


ENGINEERING TOMORROW
编程指南
VLT® AutomationDrive FC 360
vlt-drives.danfoss.com

目录 编程指南
目录
1 简介
1.1 如何阅读本编程指南
1.2 定义
1.3 电气接线 - 控制电缆
2 安全性
2.1 安全符号
2.2 具备资质的人员
2.3 安全事项
3 编程
3.1 本地控制面板操作
3.2 基本设置
4 参数说明
4.1 参数: 0-** 操作和显示
4.2 参数: 1-** 负载和电机
4.3 参数: 2-** 制动
3
3
4
7
10
10
10
10
12
12
19
22
22
33
45
4.4 参数: 3-** 参考值/加减速
4.5 参数: 4-** 极限/警告
4.6 参数: 5-** 数字输入/输出
4.7 参数: 6-** 模拟输入/输出
4.8 参数: 7-** 控制器
4.9 参数: 8-** 通讯和选件
4.10 参数: 9-** PROFIdrive
4.11 参数: 12-** 以太网
4.12 参数: 13-** 智能逻辑控制
4.13 参数: 14-** 特殊功能
4.14 参数: 15-** 变频器信息
4.15 参数: 16-** 数据读数
4.16 参数: 17-** 反馈选件
4.17 参数: 18-** 数据读数 2
4.18 参数: 21-** 扩展 闭环
4.19 参数: 22-** 应用功能
4.20 参数: 30-** 特殊功能
48
54
58
69
72
77
83
90
93
100
107
109
113
114
115
117
119
4.21 参数: 32-** MCO 基本设置
4.22 参数: 33-** MCO 高级 设置
4.23 参数: 34-** MCO 数据读数
4.24 参数: 37-** 应用设置
MG06C841 Danfoss A/S © 12/2018 全权所有。 1
119
120
121
123
目录
VLT® AutomationDrive FC 360
5 参数列表
5.1 简介
5.2 参数列表
6 故障诊断
6.1 警告和报警
索引
128
128
131
149
149
157
2 Danfoss A/S © 12/2018 全权所有。 MG06C841
简介 编程指南
1 简介
1.1 如何阅读本编程指南
1.1.1 本手册的目的
本编程指南提供了有关控制变频器、参数访问、编程和故
障排除的信息。
本编程指南仅供熟悉 VLT® AutomationDrive FC 360 且
具备相应资质的人员使用。
请在编程前阅读并遵守本手册中的说明和步骤。
VLT® 为注册商标。
1.1.2 其他资源
其他资源包括:
VLT® AutomationDrive FC 360 快速指南
•
启动和运行变频器所必需的信息。
VLT® AutomationDriveFC 360
•
设计指南
关变频器以及客户设计和应用的所有技术信息。
请与当地 Danfoss 供应商联系或访问
fc360
以下载文档。
www.danfoss.com/
1.1.3 文档和软件版本
我们将对本手册定期进行审核和更新。欢迎所有改进建
议。
表 1.1
列出了文档版本和相应的软件版本。
版本 备注
MG06C8 因出现新的硬件和软件版本而更新。 1.8x
表 1.1 文档和软件版本
提供
提供了有
软件版
本
°C
°F
AC 交流电
AEO 自动能量优化
ACP 应用控制处理器
AWG 美国线规
AMA 电机自动整定
DC 直流电
EEPROM 电可擦可编程只读存储器
EMC 电磁兼容性
EMI 电磁干扰
ESD 静电放电
ETR 电子热敏继电器
f
M,N
FC 变频器
IGBT 绝缘栅双极型晶体管
IP 防护等级
I
LIM
I
INV
I
M,N
I
VLT,MAX
I
VLT,N
L
d
L
q
LCP 本地控制面板
指示灯 发光二极管
MCP 电动机控制处理器
N.A. 不适用
NEMA 美国电器制造商协会
P
M,N
PCB 印刷电路板
PE 保护性接地
PELV 保护性超低压
PWM 脉冲宽度调制
R
s
再生 反馈端子
RPM 每分钟转数
RFI 射频干扰
SCR 可控硅整流器
SMPS 开关模式电源
T
LIM
U
M,N
X
h
摄氏度
华氏度
额定电机频率
电流极限
逆变器额定输出电流
额定电机电流
最大输出电流
变频器提供的额定输出电流。
电机 d 轴电感
电机 q 轴电感
额定电机功率
定子阻抗
转矩极限
额定电机电压
电机主电抗
1 1
表 1.2 缩略语
MG06C841 Danfoss A/S © 12/2018 全权所有。 3
175ZA078.10
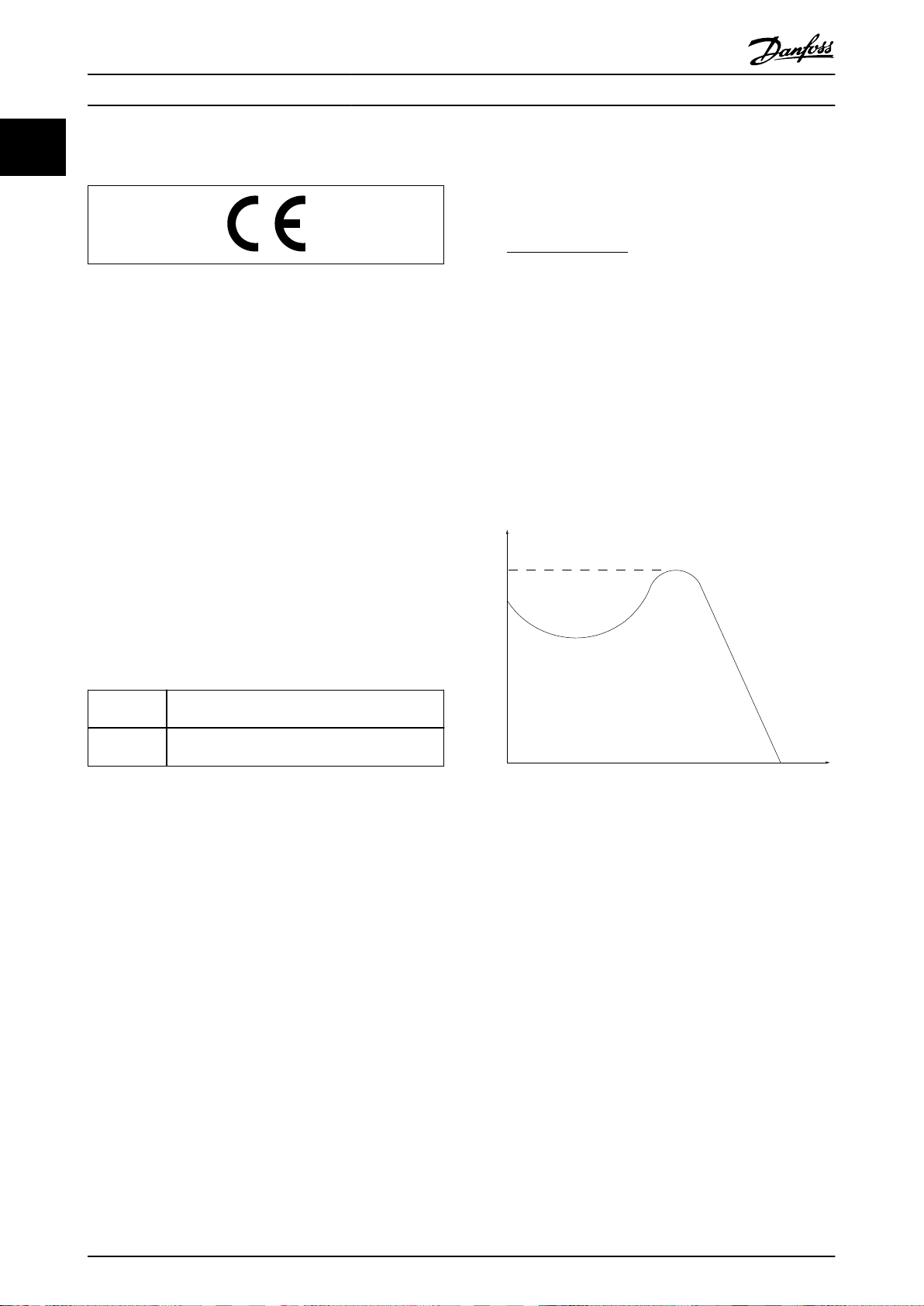
Pull-out
RPM
Torque
简介
VLT® AutomationDrive FC 360
11
1.1.4 批准和认证
n
M,N
电机额定速度(铭牌数据)。
n
s
同步电机速度。
2 ×参数 1−23 × 60s
1.2 定义
1.2.1 变频器
惯性停车
电动机主轴处于自由模式。电动机无转矩。
I
VLT,MAX
最大输出电流。
I
VLT,N
变频器提供的额定输出电流。
U
VLT,MAX
ns=
n
slip
电机滑差。
P
M,N
电机额定功率(铭牌数据,单位为 kW 或 hp)。
T
M,N
额定转矩(电机)。
U
M
瞬时电机电压。
U
M,N
电机额定电压(铭牌数据)。
起步转矩
参数
1−39
最大输出电压。
1.2.2 输入
控制命令
可通过 LCP 和数字输入启动和停止所连接的电机。
功能分为两组。
第 1 组中的功能比第 2 组中的功能具有更高优先级。
第 1 组 惯性停止、复位和惯性停止、快速停止、直流制
动、停止和 [OFF](关闭)。
第 2 组 启动、自锁启动、反向启动、点动、锁定输出和
[Hand On](手动启动)。
表 1.3 功能组
1.2.3 电动机
电机正在运行
在输出轴上生成扭矩,电机上的速度从 0 RPM 增至最大
速度。
f
JOG
激活点动功能(通过数字端子或总线)时的电机频率。
f
M
电机频率。
f
MAX
电机最大频率。
f
MIN
电机最小频率。
f
M,N
电机额定频率(铭牌数据)。
I
M
电机电流(实际值)。
I
M,N
额定电机电流(铭牌数据)。
图 1.1 起步转矩
η
VLT
变频器效率被定义为输出功率和输入功率的比值。
启动 - 禁用命令
启动-禁用命令属于第 1 组的控制命令。有关详细信息,
表 1.3
请参阅
。
停止命令
停止命令属于第 1 组的控制命令。有关详细信息,请参
阅
表 1.3
。
1.2.4 参考值
模拟参考值
传输到模拟输入端 53 或 54 的信号,该值可为电压或电
流。
二进制参考值
通过串行通讯端口传输的信号。
4 Danfoss A/S © 12/2018 全权所有。 MG06C841

简介 编程指南
预置参考值
定义的预置参考值,该值可在参考值的 -100% 到 +100%
范围内设置。可以通过数字端子选择的 8 个预置参考
值。可以通过总线选择的 4 个预置参考值。
脉冲参考值
传输到数字输入(端子 29 或 33)的脉冲频率信号。
Ref
MAX
确定 100% 满额值(通常是 10 V、20 mA)时的参考值
输入和产生的参考值之间的关系。在
考值
中设置最大参考值。
Ref
MIN
参数 3-03 最大参
确定 0% 值(通常是 0 V、0 mA、4 mA)时的参考值输
入和产生的参考值之间的关系。在
值
中设置最小参考值。
参数 3-02 最小参考
1.2.5 其他
模拟输入
模拟输入可用于控制变频器的各项功能。
模拟输入有两种类型:
电流输入: 0–20 mA 和 4–20 mA。
•
电压输入: 0–10 V DC。
•
模拟输出
模拟输出可提供 0-20 mA 或 4-20 mA 的信号。
自动电机识别 (AMA)
AMA 算法可确定相连电机处于静止状态时的电气参数。
制动电阻器
制动电阻器是一个能够吸收再生制动过程中所产生的制动
功率的模块。该再生制动功率会使直流回路电压增高,制
动斩波器可确保将该功率传输到制动电阻器。
CT 特性
恒转矩特性,用于所有应用中(如传送带、容积泵和起重
机)。
数字输入
数字输入可用于控制变频器的各项功能。
数字输出
变频器具有 2 个可提供 24 V 直流信号(最大 40 mA)
的固态输出。
ETR
电热继电器是基于当前负载及时间的热负载计算元件。其
作用是估计电机温度。
FC 标准总线
包括使用 FC 协议或 MC 协议的 RS485 总线。请参阅
参数 8-30 协议
正在初始化
如果执行初始化(
复位),变频器将恢复为默认设置。
间歇工作周期
间歇工作额定值是指一系列工作周期。每个周期包括一个
加载时段和卸载时段。操作可以是定期工作,也可以是非
定期工作。
。
参数 14-22 工作模式
或 2 键组合式
LCP
本地控制面板是对变频器进行控制和编程的完整界面。LCP
可拆除。使用安装套件选件,可将 LCP 安装到前面板中
与变频器之间的距离不超过 3 米(9.8 英尺)的位置。
GLCP
本地图形控制面板 (LCP 102) 界面用于对变频器进行控
制和编程。显示屏是图形式,面板用于显示过程值。GLCP
具有存储和复制功能。
NLCP
本地数字控制面板 (LCP 21) 界面用于对变频器进行控制
和编程。显示屏是数字式的,因此该面板用于显示过程
值。NLCP 具有存储和复制功能。
低位 (lsb)
最小有效位。
高位 (msb)
最大有效位。
MCM
Mille Circular Mil 的缩写,是美国测量电缆横截面积
的单位。1 MCM = 0.5067 mm2。
联机/脱机参数
对联机参数而言,在更改了其数据值后,改动将立即生
效。按 [OK](确定)键可激活对脱机参数所做的更改。
过程 PID
PID 控制可调节输出频率,使之与变化的负载相匹配,从
而维持所需的速度、压力和温度。
PCD
过程控制数据。
电源循环
关闭主电源,直到显示屏 (LCP) 熄灭,然后再次打开电
源。
功率因数
功率因数表示 I1 和 I
功率因数
3xUxI1cosϕ1
=
3xUxI
对于 VLT® AutomationDriveFC 360 变频器,
之间的关系。
RMS
RMS
cosϕ1
=
1,因此:
功率因数
I1xcosϕ1
=
I
RMS
=
I
I
RMS
1
功率因数表示变频器对主电源施加负载的程度。
功率因数越小,相同功率性能的 I
2
2
I
RMS
= I
+ I
1
5
+ I
2
+ .. + I
7
2
n
就越大。
RMS
此外,功率因数越高,表明不同的谐波电流越小。
借助内置的直流线圈可获得较高的功率因数,从而将对主
电源施加的负载降到最低程度。
脉冲输入/增量编码器
一种外接式数字脉冲传感器,用于反馈电机转速信息。这
种编码器用于具有较高速度控制精度要求的应用。
RCD
漏电断路器。
1 1
MG06C841 Danfoss A/S © 12/2018 全权所有。 5

