[2] Copy from set-up 2 (Copiar
desde el ajuste 2)
[9] Copy from Factory set-up
(Copia del ajuste de fábrica)
0-6* Password (Contraseña)
0-60 (Main) Menu Password
(Contraseña del menú principal)
0-999 *0
0-61 Access to Main/Quick Menu
w/o Password (Acceso al Menú
rápido/principal sin contraseña)
*[0] Full access (Acceso total)
[1] LCP:Read Only (LCP: solo
lectura)
[2] LCP:No Access (LCP: sin
acceso)
1-** Load/Motor (Carga/Motor)
1-0* General Settings (Ajustes
generales)
1-00 Conguration Mode (Modo
de conguración)
*[0] Speed open loop (Veloc. lazo
abierto)
[3] Process (Proceso)
1-01 Motor Control Principle
(Principio control motor)
[0] U/f
*[1] VVC
1-03 Torque Characteristics
(Características de par)
*[0] Constant torque (Par
constante)
[2] Automatic Energy Optim.
(Optim. de la energía automática)
1-05 Local Mode Conguration
(Conguración de modo local)
[0] Speed open loop (Veloc. lazo
abierto)
*[2] Consulte la conguración del
par. 1-00
Quick Guide•Kurzanleitung•Guide rapide•Guía rápida•Guia Rápido•Краткое
руководство
1-2* Motor Data (Datos motor)
1-20 Motor Power [kW] [hp]
(Potencia del motor [kW] [CV])
[1] 0,09 kW / 0,12 CV
[2] 0,12 kW / 0,16 CV
[3] 0,18 kW / 0,25 CV
[4] 0,25 kW / 0,33 CV
[5] 0,37 kW / 0,50 CV
[6] 0,55 kW / 0,75 CV
[7] 0,75 kW / 1,00 CV
[8] 1,10 kW / 1,50 CV
[9] 1,50 kW / 2,00 CV
[10] 2,20 kW / 3,00 CV
[11] 3,00 kW / 4,00 CV
[12] 3,70 kW / 5,00 CV
[13] 4,00 kW / 5,40 CV
[14] 5,50 kW / 7,50 CV
[15] 7,50 kW / 10,00 CV
[16] 11,00 kW / 15,00 CV
[17] 15,00 kW / 20,00 CV
[18] 18,50 kW / 25,00 CV
[19] 22,00 kW / 29,50 CV
[20] 30,00 kW / 40,00 CV
1-22 Motor Voltage (Tensión del
motor)
50-999 V *230-400 V
1-23 Motor Frequency
(Frecuencia del motor)
20-400 Hz *50 Hz
1-24 Motor Current (Intensidad
del motor)
0,01-100,00 A *Dep. tipo motor
1-25 Motor Nominal Speed
(Velocidad nominal de motor)
100-9999 r/min * Dep. tipo
motor
1-29 Automatic Motor Tuning
(AMT) (Ajuste automático del
motor [AMT])
*[0] O (Desactivado)
[2] Enable AMT (Activar AMT)
[3] Complete AMT with Rotating
+
motor (AMT completo con motor
en giro)
1-3* Adv. Motor Data (Datos
avanz. del motor)
1-30 Stator Resistance (Rs)
(Resistencia del estátor [Rs])
[Ω] * Dep. de datos del motor
1-33 Stator Leakage Reactance
(X1) (Reactancia de fuga del
estátor [X1])
[Ω] * Dep. de datos del motor
1-35 Main Reactance (Xh)
(Reactancia principal [Xh])
[Ω] * Dep. de datos del motor
1-5* Load Indep. Setting (Aj.
indep.de la carga)
1-50 Motor Magnetisation at 0
Speed (Magnetización del motor
a velocidad cero)
0-300 % *100 %
1-52 Min Speed Norm. Magnet.
