

Page 1

ENGINEERING TOMORROW
Guia de Design
VLT® AutomationDrive FC 302
315–1200 kW
vlt-drives.danfoss.com
Page 2
Page 3
Índice Guia de Design
Índice
1 Introdução
1.1 Objetivo do Guia de Design
1.2 Recursos adicionais
1.3 Versão de Software e Documento
1.4 Convenções
2 Segurança
2.1 Símbolos de Segurança
2.2 Pessoal qualicado
2.3 Segurança e Precauções
3 Aprovações e certicações
3.1 Aprovações de conformidade/regulamentares
3.2 Características nominais de proteção do gabinete
4 Visão geral do produto
4.1 Drives VLT® High-power
4.2 Tamanho do gabinete pelo valor nominal da potência
5
5
5
5
5
6
6
6
6
8
8
9
11
11
11
4.3 Visão geral dos gabinetes, 380–500 V
4.4 Visão geral dos gabinetes, 525–690 V
4.5 Disponibilidade do kit
5 Recursos do produto
5.1 Recursos operacionais automatizados
5.2 Recursos de aplicação personalizada
5.3 Visão geral da frenagem dinâmica
5.4 Visão geral do freio mecânico de retenção
5.5 Visão geral da divisão da carga
5.6 Visão geral de Regen
6 Visão geral de opcionais e acessórios
6.1 Dispositivos de eldbus
6.2 Extensões funcionais
6.3 Controle de movimento e placas de relé
6.4 Resistores de Freio
6.5 Filtros de onda senoidal
12
15
18
19
19
22
26
26
29
31
32
32
33
35
36
36
6.6 Filtros dU/dt
6.7 Filtros do modo comum
6.8 Filtros de Harmônicas
6.9 Opcionais de gabinete integrado
6.10 Kits de alta potência
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 1
36
36
36
37
39
Page 4
Índice
VLT® AutomationDrive FC 302
315–1200 kW
7 Especicações
7.1 Dados elétricos, 380–500 V
7.2 Dados elétricos, 525–690 V
7.3 Alimentação de rede elétrica
7.4 Saída do motor e dados do motor
7.5 Condições do ambiente
7.6 Especicações de Cabo
7.7 Entrada/saída de controle e dados de controle
7.8 Pesos do gabinete
7.9 Fluxo de ar para gabinetes E1–E2 e F1–F13
8 Dimensões externas e do terminal
8.1 Dimensões externas e do terminal E1
8.2 Dimensões externas e do terminal E2
8.3 Dimensões externas e do terminal F1
8.4 Dimensões externas e do terminal F2
8.5 Dimensões externas e do terminal F3
8.6 Dimensões externas e do terminal F4
40
40
46
52
52
52
53
53
56
57
59
59
67
75
82
89
101
8.7 Dimensões externas e do terminal F8
8.8 Dimensões externas e do terminal F9
8.9 Dimensões externas e do terminal F10
8.10 Dimensões externas e do terminal F11
8.11 Dimensões externas e do terminal F12
8.12 Dimensões externas e do terminal F13
9 Considerações de instalação mecânica
9.1 Armazenagem
9.2 Elevação da unidade
9.3 Ambiente operacional
9.4 Congurações de montagem
9.5 Resfriamento
9.6 Derating
10 Considerações de instalação elétrica
10.1 Instruções de Segurança
10.2 Esquemática de Fiação
112
116
122
128
136
142
150
150
150
151
152
153
154
157
157
158
10.3 Conexões
10.4 Terminais e ação de controle
10.5 Fusíveis e disjuntores
10.6 Desconexões e contatores
10.7 Motor
2 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
159
163
170
175
177
Page 5
Índice Guia de Design
10.8 Frenagem
10.9 Dispositivos de corrente residual (RCD) e monitor de resistência de isolamento
(IRM)
10.10 Corrente de Fuga
10.11 Grade de TI
10.12 Eciência
10.13 Ruído Acústico
10.14 Condições dU/dt
10.15 Visão geral da compatibilidade eletromagnética (EMC)
10.16 Instalação compatível com EMC
10.17 Visão geral das harmônicas
11 Princípios básicos da operação de um drive
11.1 Descrição da Operação
11.2 Controles do drive
12 Exemplos de Aplicações
12.1 Programar um sistema do drive de malha fechada
179
181
181
182
183
183
184
185
190
192
195
195
195
204
204
12.2 Congurações de ação para Adaptação Automática do Motor (AMA)
12.3 Congurações de ação para Referência de Velocidade Analógica
12.4 Congurações de ação para Partida/Parada
12.5 Conguração de ação para um Reset de Alarme Externo
12.6 Conguração de ação para a referência de velocidade usando um potenciômetro
manual
12.7 Conguração de ação para aceleração/desaceleração
12.8 Conguração de ação para conexão de rede RS485
12.9 Conguração de ação para um termistor do motor
12.10 Conguração de ação para um setup de relé com smart logic control
12.11 Conguração de ação para o controle do freio mecânico
12.12 Conguração de ação para o encoder
12.13 Conguração de ação para limite de torque e parada
13 Como comprar um drive
13.1 Congurador do Drive
13.2 Números da solicitação de pedido para opcionais/kits
13.3 Números da solicitação de pedido para ltros e resistores do freio
204
205
205
207
207
207
208
208
209
209
210
210
212
212
216
219
13.4 Peças de Reposição
14 Apêndice
14.1 Abreviações e símbolos
14.2 Denições
14.3 Instalação e setup do RS485
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 3
219
220
220
221
222
Page 6
Índice
VLT® AutomationDrive FC 302
315–1200 kW
14.4 RS485: Visão Geral do Protocolo Danfoss FC
14.5 RS485: Estrutura do telegrama do protocolo Danfoss FC
14.6 RS485: Exemplos de parâmetro do protocolo Danfoss FC
14.7 RS485: Visão Geral do Modbus RTU
14.8 RS485: Estrutura do telegrama Modbus RTU
14.9 RS485: Códigos de função de mensagem do Modbus RTU
14.10 RS485: Parâmetros do Modbus RTU
14.11 RS485: Perl de Controle do FC da
Índice
223
224
228
228
229
233
233
234
241
4 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 7

Introdução Guia de Design
1 Introdução
1.1 Objetivo do Guia de Design
Este Guia de Design destina-se a:
Engenheiros de sistemas e projetos.
•
Consultores de design.
•
Especialistas em aplicação e produto.
•
O Guia de Design fornece informações técnicas para
entender as capacidades do conversor para integração nos
sistemas de controle e monitoramento do motor.
VLT® é uma marca registrada.
1.2 Recursos adicionais
Outros recursos estão disponíveis para entender a
operação avançada do conversor, a programação e a
conformidade com as diretivas.
O guia de operação fornece informações
•
detalhadas para a instalação e inicialização do
conversor.
O guia de programação fornece maiores detalhes
•
sobre como trabalhar com parâmetros e contém
muitos exemplos de aplicações.
O Guia de Operação do VLT
•
O descreve como usar os conversores Danfoss
em aplicações de segurança funcional. Este
manual é fornecido com o conversor quando o
opcional Safe Torque O está presente.
O Guia de Design do VLT® Brake Resistor MCE 101
•
descreve como selecionar o resistor de frenagem
ideal.
®
FC Series - Safe Torque
Versão de Software e Documento
1.3
Este manual é revisado e atualizado regularmente. Todas as
sugestões para melhorias são bem-vindas. Tabela 1.1
mostra a versão do documento e a versão de software
correspondente.
Edição Observações Versão de
software
MG34S3xx Conteúdo D1h–D8h removido e
implementada uma nova estrutura.
Tabela 1.1 Versão de Software e Documento
8.03
1.4 Convenções
Listas numeradas indicam os procedimentos.
•
Listas de itens indicam outras informações e a
•
descrição das ilustrações.
O texto em itálico indica:
•
- Referência cruzada.
- Link.
- Rodapé.
- Nome do parâmetro, nome do grupo do
parâmetro, opcional de parâmetro.
Todas as dimensões nos desenhos estão em mm.
•
Um asterisco (*) indica a conguração padrão de
•
um parâmetro.
1 1
O Guia de Design do VLT® Advanced Harmonic
•
Filters AHF 005/AHF 010 e o princípio de funcionamento do ltro avançado de harmônicas. Este
guia também descreve como selecionar o ltro
avançado de harmônicas correto para uma
aplicação especíca.
O Guia de Design dos Filtros de Saída explica
•
porque é necessário usar ltros de saída em
determinadas aplicações e como selecionar o
ltro de onda senoidal ou dU/dt ideal.
Está disponível equipamento opcional que pode
•
alterar algumas das informações descritas nestas
publicações. Para obter requisitos especícos,
consulte as instruções fornecidas com os
opcionais.
Publicações e manuais complementares estão disponíveis
em Danfoss. Consulte drives.danfoss.com/downloads/
portal/#/ para obter as listas.
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 5
Page 8
Segurança
VLT® AutomationDrive FC 302
315–1200 kW
2 Segurança
22
2.1 Símbolos de Segurança
Os seguintes símbolos são usados neste guia:
ADVERTÊNCIA
Indica uma situação potencialmente perigosa que
poderia resultar em morte ou ferimentos graves.
ADVERTÊNCIA
PERIGO DE CORRENTE DE FUGA
As correntes de fuga excedem 3,5 mA. Falha em aterrar o
conversor corretamente pode resultar em morte ou
ferimentos graves.
Assegure o aterramento correto do
•
equipamento por um eletricista certicado.
CUIDADO
Indica uma situação potencialmente perigosa que
poderia resultar em ferimentos leves ou moderados.
Também pode ser usado para alertar contra práticas
inseguras.
AVISO!
Indica informações importantes, incluindo situações que
possam resultar em danos ao equipamento ou à
propriedade.
2.2 Pessoal qualicado
Somente pessoal qualicado tem permissão para instalar
ou operar este equipamento.
O pessoal
qual está autorizado a instalar, comissionar e manter
equipamentos, sistemas e circuitos de acordo com as leis e
regulamentos pertinentes. Além disso, o pessoal deve estar
familiarizado com as instruções e as medidas de segurança
descritas neste manual.
2.3
qualicado é denido como pessoal treinado, o
Segurança e Precauções
ADVERTÊNCIA
ALTA TENSÃO
Os conversores contêm alta tensão quando conectados à
rede elétrica CA de entrada, alimentação CC, Load
Sharing ou motores permanentes. Não utilizar pessoal
qualicado na instalação, inicialização ou manutenção do
conversor pode resultar em morte ou ferimentos graves.
Somente pessoal qualicado deve instalar,
•
inicializar e manter o conversor.
ADVERTÊNCIA
TEMPO DE DESCARGA
O conversor contém capacitores de barramento CC, que
podem permanecer carregados até mesmo quando o
conversor não estiver ligado. Pode haver alta tensão
presente mesmo quando as luzes LED de advertência
estiverem apagadas. Não aguardar 40 minutos após a
energia ter sido removida antes de prestar serviço de
manutenção pode resultar em morte ou ferimentos
graves.
1. Pare o motor.
2. Desconecte a rede elétrica CA e as fontes
remotas do barramento CC, incluindo backups
de bateria, UPS e conexões de barramento CC a
outros conversores.
3. Desconecte ou trave o motor.
4. Aguarde 40 minutos para os capacitores descarregarem completamente.
5. Antes de realizar qualquer serviço de
manutenção, use um dispositivo de medição de
tensão apropriado para ter certeza de que os
capacitores estejam completamente descarregados.
ADVERTÊNCIA
RISCO DE INCÊNDIO
Os resistores de frenagem esquentam durante e depois
da frenagem. Não colocar o resistor de frenagem em
uma área segura pode resultar em danos à propriedade
e/ou ferimentos graves.
Garanta que o resistor de frenagem seja
•
colocado em um ambiente seguro, para
prevenir risco de incêndio.
Não toque no resistor de frenagem durante ou
•
após a frenagem para evitar queimaduras
graves.
6 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 9
1
2
e30bd832.10
Segurança Guia de Design
AVISO!
OPCIONAL DE SEGURANÇA PARA BLINDAGEM
DA REDE ELÉTRICA
Um opcional de blindagem da rede elétrica está
disponível para gabinetes com características nominais
de proteção de IP21/IP54 (Tipo 1/Tipo 12). A blindagem
da rede elétrica é uma tampa instalada dentro do
gabinete para proteger contra o toque acidental dos
terminais de energia, de acordo com a BGV A2, VBG 4.
2.3.1 Instalação compatível com ADN
Para evitar a formação de centelhas em conformidade com
o Acordo Europeu relativo ao Transporte Internacional de
Produtos Perigosos por Vias Fluviais (ADN), tome
precauções para os conversores com classicação de
proteção IP00 (Chassi), IP20 (Chassi), IP21 (Tipo 1) ou IP54
(Tipo 12).
Não instale um interruptor de rede elétrica.
•
Garanta que parâmetro 14-50 Filtro de RFI esteja
•
programado para [1] On (Ligado).
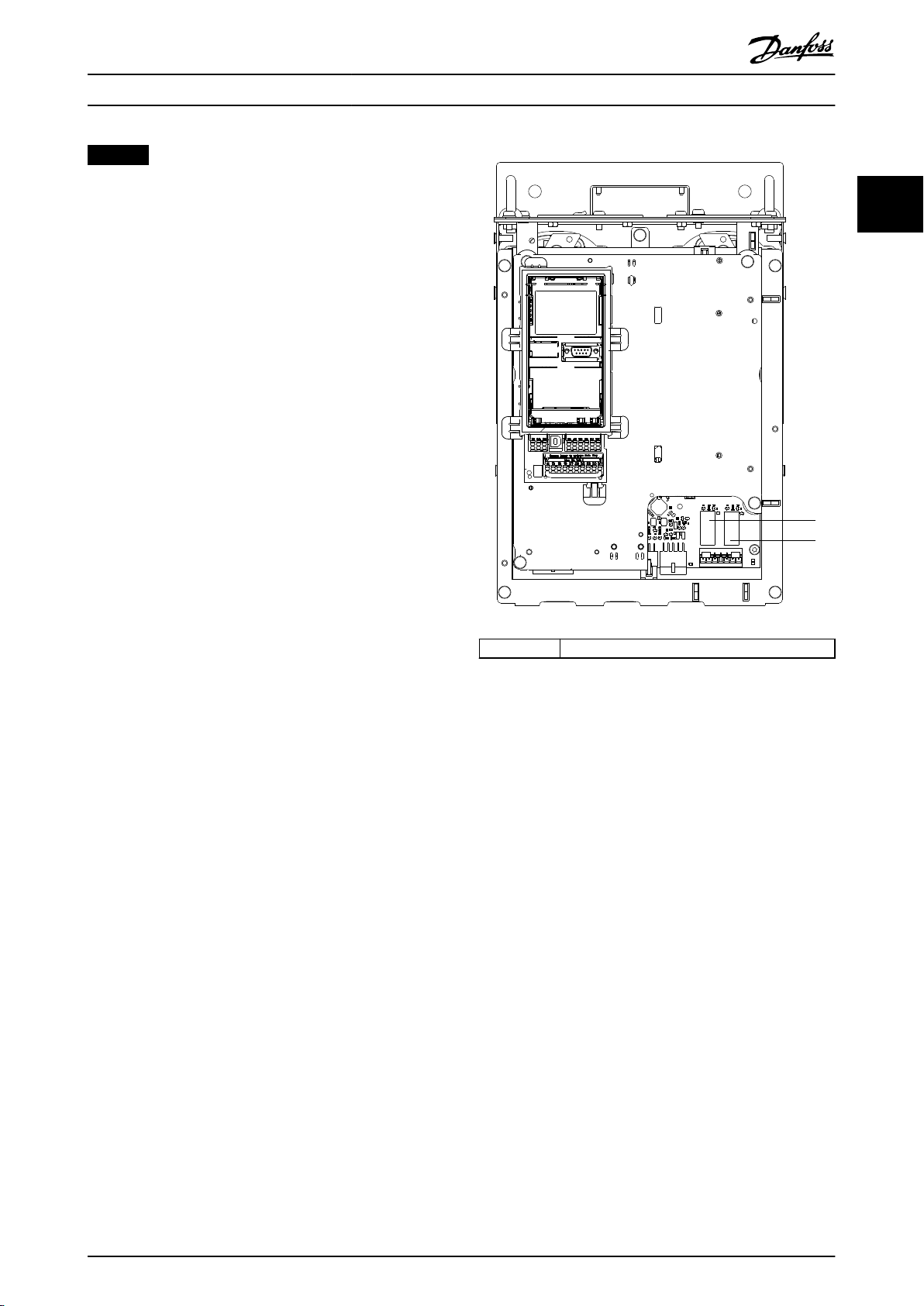
Remova todos os plugues de relé marcados com
•
RELAY (RELÉ). Consulte o Ilustração 2.1.
Verique quais opcionais de relé estão instalados,
•
se houver. O único opcional de relé permitido é o
VLT® Extended Relay Card MCB 113.
2 2
1, 2 Plugues do relé
Ilustração 2.1 Localização dos plugues do relé
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 7
Page 10
Aprovações e
certicações
VLT® AutomationDrive FC 302
315–1200 kW
3 Aprovações e certicações
Esta seção fornece uma breve descrição das várias
aprovações e certicações que são encontradas nos
33
conversores Danfoss. Nem todas as aprovações são
encontradas em todos os conversores.
3.1 Aprovações de conformidade/
regulamentares
AVISO!
LIMITAÇÕES IMPOSTAS NA FREQUÊNCIA DE
SAÍDA
A partir da versão de software 6.72, a frequência de
saída do drive é limitada em 590 Hz devido às regulamentações do controle de exportação. As versões de
software 6.xx também limitam a frequência de saída
máxima em 590 Hz, mas essas versões não podem ser
instaladas; isso é, não é possível atualizá-las nem
retorná-las para uma versão anterior.
3.1.1.1 Marcação CE
A marcação CE (Conformité Européenne) indica que o
fabricante do produto está em conformidade com todas as
diretivas aplicáveis da UE. As diretivas da UE aplicáveis à
concepção e fabricação de conversores estão listadas em
Tabela 3.1.
AVISO!
A marcação CE não regula a qualidade do produto. Não
se pode deduzir especicações técnicas da marcação CE.
Diretiva da UE Versão
Diretiva de baixa tensão 2014/35/EU
Diretiva EMC 2014/30/EU
Diretiva de maquinaria
Diretiva ErP 2009/125/EC
Diretiva ATEX 2014/34/EU
Diretiva RoHS 2002/95/EC
Tabela 3.1 Diretivas da UE aplicáveis a conversores
1) A conformidade da diretiva de maquinaria é necessária somente
para conversores com uma função de segurança integrada.
1)
2014/32/EU
AVISO!
Conversores com uma função de segurança integrada,
como Safe Torque O (STO), devem estar em conformidade com a diretiva de maquinaria.
Diretiva de baixa tensão
Os conversores devem possuir a etiqueta de CE em conformidade com a Diretiva de baixa tensão de 1º de janeiro de
2014. A diretiva de baixa tensão se aplica a todos os
equipamentos elétricos nas faixas de tensão de 50 a 1.000
V CA e de 75 a 1.500 V CC.
O objetivo da diretiva é garantir segurança pessoal e evitar
danos à propriedade ao operar equipamentos elétricos
instalados, mantidos e usados conforme o previsto.
Diretiva EMC
O objetivo da Diretiva EMC (compatibilidade eletromagnética) é reduzir a interferência eletromagnética e
aumentar a imunidade de equipamentos e instalações
elétricas. O requisito básico de proteção da Diretiva EMC é
que os dispositivos que geram interferência eletromagnética (EMI) ou cuja operação pode ser afetada por EMI
devem ser projetados para limitar a geração de interferências eletromagnéticas. Os dispositivos devem ter um
grau adequado de imunidade à EMI quando instalados,
mantidos e usados adequadamente conforme previsto.
Dispositivos de equipamentos elétricos usados
isoladamente, ou como parte de um sistema, devem
conter a marcação CE. Os sistemas não precisam ter a
marcação CE, mas devem cumprir os requisitos básicos de
proteção da Diretiva EMC.
Diretiva de maquinaria
O objetivo da Diretiva de maquinaria é garantir segurança
pessoal e evitar danos materiais aos equipamentos
mecânicos utilizados na aplicação pretendida. A Diretiva de
maquinaria se aplica a uma máquina constituída por um
agregado de componentes ou dispositivos interconectados,
dos quais pelo menos 1 possui movimentação mecânica.
Conversores com uma função de segurança integrada
devem estar em conformidade com a Diretiva de
maquinaria. Conversores que não possuem uma função de
segurança não são classicados segundo a Diretiva de
maquinaria. Se um conversor for integrado ao sistema de
maquinaria, a Danfoss pode fornecer informações sobre os
aspectos de segurança relacionados ao conversor.
Ao usar conversores em máquinas com pelo menos 1 parte
móvel, o fabricante da máquina deve fornecer uma
declaração indicando que está em conformidade com
todos os estatutos relevantes e medidas de segurança.
3.1.1.2 Diretiva ErP
Declarações de conformidade estão disponíveis mediante
solicitação.
8 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
A Diretiva ErP é a European Ecodesign Directive para
produtos relacionados à energia, incluindo conversores. O
objetivo da diretiva é aumentar a eciência energética e o
nível de proteção do ambiente, enquanto aumenta a
segurança da fonte de energia. O impacto ambiental de
Page 11

Aprovações e certicações Guia de Design
produtos relacionados a energia inclui o consumo de
energia através de todo o ciclo útil do produto.
3.1.1.3 Listagem UL
A marcação Underwriters Laboratory (UL) certica a
segurança de produtos e suas declarações ambientais com
base em testes padronizados. Os conversores de tensão T7
(525 a 690 V) possuem a certicação UL somente para 525
a 600 V.
3.1.1.4 CSA/cUL
A aprovação CSA/cUL é para conversores de frequência
com tensão nominal de 600 V ou menos. A norma garante
que, quando o conversor for instalado de acordo com o
guia de operação/instalação fornecido, o equipamento
atende às normas da UL para segurança elétrica e térmica.
Essa marcação certica que o produto desempenha de
acordo com todas as especicações de engenharia e testes
necessários. Um
mediante solicitação.
certicado de conformidade é fornecida
3.1.1.5 EAC
3.1.1.8 RCM
A Regulatory Compliance Mark (RCM) indica que está em
conformidade com equipamentos de telecomunicações e
EMC/comunicações de rádio conforme noticação de
etiquetagem EMC das autoridades de Mídia e Comunicações da Austrália. RCM é agora uma única marcação de
conformidade que abrange as marcações de conformidade
A-Tick e C-Tick. A conformidade RCM é necessária para
colocar dispositivos elétricos e eletrônicos no mercado da
Austrália e Nova Zelândia.
3.1.1.9 Marítima
Para que navios e plataformas de petróleo e gás recebam
uma licença e seguro de regulamentação, uma ou mais
associações de certicação marítima devem certicar essas
aplicações. Até 12 associações de classicação marítima
diferentes possuem séries de conversores Danfoss
certicados.
Para visualizar ou imprimir aprovações e certicados
marítimos, vá para a área de download em
drives.danfoss.com/industries/marine-and-oshore/marine-
-type-approvals/#/.
3 3
A marcação EurAsian Conformity (EAC) indica que o
produto está em conformidade com todos os requisitos e
regulamentações técnicas aplicáveis ao produto de acordo
com a EurAsian Customs Union, que é composta pelos
estados membros da EurAsian Economic Union.
O logo da EAC deve estar na etiqueta do produto e da
embalagem. Todos os produtos utilizados dentro da área
da EAC, deve ser adquiridos na Danfoss dentro da área da
EAC.
3.1.1.6 UKrSEPRO
O certicado UKrSEPRO garante a qualidade e segurança
de produtos e serviços, além da estabilidade de produção
de acordo com as normas regulatórias ucranianas. O
certicado UkrSepro é um documento exigido para
autorizar alfândega para qualquer produto entrando ou
saindo do território da Ucrânia.
3.1.1.7 TÜV
TÜV SÜD é uma organização europeia de segurança que
certica a segurança funcional do conversor de acordo
com a EN/IEC 61800-5-2. A TÜV SÜD testa produtos e
monitora sua produção para garantir que as empresas
estejam em conformidade com seus regulamentos.
3.1.2 Regulamentos de controle de
exportação
Os conversores podem estar sujeitos a regulamentos de
controle de exportação regionais e/ou nacionais.
Um número ECCN é usado para classicar todos os
conversores que estão sujeitos a regulamentos de controle
de exportação. O número ECCN é fornecido nos
documentos que acompanham o conversor.
Em caso de uma nova exportação, o exportador é
responsável por assegurar o cumprimento dos regulamentos de controle de exportação relevantes.
Características nominais de proteção do
3.2
gabinete
As séries de conversores VLT® estão disponíveis em
diferentes proteções de gabinete para acomodar as
necessidades da aplicação. Essas características nominais
de proteção do gabinete são fornecidas de acordo com 2
padrões internacionais:
O tipo UL valida que os gabinetes atendem aos
•
padrões NEMA (National Electrical Manufacturers
Association). Os requisitos de construção e testes
para gabinetes são fornecidos na Publicação dos
Padrões NEMA 250-2003 e UL 50, 11ª edição.
Classicações de IP (Proteção de entrada)
•
denidas pela IEC (International Electrotechnical
Commission) no restante do mundo.
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 9
Page 12
Aprovações e certicações
VLT® AutomationDrive FC 302
315–1200 kW
As séries de conversores Danfoss VLT® padrão estão
disponíveis em diferentes proteções de gabinete para
atender aos requisitos de IP00 (Chassi), IP20 (Chassi
protegido), IP21 (Tipo UL 1) ou IP54 (Tipo UL 12). Neste
manual, Tipo UL é escrito como Tipo. Por exemplo, IP21/
Tipo 1.
33
Padrão do tipo UL
Tipo 1 – Gabinetes construídos para uso em ambientes
fechados para fornecer um grau de proteção pessoal
contra contato acidental com as unidades internas e um
grau de proteção contra queda de sujeira.
Tipo 12 – Os gabinetes de uso geral são destinados para
uso em ambientes fechados para proteger as unidades
internas do seguinte:
Fibras
•
Fiapos
•
Poeira e sujeira
•
Respingos leves
•
Inltração
•
Gotejamento e condensação externa de líquidos
•
não corrosivos
1º dígito 2º dígito Nível de proteção
0 – Sem proteção.
1 – Protegido até 50 mm (2,0 pol.). Nenhuma mão poderia acessar o gabinete.
2 – Protegido até 12,5 mm (0,5 pol.). Nenhum dedo poderia acessar o gabinete.
3 – Protegido até 2,5 mm (0,1 pol.). Nenhuma ferramenta poderia acessar o gabinete.
4 – Protegido até 1,0 mm (0,04 pol.). Nenhum o poderia acessar o gabinete.
5 – Protegido contra poeira – entrada limitada.
6 – Protegido totalmente contra poeira.
– 0 Sem proteção.
– 1 Protegido contra gotejamento de água na vertical.
– 2
– 3
– 4 Protegido contra respingos de água.
– 5 Protegido contra jatos de água.
– 6 Protegido contra jatos fortes de água.
– 7 Protegido contra imersão temporária.
– 8 Protegido contra imersão permanente.
Protegido contra gotejamento de água em um ângulo de 15°.
Protegido contra água em um ângulo de 60°.
Não pode haver furos no gabinete, nem aberturas ou
cortes em conduítes, exceto quando usados com juntas
resistentes a óleo para montar mecanismos a prova de
óleo ou poeira. As portas são também fornecidas com
juntas resistentes a óleo. Além disso, os gabinetes
metálicos para controladores combinados têm portas
articuladas, com abertura horizontal, e necessidade de uma
ferramenta para abrir.
Padrão IP
A Tabela 3.2 fornece uma referência cruzada entre os 2
padrões. A Tabela 3.3 demonstra como ler o número de IP
e depois dene os níveis de proteção. Os conversores
atendem aos requisitos de ambos.
NEMA e UL IP
Chassi IP00
Chassi
protegido
Tipo 1 IP21
Tipo 12 IP54
Tabela 3.2 Referência cruzada de NEMA e Número de IP
IP20
Tabela 3.3 Detalhamento do Número de IP
10 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 13

