


ENGINEERING TOMORROW
Guia de Programação
VLT® AutomationDrive FC 360
vlt-drives.danfoss.com

Índice Guia de Programação
Índice
1 Introdução
1.1 Como Ler Este Guia de Programação
1.2 Denições
1.3 Fiação Elétrica - Cabos de Controle
2 Segurança
2.1 Símbolos de Segurança
2.2 Pessoal qualicado
2.3 Segurança e Precauções
3 Programação
3.1 Operações do Painel de Controle Local
3.2 Programação Básica
4 Descrições do Parâmetro
4.1 Parâmetros 0-** operação/Display
4.2 Parâmetros 1-** Carga e Motor
4.3 Parâmetros 2-** Freios
3
3
4
7
11
11
11
11
13
13
22
25
25
39
54
4.4 Parâmetros 3-** Referência / Rampas
4.5 Parâmetros 4-** Limites/Advertências
4.6 Parâmetros 5-** Entrada/Saída Digital
4.7 Parâmetros 6-** Entrada/Saída Analógica
4.8 Parâmetros 7-** Controladores
4.9 Parâmetros 8-** Comunicações e Opcionais
4.10 Parâmetros 9-** PROFIdrive
4.11 Parâmetros 12-** Ethernet
4.12 Parâmetros 13-** Smart Logic Control
4.13 Parâmetros 14-** Funções Especiais
4.14 Parâmetros 15-** Drive Information
4.15 Parâmetros 16-** Data Readouts
4.16 Parâmetros 17-** Opcionais de Feedback
4.17 Parâmetros 18-** Leitura de Dados 2
4.18 Parâmetros 21-** Ext. Malha Fechada
4.19 Parâmetros 22-** Funções de Aplicação
4.20 Parâmetros 30-** Recursos Especiais
58
65
70
85
89
95
102
111
114
123
132
135
140
141
142
144
146
4.21 Parâmetros 32-** Congurações básicas do controle de movimento
4.22 Parâmetros 33-** Controle de movimento avançado Congurações
4.23 Parâmetros 34-** Leituras de Dados do Controle de Movimento
4.24 Parâmetros 37-** Congurações da Aplicação
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 1
147
148
150
152
Índice
VLT® AutomationDrive FC 360
5 Listas de Parâmetros
5.1 Introdução
5.2 Listas de Parâmetros
6 Resolução de Problemas
6.1 Advertências e Alarmes
Índice
158
158
161
183
183
193
2 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
Introdução Guia de Programação
1 Introdução
1.1 Como Ler Este Guia de Programação
1.1.1 Objetivo do Manual
Este guia de programação fornece informações sobre o
controle do conversor de frequência, acesso a parâmetros,
programação e resolução de problemas.
O guia de programação destina-se a ser utilizado por
pessoal
qualicado e familiarizado com VLT
AutomationDrive FC 360.
Leia as instruções antes da programação e siga os procedimentos neste manual.
VLT® é uma marca registrada.
1.1.2 Recursos Adicionais
Os recursos adicionais incluem:
VLT® AutomationDrive FC 360 O Guia Rápido
•
fornece as informações necessárias para colocar o
conversor de frequência em funcionamento.
®
VLT
•
AutomationDrive FC 360 O Guia de Design
fornece informações técnicas detalhadas sobre o
design e as aplicações do conversor de frequência
e do cliente.
Entre em contato com Danfoss o fornecedor local ou
acesse www.danfoss.com/fc360 para fazer download da
documentação.
1.1.3 Documento e versão de software
Este manual é revisado e atualizado regularmente. Todas as
sugestões para melhorias são bem-vindas. Tabela 1.1
mostra a versão do documento com a respectiva versão de
software.
Edição Observações
MG06C8
Tabela 1.1 Documento e versão de software
Atualização devido a nova versão de
hardware e software.
®
Versão
do
software
1.8x
°C
°F
CA Corrente alternada
AEO Otimização automática de energia
ACP Processador de controle de aplicação
AWG American wire gauge
AMA Adaptação automática do motor
CC Corrente contínua
EEPROM
EMC Compatibilidade eletromagnética
EMI Interferência eletromagnética
ESD Descarga eletrostática
ETR Relé térmico eletrônico
f
M,N
FC Conversor de frequência
IGBT Transistor bipolar de porta isolada
IP Proteção de entrada
I
LIM
I
INV
I
M,N
I
VLT,MAX
I
VLT,N
L
d
L
q
LCP Painel de controle local
LED Diodo emissor de luz
MCP Processador de controle do motor
N.A. Não aplicável
NEMA
P
M,N
PCB Placa de circuito impresso
PE Ponto de aterramento de proteção
PELV Tensão extra baixa de proteção
PWM Modulação por largura de pulso
R
s
Regen Terminais regenerativos
RPM Rotações por minuto
RFI Interferência de radiofrequência
SCR Reticador controlado de silício
SMPS
T
LIM
U
M,N
X
h
Graus Celsius
Fahrenheit
Memória somente de leitura
programável e apagável eletricamente
Frequência do motor nominal
Limite de Corrente
Corrente nominal de saída do inversor
Corrente nominal do motor
Corrente de saída máxima
Corrente de saída nominal fornecida
pelo conversor de frequência
Indutância do eixo d do motor
Indutância do eixo-q do motor
National Electrical Manufacturers
Association
Potência do motor nominal
Resistência do estator
Fonte de alimentação no modo de
chaveamento
Limite de torque
Tensão nominal do motor
Reatância principal do motor
1 1
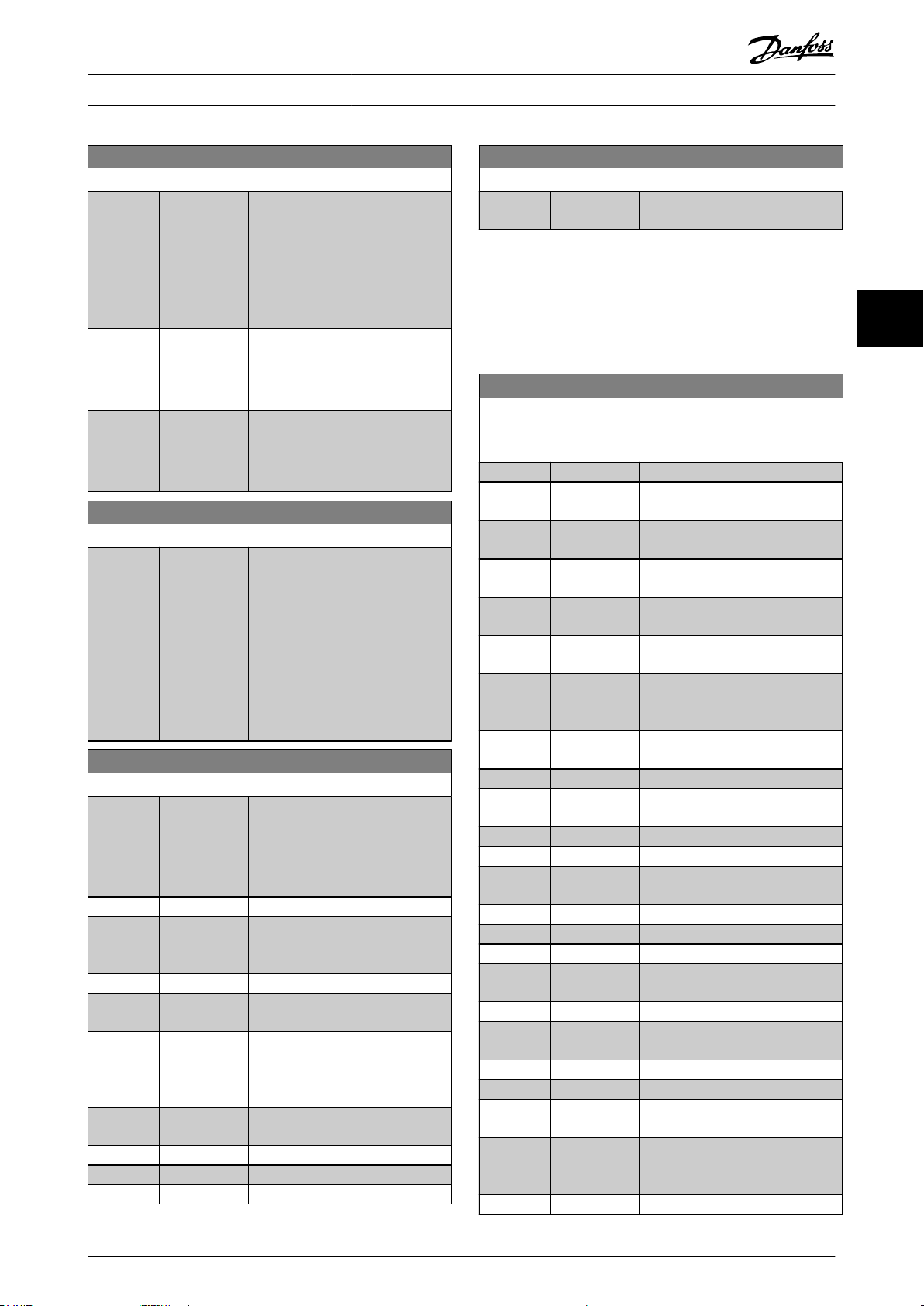
Tabela 1.2 Abreviações
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 3
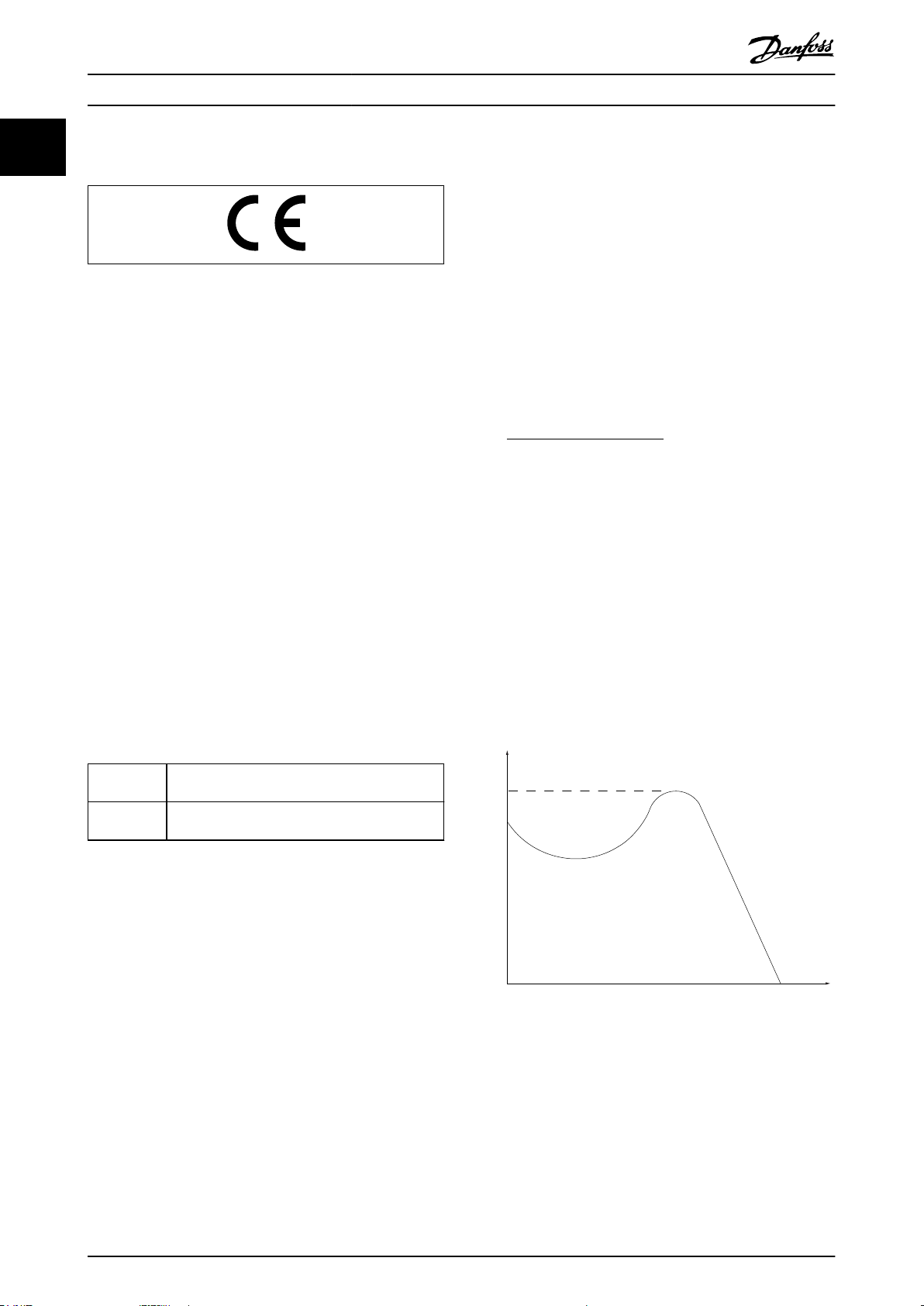
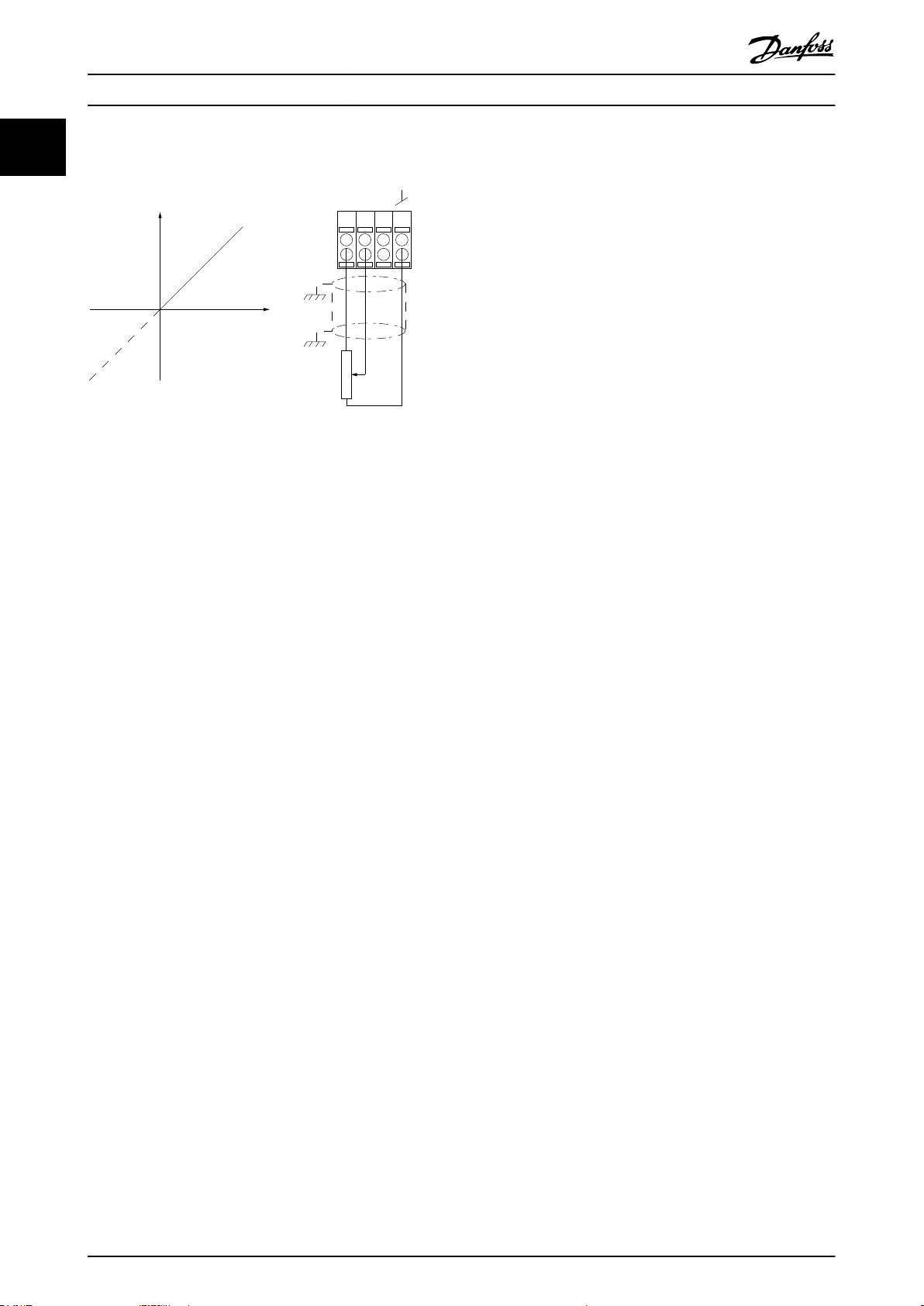
175ZA078.10
Arranque
RPM
Torque
Introdução
VLT® AutomationDrive FC 360
11
1.1.4 Aprovações e Certicações
f
M,N
Frequência nominal do motor (dados da plaqueta de
identicação).
I
M
Corrente do motor (real).
I
M,N
Corrente nominal do motor (dados da plaqueta de identi-
1.2 Denições
1.2.1 Conversor de Frequência
Parada por inércia
O eixo do motor está em modo livre. Nenhum torque no
motor.
I
VLT,MAX
Corrente de saída máxima.
I
VLT,N
Corrente de saída nominal fornecida pelo conversor de
frequência.
U
VLT,MAX
Tensão de saída máxima.
1.2.2 Entrada
Comandos de controle
Inicie e pare o motor conectado com o LCP e as entradas
digitais.
As funções estão divididas em 2 grupos.
As funções do grupo 1 têm prioridade mais alta que as do
cação).
n
M,N
Velocidade nominal do motor (dados da plaqueta de
identicação).
n
s
Velocidade do motor síncrono.
2 × Parâmetro 1−23 × 60s
ns=
n
slip
Parâmetro 1−39
Deslizamento do motor.
P
M,N
Potência nominal do motor (dados da plaqueta de identicação em kW ou hp).
T
M,N
Torque nominal (motor).
U
M
Tensão instantânea do motor.
U
M,N
Tensão nominal do motor (dados da plaqueta de identi-
cação).
Torque de segurança
grupo 2.
Grupo 1 Parada por inércia, reset e parada por inércia,
parada rápida, frenagem CC, parada e [OFF].
Grupo 2 Partida, partida por pulso, partida reversa, jog,
congelar frequência de saída e [Hand On].
Tabela 1.3 Grupos de Função
1.2.3 Motor
Motor em funcionamento
Torque gerado no eixo de saída e velocidade de 0 RPM à
velocidade máxima no motor.
f
JOG
Frequência do motor quando a função jog estiver ativada
(por meio dos terminais digitais ou barramento).
f
M
Frequência do motor.
f
MAX
Frequência do motor máxima.
f
MIN
Frequência do motor mínima.
Ilustração 1.1 Torque de segurança
η
VLT
A eciência do conversor de frequência é denida como a
relação entre a potência de saída e a de entrada.
Comando inibidor de partida
Um comando inibidor de partida pertencente aos
comandos de controle no grupo 1. Consulte Tabela 1.3
para obter mais detalhes.
4 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828