简介
VLT® AutomationDrive FC 360
11
设置
将参数设置保存在 2 个菜单中。可在这 2 个参数菜单之
间切换,并在保持 1 个菜单有效时编辑另一个菜单。
SFAVM
该缩写描述的是开关模式定子磁通定向的异步矢量调制。
滑差补偿
变频器通过提供频率补偿(根据测量的电机负载)对电机
滑差进行补偿,以保持电机速度的基本恒定。
智能逻辑控制 (SLC)
SLC 是一系列由用户定义的操作,当智能逻辑控制器判断
相关的用户定义的事件为“真”时(
功能
),将执行这些操作。
STW
状态字。
THD
总谐波失真表明了谐波失真的总体影响。
热敏电阻
温控电阻器被安装在监测温度的地方(变频器或电机)。
跳闸
当变频器遭遇过电压等故障或为了保护电机、过程或机械
装置时所进入的状态。只有当故障原由消失后,才能重新
启动,跳闸状态可通过激活复位来取消,有时候还可通过
编程自动复位来取消。请勿因个人安全而使用跳闸。
参数组 13-** 编程
跳闸锁定
跳闸锁定是当变频器在故障状态下进行自我保护并且需要
人工干预时(例如,变频器的输出端发生短路所导致的跳
闸锁定)所进入的状态。只有通过切断主电源、消除故障
原因并重新连接变频器,才可以取消锁定性跳闸。在通过
激活复位或自动复位(通过编程来实现)取消跳闸状态之
前,禁止重新启动。请勿因个人安全而使用跳闸。
VT 特性
可变转矩特性用于泵和鼓风机。
+
VVC
与标准电压/频率比控制相比,电压矢量控制 (VVC+) 可
在速度参考值发生改变或与负载转矩相关时提高动力特性
和稳定性。
60° AVM
60°
请参阅开关模式
异步矢量调制。
6 Danfoss A/S © 12/2018 全权所有。 MG06C841
130BC438.19
3 phase
power
input
Switch mode
power supply
Motor
Interface
(PNP) = Source
(NPN) = Sink
ON=Terminated
OFF=Open
Brake
resistor
91 (L1)
92 (L2)
93 (L3)
PE
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN/OUT)
0/4-20 mA
12 (+24 V OUT)
33 (D IN)
18 (D IN)
20 (COM D IN)
10 V DC
15 mA 100 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0V
5V
S801
RS485
RS485
03
+10 V DC
0/4-20 mA
0-10 V DC
24 V DC
02
01
05
04
250 V AC, 3 A
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
27 (D IN/OUT)
24 V
0 V
0 V (PNP)
24 V (NPN)
0 V
24 V
29 (D IN/OUT)
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
32 (D IN)
31 (D IN)
95
P 5-00
21
ON
(+UDC) 89
(BR) 81 5)
24 V (NPN)
0 V (PNP)
0-10 V DC
(-UDC) 88
RFI
3)
0 V
250 V AC, 3 A
Relay 1
1)
Relay 2 2)
4)
06
42 (A OUT)
45 (A OUT)
Analog
output
0/4-20 mA
简介 编程指南
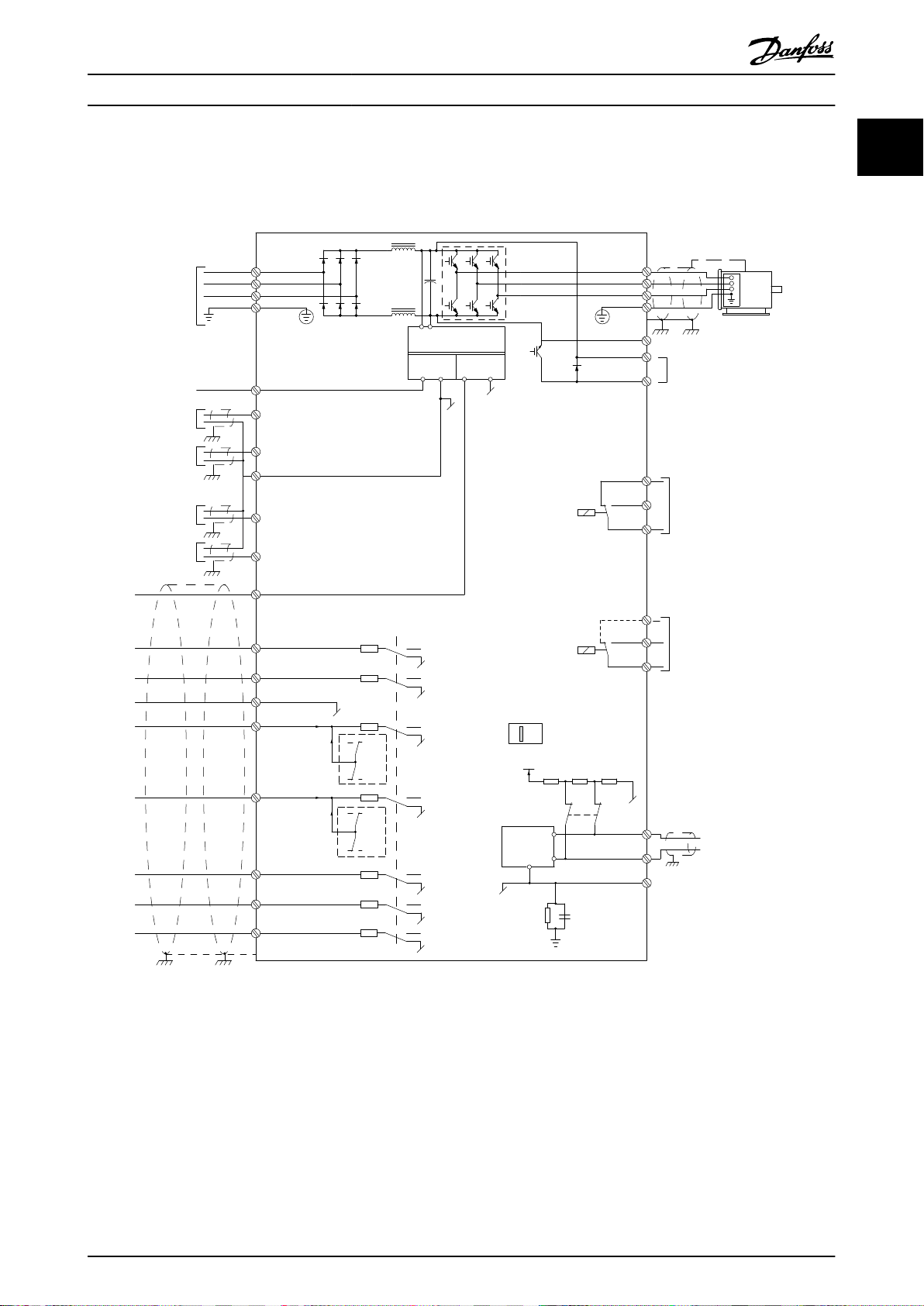
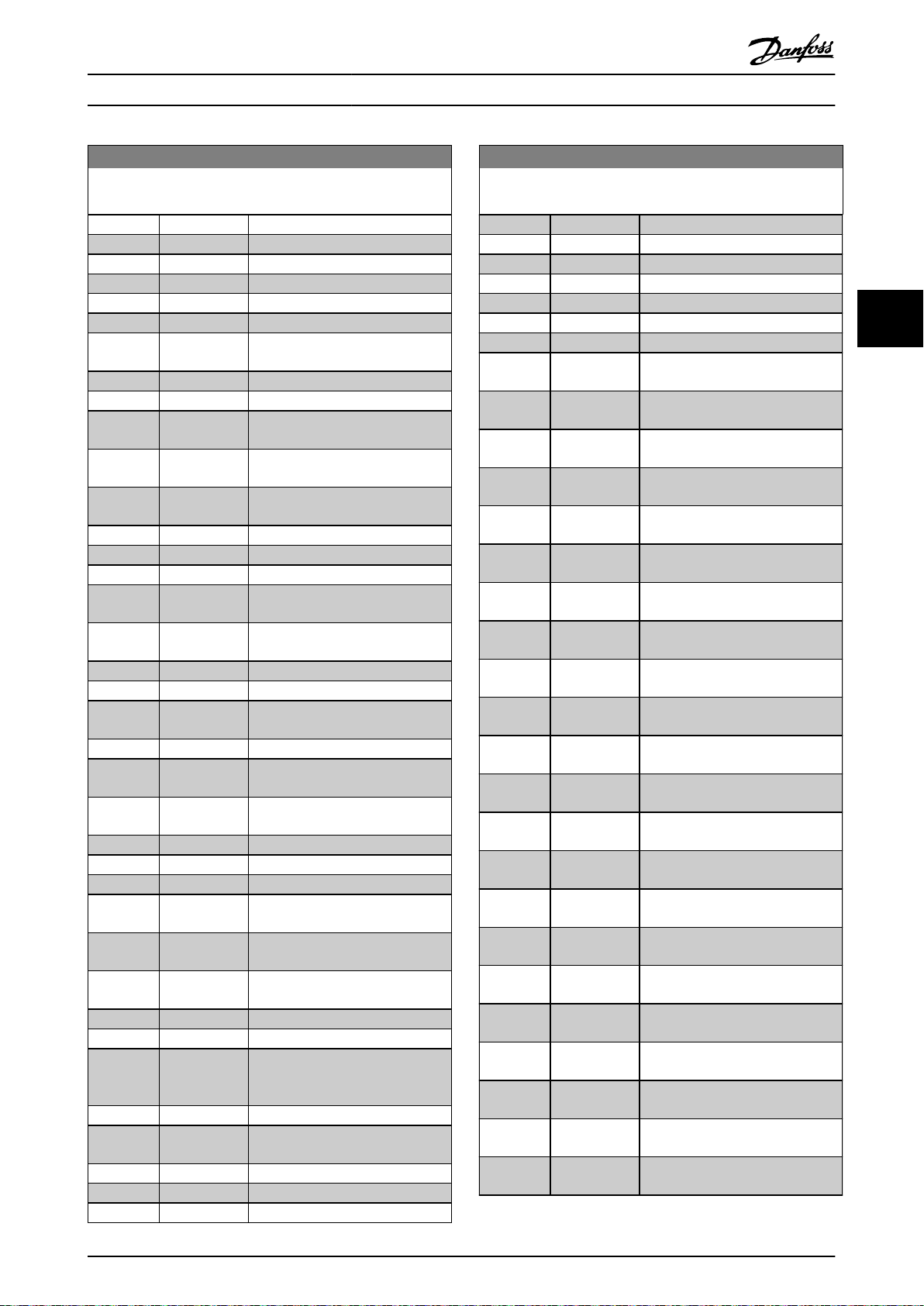
1.3 电气接线 - 控制电缆
1.3.1 概述
1 1
图 1.2 基本接线示意图
A = 模拟,D = 数字式
1) J1–J5 上配有内置制动斩波器。
2) 对于 J1-J3,继电器 2 为两触点极;对于 J4-J7,继电器 2 为 3 触点。J4-J7 的 继电器 2 上的端子 4、5、6 的常
开/常闭逻辑与继电器 1 相同。继电器在 J1-J5 中为可插拔式,在 J6-J7 中为固定式。
3) J1–J5 中配有单个直流电抗器; J6–J7 中配有两个直流电抗器。
4) 开关 S801(总线端子)可用于端接 RS485 端口(端子 68 和 69)。
5) J6–J7 中无 BR。
MG06C841 Danfoss A/S © 12/2018 全权所有。 7
130BD367.11
12 13 18 19 27 29 32 33 55
+24 VDC
0 VDC
PNP (Source)
Digital input wiring
NPN (Sink)
Digital input wiring
12 18 19 27 29 31 32 33 55
+24 VDC
0 VDC
130BD368.11
130BA681.10
12 18 19
130BD369.11
322927 31 33 20
P 5-12 [0]
P 5-10 [8]
Start/Stop
+24V
Speed
Start
[18]
简介
VLT® AutomationDrive FC 360
11
长的控制电缆和模拟信号可能会由于主电源线的噪声而形
成 50/60 Hz 的地线回路,不过这种情况非常少见。如果
有关控制电缆的正确端接方法,请参阅
用屏蔽控制电缆
”一节。
设计指南
中的“
使
发生这种情况,则破坏屏蔽层或在屏蔽层与机架之间插入
一个 100 nF 的电容。
数字和模拟的输入输出必须分别连接到变频器的公共输入
端(端子 20 及 55),以避免来自这两个组的接地电流
影响其他组。例如,打开数字输入可能会干扰模拟输入信
号。
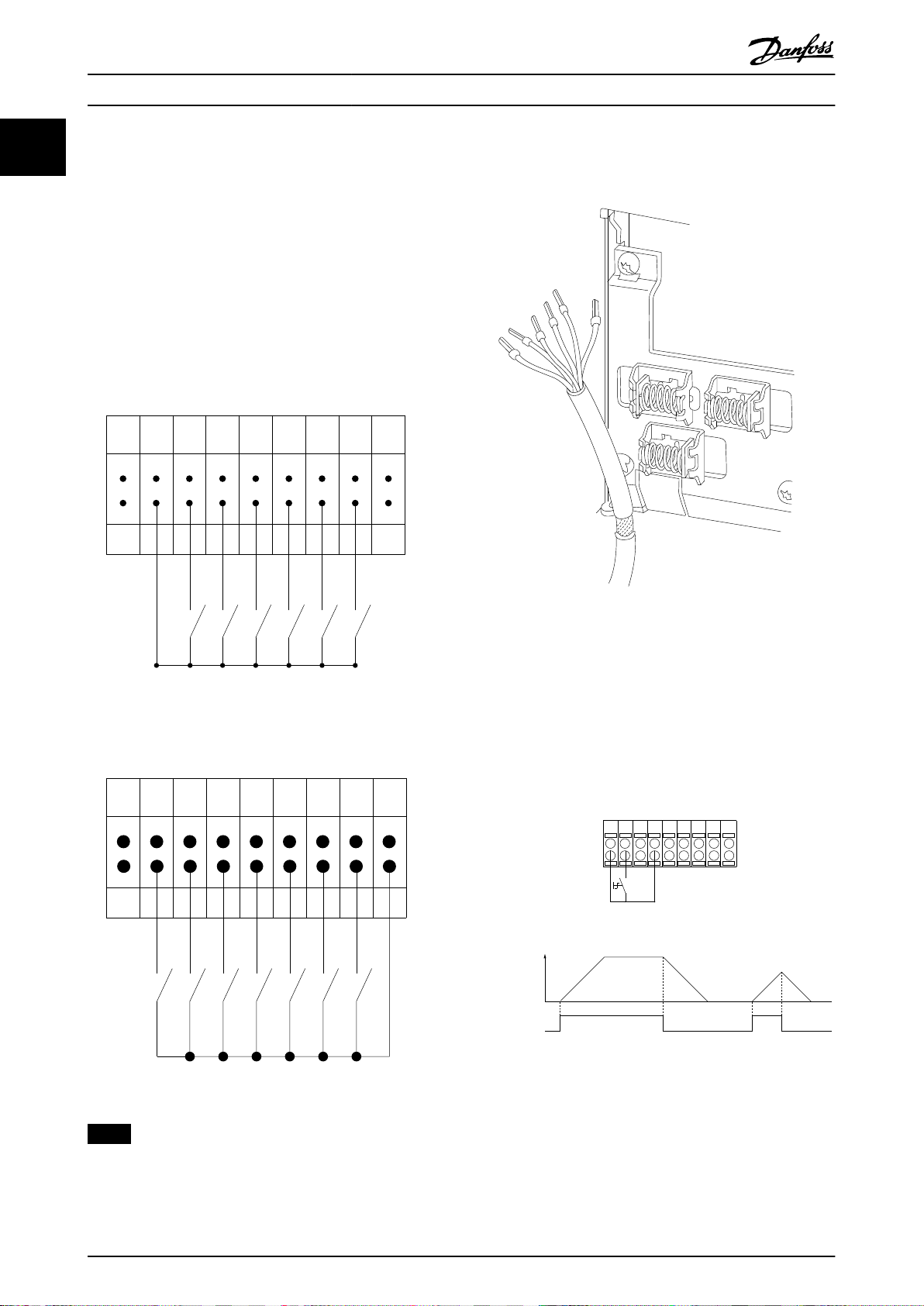
控制端子的输入极性
图 1.5 将屏蔽/铠装控制电缆接地
图 1.3 PNP(源型)
图 1.4 NPN(漏型)
1.3.2 启动/停止
端子 18 =
端子 27 =
(默认值为
图 1.6 启动/停止
参数 5-10 端子 18 数字输入[8] 启动
参数 5-12 端子 27 数字输入[0] 无功能
惯性停车
)。
。
注意
控制电缆必须为屏蔽/铠装电缆。
8 Danfoss A/S © 12/2018 全权所有。 MG06C841
1312 18 19
130BD370.11
322927 33
P 5 - 12 [6]
P 5 - 10 [9]
+24 V
Speed
Latched start Stop inverse
Latched start (18)
Stop inverse (27)
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10
V
A IN
A IN
COM
A OUT
12
31
18
19
27
29
32
33
50
53
54
55
42
130BF821.10
D IN
130BF873.10
5553 5450
Speed
P 6-15
1 kΩ
+10 V/30 mA
Ref. voltage
P 6-11 10V
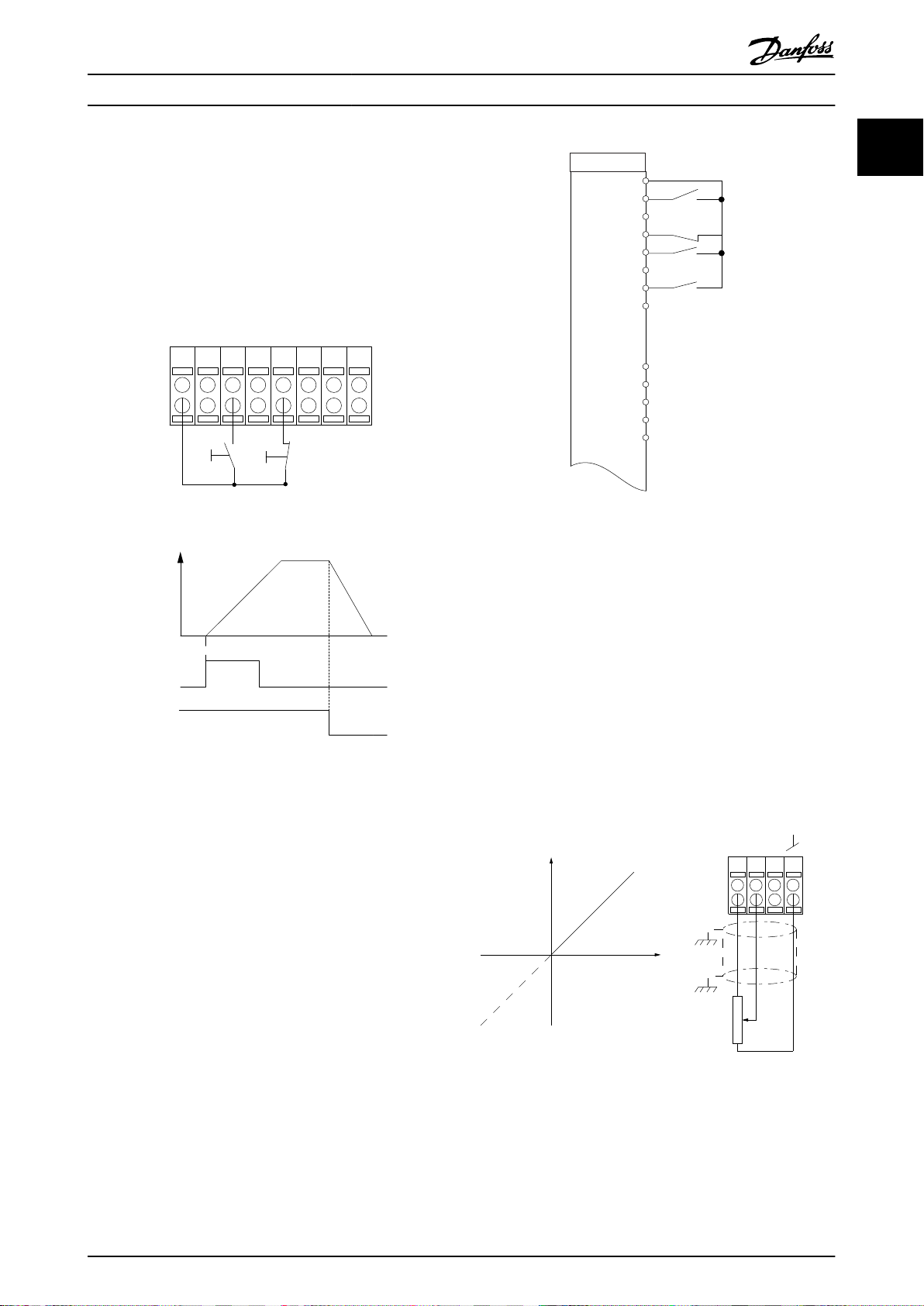
简介 编程指南
1.3.3 自锁启动/停止反逻辑
端子 18 =
动
。
端子 27=
辑
。
参数 5-10 端子 18 数字输入[9] 自锁启
参数 5-12 端子 27 数字输入[6] 停止反逻
1 1
图 1.8 加速/减速
1.3.5 电位计参考值
来自电位计的电压参考值
参考值来源 1 = [1]
模拟输入
53(默认
值)。
端子 53,低电压 = 0 伏特。
端子 53,高电压 = 10 伏特。
端子 53,参考值/反馈值下限 = 0。
端子 53,参考值/反馈值上限 = 50。
图 1.7 自锁启动/停止反逻辑
参数 6-19 Terminal 53 mode
=
[1] 电压
。
1.3.4 加速/减速
端子 29/32 = 加速/减速
端子 18 =
启动
输入端子 27 =
[19] 锁定参考值
端子 29 =
加速
端子 32 =
减速
参数 5-10 端子 18 数字输入[8]
(默认值)。
参数 5-12 端子 27 数字输入
。
参数 5-13 端子 29 数字输入[21]
。
参数 5-14 端子 32 数字输入[22]
。
图 1.9 电位计参考值
MG06C841 Danfoss A/S © 12/2018 全权所有。 9
安全性
VLT® AutomationDrive FC 360
2 安全性
22
2.1 安全符号
本指南使用了下述符号:
警告
表明某种潜在危险情况,将可能导致死亡或严重伤害。
小心
表明某种潜在危险情况,将可能导致轻度或中度伤害。这
还用于防范不安全的行为。
注意
表示重要信息,包括可能导致设备或财产损坏的情况。
2.2 具备资质的人员
警告
意外启动
当变频器连接到交流主电源、直流电源或负载共享时,电
机随时可能启动。在编程、维护或维修过程中意外启动可
能会导致死亡、严重人身伤害或财产损失。 电机可通过
外部开关、串行总线命令、从 LCP 提供输入参考值信号
或消除故障状态后启动。
要防止电机意外启动:
断开变频器与主电源的连接。
•
按 LCP 上的 [Off/Reset](停止/复位)键,然
•
后再设置参数。
将变频器连接到交流主电源、直流电源或负载共
•
享时,变频器、电机和所有驱动设备必须已完全
连接并组装完毕。
要实现变频器的无故障和安全运行,必须保证正确可靠的
运输、存放、安装、操作和维护。仅允许具备资质的人员
安装和操作本设备。
具备资质的人员是指经过培训且经授权按照相关法律和法
规安装、调试和维护设备、系统和电路的人员。同时,具
备资质的人员还必须熟悉本文档中所述的说明和安全措
施。
安全事项
2.3
警告
高电压
变频器与交流主电源输入线路、直流电源相连或负载共享
时带有高电压。如果执行安装、启动和维护工作的人员缺
乏资质,将可能导致死亡或严重伤害。
仅限具备资质的人员执行安装、启动和维护工
•
作。
在执行任何维护或修理作业之前,使用适当的电
•
压测量设备,以确保变频器上无剩余电压。
警告
放电时间
即使变频器未上电,变频器直流回路的电容器可能仍有
电。即使警告指示灯熄灭,也可能存在高压。在切断电源
后,如果在规定的时间结束之前就执行维护或修理作业,
则可能导致死亡或严重伤害。
停止电机。
•
断开交流主电源、远程直流电源(包括备用电
•
池)、UPS 以及与其它变频器的直流回路连接。
断开或锁定永磁电机。
•
请等待电容器完全放电。最短等待时间在
•
表 2.1
中指定,也可在变频器顶部的产品标签
上看到。
在执行任何维护或修理作业之前,使用适当的电
•
压测量设备,以确保电容器已完全放电。
电压
[V]
380–480
380–480
功率范围
[kW (hp)]
0.37–7.5 kW
(0.5–10 hp)
11–75 kW
(15–100 hp)
最短等待时间
(分钟)
4
15
表 2.1 放电时间
警告
漏电电流危险
漏电电流超过 3.5 mA。如果不将变频器正确接地,将可
能导致死亡或严重伤害。
由经认证的电气安装商确保设备正确接地。
•
10 Danfoss A/S © 12/2018 全权所有。 MG06C841
安全性 编程指南
警告
设备危险
接触旋转主轴和电气设备可能导致死亡或严重伤害。
确保只有经过培训且具备资质的人员才能执行安
•
装、启动和维护工作。
确保所有电气作业均符合国家和地方电气法规。
•
按照本指南中的过程执行。
•
小心
内部故障危险
如果变频器关闭不当,其内部故障可能导致严重伤害。
接通电源前,确保所有安全盖板安装到位且牢靠
•
固定。
注意
高海拔
当安装地点的海拔超过 2000 米(6562 英尺)时,请联
系 Danfoss 咨询 PELV 事宜。
2 2
注意
用在绝缘电网上
有关在独立电网中使用变频器的详细信息,请参阅
南中的射频干扰开关
请按照在 IT 电网中安装设备的建议操作。使用相关的
IT 电网监控设备,以避免造成破坏。
部分。
设计指
MG06C841 Danfoss A/S © 12/2018 全权所有。 11
130BC506.10
Setup 1
A
B
C
D
5
12
13 14 15
10
11
10
9
6
7
8
4
1
2
3
Menu
Status
Quick
Menu
Main
Menu
Hand
On
O
Reset
Auto
On
Back
OK
On
Warn
Alarm
130BD135.10
Setup 12
INDEX
AHP
VkW
srpm
Hz%
n2n1
n3
p5 p4
p3 p2 p1
编程
3 编程
VLT® AutomationDrive FC 360
3.1 本地控制面板操作
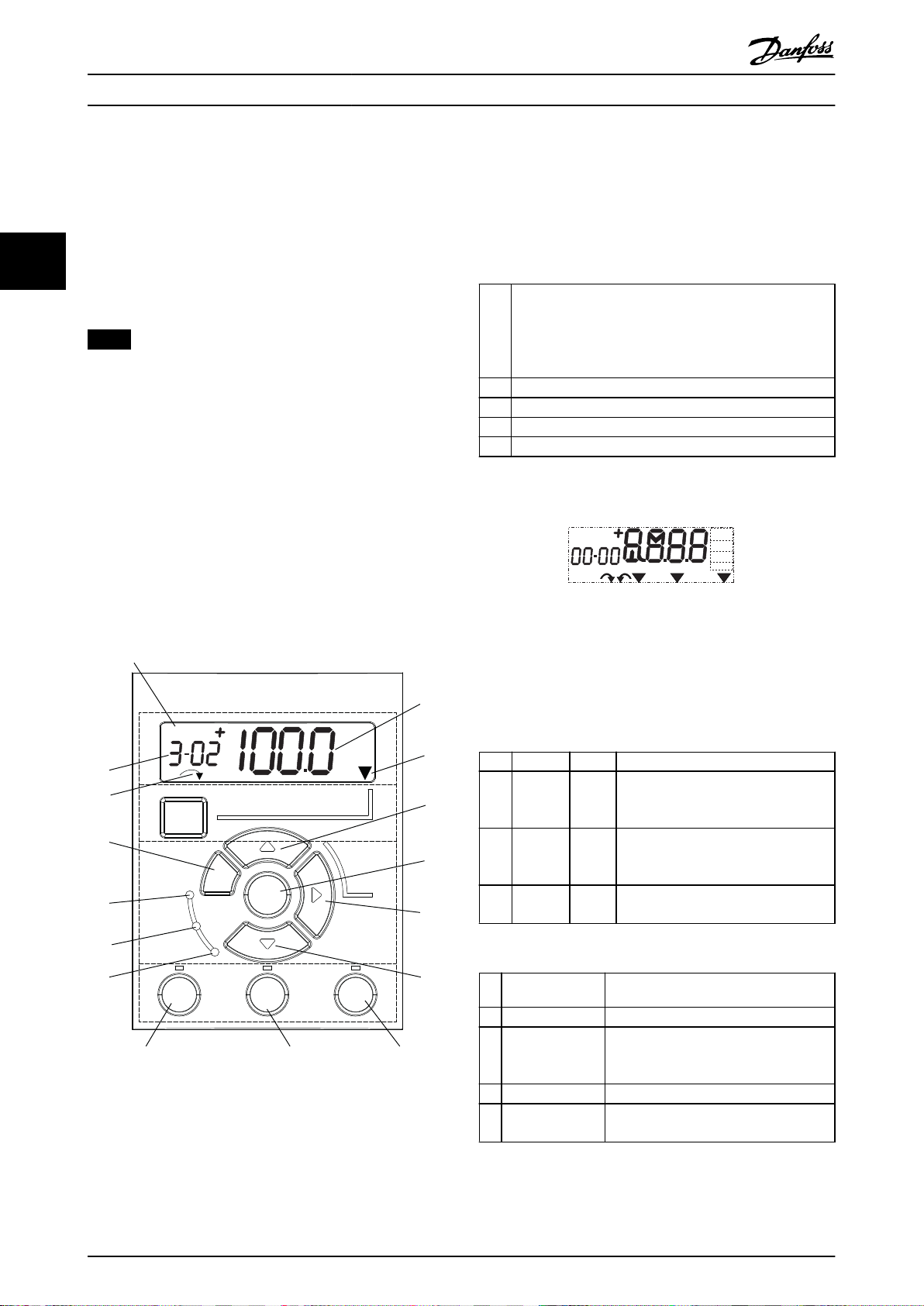
A. 数字显示。
LCD 显示屏是背光型,可显示 1 行数字。所有数据显示
33
VLT® AutomationDrive FC 360 支持数字式本地控制面板
(NLCP) LCP 21、图形本地控制面板 (GLCP) LCP 102 和
盲盖。本章介绍使用 LCP 21 和 LCP 102 的操作。
注意
还可以通过 PC 的 RS485 通讯端口从 MCT 10 设置软件
对变频器进行编程。该软件可以使用订购号 130B1000 进
行订购,也可以从下述 Danfoss 网站下载:
drives.danfoss.com/downloads/pctools/#/
.
在 LCP 上。
1 菜单编号显示出有效菜单和编辑菜单。如果有效菜单和编
辑菜单是同一个菜单,则仅显示该菜单编号(出厂设
置)。如果有效菜单和编辑菜单不同,则显示屏中将同时
显示出两个编号(菜单 12)。编号在闪烁的菜单为编辑
菜单。
2 参数编号。
3 参数值。
4 屏幕左下侧显示出电机方向。小箭头表示方向。
5 三角形表示 LCP 是位于状态、快捷菜单还是主菜单下。
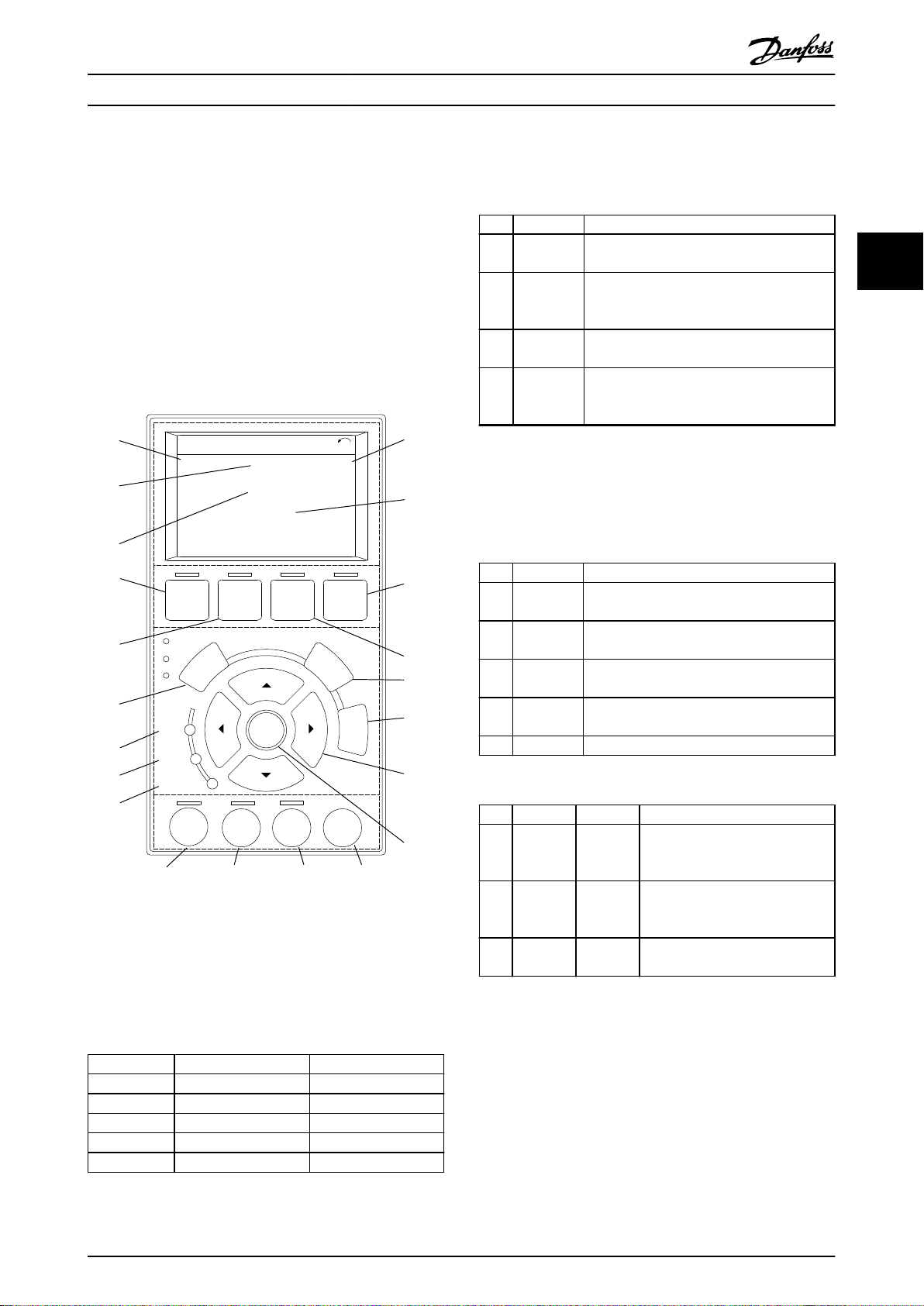
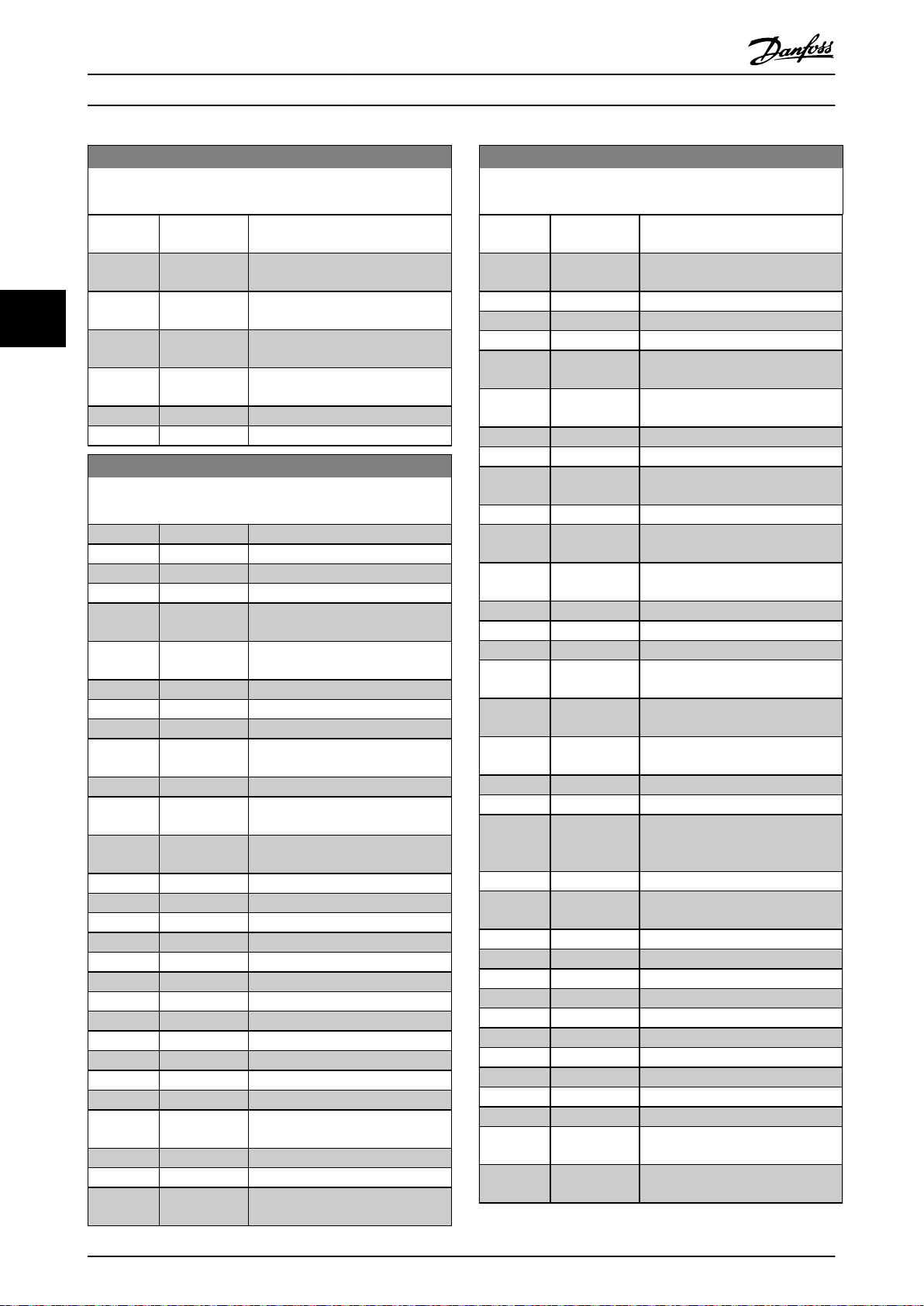
3.1.1 数字式本地控制面板
表 3.1
图 3.1
的图例,部分 A
数字式本地控制面板 LCP 21 分为 4 个功能区。
A. 数字显示。
B. 菜单键。
C. 导航键和指示灯 (LED)。
D. 操作键和指示灯 (LED)。
图 3.2 显示信息
B. 菜单键
要在状态菜单、快捷菜单和主菜单之间切换,请按
[Menu](菜单)键。
C. 指示灯 (LED) 和导航键
指示 指示灯 功能
当变频器获得主电源电压、直流总线端
6 启动 绿色
子或 24 V 外接电源的供电后,通电
指示灯会亮起。
当符合警告条件时,黄色的警告指示灯
7 警告 黄色
亮起,同时会在显示区中出现标识相关
问题的文字。
图 3.1 LCP 21 视图
8 报警 红色
表 3.2
图 3.1
按键 功能
9 [Back](后退) 返回导航结构的上一步或上一层。
[▲] [▼]
10
11 [OK](确定) 按下可访问参数组或启用某个选项。
12
表 3.3
[►]
图 3.1
故障状态会使红色报警指示灯闪烁,同
时将显示报警文字。
的图例,指示灯 (LED)
用于切换参数组、参数和参数值,还可
增/减参数值。箭头也用于设置本地参考
值。
按下可在参数值内从左到右横向移动,
更改单个数字。
的图例,导航键
12 Danfoss A/S © 12/2018 全权所有。 MG06C841
130BC440.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
编程 编程指南
D. 操作键和指示灯 (LED)
按键 功能
用本地控制模式启动变频器。
通过控制输入或串行通讯发出的外部停止
13 手动启动
14 关闭/复位
15 自动启动
表 3.4
图 3.1
•
信号会忽略本地手动启动模式。
在故障清除后,使电机停止,但不切断变频器
的供电或手动复位变频器。如果在报警模式
下,则当报警条件消除后,报警将被复位。
将系统置于远程操作模式。
对控制端子或总线通讯发出的外部启动命
•
令作出响应。
的图例,部分 D
警告
高电压
按 [Off/Reset](停止/复位)键后接触变频器仍存在危
险,因为该键并不能将变频器与主电源断开。
将变频器与主电源断开,然后等待变频器完全放
•
电。请参阅
表 2.1
中的放电时间。
[►] 还可用来在参数组之间移动。在
可移至下一个参数组的第一个参数(如从
域性设置[0] 国际
环
)。
移至
参数 1-00 配置模式[0] 开
主菜单
中时,按 [►]
参数 0-03 区
3.1.3 NLCP 上的快捷菜单。
借助
快捷菜单
1. 要进入
2. 使用 [▲] [▼] 选择 QM1 ( 快捷菜单 1 ) 或
3. 按 [▲] [▼] 可浏览
4. 按 [OK](确定)选择参数。
5. 按 [▲] [▼] 可更改参数设置的值。
6. 按 [OK](确定)接受所做的更改。
7. 要退出,请按两下 [Back](后退)(如果在
,可以轻松访问最常用的参数。
快捷菜单
到屏幕中的光标位于
QM2(快捷菜单 2),然后按 [OK](确定)。
QM2 和 QM3 内,则按三下)进入
按一下 [Menu](菜单)进入
,请按 [Menu](菜单)键,直
快捷菜单
快捷菜单
上。
中的参数。
状态模式
主菜单
。
3 3
,或
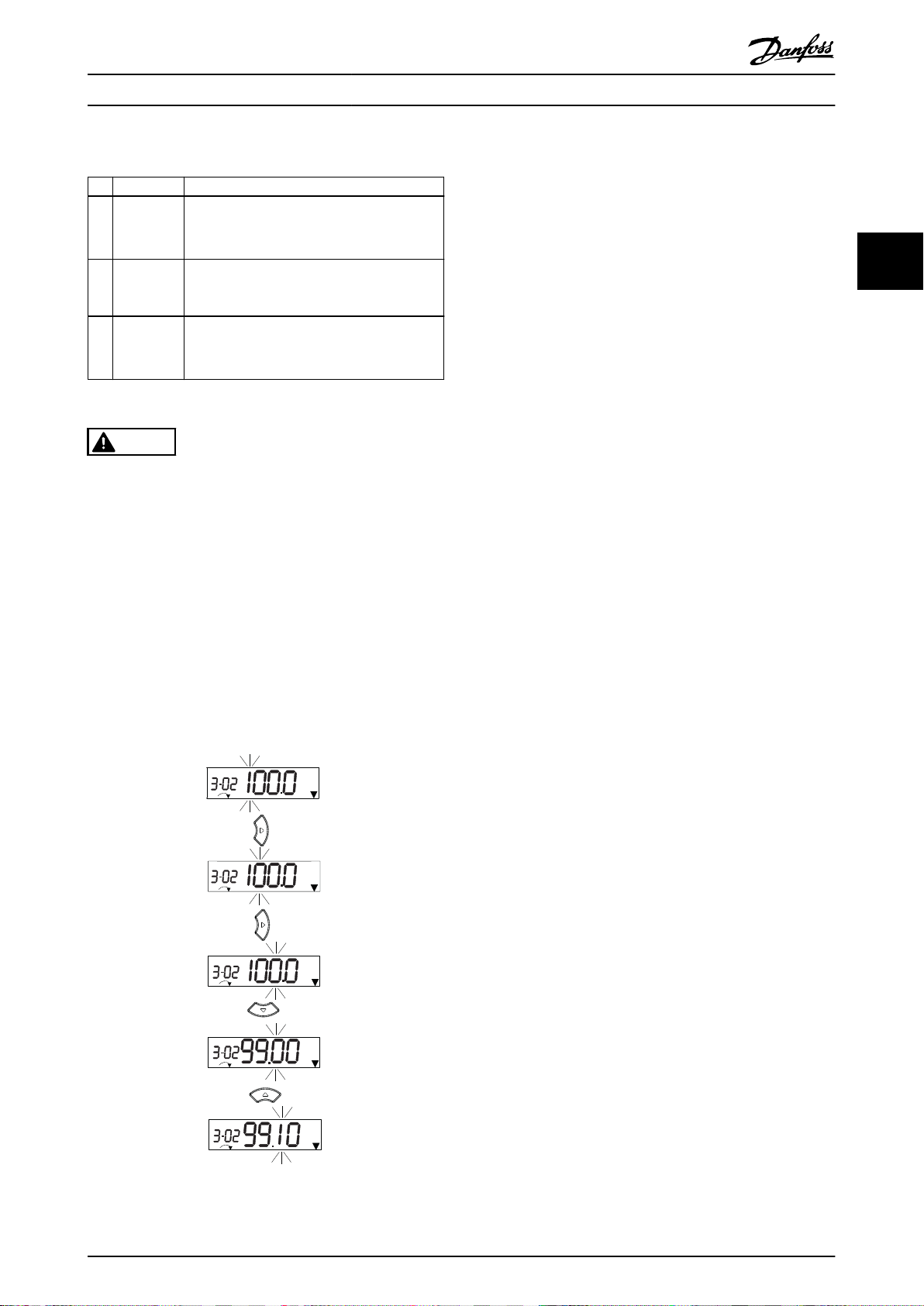
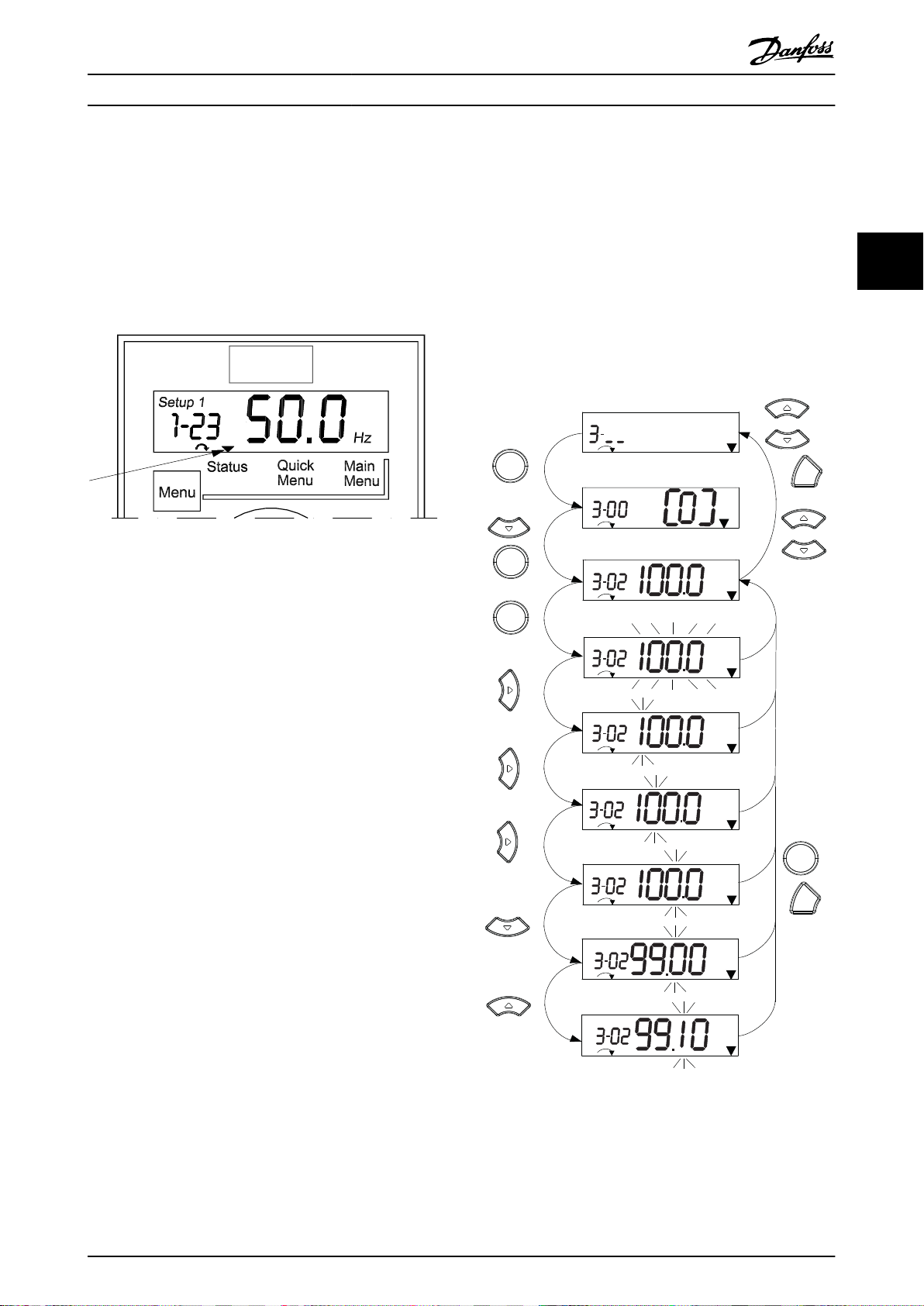
3.1.2 NLCP 上的右键功能
按 [►] 可对显示屏上所显示的 4 个数字分别进行编
辑。按一下 [►],光标移至第一个数字,第一个数字开始
闪烁,如
不会更改数值,也不会移动小数位。
图 3.3
所示。按 [▲] [▼] 可更改值。按 [►]
图 3.3 右键功能
MG06C841 Danfoss A/S © 12/2018 全权所有。 13
130BC445.13
1-22 XXXX V
Motor
nominal
speed
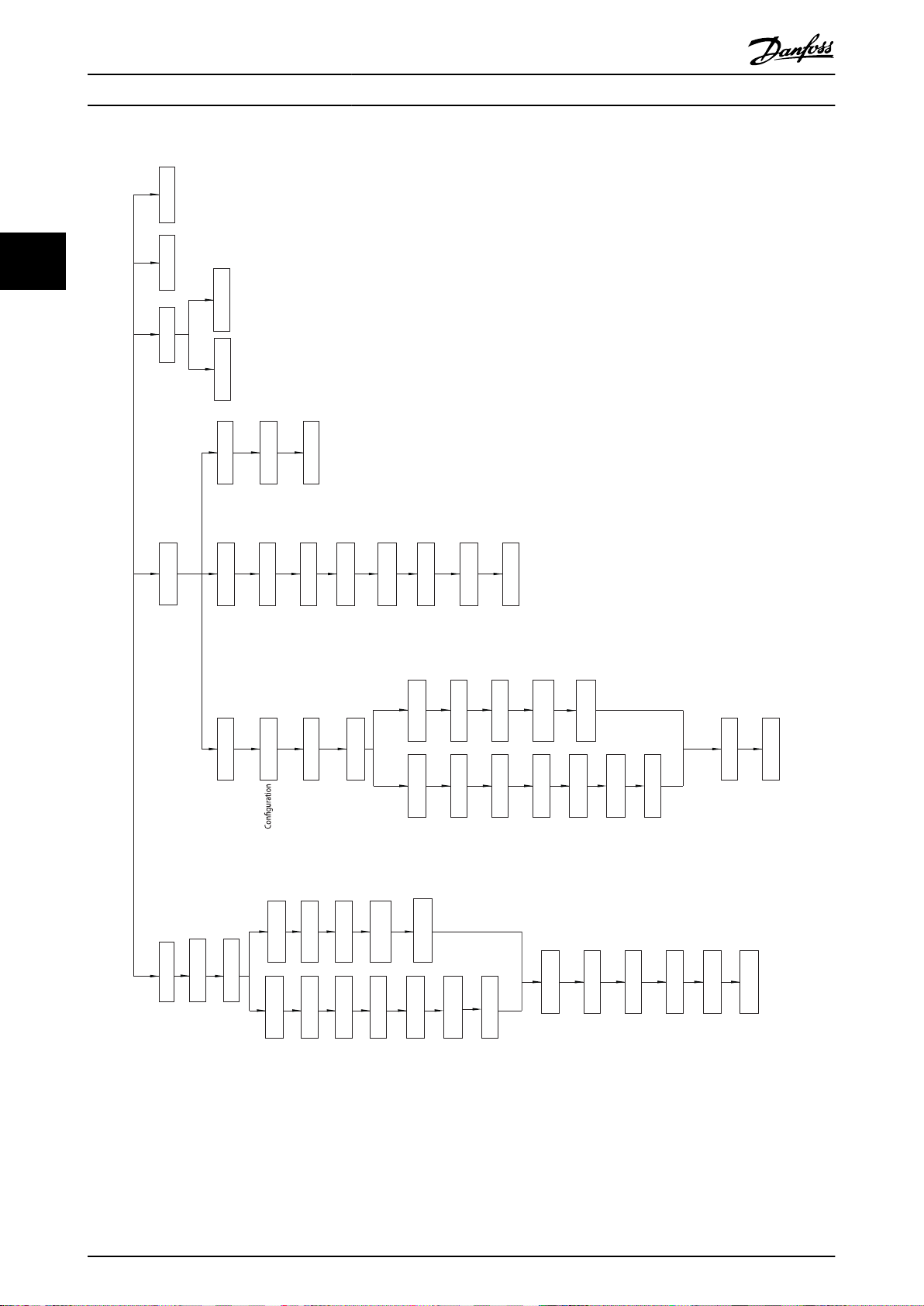
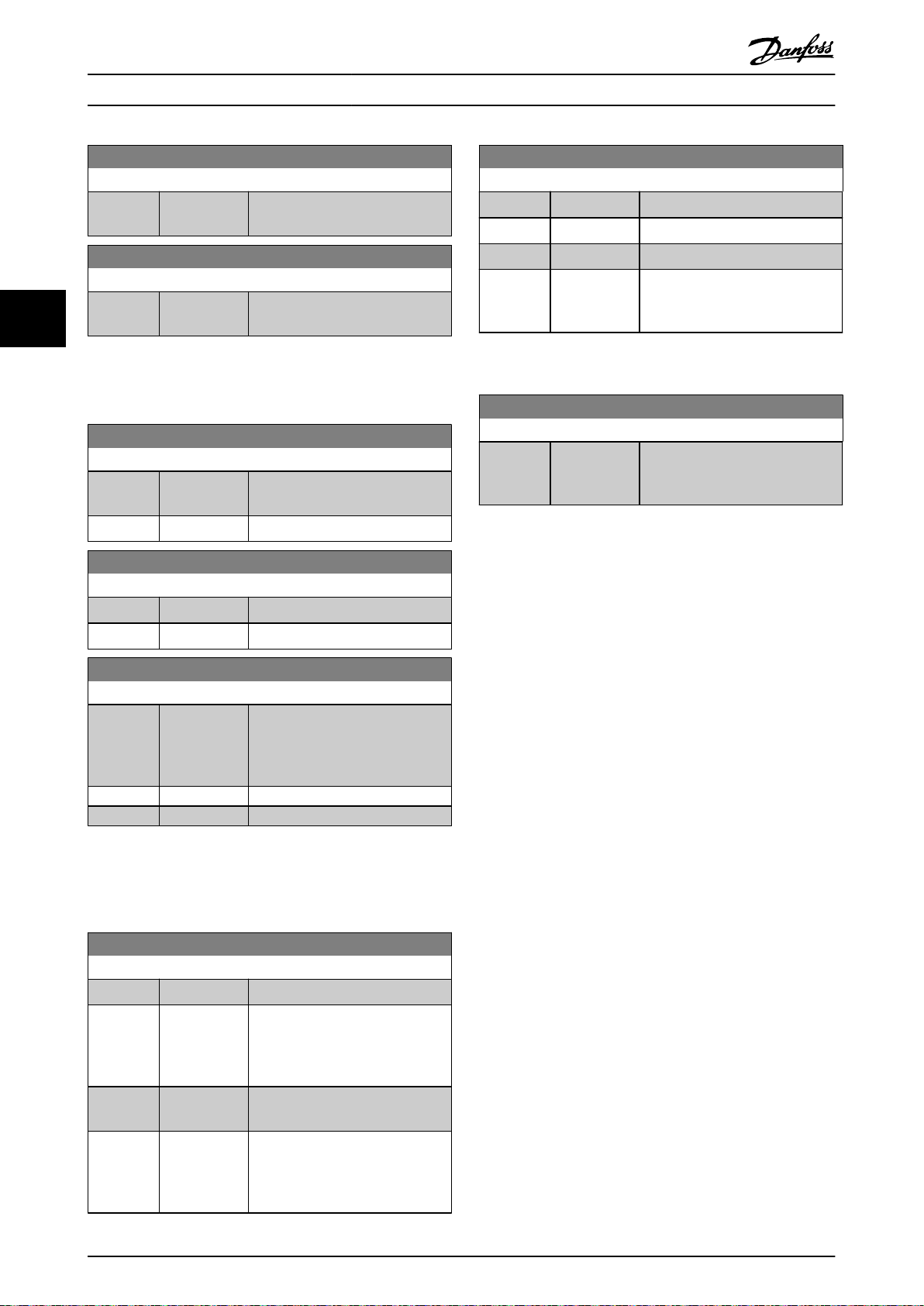
QM 1
0-01 [0]
1-10 [0]
1-24 XXXX A
Language
Motor Type
1-20 XXXX kW
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Stator
Motor frequency
1-25 XXXX
1-30 XXXX
1-39 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
3-02 XXXX
3-03 XXXX
3-41 XXXX S
3-42 XXXX S
5-12
[2]
1-29 [1]
AMA
Back EMF at
1000 RPM
d-axis
QM 2
BMS
AMS
ES
5-70 XXXX
5-71 [0]
1-30 XXXX
1-39 XXXX
1-90 [0]
2-10 [0]
4-16 XXXX %
4-17 XXXX %
4-18 XXXX %
1-00 [0]
1-01 [1]
1-10 [0]
1-24 XXXX A 1-20 XXXX kW
1-22 XXXX V
Motor
nominal
speed
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Motor frequency
1-25 XXXX
1-30 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
Back EMF at
1000 RPM
d-axis
1-39 XXXX
4-14 XXXX
4-19 XXXX
Stator
QM 3
QM 4 QM 5
L10C
SFS
TBD
Motor
nominal
speed
Motor
nominal
speed
Motor current
Motor cont.
rated torque
Resistance (Rs)
Motor poles
inductance (Ld)
Asynchronous motor
Motor current
Minimum reference
Maximum reference
Ramp 1 ramp-up time
Ramp 1 ramp-down time
Terminal 27 digital input
Basic motor set-up
mode
Motor control
principle
Motor type
PM motor
PM motor
Motor
current
Motor cont.
rated torque
Stator
Resistance (Rs)
Motor poles
inductance (Ld)
Motor speed high limit [Hz]
Maximum output frequency
Asynchronous motor
Motor current
RPM
RPM
RPM
Hz
RPM
Hz
Hz
Hz
Hz
Hz
Adv. motor set-up
Resistance (Rs)
Motor poles
Motor thermal
protection
Brake function
Torque limit motor mode
Torque limit generator mode
Current limit
Encoder set-up
Terminal 32/33
pulses per revolution
Terminal 32/33
encoder direction
Changes made
Last 10 changes Since factory setting
Alarm log
编程
VLT® AutomationDrive FC 360
33
14 Danfoss A/S © 12/2018 全权所有。 MG06C841
图 3.4 快捷菜单结构
130BA466.10
130BC446.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
7
10
11
12
OK
OK
Back
8
Back
Setup 1
2 x
+
OK
9
OK
编程 编程指南
3.1.4 NLCP 上的状态菜单
接通电源后,状态菜单便进入活动状态。点按 [Menu]
(菜单)可以在
[▲] 和 [▼] 可以在每个菜单的选项之间切换。
显示器用位于状态上方的小箭头表示状态模式。
图 3.5 表示状态模式
在自动启动模式下,可从 NLCP 状态菜单访问以下 8 个
参数:
•
•
•
•
•
•
•
•
在 [Hand On](手动启动)模式下,可从 NLCP 状态菜单
访问以下 6 个参数:
•
•
•
•
•
•
状态菜单、快捷菜单和主菜单
参数 16-02 参考值 %
参数 16-09 自定义读数
参数 16-10 功率 [kW]
参数 16-13 频率
参数 16-14 电动机电流
参数 16-16 转矩 (Nm)
.
.
.
.
.
.
参数 16-30 直流回路电压
参数 16-52 反馈 [单位]
参数 16-09 自定义读数
参数 16-10 功率 [kW]
参数 16-13 频率
参数 16-14 电动机电流
参数 16-16 转矩 (Nm)
.
.
.
.
.
参数 16-30 直流回路电压
之间切换。
.
.
.
4. [▲] [▼]: 浏览特定参数组中的参数。
5. 按 [OK](确定)选择参数。
6. [►] 和 [▲] [▼]: 设置/更改参数值。
7. 按 [OK](确定)接受所设置的值。
8. 要退出,请按两下 [Back](后退)(按三下可
访问数组参数)进入
(菜单)进入状态菜单。
请参阅
图 3.6、图 3.7和图 3.8
枚举参数和数组参数的原则。图中所示操作在
表 3.6 和表 3.7
中介绍。
主菜单
,或按一下 [Menu]
,了解更改连续参数、
表 3.5
3 3
、
3.1.5 NLCP 上的主菜单
通过
主菜单
可访问所有参数。
图 3.6 使用主菜单 — 连续参数
主菜单
1. 要进入
MG06C841 Danfoss A/S © 12/2018 全权所有。 15
屏幕光标位于
2. [▲] [▼]: 浏览参数组。
3. 按 [OK](确定)选择参数组。
,请按 [MENU](菜单)键,直到
主菜单
上。
130BC447.11
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
OK
OK
Back
7
OK
Back
130BC448.10
1
2
4
5
6
7
8
9
10
OK
Back
Back
Back
5 x
Setup 1
Setup 1
Setup 1
Setup 1
%
INDEX
%
INDEX
%
INDEX
Setup 1
INDEX
%
OK
OK
OK
编程
VLT® AutomationDrive FC 360
1 [OK](确定): 显示参数组内的第一个参数。
2
反复按 [▼] 可下移至目标参数。
数组参数说明如下:
3 按 [OK](确定)开始编辑。
4 [►]: 第一位数字闪烁(可以编辑)。
5 [►]: 第二位数字闪烁(可以编辑)。
33
6 [►]: 第三位数字闪烁(可以编辑)。
7
[▼]: 减小参数值,小数点会自动更改。
8
[▲]: 增大参数值。
9 [Back](后退): 取消更改,返回到 2。
[OK](确定): 接受更改,返回到 2。
10
[▲][▼]: 选择参数组内的参数。
11 [Back](后退): 删除参数值,并显示参数组。
12
[▲][▼]: 选择组。
表 3.5 更改连续参数值
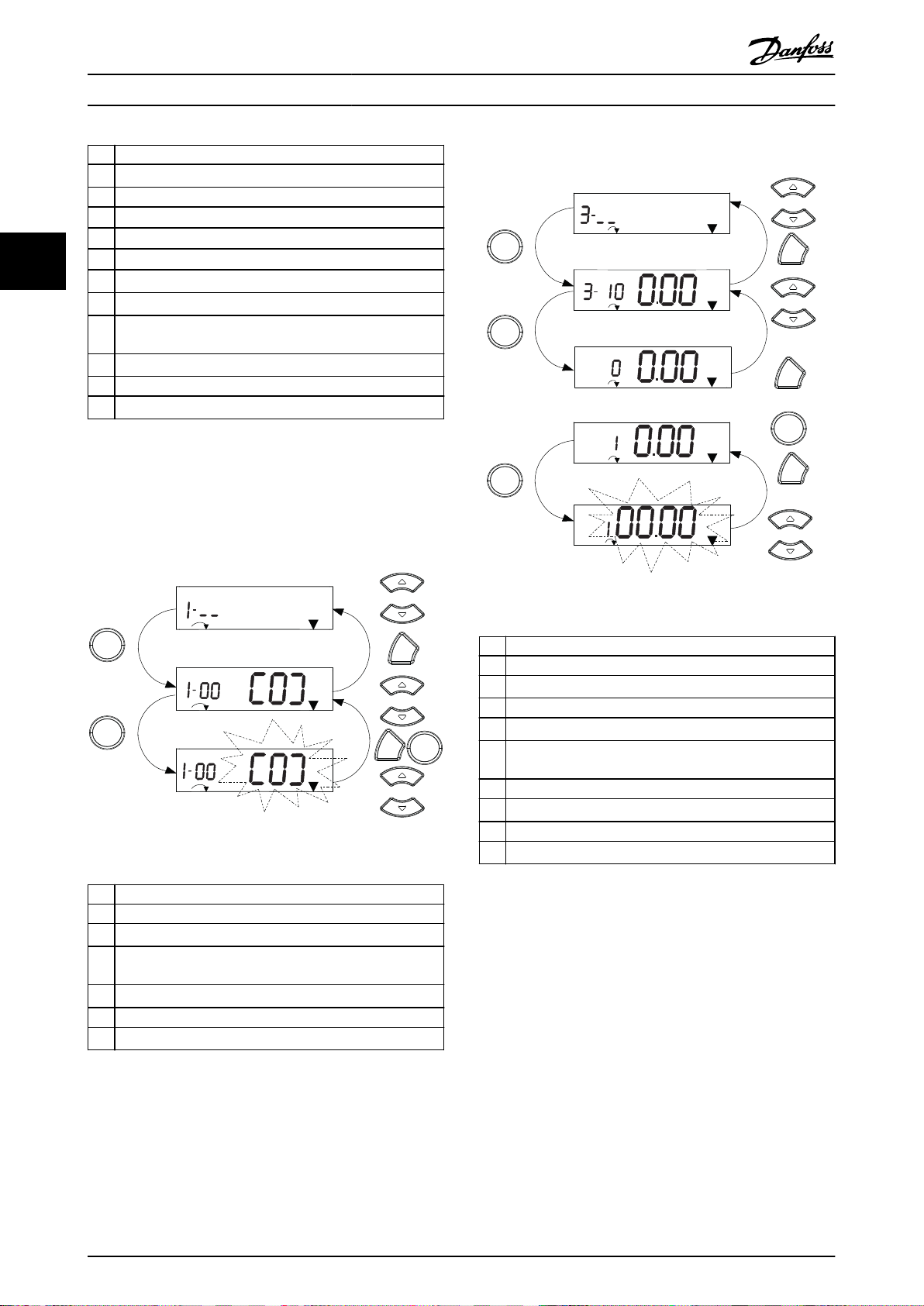
枚举参数的访问和编辑方式与其它参数类似,但由于 LCP
21 数字限制(4 个大数字),并且枚举值可大于 99,因
此,参数值显示在括号内。当枚举值大于 99 时,LCP 21
只能显示括号的第一部分。
图 3.8 使用主菜单 — 数组参数
1 [OK](确定): 显示参数编号和首次索引的值。
2 [OK](确定): 可以选择索引。
3
[▲][▼]: 选择索引。
4 [OK](确定): 可以编辑值。
5
[▲][▼]: 更改参数值(闪烁)。
6 [Back](后退): 取消更改。
[OK](确定): 接受更改。
7 [Back](后退): 取消编辑索引,可以选择新参数。
8
[▲][▼]: 选择参数组内的参数。
图 3.7 使用主菜单 — 枚举参数
1 [OK](确定): 显示参数组内的第一个参数。
2 按 [OK](确定)开始编辑。
3
[▲][▼]: 更改参数值(闪烁)。
4 按 [Back](后退)取消更改;按 [OK](确定)接受更改
(返回第 2 个屏幕)。
5
[▲][▼]: 选择参数组内的参数。
6 [Back](后退): 删除参数值,并显示参数组。
7
[▲][▼]: 选择组。
表 3.6 更改枚举参数值
16 Danfoss A/S © 12/2018 全权所有。 MG06C841
9 [Back](后退): 删除参数索引值并显示参数组。
10
[▲][▼]: 选择组。
表 3.7 更改数组参数值
130BD598.10
Auto
On
Reset
Hand
On
O
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
36.4 kW
Auto Remote Ramping
0.000
On
Alarm
Warn.
A
7.83 A
799 RPM
B
C
D
53.2 %
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18 19 20 21
编程 编程指南
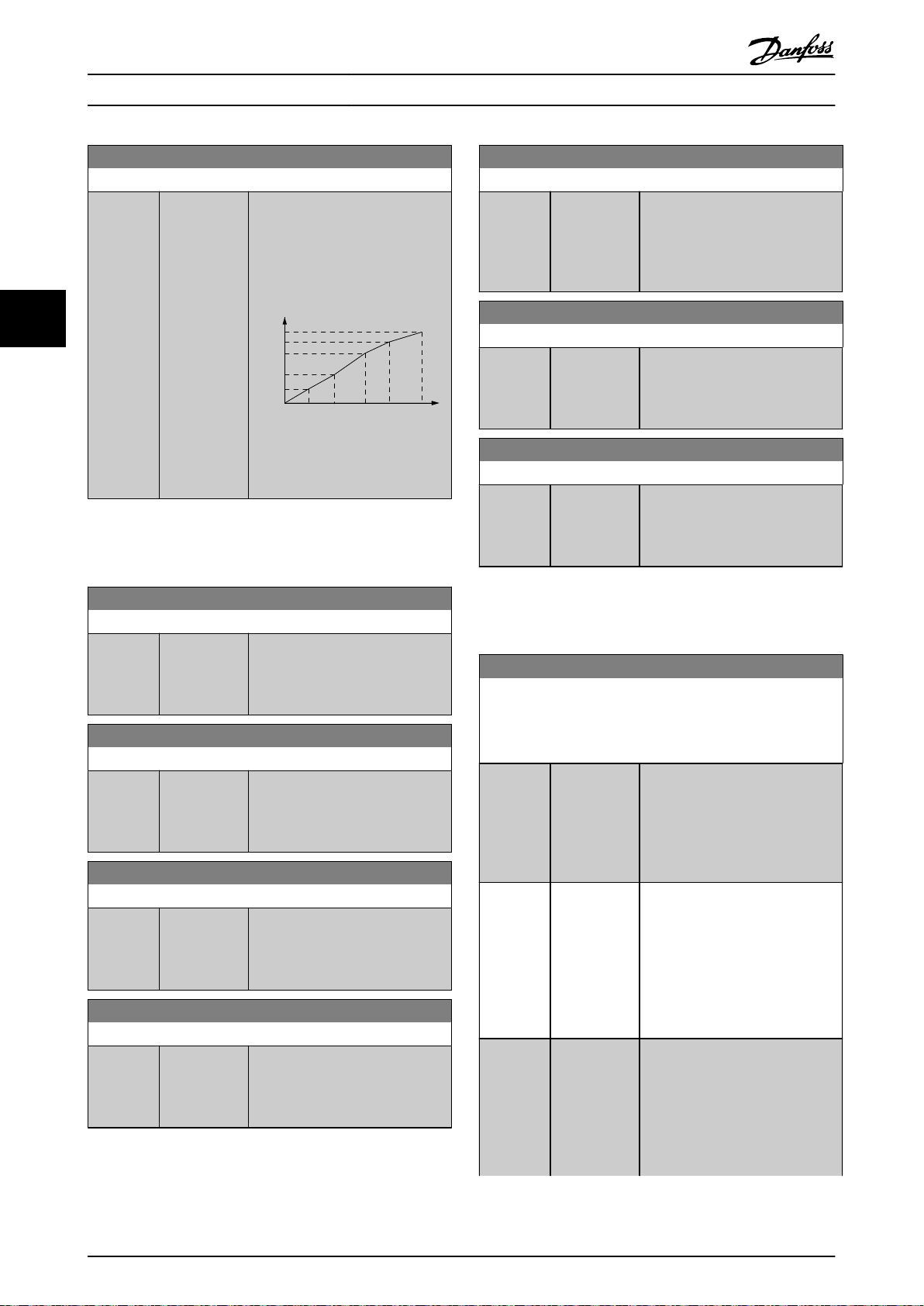
3.1.6 图形化本地控制面板
图形化本地控制面板 LCP 102 的显示区更大,比 LCP
21 能够显示更多信息。LCP 102 支持以英语、中文和葡
萄牙语显示。
GLCP 分为四个功能组(如
A. 显示区。
B. 显示屏菜单键。
C. 导航键和指示灯 (LED)。
D. 操作键和复位。
图 3.9
所示)。
B. 显示屏菜单键
菜单键用于菜单访问、参数设置、切换正常操作期间的状
态显示模式以及查看故障日志数据。
按键 功能
Status(状
6
Quick Menu
7
Main Menu
8
(主菜单)
Alarm Log
9
表 3.9
态)
(快捷菜
单)
(报警记
录)
图 3.9
显示运行信息。
用于访问编程参数以了解初始设置说明和许
多详细的应用说明。
借此可访问所有设置参数。
列出当前警告、最近 10 个报警和维护记
录。
的图例,显示屏菜单键
C. 导航键和指示灯 (LED)
导航键用于设置功能和移动屏幕光标。在本地操作模式
下,还可以使用导航键来执行速度控制。三个变频器状态
指示灯也位于这个区域。
按键 功能
Back(后
10
退)
Cancel(取消)取消最近的改动或命令(只要显示模式尚未
11
Info(信
12
息)
13 导航键
14 OK(确定) 按下可访问参数组或启用某个选项。
用于返回菜单结构的上一步或上一列表。
发生变化)。
按此键可查看要显示的功能的定义。
使用四个导航键可以在菜单的各个项之间移
动。
3 3
表 3.10
图 3.9
的图例,导航键
指示 指示灯 功能
当变频器通过主电源电压或直流总
图 3.9 图形化本地控制面板 (GLCP)
A. 显示区
当变频器通过主电源电压、直流总线端子供电时,显示区
会被激活。
LCP 上显示的信息可以根据用户应用进行定制。在
单 Q3-13 显示设置
中选择选项。
显示 参数编号 默认设置
1 0-20
2 0-21
3 0-22
4 0-23
5 0-24
表 3.8
图 3.9
的图例,显示区
MG06C841 Danfoss A/S © 12/2018 全权所有。 17
[1602] 参考值 [%]
[1614] 电机电流
快捷菜
[1610] 功率 [kW]
[1613] 频率
[1502] 千瓦时计数器
15 On(亮) 绿色
Warn(警
16
Alarm(报
17
表 3.11
告)
警)
图 3.9
黄色
红色
的图例,指示灯 (LED)
线端子供电时,通电指示灯会点
亮。
当符合警告条件时,黄色的警告指
示灯亮起,同时会在显示区中出现
标识相关问题的文字。
故障状态会使红色报警指示灯闪
烁,同时将显示报警文字。
130BD532.10
编程
VLT® AutomationDrive FC 360
D. 操作键和复位
操作键位于 LCP 的底部。
按键 功能
在手动启动模式下启动变频器。
Hand On
18
33
(手动启
Off(关
19
Auto On
20
(自动启
Reset(复
21
表 3.12
动)
闭)
动)
位)
图 3.9
使电机停止,但不切断变频器的供电。
将系统置于远程操作模式。
在故障清除后用手动方式将变频器复位。
的图例,操作键和复位
通过控制输入或串行通讯发出的外
•
部停止信号会忽略本地手动启动模
式。
对控制端子或串行通讯给出的外部启动
•
命令作出响应。
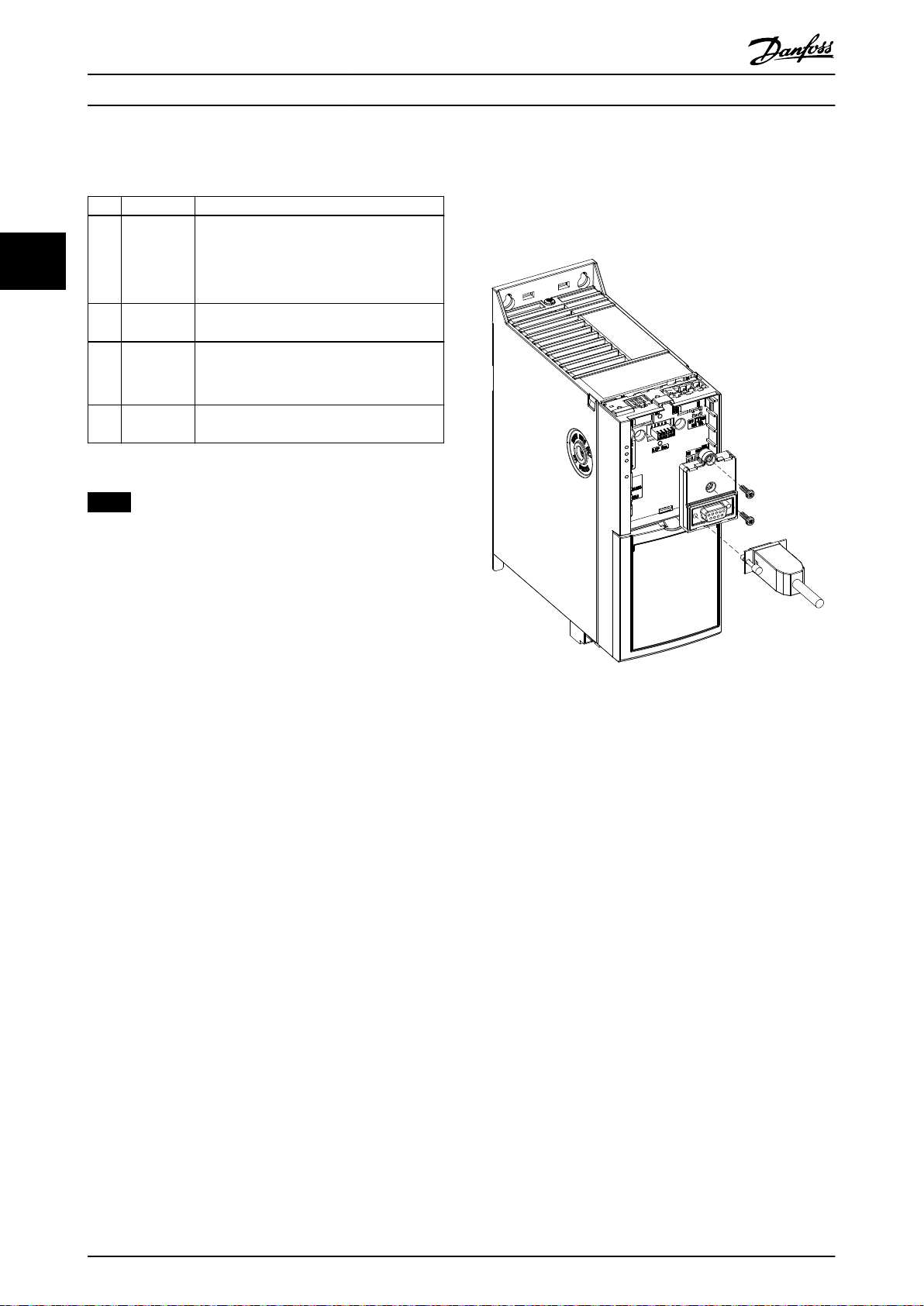
3.1.8 安装 GLCP
使用 GLCP 适配器(订购号: 132B0281) 和电缆将 LCP
102 连接到变频器,如
图 3.10
所示。
注意
要调整显示屏的对比度,请按 [Status](状态)和
[▲]/[▼] 键。
3.1.7 使用 GLCP 更改参数设置
参数设置可从
快捷菜单
1. 按 LCP 上的 [Quick Menu] ( 快捷菜单) 或
2. 按 [▲] [▼] 可浏览参数组,按 [OK](确定)
3. 按 [▲] [▼] 可浏览参数,按 [OK](确定)可
4. 按 [▲] [▼] 可更改参数设置的值。
5. 当十进制参数处于编辑状态时,按 [◄] [►] 可
6. 按 [OK](确定)接受所做的更改。
7. 按两下 [Back](后退)进入状态 菜单,或按一
查看更改
快捷菜单 Q5 - 已完成的更改
参数。
•
•
•
快捷菜单或主菜单
只能访问有限数量的参数。
[Main Menu](主菜单)。
可选择一个参数组。
选择一个参数。
切换数字。
下 [Main Menu](主菜单)进入主菜单。
该列表仅显示在当前编辑菜单中更改的参数。
重置为默认值的参数不会列出。
“Empty”
字样表示未更改任何参数。
进行访问和更改。通过
列出了所有更改默认设置的
图 3.10 GLCP 适配器和连接电缆
3.1.9 使用 LCP 备份/下载参数
为了实现正确的应用编程,通常需要设置若干相关参数的
功能。
章 4 参数说明
设置数据被存储在变频器内部。
要进行备份,将数据上载到 LCP 存储器中。
•
要将数据下载到另一个变频器,将 LCP 连接到
•
该设备并下载存储的设置。
恢复出厂默认设置不会更改存储在 LCP 存储器
•
中的数据。
备份/下载过程
1. 在上载或下载数据之前,按 GLCP 上的 [Off]
(停止)键或 NLCP 上的 [Off Reset](停止复
位)键停止电机。
2. 转到 [Main Menu]
单)然后按 [OK](确定)。
3. 选择
[1] 所有参数到 LCP
LCP , 或选择
LCP 下载数据,还可选择
以从 LCP 下载与电机规格无关的参数。
中提供了参数详细信息。
参数 0-50 LCP 复制
可将数据上载到
[2] 从 LCP 传所有参数
[3] 传电机无关参数
(主菜
可从
18 Danfoss A/S © 12/2018 全权所有。 MG06C841
编程 编程指南
4. 按 [OK](确定)。一个进度条将显示上载或下
载进度。
5. 按 [Hand On](手动启动)或 [Auto On](自动
启动)可返回正常运行状态。
3.1.10 使用 LCP 恢复默认设置
注意
恢复默认设置可能会丢失设置数据、电机数据、本地化数
据和监测记录。要提供备份,将数据上载到 LCP 然后再
初始化。
恢复变频器的默认参数设置是通过执行变频器初始化来实
现的。初始化通过
手动执行。初始化不会复位
数 0-03 区域性设置
使用
•
位变频器设置,比如运行时间、串行通讯选择、
故障日志、报警日志和其他监测功能。
手动初始化会清除所有电机、编程、本地化和监
•
测数据并恢复出厂设置。
建议的初始化过程,通过
1. 选择
定)。
2. 选择
3. 切断设备电源,并等显示屏关闭。
4. 接通设备电源。
在启动期间将恢复默认参数设置。此时所花的时间可能略
长于正常水平。
5. 显示出
6. 按 [Reset](复位)可返回运行模式。
手动初始化过程
1. 切断设备电源,并等显示屏关闭。
2. 在给设备加电时,同时按住 GLCP 的 [Status]
(状态)、[Main Menu](主菜单)和 [OK](确
定)或者 NLCP 的[Menu](菜单)和[OK](确定)
约 5 秒或直到听到响声且风扇开始转动。
在启动期间将恢复出厂默认参数设置。此时所花的时间可
能略长于正常水平。
手动初始化不会复位下述变频器信息:
参数 0-03 区域性设置
•
参数 1-06 顺时针方向
•
参数 15-00 运行时间
•
参数 15-03 加电次数
•
参数 15-04 过温次数
•
参数 15-05 过压次数
•
参数 15-30 报警记录: 故障错误代码
•
参数 14-22 工作模式
参数 1-06 顺时针方向 和参
的设置。
参数 14-22 工作模式
参数 14-22 工作模式
参数 14-22 工作模式
[2] 初始化
报警 80,变频器初始化为默认值
,然后按 [OK](确定)。
(推荐)执行或
执行初始化不会复
然后按 [OK]( 确
。
3.2
基本设置
3.2.1 异步电机设置
按所列顺序输入以下电机数据。这些信息可在电机铭牌上
找到。
1.
参数 1-20 电机功率
2.
参数 1-22 电机电压
3.
参数 1-23 电机频率
4.
参数 1-24 电机电流
5.
参数 1-25 电机额定转速
为在 VVC+ 模式下保持最佳性能,需要更多电机数据来设
置以下参数。
6.
参数 1-30 定子阻抗 (Rs)
7.
参数 1-31 转子阻抗 (Rr)
8.
参数 1-33 定子漏抗 (X1)
9.
参数 1-35 主电抗 (Xh)
这些数据可在电机数据表中找到(一般不位于电机铭牌
上)。使用
完整 AMA
以 VVC+ 模式下运行时针对应用的调整
VVC+ 是最可靠的控制模式。大多数情况下,无需更多调整
即可提供最佳性能。运行完整 AMA 以获取最佳性能。
3.2.2
初始设置步骤
1. 将
2. 在
参数 1-29 电机自动整定 (AMA) [1] 启用
运行完整 AMA 或手动输入参数。
在 VVC+ 下的永磁电机设置
参数 1-10 电动机结构
永磁电机工作模式:
1a
[1] PM,非突出 SPM
1b
[3] PM, salient IPM (PM , 突出
IPM)
参数 1-00 配置模式
.
.
.
.
.
.
.
.
.
设为以下选项可激活
中选择
[0] 开环
。
注意
永磁电机不支持编码器反馈。
设置电机数据
完成初始设置步骤后,
高级 电动机数据 I和 1-4* 高级 电动机数据 II
活。
相关信息可在电机铭牌上以及电机数据表中找到。
按照所列顺序设置以下参数:
1.
参数 1-24 电动机电流
2.
参数 1-26 电动机持续额定转矩
3.
参数 1-25 电动机额定转速
4.
参数 1-39 电动机极数
参数组 1-2* 电动机数据、1-3*
被激
.
.
.
.
3 3
MG06C841 Danfoss A/S © 12/2018 全权所有。 19
编程
5.
参数 1-40 1000 RPM 时的后 EMF
6.
参数 1-42 Motor Cable Length
使用
参数 1-29 自动电动机调整 (AMA)
用完整 AMA
以运行完整 AMA。如果未成功执行完整
AMA,则必须手动配置以下参数。
33
1.
参数 1-30 定子阻抗 (Rs)
输入公共相位定子绕组阻抗 (Rs)。如果只有相
间数据可用,则将相间数据除以 2 即可得出相
位值。
还可以用欧姆表测量此值。这样做时,电缆的阻
VLT® AutomationDrive FC 360
.
.
并选择
[1] 启
.
数 1-46 位置检测增益
中为不同的电机调整该值。如果变
频器启动失败,或在变频器启动时出现过电流报警,请检
查转子是否受阻。如果转子未受阻,则将
动模式
设为
[1] 停车
,然后重试。
参数 1-70 启
停车
对于电机慢速旋转的应用(比如风机风扇的应用),建议
选择此功能。
间
可以调整。对于高惯量应用对象,请增大这些参数的
参数 2-06 停车电流和 参数 2-07 停车时
出厂设置值。
以额定速度启动电机。如果应用运行状况不佳,请检查
VVC+ PM 设置。
表 3.13
列出了针对不同应用的建议。
值也将被考虑在内。将测得值除以 2,然后输入
结果。
2.
参数 1-37 d 轴电感 (Ld)
.
输入永磁电机的 D 轴电感值。
如果只有相间数据可用,则将相间数据除以 2
即可得出相位值。
还可以用电感计测量此值。这样做时,电缆的电
感值也将被考虑在内。将测得值除以 2,然后输
入结果。
3.
参数 1-38 q 轴电感 (Lq)
仅在
参数 1-10 电动机结构
出 IPM
时,该参数才有效。.
.
设为
输入永磁电机的交轴电感值。如果只有相间数据
可用,则将相间数据除以 2 即可得出相位值。
还可以用电感计测量此值。这样做时,电缆的电
感值也将被考虑在内。将电机转子转一圈,找到
最大的相间电感值。将该值除以 2,然后输入结
果。
4.
参数 1-44 d-axis Inductance Sat. (LdSat)
仅在
参数 1-10 电动机结构
出 IPM
时,该参数才有效。.
设为
此参数与 D 轴的饱和电感相对应。默认值为
数 1-37 d 轴电感 (Ld)
中设置的值. 大多数
情况下,请勿更改默认值。如果电机供应商提供
了饱和曲线,则输入额定电流的 100% 作为 D
[3] PM、突
.
[3] PM、突
参
应用 设置
低惯量应用
1)
I
Load
中惯量应用
50>I
高惯量应用
I
Load/IMotor
低速高负载
<30%(额定转速)
表 3.13 针对不同应用的建议
1) I
2) I
2)
/I
<5
Motor
Load/IMotor
> 50
= 负载惯量。
Load
= 电机惯量。
Motor
>5
使用因数 5 到 10 增加
•
数 1-17 电压滤波时间常量
值。
减小
•
•
保留通过计算得到的值。
增加
数 1-15 低速滤波时间常量
数 1-16 高速滤波时间常量
减少
减小
(>100% 的时间如果较长,将可能
使电机发生过热)。
参数 1-14 衰减增益
值。
减小
参数 1-66 低速最小电流
的值 (<100%)。
参数 1-14 衰减增益、参
参数 1-17 电压滤波时间常量
参数 1-66 低速最小电流
如果电机在某个速度下开始振荡,请增大
减增益
。以较小步长逐渐增大此值。
参
的
的
和
的值
参数 1-14 衰
参
轴电感值。
5.
参数 1-45 q-axis Inductance Sat. (LqSat)
仅在
参数 1-10 电动机结构
出 IPM
时,该参数才有效。.
设为
此参数与 Q 轴的饱和电感相对应。默认值为
数 1-38 q 轴电感 (Lq)
中设置的值. 大多数
情况下,请勿更改默认值。如果电机供应商提供
了电感曲线,则输入额定电流的 100% 作为 Q
.
[3] PM、突
参
参数 1-66 低速最小电流
在
表示使用额定转矩作为启动转矩。
3.2.3 电机自适应 (AMA)
强烈建议使用 AMA,因为它可以测量电机的电气特性,以
此在变频器与 VVC+模式下的电动机之间实现最佳兼容性。
中可调整启动转矩。100%
轴电感值。
测试电机工作情况
1. 以低速 (100–200 RPM) 启动电机。如果电机未
运行,则检查安装、一般编程和电机数据。
2. 检查
参数 1-70 启动模式
中的启动功能是否符
合应用要求。
转子检测
此功能是建议选项,适合电机从静止状态开始启动的应
变频器会建立一个用于调节电机输出电流的数学
•
模型,从而提高电机性能。
某些电机无法运行该测试的完整版本。在这种情
•
况下,请选择
如果出现警告或报警,请参阅
•
报警消息
为获得最佳结果,应对冷电机执行该程序
•
启用精简 AMA
。
(不适用于 PM)。
章 6.1.3 警告/
用,比如泵或传送机。在某些电机上,当变频器执行转子
检测时,将会发出声音。该声音对电机无害。在
参
20 Danfoss A/S © 12/2018 全权所有。 MG06C841
编程 编程指南
要运行 AMA,可使用数字式 LCP
1. 按照默认参数设置,运行 AMA 前应连接端子 12
和 27。
2. 进入
3. 转到
4. 按 [OK](确定)。
5. 使用铭牌上的数据,在
6. 为 IM 和 PM 设置
7. 为 PM 设置
8. 设置
9. 转至
10. 按 [OK](确定)。
11. 选择
12. 按 [OK](确定)。
13. 按 [Hand On](手动启动)以启动 AMA。
14. 该测试将自动运行,并会表明它何时完成。
根据功率规格的不同,AMA 的完成时间为 3 到 10 分
钟。
主菜单
。
参数组 1-** 负载和电机
参数组 1-2* 电动机数据
内设置电动机参数。
参数 1-39 电动机极数
参数 1-40 1000 RPM 时的后 EMF
参数 1-42 Motor Cable Length
电缆长度。
参数 1-29 自动电动机调整 (AMA)
[1] 启用完整 AMA。
。
。
中的电机
。
3 3
。
注意
AMA 功能不会导致电机运行,也不会损坏电机。
MG06C841 Danfoss A/S © 12/2018 全权所有。 21
0-03 区域性设置
选项: 功能:
注意
该参数在电动机运行过程中无
法调整。
[0] 国际 激活
参数 1-20 电动机功率
[kW]
,以便用 [kW] 为单位设置
电机功率,并将
参数 1-23 电动
机频率
的默认值设为 50 Hz。
[1] 美国 激活
参数 1-20 电动机功率
[kW]
,以便用 HP 为单位设置电机
功率,并将
参数 1-23 电动机频
率
的默认值设为 60 Hz。
0-04 上电工作状态
选项: 功能:
选择在手动启动模式下断电后重新
将变频器连接到主电源时的运行模
式。
[0] 继续 使用变频器关闭之前的启动/停止设
置(通过 [HAND ON/OFF](手动启
动/停止)键应用)来重新启动变频
器。
[1] * 停止并保存给定值当主电源恢复供电并且按了 [Hand
On](手动启动)键后,将使用保存
的本地参考值来重新启动变频器。
[2] 强制停止,参
考值 = 0
在重新启动变频器时将本地参考值
复位为 0。
0-06 GridType
选项: 功能:
选择电网类型,以提供适合的供电
电压/频率。
0-06 GridType
选项: 功能:
注意
某些功率不支持一些选项。
采用 IT 电网作为供电主电源时,
变压器输助侧的中性点不接地。
采用三角形连接作为供电主电源
时,变压器辅助侧为三角形连接,
一相接地。
[10] 380-440V/
50Hz/IT-grid
[11] 380-440V/
50Hz/Delta
[12] 380-440V/
50Hz
[20] 440-480V/
50Hz/IT-grid
[21] 440-480V/
50Hz/Delta
[22] 440-480V/
50Hz
[110] 380-440V/
60Hz/IT-grid
[111] 380-440V/
60Hz/Delta
[112] 380-440V/
60Hz
[120] 440-480V/
60Hz/IT-grid
[121] 440-480V/
60Hz/Delta
[122] 440-480V/
60Hz
0-07 Auto DC Braking
选项: 功能:
防止 IT 电网环境下惯性停车时出
现过压。仅当在此参数中选择了
[1] 开
时,才会激活此参数。
[0] 关 该功能无效。
[1] * 开 启用此功能。
参数说明
VLT® AutomationDrive FC 360
4 参数说明
4.1 参数: 0-** 操作和显示
这些参数与变频器的基本功能、LCP 按键的功能以及 LCP
显示器的配置有关。
44
4.1.1 0-0* 基本设置
0-01 语言
选项: 功能:
[0] * 英语
[10] 中文
[28] 葡萄牙语
22 Danfoss A/S © 12/2018 全权所有。 MG06C841
4.1.2 0-1* 菜单操作
定义和控制各个参数菜单。
变频器有 2 个参数菜单,可单独对它们进行设置。这不
仅使变频器拥有灵活性,而且还可以解决高级控制功能方
面的问题,因此往往能省下购买外部控制设备的成本。例
如,可以用这 2 个菜单来设置变频器,使其按照两个菜
0-10 有效设置
选项: 功能:
选择变频器的工作菜单。选择
参
数 0-51 菜单复制
将复制菜单 1
或所有菜单。为了防止同一参数在
两个不同菜单中的设置发生冲突,
请
参数 0-12 此菜单连接到
将这
两个菜单关联起来。在切换菜单
前,如果被标有
运行期间无法更改
的参数具有不同的值,请将变频器
停止。在
章 5 参数列表
的参数列
表中,那些
操作期间无法更改
的参
数被标明为“假”。
[1] * 菜单 1 菜单 1 有效。
[2] 菜单 2 菜单 2 有效。
[9] 多重菜单 该选项用于借助数字输入和串行通
讯端口从远程进行菜单选择。该菜
单使用
参数 0-12 此菜单连接到
的设置。
0-11 编辑设置
选项: 功能:
选择在运行期间设置的菜单: 可
以是有效菜单或非有效菜单。正在
编辑的菜单的编号将在 LCP 中闪
烁显示。
[1] 菜单 1
[1] 菜单 1
到
[2]
菜单 2 在运
行期间可以自由编辑,不论它们是
不是有效菜单。
[2] 菜单 2
[9] * 有效菜单 变频器的工作菜单也可以在运行期
间进行编辑。
0-12 此菜单连接到
选项: 功能:
这种联接确保“
在运行期间无法更
改
”的参数可以实现同步,这样,
即可在运行期间从一个菜单切换到
另一个菜单。
如果菜单未联接,则不能在电机运
行时切换菜单。因此,只有在电机
惯性停车之后才能切换菜单。
[0] 未链接 在两个菜单中都保持参数不变。这
些参数在电机运行过程中无法更
改。
[20] * 链接 将在
运行期间无法更改
的参数从一
个菜单复制到另一个菜单,这样在
两个菜单中是相同的。
0-14 读数: 编辑菜单/通道
范围: 功能:
0*
[-2147483647
2147483647 ]
查看
参数 0-11 编程菜单
的设
置。编辑每个通讯通道的设置。
A
表示有效设置; F 表示出厂设
置; 数字表示设置代码。从右至
左的通讯通道分别是 LCP、FC 总
线、USB 和 HPFB1-5。
0-16 Application Selection
选项: 功能:
选择集成的应用功能。选择应用
后,将自动设置相关参数组。
[0] * None
[1] Simple
Process
Close Loop
[2] Local/Remote
[3] Speed Open
Loop
[4] Simple Speed
Close Loop
[5] Multi Speed
[6] OGD LA10
[7] OGD V210
[8] Hoist
[9] Hoist Speed
Close Loop
参数说明 编程指南
单中的控制方案来工作。菜单 1 包括一个控制方案(如
负责水平运动的电机 1),菜单 2 包括另一个控制方案
(如负责垂直运动的电机 2)。再比如,OEM 机器构建商
可以用这些参数对其装配的并且用于某一范围内的不同类
型机器的所有变频器进行设置,让它们拥有相同参数。这
样一来,在生产/调试期间只需根据变频器安装在哪种机器
上而选择特定的菜单。
有效菜单(即变频器当前使用的菜单)可以在
数 0-10 有效设置
择
[9] 多重菜单
中选择,并且可显示在 LCP 中。选
,可以在变频器运行或停止时通过数字
参
输入或串行通讯命令实现菜单之间的切换。如果需要在运
行期间更改菜单,请确保已根据需要对
单连接到
进行设置。使用
参数 0-11 编辑设置
参数 0-12 此菜
可以编
辑任何菜单中的参数,同时继续变频器在其有效菜单中的
操作,这里的有效菜单可以和编辑中的菜单不同。使用
参数 0-51 菜单复制
可以在菜单之间复制参数设置,这
有助于加快调试过程,比如当不同菜单要求使用类似的参
数设置时。
4 4
MG06C841 Danfoss A/S © 12/2018 全权所有。 23
4.1.3 0-2* LCP 显示器
使用此组中的参数可定义 GLCP 中显示的变量。
数 16-17 速度 [RPM]
中的每个参数的一个选项。
是用于
参数组 0-2* LCP 显示器
参
0-20 显示行 1.1(小)
选择要在第 1 行左侧位置显示的变量。
选项: 功能:
[0] 无
[37] 显示文字 1
[38] 显示文字 2
[39] 显示文字 3
[748] PCD Feed
Forward
[953] Profibus 警
告字
[1501] 运转时间
[1502] 千瓦时计数器
[1600] 控制字
[1601] 参考值 [单
位]
[1602] * 参考值 %
[1603] 状态字 [二进
制]
[1605] 实际转速值
[%]
[1609] 自定义读数
[1610] 功率 [kW]
[1611] 功率 [hp]
[1612] 电动机电压
[1613] 频率
[1614] 电动机电流
[1615] 频率 [%]
[1616] 转矩 (Nm)
[1617] 速度 [RPM]
[1618] 电动机发热
[1622] 转矩 [%]
[1630] 直流回路电压
[1633] 制动能量/2 分
钟
[1634] 散热片温度
[1635] 逆变器热保护
[1636] 逆变器额定电
流
[1637] 逆变器最大电
流
[1638] 条件控制器状
态
[1639] 控制卡温度
[1650] 外部参考值
[1652] 反馈 [单位]
[1653] 数字电位计参
考值
[1657] Feedback
[RPM]
[1660] 数字输入
[1661] 53 端切换设置
[1662] 模拟输入端
53
0-20 显示行 1.1(小)
选择要在第 1 行左侧位置显示的变量。
选项: 功能:
[1663] 54 端切换设置
[1664] 模拟输入端
54
[1665] 模拟输出端
42 [mA]
[1666] 数字输出
[1667] 端子 29 频率
[1668] 端子 33 频率
[1669] 端子 27 脉冲
输出
[1670] 端子 29 脉冲
输出
[1671] 继电器输出
[二进制]
[1672] 计数器 A
[1673] 计数器 B
[1679] Analog
output 45
[mA]
[1680] 控制字 1 信号
[1682] 总线设定 A 信
号
[1684] 通讯卡状态字
[1685] FC 口控制字 1
[1686] FC 速度给定 A
[1690] 报警字
[1691] 报警字 2
[1692] 警告字
[1693] 警告字 2
[1694] 扩展状态字
[1695] 扩展状态字 2
[1697] Alarm Word 3
[1890] 过程 PID 错
误
[1891] 过程 PID 输
出
[1892] 过程 PID 箝
位输出
[1893] 过程 PID 增
益标定输出
[2117] 扩展 1 参照值
[单位]
[2118] 扩展 1 反馈
[单位]
[2119] 扩展 1 输出
[%]
[3401] PCD 1 写入
MCO
[3402] PCD 2 写入
MCO
[3403] PCD 3 写入
MCO
参数说明
44
24 Danfoss A/S © 12/2018 全权所有。 MG06C841
VLT® AutomationDrive FC 360
0-20 显示行 1.1(小)
选择要在第 1 行左侧位置显示的变量。
选项: 功能:
[3404] PCD 4 写入
MCO
[3405] PCD 5 写入
MCO
[3406] PCD 6 写入
MCO
[3407] PCD 7 写入
MCO
[3408] PCD 8 写入
MCO
[3409] PCD 9 写入
MCO
[3410] PCD 10 写入
MCO
[3421] PCD 1 从 MCO
读取
[3422] PCD 2 从 MCO
读取
[3423] PCD 3 从 MCO
读取
[3424] PCD 4 从 MCO
读取
[3425] PCD 5 从 MCO
读取
[3426] PCD 6 从 MCO
读取
[3427] PCD 7 从 MCO
读取
[3428] PCD 8 从 MCO
读取
[3429] PCD 9 从 MCO
读取
[3430] PCD 10 从
MCO 读取
[3450] 实际位置
[3456] 跟踪错误
0-21 显示行 1.2(小)
选择要在第 1 行中间位置显示的变量。
选项: 功能:
[0] 无
[37] 显示文字 1
[38] 显示文字 2
[39] 显示文字 3
[748] PCD Feed
Forward
[953] Profibus 警
告字
[1501] 运转时间
[1502] 千瓦时计数器
[1600] 控制字
0-21 显示行 1.2(小)
选择要在第 1 行中间位置显示的变量。
选项: 功能:
[1601] 参考值 [单
位]
[1602] 参考值 %
[1603] 状态字 [二进
制]
[1605] 实际转速值
[%]
[1609] 自定义读数
[1610] 功率 [kW]
[1611] 功率 [hp]
[1612] 电动机电压
[1613] 频率
[1614] * 电动机电流
[1615] 频率 [%]
[1616] 转矩 (Nm)
[1617] 速度 [RPM]
[1618] 电动机发热
[1622] 转矩 [%]
[1630] 直流回路电压
[1633] 制动能量/2 分
钟
[1634] 散热片温度
[1635] 逆变器热保护
[1636] 逆变器额定电
流
[1637] 逆变器最大电
流
[1638] 条件控制器状
态
[1639] 控制卡温度
[1650] 外部参考值
[1652] 反馈 [单位]
[1653] 数字电位计参
考值
[1657] Feedback
[RPM]
[1660] 数字输入
[1661] 53 端切换设置
[1662] 模拟输入端
53
[1663] 54 端切换设置
[1664] 模拟输入端
54
[1665] 模拟输出端
42 [mA]
[1666] 数字输出
[1667] 端子 29 频率
[1668] 端子 33 频率
[1669] 端子 27 脉冲
输出
[1670] 端子 29 脉冲
输出
参数说明 编程指南
MG06C841 Danfoss A/S © 12/2018 全权所有。 25
4 4
0-21 显示行 1.2(小)
选择要在第 1 行中间位置显示的变量。
选项: 功能:
[1671] 继电器输出
[二进制]
[1672] 计数器 A
[1673] 计数器 B
[1679] Analog
output 45
[mA]
[1680] 控制字 1 信号
[1682] 总线设定 A 信
号
[1684] 通讯卡状态字
[1685] FC 口控制字 1
[1686] FC 速度给定 A
[1690] 报警字
[1691] 报警字 2
[1692] 警告字
[1693] 警告字 2
[1694] 扩展状态字
[1695] 扩展状态字 2
[1697] Alarm Word 3
[1890] 过程 PID 错
误
[1891] 过程 PID 输
出
[1892] 过程 PID 箝
位输出
[1893] 过程 PID 增
益标定输出
[2117] 扩展 1 参照值
[单位]
[2118] 扩展 1 反馈
[单位]
[2119] 扩展 1 输出
[%]
[3401] PCD 1 写入
MCO
[3402] PCD 2 写入
MCO
[3403] PCD 3 写入
MCO
[3404] PCD 4 写入
MCO
[3405] PCD 5 写入
MCO
[3406] PCD 6 写入
MCO
[3407] PCD 7 写入
MCO
[3408] PCD 8 写入
MCO
[3409] PCD 9 写入
MCO
0-21 显示行 1.2(小)
选择要在第 1 行中间位置显示的变量。
选项: 功能:
[3410] PCD 10 写入
MCO
[3421] PCD 1 从 MCO
读取
[3422] PCD 2 从 MCO
读取
[3423] PCD 3 从 MCO
读取
[3424] PCD 4 从 MCO
读取
[3425] PCD 5 从 MCO
读取
[3426] PCD 6 从 MCO
读取
[3427] PCD 7 从 MCO
读取
[3428] PCD 8 从 MCO
读取
[3429] PCD 9 从 MCO
读取
[3430] PCD 10 从
MCO 读取
[3450] 实际位置
[3456] 跟踪错误
0-22 显示行 1.3(小)
选择要在第 1 行右侧位置显示的变量。
选项: 功能:
[0] 无
[37] 显示文字 1
[38] 显示文字 2
[39] 显示文字 3
[748] PCD Feed
Forward
[953] Profibus 警
告字
[1501] 运转时间
[1502] 千瓦时计数器
[1600] 控制字
[1601] 参考值 [单
位]
[1602] 参考值 %
[1603] 状态字 [二进
制]
[1605] 实际转速值
[%]
[1609] 自定义读数
[1610] * 功率 [kW]
[1611] 功率 [hp]
[1612] 电动机电压
[1613] 频率
[1614] 电动机电流
参数说明
44
26 Danfoss A/S © 12/2018 全权所有。 MG06C841
VLT® AutomationDrive FC 360
0-22 显示行 1.3(小)
选择要在第 1 行右侧位置显示的变量。
选项: 功能:
[1615] 频率 [%]
[1616] 转矩 (Nm)
[1617] 速度 [RPM]
[1618] 电动机发热
[1622] 转矩 [%]
[1630] 直流回路电压
[1633] 制动能量/2 分
钟
[1634] 散热片温度
[1635] 逆变器热保护
[1636] 逆变器额定电
流
[1637] 逆变器最大电
流
[1638] 条件控制器状
态
[1639] 控制卡温度
[1650] 外部参考值
[1652] 反馈 [单位]
[1653] 数字电位计参
考值
[1657] Feedback
[RPM]
[1660] 数字输入
[1661] 53 端切换设置
[1662] 模拟输入端
53
[1663] 54 端切换设置
[1664] 模拟输入端
54
[1665] 模拟输出端
42 [mA]
[1666] 数字输出
[1667] 端子 29 频率
[1668] 端子 33 频率
[1669] 端子 27 脉冲
输出
[1670] 端子 29 脉冲
输出
[1671] 继电器输出
[二进制]
[1672] 计数器 A
[1673] 计数器 B
[1679] Analog
output 45
[mA]
[1680] 控制字 1 信号
[1682] 总线设定 A 信
号
[1684] 通讯卡状态字
[1685] FC 口控制字 1
[1686] FC 速度给定 A
0-22 显示行 1.3(小)
选择要在第 1 行右侧位置显示的变量。
选项: 功能:
[1690] 报警字
[1691] 报警字 2
[1692] 警告字
[1693] 警告字 2
[1694] 扩展状态字
[1695] 扩展状态字 2
[1697] Alarm Word 3
[1890] 过程 PID 错
误
[1891] 过程 PID 输
出
[1892] 过程 PID 箝
位输出
[1893] 过程 PID 增
益标定输出
[2117] 扩展 1 参照值
[单位]
[2118] 扩展 1 反馈
[单位]
[2119] 扩展 1 输出
[%]
[3401] PCD 1 写入
MCO
[3402] PCD 2 写入
MCO
[3403] PCD 3 写入
MCO
[3404] PCD 4 写入
MCO
[3405] PCD 5 写入
MCO
[3406] PCD 6 写入
MCO
[3407] PCD 7 写入
MCO
[3408] PCD 8 写入
MCO
[3409] PCD 9 写入
MCO
[3410] PCD 10 写入
MCO
[3421] PCD 1 从 MCO
读取
[3422] PCD 2 从 MCO
读取
[3423] PCD 3 从 MCO
读取
[3424] PCD 4 从 MCO
读取
[3425] PCD 5 从 MCO
读取
参数说明 编程指南
MG06C841 Danfoss A/S © 12/2018 全权所有。 27
4 4
0-22 显示行 1.3(小)
选择要在第 1 行右侧位置显示的变量。
选项: 功能:
[3426] PCD 6 从 MCO
读取
[3427] PCD 7 从 MCO
读取
[3428] PCD 8 从 MCO
读取
[3429] PCD 9 从 MCO
读取
[3430] PCD 10 从
MCO 读取
[3450] 实际位置
[3456] 跟踪错误
0-23 显示行 2(大)
选择要在第 2 行显示的变量。
选项: 功能:
[0] 无
[37] 显示文字 1
[38] 显示文字 2
[39] 显示文字 3
[748] PCD Feed
Forward
[953] Profibus 警
告字
[1501] 运转时间
[1502] 千瓦时计数器
[1600] 控制字
[1601] 参考值 [单
位]
[1602] 参考值 %
[1603] 状态字 [二进
制]
[1605] 实际转速值
[%]
[1609] 自定义读数
[1610] 功率 [kW]
[1611] 功率 [hp]
[1612] 电动机电压
[1613] * 频率
[1614] 电动机电流
[1615] 频率 [%]
[1616] 转矩 (Nm)
[1617] 速度 [RPM]
[1618] 电动机发热
[1622] 转矩 [%]
[1630] 直流回路电压
[1633] 制动能量/2 分
钟
[1634] 散热片温度
[1635] 逆变器热保护
[1636] 逆变器额定电
流
0-23 显示行 2(大)
选择要在第 2 行显示的变量。
选项: 功能:
[1637] 逆变器最大电
流
[1638] 条件控制器状
态
[1639] 控制卡温度
[1650] 外部参考值
[1652] 反馈 [单位]
[1653] 数字电位计参
考值
[1657] Feedback
[RPM]
[1660] 数字输入
[1661] 53 端切换设置
[1662] 模拟输入端
53
[1663] 54 端切换设置
[1664] 模拟输入端
54
[1665] 模拟输出端
42 [mA]
[1666] 数字输出
[1667] 端子 29 频率
[1668] 端子 33 频率
[1669] 端子 27 脉冲
输出
[1670] 端子 29 脉冲
输出
[1671] 继电器输出
[二进制]
[1672] 计数器 A
[1673] 计数器 B
[1679] Analog
output 45
[mA]
[1680] 控制字 1 信号
[1682] 总线设定 A 信
号
[1684] 通讯卡状态字
[1685] FC 口控制字 1
[1686] FC 速度给定 A
[1690] 报警字
[1691] 报警字 2
[1692] 警告字
[1693] 警告字 2
[1694] 扩展状态字
[1695] 扩展状态字 2
[1697] Alarm Word 3
[1890] 过程 PID 错
误
[1891] 过程 PID 输
出
参数说明
44
28 Danfoss A/S © 12/2018 全权所有。 MG06C841
VLT® AutomationDrive FC 360