Visão geral do produto Guia de Design
4 Visão geral do produto
4.1
Drives VLT® High-power
Os conversores Danfoss VLT® descritos neste manual estão
disponíveis como unidades independentes, montadas em
parede ou em painéis elétricos. Cada conversor VLT® pode
ser congurado, compatibilizado e otimizado em termos
de eciência com todos os tipos de motores padrão, o que
evita as restrições de ofertas de pacotes de motor/
conversor. Estes conversores vêm em 2 congurações de
front-end. 6 pulsos e 12 pulsos.
Benefícios dos conversores VLT® 6-pulse
Disponíveis em vários tamanhos de gabinete e
•
características nominais de proteção.
98% de eciência reduz os custos operacionais.
•
O projeto exclusivo de resfriamento do canal
•
traseiro reduz a necessidade de mais equipamentos de resfriamento, resultando em menores
custos de instalação e recorrentes.
Menor consumo de energia para o equipamento
•
de resfriamento da sala de controle.
Custos de propriedade reduzidos.
•
Interface de usuário consistente em toda a gama
•
de conversores Danfoss.
Assistentes de inicialização orientados a
•
aplicações.
Interface do usuário em vários idiomas.
•
Benefícios dos conversores VLT® 12-pulse
O VLT® 12-pulse é um conversor de frequência de alta
eciência que fornece redução harmônica sem adicionar
componentes capacitivos ou indutivos, o que muitas vezes
exige análises de rede para evitar potenciais problemas de
ressonância do sistema. O conversor de 12 pulsos é
construído com o mesmo projeto modular que o
conhecido conversor VLT® de 6 pulsos. Para obter mais
métodos de redução harmônica, consulte o Guia de Design
do VLT® Advanced Harmonic Filter AHF 005/AHF 010.
O conversor de 12 pulsos oferece os mesmos benefícios
que o de 6 pulsos, além de ser:
Robusto e altamente estável em todas as
•
condições de rede e de operação.
Ideal para aplicações em que uma diminuição da
•
tensão média ou o isolamento da grade é
necessário.
Excelente imunidade contra transientes de
•
entrada.
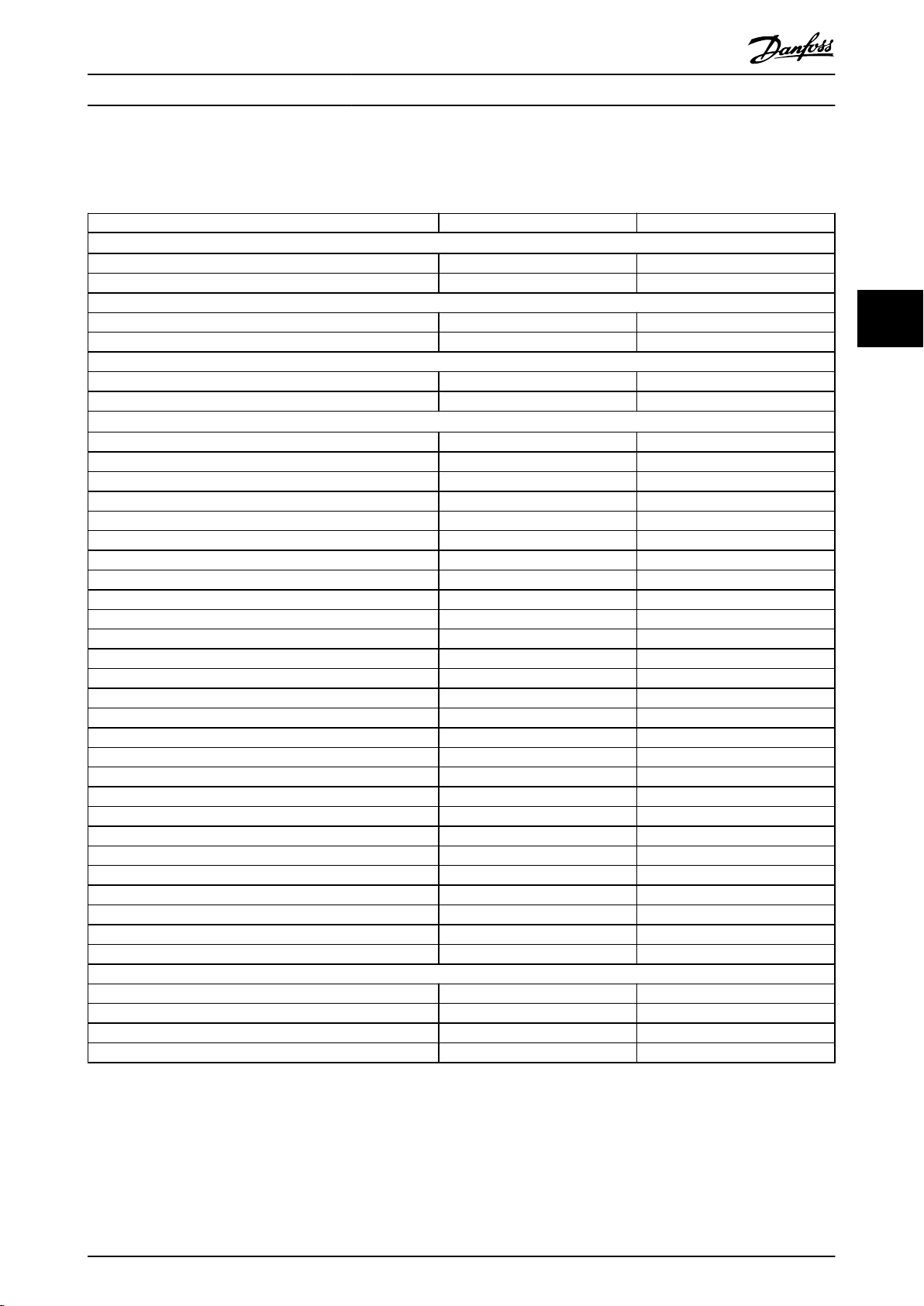
4.2 Tamanho do gabinete pelo valor
nominal da potência
Gabinetes disponíveis
1)
kW
250 350 – F8–F9
315 450 E1–E2 F8–F9
355 500 E1–E2 F8–F9
400 550 E1–E2 F8–F9
450 600 F1–F3 F10–F11
500 650 F1–F3 F10–F11
560 750 F1–F3 F10–F11
630 900 F1–F3 F10–F11
710 1000 F2–F4 F12–F13
800 1200 F2–F4 F12–F13
Tabela 4.1 Valor nominal da potência do gabinete, 380–500 V
1) Todos os valores nominais da potência são tomados em alta
sobrecarga.
A saída é medida a 400 V (kW) e 460 V (hp).
kW1)Hp
355 400 E1–E2 F8–F9
400 400 E1–E2 F8–F9
500 500 E1–E2 F8–F9
560 600 E1–E2 F8–F9
630 650 F1–F3 F10–F11
710 750 F1–F3 F10–F11
800 950 F1–F3 F10–F11
900 1050 F2–F4 F12–F13
1000 1150 F2–F4 F12–F13
1200 1350 F2–F4 F12–F13
Tabela 4.2 Valor nominal da potência do gabinete, 525–690 V
1) Todos os valores nominais da potência são tomados em alta
sobrecarga.
A saída é medida a 690 V (kW) e 575 V (hp).
Hp
1)
1)
6 pulsos 12 pulsos
Gabinetes disponíveis
6 pulsos 12 pulsos
4 4
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 11
Page 14
Visão geral do produto
VLT® AutomationDrive FC 302
315–1200 kW
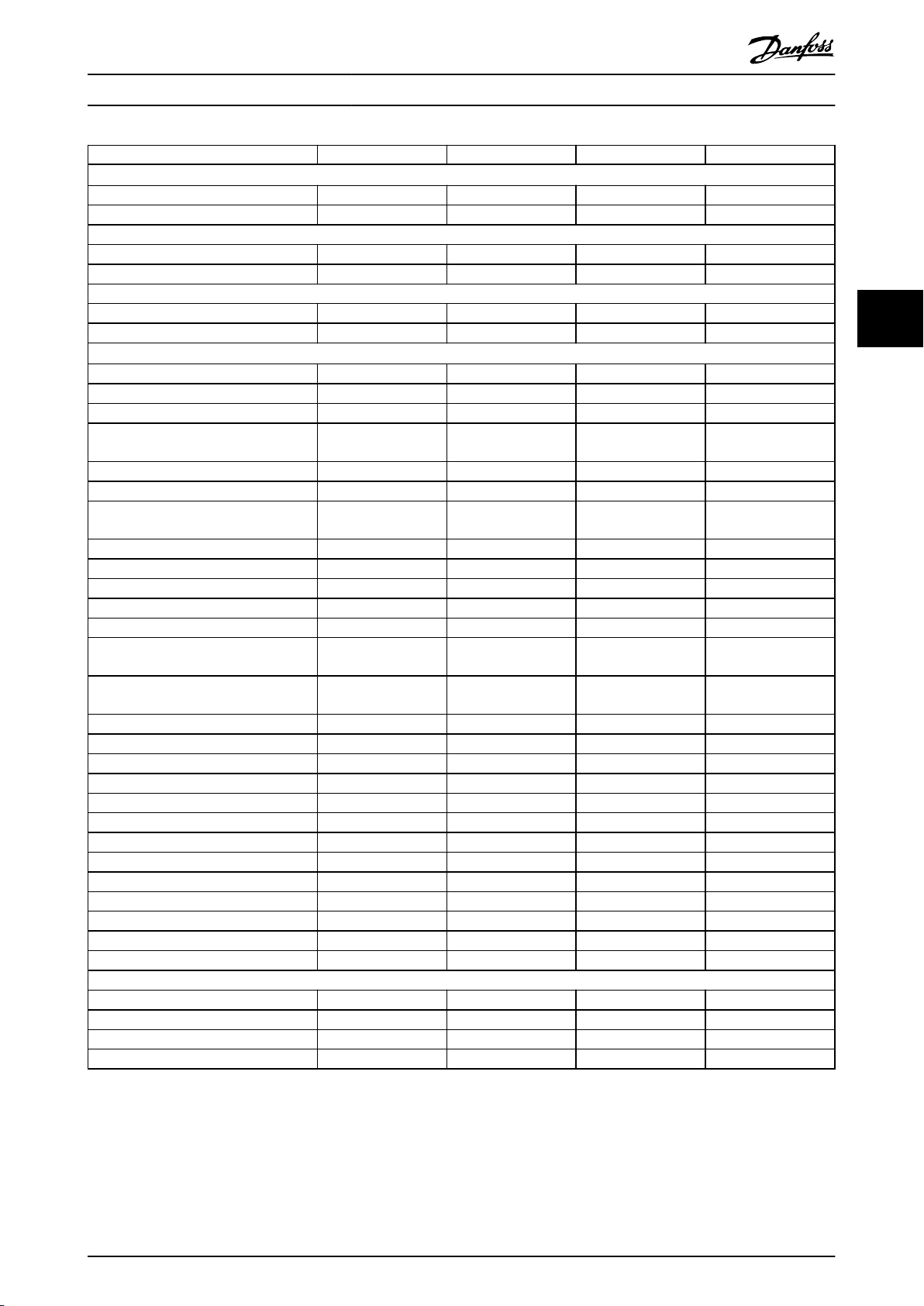
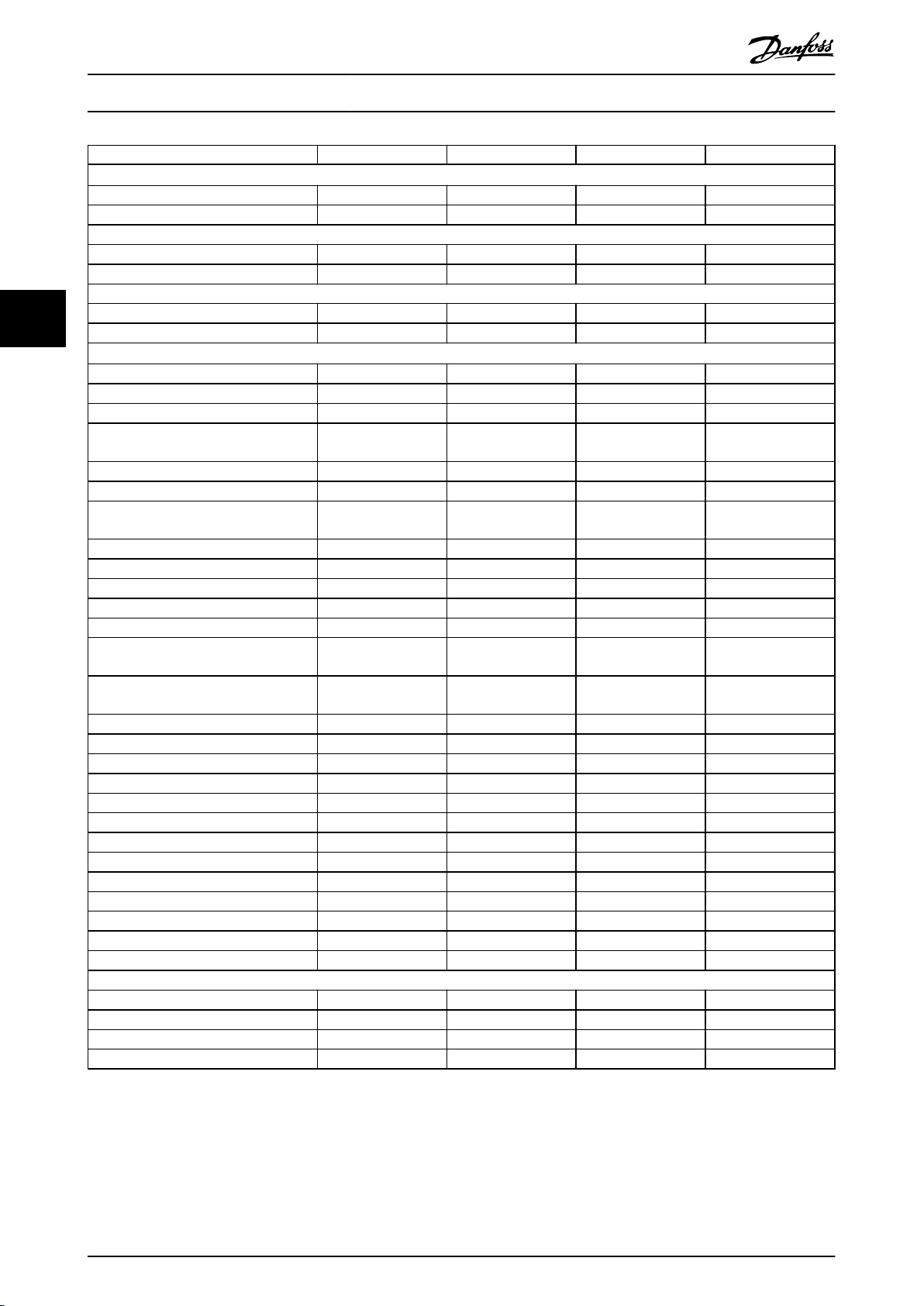
4.3 Visão geral dos gabinetes, 380–500 V
Tamanho do gabinete E1 E2
Valor nominal da potência
Saída a 400 V (kW) 315–400 315–400
Saída a 460 V (hp) 450–550 450–550
Conguração de front-end
6 pulsos S S
44
12 pulsos – –
Características nominais de proteção
IP IP21/54 IP00
Tipo UL Tipo 1/12 Chassi
Opções de hardware
Canal traseiro de aço inoxidável – O
Blindagem da rede elétrica O –
Aquecedor de espaço e termostato – –
Luz do painel elétrico com tomada de energia – –
Filtro de RFI (Classe A1) O O
Terminais NAMUR – –
Monitor de resistência de isolamento (IRM) – –
Monitor de corrente residual (RCM) – –
Circuito de frenagem (IGBTs) O O
Safe Torque O S S
Terminais Regen O O
Terminais do motor comuns – –
Parada de emergência com relé de segurança Pilz – –
Safe Torque O com relé de segurança Pilz – –
Sem LCP – –
LCP Gráco S S
LCP Numérico O O
Fusíveis O O
Terminais de divisão da carga O O
Terminais de divisão da carga + fusíveis O O
Desconexão O O
Disjuntores – –
Contatores – –
Starters de motor manual – –
30 A, terminais protegidos por fusível – –
Alimentação de 24 V CC (SMPS, 5 A) O O
Monitoramento da temperatura externa – –
Dimensões
Altura, mm (pol) 2000 (78,8) 1547 (60,9)
Largura, mm (pol) 600 (23,6) 585 (23,0)
Profundidade, mm (pol) 494 (19,4) 498 (19,5)
Peso, kg (lb) 270–313 (595–690) 234–277 (516–611)
1)
3)
Tabela 4.3 Drives E1–E2, 380–500 V
1) Todos os valores nominais da potência são tomados em alta sobrecarga. A saída é medida a 400 V (kW) e 460 V (hp).
2) Se o gabinete for congurado com divisão da carga ou terminais regen, as características nominais de proteção são de IP00, caso contrário as
características nominais são de IP20.
3) S = padrão, O = opcional, e um traço indica que a opção não está disponível.
12 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 15
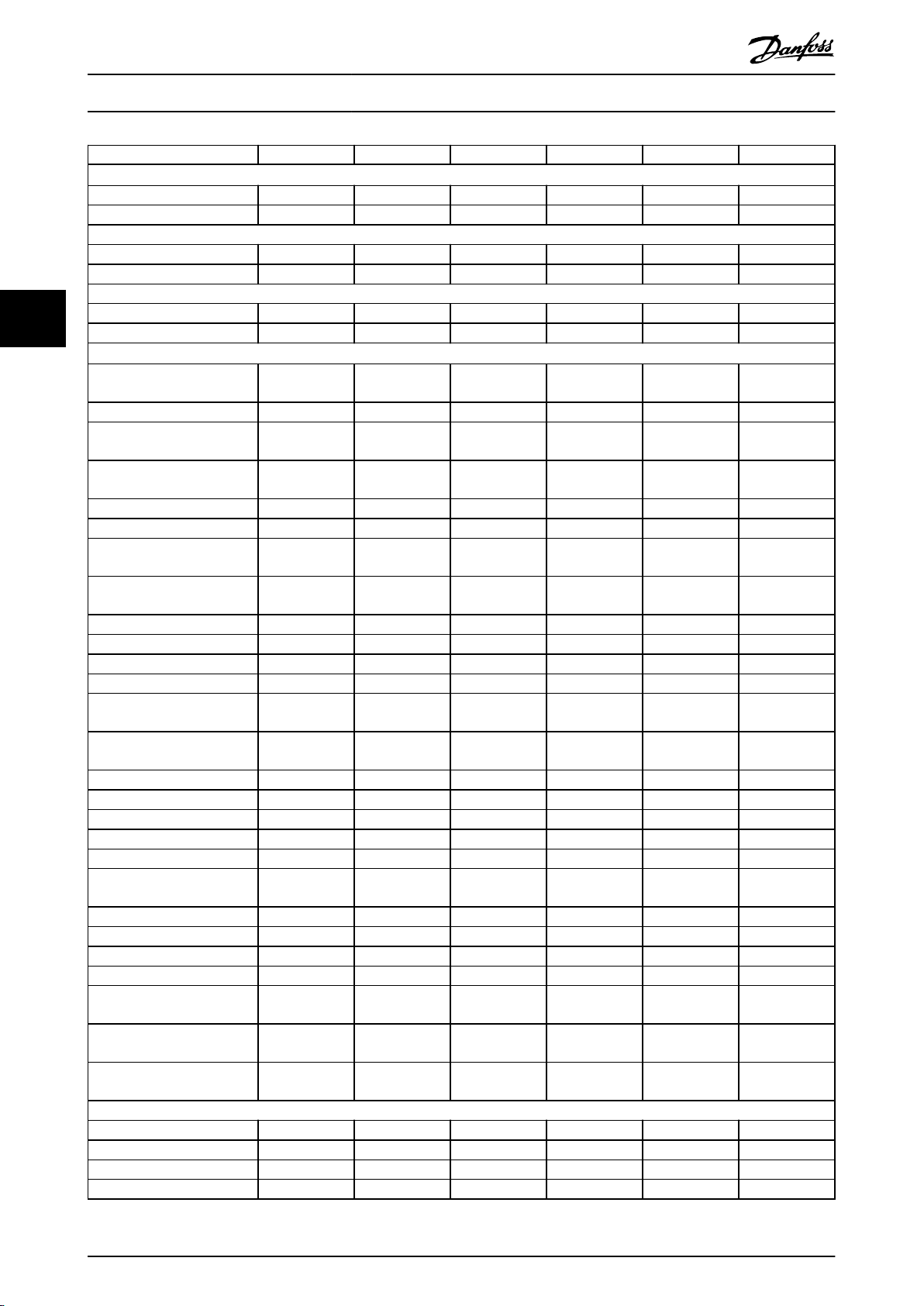
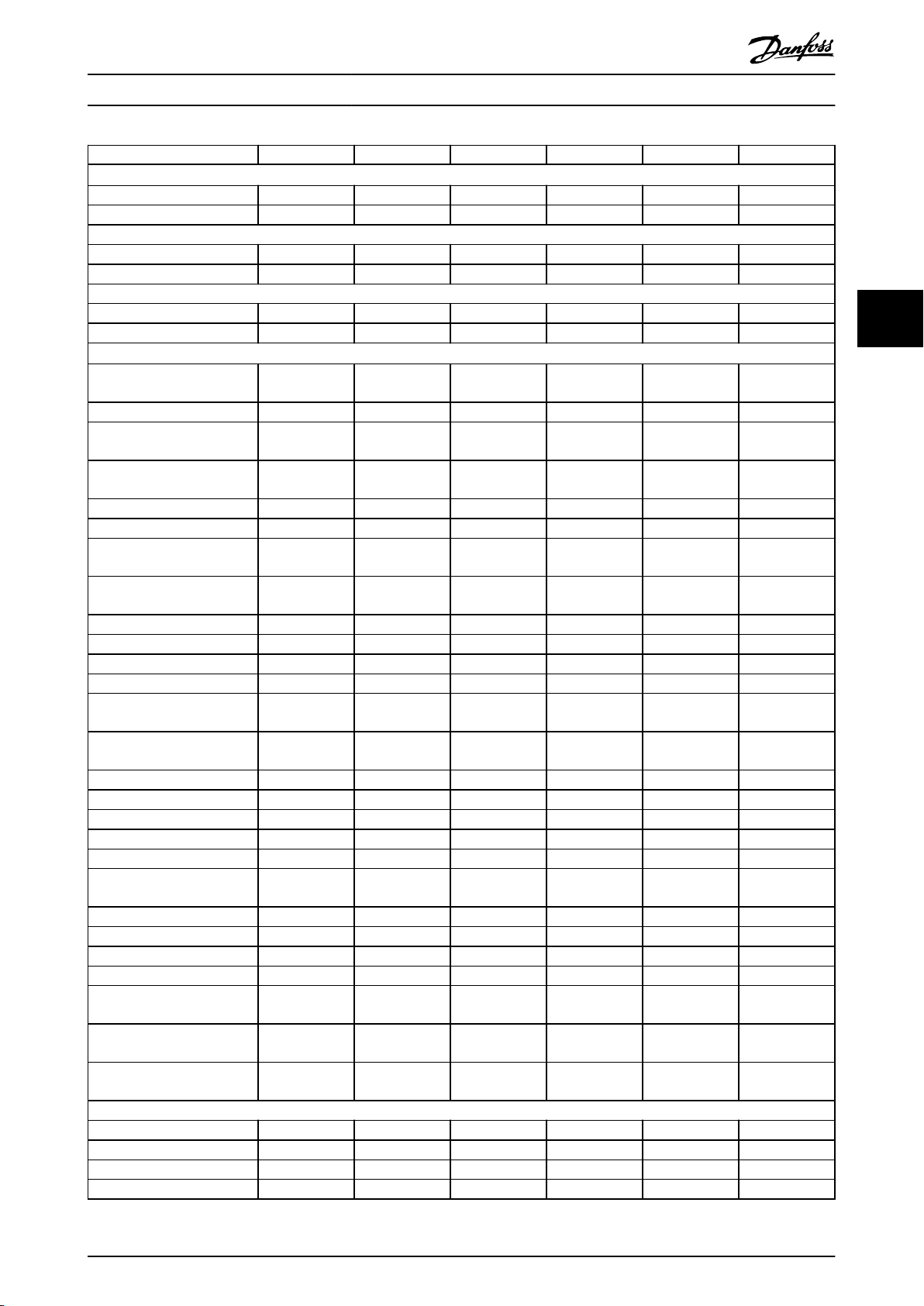
Visão geral do produto Guia de Design
Tamanho do gabinete F1 F2 F3 F4
Valor nominal da potência
Saída a 400 V (kW) 315–400 450–500 315–400 450–500
Saída a 460 V (hp) 450–550 600–650 450–550 600–650
Conguração de front-end
6 pulsos S S S S
12 pulsos – – – –
Características nominais de proteção
IP IP21/54 IP21/54 IP21/54 IP21/54
Tipo UL Tipo 1/12 Tipo 1/12 Tipo 1/12 Tipo 1/12
Opções de hardware
Canal traseiro de aço inoxidável O O O O
Blindagem da rede elétrica – – – –
Aquecedor de espaço e termostato O O O O
Luz do painel elétrico com tomada de
energia
Filtro de RFI (Classe A1) – – O O
Terminais NAMUR O O O O
Monitor de resistência de isolamento
(IRM)
Monitor de corrente residual (RCM) – – O O
Circuito de frenagem (IGBTs) O O O O
Safe Torque O S S S S
Terminais Regen O O O O
Terminais do motor comuns O O O O
Parada de emergência com relé de
segurança Pilz
Safe Torque O com relé de segurança
Pilz
Sem LCP – – – –
LCP Gráco S S S S
LCP Numérico – – – –
Fusíveis O O O O
Terminais de divisão da carga O O O O
Terminais de divisão da carga + fusíveis O O O O
Desconexão – – O O
Disjuntores – – O O
Contatores – – O O
Starters de motor manual O O O O
30 A, terminais protegidos por fusível O O O O
Alimentação de 24 V CC (SMPS, 5 A) O O O O
Monitoramento da temperatura externa O O O O
Dimensões
Altura, mm (pol) 2204 (86,8) 2204 (86,8) 2204 (86,8) 2204 (86,8)
Largura, mm (pol) 1400 (55,1) 1800 (70,9) 2000 (78,7) 2400 (94,5)
Profundidade, mm (pol) 606 (23,9) 606 (23,9) 606 (23,9) 606 (23,9)
Peso, kg (lb) 1017 (2242,1) 1260 (2777,9) 1318 (2905,7) 1561 (3441,5)
1)
3)
O O O O
– – O O
– – O O
O O O O
4 4
Tabela 4.4 Drives F1-F4, 380-500 V
1) Todos os valores nominais da potência são tomados em alta sobrecarga. A saída é medida a 400 V (kW) e 460 V (hp).
2) Se o gabinete for
características nominais são de IP20.
3) S = padrão, O = opcional, e um traço indica que a opção não está disponível.
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 13
congurado com divisão da carga ou terminais regen, as características nominais de proteção são de IP00, caso contrário as
Page 16
Visão geral do produto
Tamanho do gabinete F8 F9 F10 F11 F12 F13
Valor nominal da potência
Saída a 400 V (kW) 90–132 160–250 450–630 450–630 710–800 710–800
Saída a 460 V (hp) 125–200 250–350 600–900 600–900 1000–1200 1000–1200
Conguração de front-end
6 pulsos – – – – – –
12 pulsos S S S S S S
Características nominais de proteção
44
IP IP21/54 IP21/54 IP21/54 IP21/54 IP21/54 IP21/54
NEMA Tipo 1/12 Tipo 1/12 Tipo 1/12 Tipo 1/12 Tipo 1/12 Tipo 1/12
Opções de hardware
Canal traseiro de aço
inoxidável
Blindagem da rede elétrica – – – – – –
Aquecedor de espaço e
termostato
Luz do painel elétrico com
tomada de energia
Filtro de RFI (Classe A1) – O – – O O
Terminais NAMUR O O O O O O
Monitor de resistência de
isolamento (IRM)
Monitor de corrente residual
(RCM)
Circuito de frenagem (IGBTs) O O O O O O
Safe Torque O S S S S S S
Terminais Regen – – – – – –
Terminais do motor comuns – – O O O O
Parada de emergência com
relé de segurança Pilz
Safe Torque O com relé de
segurança Pilz
Sem LCP – – – – – –
LCP Gráco S S S S S S
LCP Numérico – – – – – –
Fusíveis O O O O O O
Terminais de divisão da carga – – – – – –
Terminais de divisão da carga
+ fusíveis
Desconexão – O O O O O
Disjuntores – – – – – –
Contatores – – – – – –
Starters de motor manual – – O O O O
30 A, terminais protegidos por
fusível
Alimentação de 24 V CC
(SMPS, 5 A)
Monitoramento da
temperatura externa
Dimensões
Altura, mm (pol) 2204 (86,8) 2204 (86,8) 2204 (86,8) 2204 (86,8) 2204 (86,8) 2204 (86,8)
Largura, mm (pol) 800 (31,5) 1400 (55,2) 1600 (63,0) 2400 (94,5) 2000 (78,7) 2800 (110,2)
Profundidade, mm (pol) 606 (23,9) 606 (23,9) 606 (23,9) 606 (23,9) 606 (23,9) 606 (23,9)
Peso, kg (lb) 447 (985,5) 669 (1474,9) 893 (1968,8) 1116 (2460,4) 1037 (2286,4) 1259 (2775,7)
1)
2)
– – – – – –
– – O O O O
– – O O O O
– O – – O O
– O – – O O
– – – – – –
O O O O O O
– – – – – –
– – O O O O
O O O O O O
– – O O O O
VLT® AutomationDrive FC 302
315–1200 kW
Tabela 4.5 Drives F8–F13, 380–500 V
1) Todos os valores nominais da potência são tomados em alta sobrecarga. A saída é medida a 400 V (kW) e 460 V (hp).
14 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 17
Visão geral do produto Guia de Design
2) S = padrão, O = opcional, e um traço indica que a opção não está disponível.
4.4 Visão geral dos gabinetes, 525–690 V
Tamanho do gabinete E1 E2
Valor nominal da potência
Saída a 690 V (kW) 355–560 355–560
Saída a 575 V (hp) 400–600 400–600
Conguração de front-end
6 pulsos S S
12 pulsos – –
Características nominais de proteção
IP IP21/54 IP00
Tipo UL Tipo 1/12 Chassi
Opções de hardware
Canal traseiro de aço inoxidável – O
Blindagem da rede elétrica O –
Aquecedor de espaço e termostato – –
Luz do painel elétrico com tomada de energia – –
Filtro de RFI (Classe A1) O O
Terminais NAMUR – –
Monitor de resistência de isolamento (IRM) – –
Monitor de corrente residual (RCM) – –
Circuito de frenagem (IGBTs) O O
Safe Torque O S S
Terminais Regen O O
Terminais do motor comuns – –
Parada de emergência com relé de segurança Pilz – –
Safe Torque O com relé de segurança Pilz – –
Sem LCP – –
LCP Gráco S S
LCP Numérico O O
Fusíveis O O
Terminais de divisão da carga O O
Terminais de divisão da carga + fusíveis O O
Desconexão O O
Disjuntores – –
Contatores – –
Starters de motor manual – –
30 A, terminais protegidos por fusível – –
Alimentação de 24 V CC (SMPS, 5 A) O O
Monitoramento da temperatura externa – –
Dimensões
Altura, mm (pol) 2000 (78,8) 1547 (60,9)
Largura, mm (pol) 600 (23,6) 585 (23,0)
Profundidade, mm (pol) 494 (19,4) 498 (19,5)
Peso, kg (lb) 263–313 (580–690) 221–277 (487–611)
1)
3)
4 4
Tabela 4.6 Drives E1–E2, 525–690 V
1) Todos os valores nominais da potência são tomados em alta sobrecarga. A saída é medida a 690 V (kW) e 575 V (hp).
2) Se o gabinete for
características nominais são de IP20.
3) S = padrão, O = opcional, e um traço indica que a opção não está disponível.
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 15
congurado com divisão da carga ou terminais regen, as características nominais de proteção são de IP00, caso contrário as
Page 18
Visão geral do produto
Tamanho do gabinete F1 F2 F3 F4
Valor nominal da potência
Saída a 690 V (kW) 630–800 900–1200 630–800 900–1200
Saída a 575 V (hp) 650–950 1050–1350 650–950 1050–1350
Conguração de front-end
6 pulsos S S S S
12 pulsos – – – –
Características nominais de proteção
44
IP IP21/54 IP21/54 IP21/54 IP21/54
Tipo UL Tipo 1/12 Tipo 1/12 Tipo 1/12 Tipo 1/12
Opções de hardware
Canal traseiro de aço inoxidável O O O O
Blindagem da rede elétrica – – – –
Aquecedor de espaço e termostato O O O O
Luz do painel elétrico com tomada de
energia
Filtro de RFI (Classe A1) – – O O
Terminais NAMUR O O O O
Monitor de resistência de isolamento
(IRM)
Monitor de corrente residual (RCM) – – O O
Circuito de frenagem (IGBTs) O O O O
Safe Torque O S S S S
Terminais Regen O O O O
Terminais do motor comuns O O O O
Parada de emergência com relé de
segurança Pilz
Safe Torque O com relé de segurança
Pilz
Sem LCP – – – –
LCP Gráco S S S S
LCP Numérico – – – –
Fusíveis O O O O
Terminais de divisão da carga O O O O
Terminais de divisão da carga + fusíveis O O O O
Desconexão – – O O
Disjuntores – – O O
Contatores – – O O
Starters de motor manual O O O O
30 A, terminais protegidos por fusível O O O O
Alimentação de 24 V CC (SMPS, 5 A) O O O O
Monitoramento da temperatura externa O O O O
Dimensões
Altura, mm (pol) 2204 (86,8) 2204 (86,8) 2204 (86,8) 2204 (86,8)
Largura, mm (pol) 1400 (55,1) 1800 (70,9) 2000 (78,7) 2400 (94,5)
Profundidade, mm (pol) 606 (23,9) 606 (23,9) 606 (23,9) 606 (23,9)
Peso, kg (lb) 1017 (2242,1) 1260 (2777,9) 1318 (2905,7) 1561 (3441,5)
1)
3)
VLT® AutomationDrive FC 302
315–1200 kW
O O O O
– – O O
– – O O
O O O O
Tabela 4.7 Drives F1–F4, 525–690 V
1) Todos os valores nominais da potência são tomados em alta sobrecarga. A saída é medida a 690 V (kW) e 575 V (hp).
2) Se o gabinete for
características nominais são de IP20.
3) S = padrão, O = opcional, e um traço indica que a opção não está disponível.
16 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
congurado com divisão da carga ou terminais regen, as características nominais de proteção são de IP00, caso contrário as
Page 19
Visão geral do produto Guia de Design
Tamanho do gabinete F8 F9 F10 F11 F12 F13
Valor nominal da potência
Saída a 690 V (kW) 355–560 355–560 630–800 630–800 900–1200 900–1200
Saída a 575 V (hp) 400–600 400–600 650–950 650–950 1050–1350 1050–1350
Conguração de front-end
6 pulsos – – – – – –
12 pulsos S S S S S S
Características nominais de proteção
IP IP21/54 IP21/54 IP21/54 IP21/54 IP21/54 IP21/54
NEMA Tipo 1/12 Tipo 1/12 Tipo 1/12 Tipo 1/12 Tipo 1/12 Tipo 1/12
Opções de hardware
Canal traseiro de aço
inoxidável
Blindagem da rede elétrica – – – – – –
Aquecedor de espaço e
termostato
Luz do painel elétrico com
tomada de energia
Filtro de RFI (Classe A1) – O – – O O
Terminais NAMUR O O O O O O
Monitor de resistência de
isolamento (IRM)
Monitor de corrente residual
(RCM)
Circuito de frenagem (IGBTs) O O O O O O
Safe Torque O S S S S S S
Terminais Regen – – – – – –
Terminais do motor comuns – – O O O O
Parada de emergência com
relé de segurança Pilz
Safe Torque O com relé de
segurança Pilz
Sem LCP – – – – – –
LCP Gráco S S S S S S
LCP Numérico – – – – – –
Fusíveis O O O O O O
Terminais de divisão da carga – – – – – –
Terminais de divisão da carga
+ fusíveis
Desconexão – O O O O O
Disjuntores – – – – – –
Contatores – – – – – –
Starters de motor manual – – O O O O
30 A, terminais protegidos por
fusível
Alimentação de 24 V CC
(SMPS, 5 A)
Monitoramento da
temperatura externa
Dimensões
Altura, mm (pol) 2204 (86,8) 2204 (86,8) 2204 (86,8) 2204 (86,8) 2204 (86,8) 2204 (86,8)
Largura, mm (pol) 800 (31,5) 1400 (55,1) 1600 (63,0) 2400 (94,5) 2000 (78,7) 2800 (110,2)
Profundidade, mm (pol) 606 (23,9) 606 (23,9) 606 (23,9) 606 (23,9) 606 (23,9) 606 (23,9)
Peso, kg (lb) 447 (985,5) 669 (1474,9) 893 (1968,8) 1116 (2460,4) 1037 (2286,4) 1259 (2775,7)
1)
2)
– – – – – –
– – O O O O
– – O O O O
– O – – O O
– O – – O O
– – – – – –
O O O O O O
– – – – – –
– – O O O O
O O O O O O
– – O O O O
4 4
Tabela 4.8 Drives F8–F13, 525–690 V
1) Todos os valores nominais da potência são tomados em alta sobrecarga. A saída é medida a 690 V (kW) e 575 V (hp).
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 17
Page 20
Visão geral do produto
2) S = padrão, O = opcional, e um traço indica que a opção não está disponível.
VLT® AutomationDrive FC 302
315–1200 kW
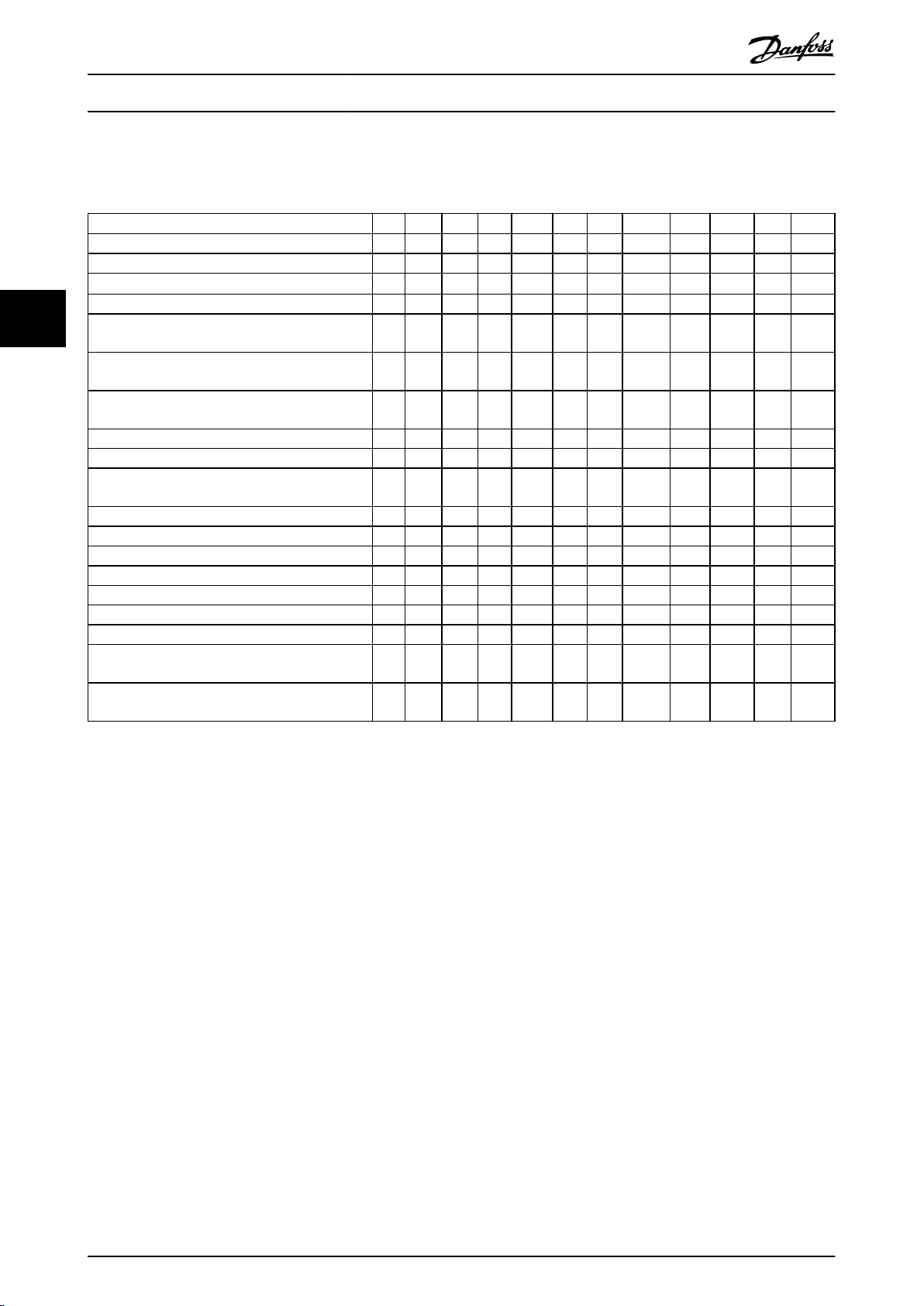
4.5 Disponibilidade do kit
Descrição do kit
USB na porta O – O O O O O O O O O O
LCP, numérico O O O O O O O O O O O O
LCP, gráco
Cabo do LCP, 3 m (9 pés) O O O O O O O O O O O O
44
Kit de montagem do LCP numérico
(LCP, xadores, gaxeta e cabo)
Kit de montagem do LCP gráco
(LCP, xadores, gaxeta e cabo)
Kit de montagem para todos os LCPs
(xadores, gaxeta e cabo)
Entrada superior para os cabos do motor – – O O O O O O O O O O
Entrada superior para cabos de rede elétrica – – O O O O O O O O O O
Entrada superior para cabos de rede elétrica com
desconexão
Entrada superior para cabos do eldbus – O – – – – – – – – – –
Terminais do motor comuns – – O O O O – – – – – –
Gabinete 3R NEMA – O – – – – – – – – – –
Pedestal O O – – – – – – – – – –
Placa de opções de entrada O O – – – – – – – – – –
Conversão IP20 – O – – – – – – – – – –
Resfriamento de saída superior (somente) – O – – – – – – – – – –
Resfriamento do canal traseiro (entrada traseira/
saída traseira)
Resfriamento do canal traseiro (entrada inferior/
saída superior)
1)
2)
E1 E2 F1 F2 F3 F4 F8 F9 F10 F11 F12 F13
O O O O O O O O O O O O
O O O O O O O O O O O O
O O O O O O O O O O O O
O O O O O O O O O O O O
– – – – O O – – – – – –
O O O O O O O O O O O O
– O – – – – – – – – – –
Tabela 4.9 Kits disponíveis para gabinetes metálicos E1–E2, F1–F4 e F8–F13
1) S = padrão, O = opcional, e um traço indica que o kit não está disponível para esse gabinete. Para descrições e números de peças do kit,
consulte capétulo 13.2 Números da solicitação de pedido para opcionais/kits.
2) O LCP
compra.
gráco vem por padrão com os gabinetes E1–E2, F1–F4 e F8–F13. Se for necessário mais de 1 LCP gráco, o kit está disponível para
18 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 21
Recursos do produto Guia de Design
5 Recursos do produto
5.1 Recursos operacionais automatizados
Os recursos operacionais automatizados estão ativos
quando o conversor está em funcionamento. A maioria
deles não exige programação ou conguração. O conversor
possui uma gama de funções de proteção integradas para
se proteger e para proteger o motor quando ele está em
funcionamento.
Para obter detalhes de qualquer
em um determinado parâmetro do motor, consulte o guia
de programação.
5.1.1 Proteção contra curto-circuito
Motor (entre fases)
O conversor está protegido contra curtos-circuitos no lado
do motor por medição de corrente em cada uma das 3
fases do motor. Um curto-circuito entre 2 fases de saída
causa uma sobrecorrente no inversor. O inversor é
desligado quando a corrente de curto-circuito ultrapassa o
valor permitido (Alarm 16, Trip Lock (Alarme 16, Bloqueio por
Desarme)).
Lado da rede elétrica
Um conversor que funciona corretamente limita a corrente
que pode ser consumida proveniente da alimentação.
Ainda assim, recomenda-se o uso de fusíveis e/ou
disjuntores no lado da alimentação como proteção se
houver quebra de componente dentro do conversor (1ª
falha). Fusíveis no lado da rede elétrica são obrigatórios
para conformidade com o UL.
AVISO!
Para garantir o cumprimento da norma IEC 60364 para
CE ou NEC 2009 para UL, é obrigatório o uso de fusíveis
e/ou disjuntores.
Resistor de frenagem
O conversor é protegido contra curto-circuito no resistor
de frenagem.
Load Sharing
Para proteger o barramento de CC contra curtos-circuitos e
os conversores contra sobrecarga, instale fusíveis de CC em
série com os terminais de Load Sharing de todas as
unidades conectadas.
5.1.2 Proteção contra sobretensão
Sobretensão gerada pelo motor
A tensão no barramento CC aumenta quando o motor
funciona como um gerador. Isto ocorre nos seguintes
casos:
conguração necessária,
A carga gira o motor em uma frequência de saída
•
constante a partir do drive, ou seja, a carga gera
energia.
Se o momento de inércia for alto durante a
•
desaceleração (tempo de desaceleração), o atrito
será baixo e o tempo de desaceleração muito
curto para a energia ser dissipada como uma
perda pelo sistema do drive.
Conguração incorreta de compensação de
•
escorregamento aumenta a tensão do
barramento CC.
FEM Força Eletro Motriz contrária da operação do
•
motor PM. Se parada por inércia em alta RPM, a
FEM Força Eletro Motriz contrária do motor PM
pode potencialmente exceder a tolerância de
tensão máxima do drive e causar danos. Para
ajudar a evitar isso, o valor de
parâmetro 4-19 Max Output Frequency é automaticamente limitado com base em um cálculo
interno baseado no valor de parâmetro 1-40 Back
EMF at 1000 RPM, parâmetro 1-25 Motor Nominal
Speed, e parâmetro 1-39 Motor Poles.
AVISO!
Para evitar excessos de velocidade do motor (por
exemplo, devido a efeitos de autorrotação excessivos),
equipe o drive com um resistor de frenagem.
A sobretensão pode ser resolvida com o uso de uma
função de frenagem (parâmetro 2-10 Brake Function) e/ou
com o uso do controle de sobretensão
(parâmetro 2-17 Over-voltage Control).
Funções de frenagem
Conecte um resistor de frenagem para a dissipação do
excedente da energia de frenagem. Conectar um resistor
de frenagem permite uma tensão do barramento CC mais
alta durante a frenagem.
O freio CA é uma alternativa para melhorar a frenagem
sem usar um resistor de frenagem. Esta função controla
um excesso de magnetização do motor quando ele age
como um gerador. Aumentar as perdas elétricas no motor
permite que a função OVC aumente o torque de frenagem,
sem exceder o limite de sobretensão.
AVISO!
O freio CA não é tão ecaz quanto a frenagem dinâmica
com um resistor.
Controle de sobretensão (OVC)
Ao estender automaticamente o tempo de desaceleração,
o OVC reduz o risco de desarme do drive devido à
sobretensão no barramento CC.
5 5
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 19
Page 22
Recursos do produto
VLT® AutomationDrive FC 302
315–1200 kW
AVISO!
O OVC pode ser ativado para um motor PM com controle
central, PM VVC+, Flux OL e Flux CL para motores PM.
AVISO!
Não ativa o OVC em aplicações de içamento.
5.1.3 Detecção de fase ausente de motor
A função de fase ausente de motor (parâmetro 4-58 Função
de Fase do Motor Ausente) está ativada por padrão para
55
evitar danos no motor em caso de fase ausente de motor.
A conguração padrão é 1.000 ms, mas pode ser ajustada
para uma detecção mais rápida.
5.1.4 Detecção de desbalanceamento da
Limite de velocidade máximo: Parâmetro 4-13 Lim. Superior
da Veloc. do Motor [RPM] ou parâmetro 4-19 Freqüência Máx.
de Saída limite a velocidade de saída máxima que o
conversor pode fornecer.
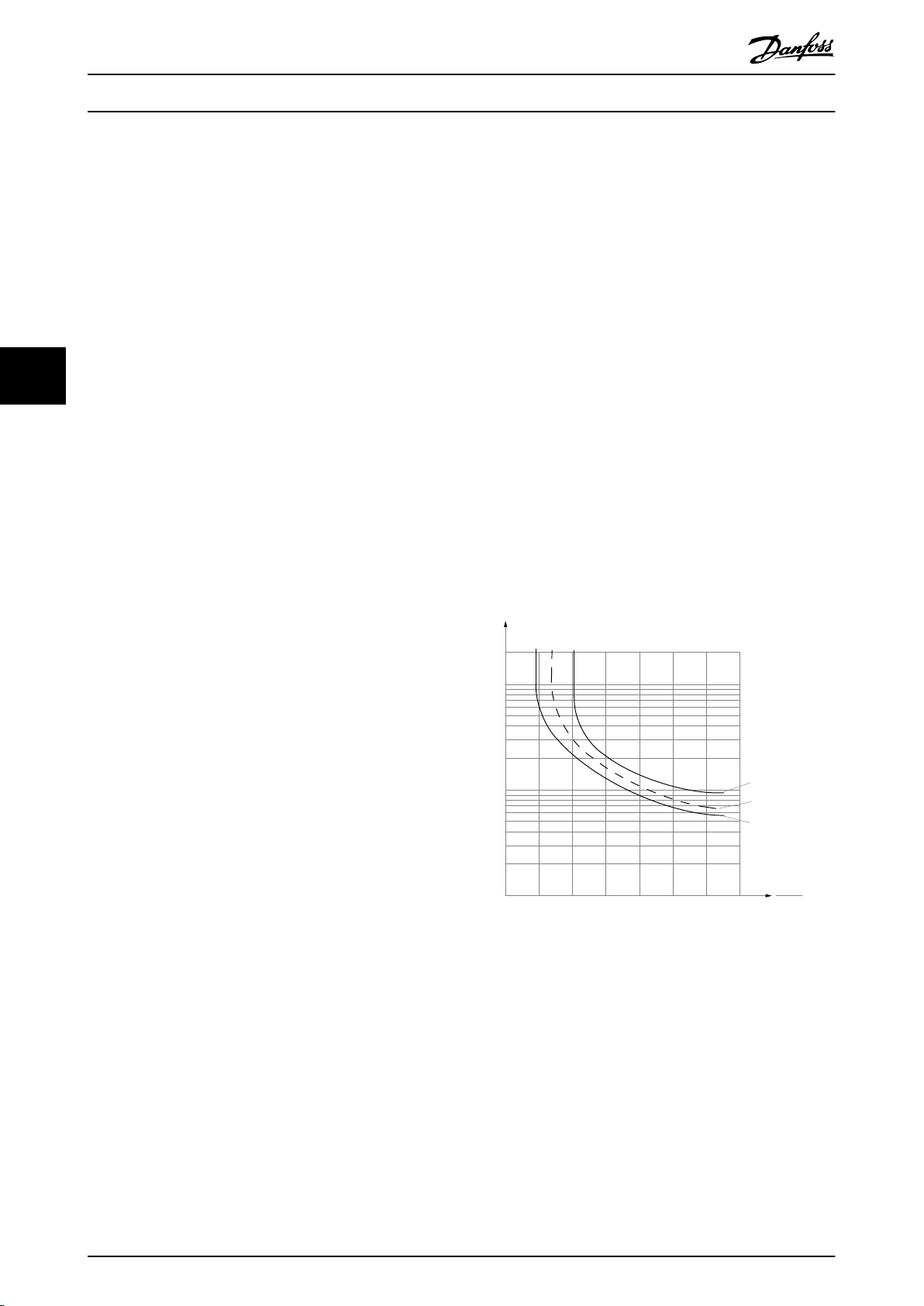
Relé térmico eletrônico (ETR)
O ETR é um recurso eletrônico que simula um relé
bimetálico com base em medições internas. A característica
é mostrada em Ilustração 5.1.
Limite de tensão
O inversor se desliga para proteger os transistores e os
capacitores de barramento CC quando um determinado
nível de tensão embutido no código for atingido.
Superaquecimento
O conversor possui sensores de temperatura integrados e
reage imediatamente aos valores críticos por meio de
limites embutidos no código.
tensão de alimentação
5.1.7 Proteção de Rotor Bloqueado
A operação em desbalanceamento de tensão de
alimentação grave reduz a vida útil do motor e do
conversor. Se o motor for operado continuamente próximo
à carga nominal, as condições são consideradas graves. A
conguração padrão desarma o conversor se houver um
desbalanceamento da tensão de alimentação
(parâmetro 14-12 Função no Desbalanceamento da Rede).
5.1.5 Chaveamento na saída
Pode haver situações em que o rotor está bloqueado
devido a excesso de carga ou outros fatores. O rotor
bloqueado não pode produzir resfriamento suciente que,
por sua vez, pode superaquecer o enrolamento do motor.
O conversor é capaz de detectar a situação de rotor
bloqueado com controle de uxo PM de malha aberta e
controle PM VVC+ (parâmetro 30-22 Proteção de Rotor
Bloqueado).
É permitido adicionar um interruptor à saída entre o motor
e o conversor; no entanto, mensagens de falha podem
aparecer. A Danfoss não recomenda o uso deste recurso
para os conversores de 525-690 V conectados a uma rede
de rede elétrica de TI.
5.1.6 Proteção de sobrecarga
Limite de torque
O recurso de limite de torque protege o motor contra
sobrecarga, independentemente da velocidade. O limite de
torque é controlado em parâmetro 4-16 Limite de Torque do
Modo Motor e parâmetro 4-17 Limite de Torque do Modo
Gerador. O tempo antes da advertência do limite de torque
ser desarmada é controlado em parâmetro 14-25 Atraso do
Desarme no Limite de Torque.
Limite de corrente
O limite de corrente é controlado em parâmetro 4-18 Limite
de Corrente e o tempo antes do desarme do conversor é
controlado em parâmetro 14-24 AtrasoDesarmLimCorrnte.
Limite de velocidade
Limite de velocidade mínimo: Parâmetro 4-11 Lim. Inferior
da Veloc. do Motor [RPM] ou parâmetro 4-12 Lim. Inferior da
Veloc. do Motor [Hz] limite a faixa de velocidade
operacional mínima do conversor.
5.1.8 Derating automático
O conversor verica constantemente os seguintes níveis
críticos:
Alta temperatura no cartão de controle ou no
•
dissipador de calor.
Alta carga do motor.
•
Alta tensão do barramento CC.
•
Baixa velocidade do motor.
•
Como resposta a um nível crítico, o conversor ajusta a
frequência de chaveamento. Para altas temperaturas
internas e baixa velocidade do motor, o conversor pode
também forçar o padrão PWM para SFAVM.
AVISO!
O derating automático é diferente quando
parâmetro 14-55 Filtro Saída está programado para [2]
FiltroOndaSenoidl Fixo.
20 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 23
Recursos do produto Guia de Design
5.1.9 Otimização automática de energia
A otimização automática de energia (AEO) direciona o
conversor para monitorar continuamente a carga no motor
e ajustar a tensão de saída para maximizar a eciência.
Com carga leve, a tensão é reduzida e a corrente do motor
é minimizada. O motor se benecia de:
Maior eciência.
•
Aquecimento reduzido.
•
Operação mais silenciosa.
•
Não é necessário selecionar uma curva V/Hz porque o
conversor ajusta automaticamente a tensão do motor.
5.1.10 Modulação automática da
frequência de chaveamento
O conversor gera pulsos elétricos curtos para formar um
padrão de onda CA. A frequência de chaveamento é a taxa
com que esses pulsos ocorrem. Uma frequência de
chaveamento baixa (taxa de pulsos lenta) resulta em um
ruído audível no motor, tornando preferível uma
frequência de chaveamento mais alta. No entanto, uma
frequência de chaveamento alta gera calor no conversor, o
que pode limitar a quantidade de corrente disponível para
o motor.
5.1.12 Desempenho de utuação da
potência
O conversor resiste a utuações da rede elétrica como:
Transientes.
•
Quedas momentâneas.
•
Quedas de tensão curtas.
•
Surtos.
•
O conversor compensa automaticamente as tensões de
entrada ±10% da nominal para fornecer torque e tensão
nominal do motor. Com a nova partida automática
selecionada, o conversor é automaticamente ligado após
um desarme de tensão. Com o ying start, o conversor
sincroniza a rotação do motor antes da partida.
5.1.13 Amortecimento de ressonância
O amortecimento de ressonância elimina o ruído de
ressonância de alta frequência do motor. Está disponível o
amortecimento de frequência selecionado manualmente
ou automaticamente.
5.1.14 Ventiladores controlados por
temperatura
5 5
A modulação automática da frequência de chaveamento
regula essas condições automaticamente para fornecer a
frequência de chaveamento mais alta sem superaquecer o
conversor. Ao fornecer uma alta frequência de
chaveamento regulada, silencia o ruído de operação do
motor a velocidades baixas quando o controle de ruído
audível é crítico e produz potência de saída total para o
motor quando necessário.
5.1.11 Derating para frequência de
chaveamento alta automático
O drive foi projetado para operação com carga total
contínua em frequências de chaveamento entre 1,5–2 kHz
para 380–500 V, e 1–1,5 kHz para 525–690 V. A faixa de
frequência depende da potência e das características
nominais de tensão. Uma frequência de chaveamento
excedendo uma faixa máxima permitida gera aumento de
calor no drive e exige que a corrente de saída seja derated.
Um recurso automático do drive é o controle de frequência
de chaveamento dependente da carga. Este recurso
permite que o motor se benecie de uma frequência de
chaveamento mais alta que a carga permitir.
Sensores no conversor regulam a operação dos
ventiladores de resfriamento internos. Geralmente, os
ventiladores de resfriamento não funcionam ao operar com
carga baixa, ou quando em sleep mode ou standby. Esses
sensores reduzem o ruído, aumentam a eciência e
prolongam a vida operacional do ventilador.
5.1.15 Conformidade com a EMC
A interferência eletromagnética (EMI) e a interferência de
radiofrequência (RFI) são distúrbios que podem afetar um
circuito elétrico devido à indução ou à radiação eletromagnética de uma fonte externa. O conversor é projetado para
estar em conformidade com a norma de produto EMC para
conversores IEC 61800-3 e a norma europeia EN 55011. Os
cabos de motor devem ser blindados e terminados de
maneira adequada para estarem em conformidade com os
níveis de emissão em EN 55011. Para obter mais
informações sobre o desempenho de EMC, consulte
capétulo 10.15.1 Resultados do teste de EMC.
5.1.16 Isolação galvânica dos terminais de
controle
Todos os terminais de controle e terminais de relé de saída
são isolados galvanicamente da energia da rede elétrica, o
que protege completamente o circuito de controle da
corrente de entrada. Os terminais do relé de saída
requerem seus próprios aterramentos. Esse isolamento
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 21
Page 24
1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2000
500
200
400
300
1000
600
t [s]
175ZA052.11
fOUT = 0,2 x f M,N
fOUT = 2 x f M,N
fOUT = 1 x f M,N
IMN
IM
Recursos do produto
VLT® AutomationDrive FC 302
315–1200 kW
atende aos requisitos de proteção rígidos de tensão
ultrabaixa (PELV) de isolamento.
- sensor PTC- ou KTY nos enrolamentos
do motor e conectado a um AI ou DI
padrão.
Os componentes que formam a isolação galvânica são:
Alimentação, incluindo isolação de sinal.
•
Drive do gate para os IGBTs, transformadores de
•
disparo e os acopladores ópticos.
Os transdutores de efeito Hall de corrente de
•
saída.
5.2 Recursos de aplicação personalizada
•
- PT100 ou PT1000 nos enrolamentos e
rolamentos do motor, conectado ao
VLT® Sensor Input Card MCB 114.
-
Entrada do termistor PTC no VLT® PTC
Thermistor Card MCB 112 (aprovado
pela ATEX).
Interruptor térmico mecânico (tipo Klixon) em um
DI.
55
Funções de aplicação personalizados são os recursos mais
comuns programados no conversor para desempenho
melhorado do sistema. Eles exigem o mínimo de
programação ou conguração. Consulte o guia de
programação para obter instruções sobre a ativação dessas
funções.
Relé térmico eletrônico (ETR) integrado.
•
O ETR calcula a temperatura do motor medindo a corrente,
a frequência e o tempo de operação. O conversor mostra a
carga térmica no motor em porcentagem e pode emitir
uma advertência em um setpoint de sobrecarga
programável.
5.2.1 Adaptação Automática do Motor
Adaptação Automática do Motor (AMA) é um
procedimento de teste automatizado usado para medir as
características elétricas do motor. A AMA oferece um
As opções programáveis na sobrecarga permitem que o
conversor pare o motor, reduza a saída e ignore a
condição. Mesmo em baixas velocidades, o conversor
atende os padrões de sobrecarga do motor eletrônico I2t
Classe 20.
modelo eletrônico preciso do motor, permitindo que o
drive calcule o desempenho e a eciência ideais. Realizar o
procedimento AMA também maximiza o recurso de
otimização automática da energia do drive. A AMA é
realizada sem o motor girar e sem desacoplar a carga do
motor.
5.2.2 Controlador PID integrado
O controlador (PID) integrado proporcional, integral e
derivativo elimina a necessidade dos dispositivos de
controle auxiliar. O controlador PID mantém um controle
constante dos sistemas de malha fechada que regulam
pressão, uxo, temperatura, ou outros requisitos do
sistema que devem ser mantidos.
O drive pode usar 2 sinais de feedback de 2 dispositivos
diferentes, permitindo que o sistema seja regulado com
requisitos diferentes de feedback. O drive toma decisões
de controle ao comparar os 2 sinais para otimizar o
desempenho do sistema.
5.2.3 Proteção térmica do motor
A proteção térmica do motor pode ser fornecida por meio
de:
Detecção direta da temperatura usando um
•
22 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Ilustração 5.1 Características do ETR
O eixo X mostra a relação entre I
motor
e I
nominal. O
motor
eixo Y mostra o tempo em segundos antes de o ETR
desativar e desarmar o conversor. As curvas mostram a
velocidade nominal característica no dobro da velocidade
nominal e a 0,2 vezes a velocidade nominal.
A uma velocidade mais baixa, o ETR desativa com menos
calor devido ao menor resfriamento do motor. Desse
modo, o motor é protegido contra superaquecimento,
mesmo em velocidades baixas. O recurso do ETR calcula a
temperatura do motor baseado na corrente e velocidade
reais. A temperatura calculada ca visível como um
parâmetro de leitura em parâmetro 16-18 Térmico Calculado
do Motor.
Page 25
Recursos do produto Guia de Design
Uma versão especial do ETR também está disponível para
motores EX-e em áreas ATEX. Essa função possibilita inserir
uma curva especíca para proteger o motor Ex-e. Consulte
o guia de programação para obter as instruções de
conguração.
5.2.4 Proteção térmica do motor para
motores Ex-e
O conversor é equipado com uma função de monitoramento térmico ATEX ETR para operação de motores Ex-e
de acordo com a norma EN-60079-7. Quando combinado
com um dispositivo de monitoramento PTC aprovado pela
ATEX, como o opcional VLT® PTC Thermistor Card MCB 112
ou um dispositivo externo, a instalação não exige uma
aprovação individual de uma organização autorizada.
A função do monitoramento térmico ATEX ETR permite o
uso de um motor Ex-e em vez de um motor Ex-d mais
caro, maior e mais pesado. A função garante que o
conversor limite a corrente do motor para prevenir o
superaquecimento.
Requisitos relacionados ao motor Ex-e
Garanta que o motor Ex-e seja aprovado para
•
operação em zonas perigosas (zona ATEX 1/21,
zona ATEX 2/22) com conversores. O motor deve
certicado para a zona perigosa especíca.
ser
Instale o motor Ex-e na zona 1/21 ou 2/22 da
•
zona perigosa, de acordo com a aprovação do
motor.
AVISO!
Instale o conversor fora da zona perigosa.
Garanta que o motor Ex-e esteja equipado com
•
um dispositivo de proteção de sobrecarga do
motor aprovado pela ATEX. Esse dispositivo
monitora a temperatura nos enrolamentos do
motor. Se houver um nível de temperatura crítico
ou um mau funcionamento, o dispositivo desliga
o motor.
-
O opcional VLT® PTC Thermistor Card
MCB 112 fornece monitoramento
aprovado pela ATEX da temperatura do
motor. É um pré-requisito que o
conversor seja equipado com 3 a 6
termistores PTC em série de acordo com
a DIN 44081 ou 44082.
- Como alternativa, uma fonte externa de
dispositivo de proteção de PTC aprovada
pela ATEX pode ser usada.
Filtro de onda senoidal é necessário quando
•
- Cabos longos (picos de tensão) ou
aumento da tensão de rede produzem
tensões que excedem a tensão máxima
permitida nos terminais do motor.
- A frequência de chaveamento mínima
do conversor não atende ao requisito
informado pelo fabricante do motor. A
frequência de chaveamento mínima do
conversor é mostrada como o valor
padrão em parâmetro 14-01 Freqüência
de Chaveamento.
Compatibilidade do motor e do conversor
Para motores certicados de acordo com EN-60079-7, uma
lista de dados incluindo limites e regras é fornecida pelo
fabricante do motor como uma planilha de dados, ou na
plaqueta de identicação do motor. Durante o
planejamento, a instalação, a colocação em funcionamento,
a operação e o serviço, siga os limites e regras fornecidos
pelo fabricante para:
Frequência de chaveamento mínima.
•
Corrente máxima.
•
Frequência mínima do motor.
•
Frequência máxima do motor.
•
Ilustração 5.2 mostra onde os requisitos são indicados na
plaqueta de identicação do motor.
Ao combinar conversor e motor, a Danfoss especica os
seguintes requisitos adicionais para garantir uma proteção
térmica adequada do motor:
Não exceda a relação máxima permitida entre o
•
tamanho do conversor e o tamanho do motor. O
valor típico é I
Considere todas as quedas de tensão do
•
conversor para o motor. Se o motor funcionar
com uma tensão mais baixa que a indicada nas
características U/f, a corrente pode aumentar,
disparando um alarme.
VLT, n
≤2xI
m,n
5 5
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 23
Page 26
130BD888.10
CONVERTER SUPPLY
VALID FOR 380 - 415V FWP 50Hz
3 ~ Motor
MIN. SWITCHING FREQ. FOR PWM CONV. 3kHz
l = 1.5XI
M,N
tOL = 10s tCOOL = 10min
MIN. FREQ. 5Hz MAX. FREQ. 85 Hz
PWM-CONTROL
f [Hz]
Ix/I
M,N
PTC °C DIN 44081/-82
Manufacture xx
EN 60079-0
EN 60079-7
СЄ 1180 Ex-e ll T3
5 15 25 50 85
0.4 0.8 1.0 1.0 0.95
1
xЗ
2
3
4
Recursos do produto
VLT® AutomationDrive FC 302
315–1200 kW
Backup cinético
Esta seleção garante que o conversor funcione enquanto
houver energia no sistema. Para quedas da rede elétrica
breves, a operação é restaurada após o retorno da rede
elétrica, sem parar a aplicação ou perder controle a
qualquer momento. Vários variantes de backup cinético
podem ser selecionados.
Congure o comportamento do conversor na queda da
rede elétrica em parâmetro 14-10 Falh red elétr e
parâmetro 1-73 Flying Start.
55
1 Frequência mínima de chaveamento
2 Corrente máxima
3 Frequência do motor mínima
4 Frequência do motor máxima
Ilustração 5.2 Plaqueta de identicação do motor mostrando
os requisitos do conversor
Para obter mais informações, consulte o exemplo de
aplicação em capétulo 12 Exemplos de Aplicações.
5.2.5 Queda da Rede Elétrica
Durante uma queda da rede elétrica, o conversor continua
funcionando até que a tensão CC caia abaixo do nível
mínimo de parada. O nível mínimo de parada é
normalmente 15% abaixo da tensão de alimentação
nominal mais baixa. A tensão de rede antes da queda e a
carga do motor determinam quanto tempo leva para o
conversor realizar a parada por inércia.
O conversor pode ser congurado (parâmetro 14-10 Falh
red elétr) para diferentes tipos de comportamento durante
a queda da rede elétrica:
Bloqueio por desarme após o barramento CC se
•
Flying start
Esta seleção torna possível capturar um motor que esteja
girando livremente devido à uma queda da rede elétrica.
Este opcional é relevante para centrífugas e ventiladores.
24 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
esgotar.
Parada por inércia com ying start sempre que a
•
rede elétrica voltar (parâmetro 1-73 Flying Start).
Backup cinético.
•
Desaceleração controlada.
•
5.2.6 Nova Partida Automática
O conversor pode ser programado para reiniciar o motor
automaticamente após um desarme com baixo grau de
importância, como utuação ou perda de energia
momentânea. Esse recurso elimina a necessidade de reset
manual e melhora a operação automatizada de sistemas
controlados remotamente. O número de tentativas de
novas partidas e a duração entre as tentativas pode ser
limitada.
5.2.7 Torque total em velocidade reduzida
O conversor segue uma curva V/Hz variável para fornecer
torque total do motor mesmo em velocidades reduzidas. O
torque de saída total pode coincidir com a velocidade
operacional nominal máxima do motor. Esse conversor
difere de conversores de torque variável e de torque
constante. Conversores de torque variável fornecem torque
do motor reduzido em baixa velocidade. Conversores de
torque constante fornecem excesso de tensão, calor e
ruído do motor com menos do que a velocidade total.
5.2.8 Bypass de frequência
Em algumas aplicações, o sistema pode ter velocidades
operacionais que criam uma ressonância mecânica. Essa
ressonância mecânica pode gerar ruído excessivo e
possivelmente danicar os componentes mecânicos do
sistema. O conversor tem 4 larguras de banda de
frequência de bypass programáveis. As larguras de banda
permitem que o motor ignore velocidades que induzem
ressonância do sistema.
5.2.9 Pré-aquecimento do motor
Para pré-aquecer um motor em um ambiente frio ou
úmido, uma pequena quantidade de corrente contínua
pode uir continuamente no motor para protegê-lo de
condensação e para partidas a frio. Essa função pode
eliminar a necessidade de um aquecedor elétrico.
Page 27
. . .
. . .
Par. 13-11
Comparator Operator
Par. 13-43
Logic Rule Operator 2
Par. 13-51
SL Controller Event
Par. 13-52
SL Controller Action
130BB671.13
Coast
Start timer
Set Do X low
Select set-up 2
. . .
Running
Warning
Torque limit
Digital input X 30/2
. . .
=
TRUE longer than..
. . .
. . .
130BA062.13
Estado 1
Evento 1/
Ação 1
Estado 2
Evento 2/
Ação 2
Iniciar
evento P13-01
Estado 3
Evento 3/
Ação 3
Estado 4
Evento 4/
Ação 4
Parar
event P13-02
Parar
event P13-02
Parar
event P13-02
Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
Recursos do produto Guia de Design
5.2.10 Setups Programáveis
O conversor possui quatro setups que podem ser
programados de forma independente. Usando setup
múltiplo é possível alternar entre funções programadas de
forma independente ativadas por entradas digitais ou
comando serial. Setups independentes são usados, por
exemplo, para alterar referências ou para operação dia/
noite ou verão/inverno ou para controlar vários motores. O
LCP exibe a conguração ativa.
Os dados de setup podem ser copiados entre conversores
por download das informações do LCP removível.
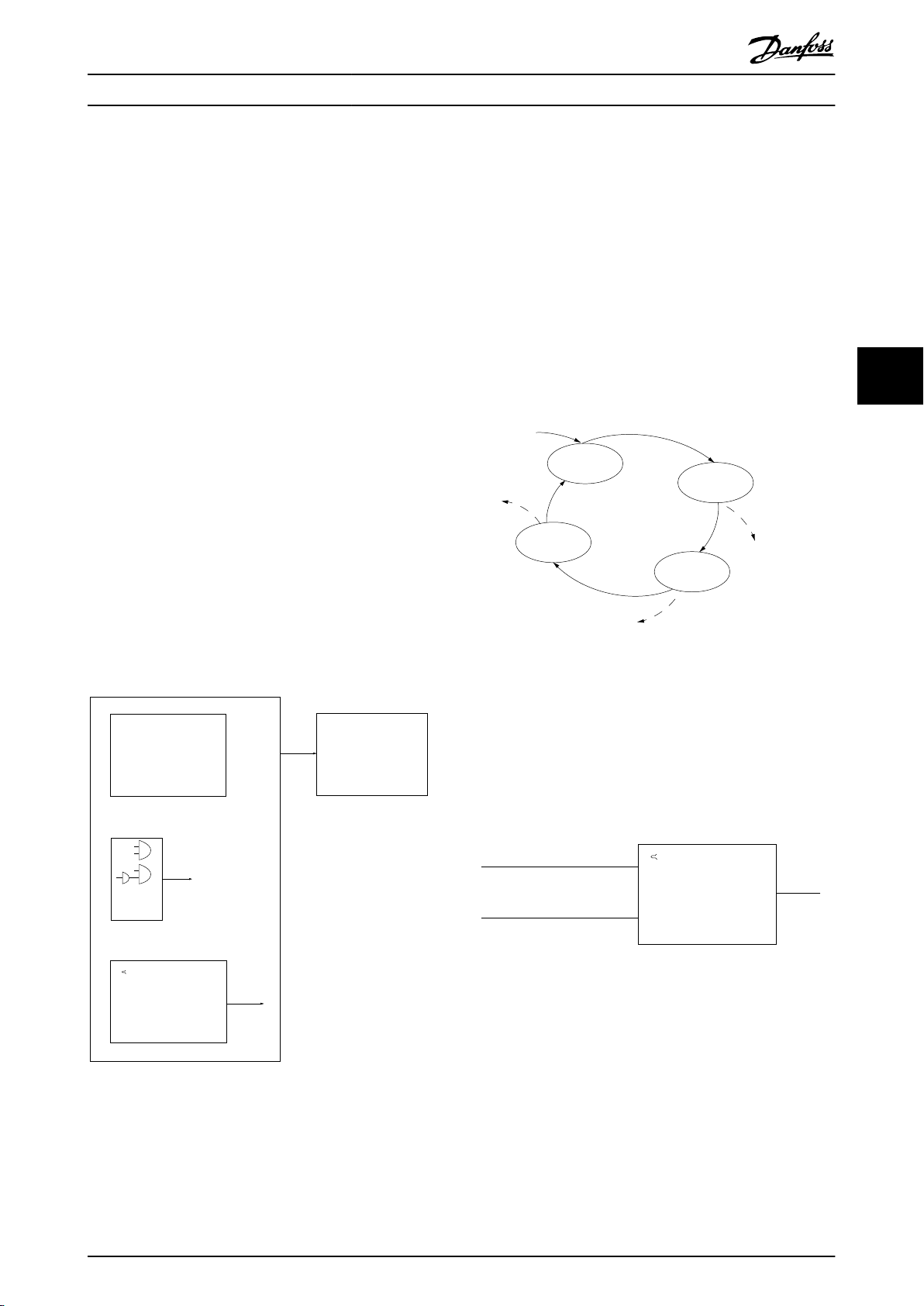
5.2.11 Smart Logic Control (SLC)
Smart Logic Control (SLC) é uma sequência de ações
denidas pelo usuário (consulte parâmetro 13-52 Ação do
SLC [x]) executada pelo SLC quando o evento associado
denido pelo usuário (consulte parâmetro 13-51 Evento do
SLC [x]) é avaliado como TRUE (Verdadeiro) pelo SLC.
A condição para um evento pode ser um status em
particular ou que a saída de uma regra lógica ou um
comparador operante se torne TRUE (Verdadeiro). A
condição resulta a uma ação associada, conforme
mostrado em Ilustração 5.3.
evento são avaliadas. Se este evento for avaliado como
verdadeiro, a ação correspondente é executada. Somente 1
evento é avaliado por vez. Se um evento for avaliado como
falso, nada acontece no SLC durante o intervalo de
varredura atual e nenhum outro evento é avaliado.
Quando o SLC é iniciado, ele só avalia o evento [0] durante
cada intervalo de varredura. Somente quando o evento [0]
for avaliado como verdadeiro, o SLC executará a ação [0] e
iniciará a avaliação do próximo evento. É possível
programar de 1 a 20 eventos e ações.
Depois de o último evento/ação ser executado, a
sequência recomeça a partir do evento [0]/ação [0]. A
Ilustração 5.4 mostra um exemplo com 4 eventos/ações:
Ilustração 5.4 Ordem de execução quando 4 eventos/ações são
programados
5 5
Comparadores
Os comparadores são usados para comparar variáveis
contínuas (frequência de saída, corrente de saída, entrada
analógica e assim por diante) com valores predenidos
xos.
Ilustração 5.5 Comparadores
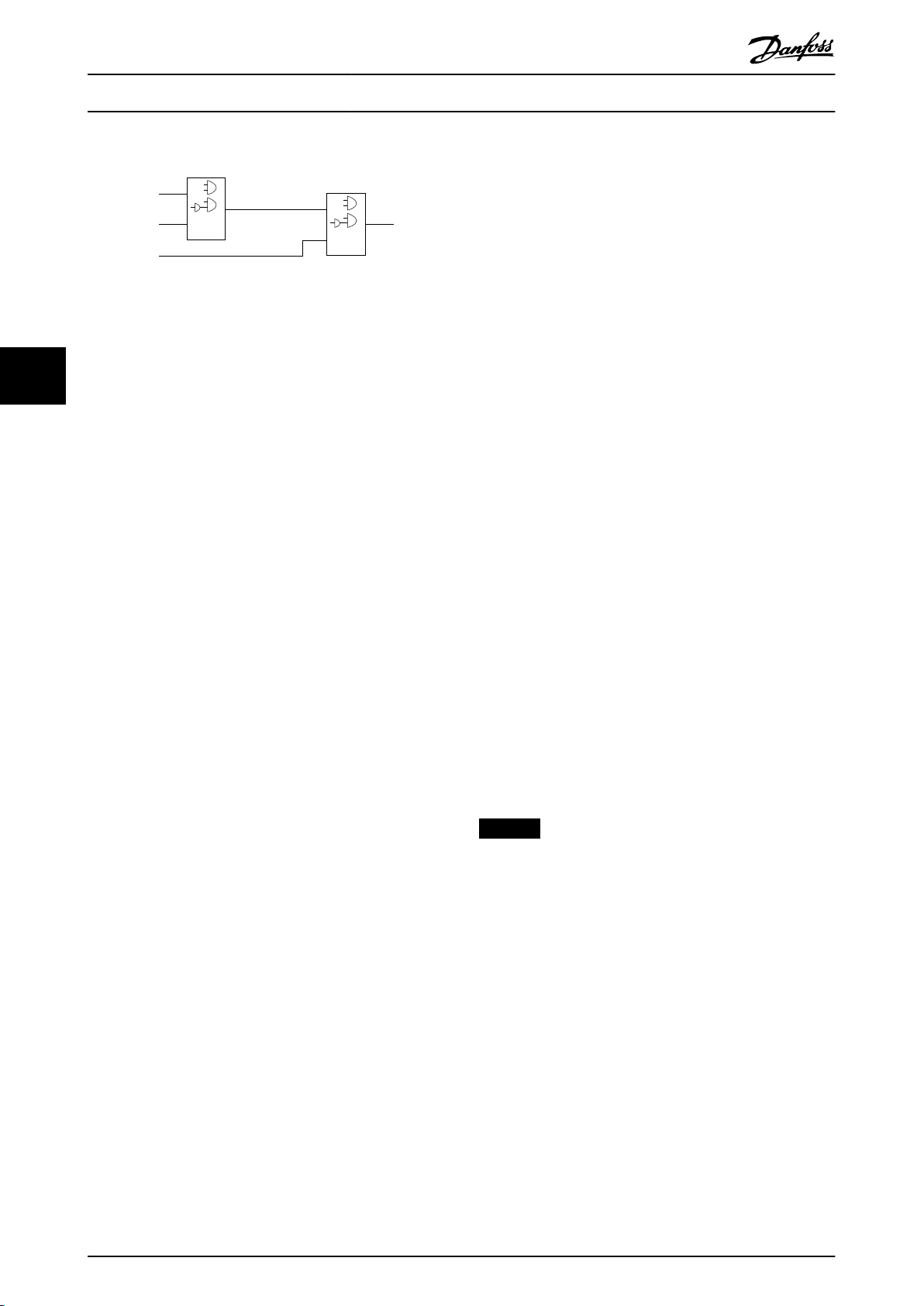
Regras lógicas
Combine até 3 entradas booleanas (entradas TRUE/FALSE
(Verdadeiro/Falso)) de temporizadores, comparadores,
Ilustração 5.3 Evento e ação do SLC
entradas digitais, bits de status e eventos usando os
operadores lógicos AND, OR e NOT (E, OU e NÃO).
Os eventos e as ações são numerados e vinculados em
pares (estados), o que signica que quando o evento [0] é
cumprido (atinge o valor TRUE), a ação [0] é executada.
Após a 1a ação ser executada, as condições do próximo
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 25
Page 28
. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
55
Recursos do produto
Ilustração 5.6 Regras lógicas
VLT® AutomationDrive FC 302
315–1200 kW
Para conversores equipados com a opção de freio, um IGBT
do freio, juntamente com os terminais 81(R-) e 82(R+),
estão incluídos para conectar um resistor de frenagem
externo.
A função do IGBT do freio é limitar a tensão no
barramento CC sempre que o limite máximo de tensão for
excedido. Ele limita a tensão trocando o resistor montado
externamente através do barramento CC para remover o
excesso de tensão CC presente nos capacitores de
barramento.
5.2.12 Safe Torque O
A colocação do resistor de frenagem externo tem as
A função Safe Torque O (STO) é usada para interromper o
drive em situações de parada de emergência.
Para obter mais informações sobre o Safe Torque
incluindo instalação e colocação em funcionamento,
consulte o Guia de operação de Safe Torque O.
Condições de responsabilidade
O cliente é responsável por garantir que o pessoal saiba
como instalar e operar a função Safe Torque O ao:
Ler e entender as normas de segurança com
•
relação à saúde, segurança e prevenção de
acidentes.
Entender as diretrizes gerais e de segurança
•
fornecidas no Guia de operação do safe torque o.
Ter um bom conhecimento das normas gerais e
•
de segurança para a aplicação especíca.
Visão geral da frenagem dinâmica
5.3
A frenagem dinâmica retarda o motor usando um dos
seguintes métodos:
Freio CA
•
A energia do freio é distribuída no motor
alterando as condições de perda no motor
(parâmetro 2-10 Função de Frenagem = [2]). A
função Freio CA não pode ser usada em
aplicações com ciclos de alta frequência, pois essa
situação superaquece o motor.
Freio CC
•
Uma corrente CC sobremodulada adicionada à
corrente CA funciona como um freio de corrente
parasita (parâmetro 2-02 Tempo de Frenagem CC ≠
0 s).
Resistor de freio
•
Um IGBT do freio mantém a sobretensão abaixo
de um determinado limite direcionando a energia
do freio do motor para o resistor de frenagem
conectado (parâmetro 2-10 Função de Frenagem =
[1]). Para obter mais informações sobre como
selecionar um resistor de frenagem, consulte o
Guia de Design VLT® Brake Resistor MCE 101.
26 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
O,
vantagens de selecionar o resistor com base na
necessidade de aplicação, dissipar a energia fora do painel
de controle e proteger o conversor contra superaque-
cimento, se o resistor de frenagem estiver sobrecarregado.
O sinal do gate do IGBT do freio é originado no cartão de
controle e é entregue ao IGBT do freio através do cartão
de energia e do cartão do conversor do gate. Além disso,
os cartões de potência e de controle monitoram o IGBT do
freio quanto a curto-circuitos. O cartão de potência
também monitora o resistor de frenagem quanto a
sobrecargas.
Visão geral do freio mecânico de
5.4
retenção
Freio de holding mecânico é um equipamento externo
montado diretamente no eixo do motor que executa
frenagem estática. Frenagem estática é quando um freio é
usado para imobilizar o motor após a carga parar. Um freio
de holding é controlado por um PLC ou diretamente por
uma saída digital do conversor.
AVISO!
Um conversor não pode fornecer um controle seguro de
um freio mecânico. Um circuito de redundância para
controle de frenagem deve estar incluído na instalação.
Page 29
Recursos do produto Guia de Design
5.4.1 Freio mecânico usando controle de malha aberta
Nas aplicações de içamento, normalmente é necessário controlar um freio eletromagnético. Uma saída do relé (relé 1 ou relé
2) ou uma saída digital programada (terminal 27 ou 29) é exigida. Normalmente, esta saída deve ser fechada enquanto o
conversor não conseguir reter o motor. No parâmetro 5-40 Função do Relé (parâmetro de matriz), parâmetro 5-30 Terminal 27
Saída Digital ou parâmetro 5-31 Terminal 29 Saída Digital, selecione [32] Ctrlfreio mecân para aplicações com um freio eletromagnético.
Quando [32] Ctrlfreio mecân é selecionado, o relé do freio mecânico permanece fechado durante a partida até a corrente de
saída estar acima do nível selecionado em parâmetro 2-20 Corrente de Liberação do Freio. Durante a parada, o freio mecânico
fecha quando a velocidade está abaixo do nível selecionado em parâmetro 2-21 Velocidade de Ativação do Freio [RPM]. Se o
conversor for colocado em condição de alarme, como uma situação de sobretensão, o freio mecânico é imediatamente
acionado. O freio mecânico também é acionado durante o safe torque
Considere o seguinte ao usar o freio eletromagnético:
Use qualquer saída do relé ou saída digital (terminal 27 ou 29). Se necessário, use um contator.
•
Garanta que a saída esteja desligada enquanto o conversor não conseguir girar o motor. Exemplos são carga muito
•
pesada ou motor não montado.
Antes de conectar o freio mecânico, selecione [32] Ctrlfreio mecân no grupo do parâmetro 5-4* Relés (ou no grupo do
•
parâmetro 5-3* Saídas Digitais).
O freio é liberado quando a corrente do motor exceder o valor predenido no parâmetro 2-20 Corrente de Liberação
•
do Freio.
O freio é acionado quando a frequência de saída é menor do que a frequência programada em
•
parâmetro 2-21 Velocidade de Ativação do Freio [RPM] ou parâmetro 2-22 Velocidade de Ativação do Freio [Hz] e
somente se o conversor efetuar um comando de parada.
o.
5 5
AVISO!
Para levantamento vertical ou aplicação de içamento, certique-se de que a carga possa ser parada em caso de
emergência ou mau funcionamento. Se o conversor estiver no modo de alarme ou em uma situação de sobretensão, o
freio mecânico é acionado.
Para aplicações de içamento, certique-se de que os limites de torque em parâmetro 4-16 Limite de Torque do Modo Motor e
parâmetro 4-17 Limite de Torque do Modo Gerador estejam denidos abaixo do limite de corrente em parâmetro 4-18 Limite
de Corrente. Recomenda-se também denir parâmetro 14-25 Atraso do Desarme no Limite de Torque como 0,
parâmetro 14-26 Atraso Desarme-Defeito Inversor como 0 e parâmetro 14-10 Falh red elétr como [3] Parada por inércia.
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 27
Page 30
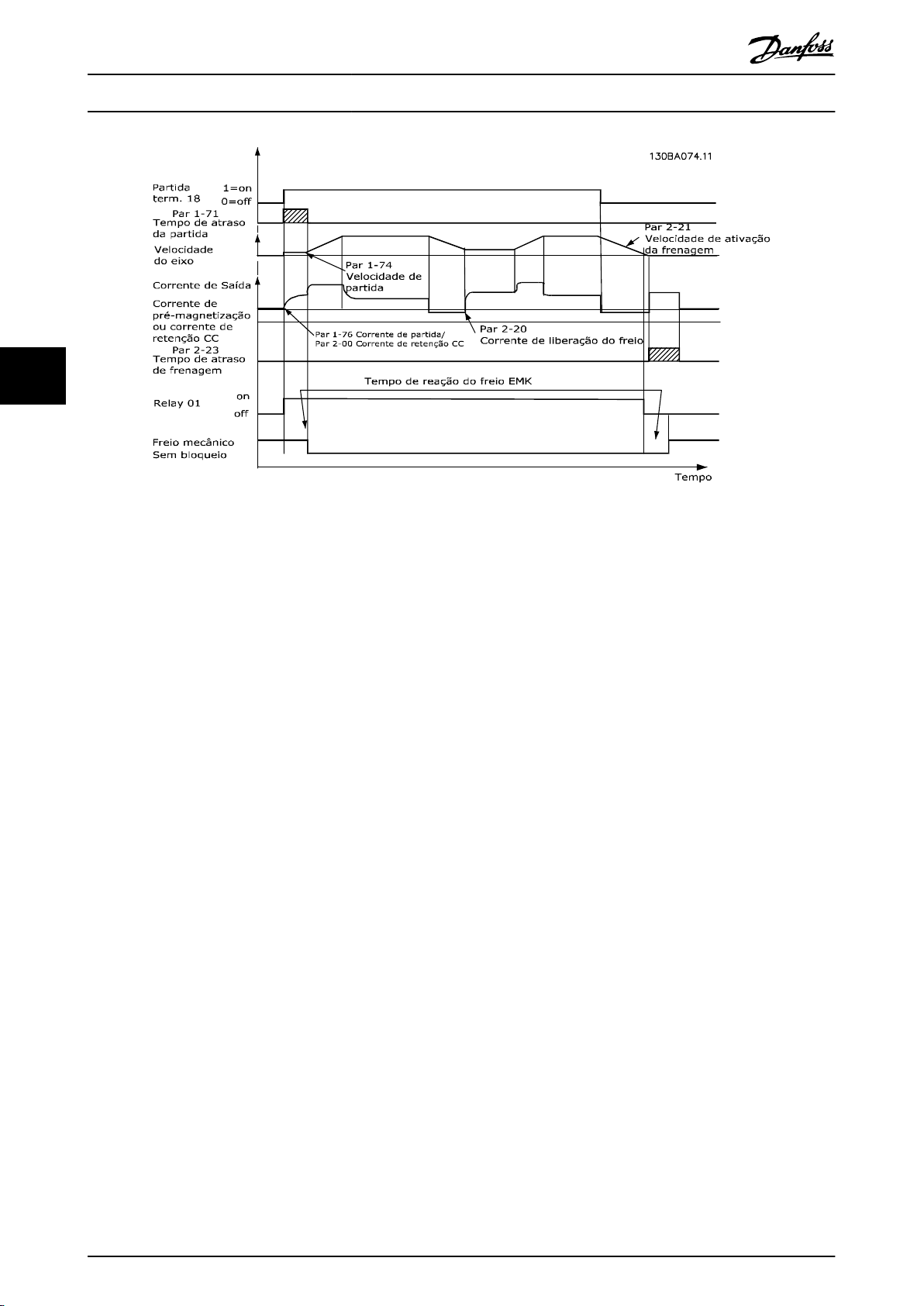
Recursos do produto
VLT® AutomationDrive FC 302
315–1200 kW
55
Ilustração 5.7 Controle do freio mecânico em malha aberta
5.4.2 Freio mecânico usando controle de malha fechada
O VLT® AutomationDrive FC 302 conta com um controle do freio mecânico projetado para aplicações de içamento e suporta
as seguintes funções:
2 canais para feedback do freio mecânico, oferecendo proteção contra comportamento acidental resultante de um
•
cabo rompido.
Monitoramento do feedback do freio mecânico por todo o ciclo. O monitoramento ajuda a proteger o freio
•
mecânico, especialmente se mais conversores estiverem conectados ao mesmo eixo.
Sem aceleração até o feedback conrmar que o freio mecânico está aberto.
•
Controle de carga melhorado na parada.
•
A transição quando o motor assume a carga do freio pode ser congurada.
•
Parâmetro 1-72 Função de Partida [6] Mecân.Içam Lib.Freio aciona o freio mecânico de içamento. A principal diferença em
relação ao controle de freio mecânico regular é que a função de frenagem mecânica de içamento possui um controle direto
sobre o relé de frenagem. Em vez de colocar uma corrente para liberar o freio, dene-se o torque aplicado contra o freio
fechado antes da liberação. Como o torque é denido diretamente, o setup é mais direto para aplicações de içamento.
A estratégia do freio mecânico de içamento se baseia na seguinte sequência de 3 passos, em que o controle do motor e a
liberação do freio são sincronizados para obter a liberação do freio mais suave possível.
1. Pré-magnetize o motor.
Para garantir que o motor esteja preso e para
-magnetizado.
2. Aplique o torque no freio fechado.
Quando a carga é mantida pelo freio mecânico, o seu tamanho não pode ser determinado, somente a sua direção
pode. No momento em que o freio é aberto, o motor deve assumir a carga. Para facilitar essa transição, um torque
denido pelo usuário (parâmetro 2-26 Ref. de Torque) é aplicado na direção do içamento. Este processo é usado
para inicializar o controlador de velocidade que nalmente assume a carga. Para reduzir o desgaste na caixa de
engrenagem devido à folga, o torque é acelerado.
vericar se ele está montado corretamente, o motor é primeiro pré-
28 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 31

