

Page 1
ENGINEERING TOMORROW
操作ガイド
VLT® AutomationDrive FC 301/302
0.25–75 kW
www.DanfossDrives.com
Page 2

Page 3
Page 4
Page 5
Page 6
Page 7
目次 操作ガイド
目次
1 はじめに
1.1 取扱説明書の目的
1.2 補助的リソース
1.3 取扱説明書ならびにソフトウェア・バージョン
1.4 製品概要
1.5 型式承認および認証
2 安全性
2.1 安全記号
2.2 有資格技術者
2.3 安全予防措置
3 機械的設置
3.1 開梱
3.1.1 納入物 8
3.2 設置環境
3.3 取り付け
3
3
3
3
3
5
6
6
6
6
8
8
8
8
4 電気的設置
4.1 安全指示
4.2 EMC 対策設置
4.3 接地
4.4 配線図
4.5 モーター接続
4.6 AC 主電源接続
4.7 コントロール配線
4.7.1 Safe Torque Off (STO) 15
4.7.2 機械的ブレーキ・コントロール 15
4.8 設置チェックリスト
5 設定
5.1 安全指示
5.2 ローカル・コントロール・パネル動作
5.3 システム設定
6 基本 I/O 設定
10
10
10
10
12
14
15
15
16
17
17
18
19
20
7 メンテナンス、診断およびトラブルシューティング
7.1 メンテナンスとサービス
7.2 警告と警報の種類
7.3 警告と警報のリスト
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 1
22
22
22
23
Page 8
目次
VLT® AutomationDrive FC 301/302
8 仕様
8.1 電気データ
8.1.1 主電源 200-240 V 32
8.1.2 主電源 380–500 V 34
8.1.3 主電源 525-600 V ( FC 302 のみ) 37
8.1.4 主電源 525-690 V (FC 302 のみ) 40
8.2 主電源
8.3 モーター出力とモーター・データ
8.4 周囲条件
8.5 ケーブル仕様
8.6 コントロール入力/出力とコントロールデータ
8.7 ヒューズと遮断器
8.8 接続の締め付けトルク
8.9 電力規格、重量、寸法
9 付属資料
9.1 記号、略語と用例
9.2 パラメーター・メニュー構造
32
32
43
43
44
44
44
48
58
59
65
65
65
インデックス
75
2 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 9
はじめに 操作ガイド
1 はじめに
1.1 取扱説明書の目的
この操作ガイドには、周波数変換器の設置と設定を安全に
行うための情報が記載されています。
操作ガイドは、有資格技術者による利用を前提としていま
す。
周波数変換器を安全かつ専門的に使用するため、取扱説明
書の内容に従ってください。特に、安全指示と一般警告に
注意を払ってください。この操作ガイドは、周波数変換器
の操作時にいつでも取り出して読めるよう大切に保管し
てください。
VLT® は登録商標です。
1.2 補助的リソース
高度な周波数変換器の機能やプログラミングを理解する
ために、様々な補助的リソースが利用できます。
VLT® AutomationDrive FC 301
•
ラミング・ガイド
の詳細や、多くのアプリケーション事例について
学習できます。
VLT® AutomationDrive FC 301
•
ンガイド
めの詳細な性能や機能が記載されています。
オプション機器の操作説明。
•
Danfoss は補足的な情報と取扱説明書を提供しています。
参照してください。
filter=type%3Adocumentation%2Csegment%3Adds
照ください。
取扱説明書ならびにソフトウェア・
1.3
は、モーター制御システムを設計するた
により、パラメーターの使い方
www.danfoss.com/en/search/?
バージョン
この取扱説明書には、定期的な見直しと更新が行われま
す。改善のご提案を歓迎いたします。
書のバージョンと、対応するソフトウェアのバージョンを
示しています。
/
FC 302
/
FC 302
表 1.1
プログ
デザイ
をご参
は取扱説明
製品概要
1.4
1.4.1 使用目的
周波数変換器は、電動モーターの制御目的で
システムフィードバック、又は外部コントローラ
•
ーからのリモートコマンドに反応して、モーター
速度の制御を行う電子モーターコントローラー
です。パワードライブシステムは、周波数変換
器、モーター、及びモーター駆動の機器から構成
されています。
システム及びモーター状態監視。
•
周波数変換器は、モーター過負荷保護のために使用するこ
ともできます。
設定によっては、周波数変換器を独立的な用途に用いるこ
とができる一方で、より大きな装置や設置物の一部として
用いることも可能です。
周波数変換器は、地域の法規に従って、住居環境、工業環
境、商業環境にて使用することができます。
注記
住居環境では、この製品は無線干渉を生じさせる可能性が
あり、追加的な緩和措置が必要になる場合があります。
予期される誤用
周波数変換器を、指定の動作条件・動作環境に準拠してい
ない用途に使用しないでください。
れている条件を遵守してください。
章 8 仕様
に指定さ
注記
周波数変換器の出力周波数は 590 Hz に制限されます。
590 Hz を超える需要については、Danfoss にご連絡くだ
さい。
1 1
エディション 注釈 ソフトウェア・バ
ージョン
MG33ATxx エラー修正。ケーブルの最
小断面積を 10 mm2 (7 AWG)
に変更
表 1.1 取扱説明書ならびにソフトウェア・バージョン
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 3
8.1x, 48.20
(IMC)
Page 10
1
2
3
4
5
6
7
8
9
10
11
12
13
16
17
18
19
14
6
FAN MOUNTING
QDF-30
DC-
DC+
Remove jumper to activate Safe Stop
Max. 24 Volt !
12
13 1819 27 29 32
33
20
37
0605 04
0302 01
130BF713.10
61
68
69
39
42
50
53 54
55
1
3
5
20
9
6
13
15
14
6
18
11
10
16, 17
19
14
7
8
4
2
はじめに
VLT® AutomationDrive FC 301/302
11
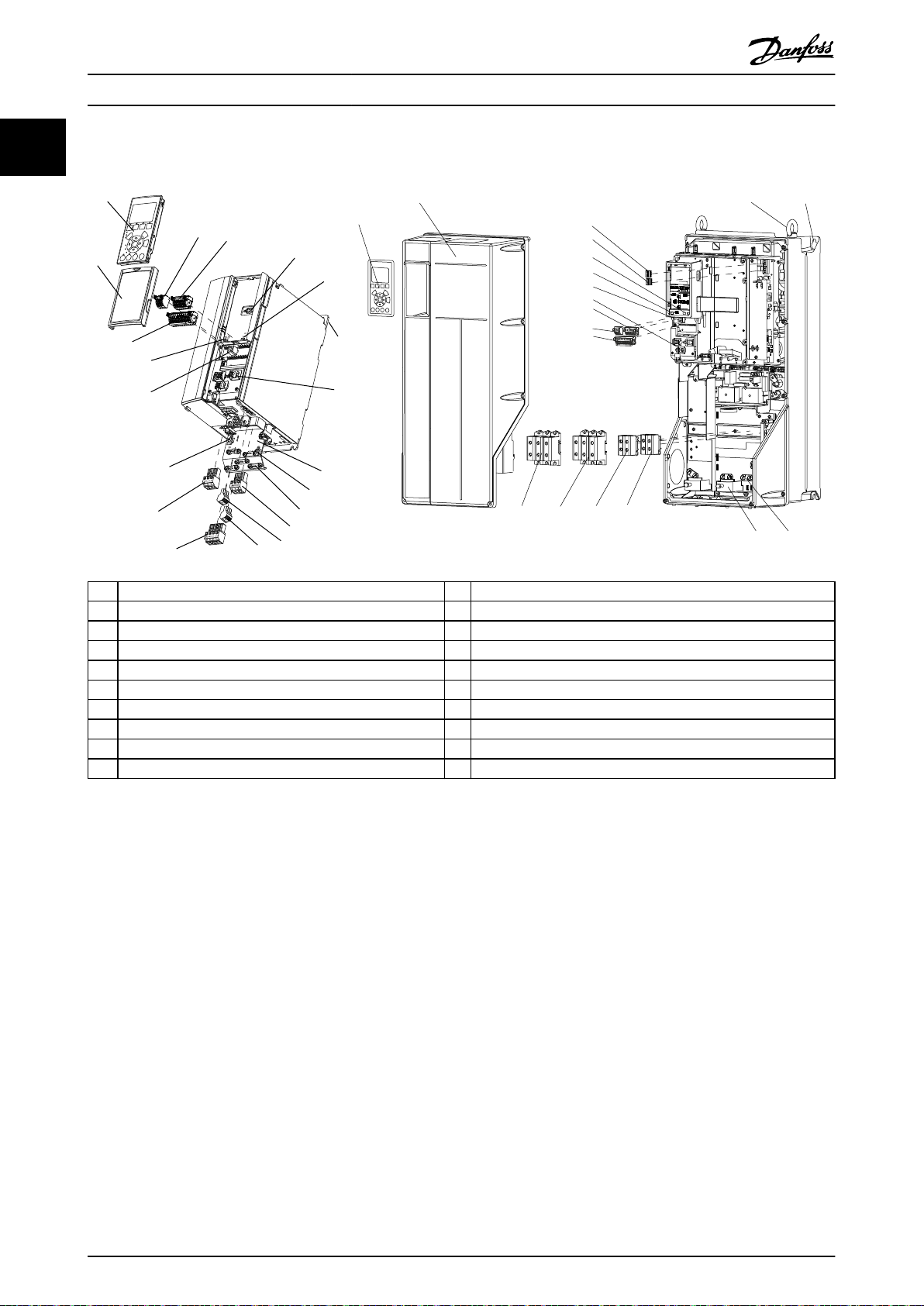
1.4.2 分解図
1 ローカル・コントロール・パネル (LCP) 11 リレー 2 (04、05、06)
2 カバー 12 吊り上げ用リング
3 RS485 フィールドバスコネクター 13 取り付け用スロット
4 ディジタル入力/出力コネクター 14 接地接続 (PE)
5 ディジタル入力/出力コネクター 15 ケーブル・シールド・コネクター
6 シールド・ ケーブル 接地およびリリーフ 16 ブレーキ 端子 (-81、+82)
7 USB コネクター 17 ロード シェア 端子 (-88、+89)
8 RS485 端子スイッチ 18 モーター端子 96 (U)、97 (V)、98 (W)
9 A53 および A54 向け DIP スイッチ 19 主電源 入力 端子 91 (L1)、92 (L2)、93 (L3)
10 リレー 1 (01、02、03) 20 LCP コネクター
図 1.1 展開図、エンクロージャー・サイズ A、IP20 (左) およびエンクロージャー・サイズ C、IP55/IP66 (右)
4 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 11
089
はじめに 操作ガイド
1.5 型式承認および認証
以下のリストは、Danfoss 周波数変換器について考えられ
る型式承認および認証を集めたものです。
1 1
注記
周波数変換器に関する具体的な承認および認証は、周波数
変換器の銘板上に表示されています。詳しくは、お近くの
Danfoss 事業所やパートナーにお問い合わせください。
UL 508C 熱記憶保持要件の詳細については、製品別
インガイドのモーター熱保護
さい。
内国水路での危険物の国際輸送に関する欧州協定(ADN)の
遵守に関する詳細は、
守した設置
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 5
」を参照してください。
のセクションをご参照くだ
製品別デザインガイドの「ADN を遵
デザ
Page 12
安全性
VLT® AutomationDrive FC 301/302
2 安全性
22
2.1 安全記号
安全予防措置
2.3
以下は、このガイドで使用されている記号です:
警告
死亡事故や深刻な傷害事故を招く可能性のある危険な状
況を示します。
注意
軽微あるいは中小程度の傷害を招く危険性のある状況を
示します。これは安全ではないやり方に対する警告とし
ても使用される場合があります。
注記
重要情報を示します。装置や所有物などの損害を招く可
能性のある状況が含まれます。
2.2 有資格技術者
周波数変換器を無故障かつ安全に動作させるためには、正
確かつ信頼性の高い輸送、保管、設置、操作、メンテナン
スが必要です。有資格技術者にのみ機器の設置や操作が
許されています。
有資格技術者とは、訓練を受けたスタッフであって、関連
する法律と規則に従って設備、システム、回路の設置、設
定、メンテナンスを行うことを許された者のことをいいま
す。また、有資格技術者は、この取扱説明書に記載する指
示と安全措置を熟知する必要があります。
警告
高電圧
AC 主電源、DC 電源、 あるいはロードシェアに接続され
ている限り、ドライブには高電圧が印加されています。有
資格技術者でない人が、設置、スタートアップ、メンテナ
ンスを誤って行った場合、死亡事故や重大な傷害事故を招
くことがあります。
設置、始動、メンテナンスは、有資格技術者のみ
•
が行ってください。
サービスや修理を実施する前に、ドライブ上に残
•
存電圧がないことを確認するために、適切な電圧
測定機器を使用してください。
警告
予期しない始動
ドライブが AC 主電源、直流電源、あるいは負荷分散に接
続されている場合、モーターは思いがけなくスタートする
ことがあります。プログラミング、サービス、あるいは修
理中の予期しない始動は、死亡、深刻な傷害、あるいは物
損事故を招く恐れがあります。モーターは外部スイッチ、
フィールドバスコマンド、LCP からの入力速度指令信号に
よって、又は不具合状態のクリア後にスタートします。
予期しないモーターのスタートを防止するには:
ドライブを主電源から切り離してください。
•
パラメーターのプログラミング前に、LCP 上の
•
[Off/Reset] を押します。
ドライブを AC 主電源、直流電源、あるいはロー
•
ドシェアに接続する前に、ドライブ、モーター、
運転機器は、配線及び組み立てが完了している必
要があります。
6 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 13
安全性 操作ガイド
警告
放電時間
周波数変換器の直流リンク・キャパシターは、周波数変換
器の電源が入っていないときでも充電されています。警
告 LED が点灯していない場合でも、高電圧が存在する可
能性があります。サービスや修理の実施前に、電源を切っ
てから一定時間待たないと、死亡事故または重大な傷害事
故を招くことがあります。
モーターを停止します。
•
バッテリー・バックアップ、UPS および他の周
•
波数変換器に接続されている直流リンク接続も
含めて、AC 主電源、リモート直流リンク電源の
接続を全て外してください。
PM モーターの接続を外すか、ロックしてくださ
•
い。
キャパシターが完全に放電されるまでお待ちく
•
ださい。最小継続待機時間は、
れており、周波数変換器の上部にある製品ラベル
にも表示してあります。
サービスや修理を実施する前に、キャパシターが
•
完全に放電していることを確認するために、適切
な電圧測定機器を使用してください。
電圧 [V] 最小待機時間 (分)
4 7 15
200–240 0.25–3.7 kW
(0.34–5 hp)
380–500 0.25–7.5 kW
(0.34–10 hp)
525–600 0.75–7.5 kW
(1–10 hp)
525–690 – 1.5–7.5 kW
(2–10 hp)
表 2.1
– 5.5–37 kW
– 11–75 kW
– 11–75 kW
に記載さ
(7.5–50 hp)
(15–100 hp)
(15–100 hp)
11–75 kW
(15–100 hp)
警告
機器の危険性
回転するシャフトや電気機器に接触すると、死亡事故また
は重大な傷害事故を招くことがあります。
訓練を受けた有資格技術者のみが、設置、始動、
•
メンテナンスを行うようにしてください。
電気作業は、国内および地域の電気工事規則に準
•
拠する必要があります。
本ガイドの手順に従ってください。
•
警告
予期しないモーター回転
回転
永久磁石モーターが予期しない回転をした場合、電圧が発
生してユニットが充電された状態になり、深刻な怪我や設
備への損害が生じる危険があります。
予期しない回転を防ぐため、永久磁石モーターが
•
ブロックされていることを確認してください。
注意
内部故障により危険
周波数変換器の内部故障は、周波数変換器を適切に閉じな
いと、深刻な傷害事故を招くことがあります。
電力を供給する前に、すべての安全カバーが適切
•
に配置され、しっかりと固定されていることを確
認します。
2 2
表 2.1 放電時間
警告
漏洩電流に関する危険事項
漏洩電流は、3.5 mA (ミリアンペア) を超えます。周波
数変換器の接地を正しく行わない場合、死亡事故又は深刻
な傷害事故を招くことがあります。
機器の接地は、有資格の電気工事者が正しく行う
•
必要があります。
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 7
Page 14
130BD600.11
CHASSIS/ IP20 Tamb.50
C/122 F
V LT
MADE IN DENMARK
R
P/N: 131X3537 S/N: 010122G430
0.37kW/ 0.50HP
IN: 3x200-240V 50/60Hz 2.2A
OUT: 3x0-Vin 0-590Hz 2.4A
o
CAUTION:
See manual for special condition/mains fuse
Voir manual de conditions speclales/fusibles
WARNING:
Stored charge, wait 4 min.
Charge residuelle, attendez 4 min.
* 1 3 1
X
3 5 3 7 0 1 0 1 2 2 G 4 3 0 *
`
Automation Drive
www.danfoss.com
T/C: FC-302PK37T2E20H1BGXXXXSXXXXA6BKC4XXXD0
Listed 76X1 E134261 Ind. Contr. Eq.
o
`
1
2
4
5
6
7
8
9
10
3
a
a
130BD528.10
機械的設置
3 機械的設置
VLT® AutomationDrive FC 301/302
3.1 開梱
33
3.1.1 納入物
3.2
注記
設置環境
空気中の水分、粒子、腐食性ガスが存在する環境では、機
納入物は、機器構成によって異なります。
器の IP/タイプ等級が設置環境に適合していることを確
認してください。周囲環境の条件を遵守していないと、周
納入物と銘板上の情報が、注文確認書に対応して
•
いることを確認してください。
梱包と周波数変換器を目視検査して、輸送中の不
•
適切な取扱によって損傷が発生していないか確
認します。損害については、運送業者に請求を行
なってください。説明のために、損傷のあった部
品を保管してください。
波数変換器の寿命が短くなることがあります。空気中の
湿度、温度、高度の条件を遵守してください。
振動とショック
周波数変換器は、ユニットが生産施設内の壁や床に取り付
けられ、パネルがボルトで壁や床に留められている場合の
要件に準拠しています。
周囲環境仕様の詳細については、
章 8.4 周囲条件
を参
照してください。
3.3 取り付け
注記
誤った取り付けは、過熱や性能の低下を招く場合がありま
す。
冷却
上部と下部に冷却用空きスペースを確保してく
•
ださい。空きスペースの要件については、
図 3.2
を参照してください。
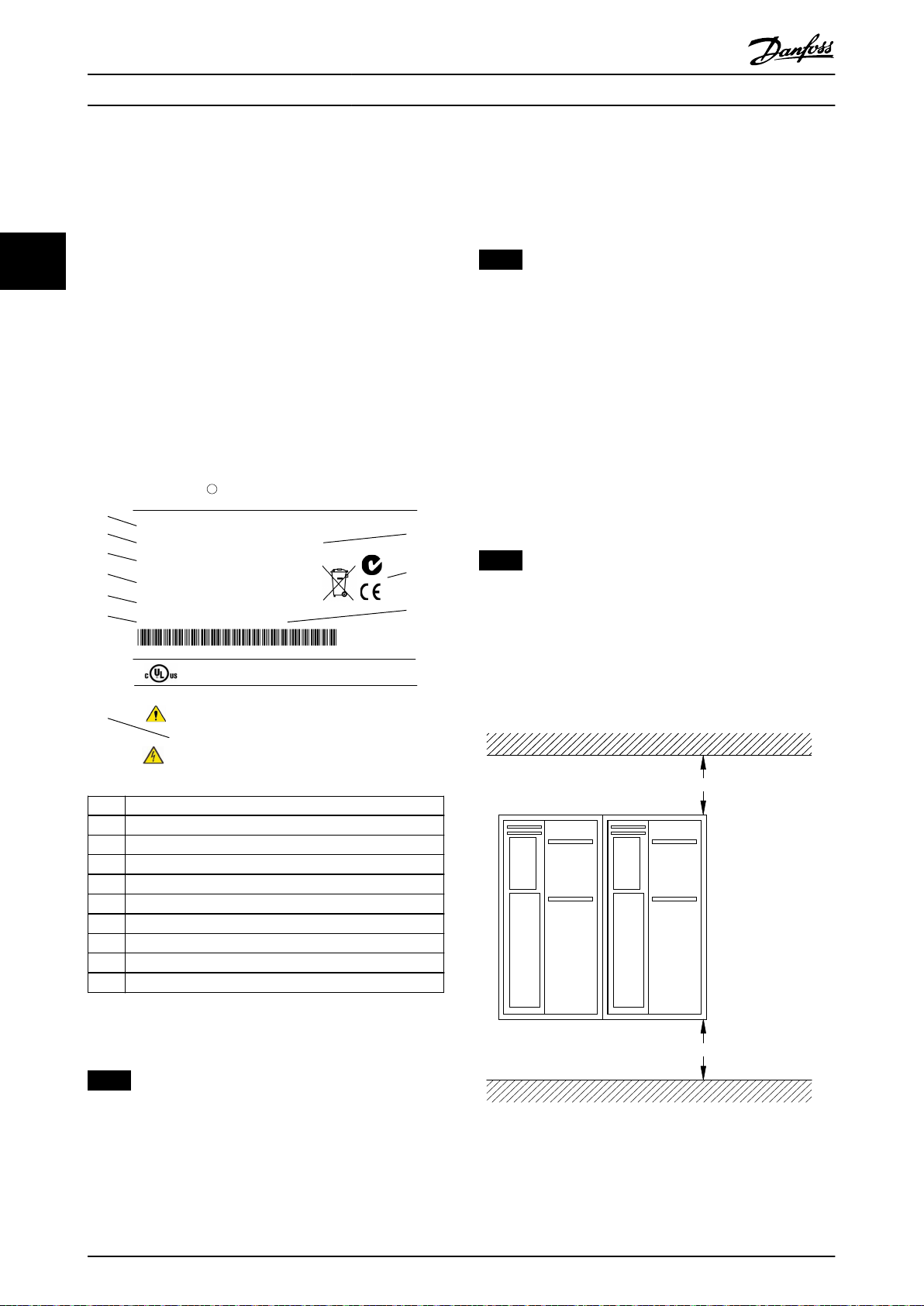
1 タイプ・コード
2 コード番号
3 シリアル番号
4 電力規格
5 入力電圧、周波数、電流(低/高電圧時)
6 出力電圧、周波数、電流 (低/高電圧時)
7 エンクロージャーのサイズ と IP 保護等級
8 最高周囲温度
9 認証
10 放電時間(警告)
図 3.1 製品銘板(例)
注記
周波数変換器からネームプレートを取り外さないでくだ
さい(保証対象外になります)。
保存上の要件が満たされているか確認してください。詳
細については
8 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
章 8.4 周囲条件
を参照してください。
図 3.2 上部及び下部の冷却用空きスペース
Page 15
130BD504.10
機械的設置 操作ガイド
エンクロージ
ャー
a [mm (in)] 100 (3.9) 200 (7.8) 200 (7.8) 225 (8.9)
表 3.1 最小気流空きスペースの要件
吊り下げ方法
作業に最適なリフティング機器を確保します。
•
必要ならば、ユニットを移動するために最適な定
•
格を持つ、ホイスト、クレーン、フォークリフト
などを用意してください。
持ち上げる場合、ユニットのホイスト・リング
•
(装備されている場合)を使用します。
A1–A5 B1–B4 C1, C3 C2, C4
警告
重量物
積載物のバランスが悪いと、落下したり転倒するおそれが
あります。吊り下げ時に適切な注意を払わないと、死亡、
重大な障害、または機器損傷のリスクが増大します。
吊り下げた積載物の下は、絶対に通行しないでく
•
ださい。
傷害を防止するため、手袋、安全眼鏡、安全靴な
•
どの個人用保護装備を着用してください。
適切な重量定格を備えた吊り下げ装置を使用し
•
てください。安全な吊り下げ方法を決めるため
にユニットの重量を確認してください。
章 8.9 電力規格、重量、寸法
ドライブモジュール上部から吊り下げケーブル
•
までの角度は、ケーブル状の最大負荷力に影響を
与えます。この角度は、65°以上とする必要があ
ります。吊り下げケーブルの取り付けと寸法測
定を適切に行います。
を参照。
3 3
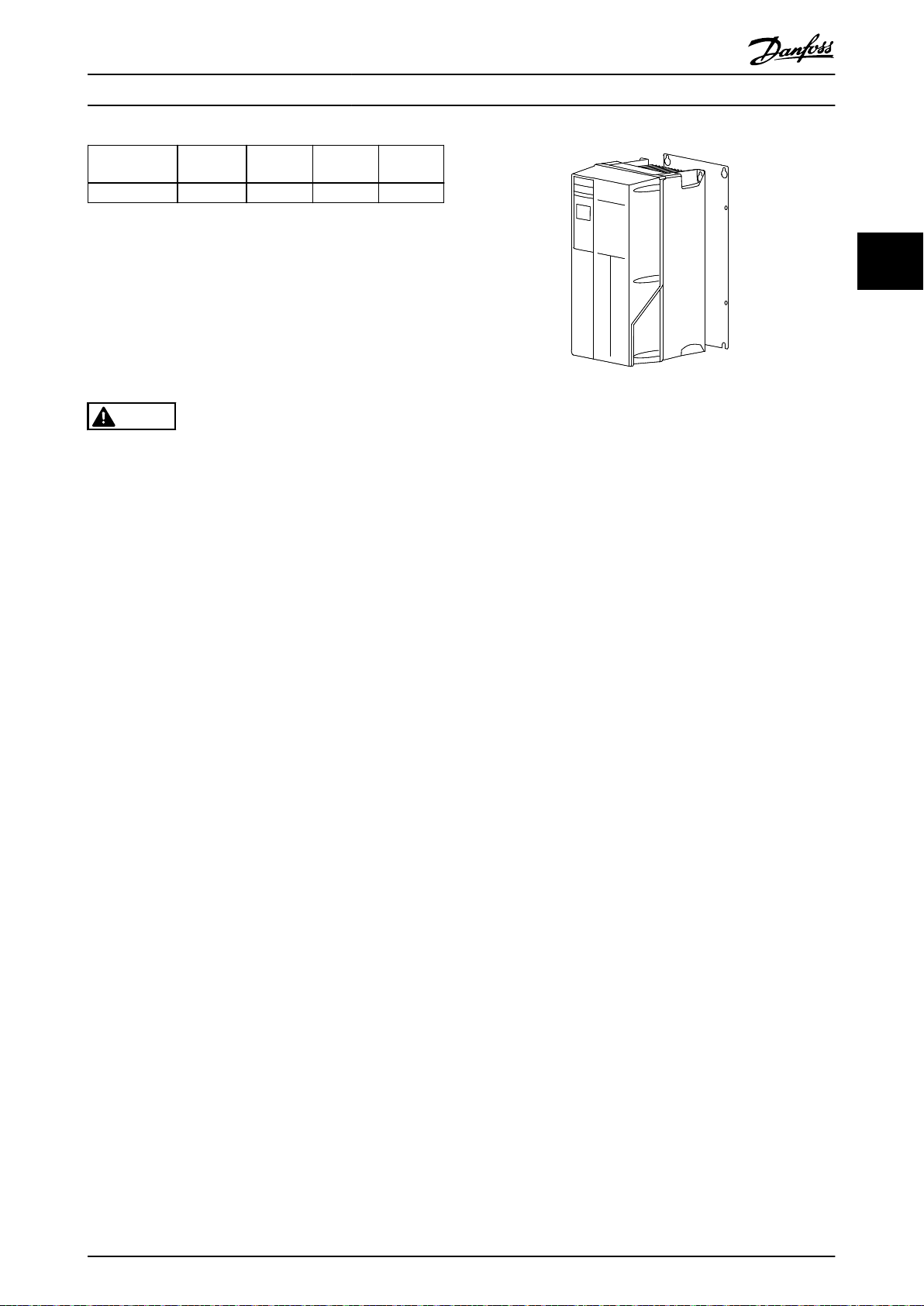
図 3.3 実装板を用いた正しい取り付け
取り付け
1. 取り付け位置の強度がユニットの重量を支えら
れることを確認してください。周波数変換器は
並べて設置可能です。
2. ユニットは、モーターのできる限り近くに置いて
ください。モーター・ケーブルはできる限り短く
します。
3. ユニットは垂直に冷却気流を確保するために、堅
固で平らな表面、あるいはオプションの背版に取
り付けます。
4. 壁に取り付ける場合、ユニットのスロット付き実
装穴(装備されている場合)を使用します。
実装板とレールへの取り付け
レールに取り付ける場合は実装板が必要です。
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 9
Page 16
電気的設置
4 電気的設置
VLT® AutomationDrive FC 301/302
4.1 安全指示
一般的な安全上の説明については、
照ください。
44
警告
章 2 安全性
をご参
EMC 対策設置
4.2
EMC 対策設置を行う際は、 以下の指示をご参照ください。
章 4.3 接地、 章 4.4 配線図, 章 4.5 モーター接続
および
章 4.7 コントロール配線
。
,
4.3 接地
誘導電圧
出力モーター・ケーブルからの誘導電圧は、共に機器のキ
ャパシターを充電します。これは機器がオフの場合、ロッ
クアウトの場合でも同様です。出力ケーブルを別にせず
動作させた場合、又はシールド・ケーブルを使用しなかっ
た場合、死亡事故又は深刻な傷害事故を招くことがありま
す。
出力モーター・ケーブルを別に配線するか、又は
•
シールド・ケーブルを使用します。
•
注意
ショックの危険
この周波数変換器は保護導体に直流電流を引き起こすこ
とがあります。推奨事項に従わない場合、RCD が意図され
た保護を行わない可能性があります。
残留電流で動作する保護デバイス (RCD) が電
•
気ショック保護のために使用されているときは、
供給側でタイプ B の RCD のみが許容されま
す。
過電流保護
複数のモーターを用いる用途には、周波数変換器
•
とモーター間の短絡保護やモーター熱保護など、
予備的な保護機器が必要です。
短絡と過電流保護を行うため、入力ヒューズが必
•
要です。工場で装備されない場合、設置作業者が
ヒューズの取り付けを行う必要があります。
章 8.7 ヒューズと遮断器
をご参照ください。
ケーブルの種類と定格
すべてのケーブルが、ケーブル断面積と周囲温度
•
の国内及び地域の規制に準拠していなければな
りません。
推奨される電力接続ケーブル: 最低 75 °C
•
(167 °F) 定格の銅線。
の最大ヒューズ定格
警告
漏洩電流に関する危険事項
漏洩電流は、3.5 mA (ミリアンペア) を超えます。周波
数変換器の接地を正しく行わない場合、死亡事故又は深刻
な傷害事故を招くことがあります。
機器の接地は、有資格の電気工事者が正しく行う
•
必要があります。
電気的安全のために
適用される基準と指令に従って、周波数変換器を
•
接地してください。
入力電力、モーター電源、およびコントロール配
•
線用に専用アース線が必要です。
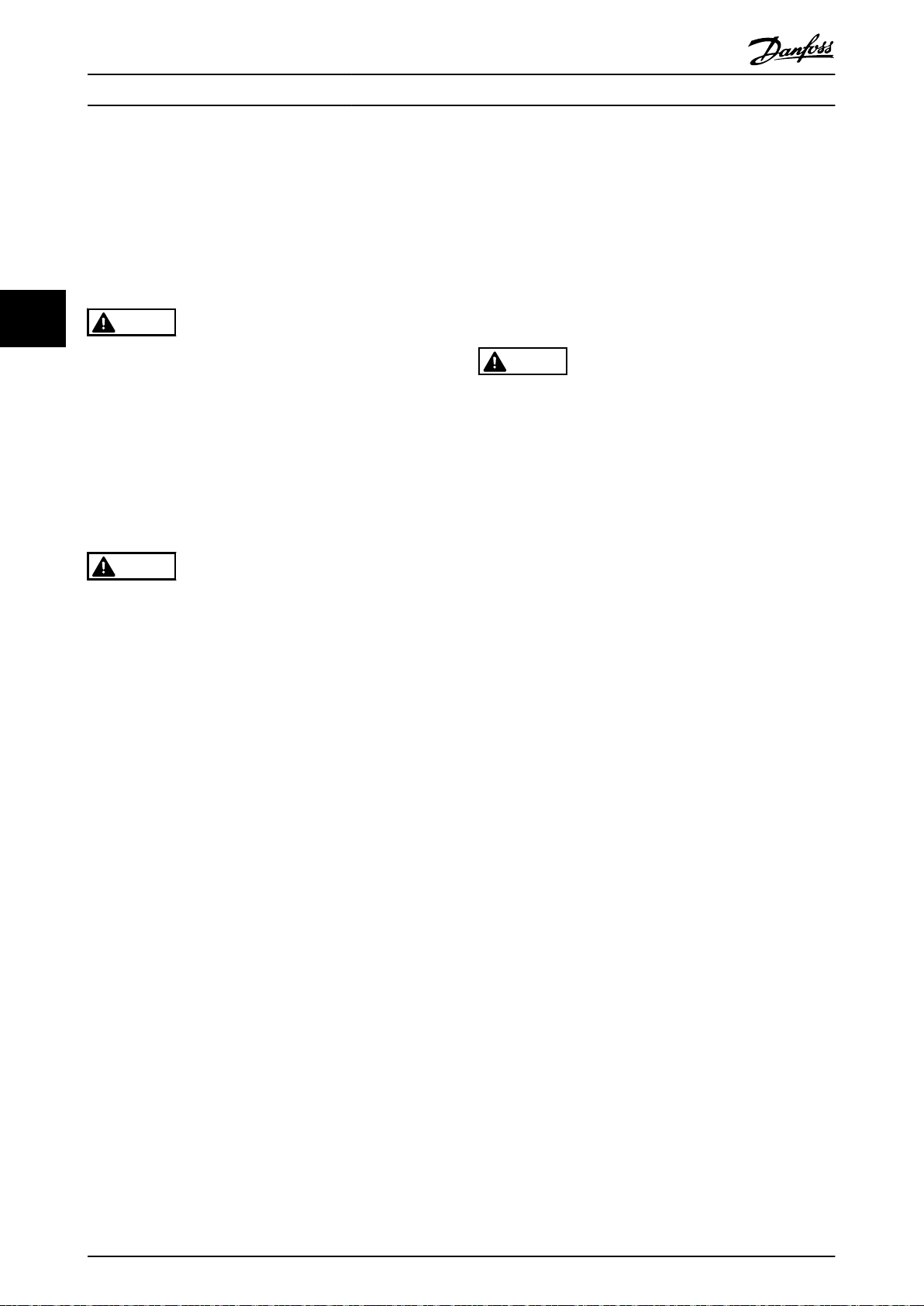
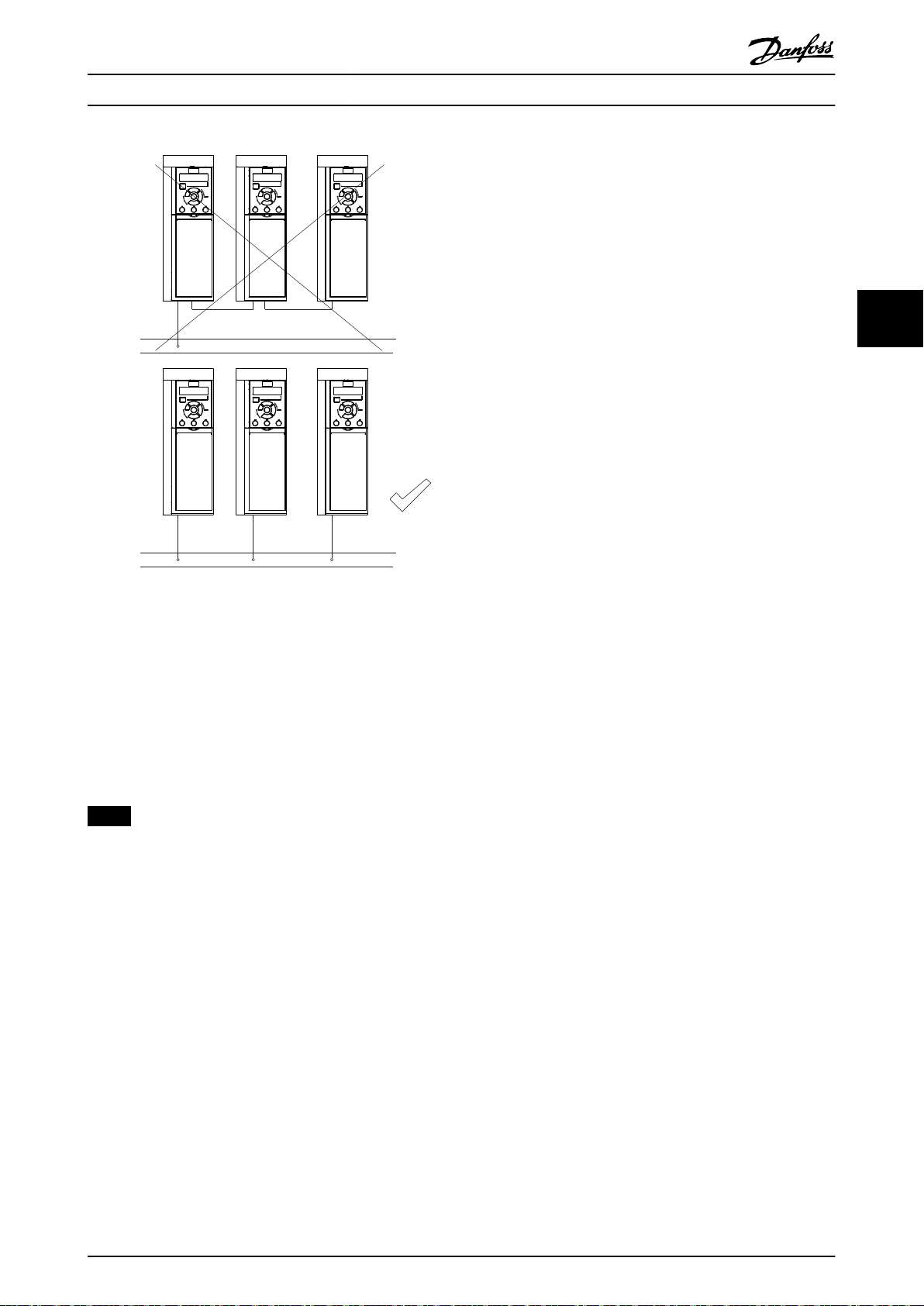
複数の周波数変換器をディジーチェーン接続し
•
て、接地しないでください (
接地ワイヤ接続をできるだけ短くします。
•
モーターのメーカーの配線条件に従ってくださ
•
い。
接地ケーブルの最小ケーブル断面積: 10 mm
•
(7 AWG).
個々の接地線を別々に終端処理、どちらも寸法要
•
件に従う。
図 4.1
を参照)。
2
推奨ケーブル・サイズおよびタイプについては、
章 8.1 電気データ
照してください。
10 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
および
章 8.5 ケーブル仕様
を参
Page 17
130BC500.10
FC 1
FC 1
FC 2
FC 2
FC 3
FC 3
PE
PE
電気的設置 操作ガイド
4 4
図 4.1 接地の原則
EMC 対策接地のために
金属ケーブル・グランド、又は機器に付属するク
•
