


ENGINEERING TOMORROW
Guía de programación
PROFINET
VLT® AutomationDrive FC 360
vlt-drives.danfoss.com

Índice Guía de programación
Índice
1 Introducción
1.1 Objetivo de este manual
1.2 Recursos adicionales
1.3 Versión del documento y del software
1.4 Vista general de producto
1.5 Homologaciones y certicados
1.6 Símbolos, abreviaturas y convenciones
2 Seguridad
2.1 Símbolos de seguridad
2.2 Personal cualicado
2.3 Medidas de seguridad
3 Conguración
3.1 Conguración de la red PROFINET
3.2 Conguración del controlador
3.3 Conguración del convertidor de frecuencia
3
3
3
3
3
4
4
5
5
5
5
7
7
7
9
4 Control
4.1 Tipos de PPO
4.2 Datos de proceso
4.3 Perl de control
4.4 Perl de Control de PROFIdrive
4.5 Perl de control FCDrive
5 Comunicación acíclica (DP-V1)
5.1 Características de un sistema de controlador de I/O
5.2 Características de un sistema de supervisor de I/O
5.3 Esquema de transmisión
5.4 Secuencia de petición de lectura / escritura acíclica
5.5 Estructura de datos en los telegramas acíclicos
5.6 Cabecera
5.7 Bloque de parámetros
5.8 Bloque de datos
6 Parámetros
10
10
11
13
14
18
21
21
21
22
23
24
24
24
24
26
6.1 Grupo de parámetros 0-** Func./Display
6.2 Grupo de parámetros 8-** Comunic. y opciones
6.3 Grupo de parámetros 9-** PROFIdrive
6.4 Grupo de parámetros 12-** Ethernet
6.5 Parámetros especícos de PROFINET
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 1
26
26
29
33
36
Índice PROFINET
6.6 Tipos de objetos y datos admitidos
7 Ejemplos de aplicaciones
7.1 Ejemplo: datos de proceso con PPO tipo 6
7.2 Ejemplo: telegrama de código de control mediante el telegrama estándar 1/PPO3
7.3 Ejemplo: telegrama de código de estado mediante el telegrama estándar 1/PPO3
7.4 Ejemplo: programación PLC
7.5 Ejemplo: seguimiento del PLC y la red
8 Resolución de problemas
8.1 Sin respuesta a las señales de control
8.2 Advertencias y alarmas
8.2.1 Advertencia / mensaje de alarma 55
Índice
41
43
43
44
45
46
47
51
51
53
61
2 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105
Introducción Guía de programación
1 Introducción
1.1 Objetivo de este manual
La Guía de programación de PROFINET facilita información
sobre la conguración del sistema, el control del
convertidor de frecuencia, el acceso a los parámetros, la
programación, la resolución de problemas y algunos
ejemplos de aplicación típicos.
Esta guía de programación está concebida para su uso por
personal cualicado que esté familiarizado con los conver-
tidores de frecuencia VLT®, con la tecnología PROFINET y
con el PC o PLC que se utilice como maestro del sistema.
Lea las instrucciones antes de proceder a la programación
y siga los procedimientos indicados en este manual.
VLT® es una marca registrada.
1.2 Recursos adicionales
Los siguientes recursos están disponibles para el
convertidor de frecuencia y el equipo opcional:
La Guía rápida del VLT® AutomationDrive FC 360
•
proporciona toda la información necesaria para
poner en marcha el convertidor de frecuencia.
La Guía de diseño del VLT® AutomationDrive FC
•
360 proporciona información detallada sobre las
capacidades y las funcionalidades para diseñar
sistemas de control de motores.
La Guía de programación del VLT® AutomationDrive
•
FC 360 proporciona información detallada sobre
cómo trabajar con parámetros, así como
numerosos ejemplos de aplicación.
Danfoss proporciona publicaciones y manuales complementarios. Consulte drives.danfoss.com/knowledge-center/
technical-documentation/ para ver un listado.
Vista general de producto
1.4
Esta guía de programación corresponde a la interfaz
PROFINET para el VLT® AutomationDrive FC 360.
La interfaz PROFINET se ha diseñado para establecer
comunicación con cualquier sistema que cumpla con el
estándar del esquema PROFINET, versiones 2.2 y 2.3.
Desde su lanzamiento en 2001, PROFINET se ha
actualizado para responder a requisitos de rendimiento
bajos e intermedios, compatibles con las funciones
PROFINET RT a rendimiento de actuador del máximo nivel
en PROFINET IRT. Hoy por hoy, PROFINET es el eldbus
basado en Ethernet que ofrece la tecnología más redimensionable y versátil.
PROFINET ofrece las herramientas de red necesarias para
desplegar la tecnología Ethernet estándar para aplicaciones
de fabricación, al mismo tiempo que permite el acceso a
Internet y conectividad dentro de la empresa.
El cartucho de control de PROFINET está diseñado para
utilizarse con el VLT® AutomationDrive FC 360.
Terminología
En este manual se utilizan varios términos para Ethernet.
PROFINET es el término utilizado para describir el
•
protocolo de PROFINET.
Ethernet es un término común utilizado para
•
describir la capa física de la red y no está
relacionado con el protocolo de la aplicación.
1 1
Versión del documento y del software
1.3
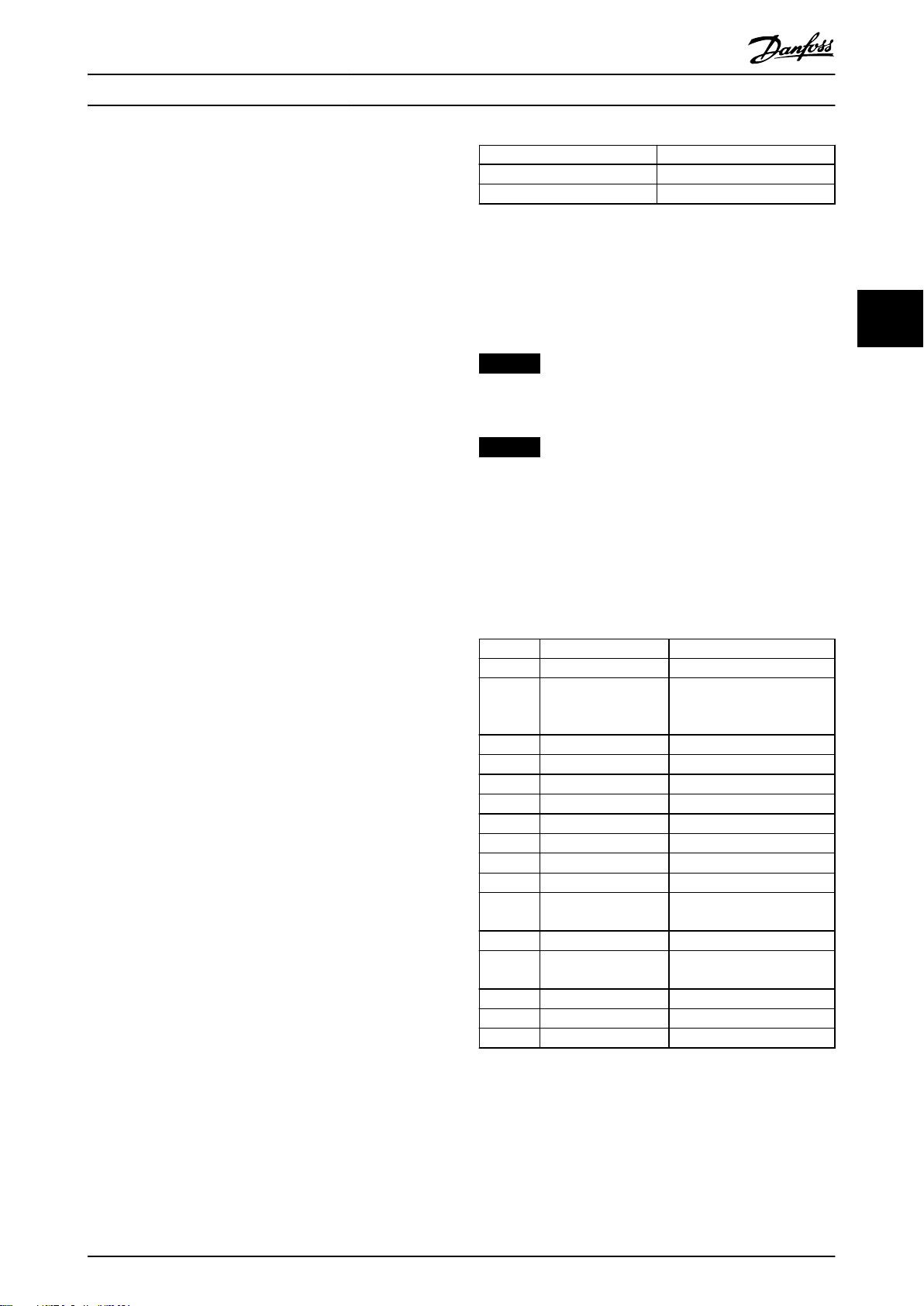
Este manual se revisa y se actualiza de forma periódica. Le
agradecemos cualquier sugerencia de mejoras. La Tabla 1.1
muestra las versiones de documento y software. La versión
de rmware de la interfaz PROFINET puede consultarse en
el parámetro 15-61 Option SW Version.
Versión
Edición Comentarios
MG06G1xx Primera edición de este manual. 3.0x
Tabla 1.1 Versión del documento y del software
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 3
de
software
Introducción PROFINET
11
1.5 Homologaciones y certicados
Hay disponibles más homologaciones y certicados. Para
obtener más información, póngase en contacto con un
colaborador local de Danfoss.
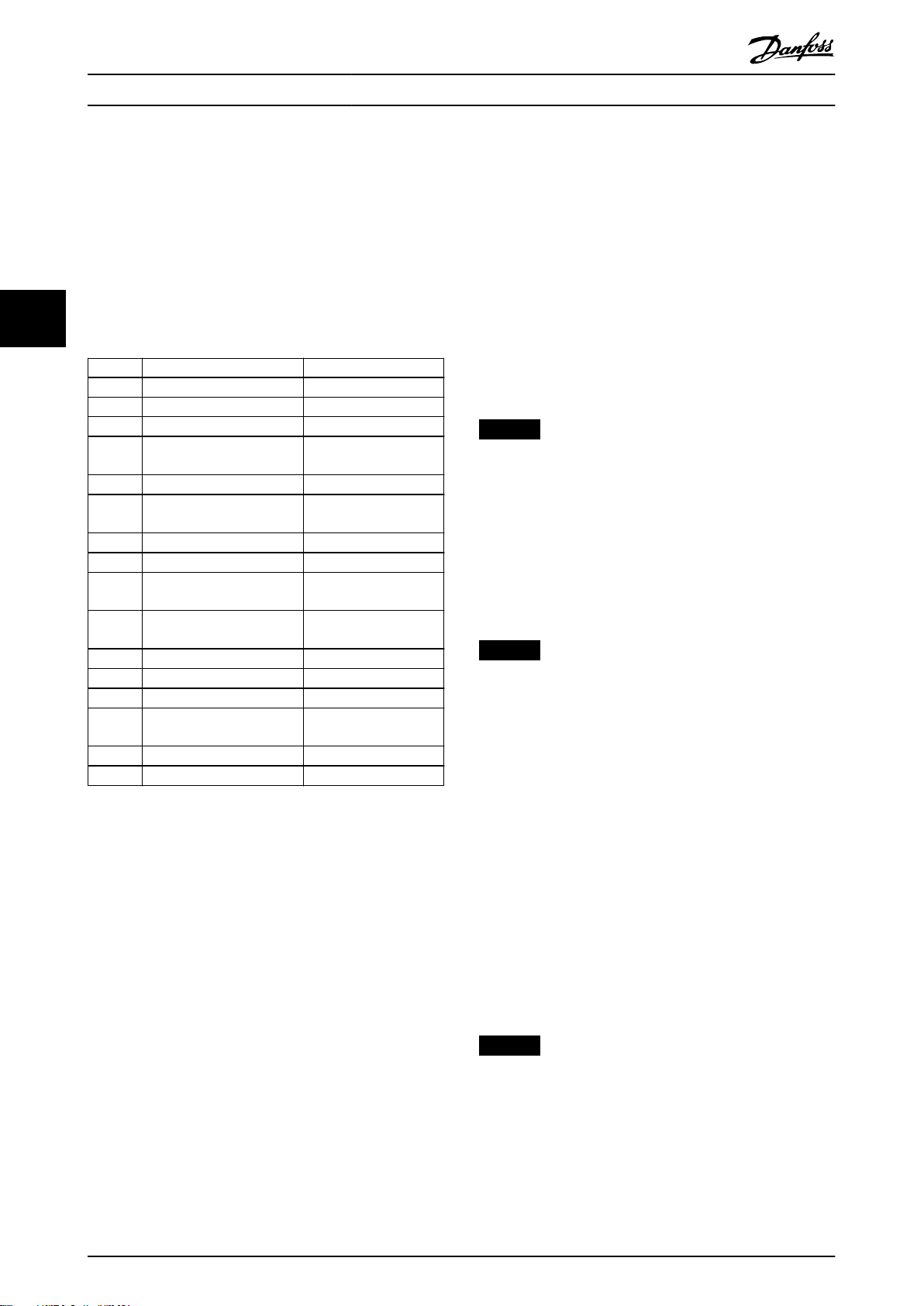
1.6 Símbolos, abreviaturas y convenciones
Abreviatura Denición
CC Tarjeta de control
CTW Código de control
DCP Protocolo de descubrimiento y conguración
DHCP Protocolo de conguración de host dinámico
CEM Compatibilidad electromagnética
GSDML Lenguaje de marcado de descripción general de
estación
I/O Entrada/salida
IP Protocolo de Internet
IRT Tiempo real isócrono
LCP Panel de control local
LED Diodo emisor de luz
LSB Bit menos signicativo
MAV Valor actual principal (velocidad real)
MSB Bit más signicativo
MRV Valor de referencia principal
PC Ordenador personal
PCD Datos de control de procesos
PLC Controlador lógico programable
PNU Número de parámetro
PPO Objeto de parámetro de proceso
REF Referencia (= MRV)
RT Tiempo real
STW Código de estado
Tabla 1.2 Símbolos y abreviaturas
Convenciones
Las listas numeradas indican procedimientos.
Las listas de viñetas indican otra información y descripción
de ilustraciones.
El texto en cursiva indica:
Referencia cruzada.
•
Vínculo.
•
Nombre del parámetro.
•
Grupo de parámetros.
•
Opción de parámetro.
•
4 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105
Seguridad Guía de programación
2 Seguridad
2.1 Símbolos de seguridad
Medidas de seguridad
2.3
2 2
En esta guía se han utilizado los siguientes símbolos:
ADVERTENCIA
Indica situaciones potencialmente peligrosas que pueden
producir lesiones graves o incluso la muerte.
PRECAUCIÓN
Indica una situación potencialmente peligrosa que puede
producir lesiones leves o moderadas. También puede
utilizarse para alertar contra prácticas no seguras.
AVISO!
Indica información importante, entre la que se incluyen
situaciones que pueden producir daños en el equipo u
otros bienes.
2.2 Personal cualicado
Se precisan un transporte, un almacenamiento, una
instalación, un funcionamiento y un mantenimiento
correctos y ables para que el convertidor de frecuencia
funcione de un modo seguro y sin ningún tipo de
problemas. Este equipo únicamente puede ser manejado o
instalado por personal cualicado.
El personal cualicado es aquel personal formado que está
autorizado para realizar la instalación, la puesta en marcha
y el mantenimiento de equipos, sistemas y circuitos
conforme a la legislación y la regulación vigentes.
Asimismo, el personal cualicado tiene que estar familiarizado con las instrucciones y medidas de seguridad
descritas en este documento.
ADVERTENCIA
TENSIÓN ALTA
Los convertidores de frecuencia contienen tensión alta
cuando están conectados a una entrada de red de CA, a
un suministro de CC o a una carga compartida. Si la
instalación, el arranque y el mantenimiento no son
efectuados por personal cualicado, pueden causarse
lesiones graves o incluso la muerte.
La instalación, el arranque y el mantenimiento
•
deben ser realizados exclusivamente por
personal cualicado.
Antes de realizar cualquier trabajo de
•
reparación o mantenimiento, utilice un
dispositivo de medición de tensión adecuado
para asegurarse de que el convertidor se haya
descargado por completo.
ADVERTENCIA
ARRANQUE ACCIDENTAL
Cuando el convertidor de frecuencia se conecta a una
red de CA, a un suministro de CC o a una carga
compartida, el motor puede arrancar en cualquier
momento. Un arranque accidental durante la programación, el mantenimiento o los trabajos de reparación
puede causar la muerte, lesiones graves o daños
materiales. El motor puede arrancar mediante un
conmutador externo, una orden de eldbus, una señal
de referencia de entrada desde el LCP o el LOP, por
funcionamiento remoto mediante el Software de
conguración MCT 10 o por la eliminación de una
condición de fallo.
Para evitar un arranque accidental del motor:
Pulse [O/Reset] en el LCP antes de programar
•
cualquier parámetro.
Desconecte el convertidor de frecuencia de la
•
alimentación.
Debe cablear y montar completamente el
•
convertidor de frecuencia, el motor y cualquier
equipo accionado antes de conectar el
convertidor de frecuencia a la red de CA, al
suministro de CC o a una carga compartida.
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 5
Seguridad PROFINET
ADVERTENCIA
TIEMPO DE DESCARGA
22
El convertidor de frecuencia contiene condensadores en
el bus de corriente continua que pueden seguir cargados
incluso cuando el convertidor de frecuencia está
apagado. Puede haber tensión alta presente aunque las
luces del indicador LED de advertencia estén apagadas.
Si, después de desconectar la alimentación, no espera el
tiempo especicado antes de realizar cualquier trabajo
de reparación o tarea de mantenimiento, pueden
producirse lesiones graves o incluso la muerte.
Pare el motor.
•
Desconecte la red de CA y las fuentes de
•
alimentación de enlace de CC remotas, incluidas
las baterías de emergencia, los SAI y las
conexiones de enlace de CC a otros convertidores de frecuencia.
Desconecte o bloquee el motor PM.
•
Espere a que los condensadores se descarguen
•
por completo. El tiempo de espera mínimo se
especica en el capítulo Seguridad de la guía de
funcionamiento suministrada con el convertidor
de frecuencia.
Antes de realizar cualquier trabajo de
•
reparación o mantenimiento, utilice un
dispositivo de medición de tensión adecuado
para asegurarse de que los condensadores se
han descargado por completo.
ADVERTENCIA
PELIGRO DEL EQUIPO
El contacto con ejes en movimiento y equipos eléctricos
puede provocar lesiones graves o la muerte.
Asegúrese de que la instalación, el arranque y
•
el mantenimiento sean realizados únicamente
por personal formado y cualicado.
Asegúrese de que los trabajos eléctricos
•
respeten las normativas eléctricas locales y
nacionales.
Siga los procedimientos indicados en este
•
documento.
PRECAUCIÓN
PELIGRO DE FALLO INTERNO
Si el convertidor de frecuencia no está correctamente
cerrado, un fallo interno en este puede causar lesiones
graves.
Asegúrese de que todas las cubiertas de
•
seguridad estén colocadas y jadas de forma
segura antes de suministrar electricidad.
ADVERTENCIA
PELIGRO DE CORRIENTE DE FUGA
Las corrientes de fuga superan los 3,5 mA. No efectuar la
correcta conexión toma a tierra del convertidor de
frecuencia puede ser causa de lesiones graves e incluso
de muerte.
La correcta conexión a tierra del equipo debe
•
estar garantizada por un instalador eléctrico
certicado.
6 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105