Mec.Freio
GanhoBoost
Relé
Torqueref.
MotorVelocidade
Premagnet. Rampa de Torque
Tempo
p. 2-27
Ref. de Torque 2-26
Fator de Ganho do Boost
p. 2-28
Freio
Release
Tempo
p. 2-25
Rampa de Aceleração 1
p. 3-41
Rampa de Desaceleração 1
p. 3-42
Parada
Atraso
p. 2-24
Ativar
Freio
Atraso
p. 2-23
1 2 3
130BA642.12
II
I
Recursos do produto Guia de Design
3. Libere o freio.
Quando o torque alcançar o valor denido em parâmetro 2-26 Ref. de Torque, o freio é liberado. O valor
programado em parâmetro 2-25 Tempo de Liberação do Freio determina o atraso antes da carga ser liberada. Para
reagir o mais rápido possível no passo de carga que se segue após a liberação do freio, o controle do PID de
velocidade pode ser reforçado aumentando o ganho proporcional.
5 5
Ilustração 5.8 Sequência de liberação do freio para o controle do freio mecânico de içamento
Parâmetro 2-26 Ref. de Torque a parâmetro 2-33 Speed PID Start Lowpass Filter Time estão disponíveis somente para o controle
do freio mecânico para içamento (uxo com feedback de motor). Parâmetro 2-30 Position P Start Proportional Gain a
parâmetro 2-33 Speed PID Start Lowpass Filter Time podem ser programados para uma mudança de transição suave de
controle da velocidade para controle de posição durante parâmetro 2-25 Tempo de Liberação do Freio - o tempo quando a
carga é transferida do freio mecânico para o conversor.
Parâmetro 2-30 Position P Start Proportional Gain a parâmetro 2-33 Speed PID Start Lowpass Filter Time são ativados quando
parâmetro 2-28 Fator de Ganho do Boost estiver programado para 0. Consulte Ilustração 5.8 para obter mais informações.
AVISO!
Para obter um exemplo de controle de freio mecânico avançado para aplicações de içamento, consulte
capétulo 12 Exemplos de Aplicações.
5.5 Visão geral da divisão da carga
A divisão da carga é um recurso que permite a conexão dos circuitos CC de vários conversores, criando um sistema de
múltiplos conversores para executar uma carga mecânica. A divisão da carga fornece os seguintes benefícios:
Economia de energia
Um motor funcionando no modo regenerativo pode alimentar conversores que estejam funcionando no modo motor.
Menor necessidade de peças sobressalentes
Normalmente, apenas 1 resistor de frenagem é necessário para todo o sistema do conversor em vez de 1 resistor de
frenagem por conversor.
Backup de energia
Se houver falha de rede elétrica, todos os conversores ligados podem ser alimentados pelo barramento CC de um backup. A
aplicação pode continuar funcionando ou passar por um processo de desligamento controlado.
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 29
Page 32

