

Page 1

ENGINEERING TOMORROW
Guia de Design
VLT® AutomationDrive FC 360
vlt-drives.danfoss.com
Page 2

Page 3
Índice Guia de Design
Índice
1 Introdução
1.1 Como ler este Guia de Design
1.2 Denições
1.3 Precauções de segurança
1.4 Instruções para descarte
1.5 Documento e versão de software
1.6 Aprovações e certicações
2 Visão geral do produto
2.1 Visão geral do tamanho do gabinete
2.2 Instalação elétrica
2.2.1 Requisitos de aterramento 15
2.2.2 Fiação de controle 17
2.3 Estruturas de controle
2.3.1 Princípio de controle 20
2.3.2 Modos de controle 20
2.3.3 Princípio de controle do FC 360 21
2.3.4 Estrutura de controle em VVC
2.3.5 Controle de corrente interna no modo VVC
5
5
6
9
10
10
10
12
12
13
20
+
+
22
22
2.3.6 Controle local [Hand On] e controle remoto [Auto On] 23
2.4 Tratamento das referências
2.4.1 Limites de referência 25
2.4.2 Graduação das referências predenidas e das referências de barramento 26
2.4.3 Escalonamento de referência de pulso e analógica e feedback 26
2.4.4 Banda morta em torno de zero 27
2.5 Controle do PID
2.5.1 Controle do PID de velocidade 30
2.5.2 Controle do PID de processo 33
2.5.3 Parâmetros relevantes de controle de processo 34
2.5.4 Exemplo de controle do PID de processo 35
2.5.5 Otimização do controlador de processo 38
2.5.6 Método de sintonização Ziegler Nichols 38
2.6 Emissão EMC e imunidade
2.6.1 Aspectos gerais da emissão EMC 39
2.6.2 Requisitos de emissão EMC 41
2.6.3 Requisitos de imunidade EMC 41
24
30
39
2.7 Isolação Galvânica
2.8 Corrente de fuga para o terra
2.9 Funções de freio
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 1
43
43
45
Page 4
Índice
VLT® AutomationDrive FC 360
2.9.1 Freio mecânico de retenção 45
2.9.2 Frenagem Dinâmica 45
2.9.3 Seleção do resistor de frenagem 45
2.10 Smart Logic Controller
2.11 Condições de funcionamento extremas
3 Código do tipo e seleção
3.1 Solicitação de pedido
3.2 Códigos de compra: Opções, acessórios e peças de reposição
3.3 Códigos de compra: Resistores de frenagem
3.3.1 Códigos de compra: Resistores de frenagem 10% 52
3.3.2 Códigos de compra: Resistor de frenagem 40% 53
4 Especicações
4.1 Alimentação de rede elétrica 3x380–480 V CA
4.2 Especicações Gerais
4.3 Fusíveis
4.4 Eciência
4.5 Ruído acústico
4.6 Condições dU/dt
4.7 Condições especiais
47
47
50
50
51
52
54
54
57
61
61
62
62
63
4.7.1 Derating manual 64
4.7.2 Derating automático 66
4.8 Tamanhos do gabinete metálico, valor nominal da potência e dimensões
5 Instalação e setup do RS485
5.1 Introdução
5.1.1 Visão Geral 68
5.1.2 Conexão de rede 69
5.1.3 Setup de hardware 69
5.1.4 Programação dos parâmetros da comunicação do Modbus 69
5.1.5 Precauções com EMC 69
5.2 Protocolo Danfoss FC
5.2.1 Visão Geral 69
5.2.2 FC com Modbus RTU 70
5.3 Conguração de rede
5.4 Estrutura do enquadramento de mensagem do protocolo Danfoss FC
5.4.1 Conteúdo de um caractere (byte) 70
5.4.2 Estrutura do telegrama 70
66
68
68
69
70
70
5.4.3 Comprimento do telegrama (LGE) 71
5.4.4 Endereço do conversor de frequência (ADR) 71
2 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 5

Índice Guia de Design
5.4.5 Byte de controle dos dados (BCC) 71
5.4.6 O Campo de dados 71
5.4.7 O Campo PKE 71
5.4.8 Número do parâmetro (PNU) 72
5.4.9 Índice (IND) 72
5.4.10 Valor do Parâmetro (PWE) 72
5.4.11 Tipos de dados suportados pelo conversor de frequência 73
5.4.12 Conversão 73
5.4.13 Palavras do processo (PCD) 73
5.5 Exemplos
5.5.1 Gravação de um valor de parâmetro 73
5.5.2 Leitura de um valor de parâmetro 73
5.6 Modbus RTU
5.6.1 Pré-requisitos de conhecimento 74
5.6.2 Visão Geral 74
5.6.3 Conversor de Frequência com Modbus RTU 74
5.7 Conguração de rede
5.8 Estrutura do Enquadramento de Mensagem do Modbus RTU
5.8.1 Introdução 75
5.8.2 Estrutura do telegrama do Modbus RTU 75
5.8.3 Campo de início/parada 75
5.8.4 Campo de endereço 76
5.8.5 Campo de função 76
5.8.6 Campo de dados 76
5.8.7 Campo de vericação CRC 76
5.8.8 Endereçamento do registrador da bobina 76
73
74
75
75
5.8.9 Como controlar o Conversor de Frequência 79
5.8.10 Códigos de função suportados pelo Modbus RTU 79
5.8.11 Códigos de exceção do Modbus 79
5.9 Como Acessar os Parâmetros
5.9.1 Tratamento de parâmetros 79
5.9.2 Armazenagem de dados 80
5.9.3 IND (Índice) 80
5.9.4 Blocos de texto 80
5.9.5 Fator de conversão 80
5.9.6 Valores de parâmetros 80
5.10 Exemplos
5.10.1 Ler o status da bobina (01 hex) 80
5.10.2 Forçar/gravar bobina única (05 hex) 81
5.10.3 Forçar/gravar múltiplas bobinas (0F hex) 81
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 3
79
80
Page 6

Índice
VLT® AutomationDrive FC 360
5.10.4 Ler registradores de retenção (03 hex) 82
5.10.5 Registrador único predenido (06 hex) 82
5.10.6 Vários registros predenidos (10 hex) 82
5.11 Perl de Controle do FC da Danfoss
5.11.1 Palavra de controle de acordo com o perl do FC (Protocolo 8–10 = Perl do
FC) 83
5.11.2 Status word de acordo com o perl do FC (STW) 84
5.11.3 Valor de referência da velocidade do barramento 86
6 Exemplos de aplicações
6.1 Introdução
Índice
83
87
87
92
4 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 7
Introdução Guia de Design
1 Introdução
1.1 Como ler este Guia de Design
Este Guia de Design fornece informações sobre como
selecionar, comissionar e solicitar um conversor de
frequência. Ele fornece informações sobre as instalações
mecânica e elétrica.
O Guia de Design é destinado ao uso por pessoal
qualicado.
Leia e siga o Guia de Design para usar o conversor de
frequência de maneira segura e prossional, prestando
atenção especial às instruções de segurança e às
advertências gerais.
VLT® é uma marca registrada.
VLT® AutomationDrive FC 360 O Guia Rápido
•
fornece as informações necessárias para colocar o
conversor de frequência em funcionamento.
VLT® AutomationDrive FC 360 O Guia de
•
Programação fornece as informações sobre como
programar e inclui descrições completas dos
parâmetros.
A literatura técnica do FC 360 também está disponível on-
-line em www.danfoss.com/fc360.
Os seguintes símbolos são usados neste manual:
ADVERTÊNCIA
Indica uma situação potencialmente perigosa que pode
resultar em morte ou ferimentos graves.
CUIDADO
Indica uma situação potencialmente perigosa que pode
resultar em ferimentos leves ou moderados. Também
pode ser usado para alertar contra práticas inseguras.
AVISO!
Indica informações importantes, incluindo situações que
podem resultar em danos ao equipamento ou à
propriedade.
As seguintes convenções são usadas neste manual:
Listas numeradas indicam os procedimentos.
•
As listas com marcadores indicam outras
•
informações e descrições das ilustrações.
O texto em itálico indica:
•
- Referência cruzada.
- Link.
- Nota de rodapé.
- Nome do parâmetro.
- Nome do grupo do parâmetro.
- Opcional de parâmetro.
Todas as dimensões nos desenhos estão em mm
•
(polegadas).
1.1.1 Abreviações
Corrente alternada CA
American Wire Gauge AWG
Ampère/AMP A
Adaptação automática do motor AMA
Limite de corrente I
Graus Celsius
Corrente contínua CC
Depende do conversor D-TYPE
Compatibilidade eletromagnética EMC
Relé térmico eletrônico ETR
Grama g
Hertz Hz
Potência hp
kiloHertz kHz
Painel de controle local LCP
Metro m
Indutância em milihenry mH
Miliampere mA
Milissegundo ms
Minuto min
Ferramenta Motion Control MCT
Nanofarad nF
Newton metro Nm
Corrente nominal do motor I
Frequência do motor nominal f
Potência do motor nominal P
Tensão do motor nominal U
Motor de ímã permanente Motor PM
Tensão extra baixa de proteção PELV
Placa de circuito impresso PCB
Corrente de saída nominal do inversor I
Rotações por minuto RPM
Terminais regenerativos Regen
Segundo s
Velocidade de sincronização do motor n
Limite de torque T
Volts V
LIM
°C
M,N
M,N
M,N
M,N
INV
s
LIM
1 1
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 5
Page 8
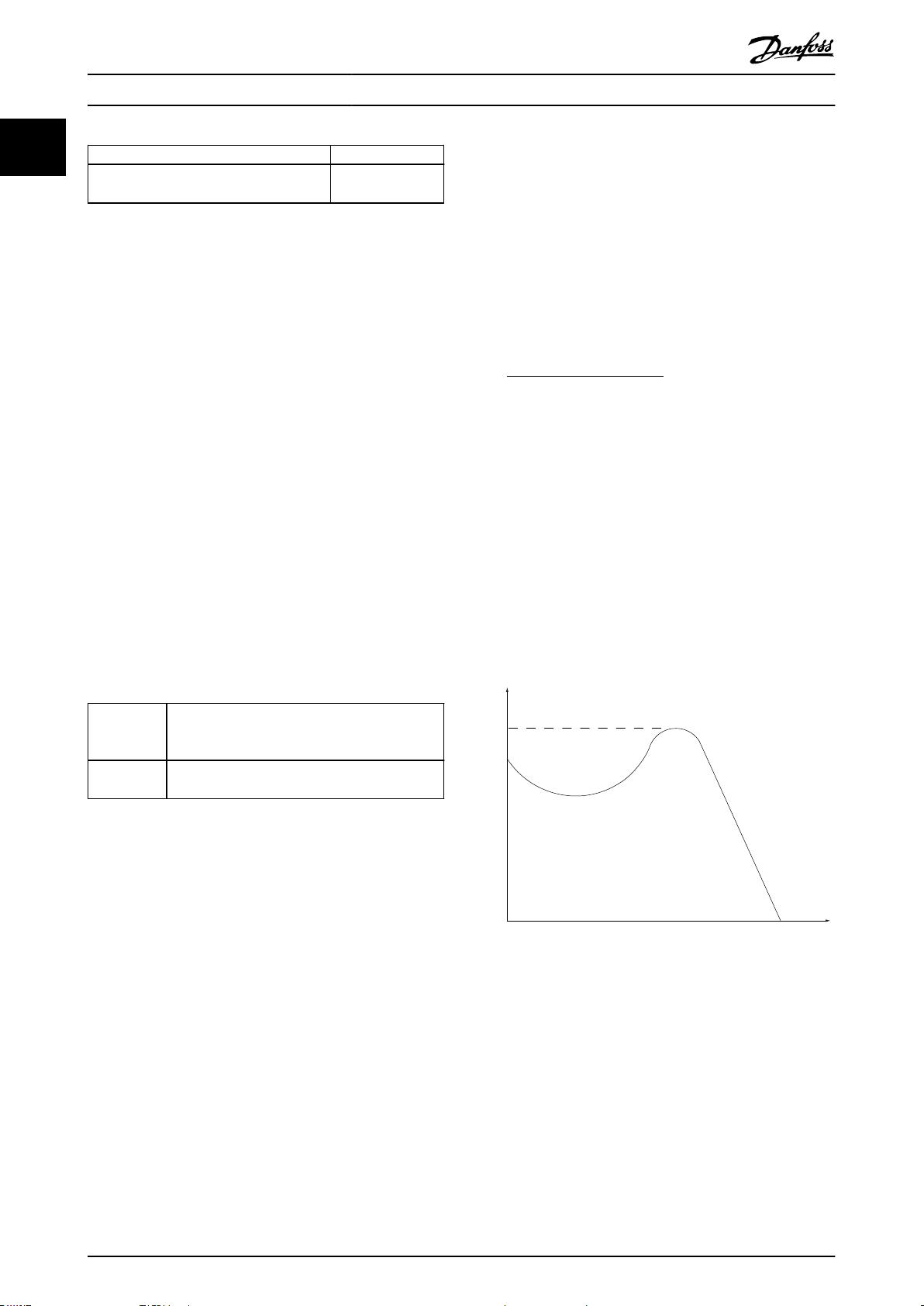
175ZA078.10
Arranque
RPM
Torque
Introdução
VLT® AutomationDrive FC 360
11
Corrente de saída máxima I
Corrente de saída nominal fornecida pelo
conversor de frequência
VLT,MAX
I
VLT,N
I
M
Corrente do motor (real).
I
M,N
Corrente nominal do motor (dados da plaqueta de identi-
1.2 Denições
1.2.1 Conversor de frequência
cação).
n
M,N
Velocidade nominal do motor (dados da plaqueta de
identicação).
Parada por inércia
n
O eixo do motor está em modo livre. Nenhum torque no
motor.
I
VLT,MAX
Corrente de saída máxima.
I
VLT,N
Corrente de saída nominal fornecida pelo conversor de
frequência.
U
VLT,MAX
Tensão de saída máxima.
1.2.2 Entrada
Comandos de controle
Inicie e pare o motor conectado com o LCP e as entradas
digitais.
As funções estão divididas em 2 grupos.
As funções do grupo 1 têm prioridade mais alta que as do
s
Velocidade do motor síncrono.
2 × Parâmetro 1−23 × 60s
ns=
n
slip
Parâmetro 1−39
Deslizamento do motor.
P
M,N
Potência do motor nominal (dados da plaqueta de identicação em kW ou hp).
T
M,N
Torque nominal (motor).
U
M
Tensão do motor instantânea.
U
M,N
Tensão nominal do motor (dados da plaqueta de identi-
cação).
Torque de segurança
grupo 2.
Grupo 1 Parada precisa, parada por inércia, parada precisa
e parada por inércia, parada rápida, frenagem CC,
parada e [OFF].
Grupo 2 Iniciar, partida por pulso, partida reversa, jog,
congelar frequência de saída e [Hand On]
Tabela 1.1 Grupos de função
1.2.3 Motor
Motor em funcionamento
Torque gerado no eixo de saída e velocidade de 0 RPM à
velocidade máxima no motor.
f
JOG
Frequência do motor quando a função jog estiver ativada
(por meio dos terminais digitais ou barramento).
f
M
Frequência do motor.
f
MAX
Frequência do motor máxima.
f
MIN
Frequência do motor mínima.
f
M,N
Frequência nominal do motor (dados da plaqueta de
identicação).
Ilustração 1.1 Torque de segurança
η
VLT
A eciência do conversor de frequência é denida como a
relação entre a potência de saída e a de entrada.
Comando inibidor de partida
Um comando inibidor de partida pertencente aos
comandos de controle no grupo 1. Consulte Tabela 1.1
para obter mais detalhes.
Comando de parada
Um comando de parada pertencente aos comandos de
controle no grupo 1. Consulte Tabela 1.1 para obter mais
detalhes.
6 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 9

Introdução Guia de Design
1.2.4 Referências
Referência analógica
Um sinal transmitido para as entradas analógicas 53 ou 54
pode ser tensão ou corrente.
Referência binária
Um sinal transmitido através da porta de comunicação
serial.
Referência predenida
Uma referência predenida a ser programada de -100% a
+100% da faixa de referência. Seleção de 8 referências
predenidas via terminais digitais. Seleção de 4 referências
predenidas por meio do barramento.
Referência de pulso
É um sinal de pulso transmitido às entradas digitais
(terminal 29 ou 33).
Ref
MÁX
Determina a relação entre a entrada de referência com
valor de escala total de 100% (tipicamente 10 V, 20 mA) e
a referência resultante. O valor de referência máxima está
programado em parâmetro 3-03 Maximum Reference.
Ref
MÍN
Determina a relação entre a entrada de referência com
valor de escala total de 0% (tipicamente 0 V, 0 mA, 4 mA)
e a referência resultante. O valor de referência mínima está
programado em parâmetro 3-02 Minimum Reference.
1.2.5 Diversos
Entradas analógicas
As entradas analógicas são utilizadas para controlar várias
funções do conversor de frequência.
Há 2 tipos de entradas analógicas:
Entrada de corrente: 0-20 mA e 4-20 mA.
•
Entrada de tensão: 0-10 V CC.
•
Saídas analógicas
As saídas analógicas podem fornecer um sinal de 0-20 mA
ou 4-20 mA.
Adaptação automática do motor, AMA
O algoritmo AMA determina os parâmetros elétricos para o
motor conectado quando parado.
Resistor de frenagem
O resistor de frenagem é um módulo capaz de absorver a
potência de frenagem gerada na frenagem regenerativa.
Essa potência de frenagem regenerativa aumenta a tensão
do barramento CC e um circuito de frenagem garante que
a potência seja transmitida ao resistor de frenagem.
Características de TC
Características do torque constante usadas por todas as
aplicações tais como correia transportadora, bombas de
deslocamento e guindastes.
Entradas digitais
As entradas digitais podem ser utilizadas para controlar
várias funções do conversor de frequência.
Saídas digitais
O conversor de frequência apresenta 2 saídas de estado
sólido que podem fornecer um sinal de 24 V CC (máximo
de 40 mA).
ETR
O relé térmico eletrônico é um cálculo da carga térmica
baseado na carga atual e no tempo. Sua nalidade é fazer
uma estimativa da temperatura do motor.
Barramento padrão do FC
Inclui o barramento RS485 com o Protocolo Danfoss FC ou
o protocolo MC. Consulte parâmetro 8-30 Protocolo.
Inicialização
Se a inicialização for executada (parâmetro 14-22 Modo
Operação ou redenição de 2 dedos), o conversor de
frequência retorna à conguração padrão.
Ciclo útil intermitente
Características nominais úteis intermitentes referem-se a
uma sequência de ciclos úteis. Cada ciclo consiste de um
período com carga e outro sem carga. A operação pode
ser de funcionamento periódico ou de funcionamento
aperiódico.
LCP
O painel de controle local compõe uma interface completa
para controle e programação do conversor de frequência.
O LCP é desconectável. Com o kit de instalação opcional, o
LCP pode ser instalado a até 3 m (9,8 pés) do conversor de
frequência em um painel frontal.
GLCP
A interface do painel de controle local gráco (LCP 102)
para controle e programação do conversor de frequência.
O display é gráco e o painel é usado para mostrar os
valores do processo. O GLCP possui funções de armazenamento e cópia.
NLCP
A interface do painel de controle local numérico (LCP 21)
para controle e programação do conversor de frequência.
O display é numérico e o painel é usado para mostrar os
valores de processo. O NLCP possui funções de armazenamento e cópia.
lsb
É o bit menos signicativo.
msb
É o bit mais signicativo.
MCM
Curto para mille circular em milésimo, uma unidade de
medição americana para seção transversal do cabo. 1 MCM
= 0,5067 mm2.
1 1
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 7
Page 10
Introdução
VLT® AutomationDrive FC 360
11
Parâmetros on-line/o-line
As alterações nos parâmetros on-line são ativadas imediatamente após a mudança no valor de dados. Para ativar as
alterações nos parâmetros o-line, pressione [OK].
PID de processo
O controle do PID mantém velocidade, pressão e
temperatura ajustando a frequência de saída para corresponder à carga variável.
PCD
Dados de controle de processo.
Ciclo de energização
Desligue a rede elétrica até o display (LCP) car escuro,
depois ligue novamente.
Fator de potência
O fator de potência é a relação entre I1 e I
Fator depotência =
3xUxI1cosϕ1
3xUxI
RMS
RMS
.
Para VLT® AutomationDrive FC 360 conversores de
frequência,
Fator depotência =
cosϕ
1 = 1, portanto:
I1xcosϕ1
I
RMS
=
I
I
RMS
1
O fator de potência indica em que intensidade o conversor
de frequência oferece uma carga na alimentação de rede
elétrica.
Quanto menor o fator de potência, maior será a I
RMS
para o
mesmo desempenho em kW.
I
RMS
=
I
+ I
1
5
+ I
2
+ .. + I
7
2
n
2
2
Além disso, um fator de potência alto indica que as
diferentes correntes harmônicas são baixas.
As bobinas CC incorporadas produzem um alto fator de
potência, minimizando a carga imposta na alimentação de
rede elétrica.
Entrada de pulso/encoder incremental
É um transmissor digital de pulso, externo, utilizado para
retornar informações sobre a velocidade do motor. O
encoder é utilizado em aplicações onde há necessidade de
extrema precisão no controle da velocidade.
RCD
Dispositivo de corrente residual.
Setup
Salve as programações dos parâmetros em 2 setups.
Alterne entre os 2 setups de parâmetro e edite 1 setup
enquanto outro estiver ativo.
SFAVM
Acrônimo que descreve a modulação vetorial assíncrona
orientada pelo ux do estator para padrão de
Smart logic control (SLC)
O SLC é uma sequência de ações denidas pelo usuário
executadas quando o Smart Logic Controller avalia os
eventos denidos pelo usuário associados como
verdadeiros (grupo do parâmetro 13-** Smart Logic Control).
STW
Status word.
THD
A distorção de harmônicas total indica a contribuição total
da distorção de harmônicas.
Termistor
Um resistor dependente da temperatura colocado onde a
temperatura é monitorada (conversor de frequência ou
motor).
Desarme
Um estado inserido em situações de falha, por exemplo, se
o conversor de frequência estiver sujeito a sobretensão ou
quando estiver protegendo o motor, processo ou
mecanismo. Uma nova partida é evitada até que a causa
da falha desapareça e o estado de desarme seja cancelado
ativando o reset ou, às vezes, sendo programado para
reset automaticamente. Não use o desarme para segurança
pessoal.
Bloqueio por desarme
O bloqueio por desarme é um estado inserido em
situações de falha quando o conversor de frequência está
se protegendo e requer intervenção física. Um exemplo
que causa um bloqueio por desarme é o conversor de
frequência que está sujeito a um curto-circuito na saída.
Um desarme bloqueado só pode ser cancelado
desconectando a rede elétrica, removendo a causa da falha
e reconectando o conversor de frequência. A nova partida
é impedida até que o estado de desarme seja cancelado,
ativando a reinicialização ou, às vezes, sendo programado
para reinicializar automaticamente. Não use o bloqueio por
desarme para segurança pessoal.
Características de VT
Características do torque variável, utilizado em bombas e
ventiladores.
+
VVC
Se comparado com o controle padrão de relação tensão/
frequência, o controle vetorial de tensão (VVC+) melhora a
dinâmica e a estabilidade, tanto quando a referência de
velocidade é alterada quanto em relação ao torque de
carga.
AVM a 60°
Refere-se à modulação vetorial assíncrona do padrão de
°
chaveamento de 60
.
chaveamento.
Compensação de escorregamento
O conversor de frequência compensa o escorregamento do
motor, fornecendo um complemento à frequência que
acompanha a carga medida do motor, mantendo a
velocidade do motor praticamente constante.
8 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 11
Introdução Guia de Design
1.3 Precauções de segurança
ADVERTÊNCIA
A tensão do conversor de frequência é perigosa sempre
que o conversor estiver conectado à rede elétrica. A
instalação incorreta do motor, conversor de frequência
ou eldbus pode causar morte, ferimentos graves ou
danos ao equipamento. Consequentemente, as instruções
neste manual, bem como as normas nacional e local
devem ser obedecidas.
Normas de segurança
1. Desconecte sempre a alimentação de rede
elétrica do conversor de frequência antes de
realizar um serviço de manutenção. Verique se a
alimentação de rede elétrica foi desconectada e
observe o tempo de descarga indicado em
Tabela 1.2 antes de remover o motor e a
alimentação de rede elétrica.
2. [O/Reset] no LCP não desconecta a alimentação
de rede elétrica e não deve ser usado como um
interruptor de segurança.
3. Aterre o equipamento adequadamente, proteja o
usuário contra tensão de alimentação, e proteja o
motor contra sobrecarga, de acordo com as
normas nacionais e locais aplicáveis.
4. A proteção contra sobrecarga do motor não está
incluída na
função for desejada, programe
parâmetro 1-90 Proteção Térmica do Motor para [4]
Desarme do ETR 1 ou [3] Advertência do ETR 1.
5. O conversor de frequência tem mais fontes de
tensão do que L1, L2 e L3 quando há divisão da
carga (ligação do circuito intermediário CC).
Verique se todas as fontes de tensão foram
desligadas e se já decorreu o tempo necessário,
antes de iniciar o trabalho de reparo.
Advertência contra partida acidental
1. O motor pode ser parado com comandos digitais,
comandos de barramento, referências ou uma
parada local, enquanto o conversor de frequência
estiver conectado à rede elétrica. Se considerações de segurança pessoal (por exemplo, risco
de ferimentos causados pelo contato com peças
móveis após uma partida acidental) tornar
necessário garantir que não ocorra nenhuma
partida acidental, essas funções de parada não
são sucientes. Em tais casos, desconecte a
alimentação de rede elétrica.
2. O motor pode dar partida ao mesmo tempo em
que os parâmetros são congurados. Se isso
signicar que a segurança pessoal pode ser
comprometida, a partida do motor deve ser
conguração de fábrica. Se esta
evitada, por exemplo, com a desconexão segura
da conexão do motor.
3. Um motor, que foi parado com a alimentação de
rede elétrica conectada, poderá dar partida se
ocorrerem defeitos na eletrônica do conversor de
frequência, por meio de uma sobrecarga
temporária, ou se uma falha na fonte de
alimentação de rede elétrica ou a conexão do
motor for corrigida. Se a partida acidental deve
ser evitada por razões de segurança pessoal, as
funções normais de parada do conversor de
frequência não são sucientes. Em tais casos,
desconecte a alimentação de rede elétrica.
4. Em casos raros, sinais de controle provenientes
ou internos do conversor de frequência podem
ser ativados por engano, atrasados ou não
ocorrerem completamente. Quando usados em
situações em que a segurança é fundamental, por
exemplo, ao controlar a função de freio eletromagnético de uma aplicação de elevação, não
dependa exclusivamente desses sinais de
controle.
ADVERTÊNCIA
ALTA TENSÃO
Tocar as partes elétricas pode ser fatal, mesmo depois
que o equipamento tenha sido desconectado da rede
elétrica.
Certique-se de que todas as entradas de tensão tenham
sido desconectadas, incluindo divisão da carga (ligação
do circuito intermediário CC) e conexão do motor para
backup cinético.
Os sistemas em que os conversores de frequência estão
instalados devem, se necessário, estar equipados com
dispositivos adicionais de monitoramento e proteção de
acordo com as normas de segurança válidas, tais como
leis sobre ferramentas mecânicas, normas de segurança
para a prevenção de acidentes etc. Modicações nos
conversores de frequência através de software
operacional são permitidas.
AVISO!
Situações perigosas devem ser identicadas pelo
construtor/integrador da máquina responsável por
considerar os meios preventivos necessários. Dispositivos
adicionais de monitoramento e proteção podem ser
incluídos, sempre de acordo com as normas de
segurança nacionais válidas, como leis sobre ferramentas
mecânicas e regulamentos para a prevenção de
acidentes.
1 1
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 9
Page 12
Introdução
VLT® AutomationDrive FC 360
11
ADVERTÊNCIA
TEMPO DE DESCARGA
O conversor de frequência contém capacitores de
barramento CC, que podem permanecer carregados
mesmo quando o conversor de frequência não está
energizado. Pode haver alta tensão presente mesmo
quando as luzes indicadoras LED de advertência
estiverem apagadas. Se o tempo especicado após a
energia ter sido desligada não for aguardado para
executar ou serviço de manutenção, isto pode resultar
em morte ou ferimentos graves.
Pare o motor.
•
Desconecte as fontes de alimentação da rede
•
elétrica CA e do barramento CC, incluindo os
backups de bateria, UPS e conexões do
barramento CC para os outros conversores de
frequência.
Desconecte ou trave o motor PM.
•
Aguarde os capacitores se descarregarem por
•
completo. O tempo de espera mínimo está
especicado em Tabela 1.2 e também é visível
na etiqueta do produto, no topo do conversor
de frequência.
Antes de realizar qualquer serviço de
•
manutenção, use um dispositivo de medição de
tensão apropriado para ter certeza de que os
capacitores estejam completamente descarregados.
Tensão
[V]
380–480
380–480
Faixa de potência
[kW (hp)]
0,37–7,5 kW
(0,5–10 hp)
11–75 kW
(15–100 hp)
Tempo de espera
mínimo
(minutos)
4
15
1.5 Documento e versão de software
Este manual é revisado e atualizado regularmente. Todas as
sugestões de melhoria são bem-vindas.
Edição Observações Versão do software
MG06B5xx Atualização devido a
nova versão de
hardware e software.
1.8x
1.6 Aprovações e certicações
Os conversores de frequência foram projetados em conformidade com as diretivas descritas nesta seção.
Para obter mais informações sobre aprovações e
certicados, acesse a área de download em
www.danfoss.com/fc360.
1.6.1 Marcação CE
A marcação CE (Conformité Européenne) indica que o
fabricante do produto está em conformidade com todas as
diretivas da UE aplicáveis.
As diretivas da UE aplicáveis à concepção e fabricação de
conversores são:
A diretiva de baixa tensão
•
A diretiva EMC
•
A diretiva de maquinaria (para unidades com
•
função de segurança integrada).
A marcação CE é destinada a eliminar as barreiras técnicas
ao livre comércio entre os estados da CE e da EFTA dentro
da ECU. A marcação CE não regula a qualidade do produto.
Não se pode deduzir especicações técnicas da marcação
CE.
1.6.2 Diretiva de baixa tensão
Tabela 1.2 Tempo de descarga
Instruções para descarte
1.4
O equipamento que contiver
componentes elétricos não pode ser
descartado junto com o lixo doméstico.
Deve ser coletado separadamente com o
lixo de material elétrico e eletrônico, em
conformidade com a legislação local e
atual em vigor.
Os conversores são classicados como componentes
eletrônicos e devem ter a certicação CE em conformidade
com a diretiva de baixa tensão. A diretiva é aplicável a
todos os equipamentos elétricos nas faixas de tensão de
50–1000 V CA e 75–1500 V CC.
A diretiva determina que o projeto do equipamento deve
garantir a segurança e a saúde das pessoas e dos animais,
e a preservação do material, garantindo a instalação, a
manutenção e o uso adequados do equipamento. Danfoss
A certicação CE está em conformidade com a diretiva de
baixa tensão, e a Danfoss fornece uma declaração de
conformidade mediante solicitação.
10 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 13