130BE934.10
130BE935.10
Conguración Guía de programación
3 Conguración
3.1 Conguración de la red PROFINET
Asegúrese de que todos los dispositivos PROFINET
conectados a la misma red de bus tengan un único
nombre de estación (nombre de host).
Ajuste el nombre de host PROFINET del convertidor de
frecuencia a través del parámetro 12-08 Nombre de host.
3.2 Conguración del controlador
3.2.1 Archivo GSDML
Para congurar un controlador PROFINET, la herramienta
de conguración necesita un archivo GSDML para cada
tipo de dispositivo de la red. El archivo GSDML es un
archivo xml PROFINET que contiene los datos de congu-
ración de comunicaciones necesarios para un dispositivo.
Descargue la versión más reciente del archivo GSDML en
www.danfoss.com/BusinessAreas/DrivesSolutions/pronet. El
nombre del archivo GSDML puede ser distinto al indicado
en este manual.
El siguiente ejemplo muestra cómo congurar el
controlador.
Convertidor de frecuencia Archivo GSDML
VLT® AutomationDrive FC 360
GSDML-V2.3-Danfoss-
-FC360-20151212.xml
3 3
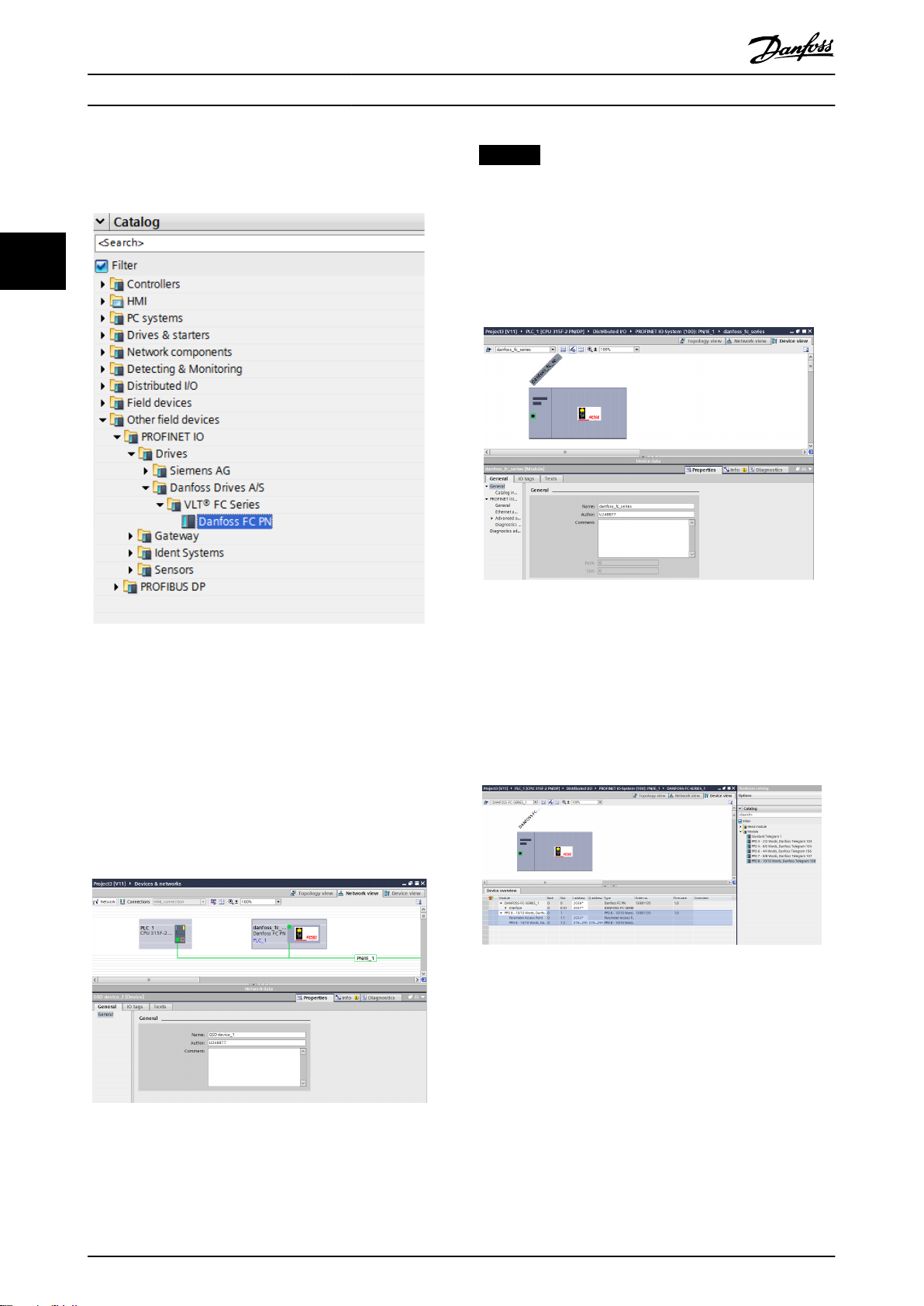
Ilustración 3.1 Importe el archivo GSDML a la herramienta de
conguración
Tabla 3.1 Archivo GSDML
Para
congurar el controlador PROFINET, el primer paso es
importar el archivo GSDML a la herramienta de congu-
ración. Los siguientes pasos, descritos en la Ilustración 3.1,
la Ilustración 3.2 y la Ilustración 3.3, muestran cómo añadir
un nuevo archivo GSDML a la herramienta de software
Simatic Manager. Para cada convertidor de frecuencia, se
importa una sola vez un archivo GSDML concreto,
siguiendo la instalación inicial de la herramienta de
software.
Ilustración 3.2 Añada un nuevo archivo GSDML a la
herramienta de software Simatic Manager
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 7
130BE936.10
130BE937.10
130BE938.10
130BE939.10
Conguración PROFINET
El archivo GSDML se importará y podrá accederse a él
mediante la siguiente ruta en el catálogo de hardware:
AVISO!
El nombre debe corresponderse con el indicado en el
parámetro 12-08 Nombre de host. Si está seleccionado el
elemento Asignar dirección IP a través del controlador de
I/O, el controlador descargará la dirección IP al
dispositivo de I/O que tenga el nombre de dispositivo en
33
cuestión. La dirección IP se almacena en la memoria no
volátil del convertidor de frecuencia.
Ilustración 3.5 Ajuste el hardware y añada un sistema
PROFINET maestro.
Ilustración 3.3 Ruta en el catálogo de hardware
Abra un proyecto, ajuste el hardware y añada un sistema
PROFINET maestro. Seleccione el N.º de ref. del convertidor
de frecuencia Danfoss y luego arrástrelo y suéltelo sobre el
sistema de I/O de PROFINET.
Para introducir el nombre del dispositivo, abra las
propiedades del convertidor de frecuencia insertado.
Consulte la Ilustración 3.4.
El siguiente paso es ajustar los datos de entrada y salida
periféricas. El ajuste de datos en el área periférica se
transmite cíclicamente mediante los telegramas / tipos de
PPO. En el siguiente ejemplo, un PPO de tipo 6 se arrastra
hasta la ranura 1.
Ilustración 3.6 Ajuste los datos de entrada y salida de
periféricos
Ilustración 3.4 Abra las propiedades del convertidor
de frecuencia insertado para introducir el nombre del
dispositivo
8 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105
Conguración Guía de programación
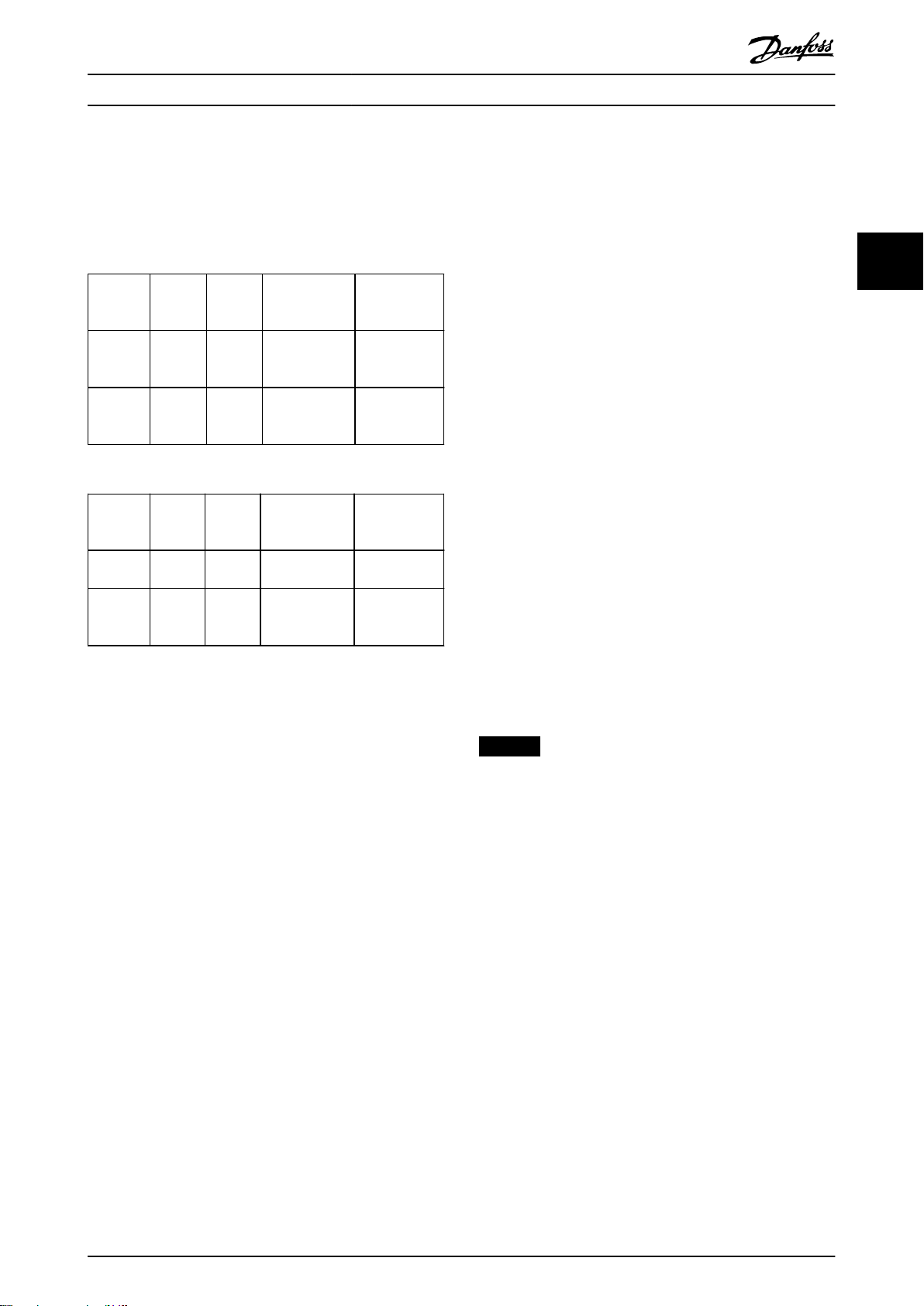
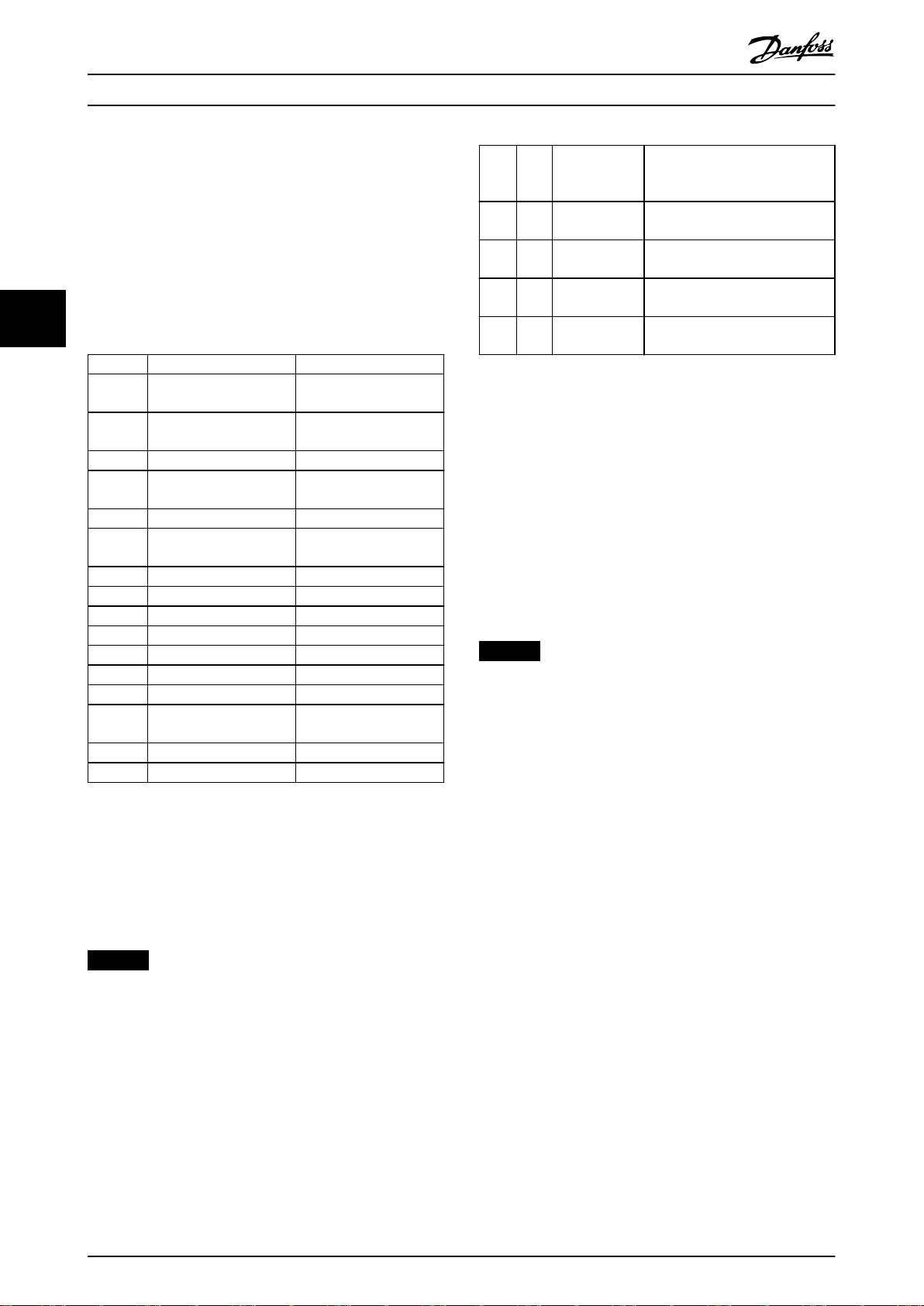
La herramienta de conguración asigna automáticamente
direcciones en el área de direcciones periféricas. En este
ejemplo, el área de entrada y de salida tienen la siguiente
conguración:
Tipo de PPO 6
Número
de código
de PCD
Dirección
de
entrada
Ajuste STW MAV
Tabla 3.2 Lectura PCD (Convertidor de frecuencia a PLC)
Número
de código
de PCD
Dirección
de salida
Ajuste CTW MRV
Tabla 3.3 Escritura PCD (PLC a convertidor de frecuencia)
Asigne los PCD a través del parámetro 9-16 Cong. lectura
PCD para las entradas y a través del parámetro 9-15 Cong.
escritura PCD para las salidas.
Descarga del archivo de conguración en el PLC. El sistema
PROFINET empieza a intercambiar datos cuando se ajusta
el PLC en modo de ejecución (Run).
0 1 2 3
256-257 258-259 260-261 262-263
Parámetro 9-16
Cong. lectura
PCD
0 1 2 3
256-257 258-259 260-261 262-263
Parámetro 9-15
Cong. escritura
PCD
Parámetro 9-16
Cong. lectura
PCD
Parámetro 9-15
Cong. escritura
PCD
Conguración del convertidor de
3.3
frecuencia
3.3.1 Parámetros del VLT
Los siguientes parámetros son importantes a la hora de
congurar un convertidor de frecuencia con una interfaz
PROFINET.
Parámetro 0-40 Botón (Hand on) en LCP. Si [Hand
•
On] está activado, el control del convertidor
mediante la interfaz PROFINET estará desactivado.
Después de la puesta en marcha inicial, el
•
convertidor de frecuencia detecta automáticamente si hay una opción de bus de campo
instalada en la ranura A y ajusta el
parámetro 8-02 Fuente de control a [Opción A]. Si
se añade, modica o elimina una opción de un
convertidor de frecuencia ya puesto en funcionamiento, esto no cambiará el
parámetro 8-02 Fuente de control, pero entrará en
modo de desconexión y el convertidor mostrará
un error.
Parámetro 8-10 Trama control. Seleccione el perl
•
de convertidor de frecuencia Danfoss o el perl
de PROFIdrive.
Del Parámetro 8-50 Selección inercia al
•
parámetro 8-58 Prodrive OFF3 Selección.
Seleccione cómo enlazar las órdenes de control
PROFINET con la orden de entrada digital de la
tarjeta de control.
AVISO!
Cuando el parámetro 8-01 Puesto de control está ajustado
como [2] Solo cód. de control, los ajustes del
parámetro 8-50 Selección inercia al
parámetro 8-58 Prodrive OFF3 Selección se anulan y solo
actúan bajo control de bus.
3 3
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 9
Standard telegram
1
PPO 6
PPO 7
PPO 8
Danfoss telegram
(The old PPO type 3)
CTW/STW
REF/MAV
PCD 2
Read/
Write
PCD 3
Read/
Write
PCD 4
Read/
Write
PCD 5
Read/
Write
PPO 4
CTW/STW REF/MAV
PCD 2
Read/
Write
PCD 3
Read/
Write
CTW/STW
REF/MAV
PCD 2
Read/
Write
PCD 3
Read/
Write
PCD 4
Read/
Write
PCD 5
Read/
Write
PCD 6
Read/
Write
PCD 7
Read/
Write
PCD 8
Read/
Write
PCD 9
Read/
Write
CTW/STW REF/MAV
PCD 2
Read/
Write
PCD 3
Read/
Write
PCD 4
Read/
Write
PCD 5
Read/
Write
PCD 6
Read/
Write
PCD 7
Read/
Write
CTW/STW REF/MAV
CTW/STW REF/MAV
PPO 3
130BE941.10
Control PROFINET
4 Control
4.1 Tipos de PPO
El ajuste del parámetro 9-15 Cong. escritura PCD determina
las señales para transmisión (petición) desde el maestro
El perl de PROFINET para convertidores de frecuencia
especica un número de telegramas estándar y otorga
espacio para telegramas especícos del proveedor. El perl
44
de PROFIdrive para convertidores de frecuencia es
adecuado para el intercambio de datos entre un
controlador de procesos (como un PLC) y un convertidor
de frecuencia. Todos los telegramas se denen para las
transferencia cíclica de datos de alta prioridad.
hasta el convertidor de frecuencia.
El ajuste del parámetro 9-16 Cong. lectura PCD determina
las señales para transmisión (respuesta) desde el
convertidor de frecuencia hasta el maestro.
Seleccione el tipo de PPO en la conguración del maestro.
La selección se graba automáticamente en el convertidor
de frecuencia. No se requiere ningún ajuste manual de
tipos de PPO en el convertidor de frecuencia. Lea el tipo
Objetos de datos de proceso puros
Los tipos de PPO 3, 4, 6, 7 y 8 son objetos de datos de
proceso puros para aplicaciones que no requieran acceso a
actual de PPO en el parámetro 9-22 Selección de telegrama.
El ajuste [1] Telegram.estándar1 es equivalente al tipo 3 de
PPO.
parámetros cíclicos. El PLC envía datos de control de
procesos y el convertidor de frecuencia responde entonces
con un PPO de la misma longitud, conteniendo datos de
estado del proceso.
En la Ilustración 4.1 se muestran los tipos de PPO
disponibles:
PCD 1: los primeros dos bytes del área de datos
•
de proceso (PCD 1) constan de una parte ja
presente en todos los tipos de PPO.
PCD 2: los dos bytes siguientes son jos para las
•
entradas de PCD de escritura (véase el
parámetro 9-15 Cong. escritura PCD [1]), pero
congurables para las entradas de PCD de lectura
(véase el parámetro 9-16 Cong. lectura PCD [1]).
PCD 3-10: en los bytes restantes, se pueden
•
Además, todos los tipos de PPO pueden ajustarse como
consistentes para código o módulo. El área de datos de
proceso puede ser consistente para código o módulo,
mientras que el canal de parámetros siempre debe ser
consistente para módulo.
Los datos consistentes para código se transmiten
•
como códigos individuales independientes entre
el PLC y el convertidor de frecuencia.
Los datos consistentes para módulo se transmiten
•
como conjuntos de códigos interrelacionados y se
transeren simultáneamente entre el PLC y el
convertidor de frecuencia.
parametrizar los datos de proceso con señales de
proceso; véase el parámetro 9-23 Páram. para
señales.
Ilustración 4.1 Tipos de PPO disponibles
10 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105
Control Guía de programación
4.2 Datos de proceso
Utilice la parte de datos de proceso del PPO para controlar
y realizar un seguimiento del convertidor de frecuencia
mediante PROFINET.
4.2.1 PCD
Código de control (CTW) según el perl de PROFIdrive:
Los códigos de control constan de 16 bits. El signicado de
cada bit se explica en y . El siguiente patrón de bits ajusta
todas las órdenes de arranque necesarias:
0000 0100 0111 1111 = 047F hex.
0000 0100 0111 1110 = 047E hex.
0000 0100 0111 1111 = 047F hex.
1) Para reiniciar tras el encendido:
Ajuste los bits 1 y 2 del CTW como 1.
•
Alterne el bit 0 0-1.
•
Estos valores corresponden a los bytes 9 y 10 de la
Tabla 4.1.
Parada rápida: 0000 0100 0110 1111 = 046F hex.
Parada: 0000 0100 0011 1111 = 043F hex.
1)
1)
4.2.2 MRV
MRV es la velocidad de referencia con formato de datos de
Valor normalizado. 0 Hex = 0 % y 4000 Hex = 100 %.
En el ejemplo se utiliza 2000 Hex, que corresponde al 50 %
de la frecuencia máxima en el parámetro 3-03 Referencia
máxima. Véanse los valores de los bytes 11 y 12 en la
Tabla 4.1.
Por lo tanto, el PPO completo tiene los siguientes valores
hexadecimales:
Byte Valor
CTW 9 04
PCD
Tabla 4.1 Ejemplo de petición: valores PPO en hexadecimal
Los datos de proceso del componente PCD actúan de
inmediato sobre el convertidor de frecuencia y se pueden
actualizar desde el maestro lo más rápidamente posible.
En la Tabla 4.2 se muestra una respuesta positiva al
ejemplo de petición de la Tabla 4.1.
CTW 10 7F
MRV 11 20
MVR 12 00
Byte Valor
STW 9 0F
PCD
Tabla 4.2 Ejemplo de respuesta: respuesta positiva
El componente PCD responde de acuerdo con el estado y
la parametrización del convertidor de frecuencia.
Respuesta de la parte PCD:
STW: 0F07 hex
•
funcionamiento y que no hay advertencias ni
fallos.
MAV: 2000 hex indica que la frecuencia de salida
•
es el 50 % de la referencia máxima.
En la Tabla 4.3 se muestra una respuesta negativa al
ejemplo de petición de la Tabla 4.1.
PCD
Tabla 4.3 Ejemplo de respuesta: respuesta negativa
STW 10 07
MAV 11 20
MAR 12 00
signica que el motor está en
Byte Valor
STW 9 0F
STW 10 07
MAV 11 20
MAR 12 00
4.2.3 Datos de control de procesos
Los datos de control de procesos (PCD) son los datos de
proceso enviados desde el PLC al convertidor de
frecuencia.
Maestro/esclavo
1 2 3 ....... 10
CTW MRV PCD ....... PCD
PCD de escritura
Tabla 4.4 Datos de control de procesos
El PCD 1 contiene un código de control de 16 bits, en el
que cada bit controla una función especica del
convertidor de frecuencia. Consulte el capétulo 4.3 Perl de
control.
El PCD 2 contiene un valor de consigna de velocidad de 16
bits en términos porcentuales. Consulte el
capétulo 4.2.5 Manejo de referencias.
4 4
Los ajustes del parámetro 9-15 Cong. escritura PCD y el
parámetro 9-16 Cong. lectura PCD denen el contenido de
los PCD desde el PCD 3 hasta el PCD 10.
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 11
-100%
(C000 hex)
0%
(0 hex)
100%
(4000 hex)
P 3-00 set to
[1] -Max to +Max
P 3-03
Max reference
0 P 3-03
Max reference
0%
(0 hex)
100%
(4000 hex)
P 3-00 set to
[0] Min - Max
P 3-02
Min reference
P 3-03
Max reference
130BA198.10
Control PROFINET
4.2.4 Datos de estado de proceso
La referencia (MRV) y la realimentación (MAV) siempre se
escalan igual. El ajuste del parámetro 3-00 Rango de
Los datos de estado de proceso enviados desde el
convertidor de frecuencia contienen información acerca del
referencia determina el escalado de la referencia y la
realimentación (MAV). Véase la Ilustración 4.3.
estado actual.
Esclavo/maestro
1 2 3 ...... 10
44
STW MAV PCD ...... PCD
PCD de lectura
Tabla 4.5 Datos de estado de proceso
El PCD 1 contiene un código de estado de 16 bits y cada
bit contiene información relacionada con un posible estado
del convertidor de frecuencia.
El PCD 2 contiene cada uno de los valores predeterminados de la velocidad actual del convertidor de
Ilustración 4.3 Referencia (MRV) y realimentación (MAV),
escaladas
frecuencia en formato de porcentaje (consulte el
capétulo 4.2.5 Manejo de referencias). El PCD 2 puede
congurarse para contener otras señales de proceso.
AVISO!
Si el parámetro 3-00 Rango de referencia está ajustado
Los ajustes del parámetro 9-16 Cong. lectura PCD denen
el contenido de los PCD 3 a 10.
como [0] Mín - Máx, una referencia negativa será
manejada como 0 %.
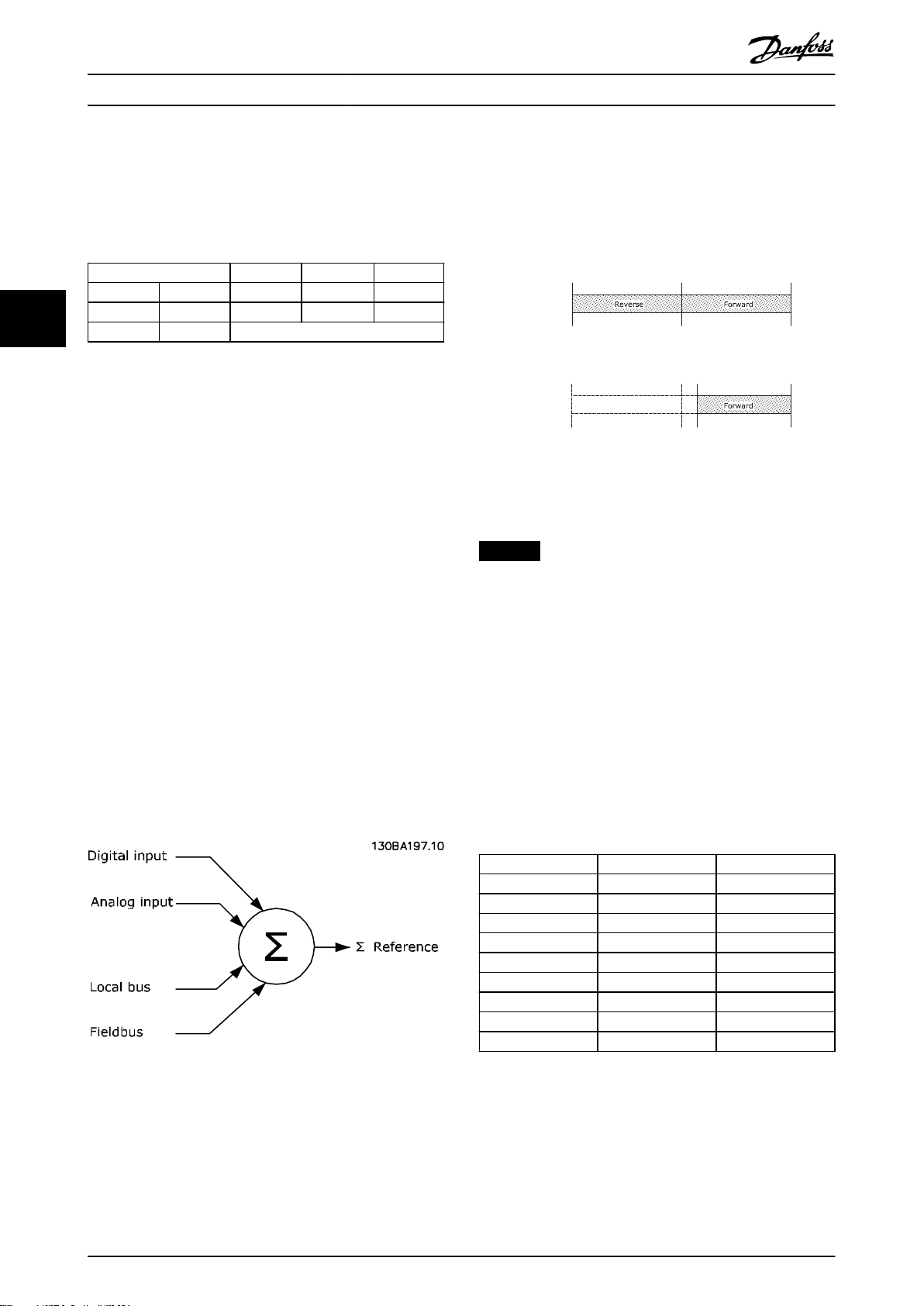
4.2.5 Manejo de referencias
El manejo de referencias es un mecanismo avanzado que
acumula referencias procedentes de distintas fuentes,
como se muestra en la Ilustración 4.2.
Para obtener más información sobre el manejo de
referencias, consulte la Guía de diseño del convertidor de
frecuencia.
Ilustración 4.2 Referencia
La salida real del convertidor de frecuencia está limitada
por los parámetros de limitación de velocidad Límite bajo/
alto veloc. motor [RPM/Hz] en los par. parámetro 4-11 Límite
bajo veloc. motor [RPM] a parámetro 4-14 Límite alto veloc.
motor [Hz].
El límite de velocidad nal se ajusta en el
parámetro 4-19 Frecuencia salida máx..
En la Tabla 4.6 se enumeran los formatos de referencia
(MRV) y realimentación (MAV).
MRV/MAV Entero en hex. Entero en decimal
100 % 4000 16 384
75 % 3000 12 288
50 % 2000 8192
25 % 1000 4096
0 % 0 0
–25 % F000 –4096
–50 % E000 –8192
–75 % D000 –12 288
–100 % C000 –16 384
Tabla 4.6 Formato de referencia/realimentación (MRV/MAV)
La referencia, o valor de consigna de velocidad, se envía
mediante PROFINET y se transmite siempre al convertidor
de frecuencia en términos porcentuales como enteros
representados en hexadecimal (0-4000 hex).
12 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105
Control Guía de programación
AVISO!
Los números negativos se forman como complementos
de dos.
AVISO!
El tipo de datos de MRV y MAV es un valor normalizado
N2 de 16 bits, que expresa valores en un rango entre –
200 % y +200 % (8001 a 7FFF).
Ejemplo
Los siguientes ajustes determinan la velocidad como se
muestra en la Tabla 4.7:
Parámetro 1-00 Modo Conguración ajustado
•
como [0] Veloc. lazo abierto.
Parámetro 3-00 Rango de referencia ajustado como
•
[0] Mín - Máx.
Parámetro 3-02 Referencia mínima ajustado a 0 Hz.
•
Parámetro 3-03 Referencia máxima ajustado a
•
50 Hz.
MRV/MAV Velocidad real [Hz]
0 % 0 hex 0
25 % 1000 hex 12,5
50 % 2000 hex 25
75 % 3000 hex 37,5
100 % 4000 hex 50
Tabla 4.7 Velocidad real para MRV/MAV
4.2.7 Inuencia de los terminales de
entrada digital en el modo de control
del convertidor de frecuencia
En los parámetros del parámetro 8-50 Selección inercia al
parámetro 8-58 Prodrive OFF3 Selección, ajuste la inuencia
de los terminales de entrada digital sobre el control del
convertidor de frecuencia.
AVISO!
El ajuste del parámetro 8-01 Puesto de control anula los
ajustes de los parámetros del parámetro 8-50 Selección
inercia al parámetro 8-58 Prodrive OFF3 Selección.
Programe cada una de las señales de entrada digital como
Y lógico, O lógico o para que no tengan relación con el bit
correspondiente del código de control. De este modo, las
siguientes fuentes de señal iniciarán una orden de control
especíca, por ejemplo parada/inercia:
Solo eldbus.
•
Fieldbus Y entrada digital.
•
Fieldbus O terminal de entrada digital
•
AVISO!
Para controlar el convertidor de frecuencia mediante
PROFINET, ajuste el parámetro 8-50 Selección inercia
como [1] Bus o [2] Lógico Y. A continuación, ajuste el
parámetro 8-01 Puesto de control como [0] Digital y cód.
ctrl o [2] Solo cód. de control.
4 4
4.2.6 Funcionamiento de control de
procesos
En funcionamiento de control de procesos, el
parámetro 1-00 Modo Conguración se ajusta como [3]
Proceso.
El intervalo de referencias del parámetro 3-00 Rango de
referencia es siempre [0] Mín - Máx.
MRV representa el valor de consigna del proceso.
•
MAV expresa la realimentación real del proceso
•
(intervalo ±200 %).
Para obtener información más detallada y ejemplos de
opciones de relaciones lógicas, consulte el
capétulo 8 Resolución de problemas.
Perl de control
4.3
Controle el convertidor de frecuencia conforme a:
El perl de PROFIdrive; consulte el
•
capétulo 4.4 Perl de Control de PROFIdrive, o
El control del convertidor de frecuencia Danfoss;
•
consulte el capétulo 4.5 Perl de control FCDrive.
Seleccione el perl de control en el parámetro 8-10 Trama
control. La elección del perl afecta solo al código de
control y de estado.
El Capétulo 4.4 Perl de Control de PROFIdrive y el
capétulo 4.5 Perl de control FCDrive ofrecen una
descripción detallada de los datos de control y estado.
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 13
Control PROFINET
4.4 Perl de Control de PROFIdrive
Esta sección describe la funcionalidad del código de
control y del código de estado en el perl de PROFIdrive.
4.4.1 Código de control según el perl de
PROFIdrive (CTW)
44
El código de control se utiliza para enviar órdenes de un
maestro (p. ej., un PC) a un esclavo.
Bit Bit = 0 Bit = 1
00 OFF 1 ON 1
01 OFF 2 ON 2
02 OFF 3 ON 3
03 Inercia
04 Parada rápida Rampa
Mantener la salida de
05
frecuencia
06 Parada de rampa Arranque
07 Sin función Reinicio
Velocidad ja 1
08
DESACTIVADO
Velocidad ja 2
09
DESACTIVADO
10 Datos no válidos Datos válidos
11 Sin función Enganche abajo
12 Sin función Enganche arriba
13 Ajuste de parámetros
14 Sin función Sin función
15 Hacia delante Cambio sentido
Tabla 4.8 Bits del código de control
Explicación de los bits de control
Bit 00: APAGADO 1 / ENCENDIDO 1
Las paradas de rampa normal utilizan los tiempos de
rampa de la rampa actualmente seleccionada.
Bit 00 = 0 detiene y activa el relé de salida 1 o 2 si la
frecuencia de salida es 0 Hz y si se ha seleccionado [31]
Relé 123 en el parámetro 5-40 Relé de función.
Si bit 0 = 1, el convertidor de frecuencia está en el estado
1: encendido inhibido.
Consulte la Ilustración 4.4.
Bit 01, APAGADO 2 / ENCENDIDO 2
Paro por inercia.
Bit 01 = 0 detiene por inercia y activa el relé de salida 1 o
2 si la frecuencia de salida es 0 Hz y si se ha seleccionado
[31] Relé 123 en el parámetro 5-40 Relé de función.
Si bit 01 = 1, el convertidor de frecuencia está en el estado
1: encendido inhibido. Consulte la Ilustración 4.4.
Sin funcionamiento por
inercia
Usar rampa
Velocidad ja 1
ENCENDIDO
Velocidad ja 2
ENCENDIDO
Selección del bit menos
signicativo (lsb)
Bit 02, APAGADO 3 / ENCENDIDO 3
Parada rápida utilizando el tiempo de rampa del
parámetro 3-81 Tiempo rampa parada rápida.
Bit 02 = 0 detiene rápidamemte y activa el relé de salida 1
o 2 si la frecuencia de salida es 0 Hz y si se ha
seleccionado [31] Relé 123 en el parámetro 5-40 Relé de
función.
Si bit 02 = 1, el convertidor de frecuencia está en el estado
1: encendido inhibido.
Consulte la Ilustración 4.4.
Bit 03: funcionamiento por inercia / sin inercia
Bit 03 = 0 lleva a un paro por inercia.
Cuando el bit 03 = 1, si se cumplen las demás condiciones
de arranque, el convertidor de frecuencia podrá arrancar.
AVISO!
La selección en el parámetro 8-50 Selección inercia
determina el enlace del bit 03 con la correspondiente
función de las entradas digitales.
Bit 04: parada rápida / rampa
Parada rápida utilizando el tiempo de rampa del
parámetro 3-81 Tiempo rampa parada rápida.
Cuando el bit 04 = 0, se produce una parada rápida.
Cuando el bit 04 = 1, si se cumplen las demás condiciones
de arranque, el convertidor de frecuencia podrá arrancar.
AVISO!
La selección en el parámetro 8-51 Selección parada rápida
determina el enlace del bit 04 con la correspondiente
función de las entradas digitales.
Bit 05: mantener la salida de frecuencia / utilizar rampa
Cuando el bit 05 = 0, se mantiene la frecuencia de salida
actual aunque se cambie el valor de referencia.
Cuando el bit 05 = 1: el convertidor de frecuencia puede
realizar su función reguladora de nuevo de acuerdo con el
respectivo valor de referencia.
Bit 06: parada / arranque de rampa
La parada de rampa normal utiliza los tiempos de rampa
de la rampa seleccionada. Además, si se selecciona [31]
Relé 123 en el parámetro 5-40 Relé de función y si la
frecuencia de salida es 0 Hz, este bit activa el relé de salida
01 o 04.
Bit 06 = 0 detiene el convertidor de frecuencia.
Cuando el bit 06 = 1, si se cumplen las demás condiciones
de arranque, el convertidor de frecuencia podrá arrancar.
AVISO!
La selección en el parámetro 8-53 Selec. arranque
determina el enlace del bit 06 con la correspondiente
función de las entradas digitales.
14 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105
Control Guía de programación
Bit 07: sin función / reinicio
Reinicio después de la desconexión. Reconoce el evento en
el buer defectuoso.
Cuando el bit 07 = 0, no se produce reinicio.
Cuando hay un cambio de inclinación del bit 07 a 1, se
produce un reinicio después de la desconexión.
Bit 08, velocidad ja 1 DESACTIVADO/ACTIVADO
Activación de la velocidad preprogramada en el
parámetro 8-90 Veloc Bus Jog 1. Velocidad ja 1 solo es
posible si el bit 04 = 0 y los bits 00-03 = 1.
Bit 09, velocidad ja 2 DESACTIVADO/ACTIVADO
Activación de la velocidad preprogramada en el
parámetro 8-91 Veloc Bus Jog 2. Velocidad ja 2 solo es
posible si el bit 04 = 0 y los bits 00-03 = 1.
Bit 10: datos no válidos / válidos
Indica al convertidor de frecuencia si debe utilizar o
ignorar el código de control.
Bit 10 = 0 ignora el código de control, lo que hace posible
desactivar el código de control al actualizar o leer
parámetros.
Bit 10 = 1 utiliza el código de control. Esta función es
importante, debido a que el código de control siempre
está contenido en el telegrama, independientemente del
tipo de telegrama que se emplee.
Bit 11: sin función / ralentizar
Se utiliza para reducir el valor de velocidad de referencia
en la cantidad señalada en el parámetro 3-12 Valor de
enganche/arriba-abajo.
Cuando el bit 11 = 0, no se producirá ninguna modi-
cación del valor de referencia.
Cuando el bit 11 = 1, el valor de referencia se reduce.
Bit 12: sin función / enganche arriba
Se utiliza para aumentar el valor de velocidad de referencia
en la cantidad señalada en el parámetro 3-12 Valor de
enganche/arriba-abajo.
Cuando el bit 12 = 0, no se produce ninguna modicación
del valor de referencia.
Cuando el bit 12 = 1, el valor de referencia se incrementa.
Si tanto la deceleración como la aceleración están
activadas (bits 11 y 12 = 1), la deceleración tiene prioridad,
es decir, se reduce el valor de velocidad de referencia.
Bits 13: selección de ajustes
Los bits 13 se utilizan para seleccionar entre los dos ajustes
de parámetros de acuerdo con la Tabla 4.9.
La función solo es posible cuando se selecciona [9] Ajuste
múltiple en el parámetro 0-10 Ajuste activo. La selección del
parámetro 8-55 Selec. ajuste determina el enlace del bit 13
con la correspondiente función de las entradas digitales.
Solo es posible modicar el ajuste durante el funcionamiento de convertidor de frecuencia si los ajustes se han
enlazado en el parámetro 0-12 Ajuste actual enlazado a.
Ajuste Bit 13
1 0
2 1
Tabla 4.9 Ajustes de parámetros
Bit 14: sin uso
Bit 15: sin función / cambio de sentido
El bit 15 = 0 causa que no haya inversión del sentido de
giro.
El bit 15 = 1 causa que haya inversión.
AVISO!
El cambio de sentido se ajusta de fábrica como [0]
Entrada digital en el parámetro 8-54 Selec. sentido inverso.
AVISO!
El bit 15 solo produce el cambio de sentido cuando se
selecciona Comunicación serie, Lógico O o Lógico Y.
4.4.2 Código de estado Según el perl de
PROFIdrive (STW)
El código de estado se utiliza para comunicar al maestro
(por ejemplo, un PC) el estado de un esclavo.
Bit Bit = 0 Bit = 1
00 Control no preparado Ctrl prep.
Convertidor de
01
frecuencia no
preparado
02 Inercia Activar
03 Sin error Desconexión
04 OFF 2 ON 2
05 OFF 3 ON 3
06 Arranque posible Arranque imposible
07 Sin advertencia Advertencia
08
Velocidad ≠ referencia
09 Funcionamiento local Contr. bus
Fuera del límite de
10
frecuencia
11 Sin función En funcionamiento
Convertidor de
12
frecuencia OK
13 Tensión OK Tensión excedida
14 Par OK Par excedido
15 Térmica OK Límite superado
Tabla 4.10 Bits del código de estado
Convertidor de frecuencia
preparado
Velocidad = referencia
Límite de frecuencia OK
Detenido, arranque
automático
4 4
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 15
Control PROFINET
Explicación de los bits de estado
Bit 00: control no listo / listo
Cuando el bit 00 = 0, los bits 00, 01 o 02 del código de
control son 0 (APAGADO 1, APAGADO 2 o APAGADO 3) o el
convertidor de frecuencia se apaga (desconexión).
Cuando el bit 00 = 1, el control del convertidor de
frecuencia está preparado, pero no hay necesariamente
alimentación a la unidad (en el caso de suministro externo
de 24 V del sistema de control).
44
Bit 01, VLT no preparado / preparado
Mismo signicado que el bit 00, pero hay suministro a la
unidad. El convertidor de frecuencia está preparado
cuando recibe las señales de arranque necesarias.
Bit 02: inercia/activar
Cuando el bit 02 = 0, los bits 00, 01 o 02 del código de
control son 0 (APAGADO 1, APAGADO 2 o APAGADO 3 o
inercia) o el convertidor de frecuencia se apaga
(desconexión).
Cuando el bit 02 = 1: los bits 00, 01 o 02 del código de
control son 1 y el convertidor de frecuencia no se ha
desconectado.
Bit 03: sin error / desconexión
Cuando el bit 03 = 0, hay un estado sin error del
convertidor de frecuencia.
Cuando el bit 03 = 1, el convertidor de frecuencia se ha
desconectado y necesita una señal de reinicio para
restablecer el funcionamiento.
Bit 04, ENCENDIDO 2 / APAGADO 2
Cuando el bit 01 del código de control es 0, el bit 04 = 0.
Cuando el bit 01 del código de control es 1, el bit 04 = 1.
Bit 05, ENCENDIDO 3 / APAGADO 3
Cuando el bit 02 del código de control es 0, el bit 05 = 0.
Cuando el bit 02 del código de control es 1, el bit 05 = 1.
Bit 06: arranque posible/imposible
Si se ha seleccionado [1] PROFIdrive en el
parámetro 8-10 Trama control, el bit 06 será 1 tras el
reconocimiento de desconexión, tras la activación de
APAGADO 2 o APAGADO 3 y tras la conexión de la tensión
de red. Para reiniciar un Arranque imposible, ajuste el bit 00
del código de control como 0 y los bits 01, 02 y 10 como
1.
Bit 07: sin advertencia / advertencia
Bit 07 = 0 signica que no hay advertencias.
Bit 07 = 1 signica que ha ocurrido una advertencia.
Bit 08: velocidad ≠ referencia / velocidad = referencia
Cuando el bit 08 = 0, la velocidad actual del motor se
desvía del valor de velocidad de referencia ajustado. Esta
desviación podría suceder, por ejemplo, cuando la
velocidad cambia durante el arranque o parada mediante
una rampa de aceleración/deceleración.
Cuando el bit 08 = 1, la velocidad actual del motor se
corresponde con el valor de velocidad de referencia
ajustado.
Bit 09: funcionamiento local / control de bus
Si el bit 09 = 0, esto indica que el convertidor de
frecuencia se ha detenido mediante el botón [Stop] del LCP
o que se ha seleccionado [0] Conex. a manual/auto o [2]
Local en el parámetro 3-13 Lugar de referencia.
Cuando el bit 09 = 1, el convertidor de frecuencia se
puede controlar mediante la interfaz serie.
Bit 10: fuera del límite de frecuencia / límite de
frecuencia OK
Cuando el bit 10 = 0, la frecuencia de salida está fuera de
los límites ajustados en el parámetro 4-52 Advert. Veloc.
baja y el parámetro 4-53 Advert. Veloc. alta.
Cuando el bit 10 = 1, la frecuencia de salida se encuentra
dentro de los límites indicados.
Bit 11: sin función / en funcionamiento
Cuando el bit 11 = 0, el motor no está en funcionamiento.
Cuando el bit 11 = 1, el convertidor de frecuencia tiene
una señal de arranque o la frecuencia de salida es mayor
que 0 Hz.
Bit 12, convertidor OK/parado, arranque automático
Cuando el bit 12 = 0, no hay sobrecarga temporal del
inversor.
Cuando el bit 12 = 1, el convertidor de frecuencia se ha
detenido debido a una sobrecarga. No obstante, el
convertidor de frecuencia no está apagado (desconectado)
y arranca de nuevo cuando naliza la sobrecarga.
Bit 13: tensión OK/excedida
Cuando el bit 13 = 0, no se han excedido los límites de
tensión del convertidor de frecuencia.
Cuando el bit 13 = 1, la tensión directa al enlace de CC del
convertidor de frecuencia es demasiado baja o demasiado
alta.
Bit 14: par OK/excedido
Cuando el bit 14 = 0, el par del motor es inferior al límite
seleccionado en el parámetro 4-16 Modo motor límite de par
y el parámetro 4-17 Modo generador límite de par.
Cuando el bit 14 = 1, se ha sobrepasado el límite
seleccionado en el parámetro 4-16 Modo motor límite de par
o el parámetro 4-17 Modo generador límite de par.
Bit 15: térmica OK / límite superado
Cuando el bit 15 = 0, los temporizadores para la
protección térmica del motor y la protección térmica del
convertidor de frecuencia, respectivamente, no han
sobrepasado el 100 %.
Cuando el bit 15 = 1, uno de los límites ha superado el
100 %.
16 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105