130BF758.10
380 V
2x aR-32 2x aR-12
3x 0.23mH
11 kW
FC-302
4 kW
FC-302
3x 0.81 mH
3x gG-40
3x gG-16
M
Common mains
disconnect switch
Mains connecting point for
additional drives in the
load sharing application
DC connecting point for
additional drives in the
load sharing application
91
92
93
91
92
93
96
97
98
96
97
98
82 81 82 81
M
89 88 89 88
Recursos do produto
VLT® AutomationDrive FC 302
315–1200 kW
Pré-condições
As seguintes pré-condições devem ser atendidas antes de considerar o Load Sharing:
O conversor deve ser equipado com terminais de Load Sharing.
•
A série de produtos deve ser a mesma. Use somente conversores VLT® AutomationDrive FC 302 com outros
•
conversores VLT® AutomationDrive FC 302.
Os conversores devem ser colocados sicamente próximos uns dos outros para permitir que a ação entre eles não
•
seja superior a 25 m (82 pés).
Os conversores devem ter as mesmas características nominais de tensão.
•
Ao incluir um resistor de frenagem em uma conguração de Load Sharing, todos os conversores devem estar
•
equipados com um circuito de frenagem.
55
Os fusíveis devem ser incluídos aos terminais de divisão da carga.
•
Para obter um diagrama de uma aplicação de divisão da carga em que as melhores práticas são aplicadas, consulte
Ilustração 5.9.
Ilustração 5.9 Diagrama de uma aplicação de divisão da carga em que as melhores práticas são aplicadas
Load Sharing
As unidades com a opção de Load Sharing integrada contêm os terminais (+) 89 CC e (–) 88 CC. Dentro do conversor, esses
terminais se conectam ao barramento CC em frente ao reator do barramento CC e aos capacitores do barramento.
Os terminais de Load Sharing podem ser conectados em 2 congurações diferentes.
Os terminais reúnem os circuitos de barramento CC de múltiplos conversores. Esta conguração permite que uma
•
unidade em modo regenerativo compartilhe o excesso de tensão do barramento com outra unidade que esteja
acionando um motor. Desta maneira, o Load Sharing pode reduzir a necessidade de resistores de frenagem
dinâmica externos, enquanto também economiza energia. O número de unidades que pode ser conectado desta
maneira é innito, desde que cada unidade tenha as mesmas características nominais de tensão. Além disso,
dependendo do tamanho e do número de unidades, pode ser necessário instalar reatores CC e fusíveis CC nas
conexões de barramento CC, e reatores CA na rede elétrica. A tentativa de tal conguração exige considerações
especícas.
30 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 33

