

Page 1
Karta katalogowa
VLT® AutomationDrive FC 302 z wbudowanym
sterownikiem ruchu, przeznaczony do zastosowań
związanych z pozycjonowaniem i synchronizacją
Odkryj precyzję pozycjonowania i pełną kontrolę
nad synchronizacją w nowoczesnej odsłonie
Precyzyjne pozycjonowanie i synchronizacja
przy użyciu przetwornicy częstotliwości.
Dzięki funkcjonalności zintegrowanego
sterownika ruchu (Integrated Motion
Controller, IMC), przetwornica VLT®
AutomationDrive FC 302 zastępuje
bardziej złożone sterowniki pozycjonowania
i synchronizacji, zapewniając oszczędność
czasu i kosztów.
Operacje pozycjonowania i synchronizacji
są zwykle wykonywane z wykorzystaniem
serwomechanizmu lub sterownika ruchu.
Wiele aplikacji w rzeczywistości nie wymaga
wysokiej dynamiki pracy oferowanej przez
serwomechanizmy.
Dlatego przetwornica FC 302 ze
zintegrowanym sterownikiem ruchu (IMC)
stanowi oszczędną, wysoce wydajną
alternatywę dla układu wykonawczego
Bez
enkodera,
dzięki czemu
zmniejszysz koszty
i stopień złożoności
serwo w aplikacjach z pozycjonowaniem
i synchronizowaniem w jednej osi.
Sterownik IMC może być używany
w przypadku wielu aplikacji, które
do tej pory były obsługiwane przez
serwomechanizmy, na przykład:
nStoły obrotowe
n Maszyny tnące
n Maszyny pakujące
Używaj FC 302 do uruchamiania silnika
indukcyjnego lub PM z lub bez sprzężenia
zwrotnego silnika i bez potrzeby stosowania dodatkowego sprzętu. W przypadku
sterowania bez zewnętrznego sygnału
sprzężenia „sensorless” (bez sprzężenia
zwrotnego silnika) najlepsza wydajność jest
Cecha Korzyść
Zintegrowana z przetwornicą częstotliwości funkcja
sterowania ruchem
Brak konieczności stosowania enkodera oraz
powiązanego z nim okablowania
Brak konieczności korzystania z serwomechanizmu
Konfiguracja za pomocą parametrów
Synchronizacja pozycji wyjściowej
– Odnowienie kalibracji przy każdym cyklu
Homing z ograniczeniem momentu
– Brak konieczności korzystania z czujnika
– Oszczędzaj czas i pieniądze, które musiałbyś
– Niższe koszty zakupu ze względu na mniejszą
– Trwalsza instalacja
– Krótszy czas montażu elementów elektrycznych
– Łatwiejsza i szybsza konfiguracja
– Brak konieczności zaawansowanego programowania
– Niższe koszty zakupu
– Bezpieczny rezultat
– Oszczędność czasu
– Prostota
– Minimalizuje ryzyko błędów związanych
–
– Oszczędność kosztów związanych z zakupem,
osiągana z silnikiem PM. Wydajność sterowania bez zewnętrznego sygnału sprzężenia „sensorless” silnikami indukcyjnymi jest
jednak wystarczająca dla mniej wymagających aplikacji.
Dzięki IMC oszczędzasz czas i pieniądze:
nBrak potrzeby zaawansowanego
programowania oraz mniejsza
ilość podzespołów to mniej godzin
poświęconych na prace inżynieryjne,
instalację i uruchomienie
nMożliwość wyeliminowania
dodatkowych kosztów związanych
ze sprzężeniem zwrotnym,
okablowaniem i instalacją dzięki
korzystaniu ze sterowania bez
zewnętrznego sygnału sprzężenia —
„sensorless”
nMożliwość oszczędności na kosztach
związanych z czujnikiem pozycji wyjściowej (home) i okablowaniem, dzięki funkcji „homing z ograniczeniem momentu”
Rozwiązanie IMC zapewnia łatwą
i bezpieczną konfigurację:
nKonfiguracja za pomocą parametrów
bez konieczności zaawansowanego
programowania. Mniejsza złożoność
minimalizuje ryzyko błędów.