Introdução Guia de Programação
Comando de parada
Um comando de parada pertencente aos comandos de
controle no grupo 1. Consulte Tabela 1.3 para obter mais
detalhes.
1.2.4 Referências
Referência analógica
Um sinal transmitido para as entradas analógicas 53 ou 54
pode ser tensão ou corrente.
Referência binária
Um sinal transmitido através da porta de comunicação
serial.
Referência predenida
Uma referência predenida a ser programada de -100% a
+100% da faixa de referência. Seleção de 8 referências
predenidas via terminais digitais. Seleção de 4 referências
predenidas por meio do barramento.
Referência de pulso
É um sinal de pulso transmitido às entradas digitais
(terminal 29 ou 33).
Ref
MÁX
Determina a relação entre a entrada de referência com
valor de escala total de 100% (tipicamente 10 V, 20 mA) e
a referência resultante. O valor máximo de referência está
programado em parâmetro 3-03 Referência Máxima.
Ref
MÍN
Determina a relação entre a entrada de referência com
valor de escala total de 0% (tipicamente 0 V, 0 mA, 4 mA)
e a referência resultante. O valor mínimo de referência está
programado em parâmetro 3-02 Referência Mínima.
1.2.5 Diversos
Entradas analógicas
As entradas analógicas são utilizadas para controlar várias
funções do conversor de frequência.
Há 2 tipos de entradas analógicas:
Entrada de corrente: 0 a 20 mA e 4 a 20 mA.
•
Entrada de tensão: 0 a 10 V CC.
•
Saídas analógicas
As saídas analógicas podem fornecer um sinal de 0 a 20
mA ou 4 a 20 mA.
Adaptação automática do motor, AMA
O algoritmo AMA determina os parâmetros elétricos para o
motor conectado quando parado.
Resistor de frenagem
O resistor de frenagem é um módulo capaz de absorver a
potência de frenagem gerada na frenagem regenerativa.
Essa potência de frenagem regenerativa aumenta a tensão
do barramento CC e um circuito de frenagem garante que
a potência seja transmitida ao resistor de frenagem.
Características de TC
Características do torque constante usadas por todas as
aplicações tais como correia transportadora, bombas de
deslocamento e guindastes.
Entradas digitais
As entradas digitais podem ser utilizadas para controlar
várias funções do conversor de frequência.
Saídas digitais
O conversor de frequência apresenta 2 saídas de estado
sólido que podem fornecer um sinal de 24 V CC (máximo
de 40 mA).
ETR
O relé térmico eletrônico é um cálculo da carga térmica
baseado na carga atual e no tempo. Sua nalidade é fazer
uma estimativa da temperatura do motor.
Barramento padrão do FC
Inclui o barramento RS485 com o Protocolo Danfoss FC ou
o protocolo MC. Consulte parâmetro 8-30 Protocolo.
Inicialização
Se a inicialização for executada (parâmetro 14-22 Modo
Operação ou redenição de 2 dedos), o conversor de
frequência retorna à conguração padrão.
Ciclo útil intermitente
Características nominais úteis intermitentes referem-se a
uma sequência de ciclos úteis. Cada ciclo consiste de um
período com carga e outro sem carga. A operação pode
ser de funcionamento periódico ou de funcionamento
aperiódico.
LCP
O painel de controle local compõe uma interface completa
para controle e programação do conversor de frequência.
O LCP é desconectável. Com o kit de instalação opcional, o
LCP pode ser instalado a até 3 m (9,8 pés) do conversor de
frequência em um painel frontal.
GLCP
A interface do painel de controle local gráco (LCP 102)
para controle e programação do conversor de frequência.
O display é gráco e o painel é usado para mostrar os
valores do processo. O GLCP possui funções de armazenamento e cópia.
NLCP
A interface do painel de controle local numérico (LCP 21)
para controle e programação do conversor de frequência.
O display é numérico e o painel é usado para mostrar os
valores de processo. O NLCP possui funções de armazenamento e cópia.
lsb
É o bit menos signicativo.
msb
É o bit mais signicativo.
1 1
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 5
Introdução
VLT® AutomationDrive FC 360
11
MCM
Curto para mille circular em milésimo, uma unidade de
medição americana para seção transversal do cabo. 1 MCM
= 0,5067 mm2.
Parâmetros on-line/o-line
As alterações nos parâmetros on-line são ativadas imediatamente após a mudança no valor de dados. Para ativar as
alterações nos parâmetros o-line, pressione [OK].
PID de processo
O controle do PID mantém velocidade, pressão e
temperatura ajustando a frequência de saída para corresponder à carga variável.
PCD
Dados de controle de processo.
Ciclo de energização
Desligue a rede elétrica até o display (LCP) car escuro,
depois ligue novamente.
Fator de potência
O fator de potência é a relação entre I1 e I
Fator depotência =
3xUxI1cosϕ1
3xUxI
RMS
RMS
.
Para VLT® AutomationDrive FC 360 conversores de
frequência,
Fator depotência =
cosϕ
1 = 1, portanto:
I1xcosϕ1
I
RMS
=
I
I
RMS
1
O fator de potência indica em que intensidade o conversor
de frequência oferece uma carga na alimentação de rede
elétrica.
Quanto menor o fator de potência, maior será a I
RMS
para o
mesmo desempenho em kW.
I
RMS
=
I
+ I
1
5
+ I
2
+ .. + I
7
2
n
2
2
Além disso, um fator de potência alto indica que as
diferentes correntes harmônicas são baixas.
As bobinas CC incorporadas produzem um alto fator de
potência, minimizando a carga imposta na alimentação de
rede elétrica.
Entrada de pulso/encoder incremental
É um transmissor digital de pulso, externo, utilizado para
retornar informações sobre a velocidade do motor. O
encoder é utilizado em aplicações onde há necessidade de
extrema precisão no controle da velocidade.
RCD
Dispositivo de corrente residual.
Setup
Salve as programações dos parâmetros em 2 setups.
Alterne entre os 2 setups de parâmetros e edite 1 setup
enquanto outro estiver ativo.
SFAVM
Acrônimo que descreve a modulação vetorial assíncrona
orientada por uxo do estator para padrão de
chaveamento.
Compensação de escorregamento
O conversor de frequência compensa o escorregamento do
motor, fornecendo um complemento à frequência que
acompanha a carga medida do motor, mantendo a
velocidade do motor praticamente constante.
Smart logic control (SLC)
O SLC é uma sequência de ações denidas pelo usuário
executadas quando o Smart Logic Controller avalia os
eventos denidos pelo usuário associados como
verdadeiros (grupo do parâmetro 13-** Smart Logic Control).
STW
Status word.
THD
A distorção de harmônicas total indica a contribuição total
da distorção de harmônicas.
Termístor
Um resistor dependente da temperatura colocado onde a
temperatura é monitorada (conversor de frequência ou
motor).
Desarme
Um estado inserido em situações de falha, por exemplo, se
o conversor de frequência estiver sujeito a sobretensão ou
quando estiver protegendo o motor, processo ou
mecanismo. Uma nova partida é evitada até que a causa
da falha desapareça e o estado de desarme seja cancelado
ativando o reset ou, às vezes, sendo programado para
reset automaticamente. Não use o desarme para segurança
pessoal.
Bloqueio por desarme
O bloqueio por desarme é um estado inserido em
situações de falha quando o conversor de frequência está
se protegendo e requer intervenção física. Um exemplo
que causa um bloqueio por desarme é o conversor de
frequência que está sujeito a um curto-circuito na saída.
Um desarme bloqueado só pode ser cancelado
desconectando a rede elétrica, removendo a causa da falha
e reconectando o conversor de frequência. A nova partida
é impedida até que o estado de desarme seja cancelado,
ativando a reinicialização ou, às vezes, sendo programado
para reinicializar automaticamente. Não use o bloqueio por
desarme para segurança pessoal.
Características de VT
Características do torque variável, utilizado em bombas e
ventiladores.
+
VVC
Se comparado com o controle padrão de relação tensão/
frequência, o controle vetorial de tensão (VVC+) melhora a
dinâmica e a estabilidade, tanto quando a referência de
velocidade é alterada quanto em relação ao torque de
carga.
AVM a 60°
Refere-se à modulação vetorial assíncrona do padrão de
°
chaveamento de 60
.
6 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
130BC438.19
3 phase
power
input
Switch mode
power supply
Motor
Interface
(PNP) = Source
(NPN) = Sink
ON=Terminated
OFF=Open
Brake
resistor
91 (L1)
92 (L2)
93 (L3)
PE
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN/OUT)
0/4-20 mA
12 (+24 V OUT)
33 (D IN)
18 (D IN)
20 (COM D IN)
10 V DC
15 mA 100 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0V
5V
S801
RS485
RS485
03
+10 V DC
0/4-20 mA
0-10 V DC
24 V DC
02
01
05
04
250 V AC, 3 A
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
27 (D IN/OUT)
24 V
0 V
0 V (PNP)
24 V (NPN)
0 V
24 V
29 (D IN/OUT)
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
32 (D IN)
31 (D IN)
95
P 5-00
21
ON
(+UDC) 89
(BR) 81 5)
24 V (NPN)
0 V (PNP)
0-10 V DC
(-UDC) 88
RFI
3)
0 V
250 V AC, 3 A
Relay 1
1)
Relay 2 2)
4)
06
42 (A OUT)
45 (A OUT)
Analog
output
0/4-20 mA
Introdução Guia de Programação
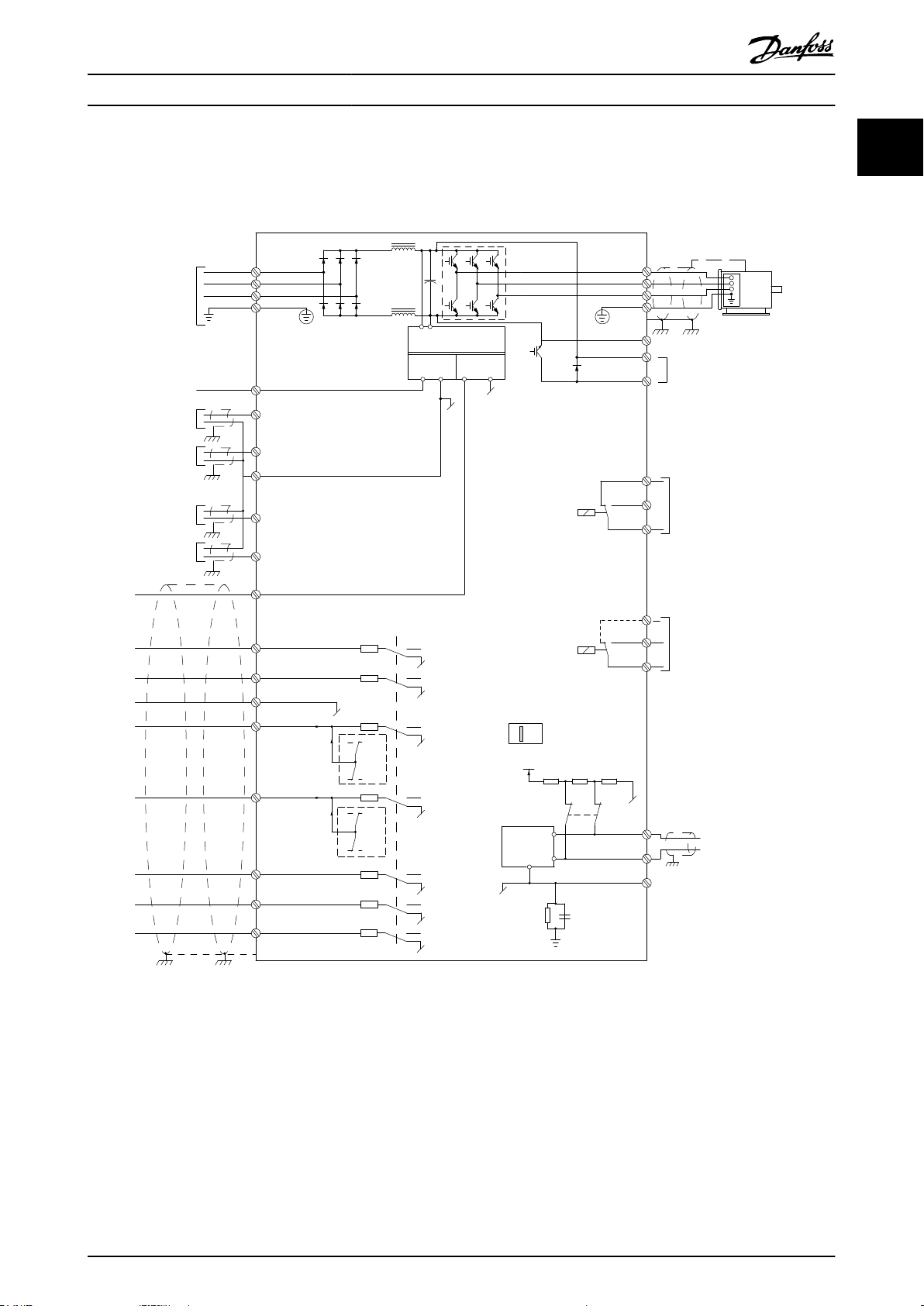
1.3 Fiação Elétrica - Cabos de Controle
1.3.1 Visão Geral
1 1
Ilustração 1.2 Diagrama Esquemático de Fiação Básica
A = Analógica, D = Digital
1) Circuito de frenagem integrado disponível de J1 a J5.
2) O relé 2 tem 2 polos para J1 a J3 e 3 polos para J4 a J7. O relé 2 de J4–J7 com terminais 4, 5, e 6 tem a mesma lógica NA/NF
que o relé 1. Os relés são plugáveis em J1 a J5 e xos em J6 a J7.
3) Filtro CC simples em J1 a J5; Filtro CC duplo em J6 a J7.
4) O interruptor S801 (terminais de comunicação serial) pode ser usado para ativar a terminação na porta RS485 (terminais 68 e
69).
5) Sem BR para J6 a J7.
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 7
130BD367.11
12 13 18 19 27 29 32 33 55
+24 VDC
0 VDC
PNP (Source)
Digital input wiring
NPN (Sink)
Digital input wiring
12 18 19 27 29 31 32 33 55
+24 VDC
0 VDC
130BD368.11
130BA681.10
Introdução
VLT® AutomationDrive FC 360
11
Em casos raros, cabos de controle longos e sinais
analógicos podem resultar em malhas de aterramento de
AVISO!
Os cabos de controle devem ser blindados/reforçados.
50/60 Hz devido ao ruído dos cabos de alimentação de
rede elétrica. Se isto ocorrer, quebre a blindagem ou insira
um capacitor de 100 nF entre a blindagem e o chassi.
Consulte a seção Usando Cabos de Controle Blindados no
Guia de Design para a terminação correta dos cabos de
controle.
As entradas e saídas digitais e analógicas devem ser
conectadas separadamente às entradas comuns (terminais
20 e 55) do conversor de frequência para evitar que as
correntes de aterramento de ambos os grupos afetem
outros grupos. Por exemplo, o chaveamento na entrada
digital pode perturbar o sinal de entrada analógica.
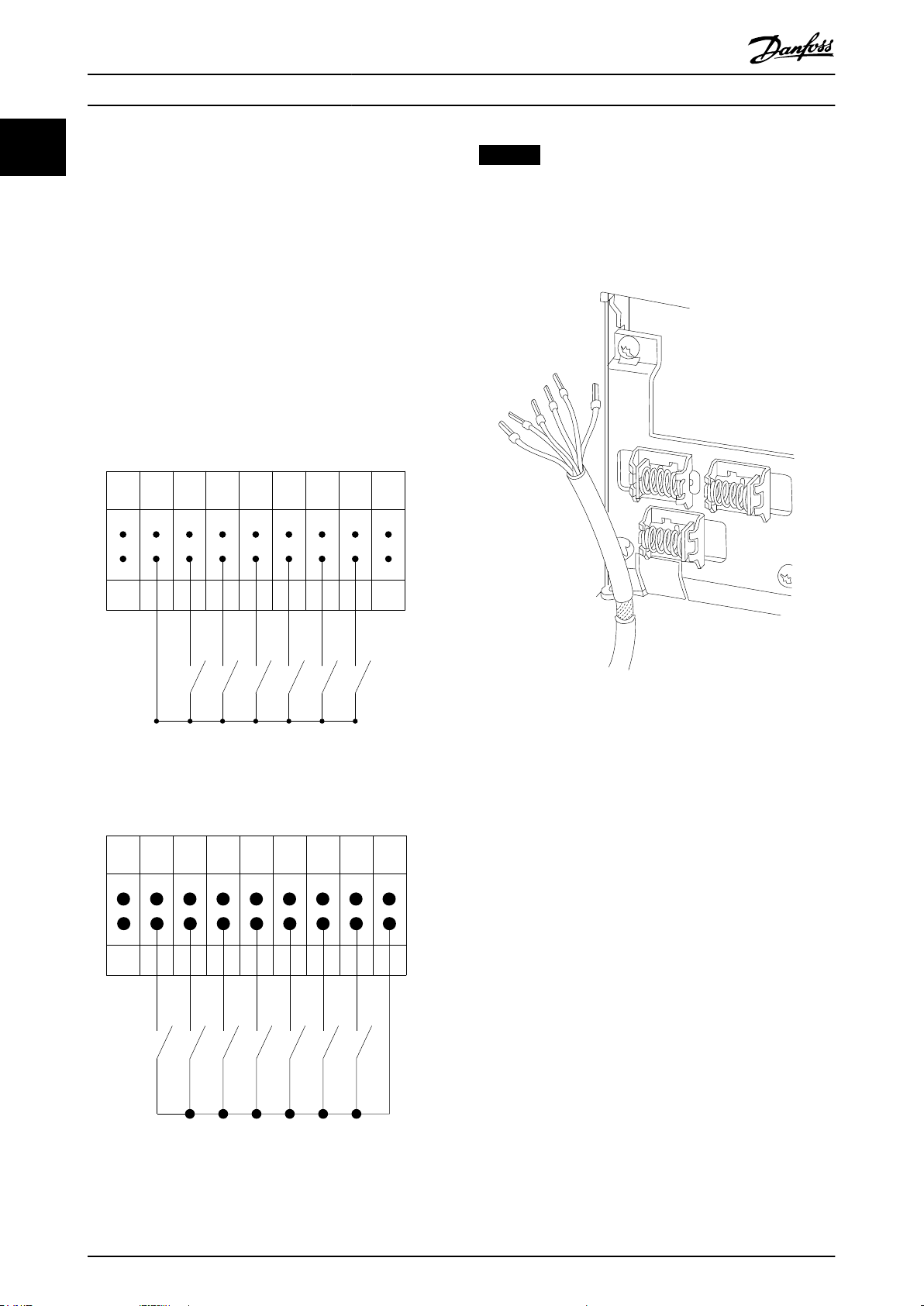
Polaridade da entrada dos terminais de controle
Ilustração 1.3 PNP (Origem)
Ilustração 1.4 NPN (Dissipador)
Ilustração 1.5 Aterramento de cabos de controle blindados/
reforçados
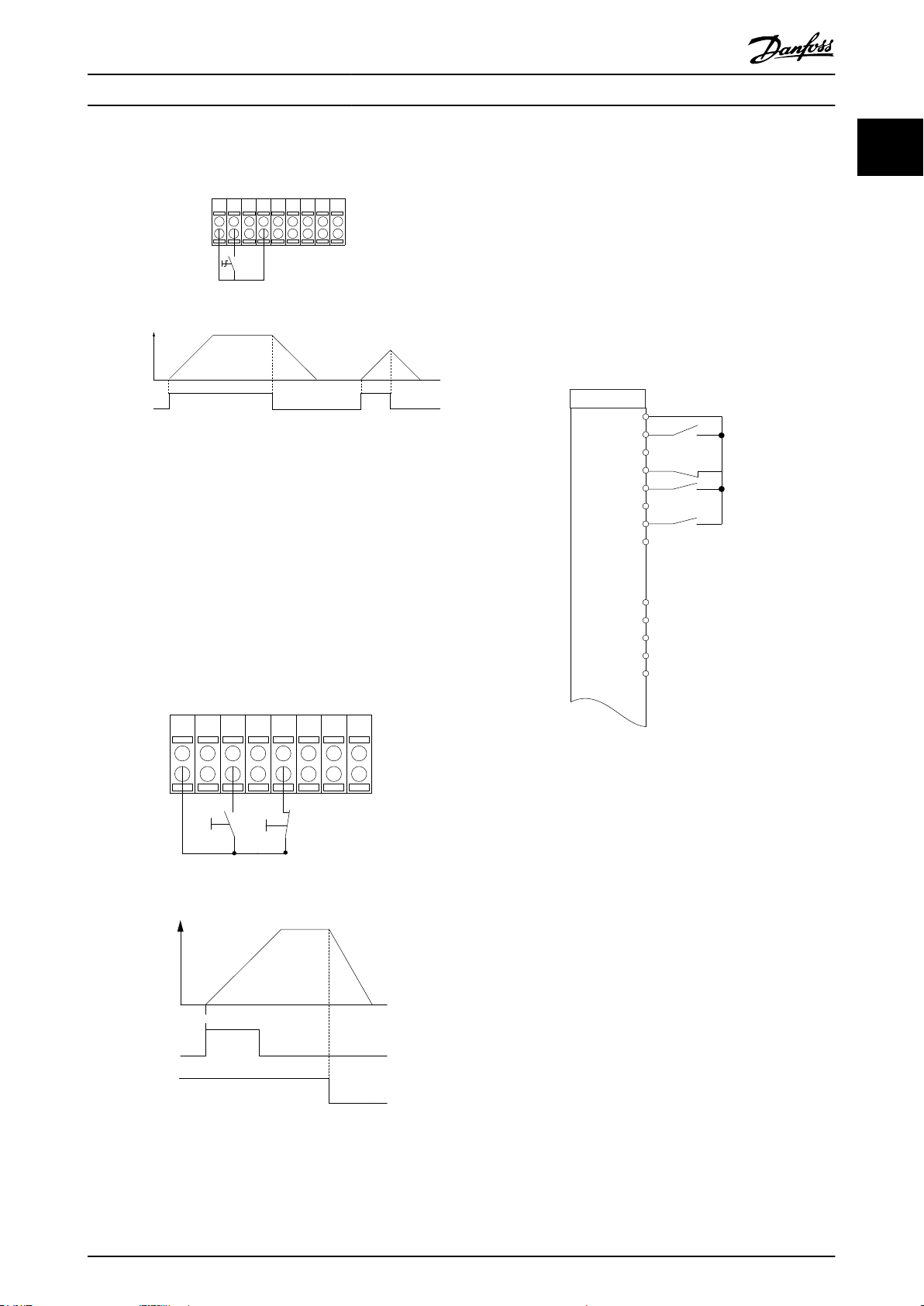
1.3.2 Partida/Parada
Terminal 18 = Parâmetro 5-10 Terminal 18 Entrada Digital [8]
Partida.
Terminal 27 = Parâmetro 5-12 Terminal 27, Entrada Digital
[0] Sem operação (Parada por Paradp/inérc,reverso).
8 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
12 18 19
130BD369.11
322927 31 33 20
P 5-12 [0]
P 5-10 [8]
Start/Stop
+24V
Speed
Start
[18]
1312 18 19
130BD370.11
322927 33
P 5 - 12 [6]
P 5 - 10 [9]
+24 V
Speed
Latched start Stop inverse
Latched start (18)
Stop inverse (27)
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10
V
A IN
A IN
COM
A OUT
12
31
18
19
27
29
32
33
50
53
54
55
42
130BF821.10
D IN
Introdução Guia de Programação
Ilustração 1.6 Partida/Parada
1.3.3 Partida por pulso/Parada por inércia
inversa
Terminal 18 = Parâmetro 5-10 Terminal 18 Entrada Digital [9]
Partida por pulso.
Terminal 27 = Parâmetro 5-12 Terminal 27, Entrada Digital
[6] Parada - Ativo em 0.
1.3.4 Aceleração/Desaceleração
Terminais 29/32 =Aceleração/desaceleração
Terminal 18 = Parâmetro 5-10 Terminal 18 Entrada
Digital [8] Partida (padrão).
Terminal 27 = Parâmetro 5-12 Terminal 27, Entrada
Digital [19] Congelar referência.
Terminal 29 = Parâmetro 5-13 Terminal 29, Entrada
Digital [21] Acelerar.
Terminal 32 = Parâmetro 5-14 Terminal 32, Entrada
Digital [22] Desacelerar.
1 1
Ilustração 1.8 Aceleração/Desaceleração
1.3.5 Referência do Potenciômetro
Referência de tensão via potenciômetro
Fonte da referência 1 = [1] Entrada analógica 53
Ilustração 1.7 Partida por pulso/Parada por inércia inversa
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 9
(padrão).
Terminal 53, baixa tensão = 0 V.
Terminal 53, alta tensão = 10 V.
Terminal 53, ref. baixa/feedback = 0.
Terminal 53, ref. alta/feedback = 50.
Parâmetro 6-19 Modo do terminal 53 = [1] Modo de
tensão.
130BF873.10
5553 5450
Speed
P 6-15
1 kΩ
+10 V/30 mA
Ref. voltage
P 6-11 10V
Introdução
VLT® AutomationDrive FC 360
11
Ilustração 1.9 Referência do Potenciômetro
10 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
Segurança Guia de Programação
2 Segurança
2.1 Símbolos de Segurança
Os seguintes símbolos são usados neste guia:
ADVERTÊNCIA
Indica uma situação potencialmente perigosa que possa
resultar em morte ou ferimentos graves.
CUIDADO
Indica uma situação potencialmente perigosa que possa
resultar em ferimentos menores ou moderados. Também
pode ser usado para alertar contra práticas inseguras.
AVISO!
Indica informações importantes, incluindo situações que
podem resultar em danos ao equipamento ou à
propriedade.
2.2 Pessoal qualicado
Para uma operação segura e sem problemas do conversor,
são necessários transporte, armazenagem, instalação,
operação e manutenção corretos e conáveis. Somente
pessoal qualicado tem permissão para instalar e operar
este equipamento.
ADVERTÊNCIA
PARTIDA ACIDENTAL
Quando o conversor de frequência estiver conectado à
rede elétrica CA, alimentação CC ou load sharing, o
motor poderá dar partida a qualquer momento. Partida
acidental durante a programação, serviço ou serviço de
manutenção pode resultar em morte, ferimentos graves
ou danos à propriedade. O motor pode dar partida por
meio de interruptor externo, comando de barramento
serial, sinal de referência de entrada do LCP ou após uma
condição de falha resolvida.
Para impedir a partida do motor:
Desconecte o conversor de frequência da rede
•
elétrica.
Pressione [O/Reset] no LCP, antes de
•
programar parâmetros.
Conecte toda a ação e monte completamente
•
o conversor de frequência, o motor e qualquer
equipamento acionado antes de o conversor de
frequência ser conectado à rede elétrica CA,
fonte de alimentação CC ou load sharing.
2 2
Pessoal
autorizado a instalar, comissionar e manter o equipamento,
os sistemas e circuitos em conformidade com as leis e
normas pertinentes. Além disso, o pessoal qualicado deve
estar familiarizado com as instruções e medidas de
segurança descritas neste manual.
2.3
qualicado é denido como pessoal treinado,
Segurança e Precauções
ADVERTÊNCIA
ALTA TENSÃO
Os conversores contêm alta tensão quando estão
conectados à entrada da rede elétrica CA, alimentação
CC ou Load Sharing. Deixar de realizar a instalação, a
inicialização e a manutenção por pessoal qualicado
pode resultar em morte ou lesões graves.
Somente pessoal qualicado deve realizar a
•
instalação, a inicialização e a manutenção.
Antes de realizar qualquer serviço de
•
manutenção ou reparo, use um dispositivo de
medição de tensão adequado para se certicar
de que não há tensão residual no conversor.
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 11
Segurança
VLT® AutomationDrive FC 360
ADVERTÊNCIA
TEMPO DE DESCARGA
22
O conversor de frequência contém capacitores de
barramento CC, que podem permanecer carregados
mesmo quando o conversor de frequência não está
energizado. Pode haver alta tensão presente mesmo
quando as luzes indicadoras LED de advertência
estiverem apagadas. Se o tempo especicado após a
energia ter sido desligada não for aguardado para
executar ou serviço de manutenção, isto pode resultar
em morte ou ferimentos graves.
Pare o motor.
•
Desconecte as fontes de alimentação da rede
•
elétrica CA e do barramento CC, incluindo os
backups de bateria, UPS e conexões do
barramento CC para os outros conversores de
frequência.
Desconecte ou trave o motor PM.
•
Aguarde os capacitores se descarregarem por
•
completo. O tempo de espera mínimo está
especicado em Tabela 2.1 e também é visível
na etiqueta do produto, no topo do conversor
de frequência.
Antes de realizar qualquer serviço de
•
manutenção, use um dispositivo de medição de
tensão apropriado para ter certeza de que os
capacitores estejam completamente descarregados.
ADVERTÊNCIA
PERIGO PARA O EQUIPAMENTO
Contato com eixos rotativos e equipamentos elétricos
pode resultar em morte ou ferimentos graves.
Garanta que apenas pessoal treinado e
•
qualicado realize a instalação, inicialização e
manutenção.
Garanta que o trabalho elétrico esteja em
•
conformidade com os códigos elétricos
nacionais e locais.
Siga os procedimentos deste guia.
•
CUIDADO
RISCO DE FALHA INTERNA
Uma falha interna no drive pode resultar em lesões
graves quando o drive não estiver fechado corretamente.
Assegure que todas as tampas de segurança
•
estão no lugar e bem presas antes de aplicar
energia.
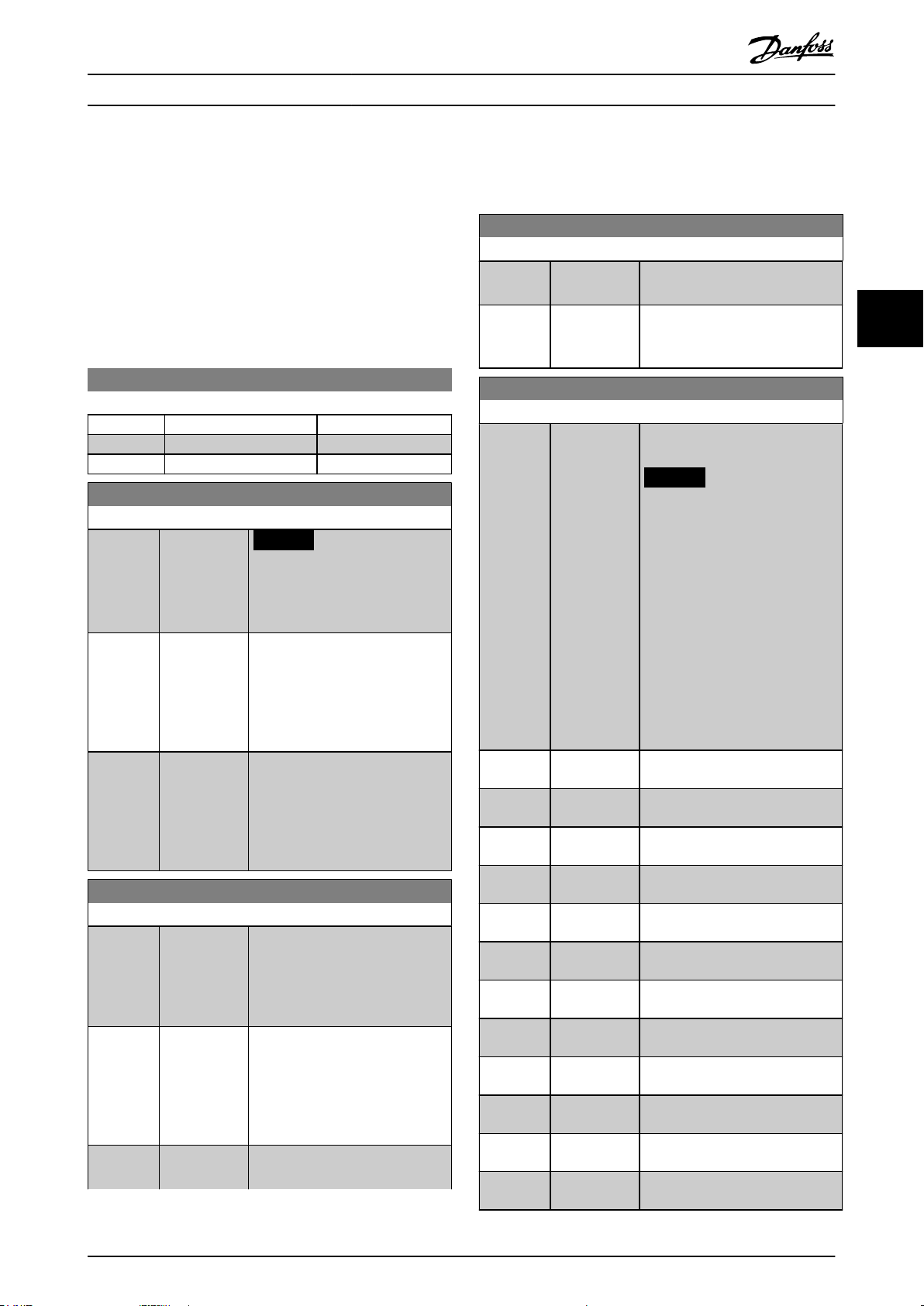
AVISO!
ALTITUDES ELEVADAS
Para instalação em altitudes acima de 2000 m (6562 pés),
entre em contato com a Danfoss com relação à PELV.
AVISO!
USO EM REDE ELÉTRICA ISOLADA
Tensão
[V]
380–480
380–480
Faixa de potência
[kW (hp)]
0,37–7,5 kW
(0,5–10 hp)
11–75 kW
(15–100 hp)
Tempo de espera
mínimo
(minutos)
4
15
Para obter detalhes sobre o uso do conversor de
frequência em rede elétrica isolada, consulte a seção
Interruptor de RFI no Guia de Design.
Siga as recomendações com relação à instalação em rede
elétrica IT. Use dispositivos de monitoramento relevantes
para rede elétrica IT para evitar danos.
Tabela 2.1 Tempo de descarga
ADVERTÊNCIA
RISCO DE CORRENTE DE FUGA
As correntes de fuga excedem 3,5 mA. Falha em aterrar o
conversor corretamente pode resultar em morte ou
ferimentos graves.
Assegure o aterramento correto do
•
equipamento por um eletricista certicado.
12 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
130BC506.10
Setup 1
A
B
C
D
5
12
13 14 15
10
11
10
9
6
7
8
4
1
2
3
Menu
Status
Quick
Menu
Main
Menu
Hand
On
O
Reset
Auto
On
Back
OK
On
Warn
Alarm
130BD135.10
Setup 12
INDEX
AHP
VkW
srpm
Hz%
n2n1
n3
p5 p4
p3 p2 p1
Programação Guia de Programação
3 Programação
3.1 Operações do Painel de Controle Local
VLT® AutomationDrive FC 360 suporta o painel de controle
local numérico (NLCP) LCP 21, o painel de controle local
gráco (GLCP) LCP 102 e a tampa cega. Este capítulo
descreve as operações com o LCP 21 e o LCP 102.
AVISO!
O conversor de frequência também pode ser
programado Software de setup MCT 10 no PC por meio
da porta de comunicação RS485. Este software pode ser
encomendado usando o código número 130B1000 ou
baixado do site da Danfoss: drives.danfoss.com/
downloads/pctools/#/.
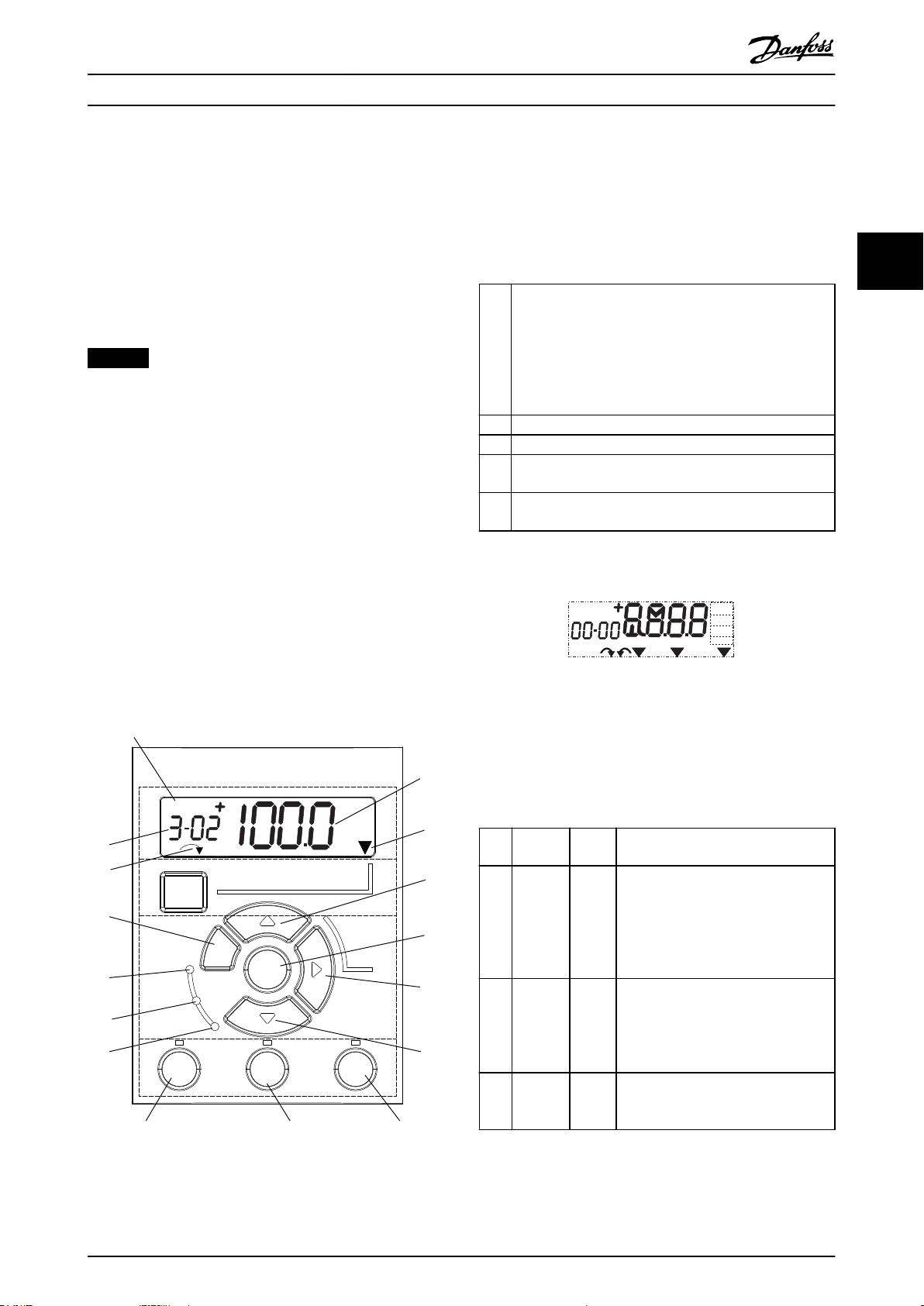
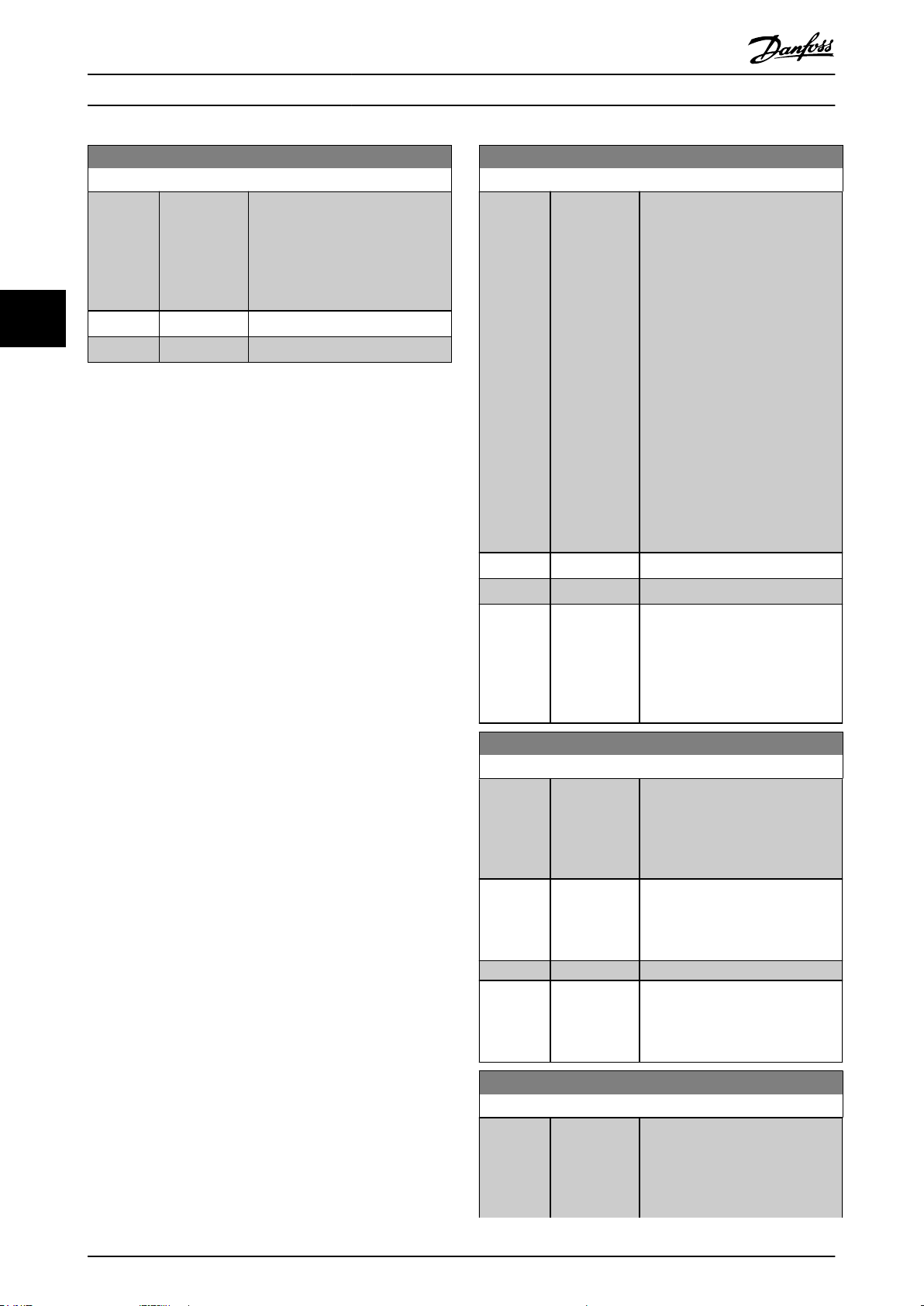
3.1.1 Painel de Controle Local Numérico
O painel de controle local numérico LCP 21 é dividido em
4 seções funcionais.
A. Display numérico.
B. Tecla do menu.
C. Teclas de navegação e luzes indicadoras(LEDs).
D. Teclas de operação e luzes indicadoras (LEDs).
A. Display Numérico
A tela de LCD é iluminada por trás com uma linha
numérica. Todos os dados são mostrados no LCP.
1 O número do setup exibe a conguração ativa e o setup
de edição. Caso o mesmo setup atue tanto como setup
ativo e como setup de edição, somente esse setup é
mostrado (conguração de fábrica). Quando a
conguração ativa e setups de edição forem diferentes, os
dois números são exibidos no display (conguração 12). O
número piscando indica o setup de edição.
2 Número do parâmetro.
3 Valor do parâmetro.
4 O sentido do motor é mostrado no canto inferior esquerdo
do display. Uma pequena seta indica o sentido de rotação.
5 O triângulo indica se o LCP está no menu de Status, no
Quick Menu ou no Menu Principal.
Tabela 3.1 Legenda de Ilustração 3.1, seção A
Ilustração 3.2 Informações da tela
3 3
B. Tecla do menu
Para selecionar entre Status, Quick Menu ou Menu
Principal. pressione [Menu].
C. Luzes indicadoras (LEDs) e teclas de navegação
Indicado
Ilustração 3.1 Vista do LCP 21
6 On Verde
Advertên
7
cia
8 Alarme
Tabela 3.2 Legenda para Ilustração 3.1, Luzes indicadoras (LEDs)
Luz Função
r
A luz indicadora ON é ativada quando
o conversor de frequência receber
energia da tensão de rede, dos
terminais de comunicação serial CC ou
de uma fonte de alimentação de 24 V
externa.
Quando condições de advertência
forem atingidas, o LED amarelo de
Amarel
AVISO acende e um texto é exibido na
o
área do display identicando o
problema.
Uma condição de falha faz o LED
Vermel
vermelho de alarme piscar e um texto
ho
de alarme é exibido.
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 13
130BC440.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Programação
VLT® AutomationDrive FC 360
Tecla Função
9 [Back]
33
10
11 [OK]
12
Tabela 3.3 Legenda para Ilustração 3.1, Teclas de navegação
[▲] [▼]
[►]
Para retornar à etapa ou camada anterior,
na estrutura de navegação.
Para alternar entre os grupos do
parâmetro, nos parâmetros e dentro dos
parâmetros ou aumentar/diminuir valores
dos parâmetros. Setas também podem
ser usadas para conguração da
referência local.
Pressione para acessar grupos do
parâmetro ou para ativar uma seleção.
Pressione para se mover da esquerda
para a direita dentro do valor do
parâmetro para alterar cada dígito individualmente.
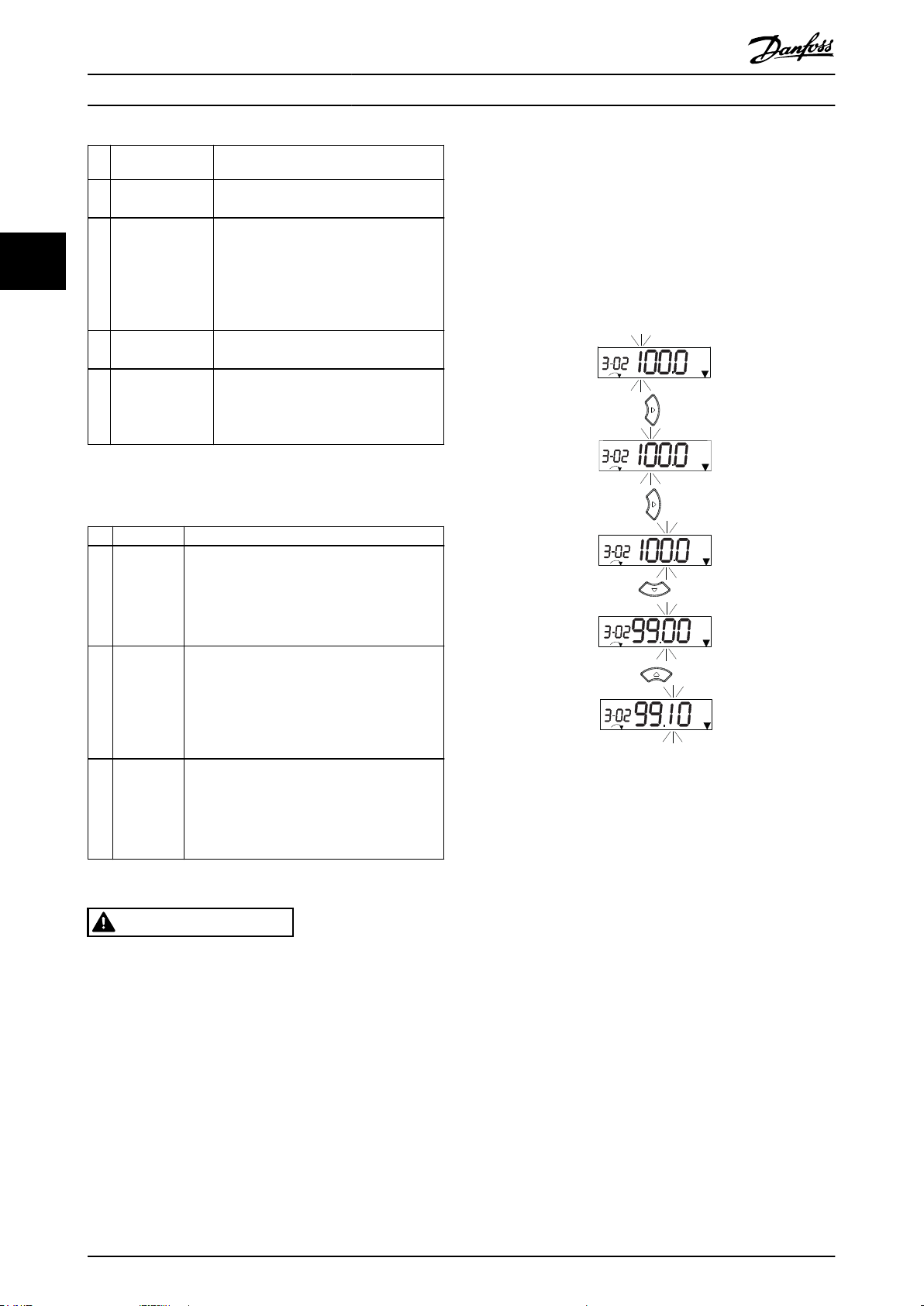
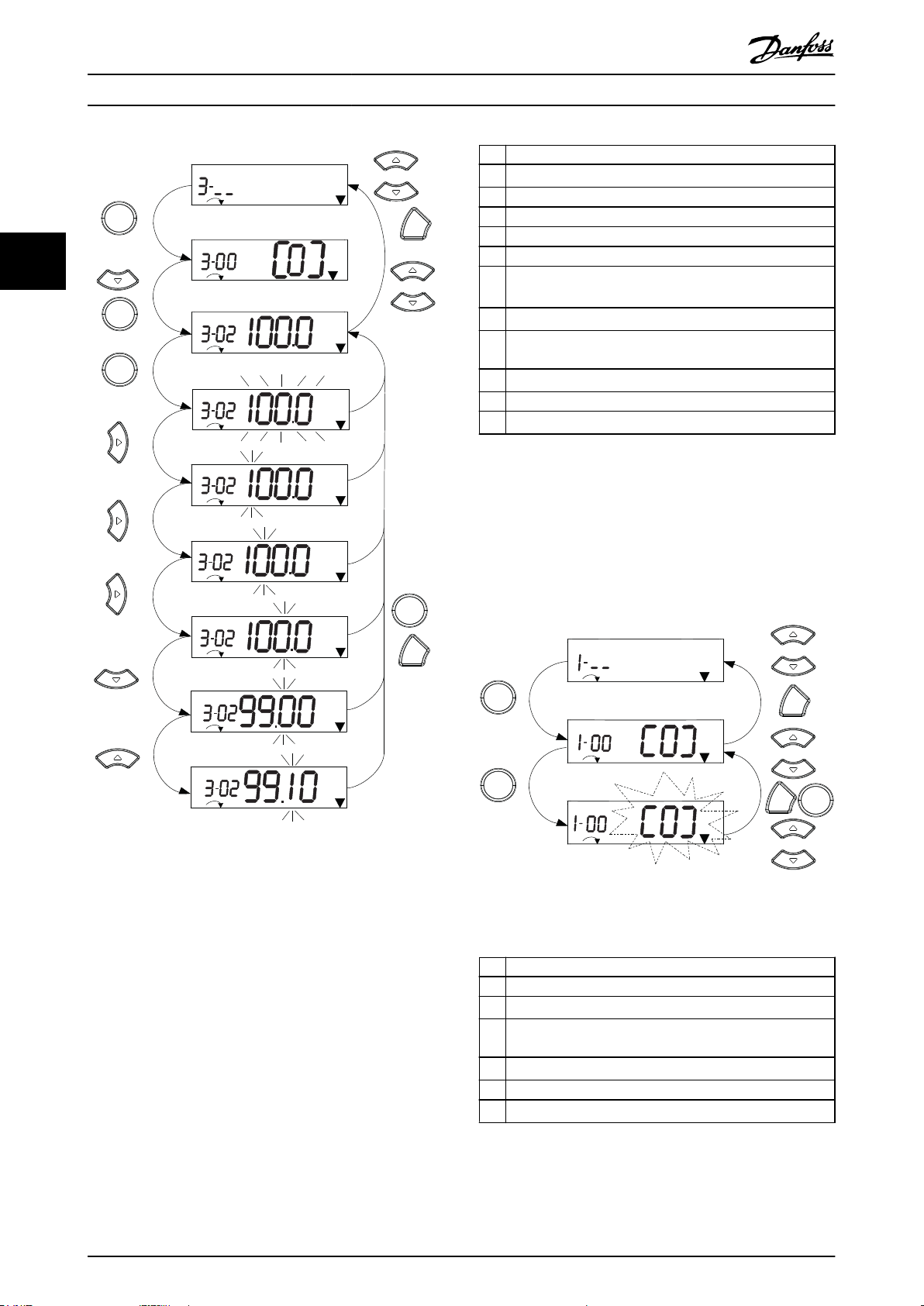
3.1.2 Função da tecla direita no NLCP
Pressione [►] para editar individualmente qualquer dos 4
dígitos na tela. Quando [►] é pressionado uma vez, o
cursor vai para o primeiro dígito e o dígito começa a piscar
como mostrado em Ilustração 3.3. Pressione [▲] [▼] para
alterar o valor. Pressionar [►] não altera o valor dos dígitos
nem move a casa decimal.
D. Teclas de operação e luzes indicadoras (LEDs)
Tecla Função
Inicia o conversor de frequência no controle
Hand On
13
(Manual
ligado)
14 O/Reset
Auto On
15
(Automátic
o ligado)
local.
Um sinal de parada externo por entrada de
•
controle ou comunicação serial substitui o
manual ligado local.
Para o motor, mas não remove a energia para
o conversor de frequência ou reinicializa o
conversor de frequência manualmente após
uma falha ser eliminada. Se estiver em modo
alarme, o alarme será reinicializado se a
condição de alarme for removida.
Coloca o sistema em modo operacional
remoto.
Responde a um comando de partida
•
externo por terminais de controle ou
comunicação serial.
Ilustração 3.3 Função da tecla direita
[►] também pode ser usado para se mover entre os grupos
do parâmetro. Quando no Menu Principal, pressione [►]
para ir para o primeiro parâmetro no próximo grupo do
Tabela 3.4 Legenda de Ilustração 3.1, seção D
parâmetro (por exemplo, para ir de
parâmetro 0-03 Denições Regionais [0] Internacional para
ADVERTÊNCIA
ALTA TENSÃO
Tocar o conversor de frequência após pressionar a tecla
[Desligar/Reset] ainda é perigoso, porque a chave não
desconecta o conversor de frequência da rede elétrica.
parâmetro 1-00 Modo Conguração [0] Malha aberta).
3.1.3 Quick Menu no NLCP
O Quick Menu dá acesso fácil aos parâmetros utilizados
com mais frequência.
Desconecte o conversor de frequência da rede
•
elétrica e aguarde o conversor de frequência
descarregar totalmente. Consulte o tempo de
descarga em Tabela 2.1.
1. Para entrar no Quick Menu, pressione [Menu] até
o indicador no display car posicionado sobre
Quick Menu.
2.
Pressione [▲] [▼] para selecionar QM1 ou QM2, e
em seguida pressione [OK].
3.
Pressione [▲] [▼] para navegar pelos parâmetros
no Quick Menu.
14 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
Programação Guia de Programação
4. Pressione [OK] para selecionar um parâmetro.
5.
Pressione [▲] [▼] para alterar o valor de uma
programação do parâmetro.
6. Pressione [OK] para aceitar a modicação.
7. Para sair, pressione [Back] duas vezes (ou 3 vezes
se estiver em QM2 e QM3) para entrar em Status
ou pressione [Menu] uma vez para entrar no
Menu Principal.
3 3
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 15
130BC445.13
1-22 XXXX V
Motor
nominal
speed
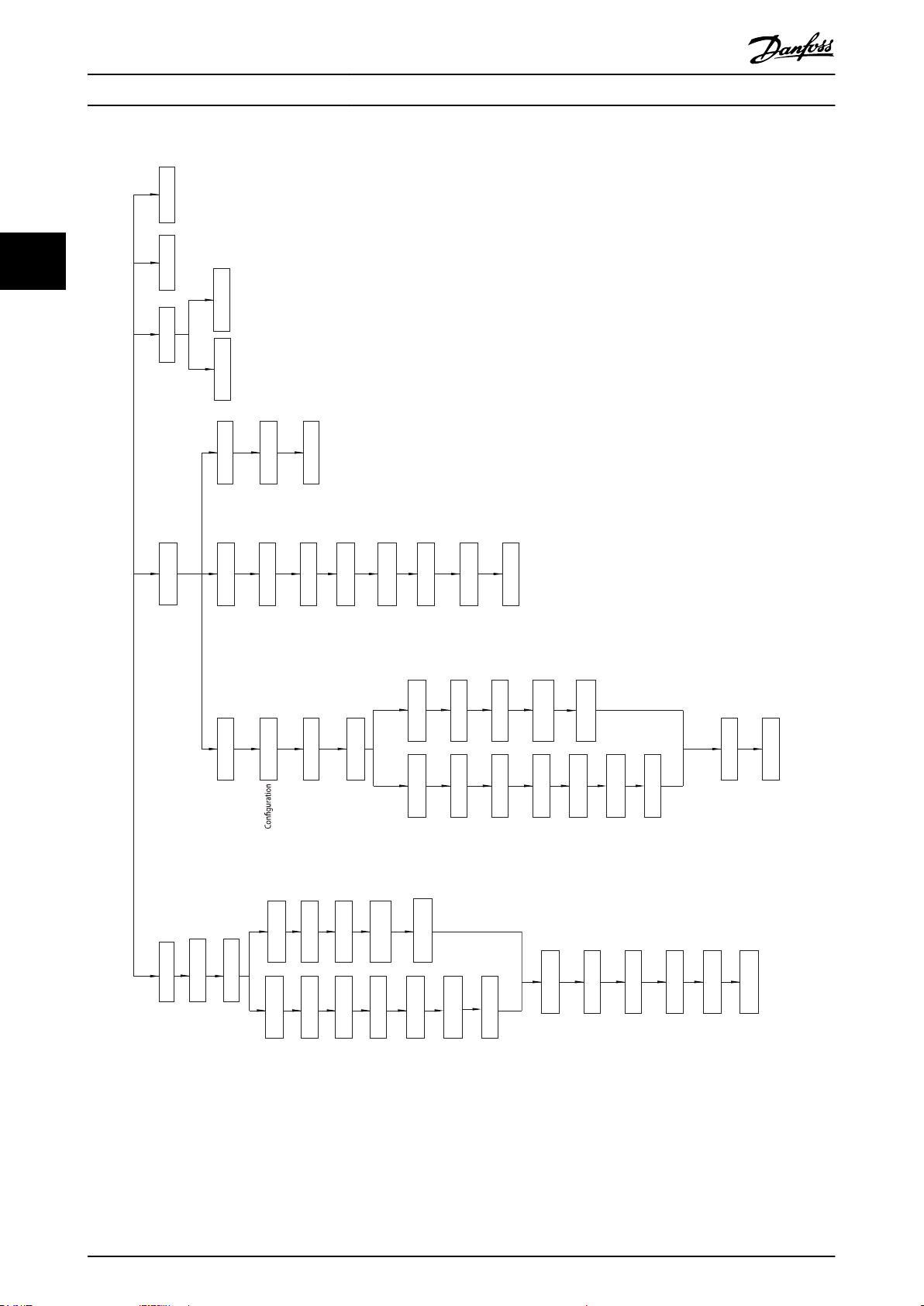
QM 1
0-01 [0]
1-10 [0]
1-24 XXXX A
Language
Motor Type
1-20 XXXX kW
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Stator
Motor frequency
1-25 XXXX
1-30 XXXX
1-39 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
3-02 XXXX
3-03 XXXX
3-41 XXXX S
3-42 XXXX S
5-12
[2]
1-29 [1]
AMA
Back EMF at
1000 RPM
d-axis
QM 2
BMS
AMS
ES
5-70 XXXX
5-71 [0]
1-30 XXXX
1-39 XXXX
1-90 [0]
2-10 [0]
4-16 XXXX %
4-17 XXXX %
4-18 XXXX %
1-00 [0]
1-01 [1]
1-10 [0]
1-24 XXXX A 1-20 XXXX kW
1-22 XXXX V
Motor
nominal
speed
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Motor frequency
1-25 XXXX
1-30 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
Back EMF at
1000 RPM
d-axis
1-39 XXXX
4-14 XXXX
4-19 XXXX
Stator
QM 3
QM 4 QM 5
L10C
SFS
TBD
Motor
nominal
speed
Motor
nominal
speed
Motor current
Motor cont.
rated torque
Resistance (Rs)
Motor poles
inductance (Ld)
Asynchronous motor
Motor current
Minimum reference
Maximum reference
Ramp 1 ramp-up time
Ramp 1 ramp-down time
Terminal 27 digital input
Basic motor set-up
mode
Motor control
principle
Motor type
PM motor
PM motor
Motor
current
Motor cont.
rated torque
Stator
Resistance (Rs)
Motor poles
inductance (Ld)
Motor speed high limit [Hz]
Maximum output frequency
Asynchronous motor
Motor current
RPM
RPM
RPM
Hz
RPM
Hz
Hz
Hz
Hz
Hz
Adv. motor set-up
Resistance (Rs)
Motor poles
Motor thermal
protection
Brake function
Torque limit motor mode
Torque limit generator mode
Current limit
Encoder set-up
Terminal 32/33
pulses per revolution
Terminal 32/33
encoder direction
Changes made
Last 10 changes Since factory setting
Alarm log
Programação
VLT® AutomationDrive FC 360
33
16 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
Ilustração 3.4 Estrutura do Quick Menu
130BA466.10
Programação Guia de Programação
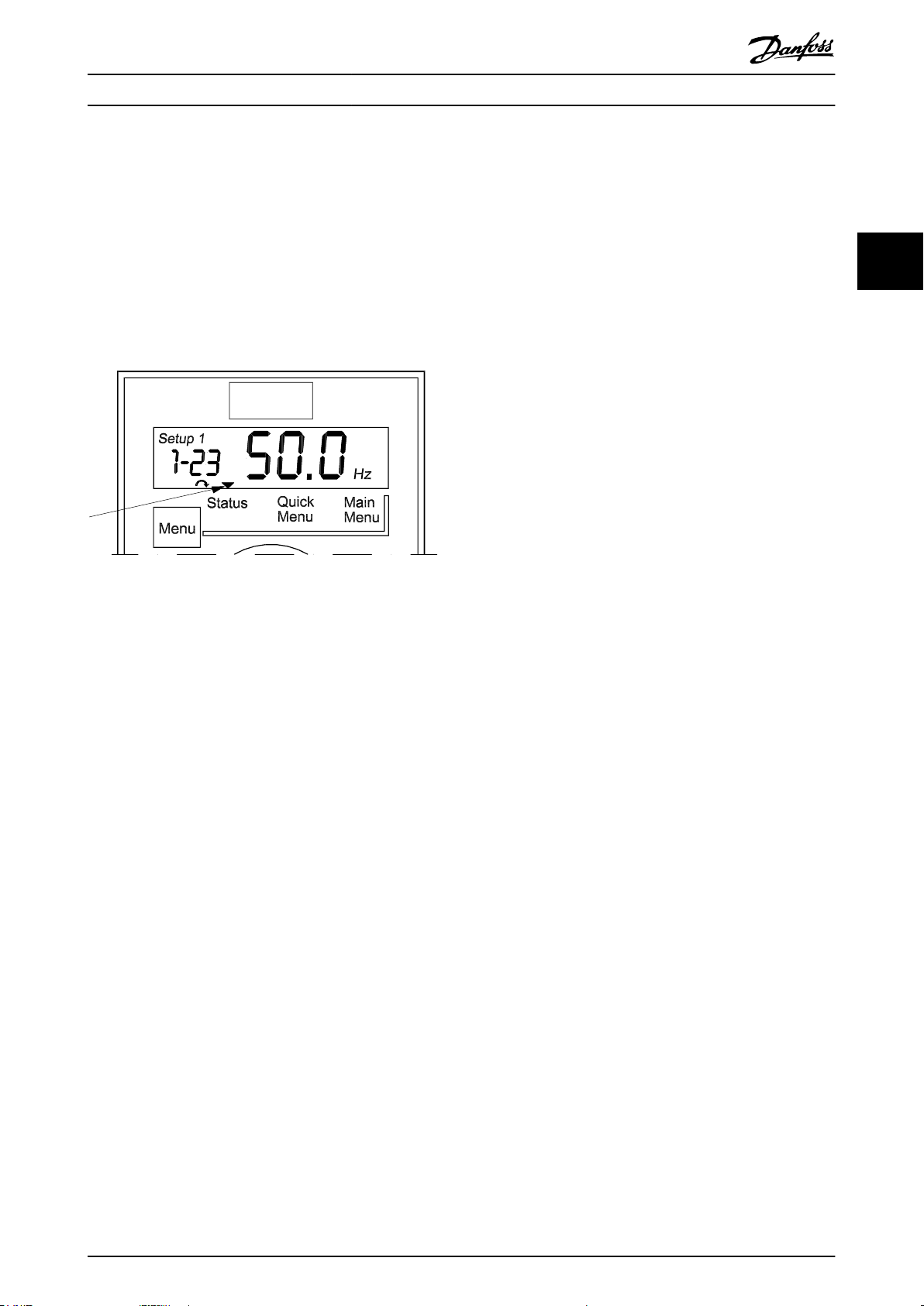
3.1.4 Menu de Status no NLCP
Após a energização, o Menu Status ca ativo. Pressione
[Menu] para alternar entre Status, Quick Menu e Menu
Principal.
[▲] e [▼] alternam entre as opções em cada menu.
O display indica o modo de status com uma pequena seta
acima de Status.
Ilustração 3.5 Indicando o Modo Status
Os 8 parâmetros a seguir podem ser acessados no menu
de status do NLCP no modo automático ligado:
Parâmetro 16-02 Referência [%].
•
Parâmetro 16-09 Leit.Personalz..
•
Parâmetro 16-10 Potência [kW].
•
Parâmetro 16-13 Freqüência.
•
Parâmetro 16-14 Corrente do motor.
•
Parâmetro 16-16 Torque [Nm].
•
Parâmetro 16-30 Tensão de Conexão CC.
•
Parâmetro 16-52 Feedback [Unidade].
•
Os 6 parâmetros a seguir podem ser acessados no menu
de status do NLCP no modo [Hand On]:
Parâmetro 16-09 Leit.Personalz..
•
Parâmetro 16-10 Potência [kW].
•
Parâmetro 16-13 Freqüência.
•
Parâmetro 16-14 Corrente do motor.
•
Parâmetro 16-16 Torque [Nm].
•
Parâmetro 16-30 Tensão de Conexão CC.
•
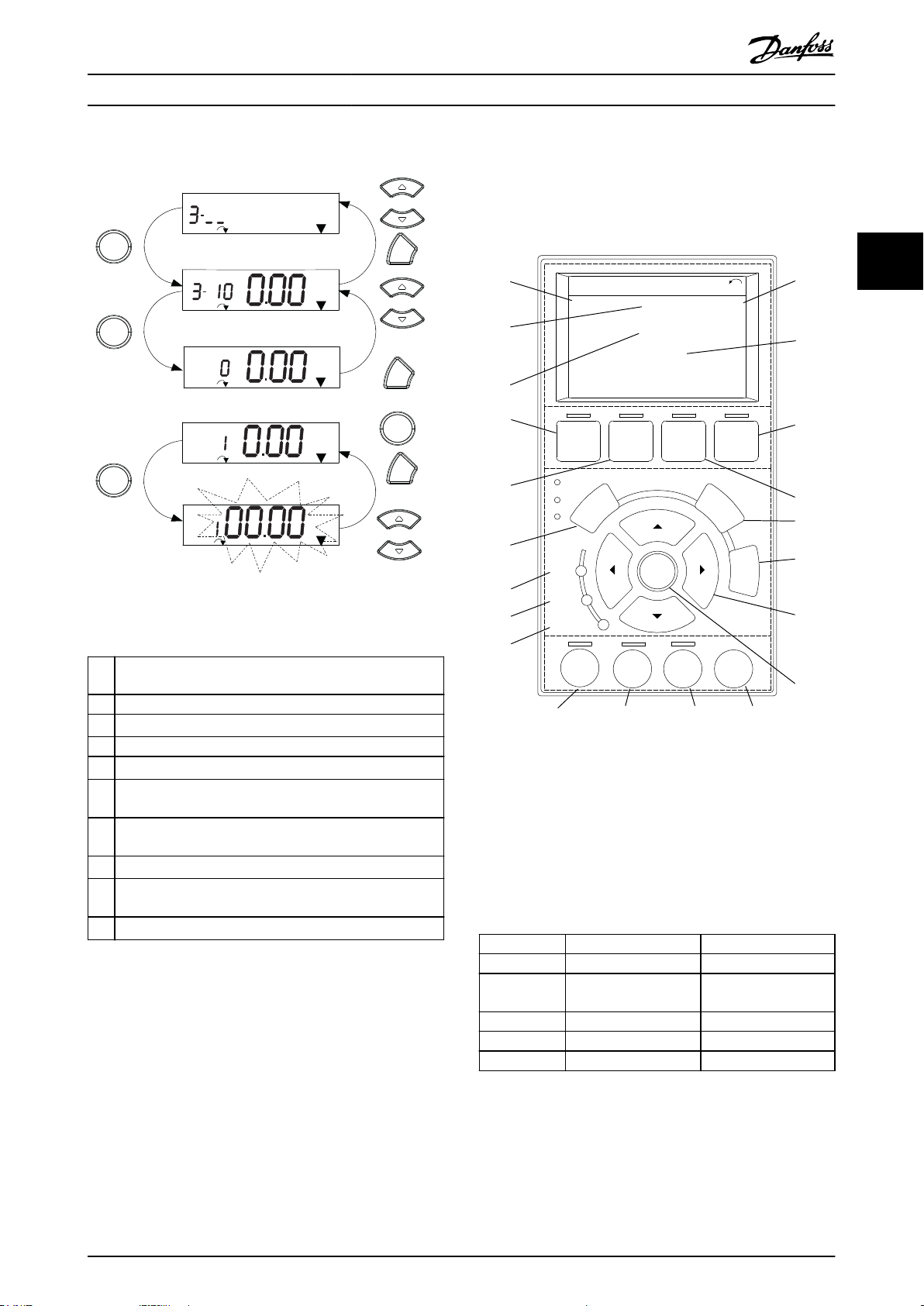
3.1.5 Menu principal no NLCP
O Menu Principal dá acesso a todos os parâmetros.
1. Para entrar no Menu Principal, pressione a tecla
[Menu] até o indicador na tela car posicionado
sobre Menu Principal.
2.
[▲] [▼]: Navegando pelos grupos do parâmetro.
3. Pressione [OK] para selecionar um grupo do
parâmetro.
4.
[▲] [▼]: Navegando pelos parâmetros do grupo
especíco.
5. Pressione [OK] para selecionar o parâmetro.
6.
[►] e [▲] [▼]:
7. Pressione [OK] para aceitar o valor.
8. Para sair, pressione [Voltar] duas vezes (ou 3
vezes para parâmetros de matriz) para entrar no
Menu Principal ou pressione [Menu] uma vez para
entrar em Status.
Consulte Ilustração 3.6, Ilustração 3.7 e Ilustração 3.8 para
obter informações sobre os princípios de alterar o valor de
parâmetros contínuos, parâmetros enumerados e
parâmetro de matriz, respectivamente. As ações nas
ilustrações estão descritas em Tabela 3.5, Tabela 3.6 e
Tabela 3.7.
Denir/alterar o valor do parâmetro.
3 3
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 17
130BC446.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
7
10
11
12
OK
OK
Back
8
Back
Setup 1
2 x
+
OK
9
OK
130BC447.11
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
OK
OK
Back
7
OK
Back
Programação
VLT® AutomationDrive FC 360
1 [OK]: O primeiro parâmetro do grupo é mostrado.
2
Pressione [▼] repetidamente para ir até o parâmetro.
3 Pressione [OK] para iniciar a edição.
4
[►]: Primeiro dígito piscando (pode ser editado).
5
[►]: Segundo dígito piscando (pode ser editado).
6
33
[►]: Terceiro dígito piscando (pode ser editado).
7
[▼]: Diminui o valor do parâmetro, a casa decimal muda
automaticamente.
8
[▲]: Aumenta o valor do parâmetro.
9 [Back] Cancelar alterações, voltar a 2.
[OK]: Aceitar alterações, voltar a 2.
10
[▲][▼]: Selecione o parâmetro dentro do grupo.
11 [Back] Remove o valor e mostra o grupo do parâmetro.
12
[▲][▼]: Selecionar grupo.
Tabela 3.5 Alterando valores de parâmetros contínuos
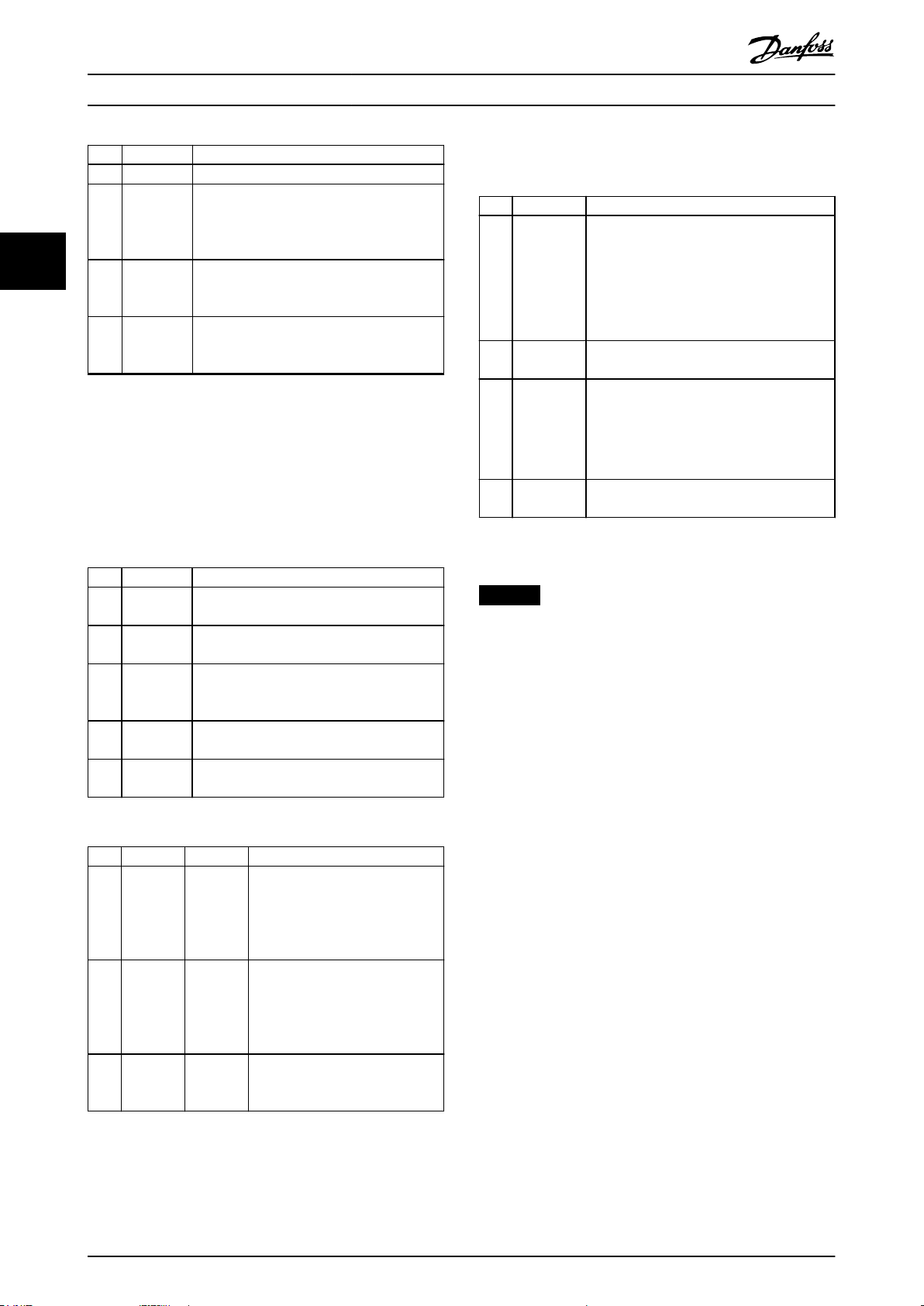
Para parâmetros enumerados, a interação é semelhante,
mas o valor do parâmetro é mostrado entre colchetes
devido à limitação de dígitos do LCP 21 (4 dígitos grandes)
e o enum pode ser maior que 99. Quando o valor enum
for maior que 99, o LCP 21 pode mostrar somente a
primeira parte do colchete.
Ilustração 3.6 Interações do menu principal - Parâmetros
contínuos
Ilustração 3.7 Interações do menu principal - Parâmetros
enumerados
1 [OK]: O primeiro parâmetro do grupo é mostrado.
2 Pressione [OK] para iniciar a edição.
3
[▲][▼]: Alterar valor do parâmetro (piscando).
4 Pressione [Voltar] para cancelar as alterações ou [OK] para
aceitar as alterações (retornar à tela 2).
5
[▲][▼]: Selecione um parâmetro dentro do grupo.
6 [Back] Remove o valor e mostra o grupo do parâmetro.
7
[▲][▼]: Selecione um grupo.
Tabela 3.6 Alterando valores de parâmetros enumerados
18 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
130BC448.10
1
2
4
5
6
7
8
9
10
OK
Back
Back
Back
5 x
Setup 1
Setup 1
Setup 1
Setup 1
%
INDEX
%
INDEX
%
INDEX
Setup 1
INDEX
%
OK
OK
OK
130BD598.10
Auto
On
Reset
Hand
On
O
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
36.4 kW
Auto Remote Ramping
0.000
On
Alarm
Warn.
A
7.83 A
799 RPM
B
C
D
53.2 %
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18 19 20 21
Programação Guia de Programação
Os parâmetros de matriz funcionam da seguinte maneira:
Ilustração 3.8 Interações do menu principal - Parâmetros de
matriz
A. Área do display.
B. Teclas do menu do display.
C. Teclas de navegação e luzes indicadoras(LEDs).
D. Teclas de operação e reset.
3 3
1 [OK]: Mostra os números do parâmetro e o valor do
primeiro índice.
2 [OK]: O índice pode ser selecionado.
3
[▲][▼]: Selecione o índice.
4 [OK]: O valor pode ser editado.
5
[▲][▼]: Alterar valor do parâmetro (piscando).
6 [Back] Cancela as alterações.
[OK]: Aceita as alterações.
7 [Back] Cancela a edição do índice, um novo parâmetro
pode ser selecionado.
8
[▲][▼]: Selecione o parâmetro dentro do grupo.
9 [Back] Remove o valor do índice do parâmetro e mostra o
grupo do parâmetro.
10
[▲][▼]: Selecionar grupo.
Tabela 3.7 Alterando valores dos parâmetros de matriz
3.1.6 Painel de Controle Local Gráco (LCP)
O painel de controle local gráco LCP 102 tem uma área
de display maior, que exibe mais informações que o LCP
21. O LCP 102 suporta exibição em inglês, chinês e
português.
O GLCP é dividido em quatro grupos funcionais (ver
Ilustração 3.9).
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 19
Ilustração 3.9 Painel de Controle Local Gráco (GLCP)
A. Área do display
A área do display é ativada quando o conversor de
frequência recebe energia da tensão de rede ou de
terminais de comunicação serial CC.
As informações mostradas no LCP podem ser customizadas
para as aplicações do usuário. Selecione as opções no
Quick Menu Q3-13 Congurações do Display.
Display. Número do parâmetro Conguração padrão
1 0-20 [1602] Referência [%]
2 0-21
[1614] Corrente do
Motor
3 0-22 [1610] Potência [kW]
4 0-23 [1613] Frequência
5 0-24 [1502] Contador de kWh
Tabela 3.8 Legenda para Ilustração 3.9, Área do display
B. Teclas do menu do display
As teclas de menu são usadas para acesso ao menu para
conguração de parâmetros, articulação entre modos
display de status durante a operação normal e visualização
de dados do registro de falhas.
Programação
VLT® AutomationDrive FC 360
Tecla Função
6 Status Mostra informações operacionais.
Quick
Menu
7
(Menu
Rápido)
33
Main Menu
8
(Menu
Principal)
Alarm Log
9
(Registro de
Alarmes)
Tabela 3.9 Legenda para Ilustração 3.9, Teclas do menu do
display
Permite acesso aos parâmetros de
programação para obter instruções de setup
iniciais e muitas instruções detalhadas da
aplicação.
Permite acesso a todos os parâmetros de
programação.
Mostra uma lista das advertências atuais, os
últimos 10 alarmes e o log de manutenção.
C. Teclas de navegação e luzes indicadoras (LEDs)
As teclas de navegação são usadas para programar funções
e mover o cursor no display. As teclas de navegação
também fornecem controle da velocidade na operação
D. Teclas de operação e reinicializar
As teclas de operação estão na parte inferior do LCP.
Tecla Função
Inicia o conversor de frequência no modo
Manual ligado.
Hand On
18
(Manual
Ligado)
19
20
21 Reinicializar
O
(Desligado)
Auto On
(Automático
Ligado)
Para o motor, mas não remove a energia
para o conversor de frequência.
Coloca o sistema em modo operacional
remoto.
•
Reinicializa o conversor de frequência
manualmente após uma falha ser eliminada.
Um sinal de parada externo por
•
entrada de controle ou
comunicação serial substitui o
manual ligado local.
Responde a um comando de partida
externo por terminais de controle ou
comunicação serial.
local. Há também três luzes indicadoras de status do
conversor de frequência nessa área.
Tecla Função
10
11
12
13
14 OK
Tabela 3.10 Legenda para Ilustração 3.9, Teclas de navegação
Back
(Anterior)
Cancel
(Cancelar)
Info
(Informaçõe
Teclas de
navegação
Retorna à etapa ou lista anterior na estrutura
de menu.
Cancela a última alteração ou comando
enquanto o modo display não for alterado.
Pressione para obter uma denição da
função exibida.
s)
Para mover entre os itens do menu, use as 4
teclas de navegação.
Pressione para acessar grupos do parâmetro
ou para ativar uma seleção.
Tabela 3.12 Legenda para Ilustração 3.9, Teclas de operação e
reinicializar
AVISO!
Para ajustar o contraste do display, pressione [Status] e
as teclas [▲]/[▼].
3.1.7 Alterando a programação do
parâmetro com GLCP
Acesse e altere a programação do parâmetro no Quick
Menu (Menu Rápido) ou no Main Menu (Menu Principal). O
Quick Menu dá acesso somente a um número limitado de
parâmetros.
1. Pressione [Quick Menu] ou [Main Menu] (Menu
Indicador Luz Função
A luz indicadora ON é ativada
quando o conversor de frequência
15 On Verde
Advertênc
16
17 Alarme Vermelho
ia
Amarelo
recebe energia da tensão de rede
ou de terminais de comunicação
serial CC.
Quando condições de advertência
forem atingidas, o LED amarelo de
AVISO acende e um texto é
exibido na área do display identicando o problema.
Uma condição de falha faz o LED
vermelho de alarme piscar e um
texto de alarme é exibido.
principal) no LCP.
2.
Pressione [▲] [▼] para navegar pelos grupos do
parâmetro, pressione [OK] para selecionar grupo
de parâmetros.
3.
Pressione [▲] [▼] para navegar pelos parâmetros,
pressione [OK] para selecionar um parâmetro.
4.
Pressione [▲] [▼] para alterar o valor de uma
programação do parâmetro.
5.
Press [◄] [►] para alterar o dígito quando um
parâmetro decimal estiver no estado de edição.
6. Pressione [OK] para aceitar a modicação.
Tabela 3.11 Legenda para Ilustração 3.9, Luzes
indicadoras (LEDs)
20 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
130BD532.10
Programação Guia de Programação
Visualizar alterações
Quick Menu Q5 - Alterações Efetuadas indica todos os
parâmetros alterados em relação à conguração padrão.
A lista mostra apenas os parâmetros que foram
•
alterados no setup atual da edição.
Os parâmetros que foram reinicializados para
•
valores padrão não são indicados.
A mensagem Empty (vazio) indica que nenhum
•
parâmetro foi alterado.
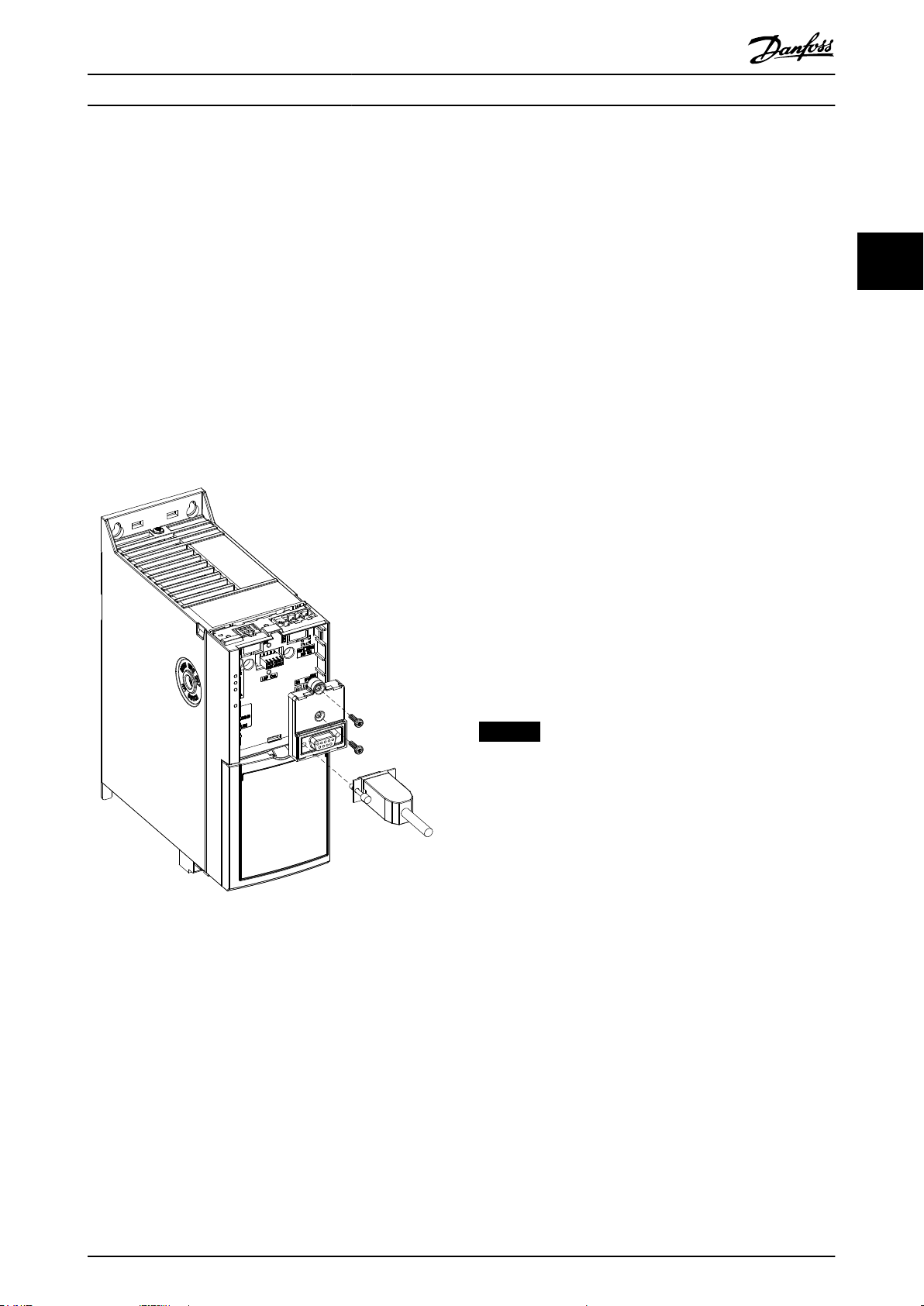
3.1.8 Montando o GLCP
Use o adaptador do GLCP (número de pedido: 132B0281) e
um cabo para conectar o LCP 102 ao conversor de
frequência, como mostrado em Ilustração 3.10.
Para backup, transra dados por upload para a
•
memória do LCP.
Para fazer download de dados em outro
•
conversor de frequência, conecte o LCP a essa
unidade e faça o download das congurações
armazenadas.
Restaurar a conguração padrão de fábrica não
•
altera os dados armazenados na memória do LCP.
Processo de backup/download
1. Pressione [O] no GLCP ou [O/Reset] no NLCP
para parar o motor antes de fazer upload ou
baixar dados.
2. Pressione [Main Menu] (Menu principal)
parâmetro 0-50 Cópia do LCP e pressione [OK].
3. Selecione [1] Todos para o LCP para fazer upload
de dados para o LCP ou selecione [2] Todos a
partir d LCP para baixar dados do LCP ou
selecione [3] Indep.d tamanh.de LCP para baixar
parâmetros independentes do tamanho do motor
do LCP.
4. Pressione [OK]. Uma barra de progresso mostra o
andamento do download ou do upload.
5. Pressione [Hand On] ou [Auto On] para retornar à
operação normal.
3 3
Ilustração 3.10 Adaptador do GLCP e Cabo de Conexão
3.1.9 Fazer Backup/Download de
Parâmetros com o LCP
Para estabelecer a programação correta da aplicação
geralmente é necessário programar funções em vários
parâmetros relacionados. Os detalhes dos parâmetros são
fornecidos em capétulo 4 Descrições do Parâmetro.
Os dados de programação são armazenados internamente
no conversor de frequência.
3.1.10 Restaurando a conguração padrão
com o LCP
AVISO!
Risco de perder programação, dados do motor,
localização e registros de monitoramento ao realizar a
restauração da conguração padrão. Para fornecer um
backup, transra os dados por upload para o LCP antes
da inicialização.
A restauração da programação do parâmetro padrão é
realizada pela inicialização do conversor de frequência.
Inicialização é executada por meio do
parâmetro 14-22 Modo Operação (recomendado) ou
manualmente. A inicialização não reinicializa as congu-
rações de parâmetro 1-06 Sentido Horário e
parâmetro 0-03 Denições Regionais.
A inicialização usando parâmetro 14-22 Modo
•
Operação não reinicializa congurações do
conversor de frequência como as horas de funcionamento, seleções da comunicação serial, registro
de falhas, registro de alarme e outras funções de
monitoramento.
A inicialização manual apaga todos os dados do
•
motor, de programação, de localização e de
monitoramento e restaura a conguração padrão
de fábrica.
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 21
Programação
VLT® AutomationDrive FC 360
Procedimento de inicialização recomendado, via
parâmetro 14-22 Modo Operação
1. Selecione parâmetro 14-22 Modo Operação e
pressione [OK].
2. Selecione [2] Inicialização e pressione [OK].
33
3. Remova a energia da unidade e aguarde até o
display desligar.
4. Aplique energia à unidade.
As programações do parâmetro padrão são restauradas
durante a partida. Isso poderá demorar ligeiramente mais
que o normal.
5. Alarme 80, Drive inicializado no valor padrão é
mostrado.
6. Pressione [Reset] para retornar ao modo de
operação.
Procedimento de inicialização manual
1. Remova a energia da unidade e aguarde até o
display desligar.
2. Pressione e mantenha pressionado [Status], [Main
Menu] e [OK] ao mesmo tempo no GLCP ou
pressione [Menu] e [OK] ao mesmo tempo no
NLCP enquanto aplica energia à unidade (aproximadamente 5 s ou até ouvir um clique e o
ventilador ser acionado).
As programações do parâmetro padrão de fábrica são
restauradas durante a partida. Isso poderá demorar
ligeiramente mais que o normal.
A inicialização manual não reinicializa as seguintes
informações do conversor de frequência:
Parâmetro 0-03
•
Parâmetro 1-06 Sentido Horário
•
Parâmetro 15-00 Horas de funcionamento
•
Parâmetro 15-03 Energizações
•
Parâmetro 15-04 Superaquecimentos
•
Parâmetro 15-05 Sobretensões
•
Parâmetro 15-30 Log Alarme: Cód Falha
•
Programação Básica
3.2
Denições Regionais
3.2.1 Setup de Motor Assíncrono
Insira os dados do motor a seguir na ordem indicada. Essas
informações são encontradas na plaqueta de identicação
do motor.
1. Parâmetro 1-20 Potência do Motor.
2. Parâmetro 1-22 Tensão do Motor.
3. Parâmetro 1-23 Freqüência do Motor.
4. Parâmetro 1-24 Corrente do Motor.
5. Parâmetro 1-25 Velocidade nominal do motor.
Para desempenho ideal no modo VVC+, dados adicionais
do motor são necessários para congurar os parâmetros a
seguir.
6. Parâmetro 1-30 Resistência do Estator (Rs).
7. Parâmetro 1-31 Resistência do Rotor (Rr).
8. Parâmetro 1-33 Reatância Parasita do Estator (X1).
9. Parâmetro 1-35 Reatância Principal (Xh).
Os dados podem ser encontrados na folha de dados do
motor (esses dados tipicamente não estão disponíveis na
plaqueta de
completa usando parâmetro 1-29 Adaptação Automática do
Motor (AMA) [1] Ativar AMA completa ou insira os
parâmetros manualmente.
Ajuste especíco da aplicação ao executar VVC
VVC+ é o modo de controle mais robusto. Na maioria das
situações ele fornece desempenho ideal sem ajustes
posteriores. Execute uma AMA completa para obter o
melhor desempenho.
3.2.2
Etapas iniciais de programação
1. Ajuste parâmetro 1-10 Construção do Motor com
2. Selecione [0] Malha aberta em
identicação do motor). Execute a AMA
Setup do motor PM em VVC
as opções a seguir para ativar a operação do
motor PM:
1a [1] PM, SPM não saliente
1b [3] PM, IPM saliente, Sat
parâmetro 1-00 Modo Conguração.
+
+
AVISO!
O feedback do encoder não é suportado para motores
PM.
Programar os dados do motor
Quando as etapas iniciais de programação estiverem
concluídas, os parâmetros relacionados ao motor PM nos
grupos dos parâmetros 1-2* Dados do Motor, 1-3* Dados
Avanç. do Motor I e 1-4* Dados Avanç. do Motor estão
ativos.
As informações estão na plaqueta de identicação do
motor e na folha de dados do motor.
Programe os parâmetros a seguir na ordem indicada:
1. Parâmetro 1-24 Corrente do Motor.
2. Parâmetro 1-26 Torque nominal do Motor.
3. Parâmetro 1-25 Velocidade nominal do motor.
4. Parâmetro 1-39 Pólos do Motor.
22 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828