(Magnetización normal a
velocidad mínima) [Hz]
0,0-10,0 Hz *0,0 Hz
1-55 U/f Characteristic - U
(Característica U/f - U)
0-999,9 V
1-56 U/f Characteristic - F
(Característica U/f - F)
0-400 Hz
1-6* Load Depen. Setting (Aj.
depend.de la carga)
1-60 Low Speed Load Compensation (Compensación de carga
a baja velocidad)
0-199 % *100 %
1-61 High Speed Load Compensation (Compensación de carga
a alta velocidad)
0-199 % *100 %
1-62 Slip Compensation
(Compensación de deslizamiento)
-400-399 % *100 %
1-63 Slip Compensation Time
Constant (Constante de tiempo
de compensación de deslizamiento)
0,05-5,00 s *0,10 s
1-7* Start Adjustments (Ajustes
del arranque)
1-71 Start Delay (Retardo de
arranque)
0,0-10,0 s *0,0 s
1-72 Start Function (Función de
arranque)
[0] DC hold/delay time (CC
mantenida / Tiempo de retardo)
[1] DC brake/delay time (Freno
CC / tiempo ret.)
*[2] Coast/delay time (Tiempo
inerc/retardo)
1-73 Flying Start (Motor en giro)
*[0] Disabled (Desactivado)
[1] Enabled (Activado)
4 4
MG02BC4P Danfoss A/S © 10/2017 All rights reserved. 95
Page 100

Guía rápida
VLT® Micro Drive FC 51
1-8* Stop Adjustments (Ajustes
de parada)
1-80 Function at Stop (Función
en parada)
*[0] Coast (Inercia)
[1] DC hold (CC mant)
1-82 Min Speed for Funct. at
Stop [Hz] (Vel. mín. para func.
parada [Hz])
44
0,0-20,0 Hz *0,0 Hz
1-9*Motor Temperature
(Temperatura del motor)
1-90 Motor Thermal Protection
(Protección térmica del motor)
*[0] No protection (Sin
protección)
[1] Thermistor warning (Advert.
termistor)
[2] Thermistor trip (Descon.
termistor)
[3] Etr warning (Advert. ETR)
[4] Etr trip (Descon. ETR)
1-93 Thermistor Resource
(Fuente de termistor)
*[0] None (Ninguna)
[1] Analog input 53 (Entrada
analógica 53)
[6] Digital input 29 (Entrada
digital 29)
2-** Brakes (Frenos)
2-0* DC Brake (Freno CC)
2-00 DC Hold Current (Corriente
de CC mantenida)
0-150 % *50 %
2-01 DC Brake Current
(Intensidad de frenado CC)
0-150 % *50 %
2-02 DC Braking Time (Tiempo
de frenado CC)
0,0-60,0 s *10,0 s
2-04 DC Brake Cut In Speed
(Velocidad de conexión del
freno CC)
0,0-400,0 Hz *0,0 Hz
2-1* Brake Energy Funct.
(Función de energía de frenado)
2-10 Brake Function (Función de
freno)
*[0] O (Desactivado)
[1] Resistor brake (Freno con
resistencia)
[2] AC brake (Freno de CA)
2-11 Brake Resistor (ohm)
(Resistencia de freno [ohmios])
Mín. / máx. / predeterminada:
Dep. nivel de potencia
1) Solo M4 y M5
2-14 Brake Voltage reduce
(Reducción de tensión de freno)
0 - Dep. nivel de potencia * 0
2-16 AC Brake, Max current
(Freno de CA, intensidad
máxima)
0-150 % *100 %
2-17 Overvoltage Control
(Control de sobretensión)
*[0] Disabled (Desactivado)
[1] Enabled (not at stop)
(Activado [no parada])
[2] Enabled (Activado)
2-2* Mechanical Brake (Freno
mecánico)
2-20 Release Brake Current
(Intensidad freno liber.)