Recursos do produto Guia de Design
O conversor é alimentado exclusivamente a partir de uma fonte CC. Essa conguração exige:
•
- Uma fonte CC.
- Um meio para carregar o barramento CC na energização.
5.6 Visão geral de Regen
Regen geralmente ocorre em aplicações com frenagem contínua, como gruas/guinchos, transportadores de descida e
centrífugas em que a energia é retirada de um motor desacelerado.
O excesso de energia é removido do conversor usando uma das seguintes opções:
O circuito de frenagem permite que o excesso de energia seja dissipado na forma de calor dentro das bobinas do
•
resistor de frenagem.
Os terminais Regen permitem que uma unidade regen de terceiros seja conectada ao conversor, permitindo que o
•
excesso de energia retorne à rede elétrica.
5 5
Retornar o excesso de energia de volta à rede elétrica é o uso mais
utilizam frenagem contínua.
eciente de energia regenerada em aplicações que
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 31
Page 34

Visão geral de opcionais e ...
VLT® AutomationDrive FC 302
315–1200 kW
6 Visão geral de opcionais e acessórios
6
6.1 Dispositivos de eldbus
Esta seção descreve os dispositivos de eldbus que estão
disponíveis com a série VLT® AutomationDrive FC 302. O
uso de um dispositivo de eldbus reduz o custo do
sistema, proporciona uma comunicação mais rápida e
eciente e fornece uma interface do usuário mais fácil.
Para obter os números da solicitação de pedido, consulte
capétulo 13.2 Números da solicitação de pedido para
opcionais/kits.
6.1.1
VLT® PROFIBUS DP-V1 MCA 101
O VLT® PROFIBUS DP-V1 MCA 101 fornece:
Compatibilidade ampla, alto nível de disponibi-
•
lidade, suporte para todos os principais
fornecedores de PLC e compatibilidade com
versões futuras.
Comunicação rápida e eciente, instalação
•
transparente, diagnóstico avançado e parametrização e
processo através de um arquivo GSD
Parametrização acíclica usando o PROFIBUS DP-
•
-V1, PROFIdrive ou as máquinas de estado de
perl do Danfoss FC.
6.1.2
VLT® DeviceNet MCA 104
O VLT® DeviceNet MCA 104 fornece:
O suporte ao perl do conversor de frequência
•
ODVA suportado por meio de instância de E/S
20/70 e 21/71 garante compatibilidade com
sistemas existentes.
Benefícios das fortes políticas de teste de confor-
•
midade da ODVA que asseguram que os produtos
sejam interoperáveis.
6.1.3
VLT® CAN Open MCA 105
O opcional MCA 105 fornece:
Manuseio padronizado.
•
Interoperabilidade.
•
Custo baixo.
•
Este opcional é totalmente equipado com acesso de alta
prioridade para controlar o drive (comunicação PDO) e
para acessar todos os parâmetros pelos dados acíclicos
(comunicação SDO).
Para interoperabilidade, o opcional usa o
conversor de frequência DSP 402.
autoconguração de dados de
perl do
6.1.4
VLT® PROFIBUS Converter MCA 113
O opcional MCA 113 é uma versão especial dos opcionais
PROFIBUS que emulam os comandos dos VLT® 3000 no
VLT® AutomationDrive FC 302.
O VLT® 3000 pode ser substituído pelo VLT
AutomationDrive FC 302, ou um sistema existente pode ser
expandido sem mudanças custosas do programa PLC. Para
atualização para um
instalado pode ser removido e substituído por um novo
opcional. O opcional MCA 113 protege o investimento sem
perder a exibilidade.
6.1.5
VLT® PROFIBUS Converter MCA 114
O opcional MCA 114 é uma versão especial dos opcionais
PROFIBUS que emulam os comandos do VLT® 5000 no
VLT® AutomationDrive FC 302. Este opcional suporta o DP-
-V1.
O VLT® 5000 pode ser substituído pelo VLT
AutomationDrive FC 302, ou um sistema existente pode ser
expandido sem mudanças custosas do programa PLC. Para
atualização para um
instalado pode ser removido e substituído por um novo
opcional. O opcional MCA 114 protege o investimento sem
perder a exibilidade.
6.1.6
VLT® PROFINET MCA 120
O VLT® PROFINET MCA 120 combina o maior desempenho
com o mais alto grau de abertura. A opção foi projetada
para permitir o reuso de muitos recursos do VLT
PROFIBUS MCA 101, minimizando o esforço do usuário
para migrar o PROFINET e garantindo o investimento em
um programa PLC.
Mesmos tipos de PPO, como o VLT® PROFIBUS DP
•
V1 MCA 101, para migração fácil para o
PROFINET.
Servidor web integrado para diagnóstico remoto
•
e leitura de parâmetros básicos do conversor.
Suporta MRP.
•
Suporta DP-V1. O diagnóstico permite o
•
manuseio fácil, rápido e padronizado de
informações de aviso e falha no PLC, melhorando
a largura de banda do sistema.
eldbus diferente, o conversor
eldbus diferente, o conversor
®
®
®
32 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 35

Visão geral de opcionais e ... Guia de Design
Suporta PROFIsafe quando combinado com o
•
VLT® Safety Option MCB 152.
Implementação de acordo com a conformidade
•
classe B.
6.1.7
VLT® EtherNet/IP MCA 121
Ethernet é o futuro padrão de comunicação no chão da
fábrica. O VLT® EtherNet/IP MCA 121 é baseado na mais
nova tecnologia disponível para uso industrial e lida com
os requisitos mais exigentes. EtherNet/IP™ estende a
Ethernet comercial padrão para o Protocolo Industrial
Comum (CIP™) – o mesmo protocolo de camada superior
e modelo de objeto encontrado no DeviceNet.
Esse opcional oferece recursos avançados como:
Interruptor incorporado de alto desempenho que
•
permite a topologia de linha, o que elimina a
necessidade de interruptores externos.
Anel DLR (a partir de outubro de 2015).
•
Funções avançadas de interruptor e diagnóstico.
•
Servidor web interno.
•
Envio de e-mail para o cliente para noticação de
•
serviço.
Comunicação unicast e multicast.
•
6.1.8
VLT® Modbus TCP MCA 122
O VLT® Modbus TCP MCA 122 se conecta às redes
baseadas em TCP Modbus. Ele lida com intervalos de
conexão de até 5 ms em ambas as direções, posicionando-
-o entre os dispositivos Modbus TCP de melhor
desempenho no mercado. Para redundância mestre,
apresenta troca a quente entre 2 mestres.
Outros recursos são:
Servidor web integrado para diagnóstico remoto
•
e leitura de parâmetros básicos do conversor.
Noticação por e-mail que pode ser congurada
•
para enviar uma mensagem de e-mail a um ou
mais destinatários quando determinados alarmes
ou avisos ocorrerem ou quando forem apagados.
Conexão do mestre duplo do PLC para
•
redundância.
6.1.9
VLT® POWERLINK MCA 123
O opcional MCA 123 representa a 2a geração de eldbus. A
alta taxa de bit de Ethernet industrial agora pode ser
usada para disponibilizar mundialmente toda a capacidade
das tecnologias de TI usadas na automação para o mundo
da fábrica.
Este opcional de eldbus oferece alto desempenho,
recursos em tempo real e sincronização de tempo. Devido
aos seus modelos de comunicação baseados no CANOpen,
gestão de rede e modelo de descrição do dispositivo,
oferece uma rede de comunicação rápida e os seguintes
recursos:
Aplicações de controle de movimento dinâmico.
•
Manuseio de material.
•
Aplicações de sincronização e posicionamento.
•
6.1.10
O opcional MCA 124 oferece conectividade a redes
baseadas em EtherCAT por meio do Protocolo EtherCAT.
O opcional manipula a comunicação de linha EtherCAT em
velocidade total e a conexão para o conversor com um
intervalo de 4 ms nas duas direções, permitindo ao MCA
124 participar em redes variando de aplicações de baixo
desempenho até atuadores.
6.2
Esta seção descreve os opcionais de extensões funcionais
que estão disponíveis com a série VLT® AutomationDrive
FC 302. Para obter os números da solicitação de pedido,
consulte capétulo 13.2 Números da solicitação de pedido
para opcionais/kits.
6.2.1
VLT® EtherCAT MCA 124
Suporte a EoE Ethernet sobre EtherCAT.
•
HTTP (Hypertext Transfer Protocol, protocolo de
•
transferência de hipertexto) para diagnóstico via
servidor da web integrado.
CoE (CAN Over Ethernet, CAN sobre Ethernet)
•
para acesso aos parâmetros do conversor.
SMTP (Simple Mail Transfer Protocol, Protocolo
•
Simples de Transferência de Correio) para
noticação de e-mail.
TCP/IP para fácil acesso a dados de conguração
•
do conversor a partir do MCT 10.
Extensões funcionais
VLT® General Purpose I/O Module
MCB 101
O VLT® General Purpose I/O Module MCB 101 oferece um
número amplo de entradas e saídas de controle:
3 entradas digitais de 0–24 V: Lógica 0 < 5 V;
•
Lógica 1 > 10 V.
2 entradas analógicas 0–10 V: Resolução de 10
•
bits mais sinal.
2 saídas digitais NPN/PNP push-pull.
•
1 saída analógica 0/4–20 mA.
•
Conexão carregada por mola.
•
6
6
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 33
Page 36

Visão geral de opcionais e ...
VLT® AutomationDrive FC 302
315–1200 kW
6
6.2.2
VLT® Encoder Input MCB 102
O opcional MCB 102 oferece a possibilidade de conectar
vários tipos de encoders absolutos e incrementais. O
encoder conectado pode ser usado para controle da
velocidade de malha fechada e controle do motor de
de malha fechada.
Os seguintes tipos de encoder são suportados:
5 V TTL (RS 422)
•
1VPP SinCos
•
SSI
•
HIPERFACE
•
EnDat
•
6.2.3
VLT® Resolver Option MCB 103
O opcional MCB 103 permite a conexão de um resolver
para fornecer o feedback de velocidade do motor.
Tensão primária: 2–8 V
•
Frequência primária: 2,0–15 kHz
•
Corrente máxima primária: 50 mA rms
•
Tensão de entrada secundária: 4 V
•
Conexão carregada por mola
•
6.2.4
VLT® Relay Card MCB 105
rms
rms
uxo
seguro interromper o link positivo ou negativo sem
interferir no sinal de detecção do PLC Seguro.
6.2.6 Cartão do Termistor MCB 112 do PTC
®
VLT
O opcional MCB 112 fornece monitoramento extra do
motor em comparação com a função ETR integrada e o
terminal do termistor.
Protege o motor contra superaquecimento.
•
Aprovado para ATEX para uso com motores Ex-d
•
e Ex-e (EX-e somente FC 302).
Usa a função Safe Torque O, que é aprovada
•
conforme a SIL 2 IEC 61508.
6.2.7
VLT® Sensor Input Option MCB 114
O VLT® Sensor Input Option MCB 114 protege o motor
contra aquecimento excessivo, monitorando a temperatura
dos rolamentos e enrolamentos do motor.
3 entradas de sensor de detecção automática
•
para sensores PT100/PT1000 de 2 ou 3
1 entrada analógica adicional de 4 a 20 mA.
•
6.2.8
VLT® Safety Option MCB 150 e
os.
MCB 151
O VLT® Relay Card MCB 105 estende as funções do relé
com mais 3 saídas de relé.
Protege a conexão de cabos de controle.
•
Conexão de o do controle xado por mola.
•
Taxa de chaveamento máxima (carga nominal/carga
mínima)
6 minutos-1/20 s-1.
Carga do terminal máxima
Carga resistiva CA-1: 240 V CA, 2 A.
6.2.5 Opcional MCB 108 da Interface
Segura do PLC VLT
O opcional MCB 108 fornece uma entrada segura com
base em uma entrada 24 V CC monopolar. Para a maioria
das aplicações, essa entrada permite ao usuário
implementar segurança de maneira econômica.
Para aplicações que funcionam com produtos mais
avançados como PLC de Segurança e cortinas de luz, a
interface do PLC Seguro permite a conexão de um link de
segurança de dois
os. A Interface de PLC permite ao PLC
®
Os opcionais MCB 150 e MCB 151 expandem as funções de
safe torque o, que são integradas como um padrão VLT
AutomationDrive FC 302. Use a função parada segura 1
(SS1) para realizar uma parada controlada antes de
remover o torque. Utilize a função velocidade limitada de
segurança (SLS) para monitorar se uma velocidade especicada foi excedida.
Esses opcionais podem ser usados até PL d, de acordo com
ISO 13849-1 e SIL 2, de acordo com IEC 61508.
Funções adicionais de segurança em confor-
•
midade com a norma.
Substituição do equipamento de segurança
•
externo.
Requisitos de espaço reduzido.
•
2 entradas programáveis seguras.
•
1 saída segura (para T37).
•
Certicação da máquina mais fácil.
•
O drive pode ser energizado continuamente.
•
Cópia via LCP segura.
•
Relatório dinâmico de colocação em funcio-
•
namento.
®
34 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 37

Visão geral de opcionais e ... Guia de Design
Encoder TTL (MCB 150) ou HTL (MCB 151) como
•
feedback de velocidade.
6.2.9
VLT® Safety Option MCB 152
O opcional MCB 152 ativa o safe torque o pelo eldbus
PROFIsafe com opcional de eldbus VLT® PROFINET MCA
120. Ele melhora a exibilidade ao conectar os dispositivos
de segurança em uma fábrica.
As funções de segurança do MCB 152 são implementadas
de acordo com o EN IEC 61800-5-2. O MCB 152 suporta a
funcionalidade PROFIsafe para ativar funções integradas de
segurança do VLT® AutomationDrive FC 302 em qualquer
host PROFIsafe, até o nível da integridade de segurança SIL
2 de acordo com EN IEC 61508 e EN IEC 62061, nível de
desempenho PL d, categoria 3 de acordo com EN ISO
13849-1.
Dispositivo PROFIsafe (com MCA 120).
•
Substituição do equipamento de segurança
•
externo.
2 entradas programáveis seguras.
•
Cópia via LCP segura.
•
Relatório dinâmico de colocação em funcio-
•
namento.
Controle de movimento e placas de relé
6.3
Envia e recebe dados pela interface eldbus
•
(exige o opcional de eldbus).
Ferramentas de software de PC para depuração e
•
colocação em funcionamento: Programa e editor
de came.
Linguagem de programação estruturada com
•
execução cíclica e acionada por evento.
6.3.2
VLT® Synchronizing Controller
MCO 350
O opcional MCO 350 para VLT® AutomationDrive FC 302
expande as propriedades funcionais do conversor de
frequência em aplicações de sincronização e substitui
soluções mecânicas tradicionais.
Sincronização de velocidade.
•
Sincronização da posição (ângulo) com ou sem a
•
correção do marcador.
Relação de engrenagem ajustável on-line.
•
Relação de posição (ângulo) ajustável on-line
•
Saída do encoder com função mestre virtual para
•
sincronização de vários escravos.
Controle via E/S ou eldbus.
•
Função Início.
•
Conguração e leitura de status e dados pelo LCP.
•
6
6
Esta seção descreve os opcionais de controle de
movimento e placa de relé que estão disponíveis com a
série VLT® AutomationDrive FC 302. Para obter os números
da solicitação de pedido, consulte capétulo 13.2 Números
da solicitação de pedido para opcionais/kits.
6.3.1
VLT® Motion Control Option MCO 305
O opcional MCO 305 é um controlador de movimento
programável integrado que adiciona funcionalidade
adicional para VLT® AutomationDrive FC 302.
O opcional MCO 305 oferece funções de movimento fáceis
de usar combinadas com programabilidade, uma solução
ideal para aplicações de posicionamento e sincronização.
Sincronização (eixo eletrônico), posicionamento e
•
controle do came eletrônico.
2 interfaces separadas suportam os encoders
•
absolutos e incrementais.
1 saída do encoder (função mestre virtual).
•
10 entradas digitais.
•
8 saídas digitais.
•
Suporta o barramento de movimento CANOpen,
•
encoders e módulos E/S.
6.3.3
VLT® Positioning Controller MCO 351
O opcional MCO 351 oferece uma variedade de benefícios
de fácil utilização para aplicações de posicionamento em
muitos setores.
Posicionamento relativo.
•
Posicionamento absoluto.
•
Posicionamento de sensor de toque.
•
Manipulação de limite de extremidade (software
•
e hardware).
Controle via E/S ou eldbus.
•
Manipulação de frenagem mecânica (atraso de
•
retenção programável).
Manipulação de erro.
•
Velocidade de jog/operação manual.
•
Posicionamento relacionado a marcador.
•
Função de Início.
•
Conguração e leitura de status e dados via LCP.
•
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 35
Page 38

Visão geral de opcionais e ...
VLT® AutomationDrive FC 302
315–1200 kW
6
6.3.4
VLT® Extended Relay Card MCB 113
O VLT® Extended Relay Card MCB 113inclui entradas/saídas
para maior exibilidade.
7 entradas digitais.
•
2 saídas analógicas.
•
4 relés SPDT.
•
Atende às recomendações NAMUR.
•
Capacidade de isolação galvânica.
•
6.4 Resistores de Freio
Em aplicações em que o motor é usado como freio, a
energia é gerada no motor e devolvida para o conversor.
Se a energia não puder ser transportada de volta para o
motor, ela aumenta a tensão na linha CC do conversor. Em
aplicações com frenagens frequentes e/ou cargas de alta
inércia, esse aumento pode levar a um desarme por
sobretensão no conversor e, nalmente, a um
desligamento. Os resistores de frenagem são utilizados
para dissipar o excesso de energia resultante da frenagem
regenerativa. O resistor é selecionado com base em seu
valor ôhmico, sua taxa de dissipação de energia e seu
tamanho físico. A Danfoss oferece uma grande variedade
de resistores diferentes especialmente projetados para os
conversores Danfoss. Para obter os números da solicitação
de pedido e mais informações sobre como dimensionar os
resistores de frenagem, consulte o Guia de Design do VLT
Brake Resistor MCE 101.
Filtros de onda senoidal
6.5
®
Filtros dU/dt
6.6
A Danfoss fornece ltros dU/dt que são ltros passa-baixa
de modo diferencial que reduzem as tensões de pico de
fase a fase do terminal do motor, e reduzem o tempo de
subida para um nível que diminui a tensão no isolamento
dos enrolamentos do motor. Este é um problema típico em
congurações que utilizam cabos de motor curtos.
Comparados aos
possuem uma frequência de corte acima da frequência de
chaveamento.
Para obter os números da solicitação de pedido e mais
informações sobre os
Design de Filtros de Saída.
ltros de onda senoidal, os ltros dU/dt
ltros dU/dt, consulte o Guia de
6.7 Filtros do modo comum
Os núcleos de modo comum de alta frequência (núcleos
HF-CM) reduzem a interferência eletromagnética e
eliminam danos de rolamentos causados por descarga
elétrica. Eles são núcleos magnéticos nanocristalinos
especiais que possuem um desempenho de ltragem
superior em comparação com os núcleos de ferrite
normais. O núcleo HF-CM atua como um indutor de modo
comum entre as fases e o ponto de aterramento.
Instalados em torno das 3 fases do motor (U, V, W), os
ltros de modo comum reduzem as correntes de modo
comum de alta frequência. Como resultado, a interferência
eletromagnética de alta frequência do cabo do motor é
reduzida.
Quando um conversor controla um motor, o ruído de
ressonância é ouvido do motor. Este ruído, que é o
resultado do projeto do motor, ocorre sempre que um
interruptor do inversor no conversor estiver ativado. Assim,
a frequência do ruído de ressonância corresponde à
frequência de chaveamento do conversor.
A Danfoss fornece um ltro de onda senoidal para diminuir
o ruído do motor. O ltro reduz o tempo de aceleração da
tensão, a tensão de carga de pico (U
corrente (ΔI) para o motor, o que signica que a corrente e
a tensão se tornam quase senoidais. O ruído do motor é
reduzido ao mínimo.
O ripple de corrente nas bobinas do ltro de onda
senoidal também gera algum ruído. Resolva o problema
integrando o ltro em um painel elétrico ou gabinete.
Para obter os números da solicitação de pedido e mais
informações sobre os ltros de onda senoidal, consulte o
Guia de Design de Filtros de Saída.
) e o ripple de
PEAK
Para obter os números da solicitação de pedido, consulte o
Guia de Design de Filtros de Saída.
Filtros de Harmônicas
6.8
O VLT® Advanced Harmonic Filters AHF 005 e AHF 010 não
devem ser comparados com os ltros de harmônicas
tradicionais. Os ltro de harmônicas Danfoss foram
especialmente projetados para corresponder aos
conversores Danfoss.
Ao conectar o AHF 005 ou o AHF 010 na frente de um
conversor Danfoss, a distorção de corrente harmônica total
gerada de volta à rede elétrica é reduzida em 5% e 10%.
Para obter os números da solicitação de pedido e mais
informações sobre como dimensionar os resistores de
frenagem, consulte o Guia de Design do VLT® Advanced
Harmonic Filters AHF 005/AHF 010.
36 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 39

Visão geral de opcionais e ... Guia de Design
6.9 Opcionais de gabinete integrado
Os seguintes opcionais integrados são especicados no
código do tipo na solicitação de pedido do drive.
Gabinete com canal traseiro resistente à corrosão
Para proteção adicional contra corrosão em ambientes
severos, as unidades podem ser compradas em um
gabinete que inclui um canal traseiro de aço inoxidável,
pesados dissipadores de calor banhados e um ventilador
incrementado. Este opcional é recomendado em ambientes
de sal e ar, como aqueles perto do oceano.
Blindagem da rede elétrica
A blindagem Lexan® pode ser montada na frente dos
terminais da alimentação de energia e da placa de entrada
para proteger contra contato físico ao abrir a porta do
gabinete.
Aquecedores elétricos e termostato
Montados no painel elétrico interior dos drives tamanho F
do gabinete e controlados por um termostato automático,
os aquecedores elétricos controlados por um termostato
automático evitam a condensação no interior do gabinete.
congurações padrão do termostato ligam os
As
aquecedores a 10 °C (50 °F) e os desligam a 15,6 °C
(60 °F).
Luz do painel elétrico com tomada de energia
Para aumentar a visibilidade durante reparos e
manutenção, uma luz pode ser montada no interior do
painel elétrico dos drives F do gabinete. O compartimento
da lâmpada inclui uma tomada de alimentação para
alimentar temporariamente computadores e outros
dispositivos.
Disponível em 2 tensões:
230 V, 50 Hz, 2,5 A, CE/ENEC
•
120 V, 60 Hz, 5 A, UL/cUL
•
Filtros de RFI
A série de drives VLT® apresenta ltros de RFI Classe A2
integrados como padrão. Se níveis adicionais de proteção
RFI/EMC forem exigidos, eles podem ser obtidos utilizando
ltros de RFI Classe A1 opcionais, que oferecem supressão
de interferência de radiofrequência e radiação eletromagnética de acordo com EN 55011. Há também disponíveis
ltros de RFI para uso marítimo.
Nos drives tamanho F do gabinete, o ltro de RFI Classe
A1 exige a inclusão do painel elétrico para opcionais.
Terminais NAMUR
A seleção deste opcional oferece conexão de terminal
padronizada e funcionalidade associada, conforme denido
pelo NAMUR NE37. NAMUR é uma associação internacional
dos usuários de tecnologia de automação nas indústrias de
processo, especialmente nas indústrias química e
farmacêutica na Alemanha.
Exige a seleção do cartão de relé estendido VLT® MCB 113
e do cartão do termistor do PTC VLT® MCB 112.
Monitor de resistência de isolamento (IRM)
Monitora a resistência de isolamento em sistemas sem
aterramento (sistemas IT na terminologia IEC) entre os
condutores de fase do sistema e do ponto de aterramento.
Há uma pré-advertência ôhmica e um setpoint de alarme
principal do nível de isolação. Associado a cada setpoint há
um relé de alarme SPDT para uso externo. Somente 1
monitor de resistência de isolamento pode ser conectado a
cada sistema sem aterramento (IT).
Integrado ao circuito de parada segura.
•
Display LCD de resistência de isolamento.
•
Memória defeituosa.
•
Teclas de info, teste e redenição.
•
Dispositivo de corrente residual (RCD)
Utiliza o método da estabilidade do núcleo para monitorar
as correntes de falha de aterramento em sistemas
aterrados e sistemas aterrados de alta resistência (sistemas
TN e TT na terminologia IEC). Há uma pré-advertência
(50% do setpoint do alarme principal) e um setpoint de
alarme principal. Associado a cada setpoint há um relé de
alarme SPDT para uso externo. Requer um transformador
de corrente do "tipo janela" (fornecido e instalado pelo
cliente)
Integrado ao circuito de parada segura.
•
O dispositivo IEC 60755 Tipo B monitora correntes
•
de falha de aterramento CC puras e CC pulsadas.
Indicador de gráco de barras de LED do nível de
•
corrente de falha de aterramento de 10–100% do
setpoint.
Memória defeituosa.
•
Tecla de teste e redenição.
•
Safe Torque O com relé de segurança Pilz
Disponível para drives com gabinete tamanho F. Permite
que o relé Pilz se encaixe no gabinete sem exigir um
gabinete para opcionais. O relé é usado no opcional de
monitoramento da temperatura externa. Se o monito-
ramento PTC for exigido, o VLT®PTC Thermistor Card MCB
112 deve ser comprado.
Parada de emergência com relé de segurança Pilz
Inclui um botão de parada de emergência de 4 os
redundante montado na frente do gabinete e um relé Pilz
que o monitora junto com um circuito de parada segura e
posição do contator. Exige um contator e o gabinete para
opcionais para drives com gabinete tamanho F.
Circuito de frenagem (IGBTs)
Terminais do freio com um IGBT do circuito de frenagem
permitem a conexão dos resistores de frenagem externos.
Para obter dados detalhados sobre os resistores de
frenagem, consulte o Guia de Design do VLT® Brake
Resistor MCE 101, disponível em drives.danfoss.com/
downloads/portal/#/.
6
6
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 37
Page 40

