

Page 1

MAKING MODERN LIVING POSSIBLE
Руководство по проектированию
VLT® AutomationDrive FC 360
www.DanfossDrives.com
Page 2

Page 3
Оглавление Руководство по проектированию
Оглавление
1 Введение
1.1 Как пользоваться этим руководством по проектированию
1.1.1 Символы 5
1.1.2 Сокращения 5
1.2 Определения
1.2.1 Преобразователь частоты 6
1.2.2 Вход 6
1.2.3 Двигатель 6
1.2.4 Задания 7
1.2.5 Разное 7
1.3 Меры предосторожности
1.4 Указания по утилизации
1.5 Версия документа и программного обеспечения
1.6 Разрешения и сертификаты
1.6.1 Маркировка CE 10
1.6.2 Директива по низковольтному оборудованию 11
1.6.3 Директива по электромагнитной совместимости 11
5
5
6
9
10
10
10
2 Обзор изделия
2.1 Сведения о размерах корпусов
2.2 Электрический монтаж
2.2.1 Общие требования 16
2.2.2 Требования к заземлению 16
2.2.3 Подключение сетевого питания, двигателя и заземления 17
2.2.4 Подключение элементов управления 18
2.3 Структуры управления
2.3.1 Принцип управления 21
2.3.2 Режимы управления 21
2.3.3 Принцип управления FC 360 23
2.3.4 Структура управления в VVC
2.3.5 Внутреннее регулирование тока в режиме VVC
2.3.6 Местное (Hand On) и дистанционное (Auto On) управление 25
2.4 Формирование задания
2.4.1 Пределы задания 27
2.4.2 Масштабирование предварительно установленных заданий и заданий для
шины 28
12
12
13
21
+
+
24
25
26
2.4.3 Масштабирование заданий и сигналов ОС на аналоговом и импульсном
входах 28
2.4.4 Зона нечувствительности около нуля 30
2.5 ПИД-регулятор
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 1
33
Page 4
Оглавление
VLT® AutomationDrive FC 360
2.5.1 ПИД-регулятор скорости 33
2.5.2 ПИД-регулятор процесса 36
2.5.3 Параметры, относящиеся к регулятору процесса 37
2.5.4 Пример ПИД-регулятора процесса 39
2.5.5 Оптимизация регулятора процесса 41
2.5.6 Метод настройки Циглера — Николса 41
2.6 Излучение помех и помехоустойчивость в соответствии с требованиями ЭМС
2.6.1 Общие вопросы защиты от излучений в соответствии с требованиями ЭМС 43
2.6.2 Требования по излучению в соответствии с требованиями ЭМС 44
2.6.3 Требования помехозащищенности в соответствии с требованиями ЭМС 44
2.7 Гальваническая развязка
2.8 Ток утечки на землю
2.9 Функции торможения
2.9.1 Механический удерживающий тормоз 48
2.9.2 Динамическое торможение 48
2.9.3 Выбор тормозного резистора 48
2.10 Интеллектуальный логический контроллер
2.11 Экстремальные условия работы
3 Код типа и его выбор
3.1 Заказ
3.2 Номера для заказа: Дополнительные устройства и принадлежности
3.3 Номера для заказа: Тормозные резисторы
3.3.1 Номера для заказа: тормозные резисторы 10 % 55
43
46
46
48
50
51
53
53
54
55
3.3.2 Номера для заказа: тормозные резисторы 40 % 56
4 Технические характеристики
4.1 Технические характеристики, зависящие от мощности
4.2 Общие технические требования
4.3 Предохранители
4.3.1 Введение 64
4.3.2 Соответствие требованиям ЕС 64
4.4 КПД
4.5 Акустический шум
4.6 Условия du/dt
4.7 Особые условия
4.7.1 Снижение номинальных характеристик вручную 66
4.7.2 Автоматическое снижение номинальных параметров 67
5 Монтаж и настройка RS485
5.1 Введение
57
57
60
64
64
65
65
66
68
68
2 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 5
Оглавление Руководство по проектированию
5.1.1 Краткое описание 68
5.1.2 Подключение сети 69
5.1.3 Набор аппаратного обеспечения 69
5.1.4 Настройки параметров для связи Modbusn 69
5.1.5 Обеспечение ЭМС 69
5.2 FC-протокол
5.3 Конфигурация сети
5.4 Структура кадра сообщения по FC-протоколу
5.4.1 Состав символа (байта) 70
5.4.2 Структура телеграммы 71
5.4.3 Длина телеграммы (LGE) 71
5.4.4 Адрес преобразователя частоты (ADR) 71
5.4.5 Управляющий байт (BCC) 71
5.4.6 Поле данных 71
5.4.7 Поле PKE 71
5.4.8 Номер параметра (PNU) 72
5.4.9 Индекс (IND) 72
5.4.10 Значение параметра (PWE) 72
5.4.11 Типы данных, поддерживаемые преобразователем частоты 73
5.4.12 Преобразование 73
5.4.13 Слова состояния процесса (PCD) 73
5.5 Примеры
70
70
70
73
5.6 Modbus RTU
5.6.1 Необходимые сведения 74
5.6.2 Краткое описание 74
5.6.3 Преобразователь частоты с Modbus RTU 75
5.7 Конфигурация сети
5.8 Структура кадра сообщения Modbus RTU
5.8.1 Введение 75
5.8.2 Структура сообщения Modbus RTU 76
5.8.3 Поля начала/останова 76
5.8.4 Адресное поле 76
5.8.5 Поле функции 76
5.8.6 Поле данных 77
5.8.7 Поле контроля CRC 77
5.8.8 Адресация катушек и регистров 77
5.8.9 Управление преобразователем частоты 80
5.8.10 Коды функций, поддерживаемые Modbus RTU 80
5.8.11 Исключительные коды Modbus 80
74
75
75
5.9 Доступ к параметрам
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 3
80
Page 6
Оглавление
VLT® AutomationDrive FC 360
5.9.1 Операции с параметрами 80
5.9.2 Хранение данных 81
5.10 Примеры
5.10.1 Считывание состояния катушки (01 16-ричн.) 81
5.10.2 Форсировать/запись на одну катушку (05 16-ричн.) 82
5.10.3 Форсировать/запись на несколько катушек (0F 16-ричн.) 82
5.10.4 Чтение регистров временного хранения (03 16-ричн.) 83
5.10.5 Установка одного регистра (06 16-ричн.) 83
5.10.6 Установка нескольких регистров (10 16-ричн.) 84
5.11 Профиль управления FC Danfoss
5.11.1 Командное слово, соответствующее профилю FC (пар. 8-10 Protocol
(Протокол) = Профиль FC) 84
5.11.2 Слово состояния, соответствующее профилю FC (STW) (8-30 Protocol =
профиль FC) 86
5.11.3 Значение задания скорости передачи по шине 88
6 Примеры применения
6.1 Введение
6.1.1 Подключение энкодера 92
6.1.2 Направление энкодера 92
81
84
89
89
6.1.3 Приводная система с обратной связью 93
Алфавитный указатель
94
4 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 7
Введение Руководство по проектированию
1 Введение
1
1
1.1 Как пользоваться этим руководством
по проектированию
Настоящее руководство по проектированию содержит
сведения о выборе, вводе в эксплуатацию и заказе
преобразователя частоты. В руководстве также
представлена информация о механическом и
электрическом монтаже.
Руководство по проектированию предназначено для
использования квалифицированным персоналом.
Чтобы обеспечить профессиональное и безопасное
использование преобразователя частоты, прочтите
Руководство по проектированию и следуйте ему; в
частности, обратите внимание на указания по технике
безопасности и общие предупреждения.
VLT® является зарегистрированным товарным знаком.
Краткое руководство VLT
•
®
AutomationDrive FC
360 содержит основные сведения,
необходимые для монтажа и эксплуатации
преобразователя частоты.
Руководство по программированию VLT
•
®
AutomationDrive FC 360 содержит сведения по
программированию и включает полные
описания параметров.
Техническая документация компании FC 360 также
представлена в Интернете по адресу www.danfoss.com/
fc360.
Символы
1.1.1
В этом документе используются следующие символы.
ВНИМАНИЕ!
Указывает на потенциально опасную ситуацию, при
которой существует риск летального исхода или
серьезных травм.
ПРЕДУПРЕЖДЕНИЕ
Указывает на потенциально опасную ситуацию, при
которой существует риск получения незначительных
травм или травм средней тяжести. Также может
использоваться для обозначения потенциально
небезопасных действий.
УВЕДОМЛЕНИЕ
Указывает на важную информацию, в том числе о
такой ситуации, которая может привести к
повреждению оборудования или другой
собственности.
1.1.2 Сокращения
Переменный ток Перем. ток
Американский сортамент проводов AWG
Ампер A
Автоматическая адаптация двигателя ААД
Предел по току I
Градусы Цельсия
Постоянный ток Пост. ток
В зависимости от типа привода D-TYPE
Электромагнитная совместимость ЭМС
Электронное тепловое реле ЭТР
Грамм g
Герц Гц
Лошадиные силы л. с.
Килогерц kHz
Панель местного управления LCP
метр м
Миллигенри (индуктивность) mH
Миллиампер mA
Миллисекунда мс
Минута мин
Служебная программа управления
движением (MCT)
Нанофарад nF
Ньютон-метр Н·м
Номинальный ток двигателя I
Номинальная частота двигателя f
Номинальная мощность двигателя P
Номинальное напряжение двигателя U
Двигатель с постоянными магнитами Двигатель с ПМ
Защитное сверхнизкое напряжение PELV
Печатная плата PCB
Номинальный выходной ток инвертора I
Число оборотов в минуту об/мин
Клеммы рекуперации Рекуперация
Секунда с
Скорость синхронного двигателя n
Предел крутящего момента T
Вольты В
Максимальный выходной ток I
Номинальный выходной ток,
обеспечиваемый преобразователем
частоты.
LIM
°C
MCT
M,N
M,N
M,N
M,N
INV
s
LIM
VLT,MAX
I
VLT,N
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 5
Page 8
175ZA078.10
Pull-out
rpm
Torque
Введение
VLT® AutomationDrive FC 360
1
1.2 Определения
1.2.1 Преобразователь частоты
Останов выбегом
Вал находится в режиме свободного вращения.
Крутящий момент на двигателе отсутствует.
I
VLT, MAX
Максимальный выходной ток.
I
VLT,N
Номинальный выходной ток, обеспечиваемый
преобразователем частоты.
U
VLT,MAX
Максимальное выходное напряжение.
Вход
1.2.2
Команды управления
Запуск и останов подключенного двигателя
осуществляется с помощью LCP и цифровых входов.
Функции делятся на 2 группы.
Функции группы 1 имеют более высокий приоритет, чем
функции группы 2.
Группа 1
Группа 2 Пуск, импульсный пуск, реверс, реверс и пуск,
Сброс, останов выбегом, сброс и останов
выбегом, быстрый останов, торможение
постоянным током, останов и [OFF] (Выкл.).
фиксация частоты и фиксация выходной
частоты.
I
M,N
Номинальный ток двигателя (данные паспортной
таблички).
n
M,N
Номинальная скорость двигателя (данные паспортной
таблички).
n
s
Скорость синхронного двигателя
2×
пар.
n
s
n
slip
. 1 − 23× 60
=
пар.
. 1 − 39
с
Скольжение двигателя.
P
M,N
Номинальная мощность двигателя (данные из
паспортной таблички, в кВт или л. с.).
T
M,N
Номинальный крутящий момент (двигателя).
U
M
Мгновенное напряжение двигателя.
U
M,N
Номинальное напряжение двигателя (данные
паспортной таблички).
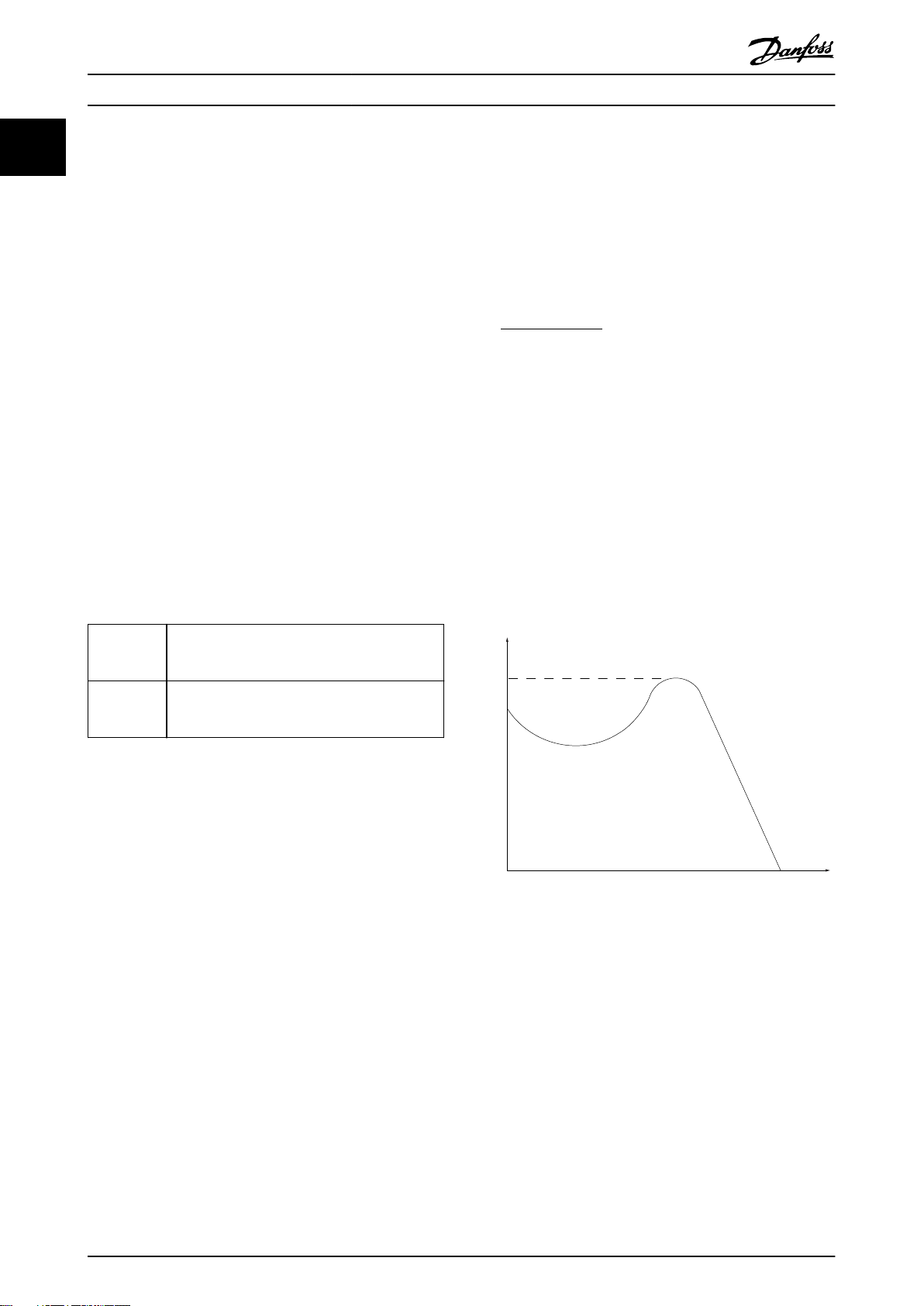
Момент опрокидывания
Таблица 1.1 Группы функций
Двигатель
1.2.3
Двигатель работает
Крутящий момент, генерируемый на выходном валу, и
скорость от 0 об/мин до максимальной скорости
двигателя.
f
JOG
Частота двигателя в случае активизации функции
фиксации частоты (через цифровые клеммы).
f
M
Частота двигателя.
f
MAX
Максимальная частота двигателя.
f
MIN
Минимальная частота двигателя.
f
M,N
Номинальная частота двигателя (данные паспортной
таблички).
I
M
Ток двигателя (фактический).
Рисунок 1.1 Момент опрокидывания
η
VLT
КПД преобразователя частоты определяется
отношением выходной мощности к входной.
Команда запрещения пуска
Команда останова, которая относится к группе команд
управления 1. Подробнее см. в глава 1.2.2 Вход.
Команда останова
Команда останова, которая относится к группе команд
управления 1. Подробнее см. в глава 1.2.2 Вход.
6 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 9

Введение
Руководство по проектированию
1.2.4 Задания
Аналоговое задание
Сигнал, подаваемый на аналоговые входы 53 или 54,
может представлять собой напряжение или ток.
Двоичное задание
Сигнал, передаваемый на порт последовательного
канала связи.
Предустановленное задание
Предварительно установленное задание, значение
которого может находиться в диапазоне от -100 до +100
% от диапазона задания. Предусмотрен выбор восьми
предустановленных заданий через цифровые входы.
Импульсное задание
Импульсный частотный сигнал, подаваемый на
цифровые входы (клемма 29 или 33).
Ref
MAX
Определяет зависимость между входным заданием при
100 % от значения полной шкалы (обычно 10 В, 20 мА)
и результирующим заданием. Максимальное значение
задания устанавливается в 3-03 Максимальное задание.
Ref
MIN
Определяет зависимость между входным заданием при
значении 0 % (обычно 0 В, 0 мА, 4 мА) и
результирующим заданием. Минимальное значение
задания устанавливается в 3-02 Мин. задание.
Разное
1.2.5
Аналоговые входы
Аналоговые входы используются для управления
различными функциями преобразователя частоты.
Предусмотрено два вида аналоговых входов:
Вход по току 0–20 мА и 4–20 мА
•
Вход по напряжению, от 0 до +10 В пост. тока.
•
Аналоговые выходы
Аналоговые выходы могут выдавать сигнал 0–20 мА, 4–
20 мА.
Автоматическая адаптация двигателя (ААД)
Алгоритм ААД определяет электрические параметры
подключенного двигателя, находящегося в
остановленном состоянии.
Тормозной резистор
Тормозной резистор представляет собой модуль,
способный поглощать мощность торможения,
выделяемую при рекуперативном торможении.
Регенеративная мощность торможения повышает
напряжение промежуточной цепи, и тормозной
прерыватель обеспечивает передачу этой мощности в
тормозной резистор.
Характеристики СТ
Характеристики постоянного крутящего момента
(сonstant torque, CT), используемые во всевозможных
применениях, например в ленточных транспортерах,
поршневых насосах и подъемных кранах.
Цифровые входы
Цифровые входы могут использоваться для управления
различными функциями преобразователя частоты.
Цифровые выходы
Преобразователь частоты имеет 2 полупроводниковых
выхода, способных выдавать сигналы 24 В пост. тока
(ток до 40 мА).
DSP
Цифровой процессор сигналов.
ЭТР
Электронное тепловое реле вычисляет тепловую
нагрузку исходя из текущей нагрузки и времени. Служит
для оценки температуры двигателя.
Шина стандарта FC
Представляет собой шину RS485, работающую по
протоколу FC или протоколу MC. См. 8-30 Protocol.
Инициализация
Если выполняется инициализация (14-22 Operation Mode),
преобразователь частоты возвращается к заводским
настройкам.
Прерывистый рабочий цикл
Под прерывистым рабочим циклом понимают
последовательность рабочих циклов. Каждый цикл
состоит из периода работы под нагрузкой и периода
работы вхолостую. Работа может иметь либо
периодический, либо непериодический характер.
LCP
Панель местного управления (LCP) предоставляет
полный интерфейс для управления преобразователем
частоты и его программирования. Панель управления
съемная и может быть установлена на расстоянии до 3
м от преобразователя частоты, например, на лицевой
панели с помощью дополнительного монтажного
комплекта.
NLCP
Цифровая панель местного управления (NLCP)
предоставляет интерфейс для управления
преобразователем частоты и его программирования. На
дисплее панели в цифровом виде отображаются
значения технологического процесса. Панель NLCP
имеет функции хранения и копирования.
Младший бит
Младший значащий бит.
Старший бит
Старший значащий бит.
MCM
Сокращение Mille Circular Mil, американской единицы
измерения сечения проводов. 1 MCM = 0,5067 мм².
1
1
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 7
Page 10
Введение
VLT® AutomationDrive FC 360
1
Оперативные/автономные параметры
Оперативные параметры вступают в действие сразу же
после изменения их значений. Нажмите [OK] для
активации изменения автономных параметров.
ПИД-регулятор процесса
ПИД-регулятор поддерживает необходимую скорость,
давление, температуру и т. д. путем регулирования
выходной частоты так, чтобы она соответствовала
изменяющейся нагрузке.
PCD
Данные управления процессом
Включение-выключение питания
Отключите сетевое питание и подождите, пока дисплей
(LCP) не погаснет, затем снова включите питание.
Коэффициент мощности
Коэффициент мощности — это отношение I1 к I
3 x U x
I
cos
ϕ1
Коэффициент мощности
=
Для преобразователей частоты FC 360,
Коэффициент мощности
=
3 x U x
I1 x cos
I
эфф.
ϕ1
1
I
эфф.
=
I
эфф.
cosϕ
I
1
эфф.
1=1, отсюда:
Коэффициент мощности показывает, в какой мере
преобразователь частоты нагружает питающую сеть.
Чем ниже коэффициент мощности, тем больше I
эфф.
при
одной и той же мощности преобразователя (кВт).
2
2
2
I
эфф.
=
I
+
I
+
I
1
5
+ .. +
7
2
I
n
Кроме того, высокий коэффициент мощности
показывает, что токи различных гармоник малы.
Встроенные дроссели постоянного тока повышают
коэффициент мощности, минимизируя нагрузку на
питающую сеть.
Импульсный вход/инкрементальный энкодер
Внешний цифровой импульсный датчик, используемый
для формирования сигнала обратной связи по скорости
двигателя. Энкодер используется в таких системах, где
требуется высокая точность регулирования скорости.
RCD
Датчик остаточного тока
Набор параметров
Настройки параметров можно сохранять в виде 2
наборов. Возможен переход между двумя наборами
параметров и редактирование одного набора
параметров во время действия другого набора
параметров.
SFAVM
Метод коммутации, называемый Асинхронное векторное
управление с ориентацией по магнитному потоку
статора (Stator Flux oriented Asynchronous Vector
Modulation).
Компенсация скольжения
Преобразователь частоты компенсирует скольжение
двигателя путем повышения частоты в соответствии с
измеряемой нагрузкой двигателя, обеспечивая почти
полное постоянство скорости вращения двигателя.
Интеллектуальное логическое управление (SLC)
Интеллектуальное логическое управление — это
последовательность действий, определяемых
пользователем, которые выполняются
интеллектуальным логическим контроллером (SLC), если
он признает соответствующие определенные
пользователем события истинными (группа параметров
13-**Smart Logic Control (Интеллектуальное логическое
управление).
STW
Слово состояния.
THD
Общее гармоническое искажение тока, является
амплитудой всех гармонических искажений.
Термистор
Терморезистор, устанавливаемый там, где требуется
контроль температуры (в преобразователе частоты или
в двигателе).
Отключение
Состояние, вводимое в аварийных ситуациях, например,
в случае перегрева преобразователя частоты или для
защиты двигателя, технологического процесса или
механизма. Перезапуск не допускается до тех пор, пока
причина неисправности не будет устранена и состояние
отключения не будет отменено выполнением функции
сброса или, в некоторых случаях, посредством
запрограммированного автоматического сброса. Не
используйте отключение для обеспечения безопасности
персонала.
Отключение с блокировкой
Состояние, вводимое в аварийной ситуации, когда
преобразователь частоты осуществляет защиту
собственных устройств и требует физического
вмешательства, например, при возникновении
короткого замыкания на его выходе. Отключение с
блокировкой может быть отменено выключением сети
питания, устранением причины неисправности и новым
подключением преобразователя частоты. Перезапуск не
допускается до тех пор, пока состояние отключения не
будет отменено выполнением функции сброса или, в
некоторых случаях, посредством запрограммированного
автоматического сброса. Не используйте отключение с
блокировкой для обеспечения безопасности персонала.
Характеристики переменного крутящего момента:
Характеристики переменного крутящего момента (VT,
variable torque), используемые для управления насосами
и вентиляторами.
+
VVC
В сравнении с обычным регулированием соотношения
«напряжение/частота» векторное управление
напряжением (VVC+) обеспечивает улучшение динамики
и устойчивости как при изменении задания скорости,
так и при изменениях момента нагрузки.
8 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 11
Введение Руководство по проектированию
60° AVM
Модель переключения, так называемое Асинхронное
векторное управление 60°.
1.3 Меры предосторожности
ВНИМАНИЕ!
Напряжение преобразователя частоты опасно, если
он подключен к сети. Неправильный монтаж
двигателя, преобразователя частоты или
периферийной шины может привести к повреждению
оборудования, серьезным травмам или летальному
исходу. Поэтому следует выполнять указания
настоящего руководства, а также следовать
государственным и местным правилам и нормам по
технике безопасности.
Правила техники безопасности
1. Перед выполнением ремонтных работ всегда
отключайте сетевое питание преобразователя
частоты. Прежде чем снимать двигатель и
работать с разъемами сетевого питания,
убедитесь, что сеть питания отключена и
выдержано время после отключения, указанное
в Таблица 1.2.
2. Кнопка [Off/Reset] (Выкл./Сброс) на LCP не
отключает сетевое питание и не должна
использоваться в качестве защитного
выключателя.
3. Оборудование необходимо правильно
заземлить; пользователь должен быть защищен
от напряжения питания, а двигатель должен
быть защищен от перегрузки согласно
действующим государственным и местным
нормам и правилам.
4. Защита электродвигателя от перегрузки не
включена в заводские настройки. Если
требуется предусмотреть эту функцию,
установите для 1-90 Motor Thermal Protection
значение [4] ETR trip 1 (ЭТР: отключение 1) или
[3] ETR warning 1 (ЭТР: предупреждение 1).
5. При наличии цепи разделения нагрузки
(подключенной промежуточной цепи
постоянного тока) преобразователь частоты
помимо L1, L2 и L3 имеет и другие источники
напряжения. Прежде чем приступать к
ремонтным работам, убедитесь, что все
источники напряжения отсоединены и после
этого прошло достаточное время.
Предупреждение о возможности непреднамеренного
пуска
1. Когда преобразователь частоты подключен к
сети, двигатель можно остановить с помощью
цифровых команд, команд, поступающих по
шине, заданий или местного останова. В
случаях, когда непреднамеренный пуск
необходимо предотвратить из соображений
личной безопасности (например, во избежание
получения травмы от соприкосновения с
движущимися частями при непреднамеренном
пуске), указанных способов остановки
недостаточно. В таких случаях следует
отключить сетевое питание.
2. Двигатель может запуститься во время
установки параметров. Если это создает угрозу
личной безопасности, необходимо
предотвратить запуск двигателя, например,
надежным разъединением цепи подключения
двигателя.
3. Двигатель, остановленный без отключения от
питающей сети, может запуститься из-за
неисправности электроники в преобразователе
частоты, при временной перегрузке или при
устранении отказа в питающей электросети
или в цепи подключения двигателя. Если
необходимо предотвратить непреднамеренный
пуск в целях личной безопасности, обычных
функций останова преобразователя частоты
недостаточно. В таких случаях следует
отключить сетевое питание.
4. Сигналы управления, выводимые из
преобразователя частоты или находящиеся
внутри него, могут быть в редких случаях
активированы по ошибке, задержаны или
полностью отсутствовать. При использовании в
ситуациях, когда безопасность имеет особо
важное значение (например, при управлении
функцией электромагнитного торможения
подъемного механизма), нельзя полагаться
исключительно на эти сигналы управления.
1
1
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 9
Page 12
Введение
VLT® AutomationDrive FC 360
1
ВНИМАНИЕ!
Высокое напряжение
Прикосновение к токоведущим частям может
привести к смертельному исходу, даже если
оборудование отключено от сети.
Убедитесь также, что отключены все входные
напряжения, включая цепь разделения нагрузки
(подключение промежуточной цепи постоянного тока)
и подключение двигателя к цепи кинетического
резервирования.
Системы, в которых установлены преобразователи
частоты, следует в необходимых случаях оснащать
дополнительными устройствами мониторинга и
защиты в соответствии с действующими нормами и
правилами обеспечения безопасности, такими как
законы о работе с механизмами, правила
предотвращения несчастных случаев и др.
Разрешается вносить изменения в преобразователи
частоты с помощью операционного программного
обеспечения.
УВЕДОМЛЕНИЕ
Опасные ситуации должны идентифицироваться
сборщиком машины/интегратором, который несет
ответственность за реализацию соответствующих мер
предосторожности. Возможно оснащение
дополнительными устройствами мониторинга и
защиты в соответствии с действующими нормами и
правилами обеспечения безопасности, такими как
законы о работе с механизмами и правила
предотвращения несчастных случаев.
ВНИМАНИЕ!
ВРЕМЯ РАЗРЯДКИ
В преобразователе частоты установлены
конденсаторы постоянного тока, которые остаются
заряженными даже после отключения сетевого
питания. Несоблюдение такого периода ожидания
после отключения питания перед началом
обслуживания или ремонтных работ может привести
к летальному исходу или серьезным травмам.
1. Остановите двигатель.
2. Отключите сеть переменного тока, двигатели
с постоянными магнитами и дистанционно
расположенные источники питания сети
постоянного тока, в том числе резервные
аккумуляторы, ИБП и подключения к сети
постоянного тока других преобразователей
частоты.
3. Перед выполнением работ по обслуживанию
и ремонту следует дождаться полной
разрядки конденсаторов. Время ожидания
указано в Таблица 1.2.
Минимальное время выдержки (в
Напряжение [В]
380–480 0,37–7,5 кВт 11–75 кВт
Высокое напряжение может присутствовать даже в том
случае, если светодиоды погасли.
Таблица 1.2 Время разрядки
минутах)
4 15
1.4 Указания по утилизации
Оборудование, содержащее
электрические компоненты, нельзя
утилизировать вместе с бытовыми
отходами.
Его следует собирать как электрические
и электронные отходы в соответствии с
действующими местными правовыми
актами.
1.5 Версия документа и программного
обеспечения
Данное руководство регулярно пересматривается и
обновляется. Все предложения по его улучшению будут
приняты и рассмотрены.
Редакция Комментарии Версия ПО
MG06B4xx Заменяет MG06B3xx 1.4x
1.6 Разрешения и сертификаты
Преобразователи частоты разрабатываются в
соответствии с требованиями описанных в этом разделе
директив.
Подробнее о разрешениях и сертификатах см. в разделе
загрузки на сайте www.danfoss.com/fc360.
Маркировка CE
1.6.1
Маркировка CE (Communauté européenne) указывает,
что производитель продукта выполнил все применимые
директивы ЕС. К конструированию и производству
преобразователей частоты применяются следующие
директивы ЕС: директива по низковольтному
оборудованию, директива по электромагнитной
совместимости, а также (для устройств со встроенными
защитными функциями) директива о машинном
оборудовании.
Маркировка CE предназначена для устранения
технических препятствий свободной торговле между ЕС
и странами ЕАСТ внутри еврозоны. Маркировка СЕ не
определяет качество изделия. По маркировке CE нельзя
определить технические характеристики.
10 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 13