Introdução Guia de Design
1.6.3 Diretiva EMC
Compatibilidade eletromagnética (EMC) signica que a
interferência eletromagnética entre peças do equipamento
não prejudica seu desempenho. O requisito de proteção
básica da diretiva EMC 2014/30/EU determina que
dispositivos que geram interferência eletromagnética (EMI)
ou cuja operação possa ser afetada pela EMI devem ser
projetados para limitar a geração de interferência eletromagnética, e devem ter um grau adequado de imunidade
à EMI quando instalado, mantido e usado adequadamente.
Um conversor pode ser usado como dispositivo
independente ou como parte de uma instalação mais
complexa. Os dispositivos em qualquer um desses casos
devem ter a marcação CE. Os sistemas não precisam ter a
marcação CE, mas devem atender aos requisitos básicos de
proteção da diretiva EMC.
1 1
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 11
Page 14
130BA870.10
130BA809.10
130BA810.10
130BA810.10
130BA810.10
130BA826.10
130BA826.10
Visão geral do produto
VLT® AutomationDrive FC 360
2 Visão geral do produto
22
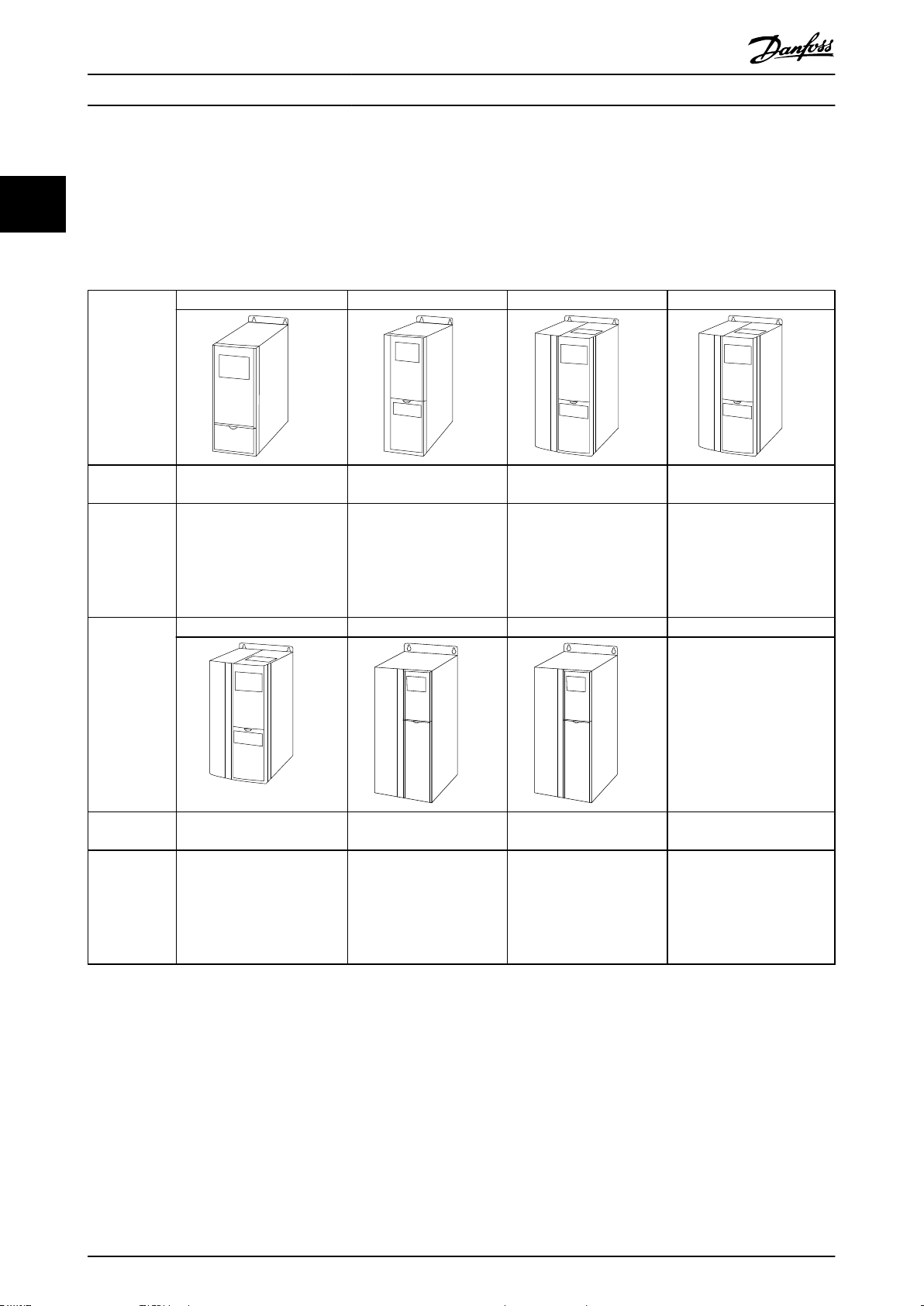
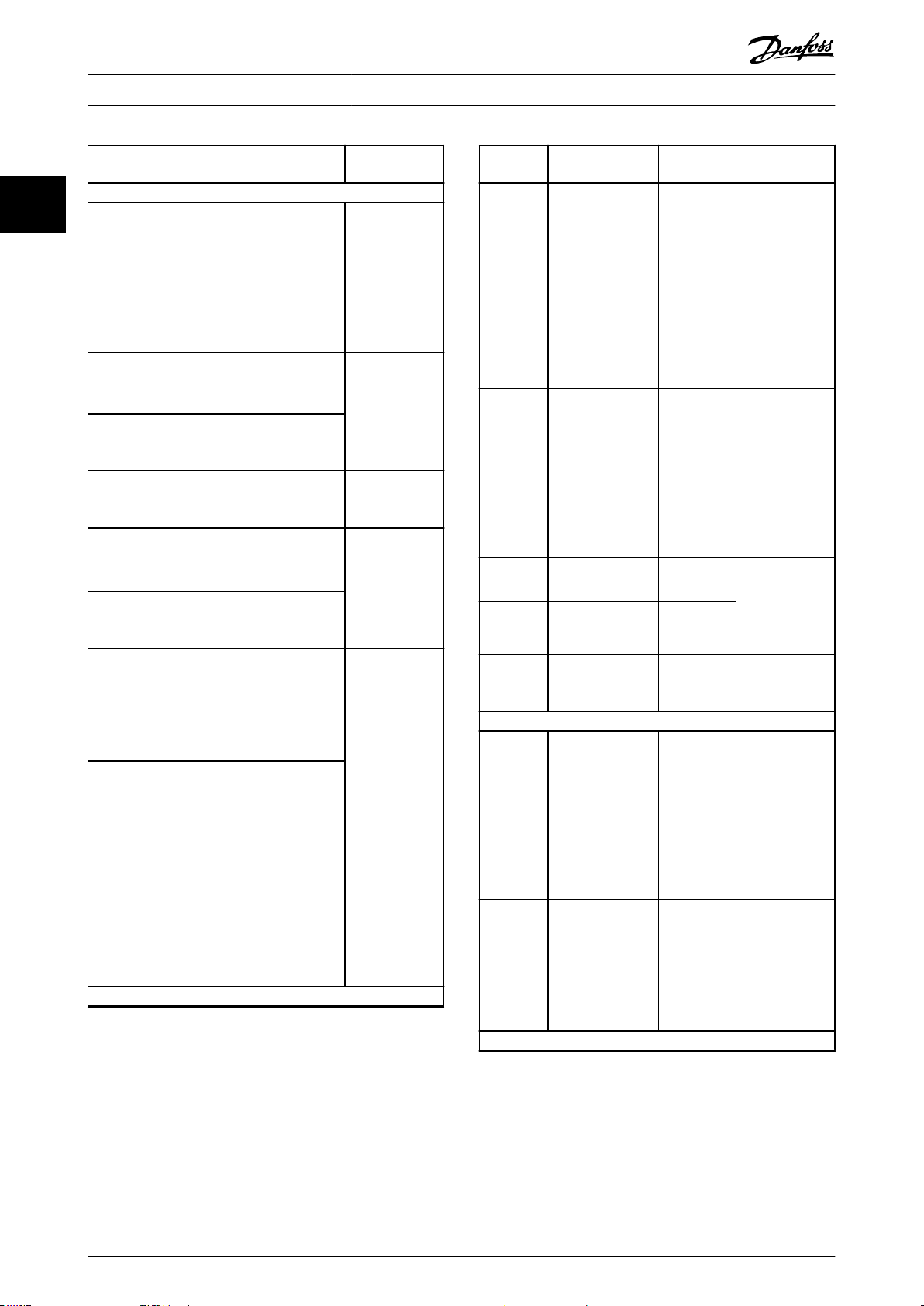
2.1 Visão geral do tamanho do gabinete
O tamanho do gabinete depende da faixa de potência.
Tamanho do
gabinete
Proteção do
gabinete
Potência
nominal de
sobrecarga alta
- sobrecarga
máxima de
1)
160%
Tamanho do
gabinete
J1 J2 J3 J4
IP20 IP20 IP20 IP20
0,37–2,2 kW/0,5–3 hp
(380–480 V)
J5 J6 J7
3,0–5,5 kW/4,0–7,5 hp
(380–480 V)
7,5 kW/10 hp (380–480 V)
11–15 kW/15–20 hp
(380–480 V)
Proteção do
gabinete
Potência
nominal de
sobrecarga alta
- sobrecarga
máxima de
1)
160%
Tabela 2.1 Tamanhos de gabinete
1) Tipo de sobrecarga normal para tamanhos de 11–75 kW (15–100 hp): Sobrecarga de 110% durante 1 minuto.
Tipo de sobrecarga alta para tamanhos de 0,37–7,5 kW (0,5–10 hp): Sobrecarga de 160% durante 1 minuto.
Tipo de sobrecarga alta para tamanhos de 11–22 kW (15–30 hp): Sobrecarga de 150% durante 1 minuto.
Tipo de sobrecarga alta para tamanhos de 30–75 kW (40–100 hp): Sobrecarga de 150% durante 1 minuto.
12 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
IP20 IP20 IP20
18,5–22 kW/25–30 hp
(380–480 V)
30–45 kW/40–60 hp
(380–480 V
55–75 kW/75–100 hp
(380–480 V)
Page 15
130BC438.19
3 phase
power
input
Switch mode
power supply
Motor
Interface
(PNP) = Source
(NPN) = Sink
ON=Terminated
OFF=Open
Brake
resistor
91 (L1)
92 (L2)
93 (L3)
PE
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN/OUT)
0/4-20 mA
12 (+24 V OUT)
33 (D IN)
18 (D IN)
20 (COM D IN)
10 V DC
15 mA 100 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0V
5V
S801
RS485
RS485
03
+10 V DC
0/4-20 mA
0-10 V DC
24 V DC
02
01
05
04
250 V AC, 3 A
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
27 (D IN/OUT)
24 V
0 V
0 V (PNP)
24 V (NPN)
0 V
24 V
29 (D IN/OUT)
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
32 (D IN)
31 (D IN)
95
P 5-00
21
ON
(+UDC) 89
(BR) 81 5)
24 V (NPN)
0 V (PNP)
0-10 V DC
(-UDC) 88
RFI
3)
0 V
250 V AC, 3 A
Relay 1
1)
Relay 2 2)
4)
06
42 (A OUT)
45 (A OUT)
Analog
output
0/4-20 mA
Visão geral do produto Guia de Design
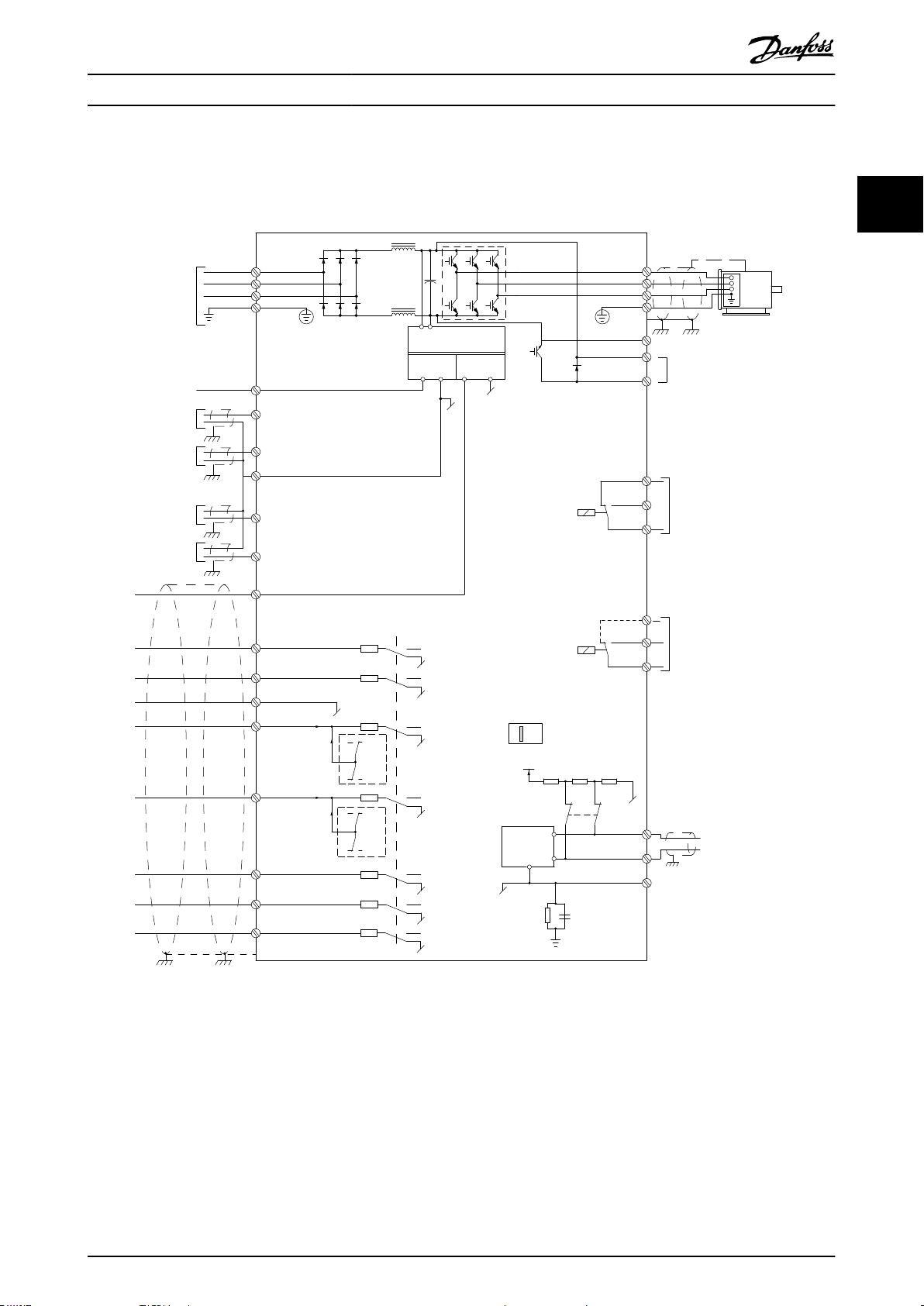
2.2 Instalação elétrica
Esta seção descreve como instalar a ação do conversor de frequência.
2 2
Ilustração 2.1 Diagrama esquemático de ação básica
A = analógica, D = digital
1) Circuito de frenagem integrado disponível de J1 a J5.
2) O relé 2 tem 2 polos para J1 a J3 e 3 polos para J4 a J7. O relé 2 de J4–J7 com terminais 4, 5, e 6 tem a mesma lógica NA/NF
que o relé 1. Os relés são plugáveis em J1 a J5 e xos em J6 a J7.
3) Filtro CC simples em J1 a J5; Filtro CC duplo em J6-J7.
4) O interruptor S801 (terminais de comunicação serial) pode ser usado para ativar a terminação na porta RS485 (terminais 68 e
69).
5) Sem BR para J6 a J7.
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 13
Page 16

e30bf228.11
L1
L2
L3
PE
PE
u
v
w
2
1
3
5
16
17
18
14
12
8
7
10
9
4
11
13
4
6
15
90
4
Visão geral do produto
VLT® AutomationDrive FC 360
22
1 PLC 10 Cabo de rede elétrica (não blindado)
2
Cabo de equalização com diâmetro mínimo de 16 mm
(6 AWG).
3 Cabos de controle 12 Isolamento do cabo descascado
4 Mínimo de 200 mm (7,87 pol.) entre os cabos de controle, os
cabos de motor e os cabos de rede elétrica.
5 Alimentação de rede elétrica 14 Resistor de frenagem
6 Superfície exposta (não pintada) 15 Caixa metálica
7 Arruelas tipo estrela 16 Conexão para o motor
8 Cabo do freio (blindado) 17 Motor
9 Cabo de motor (blindado) 18 Bucha de cabo de EMC
Ilustração 2.2 Conexão elétrica típica
2
11 Contator de saída e mais.
13 Barramento do ponto de aterramento comum Siga as
exigências locais e nacionais para o aterramento do painel
elétrico.
14 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 17
Visão geral do produto Guia de Design
ADVERTÊNCIA
EQUIPAMENTO PERIGOSO
Eixos rotativos e equipamentos elétricos podem ser
perigosos É importante a proteção contra riscos elétricos
ao aplicar energia à unidade. Todo o trabalho elétrico
deve estar em conformidade com os códigos elétricos
nacionais e locais. A instalação, a partida e a
manutenção devem ser executadas somente por pessoal
qualicado e treinado. Deixar de seguir essas orientações
poderá resultar em morte ou ferimentos graves.
ADVERTÊNCIA
ISOLAMENTO DE FIAÇÃO
Passe a potência de entrada, a ação do motor e a ação
de controle por 3 conduítes metálicos separados, ou use
cabos blindados separados para isolamento de ruído de
alta frequência. Não isolar a ação de energia, do motor
e de controle pode resultar em perda de desempenho do
conversor de frequência e equipamentos associados.
Passe os cabos de motor de vários conversores de
frequência separadamente. A tensão induzida dos cabos
de motor de saída que passam juntos pode carregar os
capacitores do equipamento, mesmo com o
equipamento desligado e bloqueado. Se os cabos de
motor de saída não forem estendidos separadamente ou
não forem utilizados cabos blindados, o resultado poderá
ser morte ou lesões graves.
Passe os cabos de motor de saída separadamente.
•
Use cabos blindados.
•
Bloqueie todos os conversores de frequência
•
simultaneamente.
Tipos e características nominais dos os
Toda a ação deverá estar em conformidade com
•
as regulamentações locais e nacionais com
relação à seção transversal e aos requisitos de
temperatura ambiente.
A Danfoss recomenda que todas as conexões de
•
energia sejam feitas com um o de cobre com
classicção mínima de 75 °C (167 °F).
Consulte capétulo 4 Especicações para tamanhos
•
de o recomendados
2.2.1 Requisitos de aterramento
ADVERTÊNCIA
PERIGO DE ATERRAMENTO!
Para a segurança do operador, um eletricista certicado
deve aterrar o conversor de frequência de acordo com os
códigos elétricos nacionais e locais, e as instruções
contidas neste manual. As correntes de aterramento são
superiores a 3,5 mA. Não aterrar o conversor de
frequência corretamente poderá resultar em morte ou
lesões graves.
Estabeleça um aterramento de proteção
•
adequado para equipamentos com correntes de
aterramento superiores a 3,5 mA. Consulte
capétulo 2.8 Corrente de fuga para o terra para
obter mais detalhes.
Um o de aterramento dedicado é necessário
•
para a potência de entrada, a potência do motor
e a ação de controle.
Use as braçadeiras fornecidas com o
•
equipamento para obter conexões de
aterramento adequadas.
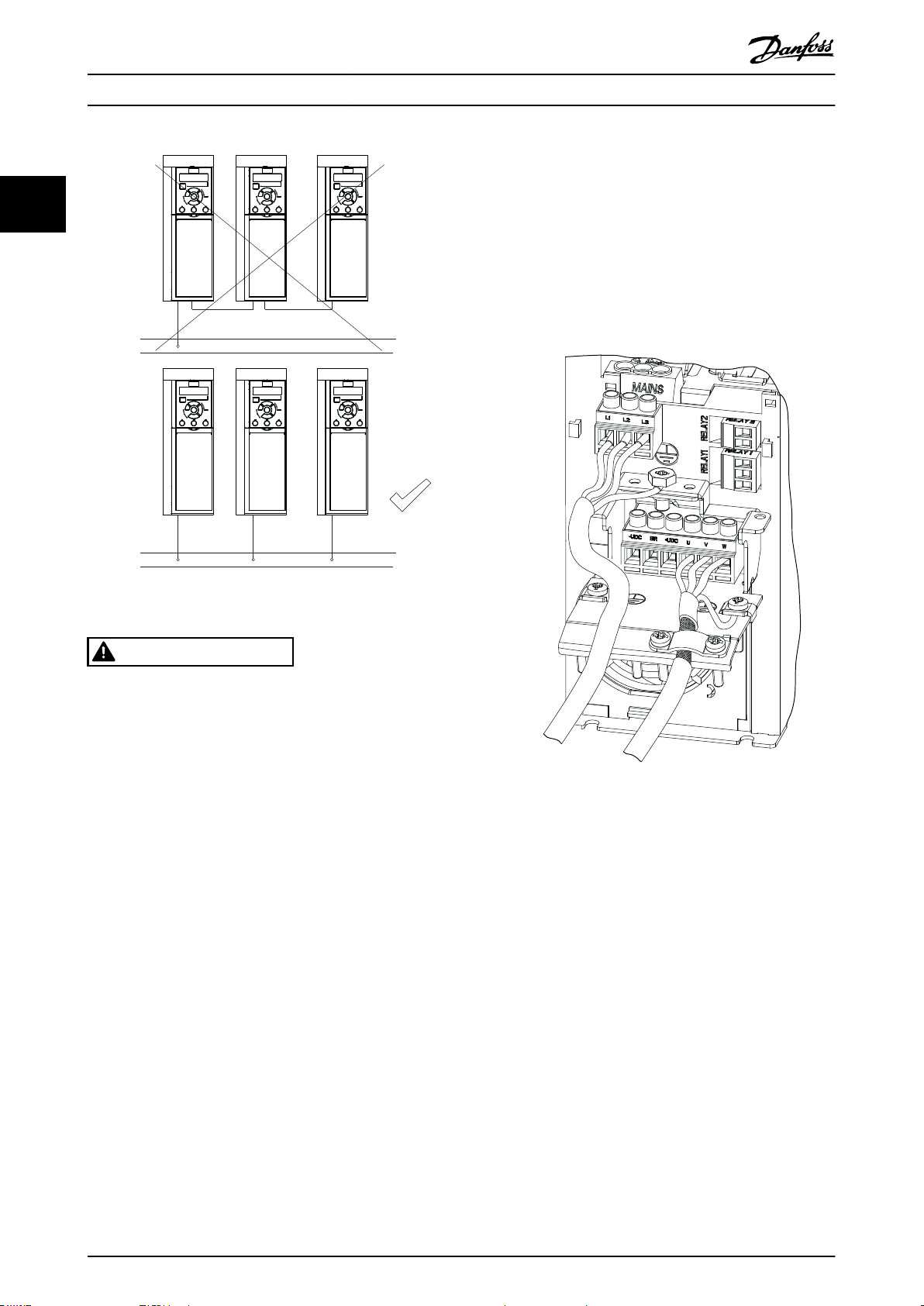
Não aterre um conversor de frequência em outro,
•
como em uma ligação em cascata (consulte
Ilustração 2.3).
Mantenha as conexões do o de aterramento tão
•
curtas quanto possível.
Use o com lamentos grossos para reduzir o
•
ruído elétrico.
Atenda aos requisitos de ação do fabricante do
•
motor.
2 2
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 15
Page 18
130BC500.10
FC 1
FC 1
FC 2
FC 2
FC 3
FC 3
PE
PE
130BC501.10
01
02 03
04
05
Visão geral do produto
22
VLT® AutomationDrive FC 360
•
parâmetro 14-50 Filtro de RFI para OFF (tamanhos
de gabinete J6–J7) ou remova o parafuso RFI
(tamanhos de gabinete J1–J5). Quando
desligados, os capacitores internos do ltro de RFI
entre o chassi e o circuito intermediário são
isolados para evitar danos ao circuito intermediário e reduzir as correntes capacitivas do terra
de acordo com a IEC 61800-3.
Não instale um interruptor entre o conversor de
frequência e o motor na rede elétrica IT.
Ilustração 2.3 Princípio de aterramento
ADVERTÊNCIA
TENSÃO INDUZIDA
Passe cabos de motor de saída de vários conversores de
frequência separadamente. A tensão induzida dos cabos
de motor de saída que passam juntos pode carregar os
capacitores do equipamento, mesmo com o
equipamento desligado e bloqueado. Não passar os
cabos de motor de saída separadamente pode resultar
em morte ou ferimentos graves.
Braçadeiras de aterramento são fornecidas para a ação do
motor (consulte Ilustração 2.4).
Não instale capacitores de correção do fator de
•
potência entre o conversor de frequência e o
motor.
Não conecte um dispositivo de partida ou de
•
•
•
troca de polo entre o conversor de frequência e o
motor.
Atenda aos requisitos de
motor.
Todos os conversores de frequência devem ser
usados com uma fonte de entrada isolada e com
linhas de energia de referência de aterramento.
Quando alimentado a partir de uma fonte de
rede elétrica isolada (rede elétrica IT ou delta
utuante) ou rede elétrica TT/TN-S com uma
perna aterrada (delta aterrada), programe
ação do fabricante do
Ilustração 2.4 Conexões de rede elétrica, motor, terra para
tamanhos do gabinete J1–J5 (tomando o J2 como exemplo)
16 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 19
130BD648.11
130BC504.11
42 45
12
18
19
27
29
31
32
33
20
50
53
54
55
130BC505.12
Visão geral do produto Guia de Design
Ilustração 2.5 Conexões de rede elétrica, motor, terra para
tamanhos do gabinete J6–J7 (tomando o J7 como exemplo)
2 2
A Ilustração 2.4 mostra entrada da rede elétrica, motor e
conexões do aterramento para tamanhos dos gabinetes
J1–J5. A Ilustração 2.5 mostra entrada da rede elétrica,
motor e conexões do terra para tamanhos dos gabinetes
J6–J7. As congurações reais variam com os tipos de
unidade e equipamentos opcionais.
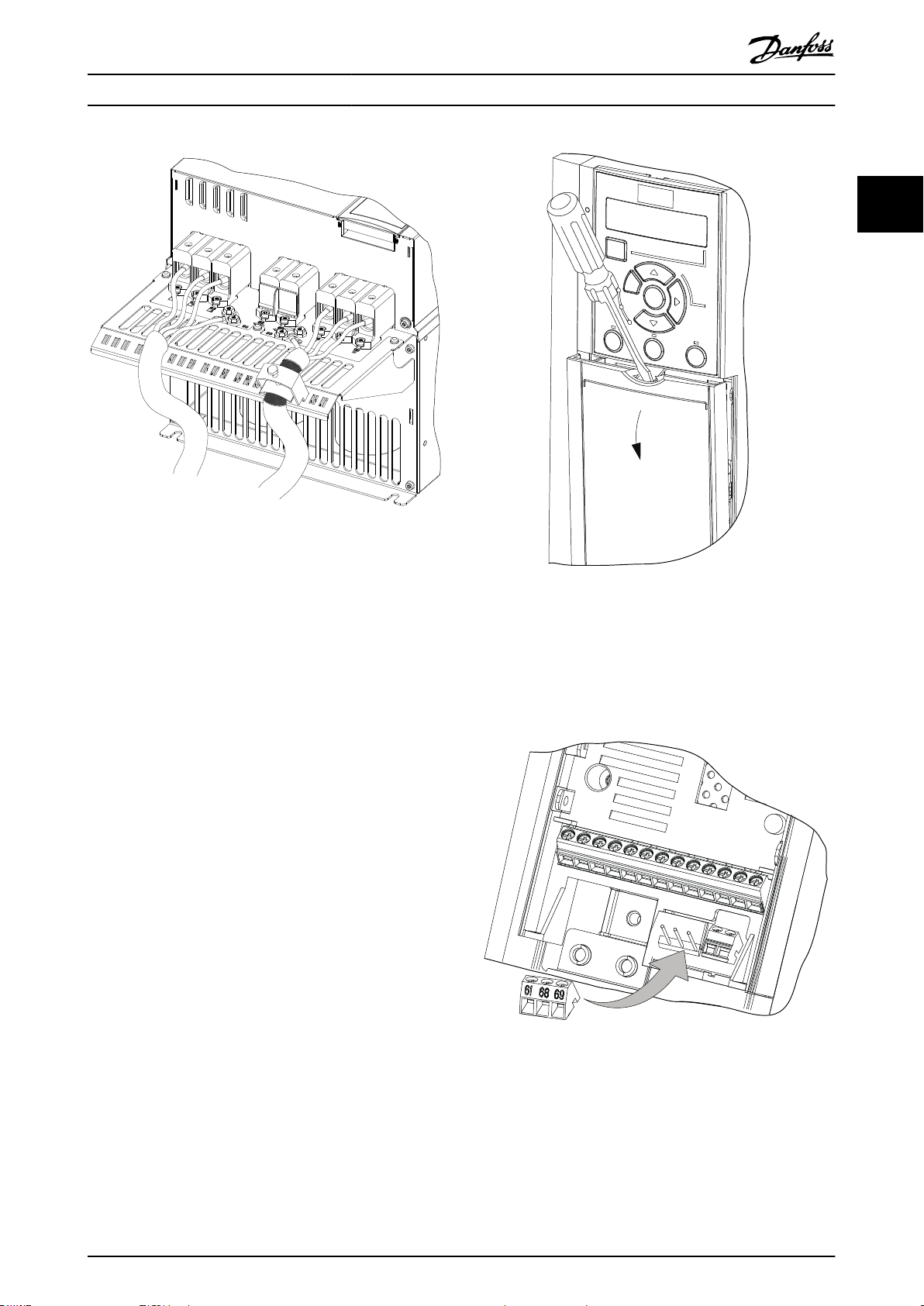
2.2.2 Fiação de controle
Acesso
Remova a chapa de tampa com uma chave de
•
fenda. Consulte Ilustração 2.6.
Ilustração 2.6 Acesso à ação de controle para tamanhos de
gabinetes J1-J7
Tipos de terminal de controle
A Ilustração 2.7 mostra os terminais de controle do
conversor de frequência. As funções do terminal e as
congurações padrão estão resumidas em Tabela 2.2.
Ilustração 2.7 Locais do terminal de controle
Consulte capétulo 4.2 Especicações Gerais para saber
detalhes das características nominais dos terminais.
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 17
Page 20
Visão geral do produto
VLT® AutomationDrive FC 360
Terminal Parâmetro
E/S digital, E/S pulso, encoder
22
12 – +24 V CC
Parâmetro 5-10 Ter
18
19
31
32
33
27
29
20 –
minal 18 Entrada
Digital
Parâmetro 5-11 Ter
minal 19, Entrada
Digital
Parâmetro 5-16 Ter
minal X30/2
Entrada Digital
Parâmetro 5-14 Ter
minal 32, Entrada
Digital
Parâmetro 5-15 Ter
minal 33 Entrada
Digital
Parâmetro 5-12 Ter
minal 27, Entrada
Digital
Parâmetro 5-30 Ter
minal 27 Saída
Digital
Parâmetro 5-13 Ter
minal 29, Entrada
Digital
Parâmetro 5-31 Ter
minal 29 Saída
Digital
Entradas/saídas analógicas
Conguraçã
o padrão
[8] Partida
[10]
Reversão
[0] Sem
operação
[0] Sem
operação
[0] Sem
operação
DI [2]
Paradp/
inérc,reverso
DO [0] Sem
operação
DI [14] Jog
DO [0] Sem
operação
Comum para
Descrição
Tensão de
alimentação de
24 V CC. A
corrente de
saída máxima é
de 100 mA para
todas as cargas
de 24 V.
Entradas digitais.
Entrada digital
Entrada digital,
encoder de 24 V.
O terminal 33
pode ser usado
para entrada de
pulso.
Selecionável
tanto para
entrada digital,
saída digital ou
saída de pulso. A
conguração
padrão é a
entrada digital.
O terminal 29
pode ser usado
para entrada de
pulso.
entradas digitais
e potencial de 0
V para
alimentação de
24 V.
Terminal Parâmetro
Parâmetro 6-91 Ter
42
45
50 – +10 V CC
53
54
55 –
61 –
68 (+)
69 (-)
minal 42 Saída
Analógica
Parâmetro 6-71 Ter
minal 45 Saída
Analógica
Grupo do
parâmetro 6-1*
Grupo do
parâmetro 6-2*
Comunicação serial
Grupo do
parâmetro 8-3*
Grupo do
parâmetro 8-3*
Conguraçã
o padrão
[0] Sem
operação
[0] Sem
operação
Referência
Feedback
Relés
Descrição
Saída analógica
programável. O
sinal analógico é
de 0-20 mA ou
4-20 mA a um
máximo de 500
Ω. Também
pode ser
congurado
como saídas
digitais
Tensão de
alimentação
analógica de 10
V CC. Máximo de
15 mA
comumente
usado para
potenciômetro
ou termistor.
Entrada
analógica.
Selecionável
para tensão ou
corrente.
Comum para
entrada
analógica
Filtro RC
integrado para
blindagem.
SOMENTE para
conectar a tela
quando
enfrentar
problemas de
EMC.
Interface RS485.
Um interruptor
do cartão de
controle é
fornecido para
resistência de
terminação.
18 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 21
1
2
PE
FC
PE
PLC
130BB922.12
PE PE
<10 mm
100nF
FC
PE
PE
PLC
<10 mm
130BB609.12
PE
FC
PE
FC
130BB923.12
PE PE
69
68
61
69
68
61
1
2
<10 mm
Visão geral do produto Guia de Design
Terminal Parâmetro
01, 02, 03 5-40 [0]
04, 05, 06 5-40 [1]
Tabela 2.2 Descrições dos terminais
Conguraçã
o padrão
[0] Sem
operação
[0] Sem
operação
Descrição
Saída do relé de
formato C. Estes
relés estão em
vários locais,
dependendo da
conguração e
tamanho do
conversor de
frequência.
Utilizável para
tensão CC ou CA
e carga indutiva
ou resistiva.
RO2 no gabinete
metálico J1-J3 é
de 2 polos,
apenas os
terminais 04 e
05 estão
disponíveis
Funções do terminal de controle
As funções do conversor de frequência são comandadas
pelo recebimento de sinais de entrada de controle.
Programe cada terminal para a função que ele
•
suporta nos parâmetros associados a esse
terminal.
Conrme se o terminal de controle está
•
programado para a função correta. Consulte o
capítulo Painel de controle local e programação no
Guia Rápido para detalhes sobre como acessar
parâmetros e programação.
A programação do terminal padrão inicia o
•
conversor de frequência funcionando em um
modo operacional típico.
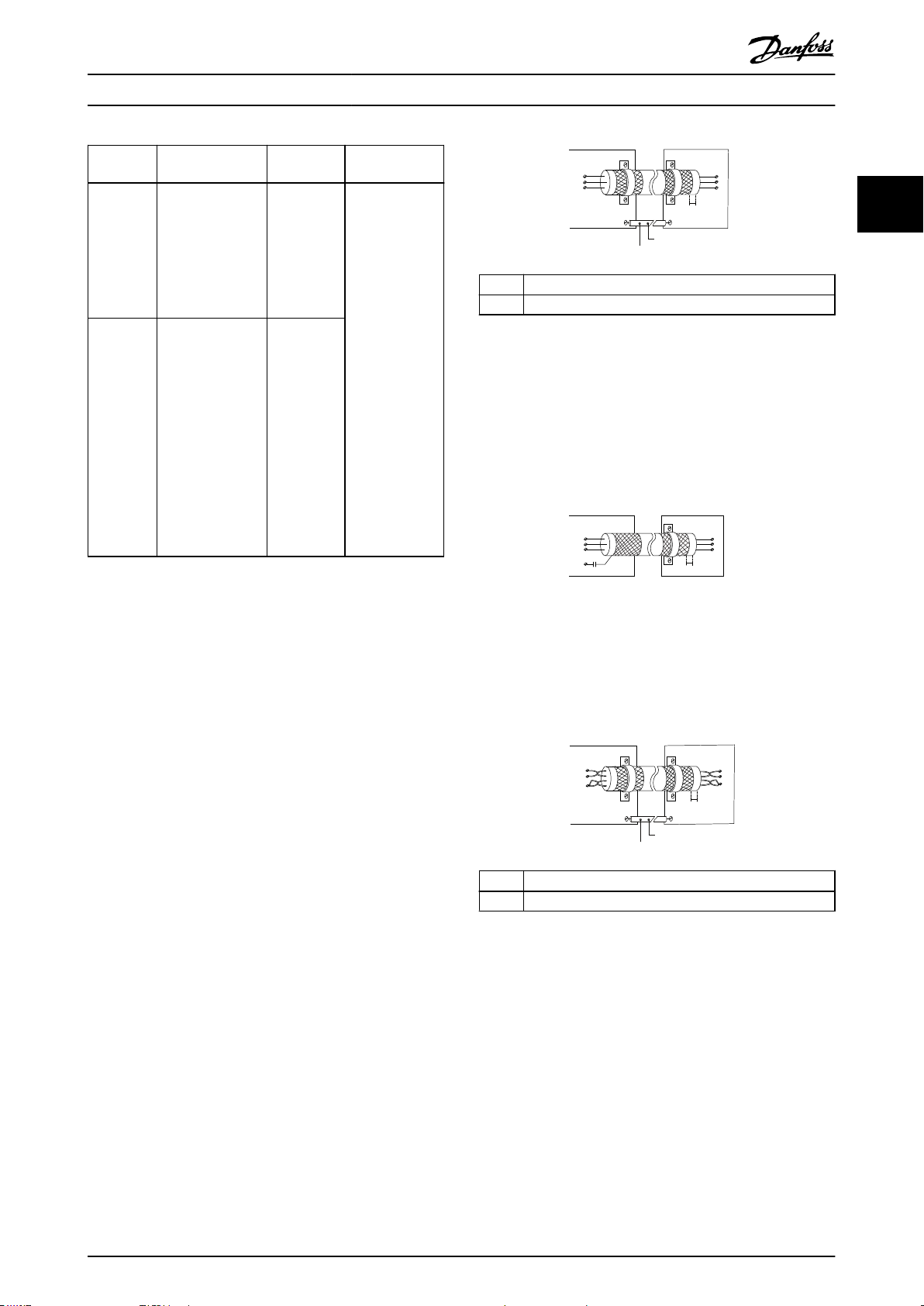
Uso de cabos de controle blindados
O método preferido na maioria dos casos é xar cabos de
controle e de comunicação serial com braçadeiras de
proteção fornecidas em ambas as extremidades para
garantir o melhor contato de cabo de alta frequência
possível.
Se o potencial de aterramento entre o conversor de
frequência e o PLC for diferente, poderá ocorrer um ruído
elétrico perturbando todo o sistema. Resolva este
problema instalando um cabo de equalização o mais
próximo possível do cabo de controle. Mínima seção
transversal do cabo: 16 mm2 (6 AWG).
1
Mínimo 16 mm2 (6 AWG)
2 Cabo de equalização
Ilustração 2.8 Braçadeiras de blindagem em ambas as
extremidades
Malhas de aterramento de 50/60 Hz
Com cabos de controle muito longos, podem ocorrer
malhas de aterramento. Para eliminar malhas de
aterramento, conecte 1 extremidade da tela ao terra com
um capacitor de 100 nF (mantendo os terminais curtos).
Ilustração 2.9 Conexão com um capacitor de 100 nF
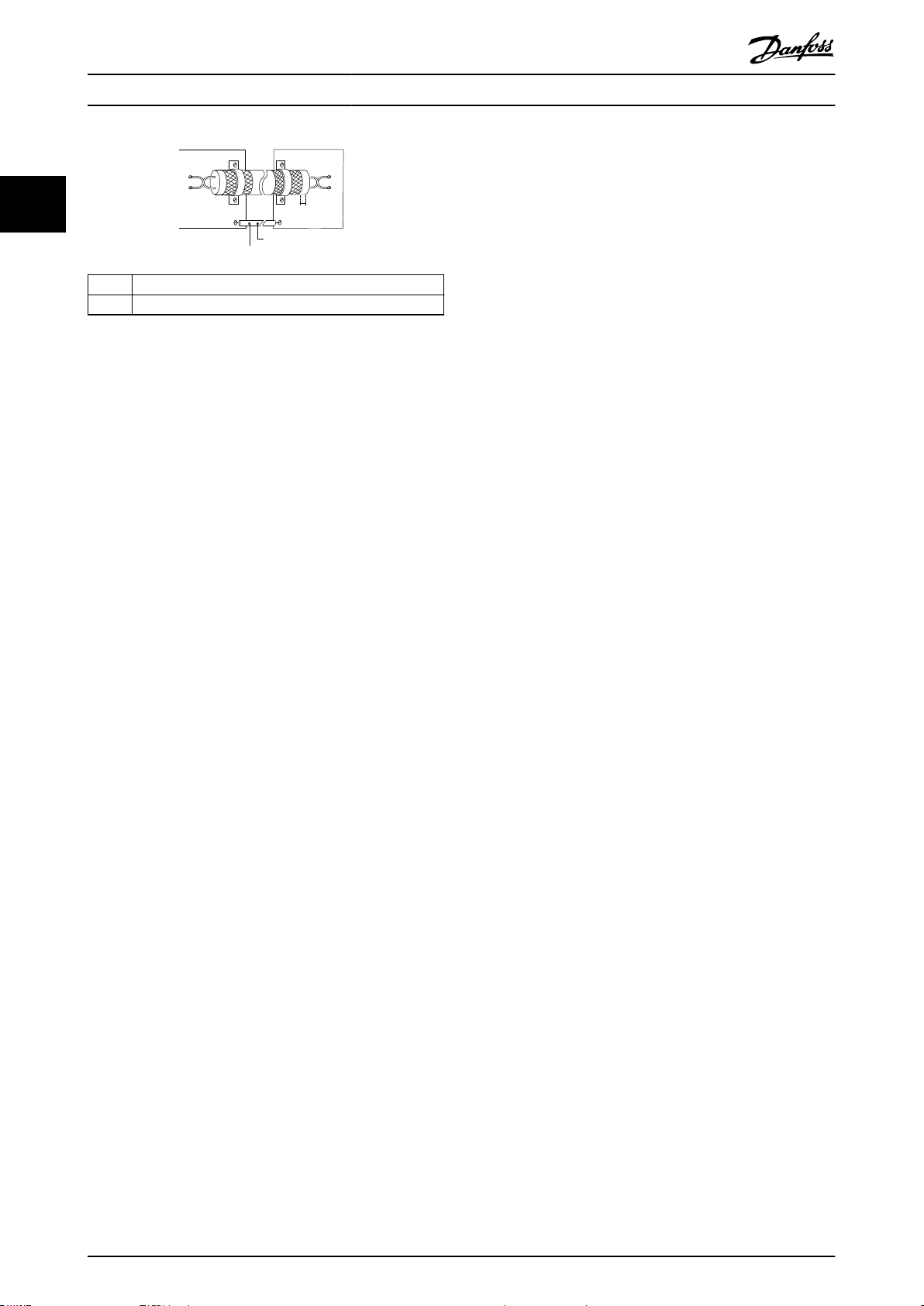
Evitar ruído EMC na comunicação serial
Esse terminal está conectado ao aterramento por meio de
um conexão RC interno. Use cabos de par trançado para
reduzir a interferência entre os condutores. O método
recomendado é mostrado na Ilustração 2.10.
1
Mínimo 16 mm2 (6 AWG)
2 Cabo de equalização
Ilustração 2.10 Cabos de par trançado
Alternativamente, a conexão ao terminal 61 pode ser
omitida.
2 2
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 19
Page 22
PE
FC
PE
FC
130BB924.12
PE PE
69
69
68
68
1
2
<10 mm
Visão geral do produto
22
1
Mínimo 16 mm2 (6 AWG)
2 Cabo de equalização
Ilustração 2.11 Cabos de par trançado sem terminal 61
2.3 Estruturas de controle
2.3.1 Princípio de controle
Um conversor de frequência retica a tensão CA da rede
elétrica para a tensão CC. Em seguida, a tensão CC é
convertida em uma corrente CA com amplitude e
frequência variáveis.
O motor é fornecido com tensão/corrente e frequência
variáveis, permitindo o controle de velocidade inni-
tamente variável de motores trifásicos padrão CA e
motores síncronos de ímã permanente.
2.3.2 Modos de controle
O conversor de frequência é capaz de controlar a
velocidade ou o torque no eixo do motor. A conguração
do par parâmetro 1-00 Modo Conguração determina o tipo
de controle.
Controle da velocidade
Existem dois tipos de controle de velocidade:
Controle de velocidade de malha aberta, que não
•
requer nenhum feedback do motor (sem sensor).
Controle do PID de malha fechada de velocidade,
•
que requer um feedback de velocidade para uma
entrada. Um controle de malha fechada de
velocidade adequadamente otimizado tem maior
precisão do que um controle de malha aberta de
velocidade.
Selecione qual entrada usar como feedback do PID de
velocidade em parâmetro 7-00 Fonte do Feedback do PID de
Velocidade.
VLT® AutomationDrive FC 360
Controle de torque
A função de controle do torque é utilizada em aplicações
onde o torque no eixo de saída do motor estiver
controlando a aplicação como controle de tensão. O
controle de torque pode ser selecionado em
parâmetro 1-00 Modo Conguração. A conguração de
torque é feita congurando uma referência de controle
analógica, digital ou por barramento. Ao executar o
controle de torque, recomenda-se executar um
procedimento AMA completo, porque os dados corretos do
motor são importantes para alcançar o desempenho ideal.
•
•
Referência de velocidade/torque
A referência a esses controles pode ser uma única
referência ou a soma de várias referências, incluindo
referências relativamente escalonadas. O tratamento de
referência é explicado em detalhes em
capétulo 2.4 Tratamento das referências.
Malha fechada no modo VVC+. Esta função é
usada em aplicações com variação dinâmica baixa
a média do eixo, e oferece excelente desempenho
em todos os 4 quadrantes e em todas as
velocidades do motor. O sinal de feedback de
velocidade é obrigatório. Recomenda-se usar a
placa opcional MCB102. Garanta que a resolução
do encoder seja de pelo menos 1024 PPR, e que
o cabo de blindagem do encoder esteja bem
aterrado, porque a precisão do sinal de feedback
de velocidade é importante. Ajuste
parâmetro 7-06 Per. ltro passa-baixa do PID de
veloc para obter o melhor sinal de feedback de
velocidade.
Malha aberta no modo VVC+. A função é usada
em aplicações mecanicamente robustas, mas a
precisão é limitada. A função de torque de malha
aberta funciona para duas direções. O torque é
calculado com base na medição de corrente
interna no conversor de frequência.
20 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 23
130BD974.10
L2 92
L1 91
L3 93
M
U 96
V 97
W 98
RFI switch
Inrush
R+
82
Load sharing -
88(-)
R81
Brake resistor
Load sharing +
89(+)
Load sharing -
Load sharing +
L2 92
L1 91
L3 93
89(+)
88(-)
Inrush
R inr
M
U 96
V 97
W 98
P 14-50
130BD975.10
Visão geral do produto Guia de Design
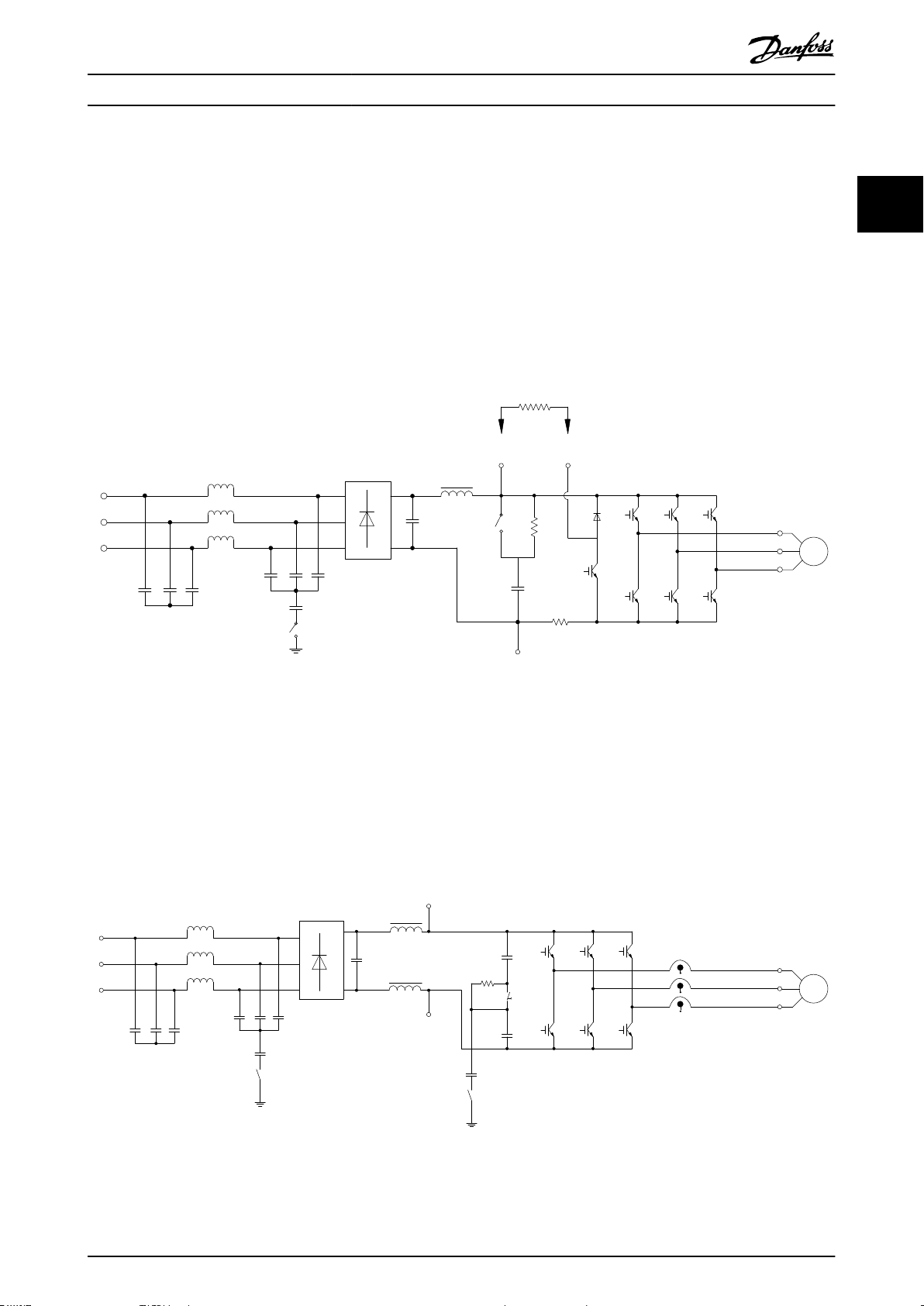
2.3.3 Princípio de controle do FC 360
O VLT® AutomationDrive FC 360 é um conversor de frequência de uso geral para aplicações de velocidade variável. O
princípio de controle é baseado no controle vetorial de tensão+.
0,37–22 kW (0,5–30 hp)
Os conversores de frequência FC 360 0,37–22 kW (0,5–30 hp) podem controlar motores assíncronos e motores síncronos de
ímã permanente até 22 kW.
O princípio de detecção de corrente nos conversores de frequência FC 360 0,37–22 kW (0,5–30 hp) é baseado na medição
de corrente por um resistor no barramento CC. A proteção contra falha de aterramento e o comportamento em curto-
-circuito são controlados pelo mesmo resistor.
2 2
Ilustração 2.12 Diagrama de controle para FC 360 0,37–22 kW (0,5–30 hp)
30–75 kW (40–100 hp)
Os conversores de frequência FC 360 30–75 kW (40–100 hp) só podem controlar motores assíncronos.
O princípio de detecção de corrente dos conversores de frequência FC 360 30–75 kW (40–100 hp) são baseados na medição
de corrente nas fases do motor.
A proteção contra falha de aterramento e o comportamento de curto-circuito nos conversores de frequência FC 360 30–75
kW (40–100 hp) são controlados pelos 3 transdutores de corrente nas fases do motor.
Ilustração 2.13 Diagrama de controle para FC 360 30–75 kW (40–100 hp)
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 21
Page 24

