


MAKING MODERN LIVING POSSIBLE
Guía de diseño de
VLT® AutomationDrive FC 301/302
0,25-75 kW
www.danfoss.com/drives

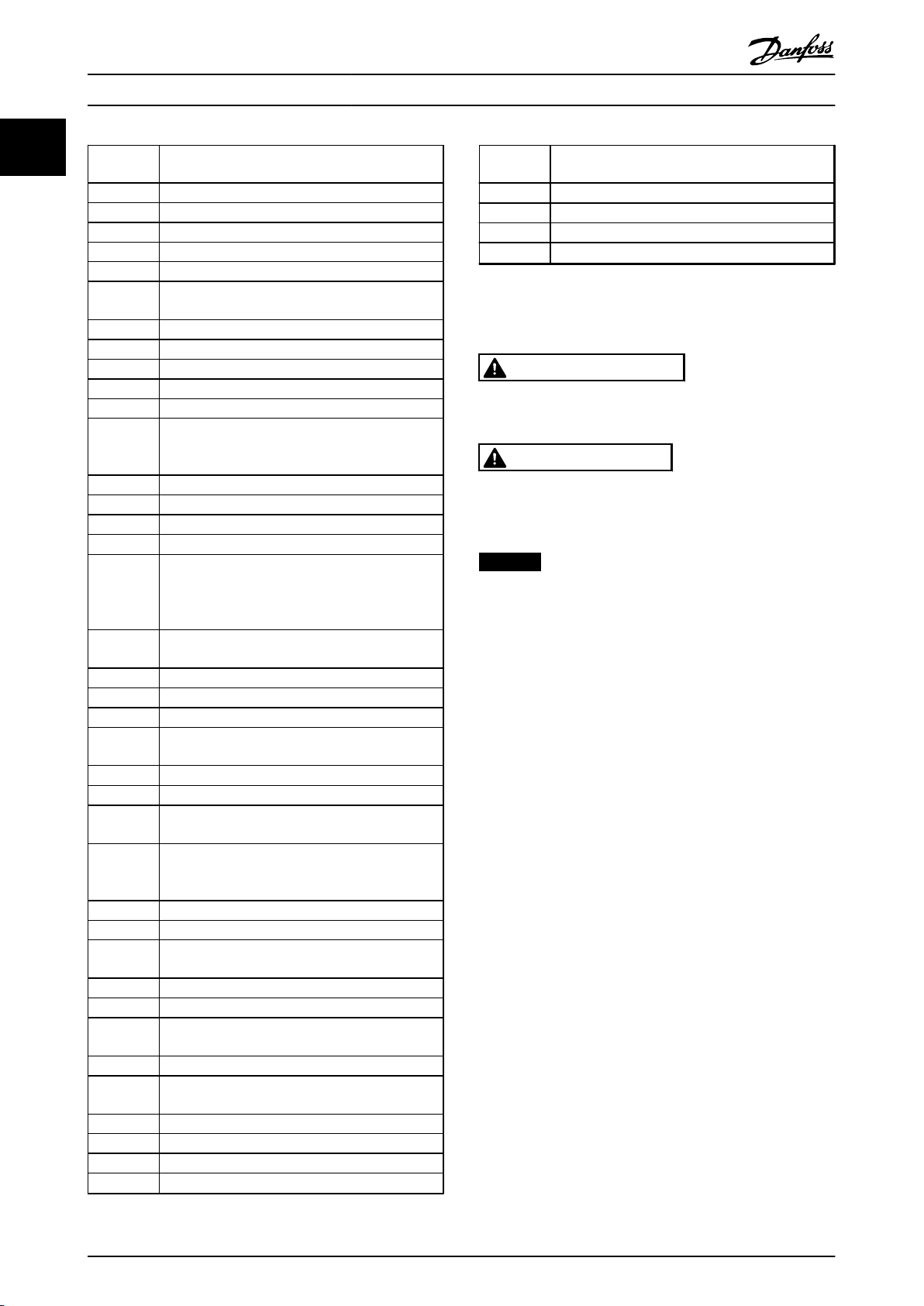
Índice Guía de diseño de
Índice
1 Introducción
1.1 Propósito de la Guía de diseño
1.2 Recursos adicionales
1.3 Abreviaturas, símbolos y convenciones
1.4 Definiciones
1.5 Versión de documento y software
1.6 Cumplimiento de las normas
1.6.1 Marca CE 11
1.6.1.1 Directiva de baja tensión 12
1.6.1.2 Directiva EMC 12
1.6.1.3 Directiva de máquinas 12
1.6.2 Conformidad con UL 12
1.6.3 Conformidad con C-Tick 12
1.6.4 Conformidad marina 12
1.7 Instrucciones de eliminación
1.8 Seguridad
2 Seguridad
9
9
9
9
10
11
11
13
13
14
2.1 Símbolos de seguridad
2.2 Personal cualificado
2.3 Medidas de seguridad
3 Principios básicos de funcionamiento
3.1 General
3.2 Descripción del funcionamiento
3.3 Secuencia de funcionamiento
3.3.1 Sección del rectificador 16
3.3.2 Sección intermedia 16
3.3.3 Sección del inversor 16
3.3.4 Opción de freno 16
3.3.5 Carga compartida 17
3.4 Interfaz de control
3.5 Esquema del cableado
3.6 Controladores
3.6.1 Principio de control 20
3.6.2 FC 301 frente a FC 302 Principio de control 21
3.6.3 Estructura de control en VVC
plus
14
14
14
16
16
16
16
17
18
20
22
3.6.4 Estructura de control de flujo sin realimentación (solo FC 302) 23
3.6.5 Estructura de control en flujo con realimentación del motor (solo FC 302) 24
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 1
Índice Guía de diseño de
3.6.6 PID 25
3.6.6.1 Control de PID de velocidad 25
3.6.6.2 Ajuste del control de PID de velocidad 28
3.6.6.3 Control de PID de procesos 28
3.6.6.4 Control de PID avanzado 30
3.6.7 Control de intensidad interno en modo VVC
3.6.8 Control local (Hand On) y remoto (Auto On) 30
plus
30
3.7 Manejo de referencias
3.7.1 Referencias 32
3.7.2 Límites referencia 34
3.7.3 Escalado de referencias internas y referencias de bus 35
3.7.4 Escalado de referencias de impulsos y analógicas y realimentación 35
3.7.5 Banda muerta alrededor de cero 36
4 Funciones del producto
4.1 Funciones de funcionamiento automatizadas
4.1.1 protección ante cortocircuitos 40
4.1.2 Protección contra sobretensión 40
4.1.3 Detección de que falta una fase del motor 41
4.1.4 Detección de desequilibrio de fase de red 41
4.1.5 Conmutación en la salida 41
4.1.6 Protección contra sobrecargas 41
4.1.7 Protección rotor bloqueado 41
4.1.8 Reducción de potencia automática 41
4.1.9 Optimización automática de energía 42
32
40
40
4.1.10 Modulación automática de frecuencia de conmutación 42
4.1.11 Reducción de potencia automática para una frecuencia portadora alta 42
4.1.12 Rendimiento de fluctuación de potencia 42
4.1.13 Amortiguación de resonancia 42
4.1.14 Ventiladores controlados por temperatura 42
4.1.15 Conformidad con EMC 43
4.1.16 Aislamiento galvánico de los terminales de control 43
4.2 Funciones de aplicación personalizadas
43
4.2.1 Adaptación automática del motor 43
4.2.2 Protección térmica del motor 43
4.2.3 Corte de red 44
4.2.4 Controlador PID integrado 44
4.2.5 Rearranque automático 45
4.2.6 Función de Motor en giro 45
4.2.7 Par completo a velocidad reducida 45
4.2.8 Bypass de frecuencia 45
2 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05
Índice Guía de diseño de
4.2.9 Precalentador del motor 45
4.2.10 4 ajustes programables 45
4.2.11 Frenado dinámico 45
4.2.12 Control de freno mecánico de lazo abierto 46
4.2.13 Control de freno mecánico de lazo cerrado / freno mecánico de elevación 47
4.2.14 Smart Logic Control (SLC) 48
4.2.15 Desconexión segura de par 49
4.3 VLT® FlexConcept® de Danfoss
5 Integración del sistema
5.1 Condiciones ambientales de funcionamiento
5.1.1 Humedad 50
5.1.2 Temperatura 50
5.1.3 Temperatura y refrigeración 50
5.1.4 Reducción de potencia manual 51
5.1.4.1 Reducción de potencia en función del funcionamiento a velocidad lenta 51
5.1.4.2 Reducción de potencia debido a la baja presión atmosférica 51
5.1.5 Ruido acústico 52
5.1.6 Vibración y golpe 52
5.1.7 Entornos agresivos 52
5.1.7.1 Gases 52
5.1.7.2 Exposición al polvo 53
5.1.7.3 Entornos potencialmente explosivos 53
5.1.8 Mantenimiento 54
5.1.9 Almacenamiento 54
49
50
50
5.2 Aspectos generales de la EMC
5.2.1 Resultados de las pruebas de EMC 56
5.2.2 Requisitos en materia de emisiones 57
5.2.3 Requisitos de inmunidad 57
5.2.4 Aislamiento del motor 58
5.2.5 Corrientes en los cojinetes del motor 59
5.3 Interferencia de la red de alimentación / armónicos
5.3.1 El efecto de los armónicos en un sistema de distribución de potencia 60
5.3.2 Normas y requisitos de limitación armónica 60
5.3.3 Mitigación de armónicos 61
5.3.4 Cálculo de armónicos 61
5.4 Aislamiento galvánico (PELV)
5.4.1 PELV: tensión de protección muy baja 61
5.5 Funciones de freno
5.5.1 Selección de resistencia de freno 62
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 3
54
59
61
62
Índice Guía de diseño de
6 Especificaciones de los productos
6.1 Datos eléctricos
6.1.1 Alimentación de red 200-240 V 65
6.1.2 Alimentación de red 380-500 V 68
6.1.3 Alimentación de red 525-600 V (solo FC 302) 71
6.1.4 Alimentación de red 525-690 V (solo FC 302) 74
6.2 Especificaciones generales
6.2.1 Alimentación de red 77
6.2.2 Salida del motor y datos del motor 77
6.2.3 Condiciones ambientales 78
6.2.4 Especificaciones del cable 78
6.2.5 Entrada / Salida de control y datos de control 78
6.2.6 Reducción de potencia en función de la temperatura ambiente 82
6.2.6.1 Reducción de potencia en función de la temperatura ambiente, tipo de protección A 82
6.2.6.2 Reducción de potencia en función de la temperatura ambiente, tipo de protección B 82
6.2.6.3 Reducción de potencia en función de la temperatura ambiente, tipo de protección C 85
65
65
77
6.2.7 Valores medidos para la prueba dU/dt 88
6.2.8 Rendimiento 91
6.2.9 Ruido acústico 91
7 Procedimiento para realizar pedidos
7.1 Configurador de convertidores de frecuencia
7.1.1 Código descriptivo 92
7.1.2 Idioma 94
7.2 Números de pedido
7.2.1 Opciones y accesorios 95
7.2.2 Repuestos 97
7.2.3 Bolsa de accesorios 97
7.2.4 VLT AutomationDrive FC 301 98
7.2.5 Resistencias de freno para FC 302 101
7.2.6 Otras resistencias de freno de conjunto plano 107
7.2.7 Filtros armónicos 108
7.2.8 Filtros sinusoidales 110
7.2.9 Filtros dU/dt 112
92
92
95
8 Instalación mecánica
8.1 Seguridad
8.2 Dimensiones mecánicas
4 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05
114
114
114
Índice Guía de diseño de
8.2.1 Montaje mecánico 117
8.2.1.1 Separación 117
8.2.1.2 Montaje en pared 117
9 Instalación eléctrica
9.1 Seguridad
9.2 Cables
9.2.1 Par de apriete 120
9.2.2 Orificios de entrada 121
9.2.3 Apriete de la cubierta tras realizar las conexiones 125
9.3 Conexión de red
9.3.1 Fusibles y magnetotérmicos 129
9.3.1.1 Fusibles 129
9.3.1.2 Recomendaciones 129
9.3.1.3 Cumplimiento de la normativa CE 130
9.3.1.4 Conformidad con UL 133
9.4 Conexión del motor
9.5 Protección de corriente de fuga a tierra
9.6 Conexiones adicionales
9.6.1 Relé 142
9.6.2 Desconectores y contactores 143
119
119
120
125
138
141
142
9.6.3 Carga compartida 144
9.6.4 Resistencia de freno 144
9.6.5 Software para PC 144
9.6.5.1 MCT 10 145
9.6.5.2 MCT 31 145
9.6.5.3 Software de cálculo de armónicos (HCS) 145
9.7 Información adicional del motor
9.7.1 Cable de motor 146
9.7.2 Conexión de motores múltiples 146
9.8 Seguridad
9.8.1 Prueba de alta tensión 149
9.8.2 Conexión a tierra EMC 149
9.8.3 Instalación conforme a ADN 149
10 Ejemplos de aplicaciones
10.1 Aplicaciones empleadas comúnmente
10.1.1 Sistema de convertidor de lazo cerrado 155
10.1.2 Programación de límite de par y parada 155
146
149
150
150
10.1.3 Programación del control de velocidad 156
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 5

Índice Guía de diseño de
11 Opciones y accesorios
11.1 Opciones de comunicación
11.2 E/S, opciones de realimentación y seguridad
11.2.1 VLT® General Purpose I/O Module MCB 101 158
11.2.2 Opción del encoder VLT® MCB 102 160
11.2.3 Opción de resolver VLT® MCB 103 162
11.2.4 VLT® Relay Card MCB 105 164
11.2.5 Opción VLT® Safe PLC Interface MCB 108 166
11.2.6 VLT® PTC Thermistor Card MCB 112 167
11.2.7 VLT® Extended Relay Card MCB 113 169
11.2.8 Opción VLT® Sensor Input MCB 114 170
11.2.9 VLT® Safe Option MCB 15x 172
11.2.10 Adaptador VLT® de opciones C MCF 106 175
11.3 Opciones de control de movimiento
11.4 Accesorios
11.4.1 Resistencias de freno 177
11.4.2 Filtros sinusoidales 177
158
158
158
175
177
11.4.3 Filtros dU/dt 178
11.4.4 Filtros de modo común 178
11.4.5 Filtros armónicos 178
11.4.6 Kit de protección IP21 / Tipo 1 178
11.4.7 Kit de montaje remoto para LCP 180
11.4.8 Soporte de montaje para tipos de protección A5, B1, B2, C1 y C2 181
12 Instalación y ajuste RS-485
12.1 Instalación y configuración de
12.1.1 Descripción general 183
12.2 Conexión de red
12.3 Terminación de bus
12.4 Instalación y ajuste RS-485
12.5 Aspectos generales del protocolo FC
12.6 Configuración de red
12.7 Estructura de formato de mensajes del protocolo FC
12.7.1 Contenido de un carácter (byte) 185
12.7.2 Estructura de telegramas 185
183
183
184
184
184
185
185
185
12.7.3 Longitud del telegrama (LGE) 186
12.7.4 Dirección del convertidor de frecuencia (ADR) 186
12.7.5 Byte de control de datos (BCC) 186
12.7.6 El campo de datos 187
6 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05
Índice Guía de diseño de
12.7.7 El campo PKE 188
12.7.8 Número de parámetro (PNU) 188
12.7.9 Índice (IND) 188
12.7.10 Valor de parámetro (PWE) 188
12.7.11 Tipos de datos admitidos 189
12.7.12 Conversión 189
12.7.13 Códigos de proceso (PCD) 189
12.8 Ejemplos
12.8.1 Escritura del valor de un parámetro. 190
12.8.2 Lectura del valor de un parámetro 190
12.9 Visión general de Modbus RTU
12.9.1 Requisitos previos 190
12.9.2 Conocimientos previos necesarios 190
12.9.3 Visión general de Modbus RTU 190
12.9.4 Convertidor de frecuencia con Modbus RTU 191
12.10 Configuración de red
12.11 Estructura de formato de mensaje de Modbus RTU
12.11.1 Convertidor de frecuencia con Modbus RTU 191
12.11.2 Estructura de mensaje Modbus RTU 192
12.11.3 Campo de arranque / parada 192
12.11.4 Campo de dirección 192
12.11.5 Campo de función 192
12.11.6 Campo de datos 192
12.11.7 Campo de comprobación CRC 193
190
190
191
191
12.11.8 Direccionamiento de registros de bobinas 193
12.11.9 Cómo controlar el convertidor de frecuencia 194
12.11.10 Códigos de función admitidos por Modbus RTU 194
12.11.11 Códigos de excepción Modbus 195
12.12 Cómo acceder a los parámetros
12.12.1 Gestión de parámetros 195
12.12.2 Almacenamiento de datos 195
12.12.3 IND (índice) 195
12.12.4 Bloques de texto 195
12.12.5 Factor de conversión 196
12.12.6 Valores de parámetros 196
12.13 (Danfoss) Perfil de control FC
12.13.1 Código de control según el perfil FC (8-10 Trama control = perfil FC) 196
12.13.2 Código de estado según el perfil FC (STW) (8-10 Trama control = perfil FC) 198
12.13.3 Valor de referencia de velocidad de bus 199
12.13.4 Código de control de acuerdo con el perfil de PROFIdrive (CTW) 200
195
196
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 7
Índice Guía de diseño de
12.13.5 Código de estado según el perfil de PROFIdrive (STW) 201
Índice
203
8 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05
Introducción Guía de diseño de
1 Introducción
1
1
1.1 Propósito de la Guía de diseño
La Guía de diseño proporciona la información necesaria
para integrar el convertidor de frecuencia en diversas
aplicaciones.
VLT® es una marca registrada.
1.2 Recursos adicionales
Tiene a su disposición otros recursos para comprender la
programación, el funcionamiento y las directivas de
cumplimiento del convertidor de frecuencia.
Este manual de funcionamiento ofrece información
•
detallada acerca de la instalación y el arranque
del convertidor de frecuencia.
La Guía de programación proporciona información
•
detallada sobre cómo trabajar con parámetros y
muchos ejemplos de aplicación.
El Manual de funcionamiento de la desconexión
•
segura de par VLT
convertidores de frecuencia de (Danfoss) en
aplicaciones de seguridad funcional.
En (Danfoss) podrá obtener publicaciones y
•
manuales complementarios. Consulte
danfoss.com/Product/Literature/Technical
+Documentation.htm para ver un listado.
El equipo opcional disponible podría cambiar
•
alguna información descrita en estas publicaciones. Asegúrese de leer las instrucciones
suministradas con las opciones para los requisitos
específicos.
Póngase en contacto con el proveedor de (Danfoss) o
visite www.danfoss.com para obtener información más
detallada.
®
describe cómo utilizar los
1.3
Abreviaturas, símbolos y convenciones
Convenciones
Las listas numeradas indican procedimientos.
Las listas de viñetas indican otra información y descripción
de ilustraciones.
El texto en cursiva indica
referencia cruzada
•
enlace
•
nota a pie de página
•
nombre del parámetro, nombre del grupo de
•
parámetros, opción del parámetro
60° AVM Modulación asíncrona de vectores de 60º
A Amperio
CA Corriente alterna
AD Descarga por el aire
AI Entrada analógica
AMA Adaptación automática del motor
AWG Calibre de cables estadounidense
°C
CD Descarga constante
CM Modo común
CT Par constante
CC Corriente continua
DI Entrada digital
DM Modo diferencial
D-TYPE Depende del convertidor de frecuencia
EMC Compatibilidad electromagnética
ETR Relé termoelectrónico
f
JOG
f
M
f
MAX
f
MIN
f
M,N
FC Convertidor de frecuencia
g Gramo
Hiperface®Hiperface® es una marca registrada de Stegmann
CV Caballos de vapor
HTL Impulsos del encoder HTL (10-30 V), (High-voltage
Hz Hercio
I
INV
I
LÍM
I
M,N
I
VLT,MÁX.
Grados Celsius
La frecuencia del motor cuando se activa la función
de velocidad fija
Frecuencia del motor
La frecuencia de salida máxima que el convertidor
de frecuencia aplica a su salida.
La frecuencia mínima del motor del convertidor de
frecuencia.
Frecuencia nominal del motor
Transistor Logic)
Intensidad nominal de salida del convertidor
Límite de intensidad
Corriente nominal del motor
Intensidad máxima de salida
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 9
Introducción
Guía de diseño de
1
I
VLT,N
kHz Kilohercio
LCP Panel de control local
lsb Bit menos significativo
m Metro
mA Miliamperio
MCM Mille Circular Mil, unidad norteamericana de
MCT Herramienta de control de movimiento
mH Milihenrio (inductancia)
min Minuto
ms Milisegundo
msb Bit más significativo
η
VLT
nF Nanofaradio
NLCP Panel de control local numérico
Nm Newton metro
n
s
Parámetros
en
línea / fuera
de línea
P
br,cont.
PCB Placa de circuito impreso
PCD Datos de proceso
PELV Tensión de protección muy baja
P
m
P
M,N
Motor PM Motor de magnetización permanente
PID de
proceso
R
br,nom
RCD Dispositivo de corriente diferencial
Regen Terminales regenerativos
R
min
RMS Raíz cuadrática media
r/min Revoluciones por minuto
R
rec
s Segundo
SFAVM Modulación asíncrona de vectores orientada al flujo
STW Código de estado
SMPS Fuente de alimentación del modo de conmutación
THD Distorsión armónica total
T
LÍM
Corriente nominal de salida suministrada por el
convertidor de frecuencia
sección de cables
Rendimiento del convertidor de frecuencia definido
como la relación entre la potencia de salida y la
potencia de entrada
Velocidad del motor síncrono
Los cambios realizados en los parámetros en línea
se activan inmediatamente después de cambiar el
valor de dato.
Potencia nominal de la resistencia de freno
(potencia media durante el frenado continuo)
Potencia nominal de salida del convertidor de
frecuencia como HO
Potencia nominal del motor
El controlador PID mantiene la velocidad, presión,
temperatura, etc., deseados
El valor de resistencia nominal que garantiza una
potencia de frenado en el eje del motor de
150/160 % durante 1 minuto
Valor de resistencia de freno mínima permitida por
el convertidor de frecuencia
Valor de la resistencia y resistencia de la resistencia
de freno
del estátor
Límite de par
TTL Impulsos del encoder TTL (5 V) (Transistor
Transistor Logic)
U
M,N
V Voltios
VT Par variable
plus
VVC
Tabla 1.1 Abreviaturas
Tensión nominal del motor
Control vectorial de la tensión
En este documento se utilizan los siguientes símbolos:
ADVERTENCIA
Indica situaciones potencialmente peligrosas que pueden
producir lesiones graves o incluso la muerte.
PRECAUCIÓN
Indica una situación potencialmente peligrosa que puede
producir lesiones leves o moderadas. También puede
utilizarse para alertar contra prácticas inseguras.
AVISO!
Indica información importante, entre la que se incluyen
situaciones que pueden producir daños en el equipo u
otros bienes.
1.4 Definiciones
Inercia
El eje del motor se encuentra en modo libre. Sin par en el
motor.
Resistencia de freno
La resistencia de freno es un módulo capaz de absorber la
potencia de frenado generada durante el frenado regenerativo. Esta potencia de frenado regenerativo aumenta la
tensión del circuito intermedio y un chopper de frenado
garantiza que la potencia se transmita a la resistencia de
freno.
Características de par constante (CT)
Características de par constante utilizadas para todas las
aplicaciones, como cintas transportadoras, bombas de
desplazamiento y grúas.
Inicialización
Si se lleva a cabo una inicialización (14-22 Modo funcionamiento), el convertidor de frecuencia vuelve a los ajustes
predeterminados.
10 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05
Introducción
Ciclo de trabajo intermitente
Una clasificación de trabajo intermitente es una secuencia
de ciclos de trabajo. Cada ciclo está formado por un
periodo en carga y un periodo sin carga. El funcionamiento puede ser de trabajo periódico o de trabajo no
periódico.
Ajuste
Guardar ajustes de parámetros en cuatro configuraciones
distintas. Cambiar entre estas cuatro configuraciones de
parámetros y editar una mientras otra está activa.
Compensación de deslizamiento
El convertidor de frecuencia compensa el deslizamiento del
motor añadiendo un suplemento a la frecuencia que sigue
a la carga medida del motor, manteniendo la velocidad del
mismo casi constante.
Smart Logic Control (SLC)
El SLC es una secuencia de acciones definidas por el
usuario ejecutadas cuando los eventos asociados definidos
por el usuario son evaluados como verdaderos por el
Controlador Smart Logic. (Grupo de parámetros 13-**
Lógica inteligente.
Bus estándar FC
Incluye el bus RS-485 bus con el protocolo FC o el
protocolo MC. Consulte 8-30 Protocolo.
Termistor
Resistencia que depende de la temperatura y que se
coloca en el punto donde ha de controlarse la temperatura
(convertidor de frecuencia o motor).
Desconexión
Estado al que se pasa en situaciones de fallo; por ejemplo,
si el convertidor de frecuencia se sobrecalienta, o cuando
está protegiendo al motor, al proceso o al mecanismo. Se
impide el rearranque hasta que desaparece la causa del
fallo y se anula el estado de desconexión mediante la
activación del reinicio o, en algunos casos, mediante la
programación de un reinicio automático. No debe utilizarse
la desconexión para la seguridad personal.
Bloqueo por alarma
Estado al que se pasa en situaciones de fallo cuando el
convertidor de frecuencia está protegiéndose a sí mismo y
requiere una intervención física; por ejemplo, si el
convertidor de frecuencia se cortocircuita en la salida. Un
bloqueo por alarma solo puede cancelarse cortando la
alimentación, eliminando la causa del fallo y volviendo a
conectar el convertidor de frecuencia. Se impide el
rearranque hasta que se cancela el estado de desconexión
mediante la activación del reinicio o, en algunos casos,
mediante la programación del reinicio automático. No
debe utilizarse la desconexión para la seguridad personal.
Características de VT
Características de par variable utilizadas en bombas y
ventiladores.
Guía de diseño de
Factor de potencia
El factor de potencia real (lambda) tiene en cuenta todos
los armónicos y siempre es inferior al factor de potencia
(cosphi), que solo tiene en cuenta los primeros armónicos
de la corriente y la tensión.
P
kW
Uλ x Iλ x
cos
cosϕ=
Cosphi también se conoce como el factor de potencia de
desplazamiento.
Tanto lambda como cosphi se indican para los convertidores de frecuencia Danfoss VLT® en el
capétulo 6.2.1 Alimentación de red.
El factor de potencia indica hasta qué punto el convertidor
de frecuencia impone una carga a la alimentación de red.
Cuanto menor es el factor de potencia, mayor es I
el mismo rendimiento en kW.
Además, un factor de potencia elevado indica que las
distintas corrientes armónicas son bajas.
Todos los convertidores de frecuencia de (Danfoss) tienen
bobinas de CC integradas en el enlace de CC para producir
un factor de potencia alto y para reducir el THD en la
alimentación de red.
1.5
Este manual se revisa y se actualiza de forma periódica. Le
agradecemos cualquier sugerencia de mejoras. La Tabla 1.2
muestra las versiones de documento y software.
Edición Comentarios Versión de software
MG33BFxx Sustituye a MG33BExx 6.72
Tabla 1.2 Versión de documento y software
1.6
Los convertidores de frecuencia están diseñados conforme
a las directivas descritas en este apartado.
1.6.1
La marca CE (Comunidad Europea) indica que el fabricante
del producto cumple todas las directivas aplicables de la
UE. Las tres directivas de la UE aplicables al diseño y
fabricación de convertidores de frecuencia son la directiva
de tensión baja, la directiva EMC y la directiva de
máquinas (para unidades con función de seguridad
integrada).
El propósito de la marca CE es el de eliminar las barreras
técnicas para el comercio libre entre los países de la CE y
la EFTA, dentro de la ECU. La marca CE no regula la
calidad del producto. Las especificaciones técnicas no
pueden deducirse de la marca CE.
=
P
kVA
Versión de documento y software
Cumplimiento de las normas
Marca CE
Uλ x Iλ
ϕ
para
RMS
1
1
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 11
Introducción
Guía de diseño de
1
1.6.1.1 Directiva de baja tensión
Los convertidores de frecuencia están clasificados como
componentes electrónicos y deben contar con la marca CE
según la directiva de baja tensión. Esta directiva se aplica a
todos los equipos eléctricos en el rango de tensión de
50-1000 V CA y 75-1600 V CC.
La directiva exige que el diseño del equipo debe asegurar
que no se pongan en peligro la seguridad ni la salud de
las personas y del ganado y que el valor del material se
conserve hasta que el equipo esté instalado correctamente,
mantenido y se use conforme a lo previsto. Las marcas CE
de (Danfoss) cumplen con la directiva de baja tensión y
ofrecen una declaración de conformidad si así se solicita.
1.6.1.2
La compatibilidad electromagnética (EMC) significa que las
interferencias electromagnéticas entre aparatos no afectan
a su rendimiento. Los requisitos de protección básicos de
la directiva EMC 2004/108/CE indican que los dispositivos
que generan interferencias electromagnéticas (EMI) o los
dispositivos cuyo funcionamiento se pueda ver afectado
por las EMI deben diseñarse para limitar la generación de
interferencias electromagnéticas y deben tener un grado
adecuado de inmunidad a las EMI cuando se instalan
correctamente, se mantienen y se usan conforme a lo
previsto.
Un convertidor de frecuencia se puede utilizar como
dispositivo independiente o como parte de una instalación
más compleja. Los dispositivos que se utilizan independientemente o como parte de un sistema deben disponer
de la marca CE. Los sistemas no deben tener la marca CE
pero deben cumplir con los requisitos de protección
básicos de la directiva EMC.
Directiva EMC
La directiva de máquinas 2006/42/CE cubre una máquina
que consta de un conjunto de componentes o dispositivos
interconectados de los cuales al menos uno es capaz de
realizar un movimiento mecánico. La directiva exige que el
diseño del equipo debe asegurar que no se pongan en
peligro la seguridad ni la salud de las personas y del
ganado y que el valor del material se conserve hasta que
el equipo esté instalado correctamente, mantenido y se
use conforme a lo previsto.
Cuando los convertidores de frecuencia se utilizan en
máquinas con al menos una parte móvil, el fabricante de
la máquina debe proporcionar una declaración que
exponga que cumple con todas las normas y medidas de
seguridad relevantes. Las marcas CE de (Danfoss) cumplen
con la directiva de máquinas para convertidores de
frecuencia con una función de seguridad integrada y
ofrecen una declaración de conformidad si así se solicita.
Conformidad con UL
1.6.2
Homologación de UL
Ilustración 1.1 UL
AVISO!
Los convertidores de frecuencia con tipo de protección
T7 (525-690 V) no disponen de certificado para UL.
El convertidor de frecuencia cumple los requisitos de la
norma UL508C de retención de memoria térmica. Si desea
obtener más información, consulte el apartado Protección
térmica del motor en la Guía de diseño.
1.6.1.3
Los convertidores de frecuencia se clasifican como
componentes electrónicos sujetos a la directiva de baja
tensión, aunque los convertidores de frecuencia con una
función de seguridad integrada deben cumplir con la
directiva de máquinas 2006/42/CE. Los convertidores de
frecuencia sin función de seguridad no se incluyen en la
directiva de máquinas. Si un convertidor de frecuencia está
integrado en un sistema de maquinaria, (Danfoss)
proporciona información sobre los aspectos de seguridad
relativos al convertidor.
12 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05
Directiva de máquinas
Conformidad con C-Tick
1.6.3
1.6.4 Conformidad marina
Para conocer la conformidad con el acuerdo europeo
relativo al transporte internacional de mercancías
peligrosas por vías navegables (ADN), consulte
capétulo 9.8.3 Instalación conforme a ADN.
Introducción Guía de diseño de
1.7 Instrucciones de eliminación
No deseche equipos que contienen
componentes eléctricos junto con los
desperdicios domésticos.
Deben recogerse de forma selectiva según
la legislación local vigente.
Tabla 1.3 Instrucciones de eliminación
1.8 Seguridad
Los convertidores de frecuencia contienen componentes
de alta tensión y pueden ser mortales si se utilizan
incorrectamente. Solo técnicos formados deben instalar y
hacer funcionar el equipo. No se debe intentar realizar
actividades de reparación sin desconectar primero la
alimentación del convertidor de frecuencia y esperar el
tiempo necesario para que la energía eléctrica almacenada
se disipe.
Consulte el Manual de funcionamiento, suministrado con la
unidad y disponible en línea para:
tiempo de descarga e
•
instrucciones de seguridad detalladas y
•
advertencias.
Es obligatorio seguir estrictamente las precauciones y
avisos para que el convertidor de frecuencia tenga un
funcionamiento seguro.
1
1
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 13
Seguridad Guía de diseño de
2 Seguridad
22
2.1 Símbolos de seguridad
2.3
Medidas de seguridad
En este documento se utilizan los siguientes símbolos:
ADVERTENCIA
Indica situaciones potencialmente peligrosas que pueden
producir lesiones graves o incluso la muerte.
PRECAUCIÓN
Indica una situación potencialmente peligrosa que puede
producir lesiones leves o moderadas. También puede
utilizarse para alertar contra prácticas inseguras.
AVISO!
Indica información importante, entre la que se incluyen
situaciones que pueden producir daños en el equipo u
otros bienes.
2.2 Personal cualificado
Se precisan un transporte, un almacenamiento, una
instalación, un funcionamiento y un mantenimiento
correctos y fiables para que el convertidor de frecuencia
funcione de un modo seguro y sin ningún tipo de
problemas. Este equipo únicamente puede ser manejado o
instalado por personal cualificado.
El personal cualificado es aquel personal formado que está
autorizado a instalar, poner en marcha y efectuar el
mantenimiento de equipos, sistemas y circuitos de acuerdo
con la legislación y la regulación vigente. Además, el
personal debe estar familiarizado con las instrucciones y
medidas de seguridad descritas en este documento.
ADVERTENCIA
ALTA TENSIÓN
Los convertidores de frecuencia contienen tensiones
altas cuando están conectados a una potencia de
entrada de red de CA. En caso de que la instalación, el
arranque y el mantenimiento no fueran efectuados por
personal cualificado, podrían causarse lesiones graves o
incluso la muerte.
La instalación, puesta en marcha y manteni-
•
miento solo deben realizarlos personal
cualificado.
ADVERTENCIA
ARRANQUE ACCIDENTAL
Cuando el convertidor de frecuencia se conecta a la red
de CA, el motor podría arrancar en cualquier momento,
ocasionando el riesgo de sufrir lesiones graves o incluso
la muerte, así como daños al equipo u otros objetos. El
motor puede arrancarse mediante un interruptor
externo, un comando de bus serie, una señal de
referencia de entrada desde el LCP o por la eliminación
de una condición de fallo.
1. Desconecte el convertidor de frecuencia de la
red cuando así lo dicten las consignas de
seguridad personal para evitar arranques
accidentales del motor.
2. Pulse [Off] en el LCP antes de programar los
parámetros.
3. El convertidor de frecuencia, el motor y los
equipos accionados deben estar listos para
funcionar cuando se conecte el convertidor de
frecuencia a la red de CA.
14 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05
Seguridad Guía de diseño de
ADVERTENCIA
TIEMPO DE DESCARGA
El convertidor de frecuencia contiene condensadores de
enlace de CC, que pueden seguir cargados incluso si el
convertidor de frecuencia está apagado. Si después de
desconectar la alimentación no espera el tiempo especificado antes de realizar cualquier reparación o tarea de
mantenimiento, se pueden producir lesiones graves o
incluso la muerte.
1. Pare el motor.
2. Desconecte la red de CA, los motores de
magnetización permanente y las fuentes de
alimentación de enlace de CC remotas, entre las
que se incluyen baterías de emergencia, SAI y
conexiones de enlace de CC a otros convertidores de frecuencia.
3. Espere a que los condensadores se descarguen
por completo antes de efectuar actividades de
mantenimiento o reparación. La duración del
tiempo de espera se especifica en la Tabla 2.1.
Tensión [V] Tiempo de espera mínimo (minutos)
4 7 15
200-240 0,25-3,7 kW 5,5-37 kW
380-500 0,25-7,5 kW 11-75 kW
525-600 0,75-7,5 kW 11-75 kW
525-690 1,5-7,5 kW 11-75 kW
Puede haber tensión alta presente aunque las luces del
indicador LED de advertencia estén apagadas.
ADVERTENCIA
PELIGRO DEL EQUIPO
El contacto con ejes de rotación y equipos eléctricos
puede provocar lesiones graves o la muerte.
Asegúrese de que la instalación, el arranque y
•
el mantenimiento lo lleve a cabo únicamente
personal formado y cualificado.
Asegúrese de que los trabajos eléctricos
•
cumplan con los códigos eléctricos nacionales y
locales.
Siga los procedimientos de este manual.
•
PRECAUCIÓN
AUTORROTACIÓN
El giro accidental de los motores de magnetización
permanente podría provocar lesiones y daños materiales.
Asegúrese de que los motores de magneti-
•
zación permanente estén bloqueados para
evitar un giro accidental.
PRECAUCIÓN
POSIBLE PELIGRO EN CASO DE FALLO INTERNO
Existe el riesgo de sufrir lesiones personales cuando el
convertidor de frecuencia no está correctamente cerrado.
Antes de suministrar electricidad, asegúrese de
•
que todas las cubiertas de seguridad están
colocadas y fijadas de forma segura.
2 2
Tabla 2.1 Tiempo de descarga
ADVERTENCIA
PELIGRO DE CORRIENTE DE FUGA
Las corrientes de fuga superan los 3,5 mA. No efectuar la
toma de tierra correcta del convertidor de frecuencia
podría ser causa de lesiones graves e incluso muerte.
La toma a tierra correcta del equipo debe estar
•
garantizada por un instalador eléctrico
certificado.
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 15
Principios básicos de funci...
Guía de diseño de
3 Principios básicos de funcionamiento
3.1 General
33
Este capítulo ofrece una visión general de los conjuntos
principales y los circuitos del convertidor de frecuencia. Su
propósito es describir las funciones eléctricas internas y de
procesamiento de señal. También se incluye una
descripción de la estructura de control interna.
Además, se describen las funciones opcionales y automatizadas del convertidor de frecuencia disponibles para
diseñar sistemas operativos sólidos con un control
sofisticado y un rendimiento de información de estado.
3.2 Descripción del funcionamiento
El convertidor de frecuencia suministra una cantidad
regulada de alimentación de CA a un motor de inducción
trifásico estándar con el fin de controlar la velocidad del
mismo. El convertidor de frecuencia suministra frecuencia y
tensión variables al motor.
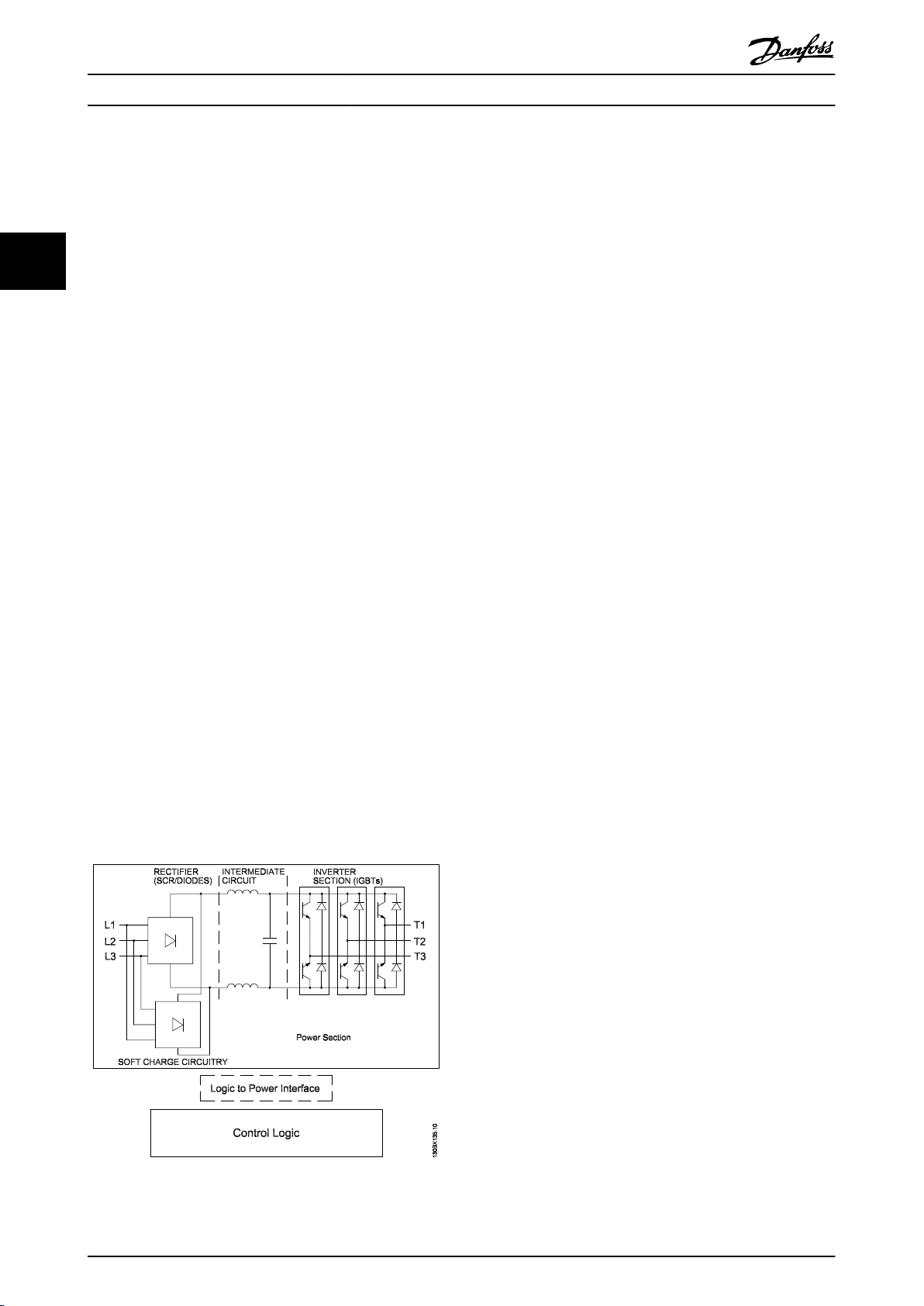
El convertidor de frecuencia está dividido en cuatro
módulos principales.
Rectificador
•
Circuito intermedio
•
Inversor
•
Control y regulación
•
En el capétulo 3.3 Secuencia de funcionamiento, estos
módulos se tratan con más detalle y se describe cómo las
señales de potencia y control se mueven dentro del
convertidor de frecuencia.
3.3 Secuencia de funcionamiento
3.3.1 Sección del rectificador
Cuando se conecta por primera vez la alimentación al
convertidor de frecuencia, esta entra a través de los
terminales de entrada (L1, L2 y L3) y en la opción de
desconexión y / o filtro RFI, en función de la configuración
de la unidad.
3.3.2 Sección intermedia
A continuación de la sección del rectificador, la tensión
pasa a la sección intermedia. Esta tensión rectificada es
suavizada por un circuito de filtro sinusoidal, que se
compone del inductor de bus de CC y del banco de
condensadores del bus de CC.
El inductor del bus de CC proporciona impedancia en serie
a la intensidad cambiante. Esto ayuda al proceso de
filtrado reduciendo la distorsión armónica a la forma de
onda de la corriente CA de entrada, normalmente
inherente en los circuitos rectificadores.
Sección del inversor
3.3.3
En la sección del inversor, una vez estén presentes un
comando de ejecución y una referencia de velocidad, los
IGBT comienzan a conmutar para crear la onda de salida.
Esta forma de onda, generada por el principio PWM VVC
de (Danfoss) en la tarjeta de control, proporciona un
rendimiento óptimo y pérdidas mínimas en el motor.
plus
Opción de freno
3.3.4
En los convertidores de frecuencia equipados con la
opción de freno dinámico se incluye un IGBT del freno
junto con los terminales 81(R-) y 82(R+) para la conexión
de una resistencia de freno externa.
La función del IGBT del freno consiste en limitar la tensión
del circuito intermedio cuando se exceda el límite de
tensión máxima. Esto lo realiza conmutando la resistencia
montada externamente a través del bus de CC para
eliminar el exceso de tensión de CC presente en los
condensadores del bus. El exceso de tensión del bus de CC
suele ser el resultado de una carga descontrolada que
produce que la energía regenerativa vuelva al bus de CC.
Esto ocurre, por ejemplo, cuando la carga controla al
Ilustración 3.1 lógica de control interno
16 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05
motor, haciendo que la tensión regrese al circuito de bus
de CC.

