


MAKING MODERN LIVING POSSIBLE
Design Guide
VLT® AutomationDrive FC 301/302
0,25–75 kW
www.danfoss.com/drives

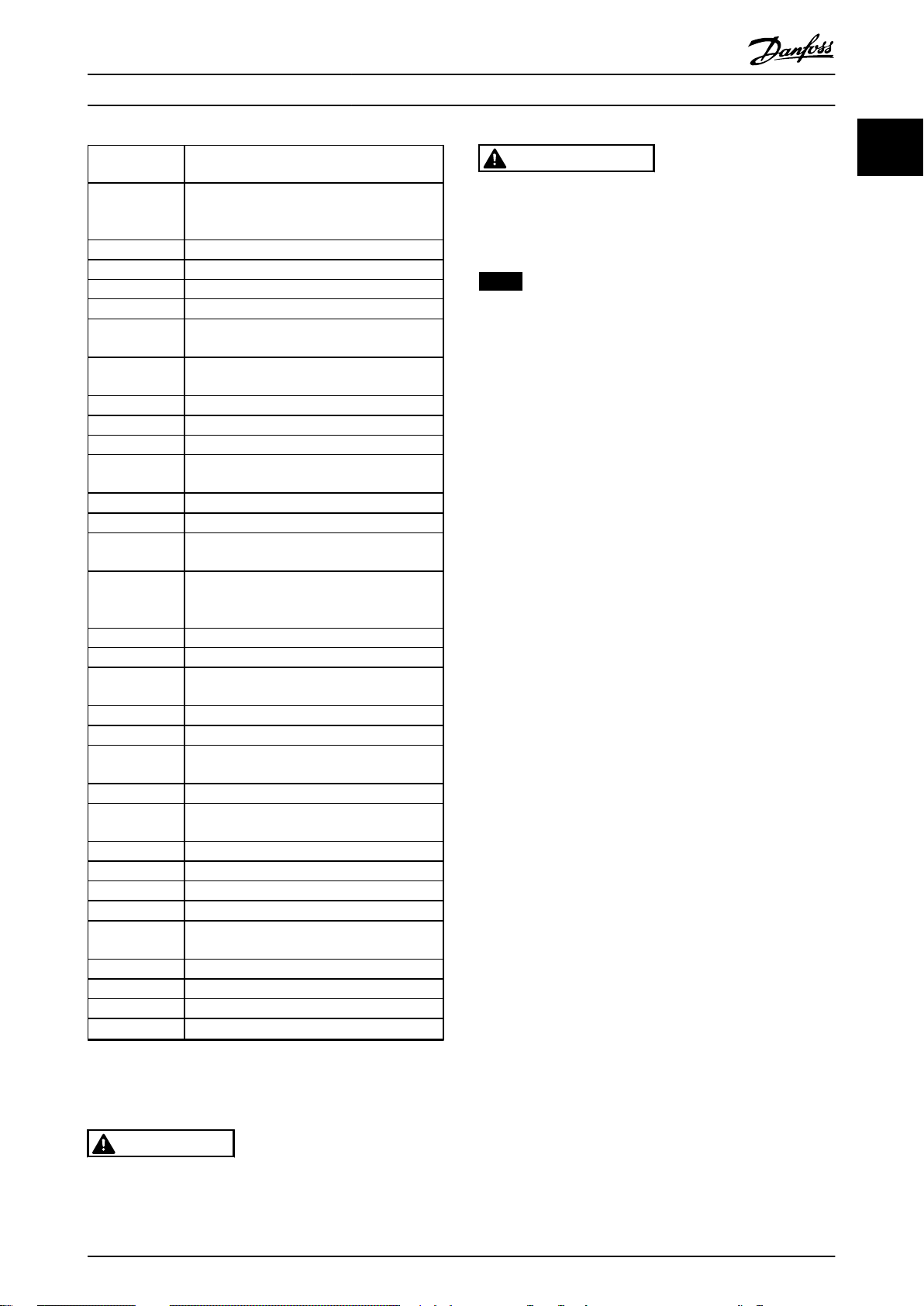
Innehåll Design Guide
Innehåll
1 Inledning
1.1 Syftet med Design Guide
1.2 Ytterligare dokumentation
1.3 Förkortningar, symboler och konventioner
1.4 Definitioner
1.5 Dokument- och programversion
1.6 Överensstämmelse med föreskrifter
1.6.1 CE-märkning 10
1.6.1.1 Lågspänningsdirektivet 10
1.6.1.2 EMC-direktivet 10
1.6.1.3 Maskindirektivet 11
1.6.2 Uppfyller UL 11
1.6.3 Uppfyller C-tick 11
1.6.4 Uppfyller Marine 11
1.7 Instruktion för avfallshantering
1.8 Säkerhet
2 Säkerhet
8
8
8
8
9
10
10
11
11
12
2.1 Säkerhetssymboler
2.2 Behörig personal
2.3 Säkerhetsåtgärder
3 Grundläggande driftprinciper
3.1 Allmänt
3.2 Driftsbeskrivning
3.3 Driftsekvens
3.3.1 Likriktardelen 14
3.3.2 Mellanliggande del 14
3.3.3 Växelriktardel 14
3.3.4 Bromstillval 14
3.3.5 Lastdelning 15
3.4 Styrgränssnitt
3.5 Kopplingsschema
3.6 Regulatorer
3.6.1 Styrprincip 18
3.6.2 FC 301 kontra FC 302 Styrprincip 19
3.6.3 Styrstruktur i VVC
plus
12
12
12
14
14
14
14
15
16
18
20
3.6.4 Styrstruktur i Flux utan återkoppling (endast FC 302) 21
3.6.5 Styrstruktur i Flux med motoråterkoppling (endast FC 302) 22
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 1
Innehåll Design Guide
3.6.6 PID 23
3.6.6.1 Varvtal PID-styrning 23
3.6.6.2 Finjustering av PID-varvtalsreglering 26
3.6.6.3 Process-PID-styrning 27
3.6.6.4 Avancerad PID-reglering 28
3.6.7 Intern strömreglering i VVC
3.6.8 Lokalstyrning (Hand On) och Fjärrstyrning (Auto On) 29
plus
-läge 28
3.7 Referenshantering
3.7.1 Referenser 30
3.7.2 Referensgränser 32
3.7.3 Skalning av förinställda referenser och bussreferenser 33
3.7.4 Skalning av analog referens och återkoppling och pulsreferens och pulsåterkoppling 33
3.7.5 Dödband kring noll 34
4 Produktfunktioner
4.1 Automatiserade driftfunktioner
4.1.1 Kortslutningsskydd 38
4.1.2 Överspänningsskydd 38
4.1.3 Detektering av motorfas saknas 39
4.1.4 Detektering av nätfasobalans 39
4.1.5 Slå på utgången 39
4.1.6 Överbelastningsskydd 39
4.1.7 Låst rotor-funktion 39
4.1.8 Automatisk nedstämpling 39
30
38
38
4.1.9 Automatisk energioptimering 40
4.1.10 Automatisk switchfrekvensmodulering 40
4.1.11 Automatisk nedstämpling för hög bärfrekvens 40
4.1.12 Prestanda vid effektfluktuationer 40
4.1.13 Resonansdämpning 40
4.1.14 Temperaturstyrda fläktar 40
4.1.15 EMC-överensstämmelse 40
4.1.16 Galvanisk isolation av styrplintar 40
4.2 Anpassade tillämpningsfunktioner
4.2.1 Automatisk motoranpassning 41
4.2.2 Termiskt motorskydd 41
4.2.3 Nätavbrott 41
4.2.4 Inbyggd PID-regulator 42
4.2.5 Automatisk omstart 42
4.2.6 Flygande start 42
4.2.7 Fullt moment med reducerad hastighet 42
41
2 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07
Innehåll Design Guide
4.2.8 Frekvenshopp 42
4.2.9 Förvärmning av motor 42
4.2.10 Fyra programmerbara inställningar 42
4.2.11 Dynamisk bromsning 43
4.2.12 Styrning av mekanisk broms utan återkoppling 43
4.2.13 Mekanisk bromsstyrning med återkoppling/mekanisk broms vid lyft 44
4.2.14 Smart Logic Control (SLC) 45
4.2.15 Säkert vridmoment av 46
4.3 Danfoss VLT® FlexConcept
®
46
5 Systemintegrering
5.1 Omgivande miljöförhållanden
5.1.1 Fukt 47
5.1.2 Temperatur 47
5.1.3 Temperatur och kylning 47
5.1.4 Manuell nedstämpling 48
5.1.4.1 Nedstämpling för drift vid lågt varvtal 48
5.1.4.2 Nedstämpling för lågt lufttryck 48
5.1.5 Ljudnivå 49
5.1.6 Vibrationer och stötar 49
5.1.7 Aggressiva miljöer 49
5.1.7.1 Gaser 49
5.1.7.2 Exponering för damm 50
5.1.7.3 Omgivningar med explosionsrisk 50
5.1.8 Underhåll 51
5.1.9 Lagring 51
5.2 Allmänt om EMC
47
47
52
5.2.1 EMC-testresultat 53
5.2.2 Emissionskrav 54
5.2.3 Immunitetskrav 54
5.2.4 Motorisolering 55
5.2.5 Lagerströmmar i motorn 56
5.3 Nätstörningar/Övertoner
5.3.1 Övertonseffekter i ett strömdistributionssystem 57
5.3.2 Övertonsbegränsningar, standard och krav 57
5.3.3 Övertonsbegränsning 58
5.3.4 Övertonsberäkning 58
5.4 Galvanisk isolation (PELV)
5.4.1 PELV – Protective Extra Low Voltage 58
5.5 Bromsfunktioner
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 3
56
58
59
Innehåll Design Guide
5.5.1 Val av bromsmotstånd 59
6 Produktspecifikationer
6.1 Elektriska data
6.1.1 Nätförsörjning 200–240 V 62
6.1.2 Nätförsörjning 380–500 V 64
6.1.3 Nätförsörjning 525–600 V (endast FC 302) 67
6.1.4 Nätförsörjning 525–690 V (endast FC 302) 70
6.2 Allmänna specifikationer
6.2.1 Nätström 72
6.2.2 Motoreffekt och motordata 72
6.2.3 Omgivande miljöförhållanden 73
6.2.4 Kabelspecifikationer 73
6.2.5 Styrning av ingång/utgång och styrdata 73
6.2.6 Nedstämpling för omgivningstemperaturer 77
6.2.6.1 Nedstämpling för omgivningstemperatur, kapslingstyp A 77
6.2.6.2 Nedstämpling för omgivningstemperaturer, kapslingstyp B 77
6.2.6.3 Nedstämpling för omgivningstemperatur, kapslingstyp C 80
6.2.7 Uppmätta värden för dU/dt-testning 82
62
62
72
6.2.8 Verkningsgrad 85
6.2.9 Ljudnivå 85
7 Så här beställer du
7.1 Drive Configurator
7.1.1 Typkod 86
7.1.2 Språk 88
7.2 Beställningsnummer
7.2.1 Tillval och tillbehör 89
7.2.2 Reservdelar 91
7.2.3 Tillbehörspåsar 91
7.2.4 VLT AutomationDrive FC 301 92
7.2.5 Bromsmotstånd för FC 302 94
7.2.6 Andra flat pack-bromsmotstånd 98
7.2.7 Övertonsfilter 100
7.2.8 Sinusfilter 102
7.2.9 dU/dt-filter 104
86
86
89
8 Mekanisk installation
8.1 Säkerhet
8.2 Dimensioner
8.2.1 Mekanisk montering 109
4 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07
106
106
107
Innehåll Design Guide
8.2.1.1 Avstånd 109
8.2.1.2 Väggmontering 109
9 Elinstallation
9.1 Säkerhet
9.2 Kablar
9.2.1 Åtdragningsmoment 112
9.2.2 Ingångshål 113
9.2.3 Åtdragning av skydd efter att anslutningar upprättats 117
9.3 Nätanslutning
9.3.1 Säkringar och maximalbrytare 121
9.3.1.1 Säkringar 121
9.3.1.2 Rekommendationer 121
9.3.1.3 CE-överensstämmelse 122
9.3.1.4 Uppfyller UL 125
9.4 Motoranslutning
9.5 Skydd mot läckström till jord
9.6 Ytterligare anslutningar
9.6.1 Relä 134
9.6.2 Frånskiljare och kontaktorer 135
111
111
112
117
130
133
134
9.6.3 Lastdelning 136
9.6.4 Bromsmotstånd 136
9.6.5 PC-programvara 136
9.6.5.1 MCT 10 137
9.6.5.2 MCT 31 137
9.6.5.3 Programvaran Harmonic Calculation Software (HCS) 137
9.7 Ytterligare motorinformation
9.7.1 Motorkabel 137
9.7.2 Ansluta flera motorer 138
9.8 Säkerhet
9.8.1 Test för hög spänning 140
9.8.2 EMC-jordning 140
9.8.3 ADN-korrekt installation 140
10 Tillämpningsexempel
10.1 Vanliga tillämpningar
10.1.1 Drivsystem med återkoppling 146
10.1.2 Programmering av Momentgräns och stopp 146
137
140
141
141
10.1.3 Programmering av varvtalsreglering 147
11 Tillval och tillbehör
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 5
149
Innehåll Design Guide
11.1 Kommunikationstillval
11.2 I/O, återkopplings- och säkerhetstillval
11.2.1 VLT® modul för generellt I/O-kort MCB 101 149
11.2.2 VLT® Pulsgivartillval MCB 102 151
11.2.3 VLT® resolver-tillval MCB 103 153
11.2.4 VLT® reläkort MCB 105 155
11.2.5 VLT® Safe PLC-gränssnittstillval MCB 108 157
11.2.6 VLT® PTC-termistorkort MCB 112 158
11.2.7 VLT® Extended Relay Card MCB 113 159
11.2.8 VLT® givaringångstillval MCB 114 161
11.2.9 VLT® Safe Option MCB 15x 162
11.2.10 VLT® C-tillvalsadapter MCF 106 166
11.3 Rörelsekontrolltillval
11.4 Tillbehör
11.4.1 Bromsmotstånd 168
11.4.2 Sinusfilter 168
11.4.3 dU/dt-filter 168
149
149
166
168
11.4.4 Common Mode-filter 168
11.4.5 Övertonsfilter 168
11.4.6 IP21/typ 1 kapslingssats 169
11.4.7 Fjärrmonteringssats för LCP 171
11.4.8 Monteringsfäste för kapslingstyp A5, B1, B2, C1 och C2 171
12 Installation och konfiguration av RS-485
12.1 Installation och inställning av
12.1.1 Översikt 174
12.2 Nätverksanslutning
12.3 Bussavslutning
12.4 Installation och konfiguration av RS-485
12.5 Översikt över FC-protokollet
12.6 Nätverkskonfiguration
12.7 FC-protokollets grundstruktur för meddelanden
12.7.1 Innehållet i ett tecken (en byte) 176
12.7.2 Telegramstruktur 176
12.7.3 Telegramlängd (LGE) 177
174
174
175
175
175
176
176
176
12.7.4 Frekvensomformarens adress (ADR) 177
12.7.5 Datakontrollbyte (BCC) 177
12.7.6 Datafältet 178
12.7.7 PKE-fältet 179
12.7.8 Parameternummer (PNU) 179
6 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07
Innehåll Design Guide
12.7.9 Index (IND) 179
12.7.10 Parametervärde (PWE) 180
12.7.11 Datatyper som stöds 180
12.7.12 Konvertering 180
12.7.13 Processord (PCD) 181
12.8 Exempel
12.8.1 Skriva ett parametervärde 181
12.8.2 Läsa ett parametervärde 181
12.9 Översikt över Modbus RTU
12.9.1 Antaganden 182
12.9.2 Vad användaren redan bör känna till 182
12.9.3 Översikt över Modbus RTU 182
12.9.4 Frekvensomformare med Modbus RTU 182
12.10 Nätverkskonfiguration
12.11 Grundstruktur för Modbus RTU-meddelanden
12.11.1 Frekvensomformare med Modbus RTU 183
12.11.2 Meddelandestruktur för Modbus RTU 183
12.11.3 Start-/stoppfält 183
12.11.4 Adressfält 183
12.11.5 Funktionsfält 184
12.11.6 Datafält 184
12.11.7 Fältet CRC-kontroll 184
181
182
182
183
12.11.8 Adressering av spolregister 184
12.11.9 Styra frekvensomformaren 185
12.11.10 Funktionskoder som stöds av Modbus RTU 186
12.11.11 Modbus--undantagskoder 186
12.12 Åtkomst till parametrar
12.12.1 Parameterhantering 186
12.12.2 Datalagring 186
12.12.3 IND (Index) 187
12.12.4 Textblock 187
12.12.5 Konverteringsfaktor 187
12.12.6 Parametervärden 187
12.13 Danfoss FC-styrprofil
12.13.1 Styrord enligt FC-profil (8-10 Styrprofil = FC-profile) 187
12.13.2 Statusord enligt FC-profil (STW) (8-10 Styrprofil = FC-profil) 189
12.13.3 Varvtalsreferens för buss 190
12.13.4 Styrord enligt PROFIdrive-profilen (CTW) 190
12.13.5 Statusord enligt PROFIdrive-profil (STW) 192
186
187
Index
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 7
194
Inledning Design Guide
1
1 Inledning
1.1 Syftet med Design Guide
Design Guide innehåller den information som krävs för
integrering av frekvensomformaren i en mängd olika
tillämpningar.
VLT® är ett registrerat varumärke.
1.2 Ytterligare dokumentation
Det finns ytterligare dokumentation som hjälper dig att
förstå frekvensomformarens avancerade funktioner,
programmering och överensstämmelse med krav.
Handboken innehåller detaljerade anvisningar för
•
hur du installerar och startar frekvensomformaren.
Programmeringshandboken innehåller detaljerad
•
information om hur du arbetar med parametrar
och många tillämpningsexempel.
Handboken för VLT
•
innehåller information om hur du använder
Danfoss frekvensomformare i funktionssäkerhetstillämpningar.
Du kan få tag på ytterligare dokumentation och
•
handböcker via Danfoss. Se danfoss.com/Product/
Literature/Technical+Documentation.htm för listor.
De beskrivna procedurerna gäller inte alltid helt
•
och fullt om du använder viss tillvalsutrustning.
Glöm inte att kontrollera de specifika krav som
beskrivs i instruktionerna som medföljer tillvalsutrustningen.
Kontakta en Danfoss-leverantör eller besök
www.danfoss.com om du vill ha ytterligare information.
1.3
Förkortningar, symboler och
konventioner
Konventioner
Numrerade listor används för procedurer.
Punktlistor används för annan information och för
beskrivning av illustrationer.
Kursiv text används för
hänvisningar
•
länk
•
fotnot
•
parameternamn, parametergruppens namn,
•
parameteralternativ
®
Säkert vridmoment av
60° AVM 60° Asynkron vektor modulering
A Ampere/AMP
AC Växelström
AD Frånluft
AI Analog ingång
AMA Automatisk motoranpassning
AWG American Wire Gauge
°C
CD Konstant urladdning
CM Common mode
CT Konstant moment
DC Likström
DI Digital ingång
DM Differential mode
D-TYP Beror på frekvensomformaren
EMC Elektromagnetisk kompatibilitet
ETR Elektronisk-termiskt relä
f
JOG
f
M
f
MAX
f
MIN
f
M,N
FC Frekvensomformare
g Gram
Hiperface
hk Hästkraft
HTL HTL-pulsgivarpulser (10–30 V) – högspännings-
Hz Hertz
I
I
I
I
I
kHz Kilohertz
LCP Lokal manöverpanel
lsb Den minst signifikanta biten (least significant
m Meter
mA Milliampere
MCM Mille Circular Mil
MCT Rörelsekontrollverktyg
mH Millihenry-induktans
min Minut
ms Millisekund
®
INV
LIM
M,N
VLT,MAX
VLT,N
Grader Celsius
Motorfrekvensen när joggfunktion aktiveras
Motorfrekvens
Den maximala utfrekvens som frekvensomformaren använder på denna utgång.
Den minimala motorfrekvensen från frekvensomformaren.
Nominell motorfrekvens
Hiperface® är ett registrerat varumärke som
tillhör Stegmann
transistorlogik
Nominell växelriktarutström
Strömgräns
Nominell motorström
Den maximala utströmmen
Den nominella utströmmen från frekvensomformaren
bit)
8 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07
Inledning
msb Den mest signifikanta biten (most significant
bit)
η
VLT
nF Nanofarad
NLCP Numerisk lokal manöverpanel (NLCP)
Nm Newtonmeter
n
s
Online-/offlineparametrar
P
br,cont.
PCB Kretskort
PCD Processdata
PELV Protective Extra Low Voltage
P
m
P
M,N
PM-motor Permanentmagnetmotor
Process-PID PID-regulatorn upprätthåller önskat varvtal,
R
br,nom
RCD Jordfelsbrytare
Regen Regenerativa plintar
R
min
RMS Effektivvärde
varv/minut Varv per minut
R
rec
s Sekund
SFAVM Stator Flux-orienterad Asynkron Vektor
STW Statusord
SMPS Strömförsörjning i switchläge
THD Total övertonsdistorsion
T
LIM
TTL TTL-pulsgivarpulser (5 V) – transistor-transis-
U
M,N
V Volt
VT variabelt moment
plus
VVC
Tabell 1.1 Förkortningar
Frekvensomformarens verkningsgrad
definierad som förhållandet mellan utgående
och ingående effekt
Synkront motorvarvtal
Ändringar av onlineparametrar aktiveras
omedelbart efter det att datavärdet ändrats.
Bromsmotståndets märkeffekt (genomsnittlig
effekt vid kontinuerlig bromsning)
Frekvensomformarens nominella uteffekt som
HÖ
Nominell motoreffekt
tryck, temperatur osv.
Det nominella (rekommenderade) motståndsvärdet som säkerställer en bromseffekt på
motoraxeln på 150/160 % under 1 minut.
Minsta tillåtna bromsmotståndsvärde enligt
frekvensomformaren
Bromsmotståndets motståndsvärde och
motstånd
Modulering
Momentgräns
torlogik
Nominell motorspänning
Voltage Vector Control
Design Guide
Följande symboler används i det här dokumentet:
VARNING
Indikerar en potentiellt farlig situation som kan leda till
dödsfall eller allvarliga personskador.
FÖRSIKTIGT
Indikerar en potentiellt farlig situation som kan leda till
mindre eller måttliga personskador. Symbolen kan också
användas för att uppmärksamma tillvägagångssätt som
inte är säkra.
OBS!
Indikerar viktig information, inklusive situationer som
kan leda till skador på utrustning eller egendom.
1.4 Definitioner
Utrullning
Motoraxeln är i fritt läge. Inget moment på motorn.
Bromsmotstånd
Bromsmotståndet är en modul som kan absorbera
bromseffekten som genereras vid regenerativ bromsning.
Denna regenerativa bromseffekt höjer mellankretsspänningen. En bromschopper ser till att effekten avsätts i
bromsmotståndet.
CT-kurva
Konstant moment används för tillämpningar med t.ex.
transportband, förträngningspumpar och kranar.
Initiering
Om initiering utförs (14-22 Driftläge) återställs frekvensomformaren till fabriksinställningarna.
Intermittent driftcykel
Ett intermittent driftvärde avser en serie driftcykler. Varje
cykel består av en period med och en period utan
belastning. Driften kan vara endera periodisk eller ickeperiodisk.
Meny
Spara parameterinställningarna i fyra menyer. Byt mellan
de fyra parameterinställningarna och redigera en
uppsättning medan en annan uppsättning är aktiv.
Eftersläpningskompensation
Frekvensomformaren kompenserar eftersläpningen med ett
frekvenstillskott som följer den uppmätta motorbelastningen vilket håller motorvarvtalet närmast konstant.
Smart Logic Control (SLC)
SLC är en sekvens av användardefinierade åtgärder som
utförs när motsvarande användardefinierad händelse
utvärderas som sann av Smart Logic Controller.
(Parametergrupp 13-** Smart Logic.
FC-standardbuss
Inkluderar RS-485-buss med FC-protokoll eller MCprotokoll. Se 8-30 Protokoll.
Termistor
Ett temperaturberoende motstånd som placeras där
temperaturen ska övervakas (frekvensomformare eller
motor).
1
1
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 9
Inledning
Design Guide
1
Tripp
Ett tillstånd som uppstår vid felsituationer, exempelvis när
frekvensomformaren utsätts för överhettning eller när
frekvensomformaren skyddar motorn, processen eller
mekanismen. Omstart förhindras tills orsaken till felet har
försvunnit och trippläget annulleras genom återställning
eller, i vissa fall, programmeras för automatisk återställning.
Tripp får inte användas för personlig säkerhet.
Tripp låst
Ett läge som uppstår vid felsituationer när frekvensomformaren skyddar sig själv, och som kräver fysiska ingrepp,
exempelvis om frekvensomformaren utsatts för
kortslutning vid utgången. En fastlåst tripp kan annulleras
genom att slå av nätspänningen, eliminera felorsaken och
ansluta frekvensomformaren på nytt. Omstart förhindras
tills trippläget annulleras genom återställning eller, i vissa
fall, genom programmerad automatisk återställning. Tripp
får inte användas för personlig säkerhet.
VT-kurva
Variabel momentkurva. Används för pumpar och fläktar.
Effektfaktor
Den sanna effektfaktorn (lambda) tar alla övertoner med i
beräkningen och är alltid mindre än effektfaktorn (cos-fi)
som endast beaktar de första övertonerna för ström och
spänning.
P
kW
Uλ x Iλ x
cos
cosϕ=
Cosfi kallas även förskjuten effektfaktor.
Både lambda och cosfi för Danfoss VLT®-frekvensomformare anges i kapitel 6.2.1 Nätström.
Effektfaktorn indikerar i vilken grad frekvensomformaren
belastar nätförsörjningen.
Ju lägre effektfaktor, desto högre I
effekt.
Dessutom visar en hög effektfaktor att övertonsströmmarna är låga.
Alla Danfoss-frekvensomformare har inbyggda likströmsspolar i DC-bussen för att ge hög effektfaktor och minska
THD på nätet.
1.5
Denna handbok granskas och uppdateras regelbundet.
Förslag på förbättringar tas tacksamt emot. Tabell 1.2 visar
dokumentversionen och motsvarande programversion.
Utgåva Anmärkningar Programversion
MG33BFxx Ersätter MG33BExx 6,72
Tabell 1.2 Dokument- och programversion
=
P
kVA
Dokument- och programversion
Uλ x Iλ
ϕ
vid samma kW-
RMS
1.6
Överensstämmelse med föreskrifter
Frekvensomformare är konstruerade i överensstämmelse
med de direktiv som beskrivs i detta avsnitt.
1.6.1 CE-märkning
CE-märket (Conformité Européenne) anger att produkttillverkaren följer alla gällande EU-direktiv. De tre EU-direktiv
som gäller utformning och tillverkning av frekvensomformare är lågspänningsdirektivet, EMC-direktivet, och (för
enheter med integrerad säkerhetsfunktion) maskindirektivet.
CE-märkningen är avsedd att undanröja tekniska hinder för
den fria rörligheten mellan EU- och EFTA-länder på den
inre marknaden. CE-märkningen avser inte produktens
kvalitet. Märkningen ger inte heller någon information om
produktens tekniska specifikationer.
1.6.1.1
Frekvensomformare klassificeras som elektroniska
komponenter och måste vara CE-märkta i enlighet med
lågspänningsdirektivet. Direktivet omfattar all elektrisk
utrustning avsedd för 50–1000 V AC och 75–1600 V DC.
Direktivet gör gällande att utrustningen måste utformas på
ett sådant sätt att säkerhet och hälsa för personer och djur
inte riskeras, liksom materiella tillgångar, när utrustningen
installeras korrekt, underhålls ordentligt och används som
avsett. Danfoss CE-märkning uppfyller lågspänningsdirektivet och en försäkran om överensstämmelse med
direktivet kan utfärdas på begäran.
1.6.1.2
Elektromagnetisk kompatibilitet (EMC) innebär att elektromagnetiska störningar mellan apparater inte påverkar
deras prestanda negativt. Det grundläggande skyddskravet
i EMC-direktivet 2004/108/EG anger att enheter som
genererar elektromagnetiska störningar (EMI), eller vars
drift kan påverkas av EMI, måste vara konstruerade för att
begränsa generering av elektromagnetiska störningar och
ska ha en lämplig immunitetsklass för EMI när de
installeras korrekt, underhålls och används som avsett.
En frekvensomformare kan användas som fristående enhet
eller som en del av en mer omfattande anläggning.
Enheter som används fristående eller som en del av ett
system måste vara CE-märkta. System måste inte vara CEmärkta, men måste uppfylla EMC-direktivets
grundläggande skyddskrav.
Lågspänningsdirektivet
EMC-direktivet
10 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07
Inledning Design Guide
1.6.1.3 Maskindirektivet
1.7
Instruktion för avfallshantering
1
1
Frekvensomformare klassificeras som elektroniska
komponenter som lyder under lågspänningsdirektivet, men
frekvensomformare med integrerad säkerhetsfunktion
måste uppfylla maskindirektivet 2006/42/EG. Frekvensomformare som saknar säkerhetsfunktion omfattas inte av
maskindirektivet. Om en frekvensomformare integreras i ett
maskinsystem, ger Danfoss information om vilka säkerhetsbestämmelser som gäller för frekvensomformaren.
Maskindirektivet 2006/42/EG gäller maskiner som består av
ett antal sammankopplade komponenter eller enheter
varav minst en kan utföra mekanisk rörelse. Direktivet gör
gällande att utrustningen måste utformas på ett sådant
sätt att säkerhet och hälsa för personer och djur inte
riskeras, liksom materiella tillgångar, när utrustningen
installeras korrekt, underhålls ordentligt och används som
avsett.
När frekvensomformare används i maskiner med minst en
rörlig del, måste maskintillverkaren tillhandahålla en
deklaration som informerar om att maskinen uppfyller alla
relevanta lagar och säkerhetsföreskrifter. Danfoss CEmärkningar uppfyller maskindirektivet för
frekvensomformare som har en integrerad säkerhetsfunktion och tillhandahåller en försäkran om
överensstämmelse på begäran.
Uppfyller UL
1.6.2
Utrustning som innehåller elektriska
komponenter får inte hanteras på samma
sätt som hushållsavfall.
Sortera det separat i enlighet med
gällande lokal lagstiftning.
Tabell 1.3 Instruktion för avfallshantering
1.8 Säkerhet
Frekvensomformare innehåller högspänningskomponenter
och kan ge livshotande skador om de hanteras felaktigt.
Enbart utbildade tekniker får installera och köra utrustningen. Inget reparationsarbete får utföras utan att
frekvensomformaren har gjorts strömlös och att den
föreskrivna tidsperioden har förflutit (så att den lagrade
energin kan avges).
Se Handboken, som levereras med enheten och finns
tillgänglig online för:
urladdningstid och
•
detaljerade säkerhetsanvisningar och varningar.
•
För att frekvensomformaren ska kunna köras säkert måste
alla säkerhetsföreskrifter och säkerhetsmeddelanden följas.
UL-klassad
Bild 1.1 UL
OBS!
Frekvensomformare med kapslingstyp T7 (525–690 V) är
inte certifierade för UL.
Frekvensomformaren uppfyller kraven i UL508C. Mer
information finns i avsnittet Termiskt motorskydd i Design
Guide.
1.6.3
Uppfyller C-tick
1.6.4 Uppfyller Marine
Mer information om överensstämmelse med den
europeiska överenskommelsen om transport av farligt gods
(ADN) finns i kapitel 9.8.3 ADN-korrekt installation.
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 11
Säkerhet
Design Guide
2 Säkerhet
22
2.1 Säkerhetssymboler
Följande symboler används i det här dokumentet:
VARNING
Indikerar en potentiellt farlig situation som kan leda till
dödsfall eller allvarliga personskador.
FÖRSIKTIGT
Indikerar en potentiellt farlig situation som kan leda till
mindre eller måttliga personskador. Symbolen kan också
användas för att uppmärksamma tillvägagångssätt som
inte är säkra.
OBS!
Indikerar viktig information, inklusive situationer som
kan leda till skador på utrustning eller egendom.
VARNING
OAVSIKTLIG START
När frekvensomformaren är ansluten till
växelströmsnätet kan motorn starta när som helst, vilket
orsakar risk för dödsfall, allvarliga personskador eller
materiella skador. Motorn starta med hjälp av en extern
brytare, ett seriellt buss-kommando, en ingångsreferenssignal från LCP, eller ett uppklarat feltillstånd.
1. Koppla ur frekvensomformaren från nätanslutningen när hänsyn till personsäkerhet gör det
nödvändigt att undvika oavsiktlig motorstart.
2. Tryck på [Av] på LCP, innan du programmerar
parametrarna.
3. Frekvensomformaren, motorn och all annan
elektrisk utrustning måste vara driftklara när
frekvensomformaren ansluts till
växelströmsnätet.
2.2 Behörig personal
Korrekt och säker transport, lagring, installation, styrning
och underhåll krävs för problemfri och säker drift av
frekvensomformaren. Endast behörig personal får installera
och använda denna utrustning.
Behörig personal definieras som utbildade medarbetare
med behörighet att installera, driftsätta och underhålla
utrustning, system och kretsar i enlighet med gällande
lagar och bestämmelser. Dessutom måste personalen vara
införstådd med de instruktioner och säkerhetsåtgärder som
beskrivs I detta dokument.
2.3
Säkerhetsåtgärder
VARNING
HÖG SPÄNNING
Frekvensomformare innehåller hög spänning när de är
anslutna till växelströmsnätet. Om installation, driftsättning och underhåll inte utförs av utbildad personal
kan det leda till dödsfall eller allvarliga personskador.
Installation, driftsättning och underhåll får
•
endast utföras av behörig personal.
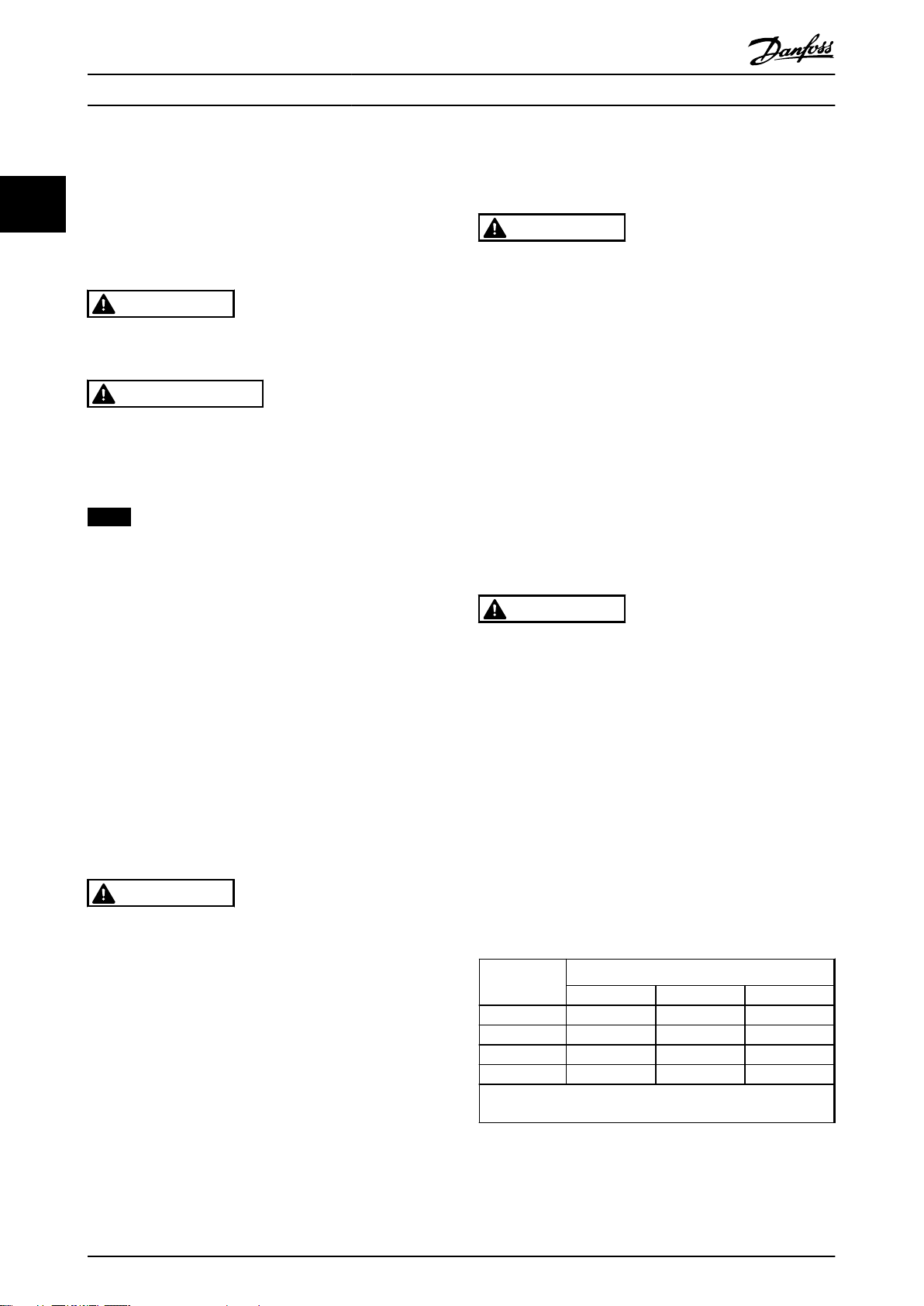
VARNING
URLADDNINGSTID
Frekvensomformaren har DC-busskondensatorer som kan
behålla sin spänning även när nätspänningen kopplats
från. Om du inte väntar den angivna tiden efter att
strömmen bryts innan service eller reparationsarbete
påbörjas kan det leda till dödsfall eller allvarliga
personskador.
1. Stoppa motorn.
2. Koppla från nätspänningen, permanentmagnetmotorer och externa DC-bussförsörjningar,
inklusive reservbatterier, UPS och DC-bussanslutningar till andra frekvensomformare.
3. Vänta tills kondensatorerna är helt urladdade
innan underhåll eller reparationsarbete utförs.
Information om väntetiderna finns i Tabell 2.1.
Spänning [V] Minsta väntetid (minuter)
4 7 15
200-240 0,25–3,7 kW 5,5–37 kW
380-500 0,25–7,5 kW 11–75 kW
525-600 0,75–7,5 kW 11–75 kW
525-690 1,5–7,5 kW 11–75 kW
Högspänning kan finnas kvar även om varningslysdioderna är
släckta.
Tabell 2.1 Urladdningstid
12 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07
Säkerhet Design Guide
VARNING
VARNING FÖR LÄCKSTRÖM
Läckström överstiger 3,5 mA. Om frekvensomformaren
inte jordas korrekt kan det leda till dödsfall eller
allvarliga personskador.
En certifierad elinstallatör ska säkerställa att
•
utrustningen har korrekt jordning.
VARNING
FARLIG UTRUSTNING
Kontakt med roterande axlar och elektrisk utrustning kan
leda till dödsfall eller allvarliga personskador.
Säkerställ att endast utbildad och behörig
•
personal utför installation, driftsättning och
underhåll.
Kontrollera att elektriskt arbete följer gällande
•
nationella och lokala elsäkerhetsföreskrifter.
Följ procedurerna i denna handbok.
•
2 2
FÖRSIKTIGT
ROTERANDE DELAR
Oavsiktlig rotation av permanentmagnetmotorer utgör
en risk för personskador och materiella skador.
Säkerställ att permanentmagnetmotorer
•
blockeras för att förhindra oavsiktlig rotation.
FÖRSIKTIGT
RISK FÖR FARA I HÄNDELSE AV INTERNT FEL
Risk för personskador om frekvensomformaren inte är
korrekt försluten.
Innan du kopplar på strömmen ska du
•
säkerställa att alla skyddskåpor sitter på plats
och är säkrade.
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 13
Grundläggande driftprincipe...
Design Guide
3 Grundläggande driftprinciper
3.1 Allmänt
33
Detta avsnitt innehåller en översikt över frekvensomformarens viktigaste delar och kretsar. Det beskriver interna
elektriska funktioner och signalbehandling. Det beskriver
också den interna styrstrukturen.
Dessutom beskrivs automatiserade funktioner och tillvalsfunktioner för frekvensomformaren, som kan användas för
att utforma kraftfulla driftsystem med sofistikerade
reglerings- och statusrapporteringsfunktioner.
3.2 Driftsbeskrivning
Frekvensomformaren ger en reglerad mängd växelström
från elnätet till en vanlig trefas-induktionsmotor för att
styra motorvarvtalet. Frekvensomformaren försörjer motorn
med variabel frekvens och spänning.
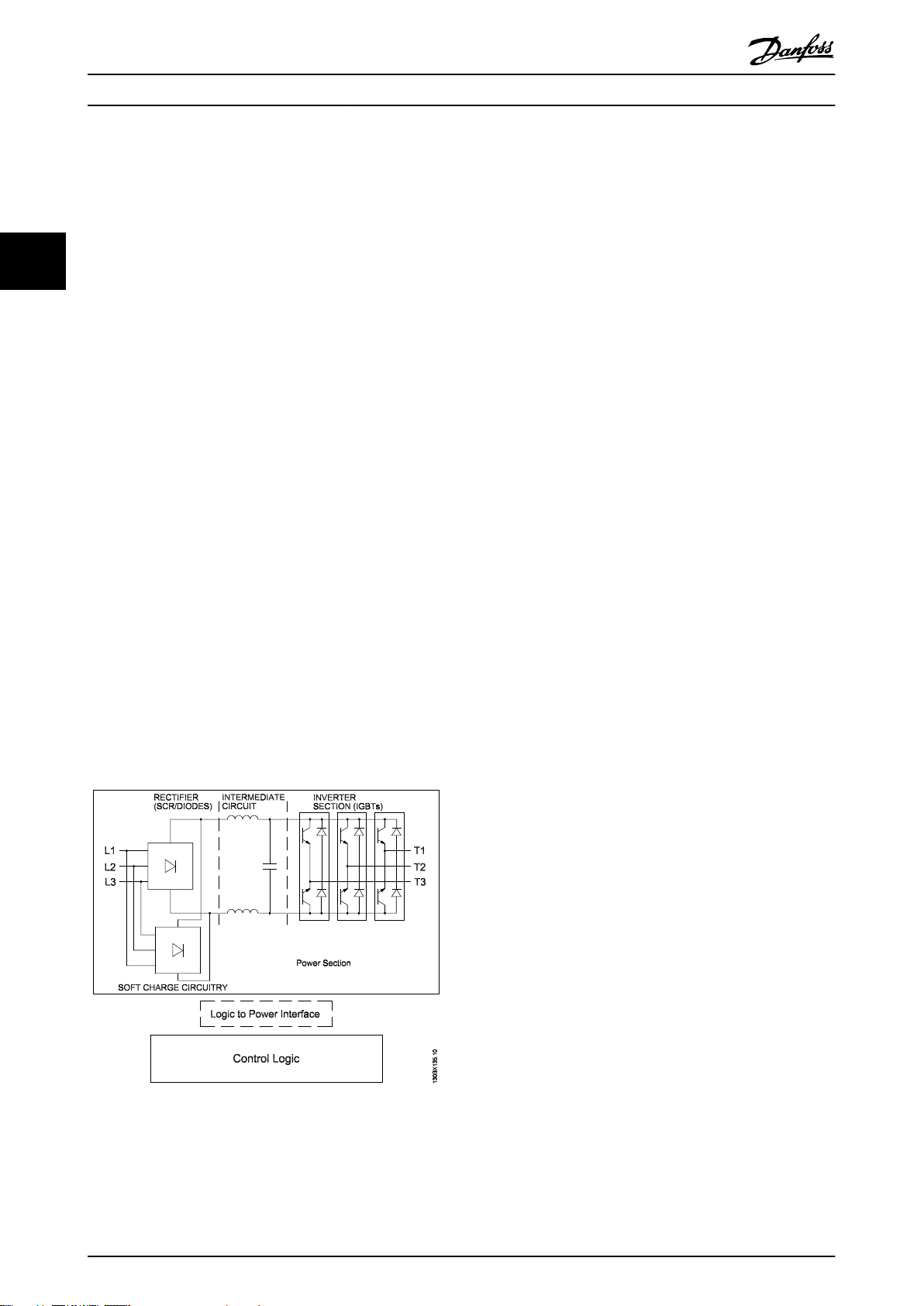
Frekvensomformaren består av fyra huvudmoduler.
Likriktare
•
Mellankrets
•
Växelriktare
•
Styrning och reglering
•
Avsnitten kapitel 3.3 Driftsekvens behandlar dessa moduler
mer utförligt och beskriver hur effekt- och styrsignaler rör
sig i frekvensomformaren.
3.3 Driftsekvens
3.3.1 Likriktardelen
När nätströmmen ansluts till frekvensomformaren för första
gången, går den in via ingångsplintarna (L1, L2 och L3)
och vidare till brytaren och/eller RFI-filtervalet, beroende
på hur enheten är konfigurerad.
3.3.2 Mellanliggande del
Efter likriktardelen passerar spänningen till den mellanliggande delen. Denna likriktade spänningen jämnas ut av
en sinusfilterkrets som består av DC-bussinduktorn och DCkondensatorbanken.
DC-bussinduktorn ger serieimpedans till varierande ström.
Detta underlättar den filtreringen och minskar övertonsstörningarna på ingångsväxelströmmens vågform som
normalt finns i likriktarkretsar.
Växelriktardel
3.3.3
I växelriktardelen börjar IGBT-modulerna att växla för att
skapa utgångsvågformen när ett körkommando och en
varvtalsreferens finns tillgängliga. Vågformen som
genereras av Danfoss VVC
ger optimal prestanda och minimala förluster i motorn.
plus
PWM-principen på styrkortet
Bild 3.1 Intern styrlogik
Bromstillval
3.3.4
För frekvensomformare som är utrustade med tillvalet
dynamisk broms, inkluderas en broms-IGBT tillsammans
med plint 81(R-) och 82(R+) för att ansluta ett externt
bromsmotstånd.
Ändamålet med broms-IGBT är att minska spänningen i
mellankretsen när den maximala spänningsgränsen
överskrids. Detta görs genom att växla det externt
monterade motståndet över DC-bussen för att ta bort
överskottslikspänning på busskondensatorerna. Överskottsspänning på DC-bussen uppstår vanligen när negativ
belastning orsakar att regenerativ energi sänds tillbaka till
DC-bussen. Detta inträffar till exempel när lasten driver
motorn och och får spänningen att återgå till DCbusskretsen.
14 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