Введение Руководство по проектированию
1.6.2 Директива по низковольтному
оборудованию
В соответствии с директивой по низковольтному
оборудованию преобразователи частоты
классифицируются как электронные компоненты и
должны иметь маркировку СЕ. Директива относится ко
всему электрическому оборудованию, в которых
используются напряжения в диапазонах 50–1000 В
перем. тока или 75–1600 В пост. тока.
Директива требует, чтобы конструкция оборудования
обеспечивала отсутствие риска для безопасности и
здоровья людей и животных и сохранение
материальной ценности оборудования при условии
правильной установки и обслуживания, а также
использования по назначению. Компания Danfoss ставит
знак СЕ согласно директиве о низковольтном
оборудовании; Danfoss по запросу предоставляет
декларацию соответствия.
1
1
Директива по электромагнитной
1.6.3
совместимости
Электромагнитная совместимость (ЭМС) означает, что
взаимные помехи между различными компонентами
оборудования не влияют на работу оборудования.
Базовое требование по защите из директивы по
электромагнитной совместимости 2004/108/EC состоит в
том, что устройства, которые создают электромагнитные
помехи (ЭП) или на работу которых могут влиять ЭП,
должны конструироваться таким образом, чтобы
ограничить создаваемые электромагнитные помехи, а
также должны иметь приемлемый уровень устойчивости
к ЭП при условии правильной установки и
обслуживания, а также использования по назначению.
Преобразователь частоты можно использовать как
отдельное устройство или как часть более сложной
установки. В обоих случаях устройствах должны иметь
маркировку CE. Системы не обязательно должны иметь
маркировку CE, однако должны соответствовать
основным требованиям по защите директивы по ЭМС.
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 11
Page 14
130BA870.10
130BA809.10
130BA810.10
130BA810.10
130BA810.10
130BA826.10
130BA826.10
Обзор изделия
VLT® AutomationDrive FC 360
2 Обзор изделия
22
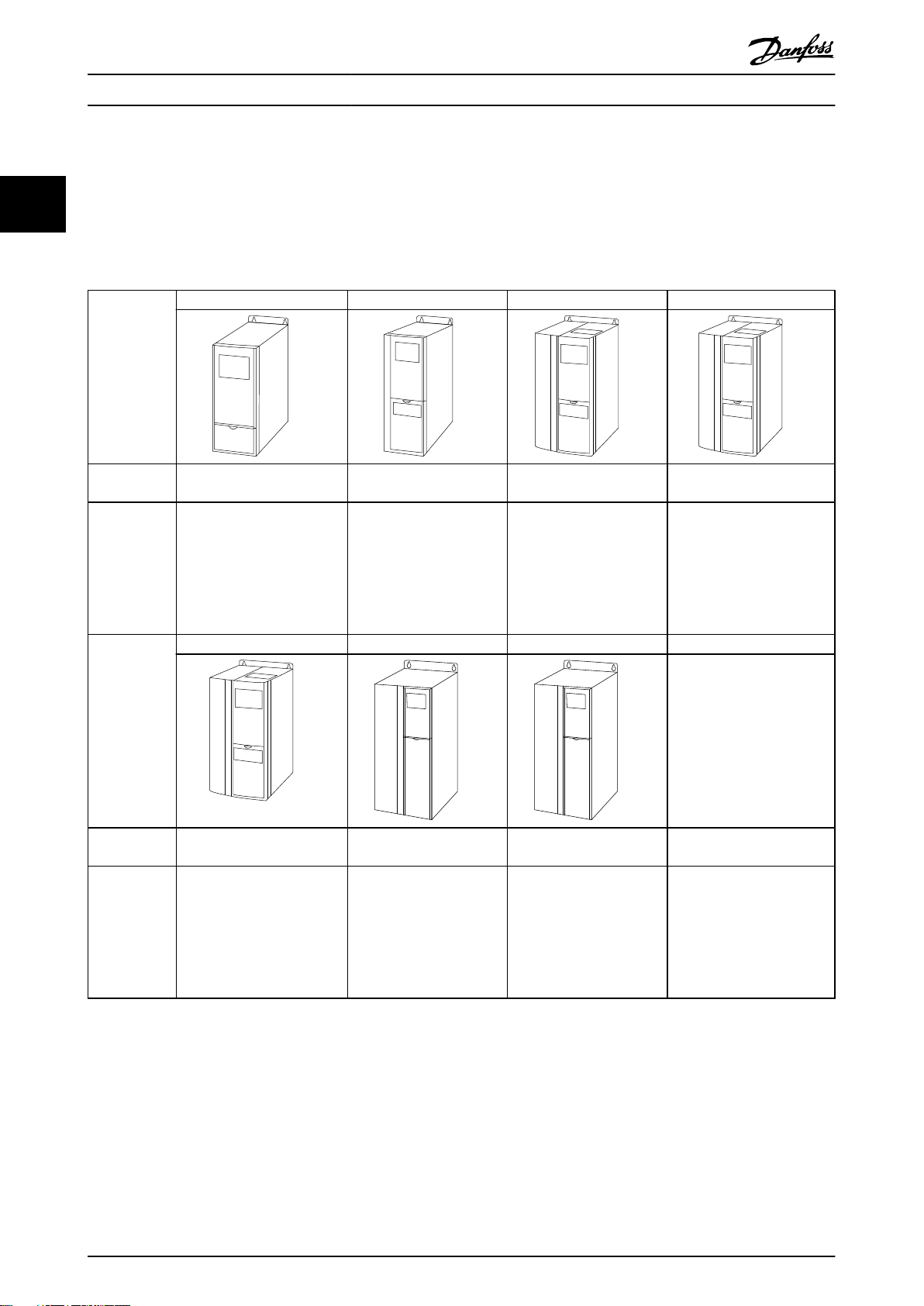
2.1 Сведения о размерах корпусов
Размер корпуса зависит от диапазона мощности.
Размер
корпуса
Класс защиты
корпуса
Большая
перегрузка по
номинальной
мощности —
макс.
перегрузка
1)
160 %
Размер
корпуса
J1 J2 J3 J4
IP20 IP20 IP20 IP20
0,37–2,2 кВт (380–480 В) 3,0–5,5 кВт (380–480 В) 7,5 кВт (380–480 В) 11–15 кВт (380–480 В)
J5 J6 J7
Класс защиты
корпуса
Большая
перегрузка по
номинальной
мощности —
макс.
перегрузка
1)
160 %
Таблица 2.1 Размеры корпусов
1) Нормальный тип перегрузки для размеров 11–75 кВт: 110 % в течение 1 минуты
Высокий тип перегрузки для размеров 0,37–7,5 кВт: 160 % в течение 1 минуты
Высокий тип перегрузки для размеров 11–22 кВт: 150 % в течение 1 минуты
Высокий тип перегрузки для размеров 30–75 кВт: 150 % в течение 1 минуты
12 Danfoss A/S © 09/2014 Все права защищены. MG06B450
18,5–22 кВт (380–480 В) 30–45 кВт (380–480 В) 55–75 кВт (380–480 В)
IP20 IP20 IP20
Page 15
130BC438.15
3 Phase
power
input
Switch Mode
Power Supply
Motor
Analog Output
Interface
(PNP) = Source
(NPN) = Sink
ON=Terminated
OFF=Open
Brake
resistor
91 (L1)
92 (L2)
93 (L3)
PE
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN)
0/4-20 mA
12 (+24 V OUT)
31 (D IN)
18 (D IN)
20 (COM D IN)
10 V DC
15 mA 100 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(A OUT) 45
(A OUT) 42
(P RS-485) 68
(N RS-485) 69
(COM RS-485) 61
0V
5V
S801
0/4-20 mA
RS-485
RS-485
03
+10 V DC
0/4-20 mA
0-10 V DC
24 V DC
02
01
05
04
240 V AC, 3 A
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
27 (D IN/OUT)
24 V
0 V
0 V (PNP)
24 V (NPN)
0 V
24 V
29 (D IN/OUT)
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
95
P 5-00
21
ON
(+UDC) 89
(BR) 81 5)
24 V (NPN)
0 V (PNP)
0-10 V DC
(-UDC) 88
RFI
3)
0 V
240 V AC, 3 A
Relay 1
1)
Relay 2 2)
4)
06
Обзор изделия
Руководство по проектированию
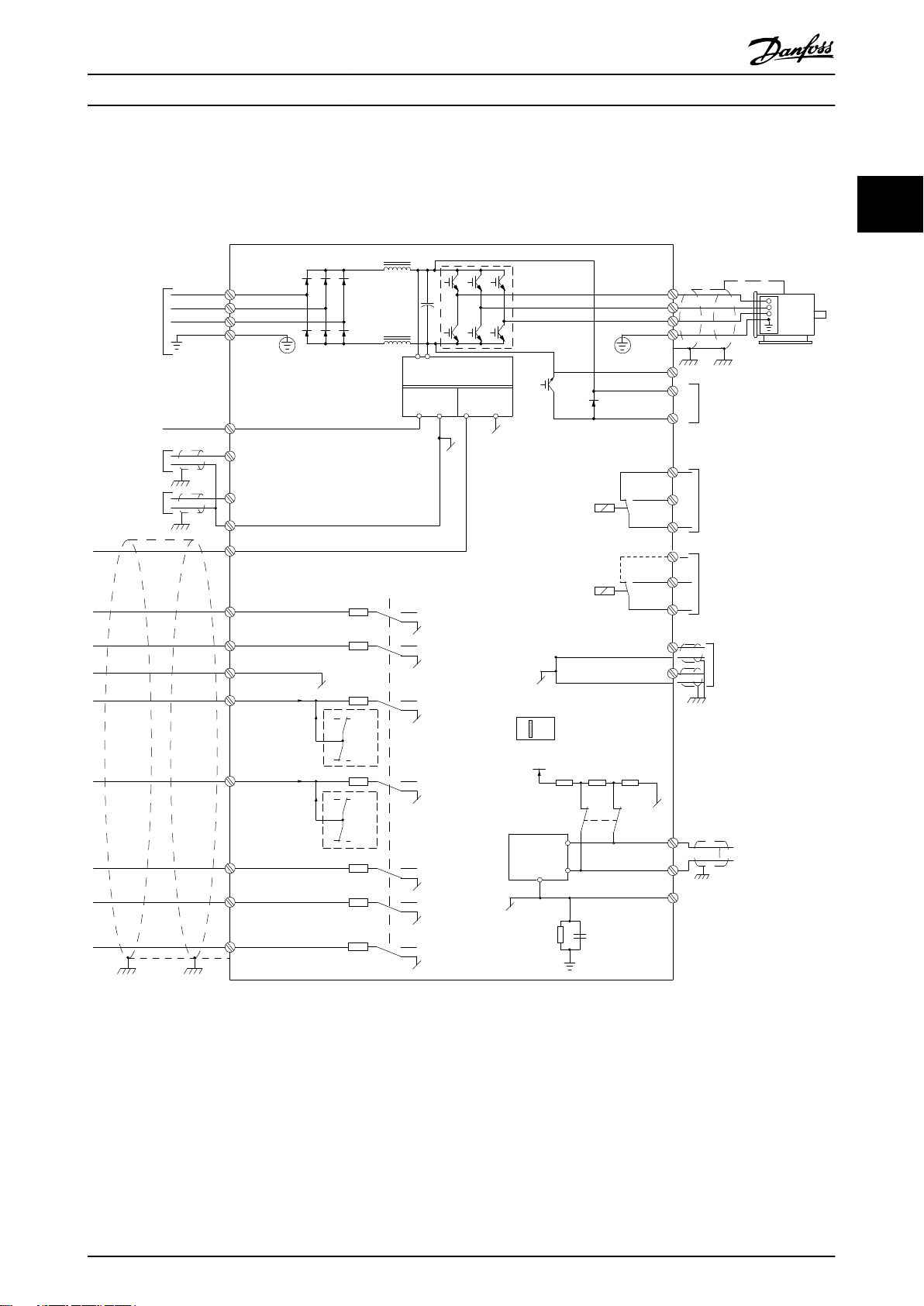
2.2 Электрический монтаж
В данном разделе описывается процедура устройства проводки к преобразователю частоты.
2 2
Рисунок 2.1 Схема основных подключений
A = аналоговый, D = цифровой
1) Встроенным тормозным прерывателем оборудуются приводы мощностью 0,37–22 кВт и выше.
2) Реле 2 является 2-полюсным для корпусов J1–J3 и 3-полюсным для J4–J7. Реле 2 для J4–J7 имеет клеммы 4, 5 и 6 с
такой же логикой «нормально открытый/нормально закрытый», как у реле 1. В J1–J5 реле штепсельные, а в J6–J7 —
фиксированные.
3) Один дроссель постоянного тока в преобразователях мощностью 0,37–22 кВт (J1–J5); Два дросселя постоянного
тока в преобразователях мощностью 30–75 кВт (J6–J7).
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 13
Page 16

Обзор изделия
4) Переключатель S801 (клемма шины) может использоваться для включения оконечной нагрузки для порта RS485
(клеммы 68 и 69).
5) Тормоз (BR) в преобразователях мощностью 30–75 кВт (J6–J7) отсутствует.
VLT® AutomationDrive FC 360
22
14 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 17
130BD391.11
1
2
3
4
5
6
78
9
10
Reset
Auto
On
Hand
On
OK
Back
Menu
Status Quick
Menu
Main
Menu
PE
U
V
W
L1
L2
L3
PE
Обзор изделия
Руководство по проектированию
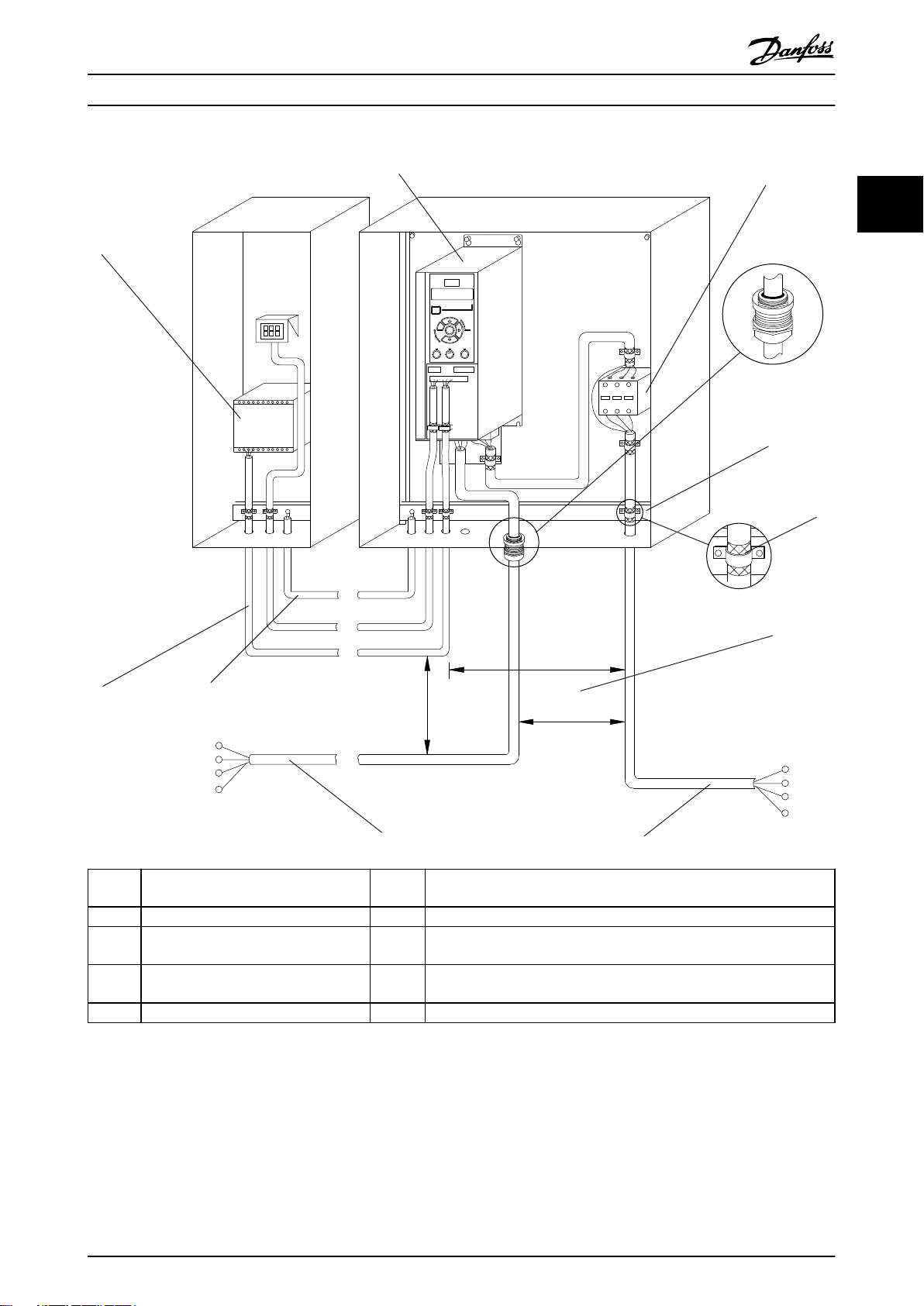
2 2
1 ПЛК 6 Минимальное расстояние между кабелями управления, кабелем
электродвигателя и кабелями сети питания составляет 200 мм
2 Преобразователь частоты 7 Двигатель, 3 фазы и защитное заземление
3 Выходной контактор (обычно не
8 Сеть, 3 фазы и усиленное защитное заземление
рекомендуется)
4 Рейка заземления (защитное
9 Подключение элементов управления
заземление)
5 Экранирование кабеля (зачищено) 10 Выравнивающий кабель, минимум 16 мм² (6 AWG)
Рисунок 2.2 Типовые электрические соединения
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 15
Page 18
Обзор изделия
VLT® AutomationDrive FC 360
2.2.1 Общие требования
22
ВНИМАНИЕ!
ОПАСНОЕ ОБОРУДОВАНИЕ!
Вращающиеся валы и электрическое оборудование
могут быть опасны. При подключении питания к
устройству необходимо обеспечить защиту от
поражения электрическим током. Все монтажные,
пусконаладочные работы и техническое
обслуживание электрооборудования должно отвечать
национальным и местным нормативам и выполняться
только квалифицированным и специально обученным
персоналом. Несоблюдение данных рекомендаций
может привести к летальному исходу или серьезным
травмам.
ПРЕДУПРЕЖДЕНИЕ
ИЗОЛЯЦИЯ ПРОВОДОВ!
Прокладывайте входные силовые кабели, проводку
двигателя и управляющую проводку в трех разных
металлических желобах или используйте
изолированные экранированные кабели для изоляции
высокочастотных шумов. Несоблюдение требований к
изоляции силовых кабелей, проводки двигателя и
проводки подключения элементов управления может
привести к снижению эффективности
преобразователя частоты и связанного с ним
оборудования.
Отдельно прокладывайте кабели двигателя от разных
преобразователей частоты. Индуцированное
напряжение от выходных кабелей двигателей,
проложенных рядом друг с другом, может зарядить
конденсаторы оборудования даже при выключенном
и изолированном оборудовании.
Функция преобразователя частоты,
•
активируемая электронной системой,
обеспечивает защиту двигателя от перегрузки.
Защита двигателя от перегрузки соответствует
классу 20.
Тип и номиналы провода
Вся проводка должна соответствовать
•
государственным и местным нормам и
правилам в отношении сечения провода и
температур окружающей среды.
Компания Danfoss рекомендует применять
•
силовые кабели из медного провода,
рассчитанного на минимальную температуру
75 °C.
Описание рекомендуемых размеров кабеля см.
•
в глава 4 Технические характеристики.
2.2.2
Требования к заземлению
ВНИМАНИЕ!
ОПАСНОСТЬ ЗАЗЕМЛЕНИЯ!
В целях безопасности оператора сертифицированный
электрик должен правильно заземлить
преобразователь частоты в соответствии с
государственными и местными нормами
электробезопасности, а также согласно инструкциям,
содержащимся в данном документе. Блуждающие
токи превышают 3,5 мА. Неправильно выполненное
заземление преобразователя частоты может привести
к летальному исходу или серьезным травмам.
Оборудование с блуждающими токами выше
•
3,5 мА следует надлежащим образом
заземлить. Подробнее см. в глава 2.8 Ток
утечки на землю.
Для силового кабеля, проводки двигателя и
•
управляющей проводки требуется специальный
заземляющий кабель.
Для устройства заземления надлежащим
•
образом следует использовать зажимы,
которые входят в комплект оборудования.
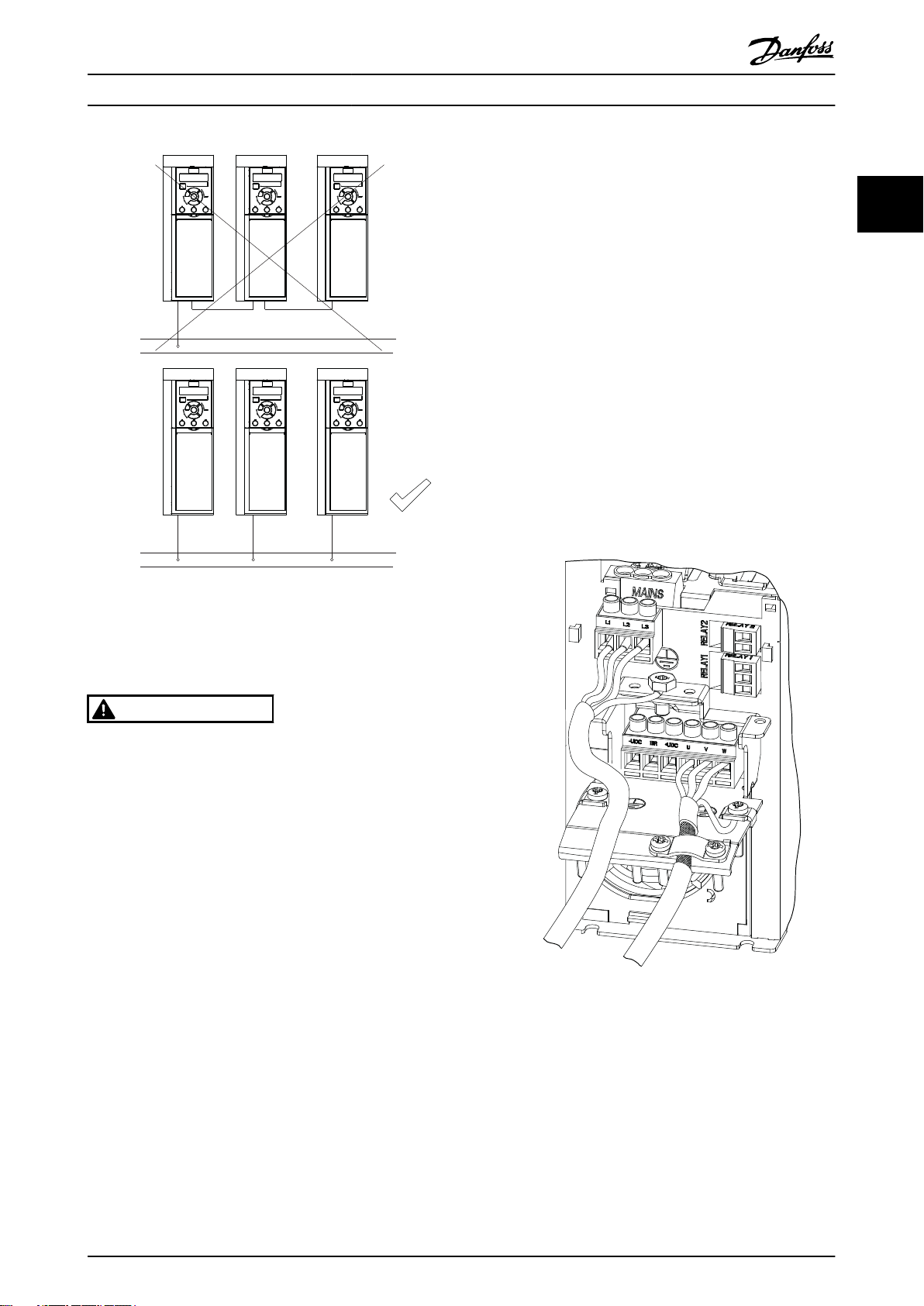
Запрещается совместно заземлять несколько
•
преобразователей частоты с использованием
последовательного подключения (см.
Рисунок 2.3).
Заземляющие провода должны быть как можно
•
более короткими.
Для уменьшения электрических помех
•
используйте многожильный провод.
Соблюдайте требования производителя
•
двигателя, относящиеся к его подключению.
16 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 19
130BC500.10
FC 1
FC 1
FC 2
FC 2
FC 3
FC 3
PE
PE
130BC501.10
01
02 03
04
05
Обзор изделия Руководство по проектированию
Все преобразователи частоты могут
•
использоваться как с изолированным
источником входного тока, так и с
заземленными силовыми линиями. Если
преобразователь частоты питается от сети,
изолированной от земли (IT-сеть или
плавающий треугольник) или от сети TT/TN-S с
заземленной ветвью (заземленный
треугольник), установите для пар.
14-50 Фильтр ВЧ-помех значение OFF (ВЫКЛ.)
(типы корпусов J6–J7) или выкрутите винт RFI
(типы корпусов J1–J5). В выключенном
положении встроенные конденсаторы фильтра
защиты от ВЧ-помех между корпусом и
промежуточной цепью выключаются во
избежание повреждения промежуточной цепи
и для уменьшения емкостных токов на землю
согласно стандарту IEC 61800-3.
В IT-сети запрещается устанавливать
•
переключатель между преобразователем
частоты и двигателем.
2 2
Рисунок 2.3 Принципы заземления
Подключение сетевого питания,
2.2.3
двигателя и заземления
ВНИМАНИЕ!
ИНДУЦИРОВАННОЕ НАПРЯЖЕНИЕ!
Отдельно прокладывайте выходные кабели двигателя
от разных преобразователей частоты.
Индуцированное напряжение от выходных кабелей
двигателей, проложенных рядом друг с другом,
может зарядить конденсаторы оборудования даже
при выключенном и заблокированном оборудовании.
Несоблюдение требований к раздельной прокладке
выходных кабелей двигателя может привести к
летальному исходу или серьезным травмам.
Для проводки двигателя предлагаются зажимы
заземления (см. Рисунок 2.4).
•
•
•
Запрещается устанавливать конденсаторы
между преобразователем частоты и двигателем
для компенсации коэффициента мощности.
Запрещается подключать пусковое устройство
или устройство переключения полярности
между преобразователем частоты и
двигателем.
Соблюдайте требования производителя
двигателя, относящиеся к его подключению.
Рисунок 2.4 Подключение сетевого питания, двигателя и
заземления для размеров корпуса J1–J5
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 17
Page 20
130BD648.11
130BC504.10
42 45
12
18
19
27
29
31
32
33
20
50
53
54
55
130BC505.12
Обзор изделия
VLT® AutomationDrive FC 360
22
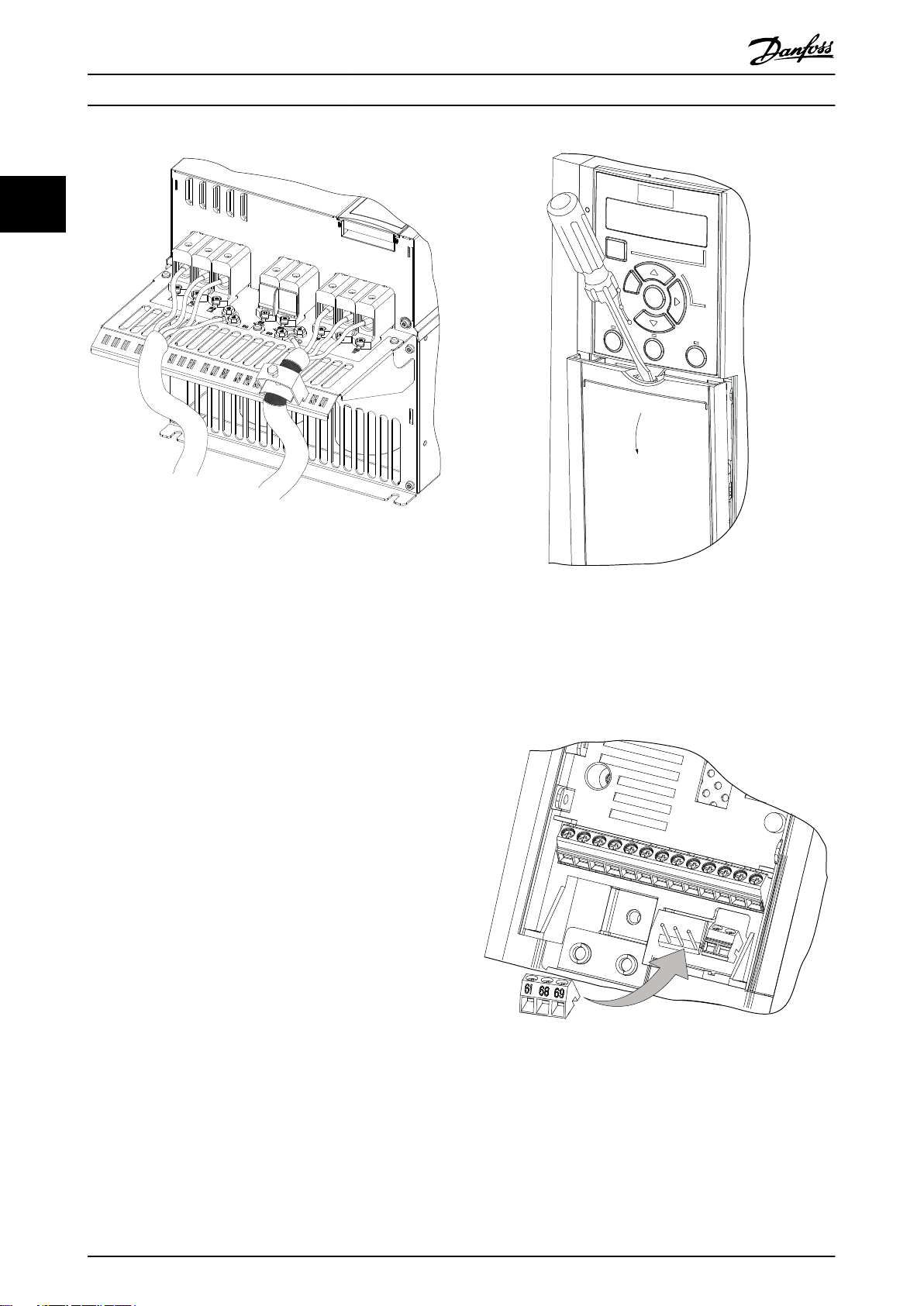
Рисунок 2.5 Подключение сетевого питания, двигателя и
заземления для размера корпуса J7
На Рисунок 2.4 показано подключение сетевого питания,
двигателя и заземления для размеров корпуса J1–J5. На
Рисунок 2.5 показано подключение сетевого питания,
двигателя и заземления для размера корпуса J7.
Фактические конфигурации отличаются для разных
типов устройств и дополнительного оборудования.
Подключение элементов
2.2.4
управления
Доступ
Снимите крышку с помощью отвертки. См.
•
Рисунок 2.6.
Рисунок 2.6 Доступ к проводке элементов управления для
размеров корпуса J1–J7
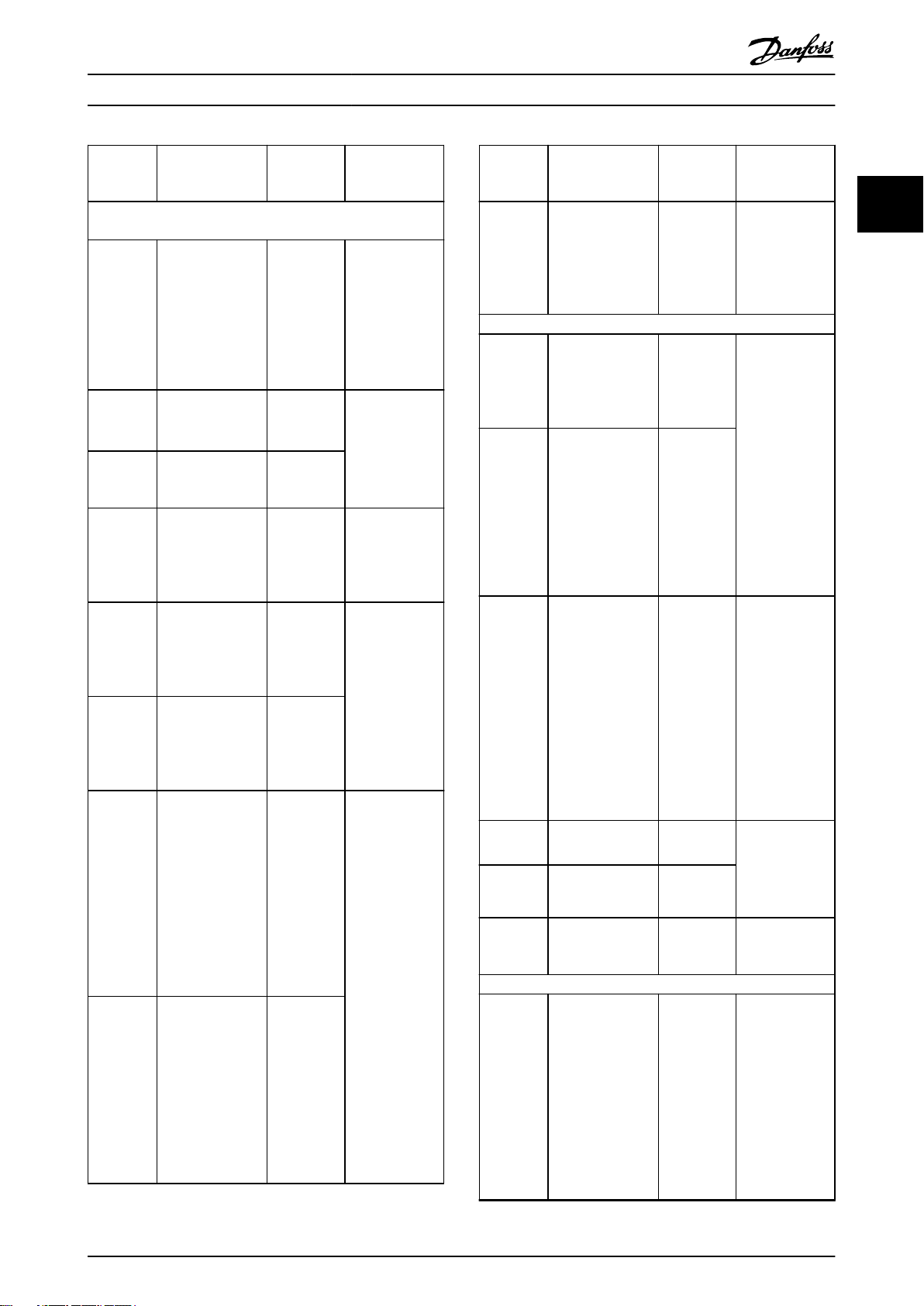
Типы клемм управления
Клеммы управления преобразователя частоты показаны
на Рисунок 2.7. Функции клемм и настройки по
умолчанию приведены в Таблица 2.2.
Рисунок 2.7 Расположение клемм управления
Сведения о номиналах клемм см. в глава 4.2 Общие
технические требования.
18 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 21
Обзор изделия Руководство по проектированию
Настройка
Клемма Параметр
Цифровые входы/выходы, импульсные входы/входы,
12 –
18
19
31
32
33
27
29
5-10 Terminal 18
Digital Input
5-11 Terminal 19
Digital Input
5-16 Terminal 31
Digital Input
5-14 Terminal 32
Digital Input
5-15 Terminal 33
Digital Input
5-12 Terminal 27
Digital Input
5-30 Terminal 27
Digital Output
5-13 Terminal 29
Digital Input
5-31 Terminal 29
Digital Output
по
умолчанию
энкодер
+24 В пост.
тока
[8] Start
(Пуск)
[10]
Reversing
(Реверс)
[0] No
operation
(Не
используетс
я)
[0] No
operation
(Не
используетс
я)
[0] No
operation
(Не
используетс
я)
Цифровой
вход [2]
Coast inverse
(Выбег,
инверсный)
Цифровой
выход [0] No
operation
(Не
используетс
я)
Цифровой
вход [14]
Jog (Фикс.
част.)
Цифровой
выход [0] No
operation
(Не
используетс
я)
Описание
Напряжение
питания 24 В
пост. тока.
Максимальный
выходной ток
составляет 100
мА для всех
нагрузок 24 В.
Цифровые
входы.
Цифровой вход
Цифровой вход,
энкодер 24 В.
Клемма 33
может
использоваться
как импульсный
вход.
Могут
выбираться в
качестве
цифрового
входа,
цифрового
выхода или
импульсного
выхода. По
умолчанию
настроены в
качестве
цифровых
входов.
Клемма 29
может
использоваться
как импульсный
вход.
Клемма Параметр
20 –
Аналоговые входы/выходы
42
45
50 –
53
54
55 –
61 –
6-91 Terminal 42
Analog Output
6-71 Terminal 45
Analog Output
Группа
параметров 6-1*
Группа
параметров 6-2*
Последовательная связь
Настройка
по
умолчанию
Общая клемма
[0] No
operation
(Не
используетс
я)
[0] No
operation
(Не
используетс
я)
+10 В пост.
тока
Задание
Обратная
связь
Описание
для цифровых
входов и
потенциал 0 В
для питания 24
В.
Программируем
ый аналоговый
выход.
Аналоговый
сигнал
составляет 0–20
мА или 4–20 мА
при макс. 500
Ом. Может
также быть
запрограммиро
ван в качестве
цифровых
выходов
Напряжение
питания 10 В
пост. тока,
аналоговые
входы.
Максимум 15
мА, обычно
используется
для
подключения
потенциометра
или термистора.
Аналоговый
вход. Могут
выбираться для
напряжения или
тока.
Общий для
аналогового
входа
Встроенный
резистивноемкостной
фильтр для
экрана кабеля.
Используется
ТОЛЬКО для
подключения
экрана при
наличии
проблем с ЭМС.
2 2
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 19
Page 22
1
2
PE
FC
PE
PLC
130BB922.12
PE PE
<10 mm
100nF
FC
PE
PE
PLC
<10 mm
130BB609.12
Обзор изделия
VLT® AutomationDrive FC 360
Настройка
Клемма Параметр
22
68 (+)
69 (-)
01, 02, 03 5-40 [0]
04, 05, 06
Группа
параметров 8-3*
Группа
параметров 8-3*
5-40 [1]
по
умолчанию
Реле
[0] No
operation
(Не
используетс
я)
[0] No
operation
(Не
используетс
я)
Описание
Интерфейс
RS485. Для
контактного
сопротивления
предусмотрен
переключатель
платы
управления.
Выход реле
типа Form C.
Эти реле
расположены в
разных местах в
зависимости от
конфигурации и
типоразмера
преобразовател
я частоты.
Используется
для
подключения
напряжения
переменного и
постоянного
тока, а также
резистивных и
индуктивных
нагрузок.
Выход реле RO2
в корпусе J1–J3
является 2полюсным,
доступны
только клеммы
04 и 05
Использование экранированных кабелей управления
В большинстве случаев предпочтительным методом
будет фиксация управляющих кабелей и кабелей
последовательной связи с помощью входящих в
комплект экранирующих зажимов на обоих концах, что
позволит обеспечить наилучший контакт для
высокочастотных кабелей.
Если потенциалы земли преобразователя частоты и ПЛК
различаются, могут возникнуть электрические помехи,
нарушающие работу всей системы. Эта проблема
решается установкой выравнивающего кабеля как
можно ближе к кабелю управления. Мин. поперечное
сечение: 16 мм² (6 AWG).
Рисунок 2.8 Экранирующие зажимы на обоих концах
Контуры заземления 50/60 Гц
Если используются очень длинные кабели управления,
могут возникать контуры заземления. Для их устранения
следует подключить один конец экрана к земле через
конденсатор емкостью 100 нФ (обеспечив короткие
выводы).
По умолчанию клеммы запрограммированы
•
таким образом, чтобы инициировать работу
преобразователя частоты в типичном режиме
работы.
1 Минимум 16 мм² (6 AWG)
2 Выравнивающий кабель
Таблица 2.2 Описание клемм
Рисунок 2.9 Подключение через конденсатор емкостью 100
Функции клемм управления
нФ
Функции преобразователя частоты управляются путем
получения входных сигналов управления.
Для каждой клеммы в параметрах
•
соответствующей клеммы программируется
поддерживаемая функция.
Убедитесь, что каждая клемма управления
•
запрограммирована на работу с правильной
функцией. См. главу Панель местного
управления и программирование в Кратком
Избегайте помех ЭМС в системе последовательной
связи
Эта клемма подключается к заземлению через
внутреннюю резистивно-емкостную цепь (RC-цепь). Для
снижения помех между проводниками используются
кабели из витой пары. Рекомендуемый метод показан
на Рисунок 2.10.
руководстве для получения детальной
информации о доступе к параметрам и
программировании.
20 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 23
PE
FC
PE
FC
130BB923.12
PE PE
69
68
61
69
68
61
1
2
<10 mm
PE
FC
PE
FC
130BB924.12
PE PE
69
69
68
68
1
2
<10 mm
Обзор изделия
Руководство по проектированию
2.3.2
Режимы управления
Преобразователь частоты может регулировать либо
скорость, либо крутящий момент вала двигателя. Тип
управления определяется настройкой параметра
1-00 Configuration Mode.
2 2
1 Минимум 16 мм² (6 AWG)
2 Выравнивающий кабель
Рисунок 2.10 Кабели из витой пары
В качестве альтернативы, подключение к клемме 61
может быть пропущено.
1 Минимум 16 мм² (6 AWG)
2 Выравнивающий кабель
Рисунок 2.11 Кабели из витой пары без клеммы 61
2.3 Структуры управления
2.3.1 Принцип управления
Преобразователь частоты выпрямляет сетевое
переменное напряжение, преобразуя его в постоянное
напряжение, которое затем преобразуется в
переменный ток с регулируемой амплитудой и
частотой.
На двигатель подаются изменяющиеся напряжение/ток
и частота, благодаря чему обеспечивается плавное
регулирование скорости вращения стандартных
трехфазных двигателей переменного тока и синхронных
двигателей с постоянным магнитами.
Регулирование скорости
Предусмотрено два типа регулирования скорости:
Регулирование скорости при разомкнутом
•
контуре, когда не требуется никакой обратной
связи от двигателя (режим без датчика).
ПИД-регулирование скорости при замкнутом
•
контуре, когда требуется подача на вход
сигнала обратной связи по скорости.
Правильно оптимизированное регулирование с
обратной связью по скорости обеспечивает
более высокую точность, чем регулирование
скорости без обратной связи.
Выбор входа для сигнала обратной связи ПИДрегулятора скорости осуществляется в параметре
7-00 Speed PID Feedback Source.
Регулирование крутящего момента
Функция регулирования крутящего момента
используется в применениях, где крутящий момент на
выходном валу двигателя управляет применением за
счет контроля напряжений. Регулирование крутящего
момента можно выбрать в 1-00 Configuration Mode.
Настройка крутящего момента выполняется
посредством настройки аналогового или цифрового
задания, или задания по шине. Для использования
функции регулирования крутящего момента
рекомендуется провести процедуру полной ААД,
поскольку правильные данные двигателя чрезвычайно
важны для оптимальной работы.
Замкнутый контур в режиме VVC+. Эта функция
•
используется в приложениях с низким/средним
динамическим отклонением вала, и
обеспечивает превосходное характеристики во
всех 4 квадрантах и при всех скоростях
двигателя. Наличие обратной связи по
скорости является обязательным.
Рекомендуется использовать дополнительную
плату MCB102. Обеспечьте разрешение
энкодера не менее 1024 импульса в минуту
(PPR) и хорошее заземление экранированного
кабеля энкодера, поскольку точность обратной
связи по скорости имеет важное значение.
Отрегулируйте 7-06 Speed PID Lowpass Filter Time
так, чтобы получать наилучший сигнал
обратной связи по скорости.
Разомкнутый контур в режиме VVC+. Эта
•
функция используется в механически
устойчивых применениях, но имеет
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 21
Page 24

