

Page 1

ENGINEERING TOMORROW
프로그래밍 지침서
VLT® AutomationDrive FC 360
www.DanfossDrives.com
Page 2

Page 3
차례 프로그래밍 지침서
차례
1 소개
1.1 본 프로그래밍 지침서 이용 방법
1.2 정의
1.3 전기 배선 - 제어 케이블
2 안전
2.1 안전 기호
2.2 공인 기사
2.3 안전 주의사항
3 프로그래밍
3.1 현장 제어 패널 운전
3.2 기본적인 프로그래밍
4 파라미터 설명
4.1 파라미터: 0-** 운전 및 디스플레이
4.2 파라미터: 1-** 부하/모터
4.3 파라미터: 2-** 제동 장치
3
3
4
7
10
10
10
10
12
12
19
22
22
34
48
4.4 파라미터: 3-** 지령/가감속
4.5 파라미터: 4-** 한계/경고
4.6 파라미터: 5-** 디지털 입/출력
4.7 파라미터: 6-** 아날로그 입/출력
4.8 파라미터: 7-** 컨트롤러
4.9 파라미터: 8-** 통신 및 옵션
4.10 파라미터: 9-** 프로피드라이브
4.11 파라미터: 12-** 이더넷
4.12 파라미터: 13-** 스마트 논리 제어
4.13 파라미터: 14-** 특수 기능
4.14 파라미터: 15-** 인버터 정보
4.15 파라미터: 16-** 정보 읽기
4.16 파라미터: 17-** 피드백 옵션
4.17 파라미터: 18-** 정보 읽기 2
4.18 파라미터: 21-** 확장형 폐회로
4.19 파라미터: 22-** 어플리케이션 기능
4.20 파라미터: 30-** 특수 기능
51
57
61
74
78
83
90
98
101
109
117
120
125
126
127
129
131
4.21 파라미터: 32-** 모션컨트롤 기본 설정
4.22 파라미터: 33-** 모션컨트롤 고급 설정
4.23 파라미터: 34-** 모션컨트롤 데이터 읽기
4.24 파라미터: 37-** 어플리케이션 설정
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 1
131
132
134
136
Page 4
차례
VLT® AutomationDrive FC 360
5 파라미터 목록
5.1 소개
5.2 파라미터 목록
6 고장수리
6.1 경고 및 알람
인덱스
142
142
145
163
163
172
2 Danfoss A/S © 12/2018 All rights reserved. MG06C839
Page 5
소개 프로그래밍 지침서
1 소개
1
1
1.1 본 프로그래밍 지침서 이용 방법
1.1.1 설명서의 용도
이 프로그래밍 지침서는 AC 드라이브 제어, 파라미터
액세스, 프로그래밍 및 고장수리에 관한 정보를 제공합
니다.
이 프로그래밍 지침서는 VLT® AutomationDrive FC
360에 익숙한 공인 기사를 위한 지침서입니다.
프로그래밍에 앞서 지침을 읽어보고 본 설명서의 절차
를 준수합니다.
VLT®는 등록 상표입니다.
1.1.2 추가 리소스
추가 리소스에는 다음이 포함됩니다.
VLT® AutomationDrive FC 360 요약 지침서
•
는 AC 드라이브의 기동 및 구동에 필요한 정
보를 제공합니다.
VLT® AutomationDrive FC 360
•
설계 지침서
에는 AC 드라이브와 사용자 설계 및 응용에
관한 세부 기술 정보가 수록되어 있습니다.
자세한 정보는 가까운 댄포스 공급업체에 문의하거나
www.danfoss.com/fc360
에서 해당 문서를 다운로드합
니다.
1.1.3 문서 및 소프트웨어 버전
본 설명서는 정기적으로 검토 및 업데이트됩니다. 모든
개선 관련 제안을 환영합니다.
해당 소프트웨어 버전을 나타냅니다.
버전 비고
MG06C8
표 1.1 문서 및 소프트웨어 버전
°C
°F
AC Alternating current(교류)
AEO
ACP
AWG American wire gauge(미국 전선 규격)
AMA
신규 하드웨어 및 소프트웨어 출시로 인한
업데이트.
Degrees Celsius(섭씨도)
Fahrenheit(화씨)
Automatic Energy Optimization(자동
에너지 최적화)
Application control processor(어플리케
이션 제어 프로세서)
Automatic motor adaptation(자동 모터
최적화)
표 1.1
는 문서 버전 및
소프트
웨어 버
전
1.8x
DC Direct current(직류)
Electrically erasable programmable
EEPROM
EMC
EMI
ESD Electrostatic discharge(정전기 방전)
ETR
f
M,N
FC Frequency Converter(AC 드라이브)
IGBT
IP
I
LIM
I
INV
I
M,N
I
VLT,MAX
I
VLT,N
L
d
L
q
LCP Local Control Panel(현장 제어 패널)
LED Light-emitting diode(발광 다이오드)
MCP
N.A. Not applicable(해당 없음)
NEMA
P
M,N
PCB Printed Circuit Board(인쇄 회로 기판)
PE Protective earth(보호 접지)
PELV
PWM Pulse width modulation(펄스 폭 변조)
R
s
Regen Regenerative terminals(회생 단자)
RPM Revolutions Per Minute(분당 회전수)
RFI
SCR
read-only memory(전기적 소거 가능 및
프로그래밍 가능 읽기 전용 메모리)
Electromagnetic Compatibility(전자기
호환성)
Electromagnetic Interference(전자기
간섭)
Electronic Thermal Relay(전자 써멀 릴
레이)
Nominal motor frequency(모터 정격 주
파수)
Insulated-gate bipolar transistor(절연
게이트 쌍극성 트랜지스터)
Ingress protection(분진 및 수분에 대한
보호)
Current limit(전류 한계)
Rated Inverter Output Current(인버터
정격 출력 전류)
Nominal motor current(모터 정격 전류)
Maximum output current(최대 출력 전
류)
Rated output current supplied by the
frequency converter(AC 드라이브에서
공급하는 정격 출력 전류)
Motor d-axis inductance(모터의 d축
인덕턴스)
Motor q-axis inductance(모터의 q축
인덕턴스)
Motor control processor(모터 제어 프
로세서)
National Electrical Manufacturers
Association(미국 전기 공업협회)
Nominal motor power(모터 정격 동력)
Protective Extra Low Voltage(방호초
저전압)
Stator resistance(고정자 저항)
Radio Frequency Interference(무선 주
파수 간섭)
Silicon controlled rectifier(실리콘 제어
정류기)
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 3
Page 6
175ZA078.10
Pull-out
RPM
Torque
소개
VLT® AutomationDrive FC 360
1
SMPS
T
LIM
U
M,N
X
h
표 1.2 약어
Switch Mode Power Supply(스위치 모
드 전원 공급)
Torque limit(토크 한계)
Nominal motor voltage(모터 정격 전압)
Motor main reactance(모터 주 리액턴
스)
1.1.4 승인 및 인증
1.2 정의
1.2.1 Frequency converter(AC 드라이
브)
코스팅(프리런)
모터축이 코스팅(프리런) 상태입니다. 모터에 토오크가
없습니다.
I
VLT,MAX
최대 출력 전류입니다.
I
VLT,N
AC 드라이브에서 공급하는 정격 출력 전류입니다.
U
VLT,MAX
최대 출력 전압입니다.
1.2.2 입력
f
M
모터 주파수입니다.
f
MAX
최대 모터 주파수입니다.
f
MIN
최소 모터 주파수입니다.
f
M,N
모터 정격 주파수(명판 데이터)입니다.
I
M
(실제) 모터 전류입니다.
I
M,N
모터 정격 전류(명판 데이터)입니다.
n
M,N
모터 정격 회전수(명판 데이터)입니다.
n
s
동기식 모터 회전수입니다.
2 ×
ns=
n
slip
파라미터
파라미터
1−23 × 60s
1−39
모터 슬립입니다.
P
M,N
모터 정격 동력(명판 데이터, kW 또는 HP 단위)입니다.
T
M,N
모터 정격 토크입니다.
U
M
순간 모터 전압입니다.
U
M,N
모터 정격 전압(명판 데이터)입니다.
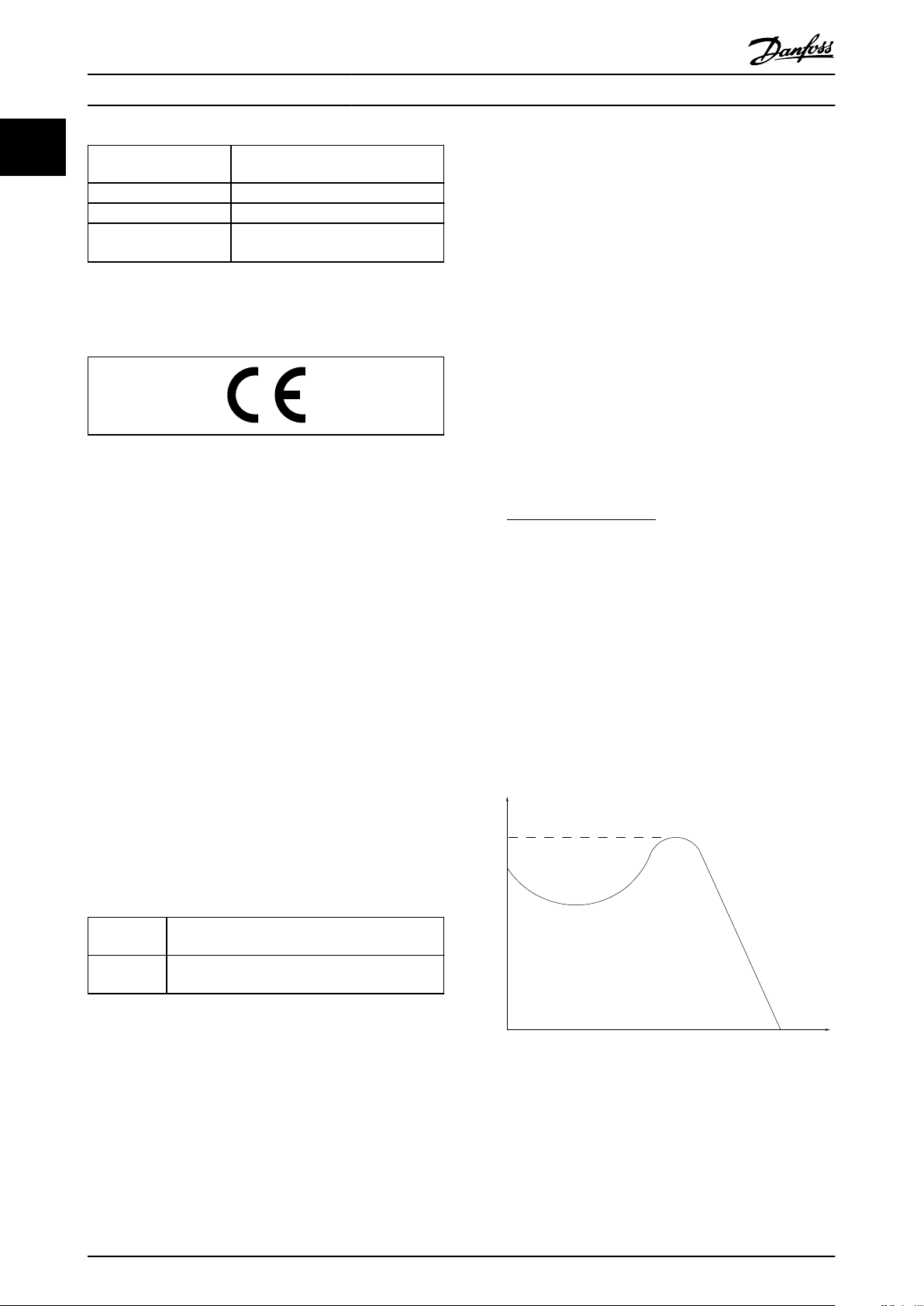
기동 토크
제어 명령
LCP 및 디지털 입력으로 연결된 모터를 기동 및 정지
합니다.
기능은 두 그룹으로 구분됩니다.
그룹 1의 기능은 그룹 2의 기능에 우선합니다.
그룹 1 코스팅 정지, 리셋 및 코스팅 정지, 급속 정지, 직류
제동, 정지 및 [OFF].
그룹 2 기동, 펄스 기동, 역회전 기동, 조그, 출력 고정 및
[Hand On].
표 1.3 기능 그룹
1.2.3 모터
모터 구동 중
출력축에서 생성된 토크와 모터의 0 RPM에서 최대 속
도까지의 속도입니다.
f
JOG
디지털 단자 또는 버스통신을 통해 조그 기능이 활성화
되었을 때의 모터 주파수입니다.
그림 1.1 기동 토크
η
VLT
AC 드라이브 효율은 입력 전원 및 출력 전원 간의 비율
로 정의됩니다.
4 Danfoss A/S © 12/2018 All rights reserved. MG06C839
Page 7
소개 프로그래밍 지침서
기동 불가 명령
그룹 1의 제어 명령에 속하는 기동 불가 명령입니다. 자
세한 내용은
정지 명령
그룹 1의 제어 명령에 속하는 정지 명령입니다. 자세한
내용은
표 1.3
표 1.3
를 참조하십시오.
를 참조하십시오.
1.2.4 지령
아날로그 지령
아날로그 입력 단자 53 또는 54에 전달되는 신호이며
전압 또는 전류일 수 있습니다.
이진수 지령
직렬 통신 포트를 통해 전달되는 신호입니다.
프리셋 지령
프리셋 지령은 -100%에서 +100% 사이의 지령 범위에
서 설정할 수 있는 지령입니다. 디지털 단자를 통해 8개
의 프리셋 지령을 선택할 수 있습니다. 버스통신을 통해
4개의 프리셋 지령을 선택할 수 있습니다.
펄스 지령
디지털 입력(단자 29 또는 33)에 전달된 펄스 주파수
신호입니다.
Ref
MAX
100% 전체 범위 값(일반적으로 10 V, 20 mA)에서의
지령 입력과 결과 지령 간의 관계를 결정합니다. 최대
지령 값은
Ref
0% 값(일반적으로 0 V, 0 mA, 4 mA)에서의 지령 입력
과 결과 지령 간의 관계를 결정합니다. 최소 지령 값은
파라미터 3-02 최소 지령
파라미터 3-03 최대 지령
MIN
에서 설정됩니다.
에서 설정됩니다.
1.2.5 기타
아날로그 입력
아날로그 입력은 AC 드라이브의 각종 기능을 제어하는
데 사용합니다.
아날로그 입력에는 다음과 같은 두 가지 형태가 있습니
다.
전류 입력: 0–20 mA 및 4–20 mA.
•
전압 입력: 0–10 V DC.
•
아날로그 출력
아날로그 출력은 0-20 mA 신호 또는 4-20 mA 신호
를 공급할 수 있습니다.
자동 모터 최적화, AMA
AMA 알고리즘은 정지 상태에서 연결된 모터의 전기적
인 파라미터를 결정합니다.
제동 저항
제동 저항은 회생 제동 시에 발생하는 제동 동력을 흡
수하기 위한 모듈입니다. 회생 제동 동력은 DC 링크 전
압을 증가시키고, 제동 초퍼는 이 때 발생한 동력을 제
동 저항에 전달되도록 합니다.
CT 특성
컨베이어 벨트, 배수 펌프나 크레인 등에는 일정 토크
특성이 사용됩니다.
디지털 입력
디지털 입력은 AC 드라이브의 각종 기능을 제어하는
데 사용할 수 있습니다.
디지털 출력
AC 드라이브는 24V DC(최대 40 mA) 신호를 공급할
수 있는 두 개의 고정 상태 출력을 가지고 있습니다.
ETR
Electronic Thermal Relay(전자 써멀 릴레이)의 약자
이며 실제 부하 및 시간을 기준으로 한 써멀 부하 계산
입니다. 모터 온도의 측정을 그 목적으로 합니다.
FC 표준 버스통신
FC 프로토콜이나 MC 프로토콜이 있는 RS485 버스통
신이 여기에 해당합니다.
(를) 참조하십시오.
초기화
초기화가 실행(
름 리셋)되면 AC 드라이브가 초기 설정으로 복원됩니
다.
단속적 듀티 사이클
단속적 듀티 정격은 듀티 사이클의 시퀀스를 나타냅니
다. 각각의 사이클은 부하 기간과 부하 이동 기간으로
구성되어 있습니다. 단속 부하로 운전하거나 정상 부하
로 운전할 수 있습니다.
LCP
현장 제어 패널은 AC 드라이브를 제어하고 프로그래밍
하기에 완벽한 인터페이스로 구성되어 있습니다. LCP
는 탈착식입니다. LCP는 설치 키트 옵션을 사용하여
AC 드라이브에서 최대 3미터(9.8 ft) 거리에 설치할 수
있습니다.
GLCP
그래픽 방식의 현장 제어 패널(LCP 102)은 AC 드라이
브를 제어하고 프로그래밍하기에 완벽한 인터페이스로
구성되어 있습니다. 표시창은 그래픽으로 되어 있으며
패널은 공정 값을 나타내는 데 사용됩니다. GLCP에는
저장 및 복사 기능이 있습니다.
NLCP
숫자 방식의 현장 제어 패널(LCP 21)은 AC 드라이브를
제어하고 프로그래밍하기에 완벽한 인터페이스로 구성
되어 있습니다. 표시창은 숫자로 되어 있으며 패널은 공
정 값을 나타내는 데 사용됩니다. NLCP에는 저장 및
복사 기능이 있습니다.
lsb
Least significant bit(최하위 비트)의 약자입니다.
msb
Most significant bit(최상위 비트)의 약자입니다.
MCM
미국의 케이블 단면적 측정 단위인 Mille Circular Mil
의 약자입니다. 1 MCM = 0.5067 mm2.
파라미터 14-22 운전 모드
파라미터 8-30 프로토콜
또는 동시 누
을
1
1
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 5
Page 8
소개
VLT® AutomationDrive FC 360
1
온라인/오프라인 파라미터
온라인 파라미터에 대한 변경 사항은 데이터 값이 변경
되면 즉시 적용됩니다. 오프라인 파라미터에 대한 변경
사항을 활성화하려면 [OK]를 누릅니다.
공정 PID
PID 제어는 변화하는 부하에 따라 출력 주파수를 자동
조정하여 속도, 압력 및 온도를 유지합니다.
PCD
Process control data(공정 제어 데이터)의 약자입니다.
전원 재투입
표시창(LCP)이 꺼질 때까지 주전원을 차단한 다음 다시
전원을 켭니다.
역률
역률은 I1과 I
역률
=
의 관계를 나타냅니다.
RMS
3xUxI1cosϕ1
3xUxI
RMS
VLT® AutomationDrive FC 360 AC 드라이브의 경우,
cosϕ1
= 1, 따라서,
역률
I1xcosϕ1
=
I
RMS
=
I
I
RMS
1
역률은 AC 드라이브가 주전원 공급에 가하는 부하의
크기입니다.
역률이 낮을수록 동일한 kW(출력)를 얻기 위해 I
RMS
가
높아집니다.
I
RMS
=
I
+ I
1
5
+ I
2
+ .. + I
7
2
n
2
2
또한 역률이 높으면 다른 고조파 전류는 낮아집니다.
내장 DC 코일은 역률을 높여 주전원 공급에 가해지는
부하를 최소화합니다.
펄스 입력/인크리멘탈 엔코더
모터 회전수에 대한 정보를 피드백하는 외부 디지털 펄
스 트랜스미터입니다. 엔코더는 정밀한 속도 제어가 요
구되는 어플리케이션에 사용됩니다.
RCD
Residual current device(잔류 전류 장치)의 약자입니
다.
셋업
2개의 셋업에 파라미터 설정을 저장할 수 있습니다. 2
개의 파라미터 셋업을 서로 변경할 수 있으며 하나의
셋업이 활성화되어 있더라도 다른 셋업을 수정할 수 있
습니다.
SFAVM
Stator Flux oriented Asynchronous Vector
Modulation(고정자속 지향성 비동기식 벡터 변조) 스위
칭 방식을 설명하는 약자입니다.
슬립 보상
AC 드라이브는 모터의 슬립 보상을 위해 모터 회전수
를 거의 일정하도록 하는 모터 부하를 측정하고 그에
따라 주파수를 보완하여 줍니다.
스마트 로직 제어(SLC)
SLC는 스마트 로직 제어기가 관련 사용자 정의 이벤트
를 TRUE(참)로 연산할 때 실행되는 사용자 정의 동작
단계입니다(파라미터 그룹
13-** 스마트 로직 제어
).
STW
상태 워드입니다.
THD
총 고조파 왜곡은 고조파 왜곡의 총 기여도를 나타냅니
다.
써미스터
온도에 따라 작동되는 저항이며, AC 드라이브 또는 모
터의 온도를 감시하는데 사용됩니다.
트립
AC 드라이브에 과전압이 발생하거나 AC 드라이브가
모터, 공정 또는 기계장치의 작동을 방해하는 경우 등
결함이 발생한 상태입니다. 결함의 원인이 사라져야 재
기동할 수 있으며 리셋을 실행하거나 또는 경우에 따라
자동으로 리셋하도록 프로그래밍하여 트립 상태를 해제
할 수 있습니다. 사용자의 안전을 위해 트립을 사용하지
마십시오.
트립 잠김
트립 잠김은 AC 드라이브에 결함이 발생하여 사용자의
개입이 필요한 상태이며 그 예로는 AC 드라이브의 출
력 단자가 단락된 경우가 있습니다. 주전원을 차단하고
결함의 원인을 제거한 다음 AC 드라이브를 다시 연결
해야만 잠긴 트립을 해제할 수 있습니다. 리셋을 실행하
거나 또는 경우에 따라 자동으로 리셋하도록 프로그래
밍하여 트립 상태를 해제해야만 재기동할 수 있습니다.
사용자의 안전을 위해 트립 잠김을 사용하지 마십시오.
VT 특성
펌프와 팬에 사용되는 가변 토크 특성입니다.
+
VVC
전압 벡터 제어(VVC+)는 표준 V/f(전압/주파수) 비율
제어에 비해 가변되는 속도 지령 및 부하 토크에서 유
동성과 안정성을 향상시킵니다.
60° AVM
60° Asynchronous Vector Modulation (60° 비동기식
벡터 변조)
스위칭 방식을 의미합니다.
6 Danfoss A/S © 12/2018 All rights reserved. MG06C839
Page 9
130BC438.19
3 phase
power
input
Switch mode
power supply
Motor
Interface
(PNP) = Source
(NPN) = Sink
ON=Terminated
OFF=Open
Brake
resistor
91 (L1)
92 (L2)
93 (L3)
PE
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN/OUT)
0/4-20 mA
12 (+24 V OUT)
33 (D IN)
18 (D IN)
20 (COM D IN)
10 V DC
15 mA 100 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0V
5V
S801
RS485
RS485
03
+10 V DC
0/4-20 mA
0-10 V DC
24 V DC
02
01
05
04
250 V AC, 3 A
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
27 (D IN/OUT)
24 V
0 V
0 V (PNP)
24 V (NPN)
0 V
24 V
29 (D IN/OUT)
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
32 (D IN)
31 (D IN)
95
P 5-00
21
ON
(+UDC) 89
(BR) 81 5)
24 V (NPN)
0 V (PNP)
0-10 V DC
(-UDC) 88
RFI
3)
0 V
250 V AC, 3 A
Relay 1
1)
Relay 2 2)
4)
06
42 (A OUT)
45 (A OUT)
Analog
output
0/4-20 mA
소개 프로그래밍 지침서
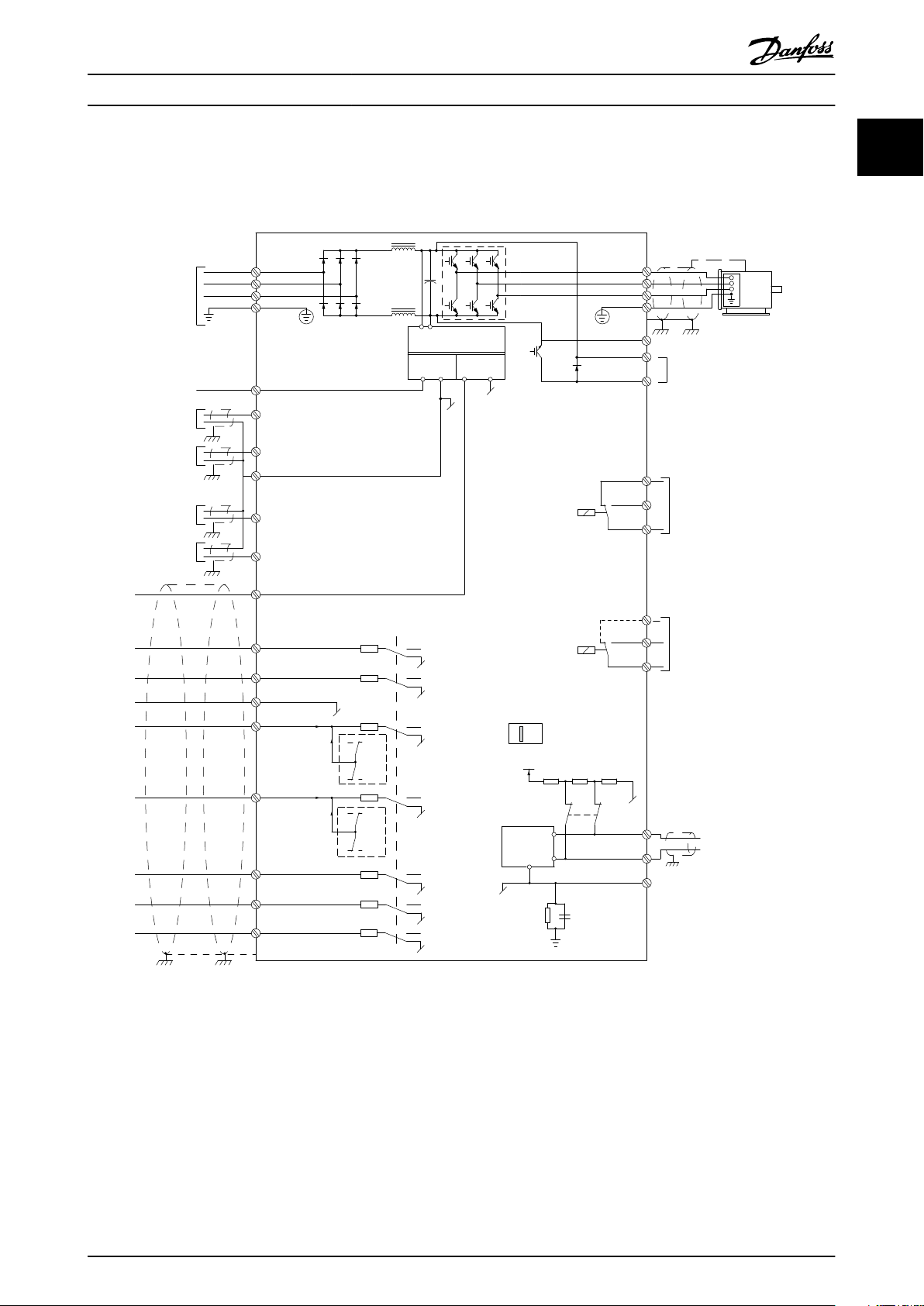
1.3 전기 배선 - 제어 케이블
1.3.1 개요
1
1
그림 1.2 기본 배선 구조
A = 아날로그, D = 디지털
1) J1–J5에 한해서 내장 제동 초퍼를 사용할 수 있습니다.
2) 릴레이 2는 J1–J3의 경우 2극이며 J4–J7의 경우 3극입니다. 단자 4, 5 및 6이 있는 J4–J7의 릴레이 2는 NO/NC
논리가 릴레이 1과 동일합니다. 릴레이는 J1–J5의 경우 플러그형이며 J6–J7의 경우 고정형입니다.
3) J1–J5 기준 단일 DC 초크, J6–J7 기준 듀얼 DC 초크,
4) S801 스위치(버스통신 단자)는 RS485 포트(단자 68 및 69)를 종단하는데 사용할 수 있습니다.
5) J6–J7의 경우, BR 없음.
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 7
Page 10
130BD367.11
12 13 18 19 27 29 32 33 55
+24 VDC
0 VDC
PNP (Source)
Digital input wiring
NPN (Sink)
Digital input wiring
12 18 19 27 29 31 32 33 55
+24 VDC
0 VDC
130BD368.11
130BA681.10
12 18 19
130BD369.11
322927 31 33 20
P 5-12 [0]
P 5-10 [8]
Start/Stop
+24V
Speed
Start
[18]
소개
VLT® AutomationDrive FC 360
1
드문 경우이기는 하지만 길이가 긴 제어 케이블과 아날
로그 신호를 사용하면 주전원 공급 케이블로부터 전달
된 노이즈로 인해 50/60Hz 접지 루프가 발생할 수 있
습니다. 이러한 경우가 발생하면 차폐선을 차단하거나
차폐선과 섀시 사이에 100 nF 컨덴서를 삽입합니다.
디지털 및 아날로그 입출력은 양쪽에 서로 영향을 미칠
수 있는 접지전류를 피하기 위해 AC 드라이브의 공통
입력(단자 20 및 55)에 각각 분리해서 연결해야 합니
다. 예를 들어, 디지털 입력의 전원 공급/차단은 아날로
그 입력 신호에 영향을 미칠 수 있습니다.
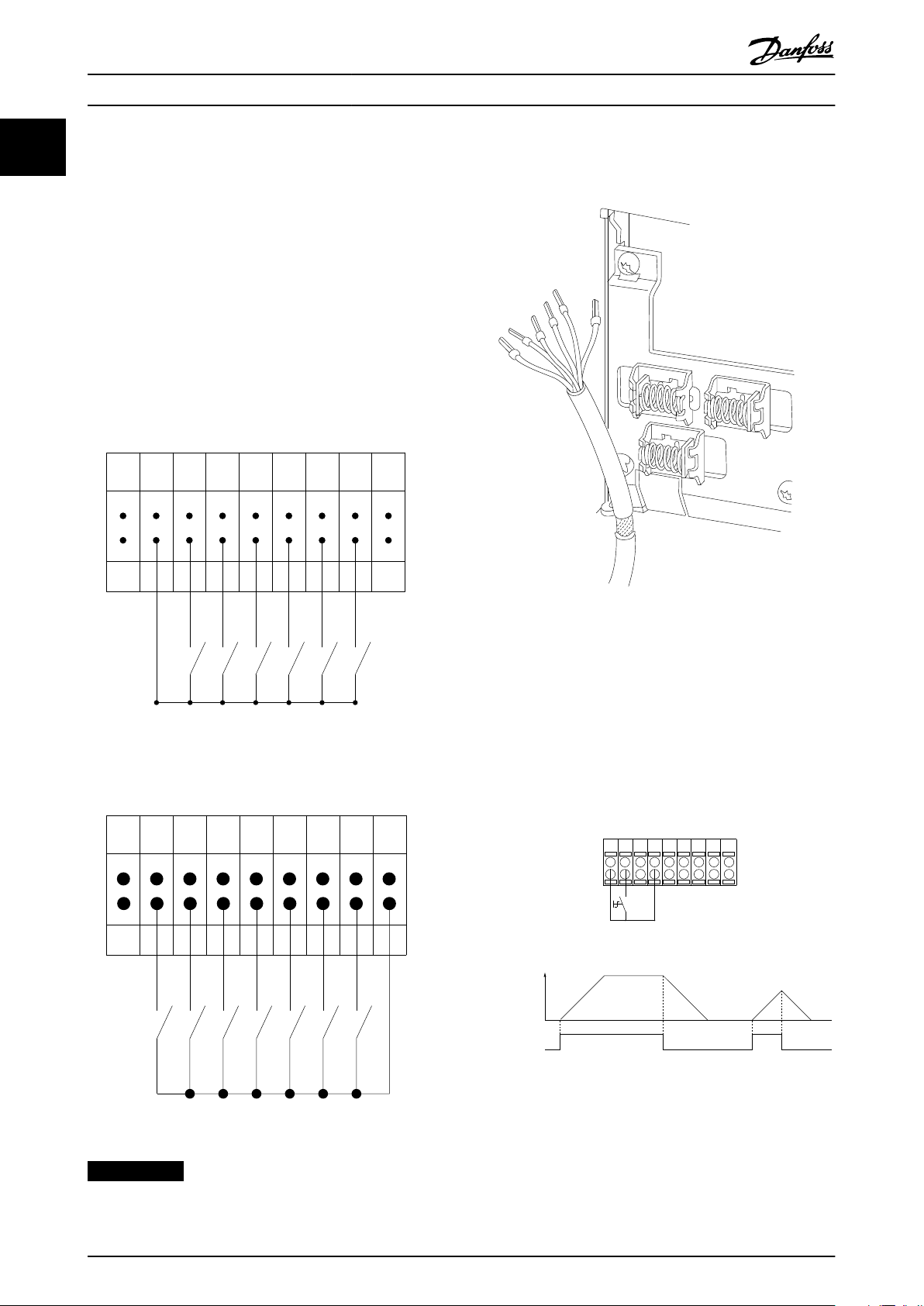
제어 단자의 입력 극성
제어 케이블의 올바른 종단을 위해
형 제어 케이블 사용
그림 1.5 차폐/보호된 제어 케이블의 접지
편을 참조하십시오.
설계 지침서의 차폐
그림 1.3 PNP (소스)
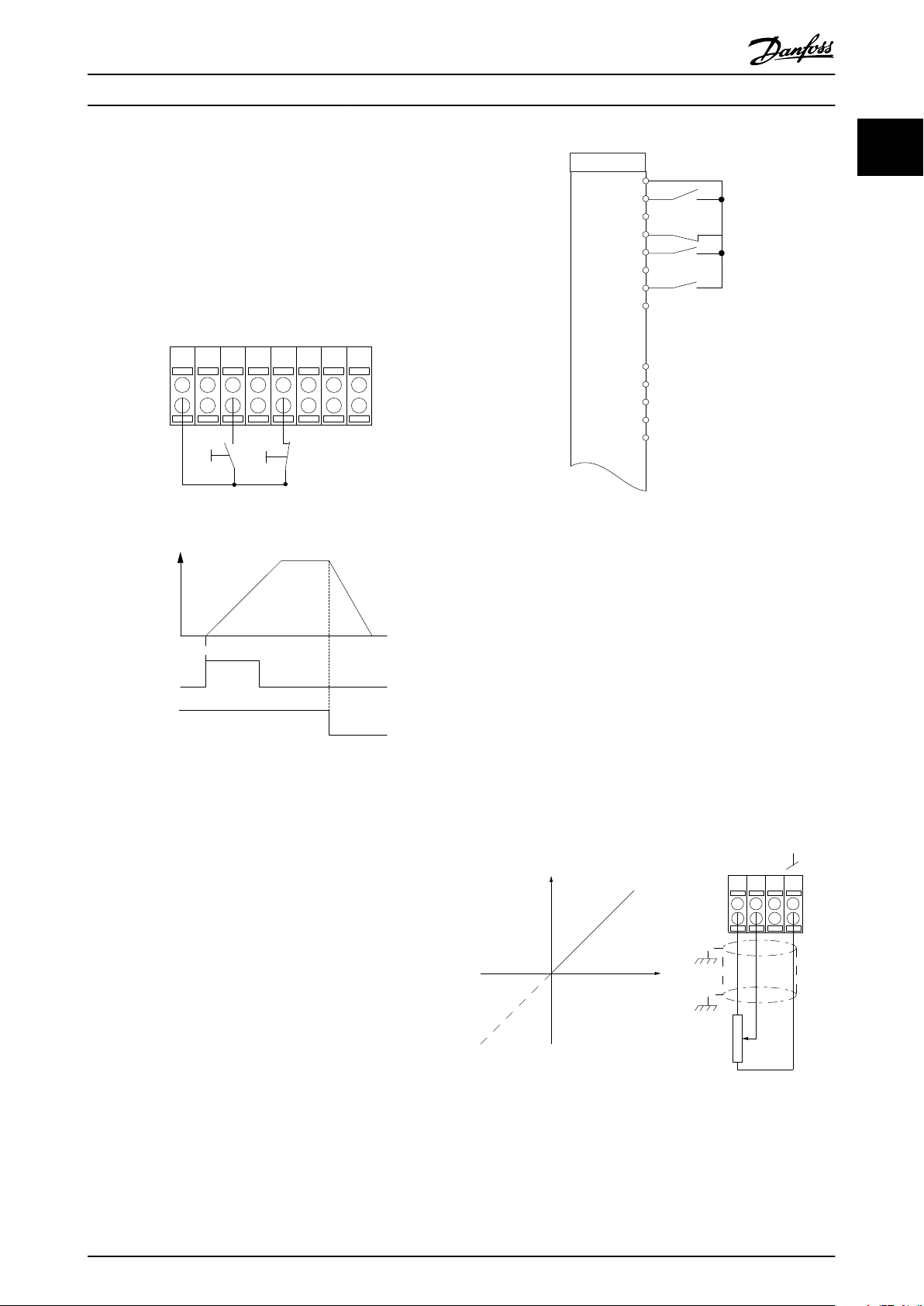
1.3.2 기동/정지
단자 18 =
동
.
단자 27 =
전하지 않음
그림 1.6 기동/정지
파라미터 5-10 단자 18 디지털 입력 [8] 기
파라미터 5-12 단자 27 디지털 입력 [0] 운
(초기 설정값
코스팅 인버스
).
그림 1.4 NPN (싱크)
주의 사항
제어 케이블은 반드시 차폐/보호되어야 합니다.
8 Danfoss A/S © 12/2018 All rights reserved. MG06C839
Page 11
1312 18 19
130BD370.11
322927 33
P 5 - 12 [6]
P 5 - 10 [9]
+24 V
Speed
Latched start Stop inverse
Latched start (18)
Stop inverse (27)
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10
V
A IN
A IN
COM
A OUT
12
31
18
19
27
29
32
33
50
53
54
55
42
130BF821.10
D IN
130BF873.10
5553 5450
Speed
P 6-15
1 kΩ
+10 V/30 mA
Ref. voltage
P 6-11 10V
소개 프로그래밍 지침서
1.3.3 펄스 기동/정지 인버스
1
1
단자 18 =
스 기동
단자 27 =
파라미터 5-10 단자 18 디지털 입력 [9] 펄
.
파라미터 5-12 단자 27 디지털 입력 [6] 정
지 인버스.
그림 1.7 펄스 기동/정지 인버스
그림 1.8 가속/감속
1.3.5 가변 저항 지령
가변 저항을 통한 전압 지령
지령 소스 1 =
정값).
단자 53, 최저 전압 = 0V.
단자 53, 고전압 = 10V.
단자 53, 최저 지령/피드백 = 0.
단자 53, 최고 지령/피드백 = 50.
파라미터 6-19 Terminal 53 mode
압
.
[1] 아날로그 입력 53
(초기 설
=
[1] 전
1.3.4 가속/감속
단자 29/32=가속/감속
단자 18 =
력 [8] 기동
단자 27 =
력 [19] 지령 고정
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 9
단자 29 =
력 [21] 가속
단자 32 =
력 [22] 감속
파라미터 5-10 단자 18 디지털 입
(초기 설정값).
파라미터 5-12 단자 27 디지털 입
.
파라미터 5-13 단자 29 디지털 입
.
파라미터 5-14 단자 32 디지털 입
.
그림 1.9 가변 저항 지령
Page 12
안전
VLT® AutomationDrive FC 360
2 안전
22
2.1 안전 기호
본 지침서에 사용된 기호는 다음과 같습니다.
경고
사망 또는 중상으로 이어질 수 있는 잠재적으로 위험한
상황을 나타냅니다.
주의
경상 또는 중등도 상해로 이어질 수 있는 잠재적으로
위험한 상황을 나타냅니다. 이는 또한 안전하지 않은 실
제 상황을 알리는 데도 이용될 수 있습니다.
주의 사항
장비 또는 자산의 파손으로 이어질 수 있는 상황 등의
중요 정보를 나타냅니다.
2.2 공인 기사
경고
의도하지 않은 기동
AC 드라이브가 교류 주전원, 직류 공급 또는 부하 공유
에 연결되어 있는 경우, 모터는 언제든지 기동할 수 있
습니다. 프로그래밍, 서비스 또는 수리 작업 중에 의도
하지 않은 기동이 발생하면 사망, 중상 또는 장비나 자
산의 파손으로 이어질 수 있습니다. 모터는 외부 스위
치, 직렬 버스통신 명령 또는 LCP의 입력 지령 신호를
이용하거나 결함 조건 해결을 통해 기동할 수 있습니다.
의도하지 않은 모터 기동을 방지하려면:
주전원으로부터 AC 드라이브를 연결 해제합니
•
다.
파라미터를 프로그래밍하기 전에 LCP의 [Off/
•
Reset]를 누릅니다.
AC 드라이브를 교류 주전원, 직류 공급장치 또
•
는 부하 공유에 연결하기 전에 AC 드라이브,
모터 및 관련 구동 장비를 완벽히 배선 및 조
립합니다.
드라이브를 문제 없이 안전하게 운전하기 위해서는 올
바르고 안정적인 운송, 보관, 설치, 운전 및 유지보수가
필요합니다. 본 장비의 설치 및 운전은 공인 기사에게만
허용됩니다.
공인 기사는 교육받은 기사 중 해당 법률 및 규정에 따
라 장비, 시스템 및 회로를 설치, 작동 및 유지보수하도
록 승인된 기사로 정의됩니다. 또한 공인 기사는 본 설
명서에 수록된 지침 및 안전 조치에 익숙해야 합니다.
안전 주의사항
2.3
경고
고전압
교류 주전원 입력, DC 공급 또는 부하 공유에 연결될
때 드라이브에 고전압이 발생합니다. 설치, 기동 및 유
지보수를 공인 기사가 수행하지 않으면 사망 또는 중상
으로 이어질 수 있습니다.
반드시 공인 기사가 설치, 기동 및 유지보수를
•
수행해야 합니다.
서비스 또는 수리 작업을 수행하기 전에 적절
•
한 전압 측정 장치를 사용하여 드라이브에 전
압이 남아 있지 않은지 확인합니다.
경고
방전 시간
AC 드라이브에는 AC 드라이브에 전원이 인가되지 않
더라도 충전이 유지될 수 있는 DC 링크 커패시터가 포
함되어 있습니다. 경고 LED 표시등이 꺼져 있더라도 고
전압이 남아 있을 수 있습니다. 전원을 분리한 후 서비
스 또는 수리 작업을 진행하기 전까지 지정된 시간 동
안 기다리지 않으면 사망 또는 중상으로 이어질 수 있
습니다.
모터를 정지합니다.
•
교류 주전원 및 원격 DC 링크 전원 공급(배터
•
리 백업장치, UPS 및 다른 AC 드라이브에 연
결된 DC 링크 연결장치 포함)을 차단합니다.
PM 모터를 차단하거나 구속시킵니다.
•
컨덴서가 완전히 방전될 때까지 기다립니다.
•
최소 대기 시간은
AC 드라이브 상단의 제품 라벨에서도 확인할
수 있습니다.
서비스 또는 수리 작업을 수행하기 전에 적절
•
한 전압 측정 장치를 사용하여 컨덴서가 완전
히 방전되었는지 확인합니다.
표 2.1
에 명시되어 있으며
10 Danfoss A/S © 12/2018 All rights reserved. MG06C839
Page 13
안전 프로그래밍 지침서
전압
[V]
380–480
380–480
표 2.1 방전 시간
출력 범위
[kW (hp)]
0.37–7.5 kW
(0.5–10 hp)
11–75 kW
(15–100 hp)
최소 대기 시간
(분)
4
15
경고
누설 전류 위험
누설 전류가 3.5 mA를 초과합니다. 드라이브를 올바르
게 접지하지 못하면 사망 또는 중상으로 이어질 수 있
습니다.
공인 전기설치 인력이 장비를 올바르게 접지하
•
게 합니다.
경고
장비 위험
회전축 및 전기 장비에 접촉하면 사망 또는 중상으로
이어질 수 있습니다.
반드시 해당 교육을 받은 공인 기사가 설치, 기
•
동 및 유지보수를 수행해야 합니다.
전기 작업 시에는 항상 국가 및 현지 전기 규
•
정을 준수해야 합니다.
본 지침서의 절차를 따릅니다.
•
2 2
주의
내부 결함 위험
드라이브가 올바르게 닫혀 있지 않으면 드라이브의 내
부 결함 시 중상으로 이어질 수 있습니다.
전원을 공급하기 전에 모든 안전 덮개가 제자
•
리에 안전하게 고정되어 있는지 확인해야 합니
다.
주의 사항
높은 고도
고도가 2000 m (6562 ft) 이상인 곳에 설치할 경우
PELV에 대해 댄포스에 문의하십시오.
주의 사항
절연된 주전원에서의 사용
절연된 주전원에서의 AC 드라이브 사용에 관한 자세한
내용은
IT 주전원에서의 설치에 관한 권장 사항을 준수합니다.
IT 주전원 관련 감시 장치를 사용하여 손상을 피합니다.
설계 지침서의 RFI 스위치
절을 참조하십시오.
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 11
Page 14
130BC506.10
Setup 1
A
B
C
D
5
12
13 14 15
10
11
10
9
6
7
8
4
1
2
3
Menu
Status
Quick
Menu
Main
Menu
Hand
On
O
Reset
Auto
On
Back
OK
On
Warn
Alarm
130BD135.10
Setup 12
INDEX
AHP
VkW
srpm
Hz%
n2n1
n3
p5 p4
p3 p2 p1
프로그래밍
3 프로그래밍
VLT® AutomationDrive FC 360
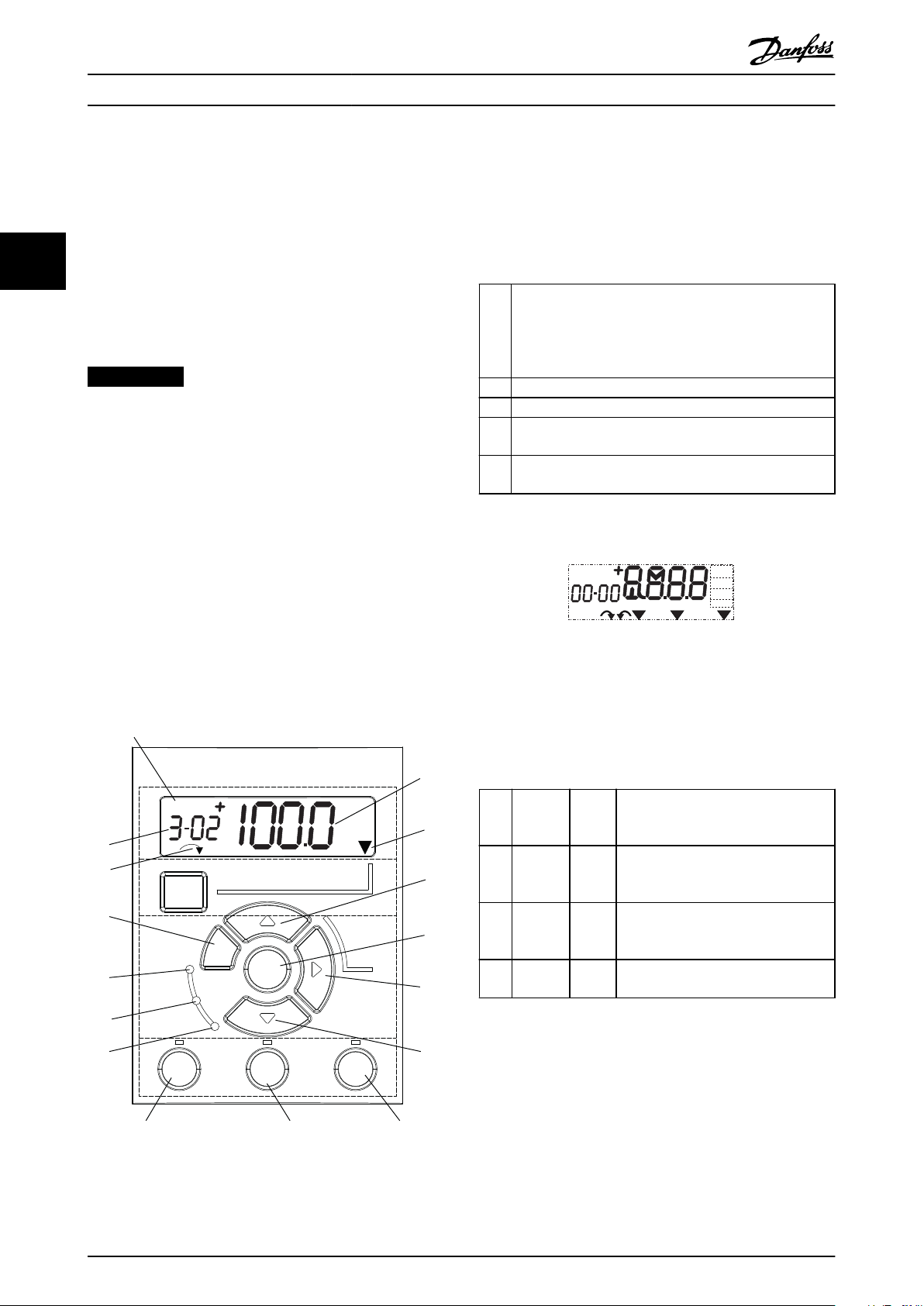
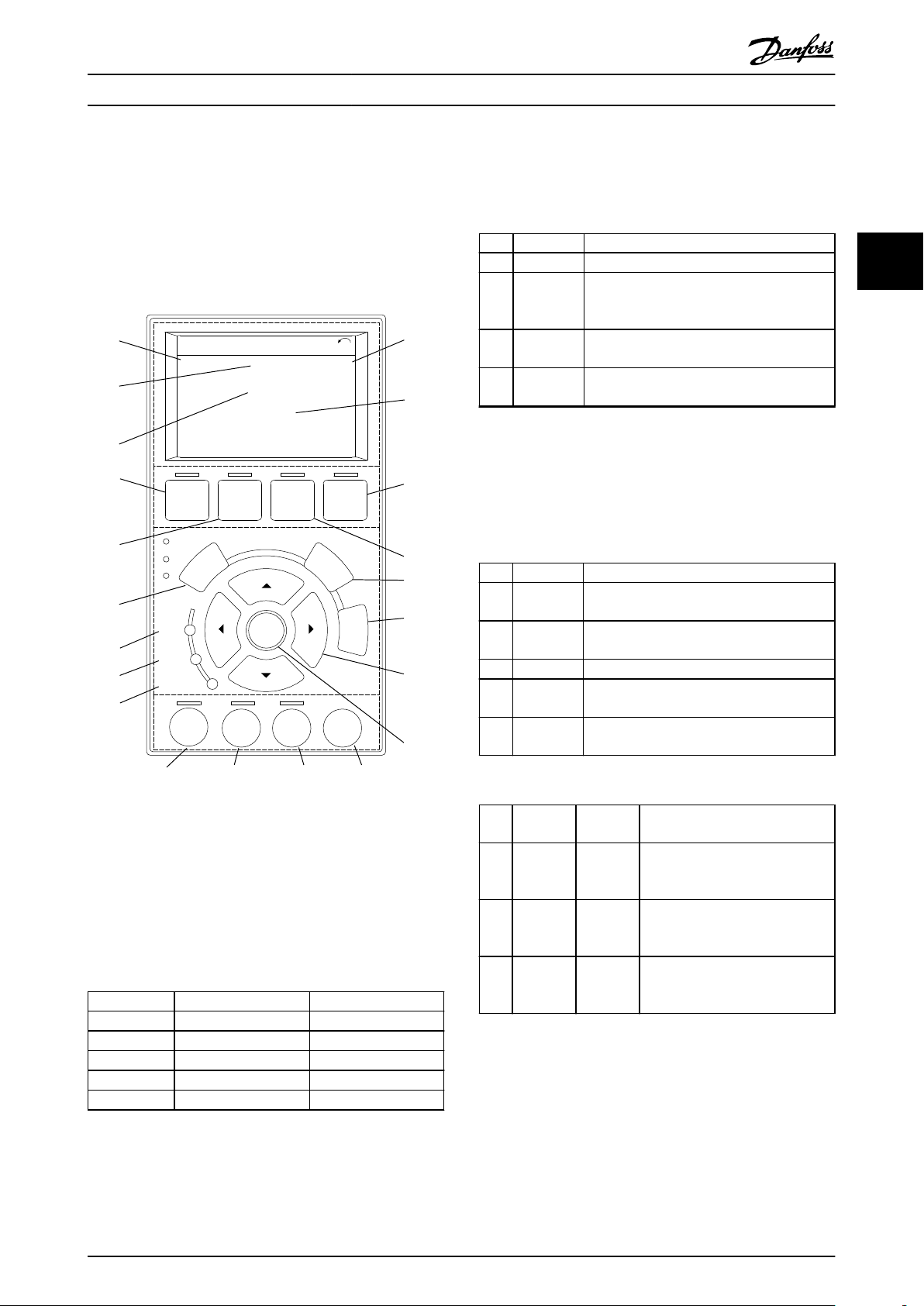
3.1 현장 제어 패널 운전
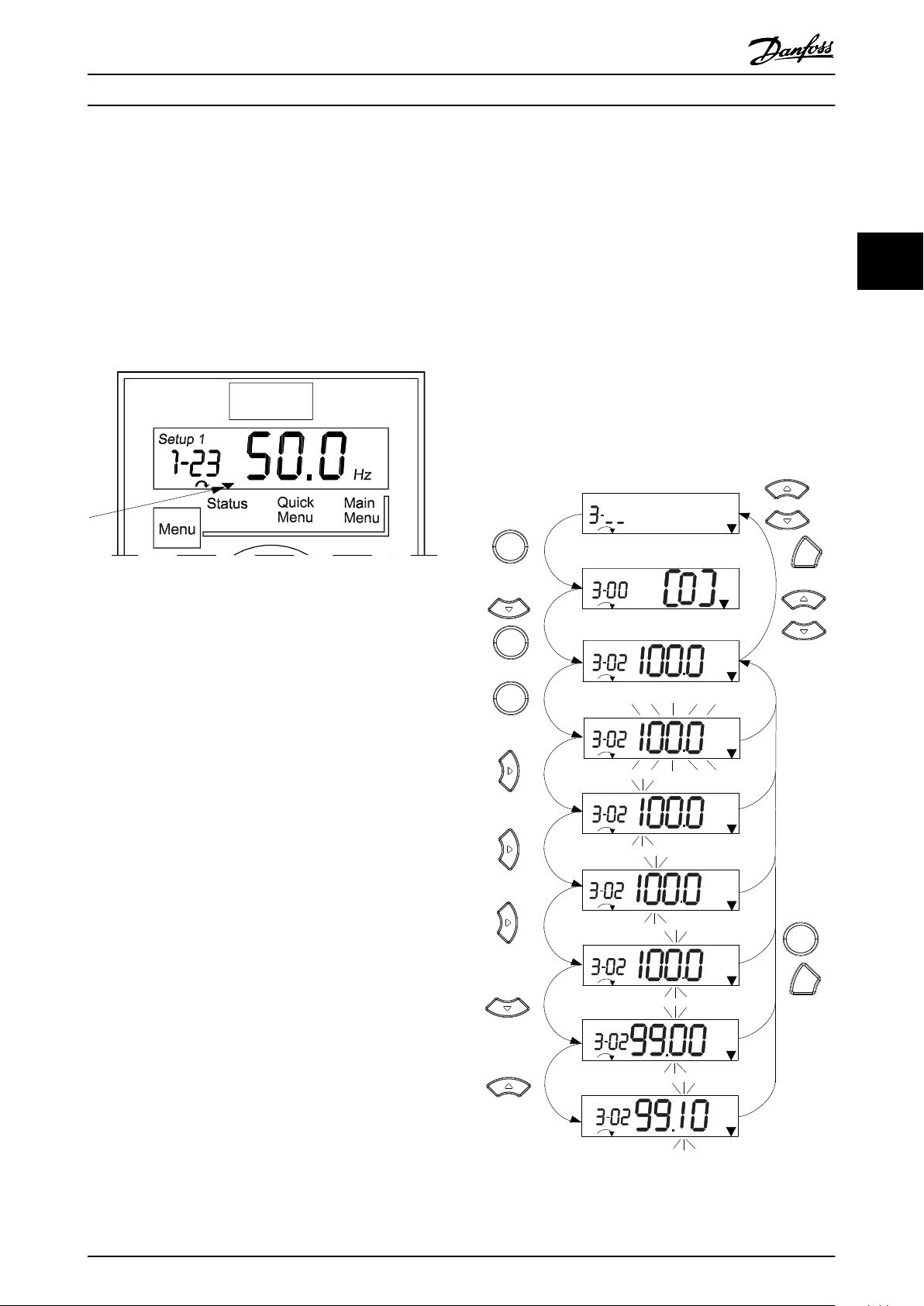
A. 숫자 방식의 표시창
LCD 표시창에는 백라이트가 적용되었으며 숫자로 1줄
33
VLT® AutomationDrive FC 360는 숫자 방식의 현장
제어 패널(NLCP) LCP 21, 그래픽 방식의 현장 제어
패널(GLCP) LCP 102 및 블라인드 덮개를 지원합니다.
이 장에서는 LCP 21 및 LCP 102를 이용한 운전을 설
명합니다.
주의 사항
또한 RS485 통신 포트를 통해 PC의 MCT-10 셋업 소
프트웨어로 AC 드라이브를 프로그래밍할 수 있습니다.
이 소프트웨어는 코드 번호 130B1000을 이용하여 주
문하거나 다음 댄포스 웹사이트에서도 다운로드할 수
있습니다.
3.1.1 숫자 방식의 현장 제어 패널
drives.danfoss.com/downloads/pctools/#/
.
이 표시됩니다. 모든 데이터가 LCP에 표시됩니다.
1 셋업 번호는 활성 셋업과 수정 셋업을 표시합니다. 만일 동일한
셋업이 활성 셋업과 수정 셋업의 역할을 모두 수행하는 경우,
하나의 셋업 번호만 표시됩니다(공장 설정값). 활성 셋업과 수
정 셋업이 서로 다른 경우에는 두 번호가 모두 표시창에 표시
됩니다(셋업 12). 이 때, 점멸하는 번호가 수정 셋업입니다.
2 파라미터 번호.
3 파라미터 값
4 모터 회전 방향은 표시창 왼쪽 하단에 나타납니다. 작은 화살표
는 방향을 나타냅니다.
5 삼각형은 LCP가 상태, 단축 메뉴 또는 주 메뉴에 있는지 여부
를 나타냅니다.
표 3.1
그림 3.1
에 대한 범례, 섹션 A
숫자 방식의 현장 제어 패널 LCP 21은 4가지 기능별
섹션으로 나뉘어집니다.
A. 숫자 방식의 표시창.
B. 메뉴 키.
그림 3.2 표시창 정보
C. 검색 키 및 표시 램프(LED).
D. 운전 키 및 표시 램프(LED).
B. 메뉴 키
상태, 단축 메뉴 또는 주 메뉴를 선택하려면 [Menu]를
누릅니다.
C. 표시 램프(LED) 및 검색 키
그림 3.1 LCP 21 그림
12 Danfoss A/S © 12/2018 All rights reserved. MG06C839
표시 램
프 이름
6 켜짐 녹색
7 경고 황색
8 알람 적색
표 3.2
그림 3.1
표시
램프
색상
, 표시 램프(LED)에 대한 범례
기능
AC 드라이브가 주전원 전압, DC 링크 단
자 또는 외부 24V 공급으로부터 전원을
공급 받을 때 켜집니다.
경고 조건이 충족될 때 황색 경고 LED가
켜지고 문제를 설명하는 텍스트가 표시창
영역에 나타납니다.
결함 조건이 충족되면 적색 알람 LED가
점멸하고 알람 텍스트가 표시됩니다.
Page 15
130BC440.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
프로그래밍 프로그래밍 지침서
키 기능
9 [Back]
표 3.3
[▲] [▼]
[►]
그림 3.1
10
11 [OK]
12
검색 내용의 이전 단계 또는 이전 수준으로
이동할 때 사용합니다.
파라미터 그룹 및 파라미터 간 전환하거나
파라미터의 각종 항목을 확인하거나 파라미
터 값을 증가/감소할 때 사용합니다. 화살표
는 현장(수동) 지령을 설정할 때에도 사용할
수 있습니다.
파라미터 그룹에 접근하거나 선택 항목을 활
성화할 때 누릅니다.
각 자릿수를 개별 변경하기 위해 파라미터
값 내에서 왼쪽에서 오른쪽으로 이동할 때
누릅니다.
, 검색 키에 대한 범례
D. 운전 키 및 표시 램프(LED)
키 기능
AC 드라이브가 현장 제어 모드에서 기동합니다.
제어 단자 입력 또는 직렬 통신에 의한 외부
Hand On(수
13
14
Reset(꺼짐/
Auto On(자
15
표 3.4
동 켜짐)
Off/
리셋)
동 켜짐)
그림 3.1
•
정지 신호는 현장 수동 켜짐 명령보다 우선합
니다.
모터를 정지하지만 AC 드라이브에 공급되는 전원
을 분리하지는 않습니다. 또는 결함이 해결된 후에
AC 드라이브를 수동으로 리셋합니다. 알람 모드에
서는 알람 조건이 해결되면 알람이 리셋됩니다.
시스템을 원격 운전 모드로 전환합니다.
제어 단자 또는 버스통신에 의한 외부 기동 명
•
령에 응답합니다.
에 대한 범례, 섹션 D
그림 3.3 오른쪽 키 기능
[►]는 또한 파라미터 그룹 간 이동에 사용할 수 있습니
주 메뉴
다.
번째 파라미터로 이동합니다(예를 들어,
터 0-03 지역 설정 [0] 국제 표준
터 1-00 구성 모드 [0] 개회로
에서 [►]를 누르면 다음 파라미터 그룹의 첫
파라미
에서
파라미
로 이동).
3.1.3 NLCP의 단축 메뉴
3 3
경고
고전압
[Off/Reset] 키를 사용하더라도 주전원에서 AC 드라이
브가 분리되지 않기 때문에 이 키를 누른 후에 AC 드라
이브를 만지면 위험합니다.
주전원에서 AC 드라이브를 분리하고 AC 드라
•
이브가 완전히 방전될 때까지 기다립니다.
표 2.1
에서 방전 시간을 참조하십시오.
3.1.2 NLCP의 오른쪽 키 기능
[►]를 눌러 표시창의 4 자릿수 중 하나 이상을 개별 수
정합니다. [►]를 한 번 누르면 커서가 첫 번째 자릿수로
이동하고
그림 3.3
시작합니다. [▲] [▼]를 눌러 값을 변경합니다. [►]를
눌러도 자릿수의 값이 변경되거나 소수점이 이동하지
않습니다.
에서와 같이 해당 자릿수가 점멸하기
단축 메뉴
를 이용하면 자주 사용하는 파라미터에 쉽게
접근할 수 있습니다.
1.
단축 메뉴
가
로 이동하려면, 표시창 내에서 표시
단축 메뉴
위에 올 때까지 [Menu]를 누릅
니다.
2. [▲] [▼]를 눌러 QM1 또는 QM2를 선택한 다
음 [OK]를 누릅니다.
3. [▲] [▼] 키를 눌러
단축 메뉴
에 있는 파라미터
를 탐색합니다.
4. [OK] 키를 눌러 파라미터를 선택합니다.
5. [▲] [▼]를 눌러 파라미터 설정 값을 변경합니
다.
6. [OK] 키를 눌러 변경 사항을 저장합니다.
7. 종료하려면 [Back]을 두 번 (또는 QM2 및
QM3의 경우 세 번) 눌러
[Menu]를 한 번 눌러
상태
주 메뉴
로 이동하거나
로 이동합니다.
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 13
Page 16
130BC445.13
1-22 XXXX V
Motor
nominal
speed
QM 1
0-01 [0]
1-10 [0]
1-24 XXXX A
Language
Motor Type
1-20 XXXX kW
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Stator
Motor frequency
1-25 XXXX
1-30 XXXX
1-39 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
3-02 XXXX
3-03 XXXX
3-41 XXXX S
3-42 XXXX S
5-12
[2]
1-29 [1]
AMA
Back EMF at
1000 RPM
d-axis
QM 2
BMS
AMS
ES
5-70 XXXX
5-71 [0]
1-30 XXXX
1-39 XXXX
1-90 [0]
2-10 [0]
4-16 XXXX %
4-17 XXXX %
4-18 XXXX %
1-00 [0]
1-01 [1]
1-10 [0]
1-24 XXXX A 1-20 XXXX kW
1-22 XXXX V
Motor
nominal
speed
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Motor frequency
1-25 XXXX
1-30 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
Back EMF at
1000 RPM
d-axis
1-39 XXXX
4-14 XXXX
4-19 XXXX
Stator
QM 3
QM 4 QM 5
L10C
SFS
TBD
Motor
nominal
speed
Motor
nominal
speed
Motor current
Motor cont.
rated torque
Resistance (Rs)
Motor poles
inductance (Ld)
Asynchronous motor
Motor current
Minimum reference
Maximum reference
Ramp 1 ramp-up time
Ramp 1 ramp-down time
Terminal 27 digital input
Basic motor set-up
mode
Motor control
principle
Motor type
PM motor
PM motor
Motor
current
Motor cont.
rated torque
Stator
Resistance (Rs)
Motor poles
inductance (Ld)
Motor speed high limit [Hz]
Maximum output frequency
Asynchronous motor
Motor current
RPM
RPM
RPM
Hz
RPM
Hz
Hz
Hz
Hz
Hz
Adv. motor set-up
Resistance (Rs)
Motor poles
Motor thermal
protection
Brake function
Torque limit motor mode
Torque limit generator mode
Current limit
Encoder set-up
Terminal 32/33
pulses per revolution
Terminal 32/33
encoder direction
Changes made
Last 10 changes Since factory setting
Alarm log
프로그래밍
VLT® AutomationDrive FC 360
33
14 Danfoss A/S © 12/2018 All rights reserved. MG06C839
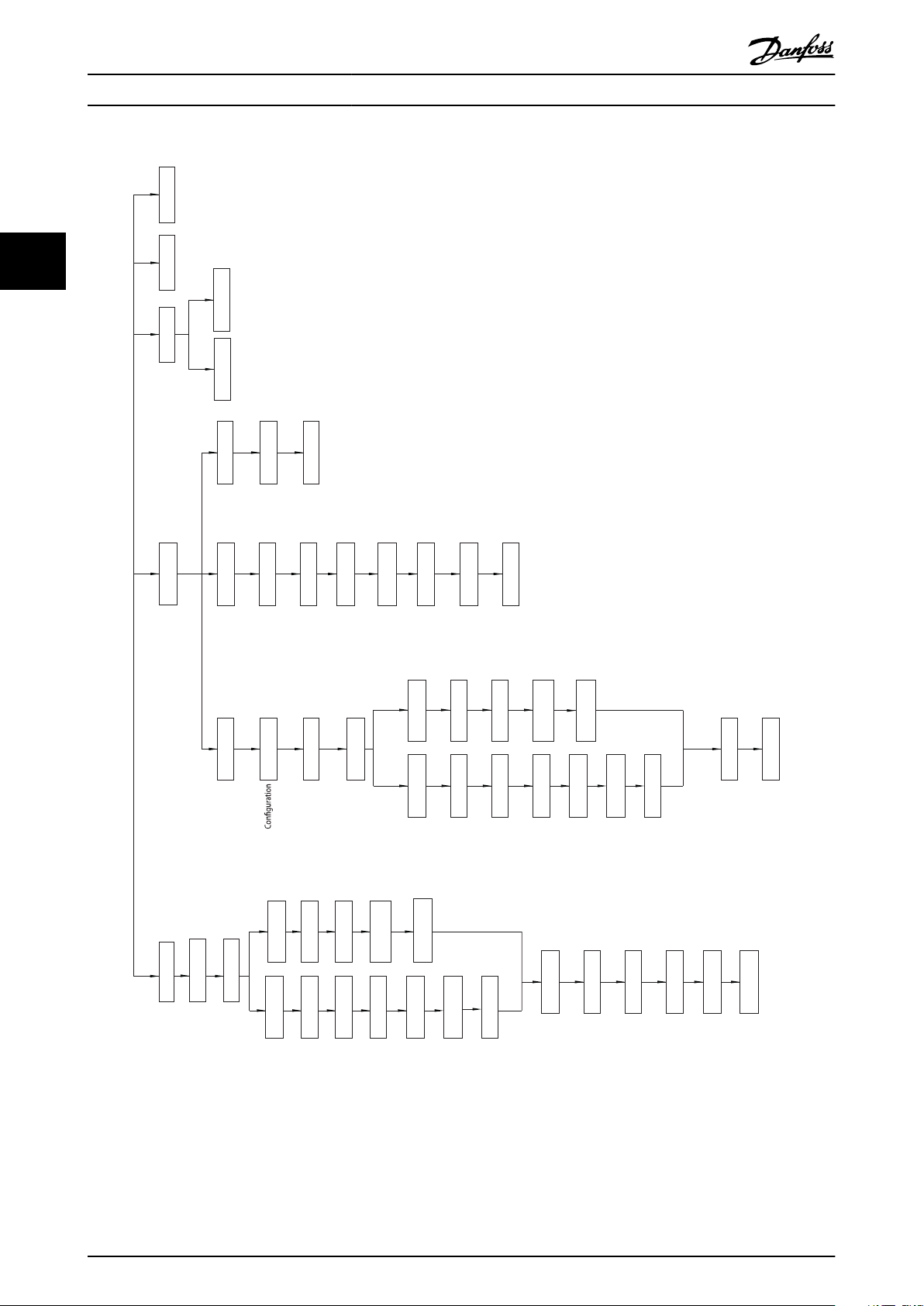
그림 3.4 단축 메뉴 구조
Page 17
130BA466.10
130BC446.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
7
10
11
12
OK
OK
Back
8
Back
Setup 1
2 x
+
OK
9
OK
프로그래밍 프로그래밍 지침서
3.1.4 NLCP의 상태 메뉴
전원 인가 후에 상태 메뉴가 활성화됩니다. [Menu]를
눌러 상태,
다.
[▲] 및 [▼]로 각 메뉴의 옵션 간 전환을 수행합니다.
상태
상태 모드입니다.
그림 3.5 상태 모드 확인 방법
단축 메뉴
위에 작은 화살표가 표시된 상태 모드가 현재의
또는
주 메뉴
간 전환을 수행합니
3. [OK] 키를 눌러 파라미터 그룹을 선택합니다.
4. [▲] [▼]: 특정 그룹 내의 파라미터를 탐색합니
다.
5. [OK] 키를 눌러 파라미터를 선택합니다.
6. [►] 및 [▲] [▼]: 파라미터 값을 설정/변경합니
다.
7. [OK] 키를 눌러 값을 저장합니다.
8. 종료하려면 [Back]을 두 번 (배열 파라미터의
경우 세 번) 눌러
[Menu]를 한 번 눌러 상태로 이동합니다.
연속, 열거 및 배열 파라미터의 값을 각각 변경하는 방
식은
그림 3.6, 그림 3.7
그림에서의 동작은
어 있습니다.
주 메뉴
및
그림 3.8
표 3.5, 표 3.6
로 이동하거나
을 참조하십시오.
및
표 3.7
에 설명되
3 3
다음 8개의 파라미터는 Auto-on 모드의 NLCP 상태 메
뉴에서 접근할 수 있습니다.
파라미터 16-02 지령 %
•
다음 6개의 파라미터는 [Hand On] 모드의 NLCP 상태
메뉴에서 접근할 수 있습니다.
3.1.5 NLCP의 주 메뉴
주 메뉴
파라미터 16-09 사용자 정의 읽기
•
파라미터 16-10 출력[kW]
•
파라미터 16-13 주파수
•
파라미터 16-14 모터 전류
•
파라미터 16-16 토오크 [Nm]
•
파라미터 16-30 DC 링크 전압
•
파라미터 16-52 피드백 [단위]
•
파라미터 16-09 사용자 정의 읽기
•
파라미터 16-10 출력[kW]
•
파라미터 16-13 주파수
•
파라미터 16-14 모터 전류
•
파라미터 16-16 토오크 [Nm]
•
파라미터 16-30 DC 링크 전압
•
에서는 모든 파라미터에 접근할 수 있습니다.
1.
주 메뉴
주 메뉴
2. [▲] [▼]: 파라미터 그룹을 탐색합니다.
로 이동하려면, 표시창 내에서 표시가
위에 올 때까지 [Menu]를 누릅니다.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
그림 3.6 주 메뉴 상호작용 - 연속 파라미터
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 15
Page 18
130BC447.11
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
OK
OK
Back
7
OK
Back
130BC448.10
1
2
4
5
6
7
8
9
10
OK
Back
Back
Back
5 x
Setup 1
Setup 1
Setup 1
Setup 1
%
INDEX
%
INDEX
%
INDEX
Setup 1
INDEX
%
OK
OK
OK
프로그래밍
VLT® AutomationDrive FC 360
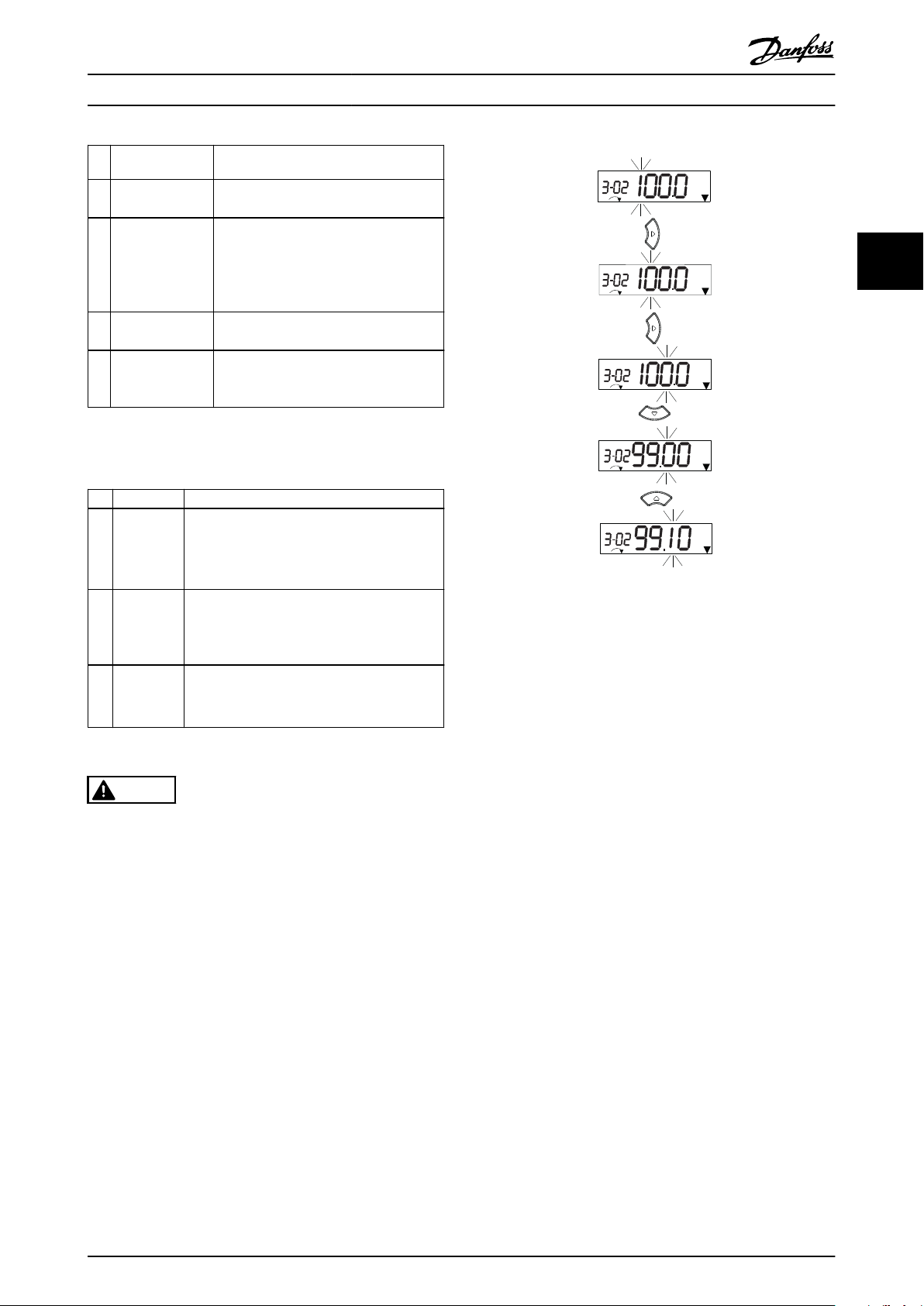
1 [OK]: 그룹의 첫 번째 파라미터가 나타납니다.
2
[▼]를 반복해서 누르면 해당 파라미터까지 아래로 이동합니다.
3 [OK]를 눌러 수정을 시작합니다.