+
_
+
_
S
S
Cong. mode
Ref.
Process
P 1-00
High
+f max.
Low
-f max.
P 4-12
Motor speed
low limit (Hz)
P 4-14
Motor speed
high limit (Hz)
Motor
controller
Ramp
Speed
PID
P 7-20 Process feedback
1 source
P 7-22 Process feedback
2 source
P 7-00 Speed PID
feedback source
P 1-00
Cong. mode
P 4-19
Max. output freq.
-f max.
Motor
controller
P 4-19
Max. output freq.
+f max.
P 3-**
P 7-0*
130BD371.10
Visão geral do produto
VLT® AutomationDrive FC 360
2.3.4
Estrutura de controle em VVC
+
22
Ilustração 2.14 Estrutura de controle em congurações de malha fechada e congurações de malha aberta VVC
Na conguração mostrada em Ilustração 2.14, parâmetro 1-01 Principio de Controle do Motor está programado para [1] VVC+ e
parâmetro 1-00 Modo Conguração está programado para [0] Malha Aberta. A referência resultante do sistema de tratamento
de referências é recebida e alimentada por meio da limitação de rampa e da limitação de velocidade, antes de ser enviada
para o controle do motor. A saída do controle do motor ca então restrita pelo limite de frequência máxima.
+
Se parâmetro 1-00 Modo Conguração for programado para [1] Malha fech. veloc., a referência resultante é passada da
limitação de rampa e da limitação de velocidade para um controle do PID de velocidade. Os parâmetros de controle do PID
de velocidade estão no grupo do parâmetro 7-0* Ctrl. do PID de Velocidade. A referência resultante do controle do PID de
velocidade é enviada ao controle do motor limitado pelo limite de frequência.
Selecione [3] Processo em parâmetro 1-00 Modo Conguração para usar o controle do PID de processo para controle de
velocidade ou pressão em malha fechada no aplicativo controlado. Os parâmetros do PID de processo estão nos grupos do
parâmetro 7-2* Feedb Ctrl. Process e 7-3* Ctrl. PID Processos.
2.3.5
O conversor de frequência possui um controle de limite de corrente integral. Este recurso é ativado quando a corrente do
motor, e assim o torque, é superior aos limites de torque denidos em parâmetro 4-16 Limite de Torque do Modo Motor,
parâmetro 4-17 Limite de Torque do Modo Gerador e parâmetro 4-18 Limite de Corrente.
Quando o conversor de frequência está no limite de corrente durante a operação do motor ou a operação regenerativa, o
conversor de frequência tenta car abaixo dos limites de torque predenidos o mais rápido possível sem perder o controle
do motor.
22 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Controle de corrente interna no modo VVC
+
Page 25

e30bp046.12
Hand
On
Off
Auto
On
Reset
Visão geral do produto Guia de Design
2.3.6 Controle local [Hand On] e controle remoto [Auto On]
Opere o conversor de frequência manualmente através do painel de controle local (LCP) ou remotamente via entradas
analógicas/digitais ou eldbus.
Inicie e pare o conversor de frequência pressionando as teclas [Hand On] e [O/Reset] no LCP. Programação é necessária:
Parâmetro 0-40 Tecla [Hand on] (Manual ligado) do LCP.
•
Parâmetro 0-44 Tecla [O/Reset] no LCP.
•
Parâmetro 0-42 Tecla [Auto on] (Automát. ligado) do LCP.
•
Redena os alarmes através da tecla [O/Reset] ou através de uma entrada digital quando o terminal estiver programado
para Reset.
Ilustração 2.15 Teclas de controle do LCP
A referência local força o modo de conguração para malha aberta, independente da conguração em parâmetro 1-00 Modo
Conguração.
A referência local é restaurada no desligamento.
2 2
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 23
Page 26

No function
Analog ref.
Pulse ref.
Local bus ref.
Preset relative ref.
Preset ref.
Local bus ref.
No function
Analog ref.
Pulse ref.
Analog ref.
Pulse ref.
Local bus ref.
No function
Local bus ref.
Pulse ref.
No function
Analog ref.
Input command:
Catch up/ slow down
Catchup Slowdown
value
Freeze ref./Freeze output
Speed up/ speed down
ref.
Remote
Ref. in %
-max ref./
+max ref.
Scale to
Hz
Scale to
Nm
Scale to
process
unit
Relative
X+X*Y
/100
DigiPot
DigiPot
DigiPot
max ref.
min ref.
DigiPot
D1
P 5-1x(15)
Preset '1'
External '0'
Process
Torque
Speed
open/closed loop
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(0)
(0)
(1)
Relative scaling ref.
P 3-18
Ref.resource 1
P 3-15
Ref. resource 2
P 3-16
Ref. resource 3
P 3-17
200%
-200%
Y
X
-100%
100%
%
%
Ref./feedback range
P 3-00
Conguration mode
P 1-00
P 3-14
±100%
130BD374.10
P 16-01
P 16-02
P 3-12
P 5-1x(21)/P 5-1x(22)
P 5-1x(28)/P 5-1x(29)
P 5-1x(19)/P 5-1x(20)
P 3-04
Freeze ref.
&
increase/
decrease
ref.
Catch up/
slow
down
P 3-10
Visão geral do produto
VLT® AutomationDrive FC 360
2.4 Tratamento das referências
Referência local
22
A referência local está ativa quando o conversor de frequência é operado com [Hand On] ativo. Ajuste a referência usando
[▲]/[▼] e [◄/[►].
Referência remota
O sistema de tratamento de referência para calcular a referência remota é mostrado em Ilustração 2.16.
Ilustração 2.16 Referência remota
24 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 27
Referência resultante
Soma de todas
referências
Direto
Reverso
P 3-00 Faixa da Referência = [0] Min-Max
130BA184.10
-P 3-03
P 3-03
P 3-02
-P 3-02
P 3-00 Falxa da Referência =[1] -Max-Max
Referência resultante
Soma de todas
referências
-P 3-03
P 3-03
130BA185.10
Visão geral do produto Guia de Design
A referência remota é calculada uma vez em cada
intervalo de varredura e inicialmente consiste em dois
tipos de entradas de referência:
1. X (a referência externa): Uma soma (consulte
parâmetro 3-04 Função de Referência) de até
quatro referências selecionadas externamente,
composta de qualquer combinação (determinada
pela programação de parâmetro 3-15 Fonte da
Referência 1, parâmetro 3-16 Fonte da Referência 2
e parâmetro 3-17 Fonte da Referência 3) de uma
referência predenida xa
(parâmetro 3-10 Referência Predenida), referências
analógicas variáveis, referências de pulso digital
variável, e várias referências de eldbus em
qualquer unidade que o conversor de frequência
esteja monitorando ([Hz], [RPM], [Nm] e assim por
diante).
2. Y (a referência relativa): Uma soma de 1
referência predenida xa
(parâmetro 3-14 Referência Relativa Pré-denida) e
1 referência analógica variável
(parâmetro 3-18 Recurso de Referência de Escala
Relativa) em [%].
Os dois tipos de entradas de referência são combinados na
seguinte fórmula:
Referência remota=X+X*Y/100%.
Se a referência relativa não for usada, programe
parâmetro 3-18 Recurso de Referência de Escala Relativa para
[0] Sem função e parâmetro 3-14 Referência Relativa Pré-
-denida para 0%. As entradas digitais no conversor de
frequência podem ativar a função catch-up/slow down e a
função de referência de congelamento. As funções e
parâmetros estão descritos no Guia de Programação do
VLT® AutomationDrive FC 360.
A escala das referências analógicas é descrita nos grupos
do parâmetro 6-1* Entrada Analógica 53 e 6-2* Entrada
Analógica 54, e a escala das referências de pulso digital é
descrita no grupo de parâmetros 5-5* Entrada de Pulso.
Os limites e intervalos de referência são denidos no grupo
do parâmetro 3-0* Limites de referência.
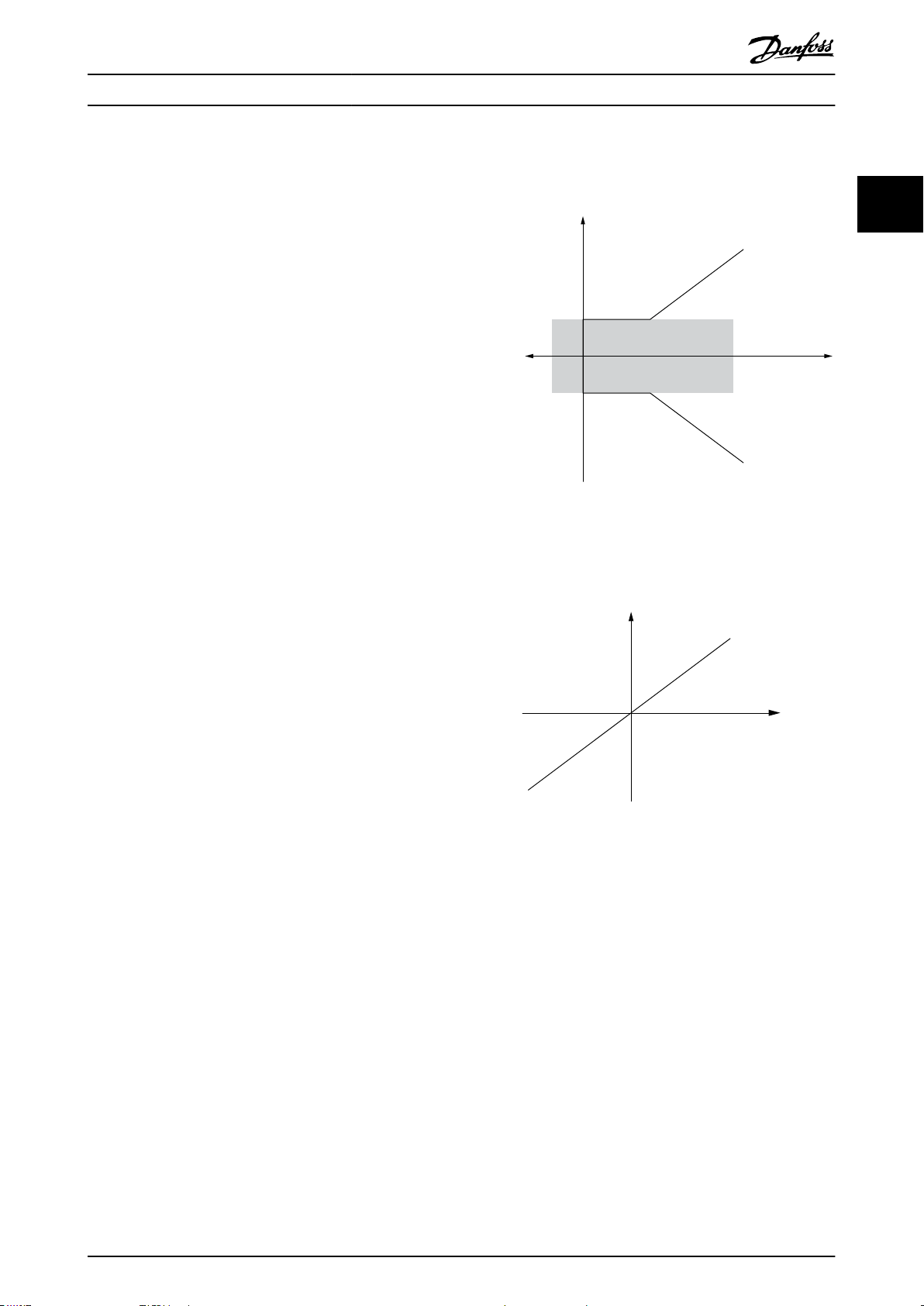
2.4.1 Limites de referência
Parâmetro 3-00 Reference Range, parâmetro 3-02 Minimum
Reference e parâmetro 3-03 Maximum Reference denem a
faixa permitida da soma de todas as referências. A soma de
todas as referências são xadas quando necessário. A
relação entre a referência resultante (após a xação) e a
soma de todas as referências é mostrada em Ilustração 2.17
e Ilustração 2.18.
2 2
Ilustração 2.17 Soma de todas as referências quando a faixa
de referência é programada como 0
Ilustração 2.18 Soma de todas as referências quando a faixa
de referência é programada para 1
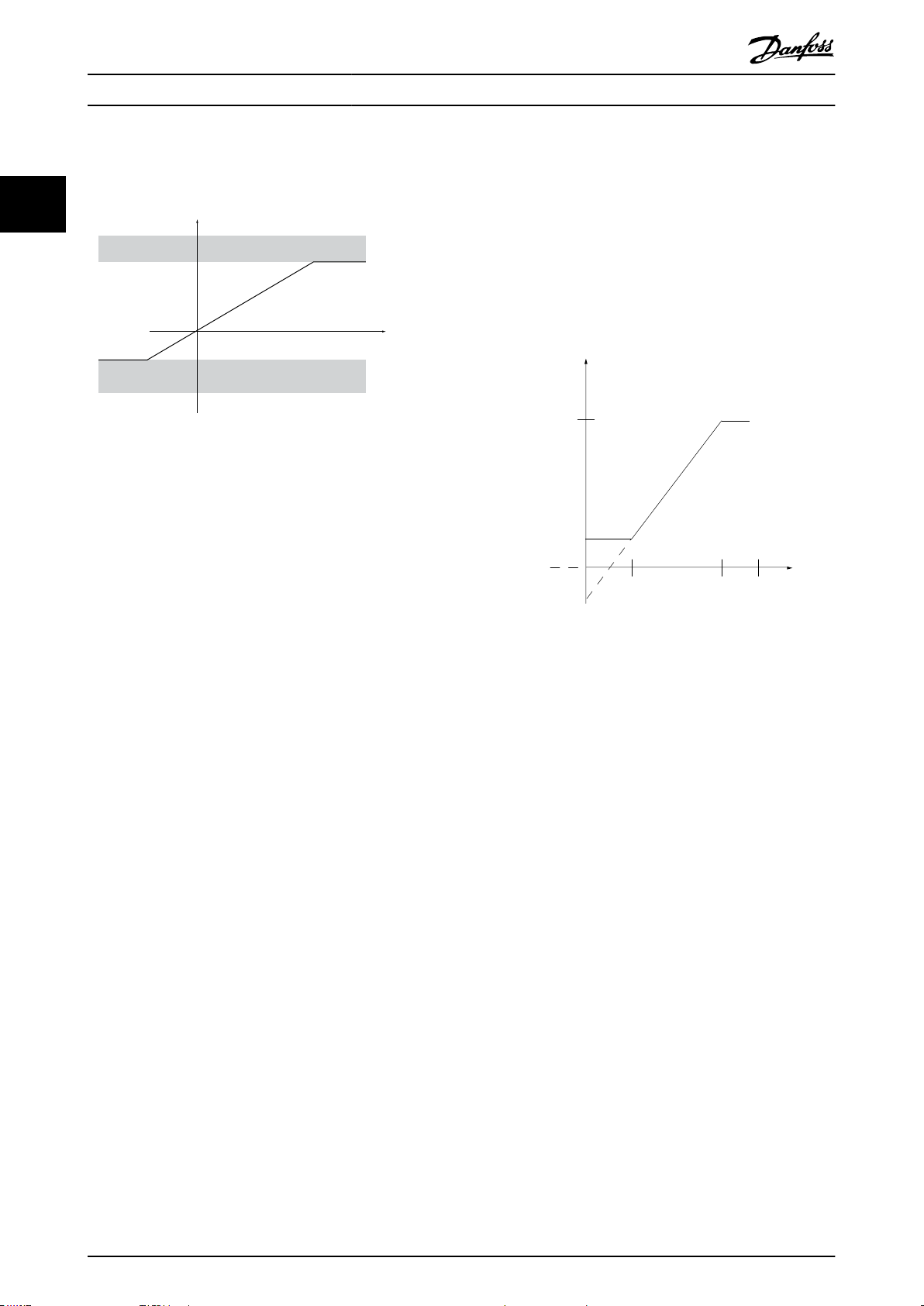
O valor de parâmetro 3-02 Minimum Reference não pode ser
programado como menor que 0, a menos que
parâmetro 1-00 Conguration Mode esteja programado para
[3] Processo. Nesse caso, as seguintes relações entre a
referência resultante (após a xação) e a soma de todas as
referências são mostradas em Ilustração 2.19.
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 25
Page 28
130BA186.11
P 3-03
P 3-02
Soma de todas
referências
P 3-00 faixa da referência = [0] Min - Max
Referência resultante
Resource output
[Hz]
Resource input
Terminal X
high
High reference/
feedback value
130BD431.10
8
[V]
50
10
P1
P2
10
Low reference/
feedback value
Visão geral do produto
VLT® AutomationDrive FC 360
2.4.3 Escalonamento de referência de pulso
e analógica e feedback
22
Ilustração 2.19 Soma de todas as referências quando a
referência mínima é denida como um valor de menos
2.4.2 Graduação das referências
predenidas e das referências de
barramento
As referências predenidas são graduadas de acordo
com as regras seguintes:
Quando parâmetro 3-00 Intervalo de Referência
•
estiver programado para [0] Mín-Máx, uma
referência de 0% é igual a 0 [unidade] onde a
unidade pode ser qualquer unidade, por exemplo,
RPM, m/s, e bar. Uma referência de 100% é igual
ao valor máximo (valor absoluto de
parâmetro 3-03 Referência Máxima, valor absoluto
de parâmetro 3-02 Minimum Reference).
Quando parâmetro 3-00 Intervalo de Referência
•
estiver programado para [1] -Máx–+Máx, uma
referência de 0% é igual a 0 [unidade], e uma
referência de 100% é igual à referência máxima.
As referências de barramento são graduadas de acordo
com as regras seguintes:
Quando parâmetro 3-00 Intervalo de Referência
•
estiver programado para [0] Min–máx, uma
referência de 0% é igual a referência mínima e
uma referência de 100% é igual à referência
máxima.
Quando parâmetro 3-00 Intervalo de Referência
•
estiver programado para [1] -Máx–+Máx, uma
referência de -100% é igual à referência máxima,
e uma referência de 100% é igual à referência
máxima.
As referências e o feedback são graduados a partir das
entradas analógica e de pulso, da mesma maneira. A única
diferença é que uma referência acima ou abaixo dos
pontos nais mínimo e máximo especicados (P1 e P2 no
Ilustração 2.20) são xadas, enquanto um feedback acima
ou abaixo não é.
Ilustração 2.20 Pontos nais mínimo e máximo
26 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 29
Visão geral do produto Guia de Design
Os pontos nais P1 e P2 são denidos em Tabela 2.3 dependendo da escolha de entrada.
Entrada Analógico 53
modo de
tensão
P1=(valor de entrada mínimo, valor de referência mínima)
Valor de referência mínima Parâmetro 6-14
Terminal 53
Low Ref./Feedb.
Value
Valor de entrada mínimo Parâmetro 6-10
Terminal 53
Low Voltage
[V]
P2=(valor de entrada máximo, valor de referência máxima)
Valor de referência máxima Parâmetro 6-15
Terminal 53
High Ref./
Feedb. Value
Valor de entrada máximo Parâmetro 6-11
Terminal 53
High Voltage
[V]
Tabela 2.3 Pontos nais P1 e P2
Analógico 53
modo de
corrente
Parâmetro 6-14 T
erminal 53 Low
Ref./Feedb. Value
Parâmetro 6-12 T
erminal 53 Low
Current [mA]
Parâmetro 6-15 T
erminal 53 High
Ref./Feedb. Value
Parâmetro 6-13 T
erminal 53 High
Current [mA]
Analógico 54
modo de
tensão
Parâmetro 6-24
Terminal 54
Low Ref./Feedb.
Value
Parâmetro 6-20
Terminal 54
Low Voltage
[V]
Parâmetro 6-25
Terminal 54
High Ref./
Feedb. Value
Parâmetro 6-21
Terminal 54
High
Voltage[V]
Analógico 54
modo de
corrente
Parâmetro 6-24 T
erminal 54 Low
Ref./Feedb. Value
Parâmetro 6-22 T
erminal 54 Low
Current [mA]
Parâmetro 6-25 T
erminal 54 High
Ref./Feedb. Value
Parâmetro 6-23 T
erminal 54 High
Current [mA]
Entrada de
pulso 29
Parâmetro 5-52
Term. 29 Low
Ref./Feedb. Value
Parâmetro 5-50
Term. 29 Low
Frequency [Hz]
Parâmetro 5-53
Term. 29 High
Ref./Feedb. Value
Parâmetro 5-51
Term. 29 High
Frequency [Hz]
Entrada de pulso 33
2 2
Parâmetro 5-57 Term.
33 Low Ref./Feedb.
Value
Parâmetro 5-55 Term.
33 Low Frequency
[Hz]
Parâmetro 5-58 Term.
33 High Ref./Feedb.
Value
Parâmetro 5-56 Term.
33 High Frequency
[Hz]
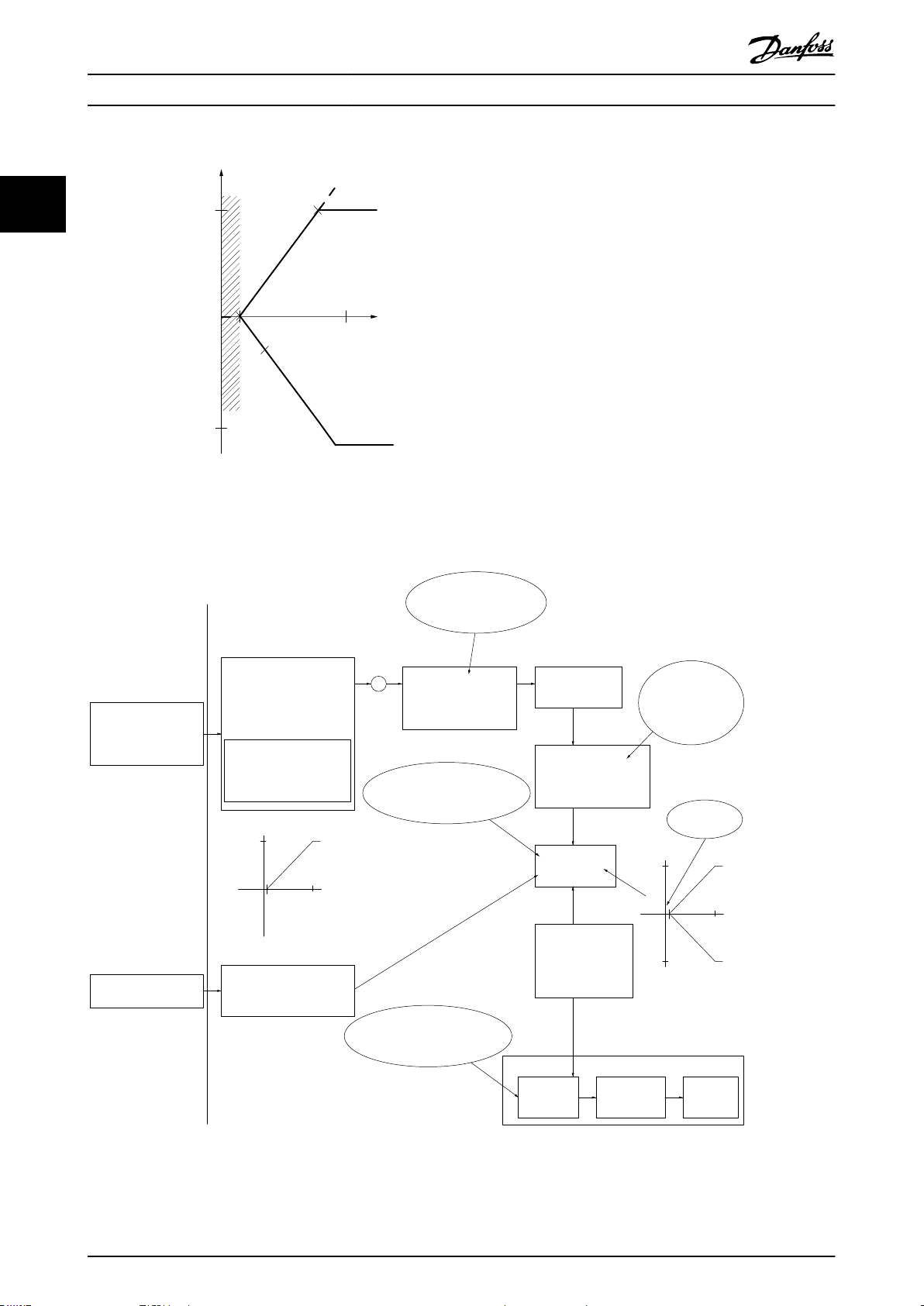
2.4.4 Banda morta em torno de zero
Às vezes, a referência (em casos raros, também o feedback) deve ter uma banda morta em torno de 0 para garantir que a
máquina seja parada quando a referência estiver próxima de 0.
Para tornar a banda morta ativa e
Dena o valor de referência mínima (consulte Tabela 2.3 para obter o parâmetro relevante) ou o valor de referência
•
máxima em 0. Em outras palavras, P1 ou P2 devem estar no eixo X em Ilustração 2.21.
Certique-se de que os dois pontos que denem o gráco em escala estejam no mesmo quadrante.
•
P1 ou P2 dene o tamanho da banda morta como mostrado em Ilustração 2.21.
denir a quantidade de banda morta, faça o seguinte:
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 27
Page 30
Resource output
[Hz] or “No unit”
Resource input
[mA]
Quadrant 2
Quadrant 3
Quadrant 1
Quadrant 4
Terminal X high
Low reference/feedback
value
High reference/feedback
value
1
-50
165020
P1
P2
0
130BD446.10
forward
reverse
Terminal low
20
1
10
V
V
20
1
10
-20
130BD454.10
+
Analog input 53
Low reference 0 Hz
High reference 20 Hz
Low voltage 1 V
High voltage 10 V
Ext. source 1
Range:
0.0% (0 Hz)
100.0% (20 Hz)
100.0% (20 Hz)
Ext. reference
Range:
0.0% (0 Hz)
20 Hz 10V
Ext. Reference
Absolute
0 Hz 1 V
Reference
algorithm
Reference
100.0% (20 Hz)
0.0% (0 Hz)
Range:
Limited to:
0%- +100%
(0 Hz- +20 Hz)
Limited to: -200%- +200%
(-40 Hz- +40 Hz)
Reference is scaled
according to min
max reference giving a
speed.!!!
Scale to
speed
+20 Hz
-20 Hz
Range:
Speed
setpoint
Motor
control
Range:
-8 Hz
+8 Hz
Motor
Digital input 19
Low No reversing
High Reversing
Limits Speed Setpoint
according to min max speed.!!!
Motor PID
Hz
Hz
Dead band
Digital input
General Reference
parameters:
Reference Range: Min - Max
Minimum Reference: 0 Hz (0,0%)
Maximum Reference: 20 Hz (100,0%)
General Motor
parameters:
Motor speed direction:Both directions
Motor speed Low limit: 0 Hz
Motor speed high limit: 8 Hz
Visão geral do produto
VLT® AutomationDrive FC 360
22
Ilustração 2.21 Tamanho da banda morta
Caso-exemplo 1: Referência positiva com banda morta, entrada digital para acionamento reverso, parte I
Ilustração 2.22 mostra como a entrada de referência com limites dentro dos mínimos aos máximos de xação.
Ilustração 2.22 Fixação da entrada de referência com limites dentro do mínimo ao máximo
28 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 31

+
30 Hz
1
10
20 Hz
1
10
130BD433.11
-20 Hz
V
V
Analog input 53
Low reference 0 Hz
High reference 20 Hz
Low voltage 1 V
High voltage 10 V
Ext. source 1
Range:
0.0% (0 Hz)
150.0% (30 Hz)
150.0% (30 Hz)
Ext. reference
Range:
0.0% (0 Hz)
30 Hz 10 V
Ext. Reference
Absolute
0 Hz 1 V
Reference
algorithm
Reference
100.0% (20 Hz)
0.0% (0 Hz)
Range:
Limited to:
-100%- +100%
(-20 Hz- +20 Hz)
Limited to: -200%- +200%
(-40 Hz- +40 Hz)
Reference is scaled
according to
max reference giving a
speed.!!!
Scale to
speed
+20 Hz
-20 Hz
Range:
Speed
setpoint
Motor
control
Range:
–10 Hz
+10 Hz
Motor
Digital input 19
Low No reversing
High Reversing
Limits Speed Setpoint
according to min max speed.!!!
Motor PID
Dead band
Digital input
General Reference
parameters:
Reference Range: -Max - Max
Minimum Reference: Don't care
Maximum Reference: 20 Hz (100.0%)
General Motor
parameters:
Motor speed direction: Both directions
Motor speed Low limit: 0 Hz
Motor speed high limit: 10 Hz
Visão geral do produto Guia de Design
Caso-exemplo 2: Referência positiva com banda morta, entrada digital para acionamento reverso, parte II
Ilustração 2.23 mostra como a entrada de referência com limites externos -máximo a +máximo se limita aos limites de
entrada baixo e alto antes de adicionar à referência externa, e como a referência externa é xada em -máximo a +máximo
pelo algoritmo de referência.
2 2
Ilustração 2.23 Fixação da entrada de referência com limites fora -Máximo a +Máximo
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 29
Page 32