Обзор изделия
ограниченную точность. Функция крутящего
момента с разомкнутым контуром работает в
двух направлениях вращения. Крутящий
22
Задание скорости/момента
Задание для этих методов регулирования может быть
либо отдельным заданием, либо суммой различных
заданий, включая задания с относительным
масштабированием. Обработка заданий подробно
описывается в глава 2.4 Формирование задания.
момент рассчитывается на основе внутреннего
измерения тока преобразователя частоты.
VLT® AutomationDrive FC 360
22 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 25
130BD974.10
L2 92
L1 91
L3 93
M
U 96
V 97
W 98
RFI switch
Inrush
R+
82
Load sharing -
88(-)
R81
Brake resistor
Load sharing +
89(+)
Load sharing -
Load sharing +
L2 92
L1 91
L3 93
89(+)
88(-)
Inrush
R inr
M
U 96
V 97
W 98
P 14-50
130BD975.10
Обзор изделия Руководство по проектированию
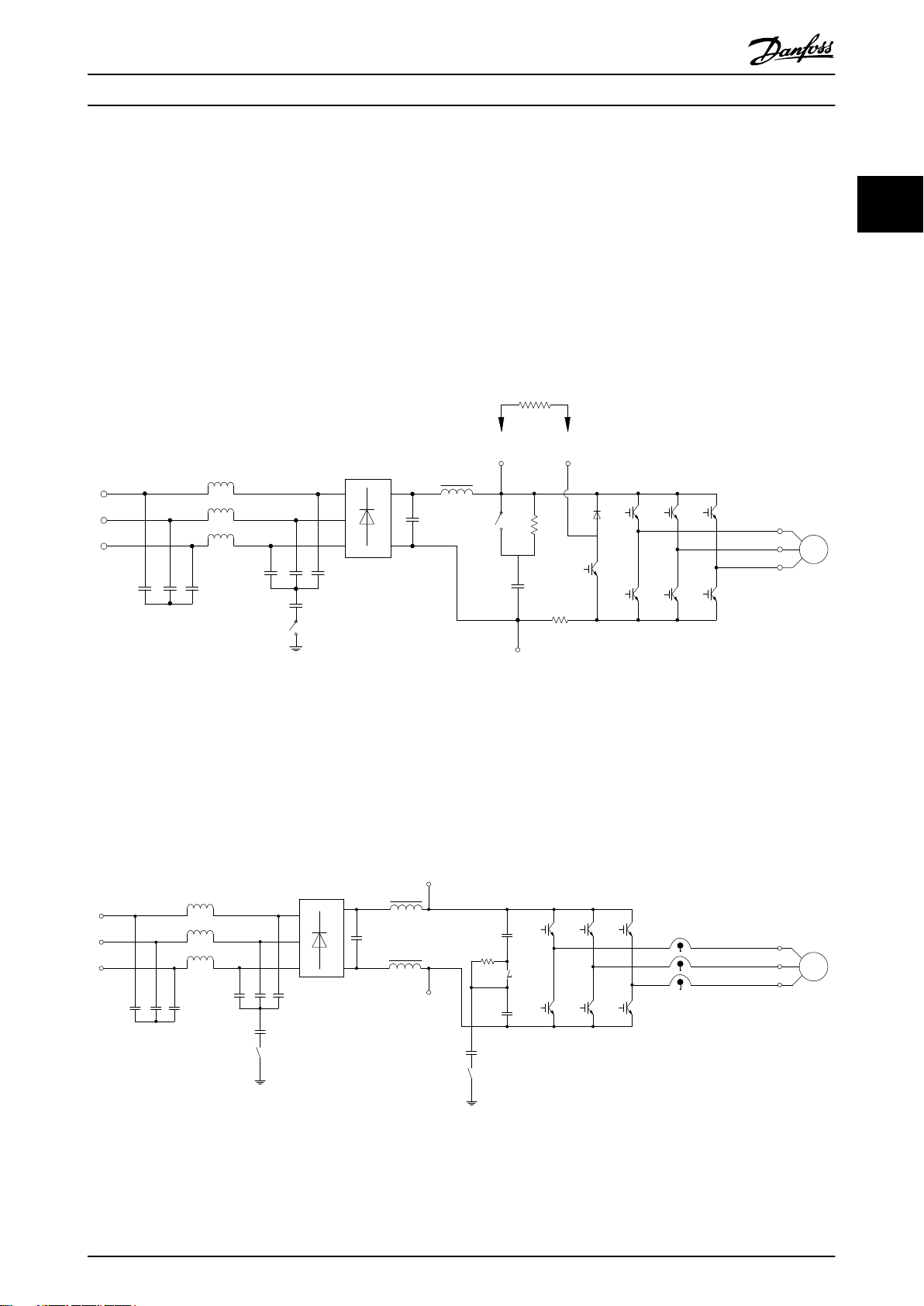
2.3.3 Принцип управления FC 360
FC 360 представляет собой преобразователь частоты общего назначения, предназначенный для применений,
требующих регулируемой скорости вращения. Принцип управления основан на векторном управлении напряжением
(VVC+).
0,37–22 кВт
Преобразователи частоты FC 360 мощностью 0,37–22 кВт могут управлять асинхронными двигателями и синхронными
двигателями с постоянными магнитами мощностью до 22 кВт.
Принцип измерения тока в преобразователях частоты FC 360 0,37–22 кВт состоит в измерении тока резистором в
цепи постоянного тока. Защита от замыкания на землю и короткого замыкания выполняется тем же резистором.
2 2
Рисунок 2.12 Схема управления для FC 360 0,37–22 кВт
30–75 кВт
Преобразователи частоты FC 360 30–75 кВт может управлять только асинхронными двигателями.
Принцип измерения тока в преобразователях частоты FC 360 30–75 кВт состоит в измерении тока в фазах двигателя.
Защита от замыкания на землю и короткого замыкания в преобразователях частоты FC 360 30–75 кВт выполняется
тремя преобразователями тока на фазах двигателя.
Рисунок 2.13 Схема управления для FC 360 30–75 кВт
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 23
Page 26
+
_
+
_
S
S
Cong. mode
Ref.
Process
P 1-00
High
+f max.
Low
-f max.
P 4-12
Motor speed
low limit (Hz)
P 4-14
Motor speed
high limit (Hz)
Motor
controller
Ramp
Speed
PID
P 7-20 Process feedback
1 source
P 7-22 Process feedback
2 source
P 7-00 Speed PID
feedback source
P 1-00
Cong. mode
P 4-19
Max. output freq.
-f max.
Motor
controller
P 4-19
Max. output freq.
+f max.
P 3-**
P 7-0*
130BD371.10
Обзор изделия
VLT® AutomationDrive FC 360
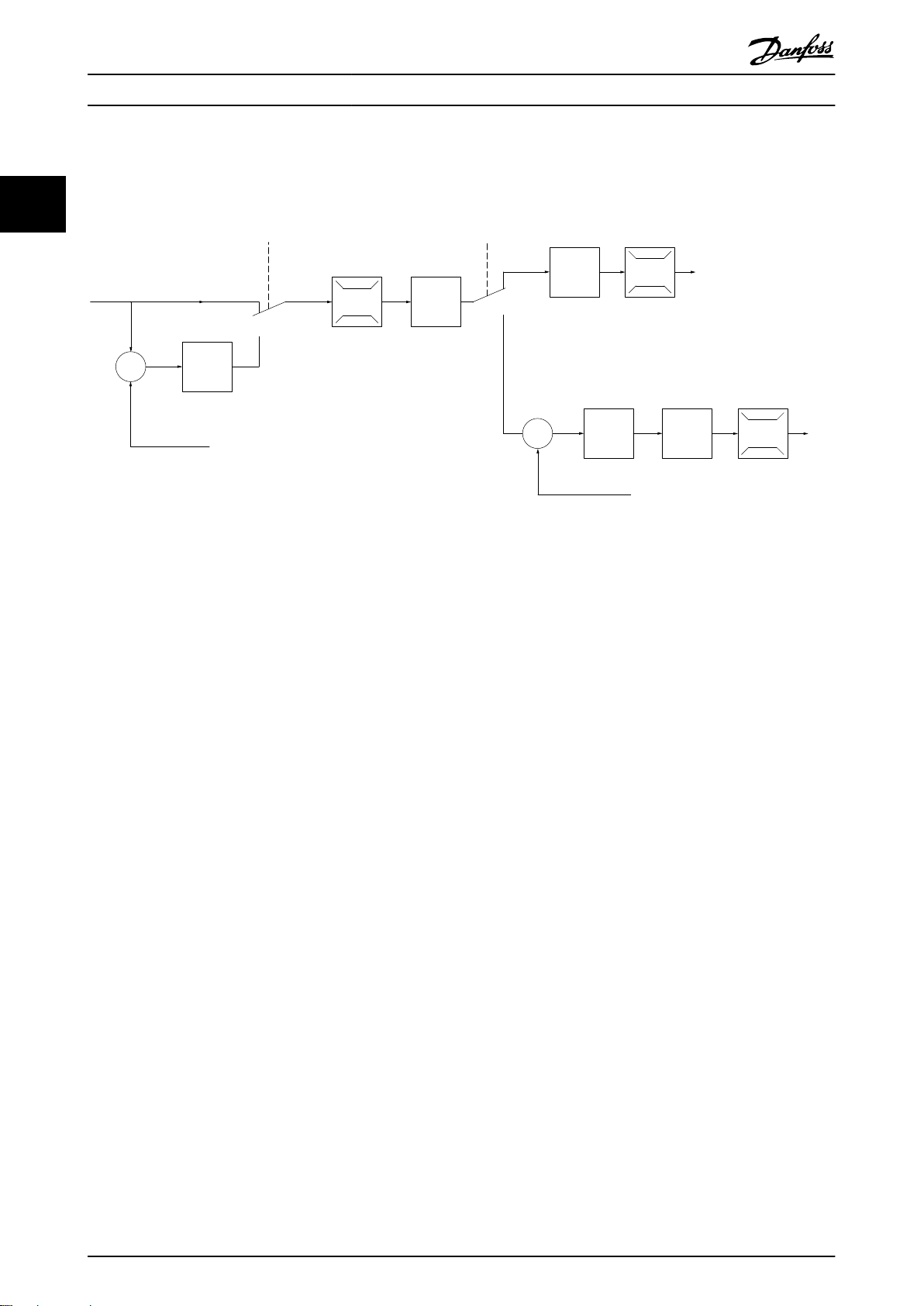
2.3.4
Структура управления в VVC
+
22
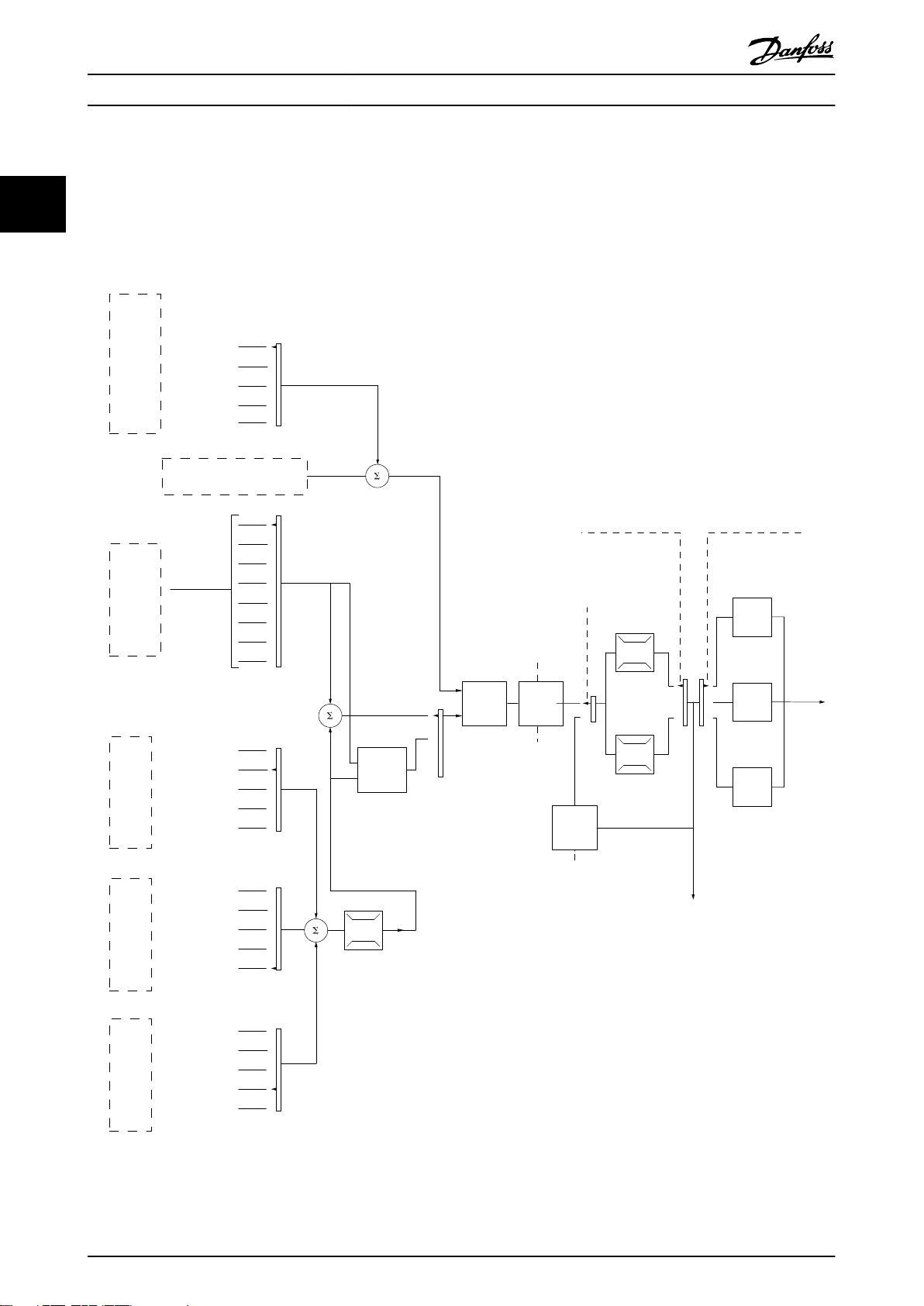
Рисунок 2.14 Структура управления в конфигурациях с разомкнутым и замкнутым контуром VVC
В конфигурации, показанной на Рисунок 2.14, для параметра 1-01 Motor Control Principle установлено значение [1] VVC+,
а для параметра 1-00 Configuration Mode — значение [0] Speed open loop (Ск-сть, без обр. св). Результирующее задание
от системы формирования задания принимается и передается через схемы ограничения изменения скорости и
ограничения скорости и только после этого используется для управления двигателем. Затем выходной сигнал
системы управления двигателем ограничивается максимальным частотным пределом.
+
Если параметр 1-00 Configuration Mode имеет значение [1] Speed closed loop (Ск-сть, замкн.конт.), результирующее
задание передается от схем ограничения изменения скорости и ограничения скорости на ПИД-регулятор скорости.
Параметры ПИД-регулирования скорости входят в группу параметров 7-0* Speed PID Ctrl (ПИД-регулят.скор).
Результирующее задание от ПИД-регулятора скорости передается для управления двигателем с ограничением по
частотному пределу.
Выберите [3] Process (Процесс) в параметре 1-00 Configuration Mode, чтобы использовать ПИД-регулятор процесса для
регулирования с обратной связью, например, скорости или давления в управляемой системе. Параметры ПИДрегулятора процесса находятся в группах параметров 7-2* Process Ctrl (ОС д/управл. проц) и 7-3* Process PID Ctrl.
(Упр.ПИД-рег.проц.).
24 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 27
Hand
On
Off
Reset
Auto
On
130BB893.10
Обзор изделия
Руководство по проектированию
2.3.5 Внутреннее регулирование тока в
режиме VVC
Особенностью преобразователя частоты является
встроенный регулятор предельного тока, который
включается, когда ток двигателя и, следовательно,
крутящий момент оказываются выше предельных
моментов, установленных в параметрах 4-16 Torque Limit
Motor Mode, 4-17 Torque Limit Generator Mode и
4-18 Current Limit.
Когда преобразователь частоты достигает предела по
току в двигательном или регенеративном режиме, он
стремится снизить ток ниже установленных пределов
для момента как можно скорее, насколько это
возможно без потери управления электродвигателем.
Местное (Hand On) и
2.3.6
+
дистанционное (Auto On)
управление
Преобразователь частоты управляется вручную с
панели местного управления (LCP) или дистанционно
через аналоговые/цифровые входы или по
последовательной шине.
Преобразователь частоты запускается и
останавливается с помощью кнопок [Hand On] (Ручной
пуск) и [Off/Reset] (Выкл./Сброс) на LCP. Необходима
настройка параметров:
0-40 [Hand on] Key on LCP.
•
0-44 [Off/Reset] Key on LCP.
•
0-42 [Auto on] Key on LCP.
•
Если для клеммы запрограммирована возможность
сброса, сброс аварийных сигналов выполняется
посредством нажатия кнопки [Off/Reset] (Выкл./Сброс)
или через дискретные входы.
2 2
Рисунок 2.15 Кнопки управления LCP
Местное задание переводит режим конфигурирования
на разомкнутый контур, независимо от значения
параметра 1-00 Configuration Mode (Режим
конфигурирования).
Местное задание сохраняется при выключении.
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 25
Page 28
No function
Analog ref.
Pulse ref.
Local bus ref.
Preset relative ref.
Preset ref.
Local bus ref.
No function
Analog ref.
Pulse ref.
Analog ref.
Pulse ref.
Local bus ref.
No function
Local bus ref.
Pulse ref.
No function
Analog ref.
Input command:
Catch up/ slow down
Catchup Slowdown
value
Freeze ref./Freeze output
Speed up/ speed down
ref.
Remote
Ref. in %
-max ref./
+max ref.
Scale to
Hz
Scale to
Nm
Scale to
process
unit
Relative
X+X*Y
/100
DigiPot
DigiPot
DigiPot
max ref.
min ref.
DigiPot
D1
P 5-1x(15)
Preset '1'
External '0'
Process
Torque
Speed
open/closed loop
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(0)
(0)
(1)
Relative scaling ref.
P 3-18
Ref.resource 1
P 3-15
Ref. resource 2
P 3-16
Ref. resource 3
P 3-17
200%
-200%
Y
X
-100%
100%
%
%
Ref./feedback range
P 3-00
Conguration mode
P 1-00
P 3-14
±100%
130BD374.10
P 16-01
P 16-02
P 3-12
P 5-1x(21)/P 5-1x(22)
P 5-1x(28)/P 5-1x(29)
P 5-1x(19)/P 5-1x(20)
P 3-04
Freeze ref.
&
increase/
decrease
ref.
Catch up/
slow
down
P 3-10
Обзор изделия
VLT® AutomationDrive FC 360
2.4 Формирование задания
Местное задание
22
Местное задание активно, когда преобразователь частоты работает в режиме ручного управления после нажатия
кнопки [Hand On] (Ручной пуск). Для настройки задания используются кнопки [▲]/[▼] и [◄/[►].
Дистанционное задание
Система формирования задания для вычисления дистанционного задания показана на Рисунок 2.16.
Рисунок 2.16 Дистанционное задание
26 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 29
Resulting reference
Sum of all
references
Forward
Reverse
P 3-00 Reference Range= [0] Min-Max
130BA184.10
-P 3-03
P 3-03
P 3-02
-P 3-02
P 3-00 Reference Range =[1]-Max-Max
Resulting reference
Sum of all
references
-P 3-03
P 3-03
130BA185.10
Обзор изделия
Дистанционное задание рассчитывается один раз для
каждого интервала сканирования и изначально
содержит два входящих сигнала задания.
1. Х (внешнее задание): сумма (см. пар.
3-04 Reference Function) до четырех выбранных
внешних заданий, включая любые комбинации
(определяемые установкой пар. 3-15 Reference 1
Source, 3-16 Reference 2 Source и 3-17 Reference 3
Source) из фиксированных предустановленных
заданий (пар. 3-10 Preset Reference), переменных
аналоговых заданий, переменных дискретных
импульсных заданий на цифровых входах и
различных заданий, поступающих по
последовательной шине, измеренных в
соответствующих единицах управления
преобразователем частоты ([Гц], [об/мин], [Н-м]
и т. д.).
2. Y (относительное задание): сумма одного
фиксированного предустановленного задания
(пар. 3-14 Preset Relative Reference) и одного
переменного аналогового задания (пар.
3-18 Relative Scaling Reference Resource) в [%].
Два типа задания на входе суммируются по следующей
формуле: Дистанционное задание =X+X*Y/100%. Если
относительное задание не используется, необходимо
установить для параметра 3-18 Relative Scaling Reference
Resource значение [0] No function (Не используется), а
для параметра 3-14 Preset Relative Reference — значение
0 %. Обе функции — увеличение/уменьшение задания и
фиксация задания — могут активизироваться с
помощью цифровых входов преобразователя частоты.
Описание функций и параметров можно найти в
Руководстве по программированию VLT
AutomationDrive FC 360.
Масштабирование аналоговых заданий описывается
группами параметров 6-1* Analog Input 53 (Аналоговый
вход 53) и 6-2* Analog Input 54 (Аналоговый вход 54), а
масштабирование импульсных заданий на цифровых
входах — группой параметров 5-5* Pulse Input
(Импульсный вход).
Пределы и диапазоны заданий устанавливаются в
группе параметров 3-0* Reference Limits (Пределы
задания).
2.4.1
Пределы задания
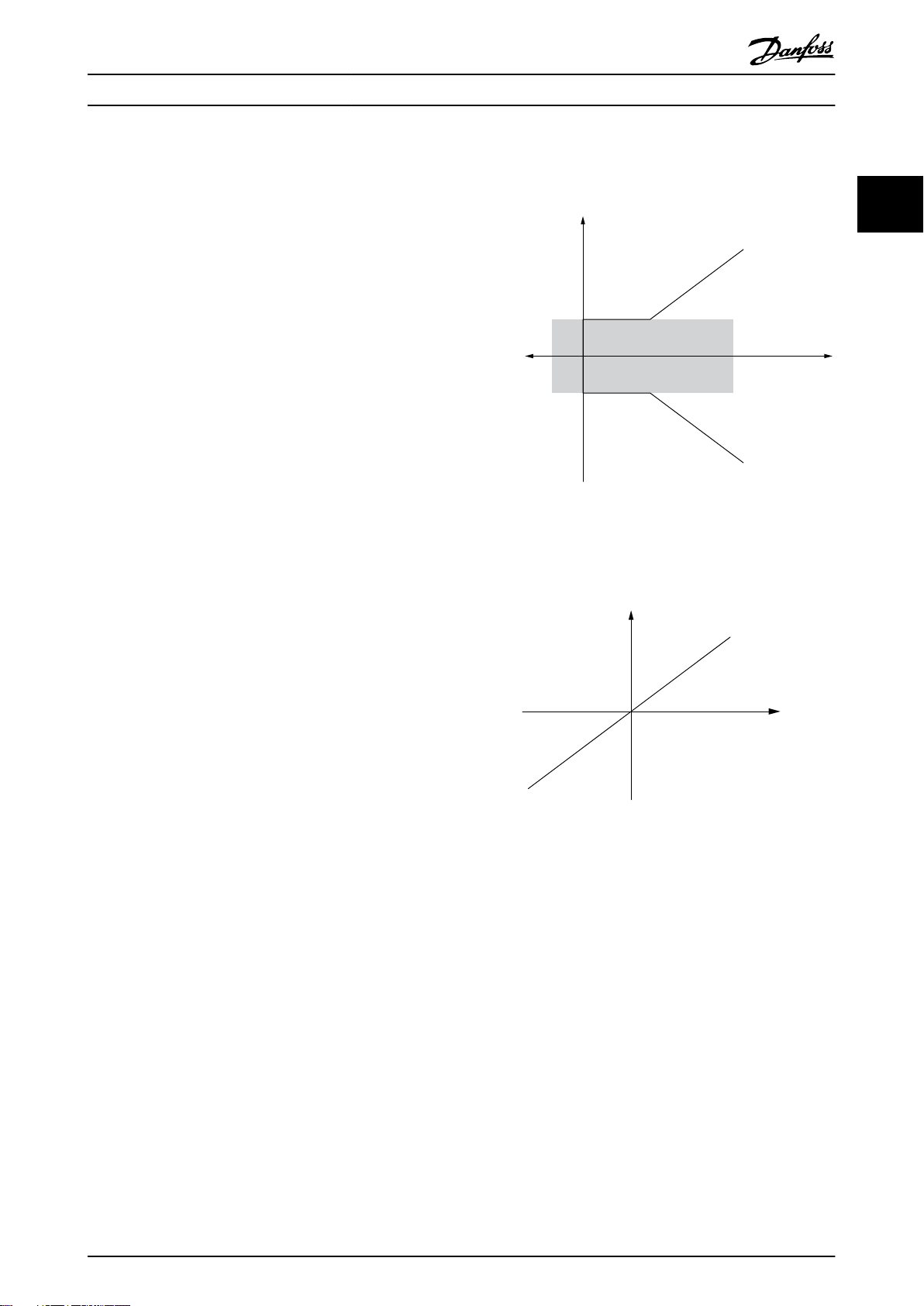
Параметры 3-00 Диапазон задания, 3-02 Мин. задание и
3-03 Максимальное задание совместно определяют
допустимый диапазон суммы всех заданий. Эта сумма
заданий при необходимости фиксируется. Зависимость
между результирующим заданием (после фиксации) и
суммой всех заданий показана на Рисунок 2.17 и
Рисунок 2.18.
Руководство по проектированию
2 2
Рисунок 2.17 Сумма всех активных заданий, когда для
диапазона задания установлено значение «0»
®
Рисунок 2.18 Сумма всех активных заданий, когда для
диапазона задания установлено значение «1».
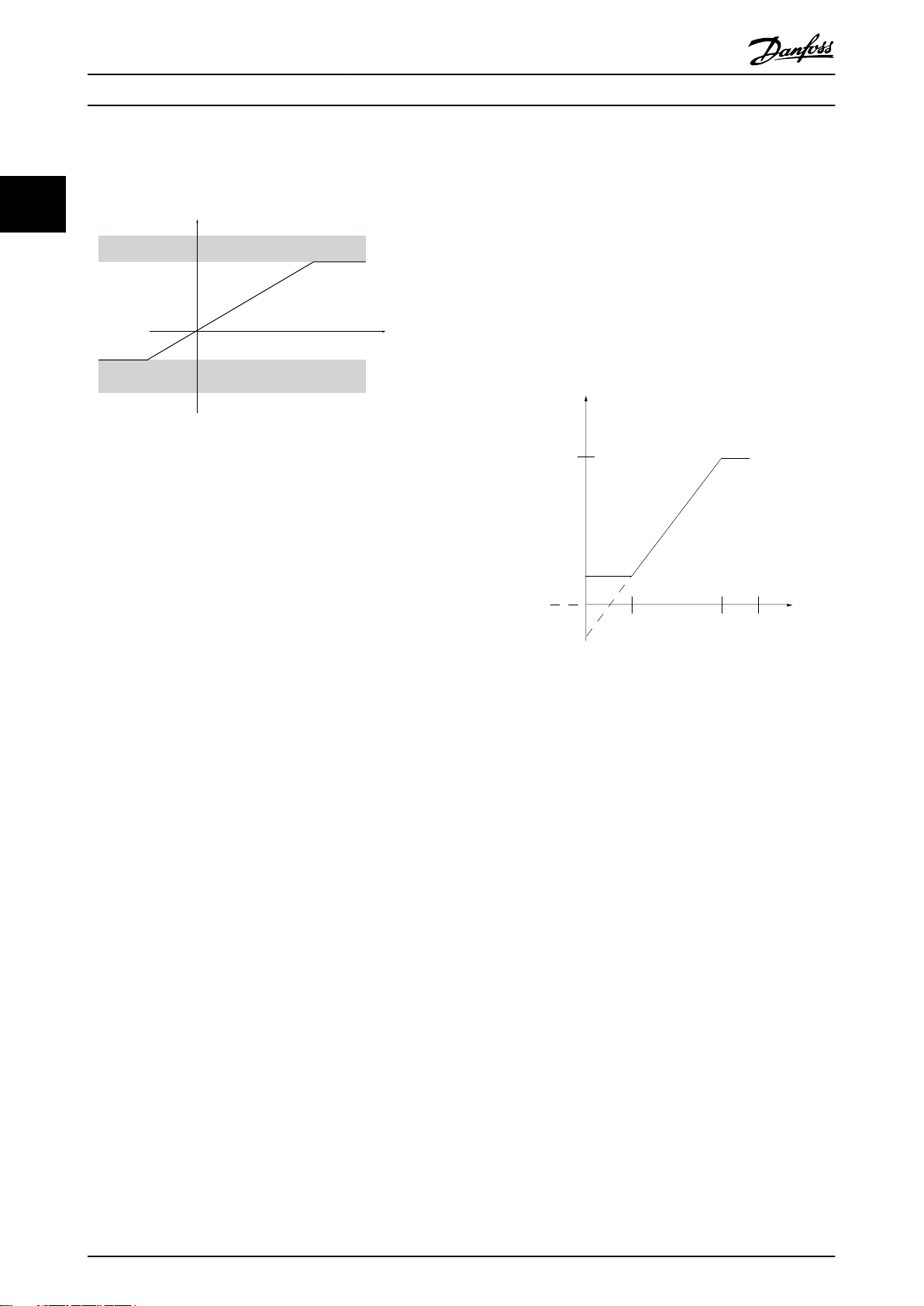
Для параметра 3-02 Мин. задание нельзя установить
значение меньше, чем 0, если для 1-00 Режим
конфигурирования не установлено значение [3] Process
(Процесс). В этом случае зависимость между
результирующим заданием (после фиксации) и суммой
всех заданий имеет вид, показанный на Рисунок 2.19.
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 27
Page 30
130BA186.11
P 3-03
P 3-02
Sum of all
references
P 3-00 Reference Range= [0] Min to Max
Resulting reference
Resource output
[Hz]
Resource input
Terminal X
high
High reference/
feedback value
130BD431.10
8
[V]
50
10
P1
P2
10
Low reference/
feedback value
Обзор изделия
VLT® AutomationDrive FC 360
2.4.3
Масштабирование заданий и
сигналов ОС на аналоговом и
импульсном входах
22
Задания и сигналы обратной связи масштабируются с
аналоговых и цифровых входов одинаково.
Единственным различием является то, что задания выше
или ниже заданных минимальных и максимальных
«конечных точек» (P1 и P2 на Рисунок 2.20) фиксируются,
а сигнал обратной связи выше или ниже этих точек не
фиксируется.
Рисунок 2.19 Сумма всех заданий, когда минимальное
задание установлено как отрицательное значение
Масштабирование предварительно
2.4.2
установленных заданий и заданий
для шины
Предварительно устанавливаемые задания
масштабируются по следующим правилам:
Когда для параметра 3-00 Reference Range
•
установлено значение [0] Min–Max (Мин.–Макс.),
задание при 0 % равно 0 [ед. изм.], где может
использоваться любая единица измерения (об/
мин, м/с, бар и т. п.). Задание 100 % равно
максимальной абсолютной величине
(3-03 Maximum Reference), минимальной
абсолютной величине (3-02 Мин. задание).
Когда для параметра 3-00 Reference Range
•
установлено значение [1] -Max–+Max (-Макс.–
+Макс.), задание при 0 % равно 0 [ед. изм.], а
задание при 100 % равно максимальному
заданию.
Задание по шине масштабируется по следующим
правилам:
Когда для параметра 3-00 Reference Range
•
установлено значение [0] Min–Max (Мин.–Макс.),
задание при 0 % равно минимальному
заданию, а при 100 % — максимальному
заданию.
Когда для параметра 3-00 Reference Range
•
установлено значение [1] -Max–+Max (-Макс.–
+Макс.), задание при -100% равно
максимальному заданию со знаком минус, а
задание при 100 % равно максимальному
заданию.
Рисунок 2.20 Минимальная и максимальная конечные
точки
28 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 31

Обзор изделия Руководство по проектированию
Конечные точки P1 и P2 определяются в Таблица 2.3, в зависимости от того, какой вход используется.
Вход Аналоговый
53
(режим
напряжения)
P1 = (Минимальное входное значение, минимальное значение задания)
Минимальное значение
задания
Минимальное входное
значение
P2 = (Максимальное входное значение, максимальное значение задания)
Максимальное значение
задания
Максимальное входное
значение
Таблица 2.3 Конечные точки P1 и P2
6-14 Клемма
53, низкое
зад./обр. связь
6-10 Клемма
53, низкое
напряжение
[B]
6-15 Клемма
53, высокое
зад./обр. связь
6-11 Клемма
53, высокое
напряжение
[B]
Аналоговый 53
(режим тока)
6-14 Клемма 53,
низкое зад./обр.
связь
6-12 Клемма 53,
малый ток [мА]
6-15 Клемма 53,
высокое зад./
обр. связь
6-13 Клемма 53,
большой ток
[мА]
Аналоговый
54
(режим
напряжения)
6-24 Клемма
54, низкое
зад./обр. связь
6-20 Клемма
54, низкое
напряжение
[B]
6-25 Клемма
54, высокое
зад./обр. связь
6-21 Клемма
54, высокое
напряжение[В]
Аналоговый 54
(режим тока)
6-24 Клемма 54,
низкое зад./обр.
связь
6-22 Клемма 54,
малый ток [мА]
6-25 Клемма 54,
высокое зад./
обр. связь
6-23 Клемма 54,
большой ток
[мА]
Импульсный
вход 29
5-52 Клемма
29, мин.
задание/обр.
связь
5-50 Клемма
29, мин.
частота [Гц]
5-53 Клемма
29, макс.
задание/обр.
связь
5-51 Клемма
29, макс.
частота [Гц]
Импульсный вход
33
5-57 Клемма 33,
мин. задание/обр.
связь
5-55 Клемма 33,
мин. частота [Гц]
5-58 Клемма 33,
макс. задание/обр.
связь
5-56 Клемма 33,
макс. частота [Гц]
2 2
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 29
Page 32