4 [►]: 첫 번째 자릿수 점멸 (수정 가능).
5 [►]: 두 번째 자릿수 점멸 (수정 가능).
33
6 [►]: 세 번째 자릿수 점멸 (수정 가능).
7
[▼]: 파라미터 값을 감소시키며 소수점은 자동 변경됩니다.
8
[▲]: 파라미터 값을 증가시킵니다.
9 [Back]: 변경 내용을 취소하고 2로 돌아갑니다.
[OK]: 변경 내용을 수락하고 2로 돌아갑니다.
10
[▲][▼]: 그룹 내에서 파라미터를 선택합니다.
11 [Back]: 값을 제거하고 파라미터 그룹을 표시합니다.
12
[▲][▼]: 그룹을 선택합니다.
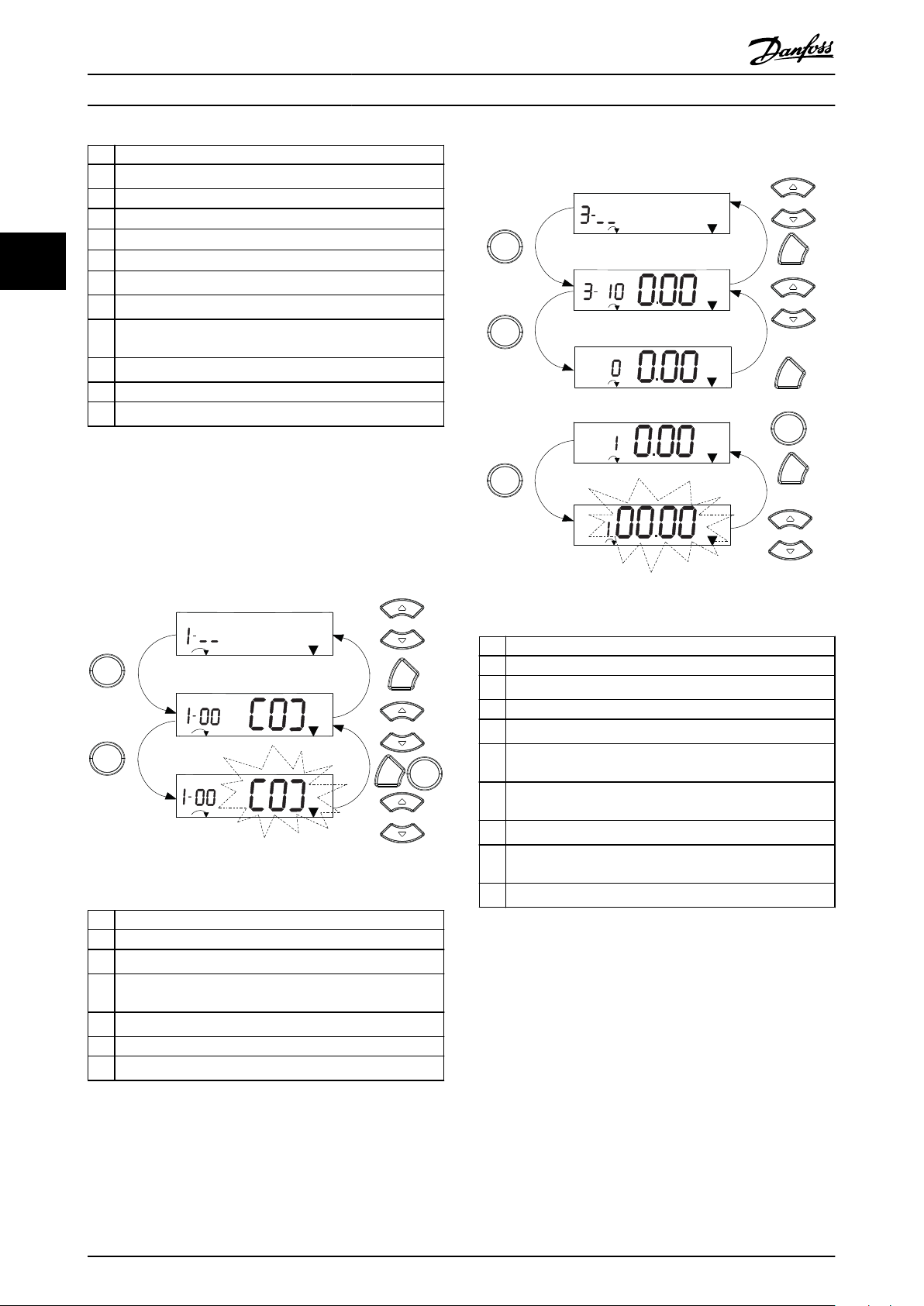
배열 파라미터의 기능은 다음과 같습니다.
표 3.5 연속 파라미터의 값 변경
열거 파라미터의 경우, 그 상호작용은 유사하지만 LCP
21 자릿수 제한(큰 자릿수 4개) 때문에 파라미터 값이
괄호 안에 표시되며 열거자(enum)가 99보다 클 수 있
습니다. 열거자(enum) 값이 99보다 크면 LCP 21은 괄
호의 앞쪽 부분만 표시할 수 있습니다.
그림 3.8 주 메뉴 상호작용 - 배열 파라미터
1 [OK]: 파라미터 번호와 첫 번째 인덱스의 값을 표시합니다.
2 [OK]: 인덱스를 선택할 수 있습니다.
3
[▲][▼]: 인덱스를 선택합니다.
4 [OK]: 값을 수정할 수 있습니다.
5
[▲][▼]: 파라미터 값을 변경합니다(점멸).
6 [Back]: 변경 내용을 취소합니다.
[OK]: 변경 내용을 수락합니다.
7 [Back]: 인덱스 수정을 취소하고 새 파라미터를 선택할 수 있습
니다.
8
[▲][▼]: 그룹 내에서 파라미터를 선택합니다.
그림 3.7 주 메뉴 상호작용 - 열거 파라미터
1 [OK]: 그룹의 첫 번째 파라미터가 나타납니다.
2 [OK]를 눌러 수정을 시작합니다.
3
[▲][▼]: 파라미터 값을 변경합니다(점멸).
4 [Back]을 눌러 변경 내용을 취소하거나 [OK]를 눌러 변경 내용
을 수락합니다(화면 2로 돌아갑니다).
5
[▲][▼]: 그룹 내에서 파라미터를 선택합니다.
6 [Back]: 값을 제거하고 파라미터 그룹을 표시합니다.
7
[▲][▼]: 그룹을 선택합니다.
표 3.6 열거 파라미터의 값 변경
16 Danfoss A/S © 12/2018 All rights reserved. MG06C839
9 [Back]: 파라미터 인덱스 값을 제거하고 파라미터 그룹을 표시
합니다.
10
[▲][▼]: 그룹을 선택합니다.
표 3.7 배열 파라미터의 값 변경
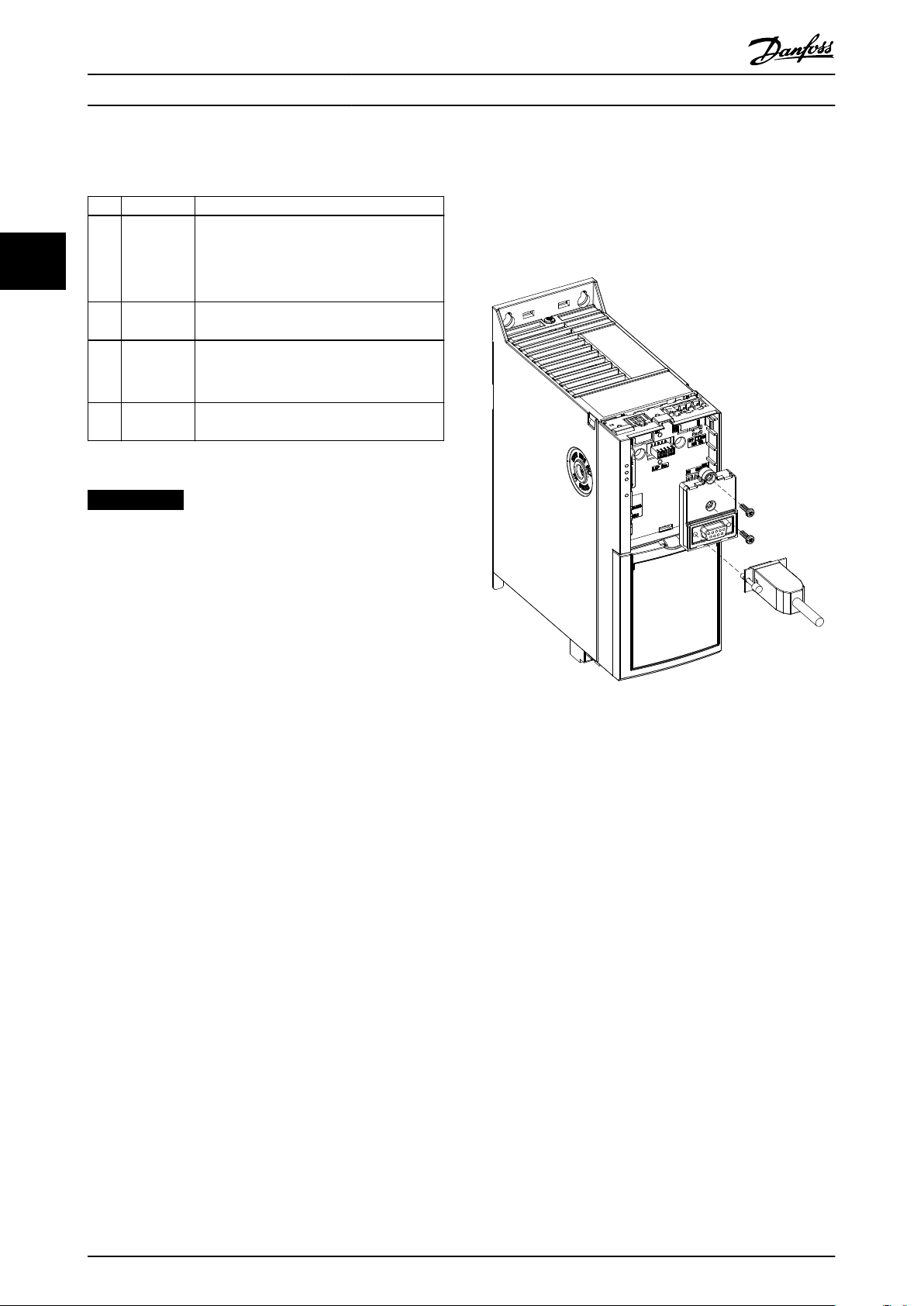
3.1.6 그래픽 현장 제어 패널
그래픽 현장 제어 패널 LCP 102에는 대형 표시창 영역
이 있으며 여기에는 LCP 21보다 많은 정보가 표시됩니
다. LCP 102는 영어, 중국어 및 포르투갈어 표시창을
지원합니다.
Page 19
130BD598.10
Auto
On
Reset
Hand
On
O
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
36.4 kW
Auto Remote Ramping
0.000
On
Alarm
Warn.
A
7.83 A
799 RPM
B
C
D
53.2 %
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18 19 20 21
프로그래밍 프로그래밍 지침서
GLCP는 기능별로 4가지로 나뉘어집니다(
조).
A. 표시창 영역
B. 표시창 메뉴 키
C. 검색 키 및 표시 램프(LED).
D. 운전 키 및 리셋.
그림 3.9
참
B. 표시창 메뉴 키
메뉴 키는 메뉴에 접근하여 파라미터를 셋업하고 정상
운전 시 상태 표시창 모드 내에서 이동하며 결함 기록
데이터를 보는 데 사용됩니다.
키 기능
6 Status 운전 정보를 표시합니다.
프로그래밍 파라미터에 접근하여 초기 셋업 지침
7 Quick Menu
8 Main Menu
9 Alarm Log
표 3.9
그림 3.9
과 각종 세부 어플리케이션 지침을 확인할 수 있
습니다.
프로그래밍 가능한 모든 파라미터에 접근할 수
있습니다.
최근 경고, 마지막으로 발생한 알람 10개 그리고
유지보수 기록 목록을 표시합니다.
, 표시창 메뉴 키에 대한 범례
C. 검색 키 및 표시 램프(LED)
검색 키는 기능을 프로그래밍하고 표시창 커서를 이동
하는 데 사용됩니다. 검색 키는 또한 현장 운전 시 속도
제어 기능을 제공합니다. 이 영역에는 또한 3개의 AC
드라이브 상태 표시 램프가 있습니다.
키 기능
10 Back (뒤로)
Cancel (취소)표시모드를 변경하지 않는 한 마지막 변경 내용
11
12 Info (정보) 누르면 표시 중인 기능의 정의가 표시됩니다.
13 검색 키
14 OK (확인)
메뉴 구조의 이전 단계 또는 이전 목록으로 돌아
갑니다.
또는 명령이 취소됩니다.
메뉴에 있는 항목 간 이동을 수행하려면 검색 키
4개를 사용합니다.
파라미터 그룹에 접근하거나 선택 항목을 활성화
할 때 누릅니다.
3 3
표 3.10
그림 3.9
, 검색 키에 대한 범례
그림 3.9 그래픽 현장 제어 패널 (GLCP)
표시 램프이름표시 램프
AC 드라이브가 주전원 전압 또는 직류 버스통신 단자
로부터 전원을 공급 받을 때 표시창 영역이 활성화됩니
다.
LCP에 표시되는 정보는 사용자 어플리케이션에 맞게
사용자 정의할 수 있습니다.
설정
에서 옵션을 선택합니다.
단축 메뉴 Q3-13 표시창
표시창 파라미터 번호 초기 설정
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 17
2 0-21
3 0-22
4 0-23
5 0-24
표 3.8
그림 3.9
1 0-20
, 표시창 영역에 대한 범례
A. 표시창 영역
[1602] 지령 [%]
[1614] 모터 전류
[1610] 출력 [kW]
[1613] 주파수
[1502] kWh 카운터
15 On 녹색
16 Warn 황색
17 Alarm 적색
표 3.11
그림 3.9
색상
AC 드라이브가 주전원 전압 또는 직
류 버스통신 단자로부터 전원을 공급
받을 때 켜집니다.
경고 조건이 충족될 때 황색 경고
LED가 켜지고 문제를 설명하는 텍스
트가 표시창 영역에 나타납니다.
결함 조건이 충족되면 적색 알람
LED가 점멸하고 알람 텍스트가 표시
됩니다.
, 표시 램프(LED)에 대한 범례
기능
Page 20
130BD532.10
프로그래밍
VLT® AutomationDrive FC 360
D. 운전 키 및 리셋
운전 키는 LCP 맨 아래에 있습니다.
키 기능
AC 드라이브를 수동 모드로 기동합니다.
Hand On (수
18
33
동 켜짐)
19 Off
Auto On (자
20
동 켜짐)
21 Reset
표 3.12
그림 3.9
, 운전 키 및 리셋에 대한 범례
제어 단자 입력 또는 직렬 통신에 의한
•
외부 정지 신호는 현장 수동 켜짐 명령
보다 우선합니다.
모터를 정지하지만 AC 드라이브에 공급되는 전
원을 분리하지는 않습니다.
시스템을 원격 운전 모드로 전환합니다.
제어 단자 또는 직렬 통신에 의한 외부 기동
•
명령에 응답합니다.
결함이 해결된 후에 AC 드라이브를 수동으로
리셋합니다.
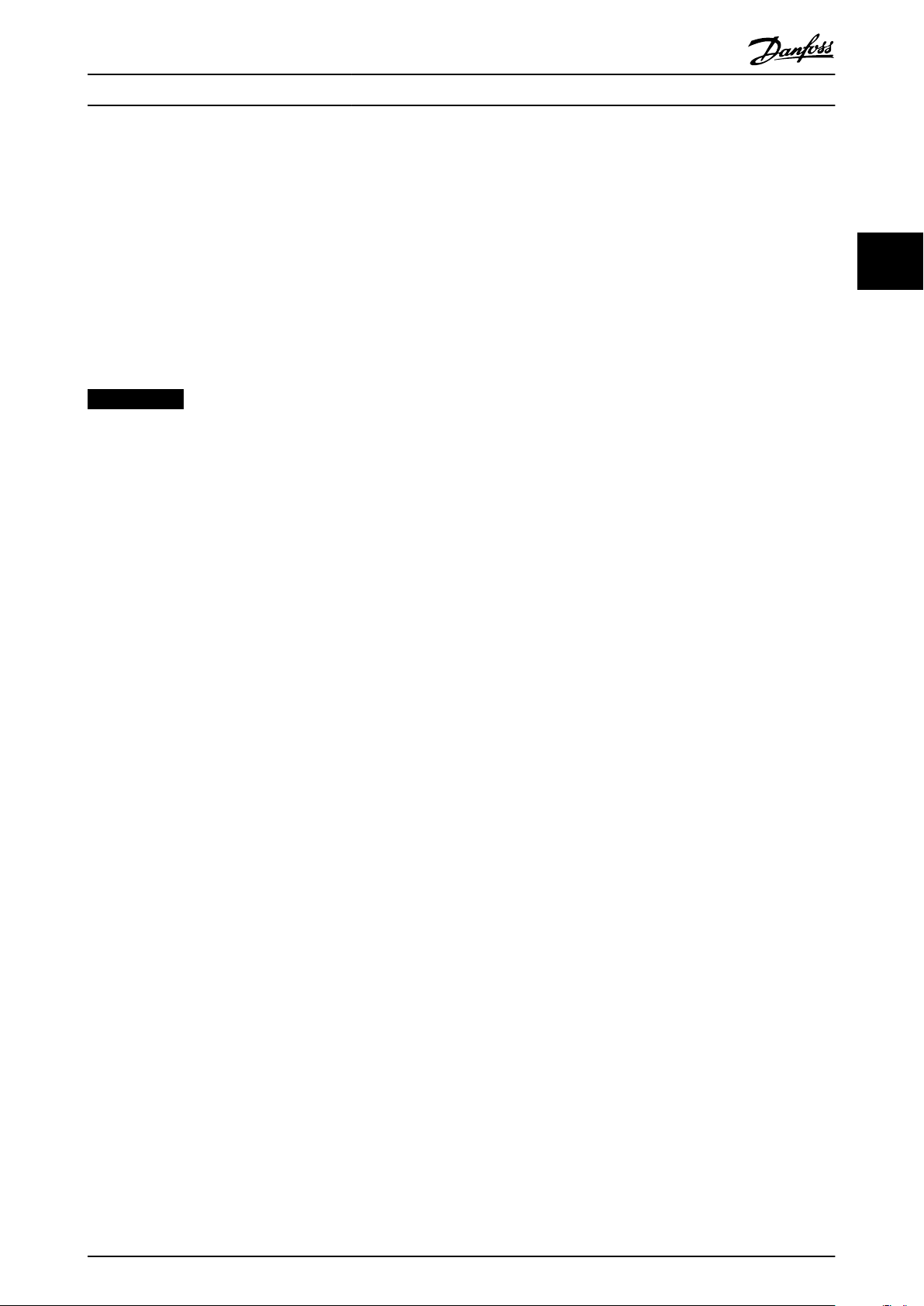
3.1.8 GLCP 장착
GLCP 어댑터(주문 번호: 132B0281)와 케이블을 사용
하여
그림 3.10
연결합니다.
에서와 같이 LCP 102를 AC 드라이브에
주의 사항
표시창의 명암 대비를 조정하려면 [Status] 및 [▲]/[▼]
키를 누릅니다.
3.1.7 GLCP로 파라미터 설정 변경
단축 메뉴
변경합니다.
미터에만 접근할 수 있습니다.
변경 사항 보기
단축 메뉴 Q5 - 변경 사항
모든 파라미터가 나열됩니다.
또는
주 메뉴
단축 메뉴
1. LCP의 [Quick Menu] 또는 [Main Menu]를
누릅니다.
2. [▲] [▼]를 눌러 파라미터 그룹을 탐색하고
[OK]를 눌러 파라미터 그룹을 선택합니다.
3. [▲] [▼]를 눌러 파라미터를 탐색하고 [OK]를
눌러 파라미터를 선택합니다.
4. [▲] [▼]를 눌러 파라미터 설정 값을 변경합니
다.
5. 십진수 파라미터가 수정 상태일 때 [◄] [►]를
눌러 자릿수를 이동합니다.
6. [OK] 키를 눌러 변경 사항을 저장합니다.
7. [Back]을 두 번 눌러 상태로 이동하거나
[Main Menu]를 한 번 눌러 주 메뉴로 이동합
니다.
목록에는 현재 수정 셋업에서 변경된 파라미터
•
만 표시됩니다.
초기 설정값에서 리셋된 파라미터는 나열되지
•
않습니다.
비어 있음
•
의미합니다.
에서 파라미터 설정을 접근 및
를 이용하면 제한된 개수의 파라
에는 초기 설정에서 변경된
메시지는 변경된 파라미터가 없음을
그림 3.10 GLCP 어댑터 및 연결 케이블
3.1.9 LCP로/에서 데이터 백업/다운로드
어플리케이션에 맞는 프로그래밍을 하려면 연관된 여러
파라미터를 설정할 필요가 있습니다. 파라미터 관련 세
부 내용은
프로그래밍 데이터는 AC 드라이브 내부에 저장됩니다.
•
•
•
백업/다운로드 절차
1. GLCP의 [Off] 또는 NLCP의 [Off Reset]를
2. [Main Menu]
장을 4 파라미터 설명
백업하려면 데이터를 LCP 메모리에 업로드합
니다.
다른 AC 드라이브에 데이터를 다운로드하려면
LCP를 해당 제품에 연결하고 저장된 설정을
다운로드합니다.
공장 초기 설정으로 복원하더라도 LCP 메모리
에 저장된 데이터는 변경되지 않습니다.
눌러 데이터를 업로드 또는 다운로드하기 전에
모터를 정지합니다.
파라미터 0-50 LCP 복사
르고 [OK]를 누릅니다.
에 수록되어 있습니다.
를 누
18 Danfoss A/S © 12/2018 All rights reserved. MG06C839
Page 21
프로그래밍 프로그래밍 지침서
3.
[1] 모두 업로드
업로드하거나
LCP에서 데이터를 다운로드하거나
제외 다운로드
즈와 관계없는 파라미터만 다운로드합니다.
4. [OK]를 누릅니다. 진행 표시줄이 업로드 또는
다운로드 진행률을 보여줍니다.
5. [Hand On] 또는 [Auto On]을 눌러 정상 운전
으로 돌아갑니다.
를 선택하여 데이터를 LCP에
[2] 모두 다운로드
를 선택하여 LCP에서 모터 사이
를 선택하여
[3] 용량
3.1.10 LCP로 초기 설정 복원
주의 사항
초기 설정으로 복원하면 프로그래밍, 모터 데이터, 현지
화 및 감시 기록이 손실될 위험이 있습니다. 백업을 제
공하려면 초기화하기 전에 데이터를 LCP에 업로드합니
다.
기동하는 동안 공장 초기 파라미터 설정이 복원됩니다.
이 작업은 평상 시보다 약간 더 걸릴 수 있습니다.
수동으로 초기화하더라도 다음과 같은 AC 드라이브 정
보가 리셋되지 않습니다.
파라미터 0-03 지역 설정
•
파라미터 1-06 시계 방향 정의
•
파라미터 15-00 운전 시간
•
파라미터 15-03 전원 인가
•
파라미터 15-04 온도 초과
•
파라미터 15-05 과전압
•
파라미터 15-30 알람 기록: 오류 코드
•
3.2 기본적인 프로그래밍
3.2.1 비동기식 모터 셋업
3 3
AC 드라이브를 초기화하면 초기 파라미터 설정이 복원
됩니다. 초기화는
통해서나 수동으로 수행됩니다. 초기화하더라도
터 1-06 시계 방향 정의
의 설정이 리셋되지 않습니다.
파라미터 14-22 운전 모드
•
하더라도 운전 시간, 직렬 통신 선택 항목, 결
함 기록, 알람 기록 및 기타 감시 기능 등의
AC 드라이브 설정은 리셋되지 않습니다.
수동으로 초기화하면 모든 모터, 프로그래밍,
•
현지화 및 감시 데이터가 지워지고 공장 초기
설정으로 복원됩니다.
파라미터 14-22 운전 모드
1.
파라미터 14-22 운전 모드
를 누릅니다.
2.
[2] 초기화
3. 유닛에서 전원을 분리하고 표시창이 꺼질 때까
지 기다립니다.
4. 유닛에 전원을 공급합니다,
초기 시동시 초기 파라미터 설정이 복원됩니다. 이 작업
은 평상 시보다 약간 더 걸릴 수 있습니다.
5.
알람 80, dr초기화완료
6. [Reset]을 눌러 운전 모드로 돌아갑니다.
수동 초기화 절차
1. 유닛에서 전원을 분리하고 표시창이 꺼질 때까
지 기다립니다.
2. 유닛에 전원을 공급하는 동안 GLCP에서는
[Status], [Main Menu] 및 [OK]를, NLCP에
서는 [Menu]와 [OK]를 동시에 길게 누릅니다
(약 5초간 누르거나 딸깍 소리가 들리고 팬이
기동할 때까지 누릅니다).
파라미터 14-22 운전 모드
및
파라미터 0-03 지역 설정
를 사용하여 초기화
를 통한 권장 초기화 절차
를 선택하고 [OK]
를 선택하고 [OK]를 누릅니다.
가 표시됩니다.
(권장)를
파라미
목록 순서에 따라 다음의 모터 데이터를 입력합니다. 모
터 명판에 있는 정보를 확인합니다.
1.
파라미터 1-20 모터 동력
2.
파라미터 1-22 모터 전압
3.
파라미터 1-23 모터 주파수
4.
파라미터 1-24 모터 전류
5.
파라미터 1-25 모터 정격 회전수
VVC+ 모드에서 최적 성능을 위해서는 다음의 파라미터
를 셋업하는 데 모터 데이터가 추가로 필요합니다.
6.
파라미터 1-30 고정자 저항 (Rs)
7.
파라미터 1-31 회전자 저항 (Rr)
8.
파라미터 1-33 고정자 누설 리액턴스 (X1)
9.
파라미터 1-35 주 리액턴스 (Xh)
해당 데이터는 모터 데이터시트에서 확인할 수 있습니
다(이 데이터는 일반적으로 모터 명판에 없습니다).
라미터 1-29 자동 모터 최적화(AMA) [1] 완전 AMA
사용함
을 통해 완전 AMA를 실행하거나 파라미터를 수
동으로 입력합니다.
VVC+ 실행 시 어플리케이션별 조정
VVC+는 가장 견고한 제어 모드입니다. 이 모드는 대부
분의 경우에서 추가 조정 없이 최적 성능을 제공합니다.
최고의 성능을 위해서는 완전 AMA를 실행합니다.
.
.
.
.
.
.
.
.
.
파
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 19
Page 22
프로그래밍
3.2.2
초기 프로그래밍 단계
33
VVC+의 PM 모터 셋업
1.
파라미터 1-10 모터 구조
정하여 PM 모터 운전을 활성화합니다.
1a
[1] PM,비돌극SPM
1b
[3] PM, 돌극 IPM
2.
파라미터 1-00 구성 모드
선택합니다.
주의 사항
PM 모터의 경우 엔코더 피드백이 지원되지 않습니다.
모터 데이터 프로그래밍
초기 프로그래밍 단계가 완료되면 파라미터 그룹
모터 데이터, 1-3* 고급 모터 데이터
터 데이터 II
다.
해당 정보는 모터 명판과 모터 데이터시트에 있습니다.
나열된 순서에 따라 다음 파라미터를 프로그래밍합니
다.
1.
2.
3.
4.
5.
6.
파라미터 1-29 자동 모터 최적화 (AMA)
완전 AMA를 실행하고
니다. 완전 AMA가 성공적으로 수행되지 않으면 다음의
파라미터를 수동으로 구성합니다.
1.
2.
의 PM 모터 관련 파라미터가 활성화됩니
파라미터 1-24 모터 전류
파라미터 1-26 모터 일정 정격 토오크
파라미터 1-25 모터 정격 회전수
파라미터 1-39 모터 극수
파라미터 1-40 1000 RPM에서의 역회전
EMF
.
파라미터 1-42 Motor Cable Length
[1] 완전 AMA 사용함
파라미터 1-30 고정자 저항 (Rs)
상 공통 고정자 권선 저항(Rs)을 입력합니다.
상간 데이터만 사용할 수 있는 경우에는 상간
값을 2로 나누어 위상 값을 얻습니다.
저항계로도 값을 측정할 수 있으며 저항계는
또한 케이블의 저항을 고려합니다. 측정된 값
을 2로 나누고 그 결과를 입력합니다.
파라미터 1-37 d축 인덕턴스 (Ld)
PM 모터의 d축 인덕턴스를 입력합니다.
상간 데이터만 사용할 수 있는 경우에는 상간
값을 2로 나누어 위상 값을 얻습니다.
인덕턴스계로도 값을 측정할 수 있으며 인덕턴
스계는 또한 케이블의 인덕턱스를 고려합니다.
측정된 값을 2로 나누고 그 결과를 입력합니
다.
VLT® AutomationDrive FC 360
을 다음 옵션으로 설
에서
[0] 개회로
를
1-2*
및
1-4* 고급 모
.
.
.
.
.
를 사용하여
을 선택합
.
.
3.
파라미터 1-38 q축 인덕턴스 (Lq)
이 파라미터는
[3] PM, 돌극IPM
만 활성화됩니다..
PM 모터의 횡축(q축) 인덕턴스를 입력합니다.
상간 데이터만 사용할 수 있는 경우에는 상간
값을 2로 나누어 위상 값을 얻습니다.
인덕턴스계로도 값을 측정할 수 있으며 인덕턴
스계는 또한 케이블의 인덕턱스를 고려합니다.
모터의 회전자를 1 회전하게 하고 최대 상간
인덕턴스 값을 찾습니다. 값을 2로 나누고 그
결과를 입력합니다.
4.
파라미터 1-44 d-axis Inductance Sat.
(LdSat)
이 파라미터는
.
[3] PM, 돌극IPM
만 활성화됩니다..
이 파라미터는 d축의 인덕턴스 포화와 일치합
니다. 초기 설정값은
턴스 (Ld)
우 초기 설정값을 변경하지 마십시오. 모터 공
급업체가 포화 곡선을 제공하는 경우 d축 인덕
턴스 값을 입력하고 이때 이 값은 정격 전류의
100%입니다.
5.
파라미터 1-45 q-axis Inductance Sat.
(LqSat)
이 파라미터는
.
[3] PM, 돌극IPM
만 활성화됩니다..
이 파라미터는 q축의 인덕턴스 포화와 일치합
니다. 초기 설정값은
턴스 (Lq)
우 초기 값을 변경하지 마십시오. 모터 공급업
체가 포화 곡선을 제공하는 경우 q축 인덕턴스
값을 입력하고 이때 이 값은 정격 전류의
100%입니다.
모터 운전 시험
1. 모터를 저속(100-200 RPM)으로 기동합니다.
모터가 구동하지 않는 경우 설치, 일반 프로그
래밍 및 모터 데이터를 점검합니다.
2.
파라미터 1-70 기동 모드
리케이션 요구사항에 적합한지 확인합니다.
회전자 감지
이 기능은 모터가 정지 상태에서 기동하는 어플리케이
션(예를 들어, 펌프 또는 컨베이어)에 적합한 권장 사항
입니다. 일부 모터의 경우 AC 드라이브가 회전자 감지
를 수행할 때 소리가 날 수 있습니다. 이 작업을 하더라
도 모터에는 악영향을 주지 않습니다. 다른 모터에 대해
서는
파라미터 1-46 위치 감지 게인
다. AC 드라이브가 기동하지 못하거나 기동 시 과전류
알림이 발생하면 회전자가 차단되지 않았는지 확인합니
다. 회전자가 차단되지 않은 경우
모드를 [1] 파킹
으로 설정하고 다시 시도합니다.
파라미터 1-10 모터 구조
으로 설정되어 있는 경우에
파라미터 1-10 모터 구조
으로 설정되어 있는 경우에
파라미터 1-37 d축 인덕
에서 설정한 값입니다.. 대부분의 경
파라미터 1-10 모터 구조
으로 설정되어 있는 경우에
파라미터 1-38 q축 인덕
에서 설정한 값입니다.. 대부분의 경
의 기동 기능이 어플
파라미터 1-70 기동
.
가
가
가
의 값을 조정합니
20 Danfoss A/S © 12/2018 All rights reserved. MG06C839
Page 23
프로그래밍 프로그래밍 지침서
파킹
이 기능은 예를 들어 팬 어플리케이션의 풍차 회전과
같이 모터가 저속으로 회전하는 어플리케이션에 권장되
는 옵션입니다.
터 2-07 파킹 시간
파라미터 2-06 파킹 전류
및
파라미
는 조정할 수 있습니다. 관성이 높은
어플리케이션의 경우에는 이러한 파라미터의 공장 설정
값을 증가시킵니다.
모터를 정격 회전수에서 기동합니다. 어플리케이션이
제대로 구동하지 않는 경우 VVC+ PM 설정을 점검합니
다.
표 3.13
는 각기 다른 어플리케이션의 권장 사항을
나타냅니다.
관련 파라미터 설정
관성이 낮은 어플리케이션
1)
I
Load
관성이 중간 수준인 어플리
케이션
50>I
관성이 높은 어플리케이션
I
Load/IMotor
저속에서 부하가 큰 경우
<30% (정격 속도)
표 3.13 각기 다른 어플리케이션의 권장 사항
1) I
2) I
2)
/I
<5
Motor
Load/IMotor
Load
Motor
>5
> 50
= 부하의 관성.
= 모터의 관성.
모터가 특정 회전수에서 진동하기 시작하면
터 1-14 댐핑 게인
를 증가시킵니다. 작은 단계로 값을
파라미터 1-17 전압 필터 시상수
•
대해 값을 인수 5에서 10 단위로 증
가시킵니다.
파라미터 1-14 댐핑 게인
•
값을 감소시킵니다.
파라미터 1-66 최저 속도의 최소
•
전류
에 대해 값(<100%)을 감소시킵
니다.
계산된 값을 유지합니다.
파라미터 1-14 댐핑 게인, 파라미
터 1-15 저속 필터 시상수
터 1-16 고속 필터 시상수
을 증가시킵니다.
파라미터 1-17 전압 필터 시상수
파라미터 1-66 최저 속도의 최소 전류
감소(장시간 >100%이면 모터가 과열될
수 있음)
및
에 대해 값
에
에 대해
파라미
감소
파라미
증가시킵니다.
파라미터 1-66 최저 속도의 최소 전류
에서 기동 토크
를 조정합니다. 100%는 정격 토크를 기동 토크로 제공
합니다.
3.2.3 자동 모터 최적화 (AMA)
모터의 전기적 특성을 측정할 수 있으므로 VVC+ 모드
에서 AC 드라이브와 모터 간의 호환성을 최적화할 수
있도록 AMA의 실행이 적극 권장됩니다.
AC 드라이브는 출력 모터 전류 조정과 관련하
•
여 모터의 수학적 모델을 만들어 모터 성능을
향상시킵니다.
모터에 따라 완전 AMA를 실행할 수 없는 경우
•
도 있습니다. 이러한 경우에는
함
(PM의 경우는 제외)을 선택합니다.
경고 또는 알람이 발생하면
•
람 메시지
최상의 결과를 위해서는 모터가 차가운 상태에
•
을 참조하십시오.
서 이 절차를 수행합니다.
숫자 방식의 LCP를 사용하여 AMA를 구동하려면
1. 초기 파라미터 설정 사용 시에는 AMA를 구동
하기 전에 단자 12와 27을 연결합니다.
2.
주 메뉴
3.
파라미터 그룹 1-** 부하/모터
로 이동합니다.
4. [OK]를 누릅니다.
5. 명판 데이터에 따라
데이터
의 모터 파라미터를 설정합니다.
6. IM 및 PM의 경우
파라미터 그룹 1-2* 모터
파라미터 1-39 모터 극수
설정합니다.
7. PM의 경우
역회전 EMF
8.
파라미터 1-42 Motor Cable Length
파라미터 1-40 1000 RPM에서의
를 설정합니다.
케이블 길이를 설정합니다.
9.
파라미터 1-29 자동 모터 최적화 (AMA)
이동합니다.
10. [OK]를 누릅니다.
11.
[1] 완전 AMA 사용함
을 선택합니다.
12. [OK]를 누릅니다.
13. [Hand On]을 눌러 AMA를 활성화합니다.
14. 자동으로 시험이 시작되고 시험이 완료되면 이
를 알려줍니다.
출력 용량에 따라 AMA를 완료하는 데 3분에서 10분
정도가 소요됩니다.
축소 AMA 사용
장을 6.1.3 경고/알
로 이동합니다.
에서 모터
(으)로
3 3
를
주의 사항
AMA 기능은 모터를 구동시키지 않으며 모터에 악영향
을 주지 않습니다.
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 21
Page 24
0-03 지역 설정
옵션: 기능:
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
[0] 국제 표준
파라미터 1-20 모터 출력[kW]
를
활성화하여 모터 출력을 kW 단위
로 설정하고
파라미터 1-23 모터
주파수
의 초기 설정을 50 Hz로
설정합니다.
[1] 미국 표준
파라미터 1-20 모터 출력[kW]
를
활성화하여 모터 출력을 hp 단위
로 설정하고
파라미터 1-23 모터
주파수
의 초기 설정을 60 Hz로
설정합니다.
0-04 전원 인가 시 운전 상태 (수동)
옵션: 기능:
Hand-on 모드에서 전원을 차단
한 다음 AC 드라이브를 주전원
전압에 다시 연결하는 동안 운전
모드를 선택합니다.
[0] 재개 AC 드라이브의 전원을 차단하기
전에 선택한 기동/정지 설정
([Hand On/Off]로 설정)을 유지
하면서 AC 드라이브를 재기동합
니다.
[1] * 강제정지,지령
=이전
주전원 전압이 인가되고 [Hand
On]을 누른 후에 저장된 현장 지
령으로 AC 드라이브를 재기동합
니다.
[2] 강제 정지, 지
령=0
AC 드라이브를 재기동하는 동안
현장 지령을 0으로 리셋합니다.
0-06 GridType
옵션: 기능:
공급 전압/주파수의 전력망 유형
을 선택합니다.
주의 사항
출력 용량에서 지원되는 않는
옵션도 있습니다.
IT 전력망은 공급 주전원으로, 변
압기 2차 측의 중립점이 접지에
연결되어 있지 않습니다.
델타는 변압기 2차 측이 델타형으
로 연결되어 있고 위상 하나가 접
지가 연결되어 있는 공급 주전원
입니다.
[10] 380-440V/
50Hz/ITgrid
[11] 380-440V/
50Hz/Delta
[12] 380-440V/
50Hz
[20] 440-480V/
50Hz/ITgrid
[21] 440-480V/
50Hz/Delta
[22] 440-480V/
50Hz
[110] 380-440V/
60Hz/ITgrid
[111] 380-440V/
60Hz/Delta
[112] 380-440V/
60Hz
[120] 440-480V/
60Hz/ITgrid
[121] 440-480V/
60Hz/Delta
[122] 440-480V/
60Hz
0-07 Auto DC Braking
옵션: 기능:
IT 그리드 환경에서 코스팅(프리
런) 시 과전압 보호 기능입니다.
이 파라미터에서
[1] 켜짐
을 선택
한 경우에만 이 파라미터가 활성
화됩니다.
파라미터 설명
VLT® AutomationDrive FC 360
4 파라미터 설명
4.1 파라미터: 0-** 운전 및 디스플레이
AC 드라이브의 기본 기능, LCP 키의 기능 및 LCP 표
시창의 구성 관련 파라미터입니다.
44
4.1.1 0-0* 기본 설정
0-01 언어
옵션: 기능:
[0] * 영어
[10] 중국어
[28] Portuguese
22 Danfoss A/S © 12/2018 All rights reserved. MG06C839
Page 25
0-07 Auto DC Braking
옵션: 기능:
[0] 꺼짐 이 기능은 활성화되지 않습니다.
[1] * 켜짐 이 기능은 활성화됩니다.
0-10 셋업 활성화
옵션: 기능:
AC 드라이브가 운전할 셋업을 선
택합니다.
파라미터 0-51 셋업 복
사
를 선택하여 하나의 셋업을 또
하나의 셋업이나 모든 셋업에 복
사합니다. 2개의 각기 다른 셋업
에 동일한 파라미터가 설정되지
않게 하려면
파라미터 0-12 다음
에 링크된 설정
에서 셋업을 함께
링크합니다.
운전 중 변경 불가
로
표시된 파라미터에 각기 다른 값
이 있는 셋업 간의 전환을 수행하
기 전에 AC 드라이브를 정지시킵
니다.
운전 중 변경 불가
로 표시된
파라미터는
장을 5 파라미터 목록
의 파라미터 목록에 FALSE(거짓)
로 표시됩니다.
0-10 셋업 활성화
옵션: 기능:
[1] * 셋업 1 셋업 1이 활성화됩니다.
[2] 셋업2 셋업 2가 활성화됩니다.
[9] 다중 설정 이 옵션은 디지털 입력과 직렬 통
신 포트를 통해 원격 셋업을 선택
할 때 사용합니다. 이 셋업은
파라
미터 0-12 다음에 링크된 설정
의
설정을 사용합니다.
0-11 변경 셋업 선택
옵션: 기능:
운전하는 동안 프로그래밍할 셋업
을 활성 셋업 또는 비활성 셋업
중에서 하나 선택합니다. 편집 중
인 셋업 번호가 LCP에서 점멸합
니다.
[1] 셋업 1
[1] 셋업 1
에서
[2] 셋업 2
까지
는 운전하는 동안 활성 셋업과 관
계 없이 원하는 대로 편집할 수
있습니다.
[2] 셋업 2
[9] * 활성 셋업 AC 드라이브가 운전 중인 셋업
또한 운전하는 동안 편집할 수 있
습니다.
0-12 다음에 링크된 설정
옵션: 기능:
운전하는 동안 하나의 셋업에서
다른 셋업으로 이동을 가능하게
하는
운전 중 변경 불가
파라미터
값의 동기화를 확인합니다.
셋업이 링크되지 않았다면 모터가
구동하는 동안 셋업 간 변경은 가
능하지 않습니다. 따라서 모터가
코스팅(프리런)될 때까지 셋업이
변경되지 않습니다.
[0] 링크 안됨 두 셋업에서 모두 파라미터를 변
경되지 않은 상태로 둡니다. 모터
가 운전하는 동안에는 이 파라미
터를 변경할 수 없습니다.
[20] * Linked 하나의 셋업에서 다른 셋업으로
운전 중 변경 불가
파라미터를 복
사하면 이 파라미터가 두 셋업에
서 동일하게 설정됩니다.
0-14 읽기: 설정 셋업 / 경로
범위: 기능:
0*
[-21474836
47 2147483647
]
파라미터 0-11 프로그래밍 설정
의 설정을 표시합니다. 각 통신 채
널에 대한 수정 셋업입니다. A는
활성 셋업을 의미하고 F는 공장
출고 시 설정을 의미하며 숫자는
파라미터 설명 프로그래밍 지침서
4.1.2 0-1* 셋업 처리
각각의 파라미터 셋업을 정의하고 제어하는 파라미터입
니다.
AC 드라이브에는 개별적으로 프로그래밍할 수 있는 2
개의 파라미터 셋업이 있습니다. 이는 AC 드라이브를
다양하게 활용할 수 있게 해주며 고급 제어 기능 문제
를 해결할 수 있게 해줄 뿐만 아니라 외부 제어 장비에
드는 비용을 절감시켜 주기도 합니다. 예를 들어, AC
드라이브를 하나의 셋업과 하나의 제어 방식에 따라 운
전(예를 들어 수평 운전에 사용되는 모터 1)하도록 프로
그래밍할 수도 있고 또 하나의 셋업과 제어 방식에 따
라 운전(수직 운전에 사용되는 모터 2)하도록 프로그래
밍할 수도 있습니다. 또는 OEM 제조업체의 경우, 동일
범위 내의 각기 다른 장비 유형에 알맞게 모든 AC 드라
이브를 프로그래밍하여 동일한 파라미터를 갖게 한 다
음 생산/작동 공정 중에 AC 드라이브가 설치된 장비에
따라 특정 셋업을 쉽게 선택할 수도 있습니다.
활성 셋업(AC 드라이브가 현재 운전 중인 셋업)은
미터 0-10 셋업 활성화
표시됩니다.
[9] 다중 셋업
에서 선택할 수 있으며 LCP에
을 선택하면 AC 드라이브가
파라
구동 중이거나 정지된 상태에서 디지털 입력 또는 직렬
통신 명령을 통해 셋업 간 전환이 가능합니다. 구동 중
에 셋업을 변경해야 하는 경우,
링크된 설정
가 알맞게 설정되어 있는지 확인합니다.
라미터 0-11 변경 셋업 선택
파라미터 0-12 다음에
파
을 사용하면 AC 드라이브
가 활성 셋업(수정 중인 셋업과 다를 수 있음)으로 계속
운전하는 동안에도 모든 셋업 내의 파라미터를 수정할
수 있습니다.
파라미터 0-51 셋업 복사
을 사용하면 각
기 다른 셋업에 유사한 파라미터 설정이 필요할 때, 신
속히 작동할 수 있도록 셋업 간 파라미터 설정을 복사
할 수 있습니다.
4 4
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 23
Page 26
0-14 읽기: 설정 셋업 / 경로
범위: 기능:
셋업 코드를 나타냅니다. 통신 채
널은 오른쪽에서 왼쪽으로 LCP,
FC 버스통신, USB, HPFB1-5 순
입니다.
0-16 Application Selection
옵션: 기능:
통합 어플리케이션 기능을 선택합
니다. 어플리케이션을 선택하면
관련 파라미터 세트가 자동 설정
됩니다.
[0] * None
[1] Simple
Process
Close Loop
[2] Local/
Remote
[3] Speed Open
Loop
[4] Simple
Speed Close
Loop
[5] Multi Speed
[6] OGD LA10
[7] OGD V210
[8] Hoist
[9] Hoist Speed
Close Loop
0-20 소형 표시 1.1
왼쪽에 표시할 소형 표시 1 변수를 선택합니다.
옵션: 기능:
[0] 없음
[37] 표시 문자 1
[38] 표시 문자 2
[39] 표시 문자 3
[748] PCD Feed
Forward
[953] 프로피버스
경고 워드
[1501] 구동 시간
[1502] kWh 카운터
[1600] 제어 워드
[1601] 지령 [단위]
[1602] * 지령 %
[1603] 상태 워드
0-20 소형 표시 1.1
왼쪽에 표시할 소형 표시 1 변수를 선택합니다.
옵션: 기능:
[1605] 필드버스 속
도 실제 값
[%]
[1609] 사용자 정의
읽기
[1610] 출력[kW]
[1611] 출력[HP]
[1612] 모터 전압
[1613] 주파수
[1614] 모터 전류
[1615] 주파수 [%]
[1616] 토오크 [Nm]
[1617] 속도 [RPM]
[1618] 모터 과열
[1622] 토오크 [%]
[1630] DC 링크 전압
[1633] 제동 에너
지/2 분
[1634] 방열판 온도
[1635] 인버터 과열
[1636] 인버터 정격
전류
[1637] 인버터 최대
전류
[1638] SL 제어기 상
태
[1639] 제어카드 온
도
[1650] 외부 지령
[1652] 피드백 [단
위]
[1653] 디지털 전위
차계 지령
[1657] Feedback
[RPM]
[1660] 디지털 입력
[1661] 단자 53 스위
치 설정
[1662] 아날로그 입
력 53
[1663] 단자 54 스위
치 설정
[1664] 아날로그 입
력 54
[1665] 아날로그 출
력 42 [mA]
[1666] 디지털 출력
[이진수]
[1667] 주파수 입력
#29 [Hz]
[1668] 주파수 입력
#33 [Hz]
파라미터 설명
44
4.1.3 0-2* LCP 디스플레이
이 그룹의 파라미터를 사용하여 GLCP에 표시되는 변수
를 정의합니다.
터 그룹 0-2* LCP 디스플레이
대한 하나의 옵션입니다.
24 Danfoss A/S © 12/2018 All rights reserved. MG06C839
파라미터 16-17 속도 [RPM]은 파라미
VLT® AutomationDrive FC 360
내 각각의 파라미터에
Page 27
0-20 소형 표시 1.1
왼쪽에 표시할 소형 표시 1 변수를 선택합니다.
옵션: 기능:
[1669] 펄스 출력
#27 [Hz]
[1670] 펄스 출력
#29 [Hz]
[1671] 릴레이 출력
[이진수]
[1672] 카운터 A
[1673] 카운터 B
[1679] Analog
output 45
[mA]
[1680] 필드버스 제
어워드 1
[1682] 필드버스 지
령 1
[1684] 통신 옵션
STW
[1685] FC 단자 제어
워드 1
[1686] FC 단자 지령
1
[1690] 알람 워드
[1691] 알람 워드 2
[1692] 경고 워드
[1693] 경고 워드 2
[1694] 확장 상태 워
드
[1695] 확장형 상태
워드 2
[1697] Alarm Word
3
[1890] 공정 PID 오
차
[1891] 공정 PID 출
력
[1892] 공정 PID 클
램프 출력
[1893] 공정 PID 게
인 반영 출력
[2117] 확장PID 1:
지령 [단위]
[2118] 확장PID 1:
피드백 [단
위]
[2119] 확장PID 1:
출력 [%]
[3401] PCD 1 MCO
쓰기
[3402] PCD 2 MCO
쓰기
[3403] PCD 3 MCO
쓰기
0-20 소형 표시 1.1
왼쪽에 표시할 소형 표시 1 변수를 선택합니다.
옵션: 기능:
[3404] PCD 4 MCO
쓰기
[3405] PCD 5 MCO
쓰기
[3406] PCD 6 MCO
쓰기
[3407] PCD 7 MCO
쓰기
[3408] PCD 8 MCO
쓰기
[3409] PCD 9 MCO
쓰기
[3410] PCD 10
MCO 쓰기
[3421] PCD 1 MCO
읽기
[3422] PCD 2 MCO
읽기
[3423] PCD 3 MCO
읽기
[3424] PCD 4 MCO
읽기
[3425] PCD 5 MCO
읽기
[3426] PCD 6 MCO
읽기
[3427] PCD 7 MCO
읽기
[3428] PCD 8 MCO
읽기
[3429] PCD 9 MCO
읽기
[3430] PCD 10
MCO 읽기
[3450] 실제 위치
[3456] 트랙 결함
0-21 소형 표시 1.2
중간 위치에 표시할 소형 표시 1 변수를 선택합니다.
옵션: 기능:
[0] 없음
[37] 표시 문자 1
[38] 표시 문자 2
[39] 표시 문자 3
[748] PCD Feed
Forward
[953] 프로피버스
경고 워드
[1501] 구동 시간
[1502] kWh 카운터
[1600] 제어 워드
[1601] 지령 [단위]
파라미터 설명 프로그래밍 지침서
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 25
4 4
Page 28
0-21 소형 표시 1.2
중간 위치에 표시할 소형 표시 1 변수를 선택합니다.
옵션: 기능:
[1602] 지령 %
[1603] 상태 워드
[1605] 필드버스 속
도 실제 값
[%]
[1609] 사용자 정의
읽기
[1610] 출력[kW]
[1611] 출력[HP]
[1612] 모터 전압
[1613] 주파수
[1614] * 모터 전류
[1615] 주파수 [%]
[1616] 토오크 [Nm]
[1617] 속도 [RPM]
[1618] 모터 과열
[1622] 토오크 [%]
[1630] DC 링크 전압
[1633] 제동 에너
지/2 분
[1634] 방열판 온도
[1635] 인버터 과열
[1636] 인버터 정격
전류
[1637] 인버터 최대
전류
[1638] SL 제어기 상
태
[1639] 제어카드 온
도
[1650] 외부 지령
[1652] 피드백 [단
위]
[1653] 디지털 전위
차계 지령
[1657] Feedback
[RPM]
[1660] 디지털 입력
[1661] 단자 53 스위
치 설정
[1662] 아날로그 입
력 53
[1663] 단자 54 스위
치 설정
[1664] 아날로그 입
력 54
[1665] 아날로그 출
력 42 [mA]
[1666] 디지털 출력
[이진수]
[1667] 주파수 입력
#29 [Hz]
0-21 소형 표시 1.2
중간 위치에 표시할 소형 표시 1 변수를 선택합니다.
옵션: 기능:
[1668] 주파수 입력
#33 [Hz]
[1669] 펄스 출력
#27 [Hz]
[1670] 펄스 출력
#29 [Hz]
[1671] 릴레이 출력
[이진수]
[1672] 카운터 A
[1673] 카운터 B
[1679] Analog
output 45
[mA]
[1680] 필드버스 제
어워드 1
[1682] 필드버스 지
령 1
[1684] 통신 옵션
STW
[1685] FC 단자 제어
워드 1
[1686] FC 단자 지령
1
[1690] 알람 워드
[1691] 알람 워드 2
[1692] 경고 워드
[1693] 경고 워드 2
[1694] 확장 상태 워
드
[1695] 확장형 상태
워드 2
[1697] Alarm Word
3
[1890] 공정 PID 오
차
[1891] 공정 PID 출
력
[1892] 공정 PID 클
램프 출력
[1893] 공정 PID 게
인 반영 출력
[2117] 확장PID 1:
지령 [단위]
[2118] 확장PID 1:
피드백 [단
위]
[2119] 확장PID 1:
출력 [%]
[3401] PCD 1 MCO
쓰기
[3402] PCD 2 MCO
쓰기
파라미터 설명
44
26 Danfoss A/S © 12/2018 All rights reserved. MG06C839
VLT® AutomationDrive FC 360
Page 29
0-21 소형 표시 1.2
중간 위치에 표시할 소형 표시 1 변수를 선택합니다.
옵션: 기능:
[3403] PCD 3 MCO
쓰기
[3404] PCD 4 MCO
쓰기
[3405] PCD 5 MCO
쓰기
[3406] PCD 6 MCO
쓰기
[3407] PCD 7 MCO
쓰기
[3408] PCD 8 MCO
쓰기
[3409] PCD 9 MCO
쓰기
[3410] PCD 10
MCO 쓰기
[3421] PCD 1 MCO
읽기
[3422] PCD 2 MCO
읽기
[3423] PCD 3 MCO
읽기
[3424] PCD 4 MCO
읽기
[3425] PCD 5 MCO
읽기
[3426] PCD 6 MCO
읽기
[3427] PCD 7 MCO
읽기
[3428] PCD 8 MCO
읽기
[3429] PCD 9 MCO
읽기
[3430] PCD 10
MCO 읽기
[3450] 실제 위치
[3456] 트랙 결함
0-22 소형 표시 1.3
오른쪽에 표시할 소형 표시 1 변수를 선택합니다.
옵션: 기능:
[0] 없음
[37] 표시 문자 1
[38] 표시 문자 2
[39] 표시 문자 3
[748] PCD Feed
Forward
[953] 프로피버스
경고 워드
[1501] 구동 시간
[1502] kWh 카운터
0-22 소형 표시 1.3
오른쪽에 표시할 소형 표시 1 변수를 선택합니다.
옵션: 기능:
[1600] 제어 워드
[1601] 지령 [단위]
[1602] 지령 %
[1603] 상태 워드
[1605] 필드버스 속
도 실제 값
[%]
[1609] 사용자 정의
읽기
[1610] * 출력[kW]
[1611] 출력[HP]
[1612] 모터 전압
[1613] 주파수
[1614] 모터 전류
[1615] 주파수 [%]
[1616] 토오크 [Nm]
[1617] 속도 [RPM]
[1618] 모터 과열
[1622] 토오크 [%]
[1630] DC 링크 전압
[1633] 제동 에너
지/2 분
[1634] 방열판 온도
[1635] 인버터 과열
[1636] 인버터 정격
전류
[1637] 인버터 최대
전류
[1638] SL 제어기 상
태
[1639] 제어카드 온
도
[1650] 외부 지령
[1652] 피드백 [단
위]
[1653] 디지털 전위
차계 지령
[1657] Feedback
[RPM]
[1660] 디지털 입력
[1661] 단자 53 스위
치 설정
[1662] 아날로그 입
력 53
[1663] 단자 54 스위
치 설정
[1664] 아날로그 입
력 54
[1665] 아날로그 출
력 42 [mA]
[1666] 디지털 출력
[이진수]
파라미터 설명 프로그래밍 지침서
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 27
4 4
Page 30
0-22 소형 표시 1.3
오른쪽에 표시할 소형 표시 1 변수를 선택합니다.
옵션: 기능:
[1667] 주파수 입력
#29 [Hz]
[1668] 주파수 입력
#33 [Hz]
[1669] 펄스 출력
#27 [Hz]
[1670] 펄스 출력
#29 [Hz]
[1671] 릴레이 출력
[이진수]
[1672] 카운터 A
[1673] 카운터 B
[1679] Analog
output 45
[mA]
[1680] 필드버스 제
어워드 1
[1682] 필드버스 지
령 1
[1684] 통신 옵션
STW
[1685] FC 단자 제어
워드 1
[1686] FC 단자 지령
1
[1690] 알람 워드
[1691] 알람 워드 2
[1692] 경고 워드
[1693] 경고 워드 2
[1694] 확장 상태 워
드
[1695] 확장형 상태
워드 2
[1697] Alarm Word
3
[1890] 공정 PID 오
차
[1891] 공정 PID 출
력
[1892] 공정 PID 클
램프 출력
[1893] 공정 PID 게
인 반영 출력
[2117] 확장PID 1:
지령 [단위]
[2118] 확장PID 1:
피드백 [단
위]
[2119] 확장PID 1:
출력 [%]
[3401] PCD 1 MCO
쓰기
0-22 소형 표시 1.3
오른쪽에 표시할 소형 표시 1 변수를 선택합니다.
옵션: 기능:
[3402] PCD 2 MCO
쓰기
[3403] PCD 3 MCO
쓰기
[3404] PCD 4 MCO
쓰기
[3405] PCD 5 MCO
쓰기
[3406] PCD 6 MCO
쓰기
[3407] PCD 7 MCO
쓰기
[3408] PCD 8 MCO
쓰기
[3409] PCD 9 MCO
쓰기
[3410] PCD 10
MCO 쓰기
[3421] PCD 1 MCO
읽기
[3422] PCD 2 MCO
읽기
[3423] PCD 3 MCO
읽기
[3424] PCD 4 MCO
읽기
[3425] PCD 5 MCO
읽기
[3426] PCD 6 MCO
읽기
[3427] PCD 7 MCO
읽기
[3428] PCD 8 MCO
읽기
[3429] PCD 9 MCO
읽기
[3430] PCD 10
MCO 읽기
[3450] 실제 위치
[3456] 트랙 결함
0-23 둘째 줄 표시
둘째 줄에 표시할 변수를 선택합니다.
옵션: 기능:
[0] 없음
[37] 표시 문자 1
[38] 표시 문자 2
[39] 표시 문자 3
[748] PCD Feed
Forward
[953] 프로피버스
경고 워드
파라미터 설명
44
28 Danfoss A/S © 12/2018 All rights reserved. MG06C839
VLT® AutomationDrive FC 360
Page 31

