

Technické údaje
VLT® AutomationDrive FC 302 s integrovaným regulátorem
pohybu – pro aplikace s polohováním a synchronizací
Nicméně výkon bezsnímačového řízení
indukčních motorů postačuje v případě
méně náročných aplikací.
S pomocí IMC ušetříte čas a náklady:
nProtože není zapotřebí žádné rozsáhlé
programování a stačí méně komponent,
zkracuje se doba přípravy, instalace a
uvedení do provozu.
nPři bezsnímačovém řízení ušetříte další
náklady na zařízení zpětné vazby, kabeláž
a instalaci.
nAbyste ušetřili náklady na čidlo výchozí
Objevte přesné řízení polohování a synchronizace
v moderním tanci.
polohy a kabeláž, použijte funkci „návrat
do výchozí polohy na úrovni momentu“
– tzv. „homing“.
Dosáhněte vysoce přesného polohování
a synchronizace jednoduše jen pomocí
měniče kmitočtu. Díky funkci IMC
(Integrated Motion Controller) nahradí
měnič VLT® AutomationDrive FC 302
komplexnější regulátory polohování a
synchronizace a ušetří čas i náklady.
Operace polohování a synchronizace se
obvykle provádějí pomocí servopohonů
nebo regulátoru pohybu. Nicméně řada
těchto aplikací nevyžaduje tak vysokou
dynamiku, kterou nabízejí servopohony.
Proto představuje měnič FC 302 s funkcí
IMC hospodárnou, ale výkonnou alternativu
k servopohonu v aplikacích polohování
a synchronizace s jednou osou.
Bez inkrementálního čidla
– ušetříte náklady
a snížíte složitost
IMC lze použít v řadě aplikací, které byly
dosud řešeny pomocí servopohonů,
například:
Řešení IMC poskytuje snadné
a bezpečné nastavení:
nKonfigurace se provádí prostřednictvím
nOtočné stoly
n Řezačky
n Balicí stroje
nMůžete přidat další funkce pomocí
Měnič FC 302 můžete použít k řízení
indukčního motoru nebo motoru s
permanentním magnetem v režimu zpětné
nPokud potřebujete znovu vyrovnat
vazby od motoru nebo bez ní – bez
nutnosti dalšího technického vybavení. Při
bezsnímačovém řízení (bez zpětné vazby
od motoru) se nejlepšího výkonu dosáhne
s motorem s permanentním magnetem.
Funkce Výhoda
Funkce řízení pohybu integrovaná do měniče
kmitočtu
Není zapotřebí žádné inkrementální čidlo
ani jeho kabeláž
Žádný servopohon
Konfigurace prostřednictvím parametrů
Synchronizace výchozí polohy
– Obnovení kalibrace při každém cyklu
Návrat do výchozí polohy na úrovni momentu
– Žádné čidlo
– Ušetříte náklady a čas vynaložené na další
komponenty
– Nižší nákupní cena díky menšímu počtu
komponent
– Robustnější instalace
– Zkrácená doba elektrické a mechanické instalace
– Snadnější a rychlejší nastavení
– Bez nutnosti rozsáhlého programování
– Nižší nákupní cena
– Bezpečný výsledek
– Úspora času
– Zabránění složitosti
– Minimalizace rizika chyb spojených s rozsáhlým
programováním
Trvale vysoká úroveň přesnosti v systémech
–
se skluzem
– Ušetříte náklady na pořízení, instalaci
a údržbu dalšího vybavení
parametrů, není zapotřebí žádné