0,00-100,0 A *0,00 A
2-22 Activate Brake Speed [Hz]
(Activar velocidad de frenado)
0,0-400,0 Hz *0,0 Hz
3-** Reference / Ramps
(Referencia/Rampas)
3-0* Reference Limits (Límites de
referencia)
3-00 Reference Range (Intervalo
de referencias)
*[0] Min - Max (Mín - Máx)
[1] -Max - +Max (-Máx - +Máx)
3-02 Minimum Reference
(Referencia mínima)
–4999-4999 *0,000
3-03 Maximum Reference
(Referencia máxima)
–4999-4999 *50,00
3-1* References (Referencias)
3-10 Preset Reference
(Referencia interna)
–100,0-100,0 % *0,00 % 3-11 Jog
Speed [Hz] (Velocidad ja)
0,0-400,0 Hz *5,0 Hz
3-12 Catch up/slow Down Value
(Valor de enganche arriba/abajo)
0,00-100,0 % *0,00 %
3-14 Preset Relative Reference
(Referencia relativa interna)
–100,0-100,0 % *0,00 %
3-15 Reference Resource 1
(Recurso de referencia 1)
[0] No function (Sin función)
*[1] Analog Input 53 (Entrada
analógica 53)
[2] Analog input 60 (Entrada
analógica 60)
[8] Pulse input 33 (Ent. pulso 33)
[11] Local bus ref (Referencia bus
local)
[21] LCP Potentiometer
(Potenciómetro del LCP)
3-16 Reference Resource 2
(Recurso de referencia 2)
[0] No function (Sin función)
[1] Analog in 53 (Ent. analóg. 53)
*[2] Analog in 60 (Entrada
analógica 60)
[8] Pulse input 33 (Ent. pulso 33)
*[11] Local bus reference
(Referencia bus local)
[21] LCP Potentiometer
(Potenciómetro del LCP)
3-17 Reference Resource 3
(Recurso de referencia 3)
[0] No function (Sin función)
[1] Analog Input 53 (Entrada
analógica 53)
[2] Analog input 60 (Entrada
analógica 60)
[8] Pulse input 33 (Ent. pulso 33)
*[11] Local bus ref (Referencia
bus local)
[21] LCP Potentiometer
(Potenciómetro del LCP)
3-18 Relative Scaling Ref.
Resource (Recurso escal.
relativo)
*[0] No function (Sin función)
[1] Analog Input 53 (Entrada
analógica 53)
[2] Analog input 60 (Entrada
analógica 60)
[8] Pulse input 33 (Ent. pulso 33)
[11] Local bus ref (Referencia bus
local)
[21] LCP Potentiometer
(Potenciómetro del LCP)
3-4* Ramp 1 (Rampa 1)
3-40 Ramp 1 Type (Rampa 1
Tipo)
*[0] Linear (Lineal)
[2] Sine2 ramp (Rampa senoidal
2)
3-41 Ramp 1 Ramp up Time
(Rampa 1 tiempo acel. rampa)
0,05-3600 s *3,00 s (10,00 s1])
3-42 Ramp 1 Ramp Down Time
(Tiempo de desaceleración de la
rampa 1)
0,05-3600 s *3,00 s (10,00 s1])
3-5* Ramp 2 (Rampa 2)
3-50 Ramp 2 Type (Tipo de la
rampa 2)
*[0] Linear (Lineal)
[2] Sine2 ramp (Rampa senoidal
2)
3-51 Ramp 2 Ramp up Time
(Rampa 2 tiempo acel. rampa)
0,05-3600 s *3,00 s (10,00 s1])
3-52 Ramp 2 Ramp down Time
(Tiempo de desaceleración de la
rampa 2)
0,05-3600 s *3,00 s (10,00 s1])
3-8* Other Ramps (Otras rampas)
3-80 Jog Ramp Time (Tiempo
de rampa de velocidad
0,05-3600 s *3,00 s (10,00 s1))
3-81 Quick Stop Ramp Time
(Tiempo rampa parada rápida)
0,05-3600 s *3,00 s (10,00 s1])
4-** Limits/Warnings (Límites/
Advertencias)
4-1* Motor Limits (Límites del
motor) 4-10 Motor Speed
Direction (Dirección de la
velocidad del motor)
*[0] Clockwise (Izqda. a dcha.) si
par. 1-00 está ajustado a control
de lazo cerrado
[1] CounterClockwise (Dcha. a
izqda.)
*[2] Both (Ambos sentidos) si par.
1-00 está ajustado a lazo abierto
4-12 Motor Speed Low Limit
[Hz] (Límite bajo veloc. motor
[Hz])
0,0-400,0 Hz *0,0 Hz
4-14 Motor Speed High Limit
[Hz] (Límite alto de la velocidad
del motor [Hz])
0,1-400,0 Hz *65,0 Hz
4-16 Torque Limit Motor Mode
(Modo de motor de límite de
par)
0-400 % *150 %
4-17 Torque Limit Generator
Mode (Modo de generador de
límite de par)
0-400 % *100 %
ja)
96 Danfoss A/S © 10/2017 All rights reserved. MG02BC4P
 Loading...
Loading...