0-23 둘째 줄 표시
둘째 줄에 표시할 변수를 선택합니다.
옵션: 기능:
[1501] 구동 시간
[1502] kWh 카운터
[1600] 제어 워드
[1601] 지령 [단위]
[1602] 지령 %
[1603] 상태 워드
[1605] 필드버스 속
도 실제 값
[%]
[1609] 사용자 정의
읽기
[1610] 출력[kW]
[1611] 출력[HP]
[1612] 모터 전압
[1613] * 주파수
[1614] 모터 전류
[1615] 주파수 [%]
[1616] 토오크 [Nm]
[1617] 속도 [RPM]
[1618] 모터 과열
[1622] 토오크 [%]
[1630] DC 링크 전압
[1633] 제동 에너
지/2 분
[1634] 방열판 온도
[1635] 인버터 과열
[1636] 인버터 정격
전류
[1637] 인버터 최대
전류
[1638] SL 제어기 상
태
[1639] 제어카드 온
도
[1650] 외부 지령
[1652] 피드백 [단
위]
[1653] 디지털 전위
차계 지령
[1657] Feedback
[RPM]
[1660] 디지털 입력
[1661] 단자 53 스위
치 설정
[1662] 아날로그 입
력 53
[1663] 단자 54 스위
치 설정
[1664] 아날로그 입
력 54
[1665] 아날로그 출
력 42 [mA]
0-23 둘째 줄 표시
둘째 줄에 표시할 변수를 선택합니다.
옵션: 기능:
[1666] 디지털 출력
[이진수]
[1667] 주파수 입력
#29 [Hz]
[1668] 주파수 입력
#33 [Hz]
[1669] 펄스 출력
#27 [Hz]
[1670] 펄스 출력
#29 [Hz]
[1671] 릴레이 출력
[이진수]
[1672] 카운터 A
[1673] 카운터 B
[1679] Analog
output 45
[mA]
[1680] 필드버스 제
어워드 1
[1682] 필드버스 지
령 1
[1684] 통신 옵션
STW
[1685] FC 단자 제어
워드 1
[1686] FC 단자 지령
1
[1690] 알람 워드
[1691] 알람 워드 2
[1692] 경고 워드
[1693] 경고 워드 2
[1694] 확장 상태 워
드
[1695] 확장형 상태
워드 2
[1697] Alarm Word
3
[1890] 공정 PID 오
차
[1891] 공정 PID 출
력
[1892] 공정 PID 클
램프 출력
[1893] 공정 PID 게
인 반영 출력
[2117] 확장PID 1:
지령 [단위]
[2118] 확장PID 1:
피드백 [단
위]
[2119] 확장PID 1:
출력 [%]
파라미터 설명 프로그래밍 지침서
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 29
4 4
Page 32
0-23 둘째 줄 표시
둘째 줄에 표시할 변수를 선택합니다.
옵션: 기능:
[3401] PCD 1 MCO
쓰기
[3402] PCD 2 MCO
쓰기
[3403] PCD 3 MCO
쓰기
[3404] PCD 4 MCO
쓰기
[3405] PCD 5 MCO
쓰기
[3406] PCD 6 MCO
쓰기
[3407] PCD 7 MCO
쓰기
[3408] PCD 8 MCO
쓰기
[3409] PCD 9 MCO
쓰기
[3410] PCD 10
MCO 쓰기
[3421] PCD 1 MCO
읽기
[3422] PCD 2 MCO
읽기
[3423] PCD 3 MCO
읽기
[3424] PCD 4 MCO
읽기
[3425] PCD 5 MCO
읽기
[3426] PCD 6 MCO
읽기
[3427] PCD 7 MCO
읽기
[3428] PCD 8 MCO
읽기
[3429] PCD 9 MCO
읽기
[3430] PCD 10
MCO 읽기
[3450] 실제 위치
[3456] 트랙 결함
0-24 셋째 줄 표시
셋째 줄에 표시할 변수를 선택합니다.
옵션: 기능:
[0] 없음
[37] 표시 문자 1
[38] 표시 문자 2
[39] 표시 문자 3
[748] PCD Feed
Forward
0-24 셋째 줄 표시
셋째 줄에 표시할 변수를 선택합니다.
옵션: 기능:
[953] 프로피버스
경고 워드
[1501] 구동 시간
[1502] * kWh 카운터
[1600] 제어 워드
[1601] 지령 [단위]
[1602] 지령 %
[1603] 상태 워드
[1605] 필드버스 속
도 실제 값
[%]
[1609] 사용자 정의
읽기
[1610] 출력[kW]
[1611] 출력[HP]
[1612] 모터 전압
[1613] 주파수
[1614] 모터 전류
[1615] 주파수 [%]
[1616] 토오크 [Nm]
[1617] 속도 [RPM]
[1618] 모터 과열
[1622] 토오크 [%]
[1630] DC 링크 전압
[1633] 제동 에너
지/2 분
[1634] 방열판 온도
[1635] 인버터 과열
[1636] 인버터 정격
전류
[1637] 인버터 최대
전류
[1638] SL 제어기 상
태
[1639] 제어카드 온
도
[1650] 외부 지령
[1652] 피드백 [단
위]
[1653] 디지털 전위
차계 지령
[1657] Feedback
[RPM]
[1660] 디지털 입력
[1661] 단자 53 스위
치 설정
[1662] 아날로그 입
력 53
[1663] 단자 54 스위
치 설정
[1664] 아날로그 입
력 54
파라미터 설명
44
30 Danfoss A/S © 12/2018 All rights reserved. MG06C839
VLT® AutomationDrive FC 360
Page 33

0-24 셋째 줄 표시
셋째 줄에 표시할 변수를 선택합니다.
옵션: 기능:
[1665] 아날로그 출
력 42 [mA]
[1666] 디지털 출력
[이진수]
[1667] 주파수 입력
#29 [Hz]
[1668] 주파수 입력
#33 [Hz]
[1669] 펄스 출력
#27 [Hz]
[1670] 펄스 출력
#29 [Hz]
[1671] 릴레이 출력
[이진수]
[1672] 카운터 A
[1673] 카운터 B
[1679] Analog
output 45
[mA]
[1680] 필드버스 제
어워드 1
[1682] 필드버스 지
령 1
[1684] 통신 옵션
STW
[1685] FC 단자 제어
워드 1
[1686] FC 단자 지령
1
[1690] 알람 워드
[1691] 알람 워드 2
[1692] 경고 워드
[1693] 경고 워드 2
[1694] 확장 상태 워
드
[1695] 확장형 상태
워드 2
[1697] Alarm Word
3
[1890] 공정 PID 오
차
[1891] 공정 PID 출
력
[1892] 공정 PID 클
램프 출력
[1893] 공정 PID 게
인 반영 출력
[2117] 확장PID 1:
지령 [단위]
[2118] 확장PID 1:
피드백 [단
위]
0-24 셋째 줄 표시
셋째 줄에 표시할 변수를 선택합니다.
옵션: 기능:
[2119] 확장PID 1:
출력 [%]
[3401] PCD 1 MCO
쓰기
[3402] PCD 2 MCO
쓰기
[3403] PCD 3 MCO
쓰기
[3404] PCD 4 MCO
쓰기
[3405] PCD 5 MCO
쓰기
[3406] PCD 6 MCO
쓰기
[3407] PCD 7 MCO
쓰기
[3408] PCD 8 MCO
쓰기
[3409] PCD 9 MCO
쓰기
[3410] PCD 10
MCO 쓰기
[3421] PCD 1 MCO
읽기
[3422] PCD 2 MCO
읽기
[3423] PCD 3 MCO
읽기
[3424] PCD 4 MCO
읽기
[3425] PCD 5 MCO
읽기
[3426] PCD 6 MCO
읽기
[3427] PCD 7 MCO
읽기
[3428] PCD 8 MCO
읽기
[3429] PCD 9 MCO
읽기
[3430] PCD 10
MCO 읽기
[3450] 실제 위치
[3456] 트랙 결함
파라미터 설명 프로그래밍 지침서
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 31
4 4
Page 34

130BD380.10
0
Custom Readout (Value)
P 16-09
Custom Readout
Unit P 0-30
Max value
P 0-32
Min value
P 0-31
Motor Speed
Motor Speed
High limit
P 4-14 (Hz)
Linear Unit (e.g. Speed and flow)
Quadratic Unit (Pressure)
Cubic Unit (Power)
Liniar
units only
0-30 사용자 정의 읽기 단위
옵션: 기능:
LCP에 표시할 값을 설정합니다.
값은 속도에 대해 선형, 2차 또는
3차 관계를 가지고 있습니다. 이
관계는 선택한 단위에 따라 달라
집니다.
표 4.1
을(를) 참조하십시
오. 실제 계산된 값은
파라미
터 16-09 사용자 정의 읽기
에서
읽을 수 있습니다.
[0] None
[1] * %
0-30 사용자 정의 읽기 단위
옵션: 기능:
[5] PPM
[10] 1/min
[11] RPM
[12] PULSE/s
[20] l/s
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[127] ft³/h
[140] ft/s
[141] ft/min
[160] °F
[170] psi
[171] lb/in2
[172] in wg
[173] ft WG
[180] HP
0-31 사용자 정의 읽기 최소값
범위: 기능:
0
CustomRe
adoutUnit
*
[ 0 -
999999.99
CustomRead
outUnit]
이 파라미터는 (속도가 0일 때 발
생하는) 사용자 정의 읽기 최소값
을 설정합니다.
파라미터 0-30 사
용자 정의 읽기 단위
에서 선형 단
위를 선택할 때 0과 다른 값을 선
택하는 경우에만 가능합니다. 2차
및 3차 단위의 경우 최소값은 0입
니다.
파라미터 설명
4.1.4 0-3* LCP사용자읽기
LCP의 표시 요소를 사용자 정의할 수 있습니다.
사용자 정의 읽기
표시할 계산 값은
위, 파라미터 0-31 사용자 정의 읽기 최소값
당),
파라미터 0-32 사용자 정의 읽기 최대값, 파라미
44
터 4-14 모터 속도 상한 [Hz]
기준으로 합니다.
그림 4.1 사용자 정의 읽기
관계는
파라미터 0-30 사용자 정의 읽기 단위
택한 단위의 유형에 따라 달라집니다:
단위 유형 속도 관계
점형
속도
유량, 부피
유량, 체적
유속
길이
온도
압력 2차
전력 3차
표 4.1 단위 유형과 속도 간의 관계
32 Danfoss A/S © 12/2018 All rights reserved. MG06C839
VLT® AutomationDrive FC 360
파라미터 0-30 사용자 정의 읽기 단
(선형만 해
의 설정과 실제 속도를
에서 선
선형
Page 35
0-32 사용자 정의 읽기 최대값
범위: 기능:
100
CustomRe
adoutUnit
*
[ 0.0 -
999999.99
CustomRead
outUnit]
이 파라미터는 모터 회전수가
파
라미터 4-14 모터 속도 상한
[Hz]
의 설정 값에 도달했을 때 표
시되는 최대값을 설정합니다.
0-37 표시 문자 1
범위: 기능:
[0 - 0 ] 예를 들어, 필드버스 어플리케이
션의 장치 태그에 사용되는 임의
의 텍스트.
0-38 표시 문자 2
범위: 기능:
[0 - 0 ] 예를 들어, 필드버스 어플리케이
션의 위치 태그에 사용되는 임의
의 텍스트.
0-39 표시 문자 3
범위: 기능:
[0 - 0 ] 예를 들어, 필드버스 어플리케이
션의 도움말 태그에 사용되는 임
의의 텍스트.
0-40 LCP의 [수동 운전] 키
옵션: 기능:
[0] 사용안함 수동 모드에서 의도하지 않은 AC
드라이브 기동을 방지합니다.
[1] * 사용함 [Hand On]이 활성화됩니다.
0-42 LCP의 [자동 운전] 키
옵션: 기능:
[0] 사용안함 LCP에서 의도하지 않은 AC 드라
이브 기동을 방지합니다.
[1] * 사용함 [Hand On]이 활성화됩니다.
0-44 LCP의 [Off/Reset] 키
옵션: 기능:
[0] 사용안함 LCP를 통해 의도하지 않게 AC
드라이브가 정지하거나 리셋되지
않게 하려면
[0] 사용안함
을 선택
합니다. 설정은
파라미터 0-60 주
메뉴 비밀번호
를 통해 잠글 수 있
습니다.
[1] * 사용함
[7] Enable
Reset Only
0-50 LCP 복사
옵션: 기능:
[0] * 복사하지 않음기능 없음.
[1] 모두 업로드 AC 드라이브 메모리에서 LCP로
모든 셋업의 파라미터 전체를 복
사합니다. 서비스를 실행하기 위
한 목적으로 작동 후에는 모든 파
라미터를 LCP로 복사합니다.
[2] 모두 다운로드LCP 메모리에서 AC 드라이브로
모든 셋업의 파라미터 전체를 복
사합니다.
[3] 용량 제외 다
운로드
모터 사이즈와 관계 없는 파라미
터만 복사합니다. 이 선택 항목은
이미 설정된 모터 데이터에 영향
을 주지 않고 동일한 기능으로 일
부 AC 드라이브를 프로그래밍하
는데 사용할 수 있습니다.
0-51 셋업 복사
옵션: 기능:
[0] * 복사하지 않음기능 없음.
[1] 셋업 1에 복사셋업 1에서 셋업 2로 복사합니다.
[2] 셋업 2에 복사셋업 2에서 셋업 1로 복사합니다.
[9] 모두 복사 공장 설정값을 (
파라미
터 0-11 변경 셋업 선택
에서 선
택한) 프로그래밍 설정에 복사합
니다.
0-60 주 메뉴 비밀번호
범위: 기능:
0* [0 - 999 ] [Main Menu] 키를 통해
주 메뉴
에 접근할 때 사용되는 비밀번호
를 정의합니다. 값을 0으로 설정
하면 비밀번호 기능이 비활성화됩
니다.
파라미터 설명 프로그래밍 지침서
4.1.6 0-5* 복사/저장
NLCP 및 GLCP에서/로 파라미터를 복사합니다. 하나의
AC 드라이브에서 다른 AC 드라이브로 셋업을 저장 및
복사할 때 이 파라미터를 사용합니다.
4 4
4.1.5 0-4* LCP 키패드
LCP에 있는 각각의 키를 사용함/사용안함으로 설정하
거나 비밀번호로 보호할 수 있습니다.
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 33
4.1.7 0-6* 비밀번호
Page 36

1-00 구성 모드
옵션: 기능:
(예컨대, 아날로그 입력 또는 필드
버스를 통한) 원격 지령이 활성화
될 때 사용할 어플리케이션 제어
방식을 선택합니다.
[0] * 개회로 가변 부하에서 거의 일정한 속도
에 대한 자동 미끄럼 보상을 통해
모터의 피드백 신호 없이 속도를
제어할 수 있습니다. 보상이 활성
화되지만 파라미터 그룹
1-** 부
하/모터
에서 이를 비활성화할 수
도 있습니다.
[1] 속도 폐 회로 피드백과 함께 속도 폐회로 제어
를 사용할 수 있습니다. 속도 정밀
도를 높이기 위해 피드백 신호를
제공하고 속도 PID 제어기를 설정
합니다. 속도 제어 파라미터는
파
라미터 그룹 7-0* 속도 PID 제어
에서 설정됩니다.
[2] 토오크 속도 피드백과 함께 토오크 폐회
로 제어를 사용할 수 있습니다.
파
라미터 1-01 모터 제어 방식
에서
옵션
[1] VVC
+
가 선택되었을 경
우에만 사용할 수 있습니다.
[3] 폐회로 AC 드라이브에서 공정 제어를 사
용할 수 있습니다. 공정 제어 파라
미터는
파라미터 그룹 7-2* 공정
제어 피드백
및
파라미터 그룹
7-3* 공정 PID 제어
에서 설정됩
니다.
[4] 개회로 토크
제어
VVC+ 모드에서 토오크 개회로를
사용할 수 있습니다(
파라미
터 1-01 모터 제어 방식
). 토오크
PID 파라미터는
파라미터 그룹
7-1*토오크 PI 제어
에서 설정됩
니다.
[6] 서페이스 와인더서페이스 권선기 제어를 사용할
수 있습니다. 해당 파라미터는
파
라미터 그룹 7-2* 공정 제어 피
드백
및
파라미터 그룹 7-3* 공
정 PID 제어
에 있습니다.
[7] 확장형PID(속
도개회로)
확장형 PID 속도 개회로를 사용할
수 있습니다. 해당 파라미터는
파
라미터 그룹 7-2* 공정 제어 피
드백
-
파라미터 그룹 7-5* 확장
형 공정 PID 제어
에 있습니다.
1-01 모터 제어 방식
옵션: 기능:
[0] U/f
주의 사항
U/f 제어를 실행할 때는 미끄
럼 및 부하 보상이 포함되지
않습니다.
병렬로 연결된 모터 및/또는 특수
모터 어플리케이션에 사용됩니다.
파라미터 1-55 U/f 특성 - U
및
파라미터 1-56 U/f 특성 - F
에서
U/f 설정에서 설정합니다.
[1] * VVC+
주의 사항
파라미터 1-10 모터 구조
이
PM 사용 가능 옵션으로 설정
되면 VVC+ 옵션만 사용할 수
있습니다.
미끄럼 및 부하 보상을 포함하는
정상 구동 모드.
1-03 토오크 특성
옵션: 기능:
필요한 토오크 특성을 선택합니
다. VT와 AEO는 모두 절전 운전
입니다.
[0] * 압축기 토오크모터축 출력이 가변 속도 제어 시
일정 토오크를 제공합니다.
[1] 가변 토오크 모터축 출력이 가변 속도 제어 시
가변 토오크를 제공합니다.
파라
미터 14-40 가변 토오크 수준
에
서 가변 토오크 한계를 설정합니
다.
[2] 자동 에너지
최적화 CT
파라미터 14-41 자동 에너지 최
적화 최소 자화
를 통해 여자 및
주파수를 최소화함으로써 자동으
로 에너지 소비를 최적화합니다.
1-06 시계 방향
옵션: 기능:
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
이 파라미터는 LCP 방향 화살표
에 해당하는
시계방향
을 정의합니
다. 모터 와이어를 교체하지 않고
축 회전 방향을 쉽게 변경하는 데
사용합니다.
[0] * 정 AC 드라이브가 다음과 같이 모터
에 연결되었을 때 모터축이 시계
파라미터 설명
4.2 파라미터: 1-** 부하/모터
4.2.1 1-0* 일반 설정
44
34 Danfoss A/S © 12/2018 All rights reserved. MG06C839
VLT® AutomationDrive FC 360
Page 37