nAby dodać więcej funkcji, można sko-
rzystać z logicznego sterownika zdarzeń
(SLC), który jest całkowicie kompatybilny
ze zintegrowanym kontrolerem ruchu
nFunkcja „home synchronizing” umożliwia
dostosowywanie pozycji wyjściowej
(home) podczas pracy
poświęcić na dodatkowe podzespoły
liczbę podzespołów
i mechanicznych
z zaawansowanym programowaniem
Wysoki poziom dokładności utrzymywany
w sposób ciągły w układach z poślizgiem
montażem i konserwacją dodatkowych podzespołów
www.danfoss.com/imc
Page 2
Pozycjonowanie
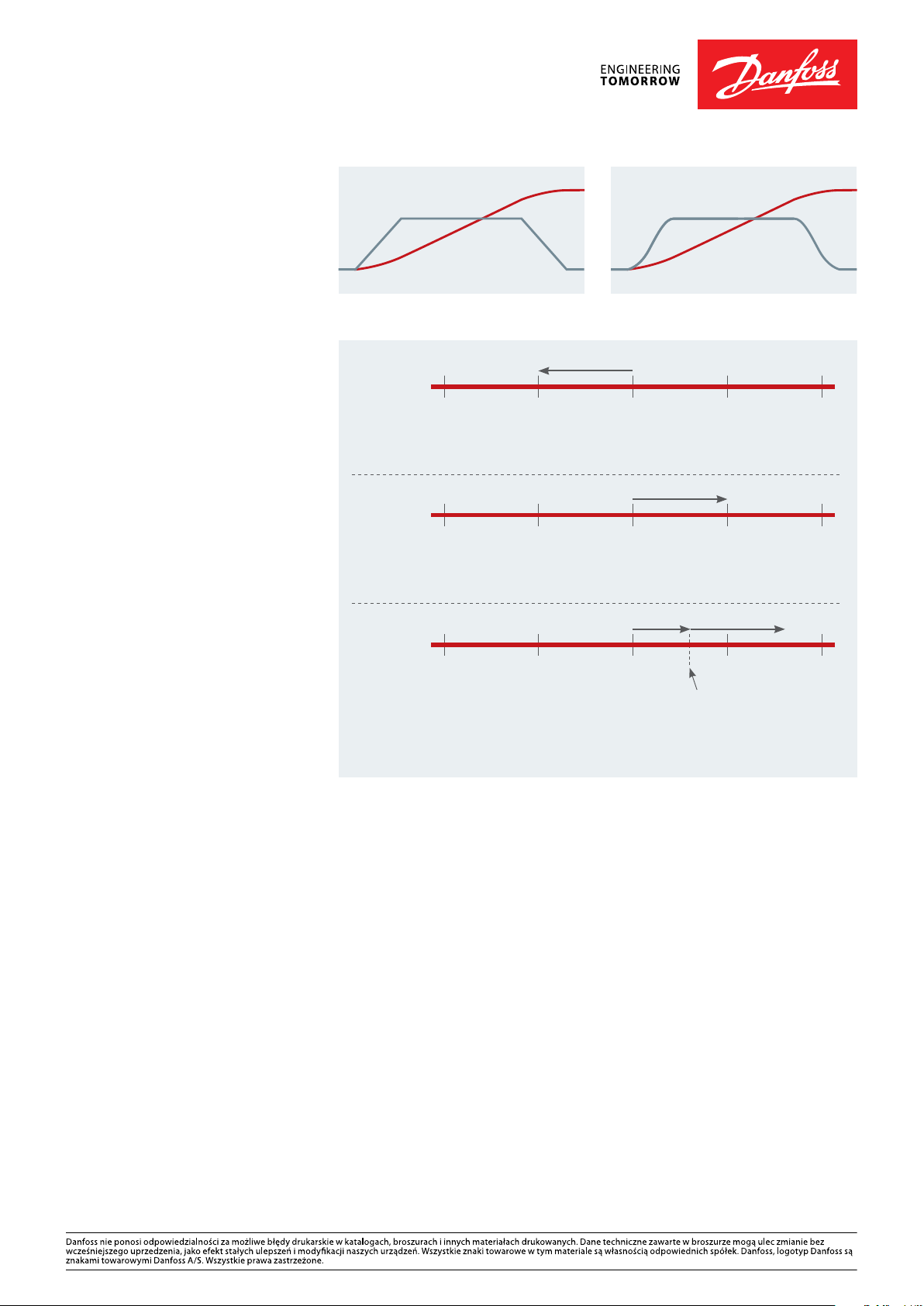
W trybie pozycjonowania przetwornica
steruje ruchem na określonym dystansie
(pozycjonowanie względne) lub do
określonego celu (pozycjonowanie
bezwzględne). Przetwornica oblicza profil
ruchu na podstawie pozycji docelowej,
wartości docelowej prędkości ustawień
czasów rozpędzania/zatrzymania (zobacz
przykłady na Rys. 1 i Rys. 2 po prawej).