Resource output
[Hz] or “No unit”
Resource input
[mA]
Quadrant 2
Quadrant 3
Quadrant 1
Quadrant 4
Terminal X high
Low reference/feedback
value
High reference/feedback
value
1
-50
165020
P1
P2
0
130BD446.10
forward
reverse
Terminal low
Обзор изделия
VLT® AutomationDrive FC 360
2.4.4 Зона нечувствительности около
нуля
22
В некоторых случаях задание (а изредка и сигнал
обратной связи) должно иметь зону нечувствительности
около нулевой точки (чтобы обеспечить останов
машины, когда задание находится около нуля).
Чтобы ввести в действие зону нечувствительности и
установить ее размер, необходимо сделать
следующее:
Установите значение либо минимального
•
(соответствующий параметр см. в Таблица 2.3),
либо максимального задания равным 0.
Другими словами, P1 или P2 должны
находиться на оси X в Рисунок 2.21.
При этом обе точки, определяющие кривую
•
масштабирования, находятся в одном
квадранте.
Размер зоны нечувствительности определяется либо
точкой P1, либо точкой P2, как показано на Рисунок 2.21.
30 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Рисунок 2.21 Размер зоны нечувствительности
Page 33

20
1
10
V
V
20
1
10
-20
130BD454.10
+
Analog input 53
Low reference 0 Hz
High reference 20 Hz
Low voltage 1 V
High voltage 10 V
Ext. source 1
Range:
0.0% (0 Hz)
100.0% (20 Hz)
100.0% (20 Hz)
Ext. reference
Range:
0.0% (0 Hz)
20 Hz 10V
Ext. Reference
Absolute
0 Hz 1 V
Reference
algorithm
Reference
100.0% (20 Hz)
0.0% (0 Hz)
Range:
Limited to:
0%- +100%
(0 Hz- +20 Hz)
Limited to: -200%- +200%
(-40 Hz- +40 Hz)
Reference is scaled
according to min
max reference giving a
speed.!!!
Scale to
speed
+20 Hz
-20 Hz
Range:
Speed
setpoint
Motor
control
Range:
-8 Hz
+8 Hz
Motor
Digital input 19
Low No reversing
High Reversing
Limits Speed Setpoint
according to min max speed.!!!
Motor PID
Hz
Hz
Dead band
Digital input
General Reference
parameters:
Reference Range: Min - Max
Minimum Reference: 0 Hz (0,0%)
Maximum Reference: 20 Hz (100,0%)
General Motor
parameters:
Motor speed direction:Both directions
Motor speed Low limit: 0 Hz
Motor speed high limit: 8 Hz
Обзор изделия Руководство по проектированию
Случай 1. Положительное задание с зоной нечувствительности, цифровой вход для запуска реверса, часть I
На Рисунок 2.22 показано, как фиксируется вход задания с пределами, лежащими внутри интервала от минимума до
максимума.
2 2
Рисунок 2.22 Фиксация входа задания с пределами, лежащими внутри интервала от от минимума до максимума.
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 31
Page 34

+
30 Hz
1
10
20 Hz
1
10
130BD433.10
-20 Hz
V
V
Analog input 53
Low reference 0 Hz
High reference 20 Hz
Low voltage 1 V
High voltage 10 V
Ext. source 1
Range:
0.0% (0 Hz)
150.0% (30 Hz)
150.0% (30 Hz)
Ext. reference
Range:
0.0% (0 Hz)
30 Hz 10 V
Ext. Reference
Absolute
0 Hz 1 V
Reference
algorithm
Reference
100.0% (20 Hz)
0.0% (0 Hz)
Range:
Limited to:
-100%- +100%
(-20 Hz- +20 Hz)
Limited to: -200%- +200%
(-40 Hz- +40 Hz)
Reference is scaled
according to
max reference giving a
speed.!!!
Scale to
speed
+20 Hz
-20 Hz
Range:
Speed
setpoint
Motor
control
Range:
-8 Hz
+8 Hz
Motor
Digital input 19
Low No reversing
High Reversing
Limits Speed Setpoint
according to min max speed.!!!
Motor PID
Dead band
Digital input
General Reference
parameters:
Reference Range: -Max - Max
Minimum Reference: Don't care
Maximum Reference: 20 Hz (100.0%)
General Motor
parameters:
Motor speed direction: Both directions
Motor speed Low limit: 0 Hz
Motor speed high limit: 10 Hz
Обзор изделия
VLT® AutomationDrive FC 360
Случай 2. Положительное задание с зоной нечувствительности, цифровой вход для запуска реверса, часть II
На Рисунок 2.23 показано, как вход задания с пределами, находящимися вне пределов от -максимума до +максимума,
фиксирует на входах нижний и верхний пределы перед прибавлением к внешнему заданию, а также как внешнее
22
задание фиксируется алгоритмом задания к диапазону от -максимума до +максимума.
Рисунок 2.23 Фиксация входа задания с пределами, лежащими внутри интервала от -максимума до +максимума.
32 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 35

Обзор изделия Руководство по проектированию
2.5 ПИД-регулятор
2.5.1 ПИД-регулятор скорости
1-00 Режим конфигурирования
[0] Speed open loop (Ск-сть, разомкн. конт)
[1] Speed closed loop (Ск-сть, замкн.конт.)
[2] Torque (Крутящий момент) Отсутствует Не активен
[3] Process (Процесс) Не активен Не активен
Таблица 2.4 Конфигурации регулирования, активное регулирование скорости
1) Не активен означает, что этот конкретный режим предусмотрен, но в этом режиме регулятор скорости не действует.
2) Отсутствует означает, что этот конкретный режим не предусмотрен вообще.
Регулирование скорости осуществляется с помощью следующих параметров:
Параметр Описание функции
7-00 Ист.сигн.ОС ПИД-рег.скор.
7-02 Speed PID Proportional Gain
7-03 Постоянн.интегр-я ПИД-регулят.скор.
7-04 Постоянн.дифф-я ПИД-регулят. скор.
7-05 Пр.усил.в цепи дифф-я ПИД-рег.скор
7-06 Пост.вр.фильт.ниж.част.ПИД-рег.скор.
1-01 Принцип управления двигателем
U/f
Не активен
Отсутствует
Выберите, с какого входа должен получать ПИД-регулятор скорости свой сигнал
обратной связи.
Чем выше это значение, тем быстрее происходит регулирование. Однако слишком
большое значение способно привести к автоколебаниям.
Исключает статическую ошибку скорости. Чем ниже значение, тем быстрее реакция.
Однако слишком малое значение способно привести к автоколебаниям.
Обеспечивает коэффициент усиления, пропорциональный скорости изменения сигнала
обратной связи. Установка этого параметра на 0 отключает дифференцирующее звено.
В случае быстрых изменений задания или сигнала обратной связи в данном
применении, что приводит к резкому изменению рассогласования, действие
дифференцирующего звена может стать преобладающим. Это объясняется тем, что
дифференцирующее звено реагирует на изменения рассогласования. Чем быстрее
изменяется рассогласование, тем больше будет коэффициент усиления
дифференцирующего звена. Следовательно, можно ограничить коэффициент усиления
дифференцирующего звена таким образом, чтобы получить возможность установки
приемлемой постоянной времени дифференцирования для медленных изменений и
надлежащее ее значение для быстрых изменений.
Фильтр нижних частот, который подавляет автоколебания сигнала обратной связи и
улучшает характеристики в установившемся режиме. Однако слишком большое время
фильтра ухудшает динамические свойства ПИД-регулятора скорости.
Практические значения параметра 7-06 Speed PID Lowpass Filter Time, взятые из числа
импульсов на оборот (PPR) от энкодера:
PPR энкодера 7-06 Пост.вр.фильт.ниж.част.ПИД-
512 10 мс
1024 5 мс
2048 2 мс
4096 1 мс
1)
2)
+
VVC
Не активен
АКТИВЕН
рег.скор.
2 2
Таблица 2.5 Параметры регулирования скорости
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 33
Page 36

M
3
96 97 9998
91 92 93 95
50
12
L1 L2L1PEL3
W PEVU
F1
L2
L3
N
PE
18
53
27
55
20
32
33
24 Vdc
130BD372.10
Обзор изделия
VLT® AutomationDrive FC 360
Пример программирования регулятора скорости
В этом примере ПИД-регулятор скорости используется
для поддержания постоянной скорости двигателя вне
22
зависимости от изменяющейся нагрузки на двигатель.
Требуемая скорость двигателя устанавливается с
помощью потенциометра, подключенного к клемме 53.
Диапазон скорости составляет 0–1500 об/мин, что
соответствует напряжению 0–10 В на потенциометре.
Пуск и останов осуществляются выключателем,
присоединенным к клемме 18. ПИД-регулятор скорости
контролирует текущее число оборотов двигателя с
помощью инкрементного энкодера, рассчитанного на 24
В (HTL), который вырабатывает сигнал обратной связи.
Датчик обратной связи представляет собой энкодер
(1024 импульса на оборот), подключенный к клеммам 32
и 33. Диапазон частот импульсного сигнала, подаваемых
на клеммы 32 и 33, составляет 4–32 кГц
Рисунок 2.24 Программирование регулятора скорости
34 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 37

Обзор изделия
Руководство по проектированию
Для программирования регулятора скорости выполните шаги, описанные в Таблица 2.6 (см. описание настроек в
Руководстве по программированию).
В Таблица 2.6 предполагается, что остальные параметры и выключатели остаются в положении, задаваемом по
умолчанию.
Функция Номер параметра Настройка
1) Убедитесь, что двигатель работает надлежащим образом. Выполните следующие операции:
Установите параметры двигателя в соответствии с
данными паспортной таблички.
Выполните автоматическую адаптацию двигателя (ААД).
2) Проверьте правильность работы двигателя и установленного на нем энкодера. Выполните следующие операции:
Нажмите [Hand On] (Ручной пуск). Проверьте, работает
ли двигатель, и заметьте, в каком направлении он
вращается (далее это направление будет считаться
«положительным»).
3) Убедитесь, что пределы преобразователя частоты установлены на безопасные значения.
Установите допустимые пределы для заданий.
Проверьте, находятся ли настройки времени изменения
скорости в пределах возможностей преобразователя
частоты и допустимы ли рабочие характеристики для
данного применения.
Установите допустимые пределы для скорости и частоты
двигателя.
4) Выполните конфигурирование регулятора скорости и выберите принцип управления двигателем:
Активизация регулятора скорости
Выбор принципа управления двигателем
5) Выполните конфигурирование и масштабирование задания для регулятора скорости:
Выберите аналоговый вход 53 в качестве источника
задания.
Масштабируйте аналоговый вход 53 на диапазон от 0
об/мин (0 В) до 50 об/мин (10 В)
6) Выполните конфигурирование сигнала энкодера HTL 24 В в качестве обратной связи для управления двигателем и
регулирования скорости:
Установите в качестве входов энкодера цифровые входы
32 и 33.
В качестве источника сигнала обратной связи ПИДрегулятора скорости выберите клемму 32/33.
7) Настройте параметры ПИД-регулятора скорости.
Воспользуйтесь указаниями по настройке (при
необходимости) или произведите настройку вручную.
8) Завершение:
Сохраните установленные значения параметров в
памяти панели LCP.
1-2* Motor Data (Данные
двигателя)
1-29 Automatic Motor
Adaption (AMA)
Установите положительное задание.
3-02 Minimum Reference
3-03 Maximum Reference
3-41 Ramp 1 Ramp Up
Time
3-42 Ramp 1 Ramp Down
Time
4-12 Motor Speed Low
Limit [Hz]
4-14 Motor Speed High
Limit [Hz]
4-19 Max Output
Frequency
1-00 Configuration Mode
1-01 Motor Control
Principle
3-15 Reference 1 Source
6-1* Analog Input 1
(Аналоговый вход 1)
5-14 Terminal 32 Digital
Input
5-15 Terminal 33 Digital
Input
7-00 Speed PID Feedback
Source
7-0* Speed PID Ctrl.
(ПИД-регулят. скор.)
0-50 Копирование с LCP [1] All to LCP (Все в LCP)
Как указано на паспортной табличке
двигателя.
[1] Enable complete AMA (Включ. полной ААД)
0
50
установка по умолчанию
установка по умолчанию
0 Гц
50 Гц
60 Гц
[1] Speed closed loop (Ск-сть, замкн.конт.)
+
[1] VVC
Не требуется (по умолчанию).
Не требуется (по умолчанию).
[82] Encoder input B (Вход B энкодера)
[83] Encoder input А (Вход А энкодера)
[1] 24 V Encoder (Энкодер 24 В)
2 2
Таблица 2.6 Порядок программирования ПИД-регулятора скорости
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 35
Page 38

P 7-30
normal/inverse
PID
P 7-38
*(-1)
Feed forward
Ref.
Handling
Feedback
Handling
% [unit]
% [unit]
%
[unit]
%
[speed]
Scale to
speed
P 4-10
Motor speed
direction
To motor
control
Process PID
130BA178.10
_
+
0%
-100%
100%
0%
-100%
100%
Обзор изделия
VLT® AutomationDrive FC 360
2.5.2 ПИД-регулятор процесса
ПИД-регулятор процесса может использоваться для регулирования параметров применения, которые могут
22
измеряться датчиком (например, датчиком давления, температуры, расхода) и корректироваться подключенным
двигателем посредством насоса, вентилятора или других подключенных устройств.
В Таблица 2.7 показаны конфигурации регулирования, в которых возможно регулирование процесса. Области
действия регулятора скорости указаны в глава 2.3 Структуры управления.
1-00 Configuration Mode 1-01 Motor Control Principle
U/f
[3] Process (Процесс) Отсутствует Процесс
Таблица 2.7 Конфигурация управления
VVC
+
УВЕДОМЛЕНИЕ
ПИД-регулятор процесса может работать при значениях параметров, установленных по умолчанию; тем не менее,
рекомендуется провести оптимизацию характеристик управления системой.
Рисунок 2.25 Схема ПИД-регулятора процесса
36 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 39

Обзор изделия Руководство по проектированию
2.5.3 Параметры, относящиеся к регулятору процесса
Параметр Описание функции
7-20 Process CL Feedback 1 Resource
7-22 Process CL Feedback 2 Resource
7-30 Process PID Normal/ Inverse Control В режиме [0] Normal (Нормальный) реакция регулятора процесса состоит в увеличении
7-31 Process PID Anti Windup
7-32 Process PID Start Speed
7-33 Process PID Proportional Gain
7-34 Process PID Integral Time
7-35 Process PID Differentiation Time
7-36 Process PID Diff. Gain Limit
7-38 Process PID Feed Forward Factor
Выберите источник (а именно аналоговый или импульсный вход), от которого будет
поступать сигнал обратной связи для ПИД-регулятора процесса.
Дополнительная возможность: определите, должен ли ПИД-регулятор процесса
получать дополнительный сигнал обратной связи (и откуда). Если выбран
дополнительный источник обратной связи, то перед использованием в ПИДрегулятора процесса оба сигнала обратной связи будут суммироваться.
скорости вращения двигателя, если поступающий сигнал обратной связи меньше
задания. В режиме [1] Inverse (Инверсный), реакция регулятора процесса заключается в
уменьшении числа оборотов двигателя.
Благодаря действию функции антираскрутки, при достижении предела либо по
частоте, либо по крутящему моменту, устанавливается такой коэффициент усиления
интегрирующего звена, который соответствует фактической частоте. Тем самым
предотвращается интегрирование рассогласования, которое не может быть
скомпенсировано изменением скорости. Эта функция может быть запрещена выбором
варианта [0] Off (Выкл.).
В некоторых применениях достижение требуемой скорости/уставки может
происходить на протяжении продолжительного времени. В таких применениях может
оказаться целесообразным устанавливать фиксированную скорость двигателя
командой преобразователя частоты перед включением регулятора процесса. Это
осуществляется установкой значения скорости пуска ПИД-регулятора процесса в
параметре 7-32 Process PID Start Speed.
Чем выше это значение, тем быстрее происходит регулирование. Однако слишком
большое значение способно привести к автоколебаниям.
Исключает статическую ошибку скорости. Чем ниже значение, тем быстрее реакция.
Однако слишком малое значение способно привести к автоколебаниям.
Обеспечивает коэффициент усиления, пропорциональный скорости изменения
сигнала обратной связи. Установка этого параметра на 0 отключает
дифференцирующее звено.
В случае быстрых изменений задания или сигнала обратной связи в данном
применении, что приводит к резкому изменению рассогласования, действие
дифференцирующего звена может стать преобладающим. Это объясняется тем, что
дифференцирующее звено реагирует на изменения рассогласования. Чем быстрее
изменяется рассогласование, тем больше будет коэффициент усиления
дифференцирующего звена. Таким образом, коэффициент усиления
дифференцирующего звена может быть ограничен таким образом, чтобы постоянная
времени дифференцирующего звена могла быть установлена на значение,
соответствующее медленным изменениям.
В применениях, где имеется хорошая (и приблизительно линейная корреляция) между
заданием процесса и скоростью двигателя, необходимой для достижения такого
задания, возможно использование коэффициента прямой связи для улучшения
динамических характеристик ПИД-регулятора процесса.
2 2
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 37
Page 40

Обзор изделия
Параметр Описание функции
5-54 Pulse Filter Time Constant #29
•
(импульсная клемма 29)
22
5-59 Pulse Filter Time Constant #33
•
(импульсная клемма 33)
6-16 Terminal 53 Filter Time Constant
•
(аналоговая клемма 53)
6-26 Terminal 54 Filter Time Constant
•
(аналоговая клемма 54)
Таблица 2.8 Параметры регулирования процесса
VLT® AutomationDrive FC 360
Если в сигнале обратной связи по току/напряжению присутствуют колебания, их
можно уменьшить с помощью фильтра нижних частот. Постоянная времени
импульсного фильтра соответствует предельной скорости пульсаций, появляющихся в
сигнале обратной связи.
Пример: Если фильтр нижних частот установлен на 0,1 с, предельная скорость
составит 10 рад/с (величина, обратная 0,1 с), что соответствует (10/2 x π)) = 1,6 Гц. Это
означает, что фильтр подавляет все токи/напряжения, которые изменяются с частотой
более 1,6 колебаний в секунду. Управление выполняется только сигналом обратной
связи, который изменяется с частотой (скоростью) менее 1,6 Гц.
Фильтр нижних частот улучшает характеристики установившегося режима, но выбор
слишком большой постоянной времени фильтра ухудшает динамические
характеристики ПИД-регулятора процесса.
38 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 41

Transmitter
96 97 9998
91 92 93 95
50
12
L1 L2L1PEL3
W PEVU
F1
L2
L3
N
PE
130BD373.10
18
53
27
55
54
M
3
Обзор изделия Руководство по проектированию
2.5.4 Пример ПИД-регулятора процесса
На Рисунок 2.26 приведен пример ПИД-регулятора
процесса, используемого в системе вентиляции.
Рисунок 2.26 ПИД-регулятор процесса в системе
вентиляции
2 2
В системе вентиляции имеется возможность
Рисунок 2.27 Двухпроводный датчик
устанавливать температуру в пределах от -5 до 35 °C с
помощью потенциометра на 0–10 В. С помощью
регулятора процесса установленную температуру
можно поддерживать на постоянном уровне.
1. Пуск/останов системы осуществляется с
помощью переключателя, соединенного с
клеммой 18.
Регулирование является инверсным, что означает, что
при повышении температуры скорость вентиляции
также возрастает, при этом подается больше воздуха.
Когда температура снижается, скорость уменьшается.
Используемый датчик имеет рабочий диапазон
температур от -10 до 40 °C, 4–20 мА. Нижний предел
скорости вращения двигателя — 300/1500 об/мин.
Функция Номер
параметра
Инициализируйте преобразователь частоты 14-22 [2] Initialisation (Инициализация): включение-выключение питания
1) Установите параметры двигателя:
Задайте параметры двигателя в соответствии с
данными паспортной таблички.
Выполните полную автоматическую адаптацию
двигателя (ААД)
2) Проверьте правильность направления вращения двигателя.
Если двигатель подключен к преобразователю частоты с прямой очередностью фаз (U–U, V–V, W–W), то вал двигателя обычно
вращается по часовой стрелке (если смотреть со стороны конца вала).
Нажмите [Hand On] (Ручной пуск). Проверьте
направление вращения вала при подаче
ручного задания.
1-2* Как указано на паспортной табличке двигателя
1-29 [1] Enable complete AMA (Включ. полной ААД)
2. Задание температуры с помощью
потенциометра (от -5 до 35 °C, 0–10 В пост.
тока), подключенного к клемме 53.
3. Обратная связь по температуре через датчик
(от -10 до 40 °C, 4–20 мА), подключенный к
клемме 54.
Настройка
— нажмите [Reset] (Сброс)
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 39
Page 42

Обзор изделия
VLT® AutomationDrive FC 360
Если вал двигателя вращается в направлении,
4-10 Выберите правильное направление вала двигателя
противоположном требуемому направлению:
1. Измените направление двигателя в
22
параметре 4-10 Motor Speed Direction.
2. Выключите сеть и дождитесь разрядки звена
постоянного тока.
3. Поменяйте местами две фазы двигателя.
Установите режим конфигурирования 1-00 [3] Process (Процесс)
3) Задайте конфигурацию задания, т. е. диапазон для формирования задания. Задайте масштабирование аналогового входа в
параметре 6-**.
Задайте ед. изм. задания/сигн. ОС
Установите минимальное задание (10 °C)
Установите максимальное задание (80 °C)
Усли установочное значение определяется на
основе предварительно заданного значения
(параметра массива), установите для других
источников заданий значение No Function (Не
используется).
3-01
3-02
3-03
3-10
[60] °C, единица, отображаемая на дисплее
-5 °C
35 °C
[0] 35%
Пар
. 3 −10
Зад.
=
100
0
×
Пар
. 3 −03 −
пар
. 3 −02 = 24, 5°
C
Параметры с 3-14 Предустановл.относительное задание по
3-18 Источник отн. масштабирования задания, [0] = No Function
(Не используется)
4) Откорректируйте предельные значения для преобразователя частоты:
Установите для времени изменения скорости
подходящее значение, например, 20 с.
Установите нижние предельные значения
скорости
Установите верхнее предельное значение
3-41
3-42
4-12
4-14
4-19
20 с
20 с
10 Гц
50 Гц
60 Гц
скорости двигателя
Установите максимальную выходную частоту
Установите в 6-19 Terminal 53 mode и 6-29 Terminal 54 mode режим напряжения или тока.
5) Выполните масштабирование аналоговых входов для заданий и обратной связи.
Установите режим низкого напряжения для
клеммы 53
Установите режим высокого напряжения для
клеммы 53
Установите низкое значение сигнала обратной
6-10
6-11
6-24
6-25
7-20
0 В
10 В
-5 °C
35 °C
[2] Analog input 54 (Аналоговый вход 54)
связи для клеммы 54
Установите высокое значение сигнала обратной
связи для клеммы 54
Задайте источник сигнала ОС
6) Базовые настройки ПИД-регулятора
Нормальный/инверсный режим управления
7-30 [0] Normal (Нормальный)
ПИД-регулятора процесса
Антираскрутка ПИД-регулятора процесса 7-31 [1] On (Вкл.)
Скорость пуска ПИД-рег. пр. 7-32 300 об/мин
Сохранение параметров в LCP 0-50 [1] All to LCP (Все в LCP)
Таблица 2.9 Пример настройки ПИД-регулятора процесса
40 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 43

Обзор изделия
Руководство по проектированию
2.5.5 Оптимизация регулятора процесса
После конфигурирования основных настройки как
описано в глава 2.5.5 Порядок программирования
остается оптимизировать коэффициент усиления
пропорционального звена, постоянную времени
интегрирующего звена и постоянную времени
дифференцирующего звена (параметры 7-33 Process PID
Proportional Gain, 7-34 Process PID Integral Time,
7-35 Process PID Differentiation Time). Для большинства
процессов это выполняется в приведенной ниже
последовательности.
1. Запустите электродвигатель.
2.
Установите для параметра 7-33 Process PID
Proportional Gain значение, равное 0,3, и
увеличивайте его до тех пор, пока сигнал
обратной связи снова не начнет плавно
изменяться. Уменьшайте это значение до
момента стабилизации сигнала обратной связи.
Уменьшите коэффициент усиления
пропорционального звена на 40–60 %.
3.
Установите для параметра 7-34 Process PID
Integral Time значение, равное 20 с, и
уменьшайте его до тех пор, пока сигнал
обратной связи снова не начнет плавно
изменяться. Увеличивайте постоянную времени
интегрирующего звена до момента
стабилизации сигнала обратной связи, а затем
увеличьте ее на 15–50 %.
4. В случае систем высокого быстродействия
используйте только параметр 7-35 Process PID
Differentiation Time (время
дифференцирования). Обычно значение этого
параметра в четыре раза больше
установленного времени интегрирования.
Используйте дифференцирующее звено только
в том случае, если была произведена полная
оптимизация настроек коэффициента усиления
пропорционального звена и постоянной
времени интегрирующего звена. Убедитесь, что
колебания сигнала обратной связи в
достаточной мере подавляются фильтром
нижних частот.
УВЕДОМЛЕНИЕ
Чтобы вызвать изменение сигнала обратной связи,
клавишу запуска/останова можно. при необходимости
нажимать несколько раз.
2.5.6 Метод настройки Циглера —
Николса
Для настройки ПИД-регуляторов преобразователя
частоты Danfoss рекомендует использовать метод
настройки Циглера — Николса.
УВЕДОМЛЕНИЕ
Метод настройки Циглера — Николса не следует
использовать в системах, которые могут быть
повреждены автоколебаниями, создаваемыми при
настройках регулирования с очень малой
устойчивостью.
Критерии для настройки параметров основаны на
оценке системы на границе устойчивости, а не на
реакции на ступенчатое воздействие. Увеличивайте
коэффициент усиления пропорционального звена до
тех пор, пока не будут обнаружены (путем измерения
сигнала обратной связи) незатухающие колебания, т. е.
до момента минимальной устойчивости системы.
Соответствующий коэффициент усиления (Ku)
называется предельным коэффициентом усиления и
представляет собой коэффициент усиления, при
котором начинаются колебания. Период колебаний (Pu)
(называется граничным периодом) определяется, как
показано на Рисунок 2.28, и должен измеряться, когда
амплитуда колебаний достаточно мала.
1. Выберите только пропорциональное
регулирование: это означает, что для
постоянной времени интегрирующего звена
выбирается максимальное значение, а
постоянная времени дифференцирующего
звена выбирается равной нулю.
2. Увеличивайте коэффициент усиления
пропорционального звена до тех пор, пока не
будут достигнуты граница неустойчивости
(незатухающие колебания) и критическое
значение коэффициента усиления Ku.
3. Измерьте период колебаний, чтобы определить
критическую постоянную времени Pu.
4.
С помощью Таблица 2.10 вычислите
необходимые параметры ПИД-регулятора.
Чтобы получить удовлетворительное регулирование,
оператор процесса может производить окончательную
настройку регулятора методом последовательных
приближений.
2 2
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 41
Page 44

130BA183.10
y(t)
t
P
u
Обзор изделия
VLT® AutomationDrive FC 360
22
Рисунок 2.28 Система на границе устойчивости
Тип
управления
Пропорциона
льное
усиление
Постоянная
времени
интегрирован
Время
дифференцир
ования
ия
ПИ-регулятор
Жесткий ПИД-
0,45 * K
0,6 * K
u
u
0,833 * P
0,5 * P
u
u
0,125 * P
–
u
регулятор
ПИД-
0,33 * K
u
0,5 * P
u
0,33 * P
u
регулятор с
некоторым
перерегулиро
ванием
Таблица 2.10 Настройка Циглера — Николса для регулятора
42 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 45

1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Обзор изделия Руководство по проектированию
2.6 Излучение помех и помехоустойчивость в соответствии с требованиями ЭМС
2.6.1 Общие вопросы защиты от излучений в соответствии с требованиями ЭМС
Электрические помехи обычно распространяются по проводящим цепям в диапазоне частот от 150 кГц до 30 МГц.
Воздушные помехи из системы преобразователя частоты в диапазоне частот от 30 МГц до 1 ГГц создаются
преобразователем частоты, кабелем двигателя и двигателем.
Емкостные токи в кабеле двигателя, связанные с высоким значением скорости изменения напряжения двигателя dV/
dt, создают токи утечки.
Применение экранированного кабеля двигателя приводит к увеличению тока утечки (см. Рисунок 2.29), поскольку
емкостная проводимость на землю таких кабелей больше, чем у неэкранированных. Если ток утечки не фильтруется,
он вызывает большие помехи в сети в ВЧ-диапазоне ниже приблизительно 5 МГц. Поскольку ток утечки (I1)
возвращается в устройство через экран (I3), экранированный кабель двигателя принципиально может создавать
только небольшое электромагнитное поле (I4).
Экран снижает излучаемые помехи, но увеличивает низкочастотные помехи в сети. Подключайте экран кабеля
двигателя как к корпусу преобразователя частоты, так и к корпусу двигателя. Наилучшим образом это делается с
использованием соединенных с экраном зажимов, позволяющих исключить применение скрученных концов экрана
(скруток). Скрутки увеличивают сопротивление экрана на высоких частотах, что снижает эффект экранирования и
увеличивает ток утечки (I4).
Подключите экран к корпусу на обоих концах, если экранированный кабель используется для следующих
компонентов:
Периферийная шина
•
Сеть
•
Реле
•
Кабель управления
•
Сигнальный интерфейс
•
Тормоз.
•
Однако в некоторых случаях может потребоваться разрыв экрана, чтобы исключить возникновение контуров тока в
экране.
2 2
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 43
Page 46

Обзор изделия
1 Кабель заземления
2 Экран
3 Питание от сети перем. тока
22
4 Преобразователь частоты
5 Экранированный кабель двигателя
6 Двигатель
Рисунок 2.29 Защита от излучений в соответствии с требованиями ЭМС
VLT® AutomationDrive FC 360
Если экран должен быть расположен на монтажной плате преобразователя частоты, эта плата должна быть
металлической, поскольку токи экрана должны передаваться обратно на блок. Следует обеспечить хороший
электрический контакт монтажной платы с шасси преобразователя частоты через крепежные винты.
При использовании неэкранированных кабелей некоторые требования к излучению помех не могут быть
удовлетворены, хотя требования к помехозащищенности выполняются.
Для уменьшения уровня помех, создаваемых всей системой (блоком и установкой), кабели двигателя и тормоза
должны быть как можно короче. Не прокладывайте сигнальные кабели чувствительных устройств вдоль сетевых
кабелей, а также кабелей двигателя и тормоза. ВЧ-помехи с частотами выше 50 МГц (распространяющиеся по воздуху)
создаются, главным образом, электронными устройствами управления.
Требования по излучению в соответствии с требованиями ЭМС
2.6.2
Результаты испытаний в Таблица 2.11 были получены на системе, в которую входили преобразователь частоты (с
монтажной пластиной), двигатель и экранированные кабели двигателя.
Кондуктивные помехи Излучаемые помехи
EN 55011
Стандарты и
требования
J1
J2
J3
J4
J5
J6
J7
Таблица 2.11 Требования по излучению в соответствии с требованиями ЭМС
Требования помехозащищенности в соответствии с требованиями ЭМС
2.6.3
EN/IEC 61800-3
0,37–2,2 кВт, 380–480 В 25 м Да
3,0–5,5 кВт, 380–480 В 25 м Да
7,5 кВт, 380–480 В 25 м Да
11–15 кВт, 380–480 В 25 м Да
18,5–22 кВт, 380–480 В 25 м Да
30–45 кВт, 380–480 В 25 м Да
55–75 кВт, 380–480 В 25 м Да
Класс A, группа 2
Промышленные условия
Категория С3
Вторые условия
эксплуатации
Класс A, группа 1
Промышленные условия
Категория C2
Первые условия эксплуатации,
ограниченное распространение
Требования к помехоустойчивости для преобразователей частоты зависят от условий эксплуатации. Требования для
производственной среды являются более высокими, нежели требования для среды в жилых помещениях или офисах.
Все преобразователи частоты Danfoss соответствуют требованиям к производственной среде и, следовательно,
отвечают также более низким требованиям к среде в жилых помещениях и офисах с большим запасом по
безопасности.
Для подтверждения устойчивости к помехам, возникающим при протекании электрических процессов, система
(преобразователь частоты с дополнительными устройствами, если они существенны, экранированный кабель
управления, блок управления с потенциометром, кабель двигателя и двигатель) была испытана на воздействие помех.
Испытания проводились в соответствии со следующими базовыми стандартами:
44 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 47

Обзор изделия
EN 61000-4-2 (IEC 61000-4-2), Электростатические разряды (ESD): Воспроизведение электростатических
•
Руководство по проектированию
разрядов, связанных с присутствием человека.
EN 61000-4-3 (IEC 61000-4-3), Защита от излучения: Воспроизведение амплитудно модулируемых
•
воздействий радиолокационного оборудования и оборудования связи, а также мобильных средств связи.
EN 61000-4-4 (IEC 61000-4-4), Импульсные переходные процессы: Воспроизведение помех, вызываемых
•
переключением контактора, реле или аналогичных устройств.
EN 61000-4-5 (IEC 61000-4-5), Кратковременные переходные процессы: Воспроизведение переходных
•
процессов, связанных, например, с ударом молнии вблизи установок.
EN 61000-4-6 (IEC 61000-4-6), Защита от кондуктивных помех: Воспроизведение воздействия
•
радиопередающего оборудования, соединенного между собой кабелями.
Требования к помехозащищенности должны соответствовать стандарту на продукцию IEC 61800-3. Подробнее см. в
Таблица 2.12.
Диапазон напряжений: 380–480 В
Стандарт на продукцию 61800-3
Эл.-статич.
Проверка
Критерий приемки B B B A A
Сетевой кабель — — 2 кВ CN
Кабель двигателя
Кабель тормозного
резистора
Кабель разделения
нагрузки
Кабель реле
Кабель управления
Стандартный кабель/
кабель периферийной
шины
Кабель для LCP
Корпус
разряды
— — 4 кВ ССС —
— —
— —
— — 4 кВ ССС —
— —
— —
— —
4 кВ СD
8 кВ AD
Помехоустойчиво
сть к излучаемым
помехам
10 В/м — — —
Импульсы Броски напряжения Помехоустойчивос
2 кВ/2 Ом DM
2 кВ/12 Ом CM
4 кВ ССС —
4 кВ ССС —
длина > 2м
1 кВ CCC
длина > 2м
1 кВ CCC
длина > 2м
1 кВ CCC
Неэкранированный:
1 кВ/42 Ом CM
Неэкранированный:
1 кВ/42 Ом CM
—
ть к кондуктивным
помехам
10 В
эфф.
10 В
эфф.
10 В
эфф.
10 В
эфф.
10 В
эфф.
10 В
эфф.
10 В
эфф.
10 В
эфф.
2 2
Таблица 2.12 Требования помехозащищенности в соответствии с требованиями ЭМС
Определение
CD: электростатический разряд при контакте
AD: электростатический разряд через воздух
DM: дифференциальный режим
CM: синфазный режим
CN: непосредственная инжекция через межкаскадную цепь
ССС: инжекция через зажим емкостной связи
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 45
Page 48

130BD447.10
1
3
2
a
M
130BB955.12
a
b
Leakage current
Motor cable length
Обзор изделия
VLT® AutomationDrive FC 360
2.7 Гальваническая развязка
PELV обеспечивает защиту посредством очень низкого
22
напряжения. Защита от поражения электрическим током
обеспечена, если электрическое питание имеет
изоляцию типа PELV, а монтаж выполнен в соответствии
с требованиями, изложенными в местных/
государственных нормативах для источников PELV.
ВНИМАНИЕ!
Прежде чем прикасаться к токоведущим частям,
убедитесь, что отключены все прочие входные
напряжения, такие как цепь разделения нагрузки
(подключение промежуточной цепи постоянного
тока), а также подключение двигателя для
кинетического резервирования. Подождите, как
минимум, в течение времени, указанного Таблица 1.2.
Все клеммы управления и выводы реле 01–03/04–06
соответствуют требованиям PELV (защитное сверхнизкое
Неcоблюдение рекомендаций может привести к
летальному исходу или серьезным травмам.
напряжение). PELV не применяется к заземленной ветви
треугольника с напряжением выше 400 В.
Гальваническая (гарантированная) развязка
обеспечивается выполнением требований по усиленной
изоляции и за счет соответствующих длин путей утечек
тока и изоляционных расстояний. Эти требования
указаны в стандарте EN 61800-5-1.
2.8 Ток утечки на землю
Соблюдайте национальные и местные нормативы,
относящиеся к защитному заземлению оборудования с
током утечки > 3,5 мА.
Технология преобразователей частоты предполагает
высокочастотное переключение при высокой мощности.
При этом генерируются токи утечки в проводах
заземления. Ток при отказе преобразователя частоты,
Компоненты, обеспечивающие электрическую изоляцию
как показано в Рисунок 2.30, отвечают также
требованиям к повышенной изоляции и выдерживают
соответствующие испытания, как указано в EN 61800-5-1.
Гальваническую развязку PELV можно видеть в 3 местах
(см. Рисунок 2.30):
возникающий на выходных силовых клеммах, может
содержать компонент постоянного тока, который может
приводить к зарядке конденсаторов фильтра и к
образованию переходных токов заземления.
Ток утечки на землю зависит от конфигурации системы,
в том числе от наличия фильтров ВЧ-помех,
экранированных кабелей двигателя и мощности
Чтобы обеспечить защиту PELV, все соединения с
преобразователя частоты.
клеммами управления должны быть выполнены
согласно требованиям PELV (например, термистор
должен иметь усиленную/двойную изоляцию).
Источник питания (импульсный) для кассеты управления
1
2 Связь между силовой платой питания и кассетой
управления
3 Пользовательские реле
Рисунок 2.30 Гальваническая развязка
Рисунок 2.31 Влияние длины кабеля и мощности на ток
утечки, Pa>P
b
Интерфейс между стандартным интерфейсом RS485 и
контуром ввода-вывода (PELV) функционально
изолирован.
46 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 49