Principios básicos de funci... Guía de diseño de
Colocar externamente la resistencia de freno tiene las
ventajas de seleccionar la resistencia en base a las
necesidades de la aplicación, disipar la energía fuera del
panel de control y proteger al convertidor de sobrecalentamiento si la resistencia de freno está sobrecargada.
La señal de puerta del IGBT del freno se origina en la
tarjeta de control y se envía al IGBT de freno mediante la
tarjeta de potencia y la tarjeta de accionamiento de
puerta. Adicionalmente, las tarjetas de alimentación y
control vigilan el IGBT y la resistencia del freno por si se
producen cortocircuitos y sobrecargas.
Carga compartida
3.3.5
Las unidades con la opción de carga compartida integrada
contienen terminales (+) 89 CC y (–) 88 CC. Dentro del
convertidor de frecuencia, estos terminales se conectan al
bus de CC enfrente del reactor del enlace de CC y los
condensadores del bus.
El uso de los terminales de carga compartida puede
adoptar dos configuraciones diferentes.
En un método, los terminales se utilizan para enlazar los
circuitos de bus de CC de múltiples convertidores de
frecuencia. Esto permite que una unidad en modo regenerativo comparta su exceso de tensión de bus con otra
unidad que está haciendo funcionar un motor. La carga
compartida de esta forma puede reducir la necesidad de
resistencias de freno dinámicas externas, al tiempo que se
ahorra energía. En teoría, el número de unidades que
pueden ser conectadas de este modo es infinito; no
obstante, todas las unidades deben tener la misma clasificación de tensión. Adicionalmente, y en función del
tamaño y del número de unidades, puede ser necesario
instalar bobinas y fusibles de CC en las conexiones del
enlace de CC, y reactores de CA en la red. Cualquier
intento de realizar una configuración de este tipo requiere
consideraciones específicas y no debe realizarse sin
consultar primero con el departamento de ingeniería de
aplicación de (Danfoss).
3.4
Interfaz de control
3.4.1 Principio de control
El convertidor de frecuencia recibe entrada de control de
varias fuentes.
Panel de control local (modo manual)
•
Terminales de control analógicos programables,
•
digitales y analógicos / digitales (modo
automático)
Los puertos RS-485, USB o de comunicación en
•
serie (modo automático)
Cuando están cableados y programados adecuadamente,
los terminales de control proporcionan realimentación,
referencia y otras señales de entrada al convertidor de
frecuencia; el estado de salida y las condiciones de fallos
del convertidor de frecuencia, relés para hacer funcionar el
equipo auxiliar e interfaz de comunicación serie. También
se proporcionan 24 V convencionales. Los terminales de
control se pueden programar para varias funciones
seleccionando opciones de parámetros mediante el panel
de control local (LCP) en la parte frontal de la unidad o las
fuentes externas. La mayor parte del cableado de control
es suministrado por el cliente a no ser que se solicite a
fábrica.
3 3
En el segundo método, el convertidor de frecuencia es
alimentado exclusivamente desde una fuente de CC. Esto
es un poco mas complicado. Primero, es necesaria una
fuente de CC. Segundo, también es necesario un medio
para realizar una carga suave del bus de CC en el
arranque. Por último, se requiere una fuente de tensión
para alimentar los ventiladores internos de la unidad.
Tampoco debe intentarse realizar una configuración de
este tipo sin consultar previamente con el departamento
de ingeniería de aplicación de (Danfoss).
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 17
130BD599.10
3-phase
power
input
DC bus
Switch Mode
Power Supply
Motor
Analog Output
Interface
relay1
relay2
ON=Terminated
OFF=Open
Brake
resistor
91 (L1)
92 (L2)
93 (L3)
PE
88 (-)
89 (+)
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN)
0/4-20 mA
12 (+24 V OUT)
13 (+24 V OUT)
37 (D IN)
18 (D IN)
20 (COM D IN)
10 V DC
15 mA 130/200 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(COM A OUT) 39
(A OUT) 42
(P RS-485) 68
(N RS-485) 69
(COM RS-485) 61
0 V
5V
S801
0/4-20 mA
RS-485
RS-485
03
+10 V DC
0/-10 V DC -
+10 V DC
+10 V DC
0/4-20 mA
0/-10 V DC-
240 V AC, 2 A
24 V DC
02
01
05
04
06
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
27
24 V
0 V
(D IN/OUT)
0 V (PNP)
24 V (NPN)
(D IN/OUT)
0 V
24 V
29
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
1 2
ON
S201
ON
21
S202
ON=0/4-20 mA
OFF=0/-10 V DC +10 V DC
95
P 5-00
21
ON
S801
(R+) 82
(R-) 81
: Chassis
: Ground
**
240 V AC, 2 A
400 V AC, 2 A
*
*
*
Principios básicos de funci...
Guía de diseño de
3.5 Esquema del cableado
33
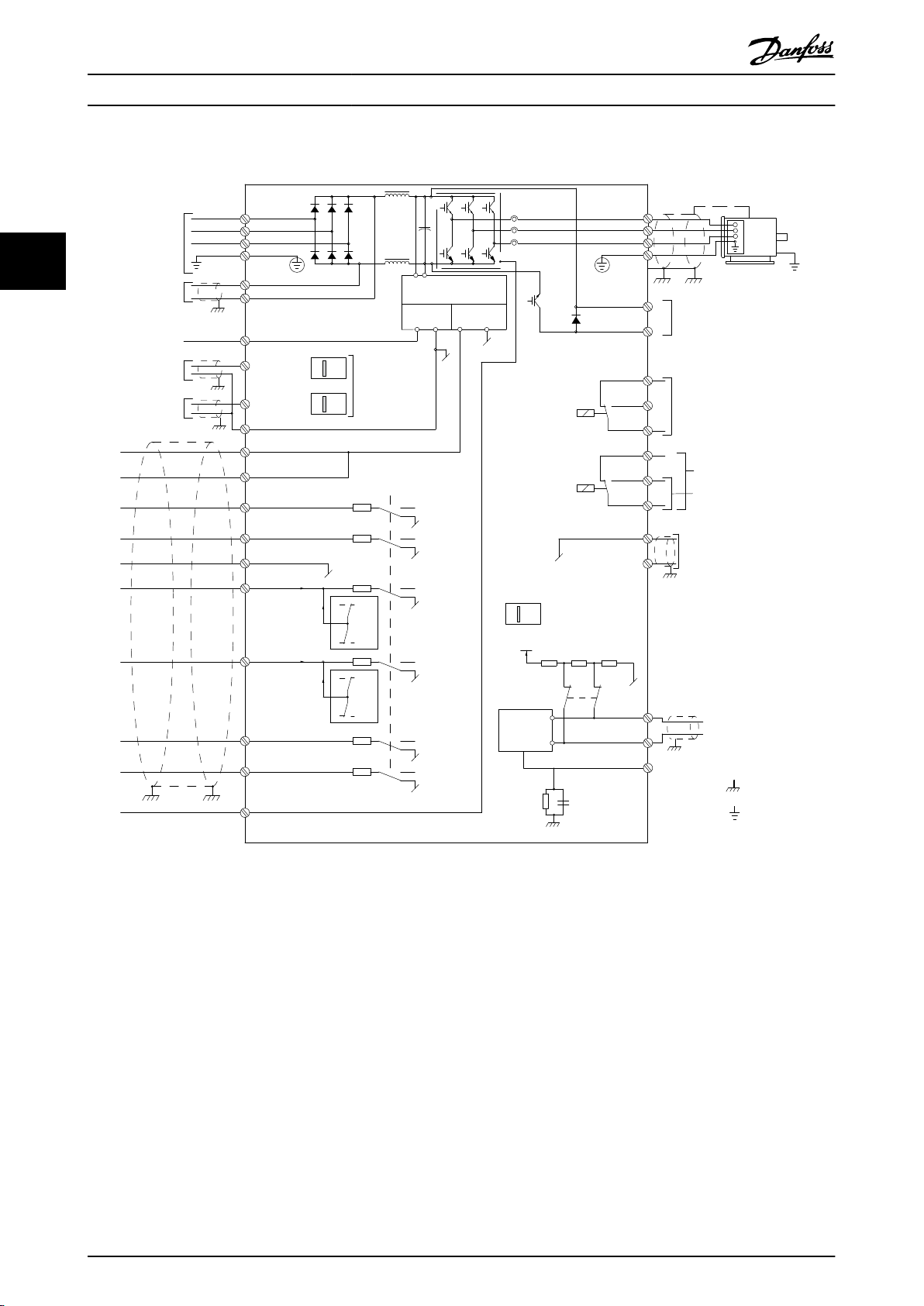
Ilustración 3.2 Esquema básico del cableado
A = analógico, D = digital
*El terminal 37 (opcional) se utiliza para la desconexión segura de par. Para conocer las instrucciones de instalación de la
desconexión segura de par, consulte el Manual de funcionamiento de la desconexión segura de par para los convertidores de
frecuencia VLT® de (Danfoss). El terminal 37 no está incluido en el FC 301 (excepto con el tipo de protección A1). El relé 2 y
el terminal 29 no tienen ninguna función en el FC 301.
**No conecte el apantallamiento de cables.
18 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05
130BD529.11
1
2
3
4
5
6
7
8
PE
U
V
W
9
L1
L2
L3
PE
10
11
Principios básicos de funci...
Guía de diseño de
3 3
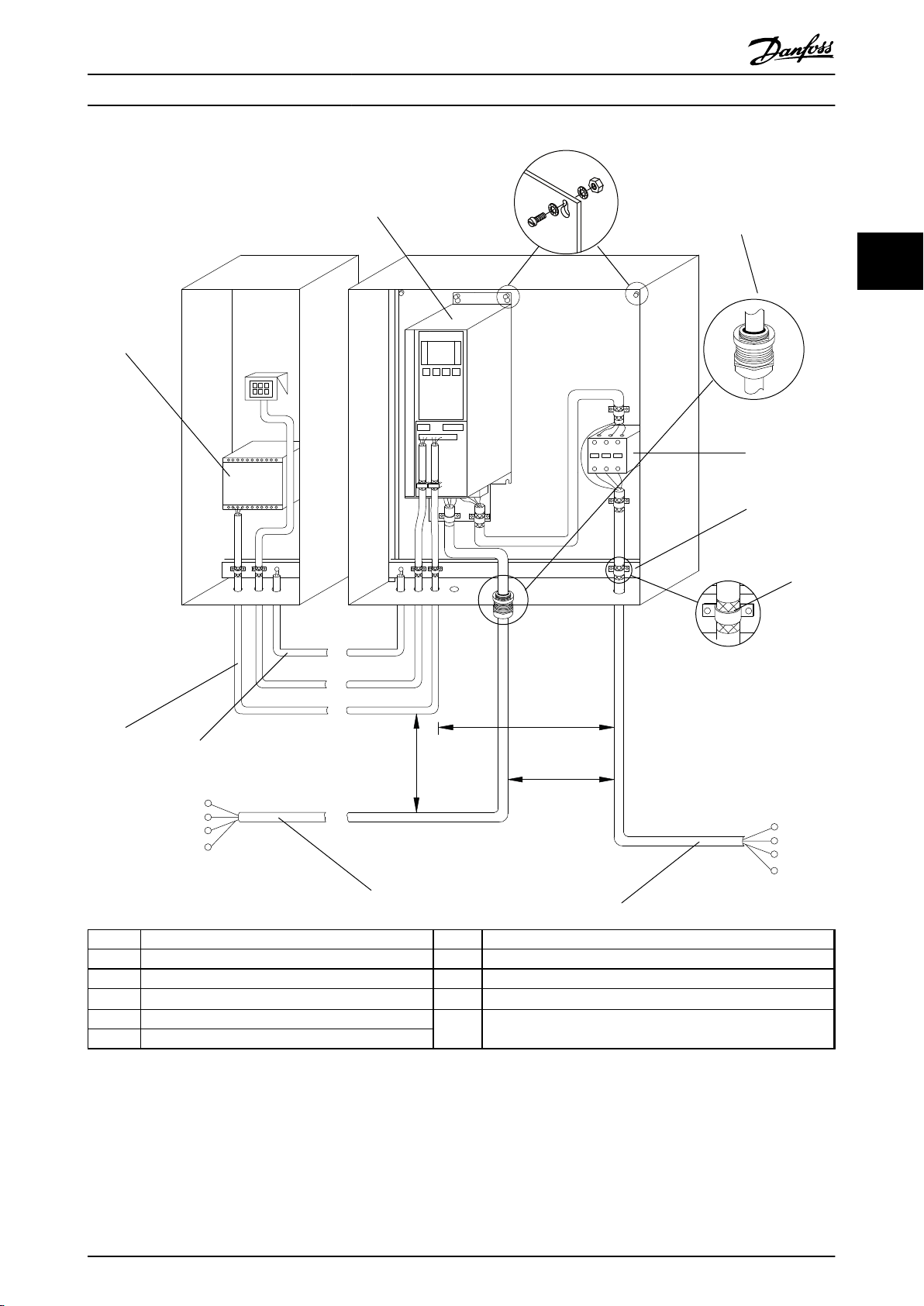
1 PLC 7 Motor, trifásico y PE (apantallada)
2 Convertidor de frecuencia 8 Red, trifásica y PE reforzada (sin apantallar)
3 Contactor de salida 9 Cableado de control (apantallado)
4 Abrazadera de cable 10
5 Aislamiento de cable (pelado)
6 Prensacables
11
Ecualización de potencial mín. 16 mm2 (0,025 in)
Espacio libre entre el cable de control, el cable de motor y el
cable de red: mín. 200 mm
Ilustración 3.3 Conexión-eléctrica conforme a EMC
Para obtener más información sobre EMC, consulte capétulo 4.1.15 Conformidad con EMC.
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 19
Principios básicos de funci... Guía de diseño de
AVISO!
INTERFERENCIA EMC
Utilice cables apantallados para el cableado de control y
de motor y cables independientes para la potencia de
entrada, el cableado del motor y el cableado de control.
33
No aislar los cables de control, del motor o de potencia
puede provocar un comportamiento inesperado o una
reducción del rendimiento. Se requiere un espacio libre
mínimo de 200 mm (7,9 in) entre los cables de control,
de motor y de potencia.
3.6 Controladores
3.6.1 Principio de control
Los convertidores de frecuencia rectifican la tensión de CA
de la red de alimentación y la convierten en tensión de
CC, después de lo cual dicha tensión de CC se convierte en
corriente CA de amplitud y frecuencia variables.
De este modo, el motor recibe una tensión / intensidad y
frecuencia variables, lo que permite un control de
velocidad variable en motores asíncronos trifásicos
estándar y en motores de magnetización permanente.
El convertidor de frecuencia puede controlar la velocidad o
el par en el eje del motor. El ajuste de 1-00 Modo Configu-
ración determina el tipo de control.
Control de velocidad
Hay dos tipos de control de velocidad:
El control de lazo abierto de velocidad, que no
•
requiere realimentación del motor (sin sensor).
El control de PID de lazo cerrado de velocidad
•
requiere una realimentación de velocidad hacia
una entrada. Un control de lazo cerrado de
velocidad, debidamente optimizado, tiene una
precisión mayor que un control de lazo abierto.
Control de par
La función de control de par se utiliza en aplicaciones en
las que el par de salida de eje motor controla la aplicación
como control de tensión. El control de par puede
seleccionarse en 1-00 Modo Configuración, ya sea en
plus
VVC
[4] Lazo abierto de par o Control de flujo en lazo
cerrado con [2] realimentación de velocidad del motor. El
ajuste de par se realiza mediante la configuración de una
referencia controlada analógica, digital o de bus. El factor
de límite máximo de velocidad se define en 4-21 Fuente del
factor de límite de velocidad. Al efectuar el control de par,
se recomienda llevar a cabo un procedimiento AMA
completo, ya que los datos correctos del motor son de
gran importancia para obtener un rendimiento óptimo.
Lazo cerrado en modo de flujo con realimen-
•
tación de encoder ofrece un rendimiento superior
en los cuatro cuadrantes y a todas las velocidades
del motor.
Modo lazo abierto en VVC
•
en aplicaciones mecánicas robustas, pero la
precisión es limitada. La función de par de lazo
abierto funciona, básicamente, solo en una
dirección de velocidad. El par se calcula sobre la
base de la medición interna de intensidad del
convertidor de frecuencia.
Referencia de velocidad / par
La referencia a estos controles puede ser una referencia
única o la suma de varias, incluyendo referencias de
escalado relativo. El manejo de referencias se explica con
mayor detalle en capétulo 3.7 Manejo de referencias.
plus
. La función se utiliza
Selecciona qué entrada se utilizará como realimentación
PID de velocidad en 7-00 Fuente de realim. PID de veloc.
20 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05
Principios básicos de funci... Guía de diseño de
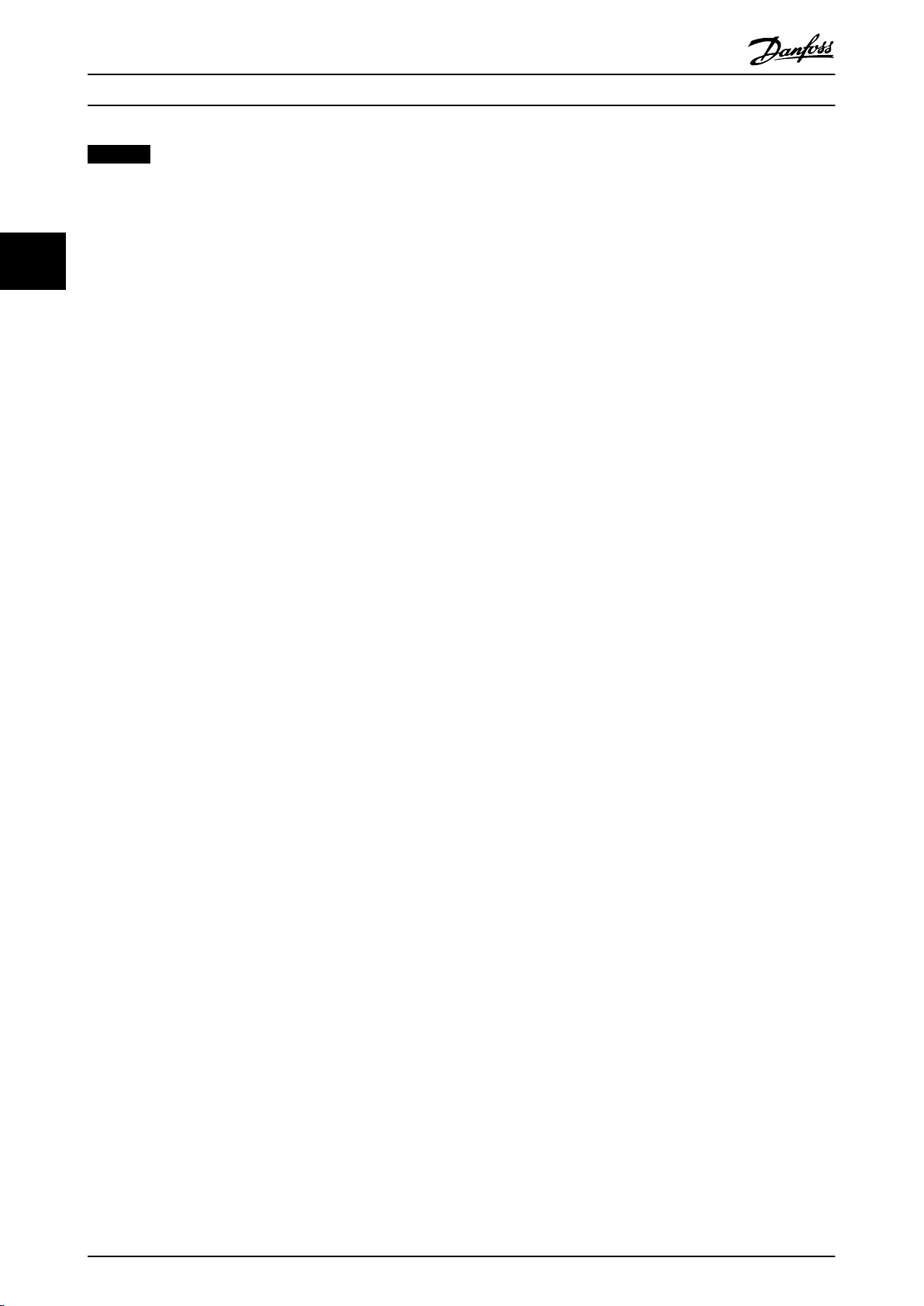
3.6.2 FC 301 frente a FC 302 Principio de control
El FC 301 es un convertidor de frecuencia de uso general para aplicaciones de velocidad variable. El principio de control
está basado en el Control vectorial de la tensión (VVC
FC 301 puede manejar tanto motores asíncronos como motores PM.
El principio de detección de intensidad en el FC 301 está basado en la medida de la intensidad en el enlace de CC o en la
fase del motor. La protección de fallo a tierra en la parte del motor se resuelve mediante un circuito de desaturación en los
IGBT conectado a la placa de control.
El comportamiento en cortocircuito del FC 301 depende del transductor de corriente en el enlace de CC positivo y de la
protección de desaturación con realimentación desde los 3 IGBT inferiores y el freno.
Ilustración 3.4 Principio de control FC 301
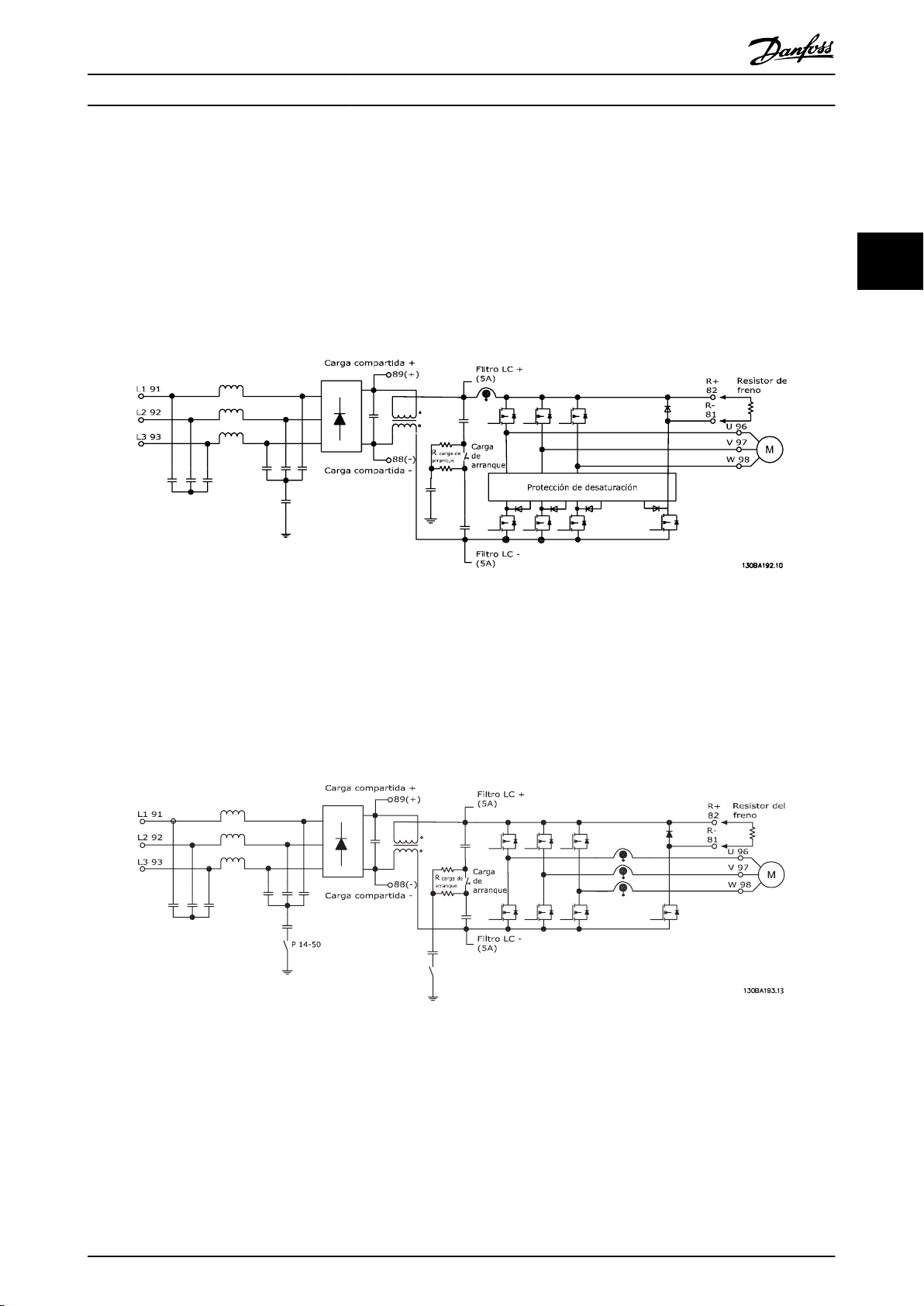
El FC 302 es un convertidor de frecuencia de alto rendimiento para aplicaciones exigentes. El convertidor de frecuencia
puede manejar varias clases de principios de control de motor tales como el modo de motor especial U/f, VVC
control de motor por vector de flujo.
FC 302 puede manejar motores sincrónicos de magnetización permanente (servomotores sin escobillas) así como motores
asíncronos normales de jaula de ardilla.
El comportamiento en cortocircuito del FC 302 depende de los 3 transductores de corriente de las fases del motor y de la
protección de desaturación con realimentación desde el freno.
plus
).
plus
o el
3 3
Ilustración 3.5 Principio de control FC 302
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 21
Principios básicos de funci... Guía de diseño de
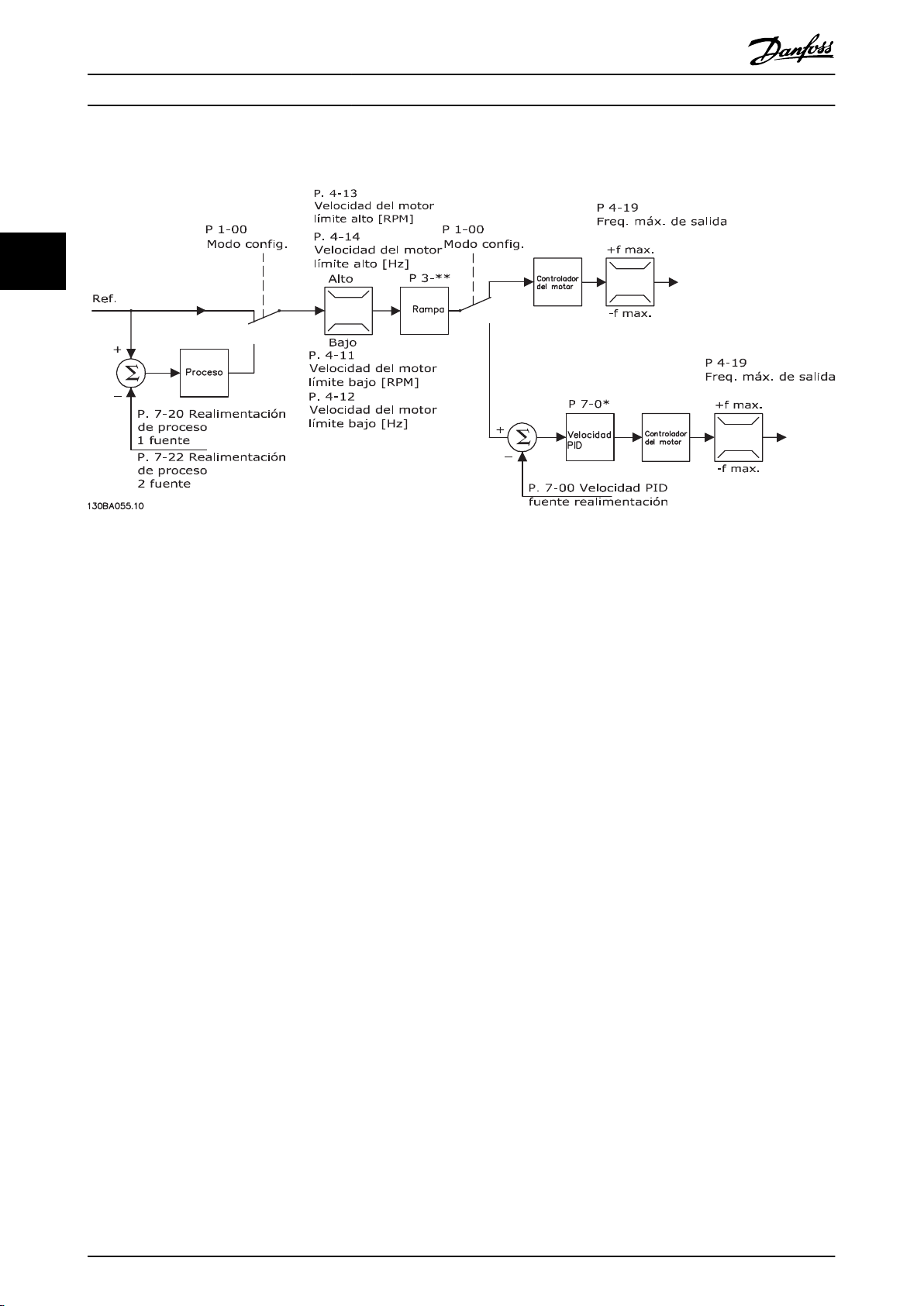
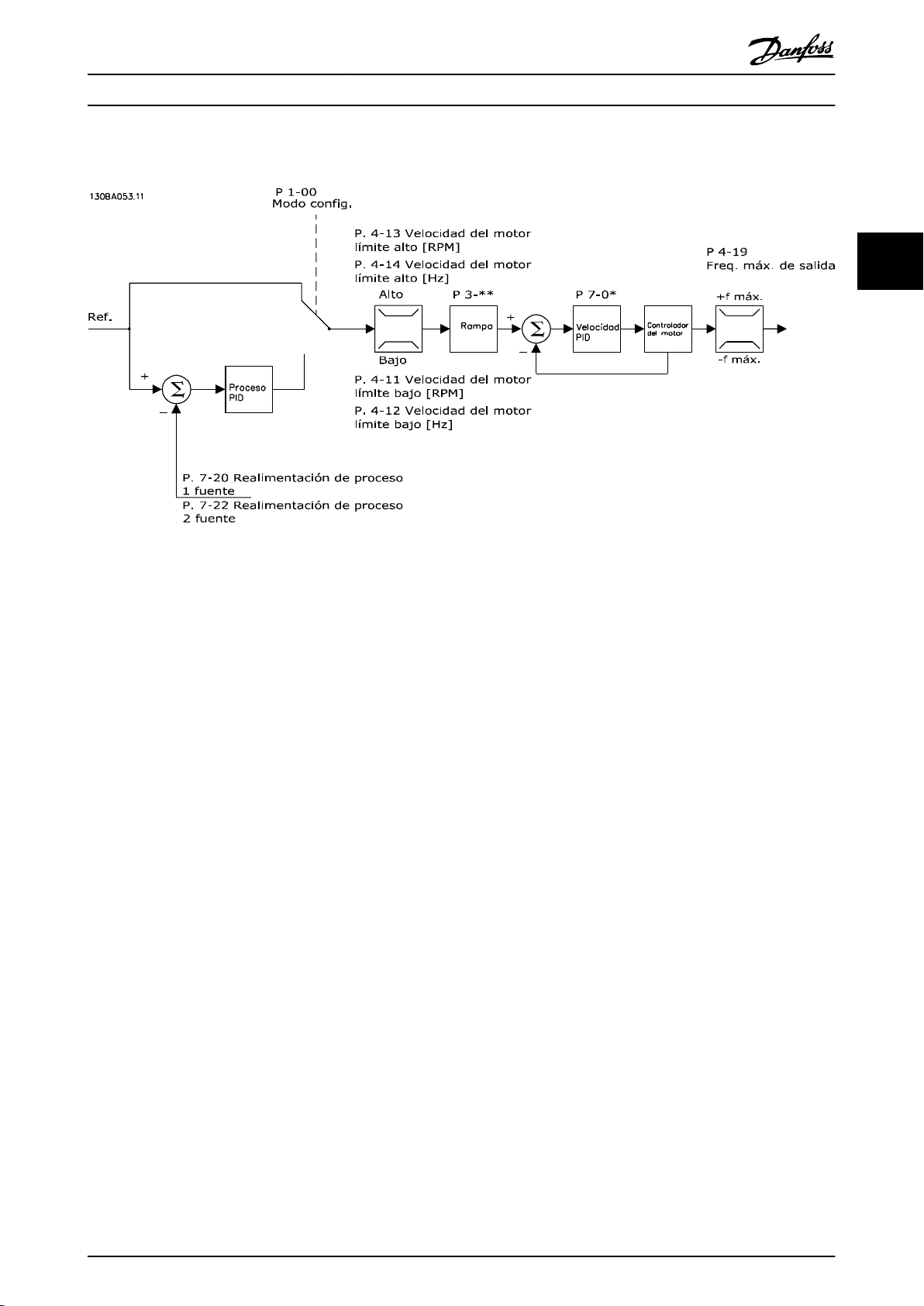
3.6.3
Estructura de control en VVC
plus
33
Ilustración 3.6 Estructura de control en configuraciones de lazo abierto y lazo cerrado VVC
Consulte los Parámetros activos / inactivos en distintos modos de control de la unidad en la Guía de programación para tener
una vista general de qué configuración de control está disponible, según la selección de motor de CA o motor de PM no
saliente. En la configuración mostrada en Ilustración 3.6, 1-01 Principio control motor se ajusta a [1] VVC
Configuración se ajusta a [0] Veloc. lazo abierto. Se recibe la referencia resultante del sistema de manejo de referencias y se
transfiere a la limitación de rampa y de velocidad antes de enviarse al control del motor. La salida del control del motor
entonces se limita mediante el límite de frecuencia máximo.
plus
plus
y 1-00 Modo
Si 1-00 Modo Configuración se ajusta a [1] Veloc. lazo cerrado, la referencia resultante pasará desde la limitación de rampa y
limitación de velocidad a un control de PID de velocidad. Los parámetros del control de PID de velocidad se encuentran en
el grupo de parámetros 7-0* Ctrlador PID vel. La referencia resultante del control de PID de velocidad se envía al control de
motor limitado por el límite de frecuencia.
Seleccione [3] Proceso en 1-00 Modo Configuración para utilizar el control de PID de procesos para el control de lazo cerrado
de, por ejemplo, la velocidad o la presión de la aplicación controlada. Los parámetros del PID de proceso se encuentran en
el grupo de parámetros 7-2* Ctrl. realim. proc. y 7-3* Ctrl. PID proceso.
22 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05
Principios básicos de funci... Guía de diseño de
3.6.4 Estructura de control de flujo sin realimentación (solo FC 302)
Ilustración 3.7 Estructura de control de flujo sin realimentación de lazo abierto y de lazo cerrado
3 3
Consulte los Parámetros activos / inactivos en distintos modos de control de la unidad en la Guía de programación para tener
una vista general de qué configuración de control está disponible, según la selección de motor de CA o motor de PM no
saliente. En la configuración mostrada, 1-01 Principio control motor se ajusta a [2] Flux sensorless y 1-00 Modo Configuración se
ajusta a [0] Veloc. lazo abierto. La referencia resultante del sistema de manejo de referencias pasa a través de los límites de
rampa y velocidad, tal y como determinan los ajustes de parámetros indicados.
Se genera una realimentación de velocidad estimada para el PID de velocidad con el fin de controlar la frecuencia de salida.
El PID de velocidad debe establecerse con sus parámetros P, I y D (grupo de parámetros 7-0* Ctrlador PID vel.).
Seleccione [3] Proceso en 1-00 Modo Configuración para utilizar el control de PID de procesos para el control de lazo cerrado
de, por ejemplo, la velocidad o la presión de la aplicación controlada. Los parámetros del PID de proceso se encuentran en
los grupos de parámetros 7-2* Ctrl. realim. proc. y 7-3* Ctrl. PID proceso.
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 23
Principios básicos de funci... Guía de diseño de
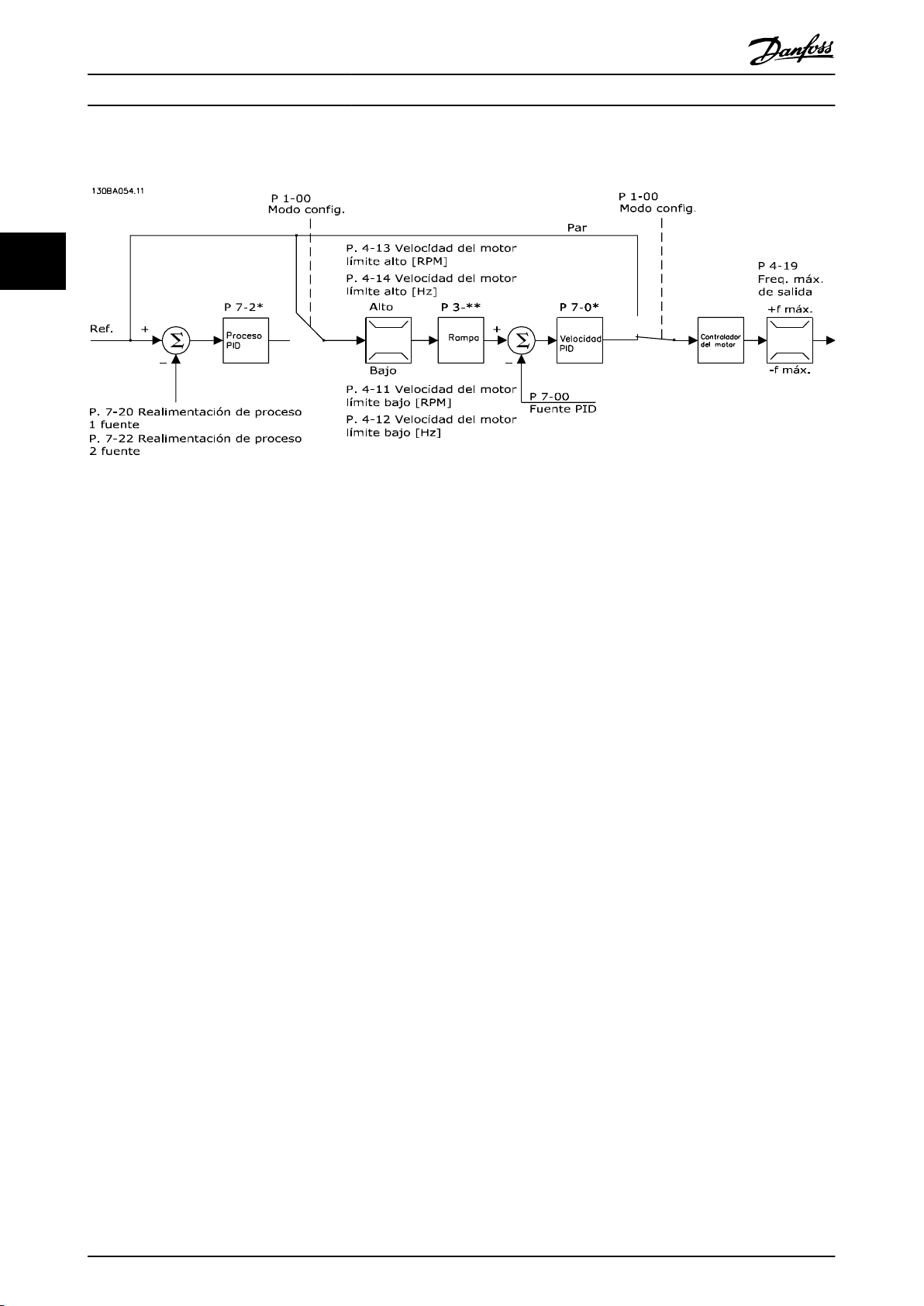
3.6.5 Estructura de control en flujo con realimentación del motor (solo FC 302)
33
Ilustración 3.8 Estructura de control en configuración de flujo con realimentación del motor (disponible solo en FC 302)
Consulte los Parámetros activos / inactivos en distintos modos de control de la unidad en la Guía de programación para tener
una vista general de qué configuración de control está disponible, según la selección de motor de CA o motor de PM no
saliente. En la configuración mostrada, 1-01 Principio control motor se ajusta a [3] Lazo Cerrado Flux y 1-00 Modo Configu-
ración se ajusta a [1] Veloc. lazo cerrado.
El control del motor en esta configuración se basa en una señal de realimentación procedente de un encoder o resolver
montado directamente en el motor (que se ajusta en 1-02 Realimentación encoder motor Flux).
Seleccione [1] Veloc. lazo cerrado en 1-00 Modo Configuración para utilizar la referencia resultante como una entrada para el
control de PID de velocidad. Los parámetros de control de PID de velocidad se encuentran en el grupo de parámetros 7-0*
Ctrlador PID vel.
Seleccione [2] Par en 1-00 Modo Configuración para utilizar la referencia resultante directamente como una referencia de par.
Control de par solo puede seleccionarse en la configuración de flujo con realimentación del motor (1-01 Principio control
motor). Cuando se selecciona este modo, la referencia utiliza la unidad Nm. No requiere realimentación de par, ya que el par
real se calcula a partir de la medida de intensidad del convertidor de frecuencia.
Seleccione [3] Proceso en 1-00 Modo Configuración para utilizar el control de PID de procesos para el control de lazo cerrado
de, por ejemplo, la velocidad o una variable de proceso de la aplicación controlada.
24 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05
Principios básicos de funci... Guía de diseño de
3.6.6 PID
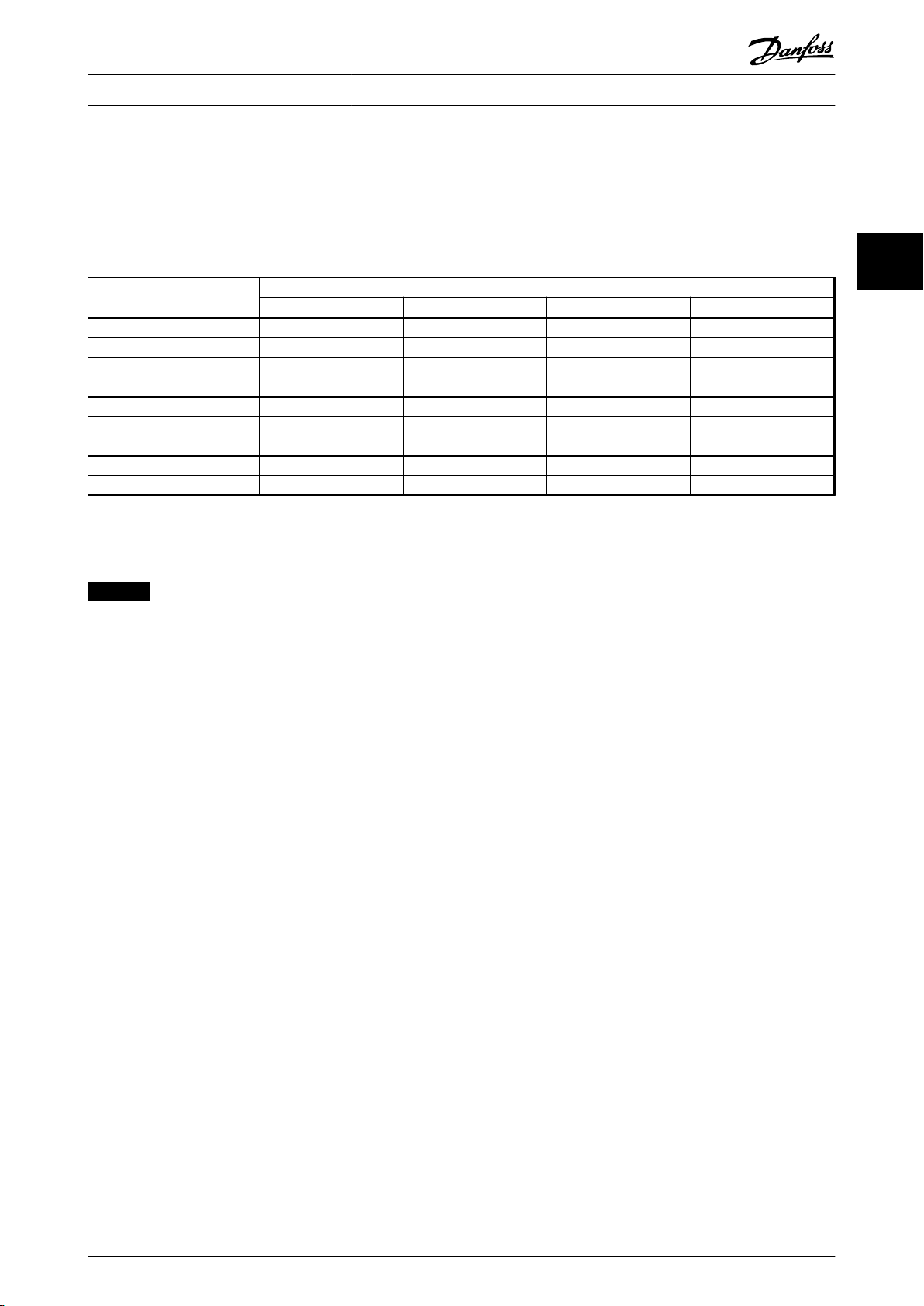
3.6.6.1 Control de PID de velocidad
El control de PID de velocidad mantiene una velocidad de motor constante independientemente de la modificación de
carga del motor.
1-00 Modo Configuración
[0] Veloc. lazo abierto ACTIVO ACTIVO ACTIVO N.D.
[1] Veloc. lazo cerrado N.D. No activado N.D. ACTIVO
[2] Par N.D. N.D. N.D. No activado
[3] Proceso No activado No activado No activado N.D.
[4] Lazo abierto de par N.D. No activado N.D. N.D.
[5] Vaivén No activado No activado No activado No activado
[6] Bobinadora superf. No activado No activado No activado N.D.
[7] Vel. lazo a. PID ampl. No activado No activado No activado N.D.
[8] Vel. lazo c. PID ampl. N.D. No activado N.D. No activado
Tabla 3.1 Configuraciones de control con control de velocidad activo
«N.D.» significa que el modo especificado no está disponible. «No activado» significa que el modo especificado está disponible pero el control de
velocidad no está activado en dicho modo.
1-01 Principio control motor
U/f
VVC
plus
Flux Sensorless Flux con realim. encoder
3 3
AVISO!
El PID de control de velocidad funciona usando el ajuste de parámetros predeterminado, pero es recomendable ajustar
los parámetros para optimizar el rendimiento del control del motor. Los dos principios de control del motor de flujo
dependen especialmente del ajuste adecuado para alcanzar todo su potencial.
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 25
Principios básicos de funci... Guía de diseño de
La Tabla 3.2 resume las características que se pueden establecer para el control de velocidad. Consulte la Guía de programación de VLT® AutomationDrive FC 301 / FC 302 para obtener detalles sobre la programación.
Parámetro Descripción de la función
7-00 Fuente de realim. PID de veloc. Seleccione desde qué entrada obtendrá la realimentación el PID de velocidad.
7-02 Ganancia proporc. PID veloc. Cuanto mayor sea este valor, más rápido será el control. Sin embargo, valores demasiado
33
7-03 Tiempo integral PID veloc.
7-04 Tiempo diferencial PID veloc. Proporciona una ganancia proporcional al índice de cambio de la realimentación. El
7-05 Límite ganancia dif. PID veloc.
7-06 Tiempo filtro paso bajo PID veloc.
7-07 Relación engranaje realim. PID velocidad El convertidor de frecuencia multiplica la realimentación de velocidad por esta relación.
7-08 Factor directo de alim. PID de veloc. Se deriva la señal de referencia del controlador de velocidad en la cantidad especificada.
7-09 Speed PID Error Correction w/ Ramp El error de velocidad entre la rampa y la velocidad real se mantiene a pesar del ajuste
elevados pueden producir oscilaciones.
Elimina el error de velocidad de estado estable. Cuanto menor es el valor, más rápida es
la reacción. Sin embargo, valores demasiado bajos pueden producir oscilaciones.
ajuste a cero desactiva el diferenciador.
Si hay cambios rápidos en la referencia o en la realimentación en determinada
aplicación, lo que significa que el error cambia rápidamente, el diferenciador puede
volverse demasiado dominante. Esto se debe a que reacciona a cambios en el error.
Cuanto más rápido cambia el error, más alta es la ganancia del diferenciador. Por ello,
esta ganancia se puede limitar para permitir el ajuste de un tiempo diferencial razonable
para cambios lentos, y una ganancia rápida adecuada para cambios rápidos.
El filtro de paso bajo amortigua las oscilaciones de la señal de realimentación y mejora
el rendimiento de estado estable. Sin embargo, un tiempo de filtro demasiado grande
deteriora el rendimiento dinámico del control de PID de velocidad.
Ajustes prácticos del parámetro 7-06 tomados del número de impulsos por revolución
del encoder (PPR):
PPR del encoder 7-06 Tiempo filtro paso bajo PID veloc.
512 10 ms
1024 5 ms
2048 2 ms
4096 1 ms
Esta función aumenta el rendimiento dinámico del lazo de control de velocidad.
de este parámetro. Si el error de velocidad supera el parámetro, este se corrige mediante
la rampa de forma controlada.
Tabla 3.2 Parámetros relevantes para el control de velocidad
Realice la programación en el orden indicado (consulte la explicación de los ajustes en la Guía de programación).
En la Tabla 3.3 se supone que todos los demás parámetros e interruptores permanecen en su ajuste predeterminado.
Función Parámetro Ajuste
1) Asegúrese de que el motor está funcionando correctamente. Haga lo siguiente:
Ajuste los parámetros del motor usando los datos de la placa de
características
Realice una Adaptación automática del motor 1-29 Adaptación
2) Compruebe que el motor está en marcha y que el encoder está conectado correctamente. Haga lo siguiente:
Pulse [Hand On] en el LCP. Compruebe que el motor está en marcha
y fíjese en qué dirección está girando (que a partir de ahora denominaremos «dirección positiva»).
Vaya a 16-20 Ángulo motor. Gire el motor lentamente en la dirección
positiva. Debe girarlo tan lentamente (solo algunas r/min) que pueda
determinarse si el valor de 16-20 Ángulo motor está aumentando o
disminuyendo.
Si 16-20 Ángulo motor está disminuyendo, cambie la dirección del
encoder en 5-71 Term. 32/33 direc. encoder.
1-2* En función de las especificaciones de la placa
de características del motor
[1] Act. AMA completo
automática del
motor (AMA)
Ajuste una referencia positiva.
16-20 Ángulo
motor
5-71 Term. 32/33
direc. encoder
N.D. (parámetro de solo lectura) Nota: un valor
creciente se desborda al llegar a 65535 y
vuelve a empezar por 0.
[1] Dcha. a izqda. (si 16-20 Ángulo motor está
disminuyendo)
26 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05
Principios básicos de funci...
Función Parámetro Ajuste
3) Asegúrese de que los límites del convertidor de frecuencia están ajustados a valores seguros
Ajuste unos límites aceptables para las referencias. 3-02 Referencia
Compruebe que los ajustes de rampa estén dentro de las posibilidades del convertidor de frecuencia y cumplan las especificaciones
de funcionamiento de la aplicación.
Ajuste unos límites aceptables para la frecuencia y la velocidad del
motor.
4) Configure el control de velocidad y seleccione el principio de control del motor
Activación del control de velocidad
Selección del principio de control del motor 1-01 Principio
5) Configure y escale la referencia al control de velocidad
Ajuste la entrada analógica 53 como fuente de referencia. 3-15 Recurso de
Escale la entrada analógica 53 de 0 RPM (0 V) a 1500 RPM (10 V) 6-1* No necesario (predeterminado)
6) Configure la señal del encoder HTL de 24 V como realimentación para el control del motor y de la velocidad.
Ajuste la entrada digital 32 y la 33 como entradas del encoder HTL 5-14 Terminal 32
Seleccione el terminal 32/33 como realimentación del motor 1-02 Realimen-
Seleccione el terminal 32/33 como realimentación PID de velocidad 7-00 Fuente de
7) Ajuste los parámetros PID del control de velocidad
Use las pautas de ajuste cuando sea apropiado o ajuste
manualmente
8) Guarde para finalizar
Guarde los ajustes de los parámetros en el LCP para mantenerlos a
salvo
Guía de diseño de
0 r/min (valor predeterminado)
mínima
3-03 Referencia
máxima
3-41 Rampa 1
tiempo acel. rampa
3-42 Rampa 1
tiempo desacel.
rampa
4-11 Límite bajo
veloc. motor [RPM]
4-13 Límite alto
veloc. motor [RPM]
4-19 Frecuencia
salida máx.
1-00 Modo Configuración
control motor
referencia 1
entrada digital
5-15 Terminal 33
entrada digital
tación encoder
motor Flux
realim. PID de
veloc.
7-0* Consulte las directrices
0-50 Copia con
LCP
1500 r/min (predeterminado)
ajustes predeterminados
ajustes predeterminados
0 r/min (valor predeterminado)
1500 r/min (predeterminado)
60 Hz (predeterminado 132 Hz)
[1] Veloc. lazo cerrado
[3] Lazo Cerrado Flux
No necesario (predeterminado)
[0] Sin función (predeterminado)
No necesario (predeterminado)
No necesario (predeterminado)
[1] Trans. LCP tod. par.
3 3
Tabla 3.3 Orden de programación
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 27
Principios básicos de funci...
Guía de diseño de
3.6.6.2 Ajuste del control de PID de
3.6.6.3
Control de PID de procesos
velocidad
Utilice el control de PID de procesos para controlar
Las pautas de ajuste que le ofrecemos a continuación son
relevantes en caso de que utilice uno de los principios de
control del motor de flujo en aplicaciones en las que la
33
carga sea principalmente inercial (con un bajo nivel de
fricción).
El valor del 30-83 Ganancia proporc. PID veloc. depende de
la inercia combinada del motor y la carga, y el ancho de
banda seleccionado puede calcularse usando la fórmula
siguiente:
2
x
par.
. 1 − 20 x 9550
. 1 − 25
x
Ancho de banda rad/s
Par
. 7 − 02 =
Total inercia kgm
Par
AVISO!
1-20 Potencia motor [kW] es la potencia del motor en
[kW] (o sea, introduzca «4» kW en vez de «4000» W en la
fórmula).
Un valor que resulta práctico usar para el ancho de banda
es 20 rad/s. Compruebe el resultado del cálculo del
7-02 Ganancia proporc. PID veloc. y compárelo con la
fórmula siguiente (esto no es necesario si usa una
realimentación de alta resolución, tal como una SinCos):
Par
. 7 − 02
Máx. par rizado
MÁX.
0. 01 x 4 x
=
%
El valor inicial recomendado para el 7-06 Tiempo filtro paso
bajo PID veloc. es de 5 ms (a menor resolución del encoder,
mayor valor del filtro). Normalmente es aceptable un valor
máximo de rizado del par del 3 %. En los encoders
incrementales, la resolución del encoder se encuentra en el
5-70 Term. 32/33 resolución encoder (HTL de 24 V en un
convertidor de frecuencia estándar) o en el
17-11 Resolución (PPR) (TTL de 5 V en la opción del
encoder MCB 102).
Generalmente, el límite práctico máximo del 7-02 Ganancia
proporc. PID veloc. viene determinado por la resolución del
encoder y el tiempo del filtro de realimentación, pero
también otros factores de la aplicación pueden limitar el
7-02 Ganancia proporc. PID veloc. a un valor inferior.
Para reducir al mínimo la sobremodulación, el 7-03 Tiempo
integral PID veloc. puede ajustarse, aproximadamente, a
2,5 s (varía según la aplicación).
Ajuste 7-04 Tiempo diferencial PID veloc. a 0 hasta que todo
lo demás esté ajustado. Si resulta necesario, termine el
ajuste experimentando con pequeños incrementos de este
ajuste.
Encoder Resolución x Par
2 x π
. 7 − 06
x
parámetros de aplicación que pueden medirse mediante
un sensor (es decir, presión, temperatura, flujo) y verse
afectados por el motor conectado a través de una bomba
o ventilador o de otra manera.
Tabla 3.4 muestra las configuraciones de control que
permiten usar el control de proceso. Si se usa un principio
de control de motor de vector de flujo, recuerde ajustar los
parámetros PID del control de velocidad. Consulte el
capétulo 3.6 Controladores para saber dónde está activado
el control de velocidad.
1-00 Modo
Configuración
[3] Proceso No
Tabla 3.4 Configuraciones de control con control de proceso
1-01 Principio control motor
U/f
activado
plus
VVC
Proceso Proceso y
Flux
Sensorless
velocidad
Flux con
realim.
encoder
Proceso y
velocidad
AVISO!
El PID de control de proceso funciona usando el ajuste
de parámetros por defecto, pero es recomendable
ajustar los parámetros para optimizar el rendimiento del
control de la aplicación. Los dos principios de control del
motor de flujo dependen especialmente del ajuste
adecuado del PID de control de velocidad (previo al
ajuste del PID de control de proceso) para alcanzar todo
su potencial.
28 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