0-23 显示行 2(大)
选择要在第 2 行显示的变量。
选项: 功能:
[1892] 过程 PID 箝
位输出
[1893] 过程 PID 增
益标定输出
[2117] 扩展 1 参照值
[单位]
[2118] 扩展 1 反馈
[单位]
[2119] 扩展 1 输出
[%]
[3401] PCD 1 写入
MCO
[3402] PCD 2 写入
MCO
[3403] PCD 3 写入
MCO
[3404] PCD 4 写入
MCO
[3405] PCD 5 写入
MCO
[3406] PCD 6 写入
MCO
[3407] PCD 7 写入
MCO
[3408] PCD 8 写入
MCO
[3409] PCD 9 写入
MCO
[3410] PCD 10 写入
MCO
[3421] PCD 1 从 MCO
读取
[3422] PCD 2 从 MCO
读取
[3423] PCD 3 从 MCO
读取
[3424] PCD 4 从 MCO
读取
[3425] PCD 5 从 MCO
读取
[3426] PCD 6 从 MCO
读取
[3427] PCD 7 从 MCO
读取
[3428] PCD 8 从 MCO
读取
[3429] PCD 9 从 MCO
读取
[3430] PCD 10 从
MCO 读取
[3450] 实际位置
[3456] 跟踪错误
0-24 显示行 3(大)
选择要在第 3 行显示的变量。
选项: 功能:
[0] 无
[37] 显示文字 1
[38] 显示文字 2
[39] 显示文字 3
[748] PCD Feed
Forward
[953] Profibus 警
告字
[1501] 运转时间
[1502] * 千瓦时计数器
[1600] 控制字
[1601] 参考值 [单
位]
[1602] 参考值 %
[1603] 状态字 [二进
制]
[1605] 实际转速值
[%]
[1609] 自定义读数
[1610] 功率 [kW]
[1611] 功率 [hp]
[1612] 电动机电压
[1613] 频率
[1614] 电动机电流
[1615] 频率 [%]
[1616] 转矩 (Nm)
[1617] 速度 [RPM]
[1618] 电动机发热
[1622] 转矩 [%]
[1630] 直流回路电压
[1633] 制动能量/2 分
钟
[1634] 散热片温度
[1635] 逆变器热保护
[1636] 逆变器额定电
流
[1637] 逆变器最大电
流
[1638] 条件控制器状
态
[1639] 控制卡温度
[1650] 外部参考值
[1652] 反馈 [单位]
[1653] 数字电位计参
考值
[1657] Feedback
[RPM]
[1660] 数字输入
[1661] 53 端切换设置
[1662] 模拟输入端
53
参数说明 编程指南
MG06C841 Danfoss A/S © 12/2018 全权所有。 29
4 4

0-24 显示行 3(大)
选择要在第 3 行显示的变量。
选项: 功能:
[1663] 54 端切换设置
[1664] 模拟输入端
54
[1665] 模拟输出端
42 [mA]
[1666] 数字输出
[1667] 端子 29 频率
[1668] 端子 33 频率
[1669] 端子 27 脉冲
输出
[1670] 端子 29 脉冲
输出
[1671] 继电器输出
[二进制]
[1672] 计数器 A
[1673] 计数器 B
[1679] Analog
output 45
[mA]
[1680] 控制字 1 信号
[1682] 总线设定 A 信
号
[1684] 通讯卡状态字
[1685] FC 口控制字 1
[1686] FC 速度给定 A
[1690] 报警字
[1691] 报警字 2
[1692] 警告字
[1693] 警告字 2
[1694] 扩展状态字
[1695] 扩展状态字 2
[1697] Alarm Word 3
[1890] 过程 PID 错
误
[1891] 过程 PID 输
出
[1892] 过程 PID 箝
位输出
[1893] 过程 PID 增
益标定输出
[2117] 扩展 1 参照值
[单位]
[2118] 扩展 1 反馈
[单位]
[2119] 扩展 1 输出
[%]
[3401] PCD 1 写入
MCO
[3402] PCD 2 写入
MCO
[3403] PCD 3 写入
MCO
0-24 显示行 3(大)
选择要在第 3 行显示的变量。
选项: 功能:
[3404] PCD 4 写入
MCO
[3405] PCD 5 写入
MCO
[3406] PCD 6 写入
MCO
[3407] PCD 7 写入
MCO
[3408] PCD 8 写入
MCO
[3409] PCD 9 写入
MCO
[3410] PCD 10 写入
MCO
[3421] PCD 1 从 MCO
读取
[3422] PCD 2 从 MCO
读取
[3423] PCD 3 从 MCO
读取
[3424] PCD 4 从 MCO
读取
[3425] PCD 5 从 MCO
读取
[3426] PCD 6 从 MCO
读取
[3427] PCD 7 从 MCO
读取
[3428] PCD 8 从 MCO
读取
[3429] PCD 9 从 MCO
读取
[3430] PCD 10 从
MCO 读取
[3450] 实际位置
[3456] 跟踪错误
参数说明
44
30 Danfoss A/S © 12/2018 全权所有。 MG06C841
VLT® AutomationDrive FC 360
4.1.4 0-3* LCP 自定义读数
可以对 LCP 中的显示元素进行自定义。
自定义读数
显示的计算值基于
数 0-31 自定义读数最小值
义读数最大值、参数 4-14 电动机速度上限 [Hz]
置以及实际速度。
参数 0-30 自定义读数单位、参
(仅线性)、
参数 0-32 自定
中的设

130BD380.10
0
Custom Readout (Value)
P 16-09
Custom Readout
Unit P 0-30
Max value
P 0-32
Min value
P 0-31
Motor Speed
Motor Speed
High limit
P 4-14 (Hz)
Linear Unit (e.g. Speed and flow)
Quadratic Unit (Pressure)
Cubic Unit (Power)
Liniar
units only
0-30 用户定义读数的单位
选项: 功能:
设置在 LCP 中显示的值。这些值
与速度成线性、平方或立方关系。
这里的关系取决于所选的单位。请
参阅
表 4.1
。可从
参
数 16-09 自定义读数
读取计算出
的实际值。
[0] None
[1] * %
[5] PPM
[10] 1/min
[11] RPM
[12] PULSE/s
[20] l/s
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/s
[31] kg/min
0-30 用户定义读数的单位
选项: 功能:
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] ?C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[127] ft³/h
[140] ft/s
[141] ft/min
[160] °F
[170] psi
[171] lb/in2
[172] in wg
[173] ft WG
[180] HP
0-31 自定义读数最小值
范围: 功能:
0
Custom‐
ReadoutUn
it*
[ 0 -
999999.99
CustomRea‐
doutUnit]
该参数用于设置自定义读数的最小
值(发生在 0 速时)。仅当在
参
数 0-30 用户定义读数的单位
中
选择了线性单位时,才能选择一个
非 0 值。对于平方和立方单位,
最小值为 0。
0-32 自定义读数最大值
范围: 功能:
100
Custom‐
ReadoutUn
it*
[ 0.0 -
999999.99
CustomRea‐
doutUnit]
该参数用于设置当电动机速度达到
所设的值时,应显示的最大值
参
数 4-14 电动机速度上限 [Hz]
。
0-37 显示文字 1
范围: 功能:
[0 - 0 ] 自由文本,比如用于现场总线应用
的设备标签。
参数说明 编程指南
图 4.1 自定义读数
4 4
与速度的关系取决于在
择的单位类型:
设备类型 与速度的关系
无量纲
速度
体积流量
质量流量
速度
长度
温度
压力 平方
功率 立方
表 4.1 单位类型与速度的关系
MG06C841 Danfoss A/S © 12/2018 全权所有。 31
参数 0-30 自定义读数单位
线性
中选
0-38 显示文字 2
范围: 功能:
[0 - 0 ] 自由文本,比如用于现场总线应用
的位置标签。
0-39 显示文字 3
范围: 功能:
[0 - 0 ] 自由文本,比如用于现场总线应用
的帮助标签。
0-40 LCP 的手动启动键
选项: 功能:
[0] 禁用 请避免变频器在手动模式下意外启
动。
[1] * 启用 [Hand On](手动启动)被启用。
0-42 LCP 的自动启动键
选项: 功能:
[0] 禁用 避免从 LCP 意外启动变频器。
[1] * 启用 [Hand On](手动启动)被启用。
0-44 LCP 的 [Off/Reset](停止/复位)键
选项: 功能:
[0] 禁用 要避免变频器从 LCP 意外停止或
复位,请选择
[0] 禁用
。设置可
通过
参数 0-60 主菜单密码
锁
定。
[1] * 启用
[7] 复位
0-50 LCP 复制
选项: 功能:
[0] * 不复制 无功能。
[1] 所有参数到
LCP
将变频器存储器中的所有菜单中的
所有参数都复制到 LCP。为便于维
护,建议您在调试之后将所有参数
都复制到 LCP 中。
[2] 从 LCP 传所有参数将 LCP 存储器中的所有菜单中的
所有参数都复制到变频器存储器。
[3] 传电机无关参数仅复制与电机规格无关的参数。要
在不影响已设置的电动机数据的情
况下为多台变频器设置相同功能,
可以使用该选项。
0-51 菜单复制
选项: 功能:
[0] * 不复制 无功能。
[1] 从菜单 1 复制 从菜单 1 复制到菜单 2。
[2] 从菜单 2 复制 从菜单 2 复制到菜单 1。
[9] 从出厂菜单复制将出厂设置复制到在
参
数 0-11 编辑设置
中所选的编程
菜单中。
0-60 扩展菜单密码
范围: 功能:
0* [0 -
999 ]
定义通过 [Main Menu](主菜单)
键访问
主菜单
时的密码。设为 0
值可禁用密码功能。
参数说明
VLT® AutomationDrive FC 360
44
4.1.5 0-4* LCP 键盘
启用、禁用 LCP 上的各个键以及设置保护密码。
4.1.7 0-6* 密码
4.1.6 0-5* 复制/保存
将参数复制到 NLCP 及 GLCP 或从其复制参数。可使用这
些参数在变频器之间保存和复制菜单。
32 Danfoss A/S © 12/2018 全权所有。 MG06C841

1-00 配置模式
选项: 功能:
选择当远程参考值激活时(即,通
过模拟输入或现场总线)要使用的
应用控制原则。
[0] * 开环 启用速度控制(不使用来自电机的
反馈信号),通过自动滑差补偿在
变化的负载情况下保持基本恒速。
补偿功能被启用,但您可以在
参数
组 1-** 负载和电机
中禁用它。
[1] 闭环速度 启用带反馈的闭环速度控制。为提
高速度精度,请提供反馈信号,并
设置速度 PID 控制。速度控制参
数在
参数组 7-0* 速度 PID 控制
中设置。
[2] 转矩 启用带速度反馈的转矩闭环控制。
仅当在
参数 1-01 电动控制原理
中选择了选项
[1] VVC
+
时才可
用。
[3] 过程 启用使用变频器中的过程控制。过
程控制参数在
参数组 7-2* 过程
控制。反馈和参数组 7-3* 过程
PID 控制
中。
[4] 转矩控制开环
启用使用 VVC+ 模式中的转矩开环
(
参数 1-01 电动控制原理
)。转矩
PID 参数在
参数组 7-1* 转矩 PI
控制
中设置。
[6] 表面卷绕机 支持使用表面卷绕机控制功能。
参
数组 7-2* 过程控制 反馈和参数
组 7-3* 过程 PID 控制器
中的
特定参数。
[7] 扩展 PID 速
度开环
支持使用扩展 PID 速度开环。
参
数组 7-2* 过程控制 反馈至参数
组 7-5* 扩展 过程 PID 控制器
中的特定参数。
1-01 电动控制原理
选项: 功能:
[0] U/f
注意
运行 U/f 控制时,不包括滑差
补偿和负载补偿。
用于并联电机和/或特殊电机。在
参数 1-55 U/f 特性 - U
和
参
1-01 电动控制原理
选项: 功能:
数 1-56 U/f 特性 - F
中设置
U/f 设置。
[1] * VVC+
注意
当
参数 1-10 电机结构
设置
为 PM 启用的选件时,仅可以
使用 VVC+ 选件。
正常运行模式,包括滑差补偿和负
载补偿。
1-03 转矩特性
选项: 功能:
选择所需的转矩特性。VT 和 AEO
都属于节能运行方式。
[0] * 恒转矩 电机主轴输出在变速控制下提供恒
定转矩。
[1] 可变转矩 电机主轴输出将通过可变速度控制
提供可变转矩。在
参数 14-40 VT
级别
中设置可变转矩级别。
[2] 自动能量优化CT借助
参数 14-41 AEO 最小磁化
最
大限度降低磁化和频率,从而自动
优化能耗。
1-06 顺时针方向
选项: 功能:
注意
该参数在电机运行过程中无法
调整。
该参数定义了“顺时针”一词对于
LCP 方向键的含义。借此可在不交
换电机接线的情况下轻松改变轴的
旋转方向。
[0] * 正常 当变频器按下述方式与电机连接
时,电机轴将沿顺时针方向旋转:
U⇒U; V⇒V; 以及 W⇒W。
[1] 反向 当变频器按下述方式与电机连接
时,电机轴将沿逆时针方向旋转:
U⇒U; V⇒V; 以及 W⇒W。
参数说明 编程指南
4.2 参数: 1-** 负载和电机
4.2.1 1-0* 一般设置
4 4
MG06C841 Danfoss A/S © 12/2018 全权所有。 33
1-08 电机控制带宽
选项: 功能:
[0] 上限 适用于高动态响应。
[1] * 中等 适用于平滑稳态运行。
[2] 低 适用于具有最低动态响应的平滑稳态运行。
[3] 自适应 1 通过额外主动阻尼优化实现平滑稳态运行。
[4] 自适应 2 针对低电感永磁电机。此选项是
1
的替代选项。
[3] 自适应