130BB956.12
THVD=0%
THVD=5%
Leakage current
130BB958.12
f
sw
Cable
150 Hz
3rd harmonics
50 Hz
Mains
RCD with low f
cut-
RCD with high f
cut-
Leakage current
Frequency
130BB957.11
Leakage current [mA]
100 Hz
2 kHz
100 kHz
Обзор изделия
Руководство по проектированию
Ток утечки зависит также от линейных искажений.
Рисунок 2.32 Влияние искажения в цепи на ток утечки
Используйте только RCD типа В, которые могут
•
обнаруживать переменные и постоянные токи.
Используйте RCD с задержкой по пусковым
•
токам, чтобы предотвратить отказы,
вызываемые переходными токами на землю.
Размеры RCD следует подбирать с учетом
•
конфигурации системы и условий окружающей
среды.
Рисунок 2.33 Основные источники тока утечки
2 2
УВЕДОМЛЕНИЕ
Большой ток утечки может вызвать выключение RCD.
Во избежание этой проблемы выверните винт RFI
(размеры корпуса J1–J5) или установите для
14-50 Фильтр ВЧ-помех значение [0] Off (Выкл.)
(размеры корпуса J6 и J7) во время зарядки фильтра.
В соответствии со стандартом EN/IEC61800-5-1 (стандарт
по системам силового привода) следует соблюдать
особую осторожность в том случае, если ток утечки
превышает 3,5 мА. Заземление следует усилить одним
из следующих способов.
Сечение провода заземления (клемма 95)
•
должно быть не менее 10 мм².
Следует использовать два отдельных провода
•
заземления соответствующих нормативам
размеров.
Дополнительную информацию см. в стандарте EN/
IEC61800-5-1.
Использование датчиков остаточного тока
Если используются датчики остаточного тока (RCD),
также известные как автоматические выключатели для
защиты от утечек на землю (ELCB), соблюдайте
следующие требования.
Рисунок 2.34 Влияние частоты отключения датчика
остаточного тока (RCD) на величины реагирования/
измеряемые величины
Подробнее см. Примечание о применении RCD.
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 47
Page 50

T
ta
tc
tb
to ta
tc
tb
to ta
130BA167.10
Load
Time
Speed
Обзор изделия
VLT® AutomationDrive FC 360
22
2.9 Функции торможения
2.9.1 Механический удерживающий
тормоз
Механический удерживающий тормоз, устанавливаемый
прямо на валу двигателя, обычно выполняет
статическое торможение.
УВЕДОМЛЕНИЕ
Когда удерживающий тормоз включен в цепь
безопасности, преобразователь частоты не может
обеспечить безопасное управление механическим
тормозом. В полную схему установки должна быть
включена цепь дублирования для управления
тормозом.
2.9.2 Динамическое торможение
Динамическое торможение осуществляется указанными
ниже способами.
Резистивное торможение. IGBT торможения
•
поддерживает перенапряжение на уровне
ниже определенного порога путем
направления энергии торможения от двигателя
к подключенному тормозному резистору
(2-10 Brake Function = [1] Resistor brake
(Резистивн.торможен.)).
Пороговое значение можно отрегулировать с
помощью параметра 2-14 Brake voltage reduce, с
диапазоном 70 В.
Торможение переменным током. Энергия
•
торможения распределяется в двигателе путем
изменения состояний потерь в двигателе.
Функция торможения переменным током не
может быть использована в применениях с
высокой частотой циклических операций,
поскольку это приводит к перегреву двигателя
(2-10 Brake Function [2] AC brake (Торм. перем.
током).
Торможение постоянным током. Постоянный
•
ток с перемодуляцией, добавляемый к
переменному току, действует в качестве
сигнала индукционного торможения (2-02 DC
Braking Time≠0 с).
2.9.3
Выбор тормозного резистора
Тормозной резистор необходим для рассеивания
повышенной мощности, выделяемой при торможении в
генераторном режиме. Применение тормозного
резистора обеспечивает поглощение выделяемой тепла
в тормозном резисторе, а не в преобразователе
частоты. Подробнее см. в Руководстве по
проектированию тормозных резисторов.
Если величина кинетической энергии, передаваемой в
резистор в каждом периоде торможения, не известна,
среднюю мощность можно рассчитать на основе
времени цикла и времени торможения. Прерывистый
рабочий цикл резистора показывает интервал времени,
в течение которого резистор включен. На Рисунок 2.35
показан типичный цикл торможения.
Прерывистый рабочий цикл для резистора
рассчитывается следующим образом:
Рабочий цикл = t
торм.
/T
tb - время торможения в секундах
Т = время цикла в секундах
Рисунок 2.35 Типичный цикл торможения
Диапазон мощности
380–480 В
Длительность цикла (с)
Рабочий цикл торможения при
полном (100 %) крутящем моменте
Рабочий цикл торможения при
повышенном (150/160 %) крутящем
моменте
Таблица 2.13 Торможение при крутящем моменте
повышенной перегрузки
1) Для соответствия характеристикам, указанным в
Таблица 2.13, в преобразователях частоты 30–75 кВт
необходимо использовать внешний тормозной резистор.
0,37–75 кВт
Непрерывный
1)
120
40%
Компания Danfoss предлагает тормозные резисторы с
рабочим циклом 10 % и 40 %. Если используется 10 %
рабочий цикл, тормозные резисторы поглощают
мощность торможения в течение 10 % времени цикла.
Остающиеся 90 % времени цикла используются для
рассеяния избыточного тепла.
48 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 51

Обзор изделия
Руководство по проектированию
УВЕДОМЛЕНИЕ
Убедитесь, что резистор подходит для обработки
требуемого времени торможения.
Максимально допустимая нагрузка на тормозной
резистор определяется пиковой мощностью при
заданном прерывистом цикле и может быть вычислена
следующим образом:
Расчет тормозного резистора
R
торм.
Ом =
U
пост.ток, торм.
P
x 0. 83
пик.
2
где
P
пик.
= P
двиг.
x M
торм.
x η
двиг.
x η
VLT
[Вт]
Очевидно, сопротивление торможения зависит от
напряжения в промежуточной цепи (U
Мощность Тормоз
активен
U
пост.тока,торм.
FC 360
3 x 380–480 В
770 В 800 В 800 В
Предупрежде
ние перед
отключением
пост. тока
).
Отключение
(защитное
отключение)
Пороговое значение можно отрегулировать с помощью
параметра 2-14 Brake voltage reduce, с диапазоном 70 В.
УВЕДОМЛЕНИЕ
Убедитесь, что тормозной резистор выдерживает
напряжение 410 В или 820 В.
УВЕДОМЛЕНИЕ
Сопротивление тормозного резистора не должно
превышать значения, рекомендуемого Danfoss. Если
выбрать тормозной резистор с более высоким
омическим сопротивлением, то тормозной момент,
равный 160 % от номинального крутящего момента,
может не достигаться, поскольку существует
вероятность автоматического отключения
преобразователя частоты из соображений
безопасности.
Сопротивление должно быть больше, чем R
мин.
.
УВЕДОМЛЕНИЕ
Если в выходном транзисторе схемы происходит
короткое замыкание, то рассеяние мощности в
тормозном резисторе может быть предотвращено
только отключением преобразователя частоты от
питающей сети с помощью сетевого выключателя или
контактора. (Контактор может управляться
преобразователем частоты.)
УВЕДОМЛЕНИЕ
Нельзя прикасаться к тормозному резистору,
поскольку во время торможения он может стать
очень горячим. Тормозной резистор следует
размещать в безопасной среде, чтобы исключить
опасность пожара.
2.9.4 Управление с помощью функции
торможения
2 2
Компания Danfoss рекомендует использовать
сопротивление торможения R
, рассчитанное по
рек.
формуле ниже. Рекомендуемое тормозное
опротивление гарантирует, что преобразователь
частоты будет способен тормозиться при наибольшем
тормозном моменте (M
2
U
R
Ом =
рек.
η
обычно составляет 0,80 (≤ 75 кВт); 0,85 (11–22 кВт)
двиг.
η
обычно составляет 0,97
VLT
P
двиг.
пост. тока
x
M
торм.
%
) 160 %.
торм.(%)
x 100x 0,83
xη
x η
VLT
двиг.
В случае преобразователей частоты FC 360 тормозное
сопротивление R
при тормозном моменте, равном
рек.
160 %, определяется выражением:
480В :
480В :
R
R
рек.
рек.
=
=
396349
P
двиг.
397903
P
двиг.
Ом
Ом
1
2
1) Для преобразователей частоты с выходной
мощностью на валу ≤ 7,5 кВт
2) Для преобразователей частоты с выходной
мощностью на валу 11–75 кВт
Тормоз защищен от короткого замыкания тормозного
резистора, а тормозной транзистор контролируется с
целью обнаружения его короткого замыкания. Для
защиты тормозного резистора от перегрузки в случае
возникновения неисправности преобразователя частоты
может использоваться релейный/цифровой выход.
Кроме того, тормоз обеспечивает возможность
считывания значений мгновенной мощности и средней
мощности за последние 120 с. Тормоз может также
контролировать мощность торможения и обеспечивать,
чтобы она не превышала предела, установленного в
параметре 2-12 Brake Power Limit (kW).
УВЕДОМЛЕНИЕ
Контроль мощности тормоза не является защитной
функцией; для предотвращения превышения
предельной мощности тормоза требуется тепловое
реле. Цепь тормозного резистора не защищена от
утечки на землю.
Вместо функции торможения можно с помощью
параметра 2-17 Over-voltage Control включить функцию
контроля перенапряжения (без тормозного резистора).
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 49
Page 52

. . .
. . .
Par. 13-11
Comparator Operator
Par. 13-43
Logic Rule Operator 2
Par. 13-51
SL Controller Event
Par. 13-52
SL Controller Action
130BB671.13
Coast
Start timer
Set Do X low
Select set-up 2
. . .
Running
Warning
Torque limit
Digital input X 30/2
. . .
=
TRUE longer than..
. . .
. . .
22
Обзор изделия
VLT® AutomationDrive FC 360
Данная функция активна для всех блоков. Функция дает
возможность избежать отключения преобразователя
частоты при возрастании напряжения в цепи
постоянного тока. Это достигается путем увеличения
выходной частоты с целью ограничения напряжения,
поступающего из цепи постоянного тока. Данная
функция удобна, например, для предотвращения
отключения преобразователя частоты при очень
коротком времени замедления. В этом случае время
замедления увеличивается.
УВЕДОМЛЕНИЕ
Контроль перенапряжения нельзя включить при
работе с двигателем с постоянными магнитами (т. е.
когда для параметра 1-10 Motor Construction
установлено значение [1] PM non salient SPM (Неявноп.
с пост. магн.)).
2.10 Интеллектуальный логический
контроллер
Интеллектуальное логическое управление (SLC)
представляет собой заданную пользователем
последовательность действий (см. 13-52 Действие
контроллера SL [x]), которая выполняется SLC, когда
соответствующее заданное пользователем событие (см.
13-51 Событие контроллера SL [x]) оценивается SLC как
true (истина).
Условием для события может быть определенный статус
или такое условие, при котором выход из логики или
операнда компаратора определяется как TRUE (Истина).
Это приведет к связанному действию, как показано на
Рисунок 2.36.
Рисунок 2.36 Связанное действие
События и действия пронумерованы и связаны в пары
(состояния). Это означает, что когда наступает событие
[0] (приобретает значение TRUE), выполняется действие
[0]. После этого анализируются условия события [1] и,
если оно оценивается как true (истина), выполняется
действие [1] и т. д. В каждый момент времени
оценивается только одно событие. Если событие
оценено как false (ложь), в течение текущего интервала
сканирования (в SLC) ничего не происходит и никакие
другие события не анализируются. Когда запускается
SLC, в каждом интервале сканирования выполняется
оценка события [0] (и только события [0]). И только
когда событие [0] будет оценено как true (истина), SLC
выполнит действие [0] и начнет оценивать событие [1].
Можно запрограммировать от 1 до 20 событий и
действий.
Когда выполнено последнее событие/действие,
последовательность начинается снова с события [0]/
действия [0]. На рисунке Рисунок 2.37 показан пример с
тремя событиями/действиями.
50 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 53

130BA062.14
State 1
13-51.0
13-52.0
State 2
13-51.1
13-52.1
Start
event P13-01
State 3
13-51.2
13-52.2
State 4
13-51.3
13-52.3
Stop
event P13-02
Stop
event P13-02
Stop
event P13-02
Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
Обзор изделия
Руководство по проектированию
когда ток короткого замыкания превышает допустимое
значение (аварийный сигнал 16, отключение с
блокировкой).
Коммутация на выходе
Коммутация цепей на выходе между двигателем и
преобразователем частоты вполне допустима и не
может повредить преобразователь частоты. Однако
может появиться сообщение о неисправности.
Превышение напряжения, создаваемое двигателем
Напряжение в промежуточной цепи увеличивается,
когда двигатель переходит в генераторный режим. Это
Рисунок 2.37 Последовательность с тремя событиями/
действиями
происходит в следующих случаях.
1. Нагрузка раскручивает двигатель (при
постоянной выходной частоте
преобразователя).
Компараторы
Компараторы используются для сравнения
непрерывных переменных (выходной частоты,
выходного тока, аналогового входного сигнала и т. д.) с
фиксированными предустановленными величинами.
2. При замедлении (уменьшении скорости) при
большом моменте инерции трение низкое и
времени замедления недостаточно для
рассеивания энергии в виде потерь в
преобразователе частоты, двигателе и
установке.
3. Неверная настройка компенсации скольжения
может привести к повышению напряжения в
цепи постоянного тока.
Блок управления может пытаться скорректировать
изменение скорости, если это возможно (пар.
Рисунок 2.38 Компараторы
2-17 Контроль перенапряжения).
При достижении определенного уровня напряжения
преобразователь частоты отключается для защиты
транзисторов и конденсаторов промежуточной цепи.
Правила логики
С помощью логических операторов и, или, не можно
объединять до трех булевых входов (true/false) от
таймеров, компараторов, цифровых входов, битов
состояния и событий.
Для выбора способа регулирования уровня напряжения
промежуточной цепи см. параметры 2-10 Функция
торможения и 2-17 Контроль перенапряжения.
Отключение напряжения сети
При пропадании напряжения сети преобразователь
частоты продолжает работать, пока напряжение
промежуточной цепи не снизится до минимального
уровня, при котором происходит останов (т. е. 320 В).
Продолжительность выполнения выбега инвертором
определяется напряжением сети перед пропаданием
питания и нагрузкой двигателя.
+
Рисунок 2.39 Правила логики
Статическая перегрузка в режиме VVC
При перегрузке преобразователя частоты (достигнут
предел момента, заданный в пар. 4-16 Torque Limit Motor
Mode/4-17 Torque Limit Generator Mode) блоки управления
2.11 Экстремальные условия работы
Короткое замыкание (фаза–фаза двигателя)
Преобразователь частоты имеет защиту от короткого
замыкания, основанную на измерении тока в каждой из
трех фаз двигателя или в цепи постоянного тока.
Короткое замыкание между двумя выходными фазами
приводит к перегрузке преобразователя частоты по
току. Преобразователь частоты отключается отдельно,
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 51
уменьшают выходную частоту для снижения нагрузки.
При сильной перегрузке ток может оказаться столь
большим, что это приведет к отключению
преобразователя частоты примерно через 5–10 с.
Работа на предельном крутящем моменте ограничена
временем (0–60 с), которое задается параметром
14-25 Trip Delay at Torque Limit.
2 2
Page 54

Обзор изделия
VLT® AutomationDrive FC 360
2.11.1 Тепловая защита двигателя
Чтобы защитить систему от серьезных повреждений, в
22
VLT® AutomationDrive FC 360 предусмотрено несколько
специальных функций.
Предел крутящего момента
Предел крутящего момента защищает двигатель от
перегрузки независимо от скорости вращения. Предел
крутящего момента устанавливается в параметре
4-16 Torque Limit Motor Mode и/или 4-17 Torque Limit
Generator Mode, а время останова после
предупреждения о превышении крутящего момента
устанавливается в 14-25 Trip Delay at Torque Limit.
Предел по току
Предел по току задается в параметре 4-18 Current Limit,
а время до отключения при появлении предупреждения
о превышении предела по току задается в 14-24 Trip
Delay at Current Limit.
Нижний предел скорости
Параметр 4-12 Motor Speed Low Limit [Hz] ограничивают
максимальную выходную скорость, которую может
обеспечить преобразователь частоты.
Верхний предел скорости
Параметр 4-14 Motor Speed High Limit [Hz] или 4-19 Max
Output Frequency ограничивают максимальную выходную
скорость, которую может обеспечить преобразователь
частоты.
Электронное тепловое реле (ЭТР)
Функция ЭТР преобразователя частоты измеряет
фактический ток, скорость и время для вычисления
температуры двигателя и его защиты от перегрева
(предупреждение или отключение). Внешний термистор
также доступен. ЭТР — это электронная функция,
которая имитирует биметаллическое реле на основе
внутренних измерений. Ее характеристика представлена
на Рисунок 2.40.
Рисунок 2.40 ЭТР
На оси X показано соотношение между I
номинальным значением I
в секундах перед срабатыванием ЭТР, отключающим
преобразователь частоты. На кривых показана
характерная номинальная скорость: вдвое больше
номинальной скорости и 0,2 от номинальной скорости.
При низкой скорости функция ЭТР срабатывает при
более низкой температуре в связи с меньшим
охлаждением двигателя. Таким образом двигатель
защищен от перегрева даже на малой скорости.
Функция ЭТР вычисляет температуру двигателя на
основе фактического тока и скорости. Вычисленная
температура отображается как параметр для чтения в
16-18 Motor Thermal.
. По оси Y показано время
двиг.
двиг.
и
52 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 55

130BC435.11
CHASSIS/IP20
VLT
MADE BY DANFOSS
IN CHINA
AutomationDrive
www.danfoss.com
R
T/C: FC-360HK37T4E20H2BXCDXXSXXXXAXBX
P/N: 134F2970 S/N: 691950A240
0.37 kW 0.5HP High Overload
IN: 3x380-480V 50/60Hz 1.24/0.99A
OUT: 3x0-Vin 0-500Hz 1.2/1.1A(Tamb. 45 C)
o
1
2
3
CAUTION:
SEE MANUAL
WARNING:
AND LAODSHARING BEFORE SERVICE
STORED CHARGE DO NOT TOUCH UNTIL 4 MIN. AFTER
DISCONNECTION
RISK OF ELECTRIC SHOCK-DUAL SUPPLY DISCONNECT MAINS
130BC437.10
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
F C - 3 6 0 H T 4 E 2 0 H 2 X X C D X X S X X X X A X B X
Q B 0
LAA
Код типа и его выбор Руководство по проектированию
3 Код типа и его выбор
3.1 Заказ
Убедитесь, что оборудование соответствует вашим
требованиям и сведениям заказа, для чего проверьте
мощность, напряжение и данные о перегрузке на
паспортной табличке преобразователя частоты.
1 Код типа
2 Номер для заказа
3 Технические характеристики
Рисунок 3.1 Паспортная табличка 1 и 2
1–6: наименование изделия
7: перегрузка
H: тяжелый режим
Q: нормальный режим
1)
0,37–75 кВт, например
8–10: мощность
K37: 0,37 кВт
1K1: 1,1 кВт
2)
11K: 11 кВт и т. д.
11–12: класс напряжения T4: 380–480 В, 3 фазы
13–15: Класс IP E20: IP20
16–17: ВЧ-помехи H2: класс C3
18: тормозной прерыватель
X: нет
B: встроенный
3)
19: LCP X: нет
20: покрытие печатной платы C: 3C3
21: сетевые клеммы D: разделение нагрузки
29–30: встроенный сетевой
интерфейс
AX: нет
A0: Profibus
AL: ProfiNet
4)
Таблица 3.1 Код типа: различные функции и дополнительные
возможности
Сведения о дополнительных устройствах и принадлежностях
см. в разделе Дополнительные устройства и принадлежности
в Руководстве по проектированию.
1) Для вариантов, предназначенных для работы в нормальных
условиях, только 11–75 кВт. В вариантах, предназначенных для
работы в нормальных условиях, сетевые интерфейсы Profibus и
ProfiNet не предусмотрены.
2) Сведения по всем типоразмерам по мощности см. в
глава 4.1.1 Питание от сети 3 x 380–480 В перем. тока.
3) 0,37–22 кВт со встроенным тормозным прерывателем. 30–
75 кВт — только с внешним тормозным прерывателем.
4) На текущий момент не выпускается.
3 3
Рисунок 3.2 Строка кода типа
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 53
Page 56

Код типа и его выбор
VLT® AutomationDrive FC 360
3.2 Номера для заказа: Дополнительные
устройства и принадлежности
Описание Номера для
заказа
33
Панель управления VLT® LCP 21
Выносной монтажный комплект для
панели VLT® LCP, включающий кабель
длиной 3 м
Закрывающий щитокVLT®, FC 360
132B0254
132B0102
132B0262
1)
2)
1)
Переходник VLT® графической LCP
Панель управления VLT® LCP 102
Вход энкодера VLT®MCB 102, FC 360
Вход резолвера VLT® MCB 103, FC 360
Клеммная крышка VLT® для MCB, J1, FC
360
Клеммная крышка VLT® для MCB, J2, FC
360
Клеммная крышка VLT® для MCB, J3, FC
360
Клеммная крышка VLT® для MCB, J4, FC
360
Клеммная крышка VLT® для MCB, J5, FC
360
Монтажный комплект развязывающей
панели VLT®, J1
Монтажный комплект развязывающей
панели VLT®, J2, J3
Монтажный комплект развязывающей
панели VLT®, J4, J5
Монтажный комплект развязывающей
панели VLT®, J6
Монтажный комплект развязывающей
панели VLT®, J7
132B0281
130B1107
132B0282
132B0283
132B0263
132B0265
132B0266
132B0267
132B0268
132B0258
132B0259
132B0260
132B0284
132B0285
1) 2 вида упаковки — по 6 или 72 шт.
2) 2 шт. в одной упаковке
54 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 57

Код типа и его выбор Руководство по проектированию
3.3 Номера для заказа: Тормозные резисторы
Компания Danfoss предлагает широкую номенклатуру различных резисторов, специально предназначенных для
преобразователей частоты Danfoss. О подборе размеров тормозного резистора см. глава 2.9.4 Управление с помощью
функции торможения. В этом разделе указаны номера для заказа тормозных резисторов.
3.3.1 Номера для заказа: тормозные резисторы 10 %
FC 360 P
T4 [kW]
HK37 0,37 890 1041,98 989 0,030 3000 120 1,5 0,3 139
HK55 0,55 593 693,79 659 0,045 3001 120 1,5 0,4 131
HK75 0,75 434 508,78 483 0,061 3002 120 1,5 0,4 129
H1K1 1,1 288 338,05 321 0,092 3004 120 1,5 0,5 132
H1K5 1,5 208 244,41 232 0,128 3007 120 1,5 0,8 145
H2K2 2,2 139 163,95 155 0,190 3008 120 1,5 0,9 131
H3K0 3 100 118,86 112 0,262 3300 120 1,5 1,3 131
H4K0 4 74 87,93 83 0,354 3335 120 1,5 1,9 128
H5K5 5,5 54 63,33 60 0,492 3336 120 1,5 2,5 127
H7K5 7,5 38 46,05 43 0,677 3337 120 1,5 3,3 132
H11K 11 27 32,99 31 0,945 3338 120 1,5 5,2 130
H15K 15 19 24,02 22 1,297 3339 120 1,5 6,7 129
H18K 18,5 16 19,36 18 1,610 3340 120 1,5 8,3 132
H22K 22 16 18,00 17 1,923 3357 120 1,5 10,1 128
H30K 30 11 14,6 13 2,6 3341 120 2,5 13,3 150
H37K 37 9 11,7 11 3,2 3359 120 2,5 15,3 150
H45K 45 8 9,6 9 3,9 3065 120 10 20 150
H55K 55 6 7,8 7 4,8 3070 120 10 26 150
H75K 75 4 5,7 5 6,6 3231 120 10 36 150
m (HO)
R
[Ом] [Ом] [Ом]
мин.
R
торм., ном.
R
рек.
P
торм.,срд.
[kW] 175Uxxxx [с] [мм²] [А] [%]
Номер
кода
Период Сечение
кабеля
1)
Тепловое
реле
Макс.
тормозн
ой
момент
при R
рек.
3 3
Таблица 3.2 FC 360 — сеть: 380–480 В (T4), рабочий цикл 10 %
1) Вся система кабелей должна соответствовать государственным и местным нормам и правилам в отношении сечения кабелей и
температуры окружающей среды.
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 55
Page 58

Код типа и его выбор
VLT® AutomationDrive FC 360
3.3.2 Номера для заказа: тормозные резисторы 40 %
FC 360 P
m (HO)
33
T4 [kW]
HK37 0,37 890 1041,98 989 0,127 3101 120 1,5 0,4 139
HK55 0,55 593 693,79 659 0,191 3308 120 1,5 0,5 131
HK75 0,75 434 508,78 483 0,260 3309 120 1,5 0,7 129
H1K1 1,1 288 338,05 321 0,391 3310 120 1,5 1 132
H1K5 1,5 208 244,41 232 0,541 3311 120 1,5 1,4 145
H2K2 2,2 139 163,95 155 0,807 3312 120 1,5 2,1 131
H3K0 3 100 118,86 112 1,113 3313 120 1,5 2,7 131
H4K0 4 74 87,93 83 1,504 3314 120 1,5 3,7 128
H5K5 5,5 54 63,33 60 2,088 3315 120 1,5 5 127
H7K5 7,5 38 46,05 43 2,872 3316 120 1,5 7,1 132
H11K 11 27 32,99 31 4,226 3236 120 2,5 11,5 130
H15K 15 19 24,02 22 5,804 3237 120 2,5 14,7 129
H18K 18,5 16 19,36 18 7,201 3238 120 4 19 132
H22K 22 16 18,00 17 8,604 3203 120 4 23 128
H30K 30 11 14,6 13 11,5 3206 120 10 32 150
H37K 37 9 11,7 11 14,3 3210 120 10 38 150
H45K 45 8 9,6 9 17,5 3213 120 16 47 150
H55K 55 6 7,8 7 21,5 3216 120 25 61 150
H75K 75 4 5,7 5 29,6 3219 120 35 81 150
R
[Ом] [Ом] [Ом]
мин.
R
торм., ном.
R
рек.
P
торм.,срд.
[kW] 175Uxxxx [с] [мм²] [А] [%]
Номер
кода
Период Сечение
кабеля
1)
Тепловое
реле
Макс.
тормозн
ой
момент
при R
рек.
Таблица 3.3 FC 360 — сеть: 380–480 В (T4), рабочий цикл 40 %
1) Вся система кабелей должна соответствовать государственным и местным нормам и правилам в отношении сечения кабелей и
температуры окружающей среды.
56 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 59

Технические характеристики Руководство по проектированию
4 Технические характеристики
4.1 Технические характеристики, зависящие от мощности
Типичная выходная мощность на
валу
преобразователя частоты [кВт]
Корпус IP20 J1 J1 J1 J1 J1 J1 J2 J2 J2 J3
Выходной ток
Выходная мощность на валу [кВт] 0,37 0,55 0,75 1,1 1,5 2,2 3 4 5,5 7,5
Непрерывный (3 x 380–440 В) [A] 1,2 1,7 2,2 3 3,7 5,3 7,2 9 12 15,5
Непрерывный (3 x 441–480 В) [A] 1,1 1,6 2,1 2,8 3,4 4,8 6,3 8,2 11 14
Прерывистый (перегрузка 60 с) [A] 1,9 2,7 3,5 4,8 5,9 8,5 11,5 14,4 19,2 24,8
Непрерывная мощность (400 В
перем. тока) [кВА]
Непрерывная мощность (480 В
перем. тока) [кВА]
Макс. входной ток
Непрерывный (3 x 380–440 В) [A] 1,2 1,6 2,1 2,6 3,5 4,7 6,3 8,3 11,2 15,1
Непрерывный (3 x 441–480 В) [A]
Прерывистый (перегрузка 60 с) [A] 1,9 2,6 3,4 4,2 5,6 7,5 10,1 13,3 17,9 24,2
Дополнительные технические характеристики
Макс. поперечное сечение кабеля
(сеть, двигатель, тормоз и цепь
разделения нагрузки) [мм²/AWG]
Расчетные потери мощности при
максимальной номинальной
нагрузке [W]
Вес, корпус IP20 2,3 2,3 2,3 2,3 2,3 2,5 3,6 3,6 3,6 4,1
КПД [%]
2)
3)
HK37
0.37
0,84 1,18 1,53 2,08 2,57 3,68 4,99 6,24 8,32 10,74
0,9 1,3 1,7 2,5 2,8 4,0 5,2 6,8 9,1 11,6
1,0 1,2 1,8 2,0 2,9 3,9 4,3 6,8 9,4 12,6
20,88 25,16 30,01 40,01 52,91 73,97 94,81 115,5 157,54 192,83
96,2 97,0 97,2 97,4 97,4 97,6 97,5 97,6 97,7 98,0
HK55
0.55
HK75
0.75
H1K1
1.1
H1K5
1.5
4 мм²
H2K2
2.2
H3K03H4K04H5K5
5.5
H7K5
7.5
4 4
Таблица 4.1 Питание от сети 3 x 380–480 В перем. тока — тяжелый режим
1)
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 57
Page 60

Технические характеристики
VLT® AutomationDrive FC 360
Типичная выходная мощность на
валу
преобразователя частоты [кВт]
IP20 J4 J4 J5 J5 J6 J6 J6 J7 J7
Выходной ток
Непрерывный (3 x 380–440 В) [A] 23 31 37 42,5 61 73 90 106 147
Непрерывный (3 x 441–480 В) [A] 21 27 34 40 52 65 77 96 124
Прерывистый (перегрузка 60 с) [A] 34,5 46,5 55,5 63,8 91,5 109,5 135 159 220,5
44
Непрерывная мощность (400 В
перем. тока) [кВА]
Непрерывная мощность (480 В
перем. тока) [кВА]
Макс. входной ток
Непрерывный (3 x 380–440 В) [A] 22,1 29,9 35,2 41,5 57 70,3 84,2 102,9 140,3
Непрерывный (3 x 441–480 В) [A] 18,4 24,7 29,3 34,6 49,3 60,8 72,7 88,8 121,1
Прерывистый (перегрузка 60 с) [A] 33,2 44,9 52,8 62,3 85,5 105,5 126,3 154,4 210,5
Дополнительные технические характеристики
Макс. поперечное сечение кабеля
(сеть, двигатель, тормоз) [мм²/AWG]
Расчетные потери мощности при
максимальной номинальной
нагрузке [W]
Масса, корпус IP20 [кг] 9,4 9,5 12,3 12,5 22,4 22,5 22,6 37,3 38,7
КПД [%]3)
2)
H11K
11
15,94 21,48 25,64 29,45 42,3 50,6 62,4 73,4 101,8
17,5 22,4 28,3 33,3 43,2 54,0 64,0 79,8 103,1
289,53 393,36 402,83 467,52 630 848 1175 1250 1507
97,8 97,8 98,1 97,9 98,1 98,0 97,7 98,0 98,2
H15K15H18K
18.5
16 мм² 50 мм² 85 мм²
H22K22H30K30H37K
37
H45K
45
H55K
55
H75K
75
Таблица 4.2 Питание от сети 3 x 380–480 В перем. тока — тяжелый режим
1)
58 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 61

Технические характеристики
Руководство по проектированию
Типичная выходная мощность на
валу
преобразователя частоты [кВт]
IP20 J4 J4 J5 J5 J6 J6 J6 J7 J7
Выходной ток
Непрерывный (3 x 380–440 В) [A] 23 31 37 42,5 61 73 90 106 147
Непрерывный (3 x 441–480 В) [A]
Прерывистый (перегрузка 60 с) [A] 25,3 34,1 40,7 46,8 67,1 80,3 99 116,6 161,7
Непрерывная мощность (400 В
перем. тока) [кВА]
Непрерывная мощность (480 В
перем. тока) [кВА]
Макс. входной ток
Непрерывный (3 x 380–440 В) [A] 22,1 29,9 35,2 41,5 57 70,3 84,2 102,9 140,3
Непрерывный (3 x 441–480 В) [A] 18,4 24,7 29,3 34,6 49,3 60,8 72,7 88,8 121,1
Прерывистый (перегрузка 60 с) [A] 24,3 32,9 38,7 45,7 62,7 77,3 92,6 113,2 154,3
Дополнительные технические характеристики
Макс. поперечное сечение кабеля
(сеть, двигатель, тормоз) [мм²/
AWG]
Расчетные потери мощности при
максимальной номинальной
нагрузке [W]
Масса, корпус IP20 [кг] 9,4 9,5 12,3 12,5 22,4 22,5 22,6 37,3 38,7
КПД [%]3)
2)
Q11K
11
21 27 34 40 52 65 77 96 124
15,94 21,48 25,64 29,45 42,3 50,6 62,4 73,4 101,8
17,5 22,4 28,3 33,3 43,2 54,0 64,0 79,8 103,1
289,53 393,36 402,83 467,52 630 848 1175 1250 1507
97,8 97,8 98,1 97,9 98,1 98,0 97,7 98,0 98,2
Q15K15Q18K
18.5
16 мм² 50 мм² 85 мм²
Q22K22Q30K30Q37K
37
Q45K
45
Q55K
55
Q75K
75
4 4
Таблица 4.3 Питание от сети 3 x 380–480 В перем. тока — нормальная нагрузка
1) Тяжелый режим = крутящий момент 150–160 % в течение 60 с, нормальный режим = крутящий момент 110 % в течение
60 с.
2) Типовые значения потерь мощности приводятся при номинальной нагрузке и должны находиться в пределах
(допуск связан с изменениями напряжения и различием характеристик кабелей).
Значения приведены исходя из типичного КПД двигателя (граница IE2/IE3). Для двигателей с более низким КПД потери в
преобразователе возрастают, и наоборот.
Относится к мощности охлаждения преобразователя частоты. Если частота коммутации выше значения по умолчанию,
возможен рост потерь. Приведенные данные учитывают мощность, потребляемую LCP и типовыми платами управления.
Установка дополнительных устройств и нагрузки заказчика могут увеличить потери на 30 Вт (хотя обычно при полной
нагрузке платы управления, наличии периферийной шины или при установке дополнительных плат в гнездо В увеличение
потерь составляет всего 4 Вт).
Данные о потерях мощности в соответствии с EN 50598-2 см. www.danfoss.com/vltenergyefficiency.
3) Для размеров корпуса J1–J5 измеряется с использованием экранированных кабелей двигателя длиной 5 м при
номинальной нагрузке и номинальной частоте, для размеров корпуса J6 и J7 — с использованием экранированных кабелей
двигателя длиной 33 м при номинальной нагрузке и номинальной частоте. Класс энергоэффективности см. в разделе
Условия окружающей среды в глава 4.2 Общие технические требования. Потери при частичной нагрузке см. на сайте
www.danfoss.com/vltenergyefficiency.
1)
±
15 %
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 59
Page 62