Principios básicos de funci... Guía de diseño de
Ilustración 3.9 Diagrama del control de PID de procesos
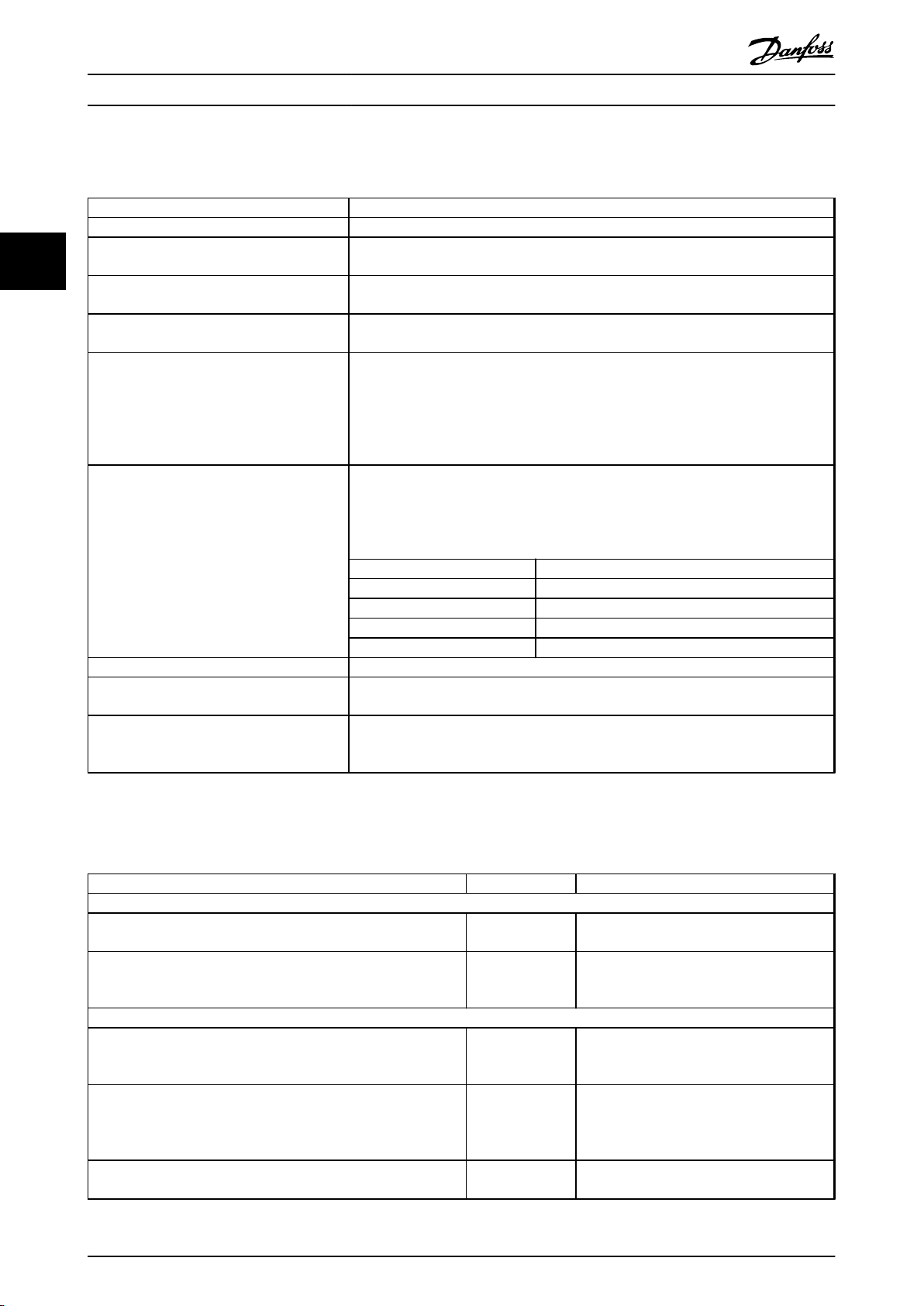
La Tabla 3.5 resume las características que se pueden establecer para el control de proceso.
Parámetro Descripción de la función
7-20 Fuente 1 realim. lazo
cerrado proceso
7-22 Fuente 2 realim. lazo
cerrado proceso
7-30 Ctrl. normal/inverso
de PID de proceso.
7-31 Saturación de PID de
proceso
7-32 Valor arran. para
ctrldor. PID proceso.
7-33 Ganancia proporc.
PID de proc.
7-34 Tiempo integral PID
proc.
7-35 Tiempo diferencial
PID proc.
7-36 Límite ganancia
diferencial PID proceso.
7-38 Factor directo
aliment. PID de proc.
Seleccione de qué fuente (es decir, entrada analógica o de impulsos) obtendrá su realimentación el PID de
proceso.
Opcional: Determina si (y desde dónde) el PID de procesos debe obtener una señal de realimentación
adicional. Si se selecciona una fuente de realimentación adicional, las dos señales de realimentación se
añaden conjuntamente antes de ser utilizadas en el control de PID de procesos.
En [0] Funcion. normal, el control de proceso responde con un incremento de la velocidad del motor si la
realimentación es inferior a la referencia. En la misma situación, pero en [1] Funcionamiento inverso, el control
de proceso responde con una velocidad de motor decreciente.
La función de saturación garantiza que cuando se alcanza un límite de frecuencia o de par, el integrador se
ajusta en una ganancia que corresponda a la frecuencia real. Esto evita la integración a lo largo de un error
que no pueda compensarse, de ningún modo, con un cambio de velocidad. Esta función puede desactivarse
seleccionando [0] No.
En algunas aplicaciones, alcanzar el punto de velocidad/consigna necesario puede tomar un tiempo muy
largo. En estas aplicaciones, podría resultar útil ajustar una velocidad fija del motor desde el convertidor de
frecuencia antes de activar el control de proceso. Esto se hace fijando un valor de arranque para PID de
procesos (velocidad) en el 7-32 Valor arran. para ctrldor. PID proceso.
Cuanto mayor sea este valor, más rápido será el control. Sin embargo, valores demasiado elevados pueden
crear oscilaciones.
Elimina el error de velocidad de estado estable. Cuanto menor es el valor, más rápida es la reacción. Sin
embargo, valores demasiado bajos pueden crear oscilaciones.
Proporciona una ganancia proporcional al índice de cambio de la realimentación. El ajuste a cero desactiva el
diferenciador.
Si hay cambios rápidos en la referencia o en la realimentación en determinada aplicación, lo que significa
que el error cambia rápidamente, el diferenciador puede volverse demasiado dominante. Esto se debe a que
reacciona a cambios en el error. Cuanto más rápido cambia el error, más alta es la ganancia del diferenciador.
Por ello, esta ganancia se puede limitar para permitir el ajuste de un tiempo diferencial razonable para
cambios lentos.
En aplicaciones con una correlación buena (y aproximadamente lineal) entre la referencia del proceso y la
velocidad del motor necesaria para obtener dicha referencia, el factor de acercamiento puede usarse para
alcanzar un mejor rendimiento dinámico del control de PID de procesos.
3 3
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 29

130BP046.10
Hand
on
O
Auto
on
Reset
Principios básicos de funci... Guía de diseño de
Parámetro Descripción de la función
5-54 Tiempo filtro pulsos
constante #29 (Terminal
de impulsos 29),
5-59 Tiempo filtro pulsos
constante #33 (Terminal
33
de impulsos 33),
6-16 Terminal 53 tiempo
filtro constante (Terminal
analógico 53),
6-26 Terminal 54 tiempo
filtro constante (Terminal
analógico 54)
6-36 Term. X30/11 const.
tiempo filtro
6-46 Term. X30/12 const.
tiempo filtro
35-46 Term. X48/2 Filter
Time Constant
Tabla 3.5 Parámetros relevantes para el control de proceso
Si existen oscilaciones de la señal de realimentación de intensidad / tensión, se pueden reducir mediante un
filtro de paso bajo. Esta constante de tiempo representa el límite de velocidad de los rizados que se
producen en la señal de realimentación.
Ejemplo: Si el filtro de paso bajo se ha ajustado a 0,1 s, la velocidad límite es 10 RAD/s (el recíproco de 0,1 s),
que corresponde a (10/[2 × π]) = 1,6 Hz. Esto significa que todas las intensidades / tensiones que varían en
más de 1,6 oscilaciones por segundo son suprimidas por el filtro. El control solo se efectúa en una señal de
realimentación que varía en una frecuencia (velocidad) de menos de 1,6 Hz.
El filtro de paso bajo mejora el rendimiento de estado estable, pero, si se selecciona un tiempo de filtro
demasiado grande, el rendimiento dinámico del control de PID de procesos disminuye.
3.6.6.4
Control de PID avanzado
Consulte la Guía de programación de VLT® AutomationDrive FC 301 / FC 302 para parámetros de control de PID avanzados
3.6.7
Control de intensidad interno en modo VVC
plus
Cuando el par / intensidad del motor supera los límite de par ajustados en 4-16 Modo motor límite de par, 4-17 Modo
generador límite de par y 4-18 Límite intensidad, el control del límite de corriente integral se activa.
Cuando el convertidor de frecuencia está en el límite de intensidad durante el funcionamiento del motor o el funcionamiento regenerativo, intenta situarse lo más rápidamente posible por debajo de los límites de par predeterminados sin
perder el control del motor.
Control local (Hand On) y remoto (Auto On)
3.6.8
El convertidor de frecuencia puede accionarse manualmente a través del panel de control local (LCP) o de forma remota
mediante entradas analógicas y digitales, y un bus serie. Si se permite en 0-40 Botón (Hand on) en LCP, 0-41 Botón (Off) en
LCP, 0-42 [Auto activ.] llave en LCP y 0-43 Botón (Reset) en LCP, es posible arrancar y parar el convertidor de frecuencia
mediante el LCP utilizando las teclas [Hand On] y [Off]. Las alarmas pueden reiniciarse mediante la tecla [Reset]. Después de
pulsar [Hand On], el convertidor de frecuencia pasa al modo manual y sigue (de manera predeterminada) la referencia local,
que se puede ajustar mediante las teclas de navegación del LCP.
Tras pulsar [Auto on], el convertidor de frecuencia pasa al modo automático y sigue (de manera predeterminada) la
referencia remota. En este modo, resulta posible controlar el convertidor de frecuencia mediante las entradas digitales y
diferentes interfaces serie (RS-485, USB o un bus de campo opcional). Consulte más detalles acerca del arranque, parada,
cambio de rampas y ajustes de parámetros, etc., en el grupo de parámetros 5-1* Entradas digitales o en el grupo de
parámetros 8-5* Digital/Bus.
Ilustración 3.10 Teclas de funcionamiento
30 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