Visão geral do produto
VLT® AutomationDrive FC 360
2.5 Controle do PID
2.5.1 Controle do PID de velocidade
22
Parâmetro 1-00 Conguration Mode
[0] Malha Aberta
[1] Malha fech. veloc.
[2] Torque Não está disponível Inativo
[3] Processo Inativo Inativo
Tabela 2.4 Congurações de controle, controle da velocidade ativo
1) Inativo indica que o modo especíco está disponível, mas o controle de velocidade não está ativo nesse modo.
2) Não disponível indica que o modo especíco não está disponível.
Parâmetro Descrição da função
Parâmetro 7-00 Speed PID Feedback Source Selecione de qual entrada o PID de velocidade recebe seu feedback.
Parâmetro 7-02 Ganho Proporcional no PID de
Velocidade
Parâmetro 7-03 Speed PID Integral Time Elimina erros de velocidade de estado estável. Valores mais baixos signicam uma reação
Parâmetro 7-04 Speed PID Dierentiation Time Fornece um ganho proporcional à taxa de variação do feedback. Uma conguração de 0
Parâmetro 7-05 Speed PID Di. Gain Limit Se houver mudanças rápidas na referência ou no feedback em uma determinada aplicação,
Parâmetro 7-06 Speed PID Lowpass Filter Time Um ltro passa-baixa que amortiza oscilações no sinal de feedback e melhora o
Parâmetro 1-01 Motor Control Principle
U/f
1)
Inativo
Não disponível
Quanto maior o valor, mais rápido será o controle. No entanto, um valor muito alto pode
levar a oscilações.
mais rápida. No entanto, um valor muito baixo pode levar a oscilações.
desativa o diferenciador.
o que signica que o erro muda rapidamente, o diferenciador pode em breve se tornar
dominante demais. Isto ocorre porque ele reage às variações no erro. Quanto mais rápida a
variação do erro, maior será o ganho diferencial. O ganho diferencial pode, portanto, ser
limitado, para permitir a programação de um tempo de diferenciação razoável, para
variações lentas, e um ganho adequadamente rápido, para variações rápidas.
desempenho em regime. No entanto, um tempo do ltro muito longo deteriora o
desempenho dinâmico do controle do PID de velocidade.
Congurações práticas de parâmetro 7-06 Per. ltro passa-baixa do PID de veloc tirado do
número de pulsos por revolução do encoder (PPR):
Encoder PPR Parâmetro 7-06 Speed PID Lowpass Filter
512 10 ms
1024 5 ms
2048 2 ms
4096 1 ms
2)
+
VVC
Inativo
ACTIVE
Time
Tabela 2.5 Parâmetros de controle de velocidade
Exemplo de programação do controle da velocidade
Neste exemplo, o controle do PID de velocidade é usado para manter uma velocidade constante do motor, independentemente da carga variável no motor. A velocidade do motor requerida é programada por meio de um potenciômetro
conectado no terminal 53. A faixa de velocidade é 0–1500 RPM correspondente a 0–10 V sobre o potenciômetro. Um
interruptor conectado ao terminal 18 controla a partida e a parada. O PID de velocidade monitora a RPM real do motor
usando um encoder incremental de 24 V (HTL) como feedback. O sensor de feedback é um encoder (1024 pulsos por
revolução) conectado aos terminais 32 e 33. A faixa de frequência de pulso para os terminais 32 e 33 é de 4 Hz-32 kHz.
30 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 33

M
3
96 97 9998
91 92 93 95
50
12
L1 L2L1PEL3
W PEVU
F1
L2
L3
N
PE
18
53
27
55
32
33
24 Vdc
130BD372.11
Visão geral do produto Guia de Design
2 2
Ilustração 2.24 Programação de controle da velocidade
Siga os passos descritos em Tabela 2.6 para programar o controle da velocidade (consulte a explicação das congu-
rações no Guia de Programação)
Em Tabela 2.6, presume-se que todos os outros parâmetros e interruptores permanecem na conguração padrão.
Função Número do parâmetro Conguração
1) Certique-se de que o motor esteja funcionando corretamente. Proceda da seguinte maneira:
Ajuste os parâmetros do motor usando os dados na
plaqueta de identicação.
Execute uma AMA. Parâmetro 1-29 Adaptação
2) Verique se o motor está funcionando e se o encoder está conectado corretamente. Proceda da seguinte maneira:
Pressione [Hand On]. Verique se o motor está funcionando
e observe o sentido de rotação (referido como sentido
positivo).
3) Certique-se de que os limites do conversor de frequência estejam denidos para valores seguros:
Programe limites aceitáveis para as referências. Parâmetro 3-02 Referência
Verique se as congurações da rampa estão de acordo
com a especicação do conversor de frequência e
permitiram especicações de operação da aplicação.
Grupo do parâmetro 1-2*
Dados do Motor
Conforme especicado pela plaqueta de identi-
cação do motor.
[1] Ativar AMA completa
Automática do Motor
(AMA)
Programe uma referência positiva.
0
Mínima
Parâmetro 3-03 Referência
50
Máxima
Parâmetro 3-41 Tempo de
Conguração padrão
Aceleração da Rampa 1
Parâmetro 3-42 Tempo de
Conguração padrão
Desaceleração da Rampa 1
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 31
Page 34

Visão geral do produto
VLT® AutomationDrive FC 360
Programe limites aceitáveis para a velocidade e frequência
do motor.
22
4) Congure o controle da velocidade e selecione o princípio de controle do motor:
Ativação de controle da velocidade Parâmetro 1-00 Modo
Seleção do princípio de controle do motor Parâmetro 1-01 Principio
5) Congure e escale a referência para o controle da velocidade:
Programe a entrada analógica 53 como fonte da referência. Parâmetro 3-15 Fonte da
Escala de entrada analógica 53 0 Hz (0 V) a 50 Hz (10 V) Grupo do parâmetro 6-1*
6) Congure o sinal do encoder HTL de 24 V como feedback para o controle do motor e controle da velocidade:
Congure as entradas digitais 32 e 33 como entradas do
encoder.
Selecione o terminal 32/33 como feedback do PID de
velocidade.
7) Ajuste os parâmetros do PID de controle da velocidade:
Use as orientações de ajuste quando relevantes ou ajuste
manualmente.
8) Fim
Salve a programação do parâmetro no LCP para proteção. Parâmetro 0-50 LCP Copy [1] Todos para o LCP
Parâmetro 4-12 Lim.
Inferior da Veloc. do Motor
[Hz]
Parâmetro 4-14 Lim.
Superior da Veloc do Motor
[Hz]
Parâmetro 4-19 Freqüência
Máx. de Saída
Conguração
de Controle do Motor
Referência 1
Entrada analógica 1
Parâmetro 5-14 Terminal
32, Entrada Digital
Parâmetro 5-15 Terminal
33 Entrada Digital
Parâmetro 7-00 Fonte do
Feedback do PID de
Velocidade
Grupo do parâmetro 7-0*
Ctrl. do PID de Velocidade
0 Hz
50 Hz
60 Hz
[1] Malha fech. veloc.
+
[1] VVC
Não necessário (padrão)
Não necessário (padrão)
[82] Entrada do encoder B
[83] Entrada do encoder A
[1] Encoder de 24 V
Tabela 2.6 Ordem de programação para controle do PID de velocidade
32 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 35

P 7-30
normal/inverso
PID
P 7-38
*(-1)
Alimentação positiva
Manuseio
da Ref.
Manuseio
do
Feedback
% [unid.med.]
% [unid.med.]
%
[unid.med.]
%
[Velocidade]
Adequar c
velocidade
P 4-10
Sentido da
Velocidade do motor
Para o
controle do
motor
PID de Processo
130BA178.10
_
+
0%
-100%
100%
0%
-100%
100%
Visão geral do produto Guia de Design
2.5.2 Controle do PID de processo
O controle do PID de processo pode ser usado para controlar os parâmetros de aplicação que podem ser medidos por um
sensor (por exemplo, pressão, temperatura, uxo) e afetados pelo motor conectado através de uma bomba, ventilador ou
outros dispositivos conectados.
Tabela 2.7 mostra as congurações de controle nas quais o controle de processo é possível. Consulte capétulo 2.3 Estruturas
de controle para ver onde o controle da velocidade está ativo.
Parâmetro 1-00 Modo Conguração Parâmetro 1-01 Principio de Controle do Motor
U/f
VVC
+
[3] Processo Não está disponível Processo
Tabela 2.7 Conguração de controle
AVISO!
O controle do PID de processo funciona sob a programação do parâmetro padrão, mas o ajuste dos parâmetros é
recomendado para otimizar o desempenho do controle de aplicativos.
2 2
Ilustração 2.25 Diagrama de controle do PID de processo
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 33
Page 36

Visão geral do produto
VLT® AutomationDrive FC 360
2.5.3 Parâmetros relevantes de controle de processo
22
Parâmetro Descrição da função
Parâmetro 7-20 Fonte de Feedback 1 PID de
Processo
Parâmetro 7-22 Fonte de Feedback 2 Opcional: Determine se (e de onde) o PID de processo recebe um sinal de feedback
Parâmetro 7-30 Ctrl Normal/Inversão do PID de
Processo
Parâmetro 7-31 Anti Windup do PID do
Processo
Parâmetro 7-32 Velocidade Inicial do PID do
Processo
Parâmetro 7-33 Ganho Proporcional do PID de
Processo
Parâmetro 7-34 Tempo de Integr. do PID de
velocid.
Parâmetro 7-35 Tempo de Difer. do PID de veloc Fornece um ganho proporcional à taxa de alteração de feedback. Uma conguração de 0
Parâmetro 7-36 Dif.do PID de Proc.- Lim. de
Ganho
Parâmetro 7-38 Fator de Feed Forward do PID
de Processo
Parâmetro 6-16 Terminal 53 Const. de
•
Tempo do Filtro (Terminal analógico 53)
Parâmetro 6-26 Terminal 54 Const. de
•
Tempo do Filtro (Terminal analógico 54)
Selecione de qual fonte (entrada analógica ou de pulso) o PID de processo recebe seu
feedback.
adicional. Se uma fonte do feedback adicional for selecionada, os 2 sinais de feedback
serão adicionados antes de serem usados no controle do PID de processo.
Em operação [0] Normal, o controle de processo responde com um aumento da velocidade
do motor se o feedback for menor que a referência. Em operação [1] Inversa, o controle de
processo responde com uma velocidade decrescente do motor.
A função anti-término garante que quando um limite de frequência ou um limite de
torque é atingido, o integrador é ajustado para um ganho que corresponde à frequência
real. Isso evita a integração em um erro que não pode ser compensado por uma mudança
de velocidade. Pressione [0] O para desativar esta função.
Em algumas aplicações, atingir a velocidade/setpoint exigida pode levar muito tempo. Em
tais aplicações, pode ser uma vantagem denir uma velocidade xa do motor a partir do
conversor de frequência antes que o controle de processo seja ativado. Programe uma
velocidade xa do motor denindo um valor inicial do PID de processo (velocidade)
parâmetro 7-32 Velocidade Inicial do PID do Processo.
Quanto maior o valor, mais rápido será o controle. No entanto, um valor muito grande
pode levar a oscilações.
Elimina erros de velocidade de estado estável. Um valor menor signica uma reação mais
rápida. Contudo, um valor muito pequeno pode levar a oscilações.
desativa o diferenciador.
Se houver mudanças rápidas na referência ou feedback em uma determinada aplicação (o
que signica que o erro muda rapidamente), o diferenciador pode em breve se tornar
dominante demais. Isto ocorre porque ele reage às variações no erro. Quanto mais rápida
a variação do erro, maior será o ganho diferencial. O ganho diferencial pode, desse modo,
ser limitado para permitir a programação de um tempo de diferenciação razoável, para
variações lentas.
Em aplicações onde há uma boa (e aproximadamente linear) correlação entre a referência
do processo e a velocidade do motor necessária para obter essa referência, use o fator de
feed forward para obter um melhor desempenho dinâmico do controle do PID de
processo.
Se houver oscilações do sinal de feedback de corrente/tensão, use um ltro passa-baixa
para amortecer essas oscilações.
Exemplo: Se o ltro passa-baixa tiver sido ajustado para 0,1 s, a velocidade limite será de
10 RAD/s (o inverso de 0,1 s), correspondendo a (10/(2 x π))=1,6 Hz. Isso signica que o
ltro amortece todas as correntes/tensões que variam em mais de 1,6 oscilação por
segundo. O controle é realizado somente em um sinal de feedback que varia por uma
frequência (velocidade) menor que 1,6 Hz.
O ltro passa-baixa melhora o desempenho do estado estável, mas a seleção de um
tempo do ltro muito longo deteriora o desempenho dinâmico do controle do PID de
processo.
Tabela 2.8 Parâmetros de controle de processo
34 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 37

Transmitter
96 97 9998
91 92 93 95
50
12
L1 L2L1PEL3
W PEVU
F1
L2
L3
N
PE
130BD373.10
18
53
27
55
54
M
3
Visão geral do produto Guia de Design
2.5.4 Exemplo de controle do PID de
processo
Ilustração 2.26 é um exemplo de um controle do PID de
processo usado em um sistema de ventilação:
Ilustração 2.26 Controle do PID de processo em um sistema de
ventilação
Em um sistema de ventilação, a temperatura pode ser
ajustada de -5 a +35 °C (23–95 °F) com um potenciômetro
de 0–10 V. Para manter constante a temperatura
denida,
use o controle de processo.
O controle é inverso, o que signica que, quando a
temperatura aumenta, a velocidade de ventilação também
aumenta, gerando mais ar. Quando a temperatura cai, a
velocidade diminui. O transmissor utilizado é um sensor de
temperatura com uma faixa de -10 a +40 °C (14–104 °F),
4–20 mA.
2 2
Ilustração 2.27 Transmissor de 2 os
1. Partida/parada por meio do interruptor conectado
ao terminal 18.
2. Referência de temperatura por meio do
potenciômetro (-5 a +35 °C (23–95 °F), 0–
10 V CC) conectado ao terminal 53.
3. Feedback de temperatura por meio do
transmissor (-10 a +40 °C (14–104 °F), 4–20 mA)
conectado ao terminal 54.
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 35
Page 38

Visão geral do produto
VLT® AutomationDrive FC 360
Função Número do
parâmetro
Inicialize o conversor de frequência. Parâmetro 14-22
22
1) Ajuste os parâmetros do motor:
Ajuste os parâmetros do motor de acordo com os
dados da plaqueta de identicação.
Execute uma AMA completa. Parâmetro 1-29 Ad
2) Verique se o motor está funcionando no sentido correto.
Quando o motor está conectado ao conversor de frequência com uma ordem de avanço direta como U-U; V-V; W-W, o eixo do motor
geralmente gira no sentido horário visto na extremidade do eixo.
Pressione [Hand On]. Verique a direção do eixo
aplicando uma referência manual.
Se o motor girar no sentido oposto ao requerido:
1. Altere a direção do motor em
parâmetro 4-10 Sentido de Rotação do Motor.
2. Desligue a rede elétrica e aguarde a descarga
do barramento CC.
3. Inverta 2 fases do motor.
Dena o modo de conguração. Parâmetro 1-00 M
3) Dena a conguração de referência, que é o intervalo para o tratamento da referência. Ajuste a escala da entrada analógica no grupo
do parâmetro 6-** Entrada/Saída Analógica.
Denir unidades de referência/feedback.
Denir referência mínima (10 °C (50 °F)).
Denir referência máxima (80 °C (176 °F)).
Se o valor denido for determinado a partir de um
valor predenido (parâmetro de matriz), dena
outras fontes de referência para [0] Sem função.
4) Ajuste os limites para o conversor de frequência:
Ajuste os tempos de rampa para um valor
apropriado como 20 s.
Dena limites de velocidade mínima.
Ajuste o limite de velocidade máxima do motor.
Dena a frequência de saída máxima.
Dena parâmetro 6-19 Modo do terminal 53 e parâmetro 6-29 Modo do terminal 54 para o modo de tensão ou corrente.
Modo Operação
Grupo do
parâmetro 1-2*
Dados do Motor
aptação
Automática do
Motor (AMA)
Parâmetro 4-10 Se
ntido de Rotação
do Motor
odo Conguração
Parâmetro 3-01
Reference/
Feedback Unit
Parâmetro 3-02
Minimum
Reference
Parâmetro 3-03
Maximum
Reference
Parâmetro 3-10
Preset Reference
Parâmetro 3-41
Ramp 1 Ramp Up
Time
Parâmetro 3-42
Ramp 1 Ramp
Down Time
Parâmetro 4-12
Motor Speed Low
Limit [Hz]
Parâmetro 4-14
Motor Speed High
Limit [Hz]
Parâmetro 4-19
Max Output
Frequency
Conguração
[2] Inicialização - execute um ciclo de energização - aperte reset.
Conforme indicado na plaqueta de identicação do motor.
[1] Ativar AMA completa.
Selecione a direção correta do eixo do motor.
[3] Processo.
[60] °C Unidade mostrada no display.
-5 °C (23 °F).
35 °C (95 °F).
[0] 35%.
Par . 3 − 10
Ref . =
Parâmetro 3-14 Preset Relative Reference a parâmetro 3-18 Relative
Scaling Reference Resource [0] = Sem função.
20 s
20 s
10 Hz
50 Hz
60 Hz
0
× Par . 3 − 03 − par . 3 − 02 = 24, 5°C
100
36 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 39

Visão geral do produto Guia de Design
Função Número do
parâmetro
5) Entradas analógicas de escala usadas para referência e feedback:
Ajuste a baixa tensão do terminal 53.
Ajuste a alta tensão do terminal 53.
Ajuste o valor de feedback baixo do terminal 54.
Ajuste o valor de feedback alto do terminal 54.
Dena a fonte do feedback.
6) Congurações básicas do PID:
PID de processo normal/inverso. Parâmetro 7-30
PID de processo anti-término. Parâmetro 7-31
Velocidade inicial do PID do processo. Parâmetro 7-32 Ve
Salvar parâmetros para o LCP. Parâmetro 0-50 Có
Parâmetro 6-10
Terminal 53 Low
Voltage
Parâmetro 6-11
Terminal 53 High
Voltage
Parâmetro 6-24
Terminal 54 Low
Ref./Feedb. Value
Parâmetro 6-25
Terminal 54 High
Ref./Feedb. Value
Parâmetro 7-20
Process CL
Feedback 1
Resource
Process PID
Normal/ Inverse
Control
Process PID Anti
Windup
locidade Inicial do
PID do Processo
pia do LCP
Conguração
0 V
10 V
-5 °C (23 °F)
35 °C (95 °F)
[2] Entrada analógica 54
[0] Normal
[1] Ligado
300 RPM
[1] Todos para o LCP
2 2
Tabela 2.9 Exemplo de setup de controle do PID de processo
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 37
Page 40

130BA183.10
y(t)
t
P
u
Visão geral do produto
VLT® AutomationDrive FC 360
2.5.5 Otimização do controlador de
processo
vez de utilizar uma resposta degrau. Aumente o ganho
proporcional até observar oscilações contínuas (conforme
medido no feedback), isto é, até que o sistema se torne
22
Depois de denir as congurações básicas, conforme
descrito em capétulo 2.5.5 Sequência da programação,
otimize o ganho proporcional, o tempo de integração e o
tempo de diferenciação (parâmetro 7-33 Ganho Propor-
cional do PID de Processo, parâmetro 7-34 Tempo de Integr.
do PID de velocid. e parâmetro 7-35 Tempo de Difer. do PID
marginalmente estável. O ganho correspondente (Ku) é
chamado de ganho nal e é o ganho no qual a oscilação é
obtida. O período da oscilação (Pu) (chamado o objetivo
nal) é determinado como mostrado em Ilustração 2.28 e
deve ser medido quando a amplitude de oscilação é
pequena.
de veloc). Na maioria dos processos, complete o seguinte
procedimento:
1. Selecione somente controle proporcional, o que
signica que o tempo integrado é denido para o
1. Dar partida no motor.
2. Programe parâmetro 7-33 Ganho Proporcional do
PID de Processo para 0,3 e aumente-o, até que o
sinal de feedback comece a variar continuamente
outra vez. Reduza o valor até que o sinal de
feedback tenha estabilizado. Diminua o ganho
proporcional em 40-60%.
3.
Dena parâmetro 7-34 Tempo de Integr. do PID de
velocid. para 20 s e reduza o valor até que o sinal
de feedback comece novamente a variar
continuamente. Aumente o tempo de integração
até que o sinal de feedback estabilize, seguido
por um aumento de 15%-50%.
O operador do processo pode executar a
controle iterativamente, para prover um controle
satisfatório.
valor máximo, enquanto o tempo de diferenciação está congurado para 0.
2. Aumente o valor do ganho proporcional até que
o ponto de instabilidade (oscilações sustentadas)
e o valor crítico do ganho, Ku, sejam atingidos.
3. Meça o período de oscilação para obter a
constante de tempo crítica, Pu.
4. Use Tabela 2.10 para calcular os parâmetros de
controle do PID necessários.
anação nal do
4. Use parâmetro 7-35 Tempo de Difer. do PID de
veloc somente para sistemas de ação rápida
(tempo de diferenciação). O valor típico é 4 vezes
o tempo de integração denido. Use o diferenciador quando a conguração do ganho
proporcional e do tempo de integração tiver sido
totalmente otimizada. Certique-se de que o ltro
passa-baixa amorteça sucientemente as
oscilações no sinal de feedback.
AVISO!
Se necessário, a partida/parada pode ser ativada várias
vezes para provocar uma variação do sinal de feedback.
2.5.6 Método de sintonização Ziegler
Nichols
Para sintonizar os controles do PID do conversor de
frequência, a Danfoss recomenda o método de
sintonização Ziegler Nichols .
AVISO!
Não use o método de sintonização Ziegler Nichols em
aplicações que poderiam ser danicadas pelas oscilações
criadas por congurações de controle marginalmente
estáveis.
Os critérios para ajustar os parâmetros são baseados em
uma avaliação do sistema, no limite de estabilidade, em
38 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Ilustração 2.28 Sistema marginalmente estável
Tipo de
controle
Controle de PI 0,45 x K
Controle
rigoroso do
PID
Alguma
ultrapassagem
do PID
Tabela 2.10 Sintonização Ziegler Nichols para o regulador
Ganho proporcional
u
0,6 x K
u
0,33 x K
u
Tempo
integrado
0,833 x P
0,5 x P
u
0,5 x P
u
u
Tempo de
diferenciação
–
0,125 x P
0,33 x P
u
u
Page 41

Visão geral do produto Guia de Design
2.6 Emissão EMC e imunidade
2.6.1 Aspectos gerais da emissão EMC
O transiente por faísca elétrica é conduzido em frequências na faixa de 150 kHz a 30 MHz. A interferência em suspensão no
ar do sistema conversor de frequência na faixa de 30 MHz a 1 GHz é gerada a partir do conversor de frequência, do cabo de
motor e do motor.
Correntes capacitivas no cabo de motor acoplado com um alto dU/dt da tensão do motor geram correntes de fuga.
O uso de um cabo de motor blindado aumenta a corrente de fuga (consulte Ilustração 2.29) porque os cabos blindados têm
maior capacitância em relação ao aterramento do que os cabos não blindados. Se a corrente de fuga não for
uma maior interferência na rede elétrica na faixa de radiofrequência, abaixo de aproximadamente 5 MHz. Uma vez que a
corrente de fuga (I1) é levada de volta para a unidade através da blindagem (I3), existe apenas um pequeno campo eletromagnético (I4) do cabo de motor blindado.
A blindagem reduz a interferência irradiada, mas aumenta a interferência de baixa frequência na rede elétrica. Conecte a
blindagem do cabo de motor ao gabinete metálico do conversor de frequência e ao gabinete metálico do motor. A melhor
maneira de se fazer isso é usando braçadeiras de blindagem integradas para evitar extremidades de blindagem torcidas
(rabichos). As braçadeiras de blindagem aumentam a impedância da blindagem em altas frequências, o que reduz o efeito
da blindagem e aumenta a corrente de fuga (I4).
Monte a blindagem no gabinete metálico em ambas as extremidades se um cabo blindado for usado para as seguintes
nalidades:
ltrada, haverá
2 2
Fieldbus
•
Rede
•
Relé
•
Cabos de controle
•
Interface de sinal
•
Freio
•
No entanto, em algumas situações é necessário romper a blindagem para evitar malhas de corrente.
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 39
Page 42

1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Visão geral do produto
VLT® AutomationDrive FC 360
22
1 Cabo terra
2 Blindagem
3 Alimentação de rede elétrica CA
4 Conversor de frequência
5 Cabo de motor blindado
6 Motor
Ilustração 2.29 Emissão EMC
Ao colocar a blindagem em uma placa de montagem para o conversor de frequência, use uma placa de montagem de
metal para transportar as correntes de proteção de volta para a unidade. Garanta um bom contato elétrico da placa de
montagem através dos parafusos de montagem com o chassi do conversor de frequência.
Ao usar cabos não blindados, alguns requisitos de emissão não são cumpridos, embora os requisitos de imunidade sejam
observados.
Para reduzir o nível de interferência do sistema como um todo (unidade e instalação), faça com que os cabos do motor e do
freio sejam os mais curtos possíveis. Evite colocar cabos com um nível de sinal sensível ao lado dos cabos da rede elétrica,
do motor e do cabo do freio. A interferência nas frequências de rádio superior a 50 MHz (em suspensão no ar) é produzida
especialmente por sistemas eletrônicos de controle.
40 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 43

Visão geral do produto Guia de Design
2.6.2 Requisitos de emissão EMC
O resultado do teste em Tabela 2.11 foram obtidos usando um sistema com um conversor de frequência (com a placa de
montagem), um motor, e cabos de motor blindados.
Classe A grupo 2/EN 55011
Ambiente industrial
Tamanho do gabinete e potência nominal
J1 0,37–2,2 kW (0,5–3,0 hp), 380–480 V – – 25 m (82 pés) Sim
A1
Filtro
A2
Filtro
Tabela 2.11 Emissão EMC (tipo de ltro: Interno)
1) A faixa de frequência de 150 kHz a 30 MHz não está harmonizada entre IEC/EN 61800-3 e EN 55011 e não está incluída obrigatoriamente.
J2 3,0–5,5 kW (4,0–7,5 hp), 380–480 V – – 25 m (82 pés) Sim
J3 7,5 kW (10 hp), 380–480 V – – 25 m (82 pés) Sim
J4 11–15 kW (15–20 hp), 380–480 V – – 25 m (82 pés) Sim
J5 18,5–22 kW (25–30 hp), 380–480 V – – 25 m (82 pés) Sim
J1 0,37–2,2 kW (0,5–3,0 hp), 380–480 V 5 m (16,4 pés)
J2 3,0–5,5 kW (4,0–7,5 hp), 380–480 V 5 m (16,4 pés)
J3 7,5 kW (10 hp), 380–480 V 5 m (16,4 pés)
J4 11–15 kW (15–20 hp), 380–480 V 5 m (16,4 pés)
J5 18,5–22 kW (25–30 hp), 380–480 V 5 m (16,4 pés)
J6 30–45 kW (40–60 hp), 380–480 V 25 m (82 pés)
J7 55–75 kW (75–100 hp), 380–480 V 25 m (82 pés)
Categoria C3/EN/IEC 61800-3
Segundo ambiente
Conduzido Irradiado Conduzido Irradiado
1)
Sim
1)
Sim
1)
Sim
1)
Sim
1)
Sim
1)
Sim
1)
Sim
Classe A grupo 1/EN 55011
Ambiente industrial
Categoria C2/EN/IEC 61800-3
Restrito ao primeiro ambiente
– –
– –
– –
– –
– –
– –
– –
2 2
2.6.3 Requisitos de imunidade EMC
Os requisitos de imunidade para conversores de frequência dependem do ambiente em que estão instalados. Os requisitos
para ambiente industrial são mais rigorosos que os requisitos para ambientes residencial e de escritório. Todos os
conversores de frequência Danfoss atendem aos requisitos do ambiente industrial. Portanto, também estão em conformidade com os requisitos mais baixos do ambiente doméstico e de escritório, com uma grande margem de segurança.
Para documentar a imunidade contra o transiente de ruptura de fenômenos elétricos, os seguintes testes de imunidade
foram feitos em um sistema que consiste em:
Um conversor de frequência (com opções, se relevante).
•
Um cabo de controle blindado.
•
Uma caixa de controle com potenciômetro, cabo de motor e motor.
•
Os testes foram executados de acordo com as seguintes normas básicas:
EN 61000-4-2 (IEC 61000-4-2) Descargas eletrostáticas (ESD): Simulação de descargas eletrostáticas causadas por
•
seres humanos.
EN 61000-4-3 (IEC 61000-4-3) Imunidade irradiada: Simulação de amplitude modulada dos efeitos do radar, e
•
equipamento de comunicação por rádio e equipamento de comunicações móveis.
EN 61000-4-4 (IEC 61000-4-4) Transiente de ruptura: Simulação de interferência causada pelo chaveamento de
•
um contator, relé ou dispositivos semelhantes.
EN 61000-4-5 (IEC 61000-4-5) Transientes de sobretensão: Simulação de transientes causados, por exemplo, por
•
um raio próximo às instalações.
EN 61000-4-6 (IEC 61000-4-6) Imunidade conduzida: Simulação do efeito de equipamento de radiotransmissão,
•
ligado aos cabos de conexão.
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 41
Page 44

Visão geral do produto
VLT® AutomationDrive FC 360
Os requisitos de imunidade devem seguir o padrão do produto IEC 61800-3. Consulte Tabela 2.12 para obter mais detalhes.
22
Padrão do produto 61800-3
Teste
ESD Imunidade
irradiada
Ruptura Surto Imunidade
conduzida
Critério de aceitação B B B A A
Faixa da tensão: 380–480 V
Cabo da rede elétrica – – 2 kV CN
Cabo de motor – – 4 kV CCC – 10 V
Cabo do freio – – 4 kV CCC – 10 V
Cabo de divisão da carga – – 4 kV CCC – 10 V
Cabo de relé – – 4 kV CCC – 10 V
2 kV/2 Ω DM
2 kV/12 Ω CM
10 V
RMS
RMS
RMS
RMS
RMS
Compriment
Cabos de controle – –
o > 2 m (6,6
pés)
Sem blindagem:
1 kV/42 Ω CM
10 V
RMS
1 kV CCC
Compriment
Cabo padrão/eldbus – –
o > 2 m (6,6
pés)
Sem blindagem:
1 kV/42 Ω CM
10 V
RMS
1 kV CCC
Compriment
Cabo do LCP – –
o > 2 m (6,6
pés)
– 10 V
RMS
1 kV CCC
Gabinete
4 kV CD
8 kV AD
10 V/m – – –
Tabela 2.12 Requisitos de imunidade EMC
Denição:
CD: Descarga de contato
AD: Descarga aérea
DM: Módulo diferencial
CM: Modo comum
CN: Injeção direta através de rede de acoplamento
CCC: Injeção através de braçadeira de acoplamento capacitivo
42 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 45

130BD447.11
12
4
3
ab
M
130BB955.12
a
b
Leakage current
Motor cable length
Visão geral do produto Guia de Design
2.7 Isolação Galvânica
A PELV oferece proteção através de tensão extra baixa. A
proteção contra choque elétrico é garantida quando a
alimentação elétrica é do tipo PELV e a instalação é
efetuada como descrito nas normas locais/nacionais sobre
alimentações PELV.
Todos os terminais de controle e terminais de relé
01-03/04-06 estão em conformidade com a PELV (tensão
extra baixa de proteção). Isso não se aplica à perna delta
aterrada acima de 400 V.
A isolação galvânica (garantida) é obtida satisfazendo-se as
exigências relativas à alta isolação e fornecendo o espaço
de circulação relevante. Estes requisitos encontram-se
descritos na norma EN 61800-5-1.
Os componentes que compõem o isolamento elétrico,
conforme mostrado em Ilustração 2.30, também atendem
aos requisitos para isolamento mais alto e ao teste
relevante, conforme descrito na EN 61800-5-1.
A isolação galvânica da PELV pode ser mostrada em 3
locais (consulte Ilustração 2.30):
Para manter a PELV, todas as conexões feitas nos terminais
de controle devem ser PELV, por exemplo, o termistor deve
ser reforçado/duplamente isolado.
ADVERTÊNCIA
Antes de tocar em qualquer parte elétrica, certique-se
de que as demais entradas de tensão tenham sido
desconectadas, como a divisão da carga (conexão do
circuito intermediário CC) e a conexão do motor para
backup cinético. Espere pelo menos o tempo indicado na
Tabela 1.2. Deixar de cumprir essas recomendações
poderá resultar em morte ou ferimentos graves.
2.8 Corrente de fuga para o terra
Siga os códigos nacionais e locais relativos ao aterramento
de proteção do equipamento com corrente de fuga >3,5
mA.
A tecnologia do conversor de frequência implica na
mudança de alta frequência em alta potência. Isso gera
uma corrente de fuga na conexão do terra. Uma corrente
de falha no conversor de frequência em terminais de
potência de saída poderá conter um componente CC, que
pode carregar os capacitores do ltro e causar uma
corrente transiente do ponto de aterramento.
A corrente de fuga para o terra é composta de várias
contribuições e depende de várias congurações do
sistema, incluindo ltragem RFI, cabos de motor blindados
e potência do conversor de frequência.
2 2
1 Fonte de alimentação (SMPS) para cassete de controle
2 Comunicação entre cartão de potência e cassete de controle
3 Relés do cliente
Ilustração 2.30 Isolação Galvânica
Ilustração 2.31 Inuência do comprimento do cabo e da
potência na corrente de fuga, Pa>P
b
A interface entre o padrão RS485 e o circuito de E/S (PELV)
é funcionalmente isolada.
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 43
Page 46

130BB956.12
THDv=0%
THDv=5%
Leakage current
130BB958.12
f
sw
Cable
150 Hz
3rd harmonics
50 Hz
Mains
RCD with low f
cut-
RCD with high f
cut-
Leakage current
Frequency
130BB957.11
Leakage current [mA]
100 Hz
2 kHz
100 kHz
Visão geral do produto
VLT® AutomationDrive FC 360
A corrente de fuga também depende da distorção da
linha.
22
Use apenas RCDs do tipo B, os quais são capazes
•
de detectar correntes CA e CC.
Use RCDs com um atraso de inuxo para evitar
•
falhas causadas por correntes de aterramento
transientes.
Dimensione RCDs de acordo com a conguração
•
do sistema e as considerações ambientais.
Ilustração 2.33 Principais contribuições para a corrente de
fuga
Ilustração 2.32 Inuência da distorção de linha na corrente de
fuga
AVISO!
Corrente de fuga alta pode causar o desligamento dos
RCDs. Para evitar esse problema, remova o parafuso de
RFI (tamanhos de gabinete J1 a J5) ou programe
parâmetro 14-50 Filtro de RFI para [0] O (tamanhos de
gabinete J6 e J7) quando um ltro estiver sendo
carregado.
EN/IEC61800-5-1 (Padrão do produto para sistema de
conversor de potência) exige cuidados especiais caso a
corrente de fuga exceda 3,5 mA. O aterramento deve ser
reforçado de 1 das seguintes maneiras:
Fio de aterramento (terminal 95) de pelo menos
•
10 mm2.
os de aterramento separados que cumprem as
2
•
regras de dimensionamento.
Consulte EN/IEC61800-5-1 para obter mais informações.
Usando RCDs
Onde os dispositivos de corrente residual (RCDs), também
conhecidos como disjuntores para a corrente de fuga à
terra (ELCBs), são utilizados, cumpram com o seguinte:
Ilustração 2.34 Inuência da frequência de desativação do RCD
no que é respondido/medido
Para obter mais detalhes, consulte as Notas de Aplicação do
RCD.
44 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 47

