


MAKING MODERN LIVING POSSIBLE
Design Guide
VLT® AutomationDrive FC 301/302
0,25-75 kW
www.danfoss.com/drives

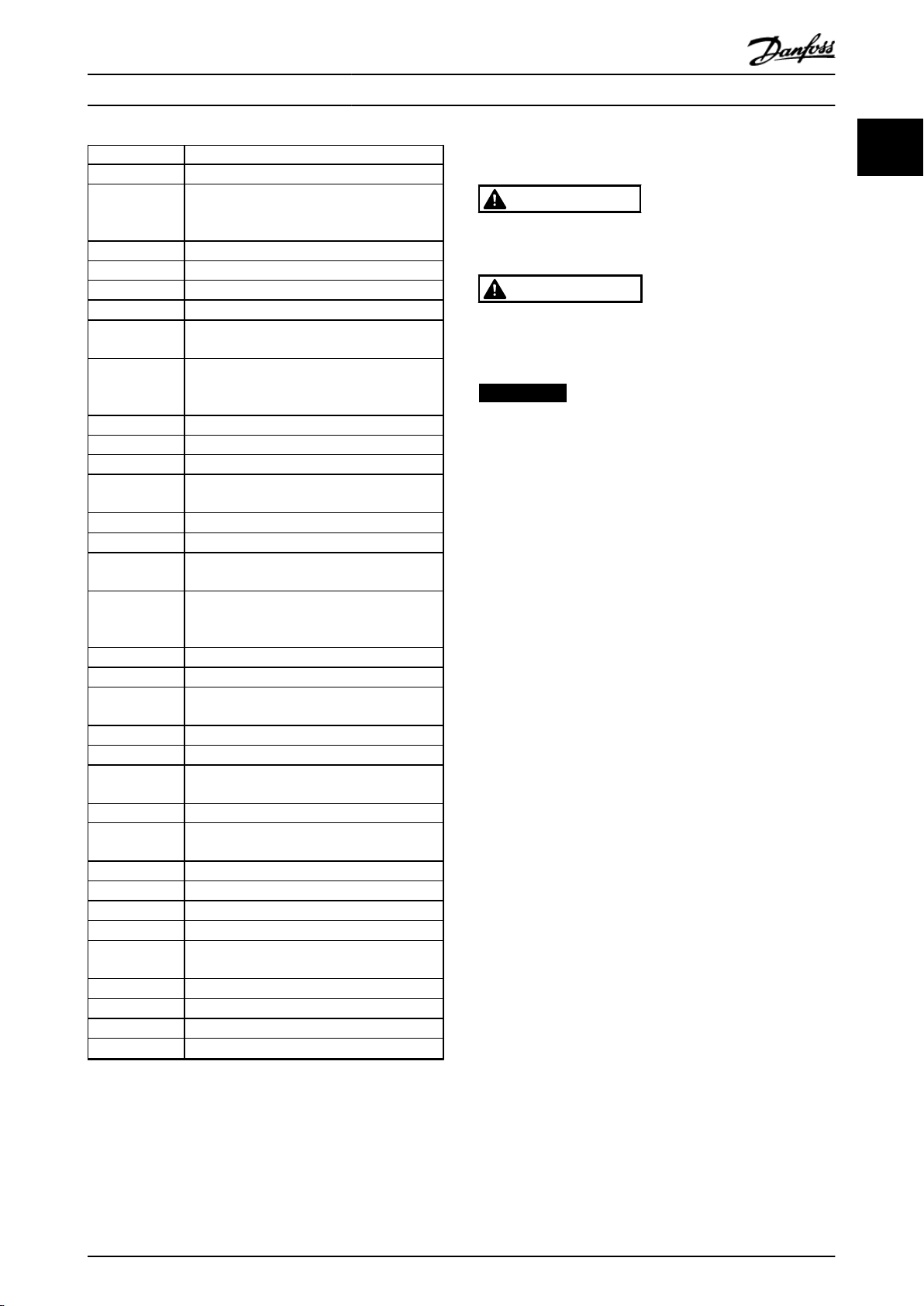
Indholdsfortegnelse Design Guide
Indholdsfortegnelse
1 Introduktion
1.1 Formålet med Design Guiden
1.2 Yderligere ressourcer
1.3 Forkortelser, symboler og konventioner
1.4 Ordforklaring
1.5 Dokument- og softwareversion
1.6 Regulatorisk overensstemmelse
1.6.1 CE-mærket 10
1.6.1.1 Lavspændingsdirektivet 10
1.6.1.2 EMC-direktivet 11
1.6.1.3 Maskindirektivet 11
1.6.2 UL-overensstemmelse 11
1.6.3 C-tick overensstemmelse 11
1.6.4 Marine overensstemmelse 11
1.7 Bortskaffelsesinstruktion
1.8 Sikkerhed
2 Sikkerhed
8
8
8
8
9
10
10
11
11
12
2.1 Sikkerhedssymboler
2.2 Uddannet personale
2.3 Sikkerhedsforanstaltninger
3 Grundlæggende driftsprincipper
3.1 Generelt
3.2 Beskrivelse af drift
3.3 Driftssekvens
3.3.1 Ensretterdelen 14
3.3.2 Mellemdelen 14
3.3.3 Vekselretterdel 14
3.3.4 Bremseoption 14
3.3.5 Belastningsfordeling 15
3.4 Styringsgrænseflade
3.5 Ledningsdiagram
3.6 Styreenheder
3.6.1 Styreprincip 18
3.6.2 FC 301 vs. FC 302 Styreprincip 19
3.6.3 Styringsstruktur for VVC
plus
12
12
12
14
14
14
14
15
16
18
20
3.6.4 Styringsstruktur i Flux Sensorless (kun FC 302) 21
3.6.5 Styringsstruktur for Flux med motorfeedback (kun FC 302) 22
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 1
Indholdsfortegnelse Design Guide
3.6.6 PID 23
3.6.6.1 PID-hastighedsstyring 23
3.6.6.2 Optimering af PID-hastighedsstyring 25
3.6.6.3 PID-processtyring 26
3.6.6.4 Avanceret PID-styring 28
3.6.7 Intern strømstyring i VVC
3.6.8 Lokal styring (Hand On) og fjernstyring (Auto On) 28
plus
-tilstand 28
3.7 Referencehåndtering
3.7.1 Referencer 29
3.7.2 Referencegrænser 31
3.7.3 Skalering af preset-referencer og busreferencer 32
3.7.4 Skalering af analoge referencer samt pulsreferencer og feedback 32
3.7.5 Dødbånd omkring nul 33
4 Produktfunktioner
4.1 Automatiserede driftsfunktioner
4.1.1 Kortslutningsbeskyttelse 37
4.1.2 Overspændingsbeskyttelse 37
4.1.3 Detektering af manglende motorfase 38
4.1.4 Detektering af ubalance i netfasen 38
4.1.5 Kobling på udgangen 38
4.1.6 Overbelastningsbeskyttelse 38
4.1.7 Låst rotorbeskyttelse 38
4.1.8 Automatisk derating 38
4.1.9 Automatisk energioptimering 39
29
37
37
4.1.10 Automatisk switchfrekvensmodulering 39
4.1.11 Automatisk derating for høj bærefrekvens 39
4.1.12 Effektudsving i ydeevne 39
4.1.13 Resonansdæmpning 39
4.1.14 Temperaturkontrollerede ventilatorer 39
4.1.15 EMC-overensstemmelse 39
4.1.16 Galvanisk adskillelse af styreklemmer 39
4.2 Tilpassede applikationsfunktioner
40
4.2.1 Automatisk motortilpasning 40
4.2.2 Termisk motorbeskyttelse 40
4.2.3 Netudfald 40
4.2.4 Indbygget PID-styreenhed 41
4.2.5 Automatisk genstart 41
4.2.6 Flying start 41
4.2.7 Fuldt moment ved reduceret hastighed 41
4.2.8 Frekvens-bypass 41
2 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
Indholdsfortegnelse Design Guide
4.2.9 Motorforvarmer 41
4.2.10 Fire programmerbare opsætninger 41
4.2.11 Dynamisk bremsning 42
4.2.12 Mekanisk bremsestyring, åben sløjfe 42
4.2.13 Mekanisk bremsestyring, lukket sløjfe / mekanisk hæve-/sænkebremse 43
4.2.14 Smart Logic Control (SLC) 44
4.2.15 Safe Torque Off 45
4.3 Danfoss VLT® FlexConcept
®
45
5 Systemintegration
5.1 Omgivende driftsforhold
5.1.1 Luftfugtighed 46
5.1.2 Temperatur 46
5.1.3 Temperatur og køling 46
5.1.4 Manuel derating 47
5.1.4.1 Derating for kørsel ved lav hastighed 47
5.1.4.2 Derating for lavt lufttryk 47
5.1.5 Akustisk støj 48
5.1.6 Vibrationer og rystelser 48
5.1.7 Aggressive atmosfærer 48
5.1.7.1 Gasser 48
5.1.7.2 Støveksponering 49
5.1.7.3 Potentielt eksplosive atmosfærer 49
5.1.8 Vedligeholdelse 49
5.1.9 Opbevaring 50
5.2 Generelle forhold vedrørende EMC
46
46
50
5.2.1 EMC-testresultater 51
5.2.2 Emissionskrav 52
5.2.3 Immunitetskrav 52
5.2.4 Motorisolering 53
5.2.5 Motorlejestrøm 54
5.3 Netforsyningsforstyrrelse/harmoniske strømme
5.3.1 Påvirkninger fra harmoniske strømme i et strømdistributionssystem 55
5.3.2 Standarder og krav vedrørende begrænsning af harmoniske strømme 55
5.3.3 Dæmpning af harmoniske strømme 56
5.3.4 Beregning af harmoniske strømme 56
5.4 Galvanisk adskillelse (PELV)
5.4.1 PELV – beskyttende ekstra lav spænding 56
5.5 Bremsefunktioner
5.5.1 Valg af bremsemodstand 57
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 3
54
56
57
Indholdsfortegnelse Design Guide
6 Produktspecifikationer
6.1 Elektriske data
6.1.1 Netforsyning 200-240 V 60
6.1.2 Netforsyning 380-500 V 62
6.1.3 Netforsyning 525-600 V (kun FC 302) 65
6.1.4 Netforsyning 525-690 V (kun FC 302) 68
6.2 Generelle specifikationer
6.2.1 Netforsyning 70
6.2.2 Motorudgang og motordata 70
6.2.3 Omgivelsesforhold 71
6.2.4 Kabelspecifikationer 71
6.2.5 Styringsind-/udgange og styringsdata 71
6.2.6 Derating for omgivelsestemperatur 75
6.2.6.1 Derating for omgivelsestemperatur, kapslingstype A 75
6.2.6.2 Derating for omgivelsestemperatur, kapslingstype B 75
6.2.6.3 Derating for omgivelsestemperatur, kapslingstype C 78
6.2.7 Målte værdier for dU/dt-test 80
60
60
70
6.2.8 Virkningsgrad 83
6.2.9 Akustisk støj 83
7 Bestilling
7.1 Drevkonfigurator
7.1.1 Typekode 84
7.1.2 Sprog 86
7.2 Bestillingsnumre
7.2.1 Optioner og tilbehør 87
7.2.2 Reservedele 89
7.2.3 Tilbehørsposer 89
7.2.4 VLT AutomationDrive FC 301 90
7.2.5 Bremsemodstande for FC 302 92
7.2.6 Andre flat-pack bremsemodstande 96
7.2.7 Harmoniske filtre 98
7.2.8 Sinusfiltre 100
7.2.9 dU/dt-filtre 102
84
84
87
8 Mekanisk montering
8.1 Sikkerhed
8.2 Mekaniske mål
8.2.1 Mekanisk montering 107
8.2.1.1 Mindsteafstand 107
4 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
104
104
105
Indholdsfortegnelse Design Guide
8.2.1.2 Vægmontering 107
9 Elektrisk installation
9.1 Sikkerhed
9.2 Kabler
9.2.1 Tilspændingsmoment 110
9.2.2 Indgangshuller 110
9.2.3 Tilspænding af afdækningen, efter forbindelser er etableret 114
9.3 Nettilslutning
9.3.1 Sikringer og afbrydere 119
9.3.1.1 Sikringer 119
9.3.1.2 Anbefalinger 119
9.3.1.3 Overholdelse af CE 120
9.3.1.4 UL-overensstemmelse 123
9.4 Motortilslutning
9.5 Lækstrøm til jord-beskyttelse
9.6 Yderligere tilslutninger
9.6.1 Relæ 131
9.6.2 Afbrydere og kontaktorer 133
109
109
109
115
128
130
131
9.6.3 Belastningsfordeling 133
9.6.4 Bremsemodstand 133
9.6.5 Pc-software 134
9.6.5.1 MCT 10 134
9.6.5.2 MCT 31 134
9.6.5.3 Harmonics Calculation Software (HCS) 134
9.7 Yderligere motoroplysninger
9.7.1 Motorkabel 135
9.7.2 Tilslutning af flere motorer 135
9.8 Sikkerhed
9.8.1 Højspændingstest 138
9.8.2 EMC-jording 138
9.8.3 ADN-korrekt installation 138
10 Applikationseksempler
10.1 Almindelige applikationer
10.1.1 Frekvensomformersystem med lukket sløjfe 144
10.1.2 Programmering af momentgrænse og stop 144
135
138
139
139
10.1.3 Programmering af hastighedsstyring 145
11 Optioner og tilbehør
11.1 Kommunikationsoptioner
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 5
146
146
Indholdsfortegnelse Design Guide
11.2 I/O, Feedback og sikkerhedsoptioner
11.2.1 VLT® Universal I/O modul MCB 101 146
11.2.2 VLT® Encoderoption MCB 102 147
11.2.3 VLT® Resolveroption MCB 103 149
11.2.4 VLT® Relækort MCB 105 151
11.2.5 VLT® Safe PLC Interface-option MCB 108 153
11.2.6 VLT® PTC-termistorkort MCB 112 154
11.2.7 VLT® Udvidet relækort MCB 113 156
11.2.8 VLT® Sensor Input-option MCB 114 157
11.2.9 VLT® Safe-option MCB 15x 158
11.2.10 VLT® C-option Adapter MCF 106 162
11.3 Bevægelsesstyringsoptioner
11.4 Tilbehør
11.4.1 Bremsemodstande 164
11.4.2 Sinusfiltre 164
11.4.3 dU/dt-filtre 164
11.4.4 Common Mode-filtre 164
146
162
164
11.4.5 Harmoniske filtre 164
11.4.6 IP21/Type 1-kapslingssæt 165
11.4.7 Frembygningssæt til LCP 167
11.4.8 Monteringskonsol for kapslingstyper A5, B1, B2, C1 og C2 168
12 Installation og opsætning af RS-485
12.1 Installation og opsætning
12.1.1 Oversigt 170
12.2 Netværkstilslutning
12.3 Busterminering
12.4 Installation og opsætning af RS-485
12.5 FC-protokoloversigt
12.6 Netværkskonfiguration
12.7 FC-protokol rammestruktur for meddelelse
12.7.1 Indhold af et tegn (byte) 172
12.7.2 Telegramstruktur 172
12.7.3 Telegramlængde (LGE) 172
12.7.4 Frekvensomformeradresse (ADR) 172
170
170
171
171
171
171
172
172
12.7.5 Datakontrolbyte (BCC) 172
12.7.6 Datafeltet 173
12.7.7 PKE-feltet 174
12.7.8 Parameternummer (PNU) 174
12.7.9 Indeks (IND) 174
6 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
Indholdsfortegnelse Design Guide
12.7.10 Parameterværdi (PWE) 174
12.7.11 Understøttede datatyper 175
12.7.12 Konvertering 175
12.7.13 Procesord (PCD) 175
12.8 Eksempler
12.8.1 Skrivning af en parameterværdi 176
12.8.2 Læsning af en parameterværdi 176
12.9 Oversigt over Modbus RTU
12.9.1 Forudsætninger 176
12.9.2 Dette bør brugeren vide på forhånd 176
12.9.3 Oversigt over Modbus RTU 176
12.9.4 Frekvensomformer med Modbus RTU 177
12.10 Netværkskonfiguration
12.11 Rammestruktur for Modbus RTU-meddelelse
12.11.1 Frekvensomformer med Modbus RTU 177
12.11.2 Modbus RTU-meddelelsesstruktur 178
12.11.3 Start/stop-felt 178
12.11.4 Adressefelt 178
12.11.5 Funktionsfelt 178
12.11.6 Datafelt 178
12.11.7 CRC-kontrolfelt 179
176
176
177
177
12.11.8 Spoleregisteraddressering 179
12.11.9 Sådan styres frekvensomformeren 180
12.11.10 Funktionskoder, som understøttes af Modbus RTU 180
12.11.11 Modbus-undtagelseskoder 180
12.12 Adgang til parametre
12.12.1 Parameterhåndtering 181
12.12.2 Datalagring 181
12.12.3 IND (indeks) 181
12.12.4 Tekstblokke 181
12.12.5 Konverteringsfaktor 181
12.12.6 Parameterværdier 181
12.13 Danfoss FC-styreprofil
12.13.1 Styreord i henhold til FC-profil (8-10 Styreprofil = FC profil) 182
12.13.2 Statusord i henhold til FC-profil (STW) (8-10 Styreprofil = FC-profil) 183
12.13.3 Bushastighedsreferenceværdi 184
12.13.4 Styreord i henhold til PROFIdrive-profil (CTW) 185
12.13.5 Statusord i henhold til PROFIdrive-profil (STW) 186
181
182
Indeks
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 7
188
Introduktion Design Guide
1
1 Introduktion
1.1 Formålet med Design Guiden
Design Guiden indeholder oplysninger, der er nødvendige
til integrering af frekvensomformeren i forskellige applikationer.
VLT® er et registreret varemærke.
1.2 Yderligere ressourcer
Der findes flere ressourcer, der kan give en forståelse af
frekvensomformerens avancerede drift, programmering og
overensstemmelse med direktiver.
Denne betjeningsvejledning indeholder
•
detaljerede oplysninger om installation og opstart
af frekvensomformeren.
Programming Guide indeholder detaljerede
•
oplysninger om, hvordan der arbejdes med
parametre, samt mange applikationseksempler.
®
VLT
•
•
•
Kontakt en Danfoss-leverandør eller gå til www.danfoss.com
for yderligere oplysninger.
1.3
Forkortelser, symboler og konventioner
Konventioner
Nummererede lister angiver procedurer.
Lister med punkttegn angiver andre oplysninger og beskrivelser af illustrationer.
Tekst i kursiv angiver
•
•
•
•
Safe Torque Off -betjeningsvejledningen
beskriver, hvordan man bruger Danfoss frekvensomformere i funktionel sikkerhed-applikationer.
Yderligere publikationer og manualer kan fås fra
Danfoss. Se danfoss.com/Product/Literature/
Technical+Documentation.htm for at få en liste.
Det er muligt at købe ekstraudstyr, hvilket kan
resultere i ændrede procedurer i forhold til det,
der er beskrevet i disse publikationer. Sørg for at
se instruktionerne, der medfølger optionerne, for
specifikke krav.
krydsreferencer
links
fodnote
parameternavn, parametergruppenavn, paramete-
roption
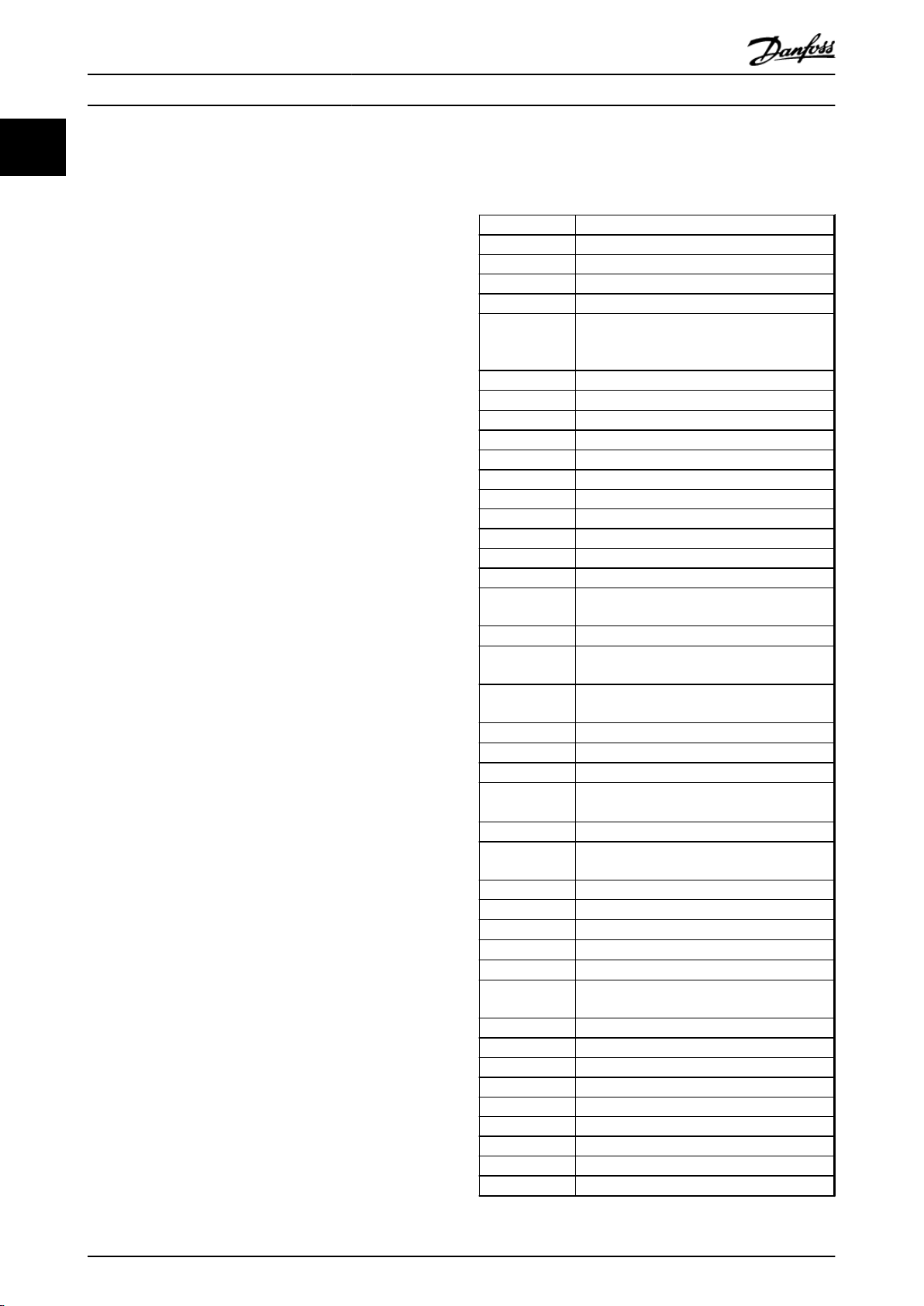
60° AVM 60° Asynkron vektormodulering
A Ampere/AMP
AC Vekselstrøm
AD Luftafladning
AI Analog indgang
AMA (Automatic
Motor
Adaptation)
AWG American Wire Gauge
°C
CD Konstant afladning
CM Common mode
CT Konstant moment
DC Jævnstrøm
DI Digital indgang
DM Differential mode
D-TYPE Frekvensomformerafhængigt
EMC Elektromagnetisk kompatibilitet
ETR Elektronisk termorelæ
f
JOG
f
M
f
MAX
f
MIN
f
M,N
FC Frekvensomformer
g Gram
Hiperface
hk Hestekræfter
HTL HTL encoder (10-30 V) pulser - højspænding
Hz Hertz
I
I
I
I
I
kHz Kilohertz
LCP LCP-betjeningspanel
lsb Mindst betydende bit
m Meter
mA Milliampere
MCM Mille Circular Mil
MCT Motion Control Tool
mH Millihenry-induktans
min. Minut
®
INV
LIM
M,N
VLT,MAKS
VLT,N
Automatisk motortilpasning
Grader celsius
Motorfrekvensen, når jog-funktionen er
aktiveret
Motorfrekvens
Den maksimale udgangsfrekvens, som
frekvensomformeren kan påføre på udgangen
Den minimale motorfrekvens fra frekvensomformeren
Nominel motorfrekvens
Hiperface® er et registreret varemærke
tilhørende Stegmann
Transistor Logic
Nominel udgangsstrøm for vekselretter
Strømgrænse
Nominel motorstrøm
Maksimal udgangsstrøm
Nominel udgangsstrøm leveret af frekvensomformeren
8 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
Introduktion
ms Millisekund
msb Mest betydende bit
η
VLT
nF Nanofarad
NLCP Numerisk LCP-betjeningspanel
Nm Newtonmeter
n
s
Online-/offlineparametre
P
br, forts.