Programação Guia de Programação
5. Parâmetro 1-40 Força Contra Eletromotriz em
1000RPM.
6. Parâmetro 1-42 Comprimento do Cabo do Motor.
Execute uma AMA completa usando
parâmetro 1-29 Adaptação Automática do Motor (AMA) e
selecione [1] Ativar AMA Completa. Se uma AMA completa
não for executada com sucesso, congure os seguintes
parâmetros manualmente.
1. Parâmetro 1-30 Resistência do Estator (Rs).
Insira a resistência comum do enrolamento do
estator da fase (Rs). Se apenas dados fase-fase
estiverem disponíveis, divida o valor de fase-fase
por 2 para obter o valor de fase.
Também é possível medir o valor com um
ohmímetro, que leva em conta a resistência do
cabo. Divida o valor medido por 2 e insira o
resultado.
2. Parâmetro 1-37 Indutância do eixo-d (Ld).
Insira a indutância direta do eixo do motor PM.
Se apenas dados fase-fase estiverem disponíveis,
divida o valor de fase-fase por 2 para obter o
valor de fase.
Também é possível medir o valor com um
medidor de indutância, que leva em conta a
indutância do cabo. Divida o valor medido por 2
e insira o resultado.
3. Parâmetro 1-38 Indutância do eixo-q (Lq).
Este parâmetro está ativo somente quando
parâmetro 1-10 Construção do Motor for
programado para [3] PM, IPM saliente, Sat.
Insira a indutância de quadratura do eixo do
motor PM. Se apenas dados fase-fase estiverem
disponíveis, divida o valor de fase-fase por 2 para
obter o valor de fase.
Também é possível medir o valor com um
medidor de indutância, que leva em conta a
indutância do cabo. Faça 1 rotação do rotor do
motor e encontre o valor máximo de indutância
fase-fase. Divida o valor por 2 e insira o resultado.
4. Parâmetro 1-44 Sat. da Indutância do eixo-d
(LdSat).
Este parâmetro está ativo somente quando
parâmetro 1-10 Construção do Motor for
programado para [3] PM, IPM saliente, Sat.
Este parâmetro corresponde à indutância de
saturação do eixo d. O valor padrão é o valor
denido em parâmetro 1-37 Indutância do eixo-d
(Ld). Não altere o valor padrão na maioria dos
casos. Se o fornecedor do motor fornecer a curva
de saturação, insira o valor de indutância do eixo
d, que é 100% da corrente nominal.
5. Parâmetro 1-45 Sat. da Indutância do eixo-q
(LqSat).
Este parâmetro está ativo somente quando
parâmetro 1-10 Construção do Motor for
programado para [3] PM, IPM saliente, Sat.
Este parâmetro corresponde à indutância de
saturação de do eixo q. O valor padrão é o valor
denido em parâmetro 1-38 Indutância do eixo-q
(Lq). Na maioria dos casos, não altere o padrão.
Se o fornecedor do motor fornecer a curva de
saturação, insira o valor de indutância do eixo q,
que é 100% da corrente nominal.
Teste da operação do motor
1. Inicie o motor em baixa velocidade (100–200
RPM). Se o motor não funcionar, verique a
instalação, a programação geral e os dados do
motor.
2. Verique se a função partida em
parâmetro 1-70 Modo de Partida se adequa aos
requisitos da aplicação.
Detecção do rotor
Esta função é a seleção recomendada para aplicações em
que o motor começa a partir da parada, como por
exemplo, em bombas ou transportadores. Para alguns
motores, um som é ouvido quando o conversor de
frequência executa a detecção do rotor. Este som não
prejudica o motor. Ajuste o valor em parâmetro 1-46 Ganho
de Detecção de Posição para motores diferentes. Se o
conversor de frequência não iniciar ou ocorrer um alarme
de sobrecorrente quando o conversor de frequência iniciar,
verique se o rotor está bloqueado ou não. Se o rotor não
estiver bloqueado, programe parâmetro 1-70 Modo de
Partida para [1] Estacionamento e tente novamente.
Estacionamento
Esta função é a opção recomendada para aplicações nas
quais o motor está girando em baixa velocidade, por
exemplo, moagem a vento em aplicações de ventiladores.
Parâmetro 2-06 Corrente de Estacionamento e
parâmetro 2-07 Tempo de Estacionamento são ajustáveis.
Aumente a conguração de fábrica desses parâmetros para
aplicações com alta inércia.
Inicie o motor em velocidade nominal. Caso a aplicação
não funcione bem, verique as congurações de VVC+ PM.
Tabela 3.13 mostra recomendações em diferentes
aplicações.
3 3
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 23
Programação
VLT® AutomationDrive FC 360
Aplicação Congurações
Aplicações de baixa inércia
1)
/I
Motor
2)
<5
I
Carga
33
Aplicações de média
inércia
50>I
Carga/IMotor
Aplicações de alta inércia
I
Carga/IMotor
Alta carga em baixa
velocidade
<30% (velocidade
nominal)
Tabela 3.13 Recomendações em diferentes aplicações
1) I
Carga
2) I
Motor
>5
> 50
= A inércia da carga.
= A inércia do motor.
Aumente o valor para
•
parâmetro 1-17 Const. de tempo
do ltro de tensão por um fator
de 5 a 10.
Reduza o valor de
•
parâmetro 1-14 Ganho de Amortecimento.
Reduza o valor (<100%) de
•
parâmetro 1-66 Corrente Mín. em
Baixa Velocidade.
Mantenha valores calculados.
Aumente os valores de
parâmetro 1-14 Ganho de Amortecimento, parâmetro 1-15 Const. de
Tempo do Filtro de Baixa Veloc e
parâmetro 1-16 Const. de Tempo do
Filtro de Alta Veloc.
Diminua parâmetro 1-17 Const. de
tempo do ltro de tensão
Diminua parâmetro 1-66 Corrente
Mín. em Baixa Velocidade (>100% por
mais tempo pode sobreaquecer o
motor).
Para executar o AMA usando o LCP numérico
Se o motor começar a oscilar a uma certa velocidade,
aumente parâmetro 1-14 Ganho de Amortecimento.
Aumente o valor em pequenas etapas.
Dependendo da potência, a AMA leva de 3–10 minutos
para concluir.
Se ocorrerem advertências ou alarmes, consulte
•
capétulo 6.1.3 Mensagens de advertência/alarme.
Esse procedimento deve ser executado em um
•
motor frio para se obter os melhores resultados
1. Pela programação do parâmetro padrão, conecte
os terminais 12 e 27 antes de executar AMA.
2. Acesse o Menu Principal.
3. Acesse o grupo do parâmetro 1-** Load and Motor.
4. Pressione [OK].
5. Programe os parâmetros do motor usando os
dados da plaqueta de identicação do grupo do
parâmetro 1-2* Motor Data.
6. Programe parâmetro 1-39 Pólos do Motor para IM
e PM.
7. Programe parâmetro 1-40 Força Contra Eletromotriz
em 1000RPM para PM.
8. Dena o comprimento de cabo de motor em
parâmetro 1-42 Comprimento do Cabo do Motor.
9. Ir para parâmetro 1-29 Adaptação Automática do
Motor (AMA).
10. Pressione [OK].
11. Selecione [1] ativar AMA completa.
12. Pressione [OK].
13. Pressione [Hand On] para ativar AMA.
14. O teste executará automaticamente e indicará
quando estiver concluído.
Ajuste o torque de partida em parâmetro 1-66 Corrente Mín.
em Baixa Velocidade. 100% fornece torque nominal como
torque de partida.
AVISO!
A função AMA não faz o motor funcionar e não prejudica
o motor.
3.2.3 Adaptação Automática do Motor
(AMA)
É altamente recomendável executar AMA para medir as
características elétricas do motor e otimizar a compatibilidade entre o conversor de frequência e o motor no modo
VVC+.
O conversor de frequência constrói um modelo
•
matemático do motor para regular a corrente do
motor de saída, melhorando assim seu
desempenho.
Alguns motores não podem executar a versão
•
completa do teste. Nesse caso, selecione Ativar
AMA reduzida (não para PM).
24 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
0-03 Denições Regionais
Option: Funcão:
AVISO!
Não se pode ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
[0] Internacional Ativar parâmetro 1-20 Potência do
Motor [kW] para congurar a
potência do motor em kW e denir
o valor padrão de
parâmetro 1-23 Freqüência do Motor
para 50 Hz.
[1] US Ativar parâmetro 1-20 Potência do
Motor [kW] para congurar a
potência do motor em hp e denir
o valor padrão de
parâmetro 1-23 Freqüência do Motor
para 60 Hz.
0-04 Estado Operacion. na Energiz.(Manual)
Option: Funcão:
Selecione o modo de operação na
reconexão do conversor de
frequência à tensão de rede após o
desligamento no modo manual
ligado.
[0] Retomar Reinicie o conversor de frequência,
mantendo a congurações de
partida/parada (aplicada por [Hand
On/O]) antes de desligar
selecionado do conversor de
frequência.
[1] * Parad
forçd,ref=ant.
Reinicia o conversor de frequência
com uma referência local salva após
0-04 Estado Operacion. na Energiz.(Manual)
Option: Funcão:
a tensão de rede ser religada e
após pressionar [Hand On].
[2] Parada
forçada,ref=0
Reinicializa a referência local em 0
ao reiniciar o conversor de
frequência.
0-06 Tipo de Grade
Option: Funcão:
Selecione o tipo de grade da
tensão/frequência de alimentação.
AVISO!
Nem todos os opcionais são
suportados em todas as
capacidades de potência.
A grade de TI é uma fonte de
alimentação onde o ponto neutro
do lado secundário do
transformador não está conectado
ao terra.
Delta é uma fonte de alimentação
onde a parte secundária do
transformador é conectada em
delta e 1 fase é conectada ao terra.
[10] 380-440 V/50
Hz/grade de TI
[11] 380-440 V/50
Hz/Delta
[12] 380-440 V/50
Hz
[20] 440-480 V/50
Hz/grade de TI
[21] 440-480 V/50
Hz/Delta
[22] 440-480 V/50
Hz
[110] 380-440 V/60
Hz/grade de TI
[111] 380-440 V/60
Hz/Delta
[112] 380-440 V/60
Hz
[120] 440-480 V/60
Hz/grade de TI
[121] 440-480 V/60
Hz/Delta
[122] 440-480 V/60
Hz
Descrições do Parâmetro Guia de Programação
4 Descrições do Parâmetro
4.1 Parâmetros 0-** operação/Display
Parâmetros relacionados às funções básicas do conversor
de frequência, função das teclas do LCP e conguração do
display do LCP.
4.1.1 0-0* Congurações Básicas
0-01 Idioma
Option: Funcão:
[0] * Inglês
[10] Chinês
[28] Português
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 25
4 4
0-07 TI de Frenagem CC Automática
Option: Funcão:
Função de proteção contra
sobretensão na parada por inércia
em ambiente de grade IT. Esse
parâmetro está ativo somente
quando [1] On estiver selecionado
nesse parâmetro.
[0] Desligado Esta função não está ativa.
[1] * Ligado Esta função está ativa.
0-10 Setup Ativo
Option: Funcão:
Selecione o setup no qual o
conversor de frequência deverá
funcionar. Selecione
parâmetro 0-51 Cópia do Setup para
copiar um setup para um ou todos
os setups. Para evitar programações
conitantes do mesmo parâmetro
em dois setups diferentes, vincule
os setups em parâmetro 0-12 Setups
de conexão. Pare o conversor de
frequência antes de alternar entre
setups em que os parâmetros
marcados Não alterável durante a
operação tiverem valores diferentes.
Os parâmetros Não alteráveis
durante a operação são marcados
como FALSE nas listas de
parâmetros em capétulo 5 Listas de
Parâmetros.
[1] * Setup 1 Setup 1 está ativo.
[2] Setup 2 Setup 2 está ativo.
[9] Setup Múltiplo Esse opcional é usado para seleções
remotas de setups via entradas
digitais e porta de comunicação
serial. Este setup utiliza as programações do parâmetro 0-12 Setups
de conexão.
0-11 Set-up da Programação
Option: Funcão:
Selecione o setup a ser programado
durante a operação; a conguração
ativa ou a conguração inativa. O
número do setup que está sendo
editado pisca no LCP.
[1] Setup 1 [1] Setup 1 a [2] Setup 2 podem ser
editados livremente durante a
operação, independentemente da
conguração ativa.
[2] Setup 2
[9] * Ativar Set-up O setup no qual o conversor de
frequência esta operando também
pode ser editado durante a
operação.
0-12 Setups de conexão
Option: Funcão:
O link garante a sincronização dos
valores do parâmetro Não alterável
durante a operação, permitindo a
mudança de 1 setup para outra
durante a operação.
Descrições do Parâmetro
44
4.1.2 0-1* Operações Setup
Denir e controlar as congurações de parâmetros
individuais.
O conversor de frequência tem duas congurações de
parâmetros que podem ser programadas independentemente uma da outra. Isto torna o conversor de
frequência exível e capaz de resolver problemas de
funcionalidade de controle avançada, frequentemente
economizando no custo de equipamento de controle
externo. Por exemplo, os dois setups podem ser usados
para programar o conversor de frequência para operar de
acordo com um esquema de controle em um setup (por
exemplo, motor 1 para movimento horizontal) e outro
esquema de controle em outro setup (por exemplo, motor
2 para movimento vertical). Alternativamente, podem ser
usados por um fabricante de equipamento OEM para
programar todos os conversores de frequência instalados
na fábrica dentro de uma linha, para terem os mesmos
parâmetros e assim, durante a produção/colocação em
funcionamento, simplesmente selecionar um setup
especíco dependendo da máquina na qual o conversor de
frequência estiver instalado.
A conguração ativa (ou seja, o setup em que o conversor
de frequência está operando) pode ser selecionada em
parâmetro 0-10 Setup Ativo e mostrada no LCP.
Selecionando [9] Setup múltiplo é possível alternar entre
setups com o conversor de frequência funcionando ou
parado, através da entrada digital ou de comandos de
comunicação serial. Se for necessário alterar os setups
durante o funcionamento, assegure-se de que
parâmetro 0-12 Setups de conexão está programado como
necessário. Utilizando parâmetro 0-11 Set-up da
Programação para editar parâmetros em qualquer dos
setups enquanto continua a operação no conversor de
frequência em sua conguração ativa, que pode ser um
setup diferente do que estiver sendo editado. Use
parâmetro 0-51 Cópia do Setup para copiar programações
do parâmetro entre os setups para ativar a colocação em
funcionamento mais rápido se programações do parâmetro
semelhantes forem necessárias em setups diferentes.
26 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
VLT® AutomationDrive FC 360
0-12 Setups de conexão
Option: Funcão:
Se os setups não estiverem
vinculados, uma alternação entre
eles não será possível enquanto o
motor estiver em funcionamento.
Neste caso, a alteração não ocorrerá
até que o motor seja parado por
inércia.
[0] Não
conectado
Deixe os parâmetros inalterados em
ambos os setups. Esses parâmetros
não podem ser alterados enquanto
o motor estiver em funcionamento.
[20] * Setups
Vinculados
Copie Não alterável durante os
parâmetros de operação de 1 setup
para o outro, portanto eles são
idênticos em ambos os setups.
0-14 Leitura: Editar Setups / Canal
Range: Funcão:
0* [-2147483647
2147483647 ]
Ver a conguração do
parâmetro 0-11 Set-up da
Programação. Editar setup, para
cada canal de comunicação. A
signica conguração ativa; F
signica de fábrica; números que
indicam o código do setup. Os
canais de comunicação, da direita
para a esquerda são LCP, FC-bus,
USB e HPFB1-5.
0-16 Seleção da Aplicação
Option: Funcão:
Selecione as funções integradas da
aplicação. Quando uma aplicação
for selecionada, um conjunto de
parâmetros relacionados são
programados automaticamente.
[0] * Nenhum
[1] Malha fechada
de processo
simples
[2] Local/Remoto
[3] Malha aberta
de velocidade
[4] Malha
Fechada de
Velocidade
Simples
[5] Velocidade
Múltipla
[6] OGD LA10
[7] OGD V210
[8] Hoist
0-16 Seleção da Aplicação
Option: Funcão:
[9] Hoist Speed
Close Loop
0-20 Linha do Display 1.1 Pequeno
Selecionar uma variável para ser mostrada na linha 1, posição
esquerda.
Option: Funcão:
[0] Nenhum
[37] Texto de
Display 1
[38] Texto de
Display 2
[39] Texto de
Display 3
[748] Feed Forward
do PCD
[953] Warning Word
do Probus
[1501] Horas em
Funcio-
namento
[1502] Medidor de
kWh
[1600] Control Word
[1601] Referência
[Unidade]
[1602] * Referência [%]
[1603] Est.
[1605] Valor Real
Principal [%]
[1609] Leit.Personalz.
[1610] Potência [kW]
[1611] Potência [hp]
[1612] Tensão do
motor
[1613] Freqüência
[1614] Corrente do
motor
[1615] Freqüência [%]
[1616] Torque [Nm]
[1617] Velocidade
[RPM]
[1618] Térmico
Calculado do
Motor
[1622] Torque [%]
Descrições do Parâmetro Guia de Programação
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 27
4.1.3 0-2* Display do LCP
Use parâmetros neste grupo para denir as variáveis que
são mostradas no GLCP. Parâmetro 16-17 Velocidade [RPM] é
1 opção para cada parâmetro no grupo do parâmetro 0-2*
Display do LCP.
4 4
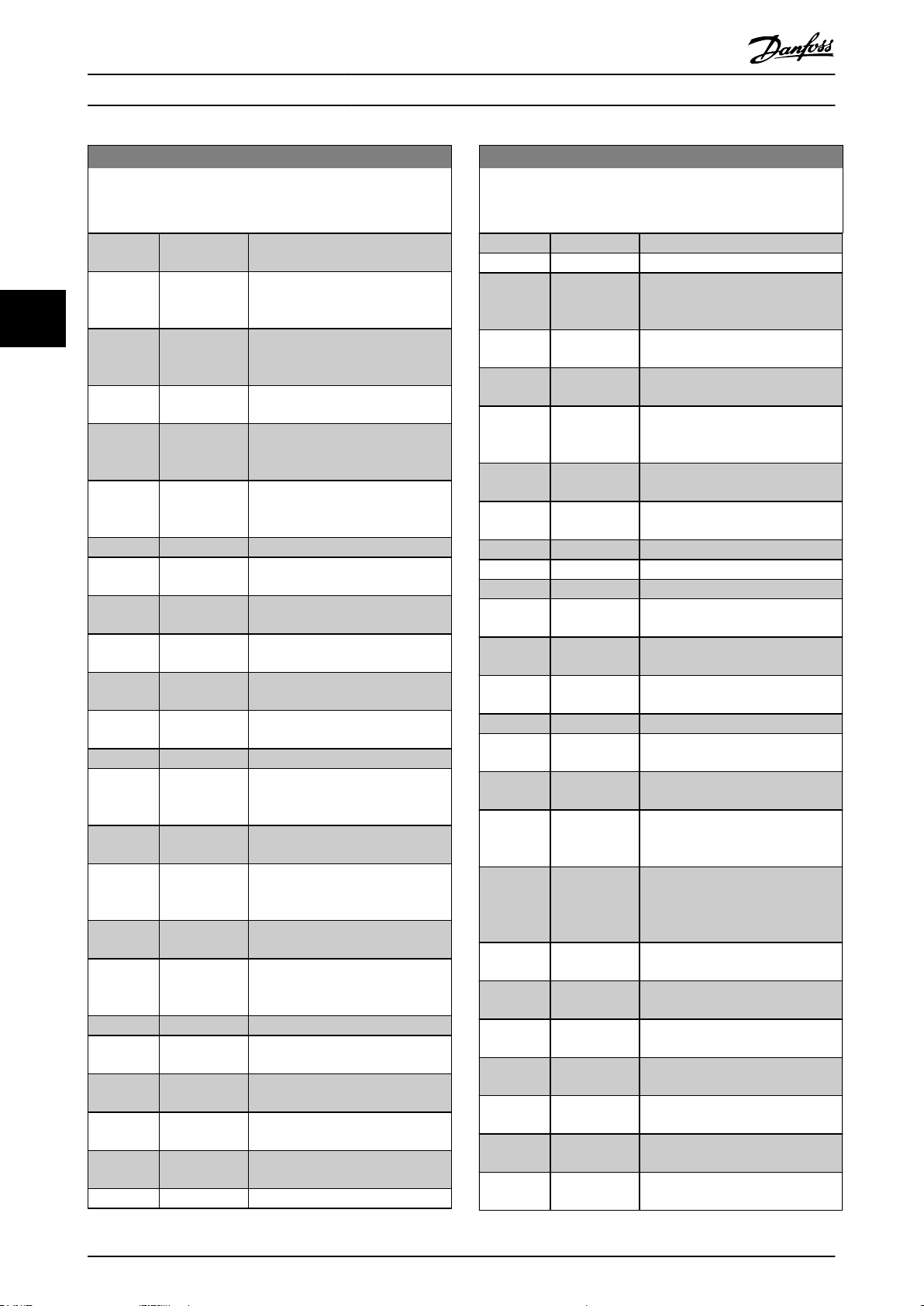
0-20 Linha do Display 1.1 Pequeno
Selecionar uma variável para ser mostrada na linha 1, posição
esquerda.
Option: Funcão:
[1630] Tensão de
Conexão CC
[1633] Energia de
Frenagem /2
min
[1634] Temp. do
Dissipador de
Calor
[1635] Térmico do
Inversor
[1636] Corrente
Nom.do
Inversor
[1637] Corrente
Máx.do
Inversor
[1638] Estado do SLC
[1639] Temp.do
Control Card
[1650] Referência
Externa
[1652] Feedback
[Unidade]
[1653] Referência do
DigiPot
[1657] Feedback
[rpm]
[1660] Entrada digital
[1661] Programação
do Terminal
53
[1662] Entrada
analógica 53
[1663] Programação
do Terminal
54
[1664] Entrada
analógica 54
[1665] Saída
analógica 42
[mA]
[1666] Saída Digital
[1667] Entrada de
pulso 29 [Hz]
[1668] Entrada de
Pulso 33 [Hz]
[1669] Saída de Pulso
27 [Hz]
[1670] Saída de Pulso
#29 [Hz]
[1671] Saída do relé
0-20 Linha do Display 1.1 Pequeno
Selecionar uma variável para ser mostrada na linha 1, posição
esquerda.
Option: Funcão:
[1672] Contador A
[1673] Contador B
[1679] Saída
Analógica
AO45
[1680] CTW 1 do
Fieldbus
[1682] REF 1 do
Fieldbus
[1684] StatusWord do
Opcional d
Comunicação
[1685] CTW 1 da
Porta Serial
[1686] REF 1 da Porta
Serial
[1690] Alarm Word
[1691] Alarm Word 2
[1692] Warning Word
[1693] Warning Word
2
[1694] Status Word
Estendida
[1695] Est. Status
Word 2
[1697] Alarm Word 3
[1890] Erro do PID de
Processo
[1891] PID de
processo Saída
[1892] Saída Presa do
PID de
Processo
[1893] Ganho
escalonado de
Saída do PID
d Proc
[2117] Referência Ext.
1[Unidade]
[2118] Feedback Ext.
1 [Unidade]
[2119] Saída Ext. 1
[%]
[3401] PCD 1 gravar
para aplicação
[3402] PCD 2 gravar
para aplicação
[3403] PCD 3 gravar
para aplicação
[3404] PCD 4 gravar
para aplicação
Descrições do Parâmetro
44
28 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
VLT® AutomationDrive FC 360