130BD806.10
Pulses
Disabled
Coast Stop
STW bit 1=false
Quick Stop
Quick Stop
STW bit 2=false
OFF
STW bit 0=false
ON
STW bit 0=true
Ramp Stop
Quick Stop
STW bit 2=false
S3: Switching ON inhibited
STW bit 6=true; 0, 1, 2=false
OFF
AND No Coast Stop
AND No Quick Stop
STW bit 0=false
AND bit 1=true
AND bit 2=true
Coast Stop
OR Quick Stop
STW bit 1=false
OR bit 2=false
Coast Stop
OR Quick Stop
STW bit 1=false
OR bit 2=false
Coast Stop
STW bit 1=false
Enable
Operation
STW bit 3=true
1st priority
2nd priority
3rd priority
Disable
Operation
STW bit 3=false
ON
STW bit 0=true
OFF
STW bit 0=true
Pulses
Disabled
S2: Ready For Switching ON
STW bit 0=true; 1, 2, 6=false
S5: Switching
OFF
STW bit 0, 1=true
bit 2, 6=false
S3: Switched ON
STW bit 0, 1=true; 2, 6=false
S4: Operation
STW bit 0, 1,2=true; 6=false
Control Guía de programación
4.4.3 Estado de PROFIdrive: diagrama de transición
En el perl de control de PROFIdrive, los bits de control:
0-3 realizan las funciones básicas de arranque/desconexión.
•
4-15 efectúan un control orientado a la aplicación.
•
En la Ilustración 4.4 se muestra el diagrama de estado básico-transición, en el que los bits de control del 0 al 3 controlan las
transiciones, mientras que el bit de estado correspondiente indica el estado real. Los puntos negros indican la prioridad de
las señales de control, donde pocos puntos indican una prioridad menor, y más puntos indican una prioridad mayor.
4 4
Ilustración 4.4 Estado de PROFIdrive: diagrama de transición
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 17
Control PROFINET
4.5 Perl de control FCDrive
4.5.1 Código de control conforme al perl
FC (CTW)
Para seleccionar el protocolo FC de Danfoss en el código
de control, ajuste el parámetro 8-10 Trama control como [0]
Protocolo FC. Utilice el código de control para enviar
órdenes de un maestro (PLC o PC) a un esclavo
44
(convertidor de frecuencia).
Bit Valor de bit = 0 Valor de bit = 1
00 Valor de referencia
01 Valor de referencia
02 Freno de CC Rampa
03 Inercia
04 Parada rápida Rampa
Mantener frecuencia de
05
salida
06 Parada de rampa Arranque
07 Sin función Reinicio
08 Sin función Velocidad ja
09 Rampa 1 Rampa 2
10 Datos no válidos Datos válidos
11 Sin función Relé 01 activo
12 Sin función Relé 02 activo
13 Ajuste de parámetros
14 Sin función Sin función
15 Hacia delante Cambio sentido
Selección externa, bit
menos signicativo (lsb)
Selección externa, bit más
signicativo (msb)
Sin funcionamiento por
inercia
Usar rampa
Selección del bit menos
signicativo (lsb)
Bit01Bit
00
0 0 1
0 1 2
1 0 3
1 1 4
Tabla 4.12 Valores de referencia programados para los bits
Bit 02: freno de CC
El bit 02 = 0 provoca el frenado de CC y la parada. La
intensidad y duración de frenado se ajustan en el
parámetro 2-01 Intens. freno CC y el parámetro 2-02 Tiempo
de frenado CC.
El bit 02 = 1 lleva al empleo de rampa.
Bit 03: funcionamiento por inercia
Bit 03 = 0 hace que el convertidor de frecuencia funcione
inmediatamente por inercia hasta detenerse por completo.
El bit 03 = 1 hace que el convertidor de frecuencia
arranque el motor si se cumplen las demás condiciones de
arranque.
AVISO!
En el parámetro 8-50 Selección inercia se elige la manera
en que el bit 03 se direcciona con la correspondiente
función en una entrada digital.
Bit 04: parada rápida
Bit 04 = 0 causa una parada rápida del convertidor de
Valor de
referencia
programado
Parámetro
[0] Parámetro 3-10 Referencia
interna
[1] Parámetro 3-10 Referencia
interna
[2] Parámetro 3-10 Referencia
interna
[3] Parámetro 3-10 Referencia
interna
frecuencia y reduce la velocidad del motor hasta detenerlo
Tabla 4.11 Valores de los bits para el código de control del
convertidor
mediante el parámetro 3-81 Tiempo rampa parada rápida.
Bit 04 = 1 hace que el convertidor de frecuencia reduzca la
velocidad del motor hasta detenerlo mediante el
Explicación de los bits de control
Bits 00/01: valor de referencia
Utilice los bits 00 y 01 para seleccionar entre los cuatro
valores de referencia, que están preprogramados en el
parámetro 3-10 Referencia interna según la Tabla 4.12.
AVISO!
En el parámetro 8-56 Selec. referencia interna, puede
realizarse una selección para denir cómo el bit 00/01 se
direcciona con la función correspondiente en las
entradas digitales.
parámetro 3-42 Rampa 1 tiempo desacel. rampa o el
parámetro 3-52 Rampa 2 tiempo desacel. rampa.
Bit 05: mantener la frecuencia de salida
Bit 05 = 0: se mantiene la frecuencia de salida actual (en
Hz). La frecuencia de salida mantenida solo puede
cambiarse ahora por medio de las entradas digitales (del
parámetro 5-10 Terminal 18 Entrada digital al
parámetro 5-15 Terminal 33 entrada digital) programadas
como [21]Aceleración y [22] Deceleración.
Bit 05 = 1 aplica una rampa.
Bit 06: parada / arranque de rampa
Bit 06 = 0 detiene el convertidor de frecuencia y hace que
el motor desacelere hasta pararse a través del parámetro
de rampa de deceleración seleccionado.
Bit 06 = 1 permite al convertidor de frecuencia arrancar el
motor si se cumplen las demás condiciones de arranque.
18 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105