1-06 시계 방향
옵션: 기능:
방향으로 회전합니다: U⇒U, V⇒V
및 W⇒W.
[1] 역 AC 드라이브가 다음과 같이 모터
에 연결되었을 때 모터축이 반시
계방향으로 회전합니다: U⇒U, V
⇒V 및 W⇒W.
파라미터 설명 프로그래밍 지침서
1-08 모터 제어 대역폭
옵션: 기능:
[0] 높음 동적 반응이 높은 경우에 적합합니다.
4.2.2 1-1* 모터 선택
일반 모터 데이터를 설정하는 파라미터 그룹입니다. 모터가 운전하는 동안에는 이 파라미터를 설정할 수 없습니다.
활성 파라미터는
파라미터 1-10 모터 구조 [0] 비동기형 [1] PM,비돌극SPM [3] 자석철각IPM
파라미터 1-00 구성 모드
파라미터 1-03 토오크 특성
파라미터 1-06 시계 방향
파라미터 1-08 모터 제어 대역폭
파라미터 1-14 댐핑 게인
파라미터 1-15 저속 필터 시상수
파라미터 1-16 고속 필터 시상수
파라미터 1-17 전압 필터 시상수
파라미터 1-20 모터 출력[kW]
파라미터 1-22 모터 전압
파라미터 1-23 모터 주파수
파라미터 1-24 모터 전류
파라미터 1-25 모터 정격 회전수
파라미터 1-26 모터 일정 정격 토오크
파라미터 1-29 자동 모터 최적화(AMA)
파라미터 1-30 고정자 저항 (Rs)
파라미터 1-31 회전자 저항 (Rr)
파라미터 1-33 고정자 누설 리액턴스 (X1)
파라미터 1-35 주 리액턴스 (Xh)
파라미터 1-37 d축 인덕턴스 (Ld)
파라미터 1-38 q축 인덕턴스 (Lq)
파라미터 1-39 모터 극수
파라미터 1-40 1000 RPM에서의 역회전 EMF
파라미터 1-42 모터 케이블 길이
파라미터 1-43 모터 케이블 길이 피트
파라미터 1-44 d축 인덕턴스 Sat. (LdSat)
파라미터 1-45 q축 인덕턴스 Sat. (LqSat)
파라미터 1-46 위치 감지 게인
파라미터 1-48 d축의 최소 인덕턴스 기준 전류
파라미터 1-49 q축의 최소 인덕턴스 기준 전류
파라미터 1-50 0 속도에서의 모터 자화
파라미터 1-52 최소 속도의 일반 자화 [Hz]
파라미터 1-55 U/f 특성 - U
1-08 모터 제어 대역폭
옵션: 기능:
[1] * 중간 적절한 정상 상태 운전에 적합합니다.
[2] 낮음 동적 반응이 낮은 적절한 정상 상태 운전에 적
합합니다.
[3] 적용 1 추가적인 능동 감쇄가 필요한 적절한 정상 상
태 운전에 최적화합니다.
[4] 적용 2 저임피던스 PM 모터에 적합합니다. 이 옵션은
[3] 적용 1
표 4.2
와 같습니다. x는 이 옵션이 선택되는 경우에 해당 파라미터가 활성화됨을 의미합니다.
x x x
x
x x x
x x x
x x
x x
x x
x x
x
x
x
x x x
x x x
x x
x x x
x x x
x
x
x
x x
x
x x x
x x
x x x
x x x
x
x
x x
x
x
x
x
x
의 대체 옵션입니다.
4 4
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 35
Page 38

파라미터 설명
VLT® AutomationDrive FC 360
파라미터 1-10 모터 구조 [0] 비동기형 [1] PM,비돌극SPM [3] 자석철각IPM
파라미터 1-56 U/f 특성 - F
파라미터 1-60 저속 운전 부하 보상
파라미터 1-61 고속 운전 부하 보상
파라미터 1-62 슬립 보상
파라미터 1-63 슬립 보상 시상수
파라미터 1-64 공진 제거
파라미터 1-65 공진 제거 시상수
44
파라미터 1-66 저속에서의 최소 전류
파라미터 1-70 기동 모드
파라미터 1-71 기동 지연
파라미터 1-72 기동 기능
파라미터 1-73 플라잉 기동
파라미터 1-80 정지 시 기능
파라미터 1-88 AC Brake Gain
파라미터 1-90 모터 써멀 보호
파라미터 2-00 직류 유지 전류
파라미터 2-01 직류 제동 전류
파라미터 2-02 직류 제동 시간
파라미터 2-04 직류 제동 동작 속도 [Hz]
파라미터 2-06 파킹 전류
파라미터 2-07 파킹 시간
파라미터 2-10 제동 기능
파라미터 2-16 교류 제동 최대 전류
파라미터 2-17 과전압 제어
파라미터 4-10 모터 속도 방향
파라미터 4-14 모터 속도 상한 [Hz]
파라미터 4-16 모터 운전의 토오크 한계
파라미터 4-17 재생 운전의 토오크 한계
파라미터 4-18 전류 한계
파라미터 4-19 최대 출력 주파수
파라미터 4-58 모터 결상 시 기능
파라미터 14-01 스위칭 주파수
파라미터 14-03 과변조
파라미터 14-07 Dead time 보상 수준
파라미터 14-08 감쇄 이득 상수
파라미터 14-09 Dead time Bias 전류 레벨
파라미터 14-10 주전원 결함
파라미터 14-11 주전원 결함 전압 수준
파라미터 14-12 주전원 불균형 반응
파라미터 14-27 인버터 결함 시 동작
파라미터 14-40 가변 토오크 수준
파라미터 14-41 자동 에너지 최적화 최소 자화
파라미터 14-50 RFI 필터
파라미터 14-51 DC 링크 전압 보상
파라미터 14-55 출력 필터
파라미터 14-64 Dead time 보상 결함 전류 수준
파라미터 14-65 속도 용량 감소 Dead time 보상
파라미터 30-22 회전자 구속 보호
파라미터 30-23 회전자 구속 감지 시간 [s]
x
x
x
x
x
x
x
x x
x x
x x x
x x x
x x x
x x x
x
x x x
x x x
x x x
x x x
x x x
x x
x x
x x x
x
x x x
x x x
x x x
x
x
x x x
x x x
x x x
x x x
x x x
x x x
x x x
x x x
x
x
x x x
x x x
x
x
x x x
x x x
x x x
x x x
x x x
x x
x x
표 4.2 활성 파라미터
36 Danfoss A/S © 12/2018 All rights reserved. MG06C839
Page 39
1-10 모터 구조
옵션: 기능:
[0] * Asynchron 비동기형 모터에 해당합니다.
[1] PM, non
salient SPM
표면 장착형(비돌극형) 자석을 갖
춘 영구 자석(PM) 모터에 해당합
니다. 모터 운전 최적화에 관한 자
세한 내용은
파라미터 1-14 댐핑
게인
~
파라미터 1-17 전압 필터
시상수
를 참조하십시오.
[3] PM, salient
IPM
내장형(돌극형) 자석을 갖춘 영구
자석(PM) 모터에 해당합니다.
1-14 댐핑 게인
범위: 기능:
120 %* [ 0 -
250 %]
감쇄 이득은 PM 설비를 안정화합
니다. 감쇄 이득 값은 PM 설비의
다이나믹 성능을 제어합니다. 감
쇄 이득이 높으면 높은 다이나믹
성능을 제공하고 감쇄 이득이 낮
으면 낮은 다이나믹 성능을 제공
합니다. 다아나믹 성능은 설비 데
이터 및 부하 유형과 관련이 있습
니다. 감쇄 이득이 너무 높거나 너
무 낮으면 제어가 불안정해집니
다.
1-15 저속 필터 시상수
범위: 기능:
Size
related*
[ 0.01 20 s]
이 시정수는 정격 속도 10% 미만
에서 사용됩니다. 짧은 감쇄 시정
수를 통해 순간 제어를 확보합니
다. 하지만 이 값이 지나치게 짧으
면 제어가 불안정해집니다.
1-16 고속 필터 시상수
범위: 기능:
Size
related*
[ 0.01 20 s]
이 시정수는 정격 속도 10% 초과
에서 사용됩니다. 짧은 감쇄 시정
수를 통해 순간 제어를 확보합니
다. 하지만 이 값이 지나치게 짧으
면 제어가 불안정해집니다.
1-17 전압 필터 시상수
범위: 기능:
Size
related*
[ 0.001 1 s]
공급 전압 계산 시 높은 주파수
리플과 시스템 공진의 영향력을
감소시킵니다. 이 필터가 없으면
전류 내 리플이 계산된 전압을 왜
곡하고 시스템의 안정성에 영향을
미칩니다.
1-20 모터 출력[kW]
옵션: 기능:
[2] 0.12 kW -
0.16 hp
[3] 0.18 kW -
0.25 hp
[4] 0.25 kW -
0.33 hp
[5] 0.37 kW -
0.5 hp
[6] 0.55 kW -
0.75 hp
[7] 0.75 kW - 1
hp
[8] 1.1 kW -
1.5 hp
[9] 1.5 kW - 2
hp
[10] 2.2 kW - 3
hp
[11] 3 kW - 4 hp
[12] 3.7 kW - 5
hp
[13] 4 kW - 5.4
hp
[14] 5.5 kW -
7.5 hp
[15] 7.5 kW - 10
hp
[16] 11 kW - 15
hp
[17] 15 kW - 20
hp
[18] 18.5 kW -
25 hp
[19] 22 kW - 30
hp
[20] 30 kW - 40
hp
[21] 37 kW - 50
hp
[22] 45 kW - 60
hp
[23] 55 kW - 75
hp
파라미터 설명 프로그래밍 지침서
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 37
4.2.3 1-2* 모터 데이터
이 파라미터 그룹은 연결된 모터의 명판 데이터에 대한
입력 데이터로 구성되어 있습니다.
주의 사항
이 파라미터의 값을 변경하면 다른 파라미터의 설정에
영향을 줍니다.
4 4
Page 40

1-20 모터 출력[kW]
옵션: 기능:
[24] 75 kW -
100 hp
[25] 90 kW -
120 hp
1-22 모터 전압
범위: 기능:
용량에 따
라 다름*
[50 -
1000 V]
모터 명판 데이터에 따라 모터 정
격 전압을 입력합니다. 초기 설정
값은 장치의 정격 출력에 해당합
니다.
1-23 모터 주파수
범위: 기능:
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
Size
related*
[ 20 - 500
Hz]
모터 명판에서 모터 주파수 값을
선택합니다. 230/440V 모터를
87Hz 주파수에서 운전하는 경우,
230V/50Hz에 해당하는 명판 데
이터에 따라 값을 설정합니다.
파
라미터 4-14 모터 속도 상한
[Hz]
및
파라미터 3-03 최대 지
령
을(를) 87Hz로 운전하는 모터에
적용합니다.
1-24 모터 전류
범위: 기능:
Size
related*
[ 0.01 -
1000.00 A]
모터 명판 데이터에 따라 모터 정
격 전류 값을 입력합니다. 이 데이
터는 모터 토오크 계산, 모터 써멀
보호 등에 사용됩니다.
1-25 모터 정격 회전수
범위: 기능:
용량에 따
라 다름*
[50 60000 RPM]
모터 명판 데이터에 따라 모터 정
격 회전수 값을 입력합니다. 이 데
이터는 자동 모터 보상을 계산하
는데 사용됩니다.
1-26 모터 일정 정격 토오크
범위: 기능:
Size
related*
[0.1 -
10000.0
Nm]
모터 명판 데이터에 따라 값을 입
력합니다. 초기 설정값은 정격 출
력에 해당합니다. 이 파라미터는
파라미터 1-10 모터 구조을 [1]
PM,비돌극SPM
또는
[3] PM
으로
설정한 경우에 사용할 수 있습니
다. 다시 말해, 이 파라미터는
1-26 모터 일정 정격 토오크
범위: 기능:
PM, 비돌극 SPM 및 PM, 돌극
IPM에서만 사용할 수 있습니다.
1-29 자동 모터 최적화(AMA)
옵션: 기능:
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
주의 사항
단자 27 디지털 입력(
파라미
터 5-12 단자 27 디지털 입
력
)의 초기 설정은 코스팅 인
버스입니다. 이 설정은 단자
27에 전원이 공급되지 않는
경우 AMA를 실행할 수 없음
을 의미합니다.
AMA 기능은 고급 모터 파라미터
를 자동 최적화하여 다이나믹 모
터 성능을 최적화합니다.
[0] * 꺼짐 기능 없음.
[1] 완전 AMA 사
용함
파라미터 1-10 모터 구조
에서 선
택한 옵션에 따라 AMA는 각기
다른 파라미터에서 실행됩니다.
•
[0] 비동기화
를 선택한
경우 AMA는 다음에서
실행됩니다:
-
파라미
터 1-30 고정자
저항 (Rs)
.
-
파라미
터 1-31 회전자
저항 (Rr)
.
-
파라미
터 1-33 고정자
누설 리액턴스
(X1)
.
-
파라미
터 1-35 주 리
액턴스 (Xh)
.
•
[1] PM, 비돌극SPM
을
선택한 경우, AMA는 다
음에서 실행됩니다:
파라미터 설명
44
VLT® AutomationDrive FC 360
38 Danfoss A/S © 12/2018 All rights reserved. MG06C839
Page 41
1-29 자동 모터 최적화(AMA)
옵션: 기능:
-
파라미
터 1-30 고정자
저항 (Rs)
.
-
파라미
터 1-37 d축 인
덕턴스 (Ld)
.
•
[3] PM, 돌극SPM
을 선
택한 경우, AMA는 다음
에서 실행됩니다:
-
파라미
터 1-30 고정자
저항 (Rs)
.
-
파라미
터 1-37 d축 인
덕턴스 (Ld)
.
-
파라미
터 1-38 q축 인
덕턴스 (Lq)
.
-
파라미
터 1-44 d-axis
Inductance Sat.
(LdSat)
.
-
파라미
터 1-45 q-axis
Inductance Sat.
(LqSat)
.
[2] 축소 AMA 사용함시스템에서 고정자 저항 Rs (
파라
미터 1-30 고정자 저항 (Rs)
)에
대해서만 축소 AMA를 실행합니
다. AC 드라이브와 모터 간에 LC
필터가 사용되는 경우 이 옵션을
선택합니다. (이 옵션은 비동기식
모터에만 해당합니다.)
1-30 고정자 저항 (Rs)
범위: 기능:
Size
related*
[ 0.0 -
9999.000
Ohm]
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
고정자 저항 값을 설정합니다. 모
터 데이터시트의 값을 입력하거나
모터가 차가운 상태에서 AMA를
실행합니다.
1-31 회전자 저항 (Rr)
범위: 기능:
Size
related*
[ 0 -
9999.000
Ohm]
1-33 고정자 누설 리액턴스 (X1)
범위: 기능:
Size
related*
[ 0.0 -
9999.000
Ohm]
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
고정자 누설 리액턴스 값을 설정
합니다. 모터 데이터시트에서 값
을 찾거나 모터가 차가운 상태에
서 AMA를 실행합니다. 초기 설정
은 모터 명판 데이터를 기준으로
AC 드라이브에 의해 계산됩니다.
파라미터 설명 프로그래밍 지침서
주의 사항
AMA 실행 중에 외부 토오크가 발생하지 않도록 합니
다.
LC 필터를 사용하는 경우, U/f 제어 모드에서 구동(권
장)하거나 VVC+ 모드에서 축소 AMA을 실행하도록
AC 드라이브를 설정합니다. LC 필터를 사용하지 않는
경우, 완전 AMA를 실행합니다.
파라미터 1-10 모터 구조
성화하는 옵션으로 설정된 경우 유일하게 사용할 수 있
는 옵션은
[1] 완전 AMA 사용함
[1] 완전 AMA 사용함
선택한 다음 [Hand on]을 눌러 AMA 기능을 활성화합
니다. 정상적으로 완료되면 표시창에 다음과 같이 표시
됩니다:
[OK]를 눌러 AMA를 종료합니다
른 후에 AC 드라이브를 운전할 수 있습니다.
주의 사항
•
•
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 39
AMA 기능을 사용하여 최상의 AC 드라이브 효
과를 얻기 위해서는 모터가 차가운 상태에서
AMA를 실행해야 합니다.
모터 구동 중에는 AMA를 실행할 수 없습니다.
이 영구 자석 모터 모드를 활
입니다.
또는
[2] 축소 AMA 사용함
. [OK]를 누
을
4.2.4 1-3* 고급 모터 데이터 I
고급 모터 데이터에 대한 파라미터를 설정합니다. 최적
성능을 위해
해당 모터와 일치해야 합니다. 알려지지 않은 모터 데이
터의 경우에는 AMA를 실행하는 것이 좋습니다.
파라미터 1-30
~
1-39
의 모터 데이터는
4 4
Page 42

1-35 주 리액턴스 (Xh)
범위: 기능:
Size
related*
[ 0.0 -
9999.00
Ohm]
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
다음 방법 중 하나를 사용하여 모
터의 주 리액턴스를 설정합니다.
•
차가운 상태의 모터에서
AMA를 실행합니다. AC
드라이브가 모터에서 값
을 측정합니다.
•
Xh 값을 직접 입력합니
다. 해당 값은 모터 공급
업체에서 제공합니다.
•
Xh의 초기 설정값을 사용
합니다. AC 드라이브는
모터 명판 데이터를 기준
으로 설정값을 선택합니
다.
1-37 d축 인덕턴스 (Ld)
범위: 기능:
Size
related*
[ 0 65535 mH]
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
d축 인덕턴스 값을 설정합니다.
영구 자석 모터 데이터시트에서
값을 찾거나 모터가 차가운 상태
에서 AMA를 실행합니다.
1-38 q축 인덕턴스 (Lq)
범위: 기능:
Size
related*
[ 0.000 65535 mH]
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
q축 인덕턴스 값을 설정합니다.
모터 데이터시트에서 값을 찾거나
모터가 차가운 상태에서 AMA를
실행합니다.
1-39 모터 극수
범위: 기능:
용량에 따
라 다름*
[2 - 100 ]
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
1-39 모터 극수
범위: 기능:
모터 극 수를 입력합니다.
여기서 언급된 값은 (양극 수가
아닌) 모터의 총 극 수에 따라 계
산된 값이므로 반드시 짝수여야
합니다.
1-40 1000 RPM에서의 역회전 EMF
범위: 기능:
Size
related*
[ 1 - 9000V]1000 RPM으로 운전 시 모터의
공칭 역기전력을 설정합니다.
역기전력은 AC 드라이브가 연결
되어 있지 않고 축이 외부의 힘에
의해서 회전하는 경우 PM 모터에
서 생성되는 전압입니다. 역기전
력은 일반적으로 모터 정격 회전
수 또는 1000 RPM에서 2선 사이
에서 측정되는 전압으로 표현됩니
다. 1000 RPM의 모터 회전수에
대한 값이 없는 경우에는 다음과
같이 올바른 값을 계산합니다. 예
를 들어 1800 RPM에서 역기전력
이 320 V라면 1000 RPM에서의
값을 다음과 같이 계산할 수 있습
니다.
예
1800 RPM에서의 역기전력 320
V. 역기전력 = (전압/RPM)*1000
= (320/1800)*1000 = 178.
이 파라미터는
파라미터 1-10 모
터 구조
이 PM(영구 자석) 모터를
활성화하는 옵션으로 설정된 경우
에만 활성화됩니다.
주의 사항
PM 모터를 사용하는 경우에
는 제동 저항 사용을 권장합니
다.
1-42 Motor Cable Length
범위: 기능:
50 m* [0 - 100m]모터 케이블 길이를 미터 단위로
설정합니다.
1-43 Motor Cable Length Feet
범위: 기능:
164 ft* [0 - 328
ft]
모터 케이블 길이를 설정합니다.
길이 단위는 피트입니다.
파라미터 설명
VLT® AutomationDrive FC 360
44
40 Danfoss A/S © 12/2018 All rights reserved. MG06C839
4.2.5 1-4* 고급 모터 데이터 II
고급 모터 데이터에 대한 파라미터를 설정합니다.
Page 43
1-44 d-axis Inductance Sat. (LdSat)
범위: 기능:
Size
related
[ 0 65535 mH]
이 파라미터는
파라미터 1-10 모
터 구조가 [3] PM, 돌극IPM
으로
설정되어 있는 경우에만 활성화됩
니다.
이 파라미터는 d축의 인덕턴스 포
화와 일치합니다. 초기 값은
파라
미터 1-37 d축 인덕턴스 (Ld)
에
서 설정한 값입니다. 대부분의 경
우, 초기 값을 변경하지 마십시오.
모터 공급업체가 포화 곡선을 제
공하는 경우, d축 인덕턴스 값(정
격 전류의 100% 미만)을 입력하
거나 모터가 차가운 상태에서
AMA를 실행합니다.
1-45 q-axis Inductance Sat. (LqSat)
범위: 기능:
Size
related*
[ 0 65535 mH]
이 파라미터는
파라미터 1-10 모
터 구조가 [3] PM, 돌극IPM
으로
설정되어 있는 경우에만 활성화됩
니다.
이 파라미터는 q축의 인덕턴스 포
화와 일치합니다. 초기 값은
파라
미터 1-38 q축 인덕턴스 (Lq)
에
서 설정한 값입니다. 대부분의 경
우, 초기 값을 변경하지 마십시오.
모터 공급업체가 포화 곡선을 제
공하는 경우, q축 인덕턴스 값(정
격 전류의 100% 미만)을 입력하
거나 모터가 차가운 상태에서
AMA를 실행합니다.
1-46 위치 감지 게인
범위: 기능:
100 %* [ 20 -
200 %]
기동 시 위치 감지 도중에 시험
펄스의 진폭을 조정합니다. 이 파
라미터를 조정하여 위치 측정 정
밀도를 향상시킵니다.
1-48 Current at Min Inductance for d-axis
범위: 기능:
100 % [ 20 -
200 %]
이 파라미터를 사용하여 인덕턴스
포화점을 설정합니다.
1-49 최소 인덕턴스 기준 전류
범위: 기능:
100 % [ 20 -
200 %]
이 파라미터는 q-인덕턴스 값의
포화 곡선을 지정합니다. 이 파라
미터의 20%-100%에서 인덕턴스
는
파라미터 1-38 q축 인덕턴스
(Lq)
및
파라미터 1-45 q-axis
Inductance Sat. (LqSat)
로 인해
대략적으로 선형입니다. 이 파라
미터는 모터 명판 부하 보상, 어플
1-49 최소 인덕턴스 기준 전류
범위: 기능:
리케이션 부하 유형 및 모터의 순
간 정지/고정을 위한 전자 제동
기능과 관련이 있습니다.
1-50 0 속도에서의 모터 자화
범위: 기능:
100 %* [0 -
300 %]
이 파라미터를
파라미터 1-52 최
소 속도의 일반 자화 [Hz]
와 함께
사용하여 저속으로 운전 중인 모
터에서 각기 다른 써멀 부하를 얻
습니다.
정격 자화 전류의 백분율 값을 입
력합니다. 너무 낮게 설정하면 모
터축의 토오크가 감소할 수 있습
니다.
Magn. current
130BB780.10
Hz
Par.1-50
90%
Par.1-52
그림 4.2 모터 자화
1-52 최소 속도의 일반 자화 [Hz]
범위: 기능:
1 Hz* [ 0.1 -
10.0 Hz]
일반 자화 전류에 필요한 주파수
를 설정합니다. 이 파라미터를
파
라미터 1-50 0 속도에서의 모터
자화
과 함께 사용합니다(
그림 4.2
또한 참조).
1-55 U/f 특성 - U
범위: 기능:
Size
related*
[0 - 1000V]각각의 주파수 포인트에서의 전압
을 입력하여 U/f 특성이 직접 모
터와 일치하게 합니다. 주파수 포
인트는
파라미터 1-56 U/f 특성
- F
에서 설정합니다.
1-56 U/f 특성 - F
범위: 기능:
Size
related*
[ 0 -
500.0 Hz]
주파수 포인트를 입력하여 U/f 특
성이 모터와 일치하게 합니다. 각
주파수 포인트에서의 전압은
파라
미터 1-55 U/f 특성 - U
에서 설
정합니다.
파라미터 설명 프로그래밍 지침서
4.2.6 1-5* 부하 독립적 설정
부하와 관계 없이 모터를 설정하는 파라미터입니다.
4 4
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 41
Page 44

1-56 U/f 특성 - F
범위: 기능:
6개의 지정 가능한 전압 및 주파
수를 기초로 하여 U/f 특성을 설
정합니다(
그림 4.3
참조).
Motor Voltage
Par 1-55 [x]
Output Frequency
Par 1-56 [x]
1-55[5]
1-55[4]
1-55[3]
1-55[2]
1-55[1]
1-55[0]
1-56
[0]
1-56
[1]
1-56
[2]
1-56
[3]
1-56
[4]
1-56
[5]
130BA166.10
그림 4.3 U/f 특성의 예
1-60 저속 운전 부하 보상
범위: 기능:
100 %* [0 -
300 %]
저속 전압 보상 값을 백분율로 입
력합니다. 이 파라미터는 저속 부
하 성능을 최적화하는 데 사용됩
니다. 이 파라미터는
파라미
터 1-10 모터 구조가 [0] 비동기
화
로 설정되어 있는 경우에만 활
성화됩니다.
1-61 고속 운전 부하 보상
범위: 기능:
100 %* [0 -
300 %]
고속 부하 전압 보상 값을 백분율
로 입력합니다. 이 파라미터는 고
속 부하 성능을 최적화하는 데 사
용됩니다. 이 파라미터는
파라미
터 1-10 모터 구조가 [0] 비동기
화
로 설정되어 있는 경우에만 활
성화됩니다.
1-62 슬립 보상
범위: 기능:
Size
related*
[ -400 -
400.0 %]
n
M,N
값의 허용 한계를 보상하는
미끄럼 보상에 대한 % 값을 입력
합니다. 미끄럼 보상은 모터 정격
회전수(n
M,N
)를 기준으로 자동 계
산됩니다.
1-63 슬립 보상 시상수
범위: 기능:
0.1 s* [0.05 - 5s]미끄럼 보상 반응 속도를 입력합
니다. 값이 높을수록 반응 속도가
느려지고 값이 낮을수록 반응 속
도가 빨라집니다. 저주파수 공진
1-63 슬립 보상 시상수
범위: 기능:
문제가 발생하면 시간을 더 길게
설정합니다.
1-64 공진 제거
범위: 기능:
100 %* [0 -
500 %]
공진 상각 값을 입력합니다.
파라
미터 1-64 공진 제거와 파라미
터 1-65 공진 제거 시상수
를 설
정하여 고주파수 공진 문제를 제
거합니다. 공진을 감소시키려면
파라미터 1-64 공진 제거
의 값을
높여야 합니다.
1-65 공진 제거 시상수
범위: 기능:
0.005 s* [ 0.001 -
0.05 s]
파라미터 1-64 공진 제거와 파라
미터 1-65 공진 제거 시상수
를
설정하여 고주파수 공진 문제를
제거합니다. 최상의 상각 결과를
제공하는 시정수를 입력합니다.
1-66 최저 속도의 최소 전류
범위: 기능:
50 %* [ 0 -
120 %]
저속에서의 최소 모터 전류를 입
력합니다. 이 전류 값을 높이면 저
속에서의 모터 토오크가 개선됩니
다.
파라미터 1-66 최저 속도의 최소
전류
는 PM 모터의 경우에만 사용
할 수 있습니다.
1-70 기동 모드
PM 모터 기동 모드를 선택합니다. 이전에 프리런했던 PM 모
터에 대한 VVC+ 제어 모드를 초기화하기 위한 모드입니다.
모터가 정지된 경우 (또는 저속으로 구동하는 경우)에만 VVC
+
에서 PM 모터를 사용할 수 있습니다.
옵션: 기능:
[0] * 회전자 감지 회전자의 전기각을 추정하고 이
각도를 시작점으로 사용합니다.
이 옵션은 산업용 어플리케이션의
표준 선택항목입니다. 플라잉 기
동 시 모터가 저속으로 구동하거
나 정지되었음이 감지되는 경우,
AC 드라이브는 회전자 위치(각도)
를 감지하고 해당 위치에서 모터
를 기동합니다.
[1] 파킹 시간 파킹 기능은 고정자 권선 전체에
걸쳐 직류 전류를 적용하고 회전
파라미터 설명
VLT® AutomationDrive FC 360
44
4.2.7 1-6* 부하 의존적 설정
부하에 따라 모터를 조정하는 파라미터입니다.
42 Danfoss A/S © 12/2018 All rights reserved. MG06C839
4.2.8 1-7* 기동 조정
모터 기동 설정을 조정하는 파라미터입니다.
Page 45

1-70 기동 모드
PM 모터 기동 모드를 선택합니다. 이전에 프리런했던 PM 모
터에 대한 VVC+ 제어 모드를 초기화하기 위한 모드입니다.
모터가 정지된 경우 (또는 저속으로 구동하는 경우)에만 VVC
+
에서 PM 모터를 사용할 수 있습니다.
옵션: 기능:
자를 전기적인 제로 위치까지 회
전합니다. 이 옵션은 일반적으로
펌프 및 팬 어플리케이션에 사용
됩니다. 플라잉 기동 시 모터가 저
속으로 구동하거나 정지되었음이
감지되는 경우, AC 드라이브는 임
의의 각도에서 모터를 파킹하기
위해 직류 전류를 보낸 다음 그
위치에서 모터를 기동합니다.
[3] Rotor Last
Position
이 옵션은 정지 시 회전자의 최종
위치를 활용하여 Quick start를
가능하게 합니다. 이는 제어 정지
상황에서만 사용되며 AC 드라이
브는 정지 시 회전자의 최종 위치
를 기록하고 회전자 감지 및 각도
계산 없이 모터를 직기동합니다.
비제어 정지 및 전원 재투입 상황
에서는 AC 드라이브가 회전자 위
치를 감지할 필요가 있습니다.
이 옵션은 신속한 재기동 어플리
케이션에 사용할 수 있습니다. 회
전자 위치가 변경된 경우 기동이
실패할 수 있습니다.
1-72 기동 기능
옵션: 기능:
기동 지연 중에 기동 기능을 선택
합니다. 이 파라미터는
파라미
터 1-71 기동 지연
과 연결되어
있습니다.
[0] DC 유지/지연시간기동 지연 시간 중에 직류 유지
전류(
파라미터 2-00 직류 유지/예
열 전류
)로 모터에 에너지를 공급
합니다.
[2] * 코스팅/지연시간기동 지연 시간(인버터 꺼짐) 도중
에 모터가 코스팅(프리런)되었습
니다.
[3] 시계방향 기
동속도
VVC+가 있는 경우에만 선택할
수 있습니다. 지령 신호에 의해 적
용된 값과 관계 없이 출력 속도는
1-72 기동 기능
옵션: 기능:
파라미터 1-75 기동 속도 [Hz]
의
기동 속도 설정값이 적용되고 출
력 전류는
파라미터 1-76 기동
전류
의 기동 전류 설정값이 적용
됩니다. 이 기능은 일반적으로 균
형추가 장착되지 않은 리프트 또
는 엘리베이터와 콘(Cone) 모터를
사용하는 설비에 사용됩니다. 이
경우 시계방향으로 기동한 후 지
령 방향으로 회전합니다.
[4] 수평 운전
VVC+가 있는 경우에만 선택할
수 있습니다.
기동 지연 시간 도중에
파라미
터 1-75 기동 속도 [Hz]와 파라
미터 1-76 기동 전류
의 기능을
사용할 때 선택합니다. 모터는 지
령 방향으로 회전합니다. 지령 신
호가 0이면
파라미터 1-75 기동
속도 [Hz]
가 무시되고 출력 속도
가 0이 됩니다. 출력 전류는
파라
미터 1-76 기동 전류
의 기동 전
류 설정값과 동일합니다.
[5] VVC+/플럭
스시계
기동 속도는 자동으로 계산됩니
다. 이 기능은 기동 지연 시간 중
의 기동 속도를 사용합니다.
1-73 플라잉 기동
옵션: 기능:
주의 사항
최상의 플라잉 기동 성능을 확
보하기 위해서는 고급 모터 데
이터(
파라미터 1-30 고정자
저항 (Rs)
~
파라미
터 1-35 주 리액턴스 (Xh)
)를
수정해야 합니다.
주전원 차단으로 인해 프리런 상
태인 모터를 정지시킵니다.
[0] * 사용안함 기능 없음.
[1] 사용함 AC 드라이브가 회전하는 모터를
정지 및 제어하게 합니다.
파라미
터 1-73 플라잉 기동
이 활성화되
어 있으면
파라미터 1-71 기동
지연
및
파라미터 1-72 기동 기
능
에는 기능이 없습니다.
[2] 항상 사용함 기동 명령 시 항상 플라잉 기동을
활성화합니다.
[3] Enabled Ref.
Dir.
AC 드라이브가 회전하는 모터를
정지 및 제어하게 합니다. 지령 방
향으로만 검색이 수행됩니다.
파라미터 설명 프로그래밍 지침서
4 4
1-71 기동 지연
범위: 기능:
0 s* [0.0 -
10.0 s]
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 43
이 파라미터는 기동 시간을 지연시킬 수 있
습니다. AC 드라이브는
기능
에서 선택한 기동 기능으로 기동을 시작
합니다. 가속이 시작될 때까지의 기동 지연
시간을 설정합니다.
파라미터 1-72 기동
Page 46

1-73 플라잉 기동
옵션: 기능:
[4] Enab.
Always Ref.
Dir.
기동 명령 시 항상 플라잉 기동을
활성화합니다. 지령 방향으로만
검색이 수행됩니다.
1-75 기동 속도 [Hz]
범위: 기능:
Size
related*
[ 0 -
500.0 Hz]
이 파라미터는 호이스트 어플리케
이션(콘(Cone) 회전자)에 사용할
수 있습니다. 모터 기동 속도를 설
정합니다. 기동 신호 후에 출력 속
도가 설정 값으로 변경됩니다.
파
라미터 1-72 기동 기능
의 기동
기능을
[3] 시계방향 기동속도
,
[4] 수평 운전, [5] VVC+ 시계방
향
으로 설정하거나
파라미
터 1-71 기동 지연
에서 기동 지
연 시간을 설정합니다.
1-76 기동 전류
범위: 기능:
Size
related*
[ 0 - 1000A]콘형 회전자 모터와 같은 일부 모
터는 회전자의 해제를 위해 추가
적인 전류/기동 속도가 필요합니
다. 이러한 추가 성능을 얻기 위해
서는 이 파라미터에서 필요한 전
류를 설정합니다.
파라미
터 1-72 기동 기능을 [3] 시계방
향 기동속도
또는
[4] 수평 운전
으로 설정하고
파라미터 1-71 기
동 지연
에서 기동 지연 시간을 설
정합니다.
1-78 압축기 기동 최대 속도[Hz]
범위: 기능:
0 Hz* [ 0 - 500
Hz]
이 파라미터는 고기동 토오크를
활성화합니다. 이 기능은 모터가
기동하는 동안 전류 한계 및 토오
크 한계를 무시합니다. 기동 신호
가 주어진 후 속도가 이 파라미터
에서 설정한 속도를 초과할 때까
지의 시간은 기동 영역이 됩니다.
기동 영역에서 전류 한계와 모터
토오크 한계는 AC 드라이브/모터
조합에 가능한 최대값으로 설정됩
니다. 전류 한계와 토오크 한계에
서 보호되지 않는 시간은
파라미
터 1-79 압축기 기동 후 트립 시
까지 최대시간
에서 설정한 값을
초과해서는 안됩니다. 그렇지 않
으면
알람 18, 기동 실패
와 함께
AC 드라이브가 트립됩니다.
1-79 압축기 기동 후 트립 시까지 최대시간
범위: 기능:
5 s* [0 - 10 s] 기동 신호가 주어진 후 속도가
파
라미터 1-78 압축기 기동 최대
속도[Hz]
에서 설정한 속도를 초
과할 때까지의 시간이 이 파라미
터에서 설정한 시간을 초과해서는
안됩니다. 그렇지 않으면
알람
18, 기동 실패
와 함께 AC 드라이
브가 트립됩니다. 기동 기능을 사
용하기 위해
파라미터 1-71 기동
지연
에서 설정한 시간은 시간 한
계 내에서 실행되어야 합니다.
1-80 정지 시 기능
옵션: 기능:
정지 명령 후 또는
파라미
터 1-82 정지 시 기능을 위한 최
소 속도 [Hz]
의 설정값으로 감속
된 후에 실행할 AC 드라이브 기
능을 선택합니다.
사용할 수 있는 선택항목은
파라
미터 1-10 모터 구조
의 설정에
따라 다릅니다.
•
[0] 비동기화
.
-
[0] 코스팅
.
-
[1] DC 홀드/모
터 예열
.
-
[3] 사전 자화
.
•
[1] PM,비돌극형 SPM
.
•
[3] PM, 돌극 IPM
.
-
[0] 코스팅
.
-
[1] DC 홀드/모
터 예열
.
[0] * 코스팅 모터가 코스팅(프리런)되도록 합
니다.
[1] DC 유지/모터예열DC 홀드 전류(
파라미터 2-00 직
류 유지/예열 전류
참조)로 모터에
에너지를 공급합니다.
[3] 선행 자화 모터가 정지되어 있는 동안 자기
장을 발생시킵니다. 이렇게 하면
명령 시 모터가 신속히 토크를 발
생시킬 수 있습니다(비동기식 모
터에만 해당). 이러한 선행 자화
기능은 최초의 기동 명령에는 도
움이 되지 않습니다. 최초 기동 명
령 시 설비를 선행 자화하는 해결
책은 다음과 같이 두 가지입니다.
파라미터 설명
VLT® AutomationDrive FC 360
44
4.2.9 1-8* 정지 조정
모터 정지 설정을 조정하는 파라미터입니다.
44 Danfoss A/S © 12/2018 All rights reserved. MG06C839
Page 47

1-80 정지 시 기능
옵션: 기능:
해결책 1:
1. 0 RPM 지령으로 AC 드
라이브를 기동합니다.
2. 속도 지령이 증가할 때까
지 2에서 4 회전자 시정
수(아래 등식 참조)를 기
다립니다.
해결책 2:
1.
파라미터 1-71 기동 지
연
를 선행 자화 시간(2-4
회전자 시정수)으로 설정
합니다.
2.
파라미터 1-72 기동 기
능를 [0] DC 홀드
로 설
정합니다.
3. DC 홀드 전류의 크기(
파
라미터 2-00 직류 유지/
예열 전류
)를 I
pre-mag
=
U
nom
/(1.73 x Xh)와 동
일하게 되도록 설정합니
다.
샘플 회전자 시정수 =
(Xh+X2)/(6.3*Freq_nom*Rr)
1 kW = 0.2 s
10 kW = 0.5 s
100 kW = 1.7 s
1-82 정지 시 기능을 위한 최소 속도 [Hz]
범위: 기능:
0 Hz* [0 - 20
Hz]
파라미터 1-80 정지 시 기능
을
활성화하는 출력 주파수를 설정합
니다.
1-88 교류 제동 게인
범위: 기능:
1.4* [1.0 -
2.0 ]
이 파라미터는 교류 제동 동력 성
능을 설정(관성이 일정한 경우, 감
속 시간을 설정)하는데 사용됩니
다. DC 링크 전압이 DC 링크 전
압 트립 값 이하인 경우에는 이
파라미터로 제너레이터 토오크를
조정할 수 있습니다. 교류 제동 이
득이 클수록 제동 성능이 강해집
니다. 1.0을 선택하면 이는 교류
제동 성능이 없음을 의미합니다.
1-88 교류 제동 게인
범위: 기능:
주의 사항
지속적인 제너레이터 토오크
가 있는 경우, 제너레이터 토
오크가 높을수록 모터 전류가
높아지고 모터가 뜨거워집니
다. 이러한 경우, 모터 과열을
방지하는데
파라미터 2-16 교
류 제동, 최대 전류
를 사용할
수 있습니다.
1-90 모터 열 보호
옵션: 기능:
[0] * 보호하지 않음AC 드라이브에 경고 발생이나 트
립이 필요 없을 때, 모터에 지속적
으로 과부하가 발생합니다.
[1] 써미스터 경고모터에 연결된 써미스터가 모터
과열에 반응할 때 경고하도록 합
니다.
[2] 써미스터 트립모터에 연결된 써미스터가 모터
과열에 반응할 때 AC 드라이브가
정지(트립)하도록 합니다.
써미스터 정지 값은 >3 kΩ이어야
합니다.
와인드업 방지를 위해 써미스터
(PTC 센서)를 모터에 설치합니다.
[3] ETR 경고 1 부하를 계산하고 모터에 과부하가
발생하면 표시창에 경고를 표시합
니다. 디지털 출력 중 하나를 통해
경고 신호를 프로그래밍합니다.
[4] ETR 트립 1 부하를 계산하고 모터에 과부하가
발생하면 AC 드라이브를 정지(트
립)합니다. 디지털 출력 중 하나를
통해 경고 신호를 프로그래밍합니
다. 경고가 발생하고 AC 드라이브
가 트립되는 경우 (써멀 경고) 신
호가 표시됩니다. 모터 ETR 과열
알람이 보고되면 즉시 리셋할 수
있습니다.
[22] ETR Trip -
Extended
Detection
부하를 계산하고 모터에 과부하가
발생하면 AC 드라이브를 정지(트
립)합니다. 디지털 출력 중 하나를
통해 경고 신호를 프로그래밍합니
다. 경고가 발생하고 AC 드라이브
가 트립되는 경우 (써멀 경고) 신
호가 표시됩니다. 모터 ETR 과열
알람이 보고되면
파라미
파라미터 설명 프로그래밍 지침서
4 4
4.2.10 1-9* 모터 온도
모터의 온도 보호 설정을 조정하는 파라미터입니다.
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 45
Page 48
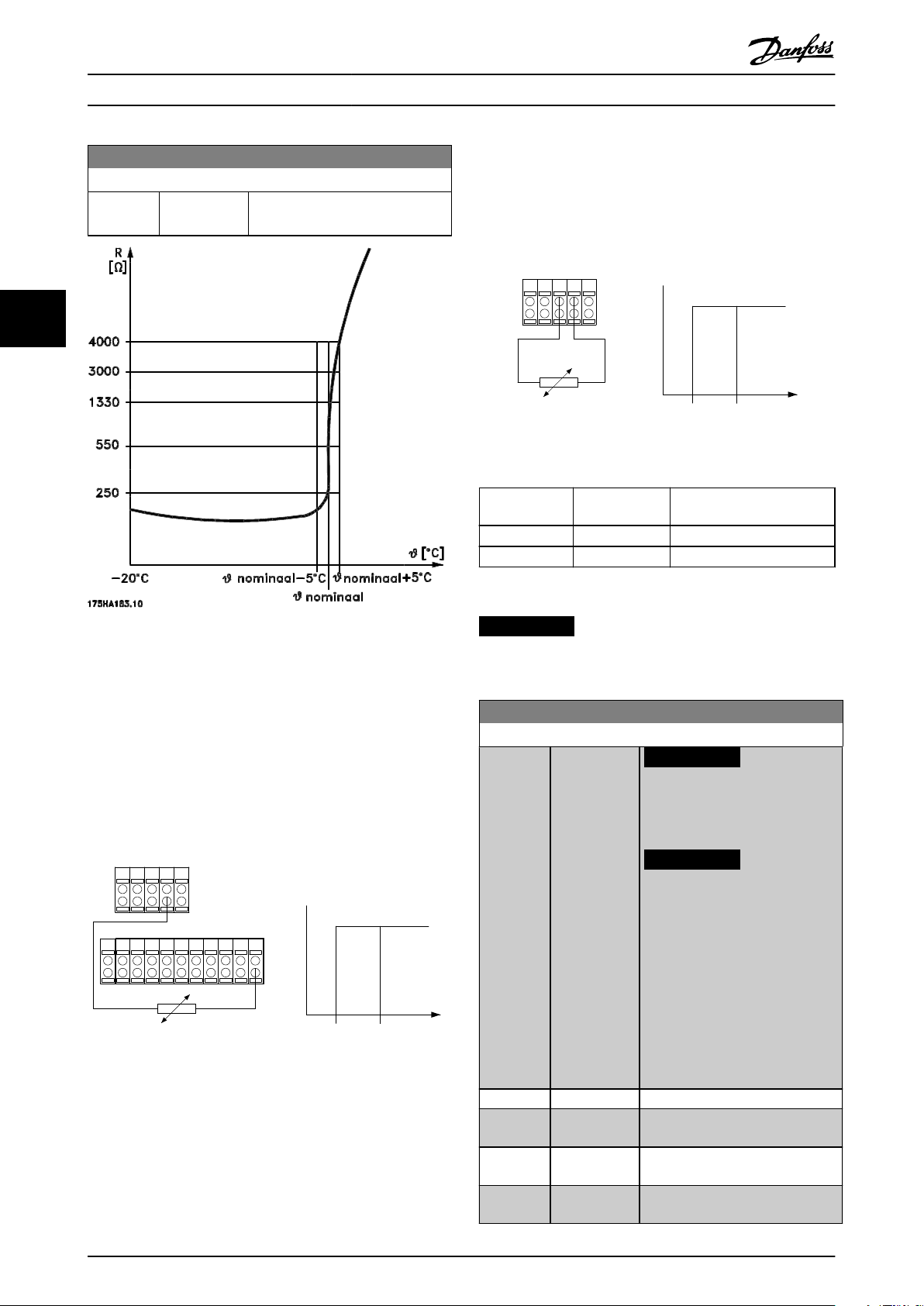
1-90 모터 열 보호
옵션: 기능:
터 16-18 모터 과열
이 0으로 감
소한 후에만 리셋할 수 있습니다.
PTC / Thermistor
R
OFF
ON
<800 Ω
+10 V
130BF960.10
>2.9 kΩ
12 13 1837 322719 29 3338
5550
42
53 54
31
PTC / Thermistor
R
OFF
ON
<800 Ω
+10 V
130BF694.10
>2.9 kΩ
5550
42
53 54
1-93 써미스터 소스
옵션: 기능:
주의 사항
모터가 운전하는 동안에는 이
파라미터를 변경할 수 없습니
다.
주의 사항
파라미터 5-00 디지털 I/O 모
드
에서 디지털 입력을
[0]
PNP - 24V에서 활성화
로 설
정해야 합니다.
써미스터(PTC 센서)가 연결될 입
력을 선택합니다. 이 파라미터에
서 아날로그 입력이 소스로 설정
되는 경우, 다른 용도, 예를 들어,
지령, 피드백 용도로 사용할 수 없
습니다.
[0] * 없음
[1] 아날로그 입
력 53
[2] 아날로그 입
력 54
[3] 디지털 입력
18
파라미터 설명
VLT® AutomationDrive FC 360
파라미터 1-90 모터 써멀 보호을 [2] 써미스
•
터 트립
파라미터 1-93 써미스터 소스을 [2] 아날로그
•
입력 54
으로 설정합니다.
로 설정합니다.
44
그림 4.6 PTC 써미스터 연결 - 아날로그 입력
그림 4.4 PTC 프로필
디지털 입력과 10V를 공급으로 사용하는 경우:
예: 모터 온도가 지나치게 상승하면 AC 드라이브가 트
립됩니다.
파라미터 셋업:
파라미터 1-90 모터 써멀 보호을 [2] 써미스
•
터 트립
파라미터 1-93 써미스터 소스을 [6] 디지털
•
입력 33
으로 설정합니다.
으로 설정합니다.
디지털/
아날로그입력
디지털 10V <800 Ω - 2.9 kΩ
아날로그 10V <800 Ω - 2.9 kΩ
표 4.3 임계 정지 값
공급 전압 임계
정지 값
주의 사항
선택한 공급 전압이 사용된 써미스터의 사양과 일치하
는지 확인합니다.
그림 4.5 PTC 써미스터 연결 - 디지털 입력
아날로그 입력과 10V를 공급으로 사용하는 경우:
예: 모터 온도가 지나치게 상승하면 AC 드라이브가 트
립됩니다.
파라미터 셋업:
46 Danfoss A/S © 12/2018 All rights reserved. MG06C839
Page 49

1-93 써미스터 소스
옵션: 기능:
[4] 디지털 입력
19
[5] 디지털 입력
32
[6] 디지털 입력
33
[7] Digital input
31
파라미터 설명 프로그래밍 지침서
4 4
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 47
Page 50

2-00 직류 유지/예열 전류
범위: 기능:
50 %* [0 -
160 %]
유지 전류를 모터 정격 전류 I
M,N
파라미터 1-24 모터 전류
의 백분
율로 설정합니다. 이 파라미터는
모터 기능을 유지(유지 토오크)하
거나 모터를 예열합니다. 이 파라
미터는
파라미터 1-72 기동 기능
에서
[0] 직류 유지
를 선택하거나
파라미터 1-80 정지 시 기능
에서
[1] 직류 유지/예열
을 선택할 경
우 활성화됩니다.
주의 사항
최대값은 모터 정격 전류에 따
라 다릅니다. 100% 전류를 너
무 오랫동안 공급하지 마십시
오. 모터가 손상될 수 있습니
다.
2-01 직류 제동 전류
범위: 기능:
50 %* [0 -
150 %]
주의 사항
모터 과열
최대값은 모터 정격 전류에 따
라 다릅니다.
과열로 인한 모터 손상을 방지
하려면 100%로 너무 오랫동
안 구동하지 마십시오.
전류를 모터 정격 전류의 백분율
로 설정합니다(
파라미터 1-24 모
터 전류
). 속도가
파라미
터 2-04 직류 제동 동작 속도
에
서 설정한 한계 미만이거나 (
파라
미터 그룹 5-1* 디지털 입력
에서
[5] 직류 제동 인버스
로 설정되어
있거나 직렬 포트를 통해) 직류
제동 인버스 기능이 활성화된 경
우, 정지 명령에 직류 제동 전류가
적용됩니다. 시간에 대한 설명은
파라미터 2-02 직류 제동 시간
를
참조하십시오.
2-02 직류 제동 시간
범위: 기능:
10 s* [0 - 60 s] 활성화되면
파라미터 2-01 직류
제동 전류
에서 설정한 직류 제동
전류의 제동 시간을 설정합니다.
2-04 직류 제동 동작 속도 [Hz]
범위: 기능:
0 Hz* [ 0 - 500
Hz]
이 파라미터는 정지 명령에 따라
직류 제동 전류(
파라미
터 2-01 직류 제동 전류
)가 활성
화될 때의 직류 제동 동작 속도를
설정하는 데 사용합니다.
2-06 파킹 전류
범위: 기능:
100 %* [0 -
150 %]
전류를 모터 정격 전류의 백분율
로 설정합니다(
파라미터 1-24 모
터 전류
).
2-07 파킹 시간
범위: 기능:
3 s* [0.1 - 60s]활성화되면
파라미터 2-06 파킹
전류
에서 설정한 파킹 전류의 파
킹 시간을 설정합니다.
2-10 제동 기능
옵션: 기능:
[0] * 꺼짐 설치된 제동 저항이 없습니다.
[1] 저항 제동 잉여 제동 에너지를 열로 소실시
키기 위해 시스템에 제동 저항이
설치되어 있습니다. 제동 저항을
연결하면 제동(발전 운전) 중에
DC 링크 전압이 상승합니다. 저항
제동 기능은 다이나믹 제동 제동
기능이 있는 AC 드라이브에서만
활성화됩니다.
[2] 교류 제동 제동 저항 없이도 제동 기능이 향
상됩니다. 이 파라미터는 재생 부
하로 구동 시 모터의 과여자를 제
어합니다. 이 기능은 OVC 기능을
향상시킬 수 있습니다. 모터의 전
기적 손실이 증가하면 OVC 기능
은 전압 한계를 초과하지 않고도
제동 토오크를 높일 수 있습니다.
파라미터 설명
VLT® AutomationDrive FC 360
4.3 파라미터: 2-** 제동 장치
4.3.1 2-0* 직류 제동
이 파라미터 그룹을 사용하여 직류 제동 및 직류 유지
기능을 구성합니다.
44
48 Danfoss A/S © 12/2018 All rights reserved. MG06C839
4.3.2 2-1* 제동 에너지 기능
다이나믹 제동 파라미터를 선택하기 위한 파라미터 그
룹입니다. 제동 초퍼가 포함된 AC 드라이브의 경우에만
해당합니다.
Page 51