0-20 Linha do Display 1.1 Pequeno
Selecionar uma variável para ser mostrada na linha 1, posição
esquerda.
Option: Funcão:
[3405] PCD 5 gravar
para aplicação
[3406] PCD 6 gravar
para aplicação
[3407] PCD 7 gravar
para aplicação
[3408] PCD 8 gravar
para aplicação
[3409] PCD 9 gravar
para aplicação
[3410] PCD 10 gravar
para aplicação
[3421] PCD 1 ler para
aplicação
[3422] PCD 2 ler para
aplicação
[3423] PCD 3 ler para
aplicação
[3424] PCD 4 ler para
aplicação
[3425] PCD 5 ler para
aplicação
[3426] PCD 6 ler para
aplicação
[3427] PCD 7 ler para
aplicação
[3428] PCD 8 ler para
aplicação
[3429] PCD 9 ler para
aplicação
[3430] PCD 10 ler
para aplicação
[3450] Posição Real
[3456] Erro Rastr.
0-21 Linha do Display 1.2 Pequeno
Selecionar uma variável para ser mostrada na linha 1, posição do
meio.
Option: Funcão:
[0] Nenhum
[37] Texto de
Display 1
[38] Texto de
Display 2
[39] Texto de
Display 3
[748] Feed Forward
do PCD
[953] Warning Word
do Probus
0-21 Linha do Display 1.2 Pequeno
Selecionar uma variável para ser mostrada na linha 1, posição do
meio.
Option: Funcão:
[1501] Horas em
Funcio-
namento
[1502] Medidor de
kWh
[1600] Control Word
[1601] Referência
[Unidade]
[1602] Referência [%]
[1603] Est.
[1605] Valor Real
Principal [%]
[1609] Leit.Personalz.
[1610] Potência [kW]
[1611] Potência [hp]
[1612] Tensão do
motor
[1613] Freqüência
[1614] * Corrente do
motor
[1615] Freqüência [%]
[1616] Torque [Nm]
[1617] Velocidade
[RPM]
[1618] Térmico
Calculado do
Motor
[1622] Torque [%]
[1630] Tensão de
Conexão CC
[1633] Energia de
Frenagem /2
min
[1634] Temp. do
Dissipador de
Calor
[1635] Térmico do
Inversor
[1636] Corrente
Nom.do
Inversor
[1637] Corrente
Máx.do
Inversor
[1638] Estado do SLC
[1639] Temp.do
Control Card
[1650] Referência
Externa
[1652] Feedback
[Unidade]
Descrições do Parâmetro Guia de Programação
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 29
4 4

0-21 Linha do Display 1.2 Pequeno
Selecionar uma variável para ser mostrada na linha 1, posição do
meio.
Option: Funcão:
[1653] Referência do
DigiPot
[1657] Feedback
[rpm]
[1660] Entrada digital
[1661] Programação
do Terminal
53
[1662] Entrada
analógica 53
[1663] Programação
do Terminal
54
[1664] Entrada
analógica 54
[1665] Saída
analógica 42
[mA]
[1666] Saída Digital
[1667] Entrada de
pulso 29 [Hz]
[1668] Entrada de
Pulso 33 [Hz]
[1669] Saída de Pulso
27 [Hz]
[1670] Saída de Pulso
#29 [Hz]
[1671] Saída do relé
[1672] Contador A
[1673] Contador B
[1679] Saída
Analógica
AO45
[1680] CTW 1 do
Fieldbus
[1682] REF 1 do
Fieldbus
[1684] StatusWord do
Opcional d
Comunicação
[1685] CTW 1 da
Porta Serial
[1686] REF 1 da Porta
Serial
[1690] Alarm Word
[1691] Alarm Word 2
[1692] Warning Word
[1693] Warning Word
2
[1694] Status Word
Estendida
0-21 Linha do Display 1.2 Pequeno
Selecionar uma variável para ser mostrada na linha 1, posição do
meio.
Option: Funcão:
[1695] Est. Status
Word 2
[1697] Alarm Word 3
[1890] Erro do PID de
Processo
[1891] PID de
processo Saída
[1892] Saída Presa do
PID de
Processo
[1893] Ganho
escalonado de
Saída do PID
d Proc
[2117] Referência Ext.
1[Unidade]
[2118] Feedback Ext.
1 [Unidade]
[2119] Saída Ext. 1
[%]
[3401] PCD 1 gravar
para aplicação
[3402] PCD 2 gravar
para aplicação
[3403] PCD 3 gravar
para aplicação
[3404] PCD 4 gravar
para aplicação
[3405] PCD 5 gravar
para aplicação
[3406] PCD 6 gravar
para aplicação
[3407] PCD 7 gravar
para aplicação
[3408] PCD 8 gravar
para aplicação
[3409] PCD 9 gravar
para aplicação
[3410] PCD 10 gravar
para aplicação
[3421] PCD 1 ler para
aplicação
[3422] PCD 2 ler para
aplicação
[3423] PCD 3 ler para
aplicação
[3424] PCD 4 ler para
aplicação
[3425] PCD 5 ler para
aplicação
Descrições do Parâmetro
44
30 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
VLT® AutomationDrive FC 360

0-21 Linha do Display 1.2 Pequeno
Selecionar uma variável para ser mostrada na linha 1, posição do
meio.
Option: Funcão:
[3426] PCD 6 ler para
aplicação
[3427] PCD 7 ler para
aplicação
[3428] PCD 8 ler para
aplicação
[3429] PCD 9 ler para
aplicação
[3430] PCD 10 ler
para aplicação
[3450] Posição Real
[3456] Erro Rastr.
0-22 Linha do Display 1.3 Pequeno
Selecionar uma variável para ser mostrada na linha 1, posição
direita.
Option: Funcão:
[0] Nenhum
[37] Texto de
Display 1
[38] Texto de
Display 2
[39] Texto de
Display 3
[748] Feed Forward
do PCD
[953] Warning Word
do Probus
[1501] Horas em
Funcio-
namento
[1502] Medidor de
kWh
[1600] Control Word
[1601] Referência
[Unidade]
[1602] Referência [%]
[1603] Est.
[1605] Valor Real
Principal [%]
[1609] Leit.Personalz.
[1610] * Potência [kW]
[1611] Potência [hp]
[1612] Tensão do
motor
[1613] Freqüência
[1614] Corrente do
motor
[1615] Freqüência [%]
[1616] Torque [Nm]
0-22 Linha do Display 1.3 Pequeno
Selecionar uma variável para ser mostrada na linha 1, posição
direita.
Option: Funcão:
[1617] Velocidade
[RPM]
[1618] Térmico
Calculado do
Motor
[1622] Torque [%]
[1630] Tensão de
Conexão CC
[1633] Energia de
Frenagem /2
min
[1634] Temp. do
Dissipador de
Calor
[1635] Térmico do
Inversor
[1636] Corrente
Nom.do
Inversor
[1637] Corrente
Máx.do
Inversor
[1638] Estado do SLC
[1639] Temp.do
Control Card
[1650] Referência
Externa
[1652] Feedback
[Unidade]
[1653] Referência do
DigiPot
[1657] Feedback
[rpm]
[1660] Entrada digital
[1661] Programação
do Terminal
53
[1662] Entrada
analógica 53
[1663] Programação
do Terminal
54
[1664] Entrada
analógica 54
[1665] Saída
analógica 42
[mA]
[1666] Saída Digital
[1667] Entrada de
pulso 29 [Hz]
Descrições do Parâmetro Guia de Programação
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 31
4 4

0-22 Linha do Display 1.3 Pequeno
Selecionar uma variável para ser mostrada na linha 1, posição
direita.
Option: Funcão:
[1668] Entrada de
Pulso 33 [Hz]
[1669] Saída de Pulso
27 [Hz]
[1670] Saída de Pulso
#29 [Hz]
[1671] Saída do relé
[1672] Contador A
[1673] Contador B
[1679] Saída
Analógica
AO45
[1680] CTW 1 do
Fieldbus
[1682] REF 1 do
Fieldbus
[1684] StatusWord do
Opcional d
Comunicação
[1685] CTW 1 da
Porta Serial
[1686] REF 1 da Porta
Serial
[1690] Alarm Word
[1691] Alarm Word 2
[1692] Warning Word
[1693] Warning Word
2
[1694] Status Word
Estendida
[1695] Est. Status
Word 2
[1697] Alarm Word 3
[1890] Erro do PID de
Processo
[1891] PID de
processo Saída
[1892] Saída Presa do
PID de
Processo
[1893] Ganho
escalonado de
Saída do PID
d Proc
[2117] Referência Ext.
1[Unidade]
[2118] Feedback Ext.
1 [Unidade]
[2119] Saída Ext. 1
[%]
0-22 Linha do Display 1.3 Pequeno
Selecionar uma variável para ser mostrada na linha 1, posição
direita.
Option: Funcão:
[3401] PCD 1 gravar
para aplicação
[3402] PCD 2 gravar
para aplicação
[3403] PCD 3 gravar
para aplicação
[3404] PCD 4 gravar
para aplicação
[3405] PCD 5 gravar
para aplicação
[3406] PCD 6 gravar
para aplicação
[3407] PCD 7 gravar
para aplicação
[3408] PCD 8 gravar
para aplicação
[3409] PCD 9 gravar
para aplicação
[3410] PCD 10 gravar
para aplicação
[3421] PCD 1 ler para
aplicação
[3422] PCD 2 ler para
aplicação
[3423] PCD 3 ler para
aplicação
[3424] PCD 4 ler para
aplicação
[3425] PCD 5 ler para
aplicação
[3426] PCD 6 ler para
aplicação
[3427] PCD 7 ler para
aplicação
[3428] PCD 8 ler para
aplicação
[3429] PCD 9 ler para
aplicação
[3430] PCD 10 ler
para aplicação
[3450] Posição Real
[3456] Erro Rastr.
0-23 Linha do Display 2 Grande
Selecionar uma variável para ser mostrada na linha 2.
Option: Funcão:
[0] Nenhum
[37] Texto de
Display 1
[38] Texto de
Display 2
Descrições do Parâmetro
44
32 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
VLT® AutomationDrive FC 360

0-23 Linha do Display 2 Grande
Selecionar uma variável para ser mostrada na linha 2.
Option: Funcão:
[39] Texto de
Display 3
[748] Feed Forward
do PCD
[953] Warning Word
do Probus
[1501] Horas em
Funcio-
namento
[1502] Medidor de
kWh
[1600] Control Word
[1601] Referência
[Unidade]
[1602] Referência [%]
[1603] Est.
[1605] Valor Real
Principal [%]
[1609] Leit.Personalz.
[1610] Potência [kW]
[1611] Potência [hp]
[1612] Tensão do
motor
[1613] * Freqüência
[1614] Corrente do
motor
[1615] Freqüência [%]
[1616] Torque [Nm]
[1617] Velocidade
[RPM]
[1618] Térmico
Calculado do
Motor
[1622] Torque [%]
[1630] Tensão de
Conexão CC
[1633] Energia de
Frenagem /2
min
[1634] Temp. do
Dissipador de
Calor
[1635] Térmico do
Inversor
[1636] Corrente
Nom.do
Inversor
[1637] Corrente
Máx.do
Inversor
[1638] Estado do SLC
0-23 Linha do Display 2 Grande
Selecionar uma variável para ser mostrada na linha 2.
Option: Funcão:
[1639] Temp.do
Control Card
[1650] Referência
Externa
[1652] Feedback
[Unidade]
[1653] Referência do
DigiPot
[1657] Feedback
[rpm]
[1660] Entrada digital
[1661] Programação
do Terminal
53
[1662] Entrada
analógica 53
[1663] Programação
do Terminal
54
[1664] Entrada
analógica 54
[1665] Saída
analógica 42
[mA]
[1666] Saída Digital
[1667] Entrada de
pulso 29 [Hz]
[1668] Entrada de
Pulso 33 [Hz]
[1669] Saída de Pulso
27 [Hz]
[1670] Saída de Pulso
#29 [Hz]
[1671] Saída do relé
[1672] Contador A
[1673] Contador B
[1679] Saída
Analógica
AO45
[1680] CTW 1 do
Fieldbus
[1682] REF 1 do
Fieldbus
[1684] StatusWord do
Opcional d
Comunicação
[1685] CTW 1 da
Porta Serial
[1686] REF 1 da Porta
Serial
[1690] Alarm Word
[1691] Alarm Word 2
Descrições do Parâmetro Guia de Programação
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 33
4 4

0-23 Linha do Display 2 Grande
Selecionar uma variável para ser mostrada na linha 2.
Option: Funcão:
[1692] Warning Word
[1693] Warning Word
2
[1694] Status Word
Estendida
[1695] Est. Status
Word 2
[1697] Alarm Word 3
[1890] Erro do PID de
Processo
[1891] PID de
processo Saída
[1892] Saída Presa do
PID de
Processo
[1893] Ganho
escalonado de
Saída do PID
d Proc
[2117] Referência Ext.
1[Unidade]
[2118] Feedback Ext.
1 [Unidade]
[2119] Saída Ext. 1
[%]
[3401] PCD 1 gravar
para aplicação
[3402] PCD 2 gravar
para aplicação
[3403] PCD 3 gravar
para aplicação
[3404] PCD 4 gravar
para aplicação
[3405] PCD 5 gravar
para aplicação
[3406] PCD 6 gravar
para aplicação
[3407] PCD 7 gravar
para aplicação
[3408] PCD 8 gravar
para aplicação
[3409] PCD 9 gravar
para aplicação
[3410] PCD 10 gravar
para aplicação
[3421] PCD 1 ler para
aplicação
[3422] PCD 2 ler para
aplicação
[3423] PCD 3 ler para
aplicação
0-23 Linha do Display 2 Grande
Selecionar uma variável para ser mostrada na linha 2.
Option: Funcão:
[3424] PCD 4 ler para
aplicação
[3425] PCD 5 ler para
aplicação
[3426] PCD 6 ler para
aplicação
[3427] PCD 7 ler para
aplicação
[3428] PCD 8 ler para
aplicação
[3429] PCD 9 ler para
aplicação
[3430] PCD 10 ler
para aplicação
[3450] Posição Real
[3456] Erro Rastr.
0-24 Linha do Display 3 Grande
Selecionar uma variável para ser mostrada na linha 3.
Option: Funcão:
[0] Nenhum
[37] Texto de
Display 1
[38] Texto de
Display 2
[39] Texto de
Display 3
[748] Feed Forward
do PCD
[953] Warning Word
do Probus
[1501] Horas em
Funcio-
namento
[1502] * Medidor de
kWh
[1600] Control Word
[1601] Referência
[Unidade]
[1602] Referência [%]
[1603] Est.
[1605] Valor Real
Principal [%]
[1609] Leit.Personalz.
[1610] Potência [kW]
[1611] Potência [hp]
[1612] Tensão do
motor
[1613] Freqüência
[1614] Corrente do
motor
[1615] Freqüência [%]
Descrições do Parâmetro
44
34 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
VLT® AutomationDrive FC 360

0-24 Linha do Display 3 Grande
Selecionar uma variável para ser mostrada na linha 3.
Option: Funcão:
[1616] Torque [Nm]
[1617] Velocidade
[RPM]
[1618] Térmico
Calculado do
Motor
[1622] Torque [%]
[1630] Tensão de
Conexão CC
[1633] Energia de
Frenagem /2
min
[1634] Temp. do
Dissipador de
Calor
[1635] Térmico do
Inversor
[1636] Corrente
Nom.do
Inversor
[1637] Corrente
Máx.do
Inversor
[1638] Estado do SLC
[1639] Temp.do
Control Card
[1650] Referência
Externa
[1652] Feedback
[Unidade]
[1653] Referência do
DigiPot
[1657] Feedback
[rpm]
[1660] Entrada digital
[1661] Programação
do Terminal
53
[1662] Entrada
analógica 53
[1663] Programação
do Terminal
54
[1664] Entrada
analógica 54
[1665] Saída
analógica 42
[mA]
[1666] Saída Digital
[1667] Entrada de
pulso 29 [Hz]
0-24 Linha do Display 3 Grande
Selecionar uma variável para ser mostrada na linha 3.
Option: Funcão:
[1668] Entrada de
Pulso 33 [Hz]
[1669] Saída de Pulso
27 [Hz]
[1670] Saída de Pulso
#29 [Hz]
[1671] Saída do relé
[1672] Contador A
[1673] Contador B
[1679] Saída
Analógica
AO45
[1680] CTW 1 do
Fieldbus
[1682] REF 1 do
Fieldbus
[1684] StatusWord do
Opcional d
Comunicação
[1685] CTW 1 da
Porta Serial
[1686] REF 1 da Porta
Serial
[1690] Alarm Word
[1691] Alarm Word 2
[1692] Warning Word
[1693] Warning Word
2
[1694] Status Word
Estendida
[1695] Est. Status
Word 2
[1697] Alarm Word 3
[1890] Erro do PID de
Processo
[1891] PID de
processo Saída
[1892] Saída Presa do
PID de
Processo
[1893] Ganho
escalonado de
Saída do PID
d Proc
[2117] Referência Ext.
1[Unidade]
[2118] Feedback Ext.
1 [Unidade]
[2119] Saída Ext. 1
[%]
[3401] PCD 1 gravar
para aplicação
Descrições do Parâmetro Guia de Programação
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 35
4 4

0-24 Linha do Display 3 Grande
Selecionar uma variável para ser mostrada na linha 3.
Option: Funcão:
[3402] PCD 2 gravar
para aplicação
[3403] PCD 3 gravar
para aplicação
[3404] PCD 4 gravar
para aplicação
[3405] PCD 5 gravar
para aplicação
[3406] PCD 6 gravar
para aplicação
[3407] PCD 7 gravar
para aplicação
[3408] PCD 8 gravar
para aplicação
[3409] PCD 9 gravar
para aplicação
[3410] PCD 10 gravar
para aplicação
[3421] PCD 1 ler para
aplicação
[3422] PCD 2 ler para
aplicação
[3423] PCD 3 ler para
aplicação
[3424] PCD 4 ler para
aplicação
[3425] PCD 5 ler para
aplicação
[3426] PCD 6 ler para
aplicação
[3427] PCD 7 ler para
aplicação
[3428] PCD 8 ler para
aplicação
[3429] PCD 9 ler para
aplicação
[3430] PCD 10 ler
para aplicação
[3450] Posição Real
[3456] Erro Rastr.
130BD380.10
0
Custom Readout (Value)
P 16-09
Custom Readout
Unit P 0-30
Max value
P 0-32
Min value
P 0-31
Motor Speed
Motor Speed
High limit
P 4-14 (Hz)
Linear Unit (e.g. Speed and flow)
Quadratic Unit (Pressure)
Cubic Unit (Power)
Liniar
units only
0-30 Unidade de Leitura Personalizada
Option: Funcão:
Programe um valor para ser exibido
no LCP. O valor tem uma relação
linear, ao quadrado ou cúbica com
a velocidade. Essa relação depende
da unidade selecionada. Consulte
Tabela 4.1. O valor calculado real
pode ser lido em
parâmetro 16-09 Leit.Personalz..
[0] Nenhum
[1] * %
[5] PPM
[10] 1/min
[11] RPM
[12] PULSOS/s
[20] l/s
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
Descrições do Parâmetro
VLT® AutomationDrive FC 360
44
Ilustração 4.1 Leitura Personalizada
4.1.4 0-3* Leitura do LCP
É possível personalizar os elementos de display no LCP.
Leitura personalizada
O valor calculado a ser mostrado é baseado nas congurações em parâmetro 0-30 Unidade de Leitura Personalizada,
parâmetro 0-31 Valor Mín Leitura Personalizada (somente
linear), parâmetro 0-32 Valor Máx Leitura Personalizada,
parâmetro 4-14 Lim. Superior da Veloc do Motor [Hz] e
velocidade real.
36 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
A relação depende do tipo de unidade de medida,
selecionada em parâmetro 0-30 Unidade de Leitura Persona-
lizada:
Tipo de unidade Relação de velocidade
Adimensional
Velocidade
Vazão, volume
Vazão, massa
Velocidade
Comprimento
Temperatura
Pressão Quadrática
Potência Cúbica
Tabela 4.1 Relação entre Tipo de Unidade e Velocidade
Linear

0-30 Unidade de Leitura Personalizada
Option: Funcão:
[25] m³/h
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[80] kW
[120] GPM
[121] galão/s
[122] galão/min
[123] galão/h
[124] CFM
[127] pé cúbico/h
[140] pés/s
[141] pés/min
[160] °F
[170] psi
[171] lb/pol2
[172] pol wg
[173] pés WG
[180] HP
0-31 Valor Mín Leitura Personalizada
Range: Funcão:
0 CustomReadoutUni
t*
[ 0 -
999999.99
CustomRea-
doutUnit]
Este parâmetro programa o valor
mínimo da leitura personalizada
(ocorre à velocidade zero). É
possível selecionar apenas um valor
diferente de 0 ao selecionar uma
unidade linear em
parâmetro 0-30 Unidade de Leitura
Personalizada. Para unidades
quadráticas e cúbicas o valor
mínimo é 0.
0-32 Valor Máx Leitura Personalizada
Range: Funcão:
100
CustomReadoutUni
t*
[ 0.0 -
999999.99
CustomRea-
doutUnit]
Este parâmetro programa o valor
máximo a ser mostrado quando a
velocidade do motor atingir o valor
programado de parâmetro 4-14 Lim.
Superior da Veloc do Motor [Hz].
0-37 Texto de Display 1
Range: Funcão:
[0 - 0 ] Texto livre, por exemplo, usado para
a etiqueta do dispositivo de um
aplicativo do eldbus
0-38 Texto de Display 2
Range: Funcão:
[0 - 0 ] Texto livre, por exemplo, usado para
a a localização da etiqueta da
aplicação do eldbus.
0-39 Texto de Display 3
Range: Funcão:
[0 - 0 ] Texto livre, por exemplo, usado para
a etiqueta de ajuda do aplicativo
do eldbus
0-40 Tecla [Hand on] (Manual ligado) do LCP
Option: Funcão:
[0] Desativado Evita a partida acidental do
conversor de frequência no modo
Manual ligado.
[1] * Ativado [Hand On] está ativado.
0-42 Tecla [Auto on] (Automát. ligado) do LCP
Option: Funcão:
[0] Desativado Evita a partida acidental do
conversor de frequência no LCP.
[1] * Ativado [Hand On] está ativado.
0-44 Tecla [O/Reset]-LCP
Option: Funcão:
[0] Desativado Selecione [0] Desativado para evitar
paradas acidentais ou reset do
conversor de frequência do LCP. A
conguração pode ser bloqueada
por parâmetro 0-60 Senha do Menu
Principal.
[1] * Ativado
[7] Ativar
somente Reset
Descrições do Parâmetro Guia de Programação
4 4
4.1.5 0-4* Teclado do LCP
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 37
Ative, desabilite e proteja com senha as teclas individuais
do LCP.

0-50 Cópia do LCP
Option: Funcão:
[0] * Sem cópia Sem função.
[1] Todos para o
LCP
Copia todos os parâmetros em
todos os setups a partir da
memória do conversor de
frequência para o LCP. Para ns de
serviço, copie todos os parâmetros
para o LCP após a colocação em
funcionamento.
[2] Todos a partir
d LCP
Copia todos os parâmetros em
todos os setups a partir da
memória do LCP para o conversor
de frequência.
[3] Indep.d
tamanh.de
LCP
Copia apenas os parâmetros que
forem independentes do tamanho
do motor. Essa seleção pode ser
utilizada para programar diversos
conversores de frequência com a
mesma função, sem tocar nos
dados do motor que já estão
denidos.
0-51 Cópia do Setup
Option: Funcão:
[0] * Sem cópia Sem função.
[1] Copiar de
setup 1
Copiar do setup 1 para setup 2.
[2] Copiar de
setup 2
Copiar do setup 2 para setup 1.
[9] Copiar do
Setup de
fábrica
Copiar a conguração de fábrica
para setup de programação
(selecionado em parâmetro 0-11 Set-
-up da Programação).
0-60 Senha do Menu Principal
Range: Funcão:
0* [0 - 999 ] Denir a senha de acesso ao Menu
Principal por meio da tecla [Main
Menu]. Programar valores para 0
desabilita a função de senha.
Descrições do Parâmetro
VLT® AutomationDrive FC 360
4.1.6 0-5* Copiar/Salvar
Copie parâmetros de e para NLCP e GLCP. Use estes
parâmetros para salvar e copiar setups de 1 conversor de
frequência para outro.
44
4.1.7 0-6* Senha
38 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828

1-00 Modo Conguração
Option: Funcão:
Seleciona o princípio de controle da
aplicação a ser usado quando uma
referência remota (por exemplo, via
entrada analógica ou eldbus)
estiver ativa.
[0] * Malha Aberta Ativa o controle da velocidade (sem
sinal de feedback de motor) com
compensação de escorregamento
automática, para velocidade quase
constante em cargas variáveis. As
compensações estão ativas, mas
podem ser desabilitadas no grupo
do parâmetro 1-** Load and Motor.
[1] Malha fech.
veloc.
Ativa controle de malha fechada de
velocidade com feedback. Para
aumentar a precisão de velocidade,
forneça um sinal de feedback e
programe o controle do PID de
velocidade. Os parâmetros de
controle da velocidade são
programados no grupo do
parâmetro 7-0* Controle do PID de
Velocidade.
[2] Torque malha
fechada
Ativa controle de malha fechada de
torque com feedback de
velocidade. Possível somente
quando o opcional [1] VVC+ estiver
selecionado em
parâmetro 1-01 Principio de Controle
do Motor.
[3] Malha
Fechada
Ativa o uso do controle de processo
no conversor de frequência. Os
parâmetros de controle de processo
são denidos no grupo do
parâmetro 7-2* Controle do Processo.
Feedback e grupo do parâmetro 7-3*
Controle do PID de processo.
[4] Torque, malha
aberta
Ativa o uso de malha aberta de
torque em modo VVC
+
((parâmetro 1-01 Principio de
Controle do Motor). Os parâmetros
do PID de torque são denidos no
grupo do parâmetro 7-1* Controle de
PI de Torque.
[6] Surface
Winder
Ativa o uso do controle do
bobinador de superfície. Parâmetros
especícos no grupo do parâmetro
7-2* Controle de Processo Feedback e
1-00 Modo Conguração
Option: Funcão:
grupo do parâmetro 7-3* Controle do
PID de processo.
[7] Extend.PID
Speed OL
Ativa o uso do OL de velocidade do
PID estendido. Parâmetros
especícos no grupo do parâmetro
7-2* Controle de Processo Feedback
para o grupo do parâmetro 7-5*.
Controle do PID de Processo.
1-01 Principio de Controle do Motor
Option: Funcão:
[0] U/f
AVISO!
Quando U/f estiver em funcionamento, deslizamento de
controle e compensações de
carga não estão incluídos.
Usado para motores conectados em
paralelo e/ou em aplicações de
motor especiais. Programe as
congurações U/f em
parâmetro 1-55 Característica U/f - U
e parâmetro 1-56 Característica U/f F.
[1] * VVC+
AVISO!
Quando
parâmetro 1-10 Construção do
Motor estiver programado para
opções ativadas por PM,
somente a opção VVC+ está
disponível.
Modo de funcionamento normal,
incluindo compensações de carga e
deslizamento.
1-03 Características de Torque
Option: Funcão:
Selecione a característica do torque
solicitada. VT e AEO são operações
de economia de energia.
[0] * Torque
constante
A potência no eixo do motor
fornece torque constante sob
controle de velocidade variável.
[1] Torque
Variável
A potência no eixo do motor
fornece torque variável, sob
controle de velocidade variável.
Programe o nível de torque variável
no parâmetro 14-40 Nível do VT.
[2] Otim. Autom
Energia CT
Otimiza automaticamente o
consumo de energia, minimizando
Descrições do Parâmetro Guia de Programação
4.2 Parâmetros 1-** Carga e Motor
4.2.1 1-0* Programações Gerais
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 39
4 4

1-03 Características de Torque
Option: Funcão:
a magnetização e a frequência por
meio de
parâmetro 14-41 Magnetização
Mínima do AEO.
1-06 Sentido Horário
Option: Funcão:
AVISO!
Não se pode ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
Esse parâmetro dene o termo
sentido horário correspondente para
a seta de direção do LCP. Usado
para mudar com facilidade o
sentido de rotação do eixo sem
trocar os os do motor.
[0] * Normal O eixo do motor gira no sentido
horário quando o conversor de
1-06 Sentido Horário
Option: Funcão:
frequência estiver conectado U⇒U;
V⇒V; e W⇒W para o motor.
[1] Inversão O eixo do motor gira no sentido
anti-horário quando o conversor de
frequência estiver conectado U⇒U;
V⇒V; e W⇒W para o motor.
Descrições do Parâmetro
VLT® AutomationDrive FC 360
44
4.2.2 1-1* Seleção do Motor
Grupo do parâmetro para programação dos dados do motor. Não é possível ajustar os parâmetros enquanto o motor estiver
em funcionamento.
Os parâmetros ativos são mostrados em Tabela 4.2. x indica que um parâmetro especíco está ativo quando o opcional
estiver selecionado.
Parâmetro 1-10 Construção do Motor [0] Assíncrono [1] PM, SPM não saliente [3] PM, IPM saliente
Parâmetro 1-00 Modo Conguração x x x
Parâmetro 1-03 Características de Torque x
Parâmetro 1-06 Sentido Horário x x x
Parâmetro 1-08 Largura de banda do controle do motor x x x
Parâmetro 1-14 Fator de Ganho de Amortecimento x x
Parâmetro 1-15 Const. de Tempo do Filtro de Baixa Veloc x x
Parâmetro 1-16 Const. de Tempo do Filtro de Alta Veloc. x x
Parâmetro 1-17 Const. de tempo do ltro de tensão x x
Parâmetro 1-20 Potência do Motor [kW] x
Parâmetro 1-22 Tensão do Motor x
Parâmetro 1-23 Freqüência do Motor x
Parâmetro 1-24 Corrente do Motor x x x
Parâmetro 1-25 Velocidade nominal do motor x x x
Parâmetro 1-26 Torque nominal do Motor x x
Parâmetro 1-29 Adaptação Automática do Motor (AMA) x x x
Parâmetro 1-30 Resistência do Estator (Rs) x x x
Parâmetro 1-31 Resistência do Rotor (Rr) x
Parâmetro 1-33 Reatância Parasita do Estator (X1) x
Parâmetro 1-35 Reatância Principal (Xh) x
Parâmetro 1-37 Indutância do eixo-d (Ld) x x
Parâmetro 1-38 Indutância do eixo-q (Lq) x
40 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
1-08 Largura de banda do controle do motor
Option: Funcão:
[0] Alto Adequado para resposta com alta dinâmica.
[1] * Médio Adequado para operação suave em estado
estável.
[2] Baixo Adequado para operação suave em estado
estável com o mínimo de resposta dinâmica.
[3] Adaptativo 1 Otimizado para operação suave em estado
estável com amortecimento ativo extra.
[4] Adaptativo 2 Foco em motores PM de baixa indutância.
Esta opção é uma alternativa para [3]
adaptativo 1.

Descrições do Parâmetro Guia de Programação
Parâmetro 1-10 Construção do Motor [0] Assíncrono [1] PM, SPM não saliente [3] PM, IPM saliente
Parâmetro 1-39 Pólos do Motor x x x
Parâmetro 1-40 Força Contra Eletromotriz em 1000RPM x x
Parâmetro 1-42 Comprimento do Cabo do Motor x x x
Parâmetro 1-43 Comprimento do cabo do motor x x x
Parâmetro 1-44 Sat. da Indutância do eixo-d (LdSat) x
Parâmetro 1-45 Sat. da Indutância do eixo-q (LqSat) x
Parâmetro 1-46 Ganho de Detecção de Posição x x
Parâmetro 1-48 Corrente na indutância mín. do eixo d x
Parâmetro 1-49 Corrente na indutância mín. do eixo q x
Parâmetro 1-50 Magnetização do Motor a 0 Hz x
Parâmetro 1-52 Veloc Mín de Magnetiz. Norm. [Hz] x
Parâmetro 1-55 Característica U/f - U x
Parâmetro 1-56 Característica U/f - F x
Parâmetro 1-60 Compensação de Carga em Baix Velocid x
Parâmetro 1-61 Compensação de Carga em Alta Velocid x
Parâmetro 1-62 Compensação de Escorregamento x
Parâmetro 1-63 Const d Tempo d Compens Escorregam x
Parâmetro 1-64 Amortecimento da Ressonância x
Parâmetro 1-65 Const Tempo Amortec Ressonânc x
Parâmetro 1-66 Corrente Mín. em Baixa Velocidade x x
Parâmetro 1-70 Modo de Partida x x
Parâmetro 1-71 Atraso da Partida x x x
Parâmetro 1-72 Função de Partida x x x
Parâmetro 1-73 Flying Start x x x
Parâmetro 1-80 Função na Parada x x x
Parâmetro 1-88 Ganho do freio CA x
Parâmetro 1-90 Proteção Térmica do Motor x x x
Parâmetro 2-00 Corrente de Hold CC x x x
Parâmetro 2-01 Corrente de Freio CC x x x
Parâmetro 2-02 Tempo de Frenagem CC x x x
Parâmetro 2-04 Veloc.Acion.d FreioCC [Hz] x x x
Parâmetro 2-06 Corrente de Estacionamento x x
Parâmetro 2-07 Tempo de Estacionamento x x
Parâmetro 2-10 Função de Frenagem x x x
Parâmetro 2-16 Corr Máx Frenagem CA x
Parâmetro 2-17 Controle de Sobretensão x x x
Parâmetro 4-10 Sentido de Rotação do Motor x x x
Parâmetro 4-14 Lim. Superior da Veloc do Motor [Hz] x x x
Parâmetro 4-16 Limite de Torque do Modo Motor x
Parâmetro 4-17 Limite de Torque do Modo Gerador x
Parâmetro 4-18 Limite de Corrente x x x
Parâmetro 4-19 Freqüência Máx. de Saída x x x
Parâmetro 4-58 Função de Fase do Motor Ausente x x x
Parâmetro 14-01 Freqüência de Chaveamento x x x
Parâmetro 14-03 Sobremodulação x x x
Parâmetro 14-07 Nível de Compensação de Tempo Ocioso x x x
Parâmetro 14-08 Fator de Ganho de Amortecimento x x x
Parâmetro 14-09 Nível de Corr de Polariz de Tpo Ocioso x x x
Parâmetro 14-10 Falh red elétr x
Parâmetro 14-11 Tensã Red na FalhaRed.Elétr. x
Parâmetro 14-12 Função no Desbalanceamento da Rede x x x
Parâmetro 14-27 Ação na Falha do Inversor x x x
Parâmetro 14-40 Nível do VT x
4 4
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 41

1-10 Construção do Motor
Option: Funcão:
[0] * Assíncrono Para motores assíncronos.
[1] PM, SPM não
saliente
Para motores de ímã permanente
(PM) com ímãs montados na
superfície (não salientes). Consulte
parâmetro 1-14 Fator de Ganho de
Amortecimento a
parâmetro 1-17 Const. de tempo do
ltro de tensão para obter detalhes
sobre a otimização da operação do
motor.
[3] PM, IPM
saliente, Sat
Para motores de ímã permanente
(PM) com ímãs (salientes) internos.
1-14 Fator de Ganho de Amortecimento
Range: Funcão:
120 %* [ 0 - 250 %] O ganho de amortecimento
estabiliza a máquina PM. O valor do
ganho de amortecimento controla
o desempenho dinâmico da
máquina PM. Alto ganho de
amortecimento produz
desempenho dinâmico alto e baixo
ganho de amortecimento resulta
em desempenho dinâmico baixo. O
desempenho dinâmico está
relacionado aos dados da máquina
e ao tipo de carga. Se o ganho de
amortecimento for muito alto ou
baixo, o controle cará instável.
1-15 Const. de Tempo do Filtro de Baixa Veloc
Range: Funcão:
Size
related*
[ 0.01 - 20 s] Essa constante de tempo é usado
abaixo de 10% da velocidade
nominal. Obtenha controle rápido
com uma constante de tempo de
amortecimento curto. No entanto,
se esse valor for muito curto, o
controle ca instável.
1-16 Const. de Tempo do Filtro de Alta Veloc.
Range: Funcão:
Size
related*
[ 0.01 - 20 s] Essa constante de tempo é usada
acima de 10% da velocidade
nominal. Obtenha controle rápido
com uma constante de tempo de
amortecimento curto. No entanto,
se esse valor for muito curto, o
controle ca instável.
1-17 Const. de tempo do ltro de tensão
Range: Funcão:
Size
related*
[ 0.001 - 1 s] Reduz a inuência de alta
frequência ripple e sistema
ressonância no cálculo da tensão de
alimentação. Sem esse ltro, os
ripples das correntes podem
distorcer a tensão calculada e afetar
a estabilidade do sistema.
1-20 Potência do Motor
Option: Funcão:
[2] 0,12 kW - 0,16
hp
[3] 0,18 kW - 0,25
hp
[4] 0,25 kW - 0,33
Hp
[5] 0,37 kW - 0,50
Hp
[6] 0,55 kW - 0,75
hp
Descrições do Parâmetro
Parâmetro 1-10 Construção do Motor [0] Assíncrono [1] PM, SPM não saliente [3] PM, IPM saliente
Parâmetro 14-41 Magnetização Mínima do AEO x
Parâmetro 14-50 Filtro de RFI x x x
Parâmetro 14-51 Compensação da Tensão do Barramento CC x x x
Parâmetro 14-55 Filtro de Saída x x x
Parâmetro 14-64 Nível de Corr Zero p/ Comp. de Tpo Ocio x x x
Parâmetro 14-65 Comp. de Tpo Ocioso de Derate de Veloc x x x
Parâmetro 30-22 Proteção de Rotor Bloqueado x x
44
Parâmetro 30-23 Tempo de Detecção do Rotor Bloq.[s] x x
Tabela 4.2 Parâmetros ativos
VLT® AutomationDrive FC 360
42 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
4.2.3 1-2* Dados do Motor
O grupo do parâmetro compõe os dados de entrada na
plaqueta de identicação do motor conectado.
AVISO!
As alterações no valor destes parâmetros afetam a
conguração de outros parâmetros.