Principios básicos de funci...
Guía de diseño de
Referencia activa y Modo de configuración
La referencia activa puede ser tanto la referencia local
como la remota.
En 3-13 Lugar de referencia, puede seleccionarse de forma
permanente la referencia local eligiendo [2] Local.
Para seleccionar permanentemente la referencia remota
seleccione [1] Remoto. Al seleccionar [0] Conex. a manual/
auto (predeterminado), el origen de referencia depende de
qué modo esté activo. (Modo manual o automático).
Ilustración 3.11 Referencia activa
Ilustración 3.12 Modo Configuración
Teclas [Hand On]
[Auto on]
Hand Conex. a
Hand ⇒ off
Auto Conex. a
Auto ⇒ off
Todas las teclas Local Local
Todas las teclas Remota Remota
3-13 Lugar de
referencia
manual / auto
Conex. a
manual / auto
manual / auto
Conex. a
manual / auto
Referencia activa
Local
Local
Remota
Remota
3 3
Tabla 3.6 Condiciones para activación de referencia remota
o local
1-00 Modo Configuración determina el tipo de principio de
control de aplicación (es decir, velocidad, par o control de
proceso) que se usará cuando esté activa la referencia
remota. 1-05 Configuración modo local determina el tipo de
principio de control de aplicación que se usará al activar la
referencia local. Una de ellas está siempre activa, pero
nunca pueden estarlo ambas a la vez.
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 31

Principios básicos de funci... Guía de diseño de
3.7 Manejo de referencias
3.7.1 Referencias
Referencia analógica
Una señal analógica aplicada a la entrada 53 o 54. La señal
33
puede ser la tensión de 0-10 V (FC 301 y FC 302) o de –10
a +10 V (FC 302). Señal de intensidad de 0-20 mA o
4-20 mA.
Referencia binaria
Una señal aplicada al puerto de comunicación en serie
(RS-485 terminales 68-69).
Referencia interna
Una referencia interna definida que puede ajustarse a un
valor comprendido entre el –100 % y el +100 % del
intervalo de referencia. Pueden seleccionarse ocho
referencias internas mediante los terminales digitales.
Referencia de impulsos
Una referencia de impulsos aplicada al terminal 29 o 33,
seleccionada en 5-13 Terminal 29 Entrada digital o
5-15 Terminal 33 entrada digital [32] Entrada de pulsos.
Escalado en el grupo de parámetros 5-5* Entrada de pulsos.
Ref
MAX
Determina la relación entre la entrada de referencia a un
100 % de escala completa (normalmente, 10 V y 20 mA) y
la referencia resultante. El valor de referencia máximo se
ajusta en 3-03 Referencia máxima.
Ref
MIN
Determina la relación entre la entrada de referencia a un
valor del 0 % (normalmente, 0 V, 0 mA y 4 mA) y la
referencia resultante. El valor de referencia mínimo
ajustado en 3-02 Referencia mínima.
Referencia local
La referencia local está activada cuando el convertidor de
frecuencia se acciona con [Hand On] activo. Ajuste la
referencia mediante las teclas de navegación [▲] / [▼] y
[◄] / [►].
Referencia remota
El sistema de manejo de referencias para el cálculo de la
referencia remota se muestra en la Ilustración 3.13.
32 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

Principios básicos de funci...
Guía de diseño de
3 3
Ilustración 3.13 Referencia remota
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 33

Principios básicos de funci... Guía de diseño de
Límites referencia
La referencia remota se calcula una vez en cada
intervalo de exploración y consta de dos tipos de
entradas de referencia:
1. X (la referencia actual): una suma (consulte
3-04 Función de referencia) de hasta cuatro
33
Los dos tipos de entradas de referencia se combinan en la
siguiente fórmula: Referencia remota = X + X × Y / 100 %.
Si no se utiliza la referencia relativa, ajuste 3-18 Recurso
refer. escalado relativo a [0] Sin función y 3-14 Referencia
interna relativa al 0 %. La función enganche arriba / abajo y
la función mantener referencia pueden activarse mediante
entradas digitales en el convertidor de frecuencia. Las
funciones y parámetros se describen en la Guía de progra-
mación.
El escalado de las referencias analógicas se describe en los
grupos de parámetros 6-1* Entrada analógica 1 y 6-2*
Entrada analógica 2, mientras que el escalado de
referencias de impulsos digitales se describe en el grupo
de parámetros 5-5* Entrada de pulsos.
Los límites e intervalos de referencias se ajustan en el
grupo de parámetros 3-0* Límites referencia.
referencias seleccionadas de forma externa, que
comprenden cualquier combinación (determinada
por el ajuste de 3-15 Recurso de referencia 1,
3-16 Recurso de referencia 2 y 3-17 Recurso de
referencia 3) de una referencia interna fija
(3-10 Referencia interna), referencias analógicas
variables, referencias digitales variables de
impulsos y varias referencias de bus serie, sea
cual sea la unidad en que se controla el
convertidor de frecuencia ([Hz], [RPM], [Nm], etc.).
2. Y (la referencia relativa): una suma de una
referencia interna fija (3-14 Referencia interna
relativa) y una referencia analógica variable
(3-18 Recurso refer. escalado relativo) en [%].
3.7.2
3-00 Rango de referencia, 3-02 Referencia mínima y
3-03 Referencia máxima definen el rango permitido para la
suma de todas las referencias. Cuando es necesario, la
suma de todas las referencias se bloquea. La relación entre
la referencia resultante (tras el bloqueo) y la suma de
todas las referencias se indica en la Ilustración 3.14.
Ilustración 3.14 Relación entre la referencia resultante y la
suma de todas las referencias
Ilustración 3.15 Referencia resultante
34 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

Principios básicos de funci... Guía de diseño de
El valor de 3-02 Referencia mínima no puede ajustarse por
debajo de 0, a menos que 1-00 Modo Configuración esté
ajustado a [3] Proceso. En ese caso, las relaciones siguientes
entre la referencia resultante (tras el bloqueo) y la suma de
todas las referencias son las indicadas en la Ilustración 3.16.
Ilustración 3.16 Suma de todas las referencias con 1-00 Modo
Configuración ajustado en [3] Proceso
Escalado de referencias internas y
3.7.3
referencias de bus
3.7.4
Escalado de referencias de impulsos y
analógicas y realimentación
Las referencias y la realimentación se escalan de la misma
manera a partir de entradas analógicas y de impulsos. La
única diferencia es que una referencia superior o inferior a
los «puntos finales» mínimo y máximo especificados (P1 y
P2 en Ilustración 3.17) se bloquea, mientras que una
realimentación superior o inferior a dichos puntos no se
bloquea.
Ilustración 3.17 Escalado de referencias de impulsos y
analógicas y realimentación
3 3
Las referencias internas se escalan según estas reglas:
Cuando 3-00 Rango de referencia: [0] Mín - Máx, el
•
0 % de la referencia es igual a 0 [unidad], donde
la unidad puede ser cualquiera, por ejemplo r/
min, m/s, bar, etc., el 100 % de la referencia es
igual al Máx (abs (3-03 Referencia máxima), abs
(3-02 Referencia mínima)).
Cuando 3-00 Rango de referencia: [1] =
•
-Máx - +Máx, el 0 % de la referencia es igual a 0
[unidad], el –100 % de la referencia es igual a Máx y el 100 % de la referencia es igual a la
referencia máxima.
Las referencias de bus se escalan según estas reglas:
Cuando 3-00 Rango de referencia: [0] Mín - Máx,
•
para obtener la resolución máxima en la
referencia del bus, el escalado del bus es: la
referencia 0 % es igual a la referencia mínima y la
referencia 100 % es igual a la referencia máxima.
Cuando 3-00 Rango de referencia: [1] =
•
-Máx - +Máx, la referencia –100 % es igual a la
referencia -Máx, y la referencia 100 % es igual a la
referencia máxima.
Ilustración 3.18 Escalado de la salida de referencia
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 35

Principios básicos de funci... Guía de diseño de
3.7.5 Banda muerta alrededor de cero
En algunos casos la referencia (y también la realimentación, en raras ocasiones) tiene que tener una banda
muerta alrededor de cero (esto es, para asegurarse de que
la máquina se detiene cuando la referencia es «casi cero»).
33
Para activar la banda muerta y ajustar su valor, realice
los ajustes siguientes:
El valor de referencia mínimo o bien el valor de
•
referencia máximo debe ser igual a cero. En otras
palabras; P1 o P2 deben estar en el eje X en la
Ilustración 3.19.
Los dos puntos que definen la gráfica de
•
escalado están en el mismo cuadrante.
El tamaño de la banda muerta se define mediante P1 o P2,
tal como se indica en la Ilustración 3.19.
Ilustración 3.20 Banda muerta inversa
Ilustración 3.19 Banda muerta
De esta forma, un punto final de referencia de
P1 = (0 V, 0 r/min) no produce ninguna banda muerta,
pero un punto final de referencia de, por ejemplo,
P1 = (1 V, 0 r/min), produce una banda muerta de –1 V a
+1 V en este caso, siempre que se ponga el punto final P2
o en el Cuadrante 1 o en el Cuadrante 4.
36 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

Principios básicos de funci... Guía de diseño de
La Ilustración 3.21 muestra cómo se bloquea la entrada de referencia con límites en el rango Mín-Máx.
3 3
Ilustración 3.21 Referencia positiva con banda muerta, entrada digital para disparar inversión
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 37

Principios básicos de funci... Guía de diseño de
La Ilustración 3.22 muestra cómo se bloquea la entrada de referencia con límites fuera del rango de –Máx a +Máx en los
límites inferior y superior de las entradas antes de añadirse a la referencia real. Asimismo, la Ilustración 3.22 muestra cómo
se bloquea la referencia real a –Máx a +Máx mediante el algoritmo de referencia.
33
Ilustración 3.22 Referencia positiva con banda muerta, entrada digital para disparar inversión. Reglas de bloqueo
38 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

Principios básicos de funci... Guía de diseño de
3 3
Ilustración 3.23 Referencia de negativa a positiva con banda muerta, dirección determinada por el signo, –Máx - +Máx
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 39

Funciones del producto
Guía de diseño de
4 Funciones del producto
4.1.2
4.1 Funciones de funcionamiento
automatizadas
Estas funciones están activas tan pronto el convertidor de
frecuencia esté funcionando. No necesitan programación ni
44
configuración. Entender que estas funciones están
presentes puede optimizar un diseño de sistema y,
posiblemente, evitar añadirle componentes o funciones
duplicados.
El convertidor de frecuencia tiene todo un abanico de
funciones de protección integradas para protegerse a sí
mismo y al motor que pone en funcionamiento.
protección ante cortocircuitos
4.1.1
Motor (fase-fase)
El convertidor de frecuencia está protegido contra cortocircuitos en el lado del motor con la medición de la
intensidad en cada una de las tres fases del motor o en el
enlace de CC. Un cortocircuito entre dos fases de salida
provoca una sobreintensidad en el inversor. El inversor se
cierra cuando la intensidad del cortocircuito sobrepasa el
valor permitido (alarma 16, bloqueo por alarma).
Red
Un convertidor de frecuencia que funciona correctamente
limita la intensidad que puede tomar de la fuente de
alimentación. Sin embargo, se recomienda utilizar fusibles
y / o magnetotérmicos en el lado de la fuente de alimentación a modo de protección, en caso de avería de
componentes internos del convertidor de frecuencia
(primer fallo). Consulte la capétulo 9.3 Conexión de red para
más información.
AVISO!
Esto es obligatorio a fin de asegurar el cumplimiento de
los requisitos de la norma CEI 60364 para CE y del NEC
2009 para UL.
Resist. de freno
El convertidor de frecuencia está protegido contra cortocircuitos en la resistencia de freno.
Carga compartida
Para proteger el bus de CC contra cortocircuitos y al
convertidor de frecuencia contra sobrecargas, instale los
fusibles de CC en serie con los terminales de carga
compartida para todas las unidades conectadas. Consulte
la capétulo 9.6.3 Carga compartida para más información.
Protección contra sobretensión
Sobretensión generada por el motor
La tensión en el circuito intermedio aumenta cuando el
motor actúa como generador. Esto ocurre en los siguientes
casos:
Cuado la carga arrastra al motor (a una frecuencia
•
de salida constante del convertidor de
frecuencia), es decir, cuando la carga genera
energía.
Durante la deceleración («rampa de decele-
•
ración»), si el momento de inercia es alto, la
fricción es baja y el tiempo de rampa de deceleración es demasiado corto para que la energía
sea disipada como una pérdida en el convertidor
de frecuencia, el motor y la instalación.
Un ajuste de compensación de deslizamiento
•
incorrecto puede provocar una tensión de enlace
de CC más elevada.
Fuerza contraelectromotriz desde el funciona-
•
miento del motor PM. Si queda en inercia a unas
r/min altas, la fuerza contraelectromotriz del
motor PM puede superar, potencialmente, la
tolerancia de tensión máxima del convertidor de
frecuencia y provocar daños. Para evitarlo, el
valor de 4-19 Frecuencia salida máx. se limita
automáticamente de acuerdo con un cálculo
interno basado en el valor de 1-40 fcem a 1000
RPM, 1-25 Veloc. nominal motor y 1-39 Polos
motor.
AVISO!
Para evitar que el motor supere la velocidad (p. ej.,
debido a efectos excesivos de autorrotación), equipe el
convertidor de frecuencia con una resistencia de freno.
La sobretensión se puede controlar o bien con una función
de freno (2-10 Función de freno) o bien con un control de
sobretensión (2-17 Control de sobretensión).
Funciones de freno
Conecte una resistencia de freno para disipar el exceso de
energía de freno. La conexión de una resistencia de freno
permite una mayor tensión de CC durante el frenado.
El freno de CA es una alternativa para mejorar el frenado
sin utilizar una resistencia de freno. Esta función controla
una sobremagnetización del motor cuando funciona un
generador. Esta función puede mejorar el OVC. El aumento
de las pérdidas eléctricas en el motor permite que la
función OVC aumente el par de frene sin superar el límite
de sobretensión.
40 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

Funciones del producto
Guía de diseño de
AVISO!
El freno de CA no es tan eficaz como el freno dinámico
con una resistencia.
Control de sobretensión (OVC)
El OVC reduce el riesgo de que el convertidor de
frecuencia se desconecte debido a una sobretensión en el
enlace de CC. Esto se soluciona ampliando automáticamente el tiempo de rampa de deceleración.
AVISO!
El OVC se puede activar para un motor PM con el núcleo
de control, PM VVC
PM.
plus
, flujo SC y flujo CL para motores
AVISO!
No debe activarse OVC en aplicaciones de elevación.
4.1.3 Detección de que falta una fase del
motor
La función Falta una fase del motor (4-58 Función Fallo
Fase Motor) está activada predeterminadamente para evitar
daños en el motor en caso de que falte una fase del
motor. El ajuste predeterminado es 1000 ms, pero se
puede ajustar para una detección más rápida.
Límite de intensidad
El límite de intensidad se controla en 4-18 Límite intensidad
y el intervalo anterior a la desconexión del convertidor de
frecuencia se controla en 14-24 Retardo descon. con lím. de
int.
Límite de veloc.
Límite de velocidad mín.: 4-11 Límite bajo veloc. motor
[RPM] o 4-12 Límite bajo veloc. motor [Hz] limitan el
intervalo operativo de velocidad a entre, por ejemplo, 30 y
50/60 Hz.
Límite de velocidad máx.: 4-13 Límite alto veloc. motor
[RPM] o 4-19 Frecuencia salida máx. limitan la velocidad
máxima de salida que puede proporcionar el convertidor
de frecuencia.
ETR
El ETR es un dispositivo electrónico que simula un relé
bimetal basado en mediciones internas. La característica se
muestra en la Ilustración 4.1.
Límite de tensión
El inversor se apaga para proteger a los transistores y
condensadores del circuito intermedio, cuando se alcanza
un determinado nivel de tensión de codificación fija.
Sobretemperatura
El convertidor de frecuencia tiene sensores de temperatura
integrados y reacciona inmediatamente a valores críticos
mediante los límites de codificación fija.
4 4
Detección de desequilibrio de fase de
4.1.4
red
El funcionamiento en condiciones graves de inestabilidad
de red reduce la vida útil del motor. Las condiciones se
consideran graves si el motor se está utilizando
continuamente cerca del valor nominal de carga. El ajuste
predeterminado desconecta el convertidor de frecuencia
en caso de desequilibrio de red (14-12 Función desequil.
alimentación).
Conmutación en la salida
4.1.5
Se permite añadir un interruptor a la salida entre el motor
y el convertidor de frecuencia. Es posible que aparezcan
mensajes de fallo. Active la función de Motor en giro para
capturar un motor que gira.
4.1.6
Protección contra sobrecargas
Límite de par
La función de límite de par protege el motor ante
sobrecargas, independientemente de la velocidad. El límite
de par se controla en 4-16 Modo motor límite de par o
4-17 Modo generador límite de par y el intervalo anterior a
la desconexión de la advertencia de límite de par se
controla en 14-25 Retardo descon. con lím. de par.
Protección rotor bloqueado
4.1.7
Puede haber situaciones en las que el rotor se bloquea
debido a una carga excesiva o algún otro factor (los
cojinetes o aplicaciones bloquean el rotor). Esto provoca el
sobrecalentamiento del bobinado del motor (para un
correcto enfriamiento es necesario que el rotor se mueva
libremente). El convertidor de frecuencia puede detectar la
situación de rotor bloqueado con un control de flujo de
PM en lazo abierto y control PM VVC
Rotor Protection).
Reducción de potencia automática
4.1.8
El convertidor de frecuencia comprueba constantemente
los niveles críticos:
Temperatura alta crítica en la tarjeta de control o
•
disipador
Carga del motor alta
•
Tensión de enlace de CC alta
•
Velocidad del motor baja
•
plus
(30-22 Locked
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 41

Funciones del producto
Guía de diseño de
Como respuesta a un nivel crítico, el convertidor de
frecuencia ajusta la frecuencia de conmutación. Para
temperaturas internas altas críticas y velocidades de motor
bajas, el convertidor de frecuencia también puede forzar el
patrón de PWM a SFAVM.
AVISO!
La reducción de potencia automática es diferente cuando
44
14-55 Filtro de salida está ajustado en [2] Filtro senoidal
fijo.
4.1.9 Optimización automática de energía
La optimización automática de energía (AEO) dirige el
convertidor de frecuencia para que controle
continuamente la carga en el motor y ajuste la tensión de
salida para aumentar al máximo la eficacia. Con carga
ligera, la tensión disminuye y la intensidad del motor se
reduce al mínimo. El motor saca provecho porque
aumenta la eficacia, se reduce el calor y el funcionamiento
es más silencioso. No es necesario seleccionar una curva
de V/Hz porque el convertidor de frecuencia ajusta
automáticamente la tensión del motor.
4.1.10
Modulación automática de
frecuencia de conmutación
El convertidor de frecuencia genera impulsos eléctricos
cortos para formar un patrón de onda de CA. La frecuencia
portadora es el ritmo de estos impulsos. Una frecuencia
portadora baja (ritmo de impulsos lento) causa ruido en el
motor, de modo que es preferible una frecuencia
portadora más alta. Una frecuencia portadora alta, sin
embargo, genera calor en el convertidor de frecuencia, lo
que puede limitar la cantidad de corriente disponible en el
motor. El uso de transistores bipolares de puerta aislada
(IGBT) significa una conmutación a una velocidad muy alta.
La modulación automática de frecuencia de conmutación
regula estas condiciones automáticamente para ofrecer la
frecuencia portadora más elevada sin sobrecalentar el
convertidor de frecuencia. Al ofrecer una frecuencia
portadora alta regulada, se silencia el ruido de funcionamiento del motor a velocidades bajas, cuando el ruido
audible es crítico, y se produce una plena potencia de
salida al motor cuando la demanda lo requiere.
4.1.11
Reducción de potencia automática
para una frecuencia portadora alta
El convertidor de frecuencia está diseñado para un funcio-
namiento continuo a plena carga a frecuencias portadoras
de entre 3,0 y 4,5 kHz. Una frecuencia portadora superior a
4,5 kHz genera un aumento del calor en el convertidor de
frecuencia y requiere que se reduzca la potencia de la
intensidad de salida.
Una característica automática del convertidor de frecuencia
es que el control de la frecuencia portadora depende de la
carga. Esta característica permite al motor beneficiarse de
la máxima frecuencia portadora que la carga permita.
4.1.12
Rendimiento de fluctuación de
potencia
El convertidor de frecuencia soporta las fluctuaciones de la
red, como los cortes transitorios y momentáneos, las
breves caídas de tensión y las sobretensiones. El
convertidor de frecuencia compensa automáticamente las
tensiones de entrada de un ±10 % del valor nominal para
ofrecer un par y una tensión nominal del motor completos.
Con el rearranque automático seleccionado, el convertidor
de frecuencia se enciende automáticamente tras una
desconexión de tensión. Y, con la función de Motor en
giro, el convertidor de frecuencia sincroniza el giro del
motor antes del arranque.
4.1.13
Los ruidos de resonancias del motor a alta frecuencia se
pueden eliminar con el uso de la amortiguación de
resonancia. Está disponible la amortiguación de frecuencia
automática o seleccionada manualmente.
4.1.14
Amortiguación de resonancia
Ventiladores controlados por
temperatura
Los ventiladores de refrigeración interna se controlan por
temperatura mediante sensores que están dentro del
convertidor de frecuencia. El ventilador de refrigeración a
menudo no funciona durante el funcionamiento a baja
carga, cuando está en el modo ir a dormir o en espera.
Esto reduce el ruido, aumenta el rendimiento y alarga la
vida útil del ventilador.
42 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

Funciones del producto
Guía de diseño de
4.1.15 Conformidad con EMC
Las interferencias electromagnéticas (EMI) o las interferencias de radiofrecuencia (RFI, en caso de radiofrecuencia)
son perturbaciones que pueden afectar al circuito eléctrico
a causa de la inducción o radiación electromagnética de
una fuente externa. El convertidor de frecuencia está
diseñado para cumplir con la norma de productos EMC
para convertidores de frecuencia CEI 61800-3 y la norma
europea EN 55011. Para cumplir con los niveles de emisión
de EN 55011, el cable de motor debe estar apantallado y
terminado correctamente. Para obtener más información
sobre el rendimiento de EMC, consulte
capétulo 5.2.1 Resultados de las pruebas de EMC.
4.1.16
Aislamiento galvánico de los
terminales de control
Todos los terminales de control y los terminales de relé de
salida están galvánicamente aislados de la potencia de red.
Esto significa que los circuitos del controlador están
totalmente protegidos de la intensidad de entrada. Los
terminales de relé de salida necesitan su propia toma de
tierra. Estos aislamientos cumplen con los estrictos
requisitos de protección de tensión muy baja (PELV) para
el aislamiento.
4.2
Funciones de aplicación personalizadas
Estas son las funciones más comunes programadas para
utilizarse en el convertidor de frecuencia para un
rendimiento del sistema mejorado. Requieren una progra-
mación o configuración mínimas. Entender que estas
funciones están disponibles puede optimizar un diseño de
sistema y, posiblemente, evitar añadirle componentes o
funciones duplicados. Consulte la Guía de programación
específica del producto para obtener instrucciones sobre la
activación de estas funciones.
4.2.1 Adaptación automática del motor
La adaptación automática del motor (AMA) es un procedi-
miento de prueba automatizado utilizado para medir las
características eléctricas del motor. El AMA proporciona un
modelo electrónico preciso del motor. Permite que el
convertidor de frecuencia calcule el rendimiento y la
eficacia óptimos con el motor. Llevar a cabo el procedi-
miento AMA también aumenta al máximo la función de
optimización automática de energía del convertidor de
frecuencia. El AMA se realiza sin que el motor esté girando
y sin desacoplar la carga del motor.
Protección térmica del motor
4.2.2
4 4
Los componentes que conforman el aislamiento galvánico
son
Fuente de alimentación, incluyendo aislamiento
•
de señal
Accionamiento de puerta para los IGBT, los
•
transformadores de disparo y optoacopladores
Los transductores de efecto Hall de intensidad de
•
salida
La protección térmica del motor se puede proporcionar de
tres maneras:
Mediante la detección directa de la temperatura a
•
través una de las formas siguientes:
Sensor KTY o PTC en los bobinados del
-
motor y conectados a una entrada
analógica o digital estándar
PT100 o PT1000 en los bobinados y
-
cojinetes del motor, conectado a una
tarjeta Sensor Input MCB 114
Entrada de termistor PTC en la PTC
-
Thermistor Card MCB 112 (homologada
por ATEX)
Mediante un interruptor termomecánico (tipo
•
Klixon) en una entrada digital
Mediante el relé termoelectrónico (ETR) integrado
•
El ETR calcula la temperatura del motor midiendo la
intensidad, la frecuencia y el tiempo de funcionamiento. El
convertidor de frecuencia muestra la carga térmica del
motor en forma de porcentaje y puede emitir una
advertencia cuando llegue a una referencia de consigna de
sobrecarga programable.
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 43

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2000
500
200
400
300
1000
600
t [s]
175ZA052.11
fSAL = 0,2 x f M,N
fSAL = 2 x f M,N
fSAL = 1 x f M,N
IMN
IM
Funciones del producto
Guía de diseño de
Las opciones programables en la sobrecarga permiten que
el convertidor de frecuencia detenga el motor, reduzca la
salida o ignore la condición. Incluso a velocidades bajas, el
convertidor de frecuencia cumple con las normas de
sobrecarga electrónica del motor I2t Clase 20.
El convertidor de frecuencia se puede configurar
(14-10 Fallo aliment.) para diferentes tipos de comporta-
miento durante el corte de red, p. ej.:
Bloqueo por alarma cuando el enlace de CC se
•
agote
Inercia con función de Motor en giro cuando la
•
red vuelva (1-73 Motor en giro)
Energía regenerativa
•
44
Rampa de deceleración controlada
•
Función de motor en giro
Esta selección hace posible «atrapar» un motor que, por un
corte de red, gira sin control. Esta opción es muy
importante para centrifugadoras y ventiladores.
Energía regenerativa
Esta selección garantiza que el convertidor de frecuencia
funciona mientras haya energía en el sistema. Para cortes
de red breves, el funcionamiento se restablece cuando la
red vuelve, sin detener la aplicación o perder el control en
ningún momento. Se pueden seleccionar diferentes
Ilustración 4.1 Características del ETR
variantes de energía regenerativa.
El comportamiento del convertidor de frecuencia en un
corte de red se puede configurar en 14-10 Fallo aliment. y
el eje X muestra la relación entre los valores I
motor
e I
motor
1-73 Motor en giro.
nominal. El eje Y muestra el intervalo en segundos que
transcurre antes de que el ETR se corte y desconecte el
convertidor de frecuencia. Las curvas muestran la
velocidad nominal característica, al doble de la velocidad
nominal y al 0,2x de la velocidad nominal.
A una velocidad inferior, el ETR se desconecta con un
calentamiento inferior debido a una menor refrigeración
del motor. De ese modo, el motor queda protegido frente
a un posible sobrecalentamiento, incluso a baja velocidad.
La función ETR calcula la temperatura del motor en
función de la intensidad y la velocidad reales. La
temperatura calculada es visible como un parámetro de
lectura en el 16-18 Térmico motor.
Controlador PID integrado
4.2.4
El controlador integrado proporcional, integral y derivativo
(PID) está disponible, lo que elimina la necesidad de
dispositivos de control auxiliares. El controlador PID
mantiene un control constante de los sistemas de lazo
cerrado en los que se deben mantener regulados la
presión, el flujo, la temperatura u otros requisitos del
sistema. El convertidor de frecuencia puede ofrecer control
autosuficiente de la velocidad del motor en respuesta a las
señales de realimentación de los sensores remotos.
También está disponible una versión especial del ETR para
motores EX-e en zonas ATEX. Esta función hace posible
introducir una curva específica para proteger el motor Ex-e.
La Guía de programación guía al usuario por la configuración.
El convertidor de frecuencia acomoda dos señales de
realimentación de dos dispositivos diferentes. Esta función
permite regular un sistema con diferentes requisitos de
realimentación. El convertidor de frecuencia toma
decisiones de control comparando las dos señales para
optimizar el rendimiento del sistema.
4.2.3
Corte de red
Durante un corte en la alimentación, el convertidor de
frecuencia sigue funcionando hasta que la tensión del
circuito intermedio desciende por debajo del nivel mínimo
para parada. Generalmente, dicho nivel es un 15 % inferior
a la tensión de alimentación nominal más baja del
convertidor de frecuencia. La tensión de red antes del
corte y la carga del motor determinan el tiempo necesario
para la parada de inercia del convertidor de frecuencia.
44 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

Funciones del producto Guía de diseño de
4.2.5 Rearranque automático
El convertidor de frecuencia puede programarse para
reiniciar el motor automáticamente tras una pequeña
desconexión, como una fluctuación o pérdida de potencia
momentáneas. Esta característica elimina la necesidad de
reiniciar manualmente y mejorar el funcionamiento
automatizado para sistemas controlados remotamente. La
cantidad de intentos de rearranque y la duración entre
intentos se puede limitar.
4.2.6 Función de Motor en giro
La función de Motor en giro permite que el convertidor de
frecuencia se sincronice con un motor en funcionamiento
girando hasta a máxima velocidad en cualquier dirección.
Esto evita desconexiones causadas por sobreintensidad.
Además, reduce al mínimo la tensión mecánica del
sistema, ya que el motor no sufre ningún cambio abrupto
de la velocidad cuando se inicia el convertidor de
frecuencia.
Par completo a velocidad reducida
4.2.7
El convertidor de frecuencia sigue una curva V/Hz variable
para ofrecer un par del motor completo incluso a
velocidades reducidas. El par de salida completo puede
coincidir con la velocidad de funcionamiento máxima
diseñada del motor. Esto se diferencia de los convertidores
de par variable que ofrecen un par del motor reducido a
velocidad baja o de los convertidores de par constante que
proporcionan exceso de tensión, calor y ruido del motor a
una velocidad inferior a la plena.
Bypass de frecuencia
4.2.8
En algunas aplicaciones, el sistema puede tener
velocidades de funcionamiento que crean una resonancia
mecánica. Esto puede generar un ruido excesivo y puede
dañar los componentes mecánicos del sistema. El
convertidor de frecuencia dispone de cuatro anchos de
banda de frecuencia de bypass programables. Esto permite
que el motor evite las velocidades que provocan
resonancia en el sistema.
4.2.10
El convertidor de frecuencia tiene cuatro ajustes que se
pueden programar independientemente. Utilizando un
ajuste múltiple, es posible alternar entre funciones
programadas independientemente activadas por entradas
digitales o un comando de serie. Los ajustes indepen-
dientes se utilizan, por ejemplo, para cambiar las
referencias, para el funcionamiento día / noche o
verano / invierno o para controlar varios motores. El ajuste
activo se muestra en el LCP.
Los datos de ajuste se pueden copiar de un convertidor de
frecuencia a otro descargando la información desde el LCP
extraíble.
4.2.11
El freno dinámico se establece por:
4 ajustes programables
Frenado dinámico
Freno con resistencia
•
Una puerta lógica IGBT del freno mantiene una
sobretensión bajo un umbral determinado
dirigiendo la energía del freno desde el motor a
la resistencia de freno conectado (2-10 Función de
freno = [1]).
Freno de CA
•
La energía del freno se distribuye en el motor
mediante la modificación de las condiciones de
pérdida del motor. La función de freno de CA no
puede utilizarse en aplicaciones con alta
frecuencia de reseteo, ya que esto sobrecalienta
el motor (2-10 Función de freno = [2]).
Freno de CC
•
Una intensidad de CC sobremodulada añadida a
la intensidad de CA funciona como un freno de
corriente parásita (2-02 Tiempo de frenado CC
≠ 0 s).
4 4
4.2.9
Precalentador del motor
Para precalentar un motor en un entorno húmedo o frío,
puede suministrarse continuamente una pequeña cantidad
de corriente de CC en el motor para protegerlo de la
condensación y de un arranque en frío. Esto puede
eliminar la necesidad de resistencia calefactora.
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 45

Funciones del producto Guía de diseño de
4.2.12 Control de freno mecánico de lazo abierto
Parámetros para controlar el funcionamiento de un freno electromagnético (mecánico), requerido habitualmente en aplicaciones de elevación.
Para controlar un freno mecánico, se requiere una salida de relé (relé 01 o 02) o una salida digital programada (terminal 27
o 29). Normalmente, esta salida debe estar cerrada cuando el convertidor de frecuencia no pueda «mantener» el motor
debido, por ejemplo, a que la carga es demasiado elevada. Seleccione [32] Ctrl. freno mec. para aplicaciones con un freno
electromagnético en 5-40 Relé de función, 5-30 Terminal 27 salida digital o 5-31 Terminal 29 salida digital. Si se ha
seleccionado [32] Ctrl. freno mec., el freno mecánico se cerrará desde el arranque hasta que la intensidad de salida sea
44
superior al nivel seleccionado en 2-20 Intensidad freno liber.Durante la parada, el freno mecánico se activa cuando la
velocidad cae por debajo del nivel especificado en el 2-21 Velocidad activación freno [RPM]. Si el convertidor de frecuencia
entra en una condición de alarma o situación de sobreintensidad o sobretensión, el freno mecánico se conectará inmediatamente. Este es también el caso durante una desconexión segura de par.
AVISO!
El modo de protección y las funciones de retardo de desconexión (14-25 Retardo descon. con lím. de par y 14-26 Ret. de
desc. en fallo del convert.) pueden retrasar la activación del freno mecánico en una situación de alarma. Estas funciones
deben deshabilitarse en aplicaciones de elevación.
Ilustración 4.2 Freno mecánico
46 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

Frenomec.
Ganancia derefuerzo
Relé
Parref.
MotorVelocidad
Premag. Rampa de par
Hora
p. 2-27
Ref. par 2-26
Factor de ganancia de refuerzo
p. 2-28
Liberación
de freno
Hora
p. 2-25
Rampa de aceleración 1
p. 3-41
Rampa de deceleración 1
p. 3-42
Retardo
de parada
p. 2-24
Activar
retardo
de freno
p. 2-23
1 2 3
130BA642.12
II
I
Funciones del producto
Guía de diseño de
4.2.13 Control de freno mecánico de lazo cerrado / freno mecánico de elevación
El control de frenado mecánico para elevación cuenta con las siguientes funciones:
Dos canales para realimentación del freno mecánico para ofrecer más protección contra acciones accidentales
•
derivadas de la rotura de una cable.
Control de la realimentación del freno mecánico en todo el ciclo. Esto ayuda a proteger el freno mecánico, sobre
•
todo si hay más de un convertidor de frecuencia conectado al mismo eje.
No hay rampa de aceleración hasta que la realimentación confirma que el freno mecánico está abierto.
•
Mejora en el control de carga en parada. Si 2-23 Activar retardo de freno se ajusta demasiado corto, W22 se activa y
•
se impide que el par esté en rampa de deceleración.
Es posible configurar la transición en el momento en que el motor asume la carga del freno. Se puede aumentar
•
2-28 Factor de ganancia de refuerzo para reducir el movimiento al mínimo. Para obtener una transición muy suave,
cambie el ajuste del control de velocidad a la posición de control durante el cambio.
Ajuste 2-28 Factor de ganancia de refuerzo a 0 para activar el Control de posición durante 2-25 Tiempo
•
liberación de freno. De esta forma se activan los parámetros de 2-30 Position P Start Proportional Gain a
2-33 Speed PID Start Lowpass Filter Time, que son parámetros PID del Control de posición.
4 4
Ilustración 4.3 Secuencia de liberación de freno para control de freno mecánico para elevación Este control de freno solo está
disponible en FLUJO con realimentación del motor, para motores asíncronos y motores PM no salientes.
Los parámetros de 2-26 Ref par a 2-33 Speed PID Start Lowpass Filter Time solo están disponibles para el control de freno
mecánico de elevación (FLUJO con realimentación del motor). Los parámetros de 2-30 Position P Start Proportional Gain a
2-33 Speed PID Start Lowpass Filter Time pueden configurarse para obtener un cambio de transición muy suave del control
de velocidad al control de posición durante 2-25 Tiempo liberación de freno (tiempo en el que la carga se traslada del freno
mecánico al convertidor de frecuencia).
Los parámetros de 2-30 Position P Start Proportional Gain a 2-33 Speed PID Start Lowpass Filter Time se activan cuando
2-28 Factor de ganancia de refuerzo está ajustado a 0. Consulte la Ilustración 4.3 para más información.
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 47