ランプを使用して、ケーブル・シールドと周波数
変換器のエンクロージャーとの間で電気的接触
を確立します (
バースト・トランジエントを低減するために、高
•
品質撚り線を使用します。
ピッグテールを使用しないでください。
•
章 4.5 モーター接続
を参照)。
注記
等電位
周波数変換器とコントロールシステムとの間の接地電位
が異なる場合には、バースト・トランジエントのリスクが
生じます。システム・コンポーネント間に平衡ケーブルを
設置します。推奨されるケーブル断面積: 16 mm2 (6
AWG)。
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 11
Page 18
130BD599.11
3-phase
–
power
–
input
DC bus
Switch Mode
Power Supply
Motor
Analog Output
Interface
relay1
relay2
1)
ON=Terminated
OFF=Open
Brake
resistor
91 (L1)
92 (L2)
93 (L3)
PE
88 (-)
89 (+)
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN)
0/4–20 mA
12 (+24 V OUT)
13 (+24 V OUT)
37 (D IN)
1)
18 (D IN)
20 (COM D IN)
10 V DC
15 mA 130/200 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(COM A OUT) 39
(A OUT) 42
(P RS485) 68
(N RS485) 69
(COM RS485) 61
2)
0 V
5V
S801
0/4–20 mA
RS-485
RS485
03
+10 V DC
0/-10 V DC–
+10 V DC
+10 V DC
0/4–20 mA
0/-10 V DC–
240 V AC, 2 A
24 V DC
02
01
05
04
06
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
27
24 V
0 V
(D IN/OUT)
0 V (PNP)
24 V (NPN)
(D IN/OUT)
1)
0 V
24 V
29
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
1 2
ON
S201
ON
21
S202
ON=0/4–20 mA
OFF=0/-10 V DC–
+10 V DC
95
P 5-00
21
ON
S801
(R+) 82
(R-) 81
: Chassis
240 V AC, 2 A
400 V AC, 2 A
: Ground
: Ground 1
: Ground 2
: PE
電気的設置
VLT® AutomationDrive FC 301/302
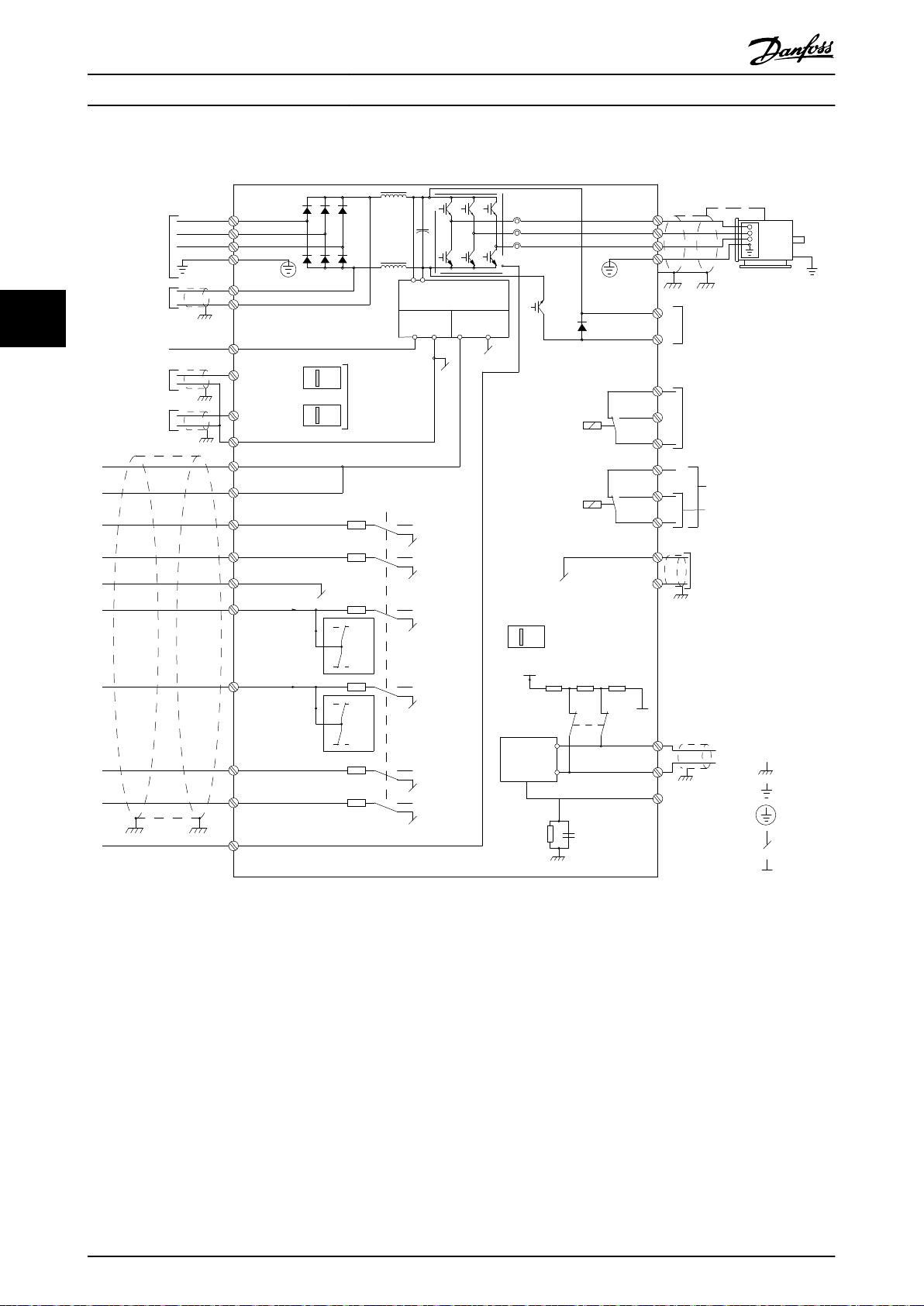
4.4 配線図
44
図 4.2 基本配線図
A = アナログ、D = ディジタル
1) Safe Torque Off (STO)には端子 37(オプション)を使用します。設置説明については、
を参照してください。FC 301 には、端子 37 はエンクロージャー・タイプ A1 にのみ含まれています。リレー 2
ガイド
及び端子 29 は FC 301 に付属していません。
2) ケーブル・シールドを接続しないでください。
12 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
VLT® Safe Torque Off 操作
Page 19
e30bf228.11
L1
L2
L3
PE
PE
u
v
w
2
1
3
5
16
17
18
14
12
8
7
10
9
4
11
13
4
6
15
90
4
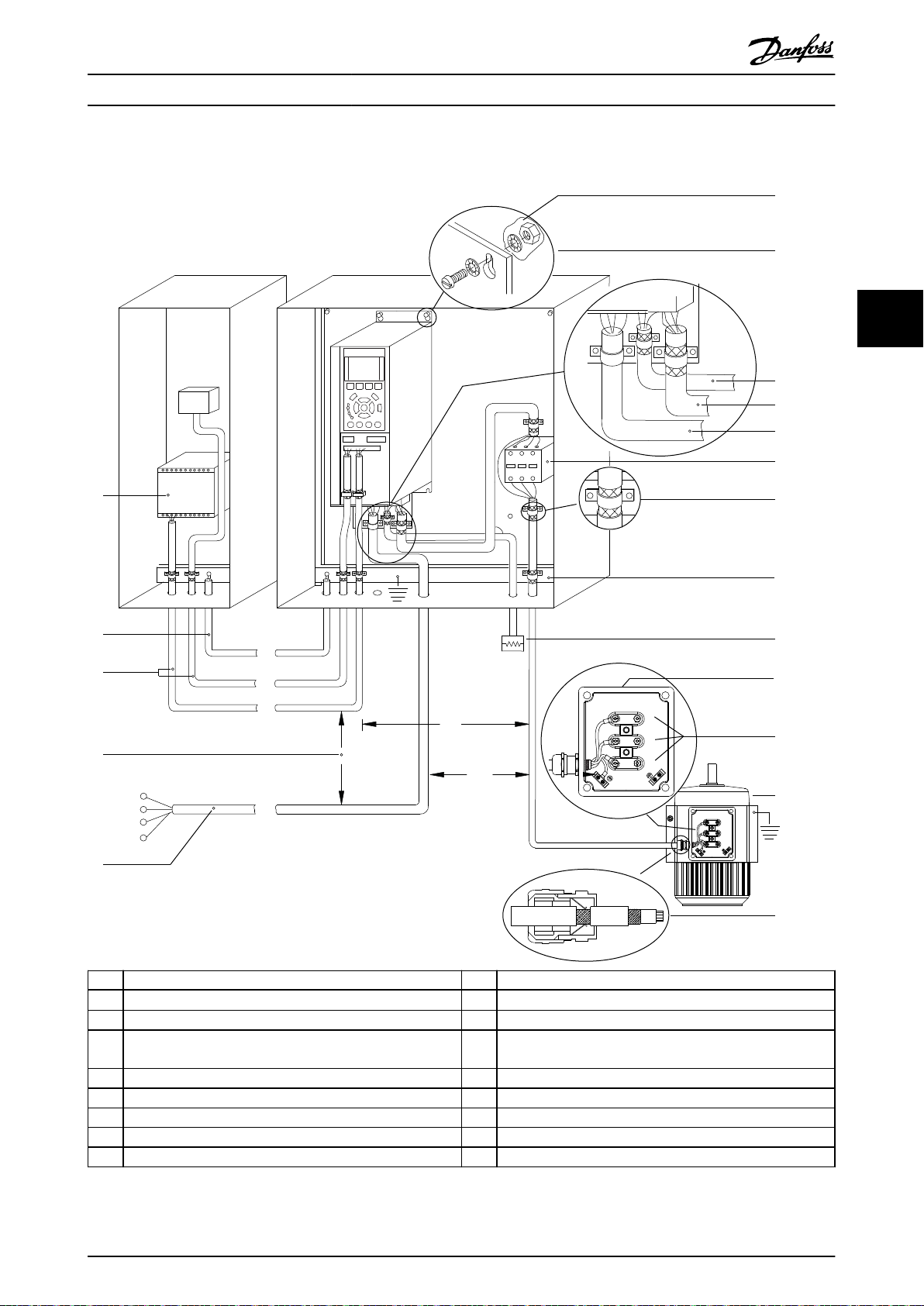
電気的設置 操作ガイド
4 4
1 PLC。 10 主電源ケーブル (シールドなし)。
2
最小 16 mm2 (6 AWG) 等価ケーブル。
3 コントロール・ケーブル。 12 ケーブル 絶縁はく離。
4 コントロール・ケーブル、モーター・ケーブル、主電源ケー
ブルの間隔は最低 200 mm (7.9 in)。
5 主電源。 14 ブレーキ抵抗器。
6 露出 (未塗装) 表面。 15 金属ボックス。
7 スター・ワッシャー。 16 モーターへの接続。
8 ブレーキ・ケーブル (シールドあり)。 17 モーター。
9 モーター・ケーブル (シールドあり)。 18 EMC ケーブル・グランド。
図 4.3 適切な EMC 設置の例
11 出力開閉器。
13 標準接地母線。地域及び国のキャビネット接地に関する要
件に従ってください。
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 13
Page 20
130BD531.10
U
V
W
96
97
98
+DC
BR-
B
M AINS
L1 L2 L3
91 92 93
RELAY 1 RELAY 2
99
U V W
MOTOR
99
130BF048.11
電気的設置
VLT® AutomationDrive FC 301/302
EMC の詳細については、
章 4.2 EMC 対策設置
を参照してください。
注記
EMC 妨害
モーターとコントロール配線にはシールド・ケーブルを使
用し、入力電力、モーター配線及びコントロール配線には
セパレートケーブルを使用します。 電力、モーター、コ
ントロール・ケーブルの隔離を行わないと、予期しない動
44
作、又は性能の減少が発生することがあります。電力、モ
ーター、コントロール・ケーブル間には、最低 200 mm
(7.9 in) の空きスペースを確保します。
4.5 モーター接続
警告
誘導電圧
出力モーター・ケーブルからの誘導電圧は、共に機器のキ
ャパシターを充電します。これは機器がオフの場合、ロッ
クアウトの場合でも同様です。出力ケーブルを別にせず
動作させた場合、又はシールド・ケーブルを使用しなかっ
た場合、死亡事故又は深刻な傷害事故を招くことがありま
す。
出力モーター・ケーブルを別に配線するか、又は
•
シールド・ケーブルを使用します。
•
ケーブル・サイズについては、国内及び地域の電
•
気法規を遵守してください。最大ワイヤサイズ
は
章 8.1 電気データ
モーターのメーカーの配線条件に従ってくださ
•
い。
モーター配線ノックアウト又はアクセスパネル
•
は、IP21 (NEMA1/12)以上のユニットを基本とし
て提供されます。
周波数変換器とモーターの間に始動器あるいは
•
極数可変機器(例えば、ダランダーモーターやス
リップリング非同期モーター)を接続しないでく
ださい。
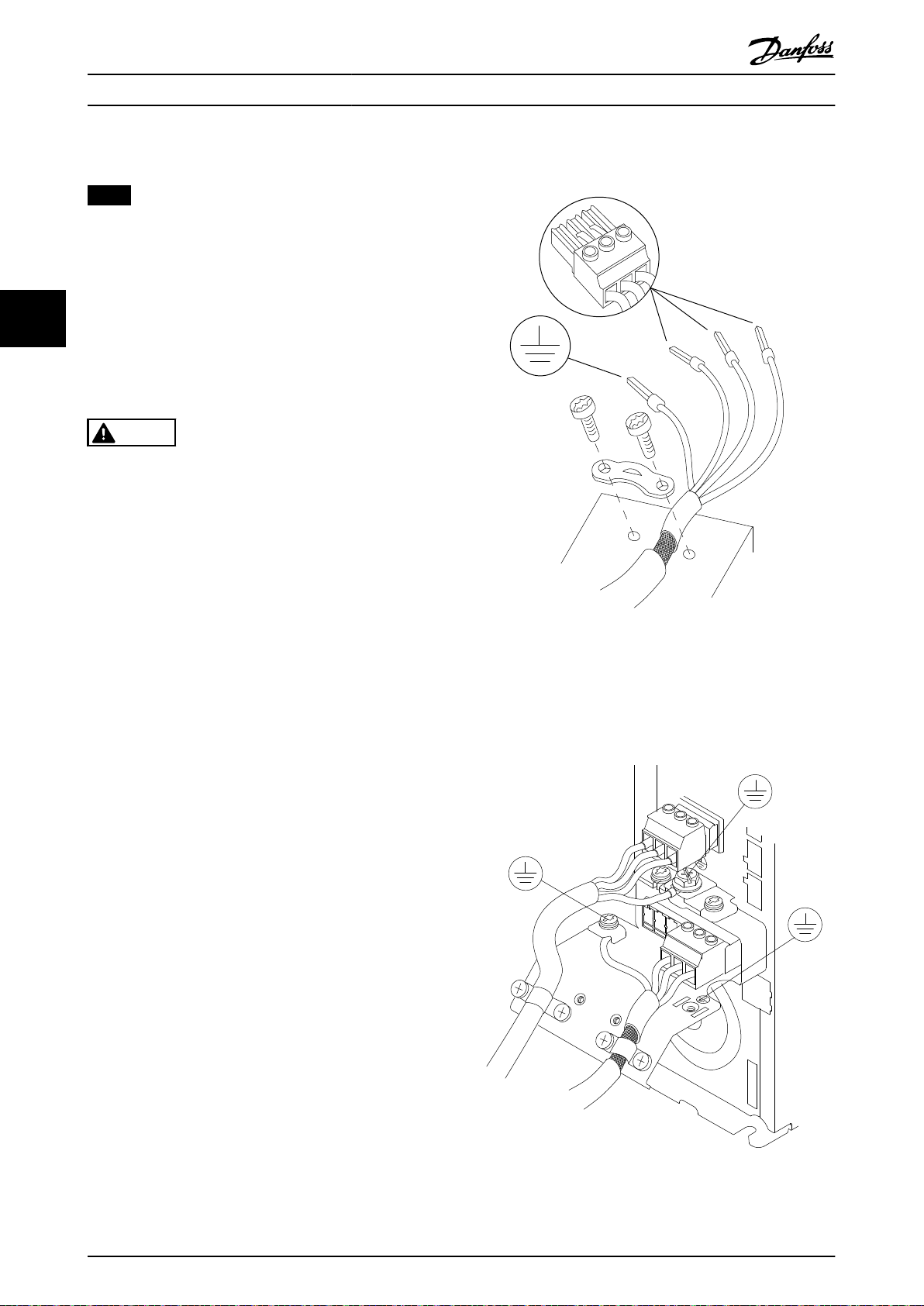
ケーブル・シールド接地の手順
1. 外部ケーブル絶縁の一部分をはく離します。
2. はく離ワイヤをケーブル・クランプの下に設置し
3.
4. 3 相モーター配線を端子 96(U)、97(V)、98(W)
5.
て、ケーブルシールドと接地との間で機械的固定
と電気的接触を確立します。
章 4.3 接地
示に従って、最も近接した接地端子に接地線を接
続します。
に接続します。
に記載されている接地に関する指
図 4.4
章 8.8 接続の締め付けトルク
る内容に従って、端子を締めます。
を参照してください。
を参照してください。
図 4.4
を参照してください。
に記載されてい
図 4.4 Motor Connection(モーター接続)
図 4.5
は、基本的な周波数変換器の主電源入力、モータ
ー、及び接地を示しています。実際の構成は、ユニットの
種類やオプション機器によって異なります。
図 4.5 モーター、主電源、アース配線の例
14 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 21
130BA902.10
L1 L2 L3
U V W
02 01
A1
A2
Frequency converter
Output
relay
Command circuit
220 V AC
Mechanical
brake
Shaft
Motor
Freewheeling
diode
Brake
380 V AC
Output
contactor
input
power circuit
電気的設置 操作ガイド
4.6 AC 主電源接続
周波数変換器の入力電流を基にワイヤのサイズ
•
を決めます。最大ワイヤサイズは
データ
を参照してください。
ケーブル・サイズについては、国内及び地域の電
•
気法規を遵守してください。
手順
1. 3 相交流入力電力のワイヤを端子 L1、L2、L3 に
接続します(
2. 機器構成に応じて、入力電力を主電源入力端子あ
るいは入力切断に接続してください。
3.
章 4.3 接地
示に従ってケーブルを接地します。
4. 絶縁された主電源(IT 主電源やフローティング・
デルタ)、又は接地脚を有する TT/TN-S 主電源(接
地デルタ)から供給するときは、
図 4.5
を参照)。
に記載されている接地に関する指
ー 14-50 RFI フィルターを [0] オフ
します。この設定によって、IEC 61800-3 に従
い、直流リンクに対する損傷を防ぎ、接地容量電
流を減少させます。
コントロール配線
4.7
章 8.1 電気
パラメータ
に設定
パラメーター 2-22 ブレーキ作動速度[Hz]
設定された周波数よりも低くなるとブレーキが
かかります。
周波数変換器が警報モードか過電圧の状態にある場合に
は、機械的ブレーキが直ちに作動します。
に
注記
周波数変換器は安全デバイスではありません。システム
設計者は、クレーン/リフトに関する国の規則に従って、
安全デバイスを組み込む責任を負います。
4 4
コントロール配線は、周波数変換器の高電力部品
•
から絶縁してください。
周波数変換器がサーミスターに接続されている
•
場合、サーミスターコントロール配線をシールド
で保護し、強化/二重に絶縁する必要がありま
す。A 24 V 直流供給電圧が推奨されています。
4.7.1 Safe Torque Off (STO)
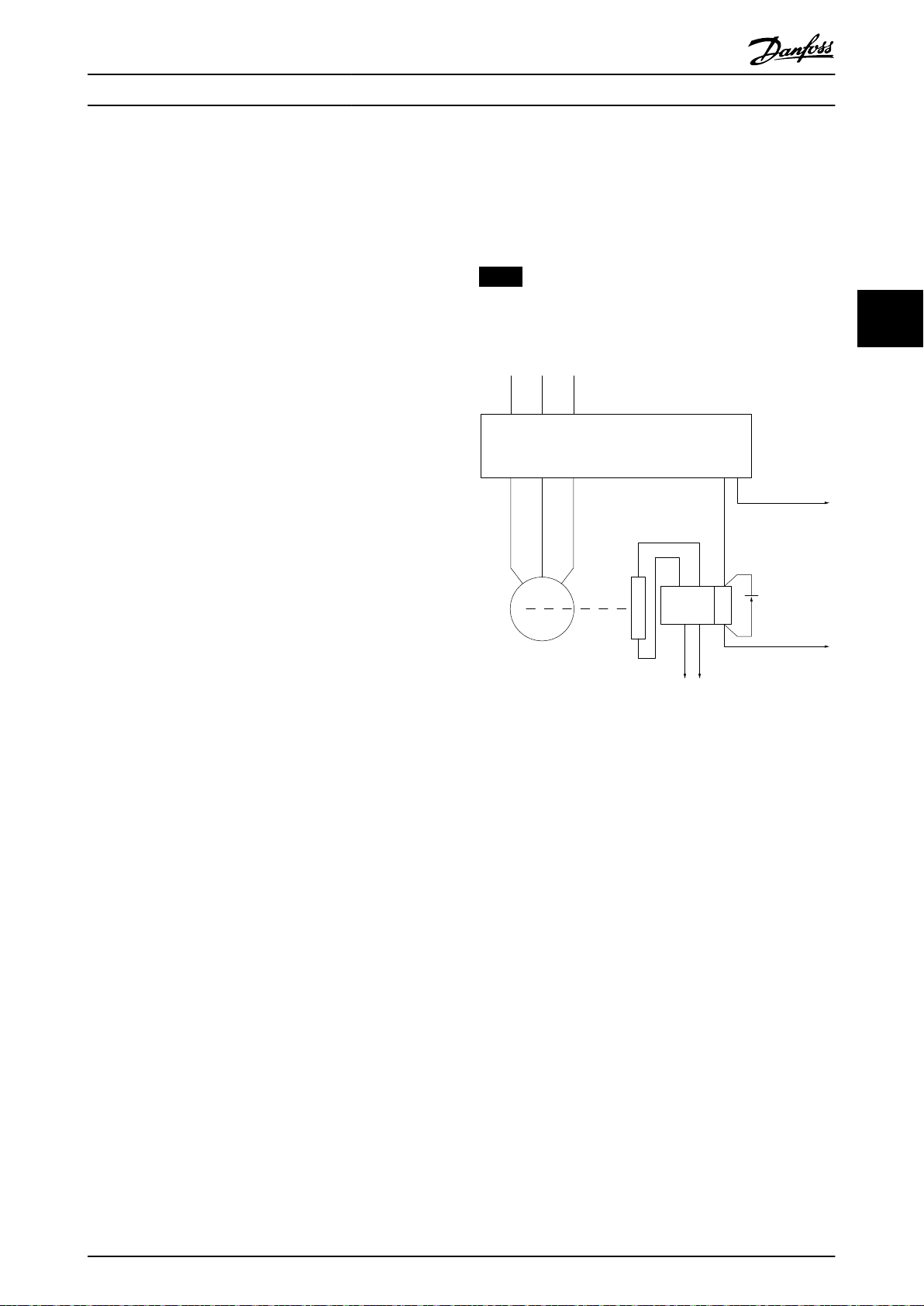
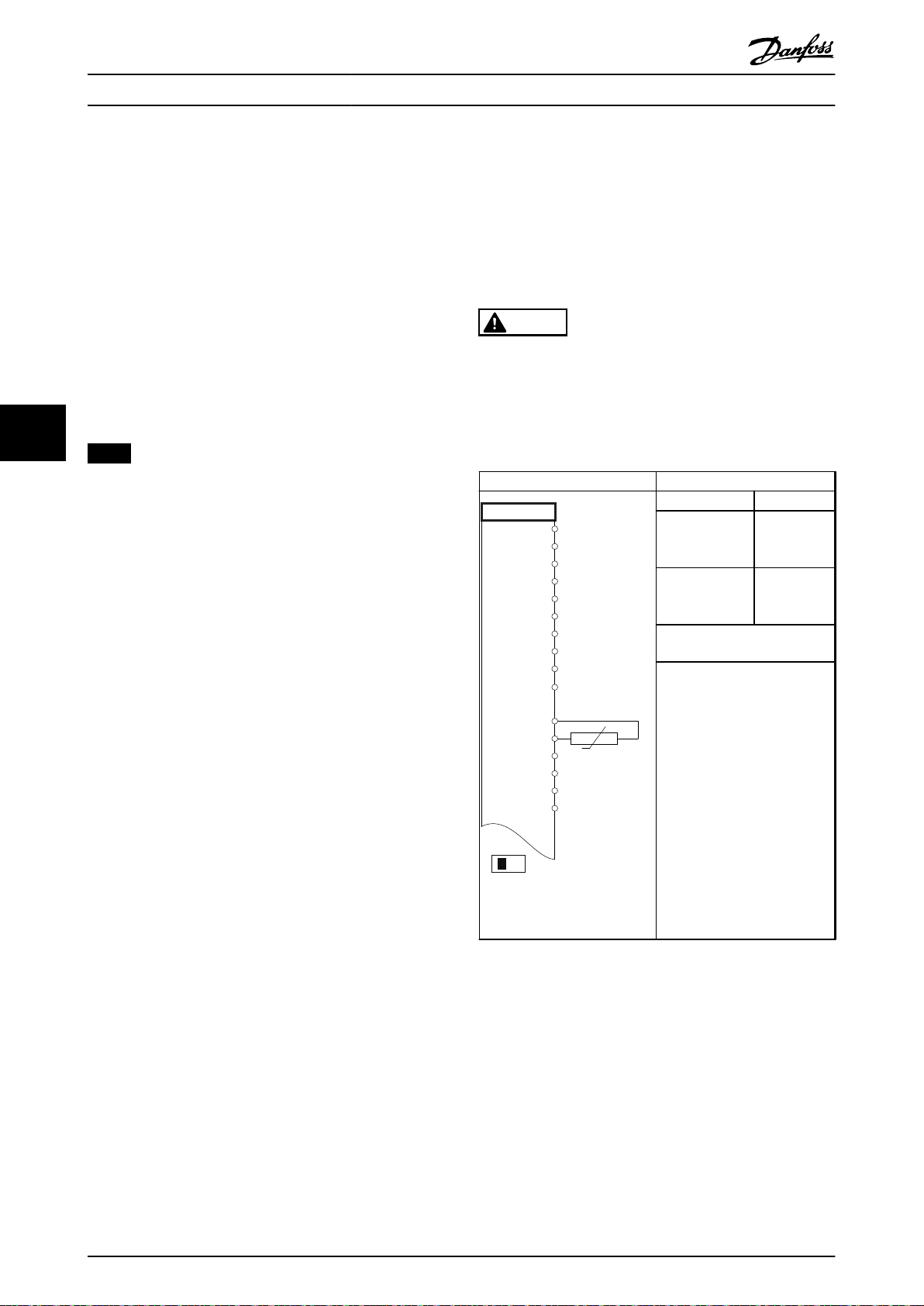
4.7.2 機械的ブレーキ・コントロール
巻き上げ/下げアップリケーションでは、電子機械的ブ
レーキを制御する必要があります。
リレー出力、又はディジタル出力(端子 27 又は
•
29)を使用してブレーキをコントロールしてくだ
さい。
負荷が大き過ぎるなどの理由で、周波数変換器が
•
モーターを停止状態に維持できない間、出力を閉
じておいてください(電圧なし)。
電磁ブレーキを使用するアプリケーションに対
•
して、パラメーター・グループ 5-4* リレーの
[32] 機械的ブレーキ・コントロール
ください。
モーター電流が
•
流の解放
す。
周波数変換器がストップ・コマンドを実行してい
•
る場合にのみ、出力周波数が
ー 2-21 ブレーキ速度の有効化[RPM]
パラメーター 2-20 ブレーキ電
の値を超えるとブレーキが解除されま
を選択して
パラメータ
または
図 4.6 機械的ブレーキを周波数変換器へ接続
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 15
Page 22
電気的設置
4.8 設置チェックリスト
VLT® AutomationDrive FC 301/302
ユニットの設置を完了する前に、
の項目をチェックしてください。
検査項目 説明
補助機器
44
ケーブルルーティ
ング(配線)
コントロール配線
冷却用空きスペー
ス
周囲条件
ヒューズと遮断器
接地
入力及び出力電力
配線
パネル内部
スイッチ類
振動
周波数変換器の入力電力やモーターの出力側に存在する補助機器、スイッチ、切断装置、入力ヒューズ/
•
遮断器などを探します。フルスピード動作の用意ができていることを確認してください。
使用されているセンサーの機能と設置状態をチェックし、周波数変換器へフィードバックします。
•
モーターの力率改善コンデンサーをはずします。
•
主電源側の力率改善コンデンサーを調整して、それらを減衰させます。
•
高周波干渉から隔離するために、モーター配線及びコントロール配線が分離、シールドされていること、
•
あるいは 3 つの金属導管に各々が通っていることを確認します。
破損や損傷のあるワイヤや不適切な接続をチェックします。
•
コントロール配線が電力とモーター配線から絶縁され、ノイズの干渉を受けていないか確認します。
•
必要に応じて、信号の電圧源をチェックします。
•
シールド・ケーブルやツイストペア・ケーブルの使用を推奨します。シールドが正しく終端されていること
を確認します。
上部と下部の空きスペースを十分に確保し、適切な冷却空気の流れを維持します。
•
を参照してください。
周囲条件を満たしているか確認してください。
•
適切なヒューズと遮断器であることをチェックします。
•
全ヒューズはしっかりと挿入されて動作状態にあり、全遮断器がオープン位置にあることをチェックし
•
ます。
接地の接続が、しっかりと固定されて、酸化されてないことをチェックします。
•
導管への接地や金属表面へ取り付けられたバックパネルは、適切な接地ではありません。
•
接続が緩んでないかチェックします。
•
モーターならびに主電源ケーブルが別々の導管にあるか、あるいは分離したシールド・ケーブルである
•
ことを確認します。
ユニット内部に、汚れ、金属片、湿気、及び腐食がないか検査します。
•
ユニットが、未塗装の金属表面に取り付けられていることを確認してください。
•
スイッチや切断設定が全て、正常な位置にあることを確保します。
•
ユニットがしっかりと取り付けられていることを確認し、必要に応じて緩衝台を使用します。
•
異常な量の振動がないか検査してください。
•
表 4.1
に記載されているとおり、設置全体を検査します。完了したときには、これら
☑
章 3.3.1 取り付け
表 4.1 設置チェックリスト
注意
内部故障が発生したときの潜在的危険
周波数変換器が適切に閉じられていないと、人身事故の危険が生じます。
電力を供給する前に、すべての安全カバーが適切に配置され、しっかりと固定されていることを確認します。
•
16 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 23
設定 操作ガイド
5 設定
5.1 安全指示
一般的な安全上の説明については、
照ください。
章 2 安全性
をご参
警告
高電圧
AC 主電源に接続されている限り、周波数変換器は高電圧
が印加されています。有資格技術者による設置、スタート
アップ、メンテナンスを怠った場合、死亡事故や重大な傷
害事故を招くことがあります。
設置、スタートアップ、メンテナンスは、有資格
•
技術者のみが実施するようにしてください。
注記
警告サインのある前面カバーは、周波数変換器の不可欠な
構成部分であり、安全カバーとされています。カバーは、
電力を供給する前に配置し、常に使用する必要がありま
す。
電力供給前に:
1. 安全カバーを適切に閉じてください。
2. すべてのケーブル・グランドが固く締められてい
るか確認します。
3. ユニットへの入力電力はオフにして、ロックアウ
トしてください。周波数変換器で入力電力を遮
断するためのスイッチがオフにされていても安
心しないでください。
4. 入力端子 L1 (91)、 L2 (92)、 及び L3 (93)に
て、相間、あるいは相と接地間に電圧が印加され
ていないことを検証します。
5. 出力端子 96 (U)、 97 (V)、 及び 98 (W)にて、
相間、あるいは相と接地間に電圧が印加されてい
ないことを検証します。
6. U-V (96-97)、V-W (97-98)、 W-U (98-96)の Ω
値を測定して、モーターの継続性を確認します。
7. 周波数変換器とモーターの接地が正しく行われ
ているかチェックします。
8. 周波数変換器の端子の接続が緩んでないか検査
します。
9. 供給電圧が周波数変換器とモーターの電圧に一
致するかを確認します。
5 5
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 17
Page 24
130BF714.10
Auto
On
Reset
Hand
On
O
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
36.4 kW
Auto Remote Ramping
0.000
On
Alarm
Warn.
7.83 A
799 RPM
53.2 %
1
2
3
16
17
4
15
14
13
12
5
6
7
8 9 10 11
設定
VLT® AutomationDrive FC 301/302
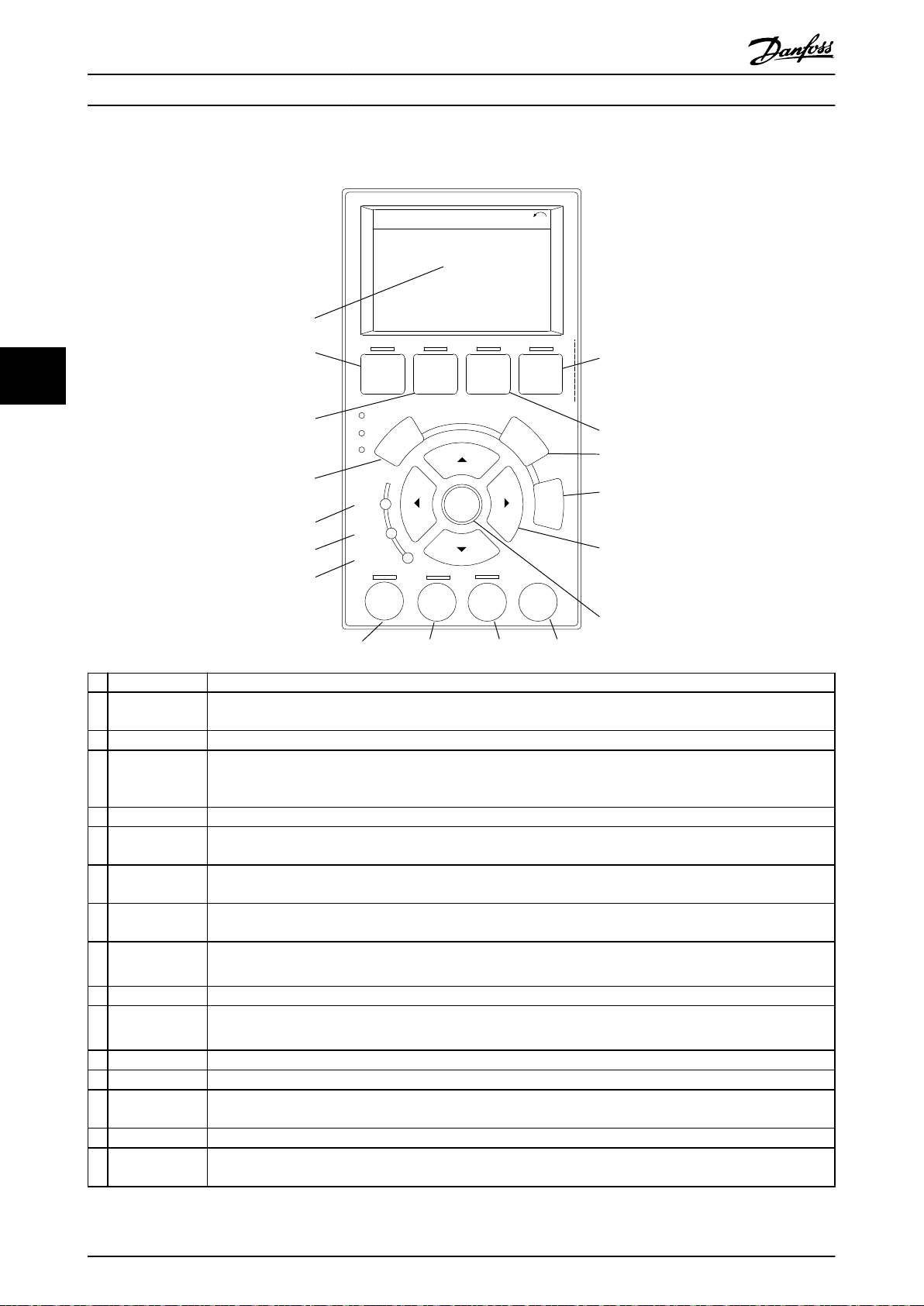
5.2 ローカル・コントロール・パネル動作
55
キー 機能
1 ディスプレイエリアに表示する情報は、選択した機能またはメニューによって異なります (この場合、
メニュー Q3-13 ディスプレイ設定
)。
クイック
2 状態 操作に関する情報を表示します。
3 Quick Menu(ク
イック・メニュ
初期設定指示と多くの詳細なアプリケーション指示について、プログラムするためのパラメーターにアクセスで
きます。
ー)
4 Back(戻る) メニュー構成の 1 つ前のステップ又はリストに戻ります。
5 緑色のインジケ
電源オン。
ーターランプ。
6 黄色のインジケ
ーターランプ。
7 赤色のインジケ
ーターランプ。
警告の間、インジケーターランプが点灯します。ディスプレイ・エリアに問題を特定したテキストが表示されま
す。
故障が発生すると、インジケーターランプが点滅し、警告テキストが表示されます。
8 [Hand On] 周波数変換器をローカル・コンロール・モードにして、LCP に反応するようにします。
9 オフ モーターを停止しますが、周波数変換器への電力は供給します。
10 [Auto On] システムをリモート操作モードにします。
11 リセット 不具合がリセットされた後に、周波数変換器を手動でリセットします。
12 OK(確定) 押して、パラメーター・グループへアクセスしたり、選択をアクティブにしたりできます。
13 ナビゲーショ
ン・キー
14 Info(情報) 押すと、表示されている機能の意味を表示します。
15 Cancel(キャン
セル)
18 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
コントロール入力やシリアル通信による外部停止信号は、ローカルの [Hand On] を重ね書きします。
•
コントロール端子やシリアル通信による外部スタート・コマンドに対応します。
•
ナビゲーション・キーを押して、メニュー内の項目間を移動します。
表示モードが変更されない限り、最後に実行した変更やコマンドが取り消されます。
Page 25
設定 操作ガイド
キー 機能
16 Main Menu (メ
インメニュー)
17 Alarm Log(警報
ログ)
図 5.1 グラフィック・ローカル・コントロール・パネル (GLCP)
すべてのプログラミング・パラメーターにアクセスできます。
現在の警告のリスト、最後の 10 個の警報、及びメンテナンス・ログを表示します。
5.3 システム設定
1. 自動モーター適合 (AMA) を実施:
1a AMA を実施する前に、
1b
パラメーター 1-29 自動モーター適合(AMA)
化します
2. モーター回転チェック。
3. エンコーダー・フィードバックを使用するには、以下の手順に従ってください:
3a
パラメーター 1-00 構成モードで [0] 開ループ
3b
パラメーター 7-00 速度 PID フィードバック・ソースで [1] 24 V エンコーダー
3c [Hand On](手動オン)を押します。
3d プラス速度基準(
表 5.1
に表示されるとおり、以下の基本モーター・パラメーターを設定します。
を通じて、モーターと周波数変換器との間の適合性を最適
を選択します。
[0]* 通常で パラメーター 1-06 時計回り方向
5 5
を選択します。
)については、 [►] を押します。
パラメーター 16-57 Feedback [RPM]
3e
ASM PM SynRM
パラメーター 1-20 モーター電力[kW]
パラメーター 1-21 モーター出力 [HP]
パラメーター 1-22 モーター電圧
パラメーター 1-23 モーター周波数
パラメーター 1-24 モーター電流
パラメーター 1-25 モーター公称速度
パラメーター 1-26 モーター一定定格トルク
パラメーター 1-39 モーター極
表 5.1 AMA の前にチェックする基本パラメーター
で、フィードバックがプラスになっていることを確認します。
パラメーター 1-10 モーター構造
X
X
X X
X X X
X X X
X X
X
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 19
Page 26
130BB686.12
VLT
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
50
53
54
55
42
39
A53
U - I
D IN
37
基本 I/O 設定
6 基本 I/O 設定
VLT® AutomationDrive FC 301/302
6
このセクションに記載されている事例は、一般的なアプリ
ケーションのためのクイック・リファレンスとして利用す
ることを目的としています。
パラメーター設定については、特に指定しなけれ
•
ば (
パラメーター 0-03 地域設定
で選択)地域
のデフォルト設定になります。
端子に関連付けられたパラメーターとその設定
•
は、図の次に示されています。
アナログ端子 A53 又は A54 に必要なスイッチ設
•
定も示されています。
注記
オプションの Safe Torque Off (STO) 機能が使用され
ている場合、工場出荷時のプログラミング値を使用して周
波数変換器を動作させるときは、端子 12(又は 13)と端子
37 との間にジャンパー線が必要となることがあります。
6.1 アプリケーション例
6.1.1 Motor Thermistor(モーター・サー
ミスター)
注意
サーミスター絶縁
人身事故や設備損害の危険があります。
PELV 絶縁条件を満足させるために、強化あるい
•
は二重絶縁が施されたサーミスターのみを使用
してください。
パラメーター
機能 設定
パラメータ
ー 1-90 モータ
ー熱保護
パラメータ
ー 1-93 サーミ
スター・ソース
* = デフォルト値
注意/コメント:
警告のみが必要な場合は、
ラメーター 1-90 モーター熱
保護を [1] サーミスター警告
に設定する必要があります。
D IN 37 はオプションです。
[2] サーミ
スター・トリ
ップ
[1] アナロ
グ入力 53
パ
20 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
表 6.1 Motor Thermistor(モーター・サーミスター)
Page 27

FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
R1R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
130BB841.10
Start ( 18)
Start
reversing (19)
Relay output
Speed
Time
Current
1-71
1-71
2-21
2-21
1-76
Open
Closed
130BB842.10
基本 I/O 設定 操作ガイド
6.1.2 機械的ブレーキ・コントロール
パラメーター
機能 設定
パラメータ
ー 5-40 機能リ
[32] 機械的
ブレーキ CL
レー
パラメータ
ー 5-10 端末
[8] スター
ト
*
18 ディジタル
入力
パラメータ
ー 5-11 端末
[11] 逆転ス
タート
19 ディジタル
入力
パラメータ
0.2
6
6
ー 1-71 スター
ト遅延
パラメータ
ー 1-72 スター
ト機能
パラメータ
[5] VVC+/
磁束時計回
り
I
m,n
ー 1-76 スター
ト電流
パラメータ
ー 2-20 ブレー
キ電流の解放
パラメータ
ー 2-21 ブレー
キ速度の有効化
アプリケー
ションに依
存
モーターの
名目スリッ
プ半分
[RPM]
*=デフォルト値
注意/コメント:
–
表 6.2 機械的ブレーキ・コントロール
図 6.1 機械的ブレーキ
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 21
・コントロール
Page 28

130BP086.12
Status
0.0Hz 0.000kW 0.00A
0.0Hz
0
Earth Fault [A14]
Auto Remote Trip
1(1)
メンテナンス、診断およびトラブルシュー
ティング
VLT® AutomationDrive FC 301/302
7 メンテナンス、診断およびトラブルシューティング
7.1 メンテナンスとサービス
通常の動作条件と負荷プロファイルの下では、周波数変換
器の寿命として指定された期間中、メンテナンスの必要は
ありません。故障、危険及び損傷を防ぐために、動作条件
に従い、端子接続の耐久性、粉塵の侵入など、周波数変換
器を定期的に検査してください。損耗や損傷した部品は、
純正スペア部品又は標準部品と交換してください。サー
ビスとサポートについては、最寄りの Danfoss 代理店まで
ご連絡ください。
警告
予期しない始動
ドライブが AC 主電源、直流電源、あるいは負荷分散に接
77
続されている場合、モーターは思いがけなくスタートする
ことがあります。プログラミング、サービス、あるいは修
理中の予期しない始動は、死亡、深刻な傷害、あるいは物
損事故を招く恐れがあります。モーターは外部スイッチ、
フィールドバスコマンド、LCP からの入力速度指令信号に
よって、又は不具合状態のクリア後にスタートします。
予期しないモーターのスタートを防止するには:
ドライブを主電源から切り離してください。
•
パラメーターのプログラミング前に、LCP 上の
•
[Off/Reset] を押します。
ドライブを AC 主電源、直流電源、あるいはロー
•
ドシェアに接続する前に、ドライブ、モーター、
運転機器は、配線及び組み立てが完了している必
要があります。
トリップは、以下の 4 つの方法でリセットできます。
LCP 上の[Reset](リセット) を押します。
•
ディジタル・リセット入力コマンド。
•
シリアル通信リセット入力コマンド。
•
自動リセット。
•
トリップ・ロック
入力電源のサイクルが生じます。モーターはフリーラン
して停止します。周波数変換器は、周波数変換器の状態監
視を継続します。周波数変換器への入力電源を遮断し、不
具合の原因を修正し、周波数変換器をリセットします。
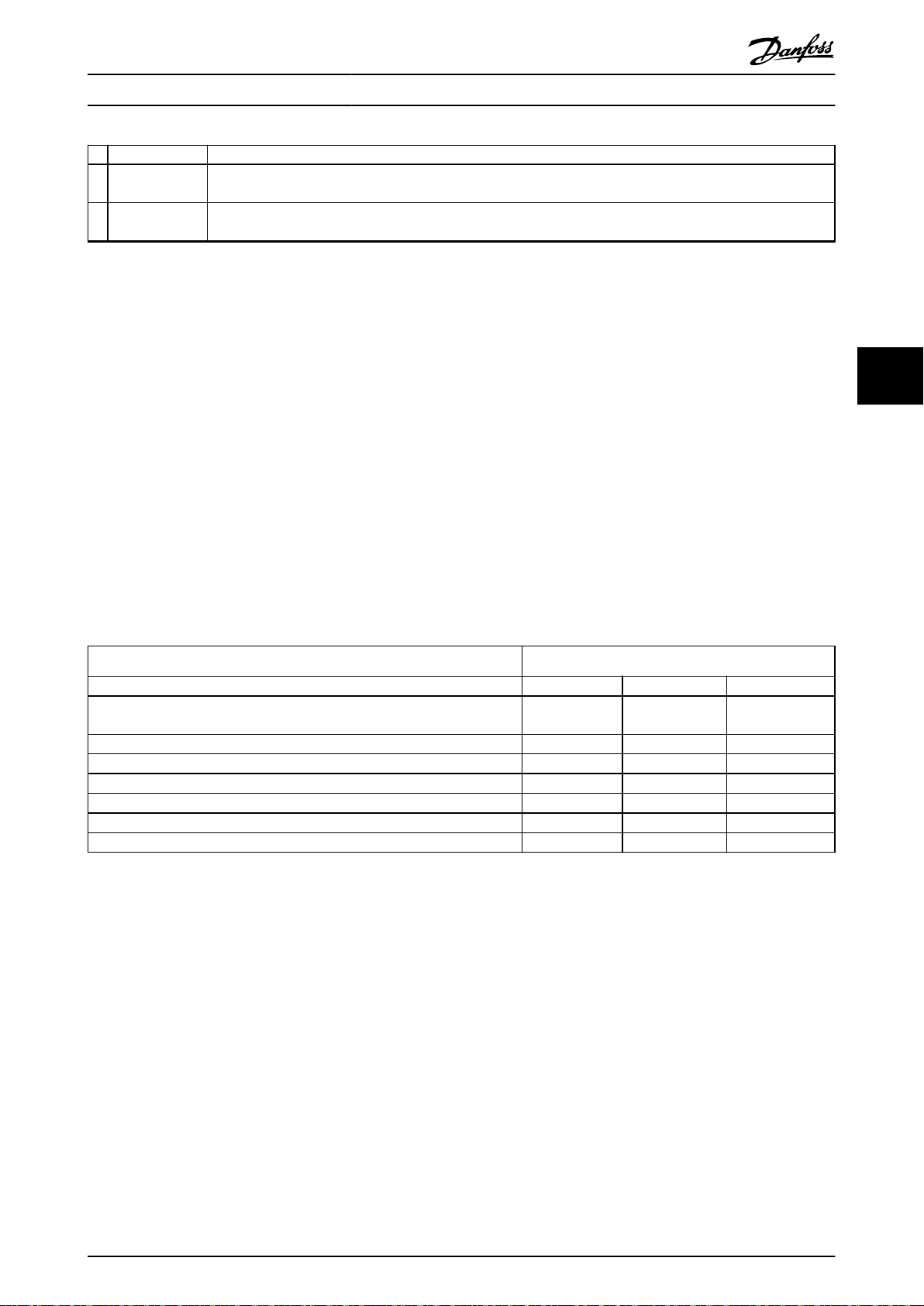
警報と警告の表示
警報は、警報番号と共に LCP に表示されます。
•
警報は、警報番号と共に点滅します。
•
図 7.1 警報例
7.2 警告と警報の種類
警告
警告は、警報状態が差し迫っている場合、あるいは異常な
動作状態が存在しており周波数変換器が警報を発行しそ
うな場合に、発行されます。その異常な状態が終了する
と、警告は自動的にクリアされます。
警報
警報は、迅速な注意喚起を必要とする障害を示します。障
害は常にトリップやトリップ・ロックを作動させます。警
報の後にシステムをリセットしてください。
トリップ
警報は、周波数変換器がトリップした場合に発報されま
す。このことは、周波数変換器やシステムが損傷するのを
防ぐために動作がサスペンドされることを意味します。
モーターはフリーランして停止します。周波数変換器の
ロジックは、動作を続け、周波数変換器の状態を監視しま
す。不具合が解消されると周波数変換器はリセットでき
ます。その後、周波数変換器は再び動作開始できる状態に
なります。
トリップ/トリップ・ロック後に、周波数変換器をリセ
ットします。
LCP 上のテキストと警報コードに加えて、3 つの状態表示
ランプがあります。
22 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 29

Back
Cancel
Info
OK
On
Alarm
Warn.
130BB467.11
メンテナンス、診断およびトラブルシュー
ティング
警告 インジケータランプ警報 インジケータラ
警告 オン オフ
警報 オフ On (フラッシュ)
トリップ・ロックオン On (フラッシュ)
図 7.2 状態表示ランプ
操作ガイド
ンプ
7.3 警告と警報のリスト
以下の警告および警報情報は、各警告および警報状態を定
義し、その状態について考えられる原因を提供し、修正方
法またはトラブルシューティング手順を詳述します。
警告 1, 10 ボルト低
コントロール・カード電圧は、端子 50 において 10 V 未
満になっています。
10 V 電源が過負荷になっているので、端子 50 から負荷
の一部を取り除いてください。最大 15 mA 又は 最小
590 Ω。
この状態は、接続されたポテンショメーターにおける短
絡、あるいはポテンショメーターの不適切な配線によって
生じます。
トラブルシューティング
端子 50 から配線を取り外します。警告がクリア
•
される場合、問題は配線にあります。警告がクリ
アされない場合、コントロール・カードを交換し
ます。
警告/警報 2, ライブ・ゼロ・エラー
この警告あるいは警報は、
ゼロ・タイムアウト機能
ムされた場合にのみ表示されます。アナログ入力の 1 つ
の信号は、入力のためにプログラムされた最小値の 50%を
下回ります。この状態は、破損した配線、あるいはシグナ
ルを送る装置の故障によって発生します。
トラブルシューティング
全てのアナログ入力端子上の接続を確認します。
端子 55 共通、信号用コントロール・カード端子
53 及び 54。端子 10 共通、信号用 VLT® General
Purpose I/O MCB 101 端子 11 及び 12。端子 2、
パラメーター 6-01 ライブ・
においてユーザーによりプログラ
®
4、6 共通、信号用 VLT
子 1、3、5。
周波数変換器プログラムとスイッチ設定がアナ
ログ信号タイプと一致することを確認します。
入力端子シグナルテストを実行します。
警告/警報 3, モーターなし
周波数変換器の出力にモーターが接続されていません。
警告/警報 4, 主電源相損失
相が電源側で損失しているか、あるいは主電源電圧アンバ
ランスが高すぎます。このメッセージはの入力整流器に
不具合が生じたときにも表示されます。オプションは、
ラメーター 14-12 主電源アンバランス時の機能
てプログラムされます。
トラブルシューティング
周波数変換器への供給電圧と供給電流を確認し
•
てください。
警告 5, 直流リンク電圧高
直流リンク電圧は高電圧警告制限より高くなっています。
制限は周波数変換器電圧定格に依存します。ユニットは
まだアクティブです。
警告 6, 直流リンク電圧低
直流リンク電圧は低電圧警告制限より低くなっています。
制限は周波数変換器電圧定格に依存します。ユニットは
まだアクティブです。
警告/警報 7, 直流過電圧
直流リンク電圧が制限を超える場合、しばらくすると周波
数変換器がトリップします。
トラブルシューティング
ブレーキ抵抗器を接続する。
•
立ち上がり/立ち下がり時間を延長する。
•
立ち上がり/立ち下がりタイプを変更します。
•
パラメーター 2-10 ブレーキ機能
•
ティブにします。
パラメーター 14-26 Inv 不具合時トリップ遅延
•
を増加します。
警告/警報 8, 直流電圧低下
直流リンク電圧が電圧低下制限を下回る場合には、24 V
直流バックアップ電源が接続されているかどうかが周波
数変換器によって確認されます。24 V DC バックアップ
電源が接続されていない場合には、周波数変換器が決めら
れた時間遅延の後にトリップします。時間遅延はユニッ
トサイズによって異なります。
トラブルシューティング
供給電圧が周波数変換器の電圧に一致するかを
•
確認します。
入力電圧テストを実施します。
•
ソフトチャージ回路テストを実施します。
•
Analog I/O MCB 109 端
パ
におい
で機能をアク
7 7
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 23
Page 30

メンテナンス、診断およびトラブルシュー
ティング
VLT® AutomationDrive FC 301/302
警告/警報 9, インバーター過負荷
周波数変換器が 100% を超える過負荷で長時間動作し、カ
ットアウトしようとしています。電子サーマル・インバー
タ保護用カウンターは 98% で警告を発し、100% で警報
を発しながらトリップします。周波数変換器は、カウンタ
ーが 90% 未満になるまでリセットできません。
トラブルシューティング
LCP に示される出力電流 と周波数変換器の定格
•
電流を比較します。
LCP 上に表示される出力電流と、測定モーター電
•
流を比較します。
LCP 上のサーマル周波数変換器負荷を表示し、数
•
値を監視します。周波数変換器継続電流定格を
超えて動作するときは、カウンターが増加しま
す。周波数変換器継続電流定格よりも下で動作
するときは、カウンターが減少します。
警告/警報 10, モーター過負荷温度
77
電子サーマル・インバータ保護(ETR) によってモーター
が過熱しています。
これらのオプションのうち 1 つを選択します:
パラメーター 1-90 モーター熱保護
•
ションに設定されている場合に、カウンターが
>90%であるときは、周波数変換器が警告又は警報
を出します。
パラメーター 1-90 モーター熱保護
•
プ・オプションに設定されている場合、カウンタ
ーが 100%に到達すると、周波数変換器がトリッ
プします。
モーターに 100%を超える過負荷を長時間掛けると不具合
が発生します。
トラブルシューティング
モーターが過熱されていないか確認します。
•
モーターが機械的に過負荷であるか確認します。
•
パラメーター 1-24 モーター電流
•
モーター電流が正しいことを確認します。
パラメーター 1-20
•
ー・データが正しく設定されていることを確認し
ます。
外部ファンが使用されている場合、
•
ー 1-91 モーター外部ファン
ているか確認します。
パラメーター 1-29 自動モーター適合(AMA)
•
おいて AMA を動作させることで、周波数変換器を
モーターに対してより正確に調整でき、熱負荷を
減少させることができます。
から
1-25
が警告オプ
がトリッ
で設定された
におけるモータ
パラメータ
でそれが選択され
に
警告/警報 11, モーター・サーミスター過熱
サーミスター接続が切断されているかどうかチェックし
てください。周波数変換器が
ー熱保護
す。
トラブルシューティング
警告/警報 12, トルク制限
トルクが、
ード
ター・モード
ー 14-25 トルク制限時のトリップ遅延
のみの状態から、警報を伴う警告に変更するために使用す
ることができます。
トラブルシューティング
警告/警報 13, 過電流
インバーター・ピーク電流制限 (定格電流の約 200%)を
超えています。警告は約 1.5 秒続きます。その後、周波
数変換器がトリップし警報が発せられます。この不具合
は、衝撃負荷、あるいは高度な慣性負荷を伴う高速度加速
によって発生することがあります。立ち上がりの間の加
速が素早い場合、不具合が速度バックアップの後に発生す
ることがあります。
拡張機械的ブレーキ・コントロールが選択されている場合
には、トリップを外部からリセットできます。
において警告又は警報を出すよう、選択をしま
モーターが過熱されていないか確認します。
•
モーターが機械的に過負荷であるか確認します。
•
端子 53 又は 54 を使用する場合、サーミスタ
•
ーが端子 53 又は 54(アナログ電圧入力)と端
子 50(+10 V 電源)との間で正しく接続されて
いることを確認してください。さらに、53 又は
54 の端子スイッチが電圧設定されていることを
確認します。
ー・リソース
とを確認します。
端子 18、19、31、32 又は 33 (ディジタル入
•
力)を使用する場合、サーミスターが使用済みデ
ィジタル入力端子(ディジタル入力 PNP のみ)と
端子 50 の間で正しく接続されていることを確
認してください。使用する端子を
ー 1-93 サーミスター・リソース
パラメーター 4-16 トルク制限モーター・モ
の値又は
•
•
•
•
パラメーター 4-17 トルク制限ジェネレー
の値を超えています。
立ち上がり中にモータートルク制限を超過した
場合、立ち上がり時間を延長します。
立ち下がり中に回生トルク制限を超過した場合、
立ち下がり時間を延長します。
トルク制限が動作中に発生した場合、トルク制限
を増加させます。システムがより高いトルクで
安全に運転出来るように確認してください。
モーターの電流が過剰でないか、アプリケーショ
ンを確認します。
が端子 53 又は 54 を選択しているこ
パラメーター 1-90 モータ
パラメーター 1-93 サーミスタ
パラメータ
で選択します。
パラメータ
は、これを、警告
24 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 31

メンテナンス、診断およびトラブルシュー
ティング
操作ガイド
トラブルシューティング
電源を切り、モーター・シャフトが回転可能か確
•
認します。
モーターサイズが周波数変換器と一致するか確
•
認します。
パラメーター
•
ータが適正であることを確認します。
警報 14, 地絡
周波数変換器とモーター間のケーブル又はモーター自体
に、出力相から接地への電流があります。電流変換器は、
周波数変換器から出る電流とモーターから周波数変換器
に入る電流を測定して地絡を検出します。2 つの電流の
偏差が大きすぎるときに、地絡が通知されます。周波数変
換器から出る電流は、周波数変換器に入る電流と同じであ
る必要があります。
トラブルシューティング
周波数変換器の電源を切り、地絡を取修理してく
•
ださい。
モーター・ケーブルと絶縁抵抗計を有するモータ
•
ーの接地に対する抵抗を測定し、モーターの地絡
を確認します。
周波数変換器の電流変換器(3 個)で潜在的な個
•
々のオフセットをリセットします。手動による
初期化又は完全 AMA を実行します。電力カード
を変更した後、この方法は最も有効です。
警報 15, ハードウェア不整合
現在のコントロール・カード ハードウェア又はソフトウ
ェアでは、取り付けられたオプションは動作しません。
パラメーターに従った値を記録し、Danfoss 代理店にお問
い合わせください。
パラメーター 15-40 FC タイプ
•
パラメーター 15-41 電力セクション
•
パラメーター 15-42 電圧
•
パラメーター 15-43 ソフトウェア・バージョ
•
ン
.
パラメーター 15-45 実際タイプ・コード文字
•
列
.
パラメーター 15-49 SW ID コントロール・カー
•
ド
.
パラメーター 15-50 SW ID 電力カード
•
パラメーター 15-60 オプション実装済み
•
パラメーター 15-61 Opt SW バージョン
•
オプションスロット用)。
1-20
から
1-25
でモーター・デ
.
.
.
.
.
(各
警報 16, 短絡
モーター又はモーター配線に短絡があります。
トラブルシューティング
周波数変換器の電源を切り、短絡を修理してくだ
•
さい。
警告
高電圧
AC 主 電源、DC 電源、あるいは負荷分散に接続されてい
る限り、周波数変換器は高電圧が印加されています。有資
格技術者でない人が、周波数変換器の設置、スタートアッ
プ、メンテナンスを行った場合、死亡事故や重大な傷害事
故を招くおそれがあります。
作業を進める前に電源を切断します。
•
警告/警報 17, コントロール・メッセージ文タイムアウ
ト
周波数変換器への通信がありません。
この警告は、
[0] オフ
ります。
パラメーター 8-04 コント Mss 文タイムが [5] 停止し
てトリップ
数変換器は立ち下がった後、警報を表示します。
トラブルシューティング
•
•
•
•
警告/警報 20, 温度入力エラー
温度センサーが接続されていません。
警告/警報 21, パラメーター・エラー
パラメータが範囲外です。パラメーター番号はディスプ
レイに表示されます。
トラブルシューティング
•
警告/警報 22, 巻き上げ機械的ブレーキ
この警告/警報の値は次の原因を示します。
0 = タイムアウトの前に、トルク値まで到達しませんで
した(
パラメーター 2-27 トルク・ランプ時間
1 = タイムアウトの前に、期待されるブレーキフィード
バックまで到達しませんでした(
レーキ遅延の有効化、パラメーター 2-25 ブレーキ解放
時間
)。
パラメーター 8-04 コント Mss 文タイム
に設定されていない場合にのみアクティブにな
に設定されている場合、警告が表示され、周波
シリアル通信ケーブル上の接続を確認します。
パラメーター 8-03 コント Mss 文タイム
します。
通信設備の動作を確認します。
EMC 設置が正しく実行されたことを確認します。
関連パラメーターを有効な値に設定してくださ
い。
)。
パラメーター 2-23 ブ
が
を増加
7 7
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 25
Page 32

メンテナンス、診断およびトラブルシュー
ティング
VLT® AutomationDrive FC 301/302
警告 23, 内部ファン不具合
ファン警告機能は、ファンが運転されているか、あるいは
ファンが取り付けられているかを確認する保護機能です。
ファン警告は、(
ター 14-53 ファン・モニター
ファンにはフィードバック・センサーが取り付けられてい
ます。ファンに運転の命令が発せられても、センサーから
フィードバックがない場合、このアラームが表示されま
す。このアラームは、ファン電力カードとコントロール・
カードとの間で通信エラーが発生したときにも表示され
ます。
この警報に関連する報告値については、警報ログを確認し
てください (
作
を参照)。
報告値が 2 である場合、ファンのうち 1 つにハードウェア
上の問題が発生しています。報告値が 12 である場合、フ
ァン電力カードとコントロール・カードとの間で通信エラ
77
ーが発生しています。
ファンのトラブルシューティング
周波数変換器への電力をサイクルし、ファンがス
•
タートアップ時に一時的に動作することを確認
します。
ファン動作が適切か確認します。
•
ー・グループ 43-** ユニット読み出し
て、各ファンの速度を表示します。
ファン電力カードのトラブルシューティング
ファン電力カードとコントロール・カードとの間
•
の配線を確認します。
ファン電力カードの交換が必要である可能性が
•
あります。
コントロール・カードの交換が必要である可能性
•
があります。
警告 24, 外部ファン不具合
ファン警告機能は、ファンが運転されているか、あるいは
ファンが取り付けられているかを確認する保護機能です。
ファン警告は、(
ター 14-53 ファン・モニター
ファンにはフィードバック・センサーが取り付けられてい
ます。ファンに運転の命令が発せられても、センサーから
フィードバックがない場合、このアラームが表示されま
す。このアラームは、電力カードとコントロール・カード
との間で通信エラーが発生したときにも表示されます。
この警報に関連する報告値については、警報ログを確認し
てください (
作
を参照)。
報告値が 1 である場合、ファンのうち 1 つにハードウェア
上の問題が発生しています。報告値が 11 である場合、電
力カードとコントロール・カードとの間で通信エラーが発
生しています。
[0] 無効
章 5.2 ローカル・コントロール・パネル動
[0] 無効
章 5.2 ローカル・コントロール・パネル動
)で無効に出来ます。
。
パラメータ
)で無効に出来ます。
。
パラメー
を使用し
パラメー
ファンのトラブルシューティング
周波数変換器への電力をサイクルし、ファンがス
•
タートアップ時に一時的に動作することを確認
します。
ファン動作が適切か確認します。
•
ー・グループ 43-** ユニット読み出し
て、各ファンの速度を表示します。
電力カードのトラブルシューティング
電力カードとコントロール・カードとの間の配線
•
を確認します。
電力カードの交換が必要である可能性がありま
•
す。
コントロール・カードの交換が必要である可能性
•
があります。
警告 25, ブレーキ抵抗器短絡
ブレーキ抵抗器は動作中監視されています。短絡した場
合には、ブレーキ機能が無効化され、警告が表示されま
す。周波数変換器は引き続き動作しますが、ブレーキ機能
は動作しません。
トラブルシューティング
周波数変換器への電力供給を停止して、ブレーキ
•
抵抗器を交換して下さい(
ー 2-15 ブレーキ確認
警告/警報 26, ブレーキ抵抗器電力制限
ブレーキ抵抗器に伝送される電力が、動作時間の最終 120
秒の平均値として計算されます。計算は、
ー 2-16 交流ブレーキ最大電流
リンク電圧とブレーキ抵抗値を基本とします。ブレーキ
放熱電力が ブレーキ抵抗電力の 90% より高くなると警
告がアクティブになります。
キ電力監視
いる場合、ブレーキ放熱電力が 100% より大きいと、周
波数変換器はトリップします。
警告/警報 27, ブレーキ・チョッパー不具合
動作中はブレーキ抵抗器が監視され、短絡すると、ブレー
キ機能が無効化され、警告が表示されます。周波数変換器
は引き続き動作可能ですが、ブレーキ・トランジスタが短
絡しているため、ブレーキ抵抗器が非アクティブである場
合でも、そのブレーキ抵抗器に多量の電力が伝達されま
す。
トラブルシューティング
•
警告/警報 28, ブレーキ確認失敗
ブレーキ抵抗器が接続されていないか、動作していませ
ん。
トラブルシューティング
•
においてオプション
周波数変換器の電源を切り、ブレーキ抵抗器を取
り外してください。
パラメーター 2-15 ブレーキ確認
てください。
パラメータ
を参照して下さい)。
において設定された直流
パラメーター 2-13 ブレー
[2]トリップ
パラメータ
を使用し
パラメータ
が選択されて
をチェックし
26 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 33
メンテナンス、診断およびトラブルシュー
ティング
操作ガイド
警報 29, ヒートシンク温度
ヒートシンクの最大温度を超えています。温度の不具合
は、温度が一定のヒートシンク温度以下になるまで、リセ
ットされません。トリップ及びリセットポイントは、周波
数変換器電力サイズによって異なります。
トラブルシューティング
以下の条件を確認します:
周囲温度が高すぎる。
•
モーター・ケーブルが長すぎる。
•
周波数変換器の上下における不適切な通気用ス
•
ペース。
周波数変換器の周囲の通気が遮られています。
•
ヒートシンクファンの損傷。
•
ヒートシンクの汚れ。
•
警報 30, モーター相 U 損失
周波数変換器とモーター間のモーター相 U が損失して
います。
警告
高電圧
AC 主 電源、DC 電源、あるいは負荷分散に接続されてい
る限り、周波数変換器は高電圧が印加されています。有資
格技術者でない人が、周波数変換器の設置、スタートアッ
プ、メンテナンスを行った場合、死亡事故や重大な傷害事
故を招くおそれがあります。
作業を進める前に電源を切断します。
•
トラブルシューティング
周波数変換器への電源を遮断し、モーター U 相
•
を確認して下さい。
警報 31, モーター相 V 損失
周波数変換器とモーター間のモーター相 V が損失して
います。
警告
高電圧
AC 主 電源、DC 電源、あるいは負荷分散に接続されてい
る限り、周波数変換器は高電圧が印加されています。有資
格技術者でない人が、周波数変換器の設置、スタートアッ
プ、メンテナンスを行った場合、死亡事故や重大な傷害事
故を招くおそれがあります。
作業を進める前に電源を切断します。
•
トラブルシューティング
周波数変換器の電力を切り、モーター V 相を確
•
認して下さい。
警報 32, モーター相 W 損失
周波数変換器とモーター間のモーター相 W が損失して
います。
警告
高電圧
AC 主 電源、DC 電源、あるいは負荷分散に接続されてい
る限り、周波数変換器は高電圧が印加されています。有資
格技術者でない人が、周波数変換器の設置、スタートアッ
プ、メンテナンスを行った場合、死亡事故や重大な傷害事
故を招くおそれがあります。
作業を進める前に電源を切断します。
•
トラブルシューティング
周波数変換器の電源を切り、モーター W 相を確
•
認して下さい。
警報 33, インラッシュ不具合
短期間のうちに多数の電源投入が行われました。
トラブルシューティング
ユニットを動作温度まで冷却させます。
•
警告/警報 34, フィールドバス通信不具合
通信オプション・カード上のフィールドバスが動作してい
ません。
警告/警報 35, オプション不具合
オプション警報を受信します。警報はオプション別です。
もっとも考えられる原因は出力アップか、または通信不良
です。
警告/警報 36, 主電源異常
この警告/警報は、周波数変換器への供給電圧 が失わ
れ、
パラメーター 14-10 主電源異常 が[0] 機能無し
設定されていない場合にのみアクティブになります。周
波数変換器へのヒューズと、ユニットへの主電源電力を確
認します。
警報 37, 供給電圧のアンバランス
電源ユニット間に、電流の不均衡があります。
警報 38, 内部不具合
内部不具合が発生した場合、
番号が表示されます。
トラブルシューティング
サイクル電力
•
オプションが正しく設置されていることを確認
•
します。
接続が緩んでいたり、失われていないか確認しま
•
す。
Danfoss 代理店又はサービス部門に連絡することが必要
な場合もあります。問題解決の指示を受けるため、コード
番号を確認してください。
表 7.1
で定義されたコード
に
7 7
番号 テキスト
0 リシアル・ポートを初期化できません。Danfoss
代理店又は Danfoss サービス部門にお問い合わせ
ください。
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 27
Page 34

メンテナンス、診断およびトラブルシュー
ティング
VLT® AutomationDrive FC 301/302
番号 テキスト
256–258 電力 EEPROM データに欠陥があるか、古すぎま
す。電力カードを交換します。
512–519 内部不具合。Danfoss 代理店又は Danfoss サービ
ス部門にお問い合わせください。
783 パラメーター値が上下限の範囲外です。
1024–1284 内部不具合。Danfoss 代理店又は Danfoss サービ
ス部門にお問い合わせください。
1299 スロット A の オプション ソフトウェア が古
すぎます。
1300 スロット B の オプション ソフトウェア が古
すぎます。
1302 スロット C1 の オプション ソフトウェア が
古すぎます。
1315 スロット A の オプション ソフトウェア はサ
ポート/許可されていません。
1316 スロット B の オプション ソフトウェア はサ
ポート/許可されていません。
77
1318 スロット C1 の オプション ソフトウェア は
サポート/許可されていません。
1379–2819 内部不具合。Danfoss 代理店又は Danfoss サービ
ス部門にお問い合わせください。
1792 ディジタル信号プロセッサーのハードウェアリセ
ット。
1793 モーター由来のパラメーターがディジタル信号プ
ロセッサーに正しく転送されませんでした。
1794 電源投入時に電力データがディジタル信号プロセ
ッサーに正しく転送されませんでした。
1795 ディジタル信号プロセッサーは未知の SPI テレグ
ラムを過剰に受信しました。AC ドライブはさら
に、MCO が正しく電源投入されない場合、この不
具合コードを使用します。この状況は、不十分な
EMC 保護または不適正な接地により、発生するこ
とがあります。
1796 RAM コピー・エラー。
1798 ソフトウェアのバージョン 48.3X またはそれ以降
が、MK1 コントロール・カードと使用されます。
MKII 発行 8 コントロール・カードと交換します。
2561 コントロール・カードを交換して下さい。
2820 LCP オーバーフロースタック。
2821 シリアル・ポート・オーバーフロー。
2822 USB ポート・オーバーフロー
3072–5122 パラメーター値がその限度外です。
5123 スロット A のオプション: コントロール・ボー
ドのハードウェアと互換性のないハードウェア
5124 スロット B のオプション: コントロール・ボー
ドのハードウェアと互換性のないハードウェア
5125 スロット C0 のオプション: コントロール・ボ
ードのハードウェアと互換性のないハードウェア
5126 スロット C1 のオプション: コントロール・ボ
ードのハードウェアと互換性のないハードウェア
5376–6231 内部不具合。Danfoss 代理店又は Danfoss サービ
ス部門にお問い合わせください。
警報 39, ヒートシンク・センサー
ヒートシンク温度センサーから何らのフィードバックも
ありません。
IGBT サーマルセンサーからの信号は、電力カード上で利
用できません。問題は、パワーカード上、ゲートドライブ
カード、あるいは、パワーカードとゲートドライブカード
間のリボンケーブルの可能性があります。
警告 40, ディジタル出力端子 27 の過負荷
端子 27 に接続されている負荷を確認するか、短絡接続
を取り除いてください。
I/O モード
及び
パラメーター 5-00 ディジタル
パラメーター 5-01 端末 27 モード
を確認します。
警告 41, ディジタル出力端子 29 の過負荷
端子 29 に接続されている負荷を確認するか、短絡接続
を取り除いてください。さらに、
ィジタル I/O モード
モード
をチェックしてください。
と
パラメーター 5-00 デ
パラメーター 5-02 端末 29
警告 42, X30/6 のディジタル出力の過負荷または
X30/7 のディジタル出力の過負荷
端子 X30/6 については、端子 X30/6 に接続されている負荷
を確認するか、短絡接続を取り除いてください。
ター 5-32 端末 X30/6 ディジ出(MCB 101)
(VLT
パラメー
®
General Purpose I/O MCB 101)もチェックしてくださ
い。
端子 X30/7 については、端子 X30/7 に接続されている負荷
を確認するか、短絡接続を取り除いてください。
ター 5-33 端末 X30/7 ディジ出(MCB 101)
(VLT
パラメー
®
General Purpose I/O MCB 101)もチェックしてくださ
い。
警報 43, 外部供給
VLT® Extended Relay Option ン MCB 113 は、外部 24V
DC なしで取り付けます。外部 24V DC 電源に接続する
か、又は
ション, [0] No
を確認します。
給オプション
パラメーター 14-80 外部 24VDC から供給オプ
を介して外部電源を使用していないこと
パラメーター 14-80 外部 24VDC から供
の変更には電力サイクルが必要です。
警報 45, 地絡 2
地絡。
トラブルシューティング
接地が適切か、接続が緩んでないか確認します。
•
ワイヤサイズが適切か確認します。
•
短絡又は漏洩電流が生じていないかモーター・ケ
•
ーブルを確認します。
表 7.1 内部不具合コード
28 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 35
メンテナンス、診断およびトラブルシュー
ティング
操作ガイド
警報 46, 電力カードの供給
電力カードの供給が、レンジ外です。他の理由としては、
ヒートサインクファンの故障が考えられます。
電力カード上のスイッチ・モード供給電源 (SMPS)によっ
て生成される電源には 3 つあります:
24 V.
•
5 V.
•
±18 V.
•
VLT® 24 V DC Supply MCB 107 によって電力が供給され
たとき、24 V 及び 5 V 電源のみが監視されます。3 相に
よる電源により供給されたとき、3 つの供給電圧すべてが
監視されます。
トラブルシューティング
電力カードの不良を確認します。
•
コントロール・カードの不良を確認します。
•
オプション・カードの不良を確認します。
•
24 V 直流電源が使用されている場合、適切な電
•
源供給が行われているか確認します。
ヒートサインクファンに故障がないかチェック
•
します。
警告 47, 24 V 電源低
電力カードの供給が、レンジ外です。
電力カード上のスイッチ・モード供給電源 (SMPS)によっ
て生成される電源には 3 つあります:
24 V.
•
5 V.
•
±18 V.
•
トラブルシューティング
電力カードの不良を確認します。
•
警告 48, 1.8 V 電源低
コントロール・カード上で使用される 1.8 V 直流電源は、
許容可能な制限外にあります。電源は、コントロール・カ
ード上で測定されます。
トラブルシューティング
コントロール・カードの不良を確認します。
•
オプション・カードが存在する場合、過電圧を確
•
認します。
警告 49, 速度制限
パラメーター 4-11 モーター速度下限[RPM]
速度が
び
パラメーター 4-13 モーター速度上限[RPM]
された範囲内にないとき、警告が表示されます。速度が、
パラメーター 1-86 トリップ速度ロー [RPM]
定制限を下回る時(開始又は停止の場合を除く)、周波数変
換器がトリップします。
警報 50, AMA 較正失敗
Danfoss 代理店又は Danfoss サービス部門にお問い合
わせください。
における指
及
で指定
警報 51, AMA チェック U
モーター電圧、モーター電流、及びモーター電力の設定が
間違っています。
トラブルシューティング
パラメーター 1-20 から 1-25
•
ます。
警報 52, AMA 低 I
モーター電流が低すぎます。
トラブルシューティング
パラメーター 1-24 モーター電流
•
してください。
警報 53, AMA モーター過大
AMA を動作させるには、モーターが大きすぎます。
警報 54, AMA モーター過小
AMA 自動調整を実行するには、モーターが小さすぎます。
警報 55, AMA パラメーター範囲外
モーターのパラメーター値は、許容範囲の外にあるため、
AMA は動作できません。
警報 56, ユーザーによる AMA 中断
AMA が手動で中断されます。
警報 57, AMA 内部不具合
AMA の再スタートを試みてください。再スタートを繰り
返すとモーターが過熱する場合があります。
警報 58, AMA 内部不具合
代理店に Danfoss お問い合わせください。
警告 59, 電流制限
電流が
ます。
ータが正しく設定されていることを確認します。必要な
らば電流制限を増加します。システムがより高いリミッ
トにおいて安全に動作可能か確認します。
警告 60, 外部インターロック
ディジタル入力信号が、周波数変換器の外部における不具
合状態を示します。外部インターロックが周波数変換器
にトリップの指示を出しました。
警告/警報 61, フィードバック・エラー
計算された速度とフィードバック・デバイスからの測定速
度間のエラーです。
パラメーター 4-18 電流制限
パラメーター 1-20 から 1-25
トラブルシューティング
外部不具合状態をクリアにします。
•
通常動作を再開するには 24 V 直流を外部イン
•
ターロックにプログラムされた端子に印加して
ください。
周波数変換器をリセットします。
•
トラブルシューティング
パラメーター 4-30 モーター・フィードバック
•
損失機能
クします。
パラメーター 4-31 モータ FB 速度エラー
•
容エラーを設定します。
nom
で警告/アラーム/停止の設定をチェッ
および I
nom
nom
の設定を確認し
の設定を確認
の値を上回ってい
におけるモーター・デ
で許
7 7
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 29
Page 36

メンテナンス、診断およびトラブルシュー
ティング
VLT® AutomationDrive FC 301/302
パラメーター 4-32 モータ FB 損失タイムアウ
•
ト
で許容フィードバック損失時間を設定します。
警告 62, 上限時の出力周波数
出力周波数が
した値に到達したとき、ドライブは警告を発します。出力
が上限未満まで減少したとき、警告は停止します。周波数
変換器が周波数を制限できない場合は、トリップして警報
を発します。後者は、周波数変換器がモーターの制御を
失った場合に、磁束モードで発生することがあります。
トラブルシューティング
•
•
警報 63, 機械的ブレーキ低
実際のモーター電流がスタート遅延時間中にブレーキ解
77
除電流値を超えませんでした。
警告 64, 電圧制限
この負荷及び速度の組み合わせによって、実際の直流リン
ク電圧より高いモーター電圧が要求されます。
警告/警報 65, コントロール・カード過熱
コントロールカードの切断温度は 85 °C(185 °F)です。
トラブルシューティング
•
•
•
•
警告 66, ヒートシンク温度低
周波数変換器の温度が低すぎて動作できません。この警
告は、IGBT モジュールの温度センサーを基本としていま
す。ユニット周囲温度を上昇させます。さらに、
ター 2-00 直流保留/予加熱電流
ター 1-80 停止時の機能
停止するたびに少量の電流が周波数変換器に供給されま
す。
警報 67, オプション・モジュール構成が変更されました
最後の電源切断後に 1 つあるいはそれ以上のオプション
が追加又は取り外されました。構成の変更が意図的なも
のであること確認し、ユニットをリセットしてください。
警報 68, 安全停止作動
Safe Torque Off (STO)が有効にされました。通常動作
を再開するには 24 V 直流を端子 37 に印加した後、
(バス、ディジタル I/O を介すか、[Reset] (リセット)
キーを押して) リセット信号を送信してください。
パラメーター 4-19 最高出力周波数
原因を特定するため、アプリケーションを確認し
ます。
出力周波数リミットを増加させます。システム
がより高い出力周波数において安全に動作可能
か確認します。
周囲動作温度が制限内であることを確認してく
ださい。
フィルターの詰まりがないか確認します。
ファンの動作を確認します。
コントロール・カードを確認します。
を[5%] 及び
に設定することで、モーターが
で設定
パラメー
パラメー
警報 69, 電力カード温度
パワーカード上の温度センサーは、温度が高すぎるか、低
すぎます。
トラブルシューティング
周囲動作温度が制限内であることを確認してく
•
ださい。
フィルターの詰まりがないか確認します。
•
ファンの動作を確認します。
•
電力カードを確認します。
•
警報 70, 違法な FC 構成
コントロール・カードと電力カードに互換性がありませ
ん。互換性を確認するには、銘板上のユニットのタイプ・
コードと、カードのパーツ番号を Danfoss 代理店に伝え
てください。
警報 71, PTC 1 安全停止
STO が、 VLT® PTC Thermistor Card MCB 112 から起動
しました(モーター過熱)。通常の動作は、MCB 112 が端
子 37 に 24 V 直流を再び印加した時と(モーターの温度
が許容レベルに到達した時)、MCB 112 からのディジタル
入力を無効にした時に再開されます。これが起こったら、
(バス、ディジタル I/O を介して、あるいは[RESET](再設
定)を押すことで)リセット信号を送信してください。
警報 72, 危険な故障
トリップ・ロックによる STO。STO の予期しない組み合わ
せが発生しました。
VLT® PTC Thermistor Card MCB 112 が X44/10
•
を起動させましたが、STO が起動していません。
MCB 112 は STO (
•
安全停止
警告を選択して指定
スで、 STO をアクティブにしても、X44/10 はア
クティブになりません。
警告 73, 安全停止自動再スタート
STO がアクティブです。自動再スタートが有効であると
き、モーターは不具合が解消されるとスタートします。
警報 74, PTC サーミスター
VLT® PTC Thermistor Card MCB 112 に関するアラーム。
PTC が作動していません。
警報 75, 違法なプロファイル選択
モーターの運転中は、パラメーター値を書き込まないでく
ださい。MCO プロファイルを
Mss 文タイムプロフ
す。
警告 77, 低電力モード
周波数変換器が低電力モードで動作しいます(許容された
インバーターセクション数を下回る数)。周波数変換器が
少ない数のインバーターと動作するよう設定され、それが
継続するときに、この警告が電力サイクル上で生成されま
す。
で [4]
パラメーター 5-19 端末 37
PTC 1 警報 又は [5] PTC 1
)を使用する唯一のデバイ
パラメーター 8-10 コント
に書き込む前に、モーターを停止しま
30 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 37
メンテナンス、診断およびトラブルシュー
ティング
操作ガイド
警報 78, 追跡エラー
設定値と実際の値の偏差が、
ラー
で設定されている値を超えています。
トラブルシューティング
機能を無効にするか、
•
エラー機能
負荷とモーターの周囲の機構を検査します。モ
•
ーター・エンクロージャーから周波数変換器への
フィードバック接続を確認します。
パラメーター 4-30 モーター・フィードバック
•
損失機能
機能を選択します。
パラメーター 4-35 追跡エラー
•
で警報/警告を選択します。
においてモーター・フィードバック信号
ター 4-37 追跡エラーランピング
ッキング・エラーバンドを調整します。
警報 79, 違法な出力セクション構成
スケーリングカードが不正なパーツ数、あるいは取り付け
られていません。パワーカード上の MK102 コネクターの
取り付けがされていません。
警報 80, ドライブがデフォルト値に初期化されました
手動リセット後に、パラメーター設定が デフォルト設定
に初期化されます。警報をクリアするには、ユニットをリ
セットします。
警報 81, CSIV コラプト
CSIV ファイルにシンタックスエラーがあります。
警報 82, CSIV パラメーター・エラー
CSIV がパラメーターの初期化に失敗。
警報 83, 違法なオプション組合せ
取り付けたオプションとの間で互換性がありません。
警報 84, 安全オプションなし
安全オプションは、一般リセットを適用しないで、削除さ
れました。安全オプションを再接続します。
警報 88, オプション検出
オプションレイアウトの変更が検知されます。
ター 14-89 Option Detectionが [0] 停止構成
され、オプションレイアウトが変更されました。
変更を適用するには、
•
ー 14-89 Option Detection
アウトの変更を有効にしてください。
別の方法として、正しいオプション設定を回復し
•
てください。
警告 89, 機械的ブレーキ・スライド
ホイストブレーキモニタは、モーター速度が 10 RPM を超
えているのを検出します。
警報 90, フィードバック・モニター
エンコーダー/レゾルバーオプションへの接続をチェッ
クして、必要に応じて VLT® Encoder Input MCB 102 又
は VLT® Resolver Input MCB 103 を交換してください。
パラメーター 4-35 追跡エ
パラメーター 4-34 追跡
および
パラメー
においてトラ
パラメー
に設定
パラメータ
でオプションレイ
警報 91, アナログ 入力 54 の設定が不正
KTY センサーがアナログ入力端子 54 に接続されている
場合には、スイッチ S202 を OFF 位置 (電圧入力) に設
定してください。
警報 99, ロックされた回転子
ローターがブロックされました。
警告/警報 104, ミキシングファン不具合
ファンが動作していません。ファン・モニターは、電源投
入時あるいはミキシングファンがオンにされた時にファ
ンが回転することをチェックします。ミキシングファン
の故障は、
て警告あるいは警報トリップとして設定できます。
トラブルシューティング
•
警告/警報 122, 不意のモーター回転
周波数変換器はモーターが停止状態になるために必要と
される機能を実行します(例えば、PM モーターの直流保留
など)。
警告 163, ATEX ETR 電流制限警告
周波数変換器が特性極性を超えて 50 秒よりも長く動作し
ています。警告は、許容熱過剰負荷の 83%で有効になり、
65%で無効になります。
警報 164, ATEX ETR 電流制限警報
特性曲線を超える動作が、
600 秒中に 60 秒を超える場合、警報が起動して周波数変
換器がトリップします。
警告 165, ATEX ETR 周波数制限警告
周波数変換器が、50 秒よりも長く、許容最小周波数以下
で動作しています (
interpol. points freq.
警報 166, ATEX ETR 周波数制限警報
周波数変換器が、600 秒間に 60 秒よりも長く、許容最小
周波数以下で動作しました(
ETR interpol. points freq.
警告 250, 新しいスペア部品
ドライブシステムの部品が交換されました。
トラブルシューティング
•
警告 251, 新しいタイプ・コード
電力カード又は他の部品が交換され、タイプ・コードが変
更されました。
パラメーター 14-53 ファン・モニター
警告/警報を戻すかどうかを決定するために周波
数変換器へ供給されるサイクル電力。
によっ
パラメーター 1-98 ATEX ETR
)。
パラメーター 1-98 ATEX
)。
通常動作に戻すために、ドライブ システムをリ
セットしてください。
7 7
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 31
Page 38