参数说明
VLT® AutomationDrive FC 360
4.2.2 1-1* 电机选择
该参数组用于设置常规电动机数据。电机正在运行,并且存在主轴扭矩。
活动参数显示在
表 4.2
中。x 表明特定参数在选择该选项后处于活动状态。
参数 1-10 电动机结构 [0] 异步 [1] PM,非突出 SPM [3] PM,突出 IPM
参数 1-00 配置模式
44
参数 1-03 转矩特性
参数 1-06 顺时针方向
参数 1-08 电机控制带宽
参数 1-14 衰减增益
参数 1-15 低速滤波时间常量
参数 1-16 高速滤波时间常量
参数 1-17 电压滤波时间常量
参数 1-20 电动机功率 [kW]
参数 1-22 电动机电压
参数 1-23 电动机频率
参数 1-24 电动机电流
参数 1-25 电动机额定转速
参数 1-26 电动机持续额定转矩
参数 1-29 电机自动整定 (AMA)
参数 1-30 定子阻抗 (Rs)
参数 1-31 转子阻抗 (Rr)
参数 1-33 定子漏抗 (X1)
参数 1-35 主电抗 (Xh)
参数 1-37 d 轴电感 (Ld)
参数 1-38 q 轴电感 (Lq)
参数 1-39 电动机极数
参数 1-40 1000 RPM 时的后 EMF
参数 1-42 电机电缆长度
参数 1-43 电机电缆长度(英尺)
参数 1-44 d 轴电感 Sat. (LdSat)
参数 1-45 q 轴电感 Sat. (LqSat)
参数 1-46 位置检测增益
参数 1-48 d 轴最小电感电流
参数 1-49 q 轴最小电感电流
参数 1-50 零速时的电机磁化
参数 1-52 正常磁化的最小速度 [Hz]
参数 1-55 U/f 特性 - U
参数 1-56 U/f 特性 - F
参数 1-60 低速负载补偿
参数 1-61 高速负载补偿
参数 1-62 滑差补偿
参数 1-63 滑差补偿时间
参数 1-64 共振衰减
参数 1-65 共振衰减时间
参数 1-66 低速最小电流
参数 1-70 启动模式
参数 1-71 启动延迟
参数 1-72 启动功能
参数 1-73 飞车启动
参数 1-80 停止功能
x x x
x
x x x
x x x
x x
x x
x x
x x
x
x
x
x x x
x x x
x x
x x x
x x x
x
x
x
x x
x
x x x
x x
x x x
x x x
x
x
x x
x
x
x
x
x
x
x
x
x
x
x
x
x x
x x
x x x
x x x
x x x
x x x
34 Danfoss A/S © 12/2018 全权所有。 MG06C841

1-10 电动机结构
选项: 功能:
[0] * Asynchron 用于异步电机。
[1] PM, non
salient SPM
用于平面装有磁铁(不突出)的永
磁 (PM) 电动机。请参考
参
数 1-14 衰减增益
至
参
数 1-17 电压滤波时间常量
以了
解优化电动机运行的详细信息。
[3] PM, salient
IPM
用于带有内部(突出)磁铁的永磁
(PM) 电动机。
1-14 衰减增益
范围: 功能:
120 %* [ 0 -
250 %]
衰减增益将使 PM 设备保持稳定。
衰减增益值将控制 PM 设备的动态
性能。高衰减增益值将导致高动态
性能,而低衰减增益值将导致低动
态性能。动态性能与设备数据和负
载类型有关。如果衰减增益过高或
过低,将导致控制过程变得不稳
定。
参数说明 编程指南
参数 1-10 电动机结构 [0] 异步 [1] PM,非突出 SPM [3] PM,突出 IPM
参数 1-88 AC Brake Gain
参数 1-90 电机热保护
参数 2-00 直流夹持电流
参数 2-01 直流制动电流
参数 2-02 直流制动时间
参数 2-04 直流制动切入速度 [Hz]
参数 2-06 停车电流
参数 2-07 停车时间
参数 2-10 制动功能
参数 2-16 交流制动最大电流
参数 2-17 过压控制
参数 4-10 电动机速度方向
参数 4-14 电动机速度上限 [Hz]
参数 4-16 电动时转矩极限
参数 4-17 发电时转矩极限
参数 4-18 电流极限
参数 4-19 最大输出频率
参数 4-58 电机缺相功能
参数 14-01 开关频率
参数 14-03 超调
参数 14-07 空载时间补偿
参数 14-08 阻尼增益因子
参数 14-09 空载时间偏置电流水平
参数 14-10 主电源故障
参数 14-11 主电源故障电压电平
参数 14-12 响应主电源缺相
参数 14-27 逆变器故障时的操作
参数 14-40 VT 级别
参数 14-41 AEO 最小磁化
参数 14-50 射频干扰滤波器
参数 14-51 直流回路电压补偿
参数 14-55 输出滤波器
参数 14-64 空载时间补偿零电流水平
参数 14-65 速度降容空载时间补偿
参数 30-22 转子堵转保护
参数 30-23 转子堵转检测时间 [s]
x
x x x
x x x
x x x
x x x
x x x
x x
x x
x x x
x
x x x
x x x
x x x
x
x
x x x
x x x
x x x
x x x
x x x
x x x
x x x
x x x
x
x
x x x
x x x
x
x
x x x
x x x
x x x
x x x
x x x
x x
x x
4 4
表 4.2 有效参数
MG06C841 Danfoss A/S © 12/2018 全权所有。 35

1-15 低速滤波时间常量
范围: 功能:
Size
related*
[ 0.01 20 s]
此时间常量用于当速度低于额定水
平的 10% 时。通过较小的衰减时
间常量可以实现快速控制。但是,
如果该时间过短,控制过程将会变
得不稳定。
1-16 高速滤波时间常量
范围: 功能:
Size
related*
[ 0.01 20 s]
此时间常量用于当速度高于额定水
平的 10% 时。通过较小的衰减时
间常量可以实现快速控制。但是,
如果该时间过短,控制过程将会变
得不稳定。
1-17 电压滤波时间常量
范围: 功能:
Size
related*
[ 0.001 1 s]
在计算供电电压时,减小高频脉动
和系统谐振的影响。如果没有此滤
波器,电流中的波动成分可能扭曲
计算得到的电压,并影响系统的稳
定性。
1-20 电动机功率 [kW]
选项: 功能:
[2] 0.12 kW -
0.16 hp
[3] 0.18 kW -
0.25 hp
[4] 0.25 kW -
0.33 hp
[5] 0.37 kW -
0.5 hp
[6] 0.55 kW -
0.75 hp
[7] 0.75 kW - 1
hp
[8] 1.1 kW - 1
hp
[9] 1.5 kW - 2
hp
[10] 2.2 kW - 3
hp
[11] 3 kW - 4 hp
[12] 3.7 kW - 5
hp
1-20 电动机功率 [kW]
选项: 功能:
[13] 4 kW - 5.4
hp
[14] 5.5 kW - 7.5
hp
[15] 7.5 kW - 10
hp
[16] 11 kW - 15
hp
[17] 15 kW - 20
hp
[18] 18.5 kW - 25
hp
[19] 22 kW - 30
hp
[20] 30 kW - 40
hp
[21] 37 kW - 50
hp
[22] 45 kW - 60
hp
[23] 55 kW - 75
hp
[24] 75 kW - 100
hp
[25] 90 kW - 120
hp
1-22 电机电压
范围: 功能:
与规格有关* [50 -
1000 V]
根据电机铭牌数据输入电机额定电
压。其默认值对应于设备的标称额
定输出。
1-23 电动机频率
范围: 功能:
注意
该参数在电机运行过程中无法
调整。
Size
related*
[ 20 -
500 Hz]
从电机的铭牌选择电机的频率值。
对于以 87 Hz 运行的 230/440 V
电机,请根据 230 V/50 Hz 的铭
牌数据来设置值。根据 87 Hz 应
用来调整
参数 4-14 电动机速度
上限 [Hz]
和
参数 3-03 最大参
考值
。
1-24 电动机电流
范围: 功能:
Size
related*
[ 0.01 -
1000.00 A]
根据电机的铭牌数据输入电机额定
电流值。此数据用于计算电机转
矩、电机热保护等等。
参数说明
VLT® AutomationDrive FC 360
44
4.2.3 1-2* 电机数据
此参数组包含来自相连电机铭牌的输入数据。
注意
更改这些参数的值会影响其他参数的设置。
36 Danfoss A/S © 12/2018 全权所有。 MG06C841

1-25 电机额定转速
范围: 功能:
与规格有关* [50 -
60000 RPM]
根据电机的铭牌数据输入电机额定
转速值。这个数据用于计算自动电
机补偿。
1-26 电动机持续额定转矩
范围: 功能:
Size
related*
[0.1 -
10000.0 Nm]
根据电机铭牌数据输入值。默认值
对应于额定输出。该参数在
参
数 1-10 电机结构
设为
[1]
PM,非突出 SPM
或
[3] PM,突出
IPM
时可用,即该参数仅适用于
PM、非突出 SPM 和 PM、突出 IPM
电机。
1-29 电机自动整定 (AMA)
选项: 功能:
注意
该参数在电机运行过程中无法
调整。
注意
端子 27 数字输入 (
参
数 5-12 端子 27 数字输入
)
的默认设置是惯性停车反逻
辑。该设置意味着,如果端子
27 关闭,则无法执行 AMA。
AMA 功能通过自动优化高级电机参
数来优化电机的动态性能。
[0] * 关 无功能。
[1] 启用完整 AMA 根据不同的参数执行 AMA,具体取
决于
参数 1-10 电动机结构
中的
选项。
•
如果选择
[0] 异步
,AMA
的执行依据以下参数:
-
参数 1-30 定子
阻抗 (Rs)
.
-
参数 1-31 转子
阻抗 (Rr)
.
-
参数 1-33 定子
漏抗 (X1)
.
-
参数 1-35 主电
抗 (Xh)
.
•
如果选择
[1] PM,非突
出 SPM
,则将依据以下参
数执行 AMA:
1-29 电机自动整定 (AMA)
选项: 功能:
-
参数 1-30 定子
阻抗 (Rs)
.
-
参数 1-37 d 轴
电感 (Ld)
.
•
如果选择
[3] PM,突出
IPM
,则将依据以下参数执
行 AMA:
-
参数 1-30 定子
阻抗 (Rs)
.
-
参数 1-37 d 轴
电感 (Ld)
.
-
参数 1-38 q 轴
电感 (Lq)
.
-
参数 1-44 daxis
Inductance
Sat. (LdSat)
.
-
参数 1-45 qaxis
Inductance
Sat. (LqSat)
.
[2] 启用精简 AMA 仅对系统的定子电阻 Rs (
参
数 1-30 定子阻抗 (Rs)
) 执行精
简 AMA。如果在变频器和电机之间
使用了 LC 滤波器,请选择此选
项。(此选项仅适用于异步电
机。)
参数说明 编程指南
4 4
MG06C841 Danfoss A/S © 12/2018 全权所有。 37
当
参数 1-10 电机结构
时,唯一可用的选项为
选择
[1] 启用完整 AMA
设置为启用永磁电机模式的选项
[1] 启用完整 AMA
或
[2] 启用精简 AMA
。
后点按
[Hand on](手动启动),即可激活 AMA 功能。在经过一
段正常运行后,显示器会显示:
AMA
。按下 [OK](确定)后,即可开始运行变频器。
按 [OK](确定)完成
注意
为实现对变频器的最佳识别,请在冷电机上运行
•
AMA。
当电机正在运行时无法执行 AMA。
•
注意
在执行 AMA 期间要避免生成外加转矩。
如果使用 LC 滤波器,则设置变频器在 U/f 控制模式
(建议)下运行,或在 VVC+ 模式下执行精简 AMA。如果
不使用 LC 滤波器,则执行完整 AMA。

1-30 定子阻抗 (Rs)
范围: 功能:
Size
related*
[ 0.0 -
9999.000
Ohm]
注意
该参数在电机运行过程中无法
调整。
设置定子阻抗值。请使用来自电机
数据表的值,或在冷态电机上执行
AMA。
1-31 转子阻抗 (Rr)
范围: 功能:
Size
related*
[ 0 -
9999.000
Ohm]
1-33 定子漏抗 (X1)
范围: 功能:
Size
related*
[ 0.0 -
9999.000
Ohm]
注意
该参数在电机运行过程中无法
调整。
设置定子漏抗值。要获取该值,请
查找电动机数据表,或在冷电动机
上执行 AMA。默认设置是变频器根
据电机的铭牌数据计算的。
1-35 主电抗 (Xh)
范围: 功能:
Size
related*
[ 0.0 -
9999.00 Ohm]
注意
该参数在电机运行过程中无法
调整。
可通过以下任一方式设置电机的主
电抗:
•
在冷态电机上运行 AMA。
由变频器测量该电机值。
•
手动输入 Xh 值。从电机
供应商处获得该数值。
•
使用 Xh 默认设置。变频
器根据电动机铭牌数据确
立设置。
1-37 d 轴电感 (Ld)
范围: 功能:
Size
related*
[ 0 65535 mH]
注意
该参数在电机运行过程中无法
调整。
输入 d 轴电感值。要获取该值,
请查找永磁电机数据表,或在冷电
机上执行 AMA。
1-38 q 轴电感 (Lq)
范围: 功能:
Size
related*
[ 0.000 65535 mH]
注意
该参数在电机运行过程中无法
调整。
设置 q 轴电感的值。可在电机数
据表中找到该值,或在冷电机上执
行 AMA。
1-39 电机极数
范围: 功能:
与规格有关* [2 -
100 ]
注意
该参数在电机运行过程中无法
调整。
输入电机极数。
电机极数值始终为偶数,因为它指
的是总极数,而不是成对的极数。
1-40 1000 RPM 时的后 EMF
范围: 功能:
Size
related*
[ 1 9000 V]
为以 1000 RPM 的速度运行的电机
设置额定后 EMF。
反电动势是在未连接变频器并且用
外力使机轴旋转时 PM 电机所生成
的电压。反电动势通常是电机运行
在额定转速或在 1000 RPM 时测得
的线电压。如果无法在 1000 RPM
的电机速度下获得此值,则可以用
下述方式计算正确的值: 如果反
电动势在 1800 RPM 下为 320
V,则可以用下述方式计算 1000
RPM 下的反电动势:
示例
1800 RPM 时的反电动势 320 V。
反电动势 = (电压/RPM)*1000 =
(320/1800)*1000 = 178。
参数说明
4.2.4 1-3* 高级 电机数据 I
VLT® AutomationDrive FC 360
这些参数用于设置高级电动机数据。为实现最佳性能,
数 1-30
到
1-39
中的电动机数据必须与电动机匹配。如
参
果不知道电动机数据,建议执行 AMA
44
38 Danfoss A/S © 12/2018 全权所有。 MG06C841
4.2.5 1-4* 高级 电机数据 II
这些参数用于设置高级电动机数据。

1-40 1000 RPM 时的后 EMF
范围: 功能:
该参数仅在
参数 1-10 电动机结
构
设为启用 PM(永磁)电机的选
项时才能被激活。
注意
对于 PM 电机,建议使用制动
电阻器。
1-42 Motor Cable Length
范围: 功能:
50 m* [0 - 100m]以米为单位设置电机电缆长度。
1-43 Motor Cable Length Feet
范围: 功能:
164 ft* [0 - 328
ft]
设置电动机电缆长度。长度单位为
英尺。
1-44 d-axis Inductance Sat. (LdSat)
范围: 功能:
Size
related
[ 0 65535 mH]
仅在
参数 1-10 电动机结构
设为
[3] PM,突出 IPM
时,该参数才
有效。
此参数与 D 轴的饱和电感相对
应。默认值为
参数 1-37 d 轴电
感 (Ld)
中设置的值。大多数情况
下,请勿更改默认值。如果电机供
应商提供了饱和曲线,则输入额定
电流的 100% 作为 D 轴电感值,
或在冷电机上执行 AMA。
1-45 q-axis Inductance Sat. (LqSat)
范围: 功能:
Size
related*
[ 0 65535 mH]
仅在
参数 1-10 电动机结构
设为
[3] PM,突出 IPM
时,该参数才
有效。
此参数与 Q 轴的饱和电感相对
应。默认值为
参数 1-38 q 轴电
感 (Lq)
中设置的值。大多数情况
下,请勿更改默认值。如果电机供
应商提供了饱和曲线,则输入额定
电流的 100% 作为 D 轴电感值,
或在冷电机上执行 AMA。
1-46 位置检测增益
范围: 功能:
100 %* [ 20 -
200 %]
在启动时的位置检测期间,调整测
试脉冲的幅值。调整此参数,以改
进位置测量精度。
1-48 Current at Min Inductance for d-axis
范围: 功能:
100 % [ 20 -
200 %]
使用此参数可设置电感饱和点。
1-49 最小电感电流
范围: 功能:
100 % [ 20 -
200 %]
该参数指定 q- 电感值的饱和曲
线。由于
参数 1-38 q 轴电感
(Lq)
和
参数 1-45 q-axis
Inductance Sat. (LqSat)
,该参
数的 20–100% 的电感值线性近
似。这些参数同电机铭牌上的负载
补偿和应用负载类型有关。该电子
制动功能用于快速停止/保持电机。
1-50 零速时的电机磁化
范围: 功能:
100 %* [0 -
300 %]
同
参数 1-52 正常磁化的最小速
度 [Hz]
一起使用该参数,可以在
电机低速运行时获得不同的热负
载。
输入一个以额定磁化电流百分比表
示的值。设置过低可能导致电机主
轴上的转矩减小。
Magn. current
130BB780.10
Hz
Par.1-50
90%
Par.1-52
图 4.2 电机磁化
1-52 正常磁化的最小速度 [Hz]
范围: 功能:
1 Hz* [ 0.1 -
10.0 Hz]
设置所需的频率(用于正常磁化电
流)。请将该参数与
参
数 1-50 零速时的电机磁化
一起使
用,另请参见
图 4.2
。
1-55 V/f 特性 - U
范围: 功能:
Size
related*
[0 - 1000V]输入每个频率点上的电压可以手动
形成适合电机的 U/f 特性。频率
点在
参数 1-56 U/f 特性 - F
中定义。
参数说明 编程指南
4 4
4.2.6 1-5* 与负载无关的 设置
这些参数用于设置与负载无关的电动机设置。
MG06C841 Danfoss A/S © 12/2018 全权所有。 39
1-56 U/f 特性 - F
范围: 功能:
Size
related*
[ 0 -
500.0 Hz]
输入频率点,以形成适合电机的
U/f 特性。每点电压在
参
数 1-55 V/f 特性 - U
中定义。
根据 6 个可定义的电压和频率设
置 U/f 特性,请参阅
图 4.3
。
Motor Voltage
Par 1-55 [x]
Output Frequency
Par 1-56 [x]
1-55[5]
1-55[4]
1-55[3]
1-55[2]
1-55[1]
1-55[0]
1-56
[0]
1-56
[1]
1-56
[2]
1-56
[3]
1-56
[4]
1-56
[5]
130BA166.10
图 4.3 U/f 特性示例
1-60 低速负载补偿
范围: 功能:
100 %* [0 -
300 %]
输入用百分比表示的低速电压补偿
值。该参数用于优化低速负载性
能。该参数仅在
参数 1-10 电机
结构
=
[0] 异步
时有效。
1-61 高速负载补偿
范围: 功能:
100 %* [0 -
300 %]
输入用百分比表示的高速负载电压
补偿值。该参数用于优化高速负载
性能。该参数仅在
参数 1-10 电
机结构
=
[0] 异步
时有效。
1-62 滑差补偿
范围: 功能:
Size
related*
[ -400 -
400.0 %]
输入滑差补偿的百分比值,以补偿
值 n
M,N
的误差。滑差补偿是基于
额定电动机速度 n
M,N
自动计算
的。
1-63 滑差补偿时间
范围: 功能:
0.1 s* [0.05 - 5s]输入滑差补偿的反应速度。值较
大,反应将较慢;值较小,反应将
较快。如果遇到低频共振问题,请
将该时间设置得长一些。
1-64 共振衰减
范围: 功能:
100 %* [0 -
500 %]
输入共振衰减值。设置
参
数 1-64 共振衰减和 参
数 1-65 共振衰减时间
将有助于避
免高频共振问题。要减少谐振,请
提高
参数 1-64 共振衰减
的值。
1-65 共振衰减时间
范围: 功能:
0.005 s* [ 0.001 -
0.05 s]
设置
参数 1-64 共振衰减和 参
数 1-65 共振衰减时间
将有助于避
免高频共振问题。请输入能实现最
佳衰减效果的时间常量。
1-66 低速最小电流
范围: 功能:
50 %* [ 0 -
120 %]
输入低速下的最小电机电流。增加
此电流有助于提高低速下的电机转
矩。仅对永磁电机启用
参数 1-66 低速最小电流
。
1-70 启动模式
选择 PM 电机启动模式。为此前自由运动的永磁电机初始化
VVC+ 控制内核。仅当电机停止(或低速运行)时,该参数才对
VVC+ 模式下的永磁电机有效。
选项: 功能:
[0] * 转子检测 估算转子的电气角度,并以此角度
为起点。该选项是工业应用的标准
选项。如果飞车启动检测到电机以
低速运行或已停止,则变频器可检
测到转子位置(角度),并从该位
置启动电机。
[1] 停车 零位校准功能在定子绕组两端施加
直流电流,并促使转子转动到电气
0 位置。该选项通常适用于泵和风
扇应用。如果飞车启动检测到电机
以低速运行或已停止,则变频器将
提供直流电流以让电机以某一角度
进行零位校准,然后再从该位置启
动电机。
[3] Rotor Last
Position
此选项利用转子停止时的最后位置
并提供快速启动。仅在受控停止情
况下使用,变频器记录转子停止时
的最后位置并在未检测转子且未计
算角度的情况下直接启动电机。在
非受控停止和电源循环的情况下,
变频器需要检测转子位置。
参数说明
VLT® AutomationDrive FC 360
44
4.2.7 1-6* 与负载相关的 设置
这些参数用于调整与负载相关的电动机设置。
40 Danfoss A/S © 12/2018 全权所有。 MG06C841
4.2.8 1-7* 启动调整
这些参数用于调整电动机启动设置。

1-70 启动模式
选择 PM 电机启动模式。为此前自由运动的永磁电机初始化
VVC+ 控制内核。仅当电机停止(或低速运行)时,该参数才对
VVC+ 模式下的永磁电机有效。
选项: 功能:
此选项可用于快速重启应用。如果
转子位置已更改,则启动可能会失
败。
1-72 启动功能
选项: 功能:
选择启动延迟期间的启动功能。该
参数与
参数 1-71 启动延迟
关联
在一起。
[0] 直流夹持/延
迟时间
启动延迟时间内,电机由直流夹持
电流 (
参数 2-00 直流夹持电流
)
供电。
[2] * 惯性停车/延迟电机在启动延时期间惯性停车(逆
变器关闭)。
[3] 顺时针启动速
度
仅在 VVC+ 下可用。不论参考信号
应用什么值,输出速度都将适用于
参数 1-75 启动速度 [Hz]
中启动
速度的设置,而输出电流将对应于
在
参数 1-76 启动电流
中启动电
流的设置。该功能通常用于不带配
重的起重应用中,尤其是使用锥体
电机的应用(该应用中,首先顺时
针启动,然后根据参考值方向旋
转)。
[4] 水平运行
仅在 VVC+ 下可用。
在启动延迟期间获得在
参
数 1-75 启动速度 [Hz]
和
参
数 1-76 启动电流
中说明的功
能。电机沿参考方向旋转。如果参
考值信号等于零 (0),
参
数 1-75 启动速度 [Hz]
将被忽
略,而输出速度将等于零 (0)。输
出电流对应于在
参数 1-76 启动
电流
中设置的启动电流。
[5] VVC+/顺时针矢量启动速度将自动计算。此功能仅在
启动延迟时间内使用启动速度。
1-73 飞车启动
选项: 功能:
注意
为了达到最佳飞车启动性能,
高级电机数据
参数 1-30 定子
阻抗 (Rs)
至
参数 1-35 主
电抗 (Xh)
必须正确。
“捕获”因主电源断开而自由旋转
的电动机。
[0] * 禁用 无功能。
[1] 启用 支持变频器“捕获”并控制旋转的
电机。启用
参数 1-73 飞车启动
后,
参数 1-71 启动延迟 和参
数 1-72 启动功能
将失效。
[2] 总是启用 每次发出启动命令时均启用飞车启
动。
[3] Enabled Ref.
Dir.
支持变频器“捕获”并控制旋转的
电机。仅按参考方向执行搜索。
[4] Enab. Always
Ref. Dir.
每次发出启动命令时均启用飞车启
动。仅按参考方向执行搜索。
1-75 启动速度 [Hz]
范围: 功能:
Size
related*
[ 0 -
500.0 Hz]
该参数可用于起重应用(锥形转
子)。设置电机启动速度。收到启
动信号后,输出速度会迅速上升到
设定值。将
参数 1-72 启动功能
中的启动功能设为
[3] 顺时针启
动速度、[4] 水平运行或 [5] VVC
+
/顺时针矢量,并在
参数 1-71 启
动延迟
中设置一个启动延迟时间。
1-76 启动电流
范围: 功能:
Size
related*
[ 0 1000 A]
某些电机(如锥形转子电机)需要
额外的电流/启动速度来释放转子。
要获得这种增强效果,请在此参数
中设置所需的电流。将
参
数 1-72 启动功能
设为
[3] 顺
时针启动速度 或 [4] 水平运行
并在
参数 1-71 启动延迟
中设置
一个启动延迟时间。
1-78 压缩机最大启动速度 [Hz]
范围: 功能:
0 Hz* [ 0 - 500
Hz]
该参数启用高启动转矩。这项功能
在电机启动期间忽略电流极限和转
矩极限。从给出启动信号到速度超
过该参数中所设速度的时间变为启
动区间。在该启动区间,电流极限
和电机转矩极限将被设为变频器/电
机组合所允许的最大值。无电流极
参数说明 编程指南
1-71 启动延迟
范围: 功能:
0 s* [0.0 -
10.0 s]
该参数可启用启动时间延时。变频器首先执
行在
参数 1-72 启动功能
能。设置开始加速之前的启动延迟时间。
MG06C841 Danfoss A/S © 12/2018 全权所有。 41
4 4
中选择的启动功

1-78 压缩机最大启动速度 [Hz]
范围: 功能:
限和转矩极限保护的时间不得超过
参数 1-79 压缩机启动到跳闸的最
长时间
设定值。否则,变频器将跳
闸,并给出
报警 18,启动失败
。
1-79 压缩机启动到跳闸的最长时间
范围: 功能:
5 s* [0 - 10s]从给出启动信号到速度超过
参
数 1-78 压缩机最大启动速度
[Hz]
中所设速度的时间不得超过
此参数中设置的时间。否则,变频
器将跳闸,并给出
报警 18,启动
失败
。在
参数 1-71 启动延迟
中
设置的任何用于启动功能的时间都
必须符合这个时限。
1-80 停止功能
选项: 功能:
选择当启动了停止命令后,或者当
速度下降到
参数 1-82 停止功能
最低速 [Hz]
的设置以下时变频器
的功能。
可用选项取决于
参数 1-10 电动机
结构
中的设置。
•
[0] 异步
。
-
[0] 惯性停车
-
[1] 直流夹持/
电动机预热
。
-
[3] 预励磁
。
•
[1] PM,非突出 SPM
。
•
[3] PM,突出 IPM
。
-
[0] 惯性停车
-
[1] 直流夹持/
电动机预热
。
[0] * 惯性停车 让电机保持自由运动模式。
[1] 直流夹持/电
动机预热
通过直流夹持电流为电机供电(请
参阅
参数 2-00 直流夹持电流
)。
[3] 预励磁 在电机尚处于停止状态时便形成一
个磁场。这样,电机即可在发出命
令时快速产生转矩(仅适用异步电
机)。此类预磁化功能对第一启动
命令不起什么作用。如果要在发出
第一个启动命令时对电机进行预励
磁,可采用以下两种解决办法:
1-80 停止功能
选项: 功能:
解决方案 1:
1. 使用 0 RPM 参考值启动
变频器。
2. 等待 2 至 4 个转子时间
常数(参见以下等式),
然后再增大速度参考值。
解决方案 2:
1. 将
参数 1-71 启动延迟
设为预励磁时间(2 至 4
个转子时间常数)。
2. 将
参数 1-72 启动功能
设为
[0] 直流夹持
。
3. 设置直流夹持电流 (
参
数 2-00 直流夹持电
流
),使其等于预励磁电
流 , 即 I
pre-mag
= U
nom
/
(1.73 x Xh)。
转子时间常数示例 =
(Xh+X2)/(6.3*额定频率*Rr)
1 kW = 0.2 s
10 kW = 0.5 s
100 kW = 1.7 s
1-82 停止功能最低速 [Hz]
范围: 功能:
0 Hz* [0 - 20
Hz]
设置激活
参数 1-80 停止功能
的
输出频率。
1-88 交流制动增益
范围: 功能:
1.4* [1.0 -
2.0 ]
此参数用于设置交流制动功率能力
(在惯量为常数时设置加减速时
间)。在直流回路电压不超过直流
回路电压跳闸值时,可使用此参数
调整发电机转矩。交流制动增益越
高,制动能力越强。选择 1.0 表
示无交流制动能力。
注意
如果存在持续发电机转矩,则
发电机转矩越高会导致电机电
流越高,电机会变热。在此条
件下,
参数 2-16 交流制动最
大电流
可用于保护电机,防止
过热。
参数说明
VLT® AutomationDrive FC 360
44
4.2.9 1-8* 停止调整
这些参数用于调整电动机停止设置。
42 Danfoss A/S © 12/2018 全权所有。 MG06C841
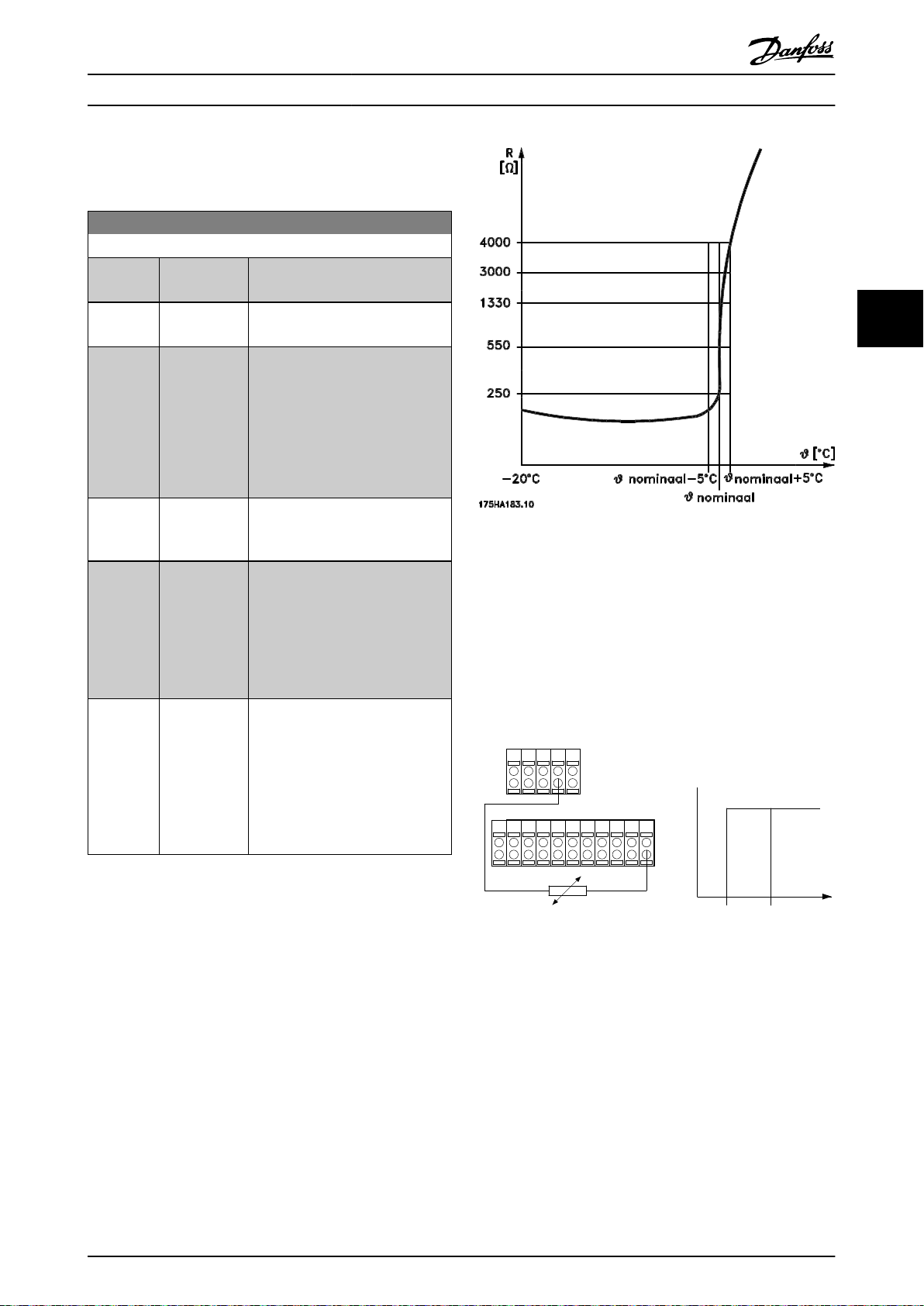
1-90 电动机热保护
选项: 功能:
[0] * 无保护 如果电机持续过载时不需要变频器
发出警告或跳闸。
[1] 热敏电阻警告 当电机中连接的热敏电阻因电机温
度过高而作出反应时激活警告。
[2] 热敏电阻跳闸 当电机中连接的热敏电阻因电机温
度过高而作出反应时停止变频器
(使其跳闸)。
热敏电阻在阻值大于 > 3 kΩ 时
自动断开。
在电机内部放置一个热敏电阻(PTC
传感器)可以实现绕组保护。
[3] ETR 警告 1 当电机过载时,计算负载并在显示
屏中激活一条警告。可以通过某个
数字输出来设置警告信号。
[4] ETR 跳闸 1 当电机过载时,计算负载并停止变
频器(使其跳闸)。可以通过某个
数字输出来设置警告信号。一旦发
生警告或变频器跳闸(热警告),
就会产生相应信号。一旦出现
MOTOR ETR OVER 报警,将立即复
位。
[22] ETR Trip -
Extended
Detection
当电机过载时,计算负载并停止变
频器(使其跳闸)。可以通过某个
数字输出来设置警告信号。一旦发
生警告或变频器跳闸(热警告),
就会产生相应信号。一旦出现
MOTOR ETR OVER 报警,则只能在
参数 16-18 电动机发热
降为 0
后复位。
PTC / Thermistor
R
OFF
ON
<800 Ω
+10 V
130BF960.10
>2.9 kΩ
12 13 1837 322719 29 3338
5550
42
53 54
31
参数说明 编程指南
4.2.10 1-9* 电机温度
这些参数用于调整电动机的温度保护设置。
4 4
图 4.4 PTC 协议
MG06C841 Danfoss A/S © 12/2018 全权所有。 43
将数字输入和 10 V 用作电源:
示例: 当电机温度过高时,变频器将跳闸。
参数设置:
将
•
•
图 4.5 PTC 热敏电阻连接 - 数字输入
参数 1-90 电机热保护
跳闸
。
将
参数 1-93 热敏电阻源
33
。
设为
设为
[6] 数字输入
将模拟输入和 10 V 用作电源:
示例: 当电机温度过高时,变频器将跳闸。
参数设置:
将
•
•
参数 1-90 电机热保护
跳闸
。
将
参数 1-93 热敏电阻源
54
。
设为
设为
[2] 模拟输入
[2] 热敏电阻
[2] 热敏电阻

PTC / Thermistor
R
OFF
ON
<800 Ω
+10 V
130BF694.10
>2.9 kΩ
5550
42
53 54
1-93 热敏电阻源
选项: 功能:
注意
该参数在电机运行过程中无法
更改。
注意
应在
参数 5-00 数字 I/O 模
式
中将数字输入设为
[0] PNP
- 在 24V 时激活
。
选择与热敏电阻(PTC 传感器)连
接的输入。如果此参数中的模拟输
入被设为源,则无法用于其他目
的,比如参考值、反馈。
[0] * 无
[1] 模拟输入端
53
[2] 模拟输入端
54
[3] 数字输入 18
[4] 数字输入 19
[5] 数字输入 32
[6] 数字输入 33
[7] 数字输入 31
参数说明
VLT® AutomationDrive FC 360
44
图 4.6 PTC 热敏电阻连接 - 模拟输入
输入
数字/模拟
数字 10 V <800 Ω - 2.9 kΩ
模拟 10 V <800 Ω - 2.9 kΩ
表 4.3 阈值断路值
供电电压 阈值
注意
检查所选的供电电压是否符合所使用的热敏电阻元件的规
格。
断路值。
44 Danfoss A/S © 12/2018 全权所有。 MG06C841
2-00 直流夹持电流
范围: 功能:
50 %* [0 -
160 %]
请用相对于电机额定电流 I
M,N
参
数 1-24 电动机电流
的百分比形式
来设置夹持电流。该参数可保持电
机功能(保持转矩)或预热电机。
如果在
参数 1-72 启动功能
中选
择了
[0] 直流夹持
或在
参
数 1-80 停止功能
中选择了
[1]
直流夹持/预热,
则该参数有效。
注意
最大值由电机额定电流决定。
避免 100% 的电流持续太久。
否则可能损坏电机。
2-01 直流制动电流
范围: 功能:
50 %* [0 -
150 %]
注意
电机过热
最大值由电机额定电流决定。
为避免因过热导致电机损坏,
请勿以 100% 运行太长时间。
将电流设置为电机额定电流的 %,
参数 1-24 电动机电流
。当速度低
于
参数 2-04 直流制动切入速度
中设置的限值时,或者,当激活直
流制动反逻辑功能(将
参数组
5-1* 数字输入
设置为
[5] 直流
制动反逻辑
;或通过串行端口)
时,将在执行停止命令时应用直流
制动电流。请参阅
参数 2-02 直流
制动时间
了解持续时间。
2-02 直流制动时间
范围: 功能:
10 s* [0 - 60s]设置直流制动电流(在
参
数 2-01 直流制动电流
中设置)
激活后的持续时间。
2-04 直流制动切入速度 [Hz]
范围: 功能:
0 Hz* [ 0 - 500
Hz]
该参数用于设置使用停止命令后,
直流制动电流
参数 2-01 直流制
动电流
被激活的直流制动切入速
度。
2-06 停车电流
范围: 功能:
100 %* [0 -
150 %]
用相对于电机额定电流
参
数 1-24 电动机电流
的百分比形式
来设置此电流。
2-07 停车时间
范围: 功能:
3 s* [0.1 - 60s]设置泊车电流(在
参数 2-06 停车
电流
中设置)激活后的持续时
间。
2-10 制动功能
选项: 功能:
[0] * 关 未安装制动电阻器。
[1] 电阻器制动 为了以热量形式耗散多余的制动能
量,系统中集成了一个制动电阻
器。连接了制动电阻器后,在制动
期间(发电操作)允许存在较高的
直流回路电压。制动电阻功能仅在
带有集成动态制动的变频器中有
效。
[2] 交流制动 在不使用制动电阻器的情况下改进
制动。该参数可以控制电动机连同
发电性负载工作时的过磁化。该功
能可以使 OVC 功能增强。通过增
加电机中的电力损耗,OVC 功能将
可以在不超出电压极限的情况下增
加制动转矩。
注意
交流制动的效果不如使用电阻
器情况下的动态制动。
交流制动使用开环和闭环中的
VVC+ 模式。
2-11 制动电阻(欧姆)
范围: 功能:
Size
related*
[ 0 6200 Ohm]
设置制动电阻器的阻值(单位为
Ω)。该值用于监测制动电阻器的
功率。
参数 2-11 制动电阻(欧姆)
仅在带有集成动态制动的变频器中
有效。请将这个参数用于不带小数
的值。
参数说明 编程指南
4.3 参数: 2-** 制动
4.3.1 2-0* 直流制动
使用该参数组可配置直流制动和直流夹持功能。
4 4
4.3.2 2-1* 制动能量功能
该参数组用于选择动态制动参数。仅针对带有制动斩波器
的变频器。
MG06C841 Danfoss A/S © 12/2018 全权所有。 45

2-12 制动功率极限 (kW)
范围: 功能:
Size
related*
[0.001 2000 kW]
参数 2-12 制动功率极限 (kW)
是
在 120 秒的时间内预计耗散到制
动电阻器上的平均功率。它用作
参数 16-33 制动能量/2 分钟
的
监控限制,指定何时发出警告/报
警。
计算
参数 2-12 制动功率极限
(kW)
的公式如下。
P
br, avg
W =
U
br
2
V × tbrs
RbrΩ × Tbrs
P
br,avg
是耗散到制动电阻器上的平
均功率。R
br
是制动电阻器的阻
抗。t
br
是在 120 秒内的活动制动
时间,Tbr。
Ubr 是制动电阻器处于活动状态时
的直流电压。对于 T4 设备,直流
电压为 770 V,可通过
参
数 2-14 制动电压衰减
减小该值。
注意
如果不知道 Rbr,或者 Tbr 不
是 120 秒,可行方法是运行制
动应用,查看
参数 16-33 制动
能量/2 分钟
的值,然后将该值
加上 20% 后输入到
参
数 2-12 制动功率极限 (kW)
中。
2-16 交流制动最大电流
范围: 功能:
100 %* [0 -
160 %]
输入使用交流制动时所允许的最大
电流,以避免电机绕组过热。
注意
参数 2-16 交流制动最大电流
仅适用于异步电机。
2-17 过压控制
选项: 功能:
过压控制 (OVC) 可降低因负载生
电导致直流回路过压而使变频器发
生跳闸的风险。
[0] * 禁用 不需要 OVC。
[1] 启用(未停止时)激活 OVC,使用停止信号停止变频
器时例外。
[2] 启用 激活 OVC。
2-17 过压控制
选项: 功能:
小心
人身伤害和设备损坏
在起重应用中启用 OVC 可能会
导致人身伤害和设备损坏。
•
在起重应用中不得启
用 OVC。
2-19 过压增益
范围: 功能:
100 %* [0 -
200 %]
选择过压增益。
2-20 抱闸释放电流
范围: 功能:
0 A* [0 - 100A]设置电动机电流,以便在符合启动
条件时释放机械制动。上限在参数
参数 16-37 逆变器最大电流
中指
定。
注意
当选择了机械制动控制输出但
没有连接机械制动装置时,由
于电机电流过低,该功能不会
在默认设置下工作。
2-22 激活制动速度 [Hz]
范围: 功能:
0 Hz* [0 - 400
Hz]
设置电机频率,以便在符合停止条
件时激活机械制动。
2-23 激活制动延时
范围: 功能:
0 s* [0 - 5 s] 输入经过减速时间之后的惯性停车
制动延时时间。延时期间的轴速保
持为零,而保持转矩为额定值。在
电机进入惯性滑停模式之前,确保
机械制动已将负载锁定。
2-24 停止延时
范围: 功能:
0 s* [0 - 5 s] 用于指定速度闭环控制电机以 0
RPM 运行的时间,制动将在此时间
段后被激活。
参数说明
VLT® AutomationDrive FC 360
44
4.3.3 2-2* 机械制动
2-14 制动电压衰减
范围: 功能:
0 V* [ 0 - 71 V] 设置该参数可能会更改制动电阻器 (
46 Danfoss A/S © 12/2018 全权所有。 MG06C841
数 2-11 制动电阻(欧姆)
参
)。