. . .
. . .
Par. 13-11
Comparator Operator
Par. 13-43
Logic Rule Operator 2
Par. 13-51
SL Controller Event
Par. 13-52
SL Controller Action
130BB671.13
Coast
Start timer
Set Do X low
Select set-up 2
. . .
Running
Warning
Torque limit
Digital input X 30/2
. . .
=
TRUE longer than..
. . .
. . .
Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
Funciones del producto Guía de diseño de
AVISO!
Para ver un ejemplo de control de freno mecánico
avanzado para aplicaciones de elevación, consulte
capétulo 10 Ejemplos de aplicaciones.
Cuando se haya ejecutado el último
secuencia vuelve a comenzar desde el evento [0] / acción
[0]. La Ilustración 4.5 muestra un ejemplo con
4 eventos / acciones:
evento / acción, la
4.2.14 Smart Logic Control (SLC)
Smart Logic Control (SLC) es una secuencia de acciones
44
definidas por el usuario (consulte 13-52 Acción Controlador
SL [x]) ejecutadas por el SLC cuando el evento asociado
definido por el usuario (consulte 13-51 Evento Controlador
SL [x]) es evaluado como VERDADERO por el SLC.
La condición de que un evento pueda estar en un estado
determinado o de que la salida de una regla lógica o un
operando comparador pase a ser VERDADERO. Esto da
lugar a una acción asociada, como se muestra en la
Ilustración 4.4.
Ilustración 4.5 Orden de ejecución cuando están programados
4 eventos / acciones
Comparadores
Los comparadores se usan para comparar variables
continuas (frecuencia o intensidad de salida, entrada
analógica, etc.) con valores fijos predeterminados.
Ilustración 4.6 Comparadores
Ilustración 4.4 Evento y acción SCL
Reglas lógicas
Se pueden combinar hasta tres entradas booleanas
Los eventos y las acciones están numerados y vinculados
en parejas (estados). Esto significa que cuando se complete
el evento [0] (cuando alcance el valor VERDADERO), se
(entradas VERDADERAS / FALSAS) de temporizadores,
comparadores, entradas digitales, bits de estado y eventos
utilizando los operadores lógicos Y, O y NO.
ejecutará la acción [0]. Después de esto, las condiciones del
evento [1] se evalúan y, si se evalúan como VERDADERAS,
la acción [1] se ejecutará y así sucesivamente. En cada
momento, solo se evalúa un evento. Si un evento se evalúa
como FALSO, no sucede nada (en el SLC) durante el
intervalo de exploración actual y no se evalúan otros
eventos. Esto significa que cuando el SLC se inicia, evalúa
el evento [0] (y solo el evento [0]) en cada intervalo de
exploración. El SLC ejecuta una acción [0] e inicia la
evaluación de otro evento [1] solo si el evento [0] se
Ilustración 4.7 Reglas lógicas
considera VERDADERO. Se pueden programar entre 1 y
20 eventos y acciones.
48 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

130BB890.14
P1 P2 P3
Funciones del producto
Guía de diseño de
4.2.15 Desconexión segura de par
Para obtener información sobre la desconexión segura de
par, consulte el Manual de funcionamiento de la
desconexión segura de par de la serie VLT
4.3
VLT® FlexConcept® de Danfoss
El VLT® FlexConcept® de Danfoss es una solución de
convertidor de frecuencia rentable, flexible y energéticamente eficiente, principalmente para transportadoras. El
concepto consta de VLT® OneGearDrive® accionado por el
VLT® AutomationDrive FC 302 o el VLT® Decentral Drive
FCD 302.
OneGearDrive es, básicamente, un motor de magnetización
permanente con un engranaje cónico. El engranaje cónico
se puede suministrar con diferentes relaciones de
reducción.
®
FC.
4 4
Ilustración 4.8 OneGearDrive
El OneGearDrive puede accionarse mediante el VLT
AutomationDrive FC 302 y el VLT® Decentral Drive FCD
302 en los siguientes tamaños de potencia, según las
demandas de la aplicación real:
0,75 kW
•
1,1 kW
•
1,5 kW
•
2,2 kW
•
3,0 kW
•
Cuando [1] PM no saliente SPM se ha seleccionado en en
FC 302 o FCD 302, el OneGearDrive se puede seleccionar
en 1-11 Fabricante motor y los parámetros recomendados
pueden ajustarse automáticamente.
Para obtener más información, consulte la Guía de progra-
mación del VLT® AutomationDrive FC 301 / FC 302, la Guía
de selección del VLT® OneGearDrive y www.danfoss.com/
BusinessAreas/DrivesSolutions/VLTFlexConcept/
®
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 49

Integración del sistema
Guía de diseño de
5 Integración del sistema
5.1.3
5.1 Condiciones ambientales de
funcionamiento
5.1.1 Humedad
Aunque el convertidor de frecuencia pueda funcionar
correctamente a humedades elevadas (hasta el 95 % de
humedad relativa), la condensación siempre debe evitarse.
55
Hay un riesgo específico de condensación cuando el
convertidor de frecuencia está más frío que el aire
ambiente húmedo. La humedad del aire también puede
condensarse en los componentes electrónicos y provocar
cortocircuitos. La condensación se produce en unidades sin
potencia. Es aconsejable instalar un calefactor de armario
cuando es posible que se forme condensación debido a las
condiciones ambientales. Evite la instalación en áreas con
escarcha.
Alternativamente, operar el convertidor de frecuencia en
modo de espera (con la unidad conectada a la red) reduce
el riesgo de condensación. Sin embargo, asegúrese de que
la disipación de potencia es suficiente para mantener los
circuitos del convertidor de frecuencia sin humedad.
Temperatura y refrigeración
El convertidor de frecuencia tiene ventiladores integrados
para garantizar una refrigeración óptima. El ventilador
principal fuerza el caudal de aire a lo largo de las aletas de
refrigeración del disipador, lo que garantiza que el aire
interno se refrigere. Algunos tamaños de potencia tienen
un pequeño ventilador secundario cerca de la tarjeta de
control, lo que garantiza que el aire interno circule para
evitar puntos calientes. El ventilador principal está
controlado por la temperatura interna del convertidor de
frecuencia y la velocidad aumenta gradualmente junto con
la temperatura, lo que reduce el ruido y el consumo
energético cuando no es necesario y garantiza la refrige-
ración máxima cuando es necesaria. El control de
ventilador se puede adaptar mediante 14-52 Control del
ventilador para que se ajuste a cualquier aplicación,
además de proteger contra los efectos negativos de la
refrigeración en climas muy fríos. Si se produce un exceso
de temperatura dentro del convertidor de frecuencia, este
reduce el patrón y la frecuencia de conmutación, consulte
capétulo 5.1.4 Reducción de potencia manual para obtener
más información.
Temperatura
5.1.2
Se especifican límites de temperatura ambiente mínimos y
máximos para todos los convertidores de frecuencia. Si se
evitan temperaturas ambiente extremas, se prolonga la
vida del equipo y aumenta al máximo la fiabilidad general
del sistema. Siga las recomendaciones enumeradas para
disfrutar del rendimiento y la vida útil máximos del equipo.
Aunque los convertidores pueden funcionar a
•
temperaturas de hasta –10 °C, solo se garantiza
un funcionamiento correcto con una carga
nominal con temperaturas de 0 °C o superiores.
No sobrepase el límite máximo de temperatura.
•
La vida útil de los componentes electrónicos
•
disminuye un 50 % cada 10 °C cuando funciona
por encima de su temperatura prevista.
Incluso los dispositivos con clasificaciones de
•
protección IP54, IP55 o IP66 deben seguir los
rangos de temperatura ambiente especificados.
Puede ser necesaria una climatización adicional
•
del armario o del lugar de instalación.
Se especifican límites de temperatura ambiente mínimos y
máximos para todos los convertidores de frecuencia. Si se
evitan temperaturas ambiente extremas, se prolonga la
vida del equipo y se aumenta al máximo la fiabilidad de
todo el sistema. Siga las recomendaciones enumeradas
para disfrutar del rendimiento y la vida útil máximos del
equipo.
Aunque los convertidores de frecuencia pueden
•
funcionar a temperaturas de hasta –10 °C, solo se
garantiza un funcionamiento correcto con una
carga nominal con temperaturas de 0 °C o
superiores.
No sobrepase el límite máximo de temperatura.
•
No sobrepase la temperatura media máxima en
•
24 h.
(La temperatura media máxima en 24 h es la
temperatura ambiente máxima menos 5 °C.
Ejemplo: si la temperatura máxima es de 50 °C, la
temperatura media máxima en 24 h es de 45 °C).
Respete los requisitos de espacio libre mínimo
•
por encima y por debajo
(capétulo 8.2.1.1 Separación).
Por norma general, la vida útil de los
•
componentes electrónicos disminuye en un 50 %
cada 10 °C, cuando funcionan por encima de su
temperatura prevista.
50 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

Max.I
out
(%)
at T
AMB, MAX
D, E and F enclosures
Altitude (km)
HO
NO
T
at 100% I
out
100%
96%
92%
0 K
-3 K
-6 K
1 km 2 km 3 km
-5 K
-8 K
-11 K
130BC015.10
AMB, MAX
Integración del sistema Guía de diseño de
Incluso los dispositivos con clasificaciones de
•
protección altas deben seguir los rangos de
temperatura ambiente especificados.
Puede ser necesaria una climatización adicional
•
del armario o del lugar de instalación.
5.1.4 Reducción de potencia manual
Tenga en cuenta la reducción de potencia cuando se
cumplen las condiciones siguientes.
Funcionamiento por encima de los 1000 m (baja
•
presión atmosférica)
Funcionamiento a velocidad baja
•
Cables de motor largos
•
Cables con una sección transversal grande
•
Temperatura ambiente alta
•
Para obtener más información, consulte
capétulo 6.2.6 Reducción de potencia en función de la
temperatura ambiente.
5.1.4.1
Reducción de potencia en función
del funcionamiento a velocidad
lenta
5.1.4.2
Reducción de potencia debido a la
baja presión atmosférica
La capacidad de refrigeración del aire disminuye al
disminuir la presión atmosférica.
Por debajo de 1000 m de altitud, no es necesaria ninguna
reducción de potencia, pero por encima de los 1000 m, la
temperatura ambiente (T
máxima (I
) deben reducirse de acuerdo con la
salida
Ilustración 5.1.
Ilustración 5.1 Reducción de potencia de la intensidad de
salida en relación con la altitud a T
bastidor A, B y C. Para altitudes superiores a 2000 m, póngase
en contacto con (Danfoss) en relación con PELV.
) o la intensidad de salida
AMB
para tamaños del
AMB, MÁX
5 5
Cuando se conecta un motor a un convertidor de
frecuencia, es necesario comprobar si la refrigeración del
motor es la adecuada.
El nivel de calentamiento depende de la carga del motor,
así como de la velocidad y del tiempo de funcionamiento.
Aplicaciones de par constante (modo CT)
Se puede producir un problema con valores bajos de r/min
en aplicaciones de par constante. En una aplicación de par
constante, un motor puede sobrecalentarse a velocidades
bajas debido a una escasez de aire de refrigeración
proveniente del ventilador integrado en el motor.
Por lo tanto, si se va a hacer funcionar el motor constantemente a un valor de r/min inferior a la mitad del valor
nominal, debe recibir aire adicional para su enfriamiento (o
debe utilizarse un motor diseñado para este tipo de
funcionamiento).
Una alternativa es reducir el nivel de carga del motor
eligiendo un motor más grande. No obstante, el diseño del
convertidor de frecuencia establece un límite en cuanto al
tamaño del motor.
Aplicaciones de par variable (cuadrático) (VT)
En aplicaciones VT, como bombas centrífugas y
ventiladores, donde el par es proporcional a la raíz
cuadrada de la velocidad y la potencia es proporcional al
cubo de la velocidad, no hay necesidad de un enfriamiento
adicional o de una reducción de la potencia del motor.
Una alternativa es reducir la temperatura ambiente en
altitudes elevadas, lo que garantiza el 100 % de intensidad
de salida. Como ejemplo de cómo leer el gráfico, se
presenta la situación a 2000 m para un tipo de protección
B con T
(T
AMB, MÁX.
AMB, MÁX
= 50 °C. A una temperatura de 45 °C
–3,3 K), está disponible el 91 % de la intensidad
nominal de salida. A una temperatura de 41,7° C, está
disponible el 100 % de la intensidad nominal de salida.
Ilustración 5.2 Reducción de potencia de la intensidad de
salida en relación con la altitud a T
bastidor D3h.
para tamaños de
AMB, MÁX
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 51

Integración del sistema
Guía de diseño de
5.1.5 Ruido acústico
El ruido acústico del convertidor de frecuencia procede de tres fuentes
Bobinas del enlace de CC (circuito intermedio)
•
Bobina de choque del filtro RFI
•
Ventiladores internos
•
Consulte capétulo 6.2.9 Ruido acústico para obtener información sobre las clasificaciones de ruido acústico.
55
5.1.6 Vibración y golpe
El convertidor de frecuencia probado según un procedimiento basado en CEI 68-2-6/34/35 y 36. Estas pruebas someten la
unidad a fuerzas de 0,7 g en el rango de 18 a 1000 Hz aleatoriamente, en 3 direcciones durante 2 horas. Todos los convertidores de frecuencia de (Danfoss) cumplen con los requisitos que se corresponden a estas condiciones cuando la unidad
está montada en la pared o el suelo, así como cuando está montada en paneles atornillados a paredes o suelos.
Entornos agresivos
5.1.7
5.1.7.1 Gases
Los gases agresivos, como el sulfuro de hidrógeno, cloro o amoníaco, pueden dañar los componentes mecánicos y
eléctricos del convertidor de frecuencia. La contaminación del aire de refrigeración también puede causar la descomposición
gradual de las juntas de las puertas y las pistas de PCB. Los contaminantes agresivos están a menudo presentes en instalaciones de tratamiento de aguas residuales o piscinas. Una señal clara de un entorno agresivo es la corrosión del cobre.
En entornos agresivos, se recomiendan las protecciones IP restringidas, junto con placas de circuito con revestimiento
barnizado. Consulte Tabla 5.1 para los valores del revestimiento barnizado.
AVISO!
El convertidor de frecuencia se entrega de serie con un barnizado clase 3C2. Si se solicita, el barnizado clase 3C3 está
disponible.
Clase
Tipo de gas Unidad
Sal marina n/a Ninguna Neblina salina Neblina salina
Óxidos de azufre
Sulfuro de hidrógeno
Cloro
Cloruro de hidrógeno
Fluoruro de hidrógeno
Amoníaco
Ozono
Nitrógeno
mg/m
mg/m
mg/m
mg/m
mg/m
mg/m
mg/m
mg/m
3
3
3
3
3
3
3
3
3C1 3C2 3C3
Valor medio Valor máximo Valor medio Valor máximo
0,1 0,3 1,0 5,0 10
0,01 0,1 0,5 3,0 10
0,01 0,1 0,03 0,3 1,0
0,01 0,1 0,5 1,0 5,0
0,003 0,01 0,03 0,1 3,0
0,3 1,0 3,0 10 35
0,01 0,05 0,1 0,1 0,3
0,1 0,5 1,0 3,0 9,0
Tabla 5.1 Clasificaciones de las clases del revestimiento barnizado
Los valores máximos son valores pico transitorios que no deben ocurrir durante más de 30 minutos al día.
52 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

Integración del sistema
Guía de diseño de
5.1.7.2 Exposición al polvo
La instalación de convertidores de frecuencia en entornos
con una alta exposición al polvo es, a menudo, inevitable.
El polvo afecta a las unidades montadas en pared o
bastidor con clasificación de protección IP55 o IP66 y
también dispositivos montados en armario con clasificación de protección IP21 o IP20. Se deben considerar los
tres aspectos descritos a continuación cuando se instalan
convertidores de frecuencia en estos entornos.
Refrigeración reducida
El polvo forma depósitos en la superficie del dispositivo y
dentro de él, en las placas de circuitos y los componentes
electrónicos. Estos depósitos funcionan como capas de
aislamiento y obstaculizan la transferencia de calor al aire
ambiente, lo que reduce la capacidad de refrigeración. Los
componentes se calientan aún más. Esto produce un
envejecimiento acelerado de los componentes electrónicos
y disminuye la vida útil del convertidor de frecuencia. Los
depósitos de polvo en el disipador de la parte posterior de
la unidad también disminuyen la vida útil de la unidad.
Ventiladores de refrigeración
El flujo de aire para refrigerar la unidad se produce
mediante los ventiladores de refrigeración, normalmente
ubicados en la parte posterior del dispositivo. Los rotores
del ventilador poseen pequeños cojinetes en los que el
polvo puede penetrar y actuar como un abrasivo. Esto
provoca daños en los cojinetes y fallos en el ventilador.
Filtros
Los convertidores de frecuencia de alta potencia están
equipados con ventiladores de refrigeración que expelen
aire caliente desde el interior del dispositivo. A partir de un
determinado tamaño, estos ventiladores se equipan con
esteras de filtro. Estos filtros se puede obstruir
rápidamente cuando se utilizan en ambientes muy
polvorientos. En estas condiciones, es necesario tomar
medidas preventivas.
Mantenimiento periódico
En las condiciones descritas anteriormente, es aconsejable
limpiar el convertidor de frecuencia durante el mantenimiento periódico. Elimine el polvo del disipador y los
ventiladores y limpie las esteras de filtro.
5.1.7.3
Los sistemas que funcionan en entornos potencialmente
explosivos deben cumplir condiciones especiales. La
directiva 94/9/CE de la UE describe el funcionamiento de
los dispositivos electrónicos en entornos potencialmente
explosivos.
Se debe controlar la temperatura de los motores
controlados por convertidores de frecuencia en entornos
potencialmente explosivos utilizando un sensor de
temperatura PTC. Pueden utilizarse motores con protección
de ignición clase «d» o «e», homologados para este
entorno.
Entornos potencialmente explosivos
La clasificación «e» consiste en evitar la formación
•
de chispas. El FC 302 con versión de firmware
V6.3x o superior está equipado con una función
de «control término de ETR ATEX» para el funcionamiento de motores Ex-e especialmente
homologados. Cuando se combina con un
dispositivo de control PTC homologado por ATEX,
como la PTC Thermistor Card MCB 112, la
instalación no necesita una aprobación individual
de una organización homologada, es decir, no
son necesarias parejas iguales.
La clasificación «d» se encarga de garantizar que
•
si se produce una chispa, se contiene en una
zona protegida. Aunque no requiere homologación, se necesitan un cableado y una
contención especiales.
La combinación «d» / «e» es la más utilizada en
•
entornos potencialmente explosivos. El motor
mismo tiene una clase de protección de ignición
«e», mientras que el cable de motor y el entorno
de conexión cumplen con la clasificación «e». La
restricción del espacio de conexión «e» se
compone de la tensión máxima permitida en este
espacio. La tensión de salida de un convertidor
de frecuencia normalmente está limitada a la
tensión de red. La modulación de la tensión de
salida puede generar una tensión pico que no se
puede permitir para la clasificación «e». En la
práctica, se ha demostrado que utilizar un filtro
de onda sinusoidal en la salida del convertidor de
frecuencia es un medio efectivo de atenuar la
tensión pico alta.
5 5
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 53

Integración del sistema Guía de diseño de
AVISO!
No instale un convertidor de frecuencia en un entorno
potencialmente explosivo. Instale el convertidor de
frecuencia en un armario fuera de esta área. También se
recomienda utilizar un filtro sinusoidal en la salida del
convertidor de frecuencia para atenuar el aumento de
tensión dU/dt y la tensión pico. Los cables del motor
deben ser lo más cortos que sea posible.
AVISO!
Las unidades VLT® AutomationDrive con la opción MCB
55
112 tienen capacidad certificada PTB de controlar el
sensor del termistor del motor para entornos
potencialmente explosivos. Los cables de motor apantallados no son necesarios cuando los convertidores de
frecuencia funcionan con filtros de salida sinusoidales.
5.1.8 Mantenimiento
Los modelos de convertidores de frecuencia de (Danfoss)
de hasta 90 kW no requieren mantenimiento. Los convertidores de frecuencia de alta potencia (110 kW nominal o
superior) tienen esteras de filtro incorporadas que el
operador debe limpiar periódicamente, en función de la
exposición al polvo y los contaminantes. Los intervalos de
mantenimiento para los ventiladores de refrigeración
(aproximadamente 3 años) y para los condensadores
(aproximadamente 5 años) se recomiendan en la mayoría
de entornos.
Almacenamiento
5.1.9
Al igual que el resto de equipos electrónicos, los convertidores de frecuencia se deben almacenar en un lugar
seco. El conformado periódico (carga del condensador) no
es necesario durante el almacenamiento.
Se recomienda mantener el equipo sellado en su embalaje
hasta la instalación.
5.2
Aspectos generales de la EMC
Normalmente, aparecen interferencias eléctricas a
frecuencias en el intervalo de 150 kHz a 30 MHz. Las
interferencias generadas por el convertidor de frecuencia y
transmitidas por el aire, con frecuencias en el rango de
30 MHz a 1 GHz, tienen su origen en el inversor, el cable
del motor y el motor.
Como se muestra en la Ilustración 5.3, la capacitancia en el
cable de motor, junto con una elevada dU/dt de la tensión
del motor, genera corrientes de fuga.
La utilización de un cable de motor apantallado aumenta
la corriente de fuga (consulte Ilustración 5.3), porque los
cables apantallados tienen una mayor capacitancia a tierra
que los cables no apantallados. Si la corriente de fuga no
se filtra, provoca una mayor interferencia en la alimentación de red, en el intervalo de radiofrecuencia inferior a
5 MHz. Puesto que la corriente de fuga (I1) se reconduce a
la unidad a través del apantallamiento (I3), en principio
solo habrá un pequeño campo electromagnético (I4) desde
el cable apantallado del motor, tal y como se indica en la
Ilustración 5.3.
El apantallamiento reduce la interferencia radiada, aunque
incrementa la interferencia de baja frecuencia en la red
eléctrica. Conecte el apantallamiento del cable de motor a
la protección del convertidor de frecuencia, así como a la
protección del motor. El mejor procedimiento consiste en
utilizar abrazaderas de apantallamiento integradas para
evitar extremos de apantallamiento retorcidos en espiral
(cables de conexión flexibles). Los cables de conexión
flexibles aumentan la impedancia del apantallamiento a
frecuencias superiores, lo que reduce el efecto de pantalla
y aumenta la corriente de fuga (I4).
Si se emplea un cable apantallado para el relé, el cable de
control, la interfaz de señales y el freno, monte el apantallamiento en ambos extremos de la protección. Sin
embargo, en algunas situaciones, es necesario eliminar el
apantallamiento para evitar los lazos de corriente.
54 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Integración del sistema Guía de diseño de
1 Cable de conexión a tierra 4 Convertidor de frecuencia
2 Apantallamiento 5 Cable de motor apantallado
3 Alimentación de red de CA 6 Motor
Ilustración 5.3 Situación que provoca corrientes de fuga
5 5
Si el apantallamiento debe colocarse en una placa de montaje para el convertidor de frecuencia, dicha placa deberá estar
fabricada en metal para conducir las intensidades del apantallamiento de vuelta a la unidad. Asegúrese, además, de que la
placa de montaje y el chasis del convertidor de frecuencia hacen buen contacto eléctrico a través de los tornillos de
montaje.
Si se utilizan cables no apantallados, no se cumplirán algunos de los requisitos sobre emisión, aunque sí se seguirán la
mayoría de los requisitos de inmunidad.
Para reducir el nivel de interferencia del sistema completo (unidad + instalación), haga que los cables de motor y de freno
sean lo más cortos posibles. Los cables con un nivel de señal sensible no deben colocarse junto a los cables de motor y de
freno. La radiointerferencia superior a 50 MHz (transmitida por el aire) es generada especialmente por los elementos
electrónicos de control.
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 55

Integración del sistema
Guía de diseño de
5.2.1 Resultados de las pruebas de EMC
Los siguientes resultados de las pruebas se obtuvieron utilizando un sistema con un convertidor de frecuencia, un cable de
control apantallado y un cuadro de control con potenciómetro, así como un motor individual y un cable de motor
apantallado (Ölflex Classic 100 CY) a frecuencia de conmutación nominal. En la Tabla 5.2, se establecen las longitudes
máximas de cable de motor.
AVISO!
Las condiciones pueden variar significativamente para otras configuraciones.
AVISO!
55
Consulte Tabla 9.19 para cables de motor paralelos.
Tipo de filtro
RFI
Estándares y
requisitos
H1
FC 301 0-37 kW 200-240 V 10 50 50 No Sí Sí
FC 302 0-37 kW 200-240 V 50 150 150 No Sí Sí
H2/H5
FC 301 0-3,7 kW 200-240 V No No 5 No No Sí
FC 302
0-7,5 kW 380-500 V No No 5 No No Sí
H3
FC 301 0-1,5 kW 200-240 V 2,5 25 25 No Sí Sí
0-1,5 kW 380-480 V 2,5 25 25 No Sí Sí
H4
FC 302 1,1-7,5 kW 525-690 V No 100 100 No Sí Sí
11-22 kW 525-690 V No 100 100 No Sí Sí
30-75 kW 525-690 V No 150 150 No Sí Sí
1)
Hx
FC 302 0,75-75 kW 525-600 V No No No No No No
EN 55011 / CISPR 11 Clase B Clase A,
EN/CEI 61800-3 Categoría C1 Categoría C2 Categoría C3 Categoría C1 Categoría C2 Categoría C3
0-75 kW 380-480 V 10 50 50 No Sí Sí
0-75 kW 380-480 V 50 150 150 No Sí Sí
5,5-37 kW 200-240 V
11-75 kW 380-500 V
11-22 kW 525-690 V
30-75 kW 525-690 V
11-37 kW 525-690 V
2)
2)
2)
2)
3)
Emisión conducida Emisión irradiada
Longitud del cable [m]
Clase A
grupo 1
No No 25 No No Sí
No No 25 No No Sí
No No 25 No No Sí
No No 25 No No Sí
No 150 150 No Sí Sí
Grupo 2
Clase B Clase A
Grupo 1
Clase A
Grupo 2
Tabla 5.2 Resultados de las pruebas de EMC (emisión), máxima longitud del cable de motor
1)
Las versiones Hx pueden utilizarse según la categoría C4 de EN / CEI 61800-3
2)
T5, 22-45 kW y T7, 22-75 kW cumplen con el grupo 1 de la clase A con 25 m de cable de motor. Existen algunas limitaciones para la
instalación (póngase en contacto con (Danfoss) para obtener más información).
HX, H1, H2, H3, H4 o H5 se define en las pos. 16-17 del código descriptivo para filtros de EMC (consulte Tabla 7.1).
3)
IP20
56 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

Integración del sistema Guía de diseño de
5.2.2 Requisitos en materia de emisiones
La norma de productos EMC para convertidores de
frecuencia define 4 categorías (C1, C2, C3 y C4) con
requisitos especificados para la emisión e inmunidad. La
Tabla 5.3 indica la definición de las 4 categorías y la clasificación equivalente de EN 55011.
Clase de
Categoría Definición
C1 Convertidores de frecuencia
instalados en el primer ambiente
(hogar y oficina) con una tensión
de alimentación inferior a 1000 V.
C2 Convertidores de frecuencia
instalados en el primer ambiente
(hogar y oficina), con una tensión
de alimentación inferior a 1000 V,
que no son ni enchufables ni
desplazables y están previstos para
su instalación y puesta en marcha
por profesionales.
C3 Convertidores de frecuencia
instalados en el segundo ambiente
(industrial) con una tensión de
alimentación inferior a 1000 V.
C4 Convertidores de frecuencia
instalados en el segundo ambiente
con una tensión de alimentación
igual o superior a 1000 V y una
intensidad nominal igual o superior
a 400 A o prevista para el uso en
sistemas complejos.
Tabla 5.3 Correlación entre CEI 61800-3 y EN 55011
Cuando se utilizan normas de emisiones generales
(conducidas), los convertidores de frecuencia deben
cumplir los límites en la Tabla 5.4.
emisiones
equivalente en
EN 55011
Clase B
Clase A,
grupo 1
Clase A,
grupo 2
Sin límite
Debe
elaborarse un
plan EMC.
5.2.3
Requisitos de inmunidad
Los requisitos de inmunidad para convertidores de
frecuencia dependen del entorno en el que estén
instalados. Los requisitos para el entorno industrial son
más exigentes que los del entorno doméstico y de oficina.
Todos los convertidores de frecuencia de (Danfoss)
cumplen con los requisitos para el entorno industrial y, por
lo tanto, cumplen también con los requisitos mínimos del
entorno doméstico y de oficina con un amplio margen de
seguridad.
Para documentar la inmunidad contra interferencias
eléctricas provocadas por fenómenos eléctricos, se han
realizado las siguientes pruebas de inmunidad según las
siguientes normas básicas:
EN 61000-4-2 (CEI 61000-4-2): Descargas electro-
•
státicas (ESD): simulación de descargas
electrostáticas de seres humanos.
EN 61000-4-3 (CEI 61000-4-3): Radiación del
•
campo electromagnético entrante, simulación
modulada en amplitud de los efectos de equipos
de radar y de comunicación por radio, así como
las comunicaciones móviles.
EN 61000-4-4 (CEI 61000-4-4): Transitorios de
•
conexión / desconexión: simulación de la interferencia introducida por el acoplamiento de un
contactor, relés o dispositivos similares.
EN 61000-4-5 (CEI 61000-4-5): Transitorios de
•
sobretensión: Simulación de transitorios
introducidos, por ejemplo, al caer rayos cerca de
las instalaciones.
EN 61000-4-6 (CEI 61000-4-6): RF modo común:
•
simulación del efecto del equipo transmisor de
radio conectado a cables de conexión.
5 5
Clase de
Ambiente
Primer ambiente
(hogar y oficina)
Segundo
ambiente
(entorno
industrial)
Tabla 5.4 Correlación entre Normas de emisiones generales y
EN 55011
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 57
Norma de emisiones
generales
Norma de emisiones para
entornos residenciales,
comerciales e industria
ligera EN/CEI 61000-6-3.
Norma de emisiones para
entornos industriales EN/CEI
61000-6-4.
emisiones
equivalente en
EN 55011
Clase B
Clase A,
grupo 1

Integración del sistema
Consulte Tabla 5.5.
Guía de diseño de
Norma básica Ráfaga
CEI 61000-4-4
Sobretensión
CEI 61000-4-5
ESD
CEI
61000-4-2
Campo electromagnético
radiado
CEI 61000-4-3
Tensión de RF
modo común
CEI 61000-4-6
Criterios de aceptación B B B A A
Rango de tensión: 200-240 V, 380-500 V, 525-600 V, 525-690 V
Línea 4 kV CM
Motor
4 kV CM
Freno 4 kV CM
55
Carga compartida 4 kV CM
Cables de control
2 kV CM
Bus estándar 2 kV CM
Cables de relé 2 kV CM
Opciones de bus de campo
2 kV CM
y de aplicación
Cable del LCP
2 kV CM
24 V CC externa 2 V CM
Protección — —
2 kV / 2 Ω DM
4 kV / 12 Ω CM
4 kV / 2 Ω
4 kV / 2 Ω
4 kV / 2 Ω
2 kV / 2 Ω
2 kV / 2 Ω
2 kV / 2 Ω
2 kV / 2 Ω
2 kV / 2 Ω
1)
1)
1)
1)
1)
1)
1)
1)
0,5 kV / 2 Ω DM
1 kV/12 Ω CM
— —
— —
— —
— —
— —
— —
— —
— —
— —
— —
8 kV AD
6 kV CC
10 V/m —
10 V
10 V
10 V
10 V
10 V
10 V
10 V
10 V
10 V
10 V
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
Tabla 5.5 Tabla sobre inmunidad EMC
1)
Inyección en la protección del cable
Aislamiento del motor
5.2.4
El diseño moderno de los motores para su uso con convertidores de frecuencia presenta un elevado grado de aislamiento
para responder a la nueva generación de IGBT de gran eficacia con una dU/dt elevada. Para actualizar motores antiguos, es
necesario confirmar el aislamiento del motor o mitigarlo con un filtro dU/dt o incluso un filtro sinusoidal, si fuera necesario.
dU/dt.
Para longitudes del cable de motor ≤ que la longitud del cable máxima que se indica en capétulo 6.2 Especificaciones
generales, se recomiendan las clasificaciones de aislamientos del motor que se encuentra en la Tabla 5.6. Si un motor tiene
una clasificación de aislamiento inferior, se recomienda utilizar un filtro dU/dt o sinusoidal.
Tensión de red nominal [V] Aislamiento del motor [V]
UN ≤ 420
420 V < UN ≤ 500 Reforzada ULL = 1600
500 V < UN ≤ 600 Reforzada ULL = 1800
600 V < UN ≤ 690 Reforzada ULL = 2000
Tabla 5.6 Aislamiento del motor
Estándar ULL = 1300
58 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05
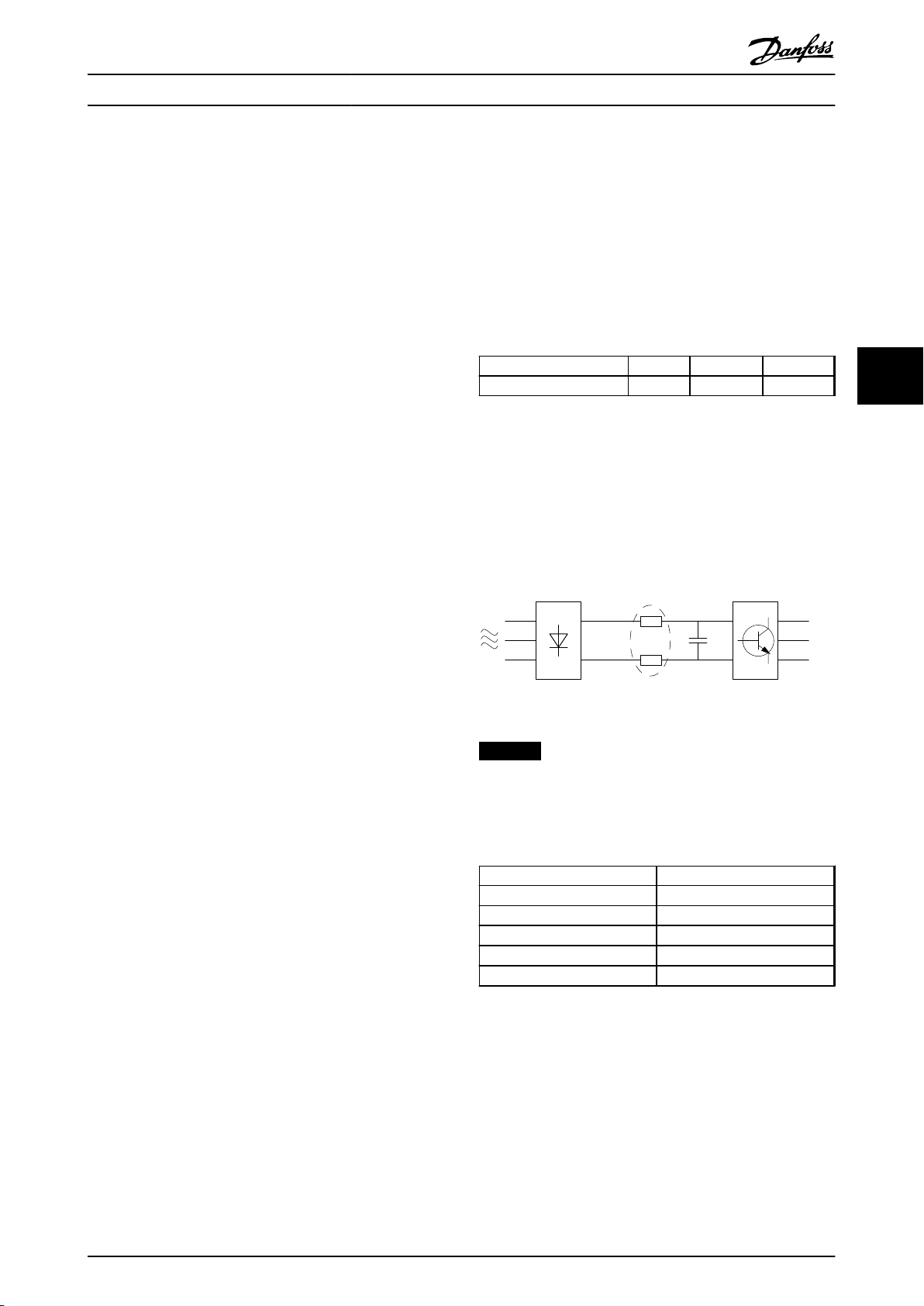
175HA034.10
Integración del sistema
Guía de diseño de
5.2.5 Corrientes en los cojinetes del motor
Para reducir al mínimo las corrientes en el eje y los
cojinetes, conecte a tierra lo siguiente respecto a la
máquina accionada:
convertidor de frecuencia
•
motor
•
máquina accionada
•
motor
•
Estrategias estándar de mitigación
1. Utilizar un cojinete aislado.
2. Aplicar rigurosos procedimientos de instalación
2a Comprobar que el motor y el motor de
carga estén alineados.
2b Seguir estrictamente las directrices de
instalación EMC.
2c Reforzar el PE de modo que la
impedancia de alta frecuencia sea
inferior en el PE que los cables de
alimentación de entrada.
2d Proporcionar una buena conexión de
alta frecuencia entre el motor y el
convertidor de frecuencia, por ejemplo,
mediante un cable apantallado que
tenga una conexión de 360° en el motor
y en el convertidor de frecuencia.
2e Asegurarse de que la impedancia desde
el convertidor de frecuencia hasta la
tierra sea inferior que la impedancia de
tierra de la máquina, lo que puede
resultar difícil para las bombas.
2f Realizar una conexión a tierra directa
entre el motor y el motor de carga.
3. Reducir la frecuencia de conmutación de IGBT.
4. Modificar la forma de onda del inversor, AVM de
60º frente a SFAVM.
5. Instalar un sistema de conexión a tierra del eje o
usar un acoplador aislante.
6. Aplicar un lubricante conductor.
7. Usar el ajuste mínimo de velocidad, si es posible.
8. Tratar de asegurar que la tensión de línea está
equilibrada con tierra. Esto puede resultar difícil
para sistemas de patilla con toma de tierra, IT, TT
o TN-CS
9. Usar un filtro dU/dt o sinusoidal.
5.3
Interferencia de la red de
alimentación / armónicos
El convertidor de frecuencia acepta una intensidad no
sinusoidal de la red, lo que aumenta la intensidad de
entrada I
. Se transforma una intensidad no sinusoidal
RMS
por medio de un análisis Fourier y se separa en
intensidades de onda sinusoidal con diferentes frecuencias,
es decir, con diferentes corrientes armónicas In con 50 Hz
como frecuencia básica.
Corrientes armónicas I
Hz 50 250 350
Tabla 5.7 Corriente no sinusoidal transformada
1
I
5
I
7
Los armónicos no afectan directamente al consumo de
energía, aunque aumentan las pérdidas de calor en la
instalación (transformador, cables). Por ello, en instalaciones con un porcentaje alto de carga del rectificador,
mantenga las corrientes armónicas en un nivel bajo para
evitar sobrecargar el transformador y una alta temperatura
de los cables.
Ilustración 5.4 Bobinas del circuito intermedio
AVISO!
Algunas corrientes armónicas pueden perturbar el
equipo de comunicación conectado al mismo
transformador o causar resonancias, si se utilizan
unidades de corrección del factor de potencia.
I
RMS
I
1
I
5
I
7
I
11-49
Tabla 5.8 Corrientes armónicas en comparación con la
corriente de entrada RMS
Para asegurar corrientes armónicas bajas, el convertidor de
frecuencia tiene bobinas de circuito intermedio de forma
estándar. Las bobinas de CC reducen la distorsión total de
armónicos (THD) al 40%.
Intensidad de entrada
1,0
0,9
0,4
0,2
<0,1
5 5
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 59