仕様
VLT® AutomationDrive FC 301/302
8 仕様
8.1 電気データ
8.1.1 主電源 200-240 V
タイプ指定 PK25 PK37 PK55 PK75 P1K1 P1K5 P2K2 P3K0 P3K7
シャフト出力 [kW(hp)](代表値)、過負荷
エンクロージャー保護等級 IP20 ( FC 301
のみ)
エンクロージャー保護等級 IP20、IP21 A2 A2 A2 A2 A2 A2 A2 A3 A3
エンクロージャー保護等級 IP55、IP66 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A5 A5
出力電流
定常 (200-240 V) [A] 1.8 2.4 3.5 4.6 6.6 7.5 10.6 12.5 16.7
断続 (200-240 V) [A] 2.9 3.8 5.6 7.4 10.6 12.0 17.0 20.0 26.7
定常 kVA (208 V) [kVA] 0.65 0.86 1.26 1.66 2.38 2.70 3.82 4.50 6.00
最大入力電流
定常 (200-240 V) [A] 1.6 2.2 3.2 4.1 5.9 6.8 9.5 11.3 15.0
88
断続 (200-240 V) [A] 2.6 3.5 5.1 6.6 9.4 10.9 15.2 18.1 24.0
追加仕様
主電源、モーター、ブレーキ、負荷分散の最
大ケーブル断面
非接続状態での最大ケーブル断面
[mm2] ([AWG])
定格最大負荷における推定電力損失[W]
4)
効率
2),5)
[mm2] ([AWG])
2),5)
3)
0.25
(0.34)
A1 A1 A1 A1 A1 A1 – – –
21 29 42 54 63 82 116 155 185
0.94 0.94 0.95 0.95 0.96 0.96 0.96 0.96 0.96
0.37
(0.5)
0.55
(0.75)
0.75
(1.0)
4, 4, 4 (12,12,12)(最低 0.2 (24))
6, 4, 4 (10,12,12)
1.1
(1.5)
1.5
(2.0)
2.2
(3.0)
3.0
(4.0)
3.7
(5.0)
表 8.1 主電源 200-240 V、PK25-P3K7
32 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 39

仕様 操作ガイド
タイプ指定 P5K5 P7K5 P11K
高/通常負荷
1)
HO(高過負
荷)
シャフト出力 [kW(hp)](代表値) 5.5 (7.5) 7.5 (10) 7.5 (10) 11 (15) 11 (15) 15 (20)
エンクロージャー保護等級 IP20 B3 B3 B4
エンクロージャー保護等級 IP21、IP55、IP66 B1 B1 B2
出力電流
定常 (200-240 V) [A] 24.2 30.8 30.8 46.2 46.2 59.4
断続 (60 秒過負荷) (200-240 V) [A] 38.7 33.9 49.3 50.8 73.9 65.3
定常 kVA (208 V) [kVA] 8.7 11.1 11.1 16.6 16.6 21.4
最大入力電流
定常 (200-240 V) [A] 22.0 28.0 28.0 42.0 42.0 54.0
断続 (60 秒過負荷) (200-240 V) [A] 35.2 30.8 44.8 46.2 67.2 59.4
追加仕様
主電源、ブレーキ、モーター、負荷分散の IP20 最大ケーブル断
2),5)
面
[mm2] ([AWG])
主電源、ブレーキ、モーター、負荷分散の IP21 最大ケーブル断
2),5)
面
[mm2] ([AWG])
モーターの IP21 最大ケーブル断面
非接続状態での最大ケーブル断面
定格最大負荷における推定電力損失[W]
4)
効率
2),5)
[mm2] ([AWG])
2),5)
[mm2] ([AWG])
3)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35,-,- (2,-,-)
16,10,16 (6, 8, 6) 16,10,16 (6, 8, 6) 35,-,- (2,-,-)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-)
239 310 371 514 463 602
0.96 0.96 0.96
HO(高過負
NO
荷)
16,10,10 (6, 8, 8)
HO(高過
NO
負荷)
NO
35,25,25 (2, 4,
4)
8 8
表 8.2 主電源 200-240 V、P5K5-P11K
タイプ指定 P15K P18K P22K P30K P37K
高/通常負荷
1)
シャフト出力 [kW(hp)](代表値)
HO(高
過負荷)NO
15
(20)
18.5
(25)
HO(高
過負荷)NO
HO(高
過負荷)NO
HO(高
過負荷)NO
HO(高
過負荷)NO
18.5
(25)22(30)22(30)30(40)30(40)37(50)37(50)45(60)
エンクロージャー保護等級 IP20 B4 C3 C3 C4 C4
エンクロージャー保護等級 IP21、IP55、IP66 C1 C1 C1 C2 C2
出力電流
定常 (200-240 V) [A] 59.4 74.8 74.8 88.0 88.0 115 115 143 143 170
断続 (60 秒過負荷) (200-240 V) [A] 89.1 82.3 112 96.8 132 127 173 157 215 187
定常 kVA (208 V) [kVA] 21.4 26.9 26.9 31.7 31.7 41.4 41.4 51.5 51.5 61.2
最大入力電流
定常 (200-240 V) [A] 54.0 68.0 68.0 80.0 80.0 104 104 130 130 154
断続 (60 秒過負荷) (200-240 V) [A] 81.0 74.8 102 88.0 120 114 156 143 195 169
追加仕様
主電源、ブレーキ、モーター、負荷分散の IP20
最大ケーブル断面5) [mm2] ([AWG])
主電源とモーターの IP21、IP55、IP66 最大ケー
ブル断面5) [mm2] ([AWG])
ブレーキと負荷分散の IP21、IP55、IP66 最大ケ
ーブル断面
非接続状態での最大ケーブル断面
5)
[mm2] ([AWG])
2),5)
[mm2] ([AWG])
定格最大負荷における推定電力損失[W]
4)
効率
3)
35 (2) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
50 (1) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
50 (1) 50 (1) 50 (1) 95 (3/0) 95 (3/0)
50, 35, 35 (1, 2, 2)
95, 70, 70
(3/0, 2/0,
2/0)
185、150、120
(350MCM、
300MCM、4/0)
624 737 740 845 874 1140 1143 1353 1400 1636
0.96 0.97 0.97 0.97 0.97
表 8.3 主電源 200-240 V、P15K–P37K
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 33
Page 40

仕様
VLT® AutomationDrive FC 301/302
8.1.2 主電源 380–500 V
タイプ指定 PK37 PK55 PK75 P1K1 P1K5 P2K2 P3K0 P4K0 P5K5 P7K5
シャフト出力 [kW(hp)](代表値)、過負荷
エンクロージャー保護等級 IP20 ( FC 301
のみ)
エンクロージャー保護等級 IP20、IP21 A2 A2 A2 A2 A2 A2 A2 A2 A3 A3
エンクロージャー保護等級 IP55、IP66 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A5 A5
出力電流 高過負荷 160%で 1 分間
シャフト出力 [kW(hp)](代表値) 0.37
定常 (380-440 V) [A] 1.3 1.8 2.4 3.0 4.1 5.6 7.2 10 13 16
断続 (380-440 V) [A] 2.1 2.9 3.8 4.8 6.6 9.0 11.5 16 20.8 25.6
定常 (441-500 V) [A] 1.2 1.6 2.1 2.7 3.4 4.8 6.3 8.2 11 14.5
断続 (441-500 V) [A] 1.9 2.6 3.4 4.3 5.4 7.7 10.1 13.1 17.6 23.2
定常 kVA(400 V AC) [kVA] 0.9 1.3 1.7 2.1 2.8 3.9 5.0 6.9 9.0 11
定常 kVA(460 V AC) [kVA] 0.9 1.3 1.7 2.4 2.7 3.8 5.0 6.5 8.8 11.6
最大入力電流
定常 (380-440 V) [A] 1.2 1.6 2.2 2.7 3.7 5.0 6.5 9.0 11.7 14.4
88
断続 (380-440 V) [A] 1.9 2.6 3.5 4.3 5.9 8.0 10.4 14.4 18.7 23
定常 (441-500 V) [A] 1.0 1.4 1.9 2.7 3.1 4.3 5.7 7.4 9.9 13
断続 (441-500 V) [A] 1.6 2.2 3.0 4.3 5.0 6.9 9.1 11.8 15.8 20.8
追加仕様
主電源、モーター、ブレーキ、負荷分散の
IP20、IP21 最大ケーブル断面
[mm2] ([AWG])
主電源、モーター、ブレーキ、負荷分散の
IP55、IP66 最大ケーブル断面
[mm2] ([AWG])
([AWG]) 6, 4, 4 (10,12,12)
定格最大負荷における推定電力損失[W]
4)
効率
2),5)
2),5)
3)
0.37
(0.5)
A1 A1 A1 A1 A1 – – – – –
(0.5)
35 42 46 58 62 88 116 124 187 255
0.93 0.95 0.96 0.96 0.97 0.97 0.97 0.97 0.97 0.97
0.55
(0.75)
0.55
(0.75)
0.75
(1.0)
0.75
(1.0)
1.1
(1.5)
1.1
(1.5)
1.5
(2.0)
1.5
(2.0)
4, 4, 4 (12,12,12)
(最低 0.2(24))
4, 4, 4 (12,12,12)
2.2
(3.0)
2.2
(3.0)
3.0
(4.0)
3.0
(4.0)
4.0
(5.0)
4.0
(5.0)
5.5
(7.5)
5.5
(7.5)
7.5
(10)
7.5
(10)
表 8.4 主電源 380-500 V AC (FC 302)、380-480 V AC (FC 301)、PK37-P7K5
34 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 41

仕様 操作ガイド
タイプ指定 P11K P15K P18K P22K
高/通常負荷
1)
荷)
シャフト出力 [kW(hp)](代表値) 11 (15) 15 (20) 15 (20)
エンクロージャー保護等級 IP20 B3 B3 B4 B4
エンクロージャー保護等級 IP21、IP55、IP66 B1 B1 B2 B2
出力電流
定常 (380-440 V) [A] 24 32 32 37.5 37.5 44 44 61
断続 (60 秒過負荷) (380-440 V) [A] 38.4 35.2 51.2 41.3 60 48.4 70.4 67.1
定常 (441-500 V) [A] 21 27 27 34 34 40 40 52
HO(高過負
断続 (60 秒過負荷)
(441-500 V) [A]
33.6 29.7 43.2 37.4 54.4 44 64 57.2
定常 kVA(400 V AC) [kVA] 16.6 22.2 22.2 26 26 30.5 30.5 42.3
定常 kVA(460 V AC) [kVA] – 21.5 – 27.1 – 31.9 – 41.4
最大入力電流
定常 (380-440 V) [A] 22 29 29 34 34 40 40 55
断続 (60 秒過負荷)
(380–440 V) [A]
35.2 31.9 46.4 37.4 54.4 44 64 60.5
定常 (441-500 V) [A] 19 25 25 31 31 36 36 47
断続 (60 秒過負荷)
(441-500 V) [A]
30.4 27.5 40 34.1 49.6 39.6 57.6 51.7
追加仕様
主電源、モーター、ブレーキ、負荷分散の
IP21、IP55、IP66 最大ケーブル断面
2),5)
16, 10, 16 (6, 8,6)16, 10, 16 (6, 8,
[mm2] ([AWG])
モーターの IP21、IP55、IP66 最大ケーブル断
2),5)
面
[mm2] ([AWG])
主電源、ブレーキ、モーター、負荷分散の
IP20 最大ケーブル断面
非接続状態での最大ケーブル断面
2),5)
[mm2] ([AWG])
2),5)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35,-,-(2,-,-) 35,-,-(2,-,-)
[mm2] ([AWG])
定格最大負荷における推定電力損失[W]
4)
効率
3)
291 392 379 465 444 525 547 739
0.98 0.98 0.98 0.98
NO
HO(高過負
荷)
6)
16, 10, 10 (6, 8, 8)
NO
18.5
(25)
HO(高過
負荷)
18.5
(25)
22 (30) 22 (30) 30 (40)
HO(高過
NO
負荷)
35,-,-(2,-,-) 35,-,-(2,-,-)
35, 25, 25 (2,
4, 4)
35, 25, 25 (2,
4, 4)
NO
8 8
表 8.5 主電源 380-500 V (FC 302)、380-480 V (FC 301)、P11K-P22K
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 35
Page 42
仕様
VLT® AutomationDrive FC 301/302
タイプ指定 P30K P37K P45K P55K P75K
高/通常負荷
1)
負荷)
シャフト出力 [kW(hp)](代表値) 30 (40) 37 (50) 37 (50) 45 (60)
HO(高過
HO(高過
NO
負荷)
HO(高過
NO
負荷)
45
55 (75) 55 (75)
(60)
HO(高過
NO
負荷)
HO(高過
NO
負荷)
NO
75
(100)75(100)90(125)
エンクロージャー保護等級 IP20 B4 C3 C3 C4 C4
エンクロージャー保護等級 IP21、
IP55、IP66
C1 C1 C1 C2 C2
出力電流
定常 (380-440 V) [A] 61 73 73 90 90 106 106 147 147 177
断続 (60 秒過負荷)
(380–440 V) [A]
91.5 80.3 110 99 135 117 159 162 221 195
定常 (441-500 V) [A] 52 65 65 80 80 105 105 130 130 160
断続 (60 秒過負荷)
(441-500 V) [A]
78 71.5 97.5 88 120 116 158 143 195 176
定常 kVA(400 V AC) [kVA] 42.3 50.6 50.6 62.4 62.4 73.4 73.4 102 102 123
定常 kVA(460 V AC) [kVA] – 51.8 – 63.7 – 83.7 – 104 – 128
最大入力電流
定常 (380-440 V) [A] 55 66 66 82 82 96 96 133 133 161
断続 (60 秒過負荷)
88
(380-440 V) [A]
定常 (441-500 V) [A] 47 59 59 73 73 95 95 118 118 145
断続 (60 秒過負荷)
(441-500 V) [A]
82.5 72.6 99 90.2 123 106 144 146 200 177
70.5 64.9 88.5 80.3 110 105 143 130 177 160
追加仕様
主電源、モーターの IP20 最大ケー
ブル断面5) [mm2] ([AWG])
ブレーキ、負荷分散の IP20 最大ケ
ーブル断面5) [mm2)] ([AWG])
35 (2) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
35 (2) 50 (1) 50 (1) 95 (4/0) 95 (4/0)
主電源とモーターの IP21、IP55、
IP66 最大ケーブル断面
5)
50 (1) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
[mm2] ([AWG])
ブレーキと負荷分散の IP21、IP55、
IP66 最大ケーブル断面
5)
50 (1) 50 (1) 50 (1) 95 (3/0) 95 (3/0)
[mm2] ([AWG])
主電源非接続状態での最大ケーブ
2),5)
ル断面
[mm2] ([AWG])
定格負荷における
推定電力損失 [W]
4)
効率
3)
50, 35, 35
(1, 2, 2)
95, 70, 70
(3/0, 2/0, 2/0)
570 698 697 843 891 1083 1022 1384 1232 1474
0.98 0.98 0.98 0.98 0.99
185、150、120
(350MCM、300MCM、
4/0)
表 8.6 主電源 380-500 V (FC 302)、380-480 V (FC 301)、P30K-P75K
36 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 43

仕様 操作ガイド
8.1.3 主電源 525-600 V ( FC 302 のみ)
タイプ指定 PK75 P1K1 P1K5 P2K2 P3K0 P4K0 P5K5 P7K5
シャフト出力 [kW(hp)](代表値)
エンクロージャー保護等級 IP20、IP21 A3 A3 A3 A3 A3 A3 A3 A3
エンクロージャー保護等級 IP55 A5 A5 A5 A5 A5 A5 A5 A5
出力電流
定常 (525-550 V) [A] 1.8 2.6 2.9 4.1 5.2 6.4 9.5 11.5
断続 (525-550 V) [A] 2.9 4.2 4.6 6.6 8.3 10.2 15.2 18.4
定常 (551-600 V) [A] 1.7 2.4 2.7 3.9 4.9 6.1 9.0 11.0
断続 (551-600 V) [A] 2.7 3.8 4.3 6.2 7.8 9.8 14.4 17.6
定常 kVA(525 V ) [kVA] 1.7 2.5 2.8 3.9 5.0 6.1 9.0 11.0
定常 kVA (575 V) [kVA] 1.7 2.4 2.7 3.9 4.9 6.1 9.0 11.0
最大入力電流
定常 (525-600 V) [A] 1.7 2.4 2.7 4.1 5.2 5.8 8.6 10.4
断続 (525-600 V) [A] 2.7 3.8 4.3 6.6 8.3 9.3 13.8 16.6
追加仕様
主電源、モーター、ブレーキ、負荷分散の最大
ケーブル断面
非接続状態での最大ケーブル断面
[mm2] ([AWG])
定格最大負荷における推定電力損失[W]
4)
効率
2),5)
[mm2] ([AWG])
2),5)
3)
0.75 (1)
35 50 65 92 122 145 195 261
0.97 0.97 0.97 0.97 0.97 0.97 0.97 0.97
1.1
(1.5)
1.5
(2.0)
2.2
(3.0)
4, 4, 4 (12,12,12)
(最低 0.2 (24))
6, 4, 4 (10,12,12)
3 (4.0) 4 (5.0)
5.5
(7.5)
7.5 (10)
8 8
表 8.7 主電源 525-600 V ( FC 302 のみ)、PK75-P7K5
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 37
Page 44

仕様
VLT® AutomationDrive FC 301/302
タイプ指定 P11K P15K P18K P22K P30K
高/通常負荷
1)
シャフト出力 [kW(hp)](代表値)
HO(高過
負荷)
11 (15) 15 (20)
HO(高過
NO
負荷)
15
(20)
NO
18.5
(25)
HO(高過
負荷)
18.5
(25)22(30)
HO(高過
NO
負荷)
22 (30) 30 (40) 30 (40)
HO(高過
NO
負荷)
NO
37
(50)
エンクロージャー保護等級 IP20 B3 B3 B4 B4 B4
エンクロージャー保護等級 IP21、
IP55、IP66
B1 B1 B2 B2 C1
出力電流
定常 (525-550 V) [A] 19 23 23 28 28 36 36 43 43 54
断続 (525-550 V) [A] 30 25 37 31 45 40 58 47 65 59
定常 (551-600 V) [A] 18 22 22 27 27 34 34 41 41 52
断続 (551-600 V) [A] 29 24 35 30 43 37 54 45 62 57
定常 kVA (550 V) [kVA] 18.1 21.9 21.9 26.7 26.7 34.3 34.3 41.0 41.0 51.4
定常 kVA (575 V) [kVA] 17.9 21.9 21.9 26.9 26.9 33.9 33.9 40.8 40.8 51.8
最大入力電流
定常 550V 時 [A] 17.2 20.9 20.9 25.4 25.4 32.7 32.7 39 39 49
断続 550V 時 [A] 28 23 33 28 41 36 52 43 59 54
定常 575V 時 [A] 16 20 20 24 24 31 31 37 37 47
断続 575 V 時 [A] 26 22 32 27 39 34 50 41 56 52
88
追加仕様
主電源、ブレーキ、モーター、負荷
分散の IP20 最大ケーブル断面
2),5)
[mm2] ([AWG])
主電源、モーター、ブレーキ、負荷
分散の IP21、IP55、IP66 最大ケーブ
2),5)
ル断面
[mm2] ([AWG])
モーターの IP21、IP55、IP66 最大ケ
ーブル断面
2),5)
[mm2] ([AWG])
非接続状態での最大ケーブル断面
2),5)
[mm2] ([AWG])
定格負荷における
推定電力損失 [W]
4)
効率
3)
10, 10,- (8,
8,-)
16, 10, 10 (6,
8, 8)
10, 10,- (8,
8,-)
10, 10,- (8,
8,-)
16, 10, 10 (6,
8, 8)
10, 10,- (8,
8,-)
16, 10, 10
(6, 8, 8)
35,-,-(2,-,-) 35,-,-(2,-,-) 35,-,-(2,-,-)
35,-,-(2,-,-) 35,-,-(2,-,-) 50,-,- (1,-,-)
35, 25, 25 (2,
4, 4)
35, 25, 25 (2,
4, 4)
50,-,- (1,-,-)
50, 35, 35
(1, 2, 2)
220 300 300 370 370 440 440 600 600 740
0.98 0.98 0.98 0.98 0.98
表 8.8 主電源 525-600 V(FC 302 のみ)、P11K–P30K
38 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 45

仕様 操作ガイド
タイプ指定 P37K P45K P55K P75K
高/通常負荷
シャフト出力 [kW(hp)](代表値)
エンクロージャー保護等級 IP20 C3 C3 C3 C4 C4
エンクロージャー保護等級 IP21、IP55、IP66 C1 C1 C1 C2 C2
出力電流
定常 (525-550 V) [A] 54 65 65 87 87 105 105 137
断続 (525-550 V) [A] 81 72 98 96 131 116 158 151
定常 (551-600 V) [A] 52 62 62 83 83 100 100 131
断続 (551-600 V) [A] 78 68 93 91 125 110 150 144
定常 kVA (550 V) [kVA] 51.4 61.9 61.9 82.9 82.9 100.0 100.0 130.5
定常 kVA (575 V) [kVA] 51.8 61.7 61.7 82.7 82.7 99.6 99.6 130.5
最大入力電流
定常 550V 時 [A] 49 59 59 78.9 78.9 95.3 95.3 124.3
断続 550V 時 [A] 74 65 89 87 118 105 143 137
定常 575V 時 [A] 47 56 56 75 75 91 91 119
断続 575 V 時 [A] 70 62 85 83 113 100 137 131
追加仕様
主電源、モーターの IP20 最大ケーブル断面5) [mm2]
([AWG])
ブレーキ、負荷分散の IP20 最大ケーブル断面
[mm2] ([AWG])
主電源とモーターの IP21、IP55、IP66 最大ケーブル
断面5) [mm2] ([AWG])
ブレーキと負荷分散の IP21、IP55、IP66 最大ケーブ
ル断面
主電源非接続状態での最大ケーブル断面
[mm2] ([AWG])
定格最大負荷における推定電力損失[W]
4)
効率
1)
5)
[mm2] ([AWG])
2),5)
3)
HO(高過
負荷)
37 (50) 45 (60) 45 (60) 55 (75) 55 (75)
5)
740 900 900 1100 1100 1500 1500 1800
0.98 0.98 0.98 0.98
HO(高過
NO
50, 35, 35
(1, 2, 2)
負荷)
50 (1) 150 (300 MCM)
50 (1) 95 (4/0)
50 (1) 150 (300 MCM)
50 (1) 95 (4/0)
HO(高過
NO
(3/0, 2/0, 2/0)
負荷)
95, 70, 70
NO
75
(100)75(100)90(125)
HO(高過
負荷)
185、150、120
(350MCM、300MCM、
NO
4/0)
8 8
表 8.9 主電源 525-600 V P37K–P75K ((FC 302 のみ)、P37K–P75K
最大ヒューズ定格については、章 8.7 ヒューズと遮断器を参照してください。
1) 高過負荷 = 60 秒間で 150%又は 160%のトルク。標準過負荷 = 60 秒間で 110%のトルク。
2) 最大ケーブル断面積の三つの値は、単芯、剛性ワイヤ及びスリーブ付き剛性ワイヤの各々に対応します。
3) 周波数変換器冷却の寸法設定に適用。スイッチ周波数がデフォルト設定よりも高い場合は、電力損失が顕著に増加する可能性があり
ます。LCP および代表的なコントロール・カードの電力消費が含まれます。EN 50598-2 に従った電力損失データについては、以下を
参照してください: drives.danfoss.com/knowledge-center/energy-efficiency-directive/#/
4) 公称電流で測定された効率。エネルギー効率クラスについては、章 8.4 周囲条件を参照してください。部分負荷損失については、
以下を参照してください: drives.danfoss.com/knowledge-center/energy-efficiency-directive/#/.
5) ケーブル断面積は、銅ケーブルを想定しています。
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 39
Page 46
仕様
VLT® AutomationDrive FC 301/302
8.1.4 主電源 525-690 V (FC 302 のみ)
タイプ指定 P1K1 P1K5 P2K2 P3K0 P4K0 P5K5 P7K5
高/通常負荷
シャフト出力 [kW(hp)](代表値)
エンクロージャー保護等級 IP20 A3 A3 A3 A3 A3 A3 A3
出力電流
定常 (525-550 V) [A] 2.1 2.7 3.9 4.9 6.1 9.0 11.0
断続 (525-550 V) [A] 3.4 4.3 6.2 7.8 9.8 14.4 17.6
定常 (551-690 V) [A] 1.6 2.2 3.2 4.5 5.5 7.5 10.0
断続 (551-690 V) [A] 2.6 3.5 5.1 7.2 8.8 12.0 16.0
定常 KVA 525 V 1.9 2.5 3.5 4.5 5.5 8.2 10.0
定常 KVA 690 V 1.9 2.6 3.8 5.4 6.6 9.0 12.0
最大入力電流
定常 (525-550 V) [A] 1.9 2.4 3.5 4.4 5.5 8.1 9.9
断続 (525-550 V) [A] 3.0 3.9 5.6 7.0 8.8 12.9 15.8
定常 (551-690 V) [A] 1.4 2.0 2.9 4.0 4.9 6.7 9.0
断続 (551-690 V) [A] 2.3 3.2 4.6 6.5 7.9 10.8 14.4
追加仕様
88
主電源、モーター、ブレーキ、負荷分散の最大ケーブ
ル断面
非接続状態での最大ケーブル断面
[mm2] ([AWG])
定格最大負荷における推定電力損失 (W)
4)
効率
1)
2),5)
[mm2] ([AWG])
2),5)
HO/NO HO/NO HO/NO HO/NO HO/NO HO/NO HO/NO
1.1
(1.5)
3)
44 60 88 120 160 220 300
0.96 0.96 0.96 0.96 0.96 0.96 0.96
1.5
(2.0)
2.2
(3.0)
4, 4, 4 (12, 12, 12) (最低 0.2 (24)
6, 4, 4 (10, 12, 12)
3.0
(4.0)
4.0
(5.0) 5.5 (7.5) 7.5 (10)
表 8.10 A3 エンクロージャー、主電源 525-690 V IP20/保護シャーシ、P1K1-P7K5
40 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 47

仕様 操作ガイド
タイプ指定 P11K P15K P18K P22K
高/通常負荷
550 V でのシャフト出力 [kW(hp)](代表値) 7.5
690 V でのシャフト出力 [kW(hp)](代表値) 11
エンクロージャー保護等級 IP20 B4 B4 B4 B4
エンクロージャー保護等級 IP21、IP55 B2 B2 B2 B2
出力電流
定常 (525-550 V) [A] 14.0 19.0 19.0 23.0 23.0 28.0 28.0 36.0
断続 (60 秒過負荷) (525-550 V) [A] 22.4 20.9 30.4 25.3 36.8 30.8 44.8 39.6
定常 (551-690 V) [A] 13.0 18.0 18.0 22.0 22.0 27.0 27.0 34.0
断続 (60 秒過負荷) (551-690 V) [A] 20.8 19.8 28.8 24.2 35.2 29.7 43.2 37.4
定常 kVA (550 V) [kVA] 13.3 18.1 18.1 21.9 21.9 26.7 26.7 34.3
定常 kVA (690 V) [kVA] 15.5 21.5 21.5 26.3 26.3 32.3 32.3 40.6
最大入力電流
定常(550 V) [A] 15.0 19.5 19.5 24.0 24.0 29.0 29.0 36.0
断続 (60 秒過負荷) (550 V) [A] 23.2 21.5 31.2 26.4 38.4 31.9 46.4 39.6
定常(690 V) [A] 14.5 19.5 19.5 24.0 24.0 29.0 29.0 36.0
断続 (60 秒過負荷) (690 V) [A] 23.2 21.5 31.2 26.4 38.4 31.9 46.4 39.6
追加仕様
主電源、モーター、負荷分散、ブレーキの最大ケー
ブル断面
主電源非接続状態での最大ケーブル断面
[mm2] ([AWG])
定格最大負荷における推定電力損失 (W)
4)
効率
1)
2),5)
[mm2] ([AWG])
2),5)
3)
HO(高過
負荷) NO
(10)
(15)
150 220 220 300 300 370 370 440
0.98 0.98 0.98 0.98
11
(15)
15
(20)
HO(高過
負荷) NO
11
(15)
15
(20)
(20)
18.5
(25)
35, 25, 25 (2, 4, 4)
16, 10, 10 (6, 8, 8)
HO(高過
負荷) NO
15
15
(20)
18.5
(25)
18.5
(25)
22
(30)
HO(高過
負荷) NO
18.5
(25)
22
(30)
(30)
(40)
22
30
8 8
表 8.11 B2/B4 エンクロージャー、主電源 525-690 V AC IP20/IP21/IP55 - シャーシ/NEMA 1/NEMA 12 (FC 302 のみ)、P11K-P22K
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 41
Page 48

仕様
タイプ指定 P30K P37K P45K P55K P75K
高/通常負荷
550 V でのシャフト出力 [kW(hp)](代表値)22
690 V でのシャフト出力 [kW(hp)](代表値)30
エンクロージャー保護等級 IP20 B4 C3 C3 D3h D3h
エンクロージャー保護等級 IP21、IP55 C2 C2 C2 C2 C2
出力電流
定常 (525-550 V) [A] 36.0 43.0 43.0 54.0 54.0 65.0 65.0 87.0 87.0 105
断続 (60 秒過負荷) (525-550 V) [A] 54.0 47.3 64.5 59.4 81.0 71.5 97.5 95.7 130.5 115.5
定常 (551-690 V) [A] 34.0 41.0 41.0 52.0 52.0 62.0 62.0 83.0 83.0 100
断続 (60 秒過負荷) (551-690 V) [A] 51.0 45.1 61.5 57.2 78.0 68.2 93.0 91.3 124.5 110
定常 kVA (550 V) [kVA] 34.3 41.0 41.0 51.4 51.4 61.9 61.9 82.9 82.9 100
定常 kVA (690 V) [kVA] 40.6 49.0 49.0 62.1 62.1 74.1 74.1 99.2 99.2 119.5
最大入力電流
定常(550 V) [A] 36.0 49.0 49.0 59.0 59.0 71.0 71.0 87.0 87.0 99.0
断続 (60 秒過負荷) (550 V) [A] 54.0 53.9 72.0 64.9 87.0 78.1 105.0 95.7 129 108.9
88
定常(690 V) [A] 36.0 48.0 48.0 58.0 58.0 70.0 70.0 86.0 – –
断続 (60 秒過負荷) (690 V) [A] 54.0 52.8 72.0 63.8 87.0 77.0 105 94.6 – –
追加仕様
主電源、モーターの最大ケーブル断面
[mm2] ([AWG])
、モーター、負荷分散、ブレーキの最大ケ
ーブル断面5) [mm2] ([AWG])
主電源非接続状態での最大ケーブル断面
2),5)
[mm2] ([AWG])
定格負荷における
推定電力損失 [W]
4)
効率
1)
5)
3)
VLT® AutomationDrive FC 301/302
HO(高
HO(高過
負荷) NO
(30)30(40)30(40)37(50)37(50)45(60)45(60)55(75)55(75)75(100)
(40)37(50)37(50)45(60)45(60)55(75)55(75)75(100)75(100)90(125)
600 740 740 900 900 1100 1100 1500 1500 1800
0.98 0.98 0.98 0.98 0.98
過負
荷) NO
95, 70, 70
(3/0, 2/0, 2/0)
HO(高過
負荷) NO
150 (300 MCM)
95 (3/0)
HO(高過
負荷) NO
185、150、120
(350MCM、300MCM、
4/0)
HO(高過
負荷) NO
–
表 8.12 B4、C2、C3 エンクロージャー、主電源 525-690 V IP20/IP21/IP55 - シャーシ/NEMA 1/NEMA 12 (FC 302 のみ)、P30K-P75K
最大ヒューズ定格については、章 8.7 ヒューズと遮断器を参照してください。
1) 高過負荷 = 60 秒間で 150%又は 160%のトルク。標準過負荷 = 60 秒間で 110%のトルク。
2) 最大ケーブル断面積の三つの値は、単芯、剛性ワイヤ及びスリーブ付き剛性ワイヤの各々に対応します。
3) 周波数変換器冷却の寸法設定に適用。スイッチ周波数がデフォルト設定よりも高い場合は、電力損失が顕著に増加する可能性があり
ます。LCP および代表的なコントロール・カードの電力消費が含まれます。EN 50598-2 に従った電力損失データについては、以下を
参照してください: drives.danfoss.com/knowledge-center/energy-efficiency-directive/#/
4) 公称電流で測定された効率。エネルギー効率クラスについては、章 8.4 周囲条件を参照してください。部分負荷損失については、
以下を参照してください: drives.danfoss.com/knowledge-center/energy-efficiency-directive/#/.
5) ケーブル断面積は、銅ケーブルを想定しています。
42 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 49

仕様
操作ガイド
8.2 主電源
主電源
電源供給端子(6-パルス) L1, L2, L3
電源供給端子(12-パルス) L1-1, L2-1, L3-1, L1-2, L2-2, L3-2
供給電圧
供給電圧
供給電圧
供給電圧
FC 301: 380–480 V/FC 302: 380–500 V ±10%
FC 302: 525–600 V ±10%
FC 302: 525–690 V ±10%
主電源電圧低/主電源降下:
低い主電源電圧又は主電源降下の間、 周波数変換器は、DC リンク電圧が最低停止レベル以下に落ちるまで稼働します。
それは通常、FC の最低定格供給電圧の 15% 降下時となります。周波数変換器の最低定格供給電圧を 10%以上下回る主
電源電圧において始動や最大トルクは期待できません。
供給周波数
主電源相間の一時的最大アンバランス 定格供給電圧の 3.0%
真の力率 (λ) ≥0.9 定格負荷での公称値
変位力率 (cos ϕ) 1 に近い (>0.98)
入力点スイッチング電源(L1、L2/L、L3) (電源投入)≤7.5 kW(10 hp)
入力点スイッチング電源(L1、L2、L3) (電源投入)11―75 kW(15-101 hp) 最大 1 回/分
入力点スイッチング電源(L1、L2、L3) (電源投入)≥90 kW(121 hp)
EN60664-1 に準じた環境 過電圧カテゴリー III/汚染度 2
ユニットは、100000 RMS 対称アンペア以下を最大 240/500/600/690 V で流すことができる回路での使用に適してい
ます。
200–240 V ±10%
50/60 Hz ±5%
最大 2 回/分
最大 1 回/2 分
8 8
モーター出力とモーター・データ
8.3
モーター出力 (U、V、W):
出力電圧 供給電圧の 0–100%
出力周波数 0–590 Hz
磁束モードでの出力周波数 0–300 Hz
出力側スイッチング 無制限
立ち上がり/立ち下がり時間 0.01–3600 s
1) 電圧及び電力に依存。
トルク特性
始動トルク (一定トルク) 60 秒で最大 160%1)、10 分で 1 回
始動/過負荷トルク(可変トルク) 0.5 秒まで最大 110%1)、10 分で 1 回
磁束でのトルク立ち上がり時間(5kHz fsw用)
VVC+のトルク立ち上がり時間(fswとは別)
1 ms
10 ms
1) パーセントは公称トルクに関連します。
1)
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 43
Page 50

仕様
VLT® AutomationDrive FC 301/302
8.4 周囲条件
環境
エンクロージャー IP20/シャーシ、IP21/タイプ 1、IP55/タイプ 12、IP66/タイプ 4X
振動テスト 1.0 g
最大 THD
最大相対湿度 5–93% (IEC 721-3-3; クラス 3K3 (非結露) 運転中
劣悪な環境(IEC 60068-2-43) H2S テスト
周囲温度
フルスケール動作時の最低周囲温度
性能低下時の最低周囲温度
保管/輸送時の温度
最大海抜高度 (定格低減なし)
EMC 規格、エミッション EN 61800-3
EMC 規格、イミュニティ EN 61800-3
エネルギー効率クラス
v
1)
1)
2)
最高 50°C (122 °F) (24 時間平均最高 45 °C (113 °F))
0 °C (32 °F)
-10 °C (14 °F)
-25 ~ +65/70 °C (-13 ~ +149/158 °F)
1000 m (3280 ft)
1) 以下については、デザインガイドの特殊条件を参照してください。
周囲温度が高い場合の定格低減。
•
高度が高い場合の定格低減。
•
88
2) 以下では EN 50598-2 に従って決定されます:
定格負荷。
•
90% 定格周波数。
•
スイッチ周波数工場出荷時設定。
•
スイッチ・パターン工場出荷時設定。
•
10%
クラス Kd
IE2
ケーブル仕様
8.5
ケーブル長とコントロール・ケーブルの断面積
モーター・ケーブルの最大長さ (シールドされている) FC 301: 50 m (164 ft)/FC 302: 150 m (492 ft)
モーター・ケーブルの最大長さ (シールドされていない) FC 301: 75 m (246 ft)/FC 302: 300 m (984 ft)
コントール端子への最大断面積(ケーブル端スリーブのないフレキシブル/剛性ワイヤ) 1.5 mm2/16 AWG
コントール端子への最大断面積(ケーブル端スリーブのないフレキシブルワイヤ) 1 mm2/18 AWG
コントール端子への最大断面積(ケーブル端スリーブ、カラー付きフレキシブルワイヤ) 0.5 mm2/20 AWG
コントロール端子に対する最小断面積 0.25 mm2/24 AWG
1)
1) 電力ケーブルについては、章 8.1 電気データの電気データ表をご参照ください。
8.6 コントロール入力/出力とコントロールデータ
デジタル入力
プログラマブル・ディジタル入力 FC 301: 4 (5)1)/FC 302: 4 (6)
端子番号 18, 19, 271), 291), 32, 33
論理 PNP または NPN
電圧レベル 0–24 V 直流
電圧レベル、論理 0 PNP <5 V DC
電圧レベル、論理 1 PNP >10 V DC
電圧レベル、論理 0 NPN
電圧レベル、論理 1 NPN
入力の最大電圧 28 V 直流
パルス周波数範囲 0–110 kHz
(デューティー・サイクル) 最小パルス幅 4.5 ms
入力抵抗、R
i
1) 端子 27 と 29 は出力としてもプログラムできます。
2)
2)
>19 V DC
<14 V DC
約 4 kΩ
1)
44 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 51