PCB Printplade
PCD Procesdata
PELV Beskyttende ekstra lav spænding
P
m
P
M,N
PM-motor Permanent magnetmotor
Proces PID PID-regulatoren opretholder den ønskede
R
br,nom
RCD Fejlstrømsafbryder
Regen Regenerative klemmer
R
min
RMS Effektiv værdi (RMS - Root Mean Square)
O/MIN Omdrejninger pr. minut
R
rec
sek Sekund
SFAVM Stator Flux-orienteret asynkron vektormodu-
STW Statusord
SMPS Switch mode-strømforsyning
THD Total harmonisk forvrængning
T
LIM
TTL TTL encoder (5 V) pulser - Transistor Transistor
U
M,N
V Volt
VT Variabelt moment
plus
VVC
Tabel 1.1 Forkortelser
Frekvensomformerens virkningsgrad defineres
som forholdet mellem den afgivne og den
modtagne effekt
Synkron motorhastighed
Ændringer af onlineparametre aktiveres,
umiddelbart efter at dataværdien er ændret
Bremsemodstandens nominelle effekt
(gennemsnitlig effekt ved kontinuerlig
bremsning)
Frekvensomformerens nominelle
udgangsstrøm angivet som HO (high overload)
Nominel motoreffekt
hastighed, tryk og temperatur, etc.
Den nominelle modstandsværdi, som sikrer
bremseeffekt på motorakslen på 150/160 % i 1
minut
Minimum tilladelig bremsemodstandsværdi pr.
frekvensomformer
Bremsemodstandens modstandsværdi og
modstand
lering
Momentgrænse
Logic
Nominel motorspænding
Voltage Vector Control
Design Guide
Følgende symboler anvendes i dette dokument:
ADVARSEL
Angiver en potentielt farlig situation, som kan medføre
dødsfald eller alvorlig personskade.
FORSIGTIG
Angiver en potentielt farlig situation, som kan medføre
mindre eller moderat personskade. Kan også bruges til
at advare mod usikre fremgangsmåder.
BEMÆRK!
Angiver vigtige oplysninger, herunder situationer, som
kan resultere i skade på udstyr eller ejendom.
1.4 Ordforklaring
Friløb
Motorakslen er i friløb. Intet moment på motoren.
Bremsemodstand
Bremsemodstanden er et modul, som kan absorbere den
bremseeffekt, der genereres ved regenerativ bremsning.
Denne regenerative bremseeffekt øger mellemkredsspændingen, og en bremsechopper sørger for at afsætte
effekten i bremsemodstanden.
CT-karakteristik
Konstant momentkarakteristik anvendes til alle applikationer, f.eks. transportbånd, fortrængningspumper og
kraner.
Initialisering
Ved initialisering (14-22 Driftstilstand) vender frekvensomformeren tilbage til fabriksindstillingen.
Periodisk driftscyklus
Periodisk drift betyder en sekvens af driftscyklusser. Hver
cyklus består af en periode med og en periode uden
belastning. Driften kan være enten periodisk drift eller
ikke-periodisk drift.
Opsætning
Parameterindstillinger kan gemmes i 4 opsætninger. Det er
muligt at skifte mellem de 4 parameteropsætninger og
redigere i en opsætning, mens en anden er aktiv.
Slipkompensering
Frekvensomformeren kompenserer for motorslippet ved at
give frekvensen et tilskud, der følger den målte motorbelastning, således at motorhastigheden holdes næsten
konstant.
Smart Logic Control (SLC)
Smart Logic Control (SLC) er en række brugerdefinerede
handlinger, som afvikles, når de tilknyttede brugerdefinerede hændelser evalueres som sande af Smart Logic
Controller. (Parametergruppe 13-** Smart Logic.
1
1
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 9

Introduktion
Design Guide
1
FC Standard Bus
Omfatter RS-485-bus med FC-protokol eller MC-protokol.
Se 8-30 Protokol.
Termistor
Temperaturafhængig modstand, der placeres, hvor
temperaturen ønskes overvåget (frekvensomformer eller
motor).
Trip
Tilstand, der skiftes til i fejlsituationer, f.eks. hvis frekvensomformeren udsættes for en overtemperatur, eller når
frekvensomformeren beskytter motoren, processen eller
mekanismen. Genstart forhindres, indtil årsagen til fejlen er
forsvundet, og trip-tilstanden annulleres ved at aktivere
nulstilling. I nogle tilfælde kan nulstillingen udføres
automatisk via programmering. Trip må ikke benyttes i
forbindelse med personsikkerhed.
Triplåst
En tilstand, der skiftes til i fejlsituationer, hvor en frekvensomformer beskytter sig selv og kræver fysisk indgriben,
f.eks. hvis frekvensomformeren udsættes for kortslutning
på udgangen. En triplås kan kun annulleres ved at afbryde
netforsyningen, fjerne årsagen til fejlen og tilslutte
frekvensomformeren igen. Genstart forhindres, indtil triptilstanden annulleres ved at aktivere nulstilling. I nogle
tilfælde kan nulstillingen udføres automatisk via programmering. Trip må ikke benyttes i forbindelse med
personsikkerhed.
VT-karakteristik
Variabel momentkarakteristik, som anvendes til pumper og
ventilatorer.
Effektfaktor
Den reelle effektfaktor (lambda) tager alle harmoniske
strømme i betragtning og er altid lavere end effektfaktoren
(cosphi), som kun tager den første harmoniske strøm på
spænding og strøm i betragtning.
P
kW
Uλ x Iλ x
cos
cosϕ=
P
kVA
=
Uλ x Iλ
ϕ
Cosphi er også kendt som effektforskydningsfaktor.
Både lambda og cos phi er angivet for Danfoss VLT
®
frekvensomformere i kapitel 6.2.1 Netforsyning.
Effektfaktoren angiver, i hvilken grad frekvensomformeren
belaster netforsyningen.
En lavere effektfaktor betyder højere I
for den samme
RMS
kW-ydelse.
Derudover indikerer en høj effektfaktor, at de forskellige
harmoniske strømme er lave.
Frekvensomformere fra Danfoss er forsynet med
indbyggede DC-spoler i DC-linket for at opnå en høj effektfaktor og for at reducere THD på hovedforsyningen.
1.5
Dokument- og softwareversion
Denne manual bliver regelmæssigt gennemgået og
opdateret. Alle forslag til forbedringer er velkomne.
Tabel 1.2 viser dokumentversionen og den tilsvarende
softwareversion.
Udgave Bemærkninger Softwareversion
MG33BFxx Erstatter MG33BExx 6.72
Tabel 1.2 Dokument- og softwareversion
1.6 Regulatorisk overensstemmelse
Frekvensomformere er konstrueret i overensstemmelse
med de direktiver, der er beskrevet i dette afsnit.
CE-mærket
1.6.1
CE-mærket (Communauté européenne) indikerer, at
producenten af produktet overholder alle gældende EUdirektiver. De tre EU-direktiver, som skal overholdes i
forbindelse med konstruktionen og fremstillingen af
frekvensomformere, er lavspændingsdirektivet, EMCdirektivet og (for apparater med integreret
sikkerhedsfunktion) maskindirektivet.
CE-mærket har til formål at eliminere de tekniske barrierer
for fri handel mellem EF- og EFTA-lande inden for EMS (det
Europæiske Monetære System). CE-mærket regulerer ikke
produktets kvalitet. De tekniske specifikationer kan ikke
udledes af CE-mærket.
1.6.1.1
Frekvensomformere er klassificeret som elektroniske
komponenter og skal CE-mærkes i henhold til den
lavspændingsdirektivet. Direktivet finder anvendelse for alt
elektrisk udstyr, der anvendes i spændingsområderne
50-1.000 V AC og 75-1.600 V DC.
Ifølge direktivet skal udstyrets design sikre, at sikkerhed og
helbred for mennesker og husdyr ikke bringes i fare, samt
at materielle værdier ikke beskadiges, så længe udstyret er
korrekt installeret og vedligeholdes og anvendes efter
hensigten. Danfoss Produkter mærket med CE-mærkater
overholder lavspændingsdirektivet, og en overensstemmelseserklæring kan tilvejebringes på forlangende.
Lavspændingsdirektivet
10 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
Introduktion
1.6.1.2 EMC-direktivet
Design Guide
1.6.2
UL-overensstemmelse
1
1
Elektromagnetisk kompatibilitet (EMC) betyder, at elektromagnetisk forstyrrelse mellem apparater ikke hæmmer
deres ydeevne. Det grundlæggende beskyttelseskrav
beskrevet i EMC-direktivet 2004/108/EC angiver, at
apparater, som genererer elektromagnetisk forstyrrelse
(EMI), eller hvis drift kan påvirkes af EMI, skal være
beregnet til at begrænse frembringelsen af elektromagnetisk forstyrrelse og skal have en passende grad af
immunitet til EMI, når disse er korrekt installeret og
vedligeholdes og anvendes som beregnet.
En frekvensomformer kan bruges enkeltstående eller som
en del af en mere kompleks installation. Apparater, der
anvendes i enkeltstående løsninger, eller som en del af et
system, skal være udstyret med CE-mærket. Systemer skal
ikke CE-mærkes, men de skal overholde de grundlæggende
beskyttelseskrav beskrevet i EMC-direktivet.
1.6.1.3
Frekvensomformere er klassificeret som elektroniske
komponenter, der hører ind under lavspændingsdirektivet,
dog skal frekvensomformere med integreret sikkerhedsfunktion overholde maskindirektivet 2006/42/EC.
Frekvensomformere uden sikkerhedsfunktion hører ikke ind
under maskindirektivet. Hvis en frekvensomformer er
integreret i et system med maskiner, stiller Danfoss
oplysninger om sikkerhedsaspekter angående frekvensomformeren til rådighed.
Maskindirektivet 2006/42/EC omhandler en maskine, der
består af en samling af forbundne komponenter eller
apparater, hvoraf mindst én kan udføre mekanisk
bevægelse. Ifølge direktivet skal udstyrets design sikre, at
sikkerhed og helbred for mennesker og husdyr ikke
bringes i fare, samt at materielle værdier ikke beskadiges,
så længe udstyret er korrekt installeret og vedligeholdes
og anvendes efter hensigten.
Når frekvensomformere anvendes i maskiner med mindst
én bevægelig del, skal maskinproducenten kunne fremvise
en erklæring, der angiver, at alle relevante love og sikkerhedsforanstaltninger overholdes. Danfoss Produkter
mærket med CE-mærkater overholder maskindirektivet for
frekvensomformere med integreret sikkerhedsfunktion, og
en overensstemmelseserklæring kan tilvejebringes på
forlangende.
Maskindirektivet
Registreret af UL
Illustration 1.1 UL
BEMÆRK!
Frekvensomformere af kapslingstype T7 (525-690 V) er
ikke UL-certificerede.
Frekvensomformeren overholder fastholdelseskravene for
termisk hukommelse i UL508C. Se afsnittet Termisk
motorbeskyttelse i Design Guide for flere oplysninger.
C-tick overensstemmelse
1.6.3
1.6.4 Marine overensstemmelse
For overensstemmelse med europæisk konvention om
international transport af farligt gods ad indre vandveje
(ADN), se kapitel 9.8.3 ADN-korrekt installation.
1.7
Bortskaffelsesinstruktion
Udstyr, der indeholder elektriske
komponenter, må ikke smides ud sammen
med almindeligt affald.
Det skal indsamles særskilt i overensstemmelse med gældende lokal
lovgivning.
Tabel 1.3 Bortskaffelsesinstruktion
1.8
Sikkerhed
Frekvensomformere indeholder komponenter med høj
spænding og kan potentielt forårsage dødsfald, hvis de
håndteres ukorrekt. Det er kun tilladt for uddannet teknisk
personale at montere og betjene dette udstyr. Reparationsarbejde bør ikke påbegyndes, før strømmen til
frekvensomformeren er fjernet, og det angivne tidsrum for
afledning af ophobet elektrisk energi er gået.
Se betjeningsvejledningen, som medsendes apparatet, og
som er tilgængelig online for flg:
afladningstid, og
•
detaljerede sikkerhedsinstruktioner og advarsler.
•
Nøje overholdelse af sikkerhedsforanstaltninger og
anmærkninger er obligatorisk for sikker drift af frekvensomformeren.
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 11
Sikkerhed
Design Guide
2 Sikkerhed
22
2.1 Sikkerhedssymboler
Følgende symboler anvendes i dette dokument:
ADVARSEL
Angiver en potentielt farlig situation, som kan medføre
dødsfald eller alvorlig personskade.
FORSIGTIG
Angiver en potentielt farlig situation, som kan medføre
mindre eller moderat personskade. Kan også bruges til
at advare mod usikre fremgangsmåder.
BEMÆRK!
Angiver vigtige oplysninger, herunder situationer, som
kan resultere i skade på udstyr eller ejendom.
ADVARSEL
UTILSIGTET START
Når frekvensomformeren er tilsluttet netspændingen, er
der altid en risiko for, at motoren kan starte, hvilket kan
resultere i død, alvorlig personskade eller beskadigelse af
udstyr eller ejendom. Motoren kan starte ved hjælp af en
ekstern kontakt, en seriel buskommando, et indgangsreferencesignal fra LCP'et eller efter en slettet fejltilstand.
1. Frekvensomformeren skal frakobles netforsyningen, når det af sikkerhedsmæssige årsager er
nødvendigt at undgå utilsigtet motorstart.
2. Tryk på [Off] på LCP'et, før parametrene
programmeres.
3. Frekvensomformeren, motoren og det drevne
udstyr skal være driftsklar, når frekvensomformeren er tilsluttet netspændingen.
2.2 Uddannet personale
Korrekt og pålidelig transport, lagring, montering, drift og
vedligeholdelse er påkrævet for problemfri og sikker drift
af frekvensomformeren. Det er kun tilladt for kvalificeret
personale at montere eller betjene dette udstyr.
Kvalificeret personale defineres som uddannet personale,
som er autoriseret til at montere, idriftsætte og
vedligeholde udstyr, systemer og kredsløb i overensstemmelse med relevante love og bestemmelser.
Derudover skal personalet være bekendte med de instruktioner og sikkerhedsforanstaltninger, der er beskrevet i
dette dokument.
2.3
Sikkerhedsforanstaltninger
ADVARSEL
HØJSPÆNDING
Frekvensomformere indeholder højspænding, når de er
tilsluttet netspændingen. Hvis montering, start og
vedligeholdelse udføres af personale, der ikke er
uddannet til det, kan det resultere i død eller alvorlig
personskade.
Montering, opstart og vedligeholdelse må kun
•
udføres af uddannet personale.
ADVARSEL
AFLADNINGSTID
Frekvensomformeren indeholder DC-link-kondensatorer,
der kan forblive opladede, selv når frekvensomformeren
ikke er forsynet med strøm. Det kan resultere i død eller
alvorlig personskade, hvis der ikke ventes det angivne
tidsrum, efter at strømmen er slået fra, før der udføres
service- eller reparationsarbejde.
1. Stop motor.
2. Frakobl netspændingen, permanente magnetmotorer samt eksterne DC-linkstrømforsyninger, herunder reservebatterier,
UPS og DC-link-tilslutninger til andre frekvensomformere.
3. Vent, indtil kondensatorerne er helt afladede,
før der foretages service- eller reparationsarbejde. Ventetiden er angivet i Tabel 2.1.
Spænding [V] Min. ventetid (minutter)
4 7 15
200-240 0,25-3,7 kW 5,5-37 kW
380-500 0,25-7,5 kW 11-75 kW
525-600 0,75-7,5 kW 11-75 kW
525-690 1,5-7,5 kW 11-75 kW
Der kan være højspænding til stede, selv når LED-advarselslamperne er slukkede.
Tabel 2.1 Afladningstid
12 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
Sikkerhed Design Guide
ADVARSEL
FARLIG LÆKSTRØM
Lækstrømmene overstiger 3,5 mA. Hvis frekvensomformeren ikke jordes korrekt, kan det resultere i død
eller alvorlig personskade.
Sørg for, at udstyret jordes korrekt af en
•
autoriseret elektriker.
ADVARSEL
FARER VED UDSTYRET
Kontakt med roterende aksler og elektrisk udstyr kan
resultere i død eller alvorlig personskade.
Montering, start og vedligeholdelse må kun
•
udføres af uddannet og kvalificeret personale.
Elektrisk arbejde skal overholde nationale og
•
lokale sikkerhedsforskrifter.
Følg procedurerne i denne manual.
•
2 2
FORSIGTIG
VINDMØLLEEFFEKT
Utilsigtet rotation i permanente magnetmotorer
medfører risiko for personskade og skade på udstyret.
Kontrollér, at permanente magnetmotorer er
•
blokerede for at forhindre utilsigtet rotation.
FORSIGTIG
POTENTIEL FARE I TILFÆLDE AF INTERN FEJL
Der er risiko for personskade, når frekvensomformeren
ikke er lukket korrekt.
Kontrollér, at alle dæksler er på plads og
•
fastgjort sikkert, inden apparatet forsynes med
strøm.
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 13
Grundlæggende driftsprincip...
Design Guide
3 Grundlæggende driftsprincipper
3.1 Generelt
33
Dette kapitel indeholder en oversigt over frekvensomformerens primære samlinger og kredsløb. Det beskriver de
interne elektriske funktioner og signalbehandlingsfunktioner. En beskrivelse af den interne styringsstruktur er
også inkluderet.
Automatiserede og valgfri frekvensomformerfunktioner, der
er tilgængelige for konstruktion af robuste driftssystemer
med avanceret ydeevnerapportering hvad angår styring og
status, er også beskrevet.
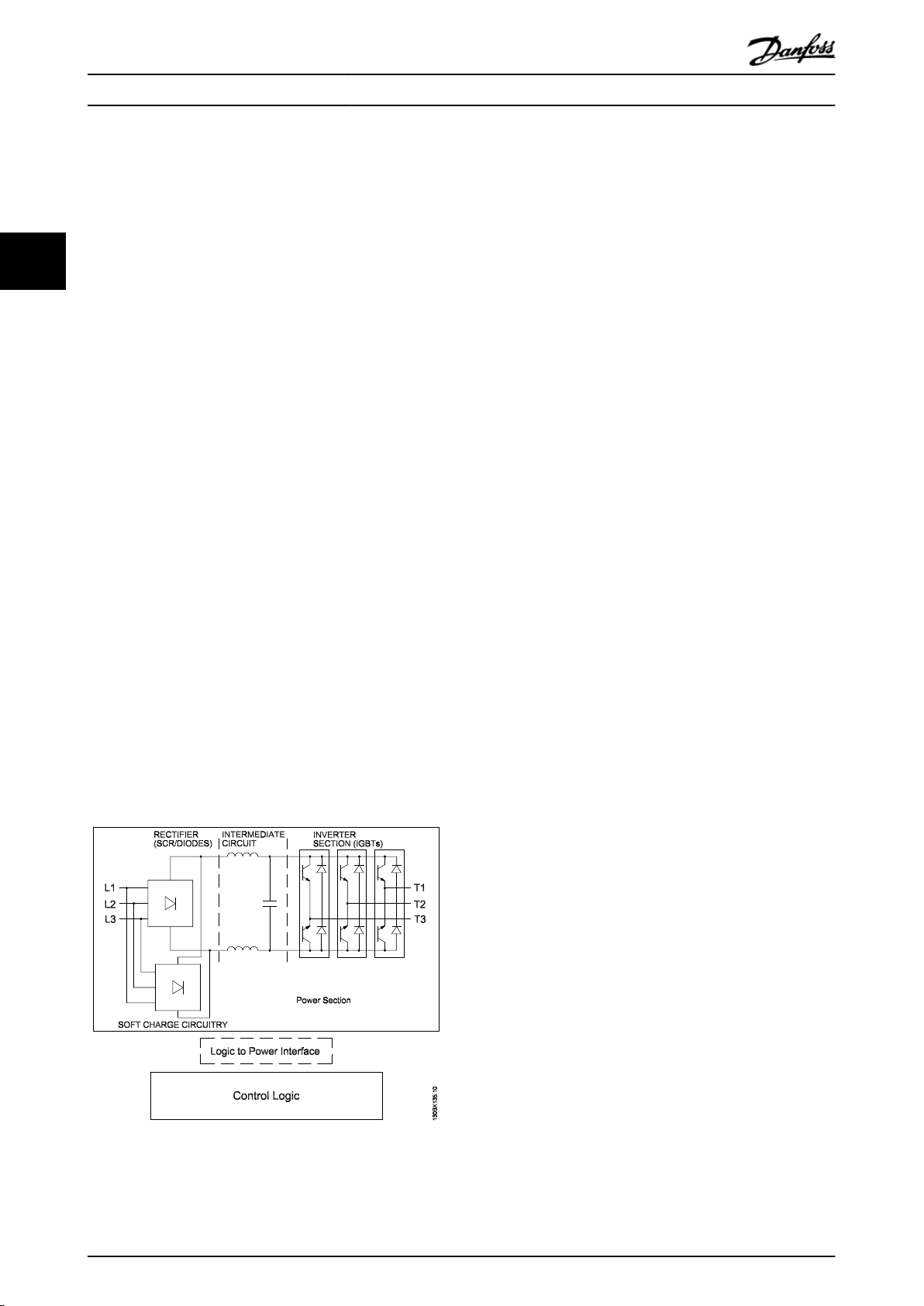
3.2 Beskrivelse af drift
Frekvensomformeren leverer en reguleret mængde
vekselstrøm fra netforsyningen til en standard trefaset
induktionsmotor for at styre motorhastigheden. Frekvensomformeren leverer variabel frekvens og spænding til
motoren.