Grundläggande driftprincipe... Design Guide
Att placera bromsmotståndet externt har fördelen att det
går att välja motstånd baserat på tillämpningens behov, så
att energin avsätts utanför manöverpanelen och frekvensomformaren skyddas mot överhettning om
bromsmotståndet överbelastas.
Broms-IGBT-växelsignalen kommer från styrkortet och
levereras till broms-IGBT via effektkortet och växelriktarkortet. Dessutom övervakar effekt- och styrkorten bromsIGBT och bromsmotståndsanslutningen avseende
kortslutning och överbelastning.
3.3.5 Lastdelning
Enheter med inbyggt lastdelningstillval innehåller plintarna
(+) 89 DC och (–) 88 DC. I frekvensomformaren ansluter
dessa plintar till DC-bussen framför DC-bussreaktorn och
busskondensatorerna.
Lastdelningsplintar kan användas med två olika konfigurationer.
Med den ena metoden används plintarna för att koppla
ihop flera frekvensomformares DC-busskretsar. På så sätt
kan en enhet som är i regenerativt läge dela sin
överskottsbusspänning med en annan enhet som kör en
motor. Lastdelning på detta sätt kan minska behovet av
externa dynamiska bromsmotstånd och samtidigt spara
energi. Teoretiskt är antalet enheter som kan anslutas på
detta sätt obegränsat, men alla enheter måste ha samma
märkspänning. Beroende på storlek och antal enheter kan
det dessutom vara nödvändigt att installera likströmsreaktorer och likströmssäkringar i DC-bussens anslutningar
och växelströmsreaktorer på nätet. Innan du genomför en
sådan konfiguration måste du göra specifika överväganden
och kontakta en tillämpningskonstruktör från Danfoss.
3.4
Styrgränssnitt
3.4.1 Styrprincip
Frekvensomformaren tar emot styrindata från flera källor.
Lokal manöverpanel (Hand-läge)
•
Programmerbara analoga, digitala och analoga/
•
digitala styrplintar (läget Auto)
RS 485-, USB- eller seriell kommunikationsportar
•
(läget Auto)
Korrekt anslutna och programmerade styrplintar ger
återkopplings-, referens- och andra ingångssignaler till
frekvensomformaren: utgångsstatus och feltillstånd från
frekvensomformaren , reläer som används för extrautrustning och gränssnitt för seriell kommunikation. En
gemensam 24 V-ledning ingår också. Du kan programmera
styrplintarna för olika funktioner genom att välja parametertillval via den lokala manöverpanelen (LCP) på enhetens
framsida eller externa källor. Majoriteten av styrkabeldragningen görs av kunden om det inte beställs från fabriken.
3 3
Med den andra metoden får frekvensomformaren ström
enbart från en likströmskälla. Detta är lite mer komplicerat.
Först och främst krävs en likströmskälla. Därefter krävs ett
sätt att mjukladda DC-bussen vid start. Sedan krävs en
spänningskälla för att driva fläktarna inuti enheten. Innan
du genomför denna konfiguration ska du kontakta en
tillämpningskonstruktör från Danfoss.
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 15
130BD599.10
3-phase
power
input
DC bus
Switch Mode
Power Supply
Motor
Analog Output
Interface
relay1
relay2
ON=Terminated
OFF=Open
Brake
resistor
91 (L1)
92 (L2)
93 (L3)
PE
88 (-)
89 (+)
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN)
0/4-20 mA
12 (+24 V OUT)
13 (+24 V OUT)
37 (D IN)
18 (D IN)
20 (COM D IN)
10 V DC
15 mA 130/200 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(COM A OUT) 39
(A OUT) 42
(P RS-485) 68
(N RS-485) 69
(COM RS-485) 61
0 V
5V
S801
0/4-20 mA
RS-485
RS-485
03
+10 V DC
0/-10 V DC -
+10 V DC
+10 V DC
0/4-20 mA
0/-10 V DC-
240 V AC, 2 A
24 V DC
02
01
05
04
06
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
27
24 V
0 V
(D IN/OUT)
0 V (PNP)
24 V (NPN)
(D IN/OUT)
0 V
24 V
29
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
1 2
ON
S201
ON
21
S202
ON=0/4-20 mA
OFF=0/-10 V DC +10 V DC
95
P 5-00
21
ON
S801
(R+) 82
(R-) 81
: Chassis
: Ground
**
240 V AC, 2 A
400 V AC, 2 A
*
*
*
Grundläggande driftprincipe...
Design Guide
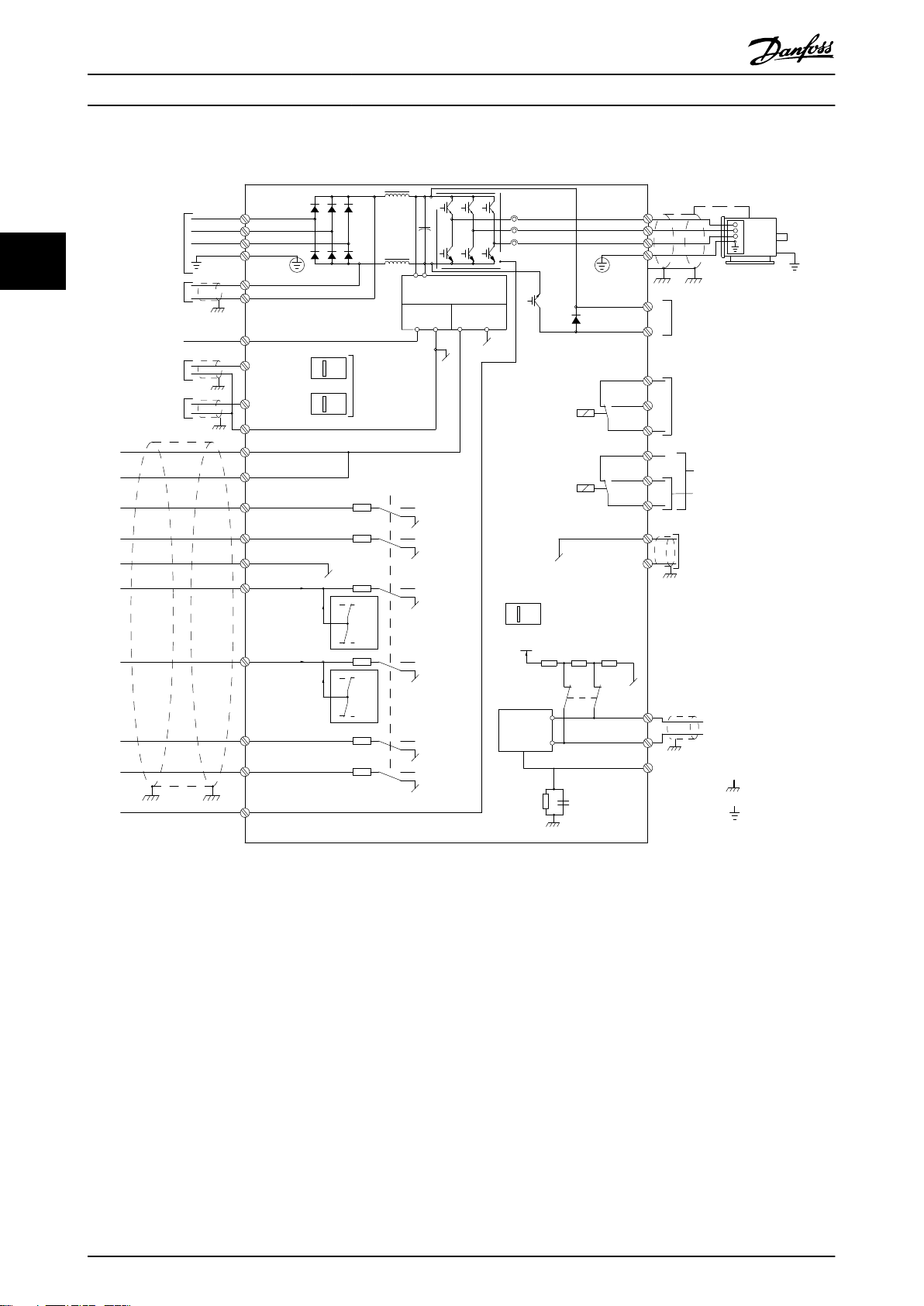
3.5 Kopplingsschema
33
Bild 3.2 Grundläggande kopplingsschema
A = analog, D = digital
*Plint 37 (tillval) används för Säkert vridmoment av. Installationsinstruktioner för Säkert vridmoment av finns i Handbok för
Säkert vridmoment av för Danfoss VLT®-frekvensomformare. Plint 37 finns inte på FC 301 (utom kapsling av typen A1). Relä 2
och Plint 29, har ingen funktion i FC 301.
**Anslut inte kabelskärmen.
16 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07
130BD529.11
1
2
3
4
5
6
7
8
PE
U
V
W
9
L1
L2
L3
PE
10
11
Grundläggande driftprincipe...
Design Guide
3 3
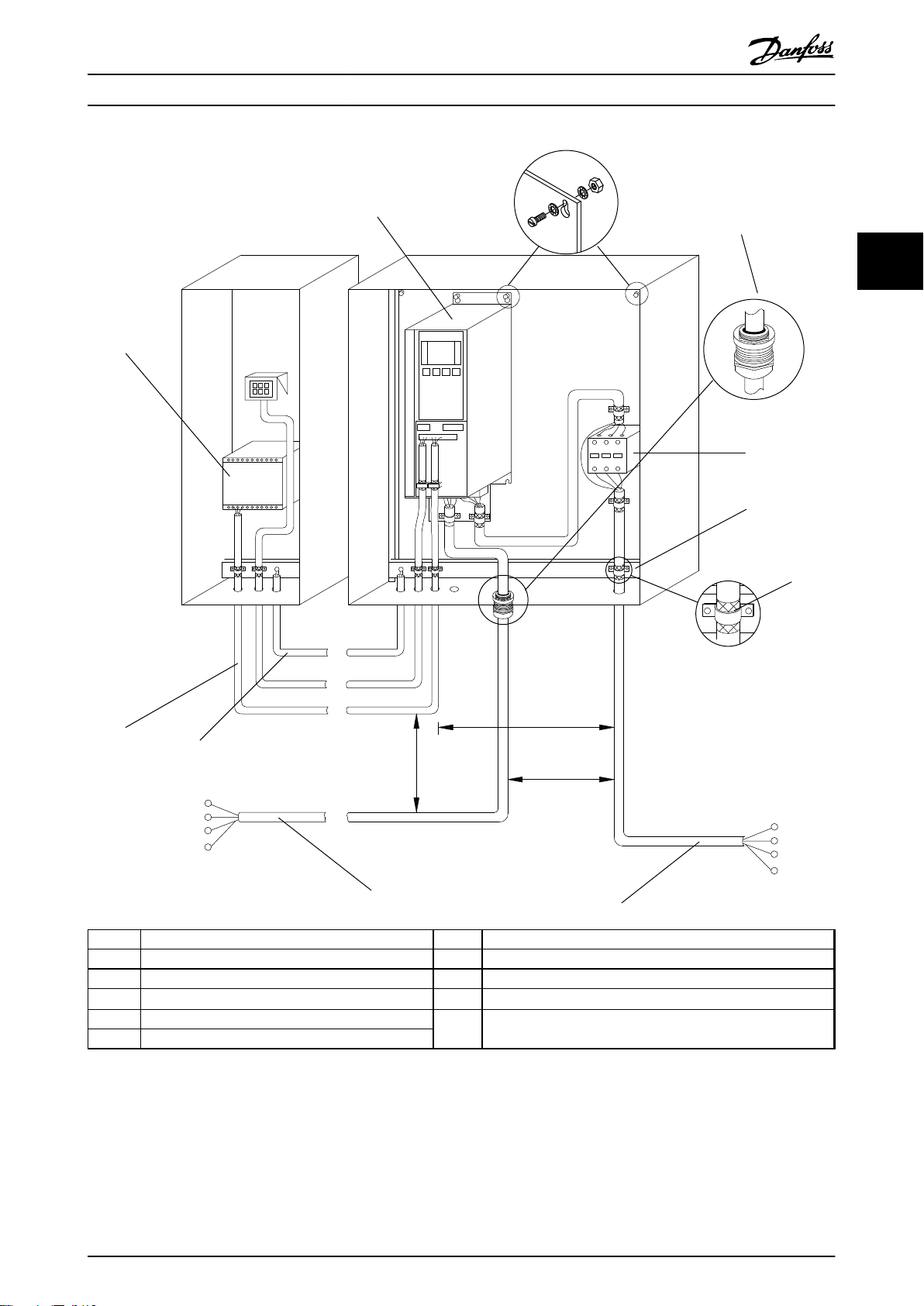
1 PLC 7 Motor, 3-fas och PE (skärmad)
2 Frekvens- omformare 8 Nät, 3-fas och förstärkt PE (inte skärmad)
3 Utgångskontaktor 9 Styrkablar (skärmade)
4 Kabelklämma 10
5 Kabelisolering (skalad)
6 Kabelförskruvning
11
Potentialutjämning min. 16 mm2 (0,025 tum)
Avstånd mellan styrkabel, motorkabel och nätkabel:
Minst 200 mm
Bild 3.3 EMC-korrekt elektrisk anslutning
Mer information om EMC finns i kapitel 4.1.15 EMC-överensstämmelse.
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 17
Grundläggande driftprincipe... Design Guide
OBS!
EMC-STÖRNINGAR
Använd skärmade kablar för motor- och styrkablar och
separera kablar för ingångsström, motorledningar och
styrkablar. Oisolerade ström-, motor-, och styrkablar kan
33
leda till oönskad funktion eller försämrad prestanda.
Minst 200 mm avstånd måste finnas mellan nät-, motoroch styrkablar.
3.6 Regulatorer
3.6.1 Styrprincip
En frekvensomformare omvandlar växelspänning från
nätspänningen till likspänning och ändrar därefter denna
till en reglerbar växelspänning med reglerbar amplitud och
frekvens.
Motorn försörjs med variabel spänning/ström och frekvens,
vilket ger möjlighet till variabel varvtalsreglering av trefasasynkronmotorer av standardtyp och
permanentmagnetmotorer.
Frekvensomformaren kan styra antingen motoraxelns
varvtal eller moment. Inställningen av 1-00 Konfigura-
tionsläge anger vilken typ av styrning som ska användas.
Varvtalsreglering
Det finns 2 typer av varvtalsreglering:
Varvtalsreglering utan återkoppling, vilket inte
•
kräver någon motoråterkoppling (givarlös).
PID-reglering av varvtal med återkoppling kräver
•
en varvtalsåterkopplingssignal på en av
ingångarna. En korrekt optimerad styrning med
återkoppling ger en bättre noggrannhet än en
styrning utan återkoppling.
Momentstyrning
Momentstyrningsfunktionen används i tillämpningar där
momentet på motorns drivaxel styr tillämpning som
spänningskontroll. Momentstyrning kan väljas i
1-00 Konfigurationsläge, antingen i VVC
återkoppling eller Flödesstyrning med återkoppling med [2]
varvtalsåterkoppling. Momentinställningen görs genom att
ställa in en referens som styrs analogt, digitalt eller via
buss. Varvtalsgränsens begränsningsfaktor ställs in i
4-21 Gränsfaktorkälla, varvtal. När momentstyrning används
rekommenderas det att utföra en fullständig AMAprocedur eftersom korrekta motordata är viktigt för
optimal prestanda.
Återkoppling i Flux-läge med pulsgivaråter-
•
koppling ger överlägsen prestanda i alla fyra
kvadranter samt i alla motorvarvtal.
Utan återkoppling i VVC
•
används i mekaniska robusta tillämpningar men
noggrannheten är begränsad. Momentfunktion
utan återkoppling fungerar bara i en rotationsriktning. Momentet beräknas baserat på aktuell
intern mätning i frekvensomformaren.
Varvtals- och momentreferens
Referensen för dessa styrningar kan antingen vara en enkel
referens eller vara en summering av olika referenser med
relativa viktningar. Hur referenser hanteras förklaras
närmare i kapitel 3.7 Referenshantering.
plus
[4] Moment utan
plus
-läge. Funktionen
Väljer vilken ingång som ska användas som varvtals-PID för
återkopplingen i 7-00 Varvtal PID-återkopplingskälla.
18 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07
Grundläggande driftprincipe... Design Guide
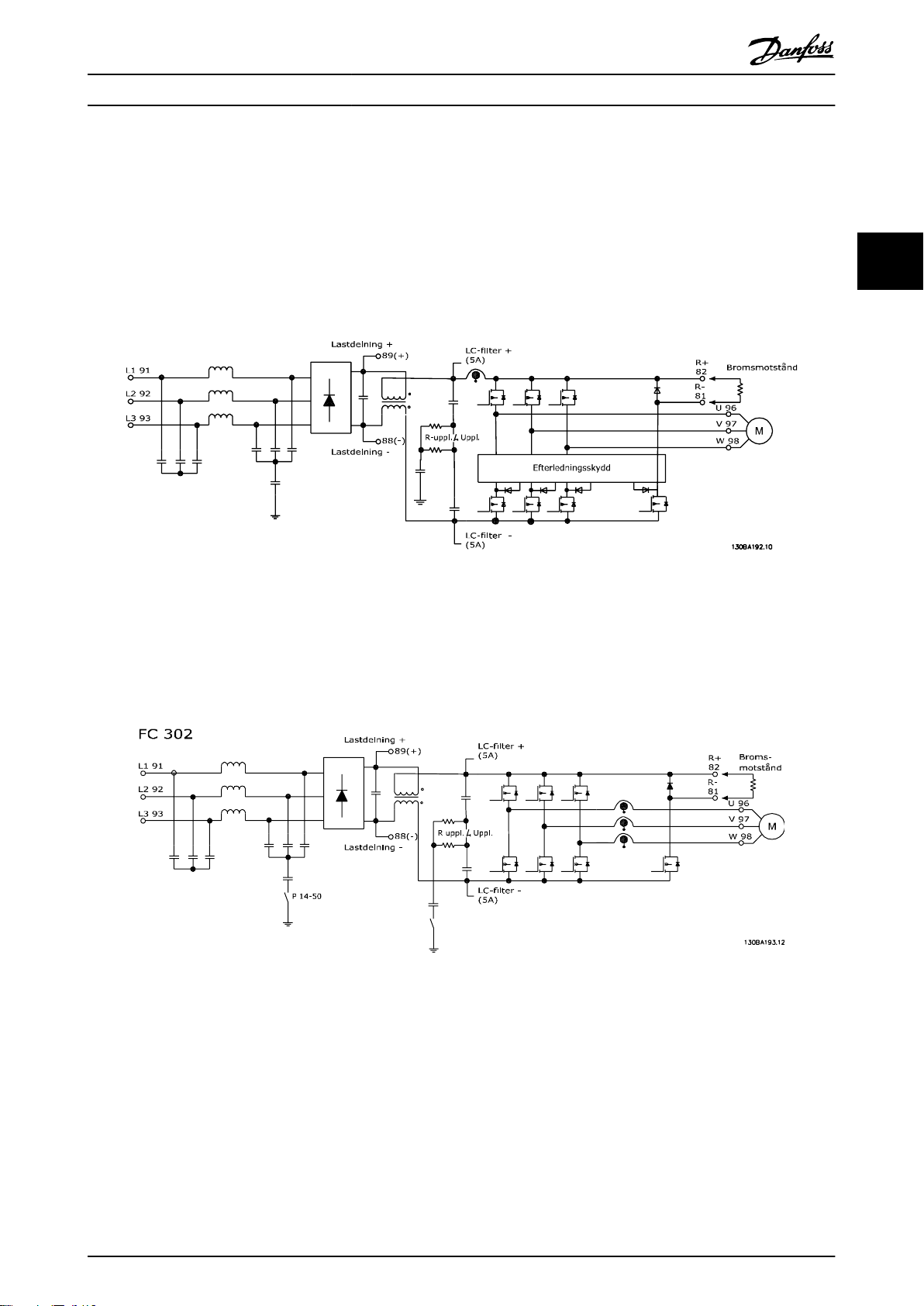
3.6.2 FC 301 kontra FC 302 Styrprincip
FC 301 är en frekvensomformare för allmänna tillämpningar med variabelt varvtal. Styrprincipen baseras på Voltage Vector
Control (VVC
FC 301 kan hantera både asynkrona motorer och PM-motorer.
Strömavkänningsprincipen i FC 301 är baserad på strömmätningen i DC-bussen eller motorfasen. Jordfelsskyddet på
motorsidan löses genom en avsatureringskrets i IGBT:erna ansluten till styrkortet.
Kortslutningsbeteendet i FC 301 beror på strömomvandlaren i den positiva DC-bussen och omättat skydd med återkoppling
från de tre lägre IGBT-enheterna och bromsen.
Bild 3.4 Styrprincip FC 301
FC 302 är en frekvensomformare med höga prestanda för krävande tillämpningar. Frekvensomformaren kan hantera olika
motorstyrningsprinciper, till exempel U/f specialmotordrift, VVC
FC 302 kan hantera såväl synkrona permanentmagnetmotorer (borstlösa servomotorer) som normala burlindade asynkronmotorer.
Kortslutning i FC 302 beror på de 3 strömomvandlarna i motorfasen och omättat skydd med återkoppling från bromsen.
plus
).
plus
och fluxvektormotorstyrning.
3 3
Bild 3.5 Styrprincip FC 302
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 19
Grundläggande driftprincipe... Design Guide
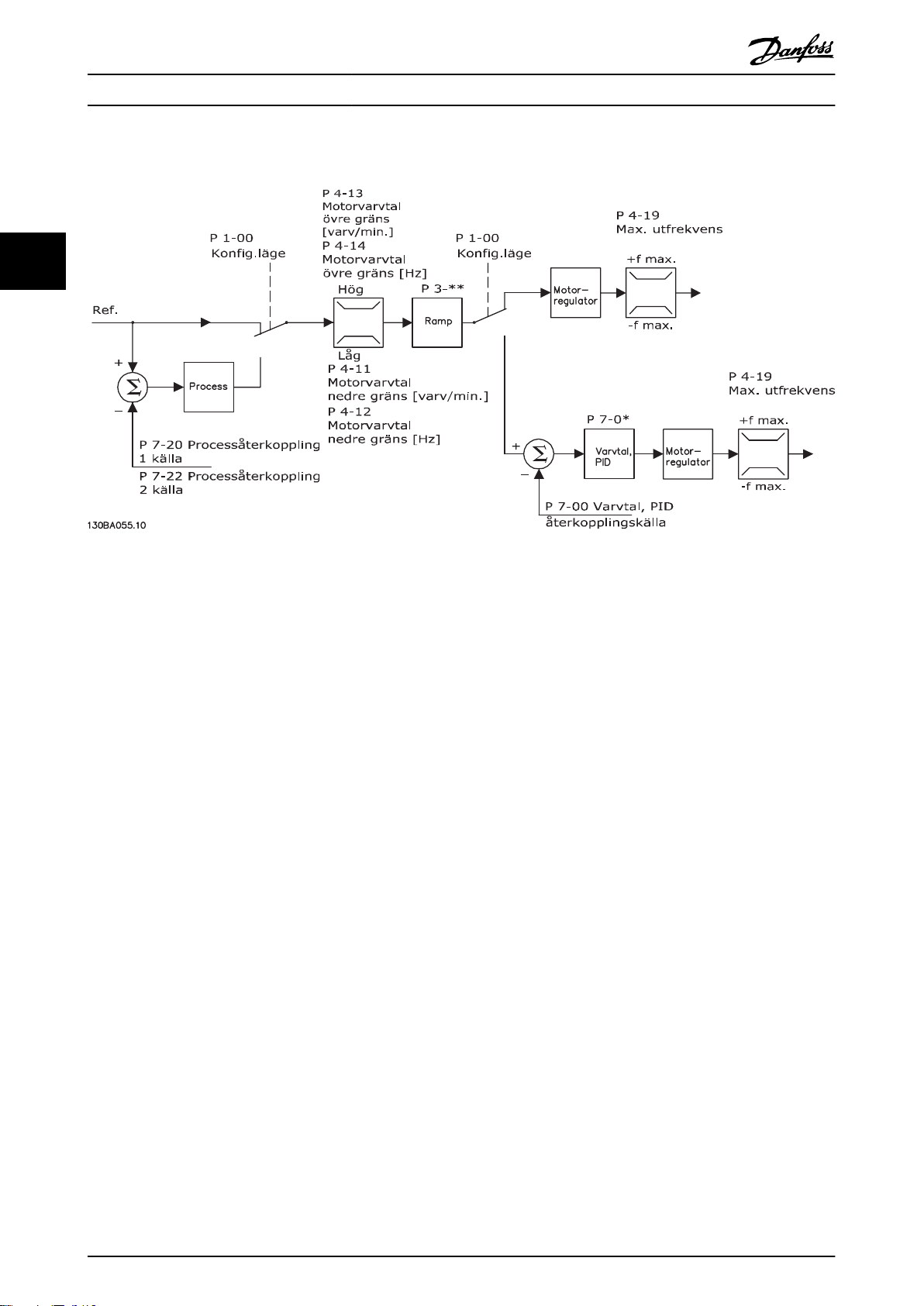
3.6.3
Styrstruktur i VVC
plus
33
plus
Bild 3.6 Styrstruktur i VVC
I Aktiva/inaktiva parametrar i olika styrningslägen för frekvensomformare i Programmeringshandboken finns en översikt över
tillgänglig styrningskonfiguration, beroende på inställningen av växelströmsmotor eller PM-motor (ej särpräglad). I den
konfiguration som visas i Bild 3.6, är 1-01 Motorstyrningsprincip satt till [1] VVC
Varvtal utan återkoppling. Resulterande referens från referenshanteringssystemet tas emot och matas genom ramp- och
varvtalsgränsen innan den skickas till motorstyrningen. Utgående värde från motorstyrningen begränsas sedan av den
maximala frekvensgränsen.
-konfigurationer med och utan återkoppling
plus
och 1-00 Konfigurationsläge är satt till [0]
Om 1-00 Konfigurationsläge har satts till [1] Varvtal med återkoppling kommer den resulterande referensen att skickas från
ramp- och varvtalsgränsen till en varvtal PID-styrning. Varvtal PID-styrningsparametrar finns i parametergruppen 7-0* Varvtal
PID-styrning. Resulterande referens från varvtal PID-styrningen skickas till motorstyrningen och begränsas av frekvensgränsen.
Välj [3] Process i 1-00 Konfigurationsläge för att använda process-PID-styrningen för styrning med återkoppling, t.ex. av varvtal
eller tryck i den styrda tillämpningen. Process-PID-parametrarna finns i parametergrupp 7-2* Processtyrning. Återkoppling och
7-3* Process-PID regl.
20 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07
Grundläggande driftprincipe... Design Guide
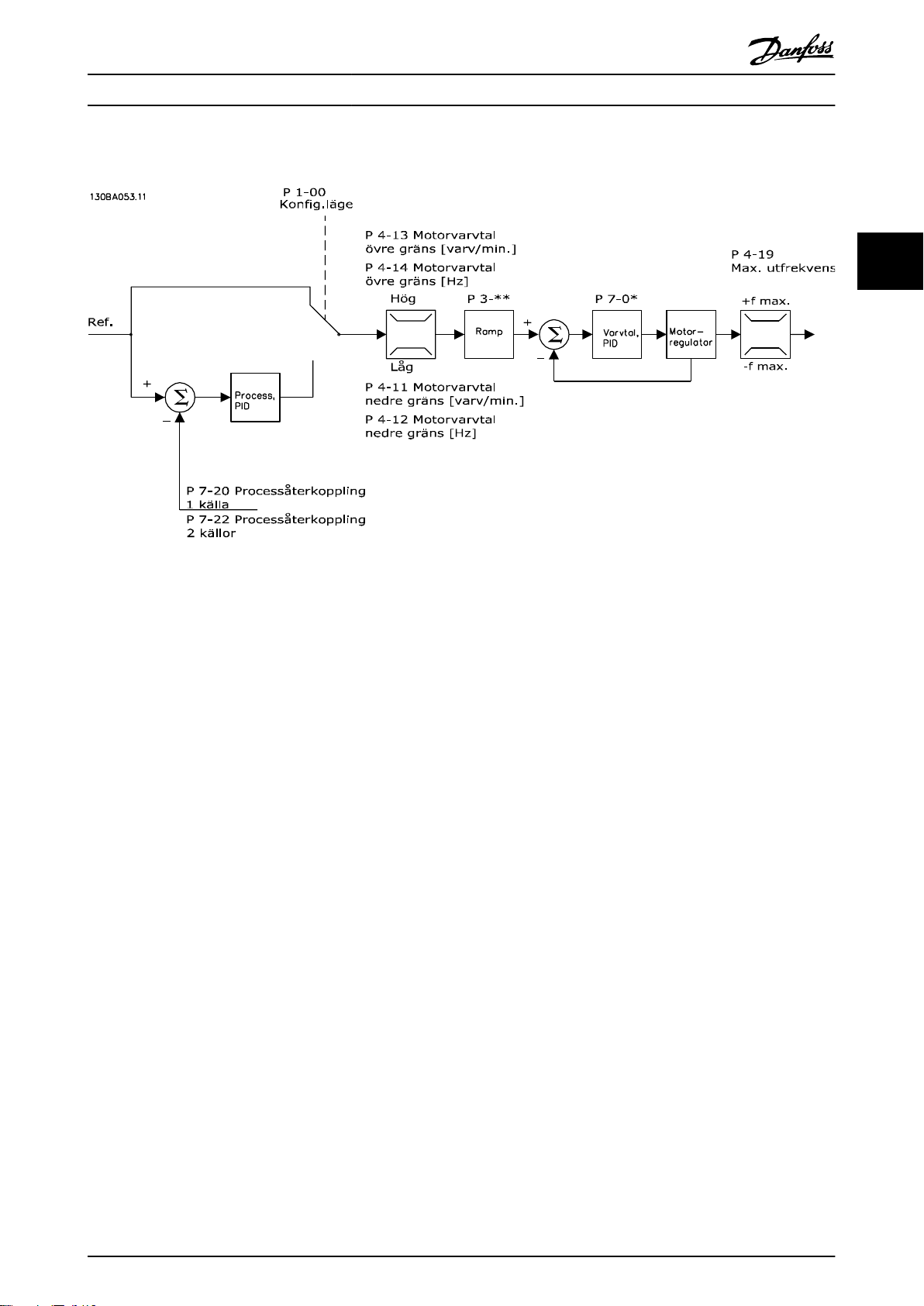
3.6.4 Styrstruktur i Flux utan återkoppling (endast FC 302)
3 3
Bild 3.7 Styrstruktur i konfigurationerna Flux utan återkoppling och med återkoppling.
I Aktiva/inaktiva parametrar i olika styrningslägen för frekvensomformare i Programmeringshandboken finns en översikt över
tillgänglig styrningskonfiguration, beroende på inställningen av växelströmsmotor eller PM-motor (ej särpräglad). I den
visade konfigurationen har 1-01 Motorstyrningsprincip satts till [2] Flux utan återkoppling och 1-00 Konfigurationsläge till [0]
Varvtal utan återkoppling. Resulterande referens från referenshanteringssystemet matas genom ramp- och varvtalsgränsen i
enlighet med angivna parameterinställningar.
En beräknad varvtalsåterkoppling genereras och skickas till varvtals-PID för styrning av den utgående frekvensen.
Varvtals-PID måste ställas in med parametrarna P, I, och D (parametergrupp 7-0* Varvtal, PID-reg).
Välj [3] Process i 1-00 Konfigurationsläge för att använda process-PID-styrning för styrning med återkoppling, t.ex. av varvtal
eller tryck i den styrda tillämpningen. Process-PID-parametrarna finns i parametergruppen 7-2* Processregl. Återkoppling och
7-3* Process-PID regl.
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 21
Grundläggande driftprincipe... Design Guide
3.6.5 Styrstruktur i Flux med motoråterkoppling (endast FC 302)
33
Bild 3.8 Styrstruktur i konfigurationen Flux med motoråterkoppling (endast tillgänglig i FC 302):
I Aktiva/inaktiva parametrar i olika styrningslägen för frekvensomformare i Programmeringshandboken finns en översikt över
tillgänglig styrningskonfiguration, beroende på inställningen av växelströmsmotor eller PM-motor (ej särpräglad). I den
visade konfigurationen har 1-01 Motorstyrningsprincip angetts till [3] Flux med motoråterk. och 1-00 Konfigurationsläge till [1]
Varvtal med återkoppling.
Motorstyrningen i den här konfigurationen använder en återkopplingssignal från en pulsgivare eller resolver monterad direkt
på motorn (som ställs in i 1-02 Flux motoråterkopplingskälla).
Välj [1] Varvtal med återkoppling i 1-00 Konfigurationsläge för att använda den resulterande referensen som insignal till
varvtal PID-styrningen. Varvtal PID-styrningens parametrar finns i parametergrupp 7-0* varvtal, PID-reg.
Välj [2] Moment i 1-00 Konfigurationsläge om du direkt vill använda resulterande referens som momentreferens. Momentstyrningen kan endast väljas i konfigurationen Flux m. motoråterk. (1-01 Motorstyrningsprincip). När detta läge valts använder
referensen enheten Nm. Den kräver ingen momentåterkoppling eftersom det verkliga momentet beräknas baserat på aktuell
mätning av frekvensomformaren.
Välj [3] Process i 1-00 Konfigurationsläge för att använda process-PID-styrningen för styrning med återkoppling, t.ex. av
varvtal eller en processvariabel i den styrda tillämpningen.
22 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07
Grundläggande driftprincipe... Design Guide
3.6.6 PID
3.6.6.1 Varvtal PID-styrning
Varvtal PID-styrningen bibehåller ett konstant motorvarvtal, oberoende av att motorbelastningen varierar.
1-00 Konfigurationsläge
[0] Varvtal utan återkoppling AKTIV AKTIV AKTIV Saknas
[1] Varvtal med återk. Saknas Inte aktiv Saknas AKTIV
[2] Moment Saknas Saknas Saknas Inte aktiv
[3] Process Inte aktiv Inte aktiv Inte aktiv Saknas
[4] Mom u återkoppl. Saknas Inte aktiv Saknas Saknas
[5] Fädning Inte aktiv Inte aktiv Inte aktiv Inte aktiv
[6] Yt-winder Inte aktiv Inte aktiv Inte aktiv Saknas
[7] Utökad PID-vrvtl OL Inte aktiv Inte aktiv Inte aktiv Saknas
[8] Utökad PID-vrvtl CL Saknas Inte aktiv Saknas Inte aktiv
Tabell 3.1 Styrkonfigurationer med aktiv varvtalsreglering
"Saknas" innebär att det aktuella läget inte är tillgängligt alls. "Inte aktiv" innebär att det aktuella läget är tillgängligt, men att varvtalsreglering
inte är aktiv i detta läge.
1-01 Motorstyrningsprincip
U/f
VVC
plus
Flux utan återkoppling Flux m. motoråterk.
OBS!
Varvtalsreglerings-PID fungerar med standardparameterinställningarna, men justering av parametrarna rekommenderas
för optimering av motorstyrningens prestanda. De två Flux-motorstyrningsprinciperna är särskilt beroende av korrekt
finjustering för att kunna ge bästa möjliga resultat.
3 3
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 23
Grundläggande driftprincipe... Design Guide
Tabell 3.2 sammanfattar de egenskaper som kan anges för varvtalsreglering. I VLT® AutomationDrive FC 301/FC 302 Programmeringshandboken finns information om programmering.
Parameter Funktionsbeskrivning
7-00 Varvtal PID-återkopplingskälla Välj vilken ingång som varvtals-PID ska hämta sin återkoppling från.
7-02 Varvtal, prop. PID-förstärkning Ju högre värde, desto snabbare styrning. Ett för högt värde kan dock leda till
33
7-03 Varvtal, PID-integraltid
7-04 Varvtal, PID-derivatatid Ger en förstärkning i proportion till återkopplingens förändringsfrekvens. En inställning
7-05 Varvtal, PID-diff.förstärkn.gräns
7-06 Varvtal, PID-lågpassfiltertid
7-07 Varvtalsåterkoppling utväxling Frekvensomformaren multiplicerar varvtalsåterkopplingen med detta förhållande.
7-08 Varvtal, PID-frammatningsfaktor Referenssignalen förbikopplar varvtalsregleringen med det angivna värdet. Detta filter
7-09 Speed PID Error Correction w/ Ramp Varvtalsfelet mellan ramp och faktiskt varvtal mäts mot inställningen i denna parameter.
svängningar.
Eliminerar varvtalsfel i steady state. Ett lägre värde innebär snabb reaktion. Ett för lågt
värde kan dock leda till svängningar.
på noll inaktiverar differentiatorn.
Om förändringar i referens eller återkoppling sker snabbt i en tillämpning (vilket innebär
att felet förändras snabbt) blir differentiatorn snart alltför dominerande. Detta beror på
att den reagerar på förändringar i felet. Ju snabbare felet förändras, desto starkare blir
differentiatorförstärkningen. Differentiatorförstärkningen kan således begränsas till att
tillåta inställning av lämplig derivatatid för långsamma förändringar och en lämplig
snabb förstärkning för snabba förändringar.
Ett lågpassfilter som dämpar svängningar hos återkopplingssignalen och förbättrar
prestanda i steady state. Men för lång filtertid försämrar dynamiska prestanda för varvtal
PID-styrningen.
Praktiska inställningar av parameter 7-06 tagna från antalet pulser per varv från
pulsgivaren (PPR):
Pulsgivare PPR 7-06 Varvtal, PID-lågpassfiltertid
512 10 ms
1024 5 ms
2048 2 ms
4096 1 ms
ökar de dynamiska prestanda för varvtalsregleringsslingan.
Om varvtalsfelet överskrider denna parameterinställning kommer varvtalsfelet att
korrigeras via rampning på ett kontrollerat sätt.
Tabell 3.2 Relevanta parametrar för varvtalsreglering
24 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07
Grundläggande driftprincipe...
Design Guide
Programmera i angiven ordningsföljd (se förklaringar till inställningarna i Programmeringshandboken)
I Tabell 3.3 förutsätts det att alla andra parametrar och brytare behåller sina fabriksinställningar.
Funktion Parameter Inställning
1) Kontrollera att motorn går korrekt. Gör följande:
Ange motorparametrarna med hjälp av märkskyltsdata 1-2* Enligt uppgifterna på motorns märkskylt
Utför automatisk motoranpassning 1-29 Automatisk
motoranpassning (AMA)
2) Kontrollera att motorn går och att pulsgivaren är rätt ansluten. Gör följande:
Tryck på [Hand On] på LCP. Kontrollera att motorn körs
och observera i vilken riktning den roterar (hädanefter
benämnd "positiv riktning").
Gå till 16-20 Motorvinkel. Vrid motorn långsamt i positiv
riktning. Den måste vridas så långsamt (endast ett fåtal
varv/minut) att det går att avgöra om värdet i
16-20 Motorvinkel ökar eller minskar.
Om 16-20 Motorvinkel minskar ska du ändra pulsgivarens
rotationsriktning i 5-71 Plint 32/33, pulsgivarriktning.
3) Kontrollera att gränserna för frekvensomformaren ligger inom säkerhetsintervallet
Ange acceptabla gränser för referenserna. 3-02 Minimireferens
Kontrollera att rampinställningarna ligger inom frekvensomformarens kapacitet och tillåtna driftspecifikationer
för tillämpningen.
Ange acceptabla gränser för motorvarvtal och frekvens. 4-11 Motorvarvtal, nedre
4) Konfigurera varvtalsregleringen och välj motorstyrningsprincipen
Aktivering av varvtalsreglering
Val av motorstyrningsprincip 1-01 Motorstyrnings-
5) Konfigurera och skala referensen för varvtalsregleringen
Ange Analog ingång 53 som referenskälla 3-15 Referensresurs 1 Behövs ej (standard)
Skala analog ingång 53 0 varv/minut (0 V) till 1 500 varv/
minut (10 V)
6) Konfigurera 24 V HTL-pulsgivarsignalen som återkoppling för motorstyrning och varvtalsreglering
Ställ in de digitala ingångarna 32 och 33 som HTLpulsgivaringångar
Välj plint 32/33 som motoråterkoppling 1-02 Flux motoråter-
Välj plint 32/33 som varvtals-PID-återkoppling 7-00 Varvtal PID-
7) Finjustera PID-parametrarna för varvtalsreglering
Använd riktlinjerna för finjustering när de behövs, eller
gör justeringen manuellt
8) Spara om du vill slutföra
Spara parameterinställningen i LCP för senare bruk 0-50 LCP-kopiering [1] Alla till LCP
Ange en positiv referens.
16-20 Motorvinkel Saknas (skrivskyddad parameter) Obs: Ett ökande
5-71 Plint 32/33, pulsgivarriktning
3-03 Maximireferens
3-41 Ramp 1,
uppramptid
3-42 Ramp 1,
nedramptid
gräns [rpm]
4-13 Motorvarvtal, övre
gräns [rpm]
4-19 Max. utfrekvens
1-00 Konfigurationsläge
princip
6-1* Behövs ej (standard)
5-14 Plint 32, digital
ingång
5-15 Plint 33, digital
ingång
kopplingskälla
återkopplingskälla
7-0* Se riktlinjerna
[1] Aktivera fullständig AMA
värde spiller över vid 65535 och börjar på nytt vid 0.
[1] Moturs (om 16-20 Motorvinkel minskar)
0 varv/minut (standard)
1 500 varv/minut, varv per minut (standard)
fabriksinställning
fabriksinställning
0 varv/minut (standard)
1 500 varv/minut
60 Hz (standard 132 Hz)
[1] Varvtal med återk.
[3] Flux m. motoråterk.
[0] Ingen funktion (standard)
Behövs ej (standard)
Behövs ej (standard)
3 3
Tabell 3.3 Programmeringsordning
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 25
Grundläggande driftprincipe...
Design Guide
3.6.6.2 Finjustering av PID-varvtalsreglering
Följande riktlinjer för finjustering är relevanta när en av
Flux-motorstyrningsprinciperna används för tillämpningar
där belastningen huvudsakligen är trög (lite friktion).
33
Värdet för 30-83 Varvtal, prop. PID-förstärkning är beroende
av den kombinerade trögheten hos motor och belastning,
och den valda bandbredden kan beräknas med följande
formel:
2
x
par
. 1 − 20 x 9550
. 1 − 25
x
Bandbredd rad/s
Par.
. 7 − 02 =
Total tröghet kgm
Par.
OBS!
1-20 Motoreffekt [kW] är motoreffekten i [kW] (dvs. ange
"4" kW i stället för "4 000" W i formeln).
20 rad/s är ett praktiskt värde för bandbredden. Kontrollera
resultatet från beräkningen av 7-02 Varvtal, prop. PID-
förstärkning i med följande formel (behövs inte om du
använder återkoppling med hög upplösning, till exempel
SinCos):
Par.
. 7 − 02
Max. moment rippel
MAX
0. 01 x 4 x
=
Det rekommenderade startvärdet för 7-06 Varvtal, PIDlågpassfiltertid är 5 ms (lägre pulsgivarupplösning kräver
ett högre filtervärde). Vanligen är en maximal
momentrippel på 3 % godtagbar. För inkrementella
pulsgivare hittas pulsgivarupplösningen i antingen
5-70 Plint 32/33 pulser per varv (24 V HTL på frekvensomformare av standardtyp) eller 17-11 Upplösning (PPR) (5 V
TTL för pulsgivartillvalet MCB 102).
I allmänhet avgörs den praktiska maximigränsen för
7-02 Varvtal, prop. PID-förstärkning av pulsgivarupplösningen och filtertiden för återkopplingen, men även andra
faktorer hos tillämpningen kan begränsa 7-02 Varvtal, prop.
PID-förstärkning till ett lägre värde.
För att minimera toppspänningen kan 7-03 Varvtal, PID-
integraltid ställas in på ca 2,5 sekunder (varierar beroende
på tillämpning).
Ange 7-04 Varvtal, PID-derivatatid till 0 tills allt annat har
finjusterats. Vid behov avslutar du finjusteringen genom att
experimentera med små stegvisa förändringar av den här
inställningen.
Pulsgivare Upplösning x Par.
%
2 x π
. 7 − 06
x
26 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07
Grundläggande driftprincipe... Design Guide
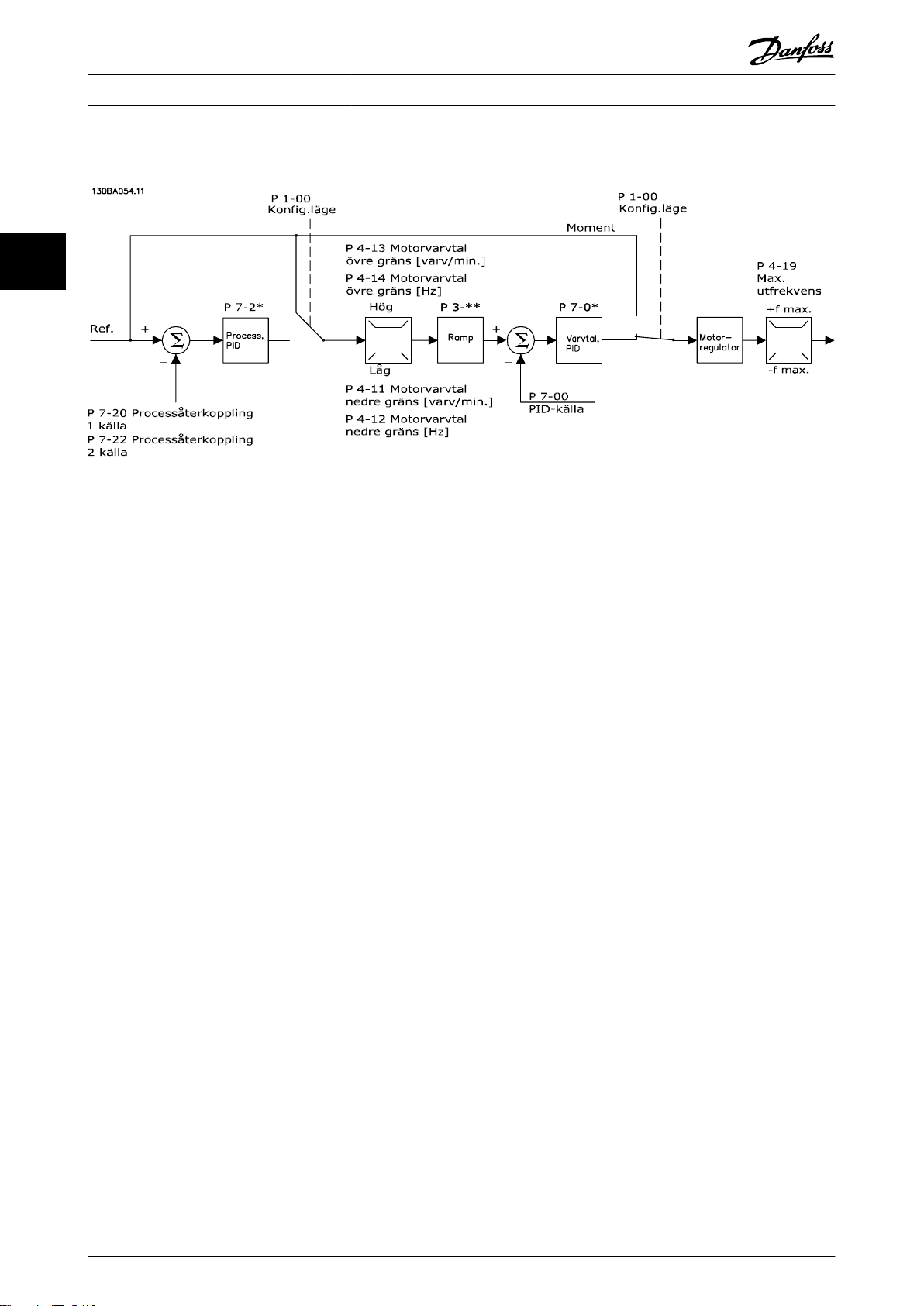
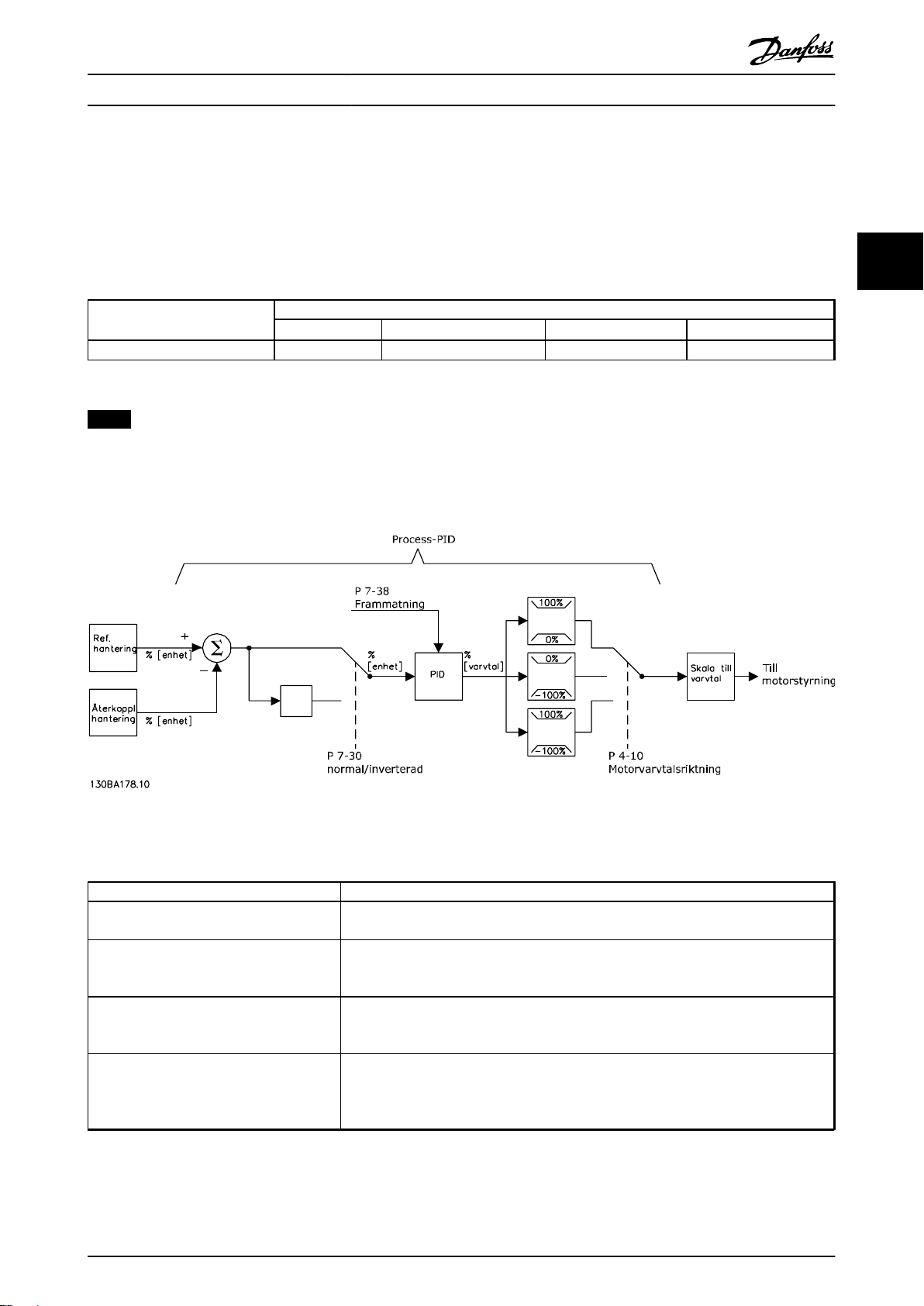
3.6.6.3 Process-PID-styrning
Använd process-PID-styrningen för att styra tillämpningsparametrar som kan mätas med en givare (t.ex. tryck, temperatur,
flöde) och påverkas av den anslutna motorn via en pump, fläkt eller annat.
Tabell 3.4 visar de styrkonfigurationer där processreglering är möjlig. När en motorstyrningsprincip av typen fluxvektor
används måste du också tänka på att justera PID-parametrarna för varvtalsreglering. Information om var varvtalsregleringen
är aktiv finns i kapitel 3.6 Regulatorer.
1-00 Konfigurationsläge 1-01 Motorstyrningsprincip
U/f
[3] Process Inte aktiv Process Process och varvtal Process och varvtal
Tabell 3.4 Styrkonfigurationer med processreglering
VVC
plus
Flux utan återkoppling Flux m. motoråterk.
OBS!
Processreglerings-PID fungerar med standardparameterinställningarna, men justering av parametrarna rekommenderas
för optimering av applikationsstyrningens prestanda. De två Flux-motorstyrningsprinciperna är speciellt beroende av
korrekt finjustering av varvtalsreglerings-PID (innan processreglerings-PID finjusteras) för att kunna ge bästa möjliga
resultat.
3 3
Bild 3.9 Diagram över Process-PID-styrning
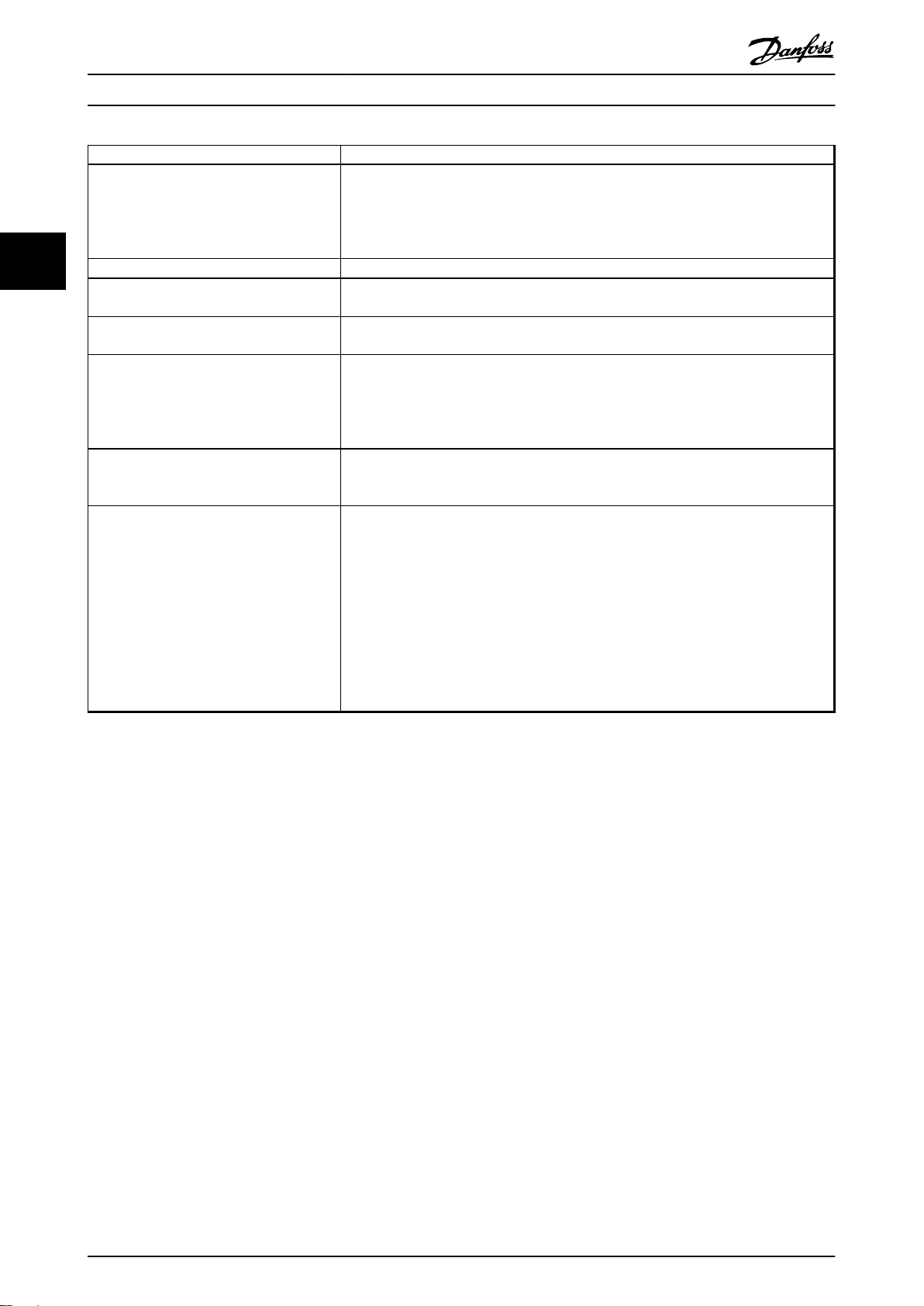
Tabell 3.5sammanfattar egenskaper som kan konfigureras för processregleringen.
Parameter Funktionsbeskrivning
7-20 Processregl. m. 1 återk.signal Välj från vilken källa (dvs. analog ingång eller pulsingång) process-PID ska hämta sin
återkoppling
7-22 Processregl. m. 2 återk.signaler Tillval: Avgör om (och varifrån) process-PID bör få en ytterligare återkopplingssignal. Om
en extra återkopplingskälla väljs kommer de två återkopplingssignalerna att adderas innan
de används för process-PID-styrningen.
7-30 Norm./inv. regl. av process-PID
7-31 Anti-windup för process-PID Anti-windup-funktionen säkerställer att integratorn får en förstärkning som motsvarar
Under [0] normal drift reagerar processregleringen med en ökning av motorvarvtalet om
återkopplingen sjunker under referensen. I samma situation, men under [1] inverterad drift,
kommer processregleringen i stället att reagera med ett minskande motorvarvtal.
aktuell frekvens när en frekvensgräns eller en momentgräns har uppnåtts. På så sätt
undviker man integrering med ett fel som ändå inte kan kompenseras med en ändring av
varvtalet. Du kan inaktivera funktionen genom att [0] Av.
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 27
Grundläggande driftprincipe...
Parameter Funktionsbeskrivning
7-32 Regulatorstartvärde för process-PID I en del applikationer kan det ta mycket lång tid att nå det nödvändiga varvtalet eller
33
7-33 Prop. först. för process-PID Ju högre värde, desto snabbare styrning. Ett för högt värde kan dock leda till svängningar.
7-34 I-tid för process-PID Eliminerar varvtalsfel i steady state. Ett lägre värde innebär snabb reaktion. Ett för lågt
7-35 D-tid för process-PID Ger en förstärkning i proportion till återkopplingens förändringsfrekvens. En inställning på
7-36 Process-PID först.gräns för diff. Om förändringar i referens eller återkoppling sker snabbt i en tillämpning (vilket innebär
7-38 Feed forward faktor för process-PID I tillämpningar där det finns en god (och ungefärligen linjär) korrelation mellan processre-
5-54 Pulsfilter, tidskonstant nr 29 (Puls-plint
29),
5-59 Pulsfilter, tidskonstant nr 33 (Puls-plint
33),
6-16 Plint 53, tidskonstant för filter (Analog
plint 53),
6-26 Plint 54, tidskonstant för filter (Analog
plint 54)
6-36 Plint X30/11, tidskonstant för filter
6-46 Plint X30/12, tidskonstant för filter
35-46 Term. X48/2 Filter Time Constant
Design Guide
börvärdet. I sådana tillämpningar kan det vara en fördel att fastställa ett bestämt
motorvarvtal från frekvensomformaren innan processregleringen aktiveras. Detta görs
genom att ange ett process-PID-startvärde (varvtal) i 7-32 Regulatorstartvärde för process-
PID.
värde kan dock leda till svängningar.
noll inaktiverar differentiatorn.
att felet förändras snabbt) blir differentiatorn snart alltför dominerande. Detta beror på att
den reagerar på förändringar i felet. Ju snabbare felet förändras, desto starkare blir
differentiatorförstärkningen. Differentiatorförstärkningen kan således begränsas till att
tillåta inställning av lämplig derivatatid för långsamma förändringar.
ferensen och motorvarvtalet som krävs för att erhålla referensen, kan frammatningsfaktorn
användas för att uppnå bättre dynamiska prestanda hos process-PID-styrningen.
Ett lågpassfilter kan dämpa svängningar i strömmens/spänningens återkopplingssignal.
Denna tidskonstant är ett uttryck för varvtalsgränsen för de ripplar som uppträder på
återkopplingssignalen.
Exempel: Om lågpassfiltret har ställts in på 0,1 sekunder, blir gränshastigheten 10 rad/s
(motsvarande 0,1 s), vilket motsvarar (10/(2 x π)) = 1,6 Hz. Detta innebär att alla strömmar/
spänningar som varierar med en frekvens överstigande 1,6 Hz dämpas av filtret. Styrning
utförs enbart på en återkopplingssignal som varierar med en frekvens (ett varvtal) på
under 1,6 Hz.
Lågpassfiltret förbättrar prestanda i steady state, men om en för lång filtertid väljs kommer
dynamiska prestanda för process-PID-styrning att försämras.
Tabell 3.5 Relevanta parametrar för processreglering
3.6.6.4
Avancerad PID-reglering
I VLT® AutomationDrive FC 301/FC 302 Programmeringshandboken finns information om avancerade PID-regleringsparametrar
3.6.7
Intern strömreglering i VVC
plus
-läge
När motorströmmen/momentet överstiger momentgränserna som är programmerade i 4-16 Momentgräns, motordrift,
4-17 Momentgräns, generatordrift och 4-18 Strömbegränsning aktiveras den inbyggda strömbegränsningsstyrningen.
När frekvensomformaren körs på strömgränsen med motordrift eller återkopplingsdrift, försöker den att så snabbt som
möjligt komma under de programmerade momentgränserna utan att förlora kontrollen över motorn.
28 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

