

Fact Sheet
VLT® AutomationDrive FC 302 med integrated motion controller
– til positionerings- og synkroniseringsapplikationer
Med IMC sparer du tid og
omkostninger:
Ingen enkoder betyder lettere
idriftsættelse og installation. Du
mindsker desuden risiko for driftsfejl
Intet behov for servodrev og du
slipper derfor for den komplekse
servoprogrammering.
Enkel og sikker opsætning:
Opsætning af IMC via enkel
parameter-opsætning gør det nemt
for dig at supportere din applikation
Ved behov for yderligere
funktionalitet, brug Smart Logic
Controller (SLC), som er fuldt ud
kompatibel med IMC
Udfør højpræcisionspositionering og
synkronisering, blot ved hjælp af en
frekvensomformer. Med Integrated
Motion Controller (IMC) funktionaliteten, kan VLT® AutomationDrive
FC 302 overtage komplekse positionerings- og synkroniseringsapplikationer
og derved spare dig tid og omkostninger.
Positionering og synkronisering udføres
typisk ved hjælp af et servodrev eller
en motion controller – dette på trods
af at mange af disse applikationer ikke
kræver den dynamiske ydeevne, som
man får ved et servodrev.
Derfor er FC 302 med IMC et omkostningseffektivt, højtydende alternativ til
en servoløsning, når det drejer sig om
single-akse positionerings- og synkroniserings-applikationer.
Enkoder-fri
så du får lavere
indkøbsomkost-
ninger og reduceret
kompleksitet
Brug blandt andet IMC til at simplificere
For at opnå høj præcision med
mange applikationer, som indtil nu er
blevet løst med servodrev, såsom:
Indekseringsborde
Skæremaskiner
IMC er fuldt ud bus-kompatibel med
Pakkemaskiner.
IMC virker både med almindelige
asynkrone motorer og permanent
magnet (PM) motorer i både åben
og lukket sløjfe styring.
I åben sløjfe styring opnås den
højeste præcision med en PM motor
Brug en asynkron motor, når
behovet for præcision er begrænset.
Funktion Fordel
Integrated Motion Control funktionalitet
i frekvensomformeren
Ingen enkoder påkrævet
Intet behov for servodrev
Programmering via parametre
Homing on the run
– Positioneringskalibrering for hver cyklus
Homing uden sensor via momentstyring
– Spar tid og omkostninger og undgå ekstra
komponenter som f.eks. enkoder
– Lavere indkøbsomkostninger takket
være færre komponenter
– Mere robust installation og lavere risiko
for driftsfejl
– Kort elektrisk installationstid
– Nem og hurtig opsætning
– Intet behov for servoprogrammering
– Enkel udskiftning ved nedbrud
– Opnå et sikkert resultat
– Spar tid
– Undgå kompleksitet
Opnå høj præcision med asynkrone motorer
–
og kompensér for positioneringsfejl
– Spar indkøbs- og installationsomkostninger
af sensor
asynkrone motorer og kompensere
for positioneringsfejl, brug “homing
sensor on the run”-funktionen
alle standard bus-typer.
drives.danfoss.dk
Positionering