1-20 Potência do Motor
Option: Funcão:
[7] 0,75 kW - 1,00
Hp
[8] 1,10 kW - 1,50
Hp
[9] 1,50 kW - 2,00
Hp
[10] 2,20 kW - 3,00
Hp
[11] 3,00 kW - 4,00
Hp
[12] 3,70 kW - 5,00
Hp
[13] 4,00 kW - 5,40
Hp
[14] 5,50 kW - 7,50
Hp
[15] 7,50 kW - 10,0
Hp
[16] 11,00 kW -
15,00 Hp
[17] 15,00 kW - 20
Hp
[18] 18,5 kW - 25
Hp
[19] 22 kW - 30 Hp
[20] 30 kW - 40 Hp
[21] 37 kW - 50 Hp
[22] 45 kW - 60 Hp
[23] 55 kW - 75 Hp
[24] 75 kW - 100
Hp
[25] 90 kW - 120
Hp
1-22 Tensão do Motor
Range: Funcão:
Size
related*
[50 - 1000 V] Insira a tensão do motor nominal
de acordo com os dados da
plaqueta de identicação do motor.
O valor padrão corresponde à saída
nominal efetiva da unidade.
1-23 Freqüência do Motor
Range: Funcão:
AVISO!
Não é possível ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
Size
related*
[ 20 - 500 Hz] Selecione o valor da frequência do
motor nos dados da plaqueta de
identicação do motor. Para
operação em 87 Hz com motores
1-23 Freqüência do Motor
Range: Funcão:
de 230/440 V, dena o valor de
acordo com os dados da plaqueta
de identicação para 230 V/50 Hz.
Adapte o parâmetro 4-14 Lim.
Superior da Veloc do Motor [Hz] e o
parâmetro 3-03 Referência Máxima
para a aplicação de 87 Hz.
1-24 Corrente do Motor
Range: Funcão:
Size
related*
[ 0.01 -
1000.00 A]
Insira o valor da corrente nominal
do motor nos dados da plaqueta
de identicação do motor. Esses
dados são usados para calcular o
torque do motor, a proteção
térmica do motor etc.
1-25 Velocidade nominal do motor
Range: Funcão:
Size
related*
[50 - 60000
RPM]
Digite o valor da velocidade
nominal do motor dos dados da
plaqueta de identicação do motor.
Os dados são usados para calcular
as compensações do motor
automáticas.
1-26 Torque nominal do Motor
Range: Funcão:
Size
related*
[0.1 -
10000.0 Nm]
Insira o valor a partir dos dados da
plaqueta de identicação do motor.
O valor padrão corresponde à saída
nominal da unidade. Este parâmetro
está disponível quando
parâmetro 1-10 Construção do Motor
estiver programado para [1] PM,
SPM não saliente ou [3] PM, IPM
saliente, isto é, o parâmetro é válido
somente para motores PM, SPM
não saliente e IPM saliente.
Descrições do Parâmetro Guia de Programação
4 4
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 43

1-29 Adaptação Automática do Motor (AMA)
Option: Funcão:
AVISO!
Não é possível ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
AVISO!
O terminal 27 Entrada Digital
(parâmetro 5-12 Terminal 27,
Entrada Digital) tem parada
por inércia inversa como
conguração padrão. Essa
conguração signica que
AMA não pode ser executada
se o terminal 27 estiver
desligado.
A função AMA otimiza o
desempenho dinâmico do motor ao
otimizar automaticamente os
parâmetros do motor avançados.
[0] * Desligado Sem função.
[1] Ativar AMA
completa
Dependendo da opção selecionada
em parâmetro 1-10 Construção do
Motor, a AMA é realizada em
parâmetros diferentes.
•
Se [0] Assíncrono estiver
selecionado, a AMA é
executada em:
- Parâmetro 1-30 R
esistência do
Estator (Rs).
- Parâmetro 1-31 R
esistência do
Rotor (Rr).
- Parâmetro 1-33 R
eatância Parasita
do Estator (X1).
- Parâmetro 1-35 R
eatância Principal
(Xh).
•
Se [1] PM, SPM não saliente
estiver selecionado, a AMA
é executada em:
- Parâmetro 1-30 R
esistência do
Estator (Rs).
- Parâmetro 1-37 In
dutância do eixo-
-d (Ld).
1-29 Adaptação Automática do Motor (AMA)
Option: Funcão:
•
Se [3] PM, SPM não saliente
estiver selecionado, a AMA
é executada em:
- Parâmetro 1-30 R
esistência do
Estator (Rs).
- Parâmetro 1-37 In
dutância do eixo-
-d (Ld).
- Parâmetro 1-38 In
dutância do eixo-
-q (Lq).
- Parâmetro 1-44 S
at. da Indutância
do eixo-d (LdSat).
- Parâmetro 1-45 S
at. da Indutância
do eixo-q (LqSat).
[2] Ativar AMA
reduzida
Executa uma AMA reduzida da
resistência do estator R
s
(parâmetro 1-30 Resistência do
Estator (Rs)) somente no sistema.
Selecione esta opção se for usado
um ltro LC entre o conversor de
frequência e o motor. (Esta opção
está disponível apenas para
motores assíncronos.)
Descrições do Parâmetro
44
VLT® AutomationDrive FC 360
44 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
Quando parâmetro 1-10 Construção do Motor estiver
programado para opcionais que ativam o modo motor
permanente, o único opcional disponível é [1] Ativar AMA
Completa.
Ative a função AMA pressionando [Hand On] após
selecionar [1] Ativar AMA Completa ou [2] Ativar AMA
Reduzida. Após uma sequência normal, o visor indica:
Pressione [OK] para encerrar a AMA. Após pressionar [OK], o
conversor de frequência está pronto para operação.
AVISO!
Para obter a melhor adaptação possível do
•
conversor de frequência, recomenda-se executar
a AMA quando o motor estiver frio.
A AMA não pode ser executada enquanto o
•
motor estiver funcionando.
AVISO!
Evite gerar um torque externo durante a AMA.
Se ltro LC for usado, programe o conversor de frequência
para funcionar em modo de controle U/f (recomendado)

1-30 Resistência do Estator (Rs)
Range: Funcão:
Size
related*
[ 0.0 -
9999.000
Ohm]
AVISO!
Não é possível ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
Programar o valor da resistência do
estator. Insira o valor a partir de
uma folha de dados do motor ou
execute uma AMA em um motor
frio.
1-31 Resistência do Rotor (Rr)
Range: Funcão:
Size
related*
[ 0 -
9999.000
Ohm]
1-33 Reatância Parasita do Estator (X1)
Range: Funcão:
Size
related*
[ 0.0 -
9999.000
Ohm]
AVISO!
Não é possível ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
Programe o valor da reatância
parasita do estator. Obtenha o valor
em uma folha de dados do motor
ou executando uma AMA no motor
frio. A conguração padrão é
calculada pelo conversor de
frequência a partir dos dados da
plaqueta de identicação do motor.
1-35 Reatância Principal (Xh)
Range: Funcão:
Size
related*
[ 0.0 -
9999.00 Ohm]
AVISO!
Não é possível ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
1-35 Reatância Principal (Xh)
Range: Funcão:
Programe a reatância principal do
motor usando um dos métodos
seguintes:
•
Execute uma AMA quando
o motor estiver frio. O
conversor de frequência
mede o valor do motor.
•
Insira o valor X
h
manualmente. O valor
pode ser obtido com o
fornecedor do motor.
•
Utilize a conguração
padrão Xh. O conversor de
frequência estabelece a
conguração com base
nos dados da plaqueta de
identicação do motor.
1-37 Indutância do eixo-d (Ld)
Range: Funcão:
Size
related*
[ 0 - 65535
mH]
AVISO!
Não é possível ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
Insira o valor da indutância do eixo-
-d. Obtenha o valor da folha de
dados do motor de ímã
permanente ou execute uma AMA
com o motor frio.
1-38 Indutância do eixo-q (Lq)
Range: Funcão:
Size
related*
[ 0.000 -
65535 mH]
AVISO!
Não é possível ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
Programe o valor da indutância do
eixo q. Descubra o valor na folha
de dados do motor ou execute uma
AMA com o motor frio.
1-39 Pólos do Motor
Range: Funcão:
Size
related*
[2 - 100 ]
AVISO!
Não é possível ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
Insira o número de polos do motor.
Descrições do Parâmetro Guia de Programação
ou execute AMA reduzida em modo VVC+. Se ltro LC não
for usado, execute AMA completa.
4.2.4 1-3* Dados Dados do Motor I
Programar os parâmetros para os dados avançados do
motor. Os dados de motor nos parâmetros 1-30 a 1-39
devem corresponder ao motor para desempenho ideal. Se
os dados do motor não forem conhecidos, é recomendável
executar uma AMA.
4 4
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 45

1-39 Pólos do Motor
Range: Funcão:
O valor de polos do motor é
sempre par, pois refere-se ao
número de polos total do motor e
não aos pares de polos.
1-40 Força Contra Eletromotriz em 1000RPM
Range: Funcão:
Size
related*
[ 1 - 9000 V] Programe a FCE nominal do motor
ao funcionar em 1000 rpm.
Força Contra Eletro Motriz é a
tensão gerada por um motor PM
quando não houver um conversor
de frequência conectado e o eixo
for girado externamente. A Força
Contra Eletro Motriz é normalmente
especicada pela velocidade
nominal do motor ou a 1,000 RPM
medida entre duas linhas. Se o
valor não estiver disponível para
uma velocidade do motor de 1000
rpm, calcule o valor correto da
seguinte maneira: Se a Força Contra
Eletro Motriz for, por exemplo, 320
V a 1800 rpm, pode ser calculada a
1000 rpm:
Exemplo
Força Contra Eletro Motriz de 320 V
a 1,800 rpm. Força Contra Eletro
Motriz= (Tensão/rpm)*1000 =
(320/1800)*1000 = 178.
Esse parâmetro está ativo somente
quando parâmetro 1-10 Construção
do Motor estiver programado para
opcionais que ativam motores PM
(ímã permanente).
AVISO!
Ao utilizar motores PM (Ímã
Permanente), recomenda-se
usar resistor do freio.
1-42 Comprimento do Cabo do Motor
Range: Funcão:
50 m* [0 - 100 m] Programe o comprimento de cabo
de motor em metros.
1-43 Comprimento do cabo do motor
Range: Funcão:
164 ft* [0 - 328 ft] Programa o comprimento de cabo
de motor. A unidade de
comprimento é pé.
1-44 Sat. da Indutância do eixo-d (LdSat)
Range: Funcão:
Size related [ 0 - 65535
mH]
Este parâmetro está ativo somente
quando parâmetro 1-10 Construção
do Motor estiver programado para
[3] PM, IPM saliente.
Este parâmetro corresponde à
indutância de saturação de eixo-d.
O valor padrão é o valor
programado em
parâmetro 1-37 Indutância do eixo-d
(Ld). Na maioria dos casos, não
altere o valor padrão. Se o
fornecedor do motor fornecer a
curva de saturação, insira o valor de
indutância do eixo d, que é 100%
da corrente nominal ou execute
uma AMA com o motor frio.
1-45 Sat. da Indutância do eixo-q (LqSat)
Range: Funcão:
Size
related*
[ 0 - 65535
mH]
Este parâmetro está ativo somente
quando parâmetro 1-10 Construção
do Motor estiver programado para
[3] PM, IPM saliente.
Este parâmetro corresponde à
indutância de saturação do eixo q.
O valor padrão é o valor
programado em
parâmetro 1-38 Indutância do eixo-q
(Lq). Na maioria dos casos, não
altere o valor padrão. Se o
fornecedor do motor fornecer a
curva de saturação, insira o valor de
indutância do eixo q, que é 100%
da corrente nominal ou execute
uma AMA com o motor frio.
1-46 Ganho de Detecção de Posição
Range: Funcão:
100 %* [ 20 - 200 %] Ajustar a amplitude do pulso de
teste durante a detecção de
posição na partida. Ajustar este
parâmetro para melhorar a medição
da posição.
Descrições do Parâmetro
VLT® AutomationDrive FC 360
4.2.5 1-4* Dados Avanç. do Motor II
44
Programar os parâmetros para os dados avançados do
motor.
46 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828

1-48 Corrente na indutância mín. do eixo d
Range: Funcão:
100 % [ 20 - 200 %] Use esse parâmetro para ajustar o
ponto de saturação da indutância.
1-49 Corrente na indutância mín. do eixo q
Range: Funcão:
100 % [ 20 - 200 %] Este parâmetro especica a curva
de saturação dos valores de
indutância q. De 20% a 100% deste
parâmetro, as indutâncias são
linearmente aproximadas devido a
parâmetro 1-38 Indutância do eixo-q
(Lq) e parâmetro 1-45 Sat. da
Indutância do eixo-q (LqSat). Os
parâmetros são relacionados às
compensações de carga da
plaqueta de identicação do motor,
ao tipo de carga da aplicação e à
função de frenagem eletrônica para
parada rápida/hold do motor.
1-50 Magnetização do Motor a 0 Hz
Range: Funcão:
100 %* [0 - 300 %] Utilize esse parâmetro juntamente
com parâmetro 1-52 Veloc Mín de
Magnetiz. Norm. [Hz] para obter
uma carga térmica diferente no
motor funcionando em baixa
velocidade.
Insira um valor que seja uma
porcentagem da corrente de
magnetização nominal. Se a
conguração for muito baixa, o
torque no eixo do motor pode ser
diminuído.
Magn. current
130BB780.10
Hz
Par.1-50
90%
Par.1-52
Ilustração 4.2 Magnetização do
Motor
1-52 Veloc Mín de Magnetiz. Norm. [Hz]
Range: Funcão:
1 Hz* [ 0.1 - 10.0
Hz]
Programe a frequência necessária
para a corrente de magnetização
1-52 Veloc Mín de Magnetiz. Norm. [Hz]
Range: Funcão:
normal. Utilize este parâmetro junto
com parâmetro 1-50 Magnetização
do Motor a 0 Hz, consulte também
Ilustração 4.2.
1-55 Característica U/f - U
Range: Funcão:
Size
related*
[0 - 1000 V] Insira a tensão em cada ponto de
frequência, para formar
manualmente uma característica U/f
que corresponda ao motor. Os
pontos de frequência são denidos
em parâmetro 1-56 Característica U/f
- F.
1-56 Característica U/f - F
Range: Funcão:
Size
related*
[ 0 - 500.0
Hz]
Insira os pontos de frequência para
formar uma característica U/f que
corresponda ao motor. A tensão em
cada ponto é denida em
parâmetro 1-55 Característica U/f - U.
Faça uma característica U/f baseada
em 6 tensões e frequências
deníveis; consulte Ilustração 4.3.
Ilustração 4.3 Exemplo de
Característica U/f
1-60 Compensação de Carga em Baix Velocid
Range: Funcão:
100 %* [0 - 300 %] Insira o valor de compensação de
tensão em baixa velocidade em
porcentagem. Esse parâmetro é
usado para otimizar o desempenho
de carga em baixa velocidade. Esse
parâmetro está ativo somente se
parâmetro 1-10 Construção do Motor
= [0] Assíncrono.
Descrições do Parâmetro Guia de Programação
4 4
4.2.6 1-5* Indep. Carga, Conguração
Parâmetros para congurações do motor independentes da
carga.
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 47
4.2.7 1-6* Depen. Carga, Conguração
Par. para ajustar as congurações do motor dependentes
da carga.

1-61 Compensação de Carga em Alta Velocid
Range: Funcão:
100 %* [0 - 300 %] Insira o valor de compensação de
tensão da carga em alta velocidade
em porcentagem. Esse parâmetro é
utilizado para otimizar o
desempenho da carga em alta
velocidade. Esse parâmetro está
ativo somente se
parâmetro 1-10 Construção do Motor
= [0] Assíncrono.
1-62 Compensação de Escorregamento
Range: Funcão:
Size
related*
[ -400 -
400.0 %]
Insira o valor % da compensação de
escorregamento para compensar a
tolerância no valor de n
M,N
. A
compensação de escorregamento é
calculada automaticamente, ou seja,
com base na velocidade nominal
do motor n
M,N
.
1-63 Const d Tempo d Compens Escorregam
Range: Funcão:
0.1 s* [0.05 - 5 s] Insira a velocidade de reação da
compensação de escorregamento.
Um valor alto redunda em uma
reação lenta e um valor baixo em
uma reação rápida. Se surgirem
problemas de ressonância de baixa
frequência, use uma conguração
de tempo mais longo.
1-64 Amortecimento da Ressonância
Range: Funcão:
100 %* [0 - 500 %] Insira o valor do amortecimento da
ressonância. Programe o
parâmetro 1-64 Amortecimento da
Ressonância e o
parâmetro 1-65 Const Tempo
Amortec Ressonânc para ajudar a
eliminar problemas de ressonância
em alta frequência. Para reduzir
oscilação de ressonância, o valor do
parâmetro 1-64 Amortecimento da
Ressonância deve ser aumentado.
1-65 Const Tempo Amortec Ressonânc
Range: Funcão:
0.005 s* [ 0.001 - 0.05s]Programe o parâmetro 1-64 Amortecimento da Ressonância e o
parâmetro 1-65 Const Tempo
Amortec Ressonânc para ajudar a
eliminar problemas de ressonância
em alta frequência. Insira a
1-65 Const Tempo Amortec Ressonânc
Range: Funcão:
constante de tempo que
proporciona o melhor amortecimento.
1-66 Corrente Mín. em Baixa Velocidade
Range: Funcão:
50 %* [ 0 - 120 %] Insira a corrente do motor mínima
em velocidade baixa. Aumentar
essa corrente melhora o torque do
motor em velocidade baixa.
Parâmetro 1-66 Corrente Mín. em
Baixa Velocidade é ativado somente
para motor PM.
1-70 Modo de Partida
Selecione o modo de partida do motor PM. Para inicializar o
núcleo de controle VVC+ anteriormente para motor PM de
funcionamento livre. Ativo para motores PM em VVC+ somente
se o motor estiver parado (ou funcionando em baixa velocidade).
Option: Funcão:
[0] * Detecção de
Rotor
Estima o ângulo elétrico do rotor e
usa este ângulo como ponto de
partida. Esta opção é a seleção
padrão para aplicações industriais.
Se o ystart detectar que o motor
opera a baixa velocidade ou parou,
o conversor de frequência detecta a
posição do rotor (o ângulo) e
aciona o motor a partir dessa
posição.
[1] Estacio-
namento
A função de estacionamento aplica
corrente CC ao longo do
enrolamento do estator e gira o
rotor para a posição elétrica 0. Esta
opção é tipicamente para
aplicações de bombas e
ventiladores. Se o ystart detectar
que o motor opera a baixa
velocidade ou parou, o conversor
de frequência envia uma corrente
CC para fazer o motor estacionar
em um ângulo e, em seguida, inicia
o motor a partir dessa posição.
[3] Rotor Last
Position
Essa opção aproveita a última
posição do rotor na parada e dá
uma partida rápida. Ele é usado
somente na situação de parada
controlada, o conversor de
Descrições do Parâmetro
VLT® AutomationDrive FC 360
44
4.2.8 1-7* Ajustes da Partida
Parâmetros para ajustar as congurações de partida do
motor.
48 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828

1-70 Modo de Partida
Selecione o modo de partida do motor PM. Para inicializar o
núcleo de controle VVC+ anteriormente para motor PM de
funcionamento livre. Ativo para motores PM em VVC+ somente
se o motor estiver parado (ou funcionando em baixa velocidade).
Option: Funcão:
frequência registra a última posição
do rotor na parada e aciona o
motor diretamente, sem detecção
do rotor e cálculo do ângulo.
Quando na situação de parada e
ciclo de energização não
controlada, o conversor de
frequência precisa detectar a
posição do rotor.
Esta opção pode ser usada para o
aplicativo de reinicialização rápida.
A partida pode falhar se a posição
do rotor tiver sido alterada.
1-72 Função de Partida
Option: Funcão:
Selecione a função partida durante
o retardo de partida. Esse
parâmetro está vinculado ao
parâmetro 1-71 Retardo de Partida.
[0] Retenção CC/
tempo de
atraso
Energiza o motor com corrente de
hold CC (parâmetro 2-00 Retenção
CC / Corr. de Pré-aquec. do Mtr)
durante o tempo de atraso da
partida.
[2] * ParadInérc/
tempAtra
O motor parou por inércia durante
o tempo de atraso da partida
(inversor desligado).
[3] Vel partid
horár
Possível somente com VVC+.
Independentemente do valor
aplicado pelo sinal de referência, a
velocidade de saída aplica a
programação da velocidade de
partida em
parâmetro 1-75 Velocidade de
Partida [Hz] ou e a corrente de
saída corresponde à conguração
da corrente de partida em
parâmetro 1-76 Corrente de Partida.
1-72 Função de Partida
Option: Funcão:
Esta função é normalmente
utilizada em aplicações de içamento
sem contrapeso e, especialmente,
em aplicações com um motor-Cone,
cuja partida é dada no sentido
horário e seguida de rotação no
sentido da referência.
[4] Funcion.na
horizntl
Possível somente com VVC+.
Para obter a função descrita nos
parâmetro 1-75 Velocidade de
Partida [Hz] e
parâmetro 1-76 Corrente de Partida,
durante o tempo de atraso da
partida. O motor gira no sentido da
referência. Se o sinal de referência
for igual a zero (0),
parâmetro 1-75 Velocidade de
Partida [Hz] será ignorado e a
velocidade de saída será igual a
zero (0). A corrente de saída
corresponde à conguração da
corrente de partida em
parâmetro 1-76 Corrente de Partida.
[5] VVC+ sentido
horário
A velocidade de partida é calculada
automaticamente. Esta função usa a
velocidade de partida somente no
tempo de atraso da partida.
1-73 Flying Start
Option: Funcão:
AVISO!
Para obter o melhor
desempenho do ying start, os
dados avançados do motor,
parâmetro 1-30 Resistência do
Estator (Rs) a
parâmetro 1-35 Reatância
Principal (Xh), precisam estar
corretos.
Capturar um motor que esteja
girando livremente devido a uma
queda da rede elétrica.
[0] * Desativado Sem função.
[1] Ativo Habilitar o conversor de frequência
para capturar e controlar um motor
em rotação. Quando
parâmetro 1-73 Flying Start estiver
ativado, parâmetro 1-71 Retardo de
Partida e parâmetro 1-72 Função de
Partida cam sem função.
Descrições do Parâmetro Guia de Programação
4 4
1-71 Retardo de Partida
Range: Funcão:
0 s* [0,0 -
10,0 s]
Este parâmetro ativa um atraso no tempo da
partida. O conversor de frequência inicia com a
função partida selecionada em
parâmetro 1-72 Função de Partida. Programe o
tempo de atraso da partida até a aceleração
começar.
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 49

1-73 Flying Start
Option: Funcão:
[2] Sempre Ativo Ativar o ying start em cada
comando de partida.
[3] Ref. Ativada
Dir.
Habilitar o conversor de frequência
para capturar e controlar um motor
em rotação. A pesquisa é executada
somente no sentido da referência.
[4] Ativar Sempre
Ref. Dir.
Ativar o ying start em cada
comando de partida. A pesquisa é
executada somente no sentido da
referência.
1-75 Velocidade de Partida [Hz]
Range: Funcão:
Size
related*
[ 0 - 500.0
Hz]
Esse parâmetro pode ser usado, por
exemplo, para aplicações em
guindastes (rotor cônico). Programe
a velocidade de partida do motor.
Após o sinal de partida, a
velocidade de saída assume o valor
programado. Programe a função
partida em parâmetro 1-72 Função
de Partida para [3] Velocidade de
partida cw, [4] Operação horizontal
ou [5] VVC+ sentido horário e
programe um tempo de atraso da
partida em parâmetro 1-71 Retardo
de Partida.
1-76 Corrente de Partida
Range: Funcão:
Size
related*
[ 0 - 1000 A] Alguns motores, por exemplo,
motores com rotores cônicos,
precisam de corrente/velocidade de
partida extra para desacoplar o
rotor. Para obter este boost,
programe a corrente requerida
neste parâmetro. Programe o
parâmetro 1-72 Função de Partida
em [3] Velocidade de partida cw ou
[4] Operação horizontal e programe
o tempo de atraso da partida em
parâmetro 1-71 Retardo de Partida.
1-78 Veloc.máx.partida do compr.[Hz]
Range: Funcão:
0 Hz* [ 0 - 500 Hz] Esse parâmetro ativa torque de
partida alto. Essa função ignora o
limite de corrente e o limite de
torque durante a partida do motor.
O tempo desde o sinal de partida é
dado até a velocidade exceder a
velocidade programada nesse
parâmetro torna-se uma zona de
1-78 Veloc.máx.partida do compr.[Hz]
Range: Funcão:
partida. Na zona inicial, o limite de
corrente e o limite de torque do
motor são programados para o
máximo valor possível para a
combinação de conversor de
frequência/motor. O tempo sem
proteção do limite de corrente e
limite de torque não deve exceder
o valor programado em
parâmetro 1-79 TempMáx.Part.Comp.
p/Desarm. Caso contrário, o
conversor de frequência desarma
com alarme 18, Partida falhou.
1-79 TempMáx.Part.Comp.p/Desarm
Range: Funcão:
5 s* [0 - 10 s] O tempo desde o sinal de partida é
dado até a velocidade exceder a
velocidade programada em
parâmetro 1-78 Veloc.máx.partida do
compr.[Hz] não deve exceder o
tempo programado nesse
parâmetro. Caso contrário, o
conversor de frequência desarma
com alarme 18, Partida falhou.
Qualquer tempo programado em
parâmetro 1-71 Retardo de Partida
para uso de uma função partida
deve ser executado dentro do
limite de tempo.
1-80 Função na Parada
Option: Funcão:
Selecione a função do conversor de
frequência, após um comando de
parada ou depois que a velocidade
é desacelerada até as congurações
no parâmetro 1-82 Veloc. Mín p/
Funcionar na Parada [Hz].
As seleções disponíveis dependem
da conguração em
parâmetro 1-10 Construção do Motor.
•
[0] Assíncrono.
Descrições do Parâmetro
VLT® AutomationDrive FC 360
44
50 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
4.2.9 1-8* Ajustes de Parada
Parâmetros para ajustar as congurações de parada do
motor.

1-80 Função na Parada
Option: Funcão:
- [0] Parada por
inércia.
- [1] Retenção CC/
Pré-aquecimento
do Motor.
- [3] Pré-
-magnetização.
•
[1] PM, SPM não saliente.
•
[3] PM, IPM saliente, Sat.
- [0] Parada por
inércia.
- [1] Retenção CC/
Pré-aquecimento
do Motor.
[0] * Parada por
inércia
Deixe o motor em modo livre.
[1] Retenção CC /
Pré-
-aquecimento
do Motor
Energiza o motor com uma
corrente de retenção CC (consulte
parâmetro 2-00 Retenção CC / Corr.
de Pré-aquec. do Mtr.
[3] Pré-
-magnetizção
Gera um campo magnético,
enquanto o motor está parado. Isso
permite que o motor produza
torque rapidamente nos comandos
(somente motores assíncronos). Essa
função de pré-magnetização não
ajuda o primeiro comando de
partida. Duas soluções diferentes
estão disponíveis para pré-
-magnetizar a máquina para o
primeiro comando de partida:
Solução 1:
1. Inicie o conversor de
frequência com uma
referência de 0 RPM.
2. Aguarde 2 a 4 constantes
de tempo do rotor
(consulte a equação
abaixo) antes de aumentar
a referência de velocidade.
Solução 2:
1. Programado
parâmetro 1-71 Retardo de
Partida para o tempo de
pré-magnetizar (2 a 4
constantes de tempo do
rotor).
2. Programado
parâmetro 1-72 Função de
1-80 Função na Parada
Option: Funcão:
Partida para [0] Retenção
CC.
3. Dena a magnitude da
corrente de retenção CC
(parâmetro 2-00 Retenção
CC / Corr. de Pré-aquec. do
Mtr para ser igual a I
pre-mag
= U
nom
/(1,73 x Xh).
Amostra das constantes de tempo
do rotor =
(Xh+X2)/(6,3*Freq_nom*Rr)
1 kW = 0,2 s
10 kW = 0,5 s
100 kW = 1,7 s
1-82 Veloc. Mín p/ Funcionar na Parada [Hz]
Range: Funcão:
0 Hz* [0 - 20 Hz] Programar a frequência de saída
que ativa o parâmetro 1-80 Função
na Parada.
1-88 Ganho do freio CA
Range: Funcão:
1.4* [1.0 - 2.0 ] Este parâmetro é usado pata
programar a capacidade da
potência de frenagem CA
(programar o tempo de desaceleração quando a inércia for
constante). Nos casos em que a
tensão do barramento CC não for
superior ao valor de desarme da
tensão do barramento CC, o torque
do gerador pode ser ajustado com
este parâmetro. Quanto maior o
ganho de freio CA, maior a
capacidade do freio. Selecionar 1,0
signica que não há capacidade de
freio CA.
AVISO!
Se houver torque de gerador
contínuo, maior torque do
gerador causará maior
corrente do motor e o motor
cará quente. Nessa condição,
parâmetro 2-16 Freio CA,
Corrente máxima o pode ser
usado para proteger o motor
contra superaquecimento.
Descrições do Parâmetro Guia de Programação
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 51
4 4

1-90 Proteção Térmica do Motor
Option: Funcão:
[0] * Sem proteção Motor sobrecarregado
continuamente, quando não houver
necessidade de nenhuma
advertência ou desarme do
conversor de frequência.
[1] Advrtnc d
Termistor
Ativa uma advertência quando o
termistor conectado no motor
reage a um superaquecimento do
motor.
[2] Desrm por
Termistor
Para (desarma) o conversor de
frequência quando o termistor
conectado no motor reagir a um
superaquecimento do motor.
O valor de desativação do termistor
deve ser > 3 kΩ.
Instale um termistor (sensor PTC)
no motor para proteção do
enrolamento.
[3] Advertência
do ETR 1
Calcula a carga e ativa uma
advertência no display quando o
motor estiver sobrecarregado.
Programe um sinal de advertência
através de uma das saídas digitais.
[4] Desarme do
ETR 1
Calcula a carga e faz a parada
(desarme) do conversor de
frequência quando o motor estiver
sobrecarregado. Programe um sinal
de advertência através de uma das
saídas digitais. O sinal aparece na
eventualidade de uma advertência
e se o conversor de frequência
desarmar (advertência térmica).
Quando o alarme do ETR do
MOTOR é relatado, pode reinicializar
imediatamente.
[22] Desarme do
ETR Detecção
estendida
Calcula a carga e faz a parada
(desarme) do conversor de
frequência quando o motor estiver
sobrecarregado. Programe um sinal
de advertência através de uma das
saídas digitais. O sinal aparece na
eventualidade de uma advertência
e se o conversor de frequência
desarmar (advertência térmica).
Quando o alarme do ETR do
MOTOR é relatado, pode reset
somente depois que
1-90 Proteção Térmica do Motor
Option: Funcão:
parâmetro 16-18 Térmico Calculado
do Motor diminuir para 0.
PTC / Thermistor
R
OFF
ON
<800 Ω
+10 V
130BF960.10
>2.9 kΩ
12 13 1837 322719 29 3338
5550
42
53 54
31
Descrições do Parâmetro
4.2.10 1-9* Temperatura do Motor
Parâmetros para ajustar as congurações de proteção de
temperatura do motor.
44
52 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
VLT® AutomationDrive FC 360
Ilustração 4.4 Perl do PTC
Utilizando uma entrada digital e uma alimentação de 10 V:
Exemplo: O conversor de frequência desarma quando a
temperatura do motor estiver muito alta.
Conguração de parâmetros:
Ilustração 4.5 Conexão do termistor PTC - Entrada digital
Utilizando uma entrada analógica e uma alimentação de
10 V:
Exemplo: O conversor de frequência desarma quando a
temperatura do motor estiver muito alta.
Conguração de parâmetros:
Programe parâmetro 1-90 Proteção Térmica do
•
Motor para [2] Desarme do Termistor.
Congure parâmetro 1-93 Fonte do Termistor para
•
[6] Entrada Digital 33.

PTC / Thermistor
R
OFF
ON
<800 Ω
+10 V
130BF694.10
>2.9 kΩ
5550
42
53 54
1-93 Fonte do Termistor
Option: Funcão:
AVISO!
Este parâmetro não pode ser
alterado enquanto o motor
estiver em funcionamento.
AVISO!
A entrada digital deve ser
denida para [0] PNP - Ativo
em 24 V em
parâmetro 5-00 Modo Entrada
Digital.
Selecionar a entrada na qual o
termístor (sensor PTC) deverá ser
conectado. Se uma entrada
analógica neste parâmetro estiver
denida como uma fonte, ela não
poderá ser usada para outra
nalidade, por exemplo, referência,
feedback.
[0] * Nenhum
[1] Entrada
analógica 53
1-93 Fonte do Termistor
Option: Funcão:
[2] Entrada
analógica 54
[3] Entrada digital
18
[4] Entrada digital
19
[5] Entrada digital
32
[6] Entrada digital
33
[7] Digital input
31
Descrições do Parâmetro Guia de Programação
Programe parâmetro 1-90 Proteção Térmica do
•
Motor para [2] Desarme do Termistor.
Programe parâmetro 1-93 Fonte do Termistor para
•
[2] Entrada Analógica 54.
Ilustração 4.6 Conexão do termistor PTC - Entrada analógica
4 4
Entrada
digital/
analógica
Digital 10 V
Analógica 10 V
Tabela 4.3 Valores limite de desativação
Tensão de
alimentação
AVISO!
Verique se a tensão de alimentação selecionada está de
acordo com a especicação do elemento termistor usado.
Valores
limite de desativação
<800 Ω - 2,9 kΩ
<800 Ω - 2,9 kΩ
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 53

2-00 Retenção CC / Corr. de Pré-aquec. do Mtr
Range: Funcão:
50 %* [0 - 160 %] Dena a corrente de holding como
uma porcentagem da corrente
nominal do motor
IM,N
parâmetro 1-24 Corrente do Motor.
Este parâmetro mantém a função
do motor (torque de holding) ou
pré-aquece o motor. Este parâmetro
está ativo se [0] Retenção CC estiver
selecionado em
parâmetro 1-72 Função de Partida
ou se [1] Retenção CC/Pré-
-aquecimento estiver selecionado
em parâmetro 1-80 Função na
Parada.
AVISO!
O valor máximo depende da
corrente nominal do motor.
Evite corrente 100% durante
muito tempo. O motor pode
ser danicado.
2-01 Corrente de Freio CC
Range: Funcão:
50 %* [0 - 150 %]
AVISO!
SUPERAQUECIMENTO DO
MOTOR
O valor máximo depende da
corrente nominal do motor.
Para evitar danos no motor
causados por superaquecimento, não opere a 100%
durante muito tempo.
Programe a corrente como % da
corrente nominal do motor,
parâmetro 1-24 Corrente do Motor.
Quando a velocidade estiver abaixo
do limite programado em
parâmetro 2-04 Velocidade de
ativação do freio CC ou quando a
função de inversão da frenagem CC
estiver ativa (no grupo do parâmetro
5-1* Entradas digitais programado
para [5] Inversão da frenagem CC; ou
através da porta serial), uma
corrente de freio CC é aplicada em
2-01 Corrente de Freio CC
Range: Funcão:
um comando de parada. Ver
parâmetro 2-02 Tempo de Frenagem
CC para saber a duração.
2-02 Tempo de Frenagem CC
Range: Funcão:
10 s* [0 - 60 s] Programe a duração da corrente de
freio CC programada em
parâmetro 2-01 Corrente de Freio CC
assim que for ativada.
2-04 Velocidade de ativação do freio CC
Range: Funcão:
0 Hz* [ 0 - 500 Hz] Este parâmetro é para conguração
da velocidade de ativação do freio
CC na qual a corrente de freio CC
parâmetro 2-01 Corrente de Freio CC
deve estar ativa, com um comando
de parada.
2-06 Corrente de Estacionamento
Range: Funcão:
100 %* [0 - 150 %] Programe a corrente de acordo com
a porcentagem da corrente nominal
do motor, parâmetro 1-24 Corrente
do Motor.
2-07 Tempo de Estacionamento
Range: Funcão:
3 s* [0.1 - 60 s] Programe a duração da corrente de
estacionamento programada em
parâmetro 2-06 Corrente de Estacionamento, uma vez ativada.
2-10 Função de Frenagem
Option: Funcão:
[0] * Desligado Não há nenhum resistor do freio
instalado.
[1] Resistor de
freio
Um resistor do freio está instalado
no sistema para dissipação do
excesso de energia do freio em
forma de calor. A conexão de um
resistor do freio permite uma
tensão do barramento CC maior
durante a frenagem (operação
como gerador). A função do resistor
Descrições do Parâmetro
VLT® AutomationDrive FC 360
4.3 Parâmetros 2-** Freios
4.3.1 2-0* Freio CC
Use este grupo do parâmetro para congurar as funções
de Freio CC e Retenção CC.
44
54 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
4.3.2 2-1* Brake Energy Funct.
Grupo do parâmetro para selecionar os parâmetros de
frenagem dinâmica válido somente para conversores de
frequência com circuito de frenagem.

2-10 Função de Frenagem
Option: Funcão:
do freio está ativa somente em
conversores de frequência com freio
dinâmico integral.
[2] Freio CA Melhora a frenagem sem usar um
resistor do freio. Esse parâmetro
controla uma sobremagnetização
do motor, com uma carga que força
o motor a funcionar como gerador.
Esta função pode melhorar a
função OVC. Aumentar as perdas
elétricas no motor permite que a
função OVC aumente o torque de
frenagem sem exceder o limite de
tensão.
AVISO!
O freio CA não é tão ecaz
quanto a frenagem dinâmica
com resistor.
O freio CA é para o modo VVC
+
tanto em malha fechada
como aberta.
2-11 Resistor de Freio (ohm)
Range: Funcão:
Size
related*
[ 0 - 6200
Ohm]
Programe o valor do resistor do
freio em Ω. Esse valor é usado para
monitorar a energia do resistor do
freio. Parâmetro 2-11 Resistor de
Freio (ohm) está ativo em
conversores de frequência com freio
dinâmico integral. Utilize este
parâmetro para valores que não
tenham decimais.
2-12 Limite da Potência de Frenagem (kW)
Range: Funcão:
Size
related*
[0.001 - 2000
kW]
Parâmetro 2-12 Limite da Potência de
Frenagem (kW) é a potência média
esperada dissipada no resistor do
freio em um intervalo de 120 s. É
usada como o limite de monitoramento de parâmetro 16-33 Energia
de Frenagem /2 min e especica
quando um alarme/advertência é
emitido.
A fórmula a seguir pode ser usada
para calcular o
parâmetro 2-12 Limite da Potência de
Frenagem (kW).
P
br, avg
W =
U
br
2
V × tbrs
RbrΩ × Tbrs
2-12 Limite da Potência de Frenagem (kW)
Range: Funcão:
P
br,avg
é a potência média dissipada
no resistor de frenagem. Rbr é a
resistência do resistor de frenagem.
tbr é o tempo de frenagem ativo
dentro do período de 120 s, Tbr.
Ubr é a tensão CC em que o resistor
de frenagem está ativo. Para
unidades T4, a tensão CC é 770 V,
que pode ser reduzida por
parâmetro 2-14 Redução da tensão
de frenagem.
AVISO!
Se Rbr não for conhecido ou se
Tbr for diferente de 120 s, a
abordagem prática é executar
a aplicação de freio, leitura de
parâmetro 16-33 Energia de
Frenagem /2 min e inserir esse
valor + 20% em
parâmetro 2-12 Limite da
Potência de Frenagem (kW).
2-16 Freio CA, Corrente máxima
Range: Funcão:
100 %* [0 - 160 %] Insira a corrente máxima permitida
ao usar Freio CA para evitar superaquecimento dos enrolamentos do
motor.
AVISO!
Parâmetro 2-16 Freio CA,
Corrente máxima está
disponível apenas para
motores assíncronos.
2-17 Controle de Sobretensão
Option: Funcão:
O controle de sobretensão (OVC)
reduz o risco de desarme do
conversor de frequência devido à
sobretensão no barramento CC
causada pela potência generativa
da carga.
[0] * Desativado Não é necessário nenhum OVC.
Descrições do Parâmetro Guia de Programação
4 4
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 55
2-14 Redução da tensão de frenagem
Range: Funcão:
0 V* [ 0 - 71 V] Congurar esse parâmetro pode alterar o
resistor do freio (parâmetro 2-11 Resistor de
Freio (ohm)).