T
ta
tc
tb
to ta
tc
tb
to ta
130BA167.10
Carga
Tempo
Velocidade
Visão geral do produto Guia de Design
2.9 Funções de freio
2.9.1 Freio mecânico de retenção
Um freio mecânico de retenção montado diretamente no
eixo do motor normalmente executa frenagem estática.
AVISO!
Quando o freio de retenção é incluído em uma corrente
de segurança, o conversor de frequência não pode
fornecer um controle seguro de um freio mecânico.
Inclua um circuito de redundância para o controle de
frenagem na instalação completa.
2.9.2 Frenagem Dinâmica
A frenagem dinâmica é estabelecida por:
Resistor de freio: Um IGBT do freio mantém a
•
sobretensão abaixo de um certo limite,
direcionando a energia de frenagem do motor
para o resistor de frenagem conectado
(parâmetro 2-10 Função de Frenagem = [1] Resistor
de freio).
Ajuste o limite em parâmetro 2-14 Redução da
tensão de frenagem, com uma faixa de 70 V.
Freio CA: A energia de frenagem é distribuída no
•
motor ao alterar as condições de perda no motor.
A função de freio CA não pode ser usada em
aplicações com ciclos de alta frequência, pois essa
situação superaquece o motor
(parâmetro 2-10 Função de Frenagem = [2] Freio
CA).
Freio CC: Uma corrente CC sobremodulada
•
adicionada à corrente CA funciona como um freio
de corrente parasita (parâmetro 2-02 Tempo de
Frenagem CC≠0 s).
2.9.3 Seleção do resistor de frenagem
Para lidar com demandas mais altas por frenagem
geradora, um resistor de frenagem é necessário. O uso de
um resistor de frenagem garante que o calor será
absorvido no resistor de frenagem e não no conversor de
frequência. Para obter mais informações, consulte o Guia
de Design do VLT® Brake Resistor MCE 101.
O ciclo útil intermitente do resistor é calculado da seguinte
maneira:
Ciclo útil = tb/T .
tb é o tempo de frenagem em segundos
T = tempo de ciclo em segundos
Ilustração 2.35 Ciclo de frenagem típico
Faixa de potência
380–480 V
Tempo de ciclo (s) 120
Ciclo útil da frenagem com torque
100%
Ciclo útil de frenagem em sobretorque
(150/160%)
Tabela 2.13 Frenagem em nível de torque de sobrecarga alto
1) Para conversores de frequência de 30–75 kW (40–100 hp), um
resistor de frenagem externo é necessário para atender a especicação em Tabela 2.13.
0,37–75 kW (0,5–100
1)
hp)
Contínua
40%
A Danfoss oferece resistores de frenagem com ciclo útil de
10% e 40%. Se for aplicado um ciclo útil de 10%, os
resistores de frenagem são capazes de absorver a potência
de frenagem durante 10% do tempo de ciclo. Os 90%
restantes do tempo de ciclo são usados para dissipar o
excesso de calor.
AVISO!
Certique-se de que o resistor tenha sido projetado para
suportar o tempo de frenagem necessário.
2 2
Se a quantidade de energia cinética transferida para o
resistor em cada período de frenagem não for conhecida, a
potência média pode ser calculada com base no tempo de
ciclo e no tempo de frenagem. O ciclo útil intermitente do
resistor é uma indicação do ciclo útil em que o resistor
está ativo. A Ilustração 2.35 mostra um ciclo de frenagem
A carga máxima permitida no resistor de frenagem é
declarada como uma potência de pico em um
determinado ciclo útil intermitente e pode ser calculada
como:
típico.
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 45
Page 48

Visão geral do produto
VLT® AutomationDrive FC 360
Cálculo da resistência de frenagem
2
U
x0 . 83
dc,br
Rbr Ω =
22
em que
P
pico
= P
P
pico
x Mbr [%] x η
motor
motor
x η
VLT
[W]
Como pode ser visto, o resistor de frenagem depende da
tensão do barramento CC (Udc).
Tamanho Freio ativo
U
dc,br
FC 360
3x380–480 V
770 V 800 V 800 V
Advertência
antes da
desativação
Desativação
(desarme)
O limite pode ser ajustado em parâmetro 2-14 Redução da
AVISO!
Se ocorrer um curto-circuito no transistor do freio, a
dissipação de energia no resistor de frenagem somente
poderá ser evitada por meio de um interruptor de rede
elétrica ou um contator que desconecte a rede elétrica
do conversor de frequência. (O contator pode ser
controlado pelo conversor de frequência).
AVISO!
Não toque no resistor de frenagem porque ele pode
aquecer durante a frenagem. Coloque o resistor de
frenagem em um ambiente seguro para evitar risco de
incêndio.
2.9.4 Controle com função de frenagem
tensão de frenagem, com faixa de 70 V.
O freio é protegido contra curtos-circuitos do resistor de
AVISO!
Certique-se de que o resistor de frenagem pode lidar
com uma tensão de 410 ou 820 V.
frenagem, e o transistor do freio é monitorado para
garantir que curtos-circuitos no transistor serão detectados.
Um relé/saída digital pode ser usado para proteger o
resistor de frenagem da sobrecarga causada por uma falha
A Danfoss recomenda o cálculo da resistência do freio R
de acordo com a fórmula abaixo. A resistência do freio
recomendada garante que o conversor de frequência seja
capaz de frear com o maior torque de frenagem (M
br(%)
) de
160%.
2
U
x100x0,83
P
motor
xM
dc
br( % )
xη
motor
xη
VLT
R
Ω =
rec
η
é tipicamente em 0,80 (≤ 75 kW/100 hp); 0,85 (11–22
motor
kW/15–30 hp).
η
é tipicamente em 0,97.
VLT
rec
no conversor de frequência.
Além disso, o freio permite a leitura da potência
momentânea e da potência média para os últimos 120 s. O
freio pode também monitorar a energização da potência e
assegurar que o limite selecionado em
parâmetro 2-12 Limite da Potência de Frenagem (kW ) não
será excedido.
AVISO!
-Monitorar a potência de frenagem não é uma função de
segurança. Um interruptor térmico é necessário para
evitar que a potência de frenagem exceda o limite. O
Para FC 360, R
escrito como:
em um torque de frenagem de 160% é
rec
circuito do resistor de frenagem não é protegido contra
fuga para o terra.
V :R
V :R
396349
=
rec
397903
=
rec
480
480
1) Para conversores de frequência com uma potência no eixo
≤ 7,5 kW (10 hp)
2) Para conversores de frequência com uma potência no eixo
de 11–75 kW (15–100 hp)
1)
Ω
P
motor
2)
Ω
P
motor
Controle de sobretensão (OVC) (resistor de frenagem
exclusivo) pode ser selecionado como uma alternativa da
função de freio em parâmetro 2-17 Controle de Sobretensão.
Esta função está ativa para todas as unidades. A função
garante que um desarme pode ser evitado se a tensão do
barramento CC aumentar. Isto é feito aumentando-se a
frequência de saída para limitar a tensão do barramento
CC. É uma função útil, por exemplo, se o tempo de desace-
AVISO!
A resistência do resistor de frenagem não deve ser
superior ao valor recomendado pela Danfoss. Se um
leração for muito curto para evitar o desarme do conversor
de frequência. Nesta situação, o tempo de desaceleração é
estendido.
resistor de frenagem com um valor ôhmico mais alto for
selecionado, o torque de frenagem de 160% pode não
ser alcançado porque o conversor de frequência pode ser
desativado por razões de segurança.
A resistência deve ser maior que R
46 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
min
.
AVISO!
OVC pode ser ativado ao operar um motor PM (quando
parâmetro 1-10 Construção do Motor estiver programado
para [1] PM, SPM não saliente).
Page 49

. . .
. . .
Par. 13-11
Comparator Operator
Par. 13-43
Logic Rule Operator 2
Par. 13-51
SL Controller Event
Par. 13-52
SL Controller Action
130BB671.13
Coast
Start timer
Set Do X low
Select set-up 2
. . .
Running
Warning
Torque limit
Digital input X 30/2
. . .
=
TRUE longer than..
. . .
. . .
130BA062.13
Estado 1
Evento 1/
Ação 1
Estado 2
Evento 2/
Ação 2
Iniciar
evento P13-01
Estado 3
Evento 3/
Ação 3
Estado 4
Evento 4/
Ação 4
Parar
event P13-02
Parar
event P13-02
Parar
event P13-02
Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
Visão geral do produto Guia de Design
2.10 Smart Logic Controller
Smart Logic Control (SLC) é uma sequência de ações
denidas pelo usuário (consulte parâmetro 13-52 SL
Controller Action [x]) executada pelo SLC quando o evento
associado denido pelo usuário (consulte
parâmetro 13-51 SL Controller Event [x]) é avaliado como
verdadeiro pelo SLC.
A condição de um evento pode ser um status especíco
ou que a saída de uma regra lógica ou de um operando
de comparador se torne verdadeira. Isso leva a uma ação
associada, como mostrado em Ilustração 2.36.
2 2
Ilustração 2.37 Sequência com 3 eventos/ações
Comparadores
Os comparadores são usados para comparar variáveis
contínuas (por exemplo, frequência de saída, corrente de
saída e entrada analógica) a valores predenidos xos.
Ilustração 2.38 Comparadores
Regras lógicas
Combine até 3 entradas booleanas (entradas verdadeiro/
falso) de temporizadores, comparadores, entradas digitais,
bits de status e eventos usando os operadores lógicos e,
Ilustração 2.36 Ação associada
ou e não.
Eventos e ações são numerados e conectados em pares
(estados). Isso signica que quando o evento [0] é
preenchido (atinge o valor real), a ação [0] é executada.
Depois disso, as condições do evento [1] são avaliadas e,
se avaliadas como verdadeiras, a ação [1] é executada e
assim por diante. Somente 1 evento é avaliado por vez. Se
um evento for avaliado como falso, nada acontece (no SLC)
durante o intervalo de varredura atual e nenhum outro
evento é avaliado. Quando o SLC é iniciado, ele avalia o
evento [0] (e somente o evento [0]) a cada intervalo de
varredura. Somente quando o evento [0] é avaliado como
Ilustração 2.39 Regras lógicas
2.11 Condições de funcionamento
extremas
verdadeiro, o SLC executa a ação [0] e inicia a avaliação do
evento [1]. É possível programar de 1 a 20 eventos e ações.
Quando o último evento/ação foi executado, a sequência
recomeça a partir do evento [0]/ação [0]. Ilustração 2.37
mostra um exemplo com 3 eventos/ações:
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 47
Curto-circuito (entre duas fases do motor)
O conversor de frequência é protegido contra curtos-
-circuitos por medição de corrente em cada uma das 3
fases do motor ou no barramento CC. Um curto-circuito
entre 2 fases de saída causa uma sobrecorrente no
conversor de frequência. O conversor de frequência é
desligado individualmente quando a corrente de curto-
Page 50

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2000
500
200
400
300
1000
600
t [s]
175ZA052.11
fOUT = 0,2 x f M,N
fOUT = 2 x f M,N
fOUT = 1 x f M,N
IMN
IM
Visão geral do produto
VLT® AutomationDrive FC 360
-circuito excede o valor permitido (alarme 16, Bloqueio por
2.11.1 Proteção térmica do motor
desarme).
22
Chaveamento na saída
O chaveamento na saída entre o motor e o conversor de
Para proteger a aplicação contra danos graves, o conversor
oferece vários recursos dedicados.
frequência é totalmente permitido e não danica o
conversor de frequência. No entanto, é possível que
apareçam mensagens de falha.
Sobretensão gerada pelo motor
A tensão no barramento CC aumenta quando o motor
funciona como um gerador. Isso ocorre nos seguintes
casos:
A carga aciona o motor (a uma frequência de
•
saída constante do conversor de frequência).
Se o momento de inércia for alto durante a
•
desaceleração (desaceleração da rampa), o atrito
é baixo e o tempo de desaceleração da rampa é
muito curto para que a energia seja dissipada
como uma perda no conversor de frequência, o
motor e a instalação.
O ajuste incorreto da compensação de escorre-
•
gamento pode causar uma tensão do barramento
CC mais alta.
A unidade de controle pode tentar corrigir a rampa se
possível (parâmetro 2-17 Controle de Sobretensão).
O conversor de frequência é desligado para proteger os
transistores e os capacitores do barramento CC quando um
determinado nível de tensão é atingido.
Para selecionar o método usado para o controle do nível
de tensão do barramento CC, consulte
parâmetro 2-10 Função de Frenagem e
parâmetro 2-17 Controle de Sobretensão.
Queda da rede elétrica
Durante uma queda da rede elétrica, o conversor de
frequência continua em operação até que a tensão do
barramento CC caia abaixo do nível mínimo de parada,
Limite de torque
O limite de torque protege o motor contra sobrecarga
independentemente da velocidade. O limite de torque é
controlado em parâmetro 4-16 Limite de Torque do Modo
Motor e parâmetro 4-17 Limite de Torque do Modo Gerador.
Parâmetro 14-25 Atraso do Desarme no Limite de Torque
controla o tempo antes da advertência do limite de torque
desarmar.
Limite de corrente
Parâmetro 4-18 Limite de Corrente controla o limite de
corrente e parâmetro 14-24 AtrasoDesarmLimCorrnte
controla o tempo antes da advertência do limite de
corrente desarmar.
Limite de velocidade mínima
Parâmetro 4-12 Lim. Inferior da Veloc. do Motor [Hz] dene a
velocidade de saída mínima que o conversor pode
fornecer.
Limite de velocidade máxima
Parâmetro 4-14 Lim. Superior da Veloc do Motor [Hz] ou
parâmetro 4-19 Freqüência Máx. de Saída dene a
velocidade de saída máxima que o conversor pode
fornecer.
ETR (relé térmico eletrônico)
A função ETR do conversor mede a corrente real, a
velocidade e o tempo para calcular a temperatura do
motor. A função também protege o motor contra superaquecimento (advertência ou desarme). Uma entrada para
termistor externo também está disponível. O ETR é um
recurso eletrônico que simula um relé bimetálico com base
em medições internas. A característica é mostrada na
Ilustração 2.40.
que é de 320 V. A tensão de rede antes da queda da rede
elétrica e a carga do motor determinam o tempo até o
inversor parar por inércia.
Sobrecarga estática no modo VVC
+
Quando o conversor de frequência está sobrecarregado, o
limite de torque em parâmetro 4-16 Limite de Torque do
Modo Motor/parâmetro 4-17 Limite de Torque do Modo
Gerador é alcançado, e a unidade de controle reduz a
frequência de saída para reduzir a carga.
Se a sobrecarga for excessiva, pode ocorrer uma corrente
que desative o conversor de frequência após aproximadamente 5-10 s.
A operação dentro do limite de torque é limitada no
tempo (0–60 s) parâmetro 14-25 Atraso do Desarme no
Limite de Torque.
Ilustração 2.40 ETR
48 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 51

Visão geral do produto Guia de Design
O eixo X mostra a relação entre I
eixo Y mostra o tempo em segundos antes de o ETR
desativar e desarmar o conversor. As curvas mostram a
velocidade nominal característica ao dobro da velocidade
nominal e a 0,2 x a velocidade nominal.
A uma velocidade mais baixa, o ETR desativa com menos
calor devido ao menor resfriamento do motor. Desse
modo, o motor é protegido contra superaquecimento,
mesmo em velocidades baixas. O recurso do ETR calcula a
temperatura do motor baseado na corrente e velocidade
reais. A temperatura calculada ca visível como um
parâmetro de leitura em parâmetro 16-18 Térmico Calculado
do Motor.
motor
e I
nominal. O
motor
2 2
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 49
Page 52

130BC435.13
CHASSIS/IP20
MADE BY DANFOSS IN CHINA
Danfoss A/S
6430 Nordborg
Denmark
T/C: FC-360HK37T4E20H2BXCDXXSXXXXAXBX
P/N: 134F2970 S/N: 691950A240
0.37 kW 0.5HP High Overload
IN: 3x380-480V 50/60Hz 1.24/0.99A
OUT: 3x0-Vin 0-500Hz 1.2/1.1A(Tamb. 45 C)
o
1
2
3
CAUTION:
SEE MANUAL
WARNING:
AND LOADSHARING BEFORE SERVICE
STORED CHARGE DO NOT TOUCH UNTIL 4 MIN. AFTER
DISCONNECTION
RISK OF ELECTRIC SHOCK-DUAL SUPPLY DISCONNECT MAINS
V LT
Automation Drive
www.danfoss.com
130BC437.11
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
F C - 3 6 0 H T 4 E 2 0 H 1 X X C D X X S X X X X A X B X
Q B
0
LAA
H 2
Código do tipo e seleção
3 Código do tipo e seleção
VLT® AutomationDrive FC 360
3.1 Solicitação de pedido
1–6: Nome do
produto
33
Conrme se o equipamento corresponde aos requisitos e
às informações sobre pedidos, vericando a potência, os
7: Sobrecarga
dados de tensão e os dados de sobrecarga na plaqueta de
identicação do conversor de frequência.
8–10: Potência
H: Serviço pesado
Q: Função normal
1)
0,37–75 kW (0,5–100 hp). Por exemplo:
K37: 0,37 kW2) (0,5 hp)
1K1: 1,1 kW (1,5 hp)
11 K: 11 kW (15 hp)
11–12: Classe de
T4: 380–480 V 3 fases
tensão
13–15: Classe IP E20: IP20
16–17: RFI
H1: C2 classe
3)
H2: Classe C3
18: Circuito de
frenagem
X: Não
B: Embutido
4)
19: LCP X: Não
20: Revestimento do
C: 3C3
PCB
21: Terminais de rede
D: Divisão de carga
elétrica
29–30: Fieldbus
embutido
AX: Não
A0: PROFIBUS
AL: PROFINET
31–32: Opção B BX: Sem opção
Tabela 3.1 Código do tipo: Seleção de diferentes recursos e
1 Código do tipo
2 Número de pedido
3 Especicações
opções
Para opções e acessórios, consulte a seção Opções e acessórios no
Guia de Design do VLT® AutomationDrive FC 360.
1) Somente 11–75 kW (15–100 hp) para funções variantes normais.
Ilustração 3.1 Plaquetas de identicação 1 e 2
PROFIBUS e PROFINET não estão disponíveis para a função normal.
2) Para todas as potências, consulte capétulo 4.1.1 Alimentação de
rede elétrica 3x380–480 V CA.
3) Há um ltro de RFI H1 disponível para 0,37–22 kW (0,5–30 hp).
4) 0,37–22 kW (0,5–30 hp) com circuito de frenagem embutido. 30–
75 kW (40–100 hp) somente com circuito de frenagem externo.
Ilustração 3.2 String do código do tipo
50 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 53

Código do tipo e seleção Guia de Design
3.2 Códigos de compra: Opções, acessórios
e peças de reposição
Descrição Códigos de
compra
VLT® Control Panel LCP 21
Kit para montagem remota do LCP com cabo
de 3 m
Tampa cega, FC 360
Adaptador LCP gráco 132B0281
VLT® Control Panel LCP 102
VLT® Encoder Input MCB 102, FC 360
VLT® Resolver Input MCB 103, FC 360
Tampa de terminal para MCB, J1, FC 360 132B0263
Tampa de terminal para MCB, J2, FC 360 132B0265
Tampa de terminal para MCB, J3, FC 360 132B0266
Tampa de terminal para MCB, J4, FC 360 132B0267
Tampa de terminal para MCB, J5, FC 360 132B0268
Kit de montagem de placa de desacoplamento, J1
Kit de montagem de placa de desacoplamento, J2, J3
Kit de montagem de placa de desacoplamento, J4, J5
Kit de montagem de placa de desacoplamento, J6
Kit de montagem de placa de desacoplamento, J7
Cabo de montagem remota LCP, 3 m (10 pés) 132B0132
VLT® Control Panel LCP 21 - Kit do conversor
RJ45
Tabela 3.2 Códigos de compra para opções e acessórios
1) 2 tipos de pacotes, 6 peças ou 72 peças.
2) 2 peças em 1 pacote.
132B0254
132B0102
132B0262
130B1107
132B0282
132B0283
132B0258
132B0259
132B0260
132B0284
132B0285
132B0254
1)
2)
1)
Descrição Códigos de
compra
Cassete de controle padrão 132B0255
Cassete de controle (com PROFIBUS) 132B0256
Cassete de controle (com PROFINET) 132B0257
Ventilador 50x15 IP21 para J1 0,37–1,5 kW
(0,5–2 hp)
Ventilador 50x20 IP21 para J1 2,2 kW (3 hp) 132B0276
Ventilador 60x20 IP21 para J2 132B0277
Ventilador 70x20 IP21 para J3 132B0278
Ventilador 92x38 IP21 para J4 132B0279
Ventilador 120x38 IP21 para J5 132B0280
Ventilador 92x38 IP21 para J6 132B0295
Ventilador 120x38 IP21 para J7 132B0313
Relé e placa RS485 para J1 – J5 132B0264
Cartão de controle de potência, 30 kW (40 hp) 132B0287
Cartão de controle de potência, 37 kW (50 hp) 132B0290
Cartão de controle de potência, 45 kW (60 hp) 132B0291
Cartão auxiliar RFI, J6 132B0292
Módulo reticador, 30–37 kW (40–50 hp) 132B0293
Módulo reticador, 45 kW (60 hp) 132B0294
Tampa frontal, J6 132B0296
Terminal de rede elétrica, J6 132B0297
Terminal do motor, J6 132B0298
Terminais de comunicação serial CC, J6 132B0299
Cabo de alimentação do cartão de controle de
potência, J6
Cabo de extensão do ventilador, J6 132B0301
Lâmina de isolamento RFI, J6 132B0302
Suporte para cartão de potência e barra do
barramento, J6
Cartão de controle de potência, 55 kW (75 hp) 132B0305
Cartão de controle de potência, 75 kW (100
hp)
Cartão de potência, J7 132B0307
Cartão auxiliar RFI, J7 132B0308
Módulo reticador, J7 132B0309
Módulo IGBT com cabo do conversor do gate,J7132B0310
132B0275
132B0300
132B0303
132B0306
3 3
Capacitor CC, 55 kW (75 hp) 132B0311
Capacitor CC, 75 kW (100 hp) 132B0312
Tampa frontal, J7 132B0314
Rede elétrica, terminal do motor, 55 kW (75
hp)
Terminais de comunicação serial CC, 55 kW (75
hp)
Rede elétrica, terminais de comunicação serial
CC, 75 kW (100 hp)
Cabo sensor de temperatura, J7 132B0318
Cabo de alimentação do cartão de controle de
potência, J7
Cabo de extensão do ventilador, J7 132B0320
Lâmina de isolamento RFI, J7 132B0321
Lâmina de inuxo de isolamento, J7 132B0322
Tabela 3.3 Códigos de compra para peças de reposição
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 51
132B0315
132B0316
132B0317
132B0319
Page 54

Código do tipo e seleção
VLT® AutomationDrive FC 360
3.3 Códigos de compra: Resistores de frenagem
A Danfoss oferece uma ampla variedade de diferentes resistores especialmente projetados para nossos conversores de
frequência. Consulte capétulo 2.9.4 Controle com função de frenagem para o dimensionamento dos resistores de frenagem.
Esta seção apresenta uma lista contendo os números de pedido para os resistores de frenagem.
33
3.3.1 Códigos de compra: Resistores de frenagem 10%
FC 360 P
T4 [kW]
HK37 0,37 890 1041,98 989 0,030 3000 120 1,5 0,3 139
HK55 0,55 593 693,79 659 0,045 3001 120 1,5 0,4 131
HK75 0,75 434 508,78 483 0,061 3002 120 1,5 0,4 129
H1K1 1,1 288 338,05 321 0,092 3004 120 1,5 0,5 132
H1K5 1,5 208 244,41 232 0,128 3007 120 1,5 0,8 145
H2K2 2,2 139 163,95 155 0,190 3008 120 1,5 0,9 131
H3K0 3 100 118,86 112 0,262 3300 120 1,5 1,3 131
H4K0 4 74 87,93 83 0,354 3335 120 1,5 1,9 128
H5K5 5,5 54 63,33 60 0,492 3336 120 1,5 2,5 127
H7K5 7,5 38 46,05 43 0,677 3337 120 1,5 3,3 132
H11K 11 27 32,99 31 0,945 3338 120 1,5 5,2 130
H15K 15 19 24,02 22 1,297 3339 120 1,5 6,7 129
H18K 18,5 16 19,36 18 1,610 3340 120 1,5 8,3 132
H22K 22 16 18,00 17 1,923 3357 120 1,5 10,1 128
H30K 30 11 14,6 13 2,6 3341 120 2,5 13,3 150
H37K 37 9 11,7 11 3,2 3359 120 2,5 15,3 150
H45K 45 8 9,6 9 3,9 3065 120 10 20 150
H55K 55 6 7,8 7 4,8 3070 120 10 26 150
H75K 75 4 5,7 5 6,6 3231 120 10 36 150
m (HO)
R
min
[Ω] [Ω] [Ω]
R
br. nom
R
rec
P
br avg
[kW] 175Uxxxx [s]
Núm. de
Código.
Período Seção
transvers
al do
1)
cabo
[mm2]
Relé
térmico
[A] [%]
Torque
máximo
de freio
com R
rec
Tabela 3.4 FC 360 - Rede elétrica: 380–480 V (T4), Ciclo útil de 10%
1) Todo cabeamento deve estar sempre em conformidade com as normas nacionais e locais, sobre seções transversais do cabo e temperatura
ambiente.
52 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 55

Código do tipo e seleção Guia de Design
3.3.2 Códigos de compra: Resistor de frenagem 40%
FC 360 P
T4 [kW]
HK37 0,37 890 1041,98 989 0,127 3101 120 1,5 0,4 139
HK55 0,55 593 693,79 659 0,191 3308 120 1,5 0,5 131
HK75 0,75 434 508,78 483 0,260 3309 120 1,5 0,7 129
H1K1 1,1 288 338,05 321 0,391 3310 120 1,5 1 132
H1K5 1,5 208 244,41 232 0,541 3311 120 1,5 1,4 145
H2K2 2,2 139 163,95 155 0,807 3312 120 1,5 2,1 131
H3K0 3 100 118,86 112 1,113 3313 120 1,5 2,7 131
H4K0 4 74 87,93 83 1,504 3314 120 1,5 3,7 128
H5K5 5,5 54 63,33 60 2,088 3315 120 1,5 5 127
H7K5 7,5 38 46,05 43 2,872 3316 120 1,5 7,1 132
H11K 11 27 32,99 31 4,226 3236 120 2,5 11,5 130
H15K 15 19 24,02 22 5,804 3237 120 2,5 14,7 129
H18K 18,5 16 19,36 18 7,201 3238 120 4 19 132
H22K 22 16 18,00 17 8,604 3203 120 4 23 128
H30K 30 11 14,6 13 11,5 3206 120 10 32 150
H37K 37 9 11,7 11 14,3 3210 120 10 38 150
H45K 45 8 9,6 9 17,5 3213 120 16 47 150
H55K 55 6 7,8 7 21,5 3216 120 25 61 150
H75K 75 4 5,7 5 29,6 3219 120 35 81 150
m (HO)
R
min
[Ω] [Ω] [Ω]
R
br. nom
R
rec
P
br avg
[kW] 175Uxxxx [s]
Núm. de
Código.
Período Seção
transvers
al do
1)
cabo
[mm2]
Relé
térmico
Torque
máximo
de freio
com R
[A] [%]
rec
3 3
Tabela 3.5 FC 360 - Rede elétrica: 380–480 V (T4), Ciclo útil de 40%
1) Todo cabeamento deve estar sempre em conformidade com as normas nacionais e locais, sobre seções transversais do cabo e temperatura
ambiente.
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 53
Page 56

Especicações
VLT® AutomationDrive FC 360
4 Especicações
4.1 Alimentação de rede elétrica 3x380–480 V CA
Potência no eixo típica do conversor
de frequência [kW (hp)]
44
Características nominais de proteção
do gabinete metálico IP20
Corrente de saída
Potência no eixo [kW] 0,37 0,55 0,75 1,1 1,5 2,2 3 4 5,5 7,5
Contínua (3x380–440 V) [A] 1,2 1,7 2,2 3 3,7 5,3 7,2 9 12 15,5
Contínua (3x441-480 V) [A] 1,1 1,6 2,1 2,8 3,4 4,8 6,3 8,2 11 14
Intermitente (sobrecarga 60 s) [A] 1,9 2,7 3,5 4,8 5,9 8,5 11,5 14,4 19,2 24,8
Contínua kVA (400 V CA) [kVA] 0,84 1,18 1,53 2,08 2,57 3,68 4,99 6,24 8,32 10,74
Contínua kVA (480 V CA) [kVA] 0,9 1,3 1,7 2,5 2,8 4,0 5,2 6,8 9,1 11,6
Corrente de entrada máxima
Contínua (3x380–440 V) [A] 1,2 1,6 2,1 2,6 3,5 4,7 6,3 8,3 11,2 15,1
Contínua (3x441-480 V) [A] 1,0 1,2 1,8 2,0 2,9 3,9 4,3 6,8 9,4 12,6
Intermitente (sobrecarga 60 s) [A] 1,9 2,6 3,4 4,2 5,6 7,5 10,1 13,3 17,9 24,2
Especicações adicionais
Máxima seção transversal do cabo
(rede elétrica, motor, freio e divisão
da carga) [mm2 (AWG)]
Perda de energia estimada na carga
máxima nominal [W]
Peso [kg (lb)], características nominais
de proteção IP20 do gabinete
metálico
Eciência [%]
2)
3)
HK37
0,37
(0,5)
20,88 25,16 30,01 40,01 52,91 73,97 94,81 115,5 157,54 192,83
2,3 (5,1) 2,3 (5,1)
96,2 97,0 97,2 97,4 97,4 97,6 97,5 97,6 97,7 98,0
HK55
0,55
(0,75)
J1 J1 J1 J1 J1 J1 J2 J2 J2 J3
HK75
0,75
(5,1)
H1K1
1,1
(1)
(1,5)
2,3
2,3 (5,1) 2,3 (5,1) 2,5 (5,5) 3,6 (7,9) 3,6 (7,9) 3,6 (7,9) 4,1 (9,0)
H1K5
1,5
(2)
4 (12)
H2K2
2,2
(3)
H3K0
3
(4)
H4K0
4
(5,5)
H5K5
5,5
(7,5)
H7K5
(10)
7,5
Tabela 4.1 Alimentação de rede elétrica 3x380–480 V AC - serviço pesado
1)
54 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 57

Especicações Guia de Design
Potência no eixo típica do
conversor de frequência [kW
(hp)]
Características nominais de
proteção do gabinete metálico
IP20
Corrente de saída
Contínua (3x380–440 V) [A] 23 31 37 42,5 61 73 90 106 147
Contínua (3x441-480 V) [A] 21 27 34 40 52 65 77 96 124
Intermitente (sobrecarga 60 s)
[A]
Contínua kVA (400 V CA) [kVA] 15,94 21,48 25,64 29,45 42,3 50,6 62,4 73,4 101,8
Contínua kVA (480 V CA) [kVA] 17,5 22,4 28,3 33,3 43,2 54,0 64,0 79,8 103,1
Corrente de entrada máxima
Contínua (3x380–440 V) [A] 22,1 29,9 35,2 41,5 57 70,3 84,2 102,9 140,3
Contínua (3x441-480 V) [A] 18,4 24,7 29,3 34,6 49,3 60,8 72,7 88,8 121,1
Intermitente (sobrecarga 60 s)
[A]
Especicações adicionais
Tamanho máximo do cabo
(rede elétrica, motor, freio)
[mm2 (AWG)]
Perda de energia estimada na
carga máxima nominal [W]
Peso [kg (lb)], características
nominais de proteção IP20 do
gabinete metálico
Eciência [%]3)
2)
H11K
11
(15)
J4 J4 J5 J5 J6 J6 J6 J7 J7
34,5 46,5 55,5 63,8 91,5 109,5 135 159 220,5
33,2 44,9 52,8 62,3 85,5 105,5 126,3 154,4 210,5
289,53 393,36 402,83 467,52 630 848 1175 1250 1507
9,4 (20,7) 9,5 (20,9)
97,8 97,8 98,1 97,9 98,1 98,0 97,7 98,0 98,2
H15K
15
(20)
H18K
18,5
(25)
16 (6) 50 (1/0) 95 (3/0)
12,3
(27,1)
H22K
22
(30)
12,5
(27,6)
H30K
30
(40)
22,4
(49,4)
H37K
37
(50)
22,5
(49,6)
H45K
45
(60)
22,6 (49,8) 37,3 (82,2) 38,7 (85,3)
H55K
55
(75)
H75K
75
(100)
4 4
Tabela 4.2 Alimentação de rede elétrica 3x380–480 V AC - serviço pesado
1)
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 55
Page 58

Especicações
VLT® AutomationDrive FC 360
Potência no eixo típica do
conversor de frequência
[kW (hp)]
Características nominais de
proteção do gabinete
metálico IP20
Corrente de saída
Contínua (3x380–440 V) [A] 23 31 37 42,5 61 73 90 106 147
44
Contínua (3x441-480 V) [A]
Intermitente (sobrecarga 60
s) [A]
Contínua kVA (400 V CA)
[kVA]
Contínua kVA (480 V CA)
[kVA]
Corrente de entrada máxima
Contínua (3x380–440 V) [A] 22,1 29,9 35,2 41,5 57 70,3 84,2 102,9 140,3
Contínua (3x441-480 V) [A] 18,4 24,7 29,3 34,6 49,3 60,8 72,7 88,8 121,1
Intermitente (sobrecarga 60
s) [A]
Especicações adicionais
Tamanho máximo do cabo
(rede elétrica, motor, freio)
[mm2 (AWG)]
Perda de energia estimada
na carga máxima nominal
2)
[W]
Peso [kg (lb)], características
nominais de proteção IP20
do gabinete metálico
Eciência [%]3)
Q11K
11
(15)
J4 J4 J5 J5 J6 J6 J6 J7 J7
21 27 34 40 52 65 77 96 124
25,3 34,1 40,7 46,8 67,1 80,3 99 116,6 161,7
15,94 21,48 25,64 29,45 42,3 50,6 62,4 73,4 101,8
17,5 22,4 28,3 33,3 43,2 54,0 64,0 79,8 103,1
24,3 32,9 38,7 45,7 62,7 77,3 92,6 113,2 154,3
289,53 393,36 402,83 467,52 630 848 1175 1250 1507
9,4 (20,7) 9,5 (20,9) 12,3 (27,1) 12,5 (27,6) 22,4 (49,4)
97,8 97,8 98,1 97,9 98,1 98,0 97,7 98,0 98,2
Q15K
15
(20)
Q18K
18,5
(25)
16 (6) 50 (1/0) 95 (3/0)
Q22K
22
(30)
Q30K
30
(40)
Q37K
37
(50)
22,5
(49,6)
Q45K
45
(60)
22,6
(49,8)
Q55K
55
(75)
37,3
(82,2)
Q75K
75
(100)
38,7 (85,3)
Tabela 4.3 Alimentação de rede elétrica 3x380-480 V CA - serviço normal
1) Serviço pesado=150-160% corrente durante 60 s; serviço normal=110% corrente durante 60 s.
2) A perda de energia típica é em condições de carga nominais e espera-se que esteja dentro de ±15% (a tolerância está relacionada à variedade
de condições de tensão e cabo).
Os valores são baseados em uma eciência de motor típica (linha divisória de IE2/IE3). Motores com menor eciência aumentam a perda de
energia no conversor de frequência e motores com alta eciência reduzem a perda de energia.
Aplica-se ao dimensionamento do resfriamento do conversor de frequência. Se a frequência de chaveamento for maior que a conguração
padrão, as perdas de energia podem aumentar. LCP e típico consumo de energia do cartão de controle estão incluídos. Outras opções e a carga
do cliente podem adicionar até 30 W às perdas (embora normalmente sejam apenas 4 W extras para um cartão de controle totalmente
carregado,
Para sabe os dados de perda de energia de acordo com EN 50598-2, consulte www.danfoss.com/vltenergyeciency.
3) Medido usando cabos de motor blindados de 5 m com carga nominal e frequência nominal para os tamanhos de gabinete J1–J5 e usando
cabos do motor blindados de 33 m com carga nominal e frequência nominal para tamanhos de gabinete J6 e J7. Para obter a classe de
eciência energética, consulte Condições do ambiente em capétulo 4 Especicações. Para saber as perdas de carga parcial, consulte
www.danfoss.com/vltenergyeciency.
eldbus ou opções para o slot B).
1)
56 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 59

Especicações Guia de Design
4.2 Especicações Gerais
Alimentação de rede elétrica (L1, L2, L3)
Terminais de alimentação L1, L2, L3
Tensão de alimentação 380–480 V: -15% (-25%)1) a +10%
1) O conversor de frequência pode funcionar a -25% da tensão de entrada com desempenho reduzido. A potência máxima de
saída do conversor de frequência é de 75% se a tensão de entrada for -25% e 85% se a tensão de entrada for -15%.
O torque total não pode ser esperado em tensão de rede menor que 10% abaixo da tensão de alimentação nominal mais baixa
do conversor de frequência.
Frequência de alimentação 50/60 Hz ±5%
Desbalanceamento máximo temporário entre as fases da rede elétrica 3,0% da tensão de alimentação nominal
Fator de potência real (λ) ≥0,9 nominal com carga nominal
Fator de potência de deslocamento (cos ϕ) Unidade próxima (>0,98)
Chaveamento na alimentação de entrada L1, L2, L3 (energizações) ≤7,5 kW (10 hp) Máximo 2 vezes/minuto
Chaveamento na alimentação de entrada L1, L2, L3 (energizações) 11–75 kW (15–100 hp) Máximo de 1 vez/minuto
A unidade é adequada para uso em um circuito capaz de fornecer menos do que 5000 Ampères RMS simétricos, 480 V no
máximo.
Saída do Motor (U, V, W)
Tensão de saída 0–100% da tensão de alimentação
Frequência de saída em modo U/f (para motor AM) 0–500 Hz
Frequência de saída em modo VVC+ (para motor AM) 0–200 Hz
Frequência de saída em modo VVC+ (para motor PM) 0–400 Hz
Chaveamento na saída Ilimitado
Tempo de rampa 0,01–3600 s
4 4
Características do torque
Torque de partida (sobrecarga alta)
Máximo 160% durante 60 s
Torque de sobrecarga (sobrecarga alta) Máximo 160% durante 60 s
Torque de partida (sobrecarga normal) Máximo 110% durante 60 s
Torque de sobrecarga (sobrecarga normal) Máximo 110% durante 60 s
1)2)
1)2)
1)2)
1)2)
Corrente de partida Máximo 200% durante 1 s
Tempo de subida do torque em VVC+ (independente de fsw) Máximo 50 ms
1) A porcentagem está relacionada ao torque nominal. É de 150% para conversores de frequência de 11–75 kW (15–100 hp).
2) Uma vez a cada 10 minutos.
Comprimentos de cabo e seções transversais
1)
Comprimento de cabo de motor máximo, blindado 50 m (164 pés)
Comprimento de cabo de motor máximo, não
blindado
0,37-22 kW (0,5-30 hp): 75 m (246 pés), 30–75 kW (40–100 hp):
100 m (328 pés)
Seção transversal máxima para terminais de controle, o exível/rígido 2,5 mm2/14 AWG
Seção transversal máxima para terminais de controle 0,55 mm2/30 AWG
1) Para cabos de energia, consulte Tabela 4.1 a Tabela 4.3.
Entradas digitais
Entradas digitais programáveis 7
Número do terminal 18, 19, 271), 291), 31, 32, 33
Lógica PNP ou NPN
Nível de tensão 0–24 V CC
Nível de tensão, lógica 0 PNP < 5 VCC
Nível de tensão, lógica 1 PNP > 10 VCC
Nível de tensão, lógica 0 NPN > 19 VCC
Nível de tensão, lógica 1 NPN < 14 VCC
Tensão máxima na entrada 28 V CC
Faixa de frequência de pulso 4 Hz-32 kHz
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 57
Page 60