130BP046.10
Hand
on
O
Auto
on
Reset
Grundläggande driftprincipe...
Design Guide
3.6.8 Lokalstyrning (Hand On) och
Fjärrstyrning (Auto On)
Frekvensomformaren kan drivas manuellt via den lokala
manöverpanelen (LCP) eller fjärrstyras med analoga eller
digitala ingångar och seriell buss. Om 0-40 [Hand on]-knapp
på LCP, 0-41 [Off]-knapp på LCP, 0-42 [Auto on]-knapp på
LCP och 0-43 [Reset]-knapp på LCP tillåter detta, går det att
starta och stoppa frekvensomformaren via LCP med
knapparna [Hand On] och [Off]. Larm kan återställas med
[Reset]. När du har tryckt på [Hand On] övergår frekvensomformaren till Hand-läge (manuellt) och följer (som
standard) den lokala referens som kan anges med
pilknapparna på LCP:n.
3 3
När du har tryckt på [Auto On] övergår frekvensomformaren till läget Auto och följer (som standard) den
externa referensen. I detta läge går det att styra frekvensomformaren via de digitala ingångarna och olika seriella
gränssnitt (RS-485, USB eller en valbar fältbuss). Mer
information om att starta, stoppa, byta ramper och
parameterinställningar finns i parametergrupp 5-1* Digitala
ingångar eller parametergrupp 8-5* Seriell kommunikation.
Bild 3.10 Manöverknappar
Läge för aktiv referens och konfiguration
Den aktiva referensen kan vara antingen den lokala
referensen eller den externa referensen.
I 3-13 Referensplats kan den lokala referensen väljas
permanent genom att [2] Lokal väljs.
För att välja den externa referensen permanent väljer du
[1] Extern. Om du väljer [0] Länkat till Hand/Auto (standard)
beror referensplatsen på det läge som är aktivt (Hand-läge
eller läget Auto).
Bild 3.11 Aktiv referens
Bild 3.12 Konfigurationsläge
[Hand On] [Auto on]knapparna
Hand Länkat till Hand/Auto Lokal
Hand ⇒ Off
Auto Länkat till Hand/Auto Extern
Auto ⇒ Off
Alla knappar Lokal Lokal
Alla knappar Extern Extern
Tabell 3.6 Villkor för lokal/extern referensaktivering
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 29
3-13 Referensplats Aktiv
referens
Länkat till Hand/Auto Lokal
Länkat till Hand/Auto Extern

Grundläggande driftprincipe... Design Guide
1-00 Konfigurationsläge avgör vilken typ av applikationsstyrprincip (dvs. styrning av varvtal, moment eller process)
som används när extern referens är aktiv. 1-05 Konfigu-
ration i lokalt läge avgör vilken typ av
applikationsstyrprincip som används när lokal referens
aktiveras. En av dem är alltid aktiv, men bägge kan inte
33
vara aktiva samtidigt.
3.7 Referenshantering
3.7.1 Referenser
Analog referens
En analog signal som överförs till ingång 53 eller 54.
Signalen kan vara antingen spänning 0–10 V (FC 301 och
FC 302) eller -10 till +10 V (FC 302). Strömsignal 0–20 mA
eller 4–20 mA.
Binär referens
En signal överförd till porten för seriell kommunikation
(RS-485-plint 68–69).
Förinställd referens
En förinställd referens som har ett värde mellan -100 %
och +100 % av referensområdet. Val mellan 8 förinställda
referenser via de digitala plintarna.
Pulsreferens
En pulsreferens används på plint 29 eller 33, väljs i par
5-13 Plint 29, digital ingång eller 5-15 Plint 33, digital ingång
[32] Pulsingång. Skalning i parametergrupp 5-5* Pulsingång.
Ref
MAX
Avgör sambandet mellan referensingången på 100 %
fullskalsvärde (normalt 10 V, 20 mA) och resulterande
referens. Maximireferensvärdet som angetts i 3-03 Maximi-
referens.
Ref
MIN
Avgör sambandet mellan referensingången på 0 % värde
(normalt 0 V, 0 mA, 4 mA) och resulterande referens. Det
minimala referensvärdet anges i 3-02 Minimireferens.
Lokal referens
Den lokala referensen är aktiv när frekvensomformaren
körs med knappen [Hand On] aktiverad. Justera referensen
med pilknapparna [▲]/[▼] och [◄]/[►].
30 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

Grundläggande driftprincipe...
Extern referens
Referenshanteringssystemet för beräkning av den externa referensen visas i Bild 3.13.
Design Guide
3 3
Bild 3.13 Extern referens
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 31

Grundläggande driftprincipe... Design Guide
Referensgränser
Den externa referensen beräknas en gång för varje
scan-intervall och består initialt av två typer av referensingångar:
1. X (den faktiska referensen): En summering (se
3-04 Referensfunktion) av upp till fyra externt
33
De två referensingångstyperna kombineras med följande
beräkning: Extern referens = X + X * Y / 100 %. Om den
relativa referensen inte används måste 3-18 Relativ
skalningsreferensresurs ställas in på [0] Ingen funktion och
3-14 Förinställd relativ referens till 0 %. Funktionerna öka/
minska och frys referens kan båda aktiveras med hjälp av
digitala ingångar på frekvensomformaren. Funktionerna
och parametrarna beskrivs i Programmeringshandboken.
Skalningen av analoga referenser beskrivs i parametergrupperna 6-1* Analog ingång 1 och 6-2* Analog ingång 2
och skalningen av digitala pulsreferenser beskrivs i
parametergrupp 5-5* Pulsingång.
Referensgränser och intervall ställs in i parametergrupp
3-0* Referensgränser.
valda referenser, omfattande en kombination
(som bestäms av inställningarna för 3-15 Referens-
resurs 1, 3-16 Referensresurs 2 och
3-17 Referensresurs 3) av en fast förinställd
referens (3-10 Förinställd referens), variabla
analoga referenser, variabla digitala pulsreferenser
och olika seriella bussreferenser oavsett i vilken
enhet som frekvensomformaren styrs ([Hz], [RPM],
[Nm] osv.).
2. Y (den relativa referensen): Summan av en fast
förinställd referens (3-14 Förinställd relativ referens)
och en variabel analog referens (3-18 Relativ
skalningsreferensresurs) i [%].
3.7.2
3-00 Referensområde, 3-02 Minimireferens och 3-03 Maximireferens definierar det tillåtna intervallet för summan av alla
referenser. Summan av alla referenser nivåfixeras vid
behov. Sambandet mellan resulterande referens (efter
fixering) och summan av alla referenser visas i Bild 3.14.
Bild 3.14 Samband mellan resulterande referens och summan
av alla referenser
Bild 3.15 Resulterande referens
32 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