Visão geral de opcionais e ...
VLT® AutomationDrive FC 302
315–1200 kW
6
Terminais Regen
Permite a conexão das unidades regen ao barramento CC
no lado do banco de capacitores dos reatores do
barramento CC para frenagem regenerativa. Os terminais
regen de tamanho F do gabinete são dimensionados para
aproximadamente 50% do valor nominal da potência do
drive. Consulte o fabricante para obter os limites de
energia regen com base no tamanho e tensão especícos
do drive.
Terminais de Load Sharing
Esses terminais se conectam ao barramento CC no lado do
reticador do reator de barramento CC e permitem o
compartilhamento da energia do barramento CC entre
vários drives. Para drives com gabinete de tamanho F, os
terminais de load sharing são dimensionados para aproximadamente 33% do valor nominal da potência do drive.
Consulte o fabricante para obter os limites de load sharing
com base no tamanho e tensão especícos do drive.
Desconexão
Uma maçaneta montada na porta permite a operação
manual de uma chave de desconexão da energia para
ativar e desativar a energia ao drive, aumentando a
segurança durante reparos. A desconexão é bloqueada
com as portas do painel elétrico para evitar que sejam
abertas enquanto ainda houver energia aplicada.
Disjuntores
Um disjuntor pode ser desarmado remotamente, mas o
reset deve ser feito manualmente. Disjuntores são
bloqueados com as portas do painel elétrico para evitar
que sejam abertos enquanto ainda houver energia
aplicada. Quando um disjuntor for comprado como
opcional, os fusíveis também serão incluídos para proteção
de sobrecarga da corrente de ação rápida do conversor de
frequência.
Contatores
Um interruptor do contator controlado eletricamente
permite a ativação e a desativação remota da energia para
o drive. Se o opcional de parada de emergência IEC for
comprado, o relé Pilz monitora o contato auxiliar no
contator.
Starters de motor manual
Fornece energia trifásica para ventiladores de arrefecimento elétrico que são frequentemente exigidos para
motores maiores. A energia para os starters é fornecida
pelo lado da carga de qualquer contator, disjuntor ou
chave de desconexão. Se um opcional de ltro de RFI
Classe 1 for comprado, o lado da entrada do RFI fornece
energia para o starter. A energia passa por um fusível antes
de cada starter do motor e é desligada quando a energia
de alimentação para o drive está desligada. São permitidos
até 2 partidas. Se um circuito protegido por um fusível de
30 A for comprado, só será permitida 1 partida. As partidas
são integradas ao circuito de parada segura.
Os recursos incluem:
Interruptor de operação (liga/desliga).
•
Proteção de sobrecarga e curto circuito com
•
função de teste.
Função reset manual.
•
30 A, terminais protegidos por fusível
Tensão de rede da alimentação de correspon-
•
dência de potência trifásica para energizar
equipamento auxiliar do cliente.
Não está disponível se 2 starters de motor
•
manual forem selecionados.
Os terminais estão desligados quando a
•
alimentação de entrada para o drive estiver
desligada.
A energia para os terminais é fornecida pelo lado
•
da carga de qualquer contator, disjuntor ou chave
de desconexão fornecidos. Se um opcional de
ltro de RFI Classe 1 for comprado, o lado da
entrada do RFI fornece energia para o starter.
Terminais do motor comuns
O opcional de terminal do motor comum oferece os
barramentos e o hardware exigidos para conectar os
terminais do motor dos inversores acompanhados a um
terminal único (por fase) para acomodar a instalação do kit
de entrada superior no lado do motor.
Este opcional também é recomendável para conectar a
saída de um drive com o ltro de saída ou contator de
saída. Os terminais do motor comum eliminam a
necessidade de comprimento de cabo igual de cada
inversor para o ponto comum do ltro de saída (ou motor).
Alimentação de 24 V CC
5 A, 120 W, 24 V CC.
•
Protegido contra sobrecorrente, sobrecarga, curto-
•
-circuitos e superaquecimento de saída.
Para alimentar dispositivos acessórios fornecidos
•
por clientes como sensores, E/S PLC, contatores,
sondas de temperatura, luzes indicadoras e/ou
outros hardwares eletrônicos.
O diagnóstico inclui um contato CC-ok seco, um
•
LED CC-ok verde e um LED vermelho de
sobrecarga.
Monitoramento da temperatura externa
Projetado para monitorar temperaturas de componente de
sistema externo, como enrolamentos e/ou rolamentos de
motor. Inclui 8 módulos de entrada universal, além de 2
módulos de entrada de termistor dedicados. Todos os 10
módulos são integrados no circuito de parada segura e
podem ser monitorados por uma rede de eldbus, que
requer a compra de um acoplador de módulo/barramento
separado). Um opcional de freio safe torque o deve ser
adquirido ao selecionar monitoramento de temperatura
externa.
38 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 41

Visão geral de opcionais e ... Guia de Design
Tipos de sinal:
Entradas RTD (incluindo Pt100) – 3 ou 4 os.
•
Termopar.
•
Corrente analógica ou tensão analógica.
•
Mais recursos:
1 saída universal – congurável para tensão
•
analógica ou corrente analógica.
2 relés de saída (NA).
•
Diagnósticos em display LC de duas linhas e LED.
•
Fio do sensor interrompido, curto circuito e
•
detecção de polaridade incorreta.
Fio do sensor interrompido, curto circuito e
•
detecção de polaridade incorreta.
Software de setup de interface.
•
Se 3 PTC forem exigidos, o opcional de VLT® PTC
•
Thermistor Card MCB 112 deve ser incluído.
Para obter os números de solicitação de pedido para
opcionais integrados do gabinete, consulte
capétulo 13.1
Congurador do Drive.
6
6
Kits de alta potência
6.10
Há disponíveis kits de alta potência, como resfriamento da
parede traseira, aquecedor elétrico e blindagem de rede
elétrica. Consulte capétulo 13.2 Números da solicitação de
pedido para opcionais/kits para obter uma breve descrição
e os números da solicitação de pedido para todos os kits
disponíveis.
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 39
Page 42

Especicações
7 Especicações
7.1 Dados elétricos, 380–500 V
VLT® AutomationDrive FC 302
315–1200 kW
VLT® AutomationDrive FC 302
Sobrecarga normal/alta SA NO SA NO SA NO
(Alta sobrecarga=150% da corrente durante 60
s, sobrecarga normal=110% da corrente durante
60 s)
Potência no eixo típica a 400 V [kW] 315 355 355 400 400 450
Potência no eixo típica a 460 V [hp] 450 500 500 600 550 600
Potência no eixo típica a 500 V [kW] 355 400 400 500 500 530
Tamanho do gabinete E1/E2 E1/E2 E1/E2
Corrente de saída (trifásica)
Contínua (a 400 V) [A] 600 658 658 745 695 800
Intermitente (sobrecarga de 60 s) (a 400 V) [A] 900 724 987 820 1043 880
77
Contínua (a 460/500 V) [A] 540 590 590 678 678 730
Intermitente (sobrecarga de 60 s) (a 460/500 V)
[A]
Contínua kVA (a 400 V) [kVA] 416 456 456 516 482 554
Contínua kVA (a 460 V) [kVA] 430 470 470 540 540 582
Contínua kVA (a 500 V) [kVA] 468 511 511 587 587 632
Corrente de entrada máxima
Contínua (a 400 V) [A] 578 634 634 718 670 771
Contínua (a 460/500 V) [A] 520 569 569 653 653 704
Número e tamanho máximos de cabos
por fase
Rede elétrica e motor [mm2 (AWG)]
Freio [mm2 (AWG)]
Divisão da carga [mm2 (AWG)]
Corrente máxima dos fusíveis da rede elétrica
externos [A]
Perda de energia estimada a 400 V [W]
Perda de energia estimada a 460 V [W]
Eciência
Frequência de saída [Hz] 0–590 0–590 0–590
Desarme de superaquecimento do cartão de
controle [°C (°F)]
1)
2), 3)
2), 3)
3)
P315 P355 P400
810 649 885 746 1017 803
4x240 (4x500 mcm) 4x240 (4x500 mcm) 4x240 (4x500 mcm)
2x185 (2x350 mcm) 2x185 (2x350 mcm) 2x185 (2x350 mcm)
4x240 (4x500 mcm) 4x240 (4x500 mcm) 4x240 (4x500 mcm)
900 900 900
6794 7532 7498 8677 7976 9473
6118 6724 6672 7819 7814 8527
0,98 0,98 0,98
85 (185) 85 (185) 85 (185)
Tabela 7.1 Dados elétricos para gabinetes E1/E2, alimentação de rede elétrica 3x380–500 V CA
1) Para obter as características nominais de fusível, consulte capétulo 10.5 Fusíveis e disjuntores.
±
2) A perda de energia típica está em condições normais, e é esperado que esteja dentro de
condições de tensão e cabo). Esses valores são baseados em uma eciência de motor típica (linha divisória IE/IE3). Os motores com eciência
inferior contribuem para a perda de energia no drive. Aplica-se para dimensionamento do arrefecimento do drive. Se a frequência de
chaveamento for maior do que a conguração padrão, as perdas de energia podem aumentar. Incluindo LCP e consumos de energia do cartão
de controle típicos. Para dados de perda de energia de acordo com EN 50598-2, consulte o drives.danfoss.com/knowledge-center/energy-eciency-
-directive/#/. Opcionais e carga do cliente podem contabilizar até 30 W em perdas, embora normalmente um cartão de controle totalmente
carregado e opcionais para os slots A e B cada só contabilizem 4 W.
3) Medido usando 5 m (16,5 pés) de cabos de motor blindados com carga nominal e frequência nominal. Eciência medida na corrente nominal.
Para classe de eciência energética, consulte capétulo 10.12 Eciência. Para perdas de carga parcial, consulte drives.danfoss.com/knowledge-
-center/energy-eciency-directive/#/.
40 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
15% (a tolerância está relacionada às diversas
Page 43

Especicações Guia de Design
VLT® AutomationDrive FC 302
Sobrecarga normal/alta SA NO SA NO SA NO SA NO
(Alta sobrecarga=150% da corrente durante 60
s, sobrecarga normal=110% da corrente
durante 60 s)
Potência no eixo típica a 400 V [kW] 450 500 500 560 560 630 630 710
Potência no eixo típica a 460 V [hp] 600 650 650 750 750 900 1000 1000
Potência no eixo típica a 500 V [kW] 530 560 560 630 630 710 800 800
Tamanho do gabinete F1/F3 F1/F3 F1/F3 F1/F3
Corrente de saída (trifásica)
Contínua (a 400 V) [A] 800 880 880 990 990 1120 1120 1260
Intermitente (sobrecarga de 60 s)
(a 400 V) [A]
Contínua (a 460/500 V) [A] 730 780 780 890 890 1050 1050 1160
Intermitente (sobrecarga de 60 s)
(a 460/500 V) [A]
Contínua kVA (a 400 V) [kVA] 554 610 610 686 686 776 776 873
Contínua kVA (a 460 V) [kVA] 582 621 621 709 709 837 837 924
Contínua kVA (a 500 V) [kVA] 632 675 675 771 771 909 909 1005
Corrente de entrada máxima
Contínua (a 400 V) [A] 771 848 848 954 954 1079 1079 1214
Contínua (a 460/500 V) [A] 704 752 752 858 858 1012 1012 1118
Número e tamanho máximos de
cabos por fase
- Motor [mm2 (AWG)]
- Rede elétrica [mm2 (AWG)] (F1)
- Rede elétrica [mm2 (AWG)] (F3)
- Divisão da carga [mm2 (AWG)]
- Freio [mm2 (AWG)]
Corrente máxima dos fusíveis da rede elétrica
externos [A]
Perda de energia estimada a 400 V [W]
Perda de energia estimada a 460 V [W]
Perdas máximas adicionadas do RFI A1,
disjuntor ou da desconexão, e do contator [W],
(somente F3)
Perdas de opcionais do painel máximas [W] 400 400 400 400 400 400 400 400
Eciência
Frequência de saída [Hz] 0–590 0–590 0–590 0–590
Desarme de superaquecimento do cartão de
controle [°C (°F)]
1)
2), 3)
2), 3)
3)
P450 P500 P560 P630
1200 968 1320 1089 1485 1680 1386 1890
1095 858 1170 979 1335 1155 1575 1276
8x150 (8x300 mcm) 8x150 (8x300 mcm) 8x150 (8x300 mcm) 8x150 (8x300 mcm)
8x240 (8x500 mcm) 8x240 (8x500 mcm) 8x240 (8x500 mcm) 8x240 (8x500 mcm)
8x456 (8x900 mcm) 8x456 (8x900 mcm) 8x456 (8x900 mcm) 8x456 (8x900 mcm)
4x120 (4x250 mcm) 4x120 (4x250 mcm) 4x120 (4x250 mcm) 4x120 (4x250 mcm)
4x185 (4x350 mcm) 4x185 (4x350 mcm) 4x185 (4x350 mcm) 4x185 (4x350 mcm)
1600 1600 2000 2000
9031 10162 10146 11822 10649 12512 12490 14674
8212 8876 8860 10424 9414 11595 11581 13213
893 963 951 1054 978 1093 1092 1230
0,98 0,98 0,98 0,98
85 (185) 85 (185) 85 (185) 85 (185)
7 7
Tabela 7.2 Dados elétricos para gabinetes F1/F3, alimentação de rede elétrica 3x380–500 V CA
1) Para obter as características nominais de fusível, consulte capétulo 10.5 Fusíveis e disjuntores.
2) A perda de energia típica está em condições normais, e é esperado que esteja dentro de ±15% (a tolerância está relacionada às diversas
condições de tensão e cabo). Esses valores são baseados em uma eciência de motor típica (linha divisória IE/IE3). Os motores com eciência
inferior contribuem para a perda de energia no drive. Aplica-se para dimensionamento do arrefecimento do drive. Se a frequência de
chaveamento for maior do que a conguração padrão, as perdas de energia podem aumentar. Incluindo LCP e consumos de energia do cartão
de controle típicos. Para dados de perda de energia de acordo com EN 50598-2, consulte o drives.danfoss.com/knowledge-center/energy-eciency-
-directive/#/. Opcionais e carga do cliente podem contabilizar até 30 W em perdas, embora normalmente um cartão de controle totalmente
carregado e opcionais para os slots A e B cada só contabilizem 4 W.
3) Medido usando 5 m (16,5 pés) de cabos de motor blindados com carga nominal e frequência nominal. Eciência medida na corrente nominal.
Para classe de eciência energética, consulte capétulo 10.12 Eciência. Para perdas de carga parcial, consulte drives.danfoss.com/knowledge-
-center/energy-eciency-directive/#/.
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 41
Page 44

Especicações
VLT® AutomationDrive FC 302
315–1200 kW
VLT® AutomationDrive FC 302
Sobrecarga normal/alta SA NO SA NO
(Alta sobrecarga=150% da corrente durante 60 s, sobrecarga
normal=110% da corrente durante 60 s)
Potência no eixo típica a 400 V [kW] 710 800 800 1000
Potência no eixo típica a 460 V [hp] 1000 1200 1200 1350
Potência no eixo típica a 500 V [kW] 800 1000 1000 1100
Tamanho do gabinete F2/F4 F2/F4
Corrente de saída (trifásica)
Contínua (a 400 V) [A] 1260 1460 1460 1720
Intermitente (sobrecarga de 60 s)
(a 400 V) [A]
Contínua (a 460/500 V) [A] 1160 1380 1380 1530
Intermitente (sobrecarga de 60 s)(a 460/500 V) [A] 1740 1518 2070 1683
Contínua kVA (a 400 V) [kVA] 873 1012 1012 1192
Contínua kVA (a 460 V) [kVA] 924 1100 1100 1219
Contínua kVA (a 500 V) [kVA] 1005 1195 1195 1325
77
Corrente de entrada máxima
Contínua (a 400 V) [A] 1214 1407 1407 1658
Contínua (a 460/500 V) [A] 1118 1330 1330 1474
Número e tamanho máximos dos cabos por fase
- Motor [mm2 (AWG)]
- Rede elétrica [mm2 (AWG)] (F2)
- Rede elétrica [mm2 (AWG)] (F4)
- Divisão da carga [mm2 (AWG)]
- Freio [mm2 (AWG)]
Corrente máxima dos fusíveis da rede elétrica externos [A]
Perda de energia estimada a 400 V [W]
Perda de energia estimada a 460 V [W]
Perdas máximas adicionadas do RFI A1, disjuntor ou da desconexão e
do contator [W], (somente F4)
Perdas de opcionais do painel máximas [W] 400 400 400 400
Eciência
Frequência de saída [Hz] 0–590 0–590
Desarme de superaquecimento do cartão de controle [°C (°F)]
3)
2), 3)
2), 3)
1)
14244 17293 15466 19278
13005 16229 14556 16624
P710 P800
1890 1606 2190 1892
12x150 (12x300 mcm) 12x150 (12x300 mcm)
8x240 (8x500 mcm) 8x240 (8x500 mcm)
8x456 (8x900 mcm) 8x456 (8x900 mcm)
4x120 (4x250 mcm) 4x120 (4x250 mcm)
6x185 (6x350 mcm) 6x185 (6x350 mcm)
2500 2500
2067 2280 2236 2541
0,98 0,98
85 (185) 85 (185)
Tabela 7.3 Dados elétricos para gabinetes F2/F4, alimentação de rede elétrica 3x380–500 V CA
1) Para obter as características nominais de fusível, consulte capétulo 10.5 Fusíveis e disjuntores.
±
2) A perda de energia típica está em condições normais, e é esperado que esteja dentro de
condições de tensão e cabo). Esses valores são baseados em uma eciência de motor típica (linha divisória IE/IE3). Os motores com eciência
inferior contribuem para a perda de energia no drive. Aplica-se para dimensionamento do arrefecimento do drive. Se a frequência de
chaveamento for maior do que a conguração padrão, as perdas de energia podem aumentar. Incluindo LCP e consumos de energia do cartão
de controle típicos. Para dados de perda de energia de acordo com EN 50598-2, consulte o drives.danfoss.com/knowledge-center/energy-eciency-
-directive/#/. Opcionais e carga do cliente podem contabilizar até 30 W em perdas, embora normalmente um cartão de controle totalmente
carregado e opcionais para os slots A e B cada só contabilizem 4 W.
3) Medido usando 5 m (16,5 pés) de cabos de motor blindados com carga nominal e frequência nominal. Eciência medida na corrente nominal.
Para classe de eciência energética, consulte capétulo 10.12 Eciência. Para perdas de carga parcial, consulte drives.danfoss.com/knowledge-
-center/energy-eciency-directive/#/.
42 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
15% (a tolerância está relacionada às diversas
Page 45

Especicações Guia de Design
VLT® AutomationDrive FC 302
Sobrecarga normal/alta SA NO SA NO SA NO SA NO
(Alta sobrecarga=150% da corrente durante 60
s, sobrecarga normal=110% da corrente
durante 60 s)
Potência no eixo típica a 400 V [kW] 250 315 315 355 355 400 400 450
Potência no eixo típica a 460 V [hp] 350 450 450 500 500 600 550 600
Potência no eixo típica a 500 V [kW] 315 355 355 400 400 500 500 530
Tamanho do gabinete F8/F9 F8/F9 F8/F9 F8/F9
Corrente de saída (trifásica)
Contínua (a 400 V) [A] 480 600 600 658 658 745 695 800
Intermitente (sobrecarga de 60 s)
(a 400 V) [A]
Contínua (a 460/500 V) [A] 443 540 540 590 590 678 678 730
Intermitente (sobrecarga de 60 s)
(a 460/500 V) [A]
Contínua kVA (a 400 V) [kVA] 333 416 416 456 456 516 482 554
Contínua kVA (a 460 V) [kVA] 353 430 430 470 470 540 540 582
Contínua kVA (a 500 V) [kVA] 384 468 468 511 511 587 587 632
Corrente de entrada máxima
Contínua (a 400 V) [A] 463 578 578 634 634 718 670 771
Contínua (a 460/500 V) [A] 427 520 520 569 569 653 653 704
Número e tamanho máximos de
cabos por fase
- Motor [mm2 (AWG)]
- Rede elétrica [mm2 (AWG)]
- Freio [mm2 (AWG)]
Corrente máxima dos fusíveis da rede elétrica
externos [A]
Perda de energia estimada a 400 V [W]
Perda de energia estimada a 460 V [W]
Eciência
Frequência de saída [Hz] 0–590 0–590 0–590 0–590
Desarme de superaquecimento do cartão de
controle [°C (°F)]
1)
2), 3)
2), 3)
3)
P250 P315 P355 P400
720 660 900 724 987 820 1043 880
665 594 810 649 885 746 1017 803
4x240 (4x500 mcm) 4x240 (4x500 mcm) 4x240 (4x500 mcm) 4x240 (4x500 mcm)
4x90 (4x3/0 mcm) 4x90 (4x3/0 mcm) 4x240 (4x500 mcm) 4x240 (4x500 mcm)
2x185 (2x350 mcm) 2x185 (2x350 mcm) 2x185 (2x350 mcm) 2x185 (2x350 mcm)
700 700 700 700
5164 6790 6960 7701 7691 8879 8178 9670
4822 6082 6345 6953 6944 8089 8085 8803
0,98 0,98 0,98 0,98
85 (185) 85 (185) 85 (185) 85 (185)
7 7
Tabela 7.4 Dados elétricos para gabinetes F8/F9, alimentação de rede elétrica 6x380–500 V CA
1) Para obter as características nominais de fusível, consulte capétulo 10.5 Fusíveis e disjuntores.
±
2) A perda de energia típica está em condições normais, e é esperado que esteja dentro de
condições de tensão e cabo). Esses valores são baseados em uma eciência de motor típica (linha divisória IE/IE3). Os motores com eciência
inferior contribuem para a perda de energia no drive. Aplica-se para dimensionamento do arrefecimento do drive. Se a frequência de
chaveamento for maior do que a conguração padrão, as perdas de energia podem aumentar. Incluindo LCP e consumos de energia do cartão
de controle típicos. Para dados de perda de energia de acordo com EN 50598-2, consulte o drives.danfoss.com/knowledge-center/energy-eciency-
-directive/#/. Opcionais e carga do cliente podem contabilizar até 30 W em perdas, embora normalmente um cartão de controle totalmente
carregado e opcionais para os slots A e B cada só contabilizem 4 W.
3) Medido usando 5 m (16,5 pés) de cabos de motor blindados com carga nominal e frequência nominal. Eciência medida na corrente nominal.
Para classe de eciência energética, consulte capétulo 10.12 Eciência. Para perdas de carga parcial, consulte drives.danfoss.com/knowledge-
-center/energy-eciency-directive/#/.
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 43
15% (a tolerância está relacionada às diversas
Page 46

Especicações
VLT® AutomationDrive FC 302
315–1200 kW
VLT® AutomationDrive FC 302
Sobrecarga normal/alta SA NO SA NO SA NO SA NO
(Alta sobrecarga=150% da corrente durante 60
s, sobrecarga normal=110% da corrente
durante 60 s)
Potência no eixo típica a 400 V [kW] 450 500 500 560 560 630 630 710
Potência no eixo típica a 460 V [hp] 600 650 650 750 750 900 900 1000
Potência no eixo típica a 500 V [kW] 530 560 560 630 630 710 710 800
Tamanho do gabinete F10/F11 F10/F11 F10/F11 F10/F11
Corrente de saída (trifásica)
Contínua (a 400 V) [A] 800 880 880 990 990 1120 1120 1260
Intermitente (sobrecarga de 60 s)
(a 400 V) [A]
Contínua (a 460/500 V) [A] 730 780 780 890 890 1050 1050 1160
Intermitente (sobrecarga de 60 s)
(a 460/500 V) [A]
Contínua kVA (a 400 V) [kVA] 554 610 610 686 686 776 776 873
77
Contínua kVA (a 460 V) [kVA] 582 621 621 709 709 837 837 924
Contínua kVA (a 500 V) [kVA] 632 675 675 771 771 909 909 1005
Corrente de entrada máxima
Contínua (a 400 V) [A] 771 848 848 954 954 1079 1079 1214
Contínua (a 460/500 V) [A] 704 752 752 858 858 1012 1012 1118
Número e tamanho máximos de
cabos por fase
- Motor [mm2 (AWG)]
- Rede elétrica [mm2 (AWG)]
- Freio [mm2 (AWG)]
Corrente máxima dos fusíveis da rede elétrica
externos [A]
Perda de energia estimada a 400 V [W]
Perda de energia estimada a 460 V [W]
Perdas máximas adicionadas do RFI A1,
disjuntor ou da desconexão e do contator [W],
(somente F11)
Perdas de opcionais do painel máximas [W] 400 400 400 400 400 400 400 400
Eciência
Frequência de saída [Hz] 0–590 0–590 0–590 0–590
Desarme de superaquecimento do cartão de
controle [°C (°F)]
1)
2), 3)
2), 3)
3)
P450 P500 P560 P630
1200 968 1320 1089 1485 1232 1680 1386
1095 858 1170 979 1335 1155 1575 1276
8x150 (8x300 mcm) 8x150 (8x300 mcm) 8x150 (8x300 mcm) 8x150 (8x300 mcm)
6x120 (6x250 mcm) 6x120 (6x250 mcm) 6x120 (6x250 mcm) 6x120 (6x250 mcm)
4x185 (4x350 mcm) 4x185 (4x350 mcm) 4x185 (4x350 mcm) 4x185 (4x350 mcm)
900 900 900 1500
9492 10647 10631 12338 11263 13201 13172 15436
8730 9414 9398 11006 10063 12353 12332 14041
893 963 951 1054 978 1093 1092 1230
0,98 0,98 0,98 0,98
85 (185) 85 (185) 85 (185) 85 (185)
Tabela 7.5 Dados elétricos para gabinetes F10/F11, alimentação de rede elétrica 6x380–500 V CA
1) Para obter as características nominais de fusível, consulte capétulo 10.5 Fusíveis e disjuntores.
±
2) A perda de energia típica está em condições normais, e é esperado que esteja dentro de
condições de tensão e cabo). Esses valores são baseados em uma eciência de motor típica (linha divisória IE/IE3). Os motores com eciência
inferior contribuem para a perda de energia no drive. Aplica-se para dimensionamento do arrefecimento do drive. Se a frequência de
chaveamento for maior do que a conguração padrão, as perdas de energia podem aumentar. Incluindo LCP e consumos de energia do cartão
de controle típicos. Para dados de perda de energia de acordo com EN 50598-2, consulte o drives.danfoss.com/knowledge-center/energy-eciency-
-directive/#/. Opcionais e carga do cliente podem contabilizar até 30 W em perdas, embora normalmente um cartão de controle totalmente
carregado e opcionais para os slots A e B cada só contabilizem 4 W.
3) Medido usando 5 m (16,5 pés) de cabos de motor blindados com carga nominal e frequência nominal. Eciência medida na corrente nominal.
Para classe de eciência energética, consulte capétulo 10.12 Eciência. Para perdas de carga parcial, consulte drives.danfoss.com/knowledge-
-center/energy-eciency-directive/#/.
44 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
15% (a tolerância está relacionada às diversas
Page 47

Especicações Guia de Design
VLT® AutomationDrive FC 302
Sobrecarga normal/alta SA NO SA NO
(Alta sobrecarga=150% da corrente durante 60 s, sobrecarga
normal=110% da corrente durante 60 s)
Potência no eixo típica a 400 V [kW] 710 800 800 1000
Potência no eixo típica a 460 V [hp] 1000 1200 1200 1350
Potência no eixo típica a 500 V [kW] 800 1000 1000 1100
Tamanho do gabinete F12/F13 F12/F13
Corrente de saída (trifásica)
Contínua (a 400 V) [A] 1260 1460 1460 1720
Intermitente (sobrecarga de 60 s)
(a 400 V) [A]
Contínua (a 460/500 V) [A] 1160 1380 1380 1530
Intermitente (sobrecarga de 60 s)(a 460/500 V) [A] 1740 1518 2070 1683
Contínua kVA (a 400 V) [kVA] 873 1012 1012 1192
Contínua kVA (a 460 V) [kVA] 924 1100 1100 1219
Contínua kVA (a 500 V) [kVA] 1005 1195 1195 1325
Corrente de entrada máxima
Contínua (a 400 V) [A] 1214 1407 1407 1658
Contínua (a 460/500 V) [A] 1118 1330 1330 1474
Número e tamanho máximos dos cabos por fase
- Motor [mm2 (AWG)]
- Rede elétrica [mm2 (AWG)]
- Freio [mm2 (AWG)]
Corrente máxima dos fusíveis da rede elétrica externos [A]
Perda de energia estimada a 400 V [W]
Perda de energia estimada a 460 V [W]
Perdas máximas adicionadas do RFI A1, disjuntor ou da desconexão e
do contator [W], (somente F13)
Perdas de opcionais do painel máximas [W] 400 400 400 400
Eciência
Frequência de saída [Hz] 0–590 0–590
Desarme de superaquecimento do cartão de controle [°C (°F)]
3)
2), 3)
2), 3)
1)
14967 18084 16392 20358
13819 17137 15577 17752
P710 P800
1890 1606 2190 1892
12x150 (12x300 mcm) 12x150 (12x300 mcm)
6x120 (6x250 mcm) 6x120 (6x250 mcm)
6x185 (6x350 mcm) 6x185 (6x350 mcm)
1500 1500
2067 2280 2236 2541
0,98 0,98
85 (185) 85 (185)
7 7
Tabela 7.6 Dados elétricos para gabinetes F12/F13, alimentação de rede elétrica 6x380–500 V CA
1) Para obter as características nominais de fusível, consulte capétulo 10.5 Fusíveis e disjuntores.
±
2) A perda de energia típica está em condições normais, e é esperado que esteja dentro de
condições de tensão e cabo). Esses valores são baseados em uma eciência de motor típica (linha divisória IE/IE3). Os motores com eciência
inferior contribuem para a perda de energia no drive. Aplica-se para dimensionamento do arrefecimento do drive. Se a frequência de
chaveamento for maior do que a conguração padrão, as perdas de energia podem aumentar. Incluindo LCP e consumos de energia do cartão
de controle típicos. Para dados de perda de energia de acordo com EN 50598-2, consulte o drives.danfoss.com/knowledge-center/energy-eciency-
-directive/#/. Opcionais e carga do cliente podem contabilizar até 30 W em perdas, embora normalmente um cartão de controle totalmente
carregado e opcionais para os slots A e B cada só contabilizem 4 W.
3) Medido usando 5 m (16,5 pés) de cabos de motor blindados com carga nominal e frequência nominal. Eciência medida na corrente nominal.
Para classe de eciência energética, consulte capétulo 10.12 Eciência. Para perdas de carga parcial, consulte drives.danfoss.com/knowledge-
-center/energy-eciency-directive/#/.
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 45
15% (a tolerância está relacionada às diversas
Page 48