Frekvensomformeren er opdelt i fire primære moduler.
Ensretter
•
Mellemkreds
•
Vekselretter
•
Styring og regulering
•
I kapitel 3.3 Driftssekvens er disse moduler beskrevet i
detaljer, og det beskrives, hvordan effekt og styresignaler
bevæger sig i frekvensomformeren.
3.3 Driftssekvens
3.3.1 Ensretterdelen
Når strøm påføres frekvensomformeren første gang,
kommer den ind via indgangsklemmerne (L1, L2 og L3) og
videre til afbryderen og/eller RFI-filteroptionen, afhængigt
af apparatets konfiguration.
3.3.2 Mellemdelen
Fra ensretter-delen passerer spændingen videre til mellemdelen. Denne udbedrede spænding udjævnes af et
sinusbølgefilterkredsløb, der består af DC-businduktoren og
DC-buskondensatorgruppen.
DC-businduktoren sørger for seriel impedans til ændret
strøm. Dette hjælper filtreringsprocessen, samtidig med at
harmonisk forvrængning til indgangen AC-bølgeform
reduceres, som normalt er indeholdt i ensretterkredsløb.
Vekselretterdel
3.3.3
I vekselretterdelen, når en kørselskommando og hastighedsreference er til stede, begynder IGBT'ernes kobling at
skabe udgangsbølgeformen. Denne bølgeform, som er
genereret af Danfoss VVC
styrekortet, giver optimal ydeevne og minimale tab i
motoren.
Bremseoption
3.3.4
plus
PWM-princippet på
Til de frekvensomformere, der er udstyret med en
dynamisk bremseoption, medfølger der en bremse-IGBT
sammen med klemmerne 81(R-) og 82(R+) til at tilslutte en
ekstern bremsemodstand.
Bremse-IGBT'ens funktion er at begrænse spændingen i
mellemkredsen, når den maksimale spændingsgrænse er
overskredet. Dette opnås ved kobling af den eksternt
monterede modstand henover DC-bussen for at fjerne
overskydende DC-spænding, der findes i buskondensatorerne. Overskydende DC-busspænding er generelt
resultat af en belastning (overhauling load), der forårsager,
at regenerativ energi returneres til DC-bussen. Dette sker
for eksempel, når belastningen driver motoren, hvilket får
spændingen til at vende tilbage til DC-bussen.
Illustration 3.1 Intern styrelogik
14 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01

Grundlæggende driftsprincip... Design Guide
Ved at placere bremsemodstanden udvendigt opnås
fordelene ved at vælge modstanden baseret på applikationens behov, sprede energien uden for betjeningspanelet
og beskytte omformeren imod overophedning, hvis
bremsemodstanden er overbelastet.
Bremse-IGBT'ens indløbssignal opstår på styrekortet og
leveres til bremse-IGBT via effektkortet og gate drivekortet. Derudover overvåger effekt og styrekort bremseIGBT og bremsemodstandens tilslutning med hensyn til
kortslutninger og overbelastninger.
3.3.5 Belastningsfordeling
Apparater med indbygget belastningsfordelingsoption
indeholder klemmer (+) 89 DC og (–) 88 DC. I frekvensomformeren er disse klemmer tilsluttet DC-bussen foran DClinkreaktoren og buskondensatorerne.
Brugen af belastningsfordelingsklemmerne kan understøtte
to forskellige konfigurationer.
Den ene metode indebærer, at klemmerne bruges til at
binde DC-buskredsløbene fra flere frekvensomformere
sammen. Dette muliggør, at et apparat, der er i regenerativ
tilstand, deler den overskydende busspænding med et
andet apparat, der driver en motor. Denne form for belastningsfordeling kan reducere behovet for eksterne
dynamiske bremsemodstande samtidig med, at der spares
energi. Antallet af apparater, der kan tilsluttes på denne
måde, er i teorien uendelig; dog skal hvert enkelt apparat
være i samme spændingsklassificering. Afhængigt af
størrelse og antallet af apparater kan det endvidere være
nødvendigt at installere DC-reaktorer og DC-sikringer i DClink-tilslutningerne, samt AC-reaktorer på netforsyningen.
Hvis sådan en konfiguration forsøges, kræver det specifikke
overvejelser, og det bør ikke forsøges uden først at rådføre
sig med Danfoss Application Engineering.
3.4
Styringsgrænseflade
3.4.1 Styreprincip
Frekvensomformeren modtager styringsindgange fra flere
kilder.
LCP-betjeningspanel (hand mode)
•
Programmerbare analoge, digitale og analoge/
•
digitale styreklemmer (auto mode)
RS-485, USB eller serielle kommunikationsporte
•
(auto mode)
Når styreklemmerne er tilsluttet og programmeret korrekt,
giver disse feedback, reference og andre indgangssignaler
til frekvensomformeren; status på udgange og fejltilstande
fra frekvensomformeren, relæer til at drive ekstraudstyr, og
den serielle kommunikationsgrænseflade. En 24 V fælles
forsyning er også til rådighed. Styreklemmer kan
programmeres til forskellige funktioner ved at vælge
parameteroptioner via LCP-betjeningspanelet foran på
apparatet eller via eksterne kilder. De fleste styreledninger
skal leveres af kunden, medmindre de bestilles fra
fabrikken.
3 3
Den anden metode indebærer, at frekvensomformeren
påføres strøm udelukkende fra en DC-kilde. Denne metode
er noget mere kompliceret. For det første kræver det en
DC-kilde. Dernæst kræver det en metode til soft chargeopstart af DC-bussen. Endeligt kræver det en
spændingskilde til at starte ventilatorerne i apparatet op.
Igen bør sådan en konfiguration ikke forsøges uden først
at rådføre sig med Danfoss Application Engineering.
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 15
130BD599.10
3-phase
power
input
DC bus
Switch Mode
Power Supply
Motor
Analog Output
Interface
relay1
relay2
ON=Terminated
OFF=Open
Brake
resistor
91 (L1)
92 (L2)
93 (L3)
PE
88 (-)
89 (+)
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN)
0/4-20 mA
12 (+24 V OUT)
13 (+24 V OUT)
37 (D IN)
18 (D IN)
20 (COM D IN)
10 V DC
15 mA 130/200 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(COM A OUT) 39
(A OUT) 42
(P RS-485) 68
(N RS-485) 69
(COM RS-485) 61
0 V
5V
S801
0/4-20 mA
RS-485
RS-485
03
+10 V DC
0/-10 V DC -
+10 V DC
+10 V DC
0/4-20 mA
0/-10 V DC-
240 V AC, 2 A
24 V DC
02
01
05
04
06
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
27
24 V
0 V
(D IN/OUT)
0 V (PNP)
24 V (NPN)
(D IN/OUT)
0 V
24 V
29
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
1 2
ON
S201
ON
21
S202
ON=0/4-20 mA
OFF=0/-10 V DC +10 V DC
95
P 5-00
21
ON
S801
(R+) 82
(R-) 81
: Chassis
: Ground
**
240 V AC, 2 A
400 V AC, 2 A
*
*
*
Grundlæggende driftsprincip...
Design Guide
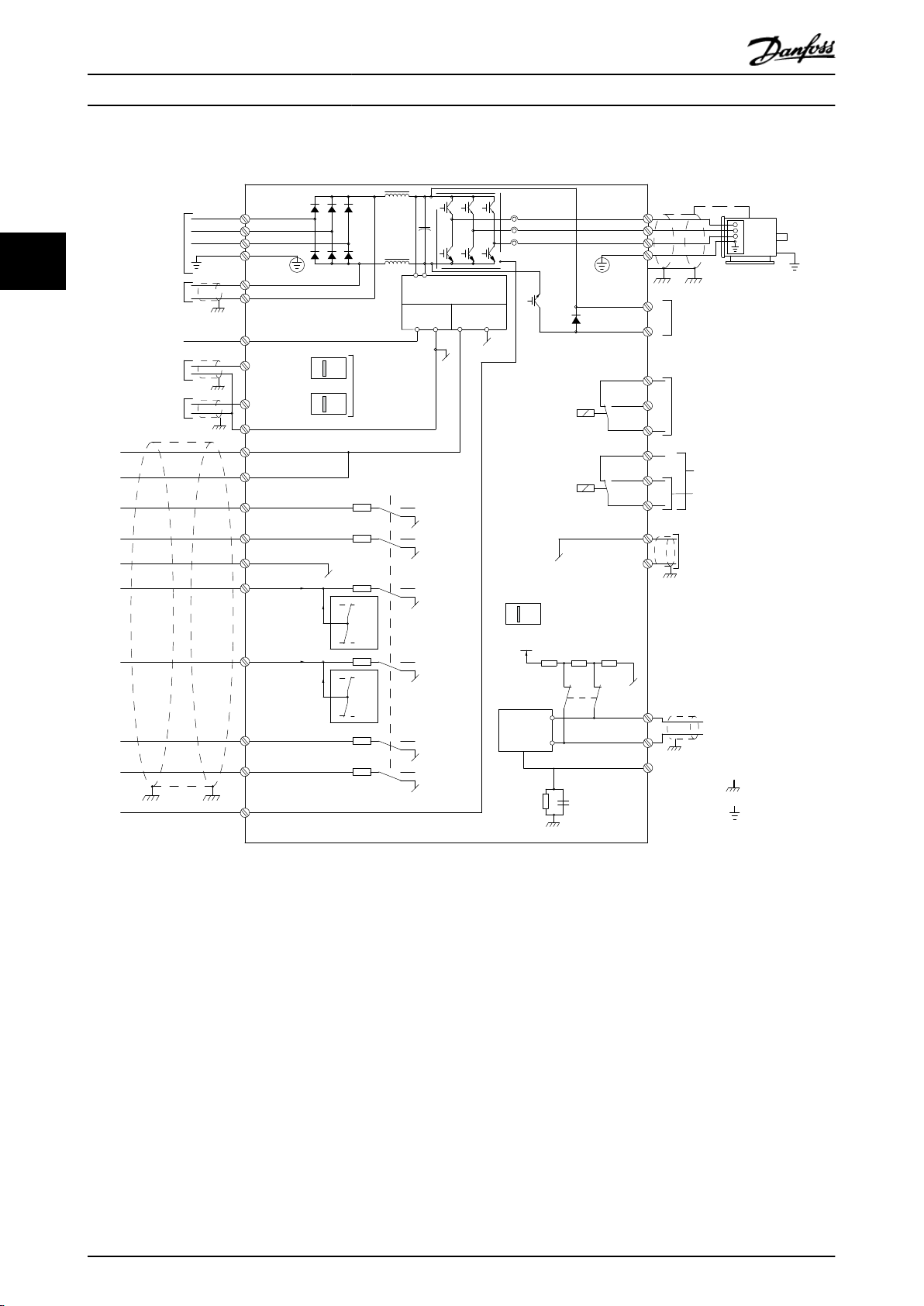
3.5 Ledningsdiagram
33
Illustration 3.2 Grundlæggende ledningsdiagram
A = analog, D = digital
*Klemme 37 (medfølger ikke altid) bruges til Safe Torque Off. Safe Torque Off-installationsinstruktioner findes i Safe Torque
Off Betjeningsvejledning for Danfoss VLT® frekvensomformere. Klemme 37 er ikke inkluderet i FC 301 (undtagen kapslingstype
A1). Relæ 2 og klemme 29 har ingen funktion i FC 301.
**Tilslut ikke kabelskærmen.
16 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
130BD529.11
1
2
3
4
5
6
7
8
PE
U
V
W
9
L1
L2
L3
PE
10
11
Grundlæggende driftsprincip...
Design Guide
3 3
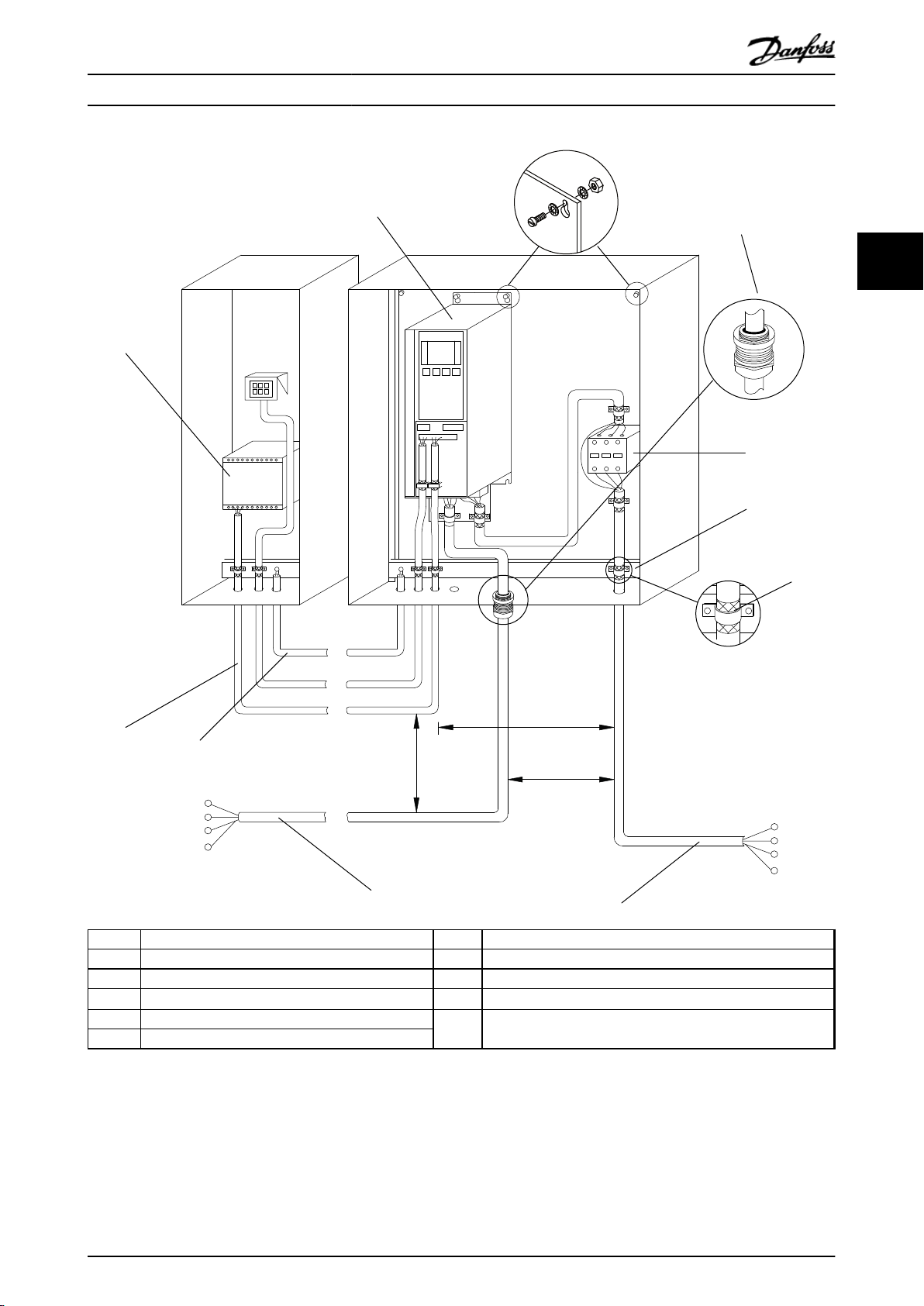
1 PLC 7 Motor, 3--faset og PE (skærmet)
2 Frekvensomformer 8 Netforsyning, 3--faset og forstærket PE (ikke skærmet)
3 Udgangs kontaktor 9 Styreledninger (skærmede)
4 Kabelbøjle 10
5 Kabelisolering (afisoleret)
6 Kabelbøsning
11
Potentialeudligning min. 16 mm
Afstand mellem styrekabel, motorkabel og forsyningskabel:
Min. 200 mm
2
Illustration 3.3 EMC-korrekt elektrisk tilslutning
For yderligere oplysninger om EMC, se kapitel 4.1.15 EMC-overensstemmelse .
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 17
Grundlæggende driftsprincip... Design Guide
BEMÆRK!
EMC-FORSTYRRELSE
Brug skærmede kabler til motorkabler og styreledninger
samt separate kabler til indgangsstrøm, motorkabler og
styreledninger. Hvis strømkabler, motorkabler og
33
styreledninger ikke adskilles, kan det resultere i utilsigtet
funktion eller reduceret ydeevne. Der skal være mindst
200 mm afstand mellem strømkabler, motorkabler og
styreledninger.
3.6 Styreenheder
3.6.1 Styreprincip
En frekvensomformer ensretter AC-spændingen fra netforsyningen til DC-spænding, hvorefter DC-spændingen
omformes til AC-strøm med variabel amplitude og
frekvens.
Motoren forsynes med variabel spænding/strøm og
frekvens, hvilket muliggør variabel hastighedskontrol af
trefasede asynkrone standardmotorer og permanente
magnetmotorer.
Frekvensomformeren kan styre enten hastigheden eller
momentet på motorakslen. Indstillingen i 1-00 Konfigurati-
onstilstand bestemmer typen af styring.
Hastighedsstyring
Der findes to typer hastighedsstyring:
Hastighedsstyring, åben sløjfe, som ikke kræver
•
feedback fra motoren (sensorless).
PID-hastighedsstyring med lukket sløjfe kræver
•
hastighedsfeedback til en indgang. Korrekt
optimeret hastighedsstyring med lukket sløjfe er
mere nøjagtig end hastighedsstyring med åben
sløjfe.
Momentstyring
Momentstyringsfunktionen bruges i applikationer, hvor
momentet på motorens udgangsaksel styrer applikationen
som spændingsstyring. Momentstyring kan vælges i
1-00 Konfigurationstilstand, enten i VVC
sløjfe eller Flux-styring, lukket sløjfe med [2] motorhastighedsfeedback. Momentet indstilles ved at indstille en
analog, digital eller busstyret reference. Den maksimale
hastighedsgrænsefaktor indstilles i 4-21 Hastighedsgrænse-
faktorkilde. Når der køres momentstyring, anbefales det at
gennemføre en fuld AMA-procedure, da de korrekte
motordata er af høj betydning for optimal ydeevne.
Lukket sløjfe i Flux mode med encoderfeedback
•
sikrer overlegen ydeevne i alle fire kvadranter og
ved alle motorhastigheder.
Åben sløjfe i VVC
•
anvendes i mekaniske robuste applikationer, men
nøjagtigheden er begrænset. Momentfunktionen
med åben sløjfe fungerer grundlæggende kun i
én hastighedsretning. Momentet beregnes på
basis af strømmålingen indvendigt i frekvensomformeren.
Hastigheds-/momentreference
Referencen til disse styreenheder kan enten være en enkelt
reference eller summen af forskellige referencer, herunder
relativt skalerede referencer. Håndteringen af referencer
uddybes nærmere i kapitel 3.7 Referencehåndtering.
plus
-tilstand. Funktionen
plus
[4] Moment åben
Vælger, hvilken indgang, der skal anvendes som PIDhastighedsfeedback i 7-00 Hastighed, PID-feedbackkilde.