Mains
Functional
isolation
PELV isolation
Motor
DC-bus
High
voltage
Control
+24 V
RS485
18
37
130BA117.10
仕様 操作ガイド
2) STO 入力端子 37 を除く。
STO 端子 37
1, 2)
(端子 37 は固定 PNP 論理)
電圧レベル 0–24 V 直流
電圧レベル、論理 0 PNP < 4 V DC
電圧レベル、論理 1 PNP > 20 V 直流
入力の最大電圧 28 V 直流
24 V の入力電流(代表値) 50 mA rms
20 V の入力電流(代表値) 60 mA rms
入力キャパシタンス 400 nF
すべてのディジタル入力は供給電圧 (PELV) と他の高電圧端子から電気絶縁されています。
1) 端子 37 と STO についての詳細情報については、章 4.7.1 Safe Torque Off (STO)を参照してください。
2) STO と、内部に直流コイルを備えた接触器を同時に使用するときは、オフにした場合に電流がコイルから戻る経路を
確保することが重要です。これは、コイルにフリーホイールダイオード(または、応答時間が短い 30 V あるいは 50 V
MOV)を使用することで可能になります。通常、接触器にはこのダイオードが付属しています。
アナログ入力
アナログ入力の数 2
端子番号 53, 54
モード 電圧又は電流
モード選択 スイッチ S201 とスイッチ S202
電圧モード スイッチ S201/スイッチ S202 = オフ (U)
電圧レベル -10 V~+10 V (スケーラブル)
入力抵抗、R
最大電圧
i
約 10 kΩ
±20 V
電流モード スイッチ S201/スイッチ S202 = オン (I)
電流レベル 0/4~20 mA (スケーラブル)
入力抵抗、R
i
約 200 Ω
最大電流 30 mA
アナログ入力の分解能 10 ビット (+ 符号)
アナログ入力の精度 最大エラー、全スケールの 0.5%
帯域幅 100 Hz
アナログ入力は、供給電圧 (PELV) などの高電圧端子から電気絶縁されています。
8 8
図 8.1 PELV 絶縁
パルス/エンコーダー入力
プログラマブル・パルス/エンコーダー入力: 2/1
端子番号パルス/エンコーダー 291), 332)/323), 33
端子 29、32、33 での最大周波数 110 kHz (プッシュプル駆動)
端子 29、32、33 での最大周波数 5 kHz (オープン・コレクター)
i
プログラミング・ガイドのパラメーター・グループ 5-1* ディジタル入力
を参照してください。
約 4 kΩ
端子 29、32、33 での最小周波数 4 Hz
電圧レベル
入力の最大電圧 28 V 直流
入力抵抗、R
パルス入力精度 (0.1–1 kHz) 最大エラー: 全スケールの 0.1%
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 45
3)
Page 52
仕様
エンコーダー入力精度 (1–11 kHz) 最大エラー: 全スケールの 0.05%
VLT® AutomationDrive FC 301/302
パルスおよびエンコーダー入力(端子 29、32、33)は、供給電圧(PELV)とその他の高電圧端子から電気絶縁されていま
す。
1) FC 302 のみ。
2) パルス入力は 29 および 33 です
3) エンコーダー入力: 32=A, 33=B.。
ディジタル出力
プログラマブル・ディジタル/パルス出力 2
端子番号 27, 29
ディジタル/周波数出力の電圧レベル 0–24 V
最大出力電流 (シンク又はソース) 40 mA
周波数出力時の最大負荷
周波数出力時の最大容量負荷 10 nF
周波数出力時の最低出力周波数 0 Hz
周波数出力時の最大出力周波数 32 kHz
周波数出力の精度 最大エラー: 全スケールの 0.1%
周波数出力の分解能 12 ビット
1)
1 kΩ
1) 端子 27 と 29 は入力としてもプログラム設定できます。
ディジタル出力は、供給電圧 (PELV) とその他の高電圧端子から電気絶縁されています。
88
アナログ出力
プログラマブル・アナログ出力の数 1
端子番号 42
アナログ出力の電流範囲 0/4~20 mA
最大負荷 GND - アナログ出力
アナログ出力の精度 最大エラー: 全スケールの 0.5%
アナログ出力の分解能 12 ビット
500 Ω
アナログ出力は供給電圧 (PELV)などの高電圧端子から電気絶縁されています。
コントロール・カード、24 V 直流出力
端子番号 12, 13
出力電圧 24 V +1、-3 V
最大負荷 200 mA
24 V 直流電源は供給電圧 (PELV) から電気絶縁されていますが、アナログ及びディジタル入出力と同じ電位がありま
す。
コントロール・カード、10 V DC 出力
端子番号
出力電圧
最大負荷 15 mA
10.5 V ±0.5 V
±50
10 V 直流電源は供給電圧 (PELV) などの高電圧端子から電気絶縁されています。
コントロール・カード、RS485 シリアル通信
端子番号 68 (P、TX+、RX+)、69 (N、TX-、RX-)
端子番号 61 端子 68 と 69 に共通
RS485 シリアル通信回路は他の中央回路から機能的に分離され、供給電圧 (PELV) から電気絶縁されています。
コントロール・カード、USB シリアル通信
USB 標準 1.1 (全速)
USB プラグ USB タイプ B プラグ
PC への接続は、標準ホスト/デバイス USB ケーブルを介して行われます。
USB 接続は、供給電圧 (PELV) などの高電圧端子から電気的に絶縁されています。
USB 接地接続は、保護接地からは電気絶縁されていません。一つの絶縁されたラップトップだけを周波数変換器の USB
コネクターへの PC 接続として使用してください。
46 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 53

仕様 操作ガイド
リレー出力
プログラマブル・リレー出力 FC 301 全 kW: 1/FC 302 全 kW: 2
リレー 01 端子番号 1-3 (B 接点) 、1-2 (A 接点)
1-3 (NC)、1-2 (NO) の最大端子負荷 (交流 -1)1) (抵抗負荷) 240 V AC、2 A
最大端子負荷 (交流 -15)1) (誘導負荷@ 、cosφ0.4 において)
1-2 (NO)、1-3 (NC)の最大端子負荷(直流 -1)1) (抵抗負荷) 60 V DC、1 A
最大端子負荷 (直流 -13)1) (誘導負荷) 24 V 直流、0.1 A
リレー 02 (FC 302 のみ) 端子番号 4–6 (B 接点) 、4–5 (A 接点)
4-5 (NO)の最大端子負荷(交流 -1)1) (抵抗負荷)2),3) 過電圧 cat. II 400 V AC、2 A
4–5 (NO)の最大端子負荷(交流-15)1)(誘導負荷 @ cosφ 0.4)
4–5 (NO)の最大端子負荷 (直流-1)1) (抵抗負荷) 80 V DC、2 A
4–5 (NO)の最大端子負荷(直流-13)1) (誘導負荷) 24 V 直流、0.1 A
4–6 (NC)の最大端子負荷(交流-1)1) (抵抗負荷) 240 V AC、2 A
4–6 (NC)の最大端子負荷(交流-15)1)(誘導負荷 @ cosφ 0.4)
4–6 (NC)の最大端子負荷(直流-1)1) (抵抗負荷) 50 V DC、2 A
4–6 (NC)の最大端子負荷(直流-13)1) (誘導負荷) 24 V 直流、0.1 A
1-3 (NC) 、1-2 (NO) 、4-6 (NC) 、4-5 (NO) の最小端子負荷 24 V 直流 1 mA、24 V 交流 20 mA
EN 60664-1 に準じた環境 過電圧カテゴリー III/汚染度 2
240 V AC、0.2 A
240 V AC、0.2 A
240 V AC、0.2 A
1) IEC 60947 パート 4 及び 5
リレー接点は補強絶縁 (PELV) により他の回路から電気絶縁されています。
2) 過電圧カテゴリー II。
3) Ul アプリケーション 300 V AC 2 A。
コントロール・カード性能
スキャン間隔 1 ms
8 8
コントロール特性
出力周波数 0~590 Hz での分解能
精密なスタート/ストップの繰り返し精度(端子 18, 19)
システム応答時間 (端子 18、19、27、29、32、33)
速度コントロール範囲 (開ループ) 同期速度の 1:100
速度コントロール範囲(閉ループ) 同期速度の 1:1000
速度精度 (開ループ)
速度精度(閉ループ)、フィードバック装置の分解能による
トルク・コントロール制度(速度フィードバック)
30–4000 RPM: エラー ±8 RPM
0–6000 RPM: エラー ±0.15 RPM
最大エラー 定格トルクの±5%
±0.003 Hz
≤±0.1 ms
≤2 ms
すべてのコントロール特性は、4 極非同期モーターに基づいています。
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 47
Page 54

仕様
VLT® AutomationDrive FC 301/302
8.7 ヒューズと遮断器
供給側では、周波数変換器(初回故障)内でコンポーネントが破損した場合の保護のため、ヒューズ及び/又は回路ブレー
カーを使用してください。
注記
IEC 60364 (CE) およ び NEC 2009 (UL) に準拠した設置においては、供給側でのヒューズ使用は必須です。
推奨
gG タイプヒューズ。
•
モーラータイプ 遮断器。他の遮断機タイプについては、周波数変換器へのエネルギーをモーラー タイプによ
•
るエネルギー供給と同等か、それ以下のレベルにします。
推奨ヒューズと推奨回路ブレーカーを使用することで、周波数変換器に対して発生しうる破損をユニット内の破損に限定
することができます。詳細は、
応用注記及び回路ブレーカー
を参照してください。
章 8.7.1 CE 準拠から章 8.7.2 UL 適合
供給できる回路での使用に適しています。適切なヒューズにより、周波数変換器短絡電流定格(SCCR) は 100000 A
なります。
までのヒューズは、周波数変換器の電圧定格に応じて、100000 A
(同期)を
rms
rms
に
88
48 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 55

仕様 操作ガイド
8.7.1 CE 準拠
200–240 V
エンクロ
ージャー
A1 0.25–1.5 (0.34–
A2 0.25–1.5
A3 3.0 (4.0) gG-16 gG-32 PKZM0-25 25
A4 0.25–1.5
A5 0.25–1.5
B1 5.5 (7.5) gG-25 gG-80 PKZM4-63 63
B2 11.0 (15.0) gG-50 gG-100 NZMB1-A100 100
B3 5.5 (7.5) gG-25 gG-63 PKZM4-50 50
B4 7.5 (10.0) gG-32 gG-125 NZMB1-A100 100
C1 15.0 (20.0) gG-63 gG-160 NZMB2-A200 160
C2 30.0 (40.0) aR-160 aR-200 NZMB2-A250 250
C3 18.5 (25.0) gG-80 gG-150 NZMB2-A200 150
C4 30.0 (40.0) aR-160 aR-200 NZMB2-A250 250
出力 [kW (hp)] 推奨される
ヒューズ・サイズ
gG-10 gG-25 PKZM0-16 16
2.0)
gG-10 gG-25 PKZM0-25 25
(0.34–2.0)
2.2 (3.0) gG-16
3.7 (5.0) gG-20
gG-10 gG-32 PKZM0-25 25
(0.34–2.0)
2.2 (3.0) gG-16
gG-10 gG-32 PKZM0-25 25
(0.34–2.0)
2.2–3.0
(3.0–4.0)
3.7 (5.0) gG-20
7.5 (10.0) gG-32
11.0 (15.0) gG-50
15.0 (20.0) gG-63
18.5 (25.0) gG-80
22.0 (30.0) gG-100 aR-160
37.0 (50.0) aR-200 aR-250
22.0 (30.0) aR-125 aR-160
37.0 (50.0) aR-200 aR-250
gG-16
最大ヒューズ
推奨
推奨される遮断機
モーラー
最大トリップレベル
[A]
8 8
表 8.13 200-240 V、エンクロージャー・サイズ A、B、C
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 49
Page 56

仕様
380–500 V
VLT® AutomationDrive FC 301/302
エンクロ
ージャー
A1 0.37–1.5
A2 0.37–3.0
A3 5.5–7.5
A4 0.37–3.0
A5 0.37–3.0
B1 11–15
B2 18.5 (25.0) gG-50 gG-100 NZMB1-A100 100
88
B3 11–15
B4 18.5 (25.0) gG-50 gG-125 NZMB1-A100 100
C1 30.0 (40.0) gG-80 gG-160 NZMB2-A200 160
C2 55.0 (75.0) aR-200 aR-250 NZMB2-A250 250
C3 37.0 (50.0) gG-100 gG-150 NZMB2-A200 150
C4 55.0 (75.0) aR-200 aR-250 NZMB2-A250 250
出力 [kW (hp)] 推奨される
ヒューズ・サイズ
gG-10 gG-25 PKZM0-16 16
(0.5–2.0)
gG-10 gG-25 PKZM0-25 25
(0.5–4.0)
4.0 (5.0) gG-16
gG-16 gG-32 PKZM0-25 25
(7.5–10.0)
gG-10 gG-32 PKZM0-25 25
(0.5–4.0)
4.0 (5.0) gG-16
gG-10 gG-32 PKZM0-25 25
(0.5–4.0)
4.0–7.5
(5.0–10.0)
(15.0–20.0)
22.0 (30.0) gG-63
(15.0–20.0)
22.0 (30.0) gG-63
30.0 (40.0) gG-80
37.0 (50.0) gG-100
45.0 (60.0) gG-160
75.0 (100.0) aR-250
45.0 (60.0) gG-160 gG-160
75.0 (100.0) aR-250
gG-16
gG-40 gG-80 PKZM4-63 63
gG-40 gG-63 PKZM4-50 50
推奨
最大ヒューズ
推奨される遮断機モーラー最大トリップレベル
[A]
表 8.14 380–500 V、エンクロージャー・サイズ A、B、C
50 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 57

仕様 操作ガイド
525–600 V
エンクロ
ージャー
出力 [kW (hp)] 推奨される
ヒューズ・サイズ
A2 0-75-4.0
(1.0–5.0)
A3 5.5 (7.5) gG-10 gG-32 PKZM0-25 25
7.5 (10.0) gG-16
A5 5.5 (7.5) gG-10 gG-32 PKZM0-25 25
7.5 (10.0) gG-16
B1 11.0 (15.0) gG-25 gG-80 PKZM4-63 63
15.0 (20.0) gG-32
18.5 (25.0) gG-40
B2 22.0 (30.0) gG-50 gG-100 NZMB1-A100 100
30.0 (40.0) gG-63
B3 11.0 (15.0) gG-25 gG-63 PKZM4-50 50
15.0 (20.0) gG-32
B4 18.5 (25.0) gG-40 gG-125 NZMB1-A100 100
22.0 (30.0) gG-50
30.0 (40.0) gG-63
C1 37.0 (50.0) gG-63 gG-160 NZMB2-A200 160
45.0 (60.0) gG-100
55.0 (60.0) aR-160 aR-250
C2 75.0 (100.0) aR-200 aR-250 NZMB2-A250 250
C3 37.0 (50.0) gG-63 gG-150 NZMB2-A200 150
45.0 (60.0) gG-100 gG-150 NZMB2-A200
C4 55.0 (75.0) aR-160 aR-250 NZMB2-A250 250
75.0 (100.0) aR-200
gG-10 gG-25 PKZM0-25 25
推奨
最大ヒューズ
推奨される遮断機
モーラー
最大トリップレベル
[A]
8 8
表 8.15 525-600 V、エンクロージャー・サイズ A、B、C
525–690 V
エンクロ
ージャー
B2/B4 11.0 (15.0)
B4/C2 30.0 (40.0) gG-63 gG-80 – –
C2/C3 37.0 (50.0)
表 8.16 525-690 V、エンクロージャー・サイズ A、B、C
出力 [kW (hp)] 推奨される
A3 1.1 (1.5)
1.5 (2.0)
2.2 (3.0)
3.0 (4.0)
4.0 (5.0)
5.5 (7.5)
7.5 (10.0)
15.0 (20.0)
18.5 (25.0)
22.0 (30.0)
45.0 (60.0)
C2 55.0 (75.0)
75.0 (100.0)
ヒューズ・サイズ
gG-6
gG-6
gG-6
gG-10
gG-10
gG-16
gG-16
gG-25
gG-32
gG-32
gG-40
gG-63
gG-80
gG-100
gG-125
推奨
最大ヒューズ
gG-25
gG-25
gG-25
gG-25
gG-25
gG-25
gG-25
gG-63
gG-100
gG-125
gG-160
推奨される遮断機
モーラー
PKZM0-16 16
– –
– –
– –
最大トリップレベル
[A]
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 51
Page 58

仕様
VLT® AutomationDrive FC 301/302
8.7.2 UL 適合
200–240 V
推奨最大ヒューズ
出力 [kW
(hp)]
0.25–
0.37
(0.34–
0.5)
0.55–1.1
(0.75–
1.5)
1.5 (2.0) KTN-R-15 JKS-15 JJN-15 FNQ-R-15 KTK-R-15 LP-CC-15
2.2 (3.0) KTN-R-20 JKS-20 JJN-20 FNQ-R-20 KTK-R-20 LP-CC-20
3.0 (4.0) KTN-R-25 JKS-25 JJN-25 FNQ-R-25 KTK-R-25 LP-CC-25
3.7 (5.0) KTN-R-30 JKS-30 JJN-30 FNQ-R-30 KTK-R-30 LP-CC-30
5.5 (7.5) KTN-R-50 KS-50 JJN-50 – – –
7.5
(10.0)
88
11.0
(15.0)
15–18.5
(20.0–
25.0)
22.0
(30.0)
30.0
(40.0)
37.0
(50.0)
Bussmann
タイプ RK1
KTN-R-05 JKS-05 JJN-05 FNQ-R-5 KTK-R-5 LP-CC-5
KTN-R-10 JKS-10 JJN-10 FNQ-R-10 KTK-R-10 LP-CC-10
KTN-R-60 JKS-60 JJN-60 – – –
KTN-R-80 JKS-80 JJN-80 – – –
KTN-R-125 JKS-125 JJN-125 – – –
KTN-R-150 JKS-150 JJN-150 – – –
KTN-R-200 JKS-200 JJN-200 – – –
KTN-R-250 JKS-250 JJN-250 – – –
1)
Bussmann
タイプ J
Bussmann
タイプ T
Bussmann
タイプ CC
Bussmann
タイプ CC
Bussmann
タイプ CC
表 8.17 200-240 V、エンクロージャー・サイズ A、B、C
52 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 59

仕様 操作ガイド
推奨最大ヒューズ
出力 [kW
(hp)]
0.25–0.37
(0.34–
0.5)
0.55–1.1
(0.75–
1.5)
1.5 (2.0) 5017906-016 KLN-R-15 ATM-R-15 A2K-15-R FWX-15 – – HSJ-15
2.2 (3.0) 5017906-020 KLN-R-20 ATM-R-20 A2K-20-R FWX-20 – – HSJ-20
3.0 (4.0) 5017906-025 KLN-R-25 ATM-R-25 A2K-25-R FWX-25 – – HSJ-25
3.7 (5.0) 5012406-032 KLN-R-30 ATM-R-30 A2K-30-R FWX-30 – – HSJ-30
5.5 (7.5) 5014006-050 KLN-R-50 – A2K-50-R FWX-50 – – HSJ-50
7.5
(10.0)
11.0
(15.0)
15–18.5
(20.0–
25.0)
22.0
(30.0)
30.0
(40.0)
37.0
(50.0)
SIBA
タイプ RK1
5017906-005 KLN-R-05 ATM-R-05 A2K-05-R FWX-5 – – HSJ-6
5017906-010 KLN-R-10 ATM-R-10 A2K-10-R FWX-10 – – HSJ-10
5014006-063 KLN-R-60 – A2K-60-R FWX-60 – – HSJ-60
5014006-080 KLN-R-80 – A2K-80-R FWX-80 – – HSJ-80
2028220-125 KLN-R-125 – A2K-125-R FWX-125 – – HSJ-125
2028220-150 KLN-R-150 – A2K-150-R FWX-150 L25S-150 A25X-150 HSJ-150
2028220-200 KLN-R-200 – A2K-200-R FWX-200 L25S-200 A25X-200 HSJ-200
2028220-250 KLN-R-250 – A2K-250-R FWX-250 L25S-250 A25X-250 HSJ-250
Littelfuse
タイプ RK1
FerrazShawmut
タイプ CC
FerrazShawmut
タイプ RK1
3)
Bussmann
タイプ
2)
JFHR2
Littelfuse
JFHR2
FerrazShawmut
JFHR2
FerrazShawmut
4)
J
8 8
表 8.18 200-240 V、エンクロージャー・サイズ A、B、C
1) 240 V 周波数変換器では、Bussmann 社製の KTS ヒューズ
を KTN ヒューズの代替品として使用できます。
2) 240 V 周波数変換器では、Bussmann 社製の FWH ヒューズ
を FWX ヒューズの代替品として使用できます。
3) 240 V 周波数変換器では、Ferraz Shawmut 社製の A6KR ヒ
ューズを A2KR ヒューズの代替品として使用できます。
4) 240 V 周波数変換器では、Ferraz Shawmut 社製の A50X ヒ
ューズを A25X ヒューズの代替品として使用できます。
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 53
Page 60
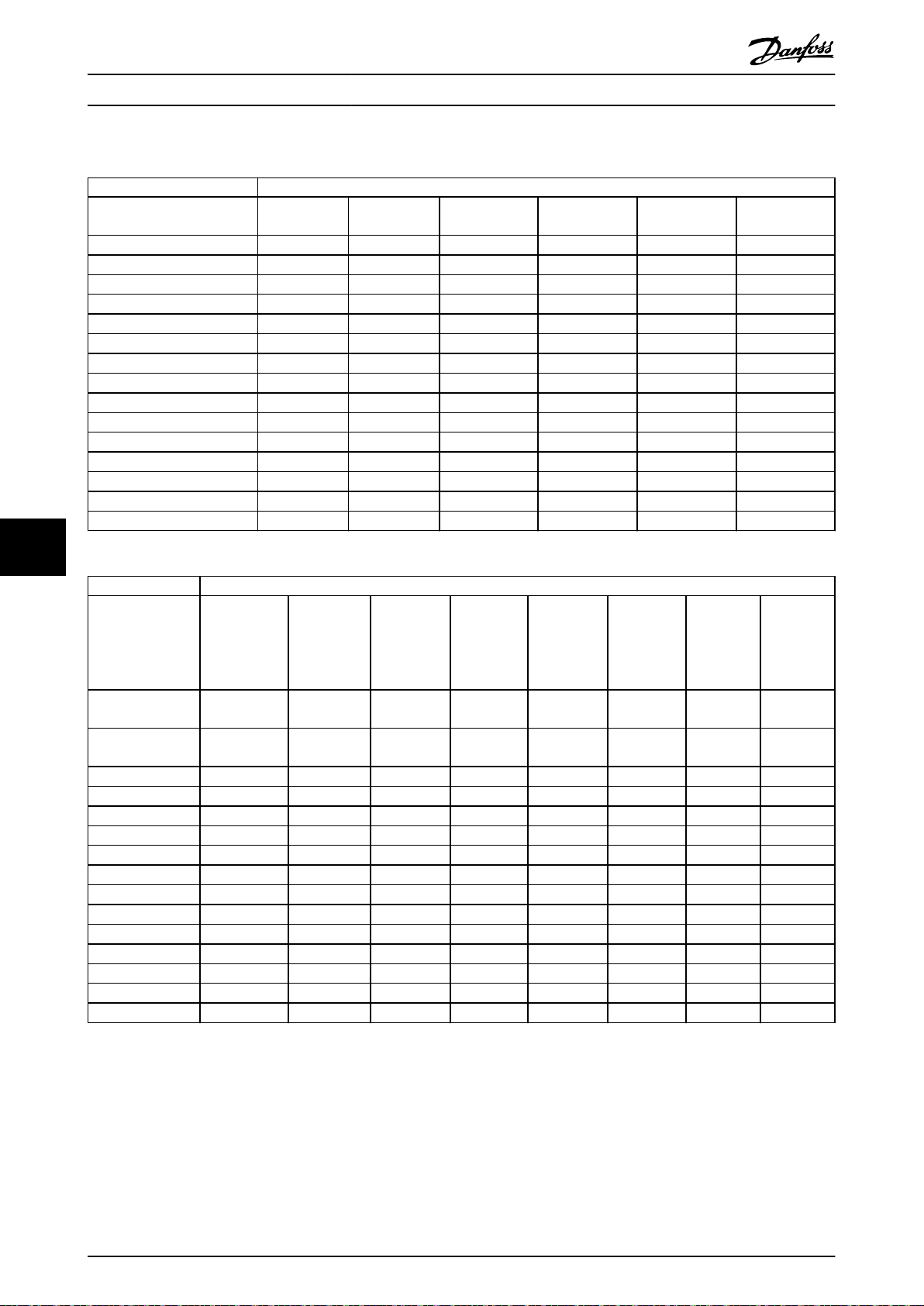
仕様
VLT® AutomationDrive FC 301/302
380–500 V
推奨最大ヒューズ
出力 [kW (hp)]
0.37–1.1 (0.5–1.5) KTS-R-6 JKS-6 JJS-6 FNQ-R-6 KTK-R-6 LP-CC-6
1.5–2.2 (2.0–3.0) KTS-R-10 JKS-10 JJS-10 FNQ-R-10 KTK-R-10 LP-CC-10
3.0 (4.0) KTS-R-15 JKS-15 JJS-15 FNQ-R-15 KTK-R-15 LP-CC-15
4.0 (5.0) KTS-R-20 JKS-20 JJS-20 FNQ-R-20 KTK-R-20 LP-CC-20
5.5 (7.5) KTS-R-25 JKS-25 JJS-25 FNQ-R-25 KTK-R-25 LP-CC-25
7.5 (10.0) KTS-R-30 JKS-30 JJS-30 FNQ-R-30 KTK-R-30 LP-CC-30
11.0 (15.0) KTS-R-40 JKS-40 JJS-40 – – –
15.0 (20.0) KTS-R-50 JKS-50 JJS-50 – – –
18.5 (25.0) KTS-R-60 JKS-60 JJS-60 – – –
22.0 (30.0) KTS-R-80 JKS-80 JJS-80 – – –
30.0 (40.0) KTS-R-100 JKS-100 JJS-100 – – –
37.0 (50.0) KTS-R-125 JKS-125 JJS-125 – – –
45.0 (60.0) KTS-R-150 JKS-150 JJS-150 – – –
55.0 (75.0) KTS-R-200 JKS-200 JJS-200 – – –
75.0 (100.0) KTS-R-250 JKS-250 JJS-250 – – –
Bussmann
タイプ RK1
Bussmann
タイプ J
Bussmann
タイプ T
Bussmann
タイプ CC
Bussmann
タイプ CC
Bussmann
タイプ CC
88
表 8.19 380–500 V、エンクロージャー・サイズ A、B、C
推奨最大ヒューズ
Ferraz
出力 [kW (hp)]
0.37–1.1 (0.5–
1.5)
1.5–2.2 (2.0–
3.0)
3.0 (4.0) 5017906-016 KLS-R-15 ATM-R-15 A6K-15-R FWH-15 HSJ-15 – –
4.0 (5.0) 5017906-020 KLS-R-20 ATM-R-20 A6K-20-R FWH-20 HSJ-20 – –
5.5 (7.5) 5017906-025 KLS-R-25 ATM-R-25 A6K-25-R FWH-25 HSJ-25 – –
7.5 (10.0) 5012406-032 KLS-R-30 ATM-R-30 A6K-30-R FWH-30 HSJ-30 – –
11.0 (15.0) 5014006-040 KLS-R-40 – A6K-40-R FWH-40 HSJ-40 – –
15.0 (20.0) 5014006-050 KLS-R-50 – A6K-50-R FWH-50 HSJ-50 – –
18.5 (25.0) 5014006-063 KLS-R-60 – A6K-60-R FWH-60 HSJ-60 – –
22.0 (30.0) 2028220-100 KLS-R-80 – A6K-80-R FWH-80 HSJ-80 – –
30.0 (40.0) 2028220-125 KLS-R-100 – A6K-100-R FWH-100 HSJ-100 – –
37.0 (50.0) 2028220-125 KLS-R-125 – A6K-125-R FWH-125 HSJ-125 – –
45.0 (60.0) 2028220-160 KLS-R-150 – A6K-150-R FWH-150 HSJ-150 – –
55.0 (75.0) 2028220-200 KLS-R-200 – A6K-200-R FWH-200 HSJ-200 A50-P-225 L50-S-225
75.0 (100.0) 2028220-250 KLS-R-250 – A6K-250-R FWH-250 HSJ-250 A50-P-250 L50-S-250
SIBA
タイプ RK1
5017906-006 KLS-R-6 ATM-R-6 A6K-6-R FWH-6 HSJ-6 – –
5017906-010 KLS-R-10 ATM-R-10 A6K-10-R FWH-10 HSJ-10 – –
Littelfuse
タイプ RK1
Ferraz
Shawmut
タイプ CC
Ferraz
Shawmut
タイプ RK1
Bussmann
JFHR2
Shawmut
JFerraz
Shawmut
J
Ferraz
Shawmut
JFHR2
1)
Littelfuse
JFHR2
表 8.20 380–500 V、エンクロージャー・サイズ A、B、C
1) Ferraz Shawmut A50QS ヒューズを A50P ヒューズの代わり
に使えます。
54 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 61
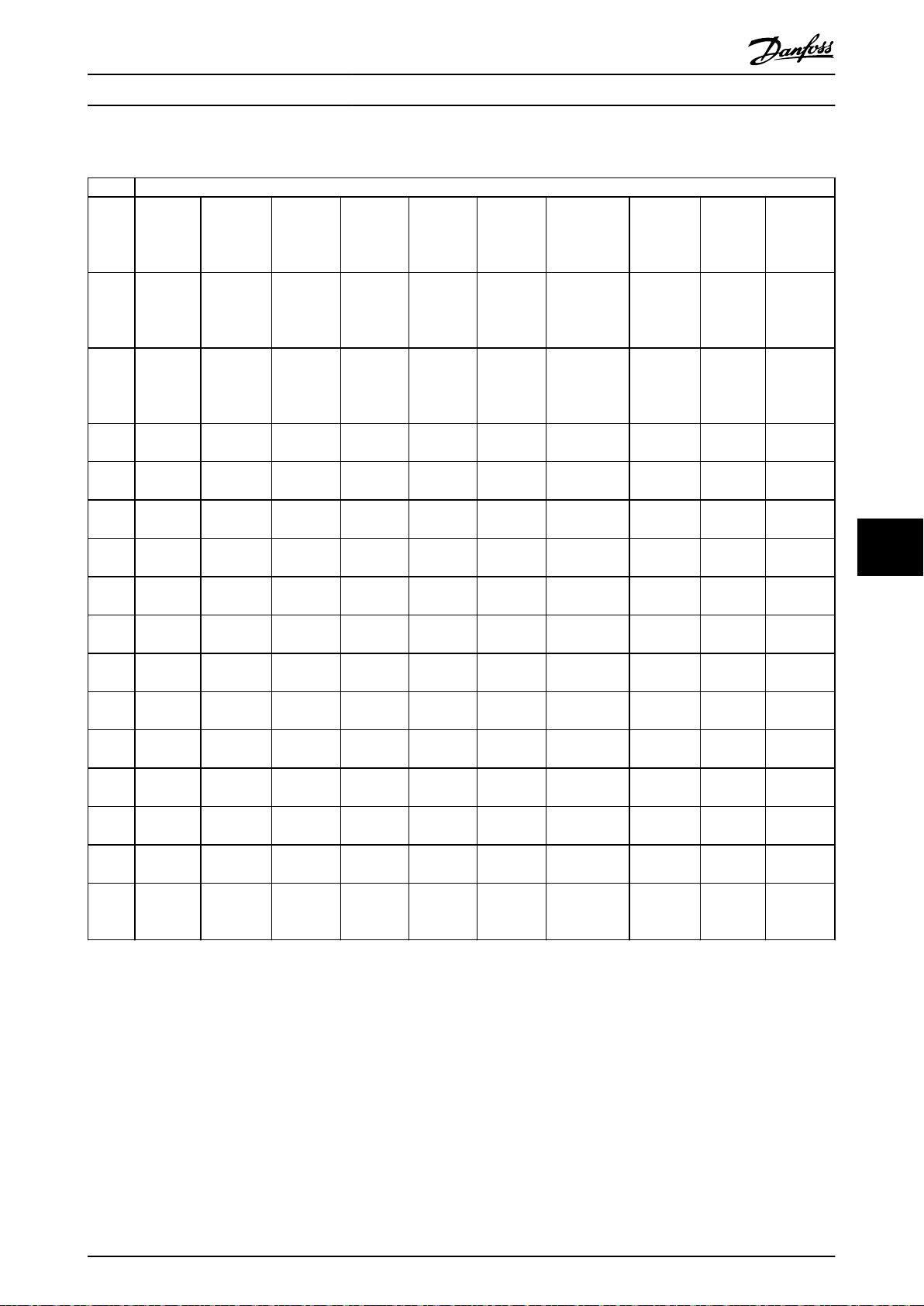
仕様 操作ガイド
525–600 V
出力
[kW
(hp)]
0.75–
1.1
(1.0–
1.5)
1.5–
2.2
(2.0–
3.0)
3.0
(4.0)
4.0
(5.0)
5.5
(7.5)
7.5
(10.0)
11
(15.0)
15.0
(20.0)
18.5
(25.0)
22.0
(30.0)
30.0
(40.0)
37.0
(50.0)
(60.0)
(75.0)
(100.0
Bussmann
タイプ
RK1
KTS-R-5 JKS-5 JJS-6 FNQ-R-5 KTK-R-5 LP-CC-5 5017906-005 KLS-R-005 A6K-5-R HSJ-6
KTS-R-10 JKS-10 JJS-10 FNQ-R-10 KTK-R-10 LP-CC-10 5017906-010 KLS-R-010 A6K-10-R HSJ-10
KTS-R15 JKS-15 JJS-15 FNQ-R-15 KTK-R-15 LP-CC-15 5017906-016 KLS-R-015 A6K-15-R HSJ-15
KTS-R20 JKS-20 JJS-20 FNQ-R-20 KTK-R-20 LP-CC-20 5017906-020 KLS-R-020 A6K-20-R HSJ-20
KTS-R-25 JKS-25 JJS-25 FNQ-R-25 KTK-R-25 LP-CC-25 5017906-025 KLS-R-025 A6K-25-R HSJ-25
KTS-R-30 JKS-30 JJS-30 FNQ-R-30 KTK-R-30 LP-CC-30 5017906-030 KLS-R-030 A6K-30-R HSJ-30
KTS-R-35 JKS-35 JJS-35 – – – 5014006-040 KLS-R-035 A6K-35-R HSJ-35
KTS-R-45 JKS-45 JJS-45 – – – 5014006-050 KLS-R-045 A6K-45-R HSJ-45
KTS-R-50 JKS-50 JJS-50 – – – 5014006-050 KLS-R-050 A6K-50-R HSJ-50
KTS-R-60 JKS-60 JJS-60 – – – 5014006-063 KLS-R-060 A6K-60-R HSJ-60
KTS-R-80 JKS-80 JJS-80 – – – 5014006-080 KLS-R-075 A6K-80-R HSJ-80
KTS-R-100 JKS-100 JJS-100 – – – 5014006-100 KLS-R-100 A6K-100-R HSJ-100
45.0
KTS-R-125 JKS-125 JJS-125 – – – 2028220-125 KLS-R-125 A6K-125-R HSJ-125
55.0
KTS-R-150 JKS-150 JJS-150 – – – 2028220-150 KLS-R-150 A6K-150-R HSJ-150
75.0
KTS-R-175 JKS-175 JJS-175 – – – 2028220-200 KLS-R-175 A6K-175-R HSJ-175
)
Bussmann
タイプ J
Bussmann
タイプ T
Bussmann
タイプ CC
推奨最大ヒューズ
Bussmann
タイプ CC
Bussmann
タイプ CC
SIBA
タイプ RK1
Littelfuse
タイプ RK1
Ferraz
Shawmut
タイプ
RK1
Ferraz
Shawmut
J
8 8
表 8.21 525-600 V、エンクロージャー・サイズ A、B、C
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 55
Page 62

仕様
VLT® AutomationDrive FC 301/302
525–690 V
推奨最大ヒューズ
出力 [kW
(hp)]
1.1 (1.5) KTS-R-5 JKS-5 JJS-6 FNQ-R-5 KTK-R-5 LP-CC-5
1.5–2.2
(2.0–
3.0)
3.0 (4.0) KTS-R15 JKS-15 JJS-15 FNQ-R-15 KTK-R-15 LP-CC-15
4.0 (5.0) KTS-R20 JKS-20 JJS-20 FNQ-R-20 KTK-R-20 LP-CC-20
5.5 (7.5) KTS-R-25 JKS-25 JJS-25 FNQ-R-25 KTK-R-25 LP-CC-25
7.5
(10.0)
11.0
(15.0)
15.0
(20.0)
18.5
(25.0)
22.0
88
(30.0)
30.0
(40.0)
37.0
(50.0)
45.0
(60.0)
55.0
(75.0)
75.0
(100.0)
Bussmann
タイプ RK1
KTS-R-10 JKS-10 JJS-10 FNQ-R-10 KTK-R-10 LP-CC-10
KTS-R-30 JKS-30 JJS-30 FNQ-R-30 KTK-R-30 LP-CC-30
KTS-R-35 JKS-35 JJS-35 – – –
KTS-R-45 JKS-45 JJS-45 – – –
KTS-R-50 JKS-50 JJS-50 – – –
KTS-R-60 JKS-60 JJS-60 – – –
KTS-R-80 JKS-80 JJS-80 – – –
KTS-R-100 JKS-100 JJS-100 – – –
KTS-R-125 JKS-125 JJS-125 – – –
KTS-R-150 JKS-150 JJS-150 – – –
KTS-R-175 JKS-175 JJS-175 – – –
Bussmann
タイプ J
Bussmann
タイプ T
Bussmann
タイプ CC
Bussmann
タイプ CC
Bussmann
タイプ CC
表 8.22 525-690 V、エンクロージャー・サイズ A、B、C
56 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 63

仕様 操作ガイド
出力 [kW
(hp)]
11.0
(15.0)
15–18.5
(20.0–
25.0)
22.0
(30.0)
30.0
(40.0)
37.0
(50.0)
45.0
(60.0)
55.0
(75.0)
75.0
(100.0)
最大プリ
ヒューズ・
サイズ
30 A KTS-R-30 JKS-30 JKJS-30 5017906-030 KLS-R-030 A6K-30-R HST-30
45 A KTS-R-45 JKS-45 JJS-45 5014006-050 KLS-R-045 A6K-45-R HST-45
60 A KTS-R-60 JKS-60 JJS-60 5014006-063 KLS-R-060 A6K-60-R HST-60
80 A KTS-R-80 JKS-80 JJS-80 5014006-080 KLS-R-075 A6K-80-R HST-80
90 A KTS-R-90 JKS-90 JJS-90 5014006-100 KLS-R-090 A6K-90-R HST-90
100 A KTS-R-100 JKS-100 JJS-100 5014006-100 KLS-R-100 A6K-100-R HST-100
125 A KTS-R-125 JKS-125 JJS-125 2028220-125 KLS-150 A6K-125-R HST-125
150 A KTS-R-150 JKS-150 JJS-150 2028220-150 KLS-175 A6K-150-R HST-150
Bussmann
E52273
RK1/JDDZ
Bussmann
E4273
J/JDDZ
推奨最大ヒューズ
Bussmann
E4273
T/JDDZ**
SIBA
E180276
RK1/JDDZ
Littelfuse
E81895
RK1/JDDZ
Ferraz
Shawmut
E163267/
E2137
RK1/JDDZ
Ferraz
Shawmut
E2137
J/HSJ
8 8
表 8.23 525-690 V、エンクロージャー・サイズ A、B、C
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 57
Page 64