Control Guía de programación
AVISO!
En el parámetro 8-53 Selec. arranque, dena cómo se
direcciona el bit 06, parada/arranque de rampa, con la
función correspondiente en una entrada digital.
Bit 07: reinicio
El Bit 07 = 0 no provoca el reinicio.
Bit 07 = 1 reinicia una desconexión. El reinicio se activa en
el anco de subida de la señal, es decir, cuando cambia de
0 lógico a 1 lógico.
Bit 08: velocidad ja
Bit 08 = 0: sin función.
Bit 08 = 1: el parámetro 3-19 Velocidad ja [RPM] determina
la frecuencia de salida.
Bit 09: selección de rampa 1/2
Bit 09 = 0: está activada la rampa 1 (del
parámetro 3-40 Rampa 1 tipo al parámetro 3-47 Rel.
Rampa1/Rampa-S comienzo dec.).
Bit 09 = 1: está activada la rampa 2 (del
parámetro 3-50 Rampa 2 tipo al parámetro 3-57 Rel.
Rampa2/Rampa-S comienzo dec.).
Bit 10: datos no válidos/válidos
Indica al convertidor de frecuencia si debe utilizar o
ignorar el código de control.
Bit 10 = 0 hace que se pase por alto el código de control.
Bit 10 = 1 utiliza el código de control. Esta función es
importante, debido a que el código de control siempre
está contenido en el telegrama, independientemente del
tipo de telegrama que se emplee. Por ello, es posible
desactivar el código de control si no es necesario al
actualizar o leer parámetros.
Bit 11: relé 01
Bit 11 = 0: el relé 01 no está activado.
Bit 11 = 1: relé 01 activado, siempre que se haya
seleccionado el bit 11 del código de control en el
parámetro 5-40 Relé de función.
Bit 12: relé 02
Bit 12 = 0: el relé 02 no está activado.
Bit 12 = 1: relé 02 activado, siempre que se haya
seleccionado [37] Bit código control 12 en el
parámetro 5-40 Relé de función.
Bits 13: selección de ajustes
Use el bit 13 para seleccionar entre los dos ajustes de
menú, según la Tabla 4.13.
Esta función solamente es posible cuando se selecciona [9]
Ajuste múltiple en el parámetro 0-10 Ajuste activo.
Ajuste Bit 13
1 0
2 1
Tabla 4.13 Selección de ajustes
AVISO!
En el parámetro 8-55 Selec. ajuste, dena cómo se
direcciona el bit 13 con la función correspondiente en las
entradas digitales.
Bit 14: sin uso
Bit 15: cambio de sentido
Bit 15 = 0: sin cambio de sentido.
Bit 15 = 1: con cambio de sentido.
4.5.2 Código de estado según el perl FC
(STW)
El código de estado se utiliza para comunicar al maestro
(p. ej., un PC) el modo de funcionamiento del esclavo
(convertidor de frecuencia).
Consulte el capétulo 7 Ejemplos de aplicaciones para ver un
ejemplo de telegrama de código de estado mediante un
PPO de tipo 3.
Bit Bit = 0 Bit = 1
00 Control no preparado Ctrl prep.
Convertidor de
01
frecuencia no preparado
02 Inercia Activar
03 Sin error Desconexión
04 Sin error Error (sin desconexión)
05 Reserv –
06 Sin error Bloqueo por alarma
07 Sin advertencia Advertencia
08 Velocidad ≠ ref. Velocidad = referencia
09 Funcionamiento local Contr. bus
Fuera del límite de
10
frecuencia
11 Sin función En funcionamiento
Convertidor de
12
frecuencia OK
13 Tensión OK Tensión excedida
14 Par OK Par excedido
15 Térmica OK Límite superado
Tabla 4.14 Denición de bits de estado
Explicación de los bits de estado
Bit 00: control no listo / listo
Bit 00 = 0: el convertidor de frecuencia se ha
desconectado.
Bit 00 = 1: los controles del convertidor de frecuencia
están preparados, pero el componente de potencia no
necesariamente está recibiendo suministro eléctrico (en el
caso de suministro externo de 24 V a los controles).
Convertidor de frecuencia
preparado
Límite de frecuencia OK
Detenido, arranque automático
4 4
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 19

Control PROFINET
Bit 01: convertidor de frecuencia preparado
Bit 01 = 0: el convertidor de frecuencia no está listo para
funcionar.
Bit 01 = 1: el convertidor de frecuencia está listo para
funcionar, pero hay activada una orden de funcionamiento
por inercia mediante las entradas digitales o la comunicación de telegramas.
Bit 02: paro por inercia
44
Bit 02 = 0: el convertidor de frecuencia ha liberado el
motor.
Bit 02 = 1: el convertidor de frecuencia puede arrancar el
motor cuando se dé la orden de arranque.
Bit 03: sin error / desconexión
Bit 03 = 0: el convertidor de frecuencia no está en modo
de fallo.
Bit 03 = 1: el convertidor de frecuencia se ha desconectado
y necesita una señal de reinicio para restablecer el funcionamiento.
Bit 04: no hay error / error (sin desconexión)
Bit 04 = 0: el convertidor de frecuencia no está en modo
de fallo.
Bit 04 = 1: hay un error en el convertidor de frecuencia,
pero sin desconexión.
Bit 05: sin uso
El bit 05 no se utiliza en el código de estado.
Bit 06: sin error / bloqueo por alarma
Bit 06 = 0: el convertidor de frecuencia no está en modo
de fallo.
Bit 06 = 1: el convertidor de frecuencia se ha desconectado
y bloqueado.
Bit 07: sin advertencia / advertencia
Bit 07 = 0: no hay advertencias.
Bit 07 = 1: se ha producido una advertencia.
Bit 08: velocidad ≠ referencia / velocidad = referencia
Bit 08 = 0: el motor funciona pero la velocidad actual es
distinta a la velocidad de referencia predeterminada. Por
ejemplo, esto puede ocurrir mientras la velocidad sigue
una rampa hacia arriba o hacia abajo durante el arranque
o la parada.
Bit 08 = 1: la velocidad actual del motor es igual a la
velocidad de referencia predeterminada.
Bit 09: funcionamiento local / control de bus
Bit 09 = 0: se ha pulsado [Stop/Reset] en el LCP o se ha
seleccionado [2] Local en el parámetro 3-13 Lugar de
referencia. No es posible controlar el convertidor de
frecuencia mediante la comunicación serie.
Bit 09 = 1: es posible controlar el convertidor de frecuencia
a través de la comunicación serie o el eldbus.
Bit 10: fuera del límite de frecuencia
Bit 10 = 0: la frecuencia de salida ha alcanzado el valor del
parámetro 4-11 Límite bajo veloc. motor [RPM] o del
parámetro 4-13 Límite alto veloc. motor [RPM].
Bit 10 = 1: la frecuencia de salida está dentro de los límites
denidos.
Bit 11: sin función / en funcionamiento
Bit 11 = 0: el motor no está en funcionamiento.
Bit 11 = 1: el convertidor de frecuencia tiene una señal de
arranque o la frecuencia de salida es mayor que 0 Hz.
Bit 12: convertidor de frecuencia OK/parado, arranque
automático
Bit 12 = 0: no hay sobretemperatura temporal en el
convertidor de frecuencia.
Bit 12 = 1: el convertidor de frecuencia se ha detenido por
sobretemperatura, pero no se ha desconectado y reinicia el
funcionamiento una vez que la temperatura vuelve a
encontrarse dentro de los límites denidos.
Bit 13: tensión OK / límite excedido
Bit 13 = 0: no hay advertencias de tensión.
Bit 13 = 1: la tensión de CC en el enlace de CC del
convertidor de frecuencia es demasiado baja o demasiado
alta.
Bit 14: par OK / límite excedido
Bit 14 = 0: la intensidad del motor es inferior al límite de
par seleccionado en el parámetro 4-16 Modo motor límite
de par o en el parámetro 4-17 Modo generador límite de par.
Bit 14 = 1: se han sobrepasado los límites de par del
parámetro 4-16 Modo motor límite de par y del
parámetro 4-17 Modo generador límite de par.
Bit 15: térmica OK / límite superado
Bit 15 = 0: los temporizadores para la protección térmica
del motor y la protección térmica del convertidor de
frecuencia no han sobrepasado el 100 %.
Bit 15 = 1: uno de los límites ha superado el 100 %.
20 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105

Comunicación acíclica (DP-V... Guía de programación
5 Comunicación acíclica (DP-V1)
PROFINET ofrece una comunicación cíclica para mejorar la
comunicación de datos cíclica. Esta función es posible
gracias a un controlador de I/O (por ejemplo, un PLC) y a
un supervisor de I/O (por ejemplo, las herramientas
del PC).
La comunicación cíclica implica que la transferencia de
datos tiene lugar de forma continuada con una
determinada frecuencia de actualización. Se trata de una
función común utilizada normalmente para una actualización rápida de los datos de proceso de I/O. La
comunicación acíclica implica un evento único, utilizado
principalmente para lectura/escritura en los parámetros de
los controladores de procesos, herramientas para PC o
sistemas de seguimiento.
5.1 Características de un sistema de
controlador de I/O
5 5
Intercambio cíclico de datos.
Lectura/escritura acíclica en los parámetros.
La conexión acíclica se queda ja y no se puede cambiar
durante el funcionamiento.
En general, un controlador de I/O se utiliza como
controlador de procesos, responsable de las órdenes, la
velocidad de referencia, el estado de la aplicación, etc.
(controlador basado en PLC o PC).
En el controlador I/O, la conexión acíclica puede utilizarse
para el acceso a los parámetros generales en los esclavos.
Características de un sistema de
5.2
supervisor de I/O
Iniciar/abortar conexión acíclica.
Lectura/escritura acíclica en los parámetros.
La conexión acíclica se puede establecer dinámicamente
(iniciada) o eliminar (abortada) aun cuando un controlador
de I/O se encuentre activo en la red.
La conexión acíclica suele utilizarse para las herramientas
conguración o de puesta en marcha, para lograr un
de
fácil acceso a todos los parámetros de todos los esclavos
del sistema.
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 21

Comunicación acíclica (DP-V... PROFINET
5.3 Esquema de transmisión
En la Ilustración 5.1 se muestra la estructura de un dispositivo de I/O PROFINET.
Un dispositivo de I/O consta de varias ranuras físicas o virtuales. La ranura 0 siempre existe y representa a la unidad básica.
Cada ranura contiene varios bloques de datos transmitidos por un índice.
El maestro debe transmitir una variable en el esclavo como sigue: /Dirección esclavo/Ranura #/Índice #
55
Ilustración 5.1 Estructura de dispositivos de I/O PROFINET
22 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105

Comunicación acíclica (DP-V... Guía de programación
5.4 Secuencia de petición de lectura / escritura acíclica
Un servicio de lectura o escritura en un parámetro del convertidor de frecuencia se lleva a cabo como se ilustra en la
Ilustración 5.2.
5 5
Ilustración 5.2 Secuencia de petición de lectura / escritura acíclica
Inicie la lectura o escritura en un parámetro del convertidor de frecuencia mediante un servicio de escritura acíclica en la
ranura 0, índice 47. Si esta petición de escritura es válida, el convertidor de frecuencia envía inmediatamente una respuesta
positiva de escritura sin datos. De lo contrario, el convertidor de frecuencia envía una respuesta de escritura negativa.
Ahora, el convertidor de frecuencia interpreta la parte del canal de parámetros de PROFIdrive de la unidad de datos y
comienza a ejecutar internamente la orden en el convertidor de frecuencia.
Como paso siguiente, el maestro envía una petición de lectura. Si el convertidor de frecuencia continúa ocupado ejecutando
la petición de parámetros interna, se envía una respuesta negativa sin datos desde el convertidor. El maestro repite la
petición hasta que el convertidor de frecuencia tiene preparados los datos de respuesta para la petición de parámetros del
convertidor.
En el ejemplo siguiente se muestran los detalles de los telegramas necesarios para el servicio de lectura/escritura.
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 23

Comunicación acíclica (DP-V... PROFINET
5.5 Estructura de datos en los telegramas
acíclicos
La estructura de datos para una petición de parámetros de
escritura/lectura consta de tres bloques principales:
Bloque de cabecera.
•
Bloque de parámetros.
•
Bloque de datos.
•
Organícelos conforme a la Tabla 5.1:
55
Número de palabras
1 Cabecera Solicitud # ID de petición
2 Cabecera Eje # Parám.
3 (parám. 1) Atributo # Elementos
4 (parám. 1) Número de parámetro
5 (parám. 1) Número de subíndice
6 (parám. 2) Atributo # Elementos
7 (parám. 2) Número de parámetro
8 (parám. 2) Número de subíndice
9 (parám. 3) Atributo # Elementos
10 (parám. 3) Número de parámetro
11 (parám. 3) Número de subíndice
...
N (parám. de datos 1) Formato # Elementos
N+1 (parám. de datos 1) Datos Datos
N (parám. de datos 2) Formato # Elementos
N+1 (parám. de datos 2) Datos Datos
N (parám. de datos 3) Formato # Elementos
N+1 (parám. de datos 3) Datos Datos
N+1 (parám. de datos 3) Datos Datos
N+1 (parám. de datos 3) Datos Datos
Tabla 5.1 Telegrama de petición
Cabecera
5.6
Número de petición
El maestro utiliza el n.º de petición para tratar la respuesta
procedente del dispositivo de I/O. El dispositivo de I/O
reeja este número en su respuesta.
ID de petición
1 = pedir parámetro
2 = cambiar parámetro
Eje
Déjelo siempre en 0 (cero).
Solo se utiliza en sistemas multieje.
Número de parámetros
Número de parámetros a leer o escribir.
Bloque de parámetros
5.7
Indique los 5 valores siguientes para cada parámetro que
haya que leer.
Atributo
Atributo a leer
10 = valor
20 = descripción
30 = texto
Número de elementos
El número de elementos que hay que leer cuando el
parámetro está indexado.
Atributo
Leer atributo.
Número de parámetro
El número del parámetro que se debe leer.
Subíndice
Indicador al índice.
5.8 Bloque de datos
El bloque de datos solo es necesario para las órdenes de
escritura. Ajuste la información de bloque de datos para la
escritura de cada parámetro.
Formato
El formato de la información que hay que escribir:
2: entero 8.
3: entero 16.
4: entero 32.
5: sin signo 8.
6: sin signo 16.
7: sin signo 32.
9: cadena visible.
33: valor normalizado de 2 bytes.
35: secuencia de bits de 16 variables booleanas.
54: diferencia de tiempo sin fecha.
En la guía de programación del convertidor de frecuencia,
consulte una tabla con el número de parámetro, el formato
y otra información relevante.
Datos
El valor real para transferir. El volumen de datos debe tener
exactamente el tamaño solicitado en el bloque de
parámetros. Si el tamaño no coincide, la petición genera
un error.
Si la transmisión de una orden de petición se realiza
correctamente, el maestro puede leer la respuesta del
convertidor. La respuesta tiene un aspecto muy similar a la
orden de petición. La respuesta solo consta de dos
bloques: el bloque de cabecera y el de datos.
24 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105

Comunicación acíclica (DP-V... Guía de programación
1 Cabecera Solicitud # ID de petición
2 Cabecera Eje # Parám.
3 (parám. de datos 1) Formato Código de fallo
4 (parám. de datos 1) Datos Datos
5 (parám. de datos 2) Formato Código de fallo
6 (parám. de datos 2) Datos Datos
7 (parám. de datos 3) Formato Código de fallo
8 (parám. de datos 3) Datos Datos
9 (parám. de datos 3) Datos Datos
10 (parám. de datos 3) Datos Datos
Tabla 5.2 Telegrama de respuesta
Código de fallo
Si el dispositivo de I/O descubre un error durante la
ejecución de la orden, ajustará el código de error según los
siguientes valores:
0 × 00 Parámetro desconocido.
0 × 01 El parámetro es de solo lectura.
0 × 02 Valor fuera de rango debido al valor máx./mín.
0 × 03 Subíndice erróneo.
0 × 04 El parámetro no es una matriz.
0 × 05 Tipo de datos erróneo (longitud de datos equivocada).
0 × 06 No se permite ajustar este parámetro (solo reiniciarlo).
0 × 07 Elemento descriptivo de solo lectura.
0 × 09 Sin descripción disponible (solo el valor).
0 × 0b Control de procesos imposible.
0 × 0f Sin matriz de texto disponible (solo el valor).
0 × 11 No es posible en el estado actual.
Valor fuera de rango debido al estado / la conguración
0 × 14
del convertidor.
0 × 15 Respuesta demasiado larga (más de 240 bytes).
Dirección de parámetro errónea (valor desconocido o no
0 × 16
compatible del atributo, elemento, número de
parámetro, subíndice o combinación ilegal).
0 × 17 Formato ilegal (para escritura).
0 × 18 Cantidad de valor inconsistente.
0 × 65 Eje erróneo: acción imposible con este eje.
0 × 66 Petición de servicio desconocida.
Este servicio no es posible con acceso a varios
0 × 67
parámetros.
0 × 68 El valor del parámetro no puede leerse desde el bus.
5 5
Tabla 5.3 Código de fallo
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 25

Parámetros PROFINET
6 Parámetros
6
6.1 Grupo de parámetros 0-** Func./Display
0-37 Texto display 1
Range: Función:
0* [0 -
En este parámetro, es posible escribir una cadena de
25 ]
texto individual para mostrarla en el LCP o para ser
leída a través de la comunicación serie.
Para mostrar el texto de forma permanente,
seleccione [37] Texto display 1 en uno de los
siguientes parámetros:
Parámetro 0-20 Línea de pantalla pequeña
•
1.1.
Parámetro 0-21 Línea de pantalla pequeña
•
1.2.
Parámetro 0-22 Línea de pantalla pequeña
•
1.3.
Parámetro 0-23 Línea de pantalla grande 2.
•
Parámetro 0-24 Línea de pantalla grande 3.
•
Parámetro 0-37 Texto display 1.
•
El cambio del parámetro 12-08 Nombre de host
cambiará el parámetro 0-37 Texto display 1, pero no al
contrario.
6.2 Grupo de parámetros 8-** Comunic. y
opciones
6.2.1 8-0* Ajustes generales
8-01 Puesto de control
El ajuste de este parámetro anula los ajustes del
parámetro 8-50 Selección inercia al parámetro 8-56 Selec. referencia
interna.
Option: Función:
[0] Digital y cód. ctrl Utilice tanto la entrada digital
como el código de control.
[1] Sólo digital Utilice únicamente entradas
digitales.
[2] Sólo cód. de control Utilice solo el código de
control.
8-02 Fuente de control
Option: Función:
AVISO!
Este parámetro no se puede ajustar con el
motor en marcha.
Seleccione la fuente del control.
[0] Ninguno
[1] FC Port
[3] Opción A
8-03 Valor de tiempo límite ctrl.
Range: Función:
1 s* [0.5 -
6000 s]
8-04 Función tiempo límite cód. ctrl.
Seleccionar la función de tiempo límite. La función de tiempo
límite se activa cuando el código de control no se actualiza
dentro del periodo de tiempo especicado en el
parámetro 8-03 Valor de tiempo límite cód. ctrl..
Option: Función:
[0] * No Reanudar el control a través del bus
Introduzca el tiempo máximo entre la recepción
de dos telegramas consecutivos. Si se supera este
tiempo, esto indica que la comunicación de
telegramas se ha detenido. Se ejecutará entonces
la función seleccionada en el
parámetro 8-04 Función tiempo límite cód. ctrl.. Un
código de control válido activa el contador del
tiempo límite.
de campo (eldbus o estándar)
utilizando el código de control más
reciente.
26 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105