I positionerings-mode kontrollerer
frekvensomformeren bevægelse over
en specifik distance (relativ positione-
ring) eller til en specifik position (absolut
positionering). Frekvensomformeren
beregner bevægelsesprofilen baseret
på rampetid, hastighedsreference og
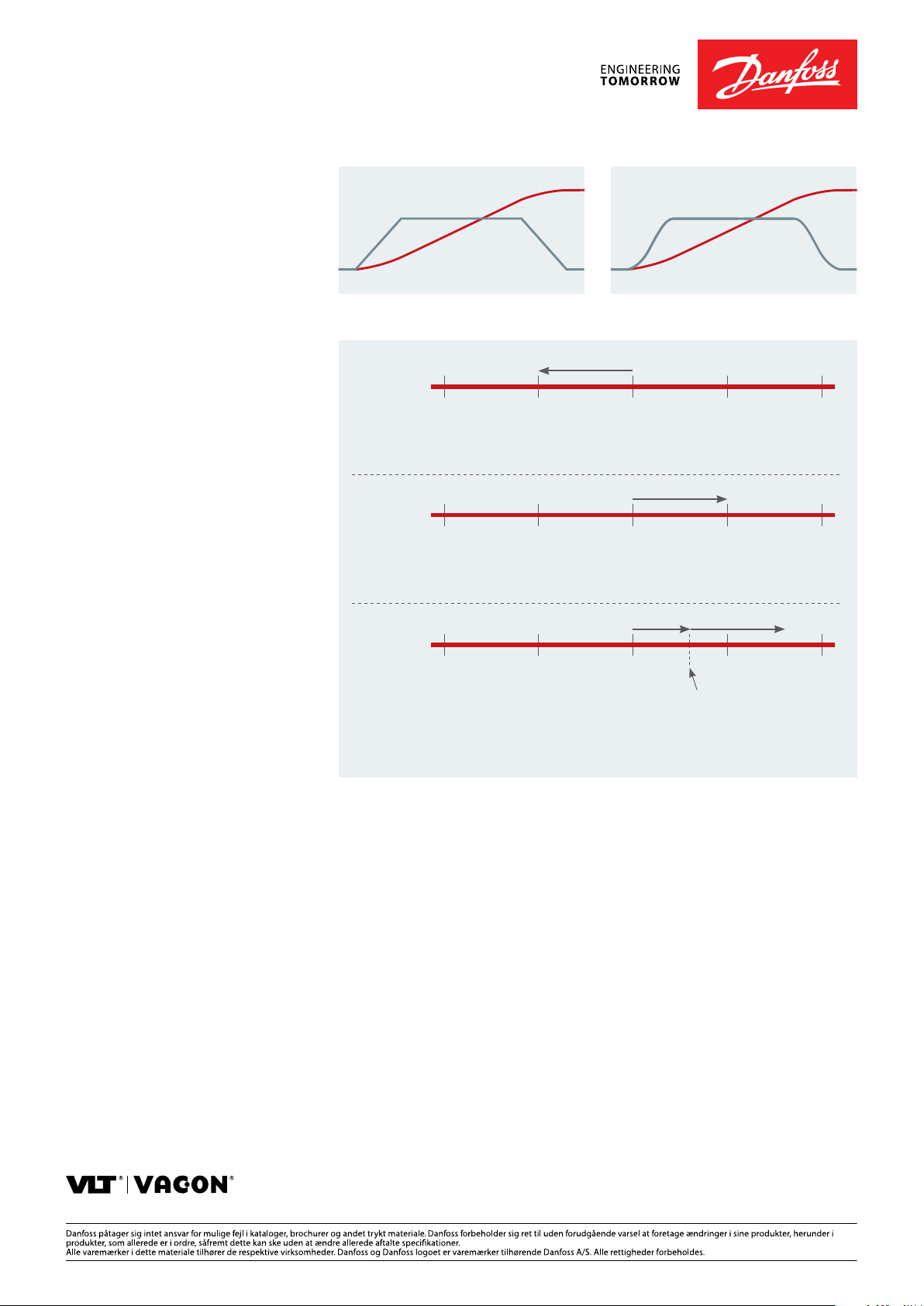
skalering, og udfører derefter handlingen. Se eksempler i figur 1 og figur 2
til højre.
Der findes tre positioneringstyper, som
ved brug af samme reference opnår
forskellige positioner.
Denne illustration (Fig. 3) viser de
forskellige resultater med en bestemt
positionsreference på 1.000 og startposition på 2.000 for hver af de tre
positioneringstyper.
Absolut positionering
En absolut positionering kan til
enhver tid fortælle, i hvilken position
maskinslæden befinder sig i.
Relativ positionering
Relativ positionering giver kun
besked om ændringer i positionen.
Touch probe positionering
Ved touch probe positionering,
roterer motoraksen sig indtil den
detekterer sensoren, hvorefter der
foretages en relativ positionering.
PositionPosition
Hastighed Hastighed
Fig. 1. Bevægelsesprofil med lineære ramper Fig. 2. Bevægelsesprofil med S-ramper
Absolut
0 1000 2000 3000 4000
Ved absolut positionering vil frekvensomformeren rotere motoraksen til den
absolutte position på 1.000 enheder.
Relativ
0 1000 2000 3000 4000
Ved relativ positionering vil frekvensomformeren rotere motoraksen 1.000 enheder
frem i forhold til startpositionen på 2.000.
Touch probe
0 1000 2000 3000 4000
Touch probe sensor
Ved touch probe positionering vil frekvensomformeren rotere motoraksen fra sin
oprindelige startposition på 2.000 i en given retning indtil den detekterer touch
probe sensoren, hvorefter den bevæger sig 1.000 enheder frem.
Fig. 3. IMC understøtter tre former for positionering
Synkronisering
Et master enkoder signal sendes til
frekvensomformeren og motoren følger
det signal ud fra en given skalering. Det
er muligt at synkronisere flere aksler til
det samme enkoder signal og benytte
forskellige skaleringer på hver aksel,
efter behov.
Homing
Homing gør det muligt at definere et
nulpunkt for frekvensomformeren, som
efterfølgende gør det muligt at udføre
positioneringsopgaver fra dette punkt.
“Homing sensor on the run”-funktionen
øger positioneringspræcision, da posi-
Funktionen gør det muligt at lave
homing ved langsomt at køre motoren
op imod et mekanisk stop. Frekvensomformeren overvåger momentet og
ved et givet momentniveau, registreres
dette som en homing.
tionen bliver genkalibreret under hver
enkelt bevægelsescyklus.
Danfoss Drives Salg Danmark, Jegstrupvej 3, 8361 Hasselager. Tlf. +45 6991 8080, drives.danfoss.dk, E-mail: kundeservice.dk@danfoss.com
DKDD.PFF.300.A5.01 © Copyright Danfoss Drives | 2020.09
 Loading...
Loading...