Mains
Functional
isolation
PELV isolation
Motor
DC Bus
High
voltage
Control
+24 V
RS-485
18
31
130BD310.10
Especicações
VLT® AutomationDrive FC 360
Largura de pulso mínima (ciclo útil) 4,5 ms
Resistência de entrada, R
i
Aproximadamente 4 kΩ
1) Os terminais 27 e 29 também podem ser programados como saídas.
Entradas analógicas
Número de entradas analógicas 2
Número do terminal 53, 54
Modos Tensão ou corrente
Seleção do modo Software
44
Nível de tensão 0–10 V
Resistência de entrada, R
i
Aproximadamente 10 kΩ
Tensão máxima -15 a +20 V
Nível de corrente 0/4 a 20 mA (escalonável)
Resistência de entrada, R
i
Aproximadamente 200 Ω
Corrente máxima 30 mA
Resolução das entradas analógicas 11 bit
Precisão das entradas analógicas Erro máx. 0,5% do fundo de escala
Largura de banda 100 Hz
As entradas analógicas são isoladas galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
Ilustração 4.1 Entradas Analógicas
AVISO!
ALTITUDES ELEVADAS
Para instalação em altitudes acima de 2.000 m (6562 pés), entre em contato com a linha direta da Danfoss com relação
à PELV.
Entradas de pulso
Entradas de pulso programáveis 2
Número do terminal do pulso 29, 33
Frequência máxima nos terminais 29, 33 32 kHz (acionado por push-pull)
Frequência máxima nos terminais 29, 33 5 kHz (coletor aberto)
Frequência mínima nos terminais 29, 33 4 Hz
Nível de tensão Consulte a seção sobre entrada digital
Tensão máxima na entrada 28 V CC
Resistência de entrada, R
i
Precisão da entrada de pulso Erro máximo: 0,1% do fundo de escala
Saídas analógicas
Número de saídas analógicas programáveis 2
Número do terminal 45, 42
Faixa atual na saída analógica 0/4–20 mA
Carga máxima do resistor em relação ao comum na saída analógica 500 Ω
Precisão na saída analógica Erro máximo: 0,8% do fundo de escala
Aproximadamente 4 kΩ
58 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 61

Especicações Guia de Design
Resolução na saída analógica 10 bits
A saída analógica está isolada galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
Cartão de controle, comunicação serial RS485
Número do terminal 68 (P,TX+, RX+), 69 (N,TX-, RX-)
Terminal número 61 Ponto comum dos terminais 68 e 69
O circuito de comunicação serial RS485 é isolado galvanicamente da tensão de alimentação (PELV).
Saídas digitais
Saídas digitais/de pulso programáveis 2
Número do terminal 27, 29
Nível de tensão na saída de frequência/digital 0–24 V
Corrente de saída máxima (dissipador ou fonte) 40 mA
Carga máxima na saída de frequência 1 kΩ
Carga capacitiva máxima na saída de frequência 10 nF
Frequência de saída mínima na saída de frequência 4 Hz
Frequência de saída máxima na saída de frequência 32 kHz
Precisão da saída de frequência Erro máximo: 0,1% do fundo de escala
Resolução da saída de frequência 10 bits
1) Os terminais 27 e 29 também podem ser programados como saídas.
A saída digital está isolada galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
Cartão de controle, saída 24 V CC
Número do terminal 12
Carga máxima 100 mA
A fonte de alimentação de 24 V CC está isolada galvanicamente da tensão de alimentação (PELV), mas está no mesmo potencial
das entradas e saídas digital e analógica.
Saídas do relé
Saídas de relé programáveis 2
Relé 01 e 02 01–03 (NF), 01–02 (NA), 04–06 (NF), 04–05 (NA)
Carga máxima do terminal (CA-1)1) em 01–02/04–05 (NA) (carga resistiva) 250 V CA, 3 A
Carga máxima do terminal (CA-15)1) em 01–02/04–05 (NA) (carga indutiva @ cosφ 0,4) 250 V CA, 0,2 A
Carga máxima do terminal (CC-1)
Carga máxima do terminal (CC-13)1) em 01–02/04–05 (NA) (carga indutiva) 24 V CC, 0,1 A
Carga máxima do terminal (CA-1)1) em 01–03/04–06 (NF) (carga resistiva) 250 V CA, 3 A
Carga máxima do terminal (CA-15)1)em 01–03/04–06 (NF) (carga indutiva @ cosφ 0,4) 250 V CA, 0,2 A
Carga máxima do terminal (CC-1)1) em 01–03/04–06 (NF) (carga resistiva) 30 V CC, 2 A
Carga do terminal mínima em 01-03 (NC), 01-02 (NO) 24 V CC 10 mA, 24 V CA 20 mA
1) IEC 60947 t 4 e 5.
Os contatos do relé são isolados galvanicamente do resto do circuito por isolação reforçada.
Os relés podem ser usados em diferentes cargas (carga resistiva ou carga indutiva) com diferentes ciclos de vida útil. O ciclo de
vida útil depende da conguração da carga especíca.
1)
em 01–02/04–05 (NA) (carga resistiva) 30 V CC, 2 A
4 4
1)
Cartão de controle, saída +10 V CC
Número do terminal 50
Tensão de saída 10,5 V ±0,5 V
Carga máxima 15 mA
A alimentação de 10 V CC está isolada galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
Características de controle
Resolução da frequência de saída a 0-500 Hz ±0,003 Hz
Tempo de resposta do sistema (terminais 18, 19, 27, 29, 32 e 33) ≤2 ms
Faixa de controle da velocidade (malha aberta) 1:100 da velocidade síncrona
Precisão da velocidade (malha aberta) ±0,5% da velocidade nominal
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 59
Page 62

Especicações
Precisão da velocidade (malha fechada) ±0,1% da velocidade nominal
Todas as características de controle são baseadas em um motor assíncrono de 4 polos.
Condições ambiente
Tamanho do gabinete J1-J7 IP20
Teste de vibração, todos os tamanhos de gabinete 1,0 g
Umidade relativa 5–95% (IEC 721-3-3); Classe 3K3 (não condensante) durante a operação
Ambiente agressivo (IEC 60068-2-43) teste com H2S Classe Kd
44
O método de teste está em conformidade com a IEC 60068-2-43 H2S (10 dias)
Temperatura ambiente (no modo de chaveamento 60 AVM)
- com derating Máximo 55 °C (131 °F)
- em corrente de saída contínua plena com alguma potência Máximo 50 °C (122 °F)
- em corrente de saída contínua plena Máximo 45 °C (113 °F)
Temperatura ambiente mínima, durante operação plena 0 °C (32 °F)
Temperatura ambiente mínima em desempenho reduzido -10 °C (14 °F)
Temperatura durante a armazenagem/transporte -25 a +65/70 °C (-13 a +149/158 °F)
Altitude máxima acima do nível do mar, sem derating 1.000 m (3,281 pés)
Altitude máxima acima do nível do mar, sem derating 3.000 m (9.843 pés)
Normas de EMC, emissão
Normas de EMC, imunidade
Classe de eciência energética
1) Consulte capétulo 4.7 Condições especiais para:
Derating para temperatura ambiente elevada.
•
Derating para alta altitude.
•
2) Para evitar a superaquecimento do cartão de controle nas variantes PROFIBUS e PROFINET de VLT® AutomationDrive FC 360,
evite carga de E/S digital/analógica completa em temperatura ambiente superior a 45 °C (113 °F).
3) Determinada de acordo com EN50598-2 em:
Carga nominal.
•
90% frequência nominal.
•
Conguração de fábrica da frequência de chaveamento.
•
Conguração de fábrica do padrão de chaveamento.
•
3)
VLT® AutomationDrive FC 360
1)2)
EN 61800-3, EN 61000-3-2, EN 61000-3-3, EN 61000-3-11,
EN 61000-3-12, EN 61000-6-3/4, EN 55011, IEC 61800-3
EN 61800-3, EN 61000-6-1/2, EN 61000-4-2,
EN 61000-4-3, EN 61000-4-4, EN 61000-4-5, EN 61000-4-6
IE2
Desempenho do cartão de controle
Intervalo de varredura 1 ms
Proteção e recursos
Proteção de motor térmica eletrônica contra sobrecarga.
•
O monitoramento de temperatura do dissipador de calor garante que o conversor de frequência desarme quando
•
a temperatura atingir um nível predenido. Uma temperatura de sobrecarga não pode ser redenida até que a
temperatura do dissipador de calor esteja abaixo do limite de temperatura.
O conversor de frequência está protegido contra curtos-circuitos nos terminais U, V, W do motor.
•
Se estiver faltando uma fase da rede elétrica, o conversor de frequência desarma ou emite uma advertência
•
(dependendo da carga e da programação do parâmetro).
O monitoramento da tensão no circuito intermediário garante que o conversor de frequência desarme quando a
•
tensão do circuito intermediário estiver muito baixa ou muito alta.
O conversor de frequência está protegido contra falhas de aterramento nos terminais do motor U, V, W.
•
60 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 63

Especicações Guia de Design
4.3 Fusíveis
Use fusíveis e/ou disjuntores no lado da alimentação para
proteger a equipe de manutenção de ferimentos e o
equipamento de danos, caso haja falha do componente
dentro do conversor de frequência (primeira falha).
Proteção do circuito de derivação
Proteja todos os circuitos de derivação em uma instalação,
disjuntor e máquinas contra curto-circuito e sobrecorrente
de acordo com as regulamentações nacionais/internacionais.
AVISO!
As recomendações não cobrem a proteção do circuito de
derivação para UL.
Tabela 4.4 lista os fusíveis recomendados que foram
testados.
ADVERTÊNCIA
RISCO DE FERIMENTOS PESSOAIS E DANOS AO
EQUIPAMENTO
Mau funcionamento ou falha em seguir as recomendações pode resultar em risco pessoal e danos ao
conversor de frequência e a outros equipamentos.
Selecione os fusíveis de acordo com as
•
recomendações. Possíveis danos podem ser
limitados a estar dentro do conversor de
frequência.
AVISO!
O uso de fusíveis ou disjuntores é obrigatório para
garantir a conformidade com a IEC 60364 para CE.
A Danfoss recomenda usar os fusíveis em Tabela 4.4 em
um circuito capaz de fornecer 100.000 A
380–480 V dependendo das características nominais de
tensão do conversor de frequência. Com o fusível
adequado, as características nominais da corrente de curto
circuito (SCCR) do conversor de frequência é de 100.000
A
.
rms
(simétrico),
rms
Tamanho
do
gabinete
Tabela 4.4 Fusível CE, 380–480 V, tamanhos do gabinete J1–J7
Potência [kW (hp)] Fusível em conformidade
com a CE
0,37–1,1 (0,5–1,5)
J1
2,2 (3)
3,0 (4)
J2
5,5 (7,5)
J3 7,5 (10) gG-32
J4 11–15 (15–20) gG-50
J5
J6
J7
18,5 (25)
22 (30)
30 (40)
45 (60)
55 (75)
75 (100)
gG-101,5 (2)
gG-254,0 (5,5)
gG-80
gG-12537 (50)
aR-250
4.4 Eciência
Eciência do conversor de frequência (η
A carga do conversor de frequência não inui muito na sua
eciência. No geral, a eciência é a mesma que a
frequência nominal do motor f
fornecer 100% do torque nominal do eixo ou somente
75%, por exemplo, no caso de cargas parciais.
Isso também signica que a eciência do conversor de
frequência não muda mesmo se outras características U/f
forem selecionadas.
Entretanto, as características U/f inuem na eciência do
motor.
A eciência diminui um pouco quando a frequência de
chaveamento é denida para um valor acima do valor
padrão. A eciência também é levemente reduzida se a
tensão de rede for de 480 V ou se o cabo de motor for
maior que 30 m.
Cálculo da eciência do conversor de frequência
Calcule a eciência do conversor de frequência em
diferentes cargas com base em Ilustração 4.2. O fator neste
gráco deve ser multiplicado pelo fator de eciência
especíco, listado nas tabelas de especicação:
, mesmo se o motor
M,N
VLT
)
4 4
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 61
Page 64

1.0
0.99
0.98
0.97
0.96
0.95
0.93
0.92
0% 50% 100% 200%
0.94
Relative Eciency
130BB252.11
1.01
150%
% Speed
100% load 75% load 50% load 25% load
Especicações
VLT® AutomationDrive FC 360
44
Ilustração 4.2 Curvas de eciência típica
Eciência do motor (η
A eciência de um motor conectado ao conversor de
frequência depende do nível de magnetização. Em geral, a
eciência é tão boa como no caso em que a operação é
realizada com o motor conectado diretamente à rede
elétrica. A eciência do motor depende do tipo do motor.
Na faixa de 75-100% do torque nominal, a
motor é praticamente constante, tanto quando é
controlada pelo conversor de frequência quanto quando é
executada diretamente na rede elétrica.
Nos motores pequenos, a inuência da característica U/f
sobre a eciência é marginal. No entanto, em motores a
partir de 11 kW (15 hp), as vantagens são signicativas.
De modo geral a frequência de chaveamento não afeta a
eciência de motores pequenos. Os motores de 11 kW (15
hp) e acima atingem melhorias de eciência de 1-2%,
porque a forma senoidal da corrente do motor é quase
perfeita em alta frequência de chaveamento.
Eciência do sistema (η
Para calcular a eciência do sistema, a eciência do
conversor de frequência (η
do motor (η
η
= η
SYSTEMA
Ruído acústico
4.5
MOTOR
x η
VLT
):
MOTOR
O ruído acústico do conversor de frequência é
proveniente de 3 fontes:
Bobinas do circuito intermediário CC.
•
Ventilador interno.
•
Bloqueador do ltro de RFI.
•
Os valores típicos medidos a uma distância de 1 m (3,3
pés) da unidade são:
Tamanho do
gabinete
J1 (0,37–2,2 kW/0,5–
3,0 hp)
J2 (3,0–5,5 kW/4,0–
7,5 hp)
62 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
)
MOTOR
)
SYSTEM
) é multiplicada pela eciência
VLT
50% velocidade do
ventilador [dBA]
N.A.
N.A.
J3 (7,5 kW/10 hp)
J4 (11–15 kW/15–20
hp)
J5 (18,5–22 kW/25–30
hp)
J6 (30–45 kW/40–60
hp)
J7 (55–75 kW/75–100
hp)
Tabela 4.5 Valores medidos típicos
1) Para J1-J3, a velocidade do ventilador é xa.
1)
N.A.
52 66
57,5 63
56 71
63 72
54
4.6 Condições dU/dt
No chaveamento de um transistor na ponte do conversor
de frequência, a tensão no motor aumenta por uma razão
dU/dt, dependendo destes fatores:
O tipo de cabo de motor.
•
A seção transversal do cabo de motor.
•
eciência do
A indução natural provoca um U
tensão do motor, antes do motor estabilizar em um nível,
dependendo da tensão no circuito intermediário. O tempo
de subida e a tensão de pico U
motor. Se a tensão de pico for muito alta, os motores sem
isolamento da bobina de fase serão afetados. Quanto mais
longo o cabo de motor, maiores o tempo de subida e a
tensão de pico.
A tensão de pico nos terminais do motor é causada pelo
chaveamento dos IGBTs. O FC 360 está em conformidade
com a norma IEC 60034-25 relativa a motores projetados
para serem controlados por conversores de frequência. O
FC 360 também está em conformidade com a norma IEC
60034-17 relativa aos controles do motor Norm por
conversores de frequência.
Os seguintes dados dU/dt são medidos no lado do
terminal do motor:
Compriment
o de
cabo
[m (pés)]
5 (16,4) 400 0,164 0,98 5,4
Velocidade máxima
de ventilador [dBA]
1)
1)
51
55
50 (164) 400 0,292 1,04 2,81
5 (16,4) 480 0,168 1,09 5,27
50 (164) 480 0,32 1,23 3,08
Tabela 4.6 Dados de dU/dt para FC 360, 2,2 kW (3,0 hp)
O comprimento do cabo de motor.
•
Se o cabo de motor é blindado ou não.
•
Indutância.
•
PICO
PEAK
Tensão
de
rede
elétrica
[V]
Tempo de
subida
[μs]
U
[kV]
de overshoot na
afetam a vida útil do
PEAK
dU/dt
[kV/μs]
Page 65

Especicações Guia de Design
Tensão
Compriment
o de
cabo
[m (pés)]
5 (16,4) 400 0,18 0,86 3,84
50 (164) 400 0,376 0,96 2,08
5 (16,4) 480 0,196 0,97 3,98
50 (164) 480 0,38 1,19 2,5
Tabela 4.7 Dados de dU/dt para FC 360, 5,5 kW (7,5 hp)
Compriment
o de
cabo
[m (pés)]
5 (16,4) 400 0,166 0,992 4,85
50 (164) 400 0,372 1,08 2,33
5 (16,4) 480 0,168 1,1 5,2
50 (164) 480 0,352 1,25 2,85
Tabela 4.8 Dados de dU/dt para FC 360, 7,5 kW (10 hp)
Compriment
o de
cabo
[m (pés)]
5 (16,4) 400 0,224 0,99 3,54
50 (164) 400 0,392 1,07 2,19
5 (16,4) 480 0,236 1,14 3,87
50 (164) 480 0,408 1,33 2,61
de
rede
elétrica
[V]
Tensão
de
rede
elétrica
[V]
Tensão
de
rede
elétrica
[V]
Tempo de
subida
[μs]
Tempo de
subida
[μs]
Tempo de
subida
[μs]
U
PEAK
[kV]
U
PEAK
[kV]
U
PEAK
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
Tensão
Compriment
o de
cabo
[m (pés)]
5 (16,4) 400 0,212 0,81 3,08
53 (174) 400 0,294 0,94 2,56
5 (16,4) 480 0,228 0,95 3,37
53 (174) 480 0,274 1,11 3,24
Tabela 4.11 Dados de dU/dt para FC 360, 37 kW (50 hp)
Compriment
o de
cabo
[m (pés)]
5 (16,4) 400 0,14 0,64 3,60
50 (164) 400 0,548 0,95 1,37
5 (16,4) 480 0,146 0,70 3,86
50 (164) 480 0,54 1,13 1,68
Tabela 4.12 Dados de dU/dt para FC 360, 45 kW (60 hp)
Compriment
o de
cabo
[m (pés)]
5 (16,4) 400 0,206 0,91 3,52
54 (177) 400 0,616 1,03 1,34
5 (16,4) 480 0,212 1,06 3,99
54 (177) 480 0,62 1,23 1,59
de
rede
elétrica
[V]
Tensão
de
rede
elétrica
[V]
Tensão
de
rede
elétrica
[V]
Tempo de
subida
[μs]
Tempo de
subida
[μs]
Tempo de
subida
[μs]
U
PEAK
[kV]
U
PEAK
[kV]
U
PEAK
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
4 4
Tabela 4.9 Dados de dU/dt para FC 360, 15 kW (20 hp)
Tensão
Compriment
o de
cabo
[m (pés)]
5 (16,4) 400 0,272 0,947 2,79
50 (164) 400 0,344 1,03 2,4
5 (16,4) 480 0,316 1,01 2,56
50 (164) 480 0,368 1,2 2,61
Tabela 4.10 Dados de dU/dt para FC 360, 22 kW (30 hp)
de
rede
elétrica
[V]
Tempo de
subida
[μs]
U
PEAK
[kV]
dU/dt
[kV/μs]
Tabela 4.13 Dados de dU/dt para FC 360, 55 kW (75 hp)
Tensão
Compriment
o de
cabo
[m (pés)]
5 (16,4) 400 0,232 0,81 2,82
50 (164) 400 0,484 1,03 1,70
5 (16,4) 480 0,176 1,06 4,77
50 (164) 480 0,392 1,19 2,45
Tabela 4.14 Dados de dU/dt para FC 360, 75 kW (100 hp)
Condições especiais
4.7
de
rede
elétrica
[V]
Tempo de
subida
[μs]
U
PEAK
[kV]
dU/dt
[kV/μs]
Em algumas condições especiais, em que a operação do
conversor de frequência é contestada, considere a possibilidade de derating. Em algumas condições, o derating deve
ser feito manualmente.
Em outras condições, o conversor de frequência executa
automaticamente um grau de derating quando necessário.
O derating é feito para garantir o desempenho em
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 63
Page 66

0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
Switching Frequency [kHz]
Output Current
45C
50C
55C
130BG247.10
(1)
(2)
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
Switching Frequency [kHz]
Output Current
45C
50C
55C
130BG248.10
(1)
(2)
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
Switching Frequency [kHz]
Output Current
45C
50C
55C
130BG249.10
(1)
(2)
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
Switching Frequency [kHz]
Output Current
45C
50C
55C
130BG250.10
(1)
(2)
Especicações
VLT® AutomationDrive FC 360
estágios críticos em que a alternativa poderia ser um
desarme.
4.7.1 Derating manual
O derating manual deve ser considerado para:
Pressão do ar – para instalação em altitudes
•
44
acima de 1.000 m (3.281 pés).
Velocidade do motor – em operação contínua a
•
RPM baixas em aplicações de torque constante.
A temperatura ambiente – acima 45 °C (113 °F),
•
para uns tipos acima 50 °C (122 °F); para obter
detalhes, consulte Ilustração 4.3 a Ilustração 4.9,
Tabela 4.15 e Tabela 4.16.
(1) Corrente de saída
(2) Frequência de chaveamento [kHz]
Ilustração 4.5 Curva de derating J3
(1) Corrente de saída
(2) Frequência de chaveamento [kHz]
Ilustração 4.3 Curva de derating J1
(1) Corrente de saída
(2) Frequência de chaveamento [kHz]
Ilustração 4.4 Curva de derating J2
64 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
(1) Corrente de saída
(2) Frequência de chaveamento [kHz]
Ilustração 4.6 Curva de derating J4
Page 67

0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
Switching Frequency [kHz]
Output Current
45C
50C
55C
130BG251.10
(1)
(2)
0%
0 2 4 6 8 10 12
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
Switching Frequency [kHz]
Output Current
45C
50C
55C
130BG252.10
(1)
(2)
110%
0%
0 2 4 6 8 10 12
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
Switching Frequency [kHz]
Output Current
45C
50C
55C
130BG253.10
(1)
(2)
110%
Especicações Guia de Design
4 4
(1) Corrente de saída
(2) Frequência de chaveamento [kHz]
Ilustração 4.7 Curva de derating J5
(1) Corrente de saída
(2) Frequência de chaveamento [kHz]
Ilustração 4.8 Curva de derating J6
(1) Corrente de saída
(2) Frequência de chaveamento [kHz]
Ilustração 4.9 Curva de derating J7
Tamanho do
gabinete
Potência
[kW (hp)]
Corrente de
saída máxima a
45 °C
0,37 (0,5) 1,2 1,2
0,55 (0,75) 1,7 1,7
J1
0,75 (1,0) 2,2 2,2
1,1 (1,5) 3,0 3,0
1,5 (2,0) 3,7 3,0
2,2 (3,0) 5,3 4,1
3 (4) 7,2 7,2
J2
4 (5,5) 9,0 9,0
5,5 (7,5) 12,0 10,2
J3 7,5 (10) 15,5 13,1
J4
J5
11 (15) 23,0 23,0
15 (20) 31,0 26,0
18,5 (25) 37,0 37,0
22 (30) 42,5 40,0
30 (40) 61 61
J6
37 (50) 73 73
45 (60) 90 77
J7
55 (75) 106 106
75 (100) 147 125
Corrente de
saída máxima a
50 °C
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 65
Tabela 4.15 Derating a 380 V
Page 68

Especicações
VLT® AutomationDrive FC 360
Tamanho do
gabinete
J1
44
J2
J3 7,5 (10) 14,0 11,9
J4
J5
J6
J7
Tabela 4.16 Derating a 480 V
Potência
[kW]
0,37 (0,5) 1,1 1,1
0,55 (0,75) 1,6 1,6
0,75 (1,0) 2,1 2,1
1,1 (1,5) 3,0 2,8
1,5 (2,0) 3,4 2,8
2,2 (3,0) 4,8 3,8
3 (4) 6,3 6,3
4 (5,5) 8,2 8,2
5,5 (7,5) 11,0 9,4
11 (15) 21,0 21,0
15 (20) 27,0 22,6
18,5 (25) 34,0 34,0
22 (30) 40,0 37,7
30 (40) 52 52
37 (50) 65 65
45 (60) 77 76
55 (75) 96 96
75 (100) 124 117
Corrente de
saída máxima a
45 °C
Corrente de
saída máxima a
50 °C
4.7.2 Derating automático
O conversor de frequência verica constantemente se há
níveis críticos:
Alta temperatura crítica no cartão de controle ou
•
no dissipador de calor.
Alta carga do motor.
•
Baixa velocidade do motor.
•
Sinais de proteção (sobretensão/subtensão,
•
sobrecarga de corrente, falha de aterramento e
curto-circuito) são acionados.
Como resposta a um nível crítico, o conversor de
frequência ajusta a frequência de chaveamento.
4.8 Tamanhos do gabinete metálico, valor nominal da potência e dimensões
Potência
[kW (hp)]
Dimensões
[mm (pol)]
Peso
[kg (lb)]
Orifício para
montagem [mm
(pol)]
Tamanho do
gabinete
Trifásico
380–480 V
Altura A 210 (8,3) 272,5 (10,7) 272,5 (10,7)
Largura B 75 (3,0) 90 (3,5) 115 (4,5) 133 (5,2) 150 (5,9) 233 (9,2) 308 (12,1)
Profundidade C 168 (6,6) 168 (6,6) 168 (6,6) 245 (9,6) 245 (9,6) 241 (9,5) 323 (12,7)
Profundidade C
com opção B
IP20
a 198 (7,8) 260 (10,2) 260 (10,2)
b 60 (2,4) 70 (2,8) 90 (3,5) 105 (4,1) 120 (4,7) 200 (7,87) 270 (10,63)
c 5 (0,2) 6,4 (0,25) 6,5 (0,26) 8 (0,32) 7,8 (0,31) 140 (5,5) 204 (8,0)
d 9 (0,35) 11 (0,43) 11 (0,43) 12,4 (0,49) 12,6 (0,5) 8,5 (0,33) 8,5 (0,33)
e 4,5 (0,18) 5,5 (0,22) 5,5 (0,22) 6,8 (0,27) 7 (0,28) 8,5 (0,33) 8,5 (0,33)
f 7,3 (0,29) 8,1 (0,32) 9,2 (0,36) 11 (0,43) 11,2 (0,44) 8,5 (0,33) 8,5 (0,33)
J1 J2 J3 J4 J5 J6 J7
0,37–2,2
(0,5–3,0)
173 (6,8) 173 (6,8) 173 (6,8) 250 (9,8) 250 (9,8) 241 (9,5) 323 (12,7)
0,37–1,5 kW/
0,5–2,0 hp:
2,3 (5,1)
2,2 kW/3,0
hp:
2,5 (5,5)
3,0–5,5
(4,0–7,5)
3,6 (7,9) 4,1 (9,0)
7,5 (10)
11–15
(15–20)
317,5
(12,5)
11 kW/15
hp:
9,4 (20,7)
15 kW/20
hp:
9,5 (20,9)
297,5
(11,7)
18,5–22
(25–30)
410 (16,1) 515 (20,3) 550 (21,7)
18,5 kW/25
hp:
12,3 (27,1)
22 kW/30
hp:
12,5 (27,6)
390 (15,4) 495 (19,49) 521 (20,5)
30–45
(40–60)
30 kW/40
hp:
22,4 (49,4)
37 kW/50
hp:
22,5 (49,6)
45 kW/60
hp:
22,6 (49,8)
55–75
(75–100)
55 kW/75
hp:
37,3 (82,2)
75 kW/100
hp:
38,7 (85,3)
Tabela 4.17 Tamanhos do gabinete metálico, valor nominal da potência e dimensões
66 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 69

A
a
D
C
B
b
130BC449.10
C
a
b
130BA648.12
f
e
B
A
a
d
e
b
c
130BG254.10
f
e
c
b
a
C
B
A
b
d
Especicações Guia de Design
4 4
Ilustração 4.10 Dimensões
Ilustração 4.11 Orifícios para montagem superior e inferior J1–
J5
Ilustração 4.12 Orifícios para montagem superior e inferior J6-
-J7
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 67
Page 70

drop cable
Instalação e setup do RS485
VLT® AutomationDrive FC 360
5 Instalação e setup do RS485
5.1 Introdução
5.1.1 Visão Geral
RS485 é uma interface do barramento de 2 os compatível com a topologia de rede de multi-distribuição. Os nós podem
ser conectados como um barramento ou através de cabos suspensos de uma linha tronco comum. 32 nós no total podem
ser conectados a um segmento de rede.
Repetidores dividem segmentos de rede; consulte Ilustração 5.1.
55
Ilustração 5.1 Interface de barramento RS485
AVISO!
Cada repetidor funciona como um nó dentro do
segmento em que está instalado. Cada nó conectado em
uma rede especíca deve ter um endereço do nó único
entre todos os segmentos.
Cada segmento deve estar com terminação em ambas as
extremidades; para isso utilize a chave de terminação
(S801) dos conversores de frequência ou um banco de
resistores de terminação polarizado. Sempre use cabos de
par trançado blindados (STP) para cabeamento de
barramento e siga as boas práticas de instalação.
A conexão do terra de baixa impedância da blindagem em
cada nó é importante, inclusive em frequências altas.
Assim, conecte uma grande superfície da blindagem a
terra, por exemplo, com uma braçadeira de cabo ou uma
bucha condutora. Às vezes, é necessário aplicar cabos de
equalização de potencial para manter o mesmo potencial
de aterramento em toda a rede, particularmente em
instalações com cabos longos.
Para evitar descasamento de impedância, use o mesmo
tipo de cabo em toda a rede. Ao conectar um motor ao
conversor de frequência, utilize sempre um cabo de motor
blindado.
Cabo Par trançado blindado (STP)
Impedância [Ω]
Comprimento
de cabo [m
(pés)]
Tabela 5.1 Especicações de cabo
120
Máximo 1.200 m (3.937 pés), incluindo linhas
de dispositivo.
Máximo 500 m (1.640 pés) entre estações.
68 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 71

61 68 69
N
P
COMM. GND
130BB795.10
Instalação e setup do RS485 Guia de Design
5.1.2 Conexão de rede
Conecte o conversor de frequência à rede RS485 da
seguinte forma (consulte também Ilustração 5.2):
1. Conecte os os de sinal aos terminais 68 (P+) e
69 (N-), na placa de controle principal do
conversor de frequência.
2. Conecte a blindagem do cabo às braçadeiras de
cabo.
AVISO!
Para reduzir o ruído entre os condutores, use cabos de
par trançado blindados.
Ilustração 5.2 Conexão de rede
5.1.3 Setup de hardware
Parâmetro Função
Parâmetro 8-35 Atr
aso Mínimo de
Resposta
Parâmetro 8-36 Atr
aso de Resposta
Mínimo
Parâmetro 8-37 Atr
aso Máximo Entre
Caracteres
Especique o tempo de atraso mínimo,
entre o recebimento de uma solicitação e a
transmissão de uma resposta. Esta função é
para contornar atrasos de retorno do
modem.
Especique um tempo de atraso máximo
entre a transmissão de uma solicitação e o
recebimento de uma resposta.
Se a transmissão for interrompida,
especique um tempo de atraso máximo
entre 2 bytes recebidos para garantir o
tempo limite.
AVISO!
A seleção padrão depende do
protocolo selecionado em
parâmetro 8-30 Protocolo.
Tabela 5.2 Programação dos parâmetros da comunicação do
Modbus
5.1.5 Precauções com EMC
5 5
Para nalizar o barramento RS485, use a chave terminadora
na placa de controle principal do conversor de frequência.
A conguração de fábrica para o interruptor é OFF.
5.1.4 Programação dos parâmetros da
comunicação do Modbus
Parâmetro Função
Parâmetro 8-30 Pro
tocolo
Parâmetro 8-31 End
ereço
Parâmetro 8-32 Bau
d Rate da Porta do
FC
Parâmetro 8-33 Bits
de Paridade /
Parada
Selecione o protocolo da aplicação a ser
executado para a interface RS485.
Programe o endereço do nó.
AVISO!
O intervalo de endereços depende do
protocolo selecionado em
parâmetro 8-30 Protocolo.
Programe a baud rate.
AVISO!
A baud rate padrão depende do
protocolo selecionado em
parâmetro 8-30 Protocolo.
Programe os bits de paridade e do número
de paradas.
AVISO!
A seleção padrão depende do
protocolo selecionado em
parâmetro 8-30 Protocolo.
Para obter uma operação livre de interferências da rede
RS485, a Danfoss recomenda as seguintes precauções de
EMC.
AVISO!
Observe as normas locais e nacionais relevantes, por
exemplo, em relação à conexão do aterramento de
proteção. Para evitar o acoplamento de ruído de alta
frequência entre os cabos, mantenha o cabo de
comunicação RS485 longe dos cabos do motor e do
resistor de frenagem. Normalmente, uma distância de
200 mm (8 pol.) é suciente. Mantenha a maior distância
possível entre os cabos, especialmente onde os cabos
correm paralelamente por longas distâncias. Quando o
cruzamento for inevitável, o cabo RS485 deve cruzar os
cabos de motor e do resistor de frenagem em um ângulo
de 90°.
5.2 Protocolo Danfoss FC
5.2.1 Visão Geral
O Protocolo Danfoss FC, também conhecido como
barramento FC ou barramento padrão, é o eldbus Danfoss
padrão. Dene uma técnica de acesso de acordo com o
princípio mestre/escravo para comunicações através de um
eldbus.
Um mestre e um máximo de 126 escravos podem ser
conectados ao barramento. O mestre seleciona os escravos
individuais por meio de um caractere de endereço no
telegrama. Um escravo em si nunca pode transmitir sem
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 69
Page 72

0 1 32 4 5 6 7
195NA036.10
Start
bit
Pridade Stop
Par bit
Instalação e setup do RS485
VLT® AutomationDrive FC 360
primeiro ser solicitado a fazê-lo, e a transferência direta de
telegramas entre os escravos individuais não é possível. A
comunicação ocorre no modo semi-duplex.
A função do mestre não pode ser transferida para um
outro nó (sistema de mestre único).
A camada física é RS485, utilizando, assim, a porta RS485
embutida no conversor de frequência. O Protocolo Danfoss
FC suporta diferentes formatos de telegrama:
Um formato curto de 8 bytes para dados de
•
55
processo.
Um formato longo de 16 bytes que também
•
inclui um canal de parâmetro.
Um formato usado para textos.
•
Conguração de rede
5.3
Para ativar o protocolo FC do conversor de frequência,
programe os parâmetros a seguir.
Parâmetro Conguração
Parâmetro 8-30 Protocolo FC
Parâmetro 8-31 Endereço 1–126
Parâmetro 8-32 Baud Rate da Porta do
FC
Parâmetro 8-33 Bits de Paridade /
Parada
Tabela 5.3 Parâmetros para ativar o protocolo
2400–115200
Paridade par, 1 bit de
parada (padrão)
5.4 Estrutura do enquadramento de
mensagem do protocolo Danfoss FC
5.2.2 FC com Modbus RTU
5.4.1 Conteúdo de um caractere (byte)
O protocolo FC fornece acesso à palavra de controle e à
referência de barramento do conversor de frequência.
A palavra de controle permite ao mestre do Modbus
controlar diversas funções importantes do conversor de
frequência:
Partida.
•
É possível parar o conversor de frequência por
•
diversos meios:
- Parada por inércia.
- Parada rápida.
- Parada por freio CC.
- Parada normal (rampa).
Reinicializar após um desarme por falha.
•
Funcionar em várias velocidades predenidas.
•
Funcionar em reverso.
•
Alteração da conguração ativa.
•
Controle dos 2 relés embutidos no conversor de
•
frequência.
A referência de barramento é comumente usada para
controle de velocidade. Também é possível acessar os
parâmetros, ler seus valores e, onde for possível, inserir
valores neles. O acesso aos parâmetros oferece uma gama
de opções de controle, incluindo o controle do setpoint do
conversor de frequência quando o controlador PI interno é
usado.
Cada caractere transferido começa com um bit de início.
Em seguida, são transmitidos 8 bits de dados, que correspondem a um byte. Cada caractere é garantido por meio
de um bit de paridade. Este bit é denido como 1 quando
atinge a paridade. Paridade é quando há um número igual
de 1s nos 8 bits de dados e o bit de paridade no total. Um
stop bit completa um caractere, consistindo em 11 bits ao
todo.
Ilustração 5.3 Conteúdo de um caractere
5.4.2 Estrutura do telegrama
Cada telegrama tem a seguinte estrutura:
Caractere de partida (STX) = 02 hex.
•
Um byte representando o comprimento do
•
telegrama (LGE).
Um byte representando o endereço do conversor
•
de frequência (ADR).
Seguem vários bytes de dados (variável, dependendo do
tipo de telegrama).
Um byte de controle dos dados (BCC) completa o
telegrama.
70 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 73