2-17 Controle de Sobretensão
Option: Funcão:
[1] Ativado (não
em stop)
Ativa o OVC, exceto ao utilizar um
sinal de parada a m de parar o
conversor de frequência.
[2] Ativado Ativar o OVC.
CUIDADO
FERIMENTOS PESSOAIS E
DANOS AO
EQUIPAMENTO
Ativar o OVC em aplicações de
içamento pode causar
ferimentos pessoais e danos
ao equipamento.
•
O OVC não deve ser
ativado em aplicações
de içamento.
2-19 Ganho de Sobretensão
Range: Funcão:
100 %* [0 - 200 %] Selecionar ganho de sobretensão.
2-20 Corrente de Liberação do Freio
Range: Funcão:
0 A* [0 - 100 A] Programe a corrente do motor para
liberação do freio mecânico quando
houver uma condição de partida
presente. O limite superior é especi-
cado no parâmetro 16-37 Corrente
Máx.do Inversor.
AVISO!
Quando a saída de controle do
freio mecânico for selecionada,
mas nenhum freio mecânico
estiver conectado, a função
não funciona por conguração
padrão devido à corrente do
motor muito baixa.
2-22 Velocidade de Ativação do Freio [Hz]
Range: Funcão:
0 Hz* [0 - 400 Hz] Programar a frequência do motor
de ativação do freio mecânico
quando houver uma condição de
parada presente.
2-23 Atraso de Ativação do Freio
Range: Funcão:
0 s* [0 - 5 s] Insira o tempo de atraso da
frenagem da parada por inércia
após o tempo de desaceleração da
rampa. O eixo é mantido em
velocidade 0 com torque de
holding total. Assegure-se de que o
freio mecânico travou a carga, antes
do motor entrar no modo parada
por inércia.
2-24 Atraso da Parada
Range: Funcão:
0 s* [0 - 5 s] Ele é usado para denir um tempo,
durante o qual a malha de
fechamento de velocidade controla
o motor para operar a 0 RPM,
depois disso o freio é ativado.
2-25 Tempo de Liberação do Freio
Range: Funcão:
0 s* [0 - 5 s] Ele reserva um tempo antes da
aceleração após a abertura do freio,
e o controle de malha de
fechamento de velocidade controla
a velocidade a 0 RPM.
2-31 Speed PID Start Proportional Gain
Range: Funcão:
0.015* [0.000 -
1.000 ]
É o ganho proporcional do
controlador de velocidade durante
o tempo programado em
parâmetro 2-25 Tempo de Liberação
do Freio.
2-32 Speed PID Start Integral Time
Range: Funcão:
200.0 ms* [1.0 -
20000.0 ms]
É o tempo integrado do
controlador de velocidade durante
o tempo programado em
parâmetro 2-25 Tempo de Liberação
do Freio.
2-33 Speed PID Start Lowpass Filter Time
Range: Funcão:
10.0 ms* [0.1 - 100.0
ms]
É o ltro passa-baixa do controle da
velocidade durante o tempo
programado em
parâmetro 2-25 Tempo de Liberação
do Freio.
Descrições do Parâmetro
VLT® AutomationDrive FC 360
44
4.3.3 2-2* Freio Mecânico
56 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
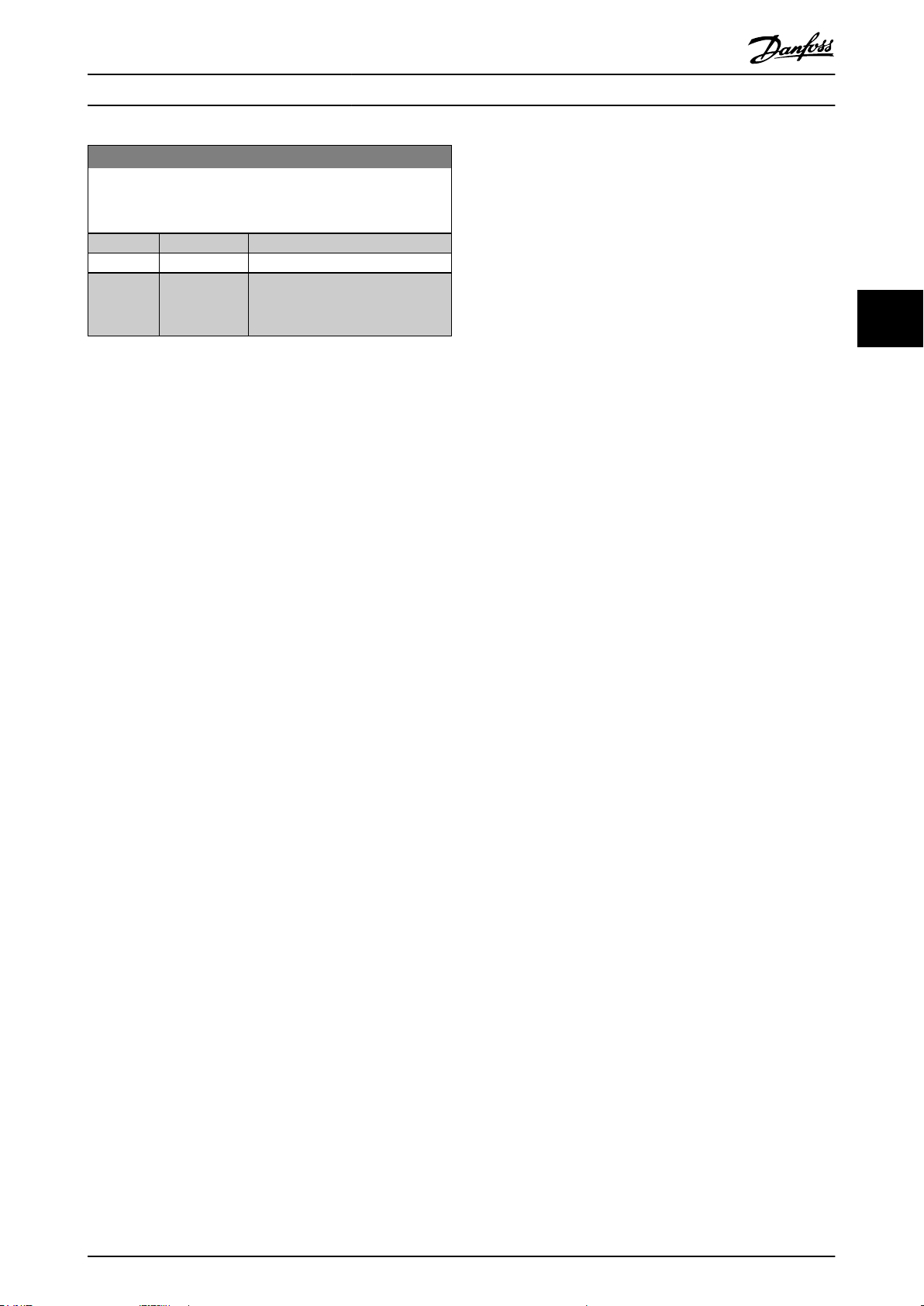
2-39 Mech. Brake w/ dir. Change
Ative ou desative a função de freio mecânico quando o eixo
muda de direção.
Option: Funcão:
[0] * OFF
[1] ON
[2] ON with start
delay
O tempo de retardo da partida é
programado em
parâmetro 1-71 Atraso da Partida.
Descrições do Parâmetro Guia de Programação
4 4
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 57

3-00 Intervalo de Referência
Option: Funcão:
[0] * Mín. - Máx. Selecione a faixa do sinal de
referência e do sinal de feedback.
Os valores dos sinais podem ser só
positivos ou positivo e negativo.
[1] -Máx até
+Máx
Para valores tanto positivos quanto
negativos (ambos os sentidos)
relativo a parâmetro 4-10 Sentido de
Rotação do Motor.
3-01 Unidade da Referência/Feedback
Option: Funcão:
[0] Nenhum
[1] %
[2] RPM
[3] Hz
[4] Nm
[5] PPM
[10] 1/min
[12] PULSOS/s
[20] l/s
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[80] kW
[120] GPM
[121] galão/s
[122] galão/min
[123] galão/h
[124] CFM
[125] pé cúbico/s
3-01 Unidade da Referência/Feedback
Option: Funcão:
[126] pé cúbico/min
[127] pé cúbico/h
[130] lb/s
[131] lb/min
[132] lb/h
[140] pés/s
[141] pés/min
[145] pé
[150] lb pé
[160] °F
[170] psi
[171] lb/pol2
[172] pol wg
[173] pés WG
[180] HP
3-02 Referência Mínima
Range: Funcão:
0 ReferenceFeedback
Unit*
[ -4999.0 4999
ReferenceFeedbackUnit]
Insira a referência mínima. A
referência mínima é o menor valor
obtido pela soma de todas as
referências.
A referência mínima está ativa
somente quando
parâmetro 3-00 Intervalo de
Referência estiver programado para
[0] Mín. - Máx.
A unidade da referência mínima
corresponde a:
•
O opcional em
parâmetro 1-00 Modo
Conguração.
•
A unidade selecionada em
parâmetro 3-01 Unidade da
Referência/Feedback.
3-03 Referência Máxima
Range: Funcão:
Size
related*
[-4999.0 4999
ReferenceFeedbackUnit]
Insira a referência máxima. A
referência máxima é o maior valor
obtido pela soma de todas as
referências
A unidade da referência máxima
coincide com:
•
A opção selecionada em
parâmetro 1-00 Modo
Conguração.
•
A unidade selecionada em
parâmetro 3-00 Intervalo de
Referência.
Descrições do Parâmetro
VLT® AutomationDrive FC 360
4.4 Parâmetros 3-** Referência / Rampas
4.4.1 3-0* Limites de Referência
Parâmetros para congurar a unidade da referência, limites
e faixas.
44
58 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828

3-04 Função de Referência
Option: Funcão:
[0] * Soma Soma as fontes de referência
predenida e externa.
[1] Externa/
Predenida
Utilize a fonte da referência externa
ou predenida. Alterne entre
externa e predenida por meio de
um comando ou uma entrada
digital.
3-10 Referência Predenida
Range: Funcão:
0 %* [-100 -
100 %]
Insira até oito referências
predenidas diferentes (0-7) neste
parâmetro usando a programação
de matriz. Para selecionar
referências dedicadas, selecione bit
de referência predenida 0/1/2 [16],
[17] ou [18] para as respectivas
entradas digitais no grupo do
parâmetro 5-1* Entradas digitais.
3-11 Velocidade de Jog [Hz]
Range: Funcão:
5 Hz* [ 0 - 500.0
Hz]
A velocidade de jog é uma
velocidade de saída xa na qual o
conversor de frequência trabalha
quando a função de jog estiver
ativa. Consulte também a
parâmetro 3-80 Tempo de Rampa do
Jog.
A velocidade de jog não deve
exceder a conguração em
parâmetro 4-14 Lim. Superior da
Veloc do Motor [Hz].
3-12 Valor de Catch Up/Slow Down
Range: Funcão:
0 %* [0 - 100 %] Insira um valor percentual a ser
adicionado ou subtraído da
referência real para catch-up ou
redução de velocidade, respectivamente. Se [28] Catch-up for
selecionado através de uma das
entradas digitais
(parâmetro 5-10 Terminal 18 Entrada
Digital a parâmetro 5-15 Terminal 33
Entrada Digital), o valor percentual
será adicionado à referência total.
Se [29] Redução de velocidade for
selecionado através de uma das
entradas digitais
3-12 Valor de Catch Up/Slow Down
Range: Funcão:
(parâmetro 5-10 Terminal 18 Entrada
Digital a parâmetro 5-15 Terminal 33
Entrada Digital), o valor percentual
será subtraído da referência total.
3-13 Tipo de Referência
Selecionar a fonte da referência a ser ativada.
Option: Funcão:
[0] * Dependnt d
Hand/Auto
Use a referência local no modo
manual ou a referência remota no
modo automático.
[1] Remoto Use a referência no modo manual.
[2] Local Use a referência no modo
automático.
3-14 Referência Relativa Pré-denida
Range: Funcão:
0 %* [-100 -
100 %]
A referência real, X, é aumentada
ou diminuída com a porcentagem
Y, programada em
parâmetro 3-14 Referência Relativa
Pré-denida. O resultado é a
referência real Z. A referência real
(X) é a soma das entradas
selecionadas em
parâmetro 3-15 Fonte da Referência
1, parâmetro 3-16 Fonte da
Referência 2, parâmetro 3-17 Fonte
da Referência 3 e
parâmetro 8-02 Origem do Controle.
X
100
%
0-100
Z
Y
X+X*Y/100
P 3-14
130BA278.10
Descrições do Parâmetro Guia de Programação
4.4.2 3-1* Referências
4 4
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 59
Ilustração 4.7 Referência Relativa Predenida
Ilustração 4.8 Referência real

3-15 Fonte da Referência 1
Option: Funcão:
Selecione a entrada de referência a
ser usada como o primeiro sinal de
referência. Parâmetro 3-15 Fonte da
Referência 1, parâmetro 3-16 Fonte
da Referência 2 e
parâmetro 3-17 Fonte da Referência 3
denem até três sinais de referência
diferentes. A soma destes sinais de
referência dene a referência real.
[0] Sem função
[1] * Entrada
analógica 53
[2] Entrada
analógica 54
[7] Entr Pulso 29
[8] Entr Pulso 33
[11] Refernc do
Bus Local
[20] Potenc. digital
[32] Bus PCD
3-16 Fonte da Referência 2
Option: Funcão:
Selecione a entrada de referência a
ser usada como segundo sinal de
referência. Parâmetro 3-15 Fonte da
Referência 1, parâmetro 3-16 Fonte
da Referência 2 e
parâmetro 3-17 Fonte da Referência 3
denem até três sinais de referência
diferentes. A soma destes sinais de
referência dene a referência real.
[0] Sem função
[1] Entrada
analógica 53
[2] * Entrada
analógica 54
[7] Entr Pulso 29
[8] Entr Pulso 33
[11] Refernc do
Bus Local
[20] Potenc. digital
[32] Bus PCD
3-17 Fonte da Referência 3
Option: Funcão:
Selecione a entrada de referência a
ser usada para o terceiro sinal de
referência. Parâmetro 3-15 Fonte da
Referência 1, parâmetro 3-16 Fonte
da Referência 2 e
parâmetro 3-17 Fonte da Referência 3
denem até três sinais de referência
3-17 Fonte da Referência 3
Option: Funcão:
diferentes. A soma destes sinais de
referência dene a referência real.
[0] Sem função
[1] Entrada
analógica 53
[2] Entrada
analógica 54
[7] Entr Pulso 29
[8] Entr Pulso 33
[11] * Refernc do
Bus Local
[20] Potenc. digital
[32] Bus PCD
3-18 Recurso de Referência de Escala Relativa
Option: Funcão:
AVISO!
Não é possível ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
Selecione um valor variável a ser
adicionado ao valor xo (denido
no parâmetro 3-14 Referência
Relativa Pré-denida). A soma dos
valores xos e variáveis
(denominada Y em Ilustração 4.9) é
multiplicada pela referência real
(denominada X em Ilustração 4.9).
Em seguida, esse produto é
somado com a referência real (X
+X*Y/100) para ter a referência real
resultante.
Ilustração 4.9 Referência Real
Resultante
[0] * Sem função
[1] Entrada
analógica 53
[2] Entrada
analógica 54
[7] Entr Pulso 29
[8] Entr Pulso 33
[11] Refernc do
Bus Local
Descrições do Parâmetro
VLT® AutomationDrive FC 360
44
60 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828

t
acc
t
dec
130BD379.10
P 3-*2
Ramp (X)
Down
Time (Dec)
P 4-14
High-limit
Hz
Reference
P 1-23
Motor
frequency
P 4-12
Low limit
Time
P 3-*1
Ramp (X)Up
Time (Acc)
3-40 Tipo de Rampa 1
Option: Funcão:
Selecione o tipo de rampa,
dependendo dos requisitos para a
aceleração/desaceleração. Uma
rampa linear proverá aceleração
constante durante a aceleração.
Uma rampa sinoidal 2 dá aceleração
não linear.
[0] * Linear
[2] Rampa
Senoidal 2
(Apenas para ser usado com o
modo de controle da velocidade.)
Rampa-S com base nos valores
programados nos
parâmetro 3-41 Tempo de Aceleração
da Rampa 1 e
parâmetro 3-42 Tempo de Desaceleração da Rampa 1.
3-41 Tempo de Aceleração da Rampa 1
Range: Funcão:
Size
related*
[0.01 - 3600s]Digite o tempo de aceleração, que
é o tempo de aceleração de 0 Hz
para a velocidade do motor
síncrono nS
parâmetro 1-23 Freqüência do Motor
ou de 0 NM para o torque nominal
se os modos de conguração de
torque forem selecionados. É
aplicável da Rampa 1 para Rampa
4. Escolha um tempo de aceleração
de tal modo que a corrente de
saída não exceda o limite de
3-41 Tempo de Aceleração da Rampa 1
Range: Funcão:
corrente do parâmetro 4-18 Limite
de Corrente durante a rampa. Ver o
tempo de desaceleração em
parâmetro 3-42 Tempo de Desaceleração da Rampa 1.
Par . 3 − 41 =
t
acc
s xns Hz
ref Hz
3-42 Tempo de Desaceleração da Rampa 1
Range: Funcão:
Size
related*
[0.01 - 3600s]Digite o tempo de desaceleração,
que é o tempo de aceleração de 0
Hz para a velocidade do motor
síncrono ns ou de 0 NM para o
torque nominal se os modos de
conguração de torque forem
selecionados. Selecione o tempo de
desaceleração de modo que não
ocorra nenhuma sobretensão no
inversor, devido à operação regenerativa do motor e de maneira que a
corrente gerada não exceda o limite
de corrente programado em
parâmetro 4-18 Limite de Corrente.
Ver tempo de aceleração, no
parâmetro 3-41 Tempo de Aceleração
da Rampa 1.
Par . 3 − 42 =
t
dec
s xns Hz
ref Hz
3-50 Tipo de Rampa 2
Option: Funcão:
Selecione o tipo de rampa,
dependendo dos requisitos para a
aceleração/desaceleração. Uma
rampa linear proverá aceleração
constante durante a aceleração.
Uma rampa senoidal 2 fornece
aceleração não linear.
[0] * Linear
[2] Rampa
Senoidal 2
Rampa S com base nos valores
programados nos
parâmetro 3-51 Tempo de Aceleração
da Rampa 2 e
parâmetro 3-52 Tempo de Desaceleração da Rampa 2.
Descrições do Parâmetro Guia de Programação
4.4.3 3-4* Rampa 1
Congure o parâmetro de rampa e os tempos de rampa
para cada uma das quatro rampas (grupo do parâmetro
3-4* Rampa 1, 3-5* Rampa 2, 3-6* Rampa 3, e 3-7* Rampa
4).
Ilustração 4.10 Exemplo de Rampa 1
4 4
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 61
4.4.4 3-5* Rampa 2
Este grupo do parâmetro congura os parâmetros da
rampa 2.

3-51 Tempo de Aceleração da Rampa 2
Range: Funcão:
Size
related*
[0.01 - 3600s]Digite o tempo de aceleração, que
é o tempo de aceleração de 0 Hz
para a velocidade nominal do
motor ns. Escolha um tempo de
aceleração de tal modo que a
corrente de saída não exceda o
limite de corrente do
parâmetro 4-18 Limite de Corrente
durante a rampa. Ver o tempo de
desaceleração em
parâmetro 3-52 Tempo de Desaceleração da Rampa 2.
Par . 3 − 51 =
t
acc
s xns Hz
ref Hz
3-52 Tempo de Desaceleração da Rampa 2
Range: Funcão:
Size
related*
[0.01 - 3600s]Digite o tempo de desaceleração,
que é o tempo de desaceleração da
velocidade nominal do motor n
s
para 0 Hz ou do torque nominal
para 0 NM se os modos de
conguração de torque forem
selecionados. Selecione o tempo de
desaceleração de modo que não
ocorra nenhuma sobretensão no
conversor de frequência, devido à
operação regenerativa do motor e
de maneira que a corrente gerada
não exceda o limite de corrente,
programado em
parâmetro 4-18 Limite de Corrente.
Ver tempo de aceleração, no
parâmetro 3-51 Tempo de Aceleração
da Rampa 2.
Par . 3 − 52 =
t
dec
s xns Hz
ref Hz
3-60 Tipo de Rampa 3
Option: Funcão:
Selecione o tipo de rampa,
dependendo dos requisitos para a
aceleração/desaceleração. Uma
rampa linear proverá aceleração
constante durante a aceleração.
Uma rampa S fornece aceleração
não linear.
[0] * Linear
3-60 Tipo de Rampa 3
Option: Funcão:
[2] Rampa
Senoidal 2
Rampa S com base nos valores
programados nos
parâmetro 3-61 Tempo de Aceleração
da Rampa 3 e
parâmetro 3-62 Tempo de Desaceleração da Rampa 3.
3-61 Tempo de Aceleração da Rampa 3
Range: Funcão:
Size
related*
[0.01 - 3600s]Digite o tempo de aceleração, que
é o tempo de aceleração de 0 Hz
para a velocidade nominal do
motor ns. Escolha um tempo de
aceleração de tal modo que a
corrente de saída não exceda o
limite de corrente do
parâmetro 4-18 Limite de Corrente
durante a rampa. Ver o tempo de
desaceleração em
parâmetro 3-62 Tempo de Desaceleração da Rampa 3.
3-62 Tempo de Desaceleração da Rampa 3
Range: Funcão:
Size
related*
[0.01 - 3600s]Insira o tempo de desaceleração, ou
seja, o tempo de desaceleração da
velocidade nominal do motor ns até
0 Hz. Selecione o tempo de desaceleração de modo que não ocorra
nenhuma sobretensão no inversor,
devido à operação regenerativa do
motor e de maneira que a corrente
gerada não exceda o limite de
corrente programado em
parâmetro 4-18 Limite de Corrente.
Ver tempo de aceleração, no
parâmetro 3-61 Tempo de Aceleração
da Rampa 3.
Par . 3 − 62 =
t
dec
s xns Hz
ref Hz
3-70 Tipo de Rampa 4
Option: Funcão:
Selecione o tipo de rampa,
dependendo dos requisitos para a
aceleração/desaceleração. Uma
rampa linear proverá aceleração
constante durante a aceleração.
Descrições do Parâmetro
VLT® AutomationDrive FC 360
44
4.4.5 3-6* Rampa 3
Este grupo do parâmetro congura os parâmetros da
rampa 3.
62 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
4.4.6 3-7* Rampa 4
Este grupo do parâmetro congura os parâmetros da
rampa 4.

3-70 Tipo de Rampa 4
Option: Funcão:
Uma rampa S fornece aceleração
não linear.
[0] * Linear
[2] Rampa
Senoidal 2
Rampa S com base nos valores
programados nos
parâmetro 3-71 Tempo de Aceleração
da Rampa 4 e
parâmetro 3-72 Tempo de Desaceleração da Rampa 4.
3-71 Tempo de Aceleração da Rampa 4
Range: Funcão:
Size
related*
[0.01 - 3600s]Digite o tempo de aceleração, que
é o tempo de aceleração de 0 Hz
para a velocidade nominal do
motor ns. Escolha um tempo de
aceleração de tal modo que a
corrente de saída não exceda o
limite de corrente do
parâmetro 4-18 Limite de Corrente
durante a rampa. Ver o tempo de
desaceleração em
parâmetro 3-72 Tempo de Desaceleração da Rampa 4.
Par . 3 − 71 =
t
acc
s xns Hz
ref Hz
3-72 Tempo de Desaceleração da Rampa 4
Range: Funcão:
Size
related*
[0.01 - 3600s]Insira o tempo de desaceleração, ou
seja, o tempo de desaceleração da
velocidade nominal do motor ns até
0 Hz. Selecione o tempo de desaceleração de modo que não ocorra
nenhuma sobretensão no inversor,
devido à operação regenerativa do
motor e de maneira que a corrente
gerada não exceda o limite de
corrente programado em
parâmetro 4-18 Limite de Corrente.
Ver tempo de aceleração, no
parâmetro 3-71 Tempo de Aceleração
da Rampa 4.
Par . 3 − 72 =
t
dec
s xns Hz
ref Hz
3-80 Tempo de Rampa do Jog
Range: Funcão:
Size
related*
[0.01 - 3600s]Insira o tempo de rampa do jog,
que é o tempo de aceleração/
desaceleração entre 0 Hz e a
3-80 Tempo de Rampa do Jog
Range: Funcão:
frequência nominal do motor ns.
Certique-se de que a corrente de
saída resultante necessária para um
tempo de rampa do jog especíco
não ultrapasse o limite de corrente
em parâmetro 4-18 Limite de
Corrente. O tempo de rampa do jog
começa ao ativar um sinal de jog
através do LCP, uma saída digital
selecionada ou a porta de
comunicação serial. Quando o
estado do jog está desativado, os
tempos normais de rampa são
válidos.
130BD375.11
Time
P 3-80
Hz
P 4-14 Hz
High limit
Jog speed
P 3-19
P 3-80
Ramp up
(acc)
Ramp down
(dec)
t jog t jog
P 4-12 Hz
Low limit
P 1-23
Motor frequency
3-81 Tempo de Rampa da Parada Rápida
Range: Funcão:
Size
related*
[0.01 - 3600s]Insira o tempo de desaceleração de
parada rápida, ou seja, o tempo de
desaceleração da velocidade do
motor síncrono até 0 Hz. Assegure
que nenhuma sobretensão
resultante surgirá no inversor,
devido à operação regenerativa do
motor, requerida para atingir o
tempo de desaceleração dado.
Assegure também que a corrente
gerada necessária para atingir o
tempo de desaceleração fornecido
não ultrapasse o limite de corrente
(programado em
parâmetro 4-18 Limite de Corrente).
Ative a parada rápida com um sinal
em uma entrada digital selecionada
ou através da porta de
comunicação serial.
Descrições do Parâmetro Guia de Programação
4 4
4.4.7 3-8* Outras Rampas
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 63
Ilustração 4.11 Tempo de Rampa do Jog
t
s xns Hz
Par . 3 − 80 =
jog
Δ jogvelocidade par . 3 − 19 Hz

130BD376.11
Time
Hz
P 4-14 Hz
high limit
Reference
P 1-23
Motor frequency
low limit
P 4-12 Hz
P 3-81
Qramp
Qstop
3-90 Tamanho do Passo
Range: Funcão:
0.10 %* [0.01 200 %]
Insira o tamanho do incremento
necessário para aumentar/diminuir
como uma porcentagem da
velocidade do motor síncrono, ns.
Se aumentar/diminuir estiver
ativado, a referência resultante é
aumentada/diminuída pela
quantidade denida nesse
parâmetro.
3-92 Restabelecimento da Energia
Option: Funcão:
[0] * Desligado Reinicializa a referência do
potenciômetro digital para 0 após a
energização.
[1] Ligado Restaura a mais recente referência
do potenciômetro digital na
energização.
3-93 Limite Máximo
Range: Funcão:
100 %* [-200 -
200 %]
Programe o valor máximo permitido
para a referência resultante. Isso é
recomendável se o potenciômetro
digital for utilizado para a
sintonização na da referência
resultante.
3-94 Limite Mínimo
Range: Funcão:
-100 % [-200 200 %]
Programa o valor mínimo permitido
para a referência resultante. Isso é
recomendável se o potenciômetro
digital for usado para a sintonização
na da referência resultante.
3-95 Atraso da Rampa de Velocidade
Range: Funcão:
1000 ms* [0 - 3600000
ms]
Insira o atraso necessário da
ativação da função do
potenciômetro digital, até que o
conversor de frequência comece a
ativar a referência na rampa. Com
um atraso de 0 ms, a referência
começa a seguir a rampa, assim
que Aumentar / Diminuir for
ativado.
Descrições do Parâmetro
VLT® AutomationDrive FC 360
44
Ilustração 4.12 Tempo de Rampa da Parada Rápida
4.4.8 3-9* Potenciômetro digital
A função do potenciômetro digital permite aumentar ou
diminuir a referência real ao ajustar o setup das entradas
digitais utilizando as funções Incrementar, Decrementar ou
Limpar. Para ativá-la, pelo menos uma entrada digital
deverá ser programada como Incrementar ou Decrementar.
64 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828

4-10 Sentido de Rotação do Motor
Option: Funcão:
[0] Sentido
horário
AVISO!
A conguração em
parâmetro 4-10 Sentido de
Rotação do Motor afeta
parâmetro 1-73 Flying Start.
Apenas a operação no sentido
horário é permitida.
[2] * Nos dois
sentidos
A operação no sentido horário e
anti-horário é permitida.
4-14 Lim. Superior da Veloc do Motor [Hz]
Range: Funcão:
65 Hz* [ 0.1 - 500
Hz]
AVISO!
A frequência de saída máxima
não pode ultrapassar 10% da
frequência de chaveamento do
inversor
(parâmetro 14-01 Freqüência de
Chaveamento).
Insira o limite máximo para a
velocidade do motor. O limite
superior da velocidade do motor
pode ser programado para corresponder à máxima do eixo do
motor, recomendada pelo
fabricante do motor.
4-14 Lim. Superior da Veloc do Motor [Hz]
Range: Funcão:
O limite superior da velocidade do
motor deve exceder o valor em
parâmetro 4-12 Limite Inferior da
Velocidade do Motor [Hz] e não deve
exceder o valor em
parâmetro 4-19 Freqüência Máx. de
Saída.
4-16 Limite de Torque do Modo Motor
Range: Funcão:
Size
related*
[ 0 - 1000 %] Essa função limita o torque no eixo
para proteger a instalação
mecânica.
4-17 Limite de Torque do Modo Gerador
Range: Funcão:
100 %* [ 0 - 1000 %] Essa função limita o torque no eixo
para proteger a instalação
mecânica.
4-18 Limite de Corrente
Range: Funcão:
Size
related*
[ 0 - 1000 %] Esta é uma função real de limite de
corrente que continua na faixa
sobressíncrona. Entretanto, devido
ao enfraquecimento do campo, o
torque do motor no limite de
corrente cai proporcionalmente
quando o aumento de tensão para
acima da velocidade do motor
sincronizada.
4-19 Freqüência Máx. de Saída
Range: Funcão:
Size
related*
[ 0 - 500 Hz]
AVISO!
Não é possível ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
AVISO!
A frequência de saída máxima
não pode ultrapassar 10% da
frequência de chaveamento do
inversor
(parâmetro 14-01 Freqüência de
Chaveamento).
Fornece um limite nal na
frequência de saída para segurança
melhorada em aplicações com risco
de excesso de velocidade. Este
limite é nal em todas as congu-
Descrições do Parâmetro Guia de Programação
4.5 Parâmetros 4-** Limites/Advertências
4.5.1 4-1* Limites do Motor
Dena os limites de velocidade, torque e corrente para o
motor e a resposta do conversor de frequência quando os
limites forem excedidos.
Um limite pode gerar uma mensagem no display. Uma
advertência sempre gerará uma mensagem no display ou
eldbus. Uma função de monitoramento pode iniciar
no
uma advertência ou um desarme, o que faz o conversor de
frequência parar e gera uma mensagem de alarme.
4 4
4-12 Limite Inferior da Velocidade do Motor [Hz]
Range: Funcão:
0 Hz* [ 0 -
400,0 Hz]
Insira o limite mínimo para a velocidade do
motor. O limite inferior da velocidade do
motor pode ser programado para corresponder à frequência mínima de saída do eixo
do motor.
O limite inferior da velocidade do motor não
deve exceder a conguração em
parâmetro 4-14 Lim. Superior da Veloc do Motor
[Hz].
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 65

4-19 Freqüência Máx. de Saída
Range: Funcão:
rações (independentemente da
conguração em
parâmetro 1-00 Modo Conguração).
4-20 Fte Fator de Torque Limite
Selecione uma entrada analógica para fazer escala das congurações em parâmetro 4-16 Limite de Torque do Modo Motor e
parâmetro 4-17 Limite de Torque do Modo Gerador 0 até 100% (ou
inversamente). Os níveis de sinal correspondentes a 0% e 100%
são denidos na escala da entrada analógica, por exemplo, grupo
do parâmetro 6-1* Entrada Analógica 1. Este parâmetro está ativo
somente quando o parâmetro 1-00 Modo Conguração estiver
programado para [0] Malha Aber ta de [1] Malha Fechada de
Velocidade.
Option: Funcão:
[0] * Sem função
[2] Ent.analóg53
[4] Ent.analg.53
inv
[6] Ent.analóg54
[8] Ent.analg.54
inv
[18] Bus Control
4-21 Fte Fator Limite de veloc
Selecione uma entrada analógica para fazer escala das congurações em parâmetro 4-19 Freqüência Máx. de Saída 0 até 100%
(ou inversamente). Os níveis de sinal correspondentes a 0% e
100% são denidos na escala da entrada analógica, por exemplo,
grupo do parâmetro 6-1* Entrada Analógica 1. Esse parâmetro está
ativo somente quando parâmetro 1-00 Modo Conguração estiver
no modo de torque.
Option: Funcão:
[0] * Sem função
[2] Ent.analóg53
[4] Ent.analg.53
inv
[6] Ent.analóg54
[8] Ent.analg.54
inv
[18] Bus Control
4-22 Impulso de arranque
Option: Funcão:
[0] * Desligado
[1] Ligado O conversor de frequência fornece
níveis de corrente maiores que o
normal para melhorar a capacidade
de torque de breakaway.
4-27 Torque Limit Bus Control
Range: Funcão:
0* [0 - 16384 ] Este parâmetro é usado para
especicar o fator de barramento
para controlar o limite de torque.
Ele funciona quando
parâmetro 4-20 Fte Fator de Torque
Limite estiver programado em [18]
Bus Control. Este parâmetro tem
formato N2.
4-28 Speed Limit Bus Control
Range: Funcão:
0* [0 - 16384 ] Este parâmetro é usado para
especicar o fator de barramento
para controlar o limite de
velocidade. Ele funciona quando
parâmetro 4-21 Fte Fator Limite de
veloc estiver programado em [18]
Bus Control. Este parâmetro tem
formato N2.
4-30 Função Perda Fdbk do Motor
Option: Funcão:
Esta função é usada para monitorar
a consistência no sinal de feedback,
isto é, se o sinal de feedback está
disponível. Selecione a ação que o
conversor de frequência deve ter se
um defeito de feedback for
detectado. A ação selecionada
ocorre quando o sinal de feedback
diferir da velocidade de saída pelo
valor programado em
parâmetro 4-31 Erro Feedb Veloc.
Motor durante mais tempo que o
valor programado em
parâmetro 4-32 Timeout Perda Feedb
Motor.
[0] Desativado
[1] Advertência
[2] * Desarme
[3] Jog
Descrições do Parâmetro
VLT® AutomationDrive FC 360
4.5.2 4-2* Fator. Limite
44
66 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
4.5.3 4-3* Monitoramento de feedback de
motor
AVISO!
Advertência 61, Erro de Feedback ca ativa assim que o
valor em parâmetro 4-31 Erro Feedb Veloc. Motor for
excedido, independentemente de a conguração em
parâmetro 4-32 Timeout Perda Feedb Motor. A Advertência
61, Erro de Feedback estar relacionada à função de perda
de feedback de motor.

4-30 Função Perda Fdbk do Motor
Option: Funcão:
[4] Congelar Saída
[5] Velocidade
Máx
[6] Mude p/
M.Aberta.
4-31 Erro Feedb Veloc. Motor
Range: Funcão:
20 Hz* [0 - 50 Hz] Selecione o erro de velocidade
máximo permitido (velocidade de
saída versus feedback).
4-32 Timeout Perda Feedb Motor
Range: Funcão:
0.05 s* [0 - 60 s] Programe o valor de timeout
permitindo que o erro de
velocidade programado em
parâmetro 4-31 Erro Feedb Veloc.
Motor seja excedido antes de
permitir a função selecionada em
parâmetro 4-30 Função Perda Fdbk
do Motor.
4-40 Adv. Freq. Baixa
Range: Funcão:
Size
related*
[ 0 - 500 Hz] Utilize este parâmetro para a
conguração de um limite inferior
para a faixa de frequência. Quando
a velocidade do motor cair abaixo
4-40 Adv. Freq. Baixa
Range: Funcão:
desse limite, o display exibe
Velocidade baixa. O bit de
advertência 10 é programado em
parâmetro 16-94 Status Word
Estendida. O relé de saída pode ser
congurado para indicar essa
advertência. A luz de advertência
do LCP não acende quando o limite
denido for atingido.
O valor não deve exceder a
conguração em
parâmetro 4-41 Advertência de Freq.
Alta.
4-41 Advertência de Freq. Alta
Range: Funcão:
Size
related*
[ 0 - 500 Hz] Utilize este parâmetro para a
conguração de um limite superior
para a faixa de frequência. Quando
a velocidade do motor exceder este
limite, o display exibe Velocidade
alta. O bit 9 de advertência é
programado em
parâmetro 16-94 Status Word
Estendida. O relé de saída pode ser
congurado para indicar essa
advertência. A luz de advertência
do LCP não acende quando o limite
denido for atingido.
O valor deve exceder o valor em
parâmetro 4-40 Adv. Freq. Baixa e
não deve exceder o valor em
parâmetro 4-14 Lim. Superior da
Veloc do Motor [Hz].
4-42 Aviso de temperatura ajustável
Range: Funcão:
0* [ 0 - 200 ] Use esse parâmetro para programar
o limite de temperatura do motor.
4-50 Advertência de Corrente Baixa
Range: Funcão:
0 A* [ 0 - 500 A] Insira o valor I
LOW
. Quando a
corrente do motor cair abaixo desse
limite, é programado um bit na
status word. Esse valor também
pode ser programado para produzir
Descrições do Parâmetro Guia de Programação
4 4
Ilustração 4.13 Erro de Velocidade de Feedback de Motor
4.5.4 4-4* Advertências Ajustáveis 2
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 67
4.5.5 4-5* Advertências Ajustáveis
Use esses parâmetros para ajustar limites de advertência
de corrente, velocidade, referência e feedback.

4-50 Advertência de Corrente Baixa
Range: Funcão:
um sinal na saída digital ou na
saída do relé.
4-51 Advertência de Corrente Alta
Range: Funcão:
Size
related*
[ 0.0 - 500.00A]Insira o valor I
HIGH
. Quando a
corrente do motor exceder esse
limite, é programado um bit na
status word. Esse valor também
pode ser programado para produzir
um sinal na saída digital ou na
saída do relé.
4-54 Advert. de Refer Baixa
Range: Funcão:
-4999* [-4999 4999 ]
Insira o limite de referência inferior.
Quando a referência real cair abaixo
desse limite, o display exibe Ref
BAIXA
Bit 20 é programado em
parâmetro 16-94 Status Word
Estendida. A saída digital ou o relé
de saída pode ser congurado para
indicar essa advertência. A luz de
advertência do LCP não acende
quando esse limite programado do
parâmetro é alcançado.
4-55 Advert. Refer Alta
Range: Funcão:
4999* [-4999 -
4999 ]
Use este parâmetro para programar
o limite superior da faixa de
referência. Quando a referência real
exceder esse limite, o display
indicará Ref
ALTA
. Bit 19 é
programado em
parâmetro 16-94 Status Word
Estendida. A saída digital ou o relé
de saída pode ser congurado para
indicar essa advertência. A luz de
advertência do LCP não acende
quando esse limite programado do
parâmetro é alcançado.
4-56 Advert. de Feedb Baixo
Range: Funcão:
-4999
ProcessCtrl
Unit*
[-4999 - 4999
ProcessCtrlUnit
]
Utilize este parâmetro para
programar um limite inferior para a
faixa de feedback. Quando o
feedback cair abaixo deste limite, o
display indicará Feedb Baixo. Bit 6 é
programado em
parâmetro 16-94 Status Word
Estendida. A saída digital ou o relé
4-56 Advert. de Feedb Baixo
Range: Funcão:
de saída pode ser congurado para
indicar essa advertência. A luz de
advertência do LCP não acende
quando esse limite programado do
parâmetro é alcançado.
4-57 Advert. de Feedb Alto
Range: Funcão:
4999
ProcessCtrl
Unit*
[-4999 - 4999
ProcessCtrlUnit
]
Utilize este parâmetro para
programar um limite superior para
a faixa de feedback. Quando o
feedback exceder este limite, o
display indicará Feedb Alto. Bit 5 é
programado em
parâmetro 16-94 Status Word
Estendida. A saída digital ou o relé
de saída pode ser congurado para
indicar essa advertência. A luz de
advertência do LCP não acende
quando esse limite programado do
parâmetro é alcançado.
4-58 Função de Fase do Motor Ausente
Option: Funcão:
[0] Desligado Nenhum alarme é exibido se
ocorrer uma fase ausente de motor.
[1] * Ligado Um alarme é exibido se ocorrer
uma fase ausente de motor.
4-61 Bypass de Velocidade de [Hz]
Range: Funcão:
0 Hz* [ 0 - 500 Hz] Alguns sistemas requerem que
determinadas velocidades de saída
sejam evitadas, devido a problemas
de ressonância no sistema. Insira os
limites inferiores das velocidades a
serem evitados.
A velocidade de bypass não deve
exceder a conguração em
parâmetro 4-14 Lim. Superior da
Veloc do Motor [Hz].
4-63 Bypass de Velocidade até [Hz]
Range: Funcão:
0 Hz* [ 0 - 500 Hz] Alguns sistemas requerem que
determinadas velocidades de saída
sejam evitadas, devido a problemas
de ressonância no sistema. Insira os
limites superiores das velocidades a
serem evitadas.
Descrições do Parâmetro
VLT® AutomationDrive FC 360
44
68 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
4.5.6 4-6* Bypass de Velocidade
4-63 Bypass de Velocidade até [Hz]
Range: Funcão:
A velocidade de bypass não deve
exceder a conguração em
parâmetro 4-14 Lim. Superior da
Veloc do Motor [Hz].
Descrições do Parâmetro Guia de Programação
4 4
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 69

5-00 Modo Entrada Digital
Option: Funcão:
Programe o modo NPN ou PNP
para entradas digitais.
AVISO!
Não se pode ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
[0] * PNP Ação em pulsos direcionais
positivos (0). Os sistemas PNP são
conectados ao ponto de
aterramento (GND).
[1] NPN Ação em pulsos direcionais
negativos (1). Os sistemas NPN são
conectados a + 24 V, internamente,
no conversor de frequência.
5-01 Modo do Terminal 27
Option: Funcão:
[0] * Entrada Dene o terminal 27 como uma
entrada digital.
[1] Saída Dene o terminal 27 como uma
saída digital.
5-02 Modo do Terminal 29
Option: Funcão:
[0] * Entrada Dene o terminal 29 como uma
entrada digital.
[1] Saída Dene o terminal 29 como uma
saída digital.
Descrições do Parâmetro
VLT® AutomationDrive FC 360
4.6 Parâmetros 5-** Entrada/Saída Digital
4.6.1 5-0* Modo E/S Digital
Parâmetros para congurar a entrada e saída utilizando
NPN e PNP.
44
As entradas digitais são utilizadas para selecionar as
diversas funções do conversor de frequência.
5-10 a 5-16 Entradas Digitais
[0] Sem
operação
[1] Rep.alarmes Reinicializa o conversor de frequência depois
[2] Paradp/
inérc,reverso
[3] Parada por
inércia e
70 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
Não responde aos sinais transmitidos para o
terminal.
de um TRIP/ALARM (Desarme/Alarme). Nem
todos os alarmes podem ser reinicializados.
Parada por inércia, entrada invertida (NF). O
conversor de frequência deixa o motor em
modo livre.
Logic 0⇒ parada por inércia.
Reset e parada por inércia, entrada invertida
(NF). Deixa o motor em modo livre e
reinicializa o conversor de frequência.
reinicio,
inverso
[4] QuickStop-
-Ativoem0
[5] Frenagem CC,
reverso
[6] Parada - Ativo
em 0
Logic 0⇒parada por inércia.
Logic 1 a Logic 0⇒reinicializar.
Entrada invertida (NC). Gera uma parada de
acordo com o tempo de rampa de parada
rápida programado em
parâmetro 3-81 Tempo de Rampa da Parada
Rápida. Quando o motor para, o eixo está
em modo livre. Logic 0⇒ Parada rápida.
Entrada invertida para frenagem CC (NF)
Para o motor energizando-o com uma
corrente CC durante um determinado
período de tempo. Consulte os
parâmetro 2-01 Corrente de Freio CC a
parâmetro 2-04 Veloc.Acion.d FreioCC [Hz]. A
função somente estará ativa se o valor do
parâmetro 2-02 Tempo de Frenagem CC for
diferente de 0. Logic 0=>Frenagem CC.
AVISO!
Quando o conversor de frequência
está no limite de torque e recebeu um
comando de parada, ele pode não
parar por si próprio. Para garantir que
o conversor de frequência pare,
congure uma saída digital para [27]
Lim.deTorque&Parada e conecte essa
saída digital a uma entrada digital
congurada como parada por inércia.
Função de parada invertida. Gera uma
função de parada quando o terminal
selecionado passa do logic 1 para o logic 0.
A parada é executada de acordo com o
tempo de rampa selecionado
(parâmetro 3-42 Tempo de Desaceleração da
Rampa 1, parâmetro 3-52 Tempo de Desaceleração da Rampa 2, parâmetro 3-62 Tempo
de Desaceleração da Rampa 3,
parâmetro 3-72 Tempo de Desaceleração da
Rampa 4).
[8] Partida Selecione partida para um comando de
partida/parada. Lógica 1 = partida, lógica
0 = parada.
[9] Partida por
pulso
[10] Reversão Muda o sentido de rotação do eixo do
[11] Partida em
reversão
[12] Ativar partida
direta
O motor começa quando um pulso é
aplicado por no mínimo 4 ms. O motor para
quando os comandos de parada são dados.
motor. Selecione lógica 1 para reversão. O
sinal de reversão só mudará o sentido da
rotação. Ele não ativa a função partida.
Selecione ambos os sentidos no
parâmetro 4-10 Sentido de Rotação do Motor.
A função não está ativa na malha fechada
de processo.
Utilizada para partida/parada e para
reversão no mesmo o. Não são permitidos
sinais simultâneos na partida.
Desacopla o movimento no sentido anti-
-horário e permite o sentido horário.