rozsáhlé programování. Omezením
složitosti se minimalizuje riziko chyb.
Inteligentního regulátoru provozu (SLC),
který je s IMC plně kompatibilní.
výchozí polohu během provozu, použijte
funkci „návrat do výchozí polohy –
synchronizace“.
www.danfoss.com/imc
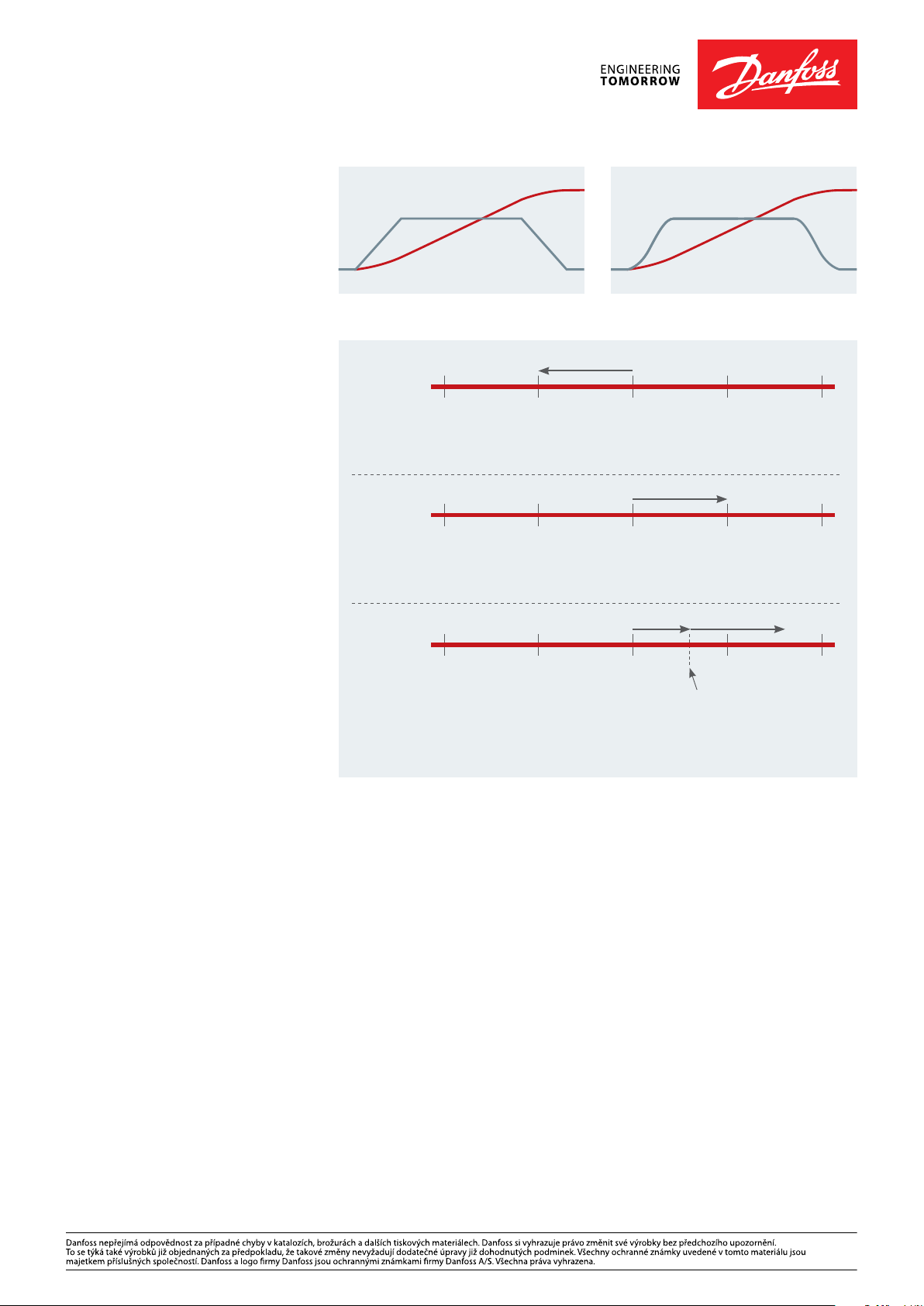
Polohování
V režimu polohování ovládá měnič pohyb
na určitou vzdálenost (relativní polohování)
nebo k určité cílové poloze (absolutní
polohování). Měnič kmitočtu vypočítá profil
pohybu na základě cílové polohy, žádané
hodnoty otáček a nastavení rampy
(viz příklady na obr. 1 a 2 napravo).
Existují 3 typy polohování pomocí různých
referenčních hodnot pro definování
cílové polohy:
n Absolutní nastavení polohy
Cílová poloha je relativní vůči
definovanému nulovému bodu stroje.
n Relativní nastavení polohy
Cílová poloha je relativní vůči skutečné
poloze stroje.
n Nastavení polohy pomocí
dotykového čidla
Cílová poloha je relativní vůči signálu
na digitálním vstupu.
Na obrázku (obr. 3) je vidět různá výsledná
poloha s nastavenou cílovou polohou
(referenční) 1000 a počáteční polohou
2000 pro jednotlivé typy polohování.
Synchronizace
V režimu synchronizace sleduje měnič
kmitočtu polohu master; více měničů
kmitočtu může sledovat stejnou polohu
master. Signál master může být externí
signál např. z inkrementálního čidla, virtuální
signál master generovaný měničem
kmitočtu nebo polohy master přenášené
pomocí komunikační sběrnice Fieldbus.
Převodový poměr a posunutí polohy lze
nastavit pomocí parametru.
Návrat do výchozí polohy
Při bezsnímačovém řízení a režimu uzavřené
smyčky s návratem inkrementálního čidla
do výchozí polohy je potřeba vytvořit
referenční hodnotu pro fyzickou polohu
PolohaPoloha
Otáčky Otáčky
Obr. 1. Profil pohybu s lineárními rampami Obr. 2. Profil pohybu s S-rampami
Absolutní
0 1000 2000 3000 4000
Při absolutním polohování se měnič pohybuje dozadu z počáteční polohy 2000
do absolutní polohy 1000 vztažené k 0.
Relativní
0 1000 2000 3000 4000
Při relativním polohování se měnič pohybuje dopředu na vzdálenost 1000
z počáteční polohy 2000 s koncem v poloze 3000.
Dotykové
čidlo
0 1000 2000 3000 4000
Dotykové čidlo
Při nastavení polohy pomocí dotykového čidla se měnič začne pohybovat dopředu
z počáteční polohy 2000, detekuje dotykové čidlo a pohybuje se dopředu na
vzdálenost 1000 z polohy dotykového čidla.
Obr. 3. IMC podporuje 3 režimy polohování
stroje po zapnutí. Je možné vybírat
z několika funkcí návratu do výchozí
polohy s čidlem nebo bez něho. Funkci
synchronizace výchozí polohy lze použít k
trvalému vyrovnání výchozí polohy během
provozu, když v systému existuje určitý
skluz. Například v případě bezsnímačového
řízení s indukčním motorem nebo v případě
skluzu v mechanické převodovce.
DKDD.PFF.300.A5.48 © Copyright Danfoss Drives | 2020.09
 Loading...
Loading...