STX LGE ADR D ATA BCC
195NA099.10
ADRLGESTX PCD1 PCD2 BCC
130BA269.10
PKE IND
130BA270.10
ADRLGESTX PCD1 PCD2 BCCCh1 Ch2 Chn
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BB918.10
PKE IND
PWE
high
PWE
low
AK PNU
Parameter
commands
and replies
Parameter
number
Instalação e setup do RS485 Guia de Design
Ilustração 5.4 Estrutura do telegrama
5.4.3 Comprimento do telegrama (LGE)
O comprimento do telegrama é o número de bytes de
dados mais o ADR do byte de endereço e o BCC do byte
de controle dos dados.
4 bytes de dados LGE=4+1+1=6 bytes
12 bytes de dados LGE=12+1+1=14 bytes
Telegramas contendo textos
Tabela 5.4 Comprimento dos telegramas
1) 10 representa os caracteres xos, enquanto n é variável
(dependendo do tamanho do texto).
101)+n bytes
Ilustração 5.5 Bloco de processo
Bloco de parâmetros
O bloco de parâmetros é usado para transferir parâmetros
entre mestre e escravo. O bloco de dados é composto de
12 bytes (6 words) e também contém o bloco de processo.
Ilustração 5.6 Bloco de parâmetros
5 5
Bloco de texto
O bloco de texto é usado para ler ou gravar textos, via
bloco de dados.
Ilustração 5.7 Bloco de texto
5.4.4 Endereço do conversor de frequência
(ADR)
Formato de endereço 1–126
Bit 7 = 1 (formato do endereço 1–126 ativo).
•
Bit 0–6 = endereço do conversor de frequência 1–
•
126.
Bit 0–6 = 0 broadcast.
•
O escravo retorna o byte de endereço inalterado ao mestre
no telegrama de resposta.
5.4.5 Byte de controle dos dados (BCC)
A soma de vericação é calculada como uma função XOR.
Antes de receber o primeiro byte no telegrama, a soma de
vericação calculada é 0.
5.4.6 O Campo de dados
A estrutura dos blocos de dados depende do tipo de
telegrama. Existem 3 tipos de telegrama e o tipo se aplica
para os telegramas de controle (mestre⇒escravo) e os
telegramas de resposta (escravo⇒mestre).
Os 3 tipos de telegrama são:
5.4.7 O Campo PKE
O campo PKE contém 2 subcampos:
Comando de parâmetro e resposta (AK).
•
Número do parâmetro (PNU).
•
Ilustração 5.8 Campo PKE
Os bits 12-15 transferem os comandos de parâmetro do
mestre para o escravo, e retornam as respostas dos
escravos processados ao mestre.
Bloco de processo (PCD)
O PCD é constituído por um bloco de dados de 4 bytes (2
palavras) e contém:
Palavra de controle e valor de referência (de
•
mestre para escravo).
Status word e a frequência de saída atual (do
•
escravo para o mestre).
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 71
Page 74

Instalação e setup do RS485
VLT® AutomationDrive FC 360
Comandos de parâmetro mestre⇒escravo
Número do bit Comando de parâmetro
15 14 13 12
0 0 0 0 Sem comando.
0 0 0 1 Leitura do valor do parâmetro.
0 0 1 0
0 0 1 1
1 1 0 1
55
1 1 1 0
1 1 1 1 Leitura de texto.
Tabela 5.5 Comandos de parâmetro
Número do bit Resposta
15 14 13 12
0 0 0 0 Nenhuma resposta.
0 0 0 1 Valor do parâmetro transferido (palavra).
0 0 1 0
0 1 1 1 Comando não pode ser executado.
1 1 1 1 Texto transferido.
Gravação do valor do parâmetro na RAM
(palavra).
Gravação do valor do parâmetro na RAM
(palavra dupla).
Gravação do valor do parâmetro na RAM
e EEPROM (palavra dupla).
Gravação do valor do parâmetro na RAM
e EEPROM (palavra).
Resposta do escravo⇒mestre
Valor do parâmetro transferido (palavra
dupla).
Código de falha Especicação do FC
253 Solicitação não suportada.
254 Atributo desconhecido.
255 Sem erro.
Tabela 5.7 Relatório do escravo
5.4.8 Número do parâmetro (PNU)
Bits de 0-11 números de parâmetros de transferência. A
função do parâmetro relevante é denida na descrição do
parâmetro no Guia de Programação do VLT
®
AutomationDrive FC 360.
5.4.9 Índice (IND)
O índice é usado com o número do parâmetro para
parâmetros com acesso de leitura/gravação com um índice,
por exemplo, parâmetro 15-30 Log Alarme: Cód Falha. O
índice consiste em 2 bytes: um byte baixo e um byte alto.
Somente o byte baixo é utilizado como índice.
5.4.10 Valor do Parâmetro (PWE)
O bloco de valor de parâmetro consiste em 2 palavras (4
Tabela 5.6 Resposta
bytes) e o seu valor depende do comando denido (AK).
Se o mestre solicita um valor de parâmetro quando o
Se o comando não puder ser executado, o escravo envia a
resposta 0111 Comando não pode ser executado e emite os
seguintes relatórios de falha em Tabela 5.7.
bloco PWE não contiver nenhum valor. Para alterar um
valor de parâmetro (gravar), grave o novo valor no bloco
PWE e envie-o do mestre para o escravo.
Código de falha Especicação do FC
0 Número de parâmetro ilegal.
1 Parâmetro não pode ser alterado.
2 Limite superior ou inferior excedido.
3 O sub-índice está corrompido.
4 Sem matriz.
5 Tipo de dados errado.
6 Não usado.
7 Não usado.
9
11 Sem acesso a gravação de parâmetro.
15 Sem texto disponível.
17 Não aplicável durante o funcionamento.
18 Outros erros.
100 –
>100 –
130
131 Não é possível gravar no setup de fábrica.
132 Sem acesso ao LCP.
252 Visualizador desconhecido.
O elemento da descrição não está
disponível.
Sem acesso ao barramento para este
parâmetro.
Se um escravo responder a uma solicitação de parâmetro
(comando de leitura), o valor do parâmetro atual no bloco
PWE é transferido e devolvido ao mestre. Se um parâmetro
contém várias opções de dados, por exemplo
parâmetro 0-01 Idioma, selecione o valor de dados
inserindo o valor no bloco PWE. Através da comunicação
serial somente é possível ler parâmetros com tipo de
dados 9 (sequência de texto).
Parâmetro 15-40 Tipo do FC a parâmetro 15-53 Nº. Série
Cartão de Potência contêm o tipo de dados 9.
Por exemplo, pode-se ler a potência da unidade e a faixa
de tensão de rede elétrica no par. parâmetro 15-40 Tipo do
FC. Quando uma sequência de texto é transferida (lida), o
comprimento do telegrama é variável, porque os textos
têm comprimentos diferentes. O comprimento do
telegrama é
denido no 2º byte do telegrama (LGE). Ao
usar a transferência de texto, o caractere de índice indica
se é um comando de leitura ou gravação.
Para ler um texto por meio do bloco PWE, congure o
comando de parâmetro (AK) para F hex. O caractere de
índice de byte alto deve ser 4.
72 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 75

E19E H
PKE IND PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA092.10
119E H
PKE
IND
PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA093.10
Instalação e setup do RS485 Guia de Design
5.4.11 Tipos de dados suportados pelo
conversor de frequência
Sem sinal algébrico signica que não há sinal operacional
no telegrama.
Tipos de dados Descrição
3 Inteiro 16
4 Inteiro 32
5 Sem designação 8
6 Sem designação 16
7 Sem designação 32
9 String de texto
Tabela 5.8 Tipos de Dados
5.4.12 Conversão
O guia de programação contém as descrições dos atributos
de cada parâmetro. Os valores de parâmetro são
transferidos somente como números inteiros. Os fatores de
conversão são usados para transferir decimais.
Parâmetro 4-12 Lim. Inferior da Veloc. do Motor [Hz] tem um
fator de conversão de 0,1. Para
mínima em 10 Hz, deve-se transferir o valor 100. Um fator
de conversão 0,1 signica que o valor transferido é
multiplicado por 0,1. O valor 100, portanto, será recebido
como 10,0.
Índice de conversão Fator de conversão
74 3600
2 100
1 10
0 1
-1 0,1
-2 0,01
-3 0,001
-4 0,0001
-5 0,00001
predenir a frequência
Exemplos
5.5
5.5.1 Gravação de um valor de parâmetro
Mude o par. parâmetro 4-14 Lim. Superior da Veloc do Motor
[Hz] para 100 Hz.
Grave os dados na EEPROM.
PKE = E19E hex - Gravar palavra única em
parâmetro 4-14 Lim. Superior da Veloc do Motor [Hz]:
IND = 0000 hex.
•
PWEHIGH = 0000 hex.
•
PWELOW = 03E8 hex.
•
Valor dos dados 1000, correspondente a 100 Hz, consulte
capétulo 5.4.12 Conversão.
O telegrama parece com Ilustração 5.9.
Ilustração 5.9 Telegrama
AVISO!
Parâmetro 4-14 Lim. Superior da Veloc do Motor [Hz] é
uma palavra única, e o comando de parâmetro para
gravar em EEPROM é E. Parâmetro 4-14 Lim. Superior da
Veloc do Motor [Hz] é 19E em hexadecimal.
A resposta do escravo para o mestre é mostrada em
Ilustração 5.10.
Ilustração 5.10 Resposta do mestre
5 5
Tabela 5.9 Conversão
5.4.13 Palavras do processo (PCD)
O bloco de palavras do processo é dividido em 2 blocos
de 16 bits, que sempre ocorrem na sequência denida.
PCD 1 PCD 2
Telegrama de controle (palavra de controle
de mestre⇒escravo)
Status word do telegrama de controle
(escravo⇒mestre)
Tabela 5.10 Palavras do processo (PCD)
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 73
Valor de
referência
Frequência de
saída atual
5.5.2 Leitura de um valor de parâmetro
Leia o valor em parâmetro 3-41 Tempo de Aceleração da
Rampa 1.
PKE = 1155 hex - Leitura do valor do parâmetro em
parâmetro 3-41 Tempo de Aceleração da Rampa 1:
IND = 0000 hex.
•
PWE
•
PWE
•
= 0000 hex.
HIGH
= 0000 hex.
LOW
Page 76

1155 H
PKE IND PWE
high
PWE
low
0000 H 0000 H 0000 H
130BA094.10
130BA267.10
1155 H
PKE
IND
0000 H 0000 H 03E8 H
PWE
high
PWE
low
Instalação e setup do RS485
Ilustração 5.11 Telegrama
Se o valor em parâmetro 3-41 Tempo de Aceleração da
Rampa 1 for 10 s, a resposta do escravo para o mestre é
mostrada em Ilustração 5.12.
VLT® AutomationDrive FC 360
Se for necessária uma resposta, o controlador monta o
telegrama de resposta e o envia.
Os controladores se comunicam utilizando uma técnica
mestre/escravo em que apenas o mestre pode iniciar
transações (chamadas de consultas). Os escravos
respondem fornecendo os dados solicitados ao mestre ou
atuando conforme solicitado na consulta.
O mestre pode abordar escravos individuais ou iniciar um
telegrama de broadcast para todos os escravos. Os
escravos retornam uma resposta a consultas endereçadas a
eles individualmente. Nenhuma resposta é devolvida às
solicitações de broadcast do mestre.
55
O protocolo Modbus RTU estabelece o formato da consulta
Ilustração 5.12 Resposta
3E8 hex corresponde ao 1.000 decimal. O índice de
conversão para parâmetro 3-41 Tempo de Aceleração da
Rampa 1 é -2, ou seja, 0,01.
Parâmetro 3-41 Tempo de Aceleração da Rampa 1 é o tipo
Sem designação 32.
Modbus RTU
5.6
5.6.1 Pré-requisitos de conhecimento
A Danfoss assume que o controlador instalado suporta as
interfaces contidas neste manual e observa rigorosamente
todos os requisitos e limitações estipulados no controlador
e conversor de frequência.
O Modbus RTU embutido (unidade terminal remota) é
projetado para se comunicar com qualquer controlador
que suporte as interfaces denidas neste manual. Supõe-se
que o usuário tenha pleno conhecimento das capacidades
e limitações do controlador.
do mestre fornecendo as seguintes informações:
O endereço do dispositivo (ou broadcast).
•
Um código de função denindo a ação solicitada.
•
Todos os dados a serem enviados.
•
Um campo de vericação de erro.
•
O telegrama de resposta do dispositivo escravo é
elaborado também usando o protocolo Modbus. Ela
contém campos que
tipos de dados a serem devolvidos e um campo de
vericação de erro. Se ocorrer um erro no recebimento do
telegrama, ou se o escravo for incapaz de executar a ação
solicitada, o escravo monta e envia uma mensagem de
erro. Como alternativa, ocorre um timeout.
conrmam a ação tomada, quaisquer
5.6.3 Conversor de Frequência com
Modbus RTU
O conversor de frequência se comunica no formato
Modbus RTU através da interface RS485 embutida. O
Modbus RTU fornece acesso à palavra de controle e à
referência de barramento do conversor de frequência.
5.6.2 Visão Geral
Independentemente do tipo de redes de comunicação
física, esta seção descreve o processo que um controlador
usa para solicitar o acesso a outro dispositivo. Este
processo inclui como o Modbus RTU responde a solicitações de outro dispositivo e como erros são detectados e
reportados. Também estabelece um formato comum para
o layout e conteúdo dos campos de telegramas.
Durante as comunicações através de uma rede Modbus
RTU, o protocolo:
Determina como cada controlador toma
•
conhecimento do seu endereço de dispositivo.
Reconhece um telegrama endereçado a ele.
•
Determina quais as ações a serem tomadas.
•
Extrai todos os dados ou outras informações
•
contidas no telegrama.
74 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
A palavra de controle permite ao mestre do Modbus
controlar diversas funções importantes do conversor de
frequência:
Partida.
•
Várias paradas:
•
- Parada por inércia.
- Parada rápida.
- Parada por freio CC.
- Parada normal (rampa).
Reinicializar após um desarme por falha.
•
Funcionar em várias velocidades predenidas.
•
Funcionar em reverso.
•
Alterar a conguração ativa.
•
Controlar o relé embutido do conversor de
•
frequência.
Page 77

Instalação e setup do RS485 Guia de Design
A referência de barramento é comumente usada para
controle de velocidade. Também é possível acessar os
parâmetros, ler seus valores e quando possível, inserir
valores. O acesso aos parâmetros oferece uma gama de
opções de controle, incluindo o controle do setpoint do
conversor de frequência quando o controlador PI interno é
usado.
5.7 Conguração de rede
Para ativar o Modbus RTU no conversor de frequência,
programe os seguintes parâmetros:
Parâmetro Conguração
Parâmetro 8-30 Protocolo Modbus RTU
Parâmetro 8-31 Endereço 1–247
Parâmetro 8-32 Baud Rate da
Porta do FC
Parâmetro 8-33 Bits de Paridade /
Parada
Tabela 5.11 Conguração de Rede
2400–115200
Paridade par, 1 bit de parada
(padrão)
5.8 Estrutura do Enquadramento de
Mensagem do Modbus RTU
5.8.1 Introdução
Os controladores são congurados para se comunicarem
na rede Modbus usando o modo RTU (unidade terminal
remota), com cada byte em um telegrama contendo 2
caracteres hexadecimais de 4 bits. O formato para cada
byte é mostrado em Tabela 5.12.
5.8.2 Estrutura do telegrama do Modbus
RTU
O dispositivo transmissor coloca um telegrama Modbus
RTU em um quadro com um ponto de início e um ponto
de término conhecidos. Isso permite que os dispositivos de
recepção comecem a leitura no início do telegrama, leiam
a parte que contém o endereço, determinem a qual
dispositivo está endereçado (ou a todos os dispositivos se
o telegrama for de broadcast) e reconheçam o término do
telegrama. Telegramas parciais são detectados e os erros
são denidos como resultado. Os caracteres para
transmissão devem estar em formato hexadecimal 00-FF
em cada campo. O conversor de frequência monitora
continuamente o barramento da rede, também durante os
intervalos de silêncio. Quando o primeiro campo (o campo
de endereço) é recebido, cada conversor de frequência ou
dispositivo decodica esse campo, para determinar qual
dispositivo está sendo endereçado. Os telegramas do
Modbus RTU endereçados para 0 são telegramas de
broadcast. Nenhuma resposta é permitida para telegramas
de broadcast. Um quadro de telegrama típico é mostrado
em Tabela 5.14.
Inicial Endereço Função Dados
T1-T2-T3-
-T4
Tabela 5.14 Estrutura do telegrama do Modbus RTU
8 bits 8 bits N x 8 bits 16 bits
Vericaçã
o de CRC
Acel.
T1-T2-T3-
-T4
5.8.3 Campo de início/parada
5 5
Bit de
partid
a
Tabela 5.12 Formato para cada byte
Sistema de
codicação
Bits por byte
Campo de
vericação de erro
Tabela 5.13 Detalhes do byte
Byte de dados Parada
/
parida
de
binário de 8 bits, hexadecimal 0–9, A–F.
2 caracteres hexadecimais contidos em cada
campo de 8 bits do telegrama.
1 bit de partida.
•
8 bits de dados, bit menos signicativo
•
enviado primeiro.
1 bit para paridade par/ímpar; nenhum
•
bit para sem paridade.
1 bit de parada se paridade for usada; 2
•
bits se for sem paridade.
Vericação de redundância cíclica (CRC).
Parad
a
Os telegramas começam com um período de silêncio de
pelo menos 3,5 intervalos de caracteres, O período de
silêncio é implementado como um múltiplo de intervalos
de caracteres na baud rate da rede selecionada (mostrado
como Início T1-T2-T3-T4). O primeiro campo a ser
transmitido é o endereço do dispositivo. Após a
transmissão do último caractere, um período similar de
pelo menos 3,5 caracteres marca o término do telegrama.
Um novo telegrama pode começar depois desse período.
Transmite todo o quadro do telegrama como um uxo
contínuo. Se ocorrer um período de silêncio de mais de 1,5
caractere antes da conclusão do quadro, o dispositivo de
recepção descarta o telegrama incompleto e assume que o
próximo byte é o campo de endereço de um novo
telegrama. Da mesma forma, se um novo telegrama
começar antes do intervalo de 3,5 caracteres após um
telegrama anterior, o dispositivo de recepção o considera
uma continuação do telegrama anterior. Esse comportamento causa um timeout (sem resposta do escravo), uma
vez que o valor no campo nal de CRC não é válido para
os telegramas combinados.
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 75
Page 78

Instalação e setup do RS485
VLT® AutomationDrive FC 360
5.8.4 Campo de endereço
O campo de endereço de um quadro de telegrama contém
8 bits. Os endereços de dispositivos escravos válidos estão
na faixa de 0 a 247 decimais. Os dispositivos escravos
individuais recebem endereços no intervalo de 1 a 247. 0 é
reservado para o modo de broadcast, que todos os
escravos reconhecem. Um mestre endereça um escravo
colocando o endereço do escravo no campo de endereço
do telegrama. Quando o escravo envia sua resposta, ele
coloca seu próprio endereço neste campo de endereço
para permitir ao mestre saber qual o escravo está
55
respondendo.
5.8.5 Campo de função
O campo de função de um quadro de telegrama contém 8
bits. Os códigos válidos estão na faixa de 1–FF. Os campos
de função são usados para enviar telegramas entre mestre
e escravo. Quando um telegrama é enviado de um
dispositivo mestre para um escravo, o campo de código de
função informa ao escravo que tipo de ação executar.
Quando o escravo responde ao mestre, ele usa o campo
de código de função para indicar que se trata de uma
resposta normal (sem erros) ou que ocorreu algum tipo de
erro (chamado de resposta de exceção).
Para uma resposta normal, o escravo simplesmente retorna
o código de função original. Para uma resposta de exceção,
o escravo retorna um código que é equivalente ao código
de função original com o bit mais
para 1 lógico. Além disso, o escravo coloca um código
único no campo de dados do telegrama de resposta. Este
código informa ao mestre qual o tipo do erro ocorrido ou
o motivo da exceção. Consulte também
capétulo 5.8.10 Códigos de função suportados pelo Modbus
RTU e capétulo 5.8.11 Códigos de exceção do Modbus.
signicativo congurado
5.8.6 Campo de dados
5.8.7 Campo de vericação CRC
Os telegramas incluem um campo de vericação de erros,
operando com base em um método de vericação de
redundância cíclica (CRC). O campo CRC verica o
conteúdo de todo o telegrama. É aplicado independentemente de qualquer método de vericação de paridade
usado para os caracteres individuais do telegrama. O
dispositivo de transmissão calcula o valor do CRC e
acrescenta o CRC como o último campo no telegrama. O
dispositivo de recepção recalcula um CRC durante o
recebimento do telegrama e compara o valor calculado
com o valor real recebido no campo CRC. 2 valores
diferentes resultam em um timeout do bus. O campo de
vericação de erros contém um valor binário de 16 bits
implementado como 2 bytes de 8 bits. Após a
implementação, o byte inferior do campo é acrescido
primeiro, seguido pelo byte superior. O byte superior do
CRC é o último byte enviado no telegrama.
5.8.8 Endereçamento do registrador da
bobina
No Modbus, todos os dados são organizados em bobinas e
registradores de retenção. As bobinas retêm um único bit,
enquanto os registradores de retenção mantêm uma
palavra de 2 bytes (isto é, 16 bits). Todos os endereços de
dados nos telegramas Modbus são referenciados como 0. A
primeira ocorrência de um item de dados é endereçada
como item número 0. Por exemplo: A bobina conhecida
como bobina 1, em um controlador programável, é
endereçada como bobina 0000, no campo de endereço de
dados de um telegrama do Modbus. A bobina 127 decimal
é endereçada como bobina 007Ehex (126 decimal).
O registrador de retenção 40001 é endereçado como
registro 0000 no campo de endereço de dados do
telegrama. O campo de código de função já especica
uma operação de registrador de retenção. Portanto, a
referência 4XXXX ca implícita. O registrador de retenção
40108 é endereçado como registro 006Bhex (107 decimal).
O campo de dados é construído usando conjuntos de 2
dígitos hexadecimais, na faixa de 00-FF hexadecimal. Esses
dígitos são compostos por 1 caractere de RTU. O campo de
dados dos telegramas enviados de um dispositivo mestre
para um escravo contém informações complementares que
o escravo deve usar para executar adequadamente.
As informações podem incluir itens, tais como:
Endereços de bobinas ou registradores.
•
A quantidade de itens a serem tratados.
•
A contagem de bytes de dados reais no campo.
•
76 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Número
da
bobina
1–16 Palavra de controle do conversor de
17–32 Velocidade do conversor de
33–48 Status word do conversor de
Descrição Direção do
frequência (consulte Tabela 5.16).
frequência ou faixa de referência do
setpoint 0x0–0xFFFF (-200% ... ~
200%).
frequência (consulte Tabela 5.17).
sinal
Mestre para
escravo
Mestre para
escravo
Escravo para
mestre
Page 79

Instalação e setup do RS485 Guia de Design
Número
da
bobina
49–64 Modo de malha aberta: Frequência
65
66–65536 Reservado. –
Tabela 5.15 Registrador de bobinas
Bobina 0 1
01 Referência predenida lsb
02 Referência predenida msb
03 Freio CC Sem freio CC
04 Parada por inércia Sem parada por inércia
05 Parada rápida Sem parada rápida
06 Congelar frequência Sem congelar frequência
07 Parada de rampa Partida
08 Sem reset Reinicializar
09 Sem jog Jog
10 Rampa 1 Rampa 2
11 Dados inválidos Dados válidos
Descrição Direção do
sinal
de saída do conversor de
frequência.
Modo de malha fechada: Sinal de
feedback do conversor de
frequência.
Controle de gravação do parâmetro
(mestre para escravo).
0 = Alterações de parâmetros são
gravadas na RAM do conversor de
frequência.
1 = Alterações de parâmetros são
gravadas em RAM e EEPROM do
conversor de frequência.
Escravo para
mestre
Mestre para
escravo
Bobina 0 1
12 Relé 1 desligado Relé 1 ligado
13 Relé 2 desligado Relé 2 ligado
14 Setup do lsb
15 –
16 Sem reversão Reversão
Tabela 5.16 Palavra de controle do conversor de frequência
(perl do FC)
Bobina 0 1
33 Controle não preparado Controle pronto
34 O conversor de frequência
não está pronto para
funcionar
35 Parada por inércia Segurança fechada
36 Sem alarme Alarme
37 Não usado Não usado
38 Não usado Não usado
39 Não usado Não usado
40 Sem advertência Advertência
41 Não na referência Na referência
42 Modo manual Modo automático
43 Fora da faixa de
frequência
44 Parado Em funcionamento
45 Não usado Não usado
46 Sem advertência de
tensão
47 Fora do limite de corrente Limite de corrente
48 Sem advertência térmica Advertência térmica
Tabela 5.17 Status word do conversor de frequência
(perl do FC)
O conversor de frequência
está pronto
Na faixa de frequência
Advertência de tensão
5 5
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 77
Page 80

Instalação e setup do RS485
VLT® AutomationDrive FC 360
Endereço do
barramento
0 1 40001 Reservado
1 2 40002 Reservado
2 3 40003 Reservado
3 4 40004 Gratuito – –
4 5 40005 Gratuito – –
55
5 6 40006 Conguração do Modbus Leitura/
6 7 40007 Último código de falha Somente
7 8 40008 Último registro de erro Somente
8 9 40009 Ponteiro do índice Leitura/
9 10 40010 Parâmetro 0-01 Idioma Dependente
19 20 40020 Parâmetro 0-02 Unidade da
29 30 40030 Parâmetro 0-03 Denições
Registrador
do
barramento
Registrador
PLC
1)
Conteúdo Acesso Descrição
Reservado para conversores de frequência
legados VLT® 5000 e VLT® 2800.
Reservado para conversores de frequência
legados VLT® 5000 e VLT® 2800.
Reservado para conversores de frequência
legados VLT® 5000 e VLT® 2800.
Somente TCP. Reservado para Modbus TCP
(parâmetro 12-28 Armazenar Valores dos Dados e
parâmetro 12-29 Gravar Sempre armazenado em,
por exemplo, EEPROM).
Código de falha recebido do banco de dados
de parâmetros; consulte o documento WHAT
38295 para obter detalhes.
Endereço do registrador com o qual o último
erro ocorreu; consulte WHAT 38296 para obter
detalhes.
Sub-índice do parâmetro a ser acessado.
Consulte WHAT 38297 para obter detalhes.
Parâmetro 0-01 Idioma (Registrador do Modbus
= 10 número de parâmetro)
Espaço de 20 bytes reservado para o parâmetro
no mapa Modbus.
Parâmetro 0-02 Unidade da Veloc. do Motor
Espaço de 20 bytes reservado para o parâmetro
no mapa Modbus.
Parâmetro 0-03 Denições Regionais
Espaço de 20 bytes reservado para o parâmetro
no mapa Modbus.
Veloc. do Motor
Regionais
–
–
–
Gravação
leitura
leitura
Gravação
do acesso ao
parâmetro
Dependente
do acesso ao
parâmetro
Dependente
do acesso ao
parâmetro
Tabela 5.18 Endereço/Registradores
1) O valor escrito no telegrama Modbus RTU deve ser 1 ou menor que o número do registrador. Por exemplo, leia o Registrador do Modbus 1
escrevendo o valor 0 no telegrama.
78 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 81

Instalação e setup do RS485 Guia de Design
5.8.9 Como controlar o Conversor de
Frequência
Esta seção descreve os códigos que podem ser usados nos
campos de função e de dados de um telegrama do
Modbus RTU.
5.8.10 Códigos de função suportados pelo
Modbus RTU
O Modbus RTU suporta o uso dos seguintes códigos de
função no campo de função de um telegrama:
Função Código da função (hex)
Ler bobinas 1
Ler registradores de retenção 3
Gravar bobina única 5
Gravar registrador único 6
Gravar bobinas múltiplas F
Gravar registradores múltiplos 10
Ler o contador de evento de
comunicação.
Relatar ID do escravo 11
Tabela 5.19 Códigos de função
Função Código
de função
Diagnóstico 8 1 Reiniciar a comunicação.
Código da
sub-função
2 Retornar o registrador de
10 Limpar os contadores e o
11 Retornar o contador de
12 Retornar o contador de
13 Retornar ao contador de
14 Retornar o contador de
B
Sub-função
diagnóstico.
registrador de
diagnóstico.
mensagem do
barramento.
erros de comunicação do
barramento.
erros do escravo.
mensagem do escravo.
Códig
o
1
2
3
4
Tabela 5.21 Códigos de exceção do Modbus
5.9
Nome Signicado
O código de função recebido na consulta
não é uma ação permitida para o servidor
(ou escravo). Isso pode ser porque o
código de função só é aplicável a
dispositivos mais recentes e não foi
Função
inválida
Endereço de
dados
inválido
Valor de
dados
inválido
Falha do
dispositivo
escravo
implementado na unidade selecionada.
Também também pode indicar que o
servidor (ou escravo) está no estado
errado para processar uma solicitação
deste tipo, por exemplo porque não está
congurado e está sendo solicitado a
retornar os valores do registro.
O endereço dos dados recebido na
consulta não é um endereço permitido
para o servidor (ou escravo). Mais especi-
camente, a combinação do número de
referência e o comprimento de transferência não é válido. Para um controlador
com 100 registros, uma solicitação com
deslocamento 96 e comprimento 4 é
bem-sucedida, enquanto uma solicitação
com deslocamento 96 e comprimento 5
gera uma exceção 02.
Um valor contido no campo de dados da
consulta não é um valor permitido para o
servidor (ou escravo). Isto indica uma
falha na estrutura do restante de um
pedido complexo, como o do
comprimento implícito estar incorreto. Isso
NÃO signica que um item de dados
enviado para armazenamento em um
registrador tenha um valor fora da
expectativa do programa de aplicação,
uma vez que o protocolo Modbus não
está ciente da signicância de qualquer
valor de qualquer registro.
Ocorreu um erro irrecuperável enquanto o
servidor (ou escravo) tentava executar a
ação requisitada.
Como Acessar os Parâmetros
5 5
Tabela 5.20 Códigos de função
5.8.11 Códigos de exceção do Modbus
5.9.1 Tratamento de parâmetros
O PNU (número do parâmetro) é traduzido a partir do
endereço do registro contido na mensagem de leitura ou
Para obter uma explicação completa da estrutura de uma
resposta de código de exceção, consulte
capétulo 5.8.5 Campo de função.
gravação Modbus. O número do parâmetro é traduzido
para Modbus como (10 x número do parâmetro) decimal.
Exemplo: Leitura parâmetro 3-12 Catch up/slow Down Value
(16 bits): O registrador de retenção 3120 contém os valores
dos parâmetros. Um valor de 1352 (decimal) signica que
o parâmetro está denido como 12,52%.
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 79
Page 82

Instalação e setup do RS485
VLT® AutomationDrive FC 360
Leitura parâmetro 3-14 Preset Relative Reference (32 bits): Os
registradores de retenção 3410 e 3411 mantêm os valores
dos parâmetros. Um valor de 11300 (decimal) signica que
o parâmetro está denido como 1113,00.
Para obter informações sobre os parâmetros, tamanho e
índice de conversão, consulte o Guia de Programação.
5.9.2 Armazenagem de dados
A bobina 65 decimal determina se os dados gravados no
55
conversor de frequência são armazenados em EEPROM e
RAM (bobina 65 = 1) ou somente na RAM (bobina 65=0).
Tipo de dados não padronizados
Os tipo de dados não padronizados são strings de texto, e
são armazenados como registradores 4x (40001–4FFFF). Os
parâmetros são lidos usando a função 03 hex de leitura de
registradores de retenção e gravados usando a função 10
hex de vários registradores predenidos. Os tamanhos
legíveis variam de 1 registro (2 caracteres) até 10 registros
(20 caracteres).
5.10 Exemplos
Os exemplos a seguir mostram diversos comandos do
Modbus RTU.
5.10.1 Ler o status da bobina (01 hex)
5.9.3 IND (Índice)
Descrição
Alguns parâmetros no conversor de frequência são
parâmetros de matriz, por exemplo parâmetro 3-10 Preset
Reference. Como o Modbus não suporta matrizes nos
registradores de retenção, o conversor de frequência
reservou o registrador de retenção 9 como ponteiro para a
matriz. Antes de ler ou gravar um parâmetro de matriz,
programe o registrador de retenção 9. Denir o registrador
de retenção com o valor 2 faz com que todos os seguintes
parâmetros de matriz de leitura/gravação sejam do índice
2.
Esta função lê o status ON/OFF (Ligado/Desligado) das
saídas discretas (bobinas) no conversor de frequência.
Broadcast nunca é suportado para leituras.
Consulta
O telegrama de consulta especica a bobina de início e a
quantidade de bobinas a serem lidas. Os endereços das
bobinas começam em 0, ou seja, a bobina 33 é
endereçada como 32.
Exemplo de um pedido para ler as bobinas 33–48 (status
word) do dispositivo escravo 01.
5.9.4 Blocos de texto
Os parâmetros armazenados como strings de texto são
acessados da mesma forma que os outros parâmetros. O
tamanho máximo do bloco de texto é de 20 caracteres. Se
uma solicitação de leitura de um parâmetro for para mais
caracteres do que o parâmetro armazena, a resposta será
truncada. Se a solicitação de leitura de um parâmetro for
para menos caracteres do que o parâmetro armazena, a
resposta é preenchida.
5.9.5 Fator de conversão
Um valor de parâmetro pode ser transferido somente
como um número inteiro. Para transferir decimais, use um
fator de conversão.
5.9.6 Valores de parâmetros
Tipo de dados padrão
Os tipos de dados padrão são int 16, int 32, uint 8, uint 16
e uint 32. Eles são armazenados como registradores 4x
(40001–4FFFF). Os parâmetros são lidos usando a função
03 hex ler registradores de retenção. Os parâmetros são
gravados usando a função 6 hexadecimal de registro único
predenido para 1 registro (16 bits), e a função 10
hexadecimal de vários registros predenidos para 2
registros (32 bits). Os tamanhos legíveis variam desde 1
registrador (16 bits) a 10 registradores (20 caracteres).
Nome do campo Exemplo (hex)
Endereço do escravo 01 (endereço do conversor de
frequência)
Função 01 (ler bobinas)
Endereço inicial HI 00
Endereço inicial LO 20 (decimal 32) bobina 33
Número de pontos HI 00
Número de pontos LO 10 (decimal 16)
Vericação de erro (CRC) –
Tabela 5.22 Consulta
Resposta
O status da bobina no telegrama de resposta é
empacotado como 1 bobina por bit do campo de dados. O
status é indicado como: 1 = ON (ligado); 0 = OFF
(Desligado). O lsb do primeiro byte de dados contém a
bobina endereçada na consulta. As outras bobinas seguem
para o nal de ordem alta deste byte, e da ordem baixa
para a ordem alta nos bytes subsequentes.
Se a quantidade de bobina retornada não for um múltiplo
de 8, os bits restantes no byte de dados nal serão
preenchidos com valores 0 (em direção ao nal de maior
ordem do byte). O campo de contagem de bytes especica
o número de bytes completos de dados.
80 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 83