2-10 제동 기능
옵션: 기능:
주의 사항
교류 제동은 저항을 사용하는
다이나믹 제동만큼 효율적이
지 않습니다.
교류 제동은 개회로와 폐회로
에서 VVC+ 모드로 작동합니
다.
2-11 제동 저항 (ohm)
범위: 기능:
Size
related*
[ 0 - 6200
Ohm]
제동 저항 값은 Ω 단위로 설정합
니다. 이 값은 제동 저항의 동력을
감시하는데 사용됩니다.
파라미
터 2-11 제동 저항 (ohm)
는 다이
나믹 제동 기능이 있는 AC 드라
이브에서만 활성화됩니다. 소수점
이 없는 값에 이 파라미터를 사용
합니다.
2-12 제동 동력 한계(kW)
범위: 기능:
Size
related*
[0.001 2000 kW]
파라미터 2-12 제동 동력 한계
(kW)
는 120초 동안 제동 제항에
서 소실된 예상 평균 동력입니다.
이는
파라미터 16-33 제동 에너
지/2 분
에서 감시 한계로 사용되
며 경고/알람이 정해지면 지정됩
니다.
다음의 공식을 사용하여
파라미
터 2-12 제동 동력 한계(kW)
를
계산할 수 있습니다.
P
br, avg
W =
U
br
2
V × tbrs
RbrΩ × Tbrs
P
br,avg
는 제동 제항에서 소실된 평
균 동력입니다. Rbr은 제동 저항의
저항이며, tbr는 120초(Tbr) 내의
활성 제동 시간입니다.
Ubr는 제동 저항이 활성화되어 있
는 직류 전압입니다. T4 유닛의
경우, 직류 전압은 770 V이며
파
라미터 2-14 제동 전압 감소
로
낮출 수 있습니다.
2-12 제동 동력 한계(kW)
범위: 기능:
주의 사항
Rbr을 알 수 없거나 Tbr이 120
초와 다른 경우, 실행 가능한
접근 방식은 제동 어플리케이
션을 구동하고
파라미
터 16-33 제동 에너지/2 분
을
읽은 다음 이 값에 20%를 더
해
파라미터 2-12 제동 동력
한계(kW)
에 입력하는 방식입
니다.
2-16 교류 제동 최대 전류
범위: 기능:
100 %* [0 -
160 %]
모터 권선의 과열 방지를 위해 교
류 제동을 사용하는 경우의 최대
허용 전류를 입력합니다.
주의 사항
파라미터 2-16 교류 제동 최
대 전류
은 비동기식 모터에만
사용할 수 있습니다.
2-17 과전압 제어
옵션: 기능:
과전압 제어(OVC)는 부하의 발전
전력으로 인해 DC 링크에 과전압
이 발생하여 AC 드라이브가 트립
될 위험을 감소시킵니다.
[0] * 사용안함 과전압 제어가 필요 없습니다.
[1] 사용함(정지시
제외)
정지 신호를 통해 AC 드라이브를
정지시키는 경우를 제외하고 OVC
를 활성화합니다.
[2] 사용함 OVC를 활성화합니다.
파라미터 설명 프로그래밍 지침서
2-14 제동 전압 감소
범위: 기능:
0 V* [ 0 - 71V]이 파라미터를 설정하면 제동 저항이 변
경될 수 있습니다(
저항 (ohm)
파라미터 2-11 제동
).
4 4
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 49
Page 52

2-17 과전압 제어
옵션: 기능:
주의
신체 상해 또는 장비 파
손
호이스트 어플리케이션에서
OVC를 사용하면 신체 상해
및 장비 파손으로 이어질 수
있습니다.
•
호이스트 어플리케이
션에서는 OVC를 활
성화하지 마십시오.
2-19 Over-voltage Gain
범위: 기능:
100 %* [0 -
200 %]
과전압 이득을 선택합니다.
2-20 제동 전류 해제
범위: 기능:
0 A* [0 - 100A]별도의 기동 조건이 있을 때 기계
식 제동 장치가 제동 해제할 수
있는 모터 전류를 설정합니다. 상
한이
파라미터 16-37 인버터 최
대 전류
에서 설정됩니다.
주의 사항
기계식 제동 장치 제어 출력을
선택하였으나 기계식 제동 장
치가 연결되지 않으면 모터 전
류가 너무 낮으므로 기능이 초
기 설정으로 작동하지 않습니
다.
2-22 제동 동작 속도 [Hz]
범위: 기능:
0 Hz* [0 - 400
Hz]
별도의 정지 조건이 있을 때 기계
식 제동 장치가 동작할 수 있는
모터 주파수를 설정합니다.
2-23 브레이크 응답 지연
범위: 기능:
0 s* [0 - 5 s] 감속 시간 이후의 코스팅 제동 지
연 시간을 입력합니다. 축이 최대
유지 토오크로 속도 0을 유지합니
다. 모터가 코스팅(프리런) 모드로
진입하기 전에 기계식 제동 장치
가 부하를 구속했는지 확인합니
다.
2-24 정지 지연
범위: 기능:
0 s* [0 - 5 s] 제동이 활성화된 후 0 RPM에서
속도 폐회로가 모터를 구동하도록
제어하는 동안의 시간을 정의하는
데 사용됩니다.
2-25 브레이크 개방 지연시간
범위: 기능:
0 s* [0 - 5 s] 제동을 개방한 후 가속하기 전까
지 시간을 보류하며 속도 폐회로
는 0 RPM에서 속도를 제어합니
다.
2-31 Speed PID Start Proportional Gain
범위: 기능:
0.015* [0.000 -
1.000 ]
파라미터 2-25 브레이크 개방 지
연시간
에서 설정한 시간 동안의
속도 제어기 비례 이득입니다.
2-32 Speed PID Start Integral Time
범위: 기능:
200.0 ms* [1.0 -
20000.0 ms]
파라미터 2-25 브레이크 개방 지
연시간
에서 설정한 시간 동안의
속도 제어기 적분 시간입니다.
2-33 Speed PID Start Lowpass Filter Time
범위: 기능:
10.0 ms* [0.1 -
100.0 ms]
파라미터 2-25 브레이크 개방 지
연시간
에서 설정한 시간 동안의
속도 제어 저역통과필터입니다.
2-39 Mech. Brake w/ dir. Change
축이 방향을 변경할 때 기계식 제동 기능을 활성화하거나 비
활성화합니다.
옵션: 기능:
[0] * OFF
[1] ON
[2] ON with
start delay
기동 지연 시간은
파라미
터 1-71 기동 지연
에서 설정됩니
다.
파라미터 설명
VLT® AutomationDrive FC 360
44
4.3.3 2-2* 기계식 제동 장치
50 Danfoss A/S © 12/2018 All rights reserved. MG06C839
Page 53

3-00 지령 범위
옵션: 기능:
[0] * 최소 - 최대 지령 신호와 피드백 신호의 범위
를 선택합니다. 신호값은 모두 양
수이거나 하나는 양수, 나머지 하
나는 음수일 수 있습니다.
[1] -최대 - +최대하나는 양수 값이고 나머지 하나
는 음수 값(양방향)인 경우,
파라
미터 4-10 모터 속도 방향
과 관
련이 있습니다.
3-01 지령/피드백 단위
옵션: 기능:
[0] None
[1] %
[2] rpm
[3] Hz
[4] Nm
[5] PPM
[10] 1/min
[12] PULSE/s
[20] l/s
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[125] ft3/s
[126] ft3/min
3-01 지령/피드백 단위
옵션: 기능:
[127] ft³/h
[130] lb/s
[131] lb/min
[132] lb/h
[140] ft/s
[141] ft/min
[145] ft
[150] lb ft
[160] °F
[170] psi
[171] lb/in2
[172] in wg
[173] ft WG
[180] HP
3-02 최소 지령
범위: 기능:
0
Reference
Feedback
Unit*
[ -4999.0
- 4999
ReferenceFe
edbackUnit]
최소 지령을 입력합니다. 최소 지
령은 모든 지령을 더했을 때 산출
할 수 있는 최저값입니다.
파라미터 3-00 지령 범위을 [0]
최소 - 최대
로 설정한 경우에만
최소 지령이 활성화됩니다.
최소 지령 단위는 다음과 일치합
니다.
•
파라미터 1-00 구성 모
드
의 옵션.
•
파라미터 3-01 지령/피
드백 단위
에서 선택된 단
위.
3-03 최대 지령
범위: 기능:
Size
related*
[-4999.0 4999
ReferenceFe
edbackUnit]
최대 지령을 입력합니다. 최대 지
령은 모든 지령을 더했을 때 산출
할 수 있는 최고값입니다.
최대 지령 단위는 다음과 일치합
니다:
•
파라미터 1-00 구성 모
드
에서 선택된 옵션.
•
파라미터 3-00 지령 범
위
에서 선택된 단위.
3-04 지령 기능
옵션: 기능:
[0] * 합계 외부 지령 소스와 프리셋 지령 소
스를 모두 합산합니다.
[1] 외부/프리셋 프리셋 지령 소스 또는 외부 지령
소스만 사용합니다. 명령 또는 디
지털 입력을 통해 외부와 프리셋
간 전환을 합니다.
파라미터 설명 프로그래밍 지침서
4.4 파라미터: 3-** 지령/가감속
4.4.1 3-0* 지령 한계
지령 단위, 한계 및 범위를 설정하는 파라미터입니다.
4 4
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 51
Page 54

3-10 프리셋 지령
범위: 기능:
0 %* [-100 -
100 %]
배열 프로그래밍을 통해 이 파라
미터에 최대 8개의 프리셋 지령
(0-7)을 입력합니다. 전용 지령을
선택하기 위해서는
파라미터 그룹
5-1* 디지털 입력
에서 해당 디지
털 입력에 대한
프리셋 지령 비트
0/1/2 [16], [17]
또는
[18]
을
선택합니다.
3-11 조그 속도 [Hz]
범위: 기능:
5 Hz* [ 0 -
500.0 Hz]
조그 속도는 조그 기능이 활성화
될 때 AC 드라이브가 구동하는
고정 출력 속도입니다.
파라미
터 3-80 조그 가감속 시간
또한
참조하십시오.
조그 속도가
파라미터 4-14 모터
속도 상한 [Hz]
의 설정값을 초과
해서는 안됩니다.
3-12 캐치업/슬로우다운 값
범위: 기능:
0 %* [0 -
100 %]
실제 지령에 더하거나 실제 지령
에서 뺄 수 있는 캐치업 또는 슬
로우다운에 대한 각각의 % 값을
입력합니다. 디지털 입력(
파라미
터 5-10 단자 18 디지털 입력
에
서
파라미터 5-15 단자 33 디지
털 입력
) 중 하나를 통해
[28] 캐
치업
이 선택되면 총 지령에 백분
율 값을 더합니다. 디지털 입력(
파
라미터 5-10 단자 18 디지털 입
력
에서
파라미터 5-15 단자 33
디지털 입력
) 중 하나를 통해
[29] 슬로우다운
이 선택되면 총
지령에서 백분율 값을 뺍니다.
3-13 지령 위치
활성화할 지령 위치를 선택합니다.
옵션: 기능:
[0] * 수동/자동에링크수동 모드에서 현장 지령을 사용
하거나 자동 모드에서 원격 지령
을 사용합니다.
[1] 원격 수동 모드에서의 지령을 사용합니
다.
[2] 현장 자동 모드에서의 지령을 사용합니
다.
3-14 프리셋 상대 지령
범위: 기능:
0 %* [-100 -
100 %]
실제 지령 X는
파라미터 3-14 프
리셋 상대 지령
에서 설정한 백분
율 Y에 따라 증가 또는 감소합니
다. 그 결과는 실제 지령 Z입니다.
실제 지령(X)은
파라미
터 3-15 지령 1 소스, 파라미
터 3-16 지령 2 소스, 파라미
터 3-17 지령 3 소스
및
파라미
터 8-02 제어 소스
에서 선택한
입력의 합입니다.
Relative
Z=X+X*Y/100
Resulting
actual
reference
Y
X
130BA059.12
Z
X
100
%
0-100
Z
Y
X+X*Y/100
P 3-14
130BA278.10
3-15 지령 리소스 1
옵션: 기능:
첫 번째 지령 신호에 사용할 지령
입력을 선택합니다.
파라미
터 3-15 지령 리소스 1, 파라미
터 3-16 지령 리소스 2
및
파라
미터 3-17 지령 3 소스
은 최대 3
개의 각기 다른 지령 신호를 정의
합니다. 이와 같은 지령 신호의 합
은 실제 지령을 나타냅니다.
[0] 기능 없음
[1] * 아날로그 입
력 53
[2] 아날로그 입
력 54
[7] 주파수 입력
29
[8] 주파수 입력
33
[11] 현장 버스통
신 지령
파라미터 설명
VLT® AutomationDrive FC 360
4.4.2 3-1* 지령
44
그림 4.7 프리셋 상대 지령
52 Danfoss A/S © 12/2018 All rights reserved. MG06C839
그림 4.8 실제 지령
Page 55
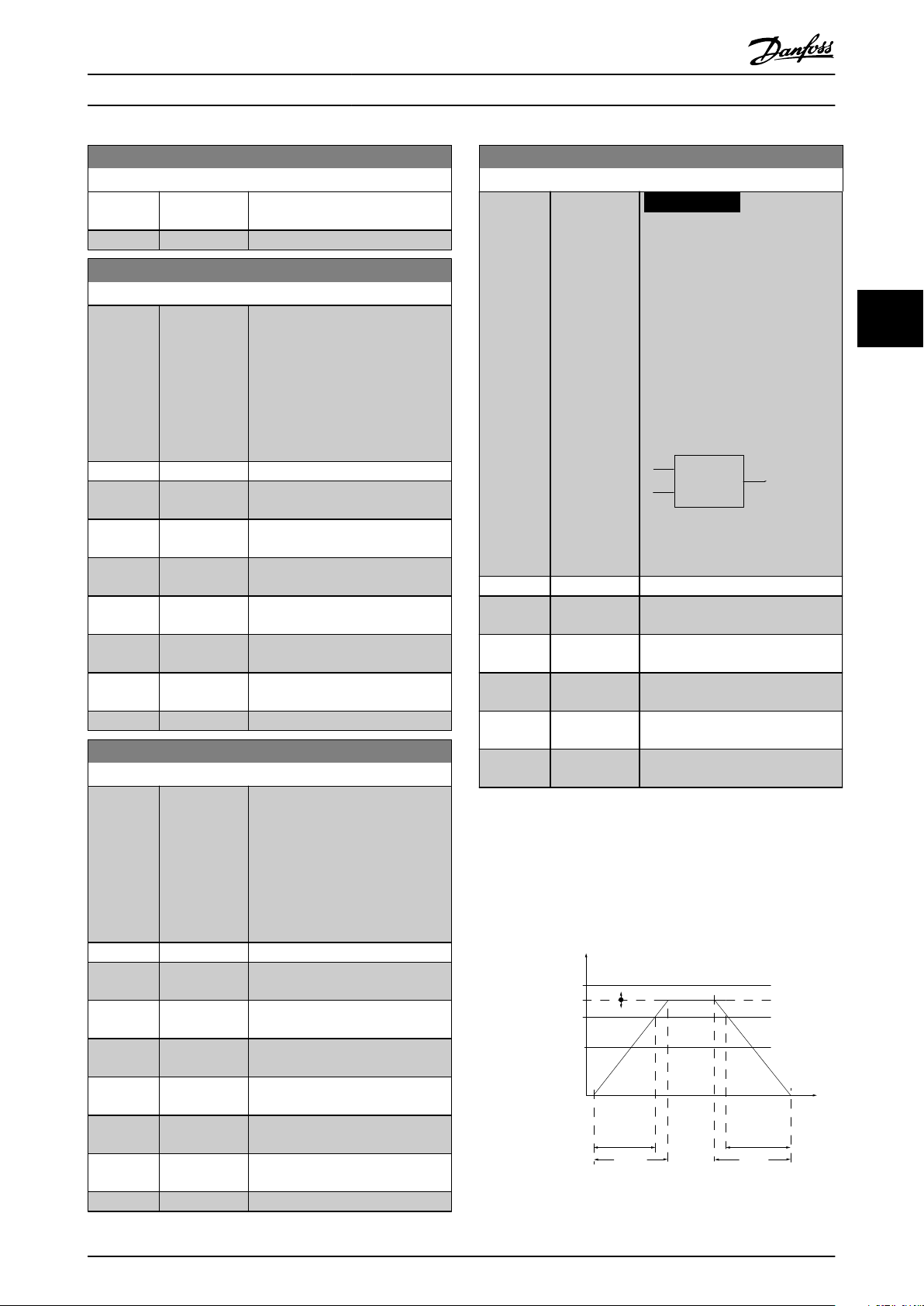
3-15 지령 리소스 1
옵션: 기능:
[20] 디지털 가변
저항기
[32] Bus PCD
3-16 지령 리소스 2
옵션: 기능:
두 번째 지령 신호에 사용할 지령
입력을 선택합니다.
파라미
터 3-15 지령 리소스 1, 파라미
터 3-16 지령 리소스 2
및
파라
미터 3-17 지령 3 소스
은 최대 3
개의 각기 다른 지령 신호를 정의
합니다. 이와 같은 지령 신호의 합
은 실제 지령을 나타냅니다.
[0] 기능 없음
[1] 아날로그 입
력 53
[2] * 아날로그 입
력 54
[7] 주파수 입력
29
[8] 주파수 입력
33
[11] 현장 버스통
신 지령
[20] 디지털 가변
저항기
[32] Bus PCD
3-17 지령 3 소스
옵션: 기능:
세 번째 지령 신호에 사용할 지령
입력을 선택합니다.
파라미
터 3-15 지령 리소스 1, 파라미
터 3-16 지령 리소스 2
및
파라
미터 3-17 지령 3 소스
은 최대 3
개의 각기 다른 지령 신호를 정의
합니다. 이와 같은 지령 신호의 합
은 실제 지령을 나타냅니다.
[0] 기능 없음
[1] 아날로그 입
력 53
[2] 아날로그 입
력 54
[7] 주파수 입력
29
[8] 주파수 입력
33
[11] * 현장 버스통
신 지령
[20] 디지털 가변
저항기
[32] Bus PCD
3-18 상대 스케일링 지령 리소스
옵션: 기능:
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
고정 값(
파라미터 3-14 프리셋
상대 지령
에서 설정)에 합산된 가
변 값을 선택합니다. 고정 값과 가
변 값의 합(
그림 4.9
의 Y)에 실제
지령(
그림 4.9
의 X)을 곱합니다.
그리고 나서 그 값에 실제 지령을
더하면 실제 결과 지령(X+X*Y/
100)이 됩니다.
Relative
Z=X+X*Y/100
Resulting
actual
reference
Y
X
130BA059.12
Z
그림 4.9 실제 결과 지령
[0] * 기능 없음
[1] 아날로그 입
력 53
[2] 아날로그 입
력 54
[7] 주파수 입력
29
[8] 주파수 입력
33
[11] 현장 버스통
신 지령
t
acc
t
dec
130BD379.10
P 3-*2
Ramp (X)
Down
Time (Dec)
P 4-14
High-limit
Hz
Reference
P 1-23
Motor
frequency
P 4-12
Low limit
Time
P 3-*1
Ramp (X)Up
Time (Acc)
파라미터 설명 프로그래밍 지침서
4 4
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 53
4.4.3 3-4* 가감속 1
4가지 가감속(
그룹 3-5* 가감속 2, 파라미터 그룹 3-6* 가감속 3
파라미터 그룹 3-7* 가감속 4
파라미터(가감속 시간)를 구성합니다.
그림 4.10 가감속 1의 예
파라미터 그룹 3-4* 가감속 1, 파라미터
)에 각기 해당하는 가감속
및
Page 56

3-40 가감속 1 유형
옵션: 기능:
가속/감속 요구 사항에 따른 가감
속 유형을 선택합니다. 선형 가감
속은 가감속 중에 일정한 속도로
가속됩니다. 사인 2 가감속은 비
선형으로 가속됩니다.
[0] * 선형
[2] 시간일정S-자
가감속
(반드시 속도 제어 모드와 함께
사용해야 합니다.)
파라미
터 3-41 1 가속 시간과 파라미
터 3-42 1 감속 시간
에서 설정한
값을 기준으로 한 S형 가감속.
3-41 1 가속 시간
범위: 기능:
용량에 따
라 다름*
[0.01 3600 s]
가속 시간, 다시 말해, 0 Hz에서
동기식 모터 회전수 nS
파라미
터 1-23 모터 주파수
까지의 가속
시간 또는 토오크 구성 모드가 선
택된 경우, 0 NM에서 정격 토오
크까지의 가속 시간을 입력합니
다. 이는 가감속 1에서 가감속 4
까지 적용 가능합니다. 가감속 중
에 출력 전류가
파라미
터 4-18 전류 한계
의 전류 한계
를 초과하지 않는 가속 시간을 선
택합니다.
파라미터 3-42 1 감속
시간
의 감속 시간을 참조하십시
오.
Par . 3 − 41 =
t
acc
s xns Hz
ref Hz
3-42 1 감속 시간
범위: 기능:
용량에 따
라 다름*
[0.01 3600 s]
감속 시간, 다시 말해, 동기식 모
터 회전수 ns에서 0 Hz까지의 감
속 시간 또는 토오크 구성 모드가
선택된 경우, 정격 토오크에서 0
NM까지의 감속 시간을 입력합니
다. 모터의 재생 운전으로 인해 인
버터에 과전압이 발생하지 않거나
발전 전류가
파라미터 4-18 전류
한계
에서 설정한 전류 한계를 초
과하지 않는 감속 시간을 선택합
니다.
파라미터 3-41 1 가속 시간
의 가속 시간을 참조하십시오.
Par . 3 − 42 =
t
dec
s xns Hz
ref Hz
3-50 가감속 2 유형
옵션: 기능:
가속/감속 요구 사항에 따른 가감
속 유형을 선택합니다. 선형 가감
속은 가감속 중에 일정한 속도로
가속됩니다. 사인 2 가감속은 비
선형으로 가속됩니다.
[0] * 선형
[2] 시간일정S-자
가감속
파라미터 3-51 2 가속 시간과 파
라미터 3-52 2 감속 시간
에서 설
정한 값을 기준으로 한 S형 가감
속.
3-51 2 가속 시간
범위: 기능:
용량에 따
라 다름*
[0.01 3600 s]
가속 시간, 다시 말해, 0 Hz에서
모터 정격 회전수 ns까지의 가속
시간을 입력합니다. 가감속 중에
출력 전류가
파라미터 4-18 전류
한계
의 전류 한계를 초과하지 않
는 가속 시간을 선택합니다.
파라
미터 3-52 2 감속 시간
의 감속
시간을 참조하십시오.
Par . 3 − 51 =
t
acc
s xns Hz
ref Hz
3-52 2 감속 시간
범위: 기능:
용량에 따
라 다름*
[0.01 3600 s]
감속 시간, 다시 말해, 정격 모터
회전수 ns에서 0 Hz까지의 감속
시간 또는 토오크 구성 모드가 선
택된 경우, 정격 토오크에서 0
NM까지의 감속 시간을 입력합니
다. 모터의 재생 운전으로 인해
AC 드라이브에 과전압이 발생하
지 않거나 발전 전류가
파라미
터 4-18 전류 한계
에서 설정한
전류 한계를 초과하지 않는 감속
시간을 선택합니다.
파라미
터 3-51 2 가속 시간
의 가속 시
간을 참조하십시오.
Par . 3 − 52 =
t
dec
s xns Hz
ref Hz
파라미터 설명
VLT® AutomationDrive FC 360
4.4.4 3-5* 가감속 2
이 파라미터 그룹은 가감속 2 파라미터를 구성합니다.
44
54 Danfoss A/S © 12/2018 All rights reserved. MG06C839
Page 57

3-60 가감속 3 유형
옵션: 기능:
가속/감속 요구 사항에 따른 가감
속 유형을 선택합니다. 선형 가감
속은 가감속 중에 일정한 속도로
가속됩니다. S형 가감속은 비선형
으로 가속됩니다.
[0] * 선형
[2] 시간일정S-자
가감속
파라미터 3-61 3 가속 시간과 파
라미터 3-62 3 감속 시간
에서 설
정한 값을 기준으로 한 S형 가감
속.
3-61 3 가속 시간
범위: 기능:
Size
related*
[0.01 3600 s]
가속 시간, 다시 말해, 0 Hz에서
모터 정격 회전수 ns까지의 가속
시간을 입력합니다. 가감속 중에
출력 전류가
파라미터 4-18 전류
한계
의 전류 한계를 초과하지 않
는 가속 시간을 선택합니다.
파라
미터 3-62 3 감속 시간
의 감속
시간을 참조하십시오.
3-62 3 감속 시간
범위: 기능:
Size
related*
[0.01 3600 s]
감속 시간, 다시 말해, 정격 모터
회전수 ns에서 0 Hz까지의 감속
시간을 입력합니다. 모터의 재생
운전으로 인해 인버터에 과전압이
발생하지 않거나 발전 전류가
파
라미터 4-18 전류 한계
에서 설정
한 전류 한계를 초과하지 않는 감
속 시간을 선택합니다.
파라미
터 3-61 3 가속 시간
의 가속 시
간을 참조하십시오.
Par . 3 − 62 =
t
dec
s xns Hz
ref Hz
3-70 가감속 4 유형
옵션: 기능:
가속/감속 요구 사항에 따른 가감
속 유형을 선택합니다. 선형 가감
속은 가감속 중에 일정한 속도로
가속됩니다. S형 가감속은 비선형
으로 가속됩니다.
[0] * 선형
3-70 가감속 4 유형
옵션: 기능:
[2] 시간일정S-자
가감속
파라미터 3-71 4 가속 시간과 파
라미터 3-72 4 감속 시간
에서 설
정한 값을 기준으로 한 S형 가감
속.
3-71 4 가속 시간
범위: 기능:
Size
related*
[0.01 3600 s]
가속 시간, 다시 말해, 0 Hz에서
모터 정격 회전수 ns까지의 가속
시간을 입력합니다. 가감속 중에
출력 전류가
파라미터 4-18 전류
한계
의 전류 한계를 초과하지 않
는 가속 시간을 선택합니다.
파라
미터 3-72 4 감속 시간
의 감속
시간을 참조하십시오.
Par . 3 − 71 =
t
acc
s xns Hz
ref Hz
3-72 4 감속 시간
범위: 기능:
Size
related*
[0.01 3600 s]
감속 시간, 다시 말해, 정격 모터
회전수 ns에서 0 Hz까지의 감속
시간을 입력합니다. 모터의 재생
운전으로 인해 인버터에 과전압이
발생하지 않거나 발전 전류가
파
라미터 4-18 전류 한계
에서 설정
한 전류 한계를 초과하지 않는 감
속 시간을 선택합니다.
파라미
터 3-71 4 가속 시간
의 가속 시
간을 참조하십시오.
Par . 3 − 72 =
t
dec
s xns Hz
ref Hz
3-80 조그 가감속 시간
범위: 기능:
Size
related*
[0.01 3600 s]
조그 가감속 시간, 즉 0 Hz와 모
터 정격 주파수 ns 간의 가속/감속
시간을 입력합니다. 지정된 조그
가감속 시간에 필요한 결과 출력
전류는
파라미터 4-18 전류 한계
의 전류 한계를 초과하지 않아야
합니다. 조그 가감속 시간은 LCP,
선택한 디지털 입력 또는 직렬 통
신 포트를 통해 조그 신호가 활성
화될 때 시작됩니다. 조그 상태를
사용할 수 없을 때는 일반적인 가
감속 시간이 사용됩니다.
파라미터 설명 프로그래밍 지침서
4.4.5 3-6* 가감속 3
이 파라미터 그룹은 가감속 3 파라미터를 구성합니다.
4 4
4.4.6 3-7* 가감속 4
이 파라미터 그룹은 가감속 4 파라미터를 구성합니다.
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 55
4.4.7 3-8* 기타 가감속
Page 58
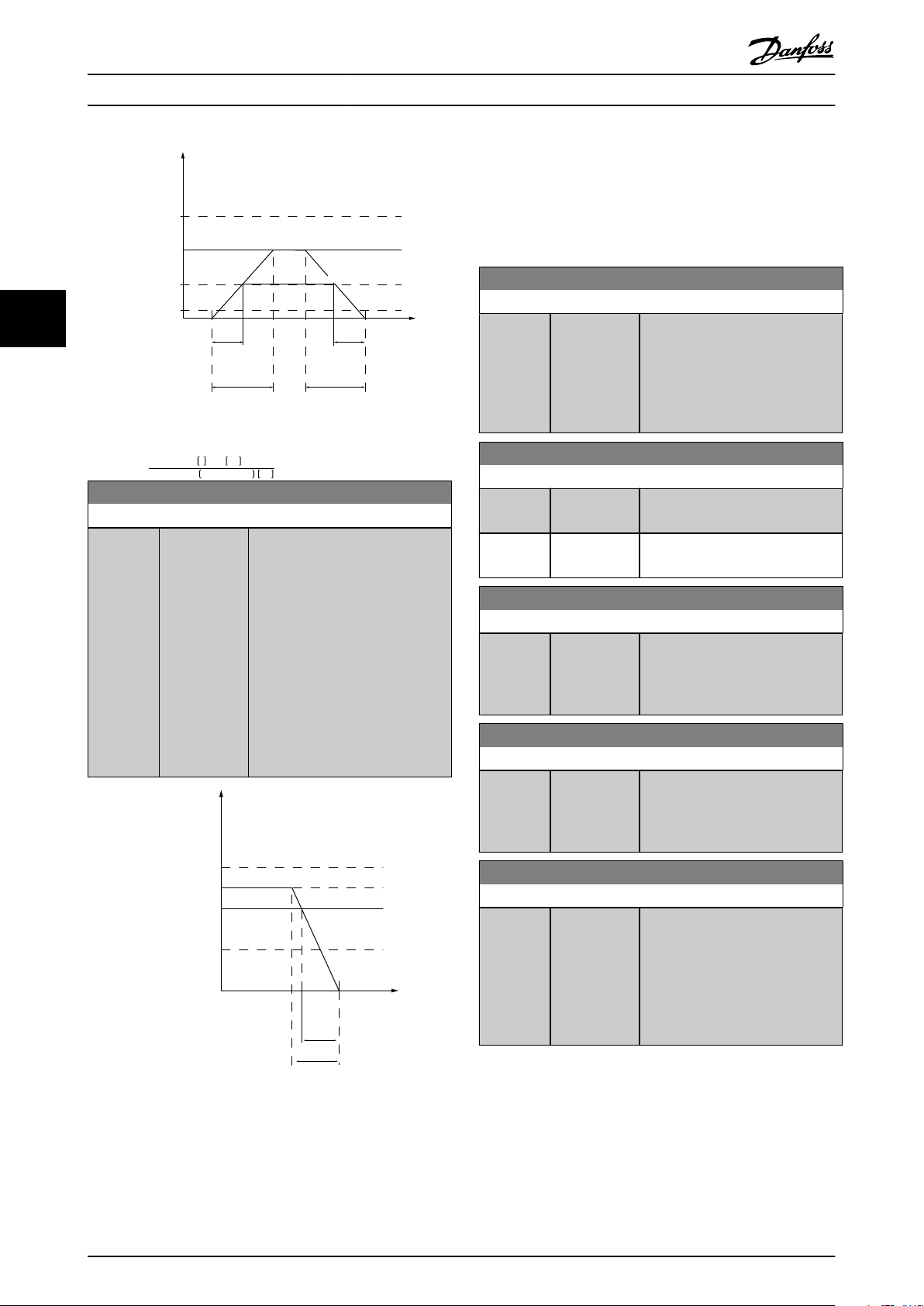
130BD375.11
Time
P 3-80
Hz
P 4-14 Hz
High limit
Jog speed
P 3-19
P 3-80
Ramp up
(acc)
Ramp down
(dec)
t jog t jog
P 4-12 Hz
Low limit
P 1-23
Motor frequency
3-81 순간 정지 가감속 시간
범위: 기능:
Size
related*
[0.01 3600 s]
순간 정지 감속 시간, 다시 말해,
동기식 모터 회전수에서 0 Hz까
지의 감속 시간을 입력합니다. 지
정된 감속 시간에 도달하는 데 필
요한 모터의 재생 운전으로 인해
인버터에 과전압이 발생하지 않아
야 합니다. 지정된 가감속 시간에
도달하는 데 필요한 재생 전류가
(
파라미터 4-18 전류 한계
에서
설정한) 전류 한계를 초과하지 않
아야 합니다. 순간 정지는 선택된
디지털 입력의 신호 또는 직렬 통
신 포트를 통해 동작합니다.
130BD376.11
Time
Hz
P 4-14 Hz
high limit
Reference
P 1-23
Motor frequency
low limit
P 4-12 Hz
P 3-81
Qramp
Qstop
3-90 단계별 크기
범위: 기능:
0.10 %* [0.01 200 %]
증가/감소에 필요한 증분 크기를
동기식 모터 회전수 ns의 백분율
로 입력합니다. 증가/감소가 활성
화된 경우에는 결과 지령이 이 파
라미터에서 설정한 값에 의해 증
가/감소됩니다.
3-92 전력 복구
옵션: 기능:
[0] * 꺼짐 전원 인가 후에 디지털 가변 저항
지령을 0%로 리셋합니다.
[1] 켜짐 전원 인가 시 가장 최근의 디지털
가변 저항 지령을 복구합니다.
3-93 최대 한계
범위: 기능:
100 %* [-200 -
200 %]
결과 지령에 대한 최대 허용 값을
설정합니다. 이는 디지털 가변 저
항기를 결과 지령의 미세조정용으
로 사용하는 경우에 권장됩니다.
3-94 최소 한계
범위: 기능:
-100 % [-200 200 %]
결과 지령에 대한 최소 허용 값을
설정합니다. 이는 디지털 가변 저
항기를 결과 지령의 미세조정용으
로 사용하는 경우에 권장됩니다.
3-95 가감속 지연
범위: 기능:
1000 ms* [0 -
3600000
ms]
AC 드라이브가 지령의 가감속을
시작하기 전에 디지털 가변 저항
기 기능의 활성화에 필요한 지연
을 입력합니다. 가감속 지연을 0
ms로 설정하면 증가/감소 활성화
와 동시에 지령이 가감속하기 시
작합니다.
파라미터 설명
VLT® AutomationDrive FC 360
4.4.8 3-9* 디지털 전위차계
디지털 가변 저항은 증가, 감소 또는 제거 기능으로 디
지털 입력의 셋업을 조정하여 실제 지령을 증가 또는
감소시킬 수 있습니다. 기능을 활성화하려면 적어도 하
나의 디지털 입력을 증가 또는 감소로 셋업해야 합니다.
44
그림 4.11 조그 가감속 시간
t
s xns Hz
Par . 3 − 80 =
jog
Δ jogspeed par . 3 − 19 Hz
그림 4.12 순간 정지 가감속 시간
56 Danfoss A/S © 12/2018 All rights reserved. MG06C839
Page 59

4-10 모터 회전 방향
옵션: 기능:
[0] 시계 방향
주의 사항
파라미터 4-10 모터 회전 방
향
의 설정값은
파라미
터 1-73 플라잉 기동
에 영향
을 미칩니다.
시계방향 운전만 허용됩니다.
[2] * 양방향 시계방향 운전과 반시계방향 운전
이 모두 허용됩니다.
4-14 모터 속도 상한 [Hz]
범위: 기능:
65 Hz* [ 0.1 -
500 Hz]
주의 사항
최대 출력 주파수는 인버터 스
위칭 주파수(
파라미
터 14-01 스위칭 주파수
)의
10%를 초과할 수 없습니다.
모터 회전수의 최대 한계를 입력
합니다. 모터의 고속 한계는 모터
축의 제조업체 권장 최대값에 해
당하는 값으로 설정할 수 있습니
다.
모터의 고속 한계는
파라미
터 4-12 모터 속도 하한 [Hz]
의
값을 초과해야 하고
파라미
터 4-19 최대 출력 주파수
의 값
을 초과해서는 안됩니다.
4-16 모터 운전의 토오크 한계
범위: 기능:
Size
related*
[ 0 1000 %]
이 기능은 기계 설비를 보호하기
위해 축의 토오크를 제한합니다.
4-17 재생 운전의 토오크 한계
범위: 기능:
100 %* [ 0 -
1000 %]
이 기능은 기계 설비를 보호하기
위해 축의 토오크를 제한합니다.
4-18 전류 한계
범위: 기능:
Size
related*
[ 0 1000 %]
이는 과동기화 범위에서도 계속
사용할 수 있는 진정한 의미의 전
류 한계 기능입니다. 하지만 전압
상승이 동기식 모터 회전수를 상
회하는 수준에서 멈추는 경우, 약
계자로 인해 전류 한계에서의 모
터 토오크가 낮아집니다.
4-19 최대 출력 주파수
범위: 기능:
Size
related*
[ 0 - 500
Hz]
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
주의 사항
최대 출력 주파수는 인버터 스
위칭 주파수(
파라미
터 14-01 스위칭 주파수
)의
10%를 초과할 수 없습니다.
과속 위험이 있는 어플리케이션에
서 안전성 향상을 위해 출력 주파
수의 최종 한계를 제공합니다. 이
한계는 (
파라미터 1-00 구성 모
드
의 설정과 관계 없이) 모든 구
성에서 최종 한계입니다.
4-20 토오크 한계 상수 소스
파라미터 4-16 모터 운전의 토오크 한계
및
파라미
터 4-17 재생 운전의 토오크 한계
에서 0-100% (또는 인버
스)의 범위를 설정하기 위해 아날로그 입력을 선택합니다.
0%와 100%에 해당하는 신호 수준은 아날로그 입력 범위 설
정(예를 들어,
파라미터 그룹 6-1* 아날로그 입력 1
)에서 정
의됩니다. 이 파라미터는
파라미터 1-00 구성 모드가 [0] 개
회로
또는
[1] 속도 폐회로
로 설정된 경우에만 활성화됩니다.
옵션: 기능:
[0] * 기능 없음
파라미터 설명 프로그래밍 지침서
4.5 파라미터: 4-** 한계/경고
4.5.1 4-1* 모터 한계
모터의 토오크, 전류 및 속도 한계 뿐만 아니라 한계를
초과한 경우 AC 드라이브의 반응을 설정합니다.
한계가 표시창에 메시지로 표시될 수 있습니다. 경고는
항상 표시창이나 필드버스에 메시지로 표시됩니다. AC
드라이브가 정지하고 알람 메시지가 발생한 후에 감시
기능이 경고 또는 트립을 발생/동작할 수 있습니다.
4 4
4-12 모터 속도 하한 [Hz]
범위: 기능:
0 Hz* [ 0 -
400.0 Hz]
모터 회전수의 최소 한계를 입력합니다.
모터 속도 하한은 모터축의 최소 출력 주
파수에 해당하는 값으로 설정할 수 있습
니다.
모터 속도 하한이
속도 상한 [Hz]
안됩니다.
파라미터 4-14 모터
의 설정값을 초과해서는
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 57
4.5.2 4-2* 한계 상수
Page 60

4-20 토오크 한계 상수 소스
파라미터 4-16 모터 운전의 토오크 한계
및
파라미
터 4-17 재생 운전의 토오크 한계
에서 0-100% (또는 인버
스)의 범위를 설정하기 위해 아날로그 입력을 선택합니다.
0%와 100%에 해당하는 신호 수준은 아날로그 입력 범위 설
정(예를 들어,
파라미터 그룹 6-1* 아날로그 입력 1
)에서 정
의됩니다. 이 파라미터는
파라미터 1-00 구성 모드가 [0] 개
회로
또는
[1] 속도 폐회로
로 설정된 경우에만 활성화됩니다.
옵션: 기능:
[2] 아날로그입력
53
[4] 아날입력53인
버스
[6] 아날로그입력
54
[8] 아날입력54인
버스
[18] Bus Control
4-21 속도 한계 상수 소스
파라미터 4-19 최대 출력 주파수
에서 0-100% (또는 인버
스)의 범위를 설정하기 위해 아날로그 입력을 선택합니다.
0%와 100%에 해당하는 신호 수준은 아날로그 입력 범위 설
정(예를 들어,
파라미터 그룹 6-1* 아날로그 입력 1
)에서 정
의됩니다. 이 파라미터는
파라미터 1-00 구성 모드
가 토오크
모드로 설정된 경우에만 활성화됩니다.
옵션: 기능:
[0] * 기능 없음
[2] 아날로그입력
53
[4] 아날입력53인
버스
[6] 아날로그입력
54
[8] 아날입력54인
버스
[18] Bus Control
4-22 Break Away Boost
옵션: 기능:
[0] * Off
[1] On AC 드라이브는 기동 토오크 성능
을 향상시키기 위해 정상 전류보
다 높은 전류를 공급합니다.
4-27 Torque Limit Bus Control
범위: 기능:
0* [0 -
16384 ]
이 파라미터는 토크 한계를 제어
하도록 버스통신 인수를 지정하는
데 사용됩니다. 이는
파라미
터 4-20 토오크 한계 상수 소스
이
[18] 버스통신 제어
로 설정되
어 있는 경우에만 사용할 수 있습
니다. 이 파라미터는 N2 형식입니
다.
4-28 Speed Limit Bus Control
범위: 기능:
0* [0 -
16384 ]
이 파라미터는 속도 한계를 제어
하도록 버스통신 인수를 지정하는
데 사용됩니다. 이는
파라미
터 4-21 속도 한계 상수 소스
이
[18] 버스통신 제어
로 설정되어
있는 경우에만 사용할 수 있습니
다. 이 파라미터는 N2 형식입니
다.
4-30 모터 피드백 손실 기능
옵션: 기능:
이 기능은 피드백 신호의 일관성,
다시 말해, 피드백 신호를 사용할
수 있는지 여부를 감시하는데 사
용됩니다. 피드백 결함이 감지되
었을 때의 AC 드라이브의 동작을
선택합니다. 피드백 신호가
파라
미터 4-32 모터 피드백 손실 시
간 초과
에서 설정한 값보다 긴 시
간 동안
파라미터 4-31 모터 피
드백 속도 오류
에서 설정한 값에
따른 출력 속도와 다를 때 선택한
동작이 수행됩니다.
[0] 사용안함
[1] 경고
[2] * 트립
[3] 조그
[4] 출력 고정
[5] 최대 속도
[6] 개회로 전환
4-31 모터 피드백 속도 오류
범위: 기능:
20 Hz* [0 - 50
Hz]
최대 허용 속도 오차(출력 속도
대비 피드백)를 선택합니다.
파라미터 설명
VLT® AutomationDrive FC 360
44
4.5.3 4-3* 모터 피드백 감시
주의 사항
경고 61, 피드백 오류는 파라미터 4-32 모터 피드백 손
실 시간 초과
피드백 속도 오류
알람 61, 피드백 오류
이 있습니다.
의 설정과 관계 없이
파라미터 4-31 모터
의 값이 초과하자마자 활성화됩니다.
는 모터 피드백 손실 기능과 관련
58 Danfoss A/S © 12/2018 All rights reserved. MG06C839
Page 61