Non-linear
Current Voltage
System
Impedance
Disturbance to
other users
Contribution to
system losses
130BB541.10
Integración del sistema
Guía de diseño de
5.3.1 El efecto de los armónicos en un
sistema de distribución de potencia
En Ilustración 5.5 un transformador está conectado al lado
primario hacia un punto de acoplamiento común PCC1, en
la fuente de alimentación de tensión media. El
transformador tiene una impedancia Z
número de cargas. El punto de acoplamiento común
donde están conectadas todas las cargas es PCC2. Cada
carga está conectada a través de cables con una
impedancia Z1, Z2 y Z3.
55
Ilustración 5.5 Sistema de distribución pequeño
Las corrientes armónicas consumidas por cargas no lineales
causan distorsión de la tensión debido a la caída de
tensión en las impedancias del sistema de distribución.
Impedancias más elevadas se traducen en mayores niveles
de distorsión de tensión.
La distorsión de corriente está relacionada con el
rendimiento del aparato, el cual está relacionado con la
carga individual. La distorsión de tensión está relacionada
con el rendimiento del sistema. No es posible determinar
la distorsión de tensión en el PCC sabiendo únicamente el
rendimiento armónico de la carga. Para predecir la
distorsión en el PCC, deben conocerse tanto la configuración del sistema de distribución como las impedancias
relevantes.
Un término empleado comúnmente para describir la
impedancia de una red es la relación de cortocircuito R
definida como la relación entre la potencia aparente de
cortocircuito de la fuente de alimentación en el PCC (Ssc) y
la potencia aparente nominal de la carga (S
S
ce
R
=
sce
S
equ
donde
S
sc
U
=
Z
suministro
2
y
S
=U×
I
equ
equ
y alimenta un
xfr
).
equ
sce
El efecto negativo de los armónicos es doble.
Las corrientes armónicas contribuyen a pérdidas
•
del sistema (en el cableado, transformador)
La distorsión de tensión armónica provoca
•
interferencias en otras cargas e incrementa las
perdidas en otras cargas.
Ilustración 5.6 Efecto negativo de los armónicos
5.3.2 Normas y requisitos de limitación
armónica
Los requisitos para la limitación armónica pueden ser
requisitos específicos de la aplicación
•
normas que deben cumplirse
•
Los requisitos específicos de la aplicación están
relacionados con una instalación específica en la que hay
razones técnicas para limitar los armónicos.
Ejemplo
Un transformador de 250 kVA con dos motores de 110 kW
conectados es suficiente si uno de los motores está
conectado directamente en línea y el otro recibe alimentación a través de un convertidor de frecuencia. Sin
embargo, el transformador tiene un tamaño menor si
ambos motores reciben alimentación de un convertidor de
frecuencia. Empleando medios adicionales para la
reducción de armónicos dentro de la instalación o
seleccionando variantes de convertidores de frecuencia de
bajos armónicos es posible que ambos motores funcionen
con convertidores de frecuencia.
,
Hay varias normas, reglamentos y recomendaciones de
mitigación de armónicos. Hay que tener en cuenta que la
aplicación de las diferentes normas depende de las
diferentes regiones geográficas y sectores industriales. Las
normas siguientes son las más comunes:
IEC61000-3-2
•
IEC61000-3-12
•
IEC61000-3-4
•
IEEE 519
•
G5/4
•
60 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

Integración del sistema
Guía de diseño de
Consulte la Guía de diseño de AHF 005/010 para averiguar
detalles específicos sobre cada norma.
En Europa, la THVD máxima es del 8 % si la planta está
conectada a través de la red pública. Si la planta cuenta
con su propio transformador, el límite es del 10 % de
THVD. El VLT® AutomationDrive está concebido para
resistir el 10 % de THVD.
5.3.3 Mitigación de armónicos
En casos en los que la supresión adicional de armónicos es
necesaria, (Danfoss) ofrece una amplia gama de equipos
de mitigación. Estos son:
Convertidores de frecuencia de 12 impulsos
•
Filtros AHF
•
Convertidores de frecuencia de bajos armónicos
•
Filtros activos
•
La elección de la solución correcta depende de varios
factores:
La red (distorsión de fondo, desequilibrio de red,
•
resonancia y tipo de fuente de alimentación
(transformador/generador))
Aplicación (perfil de carga, número de cargas y
•
tamaño de la carga)
Requisitos/reglamentos locales/nacionales
•
(IEEE519, CEI, G5/4, etc.)
Coste total de propiedad (coste inicial, eficiencia,
•
mantenimiento, etc.)
Considere siempre la mitigación de armónicos si la carga
del transformador presenta una contribución no lineal del
40 % o superior.
Cálculo de armónicos
5.3.4
(Danfoss) ofrece herramientas para el cálculo de armónicos
(consulte capétulo 9.6.5 Software para PC).
5.4
Aislamiento galvánico (PELV)
5.4.1 PELV: tensión de protección muy baja
PELV ofrece protección mediante una tensión muy baja. Se
considera garantizada la protección contra descargas
eléctricas cuando la fuente de alimentación eléctrica es de
tipo PELV y la instalación se realiza de acuerdo con las
reglamentaciones locales o nacionales sobre equipos PELV.
Todos los terminales de control y de relé 01-03/04-06
cumplen con la tensión de protección muy baja (PELV),
salvo la conexión a tierra en triángulo por encima de
400 V.
El aislamiento galvánico (garantizado) se consigue
cumpliendo los requisitos relativos a un mayor aislamiento
y proporcionando las distancias necesarias en los circuitos.
Estos requisitos se describen en la norma EN 61800-5-1.
Los componentes que forman el aislamiento eléctrico,
según se explica a continuación, también cumplen todos
los requisitos relativos al aislamiento y a la prueba correspondiente descrita en EN 61800-5-1.
El aislamiento galvánico PELV puede mostrarse en
6 ubicaciones (consulte la Ilustración 5.7 ):
Para mantener el estado PELV, todas las conexiones
realizadas con los terminales de control deben ser PELV,
por ejemplo, el termistor debe disponer de un aislamiento
reforzado / doble.
1. Fuente de alimentación (SMPS), incluido el
aislamiento de señal del enlace de CC.
2. Circuito para disparo de los IGBT (transformadores de disparo / optoacopladores).
3. Transductores de corriente.
4. Optoacoplador, módulo de freno.
5. Circuitos de aflujo de corriente interna, RFI y
medición de temperatura.
6. Relés configurables.
7. Freno mecánico.
5 5
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 61

130BC968.10
1325 4
6
b
a
M
7
Integración del sistema Guía de diseño de
5.5 Funciones de freno
La función de freno se aplica para frenar la carga en el eje
del motor, ya sea mediante el frenado dinámico o el
mecánico.
5.5.1 Selección de resistencia de freno
La resistencia de freno garantiza que la energía es
absorbida por esta y no por el convertidor de frecuencia.
Para obtener más información, consulte la Guía de diseño
55
Ilustración 5.7 Aislamiento galvánico
El aislamiento galvánico funcional (a y b en el dibujo)
funciona como opción auxiliar de 24 V y para la interfaz
del bus estándar RS-485.
ADVERTENCIA
Instalación en altitudes elevadas:
Para altitudes por encima de los 2000 m, póngase en
contacto con (Danfoss) en relación con PELV.
ADVERTENCIA
El contacto con los componentes eléctricos podría llegar
a provocar la muerte, incluso una vez desconectado el
equipo de la red de alimentación.
Además, asegúrese de que se han desconectado las
demás entradas de tensión, como la carga compartida
(enlace del circuito intermedio de CC), así como la
conexión del motor para energía regenerativa.
Antes de tocar cualquier componente eléctrico, espere
como mínimo el tiempo indicado en la Tabla 2.1.
Solo se permite menos tiempo si se indica en la placa de
características para la unidad específica.
de la resistencia de freno.
Si no se conoce la cantidad de energía cinética transferida
a la resistencia en cada periodo de frenado, la potencia
media puede ser calculada a partir del tiempo de ciclo y
del tiempo de frenado, también llamado ciclo de trabajo
intermitente. El ciclo de trabajo intermitente de la
resistencia es un indicador del ciclo de trabajo con el que
funciona la misma. Ilustración 5.8 muestra un ciclo de
frenado típico.
AVISO!
Los proveedores de motores utilizan a menudo S5 al
declarar la carga admisible que es una expresión del
ciclo de trabajo intermitente.
El ciclo de trabajo intermitente de la resistencia se calcula
como se indica a continuación:
Ciclo de trabajo = tb/T
T = tiempo del ciclo en s
tb es el tiempo de frenado en segundos (del tiempo de
ciclo total)
Ilustración 5.8 Ciclo de frenado típico
62 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

Integración del sistema
Guía de diseño de
Ciclo de
Tiempo de
ciclo (s)
trabajo de
frenado al
100% del par
Ciclo de trabajo
de frenado a
par de
sobrecarga
(150/160%)
200-240 V
PK25-P11K 120 Continua 40%
P15K-P37K 300 10% 10%
380-500 V
PK37-P75K 120 Continua 40%
P90K-P160 600 Continua 10%
P200-P800 600 40% 10%
525-600 V
PK75-P75K 120 Continua 40%
525-690 V
P37K-P400 600 40% 10%
P500-P560 600
40%
1)
10%
2)
P630-P1M0 600 40% 10%
Tabla 5.9 Frenado en nivel alto de par de sobrecarga
1)
500 kW al 86 % del par de frenado / 560 kW al 76 % del par de
frenado
2)
500 kW al 130 % del par de frenado / 560 kW al 115 % del par de
frenado
(Danfoss) ofrece resistencias de freno con ciclo de trabajo
del 5, del 10 y del 40 %. Si se aplica un ciclo de trabajo del
10 %, las resistencias de freno son capaces de absorber
potencia de frenado durante un 10 % del tiempo de ciclo.
El restante 90 % del tiempo de ciclo se utiliza para disipar
el exceso de calor.
AVISO!
Asegúrese de que la resistencia esta diseñada para
manejar el tiempo de frenado requerido.
La carga máxima admisible en la resistencia de freno se
establece como una potencia pico en un determinado ciclo
de trabajo intermitente, y puede calcularse como:
ED ciclodeservicio
donde tb es el tiempo de frenado en segundos y Tciclo es
el tiempo de ciclo total.
La resistencia de freno se calcula de la siguiente manera:
2
U
Ω =
P
dc
pico
R
br
donde
=
T de trabajo
tb
La función de freno de FC 301 y FC 302 está establecida
en 4 áreas de la red.
Tamaño Freno activo Advertencia
antes de
corte
FC 301 / FC 302
390 V 405 V 410 V
200-240 V
FC 301
778 V 810 V 820 V
380-480 V
FC 302
810 V 840 V 850 V
380-500 V
FC 302
943 V 965 V 975 V
525-600 V
FC 302
1084 V 1109 V 1130 V
525-690 V
Tabla 5.10 Límites de freno [UDC]
Corte
(desconexión)
AVISO!
Compruebe que la resistencia de freno puede manejar
una tensión de 410 V, 820 V, 850 V, 975 V o 1130 V, a
menos que se usen resistencias de freno (Danfoss).
(Danfoss) recomienda la resistencia de freno R
una que pueda garantizar que el convertidor de frecuencia
sea capaz de frenar con el par máximo de frenado (M
del 160 %. La fórmula puede escribirse como sigue:
2
U
x 100
R
Ω =
rec
P
motor
η
se encuentra, normalmente, a 0,90
motor
η
se encuentra, normalmente, a 0,98
VLT
dc
x
M
xη
br
%
VLT
x η
motor
Para convertidores de frecuencia de 200 V, 480 V, 500 V y
600 V, R
200V :
480V :
480V :
500V :
600V :
690V :
1)
Para convertidores de frecuencia con salida de eje de
al 160 % de par de frenado se escribe como:
rec
107780
R
=
rec
R
=
rec
R
=
rec
R
=
rec
R
=
rec
R
=
rec
P
motor
375300
P
motor
428914
P
motor
464923
P
motor
630137
P
motor
832664
P
motor
Ω
Ω
Ω
Ω
Ω
Ω
1
2
≤7,5 kW
2)
Para convertidores de frecuencia con salida de eje de 11 a
75 kW
, es decir,
rec
br(%)
5 5
)
P
pico
= P
× Mbr [%] × η
motor
motor
× η
VLT
[W]
La resistencia de freno depende de la tensión del circuito
intermedio (Ucc).
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 63

Integración del sistema Guía de diseño de
5.5.3
AVISO!
La resistencia seleccionada del circuito de freno no
debería ser superior a la recomendada por (Danfoss). Si
se selecciona una resistencia de freno con un valor en
ohmios más alto, tal vez no se consiga el par de frenado
del 160 % porque existe el riesgo de que el convertidor
de frecuencia se desconecte por motivos de seguridad.
AVISO!
Si se produce un cortocircuito en el transistor de freno,
la disipación de potencia en la resistencia de freno solo
55
se puede impedir por medio de un contactor o un
interruptor de red que desconecte la alimentación
eléctrica del convertidor de frecuencia (el convertidor de
frecuencia puede controlar el contactor).
Control con Función de freno
El freno está protegido contra cortocircuitos en la
resistencia de freno y el transistor de freno está controlado
para garantizar la detección de cortocircuitos en el
transistor. Puede utilizarse una salida digital / de relé para
proteger de sobrecargas la resistencia de freno en caso de
producirse un fallo en el convertidor de frecuencia.
Además, el freno permite leer la potencia instantánea y
principal de los últimos 120 segundos. El freno también
puede controlar la potencia y asegurar que no se supera el
límite seleccionado en 2-12 Límite potencia de freno (kW).
En 2-13 Ctrol. Potencia freno, seleccione la función que se
realizará cuando la potencia que se transmite a la
resistencia de freno sobrepase el límite ajustado en
2-12 Límite potencia de freno (kW).
PRECAUCIÓN
La resistencia de freno se calienta durante y después del
frenado.
Para evitar lesiones, no toque la resistencia de
•
freno
Coloque la resistencia de freno en un entorno
•
seguro para evitar el riesgo de incendio.
PRECAUCIÓN
Los convertidores de frecuencia con tipos de protección
D y F contienen más de un chopper de frenado. Por ello,
debe utilizar una resistencia de freno para cada chopper
de frenado en esos tipos de protección.
5.5.2 Cableado de la resistencia de freno
EMC (cables trenzados / apantallamiento)
Para cumplir el rendimiento de EMC especificado del
convertidor de frecuencia, utilice cables apantallados. Si se
utilizan cables no apantallados, se recomienda trenzar los
cables para reducir el ruido eléctrico de los cables entre la
resistencia de freno y el convertidor de frecuencia.
Para mejorar el rendimiento de EMC se puede utilizar un
apantallamiento metálico.
AVISO!
El control de la potencia de frenado no es una función
de seguridad; se necesita un interruptor térmico para
lograr ese objetivo. El circuito de resistencia de freno no
tiene protección de fuga a tierra.
En 2-17 Control de sobretensión puede seleccionarse Control
de sobretensión (OVC) (excluyendo la resistencia de freno)
como función de freno alternativa. Esta función está
activada para todas las unidades. La función asegura que
se pueda evitar una desconexión si aumenta la tensión del
enlace de CC. Esto se realiza incrementando la frecuencia
de salida para limitar la tensión del enlace de CC. Es una
función útil, por ejemplo, si el tiempo de rampa de deceleración es demasiado corto, ya que se evita la desconexión
del convertidor de frecuencia. En esta situación, el tiempo
de rampa de deceleración se amplía.
AVISO!
El OVC no puede activarse cuando está funcionando un
motor PM (cuando 1-10 Construcción del motor está
ajustado en [1] PM no saliente SPM).
64 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

Especificaciones de los pro... Guía de diseño de
6 Especificaciones de los productos
6.1 Datos eléctricos
6.1.1 Alimentación de red 200-240 V
Designación de tipo PK25 PK37 PK55 PK75 P1K1 P1K5 P2K2 P3K0 P3K7
Salida típica de eje [kW] 0,25 0,37 0,55 0,75 1,1 1,5 2,2 3,0 3,7
Protección IP20 (FC 301 solo) A1 A1 A1 A1 A1 A1 - - Protección IP20 / IP21 A2 A2 A2 A2 A2 A2 A2 A3 A3
Protección IP55, IP66 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A5 A5
Intensidad de salida
Continua (200-240 V) [A] 1,8 2,4 3,5 4,6 6,6 7,5 10,6 12,5 16,7
Intermitente (200-240 V) [A] 2,9 3,8 5,6 7,4 10,6 12,0 17,0 20,0 26,7
Continua kVa (208 V) [kVa] 0,65 0,86 1,26 1,66 2,38 2,70 3,82 4,50 6,00
Intensidad de entrada máx.
Continua (200-240 V) [A] 1,6 2,2 3,2 4,1 5,9 6,8 9,5 11,3 15,0
Intermitente (200-240 V) [A] 2,6 3,5 5,1 6,6 9,4 10,9 15,2 18,1 24,0
Especificaciones adicionales
Sección transversal máx. del cable4) para red,
motor, freno y carga compartida
[mm2] ([AWG])
Sección transversal máx. de cable4) para
desconexión [mm2] [(AWG)]
Pérdida de potencia estimada con carga
nominal máx. [W]
Rendimiento
3)
2)
21 29 42 54 63 82 116 155 185
0,94 0,94 0,95 0,95 0,96 0,96 0,96 0,96 0,96
4,4,4 (12,12,12)
(mín. 0,2 (24))
6,4,4 (10,12,12)
6 6
Tabla 6.1 Alimentación de red 200-240 V, PK25-P3K7
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 65

Especificaciones de los pro... Guía de diseño de
Designación de tipo P5K5 P7K5 P11K
Sobrecarga alta / normal
Salida típica de eje [kW] 5,5 7,5 7,5 11 11 15
Protección IP20 B3 B3 B4
Protección IP21, IP55, IP66 B1 B1 B2
Intensidad de salida
Continua (200-240 V) [A] 24,2 30,8 30,8 46,2 46,2 59,4
Intermitente (sobrecarga de 60 s) (200-240 V) [A] 38,7 33,9 49,3 50,8 73,9 65,3
Continua kVa (208 V) [kVa] 8,7 11,1 11,1 16,6 16,6 21,4
Intensidad de entrada máx.
Continua (200-240 V) [A] 22,0 28,0 28,0 42,0 42,0 54,0
Intermitente (sobrecarga de 60 s) (200-240 V) [A] 35,2 30,8 44,8 46,2 67,2 59,4
Especificaciones adicionales
Sección transversal máx. del cable IP204) para red, motor, freno y
66
carga compartida
[mm2] ([AWG])
Sección transversal máx. del cable IP214) para red, freno y carga
compartida
[mm2] ([AWG])
Sección transversal máx. del cable IP214) para motor
[mm2] ([AWG])
Sección transversal máx. del cable4) para desconexión
[mm2] ([AWG])
Pérdida de potencia estimada con carga nominal máx. [W]
Rendimiento
2)
1)
3)
HO NO HO NO HO NO
10,10,- (8,8,-) 10,10,- (8,8,-) 35,-,- (2,-,-)
16,10,16 (6,8,6) 16,10,16 (6,8,6) 35,-,- (2,-,-)
10,10,- (8,8,-) 10,10,- (8,8,-) 35,25,25 (2,4,4)
16,10,10 (6,8,8)
239 310 371 514 463 602
0,96 0,96 0,96
Tabla 6.2 Alimentación de red 200-240 V, P5K5-P11K
66 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

Especificaciones de los pro... Guía de diseño de
Designación de tipo P15K P18K P22K P30K P37K
Sobrecarga alta / normal
Salida típica de eje [kW] 15 18,5 18,5 22 22 30 30 37 37 45
Protección IP20 B4 C3 C3 C4 C4
Protección IP21, IP55, IP66 C1 C1 C1 C2 C2
Intensidad de salida
Continua (200-240 V) [A] 59,4 74,8 74,8 88,0 88,0 115 115 143 143 170
Intermitente (sobrecarga de 60 s) (200-240 V) [A] 89,1 82,3 112 96,8 132 127 173 157 215 187
Continua kVa (208 V) [kVa] 21,4 26,9 26,9 31,7 31,7 41,4 41,4 51,5 51,5 61,2
Intensidad de entrada máx.
Continua (200-240 V) [A] 54,0 68,0 68,0 80,0 80,0 104 104 130 130 154
Intermitente (sobrecarga de 60 s) (200-240 V) [A] 81,0 74,8 102 88,0 120 114 156 143 195 169
Especificaciones adicionales
Sección transversal máx. del cable IP20 para red,
motor, freno y carga compartida) [mm2] ([AWG])
Sección transversal máx. del cable IP21, IP55,
IP66 para red y motor [mm2] ([AWG])
Sección transversal máx. del cable IP21, IP55,
IP66 para freno y carga compartida
[mm2] ([AWG])
Sección transversal máx. del cable4) para
desconexión
[mm2] ([AWG])
Pérdida de potencia estimada con carga nominal
3)
máx. [W]
Rendimiento
2)
1)
HO NO HO NO HO NO HO NO HO NO
35 (2) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
50 (1) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
50 (1) 50 (1) 50 (1) 95 (3/0) 95 (3/0)
50, 35, 35 (1, 2, 2)
624 737 740 845 874 1140 1143 1353 1400 1636
0,96 0,97 0,97 0,97 0,97
95, 70, 70
(3/0, 2/0, 2/0)
185, 150, 120
(350 MCM,
300 MCM, 4/0)
6 6
Tabla 6.3 Alimentación de red 200-240 V, P15K-P37K
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 67

Especificaciones de los pro... Guía de diseño de
6.1.2 Alimentación de red 380-500 V
Designación de tipo PK37 PK55 PK75 P1K1 P1K5 P2K2 P3K0 P4K0 P5K5 P7K5
Salida típica de eje [kW] 0,37 0,55 0,75 1,1 1,5 2,2 3,0 4,0 5,5 7,5
Protección IP20 (FC 301 solo) A1 A1 A1 A1 A1 - - - - Protección IP20 / IP21 A2 A2 A2 A2 A2 A2 A2 A2 A3 A3
Protección IP55, IP66 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A5 A5
Intensidad de salida Sobrecarga alta 160 % durante 1 minuto
Salida de eje [kW] 0,37 0,55 0,75 1,1 1,5 2,2 3 4 5,5 7,5
Continua (380-440 V) [A] 1,3 1,8 2,4 3,0 4,1 5,6 7,2 10 13 16
Intermitente (380-440 V) [A] 2,1 2,9 3,8 4,8 6,6 9,0 11,5 16 20,8 25,6
Continua (441-500 V) [A] 1,2 1,6 2,1 2,7 3,4 4,8 6,3 8,2 11 14,5
Intermitente (441-500 V) [A] 1,9 2,6 3,4 4,3 5,4 7,7 10,1 13,1 17,6 23,2
Continua kVA (400 V) [kVA] 0,9 1,3 1,7 2,1 2,8 3,9 5,0 6,9 9,0 11
66
Continua kVA (460 V) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8 5,0 6,5 8,8 11,6
Intensidad de entrada máx.
Continua (380-440 V) [A] 1,2 1,6 2,2 2,7 3,7 5,0 6,5 9,0 11,7 14,4
Intermitente (380-440 V) [A] 1,9 2,6 3,5 4,3 5,9 8,0 10,4 14,4 18,7 23
Continua (441-500 V) [A] 1,0 1,4 1,9 2,7 3,1 4,3 5,7 7,4 9,9 13
Intermitente (441-500 V) [A] 1,6 2,2 3,0 4,3 5,0 6,9 9,1 11,8 15,8 20,8
Especificaciones adicionales
Sección transversal máx. del cable IP20, IP21
para red, motor, freno y carga compartida
[mm2] ([AWG])
Sección transversal máx. del cable IP55, IP66
para red, motor, freno y carga compartida
[mm2] ([AWG])
Sección transversal máx. del cable4) para
desconexión [mm2] ([AWG])
Pérdida de potencia estimada con carga
nominal máx. [W]
Rendimiento
3)
2)
4)
4,4,4 (12,12,12)
(mín. 0,2(24))
4)
4,4,4 (12,12,12)
6,4,4 (10,12,12)
35 42 46 58 62 88 116 124 187 255
0,93 0,95 0,96 0,96 0,97 0,97 0,97 0,97 0,97 0,97
Tabla 6.4 Alimentación de red 380-500 V (FC 302), 380-480 V (FC 301), PK37-P7K5
68 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

Especificaciones de los pro... Guía de diseño de
Designación de tipo P11K P15K P18K P22K
Sobrecarga alta / normal
Salida típica de eje [kW] 11 15 15 18,5 18,5 22,0 22,0 30,0
Protección IP20 B3 B3 B4 B4
Protección IP21 B1 B1 B2 B2
Protección IP55, IP66 B1 B1 B2 B2
Intensidad de salida
Continua (380-440 V) [A] 24 32 32 37,5 37,5 44 44 61
Intermitente (sobrecarga de 60 s) (380-440 V)
[A]
Continua (441-500 V) [A] 21 27 27 34 34 40 40 52
Intermitente (sobrecarga de 60 s)
(441-500 V) [A]
Continua kVA (400 V) [kVA] 16,6 22,2 22,2 26 26 30,5 30,5 42,3
Continua kVA (460 V) [kVA] 21,5 27,1 31,9 41,4
Intensidad de entrada máx.
Continua (380-440 V) [A] 22 29 29 34 34 40 40 55
Intermitente (sobrecarga de 60 s)
(380-440 V) [A]
Continua (441-500 V) [A] 19 25 25 31 31 36 36 47
Intermitente (sobrecarga de 60 s)
(441-500 V) [A]
Especificaciones adicionales
Sección transversal máx. del cable IP21, IP55,
IP664) para red, freno y carga compartida
[mm2] ([AWG])
Sección transversal máx. del cable IP21, IP55,
IP664) para motor [mm2] ([AWG])
Sección transversal máx. del cable IP204) para
red, motor, freno y carga compartida
[mm2] ([AWG])
Sección transversal máx. del cable4) para
desconexión [mm2] ([AWG])
Pérdida de potencia estimada con carga
nominal máx. [W]
Rendimiento
2)
1)
3)
HO NO HO NO HO NO HO NO
38,4 35,2 51,2 41,3 60 48,4 70,4 67,1
33,6 29,7 43,2 37,4 54,4 44 64 57,2
35,2 31,9 46,4 37,4 54,4 44 64 60,5
30,4 27,5 40 34,1 49,6 39,6 57,6 51,7
16, 10, 16 (6, 8, 6) 16, 10, 16 (6, 8, 6) 35,-,-(2,-,-) 35,-,-(2,-,-)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35, 25, 25 (2, 4, 4) 35, 25, 25 (2, 4, 4)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35,-,-(2,-,-) 35,-,-(2,-,-)
16, 10, 10 (6, 8, 8)
291 392 379 465 444 525 547 739
0,98 0,98 0,98 0,98
6 6
Tabla 6.5 Alimentación de red 380-500 V (FC 302), 380-480 V (FC 301), P11K-P22K
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 69

Especificaciones de los pro...
Designación de tipo P30K P37K P45K P55K P75K
Sobrecarga alta / normal
Salida típica de eje [kW] 30 37 37 45 45 55 55 75 75 90
Protección IP21 C1 C1 C1 C2 C2
Protección IP20 B4 C3 C3 C4 C4
Protección IP55, IP66 C1 C1 C1 C2 C2
Intensidad de salida
Continua (380-440 V) [A] 61 73 73 90 90 106 106 147 147 177
Intermitente (sobrecarga de 60 s)
(380-440 V) [A]
Continua (441-500 V) [A] 52 65 65 80 80 105 105 130 130 160
Intermitente (sobrecarga de 60 s)
(441-500 V) [A]
Continua kVA (400 V) [kVA] 42,3 50,6 50,6 62,4 62,4 73,4 73,4 102 102 123
66
Continua kVA (460 V) [kVA] 51,8 63,7 83,7 104 128
Intensidad de entrada máx.
Continua (380-440 V) [A] 55 66 66 82 82 96 96 133 133 161
Intermitente (sobrecarga de 60 s)
(380-440 V) [A]
Continua (441-500 V) [A] 47 59 59 73 73 95 95 118 118 145
Intermitente (sobrecarga de 60 s)
(441-500 V) [A]
Especificaciones adicionales
Sección transversal máx. del cable
IP20 para red y motor
[mm2] ([AWG])
Sección transversal máx. del cable
IP20 para freno y carga compartida
[mm2] ([AWG])
Sección transversal máx. del cable
IP21, IP55, IP66 para red y motor
[mm2] ([AWG])
Sección transversal máx. del cable
IP21, IP55, IP66 para freno y carga
compartida [mm2] ([AWG])
Sección transversal máx. del cable
con desconexión de la red [mm2]
([AWG])
Pérdida estimada de potencia
con carga nominal máx. [W]
Rendimiento
2)
1)
3)
HO NO HO NO HO NO HO NO HO NO
91,5 80,3 110 99 135 117 159 162 221 195
82,5 72,6 99 90,2 123 106 144 146 200 177
70,5 64,9 88,5 80,3 110 105 143 130 177 160
4)
570 698 697 843 891 1083 1022 1384 1232 1474
Guía de diseño de
78 71,5 97,5 88 120 116 158 143 195 176
35 (2) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
35 (2) 50 (1) 50 (1) 95 (4/0) 95 (4/0)
50 (1) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
50 (1) 50 (1) 50 (1) 95 (3/0) 95 (3/0)
50, 35, 35
(1, 2, 2)
0,98 0,98 0,98 0,98 0,99
95, 70, 70
(3/0, 2/0, 2/0)
185, 150, 120
(350 MCM,
300 MCM, 4/0)
Tabla 6.6 Alimentación de red 380-500 V (FC 302), 380-480 V (FC 301), P30K-P75K
70 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

Especificaciones de los pro... Guía de diseño de
6.1.3 Alimentación de red 525-600 V (solo FC 302)
Designación de tipo PK75 P1K1 P1K5 P2K2 P3K0 P4K0 P5K5 P7K5
Salida típica de eje [kW] 0,75 1,1 1,5 2,2 3 4 5,5 7,5
Protección IP20, IP21 A3 A3 A3 A3 A3 A3 A3 A3
Protección IP55 A5 A5 A5 A5 A5 A5 A5 A5
Intensidad de salida
Continua (525-550 V) [A] 1,8 2,6 2,9 4,1 5,2 6,4 9,5 11,5
Intermitente (525-550 V) [A] 2,9 4,2 4,6 6,6 8,3 10,2 15,2 18,4
Continua (551-600 V) [A] 1,7 2,4 2,7 3,9 4,9 6,1 9,0 11,0
Intermitente (551-600 V) [A] 2,7 3,8 4,3 6,2 7,8 9,8 14,4 17,6
Continua kVA (525 V) [kVA] 1,7 2,5 2,8 3,9 5,0 6,1 9,0 11,0
Continua kVA (575 V) [kVA] 1,7 2,4 2,7 3,9 4,9 6,1 9,0 11,0
Intensidad de entrada máx.
Continua (525-600 V) [A] 1,7 2,4 2,7 4,1 5,2 5,8 8,6 10,4
Intermitente (525-600 V) [A] 2,7 3,8 4,3 6,6 8,3 9,3 13,8 16,6
Especificaciones adicionales
Sección transversal máx. del cable
motor, freno y carga compartida [mm2] ([AWG])
Sección transversal máx. del cable4) para
desconexión [mm2] ([AWG])
Pérdida de potencia estimada con carga
nominal máx. [W]
Rendimiento
3)
2)
4)
para red,
4,4,4 (12,12,12)
(mín. 0,2 (24))
6,4,4 (10,12,12)
35 50 65 92 122 145 195 261
0,97 0,97 0,97 0,97 0,97 0,97 0,97 0,97
6 6
Tabla 6.7 Alimentación de red 525-600 V (solo FC 302), PK75-P7K5
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 71

Especificaciones de los pro... Guía de diseño de
Designación de tipo P11K P15K P18K P22K P30K
Sobrecarga alta / normal
Salida típica de eje [kW] 11 15 15 18,5 18,5 22 22 30 30 37
Protección IP20 B3 B3 B4 B4 B4
Protección IP21, IP55, IP66 B1 B1 B2 B2 C1
Intensidad de salida
Continua (525-550 V) [A] 19 23 23 28 28 36 36 43 43 54
Intermitente (525-550 V) [A] 30 25 37 31 45 40 58 47 65 59
Continua (551-600 V) [A] 18 22 22 27 27 34 34 41 41 52
Intermitente (551-600 V) [A] 29 24 35 30 43 37 54 45 62 57
Continua kVA (550 V) [kVA] 18,1 21,9 21,9 26,7 26,7 34,3 34,3 41,0 41,0 51,4
Continua kVA (575 V) [kVA] 17,9 21,9 21,9 26,9 26,9 33,9 33,9 40,8 40,8 51,8
Intensidad de entrada máx.
Continua a 550 V [A] 17,2 20,9 20,9 25,4 25,4 32,7 32,7 39 39 49
66
Intermitente a 550 V [A] 28 23 33 28 41 36 52 43 59 54
Continua a 575 V [A] 16 20 20 24 24 31 31 37 37 47
Intermitente a 575 V [A] 26 22 32 27 39 34 50 41 56 52
Especificaciones adicionales
Sección transversal máx. del cable
IP204) para red, motor, freno y carga
compartida [mm2] ([AWG])
Sección transversal máx. del cable
IP21, IP55, IP664) para red, freno y
carga compartida [mm2] ([AWG])
Sección transversal máx. del cable
IP21, IP55, IP664) para motor
[mm2] ([AWG])
Sección transversal máx. del cable
para desconexión [mm2] ([AWG])
Pérdida estimada de potencia
con carga nominal máx. [W]
Rendimiento
2)
1)
3)
HO NO HO NO HO NO HO NO HO NO
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35,-,-(2,-,-) 35,-,-(2,-,-) 35,-,-(2,-,-)
16, 10, 10 (6, 8, 8) 16, 10, 10 (6, 8, 8) 35,-,-(2,-,-) 35,-,-(2,-,-) 50,-,- (1,-,-)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35, 25, 25 (2, 4, 4) 35, 25, 25 (2, 4, 4) 50,-,- (1,-,-)
4)
220 300 300 370 370 440 440 600 600 740
0,98 0,98 0,98 0,98 0,98
16, 10, 10
(6, 8, 8)
50, 35, 35
(1, 2, 2)
Tabla 6.8 Alimentación de red 525-600 V (solo FC 302), P11K-P30K
72 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