2-25 抱闸释放时间
范围: 功能:
0 s* [0 - 5 s] 用于预留打开制动后但在斜坡加速
之前的时间,且速度闭环将速度控
制在 0 RPM。
2-31 Speed PID Start Proportional Gain
范围: 功能:
0.015* [0.000 -
1.000 ]
这是在
参数 2-25 抱闸释放时间
中设置的时间内的速度控制器比例
增益。
2-32 Speed PID Start Integral Time
范围: 功能:
200.0 ms* [1.0 -
20000.0 ms]
这是在
参数 2-25 抱闸释放时间
中设置的时间段内的速度控制器积
分时间。
2-33 Speed PID Start Lowpass Filter Time
范围: 功能:
10.0 ms* [0.1 -
100.0 ms]
这是在
参数 2-25 抱闸释放时间
中设置的时间段内的速度控制低通
滤波器。
2-39 Mech. Brake w/ dir. Change
当轴改变方向时启用或禁用机械制动功能。
选项: 功能:
[0] * OFF
[1] ON
[2] ON with
start delay
启动延迟时间在
参数 1-71 启动延
迟
中设置。
参数说明 编程指南
4 4
MG06C841 Danfoss A/S © 12/2018 全权所有。 47
3-00 参考值范围
选项: 功能:
[0] * 最小 - 最大 选择参考信号和反馈信号的范围。
信号值可以仅为正值,也可以一正
一负。
[1] - 最大 - +最大值可以为正也可以为负(两个方
向),和
参数 4-10 电动机速度
方向
有关。
3-01 参考值/反馈单位
选项: 功能:
[0] None
[1] %
[2] RPM
[3] Hz
[4] Nm
[5] PPM
[10] 1/min
[12] PULSE/s
[20] l/s
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] ?C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[125] ft³/s
[126] ft³/min
[127] ft³/h
[130] lb/s
3-01 参考值/反馈单位
选项: 功能:
[131] lb/min
[132] lb/h
[140] ft/s
[141] ft/min
[145] ft
[150] lb ft
[160] °F
[170] psi
[171] lb/in2
[172] in wg
[173] ft WG
[180] HP
3-02 最小参考值
范围: 功能:
0
Referen‐
ceFeedbac
kUnit*
[ -4999.0
- 4999
Reference‐
FeedbackUnit
]
输入最小参考值。最小参考值是通
过汇总所有参考值获得的最小值。
仅当
参数 3-00 参考值范围
设置
为
[0] 最小 - 最大
时,最小参
考值才有效。
最小参考值单位取决于:
•
参数 1-00 配置模式
中的
选项。
•
单位在
参数 3-01 参考
值/反馈单位
中选择。
3-03 最大参考值
范围: 功能:
Size
related*
[-4999.0 4999
Reference‐
FeedbackUnit
]
输入最大参考值。最大参考值是通
过汇总所有参考值而获得的最大
值。
最大参考值单位取决于:
•
在
参数 1-00 配置模式
中
选择的选项。
•
单位在
参数 3-00 参考
值范围
中选择。
3-04 参考功能
选项: 功能:
[0] * 总和 对外部参考源和预置参考源进行求
和。
[1] 外部/预置 使用外部参考源或预置参考源。通
过命令或数字输入在外部和预置参
考之间切换。
参数说明
4.4 参数: 3-** 参考值/加减速
4.4.1 3-0* 参考值极限
这些参数用于设置参考值的单位、极限和范围。
44
48 Danfoss A/S © 12/2018 全权所有。 MG06C841
VLT® AutomationDrive FC 360
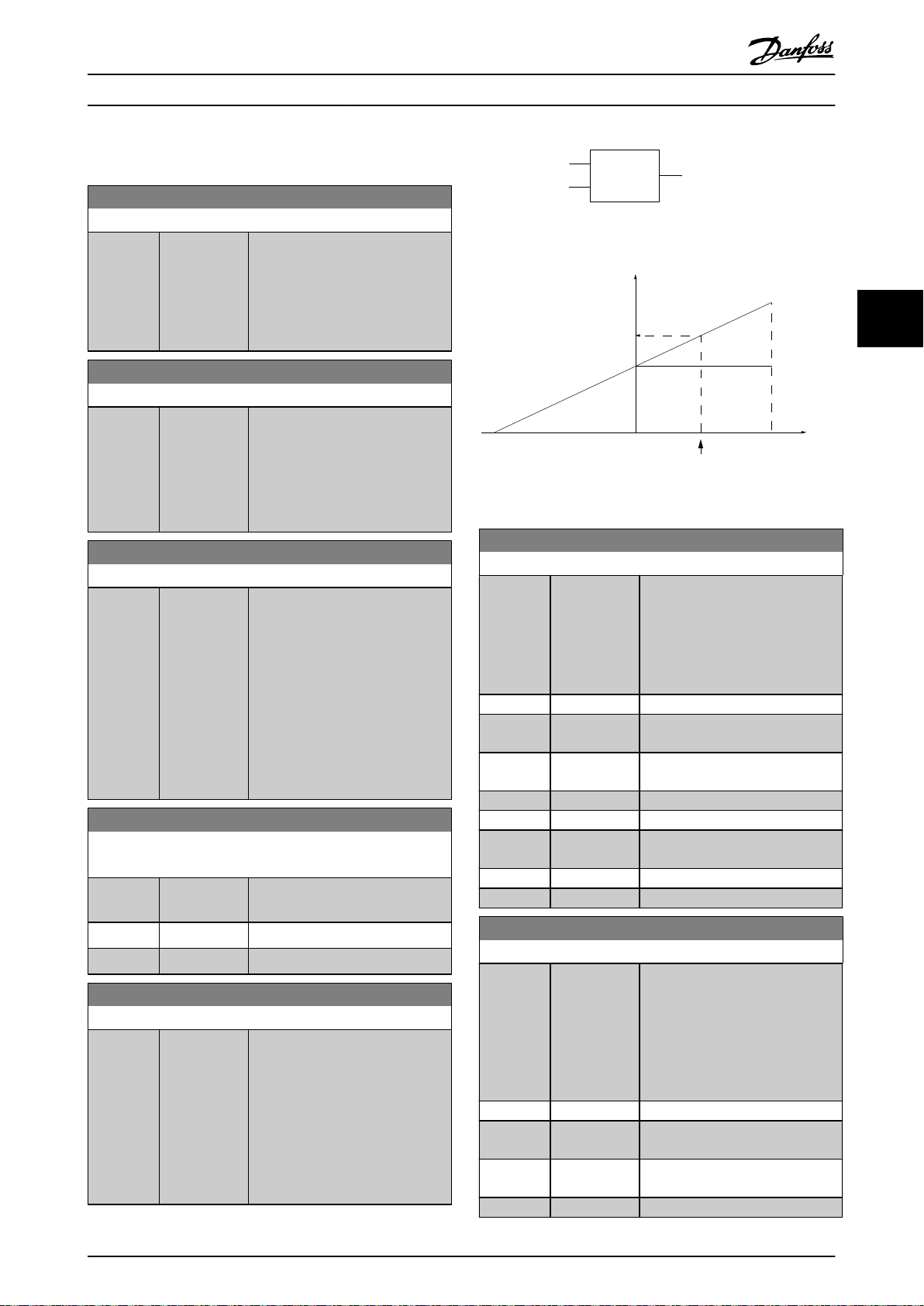
3-10 预置参考值
范围: 功能:
0 %* [-100 -
100 %]
使用数组方法,在此参数中最多可
以输入 8 个不同的预置参考值
(0-7)。为选择专用参考值,为
参数
组 5.1* 数字输入
中的对应数字
输入选择预置参考值位
0/1/2
[16]、[17]
或
[18]
。
3-11 点动速度 [Hz]
范围: 功能:
5 Hz* [ 0 -
500.0 Hz]
点动速度是一个恒定输出速度,点
动功能激活后,变频器将以该速度
运行。另请参阅
参数 3-80 点动
加减速时间
。
点动速度不得超过
参数 4-14 电动
机速度上限 [Hz]
中的设置。
3-12 加速/减速值
范围: 功能:
0 %* [0 -
100 %]
输入一个要添加到实际升速或减速
参考值中或从中减去的百分比值。
如果通过某个数字输入(
参
数 5-10 端子 18 数字输入 至参
数 5-15 端子 33 数字输入
)选择
了
[28] 升速
,该百分比值将被添
加到总参考值中。如果通过某个数
字输入(
参数 5-10 端子 18 数字
输入 至参数 5-15 端子 33 数字
输入
)选择了
[29] 减速
,则将从
总参考值中减去该百分比值。
3-13 参考值位置
选择要激活的参考值位置。
选项: 功能:
[0] * 联接到手/自动在本地模式下使用本地参考值或在
自动模式下使用远程参考值。
[1] 远程 在手动模式下使用参考值。
[2] 本地 在自动模式下使用参考值。
3-14 预置相对参考值
范围: 功能:
0 %* [-100 -
100 %]
实际参考值 X 按照在
参
数 3-14 预置相对参考值
中设置
的百分比 Y 增大或减小。所得结
果即为实际参考值 Z。实际参考值
(X) 是在下述参数中所选输入的
和:
参数 3-15 参照值 1 来源
、
参数 3-16 参照值 2 来源、参
数 3-17 参照值 3 来源 和参
数 8-02 控制源
。
Relative
Z=X+X*Y/100
Resulting
actual
reference
Y
X
130BA059.12
Z
X
100
%
0-100
Z
Y
X+X*Y/100
P 3-14
130BA278.10
3-15 参考值来源 1
选项: 功能:
选择用于第一个参考信号的参考值
输入。
参数 3-15 参考值来源 1
、
参数 3-16 参考值来源 2
和
参
数 3-17 参考值来源 3
最多可定
义 3 个不同的参考信号。这些参
考信号的和将构成实际参考值。
[0] 无功能
[1] * 模拟输入端
53
[2] 模拟输入端
54
[7] 端子 29 频率
[8] 端子 33 频率
[11] 本地总线参考
值
[20] 数字电位计
[32] PCD 总线
3-16 参考值来源 2
选项: 功能:
选择用于第二个参考信号的参考输
入。通过参数
参数 3-15 参考值来
源 1
、 和
参数 3-16 参考值来
源 2 ,参数 3-17 参考值来源 3
最多可定义 3 个不同的参考信
号。这些参考信号的和将构成实际
参考值。
[0] 无功能
[1] 模拟输入端
53
[2] * 模拟输入端
54
[7] 端子 29 频率
参数说明 编程指南
4.4.2 3-1* 参考值
图 4.7 预置相对参考值
4 4
图 4.8 实际参考值
MG06C841 Danfoss A/S © 12/2018 全权所有。 49

3-16 参考值来源 2
选项: 功能:
[8] 端子 33 频率
[11] 本地总线参考
值
[20] 数字电位计
[32] PCD 总线
3-17 参考值来源 3
选项: 功能:
选择用于第三个参考信号的输入。
参数 3-15 参考值来源 1、 参
数 3-16 参考值来源 2和 参
数 3-17 参考值来源 3
最多可定
义 3 个不同的参考信号。这些参
考信号的和将构成实际参考值。
[0] 无功能
[1] 模拟输入端
53
[2] 模拟输入端
54
[7] 端子 29 频率
[8] 端子 33 频率
[11] * 本地总线参考
值
[20] 数字电位计
[32] PCD 总线
3-18 相对标定参考值源
选项: 功能:
注意
该参数在电机运行过程中无法
调整。
选择将同在
参数 3-14 预置相对
参考值
中定义的固定值相加的变
量值。固定值和变量值的和
(
图 4.9
中的“Y”)与实际参考
值(
图 4.9
中的“X”)相乘。然
后将乘积同实际参考值相加 (X
+X*Y/100),即可得到最终的实际参
考值。
Relative
Z=X+X*Y/100
Resulting
actual
reference
Y
X
130BA059.12
Z
图 4.9 所得到的实际参考值
[0] * 无功能
[1] 模拟输入端
53
[2] 模拟输入端
54
[7] 端子 29 频率
[8] 端子 33 频率
3-18 相对标定参考值源
选项: 功能:
[11] 本地总线参考
值
t
acc
t
dec
130BD379.10
P 3-*2
Ramp (X)
Down
Time (Dec)
P 4-14
High-limit
Hz
Reference
P 1-23
Motor
frequency
P 4-12
Low limit
Time
P 3-*1
Ramp (X)Up
Time (Acc)
3-40 加减速 1 的类型
选项: 功能:
根据加速/减速要求来选择斜坡类
型。线性斜坡将在加减速期间保持
恒定的加速度。正弦 2 斜坡将进
行非线性加速。
[0] * 线性
[2] S 加减速恒定时间(只能与速度控制模式一起使
用。) S 曲线斜坡基于在
参
数 3-41 斜坡 1 加速时间
和
参
数 3-42 斜坡 1 减速时间
中设置
的值。
3-41 斜坡 1 加速时间
范围: 功能:
与规格有关* [0.01 -
3600 s]
如果选择了转矩配置模式,则输入
加速时间,这是从 0 Hz 到同步电
机速度 nS
参数 1-23 电动机频率
或从 0 NM 到额定转矩的加速时
间。适用于加减速 1 至加减速
4。所选的加速时间应该使加速期间
的输出电流不会超过
参
数 4-18 电流极限
中的电流极限。
请参阅
参数 3-42 斜坡 1 减速时间
中的减速时间。
参数
. 3 − 41 =
t
acc
s xns Hz
ref Hz
参数说明
VLT® AutomationDrive FC 360
4.4.3 3-4* 斜坡 1
分别为 4 个斜坡(
44
速 2、3-6* 加减速 3、3-7* 加减速 4
参数组 3-4* 加减速 1、3-5* 加减
)配置加减速参
数和加减速时间。
图 4.10 斜坡 1 示例
50 Danfoss A/S © 12/2018 全权所有。 MG06C841

3-42 斜坡 1 减速时间
范围: 功能:
与规格有关* [0.01 -
3600 s]
如果选择了转矩配置模式,则输入
减速时间,这是从同步电机速度 n
s
到 0 Hz 或从额定转矩到 0 NM
的减速时间。所选择的减速时间不
应使逆变器因为电机的发电运行而
发生过压,也不应使所生成的电流
超过在
参数 4-18 电流极限
中设置
的电流极限。请参阅
参
数 3-41 斜坡 1 加速时间
中的加速
时间。
参数
. 3 − 42 =
t
dec
s xns Hz
ref Hz
3-50 加减速 2 的类型
选项: 功能:
根据加速/减速要求来选择斜坡类
型。线性斜坡将在加减速期间保持
恒定的加速度。正弦 2 斜坡将进
行非线性加速。
[0] * 线性
[2] S 加减速恒定时间S 曲线斜坡基于在
参数 3-51 斜
坡 2 加速时间
和
参数 3-52 斜坡
2 减速时间
中设置的值。
3-51 斜坡 2 加速时间
范围: 功能:
与规格有关* [0.01 -
3600 s]
输入加速时间,即从 0 Hz 加速到
电机额定速度 ns 的加速时间。所
选的加速时间应该使加速期间的输
出电流不会超过
参数 4-18 电流
极限
中的电流极限。请参阅
参
数 3-52 斜坡 2 减速时间
中的减
速时间。
参数
. 3 − 51 =
t
acc
s xns Hz
ref Hz
3-52 斜坡 2 减速时间
范围: 功能:
与规格有关* [0.01 -
3600 s]
如果选择了转矩配置模式,则输入
减速时间,这是从同步电机速度 n
s
到 0 Hz 或从额定转矩到 0 NM
的减速时间。所选择的减速时间不
应使变频器因为电动机的发电运行
而发生过压,也不应使所生成的电
流超过在
参数 4-18 电流极限
中
设置的电流极限。请参阅
参
数 3-51 斜坡 2 加速时间
中的加速
时间。
参数
. 3 − 52 =
t
dec
s xns Hz
ref Hz
3-60 加减速 3 的类型
选项: 功能:
根据加速/减速要求来选择斜坡类
型。线性斜坡将在加减速期间保持
恒定的加速度。S 曲线斜坡将进行
非线性加速。
[0] * 线性
[2] S 加减速恒定时间S 曲线斜坡基于在
参数 3-61 斜
坡 3 加速时间
和
参数 3-62 斜坡
3 减速时间
中设置的值。
3-61 斜坡 3 加速时间
范围: 功能:
Size
related*
[0.01 -
3600 s]
输入加速时间,即从 0 Hz 加速到
电机额定速度 ns 的加速时间。所
选的加速时间应该使加速期间的输
出电流不会超过
参数 4-18 电流
极限
中的电流极限。请参阅
参
数 3-62 斜坡 3 减速时间
中的减
速时间。
3-62 斜坡 3 减速时间
范围: 功能:
Size
related*
[0.01 -
3600 s]
输入减速时间,即从电机额定速度
ns 减速到 0 Hz 的时间。所选择
的减速时间不应使逆变器因为电动
机的发电运行而发生过压,也不应
使所生成的电流超过在
参
数 4-18 电流极限
中设置的电流极
限。请参阅
参数 3-61 斜坡 3 加
速时间
中的加速时间。
参数
. 3 − 62 =
t
dec
s xns Hz
ref Hz
3-70 加减速 4 的类型
选项: 功能:
根据加速/减速要求来选择斜坡类
型。线性斜坡将在加减速期间保持
恒定的加速度。S 曲线斜坡将进行
非线性加速。
[0] * 线性
[2] S 加减速恒定时间S 曲线斜坡基于在
参数 3-71 斜
坡 4 加速时间
和
参数 3-72 斜坡
4 减速时间
中设置的值。
参数说明 编程指南
4.4.4 3-5* 斜坡 2
此参数组用于配置斜坡 2 参数。
4.4.5 3-6* 斜坡 3
此参数组用于配置斜坡 3 参数。
4 4
MG06C841 Danfoss A/S © 12/2018 全权所有。 51
4.4.6 3-7* 斜坡 4
此参数组用于配置斜坡 4 参数。

3-71 斜坡 4 加速时间
范围: 功能:
Size
related*
[0.01 -
3600 s]
输入加速时间,即从 0 Hz 加速到
电机额定速度 ns 的加速时间。所
选的加速时间应该使加速期间的输
出电流不会超过
参数 4-18 电流
极限
中的电流极限。请参阅
参
数 3-72 斜坡 4 减速时间
中的减
速时间。
参数
. 3 − 71 =
t
acc
s xns Hz
ref Hz
3-72 斜坡 4 减速时间
范围: 功能:
Size
related*
[0.01 -
3600 s]
输入减速时间,即从电机额定速度
ns 减速到 0 Hz 的时间。所选择
的减速时间不应使逆变器因为电动
机的发电运行而发生过压,也不应
使所生成的电流超过在
参
数 4-18 电流极限
中设置的电流极
限。请参阅
参数 3-71 斜坡 4 加
速时间
中的加速时间。
参数
. 3 − 72 =
t
dec
s xns Hz
ref Hz
3-80 点动加减速时间
范围: 功能:
Size
related*
[0.01 -
3600 s]
输入点动加减速时间,从 0 Hz 到
电机额定频率 ns 之间的加速/减
速时间。确保在给定的点动加减速
时间内,所产生的最终输出电流不
会超过
参数 4-18 电流极限
中的
电流极限。通过 LCP、所选的数字
输入或串行通讯端口激活点动信号
后,该点动加减速时间即开始计
时。当点动状态被禁用时,正常加
减速时间将有效。
130BD375.11
Time
P 3-80
Hz
P 4-14 Hz
High limit
Jog speed
P 3-19
P 3-80
Ramp up
(acc)
Ramp down
(dec)
t jog t jog
P 4-12 Hz
Low limit
P 1-23
Motor frequency
3-81 快停减速时间
范围: 功能:
Size
related*
[0.01 3600 s]
输入快速停止减速时间,从电机额
定速度下降到 0 Hz 所需的时间。
确保不会因为电动机的发电运行
(为了实现给定的减速时间)而导
致逆变器发生过载。同时确保所产
生的电流(为了获得给定的减速时
间)不会超过在
参数 4-18 电流极
限
中设置的电流极限。通过所选
数字输入上的信号或串行通讯端口
激活快速停止功能。
130BD376.11
Time
Hz
P 4-14 Hz
high limit
Reference
P 1-23
Motor frequency
low limit
P 4-12 Hz
P 3-81
Qramp
Qstop
参数说明
VLT® AutomationDrive FC 360
参数
. 3 − 80 =
t点动 s xns Hz
Δ点动速度参数. 3 − 19 Hz
44
4.4.7 3-8* 其他斜坡
图 4.11 点动加斜坡时间
52 Danfoss A/S © 12/2018 全权所有。 MG06C841
图 4.12 快速停止减速时间

3-90 步长
范围: 功能:
0.10 %* [0.01 200 %]
以相对于电机同步速度 ns 的百分
比形式,输入所要求的增/减幅度。
如果激活了增/减功能,结果参考值
将按照在本参数中设置的幅度增/
减。
3-92 恢复通电
选项: 功能:
[0] * 关 加电后将数字电位器参考值复位为
0%。
[1] 开 在加电时恢复最近的数字电位器参
考值。
3-93 最大极限
范围: 功能:
100 %* [-200 -
200 %]
设置所允许的最大结果参考值。如
果要使用数字电位计对结果参考值
进行细调,建议这样做。
3-94 最小极限
范围: 功能:
-100 % [-200 200 %]
设置所允许的最小结果参考值。如
果要使用数字电位计对结果参考值
进行细调,建议这样做。
3-95 加减延迟
范围: 功能:
1000 ms* [0 -
3600000 ms]
输入从激活数字电位计功能到变频
器开始增减参考值所需的延迟。延
迟为 0 毫秒时,激活增/减后参考
值立即开始增减。
参数说明 编程指南
4.4.8 3-9* 数字电势计
借助数字电位计,可以使用
增、减或清除
功能来调整数字
输入的设置,从而增大或减小实际参考值。要激活该功
能,必须将至少一个数字输入设为增或减。
4 4
MG06C841 Danfoss A/S © 12/2018 全权所有。 53
4-10 电机速度方向
选项: 功能:
[0] 顺时针方向
注意
参数 4-10 电机速度方向
中的
设置对
参数 1-73 飞车启动
有
影响。
只允许顺时针方向。
[2] * 双方向 允许顺时针和逆时针方向。
4-14 电动机速度上限 [Hz]
范围: 功能:
65 Hz* [ 0.1 -
500 Hz]
注意
最大输出频率不能超过逆变器
开关频率(
参数 14-01 开关频
率
)的 10%。
输入电机的速度上限。可以根据厂
商建议的电动机主轴最大频率来设
置电动机速度上限。
电机速度上限必须超过
参
数 4-12 电动机速度下限 [Hz]
中
的值,但不得超过
参数 4-19 最大
输出频率
中的值。
4-16 电动时转矩极限
范围: 功能:
Size
related*
[ 0 1000 %]
该功能旨在通过限制轴上转矩来保
护机械系统。
4-17 发电时转矩极限
范围: 功能:
100 %* [ 0 -
1000 %]
该功能旨在通过限制轴上转矩来保
护机械系统。
4-18 电流极限
范围: 功能:
Size
related*
[ 0 1000 %]
这是可以延续到过同步范围内的实
际电流限制功能。不过,由于磁场
弱化,当电压在电动机同步速度之
上停止增加时,电流极限下的电动
机转矩会相应地下降。
4-19 最大输出频率
范围: 功能:
Size
related*
[ 0 - 500
Hz]
注意
该参数在电机运行过程中无法
调整。
注意
最大输出频率不能超过逆变器
开关频率(
参数 14-01 开关频
率
)的 10%。
规定了输出频率方面的最大极限,
目的是在那些需要避免意外过速的
应用中增强安全性。该极限在所有
配置中具有最高优先性(与
参
数 1-00 配置模式
的设置无
关)。
4-20 转矩极限因数源
选择一个模拟输入,以便对
参数 4-16 电动时转矩极限 和参
数 4-17 发电时转矩极限
中的设置按 0–100%(或相反)进行
标定。同 0% 和 100% 对应的信号水平在模拟输入标定参数中
定义,例如,
参数组 6-1* 模拟输入 1
。该参数仅在
参
数 1-00 配置模式
设为
[0] 开环速度或 [1] 闭环速度
时有
效。
选项: 功能:
[0] * 无功能
[2] 模拟输入 53
[4] 模拟反相输入
53
[6] 模拟输入 54
[8] 模拟反向输入
54
[18] Bus Control
4-21 速度极限因数源
选择一个模拟输入,以便对
参数 4-19 最大输出频率
0–100%
(或相反)中的设置进行标定。同 0% 和 100% 对应的信号水
平在模拟输入标定参数中定义,例如,
参数组 6-1* 模拟输入
1
。该参数仅在
参数 1-00 配置模式
设为转矩模式时有效。
选项: 功能:
[0] * 无功能
[2] 模拟输入 53
参数说明
VLT® AutomationDrive FC 360
4.5 参数: 4-** 极限/警告
4.5.1 4-1* 电机极限
定义电机的转矩、电流和速度极限,以及在超过极限时的
变频器反应。
超过极限将会在显示屏上显示相关的消息。如果是警告,
则始终会在显示屏或现场总线上显示消息。监测功能可能
会激活警告或跳闸,此时,变频器会停止并生成报警消
44
息。
4-12 电动机速度下限 [Hz]
范围: 功能:
0 Hz* [ 0 -
400.0 Hz]
输入电机的速度下限。可以对应于电机主
轴的最小输出频率来设置电机速度下限。
电机速度下限不得超过
机速度上限 [Hz]
中的设置。
54 Danfoss A/S © 12/2018 全权所有。 MG06C841
参数 4-14 电动
4.5.2 4-2* 极限因数

4-21 速度极限因数源
选择一个模拟输入,以便对
参数 4-19 最大输出频率
0–100%
(或相反)中的设置进行标定。同 0% 和 100% 对应的信号水
平在模拟输入标定参数中定义,例如,
参数组 6-1* 模拟输入
1
。该参数仅在
参数 1-00 配置模式
设为转矩模式时有效。
选项: 功能:
[4] 模拟反相输入
53
[6] 模拟输入 54
[8] 模拟反向输入
54
[18] Bus Control
4-22 Break Away Boost
选项: 功能:
[0] * 关
[1] 开 变频器提供的电流高于正常电流水
平,以增大起步转矩能力。
4-27 Torque Limit Bus Control
范围: 功能:
0* [0 -
16384 ]
此参数用于指定控制转矩极限的总
线因数。仅当
参数 4-20 转矩极限
因数源
设置为
[18] Bus Control
(总线控制)
时才有效。此参数是
N2 格式。
4-28 Speed Limit Bus Control
范围: 功能:
0* [0 -
16384 ]
此参数用于指定控制速度极限的总
线因数。仅当
参数 4-21 速度极限
因数源
设置为
[18] Bus Control
(总线控制)
时才有效。此参数是
N2 格式。
4-30 电动机反馈损耗功能
选项: 功能:
此功能用于监测反馈信号是否一
致,即,反馈信号是否可用。选择
当检测到反馈故障时变频器应做出
的响应。如果反馈信号和输出速度
之间的偏差超过在
参数 4-31 电
动机反馈速度错误
中指定的水平,
这种情形若持续时间超过
参
数 4-32 电动机反馈损耗超时
中设
4-30 电动机反馈损耗功能
选项: 功能:
置的时间,则会执行所选择的操
作。
[0] 禁用
[1] 警告
[2] * 跳闸
[3] 点动
[4] 锁定输出
[5] 最大速度
[6] 切换为开环
4-31 电动机反馈速度错误
范围: 功能:
20 Hz* [0 - 50
Hz]
选择所允许的最大速度误差(输出
速度与反馈的差异)。
4-32 电动机反馈损耗超时
范围: 功能:
0.05 s* [0 - 60s]设置一个超时值。这段时间内,在
参数 4-31 电动机反馈速度错误
中设置的速度误差可以被超过,但
之后便会激活在
参数 4-30 电动
机反馈损耗功能
中选择的功能。
4-40 警告频率 低
范围: 功能:
与规格有关* [ 0 - 500
Hz]
使用此参数可设置频率范围的下
限。当电动机速度低于此极限时,
显示屏将显示
速度过低
。警告位
10 在
参数 16-94 扩展状态字
中
参数说明 编程指南
4 4
4.5.3 4-3* 电动机反馈监测
注意
一旦
参数 4-31 电动机反馈速度错误
会激活
警告 61,反馈错误
馈损耗超时
中的设置如何。
,而不论
报警 61,反馈错误
反馈损耗功能有关。
MG06C841 Danfoss A/S © 12/2018 全权所有。 55
中的值被超过,便
参数 4-32 电动机反
图 4.13 电机反馈速度错误
与电机
4.5.4 4-4* 调整警告 2

4-40 警告频率 低
范围: 功能:
设置。可以配置输出继电器指示此
警告。在达到设置的极限时,LCP
警告灯不会亮。
该值不得超过
参数 4-41 Warning
Freq. High
中的设置。
4-41 警告频率 上限
范围: 功能:
与规格有关* [ 0 - 500
Hz]
使用此参数可设置频率范围的上
限。当电机速度超过该极限时,显
示器将显示
速度过高
。警告位 9
在
参数 16-94 扩展状态字
中设
置。可以配置输出继电器指示此警
告。在达到设置的极限时,LCP 警
告灯不会亮。
该值必须超过
参数 4-40 Warning
Freq. Low
中的值,且不得超过
参
数 4-14 电动机速度上限 [Hz]
中
的值。
4-42 Adjustable Temperature Warning
范围: 功能:
0* [ 0 -
200 ]
使用此参数可设置电动机温度极
限。
4-50 警告电流过低
范围: 功能:
0 A* [ 0 - 500A]输入 I
LOW
值。如果电动机电流低
于该极限,将在状态字中设置 1
位。可对该值进行设置,让它在数
字输出或继电器输出上产生信号。
4-51 警告电流过高
范围: 功能:
与规格有关* [ 0.0 -
500.00 A]
输入 I
HIGH
值。如果电动机电流超
过该极限,将在状态字中设置 1
位。可对该值进行设置,让它在数
字输出或继电器输出上产生信号。
4-54 警告参考值过低
范围: 功能:
-4999* [-4999 4999 ]
输入参考值下限。当实际参考值低
于该极限时,显示屏将显示
参考值
低
。位 20 在
参数 16-94 扩展状
态字
中设置。可以配置输出继电器
或数字输出来指示这个警告。在达
4-54 警告参考值过低
范围: 功能:
到该参数设置的极限时,LCP 警告
灯不会亮。
4-55 警告参考值过高
范围: 功能:
4999* [-4999 -
4999 ]
使用此参数可设置参考值范围的上
限。当实际参考值超出该极限时,
显示屏将显示
参考值
高
。位 19 在
参数 16-94 扩展状态字
中设置。
可以配置输出继电器或数字输出来
指示这个警告。在达到该参数设置
的极限时,LCP 警告灯不会亮。
4-56 警告反馈过低
范围: 功能:
-4999
ProcessCt
rlUnit*
[-4999 4999
ProcessCtrlU
nit]
使用此参数可设置反馈范围的下
限。当反馈低于该极限时,显示器
将显示
反馈过低
。位 6 在
参
数 16-94 扩展状态字
中设置。可
以配置输出继电器或数字输出来指
示这个警告。在达到该参数设置的
极限时,LCP 警告灯不会亮。
4-57 警告反馈过高
范围: 功能:
4999
ProcessCt
rlUnit*
[-4999 4999
ProcessCtrlU
nit]
使用此参数可设置反馈范围的上
限。当反馈超出该极限时,显示屏
将显示
反馈过高
。位 5 在
参
数 16-94 扩展状态字
中设置。可
以配置输出继电器或数字输出来指
示这个警告。在达到该参数设置的
极限时,LCP 警告灯不会亮。
4-58 电机缺相功能
选项: 功能:
[0] 关 出现电机缺相时不显示报警。
[1] * 开 出现电机缺相时显示报警。
4-61 跳频始速 [Hz]
范围: 功能:
0 Hz* [ 0 - 500
Hz]
一些系统因系统内部可能产生共振
问题而要求避开某些输出速度。输
入要避开的速度下限。
跳频始速不得超过
参数 4-14 电动
机速度上限 [Hz]
中的设置。
参数说明
VLT® AutomationDrive FC 360
44
4.5.5 4-5* 调整警告
使用这些参数可调整电流、速度、参考值和反馈的警告极
限。
56 Danfoss A/S © 12/2018 全权所有。 MG06C841
4.5.6 4-6* 频率跳越

4-63 跳频终速 [Hz]
范围: 功能:
0 Hz* [ 0 - 500
Hz]
一些系统因系统内部可能产生共振
问题而要求避开某些输出速度。输
入要避开的速度上限。
跳频终速不得超过
参数 4-14 电动
机速度上限 [Hz]
中的设置。
参数说明 编程指南
4 4
MG06C841 Danfoss A/S © 12/2018 全权所有。 57
5-00 数字输入模式
选项: 功能:
为数字输入设置 NPN 或 PNP 模
式。
注意
该参数在电机运行过程中无法
调整。
[0] * PNP 正向脉冲 (0) 阶段的操作。PNP
系统的电压下降到同大地相等。
[1] NPN 发生在负向脉冲 (1) 阶段的操
作。NPN 系统的电压被提升到 +24
V(变频器的内部电压)。
5-01 端子 27 的模式
选项: 功能:
[0] * 输入 将端子 27 定义为数字输入。
[1] 输出 将端子 27 定义为数字输出。
5-02 端子 29 的模式
选项: 功能:
[0] * 输入 将端子 29 定义为数字输入。
[1] 输出 将端子 29 定义为数字输出。
参数说明
VLT® AutomationDrive FC 360
4.6 参数: 5-** 数字输入/输出
4.6.1 5-0* 数字 I/O 模式
这些参数通过 NPN 和 PNP 配置输入和输出。
44
数字输入可用于选择变频器的各项功能。
5-10 到 5-16 数字输入
[0] 无功能 对传输到端子的信号不产生响应。
[1] 复位 在跳闸/报警后将变频器复位。并不是所有报警都
能被复位。
[2] 惯性停车惯性停车,反向输入(常闭)。变频器任由电机
进入自由模式。
逻辑 0⇒ 惯性停车。
[3] 惯性/
复位反
逻辑
[4] 快停反逻辑反向输入(常闭)。根据在
[5] 直流制
动反逻
辑
58 Danfoss A/S © 12/2018 全权所有。 MG06C841
复位和惯性停车,反向输入 (NC)。听任电机以
自由模式运动,并将变频器复位。
逻辑 0 ⇒ 惯性停车。
逻辑 1 至逻辑 0⇒复位。
参数 3-81 快停减速
时间
中设置的快停减速时间生成停止信号。当电
机停止时,其主轴将处于自由模式。逻辑 0 ⇒
快速停止。
直流制动反向输入(常闭)。在一定时间内持续
向电机施加直流电流,使其停止。请参阅
数 2-01 直流制动电流
动切入速度 [Hz]
制动时间
直流制动。
中的值不为 0 时有效。逻辑 0 =>
到
。该功能仅在
参
参数 2-04 直流制
参数 2-02 直流
[6] 停止反
逻辑
注意
如果变频器在达到转矩极限时收到停止命
令,它可能无法自动停止。为确保变频器能
停止,请将某个数字输出配置为
矩极限和停止
,并将该数字输出连接到被配
[27] 转
置为惯性停车的数字输入。
停止反向功能。当所选择的端子从逻辑 1 变为
0 时,将激活停止功能。根据所选的加减速时间
(
参数 3-42 斜坡 1 减速时间、参数 3-52 斜坡
2 减速时间、参数 3-62 斜坡 3 减速时间、参
数 3-72 斜坡 4 减速时间
[8] 启动 针对启动/停止命令选择启动。逻辑 1 = 启动,
逻辑 0 = 停止。
[9] 自锁启动当应用的脉冲至少持续 4 毫秒时,电机将启
动。提供停止命令后,电机将停止。
[10] 反向 更改电机主轴的旋转方向。选择逻辑 1 执行反
向。反向信号只更改旋转方向。它并不激活启动
功能。请在
双向。该功能在闭环过程中无效。
[11] 启动反转用于启动/停止,以及实现同一线路上的反转。使
用反向功能时,不允许同时存在启动信号。
[12] 启用正
向启动
[13] 启用反
向启动
[14] 点动 用于激活点动速度。请参阅
[15] 预置参
考值开
[16] 预置参
考值位
0
[17] 预置参
考值位
1
[18] 预置参
考值位
2
预置参考值位 2 1 0
预置参考值 0 0 0 0
预置参考值 1 0 0 1
预置参考值 2 0 1 0
预置参考值 3 0 1 1
预置参考值 4 1 0 0
预置参考值 5 1 0 1
预置参考值 6 1 1 0
预置参考值 7 1 1 1
表 4.4 预置参考值 位
[19] 锁
定
参
停止逆时针运动,从而允许变为顺时针。
停止顺时针运动,从而允许变为逆时针。
度 [Hz]
在外部参考值和预置参考值之间切换。前提是已
在
参数 3-04 参考功能
预置
考值的逻辑 1=1 有效。
借助预置参考值位 0、1 和 2,可以根据
表 4.4
与
[16] 预置参考值位 0
与
[16] 预置参考值位 0
锁定实际参考值,该值现在成为开始使用
和
[22] 减速
加速或 [22] 减速
数 3-51 斜坡 2 加速时间 和参数 3-52 斜坡 2 减速
参数 4-10 电动机速度方向
。
。逻辑 0 = 外部参考值有效; 八个预置参
选择 8 个预置参考值之一。
功能的启用点/条件。如果使用
,则速度总是按加减速 2(
)完成停止。
参数 3-11 点动速
中选择了
相同。
相同。
[1] 外部/
中选择
[21] 加速
[21]
参
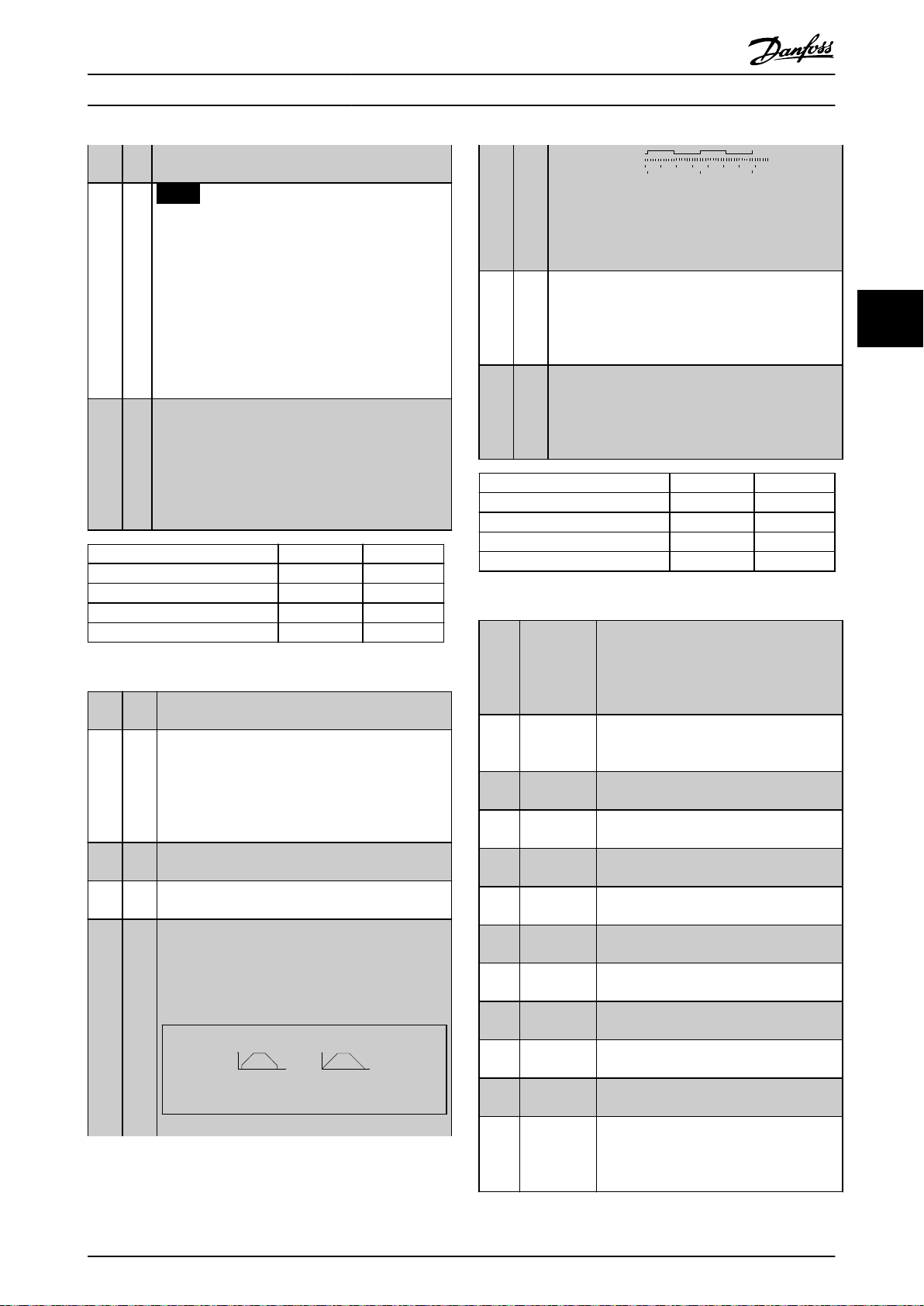
Speed [rpm] Speed [rpm]
Time[sec] Time[sec]a b
130BB462.10
Read Timer:
20 timer tides
Read Timer:
20 timer tides
Time Start
Time counter
Sample time
Timer
Pulse
130BB464.10
参数说明 编程指南
考
时间
)在 0 –
值
化。
[20] 锁
注意
定
如果
输
出
[20] 锁定输出
[8] 启动
时需要通过设置为“
惯性/复位反逻辑
锁定实际的电机频率 (Hz),该值现在成为开始使用
[21] 加速
果使用
减速 2(
数 3-52 斜坡 2 减速时间
动机频率
[21] 加速如果要对加速/减速进行数字控制(电机电位计),
请选择
择“
[19] 锁定参考值
激活。当“加速/减速”的激活时间短于 400 毫秒
时,结果参考值将增加/降低 0.1%。如果加速/减速
已激活 400 毫秒以上,结果参考值将遵循在斜坡加
速/减速参数 3-51/ 3-52 中的设置。
速度无变化 0 0
按百分比减少 1 0
按百分比增加 0 1
按百分比减少 1 1
表 4.5 关闭/升速
[22] 减速与
[23] 菜
单
选
择
位
0
[28] 升速按百分比(相对)增大
[29] 减速按百分比(相对)减小
[32] 脉
冲
输
入
[21] 加速
选择
[23] 菜单选择位 0
一个。将
单
。
中设置的参考值。
中设置的参考值。
(仅适用于端子 29 或 33)测量脉冲边沿之间的持
续时间。该参数在低频下可以获得更高的分辨率,
但在高频下却不够精确。这个原理有一个截止频
率,这使得它不适合用于在低速下分辨率低(比如
30 PPR)的编码器。
a: 低编码器分辨率 b: 标准的编码器分辨率
参数 3-03 最大参考值
的范围内变
有效,则不能通过将
上的信号设置为低来停止变频器。此
[2] 惯性停车
”或“
”的端子来停止变频器。
和
[22] 减速
[21] 加速或 [22] 减速
功能的启用点/条件。如
,则速度总是按加
参数 3-51 斜坡 2 加速时间 和参
)在 0 –
的范围内变化。
[21] 加速和 [22] 减速
”或“
关闭 升速
相同。
可以选择两个菜单中的
参数 0-10 有效设置
参数 1-23 电
。该功能可通过选
[20] 锁定输出
设为
[9] 多重菜
参数 3-12 加速/减速值
参数 3-12 加速/减速值
[3]
”来
图 4.14 边沿之间的持续期
[34] 加
[35] 加
预置加减速位 1 0
加减速 1 0 0
加减速 2 0 1
斜坡 3 1 0
斜坡 4 1 1
表 4.6 预置加减速位
[45] Latched
[51] 外部互锁 使用该参数可以将外部故障转移到变频器
[55] 数字电位计升高升高传送到以下参数组中指定的数字电位计
[56] 数字电位计降低降低传送到以下参数组中指定的数字电位计
[57] 数字电位计清零将以下参数组中指定的数字电位计参考值清
[60] 计数器 A
[61] 计数器 A
[62] 复位计数器A计数器 A 复位的输入。
[63] 计数器 B
[64] 计数器 B
[65] 复位计数器B计数器 B 复位的输入。
[72] PID 错误反向它将反转来自过程 PID 控制器的错误结
允许根据
减
速
位
0
同加减速低位 0。
减
速
高
位
start
reverse
(自锁启动
反逻辑)
(上)
(下)
(上)
(下)
表 4.6
选择 4 个加减速之一。
当应用的脉冲至少持续 4 毫秒时,电机开
始反向运转。提供停止命令后,电机将停
止。
中。这种故障将被当作在内部生成的报警来
对待。
功能的信号:
功能的信号:
零:
3-9* 数字电位 计
SLC 计数器中的增量计数输入。
SLC 计数器中的减量计数输入。
SLC 计数器中的增量计数输入。
SLC 计数器中的减量计数输入。
果。仅在
表面卷绕机
时可用。
3-9* 数字电位 计
3-9* 数字电位 计
。
参数 1-00 配置模式
或
[7] 扩展 PID 速度开环
。
。
设为
[6]
4 4
MG06C841 Danfoss A/S © 12/2018 全权所有。 59

参数说明
VLT® AutomationDrive FC 360
[73] PID 复位 I部分将过程 PID 控制器的 I 部分复位。等同
于
参数 7-40 过程 PID I 部分复位
在
参数 1-00 配置模式
设为
卷绕机或 [7] 扩展 PID 速度开环
用。
[74] PID 启用 该选项将启用扩展过程 PID 控制器。等同
于
参数 7-50 过程 PID 扩展 PID
参数 1-00 配置模式
速度开环
44
[150] 转到归位位置变频器归位。
时可用。
设为
[7] 扩展 PID
。仅
[6] 表面
时可
。仅当
5-10 端子 18 数字输入
选项: 功能:
[8] * 启动 在
参数组 5-1* 数字输入
绍。
5-11 端子 19 数字输入
选项: 功能:
[10] * 反向 在
参数组 5-1* 数字输入
绍。
中对相关功能进行了介
中对相关功能进行了介
5-12 端子 27 数字输入
[151] 归位参考开关指示归位参考开关的状态。开 表示归位,
关
表示未归位。
[155] 硬件正值极限超出硬件正值限位。该选项是在下降时激活
的。
[156] 硬件负值极限超出硬件负值限位。该选项是在下降时激活
的。
[157] 位置 快停
反逻辑
[160] 转到目标位置变频器移至目标位置。该参数仅在
[162] 位置 索引
位 0
[163] 位置 索引
位 1
[164] 位置 索引
位 2
[165] 内径来源 内径来源。关 表示选择芯线 1,开 表示
[166] 新直径选择 配置是选择非整卷直径(关)还是芯线直径
[167] 重设直径 重设直径。该选项仅在
[168] 卷绕器正向点动在中心卷绕过程中启用正向点动。该选项仅
[169] 卷绕器反向点动在中心卷绕过程中启用反向点动。该选项仅
[170] 打开张力 启用张力 PID 控制。该选项仅在
通过在
参数 32-81 最短加减速时间
置的加减速时间,在定位过程中停止变频
器。该参数仅在
Mode
设为
参数 37-00 Application
[2] 位置控制
时有效。
中设
参
数 37-00 Application Mode
位置控制
定位索引位 0。该参数仅在
时有效。
数 37-00 Application Mode
位置控制
定位索引位 1。该参数仅在
时有效。
数 37-00 Application Mode
位置控制
定位索引位 2。该参数仅在
时有效。
数 37-00 Application Mode
位置控制
选择芯线 2。该选项仅在
时有效。
数 37-00 Application Mode
中心卷绕器
(开)。该选项仅在
时有效。
数 37-00 Application Mode
中心卷绕器
时有效。
参
设为
参
设为
参
设为
参
设为
参
设为 [1]
设为 [1]
[2]
[2]
[2]
[2]
参
数 37-00 Application Mode
中心卷绕器
在
[1]
在
[1]
时有效。
参数 37-00 Application Mode
中心卷绕器
时有效。
参数 37-00 Application Mode
中心卷绕器
时有效。
设为 [1]
设为
设为
参
数 37-00 Application Mode
中心卷绕器
时有效。
设为 [1]
选项: 功能:
[2] * 惯性停车反逻辑 在
参数组 5-1* 数字输入
进行了介绍。
中对相关功能
5-13 端子 29 数字输入
选项: 功能:
[14] * 点动 在
[32] 脉冲输入
参数组 5-1* 数字输入
了介绍。
中对相关功能进行
5-14 端子 32 数字输入
选项: 功能:
[0] * 无功能 在
[82] 编码器输入 B
参数组 5-1* 数字输入
进行了介绍。
中对相关功能
5-15 端子 33 数字输入
选项: 功能:
[0] 无功能 在
[16] * 预置参考值位 0
[32] 脉冲输入
[81] 编码器输入 A
参数组 5-1* 数字输入
能进行了介绍。
中对相关功
5-16 端子 31 数字输入
选项: 功能:
[0] 无功能 在
参数组 5-1* 数字输入
绍。
中对相关功能进行了介
4.6.2 5-3* 数字输出
端子 27 和 29 常用于 2 个固态数字输出。端子 27 的
I/O 功能在
29 的 I/O 功能在
参数 5-01 端子 27 的模式
参数 5-02 端子 29 的模式
中设置,端子
中设
置。
端子 42 和 45 也可配置为数字输出。
注意
电机正在运行,并且存在主轴扭矩。
60 Danfoss A/S © 12/2018 全权所有。 MG06C841