仕様
8.8 接続の締め付けトルク
VLT® AutomationDrive FC 301/302
エンクロ
ージャ
ー・サイズ
A2
A3
A4
A5
B1
B2 11 (15)
88
B3
B4
C1
C2
C3
C4
200–240
V [kW
(hp)]
0.25–2.2
(0.34–
3.0)
3–3.7
(4.0–5.0)
0.25–2.2
(0.34–
3.0)
3–3.7
(4.0–5.0)
5.5–7.5
(7.5–
10.0)
5.5–7.5
(7.5–
10.0)
11–15
(15–20)
15–22
(20–30)
30–37
(40–50)
18.5–22
(25–30)
37–45
(50–60)
380–500 V
[kW (hp)]
0.37–4
(0.5–5.0)
5.5–7.5
(7.5–
10.0)
0.37–4
(0.5–5.0)
5.5–7.5
(7.5–
10.0)
11–15
(15–20)
18.5–22
(25–30)
11–15
(15–20)
18.5–30
(25–40)
30–45
(40–60)
55–75
(75–100)
30–37
(40–50)
55–75
(75–100)
525–690
V [kW
(hp)]
–
1.1–7.5
(1.5–
10.0)
–
–
–
11–22
(15–30)
–
11–30
(15–40)
–
30–75
(40–100)
37–45
(50–60)
11–22
(15–30)
目的 締め付けトルク[Nm]
主電源、ブレーキ抵抗、負荷分散、モーター・ケーブル。 0.5–0.6 (4.4–5.3)
主電源、ブレーキ抵抗、負荷分散、モーター・ケーブル。 1.8 (15.9)
Relay。 0.5–0.6 (4.4–5.3)
接地。 2–3 (17.7–26.6)
主電源、ブレーキ抵抗、負荷分散ケーブル。 4.5 (39.8)
モーター・ケーブル。 4.5 (39.8)
Relay。 0.5–0.6 (4.4–5.3)
接地。 2–3 (17.7–26.6)
主電源、ブレーキ抵抗、負荷分散、モーター・ケーブル。 1.8 (15.9)
Relay。 0.5–0.6 (4.4–5.3)
接地。 2–3 (17.7–26.6)
主電源、ブレーキ抵抗、負荷分散、モーター・ケーブル。 4.5 (39.8)
Relay。 0.5–0.6 (4.4–5.3)
接地。 2–3 (17.7–26.6)
主電源、ブレーキ抵抗、負荷分散ケーブル。 10 (89)
モーター・ケーブル。 10 (89)
Relay。 0.5–0.6 (4.4–5.3)
接地。 2–3 (17.7–26.6)
主電源、モーター・ケーブル。
負荷分散、ブレーキ・ケーブル。 14 (124)
Relay。 0.5–0.6 (4.4–5.3)
接地。 2–3 (17.7–26.6)
主電源、ブレーキ抵抗、負荷分散、モーター・ケーブル。 10 (89)
Relay。 0.5–0.6 (4.4–5.3)
接地。 2–3 (17.7–26.6)
主電源、モーター・ケーブル。
負荷分散、ブレーキ・ケーブル。 14 (124)
Relay。 0.5–0.6 (4.4–5.3)
接地。 2–3 (17.7–26.6)
([in-lb])
14 (124) (最大 95 mm
(3 AWG))
24 (212) (95 mm2 以上
(3 AWG))
14 (124) (最大 95 mm
(3 AWG))
24 (212) (95 mm2 以上
(3 AWG))
2
2
表 8.24 ケーブル締め付けトルク
58 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 65

仕様 操作ガイド
8.9 電力規格、重量、寸法
0.25–3.7
(0.34–5)
0.37–7.5
0.37–4
0.25–2.2
(0.34–3)
3–3.7
(4–5)
5.5–7.5
(1–10)
(0.5–10)
0.75–7.5
–
(0.5–5)
(1–10)
(7.5–10)
0.75–7.5
– –
1.1–7.5
(1.5–10)
55/66
55/66
21
20
21
タイプ 12/4X
タイプ 12/4X
タイプ 1
シャーシ
タイプ 1
420
390
375
268
375
(16.5)
(15.4)
(14.8)
374
(10.6)
(14.8)
– – –
(14.7)
–
402
401
350
257
350
(15.8)
(15.8)
(13.8)
(10.1)
(13.8)
242
200
130
130
90
(9.5)
(7.9)
(5.1)
(5.1)
(3.5)
242
170
170
130
(9.5)
–
(6.7)
(6.7)
(5.1)
– 242 (9.5)
190
190
150
(7.5)
(7.5)
(5.9)
8 8
0.37–4
0.25–2.2
(0.34–3)
(0.34–2)
200–240 V 0.25–1.5
(0.5–5)
– –
(0.5–2)
20
– –
20
–
シャーシ
シャーシ
268
200
1)
(10.6)
(7.9)
A
374
316
(14.7)
(12.4)
A
257
190
(10.1)
(7.5)
90
75
(3.5)
(3)
130
(5.1)
150
(5.9)
c 6.0 (0.24) 8.0 (0.31) 8.0 (0.31) 8.0 (0.31) 8.0 (0.31) 8.25 (0.32) 8.25 (0.32)
d ø8 (ø0.31) ø11 (ø0.43) ø11 (ø0.43) ø11 (ø0.43) ø11 (ø0.43) ø12 (ø0.47) ø12 (ø0.47)
e ø5 (ø0.2) ø5.5 (ø0.22) ø5.5 (ø0.22) ø5.5 (ø0.22) ø5.5 (ø0.22) ø6.5 (ø0.26) ø6.5 (ø0.26)
f 5 (0.2) 9 (0.35) 9 (0.35) 6.5 (0.26) 6.5 (0.26) 6 (0.24) 9 (0.35)
実装穴間の距離 b 60 (2.4) 70 (2.8) 70 (2.8) 110 (4.3) 110 (4.3) 171 (6.7) 215 (8.5)
奥行き [mm (in)]
オプション A/B なしの奥行き C 207 (8.1) 205 (8.1) 207 (8.1) 205 (8.1) 207 (8.1) 175 (6.9) 200 (7.9)
オプション A/B 付き C 222 (8.7) 220 (8.7) 222 (8.7) 220 (8.7) 222 (8.7) 175 (6.9) 200 (7.9)
幅 [mm (in)]
実装板の幅 B
1 つの C オプション付き実装板の幅 B –
エンクロージャー・サイズ A1 A2 A3 A4 A5
定格電力
[kW (hp)]
380–480/500 V 0.37–1.5
525–600 V
525–690 V
IP
NEMA
高さ [mm (in)]
実装板の高さ
フィールドバスケーブル用接地終端プレート付きの
高さ
実装穴間の距離 a
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 59
2 つの C オプション付き実装板の幅 B –
ネジ穴 [mm (in)]
最大重量 [kg (lb)] 2.7 (6) 4.9 (10.8) 5.3 (11.7) 6.6 (14.6) 7 (15.4) 9.7 (21.4) 13.5/14.2 (30/31)
前面カバーの締め付けトルク [Nm (in-lb)]
プラスチックカバー(低 IP) クリック クリック クリック – –
Page 66

仕様
VLT® AutomationDrive FC 301/302
0.25–3.7
(0.34–5)
0.37–7.5
0.37–4
0.25–2.2
(0.34–3)
3–3.7
(4–5)
5.5–7.5
(1–10)
(0.5–10)
0.75–7.5
–
(0.5–5)
(1–10)
(7.5–10)
0.75–7.5
– –
1.1–7.5
(1.5–10)
88
0.37–4
0.25–2.2
(0.5–5)
(0.34–3)
200–240 V 0.25–1.5
エンクロージャー・サイズ A1 A2 A3 A4 A5
定格電力
(0.5–2)
(0.34–2)
[kW (hp)]
380–480/500 V 0.37–1.5
– –
– –
を参照。
図 8.3
及び
図 8.2
525–600 V
525–690 V
金属カバー(IP55/66) – – – 1.5 (13.3) 1.5 (13.3)
表 8.25 出力定格、重量、寸法、エンクロージャー・サイズ A1-A5
1) 上部及び下部の実装穴については、
60 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 67

仕様 操作ガイド
11–15
(15–20)
5.5–7.5
(7.5–10)
15
18.5–30
(25–40)
11–15
(15–20)
18.5–22
(25–30)
18.5–30
(25–40)
11–15
(15–20)
18.5–22
(25–30)
11–30
(15–40)
–
11–22
(15–30)
20
シャーシ
20
シャーシ
21/55/66
タイプ 1/12/4X
520
399
650
595
(20.5)
420
(15.7)
(25.6)
495
(23.4)
380
(16.5)
624
(19.5)
(15)
(24.6)
230
165
242
(9.1)
(6.5)
(9.5)
230
205
242
(9.1)
(8.1)
(9.5)
8 8
(7.5–10)
200–240 V 5.5–7.5
(15–20)
–
(15–20)
21/55/66
タイプ 1/12/4X
–
480
1)
(18.9)
A
454
(17.9)
242
(9.5)
242
(9.5)
c 12 (0.47) 12 (0.47) 8 (0.31) –
d ø19 (ø0.75) ø19 (ø0.75) 12 (0.47) –
e ø9 (ø0.35) ø9 (ø0.35) 6.8 (0.27) 8.5 (0.33)
f 9 (0.35) 9 (0.35) 7.9 (0.31) 15 (0.59)
エンクロージャー・サイズ B1 B2 B3 B4
定格電力
[kW (hp)]
380–480/500 V 11–15
525–600 V 11–15
525–690 V
IP
NEMA
高さ [mm (in)]
実装板の高さ
フィールドバスケーブル用接地終端プレート付きの高さ A – –
実装穴間の距離 a
幅 [mm (in)]
実装板の幅 B
1 つの C オプション付き実装板の幅 B
2 つの C オプション付き実装板の幅 B 242 (9.5) 242 (9.5) 225 (8.9) 230 (9.1)
実装穴間の距離 b 210 (8.3) 210 (8.3) 140 (5.5) 200 (7.9)
奥行き [mm (in)]
オプション A/B なしの奥行き C 260 (10.2) 260 (10.2) 249 (9.8) 242 (9.5)
オプション A/B 付き C 260 (10.2) 260 (10.2) 262 (10.3) 242 (9.5)
ネジ穴 [mm (in)]
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 61
最大重量 [kg (lb)] 23 (51) 27 (60) 12 (26.5) 23.5 (52)
前面カバーの締め付けトルク [Nm (in-lb)]
プラスチックカバー(低 IP) クリック クリック クリック クリック
金属カバー(IP55/66) 2.2 (19.5) 2.2 (19.5) – –
Page 68

仕様
VLT® AutomationDrive FC 301/302
11–15
(15–20)
18.5–30
(25–40)
11–15
5.5–7.5
15
88
(15–20)
(7.5–10)
18.5–22
(25–30)
18.5–30
(25–40)
11–15
(15–20)
18.5–22
(25–30)
11–30
(15–40)
–
11–22
(15–30)
(7.5–10)
200–240 V 5.5–7.5
(15–20)
–
(15–20)
を参照。
図 8.3
及び
図 8.2
エンクロージャー・サイズ B1 B2 B3 B4
定格電力
[kW (hp)]
380–480/500 V 11–15
525–600 V 11–15
525–690 V
62 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
表 8.26 出力定格、重量、寸法、エンクロージャー・サイズ B1-B4
1) 上部及び下部の実装穴については、
Page 69

仕様 操作ガイド
エンクロージャー・サイズ C1 C2 C3 C4 D3h
定格電力
[kW (hp)]
380–480/500 V 30–45
525–600 V 30–45
525–690 V
IP
NEMA
高さ [mm (in)]
実装板の高さ
フィールドバスケーブル用接地終端プレー
ト付きの高さ
実装穴間の距離 a
幅 [mm (in)]
実装板の幅 B
1 つの C オプション付き実装板の幅 B
2 つの C オプション付き実装板の幅 B 308 (12.1) 370 (14.6) 308 (12.1) 370 (14.6) –
実装穴間の距離 b 272 (10.7) 334 (13.1) 270 (10.6) 330 (13) –
奥行き [mm (in)]
オプション A/B なしの奥行き C 310 (12.2) 335 (13.2) 333 (13.1) 333 (13.1) 375 (14.8)
オプション A/B 付き C 310 (12.2) 335 (13.2) 333 (13.1) 333 (13.1) 375 (14.8)
ネジ穴 [mm (in)]
最大重量 [kg (lb)] 45 (99) 65 (143) 35 (77) 50 (110) 62 (137)
前面カバーの締め付けトルク [Nm (in-lb)]
プラスチックカバー(低 IP) クリック クリック 2 (17.7) 2 (17.7) –
金属カバー(IP55/66) 2.2 (19.5) 2.2 (19.5) 2 (17.7) 2 (17.7) –
1) 上部及び下部の実装穴については、
200–240 V 15–22
(20–30)
(40–60)
(40–60)
–
–
図 8.2及び図 8.3
1)
A
A – –
c 12.5 (0.49) 12.5 (0.49) – – –
d ø19 (ø0.75) ø19 (ø0.75) – – –
e ø9 (ø0.35) ø9 (ø0.35) 8.5 (0.33) 8.5 (0.33) –
f 9.8 (0.39) 9.8 (0.39) 17 (0.67) 17 (0.67) –
21/55/66
タイプ 1/12/4X
680
(26.8)
648
(25.5)
308
(12.1)
308
(12.1)
を参照。
30–37
(40–50)
55–75
(75–100)
55–90
(75–125)
30–75
(40–100)
21/55/66
タイプ 1/12/4X20シャーシ
770
(30.3)
739
(29.1)
370
(14.6)
370
(14.6)
18.5–22
(25–30)
37–45
(50–60)
37–45
(50–60)
37–45
(50–60)
550
(21.7)
630
(24.8)
521
(20.5)
308
(12.1)
308
(12.1)
30–37
(40–50)
55–75
(75–100)
55–90
(75–125)
37–45
(50–60)
20
シャーシ20シャーシ
660
(26)
800
(31.5)
631
(24.8)
370
(14.6)
370
(14.6)
–
–
–
55–75
(75–100)
909
(35.8)
–
–
250
(9.8)
–
8 8
表 8.27 出力定格、重量、寸法、エンクロージャー・サイズ C1–C4 および D3h
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 63
Page 70

C
a
b
130BA648.12
f
e
B
A
a
d
e
b
c
a
e
f
130BA715.12
仕様
VLT® AutomationDrive FC 301/302
図 8.2 上部及び下部の実装穴 (
法
を参照 )
章 8.9 電力規格、重量、寸
88
図 8.3 上部及び下部の実装穴 (B4、C3、C4)
64 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 71

付属資料 操作ガイド
9 付属資料
9.1 記号、略語と用例
°C
°F
AC 交流
AEO 自動エネルギー最適化
AWG アメリカ式ワイヤ規格
AMA 自動モーター適合
DC 直流
EMC 電磁両立性
ETR 電子サーマル・リレー
f
M,N
FC 周波数変換器
I
INV
I
LIM
I
M,N
I
VLT,MAX
I
VLT,N
IP IP 保護
LCP ローカル・コントロール・パネル
MCT 動作コントロール・ツール
n
s
P
M,N
PELV 超低電圧保護
PCB プリント回路基板
PM モーター 永久磁石モーター
PWM パルス幅変調
RPM 毎分回転数
Regen 復熱式端子
T
LIM
U
M,N
摂氏温度
華氏
公称モーター周波数
定格インバーター出力電流
電流制限
公称モーター電流
最大出力電流
周波数変換器から供給される定格出力電流
同期モーター速度
公称モーター電力
トルク制限
公称モーター電圧
9 9
表 9.1 記号と略語
用例
番号付けされたリストは手順を示します。 箇条書きリストはその他の情報を示しています。
イタリック体の文字は以下を示します:
相互参照。
•
リンク
•
パラメーター名
•
パラメーター・グループ名。
•
パラメーター・オプション。
•
脚注
•
寸法の単位はすべて [mm] (in)。
パラメーター・メニュー構造
9.2
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 65
Page 72
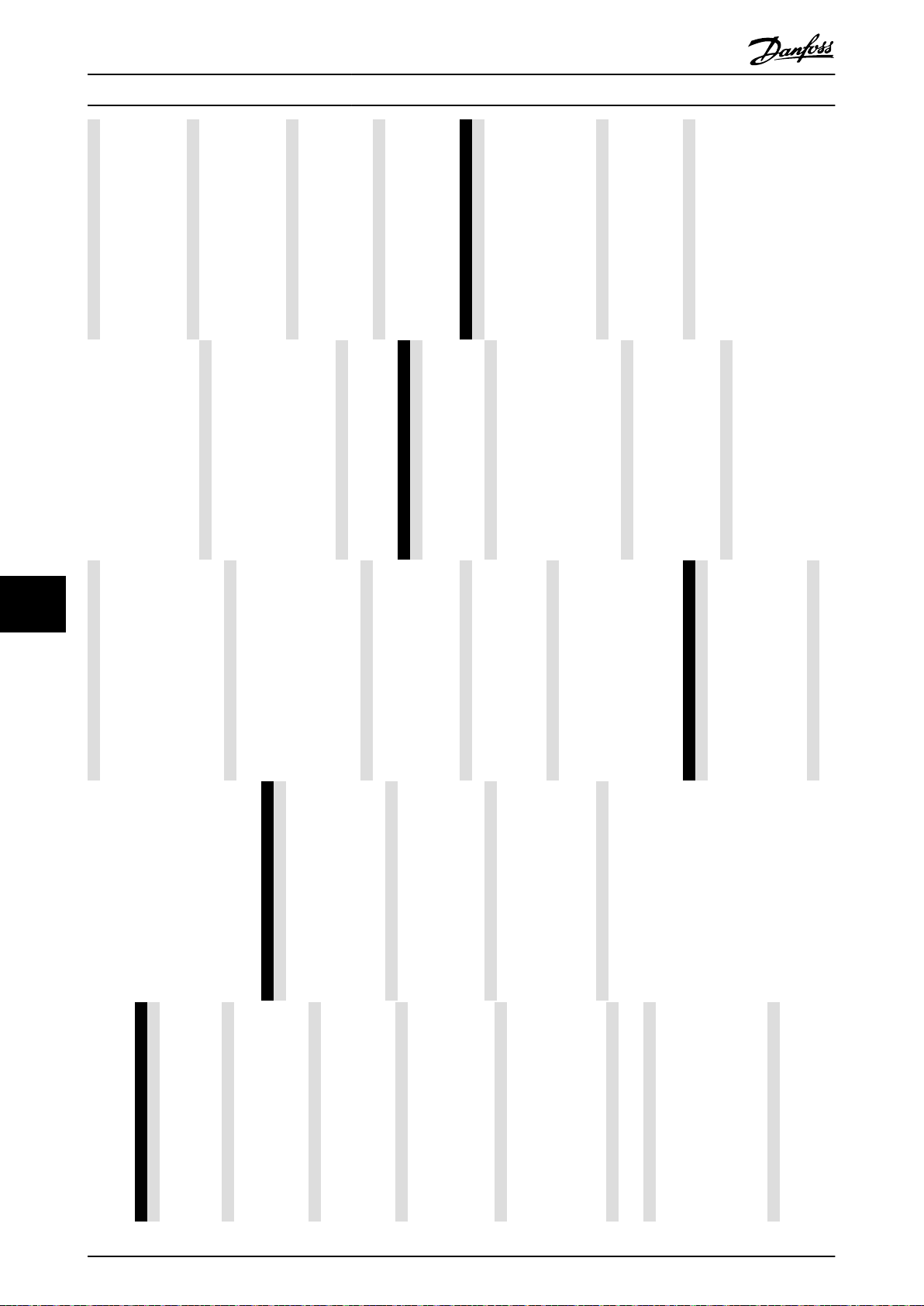
付属資料
3-6* ランプ 3
3-60 ランプ 3 タイプ
3-61 ランプ 3 立ち上がり時間
3-67 減速時ランプ3 対 Sランプ 比 スタート
3-68 減速時ランプ3 対 Sランプ 比 終了
3-66 加速時ランプ3 対 Sランプ 比 終了
3-65 加速時ランプ3 対 Sランプ 比 スタート
3-62 ランプ 3 立ち下がり時間
3-7* ランプ 4
3-76 加速時ランプ4 対 Sランプ 比 終了
3-75 加速時ランプ4 対 Sランプ 比 スタート
3-70 ランプ 4 タイプ
3-71 ランプ 4 立ち上がり時間
3-72 ランプ 4 立ち下がり時間
3-77 減速時ランプ4 対 Sランプ 比 スタート
3-78 減速時ランプ4 対 Sランプ 比 終了
3-8* その他のランプ
VLT® AutomationDrive FC 301/302
3-80 ジョグ・ランプ時間
3-81 クイック停止ランプ時間
3-82 クイック停止ランプタイプ
3-83 Q 停止 S-ramp 率減速 スタート
3-84 Q 停止 S-ramp 率減速 終了
3-89 ランプ低域フィルター時間
3-9* ディジタル電位メーター
3-90 ステップ・サイズ
3-91 ランプ時間
3-92 電力回復
3-93 上限
3-94 下限
3-95 ランプ遅延
4-** 制限 / 警告
4-1* モーター制限
4-10 モーター速度方向
4-11 モーター速度下限 [RPM]
4-12 モーター速度下限 [Hz]
4-13 モーター速度上限 [RPM]
4-14 モーター速度上限 [Hz]
4-16 トルク制限モーター・モード
4-17 トルク制限ジェネレーター・モード
4-18 電流制限
4-19 最大出力周波数
4-2* 制限係数
4-20 トルク制限係数ソース
4-21 速度制限係数ソース
4-23 ブレーキ確認制限係数ソース
4-24 ブレーキ確認制限係数
4-25 電気制限モーター係数ソース
4-26 電気制限ジェネレーター 係数ソース
4-3* モータ速度監視
4-30 モーター・フィードバック損失機能
4-31 モーターフィードバック速度エラー
4-32 モーターフィードバック損失タイムアウト
4-34 追跡エラー機能
4-35 追跡エラー
4-36 追跡エラータイムアウト
4-37 追跡エラーランピング
4-38 追跡エラーランプタイムアウト
4-39 ランプタイムアウト後の追跡エラー
2-10 ブレーキ機能
2-11 ブレーキ抵抗器(オーム)
2-12 ブレーキ電力制限 (kW)
2-13 ブレーキ電力監視
2-15 ブレーキ確認
2-16 交流ブレーキ最大電流
2-17 過電圧コントロール
2-18 ブレーキ確認状態
2-19 過電圧ゲイン
2-2* 機械的ブレーキ
2-20 ブレーキ解除電流
2-21 ブレーキ作動速度[RPM]
2-22 ブレーキ作動速度[Hz]
2-23 ブレーキ遅延の有効化
2-24 停止遅延
2-25 ブレーキ解放時間
2-26 トルク基準
2-27 トルクランプ立ち上がり時間
2-28 ゲイン・ブースト係数
2-29 トルク立ち下がり時間
2-3* 高度 機械的ブレーキ
2-30 位置 P スタート比例ゲイン
2-31 速度 PID スタート比例ゲイン
2-32 速度 PID スタート積分時間
2-33 速度 PID 低域フィルター時間
3-** 速度指令信号/ランプ
3-0* 速度指信号制限
3-00 速度指令信号範囲
3-01 速度指令信号/フィードバック単位
3-02 最小速度指令信号
3-03 最大速度指令信号
3-04 速度指令信号機能
3-1* 速度指令信号
3-10 プリセット速度指令信号
3-11 ジョグ速度 [Hz]
3-12 増加/スローダウン値
3-13 速度指令信号サイト
3-14 プリセット相対速度指令信号
3-15 速度指令信号リソース 1
3-16 速度指令信号リソース 2
3-17 速度指令信号リソース 3
3-18 相対スケーリング 速度指令信号リソース
3-19 ジョグ速度[RPM]
3-4* ランプ 1
3-46 加速時ランプ1 対 Sランプ 比 終了
3-45 加速時ランプ1 対 Sランプ 比 スタート
3-40 ランプ 1 タイプ
3-41 ランプ 1 立ち上がり時間
3-42 ランプ 1 立ち下がり時間
3-48 減速時ランプ1 対 Sランプ 比 終了
3-5* ランプ 2
3-50 ランプ 2 タイプ
3-51 ランプ 2 立ち上がり時間
3-57 減速時ランプ2 対 Sランプ 比 スタート
3-58 減速時ランプ2 対 Sランプ 比 終了
3-56 加速時ランプ2 対 Sランプ 比 終了
3-55 加速時ランプ2 対 Sランプ 比 スタート
3-52 ランプ 2 立ち下がり時間
3-47 減速時ランプ1 対 Sランプ 比 スタート
99
数
1-58 フライング・スタート検査パルス電流
1-59 フライング・スタート検査パルス周波
1-5* 負荷独立 設定
1-50 速度ゼロでのモーター磁化
1-51 正常磁化最低速度 [RPM]
1-52 最低速度通常磁化 [Hz]
0-73 タイム・ゾーン・オフセット
0-74 DST/サマータイム
0-76 DST/サマータイム開始
0-77 DST/サマータイム終了
1-56 U/f 特性 - F (周波数)
1-53 モデル・シフト周波数
1-54 弱励磁の電圧減少
1-55 U/f 特性 - U (電圧)
0-79 クロック不具合
0-81 就業日
0-82 補足就業日
0-83 補足非就業日
0-84 フィールドバスの時刻
0-85 フィールドバスのサマータイム時刻開
1-6* 負荷依存 設定
1-60 低速負荷補償
1-61 高速負荷補償
1-62 スリップ補償
了
始
0-89 日付及び時間読み出し
0-86 フィールドバスのサマータイム時刻終
1-** 負荷及びモーター
1-63 スリップ補償時間定数
1-64 共振制動
1-65 共振制動時定数
1-66 低速時の最低電流
1-67 負荷タイプ
1-68 モーター慣性
1-69 システム慣性
1-7* スタート調整
1-0* 一般設定
1-00 構成モード
1-01 モーター・コントロールの原則
1-02 磁束 MF ソース
1-03 トルク特性
1-04 過負荷モード
1-05 ローカル・モード構成
1-06 時計回り方向
1-70 スタートモード
1-71 スタート遅延
1-72 スタート機能
1-73 フライング・スタート
1-74 スタート速度[RPM]
1-75 スタート速度[Hz]
1-76 スタート電流
1-8* 停止調整
1-80 停止時の機能
1-81 停止時機能の最低速度[RPM]
1-07 モーター角オフセット調整
1-1* 特殊設定
1-10 モーター構造
1-11 モーターモデル
1-14 減衰利得
1-15 低速フィルター時間定数
1-16 高速フィルター時間定数
1-17 電圧フィルター時間定数
1-18 無負荷での最小電流
1-2* モーター・データ
1-82 停止時機能の最低速度 [Hz]
1-83 正確な停止機能
1-84 正確な停止カウンター値
1-85 正確な停止速度補償遅延
1-9* モーター温度
1-90 モーター熱保護
1-91 モーター外部ファン
1-23 モーター周波数
1-24 モーター電流
1-25 モーター公称速度
1-22 モーター電圧
1-20 モーター電力 [kW]
1-21 モーター出力 [HP]
1-26 モーター制御 定格トルク
1-93 サーミスター・リソース
1-94 ATEX ETR cur.lim、減速
1-95 サーミスター・センサータイプ
1-96 サーミスター・センサーリソース
1-29 自動モーター適合 (AMA)
1-3* 高度 モーター・データ
1-30 固定子抵抗 (Rs)
1-31 回転抵抗(Rr)
1-97 サーミスター閾値レベル
1-98 ATEX ETR interpol、ポイント周波数
1-99 ATEX ETR インターポールポイント、電流2-** ブレーキ
2-0* 直流ブレーキ
2-00 直流保持電流
2-01 直流ブレーキ電流
2-02 直流ブレーキ時間
2-03 直流ブレーキ作動速度 [RPM]
1-33 固定子漏洩リアクタンス (X1)
1-34 回転子漏洩リアクタンス(X2)
1-35 主電源リアクタンス (Xh)
1-36 鉄損失抵抗(Rfe)
1-37 d 軸インダクタンス (Ld)
1-38 q 軸インダクタンス (Lq)
1-39 モーター極数
1-40 1000 RPM での逆起電力
1-41 モーター角オフセット
1-44 d 軸インダクタンス 飽和 (LdSat)
2-04 直流ブレーキ作動速度 [Hz]
2-05 最大速度指令信号
2-06 パーキング電流
2-07 パーキング時間
2-1* ブレーキ・エネルギー機能
1-45 q 軸インダクタンス 飽和 (LqSat)
1-46 位置検知利得
1-47 トルク校正
1-48 インダクタンス飽和 ポイント
1-49 q 軸インダクタンス飽和ポイント
8.12
へのアクセス
ト) キー
バイパス) キー
0-24 表示行 3 大
0-** 操作/表示
0-0* 基本設定
0-01 言語
0-02 モーター速度単位
0-03 地域設定
0-04 電源投入(手動)時の動作状況
0-09 動作監視
0-1* 設定動作
9.2.1 ソフトウェア
0-10 アクティブ設定
0-11 設定の編集
0-15 読み出し: 実際の設定
0-12 この設定のリンク先
0-13 読み出し: リンクされた設定
0-14 読み出し: 設定/チャネルの編集
0-2* LCP 表示
0-25 マイ・パーソナル・メニュー
0-23 表示行 2 大
0-20 表示行 1.1 小
0-21 表示行 1.2 小
0-22 表示行 1.3 小
0-3* LCP カスタム読み出し
0-30 ユーザー定義読み出し単位
0-31 ユーザー定義読み出しの最小値
0-32 ユーザー定義読み出しの最高値
0-39 表示テキスト 3
0-33 ユーザー定義読み出しのソース
0-37 表示テキスト 1
0-38 表示テキスト 2
0-4* LCP キーパッド
0-40 LCP の [Hand On] (手動オン) キー
0-44 LCP の [Off/Reset] ( オフ/リセッ
0-43 LCP の[Reset](リセット)キー
0-41 LCP の[Off] (オフ)キー
0-42 LCP の[Auto On] (自動オン) キー
0-45 LCP の [Drive Bypass] (ドライブ・
0-5* コピー/保存
0-50 LCP コピー
0-51 設定コピー
0-6* パスワード
0-60 メイン・メニュー・パスワード
0-61 パスワードなしでのメイン・メニュー
66 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
セス
0-65 クイック・メニュー・パスワード
0-66 パスワード無クイック・メニューアク
0-67 バス・パスワード・アクセス
0-68 安全性パラメーター・パスワード
0-69 安全性パラメーターのパスワード保護
0-7* クロックの設定
0-70 日付と時間
0-71 日付形式
0-72 時間形式
Page 73

付属資料 操作ガイド
ージ文
8-04 コント Mss 文タイム機能
8-05 タイムアウト終了機能
8-06 ControlWordTO リセット
8-07 診断トリガー
8-08 読み出しフィルター
8-1* コントロール メッセ設定
8-10 コントロール・メッセージ文プロファイル8-13 構成可能な状態メッセージ文 STW
ット
6-84 端子 X45/3 出力タイムアウト・プリセ
7-** コントローラー
7-0* 速度 PID コントローラー
7-00 速度 PID フィードバック・ソース
7-01 速度 PID 降下
7-02 速度 PID 比例ゲイン
ック 値
ック 値
6-15 端子 53 高速度指令信号/フィードバ
6-14 端子 53 低速度指令信号/フィードバ
6-2* アナログ入力 2
6-20 端子 54 低電圧
6-16 端子 53 フィルター時間定数
8-14 コンフィ・コントロメッセ文 CTW
8-17 構成可能な警報 および 警告メッセ
7-05 速度 PID 微分 ゲイン制限
7-06 速度 PID 低域フィルター時間
7-03 速度 PID 積分時間
7-04 速度 PID 微分時間
6-21 端子 54 高電圧
6-22 端子 54 低電流
6-23 端子 54 高電流
6-24 端子 54 低速度指令信号/フィードバ
8-19 製品コード
8-3* FC ポート設定
8-30 プロトコル
8-31 アドレス
7-08 速度 PID フィードフォーワード 係数
7-09 ランプによる速度 PID エラー修正
7-07 速度 PID フィードバック・ギア比
7-1* トルク PI Ctr.
7-10 トルク PI フィードバック・ソース
ック 値
ック 値
6-25 端子 54 高速度指令信号/フィードバ
6-3* アナログ入力 3
6-26 端子 54 フィルター時間定数
8-32 FC ポート・ボーレート
8-33 パリティ/ストップ・ビット
8-34 想定サイクルタイム
8-35 最低応答遅延
8-36 最高応答遅延
7-18 トルク PI フィード・フォワード係数
7-19 電流コントローラー立ち上がり時間
7-16 トルク PI 低域フィルター時間
7-12 トルク PI 比例ゲイン
7-13 トルク PI 積分時間
ドバック 値
6-31 端子 X30/11 高電圧
6-34 端子 X30/11 低速度指令信号/フィー
6-35 端子 X30/11 高速度指令信号/フィー
6-30 端子 X30/11 低電圧
8-37 最高文字間遅延
8-4* FC MC プロトコル設定
8-40 テレグラム選択
8-41 信号用パラメーター
8-42 PCD 書き込み構成
8-43 PCD 読み出し構成
7-2* プロ CL フィードバック
7-20 プロ CL FB 1 リソース
ドバック 値
6-36 端子 X30/11 フィルター時定数
7-31 プロセス PID 反ねじ巻き
7-22 プロ CL FB 2 リソース
7-3* プロ PID CL
7-30 プロセス PID 順転/反転コントロール
6-4* アナログ入力 4
6-40 端子 X30/12 低電圧
6-41 端子 X30/12 高電圧
6-44 端子 X30/12 低速度指令信号/フィー
8-45 BTM トランザクションコマンド
8-46 BTM トランザクション状態
8-47 BTM タイムアウト
8-48 BTM 最大エラー
8-49 BTM エラーログ
8-5* ディジタル/バス
8-50 フリーラン選択
8-51 クイック停止選択
8-52 直流ブレーキ選択
8-53 スタート選択
7-32 プロ PID スタート速度
7-33 プロセス PID 比例ゲイン
7-34 プロセス PID 積分時間
ドバック 値
ドバック 値
6-45 端子 X30/12 高速度指令信号/フィー
7-39 オン速度指令信号帯域幅
7-35 プロセス PID 微分時間
7-36 プロセス PID 微分 ゲイン制限
7-38 プロPIDフィードフォワード 係数
7-4* 高度 プロセス PID I
7-40 プロセス PID I-パートリセット
7-41 プロセス PID 出力 Neg. クランプ
6-46 端子 X30/12 フィルター時定数
6-5* アナログ出力 1
6-50 端子 42 出力
6-51 端子 42 出力最小スケール
6-52 端子 42 出力最大スケール
6-53 端子 42 出力バス・コントロール
6-54 端子 42 出力タイムアウト・プリセット6-55 アナログ出力フィルター
8-54 逆転選択
8-55 設定選択
8-56 プリセット速度指令信号選択
8-57 プロフィドライブ OFF2 選択
8-58 プロフィドライブ OFF3 選択
8-8* FC ポート診断
8-80 バス・メッセージ・カウント
8-81 バス・エラー・カウント
8-82 スレーブ・メッセージ回復
Ref.
Ref.
7-49 プロセス PID 出力正/反 コントロー
7-45 プロ PIDFF リソース
7-46 プロセス PID FF 正/反 コントロール
7-44 プロセス PID ゲインスケール最大
7-42 プロセス PID 出力 Pos. クランプ
7-43 プロセス PID ゲインスケール最小
6-6* アナログ出力 2
6-60 端子 X30/8 出力
7-48 速度フィード・フォワード
ット
6-64 端子 X30/8 出力タイムアウト・プリセ
6-62 端子 X30/8 最大スケール
6-63 端子 X30/8 バス・コントロール
6-61 端子 X30/8 最小スケール
8-83 スレーブ・エラー・カウント
8-9* バス・ジョグ
8-90 バス・ジョグ 1 速度
ル
7-5* 高度 プロセス PID II
7-50 プロセス PID 拡張 PID
6-7* アナログ出力 3
6-70 端子 X45/1 出力
6-71 端子 X45/1 最小スケール
8-91 バス・ジョグ 2 速度
9-** プロフィドライブ
9-00 設定値
9-07 実際値
9-15 PCD 書き込み構成
7-51 プロ PIDFF ゲイン
7-52 プロ PIDFF ランプ up
7-53 プロ PIDFF ランプダウン
7-56 プロセス PID Ref. フィルター時間
7-57 プロセス PID Fb. フィルター時間
ット
6-74 端子 X45/1 出力タイムアウト・プリセ
6-72 端子 X45/1 最大スケール
6-73 端子 X45/1 バス・コントロール
6-8* アナログ出力 4
9-16 PCD 読み出し構成
9-18 ノード・アドレス
9-19 ドライブユニットシステム番号は
9-22 テレグラム選択
9-23 信号用パラメーター
8-** 通信とオプション
8-0* 一般設定
8-01 コントロール・サイト
8-02 コントロール・メッセージ文ソース
8-03 ControlWordTO 時間
9 9
6-82 端子 X45/3 最大スケール
6-83 端子 X45/3 バス・コントロール
6-80 端子 X45/3 出力
6-81 端子 X45/3 最小スケール
101)
101)
5-33 端子 X30/7 ディジタル出力 (MCB
5-32 端子 X30/6 ディジタル出力 (MCB
4-4* 速度モニター
5-4* リレー
5-40 機能リレー
5-41 オン遅延、リレー
5-42 オフ遅延、リレー
5-5* パルス入力
4-43 モーター速度モニター機能
4-44 モーター速度モニター最高
4-45 モーター速度モニタータイムアウト
4-5* 調整 警告
4-50 警告電流低
4-51 警告電流高
4-52 警告速度低
4-53 警告速度高
ック 値
ック 値
5-50 端子 29 低周波数
4-54 警告速度指令信号低
5-53 端子 29 高速度指令信号/フィードバ
5-51 端子 29 高周波数
5-52 端子 29 低速度指令信号/フィードバ
4-55 警告速度指令信号高
4-56 警告フィードバック低
5-54 パルス・フィルター時定数 #29
4-57 警告フィードバック高
4-58 損失したモーター相機能
4-59 始動時モーター確認
4-6* 速度バイパス
5-55 端子 33 低周波数
5-56 端子 33 高周波数
5-57 端子 33 低速度指令信号/フィードバ
4-60 バイパス最低速度 [RPM]
4-61 バイパス最低速度 [Hz]
4-62 バイパス最大速度 [RPM]
ック 値
ック 値
5-58 端子 33 高速度指令信号/フィードバ
5-6* パルス出力
5-59 パルス・フィルター時定数 #33
4-63 バイパス最高速度 [Hz]
4-8* 電気制限
4-80 電気制限機能 モーターモード
4-81 電気制限機能 ジェネレーターモード
4-82 電気制限モーターモード
5-60 端子 27 パルス出力変数
5-62 パルス出力最大周波数 #27
5-63 端子 29 パルス出力変数
5-65 パルス出力最大周波数 #29
5-66 端子 X30/6 パルス出力変数
5-68 パルス出力最大周波数 #X30/6
4-83 電気制限ジェネレーター・モード
4-9* 方向制限
4-90 方向制限モード
4-91 正速度制限[RPM]
4-92 正速度制限[Hz]
4-93 負速度制限[RPM]
5-7* 24V エンコーダー入力
5-70 端末 32/33 1 回転当たりのパルス
5-71 端子 32/33 エンコーダー方向
5-8* I/O オプション
5-80 AHF キャップ 再接続遅延
5-9* バス・コントロール完了
5-90 ディジタルおよびリレー・バス・コン
4-94 負速度制限[Hz]
4-95 正トルク制限
4-96 負トルク制限
5-** ディジタル入/出力
5-0* ディジタル I/O モード
5-00 ディジタル I/O モード
5-01 端子 27 モード
トロール
5-02 端子 29 モード
リセット
ル
5-93 パルスアウト #27 バス・コントロー
5-94 パルスアウト #27 タイムアウト・プ
5-1* ディジタル入力
5-10 端子 18 ディジタル入力
5-11 端子 19 ディジタル入力
5-12 端子 27 ディジタル入力
リセット
ル
5-97 パルス出力#X30/6 バス・コントロール
5-95 パルスアウト 29# バス・コントロー
5-13 端子 29 ディジタル入力
5-14 端子 32 ディジタル入力
5-98 パルス出力 #X30/6 タイムアウト・プ
5-96 パルスアウト 29# タイムアウト・プ
5-15 端子 33 ディジタル入力
5-16 端子 X30/2 ディジタル入力
5-17 端子 X30/3 ディジタル入力
5-18 端子 X30/4 ディジタル入力
リセット
6-** アナログ入/出力
6-0* アナログ I/O モード
6-00 ライブ・ゼロ・タイムアウト時間
6-01 ライブ・ゼロ・タイムアウト機能
5-19 端子 37 安全停止
5-20 端子 X46/1 ディジタル入力
5-21 端子 X46/3 ディジタル入力
5-22 端子 X46/5 ディジタル入力
5-23 端子 X46/7 ディジタル入力
6-1* アナログ入力 1
6-10 端子 53 低電圧
6-11 端子 53 高電圧
6-12 端子 53 低電流
6-13 端子 53 高電流
5-24 端子 X46/9 ディジタル入力
5-25 端子 X46/11 ディジタル入力
5-26 端子 X46/13 ディジタル入力
5-3* ディジタル出力
5-30 端子 27 ディジタル出力
5-31 端子 29 ディジタル出力
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 67
Page 74