18 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
Grundlæggende driftsprincip... Design Guide
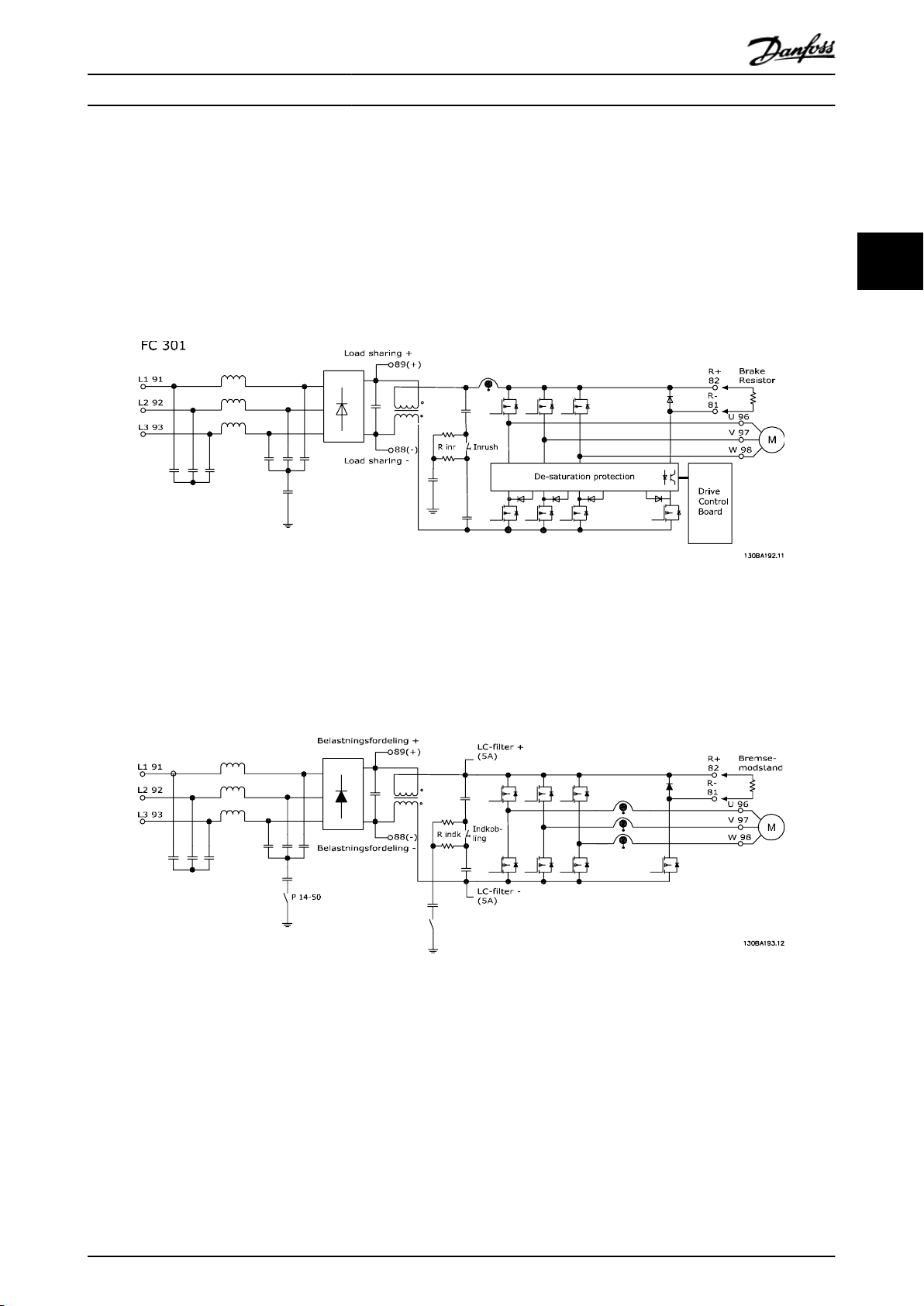
3.6.2 FC 301 vs. FC 302 Styreprincip
FC 301 er en universal frekvensomformer til variable hastighedsapplikationer. Styreprincippet er baseret på Voltage Vector
Control (VVC
FC 301 kan håndtere både asynkrone motorer og PM-motorer.
Strømfølingsprincippet i FC 301 er baseret på strømmålinger i DC-linket eller motorfasen. Jordfejlbeskyttelsen på motorsiden
løses af et afmætningskredsløb i IGBT'erne, der er sluttet til styrekortet.
Kortslutningsadfærden for FC 301 afhænger af strømtransduceren i det positive DC-link og afmætningsbeskyttelsen med
feedback fra de tre lavere IGBT'ere og bremsen.
Illustration 3.4 Styreprincip FC 301
FC 302 er en højtydende frekvensomformer til krævende applikationer. Frekvensomformeren kan håndtere forskellige typer
motorstyringsprincipper, f.eks. U/f-speciel motortilstand, VVC
FC 302 kan håndtere både synkrone motorer med permanent magnet (servomotorer) og normale kortslutningsmotorer.
Kortslutningsadfærden for FC 302 afhænger af de tre strømtransducere i motorfaserne og afmætningsbeskyttelsen med
feedback fra bremsen.
plus
).
plus
eller Flux Vektor-motorstyring.
3 3
Illustration 3.5 Styreprincip FC 302
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 19
Grundlæggende driftsprincip... Design Guide
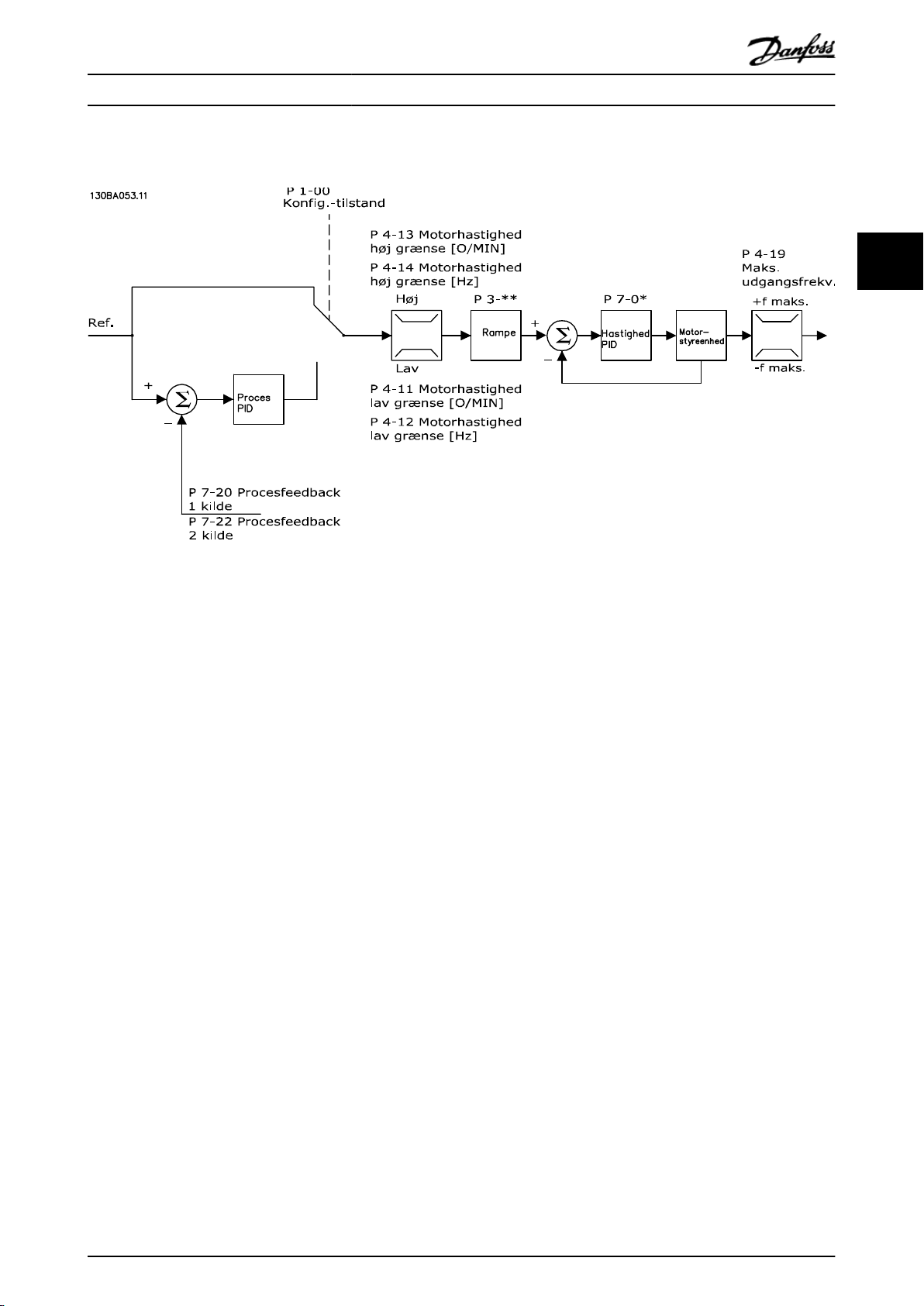
3.6.3
Styringsstruktur for VVC
plus
33
plus
Illustration 3.6 Styringsstruktur for VVC
Se Aktive/inaktive parametre i forskellige apparatstyringstilstande i Programming Guide for en oversigt over, hvilken styringskonfiguration er tilgængelig, afhængigt af valg af AC-motor eller PM, ikke-udpræget motor. I den konfiguration, der vises i
Illustration 3.6, er 1-01 Motorstyringsprincip indstillet til [1] VVC
åben sløjfe. Den resulterende reference fra referencehåndteringssystemet modtages og føres gennem rampegrænsen og
hastighedsgrænsen, før den sendes til motorstyringen. Motorstyringens udgang begrænses derefter af den maksimale
frekvensgrænse.
i konfigurationer med åben sløjfe og lukket sløjfe
plus
, og 1-00 Konfigurationstilstand er indstillet til [0] Hastighed,
Hvis 1-00 Konfigurationstilstand indstilles til [1] Hastighed, lukket sløjfe, sendes den resulterende reference fra rampegrænse
og hastighedsgrænse til en PID-hastighedsstyring. PID-hastighedsstyringsparametrene indstilles i parametergruppe 7-0*
Hastighed, PID-styr. Den resulterende reference fra PID-hastighedsstyring sendes til motorstyringen og begrænses af
frekvensgrænsen.
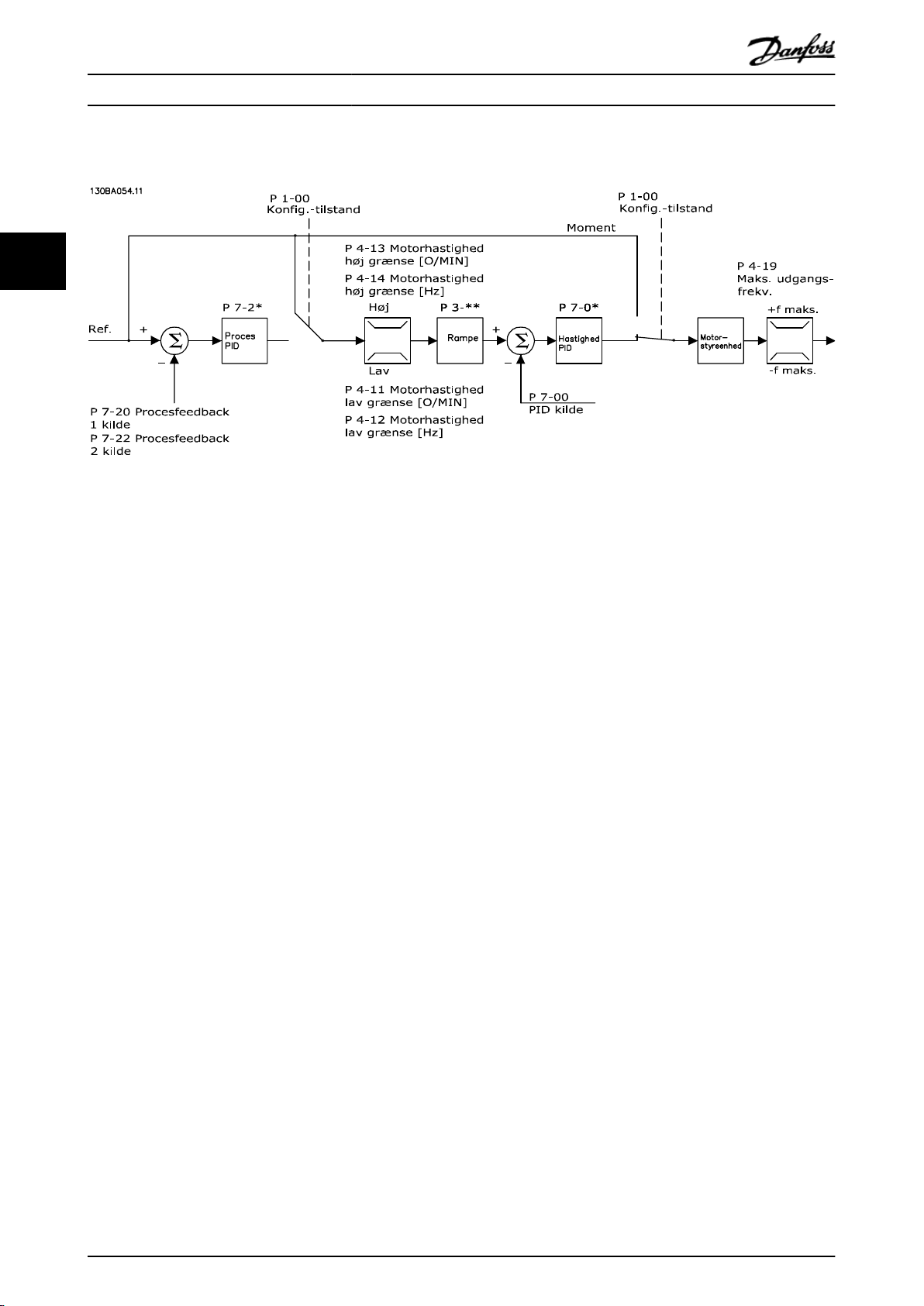
Vælg [3] Proces i 1-00 Konfigurationstilstand for at bruge PID-processtyring for lukket sløjfestyring af f.eks. hastighed eller tryk
i den styrede applikation. PID-procesparametrene findes i parametergruppen 7-2* Processtyring. Fb og 7-3* Proces, PID-reg.
20 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
Grundlæggende driftsprincip... Design Guide
3.6.4 Styringsstruktur i Flux Sensorless (kun FC 302)
3 3
Illustration 3.7 Styringsstruktur i konfigurationer med Flux Sensorless, åben sløjfe og lukket sløjfe.
Se Aktive/inaktive parametre i forskellige apparatstyringstilstande i Programming Guide for en oversigt over, hvilken styringskonfiguration er tilgængelig, afhængigt af valg af AC-motor eller PM, ikke-udpræget motor. I den viste konfiguration er
1-01 Motorstyringsprincip indstillet til [2] Flux Sensorless, og 1-00 Konfigurationstilstand er indstillet til [0] Hastighed, åben sløjfe.
Den resulterende reference fra referencehåndteringssystemet føres gennem rampe- og hastighedsgrænserne, som det er
bestemt i de angivne parameterindstillinger.
Der genereres en anslået hastighedsfeedback til PID-hastighed for at styre udgangsfrekvensen.
PID-hastighed skal indstilles med P-, I- og D-parametrene (parametergruppe 7-0* Hastighed, PID-styr.).
Vælg [3] Proces i 1-00 Konfigurationstilstand for at bruge PID-processtyring for lukket sløjfestyring af f.eks. hastighed eller tryk
i den styrede applikation. PID-procesparametrene findes i parametergruppe 7-2* Processtyr. Fb og 7-3* Proces, PID-reg.
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 21
Grundlæggende driftsprincip... Design Guide
3.6.5 Styringsstruktur for Flux med motorfeedback (kun FC 302)
33
Illustration 3.8 Styringsstruktur i Flux med motorfeedbackkonfiguration (kun tilgængelig for FC 302)
Se Aktive/inaktive parametre i forskellige apparatstyringstilstande i Programming Guide for en oversigt over, hvilken styringskonfiguration er tilgængelig, afhængigt af valg af AC-motor eller PM, ikke-udpræget motor. I den viste konfiguration er
1-01 Motorstyringsprincip indstillet til [3] Flux m. motorfeedb, og 1-00 Konfigurationstilstand er indstillet til [1] Hastighed, lukket
sløjfe.
Motorstyringen i denne konfiguration afhænger af et feedbacksignal fra en encoder eller resolver, der er monteret direkte
på motoren (indstillet i 1-02 Flux-motorfeedbackkilde).
Vælg [1] Hastighed, lukket sløjfe i 1-00 Konfigurationstilstand for at bruge den resulterende reference som indgang for PIDhastighedsstyringen. PID-hastighedsstyringsparametrene findes i parametergruppe 7-0* Hastighed, PID-styr.
Vælg [2] Moment i 1-00 Konfigurationstilstand for at bruge den resulterende reference direkte som en momentreference.
Momentstyring kan kun vælges i konfigurationen Flux med motorfeedback (1-01 Motorstyringsprincip). Når denne tilstand er
valgt, bruger referencen Nm-enheden. Det kræver ikke momentfeedback, da det faktiske moment beregnes på basis af
strømmålingen i frekvensomformeren.
Vælg [3] Proces i 1-00 Konfigurationstilstand for at bruge PID-processtyring til lukket sløjfestyring af eksempelvis hastighed
eller en procesvariabel i den styrede applikation.
22 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
Grundlæggende driftsprincip... Design Guide
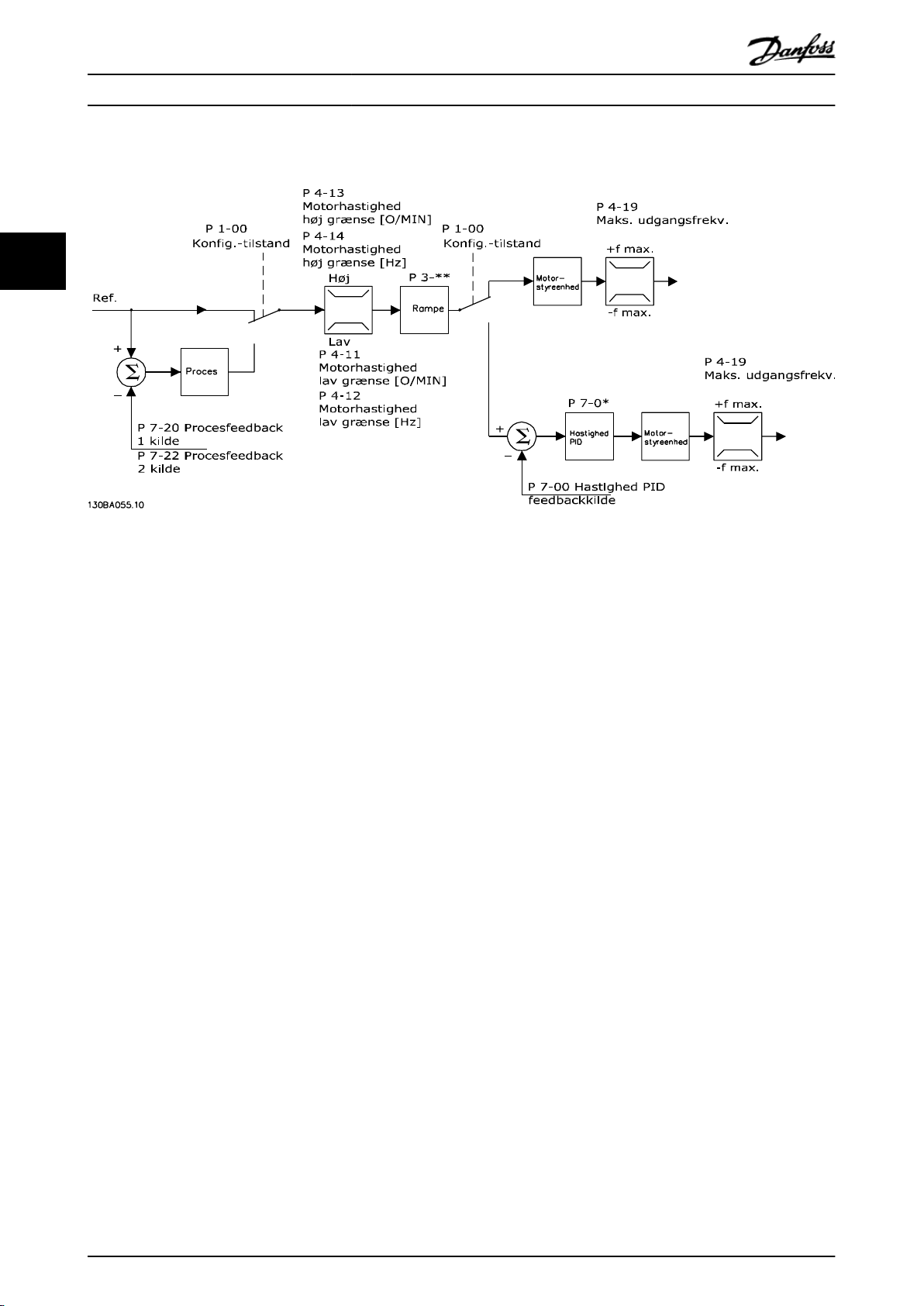
3.6.6 PID
3.6.6.1 PID-hastighedsstyring
PID-hastighedsstyring opretholder en konstant motorhastighed uanset den ændrede belastning på motoren.
1-00 Konfigurationstilstand 1-01 Motorstyringsprincip
U/f
[0] Hast., åben sløjfe AKTIV AKTIV AKTIV N.A.
[1] Hastighed, lukket sløjfe N.A. Ikke aktiv N.A. AKTIV
[2] Moment N.A. N.A. N.A. Ikke aktiv
[3] Proces Ikke aktiv Ikke aktiv Ikke aktiv N.A.
[4] Moment, åben sløjfe N.A. Ikke aktiv N.A. N.A.
[5] Wobble Ikke aktiv Ikke aktiv Ikke aktiv Ikke aktiv
[6] Overfladespole Ikke aktiv Ikke aktiv Ikke aktiv N.A.
[7] Udvidet PID-hastighed OL Ikke aktiv Ikke aktiv Ikke aktiv N.A.
[8] Udvidet PID-hastighed CL N.A. Ikke aktiv N.A. Ikke aktiv
Tabel 3.1 Styrekonfigurationer med aktiv hastighedsstyring
"N.A." betyder, at den pågældende tilstand slet ikke er tilgængelig. "Ikke aktiv" betyder, at den pågældende tilstand er tilgængelig, men at hastighedsstyringen ikke er aktiv i den tilstand.
VVC
plus
Flux Sensorless Flux m/ enc. feedb
BEMÆRK!
PID-hastighedsstyring fungerer med standardparameterindstillingen, men det anbefales kraftigt at optimere
parametrene for at forbedre motorstyringsydeevnen. Især de to Flux-motorstyringsprincipper er afhængige af korrekt
optimering for at yde det fulde potentiale.
Tabel 3.2 opsummerer de karakteristika, der kan indstilles til hastighedsstyring. Se VLT® AutomationDrive FC 301/FC 302
Programming Guide for flere oplysninger om programmering.