Grundläggande driftprincipe... Design Guide
Värdet för 3-02 Minimireferens kan inte anges till mindre än
0, om inte 1-00 Konfigurationsläge har angetts till [3]
Process. I detta fall blir sambanden mellan resulterande
referens (efter fixering) och summan av alla referenser så
som visas i Bild 3.16.
Bild 3.16 Summan av alla referenser med 1-00 Konfigurationsläge inställd på [3] Process
Skalning av förinställda referenser och
3.7.3
bussreferenser
3.7.4
Skalning av analog referens och
återkoppling och pulsreferens och
pulsåterkoppling
Referenser och återkoppling skalas från analoga ingångar
och pulsingångar på samma sätt. Den enda skillnaden är
att en referens som hamnar över eller under specificerade
lägsta och högsta ”ändpunkter” (P1 och P2 i Bild 3.17)
nivåfixeras, medan en återkoppling som faller utanför
intervallet inte gör det.
3 3
Förinställda referenser skalas enligt följande regler:
Om 3-00 Referensområde: [0] Min - Max 0 %
•
referens är lika med 0 [enhet] där enhet kan vara
valfri enhet t.ex. varv/minut, m/s, bar osv. 100 %
referens är lika med Max (abs (3-03 Maximire-
ferens ), abs (3-02 Minimireferens)).
Om 3-00 Referensområde: [1] -Max - +Max 0 % är
•
referens lika med 0 [enhet] -100 % referens är lika
med -Max referens 100 % referens är lika med
Max referens.
Bussreferenser skalas enligt följande regler:
Om 3-00 Referensområde: [0] Min - Max. För att
•
erhålla maxupplösning för bussreferensen blir
skalningen för bussen: 0 % referens lika med Minreferens och 100 % referens lika med Maxreferens.
Om 3-00 Referensområde: [1] -Max - +Max är -100
•
% referens lika med -Max referens 100 % referens
är lika med Max Referens.
Bild 3.17 Skalning av analog referens och återkoppling och
pulsreferens och pulsåterkoppling
Bild 3.18 Skalning av referensutgång
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 33

Grundläggande driftprincipe... Design Guide
3.7.5 Dödband kring noll
I vissa fall ska referensen (i undantagsfall kallad återkopplingen) ha ett dödband omkring noll (dvs. för att
säkerställa att maskinen stoppas när referensen är "nära
noll").
33
Följande inställningar ska göras för att aktivera
dödbandet och ange omfattningen:
Minimalt referensvärde eller maximalt
•
referensvärde måste vara noll. Med andra ord;
Antingen måste P1 eller P2 ligga på X-axeln i
Bild 3.19.
Och bägge punkter som definierar skalningsdiag-
•
rammet finns i samma kvadrant.
Dödbandets omfattning definieras av antingen P1 eller P2
enligt Bild 3.19.
Bild 3.20 Omvänt dödband
Bild 3.19 Dödband
Alltså kommer en referensslutpunkt P1 = (0 V, 0 RPM) inte
att resultera i dödband, men en referensslutpunkt t.ex. P1
= (1 V, 0 varv/minut) kommer att ge ett dödband på -1 V
till +1 V i detta fall, under förutsättning att slutpunkten P2
är placerad i antingen kvadrant 1 eller kvadrant 4.
34 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

Grundläggande driftprincipe... Design Guide
Bild 3.21 visar hur referensingången med gränser innanför Min till Max blir nivåfixerad.
3 3
Bild 3.21 Positiv referens med dödband, digital ingång för utlösning av reversering
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 35

Grundläggande driftprincipe... Design Guide
Bild 3.22 visar hur referensingången med gränser som faller utanför -Max till +Max-gränserna fixeras till ingångens låga och
höga gränser innan den adderas till den faktiska referensen. Bild 3.22 visar också hur den faktiska referensen nivåfixeras till Max till +Max genom referensalgoritmen.
33
Bild 3.22 Positiv referens med dödband, digital ingång för utlösning av reversering. Fixeringsregler
36 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

Grundläggande driftprincipe... Design Guide
3 3
Bild 3.23 Negativ till positiv referens med dödband, tecknet avgör riktningen, -Max till +Max
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 37

Produktfunktioner Design Guide
4 Produktfunktioner
4.1 Automatiserade driftfunktioner
Överspänningsskydd
4.1.2
Dessa funktioner aktiveras så snart frekvensomformaren är
igång. De kräver ingen programmering eller inställning.
Om du känner till funktionerna kan du optimera system-
44
konstruktionen och eventuellt undvika att införa
överflödiga komponenter och funktioner.
Frekvensomformaren har ett antal inbyggda skyddsfunktioner som skyddar enheten och den motor som körs.
4.1.1 Kortslutningsskydd
Motor (fas-fas)
Frekvensomformaren skyddas mot kortslutning på
motorsidan genom strömmätning i de tre motorfaserna
eller i DC-bussen. Vid kortslutning mellan två utfaser
uppstår överström i växelriktaren. Växelriktaren stängs av
så snart kortslutningsströmmen överstiger det tillåtna
värdet (Larm 16 Tripplås).
Nätsida
En frekvensomformare som fungerar korrekt begränsar
strömmen som den drar från försörjningen. Säkringar och/
eller maximalbrytare rekommenderas trots det på försörjningssidan som skydd vid eventuella komponentfel inne i
frekvensomformaren (första felställe). Mer information finns
i kapitel 9.3 Nätanslutning.
OBS!
Detta är obligatoriskt för att uppfylla IEC 60364 för CE
eller NEC 2009 för UL.
Motorgenererad överspänning
Spänningen i mellankretsen ökar när motorn fungerar som
generator. Detta kan ske vid följande tillfällen:
Belastningen driver motorn (vid konstant
•
utfrekvens från frekvensomformaren), dvs.
belastningen alstrar energi.
Vid deceleration (nedrampning) när tröghetsmo-
•
mentet är högt, är friktionen låg och
nedramptiden för kort för att energin ska avsättas
som en förlust i frekvensomformaren, motorn och
installationen.
Felaktigt inställd eftersläpningskompensation kan
•
ge upphov till en högre likströmskretsspänning.
Mot-EMK från PM-motordrift. PM-motorns mot-
•
EMK kan komma att överskrida
frekvensomformarens maximala spänningstolerans och orsaka skador om den utrullar på höga
varvtal. För att förhindra detta är värdet för
4-19 Max. utfrekvens automatiskt begränsat enligt
en intern beräkning baserad på värdet för
1-40 Mot-EMK vid 1000 RPM, 1-25 Nominellt
motorvarvtal och 1-39 Motorpoler.
OBS!
För att undvika rusningsvarvtal i motorn (t. ex. på grund
av för kraftigt roterande delar) kan du utrusta frekvensomformaren med ett bromsmotstånd.
Bromsmotstånd
Frekvensomformaren skyddas från kortslutning i
bromsmotståndet.
Lastdelning
För att skydda DC-bussen mot kortslutning och frekvensomformarna från överbelastning kan du installera DCsäkringar i serie med lastdelningsplintarna för alla anslutna
enheter. Mer information finns i kapitel 9.6.3 Lastdelning.
Överspänningen kan hanteras antingen med en
bromsfunktion (2-10 Bromsfunktion) och/eller med
överspänningsstyrning (2-17 Överspänningsstyrning).
Bromsfunktioner
Anslut ett bromsmotstånd för avgivning av överskott av
bromsenergi. Genom anslutning av ett bromsmotstånd
tillåts en högre DC-busspänning under bromsning.
AC-broms kan användas för att få bättre bromsförmåga
utan att bromsmotstånd behöver användas. Denna
funktion styr en övermagnetisering av motorn när den körs
med generatorisk belastning. Denna funktion kan förbättra
OVC. Genom att öka de elektriska förlusterna i motorn kan
OVC-funktionen öka bromsmomentet utan att överskrida
överspänningsgränsen.
OBS!
AC-broms inte är lika effektiv som dynamisk bromsning
med motstånd.
38 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

Produktfunktioner Design Guide
Överspänningsstyrning (OVC)
OVC minskar risken att frekvensomformaren trippar på
grund av en överspänning på DC-bussen. Detta uppnås
genom att automatiskt utöka nedramptiden.
OBS!
OVC kan aktiveras för PM-motorn med full styrkärna, PM
plus
VVC
, Flux OL och Flux CL för PM-motorer.
OBS!
Aktivera inte OVC vid användning med lyfttillämpningar.
4.1.3 Detektering av motorfas saknas
Motorfasfunktion saknas (4-58 Motorfasfunktion saknas) är
aktiverad som standard, för att undvika motorskador om
en motorfas saknas. Fabriksinställningen är 1 000 ms, men
kan justeras för en snabbare detektering.
Detektering av nätfasobalans
4.1.4
Om frekvensomformaren körs när ett allvarligt nätfel
föreligger förkortas motorns livslängd. Förhållanden anses
som allvarliga om motorn körs kontinuerligt nära nominell
belastning. Fabriksinställningen trippar frekvensomformaren vid fasobalans, nät (14-12 Funktion vid nätfel).
Slå på utgången
4.1.5
Det är tillåtet att lägga till en brytare på utgången mellan
motorn och frekvensomformaren. Felmeddelanden kan
visas. Aktivera flygande start för att fånga in en roterande
motor.
Överbelastningsskydd
4.1.6
Varvtalsgräns
Min. varvtalsgräns: 4-11 Motorvarvtal, nedre gräns [rpm]
eller 4-12 Motorvarvtal, nedre gräns [Hz] begränsar
intervallet för driftsvarvtal till mellan till exempel 30 och
50/60 Hz.
Max. varvtalsgräns: (4-13 Motorvarvtal, övre gräns [rpm] eller
4-19 Max. utfrekvens begränsar det maximala utvarvtalet
som frekvensomformaren kan ge.
ETR
ETR är en elektronisk funktion som simulerar ett
bimetallrelä baserat på interna mätningar. Egenskaperna
visas i Bild 4.1.
Spänningsgräns
Växelriktaren kopplas från så att transistorer och kondensatorer i mellankretsen skyddas när en viss hårdkodad
spänningsnivå överskrids.
Övertemperatur
Frekvensomformaren har inbyggda temperaturgivare och
reagerar direkt vid kritiska värden via hårdkodade gränser.
Låst rotor-funktion
4.1.7
Det kan uppstå situationer när rotorn är låst på grund av
för stor belastning eller andra faktorer (t. ex. lager eller
tillstånd där tillämpningen orsakat ett tillstånd med låst
rotor). Detta medför överhettning i motorns lindningar (fri
rörlighet för rotorn krävs för korrekt kylning). Frekvensomformaren kan känna av det låsta rotortillståndet med PMflödesstyrning utan återkoppling och PM VVC
(30-22 Locked Rotor Protection).
Automatisk nedstämpling
4.1.8
Frekvensomformaren kontrollerar löpande om det
föreligger kritiska nivåer:
plus
-styrning
4 4
Momentgräns
Med momentgränsfunktionen skyddas motorn från överbelastning oberoende av varvtal. Momentgränsen styrs i
4-16 Momentgräns, motordrift och/eller 4-17 Momentgräns,
generatordrift och den tid det tar innan momentgränsvar-
ningen trippar styrs i 14-25 Trippfördr. vid mom.gräns.
Strömgräns
Strömgränsen regleras i 4-18 Strömbegränsning och tiden
innan frekvensomformaren trippar regleras i
14-24 Trippfördr. vid strömgräns.
Som svar på en kritisk nivå justerar frekvensomformaren
switchfrekvensen. Vid kritiskt höga, interna temperaturer
och lågt motorvarvtal kan frekvensomformare också tvinga
PWM-mönstret till SFAVM.
Kritiskt hög temperatur på styrkort eller kylplatta
•
Hög motorbelastning
•
Hög DC-busspänning
•
Lågt motorvarvtal
•
OBS!
Den automatiska nedstämplingen ser annorlunda ut när
parameter 14-55 Utgångsfilter är inställd på [2] Fast
Sinusfilter.
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 39

Produktfunktioner
Design Guide
4.1.9 Automatisk energioptimering
Automatisk energioptimering (AEO) styr frekvensomformaren att kontinuerligt övervaka belastningen på
motorn och justera utspänningen för att maximera
verkningsgraden. Under lätt belastning minskas
spänningen och motorströmmen minimeras. Det ger
motorn högre verkningsgrad, minskad uppvärmning och
tystare drift. Det finns inget behov för att välja en V/Hz-
44
kurva eftersom frekvensomformaren automatiskt justerar
motorspänningen.
4.1.10 Automatisk
4.1.12
Frekvensomformaren tolererar nätfluktuationer som t. ex.
transienter, tillfälliga bortfall, korta spänningsfall och
stötpulser. Frekvensomformaren kompenserar automatiskt
för ingångsspänningar med ±10 % avvikelse från nominell
spänning för att ge full nominell motorspänning och
moment. Om automatisk omstart har valts, startar frekvensomformaren automatiskt efter en tripp. Med flygande
start synkroniseras frekvensomformaren till motorns
rotation före start.
Prestanda vid effektfluktuationer
4.1.13 Resonansdämpning
switchfrekvensmodulering
Högfrekventa motorresonansstörningar kan elimineras
Frekvensomformaren genererar korta elektriska pulser som
bildar ett växelströmsvågmönster. Bärfrekvensen är
frekvensen av dessa pulser. En låg bärfrekvensen (långsam
pulshastighet) orsakar störningar i motorn, vilket gör att en
högre bärfrekvens är att föredra. En hög bärfrekvens i sin
tur genererar värme i frekvensomformaren, som kan
begränsa strömtillgången för motorn. Användning av
isolerade bipolära grindtransistorer (IGBT) innebär
switchning med mycket högt varvtal.
Automatisk switchfrekvensmodulering reglerar dessa
förhållanden automatiskt och ger den högsta bärfrekvensen utan överhettning av frekvensomformaren. Genom
att ge en reglerad hög bärfrekvens dämpas motorljudet
vid långsamma varvtal, när det är viktigt att reglera hörbart
ljud, och ger full uteffekt till motorn när behovet uppstår.
4.1.11
Automatisk nedstämpling för hög
bärfrekvens
Frekvensomformaren är utformad för kontinuerlig drift
med full belastning vid bärfrekvenser mellan 3,0 och 4,5
kHz. En bärfrekvensen högre än 4,5 kHz genererar
värmeökning i frekvensomformaren och kräver
nedstämpling av utströmmen.
genom att använda resonansdämpning. Automatisk eller
manuellt vald frekvensdämpning är möjligt.
4.1.14
De interna kylfläktarna temperaturregleras av givare i
frekvensomformaren. Kylfläkt körs vanligen inte vid låg
belastning eller i energisparläge eller standbyläge. Det
minskar bullret, ökar verkningsgraden och ökar fläktens
livslängd.
4.1.15
Elektromagnetiska störningar (EMI) eller radiofrekvensstör-
ningar (RFI) är störningar som kan påverka en elektrisk
krets på grund av elektromagnetisk induktans eller
strålning från en extern källa. Frekvensomformaren är
utformad för att uppfylla kraven enligt EMC-produktstan-
darden för frekvensomformare IEC 61800-3 samt europeisk
standard SS-EN 55011. För att uppfylla emissionsnivåerna i
SS-EN 55011, måste motorkabeln vara skärmad och korrekt
avslutad. Mer information om EMC-prestanda finns i
kapitel 5.2.1 EMC-testresultat.
4.1.16
Temperaturstyrda fläktar
EMC-överensstämmelse
Galvanisk isolation av styrplintar
En av frekvensomformarens automatiska funktioner
belastningsberoende reglering av bärfrekvensen. Denna
funktion gör att motorn kan dra nytta av den högsta
bärfrekvens som belastningen tillåter.
40 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07
Alla styrplintar och utgångsreläplintar är galvaniskt
isolerade från nätspänningen. Det innebär att regulatorns
kretsar är helt skyddade från inströmmen. Utgångsreläp-
lintarna kräver separat jordning. Isoleringen uppfyller de
hårda isoleringskraven för skyddsklenspänning (PELV).
Komponenterna som utgör den galvaniska isolationen är
Strömförsörjning, inklusive signalisolering
•
Växelriktare för IGBT-enheter, triggtransformatorer
•
och optokopplare
Halleffektomvandlare för utström
•

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2000
500
200
400
300
1000
600
t [s]
175ZA052.11
fOUT = 0,2 x f M,N
fOUT = 2 x f M,N
fOUT = 1 x f M,N
IMN
IM
Produktfunktioner
Design Guide
4.2 Anpassade tillämpningsfunktioner
Detta är de vanligaste funktionerna som kan
programmeras för frekvensomformaren för att förbättra
systemets prestanda. De kräver minimalt med programmering och inställning. Om du känner till funktionerna kan
du optimera systemkonstruktionen och eventuellt undvika
att införa överflödiga komponenter och funktioner.
Anvisningar för hur du aktiverar funktionerna finns i den
produktspecifika programmeringshandboken.
4.2.1 Automatisk motoranpassning
Automatisk motoranpassning (AMA) är en automatiserad
testprocedur som används för mätning av en motors
elektriska egenskaper. AMA ger en korrekt elektronisk
modell av motorn. Den gör att frekvensomformaren kan
beräkna optimal funktion och verkningsgrad med motorn.
Med AMA-processen maximeras också den automatiska
energioptimeringsfunktionen av frekvensomformaren. AMA
utförs utan att motorn roterar och utan frånkoppling av
motorbelastningen.
Termiskt motorskydd
4.2.2
Termiskt motorskydd kan tillhandahållas på 3 sätt:
Via direkt temperaturavkänning med något av
•
följande
PTC- eller KTY-givare i motorlind-
-
ningarna, ansluten till en vanlig AI eller
DI
PT100 eller PT1000 i motorlindningar
-
och motorlager, ansluten till givaringångskort MCB 114
PTC-termistoringång på PTC-termis-
-
torkort MCB 112 (ATEX-godkänd)
Mekanisk termisk brytare (av Klixon-typ) på en DI
•
Via det inbyggda elektronisk-termiska reläet (ETR).
•
ETR beräknar motortemperaturen genom att mäta ström,
frekvens och drifttid. Frekvensomformaren visar den
termiska belastningen på motorn i procent och kan utfärda
en varning vid ett programmerbart överbelastningsbörvärde.
Med programmerbara alternativ vid överbelastningen kan
frekvensomformaren stoppa motorn, minska uteffekten
eller ignorera tillståndet. Även vid låga varvtal uppfyller
frekvensomformaren I2t klass 20-standarder för överbelastning av elektronisk motor.
Bild 4.1 ETR-egenskaper
X-axeln visar förhållandet mellan I
Y-axeln visar tiden i sekunder innan ETR stänger av och
trippar frekvensomformaren. Kurvorna visar det karaktä-
ristiska nominella varvtalet vid dubbla det nominella
varvtalet och vid 0,2 x det nominella motorvarvtalet.
Vid lägre varvtal stänger ETR av vid lägre temperatur
eftersom motorn kyls sämre. På så sätt skyddas motorn
från överhettning även vid låga varvtal. ETR-funktionen
beräknar motortemperaturen baserat på faktisk ström och
faktiskt varvtal. Den beräknade temperaturen visas som en
avläsningsparameter i 16-18 Motor, termisk.
En särskild version av ETR är också tillgänglig för EX-e-
motorer i ATEX-områden. Denna funktion gör det möjligt
att ange en specifik kurva för att skydda Ex-e-motorn.
Programmeringshandboken hjälper användaren med inställ-
ningen steg för steg.
Nätavbrott
4.2.3
Vid nätavbrott fortsätter frekvensomformaren driften tills
mellankretsspänningen är lägre än den lägsta gränsspän-
ningen, som normalt är 15 % under frekvensomformarens
lägsta nominella nätspänning. Nätspänningen före
avbrottet och motorbelastningen bestämmer hur lång tid
som går innan frekvensomformaren utrullar.
Frekvensomformaren kan konfigureras (14-10 Nätfel) för
olika typer av funktion under nätavbrott, t. ex.:
Tripplås när DC-bussen är uttömd
•
Utrullning med flygande start när nätspänningen
•
återkommer (1-73 Flygande start)
Kinetisk back-up
•
Kontrollerad nedrampning
•
motor
och I
motor
nominellt.
4 4
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 41

Produktfunktioner
Design Guide
Flygande start
Med denna funktion kan du fånga in en motor som roterar
okontrollerat på grund av nätavbrott. Detta alternativ är
mycket användbart för centrifuger och fläktar.
Kinetisk back-up
Detta val säkerställer att frekvensomformaren körs så länge
som det finns energi i systemet. Vid korta nätavbrott
återställs driften när nätspänningen återkommer, utan att
44
tillämpningen någonsin stoppas eller förlorar styrning.
Flera varianter av kinetisk back-up kan väljas.
Frekvensomformarens beteende vid nätavbrott kan
konfigureras i 14-10 Nätfel och 1-73 Flygande start.
4.2.7
Fullt moment med reducerad
hastighet
Frekvensomformaren följer en variabel V/Hz-kurva som ger
fullt motormoment även vid reducerat varvtal. Fullt
utgående vridmoment kan sammanfalla med motorns
maximala driftvarvtal. Detta är en skillnad jämfört med
frekvensomformare med variabelt moment som ger
minskat motormoment vid lågt varvtal, eller omformare
med konstant moment som ger överskottsspänning, värme
och motorljud vid mindre än fullt varvtal.
4.2.8 Frekvenshopp
Inbyggd PID-regulator
4.2.4
I vissa tillämpningar kan systemet kan ha funktionsdugliga
Den inbyggda proportionella, integrerande, deriverande
(PID) regulatorn är tillgänglig och undanröjer behovet av
extra styrenheter. PID-regulatorn upprätthåller konstant
styrning av system med återkoppling som kräver att
reglerat tryck, flöde, temperatur och andra systemkrav
upprätthålls. Frekvensomformaren kan ge oberoende
styrning av motorvarvtalet som svar på återkopplingssignaler från externa givare.
Frekvensomformaren hanterar två återkopplingssignaler
från två olika enheter. Den här funktionen gör det möjligt
att reglera ett system med olika återkopplingskrav.
Frekvensomformaren fattar styrningsbeslut genom att
jämföra de två signalerna för att optimera systemets
prestanda.
varvtal som skapar en mekanisk resonans. Det kan ge
upphov till stora ljudstörningar och potentiella skador på
mekaniska komponenter i systemet. Frekvensomformaren
har fyra programmerbara bandbredder för förbikoppling av
frekvens. De gör att motorn kan hoppa över varvtal som
ger upphov till systemresonans.
Förvärmning av motor
4.2.9
För att förvärma en motor i kall eller fuktig miljö, kan en
mycket låg likström överföras till motorn kontinuerligt för
att skydda den från kondens och kallstart. Detta kan
undanröja behovet av en värmare.
Automatisk omstart
4.2.5
Frekvensomformaren kan programmeras att automatiskt
starta om motorn efter en mindre tripp, t. ex. tillfällig
effektförlust eller fluktuation. Denna funktion undanröjer
behovet av manuell återställning och förbättrar automatisk
drift för fjärrstyrda system. Antalet omstartsförsök samt
varaktigheten mellan försöken kan begränsas.
Flygande start
4.2.6
Flygande start gör att frekvensomformaren kan synkroniseras med en motor i drift som roterar fullt varvtal eller
mindre, i båda riktningarna. Detta förhindrar trippar på
grund av överström. Det minimerar mekaniska påfrestningar på systemet eftersom motorn inte får någon
plötslig ändring av varvtalet när frekvensomformaren
startas.
4.2.10
Frekvensomformaren har fyra inställningar som kan
programmeras oberoende av varandra. Med externt
menyval är det möjligt att växla mellan oberoende
programmerade funktioner som aktiveras av digitala
ingångar eller ett seriellt kommando. Oberoende inställ-
ningar används till exempel för att ändra referenser eller
för drift under dag/natt eller sommar/vinter, eller för att
styra flera motorer. Den aktiva menyn visas på LCP:n.
Inställningsdata kan kopieras från frekvensomformare till
frekvensomformare genom att information hämtas från
den avtagbara LCP:n.
Fyra programmerbara inställningar
42 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

Produktfunktioner Design Guide
4.2.11 Dynamisk bromsning
Dynamisk broms uppnås med hjälp av:
Bromsmotstånd
•
En broms-IGBT håller överspänningen under en viss tröskelnivå genom att styra bromsenergin från motorn till det
anslutna bromsmotståndet (2-10 Bromsfunktion = [1]).
AC-broms
•
Bromsenergin distribueras i motorn genom att ändra förlustvillkoren i motorn. AC-bromsfunktionen kan inte
användas i tillämpningar med hög cykelfrekvens eftersom detta kan leda till överhettning i motorn
(2-10 Bromsfunktion = [2]).
DC-broms
•
En övermodulerad likström som läggs till växelströmmen fungerar som en virvelströmbroms
(2-02 DC-bromstid ≠ 0 s ).
4 4
4.2.12
Parametrar för att kontrollera styrningen av en elektromagnetisk (mekanisk) broms, vilket vanligtvis krävs i lyfttillämpningar.
För att styra en mekanisk broms krävs en reläutgång (relä 01 eller relä 02) eller en programmerad digital utgång (plint 27
eller 29). Normalt måste denna utgång vara stängd under de perioder som frekvensomformaren inte klarar av att "hålla"
motorn, till exempel på grund av för stor belastning. Välj Styrning av mekanisk broms [32] för tillämpningar med en elektromagnetisk broms i 5-40 Funktionsrelä, 5-30 Plint 27, digital utgång eller 5-31 Plint 29, digital utgång. Vid val av [32] Styrning av
mekanisk broms är den mekaniska bromsen stängd från starten till dess att utströmmen ligger över den nivå som valts i
2-20 Frikoppla broms, ström. Vid stopp aktiveras den mekaniska bromsen när varvtalet är lägre än den nivå som anges i
2-21 Aktivera bromsvarvtal [v/m]. Om frekvensomformaren hamnar i ett larmtillstånd eller i ett överströms- eller överspän-
ningstillstånd, kopplas den mekaniska bromsen omedelbart in. Detta inträffar också med Säkert vridmoment av.
Styrning av mekanisk broms utan återkoppling
OBS!
Skyddsläge och trippfördröjningsfunktioner (14-25 Trippfördr. vid mom.gräns och 14-26 Trippfördröjning vid växelriktarfel)
kan fördröja aktiveringen av den mekaniska bromsen i larmtillstånd. Dessa funktioner måste inaktiveras i lyfttillämpningar.
Bild 4.2 Mekanisk broms
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 43

Mek.Broms
GainFörstärkning
Relä
Momentref.
MotorVarvtal
Förmag. Momentramp
tid
p. 2-27
Momentref. 2-26
Gain Boost Factor
p. 2-28
Broms
Frikopplings
tid
p. 2-25
Ramp 1 upp
p. 3-41
Ramp 1 ned
p. 3-42
Stopp
Fördröjning
p. 2-24
Aktivera
Broms
Fördröjning
p. 2-23
1 2 3
130BA642.12
II
I
Produktfunktioner Design Guide
4.2.13 Mekanisk bromsstyrning med återkoppling/mekanisk broms vid lyft
Mekanisk bromsstyrning vid lyft stödjer följande funktioner:
Två kanaler för mekanisk bromsåterkoppling som ger ytterligare skydd mot oönskad funktion till följd av trasig
•
kabel.
Övervakning av mekanisk bromsåterkoppling genom hela cykeln. Det hjälper till att skydda den mekaniska
•
bromsen – särskilt om flera frekvensomformare är anslutna till samma axel.
Ingen upprampning innan återkopplingen bekräftar att den mekaniska bromsen är öppen.
44
•
Förbättrad belastningsstyrning vid stopp. Om 2-23 Aktivera bromsfördröjning är för kort, aktiveras W22 och
•
momentet tillåts inte att rampas ned.
Övergången när motorn tar över belastningen från bromsen kan konfigureras. 2-28 Extra förstärkningsfaktor kan
•
ökas för att minimera rörelsen. För en mycket mjuk övergång kan du ändra inställningen från varvtalsreglering till
lägesstyrning under ändringen.
Ange 0 för 2-28 Extra förstärkningsfaktor om du vill aktivera lägesstyrning under 2-25 Bromsfrikopplingstid.
•
Det aktiverar parametrarna 2-30 Position P Start Proportional Gain till 2-33 Speed PID Start Lowpass Filter
Time som är PID-parametrar för lägesstyrning.
Bild 4.3 Bromsfrikopplingssekvens för styrning av mekanisk broms i lyfttillämpningar Den här bromsstyrningen är endast tillgänglig i
FLUX med motoråterkoppling, för asynkron- och ej utpräglade PM-motorer.
2-26 Momentref till 2-33 Speed PID Start Lowpass Filter Time är endast tillgängliga för styrning av mekanisk broms för
lyftanordningar (FLUX med motoråterkoppling). 2-30 Position P Start Proportional Gain till 2-33 Speed PID Start Lowpass Filter
Time kan konfigureras för mycket mjuk övergång från varvtalsreglering till lägesstyrning under 2-25 Bromsfrikopplingstid –
tiden när belastningen överförs från den mekaniska bromsen till frekvensomformaren.
2-30 Position P Start Proportional Gain till 2-33 Speed PID Start Lowpass Filter Time är aktiverade om 2-28 Extra förstärkningsfaktor är inställd på 0. Mer information finns i Bild 4.3.
OBS!
Exempel på avancerad styrning av mekanisk broms i lyfttillämpningar finns i kapitel 10 Tillämpningsexempel.
44 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

. . .
. . .
Par. 13-11
Comparator Operator
Par. 13-43
Logic Rule Operator 2
Par. 13-51
SL Controller Event
Par. 13-52
SL Controller Action
130BB671.13
Coast
Start timer
Set Do X low
Select set-up 2
. . .
Running
Warning
Torque limit
Digital input X 30/2
. . .
=
TRUE longer than..
. . .
. . .
Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
Produktfunktioner Design Guide
4.2.14 Smart Logic Control (SLC)
Smart Logic Control (SLC) är en sekvens av användardefinierade åtgärder (se 13-52 SL Controller-funktioner [x]) som
SLC utför när motsvarande användardefinierad händelse (se
13-51 SL Controller-villkor [x]) utvärderas som SANT av SLC.
Villkoret för en händelse kan vara en viss status eller att
uteffekten från en logisk regel eller komparator är SANN.
Det leder till en definierad åtgärd, som visas i Bild 4.4.
När den sista
händelsen/åtgärden har utförts, börjar
sekvensen om igen från händelse [0]/åtgärd [0]. Bild 4.5
visar ett exempel med 4 händelser/åtgärder:
Bild 4.5 Ordning för utförandet när fyra händelser/åtgärder
har programmerats
Komparatorer
Komparatorer används för jämförelse av kontinuerliga
variabler (dvs. utfrekvens, utström, analog ingång osv.)
med fasta förinställda värden.
4 4
Bild 4.4 SLC-händelse och -åtgärd
Bild 4.6 Komparatorer
Alla händelser och åtgärder är numrerade och sammanlänkade i par (tillstånd). Detta innebär att när händelse [0]
inträffar (får värdet SANT) utförs åtgärd [0]. Därefter
kommer villkoren för händelse [1] att utvärderas och om
resultatet blir SANT kommer åtgärd [1] att utföras osv.
Endast en händelse utvärderas åt gången. Om en händelse
efter utvärderingen får värdet FALSKT händer ingenting (i
SLC) under det pågående scan intervallet och inga andra
händelser kommer att utvärderas. Detta innebär att när SLC
startas evalueras den händelse [0] (och endast händelse [0])
vid varje scan-intervall. Det är bara om händelse [0]
utvärderas som SANT som SLC utför åtgärd [0] och börjar
en utvärdering av händelse [1]. Det går att programmera
Logiska regler
Kombinera upp till tre booleska ingångar (SANT/FALSKT-
ingångar) från tidreläer, komparatorer, digitala ingångar,
statusbitar och händelser med hjälp av de logiska
operatorerna OCH, ELLER och INTE.
från 1 till 20 händelser och åtgärder.
När den sista händelsen/åtgärden har utförts börjar
sekvensen om igen från händelse [0]/åtgärd [0]. Bild 4.5
visar ett exempel med 4 händelser/åtgärder:
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 45
Bild 4.7 Logiska regler

130BB890.14
P1 P2 P3
Produktfunktioner
Design Guide
4.2.15 Säkert vridmoment av
Information om Säkert vridmoment av finns i VLT® FCseriens handbok för Säkert vridmoment av.
4.3
Danfoss VLT® FlexConcept
Danfoss VLT® FlexConcept® är en energieffektiv, flexibel
och kostnadseffektiv frekvensomformarlösning, framförallt
44
ägnad för transportbanor. Konceptet består av VLT
OneGearDrive® som drivs av VLT® AutomationDrive FC 302
eller VLT® Decentral Drive FCD 302.
OneGearDrive är i princip en permanentmagnetmotor med
en vinkelväxel. Vinkelväxeln kan levereras med olika
utväxlingsförhållande.
®
®
Bild 4.8 OneGearDrive
OneGearDrive kan drivas av VLT® AutomationDrive FC 302
och VLT® Decentral Drive FCD 302 i följande effektstorlekar
beroende på den aktuella tillämpningens krav:
0,75 kW
•
1,1 kW
•
1,5 kW
•
2,2 kW
•
3,0 kW
•
När [1] PM, ej utpräg.SPM har valts i i antingen FC 302 eller
FCD 302, kan OneGearDrive väljas i 1-11 Motor Model och
de rekommenderade parametrarna ställs in automatiskt.
Mer information finns i Programmeringshandboken för VLT
AutomationDrive FC 301/FC 302, Handboken för VLT
OneGearDrive Selection och www.danfoss.com/BusinessAreas/
DrivesSolutions/VLTFlexConcept/
®
®
46 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

Systemintegrering
5 Systemintegrering
5.1 Omgivande miljöförhållanden
Design Guide
5.1.3
Temperatur och kylning
5.1.1 Fukt
Även om frekvensomformaren kan fungera korrekt vid hög
luftfuktighet ( upp till 95 % relativ luftfuktighet) måste
kondensation alltid undvikas. Det föreligger särskilt risk för
kondensation när frekvensomformaren eller någon av dess
komponenter är kallare än fuktig omgivande luft. Fukten i
luften kan också kondensera på de elektroniska
komponenterna och orsaka kortslutningar. Kondensation
inträffar på strömlösa enheter. Det är en god idé att
installera en värmare i apparatskåpet om det finns risk för
kondensation på grund av omgivande miljöförhållanden.
Undvik installation på platser där det förekommer frost.
Ett annat alternativ är att använda frekvensomformaren i
standby-läge (med enheten ansluten till nätet) för att
minska risken för kondensation. Du bör ändå kontrollera
att effektavgivningen är tillräcklig för att hålla kretsarna i
frekvensomformaren torra.
Temperatur
5.1.2
Den lägsta och högsta omgivningstemperaturen anges för
alla frekvensomformare. Om du kan undvika extrema
omgivningstemperaturer förlänger du frekvensomformarens livslängd och maximerar systemets tillförlitlighet.
Följ de rekommendationer som listas för bästa möjliga
prestanda och livslängd för utrustningen.
Även om frekvensomformare kan användas vid så
•
låga temperaturer som -10 °C kan drift vid
nominell belastning bara garanteras vid
temperaturer på 0 °C eller mer.
Överskrid inte den gränsen för maximal tempera-
•
turgränsen.
Elektroniska komponenters livslängd minskar med
•
50 % för varje tiograderssteg (°C) vid drift över
märktemperaturen.
Även enheter med IP54-, IP55- och IP66-klassifi-
•
cering måste användas inom de intervall för
omgivningstemperatur som anges.
Ytterligare luftkonditionering av apparatskåp eller
•
installationsplats kan krävas.
Frekvensomformarna har inbyggda fläktar för att
säkerställa optimal kylning. Huvudfläkten leder luftflödet
utmed kylfenorna på kylplattan och ger på så sätt kylning
av luften på insidan. Vissa effektstorlekar har en liten
sekundär fläkt nära styrkortet, som säkerställer att luften på
insidan cirkulerar för att undvika lokal överhettning.
Huvudfläkten styrs av temperaturen inuti frekvensom-
formaren och varvtalet ökar gradvis i takt med
temperaturen, vilket minskar buller och energiförbrukning
när behovet är lågt och säkerställer maximal kylning när
situationen kräver det. Fläktstyrningen kan anpassas via
14-52 Fläktstyrning för att passa vilket användningsområde
som helst, liksom för att skydda mot negativa effekter av
kylning i mycket kallt klimat. Vid övertemperatur inuti
frekvensomformaren stämplas switchfrekvensen och
switchmönstret ned. Mer information finns i
kapitel 5.1.4 Manuell nedstämpling.
Den lägsta och högsta omgivningstemperaturen anges för
alla frekvensomformare. Om extrema omgivningstempe-
raturer kan undvikas förlängs livslängden på utrustningen
och hela systemets tillförlitlighet maximeras. Följ de
rekommendationer som listas för bästa möjliga prestanda
och livslängd för utrustningen.
Även om frekvensomformare kan användas vid så
•
låga temperaturer som till -10 °C, kan driften vid
nominell belastning bara garanteras vid
temperaturer på 0 °C eller mer.
Överskrid inte den gränsen för maximal tempera-
•
turgränsen.
Överskrid inte den maximala dygnsmedeltempe-
•
raturen.
(Dygnsmedeltemperaturen är den maximala
omgivningstemperaturen minus 5 °C.
Exempel: Max. temperatur är 50 °C, maximal
dygnstemperatur är 45 °C )
Observera ventilationskraven upptill och nedtill
•
(kapitel 8.2.1.1 Avstånd).
Vanligen gäller att livslängden på en elektronisk
•
komponent minskar med 50 % för varje tiotal
grader (C) vid användning över dess märktemperatur.
Även enheter med höga skyddsklasser måste
•
hållas inom angivet intervall för omgivningstemperatur.
Ytterligare luftkonditionering av apparatskåp eller
•
installationsplats kan krävas.
5 5
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 47