Speed [rpm] Speed [rpm]
Time[sec] Time[sec]a b
130BB462.10
Descrições do Parâmetro Guia de Programação
[13] Ativar partid
revers
[14] Jog Utilize para ativar a velocidade de jog.
[15] Ref. predef.
ligada
[16] Ref
predenida
bit 0
[17] Ref
predenida
bit 1
[18] Ref
predenida
bit 2
Bit de referência
predenida
Referência predenida 0 0 0 0
Referência predenida 1 0 0 1
Referência predenida 2 0 1 0
Referência predenida 3 0 1 1
Referência predenida 4 1 0 0
Referência predenida 5 1 0 1
Referência predenida 6 1 1 0
Referência predenida 7 1 1 1
Tabela 4.4 Referência predenida Bit
[19] Congelar
ref
[20] Congelar
saída
Desacopla o movimento no sentido horário
e permite o sentido anti-horário.
Consulte parâmetro 3-11 Velocidade de Jog
[Hz].
Alterna entre a referência externa e a
referência predenida. É suposto que [1]
Externa/Predenida tenha sido selecionado
em parâmetro 3-04 Função de Referência.
Lógica 0 = referência externa ativa; lógica
1 = 1 das 8 referências predenidas está
ativa.
Referências predenidas bits 0, 1 e 2
permitem a seleção de 1 das 8 referências
predenidas de acordo com Tabela 4.4.
O mesmo que [16] Ref predenida bit 0.
O mesmo que [16] Ref predenida bit 0.
2 1 0
Congela a referência real, que agora é o ponto
de ativação/condição para [21] Acelerar e [22]
Desacelerar a ser usado. Se [21] Acelerar ou [22]
Desacelerar for usado, a mudança de velocidade
sempre seguirá a rampa 2 (parâmetro 3-51 Tempo
de Aceleração da Rampa 2 e
parâmetro 3-52 Tempo de Desaceleração da
Rampa 2) na faixa 0–parâmetro 3-03 Referência
Máxima.
AVISO!
Quando [20] Congelar saída estiver ativo, o
conversor de frequência não poderá ser
parado ajustando para baixo o sinal em
[8] Partida. Pare o conversor de frequência
por meio de um terminal programado
para [2] Paradp/inérc,reverso ou [3] Parada
por inércia e reinicio, inverso.
Congela a frequência do motor real (Hz), que
agora é o ponto de ativação/condição para [21]
Acelerar e [22] Desacelerar a ser usado. Se [21]
Acelerar ou [22] Desacelerar for usado, a mudança
de velocidade sempre seguirá a rampa 2
(parâmetro 3-51 Tempo de Aceleração da Rampa 2
e parâmetro 3-52 Tempo de Desaceleração da
Rampa 2) na faixa 0–parâmetro 1-23 Freqüência
do Motor.
[21] Acelerar Selecione [21] Acelerar e [22] Desacelerar se o
controle digital da aceleração/desaceleração for
necessário (potenciômetro eletrônico). Ative esta
função selecionando [19] Congelar referência ou
[20] Congelar saída. Quando a aceleração/desaceleração for ativada por menos de 400 ms, a
referência resultante aumenta/diminui em 0,1%.
Se a aceleração/desaceleração for ativada por
mais de 400 ms, a referência resultante segue a
conguração no parâmetro de subida/descida
3-51/3-52.
Shut down Catch-up
Velocidade inalterada 0 0
Reduzida de % do valor 1 0
Aumentada de % do valor 0 1
Reduzida de % do valor 1 1
Tabela 4.5 Shut Down/Catch-Up
[22] Desacelerar O mesmo que [21] Acelerar.
[23] Selç do bit 0
d setup
[28] Catch-up Aumenta o valor de referência na
[29] Redução de
velocidade
[32] Entrada de
pulso
Selecione [23] Selç do bit 0 d setup para
selecionar 1 dos 2 setups. Programe
parâmetro 0-10 Setup Ativo para [9] Setup
múltiplo.
porcentagem (relativa) programada no
parâmetro 3-12 Valor de Catch Up/Slow Down.
Diminui o valor de referência na
porcentagem (relativa) programada no
parâmetro 3-12 Valor de Catch Up/Slow Down.
(Apenas Terminal 29 ou 33) Mede a duração
entre os ancos de pulso. Este parâmetro tem
uma resolução maior em frequências mais
baixas, mas não é tão preciso em frequências
mais altas. Este princípio tem uma frequência
de corte, o que o torna inadequado para
encoders com baixas resoluções (por
exemplo, 30 PPR) em baixas velocidades.
a: Resolução baixa do
encoder
b: Resolução padrão
do encoder
4 4
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 71

Read Timer:
20 timer tides
Read Timer:
20 timer tides
Time Start
Time counter
Sample time
Timer
Pulse
130BB464.10
Descrições do Parâmetro
VLT® AutomationDrive FC 360
[73] Reinicializar
PID parte I
Reinicializa a parte I do controlador de
processo do PID. Equivalente a
parâmetro 7-40 Process PID I-part Reset.
Ilustração 4.14 Duração entre ancos de
pulso
Disponível apenas quando
parâmetro 1-00 Modo Conguração estiver
programado em [6] Surface Winder ou [7]
Extended PID Speed OL (OL Velocidade PID
Estendida).
[34] Bit 0 da
44
rampa
[35] Bit 1 da
rampa
Bit da rampa predenido 1 0
Rampa 1 0 0
Rampa 2 0 1
Rampa 3 1 0
Rampa 4 1 1
Tabela 4.6 Predena os Bits da Rampa
[45] Latched start
reverse
[51] Bloqueio
externo
[55] Incremento
DigPot
[56] Decremento
DigPot
[57] Apagar
Ref.Digipot
[60] Contador A
(cresc)
[61] Contador A
(decresc)
[62] Resetar
Contador A
[63] Contador B
(cresc)
[64] Contador B
(decresc)
[65] Resetar
Contador B
[72] PID error ativ0Inverte o erro resultante do controlador de
Permite uma seleção das 4 rampas
disponíveis, de acordo com Tabela 4.6.
O mesmo que o bit 0 da rampa.
O motor começa a funcionar ao contrário
quando um pulso é aplicado por no
mínimo 4 ms. O motor para quando os
comandos de parada são dados.
Esta função torna possível dar uma falha
externa ao conversor de frequência. Essa
falha é tratada da mesma maneira que um
alarme gerado internamente.
Aumenta o sinal para a função
potenciômetro digital descrita no grupo do
parâmetro 3-9* Potenciômetro Digital.
Diminui o sinal para a função
potenciômetro digital descrita no grupo do
parâmetro 3-9* Potenciômetro Digital.
Limpe a referência do potenciômetro
digital descrita no grupo do parâmetro 3-9*
Potenciômetro Digital.
Entrada para contagem incremental no
contador SLC.
Entrada para contagem decremental no
contador SLC.
Entrada para reinicializar o contador A.
Entrada para contagem incremental no
contador SLC.
Entrada para contagem decremental no
contador SLC.
Entrada para reinicializar o contador B.
processo do PID. Disponível apenas se
parâmetro 1-00 Modo Conguração estiver
programado em [6] Surface Winder ou [7]
Extended PID Speed OL (OL Velocidade PID
Estendida).
[74] Ativo PID Esta opção ativa o controlador de Processo
do PID estendido. Equivalente a
parâmetro 7-50 PID de processo Extended
PID. Disponível apenas se
parâmetro 1-00 Modo Conguração estiver
programado em [7] Extended PID Speed OL
(OL Velocidade PID Estendida).
[150] Ir para Início O conversor de frequência se move para a
posição inicial.
[151] Chave de
referência
Chave
Indica o status da chave de referência
inicial. Ligado signica que a posição
inicial foi atingida, Desligado signica que
a posição inicial não foi atingida.
[155] Limite positivo
de HW inv.
O limite de posição do hardware positivo
foi excedido. Esta opção está ativa na
borda descendente.
[156] Limite
negativo de
HW inv.
[157] Pos. Parada
rápida inversa
O limite negativo da posição do hardware
foi excedido. Esta opção está ativa na
borda descendente.
Para o conversor de frequência durante o
posicionamento com o tempo de rampa
denido em parâmetro 32-81 Rampa
parada rápida do ctrl d movimento. Esta
opção é ecaz apenas quando
parâmetro 37-00 Modo de aplicação estiver
programado em [2] Controle de Posição.
[160] Acesse a
posição de
destino.
O conversor de frequência muda para a
posição de destino. Esta opção é ecaz
apenas quando parâmetro 37-00 Modo de
aplicação estiver programado em [2]
Controle de Posição.
[162] Pos. Idx Bit0 Índice da posição bit 0. Esta opção é
ecaz apenas quando
parâmetro 37-00 Modo de aplicação estiver
programado em [2] Controle de Posição.
[163] Pos. Idx Bit1 Índice da posição bit 1. Esta opção é
ecaz apenas quando
parâmetro 37-00 Modo de aplicação estiver
programado em [2] Controle de Posição.
[164] Pos. Idx Bit2 Índice da posição bit 2. Esta opção é
ecaz apenas quando
parâmetro 37-00 Modo de aplicação estiver
programado em [2] Controle de Posição.
[165] Núcleo
diâmetro
fonte
A fonte do diâmetro do núcleo. Desligado
signica que o núcleo 1 foi selecionado, e
ligado signica que o núcleo 2 foi
selecionado. Esta opção é ecaz apenas
quando parâmetro 37-00 Modo de
72 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828

Descrições do Parâmetro Guia de Programação
aplicação estiver programado em [1]
Center winder.
[166] Novo
diâmetro
selecione
[167] Reset
diâmetro
[168] Bobinador jog
para adiante
[169] Bobinador jog
reversão
[170] Tensão no Permite o controle do PID de tensão. Esta
Congura para selecionar o diâmetro
parcial do rolo (desligado) ou o diâmetro
do núcleo (ligado). Esta opção é ecaz
apenas quando parâmetro 37-00 Modo de
aplicação estiver programado em [1]
Center winder.
Reinicializa o diâmetro. Esta opção é ecaz
apenas quando parâmetro 37-00 Modo de
aplicação estiver programado em [1]
Center winder.
Permite o jog para frente durante o
bobinamento central. Esta opção é ecaz
apenas quando parâmetro 37-00 Modo de
aplicação estiver programado em [1]
Center winder.
Permite o jog em reverso durante o
bobinamento central. Esta opção é ecaz
apenas quando parâmetro 37-00 Modo de
aplicação estiver programado em [1]
Center winder.
opção é ecaz apenas quando
parâmetro 37-00 Modo de aplicação estiver
programado em [1] Center winder.
5-10 Terminal 18 Entrada Digital
Option: Funcão:
[8] * Partida As funções são descritas no grupo do parâmetro
5-1* Entradas digitais.
5-11 Terminal 19 Entrada Digital
Option: Funcão:
[10] * Reversão As funções são descritas no grupo do
parâmetro 5-1* Entradas digitais.
5-12 Terminal 27 Entrada Digital
Option: Funcão:
[2] * Parada por inércia
inversa
As funções são descritas no grupo
do parâmetro 5-1* Entradas digitais.
5-13 Terminal 29 Entrada Digital
Option: Funcão:
[14] * Jog As funções são descritas no grupo do
parâmetro 5-1* Entradas digitais.
[32] Entrada de pulso
5-14 Terminal 32 Entrada Digital
Option: Funcão:
[0] * Sem operação As funções são descritas no grupo
do parâmetro 5-1* Entradas digitais.
[82] Entrada do Encoder B
5-15 Terminal 33 Entrada Digital
Option: Funcão:
[0] Sem operação As funções são descritas no grupo
do parâmetro 5-1* Entradas digitais.
[16] * Ref predenida bit 0
[32] Entrada de pulso
[81] Encoder entrada A
5-16 Terminal 31 Entrada Digital
Option: Funcão:
[0] Sem operação As funções são descritas no grupo do
parâmetro 5-1* Entradas digitais.
4.6.2 5-3* Saídas Digitais
As 2 saídas digitais de estado sólido são comuns aos
terminais 27 e 29. Programar a função de E/S para o
terminal 27, no parâmetro 5-01 Modo do Terminal 27, e a
função de E/S para o terminal 29, no parâmetro 5-02 Modo
do Terminal 29.
Os terminais 42 e 45 também podem ser congurados
como saídas digitais.
AVISO!
Estes parâmetros não podem ser ajustados enquanto o
motor estiver em funcionamento.
Saídas Digitais 5-30 a 5-31
[0] Fora de funcionament Padrão para todas as saídas
digitais e saídas do relé.
[1] Placa d Cntrl Pronta O cartão de controle está pronto.
[2] Drive pronto O conversor de frequência está
pronto para operação e aplica um
sinal de alimentação na placa de
controle.
[3] Drive pto/ctrl rem O conversor de frequência está
pronto para operação e está em
modo Automático ligado.
[4] Em espera / sem
advertência
[5] Em funcionamento O motor está funcionando e o
[6] Rodand sem advrtênc O motor está funcionando e não
[7] Func faixa/sem advrt O motor está funcionando dentro
Pronto para operação. Nenhum
comando de partida ou parada é
dado (partida/desativar). Nenhuma
advertência está ativa.
torque do eixo está presente.
há advertências.
da corrente programada e as faixas
de velocidade em
parâmetro 4-50 Advertência de
Corrente Baixa a
parâmetro 4-51 Advertência de
Corrente Alta. Não há advertências.
4 4
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 73

Descrições do Parâmetro
VLT® AutomationDrive FC 360
[8] Func ref/sem advrt O motor funciona na velocidade
de referência. Sem advertências.
[9] Alarme Um alarme ativa a saída.
[10] Alarme ou advertênc Um alarme ou uma advertência
ativa a saída.
[11] No limite de torque O limite de torque programado no
parâmetro 4-16 Limite de Torque do
Modo Motor ou
parâmetro 4-17 Limite de Torque do
44
[12] Fora da faixa de Corr A corrente do motor está fora da
[13] Corrent abaix d baix A corrente do motor é menor do
[14] Corrent acima d alta A corrente do motor é maior do
[15] Fora da faixa de
frequência
[16] Abaixo da frequência,
baixo
[17] Acima da Frequência,
alto
[18] Fora da faixa d feedb Feedback fora da faixa programada
[19] Abaixo do feedb,baix O feedback está abaixo do limite
[20] Acima do feedb,alto O feedback está acima do limite
[21] Advertência térmica A advertência térmica é ativada
[22] Pronto, sem
advertência térmica
[23] Remot,ok,s/advTérm O conversor de frequência está
[24] Pronto, sem sobre/
subtensão
Modo Gerador foi excedido.
faixa programada no
parâmetro 4-18 Limite de Corrente.
que a programada em
parâmetro 4-50 Advertência de
Corrente Baixa.
que a programada em
parâmetro 4-51 Advertência de
Corrente Alta.
A frequência de saída está fora da
faixa de frequência.
Velocidade de saída menor que a
programada no
parâmetro 4-40 Adv. Freq. Baixa.
Velocidade de saída maior que a
programada no
parâmetro 4-41 Advertência de Freq.
Alta.
no parâmetro 4-56 Advert. de Feedb
Baixo e no parâmetro 4-57 Advert.
de Feedb Alto.
programado no
parâmetro 4-56 Advert. de Feedb
Baixo.
programado no
parâmetro 4-57 Advert. de Feedb
Alto.
quando a temperatura excede o
limite no motor, conversor de
frequência, resistor de frenagem
ou no termístor.
O conversor de frequência está
pronto para operação e não há
advertência de superaquecimento.
pronto para operação e está em
modo Automático ligado. Não há
advertência de superaquecimento.
O conversor de frequência está
pronto para operação e a tensão
de rede está dentro da faixa de
[25] Reversão O motor funciona (ou está pronto
[26] Bus OK Comunicação ativa (sem timeout)
[27] Lim.deTorque&Parada Use ao executar uma parada por
[28] Freio, sem advertência
de freio
[29] Freio pront,sem falhs O freio está pronto para funcionar
[30] Falha de freio (IGBT) A saída é lógica 1 quando o IGBT
[31] Relé 123 O relé é ativado quando [0] Control
[32] Ctrlfreio mecân Ativa o controle de um freio
[36] Control word bit 11
[37] Control word bit 12
[40] Fora faixa da ref. Esta opção ca ativa quando a
[41] Abaixo ref.,baixa Esta opção ca ativa quando a
[42] Acima ref, alta Esta opção ca ativa quando a
[45] Ctrl. bus Controla a saída através do
tensão especicada (consulte a
seção Especicações Gerais no Guia
de Design).
para funcionar) no sentido horário
quando lógica = 0 e no sentido
anti-horário quando lógica = 1. A
saída muda assim que o sinal de
reversão é aplicado.
via porta de comunicação serial.
inércia e em condições de limite
de torque. Se o conversor de
frequência recebeu um sinal de
parada e está operando no limite
de torque, o sinal é lógica 0.
O freio está ativo e não há
advertências.
e não há defeitos.
do freio estiver em curto-circuito.
Utilize esta função para proteger o
conversor de frequência se houver
uma falha nos módulos do freio.
Utilize a saída/relé para
desativação da tensão de rede do
conversor de frequência.
Word é selecionado no grupo do
parâmetro 8-** Com. e Opcionais.
mecânico externo. Consulte o
grupo do parâmetro 2-2* Freio
Mecânico para obter mais detalhes.
velocidade real estiver fora das
congurações em
parâmetro 4-54 Advert. de Refer
Baixa a parâmetro 4-55 Advert.
Refer Alta.
velocidade real estiver abaixo da
conguração de referência de
velocidade.
velocidade real estiver acima da
conguração de referência de
velocidade.
eldbus. O estado da saída é
programado no
parâmetro 5-90 Controle Bus Digital
& Relé. O estado da saída é
74 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828

Descrições do Parâmetro Guia de Programação
mantido em caso de timeout do
eldbus.
[46] Controle do barram.,
timeout: Ligado
[47] Controle do barram.,
timeout: Desligado
[55] Saída pulso
[56] Advert limpeza do
dissip de calor, alta
[60] Comparador 0 Consulte o grupo do parâmetro
[61] Comparador 1 Consulte o grupo do parâmetro
[62] Comparador 2 Consulte o grupo do parâmetro
[63] Comparador 3 Consulte o grupo do parâmetro
[64] Comparador 4 Consulte o grupo do parâmetro
[65] Comparador 5 Consulte o grupo do parâmetro
[70] Regra lógica 0 Consulte o grupo do parâmetro
[71] Regra lógica 1 Consulte o grupo do parâmetro
[72] Regra lógica 2 Consulte o grupo do parâmetro
Controla a saída através do
eldbus. O estado da saída é
programado no
parâmetro 5-90 Controle Bus Digital
& Relé. Quando o timeout do bus
ocorre, o estado de saída é
denido como alto (Ligado).
13-1* Comparadores. Se o
Comparador 0 for avaliado como
VERDADEIRO, a saída será alta.
Caso contrário, é baixa.
13-1* Comparadores. Se o
comparador 1 for avaliado como
VERDADEIRO, a saída será alta.
Caso contrário, é baixa.
13-1* Comparadores. Se o
comparador 2 for avaliado como
VERDADEIRO, a saída será alta.
Caso contrário, é baixa.
13-1* Comparadores. Se o
comparador 3 for avaliado como
VERDADEIRO, a saída será alta.
Caso contrário, é baixa.
13-1* Comparadores. Se o
comparador 4 for avaliado como
VERDADEIRO, a saída será alta.
Caso contrário, é baixa.
13-1* Comparadores. Se o
comparador 5 for avaliado como
VERDADEIRO, a saída será alta.
Caso contrário, é baixa.
13-4* Regras Lógicas. Se a regra
lógica 0 for avaliada como
VERDADEIRA, a saída será alta.
Caso contrário, é baixa.
13-4* Regras Lógicas. Se a regra
lógica 1 for avaliada como
VERDADEIRA, a saída será alta.
Caso contrário, é baixa.
13-4* Regras Lógicas. Se a regra
lógica 2 for avaliada como
VERDADEIRA, a saída será alta.
Caso contrário, é baixa.
[73] Regra lógica 3 Consulte o grupo do parâmetro
13-4* Regras Lógicas. Se a regra
lógica 3 for avaliada como
VERDADEIRA, a saída será alta.
Caso contrário, é baixa.
[74] Regra lógica 4 Consulte o grupo do parâmetro
13-4* Regras Lógicas. Se a regra
lógica 4 for avaliada como
VERDADEIRA, a saída será alta.
Caso contrário, é baixa.
[75] Regra lógica 5 Consulte o grupo do parâmetro
13-4* Regras Lógicas. Se a regra
lógica 5 for avaliada como
VERDADEIRA, a saída será alta.
Caso contrário, é baixa.
[80] Saída digitl A do SLC Consulte parâmetro 13-52 Ação do
SLC. A saída será alta sempre que
a Smart Logic Action [38] Den
saíd dig. A alta for executada. A
saída será baixa sempre que a
Smart Logic Action [32] Den saíd
dig. A baix for executada.
[81] Saída digitl B do SLC Consulte parâmetro 13-52 Ação do
SLC. A entrada será alta sempre
que a Smart Logic Action [39]
Den saíd dig. B alta for executada.
A entrada será baixa sempre que a
Smart Logic Action [33] Den saíd
dig. B baixa for executada.
[82] Saída digitl C do SLC Consulte parâmetro 13-52 Ação do
SLC. A entrada será alta sempre
que a Smart Logic Action [40]
Den saíd dig. C alta for executada.
A entrada será baixa sempre que a
Smart Logic Action [34] Den saíd
dig. C baixa for executada.
[83] Saída digitl D do SLC Consulte parâmetro 13-52 Ação do
SLC. A entrada será alta sempre
que a Smart Logic Action [41]
Den saíd dig. D alta for executada.
A entrada será baixa sempre que a
Smart Logic Action [35] Den saíd
dig. D baixa for executada.
[160] Sem alarme A saída será alta quando não
houver nenhum alarme presente.
[161] Rodando em reversão A saída é alta quando o conversor
de frequência estiver sendo
executado no sentido anti-horário
(o produto lógico dos bits de
status Em funcionamento E
Reversão).
[165] Ref. local ativa
[166] Ref. remota ativa
4 4
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 75

5-34 On Delay, Saída Digital
Range: Funcão:
0.01 s* [0 - 600 s]
5-35 Atraso na parada, Saída Digital
Range: Funcão:
0.01 s* [0 - 600 s]
5-40 Função do Relé
Option: Funcão:
[0] Fora de
funcionament
Conguração padrão para todas as
saídas digitais e saídas do relé.
[1] Placa d Cntrl
Pronta
O cartão de controle está pronto.
[2] Drive Pronto O conversor de frequência está
pronto para operação. As alimentações da rede elétrica e do
controle estão OK.
[3] Drive pto/ctrl
rem
O conversor de frequência está
pronto para operação e está em
modo Automático ligado.
[4] Em espera /
sem
advertência
Pronto para operação. Nenhum
comando de partida ou parada foi
aplicado. Nenhuma advertência está
ativa.
[5] Em funcio-
namento
O motor está funcionando e um
torque no eixo está presente.
Descrições do Parâmetro
VLT® AutomationDrive FC 360
[167] Comand partida ativo A saída é alta quando há um
comando de partida ativo e
nenhum comando de parada.
[168] Drive em modo
Manual
[169] Drive modo
automático
44
[170] Início concluído A operação homing está concluída.
[171] Posição de destino
atingida
[172] Falha do controle de
posição
[173] Posição freio
mecânico
[174] TLD indicador Indica se a tensão está fora do
[175] Funcionando na
tensão
[176] Pronto para funcionar O controle do bobinador central
[177] Final do rolo O limite do diâmetro foi atingido.
76 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
A saída é alta quando o conversor
de frequência estiver no modo
manual ligado.
A saída é alta quando o conversor
de frequência estiver no modo
automático ligado.
Esta opção é ecaz apenas quando
parâmetro 37-00 Modo de aplicação
estiver programado em [2] Controle
de Posição.
A posição de destino foi atingida.
Esta opção é ecaz apenas quando
parâmetro 37-00 Modo de aplicação
estiver programado em [2] Controle
de Posição.
Ocorreu uma falha no processo de
posicionamento. Consulte
parâmetro 37-18 Pos. Motivo da
falha de controle para obter
detalhes sobre a falha. Esta opção
é ecaz apenas quando
parâmetro 37-00 Modo de aplicação
estiver programado em [2] Controle
de Posição.
Seleciona o controle mecânico do
posicionamento. Esta opção é
ecaz apenas quando
parâmetro 37-00 Modo de aplicação
estiver programado em [2] Controle
de Posição.
limite (ligado) durante
bobinamento central. Esta opção é
ecaz apenas quando
parâmetro 37-00 Modo de aplicação
estiver programado em [1] Center
winder.
Indica se o controle do PID de
tensão está ativo (ligado) ou
inativo (desligado). Esta opção é
ecaz apenas quando
parâmetro 37-00 Modo de aplicação
estiver programado em [1] Center
winder.
está pronto para funcionamento.
Esta opção é ecaz apenas quando
parâmetro 37-00 Modo de aplicação
estiver programado em [1] Center
winder.
Esta opção é ecaz apenas quando
parâmetro 37-00 Modo de aplicação
estiver programado em [1] Center
winder.
[193] Sleep mode O conversor de frequência/sistema
entrou em sleep mode. Consulte o
grupo do parâmetro 22-4* Sleep
Mode.
[194] Correia partida Foi detectada uma condição de
correia partida. Consulte o grupo
do parâmetro 22-4* Sleep Mode.
5-30 Terminal 27 Saída Digital
Option: Funcão:
[0] * Sem operação As funções estão descritas no grupo do
parâmetro 5-3* Entradas digitais.
5-31 Terminal 29 Saída Digital
Option: Funcão:
[0] * Sem operação As funções estão descritas no grupo do
parâmetro 5-3* Entradas digitais.
4.6.3 5-4* Relés
Parâmetro para congurar o timing e as funções de saída
dos relés.
O parâmetro é um parâmetro de matriz que representa
dois relés: Matriz [2], (Relé 1 [0], Relé 2 [1]).

5-40 Função do Relé
Option: Funcão:
[6] Rodand sem
advrtênc
O motor está funcionando e não há
nenhuma advertência.
[7] Func faixa/sem
advrt
O motor está funcionando dentro
das faixas de corrente programada
denidas em
parâmetro 4-50 Advertência de
Corrente Baixa.
[8] Func ref/sem
advrt
O motor funciona na velocidade de
referência. Sem advertências.
[9] Alarme Um alarme ativa a saída.
[10] Alarme ou
advertênc
Um alarme ou uma advertência
ativa a saída.
[11] No limite de
torque
O limite de torque programado no
parâmetro 4-16 Limite de Torque do
Modo Motor ou
parâmetro 4-17 Limite de Torque do
Modo Gerador foi excedido.
[12] Fora da faixa
de Corr
A corrente do motor está fora da
faixa programada no
parâmetro 4-18 Limite de Corrente.
[13] Corrent abaix
d baix
A corrente do motor é menor do
que a programada em
parâmetro 4-50 Advertência de
Corrente Baixa.
[14] Corrent acima
d alta
A corrente do motor é maior do
que a programada em
parâmetro 4-51 Advertência de
Corrente Alta.
[15] Fora da faixa
de frequência
A velocidade/frequência de saída
excede o limite programado em
parâmetro 4-40 Adv. Freq. Baixa e
parâmetro 4-41 Advertência de Freq.
Alta.
[16] Abaixo da
frequência,
baixo
A frequência de saída é menor que
a programada em
parâmetro 4-40 Adv. Freq. Baixa.
[17] Acima da
Frequência,
alto
A frequência é mais alta que a
programada em
parâmetro 4-41 Advertência de Freq.
Alta.
[18] Fora da faixa
d feedb
Feedback fora da faixa programada
no parâmetro 4-56 Advert. de Feedb
Baixo e no parâmetro 4-57 Advert.
de Feedb Alto.
[19] Abaixo do
feedb,baix
O feedback está abaixo do limite
programado no
parâmetro 4-56 Advert. de Feedb
Baixo.
5-40 Função do Relé
Option: Funcão:
[20] Acima do
feedb,alto
O feedback está acima do limite
programado no
parâmetro 4-57 Advert. de Feedb
Alto.
[21] Advertência
térmica
A advertência térmica é ativada
quando a temperatura excede o
limite dentro do motor, conversor
de frequência, resistor de frenagem
ou resistor conectado.
[22] Pronto, sem
advertência
térmica
O conversor de frequência está
pronto para operação e não há
advertência de superaquecimento.
[23] Remot,ok,s/
advTérm
O conversor de frequência está
pronto para operação e está em
modo Automático ligado. Não há
advertência de superaquecimento.
[24] Pronto, sem
sobre/
subtensão
O conversor de frequência está
pronto para operação e a tensão de
rede está dentro da faixa de tensão
especicada.
[25] Reversão O motor funciona (ou está pronto
para funcionar) no sentido horário
quando lógica = 0 e no sentido
anti-horário quando lógica = 1. A
saída muda assim que o sinal de
reversão é aplicado.
[26] Bus OK Comunicação ativa (sem timeout)
via porta de comunicação serial.
[27] Lim.deTorque&
Parada
Use para executar uma parada por
inércia do conversor de frequência
na condição de limite de torque. Se
o conversor de frequência recebeu
um sinal de parada e está operando
no limite de torque, o sinal é lógica
= 0.
[28] Freio, sem
advertência de
freio
O freio está ativo e não há
advertências.
[29] Freio
pront,sem
falhs
O freio está pronto para funcionar e
não há defeitos.
[30] Falha de freio
(IGBT)
A saída é lógica = 1 quando o IGBT
do freio estiver em curto-circuito.
Utilize esta função para proteger o
conversor de frequência se houver
uma falha no módulo do freio.
Utilize a saída digital/relé para
desativação da tensão de rede do
conversor de frequência.
[31] Relé 123 Saída digital/relé é ativado quando
[0] Control Word é selecionado no
Descrições do Parâmetro Guia de Programação
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 77
4 4

5-40 Função do Relé
Option: Funcão:
grupo do parâmetro 8-** Com. e
Opcionais.
[32] Ctrlfreio
mecân
Seleção de controle do freio
mecânico. Quando parâmetros
selecionados no grupo do parâmetro
2-2* Freio Mecânico estiverem ativos,
a saída deve ser reforçada para
suportar a corrente da bobina no
freio. Esse problema é resolvido
conectando um relé externo à saída
digital selecionada.
[36] Control word
bit 11
Ative o relé 1 pela palavra de
controle do eldbus. Nenhum outro
impacto funcional no conversor de
frequência. Aplicação típica:
Controlar um dispositivo auxiliar de
um eldbus. A função é válida
quando [0] Perl do FC é
selecionado em
parâmetro 8-10 Perl da Control
Word.
[37] Control word
bit 12
Ative o relé 2 por uma palavra de
controle do eldbus. Nenhum outro
impacto funcional no conversor de
frequência. Aplicação típica:
Controlar um dispositivo auxiliar de
um eldbus. A função é válida
quando [0] Perl do FC é
selecionado em
parâmetro 8-10 Perl da Control
Word.
[40] Fora faixa da
ref.
Ativo quando a velocidade real
estiver fora das congurações em
parâmetro 4-54 Advert. de Refer
Baixa e parâmetro 4-55 Advert. Refer
Alta.
[41] Abaixo
ref.,baixa
Ativo quando a velocidade real
estiver abaixo da conguração de
referência de velocidade.
[42] Acima ref, alta Ativo quando a velocidade real
estiver acima da conguração de
referência de velocidade.
[45] Ctrl. bus Controla a saída digital/relé através
do barramento. O estado da saída é
programado no
parâmetro 5-90 Controle Bus Digital
& Relé. O estado da saída é mantido
em caso de um timeout do bus.
[46] Controle do
barram.,
timeout:
Ligado
Controla a saída através do
barramento. O estado da saída é
programado no
parâmetro 5-90 Controle Bus Digital
5-40 Função do Relé
Option: Funcão:
& Relé. Quando ocorrer um timeout
do bus, o estado da saída é
programado para alto (ligado).
[47] Controle do
barram.,
timeout:
Desligado
Controla a saída através do
barramento. O estado da saída é
programado no
parâmetro 5-90 Controle Bus Digital
& Relé. Quando ocorrer um timeout
do bus, o estado da saída é
programado baixo (desligado).
[56] Advert
limpeza do
dissip de calor,
alta
[60] Comparador 0 Consulte o grupo do parâmetro
13-1* Comparadores. Se o
Comparador 0 no SLC é
VERDADEIRO, a saída será alta. Caso
contrário, será baixa.
[61] Comparador 1 Consulte o grupo do parâmetro
13-1* Comparadores. Se o
Comparador 1 no SLC é
VERDADEIRO, a saída será alta. Caso
contrário, será baixa.
[62] Comparador 2 Consulte o grupo do parâmetro
13-1* Comparadores. Se o
Comparador 2 no SLC é
VERDADEIRO, a saída será alta. Caso
contrário, será baixa.
[63] Comparador 3 Consulte o grupo do parâmetro
13-1* Comparadores. Se o
Comparador 3 no SLC é
VERDADEIRO, a saída será alta. Caso
contrário, será baixa.
[64] Comparador 4 Consulte o grupo do parâmetro
13-1* Comparadores. Se o
Comparador 4 no SLC é
VERDADEIRO, a saída será alta. Caso
contrário, será baixa.
[65] Comparador 5 Consulte o grupo do parâmetro
13-1* Comparadores. Se o
Comparador 5 no SLC é
VERDADEIRO, a saída será alta. Caso
contrário, será baixa.
[70] Regra lógica 0 Consulte o grupo do parâmetro
13-4* Regras Lógicas. Se a regra
lógica 0 no SLC é VERDADEIRA, a
saída será alta. Caso contrário, será
baixa.
[71] Regra lógica 1 Consulte o grupo do parâmetro
13-4* Regras Lógicas. Se a regra
Descrições do Parâmetro
44
78 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
VLT® AutomationDrive FC 360

5-40 Função do Relé
Option: Funcão:
lógica 1 no SLC é VERDADEIRA, a
saída será alta. Caso contrário, será
baixa.
[72] Regra lógica 2 Consulte o grupo do parâmetro
13-4* Regras Lógicas. Se a regra
lógica 2 no SLC é VERDADEIRA, a
saída será alta. Caso contrário, será
baixa.
[73] Regra lógica 3 Consulte o grupo do parâmetro
13-4* Regras Lógicas. Se a regra
lógica 3 no SLC é VERDADEIRA, a
saída será alta. Caso contrário, será
baixa.
[74] Regra lóg 4 Consulte o grupo do parâmetro
13-4* Regras Lógicas. Se a regra
lógica 4 no SLC é VERDADEIRA, a
saída será alta. Caso contrário, será
baixa.
[75] Regra lóg 5 Consulte o grupo do parâmetro
13-4* Regras Lógicas. Se a regra
lógica 5 no SLC é VERDADEIRA, a
saída será alta. Caso contrário, será
baixa.
[80] Saída digitl A
do SLC
Consulte parâmetro 13-52 Ação do
SLC. A saída A está baixa em [32]
Den saíd dig.A baix. A saída A está
alta em [38] Den saíd dig.A alta.
[81] Saída digitl B
do SLC
Consulte parâmetro 13-52 Ação do
SLC. A saída B está baixa em [32]
Den saíd dig.A baix. A saída B está
alta em [38] Den saíd dig.A alta.
[82] Saída digitl C
do SLC
Consulte parâmetro 13-52 Ação do
SLC. A saída C está baixa em [32]
Den saíd dig.A baix. A saída C está
alta em [38] Den saíd dig.A alta.
[83] Saída digitl D
do SLC
Consulte parâmetro 13-52 Ação do
SLC. A saída D está baixa em [32]
Den saíd dig.A baix. A saída D está
alta em [38] Den saíd dig.A alta.
[160] Sem alarme A saída será alta quando não
houver nenhum alarme presente.
[161] Rodando em
Revrsão
A saída é alta quando o conversor
de frequência estiver sendo
executado no sentido anti-horário
(o produto lógico dos bits de status
Em funcionamento E Reversão).
[165] Ref. local ativa
[166] Ref. remota
ativa
5-40 Função do Relé
Option: Funcão:
[167] Comand
partida ativo
A saída é alta quando há um
comando de partida ativo e
nenhum comando de parada.
[168] Drive em
modo Manual
A saída é alta quando o conversor
de frequência estiver no modo
manual ligado.
[169] Drive modo
automático
A saída é alta quando o conversor
de frequência estiver no modo
automático ligado.
[170] Início
concluído
A operação homing está concluída.
Esta opção é ecaz apenas quando
parâmetro 37-00 Modo de aplicação
estiver programado em [2] Controle
de Posição.
[171] Posição de
destino
atingida
A posição de destino foi atingida.
Esta opção é ecaz apenas quando
parâmetro 37-00 Modo de aplicação
estiver programado em [2] Controle
de Posição.
[172] Falha do
controle de
posição
Ocorreu uma falha no processo de
posicionamento. Consulte
parâmetro 37-18 Pos. Motivo da
falha de controle para obter
detalhes sobre a falha. Esta opção é
ecaz apenas quando
parâmetro 37-00 Modo de aplicação
estiver programado em [2] Controle
de Posição.
[173] Posição freio
mecânico
Seleciona o controle mecânico do
posicionamento. Esta opção é ecaz
apenas quando
parâmetro 37-00 Modo de aplicação
estiver programado em [2] Controle
de Posição.
[175] Funcionando
na tensão
Indica se o controle do PID de
tensão está ativo (ligado) ou inativo
(desligado). Esta opção é ecaz
apenas quando
parâmetro 37-00 Modo de aplicação
estiver programado em [1] Center
winder.
[176] Pronto para
funcionar
O controle do bobinador central
está pronto para funcionamento.
Esta opção é ecaz apenas quando
parâmetro 37-00 Modo de aplicação
estiver programado em [1] Center
winder.
[193] Sleep mode O conversor de frequência/sistema
entrou em sleep mode. Consulte o
grupo do parâmetro 22-4* Sleep
Mode.
Descrições do Parâmetro Guia de Programação
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 79
4 4

5-40 Função do Relé
Option: Funcão:
[194] Função Correia
Partida
Foi detectada uma condição de
correia partida. Consulte o grupo do
parâmetro 22-4* Sleep Mode.
5-41 Atraso de Ativação do Relé
Matriz [2] (Relé 1 [0], Relé 2 [1])
Range: Funcão:
0.01 s* [0 - 600 s] Insira o atraso no tempo de
ativação do relé. O relé só corta se
a condição em
parâmetro 5-40 Função do Relé for
ininterrupta durante o tempo
especicado.
5-42 Atraso de Desativação do Relé
Matriz[2]: Relé1[0], Relé2[1]
Range: Funcão:
0.01 s* [0 - 600 s] Insira o atraso do tempo de
desativação do relé.
130BD377.10
Ref.
Low freq.
P 5-50/
P 5-55
Input
(Hz)
High
ref.
value
P 5-53/
p 5-58
High freq.
P 5-51/
P 5-56
Low
ref.
value
P 5-52/
p 5-57
5-50 Term. 29 Baixa Freqüência
Range: Funcão:
4 Hz* [4 - 31999
Hz]
Insira o limite inferior da frequência
correspondente à velocidade do
eixo do motor baixa (ou seja, o
valor de referência baixo) no
parâmetro 5-52 Term. 29 Ref./feedb.
Valor Baixo. Veja Ilustração 4.17.
Descrições do Parâmetro
VLT® AutomationDrive FC 360
44
Ilustração 4.16 Atraso de desligamento, relé
Se a condição do evento selecionado mudar antes do
estado de ligado ou desligado do temporizador de atraso
expirar, a saída do relé não é afetada.
4.6.4 5-5* Entrada de Pulso
Ilustração 4.15 Atraso de Ativação do Relé
Os parâmetros da entrada de pulso são utilizados para
denir uma janela apropriada, para a área de referência de
impulso, estabelecendo a escala e a conguração do ltro
para as entradas de pulso. Os terminais de entrada 29 ou
33 funcionam como entradas de referência de frequência.
Programe o terminal 29 (parâmetro 5-13 Terminal 29,
Entrada Digital) ou o terminal 33 (parâmetro 5-15 Terminal
33 Entrada Digital) para Entrada de pulso [32]. Se o terminal
29 for usado como entrada, programe
parâmetro 5-02 Modo do Terminal 29 para [0] Entrada.
Ilustração 4.17 Entrada de Pulso
80 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828

5-51 Term. 29 Alta Freqüência
Range: Funcão:
32000 Hz* [5 - 32000
Hz]
Insira o limite superior de
frequência correspondente à alta
velocidade do eixo do motor (ou
seja, o valor de referência superior)
em parâmetro 5-53 Term. 29 Ref./
Feedb. Valor Alto.
5-52 Term. 29 Ref./feedb. Valor Baixo
Range: Funcão:
0* [-4999 -
4999 ]
Insira o limite inferior do valor de
referência para a velocidade do eixo
do motor [Hz]. Esse valor é também
o valor de feedback mínimo.
Consulte também a
parâmetro 5-57 Term. 33 Ref./
Feedb.Valor Baixo. Programe o
terminal 29 para entrada digital
(parâmetro 5-02 Modo do Terminal
29 = [0] Entrada e
parâmetro 5-13 Terminal 29 Entrada
Digital = valor aplicável).
5-53 Term. 29 Ref./Feedb. Valor Alto
Range: Funcão:
Size
related*
[-4999 4999 ]
Insira o valor de referência alto [Hz]
para a velocidade do eixo do motor
e o valor de feedback alto. Consulte
também parâmetro 5-58 Term. 33
Ref./Feedb. Valor Alto. Selecione o
terminal 29 como uma entrada
digital (parâmetro 5-02 Modo do
Terminal 29 = [0] Entrada (padrão) e
parâmetro 5-13 Terminal 29, Entrada
Digital = valor aplicável).
5-55 Term. 33 Baixa Freqüência
Range: Funcão:
4 Hz* [4 - 31999
Hz]
Insira o limite inferior da frequência
correspondente à velocidade do
eixo do motor baixa (ou seja, o
valor de referência baixo) no
parâmetro 5-57 Term. 33 Ref./
Feedb.Valor Baixo.
5-56 Term. 33 Alta Freqüência
Range: Funcão:
32000 Hz* [5 - 32000
Hz]
Insira a frequência superior correspondente à velocidade do eixo do
motor alta (ou seja, o valor de
referência superior) em
parâmetro 5-58 Term. 33 Ref./Feedb.
Valor Alto.
5-57 Term. 33 Ref./Feedb.Valor Baixo
Range: Funcão:
0* [-4999 -
4999 ]
Insira o valor de referência baixo
[Hz] para a velocidade do eixo do
motor. Esse valor é também o valor
de feedback mínimo. Consulte
também a parâmetro 5-52 Term. 29
Ref./feedb. Valor Baixo.
5-58 Term. 33 Ref./Feedb. Valor Alto
Range: Funcão:
Size
related*
[-4999 4999 ]
Digite o valor de referência alto
[Hz] para a velocidade do eixo do
motor. Consulte também a
parâmetro 5-53 Term. 29 Ref./Feedb.
Valor Alto.
5-60 Terminal 27 Variável da Saída d Pulso
Selecione a saída desejada no terminal 27.
Option: Funcão:
[0] * Fora de
funcionament
[45] Ctrl. bus
[48] Ctrl. bus,
timeout
Descrições do Parâmetro Guia de Programação
4 4
4.6.5 5-6* Saídas de Pulso
AVISO!
Não é possível ajustar este parâmetro enquanto o motor
estiver em funcionamento.
Use estes parâmetros para congurar as saídas de pulso
com suas funções e escala. Os terminais 27 e 29 são
alocados para saídas de pulso via parâmetro 5-01 Modo do
Terminal 27 e parâmetro 5-02 Modo do Terminal 29.
Ilustração 4.18 Conguração das Saídas de Pulso
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 81

5-60 Terminal 27 Variável da Saída d Pulso
Selecione a saída desejada no terminal 27.
Option: Funcão:
[100] Frequência de
saída
[101] Referência
[102] Feedback de
processo
[103] Corrente do
motor
[104] Torque rel ao
limite
[105] Torque
associado ao
nominal
[106] Potência
[107] Velocidade
[109] Freq Saída
Máx
[113] PID Gramp.
Saída
5-62 Freq Máx da Saída de Pulso nº 27
Range: Funcão:
5000 Hz* [4 - 32000
Hz]
Programe a frequência máxima para
o terminal 27, correspondente à
variável de saída, selecionada em
parâmetro 5-60 Terminal 27 Variável
da Saída d Pulso.
5-63 Terminal 29 Variável da Saída d Pulso
Option: Funcão:
[0] * Fora de
funcionament
[45] Ctrl. bus
[48] Ctrl. bus,
timeout
[100] Frequência de
saída
[101] Referência
[102] Feedback de
processo
[103] Corrente do
motor
[104] Torque rel ao
limite
[105] Torque
associado ao
nominal
[106] Potência
[107] Velocidade
[109] Freq Saída
Máx
[113] PID Gramp.
Saída
5-65 Freq Máx da Saída de Pulso #29
Range: Funcão:
5000 Hz* [4 - 32000
Hz]
Programe a frequência máxima para
o terminal 29, correspondente à
variável de saída, selecionada em
parâmetro 5-63 Terminal 29 Variável
da Saída d Pulso.
Descrições do Parâmetro
VLT® AutomationDrive FC 360
44
4.6.6 5-7* Entrad d Encdr-24V
Conecte o encoder de 24 V ao terminal 12 (alimentação de
24 V CC), terminal 32 (canal A), terminal 33 (canal B) e ao
terminal 20 (GND). As entradas digitais 32/33 estão ativas
para as entradas do encoder quando o [1] Encoder de 24 V
for selecionado parâmetro 7-00 Fonte do Feedback do PID de
Velocidade. O encoder é do tipo 24 V de canal duplo (A e
B). Frequência de entrada máxima: 32 kHz.
82 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828

130BD366.12
+24 V DC
A
B
GND
12 18 322719 29 33 20
B
A
B
A
130BA646.10
SH (Sentido Horario)
SAH (Sentido Anti-Horario)
5-70 Term 32/33 Pulsos Por Revolução
Range: Funcão:
1024* [1 - 4096 ] Programe os pulsos por revolução
do encoder no eixo do motor. Ler o
valor correto do encoder.
5-71 Term 32/33 Sentido do Encoder
Option: Funcão:
AVISO!
Não é possível ajustar este
parâmetro enquanto o motor
estiver em funcionamento.
Alterar o sentido da rotação do
encoder detectado, sem mudar a
ação do encoder.
[0] * Sentido
horário
Programa o canal A a 90° (graus
elétricos) atrás do canal B, após a
rotação do eixo do encoder no
sentido horário.
[1] Sentido anti-
-horário
Programa o canal A a 90° (graus
elétricos) à frente do canal B, após
a rotação do eixo do encoder no
sentido horário.
5-90 Controle Bus Digital & Relé
Range: Funcão:
0* [0 -
0xFFFFFFFF ]
Este parâmetro mantém o estado
das saídas digitais e relés
controlados pelo barramento.
Um 1 lógico indica que a saída é
alta ou está ativa.
Um 0 lógico indica que a saída é
baixa ou está inativa.
Descrições do Parâmetro Guia de Programação
Conexão do encoder no conversor de frequência
Encoder incremental de 24 V. O comprimento de cabo
máximo é de 5 m (16,4 pés).
4 4
Ilustração 4.19 Conexão do Encoder de 24 V ou 10–30 V
Ilustração 4.20 Sentido da Rotação do Encoder
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 83
4.6.7 5-9* Controlado pelo Bus
Este grupo do parâmetro seleciona saídas digitais e a saída
do relé através da conguração do eldbus.
Bit 0 Terminal de saída digital 27
Bit 1 Terminal de saída digital 29
Bit 2–3 Reservado
Bit 4 Terminal de saída do relé 1
Bit 6–23 Reservado
Bit 24 Terminal 42 Saída Digital
Bit 26–31 Reservado
Tabela 4.7 Funções de Bit

5-93 Controle do Bus da Saída de Pulso 27
Range: Funcão:
0 %* [0 - 100 %] Programe a frequência de saída
transferida para o terminal de saída
27 quando o terminal estiver
congurado para [45] Controlado
pelo bus em
parâmetro 5-60 Terminal 27 Variável
da Saída d Pulso.
5-94 Timeout Pred. da Saída de Pulso nº 27
Range: Funcão:
0 %* [0 - 100 %] Programe a frequência de saída
transferida para o terminal de saída
27 quando o terminal estiver
congurado como [48] Timeout de
Ctrl do Bus em
parâmetro 5-60 Terminal 27 Variável
da Saída d Pulso e um timeout for
detectado.
5-95 Saída de Pulso #29 Ctrl Bus
Range: Funcão:
0 %* [0 - 100 %] Programe a frequência de saída
transferida para o terminal de saída
29 quando o terminal estiver
congurado como [45] Controlado
pelo Bus em
parâmetro 5-63 Terminal 29 Variável
da Saída d Pulso.
5-96 Saída de Pulso #29 Timeout Predef.
Range: Funcão:
0 %* [0 - 100 %] Programe a frequência de saída
transferida para o terminal de saída
29 quando o terminal estiver
congurado como [48] Ctrl. bus,
timeout em parâmetro 5-63 Terminal
29 Variável da Saída d Pulso e um
timeout é detectado.
Descrições do Parâmetro
VLT® AutomationDrive FC 360
44
84 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828

6-00 Timeout do Live Zero
Range: Funcão:
10 s* [1 - 99 s] Insira o tempo do timeout.
6-01 Função Timeout do Live Zero
Option: Funcão:
Selecione a função de timeout. A
função programada em
parâmetro 6-01 Função Timeout do
Live Zero será ativada se o sinal de
entrada no terminal 53 ou 54
estiver abaixo de 50% do valor
denido em
parâmetro 6-10 Terminal 53 Tensão
Baixa, parâmetro 6-12 Terminal 53
Corrente Baixa,
parâmetro 6-20 Terminal 54 Tensão
Baixa ou parâmetro 6-22 Terminal 54
Corrente Baixa durante um intervalo
de tempo denido em
parâmetro 6-00 Timeout do Live Zero.
[0] * Desligado
[1] Congelar saída
[2] Parada
[3] Jog
[4] Velocidade
máxima
[5] Parada e
desarme
Ref./Feedback
Analog input
High Ref./
Feedb. Value'
Low Ref./
Feedb. Value'
'Low Voltage'or
'Low Current'
'High Voltage'or
'High Current'
1 V 5 V 10 V
10
20
30
40
50
[V]
5
Par 6-xx
Par 6-xx
Par 6-xx
Par 6-xx
130BD378.11
6-10 Terminal 53 Tensão Baixa
Range: Funcão:
0.07 V* [0 - 10 V] Insira a tensão (V) que corresponda
ao parâmetro 6-14 Terminal 53 Ref./
Feedb. Valor Baixo. Para ativar
parâmetro 6-01 Função Timeout do
Live Zero, programe o valor para
>1 V.
6-11 Terminal 53 Tensão Alta
Range: Funcão:
10 V* [0 - 10 V] Insira a tensão (V) que corresponde
ao valor de referência alto
(programado em
parâmetro 6-15 Terminal 53 Ref./
Feedb. Valor Alto).
6-12 Terminal 53 Corrente Baixa
Range: Funcão:
4 mA* [0 - 20 mA] Digite o valor de corrente baixa.
Este sinal de referência corresponde
ao valor de feedback/referência
baixo, programado em
parâmetro 6-14 Terminal 53 Ref./
Feedb. Valor Baixo. Para ativar
parâmetro 6-01 Função Timeout do
Live Zero, programe o valor para
>2 mA.
Descrições do Parâmetro Guia de Programação
4.7 Parâmetros 6-** Entrada/Saída
Analógica
Grupo do parâmetro para denir a conguração de E/S
analógica e a saída digital.
O conversor de frequência fornece 2 entradas
analógicas:
Terminal 53.
•
Terminal 54.
•
As entradas analógicas podem ser alocadas livremente
para tensão (0 a 10 V) ou entrada de corrente (0/4 a 20
mA).
4.7.1 6-0* Modo E/S Analógica
4 4
Ilustração 4.21 Função Timeout
4.7.2 6-1* Entrada Analógica 53
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 85
Parâmetros para congurar a escala e os limites da entrada
analógica 53 (terminal 53).