Especificaciones de los pro... Guía de diseño de
Designación de tipo P37K P45K P55K P75K
Sobrecarga alta / normal
Salida típica de eje [kW] 37 45 45 55 55 75 75 90
Protección IP20 C3 C3 C3 C4 C4
Protección IP21, IP55, IP66 C1 C1 C1 C2 C2
Intensidad de salida
Continua (525-550 V) [A] 54 65 65 87 87 105 105 137
Intermitente (525-550 V) [A] 81 72 98 96 131 116 158 151
Continua (551-600 V) [A] 52 62 62 83 83 100 100 131
Intermitente (551-600 V) [A] 78 68 93 91 125 110 150 144
Continua kVA (550 V) [kVA] 51,4 61,9 61,9 82,9 82,9 100,0 100,0 130,5
Continua kVA (575 V) [kVA] 51,8 61,7 61,7 82,7 82,7 99,6 99,6 130,5
Intensidad de entrada máx.
Continua a 550 V [A] 49 59 59 78,9 78,9 95,3 95,3 124,3
Intermitente a 550 V [A] 74 65 89 87 118 105 143 137
Continua a 575 V [A] 47 56 56 75 75 91 91 119
Intermitente a 575 V [A] 70 62 85 83 113 100 137 131
Especificaciones adicionales
Sección transversal máx. del cable IP20 para red y
motor [mm2] ([AWG])
Sección transversal máx. del cable IP20 para freno y
carga compartida [mm2] ([AWG])
Sección transversal máx. del cable IP21, IP55, IP66
para red y motor [mm2] ([AWG])
Sección transversal máx. del cable IP21, IP55, IP66
para freno y carga compartida [mm2] ([AWG])
Sección transversal máx. del cable4) con desconexión
de la red [mm2] ([AWG])
Pérdida de potencia estimada con carga nominal máx.
3)
[W]
Rendimiento
2)
1)
HO NO HO NO HO NO HO NO
50 (1) 150 (300 MCM)
50 (1) 95 (4/0)
50 (1) 150 (300 MCM)
50 (1) 95 (4/0)
50, 35, 35
(1, 2, 2)
740 900 900 1100 1100 1500 1500 1800
0,98 0,98 0,98 0,98
95, 70, 70
(3/0, 2/0, 2/0)
185, 150, 120
(350 MCM,
300 MCM, 4/0)
6 6
Tabla 6.9 Alimentación de red 525-600 V (FC 302 solo), P37K-P75K
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 73

Especificaciones de los pro... Guía de diseño de
6.1.4 Alimentación de red 525-690 V (solo FC 302)
Designación de tipo P1K1 P1K5 P2K2 P3K0 P4K0 P5K5 P7K5
Sobrecarga normal / alta
Salida típica de eje (kW) 1,1 1,5 2,2 3,0 4,0 5,5 7,5
Protección IP20 A3 A3 A3 A3 A3 A3 A3
Intensidad de salida
Continua (525-550 V) [A] 2,1 2,7 3,9 4,9 6,1 9,0 11,0
Intermitente (525-550 V) [A] 3,4 4,3 6,2 7,8 9,8 14,4 17,6
Continua (551-690 V) [A] 1,6 2,2 3,2 4,5 5,5 7,5 10,0
Intermitente (551-690 V) [A] 2,6 3,5 5,1 7,2 8,8 12,0 16,0
Continua kVA 525 V 1,9 2,5 3,5 4,5 5,5 8,2 10,0
Continua kVA 690 V 1,9 2,6 3,8 5,4 6,6 9,0 12,0
Intensidad de entrada máx.
66
Continua (525-550 V) [A] 1,9 2,4 3,5 4,4 5,5 8,1 9,9
Intermitente (525-550 V) [A] 3,0 3,9 5,6 7,0 8,8 12,9 15,8
Continua (551-690 V) [A] 1,4 2,0 2,9 4,0 4,9 6,7 9,0
Intermitente (551-690 V) [A] 2,3 3,2 4,6 6,5 7,9 10,8 14,4
Especificaciones adicionales
Sección transversal máx. del cable
freno y carga compartida [mm2] ([AWG])
Sección transversal máx. del cable4) para desconexión
[mm2] ([AWG])
Pérdida de potencia estimada con carga nominal máx.
3)
[W]
Rendimiento
2)
1)
4)
para red, motor,
HO / NO HO / NO HO / NO HO / NO HO / NO HO / NO HO / NO
4, 4, 4 (12, 12, 12) (min. 0,2 [24])
6, 4, 4 (10, 12, 12)
44 60 88 120 160 220 300
0,96 0,96 0,96 0,96 0,96 0,96 0,96
Tabla 6.10 Protección A3, alimentación de red 525-690 V IP20 / chasis protegido, P1K1-P7K5
74 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

Especificaciones de los pro... Guía de diseño de
Designación de tipo P11K P15K P18K P22K
Sobrecarga normal / alta
Salida típica de eje a 550 V [kW] 7,5 11 11 15 15 18,5 18,5 22
Salida típica de eje a 690 V [kW] 11 15 15 18,5 18,5 22 22 30
Protección IP20 B4 B4 B4 B4
Protección IP21, IP55 B2 B2 B2 B2
Intensidad de salida
Continua (525-550 V) [A] 14,0 19,0 19,0 23,0 23,0 28,0 28,0 36,0
Intermitente (sobrecarga de 60 s)(525-550 V) [A] 22,4 20,9 30,4 25,3 36,8 30,8 44,8 39,6
Continua (551-690 V) [A] 13,0 18,0 18,0 22,0 22,0 27,0 27,0 34,0
Intermitente (sobrecarga de 60 s)(551-690 V) [A] 20,8 19,8 28,8 24,2 35,2 29,7 43,2 37,4
continua kVa (a 550 V) [KVA] 13,3 18,1 18,1 21,9 21,9 26,7 26,7 34,3
continua kVa (a 690 V) [KVA] 15,5 21,5 21,5 26,3 26,3 32,3 32,3 40,6
Intensidad de entrada máx.
Continua (a 550 V) [A] 15,0 19,5 19,5 24,0 24,0 29,0 29,0 36,0
Intermitente (60 s de sobrecarga) (a 550 V) [A] 23,2 21,5 31,2 26,4 38,4 31,9 46,4 39,6
Continua (a 690 V) [A] 14,5 19,5 19,5 24,0 24,0 29,0 29,0 36,0
Intermitente (60 s de sobrecarga) (a 690 V) [A] 23,2 21,5 31,2 26,4 38,4 31,9 46,4 39,6
Especificaciones adicionales
Sección transversal máx. del cable4) para
red / motor, carga compartida y freno
[mm2] ([AWG])
Sección transversal máx. del cable4) con
desconexión de la red [mm2] ([AWG])
Pérdida de potencia estimada con carga nominal
3)
máx. [W]
Rendimiento
2)
1)
HO NO HO NO HO NO HO NO
35, 25, 25 (2, 4, 4)
16,10,10 (6, 8, 8)
150 220 220 300 300 370 370 440
0,98 0,98 0,98 0,98
6 6
Tabla 6.11 Protección B2 / B4, alimentación de red 525-690 V IP20 / IP21 / IP55 - chasis / NEMA 1 / NEMA 12 (solo FC 302),
P11K-P22K
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 75

Especificaciones de los pro...
Guía de diseño de
Designación de tipo P30K P37K P45K P55K P75K
Sobrecarga normal / alta
1)
HO NO HO NO HO NO HO NO HO NO
Salida típica de eje a 550 V [kW] 22 30 30 37 37 45 45 55 50 75
Salida típica de eje a 690 V [kW] 30 37 37 45 45 55 55 75 75 90
Protección IP20 B4 C3 C3 D3h D3h
Protección IP21, IP55 C2 C2 C2 C2 C2
Intensidad de salida
Continua (525-550 V) [A] 36,0 43,0 43,0 54,0 54,0 65,0 65,0 87,0 87,0 105
Intermitente (sobrecarga de 60 s)
(525-550 V) [A] 54,0 47,3 64,5 59,4 81,0 71,5 97,5 95,7 130,5 115,5
Continua (551-690 V) [A] 34,0 41,0 41,0 52,0 52,0 62,0 62,0 83,0 83,0 100
Intermitente (sobrecarga de 60 s)
(551-690 V) [A] 51,0 45,1 61,5 57,2 78,0 68,2 93,0 91,3 124,5 110
continua kVa (a 550 V) [KVA] 34,3 41,0 41,0 51,4 51,4 61,9 61,9 82,9 82,9 100
66
continua kVa (a 690 V) [KVA] 40,6 49,0 49,0 62,1 62,1 74,1 74,1 99,2 99,2 119,5
Intensidad de entrada máx.
Continua (a 550 V) [A] 36,0 49,0 49,0 59,0 59,0 71,0 71,0 87,0 87,0 99,0
Intermitente (sobrecarga de 60 s, a 550 V)
[A] 54,0 53,9 72,0 64,9 87,0 78,1 105,0 95,7 129 108,9
Continua (a 690 V) [A] 36,0 48,0 48,0 58,0 58,0 70,0 70,0 86,0 - Intermitente (60 s de sobrecarga) (a 690 V)
[A] 54,0 52,8 72,0 63,8 87,0 77,0 105 94,6 - -
Especificaciones adicionales
Sección transversal máx. del cable para red
y motor [mm2] ([AWG])
Sección transversal máx. del cable para
carga compartida y freno [mm2] ([AWG])
Sección transversal máx. del cable4) con
desconexión de la red [mm2] ([AWG])
Pérdida estimada de potencia
con carga nominal máx. [W]
Rendimiento
2)
3)
95, 70, 70
(3/0, 2/0, 2/0)
600 740 740 900 900 1100 1100 1500 1500 1800
0,98
0,98 0,98 0,98 0,98
150 (300 MCM)
95 (3/0)
185, 150, 120
(350 MCM,
300 MCM, 4/0)
-
Tabla 6.12 Protección B4, C2, C3, alimentación de red 525-690 V IP20 / IP21 / IP55 - chasis / NEMA 1 / NEMA 12 (solo FC 302),
P30K-P75K
Consulte las clasificaciones de los fusibles en capétulo 9.3.1 Fusibles y magnetotérmicos.
1)
Sobrecarga alta = 150 % o 160 % del par durante 60 s Sobrecarga normal = 110 % del par durante 60 s.
2)
Se mide utilizando cables de motor apantallados de 5 m a la carga y a la frecuencia nominales.
3)
La pérdida de potencia típica es en condiciones de carga nominal y se espera que esté dentro del
±
15 % (la tolerancia está
relacionada con la variedad en las condiciones de cable y tensión).
Los valores están basados en el rendimiento típico de un motor (en el límite de eff2 / eff3). Los motores con rendimiento inferior
también se añaden a la pérdida de potencia del convertidor de frecuencia y a la inversa.
Si la frecuencia de conmutación se eleva por encima del ajuste predeterminado, las pérdidas de potencia pueden aumentar considerablemente.
Se incluye el consumo de energía del LCP y de las tarjetas de control típicas. La carga del cliente y las opciones adicionales pueden
añadir hasta 30 W a las pérdidas. (Aunque normalmente solo 4 W adicionales por una tarjeta de control a plena carga o por cada
opción en la ranura A o B.)
Pese a que las mediciones se realizan con instrumentos del máximo nivel, debe admitirse una imprecisión en las mismas (±5 %).
4)
Los tres valores para la sección transversal máxima del cable son para los terminales de núcleo único, de cable flexible y de cable
flexible con manguito, respectivamente.
76 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

Especificaciones de los pro... Guía de diseño de
6.2 Especificaciones generales
6.2.1 Alimentación de red
Alimentación de red
Terminales de alimentación (6 impulsos) L1, L2, L3
Tensión de alimentación 200-240 V ±10 %
Tensión de alimentación FC 301: 380-480 V / FC 302: 380-500 V ±10 %
Tensión de alimentación FC 302: 525-600 V ±10 %
Tensión de alimentación FC 302: 525-690 V ±10 %
Tensión de red baja / corte de red:
durante un episodio de tensión de red baja o un corte de red, el convertidor de frecuencia sigue funcionando hasta que la
tensión del circuito intermedio desciende por debajo del nivel de parada mínimo, que generalmente es un 15 % inferior a la
tensión de alimentación nominal más baja del convertidor de frecuencia. No se puede esperar un arranque y un par completo
con una tensión de red inferior al 10 % por debajo de la tensión de alimentación nominal más baja del convertidor de
frecuencia.
Frecuencia de alimentación 50/60 Hz ±5 %
Máximo desequilibrio transitorio entre fases de red 3,0 % de la tensión de alimentación nominal
Factor de potencia real (λ) ≥0,9 nominal con carga nominal
Factor de potencia de desplazamiento (cos ϕ) prácticamente uno (>0,98)
Conmutación en la entrada de alimentación L1, L2, L3 (arranques) ≤ 7,5 kW 2 veces por minuto como máximo
Conmutación de la entrada de alimentación L1, L2, L3 (arranques) 11-75 kW 1 vez por minuto como máximo
Conmutación en la entrada de alimentación L1, L2 y L3 (arranques) ≥90 kW máximo 1 vez cada 2 minutos
Entorno según la norma EN 60664-1 Categoría de sobretensión III / grado de contaminación 2
La unidad es adecuada para ser utilizada en un circuito capaz de proporcionar no más de 100 000 amperios simétricos RMS,
240/500/600/690 V máximo.
6 6
Salida del motor y datos del motor
6.2.2
Salida del motor (U, V, W)
Tensión de salida 0-100 % de la tensión de alimentación
Frecuencia de salida 0-590 Hz
Frecuencia de salida en modo de flujo 0-300 Hz
Conmutación en la salida Ilimitada
Tiempos de rampa 0,01-3600 s
Características de par
Par de arranque (par constante) máximo del 160 % durante 60 s1) una vez en 10 min.
Par de arranque / sobrecarga (par variable) máximo del 110 % hasta 0,5 s1) una vez cada 10 min.
Tiempo de subida de par en FLUJO (para 5 kHz de fsw) 1 ms
Tiempo de subida de par en VVC
1)
Porcentaje relativo al par nominal.
2)
El tiempo de respuesta de par depende de la aplicación y de la carga pero, por normal general, el paso de par de 0 a la
referencia equivale a entre 4 y 5 veces el tiempo de subida de par.
3)
Hay disponibles versiones especiales de los clientes con frecuencia de salida de 0-1000 Hz.
plus
(independiente de fsw) 10 ms
3)
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 77

Especificaciones de los pro... Guía de diseño de
6.2.3 Condiciones ambientales
Ambiente
Protección IP20 / chasis, IP21 / Tipo 1, IP55 / tipo 12, IP66 / tipo 4X
Prueba de vibración 1,0 g
Máx. THVD 10%
Humedad relativa máx. 5-93 % (CEI 721-3-3); clase 3K3 (sin condensación) durante el funcionamiento
Entorno agresivo (CEI 60068-2-43) prueba H2S
Temperatura ambiente Máx. 50 °C (promedio de 24 horas, máx. 45 °C)
Temperatura ambiente mínima durante el funcionamiento a escala completa 0 °C
Temperatura ambiente mínima con rendimiento reducido - 10 °C
Temperatura durante el almacenamiento / transporte De –25 a +65/70 °C
Altitud máxima sobre el nivel del mar sin reducción de potencia 1000 m
66
Normas EMC, emisión EN 61800-3, EN 55011
Normas EMC, inmunidad EN61800-3, EN 61000-6-1/2
1) Consulte el apartado capétulo 5.2.1 Resultados de las pruebas de EMC
Especificaciones del cable
6.2.4
Clase Kd
1)
Longitudes y secciones transversales para cables de control
Long. máx. de cable de motor, cable apantallado 150 m
Long. máx. de cable de motor, cable no apantallado 300 m
Sección transversal máxima a los terminales de control, cable flexible / rígido sin manguitos en los
extremos 1,5 mm2/16 AWG
Sección transversal máxima a los terminales de control, cable flexible con manguitos en los extremos 1 mm2 /18 AWG
Sección transversal máxima a los terminales de control, cable flexible con manguitos en los extremos y
abrazadera
Sección transversal mínima a los terminales de control 0,25 mm2 /24 AWG
1)
Para cables de alimentación, consulte las tablas de datos eléctricos en capétulo 6.1 Datos eléctricos.
1)
0,5 mm2 /
20 AWG
6.2.5 Entrada / Salida de control y datos de control
6.2.5.1 Entradas digitales
Entradas digitales
Entradas digitales programables FC 301: 4 (5)1)/FC 302: 4 (6)
Número de terminal 18, 19, 271), 291), 32, 33
Lógica PNP o NPN
Nivel de tensión 0-24 V CC
Nivel de tensión, «0» lógico PNP <5 V CC
Nivel de tensión, «1» lógico PNP >10 V CC
Nivel de tensión, «0» lógico NPN
Nivel de tensión, «1» lógico NPN
Tensión máxima de entrada 28 V CC
Rango de frecuencia de impulsos 0-110 kHz
(Ciclo de trabajo) Anchura de impulsos mín. 4,5 ms
Resistencia de entrada, R
2)
2)
i
>19 V CC
<14 V CC
4 kΩ (aprox.)
1)
78 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

Especificaciones de los pro... Guía de diseño de
Parada de seguridad del terminal 37
3, 4)
(el terminal 37 es de lógica PNP fija)
Nivel de tensión 0-24 V CC
Nivel de tensión, «0» lógico PNP <4 V CC
Nivel de tensión, «1» lógico PNP >20 V CC
Tensión máxima de entrada 28 V CC
Intensidad de entrada típica a 24 V 50 mA rms
Intensidad de entrada típica a 20 V 60 mA rms
Capacitancia de entrada 400 nF
Todas las entradas digitales están aisladas galvánicamente de la tensión de alimentación (PELV) y de otros terminales de alta
tensión.
1)
Los terminales 27 y 29 también pueden programarse como salidas.
2)
Excepto la entrada de parada de seguridad del terminal 37.
3)
Consulte el Manual de funcionamiento de la desconexión segura de par para los convertidores de frecuencia VLT® para
obtener más información sobre el terminal 37 y la parada de seguridad.
4)
Al usar un contactor con una bobina de CC en su interior, en combinación con la parada de seguridad, es importante crear un
camino de retorno para la intensidad desde la bobina al desconectarlo. Esto puede conseguirse con un diodo de rueda libre (o,
en su caso, con un MOV de 30 o 50 V para reducir todavía más el tiempo de respuesta) a lo largo de la bobina. Pueden
comprarse contactores típicos con este diodo.
Entradas analógicas
N.º de entradas analógicas 2
Número de terminal 53, 54
Modos Tensión o intensidad
Selección de modo Interruptor S201 e interruptor S202
Modo de tensión Interruptor S201 / Interruptor S202 = OFF (U)
Nivel de tensión De –10 a +10 V (escalable)
Resistencia de entrada, R
i
aprox. 10 kΩ
Tensión máx. ± 20 V
Modo de intensidad Interruptor S201 / Interruptor S202 = ON (I)
Nivel de intensidad De 0 / 4 a 20 mA (escalable)
Resistencia de entrada, R
i
200 Ω aproximadamente
Intensidad máx. 30 mA
Resolución de entradas analógicas 10 bit (signo +)
Precisión de las entradas analógicas Error máx: 0,5 % de escala total
Ancho de banda 100 Hz
Las entradas analógicas están galvánicamente aisladas de la tensión de alimentación (PELV) y de los demás terminales de alta
tensión.
6 6
Ilustración 6.1 Aislamiento PELV
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 79

Especificaciones de los pro...
Guía de diseño de
Entradas de impulsos / encoder
Entradas de impulsos / encoder programables 2/1
Número de terminal de impulso / encoder 291), 332) / 323), 33
3)
Frecuencia máx. en los terminales 29, 32 y 33 110 kHz (en contrafase)
Frecuencia máx. en los terminales 29, 32 y 33 5 kHz (colector abierto)
Frecuencia mínima en los terminales 29, 32 y 33 4 Hz
Nivel de tensión Consulte el apartado Entradas digitales
Tensión máxima de entrada 28 V CC
Resistencia de entrada, R
i
aprox. 4 kΩ
Precisión de la entrada de impulsos (0,1-1 kHz) Error máx.: un 0,1 % de la escala completa
Precisión de la entrada de encoder (1-11 kHz) Error máx.: un 0,05 % de la escala completa
Las entradas de impulsos y encoder (terminales 29, 32 y 33) se encuentran galvánicamente aisladas de la tensión de alimentación (PELV) y demás terminales de alta tensión.
1)
FC 302 solo
2)
66
Las entradas de impulsos son la 29 y la 33
3)
Entradas de encoder: 32 = A y 33 = B
Salida digital
Salidas digitales / de impulsos programables 2
Número de terminal 27, 29
1)
Nivel de tensión en la salida digital / de frecuencia 0-24 V
Intensidad de salida máx. (disipador o fuente) 40 mA
Carga máx. en salida de frecuencia 1 kΩ
Carga capacitiva máx. en salida de frecuencia 10 nF
Frecuencia de salida mín. en salida de frecuencia 0 Hz
Frecuencia de salida máx. en salida de frecuencia 32 kHz
Precisión de salida de frecuencia Error máx.: 0,1 % de la escala total
Resolución de salidas de frecuencia 12 bits
1)
Los terminales 27 y 29 también pueden programarse como entradas.
La salida digital está galvánicamente aislada de la tensión de alimentación (PELV) y de los demás terminales de alta tensión.
Salida analógica
Número de salidas analógicas programables 1
Número de terminal 42
Rango de intensidad en la salida analógica 0/4 a 20 mA
Carga máx. entre conexión a tierra y salida analógica inferior a 500 Ω
Precisión en la salida analógica Error máx.: un 0,5 % de la escala completa
Resolución en la salida analógica 12 bits
La salida analógica está galvánicamente aislada de la tensión de alimentación (PELV) y de los demás terminales de alta tensión.
Tarjeta de control, salida de 24 V CC
Número de terminal 12, 13
Tensión de salida 24 V +1, –3 V
Carga máx. 200 mA
El suministro externo de 24 V CC está aislado galvánicamente de la tensión de alimentación (PELV), aunque tiene el mismo
potencial que las entradas y salidas analógicas y digitales.
Tarjeta de control, salida de 10 V CC
Número de terminal ±50
Tensión de salida 10,5 V ±0,5 V
Carga máx. 15 mA
El suministro de 10 V CC está galvánicamente aislado de la tensión de alimentación (PELV) y de los demás terminales de alta
tensión.
80 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

Especificaciones de los pro...
Guía de diseño de
Tarjeta de control, comunicación serie RS-485
Número de terminal 68 (P,TX+, RX+) y 69 (N,TX-, RX-)
N.º de terminal 61 Común para los terminales 68 y 69
El circuito de comunicación serie RS-485 se encuentra separado funcionalmente de otros circuitos y galvánicamente aislado de la
tensión de alimentación (PELV).
Tarjeta de control, comunicación serie USB
USB estándar 1,1 (Velocidad máxima)
Conector USB Conector de dispositivos USB tipo B
La conexión al PC se realiza por medio de un cable USB de dispositivo o host estándar.
La conexión USB se encuentra galvánicamente aislada de la tensión de alimentación (PELV) y del resto de los terminales de alta
tensión.
La conexión a tierra USB no se encuentra galvánicamente aislada de la protección a tierra. Utilice únicamente un ordenador
portátil aislado como conexión entre el PC y el conector USB del convertidor de frecuencia.
Salidas de relé
Salidas de relé programables FC 301 todos kW: 1/FC 302 todas kW: 2
N.º de terminal del relé 01 1-3 (desconexión), 1-2 (conexión)
Carga máx. del terminal (CA-1)1) en 1-3 (NC), 1-2 (NA) (carga resistiva) 240 V CA, 2 A
Carga máx. del terminal (CA-15)
1)
(Carga inductiva a cosφ 0,4): 240 V CA, 0,2 A
Carga máx. del terminal (CC-1)1) en 1-2 (NA), 1-3 (NC) (carga resistiva) 60 V CC, 1 A
Carga máx. del terminal (CC-13)1) (carga inductiva) 24 V CC, 0,1 A
Relé 02 (solo FC 302) Número de terminal 4-6 (desconexión), 4-5 (conexión)
Carga máx. del terminal (CA-1)1) en 4-5 (NA) (Carga resistiva)
2)3)
Sobretensión cat. II 400 V CA, 2 A
Carga máx. del terminal (CA-15)1) en 4-5 (NA) (carga inductiva a cosφ 0,4) 240 V CA, 0,2 A
Carga máx. terminal (CC-1)1) en 4-5 (NA) (carga resistiva) 80 V CC, 2 A
Carga máx. terminal (CC-13)1) en 4-5 (NA) (carga inductiva) 24 V CC, 0,1 A
Carga máx. del terminal (CA-1)1) en 4-6 (NC) (carga resistiva) 240 V CA, 2 A
Carga máx. del terminal (CA-15)1) en 4-6 (NC) (carga inductiva a cosφ 0,4) 240 V CA, 0,2 A
Carga máx. del terminal (CC-1)1) en 4-6 (NC) (carga resistiva) 50 V CC, 2 A
Carga máx. del terminal (CC-13)1) en 4-6 (NC) (carga inductiva) 24 V CC, 0,1 A
Carga mín. del terminal en 1-3 (NC), 1-2 (NA), 4-6 (NC), 4-5 (NA) 24 V CC 10 mA, 24 V CA 20 mA
Ambiente conforme a la norma EN 60664-1 Categoría de sobretensión III / grado de contaminación 2
1)
CEI 60947 partes 4 y 5
Los contactos del relé están galvánicamente aislados con respecto al resto del circuito con un aislamiento reforzado (PELV).
2)
Categoría de sobretensión II
3)
Aplicaciones UL 300 V CA 2 A
6 6
Rendimiento de la tarjeta de control
Intervalo de exploración 1 ms
Características de control
Resolución de frecuencia de salida a 0-590 Hz ±0,003 Hz
Precisión repetida del arranque / parada precisos (terminales 18, 19) ≤±0,1 ms
Tiempo de respuesta del sistema (terminales 18, 19, 27, 29, 32 y 33) ≤2 ms
Rango de control de velocidad (lazo abierto) 1:100 de velocidad síncrona
Intervalo de control de velocidad (lazo cerrado) 1:1000 de velocidad síncrona
Precisión de velocidad (lazo abierto) 30-4000 r/min: error ±8 r/min
Precisión de la velocidad (lazo cerrado), en función de la resolución del dispositivo de
realimentación.
0-6000 r/min: error
±0,15 r/min
Precisión de control de par (realimentación de velocidad) error máx ±5 % del par nominal
Todas las características de control se basan en un motor asíncrono de 4 polos
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 81

2
20%
4 6 8
10
12 14 16
40%
60%
80%
100%
110%
I
out
(%)
fsw (kHz)
A1-A3 45°C, A4-A5 40°C
A1-A3 50°C, A4-A5 45°C
A1-A3 55°C, A4-A5 50°C
130BA393.10
0
0
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
A1-A3 45°C, A4-A5 40°C
A1-A3 50°C, A4-A5 45°C
A1-A3 55°C, A4-A5 50°C
0
0
130BD639.10
I
out
(%)
fsw (kHz)
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
I
out
(%)
A1-A3 45°C, A4-A5 40°C
A1-A3 50°C, A4-A5 45°C
A1-A3 55°C, A4-A5 50°C
0
0
130BA394.10
fsw (kHz)
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
I
out
(%)
A1-A3 45°C, A4-A5 40°C
A1-A3 50°C, A4-A5 45°C
A1-A3 55°C, A4-A5 50°C
0
0
130BD640.10
fsw (kHz)
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
45°C
50°C
55°C
130BA402.10
0
0
I
out
(%)
HO
B1
B2
Especificaciones de los pro... Guía de diseño de
6.2.6 Reducción de potencia en función de
la temperatura ambiente
6.2.6.1 Reducción de potencia en función
de la temperatura ambiente, tipo de
protección A
AVM de 60º, modulación de la anchura de impulsos
60° AVM
Ilustración 6.4 Reducción de potencia de I
T
para tipo de protección A, utilizando AVM de 60º y
AMB, MÁX.
para diferentes
salida
un cable de motor de 10 m como máximo
66
Ilustración 6.2 Reducción de potencia de I
T
para tipo de protección A, utilizando AVM de 60º
AMB, MÁX.
para distintas
salida
SFAVM
SFAVM - Modulación vectorial asíncrona de frecuencia
del estátor.
Ilustración 6.5 Reducción de potencia de I
T
para tipo de protección A, utilizando SFAVM y un
AMB, MÁX.
cable de motor de 10 m como máximo
6.2.6.2
Reducción de potencia en función
para diferentes
salida
de la temperatura ambiente, tipo de
protección B
Ilustración 6.3 Reducción de potencia de I
T
para tipo de protección A, utilizando SFAVM
AMB, MÁX.
Cuando solo se utilizan cables de motor de 10 m o menos
en tipos de protección A, se necesita una reducción de
potencia menor. Esto es debido al hecho de que la
longitud del cable de motor tiene una influencia relativamente elevada en la reducción de potencia
recomendada.
para diferentes
salida
Protección B, T2, T4 y T5
Para tipos de protección B y C la reducción de potencia
también depende del modo de sobrecarga seleccionado
en 1-04 Modo sobrecarga
AVM de 60º, modulación de la anchura de impulsos
Ilustración 6.6 Reducción de potencia de I
82 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05
T
60º en modo de sobrecarga alto (160 % por encima del par)
para tipos de protección B1 y B2, utilizando AVM de
AMB, MÁX.
para diferentes
salida

2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
0
0
I
out
(%)
NO
45°C
50°C
55°C
130BA401.11
B1
B2
130BB830.10
2 4
6 8
20%
10
12 14
16
f
sw
(kHz)
0
0
40%
o
50 C
60%
80%
90%
100%
o
45 C
110%
(%)
l
out
B3 & B4
HO
2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
12 14
16
o
55 C
f
sw
(kHz)
0
0
(%)
l
out
B3
B4
NO
130BB828.10
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
45°C
50°C
55°C
130BA404.10
0
0
I
out
(%)
HO
B1
B2
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
45°C
50°C
55°C
0
0
I
out
(%)
NO
130BA403.11
B1
B2
130BB834.10
2 4
6 8
20%
10
12 14
16
f
sw
(kHz)
0
0
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
B3
(%)
l
out
HO
B4
Especificaciones de los pro... Guía de diseño de
SFAVM - Modulación vectorial asíncrona de frecuencia
del estátor.
Ilustración 6.7 Reducción de potencia de I
T
para tipos de protección B1 y B2, utilizando AVM de
AMB, MÁX.
para diferentes
salida
60º en modo de sobrecarga normal (110 % por encima del
par)
Ilustración 6.8 Reducción de potencia de I
T
para tipos de protección B3 y B4, utilizando AVM de
AMB, MÁX.
para diferentes
salida
60º en modo de sobrecarga alto (160 % por encima del par)
Ilustración 6.10 Reducción de potencia de I
T
para tipos de protección B1 y B2, utilizando SFAVM
AMB, MÁX.
para diferentes
salida
en modo de sobrecarga alto (160 % por encima del par)
Ilustración 6.11 Reducción de potencia de I
T
para tipos de protección B1 y B2, utilizando SFAVM
AMB, MÁX.
para diferentes
salida
en modo de sobrecarga normal (110 % por encima del par)
6 6
Ilustración 6.12 Reducción de potencia de I
Ilustración 6.9 Reducción de potencia de I
T
60º en modo de sobrecarga normal (110 % por encima del
par)
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 83
para tipos de protección B3 y B4, utilizando AVM de
AMB, MÁX.
salida
para diferentes
T
para tipos de protección B3 y B4, utilizando SFAVM
AMB, MÁX.
en modo de sobrecarga alto (160 % por encima del par)
salida
para diferentes

2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
12 14
16
B3
B4
f
sw
(kHz)
0
0
(%)
l
out
NO
130BB832.10
1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
3
(%)
l
out
f
sw
(kHz)
0
0
B1 & B2
NO
130BB820.10
1 2 4
6 8
20%
10
40%
o
50 C
f
sw
(kHz)
0
0
60%
80%
90%
100%
o
45 C
110%
(%)
l
out
B1 & B2
HO
130BB822.10
1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
f
sw
(kHz)
0
0
(%)
l
out
B1 & B2
NO
130BB826.10
1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
f
sw
(kHz)
0
0
(%)
l
out
B1 & B2
HO
130BB824.10
Especificaciones de los pro... Guía de diseño de
SFAVM - Modulación vectorial asíncrona de frecuencia
del estátor.
Ilustración 6.13 Reducción de potencia de I
T
66
en modo de sobrecarga normal (110 % por encima del par)
para tipos de protección B3 y B4, utilizando SFAVM
AMB, MÁX.
para diferentes
salida
Ilustración 6.16 Reducción de potencia de la intensidad de
salida con frecuencia de conmutación y temperatura ambiente
para convertidores de frecuencia de 600 V, tipo de protección
Protecciones B, T6
B; SFAVM, NO
AVM de 60º, modulación de la anchura de impulsos
Ilustración 6.14 Reducción de potencia de la intensidad de
salida con frecuencia de conmutación y temperatura ambiente
para convertidores de frecuencia de 600 V, tipo de protección
B, 60 AVM, NO
Ilustración 6.17 Reducción de potencia de la intensidad de
salida con frecuencia de conmutación y temperatura ambiente
para convertidores de frecuencia de 600 V, tipo de protección
B; SFAVM, HO
Ilustración 6.15 Reducción de potencia de la intensidad de
salida con frecuencia de conmutación y temperatura ambiente
para convertidores de frecuencia de 600 V, tipo de protección
B, AVM de 60º, HO
84 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

fsw (kHz)
130BB211.10
13.6
20.4
27.2
34
I
out
(A)
30.6
1 2 64
55°C
50°C
45°C
8 10
B2 all options
fsw (kHz)
130BB212.10
40
60
80
100
I
out
(A)
90
1 2 64
55°C
50°C
45°C
8 10
B2 all options
70
20
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
45°C
50°C
55°C
130BA398.10
0
0
I
out
(%)
HO
C1 & C2
130BA397.10
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
0
0
I
out
(%)
NO
45°C
50°C
55°C
C1 & C2
130BB831.10
80%
90%
100%
110%
(%)
l
out
C3 & C4
HO
2 4
6 8
20%
10
40%
60%
o
50 C
o
45 C
12 14
16
f
sw
(kHz)
Especificaciones de los pro... Guía de diseño de
Protecciones B, T7
Protecciones B2 y B4, 525-690 V
AVM de 60º, modulación de la anchura de impulsos
Ilustración 6.18 Reducción de potencia de la intensidad de
salida con frecuencia de conmutación y temperatura ambiente
para tipos de protección B2 y B4, AVM de 60º. Nota: El gráfico
muestra la intensidad como un valor absoluto y es válido
tanto para sobrecarga normal como alta.
SFAVM - Modulación vectorial asíncrona de frecuencia
del estátor.
6.2.6.3
Reducción de potencia en función
de la temperatura ambiente, tipo de
protección C
Protecciones C, T2, T4 y T5
AVM de 60º, modulación de la anchura de impulsos
Ilustración 6.20 Reducción de potencia de I
T
para tipos de protección C1 y C2, utilizando AVM de
AMB, MÁX.
60º en modo de sobrecarga alto (160 % por encima del par)
para diferentes
salida
6 6
Ilustración 6.21 Reducción de potencia de I
T
AMB, MÁX.
para tipos de protección C1 y C2, utilizando AVM de
salida
60º en modo de sobrecarga normal (110 % por encima del
par)
Ilustración 6.19 Reducción de potencia de la intensidad de
salida con frecuencia de conmutación y temperatura ambiente
para tipo de protección B2 y B4, SFAVM. Nota: El gráfico
muestra la intensidad como un valor absoluto y es válido
tanto para sobrecarga normal como alta
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 85
Ilustración 6.22 Reducción de potencia de I
T
AMB, MÁX.
para tipos de protección C3 y C4, utilizando AVM de
60º en modo de sobrecarga alto (160 % por encima del par)
salida
para diferentes
para diferentes

2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
12 14
16
o
55 C
f
sw
(kHz)
0
0
(%)
l
out
C3 & C4
NO
130BB829.10
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
HO
f
sw
(kHz)
45°C
50°C
55°C
130BA400.10
0
0
I
out
(%)
C1 & C2
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
fsw (kHz)
0
0
I
out
(%)
NO
45°C
50°C
55°C
130BA399.10
C1 & C2
130BB835.10
80%
90%
100%
110%
C3 & C4
(%)
l
out
HO
2 4
6 8
20%
10
40%
60%
o
50 C
o
45 C
12 14
16
f
sw
(kHz)
0
0
2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
12 14
16
f
sw
(kHz)
0
0
(%)
l
out
C3 & C4
NO
130BB833.10
1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
f
sw
(kHz)
0
0
(%)
l
out
C1 & C2
NO
130BB821.10
Especificaciones de los pro... Guía de diseño de
Ilustración 6.23 Reducción de potencia de I
T
66
60º en modo de sobrecarga normal (110 % por encima del
para tipos de protección C3 y C4, utilizando AVM de
AMB, MÁX.
para diferentes
salida
Ilustración 6.26 Reducción de potencia de I
T
para tipos de protección C3 y C4, utilizando SFAVM
AMB, MÁX.
para diferentes
salida
en modo de sobrecarga alto (160 % por encima del par)
par)
SFAVM - Modulación vectorial asíncrona de frecuencia
del estátor.
Ilustración 6.24 Reducción de potencia de I
T
para tipos de protección C1 y C2, utilizando SFAVM
AMB, MÁX.
en modo de sobrecarga alto (160 % por encima del par)
para diferentes
salida
Ilustración 6.27 Reducción de potencia de I
T
AMB, MÁX.
para tipos de protección C3 y C4, utilizando SFAVM
para diferentes
salida
en modo de sobrecarga normal (110 % por encima del par)
Tipos de protección C, T6
AVM de 60º, modulación de la anchura de impulsos
Ilustración 6.25 Reducción de potencia de I
T
para tipos de protección C1 y C2, utilizando SFAVM
AMB, MÁX.
para diferentes
salida
en modo de sobrecarga normal (110 % por encima del par)
86 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05
Ilustración 6.28 Reducción de potencia de la intensidad de
salida con frecuencia de conmutación y temperatura ambiente
para convertidores de frecuencia de 600 V, tipo de protección
C, 60 AVM, NO