Max.I
out
(%)
at T
AMB, MAX
D, E and F enclosures
Altitude (km)
HO
NO
T
at 100% I
out
100%
96%
92%
0 K
-3 K
-6 K
1 km 2 km 3 km
-5 K
-8 K
-11 K
130BC015.10
AMB, MAX
Systemintegrering Design Guide
5.1.4 Manuell nedstämpling
Beakta nedstämpling när något av följande förhållanden
föreligger.
5.1.4.2
Om lufttrycket minskar avtar också luftens kylningska-
pacitet.
Nedstämpling för lågt lufttryck
Under 1 000 m höjd behövs ingen nedstämpling men på
Drift över 1000 m (lågt lufttryck)
•
Drift vid lågt varvtal
•
Långa motorkablar
•
Kablar med stort tvärsnitt
•
Hög omgivningstemperatur
•
55
Mer information finns i kapitel 6.2.6 Nedstämpling för
höjder över 1 000 m ska omgivningstemperaturen (T
eller max. utström (I
) nedstämplas i enlighet med
out
Bild 5.1.
AMB
)
omgivningstemperaturer.
5.1.4.1
Nedstämpling för drift vid lågt
varvtal
När en motor är ansluten till frekvensomformaren måste
man kontrollera att motorkylningen är tillräcklig.
Nivån på uppvärmning beror på motorns belastning men
också på driftvarvtal och tid.
Konstant moment-tillämpningar (CT-läge)
Problem kan uppstå vid låga varv per minut i konstant
moment-tillämpningar. I en tillämpning med konstant
moment kan en motor överhettas vida låga varvtal på
grund av för lite kylning från motorns inbyggda fläkt.
Om motorn kontinuerligt ska köras på ett varvtal som är
lägre än halva nominella varvtalet för motorn måste extra
kylning tillföras (eller så måste en motor som är utformad
för denna typ av drift användas).
Ett alternativ är att reducera motorns belastningsgrad
genom att välja en större motor. Frekvensomformarens
konstruktion begränsar motorns storlek.
Variabla (kvadratiska) momenttillämpningar (VT)
I VT-tillämpningar som centrifugalpumpar och fläktar, där
momentet är proportionellt mot kvadraten på varvtalet
och effekten är proportionell mot kvadraten på varvtalet,
behövs ingen ytterligare kylning eller nedstämpling av
motorn.
Bild 5.1 Nedstämpling av utström kontra höjd vid T
kapsling A, B och C. Vid höjd över 2000 m, kontakta Danfoss
avseende PELV.
AMB, MAX
för
Ett alternativ är att sänka omgivningstemperaturen vid
höga höjder och därmed säkerställa en utström på 100 %
vid höga höjder. Som ett exempel på hur diagrammet ska
läsas, förtydligas situationen vid 2 000 m för kapslingstyp B
med T
-3,3 K) är 91 % av den nominella utströmmen
MAX
= 50° C. Vid en temperatur på 45 °C (T
AMB, MAX
AMB,
tillgänglig. Vid en temperatur på 41,7 °C är 100 % av den
nominella utströmmen tillgänglig.
Bild 5.2 Nedstämpling av utström kontra höjd vid T
kapslingstyp D3h.
48 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07
AMB, MAX
för

Systemintegrering
Design Guide
5.1.5 Ljudnivå
Ljudnivån från frekvensomformaren kan komma från tre källor:
DC-busspolar (mellankrets)
•
RFI-filterdrossel
•
Interna fläktar
•
Se kapitel 6.2.9 Ljudnivå för klassificering av ljudnivå.
5.1.6 Vibrationer och stötar
Frekvensomformaren är testad enligt ett förfarande som bygger på IEC 68-2-6/34/35 och 36. Dessa tester utsätter enheten
för 0,7 g-krafter i ett intervall av 18 till 1 000 Hz, slumpmässigt, i tre riktningar under två timmar. Alla frekvensomformare
från Danfoss uppfyller de krav som motsvarar dessa villkor om enheten monteras på vägg eller golv, eller om den monteras
i panel fast monterad på vägg eller golv.
Aggressiva miljöer
5.1.7
5.1.7.1 Gaser
Aggressiva gaser som svavelväte, klorin eller ammoniak kan skada frekvensomformarens elektriska och mekaniska
komponenter. Förorening av den kylande luften kan orsaka gradvis nedbrytning av mönsterkort i och lucktätningar.
Aggressiva föroreningar förekommer ofta i reningsverk och simbassänger. Ett säkert tecken på att miljön är aggressiv är att
koppar korroderar.
I aggressiva miljöer rekommenderas begränsade IP-kapslingar tillsammans med kretskort med godkänd ytbehandling. I
Tabell 5.1 finns värden för godkänd ytbeläggning.
OBS!
Frekvensomformaren levereras som standard med klass 3C2-ytbeläggning. På begäran kan klass 3C3-ytbeläggning
användas.
Klass
Gastyp Enhet
Havssalt gäller ej Ingen Saltsprej Saltsprej
Svaveloxider
Svavelväte
Klor
Klorväte
Vätefluorid
Ammoniak
Ozon
Kväve
mg/m
mg/m
mg/m
mg/m
mg/m
mg/m
mg/m
mg/m
3
3
3
3
3
3
3
3
3C1 3C2 3C3
Medelvärde Max. värde Medelvärde Max. värde
0,1 0,3 1,0 5,0 10
0,01 0,1 0,5 3,0 10
0,01 0,1 0,03 0,3 1,0
0,01 0,1 0,5 1,0 5,0
0,003 0,01 0,03 0,1 3,0
0,3 1,0 3,0 10 35
0,01 0,05 0,1 0,1 0,3
0,1 0,5 1,0 3,0 9,0
5 5
Tabell 5.1 Klassificeringar av godkänd ytbeläggning
De maximala värdena är transienta toppvärden som inte får överskridas längre än 30 minuter per dag.
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 49

Systemintegrering Design Guide
5.1.7.2 Exponering för damm
I praktiken går det ofta inte att undvika att frekvensomformare installeras i miljöer med stor exponering för
damm. Damm påverkar vägg- eller rammonterade frekvensomformare med IP55- eller IP66-klassificering, samt sådana
som monterats i apparatskåp med IP21- eller IP20-klassificering. De tre aspekter som beskrivs nedan måste beaktas
när frekvensomformare installeras i sådana miljöer.
Reducerad kylning
Damm samlas på enhetens ytor och inuti enheten på
55
kretskorten och de elektroniska komponenterna. Dammet
fungerar som ett isolerande lager och hindrar värmeöverföringen till den omgivande luften och minskar
kylningskapaciteten. Komponenterna blir varmare. Detta
medför att de elektroniska komponenterna åldras fortare,
och frekvensomformarens livslängd förkortas. Dammavlagringar på kylplattan på frekvensomformarens baksida
påverkar också enhetens livslängd negativt.
Kylfläktar
Luftflödet för kylning av frekvensomformaren genereras av
kylfläktar, som vanligtvis finns på enhetens baksida. Damm
kan tränga in i fläktrotorernas lager, och fungerar då som
slipmedel. Det leder till lagerskador och fläkthaveri.
Filter
Frekvensomformare för höga effekter är utrustade med
kylfläktar som blåser ut varm luft från enhetens insida.
Över en viss storlek har de här fläktarna filtermattor. Filtren
kan snabbt bli igensatta om de används i mycket dammiga
miljöer. Under sådana omständigheter måste förebyggande
åtgärder vidtas.
Periodiskt underhåll
Under de förhållanden som beskrivs ovan bör frekvensomformaren rengöras under det regelbundna underhållet.
Avlägsna damm från kylplattan och fläktarna och rengör
filtermattorna.
5.1.7.3
System som används i omgivningar med explosionsrisk
måste uppfylla vissa särskilda krav. EU:s direktiv 94/9/EG
beskriver driften av elektroniska enheter i explosionsfarliga
omgivningar.
Motorer som regleras av frekvensomformare i explosions-
farliga miljöer måste temperaturövervakas med en PTC-
temperaturgivare. Motorer med antändningsskyddsklass d
eller e är godkända i den här miljön.
Omgivningar med explosionsrisk
e-klassificering består i att förhindra gnistbildning.
•
FC 302 med programvaruversion V6.3x eller
senare är försedd med funktionen "ATEX ETR
termisk övervakning" för drift av speciellt
godkända Ex-e-motorer. I kombination med en
ATEX-godkänd PTC-övervakningsenhet som PTCtermistorkortet MCB 112 behöver inte
installationen något separat godkännande från en
auktoriserad organisation, dvs. inget behov av
matchade par.
d-klassificering består i att eventuella gnistor som
•
uppstår innesluts i ett skyddat område. Inget
godkännande behövs, men däremot särskilda
ledningar och inneslutning.
En kombination av d och e är vanligast vid
•
användning i omgivning med explosionsrisk.
Själva motorn har antändningsskyddsklass e,
medan motorns kabeldragning och anslutningsområdet uppfyller e-klassificeringen.
Begränsningen för det e-klassade anslutningsområdet är den maximala spänning som tillåts i
området. En frekvensomformares utspänning är
vanligtvis begränsad till nätspänningen.
Modulering av utspänningen kan generera
otillåtna toppspänningsnivåer för e-klassificering.
Det har i praktiken visat sig att användningen av
ett sinusfilter vid frekvensomformarens
utgångsström är ett effektivt sätt att dämpa den
höga toppspänningen.
50 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

Systemintegrering Design Guide
OBS!
Installera aldrig en frekvensomformare i omgivning med
explosionsrisk. Installera frekvensomformaren i ett
apparatskåp utanför området. Användning av ett
sinusfilter vid frekvensomformarens utgång
rekommenderas också, för att dämpa dU/dt-spänningsökning och toppspänning. Se till att motorkablarna hålls
så korta som möjligt.
OBS!
VLT® AutomationDrive-enheter med tillvalet MCB 112
har PTB-certifierad övervakningsfunktion för motorns
termistorgivare för omgivningar med explosionsrisk.
Skärmade motorkablar behövs inte när frekvensomformare används med sinusutgångsfilter.
5.1.8 Underhåll
Danfoss-frekvensomformare upp till 90 kW är
underhållsfria. Frekvensomformare för höga effekter
(110 kW och mer) har inbyggda filtermattor, som måste
rengöras då och då av operatören beroende på hur
dammig och smutsig miljön är. Underhållsintervall för
kylfläktar (ungefär 3 år) och kondensatorer (ungefär 5 år)
rekommenderas för de flesta miljöer.
5 5
Lagring
5.1.9
Precis som all annan elektronisk utrustning måste frekvensomformare förvaras torrt. Periodisk formering
(kondensatorladdning) är inte nödvändigt vid lagring.
Vi rekommenderar att utrustningen förvaras i sin obrutna
förpackning fram till installationen.
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 51

1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Systemintegrering
Design Guide
5.2 Allmänt om EMC
Elektriska störningar ligger vanligtvis på frekvenser mellan 150 kHz och 30 MHz. Luftburen störning från frekvensomformaren på mellan 30 MHz och 1 GHz genereras av växelriktaren, motorkabeln och motorsystemet.
Som framgår av Bild 5.3 genereras läckströmmar av kapacitans i motorkabeln tillsammans med ett högt dU/dt från motorspänningen.
Användning av en skärmad motorkabel ökar läckströmmen (se Bild 5.3), eftersom skärmade kablar har högre kapacitans till
jord än oskärmade kablar. Om läckströmmen inte filtreras orsakar den större störning på nätströmmen i radiofrekvensområdet under ca 5 MHz. Eftersom läckströmmen (I1) förs tillbaka till enheten via skärmen (I3), finns i princip bara ett litet
elektromagnetiskt fält (I4) från den skärmade motorkabeln i enlighet med Bild 5.3.
Skärmen reducerar luftburen störning, men ökar den lågfrekventa störningen i nätledningen. Motorkabelns skärm ska
55
anslutas både till frekvensomformarens kapsling och motorns kapsling. Använd de inbyggda skärmklämmorna för att
undvika tvinnade skärmändar. Tvinnade skärmändar ökar skärmimpedansen vid högre frekvenser vilket minskar skärmeffekten och ökar läckströmmen (I4).
Om du använder en skärmad kabel till relä, styrkabel, signalgränssnitt och broms ska du ansluta skärmen till kapslingen i
båda slutpunkterna. I vissa fall det är nödvändigt att bryta skärmen för att undvika strömslingor.
1 Jordledning 4 Frekvensomformare
2 Skärm 5 Skärmad motorkabel
3 Växelströmsnätförsörjning 6 Motor
Bild 5.3 Situationer som skapar läckström
Om skärmen ska anslutas till en monteringsplåt i frekvensomformaren måste monteringsplåten vara av metall så att
skärmströmmen kan gå tillbaka till apparaten. Se också till att det blir god elektrisk kontakt från monteringsplåten via
monteringsskruvarna till frekvensomformarens chassi.
Om oskärmade kablar används uppfylls de flesta immunitetskrav, men inte vissa emissionskrav.
För att reducera den totala störningsnivån från hela systemet (enhet och installation) ska motor- och bromskablarna vara så
korta som möjligt. Undvik att förlägga kablar med känsliga signalnivåer längs med motor- eller bromskablar. Radiostörning
över 50 MHz (luftburen) genereras i synnerhet av styrelektroniken.
52 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

Systemintegrering
Design Guide
5.2.1 EMC-testresultat
Följande testresultat har erhållits vid tester utförda med ett system med en frekvensomformare, en skärmad styrkabel, en
styrdosa med potentiometer samt en separat motor och en skärmad motorkabel (Ölflex Classic 100 CY) vid nominell switchfrekvens. I Tabell 5.2 anges maximala motorkabellängder för överensstämmelse.
OBS!
Förhållandena kan variera betydligt för olika konfigurationer.
OBS!
Kontakta Tabell 9.19 angående parallella motorkablar.
RFI-filtertyp Ledningsburen emission Luftburen emission
Kabellängd [m]
Standarder
och krav
H1
FC 301 0–37 kW 200–240 V 10 50 50 Nej Ja Ja
FC 302 0–37 kW 200–240 V 50 150 150 Nej Ja Ja
H2/H5
FC 301 0–3,7 kW 200–240 V Nej Nej 5 Nej Nej Ja
FC 302
0–7,5 kW 380–500 V Nej Nej 5 Nej Nej Ja
H3
FC 301 0–1,5 kW 200–240 V 2,5 25 25 Nej Ja Ja
0–1,5 kW 380-480 V 2,5 25 25 Nej Ja Ja
H4
FC 302 1,1–7,5 kW 525–690 V Nej 100 100 Nej Ja Ja
11–22 kW 525–690 V Nej 100 100 Nej Ja Ja
30–75 kW 525–690 V Nej 150 150 Nej Ja Ja
1)
Hx
FC 302 0,75–75 kW 525–600 V Nej Nej Nej Nej Nej Nej
EN 55011/CISPR 11 Klass B Klass A
Grupp 1
SS-EN/IEC 61800-3 Kategori C1 Kategori C2 Kategori C3 Kategori C1 Kategori C2 Kategori C3
0–75 kW 380–480 V 10 50 50 Nej Ja Ja
0–75 kW 380–480 V 50 150 150 Nej Ja Ja
5,5-37 kW 200–240 V2)Nej Nej 25 Nej Nej Ja
11–75 kW 380–500 V2)Nej Nej 25 Nej Nej Ja
2)
11–22 kW 525–690 V
30–75 kW 525–690 V
11–37 kW 525–690 V
Nej Nej 25 Nej Nej Ja
2)
Nej Nej 25 Nej Nej Ja
3)
Nej 150 150 Nej Ja Ja
Klass A
Grupp 2
Klass B Klass A
Grupp 1
Klass A
Grupp 2
5 5
Tabell 5.2 EMC-testresultat (emission) maximal motorkabellängd
1)
Hx-versioner kan användas enligt SS-EN/IEC 61800-3 kategori C4
2)
T5, 22–45 kW och T7, 22–75 kW uppfyller klass A grupp 1 med 25 m motorkabel. Vissa restriktioner gäller för installationen (kontakta Danfoss
för mer information).
Hx, H1, H2, H3, H4 eller H5 definieras på typkodsposition 16–17 för EMC-filter, se Tabell 7.1.
3)
IP20
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 53

Systemintegrering
Design Guide
5.2.2 Emissionskrav
EMC-produktstandarden för frekvensomformare definierar fyra kategorier (C1, C2, C3 och C4) med specificerade krav för
emission och immunitet. Tabell 5.3 visar definitionen av de fyra kategorierna och motsvarande klassificering från SS-EN
55011.
Kategori Definition
C1 Frekvensomformare som är installerade i first environment (publika nät,
hem och kontor) med en nätspänning som understiger 1 000 V.
C2 Frekvensomformare som är installerade i first environment (publika nät,
55
C3 Frekvensomformare som är installerade i second environment (industrinät)
C4 Frekvensomformare som är installerade i second environment (industrinät)
Tabell 5.3 Förhållande mellan IEC 61800-3 och SS-EN 55011
När de generella (ledningsburna) emissionsstandarderna används måste frekvensomformarna uppfylla gränsvärdena i
Tabell 5.4.
Miljö
First environment
(publika nät, hem och kontor)
Second environment
(industrimiljö)
hem och kontor) med en nätspänning som understiger 1 000 V, som
varken är flyttbara eller utrustade med kontakter och som är avsedda att
installeras och tas i drift av en fackman.
med en nätspänning som understiger 1 000 V.
med en nätspänning som är lika med eller överstiger 1 000 V, med en
märkspänning som är lika med eller överstiger 400 A eller som är avsedda
att användas i komplexa system.
Allmän emissionsstandard
SS-EN/IEC 61000-6-3 Emissionsstandard för bostads- och
kontorsmiljöer samt lätt industrimiljö.
SS-EN/IEC 61000-6-4 Emissionsstandard för industrimiljö. Klass A Grupp 1
Motsvarande emissionsklass i SSEN 55011
Klass B
Klass A Grupp 1
Klass A Grupp 2
Ingen begränsning.
En EMC-plan ska upprättas.
Motsvarande emissionsklass i SS-EN
55011
Klass B
Tabell 5.4 Samband mellan allmänna emissionsstandarder och
SS-EN 55011
Immunitetskrav
5.2.3
Immunitetskraven för frekvensomformare beror på miljön där de installeras. Kraven på industrimiljön är högre än kraven för
hem- och kontorsmiljöer. Alla Danfoss frekvensomformare uppfyller kraven för industrimiljön och uppfyller således också de
lägre kraven för hem och kontor med en bred säkerhetsmarginal.
För att dokumentera immuniteten mot störningar från elektriska fenomen har följande immunitetstest utförts enligt följande
grundläggande standarder:
SS-EN 61000-4-2 (IEC 61000-4-2): Elektrostatiska urladdningar (ESD): Simulering av elektrostatiska urladdningar
•
från människor.
SS-EN 61000-4-3 (IEC 61000-4-3): Inkommande elektromagnetisk strålning, amplitudmodulerad simulering av
•
påverkan från radar- och radioutrustning och mobila kommunikationsapparater.
SS-EN 61000-4-4 (IEC 61000-4-4): Transienter: Simulering av störningar som orsakas av till- och frånslag i
•
kontaktorer, reläer eller liknande enheter.
SS-EN 61000-4-5 (IEC 61000-4-5): Stötpulser: Simulering av transienter som orsakas av t. ex. blixtnedslag i
•
närliggande installationer.
SS-EN 61000-4-6 (IEC 61000-4-6): RF Common mode: Simulering av effekten från radiolänksutrustning som
•
sammanfogats med anslutningskablar.
54 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

Systemintegrering
Se Tabell 5.5.
Design Guide
Grundstandard Stöt
IEC 61000-4-4
Störningsvåg
IEC 61000-4-5
ESD
IEC
61000-4-2
Utstrålat
elektromagnetiskt fält
IEC 61000-4-3
RF common
mode-spänning
IEC 61000-4-6
Acceptansvillkor B B B A A
Spänningsområde: 200–240 V, 380–500 V, 525–600 V, 525–690 V
Ledning 4 kV CM
Motor
4 kV CM
Broms 4 kV CM
Lastdelning 4 kV CM
Styrledningar
2 kV CM
Standardbuss 2 kV CM
Reläledningar 2 kV CM
Tillval för tillämpning och
fältbuss
LCP-kabel
2 kV CM
2 kV CM
Extern 24 V DC 2 V CM
2 kV/2 Ω DM
4 kV/12 Ω CM
4 kV/2 Ω
4 kV/2 Ω
4 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
0,5 kV/2 Ω DM
1 kV/12 Ω CM
Kapsling — —
— —
1)
1)
1)
1)
1)
1)
1)
1)
— —
— —
— —
— —
— —
— —
— —
— —
— —
8 kV AD
6 kV CD
10 V/m —
10 V
10 V
10 V
10 V
10 V
10 V
10 V
10 V
10 V
10 V
Tabell 5.5 EMC-immunitet
1)
Injektion på kabelskärmen
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
5 5
Motorisolering
5.2.4
Moderna motorer utformade för användning med frekvensomformare har en hög isoleringsgrad för att fungera med den
nya generationen IGBT med hög verkningsgrad och dU/dt. Vid uppgradering av gamla motorer är det nödvändigt att
kontrollera motorisoleringen eller anpassa med dU/dt-filter eller ett sinusfilter vid behov. dU/dt
För motorkabellängder ≤ den maximala kabellängden som listas i kapitel 6.2 Allmänna specifikationer rekommenderas
värdena för motorisoleringsklassificering i Tabell 5.6. Om en motor har lägre isoleringsmärkdata rekommenderar vi
användning av dU-/dt- eller sinusfilter.
Nominell nätspänning [V] Motorisolering [V]
UN ≤ 420
420 V < UN ≤ 500 Förstärkt ULL = 1600
500 V < UN ≤ 600 Förstärkt ULL = 1800
600 V < UN ≤ 690 Förstärkt ULL = 2000
Tabell 5.6 Motorisolering
Standard ULL = 1300
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 55

175HA034.10
Systemintegrering
Design Guide
5.2.5 Lagerströmmar i motorn
För att minimera och lager- och axelströmmar ska du jorda
följande till den drivna maskinen:
frekvensomformare
•
motor
•
driven maskin
•
motor
•
Standardstrategier för störningsminskning
55
1. Använd isolerade lager.
5.3
Nätstörningar/Övertoner
En frekvensomformare drar en icke sinusformad ström från
nätet, vilket ökar ingångsströmmen I
. En icke
RMS
sinusformad ström omvandlas genom Fourier-analys och
delas upp i sinusformade strömmar med olika frekvens, det
vill säga olika övertonsströmmar In med 50 Hz som
grundfrekvens.
Övertonsströmmar I
Hz 50 250 350
Tabell 5.7 Transformed icke sinusformad ström
1
I
5
I
7
2. Tillämpa ordentliga installationsprocedurer
2a Säkerställ att motorn och belastnings-
motorn är justerade.
2b Följ noggrant EMC-installationsråden.
2c Förstärk PE:n så att den höga frekven-
simpedansen är lägre i PE:n än
Övertonerna påverkar inte den direkta effektförbrukningen
men ökar värmeförlusterna i installationen (transformatorer, kablar). Därför är det viktigt, speciellt i
anläggningar med hög likriktarbelastning, att hålla
övertonsströmmarna på en låg nivå för att undvika överbelastning i transformatorn och hög temperatur i kablarna.
ingångsströmledningarna.
2d Se till att det finns en bra högfrekven-
sanslutning mellan motorn och
frekvensomformaren, till exempel en
skärmad kabel som har 360° anslutning i
motorn och frekvensomformaren.
Bild 5.4 Mellankretsspolar
2e Se till att impedansen från frekvensom-
formaren till jord är lägre än maskinens
jordningsimpedans. Detta kan vara svårt
för pumpar.
2f Skapa en direkt jordanslutning mellan
motorn och belastningsmotorn.
3. Sänk IGBT-switchfrekvensen.
4. Ändra växelriktarens vågform, 60° AVM vs.
SFAVM.
5. Installera ett axeljordningssystem eller använd en
isolerande koppling.
6. Använd ledande smörjmedel.
7. Använd minsta varvtalsinställningar om möjligt.
8. Försök att säkerställa att nätspänningen är
balanserad till jord. Det kan vara svårt för IT-, TT-,
OBS!
Vissa övertonsströmmar kan eventuellt störa kommunikationsutrustning som är ansluten till samma
transformator eller orsaka resonans i kombination med
enheter för korrigering av effektfaktor.
I
RMS
I
1
I
5
I
7
I
11-49
Tabell 5.8 Övertonsströmmar jämfört med RMSinströmmen
Inström
1,0
0,9
0,4
0,2
< 0,1
TN-CS- eller jordade system.
9. Använd dU/dt- eller sinusfilter.
För att säkerställa låga övertonsströmmar är frekvensomformaren som standard utrustad med spolar i
mellankretsen. Likströmsspolar minskar övertonsstörningar
(THD) med 40 %.
56 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

Non-linear
Current Voltage
System
Impedance
Disturbance to
other users
Contribution to
system losses
130BB541.10
Systemintegrering
Design Guide
5.3.1 Övertonseffekter i ett
strömdistributionssystem
I Bild 5.5 är en transformator ansluten på primärsidan till
en gemensam kopplingspunkt PCC1 på medelnätspänning.
Transformatorn har impedans Z
laster. Den gemensamma kopplingspunkten där alla laster
är sammankopplade är PCC2. Varje last är ansluten via
kablar med en impedans på Z1, Z2, Z3.
Bild 5.5 Litet distributionssystem
och matar ett flertal
xfr
Det finns två negativa effekter av övertoner
Övertonsströmmar bidrar till systemförluster (i
•
kabeldragning och transformator)
Övertonsspänningsdistortion orsakar störningar
•
på andra laster och ökar förlusterna i andra laster
Bild 5.6 Negativa effekter av övertoner
5.3.2 Övertonsbegränsningar, standard och
krav
Kraven för övertonsbegränsning kan vara
tillämpningsspecifika krav
•
standarder som måste följas
•
De tillämpningsspecifika kraven relaterar till en specifik
installation där det finns tekniska skäl att begränsa
övertoner.
5 5
Övertonsströmmar från icke-linjära laster orsakar
spänningsdistortion beroende på spänningsfallet på distributionssystemets impedans. Högre impedans medför
högre nivåer av spänningsdistortion.
Strömdistortion påverkar maskinprestanda och påverkar
den individuella lasten. Spänningsdistortion påverkar
systemets prestanda. Det går inte att fastställa spänningsdistortionen i PCC enbart baserat på lastens
övertonsprestanda. För att kunna förutsäga distortionen i
PCC måste distributionssystemets konfiguration och
relevanta impedanser vara kända.
En vanlig term för att beskriva impedansen i ett nät är
kortslutningsförhållande R
, definierat som förhållandet
sce
mellan den synbara kortslutningseffekten vid nätanslutningen på PCC (Ssc) och den beräknade synbara effekten
för lasten (S
S
R
=
sce
S
equ
där
S
sc
ce
=
Z
försörjning
equ
U
).
2
och
S
=U×
I
equ
equ
Exempel
En transformator på 250 kVA med två motorer på 110 kW
ansluta räcker om en av motorerna är ansluten direkt och
den andra får sin strömförsörjning via en frekvensomformare. Om båda motorerna försörjs av
frekvensomformare är emellertid transformatorn underdimensionerad. Om ytterligare åtgärder utförs för
övertonsminskning inom installationen, eller om frekvensomformare med låg övertonshalt används kan båda
motorerna köras med frekvensomformare.
Det finns olika begränsningsstandarder, regler och
rekommendationer för övertoner. Olika standarder gäller
inom olika geografiska områden och verksamheter.
Följande standarder är de vanligaste:
IEC61000-3-2
•
IEC61000-3-12
•
IEC61000-3-4
•
IEEE 519
•
G5/4
•
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 57

130BC968.10
1325 4
6
b
a
M
7
Systemintegrering Design Guide
Detaljerad information om varje standard finns i AHF
005/010 Design Guide.
I Europa är maximal THVD 8 % om anläggningen är
ansluten till det allmänna nätet. Om anläggningen har en
egen transformator, är gränsen 10 % THVD. VLT
AutomationDrive är utformad för att tåla 10 % THVD.
®
5.3.3 Övertonsbegränsning
I fall där ytterligare övertonsbegränsning krävs kan Danfoss
55
erbjuda en stort urval av begränsningsutrustning. De är:
12-pulsenheter
•
AHF-filter
•
Frekvensomformare med låg övertonshalt
•
Aktiva filter
•
Vilken som är den bästa lösningen beror på flera omständigheter:
Nätet (bakgrundsdistortion, nätobalans, resonans
•
och typ av nätförsörjning (transformator/
generator)
Tillämpning (lastprofil, antal laster och laststorlek)
•
Lokala/nationella krav/föreskrifter (IEEE519, IEC,
•
G5/4, etc.)
Totalkostnad för ägaren (startkostnad, effektivitet,
•
underhåll etc.)
Överväg alltid övertonsbegränsning om transformatorbelastningen har en ickelinjär effekt på 40 % eller mer.
De enskilda komponenterna som ingår i den elektriska
isoleringen som beskrivs nedan uppfyller också kraven för
förstärkt isolering enligt test som beskrivs i EN 61800-5-1.
Galvanisk isolation (PELV) kan finnas på sex ställen (se
Bild 5.7):
För att PELV-isoleringen ska bibehållas måste alla
komponenter som ansluts till styrplintarna vara PELVisolerande, det vill säga en termistor måste vara förstärkt/
dubbelisolerad.
1. Strömförsörjning (SMPS) inkl. signalisolering av
DC-buss.
2. Drivkretsarna som styr IGBT-delen (triggtransformatorer/optokopplare).
3. Strömomvandlare.
4. Optokopplare, bromsmodul.
5. Kretsar för mätning av interna strömmar, RFI och
temperaturer.
6. Anpassade reläer.
7. Mekanisk broms.
Övertonsberäkning
5.3.4
Danfoss erbjuder verktyg för beräkning av övertoner, se
kapitel 9.6.5 PC-programvara.
5.4
Galvanisk isolation (PELV)
5.4.1 PELV – Protective Extra Low Voltage
PELV erbjuder säkerhet tack vare extra låg spänning. Skydd
mot elektriska stötar säkerställs när elförsörjningen är av
PELV-typ och när installationen har utförts enligt lokala och
nationella bestämmelser för PELV-elförsörjning.
Alla styrplintar och reläplintar 01-03/04-06 uppfyller PELV
(Protective Extra Low Voltage), med undantag för jordad
delta över 400 V.
Du uppnår galvanisk (säker) isolering genom att uppfylla
kraven för förstärkt isolering och iaktta de föreskrivna
luftspalterna för krypströmmar. Dessa krav beskrivs i
standarden SS-EN 61800-5-1.
Bild 5.7 Galvanisk isolation
Den funktionella galvaniska isolationen (a och b i
ritningarna) avser reservtillvalet på 24 V och standardbussgränssnittet RS 485.
VARNING
Installation på hög höjd:
Vid höjd över 2 000 m ska du kontakta Danfoss
angående PELV.
58 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

Systemintegrering Design Guide
VARNING
Att vidröra strömförande delar kan vara förenat med
livsfara, även när nätströmmen är frånkopplad.
Se även till att andra spänningsanslutningar har kopplats
från, till exempel lastdelning (sammankoppling av DCmellankretsarna) samt motoranslutning vid kinetisk backup.
Innan du rör några elektriska delar måste du vänta den
tid som anges i Tabell 2.1.
Kortare tid är endast tillåtet om det anges på den
specifika enhetens märkskylt.
5.5 Bromsfunktioner
Bromsfunktionen används för att bromsa lasten på
motoraxeln, antingen som dynamisk eller mekanisk
bromsning.
Val av bromsmotstånd
5.5.1
Med ett bromsmotstånd säkerställs att energin absorberas i
bromsmotståndet och inte i frekvensomformaren. Mer
information finns i Bromsmotstånd Design Guide.
Om mängden kinetisk energi som överförs till motståndet i
varje bromsperiod inte är känd, kan medeleffekten räknas
ut baserat på cykeltiden och bromstiden som även kallas
intermittent driftcykel. Motståndets intermittenta driftcykel
är ett mått på hur stor del av driftcykeln motståndet
belastas. Bild 5.8 visar en typisk bromscykel.
OBS!
Motorleverantörer använder ofta S5 när de anger den
tillåtna belastningen som är ett uttryck av intermittent
driftcykel.
Motståndets intermittenta driftcykel beräknas på följande
sätt:
Driftcykel = tb/T
T = cykeltid i s
tb är bromstiden i s (av cykeltiden)
Bild 5.8 Typisk bromscykel
Bromsdriftcy
200–240 V
PK25–P11K 120 Kontinuerlig 40%
P15K–P37K 300 10% 10%
380–500 V
PK37–P75K 120 Kontinuerlig 40%
P90K–P160 600 Kontinuerlig 10%
P200–P800 600 40% 10%
525–600 V
PK75-P75K 120 Kontinuerlig 40%
525–690 V
P37K–P400 600 40% 10%
P500–P560 600
P630–P1M0 600 40% 10%
Tabell 5.9 Bromsning vid högt överbelastningsmoment
1)
500 kW vid 86 % bromsmoment/560 kW vid 76 % bromsmoment
2)
500 kW vid 130 % bromsmoment/560 kW vid 115 % bromsmoment
Cykeltid (s)
kel vid
100 %
moment
40%
1)
Bromsdriftcykel
vid överbelast-
ningsmoment
(150/160 %)
2)
10%
Danfoss erbjuder bromsmotstånd med driftcykel på 5 %,
10 % och 40 %. Om en driftcykel på 10 % används, kan
bromsmotstånden absorbera bromseffekt under 10 % av
cykeltiden. Resterande 90 % av cykeltiden används för att
kyla bort bromsvärmen.
OBS!
Kontrollera att motståndet är konstruerat för att klara
den krävda bromstiden.
5 5
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 59

Systemintegrering
Design Guide
Den maximala tillåtna belastningen på bromsmotståndet
anges som en toppeffekt vid en given intermittent
För frekvensomformare på 200 V, 480 V, 500 V och 600 V,
skrivs R
vid 160 % bromsmoment som:
rec
driftcykel och kan beräknas som:
200V :
480V :
480V :
500V :
600V :
690V :
1)
För frekvensomformare med ≤ 7,5 kW axeleffekt
2)
För frekvensomformare med 11–75 kW axeleffekt
OBS!
ED driftcykel
=
tb
T cykel
där tb är bromstiden i sekunder och Tcykel är den totala
cykeltiden.
Bromsmotståndet beräknas enligt följande:
2
U
Ω =
= P
dc
P
topp
x Mbr [%] x η
motor
motor
x η
VLT
[W]
R
55
br
där
P
peak
107780
R
=
rec
R
=
rec
R
=
rec
R
=
rec
R
=
rec
R
=
rec
P
motor
375300
P
motor
428914
P
motor
464923
P
motor
630137
P
motor
832664
P
motor
Ω
Ω
Ω
Ω
Ω
Ω
1
2
Det valda bromsmotståndets kretsmotstånd får inte vara
Bromsmotståndet beror på mellankretsspänningen (Udc).
Bromsfunktionen FC 301 och FC 302 regleras i fyra
områden på nätet.
större än vad som rekommenderas av Danfoss. Om ett
bromsmotstånd med högre ohm-värde väljs är det inte
säkert att 160 % bromsmoment kan uppnås eftersom det
finns en risk att frekvensomformaren kopplar ur av
Storlek Broms aktiv Varning innan
urkoppling
FC 301/FC 302
390 V 405 V 410 V
200–240 V
FC 301
778 V 810 V 820 V
380–480 V
FC 302
810 V 840 V 850 V
380–500 V
FC 302
943 V 965 V 975 V
525–600 V
FC 302
1084 V 1109 V 1130 V
525–690 V
Urkoppling
(tripp)
säkerhetsskäl.
OBS!
Om kortslutning inträffar i bromstransistorn kan
effektavgivningen i bromsmotståndet endast förhindras
genom att frekvensomformarens strömförsörjning
kopplas från med nätbrytare eller kontaktor. (Kontaktorn
kan styras av frekvensomformaren.)
FÖRSIKTIGT
Bromsmotståndet blir varmt under och efter bromsning.
Tabell 5.10 Bromsgränser [UDC]
OBS!
Kontrollera om bromsmotståndet klarar en spänning på
410 V, 820 V, 850 V, 975 V eller 1130 V – om inte
Undvik personskada genom att inte vidröra
•
bromsmotståndet
Bromsmotståndet ska placeras i en säker miljö
•
för att undvika brandrisk.
bromsmotstånd från Danfoss används.
Danfoss rekommenderar bromsmotståndet R
, dvs. ett
rec
motstånd som garanterar att frekvensomformaren kan
bromsa med det högsta bromsmomentet (Mbr
(%)
) på
160 %. Formeln kan skrivas:
2
U
x 100
R
Ω =
rec
P
motor
η
är normalt 0,90
motor
η
är normalt 0,98
VLT
dc
x
M
xη
br
%
VLT
x η
motor
FÖRSIKTIGT
Frekvensomformare med kapslingstyp D-F innehåller mer
än en bromschopper. Använd därför ett bromsmotstånd
per bromschopper för dessa kapslingar.
5.5.2 Kabeldragning för bromsmotstånd
EMC (tvinnade kablar/skärmning)
I överensstämmelse med frekvensomformarens angivna
EMC-prestanda ska skärmade kablar/ledningar användas.
Om du använder oskärmade kablar bör du tvinna
ledningarna för att reducera elektrisk störning från
ledningarna mellan bromsmotståndet och frekvensomformaren.
Använd metallskärm för förbättrade emc-prestanda.
60 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