Especicações
7.2 Dados elétricos, 525–690 V
VLT® AutomationDrive FC 302
315–1200 kW
VLT® AutomationDrive FC 302
Sobrecarga normal/alta SA NO SA NO SA NO SA NO
(Alta sobrecarga=150% da corrente durante 60
s, sobrecarga normal=110% da corrente
durante 60 s)
Potência no eixo típica a 550 V [kW] 315 355 315 400 400 450 450 500
Potência no eixo típica a 575 V [hp] 400 450 400 500 500 600 600 650
Potência no eixo típica a 690 V [kW] 355 450 400 500 500 560 560 630
Tamanho do gabinete E1/E2 E1/E2 E1/E2 E1/E2
Corrente de saída (trifásica)
Contínua (a 550 V) [A] 395 470 429 523 523 596 596 630
Intermitente (sobrecarga de 60 s) (a 550 V) [A] 593 517 644 575 785 656 894 693
Contínua (a 575/690 V) [A] 380 450 410 500 500 570 570 630
Intermitente (sobrecarga de 60 s) (a 575/690
V) [A]
77
Contínua kVA (a 550 V) [kVA] 376 448 409 498 498 568 568 600
Contínua kVA (a 575 V) [kVA] 378 448 408 498 498 568 568 627
Contínua kVA (a 690 V) [kVA] 454 538 490 598 598 681 681 753
Corrente de entrada máxima
Contínua (a 550 V) [A] 381 453 413 504 504 574 574 607
Contínua (a 575 V) [A] 366 434 395 482 482 549 549 607
Contínua (a 690 V) 366 434 395 482 482 549 549 607
Número e tamanho máximos de
cabos por fase
- Rede elétrica, motor e divisão da carga [mm
(AWG)]
- Freio [mm2 (AWG)]
Corrente máxima dos fusíveis da rede elétrica
externos [A]
Perda de energia estimada a 600 V [W]
Perda de energia estimada a 690 V [W]
Eciência
Frequência de saída [Hz] 0–500 0–500 0–500 0–500
Desarme de superaquecimento do cartão de
controle [°C (°F)]
1)
3)
2
2), 3)
2), 3)
P355 P400 P500 P560
570 495 615 550 750 627 855 693
4x240 (4x500 mcm) 4x240 (4x500 mcm) 4x240 (4x500 mcm) 4x240 (4x500 mcm)
2x185 (2x350 mcm) 2x185 (2x350 mcm) 2x185 (2x350 mcm) 2x185 (2x350 mcm)
700 700 900 900
4424 5323 4795 6010 6493 7395 7383 8209
4589 5529 4970 6239 6707 7653 7633 8495
0,98 0,98 0,98 0,98
85 (185) 85 (185) 85 (185) 85 (185)
Tabela 7.7 Dados elétricos para gabinetes E1/E2, alimentação de rede elétrica 3x525–690 V CA
1) Para obter as características nominais de fusível, consulte capétulo 10.5 Fusíveis e disjuntores.
2) A perda de energia típica está em condições normais, e é esperado que esteja dentro de ±15% (a tolerância está relacionada às diversas
condições de tensão e cabo). Esses valores são baseados em uma eciência de motor típica (linha divisória IE/IE3). Os motores com eciência
inferior contribuem para a perda de energia no drive. Aplica-se para dimensionamento do arrefecimento do drive. Se a frequência de
chaveamento for maior do que a conguração padrão, as perdas de energia podem aumentar. Incluindo LCP e consumos de energia do cartão
de controle típicos. Para dados de perda de energia de acordo com EN 50598-2, consulte o drives.danfoss.com/knowledge-center/energy-eciency-
-directive/#/. Opcionais e carga do cliente podem contabilizar até 30 W em perdas, embora normalmente um cartão de controle totalmente
carregado e opcionais para os slots A e B cada só contabilizem 4 W.
3) Medido usando 5 m (16,5 pés) de cabos de motor blindados com carga nominal e frequência nominal. Eciência medida na corrente nominal.
Para classe de eciência energética, consulte capétulo 10.12 Eciência. Para perdas de carga parcial, consulte drives.danfoss.com/knowledge-
-center/energy-eciency-directive/#/.
46 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 49

Especicações Guia de Design
VLT® AutomationDrive FC 302
Sobrecarga normal/alta SA NO SA NO SA NO
(Alta sobrecarga=150% da corrente durante 60 s,
sobrecarga normal=110% da corrente durante
60 s)
Potência no eixo típica a 550 V [kW] 500 560 560 670 670 750
Potência no eixo típica a 575 V [hp] 650 750 750 950 950 1050
Potência no eixo típica a 690 V [kW] 630 710 710 800 800 900
Tamanho do gabinete F1/F3 F1/F3 F1/F3
Corrente de saída (trifásica)
Contínua (a 550 V) [A] 659 763 763 889 889 988
Intermitente (sobrecarga de 60 s) (a 550 V) [A] 989 839 1145 978 1334 1087
Contínua (a 575/690 V) [A] 630 730 730 850 850 945
Intermitente (sobrecarga de 60 s)
(a 575/690 V) [A]
Contínua kVA (a 550 V) [kVA] 628 727 727 847 847 941
Contínua kVA (a 575 V) [kVA] 627 727 727 847 847 941
Contínua kVA (a 690 V) [kVA] 753 872 872 1016 1016 1129
Corrente de entrada máxima
Contínua (a 550 V) [A] 635 735 735 857 857 952
Contínua (a 575 V) [A] 607 704 704 819 819 911
Contínua (a 690 V) [A] 607 704 704 819 819 911
Número e tamanho máximos de cabos
por fase
- Motor [mm2 (AWG)]
- Rede elétrica [mm2 (AWG)] (F1)
- Rede elétrica [mm2 (AWG)] (F3)
- Divisão da carga [mm2 (AWG)]
- Freio [mm2 (AWG)]
Corrente máxima dos fusíveis da rede elétrica
externos [A]
Perda de energia estimada a 600 V [W]
Perda de energia estimada a 690 V [W]
Perdas máximas adicionadas para o disjuntor ou
desconexão e o contator [W], (somente F3)
Perdas de opcionais do painel máximas [W] 400 400 400 400 400 400
Eciência
Frequência de saída [Hz] 0–500 0–500 0–500
Desarme de superaquecimento do cartão de
controle [°C (°F)]
12)
2), 3)
2), 3)
3)
P630 P710 P800
945 803 1095 935 1275 1040
8x150 (8x300 mcm) 8x150 (8x300 mcm) 8x150 (8x300 mcm)
8x240 (8x500 mcm) 8x240 (8x500 mcm) 8x240 (8x500 mcm)
8x456 (4x900 mcm) 8x456 (4x900 mcm) 8x456 (4x900 mcm)
4x120 (4x250 mcm) 4x120 (4x250 mcm) 4x120 (4x250 mcm)
4x185 (4x350 mcm) 4x185 (4x350 mcm) 4x185 (4x350 mcm)
1600 1600 1600
8075 9500 9165 10872 10860 12316
8388 9863 9537 11304 11291 12798
342 427 419 532 519 615
0,98 0,98 0,98
85 (185) 85 (185) 85 (185)
7 7
Tabela 7.8 Dados elétricos para gabinetes F1/F3, alimentação de rede elétrica 3x525–690 V CA
1) Para obter as características nominais de fusível, consulte capétulo 10.5 Fusíveis e disjuntores.
±
2) A perda de energia típica está em condições normais, e é esperado que esteja dentro de
condições de tensão e cabo). Esses valores são baseados em uma eciência de motor típica (linha divisória IE/IE3). Os motores com eciência
inferior contribuem para a perda de energia no drive. Aplica-se para dimensionamento do arrefecimento do drive. Se a frequência de
chaveamento for maior do que a conguração padrão, as perdas de energia podem aumentar. Incluindo LCP e consumos de energia do cartão
de controle típicos. Para dados de perda de energia de acordo com EN 50598-2, consulte o drives.danfoss.com/knowledge-center/energy-eciency-
-directive/#/. Opcionais e carga do cliente podem contabilizar até 30 W em perdas, embora normalmente um cartão de controle totalmente
carregado e opcionais para os slots A e B cada só contabilizem 4 W.
3) Medido usando 5 m (16,5 pés) de cabos de motor blindados com carga nominal e frequência nominal. Eciência medida na corrente nominal.
Para classe de eciência energética, consulte capétulo 10.12 Eciência. Para perdas de carga parcial, consulte drives.danfoss.com/knowledge-
-center/energy-eciency-directive/#/.
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 47
15% (a tolerância está relacionada às diversas
Page 50

Especicações
VLT® AutomationDrive FC 302
315–1200 kW
VLT® AutomationDrive FC 302
Sobrecarga normal/alta SA NO SA NO SA NO
(Alta sobrecarga=150% da corrente durante 60 s,
sobrecarga normal=110% da corrente durante
60 s)
Potência no eixo típica a 550 V [kW] 750 850 850 1000 1000 1100
Potência no eixo típica a 575 V [hp] 1050 1150 1150 1350 1350 1550
Potência no eixo típica a 690 V [kW] 900 1000 1000 1200 1200 1400
Tamanho do gabinete F2/F4 F2/F4 F2/F4
Corrente de saída (trifásica)
Contínua (a 550 V) [A] 988 1108 1108 1317 1317 1479
Intermitente (sobrecarga de 60 s) (a 550 V) [A] 1482 1219 1662 1449 1976 1627
Contínua (a 575/690 V) [A] 945 1060 1060 1260 1260 1415
Intermitente (sobrecarga de 60 s)
(a 575/690 V) [A]
Contínua kVA (a 550 V) [kVA] 941 1056 1056 1255 1255 1409
Contínua kVA (a 575 V) [kVA] 941 1056 1056 1255 1255 1409
77
Contínua kVA (a 690 V) [kVA] 1129 1267 1267 1506 1506 1691
Corrente de entrada máxima
Contínua (a 550 V) [A] 952 1068 1068 1269 1269 1425
Contínua (a 575 V) [A] 911 1022 1022 1214 1214 1364
Contínua (a 690 V) [A] 911 1022 1022 1214 1214 1364
Número e tamanho máximos de cabos
por fase
- Motor [mm2 (AWG)]
- Rede elétrica [mm2 (AWG)] (F2)
- Rede elétrica [mm2 (AWG)] (F4)
- Divisão da carga [mm2 (AWG)]
- Freio [mm2 (AWG)]
Corrente máxima dos fusíveis da rede elétrica
externos [A]
Perda de energia estimada a 600 V [W]
Perda de energia estimada a 690 V [W]
Perdas máximas adicionadas para o disjuntor ou
desconexão e contator [W], (somente F4)
Perdas de opcionais do painel máximas [W] 400 400 400 400 400 400
Eciência
Frequência de saída [Hz] 0–500 0–500 0–500
Desarme de superaquecimento do cartão de
controle [°C (°F)]
1)
2), 3)
2), 3)
3)
P900 P1M0 P1M2
1418 1166 1590 1386 1890 1557
12x150 (12x300 mcm) 12x150 (12x300 mcm) 12x150 (12x300 mcm)
8x240 (8x500 mcm) 8x240 (8x500 mcm) 8x240 (8x500 mcm)
8x456 (8x900 mcm) 8x456 (8x900 mcm) 8x456 (8x900 mcm)
4x120 (4x250 mcm) 4x120 (4x250 mcm) 4x120 (4x250 mcm)
6x185 (6x350 mcm) 6x185 (6x350 mcm) 6x185 (6x350 mcm)
1600 2000 2500
12062 13731 13269 16190 16089 18536
12524 14250 13801 16821 16719 19247
556 665 634 863 861 1044
0,98 0,98 0,98
85 (185) 85 (185) 85 (185)
Tabela 7.9 Dados elétricos para gabinetes F2/F4, alimentação de rede elétrica 3x525–690 V CA
1) Para obter as características nominais de fusível, consulte capétulo 10.5 Fusíveis e disjuntores.
±
2) A perda de energia típica está em condições normais, e é esperado que esteja dentro de
condições de tensão e cabo). Esses valores são baseados em uma eciência de motor típica (linha divisória IE/IE3). Os motores com eciência
inferior contribuem para a perda de energia no drive. Aplica-se para dimensionamento do arrefecimento do drive. Se a frequência de
chaveamento for maior do que a conguração padrão, as perdas de energia podem aumentar. Incluindo LCP e consumos de energia do cartão
de controle típicos. Para dados de perda de energia de acordo com EN 50598-2, consulte o drives.danfoss.com/knowledge-center/energy-eciency-
-directive/#/. Opcionais e carga do cliente podem contabilizar até 30 W em perdas, embora normalmente um cartão de controle totalmente
carregado e opcionais para os slots A e B cada só contabilizem 4 W.
3) Medido usando 5 m (16,5 pés) de cabos de motor blindados com carga nominal e frequência nominal. Eciência medida na corrente nominal.
Para classe de eciência energética, consulte capétulo 10.12 Eciência. Para perdas de carga parcial, consulte drives.danfoss.com/knowledge-
-center/energy-eciency-directive/#/.
48 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
15% (a tolerância está relacionada às diversas
Page 51

Especicações Guia de Design
VLT® AutomationDrive FC 302
Sobrecarga normal/alta SA NO SA NO SA NO SA NO
(Alta sobrecarga=150% da corrente durante 60
s, sobrecarga normal=110% da corrente
durante 60 s)
Potência no eixo típica a 550 V [kW] 315 355 315 400 400 450 450 500
Potência no eixo típica a 575 V [hp] 400 450 400 500 500 600 600 650
Potência no eixo típica a 690 V [kW] 355 450 400 500 500 560 560 630
Tamanho do gabinete F8/F9 F8/F9 F8/F9 F8/F9
Corrente de saída (trifásica)
Contínua (a 550 V) [A] 395 470 429 523 523 596 596 630
Intermitente (sobrecarga de 60 s) (a 550 V) [A] 593 517 644 575 785 656 894 693
Contínua (a 575/690 V) [A] 380 450 410 500 500 570 570 630
Intermitente (sobrecarga de 60 s) (a 575/690
V) [A]
Contínua kVA (a 550 V) [kVA] 376 448 409 498 498 568 568 600
Contínua kVA (a 575 V) [kVA] 378 448 408 498 498 568 568 627
Contínua kVA (a 690 V) [kVA] 454 538 490 598 598 681 681 753
Corrente de entrada máxima
Contínua (a 550 V) [A] 381 453 413 504 504 574 574 607
Contínua (a 575 V) [A] 366 434 395 482 482 549 549 607
Contínua (a 690 V) 366 434 395 482 482 549 549 607
Número e tamanho máximos de
cabos por fase
- Motor [mm2 (AWG)]
- Rede elétrica [mm2 (AWG)]
- Freio [mm2 (AWG)]
Corrente máxima dos fusíveis da rede elétrica
externos [A]
Perda de energia estimada a 600 V [W]
Perda de energia estimada a 690 V [W]
Eciência
Frequência de saída [Hz] 0–500 0–500 0–500 0–500
Desarme de superaquecimento do cartão de
controle [°C (°F)]
1)
2), 3)
2), 3)
3)
P355 P400 P500 P560
570 495 615 550 750 627 855 693
4x240 (4x500 mcm) 4x240 (4x500 mcm) 4x240 (4x500 mcm) 4x240 (4x500 mcm)
4x85 (4x3/0 mcm) 4x85 (4x3/0 mcm) 4x85 (4x3/0 mcm) 4x85 (4x3/0 mcm)
2x185 (2x350 mcm) 2x185 (2x350 mcm) 2x185 (2x350 mcm) 2x185 (2x350 mcm)
630 630 630 630
4424 5323 4795 6010 6493 7395 7383 8209
4589 5529 4970 6239 6707 7653 7633 8495
0,98 0,98 0,98 0,98
85 (185) 85 (185) 85 (185) 85 (185)
7 7
Tabela 7.10 Dados elétricos para gabinetes F8/F9, alimentação de rede elétrica 6x525–690 V CA
1) Para obter as características nominais de fusível, consulte capétulo 10.5 Fusíveis e disjuntores.
±
2) A perda de energia típica está em condições normais, e é esperado que esteja dentro de
condições de tensão e cabo). Esses valores são baseados em uma eciência de motor típica (linha divisória IE/IE3). Os motores com eciência
inferior contribuem para a perda de energia no drive. Aplica-se para dimensionamento do arrefecimento do drive. Se a frequência de
chaveamento for maior do que a conguração padrão, as perdas de energia podem aumentar. Incluindo LCP e consumos de energia do cartão
de controle típicos. Para dados de perda de energia de acordo com EN 50598-2, consulte o drives.danfoss.com/knowledge-center/energy-eciency-
-directive/#/. Opcionais e carga do cliente podem contabilizar até 30 W em perdas, embora normalmente um cartão de controle totalmente
carregado e opcionais para os slots A e B cada só contabilizem 4 W.
3) Medido usando 5 m (16,5 pés) de cabos de motor blindados com carga nominal e frequência nominal. Eciência medida na corrente nominal.
Para classe de eciência energética, consulte capétulo 10.12 Eciência. Para perdas de carga parcial, consulte drives.danfoss.com/knowledge-
-center/energy-eciency-directive/#/.
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 49
15% (a tolerância está relacionada às diversas
Page 52

Especicações
VLT® AutomationDrive FC 302
315–1200 kW
VLT® AutomationDrive FC 302
Sobrecarga normal/alta SA NO SA NO SA NO
(Alta sobrecarga=150% da corrente durante 60 s,
sobrecarga normal=110% da corrente durante
60 s)
Potência no eixo típica a 550 V [kW] 500 560 560 670 670 750
Potência no eixo típica a 575 V [hp] 650 750 750 950 950 1050
Potência no eixo típica a 690 V [kW] 630 710 710 800 800 900
Tamanho do gabinete F10/F11 F10/F11 F10/F11
Corrente de saída (trifásica)
Contínua (a 550 V) [A] 659 763 763 889 889 988
Intermitente (sobrecarga de 60 s) (a 550 V) [A] 989 839 1145 978 1334 1087
Contínua (a 575/690 V) [A] 630 730 730 850 850 945
Intermitente (sobrecarga de 60 s)
(a 575/690 V) [A]
Contínua kVA (a 550 V) [kVA] 628 727 727 847 847 941
Contínua kVA (a 575 V) [kVA] 627 727 727 847 847 941
77
Contínua kVA (a 690 V) [kVA] 753 872 872 1016 1016 1129
Corrente de entrada máxima
Contínua (a 550 V) [A] 635 735 735 857 857 952
Contínua (a 575 V) [A] 607 704 704 819 819 911
Contínua (a 690 V) [A] 607 704 704 819 819 911
Número e tamanho máximos de cabos
por fase
- Motor [mm2 (AWG)]
- Rede elétrica [mm2 (AWG)]
- Freio [mm2 (AWG)]
Corrente máxima dos fusíveis da rede elétrica
externos [A]
Perda de energia estimada a 600 V [W]
Perda de energia estimada a 690 V [W]
Perdas máximas adicionadas para o disjuntor ou
desconexão e contator [W], (somente F11)
Perdas de opcionais do painel máximas [W] 400 400 400 400 400 400
Eciência
Frequência de saída [Hz] 0–500 0–500 0–500
Desarme de superaquecimento do cartão de
controle [°C (°F)]
1)
2), 3)
2), 3)
3)
P630 P710 P800
945 803 1095 935 1275 1040
8x150 (8x300 mcm) 8x150 (8x300 mcm) 8x150 (8x300 mcm)
6x120 (4x900 mcm) 6x120 (4x900 mcm) 6x120 (4x900 mcm)
4x185 (4x350 mcm) 4x185 (4x350 mcm) 4x185 (4x350 mcm)
900 900 900
8075 9500 9165 10872 10860 12316
8388 9863 9537 11304 11291 12798
342 427 419 532 519 615
0,98 0,98 0,98
85 (185) 85 (185) 85 (185)
Tabela 7.11 Dados elétricos para gabinetes F10/F11, alimentação de rede elétrica 6x525–690 V CA
1) Para obter as características nominais de fusível, consulte capétulo 10.5 Fusíveis e disjuntores.
±
2) A perda de energia típica está em condições normais, e é esperado que esteja dentro de
condições de tensão e cabo). Esses valores são baseados em uma eciência de motor típica (linha divisória IE/IE3). Os motores com eciência
inferior contribuem para a perda de energia no drive. Aplica-se para dimensionamento do arrefecimento do drive. Se a frequência de
chaveamento for maior do que a conguração padrão, as perdas de energia podem aumentar. Incluindo LCP e consumos de energia do cartão
de controle típicos. Para dados de perda de energia de acordo com EN 50598-2, consulte o drives.danfoss.com/knowledge-center/energy-eciency-
-directive/#/. Opcionais e carga do cliente podem contabilizar até 30 W em perdas, embora normalmente um cartão de controle totalmente
carregado e opcionais para os slots A e B cada só contabilizem 4 W.
3) Medido usando 5 m (16,5 pés) de cabos de motor blindados com carga nominal e frequência nominal. Eciência medida na corrente nominal.
Para classe de eciência energética, consulte capétulo 10.12 Eciência. Para perdas de carga parcial, consulte drives.danfoss.com/knowledge-
-center/energy-eciency-directive/#/.
50 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
15% (a tolerância está relacionada às diversas
Page 53

Especicações Guia de Design
VLT® AutomationDrive FC 302
Sobrecarga normal/alta SA NO SA NO SA NO
(Alta sobrecarga=150% da corrente durante 60 s,
sobrecarga normal=110% da corrente durante
60 s)
Potência no eixo típica a 550 V [kW] 750 850 850 1000 1000 1100
Potência no eixo típica a 575 V [hp] 1050 1150 1150 1350 1350 1550
Potência no eixo típica a 690 V [kW] 900 1000 1000 1200 1200 1400
Tamanho do gabinete F12/F13 F12/F13 F12/F13
Corrente de saída (trifásica)
Contínua (a 550 V) [A] 988 1108 1108 1317 1317 1479
Intermitente (sobrecarga de 60 s) (a 550 V) [A] 1482 1219 1219 1449 1976 1627
Contínua (a 575/690 V) [A] 945 1060 1060 1260 1260 1415
Intermitente (sobrecarga de 60 s)
(a 575/690 V) [A]
Contínua kVA (a 550 V) [kVA] 941 1056 1056 1255 1255 1409
Contínua kVA (a 575 V) [kVA] 941 1056 1056 1255 1255 1409
Contínua kVA (a 690 V) [kVA] 1129 1267 1267 1506 1506 1691
Corrente de entrada máxima
Contínua (a 550 V) [A] 952 1068 1068 1269 1269 1425
Contínua (a 575 V) [A] 911 1022 1022 1214 1214 1364
Contínua (a 690 V) [A] 911 1022 1022 1214 1214 1364
Número e tamanho máximos de cabos
por fase
- Motor [mm2 (AWG)]
- Rede elétrica [mm2 (AWG)] (F12)
- Rede elétrica [mm2 (AWG)] (F13)
- Freio [mm2 (AWG)]
Corrente máxima dos fusíveis da rede elétrica
externos [A]
Perda de energia estimada a 600 V [W]
Perda de energia estimada a 690 V [W]
Perdas máximas adicionadas para o disjuntor ou
desconexão e contator [W], (somente F13)
Perdas de opcionais do painel máximas [W] 400 400 400 400 400 400
Eciência
Frequência de saída [Hz] 0–500 0–500 0–500
Desarme de superaquecimento do cartão de
controle [°C (°F)]
1)
2), 3)
2), 3)
3)
P900 P1M0 P1M2
1418 1166 1590 1386 1890 1557
12x150 (12x300 mcm) 12x150 (12x300 mcm) 12x150 (12x300 mcm)
8x240 (8x500 mcm) 8x240 (8x500 mcm) 8x240 (8x500 mcm)
8x456 (8x900 mcm) 8x456 (8x900 mcm) 8x456 (8x900 mcm)
6x185 (6x350 mcm) 6x185 (6x350 mcm) 6x185 (6x350 mcm)
1600 2000 2500
12062 13731 13269 16190 16089 18536
12524 14250 13801 16821 16719 19247
556 665 634 863 861 1044
0,98 0,98 0,98
85 (185) 85 (185) 85 (185)
7 7
Tabela 7.12 Dados elétricos para gabinetes F12/F13, alimentação de rede elétrica 6x525–690 V CA
1) Para obter as características nominais de fusível, consulte capétulo 10.5 Fusíveis e disjuntores.
±
2) A perda de energia típica está em condições normais, e é esperado que esteja dentro de
condições de tensão e cabo). Esses valores são baseados em uma eciência de motor típica (linha divisória IE/IE3). Os motores com eciência
inferior contribuem para a perda de energia no drive. Aplica-se para dimensionamento do arrefecimento do drive. Se a frequência de
chaveamento for maior do que a conguração padrão, as perdas de energia podem aumentar. Incluindo LCP e consumos de energia do cartão
de controle típicos. Para dados de perda de energia de acordo com EN 50598-2, consulte o drives.danfoss.com/knowledge-center/energy-eciency-
-directive/#/. Opcionais e carga do cliente podem contabilizar até 30 W em perdas, embora normalmente um cartão de controle totalmente
carregado e opcionais para os slots A e B cada só contabilizem 4 W.
3) Medido usando 5 m (16,5 pés) de cabos de motor blindados com carga nominal e frequência nominal. Eciência medida na corrente nominal.
Para classe de eciência energética, consulte capétulo 10.12 Eciência. Para perdas de carga parcial, consulte drives.danfoss.com/knowledge-
-center/energy-eciency-directive/#/.
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 51
15% (a tolerância está relacionada às diversas
Page 54

Especicações
VLT® AutomationDrive FC 302
315–1200 kW
7.3 Alimentação de rede elétrica
Alimentação de rede elétrica
Terminais de alimentação (6 pulsos) L1, L2, L3
Terminais de alimentação (12 pulsos) L1-1, L2-1, L3-1, L1-2, L2-2, L3-2
Tensão de alimentação 380–480 V ±10%, 525–690 V ±10%
Tensão de rede baixa/queda da tensão de rede:
Durante a tensão de rede baixa ou a queda da rede elétrica, o conversor continua até que a tensão do barramento CC caia
abaixo do nível mínimo de parada, o que corresponde tipicamente a 15% abaixo da tensão de alimentação nominal mais baixa
do conversor. Não se pode esperar que a energização e o torque integral na tensão de rede sejam menores que 10% abaixo da
tensão de alimentação nominal mais baixa do conversor.
Frequência de alimentação 50/60 Hz ±5%
Desbalanceamento máximo temporário entre as fases da rede elétrica 3,0% da tensão de alimentação nominal
Fator de potência real (λ) ≥0,9 nominal na carga nominal
Fator de potência de deslocamento (cos Φ) perto da unidade (>0,98)
Chaveamento na alimentação de entrada L1, L2, L3 (energizações) 1 tempo/2 minuto máximo
Ambiente de acordo com a EN60664-1 Categoria de sobretensão III/ grau de poluição 2
77
O conversor é adequado para uso em um circuito capaz de fornecer características nominais da corrente de curto-circuito (SCCR)
de até 100 kA a 480/600 V.
1) Cálculos baseados na UL/IEC61800-3.
1)
7.4 Saída do motor e dados do motor
Saída do motor (U, V, W)
Tensão de saída 0–100% da tensão de alimentação
Frequência de saída 0–590 Hz
Frequência de saída no modo de uxo 0–300 Hz
Chaveamento na saída Ilimitado
Tempos de rampa 0,01–3600 s
1) Dependente da tensão e potência.
Características de torque
Torque de partida (torque constante) Máximo de 150% para 60 s
Torque de sobrecarga (torque constante) Máximo de 150% para 60 s
1) A porcentagem se refere à corrente nominal do conversor.
2) Uma vez a cada 10 minutos.
1), 2)
1), 2)
7.5 Condições do ambiente
Ambiente
Gabinetes E1/F1/F2/F3/F4/F8/F9/F10/F11/F12/F13 IP21/Tipo 1, IP54/Tipo 12
Gabinete E2 IP00/Chassi
Teste de vibração 1,0 g
Umidade relativa 5-95% (IEC 721-3-3; Classe 3K3 (sem condensação) durante a operação)
Ambiente agressivo (IEC 60068-2-43) teste com H2S Classe Kd
Gases agressivos (IEC 60721-3-3) Classe 3C3
Método de teste de acordo com IEC 60068-2-43 H2S (10 dias)
Temperatura ambiente (no modo de chaveamento SFAVM)
- com derating Máximo 55 °C (131 °F)
- com potência de saída total de motores EFF2 típicos (até 90% da corrente de saída) Máximo 50 °C (122 °F)
- a corrente de saída FC contínua total Máximo 45 °C (113 °F)
Temperatura ambiente mínima, durante operação plena 0 °C (32 °F)
Temperatura ambiente mínima em desempenho reduzido -10 °C (14 °F)
Temperatura durante a armazenagem/transporte -25 a +65/70 °C (13 a 149/158 °F)
1)
1)
1)
1)
52 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 55

Especicações Guia de Design
Altitude máxima acima do nível do mar sem derating 1.000 m (3.281 pés)
Altitude máxima acima do nível do mar com derating 3.000 m ( 9.842 pés)
1) Para obter mais informações sobre derating, consulte capétulo 9.6 Derating.
Normas de EMC, Emissão EN 61800-3
Normas de EMC, Imunidade EN 61800-3
Classe de eciência energética
1) Determinada de acordo com EN 50598-2 em:
Carga nominal.
•
90% de frequência nominal.
•
Frequência de chaveamento com conguração de fábrica.
•
Padrão de chaveamento com conguração de fábrica.
•
1)
IE2
7.6 Especicações de Cabo
Comprimentos de cabo e seções transversais para cabos de controle
Comprimento máximo do cabo do motor, blindado 150 m (492 pés)
Comprimento máximo do cabo do motor, não blindado 300 m (984 pés)
Seção transversal máxima para o motor, rede elétrica, Load Sharing e freio Consulte capétulo 7 Especicações
Seção transversal máxima para terminais de controle, o rígido 1,5 mm2/16 AWG (2x0,75 mm2)
Seção transversal máxima para terminais de controle, cabo exível 1 mm2/18 AWG
Seção transversal máxima para terminais de controle, cabo com núcleo embutido 0,5 mm2/20 AWG
Seção transversal máxima para terminais de controle 0,25 mm2/23 AWG
1) Para cabos de energia, consulte os dados elétricos em capétulo 7.1 Dados elétricos, 380–500 V e capétulo 7.2 Dados elétricos,
525–690 V.
7 7
1)
7.7 Entrada/saída de controle e dados de controle
Entradas digitais
Entradas digitais programáveis 4 (6)
Número do terminal 18, 19, 271), 291), 32, 33
Lógica PNP ou NPN
Nível de tensão 0–24 V CC
Nível de tensão, lógica 0 PNP <5 V CC
Nível de tensão, lógica 1 PNP >10 V CC
Nível de tensão, lógica 0 NPN >19 V CC
Nível de tensão, lógica 1 NPN <14 V CC
Tensão máxima na entrada 28 V CC
Resistência de entrada, R
Todas as entradas digitais são isoladas galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
1) Os terminais 27 e 29 também podem ser programados como saídas.
Entradas analógicas
Número de entradas analógicas 2
Número do terminal 53, 54
Modos Tensão ou corrente
Seleção do modo Interruptores A53 e A54
Modo de tensão Interruptor A53/A54=(U)
Nível de tensão -10 V a +10 V (escalonável)
Resistência de entrada, R
Tensão máxima ±20 V
Modo de corrente Interruptor A53/A54=(I)
Nível de corrente 0/4 a 20 mA (escalonável)
Resistência de entrada, R
Corrente máxima 30 mA
i
i
i
Aproximadamente 4 kΩ
Aproximadamente 10 kΩ
Aproximadamente 200 Ω
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 53
Page 56