6-13 Terminal 53 Corrente Alta
Range: Funcão:
20 mA* [0 - 20 mA] Insira o valor de corrente alta que
corresponde ao referência/feedback
alto, programado em
parâmetro 6-15 Terminal 53 Ref./
Feedb. Valor Alto.
6-14 Terminal 53 Ref./Feedb. Valor Baixo
Range: Funcão:
0* [-4999 -
4999 ]
Insira o valor de referência ou de
feedback que corresponde à tensão
ou corrente programada em
parâmetro 6-10 Terminal 53 Tensão
Baixa a parâmetro 6-12 Terminal 53
Corrente Baixa.
6-15 Terminal 53 Ref./Feedb. Valor Alto
Range: Funcão:
Size
related*
[-4999 4999 ]
Insira o valor de referência ou de
feedback que corresponde à tensão
ou corrente programada em
parâmetro 6-11 Terminal 53 Tensão
Alta a parâmetro 6-13 Terminal 53
Corrente Alta.
6-16 Terminal 53 Const. de Tempo do Filtro
Range: Funcão:
0.01 s* [0.01 - 10 s] Insira a constante de tempo. Esta é
uma constante de tempo do ltro
passa-baixa digital de primeira
ordem para eliminar o ruído
elétrico no terminal 53. Um valor
de constante de tempo alto
melhora o amortecimento, porém,
aumenta também o atraso de
tempo através do ltro.
6-19 Modo do terminal 53
Selecione se o terminal 53 é usado para entrada de corrente ou
tensão.
Option: Funcão:
[0] Modo de
corrente
[1] * Modo de
tensão
6-20 Terminal 54 Tensão Baixa
Range: Funcão:
0.07 V* [0 - 10 V] Insira a tensão (V) que corresponde
ao valor de referência baixo
(programado em
parâmetro 6-24 Terminal 54 Ref./
Feedb. Valor Baixo). Para ativar
parâmetro 6-01 Função Timeout do
Live Zero, programe o valor para
>1 V.
6-21 Terminal 54 Tensão Alta
Range: Funcão:
10 V* [0 - 10 V] Insira a tensão (V) que corresponde
ao valor de referência alta
(programado em
parâmetro 6-25 Terminal 54 Ref./
Feedb. Valor Alto).
6-22 Terminal 54 Corrente Baixa
Range: Funcão:
4 mA* [0 - 20 mA] Digite o valor de corrente baixa.
Este sinal de referência corresponde
ao valor de feedback/referência
baixo programado em
parâmetro 6-24 Terminal 54 Ref./
Feedb. Valor Baixo. Para ativar a
função timeout do live zero em
parâmetro 6-01 Função Timeout do
Live Zero, programe o valor para >2
mA.
6-23 Terminal 54 Corrente Alta
Range: Funcão:
20 mA* [0 - 20 mA] Insira o valor de corrente alta que
corresponde ao valor de feedback
de referência alto programado em
parâmetro 6-25 Terminal 54 Ref./
Feedb. Valor Alto.
6-24 Terminal 54 Ref./Feedb. Valor Baixo
Range: Funcão:
0* [-4999 -
4999 ]
Insira o valor de referência ou de
feedback que corresponde à tensão
ou corrente programada em
parâmetro 6-21 Terminal 54 Tensão
Alta/parâmetro 6-22 Terminal 54
Corrente Baixa.
6-25 Terminal 54 Ref./Feedb. Valor Alto
Range: Funcão:
Size
related*
[-4999 4999 ]
Insira o valor de referência ou de
feedback que corresponde à tensão
ou corrente programada em
parâmetro 6-21 Terminal 54 Tensão
Descrições do Parâmetro
VLT® AutomationDrive FC 360
44
4.7.3 6-2* Entrada Analógica 54
Parâmetros para congurar a escala e os limites da entrada
analógica 54 (terminal 54).
86 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828

6-25 Terminal 54 Ref./Feedb. Valor Alto
Range: Funcão:
Alta/parâmetro 6-23 Terminal 54
Corrente Alta.
6-26 Terminal 54 Const. de Tempo do Filtro
Range: Funcão:
0.01 s* [0.01 - 10 s] Insira a constante de tempo que é
uma constante de tempo do ltro
passa-baixa digital para suprimir
ruído elétrico no terminal 54. Um
valor de constante de tempo alto
melhora o amortecimento, porém,
aumenta também o atraso de
tempo através do ltro.
6-29 Modo do terminal 54
Option: Funcão:
Selecione se o terminal 54 é usado
para entrada de corrente ou tensão.
[0] Modo de
corrente
[1] * Modo de
tensão
6-70 Modo do Terminal 45
Programe o terminal 45 para atuar como saída analógica ou
como saída digital.
Option: Funcão:
[0] * 0-20 mA
[1] 4-20 mA
[2] Saída Digital
6-71 Terminal 45 Saída Analógica
Option: Funcão:
[0] * Fora de
funcionament
[100] Frequência de
saída
0–100 Hz
[101] Referência Mín
Ref
–Máx
Ref
[102] Feedback de
processo
MínFB–Máx
FB
[103] Corrente do
motor
0–I
máx
[104] Torque rel ao
limite
6-71 Terminal 45 Saída Analógica
Option: Funcão:
[105] Torque
associado ao
nominal
[106] Potência 0–P
nom
[107] Velocidade
[111] Feedback de
velocidade
[113] PID Gramp.
Saída
[139] Controle do
Barramento
0–100%
[143] Ext. CL 1
[162] Setpoint de
tensão do
tensor cônico
[254] Tensão do
Barramento
CC
6-73 Terminal 45 Escala Mínima de Saída
Range: Funcão:
0 %* [0 - 200 %] Escala da saída mínima (0 ou 4 mA)
do sinal analógico no terminal 45.
Programe o valor para ser a
porcentagem da faixa completa da
variável selecionada no
parâmetro 6-71 Terminal 45 Saída
Analógica.
6-74 Terminal 45 Escala Máxima de Saída
Range: Funcão:
100 %* [0 - 200 %] Escala da saída máxima (20 mA) do
sinal analógico no terminal 45
Programe o valor para ser a
porcentagem da faixa completa da
variável selecionada no
parâmetro 6-71 Terminal 45 Saída
Analógica.
Descrições do Parâmetro Guia de Programação
4 4
4.7.4 6-7* Saída Analógica/Digital 45
Parâmetros para congurar a escala e os limites do
terminal de saída digital/analógica 45. As saídas analógicas
são saídas de corrente: 0/4–20 mA. A resolução na saída
analógica é de 12 bits. Os terminais de saída analógica
também podem ser programados como saída digital.
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 87
6-72 Terminal 45 Saída Digital
Option: Funcão:
Selecione a função do terminal 45 como
uma saída de corrente digital. Consulte
também parâmetro 6-70 Modo do Terminal
45. Consulte capétulo 4.6.2 5-3* Saídas
Digitais para cada opção e descrição.
[0] * Fora de
funcionament
[198] Modo Bypass
Ativo

6-76 Terminal 45 Controle do barramento de saída
Range: Funcão:
0* [0 - 16384 ] Contém o nível da saída analógica
se controlada por barramento. Este
parâmetro tem formato N2.
6-90 Modo do Terminal 42
Programe o terminal 42 para atuar como saída analógica ou
como saída digital.
Option: Funcão:
[0] * 0-20 mA
[1] 4-20 mA
[2] Saída Digital
6-91 Terminal 42 Saída Analógica
Option: Funcão:
[0] * Fora de
funcionament
[100] Frequência de
saída
[101] Referência
[102] Feedback de
processo
[103] Corrente do
motor
[104] Torque rel ao
limite
[105] Torque
associado ao
nominal
[106] Potência
[107] Velocidade
[111] Feedback de
velocidade
[113] PID Gramp.
Saída
[139] Controle do
Barramento
[143] Ext. CL 1
[162] Setpoint de
tensão do
tensor cônico
[254] Tensão do
Barramento
CC
6-93 Terminal 42 Escala Mínima de Saída
Range: Funcão:
0 %* [0 - 200 %] Escala da saída mínima (0 mA ou 4
mA) do sinal analógico no terminal
42. Programe o valor para ser a
porcentagem da faixa completa da
variável selecionada no
parâmetro 6-91 Terminal 42 Saída
Analógica.
6-94 Terminal 42 Escala Máxima de Saída
Range: Funcão:
100 %* [0 - 200 %] Escala de saída máxima (20 mA) da
escala no terminal 42. Programe o
valor para ser a porcentagem da
faixa completa da variável
selecionada no
parâmetro 6-91 Terminal 42 Saída
Analógica.
(mA)
0%
20
0/4
100%
Current
Analog
output
Min Scale
par. 6-93
Variable
for
output
example:
Power
Analog
Output
Max Scale
par. 6-94
130BB772.10
Ilustração 4.22 Escala de saída
versus corrente
6-96 Terminal 42 Ctrl Saída Bus
Range: Funcão:
0* [0 - 16384 ] Mantém a saída analógica no
terminal 42 se controlada pelo bus.
Este parâmetro tem formato N2.
Descrições do Parâmetro
VLT® AutomationDrive FC 360
4.7.5 6-9* Saída Analógica/Digital 42
6-92 Terminal 42 Saída Digital
Option: Funcão:
Consulte capétulo 4.6.2 5-3* Saídas
Digitais para cada opção e
descrição.
[0] * Fora de funcio-
nament
[198] Modo Bypass Ativo
44
Parâmetros para congurar os limites do terminal de saída
digital/analógica 42. As saídas analógicas são saídas de
corrente: 0/4–20 mA. A resolução nas saídas analógicas é
de 12 bits. Os terminais de saída analógica também
podem ser programados como saída digital.
88 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828

7-00 Fonte do Feedback do PID de Velocidade
Option: Funcão:
AVISO!
Este parâmetro não pode ser
alterado enquanto o motor
estiver em funcionamento.
Selecione fonte do feedback do
Controle CL de Velocidade.
[1] Encoder de
24V
[2] MCB 102
[3] MCB 103
[6] Entrada
analógica 53
[7] Entrada
analógica 54
[8] Entrada de
frequência 29
[9] Entrada de
freq. 33
[20] * Nenhum
7-02 Ganho Proporcional no PID de Velocidade
Range: Funcão:
0.015* [0 - 1 ] Insira o ganho proporcional do
controlador de velocidade. O ganho
proporcional amplica o erro (ou
seja, o desvio entre o sinal de
feedback e o setpoint). Esse
parâmetro é utilizado com o
parâmetro 1-00 Modo Conguração
controle [1] Malha fechada de
velocidade. O controle rápido é
obtido em amplicação alta. No
entanto, se a amplicação for muito
alta, o processo pode car instável.
7-03 Tempo Integrado do PID de Velocidade
Range: Funcão:
8 ms* [2 - 20000
ms]
Insira o tempo integrado do
controlador de velocidade, que
determina o tempo que o controle
do PID interno leva para corrigir o
erro. Quanto maior o erro, mais
rápido é o aumento do ganho. O
tempo integrado provoca um atraso
no sinal e, consequentemente, um
efeito de amortecimento e pode ser
usado para eliminar erros de
velocidade em estado estável.
7-03 Tempo Integrado do PID de Velocidade
Range: Funcão:
Obtém-se um controle rápido por
meio de um tempo integrado curto,
muito embora, se este tempo for
curto demais, o processo pode
tornar-se instável. Um tempo
integrado excessivamente longo
desabilita a ação de integração,
redundando em desvios maiores
em relação à referência requerida,
uma vez que o regulador do
processo levará mais tempo para
corrigir erros. Este parâmetro é
utilizado com o controle [1] Malha
fechada de velocidade programado
em parâmetro 1-00 Modo
Conguração.
7-04 Tempo de Diferencial do PID de Veloc
Range: Funcão:
30 ms* [0 - 200 ms] Insira o tempo de diferenciação do
controlador de velocidade. O
diferenciador não responde a um
erro constante. Ele fornece um
ganho proporcional à taxa de
variação do feedback de velocidade.
Quanto mais rápido o erro mudar,
maior é o ganho do diferenciador.
O ganho é proporcional à
velocidade de variação dos erros. A
conguração desse parâmetro para
zero desabilita o diferenciador. Esse
parâmetro é utilizado com o
parâmetro 1-00 Modo Conguração
controle [1] Malha fechada de
velocidade.
7-05 Lim do Ganho Diferencial do PID d Veloc
Range: Funcão:
5* [1 - 20 ] Programe um limite para o ganho
fornecido pelo diferenciador. Como
o ganho diferencial aumenta nas
frequências mais altas, limitar o
ganho pode ser recomendável. Por
exemplo, programar um link D puro
em frequências baixas e um link D
constante em frequências mais
altas. Este parâmetro é utilizado
com o parâmetro 1-00 Modo
Conguração controle [1] Malha
fechada de velocidade.
Descrições do Parâmetro Guia de Programação
4.8 Parâmetros 7-** Controladores
4.8.1 7-0* Ctrl. do PID de Velocidade
4 4
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 89

7-06 Per. ltro passa-baixa do PID de veloc
Range: Funcão:
10 ms* [1 - 6000 ms]
AVISO!
Uma ltragem rigorosa pode
ser prejudicial ao desempenho
dinâmico.
Programe uma constante de tempo
para o ltro passa-baixa do controle
da velocidade. O ltro passa-baixa
melhora o desempenho em estado
estável e amortece as oscilações do
sinal de feedback. Este parâmetro é
usado com parâmetro 1-00 Modo
Conguração [1] Malha fech. veloc.
ou [2] Torque malha fechada. Este
parâmetro é útil se houver uma
grande quantidade de ruído no
sistema, consulte Ilustração 4.23. Por
exemplo, se uma constante de
tempo (τ) de 100 ms for
programada, a frequência de corte
para o ltro passa-baixa é 1/0,1 =
10 RAD/s, correspondendo a (10/2 x
π) = 1,6 Hz. O regulador do PID
somente regula um sinal de
feedback que varia menos de 1,6
Hz, em frequência. Se a variação da
frequência do sinal de feedback for
superior a 1,6 Hz, o regulador do
PID não responde.
Congurações práticas do
parâmetro 7-06 Per. ltro passa-baixa
do PID de veloc, efetuadas a partir
do número de pulsos por revolução
do encoder:
Encoder PPR Parâmetro 7-06
Tempo d
FiltrPassabaixa
d PID d veloc
512 10 ms
1024 5 ms
2048 2 ms
4096 1 ms
7-06 Per. ltro passa-baixa do PID de veloc
Range: Funcão:
0.6
0.6
f
g
= 10 Hz
175ZA293.11
Feedback
t (Seg.)
t (Seg.)
Feedback
Sinal de feedback interrompido
Sinal de feedback filtrado
Filtro de passa baixa
Ilustração 4.23 Sinal de feedback
7-07 Relação Engr. do Feedback PID d Veloc
Range: Funcão:
1* [0.0001 - 32 ]
Par 7-07=1.00 Par 7-07=n1/n2
130BA871.10
Motor
n1 n2
Ilustração 4.24 Relação de
Engrenagem do Feedback do PID
de Velocidade
7-08 Fator de feed forward do PID de veloc
Range: Funcão:
0 %* [0 - 500 %] O sinal de referência efetua bypass
do controlador de velocidade de
acordo com o valor especicado.
Este recurso aumenta o
desempenho dinâmico do loop de
controle da velocidade.
Descrições do Parâmetro
44
VLT® AutomationDrive FC 360
90 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828

7-12 Ganho Proporcional do PID de Torque
Range: Funcão:
100 %* [0 - 500 %] Insira o valor do ganho propor-
cional do controlador de torque. A
seleção de um valor alto faz com
que o controlador reaja mais
rápido. Uma conguração excessivamente alta causa instabilidade no
controlador.
7-13 Tempo de Integração do PID de Torque
Range: Funcão:
0.020 s* [0.002 - 2 s] Insira o tempo de integração do
controlador de torque. Quanto mais
baixo o tempo de integração, mais
rápido o controlador reage.
Entretanto, uma conguração muito
baixa resulta em instabilidade do
controlador.
7-20 Fonte de Feedback 1 PID de Processo
Option: Funcão:
O sinal de feedback efetivo é
composto pela soma de até 2 sinais
de entrada diferentes. Selecione
qual entrada é tratada como a
fonte do primeiro desses sinais. O
segundo sinal de entrada é
programado em
parâmetro 7-22 Fonte de Feedback 2.
[0] * Sem função
[1] Entrada
analógica 53
[2] Entrada
analógica 54
[3] Entrada de
freq. 29
[4] Entrada de
freq. 33
7-22 Fonte de Feedback 2
Option: Funcão:
O sinal de feedback efetivo é
composto pela soma de até dois
sinais de entrada diferentes.
Selecione qual entrada será tratada
como a fonte do segundo desses
7-22 Fonte de Feedback 2
Option: Funcão:
sinais. O primeiro sinal de entrada é
denido em parâmetro 7-20 Fonte
de Feedback 1 PID de Processo.
[0] * Sem função
[1] Entrada
analógica 53
[2] Entrada
analógica 54
[3] Entrada de
freq. 29
[4] Entrada de
freq. 33
7-30 Cntrl Norml/Invers do PID d Proc.
Option: Funcão:
Controles normal e inverso são
implementados introduzindo-se a
diferença entre o sinal de referência
e o sinal de feedback.
[0] * Normal Programa o controle de processo
para aumentar a frequência de
saída.
[1] Inverso Programa o controle de processo
para diminuir a frequência de saída.
7-31 Anti Windup PID de Proc
Option: Funcão:
[0] O (Desligado) Continua a regulação de um erro,
inclusive quando a frequência de
saída não puder ser aumentada ou
diminuída.
[1] * On (Ligado) Cessa a regulação de um erro
quando a frequência de saída não
puder mais ser ajustada.
7-32 Velocidade Inicial do PID do Processo
Range: Funcão:
0 RPM* [0 - 6000
RPM]
Inserir a velocidade do motor a ser
atingida como um sinal inicial, para
o começo do controle de PID.
Quando a energia é ligada, o
conversor de frequência começa a
seguir a rampa e, em seguida,
opera em controle de malha aberta
de velocidade. Quando a velocidade
de partida do PID do processo for
alcançada, o conversor de
frequência muda para controle do
PID de processo.
Descrições do Parâmetro Guia de Programação
4.8.2 7-1* Controle do PI de Torque
Parâmetros para congurar o controle do PI de Torque.
4 4
4.8.4 7-3* Ctrl. PID de Processo
4.8.3 7-2* Feedback do Ctrl. Feedb
Selecione a fonte do feedback para o controle do PID de
processo e como esse feedback deverá ser tratado.
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 91

7-33 Ganho Proporcional do PID de Processo
Range: Funcão:
0.01* [0 - 10 ] Insira o ganho proporcional do PID.
O ganho proporcional multiplica o
erro entre o setpoint e o sinal de
feedback.
7-34 Tempo de Integr. do PID de velocid.
Range: Funcão:
9999 s* [0.10 - 9999s]Insira o tempo integrado do PID. O
integrador proporciona um ganho
crescente se houver um erro
constante entre o setpoint e o sinal
de feedback. O tempo integrado é
aquele requerido pelo integrador
para alcançar o mesmo ganho que
o ganho proporcional.
7-35 Tempo de Difer. do PID de veloc
Range: Funcão:
0 s* [0 - 20 s] Insira o tempo do diferencial do
PID. O diferenciador não responde a
um erro que for constante, porém,
gera um ganho somente quando
houver uma variação no erro.
Quanto menor o tempo do
diferencial do PID tanto maior é o
ganho do diferenciador.
7-36 Dif.do PID de Proc.- Lim. de Ganho
Range: Funcão:
5* [1 - 50 ] Insira um limite para o ganho
diferencial. Se não houver limite, o
ganho diferencial aumenta quando
são mudanças rápidas. Para obter
um ganho diferencial puro para
mudanças lentas e um ganho
diferenciador constante em
mudanças rápidas, limite o ganho
diferencial.
7-38 Fator de Feed Forward do PID de Processo
Range: Funcão:
0 %* [0 - 200 %] Insira o fator de feed forward (FF)
do PID. O fator FF envia uma fração
constante do sinal de referência,
para efetuar bypass do controle do
PID de modo que esse controle
afete somente a fração restante do
sinal de controle. Qualquer
alteração nesse parâmetro afeta a
velocidade do motor. Quando o
Fator FF é ativado, ele gera menos
overshoot e dinâmica alta ao alterar
o setpoint. Parâmetro 7-38 Fator de
7-38 Fator de Feed Forward do PID de Processo
Range: Funcão:
Feed Forward do PID de Processo
está ativo quando
parâmetro 1-00 Modo Conguração
estiver programado para [3]
Processo.
7-39 Larg Banda Na Refer.
Range: Funcão:
5 %* [0 - 200 %] Insira a largura de banda na
referência. Quando o erro de
controle do PID (a diferença entre a
referência e o feedback) for menor
que o valor desse parâmetro, o bit
de status na referência é 1.
7-40 Process PID I-part Reset
Option: Funcão:
[0] * Não
[1] Sim Selecione [1] Sim para reinicializar a
parte I do controlador de processo
do PID. A seleção reverte automaticamente para [0] Não. A
reinicialização da parte I permite
iniciar de um ponto bem denido
após trocar alguma parte do
processo, por exemplo, trocar um
rolo têxtil.
7-41 Clamp da saída neg. do processo do PID
Range: Funcão:
-100 %* [ -100 -
100 %]
Insira um limite negativo para a
saída do Controlador de Processo
do PID.
7-42 Clamp da saída pos. do processo do PID
Range: Funcão:
100 %* [ -100 -
100 %]
Inserir um limite positivo para a
saída do Controlador de Processo
do PID.
7-43 Ganho Esc Mín. do PID de Proc Ref.
Range: Funcão:
100 %* [0 - 100 %] Insira uma porcentagem a ser
aplicada na saída do PID de
processo, quando estiver
funcionando na referência mínima.
Descrições do Parâmetro
VLT® AutomationDrive FC 360
44
4.8.5 7-4* Ctrl do PID de Processo
Avançado
Este grupo do parâmetro é usado somente se
parâmetro 1-00 Modo Conguração estiver programado
para [7] CL de velocidade do PID estendido.
92 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828

7-43 Ganho Esc Mín. do PID de Proc Ref.
Range: Funcão:
A porcentagem de escala é ajustada
linearmente entre a escala na
referência mínima
(parâmetro 7-43 Ganho Esc Mín. do
PID de Proc Ref.) e a escala na
referência máxima
(parâmetro 7-44 Process PID Gain
Scale at Max. Ref.).
7-44 Process PID Gain Scale at Max. Ref.
Range: Funcão:
100 %* [0 - 100 %] Insira a porcentagem de escalo-
namento a ser aplicada na saída do
PID de processo, quando estiver
funcionando na referência máxima.
A porcentagem de escala é ajustada
linearmente entre a escala na
referência mínima
(parâmetro 7-43 Ganho Esc Mín. do
PID de Proc Ref.) e a escala na
referência máxima
(parâmetro 7-44 Process PID Gain
Scale at Max. Ref.).
7-45 Process PID Feed Fwd Resource
Option: Funcão:
Selecione qual entrada do
conversor de frequência é usada
como fator de avanço. O fator FF é
adicionado diretamente à saída do
controlador PID. Esse parâmetro
pode aumentar o desempenho
dinâmico.
O avanço programado do
barramento deve estar no formato
N2.
[0] * Sem função
[1] Entrada
analógica 53
[2] Entrada
analógica 54
[7] Entr Pulso 29
[8] Entr Pulso 33
[11] Refernc do
Bus Local
[32] Bus PCD
7-46 Proc.PID FeedFwd Normal/Invers. Ctrl.
Option: Funcão:
[0] * Normal Selecione [0] Normal para
programar o fator de feed forward
para tratar o recurso de FF como
um valor positivo.
7-46 Proc.PID FeedFwd Normal/Invers. Ctrl.
Option: Funcão:
[1] Inverso Selecione [1] Inverso para tratar o
recurso de feed forward como valor
negativo.
7-48 Feed Forward do PCD
Range: Funcão:
0* [0 - 65535 ] Parâmetro de leitura em que o bus
parâmetro 7-45 Process PID Feed Fwd
Resource [32] pode ser lido.
O feed forward denido pelo bus
deve ser no formato N2.
7-49 Proc.PID Saída Normal/Invers. Ctrl.
Option: Funcão:
[0] * Normal Selecione [0] Normal para usar a
saída resultante do controlador de
processo do PID tal como é.
[1] Inverso Selecione [1] Inverso para inverter a
saída resultante do controlador de
processo do PID. Esta operação é
executada após o fator de feed
forward ter sido aplicado.
7-50 PID de processo Extended PID
Option: Funcão:
[0] Desativado Desabilita as peças estendidas do
controlador de processo do PID.
[1] * Ativado Ativa as peças estendidas do
controlador PID.
7-51 Process PID Feed Fwd Gain
Range: Funcão:
1* [0 - 100 ] O feed-forward é usado para obter
o ganho, baseado em um sinal bem
conhecido disponível. O controlador
PID controla somente a parte
menor do controle, necessário
devido a caracteres desconhecidos.
O fator de feed forward padrão em
parâmetro 7-38 Fator de Feed
Forward do PID de Processo está
sempre relacionado à referência,
enquanto que
parâmetro 7-51 Process PID Feed Fwd
Gain tem mais opções. Em
Descrições do Parâmetro Guia de Programação
4 4
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 93
4.8.6 7-5* Ext. do PID de Processo
Estendido
Este grupo do parâmetro é usado somente se
parâmetro 1-00 Modo Conguração estiver programado
para [7] CL de velocidade do PID estendido.

7-51 Process PID Feed Fwd Gain
Range: Funcão:
aplicações de bobinador, o fator de
feed forward é tipicamente a
velocidade de linha do sistema.
7-52 Ctrl din. sinal feed-forward na aceler.
Range: Funcão:
0.01 s* [0.01 - 100 s] Controla a dinâmica do sinal de
feed-forward na aceleração.
7-53 Desaceleração do Process PID Feed Fwd
Range: Funcão:
0.01 s* [0.01 - 100 s] Controla a dinâmica do sinal de
feed forward na desaceleração.
7-56 PID de processo Ref. Tempo Filtro
Range: Funcão:
0.001 s* [0.001 - 1 s] Programa uma constante de tempo
para o ltro passa-baixa de primeira
ordem de referência. O ltro passa-
-baixa melhora o desempenho em
regime e amortece as oscilações
nos sinais de referência/feedback.
Entretanto, uma ltragem rigorosa
pode ser prejudicial ao
desempenho dinâmico.
7-57 PID de processo Fb. Tempo Filtro
Range: Funcão:
0.001 s* [0.001 - 1 s] Programa uma constante de tempo
para o ltro passa-baixa de primeira
ordem. O ltro passa-baixa melhora
o desempenho em regime e
amortece as oscilações nos sinais
de referência/feedback. Entretanto,
uma ltragem rigorosa pode ser
prejudicial ao desempenho
dinâmico.
7-60 Conversão de Feedback 1
Selecionar a conversão para o sinal de feedback 1. Selecione [0]
Linear para deixar o sinal de feedback inalterado.
Option: Funcão:
[0] * Linear
[1] Raiz quadrada
7-62 Conversão de Feedback 2
Selecionar a conversão para o sinal de feedback 2. Selecione [0]
Linear para deixar o sinal de feedback inalterado.
Option: Funcão:
[0] * Linear
[1] Raiz quadrada
Descrições do Parâmetro
VLT® AutomationDrive FC 360
44
4.8.7 7-6* Conversão de Feedback
Use o grupo do parâmetro para congurar conversões de
sinais de feedback.
94 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828

8-00 Option A warning control
Este parâmetro é usado para ativar ou desativar as opções
instaladas.
Option: Funcão:
[0] * None
[1] Disable
Warning
8-01 Tipo de Controle
Option: Funcão:
A conguração neste parâmetro
prevalece sobre as dos
parâmetro 8-50 Seleção de Parada
por Inércia a parâmetro 8-56 Seleção
da Referência Pré-denida.
[0] * Digital e
Control Wrd
Controle utilizando a entrada digital
e a control word.
[1] Somente
Digital
Controle utilizando somente as
entradas digitais.
[2] SomenteCon-
trolWord
Controle utilizando somente a
control word.
8-02 Origem do Controle
Option: Funcão:
Selecione a origem da control word.
[0] Nenhum
[1] Porta do FC
[3] Opcional A PROFIBUS e PROFINET.
8-03 Tempo de Timeout de Controle
Range: Funcão:
1 s* [0.1 - 6000 s] Insira o tempo máximo esperado
entre a recepção de dois
telegramas consecutivos. Se este
tempo for excedido, é indicativo de
que a comunicação serial foi
interrompida. A função selecionada
em parâmetro 8-04 Função Timeout
de Controle é executada.
8-04 Função Timeout de Controle
Selecione a função de timeout. A função de timeout é ativada
quando a atualização da control word falhar dentro do intervalo
de tempo especicado em parâmetro 8-03 Tempo de Timeout da
Control Word.
Option: Funcão:
[0] * Desligado Restabelecer o controle através do
eldbus (eldbus ou padrão),
8-04 Função Timeout de Controle
Selecione a função de timeout. A função de timeout é ativada
quando a atualização da control word falhar dentro do intervalo
de tempo especicado em parâmetro 8-03 Tempo de Timeout da
Control Word.
Option: Funcão:
utilizando a control word mais
recente.
[1] Congelar saída Congelar a frequência de saída até
que a comunicação se restabeleça.
[2] Parada Parar com nova partida automática
até que a comunicação seja
restabelecida.
[3] Jog Fazer o motor funcionar na
frequência de jog, até a
comunicação ser restabelecida.
[4] Velocidade
máxima
Fazer o motor funcionar na
frequência máxima, até que a
comunicação seja restabelecida.
[5] Parada e
desarme
Para o motor e desarma, em
seguida, reinicializa o conversor de
frequência para reiniciar:
•
Via eldbus.
•
Via [Reset].
•
Por meio de uma entrada
digital.
8-07 Trigger de Diagnóstico
Option: Funcão:
[0] * Inativo Não enviar dados do diagnóstico
estendido (EDD).
[1] Disparar em
alarmes
Enviar EDD em alarmes.
[2] Disp alarm/
advertnc
Enviar EDD ao detectar alarmes ou
advertências em
parâmetro 16-90 Alarm Word,
parâmetro 9-53 Warning Word do
Probus ou
parâmetro 16-92 Warning Word.
8-10 Perl da Control Word
Selecione a interpretação da control word e status word que
corresponda ao eldbus instalado. Somente as seleções válidas
para o eldbus instalado são visíveis no display do LCP.
Option: Funcão:
[0] * Perl do FC
Descrições do Parâmetro Guia de Programação
4.9 Parâmetros 8-** Comunicações e Opcionais
4.9.1 8-0* Congurações Gerais
4 4
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 95
4.9.2 8-1* Congurações Word Deniç

8-10 Perl da Control Word
Selecione a interpretação da control word e status word que
corresponda ao eldbus instalado. Somente as seleções válidas
para o eldbus instalado são visíveis no display do LCP.
Option: Funcão:
[1] Perl do
PROFIdrive
8-14 Control Word Congurável CTW
Option: Funcão:
[0] Nenhum
[1] * Perl padrão
[2] CTW
Válida,ativa
baix
[4] Inversão de
erro do PID
[5] Reinicializar
PID parte I
[6] PID ativado
8-19 Product Code
Range: Funcão:
Size
related*
[0 2147483647 ]
Selecione 0 para leitura do código
real de produto do eldbus, de
acordo com o opcional de eldbus
montado. Selecione 1 para leitura
do ID real do fornecedor.
8-30 Protocolo
Option: Funcão:
Selecione o protocolo para a porta
RS485 integrada.
[0] * FC Comunicação de acordo com o
Protocolo Danfoss FC.
[2] Modbus RTU Comunicação de acordo com o
protocolo do Modbus RTU.
8-32 Baud Rate da Porta do FC
Option: Funcão:
Selecione a baud rate da porta
RS485.
[0] 2400 Baud
[1] 4800 Baud
[2] 9600 Baud
[3] 19200 Baud
8-32 Baud Rate da Porta do FC
Option: Funcão:
[4] 38400 Baud
[5] 57600 Baud
[6] 76800 Baud
[7] 115200 Baud
8-33 Bits Parid./Parad
Option: Funcão:
[0] * Parid.Par, 1
BitParad
[1] Parid.Impar,1
BitParad
[2] S/Parid. 1 Bit
Parad
[3] Sem Parid, 2
BitsParad
8-35 Atraso Mínimo de Resposta
Range: Funcão:
0.01 s* [ 0.0010 - 0.5s]Especique o tempo de atraso
mínimo entre o recebimento de
uma solicitação e a transmissão de
uma resposta. Esse é o tempo
utilizado para contornar os atrasos
de retorno do modem.
8-36 Atraso Máx de Resposta
Range: Funcão:
Size
related*
[ 0.1 - 10.0 s] Especique o tempo de atraso
máximo permitido entre receber o
pedido e transmitir a resposta. Se
esse tempo for excedido, nenhuma
resposta será retornada.
8-42 Conguração de gravação do PCD
Selecione os parâmetros que serão designados aos telegramas
do PCD. A quantidade de PCDs disponíveis depende do tipo de
telegrama. Os valores nos PCDs são em seguida gravados nos
parâmetros selecionados como valores de dados.
Insira até 16 diferentes mapeamentos predenidos de 0 a 15
neste parâmetro, usando programação de matriz. Se este
parâmetro estiver ativo, os endereços 2810 a 2825 representam
valores dos 16 parâmetros. Se este parâmetro não estiver ativo,
os endereços 2810 e 2811 são usados como palavra de controle
de entrada de dados e referência de barramento. Os endereços
2812 a 2825 são reservados.
Option: Funcão:
[0] Nenhum
[1] [302]
Referência
Mínima
Descrições do Parâmetro
VLT® AutomationDrive FC 360
44
4.9.3 8-3* Congurações da Porta do FC
8-31 Endereço
Range: Funcão:
1* [ 0 - 247 ] Insira o endereço da porta RS485. Intervalo
válido: 1–126 do FC-bus, ou 1–247 para Modbus.
96 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
4.9.4 8-4* Conjunto de protocolos FC MC

8-42 Conguração de gravação do PCD
Selecione os parâmetros que serão designados aos telegramas
do PCD. A quantidade de PCDs disponíveis depende do tipo de
telegrama. Os valores nos PCDs são em seguida gravados nos
parâmetros selecionados como valores de dados.
Insira até 16 diferentes mapeamentos predenidos de 0 a 15
neste parâmetro, usando programação de matriz. Se este
parâmetro estiver ativo, os endereços 2810 a 2825 representam
valores dos 16 parâmetros. Se este parâmetro não estiver ativo,
os endereços 2810 e 2811 são usados como palavra de controle
de entrada de dados e referência de barramento. Os endereços
2812 a 2825 são reservados.
Option: Funcão:
[2] [303]
Referência
Máxima
[3] [341] Tempo
de aceleração
da Rampa 1
[4] [342] Tempo
de desaceleração da
Rampa 1
[5] [351] Tempo
de aceleração
da Rampa 2
[6] [352] Tempo
de desaceleração da
Rampa 2
[7] [380] Tempo
de Rampa do
Jog
[8] [381] Tempo
da Parada
Rápida
[9] [412] Limite
Inf. Veloc do
Motor [Hz]
[10] [414] Limite
Sup. Veloc do
Motor [Hz]
[11] [590] Controle
do bus digital
e do relé
[12] [676] Ctrl de
Saída do Bus
Terminal 45
[13] [696] Terminal
42 Ctrl de
Saída do Bus
[15] CTW da Porta
do FC
[16] REF da Porta
do FC
8-42 Conguração de gravação do PCD
Selecione os parâmetros que serão designados aos telegramas
do PCD. A quantidade de PCDs disponíveis depende do tipo de
telegrama. Os valores nos PCDs são em seguida gravados nos
parâmetros selecionados como valores de dados.
Insira até 16 diferentes mapeamentos predenidos de 0 a 15
neste parâmetro, usando programação de matriz. Se este
parâmetro estiver ativo, os endereços 2810 a 2825 representam
valores dos 16 parâmetros. Se este parâmetro não estiver ativo,
os endereços 2810 e 2811 são usados como palavra de controle
de entrada de dados e referência de barramento. Os endereços
2812 a 2825 são reservados.
Option: Funcão:
[18] [311] Jog
Speed [Hz]
[19] [427] Torque
limit bus
control
[20] [428] Speed
limit bus
control
8-43 Conguração de Leitura do PCD
Selecione os parâmetros que serão designados aos PCDs dos
telegramas. O número de PCDs disponíveis depende do tipo de
telegrama. Os PCDs contêm os valores de dados reais dos
parâmetros selecionados.
Insira até 16 diferentes mapeamentos predenidos de 0 a 15
neste parâmetro, usando programação de matriz. Se este
parâmetro estiver ativo, os endereços 2910 a 2925 representam
valores dos 16 parâmetros. Se este parâmetro não estiver ativo,
os endereços 2910 e 2911 serão usados como registro de status
word e valor real principal. Os endereços 2912 a 2925 são
reservados.
Option: Funcão:
[0] Nenhum
[1] [1500] Horas
de Operação
[2] [1501] Horas
de Funcionamento
[3] [1502]
Contador de
kWh
[4] [1600] Control
Word
[5] [1601]
Referência
[Unidade]
[6] [1602]
Referência %
[7] [1603] Status
Word
[8] [1605] Valor
Real Principal
[%]
Descrições do Parâmetro Guia de Programação
MG06C828 Danfoss A/S © 12/2018 Todos os direitos reservados. 97
4 4

8-43 Conguração de Leitura do PCD
Selecione os parâmetros que serão designados aos PCDs dos
telegramas. O número de PCDs disponíveis depende do tipo de
telegrama. Os PCDs contêm os valores de dados reais dos
parâmetros selecionados.
Insira até 16 diferentes mapeamentos predenidos de 0 a 15
neste parâmetro, usando programação de matriz. Se este
parâmetro estiver ativo, os endereços 2910 a 2925 representam
valores dos 16 parâmetros. Se este parâmetro não estiver ativo,
os endereços 2910 e 2911 serão usados como registro de status
word e valor real principal. Os endereços 2912 a 2925 são
reservados.
Option: Funcão:
[9] [1609] Leitura
Personalizada
[10] [1610]
Potência [kW]
[11] [1611]
Potência [hp]
[12] [1612] Tensão
do Motor
[13] [1613]
Frequência
[14] [1614]
Corrente do
Motor
[15] [1615]
Frequência [%]
[16] [1616] Torque
[Nm]
[17] [1618] Térmico
Calculado do
Motor
[18] [1630] Tensão
do Barramento
CC
[19] [1634]
Temperatura
do Dissip. de
Calor
[20] [1635] Térmico
do Inversor
[21] [1638] Estado
do
Controlador
do SL
[22] [1650]
Referência
Externa
[23] [1652]
Feedback
[unidade]
[24] [1660] Entrada
Digital 18, 19,
27, 33
8-43 Conguração de Leitura do PCD
Selecione os parâmetros que serão designados aos PCDs dos
telegramas. O número de PCDs disponíveis depende do tipo de
telegrama. Os PCDs contêm os valores de dados reais dos
parâmetros selecionados.
Insira até 16 diferentes mapeamentos predenidos de 0 a 15
neste parâmetro, usando programação de matriz. Se este
parâmetro estiver ativo, os endereços 2910 a 2925 representam
valores dos 16 parâmetros. Se este parâmetro não estiver ativo,
os endereços 2910 e 2911 serão usados como registro de status
word e valor real principal. Os endereços 2912 a 2925 são
reservados.
Option: Funcão:
[25] [1661] Cong
Interr. do
Terminal 53
[26] [1662] Entrada
Analógica 53
(V)
[27] [1663] Cong
Interr. do
Terminal 54
[28] [1664] Entrada
analógica 54
[29] [1665] Saída
Analógica 42
[ mA]
[30] [1671] Saída
do Relé [bin]
[31] [1672]
Contador A
[32] [1673]
Contador B
[33] [1690] Alarm
Word
[34] [1692]
Warning Word
[35] [1694] Status
Word
Estendida
[38] [1622] Torque
[%]
[41] [1657]
Feedback
[RPM]
[42] [1679] Analog
Output 45
[mA]
[43] [1617] Speed
[RPM]
[44] [1666] Digital
Output
Descrições do Parâmetro
44
98 Danfoss A/S © 12/2018 Todos os direitos reservados. MG06C828
VLT® AutomationDrive FC 360
 Loading...
Loading...