Instalação e setup do RS485 Guia de Design
Nome do campo Exemplo (hex)
Endereço do escravo 01 (endereço do conversor de
frequência)
Função 01 (ler bobinas)
Contagem de bytes 02 (2 bytes de dados)
Dados (bobinas 40–33) 07
Dados (bobinas 48–41) 06 (STW = 0607hex)
Vericação de erro (CRC) –
Tabela 5.23 Resposta
AVISO!
Bobinas e registradores são endereçados explicitamente
com um deslocamento de -1 no Modbus.
Por exemplo, a bobina 33 é endereçada como bobina 32.
5.10.2 Forçar/gravar bobina única (05 hex)
Descrição
Esta função força a bobina para ON (ligado) ou OFF
(desligado). Quando for broadcast, a função força as
mesmas referências de bobina em todos os escravos
anexados.
Consulta
O telegrama de consulta especica a bobina 65 (controle
de gravação do parâmetro) a ser forçada. Os endereços das
bobinas começam em 0, ou seja, a bobina 65 é
endereçada como 64. Forçar dados = 00 00 hex (OFF) ou
FF 00 hex (ON).
Nome do campo Exemplo (hex)
Endereço do escravo 01 (endereço do conversor de
frequência)
Função 05 (gravar bobina única)
Endereço de bobina HI 00
Endereço de bobina LO 40 (64 decimal) Bobina 65
Forçar dados HI FF
Forçar dados LO 00 (FF 00 = ON)
Vericação de erro (CRC) –
Tabela 5.24 Consulta
Resposta
A resposta normal é um eco da consulta, devolvida depois
que o estado da bobina foi forçado.
Nome do campo Exemplo (hex)
Endereço do escravo 01
Função 05
Forçar dados HI FF
Forçar dados LO 00
Quantidade de bobinas HI 00
Quantidade de bobinas LO 01
Vericação de erro (CRC) –
5.10.3 Forçar/gravar múltiplas bobinas (0F
hex)
Descrição
Esta função força cada bobina em uma sequência de
bobinas para ligado ou desligado. Quando for broadcast, a
função força as mesmas referências de bobina em todos os
escravos anexados.
Consulta
O telegrama de consulta especica as bobinas 17-32
(setpoint de velocidade) a serem forçadas.
AVISO!
Os endereços das bobinas começam em 0, ou seja, a
bobina 17 é endereçada como 16.
Nome do campo Exemplo (hex)
Endereço do escravo
Função 0F (gravar bobinas múltiplas)
Endereço de bobina HI 00
Endereço de bobina LO 10 (endereço de bobina 17)
Quantidade de bobinas HI 00
Quantidade de bobinas LO 10 (16 bobinas)
Contagem de bytes 02
Forçar dados HI
(bobinas 8–1)
Forçar dados LO
(bobinas 16–9)
Vericação de erro (CRC) –
Tabela 5.26 Consulta
Resposta
A resposta normal retorna o endereço do escravo, o código
da função, o endereço inicial e a quantidade de bobinas
forçadas.
Nome do campo Exemplo (hex)
Endereço do escravo 01 (endereço do conversor de
Função 0F (gravar bobinas múltiplas)
Endereço de bobina HI 00
Endereço de bobina LO 10 (endereço de bobina 17)
Quantidade de bobinas HI 00
Quantidade de bobinas LO 10 (16 bobinas)
Vericação de erro (CRC) –
Tabela 5.27 Resposta
01 (endereço do conversor de
frequência)
20
00 (referência = 2000 hex)
frequência)
5 5
Tabela 5.25 Resposta
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 81
Page 84

Instalação e setup do RS485
VLT® AutomationDrive FC 360
5.10.4 Ler registradores de retenção (03
hex)
Descrição
Esta função lê o conteúdo dos registradores de retenção
no escravo.
Consulta
O telegrama de consulta especica o registrador de início e
a quantidade de registradores a serem lidos. Os endereços
de registro começam em 0, isto é, os registros 1 a 4 são
endereçados como 0 a 3.
55
Exemplo: Ler parâmetro 3-03 Referência Máxima, registrador
5.10.5 Registrador único predenido (06
hex)
Descrição
Esta função predene um valor em um registrador de
retenção único.
Consulta
O telegrama de consulta especica a referência do
registrador a ser predenida. Os endereços de registro
começam em 0, isto é, o registro 1 é endereçado como 0.
Exemplo: Gravar em parâmetro 1-00 Modo Conguração,
registrador 1000.
03030.
Nome do campo Exemplo (hex)
Nome do campo Exemplo (hex)
Endereço do escravo 01
Função 03 (Ler registradores de retenção)
Endereço inicial HI 0B (Endereço do registrador 3029)
Endereço inicial LO D5 (Endereço do registrador 3029)
Número de pontos HI 00
02 – (parâmetro 3-03 Referência Máxima
Número de pontos LO
Vericação de erro
(CRC)
Tabela 5.28 Consulta
tem 32 bits de comprimento, isto é, 2
registradores)
–
Resposta
Os dados do registrador no telegrama de resposta são
empacotados como 2 bytes por registrador, com o
conteúdo binário justicado à direita dentro de cada byte.
Para cada registro, o primeiro byte contém os bits de
ordem alta e o segundo contém os bits de ordem baixa.
Exemplo: hex 000088B8 = 35.000 = 35 Hz.
Nome do campo Exemplo (hex)
Endereço do escravo 01
Função 03
Contagem de bytes 04
Dados HI (registrador 3030) 00
Dados LO (registrador 3030) 16
Dados HI (registrador 3031) E3
Dados LO (registrador 3031) 60
Vericação de erro (CRC) –
Tabela 5.29 Resposta
Endereço do escravo 01
Função 06
Endereço do registrador HI 03 (endereço do registrador 999)
Endereço do registrador LO E7 (endereço do registrador 999)
Dados HI predenidos 00
Dados LO predenidos 01
Vericação de erro (CRC) –
Tabela 5.30 Consulta
Resposta
A resposta normal é um eco da consulta, devolvida depois
que o conteúdo do registrador foi passado.
Nome do campo Exemplo (hex)
Endereço do escravo 01
Função 06
Endereço do registrador HI 03
Endereço do registrador LO E7
Dados HI predenidos 00
Dados LO predenidos 01
Vericação de erro (CRC) –
Tabela 5.31 Resposta
5.10.6 Vários registros predenidos (10 hex)
Descrição
Esta função predene valores em uma sequência de
registradores de retenção.
Consulta
O telegrama de consulta especica as referências do
registrador a serem predenidas. Os endereços de registro
começam em 0, isto é, o registro 1 é endereçado como 0.
Exemplo de uma solicitação para predenir 2 registradores
(programar parâmetro 1-24 Corrente do Motor para 738
(7,38 A)):
82 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 85

Speed ref.CTW
Master-follower
130BA274.11
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bit
no.:
Instalação e setup do RS485 Guia de Design
Nome do campo Exemplo (hex)
Endereço do escravo 01
Função 10
Endereço inicial HI 04
Endereço inicial LO 07
Número de registradores HI 00
Número de registradores LO 02
Contagem de bytes 04
Gravar dados HI (registrador 4: 1049) 00
Gravar dados LO (registrador 4: 1049) 00
Gravar dados HI (registrador 4: 1050) 02
Gravar dados LO (registrador 4: 1050) E2
Vericação de erro (CRC) –
Tabela 5.32 Consulta
Resposta
A resposta normal retorna o endereço do escravo, o código
da função, endereço inicial e a quantidade de registradores
predenidos.
Nome do campo Exemplo (hex)
Endereço do escravo 01
Função 10
Endereço inicial HI 04
Endereço inicial LO 19
Número de registradores HI 00
Número de registradores LO 02
Vericação de erro (CRC) –
Tabela 5.33 Resposta
Perl de Controle do FC da Danfoss
5.11
5.11.1 Palavra de controle de acordo com o
perl do FC (Protocolo 8–10 = Perl
do FC)
Bit Valor do bit = 0 Valor do bit = 1
00 Valor de referência Seleção externa lsb
01 Valor de referência Seleção externa msb
02 Freio CC Rampa
03 Parada por inércia Sem parada por inércia
04 Parada rápida Rampa
Manter a frequência
05
de saída
06 Parada de rampa Partida
07 Sem função Reinicializar
08 Sem função Jog
09 Rampa 1 Rampa 2
10 Dados inválidos Dados válidos
11 Relé 01 aberto Relé 01 ativo
12 Relé 02 aberto Relé 02 ativo
13 Setup de parâmetro Seleção do lsb
15 Sem função Reversão
Tabela 5.34 Palavra de controle de acordo com o perl do FC
Utilizar a rampa de velocidade
Explicação dos bits de controle
Bits 00/01
Os bits 00 e 01 são usados para selecionar entre os 4
valores de referência, os quais são pré-programados em
parâmetro 3-10 Referência Predenida de acordo com
Tabela 5.35.
Valor de
referência
programado
1
2
3
4
Parâmetro
Parâmetro 3-10 Referência
Predenida [0]
Parâmetro 3-10 Referência
Predenida [1]
Parâmetro 3-10 Referência
Predenida [2]
Parâmetro 3-10 Referência
Predenida [3]
Bit01Bit
0 0
0 1
1 0
1 1
5 5
00
Ilustração 5.13 Palavra de controle de acordo com o perl do
FC
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 83
Tabela 5.35 Bits de controle
AVISO!
Em parâmetro 8-56 Seleção da Referência Pré-denida,
dena como os bits 00/01 se comportam com a função
correspondente nas entradas digitais.
Bit 02, Freio CC
Bit 02 = 0: Leva à frenagem CC e parada. Dena a corrente
e a duração de frenagem no parâmetro 2-01 Corrente de
Freio CC e no parâmetro 2-02 Tempo de Frenagem CC.
Bit 02 = 1: Leva a rampa.
Bit 03, Parada por inércia
Bit 03 = 0: O conversor de frequência libera imediatamente
o motor (os transistores de saída são desligados) e ele para
por inércia.
Bit 03 = 1: Se as outras condições de partida forem
atendidas, o conversor de frequência acionará o motor.
Page 86

Output frequencySTW
Bit
Slave-master
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BA273.12
Instalação e setup do RS485
VLT® AutomationDrive FC 360
Em parâmetro 8-50 Seleção de Parada por Inércia, dena
como o bit 03 se comporta com a função correspondente
em uma entrada digital.
Bit 04, Parada rápida
Bit 04 = 0: Desacelera a velocidade do motor até a parada
(programado em parâmetro 3-81 Tempo de Rampa da
Parada Rápida).
Bit 05, Frequência de saída em espera
Bit 05 = 0: A frequência de saída atual (em Hz) congela.
Altere a frequência de saída congelada apenas com as
entradas digitais programadas para [21] Acelerar e [22]
55
Desacelerar (parâmetro 5-10 Terminal 18 Entrada Digital a
parâmetro 5-13 Terminal 29, Entrada Digital).
AVISO!
Se congelar frequência de saída estiver ativo, o conversor
de frequência só pode ser parado de uma das seguintes
maneiras:
Bit 03 parada por inércia
•
Bit 02 freio CC.
•
Entrada digital programada para [5]
•
FrenagemCC,reverso, [2] Paradp/inérc,reverso ou
[3] Parada por inércia e reinicio, inverso
(parâmetro 5-10 Terminal 18 Entrada Digital a
parâmetro 5-13 Terminal 29, Entrada Digital).
Bit 10, Dados inválidos/Dados válidos
Informa o conversor de frequência se a palavra de controle
deve ser utilizada ou ignorada.
Bit 10 = 0: A palavra de controle é ignorada.
Bit 10 = 1: A palavra de controle é utilizada. Esta função é
importante porque o telegrama sempre contém a palavra
de controle, qualquer que seja o telegrama. Se a palavra
de controle não for necessária ao atualizar ou ler o
parâmetro, desligue-a.
Bit 11, Relé 01
Bit 11 = 0: O relé não está ativo.
Bit 11 = 1: Relé 01 ativado se [36] Bit 11 Control word for
selecionado em parâmetro 5-40 Função do Relé.
Bit 12, relé 02
Bit 12 = 0: Relé 02 não está ativado.
Bit 12 = 1: Relé 02 é ativado se [37] Control word bit 12 for
selecionado em parâmetro 5-40 Função do Relé.
Bit 13, Seleção de setup
Use o bit 13 para selecionar entre os 2 setups de menu,
conforme Tabela 5.36.
Setup Bit 13
1 0
2 1
Tabela 5.36 Setups de menu
Bit 06, Parada/partida de rampa
Bit 06 = 0: Causa uma parada e desacelera o motor até
parar por meio do parâmetro de desaceleração
selecionado.
Bit 06 = 1: Se as outras condições de partida forem
atendidas, o bit 06 permite que o conversor de frequência
inicie o motor.
Em parâmetro 8-53 Seleção da Partida, dena como o bit 06
parada/partida de rampa se comporta com a função
correspondente em uma entrada digital.
Bit 07, Reset
Bit 07 = 0: Sem reset.
Bit 07 = 1: Reinicializa um desarme. O reset é ativado na
borda do sinal principal, ou seja, na transição do 0 lógico
para o 1 lógico.
Bit 08, Jog
Bit 08 = 1: Parâmetro 3-11 Velocidade de Jog [Hz] determina
a frequência de saída.
Bit 09, Seleção de rampa 1/2
Bit 09 = 0: A rampa 1 está ativa (parâmetro 3-41 Tempo de
Aceleração da Rampa 1 a parâmetro 3-42 Tempo de Desaceleração da Rampa 1).
Bit 09 = 1: A rampa 2 (parâmetro 3-51 Tempo de Aceleração
da Rampa 2 a parâmetro 3-52 Tempo de Desaceleração da
Rampa 2) está ativa.
A função só é possível quando [9] Setups múltiplos for
selecionado em parâmetro 0-10 Setup Ativo.
Para denir como o bit 13 se comporta com a função
correspondente nas entradas digitais, use
parâmetro 8-55 Seleção do Set-up.
Bit 15 Reversão
Bit 15 = 0: Sem reversão.
Bit 15 = 1: Reversão. Na conguração padrão, a reversão é
programada como digital no par. parâmetro 8-54 Seleção da
Reversão. O bit 15 causa a reversão somente quando a
comunicação serial [2] Lógica OU ou [3] Lógica E for
selecionada.
5.11.2 Status word de acordo com o perl
do FC (STW)
Programe parâmetro 8-30 Protocol para [0] FC.
Ilustração 5.14 Status Word
84 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 87

Instalação e setup do RS485 Guia de Design
Bit Bit=0 Bit=1
00 Controle não preparado Controle pronto
01 O conversor de frequência
não está pronto para
funcionar
02 Parada por inércia Ativo
03 Sem erro Desarme
04 Sem erro Erro (sem desarme)
05 Reservado –
06 Sem erro Bloqueio por desarme
07 Sem advertência Advertência
08
Velocidade≠referência
09 Operação local Controle do barramento
10 Fora do limite de
frequência
11 Sem operação Em funcionamento
12 Conversor de frequênciaOKParado, partida automática
13 Tensão OK Tensão excedida
14 Torque OK Torque excedido
15 Temporizador OK Temporizador expirado
Tabela 5.37 Status word de acordo com o perl do FC
O conversor de frequência
está pronto
Velocidade=referência
Limite de frequência OK
Explicação dos bits de status
Bit 00, Controle não pronto/pronto
Bit 00=0: O conversor de frequência desarma.
Bit 00=1: Os controles do conversor de frequência estão
prontos, mas o componente de potência não recebe
necessariamente nenhuma alimentação (se houver uma
alimentação de 24 V externa para os controles).
Bit 01, Conversor de frequência pronto
Bit 01=0: O conversor de frequência não está pronto.
Bit 01=1: O conversor de frequência está pronto para
operação, mas o comando de parada por inércia está
ativado através das entradas digitais ou por meio da
comunicação serial.
Bit 02, Parada por inércia
Bit 02=0: O conversor de frequência libera o motor.
Bit 02=1: O conversor de frequência dá partida no motor
com um comando de partida.
Bit 03, Sem erro/desarme
Bit 03=0: O conversor de frequência não está no modo de
defeito.
Bit 03=1: O conversor de frequência desarma. Para
restabelecer a operação, pressione [Reset].
Bit 04, Sem erro/com erro (sem desarme)
Bit 04=0: O conversor de frequência não está no modo de
defeito.
Bit 04=1: O conversor de frequência exibe um erro mas
não desarma.
Bit 05, Não usado
O bit 05 não é usado na palavra de status.
Bit 06, Sem erro/bloqueio por desarme
Bit 06=0: O conversor de frequência não está no modo de
defeito.
Bit 06=1: O conversor de frequência está desarmado e
bloqueado.
Bit 07, Sem advertência/com advertência
Bit 07=0: Não há advertências.
Bit 07=1: Signica que ocorreu uma advertência.
Bit 08, Referência de velocidade/velocidade=referência
Bit 08=0: O motor funciona, mas a velocidade atual é
diferente da referência de velocidade predenida. Pode
acontecer quando a velocidade aumenta/diminui durante a
partida/parada.
Bit 08=1: A velocidade do motor corresponde à referência
de velocidade predenida.
Bit 09, Operação local/controle do barramento
Bit 09=0: [O/Reset] é ativado na unidade de controle ou
[2] Local em parâmetro 3-13 Tipo de Referência é
selecionado. Não é possível controlar o conversor de
frequência via comunicação serial.
Bit 09=1: É possível controlar o conversor de frequência via
eldbus/comunicação serial.
Bit 10, Fora do limite de frequência
Bit 10=0: A frequência de saída alcançou o valor em
parâmetro 4-12 Lim. Inferior da Veloc. do Motor [Hz] ou
parâmetro 4-14 Lim. Superior da Veloc do Motor [Hz].
Bit 10=1: A frequência de saída está dentro dos limites
denidos.
Bit 11, Fora de funcionamento/em funcionamento
Bit 11=0: O motor não está funcionando.
Bit 11=1: O conversor de frequência tem um sinal de
partida sem parada por inércia.
Bit 12, Conversor de frequência OK/parado, partida
automática
Bit 12=0: Não há superaquecimento temporário no
conversor de frequência.
Bit 12=1: O conversor de frequência para devido ao
superaquecimento, mas a unidade não desarma e retoma a
operação assim que o superaquecimento se normalizar.
Bit 13, Tensão OK/limite excedido
Bit 13=0: Não há advertências de tensão.
Bit 13=1: A tensão CC no barramento CC do conversor de
frequência está muito baixa ou muito alta.
Bit 14, Torque OK/limite excedido
Bit 14=0: A corrente do motor está inferior ao limite de
corrente selecionado em parâmetro 4-18 Limite de Corrente.
Bit 14=1: O limite de corrente em parâmetro 4-18 Limite de
Corrente está excedido.
Bit 15, Temporizador OK/limite excedido
Bit 15=0: Os temporizadores para a proteção térmica do
motor e a proteção de térmica do conversor de frequência
não ultrapassaram os 100%.
Bit 15=1: 1 dos temporizadores excede 100%.
5 5
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 85
Page 88

Actual output
frequency
STW
Follower-slave
Speed referenceCTW
Master-slave
16bit
130BA276.11
Reverse Forward
Par.3-00 set to
(1) -max- +max
Max reference Max reference
Par.3-00 set to
(0) min-max
Max reference
Forward
Min reference
100%
(4000hex)
-100%
(C000hex)
0%
(0hex)
Par.3-03 0 Par.3-03
Par.3-03
(4000hex)(0hex)
0% 100%
Par.3-02
130BA277.10
Instalação e setup do RS485
VLT® AutomationDrive FC 360
5.11.3 Valor de referência da velocidade do barramento
O valor de referência de velocidade é transmitido para o conversor de frequência em um valor relativo em %. O valor é
transmitido no formato de uma palavra de 16 bits. O valor inteiro 16384 (4000 hex) corresponde a 100%. Os números
negativos são formatados usando o complemento de 2. A frequência de saída real (MAV) é escalonada da mesma maneira
que a referência do barramento.
55
Ilustração 5.15 Frequência de saída real (MAV)
A referência e a MAV são escalonadas como a seguir:
Ilustração 5.16 Referência e MAV
86 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 89

130BF817.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
12
18
19
27
29
32
33
50
53
54
55
42
A OUT
D IN
D IN
31
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
31
18
19
27
29
32
33
50
53
54
55
42
0 ~10 V
+
-
FC
130BF818.10
D IN
130BF819.10
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
31
18
19
27
29
32
33
50
53
54
55
42
4 - 20mA
+
-
FC
D IN
Exemplos de aplicações Guia de Design
6 Exemplos de aplicações
6.1 Introdução
Os exemplos nesta seção têm a nalidade de referência
rápida para aplicações comuns.
6.1.2 Velocidade
Parâmetros
Função Conguração
Parâmetro 6-10
A programação do parâmetro são os valores
•
padrão regionais, a menos que indicado de outro
modo (selecionados em parâmetro 0-03 Denições
Regionais).
Os parâmetros associados aos terminais e suas
•
congurações estão mostrados ao lado dos
desenhos
As congurações de chaveamento necessárias
•
para os terminais analógicos 53 ou 54 também
são mostrados.
6.1.1 AMA
Parâmetros
Função Conguração
Parâmetro 1-29
Automatic
Motor
Adaptation
(AMA)
Parâmetro 5-12
Terminal 27
Digital Input
*=Valor padrão
Notas/comentários: Programe o
grupo do parâmetro 1-2* Dados
do motor de acordo com as
especicações do motor.
[1] Ativar AMA
completa
*[2] Paradp/
inérc,reverso
Tabela 6.2 Referência de Velocidade Analógica (Tensão)
Parâmetros
AVISO!
Se os terminais 12 e 27
não estiverem conectados,
programe
parâmetro 5-12 Terminal 27,
Tabela 6.1 AMA com T27 conectado
Entrada Digital para [0] Sem
operação.
Terminal 53
*0,07 V
Tensão Baixa
Parâmetro 6-11
Terminal 53
*10 V
Tensão Alta
Parâmetro 6-14
Terminal 53 Ref./
Feedb. Valor
*0
Baixo
Parâmetro 6-15
Terminal 53 Ref./
50 Hz
Feedb. Valor Alto
Parâmetro 6-19
Modo do
*[1] Tensão
terminal 53
*=Valor padrão
Notas/comentários:
Função Conguração
Parâmetro 6-22
Terminal 54
*4 mA
Corrente Baixa
Parâmetro 6-23
Terminal 54
*20 mA
Corrente Alta
Parâmetro 6-24
Terminal 54 Ref./
Feedb. Valor
*0
Baixo
Parâmetro 6-25
Terminal 54 Ref./
50 Hz
Feedb. Valor Alto
Parâmetro 6-29
Modo do
[0] Corrente
terminal 54
*=Valor padrão
Notas/comentários:
6
6
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 87
Tabela 6.3 Referência de Velocidade Analógica (Corrente)
Page 90

130BF820.10
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
31
18
19
27
29
32
33
50
53
54
55
42
≈ 5kΩ
FC
D IN
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10
V
A IN
A IN
COM
A OUT
12
31
18
19
27
29
32
33
50
53
54
55
42
130BF821.10
D IN
130BB840.12
Speed
Reference
Start (18)
Freeze ref (27)
Speed up (29)
Speed down (32)
130BF822.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
19
18
27
29
32
33
50
53
54
55
42
31
D IN
6
Exemplos de aplicações
VLT® AutomationDrive FC 360
Parâmetros
Função Conguração
Parâmetro 6-10
Terminal 53
*0,07 V
Tensão Baixa
Parâmetro 6-11
Terminal 53
*10 V
Tensão Alta
Parâmetro 6-14
Terminal 53 Ref./
Feedb. Valor
*0
Ilustração 6.1 Aceleração/desaceleração
Baixo
Parâmetro 6-15
Terminal 53 Ref./
Feedb. Valor Alto
Parâmetro 6-19
Modo do
terminal 53
*=Valor padrão
Notas/comentários:
50 Hz
*[1] Tensão
6.1.3 Partida/Parada
Parâmetros
Função Conguração
Parâmetro 5-10
Terminal 18
*[8] Partida
Entrada Digital
Parâmetro 5-11
Terminal 19
*[10] Reversão
Digital Input
Tabela 6.4 Referência de Velocidade (utilizando um
Potenciômetro Manual)
Parâmetro 5-12
Terminal 27,
[0] Sem
operação
Entrada Digital
Parâmetros
Função Conguração
Parâmetro 5-10
Terminal 18
*[8] Partida
Entrada Digital
Parâmetro 5-12
Terminal 27,
[19] Congelar
referência
Entrada Digital
Parâmetro 5-13
[21] Aceleração
Terminal 29
Digital Input
Parâmetro 5-14
Terminal 32
[22] Desace-
leração
Digital Input
*=Valor padrão
Notas/comentários:
Parâmetro 5-14
Terminal 32
Digital Input
Parâmetro 5-15
Terminal 33
Digital Input
Parâmetro 3-10
Preset Reference
Referência
predenida 0
Referência
predenida 1
Referência
predenida 2
Referência
predenida 3
[16] Ref
predenida bit
0
[17] Ref
predenida bit
1
25%
50%
75%
100%
*=Valor padrão
Notas/comentários:
Tabela 6.5 Aceleração/desaceleração
Tabela 6.6 Partida/parada com reversão e 4 velocidades
predenidas
88 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 91

130BF823.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
31
18
19
27
29
32
33
50
53
54
55
42
D IN
130BF824.10
+24 V
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
31
18
19
27
29
32
33
50
53
54
55
42
FC
D IN
D IN
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
D IN
+10
V
A IN
A IN
COM
A OUT
R
1
R
2
12
18
19
27
29
32
33
315053
54
55
42
01
02
03
04
05
06
Exemplos de aplicações Guia de Design
6.1.4 Reset do Alarme Externo
Parâmetros
Função Conguração
Parâmetros
Função Conguração
Parâmetro 5-11
Terminal 19,
[1] Reinicializar
Entrada Digital
*=Valor padrão
Notas/comentários:
Parâmetro 4-30
Motor Feedback
Loss Function
Parâmetro 4-31
Motor Feedback
Speed Error
Parâmetro 4-32
Motor Feedback
[1]
Advertência
100
5 s
Loss Timeout
Parâmetro 7-00
Speed PID
[2] MCB 102
Feedback Source
Parâmetro 17-11
Resolution (PPR)
Parâmetro 13-00
Modo do SLC
Parâmetro 13-01
Start Event
Parâmetro 13-02
Stop Event
Parâmetro 13-10
Tabela 6.7 Reset do Alarme Externo
Comparator
Operand
6.1.5 Termistor do motor
Parâmetro 13-11
Comparator
AVISO!
Para atender os requisitos de isolamento PELV, use
isolamento reforçado ou duplo nos termistores.
Parâmetros
Função Conguração
Parâmetro 1-90
Proteção
Térmica do
Motor
Parâmetro 1-93
Fonte do
Termistor
Parâmetro 6-19
Modo do
terminal 53
* = Valor padrão
Notas/comentários:
Se somente uma advertência
for necessária, programe
parâmetro 1-90 Proteção Térmica
do Motor para [1] Advrtnc d
Termistor.
[2] Desarme
do termistor
[1] Entrada
analógica 53
*[1] Tensão
Operator
Parâmetro 13-12
Valor do
Comparador
Parâmetro 13-51
SL Controller
Event
Parâmetro 13-52
SL Controller
Action
Parâmetro 5-40
Function Relay
*=Valor padrão
1024*
[1] Ligado
[19]
Advertência
[44] Tecla
Reset
[21] Número
de
Advertência
[1] ≈*
90
[22]
Comparador 0
[32] Denir
saída digital A
baixa
[80] Saída
digitl A do
SLC
6
6
Tabela 6.8 Termistor do motor
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 89
Page 92

130BD366.12
+24 V DC
A
B
GND
12 18 322719 29 33 20
B
A
B
A
130BA646.10
SH (Sentido Horario)
SAH (Sentido Anti-Horario)
6
Exemplos de aplicações
Parâmetros
Função Conguração
VLT® AutomationDrive FC 360
Notas/comentários:
Se o limite no monitor de
feedback for excedido, a
advertência 90 monitor de
feedback será emitida. O SLC
monitora a advertência 90
monitor de feedback. Se a
advertência 90 monitor de
feedback for verdadeira, o relé 1
será acionado.
O equipamento externo pode
indicar que é necessária
manutenção. Se o erro de
feedback for inferior ao limite
novamente dentro de 5 s, o
conversor de frequência
continuará e a advertência
desaparecerá. Mas o relé 1
persiste até [O/Reset] ser
pressionado.
Tabela 6.9 Usando SLC para programar um relé
6.1.6 Conexão do encoder
O objetivo desta orientação é facilitar o setup da conexão
do encoder do conversor de frequência. Antes de
congurar o encoder, as congurações básicas de um
sistema de controle de velocidade de malha fechada são
mostradas.
Ilustração 6.2 Encoder de 24 V ou 10–30 V
Ilustração 6.3 Encoder incremental de 24 V, comprimento
máximo do cabo 5 m (16,4 pés)
90 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 93

Exemplos de aplicações Guia de Design
6.1.7 Sentido do encoder
A ordem na qual os pulsos entram no conversor de
frequência determina a direção do encoder.
Sentido horário signica que o canal A está 90 graus
elétricos antes do canal B.
Sentido anti-horário signica que o canal B está 90 graus
elétricos antes de A.
O sentido é determinado olhando para a extremidade do
eixo.
6.1.8 Sistema de conversor de malha
fechada
Um sistema de conversor geralmente consiste em mais
elementos, como:
Motor.
•
Freio (caixa de engrenagem, freio mecânico).
•
Conversor de frequência.
•
Encoder como sistema de feedback.
•
Resistor de frenagem para freio dinâmico.
•
Transmissão.
•
Carga.
•
Aplicações que exigem controle de freio mecânico
geralmente precisam de um resistor de frenagem.
6
6
Ilustração 6.4 Programação básica para controle de velocidade
da malha fechada
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 91
Page 94

Índice
VLT® AutomationDrive FC 360
Índice
A
Abreviação........................................................................................... 0
Adaptação automática do motor...................................................... 7
AMA.............................................................................................................. 7
AMA com T27 conectado.................................................................. 87
Aterramento.................................................................................... 15, 17
B
Banda morta........................................................................................... 27
Banda morta em torno de 0............................................................. 27
Bobina....................................................................................................... 80
C
Cabo blindado....................................................................................... 15
Cabo de controle blindado............................................................... 19
Cabos de controle................................................................................ 19
Cartão de controle
Comunicação serial RS485............................................................ 59
Desempenho..................................................................................... 60
Saída +10 V CC.................................................................................. 59
Saída 24 V CC..................................................................................... 59
Catch-up/slow down........................................................................... 25
Chaveamento na saída....................................................................... 48
Ciclo de energização.............................................................................. 8
Ciclo útil intermitente............................................................................ 7
Circuito intermediário.................................................................. 48, 62
Classe de eciência energética........................................................ 60
Código de exceção do Modbus....................................................... 79
Código de função................................................................................. 79
Comandos do Modbus RTU.............................................................. 80
Compensação de escorregamento.................................................. 8
Comprimento de cabo....................................................................... 57
Comprimento do o............................................................................ 15
Comprimento do telegrama (LGE)................................................. 71
Comunicação do Modbus................................................................. 69
Comunicação serial......................................................................... 7, 19
Condição ambiente............................................................................. 60
Condição de funcionamento extrema.......................................... 48
Condições especiais............................................................................. 64
Conexão de energia............................................................................. 15
Conexão de rede................................................................................... 69
Conexão do terra.................................................................................. 15
Conguração de rede......................................................................... 75
Congelar frequência de saída............................................................. 6
Congelar referência.............................................................................. 25
Controle
Característica..................................................................................... 59
Fiação de controle........................................................................... 15
Palavra de controle.......................................................................... 83
Controle de corrente interna, modo VVC+.................................. 22
Controle de torque............................................................................... 20
Controle do PID de processo............................................................ 33
Controle do PID de velocidade........................................................ 30
Corrente de fuga................................................................................... 43
Corrente de saída.................................................................................. 59
Corrente nominal do motor................................................................ 6
Curto-circuito......................................................................................... 48
D
Delta aterrado........................................................................................ 16
Delta utuante....................................................................................... 16
Derating................................................................................................... 60
Desarme..................................................................................................... 8
Diretiva de baixa tensão..................................................................... 10
Diretiva de maquinaria....................................................................... 10
Diretiva EMC........................................................................................... 10
Diretiva, baixa tensão.......................................................................... 10
Diretiva, EMC.......................................................................................... 10
Diretiva, maquinaria............................................................................ 10
E
Eciência.................................................................................................. 61
Eciência energética............................................................. 54, 55, 56
EMC............................................................................................................ 60
Energia de entrada............................................................................... 15
Entrada
Potência de entrada........................................................................ 15
Entradas
Entrada analógica............................................................................... 7
Entrada digital................................................................................... 23
analógicas........................................................................................... 58
de pulso............................................................................................... 58
digitais.................................................................................................. 57
Equipamento opcional....................................................................... 17
Estruturas de controle
Malha aberta...................................................................................... 23
ETR......................................................................................................... 7, 48
consulte também Relé térmico eletrônico
F
Fator de potência.................................................................................. 16
Feedback analógico............................................................................. 26
Feedback de pulso............................................................................... 26
Fiação de controle................................................................................ 15
92 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 95

Índice Guia de Design
Filtro de RFI............................................................................................. 16
Fio de aterramento.............................................................................. 15
Freio
Potência de frenagem....................................................................... 7
Resistor de frenagem........................................................................ 7
Freio CC.................................................................................................... 83
Freio mecânico de retenção............................................................. 45
Função de frenagem........................................................................... 46
Fusível....................................................................................................... 61
I
IEC 61800-3...................................................................................... 16, 60
IND............................................................................................................. 72
Í
Índice (IND)............................................................................................. 72
I
Instruções para descarte.................................................................... 10
Introdução à emissão EMC................................................................ 39
Isolamento de ruído............................................................................ 15
J
Jog......................................................................................................... 6, 84
L
LCP.................................................................................................... 6, 7, 23
Ler a bobina............................................................................................ 80
Ler registradores de retenção (03 hex)......................................... 82
Limite de referência............................................................................. 25
M
Malha aberta.......................................................................................... 59
Malha de aterramento........................................................................ 19
Manter a frequência de saída........................................................... 84
Marcação CE........................................................................................... 10
Modbus RTU........................................................................................... 74
Momento de inércia............................................................................ 48
Motor
Cabo de motor........................................................................... 15, 16
Fases do motor.................................................................................. 48
Fiação do motor........................................................................ 15, 16
Proteção do motor.......................................................................... 60
Proteção térmica.............................................................................. 85
Proteção térmica do motor.......................................................... 48
Saída do motor................................................................................. 57
Sobretensão gerada pelo motor................................................ 48
N
Nível de tensão...................................................................................... 57
Número do parâmetro (PNU)........................................................... 72
P
Parada por inércia..................................................................... 6, 84, 85
PELV.................................................................................................... 59, 89
PELV, tensão extra baixa de proteção............................................ 43
Perl do FC
FC com Modbus RTU...................................................................... 70
Perl do FC......................................................................................... 83
Visão geral do protocolo............................................................... 70
PID de velocidade.......................................................................... 20, 22
Potência de frenagem......................................................................... 46
Potência do motor............................................................................... 15
Precaução de segurança....................................................................... 9
Precauções de EMC.............................................................................. 69
Programação do terminal.................................................................. 19
Proteção................................................................................................... 43
Proteção do circuito de derivação.................................................. 61
Proteção e recurso................................................................................ 60
R
RCD............................................................................................................... 8
Rede elétrica
Alimentação (L1, L2, L3)................................................................. 57
Alimentação de rede elétrica......................................................... 8
Dados da alimentação de rede elétrica................................... 54
Queda da rede elétrica................................................................... 48
Rede elétrica isolada............................................................................ 16
Redenir alarme.................................................................................... 23
Referência analógica........................................................................... 26
Referência de barramento................................................................. 26
Referência de pulso......................................................................... 7, 26
Referência de velocidade................................................................... 87
Referência predenida....................................................................... 26
Registradores......................................................................................... 80
Reinicializar............................................................................................. 60
Relé térmico eletrônico......................................................................... 7
consulte também ETR
Requisito de imunidade EMC........................................................... 41
Resistor de frenagem................................................................... 45, 52
Resultado do teste de EMC............................................................... 41
RS485
Instalação e setup do RS485........................................................ 68
RS485............................................................................................. 68, 70
Ruído acústico....................................................................................... 62
Ruído elétrico......................................................................................... 15
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 93
Page 96

Índice
VLT® AutomationDrive FC 360
S
Saída analógica..................................................................................... 58
Saída digital............................................................................................ 59
Saída do relé........................................................................................... 59
Saídas
Saída analógica................................................................................... 7
Seção transversal.................................................................................. 57
Setup do hardware.............................................................................. 69
Sinal de entrada.................................................................................... 19
Sobrecarga estática no modo VVC+.............................................. 48
Status word............................................................................................. 84
T
Teclas de controle do LCP.................................................................. 23
Tempo de descarga.............................................................................. 10
Tempo de subida.................................................................................. 62
Tensão de alimentação....................................................................... 59
Tensão do motor................................................................................... 62
Tensão induzida.................................................................................... 15
Termistor............................................................................................. 8, 89
Tipo de dados, suportado................................................................. 73
Torque
Característica do torque................................................................ 57
Torque de segurança............................................................................. 6
V
Vários conversores de frequência................................................... 16
Velocidade de sincronização do motor.......................................... 6
Velocidade nominal do motor........................................................... 6
Visão geral do Modbus RTU.............................................................. 74
VVC+..................................................................................................... 8, 22
94 Danfoss A/S © 03/2019 Todos os direitos reservados. MG06B528
Page 97

Índice Guia de Design
MG06B528 Danfoss A/S © 03/2019 Todos os direitos reservados. 95
Page 98

A Danfoss não aceita qualquer responsabilidade por possíveis erros constantes de catálogos, brochuras ou outros materiais impressos. A Danfoss reserva-se o direito de alterar os seus produtos sem
aviso prévio. Esta determinação aplica-se também a produtos já encomendados, desde que tais modicações não impliquem em mudanças nas especicações acordadas. Todas as marcas
registradas constantes deste material são propriedade das respectivas empresas. Danfoss e o logotipo Danfoss são marcas registradas da Danfoss A/S. Todos os direitos reservados.
Danfoss A/S
Ulsnaes 1
DK-6300 Graasten
vlt-drives.danfoss.com
130R0499 MG06B528 03/2019
*MG06B528*
 Loading...
Loading...