Parámetros Guía de programación
8-04 Función tiempo límite cód. ctrl.
Seleccionar la función de tiempo límite. La función de tiempo
límite se activa cuando el código de control no se actualiza
dentro del periodo de tiempo especicado en el
parámetro 8-03 Valor de tiempo límite cód. ctrl..
Option: Función:
[1] Mantener salida Mantener la frecuencia de salida hasta
que se reanuda la comunicación.
[2] Parada Realizar una parada con reinicio
automático hasta que se reanude la
comunicación.
[3] Velocidad ja El motor funcionará a frecuencia de
velocidad ja hasta que se reanude la
comunicación.
[4] Velocidad max. El motor funcionará a la frecuencia
máxima hasta que se reanude la
comunicación.
[5] Parada y
desconexión
Se detiene el motor y se desconecta.
Luego se reinicia el convertidor de
frecuencia para volver a arrancar:
A través del eldbus.
•
Mediante [Reset].
•
Mediante una entrada digital.
•
8-07 Accionador diagnóstico
Option: Función:
Permitir y controlar la función de
diagnóstico del convertidor.
[0] * Desactivar Los datos del diagnóstico ampliado no se
envían aunque aparezcan en el convertidor
de frecuencia.
[1] Activar
alarmas
[2] Provoc alarm/
adver
Los datos de diagnóstico ampliado se
envían cuando aparecen una o más alarmas.
Los datos de diagnóstico ampliado se
envían si aparecen una o más alarmas o
advertencias.
6.2.2 8-1* Aj. cód. ctrl.
8-10 Trama control
Seleccione la interpretación del código de control y del código
de estado correspondientes al eldbus instalado. Solo las
selecciones válidas para el eldbus instalado serán visibles en la
pantalla LCP.
Para ver las pautas para la selección de [0] Protocolo FC y de [1]
Perl PROFIdrive, consulte la Guía de diseño del convertidor de
frecuencia.
Option: Función:
[0] * Protocolo FC
[1] Perl PROFIdrive
8-14 Código de control congurable CTW
Option: Función:
[0] Ninguno
[1] * Perl por defecto
[2] CTW válido act. bajo
[4] PID error inverse
[5] PID reset I part
[6] PID enable
8-19 Product Code
Range: Función:
Size
related*
[0 2147483647 ]
Seleccione 0 para leer los datos del
código de producto del eldbus
real conforme a la opción de bus
de campo instalada. Seleccione 1
para leer la identidad real del
proveedor.
6.2.3 8-5* Digital/Bus
Parámetros para congurar la unión del código de control.
AVISO!
Estos parámetros solo están activos si el
parámetro 8-01 Puesto de control está ajustado como [0]
Digital y cód. ctrl.
8-50 Selección inercia
Seleccione la activación del funcionamiento por inercia.
Option: Función:
[0] Entrada digital Una entrada digital activa el funciona-
miento por inercia.
[1] Bus Un puerto de comunicación en serie o el
eldbus activan el funcionamiento por
inercia.
[2] Lógico Y El eldbus o el puerto de comunicación en
serie y una entrada digital activan el funcionamiento por inercia.
[3] * Lógico O El eldbus o el puerto de comunicación en
serie o una entrada digital activan el funcionamiento por inercia.
8-51 Selección parada rápida
Seleccione la activación de la función de parada rápida.
Option: Función:
[0] Entrada digital Una entrada digital activa la función de
parada rápida.
[1] Bus Un puerto de comunicación en serie o el
eldbus activan la función de parada
rápida.
6
6
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 27

Parámetros PROFINET
6
8-51 Selección parada rápida
Seleccione la activación de la función de parada rápida.
Option: Función:
[2] Lógico Y El eldbus o el puerto de comunicación en
serie y una entrada digital activan la
función de parada rápida.
[3] * Lógico O El eldbus o el puerto de comunicación en
serie y una entrada digital activan la
función de parada rápida.
8-52 Selección freno CC
Seleccione el control de la función de freno de CC a través de los
terminales (entradas digitales) y/o del eldbus.
Option: Función:
AVISO!
Cuando el parámetro 1-10 Construcción
del motor se congure como [1] PM no
saliente SPM, solo estará disponible la
opción [0] Entrada digital.
[0] Entrada
digital
[1] Bus Activar una orden de arranque a través del
[2] Lógico Y Activar una orden de arranque a través del
[3] Lógico O Activar una orden de arranque a través del
8-53 Selec. arranque
Seleccione la activación de la función de arranque.
Option: Función:
[0] Entrada digital Una entrada digital activa la función de
[1] Bus Un puerto de comunicación en serie o el
[2] Lógico Y El eldbus o el puerto de comunicación en
[3] * Lógico O El eldbus o el puerto de comunicación en
Activar una orden de arranque a través de una
entrada digital.
puerto de comunicación en serie o de la opción
de bus de campo.
eldbus o del puerto de comunicación en serie,
y también a través de una de las entradas
digitales.
eldbus o del puerto de comunicación en serie,
o mediante una de las entradas digitales.
arranque.
eldbus activan la función de arranque.
serie y una entrada digital activan la
función de arranque.
serie o una entrada digital activan la
función de arranque.
8-54 Selec. sentido inverso
Seleccione la activación de la función de cambio de sentido.
Option: Función:
[0] Entrada digital Una entrada digital activa la función de
cambio de sentido.
[1] Bus Un puerto de comunicación en serie o el
eldbus activan la función de cambio de
sentido.
[2] Lógico Y El eldbus o el puerto de comunicación en
serie y una entrada digital activan la función
de cambio de sentido.
[3] Lógico O El eldbus o el puerto de comunicación en
serie o una entrada digital activan la función
de cambio de sentido.
8-55 Selec. ajuste
Seleccione la activación de la selección de ajustes.
Option: Función:
[0] Entrada digital Una entrada digital activa la selección de
ajustes.
[1] Bus Un puerto de comunicación en serie o el
eldbus activan la selección de ajustes.
[2] Lógico Y El eldbus o el puerto de comunicación en
serie y una entrada digital activan la
selección de ajustes.
[3] * Lógico O El eldbus o el puerto de comunicación en
serie o una entrada digital activan la
selección de ajustes.
8-56 Selec. referencia interna
Option: Función:
Seleccione la activación de la selección de
referencia interna.
[0] Entrada
digital
[1] Bus Un puerto de comunicación en serie o el
[2] Lógico Y El eldbus o el puerto de comunicación en
[3] * Lógico O El eldbus o el puerto de comunicación en
Una entrada digital activa la selección de la
referencia interna.
eldbus activan la selección de referencia
interna.
serie y una entrada digital activan la selección
de referencia interna.
serie o una entrada digital activan la selección
de referencia interna.
28 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105

Parámetros Guía de programación
8-57 Prodrive OFF2 Selección
Option: Función:
[0] Entrada digital
[1] Bus
[2] Lógico Y
[3] * Lógico O
8-58 Prodrive OFF3 Selección
Option: Función:
[0] Entrada digital
[1] Bus
[2] Lógico Y
[3] * Lógico O
6.2.4 8-9* Realim. de bus
Utilice el grupo de parámetros para congurar la realimentación de bus.
8-90 Veloc Bus Jog 1
Range: Función:
100 RPM* [ 0 - 1500
RPM]
8-91 Veloc Bus Jog 2
Range: Función:
200 RPM* [ 0 - 1500
RPM]
Introduzca la velocidad ja. Activa
esta velocidad ja a través del puerto
serie o la opción de bus de campo.
Introduzca la velocidad ja. Activa
esta velocidad ja a través del puerto
serie o la opción de bus de campo.
6.3 Grupo de parámetros 9-** PROFIdrive
9-07 Valor
Range: Función:
0* [0 - 65535 ] Este parámetro proporciona el MAV para un
maestro clase 2. Este parámetro es válido si la
prioridad de control está establecida como
maestro clase 2.
9-15 Cong. escritura PCD
Matriz [10]
Option: Función:
Seleccione los parámetros que se asignarán a los PCD 3
a 10 de los telegramas. El número de los PCD
disponibles depende del tipo de telegrama. A
continuación, los valores de los PCD 3 a 10 se escriben
en los parámetros seleccionados como valores de datos.
Como método alternativo, especique un telegrama
Probus estándar en el parámetro 9-22 Selección de
telegrama.
9-16 Cong. lectura PCD
Matriz [10]
Option: Función:
Seleccione los parámetros que se asignarán a los PCD 3
a 10 de los telegramas. El número de PCD disponibles
depende del tipo de telegrama. Los PCD 3-10 contienen
los valores de dato reales de los parámetros
seleccionados. Para telegramas Probus estándar,
consulte el parámetro 9-22 Selección de telegrama
9-22 Selección de telegrama
Option: Función:
Este parámetro muestra el telegrama
de PROFIBUS estándar seleccionado
que el controlador I/O de PROFINET
ha enviado al convertidor de
frecuencia. En el encendido o si se
envía un telegrama no compatible
desde el controlador de I/O, el
parámetro muestra Ninguno en la
pantalla.
[1] Telegram.estándar1
[100] * Ninguno
[101] PPO1
[102] PPO 2
[103] PPO 3
[104] PPO 4
[105] PPO 5
[106] PPO 6
[107] PPO 7
[108] PPO 8
6
6
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 29

Parámetros PROFINET
6
9-23 Parameters for Signals
Matriz [1000]
Solo lectura
Option: Función:
Este parámetro
contiene una lista de
las señales que pueden
seleccionarse en el
parámetro 9-15 Cong.
escritura PCD y el
parámetro 9-16 Cong.
lectura PCD.
[0] * None
[302] Minimum Reference
[303] Maximum Reference
[311] Jog Speed [Hz]
[312] Catch up/slow Down Value
[341] Ramp 1 Ramp Up Time
[342] Ramp 1 Ramp Down Time
[351] Ramp 2 Ramp Up Time
[352] Ramp 2 Ramp Down Time
[380] Jog Ramp Time
[381] Quick Stop Ramp Time
[412] Motor Speed Low Limit [Hz]
[414] Motor Speed High Limit [Hz]
[416] Torque Limit Motor Mode
[417] Torque Limit Generator Mode
[553] Term. 29 High Ref./Feedb. Value
[558] Term. 33 High Ref./Feedb. Value
[590] Digital & Relay Bus Control
[593] Pulse Out 27 Bus Control
[595] Pulse Out 29 Bus Control
[615] Terminal 53 High Ref./Feedb.
Value
[625] Terminal 54 High Ref./Feedb.
Value
[676] Terminal 45 Output Bus Control
[696] Terminal 42 Output Bus Control
[733] Process PID Proportional Gain
[734] Process PID Integral Time
[735] Process PID Dierentiation Time
[748] PCD Feed Forward
[890] Bus Jog 1 Speed
[891] Bus Jog 2 Speed
[1500] Operating hours
[1501] Running Hours
[1502] kWh Counter
[1600] Control Word
[1601] Reference [Unit]
[1602] Reference [%]
[1603] Status Word
[1605] Main Actual Value [%]
[1609] Custom Readout
[1610] Power [kW]
9-23 Parameters for Signals
Matriz [1000]
Solo lectura
Option: Función:
[1611] Power [hp]
[1612] Motor Voltage
[1613] Frequency
[1614] Motor current
[1615] Frequency [%]
[1616] Torque [Nm]
[1617] Speed [RPM]
[1618] Motor Thermal
[1622] Torque [%]
[1630] DC Link Voltage
[1633] Brake Energy /2 min
[1634] Heatsink Temp.
[1635] Inverter Thermal
[1638] SL Controller State
[1639] Control Card Temp.
[1650] External Reference
[1652] Feedback[Unit]
[1653] Digi Pot Reference
[1657] Feedback [RPM]
[1660] Digital Input
[1661] Terminal 53 Setting
[1662] Analog input 53
[1663] Terminal 54 Setting
[1664] Analog input 54
[1665] Analog output 42 [mA]
[1667] Pulse input 29 [Hz]
[1668] Pulse input 33 [Hz]
[1669] Pulse output 27 [Hz]
[1670] Pulse output 29 [Hz]
[1671] Relay output
[1672] Counter A
[1673] Counter B
[1679] Analog output 45 [mA]
[1680] Fieldbus CTW 1
[1682] Fieldbus REF 1
[1684] Comm. Option STW
[1685] FC Port CTW 1
[1690] Alarm Word
[1691] Alarm Word 2
[1692] Warning Word
[1693] Warning Word 2
[1694] Ext. Status Word
[1695] Ext. Status Word 2
[1697] Alarm Word 3
[3401] PCD 1 Write For Application
[3402] PCD 2 Write For Application
[3403] PCD 3 Write For Application
[3404] PCD 4 Write For Application
[3405] PCD 5 Write For Application
[3406] PCD 6 Write For Application
30 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105

Parámetros Guía de programación
9-23 Parameters for Signals
Matriz [1000]
Solo lectura
Option: Función:
[3407] PCD 7 Write For Application
[3408] PCD 8 Write For Application
[3409] PCD 9 Write For Application
[3410] PCD 10 Write For Application
[3421] PCD 1 Read For Application
[3422] PCD 2 Read For Application
[3423] PCD 3 Read For Application
[3424] PCD 4 Read For Application
[3425] PCD 5 Read For Application
[3426] PCD 6 Read For Application
[3427] PCD 7 Read For Application
[3428] PCD 8 Read For Application
[3429] PCD 9 Read For Application
[3430] PCD 10 Read For Application
[3450] Actual Position
[3456] Track Error
9-27 Editar parámetros
Option: Función:
Los parámetros se pueden editar mediante el
Probus, la interfaz estándar RS485 o el LCP.
[0] Desactivado Desactivar la edición mediante PROFIBUS.
[1] * Activado Activar la edición mediante PROFIBUS.
9-28 Control de proceso
Option: Función:
El control de proceso (ajuste del código de
control, la velocidad de referencia y los datos
de proceso) es posible mediante PROFINET o
mediante el eldbus estándar, pero no ambos
a la vez. El control local siempre es posible
mediante el LCP. El control mediante control
de proceso es posible con cualquier terminal
o eldbus dependiendo del ajuste del
parámetro 8-50 Selección inercia al
parámetro 8-58 Prodrive OFF3 Selección.
[0] Desactivar Desactivar el control de proceso mediante el
PROFINET y activar el control de proceso
mediante el eldbus estándar o el supervisor
de I/O PROFINET.
[1]*Act. master
cíclico
Permite el control de proceso mediante el
controlador de I/O y desactiva el control de
proceso mediante el eldbus estándar o el
supervisor de I/O PROFINET.
9-53 Cód. de advert. Probus
Solo lectura
Range: Función:
0* [0 - 65535 ] Este parámetro muestra advertencias de
comunicación de PROFINET.
Bit Estado cuando el bit está activo
0 La conexión con el controlador de I/O no es correcta.
Reservado para el estado de la conexión con el
1
segundo controlador de I/O.
2 Sin uso.
3 Recibida orden de borrado de datos.
4 El valor real no está actualizado.
5 Sin vínculo en ambas vías.
6 Sin uso.
7 La inicialización de la opción PROFINET no es correcta.
8 El convertidor de frecuencia se ha desconectado.
9 Error interno de CAN.
Datos de conguración erróneos desde el controlador
10
de I/O.
11 Sin uso.
12 Se ha producido un error interno.
13 Sin congurar.
14 Tiempo límite activo.
15 Advertencia 34 activa.
Tabla 6.1 Advertencias de comunicación de PROFINET
9-65 Número perl Probus
Range: Función:
0* [0 - 0 ] Este parámetro contiene la identicación de perl.
El byte 1 contiene el número de perl y el byte 2
el número de versión del perl.
9-70 Ajuste de programación
Este parámetro es único para el LCP y el eldbus. Consulte el
parámetro 0-11 Ajuste de programación.
Option: Función:
Seleccione el ajuste que se va a editar.
[1] Ajuste activo 1 Editar el ajuste 1.
[2] Ajuste activo 2 Editar el ajuste 2.
[9] * Ajuste activo Seguir el ajuste activo seleccionado en
el parámetro 0-10 Ajuste activo.
9-71 Probus Save Data Values
Option: Función:
Los valores de parámetros cambiados mediante
PROFINET no se almacenan de forma automática
en la memoria no volátil. Utilice este parámetro
para activar una función que almacena los
valores de parámetros en la memoria EEPROM
no volátil, de forma que los valores de
parámetros cambiados se conserven al apagar el
equipo.
6
6
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 31

Parámetros PROFINET
6
9-71 Probus Save Data Values
Option: Función:
[0] * O Desactivar la función de almacenamiento no
volátil.
[1] Store all
setups
Almacenar en la memoria no volátil todos los
valores de parámetros de todos los ajustes.
Cuando todos los valores de parámetros se han
almacenado, la selección vuelve a [0]
Desactivado.
9-72 Reiniciar unidad
Option: Función:
[0] * Sin acción
[1] Reinicio
arranque
[3] Reinic. opción
comun.
Reinicio del convertidor de frecuencia en el
encendido, como para un ciclo de potencia.
Reiniciar únicamente la opción PROFINET; se
ejecuta una secuencia de encendido en la
opción PROFINET.
Al reiniciarse, el convertidor desaparece del
eldbus, lo que puede causar un error de
comunicación del maestro.
9-80 Parámetros denidos (1)
Matriz [116]
No hay acceso al LCP
Solo lectura
Range: Función:
0* [0 - 9999 ] Este parámetro muestra una lista de todos los
parámetros denidos en el convertidor de
frecuencia disponibles para PROFINET.
9-81 Parámetros denidos (2)
Matriz [116]
No hay acceso al LCP
Solo lectura
Range: Función:
0* [0 - 9999 ] Este parámetro muestra una lista de todos los
parámetros denidos en el convertidor de
frecuencia disponibles para PROFINET.
9-82 Parámetros denidos (3)
Matriz [116]
No hay acceso al LCP
Solo lectura
Range: Función:
0* [0 - 9999 ] Este parámetro muestra una lista de todos los
parámetros denidos en el convertidor de
frecuencia disponibles para PROFINET.
9-83 Parámetros denidos (4)
Matriz [116]
No hay acceso al LCP
Solo lectura
Range: Función:
0* [0 - 9999 ] Este parámetro muestra una lista de todos los
parámetros denidos en el convertidor de
frecuencia disponibles para PROFINET.
9-84 Parámetros denidos (5)
Matriz [115]
No hay acceso al LCP
Solo lectura
Range: Función:
0* [0 - 9999 ] Este parámetro muestra una lista de todos los
parámetros denidos en el convertidor de
frecuencia disponibles para PROFINET.
9-85 Dened Parameters (6)
Matriz [116]
No hay acceso al LCP
Solo lectura
Range: Función:
0* [0 - 9999 ] Este parámetro muestra una lista de todos los
parámetros denidos en el convertidor de
frecuencia disponibles para PROFINET.
9-90 Parámetros cambiados (1)
Matriz [116]
No hay acceso al LCP
Solo lectura
Range: Función:
0* [0 - 9999 ] Este parámetro muestra una lista de todos los
parámetros del convertidor de frecuencia
diferentes a los ajustes predeterminados.
9-91 Parámetros cambiados (2)
Matriz [116]
No hay acceso al LCP
Solo lectura
Range: Función:
0* [0 - 9999 ] Este parámetro muestra una lista de todos los
parámetros del convertidor de frecuencia
diferentes a los ajustes predeterminados.
32 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105

Parámetros Guía de programación
9-92 Parámetros cambiados (3)
Matriz [116]
No hay acceso al LCP
Solo lectura
Range: Función:
0* [0 - 9999 ] Este parámetro muestra una lista de todos los
parámetros del convertidor de frecuencia
diferentes a los ajustes predeterminados.
9-93 Changed Parameters (4)
Matriz [116]
No hay acceso al LCP
Solo lectura
Range: Función:
0* [0 - 9999 ] Este parámetro muestra una lista de todos los
parámetros del convertidor de frecuencia
diferentes a los ajustes predeterminados.
9-94 Parámetros cambiados (5)
Matriz [116]
Sin dirección de LCP
Solo lectura
Range: Función:
0* [0 - 9999 ] Este parámetro muestra una lista de todos los
parámetros del convertidor de frecuencia
diferentes a los ajustes predeterminados.
6.4 Grupo de parámetros 12-** Ethernet
6.4.1 12-0* Ajustes de IP
12-01 IP Address
Range: Función:
0* [0 -
4294967295 ]
12-02 Subnet Mask
Range: Función:
0* [0 -
4294967295 ]
12-03 Default Gateway
Range: Función:
0* [0 -
4294967295 ]
12-04 Servidor DHCP
Range: Función:
0* [0 - 2147483647 ] Solo lectura. Muestra la dirección IP del
Congura la dirección IP de la opción. Solo
lectura, si el parámetro 12-00 Asignación de
dirección IP está ajustado como DHCP o
BOOTP.
Congura la máscara de subred IP de la
opción. Solo lectura, si el
parámetro 12-00 Asignación de dirección IP
está ajustado como DHCP o BOOTP.
Congura la puerta de enlace IP predet. de la
opción. Solo lectura, si el
parámetro 12-00 Asignación de dirección IP
está ajustado como DHCP o BOOTP. En una
red no enrutada, esta dirección está ajustada
con la dirección IP del dispositivo de I/O.
servidor DHCP o BOOTP encontrado.
6
6
12-05 Caducidad arriendo
Range: Función:
Size related* [ 0 - 0 ] Solo lectura. Muestra el tiempo de
asignación restante de la dirección IP
actual asignada por DHCP.
12-06 Name Servers
Range: Función:
0* [0 - 4294967295 ] Direcciones IP de los servidores DNS.
Puede asignarse automáticamente si se
usa DHCP.
12-07 Nombre de dominio
Range: Función:
0 [0 - 48 ] Nombre de dominio de la red conectada. Puede
asignarse automáticamente si se usa la red DHCP.
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 33

Parámetros PROFINET
6
12-08 Nombre de host
Range: Función:
0* [0 - 48 ] Nombre lógico (dado) de la opción.
AVISO!
La pantalla del convertidor solo muestra
los primeros 19 caracteres; el resto están
almacenados en el convertidor. Si los
conmutadores de hardware son diferentes
de todo ACTIVADO o todo
DESCONECTADO, los conmutadores tendrán
prioridad.
12-09 Dirección física
Range: Función:
0* [0 - 17 ] Solo lectura. Muestra la dirección física (MAC) de
la opción.
6.4.2 12-1* Parámetros enlace Ethernet
Se aplica a todo el grupo de parámetros.
El índice [0] se utiliza para el puerto 1 y el índice [1] se
utiliza para el puerto 2.
12-10 Estado de la conexión
Solo lectura. Muestra el estado del vínculo de las vías Ethernet.
Option: Función:
[0] * Sin conexión
[1] Conexión
12-11 Duración del vínculo
Range: Función:
Size related* [ 0 - 0 ] Solo lectura. Muestra la duración del
vínculo presente en cada puerto en
dd:hh:mm:ss.
12-12 Negociación automática
Option: Función:
Congura la negociación automática de los
parámetros de enlace Ethernet para cada
puerto: Activado o Desactivado.
[0] Desactivado Velocidad de la conexión y Conexión Dúplex
pueden congurarse en los
parámetro 12-13 Velocidad de la conexión y
parámetro 12-14 Conexión Dúplex.
[1] * Activado
12-13 Link Speed
Fuerza la velocidad del vínculo para cada puerto a 10 o
100 Mbps. Si el parámetro 12-12 Negociación automática está
ajustado a [1] Activado, este parámetro es de solo lectura y
muestra la velocidad real del vínculo. Si no hay ningún vínculo,
se muestra [0] Ninguna.
Option: Función:
[0] * None
[1] 10 Mbps
[2] 100 Mbps
12-14 Link Duplex
Fuerza el dúplex de cada puerto a dúplex completo o
semidúplex. Si el parámetro 12-12 Negociación automática está
ajustado como [1] Activado, este parámetro es de solo lectura.
Option: Función:
[0] Half Duplex
[1] * Full Duplex
6.4.3 12-80 Otros servicios Ethernet
12-80 Servidor FTP
Activa/desactiva el servidor FTP integrado.
Option: Función:
[0] * Desactivado Desactiva el servidor FTP integrado.
[1] Activado Activa el servidor FTP integrado.
12-81 Servidor HTTP
Activa / desactiva el servidor HTTP (web) integrado.
Option: Función:
[0] * Desactivado Desactiva el servidor (web) HTTP integrado.
[1] Activado Activa el servidor (web) HTTP integrado.
12-82 Servicio SMTP
Activa/desactiva el servicio SMTP (correo electrónico) en la
opción.
Option: Función:
[0] * Desactivado Desactiva el servicio SMTP (correo electrónico)
en la opción.
[1] Activado Activa el servicio SMTP (correo electrónico) en
la opción.
12-89 Transparent Socket Channel Port
Range: Función:
4000* [0 -
65535 ]
Congura el n.º de puerto TCP para el canal
de zócalo transparente. Esta conguración
permite que los telegramas del convertidor
se envíen de forma transparente por Ethernet
mediante TCP. El valor por omisión es 4000, 0
signica desactivado. El Software de
conguración MCT 10 utiliza este puerto.
34 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105