Технические характеристики
VLT® AutomationDrive FC 360
4.2 Общие технические требования
Питание от сети (L1, L2, L3)
Клеммы питания L1, L2, L3
Напряжение питания 380–480 В: от -15 % (-25 %)1) до +10 %
1) Преобразователь частоты может работать с пониженной производительностью при пониженном на 25 %
напряжении. Максимальная выходная мощность преобразователя частоты составляет 75 % в случае напряжения на
входе -25 % и 85 % в случае входного напряжения -15 %.
44
Полный крутящий момент невозможен при напряжении в сети меньше 10 % минимального номинального напряжения
питания преобразователя.
Частота питания 50/60 Гц ±5 %
Макс. кратковременная асимметрия фаз сети питания 3,0 % от номинального напряжения питания
Коэффициент активной мощности (λ) ≥ 0,9 номинального значения при номинальной нагрузке
Коэффициент реактивной мощности (cos ϕ) около (> 0,98)
Число включений входного питания L1, L2, L3 при мощности ≤ 7,5 кВт не более 2 раз в минуту
Число включений входного питания L1, L2, L3 при мощности 11–75 кВт не более 1 раза в минуту
Устройство может использоваться в схеме, способной выдавать симметричный ток менее 100 000 ампер (эфф.
значение) при макс. напряжении 480 В.
Мощность двигателя (U, V, W)
Выходное напряжение 0–100 % от напряжения питания
Выходная частота 0–500 Гц
Выходная частота в режиме VVC
+
0–200 Гц
Число коммутаций на выходе Без ограничения
Время изменения скорости 0,05–3600 с
Характеристики крутящего момента
Пусковой крутящий момент (постоянный крутящий момент) максимум 160 % на протяжении 60 с
Перегрузка по крутящему моменту (постоянный крутящий момент) максимум 160 % на протяжении 60 с
Пусковой крутящий момент (переменный крутящий момент) максимум 110 % на протяжении 60 с
Перегрузка по крутящему моменту (переменный крутящий момент) максимум 110 % на протяжении 60 с
Пусковой ток максимум 200 % на протяжении 1 с
Время нарастания крутящего момента в VVC+ (независимое от частоты переключения fsw)
10 мс
1) Значения в процентах относятся к номинальному крутящему моменту.
2) Время отклика крутящего момента зависит от применения и нагрузки, но, как правило, шаг крутящего момента
от 0 до задания составляет 4–5-кратное время нарастания крутящего момента.
Длина и сечение кабелей
1)
Макс. длина кабеля двигателя (экранированный) 50 м
Макс. длина кабеля двигателя (неэкранированный) 0,37–22 кВт: 75 м, 30–75 кВт: 100 м
Макс. сечение проводов, подключаемых к клеммам управления при монтаже гибким/жестким
проводом 2,5 мм²/14 AWG
Мин. сечение проводов, подключаемых к клеммам управления 0,55 мм²/30 AWG
1) Данные о кабелях питания см. в Таблица 4.1 — Таблица 4.3.
Цифровые входы
Программируемые цифровые входы 7
Номер клеммы 18, 19, 271), 291), 32, 33, 31
Логика PNP или NPN
Уровень напряжения 0–24 В пост. тока
Уровень напряжения, логический «0» PNP < 5 В пост. тока
Уровень напряжения, логическая «1» PNP < 10 В пост. тока
Уровень напряжения, логический «0» NPN > 19 В пост. тока
Уровень напряжения, логическая «1» NPN < 14 В пост. тока
Максимальное напряжение на входе 28 В пост. тока
Диапазон частоты повторения импульсов 4 Гц – 32 кГц
1)
1)
1)
60 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 63

Mains
Functional
isolation
PELV isolation
Motor
DC Bus
High
voltage
Control
+24 V
RS-485
18
31
130BD310.10
Технические характеристики
Руководство по проектированию
(Рабочий цикл) мин. длительность импульсов 4,5 мс
Входное сопротивление, R
i
Приблизительно 4 кОм
1) Клеммы 27 и 29 могут быть также запрограммированы как выходные.
Аналоговые входы
Количество аналоговых входов 2
Номер клеммы 53, 54
Режимы Напряжение или ток
Выбор режима программный
Уровень напряжения 0–10 В
Входное сопротивление, R
i
Приблизительно 10 кОм
Максимальное напряжение от -15 до +20 В
Уровень тока От 0/4 до 20 мА (масштабируемый)
Входное сопротивление, R
i
Приблизительно 200 Ом
Максимальный ток 30 мА
Разрешающая способность аналоговых входов 11 бит
Точность аналоговых входов Погрешность не более 0,5 % от полной шкалы
Полоса частот 100 Гц
Аналоговые входы гальванически изолированы от напряжения питания (PELV) и других высоковольтных клемм.
4 4
Рисунок 4.1 Аналоговые входы
импульсные входы
Программируемые импульсные входы 2
Номера клемм импульсных входов 29, 33
Макс. частота на клеммах 29, 33 32 кГц (двухтактное управление)
Макс. частота на клеммах 29, 33 5 кГц (открытый коллектор)
Мин. частота на клеммах 29, 33 4 Гц
Уровень напряжения см. раздел, посвященный цифровым входам
Максимальное напряжение на входе 28 В пост. тока
Входное сопротивление, R
i
Приблизительно 4 кОм
Точность на импульсном входе (0,1–1 кГц) Максимальная погрешность: 0,1 % от полной шкалы
Точность на импульсном входе (1–32 кГц) Максимальная погрешность: 0,05 % от полной шкалы
Аналоговые выходы
Количество программируемых аналоговых выходов 2
Номер клеммы 45, 42
Диапазон тока аналогового выхода 0/4–20 мA
Макс. нагрузка резистора на аналоговом выходе относительно общего провода 500 Ом
Точность на аналоговом выходе Максимальная погрешность: 0,8 % полной шкалы
Разрешающая способность на аналоговом выходе 10 битов
Аналоговый выход гальванически изолирован от напряжения питания (PELV) и других высоковольтных клемм.
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 61
Page 64

Технические характеристики
Плата управления, последовательная связь через интерфейс RS485
Номер клеммы 68 (P,TX+, RX+), 69 (N,TX-, RX-)
Клемма номер 61 Общий для клемм 68 и 69
Схема последовательной связи RS485 гальванически изолирована от напряжения питания (PELV).
Цифровые выходы
Программируемые цифровые/импульсные выходы: 2
Номер клеммы 27, 29
Уровень напряжения на цифровом/частотном выходе 0–24 В
44
Макс. выходной ток (потребитель или источник) 40 мА
Макс. нагрузка на частотном выходе 1 кОм
Макс. емкостная нагрузка на частотном выходе 10 нФ
Минимальная выходная частота на частотном выходе 4 Гц
Максимальная выходная частота на частотном выходе 32 кГц
Точность частотного выхода Максимальная погрешность: 0,1 % полной шкалы
Разрешающая способность на частотном выходе 10 битов
1) Клеммы 27 и 29 могут быть также запрограммированы как входные.
Цифровой выход гальванически изолирован от напряжения питания (PELV) и других высоковольтных клемм.
Плата управления, выход 24 В пост. тока
Номер клеммы 12
Максимальная нагрузка 100 мА
Источник напряжения 24 В пост. тока гальванически изолирован от напряжения питания (PELV), но у него тот же
потенциал, что у аналоговых и цифровых входов и выходов.
VLT® AutomationDrive FC 360
1)
Выходы реле
Программируемые выходы реле 2
01–03 (нормально замкнутый контакт), 01–02 (нормально разомкнутый контакт), 04–06 (нормально
Реле 01 и 02
Макс. нагрузка (AC-1)1) на клеммах 01–02/04–05 (нормально разомкнутый контакт) (резистивная
нагрузка) 250 В пер. тока, 3 A
Макс. нагрузка (AC-15)1) на клеммах 01–02/04–05 (нормально разомкнутый контакт)
(индуктивная нагрузка при cosφ = 0,4) 250 В пер. тока, 0,2 A
Макс. нагрузка (DC-1)1) на клеммах 01–02/04–05 (нормально разомкнутый контакт) (резистивная
нагрузка) 30 В пост. тока, 2 А
Макс. нагрузка (DC-13)1) на клеммах 01–02/04–05 (нормально разомкнутый контакт)
(индуктивная нагрузка) 24 В пост. тока, 0,1 А
Макс. нагрузка (AC-1)1) на клеммах 01–03/04–06 (нормально замкнутый контакт) (резистивная
нагрузка) 250 В пер. тока, 3 A
Макс. нагрузка (AC-15)1) на клеммах 01–03/04–06 (нормально замкнутый контакт) (индуктивная
нагрузка при cosφ = 0,4) 250 В пер. тока, 0,2 A
Макс. нагрузка (DC-1)1) на клеммах 01–03/04–06 (нормально замкнутый контакт) (резистивная
нагрузка) 30 В пост. тока, 2 А
Мин. нагрузка на клеммах 01–03 (нормально замкнутый контакт), 01–02
(нормально разомкнутый контакт) 24 В пост. тока, 10 мА, 24 В пер. тока, 20 мА
1) Стандарт IEC 60947, части 4 и 5
Контакты реле имеют гальваническую развязку от остальной части схемы благодаря усиленной изоляции.
Плата управления, выход +10 В пост. тока
Номер клеммы 50
Выходное напряжение 10,5 В ±0,5 В
Максимальная нагрузка 15 мА
Источник напряжения 10 В пост. тока гальванически изолирован от напряжения питания (PELV) и других
высоковольтных клемм.
замкнутый контакт), 04–05 (нормально разомкнутый контакт)
62 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 65

Технические характеристики
Характеристики управления
Разрешающая способность выходной частоты в интервале 0–500 Гц ±0,003 Гц
Время реакции системы (клеммы 18, 19, 27, 29, 32, 33) ≤ 2 мс
Диапазон регулирования скорости (разомкнутый контур) 1:100 синхронной скорости вращения
Точность регулирования скорости вращения (разомкнутый контур) ± 0,5 % от номинальной скорости
Точность скорости вращения (замкнутый контур) ± 0,1 % от номинальной скорости
Все характеристики регулирования относятся к управлению 4-полюсным асинхронным двигателем.
Руководство по проектированию
Условия окружающей среды
Размеры корпуса J1–J7 IP20
Испытание вибрацией, все размеры корпусов 1,0 g
Относительная влажность 5–95 % (IEC 721-3-3; класс 3K3 (без конденсации)) во время работы
Агрессивная среда (IEC 60068-2-43), тест H2S
Метод испытаний соответствует требованиям стандарта IEC 60068-2-43 H2S (10 дней)
Температура окружающей среды (в режиме коммутации 60 AVM)
– со снижением номинальных характеристик максимум 55 °C
– при полном непрерывном выходном токе для определенного типоразмера максимум 50 °C
– при полном непрерывном выходном токе максимум 45 °C
Мин. температура окружающей среды во время работы с полной нагрузкой 0 °C
Мин. температура окружающей среды при работе с пониженной производительностью -10 °C
Температура при хранении/транспортировке от -25 до +65/70 °C
Макс. высота над уровнем моря без снижения номинальных характеристик 1000 м
Макс. высота над уровнем моря со снижением номинальных характеристик 3000 м
EN 61800-3, EN 61000-3-2, EN 61000-3-3, EN 61000-3-11,
Стандарты ЭМС, излучение
Стандарты ЭМС, помехоустойчивость
Класс энергоэффективности
1) Определяется в соответствии с требованием стандарта EN50598-2 при следующих условиях:
Номинальная нагрузка
•
Частота 90 % от номинальной
•
Заводская настройка частоты коммутации
•
Заводская настройка метода коммутации
•
1)
EN 61000-3-12, EN 61000-6-3/4, EN 55011, IEC 61800-3
EN 61800-3, EN 61000-6-1/2, EN 61000-4-2,
EN 61000-4-3, EN 61000-4-4, EN 61000-4-5, EN 61000-4-6
класс Kd
IE2
4 4
1)
Рабочие характеристики платы управления
Интервал сканирования 1 мс
Средства и функции защиты
Электронная тепловая защита электродвигателя от перегрузки.
•
Контроль температуры радиатора обеспечивает отключение преобразователя частоты при достижении
•
определенной температуры. Отключение схемы защиты от повышенной температуры невозможно до тех пор,
пока температура радиатора не понизится уровня предельной температуры.
Преобразователь частоты защищен от короткого замыкания клемм двигателя U, V, W.
•
При потере фазы сети питания преобразователь частоты отключается или выдает предупреждение (в
•
зависимости от нагрузки и заданных параметров).
Отслеживание напряжения промежуточной цепи обеспечивает отключение преобразователя частоты при
•
значительном понижении или повышении напряжения промежуточной цепи.
Преобразователь частоты защищен от короткого замыкания на землю клемм двигателя U, V, W.
•
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 63
Page 66

Технические характеристики
VLT® AutomationDrive FC 360
4.3 Предохранители
Размер
корпуса
Мощность [кВт] Предохранитель в соотв. с
требованиями ЕС
4.3.1 Введение
Для защиты на случай поломки компонента внутри
преобразователя частоты (первая неисправность)
используйте предохранители и/или автоматические
выключатели на стороне питания.
44
Защита параллельных цепей
Все параллельные цепи в установке, коммутационные
устройства, механизмы и т. д. должны иметь защиту от
короткого замыкания и перегрузки по току в
соответствии с государственными/международными
правилами.
УВЕДОМЛЕНИЕ
Эти рекомендации не охватывают защиту
параллельных цепей при сертификации по UL.
Протестированные и рекомендуемые предохранители и
автоматические выключатели указаны в Таблица 4.4.
Если предохранители выбираются в соответствии с
рекомендациями, возможные повреждения могут
ограничиваться повреждениями внутри
преобразователя частоты.
ВНИМАНИЕ!
Несоблюдение приведенных рекомендаций может
привести к возникновению рисков для персонала, а
также к повреждению преобразователя частоты и
иного оборудования.
4.3.2 Соответствие требованиям ЕС
УВЕДОМЛЕНИЕ
Использование предохранителей или автоматических
выключателей является обязательным для
соответствия IEC 60364 (в ЕС).
В схеме, способной выдавать эффективный ток 100 000
А (симметричный) при напряжении 380–480 В, Danfoss
рекомендует применять предохранители,
перечисленные в Таблица 4.4, с учетом номинального
напряжения преобразователя частоты. При
использовании правильных предохранителей
номинальный ток короткого замыкания (SCCR)
преобразователя частоты составляет 100 000 А (эфф.).
J1
J2
J3 7,5 gG-32
J4 11–15 gG-50
J5
J6
J7
Таблица 4.4 Предохранитель с маркировкой CE, 380–480 В,
размеры корпуса J1–J7
4.4
КПД
КПД преобразователя частоты (η
Нагрузка преобразователя частоты мало влияет на его
КПД. Обычно КПД при номинальной частоте двигателя
f
постоянен, даже при изменении величины
M,N
крутящего момента на валу двигателя в пределах от 100
до 75 % номинального момента, т.е. в случае частичных
нагрузок.
Это также означает, что КПД преобразователя частоты
не меняется даже при выборе других характеристик U/f.
Однако характеристики U/f влияют на КПД двигателя.
КПД несколько снижается при задании частоты
коммутации выше значения по умолчанию. КПД также
немного уменьшается при напряжении питающей сети
480 В и при длине кабеля свыше 30 м.
Расчет КПД преобразователя частоты
При определении КПД преобразователя частоты для
различных скоростей и нагрузок используйте
Рисунок 4.2. Коэффициент на этой диаграмме нужно
умножить на удельный КПД, указанный в таблицах
технических характеристик.
0,37–1,1
2,2
3,0
4,0
5,5
18,5
22
30
45
55
75
VLT
gG-101,5
gG-25
gG-80
gG-12537
aR-250
)
64 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 67

1.0
0.99
0.98
0.97
0.96
0.95
0.93
0.92
0% 50% 100% 200%
0.94
Relative Eciency
130BB252.11
1.01
150%
% Speed
100% load 75% load 50% load 25% load
Технические характеристики
Руководство по проектированию
Рисунок 4.2 Типичные кривые КПД
КПД двигателя (η
ДВИГ.
)
КПД двигателя, подключенного к преобразователю
частоты, зависит от уровня намагничивания. Обычно
КПД почти так же высок, как и при питании двигателя
непосредственно от сети. КПД двигателя зависит от его
типа.
В диапазоне крутящего момента 75–100 % от
номинального, КПД двигателя практически постоянен
как при работе от преобразователя частоты, так и при
питании непосредственно от сети.
У маломощных двигателей влияние на КПД
характеристик U/f незначительно. В то же время для
двигателей мощностью 11 кВт и выше имеется
существенный выигрыш.
Частота коммутации на КПД маломощных двигателей
обычно не влияет. Для двигателей мощностью 11 кВт и
выше КПД увеличивается (1–2 %) поскольку при
высокой частоте коммутации ток двигателя имеет почти
идеальную синусоидальную форму.
КПД системы (η
СИСТЕМЫ
)
Для вычисления КПД системы необходимо умножить
КПД преобразователя частоты (η
(η
):
ДВИГ.
η
4.5
= η
СИСТЕМЫ
VLT
x η
ДВИГ.
Акустический шум
Акустический шум преобразователя частоты
создается тремя источниками:
Дросселями постоянного тока промежуточной
•
цепи.
Встроенным вентилятором.
•
Дросселем фильтра ВЧ-помех.
•
Типовые значения, измеренные на расстоянии 1 м от
блока:
Размер корпуса
J1 (0,37–2,2 кВт)
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 65
При скорости
вентилятора 50%
[дБА]
Нет данных
на КПД двигателя
VLT)
При полной
скорости
вентилятора [дБА]
1)
51
J2 (3,0–5,5 кВт)
J3 (7,5 кВт)
J4 (11–15 кВт) 52 66
J5 (18,5–22 кВт) 57,5 63
J6 (30–45 кВт) 56 71
J7 (55–75 кВт) 63 72
Таблица 4.5 Типичные измеренные значения
1) Корпуса J1–J3 имеют фиксированную скорость
вентилятора.
Нет данных
Нет данных
1)
1)
55
54
4.6 Условия du/dt
При переключении транзистора в мосте
преобразователя частоты напряжение на двигателе
увеличивается со скоростью dU/dt, зависящей от
следующих факторов:
Тип кабеля двигателя.
•
Поперечное сечение кабеля двигателя.
•
Длина кабеля двигателя.
•
Использование экранированного или
•
неэкранированного кабеля двигателя.
Индуктивное сопротивление
•
Собственная индуктивность вызывает скачок
напряжения U
стабилизируется на уровне, зависимом от напряжения в
промежуточной цепи. Время нарастания и пиковое
напряжение U
Если пиковое напряжение очень велико, это влияет на
двигатели без изоляции фазных обмоток. Чем длинее
кабель двигателя, тем больше время нарастания и
пиковое напряжение.
Пиковое напряжение на клеммах двигателя вызывается
переключением транзисторов IGBT. FC 360
соответствует требованиям IEC 60034-25 в части,
касающейся двигателей, сконструированных для
управления посредством преобразователей частоты. FC
360 соответствует также IEC 60034-17 в части,
касающейся обычных двигателей, управляемых
преобразователями частоты.
Следующие данные dU/dt измерены на стороне клеммы
двигателя:
Длина
кабеля [м]
5 400 0,164 0,98 5,4
50 400 0,292 1,04 2,81
5 480 0,168 1,09 5,27
50 480 0,32 1,23 3,08
Таблица 4.6 Данные dU/dt для FC 360, 2,2 кВт
на двигателе, после чего оно
ПИК.
влияют на срок службы двигателя.
ПИК.
Время
Напряж
ение
сети [В]
нарастани
я
[мкс]
U
PEAK
[kV]
dU/dt
[кВт/мкс]
4 4
Page 68

Технические характеристики
VLT® AutomationDrive FC 360
Время
Напряж
Длина
кабеля [м]
5 400 0,18 0,86 3,84
50 400 0,376 0,96 2,08
5 480 0,196 0,97 3,98
50 480 0,38 1,19 2,5
44
Таблица 4.7 Данные dU/dt для FC 360, 5,5 кВт
Длина
кабеля [м]
5 400 0,166 0,992 4,85
50 400 0,372 1,08 2,33
5 480 0,168 1,1 5,2
50 480 0,352 1,25 2,85
Таблица 4.8 Данные dU/dt для FC 360, 7,5 кВт
Длина
кабеля [м]
5 400 0,224 0,99 3,54
50 400 0,392 1,07 2,19
5 480 0,236 1,14 3,87
50 480 0,408 1,33 2,61
ение
сети [В]
Напряж
ение
сети [В]
Напряж
ение
сети [В]
нарастани
я
[мкс]
Время
нарастани
я
[мкс]
Время
нарастани
я
[мкс]
U
[kV]
U
[kV]
U
[kV]
PEAK
PEAK
PEAK
dU/dt
[кВт/мкс]
dU/dt
[кВт/мкс]
dU/dt
[кВт/мкс]
Напряж
Длина
кабеля [м]
5 400 0,14 0,64 3,60
50 400 0,548 0,95 1,37
5 480 0,146 0,70 3,86
50 480 0,54 1,13 1,68
Таблица 4.12 Данные dU/dt для FC 360, 45 кВт
Длина
кабеля [м]
5 400 0,206 0,91 3,52
54 400 0,616 1,03 1,34
5 480 0,212 1,06 3,99
54 480 0,62 1,23 1,59
Таблица 4.13 Данные dU/dt для FC 360, 55 кВт
Длина
кабеля [м]
5 400 0,232 0,81 2,82
50 400 0,484 1,03 1,70
5 480 0,176 1,06 4,77
50 480 0,392 1,19 2,45
ение
сети [В]
Напряж
ение
сети [В]
Напряж
ение
сети [В]
Время
нарастани
я
[мкс]
Время
нарастани
я
[мкс]
Время
нарастани
я
[мкс]
U
[kV]
U
[kV]
U
[kV]
PEAK
PEAK
PEAK
dU/dt
[кВт/мкс]
dU/dt
[кВт/мкс]
dU/dt
[кВт/мкс]
Таблица 4.9 Данные dU/dt для FC 360, 15 кВт
Время
Напряж
Длина
кабеля [м]
5 400 0,272 0,947 2,79
50 400 0,344 1,03 2,4
5 480 0,316 1,01 2,56
50 480 0,368 1,2 2,61
Таблица 4.10 Данные dU/dt для FC 360, 22 кВт
Длина
кабеля [м]
5 400 0,212 0,81 3,08
53 400 0,294 0,94 2,56
5 480 0,228 0,95 3,37
53 480 0,274 1,11 3,24
Таблица 4.11 Данные dU/dt для FC 360, 37 кВт
ение
сети [В]
Напряж
ение
сети [В]
нарастани
я
[мкс]
Время
нарастани
я
[мкс]
U
[kV]
U
[kV]
PEAK
PEAK
dU/dt
[кВт/мкс]
dU/dt
[кВт/мкс]
Таблица 4.14 Данные dU/dt для FC 360, 75 кВт
4.7
Особые условия
Рассмотрите возможность снижения номинальных
характеристик в некоторых особых условиях, влияющих
на работу преобразователя частоты. В некоторых
условиях снижение номинальных параметров
необходимо произвести вручную.
В других же условиях преобразователь частоты
выполняет автоматический переход на несколько
пониженные характеристики. Снижение номинальных
характеристик используется для обеспечения работы в
критических режимах, в которых в противном случае
может произойти отключение.
4.7.1
Снижение номинальных
характеристик вручную
Необходимость снижения номинальных характеристик
вручную может быть рассмотрена в отношении
следующих факторов:
66 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 69

Технические характеристики
Руководство по проектированию
Атмосферное давление — при установке
•
оборудования на высоте выше 1 км
Скорость двигателя — при непрерывной
•
работе на низких оборотах в применениях с
постоянным крутящим моментом
Температура окружающей среды — при
•
температуре окружающей среды выше 45 °C
(для некоторых типов — выше 50 °C),
подробнее см. Таблица 4.15 и Таблица 4.16.
Размер
корпуса
Таблица 4.15 Снижение номинальных характеристик при
380 В
Мощность
[кВт]
0,37 1,2 1,2
0,55 1,7 1,7
J1
J2
J3 7,5 15,5 13,1
J4
J5
J6
J7
0,75 2,2 2,2
18,5 37,0 37,0
Максимальный
выходной ток
при 45 °C
1,1 3,0 3,0
1,5 3,7 3,0
2,2 5,3 4,1
3 7,2 7,2
4 9,0 9,0
5,5 12,0 10,2
11 23,0 23,0
15 31,0 26,0
22 42,5 40,0
30 61 61
37 73 73
45 90 77
55 106 106
75 147 125
Максимальный
выходной ток
при 50 °C
Размер
корпуса
Таблица 4.16 Снижение номинальных характеристик при
480 В
4.7.2
Мощность
[кВт]
0,37 1,1 1,1
0,55 1,6 1,6
J1
J2
J3 7,5 14,0 11,9
J4
J5
J6
J7
0,75 2,1 2,1
18,5 34,0 34,0
Максимальный
выходной ток
при 45 °C
1,1 3,0 2,8
1,5 3,4 2,8
2,2 4,8 3,8
3 6,3 6,3
4 8,2 8,2
5,5 11,0 9,4
11 21,0 21,0
15 27,0 22,6
22 40,0 37,7
30 52 52
37 65 65
45 77 76
55 96 96
75 124 117
Максимальный
выходной ток
при 50 °C
Автоматическое снижение
номинальных параметров
Преобразователь частоты непрерывно проверяет
критические уровни:
Критически высокую температуру на плате
•
управления или радиаторе.
Высокую нагрузку на двигатель.
•
Нижний предел скорости двигателя.
•
Срабатывающие сигналы защиты
•
(перенапряжение/недостаточное напряжение,
перегрузка по току, замыкание на землю и
короткое замыкание).
При обнаружении критического уровня
преобразователь частоты регулирует частоту
коммутации.
4 4
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 67
Page 70

Монтаж и настройка RS485
VLT® AutomationDrive FC 360
5 Монтаж и настройка RS485
5.1 Введение
5.1.1 Краткое описание
RS485 — это интерфейс двухпроводной шины, совместимый с топологией многоабонентской сети, в которой узлы
могут подключаться по шине или через ответвительные кабели от общей магистральной линии. Всего к одному
сегменту сети может быть подключено до 32 узлов.
Сегменты сети разделены ретрансляторами, см. Рисунок 5.1.
55
Рисунок 5.1 Интерфейс шины RS485
УВЕДОМЛЕНИЕ
Каждый ретранслятор действует как узел внутри
сегмента, в котором он установлен. Каждый узел в
составе данной сети должен иметь уникальный адрес,
не повторяющийся в остальных сегментах.
Замкните каждый сегмент на обоих концах, используя
либо конечный переключатель (S801) преобразователей
частоты, либо оконечную резисторную схему со
смещением. Для устройства шины всегда используйте
экранированную витую пару (STP) и следуйте
общепринятым способам монтажа.
Большое значение имеет обеспечение низкого
импеданса заземления экрана в каждом узле, в том
числе по высоким частотам. Подключите экран с
большой поверхностью к «земле» с помощью,
например, кабельного зажима или проводящего
кабельного уплотнения. Может потребоваться
применение кабелей выравнивания потенциалов с
целью создания одинакового потенциала по всей сети,
особенно в установках с кабелями большой длины.
Для предотвращения несогласования импедансов
используйте во всей сети кабели одного типа.
Подключайте двигатель к преобразователю частоты
экранированным кабелем.
Кабель Экранированная витая пара (STP)
Импеданс [Ом]
Длина кабеля
[м]
Таблица 5.1 Технические характеристики кабелей
120
Не более 1200 м (включая ответвительные
линии)
Не более 500 м между станциями
68 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 71

61 68 69
N
P
COMM. GND
130BB795.10
Монтаж и настройка RS485 Руководство по проектированию
5.1.2 Подключение сети
Подключите преобразователь частоты к сети RS485
следующим образом (см. также Рисунок 5.2):
1. Подключите сигнальные провода к клеммам 68
(P+) и 69 (N-) на главной плате управления
преобразователя частоты.
2. Подключите экран кабеля к кабельным
зажимам.
УВЕДОМЛЕНИЕ
Для снижения помех между проводниками
рекомендуется использовать экранированные кабели
и витые пары.
Рисунок 5.2 Подключение сети
5.1.3 Набор аппаратного обеспечения
Параметр Функция
8-33 Parity / Stop
Bits
Установите биты контроля четности и
число стоповых битов.
УВЕДОМЛЕНИЕ
Выбор по умолчанию зависит от
протокола, выбранного в пар.
8-30 Protocol.
8-35 Minimum
Response Delay
8-36 Maximum
Response Delay
8-37 Maximum
Inter-char delay
Задайте минимальную задержку между
получением запроса и передачей ответа.
Эта функция используется для
преодоления задержек при
реверсировании передачи данных
модемом.
Задайте максимальную задержку между
передачей запроса и получением ответа.
В случае прерывания передачи установите
максимальную задержку между двумя
получаемыми байтами, чтобы обеспечить
тайм-аут.
УВЕДОМЛЕНИЕ
Выбор по умолчанию зависит от
протокола, выбранного в пар.
8-30 Protocol.
5 5
Для подключения шины RS485 используйте
переключатель оконечной нагрузки на главной плате
управления преобразователя частоты.
Заводская установка переключателя — OFF (ВЫКЛ.).
Настройки параметров для связи
5.1.4
Modbusn
Параметр Функция
8-30 Protocol
8-31 Address
Выберите прикладной протокол для
работы с интерфейсом RS485.
Установите адрес узла.
УВЕДОМЛЕНИЕ
Диапазон адресов зависит от
протокола, выбранного в пар.
8-30 Protocol.
8-32 Baud Rate
Установите скорость передачи данных.
УВЕДОМЛЕНИЕ
Скорость передачи данных по
умолчанию зависит от протокола,
выбранного в пар. 8-30 Protocol.
Таблица 5.2 Настройка параметров связи по протоколу
Modbus
Обеспечение ЭМС
5.1.5
Компания Danfoss рекомендует предпринять следующие
меры по обеспечению ЭМС, позволяющие устранить
помехи в сети RS485.
УВЕДОМЛЕНИЕ
Соблюдайте соответствующие государственные и
местные нормы и правила, касающиеся, например,
подключения защитного заземления. Прокладывайте
кабель связи RS485 на удалении от кабелей двигателя
и тормозного резистора, чтобы предотвратить
взаимные ВЧ-помехи между кабелями. Обычно
достаточно обеспечить расстояние в 200 мм.
Рекомендуется предусматривать максимально
возможное расстояние между кабелями, особенно
там, где кабели проложены параллельно на большой
протяженности. Если не удается избежать
пересечения, кабель RS485 должен пересекаться с
кабелями двигателя и тормозного резистора под
углом 90°.
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 69
Page 72

Монтаж и настройка RS485
5.2 FC-протокол
5.2.1 Краткое описание
FC-протокол, также называемый FC-шиной или
стандартной шиной, является стандартным протоколом
Danfoss для периферийной шины. Он определяет
способ доступа к данным по принципу главныйподчиненный для связи по шине последовательной
связи.
К шине можно подключить одно главное и до 126
подчиненных устройств. Главное устройство выбирает
55
подчиненные устройства по символу адреса в
телеграмме. Подчиненное устройство не может
передавать сообщение по собственной инициативе: для
этого требуется запрос; также невозможен обмен
сообщениями между подчиненными устройствами.
Связь осуществляется в полудуплексном режиме.
Функция главного устройства не может быть передана
другому узлу (система с одним главным устройством).
VLT® AutomationDrive FC 360
•
•
•
•
Для регулирования скорости обычно используется
задание по шине. Также возможен доступ к параметрам,
чтение их значений и, где предусмотрено, запись
значений в параметры. Это допускает диапазон
вариантов управления, включая управление уставкой
преобразователя частоты, когда используется его
внутренний ПИ-регулятор.
5.3 Конфигурация сети
Чтобы ввести в действие протокол FC для
преобразователя частоты, установите следующие
параметры.
Работа с различными предустановленными
скоростями
Работа в обратном направлении
Изменение активного набора параметров
Управление двумя реле, встроенными в
преобразователь частоты.
Физическим уровнем является RS485, т. е. используется
порт RS485, встроенный в преобразователь частоты.
Протокол FC поддерживает разные форматы телеграмм:
Укороченный формат из 8 байтов для данных
•
процесса.
Удлиненный формат из 16 байтов, который
•
также включает канал параметров.
Формат, используемый для текстов.
•
FC с Modbus RTU
5.2.2
FC-протокол обеспечивает доступ к командному слову и
заданию по шине преобразователя частоты.
Командное слово позволяет главному устройству
Modbus управлять несколькими важными функциями
преобразователя частоты:
Пуск
•
Останов преобразователя частоты различными
•
способами:
Останов выбегом
-
Быстрый останов
-
Останов торможением постоянным
-
током
Нормальный останов (изменением
-
скорости)
Возврат в исходное состояние (сброс) после
•
аварийного отключения
Параметр Настройка
8-30 Protocol
8-31 Address
8-32 Baud Rate
8-33 Parity / Stop Bits
Таблица 5.3 Параметры включения протокола
5.4
Структура кадра сообщения по FC-
FC
1–126
2400–115200
Контроль по четности, 1 стоповый
бит (по умолчанию)
протоколу
5.4.1 Состав символа (байта)
Каждый передаваемый символ начинается со
стартового бита. Затем 8 бит данных передаются
согласно байту. Каждый символ защищается с помощью
четности битов. Этот бит устанавливается равным «1»
после подтверждения четности. Четность достигается,
когда число двоичных единиц в 8 битах данных и бит
четности равны. Символ завершается стоповым битом,
так что общее число битов равно 11.
Рисунок 5.3 Состав символа
70 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 73

STX LGE ADR DATA BCC
195NA099.10
ADRLGESTX PCD1 PCD2 BCC
130BA269.10
PKE INDADRLGESTX PCD1 PCD2 BCC
130BA271.10
PWE
high
PWE
low
PKE IND
130BA270.10
ADRLGESTX PCD1 PCD2 BCCCh1 Ch2 Chn
Монтаж и настройка RS485
Руководство по проектированию
5.4.2 Структура телеграммы
Каждая телеграмма имеет свою структуру:
1. Первый символ (STX) = 02 16-ричн.
2. Байт, указывающий длину телеграммы (LGE).
3. Байт, указывающий адрес преобразователя
частоты (ADR).
Затем следует несколько байтов данных (переменное
число, зависящее от типа телеграммы).
Телеграмма завершается управляющим байтом (BCC).
Рисунок 5.4 Структура телеграммы
5.4.3 Длина телеграммы (LGE)
Длина телеграммы — это число байтов данных в сумме
с байтом адреса ADR и управляющим байтом BCC.
4 байта данных
12 байтов данных LGE = 12 + 1 + 1 = 14 байт
Длина телеграмм, содержащих
тексты
Таблица 5.4 Длина телеграммы
1) Здесь 10 соответствует фиксированным символам, а «n» —
переменная величина (зависящая от длины текста).
Адрес преобразователя частоты
5.4.4
LGE = 4 + 1 + 1 = 6 байт
101)+n байт
(ADR)
5.4.6
Поле данных
Состав блоков данных зависит от типа телеграммы.
Существуют телеграммы трех типов, тип телеграммы
относится как к управляющей телеграмме
(главное⇒подчиненное), так и к ответной телеграмме
(подчиненное⇒главное).
3 типа телеграмм:
Блок данных процесса (PCD)
PCD образуется блоком данных, состоящим из 4 байтов
(2 слов), и содержит:
Командное слово и значение задания (от
•
главного устройства к подчиненному);
Слово состояния и текущую выходную частоту
•
(от подчиненного устройства к главному).
Рисунок 5.5 Блок обработки
Блок параметров
Блок параметров используется для пересылки
параметров между главным и подчиненным
устройствами. Блок данных состоит из 12 байтов (6
слов) и содержит также блок данных процесса.
Рисунок 5.6 Блок параметров
Текстовый блок
Текстовый блок используется для чтения или записи
текстов посредством блока данных.
5 5
Формат адреса 1–126
Бит 7 = 1 (действует формат адреса 1–126).
•
Биты 0–6 = адрес преобразователя частоты 1–
•
126.
Биты 0–6 = 0: циркулярная рассылка.
•
В своей ответной телеграмме главному устройству
подчиненное устройство посылает адресный байт без
изменения.
5.4.5
Управляющий байт (BCC)
Контрольная сумма вычисляется как функция
«исключающее ИЛИ». До получения первого байта
телеграммы расчетная контрольная сумма (BCS) равна 0.
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 71
Рисунок 5.7 Текстовый блок
5.4.7 Поле PKE
Поле PKE содержит два субполя:
поле команды параметров и ответа (AK)
•
номер параметра (PNU).
•
Page 74