Systemintegrering Design Guide
5.5.3 Styrning med bromsfunktion
Bromsen skyddas mot kortslutning i bromsmotståndet och
bromstransistorn övervakas för att säkerställa att
kortslutning i transistorn upptäcks. En reläutgång/digital
utgång kan användas för att skydda bromsmotståndet mot
överbelastning som kan uppstå i samband med fel i
frekvensomformaren.
Bromsfunktionen ger även möjlighet till avläsning av den
momentana bromseffekten och medeleffekten över de
senaste 120 s. Bromsen kan också övervaka effektutvecklingen och säkerställa att den inte överskrider ett
gränsvärde som anges i 2-12 Bromseffektgräns (kW). I
2-13 Bromseffektövervakning väljs vilken funktion som ska
utföras när den till bromsmotståndet överförda effekten
överstiger den inställda gränsen i 2-12 Bromseffektgräns
(kW).
OBS!
Övervakningen av bromseffekten är inte en säkerhetsfunktion. För det ändamålet krävs en termobrytare.
Bromsmotståndskretsen är inte skyddad för läckström till
jord.
5 5
Överspänningsstyrning (OVC) (exklusive bromsmotstånd)
kan väljas som alternativ bromsfunktion i 2-17 Överspän-
ningsstyrning. Den här funktionen är aktiv för alla enheter.
Funktionen säkerställer att frekvensomformaren inte trippar
om likströmsbusspänningen stiger. Detta görs genom att
öka utgångsfrekvensen för att begränsa spänningen från
DC-bussen. Funktionen är användbar t. ex för. att förhindra
tripp när nedramptiden är för kort. I den här situationen
förlängs nedramptiden.
OBS!
OVC kan inte aktiveras när en PM-motor körs (när
1-10 Motorkonstruktion är satt till [1] PM ej utpräglad
SPM).
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 61

Produktspecifikationer Design Guide
6 Produktspecifikationer
6.1 Elektriska data
6.1.1 Nätförsörjning 200–240 V
Typbeteckning PK25 PK37 PK55 PK75 P1K1 P1K5 P2K2 P3K0 P3K7
Normal axeleffekt [kW] 0,25 0,37 0,55 0,75 1,1 1,5 2,2 3,0 3,7
Kapsling IP20 (endast FC 301) A1 A1 A1 A1 A1 A1 - - Kapsling IP20/IP21 A2 A2 A2 A2 A2 A2 A2 A3 A3
Kapsling IP55, IP66 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A5 A5
Utström
Kontinuerlig (200–240 V) [A] 1,8 2,4 3,5 4,6 6,6 7,5 10,6 12,5 16,7
66
Intermittent (200–240 V) [A] 2,9 3,8 5,6 7,4 10,6 12,0 17,0 20,0 26,7
Kontinuerlig kVA (208 V) [kVA] 0,65 0,86 1,26 1,66 2,38 2,70 3,82 4,50 6,00
Max. inström
Kontinuerlig (200–240 V) [A] 1,6 2,2 3,2 4,1 5,9 6,8 9,5 11,3 15,0
Intermittent (200–240 V) [A] 2,6 3,5 5,1 6,6 9,4 10,9 15,2 18,1 24,0
Ytterligare specifikationer
Max. ledararea4) för nät, motor, broms och
lastdelning [mm2] ([AWG])
Max. ledararea4) med frånkoppling
[mm2] ([AWG])
Uppskattad effektförlust vid nominell
maxbelastning [W]
Verkningsgrad
3)
2)
21 29 42 54 63 82 116 155 185
0,94 0,94 0,95 0,95 0,96 0,96 0,96 0,96 0,96
4,4,4 (12,12,12)
(min. 0,2 (24))
6,4,4 (10,12,12)
Tabell 6.1 Nätspänning 200–240 V AC, PK25-P3K7
62 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

Produktspecifikationer
Design Guide
Typbeteckning P5K5 P7K5 P11K
Hög/normal överbelastning
1)
HÖ NÖ HÖ NÖ HÖ NÖ
Normal axeleffekt [kW] 5,5 7,5 7,5 11 11 15
Kapsling IP20 B3 B3 B4
Kapsling IP21, IP55, IP66 B1 B1 B2
Utström
Kontinuerlig (200–240 V) [A] 24,2 30,8 30,8 46,2 46,2 59,4
Intermittent (60 s överbelastning) (200–240 V) [A] 38,7 33,9 49,3 50,8 73,9 65,3
Kontinuerlig kVA (208 V) [kVA] 8,7 11,1 11,1 16,6 16,6 21,4
Max. inström
Kontinuerlig (200–240 V) [A] 22,0 28,0 28,0 42,0 42,0 54,0
Intermittent (60 s överbelastning) (200–240 V) [A] 35,2 30,8 44,8 46,2 67,2 59,4
Ytterligare specifikationer
IP20 max. ledararea4) för nät, motor, broms och lastdelning
[mm2] ([AWG])
IP21 max. ledararea4) för nät, broms och lastdelning
[mm2] ([AWG])
IP21 max. ledararea4) för motor [mm2] ([AWG])
Max. ledararea4) för frånkoppling [mm2] ([AWG])
Uppskattad effektförlust vid nominell maxbelastning [W]
Verkningsgrad
2)
3)
10,10,- (8,8,-) 10,10,- (8,8,-) 35,-,- (2,-,-)
16,10,16 (6,8,6) 16,10,16 (6,8,6) 35,-,- (2,-,-)
10,10,- (8,8,-) 10,10,- (8,8,-) 35,25,25 (2,4,4)
16,10,10 (6,8,8)
239 310 371 514 463 602
0,96 0,96 0,96
6 6
Tabell 6.2 Nätförsörjning 200–240 V, P5K5-P11K
Typbeteckning P15K P18K P22K P30K P37K
Hög/normal överbelastning
1)
HÖ NÖ HÖ NÖ HÖ NÖ HÖ NÖ HÖ NÖ
Normal axeleffekt [kW] 15 18,5 18,5 22 22 30 30 37 37 45
Kapsling IP20 B4 C3 C3 C4 C4
Kapsling IP21, IP55, IP66 C1 C1 C1 C2 C2
Utström
Kontinuerlig (200–240 V) [A] 59,4 74,8 74,8 88,0 88,0 115 115 143 143 170
Intermittent (60 s överbelastning) (200–240 V)
[A]
89,1 82,3 112 96,8 132 127 173 157 215 187
Kontinuerlig kVA (208 V [kVA] 21,4 26,9 26,9 31,7 31,7 41,4 41,4 51,5 51,5 61,2
Max. inström
Kontinuerlig (200–240 V) [A] 54,0 68,0 68,0 80,0 80,0 104 104 130 130 154
Intermittent (60 s överbelastning) (200–240 V)
[A]
81,0 74,8 102 88,0 120 114 156 143 195 169
Ytterligare specifikationer
IP20 max. ledararea för nät, motor, broms och
lastdelning [mm2] ([AWG])
IP21, IP55, IP66 max. ledararea för nät och motor
[mm2] ([AWG])
IP21, IP55, IP66 max. ledararea för broms och
lastdelning [mm2] ([AWG])
Max. ledararea4) för frånkoppling [mm2] ([AWG])
Uppskattad effektförlust vid nominell
maxbelastning [W]
Verkningsgrad
3)
2)
35 (2) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
50 (1) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
50 (1) 50 (1) 50 (1) 95 (3/0) 95 (3/0)
185, 150, 120
(350 MCM,
300 MCM, 4/0)
50, 35, 35 (1, 2, 2)
95, 70, 70
(3/0, 2/0, 2/0)
624 737 740 845 874 1140 1143 1353 1400 1636
0,96 0,97 0,97 0,97 0,97
Tabell 6.3 Nätförsörjning 200–240 V, P15K-P37K
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 63

Produktspecifikationer Design Guide
6.1.2 Nätförsörjning 380–500 V
Typbeteckning PK37 PK55 PK75 P1K1 P1K5 P2K2 P3K0 P4K0 P5K5 P7K5
Normal axeleffekt [kW] 0,37 0,55 0,75 1,1 1,5 2,2 3,0 4,0 5,5 7,5
Kapsling IP20 (endast FC 301) A1 A1 A1 A1 A1 - - - - Kapsling IP20/IP21 A2 A2 A2 A2 A2 A2 A2 A2 A3 A3
Kapsling IP55, IP66 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A5 A5
Utström Hög överbelastning 160 % under 1 minut
Axeleffekt [kW] 0,37 0,55 0,75 1,1 1,5 2,2 3 4 5,5 7,5
Kontinuerlig (380–440 V) [A] 1,3 1,8 2,4 3,0 4,1 5,6 7,2 10 13 16
Intermittent (380–440 V) [A] 2,1 2,9 3,8 4,8 6,6 9,0 11,5 16 20,8 25,6
Kontinuerlig (441–500 V) [A] 1,2 1,6 2,1 2,7 3,4 4,8 6,3 8,2 11 14,5
Intermittent (441–500 V) [A] 1,9 2,6 3,4 4,3 5,4 7,7 10,1 13,1 17,6 23,2
Kontinuerlig kVA (400 V) [kVA] 0,9 1,3 1,7 2,1 2,8 3,9 5,0 6,9 9,0 11
66
Kontinuerlig kVA (460 V) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8 5,0 6,5 8,8 11,6
Max. inström
Kontinuerlig (380–440 V) [A] 1,2 1,6 2,2 2,7 3,7 5,0 6,5 9,0 11,7 14,4
Intermittent (380–440 V) [A] 1,9 2,6 3,5 4,3 5,9 8,0 10,4 14,4 18,7 23
Kontinuerlig (441–500 V) [A] 1,0 1,4 1,9 2,7 3,1 4,3 5,7 7,4 9,9 13
Intermittent (441–500 V) [A] 1,6 2,2 3,0 4,3 5,0 6,9 9,1 11,8 15,8 20,8
Ytterligare specifikationer
IP20, IP21 max. ledararea4) för nät, motor,
broms och lastdelning [mm2] ([AWG])
IP55, IP66 max. ledararea4) för nät, motor,
broms och lastdelning [mm2] ([AWG])
Max. ledararea4) för frånkoppling [mm2] ([AWG])
Uppskattad effektförlust vid nominell
maxbelastning [W]
Verkningsgrad
3)
2)
35 42 46 58 62 88 116 124 187 255
0,93 0,95 0,96 0,96 0,97 0,97 0,97 0,97 0,97 0,97
4,4,4 (12,12,12)
(min. 0,2 (24))
4,4,4 (12,12,12)
6,4,4 (10,12,12)
Tabell 6.4 Nätförsörjning 380–500 V (FC 302), 380–480 V (FC 301), PK37-P7K5
64 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

Produktspecifikationer Design Guide
Typbeteckning P11K P15K P18K P22K
Hög/normal överbelastning
Typisk axeleffekt [kW] 11 15 15 18,5 18,5 22,0 22,0 30,0
Kapsling IP20 B3 B3 B4 B4
Kapsling IP21 B1 B1 B2 B2
Kapsling IP55, IP66 B1 B1 B2 B2
Utström
Kontinuerlig (380–440 V) [A] 24 32 32 37,5 37,5 44 44 61
Intermittent (60 s överbelastning) (380–440 V)
[A]
Kontinuerlig (441–500 V) [A] 21 27 27 34 34 40 40 52
Intermittent (60 s överbelastning)
(441–500 V) [A]
Kontinuerlig kVA (400 V) [kVA] 16,6 22,2 22,2 26 26 30,5 30,5 42,3
Kontinuerlig kVA (460 V) [kVA] 21,5 27,1 31,9 41,4
Max. inström
Kontinuerlig (380–440 V) [A] 22 29 29 34 34 40 40 55
Intermittent (60 s överbelastning)
(380–440 V) [A]
Kontinuerlig (441–500 V) [A] 19 25 25 31 31 36 36 47
Intermittent (60 s överbelastning)
(441–500 V) [A]
Ytterligare specifikationer
IP21, IP55, IP66 max. ledararea4) för nät,
broms och lastdelning [mm2] ([AWG])
IP21, IP55, IP66 max. ledararea4) för motor
[mm2] ([AWG])
IP20 max. ledararea4) för nät, motor, broms
och lastdelning [mm2] ([AWG])
Max. ledararea4) för frånkoppling
[mm2] ([AWG])
Uppskattad effektförlust vid nominell
maxbelastning [W]
Verkningsgrad
2)
1)
3)
HO NO HO NO HO NO HO NO
38,4 35,2 51,2 41,3 60 48,4 70,4 67,1
33,6 29,7 43,2 37,4 54,4 44 64 57,2
35,2 31,9 46,4 37,4 54,4 44 64 60,5
30,4 27,5 40 34,1 49,6 39,6 57,6 51,7
16, 10, 16 (6, 8, 6) 16, 10, 16 (6, 8, 6) 35,-,-(2,-,-) 35,-,-(2,-,-)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35, 25, 25 (2, 4, 4) 35, 25, 25 (2, 4, 4)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35,-,-(2,-,-) 35,-,-(2,-,-)
16, 10, 10 (6, 8, 8)
291 392 379 465 444 525 547 739
0,98 0,98 0,98 0,98
6 6
Tabell 6.5 Nätförsörjning 380–500 V (FC 302), 380–480 V (FC 301), P11K–P22K
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 65

Produktspecifikationer Design Guide
Typbeteckning P30K P37K P45K P55K P75K
Hög/normal överbelastning
Typisk axeleffekt [kW] 30 37 37 45 45 55 55 75 75 90
Kapsling IP21 C1 C1 C1 C2 C2
Kapsling IP20 B4 C3 C3 C4 C4
Kapsling IP55, IP66 C1 C1 C1 C2 C2
Utström
Kontinuerlig (380–440 V) [A] 61 73 73 90 90 106 106 147 147 177
Intermittent (60 s överbelastning)
(380–440 V) [A]
Kontinuerlig (441–500 V) [A] 52 65 65 80 80 105 105 130 130 160
Intermittent (60 s överbelastning)
(441–500 V) [A]
Kontinuerlig kVA (400 V) [kVA] 42,3 50,6 50,6 62,4 62,4 73,4 73,4 102 102 123
66
Kontinuerlig kVA (460 V) [kVA] 51,8 63,7 83,7 104 128
Max. inström
Kontinuerlig (380–440 V) [A] 55 66 66 82 82 96 96 133 133 161
Intermittent (60 s överbelastning)
(380–440 V) [A]
Kontinuerlig (441–500 V) [A] 47 59 59 73 73 95 95 118 118 145
Intermittent (60 s överbelastning)
(441–500 V) [A]
Ytterligare specifikationer
IP20 max. ledararea för nät och
motor [mm2] ([AWG])
IP20 max. ledararea för broms och
lastdelning [mm2] ([AWG])
IP21, IP55, IP66 max. ledararea för
nät och motor [mm2] ([AWG])
IP21, IP55, IP66 max. ledararea för
broms och lastdelning
[mm2] ([AWG])
Max. ledararea4) för nätbrytare
[mm2] ([AWG])
Uppskattad effektförlust vid
vid nominell max. belastning [W]
Verkningsgrad
2)
1)
HO NO HO NO HO NO HO NO HO NO
91,5 80,3 110 99 135 117 159 162 221 195
78 71,5 97,5 88 120 116 158 143 195 176
82,5 72,6 99 90,2 123 106 144 146 200 177
70,5 64,9 88,5 80,3 110 105 143 130 177 160
35 (2) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
35 (2) 50 (1) 50 (1) 95 (4/0) 95 (4/0)
50 (1) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
50 (1) 50 (1) 50 (1) 95 (3/0) 95 (3/0)
50, 35, 35
(1, 2, 2)
570 698 697 843 891 1083 1022 1384 1232 1474
3)
0,98 0,98 0,98 0,98 0,99
95, 70, 70
(3/0, 2/0, 2/0)
185, 150, 120
(350 MCM,
300 MCM, 4/0)
Tabell 6.6 Nätförsörjning 380–500 V (FC 302), 380–480 V (FC 301), P30K-P75K
66 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

Produktspecifikationer Design Guide
6.1.3 Nätförsörjning 525–600 V (endast FC 302)
Typbeteckning PK75 P1K1 P1K5 P2K2 P3K0 P4K0 P5K5 P7K5
Normal axeleffekt [kW] 0,75 1,1 1,5 2,2 3 4 5,5 7,5
Kapsling IP20, IP21 A3 A3 A3 A3 A3 A3 A3 A3
Kapsling IP55 A5 A5 A5 A5 A5 A5 A5 A5
Utström
Kontinuerlig (525–550 V) [A] 1,8 2,6 2,9 4,1 5,2 6,4 9,5 11,5
Intermittent (525–550 V) [A] 2,9 4,2 4,6 6,6 8,3 10,2 15,2 18,4
Kontinuerlig (551–600 V) [A] 1,7 2,4 2,7 3,9 4,9 6,1 9,0 11,0
Intermittent (551–600 V) [A] 2,7 3,8 4,3 6,2 7,8 9,8 14,4 17,6
Kontinuerlig kVA (525 V) [kVA] 1,7 2,5 2,8 3,9 5,0 6,1 9,0 11,0
Kontinuerlig kVA (575 V) [kVA] 1,7 2,4 2,7 3,9 4,9 6,1 9,0 11,0
Max. inström
Kontinuerlig (525–600 V) [A] 1,7 2,4 2,7 4,1 5,2 5,8 8,6 10,4
Intermittent (525–600 V) [A] 2,7 3,8 4,3 6,6 8,3 9,3 13,8 16,6
Ytterligare specifikationer
Max. ledararea4) för nät, motor, broms och
lastdelning [mm2] ([AWG])
Max. ledararea4) för frånkoppling [mm2] ([AWG])
Uppskattad effektförlust vid nominell
maxbelastning [W]
Verkningsgrad
3)
2)
35 50 65 92 122 145 195 261
0,97 0,97 0,97 0,97 0,97 0,97 0,97 0,97
4,4,4 (12,12,12)
(min. 0,2 (24))
6,4,4 (10,12,12)
6 6
Tabell 6.7 Nätförsörjning 525–600 V (endastFC 302), PK75–P7K5
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 67

Produktspecifikationer Design Guide
Typbeteckning P11K P15K P18K P22K P30K
Hög/normal överbelastning1) HO NO HO NO HO NO HO NO HO NO
Normal axeleffekt [kW] 11 15 15 18,5 18,5 22 22 30 30 37
Kapsling IP20 B3 B3 B4 B4 B4
Kapsling IP21, IP55, IP66 B1 B1 B2 B2 C1
Utström
Kontinuerlig (525–550 V) [A] 19 23 23 28 28 36 36 43 43 54
Intermittent (525–550 V) [A] 30 25 37 31 45 40 58 47 65 59
Kontinuerlig (551–600 V) [A] 18 22 22 27 27 34 34 41 41 52
Intermittent (551–600 V) [A] 29 24 35 30 43 37 54 45 62 57
Kontinuerlig kVA (550 V) [kVA] 18,1 21,9 21,9 26,7 26,7 34,3 34,3 41,0 41,0 51,4
Kontinuerlig kVA (575 V) [kVA] 17,9 21,9 21,9 26,9 26,9 33,9 33,9 40,8 40,8 51,8
Max. inström
Kontinuerlig vid 550 V [A] 17,2 20,9 20,9 25,4 25,4 32,7 32,7 39 39 49
66
Intermittent vid 550 V [A] 28 23 33 28 41 36 52 43 59 54
Kontinuerlig vid 575 V [A] 16 20 20 24 24 31 31 37 37 47
Intermittent vid 575 V [A] 26 22 32 27 39 34 50 41 56 52
Ytterligare specifikationer
IP20 max. ledararea4) för nät, motor,
broms och lastdelning
[mm2] ([AWG])
IP21, IP55, IP66 max. ledararea4) för
nät, broms och lastdelning
[mm2] ([AWG])
IP21, IP55, IP66 max. ledararea4) för
motor [mm2] ([AWG])
Max. ledararea4) för frånkoppling
[mm2] ([AWG])
Uppskattad effektförlust vid
vid nominell max. belastning [W]
Verkningsgrad
2)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35,-,-(2,-,-) 35,-,-(2,-,-) 35,-,-(2,-,-)
16, 10, 10 (6, 8, 8) 16, 10, 10 (6, 8, 8) 35,-,-(2,-,-) 35,-,-(2,-,-) 50,-,- (1,-,-)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35, 25, 25 (2, 4, 4) 35, 25, 25 (2, 4, 4) 50,-,- (1,-,-)
16, 10, 10
(6, 8, 8)
220 300 300 370 370 440 440 600 600 740
3)
0,98 0,98 0,98 0,98 0,98
50, 35, 35
(1, 2, 2)
Tabell 6.8 Nätförsörjning 525–600 V (endastFC 302), P11K–P30K
68 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

Produktspecifikationer Design Guide
Typbeteckning P37K P45K P55K P75K
Hög/normal överbelastning1) HO NO HO NO HO NO HO NO
Normal axeleffekt [kW] 37 45 45 55 55 75 75 90
Kapsling IP20 C3 C3 C3 C4 C4
Kapsling IP21, IP55, IP66 C1 C1 C1 C2 C2
Utström
Kontinuerlig (525–550 V) [A] 54 65 65 87 87 105 105 137
Intermittent (525–550 V) [A] 81 72 98 96 131 116 158 151
Kontinuerlig (551–600 V) [A] 52 62 62 83 83 100 100 131
Intermittent (551–600 V) [A] 78 68 93 91 125 110 150 144
Kontinuerlig kVA (550 V) [kVA] 51,4 61,9 61,9 82,9 82,9 100,0 100,0 130,5
Kontinuerlig kVA (575 V) [kVA] 51,8 61,7 61,7 82,7 82,7 99,6 99,6 130,5
Max. inström
Kontinuerlig vid 550 V [A] 49 59 59 78,9 78,9 95,3 95,3 124,3
Intermittent vid 550 V [A] 74 65 89 87 118 105 143 137
Kontinuerlig vid 575 V [A] 47 56 56 75 75 91 91 119
Intermittent vid 575 V [A] 70 62 85 83 113 100 137 131
Ytterligare specifikationer
IP20 max. ledararea för nät och motor [mm2] ([AWG])
IP20 max. ledararea för broms och lastdelning
[mm2] ([AWG])
IP21, IP55, IP66 max. ledararea för nät och motor
[mm2] ([AWG])
IP21, IP55, IP66 max. ledararea för broms och
lastdelning [mm2] ([AWG])
Max. ledararea 4) för nätbrytare [mm2] ([AWG])
Uppskattad effektförlust vid nominell maxbelastning
3)
[W]
Verkningsgrad
2)
740 900 900 1100 1100 1500 1500 1800
0,98 0,98 0,98 0,98
50 (1) 150 (300 MCM)
50 (1) 95 (4/0)
50 (1) 150 (300 MCM)
50 (1) 95 (4/0)
50, 35, 35
(1, 2, 2)
95, 70, 70
(3/0, 2/0, 2/0)
185, 150, 120
(350 MCM,
300 MCM, 4/0)
6 6
Tabell 6.9 Nätförsörjning 525–600 V (endastFC 302), P37K–P75K
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 69

Produktspecifikationer
Design Guide
6.1.4 Nätförsörjning 525–690 V (endast FC 302)
Typbeteckning P1K1 P1K5 P2K2 P3K0 P4K0 P5K5 P7K5
Hög/normal överbelastning
Typisk axeleffekt (kW) 1,1 1,5 2,2 3,0 4,0 5,5 7,5
Kapsling IP20 A3 A3 A3 A3 A3 A3 A3
Utström
Kontinuerlig (525–550 V) [A] 2,1 2,7 3,9 4,9 6,1 9,0 11,0
Intermittent (525–550 V) [A] 3,4 4,3 6,2 7,8 9,8 14,4 17,6
Kontinuerlig (551–690 V) [A] 1,6 2,2 3,2 4,5 5,5 7,5 10,0
Intermittent (551–690 V) [A] 2,6 3,5 5,1 7,2 8,8 12,0 16,0
Kontinuerlig KVA 525 V 1,9 2,5 3,5 4,5 5,5 8,2 10,0
Kontinuerlig KVA 690 V 1,9 2,6 3,8 5,4 6,6 9,0 12,0
Max. inström
66
Kontinuerlig (525–550 V) [A] 1,9 2,4 3,5 4,4 5,5 8,1 9,9
Intermittent (525–550 V) [A] 3,0 3,9 5,6 7,0 8,8 12,9 15,8
Kontinuerlig (551–690 V) [A] 1,4 2,0 2,9 4,0 4,9 6,7 9,0
Intermittent (551–690 V) [A] 2,3 3,2 4,6 6,5 7,9 10,8 14,4
Ytterligare specifikationer
Max. ledararea4) för nät, motor, broms och lastdelning
[mm2] ([AWG])
Max. ledararea4) för frånkoppling [mm2] ([AWG])
Uppskattad effektförlust vid nominell maxbelastning
3)
[W]
Verkningsgrad
2)
1)
HÖ/NO HÖ/NO HÖ/NO HÖ/NO HÖ/NO HÖ/NO HÖ/NO
4, 4, 4 (12, 12, 12) (min. 0,2 (24))
6, 4, 4 (10, 12, 12)
44 60 88 120 160 220 300
0,96 0,96 0,96 0,96 0,96 0,96 0,96
Tabell 6.10 A3-kapsling, Nätförsörjning 525–690 V IP20/skyddat chassi, P1K1–P7K5
Typbeteckning P11K P15K P18K P22K
Hög/normal överbelastning
Typisk axeleffekt vid 550 V [kW] 7,5 11 11 15 15 18,5 18,5 22
Typisk axeleffekt vid 690 V [kW] 11 15 15 18,5 18,5 22 22 30
Kapsling IP20 B4 B4 B4 B4
Kapsling IP21, IP55 B2 B2 B2 B2
Utström
Kontinuerlig (525–550 V) [A] 14,0 19,0 19,0 23,0 23,0 28,0 28,0 36,0
Intermittent (60 s överbelastning) (525–550 V) [A] 22,4 20,9 30,4 25,3 36,8 30,8 44,8 39,6
Kontinuerlig (551–690 V) [A] 13,0 18,0 18,0 22,0 22,0 27,0 27,0 34,0
Intermittent (60 s överbelastning) (551–690 V) [A] 20,8 19,8 28,8 24,2 35,2 29,7 43,2 37,4
Kontinuerlig KVA (vid 550 V) [KVA] 13,3 18,1 18,1 21,9 21,9 26,7 26,7 34,3
kontinuerlig KVA (vid 690 V) [KVA] 15,5 21,5 21,5 26,3 26,3 32,3 32,3 40,6
Max. inström
Kontinuerlig (vid 550 V) (A) 15,0 19,5 19,5 24,0 24,0 29,0 29,0 36,0
Intermittent (60 s överbelastning) (vid 550 V) (A) 23,2 21,5 31,2 26,4 38,4 31,9 46,4 39,6
Kontinuerlig (vid 690 V) (A) 14,5 19,5 19,5 24,0 24,0 29,0 29,0 36,0
Intermittent (60 s överbelastning) (vid 690 V) (A) 23,2 21,5 31,2 26,4 38,4 31,9 46,4 39,6
Ytterligare specifikationer
Max. ledararea4) för nät, motor, lastdelning och
broms [mm2] ([AWG])
Max. ledararea4) för nätbrytare [mm2] ([AWG])
Uppskattad effektförlust vid nominell maxbelastning
3)
[W]
Verkningsgrad
2)
1)
HO NO HO NO HO NO HO NO
35, 25, 25 (2, 4, 4)
16,10,10 (6, 8, 8)
150 220 220 300 300 370 370 440
0,98 0,98 0,98 0,98
Tabell 6.11 B2/B4-kapsling, nätförsörjning 525–690 V IP20/IP21/IP55 – Chassi/NEMA 1/NEMA 12 (endast FC 302), P11K-P22K
70 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

Produktspecifikationer
Design Guide
Typbeteckning P30K P37K P45K P55K P75K
Hög/normal överbelastning
1)
HO NO HO NO HO NO HO NO HO NO
Typisk axeleffekt vid 550 V (kW) 22 30 30 37 37 45 45 55 50 75
Typisk axeleffekt vid 690 V [kW] 30 37 37 45 45 55 55 75 75 90
Kapsling IP20 B4 C3 C3 D3h D3h
Kapsling IP21, IP55 C2 C2 C2 C2 C2
Utström
Kontinuerlig (525–550 V) [A] 36,0 43,0 43,0 54,0 54,0 65,0 65,0 87,0 87,0 105
Intermittent (60 s överbelastning)
(525–550 V) [A] 54,0 47,3 64,5 59,4 81,0 71,5 97,5 95,7 130,5 115,5
Kontinuerlig (551–690 V) [A] 34,0 41,0 41,0 52,0 52,0 62,0 62,0 83,0 83,0 100
Intermittent (60 s överbelastning)
(551–690 V) [A] 51,0 45,1 61,5 57,2 78,0 68,2 93,0 91,3 124,5 110
Kontinuerlig KVA (vid 550 V) [KVA] 34,3 41,0 41,0 51,4 51,4 61,9 61,9 82,9 82,9 100
kontinuerlig KVA (vid 690 V) [KVA] 40,6 49,0 49,0 62,1 62,1 74,1 74,1 99,2 99,2 119,5
Max. inström
Kontinuerlig (vid 550 V) [A] 36,0 49,0 49,0 59,0 59,0 71,0 71,0 87,0 87,0 99,0
Intermittent (60 s överbelastning)
(vid 550 V) [A] 54,0 53,9 72,0 64,9 87,0 78,1 105,0 95,7 129 108,9
Kontinuerlig (vid 690 V) [A] 36,0 48,0 48,0 58,0 58,0 70,0 70,0 86,0 - Intermittent (60 s överbelastning)
(vid 690 V) [A] 54,0 52,8 72,0 63,8 87,0 77,0 105 94,6 - -
Ytterligare specifikationer
Max. ledararea för nät och motor
[mm2] ([AWG])
Max. ledararea för lastdelning och broms
[mm2] ([AWG])
Max. ledararea4) för nätbrytare
[mm2] ([AWG])
Uppskattad effektförlust vid
vid nominell max. belastning [W]
Verkningsgrad
2)
3)
95, 70, 70
(3/0, 2/0, 2/0)
600 740 740 900 900 1100 1100 1500 1500 1800
0,98
0,98 0,98 0,98 0,98
150 (300 MCM)
95 (3/0)
185, 150, 120
(350 MCM,
300 MCM, 4/0)
-
6 6
Tabell 6.12 B4-, C2-, C3-kapsling, nätspänning– 525–690 V IP20/IP21/IP55 – Chassi/NEMA1/NEMA 12 (endast FC 302), P30K-P75K
Information om säkringsklassificeringar finns i kapitel 9.3.1 Säkringar och maximalbrytare.
1)
Hög överbelastning = 150 % eller 160 % moment under 60 s. Normal överbelastning = 110 % moment under 60 s.
2)
Mätt med 5 m skärmad motorkabel vid nominell belastning och nominell frekvens.
3)
Den normala effektförlusten gäller vid nominella belastningsförhållanden, och förväntas inte avvika mer än
±
15 % (toleransen beror
på hur spänningen och kabelförhållandena varierar).
Värdena är baserade på en normal motorverkningsgrad (på gränsen mellan eff2/eff3). Motorer med lägre effekt bidrar också till effektförlusten i frekvensomformaren och omvänt.
Om switchfrekvensen ökar jämfört med fabriksinställningen kan effektförlusterna stiga markant.
LCP och typisk effektförbrukning för styrkort är inkluderade. Fler tillval och belastningar kan öka förlusterna med upp till 30 W.
(Vanligtvis endast 4 W extra vardera för ett fullt belastat styrkort, eller tillval för öppning A eller öppning B).
Även om mätningarna görs med toppmoderna utrustning måste vissa mätningsavvikelser tillåtas (± 5 %).
4)
De tre värdena för max. ledararea gäller för enkel kärna, mjuk kabel och mjuk kabel med hylsor.
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 71

Produktspecifikationer Design Guide
6.2 Allmänna specifikationer
6.2.1 Nätström
Nätförsörjning
Försörjningsplintar (6-puls) L1, L2, L3
Nätspänning 200-240 V ±10%
Nätspänning FC 301: 380–480 V/FC 302: 380–500 V ±10 %
Nätspänning FC 302: 525– 600 V ±10 %
Nätspänning FC 302: 525–690 V ±10 %
Låg nätspänning/nätavbrott:
Vid låg nätspänning eller ett nätavbrott fortsätter frekvensomformaren till dess att mellankretsspänningen är lägre än den undre
gränsspänningen, som normalt är 15 % under frekvensomformarens lägsta nominella nätspänning. Start och fullt moment kan
inte förväntas vid en nätspänning som är 10 % under frekvensomformarens lägsta nominella nätspänning.
66
Nätfrekvens 50/60 Hz ±5 %
Max. obalans tillfälligt mellan nätfaser 3,0 % av nominell nätspänning
Sann effektfaktor (λ) ≥ 0,9 nominellt vid nominell belastning
Förskjuten effektfaktor (cos ϕ) nära ett (> 0,98)
Koppling på nätförsörjningsingång L1, L2, L3 (nättillslag) ≤ 7,5 kW max. 2 gånger/min.
Koppling på nätspänningsingång L1, L2, L3 (nättillslag) 11–75 kW max. 1 gång/min.
Koppling på nätspänningsingång L1, L2, L3 (nättillslag) ≥ 90 kW max. 1 gång/2 min.
Miljö enligt SS-EN60664-1 överspänningskategori III/utsläppsgrad 2
Enheten är lämplig att använda på en krets som har kapacitet att leverera högst 100 000 RMS symmetriska ampere,
240/500/600/690 V maximalt.
Motoreffekt och motordata
6.2.2
Motoreffekt (U, V, W)
Utspänning 0–100% av nätspänningen
Utfrekvens 0–590 Hz
Utfrekvens i Flux-läge 0-300 Hz
Koppling på utgång Obegränsat
Ramptider 0,01–3600 s
Momentegenskaper
Startmoment (konstant moment) maximalt 160 % i 60 s1) en gång på 10 min.
Start/överbelastningsmoment (variabelt moment) maximalt 110 % i upp till 0,5 s1) en gång på 10 min.
Momentstigtid i FLUX (för 5 kHz fsw) 1 ms
Momentstigtid i VVC
1)
Procentangivelsen är grundad på det nominella momentet.
2)
Momentsvarstiden beror på tillämpningen och belastningen, men är momentstigningen från 0 till referensnivå är oftast 4–5
ggr momentstigtiden.
3)
Specialanpassade versioner med utfrekvens på 0–1000 Hz finns tillgängliga.
plus
(oberoende av fsw) 10 ms
3)
72 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

Produktspecifikationer Design Guide
6.2.3 Omgivande miljöförhållanden
Miljö
Kapsling IP20/chassi, IP21/typ 1, IP55/typ 12, IP66/typ 4X
Vibrationstest 1,0 g
Max. THVD 10%
Max. relativ luftfuktighet 5–93 % (IEC 721-3-3; Klass 3K3 (icke kondenserande) under drift
Aggressiv miljö (IEC 60068-2-43) H2S-test
Omgivningstemperatur Max. 50 °C (dygnsgenomsnitt maximalt 45 °C)
Min. omgivningstemperatur vid full drift 0 °C
Min. omgivningstemperatur med reducerade prestanda - 10 °C
Temperatur vid lagring/transport -25 till +65/70 °C
Maximal höjd över havet utan nedstämpling 1000 m
EMC-standarder, emission SS-EN 61800-3, SS-EN 55011
EMC-standard, immunitet SS-EN61800-3, SS-EN 61000-6-1/2
1)
Se kapitel 5.2.1 EMC-testresultat.
Kabelspecifikationer
6.2.4
klass Kd
1)
6 6
Kabellängder och tvärsnitt för styrkablar
Max. motorkabellängd, skärmad 150 m
Max. motorkabellängd, oskärmad 300 m
Max. ledararea för styrplintar, mjuk/styv kabel utan hylsor i kabeländarna 1,5 mm2/16 AWG
Max. ledararea för styrplintar, mjuk kabel med hylsor i kabeländarna 1 mm2/18 AWG
Max. ledararea för styrplintar, mjuk kabel med hylsor med krage i kabeländarna 0,5 mm2/20 AWG
Min. ledararea för styrplintar 0,25 mm2/24 AWG
1)
Mer information om kraftkablar finns i tabellerna i kapitel 6.1 Elektriska data.
1)
6.2.5 Styrning av ingång/utgång och styrdata
6.2.5.1 Digitala ingångar
Digitala ingångar
Programmerbara digitala ingångar FC 301: 4 (5)1)/FC 302: 4 (6)
Plintnummer 18, 19, 271), 291), 32, 33
Logik PNP eller NPN
Spänningsnivå 0 - 24 V DC
Spänningsnivå, logiskt "0" PNP < 5 V DC
Spänningsnivå, logiskt "1" PNP > 10 V DC
Spänningsnivå, logiskt "0" NPN2) > 19 V DC
Spänningsnivå, logiskt "1" NPN2) < 14 V DC
Maximal spänning på ingång 28 V DC
Pulsfrekvensområde 0-110 kHz
(Driftcykel) Min. pulsbredd 4,5 ms
Ingångsresistans, R
i
ca 4 kΩ
1)
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 73

Produktspecifikationer Design Guide
Säkerhetsstopp plint 37
3, 4)
(Plint 37 är fast PNP-logik)
Spänningsnivå 0–24 V DC
Spänningsnivå, logiskt "0" PNP <4 V DC
Spänningsnivå, logiskt "1" PNP >20 V DC
Maximal spänning på ingång 28 V DC
Normal inström vid 24 V 50 mA rms
Normal inström vid 20 V 60 mA rms
Ingångskapacitans 400 nF
Alla digitala ingångar är galvaniskt isolerade från nätspänningen (PELV) och övriga högspänningsplintar.
1)
Plintarna 27 och 29 kan även programmeras som utgång.
2)
Utom ingång för säkerhetsstopp plint 37.
3)
Se handboken för VLT® -frekvensomformare - säkert vridmoment av för mer information om plint 37 och säkerhetsstopp.
4)
Vid användning av en kontaktor med en likströmsspole inuti i kombination med säkerhetsstopp är det viktigt att skapa en
retur för strömmen från spolen när den bryts. Detta kan åstadkommas med en släckdiod (eller en 30 eller 50 V MOV för
66
snabbare svarstid) genom spolen. Vanliga kontaktorer kan köpas med denna diod.
Analoga ingångar
Antal analoga ingångar 2
Plintnummer 53, 54
Lägen Spänning eller ström
Lägesväljare Brytare S201 och brytare S202
Spänningsläge Brytare S201/brytare S202 = AV (U)
Spänningsnivå -10 till +10 V (skalbar)
Ingångsresistans, R
i
cirka 10 kΩ
Max. spänning ± 20 V
Strömläge Switch S201/switch S202 = PÅ (I)
Strömnivå 0/4 till 20 mA (skalbar)
Ingångsresistans, R
i
cirka 200 Ω
Max. ström 30 mA
Upplösning för analoga ingångar 10 bitar (+ tecken)
Noggrannhet hos analoga ingångar Max. fel 0,5 % av full skala
Bandbredd 100 Hz
De analoga ingångarna är galvaniskt isolerade från nätspänningen (PELV) och övriga högspänningsplintar.
Bild 6.1 PELV-isolering
74 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