Parámetros Guía de programación
6.4.4 12-90 Ajustes avanzados de Ethernet
12-90 Diagnóstico de cableado
Activar y desactivar la función de diagnóstico avanzado del cable.
Si está activado, se puede medir la distancia a los errores del
cableado en el parámetro 12-93 Long. de cable errónea. Al nalizar
el diagnóstico, el parámetro retoma los ajustes predeterminados
de desactivación.
Option: Función:
AVISO!
La función de diagnóstico del cableado
solo se emite en vías sin vínculo
(consulte el parámetro 12-10 Estado del
vínculo).
[0] * Desactivado Desactiva la función de diagnóstico del
cableado.
[1] Activado Activa la función de diagnóstico del cableado.
12-91 Cruce automático
Option: Función:
[0] Desactivado Desactiva la función de cruce automático.
[1] * Activado Activa la función de cruce automático.
12-94 Broadcast Storm Protection
Range: Función:
-1 %* [-1 -
El conmutador integrado puede proteger el sistema
20 %]
ante la recepción de demasiados paquetes de
transmisión, que pueden agotar los recursos de red.
El valor indica un porcentaje del ancho de banda
total que se permite para transmitir mensajes.
Ejemplo:
el valor «OFF» signica que el ltro está
desactivado; se emiten todos los mensajes de
transmisión. El valor «0%» signica que no se emite
ningún mensaje de transmisión. Un valor del 10 %
indica que un porcentaje del 10 % del ancho de
banda total se permite para transmitir mensajes. Si
la cantidad de mensajes transmitidos supera el
umbral del 10 %, se bloquearán.
12-95 Broadcast Storm Filter
Aplicable al parámetro 12-94 Broadcast Storm Protection, si la
protección de transmisión múltiple incluye también los
telegramas multicast.
Option: Función:
[0] * Broadcast only
[1] Broadcast & Multicast
6
6
12-92 Intrusión IGMP
Esta función impide la inundación de la pila de protocolos
Ethernet enviando únicamente paquetes de transmisión múltiple
a las vías que forman parte de un grupo de transm. múlt.
Option: Función:
[0] Desactivado Desactiva la función de
IGMP Snooping.
[1] * Activado Activa la función de
IGMP Snooping.
12-93 Long. de cable errónea
Range: Función:
0* [0 -
65535 ]
Si el diagnóstico del cableado está activado en el
parámetro 12-90 Diagnóstico de cableado, se puede
activar o desactivar el cableado integrado mediante
reectometría de cálculo temporal (TDR). Esta
técnica de medición detecta los problemas de
cableado habituales (circuitos abiertos, cortocircuitos, problemas de impedancia o cortes en los
cables de transmisión). La distancia entre la opción
y el error se muestra en metros con una precisión
de ±2 m (6,56 ft). El valor 0 signica que no se han
detectado errores.
12-96 Cong. puerto
Activa/desactiva la función de puerto espejo. Para la solución de
problemas con una herramienta analizadora de red.
Option: Función:
[0] * Normal Sin puerto espejo.
[1] Puerto espejo 1 a 2 Todo el tráco de red en
el puerto 1 se reejará en
el puerto 2.
[2] Puerto espejo 2 a 1 Todo el tráco de red en
el puerto 2 se reejará en
el puerto 1.
[10] Port 1 disabled
[11] Port 2 disabled
[254] Puerto espejo int. a 1
[255] Puerto espejo int. a 2
12-98 Contadores de interfaz
Range: Función:
4000* [0 -
4294967295 ]
Solo lectura. Pueden usarse
contadores de interfaz avanzada desde
el conmutador integrado para
solucionar problemas de poca
importancia. El parámetro muestra la
suma de las vías 1 y 2.
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 35

Parámetros PROFINET
6
12-99 Contadores de medios
Range: Función:
0* [0 - 4294967295 ] Solo lectura. Pueden usarse contadores
de interfaz avanzada desde el
conmutador integrado para solucionar
problemas de poca importancia. El
parámetro muestra la suma de las vías 1
y 2.
6.5 Parámetros especícos de PROFINET
6.5.1 Ajuste de los parámetros de
comunicación
Todos los parámetros de comunicación básicos están
ubicados en el grupo de parámetros 12-0* Ajustes de IP.
Todos los parámetros están ajustados en los valores
estándar de PROFINET, por lo que las modicaciones
necesarias son mínimas.
Parámetro 12-00 Asignación de dirección IP.
•
Parámetro 12-01 Dirección IP.
•
Parámetro 12-02 Máscara de subred.
•
Parámetro 12-03 Puerta de enlace predeterminada.
•
Parámetro 12-04 Servidor DHCP.
•
Parámetro 12-05 Caducidad arriendo.
•
Parámetro 12-06 Servidores de nombres.
•
Parámetro 12-07 Nombre de dominio.
•
Parámetro 12-08 Nombre de host.
•
Parámetro 12-09 Dirección física.
•
La interfaz PROFINET ofrece varios modos de asignación de
direcciones. Normalmente, se utiliza el DCP, y después el
PLC asigna la dirección IP, la máscara de subred y otros
parámetros relevantes al establecer la comunicación. En los
siguientes ejemplos se muestran los ajustes en caso de
utilizarse la asignación DCP de PROFINET.
Parámetro Valor
Parámetro 12-00 Asignación de direcciónIP[1] DHCP/[2] BOOTP
Parámetro 12-01 Dirección IP Solo lectura
Parámetro 12-02 Máscara de subred Solo lectura
Parámetro 12-03 Puerta de enlace
predeterminada
Tabla 6.3 Ajuste del convertidor de frecuencia con
dirección IP asignada automáticamente (BOOTP/DHCP)
Mediante la dirección IP asignada por el servidor DHCP/
BOOTP/DCP, la dirección IP y la máscara de subred
asignadas pueden leerse en el parámetro 12-01 Dirección IP
y en el parámetro 12-02 Máscara de subred. En el
parámetro 12-04 Servidor DHCP, se visualiza la dirección IP
del servidor DHCP o BOOTP localizado. Solo para DHCP: el
resto del tiempo de asignación puede leerse en el
parámetro 12-05 Caducidad de asignación. Si el tiempo de
asignación está ajustado en 0 (cero), el temporizador
nunca indicará que el tiempo se ha excedido.
El Parámetro 12-09 Dirección física lee la dirección MAC de
la opción, que también se imprime en la etiqueta de la
opción.
El Parámetro 12-03 Puerta de enlace predeterminada es
opcional y solo puede utilizarse en redes enrutadas.
Solo lectura
AVISO!
Solo es posible asignar direcciones IP válidas de clase A,
B y C a la opción. Los intervalos válidos se muestran en
la Tabla 6.4.
Clase A 1.0.0.1-126.255.255.254
Clase B 128.1.0.1-191.255.255.254
Clase C 192.0.1.1-223.255.254.254
Tabla 6.4 Intervalos válidos para la dirección IP de la opción
Parámetro Valor
Parámetro 12-00 Asignación de direcciónIP[10] DCP
Parámetro 12-01 Dirección IP 0.0.0.0 (desde el PLC)
Parámetro 12-02 Máscara de subred 0.0.0.0 (desde el PLC)
Parámetro 12-03 Puerta de enlace
predeterminada
Parámetro 12-04 Servidor DHCP
Tabla 6.2 Ajuste del convertidor de frecuencia con
dirección IP asignada manualmente
1) * = El nombre del antrión puede ajustarse mediante el LCP, a
través de una orden del DCP o ajustando los interruptores DIP en la
interfaz PROFINET.
36 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105
0.0.0.0 (desde el PLC)
1)
*

Parámetros Guía de programación
6.5.2 Parámetros enlace Ethernet
Grupo de parámetros 12-1* Parámetros enlace Ethernet:
Parámetro 12-10 Estado de la conexión.
•
Parámetro 12-11 Duración de la conexión.
•
Parámetro 12-12 Negociación automática.
•
Parámetro 12-13 Velocidad de la conexión.
•
Parámetro 12-14 Conexión Dúplex.
•
Cada puerto tiene unos parámetros de enlace Ethernet
exclusivos.
El Parámetro 12-10 Estado de la conexión y el
parámetro 12-11 Duración de la conexión muestran
información sobre el estado del vínculo de cada puerto.
El Parámetro 12-10 Estado de la conexión muestra Conexión
o Sin conexión de acuerdo con el estado del puerto
presente.
El Parámetro 12-11 Duración de la conexión muestra la
duración del vínculo en el puerto presente. Si se pierde el
vínculo, se reinicia el contador.
El Parámetro 12-12 Negociación automática permite a dos
dispositivos Ethernet conectados elegir los parámetros de
transmisión común, como la velocidad y el modo dúplex.
En este proceso, los dispositivos conectados primero
comparten sus capacidades y, a continuación, seleccionan
el modo de transmisión más rápido que ambos permitan.
La incapacidad entre los dispositivos conectados puede
llevar a un menor rendimiento de comunicación.
Para evitarlo, la negociación automática puede
desactivarse.
Si el parámetro 12-12 Negociación automática se ajusta
como DESACTIVADO, la velocidad de conexión y el modo
dúplex pueden
parámetro 12-13 Velocidad de la conexión y el
parámetro 12-12 Negociación automática.
congurarse manualmente en el
6.5.3 Introducción
Cambios durante el funcionamiento
Verdadero signica que el parámetro puede modicarse
mientras el convertidor de frecuencia se encuentra en
funcionamiento. Falso signica que deberá pararse el
convertidor de frecuencia si se desea realizar alguna
modicación.
Dos ajustes
Todos los ajustes: el parámetro puede congurarse individualmente en cada una de las dos conguraciones; por
ejemplo, un parámetro individual puede tener dos valores
de dato diferentes.
1 ajuste: el valor de dato es el mismo en todos los ajustes.
Tipo de
dato
2 Entero 8 Int8
3 Entero 16 Int16
4 Entero 32 Int32
5 Sin signo 8 Uint8
6 Sin signo 16 Uint16
7 Sin signo 32 Uint32
9 Cadena visible VisStr
33 Valor normalizado de 2 bytes N2
35 Secuencia de bits de 16 variables booleanas V2
54 Diferencia de tiempo sin fecha TimD
Tabla 6.5 Tipo de dato
Descripción Tipo
6
6
El Parámetro 12-13 Velocidad de la conexión muestra/ajusta
la velocidad del vínculo para cada puerto. Si no hay
ningún vínculo, se muestra Ninguna.
El Parámetro 12-14 Conexión Dúplex muestra/ajusta el modo
dúplex para cada puerto.
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 37

6
Parámetros PROFINET
6.5.4 Lista de parámetros especícos de PROFINET
Cambio
Parámetro Valor predeterminado Dos ajustes
Parámetro 0-37 Texto display 1 0 Un ajuste VERDADERO 0
Parámetro 8-01 Puesto de control [0] Digital y cód. ctrl
Parámetro 8-02 Fuente de control –
Parámetro 8-03 Valor de tiempo límite ctrl. 1 Un ajuste VERDADERO –1 Uint16
Parámetro 8-04 Función tiempo límite cód.
ctrl.
Parámetro 8-07 Accionador diagnóstico [0] Desactivar Un ajuste VERDADERO – Uint8
Parámetro 8-10 Trama control [0] Protocolo FC
Parámetro 8-14 Código de control
congurable CTW
Parámetro 8-19 Product Code – Un ajuste VERDADERO 0 Uint32
Parámetro 8-50 Selección inercia [3] Lógico O
Parámetro 8-51 Selección parada rápida [3] Lógico O
Parámetro 8-52 Selección freno CC [3] Lógico O
Parámetro 8-53 Selec. arranque [3] Lógico O
Parámetro 8-54 Selec. sentido inverso [3] Lógico O
Parámetro 8-55 Selec. ajuste [3] Lógico O
Parámetro 8-56 Selec. referencia interna [3] Lógico O
Parámetro 8-57 Prodrive OFF2 Selección [3] Lógico O
Parámetro 8-58 Prodrive OFF3 Selección [3] Lógico O
Parámetro 8-90 Veloc Bus Jog 1 100 r/min
Parámetro 8-91 Veloc Bus Jog 2 200 r/min
Parámetro 9-07 Actual Value 0 N/A
Parámetro 9-15 Cong. escritura PCD – Un ajuste VERDADERO – Uint16
Parámetro 9-16 Cong. lectura PCD – Un ajuste VERDADERO – Uint16
Parámetro 9-22 Selección de telegrama [100] Ninguno Un ajuste VERDADERO – Uint8
Parámetro 9-23 Páram. para señales [0]
Parámetro 9-27 Editar parámetros [1] Activado Un ajuste FALSO – Uint16
Parámetro 9-28 Control de proceso [1] Act. master cíclico Un ajuste FALSO – Uint16
Parámetro 9-53 Cód. de advert. Probus 0
[0] Desactivado Un ajuste VERDADERO – Uint8
[1] Perl por defecto
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
durante
el funciona-
miento
VERDADERO – Uint8
VERDADERO – Uint8
VERDADERO – Uint8
VERDADERO – Uint8
VERDADERO – Uint8
VERDADERO – Uint8
VERDADERO – Uint8
VERDADERO – Uint8
VERDADERO – Uint8
VERDADERO – Uint8
VERDADERO – Uint8
VERDADERO – Uint8
VERDADERO – Uint8
VERDADERO 0 Uint16
VERDADERO 0 Uint16
FALSO 0 Uint16
VERDADERO – Uint16
VERDADERO 0 V2
Índice de
conversión
Tipo de dato
Cadena visible
21
38 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105

Parámetros Guía de programación
Cambio
Parámetro Valor predeterminado Dos ajustes
Parámetro 9-65 Número perl Probus 0
Parámetro 9-70 Edit Set-up [9] Ajuste activo Un ajuste VERDADERO – Uint8
Parámetro 9-71 Grabar valores de datos [0] Desactivado
Parámetro 9-72 Reiniciar unidad [0] Sin acción Un ajuste FALSO – Uint8
Parámetro 9-80 Parámetros denidos (1) 0
Parámetro 9-81 Parámetros denidos (2) 0
Parámetro 9-82 Parámetros denidos (3) 0
Parámetro 9-83 Parámetros denidos (4) 0
Parámetro 9-84 Parámetros denidos (5) 0
Parámetro 9-85 Dened Parameters (6) 0
Parámetro 9-90 Parámetros cambiados (1) 0
Parámetro 9-91 Parámetros cambiados (2) 0
Parámetro 9-92 Parámetros cambiados (3) 0
Parámetro 9-93 Parámetros cambiados (4) 0
Parámetro 9-94 Parámetros cambiados (5) 0
Parámetro 12-00 Asignación de dirección IP [10] DCP Un ajuste VERDADERO – Uint8
Parámetro 12-01 Dirección IP 0 Un ajuste VERDADERO –
Parámetro 12-02 Máscara de subred 0 Un ajuste VERDADERO –
Parámetro 12-03 Puerta enlace predet. 0 Un ajuste VERDADERO –
Parámetro 12-04 Servidor DHCP 0 Un ajuste VERDADERO –
Parámetro 12-05 Caducidad arriendo –
Parámetro 12-06 Servidores de nombres 0 Un ajuste VERDADERO –
Parámetro 12-07 Nombre de dominio 0 Un ajuste VERDADERO –
Parámetro 12-08 Nombre de host 0 Un ajuste VERDADERO –
Parámetro 12-09 Dirección física 0 Un ajuste VERDADERO –
Parámetro 12-10 Estado del vínculo [0] Sin conexión
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
durante
el funciona-
miento
VERDADERO 0
VERDADERO – Uint8
FALSO 0 Uint16
FALSO 0 Uint16
FALSO 0 Uint16
FALSO 0 Uint16
FALSO 0 Uint16
FALSO 0 Uint16
FALSO 0 Uint16
FALSO 0 Uint16
FALSO 0 Uint16
FALSO 0 Uint16
FALSO 0 Uint16
VERDADERO –
VERDADERO – Uint8
Índice de
conversión
Tipo de dato
Cadena de
octeto 2
Cadena de
octeto 4
Cadena de
octeto 4
Cadena de
octeto 4
Cadena de
octeto 4
Diferencia de
tiempo con
fecha
Cadena de
octeto 4
Cadena visible
48
Cadena visible
48
Cadena visible
17
6
6
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 39

6
Parámetros PROFINET
Cambio
Parámetro Valor predeterminado Dos ajustes
Parámetro 12-11 Duración del vínculo –
Parámetro 12-12 Negociación automática [1] Activado Un ajuste VERDADERO – Uint8
Parámetro 12-13 Velocidad vínculo [0] Ninguna Un ajuste VERDADERO – Uint8
Parámetro 12-14 Vínculo Dúplex [1] Full Duplex Un ajuste VERDADERO – Uint8
Parámetro 12-80 Servidor FTP [0] Desactivado Un ajuste VERDADERO – Uint8
Parámetro 12-81 Servidor HTTP [0] Desactivado Un ajuste VERDADERO – Uint8
Parámetro 12-82 Servicio SMTP [0] Desactivado Un ajuste VERDADERO – Uint8
Parámetro 12-89 Puerto de canal de zócalo
transparente
Parámetro 12-90 Diagnóstico de cableado [0] Desactivado Un ajuste VERDADERO – Uint8
Parámetro 12-91 Cruce automático [1] Activado Un ajuste VERDADERO – Uint8
Parámetro 12-92 Vigilante IGMP [1] Activado Un ajuste VERDADERO – Uint8
Parámetro 12-93 Long. de cable errónea 0 Un ajuste VERDADERO 0 Uint16
Parámetro 12-94 Protección transmisión
múltiple
Parámetro 12-95 Filtro transmisión múltiple [0] Sólo transmisión Un ajuste VERDADERO – Uint8
Parámetro 12-96 Cong. puerto – Un ajuste VERDADERO – Uint8
Parámetro 12-98 Contadores de inter faz 4000
Parámetro 12-99 Contadores de medios 0
– Un ajuste VERDADERO 0 Uint16
–1 % Un ajuste VERDADERO 0 Int8
Todos los
ajustes
Todos los
ajustes
Todos los
ajustes
durante
el funciona-
miento
VERDADERO –
VERDADERO 0 Uint32
VERDADERO 0 Uint32
Índice de
conversión
Tipo de dato
Diferencia de
tiempo con
fecha
Tabla 6.6 Lista de parámetros especícos de PROFINET
6.5.5 Conversión
Los distintos atributos de cada parámetro se muestran en
los ajustes de fábrica. Los valores de parámetros que se
transeren son únicamente números enteros. Para transferir
decimales se utilizan factores de conversión.
Un factor de conversión de 0,1
transferido se multiplica por 0,1. Por lo tanto, el valor 100
se lee como 10,0.
Ejemplos:
0 s ⇒ índice de conversión 0
0,00 s ⇒ índice de conversión –2
0 ms ⇒ índice de conversión –3
0,00 ms ⇒ índice de conversión –5
signica que el valor
Índice de conversión Factor de conversión
100 1
75 3 600 000
74 3600
70 60
67 1/60
6 1 000 000
5 100 000
4 10 000
3 1000
2 100
1 10
0 1
–1 0,1
–2 0,01
–3 0,001
–4 0,0001
–5 0,00001
–6 0,000001
Tabla 6.7 Tabla de conversión
40 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105

Parámetros Guía de programación
6.6 Tipos de objetos y datos admitidos
6.6.1 Descripción del parámetro
PROFINET dispone de varios atributos de descripción.
6.6.2 Atributo de tamaño
El índice de tamaño y el índice de conversión de cada parámetro se pueden tomar de la lista de parámetros del manual de
funcionamiento correspondiente al convertidor de frecuencia.
Unidad física
Tiempo 4
Energía 8
Potencia 9
Rotación 11 giro por minuto RPM 67 1
Par 16
Temperatura 17 grado centígrado °C 0 1
Tensión 21
Corriente 22
Resistencia 23
Relación 24 por ciento % 0 1
Cambio relativo 27 por ciento % 0 1
Frecuencia 28
Índice de
tamaño
0 Sin dimensión
Unidad de medida Denominación
segundo s 0 1
milisegundo ms –3 0,001
minuto min 70 60
hora h 74 3600
día d 77 86 400
vatio hora Wh 0 1
kilovatio hora kWh 3 1000
megavatio hora MWh 6
milivatio mW –3 0,001
vatio W 0 1
kilovatio kW 3 1000
megavatio MW 6
newton metro Nm 0 1
kilonewton metro kNm 3 1000
milivoltio mV –3 0,001
voltio V 0 1
kilovoltio kV 3 1000
miliamperio mA –3 0,001
amperio A 0 1
kiloamperio kA 3 1000
miliohmio mOhm –3 0,001
ohmio Ohmios 0 1
kiloohmio kOhm 3 1000
hercio Hz 0 1
kilohercio kHz 3 1000
megahercio MHz 6
gigahercio GHz 9
Índice de
conversión
–1 0,1
–2 0,01
Factor de conversión
6
10
6
10
6
10
9
10
6
6
Tabla 6.8 Índice de tamaños e Índice de conversión
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 41

Parámetros PROFINET
6.6.3 Tipos de objetos y datos admitidos
Tipo de dato Nombre corto Descripción Tipo de datos 2
3 I2 Entero 16 Int16
4 I4 Entero 32 Int32
5 – Sin signo 8 Uint8
6 O2 Sin signo 16 Uint16
7 O4 Sin signo 32 Uint32
9 – Cadena visible VisStr
10 – Cadena de bytes –
33 N2 Valor normalizado (16 bits) N2
35 V2 Secuencia de bits V2
54 – Diferencia de tiempo sin indicación de fecha TimD
6
Tabla 6.9 Tipos de datos admitidos
42 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105