付属資料
VLT® AutomationDrive FC 301/302
ョン
ョン
15-10 ロギング・ソース
15-11 ロギング間隔
15-12 トリガー・イベント
15-13 ロギング・モード
14-16 動的 バックアップ・ゲイン
14-2* トリップ・リセット
14-20 リセット・モード
14-21 自動再スタート時間
15-14 トリガー前サンプル
15-2* 履歴ログ
15-20 履歴ログ: イベント
15-21 履歴ログ: 値
15-22 履歴ログ: 時間
15-3* 不具合ログ
15-30 不具合ログ: エラー・コード
15-31 不具合ログ: 値
14-22 動作モード
14-23 タイプ・コード設定
14-24 電流制限時のトリップ遅延
14-25 トルク制限時のトリップ遅延
14-26 インバーター不具合時トリップ遅延
14-28 生産設定
14-29 サービス・コード
14-3* 電流制限コントローラー
15-33 不具合ログ: 日付と時間
15-32 不具合ログ: 時間
15-4* ドライブ識別
15-40 FC タイプ
15-41 電力セクション
15-42 電圧
15-43 ソフトウェア・バージョン
15-44 注文済みタイプ・コード文字列
15-45 実際タイプ・コード文字列
15-46 周波数変換器注文番号
15-47 電力カード注文番号
15-48 LCP ID 番号
15-49 SW ID コントロール・カード
15-50 SW ID 電力カード
時間
14-36 弱め界磁機能
14-37 弱め界磁速度
14-30 電流制限コントローラー、比例ゲイン
14-35 ストール保護
14-31 電流制限コントローラー、積分時間
14-32 電流制限コントローラー、フィルター
14-4* エネルギー最適化
14-40 VT レベル
14-41 AEO 最小磁化
14-42 AEO 最低周波数
14-43 モーター Cosphi
14-5* 環境
14-50 RFI フィルター
15-51 周波数変換器シリアル番号
15-53 電力カード・シリアル番号
15-54 構成ファイル名
15-58 スマート・セットアップ・ファイル名
15-59 ファイル名
15-6* オプション識別
15-60 オプション実装済み
15-61 オプション SW バージョン
15-62 オプション注文番号
15-63 オプション・シリアル番号
14-51 直流リンク補償
14-52 ファン・コントロール
14-53 ファン・モニター
14-55 出力フィルター
14-56 キャパシタンス出力フィルター
14-57 インダクタンス出力フィルター
14-59 インバーターユニットの実際のナンバー14-6* 温度自動低減
14-60 過温度で機能
15-70 スロット A のオプション
15-71 スロット A オプション SW バージョン
14-61 インバーター過負荷時の機能
14-62 インバーター 過負荷低減電流
15-75 スロット C0/E0 オプション SW バージ
15-72 スロット B のオプション
15-73 スロット B オプション SW バージョン
15-74 スロット C0/E0 のオプション
15-76 スロット C1/E1 のオプション
15-77 スロット C1/E1 オプション SW バージ
14-7* 互換性
14-72 過去警報メッセージ文
14-73 過去警告メッセージ文
14-74 過去 拡張 状態メッセージ文
14-8* オプション
14-80 外部 24VDC から供給オプション
14-88 オプションデータ保存
15-8* 動作データⅡ
15-80 ファン運転時間
15-81 プリセット・ファン運転時間
15-89 構成変更カウンター
15-9* パラメーター情報
14-89 オプション検出
14-9* デフォルト設定
14-90 不具合レベル
15-** ドライブ情報
15-0* 動作データ
15-00 動作時間
15-92 定義済みパラメーター
15-93 修正済みパラメーター
15-98 ドライブ識別
15-99 パラメーター・メタデータ
16-** データ読み出し
16-0* 一般状態
16-00 コントロール・メッセージ文
16-01 速度指令信号 [単位]
15-01 運転時間
15-02 KWh カウンター
15-03 電源投入回数
15-04 過熱回数
15-05 過電圧回数
15-06 kWh カウンターのリセット
15-07 稼動時間カウンターのリセット
15-1* データログ設定
99
バリー・レベル
13-44 論理規則ブール 3
13-42 論理規則ブール 2
12-85 ACD 最終コンフリクト
12-89 透過ソケットチャンネル・ポート
12-9* 高度なイーサネットサービス
12-90 ケーブル診断
12-91 オート・クロスオーバー
12-92 IGMP スヌーピング
12-93 ケーブルエラー長
12-94 同報ストーム保護
12-95 アイドル時間タイムアウト
12-96 ポート設定
12-97 QoS 優先度
12-98 インターフェース・カウンター
12-99 メディアカウンター
13-** スマート論理
13-0* SLC 設定
13-00 SL コントローラー・モード
13-01 イベント開始
13-02 イベント停止
13-03 SLC のリセット
13-1* コンパレーター
13-10 コンパレーター・オペランド
13-11 コンパレーター演算子
13-12 コンパレーター値
13-1* RS フリップフロップ
13-15 RS-FF オペランド S
13-16 RS-FF オペランド R
13-2* タイマー
13-20 SL コントローラー・タイマー
13-4* 論理規則
13-43 論理規則演算子 2
13-40 論理規則ブール 1
13-41 論理規則演算子 1
13-5* 状態
13-51 SL コントローラー・イベント
13-52 SL コントローラー・アクション
13-9* ユーザー定義アラート
13-90 アラートトリガー
13-91 アラートアクション
13-92 アラートテキスト
13-9* ユーザー定義読み出し
13-97 警報メッセージ文アラート
13-98 警告メッセージ文アラート
13-99 状態メッセージ文アラート
14-** 特殊関数
14-0* インバーター・スイッチ
14-00 スイッチ・パターン
14-01 スイッチ周波数
14-03 過変調
14-04 騒音減少
14-06 むだ時間補償
14-1* 主電源異常
14-10 主電源異常
14-11 主電源不具合電圧レベル
14-12 主不均衡に応答
14-14 動的 バックアップ・タイムアウト
14-15 動的 バックアップ・トリップ・リカ
12-0* IP 設定
12-00 IP アドレス割当
12-01 IP アドレス
12-02 サブネット・マスク
12-03 デフォルト・ゲートウェイ
12-04 DHCP サーバー
12-05 リース終了
12-06 ネームサーバー
12-07 ドメイン名称
12-08 ホスト名称
12-09 物理アドレス
12-1* イーサネットリンクパラメーター
12-10 リンク状態
12-11 リンク継続時間
12-12 自動ネゴシエーション
12-13 リンク速度
12-14 リンク・デュープレックス
12-18 管理者 MAC
12-19 管理者 IP アドレス
12-2* プロセス・データ
12-20 コントロール・インスタンス
12-21 プロセス・データ構成書き込み
12-22 プロセス・データ構成読み出し
12-23 プロセス・データ構成書き込みサイズ
12-24 プロセス・データ構成読み出しサイズ
12-27 マスター・アドレス
12-28 データ値の保存
12-29 常に保存
12-3* イーサネット/IP
12-30 警告パラメーター
12-31 ネット速度指令信号
12-32 ネット・コントロール
12-33 CIP レビジョン
12-34 CIP 製品コード
12-35 EDS パラメーター
12-37 COS 抑止タイマー
12-38 COS フィルター
12-4* Modbus TCP
12-40 状態パラメーター
12-41 スレーブ・メッセージ・カウント
12-42 スレーブ 例外メッセージ・カウント
12-5* EtherCAT
12-50 設定ステーション・エイリアス
12-51 構成した局アドレス
12-59 EtherCAT の状態
12-6* イーサネット PowerLink
12-60 ノード ID
12-62 SDO タイムアウト
12-63 基本的なイーサネット・タイムアウト
12-66 閾値
12-67 スレッショルドレベル・カウンター
12-68 累積カウンター
12-69 イーサネット PowerLink ステータス
12-8* 他のイーサネットサービス
12-80 FTP サーバー
12-81 HTTP サーバー
12-82 SMTP サービス
12-83 SNMP エージェント
12-84 アドレスコンフリクト検出
10-23 COS フィルター 4
9-27 パラメーター編集
9-28 プロセス制御
9-44 不具合メッセージ・カウンター
9-45 不具合コード
9-47 不具合番号
9-52 不具合状況カウンター
9-53 プロフィバス警告メッセージ文
9-63 実際ボーレート
9-64 デバイス識別
9-65 プロファイル番号
9-67 コントロール・メッセージ文 1
9-68 状態メッセージ文 1
9-70 設定の編集
9-71 プロフィバス・データ値保存
9-72 ProfibusDriveReset
9-75 DO 識別
9-80 定義済みパラメーター(1)
9-81 定義済みパラメーター(2)
9-82 定義済みパラメーター(3)
9-83 定義済みパラメーター(4)
9-84 定義済みパラメーター(5)
9-85 定義済みパラメーター (6)
9-90 変更済みパラメーター(1)
9-91 変更済みパラメーター(2)
9-92 変更済みパラメーター(3)
9-93 変更済みパラメーター(4)
9-94 変更済みパラメーター(5)
9-99 プロフィバスレビジョンカウンター
10-** CAN フィールドバス
10-0* 共通設定
10-00 CAN プロトコル
10-01 ボーレート選択
10-02 MAC ID
10-05 読み出し伝送エラー・カウンター
10-06 読み出し受信エラー・カウンター
10-07 読み出しバス・オフ・カウンター
10-1* DeviceNet
10-10 プロセス・データタイプ選択
10-11 プロセス・データ構成書き込み
10-12 プロセス・データ構成読み出し
10-13 警告パラメーター
10-14 ネット速度指令信号
10-15 ネット・コントロール
10-22 COS フィルター 3
10-2* COS フィルター
10-20 COS フィルター 1
10-21 COS フィルター 2
10-3* パラメーター・アクセス
10-30 アレイ・インデックス
10-31 データ値の保存
10-32 Devicenet レビジョン
10-33 常に保存
10-34 DeviceNet 製品コード
10-39 DeviceNet F パラメーター
10-5* CANopen
10-50 プロセス・データ構成書き込み
10-51 プロセス・データ構成読み出し
12-** イーサネット
68 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 75

付属資料 操作ガイド
32-15 エンコーダー 2 CAN ガード
32-3* エンコーダー 1
32-30 インクリメンタル信号タイプ
32-31 インクリメンタル分解能
32-32 絶対プロトコル
32-33 絶対分解能
32-35 絶対エンコーダー・データ長
32-36 絶対エンコーダー・クロック周波数
32-37 絶対エンコーダー・クロック発生
32-38 絶対エンコーダー・ケーブル長
32-39 エンコーダー監視
32-40 エンコーダー終端
32-43 エンコーダー 1 制御
32-44 エンコード 1 ノード ID
32-45 エンコーダー 1 CAN ガード
32-5* フィードバック・ソース
32-50 ソース・スレーブ
32-51 MCO 302 最終意思
32-52 ソース・マスター
32-6* PID コントローラー
32-60 比例率
32-61 微分率
32-62 積分率
32-63 積分合計用に制限値
32-64 PID 帯域幅
32-65 速度フィード・フォワード
32-66 加速フィード・フォワード
32-67 最大許容位置エラー
32-68 スレーブ用の逆動作
32-69 PID 制御用のサンプリング時間
32-70 プロファイルジェネレータ用スキャン時間
32-71 制御ウィンドウのサイズ(起動)
32-72 制御ウィンドウのサイズ(非起動)
32-73 統合制限フィルター時間
32-74 位置エラー・フィルター時間
32-8* 速度 & 加速
32-80 最大速度(エンコーダー)
32-81 最短ランプ
32-82 ランプタイプ
32-83 速度分解能
32-84 デフォルト速度
32-85 デフォルト加速
32-86 上限ジャークまで加速
32-87 下限ジャークまで加速
32-88 上限ジャークまで減速
32-89 下限ジャークまで減速
32-9* 開発
32-90 デバッグソース
33-** MCO 高度 設定
33-0* ホーム・モーション
33-00 フォース・ホーム
33-01 ホーム位置からの 0 点オフセット
33-02 ホームモーション用ランプ
33-03 ホーム・モーションの速度
33-04 ホーム・モーション中の動作
33-1* 同期化
33-10 同期係数マスター
33-11 同期係数スレーブ
33-12 同期化用の位置オフセット
30-05 ウォブルジャンプ周波数 [%]
30-06 ウォブルジャンプ時間
30-07 ウォブルシーケンス時間
30-08 ウォブル上げ/下げ時間
30-09 ウォブルランダム機能
30-10 ウォブル率
30-11 ウォブルランダム率最大
18-03 保守ログ: 日付と時間
18-02 保守ログ: 時間
18-2* モーター読み出し
18-27 安全出力 推定 速度
18-28 安全出力 測定 速度
18-29 安全出力 速度エラー
18-3* アナログ読出
16-74 正確な 停止カウンター
16-75 アナログ・イン X30/11
16-72 カウンター A
16-70 パルス出力 #29 [Hz]
16-71 リレー出力 [バイナリ]
16-76 アナログ・イン X30/12
16-73 カウンター B
30-12 ウォブルランダム率最小
30-19 ウォブルデルタ周波数 スケール済
30-2* 高度 調整開始
30-20 高始動トルク時間 [s]
30-21 高始動トルク電流 [%]
30-22 回転子拘束保護
30-23 回転子拘束検知時間 [s]
30-24 回転子拘束検知速度誤差 [%]
30-25 軽負荷遅延 [s]
18-36 アナログ入力 X48/2 [mA]
18-37 温度 入力 X48/4
18-38 温度 入力 X48/7
18-39 温度 入力 X48/10
18-4* PGIO データ読み出し
18-43 アナログ出力 X49/7
18-44 アナログ出力 X49/9
18-45 アナログ出力 X49/11
18-5* 有効な警報/警告
16-77 アナログ・アウト X30/8 [mA]
16-78 アナログ・アウト X45/1 [mA]
16-79 アナログ・アウト X45/3 [mA]
16-8* フィールドバス & FC ポート
16-80 フィールドバス CTW 1
16-86 FC ポート REF 1
16-85 FC ポート CTW 1
16-82 フィールドバス REF 1
16-84 通信 オプション STW
30-27 軽負荷速度 [%]
30-26 軽負荷電流 [%]
30-5* ユニット構成
30-50 ヒートシンク・ファンモード
30-8* 互換性 (I)
30-80 d 軸インダクタンス (Ld)
30-81 ブレーキ抵抗器(オーム)
30-83 速度 PID 比例ゲイン
30-84 プロセス PID 比例ゲイン
30-9* Wifi LCP
30-90 SSID
30-91 チャンネル
18-55 有効な警報番号
18-56 有効な警告番号
18-6* 入力&出力 2
18-60 ディジタル入力 2
18-7* 整流器のステータス
18-70 主電源電圧
18-71 主電源周波数
18-72 電源アンバランス
18-75 整流器直流電圧
18-9* PID 読み出し
18-90 プロセス PID エラー
18-91 プロセス PID 出力
16-87 バス読み出し警報/警告
16-89 構成可能な警報/警告メッセージ文
16-9* 診断読み出し
16-90 警報メッセージ文
16-91 警報メッセージ文 2
16-92 警告メッセージ文
16-93 警告メッセージ文 2
16-94 拡張 状態メッセージ文
16-95 拡張 状態メッセージ文 2
16-96 保守メッセージ文
17-** 位置フィードバック
17-1* エンコーダーを含む インターフェー
30-92 パスワード
30-93 セキュリティ タイプ
30-94 IP アドレス
30-95 サブマスク
30-96 ポート
30-97 Wifi タイムアウト・アクション
31-** バイパス・オプション
18-92 プロセス PID クランプ出力
18-93 プロセス PID ゲインスケール出力
22-** アプリケーション 機能
22-0* その他
22-00 外部インターロック遅延
23-** 時間ベース機能
23-0* 時限アクション
ス
17-2* Abs. Enc. インターフェース
17-20 プロトコル選択
17-21 分解能(位置/回転)
17-10 信号タイプ
17-11 分解能(PPR)
17-22 マルチターン・レボルーション
31-00 バイパス・モード
31-01 バイパス・スタート時間遅延
31-02 バイパス・トリップ時間遅延
31-03 テスト・モード起動
31-10 バイパス状態メッセージ文
31-11 バイパス稼働時間
23-00 オン・タイム
23-01 オン・アクション
23-02 オフ・タイム
23-03 オフ・アクション
23-04 発生
23-0* 定時アクション設定
17-24 SSI データ長さ
17-25 時計歩度
17-26 SSI データ形式
17-34 HIPERFACE ボーレート
17-5* レゾルバー・インターフェース
17-50 極数
31-19 リモートバイパス起動
32-** MCO 基本設定
32-0* エンコーダー 2
32-00 インクリメンタル信号タイプ
32-01 インクリメンタル分解能
32-02 絶対プロトコル
32-03 絶対分解能
32-04 絶対エンコーダー・ボーレート X55
23-08 定時アクションモード
23-09 定時アクション再起動
23-1* メンテナンス
23-10 保守項目
23-11 保守アクション
23-12 保守時間ベース
23-13 保守時間間隔
23-14 保守日時
17-51 入力電圧
17-52 入力周波数
17-53 変圧比
17-56 エンコーダー Sim. 分解能
17-59 レゾルバー・インターフェース
17-6* モニタ+App
17-60 フィードバック方向
17-61 フィードバック信号監視
32-05 絶対エンコーダー・データ長
32-06 絶対エンコーダー・クロック周波数
32-07 絶対エンコーダー・クロック発生
32-08 絶対エンコーダー・ケーブル長
32-09 エンコーダー監視
32-10 回転方向
32-11 ユーザユニットデノミネータ
32-12 ユーザユニットニューメレータ
32-13 エンコーダー 2 制御
32-14 エンコード 2 ノード ID
23-1* 保守リセット
23-15 保守メッセージ文をリセット
23-16 保全テキスト
30-** 特別機能
30-0* ウォブラー
30-00 ウォブルモード
30-01 ウォブルデルタ周波数 [Hz]
30-02 ウォブルデルタ周波数 [%]
30-03 ウォブルデルタ周波数 リソース
30-04 ウォブルジャンプ周波数 [Hz]
17-7* スケーリングを配置
17-70 単位を配置
17-71 単位スケールを配置
17-72 ユニットニューメレータ を配置
17-73 ユニットデノミネータを配置
17-74 オフセットを配置
18-** データ読出 2
18-0* 保守ログ
18-00 保守ログ: 項目
18-01 保守ログ: アクション
9 9
16-69 パルス出力 #27[Hz]
16-09 カスタム読み出し
16-06 実際の位置
16-02 速度指令信号 %
16-03 状態メッセージ文
16-05 主電源実効値 [%]
16-1* モーター状態
16-10 電力 [KW]
16-11 出力 [hp]
16-12 モーター電圧
16-13 周波数
16-14 モーター電流
16-15 周波数 [%]
16-16 トルク [Nm]
16-17 速度 [RPM]
16-18 モーター熱
16-19 サーミスター・センサー温度
16-20 モーター角
16-21 トルク [%] 高分解能
16-22 トルク [%]
16-23 モーターシャフト電力 [kW]
16-24 校正済み固定子抵抗
16-25 トルク [Nm]高
16-3* ドライブ状態
16-30 直流リンク電圧
16-31 システム温度
16-32 ブレーキ・エネルギー/秒
16-33 ブレーキ・エネルギー平均
16-34 ヒートシンク温度
16-35 インバーター熱
16-36 インバーター 定格 電流
16-37 インバーター 最大電流
16-38 SL コントローラー状態
16-39 コントロール・カード温度
16-40 ロギング・バッファー・フル
16-48 速度指令信号 ランプ後 [RPM]
16-41 パフォーマンス測定
16-42 サービス ログ カウンター
16-47 モーター相 W 電流
16-43 定時アクション状態
16-45 モーター相 U 電流
16-46 モーター相 V 電流
16-49 電流不具合原因
16-5* 指令信号とフィードバック
16-50 外部速度指令信号
16-51 パルス基準
16-52 フィードバック [単位]
16-53 ディジポテンショ速信
16-57 フィードバック [RPM]
16-6* 入力&出力
16-60 ディジタル入力
16-61 端子 53 スイッチ設定
16-62 アナログ入力 53
16-63 端子 54 スイッチ設定
16-64 アナログ入力 54
16-66 ディジタル出力 [バイナリ]
16-67 周波数 入力 #29 [Hz]
16-65 アナログ出力 42 [mA]
16-68 周波数 入力 33# [Hz]
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 69
Page 76
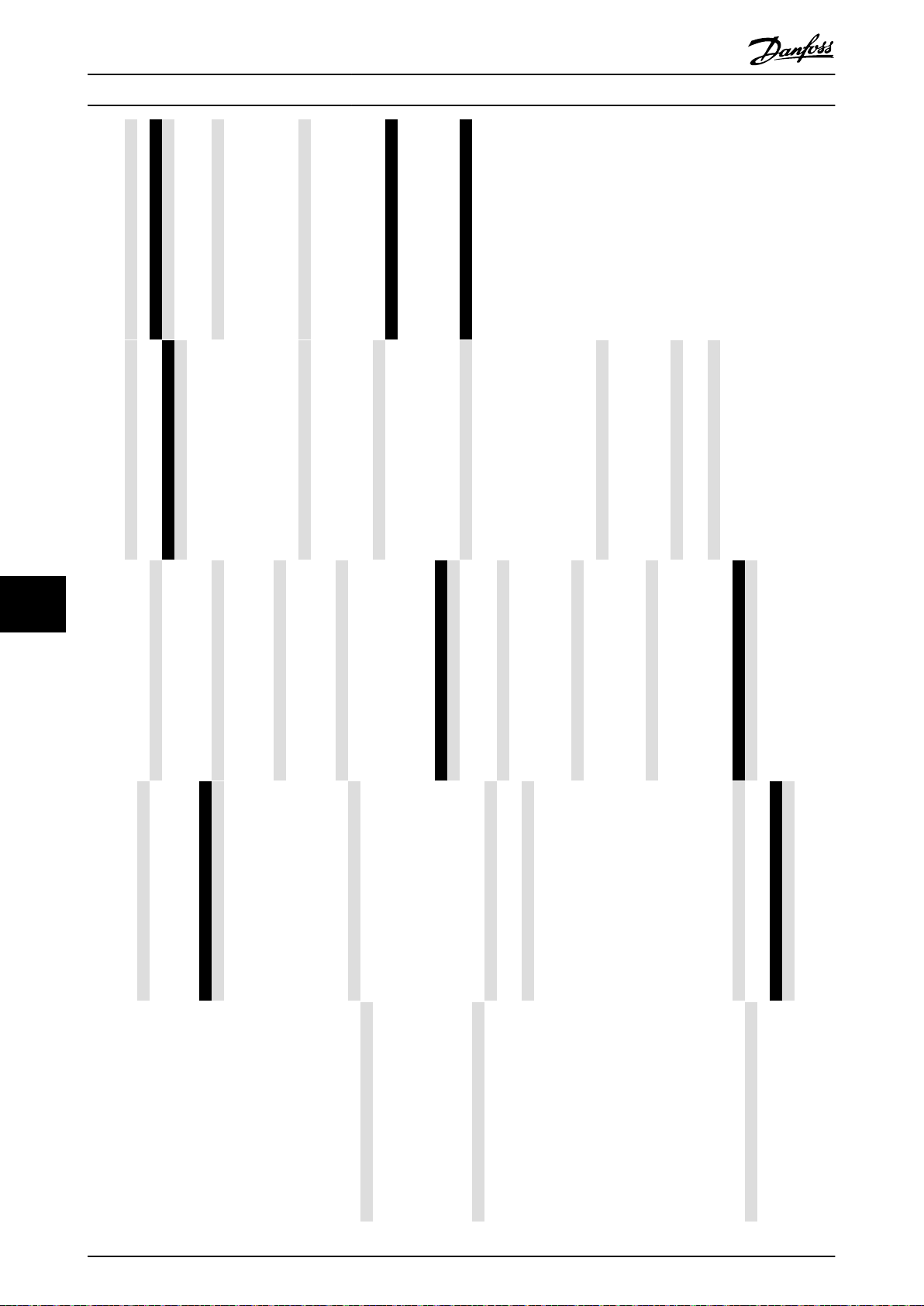
付属資料
VLT® AutomationDrive FC 301/302
ルバージョン
42-89 カスタム化ファイルバージョン
42-88 サポートされているカスタム化ファイ
42-9* 特殊
42-90 安全オプションのリスタート
43-** ユニット読み出し
43-0* コンポーネントのステータス
43-00 コンポーネントの温度
43-01 補助温度
43-02 コンポーネントソフトウェア ID
40-45 不具合ログ: コントロール・メッセージ文40-46 不具合ログ: 状態メッセージ文
40-5* 高度な制御設定
40-50 センサレス磁束モデルシフト
40-51 センサレス磁束修正 ゲイン
42-** 安全機能
42-1* 速度監視
42-10 速度ソースの測定
42-11 エンコーダー分解能
43-1* 電力カードのステータス
43-10 HS 温度 ph.U
43-11 HS 温度 ph.V
42-12 エンコーダー方向
42-13 ギア比
42-14 フィードバック・タイプ
43-15 PC ファン C 速度
43-12 HS 温度 ph.W
43-13 PC ファン A 速度
43-14 PC ファン B 速度
42-15 フィードバック・フィルター
42-17 許容誤差
42-18 ゼロ速度タイマー
42-19 ゼロ速度制限
43-2* ファン電源カードのステータス
43-20 FPC ファン A 速度
42-2* 安全入力
42-20 安全機能
43-24 FPC ファン E 速度
43-23 FPC ファン D 速度
43-22 FPC ファン C 速度
43-21 FPC ファン B 速度
42-21 タイプ
42-22 ディスクレパンシー(不一致)時間
42-23 安定信号時間
42-24 再スタート動作
選択
43-25 FPC ファン F 速度
600-**プロフィセーフ
600-22プロフィドライブ/安全テレグラム
42-3* 一般
42-30 外部障害反応
42-31 リセットソース
42-33 パラメーター設定名
グラム No.
601-**プロフィドライブ 2
600-44不具合メッセージ・カウンター
42-35 S-CRC 値
601-22プロフィドライブ 安全チャネルテレ
600-47不具合番号
600-52不具合状況カウンター
42-36 レベル 1 パスワード
42-37 レベル 1 パスワードバッファ
42-4* SS1
42-40 タイプ
42-41 ランプ・プロファイル
42-42 遅延時間
42-43 デルタ T
42-44 減速率
42-45 デルタ V
42-46 ゼロ速度
42-47 ランプ時間
42-48 減速時 Sランプ 比 スタート
42-49 減速時 Sランプ 比 終了
42-5* SLS
42-50 カットオフ速度
42-51 速度制限
42-52 フェイルセーフ反応
42-53 ランプ起動
42-54 立ち下り時間
42-6* 安全フィールドバス
42-60 テレグラム選択
42-61 行先アドレス
42-8* 状態
42-80 安全オプション状態
42-81 安全オプション状態 2
42-82 安全コントロール・メッセージ文
42-83 安全状態メッセージ文
42-85 アクティブ安全機能
42-86 安全オプション情報
42-87 手動試験までの時間
99
ック 値
ック 値
ト
35-02 端子 X48/7 温度単位
35-03 端子 X48/7 入力タイプ
35-04 端子 X48/10 温度単位
35-05 端子 X48/10 入力タイプ
35-06 温度センサー警報機能
35-1* 温度 入力 X48/4
33-85 外部 24VDC によって供給された MCO
33-86 警報時端子
33-87 警報時端子状態
33-88 警報時状態メッセージ
33-9* MCO ポート設定
33-90 X62 MCO CAN ノード ID
33-13 位置同期化用の精度ウィンドウ
33-14 相対スレーブ速度制限
33-15 マスター用のマーカー番号
33-16 スレーブ用のマーカー番号
33-17 マスター・マーカー距離
33-18 スレーブ・マーカー距離
35-17 端子 X48/4 高温度 制限
35-14 端子 X48/4 フィルター時定数
35-15 端子 X48/4 温度 モニター
35-16 端子 X48/4 低温度 制限
35-2* 温度 入力 X48/7
35-24 端子 X48/7 フィルター時定数
33-94 X60 MCO RS485 シリアル端子
33-95 X60 MCO RS485 シリアル・ボーレート
33-91 X62 MCO CAN ボーレート
34-** MCO データ読み出し
34-0* PCD 書き込みパラメーター
34-01 PCD 1 MCO へ書き込み
33-19 マスター・マーカー・タイプ
33-20 スレーブ・マーカー・タイプ
33-21 マスター・マーカー許容ウィンドウ
33-22 スレーブ・マーカー許容ウィンドウ
33-23 マーカー同期化用スタート動作
33-24 不具合用のマーカー番号
35-37 端子 X48/10 高温度 制限
35-36 端子 X48/10 低温度 制限
35-35 端子 X48/10 温度 モニター
35-27 端子 X48/7 高温度 制限
35-25 端子 X48/7 温度 モニター
35-26 端子 X48/7 低温度 制限
35-3* 温度 入力 X48/10
35-34 端子 X48/10 フィルター時定数
34-02 PCD 2 MCO へ書き込み
34-03 PCD 3 MCO へ書き込み
34-04 PCD 4 MCO へ書き込み
34-05 PCD 5 MCO へ書き込み
34-06 PCD 6 MCO へ書き込み
33-25 準備完了用のマーカー番号
33-26 速度フィルター
33-27 オフセット・フィルター時間
33-28 マーカー・フィルター構成
33-29 マーカーフィルタ用フィルタ時間
35-4* アナログ入力 X48/2
35-42 端子 X48/2 低電流
34-07 PCD 7 MCO へ書き込み
34-08 PCD 8 MCO へ書き込み
34-09 PCD 9 MCO へ書き込み
34-10 PCD 10 MCO へ書き込み
34-2* PCD 読み出しパラメーター
33-30 最大マーカー修正
33-31 同期化タイプ
33-32 フィード・フォワード速度適合
33-33 速度フィルター・ウインドウ
33-34 スレーブ・マーカー・フィルタ時間
35-43 端子 X48/2 高電流
34-23 PCD 3 MCO から読み出し
34-21 PCD 1 MCO から読み出し
34-22 PCD 2 MCO から読み出し
33-4* 制限取扱い
33-40 エンド制限スィッチでの動作
33-41 負ソフトウェア・エンド制限
36-** プログラマブル I/O オプション
36-0* I/O モード
36-03 端子 X49/7 モード
34-24 PCD 4 MCO から読み出し
34-25 PCD 5 MCO から読み出し
34-26 PCD 6 MCO から読み出し
34-27 PCD 7 MCO から読み出し
34-28 PCD 8 MCO から読み出し
34-29 PCD 9 MCO から読み出し
33-42 正ソフトウェア・エンド制限
33-43 負ソフトウェアエンド 制限アクティブ
33-44 正ソフトウェアエンド 制限アクティブ
33-45 目標ウィンドウでの時間
33-46 目標ウィンドウ制限値
33-47 目標ウィンドウのサイズ
36-04 端子 X49/9 モード
34-30 PCD 10 MCO から読み出し
33-5* I/O 構成
35-46 端子 X48/2 フィルター時定数
35-45 端子 X48/2 高指令信号/フィードバ
35-44 端子 X48/2 低指令信号/フィードバ
36-05 端子 X49/11 モード
36-4* 出力 X49/7
36-40 端子 X49/7 アナログ出力
36-42 端子 X49/7 最小スケール
36-43 端子 X49/7 最大スケール
36-44 端子 X49/7 バス・コントロール
34-4* 入力&出力
34-40 ディジタル入力
34-41 ディジタル出力
34-5* プロセス・データ
34-50 実際の位置
34-51 コマンドされた位置
33-50 端子 X57/1 ディジタル入力
33-51 端子 X57/2 ディジタル入力
33-52 端子 X57/3 ディジタル入力
33-53 端子 X57/4 ディジタル入力
33-54 端子 X57/5 ディジタル入力
33-55 端子 X57/6 ディジタル入力
36-45 端子 X49/7 タイムアウトプリセット
36-5* 出力 X49/9
36-50 端子 X49/9 アナログ出力
36-52 端子 X49/9 最小スケール
36-53 端子 X49/9 最大スケール
36-54 端子 X49/9 バス・コントロール
36-55 端子 X49/9 タイムアウトプリセット
36-6* 出力 X49/11
36-60 端子 X49/11 アナログ出力
34-52 実際のマスター位置
34-53 スレーブ・インデックス位置
34-54 マスター・インデックス位置
34-55 曲線位置
34-56 トラック・エラー
34-57 同期エラー
34-58 実際の速度
34-59 実際のマスター速度
34-60 同期状態
33-56 端子 X57/7 ディジタル入力
33-57 端子 X57/8 ディジタル入力
33-58 端子 X57/9 ディジタル入力
33-59 端子 X57/10 ディジタル入力
33-60 端子 X59/1 と X59/2 モード
33-61 端子 X59/1 ディジタル入力
33-62 端子 X59/2 ディジタル入力
33-63 端子 X59/1 ディジタル出力
33-64 端子 X59/2 ディジタル出力
36-62 端子 X49/11 最小スケール
36-63 端子 X49/11 最大スケール
36-64 端子 X49/11 バス・コントロール
36-65 端子 X49/11 タイムアウトプリセッ
40-** 特殊設定
34-61 軸状態
34-62 プログラム状態
34-64 MCO 302 状態
34-65 MCO 302 コントロール
34-66 SPI エラーカウンター
34-7* 診断読み出し
33-65 端子 X59/3 ディジタル出力
33-66 端子 X59/4 ディジタル出力
33-67 端子 X59/5 ディジタル出力
33-68 端子 X59/6 ディジタル出力
33-69 端子 X59/7 ディジタル出力
33-70 端子 X59/8 ディジタル出力
40-44 不具合ログ: 直流リンク電圧
40-4* 拡張 不具合ログ
34-70 MCO 警報メッセージ文 1
33-8* グローバル・パラメーター
40-43 不具合ログ: 電圧
40-40 不具合ログ: 拡張 速度指令信号
40-41 不具合ログ: 周波数
40-42 不具合ログ: 電流
34-71 MCO 警報メッセージ文 2
35-** センサー入力オプション
35-0* 温度 入力モード
35-00 端子 X48/4 温度単位
35-01 端子 X48/4 入力タイプ
33-80 起動されたプログラム番号
33-81 電源投入状況
33-82 ドライブ状況監視
33-83 エラー後の動作
33-84 Esc 後の動作
70 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 77

付属資料 操作ガイド
3-67 減速時ランプ 3 対 S ランプ比始
3-68 減速時ランプ 3 対 S ランプ比終
3-7* ランプ 4
3-70 ランプ 4 タイプ
3-71 ランプ 4 立ち上がり時間
Time
Proportional Gain
3-77 減速時ランプ 4 対 S ランプ比始
3-78 減速時ランプ 4 対 S ランプ比終
3-76 加速時ランプ 4 対 S ランプ比終
3-75 加速時ランプ 4 対 S ランプ比始
3-72 ランプ 4 立ち下がり時間
3-8* その他のランプ
3-80 ジョグ・ランプ時間
3-81 クイック停止ランプ時間
3-82 クイック停止ランプタイプ
3-83 Q 停止 S-ramp 率減速 Start
3-84 Q 停止 S-ramp 率減速 終了
3-89 Ramp Lowpass Filter Time
3-9* デジポテメータ
3-90 ステップ・サイズ
3-91 ランプ時間
3-92 電力回復
3-93 上限
3-94 下限
3-95 ランプ遅延
4-** 制限/警告
4-1* モーター制限
4-10 モーター速度方向
4-11 モーター速度下限[RPM]
4-12 モーター速度下限[Hz]
4-13 モーター速度上限[RPM]
4-14 モーター速度上限[Hz]
4-16 トルク制限モーター・モード
4-17 トルク制限ジェネレーター・モード
4-18 電流制限
4-19 最高出力周波数
4-2* 制限係数
4-20 トルク制限係数ソース
4-21 速度制限係数ソース
4-23 Brake Check Limit Factor Source
4-24 Brake Check Limit Factor
4-3* モータ速度監視
4-30 モーター・フィードバック損失機能
4-31 モータ FB 速度エラー
4-32 モータ FB 損失タイムアウト
4-34 追跡エラー機能
4-35 追跡エラー
4-36 追跡エラータイムアウト
4-37 追跡エラーランピング
4-38 追跡エラーランプタイムアウト
4-39 ランプタイムアウト後の追跡エラー
4-4* Speed Monitor
4-43 Motor Speed Monitor Function
4-44 Motor Speed Monitor Max
4-45 Motor Speed Monitor Timeout
4-5* 調整警告
4-50 警告電流低
4-51 警告電流高
4-52 警告速度低
4-53 警告速度高
2-34 Zero Speed Position P
2-33 Speed PID Start Lowpass Filter
1-70 PM Start Mode
1-04 過負荷モード
3-** 速信ランプ
1-71 スタート遅延
1-72 スタート機能
1-73 フライング・スタート
1-74 スタート速度[RPM]
1-05 ローカル・モード構成
1-06 時計回り方向
1-07 Motor Angle Offset Adjust
1-1* モーター選択
3-0* 速信制限
3-00 速度指令信号範囲
3-01 速度指令信号/フィードバック単位
3-02 最低速度指令信号
3-03 最大速度指令信号
3-04 速度指令信号機能
3-05 On Reference Window
3-06 Minimum Position
3-07 Maximum Position
3-08 On Target Window
3-09 On Target Time
1-75 スタート速度[Hz]
1-76 スタート電流
1-8* 停止調整
1-80 停止時の機能
1-81 停止時の機能の最低速度[RPM]
1-82 停止時機能の最低速度[Hz]
1-9* モーター温度
1-90 モーター熱保護
1-91 モーター外部ファン
1-93 サーミスター・リソース
1-94 ATEX ETR cur.lim. speed
1-25 モーター公称速度
1-26 モーター一定定格トルク
1-23 モーター周波数
1-10 モーター構造
1-11 Motor Model
1-18 Min. Current at No Load
1-2* Mo データ
1-20 モーター電力[kW]
1-24 モーター電流
1-21 モーター出力 [HP]
1-22 モーター電圧
3-1* References
3-10 プリセット速度指令信号
3-11 ジョグ速度 [Hz]
3-12 増加/スローダウン値
3-13 速度指令信号サイト
3-14 プリセット相対速度指令信号
3-15 速度指令信号リソース 1
3-16 速度指令信号リソース 2
3-17 速度指令信号リソース 3
reduction
1-95 KTY センサー・タイプ
1-96 KTY サーミスター・リソース
1-97 KTY 閾値レベル
1-98 ATEX ETR interpol. points freq.
1-99 ATEX ETR interpol points current
2-** ブレーキ
2-0* 直流ブレーキ
2-00 直流保留電流
1-29 自動モーター適合(AMA)
1-3* 調整 Mo データ
1-30 固定子抵抗(Rs)
1-31 回転抵抗(Rr)
1-33 固定子漏洩リアクタンス(X1)
1-34 回転子漏洩リアクタンス(X2)
1-35 主電源リアクタンス(Xh)
1-36 鉄損失抵抗(Rfe)
1-37 d 軸インダクタンス (Ld)
3-18 相対スケール速信リソース
3-19 ジョグ速度[RPM]
3-2* References II
3-20 Preset Target
3-21 Touch Target
3-22 Master Scale Numerator
3-23 Master Scale Denominator
3-24 Master Lowpass Filter Time
3-25 Master Bus Resolution
3-26 Master Offset
2-01 直流ブレーキ電流
2-02 直流ブレーキ時間
2-03 直流ブレーキ作動速度 [RPM]
2-04 直流ブレーキ作動速度 [Hz]
2-05 最大速度指令信号
2-06 Parking Current
2-07 Parking Time
2-1* Br エネルギ機能
2-10 ブレーキ機能
2-11 ブレーキ抵抗器(オーム)
1-48 d-axis Inductance Sat. Point
1-49 q-axis Inductance Sat. Point
1-47 Torque Calibration
1-45 q-axis Inductance Sat. (LqSat)
1-46 Position Detection Gain
1-44 d-axis Inductance Sat. (LdSat)
1-41 モーター角オフセット
1-38 q-axis Inductance (Lq)
1-39 モーター極
1-40 1000 RPM にて EMF に復活
3-47 減速時ランプ 1 対 S ランプ比始
3-48 減速時ランプ 1 対 S ランプ比終
3-46 加速時ランプ 1 対 S ランプ比終
3-27 Virtual Master Max Ref
3-28 Master Offset Speed Ref
3-4* ランプ 1
2-12 ブレーキ電力制限(kW)
2-13 ブレーキ電力監視
2-15 ブレーキ確認
1-5* 負荷独立設定
1-50 速度ゼロにおけるモーター磁化
1-51 最低速度正常磁化 [RPM]
3-45 加速時ランプ 1 対 S ランプ比始
3-40 ランプ 1 タイプ
3-41 ランプ 1 立ち上がり時間
3-42 ランプ 1 立ち下がり時間
2-16 交流ブレーキ最大電流
2-17 過電圧コントロール
2-18 ブレーキ確認状態
2-19 Over-voltage Gain
fieldweakening
1-52 最低速度正常磁化 [Hz]
1-53 モデル・シフト周波数
1-54 Voltage reduction in
3-5* ランプ 2
2-2* 機械的ブレーキ
2-20 ブレーキ電流の解放
2-21 ブレーキ速度の有効化[RPM]
2-22 ブレーキ作動速度[Hz]
1-57 Torque Estimation Time Constant
1-58 フライスタート検査パルス電流
1-55 U/f 特性 - U
1-56 U/f 特性 - F
3-57 減速時ランプ 2 対 S ランプ比始
3-58 減速時ランプ 2 対 S ランプ比終
3-56 加速時ランプ 2 対 S ランプ比終
3-55 加速時ランプ 2 対 S ランプ比始
3-50 ランプ 2 タイプ
3-51 ランプ 2 立ち上がり時間
3-52 ランプ 2 立ち下がり時間
2-23 ブレーキ遅延の有効化
2-24 停止遅延
2-25 ブレーキ解放時間
2-26 トルク基準
1-59 フライスタート検査パルス周波数
1-6* 負荷依存設定
1-60 低速負荷補償
1-61 低速負荷補償
3-6* ランプ 3
2-27 トルク・ランプ時間
2-28 ゲイン・ブースト係数
2-29 Torque Ramp Down Time
2-3* Adv. Mech Brake
1-62 スリップ補償
1-63 スリップ補償時間定数
1-64 共振制動
1-65 共振制動時間定数
3-66 加速時ランプ 3 対 S ランプ比終
3-65 加速時ランプ 3 対 S ランプ比始
3-60 ランプ 3 タイプ
3-61 ランプ 3 立ち上がり時間
3-62 ランプ 3 立ち下がり時間
Gain
Gain
2-30 Position P Start Proportional
1-66 低速時の最低電流
2-32 Speed PID Start Integral Time
2-31 Speed PID Start Proportional
1-67 負荷タイプ
1-68 最低慣性
1-69 最高慣性
1-7* スタート調整
9 9
ニュー構造
ト)キー
0-24 表示行 3 大
0-25 マイ・パーソナル・メニュー
9.2.2 パラメーター・メ
0-** 動作/表示
0-0* 基本設定
0-01 言語
0-02 モーター速度単位
0-03 地域設定
0-04 電源投入(手動)時の動作状況
0-09 Performance Monitor
0-1* 設定操作
0-10 アクティブセットアップ
0-11 設定の編集
0-12 この設定のリンク先
0-13 読み出し:リンクされた設定
0-14 読み出し:設定/チャネルの編集
0-15 Readout: actual setup
0-2* LCP 表示
0-23 表示行 2 大
0-20 表示行 1.1 小
0-21 表示行 1.2 小
0-22 表示行 1.3 小
0-3* LCP カスタ読出
0-30 ユーザー定義読み出しデータ範囲
0-31 ユーザー定義読み出しの最小値
0-32 ユーザー定義読み出しの最高値
0-33 Source for User-defined Readout
0-37 表示テキスト 1
0-38 表示テキスト 2
0-39 表示テキスト 3
0-4* LCP キーパッド
0-40 LCP の[Hand on]キー
0-41 LCP の[Off]キー
0-42 LCP の[Auto on]キー
0-43 LCP の[Reset]キー
0-44 LCP の[Off/Reset](オフ / リセッ
0-45 [Drive Bypass] Key on LCP
0-5* コピー/保存
0-50 LCP コピー
0-51 設定コピー
0-6* パスワード
0-60 メイン・メニュー・パスワード
0-61 パスワなしメインメニュー Acc
0-65 クイック・メニュー・パスワード
0-66 パスワなしクイックメニュー Acc
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 71
0-67 バス・パスワード・アクセス
0-68 Safety Parameters Password
0-69 Password Protection of Safety
Parameters
1-** 負荷及びモータ
1-0* 一般設定
1-00 構成モード
1-01 モーター・コントロールの原則
1-02 磁束 MF ソース
1-03 トルク特性
Page 78