参数说明 编程指南
5-30 到 5-31 数字输出
[0] 无功能 所有数字输出和继电器输出的默认设置。
[1] 控制就绪 控制卡就绪。
[2] 变频器就绪变频器已做好运行准备,并且对控制板提供
电压信号。
[3] 变频器就
绪/远控
[4] 启用/无警告准备好运行。没有给出启动或停止命令(启
[5] 运行 电机正在运行,并且存在主轴扭矩。
[6] 运行/无警告电机正在运行,并且没有警告。
[7] 有效范围/
无警告
[8] 运行参考
值/无警
[9] 报警 报警激活输出。
[10] 报警或警告报警或警告激活输出。
[11] 达到转矩极限超过了在
[12] 超出电流范围电机电流超出了在
[13] 低于电流下限电机电流低于
[14] 高于电流上限电机电流高于
[15] 超出频率范围输出频率超出了频率范围。
[16] 低于频率下限输出速度低于
[17] 超过频率上限输出速度高于
[18] 超出反馈范围反馈超出了
[19] 低于反馈下限反馈低于在
[20] 高于反馈上限反馈高于在
[21] 热警告 当温度超出电机、变频器、制动电阻器或热
[22] 就绪,无
热警告
[23] 远/就绪/
无警告
[24] 就绪,无
过压/欠压
[25] 反向 当逻辑 = 0 时,电机顺时针运行(或准备
[26] 总线正常 通过串行通讯端口的有效通讯(无超时)。
变频器已做好运行准备,并处于自动启动模
式。
动/禁用)。没有激活任何警告。
电机正在
数 4-51 警告电流过高
范围内运行。没有警告。
电机在参考速度下运行。无警告。
参数 4-17 发电时转矩极限
限。
参数 4-50 警告电流过低
设置的电流和速度
到
参数 4-16 电动时转矩极限
中设置的转矩极
或
参数 4-18 电流极限
中设置的范围。
参数 4-50 警告电流过低
的设置。
参数 4-51 警告电流过高
的设置。
参数 4-40 Warning Freq.
Low
中的设置。
参数 4-41 Warning Freq.
High
中的设置。
参数 4-56 警告反馈过低
参数 4-57 警告反馈过高
中设置的范围。
参数 4-56 警告反馈过低
设置的极限。
参数 4-57 警告反馈过高
设置的极限。
敏电阻的温度极限时,会激活热警告。
变频器已做好运行准备,并且没有过热警
告。
变频器已做好运行准备,并处于自动启动模
式。无“过温”警告。
变频器已做好运行准备,并且主电源电压在
指定的电压范围内(请参阅
般规范章节
顺时针运行);当逻辑 = 1 时,电机逆时
针运行(或准备逆时针运行)。应用反向信
号后,输出将立即发生变化。
)。
设计指南中的一
和
中
中
参
[27] 转矩极限
和停止
[28] 制动,无
制动警告
[29] 制动就
绪,无故
障
[30] 制动故障
(IGBT)
[31] 继电器
123
[32] 机械制动控制启用外部机械制动控制。有关详细信息,请
[36] 控制字位
11
[37] 控制字位
12
[40] 超出参考
值范围
[41] 低于参考
值下限
[42] 超出参考
值上限
[45] 总线控制 通过现场总线来控制输出。输出的状态在
[46] 超时时总
线控制打
开
[47] 超时时总
线控制关
闭
[55] 脉冲输出
[56] 散热片清
洁警告,
高
[60] 比较器 0 请参阅
[61] 比较器 1 请参阅
[62] 比较器 2 请参阅
[63] 比较器 3 请参阅
在执行惯性停车和在转矩极限情况下使用。
如果变频器收到停止信号并达到转矩极限,
信号将为逻辑 0。
制动有效并且没有警告。
制动功能已做好运行准备,并且没有故障。
当制动 IGBT 发生短路时,输出为逻辑 1。
借助该功能,当制动模块出现故障时可保护
变频器。使用输出/继电器切断变频器的主
电源电压。
当在
参数组 8-** 通讯和选件
控制字
时,该继电器被激活。
参阅
参数组 2-2* 机械制动
当实际速度超出
到
参数 4-55 警告参考值过高
激活该选项。
当实际速度低于速度参考值设置时激活该选
项。
当实际速度高于速度参考值设置时激活该选
项。
参数 4-54 警告参考值过低
参数 5-90 数字和继电器总线控制
输出状态在现场总线超时的情况下将被保
留。
通过现场总线来控制输出。输出的状态在
参数 5-90 数字和继电器总线控制
如果出现总线超时,输出状态将被设为高
(开)。
参数组 13-1* 比较器
器 0 的求值为“真”,输出将为高。否则
为低。
参数组 13-1* 比较器
器 1 的求值为“真”,输出将为高。否则
为低。
参数组 13-1* 比较器
器 2 的求值为“真”,输出将为高。否则
为低。
参数组 13-1* 比较器
器 3 的求值为“真”,输出将为高。否则
为低。
中选择
[0]
。
设置的范围时
中设置。
中设置。
。如果对比较
。如果对比较
。如果对比较
。如果对比较
4 4
MG06C841 Danfoss A/S © 12/2018 全权所有。 61

5-34 On Delay, Digital Output
范围: 功能:
0.01 s* [0 - 600
s]
5-35 Off Delay, Digital Output
范围: 功能:
0.01 s* [0 - 600
s]
参数说明
VLT® AutomationDrive FC 360
[64] 比较器 4 请参阅
[65] 比较器 5 请参阅
[70] 逻辑规则0请参阅
44
[71] 逻辑规则1请参阅
[72] 逻辑规则2请参阅
[73] 逻辑规则3请参阅
[74] 逻辑规则4请参阅
[75] 逻辑规则5请参阅
[80] SL 数字输
出 A
[81] 智能逻辑
控制数字
输出 B
[82] 智能逻辑
控制数字
输出 C
[83] 智能逻辑
控制数字
输出 D
[160] 无报警 当未发生报警时,输出为高。
[161] 反向运行 当变频器逆时针运行时,输出为高(状态位
[165] 本地参考
值有效
[166] 远程参考
值有效
[167] 启动命令有效当存在有效的启动命令,并且没有有效的停
[168] 变频器位
于手动模
式
[169] 自动模式 当变频器处于“自动”模式时,输出为高。
参数组 13-1* 比较器
器 4 的求值为“真”,输出将为高。否则
为低。
参数组 13-1* 比较器
器 5 的求值为“真”,输出将为高。否则
为低。
参数组 13-4* 逻辑规则
辑规则 0 的求值为“真”,输出将为高。
否则为低。
参数组 13-4* 逻辑规则
辑规则 1 的求值为“真”,输出将为高。
否则为低。
参数组 13-4* 逻辑规则
辑规则 2 的求值为“真”,输出将为高。
否则为低。
参数组 13-4* 逻辑规则
辑规则 3 的求值为“真”,输出将为高。
否则为低。
参数组 13-4* 逻辑规则
辑规则 4 的求值为“真”,输出将为高。
否则为低。
参数组 13-4* 逻辑规则
辑规则 5 的求值为“真”,输出将为高。
否则为低。
请参阅
参数 13-52 条件控制器动作
执行智能逻辑操作
高
,输入就为高。只要执行智能逻辑操作
[38] 数字输出 A 置为
[32] 数字输出 A 置为低
请参阅
参数 13-52 条件控制器动作
执行智能逻辑操作
出就会为高。只要执行智能逻辑操作
数字输出 B 置为低
请参阅
参数 13-52 条件控制器动作
执行智能逻辑操作
高
,输入就为高。只要执行智能逻辑操作
[39] 数字输出 高
,输入就为低 。
[40] 数字输出 C 置为
[34] 数字输出 C 置为低
请参阅
参数 13-52 条件控制器动作
执行智能逻辑操作
高
,输入就为高 。只要执行智能逻辑操作
[41] 数字输出 D 置为
[35] 数字输出 D 置为低
“
正在运行
结果)。
止命令时,输出为高。
当变频器处于“手动启动”模式时,输出为
高。
”和“反向”二者的逻辑与运算
。如果对比较
。如果对比较
。如果对逻
。如果对逻
。如果对逻
。如果对逻
。如果对逻
。如果对逻
。只要
,输入就为低 。
。只要
,输
[33]
。只要
,输入就为低。
。只要
,输入就为低 。
[170] 完成归位 归位操作完成。该参数仅在
数 37-00 Application Mode
置控制
时有效。
[171] 到达目标位置已到达目标位置。该参数仅在
数 37-00 Application Mode
置控制
时有效。
[172] 位置控制故障定位过程中发生故障。有关故障的详细信
息,请参考
Reason
参数 37-18 Pos. Ctrl Fault
。该参数仅在
数 37-00 Application Mode
置控制
时有效。
[173] 位置机械制动选择机械定位控制。该参数仅在
数 37-00 Application Mode
置控制
时有效。
[174] TLD 指示信号指明中心卷绕过程中张力是否超出极限
(开)。该选项仅在
数 37-00 Application Mode
心卷绕器
[175] 依靠张力运行指明是启用(开)还是禁用(关)张力 PID
控制。该选项仅在
时有效。
参
数 37-00 Application Mode
心卷绕器
[176] 准备运行 中心卷绕器控制就绪,可以运行。该选项仅
在
[1]
[177] 卷终 达到直径限制。该选项仅在
时有效。
参数 37-00 Application Mode
中心卷绕器
时有效。
数 37-00 Application Mode
心卷绕器
[193] 睡眠模式 变频器/系统已进入睡眠模式。请参阅
组 22-4* 睡眠模式
[194] 断裂皮带 检测到皮带断裂。请参阅
眠模式
时有效。
。
。
参
设为
参
设为
参
设为
参
设为
参
设为 [1]
设为 [1]
参
设为 [1]
参数组 22-4* 睡
[2] 位
[2] 位
[2] 位
[2] 位
设为
参数
5-30 端子 27 数字输出
选项: 功能:
[0] * 无功能
参数组 5-3* 数字输出
绍。
中对相关功能进行了介
5-31 端子 29 数字输出
选项: 功能:
[0] * 无功能
参数组 5-3* 数字输出
绍。
中对相关功能进行了介
中
中
中
62 Danfoss A/S © 12/2018 全权所有。 MG06C841

5-40 继电器功能
选项: 功能:
[0] 无功能 对所有数字输出和继电器输出为默
认设置。
[1] 控制就绪 控制卡就绪。
[2] 变频器就绪 变频器已做好运行准备。主电源和
控制电压均正常。
[3] 变频器就绪/远控变频器已做好运行准备,并处于自
动启动模式。
[4] 待机/无警告 准备好运行。没有施加启动或停止
命令。没有激活任何警告。
[5] 运行 电机正在运行,并且存在主轴扭
矩。
[6] 运行/无警告 电机正在运行,并且无警告。
[7] 有效范围/无警告电机正在
参数 4-50 警告电流过
低
中设置的电流范围内运行。
[8] 运行参考值/无警电机在参考速度下运行。无警告。
[9] 报警 报警激活输出。
[10] 报警或警告 报警或警告激活输出。
[11] 达到转矩极限 超过了在
参数 4-16 电动时转矩
极限或 参数 4-17 发电时转矩极
限
中设置的转矩极限。
[12] 超出电流范围 电机电流超出了在
参数 4-18 电
流极限
中设置的范围。
[13] 低于电流下限 电机电流低于
参数 4-50 警告电
流过低
的设置。
[14] 高于电流上限 电机电流高于
参数 4-51 警告电
流过高
的设置。
[15] 超出速度范围 输出速度/频率高于
参
数 4-40 Warning Freq. Low
和
参数 4-41 Warning Freq. High
中设置的极限。
[16] 低于速度下限 输出频率低于
参数 4-40 Warning
Freq. Low
中的设置。
[17] 高于速度上限 频率高于
参数 4-41 Warning
Freq. High
中的设置。
[18] 超出反馈范围 反馈超出了
参数 4-56 警告反馈
过低
和
参数 4-57 警告反馈过高
中设置的范围。
[19] 低于反馈下限 反馈低于在
参数 4-56 警告反馈
过低
中设置的极限。
5-40 继电器功能
选项: 功能:
[20] 高于反馈上限 反馈高于在
参数 4-57 警告反馈
过高
中设置的极限。
[21] 热警告 当温度超出电机、变频器、制动电
阻器或相连的电阻器的温度极限
时,会激活热警告。
[22] 就绪,无热警告变频器已做好运行准备,并且没有
过热警告。
[23] 远程就绪无过热变频器已做好运行准备,并处于自
动启动模式。无“过温”警告。
[24] 就绪,无过压/欠压变频器已做好运行准备,并且主电
源电压位于指定的电压范围内。
[25] 反向 当逻辑 = 0 时,电机顺时针运行
(或准备顺时针运行);当逻辑 =
1 时,电机逆时针运行(或准备逆
时针运行)。应用反向信号后,输
出将立即发生变化。
[26] 总线正常 通过串行通讯端口的有效通讯(无
超时)。
[27] 转矩极限和停止用于执行惯性停车以及用于转矩极
限情形下的变频器。如果变频器收
到停止信号并达到转矩极限,信号
将为逻辑 = 0。
[28] 制动,无制动警告制动有效并且没有警告。
[29] 制动就绪,无故障制动功能已做好运行准备,并且没
有故障。
[30] 制动故障
(IGBT)
当制动 IGBT 发生短路时,输出为
逻辑 1。借助该功能,当制动模块
出现故障时可保护变频器。使用数
字输出/继电器切断变频器的主电源
电压。
[31] 继电器 123 当在
参数组 8-** 通讯中选择 [0]
控制字
时,数字输出/继电器被激
活。
[32] 机械制动控制 选择机械制动控制。当
参数组
2-2* 机械制动
中的所选参数被激
活时,输出必须增强才能为制动器
线圈提供电流。该问题可通过将一
个外部继电器连接到所选数字输出
来解决。
[36] 控制字位 11 通过来自现场总线的控制字激活继
电器 1。在变频器中没有其它功能
影响。典型应用: 通过现场总线
来控制辅助设备。该功能仅在
参
数 8-10 控制字格式
中选择了
[0]
FC 协议
时有效。
[37] 控制字位 12 通过来自现场总线的控制字激活继
电器 2。在变频器中没有其它功能
影响。典型应用: 通过现场总线
来控制辅助设备。该功能仅在
参
参数说明 编程指南
4.6.3 5-4* 继电器
这些参数用于配置继电器的时间和输出功能。
参数是代表 2 个继电器的一个数组参数: 数组 [2],
(继电器 1 [0],继电器 2 [1])。
4 4
MG06C841 Danfoss A/S © 12/2018 全权所有。 63

5-40 继电器功能
选项: 功能:
数 8-10 控制字格式
中选择了
[0]
FC 协议
时有效。
[40] 超出参考值范围当实际速度超出
参数 4-54 警告
参考值过低和 参数 4-55 警告参
考值过高
的范围设置时激活。
[41] 低于参考值下限当实际速度低于速度参考值设置时
激活。
[42] 超出参考值上限当实际速度超出速度参考值设置时
激活。
[45] 总线控制 通过总线来控制数字输出/继电器。
输出的状态在
参数 5-90 数字和
继电器总线控制
中设置。输出状态
在总线超时的情况下将被保留。
[46] 总控,超时为 1 通过总线来控制输出。输出的状态
在
参数 5-90 数字和继电器总线
控制
中设置。如果出现总线超时,
输出状态将被设为高(开)。
[47] 总控,超时为 0 通过总线来控制输出。输出的状态
在
参数 5-90 数字和继电器总线
控制
中设置。如果出现总线超时,
输出状态将被设为低(关)。
[56] Heat sink
cleaning
warning,
high
[60] 比较器 0 请参阅
参数组 13-1* 智能逻辑控
制
。如果 SLC 中的比较器 0 为
“真”,输出就为高电平。否则为
低。
[61] 比较器 1 请参阅
参数组 13-1* 智能逻辑控
制
。如果 SLC 中的比较器 1 为
“真”,输出就为高电平。否则为
低。
[62] 比较器 2 请参阅
参数组 13-1* 智能逻辑控
制
。如果 SLC 中的比较器 2 为
“真”,输出就为高电平。否则为
低。
[63] 比较器 3 请参阅
参数组 13-1* 智能逻辑控
制
。如果 SLC 中的比较器 3 为
“真”,输出就为高电平。否则为
低。
[64] 比较器 4 请参阅
参数组 13-1* 智能逻辑控
制
。如果 SLC 中的比较器 4 为
“真”,输出就为高电平。否则为
低。
[65] 比较器 5 请参阅
参数组 13-1* 智能逻辑控
制
。如果 SLC 中的比较器 5 为
“真”,输出就为高电平。否则为
低。
5-40 继电器功能
选项: 功能:
[70] 逻辑规则 0 请参阅
参数组 13-4* 逻辑规则
。
如果 SLC 中的逻辑规则 0 为
“真”,输出就为高电平。否则为
低。
[71] 逻辑规则 1 请参阅
参数组 13-4* 逻辑规则
。
如果 SLC 中的逻辑规则 1 为
“真”,输出就为高电平。否则为
低。
[72] 逻辑规则 2 请参阅
参数组 13-4* 逻辑规则
。
如果 SLC 中的逻辑规则 2 为
“真”,输出就为高电平。否则为
低。
[73] 逻辑规则 3 请参阅
参数组 13-4* 逻辑规则
。
如果 SLC 中的逻辑规则 3 为
“真”,输出就为高电平。否则为
低。
[74] 逻辑规则 4 请参阅
参数组 13-4* 逻辑规则
。
如果 SLC 中的逻辑规则 4 为
“真”,输出就为高电平。否则为
低。
[75] 逻辑规则 5 请参阅
参数组 13-4* 逻辑规则
。
如果 SLC 中的逻辑规则 5 为
“真”,输出就为高电平。否则为
低。
[80] SL 数字输出A请参阅
参数 13-52 条件控制器动
作
。当发生
[32] 智能逻辑操作
时,输出 A 为低。当发生
[38]
智能逻辑操作
时,输出 A 为高。
[81] SL 数字输出B请参阅
参数 13-52 条件控制器动
作
。当发生
[32] 智能逻辑操作
时,输出 B 为低。当发生
[38]
智能逻辑操作
时,输出 B 为高。
[82] SL 数字输出C请参阅
参数 13-52 条件控制器动
作
。当发生
[32] 智能逻辑操作
时,输出 C 为低。当发生
[38]
智能逻辑操作
时,输出 C 为高。
[83] SL 数字输出D请参阅
参数 13-52 条件控制器动
作
。当发生
[32] 智能逻辑操作
时,输出 D 为低。当发生
[38]
智能逻辑操作
时,输出 D 为高。
[160] 无报警 当未发生报警时,输出为高。
[161] 反向运行 当变频器逆时针运行时,输出为高
(状态位“
正在运行
”和“反向”
二者的逻辑与运算结果)。
[165] 本地参考值有
效
[166] 远程参考值有
效
[167] 启动命令有效 当存在有效的启动命令,并且没有
有效的停止命令时,输出为高。
参数说明
44
64 Danfoss A/S © 12/2018 全权所有。 MG06C841
VLT® AutomationDrive FC 360
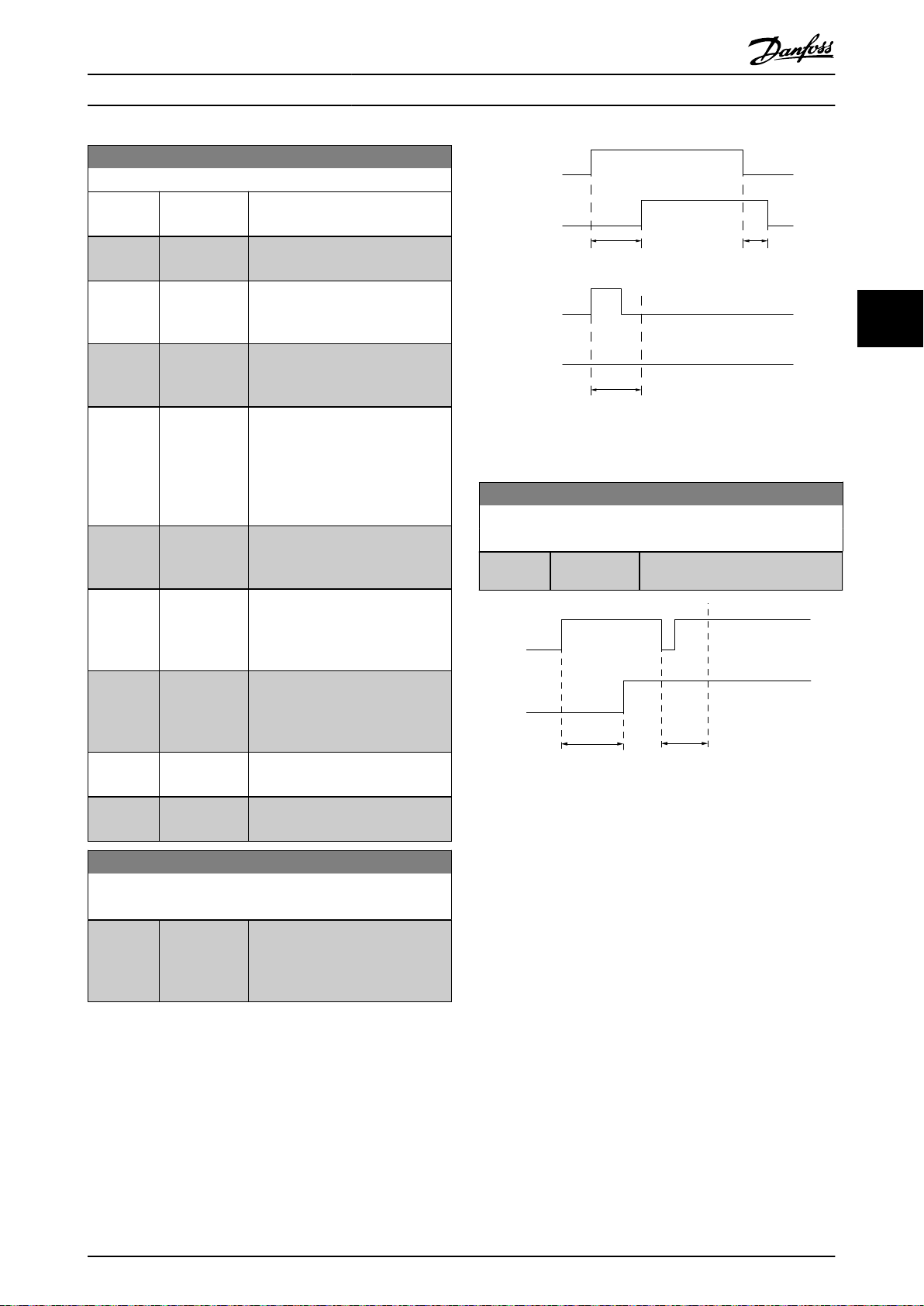
5-40 继电器功能
选项: 功能:
[168] 手动模式 当变频器处于“手动启动”模式
时,输出为高。
[169] 自动模式 当变频器处于“自动”模式时,输
出为高。
[170] Homing
Completed
归位操作完成。该参数仅在
参
数 37-00 Application Mode
设为
[2] 位置控制
时有效。
[171] Target
Position
Reached
已到达目标位置。该参数仅在
参
数 37-00 Application Mode
设为
[2] 位置控制
时有效。
[172] Position
Control
Fault
定位过程中发生故障。有关故障的
详细信息,请参考
参
数 37-18 Pos. Ctrl Fault
Reason
。该参数仅在
参
数 37-00 Application Mode
设为
[2] 位置控制
时有效。
[173] Position
Mech Brake
选择机械定位控制。该参数仅在
参数 37-00 Application Mode
设
为
[2] 位置控制
时有效。
[175] Running on
tension
指明是启用(开)还是禁用(关)
张力 PID 控制。该选项仅在
参
数 37-00 Application Mode
设为
[1]
中心卷绕器
时有效。
[176] Ready to run 中心卷绕器控制就绪,可以运行。
该选项仅在
参
数 37-00 Application Mode
设为
[1]
中心卷绕器
时有效。
[193] 睡眠模式 变频器/系统已进入睡眠模式。请参
阅
参数组 22-4* 睡眠模式
。
[194] 断裂皮带 检测到皮带断裂。请参阅
参数组
22-4* 睡眠模式
。
5-41 继电器打开延时
数组 [2](继电器 1 [0],继电器 2 [1])
范围: 功能:
0.01 s* [0 - 600s]输入继电器切入时间延迟。仅当
参数 5-40 继电器功能
中的条件
在指定时间内保持不变时,继电器
才会切入。
Selected
Event
Relay
output
Selected
Event
Relay
output
On Delay
P 5-41
On Delay
P 5-41
O Delay
P 5-42
130BA171.10
5-42 继电器关闭延时
数组 [2]: 继电器 1 [0],继电器 2 [1]
范围: 功能:
0.01 s* [0 - 600s]输入继电器关闭时间延迟。
Selected
Event
Relay
output
On Delay
P 5-41
O Delay
P 5-42
130BA172.10
参数说明 编程指南
4 4
图 4.15 继电器打开延时
MG06C841 Danfoss A/S © 12/2018 全权所有。 65
图 4.16 继电器关闭延迟
如果在“打开”或“关闭”延迟计时器到期之前,“选定
事件”状况发生变化,则继电器输出不受影响。
4.6.4 5-5* 脉冲输入
这些脉冲输入参数通过设置脉冲输入的标定和滤波器设
置,来为脉冲参考值范围定义合适的间隔。输入端子 29
或 33 充当频率参考值输入。请将端子 29 (
数 5-13 端子 29 数字输入
子 33 数字输入
) 设为
29 作为输入,请将
[0] 输入
。
) 或端子 33 (
[32] 脉冲输入
参数 5-02 端子 29 的模式
参
参数 5-15 端
。如果使用端子
设为

130BD377.10
Ref.
Low freq.
P 5-50/
P 5-55
Input
(Hz)
High
ref.
value
P 5-53/
p 5-58
High freq.
P 5-51/
P 5-56
Low
ref.
value
P 5-52/
p 5-57
5-50 端子 29 低频
范围: 功能:
4 Hz* [4 -
31999 Hz]
根据
参数 5-52 29 端参考/反馈
低
的电机主轴速度下限(低参考
值),输入该低频极限。请参考
图 4.17
。
5-51 端子 29 高频
范围: 功能:
32000 Hz* [5 -
32000 Hz]
根据
参数 5-53 29 端参考/反馈
高
的电机主轴速度上限(高参考
值),输入该高频极限。
5-52 29 端参考/反馈低
范围: 功能:
0* [-4999 -
4999 ]
输入电机主轴速度的参考值下限
[Hz]。此值也是最低的反馈值。另
请参阅
参数 5-57 33 端参考/反
馈低
。将端子 29 设置为数字输入
(
参数 5-02 端子 29 的模式
=
[0] 输入和 参数 5-13 端子 29
数字输入
= 适当值)。
5-53 29 端参考/反馈高
范围: 功能:
Size
related*
[-4999 4999 ]
输入电机主轴速度的最大参考值
[Hz] 以及最大反馈值。另请参阅
参数 5-58 33 端参考/反馈高
。选
择端子 29 作为数字输入(
参
数 5-02 端子 29 的模式
=
[0]
输入(默认值),参数 5-13 端子
29 数字输入
= 适当值)。
5-55 端子 33 低频
范围: 功能:
4 Hz* [4 -
31999 Hz]
根据
参数 5-57 33 端参考/反馈
低
的电机主轴速度下限(低参考
值),输入该低频。
5-56 端子 33 高频
范围: 功能:
32000 Hz* [5 -
32000 Hz]
根据
参数 5-58 33 端参考/反馈
高
的电机主轴速度上限(高参考
值),输入该高频。
5-57 33 端参考/反馈低
范围: 功能:
0* [-4999 -
4999 ]
输入电机主轴速度的低参考值
[Hz]。此值也是低反馈值。另请参
阅
参数 5-52 29 端参考/反馈
低
。
5-58 33 端参考/反馈高
范围: 功能:
Size
related*
[-4999 4999 ]
输入电机主轴速度的高参考值
[Hz]。另请参阅
参数 5-53 29 端
参考/反馈高
。
Output value
Output
(Hz)
High output
value
P 5-60(term27)
P 5-63(term29)
High freq.
P 5-62(term27)
P 5-65(term29)
130BA089.11
5-60 27 端脉冲输出量
选择在端子 27 上需要的输出。
选项: 功能:
[0] * 无功能
[45] 总线控制
[48] 总线控制,超
时
[100] 输出频率
[101] 参考值
参数说明
VLT® AutomationDrive FC 360
44
图 4.17 脉冲输入
4.6.5 5-6* 脉冲输出
注意
电机正在运行,并且存在主轴扭矩。
这些参数用于配置脉冲输出及其功能和标定。端子 27 和
29 通过
子 29 的模式
图 4.18 脉冲输出的配置
参数 5-01 端子 27 的模式
被分配给脉冲输出。
和
参数 5-02 端
66 Danfoss A/S © 12/2018 全权所有。 MG06C841

5-60 27 端脉冲输出量
选择在端子 27 上需要的输出。
选项: 功能:
[102] 反馈
[103] 电动机电流
[104] 相对转矩极限
[105] 相对额定的转
矩
[106] 功率
[107] 速度
[109] 最大输出频率
[113] PID 箝位输出
5-62 脉冲输出最大频率 #27
范围: 功能:
5000 Hz* [4 -
32000 Hz]
根据在
参数 5-60 27 端脉冲输出
量
中选择的输出变量设置端子 27
的最大频率。
5-63 29 端脉冲输出量
选项: 功能:
[0] * 无功能
[45] 总线控制
[48] 总线控制,超
时
[100] 输出频率
[101] 参考值
[102] 反馈
[103] 电动机电流
[104] 相对转矩极限
[105] 相对额定的转
矩
[106] 功率
[107] 速度
[109] 最大输出频率
[113] PID 箝位输出
5-65 脉冲输出最大频率 #29
范围: 功能:
5000 Hz* [4 -
32000 Hz]
设置与在
参数 5-63 29 端脉冲输
出量
中设置的输出变量对应的端
子 29 最大频率。
130BD366.12
+24 V DC
A
B
GND
12 18 322719 29 33 20
B
A
B
A
130BA646.10
CW
CCW
参数说明 编程指南
变频器的编码器连接
24 V 增量编码器。最大电缆长度 5 米(16.4 英尺)。
4 4
4.6.6 5-7* 24 V 编码器输入
将 24 V 编码器同端子 12(24 V 直流电源)、端子 32
(通道 A)、端子 33(通道 B)和端子 20(接地)相
连。在
编码器
码器的类型为双通道(A 和 B) 24 V。最大输入频率:
32 kHz。
MG06C841 Danfoss A/S © 12/2018 全权所有。 67
参数 7-00 速度 PID 反馈源
后,数字输入 32/33 将用于编码器输入。所用编
中选择
图 4.19 24 V 或 10-30 V 编码器连接
图 4.20 编码器旋转方向
[1] 24 V

5-70 端子 32/33 每转脉冲
范围: 功能:
1024* [1 -
4096 ]
设置电机主轴每转的编码器脉冲
数。从编码器读取正确的值。
5-71 29/33 码盘方向
选项: 功能:
注意
该参数在电机运行过程中无法
调整。
在不改变编码器接线的情况下更改
所检测到的编码器旋转方向。
[0] * 正常顺时针 编码器主轴顺时针旋转后,将通道
A 设为在通道 B 之后 90°(电气
角度)。
[1] 反向逆时针 编码器主轴顺时针旋转后,将通道
A 设为在通道 B 之前 90°(电气
角度)。
5-90 数字和继电器总线控制
范围: 功能:
0* [0 -
0xFFFFFFFF ]
该参数可以保持由总线控制的数字
输出和继电器的状态。
逻辑“1”表示输出为高或者被激
活。
逻辑“0”表示输出为低或者未被激
活。
5-93 脉冲输出 27 总线控制
范围: 功能:
0 %* [0 -
100 %]
设置在
参数 5-60 27 端脉冲输出
量
中将输出端子 27 配置为
[45]
总线控制
时传输给该端子的输出
频率。
5-94 脉冲输出 27 超时配置
范围: 功能:
0 %* [0 -
100 %]
设置在
参数 5-60 27 端脉冲输出
量
中将输出端子 27 配置为
[48]
总线控制超时
并且检测到了超时的
情况下传输给该端子的输出频率。
5-95 脉冲输出 29 总线控制
范围: 功能:
0 %* [0 -
100 %]
设置在
参数 5-63 29 端脉冲输出
量
中将输出端子 29 配置为
[45]
总线控制
时传输给该端子的输出
频率。
5-96 脉冲输出 29 超时配置
范围: 功能:
0 %* [0 -
100 %]
设置在
参数 5-63 29 端脉冲输出量
中将输出端子 29 配置为
[48] 总
线控制超时
并且检测到超时的情
况下传输给该端子的输出频率。
参数说明
VLT® AutomationDrive FC 360
44
4.6.7 5-9* 总线控制
该参数组通过现场总线设置选择数字输出和继电器输出。
位 0 数字输出端子 27
位 1 数字输出端子 29
位 2–3 预留
位 4 继电器 1 输出端子
位 6–23 预留
位 24 端子 42 数字输出
位 26–31 预留
表 4.7 位功能
68 Danfoss A/S © 12/2018 全权所有。 MG06C841

6-00 断线超时时间
范围: 功能:
10 s* [1 - 99s]输入超时时间。
6-01 断线超时功能
选项: 功能:
选择超时功能。如果端子 53 或
54 上的输入信号低于
参
数 6-10 端子 53 低电压、参
数 6-12 端子 53 低电流、参
数 6-20 端子 54 低电压
或
参
数 6-22 端子 54 低电流
所定义的
值的 50%,并且持续了在
参
数 6-00 断线超时时间
中定义的
时间,则会激活在
参数 6-01 断
线超时功能
中设置的功能。
[0] * 关
[1] 锁定输出
[2] 停止
[3] 点动
[4] 最大速度
[5] 停止并跳闸
Ref./Feedback
Analog input
High Ref./
Feedb. Value'
Low Ref./
Feedb. Value'
'Low Voltage'or
'Low Current'
'High Voltage'or
'High Current'
1 V 5 V 10 V
10
20
30
40
50
[V]
5
Par 6-xx
Par 6-xx
Par 6-xx
Par 6-xx
130BD378.11
6-10 端子 53 低电压
范围: 功能:
0.07 V* [0 - 10V]输入与
参数 6-14 53 端低参考/反
馈 值
对应的电压 (V)。要激活
参
数 6-01 断线超时功能
,将值设置
为 >1 V。
6-11 端子 53 高电压
范围: 功能:
10 V* [0 - 10V]根据在
参数 6-15 53 端参考/反
馈高
中设置的高参考值来输入电压
(V)。
6-12 端子 53 低电流
范围: 功能:
4 mA* [0 - 20
mA]
输入低电流值。该参考信号对应于
在
参数 6-14 53 端低参考/反馈
值
中设置的参考值/反馈值下限。要
激活
参数 6-01 断线超时功能
,
将值设置为 >2 mA。
6-13 端子 53 高电流
范围: 功能:
20 mA* [0 - 20
mA]
输入与在
参数 6-15 端子 53 高
参考/反馈 值
中设置的高参考值/
反馈值对应的高电流值。
6-14 53 端低参考/反馈 值
范围: 功能:
0* [-4999 -
4999 ]
根据
参数 6-10 端子 53 低电压
至
参数 6-12 端子 53 低电流
中设置的电压或电流来输入参考值
或反馈值。
6-15 端子 53 高参考/反馈 值
范围: 功能:
与规格有关* [-4999 -
4999 ]
根据
参数 6-11 端子 53 高电压
至
参数 6-13 端子 53 高电流
中设置的电压或电流来输入参考值
或反馈值。
6-16 端子 53 滤波器时间
范围: 功能:
0.01 s* [0.01 10 s]
输入时间常量。此常量是用来消除
端子 53 中电气噪声的一阶数字低
通滤波器时间常量。较大的时间常
量有助于获得较好的衰减效果,但
这同时也会增加通过滤波器的时间
延迟。
参数说明 编程指南
4.7 参数: 6-** 模拟输入/输出
该参数组用于设置模拟 I/O 配置和数输出。
变频器具有 2 个模拟输入:
端子 53。
•
端子 54。
•
这些模拟输入可以任意地分配给电压输入 (0V–10V) 或
电流输入 (0/4–20 mA)。
4.7.1 6-0* 模拟 I/O 模式
4.7.2 6-1* 模拟输入 53
这些参数用于配置模拟输入 53(端子 53)的标定和极
限。
4 4
图 4.21 超时功能
MG06C841 Danfoss A/S © 12/2018 全权所有。 69

6-19 端子 53 的模式
选择端子 53 是用于电流还是用于电压输入。
选项: 功能:
[0] 电流模式
[1] * 电压模式
6-20 端子 54 低电压
范围: 功能:
0.07 V* [0 - 10V]根据在
参数 6-24 端子 54 低参
考/反馈 值
中设置的低参考值来输
入电压 (V)。要激活
参
数 6-01 断线超时功能
,将值设置
为 >1 V。
6-21 端子 54 高电压
范围: 功能:
10 V* [0 - 10V]根据在
参数 6-25 端子 54 高参
考/反馈 值
中设置的高参考值来输
入电压 (V)。
6-22 端子 54 低电流
范围: 功能:
4 mA* [0 - 20
mA]
输入低电流值。该参考信号应对应
于在
参数 6-24 端子 54 低参考/
反馈 值
中设置的参考值/反馈值下
限。要激活
参数 6-01 断线超时功
能
中的断线超时功能,需将该值
设置为大于 2 mA。
6-23 端子 54 高电流
范围: 功能:
20 mA* [0 - 20
mA]
输入与在
参数 6-25 端子 54 高
参考/反馈 值
中设置的高参考值/
反馈值对应的高电流值。
6-24 端子 54 低参考/反馈 值
范围: 功能:
0* [-4999 -
4999 ]
根据
参数 6-21 端子 54 高电压
/
参数 6-22 端子 54 低电流
中设置
的电压或电流来输入参考值或反馈
值。
6-25 端子 54 高参考/反馈 值
范围: 功能:
与规格有关* [-4999 -
4999 ]
根据
参数 6-21 端子 54 高电压
/
参数 6-23 端子 54 高电流
中设置
的电压或电流来输入参考值或反馈
值。
6-26 端子 54 滤波器时间
范围: 功能:
0.01 s* [0.01 10 s]
输入时间常量,这是用来消除端子
54 中电气噪声的第一位数字低通
滤波器的时间常量。较大的时间常
量有助于获得较好的衰减效果,但
这同时也会增加通过滤波器的时间
延迟。
6-29 端子 54 的模式
选项: 功能:
选择端子 54 是用于电流输入还是
电压输入。
[0] 电流模式
[1] * 电压模式
6-70 端子 45 模式
设置端子 45 作为模拟输出或数字输出。
选项: 功能:
[0] * 0-20 mA
[1] 4-20 mA
[2] 数字输出
6-71 Terminal 45 Analog Output
选项: 功能:
[0] * 无功能
[100] 输出频率 0–100 Hz
[101] 参考值 Min
Ref
–Max
Ref
[102] 反馈 MinFB–Max
FB
[103] 电动机电流 0–I
max
[104] 相对转矩极限
[105] 相对额定的转
矩
[106] 功率 0–P
nom
[107] 速度
[111] 速度反馈
[113] PID 箝位输出
[139] 总线控制 0–100%
[143] Ext. CL 1
[162] Tapered
tension set
point
[254] DC Link
Voltage
参数说明
4.7.3 6-2* 模拟输入 54
VLT® AutomationDrive FC 360
44
这些参数用于配置模拟输入 54(端子 54)的标定和极
限。
4.7.4 6-7* 模拟/数字输出 45
这些参数用于配置模拟/数字输出端子 45 的标定和极
限。模拟输出为电流输出: 0/4–20 mA. 模拟输出的分
辨率为 12 位。模拟输出端子也可设为数字输出。
70 Danfoss A/S © 12/2018 全权所有。 MG06C841

6-73 Terminal 45 Output Min Scale
范围: 功能:
0 %* [0 -
200 %]
对端子 45 上模拟信号的最小输出
(0 或 4 mA)进行标定。以相对
于
参数 6-71 Terminal 45
Analog Output
中所选变量的全范
围的百分数形式来设置该值。
6-74 Terminal 45 Output Max Scale
范围: 功能:
100 %* [0 -
200 %]
对端子 45 模拟信号的最大输出
(20 mA) 进行标定。以相对于
参
数 6-71 Terminal 45 Analog
Output
中所选变量的全范围的百分
数形式来设置该值。
6-76 Terminal 45 Output Bus Control
范围: 功能:
0* [0 -
16384 ]
由总线控制时保持模拟输出的水
平。此参数是 N2 格式。
6-90 端子 42 模式
设置端子 42 作为模拟输出或数字输出。
选项: 功能:
[0] * 0-20 mA
[1] 4-20 mA
[2] 数字输出
6-91 Terminal 42 Analog Output
选项: 功能:
[0] * 无功能
[100] 输出频率
[101] 参考值
[102] 反馈
[103] 电动机电流
[104] 相对转矩极限
[105] 相对额定的转
矩
[106] 功率
[107] 速度
6-91 Terminal 42 Analog Output
选项: 功能:
[111] 速度反馈
[113] PID 箝位输出
[139] 总线控制
[143] Ext. CL 1
[162] Tapered
tension set
point
[254] DC Link
Voltage
6-93 Terminal 42 Output Min Scale
范围: 功能:
0 %* [0 -
200 %]
对端子 42 上模拟信号的最小输出
(0 或 4 mA)进行标定。以相对
于
参数 6-91 Terminal 42
Analog Output
中所选变量的全范
围的百分数形式来设置该值。
6-94 Terminal 42 Output Max Scale
范围: 功能:
100 %* [0 -
200 %]
对端子 42 标定的最大输出 (20
mA) 进行标定。以相对于
参
数 6-91 Terminal 42 Analog
Output
中所选变量的全范围的百分
数形式来设置该值。
(mA)
0%
20
0/4
100%
Current
Analog
output
Min Scale
par. 6-93
Variable
for
output
example:
Power
Analog
Output
Max Scale
par. 6-94
130BB772.10
图 4.22 输出标定与电流对比
6-96 端子 42 输出总线控制
范围: 功能:
0* [0 -
16384 ]
由总线控制时保持端子 42 的模拟
输出。此参数是 N2 格式。
参数说明 编程指南
6-72 端子 45 数字输出
选项: 功能:
选择端子 45 作为数字电流输出。另请参阅
参数 6-70 端子 45 模式
章 4.6.2 5-3* 数字输出
说明。
[0] * 无功能
[198] 变频器旁路
。请参阅
了解每个选项及
6-92 端子 42 数字输出
选项: 功能:
请参阅
选项及说明。
[0] * 无功能
[198] 变频器旁路
章 4.6.2 5-3* 数字输出
4 4
了解每个
4.7.5 6-9* 模拟/数字输出端子 42
这些参数用于配置模拟/数字输出端子 42 的极限。模拟
输出为电流输出: 0/4–20 mA。模拟输出的分辨率为 12
位。模拟输出端子也可设为数字输出。
MG06C841 Danfoss A/S © 12/2018 全权所有。 71

7-00 速度 PID 反馈源
选项: 功能:
注意
该参数在电机运行过程中无法
更改。
对速度闭环控制选择反馈源。
[1] 24V 编码器
[2] MCB 102
[3] MCB103
[6] 模拟输入 53
[7] 模拟输入端
54
[8] 端子 29 频率
[9] 频率输入 33
[20] * 无
7-02 速度 PID 比例增益
范围: 功能:
0.015* [0 - 1 ] 输入速度控制器比例增益。比例增
益可以将误差(反馈信号与给定值
之间的偏差)放大。该参数随
参
数 1-00 配置模式 [1] 闭环速度
控制一起使用。在较高放大倍数下
可以获得更快速的控制。但是,如
果放大倍数过高,控制过程可能变
得不稳定。
7-03 速度 PID 积分时间
范围: 功能:
8 ms* [2 -
20000 ms]
输入速度控制器积分时间。该时间
决定了内部 PID 控制用来修正误
差的时间。误差越大,增益增大的
速度越快。积分时间导致信号延
时,从而造成衰减效果。借此可以
排除稳态速度误差。较短的积分时
间可以实现快速控制,但如果积分
时间过短,过程可能会变得不稳
定。积分时间过长会使积分操作失
效,从而导致所要求的参考值发生
重大偏差,因为过程调节器需要太
长的时间来调节误差。该参数与
参
数 1-00 配置模式
中设置的
[1]
闭环速度控制
一起使用。
7-04 速度 PID 微分时间
范围: 功能:
30 ms* [0 - 200
ms]
输入速度控制器微分时间。微分器
不会对恒定误差做出反应。它提供
与速度反馈的变化率成比例的增
益。误差变化越快,来自微分器的
7-04 速度 PID 微分时间
范围: 功能:
增益就会越大。增益与误差的变化
速度成正比。将该参数设为 0 将
禁用微分器。该参数随
参
数 1-00 配置模式 [1] 闭环速度
控制一起使用。
7-05 速度 PID 微分极限
范围: 功能:
5* [1 - 20 ] 为微分器提供的增益设置一个极
限。由于微分增益会在频率较高时
增大,限制增益可能会比较有用。
例如,可以在低频下获得纯的微分
回路,并在高频下获得恒定的微分
回路。该参数随
参数 1-00 配置
模式 [1] 闭环速度
控制一起使
用。
7-06 速度 PID 低通滤波
范围: 功能:
10 ms* [1 - 6000
ms]
注意
如果滤波过于严格,将可能会
损害动态性能。
设置速度控制低通滤波器的时间常
量。低通滤波器可改善稳态性能并
且消除反馈信号的振荡。该参数与
参数 1-00 配置模式 [1] 闭环速
度
或
[2] 闭环转矩
一起使用。
如果系统存在大量噪音,该参数将
非常有用,请参阅
图 4.23
。例
如,如果将时间常量 (τ) 设为
100 ms,则低通滤波器的截止频率
将为 1/0.1 = 10 RAD/s,相当于
(10/2 x p) = 1.6 Hz。PID 调节
器将只对频率变化小于 1.6 Hz 的
反馈信号进行调节。如果反馈信号
的频率变化高于 1.6 Hz,则 PID
调节器不会做出反应。
参数 7-06 速度 PID 低通滤波
的
实际设置应采用来源编码器上的每
转脉冲数:
编码器 PPR
参数 7-06 速
度 PID 低通滤
波
512 10 ms
1024 5 ms
2048 2 ms
4096 1 ms
参数说明
VLT® AutomationDrive FC 360
4.8 参数: 7-** 控制器
4.8.1 7-0* 速度 PID 控制器
44
72 Danfoss A/S © 12/2018 全权所有。 MG06C841