4-32 모터 피드백 손실 시간 초과
범위: 기능:
0.05 s* [0 - 60 s]
파라미터 4-30 모터 피드백 손실
기능
에서 선택한 기능을 활성화하
기 전에
파라미터 4-31 모터 피
드백 속도 오류
에서 설정한 속도
오차의 초과를 허용하는 타임아웃
값을 설정합니다.
4-40 주파수 낮음 경고
범위: 기능:
용량에 따
라 다름*
[ 0 - 500
Hz]
이 파라미터를 사용하여 보다 낮
은 주파수 범위 한계를 설정합니
다. 모터 회전수가 이 한계를 초과
하면 표시창에 저속이 표시됩니
다. 경고 비트 10은
파라미
터 16-94 확장 상태 워드
에서 설
정됩니다. 이 경고를 표시하도록
출력 릴레이를 구성할 수 있습니
다. 한계 설정값에 도달하면 LCP
경고 표시 램프가 켜지지 않습니
다.
값이
파라미터 4-41 Warning
Freq. High
의 설정을 초과해서는
안됩니다.
4-41 주파수 높음 경고
범위: 기능:
용량에 따
라 다름*
[ 0 - 500
Hz]
이 파라미터를 사용하여 보다 높
은 주파수 범위 한계를 설정합니
다. 모터 회전수가 이 한계를 초과
4-41 주파수 높음 경고
범위: 기능:
하면 표시창에 고속이 표시됩니
다. 경고 비트 9는
파라미
터 16-94 확장 상태 워드
에서 설
정됩니다. 이 경고를 표시하도록
출력 릴레이를 구성할 수 있습니
다. 한계 설정값에 도달하면 LCP
경고 표시 램프가 켜지지 않습니
다.
값이
파라미터 4-40 Warning
Freq. Low
의 값을 초과해야 하고
파라미터 4-14 모터 속도 상한
[Hz]
의 값을 초과해서는 안됩니
다.
4-42 Adjustable Temperature Warning
범위: 기능:
0* [ 0 -
200 ]
이 파라미터를 사용하여 모터 온
도 한계를 설정합니다.
4-50 저전류 경고
범위: 기능:
0 A* [ 0 - 500A]I
LOW
값을 입력합니다. 모터 전류
가 이 한계보다 낮아지면 상태 워
드의 비트가 설정됩니다. 또한, 디
지털 입력 또는 릴레이 출력에서
신호가 발생하도록 이 값을 프로
그래밍할 수 있습니다.
4-51 고전류 경고
범위: 기능:
용량에 따
라 다름*
[ 0.0 -
500.00 A]
I
HIGH
값을 입력합니다. 모터 전류
가 이 한계를 초과하면 상태 워드
의 비트가 설정됩니다. 또한, 디지
털 입력 또는 릴레이 출력에서 신
호가 발생하도록 이 값을 프로그
래밍할 수 있습니다.
4-54 지령 낮음 경고
범위: 기능:
-4999* [-4999 4999 ]
최저 지령 한계를 입력합니다. 실
제 지령이 이 한계보다 낮아지면
표시창에
Ref
LOW
가 표시됩니다.
비트 20은
파라미터 16-94 확장
상태 워드
에서 설정됩니다. 이 경
고를 표시하도록 출력 릴레이 또
는 디지털 출력을 구성할 수 있습
니다. 이 파라미터 설정 한계에 도
파라미터 설명 프로그래밍 지침서
그림 4.13 모터 피드백 속도 오차
4 4
4.5.4 4-4* 경고 조정 2
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 59
4.5.5 4-5* 경고 조정
이 파라미터를 사용하여 전류, 속도, 지령 및 피드백에
대한 경고 한계를 조정합니다.
Page 62
4-54 지령 낮음 경고
범위: 기능:
달하면 LCP 경고 표시 램프가 켜
지지 않습니다.
4-55 지령 높음 경고
범위: 기능:
4999* [-4999 -
4999 ]
이 파라미터를 사용하여 지령 범
위 최고 한계를 설정합니다. 실제
지령이 이 한계를 초과하면 표시
창에
Ref
HIGH
이 표시됩니다. 비트
19은
파라미터 16-94 확장 상태
워드
에서 설정됩니다. 이 경고를
표시하도록 출력 릴레이 또는 디
지털 출력을 구성할 수 있습니다.
이 파라미터 설정 한계에 도달하
면 LCP 경고 표시 램프가 켜지지
않습니다.
4-56 피드백 낮음 경고
범위: 기능:
-4999
ProcessCt
rlUnit*
[-4999 4999
ProcessCtrl
Unit]
이 파라미터를 사용하여 피드백
범위 최저 한계를 설정합니다. 피
드백이 이 한계보다 낮아지면 표
시창에
Feedb Low
가 표시됩니
다. 비트 6은
파라미터 16-94 확
장 상태 워드
에서 설정됩니다. 이
경고를 표시하도록 출력 릴레이
또는 디지털 출력을 구성할 수 있
습니다. 이 파라미터 설정 한계에
도달하면 LCP 경고 표시 램프가
켜지지 않습니다.
4-57 피드백 높음 경고
범위: 기능:
4999
ProcessCt
rlUnit*
[-4999 4999
ProcessCtrl
Unit]
이 파라미터를 사용하여 피드백
범위 최고 한계를 설정합니다. 피
드백이 이 한계를 초과하면 표시
창에
Feedb High
가 표시됩니다.
비트 5는
파라미터 16-94 확장
상태 워드
에서 설정됩니다. 이 경
고를 표시하도록 출력 릴레이 또
는 디지털 출력을 구성할 수 있습
니다. 이 파라미터 설정 한계에 도
달하면 LCP 경고 표시 램프가 켜
지지 않습니다.
4-58 모터 결상 시 기능
옵션: 기능:
[0] 꺼짐 모터 결상 시에 알람을 표시하지
않습니다.
[1] * 켜짐 모터 결상 시에 알람을 표시합니
다.
4-61 바이패스 시작 속도 [Hz]
범위: 기능:
0 Hz* [ 0 - 500
Hz]
시스템 공진 문제로 인해 특정 출
력 속도를 피해야 하는 경우가 있
습니다. 피하고자 하는 속도의 최
저 한계를 입력합니다.
바이패스 시작 속도가
파라미
터 4-14 모터 속도 상한 [Hz]
의
설정을 초과해서는 안됩니다.
4-63 바이패스 종결 속도 [Hz]
범위: 기능:
0 Hz* [ 0 - 500
Hz]
시스템 공진 문제로 인해 특정 출
력 속도를 피해야 하는 경우가 있
습니다. 피하고자 하는 속도의 최
고 한계를 입력합니다.
바이패스 종결 속도가
파라미
터 4-14 모터 속도 상한 [Hz]
의
설정을 초과해서는 안됩니다.
파라미터 설명
VLT® AutomationDrive FC 360
4.5.6 4-6* 속도 바이패스
44
60 Danfoss A/S © 12/2018 All rights reserved. MG06C839
Page 63
5-00 디지털 입력 모드
옵션: 기능:
디지털 입력에 대해 NPN 또는
PNP 모드를 설정합니다.
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
[0] * PNP 동작은 양의 방향 펄스입니다(0).
PNP 방식은 접지(GND)에 연결됩
니다.
[1] NPN 동작은 음의 방향 펄스입니다(1).
NPN 방식은 최대 +24V(AC 드
라이브 내부)에 연결됩니다.
5-01 단자 27 모드
옵션: 기능:
[0] * 입력 단자 27을 디지털 입력으로 정의
합니다.
[1] 출력 단자 27을 디지털 출력으로 정의
합니다.
5-02 단자 29 모드
옵션: 기능:
[0] * 입력 단자 29를 디지털 입력으로 정의
합니다.
[1] 출력 단자 29를 디지털 출력으로 정의
합니다.
파라미터 설명 프로그래밍 지침서
4.6 파라미터: 5-** 디지털 입/출력
4.6.1 5-0* 디지털 I/O 모드
NPN과 PNP를 사용하여 입력 및 출력을 구성하는 파라
미터입니다.
디지털 입력은 AC 드라이브의 각종 기능을 선택하는데
사용합니다.
5-10 ~ 5-16 디지털 입력
[0] 운전
[1] 리셋 트립/알람이 발생한 후에 AC 드라이브를 리셋
[2] 코스
[3] 코스
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 61
단자로 전달된 신호에 반응하지 않습니다.
하지
않음
합니다. 하지만 리셋할 수 없는 알람도 있습니
다.
코스팅 정지, 인버스 입력(NC). AC 드라이브는
팅 인
모터가 코스팅(프리런)되도록 합니다.
버스
논리 0⇒ 코스팅 정지.
리셋 및 코스팅 정지 인버스 입력(NC). 모터가
팅리
코스팅(프리런)되도록 하고 AC 드라이브를 리
셋인
셋합니다.
버스
논리 0⇒코스팅 정지.
논리 1 - 논리 0⇒리셋.
[4] 급속
[5] 직류
[6] 정지
인버스 입력(NC).
정지
감속 시간
인버
따라 정지가 발생합니다. 모터가 정지되면 축은
스
코스팅(프리런) 상태가 됩니다. 논리 0⇒ 급속
정지.
직류 제동의 인버스 입력(NC). 특정 시간 동안
제동
모터에 직류 전류를 공급하여 모터를 정지시킵
인버
니다.
스
미터 2-04 직류 제동 동작 속도 [Hz]
하십시오.
이 0이 아닌 경우에만 기능이 동작합니다. 논리
0=>직류 제동.
에서 설정한 급속 정지 가감속 시간에
파라미터 2-01 직류 제동 전류
파라미터 3-81 순간 정지 가
파라미터 2-02 직류 제동 시간
주의 사항
인버
AC 드라이브가 토크 한계에 도달하고 정
스
지 명령을 수신한 경우에는 스스로 정지할
에서
를 참조
의 값
파라
수 없습니다. AC 드라이브를 정지시키려
면 디지털 출력을
[27] 토크 한계 및 정지
로 구성하고 이 디지털 출력을 코스팅(프
리런)으로 구성된 디지털 입력에 연결합니
다.
정지 인버스 기능. 선택된 단자가 논리 1에서
논리 0으로 변경되면 정지 기능이 발생합니다.
정지 기능은 선택된 가감속 시간(
터 3-42 1 감속 시간, 파라미터 3-52 2 감속
시간, 파라미터 3-62 3 감속 시간, 파라미
터 3-72 4 감속 시간
[8] 기동 기동/정지 명령에서 기동을 선택합니다. 논리 1
= 기동, 논리 0 = 정지.
[9] 펄스기동최소 4 ms 동안 펄스가 적용되면 모터가 기동
합니다. 정지 명령이 주어지면 모터가 정지합니
다.
[10] 역회전모터축 회전 방향을 변경합니다. 논리 1을 선택
하면 역회전합니다. 역회전 신호는 회전 방향만
변경하고 기동 기능을 활성화하지는 않습니다.
파라미터 4-10 모터 속도 방향
선택합니다. 공정 폐회로에서는 기능이 활성화
되지 않습니다.
[11] 역회
[12] 정회
[13] 역회
[14] 조그 조그 속도를 활성화하는 데 사용합니다.
[15] 프리
기동/정지 시 또는 동일한 와이어의 역회전에
전 기
사용합니다. 기동 신호는 동시에 사용할 수 없
동
습니다.
반시계방향 회전을 해제하고 시계방향 회전을
전 기
허용합니다.
동 허
용
시계방향 회전을 해제하고 반시계방향 회전을
전 기
허용합니다.
동 허
용
터 3-11 조그 속도 [Hz]
외부 지령과 프리셋 지령 간을 전환합니다.
셋 지
라미터 3-04 지령 기능
령 개
선택한 것으로 간주합니다. 논리 0 = 외부 지령
시
활성화; 논리 1 = 8개의 프리셋 지령 중 하나가
활성화.
)에 따라 동작합니다.
에서
파라미
에서 양방향을
파라미
을(를) 참조하십시오.
파
[1] 외부/프리셋
4 4
을
Page 64
Speed [rpm] Speed [rpm]
Time[sec] Time[sec]a b
130BB462.10
Read Timer:
20 timer tides
Read Timer:
20 timer tides
Time Start
Time counter
Sample time
Timer
Pulse
130BB464.10
파라미터 설명
VLT® AutomationDrive FC 360
[16] 프리
셋 지
령 비
트 0
[17] 프리
프리셋 지령 비트 0, 1 및 2를 통해
표 4.4
에
따라 8개의 프리셋 지령 중 하나를 선택할 수
있습니다.
[16] 프리셋 지령 비트 0
과 동일합니다.
일정 속도 0 0
%-값만큼 감속 1 0
%-값만큼 가속 0 1
%-값만큼 감속 1 1
셧다운 캐치업
셋 지
령 비
표 4.5 셧다운/캐치업
트 1
[18] 프리
44
[16] 프리셋 지령 비트 0
셋 지
과 동일합니다.
령 비
트 2
[22] 감속
[23] 셋업
선택
비트 0
[28] 캐치업
프리셋 지령 비트 2 1 0
프리셋 지령 0 0 0 0
프리셋 지령 1 0 0 1
프리셋 지령 2 0 1 0
프리셋 지령 3 0 1 1
프리셋 지령 4 1 0 0
프리셋 지령 5 1 0 1
프리셋 지령 6 1 1 0
프리셋 지령 7 1 1 1
[29] 슬로우
다운
[32] 펄스입력(단자 29 또는 33에만 해당) 펄스 플랭크 간
[21] 가속
[23] 셋업 선택 비트 0
하나를 선택합니다.
화를 [9] 다중 설정
파라미터 3-12 캐치업/슬로우다운 값
과 동일합니다.
을 통해 2개의 셋업 중
파라미터 0-10 셋업 활성
으로 설정합니다.
에서 설정
된 백분율에 의한 지령 값(상대값)을 증가시킵
니다.
파라미터 3-12 캐치업/슬로우다운 값
에서 설정
된 백분율에 의한 지령 값(상대값)을 감소시킵
니다.
시간을 측정합니다. 이 파라미터는 저주파수에
서는 분해능이 높지만 고주파수에서만큼 정밀
하지는 않습니다. 이 방식에는 저속에서 분해능
이 낮은 엔코더(예컨대, 30 PPR)에 사용할 수
표 4.4 프리셋 지령 비트
없게 하는 차단 주파수가 있습니다.
[19] 지
[20] 출
실제 지령을 고정하며 고정된 지령은 사용할
령
가속
및
[22] 감속
고
[21] 가속
정
라미터 3-03 최대 지령
또는
터 3-51 2 가속 시간
시간
)에 따라 속도가 변합니다.
의 활성화 지점/조건이 됩니다.
[22] 감속
이 사용되면 항상 0–
범위의 가감속 2(
및
파라미터 3-52 2 감속
주의 사항
력
[20] 출력 고정
고
호를 낮게 설정해도 AC 드라이브를 정지할
정
수 없습니다.
스팅리셋인버스
이 활성화되면
[8] 기동
[2] 코스팅 인버스
로 프로그래밍된 단자를 통해
또는
AC 드라이브를 정지합니다.
실제 모터 주파수(Hz)를 고정하며 고정된 지령은
사용할
[21] 가속
건이 됩니다.
면 항상 0–
감속 2(
파라미터 3-51 2 가속 시간
터 3-52 2 감속 시간
[21] 가속가속/감속의 디지털 제어가 필요한 경우
속
및
[22] 감속
[19] 지령 고정
이 기능을 활성화합니다. 400 ms 미만에서 가속/
감속이 활성화된 경우 결과 지령이 0.1%씩 증가/
감소합니다. 400 ms 이상에서 가속/감속이 활성화
된 경우 결과 지령은 가속/감속 파라미터
3-51/3-52의 설정에 따라 가감속합니다.
및
[21] 가속
[22] 감속
또는
의 활성화 지점/조
[22] 감속
파라미터 1-23 모터 주파수
및
)에 따라 속도가 변합니다.
을 선택합니다(모터 가변 저항).
또는
[20] 출력 고정
을 선택하여
[21]
파
파라미
의 신
[3] 코
이 사용되
범위의 가
파라미
[21] 가
a: 낮은 엔코더 분해능 b: 표준 엔코더 분해능
그림 4.14 펄스 플랭크 간격 시간
[34] 가감속
비트 0
[35] 가감속
표 4.6
에 따라 4개의 가감속 중 하나를 선택할
수 있게 합니다.
가감속 비트 0과 동일합니다.
비트 1
프리셋 가감속 비트 1 0
가감속 1 0 0
가감속 2 0 1
가감속 3 1 0
가감속 4 1 1
표 4.6 프리셋 가감속 비트
[45] 역회전
펄스
기동
[51] 외부
인터록
최소 4 ms 동안 펄스가 적용되면 모터가 역
회전 기동합니다. 정지 명령이 주어지면 모터
가 정지합니다.
이 기능으로 인해 AC 드라이브에 외부 결함
이 주어질 수 있습니다. 이 결함은 내부적으
로 생성된 알람과 같은 방식으로 처리됩니다.
62 Danfoss A/S © 12/2018 All rights reserved. MG06C839
Page 65

파라미터 설명 프로그래밍 지침서
[55] 디지털
Pot증
가
[56] 디지털
Pot감
소
[57] DP 기
억값
소거
[60] 카운터
A (증
가)
[61] 카운터
A (감
소)
[62] 카운터
A 리셋
[63] 카운터
B (증
가)
[64] 카운터
B (감
소)
[65] 카운터
B 리셋
[72] PID 오
차 반
전
[73] PID I
파트
리셋
[74] PID 사용이 옵션은 확장형 공정 PID 제어기의 사용을
[150] 홈으로이동AC 드라이브가 홈 위치로 이동합니다.
[151] 홈 지
령 스
위치
[155] HW 한
계 정
방향
[156] HW 한
계 역
방향
[157] 위치
급속
정지
인버스
파라미터 그룹 3-9* 디지털가변저항에 설명
된 디지털 가변 저항 기능에 대한 신호를 제
거합니다
.
파라미터 그룹 3-9* 디지털가변저항에 설명
된 디지털 가변 저항 기능에 대한 신호를 제
거합니다
.
파라미터 그룹 3-9* 디지털가변저항에 설명
된 디지털 가변 저항 지령을 제거합니다
SLC 카운터의 증가분 계수 입력(인크리멘탈
입력)입니다.
SLC 카운터의 감소분 계수 입력(디크리멘탈
입력)입니다.
카운터 A를 리셋하기 위한 입력입니다.
SLC 카운터의 증가분 계수 입력(인크리멘탈
입력)입니다.
SLC 카운터의 감소분 계수 입력(디크리멘탈
입력)입니다.
카운터 B를 리셋하기 위한 입력입니다.
공정 PID 제어기에서 발생하는 결과 오류와
반대가 됩니다.
[6] 서페이스 와인더
속도 OL
다.
공정 PID 제어기의 I 파트를 리셋합니다.
파라미터 1-00 구성 모드
또는
[7] 확장형 PID
로 설정되어야만 사용할 수 있습니
라미터 7-40 공정 PID I 파트 리셋
니다.
파라미터 1-00 구성 모드가 [6] 서페
이스 와인더
설정되어야만 사용할 수 있습니다.
가능하게 합니다.
확장형 PID
또는
[7] 확장형 PID 속도 OL
파라미터 7-50 공정 PID
과 동등합니다.
파라미터 1-00 구
성 모드가 [7] 확장형 PID 속도 OL
어야만 사용할 수 있습니다.
홈 지령 스위치의 상태를 나타냅니다. 켜짐은
홈 위치에 도달했음을 의미하고 꺼짐은 홈 위
치에 도달하지 않았음을 의미합니다.
정방향 하드웨어 위치 한계를 초과했습니다.
이 옵션은 하강 에지에서 활성화됩니다.
역방향 하드웨어 위치 한계를 초과했습니다.
이 옵션은 하강 에지에서 활성화됩니다.
파라미터 32-81 최단 가감속
감속 시간으로 위치 제어 도중에 AC 드라이
브를 정지합니다. 이 옵션은
에서 설정된 가
파라미
.
가
파
과 동등합
로 설정되
터 37-00 Application Mode가 [2] 위치 제
어
로 설정된 경우에만 사용할 수 있습니다.
[160] 목표
위치로
이동
[162] 위치
인덱스
비트0
[163] 위치
인덱스
비트1
[164] 위치
인덱스
비트2
[165] 코어
직경
소스
AC 드라이브가 목표 위치로 이동합니다. 이
옵션은
파라미터 37-00 Application Mode
[2] 위치 제어
있습니다.
위치 인덱스 비트 0입니다. 이 옵션은
로 설정된 경우에만 사용할 수
파라미
터 37-00 Application Mode가 [2] 위치 제
어
로 설정된 경우에만 사용할 수 있습니다.
위치 인덱스 비트 1입니다. 이 옵션은
파라미
터 37-00 Application Mode가 [2] 위치 제
어
로 설정된 경우에만 사용할 수 있습니다.
위치 인덱스 비트 2입니다. 이 옵션은
파라미
터 37-00 Application Mode가 [2] 위치 제
어
로 설정된 경우에만 사용할 수 있습니다.
코어 직경 소스입니다. 꺼짐은 코어 1이 선택
되었음을, 켜짐은 코어 2가 선택되었음을 각
각 의미합니다. 이 옵션은
파라미
가
4 4
터 37-00 Application Mode이[1] 센터 와인
더
로 설정된 경우에만 사용할 수 있습니다.
[166] 새 직
경 선
택
부분 롤 직경(꺼짐)을 선택할 것인지 아니면
코어 직경(켜짐)을 선택할 것인지 여부를 구
성합니다. 이 옵션은
파라미
터 37-00 Application Mode이[1] 센터 와인
더
로 설정된 경우에만 사용할 수 있습니다.
[167] 직경리셋직경을 리셋합니다. 이 옵션은
파라미
터 37-00 Application Mode이[1] 센터 와인
더
로 설정된 경우에만 사용할 수 있습니다.
[168] 와인더
정방향
조그
[169] 와인더
역방향
조그
로
[170] 장력제
어 켜
짐
중앙 권선 도중에 정방향 조그를 활성화합니
다. 이 옵션은
Mode이[1] 센터 와인더
사용할 수 있습니다.
중앙 권선 도중에 역방향 조그를 활성화합니
다. 이 옵션은
Mode이[1] 센터 와인더
사용할 수 있습니다.
장력 PID 제어를 활성화합니다. 이 옵션은
파라미터 37-00 Application
로 설정된 경우에만
파라미터 37-00 Application
로 설정된 경우에만
라미터 37-00 Application Mode이[1] 센터
와인더
로 설정된 경우에만 사용할 수 있습니
다.
파
5-10 단자 18 디지털 입력
옵션: 기능:
[8] * 기동 기능은
파라미터 그룹 5-1* 디지털 입력
되어 있습니다.
에 설명
5-11 단자 19 디지털 입력
옵션: 기능:
[10] * 역회전 기능은
파라미터 그룹 5-1* 디지털 입력
설명되어 있습니다.
에
5-12 단자 27 디지털 입력
옵션: 기능:
[2] * 코스팅 인버스 기능은
파라미터 그룹 5-1* 디지털 입
력
에 설명되어 있습니다.
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 63
Page 66
파라미터 설명
VLT® AutomationDrive FC 360
5-13 단자 29 디지털 입력
옵션: 기능:
[14] * 조그 기능은
[32] 펄스 입력
파라미터 그룹 5-1* 디지털 입력
에 설명되어 있습니다.
5-14 단자 32 디지털 입력
옵션: 기능:
44
[0] * 기능 없음 기능은
[82] 엔코더 입력 B
파라미터 그룹 5-1* 디지털 입
력
에 설명되어 있습니다.
[7] 범위내구
동/경고X
[8] 지령시 구
동/ 경고
없음
[9] 알람 알람이 활성화됩니다.
[10] 알람 또는경고알람 또는 경고가 활성화됩니다.
[11] 토크 한계
도달
5-15 단자 33 디지털 입력
옵션: 기능:
[0] 기능 없음 기능은
[16] * 프리셋 지령 비트 0
[32] 펄스 입력
[81] 엔코더 입력 A
파라미터 그룹 5-1* 디
지털 입력
에 설명되어 있습니다.
5-16 단자 31 디지털 입력
옵션: 기능:
[0] 기능 없음 기능은
파라미터 그룹 5-1* 디지털 입력
설명되어 있습니다.
에
4.6.2 5-3* 디지털 출력
2개의 고정 상태 디지털 출력은 단자 27과 29에 공통
으로 해당됩니다.
자 27의 입/출력 기능을 설정하고
29 모드
에서 단자 29의 입/출력 기능을 설정합니다.
단자 42 및 45 또한 디지털 출력으로 구성할 수 있습니
다.
파라미터 5-01 단자 27 모드
파라미터 5-02 단자
에서 단
[12] 전류 범위초과모터 전류가
[13] 하한전류
보다낮음
[14] 상한 전류
보다 높음
[15] 주파수 범
위 초과
[16] 주파수 하
한 미만
[17] 주파수 상
한 이상
[18] 피드백 범
위 초과
[19] 피드백 하
한 이하
[20] 피드백 상
한 이상
[21] 과열 경고 모터, AC 드라이브, 제동 저항 또는 써미
주의 사항
모터가 운전하는 동안에는 이 파라미터를 설정할 수 없
습니다.
5-30 ~ 5-31 디지털 출력
[0] 운전하지않음모든 디지털 출력과 릴레이 출력의 초기
설정입니다.
[1] 제어 준비 제어 카드가 준비되었습니다.
[2] 운전 준비 AC 드라이브가 운전 준비되며 제어 보드
에 공급 신호가 전달됩니다.
[3] 인버터준
비원격제
어
[4] 사용가능/
경고없음
[5] 구동 모터가 운전 중이며 축 토크가 있습니다.
[6] 구동 / 경
고 없음
AC 드라이브가 운전 준비되며 자동 운전
모드가 됩니다.
운전 준비가 완료되었습니다. 기동 또는
정지 명령은 실행할 수 없습니다(기동/사
용안함). 활성화된 경고가 없습니다.
모터가 구동 중이며 경고는 발생하지 않습
니다.
[22] 준비,과열
경고없음
[23] 원격,준비,
열경고X
[24] 준비, 과
전압/저전
압 없음
[25] 역회전 논리 = 0일 때는 시계방향으로, 논리 = 1
[26] 버스통신OK직렬 통신 포트를 통한 활성 통신(타임아
[27] 토크전류
한계,정지
프로그래밍된 전류와
류 경고
~
파라미터 4-51 고전류 경고
서 설정된 속도 범위 내에서 모터가 구동
중입니다. 경고가 없습니다.
모터가 지령 속도로 운전합니다. 경고가
없습니다.
파라미터 4-50 저전
에
파라미터 4-16 모터 운전의 토오크 한계
또는
파라미터 4-17 재생 운전의 토오크
한계
에서 설정된 토크 한계를 초과하였습
니다.
파라미터 4-18 전류 한계
서 설정한 범위를 벗어났습니다.
모터 전류가
에서 설정된 한계보다 낮습니다.
모터 전류가
에서 설정된 한계보다 높습니다.
출력 주파수가 주파수 범위를 벗어났습니
다.
출력 속도가
Freq. Low
다.
출력 속도가
Freq. High
다.
피드백이
고
및
서 설정한 범위를 벗어났습니다.
피드백이
고
에서 설정된 한계보다 낮습니다.
피드백이
고
에서 설정된 한계보다 높습니다.
스터의 온도가 한계를 초과했을 때 써멀
경고가 발생합니다.
AC 드라이브가 운전 준비되며 과열 경고
는 발생하지 않습니다.
AC 드라이브가 운전 준비되며 자동 운전
모드가 됩니다. 과열 경고가 없습니다.
AC 드라이브가 운전 준비되며 주전원 전
압이 지정된 전압 범위 내에 있습니다(
계 지침서 일반사양
일 때는 반시계방향으로 모터가 구동하거
나 구동할 준비가 완료되었습니다. 역회전
신호가 적용되자마자 출력이 변경됩니다.
웃 없음).
코스팅 정지를 실행할 때 사용하거나 토크
한계 조건에서 사용합니다. AC 드라이브
가 정지 신호를 수신하고 토크 한계에 도
달했을 때, 신호는 논리 0입니다.
파라미터 4-50 저전류 경고
파라미터 4-51 고전류 경고
파라미터 4-40 Warning
에서 설정된 한계보다 낮습니
파라미터 4-41 Warning
에서 설정된 한계보다 높습니
파라미터 4-56 피드백 낮음 경
파라미터 4-57 피드백 높음 경고
파라미터 4-56 피드백 낮음 경
파라미터 4-57 피드백 높음 경
편 참조).
에
에
설
64 Danfoss A/S © 12/2018 All rights reserved. MG06C839
Page 67

파라미터 설명 프로그래밍 지침서
[28] 제동장치,
경고없음
[29] 제동준비,
무결함
[30] 제동장치
결함
(IGBT)
[31] 릴레이
123
[32] 기계식 제
동 제어
[36] 제어 워드
비트 11
[37] 제어 워드
비트 12
[40] 지령 범위초과이 옵션은 실제 속도가
[41] 지령 이
하, 낮음
[42] 지령 이
상, 높음
[45] 버스통신제어필드버스를 통해 출력을 제어합니다.
브레이크가 활성화되며 경고는 발생하지
않습니다.
브레이크가 운전 준비되며 결함이 없습니
다.
제동 IGBT가 단락되면 출력은 논리 1입
니다. 제동 모듈에 결함이 있는 경우에는
이 기능을 사용하여 AC 드라이브를 보호
합니다. 출력/릴레이를 사용하여 AC 드라
이브의 주전원 전압을 작동정지합니다.
파라미터 그룹 8-** 통신 및 옵션
[0] 제어 워드
화됩니다.
외부 기계식 제동 제어를 사용합니다. 자
세한 내용은
제동장치
가 선택되면 릴레이가 활성
파라미터 그룹 2-2* 기계식
를 참조하십시오.
에서
파라미터 4-54 지
령 낮음 경고
경고
에서 설정한 범위를 벗어날 때 활성화
됩니다.
이 옵션은 실제 속도가 속도 지령 설정값
미만일 때 활성화됩니다.
이 옵션은 실제 속도가 속도 지령 설정값
을 초과할 때 활성화됩니다.
~
파라미터 4-55 지령 높음
미터 5-90 디지털 및 릴레이 버스통신 제
어
에서 출력 상태가 설정됩니다. 필드버스
가 타임아웃되는 경우, 출력 상태가 유지
됩니다.
[46] 타임아웃
시 버스통
신 제어
켜짐
[47] 타임아웃
시 버스통
신 제어
꺼짐
[55] 펄스 출력
[56] 방열판 청
소 경고,
높음
[60] 비교기 0
[61] 비교기 1
[62] 비교기 2
필드버스를 통해 출력을 제어합니다.
미터 5-90 디지털 및 릴레이 버스통신 제
어
에서 출력 상태가 설정됩니다. 버스통신
시간 초과가 발생한 경우, 출력 상태가 높
음(켜짐)으로 설정됩니다.
파라미터 그룹 13-1* 비교기
시오. 비교기 0이 TRUE(참)로 연산되면
출력이 높아지고 FALSE(거짓)로 연산되
면 출력이 낮아집니다.
파라미터 그룹 13-1* 비교기
시오. 비교기 1이 TRUE (참)로 연산되면
출력이 높아지고 FALSE(거짓)로 연산되
면 출력이 낮아집니다.
파라미터 그룹 13-1* 비교기
시오. 비교기 2가 TRUE (참)로 연산되면
출력이 높아지고 FALSE(거짓)로 연산되
면 출력이 낮아집니다.
를 참조하십
를 참조하십
를 참조하십
파라
파라
[63] 비교기 3
[64] 비교기 4
[65] 비교기 5
[70] 논리 규칙
0
[71] 논리 규칙
1
[72] 논리 규칙
2
[73] 논리 규칙
3
[74] 논리 규칙
4
[75] 논리 규칙
5
[80] SL 디지털
출력 A
[81] SL 디지털
출력 B
[82] SL 디지털
출력 C
[83] SL 디지털
출력 D
파라미터 그룹 13-1* 비교기
시오. 비교기 3이 TRUE(참)로 연산되면
출력이 높아지고 FALSE(거짓)로 연산되
면 출력이 낮아집니다.
파라미터 그룹 13-1* 비교기
시오. 비교기 4가 TRUE(참)로 연산되면
출력이 높아지고 FALSE(거짓)로 연산되
면 출력이 낮아집니다.
파라미터 그룹 13-1* 비교기
시오. 비교기 5가 TRUE(참)로 연산되면
출력이 높아지고 FALSE(거짓)로 연산되
면 출력이 낮아집니다.
파라미터 그룹 13-4* 논리 규칙
십시오. 논리 규칙 0이 TRUE(참)로 연산
되면 출력이 높아지고 FALSE(거짓)로 연
산되면 출력이 낮아집니다.
파라미터 그룹 13-4* 논리 규칙
십시오. 논리 규칙 1이 TRUE(참)로 연산
되면 출력이 높아지고 FALSE(거짓)로 연
산되면 출력이 낮아집니다.
파라미터 그룹 13-4* 논리 규칙
십시오. 논리 규칙 2가 TRUE(참)로 연산
되면 출력이 높아지고 FALSE(거짓)로 연
산되면 출력이 낮아집니다.
파라미터 그룹 13-4* 논리 규칙
십시오. 논리 규칙 3이 TRUE(참)로 연산
되면 출력이 높아지고 FALSE(거짓)로 연
산되면 출력이 낮아집니다.
파라미터 그룹 13-4* 논리 규칙
십시오. 논리 규칙 4가 TRUE(참)로 연산
되면 출력이 높아지고 FALSE(거짓)로 연
산되면 출력이 낮아집니다.
파라미터 그룹 13-4* 논리 규칙
십시오. 논리 규칙 5가 TRUE(참)로 연산
되면 출력이 높아지고 FALSE(거짓)로 연
산되면 출력이 낮아집니다.
파라미터 13-52 SL 컨트롤러 동작
참조하십시오. 스마트 로직 동작
지출력A 최고설정
아지고. 스마트 로직 동작
A 최저설정
다.
을 실행하면 출력이 높
을 실행하면 출력이 낮아집니
파라미터 13-52 SL 컨트롤러 동작
참조하십시오. 스마트 로직 동작
지출력B 최고설정
아지고. 스마트 로직 동작
B 최저설정
다.
을 실행하면 입력이 높
을 실행하면 입력이 낮아집니
파라미터 13-52 SL 컨트롤러 동작
참조하십시오. 스마트 로직 동작
지출력C 최고설정
아지고 스마트 로직 동작
최저설정
을 실행하면 입력이 낮아집니다.
을 실행하면 입력이 높
파라미터 13-52 SL 컨트롤러 동작
참조하십시오. 스마트 로직 동작
지출력D 최고설정
을 실행하면 입력이 높
를 참조하십
를 참조하십
를 참조하십
을 참조하
을 참조하
을 참조하
을 참조하
을 참조하
을 참조하
을(를)
[38] 디
[32] 디지출력
을(를)
[39] 디
[33] 디지출력
을(를)
[40] 디
[34] 디지출력C
을(를)
[41] 디
4 4
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 65
Page 68

5-34 On Delay, Digital Output
범위: 기능:
0.01 s* [0 - 600
s]
5-35 Off Delay, Digital Output
범위: 기능:
0.01 s* [0 - 600
s]
5-40 릴레이 기능
옵션: 기능:
[0] 운전하지 않음모든 디지털 출력과 릴레이 출력
의 초기 설정입니다.
[1] 제어 준비 제어 카드가 준비되었습니다.
[2] 운전 준비 AC 드라이브의 운전 준비가 완료
되었습니다. 주전원 및 제어 공급
이 정상입니다.
[3] 인버터준비원
격제어
AC 드라이브가 운전 준비되며 자
동 운전 모드가 됩니다.
[4] 사용가능/경고없음운전 준비가 완료되었습니다. 기
동 또는 정지 명령은 실행할 수
없습니다. 활성화된 경고가 없습
니다.
[5] 구동중 모터가 운전 중이며 축 토크가 있
습니다.
[6] 구동 / 경고없음모터가 구동 중이며 경고는 발생
하지 않습니다.
파라미터 설명
VLT® AutomationDrive FC 360
아지고 스마트 로직 동작
최저설정
[160] 알람 없음 알람이 발생하지 않을 때 출력이 높아집니
다.
[161] 역회전 구동AC 드라이브가 반시계방향(상태 비트
동
때 출력이 높아집니다.
[165] 현장 지령
가동
44
[166] 원격 지령
가동
[167] 기동 명령동작활성화된 기동 명령이 있을 때 출력이 높
아지지만 정지 명령이 활성화되지는 않습
니다.
[168] 수동 운전모드AC 드라이브가 hand-on 모드일 때 출력
이 높아집니다.
[169] 자동 운전모드AC 드라이브가 자동 운전 모드일 때 출력
이 높아집니다.
[170] 홈 복귀완료홈 복귀 운전이 완료되었습니다. 이 옵션
은
[2] 위치 제어
수 있습니다.
[171] 목표 위치도달목표 위치에 도달했습니다. 이 옵션은
을 실행하면 입력이 낮아집니다.
AND
역회전
의 논리 생성)으로 운전할
파라미터 37-00 Application Mode
로 설정된 경우에만 사용할
라미터 37-00 Application Mode가 [2]
위치 제어
있습니다.
[172] 위치 제어결함위치 제어 프로세스 도중에 결함이 발생했
습니다. 결함에 관한 자세한 내용은
로 설정된 경우에만 사용할 수
미터 37-18 Pos. Ctrl Fault Reason
참조하십시오. 이 옵션은
터 37-00 Application Mode가 [2] 위치
제어
로 설정된 경우에만 사용할 수 있습니
다.
[173] 위치제어,
기계식 제
동장치
[174] TLD 표시 중앙 권선 도중에 장력이 범위를 벗어나는
[175] 장력 제어
구동중
[176] 구동 준비완료센터 와인더 제어 운전이 준비되었습니다.
[177] 롤 말단 직경 한계에 도달했습니다. 이 옵션은
66 Danfoss A/S © 12/2018 All rights reserved. MG06C839
위치 제어를 위해 기계식 제어 방식을 선
택합니다. 이 옵션은
파라미
터 37-00 Application Mode가 [2] 위치
제어
로 설정된 경우에만 사용할 수 있습니
다.
지(켜짐) 여부를 표시합니다. 이 옵션은
라미터 37-00 Application Mode이[1]
센터 와인더
있습니다.
장력 PID 제어가 활성화(켜짐) 또는 비활
성화(꺼짐)되었는지 표시합니다. 이 옵션
은
파라미터 37-00 Application Mode
[1] 센터 와인더
할 수 있습니다.
이 옵션은
Mode이[1] 센터 와인더
만 사용할 수 있습니다.
라미터 37-00 Application Mode이[1]
센터 와인더
있습니다.
로 설정된 경우에만 사용할 수
로 설정된 경우에만 사용
파라미터 37-00 Application
로 설정된 경우에만 사용할 수
[35] 디지출력D
구
가
파
파라
를
파라미
이
로 설정된 경우에
파
[193] 슬립 모드 AC 드라이브/시스템이 슬립 모드로 진입
했습니다.
드
[194] 벨트 파손 벨트 파손 조건이 감지되었습니다.
파라미터 그룹 22-4* 슬립 모
를 참조하십시오.
터 그룹 22-4* 슬립 모드
오.
5-30 단자 27 디지털 출력
옵션: 기능:
[0] * 기능 없음 기능은
파라미터 그룹 5-3* 디지털 출력
설명되어 있습니다.
5-31 단자29 디지털출력
옵션: 기능:
[0] * 기능 없음 기능은
파라미터 그룹 5-3* 디지털 출력
설명되어 있습니다.
4.6.3 5-4* 릴레이
릴레이의 타이밍과 출력 기능을 구성하는 파라미터입니
다.
이 파라미터는 2가지 릴레이: 배열 [2] (릴레이 1 [0],
릴레이 2 [1])를 나타내는 배열 파라미터입니다.
파
파라미
를 참조하십시
에
에
Page 69

5-40 릴레이 기능
옵션: 기능:
[7] 범위내구동/경
고X
파라미터 4-50 저전류 경고
에서
프로그래밍된 전류 범위 내에서
모터가 구동 중입니다.
[8] 지령시구동/경고X모터가 지령 속도로 운전합니다.
경고가 없습니다.
[9] 알람 알람이 활성화됩니다.
[10] 알람 또는 경고알람 또는 경고가 활성화됩니다.
[11] 토오크 한계
도달
파라미터 4-16 모터 운전의 토오
크 한계
또는
파라미터 4-17 재
생 운전의 토오크 한계
에서 설정
된 토크 한계를 초과하였습니다.
[12] 전류 범위 초과모터 전류가
파라미터 4-18 전류
한계
에서 설정한 범위를 벗어났습
니다.
[13] 하한전류보다낮음모터 전류가
파라미터 4-50 저전
류 경고
에서 설정된 한계보다 낮
습니다.
[14] 상한 전류보
다 높음
모터 전류가
파라미터 4-51 고전
류 경고
에서 설정된 한계보다 높
습니다.
[15] 속도 범위 초과출력 속도/주파수가
파라미
터 4-40 Warning Freq. Low
및
파라미터 4-41 Warning Freq.
High
에서 설정된 한계를 초과합니
다.
[16] 하한속도보다낮음출력 주파수가
파라미
터 4-40 Warning Freq. Low
에
서 설정된 한계보다 낮습니다.
[17] 상한 속도보
다 높음
주파수가
파라미
터 4-41 Warning Freq. High
에
서 설정된 한계보다 높습니다.
[18] 피드백 범위초과피드백이
파라미터 4-56 피드백
낮음 경고
및
파라미터 4-57 피
드백 높음 경고
에서 설정한 범위
를 벗어났습니다.
[19] 피드백 하한이하피드백이
파라미터 4-56 피드백
낮음 경고
에서 설정된 한계보다
낮습니다.
[20] 피드백 상한이상피드백이
파라미터 4-57 피드백
높음 경고
에서 설정된 한계보다
높습니다.
[21] 과열 경고 모터, AC 드라이브, 제동 저항 또
는 써미스터의 온도가 한계를 초
과했을 때 써멀 경고가 발생합니
다.
[22] 준비,과열경고없음AC 드라이브가 운전 준비되며 과
열 경고는 발생하지 않습니다.
5-40 릴레이 기능
옵션: 기능:
[23] 원격준비,과열
경고X
AC 드라이브가 운전 준비되며 자
동 운전 모드가 됩니다. 과열 경고
가 없습니다.
[24] Ready, no
over-/ under
voltage
AC 드라이브가 운전 준비되며 주
전원 전압이 지정된 전압 범위 내
에 있습니다.
[25] 역회전 논리 = 0일 때는 시계방향으로,
논리 = 1일 때는 반시계방향으로
모터가 구동하거나 구동할 준비가
완료되었습니다. 역회전 신호가
적용되자마자 출력이 변경됩니다.
[26] 버스통신 OK 직렬 통신 포트를 통한 활성 통신
(타임아웃 없음).
[27] 토크전류한계,정지토크 한계 조건에 있는 AC 드라
이브의 코스팅 정지 수행에 사용
합니다. AC 드라이브가 정지 신호
를 수신하고 토크 한계에 도달했
을 때, 신호는 논리=0입니다.
[28] 제동,경고없음 브레이크가 활성화되며 경고는 발
생하지 않습니다.
[29] 제동준비,무결함브레이크가 운전 준비되며 결함이
없습니다.
[30] 제동장치결함
(IGBT)
제동 IGBT가 단락되면 출력은 논
리 = 1입니다. 제동 모듈에 결함
이 있는 경우에는 이 기능을 사용
하여 AC 드라이브를 보호합니다.
디지털 출력/릴레이를 사용하여
AC 드라이브의 주전원 전압을 작
동정지합니다.
[31] 릴레이 123
파라미터 그룹 8-** 통신 및 옵션
에서
[0] 제어 워드
가 선택되면
디지털 출력/릴레이가 활성화됩니
다.
[32] 기계제동장치제어기계식 제동 제어를 선택합니다.
파라미터 그룹 2-2* 기계식 제동
장치
에서 선택한 파라미터가 활성
화된 경우에는 브레이크 코일에
전류를 전송하도록 출력을 보강해
야 합니다. 이 문제는 선택한 디지
털 출력에 외부 릴레이를 연결하
면 해결됩니다.
[36] 제어 워드 비
트 11
필드버스의 제어 워드로 릴레이 1
을 활성화합니다. AC 드라이브에
다른 기능적 영향이 없습니다. 일
반적인 어플리케이션: 필드버스
보조 장치 제어.
파라미
터 8-10 제어 프로필
에서
[0]
FC 프로필
을 선택하면 이 기능을
사용할 수 있습니다.
파라미터 설명 프로그래밍 지침서
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 67
4 4
Page 70

5-40 릴레이 기능
옵션: 기능:
[37] 제어 워드 비
트 12
필드버스의 제어 워드로 릴레이 2
를 활성화합니다. AC 드라이브에
다른 기능적 영향이 없습니다. 일
반적인 어플리케이션: 필드버스
보조 장치 제어.
파라미
터 8-10 제어 프로필
에서
[0]
FC 프로필
을 선택하면 이 기능을
사용할 수 있습니다.
[40] 지령 범위 초과실제 속도가
파라미터 4-54 지령
낮음 경고
및
파라미터 4-55 지
령 높음 경고
의 설정을 벗어날 때
활성화됩니다.
[41] 지령 이하, 낮음실제 속도가 속도 지령 설정값 미
만일 때 활성화됩니다.
[42] 지령 이상, 높음실제 속도가 속도 지령 설정값을
초과할 때 활성화됩니다.
[45] 버스통신 제어버스통신을 통해 디지털 출력/릴
레이를 제어합니다.
파라미
터 5-90 디지털 및 릴레이 버스
통신 제어
에서 출력 상태가 설정
됩니다. 버스통신이 시간 초과되
는 경우, 출력 상태가 유지됩니다.
[46] 시간 초과 시1버스통신을 통해 출력을 제어합니
다.
파라미터 5-90 디지털 및 릴
레이 버스통신 제어
에서 출력 상
태가 설정됩니다. 버스통신 시간
초과가 발생한 경우, 출력 상태가
높음(켜짐)으로 설정됩니다.
[47] 시간 초과 시0버스통신을 통해 출력을 제어합니
다.
파라미터 5-90 디지털 및 릴
레이 버스통신 제어
에서 출력 상
태가 설정됩니다. 버스통신 시간
초과가 발생한 경우, 출력 상태가
낮음(꺼짐)으로 설정됩니다.
[56] Heat sink
cleaning
warning,
high
[60] 비교기 0
파라미터 그룹 13-1* 스마트 로
직 제어
를 참조하십시오. SLC에
서 비교기 0이 TRUE (참)으로 연
산되면 출력이 높아지고
FALSE(거짓)로 연산되면 출력이
낮아집니다.
[61] 비교기 1
파라미터 그룹 13-1* 스마트 로
직 제어
를 참조하십시오. SLC에
서 비교기 1이 TRUE (참)로 연산
되면 출력이 높아지고 FALSE(거
짓)로 연산되면 출력이 낮아집니
다.
5-40 릴레이 기능
옵션: 기능:
[62] 비교기 2
파라미터 그룹 13-1* 스마트 로
직 제어
를 참조하십시오. SLC에
서 비교기 2가 TRUE (참)로 연산
되면 출력이 높아지고 FALSE(거
짓)로 연산되면 출력이 낮아집니
다.
[63] 비교기 3
파라미터 그룹 13-1* 스마트 로
직 제어
를 참조하십시오. SLC에
서 비교기 3이 TRUE (참)로 연산
되면 출력이 높아지고 FALSE(거
짓)로 연산되면 출력이 낮아집니
다.
[64] 비교기 4
파라미터 그룹 13-1* 스마트 로
직 제어
를 참조하십시오. SLC에
서 비교기 4가 TRUE (참)로 연산
되면 출력이 높아지고 FALSE(거
짓)로 연산되면 출력이 낮아집니
다.
[65] 비교기 5
파라미터 그룹 13-1* 스마트 로
직 제어
를 참조하십시오. SLC에
서 비교기 5가 TRUE (참)로 연산
되면 출력이 높아지고 FALSE(거
짓)로 연산되면 출력이 낮아집니
다.
[70] 논리 규칙 0
파라미터 그룹 13-4* 논리 규칙
을 참조하십시오. SLC에서 논리
규칙 0이 TRUE (참)로 연산되면
출력이 높아지고 FALSE(거짓)로
연산되면 출력이 낮아집니다.
[71] 논리 규칙 1
파라미터 그룹 13-4* 논리 규칙
을 참조하십시오. SLC에서 논리
규칙 1이 TRUE (참)로 연산되면
출력이 높아지고 FALSE(거짓)로
연산되면 출력이 낮아집니다.
[72] 논리 규칙 2
파라미터 그룹 13-4* 논리 규칙
을 참조하십시오. SLC에서 논리
규칙 2가 TRUE (참)로 연산되면
출력이 높아지고 FALSE(거짓)로
연산되면 출력이 낮아집니다.
[73] 논리 규칙 3
파라미터 그룹 13-4* 논리 규칙
을 참조하십시오. SLC에서 논리
규칙 3이 TRUE (참)로 연산되면
출력이 높아지고 FALSE(거짓)로
연산되면 출력이 낮아집니다.
[74] 논리 규칙 4
파라미터 그룹 13-4* 논리 규칙
을 참조하십시오. SLC에서 논리
규칙 4가 TRUE (참)로 연산되면
출력이 높아지고 FALSE(거짓)로
연산되면 출력이 낮아집니다.
[75] 논리 규칙 5
파라미터 그룹 13-4* 논리 규칙
을 참조하십시오. SLC에서 논리
파라미터 설명
44
68 Danfoss A/S © 12/2018 All rights reserved. MG06C839
VLT® AutomationDrive FC 360
Page 71

5-40 릴레이 기능
옵션: 기능:
규칙 5가 TRUE (참)로 연산되면
출력이 높아지고 FALSE(거짓)로
연산되면 출력이 낮아집니다.
[80] SL 디지털 출
력 A
파라미터 13-52 SL 컨트롤러 동
작
을(를) 참조하십시오. 출력 A는
[32] 스마트 로직 동작
에서 낮고
[38] 스마트 로직 동작
에서 높습
니다.
[81] SL 디지털 출
력 B
파라미터 13-52 SL 컨트롤러 동
작
을(를) 참조하십시오. 출력 B는
[32] 스마트 로직 동작
에서 낮고
[38] 스마트 로직 동작
에서 높습
니다.
[82] SL 디지털 출
력 C
파라미터 13-52 SL 컨트롤러 동
작
을(를) 참조하십시오. 출력 C는
[32] 스마트 로직 동작
에서 낮고
[38] 스마트 로직 동작
에서 높습
니다.
[83] SL 디지털 출
력 D
파라미터 13-52 SL 컨트롤러 동
작
을(를) 참조하십시오. 출력 D는
[32] 스마트 로직 동작
에서 낮고
[38] 스마트 로직 동작
에서 높습
니다.
[160] 알람 없음 알람이 발생하지 않을 때 출력이
높아집니다.
[161] 역회전 구동 AC 드라이브가 반시계방향(상태
비트 구동 AND
역회전
의 논리 생
성)으로 운전할 때 출력이 높아집
니다.
[165] 현장 지령 가
동
[166] 원격 지령 가
동
[167] 기동 명령 동작활성화된 기동 명령이 있을 때 출
력이 높아지지만 정지 명령이 활
성화되지는 않습니다.
[168] 수동 운전 상태AC 드라이브가 hand-on 모드일
때 출력이 높아집니다.
[169] 자동 운전 모드AC 드라이브가 자동 운전 모드일
때 출력이 높아집니다.
[170] Homing
Completed
홈 복귀 운전이 완료되었습니다.
이 옵션은
파라미
터 37-00 Application Mode
가
[2] 위치 제어
로 설정된 경우에만
사용할 수 있습니다.
[171] Target
Position
Reached
목표 위치에 도달했습니다. 이 옵
션은
파라미
터 37-00 Application Mode
가
[2] 위치 제어
로 설정된 경우에만
사용할 수 있습니다.
5-40 릴레이 기능
옵션: 기능:
[172] Position
Control
Fault
위치 제어 프로세스 도중에 결함
이 발생했습니다. 결함에 관한 자
세한 내용은
파라미
터 37-18 Pos. Ctrl Fault
Reason
를 참조하십시오. 이 옵션
은
파라미터 37-00 Application
Mode가 [2] 위치 제어
로 설정된
경우에만 사용할 수 있습니다.
[173] Position
Mech Brake
위치 제어를 위해 기계식 제어 방
식을 선택합니다. 이 옵션은
파라
미터 37-00 Application Mode
가
[2] 위치 제어
로 설정된 경우에만
사용할 수 있습니다.
[175] Running on
tension
장력 PID 제어가 활성화(켜짐) 또
는 비활성화(꺼짐)되었는지 표시
합니다. 이 옵션은
파라미
터 37-00 Application Mode
이
[1] 센터 와인더
로 설정된 경우에
만 사용할 수 있습니다.
[176] Ready to
run
센터 와인더 제어 운전이 준비되
었습니다. 이 옵션은
파라미
터 37-00 Application Mode
이
[1] 센터 와인더
로 설정된 경우에
만 사용할 수 있습니다.
[193] 슬립 모드 AC 드라이브/시스템이 슬립 모드
로 진입했습니다.
파라미터 그룹
22-4* 슬립 모드
를 참조하십시오.
[194] 벨트 파손 벨트 파손 조건이 감지되었습니
다.
파라미터 그룹 22-4* 슬립 모
드
를 참조하십시오.
5-41 작동 지연, 릴레이
배열 [2] (릴레이 1 [0], 릴레이 2 [1])
범위: 기능:
0.01 s* [0 - 600s]릴레이 작동개시 시간을 입력합니
다. 지정된 시간 동안
파라미
터 5-40 릴레이 기능
의 조건이
중단되지 않으면 릴레이만 작동합
니다.
파라미터 설명 프로그래밍 지침서
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 69
4 4
Page 72

Selected
Event
Relay
output
Selected
Event
Relay
output
On Delay
P 5-41
On Delay
P 5-41
O Delay
P 5-42
130BA171.10
5-42 차단 지연, 릴레이
배열[2]: 릴레이1[0], 릴레이2[1]
범위: 기능:
0.01 s* [0 - 600s]릴레이 정지 지연 시간을 입력합
니다.
Selected
Event
Relay
output
On Delay
P 5-41
O Delay
P 5-42
130BA172.10
130BD377.10
Ref.
Low freq.
P 5-50/
P 5-55
Input
(Hz)
High
ref.
value
P 5-53/
p 5-58
High freq.
P 5-51/
P 5-56
Low
ref.
value
P 5-52/
p 5-57
5-50 단자 29 최저 주파수
범위: 기능:
4 Hz* [4 -
31999 Hz]
파라미터 5-52 단자 29 최저 지
령/피드백 값
에서 최저 모터축 속
도에 해당하는 최저 주파수 한계
(즉, 최저 지령 값)를 입력합니다.
그림 4.17
를 참조하십시오.
5-51 단자 29 최고 주파수
범위: 기능:
32000
Hz*
[5 32000 Hz]
파라미터 5-53 단자 29 최고 지
령/피드백 값
에서 최고 모터축 속
도에 해당하는 최고 주파수 한계
(즉, 최고 지령 값)를 입력합니다.
5-52 단자 29 최저 지령/피드백 값
범위: 기능:
0* [-4999 -
4999 ]
모터축 속도의 최저 지령 값 한계
[Hz]를 입력합니다. 이 값은 또한
최저 피드백 값이기도 합니다.
파
라미터 5-57 단자 33 최저 지령/
피드백 값
또한 참조하십시오. 단
자 29를 디지털 입력(
파라미
터 5-02 단자 29 모드
=
[0] 입
력
및
파라미터 5-13 단자 29 디
지털 입력
= 해당 값)으로 설정합
니다.
5-53 단자 29 최고 지령/피드백 값
범위: 기능:
Size
related*
[-4999 4999 ]
모터축 속도에 해당하는 최고 지
령 값 [Hz]과 최고 피드백 값을
입력합니다.
파라미터 5-58 단자
33 최고 지령/피드백 값
또한 참
조하십시오. 단자 29를 디지털 입
력(
파라미터 5-02 단자 29 모드
=
[0] 입력(초기 설정)
및
파라미
터 5-13 단자 29 디지털 입력
=
해당 값)으로 설정합니다.
파라미터 설명
VLT® AutomationDrive FC 360
44
그림 4.17 펄스 입력
그림 4.15 작동 지연, 릴레이
그림 4.16 차단 지연, 릴레이
작동 지연 시간이나 차단 지연 시간이 끝나기 전에 선
택된 이벤트 조건이 변경되더라도 릴레이 출력은 영향
을 받지 않습니다.
4.6.4 5-5* 펄스 입력
펄스 입력 파라미터는 펄스 입력에 대한 범위 설정 및
필터 설정의 구성을 통해 임펄스 지령 영역에 적합한
범위를 정의할 때 사용합니다. 입력 단자 29 또는 33은
주파수 지령 입력의 역할을 합니다. 단자 29(
터 5-13 단자 29 디지털 입력
터 5-15 단자 33 디지털 입력
설정합니다. 단자 29를 입력으로 사용한 경우에는
미터 5-02 단자 29 모드을 [0] 입력
70 Danfoss A/S © 12/2018 All rights reserved. MG06C839
) 또는 단자 33(
)을
[32] 펄스 입력
으로 설정합니다.
파라미
파라미
으로
파라
Page 73

5-55 단자 33 최저 주파수
범위: 기능:
4 Hz* [4 -
31999 Hz]
파라미터 5-57 단자 33 최저 지
령/피드백 값
에서 최저 모터축 속
도에 해당하는 최저 주파수 한계
(즉, 최저 지령 값)를 입력합니다.
5-56 단자 33 최고 주파수
범위: 기능:
32000
Hz*
[5 32000 Hz]
파라미터 5-58 단자 33 최고 지
령/피드백 값
에서 최고 모터축 속
도에 해당하는 최고 주파수(즉, 최
고 지령 값)를 입력합니다.
5-57 단자 33 최저 지령/피드백 값
범위: 기능:
0* [-4999 -
4999 ]
모터축 속도의 최저 지령 값 [Hz]
을 입력합니다. 이 값은 또한 최저
피드백 값이기도 합니다.
파라미
터 5-52 단자 29 최저 지령/피드
백 값
또한 참조하십시오.
5-58 단자 33 최고 지령/피드백 값
범위: 기능:
Size
related*
[-4999 4999 ]
모터축 속도에 해당하는 최고 지
령 값 [Hz]을 입력합니다.
파라미
터 5-53 단자 29 최고 지령/피드
백 값
또한 참조하십시오.
Output value
Output
(Hz)
High output
value
P 5-60(term27)
P 5-63(term29)
High freq.
P 5-62(term27)
P 5-65(term29)
130BA089.11
5-60 단자 27 펄스 출력 변수
원하는 단자 27의 출력을 선택합니다.
옵션: 기능:
[0] * 운전하지 않
음
[45] 버스통신 제
어
[48] 버스통신시간
초과
[100] 출력 주파수
0-100
[101] 지령
[102] 피드백
+-200%
[103] 모터 전류
[104] 토오크 0-
Tlim
[105] 토오크 0-
Tnom
[106] 출력 0-Pnom
[107] 속도 0-
HighLim
[109] 최대 출력 주
파수
[113] PID 클램프
출력
5-62 펄스 출력 최대 주파수 #27
범위: 기능:
5000 Hz* [4 -
32000 Hz]
파라미터 5-60 단자 27 펄스 출
력 변수
에서 선택한 출력 변수에
해당하는 단자 27의 최대 주파수
를 설정합니다.
파라미터 설명 프로그래밍 지침서
4 4
그림 4.18 펄스 출력의 구성
4.6.5 5-6* 펄스 출력
주의 사항
모터가 운전하는 동안에는 이 파라미터를 설정할 수 없
습니다.
이 파라미터를 사용하여 펄스 출력의 기능 및 범위설정
을 구성합니다.
터 5-02 단자 29 모드
파라미터 5-01 단자 27 모드
29가 배정됩니다.
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 71
및
파라미
를 통해 펄스 출력에 단자 27과
Page 74