Ejemplos de aplicaciones Guía de programación
7 Ejemplos de aplicaciones
7.1 Ejemplo: datos de proceso con PPO tipo 6
Este ejemplo muestra cómo trabajar con el PPO de tipo 6, que consta de código de control / código de estado y
referencia / valor real principal. El PPO también dispone de dos códigos adicionales, que pueden programarse para llevar a
cabo un seguimiento de las señales de proceso. Véase la Tabla 7.1:
0 1 2 3
CTW MRV PCD [2] PCD
Del controlador 04 7C 20 00 00 00 00 00
STW MAV PCD [2] PCD [3]
Del convertidor de
frecuencia
Byte # 1 2 3 4 5 6 7 8
0F 07 20 00 3F A6 00 08
Tabla 7.1 Ejemplo: datos de proceso con PPO tipo 6
La aplicación necesita el seguimiento del par del motor y
de la entrada digital, de modo que el PCD 2 se ajusta para
leer el par motor actual. El PCD 3 se congura para
controlar el estado de un sensor externo a través de la
entrada digital de señales de proceso. El sensor está
conectado a la entrada digital 18.
Se controla también un dispositivo externo mediante el bit
del código de control 11 y del relé integrado en el
convertidor de frecuencia. El cambio de sentido solo se
permite cuando el bit 15 de cambio de sentido del código
de control y la entrada digital 19 están ajustados como
alto.
Por razones de seguridad, el convertidor de frecuencia
detiene el motor si el cable PROFINET está roto, si el
maestro tiene un fallo de sistema, o si el PLC se encuentra
en modo de parada.
Programe el convertidor de frecuencia como se muestra en
la Tabla 7.2:
Parámetro Ajuste
Parámetro 4-10 Dirección veloc.
motor
Parámetro 5-10 Terminal 18
Entrada digital
Parámetro 5-11 Terminal 19
entrada digital
Parámetro 5-40 Relé de función [36/37] Bit código control 11/12
Parámetro 8-03 Valor de tiempo
límite cód. ctrl.
Parámetro 8-04 Función tiempo
límite cód. ctrl.
Parámetro 8-10 Trama control [0] Perl FC
Parámetro 8-50 Selección inercia [1] Bus
Parámetro 8-51 Selección parada
rápida
Parámetro 8-52 Selección freno
CC
Parámetro 8-53 Selec. arranque [1] Bus
Parámetro 8-54 Selec. sentido
inverso
Parámetro 8-55 Selec. ajuste [1] Bus
Parámetro 8-56 Selec. referencia
interna
Parámetro 9-16 Cong. lectura
PCD
[2] Ambos sentidos
[0] Sin función
[10] Cambio de sentido
1 s
[2] Parada
[1] Bus
[1] Bus
[2] Lógico Y
[1] Bus
[2] Subíndice
parámetro 16-16 Par [Nm]
[3] Subíndice
parámetro 16-60 Entrada digital
7 7
Ilustración 7.1 Diagrama de cableado
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 43
Tabla 7.2 Ajustes de parámetros

Ejemplos de aplicaciones PROFINET
7.2 Ejemplo: telegrama de código de control mediante el telegrama estándar 1/PPO3
Este ejemplo muestra cómo el telegrama de código de control se relaciona con el controlador y el convertidor de
frecuencia, utilizando el perl de control del convertidor.
El telegrama de código de control se envía desde el PLC al convertidor de frecuencia. El Telegrama estándar 1 se utiliza en
el ejemplo para mostrar el rango completo de módulos. Todos los valores indicados son arbitrarios y se proporcionan
únicamente a modo de demostración.
0 1 2 3
CTW MRV PCD PCD
04 7C 20 00
PQW: 256 258 260 262
CTW MRV
N.º bit.: 31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
0 0 0 0 0 1 0 0 0 1 1 1 1 1 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0
0 4 7 C 2 0 0 0
Tabla 7.3 PCD
77
La Tabla 7.3 indica los bits contenidos en el código de control y cómo se presentan como datos de proceso en el telegrama
estándar 1 de este ejemplo.
La Tabla 7.4 indica qué funciones de bit y qué valores de bit correspondientes están activos en este ejemplo.
Bit Valor de bit = 0 Valor de bit = 1 Valor de bit
00 Valor de referencia
01 Valor de referencia Selección externa, bit más signicativo (msb) 0
02 Freno de CC Rampa 1
03 Inercia Activar 1
04 Parada rápida Rampa 1
05 Mantener salida Rampa activa 1
06 Parada de rampa Arranque 1
07 Sin función Reinicio 0
08 Sin función Velocidad ja 0
09 Rampa 1 Rampa 2 0
10 Datos no válidos Válido 1
11 Sin función Relé 01 activo 0
12 Sin función Relé 02 activo 0
13 Ajuste de parámetros Selección del bit menos signicativo (lsb) 0
14 Ajuste de parámetros Selección del bit más signicativo (msb) 0
15 Sin función Cambio de sentido 0
Función activa – – –
Función inactiva – – –
Tabla 7.4 Telegrama de código de control mediante el telegrama estándar 1/PPO3
Selección externa, bit menos signicativo
(lsb)
0
C
7
4
0
44 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105

Ejemplos de aplicaciones Guía de programación
7.3 Ejemplo: telegrama de código de estado mediante el telegrama estándar 1/PPO3
Este ejemplo muestra cómo el telegrama de código de control se relaciona con el PLC y el convertidor de frecuencia,
utilizando el perl de control del convertidor.
El telegrama de código de control se envía desde el convertidor de frecuencia al controlador. El Telegrama estándar 1 se
utiliza en el ejemplo para mostrar el rango completo de módulos. Todos los valores indicados son arbitrarios y se proporcionan únicamente a modo de demostración.
0 1 2 3
STW MAV PCD PCD
0F 07 20 00
PIW: 256 258 260 262
STW MAV
N.º bit.: 31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
0 0 0 0 0 1 0 0 0 1 1 1 1 1 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0
0 F 0 7 2 0 0 0
Tabla 7.5 PCD
La Tabla 7.5 indica los bits contenidos en el código de estado y cómo se presentan como datos de proceso en el Telegrama
estándar 1 de este ejemplo.
7 7
La Tabla 7.6 indica qué funciones de bit y qué valores de bit correspondientes están activos en este ejemplo.
Bit Valor de bit = 0 Valor de bit = 1 Valor de bit
00 Control no preparado Ctrl prep. 1
01
02 Inercia Activar 1
03 Sin error Desconexión 0
04 Sin error Error (sin desconexión) 0
05 Reserv – 0
06 Sin error Bloqueo por alarma 0
07 Sin advertencia Advertencia 0
08 Velocidad de referencia
09 Funcionamiento local Contr. bus 1
10 Fuera del rango de frecuencia Dentro del rango de frecuencia 1
11 Sin función En funcionamiento 1
12 Convertidor de frecuencia OK Detenido, arranque automático 0
13 Tensión OK Tensión excedida 0
14 Par OK Par excedido 0
15 Temporizadores correctos Temporizadores excedidos 0
Convertidor de frecuencia no
preparado
Función activa – – –
Función inactiva – – –
Convertidor de frecuencia preparado 1
Velocidad ≠ referencia
1
7
0
F
0
Tabla 7.6 telegrama de código de estado mediante el telegrama estándar 1/PPO3
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 45

130BE940.10
Ejemplos de aplicaciones PROFINET
7.4 Ejemplo: programación PLC
En este ejemplo, se coloca el PPO de tipo 6 en la siguiente dirección de entrada/salida:
Dirección de
entrada
Ajuste
77
Ilustración 7.2 Se coloca el PPO de tipo 6 en la dirección de Entrada/Salida
256-257 258-259 260-261 262-263
Código de
estado
MAV Par motor
Entrada
digital
Esta red envía al convertidor de frecuencia una orden de
arranque (047C hex) y una referencia (2000 hex) de un
50 %.
Dirección de
salida
Ajuste
256-257 258-259 260-261 262-263
Código de
control
Referencia Sin uso Sin uso
Esta red lee el estado en las entradas digitales desde el
convertidor de frecuencia. Si la entrada digital 18 está
activada, detiene el funcionamiento del convertidor de
frecuencia.
Ilustración 7.5 La red lee el estado en las entradas digitales
Ilustración 7.3 La red envía una orden de arranque y una
referencia
Esta red cambia el sentido del motor si la entrada digital
19 está activada (ON), ya que el parámetro 8-54 Selec.
Esta red lee el par motor del convertidor de frecuencia. Se
sentido inverso está programado como Lógico Y.
envía una nueva referencia al convertidor de frecuencia
porque el par motor (86,0 %) es mayor que el valor
comparado.
Ilustración 7.6 La red cambia el sentido del motor
Ilustración 7.4 La red lee el par del motor
46 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105
Esta red activa el relé 02.

130BA110.10
Ejemplos de aplicaciones Guía de programación
Ilustración 7.7 La red activa el relé 02.
7.5 Ejemplo: seguimiento del PLC y la red
En los sistemas de automatización, el correcto funcionamiento del controlador I/O (PLC) y la red tiene la máxima
prioridad. La interfaz PROFINET está diseñada para poder
hacer un seguimiento del sistema y determinar la disponibilidad del controlador I/O y la red.
Los fallos que habitualmente puede detectar la interfaz
PROFINET son:
Pérdida de potencia (controlador I/O o
•
componentes de red).
Fallos del cableado (cable roto).
•
Mal funcionamiento de los componentes de la
•
red (en parte).
El programa controlador de I/O detuvo la
•
ejecución.
Los convertidores de frecuencia de la serie FC de Danfoss
poseen dos funciones distintas para hacer el seguimiento y
para indicar los fallos de comunicación:
Advertencia 34: activada por la interfaz de
•
eldbus para indicar un fallo del eldbus.
Alarma 17: activada por el convertidor de
•
frecuencia si el convertidor no ha recibido un
código de control para un tiempo especicado
por el usuario.
La interfaz PROFINET suprime la advertencia 34 durante los
primeros 60 s tras el encendido. Esto permite al
controlador de I/O establecer comunicación con la interfaz
PROFINET y evitar fallos esporádicos mientras se estabiliza
la infraestructura de red.
Una vez activado el temporizador, este deberá reiniciarse
dentro del periodo de tiempo ajustado en el
parámetro 8-03 Control Timeout Time. El reinicio se efectúa
mediante la recepción de un nuevo código de control. Si
no se recibe ningún código de control durante este
tiempo, el convertidor de frecuencia emitirá la alarma 17 y
ejecutará una o más órdenes:
Ajustar el motor en un estado bien denido (por
•
ejemplo: parada, desconexión).
Congurar las salidas digitales en un estado bien
•
denido (por ejemplo: activado, desactivado, sin
cambios).
De este modo, el convertidor de frecuencia reaccionará de
una forma conocida en caso de fallos de comunicación.
7 7
Para controlar la comunicación desde los controladores (y
la interfaz de eldbus), el convertidor de frecuencia tiene
una función que controla la recepción de datos de I/O al
código de control. La función de seguimiento tiene un
temporizador que puede ajustarse en un valor
comprendido entre 0,5 s y 6000 s (1,6 horas). Tras el
encendido, el temporizador estará desactivado hasta que
reciba un código de control válido (CTW).
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 47

Warning/Alarm 17 handling
activated in P8-04
(CTW time out)
IO controller
writes to CTW
Warning/Alarm 17 armed
Timer value = P8-03
Timer = 0
Decrease Timer
IO controller
writes to CTW
Activate setting in P8-04.
Outputs set to configured
action. Display W17 or A17.
Remove W17/A17
CTW bit 10 = 0 => last valid
CTW will be activated.
IO controller
writes to CTW
N
Y
N
N
Y
Y
N
Y
130BF889.10
Ejemplos de aplicaciones PROFINET
77
Ilustración 7.8 Máquina de estados de tiempo límite de CTW - Advertencia 17 o Alarma 17
48 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105

130BF890.10
Ejemplos de aplicaciones Guía de programación
Ejemplo 1: aplicación de transportadora
La cinta transportadora puede aceptar la pérdida de
comunicación durante 1 s como máximo. Al perderse la
comunicación, la transportadora debe parar.
ID Nombre Ajuste activo 1
801 Puesto de control Digital y código de control
802 Fuente de control Puerto FC
803 Valor de tiempo límite ctrl. 1,0
804 Función tiempo límite ctrl. Parada
Tabla 7.7 Conguración del ejemplo 1
El controlador de I/O está programado para enviar el CTW
cada 16 milisegundos y para que el controlador de I/O y la
interfaz PROFINET toleren la pérdida de hasta 3 ciclos de
I/O antes de activar las advertencias, alarmas, etc. Para la
interfaz PROFINET, esto signica que emite la advertencia
34 si no recibe datos de I/O durante más de 48 milisegundos.
7 7
Ilustración 7.9 Ejemplo de ajuste del tiempo de actualización y del número aceptable de ciclos de I/O perdidos
La interfaz PROFINET emitirá la advertencia 34 a los 48
milisegundos de la pérdida de comunicación. El
convertidor de frecuencia emite la advertencia 17 si
continúa sin haber comunicación tras 1,0 s. En este
momento, el convertidor de frecuencia ordena al motor
que se detenga a través del ajuste del
parámetro 8-04 Control Timeout Function. El convertidor
reducirá la velocidad del motor hasta su parada. Cuando se
reestablece la comunicación, el convertidor de frecuencia
elimina la advertencia 17 y ejecuta el último código de
Ejemplo 2: aplicación de bomba
La bomba puede aceptar la pérdida de comunicación
durante un máximo de 3 s. El relé 1 se controla mediante
el bit 11 del código de control para la apertura y el cierre
de una válvula. Cuando se pierde la comunicación, la
bomba tiene que detenerse y puede no reiniciar su funcionamiento antes de la activación de un reinicio en la
pantalla o mediante el código de control. Para la válvula, el
relé 1 tiene que pasar al estado «desactivado» y cerrar la
válvula.
control válido que ha recibido antes de producirse el
tiempo límite. Es responsabilidad de los programas de PLC
recuperar el control del motor enviando un código de
ID Nombre Ajuste activo 1
540 Relé de función
control activo con las órdenes deseadas para controlar el
motor.
801 Puesto de control Digital y código de control
802 Fuente de control Opción A
803 Valor de tiempo límite ctrl. 3,0
804 Función tiempo límite ctrl. Parada y desconexión
Tabla 7.8 Conguración del ejemplo 2
Contr. bus, t. lím.:
desactivado
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 49

130BF891.10
Ejemplos de aplicaciones PROFINET
El controlador de I/O está programado para enviar el CTW cada 64 milisegundos y para que el controlador de I/O y la
interfaz PROFINET toleren la pérdida de hasta 6 ciclos de I/O antes de activar las advertencias, alarmas, etc. Para la interfaz
PROFINET, esto signica que emite la advertencia 34 si no recibe datos de I/O durante más de 384 milisegundos.
77
Ilustración 7.10 Ejemplo de ajuste del tiempo de actualización y del número aceptable de ciclos de I/O perdidos
La interfaz PROFINET emite la advertencia 34 a los 384 milisegundos de la pérdida de comunicación. El convertidor de
frecuencia emite la alarma 17 si continúa sin haber comunicación después de 3,0 s. En este momento, el relé 1 se ajusta
como «desactivado» (parámetro 5-40 Function Relay) y ordena al motor que pare (parámetro 8-04 Control Timeout Function), lo
cual, a su vez, hará que el motor reduzca su velocidad hasta detenerse. Cuando el motor se detiene, el convertidor de
frecuencia pasa al estado de «DESCONEXIÓN». Dicho estado necesita un reinicio mediante código de control, LCP u otras
fuentes antes de que la bomba pueda activarse de nuevo.
50 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105

Resolución de problemas Guía de programación
8 Resolución de problemas
8.1 Sin respuesta a las señales de control
Comprobar 1: ¿es válido el código de control?
Si el bit 10 = 0 en el código de control, el convertidor de
frecuencia no aceptará el código de control.
Comprobar 2: ¿es correcta la relación entre bits del
código de control y del terminal de I/O?
Compruebe la relación lógica del convertidor.
Dena la relación lógica deseada en los par. del
parámetro 8-50 Selección inercia al parámetro 8-58 Prodrive
OFF3 Selección según lo indicado en las siguientes
opciones. Seleccione el modo de control del convertidor
de frecuencia, la entrada digital y/o la comunicación en
serie, utilizando los parámetros del
parámetro 8-50 Selección inercia al parámetro 8-58 Prodrive
OFF3 Selección.
Si el parámetro 8-01 Puesto de control se ajusta como solo
digital, el convertidor de frecuencia no reaccionará a las
órdenes enviadas mediante el código de control.
Las tablas de la Tabla 8.1 a la Tabla 8.8 muestran el efecto
de la orden de inercia sobre el convertidor de frecuencia
para toda la gama de ajustes del parámetro 8-50 Selección
inercia.
El efecto del modo de control de la función de los
parámetros parámetro 8-50 Selección inercia,
parámetro 8-51 Selección parada rápida y
parámetro 8-52 Selección freno CC es el siguiente:
Si se selecciona [0] Entrada digital, los terminales
controlarán las funciones de inercia y de freno de CC.
AVISO!
Las funciones de inercia, parada rápida y freno de CC
están activas para el 0 lógico.
Terminal Bits 02/03/04 Función
0 0 Inercia/Freno de CC/Parada rápida
0 1
1 0 Inercia/Freno de CC/Parada rápida
1 1
Tabla 8.2 [1] Comunicación serie
Sin inercia/Freno de CC/Parada
rápida
Sin inercia/Freno de CC/Parada
rápida
Si se selecciona [2] Lógico Y, ambas señales deben activarse
para llevar a cabo la función.
Terminal Bits 02/03/04 Función
0 0 Inercia/Freno de CC/Parada rápida
0 1
1 0
1 1
Tabla 8.3 [2] Lógico Y
Sin inercia/Freno de CC/Parada
rápida
Sin inercia/Freno de CC/Parada
rápida
Sin inercia/Freno de CC/Parada
rápida
Si se selecciona [3] Lógico O, la activación de una señal
activará la función.
Terminal Bits 02/03/04 Función
0 0
0 1 Inercia/Freno de CC/Parada rápida
1 0 Inercia/Freno de CC/Parada rápida
1 1
Tabla 8.4 [3] Lógico O
Inercia/Freno de CC/Parada rápida
Sin inercia/Freno de CC/Parada
rápida
8 8
Terminal Bits 02/03/04 Función
0 0 Inercia/Freno de CC/Parada rápida
0 1 Inercia/Freno de CC/Parada rápida
1 0
1 1
Tabla 8.1 [0] Entrada digital
Sin inercia/Freno de CC/Parada
rápida
Sin inercia/Freno de CC/Parada
rápida
Si se selecciona [1] Comunicación serie, las órdenes se
activarán solo cuando se reciban mediante comunicación
de telegramas.
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 51
El efecto del modo de control sobre la función del
parámetro 8-53 Selec. arranque y el parámetro 8-54 Selec.
sentido inverso:
Si se selecciona [0] Entrada digital, los terminales controlan
las funciones de arranque y de cambio de sentido.
Terminal Bits 06/15 Función
0 0 Parada / Sentido antihorario
0 1 Parada / Sentido antihorario
1 0 Arranque/Izqda. a dcha.
1 1 Arranque/Izqda. a dcha.
Tabla 8.5 [0] Entrada digital

Resolución de problemas PROFINET
Si se selecciona [1] Comunicación serie, las órdenes se
activarán solo cuando se reciban mediante comunicación
de telegramas.
Terminal Bits 02/03/04 Función
0 0 Parada / Sentido antihorario
0 1 Arranque/Izqda. a dcha.
1 0 Parada / Sentido antihorario
1 1 Arranque/Izqda. a dcha.
Tabla 8.6 [1] Comunicación serie
Si se selecciona [2] Lógico Y, ambas señales deben activarse
para llevar a cabo la función.
Terminal Bits 02/03/04 Función
0 0 Parada / Sentido antihorario
0 1 Parada / Sentido antihorario
1 0 Parada / Sentido antihorario
1 1 Arranque/Izqda. a dcha.
88
Tabla 8.7 [2] Lógico Y
Si se selecciona [3] Lógico O, la activación de una señal
activará la función.
Terminal Bits 00/01, 13/14 Función
Bit más
signi-
cativo
(msb)
0 0 0 0 1
0 0 0 1 1
0 0 1 0 1
0 0 1 1 1
0 1 0 0 2
0 1 0 1 2
0 1 1 0 2
0 1 1 1 2
1 0 0 0 3
1 0 0 1 3
1 0 1 0 3
1 0 1 1 3
1 1 0 0 4
1 1 0 1 4
1 1 1 0 4
1 1 1 1 4
Tabla 8.9 [0] Entrada digital
Bit
menos
signi-
cativo
(lsb)
Bit más
signi-
cativo
(msb)
Bit
menos
signi-
cativo
(lsb)
Número de ajuste
de la referencia
interna
Terminal Bits 02/03/04 Función
0 0 Parada / Sentido antihorario
0 1 Arranque/Izqda. a dcha.
1 0 Arranque/Izqda. a dcha.
1 1 Arranque/Izqda. a dcha.
Tabla 8.8 [3] Lógico O
El efecto del modo de control sobre la función del
parámetro 8-55 Selec. ajuste y el parámetro 8-56 Selec.
referencia interna:
Si se selecciona [0] Entrada digital, los terminales
controlarán el ajuste y las funciones de referencia internas.
Si se selecciona [1] Comunicación serie, las órdenes se
activarán solo cuando se reciban mediante comunicación
de telegramas.
Terminal Bits 00/01, 13/14 Función
Bit más
signi-
cativo
(msb)
0 0 0 0 1
0 0 0 1 2
0 0 1 0 3
0 0 1 1 4
0 1 0 0 1
0 1 0 1 2
0 1 1 0 3
0 1 1 1 4
1 0 0 0 1
1 0 0 1 2
1 0 1 0 3
1 0 1 1 4
1 1 0 0 1
1 1 0 1 2
1 1 1 0 3
1 1 1 1 4
Bit
menos
signi-
cativo
(lsb)
Bit más
signi-
cativo
(msb)
Bit
menos
signi-
cativo
(lsb)
Número de ajuste
de la referencia
interna
Tabla 8.10 [1] Comunicación serie
52 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105

Resolución de problemas Guía de programación
Si se selecciona [2] Lógico Y, ambas señales deben activarse
para llevar a cabo la función.
Terminal Bits 00/01, 13/14 Función
Bit más
signi-
cativo
(msb)
0 0 0 0 1
0 0 0 1 1
0 0 1 0 1
0 0 1 1 1
0 1 0 0 1
0 1 0 1 2
0 1 1 0 1
0 1 1 1 2
1 0 0 0 1
1 0 0 1 1
1 0 1 0 3
1 0 1 1 3
1 1 0 0 1
1 1 0 1 2
1 1 1 0 3
1 1 1 1 4
Tabla 8.11 [2] Lógico Y
Bit
menos
signi-
cativo
(lsb)
Bit más
signi-
cativo
(msb)
Bit
menos
signi-
cativo
(lsb)
Número de ajuste
de la referencia
interna
Si se selecciona [3] Lógico O, la activación de una señal
activará la función.
Terminal Bits 00/01, 13/14 Función
Bit más
signi-
cativo
(msb)
0 0 0 0 1
0 0 0 1 2
0 0 1 0 3
0 0 1 1 4
0 1 0 0 2
0 1 0 1 2
0 1 1 0 4
0 1 1 1 4
1 0 0 0 3
1 0 0 1 4
1 0 1 0 3
1 0 1 1 4
1 1 0 0 4
1 1 0 1 4
1 1 1 0 4
Bit
menos
signi-
cativo
(lsb)
Bit más
signi-
cativo
(msb)
Bit
menos
signi-
cativo
(lsb)
Número de ajuste
de la referencia
interna
Advertencias y alarmas
8.2
Los códigos de alarma y de advertencia de PROFINET se
muestran en la pantalla en formato hexadecimal. Si hay
más de una advertencia o alarma, se muestra la suma de
todas ellas. El código de alarma, el de advertencia y el de
advertencia de PROFINET también pueden mostrarse
mediante el bus serie en el parámetro 16-90 Código de
alarma, el parámetro 16-92 Código de advertencia y el
parámetro 9-53 Cód. de advert. Probus.
Bit
(hexade–
cimal)
00000001 48 Comprob. freno 28
00000002 49
00000004 50 Fallo Tierra 14
00000008 51 Sobretemp. tarj. control 65
00000010 52 Cód. ctrl TO 17
00000020 53 Sobrecorriente 13
00000040 54 Límite de par 12
00000080 55
00000100 40 Sobrt ETR mot 10
00000200 41 Inversor sobrecarg. 9
00000400 42 DC-link undervoltage 8
00000800 43 DC-link overvoltage 7
00001000 44 Cortocircuito 16
00004000 46 Pérdida de fase de alim. 4
00008000 47 AMA not OK 52
00010000 32 Error cero activo 2
00020000 33 Fa. corr. carga 38
00040000 34 Sobrecar. freno 26
00080000 35 Falta la fase U del motor 30
00100000 36 Falta la fase V del motor 31
00200000 37 Falta la fase W del motor 32
00400000 38 Fallo comunic. Fieldbus 34
00800000 39 24 V fallo alim. 47
01000000 24 Fallo aliment. 36
04000000 26
08000000 27 Fallo chopper freno 27
10000000 28 Cambio opción 67
20000000 29
80000000 31 Fr. mecán. bajo 63
Tabla 8.13 Parámetro 16-90 Código de alarma
Bit de
diagnóstico
de la
unidad
Código de alarma
(parámetro 16-90 Código
de alarma)
Sobretemperatura de la
tarjeta de alim.
Sobretemp. del termistor
del motor
Resist. freno cortocircuitada
Frequency converter initialization
Número
de alarma
69
11
25
80
8 8
Tabla 8.12 [3] Lógico O
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 53