15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BB918.10
PKE IND
PWE
high
PWE
low
AK PNU
Parameter
commands
and replies
Parameter
number
Монтаж и настройка RS485
55
Рисунок 5.8 Поле PKE
В битах 12–15 пересылаются команды параметров от
главного устройства к подчиненному и возвращаются
обработанные ответы подчиненного устройства
главному.
Команды параметра: главное⇒подчиненное
Номер бита Команда параметра
15 14 13 12
0 0 0 0 Нет команды.
0 0 0 1 Считывание значения параметра.
0 0 1 0 Запись значения параметра в ОЗУ
(слово).
0 0 1 1 Запись значения параметра в ОЗУ
(двойное слово).
1 1 0 1 Запись значения параметра в ОЗУ и
ЭСППЗУ (двойное слово).
1 1 1 0 Запись значения параметра в ОЗУ и
ЭСППЗУ (слово).
1 1 1 1 Чтение текста.
Таблица 5.5 Команды параметров
VLT® AutomationDrive FC 360
Код ошибки Спецификация FC
0 Недопустимый номер параметра.
1 Параметр не может быть изменен.
2 Превышены верхний и нижний
3 Поврежден субиндекс.
4 Нет массива.
5 Ошибочный тип данных.
6 Не используется.
7 Не используется.
9 Элемент описания не доступен.
11 Нет доступа для записи параметра.
15 Текст не предусмотрен.
17 Неприменимо во время работы.
18 Другие ошибки.
100 –
>100 –
130 Отсутствует доступ по шине к данному
131 Запись в заводской набор невозможна.
132 Нет доступа с LCP.
252 Неизвестный абонент.
253 Запрос не поддерживается.
254 Неизвестный атрибут.
255 Ошибок нет.
Таблица 5.7 Отчет подчиненного устройства
5.4.8
В битах 0–11 пересылаются номера параметров.
Функция соответствующего параметра определена в
описании параметров в Руководстве по
программированию VLT® AutomationDrive FC 360.
5.4.9
пределы.
параметру.
Номер параметра (PNU)
Индекс (IND)
Ответ: подчиненное⇒главное
Номер бита Ответ
15 14 13 12
0 0 0 0 Нет ответа.
0 0 0 1 Значение параметра передано (слово).
0 0 1 0 Значение параметра передано
0 1 1 1 Команда не может быть выполнена.
1 1 1 1 Текст передан.
Таблица 5.6 Ответ
Если команда не может быть выполнена, подчиненное
устройство направляет ответ, 0111 Command cannot be
performed (Команда не может быть выполнена), и
выводит следующее сообщение о неисправности в
Таблица 5.7.
72 Danfoss A/S © 09/2014 Все права защищены. MG06B450
(двойное слово).
Индекс используется с номером параметра для доступа
к чтению/записи параметров, которые имеют индекс,
например, 15-30 Alarm Log: Error Code. Индекс состоит из
2 байтов: младшего и старшего.
В качестве индекса используется только младший байт.
5.4.10
Значение параметра (PWE)
Блок значения параметра состоит из 2 слов (4 байтов), и
его значение зависит от поданной команды (AK). Если
блок PWE не содержит значения параметра, главное
устройство подсказывает его. Чтобы изменить значение
параметра (записать), запишите новое значение в блок
PWE и пошлите его от главного устройства в
подчиненное.
Page 75

Монтаж и настройка RS485
Руководство по проектированию
Если подчиненное устройство реагирует на запрос
значения параметра (команда чтения), текущее
значение параметра посылается в блоке PWE и
возвращается главному устройству. Если параметр
содержит несколько вариантов данных, например,
0-01 Language, выберите значение данных, введя
значение в блок PWE. Последовательная связь
позволяет только считывать параметры, содержащие
данные типа 9 (текстовая строка).
Параметры с 15-40 FC Type по 15-53 Power Card Serial
Number содержат данные типа 9.
Например, размер блока и диапазон напряжения сети
можно посмотреть в 15-40 FC Type. При пересылке
текстовой строки (чтение) длина телеграммы
переменная, поскольку тексты имеют разную длину.
Длина телеграммы указывается во втором байте
телеграммы (LGE). При использовании передачи текста
символ индекса определяет, является ли команда
командой чтения или записи.
Чтобы прочесть текст с помощью блока PWE, для
команды параметра (AK) следует задать 16-ричное
значение F. Старший бит символа индекса должен быть
равен 4.
5.4.11
Типы данных, поддерживаемые
преобразователем частоты
Таким образом, величина 100 будет восприниматься как
10,0.
Индекс преобразования Коэффициент
преобразования
74 3600
2 100
1 10
0 1
-1 0,1
-2 0,01
-3 0,001
-4 0,0001
-5 0,00001
Таблица 5.9 Преобразование
5.4.13
Блок слов состояния процесса разделен на два блока по
16 бит, которые всегда поступают в определенной
последовательности.
PCD 1 PCD 2
Управляющая телеграмма (командное
слово от главного⇒подчиненному)
Слово состояния управляющей телеграммы
(подчиненное ⇒главное)
Слова состояния процесса (PCD)
Значение
задания
Текущая
выходная частота
5 5
Без знака означает, что в телеграмме отсутствует знак
операции.
Типы данных Описание
3 Целое 16
4 Целое 32
5 Целое без знака 8
6 Целое без знака 16
7 Целое без знака 32
9 Текстовая строка
Таблица 5.8 Типы данных
5.4.12
Различные атрибуты каждого параметра указаны в
разделе Перечни параметров в Руководстве по
программированию. Значения параметров передаются
только как целые числа. Для передачи дробной части
числа используются коэффициенты преобразования.
Коэффициент преобразования 4-12 Motor Speed Low Limit
[Hz] равен 0,1. Если нужно предварительно установить
минимальную частоту равной 10 Гц, то должно быть
передано число 100. Коэффициент преобразования 0,1
означает, что переданная величина умножается на 0,1.
Преобразование
Таблица 5.10 Слова состояния процесса (PCD)
5.5
Примеры
5.5.1 Запись значения параметра
Измените значение 4-14 Motor Speed High Limit [Hz],
чтобы оно составило 100 Гц.
Запишите данные в ЭСППЗУ.
PKE = E19E 16-ричн. — запись одного слова в 4-14 Motor
Speed High Limit [Hz]:
IND = 0000 16-ричн.
•
PWEHIGH = 0000 16-ричн.
•
PWELOW = 03E8 16-ричн.
•
Значение данных 1000, соответствующее 100 Гц, см.
глава 5.4.12 Преобразование.
Телеграмма имеет вид как на Рисунок 5.9.
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 73
Page 76

E19E H
PKE IND PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA092.10
119E H
PKE
IND
PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA093.10
1155 H
PKE IND PWE
high
PWE
low
0000 H 0000 H 0000 H
130BA094.10
Монтаж и настройка RS485
VLT® AutomationDrive FC 360
5.6
Modbus RTU
5.6.1 Необходимые сведения
Рисунок 5.9 Телеграмма
Danfoss предполагает, что установленный контроллер
поддерживает интерфейсы, описанные в этом
документе, и что все требования и ограничения,
УВЕДОМЛЕНИЕ
4-14 Motor Speed High Limit [Hz] представляет собой
предусмотренные в контроллере и преобразователе
частоты, строго соблюдаются.
одно слово, и командой параметра для записи в
ЭСППЗУ является E. Параметр 4-14 Motor Speed High
Limit [Hz] равен 19F (в шестнадцатеричном виде).
55
Ответ от подчиненного устройства главному показан на
Рисунок 5.10.
MODBUS RTU (Remote Terminal Unit, дистанционный
терминал) предназначен для осуществления связи с
любым контроллером, который поддерживает
интерфейсы, указанные в настоящем документе.
Предполагается, что пользователь полностью
осведомлен о возможностях и ограничениях
контроллера.
Краткое описание
5.6.2
Рисунок 5.10 Ответ главного устройства
Вне зависимости от типа физических
коммуникационных сетей, в этом разделе
рассматривается процесс, который использует
5.5.2 Считывание значения параметра
контроллер для запроса доступа к другому устройству.
В этом процессе описывается, как Modbus RTU
Прочтите значение в 3-41 Ramp 1 Ramp Up Time
реагирует на запросы другого устройства, как будут
обнаруживаться ошибки и как о них будет сообщаться.
PKE = 1155 16-ричн. — чтение значения параметра в
3-41 Ramp 1 Ramp Up Time:
Кроме того, устанавливается общий формат для
компоновки и содержимого полей сообщения.
Во время обмена данными через сеть Modbus RTU
IND = 0000 16-ричн.
•
PWE
•
PWE
•
Рисунок 5.11 Телеграмма
= 0000 16-ричн.
HIGH
= 0000 16-ричн.
LOW
протокол:
•
•
•
•
Определяет, как каждый контроллер узнает
адрес своего устройства.
Распознает сообщение, направленное ему.
Определяет, какие действия предпринять.
Извлекает данные или прочие сведения,
содержащиеся в сообщении.
Если требуется ответ, контроллер формирует ответное
Если значение 3-41 Ramp 1 Ramp Up Time равно 10
секундам, ответ от подчиненного устройства главному
показан на Рисунок 5.12.
сообщение и отсылает его.
Контроллеры осуществляют связь по принципу
«главный — подчиненный», при котором только
главное устройство может инициировать операции
связи (называемые запросами). Подчиненные
устройства отвечают, посылая запрошенные данные
главному устройству или выполняя действие,
затребованное запросом.
Главное устройство может обращаться к отдельным
Рисунок 5.12 Ответ
подчиненным устройствам или посылать циркулярное
сообщение всем подчиненным устройствам.
Подчиненные устройства посылают ответное сообщение
на запросы, которые им адресовались индивидуально.
3E8 (16-ричн.) соответствует десятичному числу 1000.
Индекс преобразования для 3-41 Ramp 1 Ramp Up Time
На циркулярные запросы главного устройства ответы не
посылаются. Протокол Modbus RTU определяет формат
равен -2, то есть 0,01.
3-41 Ramp 1 Ramp Up Time относится к типу Без знака 32.
74 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 77

Монтаж и настройка RS485 Руководство по проектированию
запроса главного устройства путем предоставления
следующей информации:
Адрес устройства (или циркулярной рассылки).
•
Код функции, определяющий требуемое
•
действие.
Любые данные, которые необходимо
•
отправить.
Поле контроля ошибок.
•
Ответное сообщение подчиненного устройства также
формируется с использованием протокола Modbus. Оно
содержит поля, подтверждающие выполненные
действия, любые возвращаемые данные и поле
обнаружения ошибок. Если при приеме сообщения
появляется ошибка или если подчиненное устройство
не может выполнить затребованное действие,
подчиненное устройство формирует сообщение об
ошибке и посылает его в ответе или возникает тайм-аут.
Преобразователь частоты с Modbus
5.6.3
RTU
Преобразователь частоты осуществляет передачу в
формате Modbus RTU через встроенный интерфейс
RS485. Протокол Modbus RTU обеспечивает доступ к
командному слову и заданию по шине преобразователя
частоты.
вариантов управления, включая управление уставкой
преобразователя частоты, когда используется его
внутренний ПИ-регулятор.
5.7 Конфигурация сети
Чтобы разрешить протокол Modbus RTU на
преобразователе частоты, установите следующие
параметры:
Параметр Настройка
8-30 Protocol
8-31 Address
8-32 Baud Rate
8-33 Parity / Stop Bits
Таблица 5.11 Конфигурация сети
Modbus RTU
1–247
2400–115200
Контроль по четности, 1 стоповый
бит (по умолчанию)
5.8 Структура кадра сообщения Modbus
RTU
5.8.1 Введение
Контроллеры настраиваются на передачу по сети
Modbus с использованием режима RTU (дистанционного
терминала), в котором каждый байт в сообщении
содержит два 4-битных шестнадцатеричных символа.
Формат для каждого байта показан в Таблица 5.12.
5 5
Командное слово позволяет главному устройству
Modbus управлять несколькими важными функциями
преобразователя частоты:
Пуск
•
Остановы различного типа:
•
Останов выбегом
-
Быстрый останов
-
Останов торможением постоянным
-
током
Нормальный останов (изменением
-
скорости)
Возврат в исходное состояние (сброс) после
•
аварийного отключения
Работа с различными предустановленными
•
скоростями
Работа в обратном направлении
•
Изменение активного набора параметров
•
Управление встроенным реле преобразователя
•
частоты.
Для регулирования скорости обычно используется
задание по шине. Также возможен доступ к параметрам,
чтение их значений и, где предусмотрено, запись
значений в параметры. Это допускает диапазон
Старт
овый
бит
Таблица 5.12 Формат для каждого байта
Байт данных Остан
ов/
контр
оль
четно
сти
Остан
ов
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 75
Page 78

Монтаж и настройка RS485
VLT® AutomationDrive FC 360
Система
кодирования
Битов на байт
55
Поле контроля
ошибок
Таблица 5.13 Сведения о байте
Структура сообщения Modbus RTU
5.8.2
Передающее устройство помещает сообщение Modbus
RTU в кадр с известными начальной и конечной
точками. Это позволяет принимающему устройству
начать с начала сообщения, прочитать адресную часть,
определить, кому адресуется сообщение (или всем
устройствам, если является циркулярным), и распознать,
когда сообщение закончено. Выявляются частичные
сообщения и определяются как ошибочные.
Передаваемые символы в каждом поле должны быть
шестнадцатеричного формата от 00 до FF.
Преобразователь частоты непрерывно контролирует
сетевую шину, в том числе и во время интервалов
«молчания». Когда получено первое поле (поле адреса),
каждый преобразователь частоты или устройство
декодирует его, чтобы определить, кому адресовано
сообщение. Сообщения Modbus RTU с адресом 0
являются циркулярными. В случае циркулярных
сообщений ответ не разрешается. Типичный кадр
сообщения показан в Таблица 5.14.
Пуск Адрес Функция Данные Контрол
T1-T2-T3-T48 бит 8 бит N x 8 бит 16 бит T1-T2-T3-
Таблица 5.14 Типичная структура сообщения Modbus RTU
5.8.3
Поля начала/останова
8-битный двоичный формат,
шестнадцатеричные символы 0–9, A–F. 2
шестнадцатеричных символа,
содержащиеся в каждом 8-битном поле
сообщения.
1 стартовый бит.
•
8 битов данных, сначала посылается
•
младший значащий бит.
1 бит для контроля по четности/
•
нечетности; без бита четности, если
контроль не используется.
1 стоповый бит, если контроль по
•
четности используется; 2 стоповых
бита, если не используется.
Циклический контроль избыточности
(CRC).
Конец
ь CRC
T4
передаваемым полем является адрес устройства. После
последнего переданного символа предусматривается
подобный период длительностью 3,5 знаковых
интервала, указывающий конец сообщения. После этого
периода может начаться новое сообщение.
Весь кадр сообщения должен передаваться в виде
непрерывного потока. Если перед окончанием кадра
появляется период молчания длительностью более 1,5
знаковых интервалов, принимающее устройство
игнорирует неполное сообщение и считает, что
следующий байт — это адресное поле следующего
сообщения. Аналогичным образом, если новое
сообщение начинается в пределах 3,5 знаковых
интервалов после предыдущего сообщения,
принимающее устройство будет считать его
продолжением предыдущего сообщения. Это становится
причиной тайм-аута (нет ответа от подчиненного
устройства), поскольку значение в конечном поле CRC
не действительно для объединенных сообщений.
Адресное поле
5.8.4
Адресное поле кадра сообщения содержит 8 бит.
Достоверные адреса подчиненных устройств находятся
в диапазоне десятичных чисел 0–247. Конкретным
подчиненным устройствам присваиваются адреса в
диапазоне 1–247. («0» оставлен для циркулярного
режима, который распознают все подчиненные
устройства.) Главное устройство обращается к
подчиненному путем ввода его адреса в адресное поле
сообщения. Когда подчиненное устройство посылает
свой ответ, оно помещает в это адресное поле свой
адрес, чтобы позволить главному устройству
определить, какое подчиненное устройство отвечает.
Поле функции
5.8.5
Поле функции кадра сообщения содержит 8 бит.
Допустимые индексы находятся в диапазоне 1-FF. Поля
функций используются для передачи сообщений между
главным и подчиненным устройствами. Когда
сообщение посылается от главного устройства к
подчиненному, поле кода функции сообщает
подчиненному устройству, какое действие требуется
выполнить. Когда подчиненное устройство отвечает
главному, оно использует поле кода функции, чтобы
указать, что ответ является либо нормальным (ошибки
нет), либо произошла какая-либо ошибка
(исключительный ответ).
Сообщения начинаются с периода молчания
продолжительностью не менее 3,5 символа. Это
реализуется как несколько знаковых интерфейсов при
выбранной скорости передачи данных в сети
(показывается как Начало T1–T2–T3–T4). Первый
76 Danfoss A/S © 09/2014 Все права защищены. MG06B450
При нормальном ответе подчиненное устройство
просто повторяет первоначальный код функции. Для
исключительного ответа подчиненное устройство
возвращает код, который эквивалентен
первоначальному коду со старшим значащим битом,
установленным на логическую «1». Кроме того,
Page 79

Монтаж и настройка RS485
Руководство по проектированию
подчиненное устройство помещает уникальный код в
поле данных ответного сообщения. Это извещает
главное устройство о том, какая произошла ошибка, или
сообщает причину исключения. См. также
глава 5.8.10 Коды функций, поддерживаемые Modbus RTU
и глава 5.8.11 Исключительные коды Modbus.
5.8.6 Поле данных
Поле данных формируется с помощью групп из двух
шестнадцатеричных цифр в диапазоне от 00 до FF.
Образуется один символ RTU. Поле данных сообщений,
посылаемых главным устройством подчиненному,
содержит дополнительную информацию, которую
должно использовать подчиненное устройство для
совершения действия, определяемого кодом функции.
Оно может содержать такие элементы, как адреса
катушки или регистра, количество обрабатываемых
элементов и счет текущих байтов данных в этом поле.
Поле контроля CRC
5.8.7
Сообщения содержат поле обнаружения ошибок с
действием по методу циклического контроля
избыточности (CRC). Поле CRC проверяет содержимое
всего сообщения. Это происходит независимо от того,
какой метод проверки четности используется для
отдельных символов сообщения. Значение CRC
вычисляется передающим устройством, которое
прилагает поле проверки CRC в качестве последнего
поля сообщения. Принимающее устройство
пересчитывает CRC во время приема сообщения и
сравнивает вычисленное значение с текущим
значением, принимаемым в поле CRC. Если эти два
значения не равны, результатом будет тайм-аут шины.
Поле обнаружения ошибок содержит двоичное число из
16 бит, образующих два 8-битовых байта. Когда это
происходит, сначала добавляется младший байт, а затем
старший. Старший байт CRC — последний байт,
посылаемый в сообщении.
Адресация катушек и регистров
5.8.8
слово (т. е. 16 бит). Все адреса данных в сообщениях
Modbus указываются как 0. При первом появлении
элемента данных к нему адресуются как к элементу
номер 0. Например, катушка, известная в
программируемом контроллере как «катушка 1», в поле
адреса данных сообщения Modbus имеет адрес
«катушка 0000». Катушке с десятичным номером 127
присваивается адрес 007E 16-ричн. (десятичный номер
126).
В поле адреса данных сообщения к регистру
временного хранения 40001 адресуются как к регистру
0000. Поле кода функции уже определяет операцию
«регистр временного хранения». т. е. подразумевается
«4XXXX». К регистру временного хранения 40108
адресуются как к регистру 006B 16-ричн. (десятичный
номер 107).
Номер
катушки
1-16 Командное слово
17-32 Диапазон заданий скорости или
33-48 Слово состояния
49-64 Режим без обратной связи:
65 Управление записью параметра
66-65536 Зарезервировано
Описание Направление
сигнала
От главного к
преобразователя частоты (см.
Таблица 5.16)
уставки преобразователя частоты
0x0–0xFFFF (-200% ... ~200%)
преобразователя частоты (см.
Таблица 5.17 )
выходная частота
преобразователя частоты
Режим с обратной связью: сигнал
обратной связи преобразователя
частоты
(от главного к подчиненному)
0=Изменения параметров
записываются в ОЗУ
преобразователя частоты.
1=Изменения параметров
записываются в ОЗУ и ЭСППЗУ
преобразователя частоты.
подчиненному
От главного к
подчиненному
От
подчиненного к
главному
От
подчиненного к
главному
От главного к
подчиненному
5 5
В сети Modbus все данные организуются в катушках и
регистрах временного хранения. Катушки хранят 1 бит,
Таблица 5.15 Регистр катушки
а регистры временного хранения хранят 2-байтовое
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 77
Page 80
Монтаж и настройка RS485
Катушка 0 1
01 Предустановленное задание, младший бит
02 Предустановленное задание, старший бит
03 Торможение постоянным током Нет торможения постоянным током
04 Останов выбегом Нет останова выбегом
05 Быстрый останов Нет быстрого останова
06 Фиксация выходной частоты Отсутствие выходной фиксации частоты
07 Останов с изменением скорости Пуск
08 Нет сброса Сброс
09 Нет фиксации частоты Фиксация частоты
10 Изменение скорости 1 Изменение скорости 2
55
11 Данные недействительны Данные действительны
12 Реле 1 выкл. Реле 1 вкл.
13 Реле 2 выкл. Реле 2 вкл.
14 Установка младшего бита
15
16 Нет реверса. Реверс
Таблица 5.16 Командное слово преобразователя частоты (профиль FC)
Катушка 0 1
33 Управление не готово Готовность к управлению
34 Преобразователь частоты не готов Преобразователь частоты готов
35 Останов выбегом Защита замкнута
36 Нет авар. сигналов Аварийный сигнал
37 Не используется Не используется
38 Не используется Не используется
39 Не используется Не используется
40 Нет предупреждения Предупреждение
VLT® AutomationDrive FC 360
41 Не на задании На задании
42 Ручной режим Автоматический режим
43 Вне частотного диапазона В частотном диапазоне
44 Остановлен Работа
45 Не используется Не используется
46 Нет предупр. о напряжении Предупр. о напряжении
47 Не в пределе по току Предел по току
48 Нет предупр. о перегреве Предупр.о перегрев
Таблица 5.17 Слово состояния преобразователя частоты (профиль FC)
78 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 81

Монтаж и настройка RS485 Руководство по проектированию
Адрес
шины
0 1 40001 Зарезервировано
1 2 40002 Зарезервировано
2 3 40003 Зарезервировано
3 4 40004 Свободно – –
4 5 40005 Свободно – –
5 6 40006 Конфигурация Modbus Чтение/запись Только TCP. Зарезервировано для Modbus TCP (пар.
6 7 40007 Код последней ошибки Только чтение Из базы данных параметров получен код ошибки.
7 8 40008 Регистр последней
8 9 40009 Указатель индекса Чтение/запись Субиндекс параметра, который необходимо открыть.
9 10 40010 Пар. FC 0-01 Зависит от
19 20 40020 Пар. FC 0-02 Зависит от
29 30 40030 Пар. FC xx-xx Зависит от
Регистр
шины
Регистр
1)
ПЛК
Содержание Доступ Описание
–
–
–
Только чтение Адрес регистра, в котором произошла ошибка.
ошибки
доступа к
параметру
доступа к
параметру
доступа к
параметру
Зарезервировано для предыдущих моделей
преобразователей частоты VLT 5000 и VLT 2800
Зарезервировано для предыдущих моделей
преобразователей частоты VLT 5000 и VLT 2800
Зарезервировано для предыдущих моделей
преобразователей частоты VLT 5000 и VLT 2800
12-28 и 12-29 — сохранение в ЭСППЗУ и пр.)
Подробнее см. в разделе WHAT 38295.
Подробнее см. в разделе WHAT 38296.
Подробнее см. в разделе WHAT 38297.
Параметр 0-01 (регистр Modbus = номер параметра 10)
На карте Modbus для параметра зарезервировано 20
байт пространства.
Параметр 0-02
На карте Modbus для параметра зарезервировано 20
байт пространства.
Параметр 0-03
На карте Modbus для параметра зарезервировано 20
байт пространства.
5 5
Таблица 5.18 Адрес/регистры
1) Значение, написанное в телеграмме Modbus RTU, должно быть единицей или меньше, чем номер регистра. Например, прочитайте
регистр Modbus 1, написав значение 0 в телеграмме.
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 79
Page 82
Монтаж и настройка RS485
VLT® AutomationDrive FC 360
5.8.9 Управление преобразователем
Код НаименованиеЗначение
частоты
1 Недопустима
В настоящем разделе описываются коды, которые
я функция
можно использовать в полях функций и данных
сообщения Modbus RTU.
5.8.10 Коды функций, поддерживаемые
Modbus RTU
Протокол Modbus RTU поддерживает использование
следующих кодов функций в поле функции сообщения.
55
Функция Код функции (16-
ричн.)
Считать с катушки 1
Считать с регистров временного
хранения
Записать на одну катушку 5
Записать в один регистр 6
Записать на несколько катушек F
Записать в несколько регистров 10
Вызвать счетчик событий связи B
Сообщить идентиф. номер подчинен.
устройства
Таблица 5.19 Коды функций
Функция Код
функции
Диагностика8 1 Перезапустить связь
Код
подфункц
ии
2 Возвратить регистр
10 Очистить счетчики и
11 Возвратить счет
12 Возвратить счет ошибок
13 Возвратить счет ошибок
14 Возвратить счет
3
11
Подфункция
диагностики
регистр диагностики
сообщений,
передаваемых по шине
связи по шине
подчиненного устройства
сообщений
подчиненного устройства
2 Недопустимы
й адрес
данных
3 Недопустимо
е значение
данных
4 Ошибка
подчиненног
о устройства
Таблица 5.21 Исключительные коды Modbus
5.9
Доступ к параметрам
Код функции, полученный в запросе,
является недопустимым действием для
сервера (или подчиненного устройства).
Это может быть связано с тем, что код
функции применяется только к более
новым устройствам и не был внедрен в
выбранном устройстве. Он также может
указывать на то, что сервер (или
подчиненное устройство) находится в
ошибочном состоянии для обработки
запроса данного типа, например, он не
настроен и получает запрос на
возвращение значений регистра.
Адрес данных, полученный в запросе,
является недопустимым адресом для
сервера (или подчиненного устройства).
Если еще точнее, то сочетание номера
задания и длины передачи является
недопустимым. Для контроллера со 100
регистрами запрос со смещением 96 и
длиной 4 будет успешно обработан,
запрос со смещением 96 и длиной 5
создает исключение 02.
Значение в поле данных запроса
является недопустимым значением для
сервера (или подчиненного устройства).
Это указывает на ошибку в структуре
остатка сложного запроса, как будто
примененная длина является
неправильной. Это НЕ значит конкретно,
что элемент данных, отправленный для
сохранения в регистре, имеет значение,
не подходящее для прикладной
программы, поскольку протокол
Modbus не знает о значении
определенного значения определенного
регистра.
Возникла неисправимая ошибка во
время попытки сервера (или
подчиненного устройства) выполнить
запрашиваемое действие.
Таблица 5.20 Коды функций
5.8.11
Исключительные коды Modbus
5.9.1 Операции с параметрами
Номер параметра (PNU) переносится из адреса
регистра, содержащегося в читаемом или записываемом
Полное описание структуры ответа исключительного
кода приведено в глава 5.8.5 Поле функции.
сообщении Modbus. Номер параметра передается в
сообщение Modbus как десятичное число (10 x номер
параметра). Пример: показание 3-12 Значение разгона/
замедления (16 бит). Регистр временного хранения 3120
содержит значение параметра. Значение 1352
80 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 83

Монтаж и настройка RS485
Руководство по проектированию
(десятичное) означает, что параметр установлен на
12,52 %.
Показание 3-14 Предустановл.относительное задание
(32 бита): регистры временного хранения 3410 и 3411
содержат значения параметров. Значение 11300
(десятичное) означает, что для параметр установлено
значения 1113,00.
Сведения о параметрах, размере и индексе
преобразования, см. в руководстве по
программированию.
Хранение данных
5.9.2
Десятичное значение параметра «Катушка 65»
определяет, куда будут записываться данные в
преобразователе частоты: в ЭСППЗУ и в ОЗУ (катушка 65
= 1) или только в ОЗУ (катушка 65 = 0).
Индекс (IND)
5.9.3
Некоторые параметры в преобразователе частоты,
например 3-10 Предустановленное задание, являются
массивами. Поскольку Modbus не поддерживает
массивы в регистрах временного хранения, в
преобразователе частоты регистр временного хранения
9 зарезервирован в качестве указателя на массив.
Перед чтением или записью параметра массива
настройте регистр временного хранения 9. При
установке регистра временного хранения в значение 2
все последующие операции чтения/записи параметров
массива будут осуществляться по индексу 2.
Текстовые блоки
5.9.4
Параметры, сохраняемые в виде текстовых строк,
вызываются таким же образом, как и прочие
параметры. Максимальный размер текстового блока —
20 символов. Если запрос на считывание параметра
предназначен для большего числа символов, чем
хранит параметр, ответ укорачивается. Если запрос на
считывание параметра предназначен для меньшего
числа символов, чем хранит параметр, свободное
пространство ответа заполняется.
5.9.5
Коэффициент преобразования
Значение параметра может передаваться только как
целое число. Для пересчета десятичных дробей
используется коэффициент преобразования.
5.9.6
Значения параметров
Стандартные типы данных
Стандартными типами данных являются int 16, int 32,
uint 8, uint 16 и uint 32. Они хранятся как регистры 4x
(40001–4FFFF). Чтение параметров производится с
помощью функции 03 16-ричн., чтение регистров
временного хранения. Запись параметров
осуществляется с помощью функции 6 16-ричн.,
установка одного регистра для одного регистра (16
бит), и функции 10 16-ричн., установка нескольких
регистров, для двух регистров (32 бита). Диапазон
считываемых размеров: от 1 регистра (16 битов) до 10
регистров (20 символов).
Нестандартные типы данных
Нестандартные типы данных — текстовые строки; они
хранятся как регистры 4x (40001–4FFFF). Параметры
считываются с помощью функции 03 16-ричн., чтение
регистров временного хранения, и записываются с
помощью функции 10 16-ричн., установка нескольких
регистров. Диапазон считываемых размеров: от 1
регистра (2 символа) до 10 регистров (20 символов).
5.10
Примеры
Приведенные ниже примеры иллюстрируют различные
команды Modbus RTU.
5.10.1
Считывание состояния катушки (01
16-ричн.)
Описание
Эта функция считывает состояние ON/OFF (ВКЛ./ВЫКЛ.)
цифровых выходов (катушек) преобразователя частоты.
Чтение циркулярных сообщений не поддерживается.
Запрос
Запросное сообщение определяет начальную катушку и
количество считываемых катушек. Адреса катушек
начинаются с 0, т. е. адресом катушки 33 будет 32.
Пример запроса на считывание катушек 33–48 (слово
состояния) из подчиненного устройства 01.
Наименование поля Пример (16-ричн.)
Адрес подчиненного
устройства
Функция 01 (считать с катушки)
Начальный адрес HI 00
Начальный адрес LO 20 (десятичный адрес 32) Катушка
Число точек HI 00
Число точек LO 10 (десятичный адрес 16)
Контроль ошибок (CRC) –
01 (адрес преобразователя
частоты)
33
5 5
Таблица 5.22 Запрос
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 81
Page 84

Монтаж и настройка RS485
VLT® AutomationDrive FC 360
Ответ
Состояние катушки в ответном сообщении формируется
как одна катушка на бит поля данных. Состояние
указывается следующим образом: 1 = ВКЛ.; 0 = ВЫКЛ.
Ответ
Нормальным ответом является отражение запроса,
возвращенное после того, как было форсировано
состояние катушки.
Младший бит первого байта данных содержит катушку,
адрес которой указан в запросе. Остальные катушки
следуют в направлении старшего конца этого байта и от
младшего к старшему в последующих байтах.
Если число возвращенных катушек не кратно 8,
остальные биты конечного байта данных заполнены
нулями (в направлении старшего конца байта). Поле
счета байтов определяет число полный байтов данных.
55
Наименование поля Пример (16-ричн.)
Адрес подчиненного
устройства
Функция 01 (считать с катушки)
Число байтов 02 (2 байта данных)
Данные (катушки 40–33) 07
Данные (катушки 48–41) 06 (STW=0607 16-ричн.)
Контроль ошибок (CRC) -
Таблица 5.23 Ответ
01 (адрес преобразователя
частоты)
Наименование поля Пример (16-ричн.)
Адрес подчиненного
устройства
Функция 05
Форсировать данные HI FF
Форсировать данные LO 00
Количество катушек HI 00
Количество катушек LO 01
Контроль ошибок (CRC) –
Таблица 5.25 Ответ
5.10.3
Форсировать/запись на несколько
01
катушек (0F 16-ричн.)
Описание
Эта функция форсирует перевод катушек в
последовательности либо в положение on (вкл.), либо в
положение off (выкл.). В случае циркулярной рассылки
УВЕДОМЛЕНИЕ
Катушки и регистры адресуются в Modbus со
смещением адреса -1,
т. е., катушка 33 имеет адрес 32.
эта функция дает одинаковые задания катушкам во всех
присоединенных подчиненных устройствах.
Запрос
Запросное сообщение определяет форсируемые
катушки от 17 до 32 (уставка скорости).
5.10.2 Форсировать/запись на одну
катушку (05 16-ричн.)
Описание
Эта функция вызывает включение или выключение
катушки. В случае циркулярной рассылки эта функция
дает одинаковые задания катушкам во всех
присоединенных подчиненных устройствах.
Запрос
Запросное сообщение определяет катушку 65
(управление записью параметра), на которую
направлено действие. Адреса катушек начинаются с 0, т.
е. адресом катушки 65 будет 64. Форсировать данные =
00 00 16-ричн. (ВЫКЛ.) или FF 00 16-ричн. (ВКЛ.).
Наименование поля Пример (16-ричн.)
Адрес подчиненного
устройства
Функция 05 (записать на одну катушку)
Адрес катушки HI 00
Адрес катушки LO 40 (десятичный адрес 64)
Форсировать данные HI FF
Форсировать данные LO 00 (FF 00 = ВКЛ.)
Контроль ошибок (CRC) -
01 (адрес преобразователя
частоты)
Катушка 65
Наименование поля Пример (16-ричн.)
Адрес подчиненного
устройства
Функция 0F (записать на несколько
Адрес катушки HI 00
Адрес катушки LO 10 (адрес катушки 17)
Количество катушек HI 00
Количество катушек LO 10 (16 катушек)
Число байтов 02
Форсировать данные HI
(катушки 8–1)
Форсировать данные LO
(катушки 16–9)
Контроль ошибок (CRC) –
Таблица 5.26 Запрос
01 (адрес преобразователя
частоты)
катушек)
20
00 (задание = 2000 16-ричн.)
Ответ
В нормальном ответе возвращается адрес
подчиненного устройства, код функции, начальный
адрес и количество форсированных катушек.
Таблица 5.24 Запрос
82 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 85

Монтаж и настройка RS485
Руководство по проектированию
Наименование поля Пример (16-ричн.)
Адрес подчиненного
устройства
Функция 0F (записать на несколько
Адрес катушки HI 00
Адрес катушки LO 10 (адрес катушки 17)
Количество катушек HI 00
Количество катушек LO 10 (16 катушек)
Контроль ошибок (CRC) –
Таблица 5.27 Ответ
5.10.4
Чтение регистров временного
01 (адрес преобразователя
частоты)
катушек)
хранения (03 16-ричн.)
Описание
Эта функция считывает содержимое регистров
временного хранения в подчиненном устройстве.
Запрос
Запросное сообщение определяет начальный регистр и
количество считываемых регистров. Адреса регистров
начинаются с 0, т. е. адресами регистров 1–4 будут 0–3.
Пример: чтение 3-03 Maximum Reference, регистр 03030.
Наименование поля Пример (16-ричн.)
Адрес подчиненного
устройства
Функция 03 (чтение регистров временного
Начальный адрес HI 0B (адрес регистра 3029)
Начальный адрес LO D5 (адрес регистра 3029)
Число точек HI 00
Число точек LO
Контроль ошибок
(CRC)
Таблица 5.28 Запрос
Ответ
Данные регистра в ответном сообщении формируются
как 2 байта на каждый регистр с двоичным
содержимым, выровненным по правому краю внутри
каждого байта. У каждого регистра первый байт
содержит старшие биты, а второй байт — младшие.
Пример: 16-ричн. 000088B8 = 35,000 = 35 Гц.
01
хранения)
02 — (3-03 Maximum Reference имеет
длину 32 бита, т.е. 2 регистра)
–
Наименование поля Пример (16-ричн.)
Адрес подчиненного устройства 01
Функция 03
Число байтов 04
Данные HI (регистр 3030) 00
Данные LO (регистр 3030) 16
Данные HI (регистр 3031) E3
Данные LO (регистр 3031) 60
Контроль ошибок (CRC) –
Таблица 5.29 Ответ
5.10.5 Установка одного регистра (06 16ричн.)
Описание
Эта функция устанавливает значение в одном регистре
временного хранения.
Запрос
Запросное сообщение определяет устанавливаемое
задание регистра. Адреса регистров начинаются с 0, т.
е. адресом регистра 1 будет 0.
Пример: запись в 1-00 Configuration Mode, регистр 1000.
Наименование поля Пример (16-ричн.)
Адрес подчиненного
устройства
Функция 06
Адрес регистра HI 03 (Адрес регистра 999)
Адрес регистра LO E7 (Адрес регистра 999)
Устанавливаемые данные HI 00
Устанавливаемые данные LO 01
Контроль ошибок (CRC) –
Таблица 5.30 Запрос
Ответ
Нормальным ответом является отражение запроса,
возвращенное после того, как было передано
содержимое регистра.
Наименование поля Пример (16-ричн.)
Адрес подчиненного
устройства
Функция 06
Адрес регистра HI 03
Адрес регистра LO E7
Устанавливаемые данные HI 00
Устанавливаемые данные LO 01
Контроль ошибок (CRC) -
01
01
5 5
Таблица 5.31 Ответ
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 83
Page 86