5-63 단자 29 펄스 출력 변수
옵션: 기능:
[0] * 운전하지 않
음
[45] 버스통신 제
어
[48] 버스통신시간
초과
[100] 출력 주파수
0-100
[101] 지령
[102] 피드백
+-200%
[103] 모터 전류
[104] 토오크 0-
Tlim
[105] 토오크 0-
Tnom
[106] 출력 0-Pnom
[107] 속도 0-
HighLim
[109] 최대 출력 주
파수
[113] PID 클램프
출력
5-65 펄스 출력 최대 주파수 #29
범위: 기능:
5000 Hz* [4 -
32000 Hz]
파라미터 5-63 단자 29 펄스 출
력 변수
에서 설정한 출력 변수에
해당하는 단자 29의 최대 주파수
를 설정합니다.
130BD366.12
+24 V DC
A
B
GND
12 18 322719 29 33 20
B
A
B
A
130BA646.10
CW
CCW
파라미터 설명
VLT® AutomationDrive FC 360
44
4.6.6 5-7* 24V 엔코더 입력
24V 엔코더를 단자 12(24V DC 공급), 단자 32(채널
A), 단자 33(채널 B) 및 단자 20(GND)에 연결합니다.
파라미터 7-00 속도 PID 피드백 소스
코더
를 선택하면 엔코더 입력을 위한 디지털 입력
32/33이 활성화됩니다. 해당 엔코더는 이중 채널(A 및
B) 24 V 유형입니다. 최대 입력 주파수: 32 kHz.
AC 드라이브에 엔코더 연결
24V 인크리멘탈 엔코더. 최대 케이블 길이는 5 m
(16.4 ft)입니다.
72 Danfoss A/S © 12/2018 All rights reserved. MG06C839
에서
그림 4.19 24 V 또는 10–30 V 엔코더 연결
[1] 24V 엔
그림 4.20 엔코더 회전 방향
Page 75

5-70 단자 32/33 분해능
범위: 기능:
1024* [1 -
4096 ]
모터축의 회전수에 따라 엔코더
펄스를 설정합니다. 엔코더에서
정확한 값을 읽습니다.
5-71 단자 32/33 엔코더 방향
옵션: 기능:
주의 사항
모터가 운전하는 동안에는 이
파라미터를 설정할 수 없습니
다.
엔코더의 연결 배선을 변경하지
않고 감지된 엔코더 회전 방향을
변경합니다.
[0] * 시계 방향 엔코더 축이 시계방향으로 회전한
후 A 채널이 B 채널의 90°(전기
각도) 뒤에 있도록 설정합니다.
[1] 반 시계 방향 엔코더 축이 시계방향으로 회전한
후 A 채널이 B 채널의 90°(전기
각도) 앞에 있도록 설정합니다.
5-90 디지털 및 릴레이 버스통신 제어
범위: 기능:
0* [0 -
0xFFFFFFFF
]
이 파라미터는 버스통신에 의해
제어되는 디지털 출력과 릴레이의
상태를 유지합니다.
논리 1은 출력이 높거나 활성화됨
을 의미합니다.
논리 0은 출력이 낮거나 비활성화
됨을 의미합니다.
5-93 펄스 출력 #27 버스통신 제어
범위: 기능:
0 %* [0 -
100 %]
단자가
파라미터 5-60 단자 27
펄스 출력 변수
에서
[45] 버스통
신 제어 완료
로 구성될 때 출력
5-93 펄스 출력 #27 버스통신 제어
범위: 기능:
단자 27로 전송된 출력 주파수를
설정합니다.
5-94 펄스 출력 #27 시간 초과 프리셋
범위: 기능:
0 %* [0 -
100 %]
단자가
파라미터 5-60 단자 27
펄스 출력 변수
에서
[48] 버스통
신 제어 타임아웃
으로 구성되고
타임아웃이 감지될 때 출력 단자
27로 전송된 출력 주파수를 설정
합니다.
5-95 펄스 출력 #29 버스통신 제어
범위: 기능:
0 %* [0 -
100 %]
단자가
파라미터 5-63 단자 29
펄스 출력 변수
에서
[45] 버스통
신 제어 완료
로 구성될 때 출력
단자 29로 전송된 출력 주파수를
설정합니다.
5-96 펄스 출력 #29 시간 초과 프리셋
범위: 기능:
0 %* [0 -
100 %]
단자가
파라미터 5-63 단자 29
펄스 출력 변수
에서
[48] 버스통
신 제어 타임아웃
으로 구성되고
타임아웃이 감지될 때 출력 단자
29로 전송된 출력 주파수를 설정
합니다.
파라미터 설명 프로그래밍 지침서
4 4
4.6.7 5-9* 버스통신 제어
이 파라미터 그룹은 필드버스 설정을 통해 디지털 및
릴레이 출력을 선택합니다.
비트 0 디지털 출력 단자 27
비트 1 디지털 출력 단자 29
비트 2–3 예비
비트 4 릴레이 1 출력 단자
비트 6–23 예비
비트 24 단자 42 디지털 출력
비트 26–31 예비
표 4.7 비트 기능
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 73
Page 76

6-00 외부 지령 보호 시간
범위: 기능:
10 s* [1 - 99 s] 타임아웃 시간을 입력합니다.
6-01 외부 지령 보호 시간 기능
옵션: 기능:
타임아웃 기능을 선택합니다. 단
자 53 또는 54의 입력 신호가
파
라미터 6-00 외부 지령 보호 시
간
에서 정의된 시간 동안
파라미
터 6-10 단자 53 최저 전압, 파
라미터 6-12 단자 53 최저 전류
,
파라미터 6-20 단자 54 최저 전
압
또는
파라미터 6-22 단자 54
최저 전류
에서 설정된 값의 50%
미만인 경우,
파라미터 6-01 외부
지령 보호 시간 기능
에서 설정된
기능이 활성화됩니다.
[0] * 꺼짐
[1] 출력 고정
[2] 정지
[3] 조그
[4] 최대 속도
[5] 정지 및 트립
Ref./Feedback
Analog input
High Ref./
Feedb. Value'
Low Ref./
Feedb. Value'
'Low Voltage'or
'Low Current'
'High Voltage'or
'High Current'
1 V 5 V 10 V
10
20
30
40
50
[V]
5
Par 6-xx
Par 6-xx
Par 6-xx
Par 6-xx
130BD378.11
6-10 단자 53 최저 전압
범위: 기능:
0.07 V* [0 - 10V]
파라미터 6-14 단자 53 최저 지
령/피드백 값
과 일치하는 전압(V)
을 입력합니다.
파라미터 6-01 외
부 지령 보호 시간 기능
를 활성화
하려면 값을 >1 V로 설정합니다.
6-11 단자 53 최고 전압
범위: 기능:
10V* [0 - 10V] (
파라미터 6-15 단자 53 최고 지
령/피드백 값
에서 설정한) 최고 지
령 값과 일치하는 전압(V)을 입력
합니다.
6-12 단자 53 최저 전류
범위: 기능:
4mA* [0 -
20mA]
최저 전류 값을 입력합니다. 이 지
령 신호는
파라미터 6-14 단자
53 최저 지령/피드백 값
에서 설정
한 최저 지령/피드백 값과 일치합
니다.
파라미터 6-01 외부 지령
보호 시간 기능
를 활성화하려면
값을 >2 mA로 설정합니다.
6-13 단자 53 최고 전류
범위: 기능:
20mA* [0 -
20mA]
파라미터 6-15 단자 53 최고 지
령/피드백 값
에서 설정한 최고 지
령/피드백 값과 일치하는 최고 전
류 값을 입력합니다.
파라미터 설명
VLT® AutomationDrive FC 360
4.7 파라미터: 6-** 아날로그 입/출력
아날로그 입/출력 구성과 디지털 출력을 셋업하기 위한
파라미터 그룹입니다.
AC 드라이브는 다음과 같은 2개의 아날로그 입력을 제
공합니다.
단자 53.
•
단자 54.
44
•
아날로그 입력은 전압(0-10V) 또는 전류 입력
(0/4-20mA)을 자유롭게 할당할 수 있도록 설계되었습
니다.
4.7.1 6-0* 아날로그I/O모드
그림 4.21 타임아웃 기능
4.7.2 6-1* 아날로그 입력 53
74 Danfoss A/S © 12/2018 All rights reserved. MG06C839
아날로그 입력 53(단자 53)의 범위 설정과 한계를 구성
하는 파라미터입니다.
Page 77

6-14 단자 53 최저 지령/피드백 값
범위: 기능:
0* [-4999 -
4999 ]
파라미터 6-10 단자 53 최저 전
압
~
파라미터 6-12 단자 53 최
저 전류
에서 설정한 전압 또는 전
류와 일치하는 지령 또는 피드백
값을 입력합니다.
6-15 단자 53 최고 지령/피드백 값
범위: 기능:
용량에 따
라 다름*
[-4999 4999 ]
파라미터 6-11 단자 53 최고 전
압
~
파라미터 6-13 단자 53 최
고 전류
에서 설정한 전압 또는 전
류와 일치하는 지령 또는 피드백
값을 입력합니다.
6-16 단자 53 필터 시정수
범위: 기능:
0.01 s* [0.01 - 10s]시정수를 입력합니다. 이는 단자
53의 전기적 노이즈를 줄이는데
필요한 1차 디지털 저주파 통과
필터 시정수입니다. 시정수 값이
크면 공진을 더 많이 감소시키기
는 하지만 필터를 통한 시간 지연
도 함께 증가합니다.
6-19 단자 53 모드
단자 53을 전류 입력에 사용할지 아니면 전압 입력에 사용할
지 여부를 선택합니다.
옵션: 기능:
[0] 전류 모드
[1] * 전압 모드
6-20 단자 54 최저 전압
범위: 기능:
0.07 V* [0 - 10V] (
파라미터 6-24 단자 54 최저 지
령/피드백 값
에서 설정한) 최저 지
령 값과 일치하는 전압(V)을 입력
합니다.
파라미터 6-01 외부 지령
보호 시간 기능
를 활성화하려면
값을 >1 V로 설정합니다.
6-21 단자 54 최고 전압
범위: 기능:
10V* [0 - 10V] (
파라미터 6-25 단자 54 최고 지
령/피드백 값
에서 설정한) 최고 지
령 값과 일치하는 전압(V)을 입력
합니다.
6-22 단자 54 최저 전류
범위: 기능:
4mA* [0 -
20mA]
최저 전류 값을 입력합니다. 이 지
령 신호는
파라미터 6-24 단자
54 최저 지령/피드백 값
에서 설정
한 최저 지령/피드백 값과 일치합
니다.
파라미터 6-01 외부 지령
보호 시간 기능
에서 외부 지령 보
호 기능을 활성화하기 위해서는
값을 >2 mA로 설정합니다.
6-23 단자 54 고전류
범위: 기능:
20mA* [0 -
20mA]
파라미터 6-25 단자 54 최고 지
령/피드백 값
에서 설정한 최고 지
령/피드백 값에 해당하는 최고 전
류 값을 입력합니다.
6-24 단자 54 최저 지령/피드백 값
범위: 기능:
0* [-4999 -
4999 ]
파라미터 6-21 단자 54 최고 전
압/파라미터 6-22 단자 54 최저
전류
에서 설정한 전압 또는 전류
와 일치하는 지령 또는 피드백 값
을 입력합니다.
6-25 단자 54 최고 지령/피드백 값
범위: 기능:
용량에 따
라 다름*
[-4999 4999 ]
파라미터 6-21 단자 54 최고 전
압/파라미터 6-23 단자 54 고전
류
에서 설정한 전압 또는 전류와
일치하는 지령 또는 피드백 값을
입력합니다.
6-26 단자 54 필터 시정수
범위: 기능:
0.01 s* [0.01 - 10s]시정수를 입력합니다. 이 때 이 시
정수는 단자 54의 전기적 노이즈
를 줄이는데 필요한 1차 디지털
저주파 통과 필터 시정수입니다.
시정수 값이 크면 공진을 더 많이
감소시키기는 하지만 필터를 통한
시간 지연도 함께 증가합니다.
6-29 단자 54 모드
옵션: 기능:
단자 54를 전류 입력에 사용할지
아니면 전압 입력에 사용할지 여
부를 선택합니다.
[0] 전류 모드
[1] * 전압 모드
파라미터 설명 프로그래밍 지침서
4 4
4.7.3 6-2* 아날로그 입력 54
아날로그 입력 54(단자 54)의 범위 설정과 한계를 구성
하는 파라미터입니다.
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 75
Page 78

6-70 단자 45 모드
단자 45를 아날로그 출력 또는 디지털 출력으로 설정합니다.
옵션: 기능:
[0] * 0-20mA
[1] 4-20 mA
[2] 디지털 출력
6-71 Terminal 45 Analog Output
옵션: 기능:
[0] * 운전하지 않
음
[100] 출력 주파수
0-100
0–100 Hz
[101] 지령 Min
Ref
–Max
Ref
[102] 피드백
+-200%
MinFB–Max
FB
[103] 모터 전류 0–I
max
[104] 토오크 0-
Tlim
[105] 토오크 0-
Tnom
[106] 출력 0-Pnom 0–P
nom
[107] 속도 0-
HighLim
[111] Speed
Feedback
[113] PID 클램프
출력
[139] 버스통신
0-20mA
0–100%
[143] Ext. CL 1
[162] Tapered
tension set
point
[254] DC Link
Voltage
6-73 Terminal 45 Output Min Scale
범위: 기능:
0 %* [0 -
200 %]
단자 45에서 선택된 아날로그 신
호의 최소 출력 범위(0 또는 4
mA)를 설정합니다.
파라미
터 6-71 Terminal 45 Analog
Output
에서 선택된 변수의 최대
범위에 대한 백분율로 값을 설정
합니다.
6-74 Terminal 45 Output Max Scale
범위: 기능:
100 %* [0 -
200 %]
단자 45에서 선택된 아날로그 신
호의 최대 출력 범위(20 mA)를
설정합니다
파라미
터 6-71 Terminal 45 Analog
Output
에서 선택된 변수의 최대
범위에 대한 백분율로 값을 설정
합니다.
6-76 Terminal 45 Output Bus Control
범위: 기능:
0* [0 -
16384 ]
버스통신에 의해 제어된 경우에
아날로그 출력의 수준을 유지합니
다. 이 파라미터는 N2 형식입니
다.
6-90 단자 42 모드
단자 42를 아날로그 출력 또는 디지털 출력으로 설정합니다.
옵션: 기능:
[0] * 0-20mA
[1] 4-20 mA
[2] 디지털 출력
6-91 Terminal 42 Analog Output
옵션: 기능:
[0] * 운전하지 않
음
[100] 출력 주파수
0-100
[101] 지령
파라미터 설명
VLT® AutomationDrive FC 360
4.7.4 6-7* 아날로그/디지털 출력 45
6-72 단자 45 디지털 출력
옵션: 기능:
아날로그/디지털 출력 단자 45의 범위 설정과 한계를
구성하는 파라미터입니다. 아날로그 출력의 전류 출력
[198] 드라이브
바이패스
은 0/4–20 mA입니다. 아날로그 출력의 분해능은 12 비
트입니다. 아날로그 출력 단자 또한 디지털 출력으로 셋
업할 수 있습니다.
44
6-72 단자 45 디지털 출력
옵션: 기능:
[0] * 운전하지
76 Danfoss A/S © 12/2018 All rights reserved. MG06C839
않음
단자 45의 기능을 디지털 전류 출력으로
선택합니다.
Mode
설명은
조하십시오.
파라미터 6-70 Terminal 45
또한 참조하십시오. 각각의 옵션 및
장을 4.6.2 5-3* 디지털 출력
4.7.5 6-9* 아날로그/디지털 출력 42
아날로그/디지털 출력 단자 42의 한계를 구성하는 파라
미터입니다. 아날로그 출력의 전류 출력은 0/4–20 mA
입니다. 아날로그 출력의 분해능은 12 비트입니다. 아날
로그 출력 단자 또한 디지털 출력으로 셋업할 수 있습
니다.
를 참
Page 79

6-91 Terminal 42 Analog Output
옵션: 기능:
[102] 피드백
+-200%
[103] 모터 전류
[104] 토오크 0-
Tlim
[105] 토오크 0-
Tnom
[106] 출력 0-Pnom
[107] 속도 0-
HighLim
[111] Speed
Feedback
[113] PID 클램프
출력
[139] 버스통신
0-20mA
[143] Ext. CL 1
[162] Tapered
tension set
point
[254] DC Link
Voltage
6-93 Terminal 42 Output Min Scale
범위: 기능:
0 %* [0 -
200 %]
단자 42에서 선택된 아날로그 신
호의 최소 출력 범위(0 또는 4
mA)를 설정합니다.
파라미
터 6-91 Terminal 42 Analog
Output
에서 선택된 변수의 최대
범위에 대한 백분율로 값을 설정
합니다.
6-94 Terminal 42 Output Max Scale
범위: 기능:
100 %* [0 -
200 %]
단자 42에서의 최대 출력 범위
(20 mA)를 설정합니다.
파라미
터 6-91 Terminal 42 Analog
Output
에서 선택된 변수의 최대
범위에 대한 백분율로 값을 설정
합니다.
6-94 Terminal 42 Output Max Scale
범위: 기능:
(mA)
0%
20
0/4
100%
Current
Analog
output
Min Scale
par. 6-93
Variable
for
output
example:
Power
Analog
Output
Max Scale
par. 6-94
130BB772.10
그림 4.22 출력 범위 설정과 전
류
6-96 단자 42 출력 버스통신 제어
범위: 기능:
0* [0 -
16384 ]
버스통신에 의해 제어된 경우, 단
자 42에서 아날로그 출력을 유지
합니다. 이 파라미터는 N2 형식입
니다.
파라미터 설명 프로그래밍 지침서
4 4
6-92 단자 42 디지털 출력
옵션: 기능:
[0] * 운전하지 않음
[198] 드라이브 바이패
스
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 77
각각의 옵션 및 설명은
장
을 4.6.2 5-3* 디지털 출력
하십시오.
를 참조
Page 80

7-00 속도 PID 피드백 소스
옵션: 기능:
주의 사항
모터가 운전하는 동안에는 이
파라미터를 변경할 수 없습니
다.
속도 CL 제어에 대한 피드백 소
스를 선택합니다.
[1] 24V 엔코더
[2] MCB 102
[3] MCB 103
[6] 아날로그 입
력 53
[7] 아날로그 입
력 54
[8] 주파수 입력
29
[9] 주파수 입력
33
[20] * None
7-02 속도 PID 비례 이득
범위: 기능:
0.015* [0 - 1 ] 속도 제어기의 비례 이득을 입력
합니다. 이러한 비례 이득은 오차
(피드백 신호와 설정포인트 간의
편차)를 증폭합니다. 이 파라미터
는
파라미터 1-00 구성 모드 [1]
속도 폐회로
제어와 함께 사용됩
니다. 고증폭에 의해 순간 제어를
확보합니다. 하지만 증폭이 지나
치게 높으면, 공정이 불안정해질
수 있습니다.
7-03 속도 PID 적분 시간
범위: 기능:
8 ms* [2 -
20000 ms]
속도 제어기 적분 시간 즉, 내부
PID 제어기가 오차를 수정하는 데
걸리는 시간을 입력합니다. 오차
가 클수록 이득이 더 빠르게 증가
합니다. 적분 시간은 신호 지연을
유발하므로 효과가 감소하며 정상
상태의 속도 오차 원인을 제거하
는 데 사용할 수 있습니다. 적분
시간이 짧으면 더 빠르게 제어할
수 있으나 시간이 지나치게 짧으
면 공정이 불안정해질 수 있습니
다. 적분 시간이 너무 길면, 오차
가 발생한 경우에 공정 조절기가
오차를 조절하는 데 시간이 너무
7-03 속도 PID 적분 시간
범위: 기능:
오래 걸리므로 적분이 동작하지
않아 요구되는 지령에서 중대한
편차가 발생할 수 있습니다. 이 파
라미터는
파라미터 1-00 구성 모
드
에서 설정된
[1] 속도 폐회로
제어와 함께 사용됩니다.
7-04 속도 PID 미분 시간
범위: 기능:
30 ms* [0 - 200
ms]
속도 제어기의 미분 시간을 입력
합니다. 미분기는 정오차에 반응
하지 않습니다. 이는 속도 피드백
의 변화율에 대한 비례 이득을 제
공합니다. 오차가 더 빠르게 변화
할수록, 미분기의 이득은 더욱 커
집니다. 이득은 오차 변화 시의 속
도에 비례합니다. 이 파라미터를
0으로 설정하면 미분기를 사용할
수 없습니다. 이 파라미터는
파라
미터 1-00 구성 모드 [1] 속도
폐회로
제어와 함께 사용됩니다.
7-05 속도 PID 미분 이득 한계
범위: 기능:
5* [1 - 20 ] 미분기에 의해 제공된 이득의 한
계를 설정합니다. 미분 이득은 주
파수가 높을수록 증가하므로 이득
을 제한하는 것이 좋을 수 있습니
다. 예를 들어 저주파수에서는 단
순 미분 링크, 고주파수에서는 불
변 미분 링크를 셋업합니다. 이 파
라미터는
파라미터 1-00 구성 모
드 [1] 속도 폐회로
제어와 함께
사용됩니다.
7-06 속도 PID 저주파 통과 필터 시간
범위: 기능:
10 ms* [1 - 6000
ms]
주의 사항
너무 많이 필터링하면 다이나
믹 성능에 악영향을 미칠 수
있습니다.
속도 제어 저역통과필터의 시정수
를 설정합니다. 저역통과필터는
정상 상태의 성능을 향상시키고
피드백 신호의 공진을 감소시킵니
다. 이 파라미터는
파라미
터 1-00 구성 모드 [1] 속도 폐
회로
또는
[2] 토크 폐회로
와 함
께 사용됩니다. 이 파라미터는 시
스템에 노이즈가 많이 발생할 때
유용합니다(
그림 4.23
참조). 예를
들어, 시정수(τ)가 100 ms로 프로
파라미터 설명
VLT® AutomationDrive FC 360
4.8 파라미터: 7-** 컨트롤러
4.8.1 7-0* 속도 PID 제어
44
78 Danfoss A/S © 12/2018 All rights reserved. MG06C839
Page 81
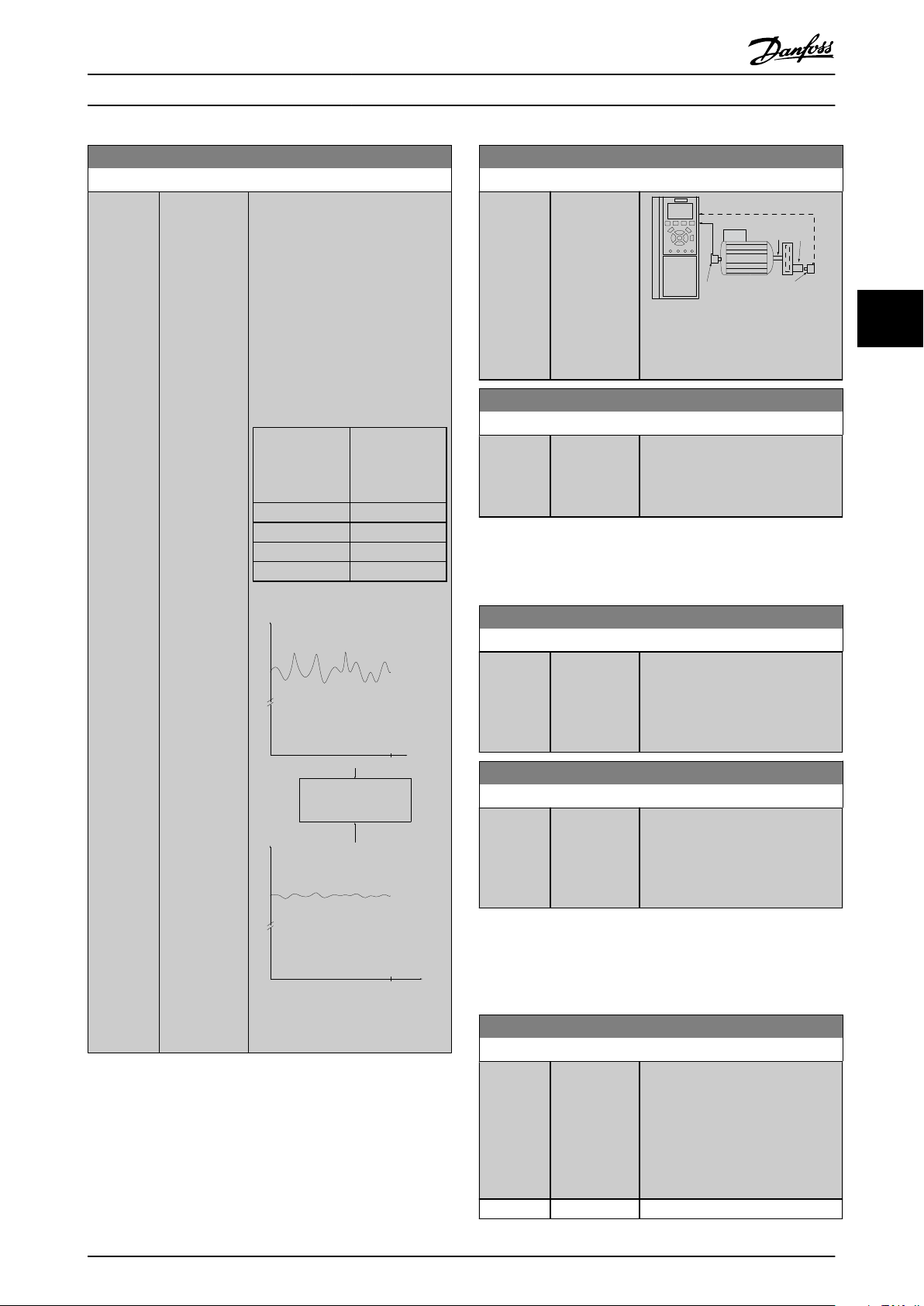
7-06 속도 PID 저주파 통과 필터 시간
범위: 기능:
그래밍되면, 저역통과필터의 차단
주파수는 1/0.1=10 RAD/초가 되
며, 이는 (10/2 x π) = 1.6 Hz와
동일합니다. PID 조절기는 1.6Hz
보다 낮은 주파수에 의해 변화하
는 피드백 신호만 조절합니다. 피
드백 신호가 1.6Hz보다 높은 주파
수에 의해 변화하는 경우, PID 조
절기는 반응하지 않습니다.
엔코더의 회전수당 펄스에 따른
파라미터 7-06 속도 PID 저주파
통과 필터 시간
의 실제 설정:
엔코더 PPR
파라미
터 7-06 속도
PID 저주파 통
과 필터 시간
512 10 ms
1024 5 ms
2048 2 ms
4096 1 ms
0.6
0.6
f
g
= 10 Hz
175ZA293.11
Feedback
Disturbed feedback signal
t (Sec.)
t (Sec.)
Filtered feedback signal
Lowpass lter
Feedback
그림 4.23 피드백 신호
7-07 속도 PID 피드백 기어 비
범위: 기능:
1* [0.0001 -
32 ]
Par 7-07=1.00 Par 7-07=n1/n2
130BA871.10
Motor
n1 n2
그림 4.24 속도 PID 피드백 기
어 비
7-08 속도 PID 피드포워드 상수
범위: 기능:
0 %* [0 -
500 %]
지령 신호가 지정된 크기만큼 속
도 제어기를 통과합니다. 이 기능
은 속도 제어 회로의 다이나믹 성
능을 개선해 줍니다.
7-12 토크 PI 제어기 비례 게인
범위: 기능:
100 %* [0 -
500 %]
토오크 제어기의 비례 이득 값을
입력합니다. 높은 값을 선택할수
록 제어기의 반응이 빨라집니다.
지나치게 높은 설정 값은 제어기
를 불안정하게 합니다.
7-13 토크 PI 제어기 적분 시간
범위: 기능:
0.020 s* [0.002 - 2s]토오크 제어기의 적분 시간을 입
력합니다. 적분 시간이 낮을수록
제어기의 반응이 빨라집니다. 하
지만 너무 낮은 설정 값은 제어기
를 불안정하게 합니다.
7-20 공정 폐회로 피드백 1 리소스
옵션: 기능:
유효한 피드백 신호는 최대 2개의
각기 다른 입력 신호의 합으로 구
성됩니다. 이러한 신호 중 첫 번째
신호의 소스로 처리할 입력을 선
택합니다. 두 번째 입력 신호는
파
라미터 7-22 공정 폐회로 피드백
2 리소스
에서 정의됩니다.
[0] * 기능 없음
파라미터 설명 프로그래밍 지침서
4 4
4.8.2 7-1* 토오크 PI 제어
토오크 PI 제어를 구성하는 파라미터입니다.
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 79
4.8.3 7-2* 공정제어기 피드백
공정 PID 제어에 대한 피드백 소스와 피드백 처리 방법
을 선택합니다.
Page 82

7-20 공정 폐회로 피드백 1 리소스
옵션: 기능:
[1] 아날로그 입
력 53
[2] 아날로그 입
력 54
[3] 주파수 입력
29
[4] 주파수 입력
33
7-22 공정 폐회로 피드백 2 리소스
옵션: 기능:
유효한 피드백 신호는 최대 2개의
각기 다른 입력 신호의 합으로 구
성됩니다. 이러한 신호 중 두 번째
신호 소스로 처리할 입력을 선택
합니다. 첫 번째 입력 신호는
파라
미터 7-20 공정 폐회로 피드백 1
리소스
에서 정의됩니다.
[0] * 기능 없음
[1] 아날로그 입
력 53
[2] 아날로그 입
력 54
[3] 주파수 입력
29
[4] 주파수 입력
33
7-30 공정 PID 정/역 제어
옵션: 기능:
지령 신호와 피드백 신호 간의 차
이를 통해 정 제어 및 역 제어가
구현됩니다.
[0] * 정 출력 주파수를 증가시킬 수 있도
록 공정 제어를 설정합니다.
[1] 역 출력 주파수를 감소시킬 수 있도
록 공정 제어를 설정합니다.
7-31 공정 PID 와인드업 방지
옵션: 기능:
[0] 꺼짐 출력 주파수를 증가 또는 감소할
수 없을 때 오차 조절을 계속합니
다.
[1] * 켜짐 출력 주파수를 더 이상 조정할 수
없을 때 오차 조절을 중지합니다.
7-32 공정 PID 기동 속도
범위: 기능:
0 RPM* [0 - 6000
RPM]
PID 제어기의 기동 신호로 사용할
모터 회전수를 입력합니다. 전원
이 인가되면 AC 드라이브는 가감
속을 시작한 다음 속도 개회로 제
어에 따라 운전합니다. 공정 PID
기동 속도에 도달하면 AC 드라이
브가 공정 PID 제어로 전환됩니
다.
7-33 공정 PID 비례 이득
범위: 기능:
0.01* [0 - 10 ] PID 비례 이득을 입력합니다. 비
례 이득은 설정포인트와 피드백
신호 간의 오차를 증가시킵니다.
7-34 공정 PID 적분 시간
범위: 기능:
9999 s* [0.10 -
9999 s]
PID 적분 시간을 입력합니다. 적
분기는 설정포인트와 피드백 신호
간의 정오차 시 이득을 증가시킵
니다. 적분 시간은 적분기가 비례
이득과 동일한 이득을 얻기 위해
필요한 시간입니다.
7-35 공정 PID 미분 시간
범위: 기능:
0 s* [0 - 20 s] PID 미분 시간을 입력합니다. 미
분기는 정오차에 반응하지 않지만
오차가 변화하는 경우에 한해 이
득을 발생시킵니다. PID 미분 시
간이 짧을수록 미분기의 이득은
더욱 커집니다.
7-36 공정 PID 미분 이득 한계
범위: 기능:
5* [1 - 50 ] 미분기 이득의 한계를 설정합니
다. 한계가 없을 경우, 변화 속도
가 빠를수록 미분기 이득이 증가
합니다. 느리게 변화할 때는 단순
미분기 이득, 빠르게 변화할 때는
불변 미분기 이득을 얻을 수 있도
록 미분기 이득을 제한합니다.
7-38 공정 PID 피드포워드 상수
범위: 기능:
0 %* [0 -
200 %]
PID 피드포워드(FF) 상수를 입력
합니다. 피드포워드(FF) 상수는
PID 제어기를 통과하기 위해 지령
신호의 일정 부분을 전송하므로
PID 제어는 제어 신호의 나머지
부분에만 영향을 줍니다. 이 파라
미터를 변경하면 모터 회전수에
영향을 줍니다. FF 상수가 활성화
파라미터 설명
VLT® AutomationDrive FC 360
44
4.8.4 7-3* 공정 PID 제어기
80 Danfoss A/S © 12/2018 All rights reserved. MG06C839
Page 83

7-38 공정 PID 피드포워드 상수
범위: 기능:
되면 과도현상이 줄어들고 설정포
인트 변경 시 다이나믹 성능이 향
상됩니다.
파라미터 7-38 공정
PID 피드포워드 상수는 파라미
터 1-00 구성 모드가 [3] 공정
으
로 설정될 때 활성화됩니다.
7-39 지령 대역폭에 따름
범위: 기능:
5 %* [0 -
200 %]
지령에 따른 대역폭을 입력합니
다. PID 제어기 오차(지령과 피드
백 간의 차이)가 이 파라미터의
값보다 작으면 지령에 따른 상태
비트는 1입니다.
7-40 공정 PID I 파트 리셋
옵션: 기능:
[0] * 아니오
[1] 예
[1] 예
를 선택하여 공정 PID 제
어기의 I 파트를 리셋합니다. 선택
항목이
[0] 아니오
로 자동 복귀합
니다. I 파트를 리셋하면 텍스타일
롤 교체와 같이 공정에서 무언가
를 변경한 이후의 명확한 지점부
터 시작할 수 있습니다.
7-41 공정 PID 출력 네가티브 클램프
범위: 기능:
-100 %* [ -100 100 %]
공정 PID 제어기 출력의 네가티브
한계를 입력합니다.
7-42 공정 PID 출력 포지티브 클램프
범위: 기능:
100 %* [ -100 -
100 %]
공정 PID 제어기 출력의 포지티브
한계를 입력합니다.
7-43 공정PID게인스케일-최소 FF
범위: 기능:
100 %* [0 -
100 %]
최소 지령 운전 시 공정 PID 출력
을 적용할 범위를 백분율로 입력
합니다. 백분율 범위는 최소 지령
시 범위(
파라미터 7-43 공정PID
게인스케일-최소 FF
)와 최대 지
령 시 범위(
파라미터 7-44 공정
PID게인스케일-최대 FF
) 사이에
서 선형으로 조정됩니다.
7-44 공정PID게인스케일-최대 FF
범위: 기능:
100 %* [0 -
100 %]
최대 지령 운전 시 공정 PID 출력
을 적용할 범위를 백분율로 입력
합니다. 백분율 범위는 최소 지령
시 범위(
파라미터 7-43 공정PID
게인스케일-최소 FF
)와 최대 지
령 시 범위(
파라미터 7-44 공정
PID게인스케일-최대 FF
) 사이에
서 선형으로 조정됩니다.
7-45 공정 PID 피드포워드 리소스
옵션: 기능:
피드포워드 상수로 사용할 AC 드
라이브 입력을 선택합니다. FF 인
수는 PID 제어기의 출력에 직접
더해집니다. 이 파라미터는 다이
나믹 성능을 증가시킬 수 있습니
다.
버스통신을 통해 설정된 피드포워
드는 N2 형식이어야 합니다.
[0] * 기능 없음
[1] 아날로그 입
력 53
[2] 아날로그 입
력 54
[7] 주파수 입력
29
[8] 주파수 입력
33
[11] 현장 버스통
신 지령
[32] Bus PCD
7-46 공정 PID 피드포워드 정/역 제어
옵션: 기능:
[0] * 정
[0] 정
을 선택하여 FF 리소스를
포지티브 값으로 처리하도록 피드
포워드 상수를 설정합니다.
[1] 역
[1] 역
을 선택하여 피드포워드 리
소스를 네거티브 값으로 처리합니
다.
7-48 PCD Feed Forward
범위: 기능:
0* [0 -
65535 ]
버스통신
파라미터 7-45 공정
PID 피드포워드 리소스
[32]가
읽기 가능한 경우에 파라미터를
읽습니다.
버스통신을 통해 설정된 피드포워
드는 N2 형식이어야 합니다.
파라미터 설명 프로그래밍 지침서
4.8.5 7-4* 고급 공정 PID 제어
4 4
이 파라미터 그룹은
확장형 PID 속도 제어
파라미터 1-00 구성 모드가 [7]
로 설정돤 경우에만 사용할 수 있
습니다.
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 81
Page 84

7-49 공정 PID 출력 정/역 제어
옵션: 기능:
[0] * 정
[0] 정
을 선택하여 공정 PID 제
어기의 결과 출력을 있는 그대로
사용합니다.
[1] 역
[1] 역
을 선택하여 공정 PID 제
어기의 결과 출력을 역으로 사용
합니다. 이 운전은 피드포워드 상
수가 적용된 후에 수행됩니다.
7-50 공정 PID 확장형 PID
옵션: 기능:
[0] 사용안함 공정 PID 제어기의 확장형 파트를
비활성화합니다.
[1] * 사용함 공정 PID 제어기의 확장형 파트를
활성화합니다.
7-51 공정 PID 피드포워드 게인
범위: 기능:
1* [0 - 100 ] 피드포워드는 잘 알려진 신호 중
사용할 수 있는 신호를 기준으로
이득을 확보하는데 사용합니다.
이후 PID 제어기는 제어 파트 중
작은 파트만 제어하는 데 이는 알
수 없는 특성 때문에 필요합니다.
파라미터 7-38 공정 PID 피드포
워드 상수
의 기본 피드포워드 상
수는 항상 지령과 관련이 있는 반
면,
파라미터 7-51 공정 PID 피
드포워드 게인
는 보다 많은 옵션
을 갖고 있습니다. 와인더 어플리
케이션에서 피드포워드 상수는 대
체로 시스템의 라인 속도입니다.
7-52 공정 PID 피드포워드 가속
범위: 기능:
0.01 s* [0.01 100 s]
가속 시 피드포워드 신호의 다이
나믹 성능을 제어합니다.
7-53 공정 PID 피드포워드 감속
범위: 기능:
0.01 s* [0.01 100 s]
감속 시 피드포워드 신호의 다이
나믹 성능을 제어합니다.
7-56 공정 PID 지령 필터 시간
범위: 기능:
0.001 s* [0.001 - 1s]지령 1차 저주파 통과 필터의 시
정수를 설정합니다. 저주파 통과
필터는 정상 상태의 성능을 향상
시키고 지령/피드백 신호의 공진
을 감소시킵니다. 하지만 너무 많
이 필터링하면 다이나믹 성능에
악영향을 미칠 수 있습니다.
7-57 공정 PID 피드백 필터 시간
범위: 기능:
0.001 s* [0.001 - 1s]피드백 1차 저주파 통과 필터의
시정수를 설정합니다. 저주파 통
과 필터는 정상 상태의 성능을 향
상시키고 지령/피드백 신호의 공
진을 감소시킵니다. 하지만 너무
많이 필터링하면 다이나믹 성능에
악영향을 미칠 수 있습니다.
7-60 피드백 1 변환
피드백 1 신호의 변환 방식을 선택합니다.
[0] 선형
을 선택하
여 피드백 신호를 변환하지 않고 있는 그대로 둡니다.
옵션: 기능:
[0] * 선형
[1] 제곱근
7-62 피드백 2 변환
피드백 2 신호의 변환 방식을 선택합니다.
[0] 선형
을 선택하
여 피드백 신호를 변환하지 않고 있는 그대로 둡니다.
옵션: 기능:
[0] * 선형
[1] 제곱근
파라미터 설명
VLT® AutomationDrive FC 360
44
4.8.6 7-5* 확장형 공정 PID 제어
이 파라미터 그룹은
확장형 PID 속도 제어
습니다.
파라미터 1-00 구성 모드가 [7]
로 설정돤 경우에만 사용할 수 있
4.8.7 7-6* 피드백 변환
이 파라미터 그룹을 사용하여 피드백 신호 변환을 구성
합니다.
82 Danfoss A/S © 12/2018 All rights reserved. MG06C839
Page 85

8-00 Option A warning control
이 파라미터는 설치된 옵션을 활성화하는데 사용됩니다.
옵션: 기능:
[0] * None
[1] Disable
Warning
8-01 제어 장소
옵션: 기능:
이 파라미터의 설정은
파라미
터 8-50 코스팅 선택
~
파라미
터 8-56 프리셋 지령 선택
의 설
정에 우선합니다.
[0] * 디지털 및 제
어 워드
디지털 입력과 제어 워드를 모두
사용하여 제어합니다.
[1] 디지털 디지털 입력만 사용하여 제어합니
다.
[2] 제어 워드 제어 워드만 사용하여 제어합니
다.
8-02 제어워드 소스
옵션: 기능:
제어 워드의 소스를 선택합니다.
[0] 없음
[1] FC Port
[3] 옵션 A 프로피버스 및 PROFINET.
8-03 컨트롤 타임아웃 시간
범위: 기능:
1 s* [0.1 -
6000 s]
연속된 두 텔레그램 사이의 수신
에 소요될 것으로 예상되는 최대
시간을 입력합니다. 이 시간의 초
과는 직렬 통신의 정지를 나타냅
니다. 다음으로
파라미터 8-04 제
어워드 타임아웃 기능
에서 설정된
기능이 실행됩니다.
8-04 제어워드 타임아웃 기능
타임아웃 기능을 선택합니다.
파라미터 8-03 제어워드 타임
아웃 시간
에서 설정된 시간 내에 제어 워드가 업데이트되지
않을 경우에는 타임아웃 기능이 활성화됩니다.
옵션: 기능:
[0] * 꺼짐 가장 최근의 제어 워드를 사용하
여 필드버스(필드버스 또는 표준)
을 통한 제어를 다시 시작합니다.
[1] 출력 고정 통신이 다시 시작될 때까지 출력
주파수를 고정시킵니다.
8-04 제어워드 타임아웃 기능
타임아웃 기능을 선택합니다.
파라미터 8-03 제어워드 타임
아웃 시간
에서 설정된 시간 내에 제어 워드가 업데이트되지
않을 경우에는 타임아웃 기능이 활성화됩니다.
옵션: 기능:
[2] 정지 통신이 다시 시작될 때까지 정지
한 후 자동으로 재기동합니다.
[3] 조그 통신이 다시 시작될 때까지 모터
는 조그 주파수로 운전합니다.
[4] 최대 속도 통신이 다시 시작될 때까지 최대
주파수로 모터를 구동합니다.
[5] 정지 및 트립 모터를 정지시키고 트립한 다음
재기동하려면 다음을 통해 AC 드
라이브를 리셋합니다.
•
필드버스를 통한 리셋.
•
[Reset]을 통한 리셋.
•
디지털 입력을 이용한 리
셋.
8-07 진단 트리거
옵션: 기능:
[0] * 사용안함 확장 진단 데이터(EDD)를 보내지
않습니다.
[1] 트리거 알람 알람에 따라 EDD를 보냅니다.
[2] 트리거 알람/
경고
파라미터 16-90 알람 워드, 파라
미터 9-53 프로피버스 경고 워드
또는
파라미터 16-92 경고 워드
의 알람 또는 경고에 따라 EDD를
보냅니다.
8-10 제어 프로필
설치된 필드버스에 해당하는 제어 워드와 상태 워드의 의미를
선택합니다. 설치된 필드버스에 유효한 선택 사항만 LCP 표
시창에 표시됩니다.
옵션: 기능:
[0] * FC 프로필
[1] 프로피dr프로
필
8-14 구성 가능한 제어 워드 CTW
옵션: 기능:
[0] 없음
[1] * 프로필 기본
값
[2] 해당비트off시
CTW유효
[4] PID error
inverse
[5] PID reset I
part
파라미터 설명 프로그래밍 지침서
4.9 파라미터: 8-** 통신 및 옵션
4.9.1 8-0* 일반 설정
4 4
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 83
4.9.2 8-1* 제어워드 설정
Page 86

8-14 구성 가능한 제어 워드 CTW
옵션: 기능:
[6] PID enable
8-19 Product Code
범위: 기능:
Size
related*
[0 2147483647
]
0을 선택하여 장착된 필드버스 옵
션에 따라 실제 필드버스 제품 코
드를 읽습니다. 1을 선택하여 실
제 공급업체 ID를 읽습니다.
8-30 프로토콜
옵션: 기능:
통합된 RS485 포트의 프로토콜을
선택합니다.
[0] * FC FC 프로토콜에 따라 통신합니다.
[2] Modbus RTU Modbus RTU 프로토콜에 따라
통신합니다.
8-32 통신 속도
옵션: 기능:
RS485 포트의 통신속도를 선택합
니다.
[0] 2400 Baud
[1] 4800 Baud
[2] 9600 Baud
[3] 19200 Baud
[4] 38400 Baud
[5] 57600 Baud
[6] 76800 Baud
[7] 115200
Baud
8-33 패리티/정지 비트
옵션: 기능:
[0] * 짝수패리티,1
정지비트
[1] 홀수패리티,1
정지비트
[2] 패리티없음,1
정지비트
[3] 패리티없음,2
정지비트
8-35 최소 응답 지연
범위: 기능:
0.01 s* [ 0.0010 -
0.5 s]
요청 수신에서 응답 전송까지의
최소 지연 시간을 지정합니다. 이
설정은 모뎀 송수신 지연을 극복
하는데 사용됩니다.
8-36 최대 응답 지연
범위: 기능:
Size
related*
[ 0.1 -
10.0 s]
요청 수신에서 응답 전송까지의
최대 지연 시간을 지정합니다. 이
시간을 초과하면 돌아오는 응답이
없습니다.
8-42 PCD 쓰기 구성
PCD의 텔레그램에 할당할 파라미터를 선택합니다. 텔레그램
유형에 따라 사용 가능한 PCD의 개수가 다릅니다. 이후 PCD
의 값은 데이터 값으로 선택된 파라미터에 쓰여집니다.
배열 프로그래밍을 통해 이 파라미터에 최대 16개의 각기 다
른 프리셋 매핑 0-15를 입력합니다. 이 파라미터가 활성화된
경우, 주소 2810–2825는 파라미터 16개의 값을 나타냅니다.
이 파라미터가 활성화되지 않은 경우, 주소 2810과 2811이
입력-데이터-드라이브 제어 워드 및 버스통신 지령으로 사용
됩니다. 주소 2812–2825는 예비용 주소입니다.
옵션: 기능:
[0] None
[1] [302]
Minimum
Reference
[2] [303]
Maximum
Reference
[3] [341] Ramp
1 Ramp up
time
[4] [342] Ramp
1 Ramp
down time
[5] [351] Ramp
2 Ramp up
time
[6] [352] Ramp
2 Ramp
down time
[7] [380] Jog
Ramp Time
[8] [381] Quick
Stop Time
[9] [412] Motor
Speed Low
Limit [Hz]
파라미터 설명
VLT® AutomationDrive FC 360
44
4.9.3 8-3* FC 단자 설정
4.9.4 8-4* FC MC 프로토콜 설정
8-31 주소
범위: 기능:
1* [ 0 -
247 ]
RS485 포트의 주소를 입력합니다. 유효 범
위: 1-126(FC 버스통신의 경우) 또는
1-247(Modbus의 경우).
84 Danfoss A/S © 12/2018 All rights reserved. MG06C839
Page 87

8-42 PCD 쓰기 구성
PCD의 텔레그램에 할당할 파라미터를 선택합니다. 텔레그램
유형에 따라 사용 가능한 PCD의 개수가 다릅니다. 이후 PCD
의 값은 데이터 값으로 선택된 파라미터에 쓰여집니다.
배열 프로그래밍을 통해 이 파라미터에 최대 16개의 각기 다
른 프리셋 매핑 0-15를 입력합니다. 이 파라미터가 활성화된
경우, 주소 2810–2825는 파라미터 16개의 값을 나타냅니다.
이 파라미터가 활성화되지 않은 경우, 주소 2810과 2811이
입력-데이터-드라이브 제어 워드 및 버스통신 지령으로 사용
됩니다. 주소 2812–2825는 예비용 주소입니다.
옵션: 기능:
[10] [414] Motor
Speed High
Limit [Hz]
[11] [590] Digital
& Relay Bus
Control
[12] [676]
Terminal 45
Output Bus
Control
[13] [696]
Terminal 42
Output Bus
Control
[15] FC Port
CTW
[16] FC Port REF
[18] [311] Jog
Speed [Hz]
[19] [427]
Torque limit
bus control
[20] [428] Speed
limit bus
control
8-43 PCD 읽기 구성
텔레그램의 PCD에 할당할 파라미터를 선택합니다. 텔레그램
유형에 따라 사용 가능한 PCD의 개수가 다릅니다. PCD에는
선택된 파라미터의 실제 데이터 값이 포함되어 있습니다.
배열 프로그래밍을 통해 이 파라미터에 최대 16개의 각기 다
른 프리셋 매핑 0-15를 입력합니다. 이 파라미터가 활성화된
경우, 주소 2910–2925는 파라미터 16개의 값을 나타냅니다.
이 파라미터가 활성화되지 않은 경우, 주소 2910과 2911이
상태 워드 등록 및 속도 실제 값으로 사용됩니다. 주소
2912–2925는 예비용 주소입니다.
옵션: 기능:
[0] None
[1] [1500]
Operation
Hours
[2] [1501]
Running
Hours
8-43 PCD 읽기 구성
텔레그램의 PCD에 할당할 파라미터를 선택합니다. 텔레그램
유형에 따라 사용 가능한 PCD의 개수가 다릅니다. PCD에는
선택된 파라미터의 실제 데이터 값이 포함되어 있습니다.
배열 프로그래밍을 통해 이 파라미터에 최대 16개의 각기 다
른 프리셋 매핑 0-15를 입력합니다. 이 파라미터가 활성화된
경우, 주소 2910–2925는 파라미터 16개의 값을 나타냅니다.
이 파라미터가 활성화되지 않은 경우, 주소 2910과 2911이
상태 워드 등록 및 속도 실제 값으로 사용됩니다. 주소
2912–2925는 예비용 주소입니다.
옵션: 기능:
[3] [1502] kWh
Counter
[4] [1600]
Control
Word
[5] [1601]
Reference
[Unit]
[6] [1602]
Reference %
[7] [1603]
Status Word
[8] [1605] Main
Actual Value
[%]
[9] [1609]
Custom
Readout
[10] [1610]
Power [kW]
[11] [1611]
Power [hp]
[12] [1612]
Motor
Voltage
[13] [1613]
Frequency
[14] [1614]
Motor
Current
[15] [1615]
Frequency
[%]
[16] [1616]
Torque
[Nm]
[17] [1618]
Motor
Thermal
[18] [1630] DC
Link Voltage
[19] [1634]
Heatsink
Temp.
파라미터 설명 프로그래밍 지침서
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 85
4 4
Page 88