Produktspecifikationer
Design Guide
Puls-/pulsgivaringång
Programmerbara puls-/pulsgivaringångar 2/1
Plintnummer, puls/pulsgivare 291), 332) / 323), 33
Maxfrekvens på plint 29, 32, 33 110 kHz (mottaktsdriven)
Maxfrekvens på plint 29, 32, 33 5 kHz (öppen kollektor)
Min. frekvens vid plint 29, 32, 33 4 Hz
Spänningsnivå se avsnittet om digitala ingångar
Maximal spänning på ingång 28 V DC
Ingångsresistans, R
i
cirka 4 kΩ
Pulsingångsnoggrannhet (0,1–1 kHz) Max. fel: 0,1 % av full skala
Noggrannhet pulsgivaringång (1–11 kHz) Max. fel: 0,05 % av full skala
Puls- och pulsgivaringångarna (plint 29, 32, 33) är galvaniskt isolerade från nätspänningen (PELV) och andra högspänningsplintar.
1)
FC 302 endast
2)
Pulsingångarna är 29 och 33
3)
Pulsgivaringångar: 32 = A, och 33 = B
Digital utgång
Programmerbara digitala utgångar/pulsutgångar 2
Plintnummer 27, 29
Spänningsnivå på digital utgång/utfrekvens 0–24 V
Max. utström (platta eller källa) 40 mA
Max. belastning vid utfrekvens 1 kΩ
Max. kapacitiv belastning vid utfrekvens 10 nF
Min. utfrekvens vid frekvensutgång 0 Hz
Maximal utfrekvens vid frekvensutgång 32 kHz
Noggrannhet, utfrekvens Max. fel: 0,1 % av full skala
Upplösning, utfrekvens 12 bitar
1)
Plintarna 27 och 29 kan även programmeras som ingångar.
Den digitala utgången är galvaniskt isolerad från nätspänningen (PELV) och övriga högspänningsplintar.
3)
6 6
1)
Analog utgång
Antal programmerbara analoga utgångar 1
Plintnummer 42
Strömområde vid analog utgång 0/4 till 20 mA
Max. belastning, jord GND – analog utgång mindre än 500 Ω
Noggrannhet på analog utgång Max. fel: 0,5 % av full skala
Upplösning på analog utgång 12 bitar
Den analoga utgången är galvaniskt isolerad från nätspänningen (PELV) och andra högspänningsplintar.
Styrkort, 24 V DC-utgång
Plintnummer 12, 13
Utspänning 24 V +1, -3 V
Max. belastning 200 mA
24 V DC-försörjningen är galvaniskt isolerad från nätspänningen (PELV), men har samma potential som de analoga och digitala
in- och utgångarna.
Styrkort, 10 V DC-utgång
Plintnummer ±50
Utspänning 10,5 V ±0,5 V
Max. belastning 15 mA
10 V DC-försörjningen är galvaniskt isolerad från nätspänningen (PELV) och övriga högspänningsplintar.
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 75

Produktspecifikationer
Design Guide
Styrkort, RS-485 seriell kommunikation
Plintnummer 68 (P, TX+, RX+), 69 (N, TX-, RX-)
Plintnummer 61 Gemensamt för plint 68 och 69
RS 485-kretsen för seriell kommunikation är funktionellt separerad från andra centrala kretsar och galvaniskt isolerad från
nätspänningen (PELV).
Styrkort, USB seriell kommunikation
USB-standard 1,1 (Full speed)
USB-kontakt USB-kontakt för typ B-enhet
Datoranslutningen sker via en USB-standardkabel.
USB-anslutningen är galvaniskt isolerad från nätspänningen (PELV) och andra plintar med högspänning.
USB-jordanslutningen är inte galvaniskt isolerad från skyddsjorden. Använd endast en isolerad bärbar dator som datoranslutning
till USB-kontakten på frekvensomformaren.
Reläutgångar
66
Programmerbara reläutgångar FC 301 alla, kW: 1/FC 302 alla kW: 2
Relä 01 Plintnummer 1-3 (brytande), 1-2 (slutande)
Max. plintbelastning (AC-1)1) på 1–3 (NC), 1–2 (NO) (resistiv belastning) 240 V AC, 2 A
Max. plintbelastning (AC-15)1) (induktiv belastning @ cosφ 0,4) 240 V AC, 0,2 A
Max. plintbelastning (DC-1)1) på 1–2 (NO), 1–3 (NC) (resistiv belastning) 60 V DC, 1 A
Max. plintbelastning (DC-13)1) (induktiv belastning) 24 V DC, 0,1 A
Relä 02 (endast FC 302) plintnummer 4-6 (brytande), 4-5 (slutande)
Max. plintbelastning (AC-1)1) på 4-5 (NO) (resistiv belastning)
2)3)
Överspänningskat. II 400 V AC, 2 A
Max. plintbelastning (AC-15)1) på 4-5 (NO) (Induktiv belastning vid cosφ 0,4) 240 V AC, 0,2 A
Max. plintbelastning (DC-1)1) på 4–5 (NO) (resistiv belastning) 80 V DC, 2 A
Max. plintbelastning (DC-13)1) på 4–5 (NO) (induktiv belastning) 24 V DC, 0,1 A
Max. plintbelastning (AC-1)1) på 4–6 (NC) (resistiv belastning) 240 V AC, 2 A
Max. plintbelastning (AC-15)1) på 4-6 (NC) (induktiv belastning vid cosφ 0,4) 240 V AC, 0,2 A
Max. plintbelastning (DC-1)1) på 4–6 (NC) (resistiv belastning) 50 V DC, 2 A
Max. plintbelastning (DC-13)1) på 4–6 (NC) (induktiv belastning) 24 V DC, 0,1 A
Min. plintbelastning på 1-3 (NC), 1-2 (NO), 4-6 (NC), 4-5 (NO) 24 V DC 10 mA, 24 V AC 20 mA
Miljö enligt SS-EN 60664-1 överspänningskategori III/utsläppsgrad 2
1)
IEC 60947, del 4 och 5
Reläkontakterna är galvaniskt isolerade från resten av kretsen genom förstärkt isolering (PELV).
2)
Överspänningskategori II
3)
UL-tillämpningar 300 V AC 2A
Styrkortsprestanda
Scan-intervall 1 ms
Styregenskaper
Upplösning av utfrekvens vid 0–590 Hz ±0,003 Hz
Upprepningsnoggrannhet för Exakt start/stopp (plint 18, 19) ≤±0,1 ms
Systemets svarstid (plint 18, 19, 27, 29, 32, 33) ≤ 2 ms
Varvtalsreglering (utan återkoppling) 1:100 av synkront varvtal
Område för varvtalsreglering (med återkoppling) 1:1 000 av synkront varvtal
Varvtalsnoggrannhet (utan återkoppling) 30–4 000 varv/minut: fel ±8 varv/minut
Varvtalsnoggrannhet (med återkoppling), beroende på återkopplingsenhetens
upplösning 0–6 000 varv/minut: fel ±0,15 varv/minut
Momentstyrningsnoggrannhet (varvtalsåterkoppling) maxfel ±5 % av nominellt moment
Alla styregenskaper är baserade på en 4-polig asynkronmotor
76 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

2
20%
4 6 8
10
12 14 16
40%
60%
80%
100%
110%
I
out
(%)
fsw (kHz)
A1-A3 45°C, A4-A5 40°C
A1-A3 50°C, A4-A5 45°C
A1-A3 55°C, A4-A5 50°C
130BA393.10
0
0
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
A1-A3 45°C, A4-A5 40°C
A1-A3 50°C, A4-A5 45°C
A1-A3 55°C, A4-A5 50°C
0
0
130BD639.10
I
out
(%)
fsw (kHz)
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
I
out
(%)
A1-A3 45°C, A4-A5 40°C
A1-A3 50°C, A4-A5 45°C
A1-A3 55°C, A4-A5 50°C
0
0
130BA394.10
fsw (kHz)
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
I
out
(%)
A1-A3 45°C, A4-A5 40°C
A1-A3 50°C, A4-A5 45°C
A1-A3 55°C, A4-A5 50°C
0
0
130BD640.10
fsw (kHz)
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
45°C
50°C
55°C
130BA402.10
0
0
I
out
(%)
HO
B1
B2
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
0
0
I
out
(%)
NO
45°C
50°C
55°C
130BA401.11
B1
B2
Produktspecifikationer Design Guide
6.2.6 Nedstämpling för
omgivningstemperaturer
6.2.6.1 Nedstämpling för
omgivningstemperatur, kapslingstyp
A
60° AVM – Pulsbreddsmodulering
SFAVM
Bild 6.5 Nedstämpling av I
kapslingstyp A, med SFAVM och maximalt 10 m motorkabel
för olika T
out
AMB, MAX
för
6.2.6.2 Nedstämpling för
omgivningstemperaturer,
kapslingstyp B
6 6
Bild 6.2 Nedstämpling av M I
för olika T
out
AMB, MAX
för
kapslingstyp AVM vid 60° AVM
SFAVM - Stator Frequency Asyncron Vector Modulation
Bild 6.3 Nedstämpling av I
kapslingstyp A, med SFAVM
för olika T
out
AMB, MAX
för
Om endast 10 m motorkabel eller mindre används i
kapslingstyp A, är mindre nedstämpling nödvändig. Detta
beror på att längden på motorkabeln har en relativt hög
inverkan på den rekommenderade nedstämplingen.
60° AVM
Kapsling B, T2, T4 och T5
För B- och C-kapslingar beror nedstämplingen också på
vilket överbelastningsläge som har valts i 1-04 Överbelast-
ningsläge
60° AVM – Pulsbreddsmodulering
Bild 6.6 Nedstämpling av I
kapslingstyp B1 och B2, vid 60° AVM i läget Hög
överbelastning (160 % övermoment)
för olika T
out
AMB, MAX
för
Bild 6.7 Nedstämpling av I
Bild 6.4 Nedstämpling av I
kapslingstyp A, vid 60° AVM och maximalt 10 m motorkabel
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 77
för olika T
out
AMB, MAX
för
kapslingstyp B1 och B2, med 60° AVM i läget Normal
överbelastning (110 % överbelastning)
för olika T
out
AMB, MAX
för

130BB830.10
2 4
6 8
20%
10
12 14
16
f
sw
(kHz)
0
0
40%
o
50 C
60%
80%
90%
100%
o
45 C
110%
(%)
l
out
B3 & B4
HO
2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
12 14
16
o
55 C
f
sw
(kHz)
0
0
(%)
l
out
B3
B4
NO
130BB828.10
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
45°C
50°C
55°C
130BA404.10
0
0
I
out
(%)
HO
B1
B2
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
45°C
50°C
55°C
0
0
I
out
(%)
NO
130BA403.11
B1
B2
130BB834.10
2 4
6 8
20%
10
12 14
16
f
sw
(kHz)
0
0
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
B3
(%)
l
out
HO
B4
2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
12 14
16
B3
B4
f
sw
(kHz)
0
0
(%)
l
out
NO
130BB832.10
Produktspecifikationer Design Guide
Bild 6.11 Nedstämpling av I
för olika T
out
AMB, MAX
för
kapslingstyp B1 och B2, med SFAVM i läget Normal
Bild 6.8 Nedstämpling av I
för olika T
out
AMB, MAX
för
överbelastning (110 % övermoment)
kapslingstyp B3 och B4, med 60° AVM i läget Hög
66
överbelastning (160 % övermoment)
Bild 6.12 Nedstämpling av I
för olika T
out
AMB, MAX
för
kapslingstyp B3 och B4, med SFAVM i läget Hög
Bild 6.9 Nedstämpling av I
för olika T
out
AMB, MAX
för
överbelastning (160 % övermoment)
kapslingstyp B3 och B4, med 60° AVM i läget Normal
överbelastning (110 % övermoment)
SFAVM - Stator Frequency Asyncron Vector Modulation
Bild 6.13 Nedstämpling av I
Bild 6.10 Nedstämpling av I
för olika T
out
AMB, MAX
för
kapslingstyp B1 och B2, med SFAVM i läget Hög
överbelastning (160 % övermoment)
78 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07
kapslingstyp B3 och B4, med SFAVM i läget Normal
överbelastning (110 % övermoment)
för olika T
out
AMB, MAX
för

1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
3
(%)
l
out
f
sw
(kHz)
0
0
B1 & B2
NO
130BB820.10
1 2 4
6 8
20%
10
40%
o
50 C
f
sw
(kHz)
0
0
60%
80%
90%
100%
o
45 C
110%
(%)
l
out
B1 & B2
HO
130BB822.10
1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
f
sw
(kHz)
0
0
(%)
l
out
B1 & B2
NO
130BB826.10
1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
f
sw
(kHz)
0
0
(%)
l
out
B1 & B2
HO
130BB824.10
fsw (kHz)
130BB211.10
13.6
20.4
27.2
34
I
out
(A)
30.6
1 2 64
55°C
50°C
45°C
8 10
B2 all options
fsw (kHz)
130BB212.10
40
60
80
100
I
out
(A)
90
1 2 64
55°C
50°C
45°C
8 10
B2 all options
70
20
Produktspecifikationer Design Guide
Kapsling B, T6
60° AVM – Pulsbreddsmodulering
Bild 6.14 Nedstämpling för utström med switchfrekvens och
omgivande temperatur för 600 V-frekvensomformare,
kapslingstyp B, 60° AVM, NÖ
Bild 6.17 Nedstämpling för utström med switchfrekvens och
omgivande temperatur för 600 V-frekvensomformare,
kapslingstyp B: SFAVM, HÖ
Kapsling B, T7
Kapsling B2 och B4, 525–690 V
60° AVM – Pulsbreddsmodulering
6 6
Bild 6.15 Nedstämpling för utström med switchfrekvens och
omgivande temperatur för 600 V-frekvensomformare,
kapslingstyp B, 60° AVM, HÖ
Bild 6.18 Nedstämpling för utström med switchfrekvens och
omgivande temperatur för kapslingstyp B2 och B4, 60° AVM.
Obs! Diagrammet är ritat med strömmen som absolut värde
och gäller för både hög och normal belastning.
SFAVM - Stator Frequency Asyncron Vector Modulation
SFAVM - Stator Frequency Asyncron Vector Modulation
Bild 6.16 Nedstämpling för utström med switchfrekvens och
omgivande temperatur för 600 V-frekvensomformare,
kapslingstyp B: SFAVM, NÖ
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 79
Bild 6.19 Nedstämpling för utström med switchfrekvens och
omgivande temperatur för kapslingstyp B2 och B4, SFAVM
Obs! Diagrammet är ritat med strömmen som absolut värde
och gäller för både hög och normal belastning.

2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
45°C
50°C
55°C
130BA398.10
0
0
I
out
(%)
HO
C1 & C2
130BA397.10
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
0
0
I
out
(%)
NO
45°C
50°C
55°C
C1 & C2
130BB831.10
80%
90%
100%
110%
(%)
l
out
C3 & C4
HO
2 4
6 8
20%
10
40%
60%
o
50 C
o
45 C
12 14
16
f
sw
(kHz)
2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
12 14
16
o
55 C
f
sw
(kHz)
0
0
(%)
l
out
C3 & C4
NO
130BB829.10
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
HO
f
sw
(kHz)
45°C
50°C
55°C
130BA400.10
0
0
I
out
(%)
C1 & C2
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
fsw (kHz)
0
0
I
out
(%)
NO
45°C
50°C
55°C
130BA399.10
C1 & C2
Produktspecifikationer Design Guide
6.2.6.3 Nedstämpling för
omgivningstemperatur, kapslingstyp
C
Kapsling C, T2, T4 och T5
60° AVM – Pulsbreddsmodulering
Bild 6.23 Nedstämpling av I
för olika T
out
AMB, MAX
för
kapslingstyp C3 och C4, med 60° AVM i läget Normal
66
Bild 6.20 Nedstämpling av I
för olika T
out
AMB, MAX
för
överbelastning (110 % övermoment)
kapslingstyp C1 och C2, med 60° AVM i läget Hög
överbelastning (160 % övermoment)
SFAVM - Stator Frequency Asyncron Vector Modulation
Bild 6.24 Nedstämpling av I
för olika T
out
AMB, MAX
för
kapslingstyp C1 och C2, med SFAVM i läget Hög
Bild 6.21 Nedstämpling av I
för olika T
out
AMB, MAX
för
överbelastning (160 % övermoment)
kapslingstyp C1 och C2, med 60° AVM i läget Normal
överbelastning (110 % övermoment)
Bild 6.22 Nedstämpling av I
kapslingstyp C3 och C4, med 60° AVM i läget Hög
överbelastning (160 % övermoment)
80 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07
Bild 6.25 Nedstämpling av I
för olika T
out
AMB, MAX
för
kapslingstyp C1 och C2, med SFAVM i läget Normal
överbelastning (110 % övermoment)
för olika T
out
AMB, MAX
för

130BB835.10
80%
90%
100%
110%
C3 & C4
(%)
l
out
HO
2 4
6 8
20%
10
40%
60%
o
50 C
o
45 C
12 14
16
f
sw
(kHz)
0
0
2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
12 14
16
f
sw
(kHz)
0
0
(%)
l
out
C3 & C4
NO
130BB833.10
1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
f
sw
(kHz)
0
0
(%)
l
out
C1 & C2
NO
130BB821.10
80%
90%
100%
o
45 C
110%
(%)
l
out
C1 & C2
HO
1 2 4
6 8
20%
10
40%
60%
o
50 C
f
sw
(kHz)
0
0
130BB823.10
1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
f
sw
(kHz)
0
0
(%)
l
out
C1 & C2
NO
130BB827.10
130BB825.10
1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
f
sw
(kHz)
0
0
(%)
l
out
C1 & C2
HO
Produktspecifikationer Design Guide
Bild 6.26 Nedstämpling av I
för olika T
out
AMB, MAX
kapslingstyp C3 och C4, med SFAVM i läget Hög
överbelastning (160 % övermoment)
Bild 6.27 Nedstämpling av I
för olika T
out
AMB, MAX
kapslingstyp C3 och C4, med SFAVM i läget Normal
överbelastning (110 % övermoment)
Kapslingstyp C, T6
60° AVM – Pulsbreddsmodulering
för
för
Bild 6.29 Nedstämpling för utström med switchfrekvens och
omgivande temperatur för 600 V-frekvensomformare,
kapslingstyp C, 60° AVM, HÖ
SFAVM - Stator Frequency Asyncron Vector Modulation
Bild 6.30 Nedstämpling för utström med switchfrekvens och
omgivande temperatur för 600 V-frekvensomformare,
kapslingstyp C; SFAVM, NÖ
6 6
Bild 6.28 Nedstämpling för utström med switchfrekvens och
omgivande temperatur för 600 V-frekvensomformare,
kapslingstyp C, 60° AVM, NÖ
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 81
Bild 6.31 Nedstämpling för utström med switchfrekvens och
omgivande temperatur för 600 V-frekvensomformare,
kapslingstyp C; SFAVM, HÖ

fsw (kHz)
130BB213.11
20.4
34
I
out
(A)
28.9
1 2 64
55°C
50°C
45°C
8 10
C2 all options
13.6
27.2
fsw (kHz)
130BB214.10
40
60
80
100
I
out
(A)
86.6
1 2 64
55°C
50°C
45°C
8 10
C2 all options
66.6
20
2
20%
4 6 8 10
40%
60%
80%
100%
110%
I
out
(%)
fsw (kHz)
I
LOAD
at T
AMB
max
130BD597.10
0
0
I
LOAD
at T
AMB
max +5 °C
I
LOAD
at T
AMB
max +5 °C
Produktspecifikationer
Design Guide
Kapslingstyp C, T7
Uppmätta värden för dU/dt-testning
6.2.7
60° AVM – Pulsbreddsmodulering
För att förhindra skador på motorer utan fasåtskillnadspapp eller annan isoleringsförstärkning för användning
med frekvensomformare, rekommenderar vi att du
installerar ett dU/dt-filter eller LC-filter på frekvensomformarens utgång.
När en transistor i växelriktaren växlar, stiger spänningen
till motorn med ett dU/dt-förhållande som bestäms av:
Motorinduktans
•
Motorkabel (typ, ledararea, längd, skärmad eller
•
oskärmad)
Bild 6.32 Nedstämpling för utström med switchfrekvens och
66
omgivande temperatur för kapslingstyp C2, 60 ° AVM. Obs!
Diagrammet är ritat med strömmen som absolut värde och
gäller för både hög och normal belastning.
Egeninduktansen orsakar en toppspänning i motorspänningen innan den stabiliseras. Nivån beror på spänningen i
DC-bussen.
Toppspänning på motorplintarna orsakas av byte av
IGBT:er. Stigtiden och toppspänningen påverkar motorns
livslängd. En för hög toppspänning kan ge negativ
SFAVM - Stator Frequency Asyncron Vector Modulation
påverkan på motorer utan fasisolering i lindningarna över
tid.
Om motorkabeln är kort (några få meter) blir stigtiden och
toppspänningen lägre. Stigtiden och toppspänningen ökar
med kabellängden (100 m).
Frekvensomformaren uppfyller kraven enligt IEC 60034-25
och IEC 60034-17 för motorkonstruktion.
200–240 V (T2)
Nät-
Bild 6.33 Nedstämpling för utström med switchfrekvens och
omgivande temperatur för kapslingstyp C2, SFAVM. Obs!
Diagrammet är ritat med strömmen som absolut värde och
gäller för både hög och normal belastning.
Kabellängd [m]
spänning
[V]
Stigtid
[μs]
Upeak
[kV]
5 240 0,13 0,510 3,090
50 240 0,23 2,034
100 240 0,54 0,580 0,865
dU/dt
[kV/μs]
150 240 0,66 0,560 0,674
Tabell 6.13 P5K5T2
NätKabellängd [m]
spänning
[V]
Stigtid [μs]
Upeak
[kV]
dU/dt [kV/μs]
36 240 0,264 0,624 1,890
136 240 0,536 0,596 0,889
150 240 0,568 0,568 0,800
Tabell 6.14 P7K5T2
Bild 6.34 Nedstämpling för utström med switchfrekvens och
omgivande temperatur för kapslingstyp C3
Kabel-
82 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07
längd [m]
30 240 0,556 0,650 0,935
100 240 0,592 0,594 0,802
150 240 0,708 0,587 0,663
Tabell 6.15 P11KT2
Nätspänning
[V]
Stigtid
[μs]
Upeak
[kV]
dU/dt
[kV/μs]

Produktspecifikationer
Design Guide
NätKabellängd [m]
36 240 0,244 0,608 1,993
136 240 0,568 0,580 0,816
150 240 0,720 0,574 0,637
Tabell 6.16 P15KT2
Kabellängd [m]
36 240 0,244 0,608 1,993
136 240 0,568 0,580 0,816
150 240 0,720 0,574 0,637
Tabell 6.17 P18KT2
Kabellängd [m]
15 240 0,194 0,626 2,581
50 240 0,252 0,574 1,822
150 240 0,488 0,538 0,882
spänning
[V]
Nät-
spänning
[V]
Nät-
spänning
[V]
Stigtid
[μs]
Stigtid
[μs]
Stigtid
[μs]
Upeak
[kV]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
NätKabellängd [m]
5 480 0,172 0,890 4,156
50 480 0,310 2,564
150 480 0,370 1,190 1,770
Tabell 6.22 P4K0T4
Kabellängd [m]
5 480 0,04755 0,739 8,035
50 480 0,207 4,548
150 480 0,6742 1,030 2,828
Tabell 6.23 P7K5T4
Kabellängd [m]
36 480 0,396 1,210 2,444
100 480 0,844 1,230 1,165
150 480 0,696 1,160 1,333
spänning
[V]
Nät-
spänning
[V]
Nät-
spänning
[V]
Stigtid
[μs]
Stigtid
[μs]
Stigtid
[μs]
Upeak
[kV]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
6 6
Tabell 6.18 P22KT2
NätKabellängd [m]
30 240 0,300 0,598 1,594
100 240 0,536 0,566 0,844
150 240 0,776 0,546 0,562
Tabell 6.19 P30KT2
Kabellängd [m]
30 240 0,300 0,598 1,594
100 240 0,536 0,566 0,844
150 240 0,776 0,546 0,562
Tabell 6.20 P37KT2
spänning
[V]
Nätspänning
[V]
Stigtid
[μs]
Stigtid
[μs]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
380–500 V (T4)
NätKabellängd [m]
5 480 0,640 0,690 0,862
50 480 0,470 0,985 0,985
150 480 0,760 1,045 0,947
spänning
[V]
Stigtid
[μs]
Upeak
[kV]
dU/dt
[kV/μs]
Tabell 6.24 P11KT4
NätKabellängd [m]
36 480 0,396 1,210 2,444
100 480 0,844 1,230 1,165
150 480 0,696 1,160 1,333
Tabell 6.25 P15KT4
Kabellängd [m]
36 480 0,312 2,846
100 480 0,556 1,250 1,798
150 480 0,608 1,230 1,618
Tabell 6.26 P18KT4
Kabellängd [m]
15 480 0,288 3,083
100 480 0,492 1,230 2,000
150 480 0,468 1,190 2,034
Tabell 6.27 P22KT4
spänning
[V]
Nätspänning
[V]
Nätspänning
[V]
Stigtid
[μs]
Stigtid
[μs]
Stigtid
[μs]
Upeak
[kV]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
Tabell 6.21 P1K5T4
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 83

Produktspecifikationer Design Guide
NätKabellängd [m]
5 480 0,368 1,270 2,853
50 480 0,536 1,260 1,978
100 480 0,680 1,240 1,426
150 480 0,712 1,200 1,334
Tabell 6.28 P30KT4
Kabellängd [m]
5 480 0,368 1,270 2,853
50 480 0,536 1,260 1,978
66
100 480 0,680 1,240 1,426
150 480 0,712 1,200 1,334
spänning
[V]
Nät-
spänning
[V]
Stigtid
[μs]
Stigtid
[μs]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
Kabellängd [m]
36 600 0,084 1,560 7,962
50 600 0,120 1,540 5,467
100 600 0,165 1,472 3,976
150 600 0,190 1,530 3,432
Tabell 6.34 P30KT6
Kabellängd [m]
15 600 0,276 1,184 4,290
Tabell 6.35 P75KT6
Nätspänning
[V]
Nätspänning
[V]
Stigtid
[μs]
Stigtid
[μs]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
525–690 V (T7)
Tabell 6.29 P37KT4
NätKabellängd [m]
15 480 0,256 1,230 3,847
50 480 0,328 1,200 2,957
100 480 0,456 1,200 2,127
150 480 0,960 1,150 1,052
spänning
[V]
Stigtid
[μs]
Upeak
[kV]
dU/dt
[kV/μs]
Kabellängd [m]
80 690 0,58 1,728 2369
130 690 0,93 1,824 1569
180 690 0,925 1,818 1570
Tabell 6.36 P7K5T7
Nätspänning
[V]
Stigtid
[μs]
Upeak
[kV]
dU/dt
[kV/μs]
Tabell 6.30 P45KT4
380–500 V (T5)
NätKabellängd [m]
5 480 0,371 1,170 2,523
Tabell 6.31 P55KT5
Kabellängd [m]
5 480 0,371 1,170 2,523
Tabell 6.32 P75KT5
spänning
[V]
Nät-
spänning
[V]
Stigtid
[μs]
Stigtid
[μs]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
600 V (T6)
NätKabellängd [m]
36 600 0,304 1,560 4,105
50 600 0,300 1,550 4,133
100 600 0,536 1,640 2,448
150 600 0,576 1,640 2,278
spänning
[V]
Stigtid
[μs]
Upeak
[kV]
dU/dt
[kV/μs]
NätKabellängd [m]
6 690 0,238 1416 4739
50 690 0,358 1764 3922
150 690 0,465 1872 3252
Tabell 6.37 P45KT7
spänning
[V]
Stigtid
[μs]
Upeak
[kV]
dU/dt
[kV/μs]
Tabell 6.33 P15KT6
84 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

1.0
0.99
0.98
0.97
0.96
0.95
0.93
0.92
0% 50% 100% 200%
0.94
Relative Eciency
130BB252.11
1.01
150%
% Speed
100% load 75% load 50% load 25% load
Produktspecifikationer Design Guide
6.2.8 Verkningsgrad
Frekvensomformarens verkningsgrad
Frekvensomformarens verkningsgrad påverkas mycket lite
av dess belastning.
Detta innebär också att frekvensomformarens
verkningsgrad inte påverkas om en annan U/f-kurva väljs.
U/f-kurvan påverkar däremot motorns verkningsgrad.
Verkningsgraden minskar något när switchfrekvensen har
satts till ett värde över 5 kHz. Verkningsgraden minskar
också något om motorkabeln är längre än 30 m.
Beräkning av verkningsgrad
Beräkna frekvensomformarens verkningsgrad vid olika
varvtal och belastning med hjälp av Bild 6.35. Multiplicera
faktorn i diagrammet med den specifika verkningsgradsfaktorn som finns i kapitel 6.2 Allmänna specifikationer.
Bild 6.35 Typiska verkningsgradskurvor
Systemverkningsgrad
Systemets verkningsgrad kan beräknas genom att frekvensomformarens verkningsgrad multipliceras med motorns
verkningsgrad.
6.2.9 Ljudnivå
Ljudnivån från frekvensomformaren kan komma från tre
källor:
DC-busspolar (mellankrets)
•
RFI-filterdrossel
•
Interna fläktar
•
Se Tabell 6.38 för klassificering av ljudnivå.
Kapslingstyp
A1 51 60
A2 51 60
A3 51 60
A4 51 60
A5 54 63
B1 61 67
B2 58 70
B4 52 62
C1 52 62
C2 55 65
C4 56 71
D3h 58 71
50 % fläkthastighet
[dBA]
Maximal fläkthas-
tighet [dBA]
6 6
Exempel: Anta en frekvensomformare på 55 kW, 380–480 V
AC vid 25 % belastning och 50 % varvtal. Diagrammet visar
0,97 nominell verkningsgrad för en frekvensomformare på
55 kW är 0,98. Den faktiska verkningsgraden är då: 0,97 x
0,98 = 0,95.
Motorverkningsgrad
Verkningsgraden för en motor som drivs från frekvensomformaren beror på magnetiseringsnivån. Motorns
verkningsgrad är beroende av motortypen.
I området 75–100 % av nominellt moment är
•
motorns verkningsgrad nästan konstant, både när
den är ansluten till frekvensomformaren och
direkt till nätet.
För små motorer påverkar U/f-kurvan inte
•
verkningsgraden nämnvärt. Men för motorer på
11 kW och mer kan det göra stor skillnad.
Switchfrekvensen påverkar inte verkningsgraden
•
för små motorer. Motorer på 11 kW och större får
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 85
bättre verkningsgrad (1–2 %). Detta beror på att
motorströmmens sinusform blir nästan perfekt vid
hög switchfrekvens.
Tabell 6.38 Klassificering av ljudnivå
Värdena är uppmätta en meter från enheten.

F C - P T
130BB836.10
X S A B CX X X X
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 302221 23 272524 26 28 29 31 373635343332 38 39
X D
Så här beställer du Design Guide
7 Så här beställer du
7.1 Drive Configurator
Bild 7.1 Typkodsexempel
Med det Internet-baserade programmet Drive Configurator kan du konfigurera rätt frekvensomformare för rätt tillämpning
och skapa typkodsträngen. Drive Configurator kommer automatiskt att generera ett åttasiffrigt försäljningsnummer som ska
levereras till ditt lokala försäljningskontor.
Dessutom kan du skapa en projektlista med flera produkter och skicka den till en försäljningsrepresentant för Danfoss.
77
Du hittar programmet Drive Configurator på den globala webbplatsen: www.danfoss.com/drives.
Typkod
7.1.1
Ett exempel på typkod:
FC-302PK75T5E20H1BGCXXXSXXXXA0BXCXXXXD0
Betydelsen av tecknen i strängen definieras i Tabell 7.1 och Tabell 7.2. I ovanstående exempel ingår en Profibus DP V1 och
ett tillval för 24 V-reservförsörjning.
Beskrivning Pos Möjliga val
Produktgrupp 1-3 FC 30x
Frekvensomformarserie
Märkeffekt 8-10 0,25–75 kW
Faser 11 Trefas (T)
Nätspänning 11-12 T2: 200–240 V
Kapsling 13-15 E20: IP20
RFI-filter 16-17 Hx: Inga inbyggda emc-filter i frekvensomformaren (endast 600 V-enheter)
4-6 301: FC 301
302: FC 302
T4: 380–480 V
T5: 380–500 V
T6: 525–600 V
T7: 525–690 V
E55: IP 55/NEMA Typ 12
P20: IP 20 (med bakre plåt)
P21: IP 21/ NEMA Type 1 (med bakre plåt)
P55: IP 55/NEMA Type 12 (med bakre plåt)
Z20: IP 20
E66: IP 66
H1: Integrerat emc-filter. Uppfyller SS-EN 55011 klass A1/B och SS-EN/IEC 61800-3, kategori 1/2
H2: Inget extra emc-filter. Uppfyller SS-EN 55011 klass A2 och SS-EN/IEC 61800-3, kategori 3
H3:
H3 - Integrerat EMC-filter. Uppfyller SS-EN 55011 klass A1/B och SS-EN/IEC 61800-3, kategori 1/2 (endast
Kapsling A1)
H4: Integrerat emc-filter. Uppfyller SS-EN 55011 klass A1 och SS-EN/IEC 61800-3, kategori 2
H5: Marina versioner. Uppfyller samma emissionsnivåer som H2-versioner
1)
1)
86 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

Så här beställer du Design Guide
Beskrivning Pos Möjliga val
Broms 18 B: Bromschopper inkluderad
X: Ingen bromschopper inkluderad
T: Säkerhetsstopp ingen broms
U: Säkerhetsstopp bromschopper
Display 19 G: Grafisk lokal manöverpanel (LCP)
N: Numerisk lokal manöverpanel (LCP)
X: Ingen lokal manöverpanel
Ytbeläggning
PCB
20 C: Ytbehandlat PCB
R: Robust
X: Ej ytbehandlat PCB
Nättillval 21 X: Inget nättillval
1: Nätfrånkopplare
3: Nätfrånkopplare och säkring
5: Nätfrånkopplare, säkring och lastdelning
7: Säkring
2)
8: Nätfrånkopplare och lastdelning
A: Säkring och lastdelning
D: Lastdelning 3)
Anpassning 22 X: Kabelgenomföringar av standardtyp
O: Europeisk metrisk tråd i kabelinföringar (endast A4, A5, B1, B2, C1 och C2)
S: Kabelinföringar, brittisk standard (endast A5, B1, B2, C1 och C2)
Anpassning 23 X: Ingen anpassning
Programvaru-
24-27 SXXX: Senaste version – standardprogramvara
version
Programva-
28 X: Används inte
ruspråk
1)
: FC 301/endast kapslingstyp A1
2)
Endast USA
3)
: A- och B3-kapslingar har lastdelning inbyggd som standard
1)
1)
2)
3)
2, 3)
2, 3)
7 7
Tabell 7.1 Beställningstypkod kapslingstyp A, B och C
Beskrivning Pos Möjliga val
A-tillval 29-30 AX: Inget A-tillval
A0: MCA 101 Profibus DP V1 (standard)
A4: MCA 104 DeviceNet (standard)
A6: MCA 105 CANOpen (standard)
AN: MCA 121 Ethernet IP
AL: MCA 120 ProfiNet
AQ: MCA 122 Modbus TCP
AT: MCA 113 Profibus converter VLT 3000
AU: MCA 114 Profibus Converter VLT 5000
AY: MCA 123 Powerlink
A8: MCA 124 EtherCAT
B-tillval 31-32 BX: Inget tillval
BK: MCB 101 Generellt I/O-kort, tillval
BR: MCB 102 Pulsgivare, tillval
BU: MCB 103 Resolver, tillval
BP: MCB 105 Relätillval
BZ: MCB 108 Säkert PLC-gränssnitt
B2: MCB 112 PTC-termistorkort
B4: MCB 114 VLT Sensor Input
B6: MCB 150 Safe Option TTL
B7: MCB 151 Safe Option HTL
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 87

Så här beställer du Design Guide
Beskrivning Pos Möjliga val
C0-tillval 33-34 CX: Inget tillval
C4: MCO 305, programmerbar rörelseregulator
C1-tillval 35 X: Inget tillval
R: MCB 113 Utök. reläkort
Z: MCA-140 Modbus RTU OEM-tillval
C-tillval,
programvara/E
1-tillval
D-tillval 38-39 DX: Inget tillval
Tabell 7.2 Beställningstypkod, tillval
36-37 XX: Standardregulator
10: MCO 350 Synkroniseringsstyrning
11: MCO 351 Positionsstyrning
D0: MCB 107 Utök. 24 V DC-reservförsörjning
OBS!
För effektklasser över 75 kW, se VLT® AutomationDriveFC 300 90-1400 kW Design Guide.
77
7.1.2 Språk
Frekvensomformare levereras automatiskt med ett språkpaket som är relevant för den region där beställningen gjordes. Fyra
regionala språkpaket täcker följande språk:
Ingår i språkpaket 1 Ingår i språkpaket 2 Ingår i språkpaket 3 Ingår i språkpaket 4
English English English English
Tyska Tyska Tyska Tyska
Franska Kinesiska Slovenska Spanska
Danska Koreanska Bulgariska Engelska USA
Holländska Japanska Serbiska Grekiska
Spanska Thailändska Rumänska Brasiliansk portugisiska
Svenska Traditionell kinesiska Ungerska Turkiska
Italienska Indonesiska Tjeckiska Polska
Finska Ryska
Tabell 7.3 Språkpaket
Om du vill beställa frekvensomformare med ett annat språkpaket ska du kontakta din lokala återförsäljare.
88 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