3 3
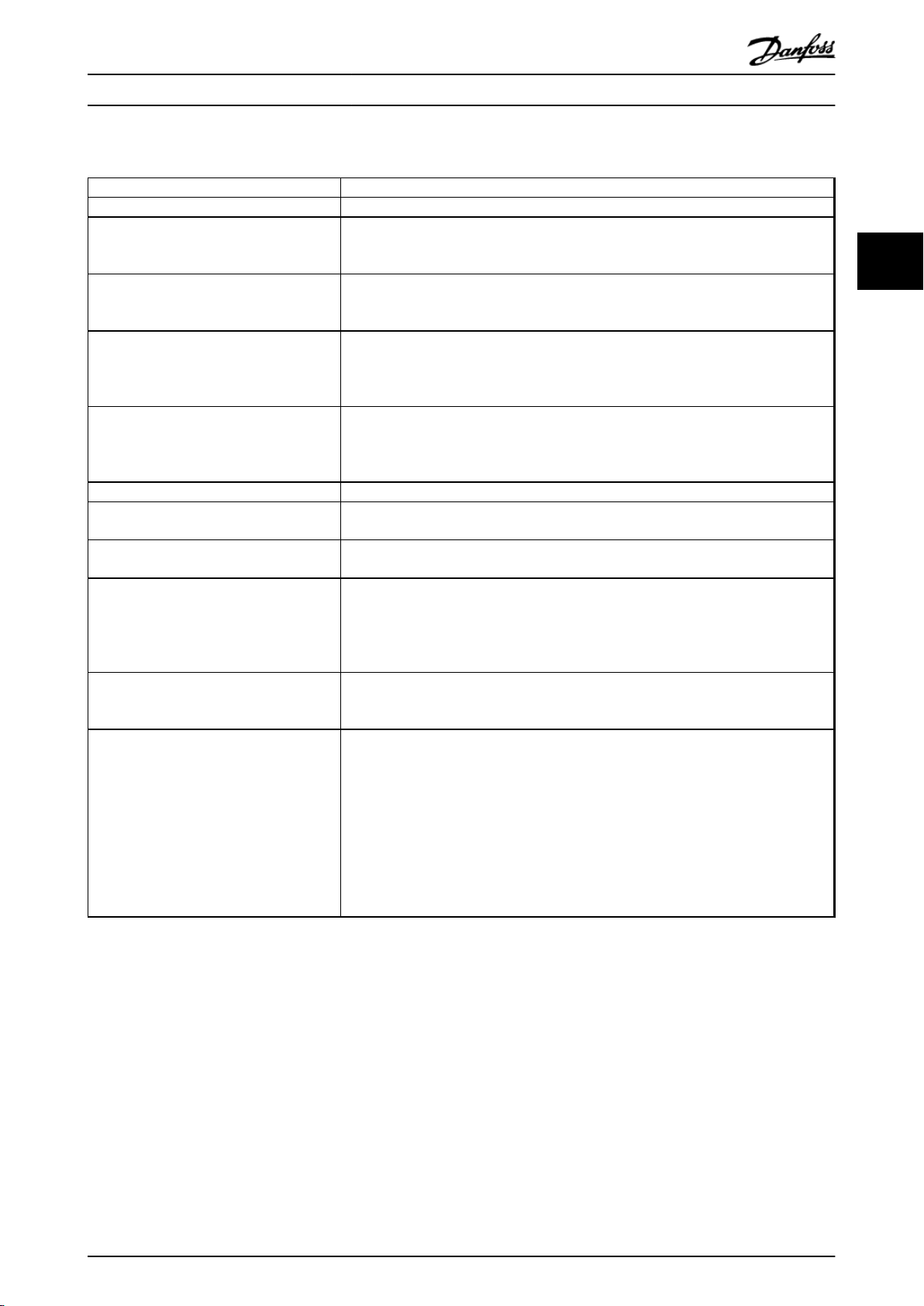
Parameter Beskrivelse af funktion
7-00 Hastighed, PIDfeedbackkilde
7-02 Hastighed, PID-proportionalforst.
7-03 Hastighed, PID-integrationstid
7-04 Hastighed, PID-differentieringstid
7-05 Hastighed, PID diff.
forstærk.-grænse
Vælg den indgang, PID-hastigheden skal få sin feedback fra.
Jo højere værdi, jo hurtigere styring. En for høj værdi kan imidlertid føre til oscilleringer.
Fjerner hastighedsfejl i stationær tilstand. En mindre værdi betyder en hurtig reaktion. En for lav værdi
kan imidlertid føre til oscilleringer.
Giver en forstærkning, der er proportionel med ændringsfrekvensen for feedback. En indstilling på nul
deaktiverer differentiatoren.
Hvis der sker hurtige ændringer i referencen eller feedback i en given applikation – hvilket betyder, at
fejlen skifter hurtigt – kan differentiatoren hurtigt blive for dominerende. Dette sker, fordi den reagerer
på ændringer i fejlen. Jo hurtigere fejlen ændres, jo stærkere er differentiatorforstærkningen. Differentiatorforstærkningen kan derfor begrænses for at tillade indstilling af en rimelig differentieringstid for
langsomme ændringer og en passende hurtig forstærkning for hurtige ændringer.
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 23
Grundlæggende driftsprincip... Design Guide
Parameter Beskrivelse af funktion
Et lavpasfilter dæmper oscilleringer på feedbacksignalet og forbedrer driften i stationær
tilstand. For lang filtertid vil imidlertid forringe den dynamiske ydeevne for PID-hastighedsstyringen.
Praktiske indstillinger for parameter 7-06, hentet fra antallet af pulseringer pr.
33
7-06 Hastighed, PID-lavpasfiltertid
7-07 Hast. PID Feedb.gearudv.forh. Frekvensomformeren ganger hastighedsfeedbacken med dette forhold.
7-08 Hastighed, PID-fremføringsfaktor Referencesignalet bypasser hastighedsstyringsenheden med den angivne mængde.
7-09 Speed PID Error Correction w/ Ramp Hastighedsfejlen mellem rampen og den faktiske hastighed sammenlignes med indstil-
Tabel 3.2 Relevante parametre til hastighedsstyring
omdrejning fra encoderen (PPR):
Encoder PPR 7-06 Hastighed, PID-lavpasfiltertid
512 10 ms
1024 5 ms
2048 2 ms
4096 1 ms
Denne funktion øger den dynamiske ydeevne for hastighedsstyringssløjfen.
lingen i denne parameter. Hvis hastighedsfejlen overstiger denne parameterindtastning,
rettes hastighedsfejlen via en kontrolleret rampning.
Programmeres i den viste rækkefølge (se forklaring på indstillinger i Programming Guide)
I Tabel 3.3 antages det, at alle andre parametre og kontakter forbliver ved fabriksindstillingen.
Funktion Parameter Indstilling
1) Sørg for, at motoren kører korrekt. Gør følgende:
Indstil motorparametrene ved hjælp af dataene på
typeskiltet
Udfør Automatisk motortilpasning 1-29 Automatisk
2) Kontrollér, om motoren kører, og om encoderen er korrekt fastgjort. Gør følgende:
Tryk på [Hand On] på LCP'et. Kontrollér, at motoren
kører, og bemærk, hvilken retning den kører i (i det
følgende benævnt som "positiv retning").
Gå til 16-20 Motorvinkel. Drej langsomt motoren i den
positive retning. Den skal drejes så langsomt (kun et par
O/MIN), at det er muligt at bestemme, om værdien i
16-20 Motorvinkel øges eller reduceres.
Hvis 16-20 Motorvinkel aftager, skal encoderretningen
ændres i 5-71 Klemme 32/33, koderretning.
3) Sørg for, at frekvensomformergrænserne er indstillet til sikre værdier
Indstil acceptable grænser for referencerne. 3-02 Minimumre-
Kontrollér, at rampeindstillingerne er inden for frekvensomformerens ydeevne og de tilladte driftsspecifikationer
for den pågældende applikation.
1-2* Som angivet på motorens typeskilt
[1] Aktivér komplet AMA
motortilpasning
(AMA)
Indstil en positiv reference.
16-20 Motorvinkel N.A. (skrivebeskyttet parameter) Bemærk: En værdi, der
øges, overløber ved 65.535 og starter igen ved 0.
5-71 Klemme 32/33,
koderretning
ference
3-03 Maksimumreference
3-41 Rampe 1,
rampe-op-tid
3-42 Rampe 1,
rampe-ned-tid
[1] Mod uret (hvis 16-20 Motorvinkel reduceres)
0 O/MIN (standard)
1.500 O/MIN (standard)
fabriksindstilling
fabriksindstilling
24 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
Grundlæggende driftsprincip... Design Guide
Funktion Parameter Indstilling
Indstil acceptable grænser for motorhastigheden og
frekvensen.
4) Konfigurér hastighedsstyringen, og vælg motorstyringsprincippet
Aktivering af hastighedsstyringen
Valg af motorstyringsprincip 1-01 Motorstyrings-
5) Konfigurér og skalér referencen for hastighedsstyringen
Indstil analog indgang 53 som referencekilde 3-15 Referenceres-
Skalér Analog indgang 53 0 O/MIN (0 V) til 1.500 O/MIN
(10 V)
6) Konfigurér 24 V HTL-encodersignalet som feedback for motorstyringen og hastighedsstyringen
Indstil digital indgang 32 og 33 som HTL-encoderindgang
Vælg klemme 32/33 som motorfeedback 1-02 Flux-
Vælg klemme 32/33 som PID-hastighedsfeedback 7-00 Hastighed, PID-
7) Indstil PID-hastighedsstyringsparametrene
Brug optimeringsretningslinjerne, hvor det er relevant,
eller gennemfør optimeringen manuelt
8) Gem for at afslutte
Gem parameterindstillingen i LCP'et for at gemme den
sikkert
4-11 Motorhastighed, lav grænse
[O/MIN]
0 O/MIN (standard)
1.500 O/MIN (standard)
60 Hz (standard 132 Hz)
4-13 Motorhastighed, høj grænse
[O/MIN]
4-19 Maks. udgangsfrekvens
1-00 Konfigurations-
[1] Hastighed, lukket sløjfe
tilstand
[3] Flux m motorfeedb
princip
Ikke nødvendig (standard)
source 1
6-1* Ikke nødvendig (standard)
5-14 Klemme 32,
[0] Ingen betjening (standard)
digital indgang
5-15 Klemme 33,
digital indgang
Ikke nødvendig (standard)
motorfeedbackkilde
Ikke nødvendig (standard)
feedbackkilde
7-0* Se retningslinjerne
0-50 LCP-kopi [1] Alle til LCP
3 3
Tabel 3.3 Programmeringsrækkefølge
3.6.6.2
Optimering af PID-hastighedsstyring
Følgende optimeringsretningslinjer er relevante, når et af Flux-motorstyringsprincipperne benyttes i applikationer, hvor
belastningen hovedsageligt er inertial (med en lav mængde friktion).
Værdien af 30-83 Hastighed, PID-proportionalforstærkning afhænger af den kombinerede inerti for motoren og belastningen,
og den valgte båndbredde kan beregnes ved hjælp af følgende formular:
2
x
par
. 1 − 20 x 9550
. 1 − 25
x
Båndbredde rad
/ sek
Par
. 7 − 02 =
Samlet inerti kgm
Par
BEMÆRK!
1-20 Motoreffekt [kW] er motoreffekten i [kW] (dvs. at der skal indtastes '4' kW i stedet for '4.000' W i formlen).
En praktisk værdi for båndbredden er 20 rad/s. Kontrollér resultatet af 7-02 Hastighed, PID-proportionalforst.-beregningen i
henhold til følgende formular (ikke nødvendig, hvis der bruges feedback i høj opløsning, f.eks. SinCos-feedback):
Par
. 7 − 02
MAKS
0. 01 x 4 x
=
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 25
Encoder Opløsning x Par
2 x π
. 7 − 06
x
Maks. moment ripple
%
Grundlæggende driftsprincip... Design Guide
Den anbefalede startværdi for 7-06 Hastighed, PID-lavpasfiltertid er 5 ms (en lavere encoderopløsning kræver en højere
filterværdi). En maks. momentrippel på 3 % er som regel acceptabel. For trinvise encodere findes encoderopløsningen i
enten 5-70 Klemme 32/33 Pulser pr. omdrejning (24 HTL på standardfrekvensomformer) eller 17-11 Opløsning (PPR) (5 V TTL på
Encoder Option MCB102).
Den praktiske maksimumgrænse for 7-02 Hastighed, PID-proportionalforst. bestemmes som regel af encoderopløsningen og
33
feedbackfiltertiden, men andre faktorer i applikationen kan eventuelt begrænse 7-02 Hastighed, PID-proportionalforst. til en
lavere værdi.
For at minimere oversvinget kan 7-03 Hastighed, PID-integrationstid indstilles til ca. 2,5 sek. (varierer afhængigt af applikationen).
Indstil til 7-04 Hastighed, PID-differentieringstid 0, indtil alt andet er indstillet. Hvis det er nødvendigt, kan optimeringen
afsluttes ved at eksperimentere med trinvise justeringer af indstillingen.
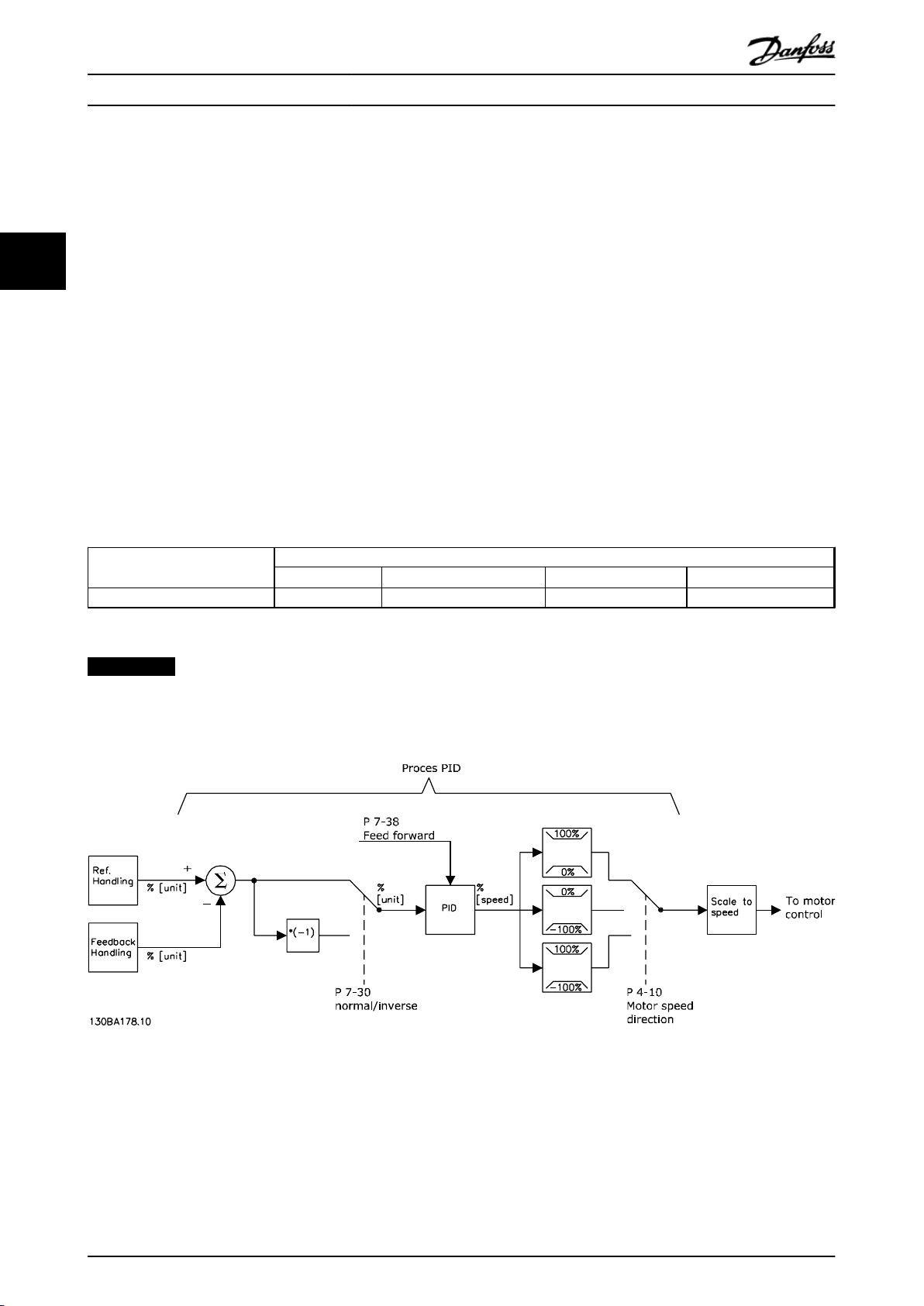
3.6.6.3
Anvend PID-processtyringen til at styre de applikationsparametre, der kan måles af en føler (dvs. tryk, temperatur, flow), og
påvirkes af en tilsluttet motor gennem en pumpe, ventilator eller på anden vis.
Tabel 3.4 viser de styrekonfigurationer, hvor det er muligt at bruge processtyring. Når der anvendes et Flux Vektor-motorstyringsprincip, skal PID-hastighedsstyringparametrene indstilles. kapitel 3.6 Styreenheder viser, hvor hastighedsstyringen er
aktiv.
1-00 Konfigurationstilstand 1-01 Motorstyringsprincip
[3] Proces Ikke aktiv Proces Proces og hastighed Proces og hastighed
Tabel 3.4 Styrekonfigurationer med processtyring
PID-processtyring
U/f
VVC
plus
Flux Sensorless Flux m/ enc. feedb
BEMÆRK!
PID-processtyringen fungerer med standardparameterindstillingen, men det anbefales kraftigt at optimere parametrene
for at forbedre applikationens styreydeevne. Især de to Flux-motorstyringsprincipper er afhængige af korrekt
optimering af PID-hastighedsstyring (inden indstilling af PID-processtyring) for at yde det fulde potentiale.
Illustration 3.9 PID-processtyringsdiagram
26 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
Grundlæggende driftsprincip... Design Guide
Tabel 3.5 opsummerer de karakteristika, der kan indstilles for processtyringen.
Parameter Beskrivelse af funktion
7-20 Proc. lukket sløjfe, tilb. 1-signal Vælg, hvilken kilde (dvs. analog eller pulsindgang) Process PID skal få sin feedback fra
7-22 Proc. lukket sløjfe, tilb. 2-signal Alternativt: Bestem. om (og hvorfra) proces PID skal have et ekstra feedbacksignal. Hvis
der vælges en ekstra feedbackkilde, kombineres de to feedbacksignaler, før de anvendes i
PID-processtyringen.
7-30 Proces PID normal/inverteret styring
7-31 Proces, PID-anti windup Anti-windup-funktionerne sikrer, at integratoren indstilles til en forstærkning, der svarer til
7-32 Proces PID starthastighed I nogle applikationer kan det tage meget lang tid at nå den krævede hastighed/det
7-33 Proces PID-proportionalforstærkning Jo højere værdi, jo hurtigere styring. En for høj værdi kan imidlertid medføre oscilleringer.
7-34 Proces, PID-integrationstid Fjerner hastighedsfejl i stationær tilstand. En mindre værdi betyder en hurtig reaktion. En
7-35 Proces, PID-differentieringstid Giver en forstærkning, der er proportionel med ændringsfrekvensen for feedback. En
7-36 Proces PID diff. Forstærkningsgrænse Hvis der sker hurtige ændringer i referencen eller feedback i en given applikation – hvilket
7-38 Proces PID-feed forward-faktor I en applikation med god (og omtrent lineær) korrelation mellem procesreferencen og den
5-54 Pulsfiltertidskonstant #29 (Pulsklem. 29),
5-59 Pulsfiltertidskonstant #33 (Pulsklem. 33),
6-16 Klemme 53, filtertidskonstant (Analog
klem. 53),
6-26 Klemme 54, filtertidskonstant (Analog
klem. 54)
6-36 Kl. X30/11, filtertidskonstant
6-46 Kl. X30/12, filtertidskonstant
35-46 Klemme X48/2, Filtertidskonstant
Ved [0] Normal drift vil processtyringen reagere ved at øge motorhastigheden, hvis
feedbacken bliver lavere end referencen. Ved [1] Inverteret drift vil processtyringen i samme
situation reagere ved at sænke motorhastigheden i stedet.
den faktiske frekvens, når enten en frekvensgrænse eller en momentgrænse nås. Dette
forhindrer integrering med en fejl, der er umulig at kompensere for med en hastighedsændring. Denne funktion kan deaktiveres ved at vælge [0] Ikke aktiv.
krævede sætpunkt. I sådanne applikationer kan det være en fordel at indstille en fast
motorhastighed på frekvensomformeren, før processtyringen aktiveres. Dette gøres ved at
indstille en proces PID-startværdi (hastighed) i 7-32 Proces PID starthastighed.
for lille værdi kan imidlertid medføre oscilleringer.
indstilling på nul deaktiverer differentiatoren.
betyder, at fejlen skifter hurtigt – kan differentiatoren hurtigt blive for dominerende. Dette
sker, fordi den reagerer på ændringer i fejlen. Jo hurtigere fejlen ændres, jo stærkere er
differentiatorforstærkningen. Differentiatorforstærkningen kan derfor begrænses for at
muliggøre indstilling af en differentieringstid for langsomme ændringer.
motorhastighed, der er nødvendig for at opnå denne reference, kan feed forward-faktoren
anvendes for at opnå bedre dynamisk ydeevne for PID-processtyringen.
Hvis der er oscilleringer på strøm-/spændingsfeedbacksignalet, kan de dæmpes ved brug
af et lavpasfilter. Denne tidskonstant repræsenterer hastighedsgrænsen for rippler, der
opstår på feedbacksignalet.
Eksempel: Hvis lavpasfiltret er indstillet til 0,1 sek., vil hastighedsgrænsen være 10 RAD/sek.
(det modsatte af 0,1 sek.), hvilket svarer til (10/(2 x π))=1,6 Hz. Dette betyder, at alle
strømme/spændinger, der varierer med mere end 1,6 oscilleringer pr. sekund, dæmpes af
filteret. Styringen udføres kun på et feedbacksignal, der varierer med en frekvens
(hastighed) på mindre end 1,6 Hz.
Lavpasfiltret forbedrer ydeevnen i stationær tilstand, men hvis der vælges en for lang
filtertid, forringes den dynamiske ydeevne for PID-processtyringen.