Especicações
Resolução das entradas analógicas 10 bits (+ sinal)
Precisão de entradas analógicas Erro máximo 0,5% da escala completa
Largura de banda 100 Hz
As entradas analógicas são galvanicamente isoladas de tensão de alimentação (PELV) e de outros terminais de alta tensão.
Ilustração 7.1 Isolamento PELV
VLT® AutomationDrive FC 302
315–1200 kW
77
Entradas de pulso
Entradas de pulso programáveis 2
Número do terminal do pulso 29, 33
Frequência máxima nos terminais 29 e 33 (acionado por push-pull) 110 kHz
Frequência máxima nos terminais 29 e 33 (coletor aberto) 5 kHz
Frequência mínima nos terminais 29 e 33 4 Hz
Nível de tensão Consulte Entradas Digitais em capétulo 7.7 Entrada/saída de controle e dados de controle
Tensão máxima na entrada 28 V CC
Resistência de entrada, R
Precisão da entrada de pulso (0,1–1 kHz) Erro máximo: 0,1% da escala completa
Saída analógica
Número de saídas analógicas programáveis 1
Número do terminal 42
Faixa atual na saída analógica 0/4–20 mA
Carga máxima do resistor em relação ao comum na saída analógica 500 Ω
Precisão na saída analógica Erro máximo: 0,8% do fundo de escala
Resolução na saída analógica 8 bits
A saída analógica está isolada galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
Cartão de controle, comunicação serial RS485
Número do terminal 68 (P, TX+, RX+), 69 (N, TX-, RX-)
Terminal número 61 Ponto comum dos terminais 68 e 69
O circuito de comunicação serial RS485 está funcionalmente separado de outros circuitos centrais e isolado galvanicamente da
tensão de alimentação (PELV).
i
Aproximadamente 4 kΩ
Saída digital
Saídas digitais/de pulso programáveis 2
Número do terminal 27, 29
Nível de tensão na saída digital/frequência 0–24 V
Corrente de saída máxima (dissipador ou fonte) 40 mA
Carga máxima na saída de frequência 1 kΩ
Carga capacitiva máxima na saída de frequência 10 nF
Frequência mínima de saída na saída de frequência 0 Hz
Frequência máxima de saída na saída de frequência 32 kHz
Precisão da saída de frequência Erro máximo: 0,1% da escala completa
Resolução das saídas de frequência 12 bits
1) Os terminais 27 e 29 também podem ser programados como entradas.
54 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
1)
Page 57

Especicações Guia de Design
A saída digital está galvanicamente isolada da tensão de alimentação (PELV) e de outros terminais de alta tensão.
Cartão de controle, saída 24 V CC
Número do terminal 12, 13
Carga máxima 200 mA
A alimentação de 24 V CC está isolada galvanicamente da tensão de alimentação (PELV), mas tem o mesmo potencial das
entradas e saídas digitais e analógicas.
Saídas de relé
Saídas de relé programáveis 2
Seção transversal máxima para terminais de relé 2,5 mm2 (12 AWG)
Seção transversal mínima para terminais de relé 0,2 mm2 (30 AWG)
Comprimento do o desencapado 8 mm (0,3 pol.).
Relé 01 número do terminal 1–3 (freio ativado), 1–2 (freio desativado)
Carga máxima do terminal (CA-1)1) em 1-2 (NO) (carga resistiva)
2), 3)
400 V CA, 2 A
Carga máxima do terminal (CA-15)1) em 1–2 (NO) (Carga indutiva @ cosφ 0,4) 240 V CA, 0,2 A
Carga máxima do terminal (CC-1)1) em 1-2 (NO) (Carga resistiva) 80 V CC, 2 A
Carga máxima do terminal (CC-13)1) em 1-2 (NO) (Carga indutiva) 24 V CC, 0,1 A
Carga máxima do terminal (CA-1)1) em 1-3 (NC) (Carga resistiva) 240 V CA, 2 A
Carga máxima do terminal (CA-15)1) em 1–3 (NC) (Carga indutiva @ cosφ 0,4) 240 V CA, 0,2 A
Carga máxima do terminal (CC-1)1) em 1-3 (NC) (Carga resistiva) 50 V CC, 2 A
Carga máxima do terminal (CC-13)
1)
em 1-3 (NC) (Carga indutiva) 24 V CC, 0,1 A
Carga mínima do terminal em 1–3 (NC), 1–2 (NO) 24 V CC 10 mA, 24 V CA 2 mA
Ambiente de acordo com a EN 60664-1 Categoria de sobretensão III/ grau de poluição 2
Relé 02 número do terminal 4–6 (freio ativado), 4–5 (freio desativado)
Carga máxima do terminal (CA-1)
1)
em 4-5 (NO) (Carga resistiva)
2), 3)
400 V CA, 2 A
Carga máxima do terminal (CA-15)1) em 4–5 (NO) (Carga indutiva @ cosφ 0,4) 240 V CA, 0,2 A
Carga máxima do terminal (CC-1)1) em 4–5 (NO) (Carga resistiva) 80 V CC, 2 A
Carga máxima do terminal (CC-13)1) em 4-5 (NO) (Carga indutiva) 24 V CC, 0,1 A
Carga máxima do terminal (CA-1)1) em 4–6 (NC) (Carga resistiva) 240 V CA, 2 A
Carga máxima do terminal (CA-15)1) em 4–6 (NC) (Carga indutiva @ cosφ 0,4) 240 V CA, 0,2 A
Carga máxima do terminal (CC-1)1) em 4–6 (NC) (Carga resistiva) 50 V CC, 2 A
Carga máxima do terminal (CC-13)1) em 4–6 (NC) (Carga indutiva) 24 V CC, 0,1 A
Carga mínima do terminal em 4-6 (NC), 4-5 (NO) 24 V CC 10 mA, 24 V CA 2 mA
Ambiente de acordo com a EN 60664-1 Categoria de sobretensão III/ grau de poluição 2
Os contatos do relé são isolados galvanicamente do resto do circuito, por isolamento reforçado (PELV).
1) IEC 60947 partes 4 e 5.
2) Categoria de sobretensão II.
3) Aplicações UL de 300 V CA 2 A.
7 7
Cartão de controle, saída +10 V CC
Número do terminal 50
Tensão de saída 10,5 V ±0,5 V
Carga máxima 25 mA
A alimentação de 10 V CC está isolada galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
Características de controle
Resolução da frequência de saída de 0 a 1.000 Hz ±0,003 Hz
Tempo de resposta do sistema (terminais 18, 19, 27, 29, 32, 33) ≤2 m/s
Faixa de controle da velocidade (malha aberta) 1:100 da velocidade síncrona
Precisão da velocidade (malha aberta) 30–4.000 RPM: Erro máximo de ±8 RPM
Todas as características de controle são baseadas em um motor assíncrono de 4 polos.
Desempenho do cartão de controle
Intervalo de varredura 5 M/S
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 55
Page 58

Especicações
Cartão de controle, comunicação serial USB
Padrão USB 1.1 (velocidade total)
Plugue USB Plugue de dispositivo USB tipo B
VLT® AutomationDrive FC 302
315–1200 kW
AVISO!
A conexão ao PC é realizada por meio de um cabo USB host/dispositivo.
A conexão USB está isolada galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
A conexão USB não está isolada galvanicamente do ponto de aterramento. Use somente laptop/PC isolado como
conexão ao conector USB no conversor ou um conversor/cabo USB isolado.
7.8 Pesos do gabinete
Gabinete 380–480/500 V 525–690 V
E1 270–313 kg (595–690 lb) 263–313 kg (580–690 lb)
E2 234–277 kg (516–611 lb) 221–277 kg (487–611 lb)
Tabela 7.13 Pesos dos gabinetes E1–E2, kg (lb)
77
Gabinete 380–480/500 V 525–690 V
F1 1.017 kg (2.242,1 lb) 1.017 kg (2.242,1 lb)
F2 1.260 kg (2.777,9 lb) 1.260 kg (2.777,9 lb)
F3 1.318 kg (2.905,7 lb) 1.318 kg (2.905,7 lb)
F4 1.561 kg (3.441,5 lb) 1.561 kg (3.441,5 lb)
F8 447 kg (985.5 lb) 447 kg (985.5 lb)
F9 669 kg (1.474,9 lb) 669 kg (1.474,9 lb)
F10 893 kg (1.968,8 lb) 893 kg (1.968,8 lb)
F11 1.116 kg (2.460,4 lb) 1.116 kg (2.460,4 lb)
F12 1.037 kg (2.286,4 lb) 1.037 kg (2.286,4 lb)
F13 1.259 kg (2.775,7 lb) 1.259 kg (2.775,7 lb)
Tabela 7.14 Pesos dos gabinetes F1–F13, kg (lb)
56 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 59

e30bg051.10
1
2
e30bg052.10
1 2
Especicações Guia de Design
7.9 Fluxo de ar para gabinetes E1–E2 e F1–F13
7 7
1
Fluxo de ar do canal frontal, 340 m3/h (200 cfm)
2 Fluxo de ar do canal traseiro,
1.105 m3/h (650 cfm) ou 1.444 m3/h (850 cfm)
Ilustração 7.2 Fluxo de ar para gabinete E1
1
Fluxo de ar do canal frontal, 255 m3/h (150 cfm)
2 Fluxo de ar do canal traseiro,
1.105 m3/h (650 cfm) ou 1.444 m3/h (850 cfm)
Ilustração 7.3 Fluxo de ar para gabinete E2
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 57
Page 60

e30bg053.10
1
2
Especicações
VLT® AutomationDrive FC 302
315–1200 kW
77
1 Fluxo de ar do canal frontal
- IP21/Tipo 1, 700 m3/h (412 cfm)
- IP54/Tipo 12, 525 m3/h (309 cfm)
2
Fluxo de ar do canal traseiro, 985 m3/h (580 cfm)
Ilustração 7.4 Fluxo de ar para gabinetes F1–13
58 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 61

130BF328.10
600 (23.6)
2000
(78.7)
538 (21.2)
494 (19.4)
579
(22.8)
748
(29.5)
Dimensões externas e do ter... Guia de Design
8 Dimensões externas e do terminal
8.1 Dimensões externas e do terminal E1
8.1.1 Dimensões externas do E1
8 8
Ilustração 8.1 Dimensões da folga da porta, frontal e lateral do E1
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 59
Page 62

130BF611.10
2
1
35 (1.4)
350 (13.8)
203 (8.0)
99 (3.9)
130 (5.1)
62 (2.4)
104 (4.1)
35 (1.4)
10 (0.4)
0 (0.0)
0 (0.0)
40 (1.6)
78 (3.1)
0 (0.0)
26 (1.0)
26 (1.0)
130BF647.10
Dimensões externas e do ter...
VLT® AutomationDrive FC 302
315–1200 kW
88
1 Lado da rede elétrica 2 Lado do motor
Ilustração 8.2 Dimensões da placa da bucha para E1/E2
8.1.2 Dimensões do terminal do E1
Os cabos de energia são pesados e difíceis de dobrar. Para garantir uma fácil instalação dos cabos, considere o posicionamento ideal do conversor. Cada terminal comporta até 4 cabos com xadores de cabo ou encaixe de cabo padrão. O
ponto de aterramento é conectado ao um ponto de terminação relevante no conversor.
Ilustração 8.3 Dimensões detalhadas do terminal para E1/E2
60 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 63

130BF595.10
195 (7.7)
0.0
323 (12.7)
492 (19.4)
75 (3.0)
0.0
188 (7.4)
300 (11.8)
412 (16.2)
525 (20.7)
600 (23.6)
546 (21.5)
510 (20.1)
462 (18.2)
426 (16.8)
453 (17.8)
1
2
3
4
Dimensões externas e do ter... Guia de Design
8 8
1 Terminais de rede elétrica 3 Terminais de divisão da carga/regen
2 Terminais do freio 4 Terminais do motor
Ilustração 8.4 Dimensões do terminal para E1, vista frontal
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 61
Page 64

130BF596.10
154 (6.1)
0.0
192 (7.6)
280 (11.0)
371 (14.6)
409 (16.1)
1
2
3
Dimensões externas e do ter...
VLT® AutomationDrive FC 302
315–1200 kW
88
1 Terminais de rede elétrica 2 Terminais do freio
3 Terminais do motor – –
Ilustração 8.5 Dimensões do terminal para E1, vista lateral
62 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 65

130BF597.10
562 (22.1)
253 (9.9)
342 (13.5)
431 (17.0)
0.0
0.0
1
Dimensões externas e do ter... Guia de Design
1 Terminais de rede elétrica – –
Ilustração 8.6 Dimensões do terminal para E1 com desconexão (380–480/500 V Modelos: P315; 525–690 V Modelos: P355–P560), vista
frontal
8 8
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 63
Page 66

130BF598.10
0.0
51 (2.0)
226 (8.9)
266 (10.5)
441 (17.4)
0.0
28 (1.1)
167 (6.6)
195 (7.7)
381 (15.0)
1
Dimensões externas e do ter...
VLT® AutomationDrive FC 302
315–1200 kW
88
1 Terminais de rede elétrica – –
Ilustração 8.7 Dimensões do terminal para E1 com desconexão (380–480/500 V Modelos: P315; 525–690 V Modelos: P355–P560), vista
lateral
64 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 67

416 (16.4)
455 (17.9)
251 (9.9)
341 (13.4)
431 (17.0)
0.0
0.0
130BF599.10
1
Dimensões externas e do ter... Guia de Design
1 Terminais de rede elétrica – –
Ilustração 8.8 Dimensões do terminal para E1 com desconexão (380–480/500 V Modelos: P355–P400), vista frontal
8 8
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 65
Page 68

130BF600.10
0.0
51 (2.0)
226 (8.9)
266 (10.5)
441 (17.4)
0.0
28 (1.1)
167 (6.6)
195 (7.7)
371 (14.6)
1
Dimensões externas e do ter...
VLT® AutomationDrive FC 302
315–1200 kW
88
1 Terminais de rede elétrica – –
Ilustração 8.9 Dimensões do terminal para E1 com desconexão (380–480/500 V Modelos: P355–P400), vista lateral
66 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 69

130BF329.10
585 (23.0)
1547
(60.9)
538
(21.2)
498 (19.5)
Dimensões externas e do ter... Guia de Design
8.2 Dimensões externas e do terminal E2
8.2.1 Dimensões externas do E2
Ilustração 8.10 Dimensões da folga da porta, frontal e lateral do E2
8 8
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 67
Page 70

130BF611.10
2
1
35 (1.4)
350 (13.8)
203 (8.0)
99 (3.9)
130 (5.1)
62 (2.4)
104 (4.1)
35 (1.4)
10 (0.4)
0 (0.0)
0 (0.0)
40 (1.6)
78 (3.1)
0 (0.0)
26 (1.0)
26 (1.0)
130BF647.10
Dimensões externas e do ter...
VLT® AutomationDrive FC 302
315–1200 kW
88
1 Lado da rede elétrica 2 Lado do motor
Ilustração 8.11 Dimensões da placa da bucha para E1/E2
8.2.2 Dimensões do terminal do E2
Os cabos de energia são pesados e difíceis de dobrar. Para garantir uma fácil instalação dos cabos, considere o posicionamento ideal do conversor. Cada terminal comporta até 4 cabos com xadores de cabo ou encaixe de cabo padrão. O
ponto de aterramento é conectado ao um ponto de terminação relevante no conversor.
Ilustração 8.12 Dimensões detalhadas do terminal para E1/E2
68 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 71

130BF601.10
R/L1 91
9
S/L2 92
U/T1 96 V/T2 97
T/L3 93
W/T3 98
F ASTENER T OR QUE M8 9.6 N m (7 FT -LB) F ASTENER T OR QUE M8 9.6 N m (7 FT -LB)
186 (7.3)
17 (0.7)
585 (23.0)
518 (20.4)
405 (15.9)
293 (11.5)
181 (7.1)
68 (2.7)
0.0
0.0
147 (5.8)
583(22.9)
502 (19.8)
454 (17.9)
418 (16.4)
1
3
2
4
Dimensões externas e do ter... Guia de Design
8 8
1 Terminais de rede elétrica 3 Terminais do motor
2 Terminais do freio 4 Terminais de divisão da carga/regen
Ilustração 8.13 Dimensões do terminal para E2, vista frontal
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 69
Page 72

409 (16.1)
371 (14.6)
280 (11.0)
192 (7.6)
154 (6.1)
0.0
130BF602.10
1
2
3
Dimensões externas e do ter...
VLT® AutomationDrive FC 302
315–1200 kW
88
1 Terminais de rede elétrica 2 Terminais do freio
3 Terminais do motor – –
Ilustração 8.14 Dimensões do terminal para E2, vista lateral
70 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 73

256 (10.1)
0.0
245 (9.6)
0.0
334 (13.1)
423 (16.7)
130BF603.10
1
Dimensões externas e do ter... Guia de Design
1 Terminais de rede elétrica – –
Ilustração 8.15 Dimensões do terminal para E2 com desconexão (380–480/500 V Modelos: P315; 525–690 V Modelos: P355–P560),
vista frontal
8 8
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 71
Page 74

381 (15.0)
0.0
130BF604.10
1
Dimensões externas e do ter...
VLT® AutomationDrive FC 302
315–1200 kW
88
1 Terminais de rede elétrica – –
Ilustração 8.16 Dimensões do terminal para E2 com desconexão (380–480/500 V Modelos: P315; 525–690 V Modelos: P355–P560),
vista lateral
72 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 75

256 (10.1)
0.0
149 (5.8)
245 (9.6)
0.0
334 (13.1)
423 (16.7)
130BF605.10
1
Dimensões externas e do ter... Guia de Design
1 Terminais de rede elétrica – –
Ilustração 8.17 Dimensões do terminal para E2 com desconexão (380–480/500 V Modelos: P355–P400), vista frontal
8 8
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 73
Page 76

381 (15.0)
0.0
130BF606.10
1
Dimensões externas e do ter...
VLT® AutomationDrive FC 302
315–1200 kW
88
1 Terminais de rede elétrica – –
Ilustração 8.18 Dimensões do terminal para E2 com desconexão (380–480/500 V Modelos: P355–P400), vista lateral
74 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 77

130BF375.10
2280
(89.7)
2204
(86.8)
1400 (55.2)
606
(23.9)
578
(22.8)
776
(30.6)
Dimensões externas e do ter... Guia de Design
8.3 Dimensões externas e do terminal F1
8.3.1 Dimensões externas do F1
8 8
Ilustração 8.19 Dimensões da folga da porta, frontal e lateral do F1
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 75
Page 78

130BF612.10
216 (8.6)
668 (26.3)
38 (1.5)
593 (23.3)
460 (18.1)
535 (21.1)
282 (11.1)
36 (1.4)
1
533 (21.0)
596 (23.4)
1329 (52.3)
200 (7.9)
258 (10.2)
36 (1.4)
Dimensões externas e do ter...
VLT® AutomationDrive FC 302
315–1200 kW
88
1 Lado da rede elétrica 2 Lado do motor
Ilustração 8.20 Dimensões da placa da bucha para F1
76 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 79

130BF583.10
2
1
CH22
Dimensões externas e do ter... Guia de Design
8.3.2 Dimensões do terminal do F1
Os cabos de energia são pesados e difíceis de dobrar. Para garantir uma fácil instalação dos cabos, considere o posicionamento ideal do conversor. Cada terminal comporta até 4 cabos com xadores de cabo ou encaixe de cabo padrão. O
ponto de aterramento é conectado ao um ponto de terminação relevante no conversor.
8 8
1 Terminais de rede elétrica 2 Barra do ponto de aterramento
Ilustração 8.21 Dimensões do terminal para o gabinete do reticador F1-F4, vista frontal
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 77
Page 80

0.0
130BF584.10
70 (2.8)
194 (7.6)
343 (13.5)
38 (1.5)
0.0
90 (3.6)
137 (5.4)
189 (7.4)
432 (17.0)
380 (15.0)
436 (17.2)
2
3
1
Dimensões externas e do ter...
VLT® AutomationDrive FC 302
315–1200 kW
88
1 Terminais de rede elétrica 3 Terminais de divisão da carga (-)
2 Terminais de divisão da carga (+) – –
Ilustração 8.22 Dimensões do terminal para o gabinete do reticador F1-F2, vista lateral
78 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 81

130BF373.10
54 (2.1)
169 (6.7)
284 (11.2)
407 (16.0)
522 (20.6)
637 (25.1)
198 (7.8)
234 (9.2)
282 (11.1)
318 (12.5)
551 (21.7)
587 (23.1)
635 (25.0)
671 (26.4)
204.1 (8.0)
497. (19.6)
572 (22.5)
129.1 (5.1)
0.0
3
2
1
Dimensões externas e do ter... Guia de Design
1 Terminais do freio 3 Barra do ponto de aterramento
2 Terminais do motor – –
Ilustração 8.23 Dimensões do terminal para o gabinete do inversor F1-F3, vista frontal
8 8
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 79
Page 82

130BF374.10
287 (11.3)
253 (10.0)
0.0
0.0
339 (13.4)
308 (12.1)
466 (18.3)
44 (1.8)
244 (9.6)
180 (7.1)
287 (11.3)
0.0
339 (13.4)
466 (18.3)
1
2
3
Dimensões externas e do ter...
VLT® AutomationDrive FC 302
315–1200 kW
88
1 Terminais do freio 3 Barra do ponto de aterramento
2 Terminais do motor – –
Ilustração 8.24 Dimensões do terminal para o gabinete do inversor F1/F3, vista lateral
80 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 83

1739 (68.5)
0.0
805 (31.7)
0.0
765 (30.1)
710 (28.0)
1694 (66.7)
1654 (65.1)
130BF365.10
1
2
Dimensões externas e do ter... Guia de Design
1 DC – 2 DC +
Ilustração 8.25 Dimensões do terminal para os terminais de regeneração F1/F3, vista frontal
8 8
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 81
Page 84

130BF330.11
2280
(89.7)
2204
(86.8)
1800 (70.9)
606
(23.9)
579
(22.8)
578
(22.8)
624
(24.6)
Dimensões externas e do ter...
VLT® AutomationDrive FC 302
315–1200 kW
8.4 Dimensões externas e do terminal F2
8.4.1 Dimensões externas do F2
88
Ilustração 8.26 Dimensões da folga da porta, frontal e lateral do F2
82 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 85

533 (21.0)
594 (23.4)
1728 (68.0)
36 (1.4)
258 (10.2)
200 (7.9)
38 (1.5) 460 (18.1)
994 (39.1)
216 (8.5)
36 (1.4)
282 (11.1)
1
130BF613.10
535 (21.1)
656 (25.8)
Dimensões externas e do ter... Guia de Design
1 Lado da rede elétrica 2 Lado do motor
Ilustração 8.27 Dimensões da placa da bucha para F2
8 8
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 83
Page 86

130BF583.10
2
1
CH22
Dimensões externas e do ter...
VLT® AutomationDrive FC 302
315–1200 kW
8.4.2 Dimensões do terminal do F2
Os cabos de energia são pesados e difíceis de dobrar. Para garantir uma fácil instalação dos cabos, considere o posicionamento ideal do conversor. Cada terminal comporta até 4 cabos com xadores de cabo ou encaixe de cabo padrão. O
ponto de aterramento é conectado ao um ponto de terminação relevante no conversor.
88
1 Terminais de rede elétrica 2 Barra do ponto de aterramento
Ilustração 8.28 Dimensões do terminal para o gabinete do reticador F1-F4, vista frontal
84 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 87

0.0
130BF584.10
70 (2.8)
194 (7.6)
343 (13.5)
38 (1.5)
0.0
90 (3.6)
137 (5.4)
189 (7.4)
432 (17.0)
380 (15.0)
436 (17.2)
2
3
1
Dimensões externas e do ter... Guia de Design
1 Terminais de rede elétrica 3 Terminais de divisão da carga (-)
2 Terminais de divisão da carga (+) – –
Ilustração 8.29 Dimensões do terminal para o gabinete do reticador F1-F2, vista lateral
8 8
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 85
Page 88

210 (8.3)
0.0
66 (2.6)
181 (7.1)
296 (11.7)
431 (17.0)
546 (21.5)
661 (26.0)
796 (31.3)
911 (35.8)
1026 (40.4)
246 (9.7)
294 (11.6)
330 (13.0)
575 (22.6)
611 (24.0)
659 (25.9)
695 (27.4)
939 (37.0)
975 (38.4)
1023 (40.3)
1059 (41.7)
144 (5.7)
219 (8.6)
512 (20.2)
587 (23.1)
880 (34.7)
955 (37.6)
3
130BF363.10
1
2
Dimensões externas e do ter...
VLT® AutomationDrive FC 302
315–1200 kW
88
1 Terminais do freio 3 Barra do ponto de aterramento
2 Terminais do motor – –
Ilustração 8.30 Dimensões do terminal para o gabinete do inversor F2/F4, vista frontal
86 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 89

130BF364.10
287 (11.3)
339 (13.4)
253 (10.0)
0.0
287 (11.3)
0.0
339 (13.4)
466 (18.3)
466 (18.3)
308 (12.1)
180 (7.1)
0.0
1
2
3
Dimensões externas e do ter... Guia de Design
1 Terminais do freio 3 Barra do ponto de aterramento
2 Terminais do motor – –
Ilustração 8.31 Dimensões do terminal para o gabinete do inversor F2/F4, vista lateral
8 8
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 87
Page 90

130BF366.10
1
2
1203 (47.4)
0.0
1163 (45.8)
1098 (43.2)
1739 (68.4)
1694 (66.7)
1654 (65.1)
0.0
Dimensões externas e do ter...
VLT® AutomationDrive FC 302
315–1200 kW
88
1 DC – 2 DC +
Ilustração 8.32 Dimensões do terminal para os terminais de regeneração F2/F4, vista frontal
88 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 91

130BF376.10
2280
(89.7)
2204
(86.8)
2000 (78.8)
606
(23.9)
578
(22.8)
578
(22.8)
776
(30.6)
Dimensões externas e do ter... Guia de Design
8.5 Dimensões externas e do terminal F3
8.5.1 Dimensões externas do F3
8 8
Ilustração 8.33 Dimensões da folga da porta, frontal e lateral do F3
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 89
Page 92

1265 (49.8) 593 (23.3)
130BF614.10
38 (1.5)
200 (7.9)
259 (10.2)
1
635 (25.0)
535 (21.1)
533 (21.0)
597 (23.5)
1130 (44.5)
1193 (47.0)
1926 (75.8)
36 (1.4)
36 (1.4)
2x 460 (18.1)
2x 216 (8.5)
2x 281 (11.1)
Dimensões externas e do ter...
VLT® AutomationDrive FC 302
315–1200 kW
88
1 Lado da rede elétrica 2 Lado do motor
Ilustração 8.34 Dimensões da placa da bucha para F3
90 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 93

2
295 (11.6)
220 (18.6)
0.0
130BF586.10
154 (6.1)
150 (5.9)
75 (3.0)
439 (17.3)
364 (14.3)
344 (13.5)
1
Dimensões externas e do ter... Guia de Design
8.5.2 Dimensões do terminal do F3
Os cabos de energia são pesados e difíceis de dobrar. Para garantir uma fácil instalação dos cabos, considere o posicionamento ideal do conversor. Cada terminal comporta até 4 cabos com xadores de cabo ou encaixe de cabo padrão. O
ponto de aterramento é conectado ao um ponto de terminação relevante no conversor.
8 8
1 Terminais de rede elétrica 2 Barra do ponto de aterramento
Ilustração 8.35 Dimensões do terminal para o gabinete para opcionais F3-F4, vista frontal
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 91
Page 94

0.0
244 (9.6)
44 (1.8)
939 (37.0)
1031 (40.6)
0.0
135 (5.3)
0.0
130BF587.10
171 (6.7)
119 (4.7)
128 (5.0)
76 (3.0)
1
2
Dimensões externas e do ter...
VLT® AutomationDrive FC 302
315–1200 kW
88
1 Terminais de rede elétrica 2 Barra do ponto de aterramento
Ilustração 8.36 Dimensões do terminal para o gabinete para opcionais F3-F4, vista lateral
92 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 95

104 (4.1)
0.0
179 (7.0)
220 (8.7)
295 (11.6)
335 (13.2)
410 (16.1)
154 (6.1)
344 (13.5)
2
130BF588.10
1
Dimensões externas e do ter... Guia de Design
8 8
1 Terminais de rede elétrica 2 Barra do ponto de aterramento
Ilustração 8.37 Dimensões do terminal para o gabinete para opcionais F3-F4 com disjuntor/chave com cápsula moldada, vista frontal
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 93
Page 96

130BF589.10
0.0
35 (1.4)
87 (3.4)
122 (4.8)
174 (6.8)
0.0
135 (5.3)
437 (17.2)
0.0
533 (21.0)
44 (1.7)
244 (9.6)
1
2
Dimensões externas e do ter...
VLT® AutomationDrive FC 302
315–1200 kW
88
1 Terminais de rede elétrica 2 Barra do ponto de aterramento
Ilustração 8.38 Dimensões do terminal para o gabinete para opcionais F3-F4 com disjuntor/chave com cápsula moldada (380-480/500
V Modelos: P450; 525-690 V Modelos: P630–P710), vista lateral
94 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 97

130BF644.10
0.0
46 (1.8)
98 (3.9)
119 (4.7)
171 (6.7)
0.0
135 (5.3)
437 (17.2)
0.0
533 (21.0)
44 (1.7)
244 (9.6)
1
2
Dimensões externas e do ter... Guia de Design
1 Terminais de rede elétrica 2 Barra do ponto de aterramento
Ilustração 8.39 Dimensões do terminal para o gabinete para opcionais F3-F4 com disjuntor/chave com cápsula moldada (380-480/500
V Modelos: P500-P630; 525-690 V Modelos: P800), vista lateral
8 8
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 95
Page 98

130BF583.10
2
1
CH22
Dimensões externas e do ter...
VLT® AutomationDrive FC 302
315–1200 kW
88
1 Terminais de rede elétrica 2 Barra do ponto de aterramento
Ilustração 8.40 Dimensões do terminal para o gabinete do reticador F1-F4, vista frontal
96 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
Page 99

130BF585.10
0.0
70 (2.8)
194 (7.6)
343 (13.5)
38 (1.5)
0.0
90 (3.6)
137 (5.4)
189 (7.4)
81 (3.2)
29 (1.2)
436 (17.2)
3
2
1
Dimensões externas e do ter... Guia de Design
1 Terminais de rede elétrica 3 Terminais de divisão da carga (-)
2 Terminais de divisão da carga (+) – –
Ilustração 8.41 Dimensões do terminal para o gabinete do reticador F3-F4, vista lateral
8 8
MG34S328 Danfoss A/S © 11/2017 Todos os direitos reservados. 97
Page 100

130BF373.10
54 (2.1)
169 (6.7)
284 (11.2)
407 (16.0)
522 (20.6)
637 (25.1)
198 (7.8)
234 (9.2)
282 (11.1)
318 (12.5)
551 (21.7)
587 (23.1)
635 (25.0)
671 (26.4)
204.1 (8.0)
497. (19.6)
572 (22.5)
129.1 (5.1)
0.0
3
2
1
Dimensões externas e do ter...
VLT® AutomationDrive FC 302
315–1200 kW
88
1 Terminais do freio 3 Barra do ponto de aterramento
2 Terminais do motor – –
Ilustração 8.42 Dimensões do terminal para o gabinete do inversor F1-F3, vista frontal
98 Danfoss A/S © 11/2017 Todos os direitos reservados. MG34S328
 Loading...
Loading...