Istnieją trzy typy pozycjonowania,
korzystające z różnych wartości zadanych
na potrzeby definiowania pozycji
docelowej.
n Bezwzględne pozycjonowanie
Pozycja docelowa jest określana
względem zdefiniowanego punktu
zero maszyny.
n Względne pozycjonowanie
Pozycja docelowa jest określana
względem rzeczywistej pozycji maszyny.
n Touch probe
Pozycja docelowa jest określana
względem sygnału na wejściu cyfrowym.
Ta ilustracja (Rys. 3) pokazuje różną
wynikową pozycję docelową przy
ustawionej pozycji docelowej (wartością
zadaną) 1000 i pozycji początkowej 2000
dla poszczególnych typów pozycjonowania.
Synchronizacja
W trybie synchronizacji przetwornica
częstotliwości podąża za pozycją sygnału
master. Za tym samym masterem podążać
może wiele przetwornic częstotliwości.
Sygnałem mastera może być sygnał
zewnętrzny, na przykład z enkodera,
wirtualny sygnał mastera generowany przez
przetwornicę częstotliwości lub pozycje
mastera przesyłane przez magistralę
komunikacyjną. Współczynnik przełożenia
i przesunięcie pozycji można regulować
za pomocą parametru.
Powrót do pozycji wyjściowej
W przypadku sterowania bez zewnętrznego
sygnału sprzężenia „sensorless” i sterowania
w pętli zamkniętej za pomocą enkodera
przyrostowego, funkcja homing (powrót
do pozycji wyjściowej) jest wymagana
do utworzenia odwołania dla fizycznej
Prędkość Prędkość
Rys. 1. Profil ruchu z liniowymi czasami rozpędzania/
zatrzymania
Bezwzględne
0 1000 2000 3000 4000
W przypadku pozycjonowania bezwzględnego przetwornica częstotliwości wykonuje ruch
wstecz z pozycji początkowej 2000 do pozycji bezwzględnej 1000 w odniesieniu do 0.
Względne
0 1000 2000 3000 4000
W przypadku pozycjonowania względnego przetwornica częstotliwości pokonuje dystans 1000
do przodu od pozycji początkowej 2000, kończąc ruch w pozycji 3000.
Touch probe
0 1000 2000 3000 4000
W przypadku pozycjonowania przy użyciu Touch probe przetwornica częstotliwości zaczyna
ruch do przodu z pozycji początkowej 2000, wykrywa sygnał Touch probe i pokonuje dystans
1000 od położenia tego czujnika.
Rys. 3. Zintegrowany sterownik ruchu IMC obsługuje trzy
tryby pozycjonowania
pozycji maszyny po załączeniu zasilania.
Do wyboru jest kilka funkcji pozycji
wyjściowej, bez czujnika i z czujnikiem.
Korzystając z funkcji synchronizowania
pozycji wyjściowej, można w sposób ciągły
regulować pozycję wyjściową podczas
pracy w przypadku, gdy w układzie
występuje jakiś rodzaj poślizgu. Na przykład
w przypadku sterowania bez zewnętrznego
sygnału sprzężenia „sensorless” z użyciem
silnika indukcyjnego lub przypadku
poślizgu w transmisji mechanicznej.
PozycjaPozycja
Rys. 2. Profil ruchu z czasami rozpędzania/zatrzymania S
Czujnik Touch probe
DKDD.PFF.300.A5.49 © Copyright Danfoss Drives | 2020.09
 Loading...
Loading...