3 3
Tabel 3.5 Relevante parametre for processtyring
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 27
130BP046.10
Hand
on
O
Auto
on
Reset
Grundlæggende driftsprincip... Design Guide
3.6.6.4 Avanceret PID-styring
Se VLT® AutomationDrive FC 301/FC 302 Programming Guide
for avanceret PID-styringsparametre
3.6.7
33
Intern strømstyring i VVC
Når motorstrømmen/moment overstiger de momentgrænser, der er indstillet i 4-16 Momentgrænse for
motordrift,4-17 Momentgrænse for generatordrift og
4-18 Strømgrænse, aktiveres den integrerede strømgrænses-
tyring.
Når frekvensomformeren har nået strømgrænsen under
motordrift eller regenerativ drift, vil den forsøge at komme
under de forhåndsindstillede momentgrænser så hurtigt
som muligt uden at miste kontrollen over motoren.
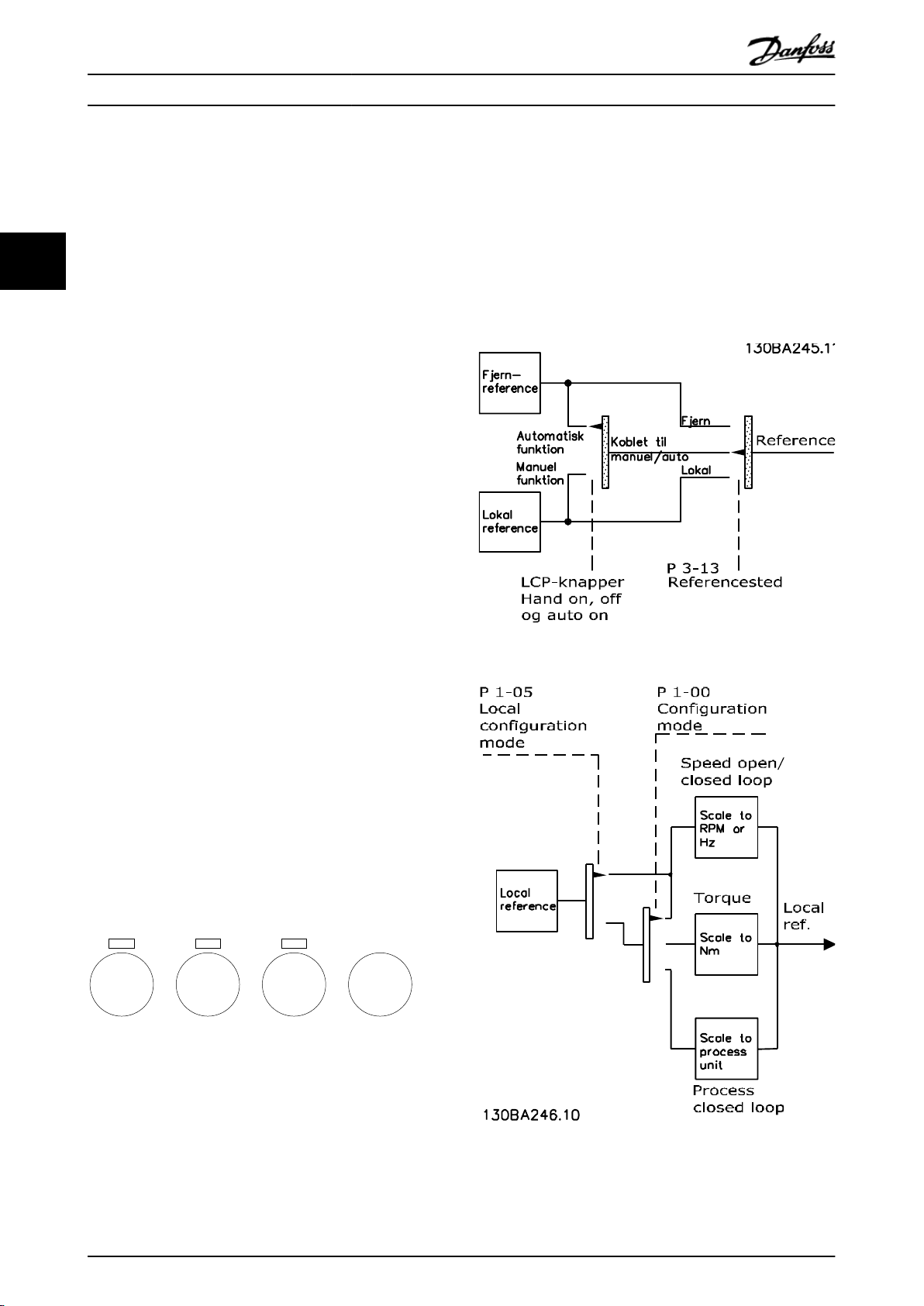
Lokal styring (Hand On) og
3.6.8
plus
-tilstand
Aktiv reference og konfigurationstilstand
Den aktive reference kan enten være den lokale reference
eller fjernreferencen.
I 3-13 Referencested kan den lokale reference vælges
permanent ved at vælge [2] Lokal.
Vælg [1] Fjernbetjent for at vælge fjernreferencen
permanent. Ved at vælge [0] Kædet til hand/auto (standard)
vil referencestedet afhænge af, hvilken tilstand er aktiv.
(Hand mode eller Auto mode).
fjernstyring (Auto On)
Frekvensomformeren kan betjenes manuelt via LCPbetjeningspanelet eller via fjernstyring via analoge og
digitale indgange og en seriel bus. Hvis det er tilladt i
0-40 [Hand on]-tast på LCP, 0-41 [Off]-tast på LCP, 0-42 [Auto
on] tast på LCP og 0-43 [Reset]-tast på LCP, er det muligt at
starte og standse frekvensomformeren via LCP'et ved hjælp
af tasterne [Hand On] og [Off]. Alarmer kan nulstilles med
[Reset]-tasten. Når der er trykket på [Hand On]-tasten, går
frekvensomformeren i Hand mode og følger (som
standard) den lokale reference, der kan indstilles ved hjælp
af navigationstasterne på LCP'et.
Illustration 3.11 Aktiv reference
Når der er trykket på [Auto On], går frekvensomformeren i
Auto mode og følger (som standard) fjernreferencen. I
denne tilstand er det muligt at styre frekvensomformeren
via de digitale indgange og forskellige serielle grænseflader (RS-485, USB eller Fieldbus (option)). Se flere
oplysninger om start, standsning, ændring af ramper og
parameteropsætninger osv. i parametergruppe 5-1* Digitale
indgange eller parametergruppe 8-5* Digital/bus.
Illustration 3.10 Betjeningstaster
Illustration 3.12 Konfigurationstilstand
28 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01

Grundlæggende driftsprincip...
Design Guide
[Hand On][Auto on]-taster
Hand Kædet til Hand/
Hand ⇒ Off
Auto Kædet til Hand/
Auto ⇒ Off
Alle taster Lokal Lokal
Alle taster Fjernbet. Fjernbet.
Tabel 3.6 Betingelser for aktivering af lokal reference/
fjernreference.
3-13 Referencested
Auto
Kædet til Hand/
Auto
Auto
Kædet til Hand/
Auto
Aktiv reference
Lokal
Lokal
Fjernbet.
Fjernbet.
1-00 Konfigurationstilstand bestemmer, hvilken slags
applikationsstyringsprincip (dvs. hastighed, moment eller
processtyring) der anvendes, når fjernreferencen er aktiv.
1-05 Lokal konfigurationstilstand bestemmer, hvilken slags
applikationsstyringsprincip der anvendes, når lokalreferencen er aktiv. En af dem er altid aktiv, men de kan ikke
begge være aktive på samme tid.
3.7
Referencehåndtering
3 3
3.7.1 Referencer
Analog reference
Et analogt signal, der påføres indgang 53 eller 54. Signalet
kan enten være spænding 0-10 V (FC 301 og FC 302) eller
-10 til +10 V (FC 302). Strømsignal 0-20 mA eller 4-20 mA.
Binær reference
Et signal, der påføres den serielle kommunikationsport
(RS-485 klemmer 68-69).
Preset-reference
En defineret preset-reference, der kan indstilles fra -100 %
til +100 % af referenceområdet. Der kan vælges otte
preset-referencer via de digitale klemmer.
Pulsreference
En pulsreference, der påføres klemme 29 eller 33 og
vælges i 5-13 Klemme 29, digital indgang eller 5-15 Klemme
33, digital indgang [32] Pulsindgang. Skalering i parametergruppe 5-5* Pulsindgang.
Ref
MAX
Bestemmer forholdet mellem referenceindgangen ved
100 % af fuld skalaværdi (typisk 10 V, 20 mA) og den
resulterende reference. Maksimumreferenceværdien, der er
indstillet i 3-03 Maksimumreference.
Ref
MIN
Bestemmer forholdet mellem referenceindgangen ved 0 %
af værdien (typisk 0 V, 0 mA, 4 mA) og den resulterende
reference. Min. referenceværdien, der er indstillet i
3-02 Minimumreference.
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 29

Grundlæggende driftsprincip...
Lokal reference
Den lokale reference er aktiv, når frekvensomformeren betjenes, mens [Hand on]-tasten er aktiv. Justér referencen med
navigationstasterne [▲]/[▼] og [◄]/[►].
Fjernreference
Referencehåndteringssystemet for beregning af fjernreferencen vises i Illustration 3.13.
Design Guide
33
Illustration 3.13 Fjernreference
30 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
Grundlæggende driftsprincip... Design Guide
Fjernreferencen beregnes én gang for hvert scanningsinterval og består som udgangspunkt af to typer
referenceindgange:
1. X (den faktiske reference): En sum (se
3-04 Referencefunktion) af op til fire eksternt
udvalgte referencer, der omfatter en hvilken som
helst kombination (bestemmes af indstillingen i
3-15 Referenceressource 1, 3-16 Referenceressource
2 og 3-17 Referenceressource 3) af en fast preset-
reference (3-10 Preset-reference), variable analoge
referencer, variable digitale pulsreferencer og
forskellige serielle busreferencer i den enhed,
frekvensomformeren styres med ([Hz], [O/MIN],
[Nm] osv.).
2. Y (den relative reference): En sum af en fast
preset-reference (3-14 Preset relativ reference) og
en variabel analog reference (3-18 Relativ
skalering, referenceressource) i [%].
De to typer referenceindgange kombineres i følgende
formular: Fjernreference = X + X * Y/100 %. Hvis der ikke
anvendes en relativ reference, indstilles 3-18 Relativ
skalering, referenceressource til [0] Ingen funktion og
3-14 Preset relativ reference til 0 %. Funktionen catch up/
slow-down og funktionen fastfrys reference kan begge
aktiveres ved hjælp af digitale indgange på frekvensomformeren. Funktionerne og parametrene beskrives i
Programming Guide.
Skaleringen af de analoge referencer beskrives i parametergrupperne 6-1* Analog indgang 1 og 6-2* Analog indgang 2,
og skaleringen af de digitale pulsreferencer beskrives i
parametergruppe 5-5* Pulsindgang.
Referencegrænser og områder indstilles i parametergruppe
3-0* Referencegrænser.
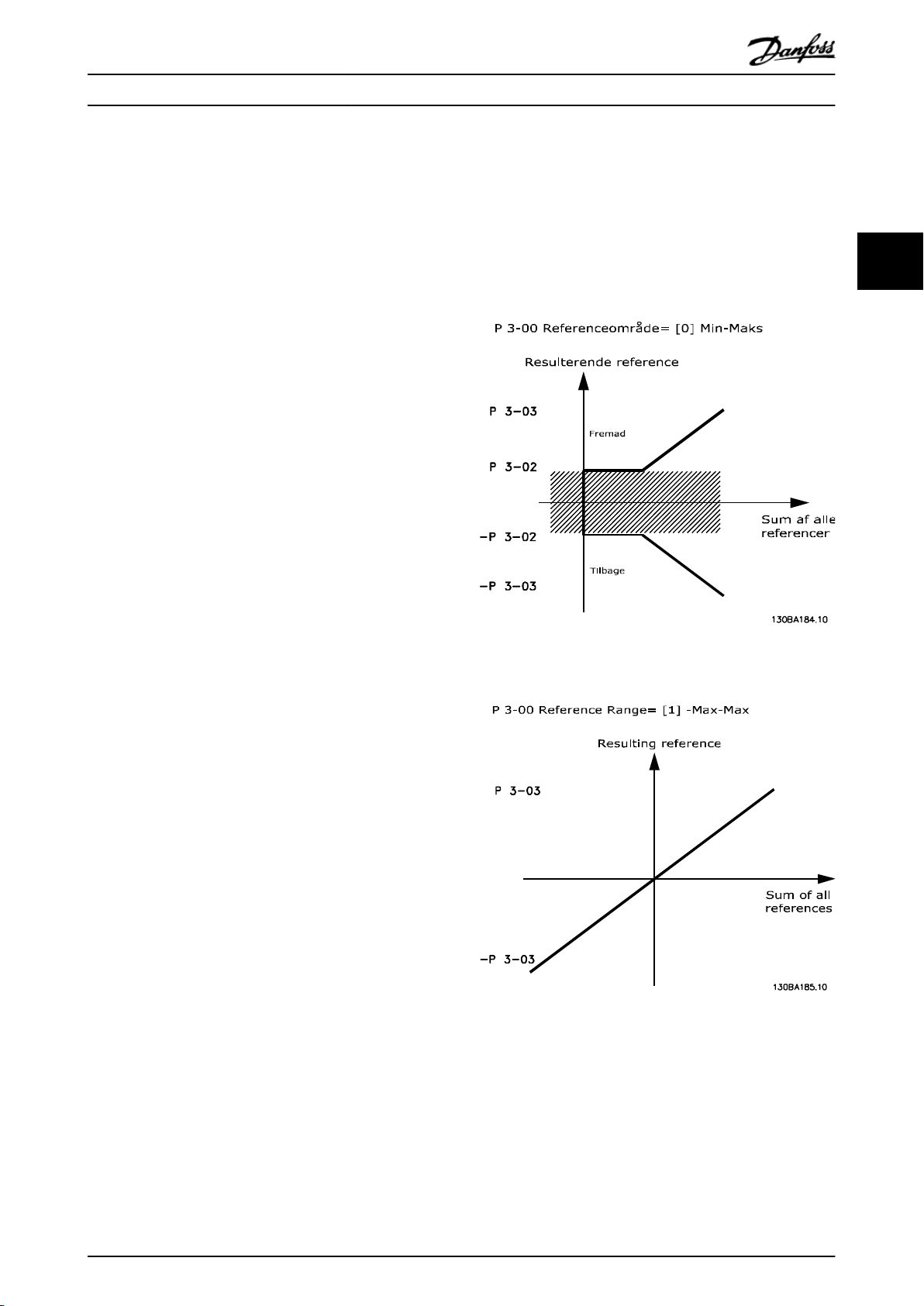
Referencegrænser
3.7.2
3-00 Referenceområde, 3-02 Minimumreference og
3-03 Maksimumreference definerer det tilladte område for
summen af alle referencer. Summen af alle referencer
fastlåses, når det er nødvendigt. Relationen mellem den
resulterende reference (efter fastlåsning) og summen af
alle referencer vises i Illustration 3.14.
Illustration 3.14 Relationen mellem den resulterende reference
og summen af alle referencer
3 3
Illustration 3.15 Resulterende reference
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 31
Grundlæggende driftsprincip... Design Guide
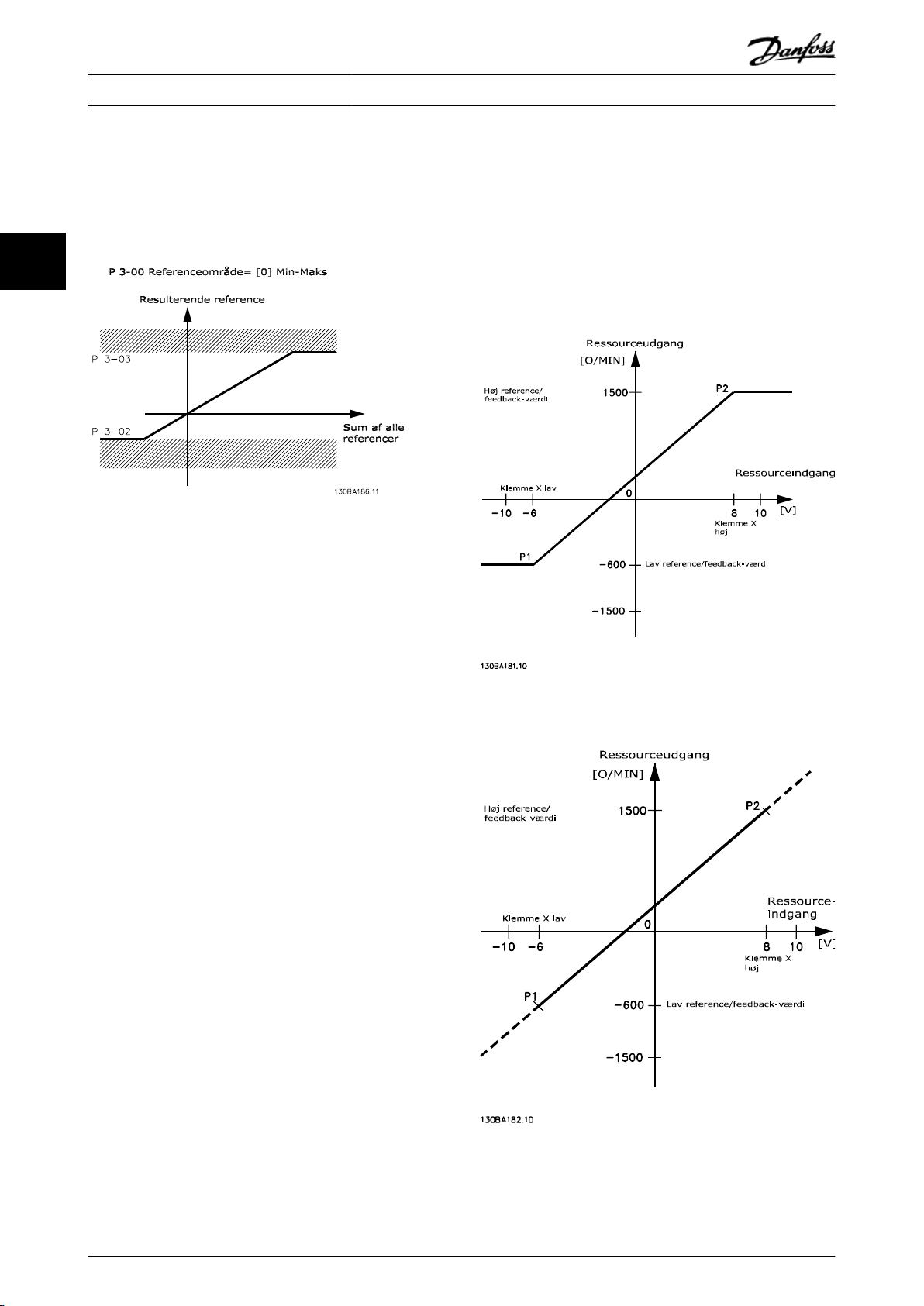
Værdien af 3-02 Minimumreference kan ikke indstilles til
mindre end 0, medmindre 1-00 Konfigurationstilstand
indstilles til [3] Proces. I dette tilfælde er følgende relationer
mellem den resulterende reference (efter fastlåsning) og
summen af alle referencer som vist i Illustration 3.16.
33
Illustration 3.16 Summen af alle referencer med 1-00 Konfigu-
rationstilstand, der blev indstillet i [3] Proces
Skalering af preset-referencer og
3.7.3
3.7.4
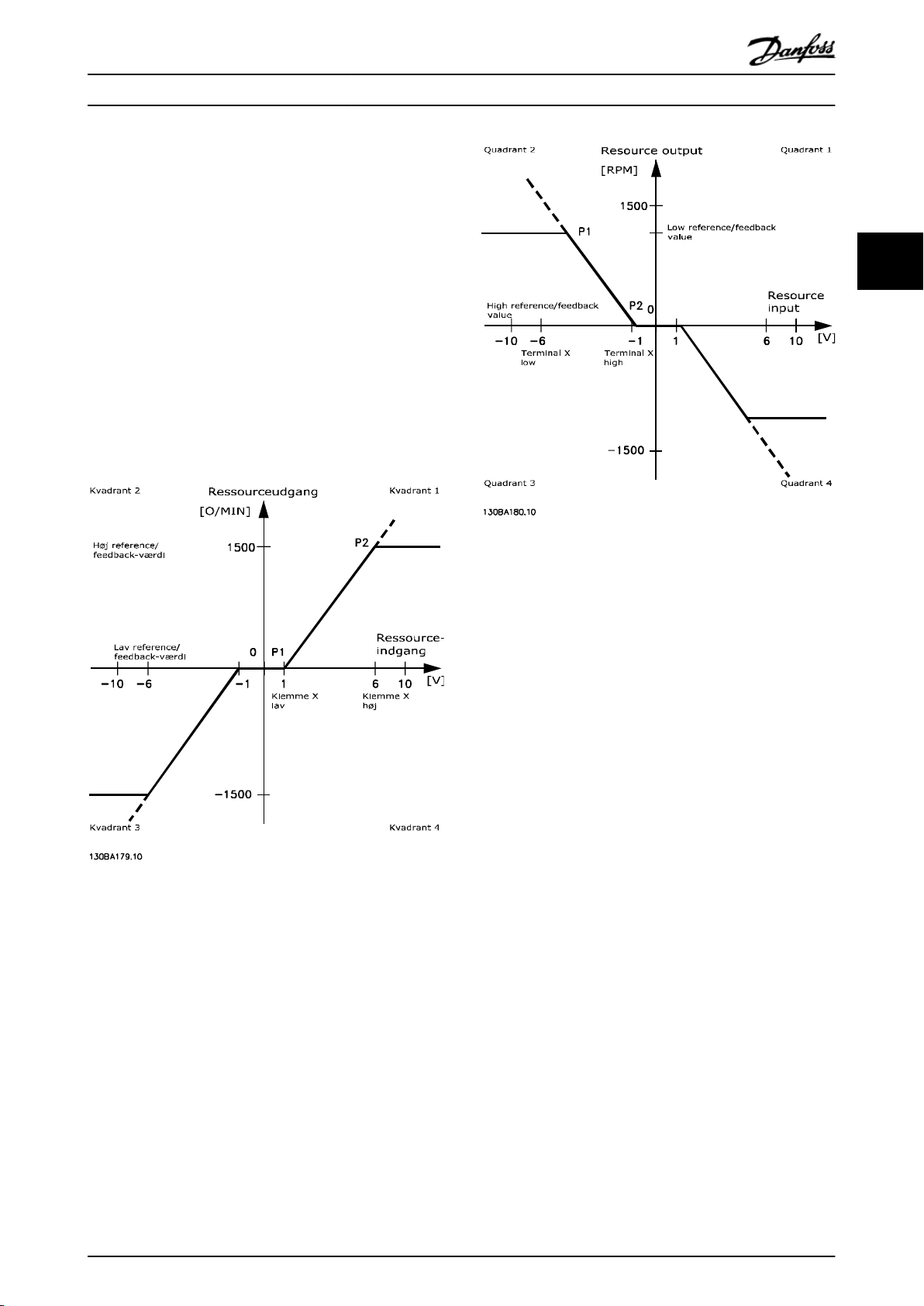
Skalering af analoge referencer samt
pulsreferencer og feedback
Referencer og feedback skaleres på baggrund af analoge
indgange og pulsindgange på samme måde. Den eneste
forskel er, at referencen over eller under de angivne
minimale og maksimale "slutpunkter" (P1 og P2 i
Illustration 3.17) er fastlåste, hvorimod en feedback over
eller under ikke er.
busreferencer
Preset-referencer skaleres i henhold til følgende regler:
Når 3-00 Referenceområde: [0] Min. - Maks. 0 %
•
reference er lig med 0 [enhed], hvor enheden kan
være alle enheder, f.eks. O/MIN, m/s, bar osv., er
100 % reference lig med maks. (abs
(3-03 Maksimumreference), abs (3-02 Minimumre-
ference)).