Så här beställer du Design Guide
7.2 Beställningsnummer
7.2.1 Tillval och tillbehör
Beskrivning Best.nr
Ej ytbehandlat Ytbehandlat
Diverse maskinvaror
VLT® panelgenomföringssats kapslingstyp A5
VLT® panelgenomföringssats kapslingstyp B1
VLT® panelgenomföringssats kapslingstyp B2
VLT® panelgenomföringssats kapslingstyp C1
VLT® panelgenomföringssats kapslingstyp C2
VLT® monteringsfästen för kapslingstyp A5
VLT® monteringsfästen för kapslingstyp B1
VLT® monteringsfästen för kapslingstyp B2
VLT® monteringsfästen för kapslingstyp C1
VLT® monteringsfästen för kapslingstyp C2
VLT® IP 21/typ 1-sats, kapslingstyp A1
VLT® IP 21/typ 1-sats, kapslingstyp A2
VLT® IP 21/typ 1-sats, kapslingstyp A3
VLT® IP 21/typ 1-toppsats, kapslingstyp A2
VLT® IP 21/typ 1-toppsats, kapslingstyp A3
VLT® bakre plåt IP55/typ 12, kapslingstyp A5
VLT® bakre plåt IP21/typ 1, IP55/typ 12, kapslingstyp B1
VLT® bakre plåt IP21/typ 1, IP55/typ 12, kapslingstyp B2
VLT® bakre plåt IP20/typ 1, kapslingstyp B4
VLT® bakre plåt IP21/typ 1, IP55/typ 12, kapslingstyp C1
VLT® bakre plåt IP21/typ 1, IP55/typ 12, kapslingstyp C2
VLT® bakre plåt IP20/typ 1, kapslingstyp C3
VLT® bakre plåt IP20/typ 1, kapslingstyp C4
VLT® bakre plåt IP66/typ 4X, kapslingstyp A5
VLT® bakre plåt i rostfritt stål IP66/typ 4X, kapslingstyp B1
VLT® bakre plåt i rostfritt stål IP66/typ 4X, kapslingstyp B2
VLT® bakre plåt i rostfritt stål IP66/typ 4X, kapslingstyp C1
VLT® bakre plåt i rostfritt stål IP66/typ 4X, kapslingstyp C2
VLT® Profibus Adapter Sub-D9-koppling
Profibus-avskärmningssats för IP20, kapslingstyp A1, A2 och A3 130B0524
Anslutningsplint för DC-bussanslutning på kapslingstyp A2/A3 130B1064
VLT® skruvplintar 130B1116
VLT® USB-förlängning, 350 mm kabel 130B1155
VLT® USB-förlängning, 650 mm kabel 130B1156
VLT® bakre ram A2 för 1 bromsmotstånd 175U0085
VLT® bakre ram A3 för 1 bromsmotstånd 175U0088
VLT® bakre ram A2 för 2 bromsmotstånd 175U0087
VLT® bakre ram A3 för 2 bromsmotstånd 175U0086
Lokal manöverpanel
VLT® LCP 101 numerisk lokal manöverpanel
VLT® LCP 102 grafisk lokal manöverpanel
VLT® kabel för LCP 2, 3 m
VLT® panelmonteringssats för alla LCP-typer
VLT® panelmonteringssats, grafisk LCP
130B1028
130B1046
130B1047
130B1048
130B1049
130B1080
130B1081
130B1082
130B1083
130B1084
130B1121
130B1122
130B1123
130B1132
130B1133
130B1098
130B3383
130B3397
130B4172
130B3910
130B3911
130B4170
130B4171
130B3242
130B3434
130B3465
130B3468
130B3491
130B1112
130B1124
130B1107
175Z0929
130B1170
130B1113
7 7
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 89

Så här beställer du Design Guide
Beskrivning Best.nr
Ej ytbehandlat Ytbehandlat
VLT® panelmonteringssats, numerisk LCP
VLT® LCP-monteringssats utan LCP
VLT® LCP-monteringssats blindlock IP55/66, 8 m
VLT® manöverpanel LCP 102, grafisk
VLT® blindlock med Danfoss-logotyp, IP55/66
Tillval för öppning A
VLT® Profibus DP V1 MCA 101
VLT® DeviceNet MCA 104
VLT® CAN Open MCA 105
VLT® PROFIBUS Converter MCA 113
VLT® PROFIBUS Converter MCA 114
VLT® PROFINET MCA 120
VLT® EtherNet/IP MCA 121
VLT® Modbus TCP MCA 122
77
POWERLINK 130B1489 130B1490
EtherCAT 130B5546 130B5646
VLT® DeviceNet MCA 104
Tillval för öppning B
VLT® Generellt I/O-kort MCB 101
VLT® Encoder Input MCB 102
VLT® Resolver Input MCB 103
VLT® relätillval MCB 105
VLT® Safe PLC I/O MCB 108
VLT® PTC Thermistor Card MCB 112
VLT® Safe Option MCB 140
VLT® Safe Option MCB 141
VLT® Safe option MCB 150
VLT® Safe option MCB 151
Monteringssatser för C-tillval
VLT® Monteringssats för C-tillval, 40 mm, kapslingstyp A2/A3
VLT® monteringssats för C-tillval, 60 mm, kapslingstyp A2/A3
VLT® monteringssats för C-tillval, kapslingstyp A5
VLT® monteringssats för C-tillval, kapslingstyp B/C/D/E/F (utom B3)
VLT® monteringssats för C-tillval, 40 mm, kapslingstyp B3
VLT® monteringssats för C-tillval, 60 mm, kapslingstyp B3
Tillval för öppning C
VLT® Motion Control MCO 305
VLT® Synchronizing Contr. MCO 350
VLT® Position. Controller MCO 351
Center Winder-regulator 130B1165 130B1166
VLT® Extended Relay Card MCB 113
VLT® C-tillvalsadapter MCF 106
Tillval för öppning D
VLT® 24 V DC-försörjning MCB 107
VLT® EtherNet/IP MCA 121
VLT® sats för läckströmsövervakning, kapslingstyp A2/A3
VLT® sats för läckströmsövervakning, kapslingstyp B3
VLT® sats för läckströmsövervakning, kapslingstyp B4
VLT® sats för läckströmsövervakning, kapslingstyp C3
130B1114
130B1117
130B1129
130B1078
130B1077
130B1100 130B1200
130B1102 130B1202
130B1103 130B1205
130B1245
130B1246
130B1135 130B1235
130B1119 130B1219
130B1196 130B1296
130B1102 130B1202
130B1125 130B1212
130B1115 130B1203
130B1127 130B1227
130B1110 130B1210
130B1120 130B1220
130B1137
130B6443
130B6447
130B3280
130B3290
130B7530
130B7531
130B7532
130B7533
130B1413
130B1414
130B1134 130B1234
130B1152 130B1252
130B1153 120B1253
130B1164 130B1264
130B1230
130B1108 130B1208
175N2584
130B5645
130B5764
130B5765
130B6226
90 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

Så här beställer du Design Guide
Beskrivning Best.nr
Ej ytbehandlat Ytbehandlat
VLT® sats för läckströmsövervakning, kapslingstyp C4
PC-programvara
VLT® Motion Ctrl Tool MCT 10, 1 licens
VLT® Motion Ctrl Tool MCT 10, 5 licenser
VLT® Motion Ctrl Tool MCT 10, 10 licenser
VLT® Motion Ctrl Tool MCT 10, 25 licenser
VLT® Motion Ctrl Tool MCT 10, 50 licenser
VLT® Motion Ctrl Tool MCT 10, 100 licenser
VLT® Motion Ctrl Tool MCT 10, >100 licenser
Tillvalen kan beställas som fabriksinbyggda tillval – se beställningsinformationen, kapitel 7.1 Drive Configurator.
Tabell 7.4 Beställningsnummer för tillval och tillbehör
Reservdelar
7.2.2
130B5647
130B1000
130B1001
130B1002
130B1003
130B1004
130B1005
130B1006
Information om vilka reservdelar som finns tillgängliga för dina behov kan du få hos VLT-butiken eller konfiguratorn
VLTShop.danfoss.com.
7.2.3 Tillbehörspåsar
Typ Beskrivning Best.nr
Tillbehörspåsar
Tillbehörspåse A1 Tillbehörspåse, kapslingstyp A1 130B1021
Tillbehörspåse A2/A3 Tillbehörspåse, kapslingstyp A2/A3 130B1022
Tillbehörspåse A5 Tillbehörspåse, kapslingstyp A5 130B1023
Tillbehörspåse A1-A5 Tillbehörspåse, kapslingstyp A1-A5 Broms- och lastdelningsanslutning 130B0633
Tillbehörspåse B1 Tillbehörspåse, kapslingstyp B1 130B2060
Tillbehörspåse B2 Tillbehörspåse, kapslingstyp B2 130B2061
Tillbehörspåse B3 Tillbehörspåse, kapslingstyp B3 130B0980
Tillbehörspåse B4 Tillbehörspåse, kapslingstyp B4, 18,5–22 kW 130B1300
Tillbehörspåse B4 Tillbehörspåse, kapslingstyp B4, 30 kW 130B1301
Tillbehörspåse C1 Tillbehörspåse, kapslingstyp C1 130B0046
Tillbehörspåse C2 Tillbehörspåse, kapslingstyp C2 130B0047
Tillbehörspåse C3 Tillbehörspåse, kapslingstyp C3 130B0981
Tillbehörspåse C4 Tillbehörspåse, kapslingstyp C4, 55 kW 130B0982
Tillbehörspåse C4 Tillbehörspåse, kapslingstyp C4, 75 kW 130B0983
Tabell 7.5 Beställningsnummer för tillbehörspåsar
7 7
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 91

Så här beställer du
Design Guide
7.2.4 VLT AutomationDrive FC 301
T2, horisontell bromsning 10 % driftcykel
FC 301 Horisontell bromsning 10 % driftcykel
Frekvensomformardata
Nät-
typ
P
m
[kW]
R
[Ω]
min
R
br.nom
[Ω]
R
[Ω]
rec
P
br.cont.
[kW]
T2 0,25 368 415,9 410 0,100 175u3004 - - - 1,5 0,5
T2 0,37 248 280,7 300 0,100 175u3006 - - - 1,5 0,6
T2 0,55 166 188,7 200 0,100 175u3011 - - - 1,5 0,7
T2 0,75 121 138,4 145 0,100 175u3016 - - - 1,5 0,8
T2 1,1 81,0 92,0 100 0,100 175u3021 - - - 1,5 0,9
T2 1,5 58,5 66,5 70 0,200 175u3026 - - - 1,5 1,6
T2 2,2 40,2 44,6 48 0,200 175u3031 - - - 1,5 1,9
T2 3 29,1 32,3 35 0,300 175u3325 - - - 1,5 2,7
77
T2 3,7 22,5 25,9 27 0,360 175u3326 175u3477 175u3478 - 1,5 3,5
T2 5,5 17,7 19,7 18 0,570 175u3327 175u3442 175u3441 - 1,5 5,3
T2 7,5 12,6 14,3 13 0,680 175u3328 175u3059 175u3060 - 1,5 6,8
T2 11 8,7 9,7 9 1,130 175u3329 175u3068 175u3069 - 2,5 10,5
T2 15 5,3 7,5 5,7 1,400 175u3330 175u3073 175u3074 - 4 15
T2 18,5 5,1 6,0 5,7 1,700 175u3331 175u3483 175u3484 - 4 16
T2 22 3,2 5,0 3,5 2,200 175u3332 175u3080 175u3081 - 6 24
T2 30 3,0 3,7 3,5 2,800 175u3333 175u3448 175u3447 - 10 27
T2 37 2,4 3,0 2,8 3,200 175u3334 175u3086 175u3087 - 16 32
Bromsmotståndsdata Installation
Ledning
IP54
Danfoss artikelnummer
Skruvplint
IP21
Skruvplint
IP65
Bolt
connection
IP20
Ledararea
[mm2]
Termiskt
relä
[A]
Tabell 7.6 T2, horisontell bromsning 10 % driftcykel
FC 301 Vertikal bromsning 40 % driftcykel
Frekvensomformardata
Nät-
typ
P
m
[kW]
R
min
[Ω]
R
br.nom
[Ω]
R
[Ω]
P
rec
br.cont.
[kW]
Bromsmotståndsdata Installation
Danfoss artikelnummer
Ledning
IP54
Skruvplint
IP21
Skruvplint
IP65
Bolt
connection
IP20
Ledararea
[mm2]
Termiskt
T2 0,25 368 415,9 410 0,100 175u3004 - - - 1,5 0,5
T2 0,37 248 280,7 300 0,200 175u3096 - - - 1,5 0,8
T2 0,55 166 188,7 200 0,200 175u3008 - - - 1,5 0,9
T2 0,75 121 138,4 145 0,300 175u3300 - - - 1,5 1,3
T2 1,1 81,0 92,0 100 0,450 175u3301 175u3402 175u3401 - 1,5 2
T2 1,5 58,5 66,5 70 0,570 175u3302 175u3404 175u3403 - 1,5 2,7
T2 2,2 40,2 44,6 48 0,960 175u3303 175u3406 175u3405 - 1,5 4,2
T2 3 29,1 32,3 35 1,130 175u3304 175u3408 175u3407 - 1,5 5,4
T2 3,7 22,5 25,9 27 1,400 175u3305 175u3410 175u3409 - 1,5 6,8
T2 5,5 17,7 19,7 18 2,200 175u3306 175u3412 175u3411 - 1,5 10,4
T2 7,5 12,6 14,3 13 3,200 175u3307 175u3414 175u3413 - 2,5 14,7
T2 11 8,7 9,7 9 5,500 - 175u3176 175u3177 - 4 23
T2 15 5,3 7,5 5,7 6,000 - - - 175u3233 10 33
T2 18,5 5,1 6,0 5,7 8,000 - - - 175u3234 10 38
T2 22 3,2 5,0 3,5 9,000 - - - 175u3235 16 51
T2 30 3,0 3,7 3,5 14,000 - - - 175u3224 25 63
T2 37 2,4 3,0 2,8 17,000 - - - 175u3227 35 78
relä
[A]
Tabell 7.7 T2, vertikal bromsning 40 % driftcykel
92 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

Så här beställer du
Design Guide
FC 301 Horisontell bromsning 10 % driftcykel
Frekvensomformardata
Nät-
typ
P
m
[kW]
R
[Ω]
min
R
br.nom
[Ω]
R
[Ω]
rec
P
br.cont.
[kW]
Bromsmotståndsdata Installation
Danfoss artikelnummer
Ledning
IP54
Skruvplint
IP21
Skruvplint
IP65
Bolt
connection
IP20
Ledararea
[mm2]
T4 0,37 1000 1121,4 1200 0,100 175u3000 - - - 1,5 0,3
T4 0,55 620 749,8 850 0,100 175u3001 - - - 1,5 0,4
T4 0,75 485 547,6 630 0,100 175u3002 - - - 1,5 0,4
T4 1,1 329 365,3 410 0,100 175u3004 - - - 1,5 0,5
T4 1,5 240 263,0 270 0,200 175u3007 - - - 1,5 0,8
T4 2,2 161 176,5 200 0,200 175u3008 - - - 1,5 0,9
T4 3 117 127,9 145 0,300 175u3300 - - - 1,5 1,3
T4 4 86,9 94,6 110 0,450 175u3335 175u3450 175u3449 - 1,5 1,9
T4 5,5 62,5 68,2 80 0,570 175u3336 175u3452 175u3451 - 1,5 2,5
T4 7,5 45,3 49,6 56 0,680 175u3337 175u3027 175u3028 - 1,5 3,3
T4 11 34,9 38,0 38 1,130 175u3338 175u3034 175u3035 - 1,5 5,2
T4 15 25,3 27,7 28 1,400 175u3339 175u3039 175u3040 - 1,5 6,7
T4 18,5 20,3 22,3 22 1,700 175u3340 175u3047 175u3048 - 1,5 8,3
T4 22 16,9 18,7 19 2,200 175u3357 175u3049 175u3050 - 1,5 10,1
T4 30 13,2 14,5 14 2,800 175u3341 175u3055 175u3056 - 2,5 13,3
T4 37 10,6 11,7 12 3,200 175u3359 175u3061 175u3062 - 2,5 15,3
T4 45 8,7 9,6 9,5 4,200 - 175u3065 175u3066 - 4 20
T4 55 6,6 7,8 7,0 5,500 - 175u3070 175u3071 - 6 26
T4 75 4,2 5,7 5,5 7,000 - - - 175u3231 10 36
Termiskt
relä
[A]
7 7
Tabell 7.8 T4, horisontell bromsning 10 % driftcykel
FC 301 Vertikal bromsning 40 % driftcykel
Frekvensomformardata
Nättyp
P
m
[kW]
R
[Ω]
min
R
[Ω]
br.nom
R
[Ω]
P
rec
br.cont.
[kW]
Bromsmotståndsdata Installation
Danfoss artikelnummer
Ledning
IP54
Skruvplint
IP21
Skruvplint
IP65
Bolt
connection
IP20
Ledararea
[mm2]
T4 0,37 1000 1121,4 1200 0,200 175u3101 - - - 1,5 0,4
T4 0,55 620 749,8 850 0,200 175u3308 - - - 1,5 0,5
T4 0,75 485 547,6 630 0,300 175u3309 - - - 1,5 0,7
T4 1,1 329 365,3 410 0,450 175u3310 175u3416 175u3415 - 1,5 1
T4 1,5 240 263,0 270 0,570 175u3311 175u3418 175u3417 - 1,5 1,4
T4 2,2 161 176,5 200 0,960 175u3312 175u3420 175u3419 - 1,5 2,1
T4 3 117 127,9 145 1,130 175u3313 175u3422 175u3421 - 1,5 2,7
T4 4 86,9 94,6 110 1,700 175u3314 175u3424 175u3423 - 1,5 3,7
T4 5,5 62,5 68,2 80 2,200 175u3315 175u3138 175u3139 - 1,5 5
T4 7,5 45,3 49,6 56 3,200 175u3316 175u3428 175u3427 - 1,5 7,1
T4 11 34,9 38,0 38 5,000 - - - 175u3236 1,5 11,5
T4 15 25,3 27,7 28 6,000 - - - 175u3237 2,5 14,7
T4 18,5 20,3 22,3 22 8,000 - - - 175u3238 4 19
T4 22 16,9 18,7 19 10,000 - - - 175u3203 4 23
T4 30 13,2 14,5 14 14,000 - - - 175u3206 10 32
T4 37 10,6 11,7 12 17,000 - - - 175u3210 10 38
T4 45 8,7 9,6 9,5 21,000 - - - 175u3213 16 47
T4 55 6,6 7,8 7,0 26,000 - - - 175u3216 25 61
T4 75 4,2 5,7 5,5 36,000 - - - 175u3219 35 81
Termiskt
relä
[A]
Tabell 7.9 T4, vertikal bromsning 40 % driftcykel
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 93

Så här beställer du
Design Guide
7.2.5 Bromsmotstånd för FC 302
FC 302 Horisontell bromsning 10 % driftcykel
Frekvensomformardata
Nät-
typ
P
m
[kW]
R
[Ω]
min
R
br.nom
[Ω]
R
[Ω]
rec
P
br.cont.
[kW]
T2 0,25 380 475,3 410 0,100 175u3004 - - - 1,5 0,5
T2 0,37 275 320,8 300 0,100 175u3006 - - - 1,5 0,6
T2 0,55 188 215,7 200 0,100 175u3011 - - - 1,5 0,7
T2 0,75 130 158,1 145 0,100 175u3016 - - - 1,5 0,8
T2 1,1 81,0 105,1 100 0,100 175u3021 - - - 1,5 0,9
T2 1,5 58,5 76,0 70 0,200 175u3026 - - - 1,5 1,6
T2 2,2 45,0 51,0 48 0,200 175u3031 - - - 1,5 1,9
T2 3 31,5 37,0 35 0,300 175u3325 - - - 1,5 2,7
T2 3,7 22,5 29,7 27 0,360 175u3326 175u3477 175u3478 - 1,5 3,5
77
T2 5,5 17,7 19,7 18 0,570 175u3327 175u3442 175u3441 - 1,5 5,3
T2 7,5 12,6 14,3 13,0 0,680 175u3328 175u3059 175u3060 - 1,5 6,8
T2 11 8,7 9,7 9,0 1,130 175u3329 175u3068 175u3069 - 2,5 10,5
T2 15 5,3 7,5 5,7 1,400 175u3330 175u3073 175u3074 - 4 14,7
T2 18,5 5,1 6,0 5,7 1,700 175u3331 175u3483 175u3484 - 4 16
T2 22 3,2 5,0 3,5 2,200 175u3332 175u3080 175u3081 - 6 24
T2 30 3,0 3,7 3,5 2,800 175u3333 175u3448 175u3447 - 10 27
T2 37 2,4 3,0 2,8 3,200 175u3334 175u3086 175u3087 - 16 32
Bromsmotståndsdata Installation
Ledning
IP54
Danfoss artikelnummer
Skruvplint
IP21
Skruvplint
IP65
Bolt
connection
IP20
Ledar-
area
[mm2]
Termiskt
relä
[A]
Tabell 7.10 T2, horisontell bromsning 10 % driftcykel
FC 302 Vertikal bromsning 40 % driftcykel
Frekvensomformardata
Nät-
typ
P
m
[kW]
R
[Ω]
min
R
br.nom
[Ω]
R
[Ω]
rec
P
br.cont.
[kW]
Bromsmotståndsdata Installation
Ledning
IP54
Danfoss artikelnummer
Skruvplint
IP21
Skruvplint
IP65
Bolt
connection
IP20
Ledararea
[mm2]
Termiskt
T2 0,25 380 475,3 410 0,100 175u3004 - - - 1,5 0,5
T2 0,37 275 320,8 300 0,200 175u3096 - - - 1,5 0,8
T2 0,55 188 215,7 200 0,200 175u3008 - - - 1,5 0,9
T2 0,75 130 158,1 145 0,300 175u3300 - - - 1,5 1,3
T2 1,1 81,0 105,1 100 0,450 175u3301 175u3402 175u3401 - 1,5 2
T2 1,5 58,5 76,0 70 0,570 175u3302 175u3404 175u3403 - 1,5 2,7
T2 2,2 45,0 51,0 48 0,960 175u3303 175u3406 175u3405 - 1,5 4,2
T2 3 31,5 37,0 35 1,130 175u3304 175u3408 175u3407 - 1,5 5,4
T2 3,7 22,5 29,7 27 1,400 175u3305 175u3410 175u3409 - 1,5 6,8
T2 5,5 17,7 19,7 18 2,200 175u3306 175u3412 175u3411 - 1,5 10,4
T2 7,5 12,6 14,3 13,0 3,200 175u3307 175u3414 175u3413 - 2,5 14,7
T2 11 8,7 9,7 9,0 5,500 - 175u3176 175u3177 - 4 23
T2 15 5,3 7,5 5,7 6,000 - - - 175u3233 10 33
T2 18,5 5,1 6,0 5,7 8,000 - - - 175u3234 10 38
T2 22 3,2 5,0 3,5 9,000 - - - 175u3235 16 51
T2 30 3,0 3,7 3,5 14,000 - - - 175u3224 25 63
T2 37 2,4 3,0 2,8 17,000 - - - 175u3227 35 78
relä
[A]
Tabell 7.11 T2, vertikal bromsning 40 % driftcykel
94 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

Så här beställer du
Design Guide
FC 302 Horisontell bromsning 10 % driftcykel
Frekvensomformardata
Nät-
typ
P
m
[kW]
R
[Ω]
min
R
br.nom
[Ω]
R
[Ω]
rec
P
br.cont.
[kW]
Bromsmotståndsdata Installation
Danfoss artikelnummer
Ledning
IP54
Skruvplint
IP21
Skruvplint
IP65
Bolt
connection
IP20
Ledararea
[mm2]
T5 0,37 1000 1389,2 1200 0,100 175u3000 - - - 1,5 0,3
T5 0,55 620 928,8 850 0,100 175u3001 - - - 1,5 0,4
T5 0,75 558 678,3 630 0,100 175u3002 - - - 1,5 0,4
T5 1,1 382 452,5 410 0,100 175u3004 - - - 1,5 0,5
T5 1,5 260 325,9 270 0,200 175u3007 - - - 1,5 0,8
T5 2,2 189 218,6 200 0,200 175u3008 - - - 1,5 0,9
T5 3 135 158,5 145 0,300 175u3300 - - - 1,5 1,3
T5 4 99,0 117,2 110 0,450 175u3335 175u3450 175u3449 - 1,5 1,9
T5 5,5 72,0 84,4 80 0,570 175u3336 175u3452 175u3451 - 1,5 2,5
T5 7,5 50,0 61,4 56 0,680 175u3337 175u3027 175u3028 - 1,5 3,3
T5 11 36,0 41,2 38 1,130 175u3338 175u3034 175u3035 - 1,5 5,2
T5 15 27,0 30,0 28 1,400 175u3339 175u3039 175u3040 - 1,5 6,7
T5 18,5 20,3 24,2 22 1,700 175u3340 175u3047 175u3048 - 1,5 8,3
T5 22 18,0 20,3 19 2,200 175u3357 175u3049 175u3050 - 1,5 10,1
T5 30 13,4 15,8 14 2,800 175u3341 175u3055 175u3056 - 2,5 13,3
T5 37 10,8 12,7 12 3,200 175u3359 175u3061 175u3062 - 2,5 15,3
T5 45 8,8 10,4 9,5 4,200 - 175u3065 175u3066 - 4 20
T5 55 6,5 8,5 7,0 5,500 - 175u3070 175u3071 - 6 26
T5 75 4,2 6,2 5,5 7,000 - - - 175u3231 10 36
Termiskt
relä
[A]
7 7
Tabell 7.12 T5, horisontell bromsning 10 % driftcykel
FC 302 Vertikal bromsning 40 % driftcykel
Frekvensomformardata
Nät-
typ
P
[kW]
m
R
min
[Ω]
R
br.nom
[Ω]
R
[Ω]
rec
P
br.cont.
[kW]
Bromsmotståndsdata Installation
Danfoss artikelnummer
Ledning
IP54
Skruvplint
IP21
Skruvplint
IP65
Bolt
connection
IP20
Ledararea
[mm2]
Termiskt
T5 0,37 1000 1389,2 1200 0,200 175u3101 - - - 1,5 0,4
T5 0,55 620 928,8 850 0,200 175u3308 - - - 1,5 0,5
T5 0,75 558 678,3 630 0,300 175u3309 - - - 1,5 0,7
T5 1,1 382 452,5 410 0,450 175u3310 175u3416 175u3415 - 1,5 1
T5 1,5 260 325,9 270 0,570 175u3311 175u3418 175u3417 - 1,5 1,4
T5 2,2 189 218,6 200 0,960 175u3312 175u3420 175u3419 - 1,5 2,1
T5 3 135 158,5 145 1,130 175u3313 175u3422 175u3421 - 1,5 2,7
T5 4 99,0 117,2 110 1,700 175u3314 175u3424 175u3423 - 1,5 3,7
T5 5,5 72,0 84,4 80 2,200 175u3315 175u3138 175u3139 - 1,5 5
T5 7,5 50,0 61,4 56 3,200 175u3316 175u3428 175u3427 - 1,5 7,1
T5 11 36,0 41,2 38 5,000 - - - 175u3236 1,5 11,5
T5 15 27,0 30,0 28 6,000 - - - 175u3237 2,5 14,7
T5 18,5 20,3 24,2 22 8,000 - - - 175u3238 4 19
T5 22 18,0 20,3 19 10,000 - - - 175u3203 4 23
T5 30 13,4 15,8 14 14,000 - - - 175u3206 10 32
T5 37 10,8 12,7 12 17,000 - - - 175u3210 10 38
T5 45 8,8 10,4 9,5 21,000 - - - 175u3213 16 47
T5 55 6,5 8,5 7,0 26,000 - - - 175u3216 25 61
T5 75 4,2 6,2 5,5 36,000 - - - 175u3219 35 81
relä
[A]
Tabell 7.13 T5, vertikal bromsning 40 % driftcykel
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 95

Så här beställer du
Design Guide
FC 302 Horisontell bromsning 10 % driftcykel
Frekvensomformardata
Nät-
typ
P
m
[kW]
R
[Ω]
min
R
br.nom
[Ω]
R
[Ω]
rec
P
br.cont.
[kW]
Bromsmotståndsdata Installation
Ledning
IP54
Danfoss artikelnummer
Skruvplint
IP21
Skruvplint
IP65
Bolt
connection
IP20
Ledararea
[mm2]
Termiskt
relä
[A]
T6 0,75 620 914,2 850 0,100 175u3001 - - - 1,5 0,4
T6 1,1 550 611,3 570 0,100 175u3003 - - - 1,5 0,4
T6 1,5 380 441,9 415 0,200 175u3005 - - - 1,5 0,7
T6 2,2 260 296,4 270 0,200 175u3007 - - - 1,5 0,8
T6 3 189 214,8 200 0,300 175u3342 - - - 1,5 1,1
T6 4 135 159,2 145 0,450 175u3343 175u3012 175u3013 - 1,5 1,7
T6 5,5 99,0 114,5 100 0,570 175u3344 175u3136 175u3137 - 1,5 2,3
T6 7,5 69,0 83,2 72 0,680 175u3345 175u3456 175u3455 - 1,5 2,9
T6 11 48,6 56,1 52 1,130 175u3346 175u3458 175u3457 - 1,5 4,4
T6 15 35,1 40,8 38 1,400 175u3347 175u3460 175u3459 - 1,5 5,7
T6 18,5 27,0 32,9 31 1,700 175u3348 175u3037 175u3038 - 1,5 7
77
T6 22 22,5 27,6 27 2,200 175u3349 175u3043 175u3044 - 1,5 8,5
T6 30 17,1 21,4 19 2,800 175u3350 175u3462 175u3461 - 2,5 11,4
T6 37 13,5 17,3 14 3,200 175u3358 175u3464 175u3463 - 2,5 14,2
T6 45 10,8 14,2 13,5 4,200 - 175u3057 175u3058 - 4 17
T6 55 8,8 11,6 11 5,500 - 175u3063 175u3064 - 6 21
T6 75 6,6 8,4 7,0 7,000 - - - 175u3245 10 32
Tabell 7.14 T6 horisontell bromsning 10 % driftcykel
FC 302 Vertikal bromsning 40 % driftcykel
Frekvensomformardata
Nät-
typ
P
m
[kW]
R
[Ω]
min
R
br.nom
[Ω]
R
[Ω]
rec
P
br.cont.
[kW]
Bromsmotståndsdata Installation
Ledning
IP54
Danfoss artikelnummer
Skruvplint
IP21
Skruvplint
IP65
Bolt
connection
IP20
Ledararea
[mm2]
Termiskt
T6 0,75 620 914,2 850 0,280 175u3317 175u3104 175u3105 - 1,5 0,6
T6 1,1 550 611,3 570 0,450 175u3318 175u3430 175u3429 - 1,5 0,9
T6 1,5 380 441,9 415 0,570 175u3319 175u3432 175u3431 - 1,5 1,1
T6 2,2 260 296,4 270 0,960 175u3320 175u3434 175u3433 - 1,5 1,8
T6 3 189 214,8 200 1,130 175u3321 175u3436 175u3435 - 1,5 2,3
T6 4 135 159,2 145 1,700 175u3322 175u3126 175u3127 - 1,5 3,3
T6 5,5 99,0 114,5 100 2,200 175u3323 175u3438 175u3437 - 1,5 4,4
T6 7,5 69,0 83,2 72 3,200 175u3324 175u3440 175u3439 - 1,5 6,3
T6 11 48,6 56,1 52 5,500 - 175u3148 175u3149 - 1,5 9,7
T6 15 35,1 40,8 38 6,000 - - - 175u3239 2,5 12,6
T6 18,5 27,0 32,9 31 8,000 - - - 175u3240 4 16
T6 22 22,5 27,6 27 10,000 - - - 175u3200 4 19
T6 30 17,1 21,4 19 14,000 - - - 175u3204 10 27
T6 37 13,5 17,3 14 17,000 - - - 175u3207 10 35
T6 45 10,8 14,2 13,5 21,000 - - - 175u3208 16 40
T6 55 8,8 11,6 11 26,000 - - - 175u3211 25 49
T6 75 6,6 8,4 7,0 30,000 - - - 175u3241 35 66
relä
[A]
Tabell 7.15 T6, vertikal bromsning 40 % driftcykel
96 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07

150/160%
175UA067.10
100%
150/160%
175UA068.10
Så här beställer du Design Guide
FC 302 Vertikal bromsning 40 % driftcykel
Frekvensomformardata
Nät-
typ
P
m
[kW]
R
[Ω]
min
R
br.nom
[Ω]
R
[Ω]
rec
P
br.cont.
[kW]
T7 1,1 620 830 630 0,360 - 175u3108 175u3109 - 1,5 0,8
T7 1,5 513 600 570 0,570 - 175u3110 175u3111 - 1,5 1
T7 2,2 340 403 415 0,790 - 175u3112 175u3113 - 1,5 1,3
T7 3 243 292 270 1,130 - 175u3118 175u3119 - 1,5 2
T7 4 180 216 200 1,700 - 175u3122 175u3123 - 1,5 2,8
T7 5,5 130 156 145 2,200 - 175u3106 175u3107 - 1,5 3,7
T7 7,5 94 113 105 3,200 - 175u3132 175u3133 - 1,5 5,2
T7 11 69,7 76,2 72 4,200 - 175u3142 175u3143 - 1,5 7,2
T7 15 46,8 55,5 52 6,000 - - - 175u3242 2,5 10,8
T7 18,5 36,0 44,7 42 8,000 - - - 175u3243 2,5 13,9
T7 22 29,0 37,5 31 10,000 - - - 175u3244 4 18
T7 30 22,5 29,1 27 14,000 - - - 175u3201 10 23
T7 37 18,0 23,5 22 17,000 - - - 175u3202 10 28
T7 45 13,5 19,3 15,5 21,000 - - - 175u3205 16 37
T7 55 13,5 15,7 13,5 26,000 - - - 175u3209 16 44
T7 75 8,8 11,5 11 36,000 - - - 175u3212 25 57
Bromsmotståndsdata Installation
Danfoss artikelnummer
Ledning
IP54
Skruvplint
IP21
Skruvplint
IP65
Bolt
connection
IP20
Ledararea
[mm2]
Termiskt
relä
[A]
7 7
Tabell 7.16 T7, vertikal bromsning 40 % driftcykel
Horisontell bromsning: Driftcykel 10 % och maximalt 120 s repetitionshastighet enligt referensbromsprofilen. Genomsnittlig effekt motsvarar 6 %.
Vertikal bromsning: Driftcykel 40 % och maximalt 120 s repetitionshastighet enligt referensbromsprofilen. Genomsnittlig effekt motsvarar 27 %.
Ledararea: Rekommenderat minsta värde baserat på PVC-isolerad kopparkabel, omgivningstemperatur på 30 °C med normal värmeavgivning.
All kabeldragning måste följa nationella och lokala bestämmelser för ledarareor och omgivande temperatur.
Bimetallrelä: Bromsströmvärde för externt bimetallrelä. Alla motstånd har en inbyggd bimetallreläbrytare N.C.
IP54 har 1 000 mm fast, oskärmad kabel. Vertikal och horisontell montering. Nedstämpling krävs vid horisontell montering.
IP21 & IP65 har skruvplint för kabelavslutning. Vertikal och horisontell montering. Nedstämpling krävs vid horisontell montering.
IP20 har bultanslutning för kabelavslutning. Golvmontering.
Bild 7.2 Horisontella laster
Bild 7.3 Vertikala laster
MG33BF07 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. 97

Så här beställer du Design Guide
7.2.6 Andra flat pack-bromsmotstånd
Flatpack IP65 för horisontella transportbanor
FC 301
T2 [kW]
P
m
R
min
R
br,nom
R
per objekt
rec
[Ω] [Ω] [Ω//W]
Driftcykel Best.nr
[%] 175Uxxxx
PK25 0,25 368 416 430/100 40 1002
PK37 0,37 248 281 330/100 eller 310/200 27 eller 55 1003 eller 0984
PK55 0,55 166 189 220/100 eller 210/200 20 eller 37 1004 eller 0987
PK75 0,75 121 138 150/100 eller 150/200 14 eller 27 1005 eller 0989
P1K1 1,1 81,0 92 100/100 eller 100/200 10 eller 19 1006 eller 0991
P1K5 1,5 58,5 66,5 72/200 14 0992
P2K2 2,2 40,2 44,6 50/200 10 0993
P3K0 3 29,1 32,3 35/200 eller 72/200 7 14 0994 eller 2 x 0992
P3K7 3,7 22,5 25,9 60/200 11 2 x 0996
Tabell 7.17 Andra flat pack för frekvensomformare med nätförsörjning
FC 301 Nätspänning: 200–240 V (T2)
77
Flatpack IP65 för horisontella transportbanor
FC 302
P
m
T2 [kW]
PK25 0,25 380 475 430/100 40 1002
PK37 0,37 275 321 330/100 eller 310/200 27 eller 55 1003 eller 0984
PK55 0,55 188 216 220/100 eller 210/200 20 eller 37 1004 eller 0987
PK75 0,75 130 158 150/100 eller 150/200 14 eller 27 1005 eller 0989
P1K1 1,1 81,0 105,1 100/100 eller 100/200 10 eller 19 1006 eller 0991
P1K5 1,5 58,5 76,0 72/200 14 0992
P2K2 2,2 45,0 51,0 50/200 10 0993
P3K0 3 31,5 37,0 35/200 eller 72/200 7 eller 14 0994 eller 2 x 0992
P3K7 3,7 22,5 29,7 60/200 11 2 x 0996
R
min
R
br.nom
R
per objekt
rec
[Ω] [Ω] [Ω/W]
Driftcykel Best.nr
[%] 175Uxxxx
Tabell 7.18 Andra flat pack för frekvensomformare med nätförsörjning
FC 302 Nätspänning: 200–240 V (T2)
98 Danfoss A/S © Rev. 2014-04-04 Med ensamrätt. MG33BF07
 Loading...
Loading...