80%
90%
100%
o
45 C
110%
(%)
l
out
C1 & C2
HO
1 2 4
6 8
20%
10
40%
60%
o
50 C
f
sw
(kHz)
0
0
130BB823.10
1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
f
sw
(kHz)
0
0
(%)
l
out
C1 & C2
NO
130BB827.10
130BB825.10
1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
f
sw
(kHz)
0
0
(%)
l
out
C1 & C2
HO
fsw (kHz)
130BB213.11
20.4
34
I
out
(A)
28.9
1 2 64
55°C
50°C
45°C
8 10
C2 all options
13.6
27.2
Especificaciones de los pro... Guía de diseño de
Ilustración 6.29 Reducción de potencia de la intensidad de
salida con frecuencia de conmutación y temperatura ambiente
para convertidores de frecuencia de 600 V, tipos de
protección C, AVM de 60º, HO
SFAVM - Modulación vectorial asíncrona de frecuencia
del estátor.
Ilustración 6.30 Reducción de potencia de la intensidad de
salida con frecuencia de conmutación y temperatura ambiente
para convertidores de frecuencia de 600 V, tipos de
protección C; SFAVM, NO
Ilustración 6.31 Reducción de potencia de la intensidad de
salida con frecuencia de conmutación y temperatura ambiente
para convertidores de frecuencia de 600 V, tipos de
protección C; SFAVM, HO
Tipo de protección C, T7
AVM de 60º, modulación de la anchura de impulsos
Ilustración 6.32 Reducción de potencia de la intensidad de
salida con frecuencia de conmutación y temperatura ambiente
para tipo de protección C2, AVM de 60º. Nota: El gráfico
muestra la intensidad como un valor absoluto y es válido
tanto para sobrecarga normal como alta
6 6
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 87

fsw (kHz)
130BB214.10
40
60
80
100
I
out
(A)
86.6
1 2 64
55°C
50°C
45°C
8 10
C2 all options
66.6
20
2
20%
4 6 8 10
40%
60%
80%
100%
110%
I
out
(%)
fsw (kHz)
I
LOAD
at T
AMB
max
130BD597.10
0
0
I
LOAD
at T
AMB
max +5 °C
I
LOAD
at T
AMB
max +5 °C
Especificaciones de los pro...
Guía de diseño de
SFAVM - Modulación vectorial asíncrona de frecuencia
del estátor.
Los picos de tensión en los terminales del motor son
provocados por la conmutación de los dispositivos IGBT.
Tanto el tiempo de subida como la tensión pico influyen
en la vida útil del motor. Si la tensión pico es demasiado
elevada, los motores sin aislamiento de fase en la bobina
se pueden ver perjudicados con el paso del tiempo.
Con cables de motor cortos (unos pocos metros), el tiempo
de subida y la tensión pico son inferiores. El tiempo de
subida y la tensión pico aumentan con la longitud del
cable (100 m).
El convertidor de frecuencia cumple con CEI 60034-25 y
CEI 60034-17 para el diseño del motor.
Ilustración 6.33 Reducción de potencia de la intensidad de
salida con frecuencia de conmutación y temperatura ambiente
66
para tipo de protección C2, SFAVM. Nota: El gráfico muestra la
intensidad como un valor absoluto y es válido tanto para
sobrecarga normal como alta
200-240 V (T2)
Longitud
del cable
[m]
Tensión
de red
[V]
5 240 0,13 0,510 3,090
50 240 0,23 2,034
100 240 0,54 0,580 0,865
150 240 0,66 0,560 0,674
Tabla 6.13 P5K5T2
Tiempo de
subida
[μs]
Upeak
[kV]
dU/dt
[kV/μs]
Longitud
del cable
[m]
Tensión
de red
[V]
Tiempo de
subida [μs]
Upeak
[kV]
36 240 0,264 0,624 1,890
136 240 0,536 0,596 0,889
Ilustración 6.34 Reducción de potencia de la intensidad de
150 240 0,568 0,568 0,800
salida con frecuencia de conmutación y temperatura ambiente
para tipo de protección C3
Valores medidos para la prueba dU/dt
6.2.7
Para evitar dañar los motores sin papel de aislamiento de
fase o cualquier otro refuerzo de aislamiento diseñados
para su funcionamiento con convertidores de frecuencia,
se recomienda encarecidamente instalar un filtro dU/dt o
un filtro LC en la salida del convertidor de frecuencia.
Cuando se conmuta un transistor en el puente del
inversor, la tensión aplicada al motor se incrementa según
una relación du/dt que depende de:
Inductancia del motor
•
Cable de motor (tipo, sección transversal,
•
longitud, apantallado o no apantallado)
La inducción natural produce un pico de tensión de
sobremodulación en la tensión del motor antes de que se
estabilice. El nivel depende de la tensión en el enlace de
CC.
88 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05
Tabla 6.14 P7K5T2
Longitud
del cable
[m]
Tensión
de red
[V]
Tiempo de
subida
[μs]
Upeak
[kV]
30 240 0,556 0,650 0,935
100 240 0,592 0,594 0,802
150 240 0,708 0,587 0,663
Tabla 6.15 P11KT2
Longitud
del cable
[m]
Tensión
de red
[V]
Tiempo de
subida
[μs]
Upeak
[kV]
36 240 0,244 0,608 1,993
136 240 0,568 0,580 0,816
150 240 0,720 0,574 0,637
Tabla 6.16 P15KT2
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
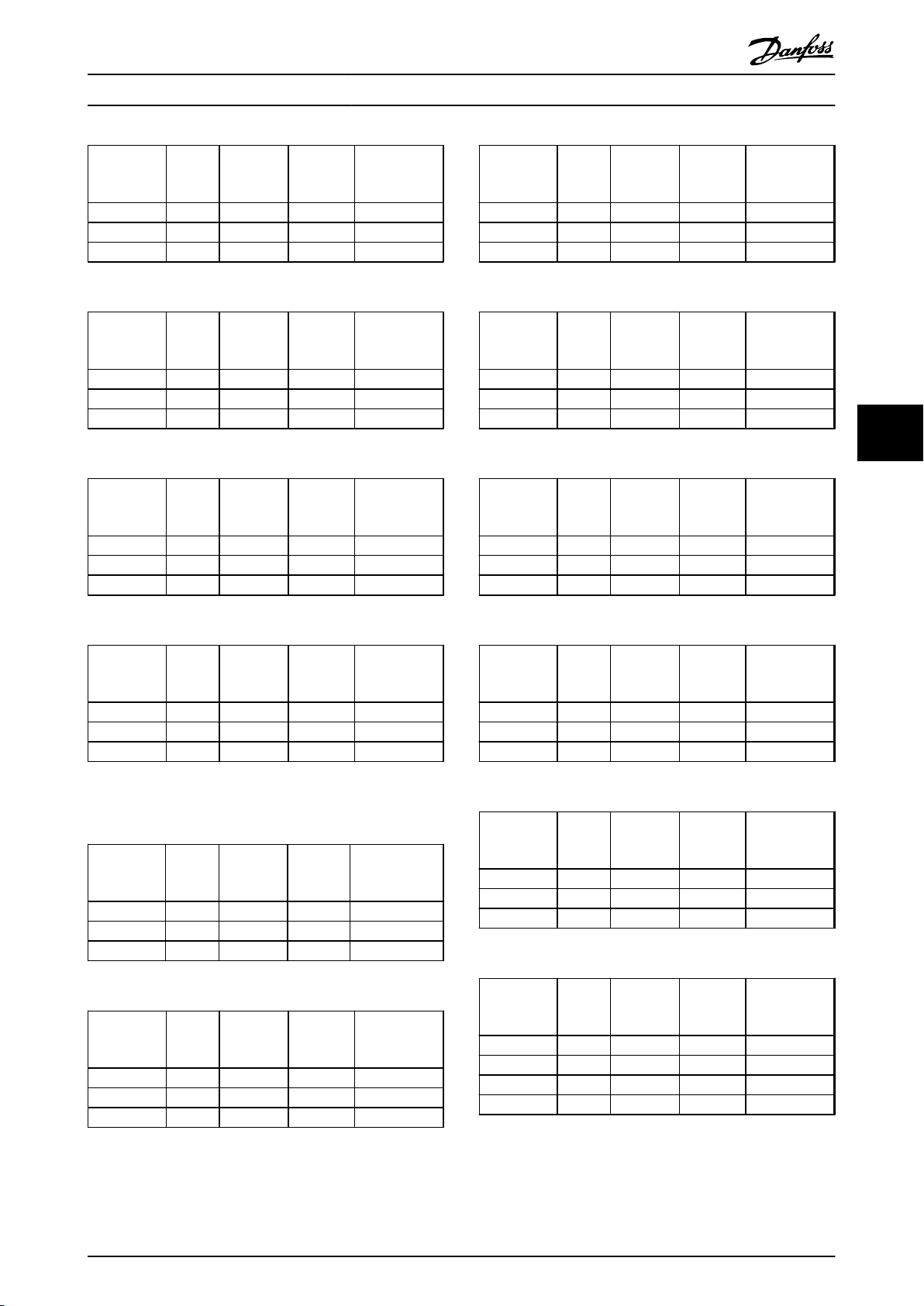
Especificaciones de los pro...
Guía de diseño de
Longitud
del cable
[m]
36 240 0,244 0,608 1,993
136 240 0,568 0,580 0,816
150 240 0,720 0,574 0,637
Tabla 6.17 P18KT2
Longitud
del cable
[m]
15 240 0,194 0,626 2,581
50 240 0,252 0,574 1,822
150 240 0,488 0,538 0,882
Tabla 6.18 P22KT2
Longitud
del cable
[m]
30 240 0,300 0,598 1,594
100 240 0,536 0,566 0,844
150 240 0,776 0,546 0,562
Tensión
de red
[V]
Tensión
de red
[V]
Tensión
de red
[V]
Tiempo de
subida
[μs]
Tiempo de
subida
[μs]
Tiempo de
subida
[μs]
Upeak
[kV]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
Longitud
del cable
[m]
5 480 0,04755 0,739 8,035
50 480 0,207 4,548
150 480 0,6742 1,030 2,828
Tabla 6.23 P7K5T4
Longitud
del cable
[m]
36 480 0,396 1,210 2,444
100 480 0,844 1,230 1,165
150 480 0,696 1,160 1,333
Tabla 6.24 P11KT4
Longitud
del cable
[m]
36 480 0,396 1,210 2,444
100 480 0,844 1,230 1,165
150 480 0,696 1,160 1,333
Tensión
de red
[V]
Tensión
de red
[V]
Tensión
de red
[V]
Tiempo de
subida
[μs]
Tiempo de
subida
[μs]
Tiempo de
subida
[μs]
Upeak
[kV]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
6 6
Tabla 6.19 P30KT2
Longitud
del cable
[m]
30 240 0,300 0,598 1,594
100 240 0,536 0,566 0,844
150 240 0,776 0,546 0,562
Tabla 6.20 P37KT2
Tensión
de red
[V]
Tiempo de
subida
[μs]
Upeak
[kV]
dU/dt
[kV/μs]
380-500 V (T4)
Longitud
del cable
[m]
5 480 0,640 0,690 0,862
50 480 0,470 0,985 0,985
150 480 0,760 1,045 0,947
Tabla 6.21 P1K5T4
Longitud
del cable
[m]
5 480 0,172 0,890 4,156
50 480 0,310 2,564
150 480 0,370 1,190 1,770
Tabla 6.22 P4K0T4
Tensión
de red
[V]
Tensión
de red
[V]
Tiempo de
subida
[μs]
Tiempo de
subida
[μs]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
Tabla 6.25 P15KT4
Longitud
del cable
[m]
36 480 0,312 2,846
100 480 0,556 1,250 1,798
150 480 0,608 1,230 1,618
Tabla 6.26 P18KT4
Longitud
del cable
[m]
15 480 0,288 3,083
100 480 0,492 1,230 2,000
150 480 0,468 1,190 2,034
Tabla 6.27 P22KT4
Longitud
del cable
[m]
5 480 0,368 1,270 2,853
50 480 0,536 1,260 1,978
100 480 0,680 1,240 1,426
150 480 0,712 1,200 1,334
Tabla 6.28 P30KT4
Tensión
de red
[V]
Tensión
de red
[V]
Tensión
de red
[V]
Tiempo de
subida
[μs]
Tiempo de
subida
[μs]
Tiempo de
subida
[μs]
Upeak
[kV]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 89

Especificaciones de los pro... Guía de diseño de
Longitud
del cable
[m]
5 480 0,368 1,270 2,853
50 480 0,536 1,260 1,978
100 480 0,680 1,240 1,426
150 480 0,712 1,200 1,334
Tabla 6.29 P37KT4
Longitud
del cable
[m]
15 480 0,256 1,230 3,847
50 480 0,328 1,200 2,957
66
100 480 0,456 1,200 2,127
150 480 0,960 1,150 1,052
Tensión
de red
[V]
Tensión
de red
[V]
Tiempo de
subida
[μs]
Tiempo de
subida
[μs]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
Longitud
del cable
[m]
36 600 0,084 1,560 7,962
50 600 0,120 1,540 5,467
100 600 0,165 1,472 3,976
150 600 0,190 1,530 3,432
Tabla 6.34 P30KT6
Longitud
del cable
[m]
15 600 0,276 1,184 4,290
Tabla 6.35 P75KT6
Tensión
de red
[V]
Tensión
de red
[V]
Tiempo de
subida
[μs]
Tiempo de
subida
[μs]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
525-690 V (T7)
Tabla 6.30 P45KT4
380-500 V (T5)
Longitud
del cable
[m]
5 480 0,371 1,170 2,523
Tabla 6.31 P55KT5
Longitud
del cable
[m]
5 480 0,371 1,170 2,523
Tabla 6.32 P75KT5
Tensión
de red
[V]
Tensión
de red
[V]
Tiempo de
subida
[μs]
Tiempo de
subida
[μs]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
600 V (T6)
Longitud
del cable
[m]
80 690 0,58 1,728 2369
130 690 0,93 1,824 1569
180 690 0,925 1,818 1570
Tabla 6.36 P7K5T7
Longitud
del cable
[m]
6 690 0,238 1416 4739
50 690 0,358 1764 3922
150 690 0,465 1872 3252
Tabla 6.37 P45KT7
Tensión
de red
[V]
Tensión
de red
[V]
Tiempo de
subida
[μs]
Tiempo de
subida
[μs]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
Tensión
Longitud
del cable [m]
36 600 0,304 1,560 4,105
50 600 0,300 1,550 4,133
100 600 0,536 1,640 2,448
150 600 0,576 1,640 2,278
Tabla 6.33 P15KT6
90 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05
de red
[V]
Tiempo de
subida
[μs]
Upeak
[kV]
dU/dt
[kV/μs]

1.0
0.99
0.98
0.97
0.96
0.95
0.93
0.92
0% 50% 100% 200%
0.94
Relative Eciency
130BB252.11
1.01
150%
% Speed
100% load 75% load 50% load 25% load
Especificaciones de los pro... Guía de diseño de
6.2.8 Rendimiento
Rendimiento de los convertidores de frecuencia
La carga del convertidor de frecuencia apenas influye en
su rendimiento.
Esto significa que el rendimiento del convertidor de
frecuencia tampoco cambia cuando se eligen otras características U/f. Sin embargo, las características U/f influyen en
el rendimiento del motor.
El rendimiento disminuye un poco si la frecuencia de
conmutación se ajusta en un valor superior a 5 kHz. El
rendimiento también se reduce ligeramente si el cable de
motor tiene más de 30 m de longitud.
Cálculo del rendimiento
Calcule el rendimiento del convertidor de frecuencia a
diferentes cargas basándose en Ilustración 6.35. Multiplique
el factor de este gráfico con el factor de rendimiento
específico indicado en capétulo 6.2 Especificaciones
generales.
La frecuencia de conmutación no afecta al
•
rendimiento de los motores pequeños. Pero los
motores de 11 kW y superiores obtienen un
rendimiento mejorado (1-2 %). Esto se debe a
que la forma sinusoidal de la intensidad del
motor es casi perfecta a frecuencias de
conmutación elevadas.
Rendimiento del sistema
Para calcular el rendimiento del sistema, el rendimiento del
convertidor de frecuencia se multiplica por el rendimiento
del motor.
6.2.9 Ruido acústico
El ruido acústico del convertidor de frecuencia procede de
tres fuentes
Bobinas del enlace de CC (circuito intermedio)
•
Bobina de choque del filtro RFI
•
Ventiladores internos
•
Consulte Tabla 6.38 para obtener información sobre las
clasificaciones de ruido acústico.
6 6
Ilustración 6.35 Curvas de rendimiento típico
Ejemplo: supongamos un convertidor de frecuencia de
55 kW, 380-480 V CA con un 25 % de su carga al 50 % de
velocidad. El gráfico muestra que un rendimiento nominal
de 0,97 para un convertidor de frecuencia de 55 kW es
0,98. El rendimiento real es: 0,97 × 0,98 = 0,95.
Clases de rendimiento
El rendimiento de un motor conectado al convertidor de
frecuencia depende del nivel de magnetización. El
rendimiento del motor depende del tipo de motor.
En un rango del 75-100 % del par nominal, el
•
rendimiento del motor es prácticamente
constante, tanto cuando lo controla el
convertidor de frecuencia como cuando funciona
con tensión de red.
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 91
La influencia de la característica U/f en motores
•
pequeños es mínima. Sin embargo, en motores a
partir de 11 kW y superiores se obtienen ventajas
de rendimiento considerables.
50 % de velocidad
Tipo de protección
A1 51 60
A2 51 60
A3 51 60
A4 51 60
A5 54 63
B1 61 67
B2 58 70
B4 52 62
C1 52 62
C2 55 65
C4 56 71
D3h 58 71
Tabla 6.38 Clasificaciones de ruido acústico
Los valores están medidos a 1 m de la unidad.
de ventilador
[dBA]
Velocidad de
ventilador máxima
[dBA]

F C - P T
130BB836.10
X S A B CX X X X
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 302221 23 272524 26 28 29 31 373635343332 38 39
X D
Procedimiento para realizar... Guía de diseño de
7 Procedimiento para realizar pedidos
7.1 Configurador de convertidores de
frecuencia
Ilustración 7.1 Ejemplo de código descriptivo
Configure el convertidor de frecuencia apropiado para su aplicación en el configurador de convertidores de frecuencia
disponible en internet y genere la cadena del código descriptivo. El configurador de convertidores de frecuencia genera
automáticamente un número de ventas de ocho dígitos que se debe enviar a la oficina de ventas local.
Además, es posible establecer una lista de proyectos con varios productos y enviársela a un representante de ventas de
(Danfoss).
77
El configurador de convertidores de frecuencia puede encontrarse en el sitio de internet: www.danfoss.com/drives.
Código descriptivo
7.1.1
Un ejemplo del código descriptivo es:
FC-302PK75T5E20H1BGCXXXSXXXXA0BXCXXXXD0
El significado de los caracteres de la cadena puede encontrarse en Tabla 7.1 y Tabla 7.2. En el ejemplo anterior, se incluyen
un Profibus DP V1 y una opción de alimentación auxiliar de 24 V.
Descripción Pos. Selecciones posibles
Grupo de
productos
Serie del
convertidor
Potencia
nominal
Fases 11 Trifásico (T)
Tensión de
red
Protección 13-15 E20: IP20
1-3 FC 30x
4-6 301: FC 301
302: FC 302
8-10 0,25-75 kW
11-12 T2: 200-240 V
T4: 380-480 V
T5: 380-500 V
T6: 525-600 V
T7: 525-690 V
E55: IP55 / NEMA tipo 12
P20: IP20 (con placa posterior)
P21: IP21/ NEMA tipo 1 (con placa posterior)
P55: IP55/ NEMA tipo 12 (con placa posterior)
Z20: IP 20
E66: IP 66
1)
92 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

Procedimiento para realizar... Guía de diseño de
Descripción Pos. Selecciones posibles
Filtro RFI 16-17 Hx: No hay filtros de EMC incorporados en el convertidor de frecuencia (solo unidades de 600 V)
H1: Filtro de EMC integrado. Cumple con EN 55011 clase A1/B y EN / CEI 61800-3 Categoría 1/2
H2: Sin filtro de EMC adicional. Cumple con EN 55011 Clase A2 y EN/CEI 61800-3 Categoría 3
H3:
H3 - Filtro de EMC integrado. Cumple con EN 55011 clase A1/B y EN/CEI 61800-3 Categoría 1/2 (solo tipo de
protección A1)
H4: Filtro de EMC integrado. Cumple con EN 55011 Clase A1 y EN/CEI 61800-3 Categoría 2
H5: versiones marinas. Cumple con los mismos niveles de emisiones que las versiones H2
Freno 18 B: chopper de frenado incluido
X: sin chopper de frenado
T: parada de seguridad sin freno
U: parada de seguridad chopper de frenado
Pantalla 19 G: Panel de control local gráfico (LCP)
N: panel numérico de control local (LCP)
X: sin panel de control local
PCB barnizado 20 C: PCB barnizado
R: resistentes
X: PCB no barnizado
Opción de red 21 X: sin opción de red
1: Desconexión de alimentación
3: desconexión red y fusible
5: desconexión de la red, fusible y carga compartida2, 3)
7: Fusible
8: desconexión de la red y carga compartida3)
A: fusible y carga compartida2, 3)
D: carga compartida 3)
Adaptación 22 X: Entradas de cables estándar
O: roscado métrico europeo en entradas de cables (solo A4, A5, B1, B2, C1, C2)
S: entradas de cables imperiales (solo A5, B1, B2, C1 y C2)
Adaptación 23 X: Sin adaptación
Versión de
software
Idioma del
software
1)FC 301/ solo tipo de protección A1
2) Solo para los EE. UU.
3) los bastidores A y B3 tienen carga compartida integrada por defecto
24-27 SXXX: ultima edición - software estándar
28 X: Sin uso
1)
1)
1)
2)
2)
7 7
Tabla 7.1 Código descriptivo de pedido para tipos de protección A, B y C
Descripción Pos. Selecciones posibles
Opciones A 29-30 AX: Sin opción A
A0: MCA 101 Profibus DP V1 (estándar)
A4: MCA 104 DeviceNet (estándar)
A6: MCA 105 CANOpen (estándar)
AN: MCA 121 Ethernet IP
AL: MCA 120 ProfiNet
AQ: MCA 122 Modbus TCP
AT: MCA 113 Profibus Converter VLT 3000
AU: MCA 114 Profibus Converter VLT 5000
AY: MCA 123 Powerlink
A8: MCA 124 EtherCAT
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 93

Procedimiento para realizar...
Descripción Pos. Selecciones posibles
Opciones B 31-32 BX: sin opción
BK: opción MCB 101 General Purpose I/O
BR: opción de encoder MCB 102
BU: opción de resolver MCB 103
BP: opción de relé MCB 105
BZ: MCB 108 Safety PLC Interface
B2: MCB 112 PTC Thermistor Card
B4: MCB 114 VLT Sensor Input
B6: MCB 150 Safe Option TTL
B7: MCB 151 Safe Option HTL
Opciones C0 33-34 CX: sin opción
C4: MCO 305, controlador de movimiento programable
Opciones C1 35 X: sin opción
R: MCB 113 Ext. Relay Card
Z: MCA-140 Opción Modbus RTU OEM
Software de
opción
77
C / Opciones
E1
Opciones D 38-39 DX: sin opción
36-37 XX: controlador estándar
10: MCO 350, control de sincronización
11: MCO 351, control de posicionamiento
D0: MCB 107, alimentación auxiliar externa de 24 V CC
Guía de diseño de
Tabla 7.2 Código descriptivo de pedido, opciones
AVISO!
Para tamaños de potencia superiores a 75 kW, consulte la Guía de diseño de VLT® AutomationDrive FC 300 90-1400 kW.
7.1.2 Idioma
Los convertidores de frecuencia se suministran automáticamente con un paquete de idioma correspondiente a la región
desde la que se realiza el pedido. Cuatro paquetes regionales de idioma cubren los siguientes idiomas:
Paquete de idioma 1 Paquete de idioma 2 Paquete de idioma 3 Paquete de idioma 4
Inglés Inglés Inglés Inglés
Alemán Alemán Alemán Alemán
Francés Chino Esloveno Español
Danés Coreano Búlgaro Inglés EE. UU.
Neerlandés Japonés Serbio Griego
Español Thai Rumano Brazilian Portuguese
Sueco Chino tradicional Húngaro Turco
Italiano Indonesio Checo Polaco
Finés Ruso
Tabla 7.3 Paquetes de idioma
Para realizar el pedido de convertidores de frecuencia con un paquete de idioma diferente, póngase en contacto con su
oficina local de ventas.
94 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

Procedimiento para realizar... Guía de diseño de
7.2 Números de pedido
7.2.1 Opciones y accesorios
Descripción N.º de pedido
Sin revestimiento
barnizado
Hardware diverso
Kit de montaje en panel VLT® para tipo de protección A5
Kit de montaje en panel VLT® para tipo de protección B1
Kit de montaje en panel VLT® para tipo de protección B2
Kit de montaje en panel VLT® para tipo de protección C1
Kit de montaje en panel VLT® para tipo de protección C2
Soportes de montaje VLT® para tipo de protección A5
Soportes de montaje VLT® para tipo de protección B1
Soportes de montaje VLT® para tipo de protección B2
Soportes de montaje VLT® para tipo de protección C1
Soportes de montaje VLT® para tipo de protección C2
Kit VLT® IP21 / tipo 1, tipo de protección A1
Kit VLT® IP21 / tipo 1, tipo de protección A2
Kit VLT® IP21 / tipo 1, tipo de protección A3
Kit superior VLT® IP21 / tipo 1, tipo de protección A2
Kit superior VLT® IP21 / tipo 1, tipo de protección A3
Placa posterior VLT® IP55 / tipo 12, tipo de protección A5
Placa posterior VLT® IP21 / tipo 1, IP55 / tipo 12, tipo de protección B1
Placa posterior VLT® IP21 / tipo 1, IP55 / tipo 12, tipo de protección B2
Placa posterior VLT® IP20 / tipo 1, tipo de protección B4
Placa posterior VLT® IP21 / tipo 1, IP55 / tipo 12, tipo de protección C1
Placa posterior VLT® IP21 / tipo 1, IP55 / tipo 12, tipo de protección C2
Placa posterior VLT® IP20 / tipo 1, tipo de protección C3
Placa posterior VLT® IP20 / tipo 1, tipo de protección C4
Placa posterior VLT® IP66 / tipo 4X, tipo de protección A5
Placa posterior VLT® en acero inoxidable IP66 / tipo 4x, tipo de protección B1
Placa posterior VLT® en acero inoxidable IP66 / tipo 4X, tipo de protección B2
Placa posterior VLT® en acero inoxidable IP66 / tipo 4X, tipo de protección C1
Placa posterior VLT® en acero inoxidable IP66 / tipo 4X, tipo de protección C2
Conector Sub D9 para adaptador Profibus VLT
Kit de placa de apantallamiento Profibus para IP20, tipos de protección A1, A2 y A3 130B0524
Bloque de terminales para la conexión del enlace de CC en tipos de protección A2 / A3 130B1064
Terminales con tornillo VLT
Extensión USB VLT®, cable de 350 mm 130B1155
Extensión USB VLT®, cable de 650 mm 130B1156
Bastidor posterior VLT® A2 para 1 resistencia de freno 175U0085
Bastidor posterior VLT® A3 para 1 resistencia de freno 175U0088
Bastidor posterior VLT® A2 para 2 resistencias de freno 175U0087
Parte posterior VLT® A3 para 2 resistencias de freno 175U0086
Panel de control local
Panel de control local numérico VLT® LCP 101
Panel de control local gráfico VLT® LCP 102
Cable VLT® para LCP 2, 3 m
Kit de montaje de panel VLT® para todos los tipos de LCP
®
®
130B1028
130B1046
130B1047
130B1048
130B1049
130B1080
130B1081
130B1082
130B1083
130B1084
130B1121
130B1122
130B1123
130B1132
130B1133
130B1098
130B3383
130B3397
130B4172
130B3910
130B3911
130B4170
130B4171
130B3242
130B3434
130B3465
130B3468
130B3491
130B1112
130B1116
130B1124
130B1107
175Z0929
130B1170
Barnizado
7 7
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 95

Procedimiento para realizar... Guía de diseño de
Descripción N.º de pedido
Sin revestimiento
barnizado
Kit de montaje de panel VLT®, LCP gráfico
Kit de montaje de panel VLT®, LCP numérico
Kit de montaje de LCP VLT®, sin LCP
Kit de montaje de LCP VLT®, tapa ciega IP55/66, 8 m
VLT® Control Panel LCP 102, gráfico
Tapa ciega VLT®, con el logotipo de Danfoss, IP55/66
Opciones para ranura A
VLT® Profibus DP V1 MCA 101
VLT® DeviceNet MCA 104
VLT® CAN Open MCA 105
VLT® PROFIBUS Converter MCA 113
VLT® PROFIBUS Converter MCA 114
VLT® PROFINET MCA 120
77
VLT® EtherNet/IP MCA 121
VLT® Modbus TCP MCA 122
POWERLINK 130B1489 130B1490
EtherCAT 130B5546 130B5646
VLT® DeviceNet MCA 104
Opciones para ranura B
VLT® General Purpose I/O MCB 101
VLT® Encoder Input MCB 102
VLT® Resolver Input MCB 103
Opción de relé VLT® MCB 105
VLT® Safe PLC I/O MCB 108
VLT® PTC Thermistor Card MCB 112
VLT® Safe Option MCB 140
VLT® Safe Option MCB 141
VLT® Safe option MCB 150
VLT® Safe option MCB 151
Kits de montaje para opciones C
Kit de montaje VLT® para opción C, 40 mm, tipos de protección A2 / A3
Kit de montaje VLT® para opción C, 60 mm, tipos de protección A2 / A3
Kit de montaje VLT® para opción C, tipo de protección A5
Kit de montaje VLT® para opción C, tipos de protección B / C / D / E / F (excepto B3)
Kit de montaje VLT® para opción C, 40 mm, tipo de protección B3
Kit de montaje VLT® para opción C, 60 mm, tipo de protección B3
Opciones para ranura C
VLT® Motion Control MCO 305
VLT® Synchronizing Contr. MCO 350
VLT® Position. Controller MCO 351
Controlador bobinadora central 130B1165 130B1166
VLT® Extended Relay Card MCB 113
Adaptador VLT® de opciones C MCF 106
Opción para ranura D
VLT® 24 V DC Supply MCB 107
VLT® EtherNet/IP MCA 121
Kit de monitor de corriente de fuga VLT®, tipos de protección A2 / A3
Kit de monitor de corriente de fuga VLT®, tipo de protección B3
130B1113
130B1114
130B1117
130B1129
130B1078
130B1077
130B1100 130B1200
130B1102 130B1202
130B1103 130B1205
130B1245
130B1246
130B1135 130B1235
130B1119 130B1219
130B1196 130B1296
130B1102 130B1202
130B1125 130B1212
130B1115 130B1203
130B1127 130B1227
130B1110 130B1210
130B1120 130B1220
130B1137
130B6443
130B6447
130B3280
130B3290
130B7530
130B7531
130B7532
130B7533
130B1413
130B1414
130B1134 130B1234
130B1152 130B1252
130B1153 120B1253
130B1164 130B1264
130B1108 130B1208
175N2584
130B5645
130B5764
Barnizado
130B1230
96 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05

Procedimiento para realizar... Guía de diseño de
Descripción N.º de pedido
Sin revestimiento
barnizado
Kit de monitor de corriente de fuga VLT®, tipo de protección B4
Kit de monitor de corriente de fuga VLT®, tipo de protección C3
Kit de monitor de corriente de fuga VLT®, tipo de protección C4
Software para PC
VLT® Motion Ctrl Tool MCT 10, 1 licencia
VLT® Motion Ctrl Tool MCT 10, 5 licencias
VLT® Motion Ctrl Tool MCT 10, 10 licencias
VLT® Motion Ctrl Tool MCT 10, 25 licencias
VLT® Motion Ctrl Tool MCT 10, 50 licencias
VLT® Motion Ctrl Tool MCT 10, 100 licencias
VLT® Motion Ctrl Tool MCT 10, >100 licencias
Las opciones se pueden pedir como opciones integradas de fábrica. Consulte la información sobre pedidos, capétulo 7.1 Configurador de
convertidores de frecuencia.
130B5765
130B6226
130B5647
130B1000
130B1001
130B1002
130B1003
130B1004
130B1005
130B1006
Barnizado
Tabla 7.4 Números de pedido para opciones y accesorios
Repuestos
7.2.2
Consulte la tienda VLT o el configurador para obtener información sobre las piezas de recambio disponibles para su
especificación, VLTShop.danfoss.com.
7.2.3 Bolsa de accesorios
Tipo Descripción N.º de pedido
Bolsa de accesorios
Bolsa de accesorios A1 Bolsa de accesorios, tipo de protección A1 130B1021
Bolsa de accesorios A2/A3 Bolsa de accesorios, tipo de protección A2 / A3 130B1022
Bolsa de accesorios A5 Bolsa de accesorios, tipo de protección A5 130B1023
Bolsa de accesorios A1–A5 Bolsa de accesorios, tipo de protección A1-A5 Conector de freno y carga
compartida
Bolsa de accesorios B1 Bolsa de accesorios, tipo de protección B1 130B2060
Bolsa de accesorios B2 Bolsa de accesorios, tipo de protección B2 130B2061
Bolsa de accesorios B3 Bolsa de accesorios, tipo de protección B3 130B0980
Bolsa de accesorios B4 Bolsa de accesorios, tipo de protección B4, 18,5-22 kW 130B1300
Bolsa de accesorios B4 Bolsa de accesorios, tipo de protección B4, 30 kW 130B1301
Bolsa de accesorios C1 Bolsa de accesorios, tipo de protección C1 130B0046
Bolsa de accesorios C2 Bolsa de accesorios, tipo de protección C2 130B0047
Bolsa de accesorios C3 Bolsa de accesorios, tipo de protección C3 130B0981
Bolsa de accesorios C4 Bolsa de accesorios, tipo de protección C4, 55 kW 130B0982
Bolsa de accesorios C4 Bolsa de accesorios, tipo de protección C4, 75 kW 130B0983
130B0633
7 7
Tabla 7.5 Números de pedido para bolsas de accesorios
MG33BF05 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. 97

Procedimiento para realizar... Guía de diseño de
7.2.4 VLT AutomationDrive FC 301
T2, frenado horizontal, ciclo de trabajo del 10 %
FC 301 Frenado horizontal, ciclo de trabajo del 10 %
Datos del convertidor de frecuencia
R
Tipo
de red
T2 0,25 368 415,9 410 0,100 175u3004 - - - 1,5 0,5
T2 0,37 248 280,7 300 0,100 175u3006 - - - 1,5 0,6
T2 0,55 166 188,7 200 0,100 175u3011 - - - 1,5 0,7
T2 0,75 121 138,4 145 0,100 175u3016 - - - 1,5 0,8
T2 1,1 81,0 92,0 100 0,100 175u3021 - - - 1,5 0,9
T2 1,5 58,5 66,5 70 0,200 175u3026 - - - 1,5 1,6
T2 2,2 40,2 44,6 48 0,200 175u3031 - - - 1,5 1,9
77
T2 3 29,1 32,3 35 0,300 175u3325 - - - 1,5 2,7
T2 3,7 22,5 25,9 27 0,360 175u3326 175u3477 175u3478 - 1,5 3,5
T2 5,5 17,7 19,7 18 0,570 175u3327 175u3442 175u3441 - 1,5 5,3
T2 7,5 12,6 14,3 13 0,680 175u3328 175u3059 175u3060 - 1,5 6,8
T2 11 8,7 9,7 9 1,130 175u3329 175u3068 175u3069 - 2,5 10,5
T2 15 5,3 7,5 5,7 1,400 175u3330 175u3073 175u3074 - 4 15
T2 18,5 5,1 6,0 5,7 1,700 175u3331 175u3483 175u3484 - 4 16
T2 22 3,2 5,0 3,5 2,200 175u3332 175u3080 175u3081 - 6 24
T2 30 3,0 3,7 3,5 2,800 175u3333 175u3448 175u3447 - 10 27
T2 37 2,4 3,0 2,8 3,200 175u3334 175u3086 175u3087 - 16 32
P
[kW]
R
m
[Ω]
min
R
br,nom
[Ω]
rec
[Ω]
Datos de la resistencia de freno Instalación
P
br.cont.
[kW]
Cable IP54
Número de pieza de Danfoss
Terminal
con
tornillo
IP21
Terminal
con
tornillo
IP65
Bolt
connection
IP20
Sección
transver-
sal del
cable
[mm2]
Relé
térmico
[A]
Tabla 7.6 T2, frenado horizontal, ciclo de trabajo del 10 %
98 Danfoss A/S © Rev. 04-04-2014 Reservados todos los derechos. MG33BF05
 Loading...
Loading...