8-43 PCD 읽기 구성
텔레그램의 PCD에 할당할 파라미터를 선택합니다. 텔레그램
유형에 따라 사용 가능한 PCD의 개수가 다릅니다. PCD에는
선택된 파라미터의 실제 데이터 값이 포함되어 있습니다.
배열 프로그래밍을 통해 이 파라미터에 최대 16개의 각기 다
른 프리셋 매핑 0-15를 입력합니다. 이 파라미터가 활성화된
경우, 주소 2910–2925는 파라미터 16개의 값을 나타냅니다.
이 파라미터가 활성화되지 않은 경우, 주소 2910과 2911이
상태 워드 등록 및 속도 실제 값으로 사용됩니다. 주소
2912–2925는 예비용 주소입니다.
옵션: 기능:
[20] [1635]
Inverter
Thermal
[21] [1638] SL
Controller
State
[22] [1650]
External
Reference
[23] [1652]
Feedback
[Unit]
[24] [1660]
Digital Input
18,19,27,33
[25] [1661]
Terminal 53
Switch
Setting
[26] [1662]
Analog input
53
[27] [1663]
Terminal 54
Switch
Setting
[28] [1664]
Analog input
54
[29] [1665]
Analog
output 42
[mA]
[30] [1671]
Relay output
[31] [1672]
Counter A
[32] [1673]
Counter B
[33] [1690]
Alarm Word
[34] [1692]
Warning
Word
8-43 PCD 읽기 구성
텔레그램의 PCD에 할당할 파라미터를 선택합니다. 텔레그램
유형에 따라 사용 가능한 PCD의 개수가 다릅니다. PCD에는
선택된 파라미터의 실제 데이터 값이 포함되어 있습니다.
배열 프로그래밍을 통해 이 파라미터에 최대 16개의 각기 다
른 프리셋 매핑 0-15를 입력합니다. 이 파라미터가 활성화된
경우, 주소 2910–2925는 파라미터 16개의 값을 나타냅니다.
이 파라미터가 활성화되지 않은 경우, 주소 2910과 2911이
상태 워드 등록 및 속도 실제 값으로 사용됩니다. 주소
2912–2925는 예비용 주소입니다.
옵션: 기능:
[35] [1694] Ext.
Status Word
[38] [1622]
Torque [%]
[41] [1657]
Feedback
[RPM]
[42] [1679]
Analog
Output 45
[mA]
[43] [1617]
Speed
[RPM]
[44] [1666]
Digital
Output
8-50 코스팅 선택
옵션: 기능:
코스팅(프리런) 기능을 단자(디지
털 입력)를 통해 제어할지 또는
버스통신을 통해 제어할지 여부를
선택합니다.
[0] 디지털 입력 디지털 입력을 통해 코스팅 명령
을 활성화합니다.
[1] 버스 통신 직렬 통신 포트 또는 필드버스 옵
션을 통해 코스팅 명령을 활성화
합니다.
[2] 논리 AND 필드버스/직렬 통신 포트와 하나
의 추가 디지털 입력을 통해 코스
팅 명령을 활성화합니다.
파라미터 설명
44
86 Danfoss A/S © 12/2018 All rights reserved. MG06C839
VLT® AutomationDrive FC 360
4.9.5 8-5* 디지털/통신
제어 워드 병합을 구성하는 파라미터입니다.
주의 사항
이 파라미터는
및 제어 워드
파라미터 8-01 제어 장소가 [0] 디지털
로 설정되어 있는 경우에만 활성화됩니다.
Page 89
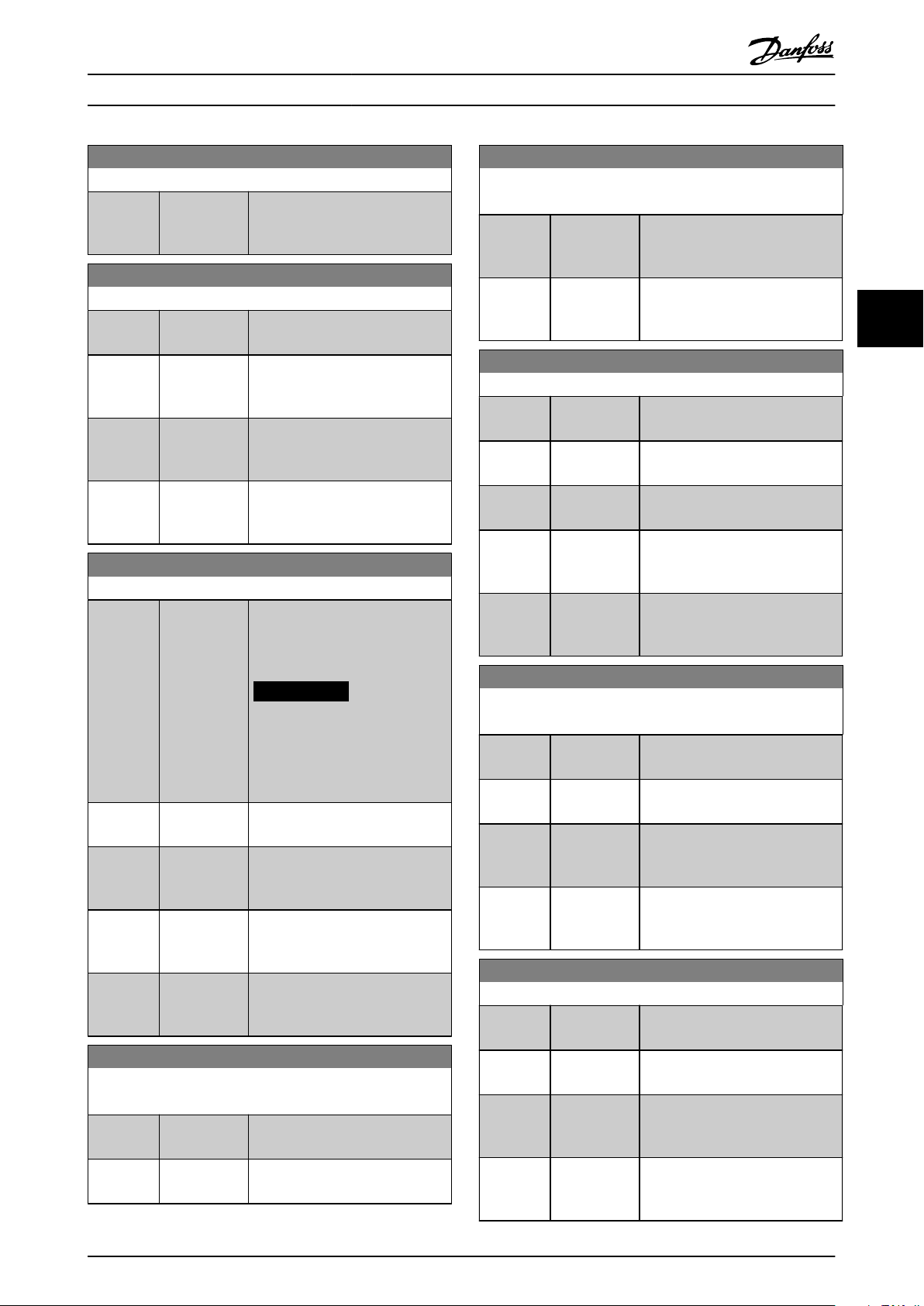
8-50 코스팅 선택
옵션: 기능:
[3] * 논리 OR 필드버스/직렬 통신 포트 또는 디
지털 입력 중 하나를 통해 코스팅
명령을 활성화합니다.
8-51 순간 정지 선택
옵션: 기능:
[0] 디지털 입력 디지털 입력을 통해 순간 정지 명
령을 활성화합니다.
[1] 버스 통신 직렬 통신 포트 또는 필드버스 옵
션을 통해 순간 정지 명령을 활성
화합니다.
[2] 논리 AND 필드버스/직렬 통신 포트와 추가
로 디지털 입력 중 하나를 통해
순간 정지 명령을 활성화합니다.
[3] * 논리 OR 필드버스/직렬 통신 포트 또는 디
지털 입력 중 하나를 통해 순간
정지 명령을 활성화합니다.
8-52 직류 제동 선택
옵션: 기능:
직류 제동을 단자(디지털 입력)를
통해 제어할지 또는 필드버스를
통해 제어할지 여부를 선택합니
다.
주의 사항
파라미터 1-10 모터 구조
이
[1] PM 비돌극 SPM
으로 설
정되면
[0] 디지털 입력
만 선
택할 수 있습니다.
[0] 디지털 입력 디지털 입력을 통해 직류 제동 명
령을 활성화합니다.
[1] 버스 통신 직렬 통신 포트 또는 필드버스 옵
션을 통해 직류 제동 명령을 활성
화합니다.
[2] 논리 AND 필드버스/직렬 통신 포트와 추가
로 디지털 입력 중 하나를 통해
직류 제동 명령을 활성화합니다.
[3] * 논리 OR 필드버스/직렬 통신 포트 또는 디
지털 입력 중 하나를 통해 직류
제동 명령을 활성화합니다.
8-53 기동 선택
기동 기능의 트리거를 선택합니다.
옵션: 기능:
[0] 디지털 입력 디지털 입력이 기동 기능을 트리
거합니다.
[1] 버스 통신 직렬 통신 포트 또는 필드버스가
기동 기능을 트리거합니다.
8-53 기동 선택
기동 기능의 트리거를 선택합니다.
옵션: 기능:
[2] 논리 AND 필드버스/직렬 통신 포트와 디지
털 입력이 기동 기능을 트리거합
니다.
[3] * 논리 OR 필드버스/직렬 통신 포트 또는 디
지털 입력이 기동 기능을 트리거
합니다.
8-54 역회전 선택
옵션: 기능:
역회전 기능의 트리거를 선택합니
다.
[0] 디지털 입력 디지털 입력이 역회전 기능을 트
리거합니다.
[1] 버스 통신 직렬 통신 포트 또는 필드버스가
역회전 기능을 트리거합니다.
[2] 논리 AND 필드버스/직렬 통신 포트와 디지
털 입력이 역회전 기능을 트리거
합니다.
[3] * 논리 OR 필드버스/직렬 통신 포트 또는 디
지털 입력이 역회전 기능을 트리
거합니다.
8-55 셋업 선택
셋업 선택의 트리거를 선택합니다.
옵션: 기능:
[0] 디지털 입력 디지털 입력이 셋업 선택을 트리
거합니다.
[1] 버스 통신 직렬 통신 포트 또는 필드버스가
셋업 선택을 트리거합니다.
[2] 논리 AND 필드버스/직렬 통신 포트와 디지
털 입력이 셋업 선택을 트리거합
니다.
[3] * 논리 OR 필드버스/직렬 통신 포트 또는 디
지털 입력이 셋업 선택을 트리거
합니다.
8-56 프리셋 지령 선택
옵션: 기능:
프리셋 지령 선택의 트리거를 선
택합니다.
[0] 디지털 입력 디지털 입력이 프리셋 지령 선택
을 트리거합니다.
[1] 버스 통신 직렬 통신 포트 또는 필드버스가
프리셋 지령 선택을 트리거합니
다.
[2] 논리 AND 필드버스/직렬 통신 포트와 디지
털 입력이 프리셋 지령 선택을 트
리거합니다.
파라미터 설명 프로그래밍 지침서
4 4
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 87
Page 90
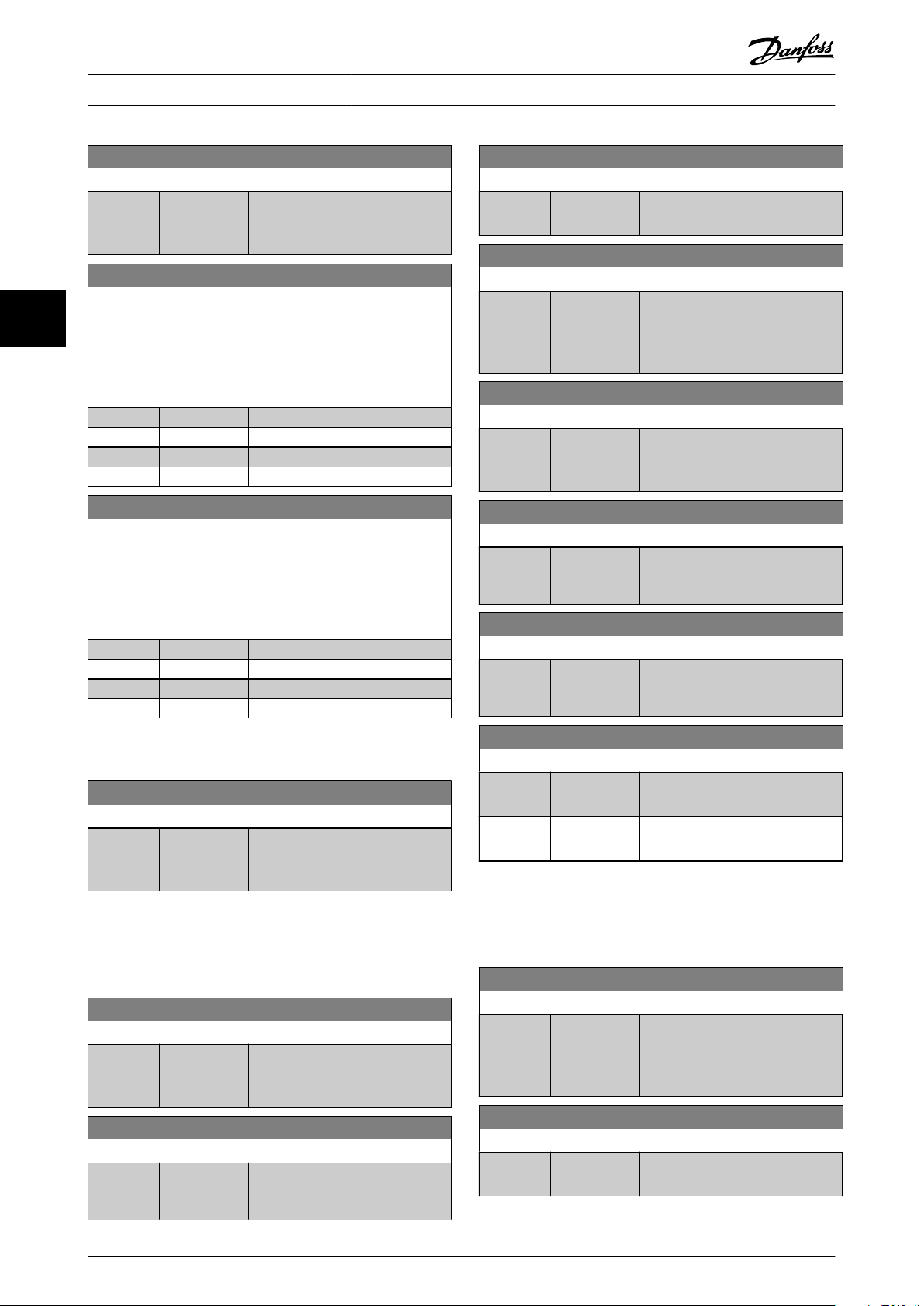
8-56 프리셋 지령 선택
옵션: 기능:
[3] * 논리 OR 필드버스/직렬 통신 포트 또는 디
지털 입력이 프리셋 지령 선택을
트리거합니다.
8-57 Profidrive OFF2 Select
단자(디지털 입력) 및/또는 필드버스를 통해 AC 드라이브의
꺼짐2 선택을 제어할지 여부를 선택합니다. 이 파라미터는
파
라미터 8-01 제어 장소가 [0] 디지털 및 제어 워드
로 설정되
어 있고
파라미터 8-10 컨트롤 워드 프로필가 [1] 프로피드
라이브 프로필
로 설정되어 있는 경우에만 활성화됩니다.
옵션: 기능:
[0] 디지털 입력
[1] 버스 통신
[2] 논리 AND
[3] * 논리 OR
8-58 Profidrive OFF3 Select
단자(디지털 입력) 및/또는 필드버스를 통해 AC 드라이브의
꺼짐3 선택을 제어할지 여부를 선택합니다. 이 파라미터는
파
라미터 8-01 제어 장소가 [0] 디지털 및 제어 워드
로 설정되
어 있고
파라미터 8-10 컨트롤 워드 프로필가 [1] 프로피드
라이브 프로필
로 설정되어 있는 경우에만 활성화됩니다.
옵션: 기능:
[0] 디지털 입력
[1] 버스 통신
[2] 논리 AND
[3] * 논리 OR
8-79 프로토콜 펌웨어 버전
범위: 기능:
용량에 따
라 다름*
[0 - 655 ] 펌웨어 개정 버전: FC는 인덱스 0
이고 Modbus는 인덱스 1이며 인
덱스 2–4는 예비용입니다.
8-80 버스통신 메시지 카운트
범위: 기능:
0* [0 -
4294967295
]
이 파라미터는 버스통신에서 감지
된 텔레그램 중 유효한 텔레그램
의 개수를 표시합니다.
8-81 버스통신 에러 카운트
범위: 기능:
0* [0 -
4294967295
]
이 파라미터는 버스통신에서 감지
된 텔레그램 중 결함(예컨대, CRC
8-81 버스통신 에러 카운트
범위: 기능:
결함)이 있는 텔레그램의 개수를
표시합니다.
8-82 슬레이브 메시지 카운트
범위: 기능:
0* [0 -
4294967295
]
이 파라미터는 AC 드라이브에 의
해 슬레이브로 전송된 텔레그램
중 유효한 텔레그램의 개수를 표
시합니다.
8-83 슬레이브 에러 카운트
범위: 기능:
0* [0 -
4294967295
]
이 파라미터는 AC 드라이브에 의
해 실행될 수 없는 오류 텔레그램
의 개수를 표시합니다.
8-84 슬레이스 메시지 전송
범위: 기능:
0* [0 -
4294967295
]
이 파라미터는 슬레이브에서 전송
된 메시지 개수를 표시합니다.
8-85 슬레이브 타임아웃 오류
범위: 기능:
0* [0 -
4294967295
]
이 파라미터는 슬레이브 타임아웃
오류 개수를 표시합니다.
8-88 Reset FC port Diagnostics
옵션: 기능:
[0] * Do not reset 모든 FC 포트 진단 카운터를 리
셋하지 않습니다.
[1] Reset
counter
모든 FC 포트 진단 카운터를 리
셋합니다.
8-90 통신 조그 1속
범위: 기능:
100 RPM* [ 0 - 1500
RPM]
조그 속도를 입력합니다. 이는 직
렬 포트 또는 필드버스 옵션을 통
해 활성화된 고정 조그 속도를 말
합니다.
8-91 통신 조그 2속
범위: 기능:
200 RPM* [ 0 - 1500
RPM]
조그 속도를 입력합니다. 이 값은
직렬 포트 또는 필드버스 옵션을
파라미터 설명
VLT® AutomationDrive FC 360
44
4.9.6 8-7* 프로토콜 SW 버전
4.9.7 8-8* FC 포트 진단
이 파라미터는 AC 드라이브 단자를 통해 버스통신을
감시하는 데 사용됩니다.
88 Danfoss A/S © 12/2018 All rights reserved. MG06C839
4.9.8 8-9* 버스통신 피드백
이 파라미터 그룹을 사용하여 버스통신 피드백을 구성
합니다.
Page 91
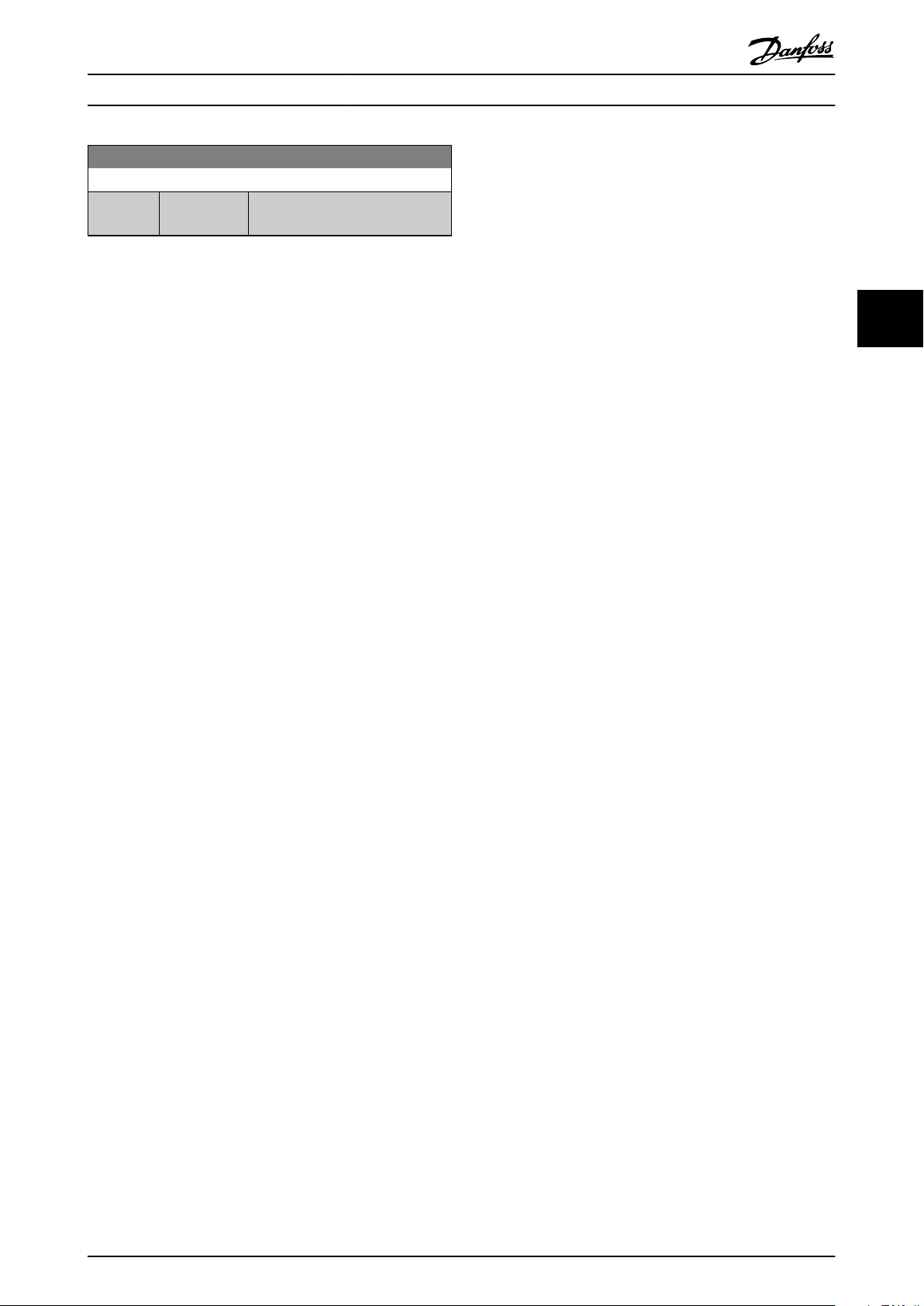
8-91 통신 조그 2속
범위: 기능:
통해 활성화된 고정 조그 속도입
니다.
파라미터 설명 프로그래밍 지침서
4 4
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 89
Page 92

9-00 설정 값
범위: 기능:
0* [0 -
65535 ]
이 파라미터는 마스터 클래스 2의
주기적 지령을 수신합니다. 제어
우선순위가 마스터 클래스 2로 전
송된 경우, 이 파라미터는 AC 드
라이브의 지령을 받는 반면, 주기
적 지령은 무시합니다.
9-07 실제 값
범위: 기능:
0* [0 -
65535 ]
이 파라미터는 마스터 클래스 2의
MAV를 전달합니다. 제어 우선순
위가 마스터 클래스 2로 설정된
경우에만 이 파라미터가 유효합니
다.
9-15 PCD 쓰기 구성
텔레그램의 PCD 3–10에 할당할 파라미터를 선택합니다. 텔
레그램 유형에 따라 사용 가능한 PCD의 개수가 다릅니다. 이
후 PCD 3–10의 값은 데이터 형태로 선택된 파라미터에 쓰여
집니다. 표준 프로피버스 텔레그램은
파라미터 9-22 텔레그
램 선택
를 참조하십시오.
옵션: 기능:
[0] 없음
[302] 최소 지령
[303] 최대 지령
[311] 조그 속도
[Hz]
[312] 캐치업/슬로우
다운 값
[341] 1 가속 시간
[342] 1 감속 시간
[351] 2 가속 시간
[352] 2 감속 시간
[380] 조그 가감속
시간
[381] 순간 정지 가
감속 시간
[412] 모터 속도 하
한 [Hz]
[414] 모터 속도 상
한 [Hz]
[416] 모터 운전의
토오크 한계
9-15 PCD 쓰기 구성
텔레그램의 PCD 3–10에 할당할 파라미터를 선택합니다. 텔
레그램 유형에 따라 사용 가능한 PCD의 개수가 다릅니다. 이
후 PCD 3–10의 값은 데이터 형태로 선택된 파라미터에 쓰여
집니다. 표준 프로피버스 텔레그램은
파라미터 9-22 텔레그
램 선택
를 참조하십시오.
옵션: 기능:
[417] 재생 운전의
토오크 한계
[427] Torque Limit
Bus Control
[428] Speed Limit
Bus Control
[553] 단자 29 최고
지령/피드백
값
[558] 단자 33 최고
지령/피드백
값
[590] 디지털 및 릴
레이 버스통
신 제어
[593] 펄스 출력
#27 버스통신
제어
[595] 펄스 출력
#29 버스통신
제어
[615] 단자 53 최고
지령/피드백
값
[625] 단자 54 최고
지령/피드백
값
[676] Terminal 45
Output Bus
Control
[696] Terminal 42
Output Bus
Control
[733] 공정 PID 비
례 이득
[734] 공정 PID 적
분 시간
[735] 공정 PID 미
분 시간
[748] PCD Feed
Forward
[890] 통신 조그 1
속
[891] 통신 조그 2
속
[1680] 필드버스 제
어워드 1
[1682] 필드버스 지
령 1
파라미터 설명
VLT® AutomationDrive FC 360
4.10 파라미터: 9-** 프로피드라이브
PROFIBUS 파라미터 설명에 관한 자세한 정보는
AutomationDrive FC 360 PROFIBUS DP 프로그래밍
지침서
44
를 참조하십시오.
PROFINET 파라미터 설명에 관한 자세한 정보는
VLT® AutomationDrive FC 360 PROFINET 프로그래
밍 지침서
를 참조하십시오.
90 Danfoss A/S © 12/2018 All rights reserved. MG06C839
VLT
®
Page 93

9-15 PCD 쓰기 구성
텔레그램의 PCD 3–10에 할당할 파라미터를 선택합니다. 텔
레그램 유형에 따라 사용 가능한 PCD의 개수가 다릅니다. 이
후 PCD 3–10의 값은 데이터 형태로 선택된 파라미터에 쓰여
집니다. 표준 프로피버스 텔레그램은
파라미터 9-22 텔레그
램 선택
를 참조하십시오.
옵션: 기능:
[3401] PCD 1 MCO
쓰기
[3402] PCD 2 MCO
쓰기
[3403] PCD 3 MCO
쓰기
[3404] PCD 4 MCO
쓰기
[3405] PCD 5 MCO
쓰기
[3406] PCD 6 MCO
쓰기
[3407] PCD 7 MCO
쓰기
[3408] PCD 8 MCO
쓰기
[3409] PCD 9 MCO
쓰기
[3410] PCD 10
MCO 쓰기
9-16 PCD 읽기 구성
텔레그램의 PCD 3–10에 할당할 파라미터를 선택합니다. 텔
레그램 유형에 따라 사용 가능한 PCD의 개수가 다릅니다.
PCD 3–10의 값에는 선택된 파라미터의 실제 데이터 값이 포
함되어 있습니다.
옵션: 기능:
[0] 없음
[1500] 운전 시간
[1501] 구동 시간
[1502] kWh 카운터
[1600] 제어 워드
[1601] 지령 [단위]
[1602] 지령 %
[1603] 상태 워드
[1605] 필드버스 속
도 실제 값
[%]
[1609] 사용자 정의
읽기
[1610] 출력[kW]
[1611] 출력[HP]
[1612] 모터 전압
[1613] 주파수
[1614] 모터 전류
[1615] 주파수 [%]
[1616] 토오크 [Nm]
[1617] 속도 [RPM]
9-16 PCD 읽기 구성
텔레그램의 PCD 3–10에 할당할 파라미터를 선택합니다. 텔
레그램 유형에 따라 사용 가능한 PCD의 개수가 다릅니다.
PCD 3–10의 값에는 선택된 파라미터의 실제 데이터 값이 포
함되어 있습니다.
옵션: 기능:
[1618] 모터 과열
[1622] 토오크 [%]
[1630] DC 링크 전압
[1633] 제동 에너
지/2 분
[1634] 방열판 온도
[1635] 인버터 과열
[1638] SL 제어기 상
태
[1639] 제어카드 온
도
[1650] 외부 지령
[1652] 피드백 [단
위]
[1653] 디지털 전위
차계 지령
[1657] Feedback
[RPM]
[1660] 디지털 입력
[1661] 단자 53 스위
치 설정
[1662] 아날로그 입
력 53
[1663] 단자 54 스위
치 설정
[1664] 아날로그 입
력 54
[1665] 아날로그 출
력 42 [mA]
[1666] 디지털 출력
[이진수]
[1667] 주파수 입력
#29 [Hz]
[1668] 주파수 입력
#33 [Hz]
[1669] 펄스 출력
#27 [Hz]
[1670] 펄스 출력
#29 [Hz]
[1671] 릴레이 출력
[이진수]
[1672] 카운터 A
[1673] 카운터 B
[1679] Analog
output 45
[mA]
[1684] 통신 옵션
STW
파라미터 설명 프로그래밍 지침서
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 91
4 4
Page 94
9-16 PCD 읽기 구성
텔레그램의 PCD 3–10에 할당할 파라미터를 선택합니다. 텔
레그램 유형에 따라 사용 가능한 PCD의 개수가 다릅니다.
PCD 3–10의 값에는 선택된 파라미터의 실제 데이터 값이 포
함되어 있습니다.
옵션: 기능:
[1685] FC 단자 제어
워드 1
[1690] 알람 워드
[1691] 알람 워드 2
[1692] 경고 워드
[1693] 경고 워드 2
[1694] 확장 상태 워
드
[1695] 확장형 상태
워드 2
[1697] Alarm Word
3
[3421] PCD 1 MCO
읽기
[3422] PCD 2 MCO
읽기
[3423] PCD 3 MCO
읽기
[3424] PCD 4 MCO
읽기
[3425] PCD 5 MCO
읽기
[3426] PCD 6 MCO
읽기
[3427] PCD 7 MCO
읽기
[3428] PCD 8 MCO
읽기
[3429] PCD 9 MCO
읽기
[3430] PCD 10
MCO 읽기
[3450] 실제 위치
[3456] 트랙 결함
9-18 노드 주소
범위: 기능:
126* [ 1 -
126 ]
이 파라미터 또는 하드웨어 스위
치의 단말 주소를 입력합니다.
파
라미터 9-18 노드 주소
에서 단말
주소를 조정하려면 하드웨어 스위
치를 126 또는 127로 설정합니다
(이렇게 하면 모든 스위치가
켜짐
으로 설정됩니다). 이와 같이 설정
되어 있지 않으면 이 파라미터는
스위치의 실제 설정을 보여줍니
다.
9-19 Drive Unit System Number
범위: 기능:
1037* [0 -
65535 ]
제조업체 특정 시스템 ID.
9-22 텔레그램 선택
파라미터 9-15 PCD 쓰기 구성
및
파라미터 9-16 PCD 읽기
구성
에서 자유롭게 구성할 수 있는 텔레그램의 대안으로 AC
드라이브의 표준 프로피버스 텔레그램 구성을 선택합니다.
옵션: 기능:
[1] 표준 텔레그
램 1
[100] * None
[101] PPO1
[102] PPO 2
[103] PPO 3
[104] PPO 4
[105] PPO 5
[106] PPO 6
[107] PPO 7
[108] PPO 8
[200] 사용자텔레그
램1
9-23 신호용 파라미터
옵션: 기능:
[0] * 없음
[302] 최소 지령
[303] 최대 지령
[311] 조그 속도
[Hz]
[312] 캐치업/슬로우
다운 값
[341] 1 가속 시간
[342] 1 감속 시간
[351] 2 가속 시간
[352] 2 감속 시간
[380] 조그 가감속
시간
[381] 순간 정지 가
감속 시간
[412] 모터 속도 하
한 [Hz]
[414] 모터 속도 상
한 [Hz]
[416] 모터 운전의
토오크 한계
[417] 재생 운전의
토오크 한계
[427] Torque Limit
Bus Control
[428] Speed Limit
Bus Control
파라미터 설명
44
92 Danfoss A/S © 12/2018 All rights reserved. MG06C839
VLT® AutomationDrive FC 360
Page 95

9-23 신호용 파라미터
옵션: 기능:
[553] 단자 29 최고
지령/피드백
값
[558] 단자 33 최고
지령/피드백
값
[590] 디지털 및 릴
레이 버스통
신 제어
[593] 펄스 출력
#27 버스통신
제어
[595] 펄스 출력
#29 버스통신
제어
[615] 단자 53 최고
지령/피드백
값
[625] 단자 54 최고
지령/피드백
값
[676] Terminal 45
Output Bus
Control
[696] Terminal 42
Output Bus
Control
[733] 공정 PID 비
례 이득
[734] 공정 PID 적
분 시간
[735] 공정 PID 미
분 시간
[748] PCD Feed
Forward
[890] 통신 조그 1
속
[891] 통신 조그 2
속
[1500] 운전 시간
[1501] 구동 시간
[1502] kWh 카운터
[1600] 제어 워드
[1601] 지령 [단위]
[1602] 지령 %
[1603] 상태 워드
[1605] 필드버스 속
도 실제 값
[%]
[1609] 사용자 정의
읽기
[1610] 출력[kW]
[1611] 출력[HP]
[1612] 모터 전압
9-23 신호용 파라미터
옵션: 기능:
[1613] 주파수
[1614] 모터 전류
[1615] 주파수 [%]
[1616] 토오크 [Nm]
[1617] 속도 [RPM]
[1618] 모터 과열
[1622] 토오크 [%]
[1630] DC 링크 전압
[1633] 제동 에너
지/2 분
[1634] 방열판 온도
[1635] 인버터 과열
[1638] SL 제어기 상
태
[1639] 제어카드 온
도
[1650] 외부 지령
[1652] 피드백 [단
위]
[1653] 디지털 전위
차계 지령
[1657] Feedback
[RPM]
[1660] 디지털 입력
[1661] 단자 53 스위
치 설정
[1662] 아날로그 입
력 53
[1663] 단자 54 스위
치 설정
[1664] 아날로그 입
력 54
[1665] 아날로그 출
력 42 [mA]
[1666] 디지털 출력
[이진수]
[1667] 주파수 입력
#29 [Hz]
[1668] 주파수 입력
#33 [Hz]
[1669] 펄스 출력
#27 [Hz]
[1670] 펄스 출력
#29 [Hz]
[1671] 릴레이 출력
[이진수]
[1672] 카운터 A
[1673] 카운터 B
[1679] Analog
output 45
[mA]
[1680] 필드버스 제
어워드 1
파라미터 설명 프로그래밍 지침서
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 93
4 4
Page 96

9-23 신호용 파라미터
옵션: 기능:
[1682] 필드버스 지
령 1
[1684] 통신 옵션
STW
[1685] FC 단자 제어
워드 1
[1690] 알람 워드
[1691] 알람 워드 2
[1692] 경고 워드
[1693] 경고 워드 2
[1694] 확장 상태 워
드
[1695] 확장형 상태
워드 2
[1697] Alarm Word
3
[3401] PCD 1 MCO
쓰기
[3402] PCD 2 MCO
쓰기
[3403] PCD 3 MCO
쓰기
[3404] PCD 4 MCO
쓰기
[3405] PCD 5 MCO
쓰기
[3406] PCD 6 MCO
쓰기
[3407] PCD 7 MCO
쓰기
[3408] PCD 8 MCO
쓰기
[3409] PCD 9 MCO
쓰기
[3410] PCD 10
MCO 쓰기
[3421] PCD 1 MCO
읽기
[3422] PCD 2 MCO
읽기
[3423] PCD 3 MCO
읽기
[3424] PCD 4 MCO
읽기
[3425] PCD 5 MCO
읽기
[3426] PCD 6 MCO
읽기
[3427] PCD 7 MCO
읽기
[3428] PCD 8 MCO
읽기
9-23 신호용 파라미터
옵션: 기능:
[3429] PCD 9 MCO
읽기
[3430] PCD 10
MCO 읽기
[3450] 실제 위치
[3456] 트랙 결함
9-27 파라미터 편집
옵션: 기능:
프로피버스, 표준 RS485 인터페
이스 또는 LCP로 파라미터를 수
정할 수 있습니다.
[0] 사용안함 프로피버스를 통해 수정하지 않도
록 설정할 수 있습니다.
[1] * 사용함 프로피버스를 통해 수정하도록 설
정할 수 있습니다.
9-28 공정 제어
옵션: 기능:
프로피버스 또는 표준 필드버스를
통해 공정 제어(제어 워드, 속도
지령 및 공정 데이터의 설정)를
할 수 있지만 프로피버스와 표준
필드버스를 동시에 사용할 수는
없습니다. 현장 제어는 항상 LCP
를 통해서만 할 수 있습니다. 공정
제어를 통한 제어는
파라미
터 8-50 코스팅 선택
~
파라미
터 8-56 프리셋 지령 선택
의 설
정에 따른 단자 또는 필드버스를
통해 가능합니다.
[0] 사용안함 프로피버스 마스터 클래스 1을 통
한 공정 제어를 사용하지 않고 표
준 필드버스 또는 프로피버스 마
스터 클래스 2를 통한 공정 제어
를 사용합니다.
[1] * 주기적 마스
터 사용
프로피버스 마스터 클래스 1을 통
한 공정 제어를 사용하고 표준 필
드버스 또는 프로피버스 마스터
클래스 2를 통한 공정 제어를 사
용하지 않습니다.
9-44 결함 메시지 카운터
범위: 기능:
0* [0 -
65535 ]
현재
파라미터 9-45 결함 코드
에
저장된 결함 이벤트 개수를 표시
합니다. 버퍼 용량은 최대 오류 이
벤트 8개까지입니다. 버퍼와 카운
터는 리셋이나 전원 인가를 통해
0으로 설정됩니다.
파라미터 설명
44
94 Danfoss A/S © 12/2018 All rights reserved. MG06C839
VLT® AutomationDrive FC 360
Page 97

9-45 결함 코드
범위: 기능:
0* [0 - 0 ] 이 버퍼에는 마지막 리셋 또는 전
원 인가 후에 발생한 모든 알람과
경고에 대한 알람 워드가 포함되
어 있습니다. 버퍼 용량은 최대 오
류 이벤트 8개까지입니다.
9-47 결함 번호
범위: 기능:
0* [0 - 0 ] 이 버퍼에는 마지막 리셋 또는 전
원 인가 후에 발생한 모든 알람과
경고에 대한 알람 워드가 포함되
어 있습니다. 버퍼 용량은 최대 오
류 이벤트 8개까지입니다.
9-52 결함 상황 카운터
범위: 기능:
0* [0 -
1000 ]
마지막 리셋 또는 전원 인가 후에
발생한 결함 이벤트 개수를 표시
합니다.
9-53 프로피버스 경고 워드
범위: 기능:
0* [0 -
65535 ]
이 파라미터는 표시창에 프로피버
스 통신 경고를 나타냅니다.
비트 설명
0 DP 마스터와의 연결 끊김.
1 사용안함.
2 FDL(필드버스 데이터 링크
레이어) 불량.
3 수신된 데이터 명령 삭제.
4 실제 값이 업데이트되지 않
음.
5 통신 속도 검색.
6 프로피버스 ASIC가 전송되
지 않음.
7 프로피버스 초기화 실패.
8 AC 드라이브 트립됨.
9 내부 CAN 오류.
10 PLC에서 잘못된 구성 데이
터 수신.
11 PLC가 잘못된 ID 전송.
12 내부 결함 발생.
13 구성되지 않음.
14 타임아웃 활성화.
15 경고 34 활성화.
표 4.8 비트 정의
9-63 실제 통신 속도
옵션: 기능:
이 파라미터는 실제 프로피버스
통신 속도를 나타냅니다. 프로피
버스 마스터가 통신 속도를 자동
설정합니다.
[0] 9.6 kbit/s
[1] 19.2 kbit/s
[2] 93.75 kbit/s
[3] 187.5 kbit/s
[4] 500 kbit/s
[6] 1500 kbit/s
[7] 3000 kbit/s
[8] 6000 kbit/s
[9] 12000 kbit/s
[10] 31.25 kbit/s
[11] 45.45 kbit/s
[255] * 통신속도 없
음
9-64 장치 ID
범위: 기능:
0* [0 - 0 ]
주의 사항
이 파라미터는 LCP를 통해 볼
수 없습니다.
장치 ID 파라미터입니다. 데이터
형식은 부호 없는 16의 배열 [n]
입니다. 첫 번째 하위 인덱스는
표 4.9
에서 보는 바와 같이 할당
됩니다.
인덱스내용 값
0 제조업체 128
1 장치 종류 1
2 버전 xxyy
3 펌웨어 날짜연도yyyy
4 펌웨어 날짜월ddmm
5 축 개수 변수
6 공급업체별:
PB 버전
xxyy
7 공급업체별:
데이터베이스
버전
xxyy
8 공급업체별:
AOC 버전
xxyy
9 공급업체별:
MOC 버전
xxyy
표 4.9 장치 ID 첫 번째 하위 인
덱스 할당
파라미터 설명 프로그래밍 지침서
4 4
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 95
Page 98

9-65 프로파일 번호
범위: 기능:
0* [0 - 0 ]
주의 사항
이 파라미터는 LCP를 통해 볼
수 없습니다.
이 파라미터에는 프로필 ID가 포
함되어 있습니다. 첫 번째 바이트
는 프로필 번호를 포함하고 두 번
째 바이트는 프로필의 버전 번호
를 포함합니다.
9-67 제어 워드 1
범위: 기능:
0* [0 -
65535 ]
이 파라미터는 마스터 클래스 2로
부터 PCD 1과 동일한 형식의 제
어 워드를 수용합니다.
9-68 상태 워드 1
범위: 기능:
0* [0 -
65535 ]
이 파라미터는 마스터 클래스 2로
부터 PCD 2와 동일한 형식의 상
태 워드를 제공합니다.
9-70 Edit Set-up
옵션: 기능:
운전하는 동안 프로그래밍(데이터
변경)을 수행할 셋업을 선택합니
다. 활성 셋업으로 선택한 셋업과
관계 없이 2개의 셋업을 프로그래
밍할 수 있습니다. 각각의 마스터
에서의 파라미터 접근은 개별 마
스터(주기적, 비주기적 MCL1, 1
차 비주기적 MCL2, 2차 비주기적
MCL2, 3차 비주기적 MCL2)에
의해 선택된 셋업으로 연결됩니
다.
[1] 셋업 1
[2] 셋업 2
[9] * 활성 셋업
9-71 프로피버스 저장 데이터 값
옵션: 기능:
RS485를 통해 변경된 파라미터
값은 비휘발성 메모리에 자동 저
장되지 않습니다. 이 파라미터를
사용하여 파라미터 값을
EEPROM 비휘발성 메모리에 저
장하는 기능을 활성화하면 전원
차단 시에도 변경된 파라미터 값
이 유지됩니다.
[0] * 꺼짐 비휘발성 저장 기능을 비활성화합
니다.
9-71 프로피버스 저장 데이터 값
옵션: 기능:
[1] 모든 설정 저
장
파라미터 9-70 Edit Set-up
에서
선택된 셋업의 모든 파라미터 값
을 비휘발성 메모리에 저장합니
다. 모든 값이 저장되면 선택항목
이
[0] 꺼짐
으로 복귀합니다.
9-72 프로피버스드라이브 리셋
옵션: 기능:
주의 사항
VLT® PROFIBUS DP MCA
101 옵션만 리셋합니다.
[0] * 동작하지 않
음
[1] 전원인가 시리셋전원 리셋과 동일한 방법으로 전
원 인가 시 AC 드라이브를 리셋
합니다.
[2] Power-on
reset prep
[3] 통신 옵션 리셋리셋할 때 필드버스에서 AC 드라
이브가 사라지며 마스터에서 통신
오류가 발생할 수 있습니다.
9-75 DO ID
범위: 기능:
0* [0 -
65535 ]
DO(드라이브 개체)에 관한 정보
를 \제공합니다. 이 파라미터는
PROFINET 전용입니다.
9-80 정의된 파라미터 (1)
범위: 기능:
0* [0 -
9999 ]
이 파라미터는 정의된 모든 AC
드라이브 파라미터의 목록을 표시
합니다.
9-81 정의된 파라미터 (2)
범위: 기능:
0* [0 -
9999 ]
이 파라미터는 정의된 모든 AC
드라이브 파라미터의 목록을 표시
합니다.
9-82 정의된 파라미터 (3)
범위: 기능:
0* [0 -
9999 ]
이 파라미터는 정의된 모든 AC
드라이브 파라미터의 목록을 표시
합니다.
파라미터 설명
VLT® AutomationDrive FC 360
44
96 Danfoss A/S © 12/2018 All rights reserved. MG06C839
Page 99

9-83 정의된 파라미터 (4)
범위: 기능:
0* [0 -
9999 ]
이 파라미터는 정의된 모든 AC
드라이브 파라미터의 목록을 표시
합니다.
9-84 정의된 파라미터 (5)
범위: 기능:
0* [0 -
9999 ]
이 파라미터는 정의된 모든 AC
드라이브 파라미터의 목록을 표시
합니다.
9-85 Defined Parameters (6)
범위: 기능:
0* [0 -
9999 ]
이 파라미터는 정의된 모든 AC
드라이브 파라미터의 목록을 표시
합니다.
9-90 변경된 파라미터 (1)
범위: 기능:
0* [0 -
9999 ]
이 파라미터는 초기 설정에서 변
경된 모든 AC 드라이브 파라미터
의 목록을 표시합니다.
9-91 변경된 파라미터 (2)
범위: 기능:
0* [0 -
9999 ]
이 파라미터는 초기 설정에서 변
경된 모든 AC 드라이브 파라미터
의 목록을 표시합니다.
9-92 변경된 파라미터 (3)
범위: 기능:
0* [0 -
9999 ]
이 파라미터는 초기 설정에서 변
경된 모든 AC 드라이브 파라미터
의 목록을 표시합니다.
9-93 변경된 파라미터 (4)
범위: 기능:
0* [0 -
9999 ]
이 파라미터는 초기 설정에서 변
경된 모든 AC 드라이브 파라미터
의 목록을 표시합니다.
9-94 변경된 파라미터 (5)
범위: 기능:
0* [0 -
9999 ]
이 파라미터는 초기 설정에서 변
경된 모든 AC 드라이브 파라미터
의 목록을 표시합니다.
9-99 프로피버스 개정 카운터
범위: 기능:
0* [0 -
65535 ]
개정 카운트를 읽습니다.
파라미터 설명 프로그래밍 지침서
4 4
MG06C839 Danfoss A/S © 12/2018 All rights reserved. 97
Page 100
12-01 IP 주소
범위: 기능:
0* [0 -
4294967295
]
옵션의 IP 주소를 구성합니다.
파
라미터 12-00 IP 주소 할당
이
[1] DHCP
또는
[2] BOOTP
로
설정되거나 딥 스위치를 통해 설
정된 경우의 읽기 전용입니다.
12-02 서브넷 마스크
범위: 기능:
0* [0 -
4294967295
]
옵션의 IP 서브넷 마스크를 구성
합니다.
파라미터 12-00 IP 주소
할당이 [1] DHCP
또는
[2]
BOOTP
로 설정된 경우의 읽기 전
용입니다.
12-03 기본 게이트웨이
범위: 기능:
0* [0 -
4294967295
]
옵션의 IP 초기 게이트웨어를 구
성합니다.
파라미터 12-00 IP 주
소 할당이 [1] DHCP
또는
[2]
BOOTP
로 설정된 경우의 읽기 전
용입니다.
12-04 DHCP 서버
범위: 기능:
0* [0 -
2147483647
]
주의 사항
IP 파라미터를 수동으로 설정
한 후에는 전원 재투입이 필요
합니다.
읽기 전용. 확인된 DHCP 또는
BOOTP 서버의 IP 주소를 표시합
니다.
12-05 임대 만료
범위: 기능:
0* [0 -
4294967295
]
읽기 전용. 현재 DHCP가 할당된
IP 주소의 임대 잔여 시간을 표시
합니다.
12-06 네임 서버
범위: 기능:
0* [0 -
4294967295
]
도메인 네임 서버의 IP 주소.
DHCP 사용 시 자동 할당할 수
있습니다.
12-07 도메인 이름
범위: 기능:
0* [1 - 48 ] 연결된 네트워크의 도메인 이름.
DHCP 네트워크 사용 시 자동 할
당할 수 있습니다.
12-08 호스트 이름
범위: 기능:
0* [1 - 48 ] 옵션의 논리적(지정) 명칭.
12-09 물리적 주소
범위: 기능:
0* [0 - 17 ] 읽기 전용. 옵션의 물리적(MAC)
주소를 표시합니다.
12-10 링크 상태
옵션: 기능:
[0] * 링크 없음
[1] 링크 이더넷 포트의 링크 상태를 표시
합니다.
12-11 링크 기간
범위: 기능:
Size
related*
[ 0 - 0 ] 각 포트의 현재 링크 기간을
dd:hh:mm:ss 형식으로 표시합니
다.
12-12 자동 감지
옵션: 기능:
각 포트에 대한 이더넷 링크 파라
미터의 자동 교섭을 다음과 같이
구성합니다. 켜짐 또는 꺼짐.
[0] 꺼짐 링크 속도와 링크 송수신 방식은
파라미터 12-13 링크 속도
및
파
라미터 12-14 링크 송수신 방식
에서 구성할 수 있습니다.
[1] * 켜짐
파라미터 설명
4.11 파라미터: 12-** 이더넷
VLT® AutomationDrive FC 360
이더넷 파라미터 설명에 관한 자세한 정보는
VLT
®
AutomationDrive FC 360 PROFINET 프로그래밍 지
침서
를 참조하십시오.
4.11.1 12-0* IP 설정
44
12-00 IP 주소 할당
옵션: 기능:
IP 주소 할당 방식을 선택합니다.
[0] 수동 IP 주소는
정할 수 있습니다.
[1] DHCP IP 주소가 DHCP 서버를 통해 할당됩니다.
[2] BOOTP IP 주소가 BOOTP 서버를 통해 할당됩니다.
[10] * DCP DCP가 DCP 프로토콜을 통해 할당됩니다.
파라미터 12-01 IP 주소
에서 설
98 Danfoss A/S © 12/2018 All rights reserved. MG06C839
4.11.2 12-1* 이더넷 링크 파라미터
 Loading...
Loading...