付属資料
9-07 Actual Value
9-15 PCD Write Configuration
9-16 PCD Read Configuration
9-18 Node Address
9-19 Drive Unit System Number
9-22 Telegram Selection
9-23 Parameters for Signals
9-27 Parameter Edit
9-45 Fault Code
9-44 Fault Message Counter
9-28 Process Control
9-47 Fault Number
9-52 Fault Situation Counter
9-64 Device Identification
9-65 Profile Number
9-63 Actual Baud Rate
9-53 Profibus Warning Word
VLT® AutomationDrive FC 301/302
9-72 ProfibusDriveReset
9-75 DO Identification
9-80 Defined Parameters (1)
9-81 Defined Parameters (2)
9-82 Defined Parameters (3)
9-83 Defined Parameters (4)
9-84 Defined Parameters (5)
9-85 Defined Parameters (6)
9-90 Changed Parameters (1)
9-68 Status Word 1
9-70 Edit Set-up
9-71 Profibus Save Data Values
9-67 Control Word 1
9-91 Changed Parameters (2)
9-92 Changed Parameters (3)
9-93 Changed Parameters (4)
9-94 Changed Parameters (5)
9-99 Profibus Revision Counter
10-** CAN F バス
10-0* 共通設定
10-00 CAN プロトコール
10-01 ボーレート選択
10-02 MAC ID
10-05 読み出し伝送エラー・カウンター
10-06 読み出し受信エラー・カウンター
10-07 読み出しバス・オフ・カウンター
10-1* DeviceNet
10-10 プロセス・データタイプ選択
10-11 プロセス・データ構成書き込み
10-12 プロセス・データ構成読み出し
10-13 警告パラメーター
10-14 ネット速度指令信号
10-15 ネット・コントロール
10-2* COS フィルター
10-20 COS フィルター 1
10-21 COS フィルター 2
10-23 COS フィルター 4
10-22 COS フィルター 3
10-3* パラアクセス
10-30 アレイ・インデックス
10-31 データ値の保存
10-32 Devicenet レビジョン
Denominator
7-97 Position PI Maximum Speed Above
7-95 Position PI Feebback Scale
Master
7-98 Position PI Feed Forward Factor
7-99 Position PI Minimum Ramp Time
8-** 通信・オプ
8-0* 一般設定
8-01 コントロール・サイト
8-02 コントロール・メッセージ文ソース
8-03 コント Mss 文タイム
8-04 コント Mss 文タイム
8-05 タイムアウト終了機能
8-06 コント Mss 文タイムリセット
8-07 診断トリガー
8-08 読み出しフィルター
8-1* Ctl 論理コント
8-10 コント Mss 文タイムプロフ
8-13 構成可能な状態メッセージ文 STW
8-14 コンフィ・コントロメッセ文 CTW
8-17 Configurable Alarm and
Warningword
8-19 Product Code
8-3* FC ポート設定
8-30 プロトコール
8-31 アドレス
8-32 FC ポート・ボーレート
8-33 パリティ/ストップ・ビット
8-34 想定サイクルタイム
8-35 最低応答遅延
8-36 最高応答遅延
8-37 最高文字間遅延
8-4* FC MC プロト設定
8-40 テレグラム選択
8-43 PCD 読み出し構成
8-41 Parameters for Signals
8-42 PCD 書込み構成
8-5* ディジ/バス
8-50 フリーラン選択
8-51 クイック停止選択
8-52 直流ブレーキ選択
8-53 スタート選択
8-54 逆転選択
8-55 設定選択
8-56 プリセット速度指令信号選択
8-57 Profidrive OFF2 Select
8-58 Profidrive OFF3 Select
8-8* FC ポート診断
8-80 バス・メッセージ・カウント
8-81 バス・エラー・カウント
8-82 回復スレーブメッセージ
8-83 スレーブ・エラー・カウント
8-9* バス・ジョグ
8-90 バス・ジョグ 1 速度
8-91 バス・ジョグ 2 速度
9-** プロフィバス
9-00 Setpoint
Numerator
7-94 Position PI Feedback Scale
99
ト
6-64 端末 X30/8 出力 TO プリセット
6-62 端末 X30/8 最大スケール
6-54 端末 42 出力タイムアウトプリセッ
6-6* アナログ出力 2
6-55 端末 42 出力フィルター
6-63 端末 X30/8 バス・コントロール
6-60 端末 X30/8 出力
6-61 端末 X30/8 最小スケール
6-7* アナログ出力 3
6-70 端末 X45/1 出力
6-73 端末 X45/1 バス・コントロール
6-72 端末 X45/1 最大 スケール
6-71 端末 X45/1 最小 スケール
6-74 端末 X45/1 出力 TO プリセット
6-8* アナログ出力 4
6-80 端末 X45/3 出力
6-81 端末 X45/3 最小 スケール
6-84 端末 X45/3 出力 TO プリセット
6-83 端末 X45/3 バス・コントロール
6-82 端末 X45/3 最大 スケール
7-** コントローラー
7-0* 速度 PID コント
7-00 速度 PID フィードバック・ソース
7-01 Speed PID Droop
7-02 速度 PID 比例ゲイン
7-03 速度 PID 積分時間
7-04 速度 PID 微分時間
7-05 速度 PID 微分ゲイン制限
7-06 速度 PID 低域フィルター時間
Ramp
7-08 速度 PID フィードフォーワード係数
7-09 Speed PID Error Correction w/
7-07 速度 PID フィードバック・ギア比
7-1* トルク PI Ctr.
7-10 Torque PI Feedback Source
7-12 トルク PI 比例ゲイン
7-13 トルク PI 積分時間
7-16 Torque PI Lowpass Filter Time
7-19 Current Controller Rise Time
7-18 Torque PI Feed Forward Factor
7-2* プロ CL FB
7-20 プロ CL FB 1 リリース
7-32 プロ PID スタート速度
7-33 プロセス PID 比例ゲイン
7-22 プロ CL FB 2 リリース
7-3* プロ PID CL
7-30 PID 順転/反転コントロール
7-34 プロセス PID 積分時間
7-31 プロセス PID 反ねじ巻き
7-35 プロセス PID 微分時間
7-36 プロ PID 微分ゲイン制限
7-38 プロ PID フィードフォーワード係数
7-39 速度指令信号帯域幅上
7-9* Position PI Ctrl.
7-90 Position PI Feedback Source
7-92 Position PI Proportional Gain
7-91 Position PI Droop
7-93 Position PI Integral Time
5-98 POut#X30/6TOPS
5-59 パルス・フィルター時間定数 #33
5-6* パルス出力
5-60 端末 27 パルス出力変数
5-62 パルス出力最大周波数 #27
5-63 端末 29 パルス出力変数
5-65 パルス出力最大周波数 #29
5-66 端末 X30/6 パルス出力変数
5-68 パルス出力最大周波数 #X30/6
4-54 低警告速度指令信号
4-55 高警告速度指令信号
4-56 低フィードバック信号警告
4-57 高フィードバック信号警告
4-58 モーター相機能がありません。
4-6* 速度バイパス
4-60 バイパス最低速度[RPM]
4-61 バイパス最低速度[Hz]
5-7* 24 V エンコ入力
5-70 端末 32/33 1 回転当たりのパルス
5-71 端末 32/33 エンコーダー方向
5-72 Term 32/33 Encoder Type
5-8* I/O Options
5-80 AHF Cap Reconnect Delay
5-9* バス Cont 完了
5-90 デジ BC & 振幅;リレー BC
5-93 パルス Out#27 BusCont
4-62 バイパス最高速度[RPM]
4-63 バイパス最高速度[Hz]
4-7* Position Monitor
4-70 Position Error Function
4-71 Maximum Position Error
4-72 Position Error Timeout
4-73 Position Limit Function
4-74 Start Fwd/Rev Function
4-75 Touch Timout
5-97 POut#X30/6 バス Ctrl
5-94 パルス Out#27 TO Preset
5-95 パルス Out#29 BusCont
5-96 パルス Out#29 TO Preset
5-** ディジ入出力
5-0* Dig I/O モード
5-00 ディジタル I/O モード
5-01 端末 27 モード
5-02 端末 29 モード
6-** アナ入出力
6-0* AnaI/O モード
6-00 ライブ・ゼロ・タイムアウト時間
6-01 ライブ・ゼロ・タイムアウト機能
6-1* アナログ入力 1
6-10 端末 53 低電圧
5-1* ディジタル入力
5-10 端末 18 ディジタル入力
5-11 端末 19 ディジタル入力
5-12 端末 27 ディジタル入力
5-13 端末 29 ディジタル入力
5-14 端末 32 ディジタル入力
6-11 端末 53 高電圧
6-12 端末 53 低電流
6-13 端末 53 高電流
6-14 端末 53 低速信/FB 値
6-15 端末 53 高速信/FB 値
6-16 端末 53 フィルター時間定数
5-15 端末 33 ディジタル入力
5-16 端末 X30/2 ディジタル入力
5-17 端末 X30/3 ディジタル入力
5-18 端末 X30/4 ディジタル入力
5-19 端末 37 安全停止
5-20 端末 X46/1 ディジタル入力
6-2* アナログ入力 2
6-20 端末 54 低電圧
6-21 端末 54 高電圧
6-22 端末 54 低電流
6-23 端末 54 高電流
6-24 端末 54 低速信/FB 値
5-21 端末 X46/3 ディジタル入力
5-22 端末 X46/5 ディジタル入力
5-23 端末 X46/7 ディジタル入力
5-24 端末 X46/9 ディジタル入力
5-25 端末 X46/11 ディジタル入力
5-26 端末 X46/13 ディジタル入力
6-25 端末 54 高速信/FB 値
6-26 端末 54 フィルター時間定数
6-3* アナログ入力 3
6-30 端末 X30/11 低電圧
6-31 端末 X30/11 高電圧
6-34 端末 X30/11 低速指/FB 値
5-3* ディジタル出力
5-30 端末 27 ディジタル出力
5-31 端末 29 ディジタル出力
5-32 端末 X30/6 ディジ出(MCB 101)
5-33 端末 X30/7 ディジ出(MCB 101)
5-4* リレー
6-35 端末 X30/11 高速指/FB 値
6-36 端末 X30/11 フィルター時間定数
6-4* アナログ入力 4
6-40 端末 X30/12 低電圧
6-41 端末 X30/12 高電圧
6-44 端末 X30/12 低速指/FB 値
5-40 機能リレー
5-41 オン遅延、リレー
5-42 オフ遅延、リレー
5-5* パルス入力
5-50 端末 29 低周波数
5-51 端末 29 高周波数
6-45 端末 X30/12 高速指/FB 値
6-46 端末 X30/12 フィルター時間定数
6-5* アナログ出力 1
6-50 端末 42 出力
6-51 端末 42 出力最低スケール
6-52 端末 42 出力最高スケール
5-52 端末 29 低速信/FB 値
5-53 端末 29 高速信/FB 値
5-54 パルス・フィルター時間定数 #29
5-55 端末 33 低周波数
5-56 端末 33 高周波数
5-57 端末 33 低速信/FB 値
6-53 端末 42 出力バス・コントロール
5-58 端末 33 高速信/FB 値
72 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 79

付属資料 操作ガイド
16-49 電流不具合ソース
16-23 Motor Shaft Power [kW]
16-21 Torque [%] High Res.
16-22 トルク[%]
16-25 トルク [Nm]高
16-24 Calibrated Stator Resistance
16-3* ドライブ状態
16-30 直流リンク電圧
16-32 ブレーキ・エネルギー/秒
16-33 ブレーキ・エネルギー/2 分
16-34 ヒートシンク温度
16-35 インバーター熱
16-36 インバーター定格電流
16-37 インバーター最大電流
16-38 SL コントローラー状態
16-39 コントロール・カード温度
16-40 ロギング・バッファー・フル
16-41 LCP ボトムステータスライン
16-44 Speed Error [RPM]
16-47 Motor Phase W Current
16-46 Motor Phase V Current
16-45 Motor Phase U Current
16-48 Speed Ref. After Ramp [RPM]
16-5* 速信&FB
16-50 外部速度指令信号
16-51 パルス基準
16-66 ディジタル出力[バイナリ]
16-52 フィードバック信号[単位]
16-53 ディジポテンショ速信
16-57 Feedback [RPM]
16-6* 入力 & 出力
16-60 ディジタル入力
16-61 端末 53 スイッチ設定
16-65 アナログ出力 42[mA]
16-62 アナログ入力 53
16-63 端末 54 スイッチ設定
16-64 アナログ入力 54
16-69 パルス出力 #27[Hz]
16-70 パルス出力 #29[Hz]
16-68 周波数入力 #33[Hz]
16-67 周波数入力 #29[Hz]
16-71 リレー出力[2 進法]
16-72 カウンター A
16-73 カウンター B
16-75 アナログ・イン X30/11
16-76 アナログ・イン X30/12
16-77 アナログ・アウト X30/8 [mA]
16-78 アナログ・アウト X45/1 [mA]
16-79 アナログ・アウト X45/3 [mA]
16-8* F バス&FC ポート
16-80 フィールドバス CTW 1
16-89 Configurable Alarm/Warning Word
16-87 Bus Readout Alarm/Warning
16-82 フィールドバス REF 1
16-86 FC ポート REF 1
16-83 Fieldbus REF 2
16-84 通信オプション STW
16-85 FC ポート CTW 1
15-41 電力セクション
15-42 電圧
15-43 ソフトウェア・バージョン
15-44 注文済みタイプ・コード文字列
15-45 実際タイプ・コード文字列
15-46 周波数変換器注文番号
15-47 電力カード注文番号
15-48 LCP ID 番号
14-26 Inv 不具合時トリップ遅延
14-28 生産設定
14-29 サービス・コード
14-3* 電流制限コント
14-30 電流制限コントローラー、比例ゲイン
14-31 電流制限コントローラー、積分時間
14-32 電流制限 Ctrl、フィルター時間
14-35 ストール保護
12-92 IGMP スヌーピング
12-89 透過ソケットチャンネル・ポート
12-9* 先進 Enet serv
12-90 ケーブル診断
12-91 Auto Cross Over
12-80 FTP サーバー
12-81 HTTP サーバー
12-82 SMTP サービス
15-49 SW ID コントロール・カード
15-50 SW ID 電力カード
15-51 周波数変換器シリアル番号
15-53 電力カード・シリアル番号
15-58 Smart Setup Filename
15-59 CSIV ファイル名
15-6* オプション識別
15-60 オプション実装済み
14-36 Fieldweakening Function
14-4* Engy 最適化
14-40 VT レベル
14-41 AEO 最小磁化
14-42 AEO 最低周波数
14-43 モーター Cosphi
14-5* 環境
14-50 RFI フィルター
12-95 同報ストームフィルター
12-96 Port Config
12-98 インターフェース・カウンター
12-93 ケーブルエラー長
12-94 同報ストーム保護
12-99 メディアカウンター
13-** スマート論理
13-0* SLC 設定
15-61 Opt SW バージョン
15-62 オプション注文番号
15-63 オプション・シリアル番号
15-70 スロット A のオプション
15-71 スロット A オプション SW Ver
15-72 スロット B のオプション
14-51 直流リンク補償
14-52 ファンコントロール
14-53 ファン・モニター
14-55 出力フィルター
14-56 キャパシタンス出力フィルター
14-57 インダクタンス出力フィルター
13-00 SL コントローラー・モード
13-01 イベントをスタート
13-02 イベントを停止
13-03 SLC をリセット
13-1* コンパレーター
13-10 コンパレーター・オペランド
15-81 Preset Fan Running Hours
15-73 スロット B オプション SW Ver
15-74 スロット C0 のオプション
15-75 スロット C0 OptSW Ver
15-76 スロット C1 のオプション
15-77 スロット C1 OptSW Ver
14-59 インバユニットの実際ナンバー
14-7* 互換性
14-72 VLT 警報メッセージ文
14-73 VLT 警告メッセージ文
14-74 VLT 拡張 状態メッセージ文
13-11 コンパレーター演算子
13-12 コンパレーター値
13-1* RS Flip Flops
13-15 RS-FF Operand S
13-16 RS-FF Operand R
15-89 Configuration Change Counter
15-8* Operating Data II
15-80 Fan Running Hours
15-9* パラ情報
15-92 定義済みパラメーター
14-8* オプション
14-80 外部 24VDC から供給オプション
14-88 Option Data Storage
14-89 Option Detection
14-9* デフォルト設定
14-90 不具合レベル
13-4* 論理規則
13-40 論理規則ブール 1
13-41 論理規則演算子 1
13-42 論理規則ブール 2
13-2* タイマー
13-20 SL コントローラー・タイマー
15-93 修正済みパラメーター
15-** ドライブ情報
13-43 論理規則演算子 2
15-98 ドライブ識別
15-99 パラメーター・メタデータ
16-** データ読み出し
16-0* 一般状態
16-00 コントロール・メッセージ文
15-0* 動作データ
15-00 動作時間
15-01 稼動時間
15-02 KWh カウンター
15-03 電源投入回数
13-44 論理規則ブール 3
13-5* 状態
13-51 SL コントローラー・イベント
13-52 SL コントローラー・アクション
14-** 特殊関数
16-09 カスタム読み出し
16-07 Target Position
16-01 速度指令信号[単位]
16-02 速度指令信号 %
16-03 状態メッセージ文
15-04 過温度回数
15-05 過電圧回数
15-06 KWh カウンターのリセット
14-0* インバスイッチ
14-00 スイッチ・パターン
14-01 スイッチ周波数
16-08 Position Error
16-05 主電源実際値[%]
16-06 Actual Position
15-07 稼動時間カウンターのリセット
15-1* データログ設定
14-03 過変調
14-04 PWM 無作為
16-1* モーター状態
15-10 ロギング・ソース
15-11 ロギング間隔
15-12 トリガー・イベント
15-13 ロギング・モード
14-06 Dead Time Compensation
14-1* 主電源オンオフ
14-10 主電源異常
14-11 主電源不具合時の主電源電圧
16-10 電力[KW]
16-11 電力[HP]
16-12 モーター電圧
16-13 周波数
16-14 モーター電流
16-15 周波数 [%]
16-16 トルク[Nm]
16-17 速度[RPM]
16-18 モーター熱
16-19 KTY センサー温度
16-20 モーター角
15-14 トリガー前サンプル
15-2* 履歴ログ
15-20 履歴ログ:イベント
15-21 履歴ログ:値
15-22 履歴ログ:時間
15-3* 不具合ログ
15-30 不具合ログ:エラー・コード
15-31 不具合ログ:値
15-32 不具合ログ:時間
15-4* ドライブ識別
15-40 FC タイプ
14-16 Kin. Backup Gain
14-12 主電源アンバランス時の機能
14-14 Kin. Backup Time Out
14-15 Kin. Backup Trip Recovery Level
14-2* トリップ・リセット
14-20 リセット・モード
14-21 自動再スタート時間
14-22 動作モード
14-23 タイプコード設定
14-24 電流制限時のトリップ遅延
14-25 トルク制限時のトリップ遅延
9 9
12-28 データ値の保存
12-29 常に保存
10-33 常に保存
10-34 DeviceNet 製品コード
10-39 DeviceNet F パラメーター
10-5* CANopen
10-50 プロセス・データ構成書き込み
10-51 プロセス・データ構成読み出し
12-** イーサネット
12-0* IP 設定
12-00 IP アドレス割当
12-01 IP アドレス
12-02 サブネット・マスク
12-03 デフォルト・ゲートウェイ
12-04 DHCP サーバー
12-05 リース終了
12-06 ネームサーバー
12-07 ドメイン名称
12-08 ホスト名称
12-09 物理アドレス
12-1* イーサネット LP
12-10 リンク状態
12-11 リンク継続時間
12-12 自動ネゴシエーション
12-13 リンク速度
12-14 リンク・デュープレックス
12-2* プロセス Data
12-20 コントロール・インスタンス
12-21 プロセス・データ構成書き込み
12-27 Master Address
12-22 プロセス・データ構成読み出し
12-23 Process Data Config Write Size
12-24 Process Data Config Read Size
12-3* イーサネット/IP
12-30 警告パラメーター
12-31 ネット速度指令信号
12-32 ネット・コントロール
12-33 CIP レビジョン
12-34 CIP 製品コード
12-35 EDS パラメーター
12-37 COS 抑止タイマー
12-38 COS フィルター
12-4* Modbus TCP
12-40 Status Parameter
12-41 Slave Message Count
12-42 Slave Exception Message Count
12-5* EtherCAT
12-50 Configured Station Alias
12-51 Configured Station Address
12-59 EtherCAT Status
12-6* Ethernet PowerLink
12-60 Node ID
12-62 SDO Timeout
12-63 Basic Ethernet Timeout
12-66 Threshold
12-67 Threshold Counters
12-68 Cumulative Counters
12-69 Ethernet PowerLink Status
12-8* 他 Enet サービス
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 73
Page 80
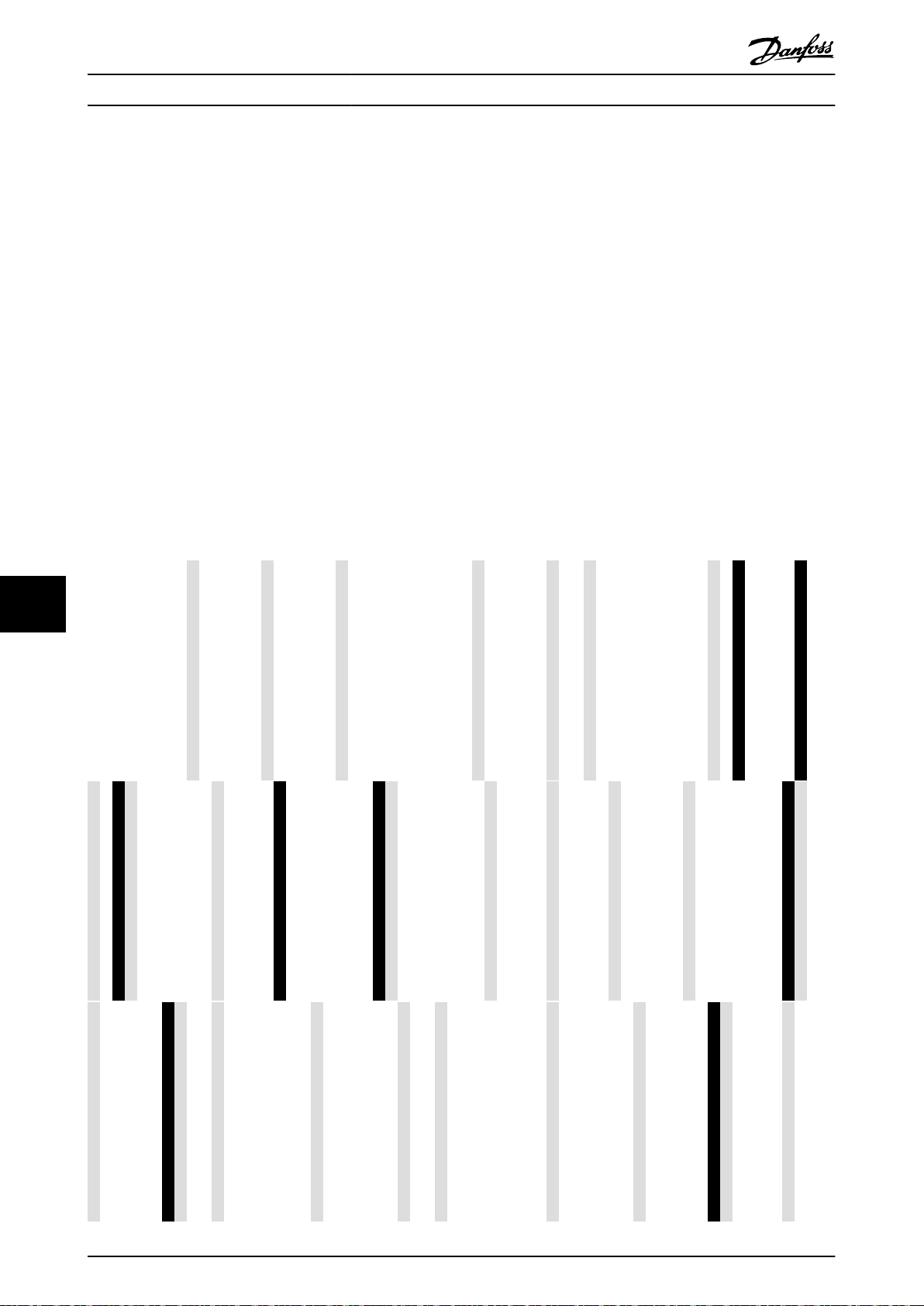
付属資料
No.
VLT® AutomationDrive FC 301/302
601-22PROFIdrive Safety Channel Tel.
99
Version
42-11 Encoder Resolution
42-12 Encoder Direction
42-13 Gear Ratio
42-14 Feedback Type
18-6* Inputs & Outputs 2
18-60 Digital Input 2
30-** 特別機能
30-2* Adv. Start Adjust
42-15 Feedback Filter
42-17 Tolerance Error
30-21 High Starting Torque Current [%]
30-20 High Starting Torque Time [s]
42-19 Zero Speed Limit
42-18 Zero Speed Timer
42-2* Safe Input
42-20 Safe Function
Error [%]
30-24 Locked Rotor Detection Speed
30-22 Locked Rotor Protection
30-23 Locked Rotor Detection Time [s]
42-21 Type
42-22 Discrepancy Time
42-23 Stable Signal Time
42-24 Restart Behaviour
42-3* General
42-30 External Failure Reaction
42-31 Reset Source
30-8* 互換性 (I)
30-80 d 軸インダクタンス (Ld)
30-81 ブレーキ抵抗器(オーム)
30-83 速度 PID 比例ゲイン
30-84 プロセス PID 比例ゲイン
31-** バイパス・オプション
31-00 Bypass Mode
42-33 Parameter Set Name
42-35 S-CRC Value
31-01 Bypass Start Time Delay
31-02 Bypass Trip Time Delay
42-36 Level 1 Password
42-4* SS1
42-40 Type
42-41 Ramp Profile
31-10 Bypass Status Word
31-11 Bypass Running Hours
31-19 Remote Bypass Activation
31-03 Test Mode Activation
42-42 Delay Time
42-43 Delta T
42-44 Deceleration Rate
35-** Sensor Input Option
35-0* 温度 入力モード
35-00 Term. X48/4 Temperature Unit
42-48 S-ramp Ratio at Decel. Start
42-47 Ramp Time
42-45 Delta V
42-46 Zero Speed
35-01 端末 X48/4 入力タイプ
35-02 Term. X48/7 Temperature Unit
35-03 端末 X48/7 入力タイプ
35-04 Term. X48/10 Temperature Unit
42-49 S-ramp Ratio at Decel. End
42-5* SLS
42-50 Cut Off Speed
42-51 Speed Limit
42-52 Fail Safe Reaction
42-53 Start Ramp
42-54 Ramp Down Time
35-17 Term. X48/4 High Temp. Limit
35-15 Term. X48/4 Temp. Monitor
35-1* Temp. Input X48/4
35-14 Term. X48/4 Filter Time Constant
35-16 Term. X48/4 Low Temp. Limit
35-05 端末 X48/10 入力タイプ
35-06 温度センサー警報機能
42-6* Safe Fieldbus
42-60 Telegram Selection
42-61 Destination Address
35-25 Term. X48/7 Temp. Monitor
35-2* Temp. Input X48/7
35-24 Term. X48/7 Filter Time Constant
42-8* Status
42-80 Safe Option Status
35-27 Term. X48/7 High Temp. Limit
35-26 Term. X48/7 Low Temp. Limit
42-81 Safe Option Status 2
42-82 Safe Control Word
35-3* Temp. Input X48/10
35-34 Term. X48/10 Filter Time
42-85 Active Safe Func.
42-83 Safe Status Word
Constant
35-35 Term. X48/10 Temp. Monitor
42-88 Supported Customization File
42-86 Safe Option Info
35-37 Term. X48/10 High Temp. Limit
35-36 Term. X48/10 Low Temp. Limit
42-89 Customization File Version
35-4* Analog Input X48/2
35-42 端末 X48/2 低電流
42-9* Special
42-90 Restart Safe Option
600-**PROFIsafe
Value
35-44 Term. X48/2 Low Ref./Feedb.
35-43 Term. X48/2 High Current
600-22PROFIdrive/safe Tel. Selected
600-44Fault Message Counter
600-47Fault Number
600-52Fault Situation Counter
Value
35-45 Term. X48/2 High Ref./Feedb.
35-46 Term. X48/2 Filter Time Constant
42-** Safety Functions
601-**PROFIdrive 2
42-1* Speed Monitoring
42-10 Measured Speed Source
16-9* 診断読み出し
16-90 警報メッセージ文
16-91 警報メッセージ文 2
16-92 警告メッセージ文
16-93 警告メッセージ文 2
16-94 拡張状態メッセージ文
17-** フィードバ・オプ
17-1* IncEn IF
17-10 信号タイプ
17-11 分解能(PPR)
17-2* 絶対 En IF
17-20 プロトコール選択
17-21 分解能(位置/回転)
17-22 Multiturn Revolutions
17-24 SSI データ長さ
17-25 時計歩度
17-26 SSI データ形式
17-34 HIPERFACE ボーレート
17-5* レゾルインタフェ
17-50 極
17-51 入力電圧
17-52 入力周波数
17-53 変圧比
17-56 Encoder Sim. Resolution
17-59 レゾルバー・インターフェース
17-6* モニタ+App
17-60 フィードバック方向
17-61 フィードバック信号監視
17-7* Position Scaling
17-70 Position Unit
17-71 Position Unit Scale
17-72 Position Unit Numerator
17-73 Position Unit Denominator
17-74 Position Offset
17-75 Position Recovery at Power-up
17-76 Position Axis Mode
17-77 Position Feedback Mode
17-8* Position Homing
17-80 Homing Function
17-81 Home Sync Function
17-82 Home Position
17-83 Homing Speed
17-84 Homing Torque Limit
17-85 Homing Timout
17-9* Position Config
17-90 Absolute Position Mode
17-91 Relative Position Mode
17-92 Position Control Selection
17-93 Master Offset Selection
17-94 Rotary Absolute Direction
18-** データ読出 2
18-3* Analog Readouts
18-36 アナログ入力 X48/2 [mA]
18-37 温度入力 X48/4
18-38 温度入力 X48/7
18-39 温度入力 X48/10
18-5* Active Alarms/Warnings
18-55 Active Alarm Numbers
18-56 Active Warning Numbers
74 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 81

インデックス 操作ガイド
インデックス
A
AC
AC 主電源..................................... 15
AC 入力....................................... 15
AMA
AMA........................................... 19
を参照して下さい
自動モーター適合
C
Current(電流)
入力電流...................................... 15
直流電流...................................... 10
D
DC 出力、10 V................................... 46
エ
エネルギー効率..... 32, 33, 34, 35, 36, 37, 38, 39,
40, 41, 42, 44
オ
オプション装置.................................. 14
グ
グラフィック・ローカル・コントロール・パネル.... 19
ケ
ケーブル
ケーブルの長さと断面積........................ 44
ケーブルルーティング(配線).................... 16
ケーブル仕様.................................. 44
モーター・ケーブル........................ 10, 14
E
EMC 干渉........................................ 14
EMC 対策設置.................................... 10
EN 50598-2...................................... 44
G
GLCP............................................ 19
を参照して下さい
グラフィック・ローカル・コントロ
ール・パネル
I
IEC 61800-3..................................... 15
P
PELV............................................ 20
R
RFI フィルター.................................. 15
RS485
RS485......................................... 46
コ
コントロール・カード
DC 出力、10 V................................. 46
RS485......................................... 46
USB シリアル通信.............................. 46
コントロール・カード.................. 23, 46, 47
シリアル通信.................................. 46
警告.......................................... 30
サ
サービス........................................ 22
サーミスター
警告.......................................... 30
シ
シールド ケーブル........................... 14, 16
システムフィードバック........................... 3
システム設定.................................... 19
シリアル通信
RS485......................................... 46
USB シリアル通信.............................. 46
シリアル通信.................................. 46
S
Safe Torque Off
警告.......................................... 30
ア
アナログ
アナログ出力.................................. 46
アナログ信号.................................... 23
アナログ入力.................................... 23
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 75
デ
デフォルト設定.................................. 47
ト
トラブルシューティング
警告及び警報.................................. 23
トリップ
トリップ.................................. 20, 22
トリップ・ロック.............................. 22
トルク
トルク特性.................................... 43
制限.......................................... 24
Page 82

インデックス
VLT® AutomationDrive FC 301/302
ネ
ネームプレート................................... 8
バ
バースト・トランジエント........................ 11
パ
パルス/エンコーダー入力......................... 45
ヒ
ヒートシンク
警告...................................... 28, 30
ヒューズ............................ 10, 16, 27, 48
フ
ファン
警告...................................... 26, 31
フィードバック.................................. 16
フ
ブレーキ抵抗器
警告.......................................... 26
ロ
ローター
警告.......................................... 31
ワ
ワイヤサイズ................................ 10, 14
主
主電源
主電源............................ 37, 38, 39, 43
予
予期しない始動............................... 6, 22
伝
伝導............................................ 16
使
使用目的......................................... 3
供
供給電圧................................ 15, 17, 27
フ
フローティング・デルタ.......................... 15
プ
プログラミング.................................. 23
メ
メンテナンス.................................... 22
モ
モーター
サーミスター.................................. 20
配線...................................... 14, 16
モーター・ケーブル........................ 10, 14
モーター・サーミスター........................ 20
モーター出力.................................. 43
モーター熱保護................................ 20
モーター状態................................... 3
モーター過負荷保護............................. 3
モーター電力.................................. 10
予期しないモーター回転......................... 7
出力性能 (U、V、W)............................ 43
警告...................................... 24, 27
過熱.......................................... 24
保
保存............................................. 8
入
入力
アナログ入力.................................. 45
デジタル入力.................................. 44
入力信号...................................... 29
入力切断...................................... 15
入力端子.................................. 15, 17
入力電力...................... 10, 14, 15, 16, 22
入力電力配線.................................. 16
入力端子........................................ 23
冷
冷却............................................. 8
冷却用空きスペース.............................. 16
出
出力
アナログ出力.................................. 46
ディジタル出力................................ 46
出力電力配線.................................. 16
リ
リセット.................................... 22, 30
リモートコマンド................................. 3
76 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
分
分解図........................................... 4
Page 83

インデックス 操作ガイド
制
制御
コントロール特性.............................. 47
コントロール配線.......................... 14, 16
配線.......................................... 10
接地.................................... 14, 15, 17
接地デルタ...................................... 15
放
放電時間......................................... 7
前
前面カバーの締め付けトルク.............. 59, 61, 63
取
取り付け..................................... 9, 16
吊
吊り下げ方法..................................... 9
周
周囲条件........................................ 44
回
回転............................................. 7
型
型式承認......................................... 5
外
外部コントローラー............................... 3
安
安全性........................................... 7
寸
寸法............................................ 59
干
干渉隔離........................................ 16
性
性能............................................ 47
振
振動............................................. 8
接
接地
接地.......................................... 16
接地接続...................................... 16
接地線........................................ 10
警告.......................................... 28
断
断路器.......................................... 17
有
有資格技術者..................................... 6
機
機械的ブレーキ CL........................... 15, 21
機械的設置....................................... 8
漏
漏洩電流..................................... 7, 10
環
環境............................................ 44
用
用例............................................ 65
略
略語............................................ 65
直
直流リンク...................................... 23
相
相損失.......................................... 23
短
短絡............................................ 25
磁
磁束............................................ 21
空
空きスペースの要件............................... 8
端
端子
出力端子...................................... 17
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 77
Page 84

インデックス
VLT® AutomationDrive FC 301/302
等
等電位.......................................... 11
納
納入物........................................... 8
背
背版............................................. 9
自
自動モーター調整(AMA)
警告.......................................... 29
自動モーター適合................................ 19
衝
衝撃............................................. 8
補
補助機器........................................ 16
補助的リソース................................... 3
記
記号............................................ 65
設
設置
チェックリスト................................ 16
設置環境....................................... 8
遮
遮断器...................................... 16, 48
配
配線
コントロール配線.............................. 14
サーミスターコントロール配線.................. 15
モーター 配線................................. 14
配線図........................................ 13
重
重量............................................ 59
電
電力
入力電力...................................... 17
力率.......................................... 16
電力接続...................................... 10
電力規格...................................... 59
電力カード
警告.......................................... 30
電圧アンバランス................................ 23
電圧レベル...................................... 44
電気的設置...................................... 10
高
高電圧....................................... 6, 17
認
認証............................................. 5
警
警告
リスト........................................ 23
警告.......................................... 22
警報
リスト........................................ 23
警報.......................................... 22
負
負荷分散..................................... 6, 22
速
速度指令信号
速度指令信号.................................. 20
過
過電流保護...................................... 10
78 Danfoss A/S © 05/2018 All rights reserved. MG33AT40
Page 85

インデックス 操作ガイド
MG33AT40 Danfoss A/S © 05/2018 All rights reserved. 79
Page 86

カタログ、プローシャー、その他の印刷物に万が一間違いが含まれていたとしても、ダンプオス杜はいっさい責任を負いかねますので、ご了承ください。なおダンプオス杜は予告なし
に製品に変更を加える権利を保有しています。既にご注文をいただいている製品に関しでも、注文品の詳細に影響を及ぼさない範囲内で、変更がなされることがあります。 印刷物に
記載されている商標は各社の所有物件です。名称 Danfoss およびダンプオスのロゴタイプはダンプオス杜の商標で、それに関係するすべての権利はダンプオス杜に帰属します。
Danfoss A/S
Ulsnaes 1
DK-6300 Graasten
vlt-drives.danfoss.com
130R0300 MG33AT40 05/2018
*MG33AT40*
 Loading...
Loading...