Når 3-00 Referenceområde: [1] -Maks. - +Maks. 0 %
•
reference er lig med 0 [enhed], er -100 % lig med
-Maks. reference, og 100 % reference er lig med
Maks. reference.
Busreferencer skaleres i henhold til følgende regler:
Når 3-00 Referenceområde: [0] Min. - Maks. For at
•
opnå maks. opløsning på busreference er
skaleringen på bussen: 0 % reference er lig Min.
reference, og 100 % reference er lig Maks.
reference.
Når 3-00 Referenceområde: [1] -Maks. - +Maks.
•
-100 % reference er lig med -Maks. reference, er
100 % reference lig med Maks. reference.
Illustration 3.17 Skalering af analoge referencer samt
pulsreferencer og feedback
Illustration 3.18 Skalering af referenceudgang
32 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
Grundlæggende driftsprincip... Design Guide
3.7.5 Dødbånd omkring nul
I nogle tilfælde skal referencen (i sjældne tilfælde også
feedback) have et dødbånd omkring nul (f.eks. for at sikre,
at maskinen standses, når referencen er "nær nul").
For at aktivere dødbåndet og indstille omfanget af
dødbåndet indstilles følgende:
Enten skal min. referenceværdien eller maks.
•
referenceværdien være nul. Sagt på en anden
måde: Enten P1 eller P2 skal befinde sig på Xaksen i Illustration 3.19.
Og begge punkter, der definerer skaleringsgrafen,
•
skal være i samme kvadrant.
Størrelsen på dødbåndet defineres enten af P1 eller P2
som vist i Illustration 3.19.
3 3
Illustration 3.20 Reversér dødbånd
Derfor vil et referenceslutpunkt på P1 = (0 V, 0 O/MIN) ikke
medføre dødbånd, men et referenceslutpunkt på f.eks.
P1 = (1 V, 0 O/MIN) vil medføre et dødbånd på -1 V til +1
V i dette tilfælde, hvis slutpunkt P2 er placeret enten i
kvadrant 1 eller kvadrant 4.
Illustration 3.19 Dødbånd
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 33
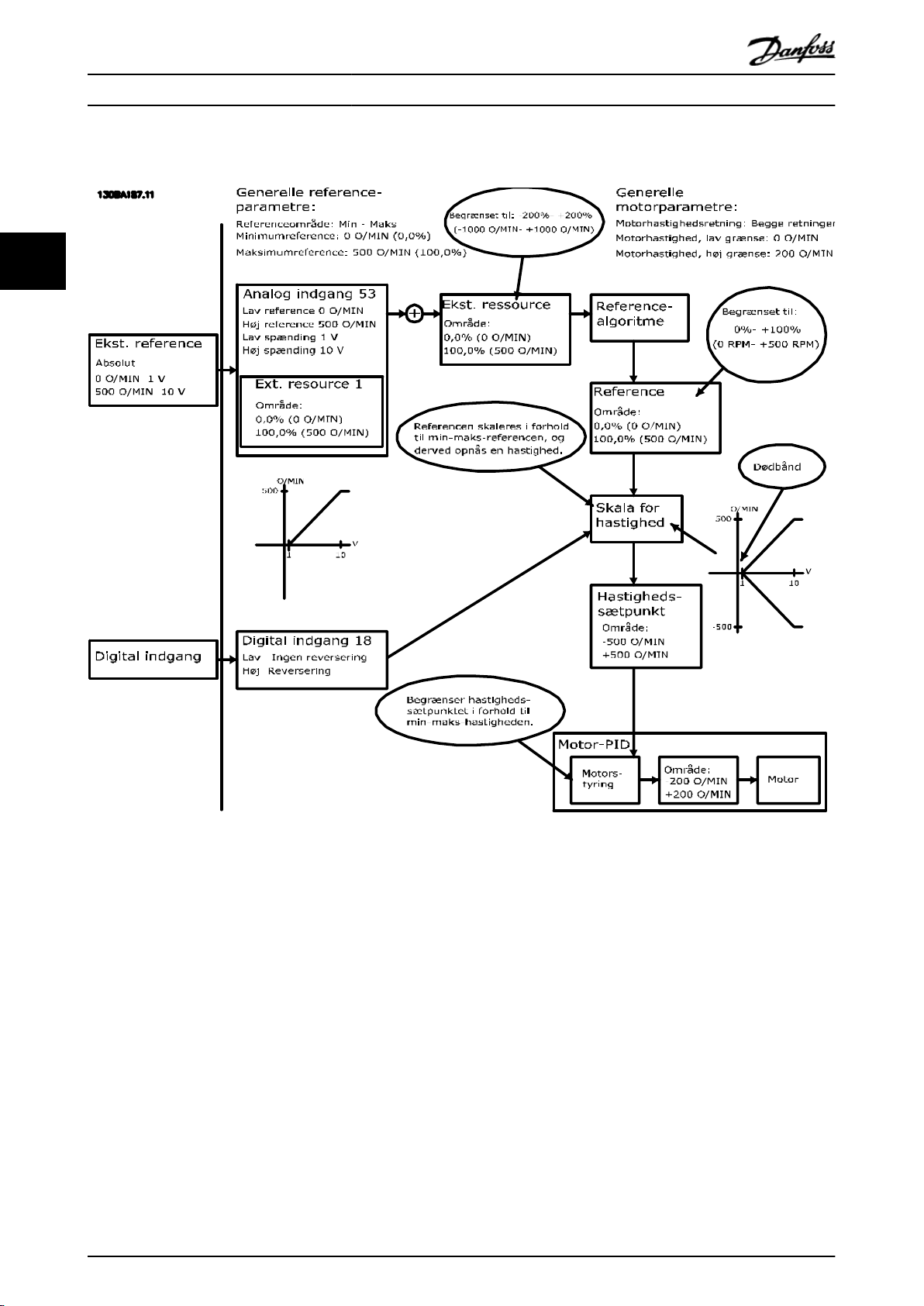
Grundlæggende driftsprincip... Design Guide
Illustration 3.21 viser, hvordan referenceindgang med grænser inden for min.- og maks.-grænserne fastfryses.
33
Illustration 3.21 Positiv reference med dødbånd, digital indgang til udløsning af reversering
34 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
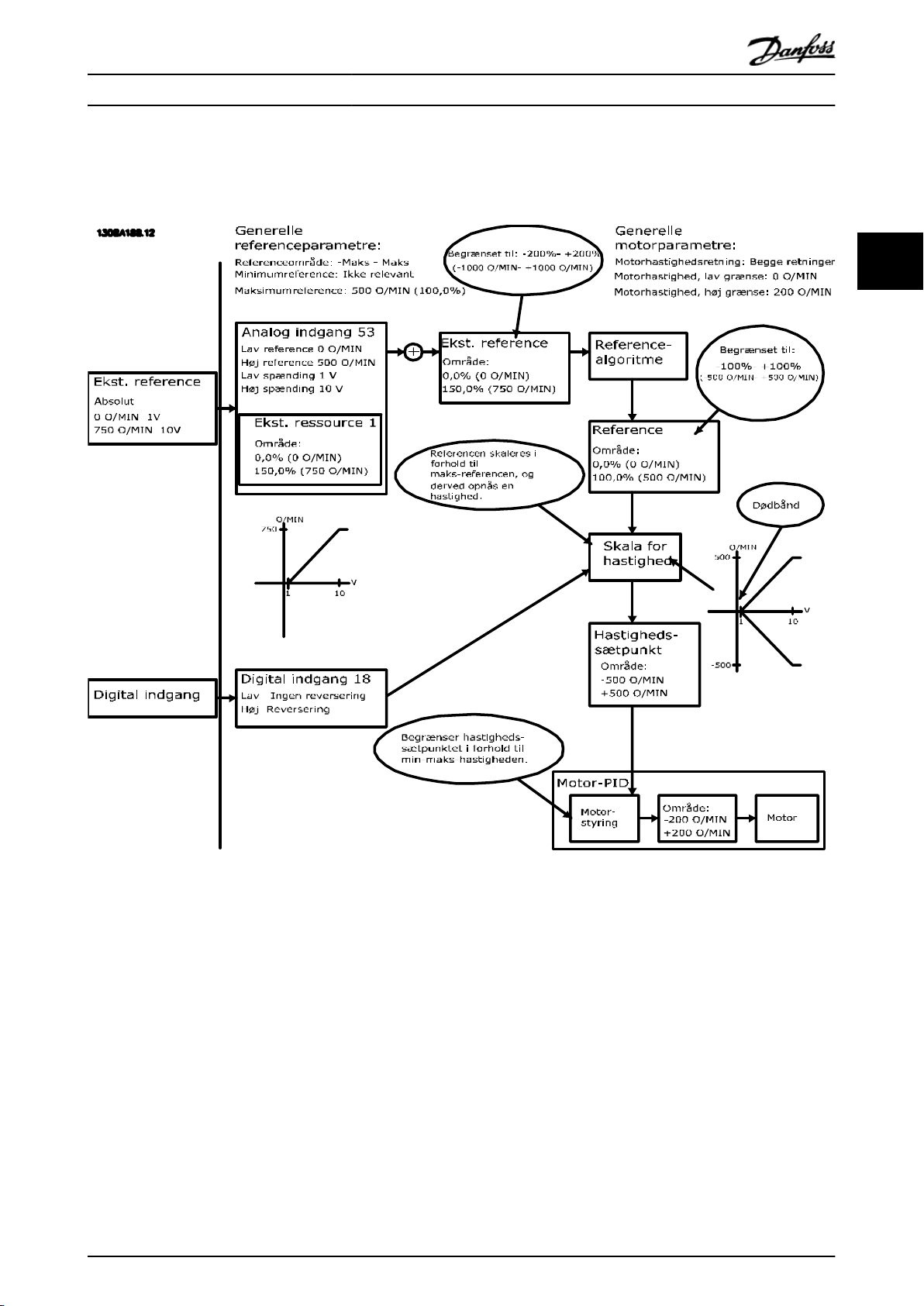
Grundlæggende driftsprincip... Design Guide
Illustration 3.22 viser, hvordan referenceindgange med grænser uden for grænserne for -maks. til +maks. fastlåses til
indgangenes lave og høje grænser, inden de føjes til den faktiske reference. Illustration 3.22 viser, hvordan den faktiske
reference fastlåses til -maks. til +maks. af referencealgoritmen.
3 3
Illustration 3.22 Positiv reference med dødbånd, digital indgang til udløsning af reversering. Fastlåsningsregler
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 35
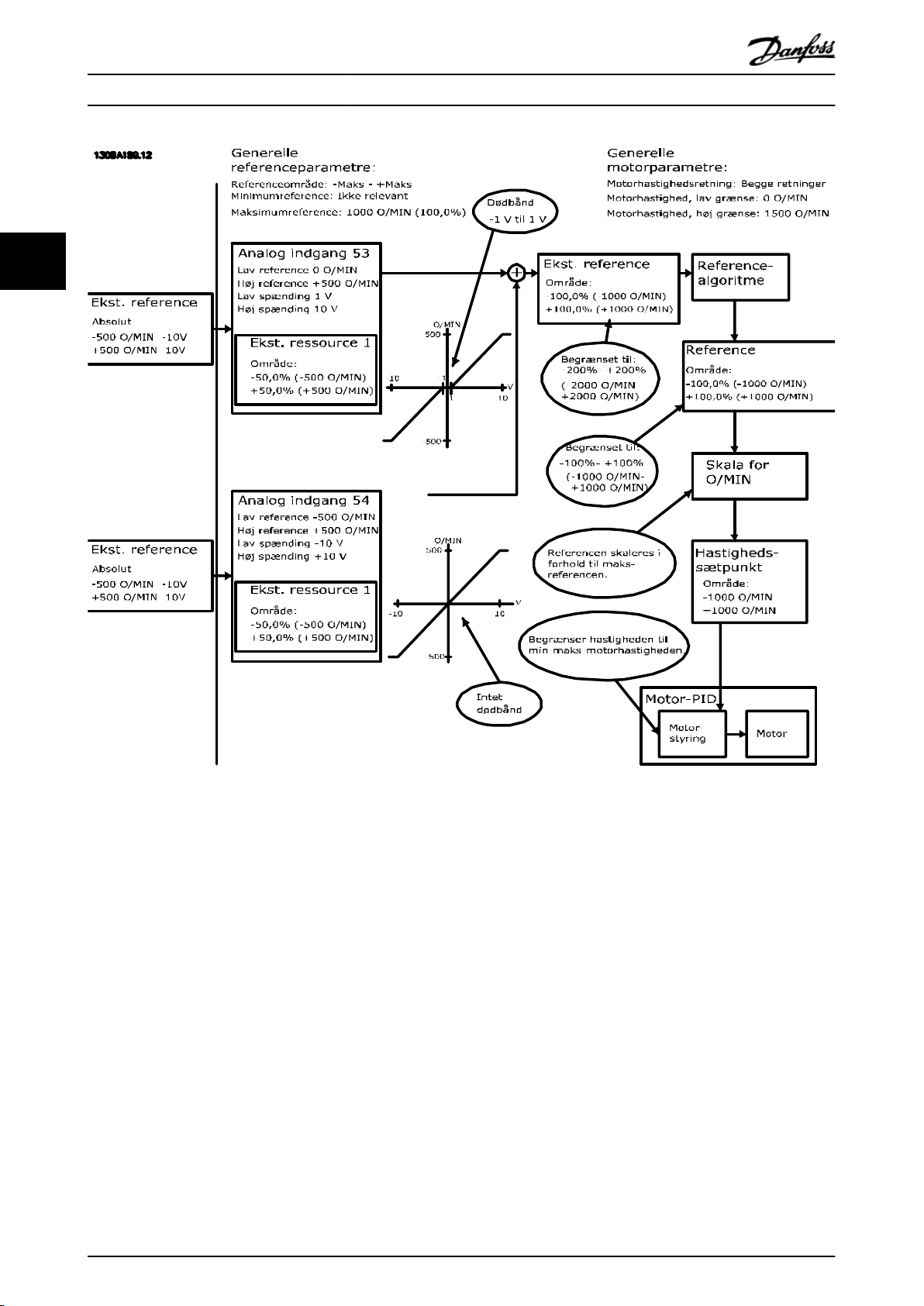
Grundlæggende driftsprincip... Design Guide
33
Illustration 3.23 Negativ til positiv reference med dødbånd, tegnet bestemmer retningen, -maks. til +maks.
36 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01

Produktfunktioner
Design Guide
4 Produktfunktioner
4.1 Automatiserede driftsfunktioner
Overspændingsbeskyttelse
4.1.2
Disse funktioner er aktive, så snart frekvensomformeren
kører. De kræver ingen programmering eller opsætning.
Forståelse for, at disse funktioner er til stede, kan optimere
et systemdesign og muligvis undgå, at der introduceres
redundante komponenter eller funktionalitet.
Frekvensomformeren har et udvalg af indbyggede beskyttelsesfunktioner til at beskytte sig selv og motoren, når
den kører.
4.1.1 Kortslutningsbeskyttelse
Motor (fase-fase)
Frekvensomformeren beskyttes mod kortslutninger på
motorsiden af strømmålinger i hver af de tre motorfaser
eller i DC-linket. En kortslutning mellem to udgangsfaser
medfører overstrøm i vekselretteren. Vekselretteren slukkes,
når kortslutningsstrømmen overstiger den tilladte værdi
(Alarm 16, Triplås).
Netforsyningsside
En frekvensomformer, der fungerer korrekt, begrænser den
strøm, der kan trækkes fra forsyningen. Det anbefales at
bruge sikringer og/eller afbrydere på forsyningssiden som
beskyttelse, hvis der skulle forekomme komponentnedbrud
inden i frekvensomformeren (første fejl).
Se kapitel 9.3 Nettilslutning for yderligere oplysninger.
BEMÆRK!
Dette er obligatorisk for at sikre overensstemmelse med
IEC 60364 til CE eller NEC 2009 til UL.
Motorgenereret overspænding
Spændingen i mellemkredsen øges, når motoren fungerer
som en generator. Dette sker i følgende tilfælde:
Belastningen driver motoren (ved konstant
•
udgangsfrekvens fra frekvensomformeren), dvs. at
belastningen genererer energi.
Under en deceleration (rampe ned) er friktionen
•
lav, hvis inertimomentet er højt, og rampe nedtiden er for kort til, at energien kan spredes som
et tab i frekvensomformeren, motoren og installationen.
En forkert indstilling af slipkompenseringen kan
•
medføre højere DC-link-spænding.
Modelektromotorisk kraft fra PM-motordrift. Ved
•
friløb ved høje O/MIN kan PM-motorens modelektromotoriske kraft måske overstige den
maksimale spændingstolerance i frekvensomformeren og forårsage skader. For at undgå dette
begrænses værdien af 4-19 Maks. udgangsfrekvens
automatisk baseret på en intern beregning, der
baseres på værdien i 1-40 Modelektromot.kraft v.
1000 O/MIN, 1-25 Nominel motorhastighed og
1-39 Motorpoler.
BEMÆRK!
For at undgå at motoren kører ved overhastighed (f.eks.
pga. meget høje"vindmølle-effekter"), skal frekvensomformeren forsynes med en bremsemodstand.
4 4
Bremsemodstand
Frekvensomformeren er beskyttet mod kortslutning i
bremsemodstanden.
Belastningsfordeling
For at beskytte DC-bussen mod kortslutning og frekvensomformerne mod overbelastning, monteres DC-sikringer i
serier med belastningsfordelingsklemmerne fra alle
tilsluttede apparater. Se kapitel 9.6.3 Belastningsfordeling for
yderligere oplysninger.
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 37
Overspændingen kan håndteres enten ved at anvende en
bremsefunktion (2-10 Bremsefunktion) og/eller overspændingsstyring (2-17 Overspændingsstyring).
Bremsefunktioner
Tilslut en bremsemodstand for udledning af overskydende
bremseenergi. Ved tilslutning af en bremsemodstand kan
en højere DC-link-spænding under bremsning tillades.
AC-bremse er et alternativ til at forbedre bremsning uden
brug af en bremsemodstand. Denne funktion styrer en
over-magnetisering af motoren ved generatorisk kørsel.
Denne funktion kan forbedre OVC. Når de elektriske tab i
motoren øges, kan OVC-funktionen øge bremsemomentet
uden at overstige overspændingsgrænsen.
Produktfunktioner Design Guide
BEMÆRK!
AC-bremsen er ikke så effektiv som dynamisk bremsning
med en modstand.
Overspændingsstyring (OVC)
OVC reducerer risikoen for, at frekvensomformeren tripper
ved en overspænding på DC-linket. Dette håndteres ved
automatisk at forlænge rampe ned-tiden.
44
BEMÆRK!
OVC kan aktiveres for PM-motorer med styringskerne PM
plus
VVC
, Flux OL og Flux CL for PM-motorer.
BEMÆRK!
OVC må ikke være aktiveret i hæve-/sænkeapplikationer.
4.1.3 Detektering af manglende motorfase
Den manglende motorfasefunktion (4-58 Manglende
motorfasefunktion) er som standard aktiveret for at undgå
motorskade, hvis der mangler en motorfase. Fabriksindstillingen er 1.000 ms, men den kan justeres, så der opnås
hurtigere detektering.
Detektering af ubalance i netfasen
4.1.4
Drift under alvorlig ubalance på netforsyningen reducerer
motorens levetid. Forholdene betragtes som alvorlige, hvis
motoren kontinuerligt kører tæt på nominel belastning.
Fabriksindstillingen tripper frekvensomformeren i tilfælde
af ubalance i netforsyningen (14-12 Funktion ved
netubalance).
Kobling på udgangen
4.1.5
Det er tilladt at tilføje kobling på udgangen mellem motor
og frekvensomformer. Der kan opstå fejlmeddelelser.
Aktivér flying start for at fange en roterende motor.
Overbelastningsbeskyttelse
4.1.6
Momentgrænse
Momentgrænsefunktionen i motoren beskytter mod
overbelastning uafhængigt af hastigheden. Momentgrænsen styres i 4-16 Momentgrænse for motordrift og/eller
4-17 Momentgrænse for generatordrift, og det tidsrum, der
går, før momentgrænseadvarslen tripper, styres i
14-25 Trip-forsinkelse ved momenegrænse.
Strømgrænse
Strømgrænsen styres i 4-18 Strømgrænse, og det tidsrum,
der går, før frekvensomformeren tripper, styres i
14-24 Tripfors. ved strømgrænse.