Resolución de problemas PROFINET
Bit
(hexade–
cimal)
00000001 112 Comprob. freno 28
00000002 113
00000004 114 Fallo Tierra 14
00000008 115 Sobretemp. tarj. control 65
00000010 116 Cód. ctrl TO 17
00000020 117 Sobrecorriente 13
00000040 118 Límite de par 12
00000080 119
00000100 104 Sobrt ETR mot 10
00000200 105 Inversor sobrecarg. 9
00000400 106 DC-link undervoltage 8
00000800 107 DC-link overvoltage 7
00004000 110 Pérdida de fase de alim. 4
00008000 111 Sin motor 3
88
00010000 96 Error cero activo 2
00040000 98 Sobrecar. freno 26
00080000 99
00100000 100 Fallo chopper freno 27
00400000 102 Fallo comunic. Fieldbus 34
00800000 103 24 V fallo alim. 47
01000000 88 Fallo aliment. 36
02000000 89 Límite de intensidad 59
10000000 92 Encoder loss 61
40000000 94 No utilizado -
Tabla 8.14 Parámetro 16-92 Código de advertencia
Bit de
diagnóstico
de la
unidad
Código de advertencia
(parámetro 16-92 Código
de advertencia)
Sobretemperatura de la
tarjeta de alim.
Sobretemp. del termistor
del motor
Resist. freno cortocircuitada
Número
de alarma
69
11
25
Bit
(hexade–
cimal)
00000001 0
00000002 1 No utilizado
00000004 2 No utilizado
00000008 3 Orden de borrado de datos recibida
00000010 4 Valor real no actualizado
00000020 5 Sin vínculo en ambas vías
00000040 6 No utilizado
00000080 7
00000100 8
00000200 9 Error interno de CAN
00000400 10
00000800 11 No utilizado
00001000 12 Se ha producido un error interno
00002000 13 Sin congurar
00004000 14 Tiempo límite activo
00008000 15 Advertencia 34 activa
Tabla 8.15 Parámetro 9-53 Cód. de advert. Probus
Bit (hex)
00000001 Parametrización correcta
00000002 Conguración correcta
00000004 Modo borrar activado
00000008 Búsqueda de velocidad de transferencia
00000010 En espera de parametrización
00000020 Esperando conguración.
00000040 En intercambio de datos
00000080 Sin uso
00000100 Sin uso
00000200 Sin uso
00000400 Sin uso
00000800 MCL2/1 conectado
00001000 MCL2/2 conectado
00002000 MCL2/3 conectado
00004000 Transporte de datos activo
00008000 Sin uso
STW opción comunic. (parámetro 16-84 Opción
comun. STW)
Código de advertencia PROFIBUS
Bit
(parámetro 9-53 Cód. de advert.
Probus)
La conexión con el controlador de I/O
no es correcta
La inicialización de la opción PROFINET
no es correcta
El convertidor de frecuencia se ha
desconectado
Datos de conguración erróneos desde
el controlador de I/O
Tabla 8.16 Parámetro 16-84 Opción comun. STW
AVISO!
El Parámetro 16-84 Opción comun. ST W no forma parte
del diagnóstico ampliado.
54 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105

Resolución de problemas Guía de programación
8.2.1 Advertencia / mensaje de alarma
Los LED del LCP indican una advertencia o una alarma. Además, se muestra un código en la pantalla.
Las advertencias permanecen activas hasta que se elimina la causa. En determinadas circunstancias, es posible que el motor
siga funcionando. Los mensajes de advertencia no tienen que ser necesariamente críticos.
Una alarma hace que el convertidor de frecuencia se desconecte. Una vez corregida la causa de la alarma, será necesario
reiniciar las alarmas para poder reanudar el funcionamiento.
Tres formas de reiniciar las alarmas
Pulsando [Reset].
•
A través de una entrada digital con la función de reset.
•
Mediante la opción de comunicación serie /
•
eldbus.
AVISO!
Después de un reinicio manual mediante la tecla [Reset], pulse [Auto On] para volver a arrancar el motor.
La razón de que no pueda reiniciarse una alarma puede ser que no se haya corregido su causa o que la alarma esté
bloqueada (consulte también la Tabla 8.17).
Las alarmas de bloqueo ofrecen una protección adicional, ya que es preciso cortar la alimentación de red para poder
reiniciarlas. Cuando vuelva a conectarse el convertidor de frecuencia, dejará de estar bloqueado y podrá reiniciarse, como se
ha indicado anteriormente, una vez subsanada la causa.
8 8
Las alarmas sin bloqueo también pueden reiniciarse mediante la función de reinicio automático del parámetro 14-20 Modo
Reset. (Advertencia: puede producirse un reinicio automático).
Cuando una advertencia o una alarma aparecen marcadas con un código en la Tabla 8.17, o bien se produce una
advertencia antes de la alarma, o bien se puede especicar si debe mostrarse una advertencia o una alarma para un fallo
determinado.
Por ejemplo, esta selección es posible en el parámetro 1-90 Protección térmica motor. Después de una alarma o desconexión,
el motor seguirá funcionando por inercia y la alarma y la advertencia parpadearán. Una vez que se haya corregido el
problema, solamente la alarma seguirá parpadeando hasta que se reinicie el convertidor de frecuencia.
8.2.2 Lista de alarmas y advertencias
Una (X) marcada en la Tabla 8.17 indica que se ha producido la advertencia o alarma. Una advertencia precede a una
alarma.
Número Descripción Advertencia Alarma
2 Error cero activo X X –
3 Sin motor X – –
Bloqueo por
alarma
Motivo
La señal del terminal 53 o 54 es inferior al 50 %
del valor ajustado en el parámetro 6-10 Terminal
53 Low Voltage, el parámetro 6-12 Terminal 53
Low Current, el parámetro 6-20 Terminal 54 Low
Voltage y el parámetro 6-22 Terminal 54 Low
Current.
No se ha conectado un motor a la salida del
convertidor de frecuencia o falta una fase del
motor.
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 55

Resolución de problemas PROFINET
Número Descripción Advertencia Alarma
4
7
8
9 Inversor sobrecarg. X X –
10 Sobrt ETR mot X X –
11
12 Límite de par X X –
Pérdida de fase de alim.
Sobretensión CC
Baja tensión CC
Sobretemp. del termistor del
motor
1)
1)
1)
X X X
X X –
X X –
X X – El termistor (o su conexión) está desconectado.
88
13 Sobrecorriente X X X
14 Fallo Tierra – X X
16 Cortocircuito – X X
17 Cód. ctrl TO X X –
18 Arranque fallido – X – –
25 Resist. freno cortocircuitada – X X
26 Sobrecar. freno X X –
27
28 Comprob. freno – X –
30 Pérdida fase U – X X Falta la fase U del motor. Compruebe la fase.
31 Pérdida fase V – X X Falta la fase V del motor. Compruebe la fase.
32 Pérdida fase W – X X Falta la fase W del motor. Compruebe la fase.
34 Fallo Fieldbus X X –
35 Fallo de opción – X – El eldbus o la opción B detecta fallos internos.
Brake IGBT/Brake chopper
short-circuited
– X X
Bloqueo por
alarma
Motivo
Falta una fase en la fuente de alimentación de
red o el desequilibrio de tensión es demasiado
alto. Compruebe la tensión de alimentación.
La tensión del circuito intermedio supera el
límite.
La tensión del circuito intermedio ha caído por
debajo del límite de advertencia de tensión
baja.
Carga superior al 100 % durante demasiado
tiempo.
El motor se ha sobrecalentado debido a una
carga de más del 100 % durante demasiado
tiempo.
El par supera el valor ajustado en el
parámetro 4-16 Torque Limit Motor Mode o en el
parámetro 4-17 Torque Limit Generator Mode.
Se ha sobrepasado el límite de intensidad pico
del inversor. Para las unidades J1-J6, si se
produce esta alarma durante el encendido,
compruebe si los cables de alimentación están
conectados por error a los terminales del motor.
Descarga desde las fases de salida a conexión
toma a tierra.
Cortocircuito en el motor o en sus terminales.
Para las unidades J7, si se produce esta alarma
durante el encendido, compruebe si los cables
de alimentación están conectados por error a
los terminales del motor.
No hay comunicación con el convertidor de
frecuencia.
La resistencia de frenado se ha cortocircuitado
y, en consecuencia, la función de freno está
desconectada.
La potencia transmitida a la resistencia de
frenado durante los últimos 120 s supera el
límite. Posibles soluciones: disminuir la energía
de freno mediante una velocidad más baja o un
mayor tiempo de rampa.
Transistor de freno cortocircuitado, en
consecuencia la función de freno está
desconectada.
La resistencia de frenado no está conectada o
no funciona.
Se han producido problemas de comunicación
de PROFIBUS
56 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105

Resolución de problemas Guía de programación
Número Descripción Advertencia Alarma
36 Fallo aliment. X X –
38 Fa. corr. carga – X X
40 Sobrecarga T27 X – –
41 Sobrecarga T29 X – –
46 Gate drive voltage fault – X X –
47 Alim. baja 24 V X X X 24 V CC puede estar sobrecargada.
50 Calibr. AMA – X – –
51 Unom,Inom AMA – X –
52 Fa. AMA In baja – X –
53 AMA motor gr. – X –
54 AMA mot. peque. – X –
55 AMA fuera ran. – X –
56 Interrup. AMA – X – Se interrumpe el AMA.
57 T. lím. AMA – X – –
58 AMA interno – X – Póngase en contacto con Danfoss.
Bloqueo por
alarma
Motivo
Esta advertencia/alarma solo se activa si la
tensión de alimentación al convertidor de
frecuencia se pierde y si el
parámetro 14-10 Mains Failure NO está ajustado
en [0] Sin función.
Póngase en contacto con el distribuidor local de
Danfoss.
Compruebe la carga conectada al terminal 27 o
elimine la conexión cortocircuitada.
Compruebe la carga conectada al terminal 29 o
elimine la conexión cortocircuitada.
Ajustes de tensión y/o intensidad del motor
erróneos.
Intensidad del motor demasiado baja.
Compruebe los ajustes.
La potencia del motor es demasiado grande
para que funcione el AMA.
La potencia del motor es demasiado pequeña
para que funcione el AMA.
Los valores de parámetros del motor están fuera
del intervalo aceptable. El AMA no funciona.
8 8
59 Límite de intensidad X X – Sobrecarga del convertidor de frecuencia.
60 Parada externa – X – –
61 Encoder loss X X – –
La intensidad real del motor no ha sobrepasado
63 Fr. mecán. bajo – X –
65 Temp. tarj. ctrl X X X
69 Temp. tarj. pot. X X X –
70 Conf. FC incor. – X X –
80
87 Frenado CC aut. X – –
90 Control encoder X X – La opción B detecta un fallo de realimentación.
95 Correa rota X X – –
99 Rotor bloqueado – X – –
101
120 Position control fault – X – –
Frequency converter initialized
to default value
Falta información sobre el
caudal / la presión
– X –
– X X –
el valor de intensidad de liberación del freno
dentro de la ventana de tiempo de retardo de
arranque.
La temperatura de desconexión de la tarjeta de
control es de 80 °C (176 °F).
Todos los ajustes de parámetros vuelven a sus
ajustes predeterminados.
Se produce en redes IT, cuando el convertidor
de frecuencia entra en inercia y la tensión de
CC es superior a 830 V. La energía del enlace de
CC es consumida por el motor. Esta función
puede activarse/desactivarse en el
parámetro 0-07 Auto DC Braking.
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 57

Resolución de problemas PROFINET
Número Descripción Advertencia Alarma
124 Tension limit – X – –
126 Motor rotating – X – –
127
250 Nva. pieza rec. – X X –
251 Nvo. cód. tipo – X X –
Tabla 8.17 Lista de códigos de advertencias y alarmas
1) Estos errores pueden estar causados por alteraciones de la red eléctrica. Este problema se podría corregir instalando un ltro de línea de
Danfoss.
2) En el tamaño de alojamiento J7, la adver tencia también puede estar causada por una elevada tensión UDC.
Back EMF too high
2)
X – –
Bloqueo por
alarma
Motivo
Intentar arrancar un motor PM que gira a una
velocidad anormalmente alta.
Una desconexión es la acción desencadenada al producirse una alarma. La desconexión deja el motor en inercia y puede
reiniciarse pulsando [Reset] o reiniciando desde una [1] entrada digital (grupo de parámetros 5-1* Entradas digitales). El evento
que generó la alarma no puede dañar el convertidor de frecuencia ni causar situaciones peligrosas. El bloqueo por alarma es
una acción que se desencadena cuando se produce una alarma, cuya causa puede dañar el convertidor de frecuencia o las
piezas conectadas a él. Una situación de bloqueo por alarma solamente se puede reiniciar mediante un ciclo de potencia.
Advertencia Amarillo
88
Tabla 8.18 Indicación LED
Alarma Rojo intermitente
Bloqueo por alarma Amarillo y rojo
Bit Hex Dec
000000
0
1
2
3
4
5
6
7
8
01
000000
02
000000
04
000000
08
000000
10
000000
20
000000
40
000000
80
000001
00
1 Comprob. freno Reserv Reserv Reserv Reserv En rampa Desactivado
2 Temp. tarj. pot.
4 Fallo Tierra Reserv Reserv Reserv Reserv
8 Temp. tarj. ctrl Reserv Reserv Temp. tarj. ctrl Reserv
16 Cód. ctrl TO
32 Sobrecorriente Reserv Reserv Sobrecorriente Reserv Realim. alta Reserv
64 Límite de par Reserv Reserv Límite de par Reserv
128 Sobrt termi mot Reserv Reserv
256 Sobrt ETR mot Correa rota Reserv Sobrt ETR mot Correa rota
Código de
alarma
(parámetro 16-90
Código de
alarma)
Código de
alarma 2
(parámetro
16-91 Cód
igo de
alarma 2)
Gate drive
voltage
fault
Conf. FC
incor.
Código de alarma
3
(parámetro 16-97
Alarm Word 3)
Reserv Temp. tarj. pot. Reserv
Reserv Cód. ctrl TO Reserv
Código de
advertencia
(parámetro 16-
92 Código de
advertencia)
Sobrt termi
mot
Código de
advertencia 2
(parámetro 16
-93 Código de
advertencia 2)
Reserv
Código
de estado
ampliado
(parámetro
16-94 Cód.
estado
amp)
AMA
tuning
Start
CW/CCW
Enganc.
abajo
Enganche
arriba
Realim.
baja
Output
current
high
Output
current low
Código
de estado
ampliado 2
(parámetro 16-
95 Código de
estado ampl. 2)
Hand/Auto
Probus OFF1
activado
Probus OFF2
activado
Probus OFF3
activado
Reserv
Ctrl prep.
Convertidor de
frecuencia
preparado
58 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105

Resolución de problemas Guía de programación
Código de
Bit Hex Dec
000002
9
00
000004
10
00
000008
11
00
000010
12
00
000020
13
00
000040
14
00
000080
15
00
000100
16
00
000200
17
00
000400
18
00
000800
19
00
001000
20
00
002000
21
00
004000
22
00
008000
23
00
010000
24
00
0200000033 554 43
25
0400000067 108 864Resistencia de
26
0800000013421772
27
10000000268 435 4
28
20000000536 870 9
29
400000001 073 741
30
1024 Tensión baja CC
2048 Sobretens. CC Reserv Reserv Sobretens. CC Reserv
4096 Cortocircuito
8192 Reserv Reserv Reserv Reserv Reserv Frenado Reserv
16 384 Pérd. fase alim. Reserv Reserv Pérd. fase alim. Reserv Reserv
32 768 AMA not OK Reserv Reserv Sin motor
65 536 Error cero activo Reserv Reserv
131 072 Fa. corr. carga Reserv Reserv Reserv Reserv Reserv Reserv
262 144 Sobrecar. freno Reserv Reserv
524 288 Pérdida fase U Reserv Reserv Reserv Reserv
1 048 576 Pérdida fase V
2 097 152 Pérdida fase W
4 194 304 Fallo Fieldbus
8 388 608 Alim. baja 24 V
16777216 Fallo aliment.
(parámetro 16-90
Código de
512 Sobrecar. inv. Reserv Reserv Sobrecar. inv. Reserv
2
8
56
12
824
Freno IGBT Reserv Reserv Reserv Reserv Reserv Reserv
Cambio opción
Frequency
converter
initialized
Código de
alarma
alarma)
Reserv
frenado
Reserv Reserv Reserv Reserv Reserv Reserv Reserv
alarma 2
(parámetro
16-91 Cód
igo de
alarma 2)
Arranque
fallido
Parada
externa
Option
detection
Fallo de
opción
Rotor
bloqueado
Position
ctrl. fault
Lím.
tensión
Límite de
intensidad
Reserv Reserv Reserv Reserv Reserv Parada externa
Fallo de
realimen-
tación
Encoder
loss
Código de alarma
3
(parámetro 16-97
Alarm Word 3)
Reserv
Reserv Reserv Reserv
Reserv Reserv
Reserv Reserv Reserv Reserv Dormir
Reserv Fallo Fieldbus Reserv Reserv Ref. dormir
Reserv Alim. baja 24 V Reserv Reserv
Reserv Fallo aliment. Reserv Reserv Bypass
Reserv
Reserv Encoder loss Reserv Reserv FlyStart active
Reserv Reserv
Código de
advertencia
(parámetro 16-
92 Código de
advertencia)
Tensión baja
CC
Error cero
activo
Lím. potenc.
resist. freno
Límite de
intensidad
Código de
advertencia 2
(parámetro 16
-93 Código de
advertencia 2)
Reserv
Frenado CC
aut.
Reserv
Reserv Reserv Arranque
Sobrecarga
T27
Reserv Reserv Reserv
Back EMF too
high
Código
de estado
ampliado
(parámetro
16-94 Cód.
estado
amp)
Output
freq. high
Output
freq. low
Brake check
OK
Frenado
máx.
OVC active Reserv
Freno de
CA
Reference
high
Reference
low
Reserv
Código
de estado
ampliado 2
(parámetro 16-
95 Código de
estado ampl. 2)
Parada rápida
Freno de CC
Parada
Arranque por
pulsos
Mantener
salida
Velocidad ja
Reserv
Retardo arr.
Funciona-
miento
Heat sink clean
warning
8 8
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 59

Resolución de problemas PROFINET
Código de
alarma
Bit Hex Dec
800000002 147 483
31
Tabla 8.19 Descripción de Código de alarma, Código de advertencia y Código de estado ampliado
648
(parámetro 16-90
Código de
alarma)
Fr. mecán. bajo Reserv Reserv Reserv Reserv
Código de
alarma 2
(parámetro
16-91 Cód
igo de
alarma 2)
Código de alarma
3
(parámetro 16-97
Alarm Word 3)
Código de
advertencia
(parámetro 16-
92 Código de
advertencia)
Código de
advertencia 2
(parámetro 16
-93 Código de
advertencia 2)
Código
de estado
ampliado
(parámetro
16-94 Cód.
estado
amp)
Base dat
ocup
Código
de estado
ampliado 2
(parámetro 16-
95 Código de
estado ampl. 2)
Reserv
Los códigos de alarma, códigos de advertencia y códigos de estado ampliados pueden leerse mediante un bus serie o un
eldbus opcional para su diagnóstico.
88
60 Danfoss A/S © 04/2017 Reservados todos los derechos. MG06G105

Índice Guía de programación
Índice
A
Abreviatura................................................................................................ 4
Advertencia............................................................................................ 55
Ajustes generales.................................................................................. 26
Ajustes predeterminados.................................................................. 37
Alarma...................................................................................................... 55
Archivo GSDML........................................................................................ 7
Arranque accidental............................................................................... 5
Atributo de tamaño............................................................................. 41
B
Bloque de datos.................................................................................... 24
C
Cableado.................................................................................................. 35
Carga compartida................................................................................... 5
Certicados............................................................................................... 4
Código de advertencia....................................................................... 53
Código de alarma................................................................................. 53
Código de control................................................................................. 14
Código de estado................................................................................. 15
Conguración........................................................................................... 4
Convención............................................................................................... 4
Corriente de fuga.................................................................................... 6
CTW........................................................................................................... 14
D
Datos de control de procesos.......................................................... 11
Datos de estado de proceso............................................................. 12
Datos de proceso.................................................................................. 11
Diagrama de transición del estado de PROFIdrive................... 17
E
Ethernet............................................................................................ 34, 37
I
I/O................................................................................................................. 4
L
LED............................................................................................................... 4
Lista de advertencias y alarmas....................................................... 58
M
Manejo de referencias......................................................................... 12
Modo de control del convertidor de frecuencia
Terminales de entrada digital...................................................... 13
MRV............................................................................................................ 11
P
Parámetro......................................................................................... 36, 37
Parámetro VLT.......................................................................................... 9
PCD............................................................................................................ 11
Perl de control..................................................................................... 13
Perl de PROFIdrive (CTW)................................................................ 14
Personal cualicado............................................................................... 5
R
Recursos adicionales.............................................................................. 3
Referencia.................................................................................................. 4
S
Seguridad................................................................................................... 6
Símbolo....................................................................................................... 4
Sin respuesta a las señales de control........................................... 51
T
Tensión alta............................................................................................... 5
Tiempo de descarga............................................................................... 6
Tipos de datos admitidos.................................................................. 42
Tipos de PPO.......................................................................................... 10
F
Funcionamiento acíclico.................................................................... 21
Funcionamiento del control de procesos.................................... 13
H
Homologación y certicación............................................................ 4
Homologaciones..................................................................................... 4
MG06G105 Danfoss A/S © 04/2017 Reservados todos los derechos. 61

Danfoss no acepta ninguna responsabilidad por posibles errores que pudieran aparecer en sus catálogos, folletos o cualquier otro material impreso y se reserva el derecho de alterar sus productos
sin previo aviso, incluidos los que estén bajo pedido, si estas modicaciones no afectan las características convenidas con el cliente. Todas las marcas comerciales de este material son propiedad de
las respectivas compañías. Danfoss y el logotipo Danfoss son marcas comerciales de Danfoss A/S. Reservados todos los derechos.
Danfoss A/S
Ulsnaes 1
DK-6300 Graasten
vlt-drives.danfoss.com
130R0704 MG06G105 04/2017
*MG06G105*
 Loading...
Loading...