Speed ref.CTW
Master-follower
130BA274.11
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bit
no.:
Монтаж и настройка RS485
VLT® AutomationDrive FC 360
5.10.6 Установка нескольких регистров
5.11
Профиль управления FC Danfoss
(10 16-ричн.)
5.11.1 Командное слово,
Описание
Эта функция устанавливает значение в
последовательности регистров временного хранения.
Запрос
Запросное сообщение определяет устанавливаемые
задания регистров. Адреса регистров начинаются с 0, т.
е. адресом регистра 1 будет 0. Пример запроса
установки двух регистров (устанавливаемый параметр
1-24 Motor Current = 738 (7,38 A)):
55
Наименование поля Пример (16-ричн.)
Адрес подчиненного устройства 01
Функция 10
Начальный адрес HI 04
Начальный адрес LO 07
Число регистров HI 00
Число регистров LO 02
Число байтов 04
Записать данные HI
(регистр 4: 1049)
Записать данные LO
(регистр 4: 1049)
Записать данные HI
(регистр 4: 1050)
Записать данные LO
(регистр 4: 1050)
Контроль ошибок (CRC) –
Таблица 5.32 Запрос
00
00
02
E2
Ответ
В нормальном ответе возвращается адрес
подчиненного устройства, код функции, начальный
адрес и количество установленных регистров.
Наименование поля Пример (16-ричн.)
Адрес подчиненного устройства 01
Функция 10
Начальный адрес HI 04
Начальный адрес LO 19
Число регистров HI 00
Число регистров LO 02
Контроль ошибок (CRC) –
Таблица 5.33 Ответ
Бит Значение бита = 0 Значение бита = 1
00 Значение задания Младший бит внешнего выбора
01 Значение задания Старший бит внешнего выбора
02 Торможение
03 Выбег Нет выбега
04 Быстрый останов Изменение скорости
05 Фиксировать
06 Останов с
07 Не используется Сброс
08 Не используется Фиксация частоты
09 Изменение
10 Данные не
11 Реле 01 разомкнуто Реле 01 включено
12 Реле 02 разомкнуто Реле 02 включено
13 Настройка
15 Не используется Реверс
Расшифровка управляющих битов
Биты 00/01
Биты 00 и 01 используются для выбора одного из
четырех значений задания, предварительно
запрограммированных в параметре 3-10 Preset Reference
в соответствии с Таблица 5.35.
соответствующее профилю FC
(пар. 8-10 Protocol (Протокол) =
Профиль FC)
Рисунок 5.13 Командное слово, соответствующее профилю
FC
Изменение скорости
постоянным током
Использовать изменение
выходную частоту
изменением
скорости
скорости 1
действительны
параметров
Таблица 5.34 Командное слово, соответствующее профилю
FC
скорости
Пуск
Изменение скорости 2
Данные действительны
Младший бит выбора
84 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 87

Монтаж и настройка RS485
Руководство по проектированию
Программиру
емое
значение
задания
1
2
3
4
Таблица 5.35 Биты управления
Параметр Бит01Бит
00
3-10 Preset Reference [0]
3-10 Preset Reference [1]
3-10 Preset Reference [2]
3-10 Preset Reference [3]
0 0
0 1
1 0
1 1
УВЕДОМЛЕНИЕ
Сделайте выбор в 8-56 Preset Reference Select, чтобы
определить, как бит 00/01 логически объединяется с
соответствующей функцией на цифровых входах.
Бит 02, торможение постоянным током
Бит 02 = 0 приводит к торможению постоянным током и
к останову. Установите ток торможения и длительность
в параметрах 2-01 DC Brake Current и 2-02 DC Braking
Time.
Бит 02 = 1 вызывает изменение скорости.
Бит 03, останов с выбегом
Бит 03 = 0: преобразователь частоты немедленно
отпускает двигатель (выходные транзисторы
запираются), который выбегом доводится до состояния
покоя.
Бит 03 = 1: преобразователь частоты запускает
двигатель, если выполняются другие условия запуска.
Значение параметра 8-50 Coasting Select определяет, как
бит 03 логически объединяется с соответствующей
функцией на цифровом входе.
Бит 04, быстрый останов
Бит 04 = 0: вызывает снижение скорости вращения
двигателя до останова (устанавливается в параметре
3-81 Quick Stop Ramp Time).
Бит 05, фиксация выходной частоты
Бит 05 = 0: фиксируется текущая выходная частота (в
Гц). Изменение зафиксированной выходной частоты
производится только с помощью цифровых входов
(параметры с 5-10 Terminal 18 Digital Input по
5-13 Terminal 29 Digital Input), запрограммированных для
выполнения функции Speed up (Увеличение скорости) =
21 и Slow down (Уменьшение скорости) = 22.
УВЕДОМЛЕНИЕ
Если активизирована фиксация выхода, то остановить
преобразователь частоты можно только следующими
способами:
Бит 03 Останов выбегом.
•
Бит 02 Tорможение пост. током.
•
Цифровой вход (параметры с5-10 Terminal 18
•
Digital Input до 5-13 Terminal 29 Digital Input),
запрограммированный на значения DC
braking (Торм. пост. током) = 5, Coasting stop
(Останов выбегом) = 2 или Reset and coasting
stop (Сброс и останов выбегом) = 3.
Бит 06, останов/пуск с изменением скорости
Бит 06 = 0: вызывает останов и заставляет двигатель
снижать скорость до останова с помощью выбранного
параметра замедления.
Бит 06 = 1: позволяет преобразователю частоты
запустить двигатель, если выполнены прочие условия
пуска.
Выберите значение параметра 8-53 Start Select с целью
определить, как бит 06 «Останов/пуск с изменением
скорости» логически объединяется с соответствующей
функцией на цифровом входе.
Бит 07, сброс
Бит 07 = 0: нет сброса.
Бит 07 = 1: сброс отключения. Сброс активируется по
переднему фронту сигнала, то есть при переходе
сигнала от логического 0 к логической 1.
Бит 08, фиксация частоты
Бит 08 = 1: выходная частота определяется параметром
3-11 Jog Speed [Hz].
Бит 09, выбор изменения скорости 1/2
Бит 09 = 0: изменение скорости 1 включено (параметры
3-41 Ramp 1 Ramp Up Time–3-42 Ramp 1 Ramp Down Time).
Бит 09 = 1: изменение скорости 2 (параметры 3-51 Ramp
2 Ramp Up Time–3-52 Ramp 2 Ramp Down Time) включено.
Бит 10, данные недействительны/данные
действительны
Указывает преобразователю частоты, использовать или
игнорировать командное слово.
Бит 10 = 0: командное слово игнорируется.
Бит 10 = 1: командное слово используется. Эта функция
имеет большое значение, поскольку независимо от типа
используемой телеграммы в ней всегда содержится
командное слово. Командное слово можно отключить,
если не требуется его использование при обновлении
или чтении параметров.
Бит 11, реле 01
Бит 11 = 0: реле не активизировано.
5 5
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 85
Page 88

Output freq.STW
Bit
no.:
Follower-master
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BA273.11
Монтаж и настройка RS485
VLT® AutomationDrive FC 360
Бит 11 = 1: реле 01 активировано при условии, что в
параметре 5-40 Function Relay выбрано Control word bit
11 (Командное слово, бит 11) = 36.
Бит 12, реле 02
Бит 12 = 0: реле 02 не активизировано.
Бит 12 = 1: реле 02 активизировано при условии, что в
параметре 5-40 Function Relay выбрано Control word bit
12 (Командное слово, бит 12) = 37.
Бит 13, выбор набора
Бит 13 используется для выбора любого из 2 наборов
параметров в соответствии с Таблица 5.36.
55
Набор параметров Бит 13
1 0
2 1
Таблица 5.36 Меню наборов параметров
Эта функция возможна только в том случае, если в
параметре 0-10 Active Set-up выбрано Multi Set-Ups
(Несколько наборов) = 9.
Используйте значение параметра 8-55 Set-up Select,
чтобы указать, как бит 13 логически объединяется с
соответствующей функцией на цифровых входах.
Бит Бит = 0 Бит = 1
00 Управление не готово Готовность к управлению
01 Привод не готов Привод готов
02 Выбег Разрешено
03 Нет ошибки Отключение
04 Нет ошибки Ошибка (нет отключения)
05 Зарезервировано 06 Нет ошибки Отключение с
блокировкой
07 Нет предупреждения Предупреждение
08 Скорость
вращения≠задание
09 Местное управление Управление по шине
10 Частота вне диапазона Частота в заданных
11 Не используется В работе
12 Привод в норме Останов, автоматический
13 Напряжение в норме Превышение напряжения
14 Крутящий момент в норме Превышение крутящего
15 Таймер в норме Превышение таймера
Таблица 5.37 Слово состояния, соответствующее профилю
FC
Скорость вращения =
задание
пределах
пуск
момента
Бит 15, реверс
Бит 15 = 0: нет реверса.
Бит 15 = 1: Реверс. При заводской настройке значение
параметра 8-54 Reversing Select устанавливает
управление реверсом с помощью цифрового входа. Бит
15 вызывает реверс только в том случае, если выбран
один из следующих вариантов: последовательная связь,
[2] Logic OR (Логическое ИЛИ) или [3] Logic AND
(Логическое И).
5.11.2
Слово состояния, соответствующее
профилю FC (STW) (8-30 Protocol =
профиль FC)
Рисунок 5.14 Слово состояния
Объяснение битов состояния
Бит 00, управление не готово/готово
Бит 00 = 0: преобразователь частоты отключается.
Бит 00 = 1: система управления преобразователя
частоты готова, но не гарантируется получение питания
силовым блоком (при питании системы управления от
внешнего источника 24 В).
Бит 01, привод готов
Бит 01 = 0: преобразователь частоты не готов к работе.
Бит 01 = 1: преобразователь частоты готов к работе, но
через цифровые входы или по последовательной связи
подается команда останова выбегом.
Бит 02, останов выбегом
Бит 02 = 0: преобразователь частоты «отпускает»
двигатель.
Бит 02 = 1: преобразователь частоты запускает
двигатель командой пуска.
Бит 03, нет ошибки/отключение
Бит 03 = 0: преобразователь частоты не находится в
состоянии отказа. Бит 03 = 1: преобразователь частоты
отключается. Для восстановления работы нажмите
[Reset] (Сброс).
Бит 04, нет ошибки/ошибка (без отключения)
Бит 04 = 0: преобразователь частоты не находится в
состоянии отказа.
Бит 04 = 1: преобразователь частоты отображает
ошибку, но не отключается.
86 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 89

Монтаж и настройка RS485 Руководство по проектированию
Бит 05, не используется
В слове состояния бит 05 не используется.
Бит 06, нет ошибки / отключение с блокировкой
Бит 06 = 0: преобразователь частоты не находится в
состоянии отказа.
Бит 06 = 1: преобразователь частоты отключен и
блокирован.
Бит 07, нет предупреждения/предупреждение
Бит 07 = 0: предупреждений нет.
Бит 07 = 1: появилось предупреждение.
Бит 08, задание скорости/скорость = задание
Бит 08 = 0: двигатель работает, но текущая скорость
отличается от предустановленного задания скорости.
Такая ситуация возможна, например, когда происходит
разгон/замедление при пуске/останове.
Бит 08 = 1: скорость двигателя соответствует
предустановленному заданию скорости.
Бит 09, местное управление/управление по шине
Бит 09 = 0: нажата кнопка [Off/Reset] (Стоп/Сброс) на
блоке управления или в параметре 3-13 Место задания
выбрано значение local control (местное управление).
Управлять преобразователем частоты через канал
последовательной связи нельзя.
Бит 09 = 1: преобразователь частоты может управляться
по периферийной шине или по последовательной
связи.
Бит 10, предел частоты вне диапазона
Бит 10 = 0: выходная частота достигла значения,
установленного в параметре 4-12 Motor Speed Low Limit
[Hz] или 4-14 Motor Speed High Limit [Hz].
Бит 10 = 1: выходная частота находится в заданных
пределах.
Бит 11, не работает/работает
Бит 11 = 0: двигатель не работает.
Бит 11 = 1: преобразователь частоты получает сигнал
пуска без останова выбегом.
Бит 12, привод в норме/остановлен, автозапуск
Бит 12 = 0: отсутствует временное превышение
температуры преобразователя частоты.
Бит 12 = 1: преобразователь частоты остановлен из-за
перегрева, но блок не отключается и возобновляет
работу, как только перегрев нормализуется.
Бит 13, напряжение в норме/выход за предел
Бит 13 = 0: нет предупреждений о напряжении.
Бит 13 = 1: напряжение в промежуточной цепи
постоянного тока преобразователя частоты слишком
мало или слишком велико.
Бит 14, крутящий момент в норме/выход за предел
Бит 14 = 0: ток двигателя меньше, чем ток предел,
установленный в параметре 4-18 Current Limit.
Бит 14 = 1: превышен предел по току в пар. 4-18 Current
Limit.
Бит 15, таймер в норме/выход за предел
Бит 15 = 0: таймеры для тепловой защиты двигателя и
тепловой защиты преобразователя частоты не перешли
предел 100 %.
Бит 15 = 1: один из таймеров превысил предел 100 %.
5 5
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 87
Page 90

Actual output
freq.
STW
Follower-master
Speed ref.CTW
Master-follower
16bit
130BA276.11
Reverse Forward
Par.3-00 set to
(1) -max- +max
Max reference Max reference
Par.3-00 set to
(0) min-max
Max reference
Forward
Min reference
100%
(4000hex)
-100%
(C000hex)
0%
(0hex)
Par.3-03 0 Par.3-03
Par.3-03
(4000hex)(0hex)
0% 100%
Par.3-02
130BA277.10
Монтаж и настройка RS485
VLT® AutomationDrive FC 360
5.11.3 Значение задания скорости
передачи по шине
Значение задания скорости передается в преобразователь частоты как относительное значение в процентах.
Значение пересылается в виде 16-битного слова; в целых числах (0–32767) значение 16384 (4000 в 16-ричном
формате) соответствует 100 %. Отрицательные числа форматируются с помощью двоичного дополнения. Текущая
выходная частота (MAV) масштабируется таким же образом, как и задание по шине.
55
Рисунок 5.15 Текущая выходная частота (MAV)
Задание и MAV масштабируются следующим образом:
Рисунок 5.16 Задание и MAV
88 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 91

FC
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
18
19
20
27
29
32
33
31
50
53
54
55
42
130BD063.11
45
A OUT
130BD064.11
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
18
19
20
27
29
32
33
31
50
53
54
55
42
0 ~10 V
+
-
FC
45
A OUT
130BD065.11
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
18
19
20
27
29
32
33
31
50
53
54
55
42
4 - 20mA
+
-
FC
A OUT
45
Примеры применения
6 Примеры применения
Руководство по проектированию
6.1 Введение
Параметры
Функция Настройка
Примеры, приведенные в данном разделе, носят
справочный характер и описывают наиболее
распространенные функции.
6-10 Клемма 53,
низкое
напряжение
0,07 В*
6-11 Клемма 53,
1-29 Авто
адаптация
двигателя (AАД)
5-12 Клемма 27,
цифровой вход
* = Значение по умолчанию
Примечания/комментарии.
Группа параметров 1-2* Motor
Параметры
Функция Настройка
[1] Enable
complete
AMA (Включ.
полной ААД)
[2]* Coast
inverse
(Выбег,
инверсный)
высокое
10 В*
напряжение
6-14 Клемма 53,
низкое зад./обр.
0
связь
6-15 Клемма 53,
высокое зад./
1500
обр. связь
6-19 Terminal 53
mode
[1] Voltage
(Напряжение
)
* = Значение по умолчанию
Примечания/комментарии.
6 6
Data (Данные двигателя)
должна быть установлена в
соответствии с двигателем
УВЕДОМЛЕНИЕ
Если клеммы 12 и 27 не
подключены, установите
для пар. 5-12 значение [0]
Таблица 6.1 ААД с подсоединенной кл. 27
Таблица 6.2 Задание скорости через аналоговый вход
(напряжение)
Параметры
Функция Настройка
6-12 Клемма 53,
малый ток
6-13 Клемма 53,
большой ток
4 мА*
20 мА*
6-14 Клемма 53,
низкое зад./обр.
0
связь
6-15 Клемма 53,
высокое зад./
1500
обр. связь
6-19 Terminal 53
mode
Таблица 6.3 Аналоговое задание скорости (ток)
* = Значение по умолчанию
Примечания/комментарии.
[0] Current
(Ток)
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 89
Page 92

130BD066.11
FC
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
18
19
20
27
29
32
33
31
50
53
54
55
42
45
A OUT
130BD067.11
FC
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
18
19
20
27
29
32
33
31
50
53
54
55
42
45
A OUT
130BB068.11
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
18
19
20
27
29
32
33
31
50
53
54
55
42
≈ 5kΩ
FC
45
A OUT
Примеры применения
VLT® AutomationDrive FC 360
Параметры
Функция Настройка
5-10 Клемма 18,
цифровой вход
5-11 Клемма 19,
цифровой вход
5-12 Клемма 27,
цифровой вход
[8] Start
(Пуск)
[10]
Reversing
(Реверс)*
[0] No
operation
Параметры
Функция Настройка
5-11 Клемма 19,
цифровой вход
[1] Reset
(Сброс)
* = Значение по умолчанию
Примечания/комментарии.
(Не
использует
ся)
5-14 Клемма 32,
цифровой вход
66
5-15 Клемма 33,
цифровой вход
[16] Preset
ref bit 0
(Предуст.
зад., бит 0)
[17] Preset
ref bit 1
(Предуст.
зад., бит 1)
3-10 Предустанов
Таблица 6.5 Внешний сброс аварийной сигнализации
ленное задание
Preset ref. 0
(Предуст. задание
0)
Preset ref. 1
(Предуст. задание
1)
Preset ref. 2
(Предуст. задание
2)
Preset ref. 3
(Предуст. задание
3)
* = Значение по умолчанию
Примечания/комментарии.
25%
50%
75%
100%
Параметры
Функция Настройка
6-10 Клемма 53,
низкое
0,07 В*
напряжение
6-11 Клемма 53,
высокое
10 В*
напряжение
6-14 Клемма 53,
низкое зад./обр.
0
связь
6-15 Клемма 53,
высокое зад./
1500
обр. связь
6-19 Terminal 53
mode
[1] Voltage
(Напряжение
)
Таблица 6.4 Пуск/останов с реверсом и 4 преду
становленными скоростями
* = Значение по умолчанию
Примечания/комментарии.
90 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Таблица 6.6 Задание скорости (с помощью ручного
потенциометра)
Page 93
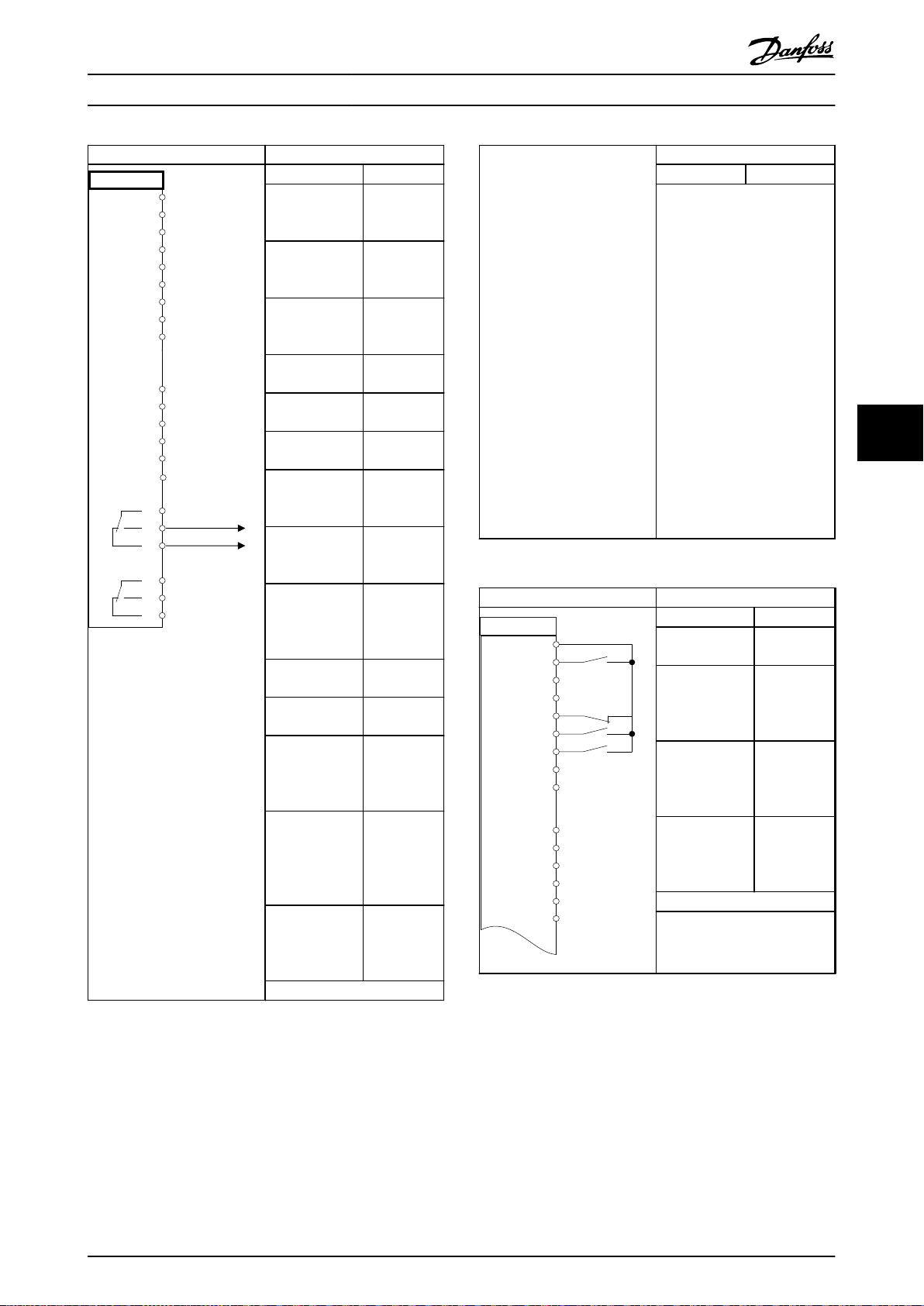
FC
+24 V
D IN
D IN
COM
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
R1R2
12
18
19
20
27
29
32
33
31
50
53
54
55
42
01
02
03
04
05
06
130BD150.11
45
A OUT
FC
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
18
19
20
27
29
32
33
31
50
53
54
55
42
130BD069.11
45
A OUT
Примеры применения
Руководство по проектированию
Параметры
Функция Настройка
4-30 Функция
при потере ОС
двигателя
[1] Warning
(Предупрежд
ение)
4-31 Ошибка
скорости ОС
100
двигателя
4-32 Тайм-аут
при потере ОС
5 с
двигателя
7-00 Ист.сигн.О
С ПИД-рег.скор.
17-11 Разрешени
е (позиции/об)
13-00 Режим
контроллера SL
13-01 Событие
запуска
[2] MCB 102
1024*
[1] On (Вкл.)
[19] Warning
(Предупрежд
ение)
13-02 Событие
останова
[44] Reset
key (Кнопка
Примечания/комментарии.
Предупреждение 90 выдается
при превышении предела на
мониторе ОС. SLC
отслеживает предупреждение
90. Если предупреждение 90
становится истинным (true),
активируется реле 1.
Внешнее оборудование может
указывать на необходимость
обслуживания. Если ошибка
обратной связи опускается
ниже предела снова в течение
5 секунд, преобразователь
частоты продолжает работу и
предупреждение исчезает.
Однако реле 1 продолжает
срабатывать до нажатия [Off/
Reset] (Выкл./сброс).
Таблица 6.7 Использование SLC для настройки реле
Параметры
Функция Настройка
6 6
сброса)
13-10 Операнд
сравнения
13-11 Оператор
сравнения
13-12 Результа
т сравнения
13-51 Событие
контроллера SL
13-52 Действие
контроллера SL
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 91
5-40 Реле
функций
* = Значение по умолчанию
[21] Warning
no. (№
предупрежд
ения)
[1] ≈*
90
[22]
Comparator 0
(Компаратор
0)
[32] Set
digital out A
low
(Ус.н.ур.на
цфв.вых.А)
[80] SL digital
output A
(Цифр.
выход SL A)
Параметры
Функция Настройка
5-10 Клемма 18,
цифровой вход
5-12 Клемма 27,
цифровой вход
5-13 Клемма 29,
цифровой вход
5-14 Клемма 32,
цифровой вход
* = Значение по умолчанию
Примечания/комментарии.
Таблица 6.8 Увеличение/снижение скорости
[8] Start
(Пуск)*
[19] Freeze
Reference
(Зафиксиров.
задание)
[21] Speed
Up
(Увеличение
скорости)
[22] Speed
Down
(Снижение
скорости)
Page 94

Start ( 18)
Freeze ref (27)
Speed up (29 )
Speed down (32 )
Speed
Reference
130BB840.11
130BD070.11
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
18
19
20
27
29
32
33
31
50
53
54
55
42
FC
45
A OUT
130BD366.12
+24 V DC
A
B
GND
12 18 322719 29 33 20
B
A
B
A
130BA646.10
CW
CCW
Примеры применения
VLT® AutomationDrive FC 360
Рисунок 6.1
66
ПРЕДУПРЕЖДЕНИЕ
В термисторах следует использовать усиленную/
двойную изоляцию в соответствии с требованиями к
изоляции PELV.
Таблица 6.9 Термистор двигателя
6.1.1
Цель данного руководства состоит в упрощении
настройки при подключении энкодера к
преобразователю частоты. Перед настройкой энкодера
Подключение энкодера
отображаются базовые уставки для системы
регулирования скорости с обратной связью.
92 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Параметры
Функция Настройка
1-90 Тепловая
защита
двигателя
[2]
Thermistor
trip (Откл. по
термистору)
1-93 Источник
термистора
[1] Analog
input 53
(Аналоговый
вход 53)
6-19 Terminal 53
mode
[1] Voltage
(Напряжение
)
* = Значение по умолчанию
Примечания/комментарии.
Если требуется только
предупреждение, следует
выбрать [1] Thermistor warning
(Предупр.по термист.) в
1-90 Тепловая защита
двигателя.
Рисунок 6.2 Энкодер 24 В или 10–30 В
Рисунок 6.3 Инкрементальный энкодер 24 В, макс. длина
кабеля 5 м
Направление энкодера
6.1.2
Направление энкодера определяется порядком
импульсов, поступающих на преобразователь частоты.
Направление CW (по часовой стрелке) означает, что
канал A опережает канал B на 90 электрических
градусов.
Page 95

Motor
Gearbox
Load
Transmission
Encoder Mech. brake
Brake resistor
130BA120.10
Примеры применения Руководство по проектированию
Направление против часовой стрелки означает, что
канал B на 90 градусов опережает канал A.
Направление вращения определяется со стороны торца
вала.
6.1.3 Приводная система с обратной
связью
Приводная система, как правило, содержит еще
несколько элементов, таких, как:
Двигатель
•
Тормоз
•
(Редуктор)
(Механический тормоз)
Преобразователь частоты
•
Энкодер в качестве системы обратной связи
•
Тормозной резистор для динамического
•
торможения
Силовая передача
•
Нагрузка
•
Для приложений, требующих управления механическим
тормозом, обычно необходим тормозной резистор.
6 6
Рисунок 6.4 Базовая настройка замкнутого контура
управления скоростью
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 93
Page 96

Алфавитный указатель
VLT® AutomationDrive FC 360
Алфавитный указатель
F
FC с Modbus RTU.................................................................................. 70
I
IEC 61800-3...................................................................................... 17, 63
IND (индекс)........................................................................................... 72
L
LCP.................................................................................................... 6, 7, 25
M
Modbus RTU........................................................................................... 75
P
PELV.................................................................................................... 62, 92
PELV, защитное сверхнизкое напряжение............................. 46
R
RCD............................................................................................................... 8
RS485........................................................................................................ 68
RS485
RS485.................................................................................................... 70
V
VVC+..................................................................................................... 8, 24
А
ААД.............................................................................................................. 7
ААД с подсоединенной кл. 27....................................................... 89
Автоматическая адаптация двигателя........................................ 7
Акустический шум.............................................................................. 65
Аналоговый вход............................................................................ 7, 61
Аналоговый выход........................................................................ 7, 61
Д
Данные о питании от сети.............................................................. 57
Директива о машинном оборудовании................................... 10
Директива по низковольтному оборудованию................... 10
Директива по ЭМС............................................................................. 10
Длина кабеля........................................................................................ 60
Длина телеграммы (LGE)................................................................. 71
Дополнительное оборудование................................................. 18
З
Задание по шине................................................................................. 28
Задание скорости............................................................................... 89
Задания и сигналы ОС на аналоговом и импульсном
входах...... 28
Заземление..................................................................................... 16, 18
Заземленный треугольник............................................................. 17
Зафиксировать задание................................................................... 27
Защита..................................................................................................... 46
Защита двигателя........................................................................ 16, 63
Защита и функции.............................................................................. 63
Защита от перегрузки....................................................................... 16
Защита параллельных цепей........................................................ 64
Зона нечувствительности............................................................... 30
Зона нечувствительности около 0.............................................. 30
И
Излучаемые помехи.......................................................................... 44
Изолированные сети питания...................................................... 17
Изоляция от помех............................................................................. 16
Импульсное задание........................................................................... 7
Импульсный вход............................................................................... 61
Индекс (IND).......................................................................................... 72
Индуцированное напряжение..................................................... 16
Исключительные коды modbus................................................... 80
В
Введение в защита от излучений помех в соответствии с
требованиями ЭМС...... 43
Включение-выключение питания.................................................. 8
Внутреннее регулирование тока, режим VVC+.................... 25
Время нарастания.............................................................................. 65
Время разрядки................................................................................... 10
Входное питание................................................................................. 16
Входной сигнал.................................................................................... 20
Выход реле............................................................................................ 62
Выходной ток........................................................................................ 62
94 Danfoss A/S © 09/2014 Все права защищены. MG06B450
К
Кабель двигателя......................................................................... 16, 17
Кабель управления............................................................................ 20
Класс энергоэффективности......................................................... 63
Код функции.......................................................................................... 80
Командное слово................................................................................ 84
Коммутация на выходе.................................................................... 51
Компенсация скольжения................................................................. 8
Кондуктивные помехи...................................................................... 44
Контур заземления............................................................................ 20
Page 97

Алфавитный указатель Руководство по проектированию
Конфигурация сети............................................................................ 75
Короткое замыкание......................................................................... 51
Коэффициент мощности............................................................. 8, 17
КПД............................................................................................................ 64
Краткое описание Modbus RTU.................................................... 74
М
Маркировка CE.................................................................................... 10
Меры по обеспечению ЭМС.......................................................... 69
Меры предосторожности................................................................. 9
Механический удерживающий тормоз.................................... 48
Момент инерции................................................................................. 51
Момент опрокидывания.................................................................... 6
Монтаж и настройка RS485............................................................ 68
Мощность двигателя.................................................................. 16, 60
Мощность торможения............................................................... 7, 49
Н
Напряжение двигателя.................................................................... 65
Напряжение питания........................................................................ 61
Настройка аппаратного обеспечения...................................... 69
Несколько преобразователей частоты.................................... 17
Номер параметра (PNU).................................................................. 72
Номинальная скорость двигателя................................................ 6
Номинальный ток двигателя........................................................... 6
О
Особое условие................................................................................... 66
Останов выбегом..................................................................... 6, 85, 86
Отключение............................................................................................. 8
П
ПИД-регулятор процесса................................................................ 36
ПИД-регулятор скорости.................................................. 21, 24, 33
Питание от сети..................................................................................... 8
Питание от сети (L1, L2, L3)............................................................. 60
Плавающий треугольник................................................................ 17
Плата управления, выход 24 В пост.тока................................. 62
Плата управления, последовательная связь через
интерфейс RS485...... 62
Подключение заземления.............................................................. 16
Подключение сети............................................................................. 69
Поперечное сечение........................................................................ 60
Последовательная связь............................................................ 7, 20
Превышение напряжения, создаваемое двигателем........ 51
Предел задания................................................................................... 27
Предохранитель................................................................................. 64
Предустановленное задание........................................................ 28
Прерывистый рабочий цикл............................................................ 7
Провод заземления........................................................................... 16
Провода двигателя..................................................................... 16, 17
Провода элементов управления................................................. 16
Программирование клемм............................................................ 20
Промежуточная цепь................................................................. 51, 65
Пропадание напряжения сети..................................................... 51
Профиль FC
Общие сведения о протоколе.................................................. 70
Профиль FC........................................................................................... 84
Р
Рабочие характеристики платы управления......................... 63
Размер проводов................................................................................ 16
Разомкнутый контур......................................................................... 63
Разъем питания................................................................................... 16
Регулирование крутящего момента.......................................... 21
Результат испытаний ЭМС.............................................................. 44
С
Сброс........................................................................................................ 63
Связь по протоколу Modbus......................................................... 69
Скорость синхронного двигателя................................................. 6
Слово состояния................................................................................. 86
Снижение номинальных характеристик................................. 63
Сокращение....................................................................................... 0
Статическая перегрузка в режиме VVC+................................. 51
Т
Тепловая защита двигателя.................................................... 52, 87
Термистор......................................................................................... 8, 92
Тип данных, поддерживаемый..................................................... 73
Ток утечки.............................................................................................. 46
Торможение постоянным током................................................. 85
Тормозной резистор............................................................. 7, 48, 55
Требования помехозащищенности в соответствии с
требованиями ЭМС...... 44
У
Увеличение/уменьшение задания............................................. 27
Указания по утилизации.................................................................. 10
Уровень напряжения........................................................................ 60
Условия окружающей среды......................................................... 63
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 95
Page 98

Алфавитный указатель
VLT® AutomationDrive FC 360
Ф
Фаза двигателя.................................................................................... 51
Фиксация выходной частоты........................................................... 6
Фиксация частоты.......................................................................... 6, 85
Фиксировать выходную частоту.................................................. 85
Фильтр ВЧ-помех................................................................................ 17
Функция отключения........................................................................ 16
Функция торможения....................................................................... 49
Х
Характеристика крутящего момента........................................ 60
Характеристики управления......................................................... 63
Ц
Цифровой вход.................................................................................... 60
Цифровой выход................................................................................. 62
Ч
Чтение регистров временного хранения (03 16-ричн.).... 83
Э
Экранированный кабель................................................................. 16
Экранированный кабель управления....................................... 20
Экстремальные рабочие условия............................................... 51
Электрические помехи.................................................................... 16
ЭМС........................................................................................................... 63
Энергоэффективность........................................................ 57, 58, 59
ЭТР................................................................................................................ 7
96 Danfoss A/S © 09/2014 Все права защищены. MG06B450
Page 99

Алфавитный указатель Руководство по проектированию
MG06B450 Danfoss A/S © 09/2014 Все права защищены. 97
Page 100

Компания «Данфосс» не несет ответственности за возможные опечатки в каталогах, брошюрах и других видах печатных материалов. Компания «Данфосс» оставляет за собой право на
изменение своих продуктов без предварительного извещения. Это относится также к уже заказанным продуктам при условии, что такие изменения не влекут последующих
корректировок уже согласованных спецификаций. Все товарные знаки в этом материале являются собственностью соответствующих компаний. «Данфосс» и логотип «Данфосс» являются
товарными знаками компании «Данфосс А/О». Все права защищены.
Danfoss A/S
Ulsnaes 1
DK-6300 Graasten
www.danfoss.com/drives
130R0499 MG06B450 09/2014
*MG06B450*
 Loading...
Loading...