7-06 速度 PID 低通滤波
范围: 功能:
0.6
0.6
f
g
= 10 Hz
175ZA293.11
Feedback
Disturbed feedback signal
t (Sec.)
t (Sec.)
Filtered feedback signal
Lowpass lter
Feedback
图 4.23 反馈信号
7-07 速度 PID 反馈传动比
范围: 功能:
1* [0.0001 -
32 ]
Par 7-07=1.00 Par 7-07=n1/n2
130BA871.10
Motor
n1 n2
图 4.24 速度 PID 反馈传动比
7-08 速度 PID 前馈因数
范围: 功能:
0 %* [0 -
500 %]
参考信号按指定的数量绕过速度控
制器。这种功能增加了速度控制环
路的动态性能。
7-12 转矩 PI 比例增益
范围: 功能:
100 %* [0 -
500 %]
输入电流极限控制器的比例增益
值。选择较高的值会使控制器的反
应更迅速。但过高的设置会导致控
制器不稳定。
7-13 转矩 PI 积分时间
范围: 功能:
0.020 s* [0.002 2 s]
输入转矩控制器的积分时间。积分
时间超小,控制器反应越快, 但
过低的设置会导致控制器不稳定。
7-20 反馈 1 来源
选项: 功能:
有效反馈信号最多只能由两个不同
输入信号叠加而成。选择将哪个输
入作为第一个反馈信号的来源。第
二个输入信号在
参数 7-22 过程
CL 反馈 2 的源
中定义。
[0] * 无功能
[1] 模拟输入 53
[2] 模拟输入 54
[3] 端子 29 的输
入频率
[4] 端子 33 的输
入频率
7-22 过程 CL 反馈 2 的源
选项: 功能:
有效反馈信号最多只能由两个不同
输入信号叠加而成。选择应将哪个
输入作为第二个反馈信号的来源。
第一个输入信号在
参数 7-20 反馈
1 来源
中定义。
[0] * 无功能
[1] 模拟输入 53
[2] 模拟输入 54
[3] 端子 29 的输
入频率
[4] 端子 33 的输
入频率
7-30 过程 PID 正常/反向控制
选项: 功能:
正常控制和反向控制是通过在参考
信号和反馈信号之间引入一个差值
来实现的。
[0] * 正常 设置过程控制,使输出频率增加。
[1] 反向 设置过程控制,使输出频率减小。
参数说明 编程指南
4.8.3 7-2* 过程控制器 反馈
选择过程 PID 控制的反馈源,以及应如何处理该反馈。
4 4
4.8.2 7-1* 转矩 PI 控制
这些参数用于配置转矩 PI 控制。
MG06C841 Danfoss A/S © 12/2018 全权所有。 73
4.8.4 7-3* 过程 PID 控制器

7-31 过程 PID 防积分饱和
选项: 功能:
[0] 关 即使输出频率无法再增减时,也将
继续进行偏差调整。
[1] * 开 当输出频率无法再调整时停止偏差
调整。
7-32 过程 PID 控制启动速度值
范围: 功能:
0 RPM* [0 - 6000
RPM]
输入作为 PID 使能信号的电机速
度。通电后,变频器首先开始加减
速,然后在开环速度控制下运行。
当达到过程 PID 启动速度后,变
频器将切换到过程 PID 控制。
7-33 过程 PID 比例增益
范围: 功能:
0.01* [0 - 10 ] 输入 PID 比例增益。该比例增益
将放大设定点和反馈信号之间的偏
差。
7-34 过程 PID 积分时间
范围: 功能:
9999 s* [0.10 -
9999 s]
输入 PID 积分时间。积分器以设
置点与反馈信号之间的恒定偏差为
基础,提供一个不断增加的增益。
积分时间是积分器达到与比例增益
相同的增益所需的时间。
7-35 过程 PID 微分时间
范围: 功能:
0 s* [0 - 20s]输入 PID 微分时间。微分器不会
对恒定偏差做出反应,它仅在偏差
变化时提供增益。PID 微分时间越
短,来自微分器的增益就会越大。
7-36 过程 PID 微分增益极限
范围: 功能:
5* [1 - 50 ] 输入微分器增益的极限。如果未设
置极限,当出现快速变化时,微分
增益将会增大。限制微分器增益可
在出现慢速变化时获得纯微分器增
益,出现快速变化时获得恒定微分
器增益。
7-38 过程 PID 前馈因数
范围: 功能:
0 %* [0 -
200 %]
输入 PID 前馈 (FF) 因子。借助
FF 因子,可以在信号发送过程中
让定量的参考信号绕过 PID 控
制,这样,PID 控制只会影响其余
部分的控制信号 对该参数的任何
更改都会影响电动机速度。激活
FF 因子后,可以减小过冲,并在
7-38 过程 PID 前馈因数
范围: 功能:
更改设定值时实现高动态。
参
数 7-38 过程 PID 前馈因数
在
参数 1-00 配置模式
设置为
[3]
过程
时有效。
7-39 使用参考值带宽
范围: 功能:
5 %* [0 -
200 %]
输入使用参考值带宽。当 PID 控
制偏差(参考值与反馈之间的偏
差)小于此参数值时,使用参考值
状态位为 1。
7-40 过程 PID I 部分复位
选项: 功能:
[0] * 端子号
[1] 是 选择
[1] 是
可将过程 PID 控制器
的 I 部分复位。该选择将自动回
复为
[0] 否
。通过将 I 部分复
位,可以在更换了流程中的某物
(比如纱卷)之后从某个明确定义
的点开始。
7-41 过程 PID 输出负 箝位
范围: 功能:
-100 %* [ -100 100 %]
输入过程 PID 控制器输出的负极
限。
7-42 过程 PID 输出正 箝位
范围: 功能:
100 %* [ -100 -
100 %]
输入过程 PID 控制器输出的正极
限。
7-43 过程 PID 比例增益(最小 参考值时)
范围: 功能:
100 %* [0 -
100 %]
输入一个标定百分比,以便在以最
小参考值工作时应用到过程 PID
输出上。该标定百分比将在最小参
考值标定 (
参数 7-43 过程 PID
比例增益(最小 参考值时)
) 和最
大参考值标定 (
参数 7-44 过程
PID 比例增益(最大 参考值时)
)
之间按线性方式进行调整。
7-44 过程 PID 比例增益(最大 参考值时)
范围: 功能:
100 %* [0 -
100 %]
输入一个标定百分比,以便在以最
大参考值工作时应用到过程 PID
参数说明
VLT® AutomationDrive FC 360
44
4.8.5 7-4* 高级过程 PID 控制
仅在
参数 1-00 配置模式
环
时,该参数组才可用。
设为
[7] 扩展 PID 速度闭
74 Danfoss A/S © 12/2018 全权所有。 MG06C841

7-44 过程 PID 比例增益(最大 参考值时)
范围: 功能:
输出上。该标定百分比将在最小参
考值标定 (
参数 7-43 过程 PID
比例增益(最小 参考值时)
) 和最
大参考值标定 (
参数 7-44 过程
PID 比例增益(最大 参考值时)
)
之间按线性方式进行调整。
7-45 过程 PID 前馈源
选项: 功能:
选择将变频器的哪一个输入用作前
馈因子。FF 因子被直接添加到
PID 控制器的输出上。该参数可提
高动态性能。
总线的前馈组应为 N2 格式。
[0] * 无功能
[1] 模拟输入端
53
[2] 模拟输入端
54
[7] 端子 29 频率
[8] 端子 33 频率
[11] 本地总线参考
值
[32] PCD 总线
7-46 过程 PID 前馈正常/反向 控制
选项: 功能:
[0] * 正常 选择
[0] 正常
可设置前馈因子,
以将前馈源视作正值。
[1] 反向 选择
[1] 反向
,可将前馈源视作
负值。
7-48 PCD Feed Forward
范围: 功能:
0* [0 -
65535 ]
在可以读取总线
参数 7-45 过程
PID 前馈源
[32] 时,读取参数。
总线的前馈组应为 N2 格式。
7-49 过程 PID 输出正常/反向 控制
选项: 功能:
[0] * 正常 选择
[0] 正常
,可按原样使用来
自过程 PID 控制器的结果输出。
[1] 反向 选择
[1] 反向
,将反转来自过程
PID 控制器的结果输出。该操作在
应用前馈因子后执行。
7-50 过程 PID 扩展 PID
选项: 功能:
[0] 禁用 禁用过程 PID 控制器的扩展部
分。
[1] * 启用 启用 PID 控制器的扩展部分。
7-51 过程 PID 前馈增益
范围: 功能:
1* [0 -
100 ]
前馈用于根据明确信号获得增益。
这样一来,PID 控制器仅需处理因
为未知特性而需要进行的更少量控
制。
参数 7-38 过程 PID 前馈因
数
中的标准前馈因数始终与参考值
有关,但
参数 7-51 过程 PID
前馈增益
具有更多选项。在卷绕
应用中,前馈因子通常是系统的生
产线速度。
7-52 过程 PID 前馈加速
范围: 功能:
0.01 s* [0.01 100 s]
控制加速时的前馈信号的动态。
7-53 过程 PID 前馈减速
范围: 功能:
0.01 s* [0.01 100 s]
控制减速时的前馈信号的动态。
7-56 过程 PID 参考值 滤波时间
范围: 功能:
0.001 s* [0.001 1 s]
设置参考值的第一位低通滤波器的
时间常量。低通滤波器可改善稳态
性能并且消除参考/反馈信号的振
荡。但是,如果滤波过于严格,可
能会损害动态性能。
7-57 过程 PID 反馈 滤波时间
范围: 功能:
0.001 s* [0.001 1 s]
设置反馈的第一位低通滤波器的时
间常量。低通滤波器可改善稳态性
能并且消除参考/反馈信号的振荡。
但是,如果滤波过于严格,可能会
损害动态性能。
参数说明 编程指南
4 4
4.8.6 7-5* 扩展 过程 PID 控制器
仅在
环
时,该参数组才可用。
MG06C841 Danfoss A/S © 12/2018 全权所有。 75
参数 1-00 配置模式
设为
[7] 扩展 PID 速度闭

7-60 反馈 1 转换
选择用于反馈 1 信号的转换。如果选择“
[0]
线性”,则不
会改变反馈信号。
选项: 功能:
[0] * 线性
[1] 平方根
7-62 反馈 2 转换
选择用于反馈 2 信号的转换。如果选择“
[0]
线性”,则不
会改变反馈信号。
选项: 功能:
[0] * 线性
[1] 平方根
参数说明
VLT® AutomationDrive FC 360
4.8.7 7-6* 反馈转换
使用该参数组可配置反馈信号的转换。
44
76 Danfoss A/S © 12/2018 全权所有。 MG06C841

8-00 启用的选件
该参数用于启用或禁用已安装的选件。
选项: 功能:
[0] * None
[1] Disable
Warning
8-01 控制地点
选项: 功能:
该参数中的设置将替代
参
数 8-50 选择惯性停车
到
参
数 8-56 预置参考值选择
的设
置。
[0] * 数字和控制字 使用数字输入和控制字进行控制。
[1] 仅数字 仅使用数字输入进行控制。
[2] 仅控制字 仅使用控制字进行控制。
8-02 控制字源
选项: 功能:
选择控制字的来源。
[0] 无
[1] FC 端口
[3] 选件 A PROFIBUS 和 PROFINET。
8-03 控制字超时时间
范围: 功能:
1 s* [0.1 -
6000 s]
输入您希望在接收两个连续电报之
间经过的最长时间。如果超过该时
间,则表明串行通讯已经停止。随
后会执行在
参数 8-04 控制字超
时功能
中选择的功能。
8-04 控制超时功能
选择超时功能。如果控制字在
参数 8-03 控制字超时时间
中指
定的时间内没有被更新,则会激活该超时功能。
选项: 功能:
[0] * 关 继续通过现场总线(现场总线或标
准总线)进行控制,使用最近的控
制字。
[1] 锁定输出 锁定输出频率,直到通讯恢复。
[2] 停止 停止,并在通讯恢复后自动重新启
动。
[3] 点动 以点动频率运行电动机,直到通讯
恢复。
[4] 最大速度 以最大频率运行电动机,直到通讯
恢复。
8-04 控制超时功能
选择超时功能。如果控制字在
参数 8-03 控制字超时时间
中指
定的时间内没有被更新,则会激活该超时功能。
选项: 功能:
[5] 停止并跳闸 停止电动机并跳闸,然后将变频器
复位,以便重新启动:
•
通过现场总线。
•
通过 [Reset](复位)。
•
通过数字输入。
8-07 诊断触发器
选项: 功能:
[0] * 禁用 不发送扩展型诊断数据 (EDD)。
[1] 在报警时触发 在出现报警时发送 EDD。
[2] 触发报警/警告。出现
参数 16-90 报警字、参
数 9-53 Profibus 警告字 或参
数 16-92 警告字
中的报警或警告
时发送 EDD。
8-10 控制字格式
根据已安装的现场总线,选择对控制字和状态字的解释。仅当所
选内容对安装的现场总线有效时,才会在 LCP 显示屏中看到所
选内容。
选项: 功能:
[0] * FC 结构
[1] PROFIdrive
结构
8-14 可配置控制字 CTW
选项: 功能:
[0] 无
[1] * 行规默认值
[2] 控制字有效,
低值
[4] PID error
inverse
[5] PID reset I
part
[6] PID enable
8-19 Product Code
范围: 功能:
Size
related*
[0 2147483647 ]
如果选择 0,将可以读取已安装现
场总线选件的实际现场总线产品代
码。如果选择 1,将可以读取实际
的供应商 ID。
参数说明 编程指南
4.9 参数: 8-** 通讯和选件
4.9.1 8-0* 一般设置
4 4
MG06C841 Danfoss A/S © 12/2018 全权所有。 77
4.9.2 8-1* 控制 字设置

8-30 协议
选项: 功能:
不能为集成的 RS485 端口选择协
议。
[0] * FC 根据 FC 协议进行通讯。
[2] Modbus RTU 按照 Modbus RTU 协议进行通讯。
8-32 FC 端口波特率
选项: 功能:
选择 RS485 端口的波特率。
[0] 2400 波特
[1] 4800 波特
[2] 9600 波特
[3] 19200 波特
[4] 38400 波特
[5] 57600 波特
[6] 76800 波特
[7] 115200 波特
8-33 奇偶校验/停止位
选项: 功能:
[0] * 偶校验,1 个停
止位
[1] 奇校验,1 停止
位
[2] 无校验,1 停止
位
[3] 无奇偶校验,2
个停止位
8-35 最小响应延迟
范围: 功能:
0.01 s* [ 0.0010 -
0.5 s]
指定接收请求和传输回复之间的最
小延时时间。该功能用于解决调制
解调器工作延时问题。
8-36 最大响应延迟
范围: 功能:
Size
related*
[ 0.1 -
10.0 s]
指定接收请求和传输回复之间允许
的最长延迟时间。如果超过该时
间,则不做出任何响应。
8-42 PCD 写操作配置
选择要分配给报文 PCD 的参数。可用的 PCD 数量取决于报文
类型。PCD 中的值将以数据值的方式被写入所选参数。
使用数组方法,在此参数中最多可以输入 16 个不同的预置映
射 0-15。如果此参数有效,从 2810 至 2825 的地址将代表
16 个参数的值。如果此参数无效,地址 2810 和 2811 将用作
输入数据变频器控制字和总线参考值。保留从 2812 至 2825
的地址。
选项: 功能:
[0] None
[1] [302]
Minimum
Reference
[2] [303]
Maximum
Reference
[3] [341] Ramp 1
Ramp up time
[4] [342] Ramp 1
Ramp down
time
[5] [351] Ramp 2
Ramp up time
[6] [352] Ramp 2
Ramp down
time
[7] [380] Jog
Ramp Time
[8] [381] Quick
Stop Time
[9] [412] Motor
Speed Low
Limit [Hz]
[10] [414] Motor
Speed High
Limit [Hz]
[11] [590]
Digital &
Relay Bus
Control
[12] [676]
Terminal 45
Output Bus
Control
[13] [696]
Terminal 42
Output Bus
Control
[15] FC Port CTW
[16] FC Port REF
[18] [311] Jog
Speed [Hz]
参数说明
VLT® AutomationDrive FC 360
4.9.3 8-3* FC 端口设置
44
8-31 地址
范围: 功能:
1* [ 0 - 247 ] 输入 RS485 端口的地址。有效范围: FC-
bus 为 1-126,Modbus 为 1-247。
78 Danfoss A/S © 12/2018 全权所有。 MG06C841
4.9.4 8-4* FC MC 协议设置

8-42 PCD 写操作配置
选择要分配给报文 PCD 的参数。可用的 PCD 数量取决于报文
类型。PCD 中的值将以数据值的方式被写入所选参数。
使用数组方法,在此参数中最多可以输入 16 个不同的预置映
射 0-15。如果此参数有效,从 2810 至 2825 的地址将代表
16 个参数的值。如果此参数无效,地址 2810 和 2811 将用作
输入数据变频器控制字和总线参考值。保留从 2812 至 2825
的地址。
选项: 功能:
[19] [427] Torque
limit bus
control
[20] [428] Speed
limit bus
control
8-43 PCD 读配置
选择要分配给报文的 PCD 的参数。可用的 PCD 数量取决于报
文类型。PCD 包含所选参数的实际数据值。
使用数组方法,在此参数中最多可以输入 16 个不同的预置映
射 0-15。如果此参数有效,从 2910 至 2925 的地址将代表
16 个参数的值。如果此参数无效,地址 2910 和 2911 将用作
状态字寄存器和实际速度值。保留从 2912 至 2925 的地址。
选项: 功能:
[0] None
[1] [1500]
Operation
Hours
[2] [1501]
Running
Hours
[3] [1502] kWh
Counter
[4] [1600]
Control Word
[5] [1601]
Reference
[Unit]
[6] [1602]
Reference %
[7] [1603]
Status Word
[8] [1605] Main
Actual Value
[%]
[9] [1609]
Custom
Readout
[10] [1610] Power
[kW]
[11] [1611] Power
[hp]
[12] [1612] Motor
Voltage
[13] [1613]
Frequency
8-43 PCD 读配置
选择要分配给报文的 PCD 的参数。可用的 PCD 数量取决于报
文类型。PCD 包含所选参数的实际数据值。
使用数组方法,在此参数中最多可以输入 16 个不同的预置映
射 0-15。如果此参数有效,从 2910 至 2925 的地址将代表
16 个参数的值。如果此参数无效,地址 2910 和 2911 将用作
状态字寄存器和实际速度值。保留从 2912 至 2925 的地址。
选项: 功能:
[14] [1614] Motor
Current
[15] [1615]
Frequency
[%]
[16] [1616]
Torque [Nm]
[17] [1618] Motor
Thermal
[18] [1630] DC
Link Voltage
[19] [1634]
Heatsink
Temp.
[20] [1635]
Inverter
Thermal
[21] [1638] SL
Controller
State
[22] [1650]
External
Reference
[23] [1652]
Feedback
[Unit]
[24] [1660]
Digital
Input
18,19,27,33
[25] [1661]
Terminal 53
Switch
Setting
[26] [1662]
Analog input
53
[27] [1663]
Terminal 54
Switch
Setting
[28] [1664]
Analog input
54
[29] [1665]
Analog
output 42
[mA]
参数说明 编程指南
MG06C841 Danfoss A/S © 12/2018 全权所有。 79
4 4

8-43 PCD 读配置
选择要分配给报文的 PCD 的参数。可用的 PCD 数量取决于报
文类型。PCD 包含所选参数的实际数据值。
使用数组方法,在此参数中最多可以输入 16 个不同的预置映
射 0-15。如果此参数有效,从 2910 至 2925 的地址将代表
16 个参数的值。如果此参数无效,地址 2910 和 2911 将用作
状态字寄存器和实际速度值。保留从 2912 至 2925 的地址。
选项: 功能:
[30] [1671] Relay
output
[31] [1672]
Counter A
[32] [1673]
Counter B
[33] [1690] Alarm
Word
[34] [1692]
Warning Word
[35] [1694] Ext.
Status Word
[38] [1622]
Torque [%]
[41] [1657]
Feedback
[RPM]
[42] [1679]
Analog
Output 45
[mA]
[43] [1617] Speed
[RPM]
[44] [1666]
Digital
Output
8-50 选择惯性停车
选项: 功能:
选择是通过端子(数字输入)与/或
总线来控制惯性停车功能。
[0] 数字输入 通过数字输入激活惯性停车命令。
[1] 总线 通过串行通讯端口或现场总线选件
激活惯性停车命令。
[2] 逻辑与 通过现场总线/串行通讯端口和一个
额外数字输入激活惯性停车命令。
8-50 选择惯性停车
选项: 功能:
[3] * 逻辑或 通过现场总线/串行通讯端口或通过
某个数字输入来激活惯性停车命
令。
8-51 快速停止选择
选项: 功能:
[0] 数字输入 通过数字输入激活快速停止命令。
[1] 总线 通过串行通讯端口或现场总线选件
激活快速停车命令。
[2] 逻辑与 通过现场总线/串行通讯端口及某个
额外数字输入共同激活快速停止命
令。
[3] * 逻辑或 通过现场总线/串行通讯端口或某个
数字输入激活快速停止命令。
8-52 直流制动选择
选项: 功能:
选择是通过端子(数字输入)与/或
现场总线来控制直流制动。
注意
仅当
参数 1-10 电动机结构
设为
[1] PM,非突出 SPM
时,选项
[0] 数字输入
才可
用。
[0] 数字输入 通过数字输入激活直流制动命令。
[1] 总线 通过串行通讯端口或现场总线选件
激活直流制动命令。
[2] 逻辑与 通过现场总线/串行通讯端口及某个
额外数字输入共同激活直流制动命
令。
[3] * 逻辑或 通过现场总线/串行通讯端口或某个
数字输入激活直流制动命令。
8-53 启动选择
选择启动功能的触发器。
选项: 功能:
[0] 数字输入 数字输入触发启动功能。
[1] 总线 串行通讯端口或现场总线触发启动
功能。
[2] 逻辑与 现场总线/串行通讯端口与某个数字
输入共同触发启动功能。
[3] * 逻辑或 现场总线/串行通讯端口或某个数字
输入触发启动功能。
参数说明
VLT® AutomationDrive FC 360
44
4.9.5 8-5* 数字/总线
这些参数用于配置控制字的合并。
注意
该参数仅在
制字
时才有效。
80 Danfoss A/S © 12/2018 全权所有。 MG06C841
参数 8-01 控制地点
被设为 [0]
数字和控

8-54 反向选择
选项: 功能:
选择反向功能的触发器。
[0] 数字输入 数字输入触发反向功能。
[1] 总线 串行通讯端口或现场总线触发反向
功能。
[2] 逻辑与 现场总线/串行通讯端口与某个数字
输入共同触发反向功能。
[3] * 逻辑或 现场总线/串行通讯端口或某个数字
输入触发反向功能。
8-55 菜单选择
选择菜单选择的触发器。
选项: 功能:
[0] 数字输入 数字输入触发菜单选择。
[1] 总线 串行通讯端口或现场总线触发菜单
选择。
[2] 逻辑与 现场总线/串行通讯端口与某个数字
输入共同触发菜单选择。
[3] * 逻辑或 现场总线/串行通讯端口或某个数字
输入触发菜单选择。
8-56 预置参考值选择
选项: 功能:
选择预置参考值选择的触发器。
[0] 数字输入 数字输入触发预置参考值选择。
[1] 总线 串行通讯端口或现场总线触发预置
参考值选择。
[2] 逻辑与 现场总线/串行通讯端口与某个数字
输入共同触发预置参考值选择。
[3] * 逻辑或 现场总线/串行通讯端口或某个数字
输入触发预置参考值选择。
8-57 Profidrive OFF2 选择
通过端子(数字输入)与/或现场总线来控制变频器 OFF2 的菜
单选择。该参数仅在
参数 8-01 控制地点
被设为
[0] 数字和
控制字符、参数 8-10 控制字格式
被设为
[1] Profidrive 结
构
才有效。
选项: 功能:
[0] 数字输入
[1] 总线
[2] 逻辑与
[3] * 逻辑或
8-58 Profidrive OFF3 选择
通过端子(数字输入)与/或现场总线来控制变频器 OFF3 的选
择。该参数仅在
参数 8-01 控制地点
设为
[0] 数字和控制字
符 且参数 8-10 控制字格式
设为
[1] Profidrive 结构
时
才有效。
选项: 功能:
[0] 数字输入
8-58 Profidrive OFF3 选择
通过端子(数字输入)与/或现场总线来控制变频器 OFF3 的选
择。该参数仅在
参数 8-01 控制地点
设为
[0] 数字和控制字
符 且参数 8-10 控制字格式
设为
[1] Profidrive 结构
时
才有效。
选项: 功能:
[1] 总线
[2] 逻辑与
[3] * 逻辑或
8-79 协议固件版本
范围: 功能:
与规格有关* [0 -
655 ]
固件修订版本: FC 位于索引 0;
Modbus 位于索引 1; 保留从 2
至 4 的索引。
8-80 总线消息计数
范围: 功能:
0* [0 -
4294967295 ]
该参数显示在总线上检测到的有效
报文数量。
8-81 总线错误计数
范围: 功能:
0* [0 -
4294967295 ]
该参数显示在总线上检测到的带有
错误(例如 CRC 错误)的报文数
量。
8-82 从站消息数
范围: 功能:
0* [0 -
4294967295 ]
此参数显示变频器发送到从站的有
效报文数量。
8-83 从站错误计数
范围: 功能:
0* [0 -
4294967295 ]
此参数显示变频器无法执行的错误
报文的数量。
8-84 发送从站消息
范围: 功能:
0* [0 -
4294967295 ]
此参数显示从站发出的信息总量。
8-85 从站超时错误
范围: 功能:
0* [0 -
4294967295 ]
此参数显示从站超时错误数。
参数说明 编程指南
4 4
4.9.6 8-7* 协议软件版本
4.9.7 8-8* FC 端口诊断
这些参数用于监视通过变频器端口的总线通讯。
MG06C841 Danfoss A/S © 12/2018 全权所有。 81

8-88 Reset FC port Diagnostics
选项: 功能:
[0] * 不重启 请勿复位所有 FC 端口诊断计数
器。
[1] 重启计数器 复位所有 FC 端口诊断计数器。
8-90 总线点动 1 速度
范围: 功能:
100 RPM* [ 0 -
1500 RPM]
输入点动速度。这是一个通过串行
端口或现场总线选件激活的固定点
动速度。
8-91 总线点动 2 速度
范围: 功能:
200 RPM* [ 0 -
1500 RPM]
输入点动速度。该值是通过串行端
口或现场总线选件激活的固定点动
速度。
参数说明
4.9.8 8-9* 总线反馈
VLT® AutomationDrive FC 360
44
使用该参数组可配置总线反馈。
82 Danfoss A/S © 12/2018 全权所有。 MG06C841

9-00 设置点
范围: 功能:
0* [0 -
65535 ]
该参数接受来自主控制器类型 2
的循环参考值。如果控制优先级被
设为主控制器类型 2,变频器参考
值将从该参数获取参考值,而循环
参考值将被忽略。
9-07 实际值
范围: 功能:
0* [0 -
65535 ]
该参数提供主控制器类型 2 的
MAV。该参数仅在控制优先级被设为
“主控制器类型 2”时有效。
9-15 PCD 写配置
选择要分配给报文的 PCD 3 到 10 的参数。可用的 PCD 数量
取决于报文类型。PCD 3 到 PCD 10 中的值将作为数据写入所
选参数。对于标准的 PROFIBUS 报文,请参阅
参数 9-22 数据
帧选择
。
选项: 功能:
[0] 无
[302] 最小参考值
[303] 最大参考值
[311] 点动速度
[Hz]
[312] 加速/减速值
[341] 斜坡 1 加速时
间
[342] 斜坡 1 减速时
间
[351] 斜坡 2 加速时
间
[352] 斜坡 2 减速时
间
[380] 点动加减速时
间
[381] 快停减速时间
[412] 电动机速度下
限 [Hz]
[414] 电动机速度上
限 [Hz]
[416] 电动时转矩极
限
[417] 发电时转矩极
限
[427] Torque Limit
Bus Control
9-15 PCD 写配置
选择要分配给报文的 PCD 3 到 10 的参数。可用的 PCD 数量
取决于报文类型。PCD 3 到 PCD 10 中的值将作为数据写入所
选参数。对于标准的 PROFIBUS 报文,请参阅
参数 9-22 数据
帧选择
。
选项: 功能:
[428] Speed Limit
Bus Control
[553] 29 端参考/反
馈高
[558] 33 端参考/反
馈高
[590] 数字和继电器
总线控制
[593] 脉冲输出 27
总线控制
[595] 脉冲输出 29
总线控制
[615] 53 端参考/反
馈高
[625] 54 端参考/反
馈高
[676] Terminal 45
Output Bus
Control
[696] Terminal 42
Output Bus
Control
[733] 过程 PID 比
例增益
[734] 过程 PID 积
分时间
[735] 过程 PID 微
分时间
[748] PCD Feed
Forward
[890] 总线点动 1
速度
[891] 总线点动 2
速度
[1680] 控制字 1 信号
[1682] 总线设定 A 信
号
[3401] PCD 1 写入
MCO
[3402] PCD 2 写入
MCO
[3403] PCD 3 写入
MCO
[3404] PCD 4 写入
MCO
[3405] PCD 5 写入
MCO
[3406] PCD 6 写入
MCO
参数说明
4.10 参数: 9-** PROFIdrive
编程指南
有关 PROFIBUS 参数说明的更多信息,请参阅
AutomationDrive FC 360 PROFIBUS DP
有关 PROFINET 参数说明的更多信息,请参阅
AutomationDrive FC 360 PROFINET 编程指南
MG06C841 Danfoss A/S © 12/2018 全权所有。 83
VLT
编程指南。
VLT
。
®
®
4 4
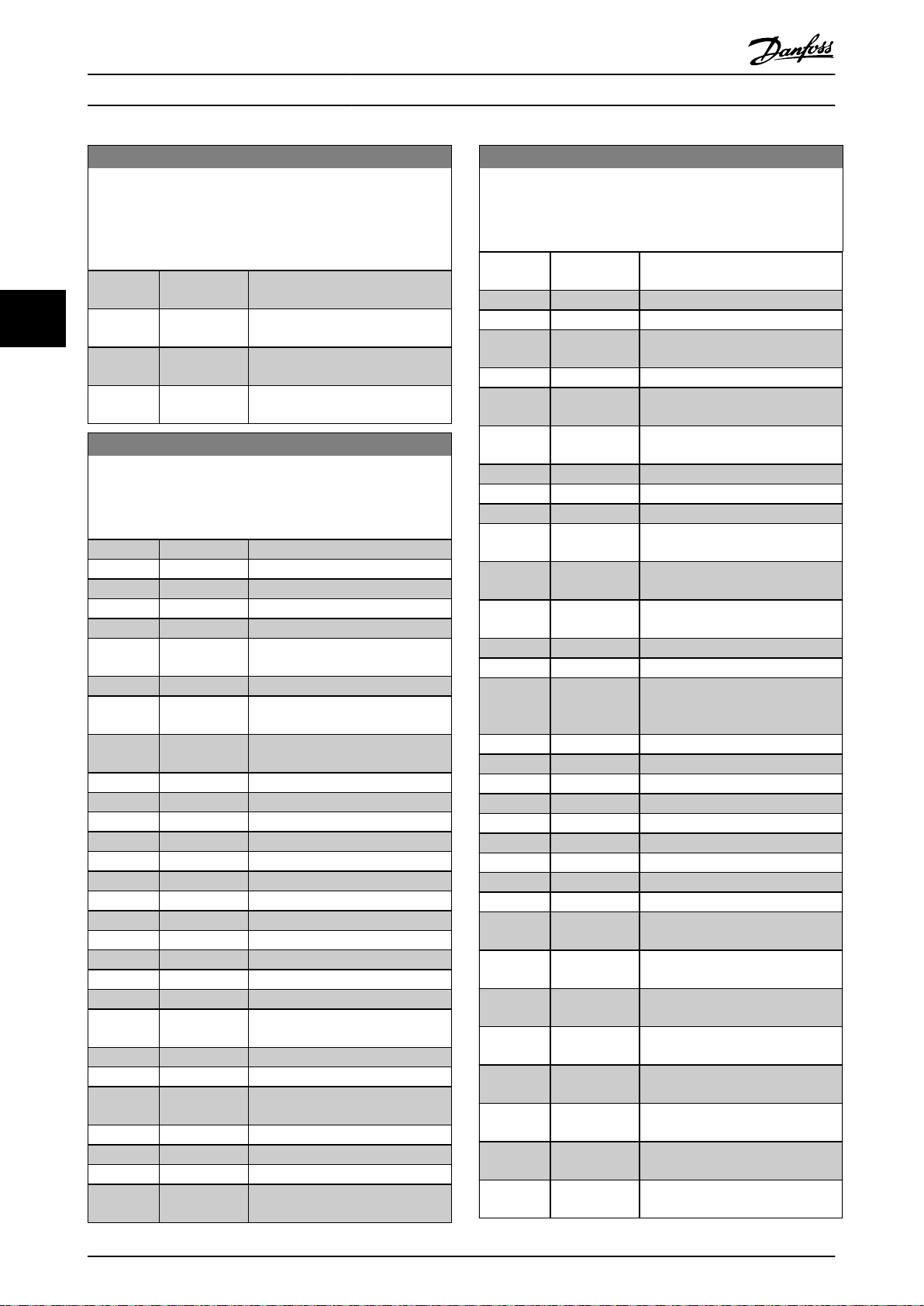
9-15 PCD 写配置
选择要分配给报文的 PCD 3 到 10 的参数。可用的 PCD 数量
取决于报文类型。PCD 3 到 PCD 10 中的值将作为数据写入所
选参数。对于标准的 PROFIBUS 报文,请参阅
参数 9-22 数据
帧选择
。
选项: 功能:
[3407] PCD 7 写入
MCO
[3408] PCD 8 写入
MCO
[3409] PCD 9 写入
MCO
[3410] PCD 10 写入
MCO
9-16 PCD 读配置
选择要分配给报文的 PCD 3 到 10 的参数。可用的 PCD 数量
取决于报文类型。PCD 3 到 PCD 10 的值包含所选参数的实际
数据值。
选项: 功能:
[0] 无
[1500] 运行时间
[1501] 运转时间
[1502] 千瓦时计数器
[1600] 控制字
[1601] 参考值 [单
位]
[1602] 参考值 %
[1603] 状态字 [二进
制]
[1605] 实际转速值
[%]
[1609] 自定义读数
[1610] 功率 [kW]
[1611] 功率 [hp]
[1612] 电动机电压
[1613] 频率
[1614] 电动机电流
[1615] 频率 [%]
[1616] 转矩 (Nm)
[1617] 速度 [RPM]
[1618] 电动机发热
[1622] 转矩 [%]
[1630] 直流回路电压
[1633] 制动能量/2 分
钟
[1634] 散热片温度
[1635] 逆变器热保护
[1638] 条件控制器状
态
[1639] 控制卡温度
[1650] 外部参考值
[1652] 反馈 [单位]
[1653] 数字电位计参
考值
9-16 PCD 读配置
选择要分配给报文的 PCD 3 到 10 的参数。可用的 PCD 数量
取决于报文类型。PCD 3 到 PCD 10 的值包含所选参数的实际
数据值。
选项: 功能:
[1657] Feedback
[RPM]
[1660] 数字输入
[1661] 53 端切换设置
[1662] 模拟输入端
53
[1663] 54 端切换设置
[1664] 模拟输入端
54
[1665] 模拟输出端
42 [mA]
[1666] 数字输出
[1667] 端子 29 频率
[1668] 端子 33 频率
[1669] 端子 27 脉冲
输出
[1670] 端子 29 脉冲
输出
[1671] 继电器输出
[二进制]
[1672] 计数器 A
[1673] 计数器 B
[1679] Analog
output 45
[mA]
[1684] 通讯卡状态字
[1685] FC 口控制字 1
[1690] 报警字
[1691] 报警字 2
[1692] 警告字
[1693] 警告字 2
[1694] 扩展状态字
[1695] 扩展状态字 2
[1697] Alarm Word 3
[3421] PCD 1 从 MCO
读取
[3422] PCD 2 从 MCO
读取
[3423] PCD 3 从 MCO
读取
[3424] PCD 4 从 MCO
读取
[3425] PCD 5 从 MCO
读取
[3426] PCD 6 从 MCO
读取
[3427] PCD 7 从 MCO
读取
[3428] PCD 8 从 MCO
读取
参数说明
44
84 Danfoss A/S © 12/2018 全权所有。 MG06C841
VLT® AutomationDrive FC 360

9-16 PCD 读配置
选择要分配给报文的 PCD 3 到 10 的参数。可用的 PCD 数量
取决于报文类型。PCD 3 到 PCD 10 的值包含所选参数的实际
数据值。
选项: 功能:
[3429] PCD 9 从 MCO
读取
[3430] PCD 10 从
MCO 读取
[3450] 实际位置
[3456] 跟踪错误
9-18 节点地址
范围: 功能:
126* [ 1 -
126 ]
在该参数中或者在硬件开关中设置
工作站地址。若要在
参
数 9-18 节点地址
中调整工作站
地址,则将硬件开关设为 126 或
127(即,所有开关都设为
“开”)。否则,该参数将显示开
关的实际设置。
9-19 Drive Unit System Number
范围: 功能:
1037* [0 -
65535 ]
特定于制造商的系统 ID。
9-22 数据帧选择
除了使用
参数 9-15 PCD 写配置
和
参数 9-16 PCD 读配置
中的自由配置报文外,还可以为变频器选择标准的 Profibus
报文配置。
选项: 功能:
[1] 标准数据帧 1
[100] * 无
[101] PPO1
[102] PPO 2
[103] PPO 3
[104] PPO 4
[105] PPO 5
[106] PPO 6
[107] PPO 7
[108] PPO 8
[200] 自定义报文 1
9-23 信号参数
选项: 功能:
[0] * 无
[302] 最小参考值
[303] 最大参考值
[311] 点动速度
[Hz]
[312] 加速/减速值
[341] 斜坡 1 加速时
间
9-23 信号参数
选项: 功能:
[342] 斜坡 1 减速时
间
[351] 斜坡 2 加速时
间
[352] 斜坡 2 减速时
间
[380] 点动加减速时
间
[381] 快停减速时间
[412] 电动机速度下
限 [Hz]
[414] 电动机速度上
限 [Hz]
[416] 电动时转矩极
限
[417] 发电时转矩极
限
[427] Torque Limit
Bus Control
[428] Speed Limit
Bus Control
[553] 29 端参考/反
馈高
[558] 33 端参考/反
馈高
[590] 数字和继电器
总线控制
[593] 脉冲输出 27
总线控制
[595] 脉冲输出 29
总线控制
[615] 53 端参考/反
馈高
[625] 54 端参考/反
馈高
[676] Terminal 45
Output Bus
Control
[696] Terminal 42
Output Bus
Control
[733] 过程 PID 比
例增益
[734] 过程 PID 积
分时间
[735] 过程 PID 微
分时间
[748] PCD Feed
Forward
[890] 总线点动 1
速度
[891] 总线点动 2
速度
[1500] 运行时间
参数说明 编程指南
MG06C841 Danfoss A/S © 12/2018 全权所有。 85
4 4
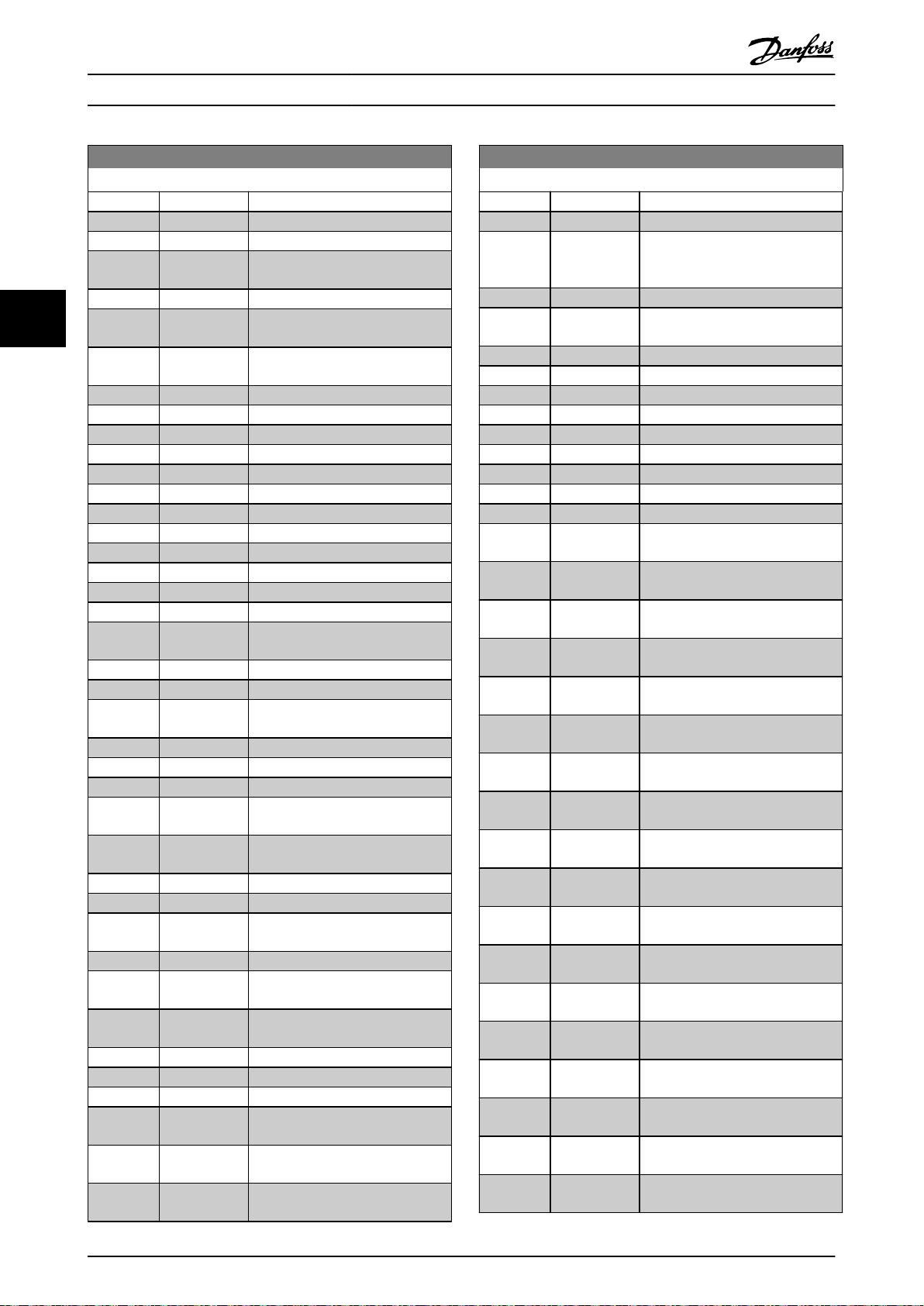
9-23 信号参数
选项: 功能:
[1501] 运转时间
[1502] 千瓦时计数器
[1600] 控制字
[1601] 参考值 [单
位]
[1602] 参考值 %
[1603] 状态字 [二进
制]
[1605] 实际转速值
[%]
[1609] 自定义读数
[1610] 功率 [kW]
[1611] 功率 [hp]
[1612] 电动机电压
[1613] 频率
[1614] 电动机电流
[1615] 频率 [%]
[1616] 转矩 (Nm)
[1617] 速度 [RPM]
[1618] 电动机发热
[1622] 转矩 [%]
[1630] 直流回路电压
[1633] 制动能量/2 分
钟
[1634] 散热片温度
[1635] 逆变器热保护
[1638] 条件控制器状
态
[1639] 控制卡温度
[1650] 外部参考值
[1652] 反馈 [单位]
[1653] 数字电位计参
考值
[1657] Feedback
[RPM]
[1660] 数字输入
[1661] 53 端切换设置
[1662] 模拟输入端
53
[1663] 54 端切换设置
[1664] 模拟输入端
54
[1665] 模拟输出端
42 [mA]
[1666] 数字输出
[1667] 端子 29 频率
[1668] 端子 33 频率
[1669] 端子 27 脉冲
输出
[1670] 端子 29 脉冲
输出
[1671] 继电器输出
[二进制]
9-23 信号参数
选项: 功能:
[1672] 计数器 A
[1673] 计数器 B
[1679] Analog
output 45
[mA]
[1680] 控制字 1 信号
[1682] 总线设定 A 信
号
[1684] 通讯卡状态字
[1685] FC 口控制字 1
[1690] 报警字
[1691] 报警字 2
[1692] 警告字
[1693] 警告字 2
[1694] 扩展状态字
[1695] 扩展状态字 2
[1697] Alarm Word 3
[3401] PCD 1 写入
MCO
[3402] PCD 2 写入
MCO
[3403] PCD 3 写入
MCO
[3404] PCD 4 写入
MCO
[3405] PCD 5 写入
MCO
[3406] PCD 6 写入
MCO
[3407] PCD 7 写入
MCO
[3408] PCD 8 写入
MCO
[3409] PCD 9 写入
MCO
[3410] PCD 10 写入
MCO
[3421] PCD 1 从 MCO
读取
[3422] PCD 2 从 MCO
读取
[3423] PCD 3 从 MCO
读取
[3424] PCD 4 从 MCO
读取
[3425] PCD 5 从 MCO
读取
[3426] PCD 6 从 MCO
读取
[3427] PCD 7 从 MCO
读取
[3428] PCD 8 从 MCO
读取
参数说明
44
86 Danfoss A/S © 12/2018 全权所有。 MG06C841
VLT® AutomationDrive FC 360

9-23 信号参数
选项: 功能:
[3429] PCD 9 从 MCO
读取
[3430] PCD 10 从
MCO 读取
[3450] 实际位置
[3456] 跟踪错误
9-27 参数编辑
选项: 功能:
可以通过 Profibus、标准 RS485
接口或 LCP 来编辑参数。
[0] 禁用 通过 PROFIBUS 禁用编辑。
[1] * 启用 通过 PROFIBUS 启用编辑。
9-28 过程控制
选项: 功能:
过程控制(控制字、速度参考值和
过程数据的设置)可通过
Profibus 或标准现场总线来实
现,但二者不能同时使用。通过
LCP 总是可以进行本地控制。过程
控制也可以通过端子或现场总线来
实现,具体取决于
参数 8-50 选
择惯性停车到 参数 8-56 预置参
考值选择
的设置。
[0] 禁用 禁用通过 PROFIBUS 主站类型 1
进行过程控制,但允许通过标准现
场总线或 PROFIBUS 主站类型 2
进行过程控制。
[1] * 启用循环控制 启用通过 PROFIBUS 主站类型 1
进行过程控制,但禁用通过标准现
场总线或 PROFIBUS 主站类型 2
进行过程控制。
9-44 故障信息计数器
范围: 功能:
0* [0 -
65535 ]
显示当前保存
参数 9-45 故障代码
的故障事件数目。缓冲区的最大容
量是 8 个错误事件。通过复位或
上电,可将缓冲区和计数器设置为
0。
9-45 故障代码
范围: 功能:
0* [0 - 0 ] 该缓冲区包括自从最近复位或加电
以来发生的所有报警和警告的报警
字。缓冲区的最大容量是 8 个错
误事件。
9-47 故障数量
范围: 功能:
0* [0 - 0 ] 该缓冲区包括自从最近复位或加电
以来发生的所有报警和警告的报警
字。缓冲区的最大容量是 8 个错
误事件。
9-52 故障状态计数器
范围: 功能:
0* [0 -
1000 ]
显示自上次复位或加电以来发生的
错误事件数。
9-53 Profibus 警告字
范围: 功能:
0* [0 -
65535 ]
该参数显示 PROFIBUS 通讯警告。
位 说明
0 与 DP 主站的连接断开。
1 未使用。
2 FDL(现场总线数据链路
层)不正常。
3 清除收到的数据命令。
4 实际值未被更新。
5 搜索波特率。
6 PROFIBUS ASIC 未传输。
7 PROFIBUS 的初始化不正
常。
8 变频器跳闸。
9 内部 CAN 错误。
10 来自 PLC 的配置数据不
正确。
11 PLC 发送了错误的 ID。
12 发生内部错误。
13 未配置。
14 超时有效。
15 警告 34 有效。
表 4.8 位定义
9-63 实际波特率
选项: 功能:
该参数显示 PROFIBUS 的实际波特
率。该波特率由 Profibus 主站自
动设置。
[0] 9,6 kbit/s
[1] 19,2 kbit/s
[2] 93,75 kbit/s
[3] 187,5 kbit/s
[4] 500 kbit/s
[6] 1500 kbit/s
[7] 3000 kbit/s
[8] 6000 kbit/s
[9] 12000 kbit/s
[10] 31,25 kbit/s
参数说明 编程指南
4 4
MG06C841 Danfoss A/S © 12/2018 全权所有。 87

9-63 实际波特率
选项: 功能:
[11] 45,45 kbit/s
[255] * 找不到波特率
9-64 设备识别
范围: 功能:
0* [0 - 0 ]
注意
该参数无法通过 LCP 查看。
设备识别参数。数据类型为“无符
号 16 位数组”。
表 4.9
定义和
显示对第一个下标索引的分配。
索引 内容 值
0 制造商 128
1 设备类型 1
2 版本 xxyy
3 固件日期和年份yyyy
4 固件日期和月份ddmm
5 轴数 不定
6 供应商特
定: PB 版
本
xxyy
7 供应商特
定: 数据库
版本
xxyy
8 供应商特
定: AOC
版本
xxyy
9 供应商特
定: MOC
版本
xxyy
表 4.9 设备标识第一个下标索引
分配
9-65 结构编号
范围: 功能:
0* [0 - 0 ]
注意
该参数无法通过 LCP 查看。
该参数包含协议标识。字节 1 包
含协议编号,字节 2 包含协议版
本号。
9-67 控制字 1
范围: 功能:
0* [0 -
65535 ]
该参数使用 PCD 1 的格式接受来
自主控制器类型 2 的控制字。
9-68 状态字 1
范围: 功能:
0* [0 -
65535 ]
该参数使用 PCD 2 的格式提供主
控制器类型 2 的状态字。
9-70 Edit Set-up
选项: 功能:
选择在运行过程中执行编程(更改
数据)的菜单。可以独立于所选的
有效菜单对 2 个菜单进行编程。
来自各个主站的参数访问会被引导
至单独主站选择的菜单(循环、非
循环 MCL1、第一非循环 MCL2、第
二非循环 MCL2、第三非循环
MCL2)。
[1] 菜单 1
[2] 菜单 2
[9] * 有效菜单
9-71 Profibus 保存数据值
选项: 功能:
通过 RS485 更改的参数值不会自
动存储到非易失性存储中。使用该
参数,可以激活将参数值存储到
EEPROM 非易失内存中的功能,从
而使更改的参数值在电源关闭后得
以保留。
[0] * 关 禁用非易失存储功能。
[1] 存储所有菜单 将
参数 9-70 Edit Set-up
中所
选菜单的所有参数值存储到非易失
性存储中。存储所有值后,该选项
将恢复为
[0] 关
。
9-72 ProfibusDriveReset
选项: 功能:
注意
仅复位 VLT® PROFIBUS DP
MCA 101 选件。
[0] * 无操作
[1] 通电复位 使变频器在通电时复位(与首先断
电然后加电的作用相同)。
[2] 通电复位准备
[3] 通讯卡复位 在复位时,变频器从现场总线中消
失,从而 可能导致主站出现通讯
错误。
9-75 DO 标识
范围: 功能:
0* [0 -
65535 ]
提供与 DO(变频器对象)有关的
信息。此参数仅适用于
PROFINET。
参数说明
VLT® AutomationDrive FC 360
44
88 Danfoss A/S © 12/2018 全权所有。 MG06C841
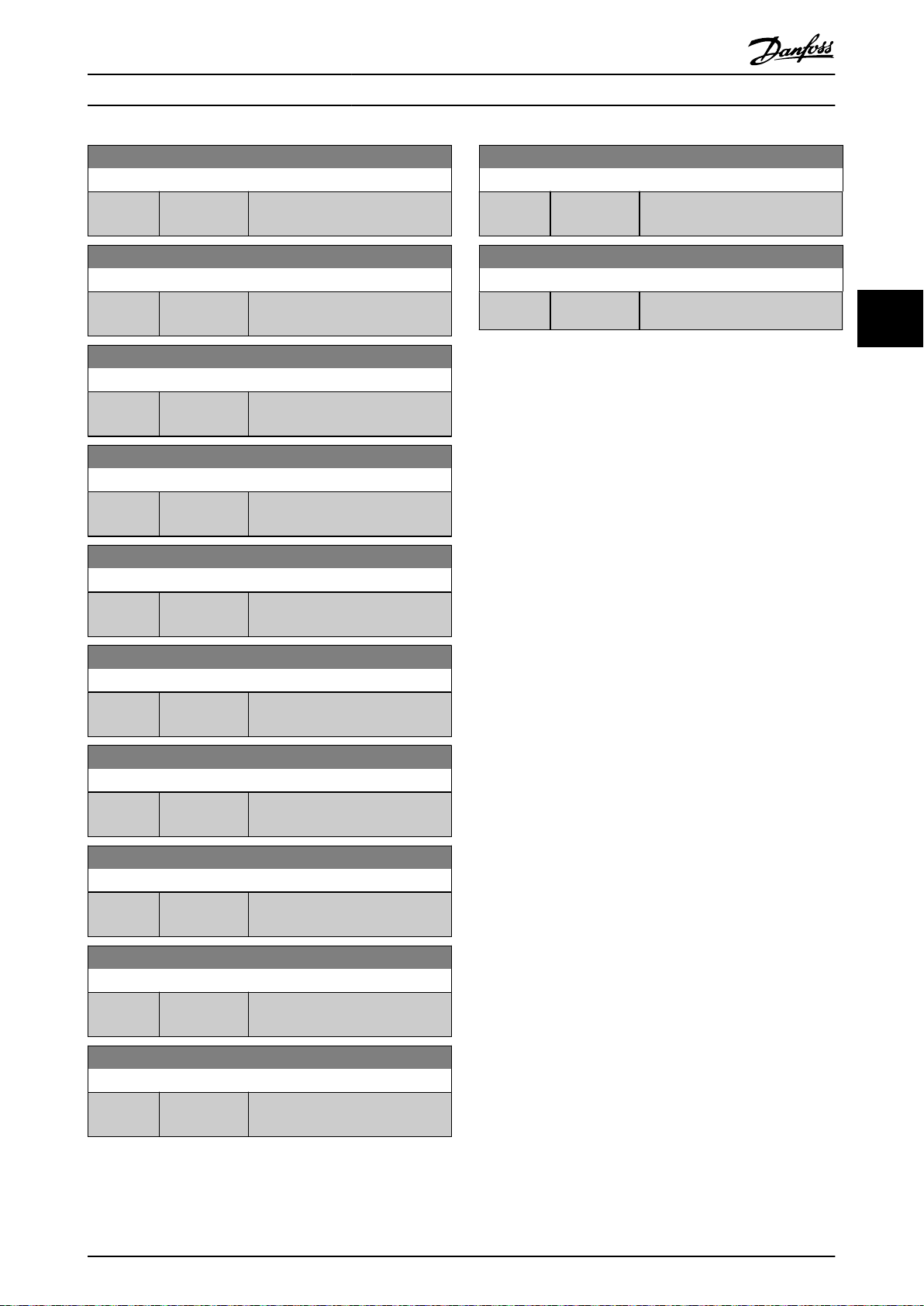
9-80 已定义参数 (1)
范围: 功能:
0* [0 -
9999 ]
该参数显示出所有已定义变频器参
数的列表。
9-81 已定义参数 (2)
范围: 功能:
0* [0 -
9999 ]
该参数显示出所有已定义变频器参
数的列表。
9-82 已定义参数 (3)
范围: 功能:
0* [0 -
9999 ]
该参数显示出所有已定义变频器参
数的列表。
9-83 已定义参数 (4)
范围: 功能:
0* [0 -
9999 ]
该参数显示出所有已定义变频器参
数的列表。
9-84 已定义参数 (5)
范围: 功能:
0* [0 -
9999 ]
该参数显示出所有已定义变频器参
数的列表。
9-85 Defined Parameters (6)
范围: 功能:
0* [0 -
9999 ]
该参数显示出所有已定义变频器参
数的列表。
9-90 已更改参数 (1)
范围: 功能:
0* [0 -
9999 ]
该参数显示所有默认设置发生变更
的变频器参数列表。
9-91 已更改参数 (2)
范围: 功能:
0* [0 -
9999 ]
该参数显示所有默认设置发生变更
的变频器参数列表。
9-92 已更改参数 (3)
范围: 功能:
0* [0 -
9999 ]
该参数显示所有默认设置发生变更
的变频器参数列表。
9-93 已更改参数 (4)
范围: 功能:
0* [0 -
9999 ]
该参数显示所有默认设置发生变更
的变频器参数列表。
9-94 已更改参数 (5)
范围: 功能:
0* [0 -
9999 ]
该参数显示所有默认设置发生变更
的变频器参数列表。
9-99 Profibus 修订计数器
范围: 功能:
0* [0 -
65535 ]
修订计数的读数
参数说明 编程指南
4 4
MG06C841 Danfoss A/S © 12/2018 全权所有。 89
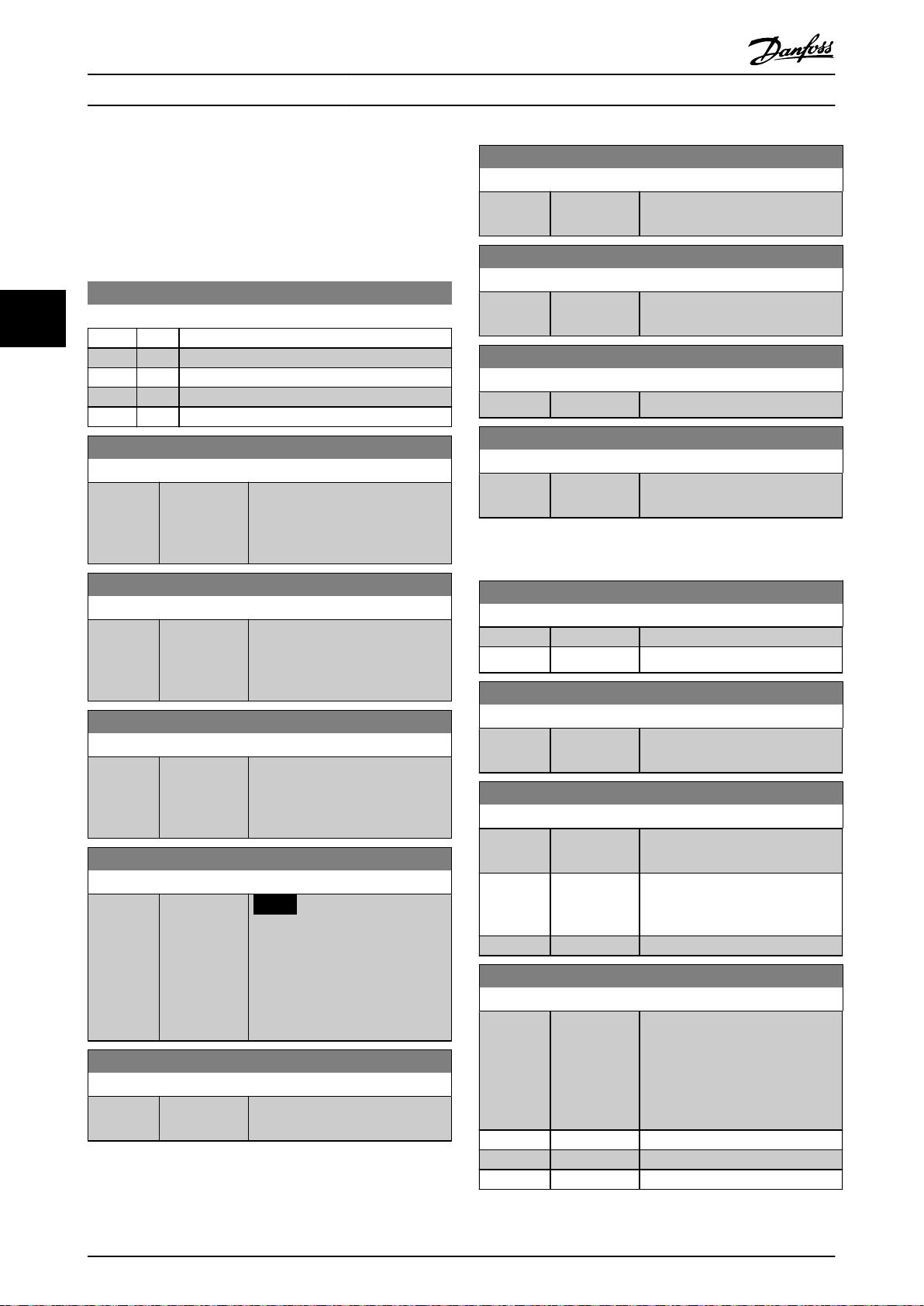
12-01 IP 地址
范围: 功能:
0* [0 -
4294967295 ]
配置选件的 IP 地址。仅当
参
数 12-00 IP 地址分配
设置为
[1] DHCP、[2] BOOTP
或通过 DIP
开关时为只读。
12-02 子网掩码
范围: 功能:
0* [0 -
4294967295 ]
配置选件的 IP 子网掩码。仅当
参
数 12-00 IP 地址分配
设置为
[1] DHCP
或
[2] BOOTP
时为只
读。
12-03 默认网关
范围: 功能:
0* [0 -
4294967295 ]
配置选件的 IP 默认网关。仅当
参
数 12-00 IP 地址分配
设置为
[1] DHCP
或
[2] BOOTP
时为只
读。
12-04 DHCP 服务器
范围: 功能:
0* [0 -
2147483647 ]
注意
在以手动方式设置了 IP 参数
之后,需要执行电源循环(断
电然后再通电)。
只读。显示找到的 DHCP 或 BOOTP
服务器的 IP 地址。
12-05 租约到期
范围: 功能:
0* [0 -
4294967295 ]
只读。显示当前由 DHCP 分配的
IP 地址的剩余租期。
12-06 名称服务器
范围: 功能:
0* [0 -
4294967295 ]
域名服务器的 IP 地址。使用
DHCP 时可以自动分配。
12-07 域名
范围: 功能:
0* [1 - 48 ] 相连网络的域名。使用 DHCP 网络
时可以自动分配。
12-08 主机名
范围: 功能:
0* [1 - 48 ] 选件的逻辑(给定)名称。
12-09 物理地址
范围: 功能:
0* [0 - 17 ] 只读。显示选件的物理 (MAC) 地
址。
12-10 链路状态
选项: 功能:
[0] * 无链路
[1] 链路 显示以太网端口的链路状态。
12-11 链路持续时间
范围: 功能:
Size
related*
[ 0 - 0 ] 显示每个端口上的当前链路的持续
时间,格式为日:小时:分钟:秒。
12-12 自动协商
选项: 功能:
为每个端口配置以太网链路的“自
动协商”参数: 开或关。
[0] 关 在
参数 12-13 链路速度 和参
数 12-14 链路双工
中可配置链路
速度和链路双工。
[1] * 开
12-13 链路速度
选项: 功能:
强制将每个端口的链路速度设成
10 Mbps 或 100 Mbps。如果
参
数 12-12 自动协商
设为
[1]
开
,则此参数为只读,并且显示实
际链路速度。如果没有链路,则显
示“无”。
[0] * 无
[1] 10 Mb/s
[2] 100Mb/s
参数说明
4.11 参数: 12-** 以太网
VLT® AutomationDrive FC 360
有关以太网参数说明的更多信息,请参阅
AutomationDrive FC 360 PROFINET 编程指南
VLT
®
。
4.11.1 12-0* IP 设置
12-00 IP 地址分配
44
选项: 功能:
选择 IP 地址分配方法。
[0] 手动 IP 地址可以在
[1] DHCP IP 地址由 DHCP 服务器分配。
[2] BOOTP IP 地址由 BOOTP 服务器分配。
[10] * DCP 通过 DCP 协议分配的 DCP。
参数 12-01 IP 地址
中设置。
4.11.2 12-1* 以太网链路参数
90 Danfoss A/S © 12/2018 全权所有。 MG06C841

12-14 链路双工
选项: 功能:
强制将每个端口的双工设置设为全
或半双工。若
参数 12-12 自动协
商
设为
[1] 开
,则此参数为只
读。
[0] 半双工
[1] * 全双工
12-80 FTP 服务器
选项: 功能:
[0] * 禁用
[1] 启用
12-81 HTTP 服务器
选项: 功能:
[0] * 禁用
[1] 启用
12-82 SMTP 服务
选项: 功能:
[0] * 禁用
[1] 启用
12-89 透明套接字通道端口
范围: 功能:
4000* [0 -
65535 ]
为透明套接字通道配置 TCP 端口
号。这样便可通过 TCP 在以太网
上透明发送 FC 报文。默认值为
4000,0 表示禁用。
12-90 电缆诊断
选项: 功能:
启用/禁用高级电缆诊断功能。如果
启用,则离电缆错误的距离可以在
参数 12-93 电缆错误长度
中读
取。完成诊断后,该参数会恢复为
“
[0]
禁用”的默认设置。
注意
电缆诊断功能将仅在没有链路
的端口上发出(请参阅
参
数 12-10 链路状态
)。
[0] * 禁用
[1] 启用
12-91 自动跨接
选项: 功能:
注意
若禁用自动跨接功能,则需要
用跨接以太网电缆来实现选件
的菊花链连接。
[0] 禁用 禁用自动跨接功能。
[1] * 启用 启用自动跨接功能。
12-92 IGMP 探查
选项: 功能:
[0] 禁用
[1] * 启用
12-93 电缆错误长度
范围: 功能:
0* [0 -
65535 ]
如果在
参数 12-90 电缆诊断
中启
用了“电缆诊断”,则可以通过时
域反射测定 (TDR) 控制该内置开
关。这是一种检测常见电缆问题
(如断路、短路和阻抗不匹配或传
输电缆断裂)的测量技术。选件离
出错位置的距离用“米”显示,精
确度为 ±2 米(6.6 英尺)。若值
为 0,则说明未检测到错误。
12-94 广播风暴保护
范围: 功能:
-1 %* [-1 20 %]
内置交换机可防止交换系统收到过
多的广播数据包,这些数据包可能
耗尽网络资源。该值是一个百分
比,它表示可将总带宽的多少用于
广播消息。
示例:
“关”表示禁用过滤器 - 所有广
播消息都将通过。如果值为
“0%”,则意味着任何广播消息都
不会通过。值为 10% 表示可将总
带宽的 10% 用于广播消息。这意
味着用于广播消息的总带宽量超过
10% 阈值时,将会被拦截。
12-95 广播风暴过滤器
适用于
参数 12-94 广播风暴保护
,如果广播风暴保护还包括
多播报文的话。
选项: 功能:
[0] * 仅广播
[1] 广播和多点播
送
参数说明 编程指南
4.11.3 12-8* 其它以太网服务
4 4
4.11.4 12-9* 高级以太网服务
MG06C841 Danfoss A/S © 12/2018 全权所有。 91

12-98 接口计数器
范围: 功能:
4000* [0 -
4294967295 ]
只读。
可以用来自内置开关的高级接口计
数器进行低级别的故障排查。该参
数显示了端口 1 + 端口 2 的汇
总。
12-99 介质计数器
范围: 功能:
0* [0 -
4294967295 ]
只读。
可以用来自内置开关的高级接口计
数器进行低级别的故障排查。该参
数显示了端口 1 + 端口 2 的汇
总。
参数说明
VLT® AutomationDrive FC 360
12-96 端口配置
选项: 功能:
[0] * 正常
[1] 镜像端口 1 到 2
[2] 镜像端口 2 到 1
[10] 端口 1 禁用
[11] 端口 2 禁用
[254] 镜像内部 端口至 1
44
[255] 镜像内部 端口至 2
92 Danfoss A/S © 12/2018 全权所有。 MG06C841

. . .
. . .
Par. 13-11
Comparator Operator
Par. 13-43
Logic Rule Operator 2
Par. 13-51
SL Controller Event
Par. 13-52
SL Controller Action
130BB671.13
Coast
Start timer
Set Do X low
Select set-up 2
. . .
Running
Warning
Torque limit
Digital input X 30/2
. . .
=
TRUE longer than..
. . .
. . .
130BA062.14
State 1
13-51.0
13-52.0
State 2
13-51.1
13-52.1
Start
event P13-01
State 3
13-51.2
13-52.2
State 4
13-51.3
13-52.3
Stop
event P13-02
Stop
event P13-02
Stop
event P13-02
13-00 条件控制器模式
选项: 功能:
[0] * 关 禁用智能逻辑控制器。
[1] 开 启用智能逻辑控制器。
13-01 启动事件
选项: 功能:
[0] 错误
[1] 可以
[2] 运行
[3] 在范围内
[4] 使用参考值
[7] 超出电流范围
[8] 低于电流下限
[9] 高于电流上限
[16] 热警告
[17] 主电源电压超
出范围
[18] 反向
参数说明 编程指南
4.12 参数: 13-** 智能逻辑控制
智能逻辑控制 (SLC) 是一系列用户定义的操作(请参阅
参数 13-52 条件控制器动作
(请参阅
参数 13-51 条件控制器事件
“真” 时,将执行这些操作。
触发事件的条件可能是某个特定状态,也可能是在逻辑规
则或比较器操作数的输出为“真”时。这将导致相关的操
作,如下图所示:
),当关联的用户定义事件
)被 SLC 判断为
图 4.26 事件和操作
启动和停止 SLC
通过在
参数 13-00 条件控制器模式
[0] 关
,可以启动和停止 SLC。SLC 的启动状态总是为 0
中选择
[1] 开
(此时它首先对事件 [0] 进行条件判断)。当对
件
(在
参数 13-01 启动事件
“真”时,SLC 将启动(假定在
模式
中选择了
止事件
) 为“真”时,SLC 将停止。
SLC
将所有 SLC 参数复位,并重新进行设置。
[1] 开
)。当
中定义)的条件判断为
参数 13-00 条件控制器
停止事件 (参数 13-02 停
参数 13-03 复位
4 4
或
启动事
图 4.25 智能逻辑控制 (SLC)
事件和操作 都有自己的编号,两者关联在一起(状
态)。这意味着,当第一个事件符合条件(值为“真”)
时,将执行第一个操作。此后会对第二个事件进行条件判
断,如果值为“真”,则执行第二个操作,依此类推。无
论何时,只能对一个事件进行判断。如果某个事件 的条
件判断为“假”,在当前的扫描间隔中将不执行任何操作
(在 SLC 中),并且不再对其他事件 进行条件判断。这
意味着,当 SLC 启动后,它会在每个扫描间隔中都判断
第一个事件(并且仅判断第一个事件 )的真假。仅当对
第一个事件的条件判断为“真”时,SLC 才会执行第一个
操作,并且开始判断第二个事件的真假。可以设置 1 到
20 个事件 和操作。
当执行了最后一个事件/操作后,又会从第一个事件/操作
开始执行该序列。
MG06C841 Danfoss A/S © 12/2018 全权所有。 93
图 4.26
中的示例带有三个事件/操作:
注意
SLC 仅在自动启动模式下有效(在手动启动模式下无
效)。
4.12.1 13-0* SLC 设置
使用 SLC 设置,可以激活、禁用和复位智能逻辑控制序
列。逻辑功能和比较器始终在后台运行,借此可以实现单
独的数字输入和输出控制。

13-01 启动事件
选项: 功能:
[19] 警告
[20] 报警(跳闸)
[21] 报警(跳闸锁
定)
[22] 比较器 0
[23] 比较器 1
[24] 比较器 2
[25] 比较器 3
[26] 逻辑规则 0
[27] 逻辑规则 1
[28] 逻辑规则 2
[29] 逻辑规则 3
[33] 数字输入
DI18
[34] 数字输入
DI19
[35] 数字输入
DI27
[36] 数字输入
DI29
[39] * 启动命令
[40] 变频器已停止
[42] 自动复位式跳
闸
[50] 比较器 4
[51] 比较器 5
[60] 逻辑规则 4
[61] 逻辑规则 5
[83] 断裂皮带
13-02 停止事件
选项: 功能:
[0] 错误
[1] 可以
[2] 运行
[3] 在范围内
[4] 使用参考值
[7] 超出电流范围
[8] 低于电流下限
[9] 高于电流上限
[16] 热警告
[17] 主电源电压超
出范围
[18] 反向
[19] 警告
[20] 报警(跳闸)
[21] 报警(跳闸锁
定)
[22] 比较器 0
[23] 比较器 1
[24] 比较器 2
[25] 比较器 3
[26] 逻辑规则 0
13-02 停止事件
选项: 功能:
[27] 逻辑规则 1
[28] 逻辑规则 2
[29] 逻辑规则 3
[30] SL 超时 0
[31] SL 超时 1
[32] SL 超时 2
[33] 数字输入
DI18
[34] 数字输入
DI19
[35] 数字输入
DI27
[36] 数字输入
DI29
[39] 启动命令
[40] * 变频器已停止
[42] 自动复位式跳
闸
[50] 比较器 4
[51] 比较器 5
[60] 逻辑规则 4
[61] 逻辑规则 5
[70] SL 超时 3
[71] SL 超时 4
[72] SL 超时 5
[73] SL 超时 6
[74] SL 超时 7
[83] 断裂皮带
13-03 复位 SLC
选项: 功能:
[0] * 不要复位 SLC 保留
参数组 13-** 智能逻辑
中的
已设定设置。
[1] 复位 SLC 将
参数组 13-** 智能逻辑
控制中
的所有参数重置为默认设置。
Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
参数说明
VLT® AutomationDrive FC 360
44
94 Danfoss A/S © 12/2018 全权所有。 MG06C841
4.12.2 13-1* 比较器
这些比较器可将连续的变量(如输出频率、输出电流、模
拟输入等)与固定的预置值进行比较。
图 4.27 比较器
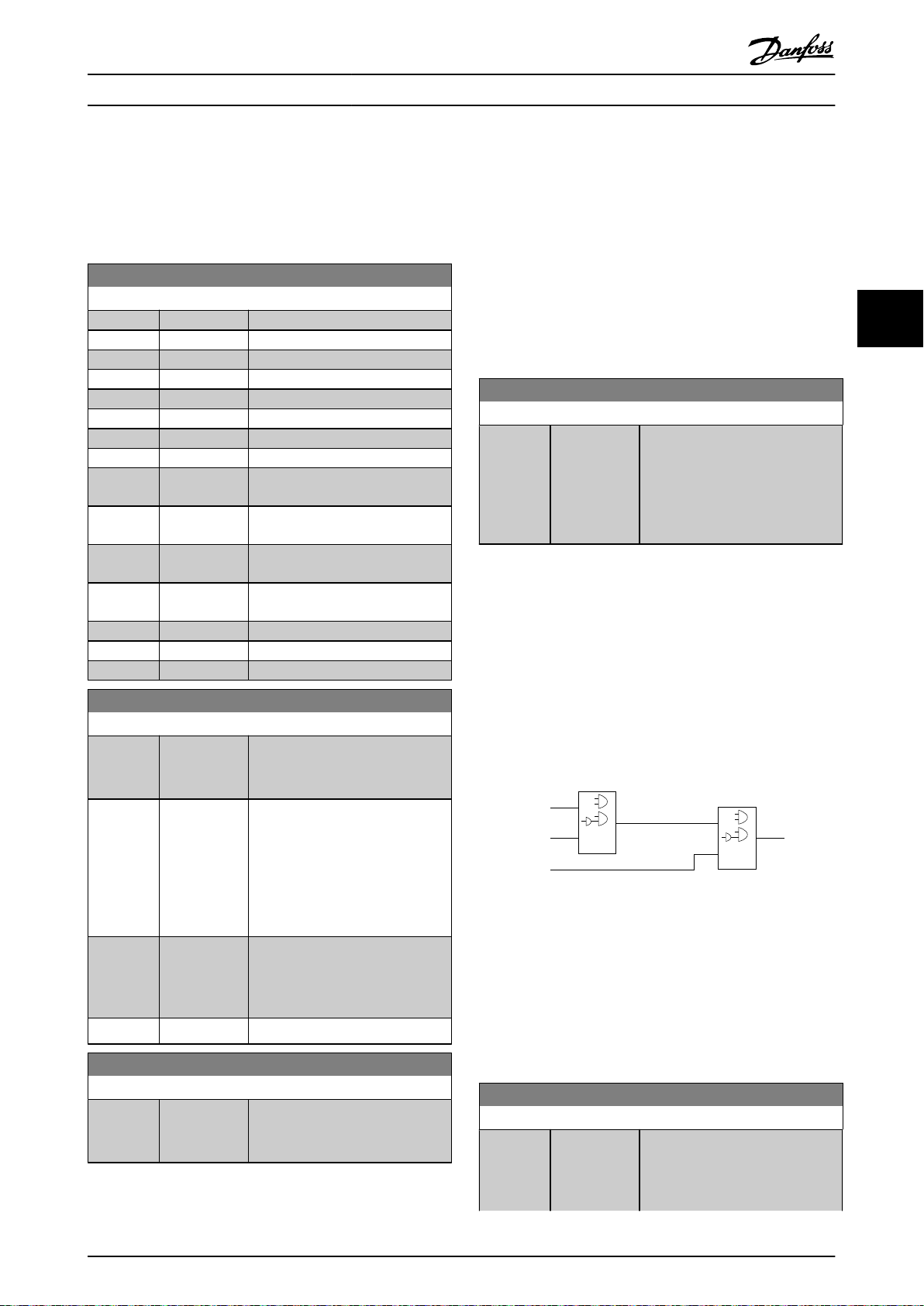
13-10 比较器操作数
选项: 功能:
[0] * 禁用
[1] 参考值
[2] 反馈
[3] 电动机速度
[4] 电动机电流
[6] 电动机功率
[7] 电动机电压
[8] 直流回路电压
[12] 模拟输入
AI53
[13] 模拟输入
AI54
[18] 脉冲输入
FI29
[19] 脉冲输入
FI33
[20] 报警编号
[30] 计数器 A
[31] 计数器 B
13-11 比较器运算符
选项: 功能:
选择在比较中使用的运算符。这是
一个数组参数,其中包括索引值为
0 到 5 的比较器运算符。
[0] >(大于) 当在
参数 13-10 比较器操作数
中
选择的变量小于
参数 13-12 比较
值
中的恒定值时,条件判断的结
果为“真”。如果在
参
数 13-10 比较器操作数
中选择的
变量大于
参数 13-12 比较值
中
的恒定值,结果将为“假”。
[1] * ≈ (约等于) 当
参数 13-10 比较器操作数
选择
的变量速度约等于恒定值时,
参
数 13-12 比较值
条件判断的结果
为“真”。
[2] >(大于) 反向逻辑
[0] 小于 (<)。
13-12 比较值
范围: 功能:
0* [-9999 -
9999 ]
输入比较器所监测变量的“触发级
别”。这是一个数组参数,其中包
括索引值为 0 到 5 的比较值。
13-20 SL 控制器定时器
范围: 功能:
0 s* [0 - 3600s]所输入的值将定义来自可编程计时
器的“假”输出的持续时间。仅当
由某个操作(比如
[29] 启动计时
器 1
) 启动并且时间超过了给定
计时器的值时,计时器才会为
“假”。
. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
13-40 逻辑布尔值 1
选项: 功能:
为所选的逻辑规则选择第一布尔
(“真”或“假”)输入。有关进
一步的说明,请参阅
参
数 13-01 启动事件 ([0]-[61])
参数说明 编程指南
有一些数字值会与固定的时间值进行比较。请参阅
数 13-10 比较器操作数
中的说明。在每个扫描间隔中都
参
会对比较器进行一次求值。然后直接使用其结果(真或
假)。这个参数组中的所有参数都是索引为 0 到 5 的数
组参数。选择“索引 0”可设置“比较器 0”,选择“索
引 1”可设置“比较器 1”,依此类推。
4.12.3 13-2* 计时器
计时器的结果(“真”或“假”)可直接用于定义某个事
件(请参阅
辑规则的布尔输入(请参阅
参数 13-42 逻辑布尔值 2
3
)。只有在由某个操作(比如
参数 13-51 条件控制器事件
参数 13-40 逻辑布尔值 1
或
参数 13-44 逻辑布尔值
[29] 启动计时器 1
),或者用作逻
、
)启
动并且经过了在该参数中输入的计时器值后,计时器才会
为“假”。随后它又变为“真”。
这个参数组中的所有参数都是索引为 0 到 2 的数组参
数。选择“索引 0”可设置计时器 0,选择“索引 1”可
设置计时器 1,依此类推。
4.12.4 13-4* 逻辑规则
4 4
MG06C841 Danfoss A/S © 12/2018 全权所有。 95
使用逻辑运算符 AND、OR、NOT,将来自计时器、比较
器、数字输入、状态位和事件的布尔输入(“真”/“假”
输入)进行组合,最多组合三个输入。为
辑布尔值 1、参数 13-42 逻辑布尔值 2
数 13-44 逻辑布尔值 3
来对
参数 13-41 逻辑运算符 1
算符 2
中所选的输入进行逻辑组合的逻辑运算符。
图 4.28 逻辑规则
中的计算选择布尔输入。定义用
和
参数 13-40 逻
和
参
参数 13-43 逻辑运
计算顺序
首先计算
运算符 1
结果 (“真”/“假”) 与
参数 13-44 逻辑布尔值 3
参数 13-40 逻辑布尔值 1 、参数 13-41 逻辑
和
参数 13-42 逻辑布尔值 2
的结果。该计算
参数 13-43 逻辑运算符 2
的设置组合在一起,得到最终
和
的逻辑规则结果 (“真”/“假”)。

13-40 逻辑布尔值 1
选项: 功能:
和
参数 13-02 停止事件 ([70]-
[74]
)。
[0] * 错误
[1] 可以
[2] 运行
[3] 在范围内
[4] 使用参考值
[7] 超出电流范围
[8] 低于电流下限
[9] 高于电流上限
[16] 热警告
[17] 主电源电压超
出范围
[18] 反向
[19] 警告
[20] 报警(跳闸)
[21] 报警(跳闸锁
定)
[22] 比较器 0
[23] 比较器 1
[24] 比较器 2
[25] 比较器 3
[26] 逻辑规则 0
[27] 逻辑规则 1
[28] 逻辑规则 2
[29] 逻辑规则 3
[30] SL 超时 0
[31] SL 超时 1
[32] SL 超时 2
[33] 数字输入
DI18
[34] 数字输入
DI19
[35] 数字输入
DI27
[36] 数字输入
DI29
[39] 启动命令
[40] 变频器已停止
[42] 自动复位式跳
闸
[50] 比较器 4
[51] 比较器 5
[60] 逻辑规则 4
[61] 逻辑规则 5
[70] SL 超时 3
[71] SL 超时 4
[72] SL 超时 5
[73] SL 超时 6
[74] SL 超时 7
[83] 断裂皮带
13-41 逻辑运算符 1
选项: 功能:
选择将对来自
参数 13-40 逻辑布
尔值 1
和
参数 13-42 逻辑布尔
值 2
的布尔输入使用的第一个逻辑
运算符。
[0] * 禁用 忽略
参数 13-42 逻辑布尔值 2、参
数 13-43 逻辑运算符 2 和参
数 13-44 逻辑布尔值 3
。
[1] 与 求表达式 [13-40] AND [13-42]
的值。
[2] 或 求表达式 [13-40] OR [13-42] 的
值。
[3] 与非 求表达式 [13-40] AND NOT
[13-42] 的值。
[4] 或非 求表达式 [13-40] OR NOT
[13-42] 的值。
[5] 非与 求表达式 NOT [13-40] AND
[13-42] 的值。
[6] 非或 求表达式 NOT [13-40] OR
[13-42] 的值。
[7] 非与非 求表达式 NOT [13-40] AND NOT
[13-42] 的值。
[8] 非或非 求表达式 NOT [13-40] OR NOT
[13-42] 的值。
13-42 逻辑布尔值 2
选项: 功能:
为所选的逻辑规则选择第二布尔
(“真”或“假”)输入。请参阅
参数 13-01 启动事件 ([0]–
[61]
) 和
参数 13-02 停止事件
(
[70]–[74]
) 了解更多说明。
[0] * 错误
[1] 可以
[2] 运行
[3] 在范围内
[4] 使用参考值
[7] 超出电流范围
[8] 低于电流下限
[9] 高于电流上限
[16] 热警告
[17] 主电源电压超
出范围
[18] 反向
[19] 警告
[20] 报警(跳闸)
[21] 报警(跳闸锁
定)
[22] 比较器 0
[23] 比较器 1
[24] 比较器 2
参数说明
44
96 Danfoss A/S © 12/2018 全权所有。 MG06C841
VLT® AutomationDrive FC 360

13-42 逻辑布尔值 2
选项: 功能:
[25] 比较器 3
[26] 逻辑规则 0
[27] 逻辑规则 1
[28] 逻辑规则 2
[29] 逻辑规则 3
[30] SL 超时 0
[31] SL 超时 1
[32] SL 超时 2
[33] 数字输入
DI18
[34] 数字输入
DI19
[35] 数字输入
DI27
[36] 数字输入
DI29
[39] 启动命令
[40] 变频器已停止
[42] 自动复位式跳
闸
[50] 比较器 4
[51] 比较器 5
[60] 逻辑规则 4
[61] 逻辑规则 5
[70] SL 超时 3
[71] SL 超时 4
[72] SL 超时 5
[73] SL 超时 6
[74] SL 超时 7
[83] 断裂皮带
13-43 逻辑运算符 2
选项: 功能:
选择在以下参数中计算的布尔输入
上所使用的第二逻辑运算符:
参
数 13-40 逻辑布尔值 1 参
数 13-41 逻辑运算符 1、 参
数 13-42 逻辑布尔值 2
、 且布尔
输入来自
参数 13-42 逻辑布尔值
2、参数 13-42 逻辑布尔值 2
表
示
参数 13-44 逻辑布尔值 3
的布
尔输入。
参数 13-40 逻辑布尔值
1、 参数 13-42 逻辑布尔值 2
表
示在以下参数中计算的布尔输入:
参数 13-40 逻辑布尔值 1、 参
数 13-41 逻辑运算符 1、 参
数 13-42 逻辑布尔值 2
。
[0] * 禁用 忽略
参数 13-44 逻辑布尔值 3
。
[1] 与
[2] 或
[3] 与非
[4] 或非
[5] 非与
13-43 逻辑运算符 2
选项: 功能:
[6] 非或
[7] 非与非
[8] 非或非
13-44 逻辑布尔值 3
选项: 功能:
为所选的逻辑规则选择第三个布尔
(“真”或“假”)输入。请参阅
参数 13-40 逻辑布尔值 1 、参
数 13-41 逻辑运算符 1
和
参
数 13-42 逻辑布尔值 2
以及布尔
输入。请参阅
参数 13-01 启动事
件 ([0]–[61]
) 和
参数 13-02 停
止事件 ([70]–[74]
) 了解更多说
明。
[0] * 错误
[1] 可以
[2] 运行
[3] 在范围内
[4] 使用参考值
[7] 超出电流范围
[8] 低于电流下限
[9] 高于电流上限
[16] 热警告
[17] 主电源电压超
出范围
[18] 反向
[19] 警告
[20] 报警(跳闸)
[21] 报警(跳闸锁
定)
[22] 比较器 0
[23] 比较器 1
[24] 比较器 2
[25] 比较器 3
[26] 逻辑规则 0
[27] 逻辑规则 1
[28] 逻辑规则 2
[29] 逻辑规则 3
[30] SL 超时 0
[31] SL 超时 1
[32] SL 超时 2
[33] 数字输入
DI18
[34] 数字输入
DI19
[35] 数字输入
DI27
[36] 数字输入
DI29
[39] 启动命令
[40] 变频器已停止
参数说明 编程指南
MG06C841 Danfoss A/S © 12/2018 全权所有。 97
4 4
13-44 逻辑布尔值 3
选项: 功能:
[42] 自动复位式跳
闸
[50] 比较器 4
[51] 比较器 5
[60] 逻辑规则 4
[61] 逻辑规则 5
[70] SL 超时 3
[71] SL 超时 4
[72] SL 超时 5
[73] SL 超时 6
[74] SL 超时 7
[83] 断裂皮带
13-51 条件控制器事件
选项: 功能:
为所选的逻辑规则选择第三个布尔
(“真”或“假”)输入。请参阅
参数 13-40 逻辑布尔值 1、参
数 13-41 逻辑运算符 1、参
数 13-42 逻辑布尔值 2
和布尔输
入。有关进一步的说明,请参阅
参数 13-01 启动事件 ([0]-[61])
和
参数 13-02 停止事件 ([70]-
[74]
)。
[0] * 错误
[1] 可以
[2] 运行
[3] 在范围内
[4] 使用参考值
[7] 超出电流范围
[8] 低于电流下限
[9] 高于电流上限
[16] 热警告
[17] 主电源电压超
出范围
[18] 反向
[19] 警告
[20] 报警(跳闸)
[21] 报警(跳闸锁
定)
[22] 比较器 0
[23] 比较器 1
[24] 比较器 2
[25] 比较器 3
[26] 逻辑规则 0
[27] 逻辑规则 1
[28] 逻辑规则 2
[29] 逻辑规则 3
[30] SL 超时 0
[31] SL 超时 1
13-51 条件控制器事件
选项: 功能:
[32] SL 超时 2
[33] 数字输入
DI18
[34] 数字输入
DI19
[35] 数字输入
DI27
[36] 数字输入
DI29
[39] 启动命令
[40] 变频器已停止
[42] 自动复位式跳
闸
[50] 比较器 4
[51] 比较器 5
[60] 逻辑规则 4
[61] 逻辑规则 5
[70] SL 超时 3
[71] SL 超时 4
[72] SL 超时 5
[73] SL 超时 6
[74] SL 超时 7
[83] 断裂皮带
13-52 条件控制器动作
选项: 功能:
[0] * 禁用 选择与 SLC 事件对应的操作。当
对相应事件(在
参数 13-51 条件
控制器事件
中定义)的条件判断
为“真”时将执行该操作。
[1] 无操作
[2] 选择菜单 1 将有效菜单(
参数 0-10 有效设
置
)更改为 1。如果更改菜单,则
该命令将同来自数字输入或现场总
线的其他菜单命令合并在一起。
[3] 选择菜单 2 将有效菜单(
参数 0-10 有效设
置
)更改为 2。如果更改菜单,则
该命令将同来自数字输入或现场总
线的其他菜单命令合并在一起。
[10] 选择预置参考
值 0
选择预置参考值 0。如果更改有效
的预置参考值,则该命令将与来自
数字输入或现场总线的其他预置参
考值命令合并在一起。
[11] 选择预置参考
值 1
选择预置参考值 1。如果更改有效
的预置参考值,则该命令将与来自
数字输入或现场总线的其他预置参
考值命令合并在一起。
[12] 选择预置参考
值 2
选择预置参考值 2。如果更改有效
的预置参考值,则该命令将与来自
数字输入或现场总线的其他预置参
考值命令合并在一起。
参数说明
VLT® AutomationDrive FC 360
44
4.12.5 13-5* 状态
98 Danfoss A/S © 12/2018 全权所有。 MG06C841
 Loading...
Loading...