Hastighedsgrænse
Min. hastighedsgrænse: 4-11 Motorhastighed, lav grænse [O/
MIN] eller 4-12 Motorhastighed, lav grænse [Hz] begrænser
det funktionelle hastighedsområde til f.eks. et område
mellem 30 og 50/60 Hz.
Maks. hastighedsgrænse: 4-13 Motorhastighed, høj grænse
[O/MIN] eller 4-19 Maks. udgangsfrekvens begrænser den
maks. udgangshastighed, som frekvensomformeren kan
yde.
ETR
ETR er en elektronisk funktion, der simulerer et bimetalrelæ
på basis af interne målinger. ETR-karakteristika er vist i
Illustration 4.1.
Spændingsgrænse
Vekselretteren slukkes for at beskytte transistorerne og
kondensatorerne på mellemkredsene, når der nås et vist
indkodet spændingsniveau.
Overtemperatur
Frekvensomformeren har indbyggede temperaturfølere og
reagerer straks på kritiske værdier via indkodede grænser.
Låst rotorbeskyttelse
4.1.7
Der kan være situationer, hvor rotoren er låst på grund af
for stor belastning eller andre faktorer (leje eller
applikation skaber en situation med låst rotor). Dette
medfører overophedning af motorviklingerne (fri
bevægelse af rotoren er nødvendigt for korrekt køling).
Frekvensomformeren er i stand til at registrere en situation
med låst rotor med PM flux-styring, åben sløjfe, og PM
plus
VVC
-styring (30-22 Locked Rotor Protection).
Automatisk derating
4.1.8
Frekvensomformeren undersøger hele tiden, om der er
kritiske niveauer:
Kritisk høj temperatur på styrekortet eller
•
kølepladen
Høj motorbelastning
•
Høj DC-link-spænding
•
Lav motorhastighed
•
Som respons på et kritisk niveau kan frekvensomformeren
justere switchfrekvensen. Ved kritisk høje interne
temperaturer og lav motorhastighed kan frekvensomformeren også tvinge PWM-mønstret til SFAVM.
BEMÆRK!
Den automatiske derating er anderledes, når
14-55 Udgangsfilter er indstillet til [2] Sinusbølgefilter fast.
38 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01

Produktfunktioner
Design Guide
4.1.9 Automatisk energioptimering
Automatisk energioptimering (AEO) får frekvensomformeren til kontinuerligt at overvåge belastningen på
motoren og justere udgangsspændingen for at maksimere
virkningsgrad. Ved let belastning reduceres spændingen og
motorstrømmen minimeres. Motoren drager nytte af den
øgede virkningsgrad, reduceret opvarmning, og mere
støjsvag drift. Der er ikke behov for at vælge en V/Hzkurve, da frekvensomformeren automatisk justerer
motorspændingen.
4.1.10 Automatisk
switchfrekvensmodulering
Frekvensomformeren genererer korte elektriske pulser, så
der skabes et AC-bølgemønster. Bærefrekvensen er
hastigheden af disse pulser. En lav bærefrekvens (langsom
pulshastighed) forårsager støj i motoren, hvilket betyder, at
en højere bærefrekvens er at foretrække. En høj
bærefrekvens genererer dog varme i frekvensomformeren,
hvilket kan begrænse mængden af strøm, som er
tilgængelig for motoren. Brugen af IGBT'ere (Isolated Gate
Bipolar Transistors) indebærer kobling med særlig høj
hastighed.
Automatisk switchfrekvensmodulering regulerer disse
forhold automatisk for at opnå den højeste bærefrekvens
uden overophedning af frekvensomformeren. Når der
leveres reguleret høj bærefrekvens, dæmpes motorens
driftsstøj ved langsomme hastigheder, når styring af hørbar
støj er kritisk og medfører fuld udgangsstrøm til motoren,
når det kræves.
4.1.11
Automatisk derating for høj
bærefrekvens
Frekvensomformeren er beregnet til kontinuerlig drift ved
fuld belastning ved bærefrekvenser mellem 3,0 og 4,5 kHz.
En bærefrekvens højere end 4,5 kHz genererer øget varme
i frekvensomformeren og kræver, at udgangsstrømmen
derates.
4.1.12
Frekvensomformeren kan modstå udsving i netforsyningen,
så som transienter, forbigående udfald, korte
spændingstab og spændingsbølger. Frekvensomformeren
kompenserer automatisk for indgangsspændinger ±10 %
fra den nominelle, så der opnås fuld nominel
motorspænding og moment. Når auto-genstart er valgt,
starter frekvensomformeren automatisk op efter et
spændingstrip. Med flying start synkroniserer frekvensomformeren til motorens omdrejningsretning før start.
Effektudsving i ydeevne
4.1.13 Resonansdæmpning
Højfrekvent resonansstøj i motoren kan elimineres ved
hjælp af resonansdæmpning. Det er muligt at vælge
frekvensdæmpning automatisk eller manuelt.
4.1.14
De interne køleventilatorer er temperaturstyrede af følere i
frekvensomformeren. En køleventilator kører ofte ikke
under drift med lav belastning, eller når den er i sleep
mode eller standby-tilstand. Dette reducerer støj, øger
virkningsgraden og forlænger ventilatorens driftslevetid.
4.1.15
Elektromagnetisk forstyrrelse (EMI) eller radiofrekvensforstyrrelse (RFI, i tilfælde af radiofrekvens) er forstyrrelser,
som kan påvirke et elektrisk kredsløb pga. elektromagnetisk induktion eller stråling fra en ekstern kilde.
Frekvensomformeren er konstrueret til at overholde EMCproduktstandarden for frekvensomformere IEC 61800-3
såvel som europæisk standard EN 55011. For at overholde
emissionsniveauerne i EN 55011 skal motorkablet være
skærmet og korrekt afsluttet. For flere oplysninger om
EMC-ydeevne se kapitel 5.2.1 EMC-testresultater.
4.1.16
Temperaturkontrollerede ventilatorer
EMC-overensstemmelse
Galvanisk adskillelse af styreklemmer
4 4
En automatisk funktion i frekvensomformeren er styring af
belastningsafhængig bærefrekvens. Denne funktion tillader,
at motoren drager nytte af så høj en bærefrekvens, som
belastningen tillader.
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 39
Alle styreklemmer og udgangsrelæklemmer er galvanisk
adskilt fra netforsyningen. Dette betyder, at styreenhedens
kredsløb er helt beskyttet mod indgangsstrøm. Udgangsrelæklemmerne kræver deres egen jording. Denne adskillelse
overholder de strenge beskyttende krav for ekstra lav
spænding (PELV) til isolering.
De komponenter, der udgør den galvaniske adskillelse, er
Strømforsyning, inkl. signalisolering.
•
Gate drive, som kører IGBT'erne (triggertrans-
•
formere/optokoblere).
Udgangsstrømmen, Hall-effekt transducere.
•

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2000
500
200
400
300
1000
600
t [s]
175ZA052.11
fUD = 0,2 x f M,N
fUD = 2 x f M,N
fUD = 1 x f M,N
IMN
IM
Produktfunktioner
Design Guide
4.2 Tilpassede applikationsfunktioner
Disse er de mest almindelige funktioner programmeret til
brug i frekvensomformeren for at opnå bedre systemydelse. De kræver kun mindre programmering eller
opsætning. Forståelse for, at disse funktioner er tilgængelige, kan optimere et systemdesign og muligvis undgå,
at der introduceres redundante komponenter eller funktionalitet. Se den produktrelevante Programming Guide, der
44
indeholder instruktioner om, hvordan disse funktioner
aktiveres.
4.2.1 Automatisk motortilpasning
Automatisk motortilpasning (AMA) er en testprocedure, der
anvendes til at måle motorens elektriske karakteristik. AMA
giver en nøjagtig elektronisk model af motoren. Det giver
frekvensomformeren mulighed for at beregne optimal
ydeevne og virkningsgrad med motoren. Kørsel af AMAproceduren maksimerer også frekvensomformerens
automatiske energioptimeringsfunktion. AMA udføres,
uden at motoren roterer, og uden at belastningen fra
motoren frakobles.
Termisk motorbeskyttelse
4.2.2
Termisk motorbeskyttelse kan opnås på tre måder:
Via direkte temperaturføling, via én af følgende
•
PTC- eller KTY-føler i motorviklingerne
-
og forbundet på en standard AI eller DI
PT100 eller PT1000 i motorviklingerne
-
og motorlejer, tilsluttet på følerindgangskort MCB 114
PTC-termistorindgang på PTC-termis-
-
torkort MCB 112 (ATEX godkendt)
Mekanisk termisk kontakt (Klixon-type) på en DI
•
Via det indbyggede elektroniske termorelæ (ETR).
•
ETR beregner motortemperaturen ved at måle strøm,
frekvens og driftstid. Frekvensomformeren viser den
termiske belastning på motoren i procent og kan afgive en
advarsel ved et programmerbart overbelastningssætpunkt.
Programmerbare optioner ved overbelastningen gør det
muligt for frekvensomformeren at stoppe motoren,
reducere udgangsstrømmen, eller ignorere tilstanden. Selv
ved lave hastigheder overholder frekvensomformeren
standarder beskrevet i I2t Class 20 vedrørende elektronisk
overbelastning af motor.
40 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
Illustration 4.1 ETR-karakteristika
X-aksen viser forholdet mellem I
Y-aksen viser tidsrummet i sekunder, inden ETR kobler ud
og tripper frekvensomformeren. Kurverne viser den
karakteristiske nominelle hastighed ved den dobbelte
nominelle hastighed og ved 0,2 x den nominelle
hastighed.
Ved lavere hastighed kobler ETR ud ved en lavere
temperatur på grund af mindre køling af motoren. Dette
forhindrer, at motoren overophedes selv ved lave
hastigheder. Funktionen ETR beregner motortemperaturen
på basis af den faktiske strøm og hastighed. Den
udregnede temperatur kan ses som en udlæsningsparameter i 16-18 Termisk motorbelastning.
En særlig version af ETR er også tilgængelig for EX-e
motorer i ATEX-områder. Denne funktion gør det muligt at
indtaste en specifik kurve til beskyttelse af EX-e motoren.
Programming Guide fører brugeren igennem opsætningen.
Netudfald
4.2.3
I tilfælde af netudfald fortsætter frekvensomformeren, indtil
mellemkredsspændingen kommer ned under mindste
stopniveau, hvilket typisk er 15 % under frekvensomformerens laveste nominelle forsyningsspænding.
Netspændingen før afbrydelsen bestemmer sammen med
motorbelastningen, hvor længe der skal gå, før frekvensomformeren friløber.
Frekvensomformeren kan konfigureres (14-10 Netfejl) til
forskellige typer adfærd under netudfald, f.eks.
Triplås når DC-link er brugt.
•
Friløb med flying start, når netforsyningen vender
•
tilbage (1-73 Indkobling på roterende motor).
Kinetisk backup.
•
Kontrolleret nedrampning.
•
motor
og I
motor
nominel.

Produktfunktioner
Design Guide
Flying start
Dette valg gør det muligt at fange en motor, som roterer
frit som følge af netudfald. Denne option er meget
relevant for centrifuger og ventilatorer.
Kinetisk backup
Dette valg sikrer, at frekvensomformeren kører, så længe
der er energi i systemet. Ved korte netudfald gendannes
driften, når netforsyningen vender tilbage, uden at applikationen bringes til et stop eller styringen mistes på noget
tidspunkt. Flere udgaver af kinetisk backup kan vælges.
Frekvensomformerens adfærd ved netudfald kan
konfigureres i 14-10 Netfejl og 1-73 Indkobling på roterende
motor.
Indbygget PID-styreenhed
4.2.4
Den indbyggede proportionelle, integrerede, afledte (PID)
styreenhed er tilgængelig, hvormed behovet for ekstra
styringsapparater fjernes. PID-styreenheden opretholder
konstant styring af systemer med lukket sløjfe, hvor
reguleret tryk, flow, temperatur andre systemkrav skal
opretholdes. Frekvensomformeren kan yde uafhængig
styring af motorhastighed som reaktion på feedbacksignaler fra fjernbetjente følere.
Frekvensomformeren har plads til to feedbacksignaler fra
to forskellige apparater. Denne funktion giver mulighed for
at regulere et system med forskellige feedbackkrav.
Frekvensomformeren træffer styringsbeslutninger ved at
sammenligne de to signaler, så systemydeevnen optimeres.
4.2.7
Fuldt moment ved reduceret
hastighed
Frekvensomformeren følger en variabel V/Hz-kurve for at
kunne give fuld motormoment selv ved reducerede
hastigheder. Fuld udgangsmoment kan falde sammen med
den maksimalt designede driftshastighed af motoren. Dette
er forskelligt fra omformere med variabelt moment, der
giver reduceret motormoment ved lav hastighed, eller
omformere med konstant moment, der giver overskydende
spænding, varme og motorstøj ved mindre end fuld
hastighed.
Frekvens-bypass
4.2.8
I nogle applikationer kan systemet have driftshastigheder,
der skaber mekanisk resonans. Dette kan generere for
meget støj og muligvis skade mekaniske komponenter i
systemet. Frekvensomformeren har fire programmerbare
bypass-frekvens-båndbredder. Disse tillader, at motoren går
over hastigheder, der forårsager systemresonans.
Motorforvarmer
4.2.9
For at forvarme en motor i kolde eller våde miljøer kan en
lille mængde jævnstrøm sive kontinuerligt ind i motoren
for at beskytte den mod kondensdannelse og kold start.
Dette kan fjerne behovet for en rumopvarmer.
4.2.10
Fire programmerbare opsætninger
4 4
Automatisk genstart
4.2.5
Frekvensomformeren kan programmeres til automatisk at
genstart motoren efter en mindre trip, som f.eks. aktuelle
effekttab eller udsving. Denne funktion fjerner behovet for
manuel nulstilling og øger automatiseret drift af fjernbetjente styrede systemer. Antallet af genstartsforsøg samt
varigheden mellem dem kan begrænses.
Flying start
4.2.6
Flying start giver frekvensomformeren mulighed for at
synkronisere med en kørende motor, der roterer ved op til
fuld hastighed i enhver retning. Dette forhindrer trip på
grund af overstrømstræk. Det minimerer mekanisk stres på
systemet, da motoren ikke modtager pludselige ændringer
i hastighed, når frekvensomformeren starter.
Frekvensomformeren har fire opsætninger, som kan
programmeres individuelt. Med multiopsætning er det
muligt at skifte mellem individuelt programmerede
funktioner, der aktiveres af digitale indgange eller en seriel
kommando. Individuelle opsætninger bruges f.eks. til at
ændre referencer, eller til dag-/nat- eller sommer-/
vinterdrift, eller til at styre flere motorer. Aktivt setup vises
i LCP'et.
Opsætningsdata kan kopieres fra frekvensomformer til
frekvensomformer via download af oplysningerne fra det
aftagelige LCP.
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 41

Produktfunktioner Design Guide
4.2.11 Dynamisk bremsning
Dynamisk bremse etableres ved:
Modstandsbremse
•
En bremse-IGBT holder overspændingen under en vis grænse ved at dirigere bremseenergien fra motoren til den
tilsluttede bremsemodstand (2-10 Bremsefunktion = [1]).
AC-bremse
•
Bremseenergien distribueres i motoren ved at ændre betingelserne for tab i motoren. AC-bremsefunktionen kan
44
ikke bruges i applikationer med høj slutte- og brydefrekvens, da dette overopheder motoren (2-10 Bremsefunktion
= [2]).
DC-bremse
•
En overmoduleret DC-strøm, der tilføres AC-strømmen, fungerer som en hvirvelstrømsbremse (2-02 DC-bremseholdetid ≠ 0 sek).
4.2.12
Parametre til styring af driften af en elektromagnetisk (mekanisk) bremse. Dette kræves typisk i hæve-/sænkeapplikationer.
For at styre en mekanisk bremse er det nødvendigt med en relæudgang (relæ 01 eller relæ 02) eller en programmeret
digital udgang (klemme 27 eller 29). Denne udgang skal som regel være lukket i perioder, hvor frekvensomformeren ikke
kan "holde" motoren, f.eks. pga. en for stor belastning. I 5-40 Funktionsrelæ, 5-30 Klemme 27, digital udgang eller 5-31 Klemme
29, digital udgang vælges [32] Mekanisk bremsestyring for applikationer med en elektromagnetisk bremse. Når [32] Mekanisk
bremsestyring vælges, er den mekaniske bremse lukket fra start, og indtil udgangsstrømmen er over det niveau, der er valgt
i 2-20 Bremsefrigørelsesstrøm. Under en standsning aktiveres den mekanisk bremse, når hastigheden er under det niveau, der
er angivet i 2-21 Bremseaktiveringshast. [O/MIN]. Hvis frekvensomformeren går i alarmtilstand, en overstrømssituation eller en
overspændingssituation, indkobler den mekaniske bremse øjeblikkeligt. Dette er også tilfældet i forbindelse med Safe
Torque Off.
Mekanisk bremsestyring, åben sløjfe
BEMÆRK!
Beskyttelsestilstands- og tripforsinkelsesfunktioner (14-25 Trip-forsinkelse ved momenegrænse og 14-26 Tripforsinkelse ved
vekselretterfejl) kan forsinke aktiveringen af den mekaniske bremse i en alarmtilstand. Disse funktioner skal deaktiveres i
hæve-/sænkeapplikationer.
Illustration 4.2 Mekanisk bremse
42 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01

Mek.Bremse
ForstærkningBoost
Relæ
Momentref.
MotorHastighed
Formagnet.
Momentrampe
Tid
p. 2-27
Momentref. 2-26
Boost-faktorfors.
p. 2-28
Bremse
Frigivelse
Tid
p. 2-25
Rampe 1 opp. 3-41 Rampe 1 nedp. 3-42 Stop
Forsinkelse
p. 2-24
Aktiver
Bremse
Forsinkelse
p. 2-23
1 2 3
130BA642.12
II
I
Produktfunktioner
Design Guide
4.2.13 Mekanisk bremsestyring, lukket sløjfe / mekanisk hæve-/sænkebremse
Den mekaniske hæve-/sænkebremsestyring understøtter følgende funktioner:
To kanaler til mekanisk bremsefeedback for yderligere beskyttelse mod utilsigtet adfærd som følge af et ødelagt
•
kabel.
Overvågning af mekanisk bremsefeedback under den komplette cyklus. Dette hjælper med til at beskytte den
•
mekaniske bremse - især hvis flere frekvensomformere er forbundet til den samme aksel.
Ingen rampe op før feedback bekræfter, at den mekaniske bremse er åben.
•
Forbedret belastningsstyring ved stop. Hvis 2-23 Bremseaktiveringsforsinkelse er indstillet for kort, aktiveres W22, og
•
momentet får ikke lov til at rampe ned.
Overgangen, hvor motoren overtager belastningen fra bremsen, kan konfigureres. 2-28 Boost-faktorforst. kan øges
•
for at minimere bevægelse. Ønskes en meget jævn overgang, ændres indstillingen fra hastighedsstyring til positionsstyring under overgangen.
Indstil 2-28 Boost-faktorforst. til 0 for at aktivere positionsstyring under 2-25 Bremsefrigørelsestid. Dette
•
aktiverer parametrene 2-30 Position P Start Proportional Gain til 2-33 Speed PID Start Lowpass Filter Time,
som er PID-parametre til positionsstyring.
4 4
Illustration 4.3 Bremsefrigørelsessekvens for den mekaniske hæve-/sænkebremsestyring. Denne bremsestyring er kun tilgængelig i
FLUX med motorfeedback og tilgængelig for asynkrone og ikke-udprægede PM-motorer.
2-26 Moment-reference til 2-33 Speed PID Start Lowpass Filter Time er kun tilgængelige for den mekaniske hæve-/sænkebremsestyring (FLUX med motorfeedback). 2-30 Position P Start Proportional Gain to 2-33 Speed PID Start Lowpass Filter Time kan
indstilles til meget jævn overgang fra hastighedsstyring til positionsstyring under 2-25 Bremsefrigørelsestid - tiden fra belastningen overføres fra den mekaniske bremse til frekvensomformeren.
2-30 Position P Start Proportional Gain til 2-33 Speed PID Start Lowpass Filter Time er aktiverede, når 2-28 Boost-faktorforst. er
indstillet til 0. Se Illustration 4.3 for yderligere oplysninger.
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 43

. . .
. . .
Par. 13-11
Comparator Operator
Par. 13-43
Logic Rule Operator 2
Par. 13-51
SL Controller Event
Par. 13-52
SL Controller Action
130BB671.13
Coast
Start timer
Set Do X low
Select set-up 2
. . .
Running
Warning
Torque limit
Digital input X 30/2
. . .
=
TRUE longer than..
. . .
. . .
Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
Produktfunktioner Design Guide
BEMÆRK!
Se kapitel 10 Applikationseksempler for et eksempel på
avanceret mekanisk bremsestyring til hæve-/sænkeapplikationer.
Når den sidste
sekvensen begynde forfra fra hændelse [0]/handling [0].
Illustration 4.5 viser et eksempel med fire hændelser/
handlinger:
hændelse/handling er blevet afviklet, vil
4.2.14 Smart Logic Control (SLC)
Smart Logic Control (SLC) er en sekvens af brugerdefi-
44
nerede handlinger (se 13-52 SL styreenh.-handling [x]), som
afvikles af SLC, når den tilknyttede brugerdefinerede
hændelse (se 13-51 SL styreenhed.-hændelse [x]) evalueres
som SAND af SLC.
Betingelsen for en hændelse kan være en særlig status,
eller at resultatet af en logisk regel eller en sammenligneroperand bliver SAND. Dette medfører en tilknyttet
handling som vist i Illustration 4.4.
Illustration 4.5 Udførelsens rækkefølge, når fire hændelser/
handlinger programmeres
Sammenlignere
Sammenlignere bruges til sammenligning af kontinuerlige
variabler (dvs. udgangsfrekvens, udgangsstrøm, analog
indgang osv.) med faste preset-værdier.
Illustration 4.6 Sammenlignere
Logiske regler
Kombinerer op til tre booleske indgange (SAND-/FALSK-
Illustration 4.4 SCL hændelse og handling
indgange) fra timere, sammenlignere, digitale indgange,
status-bits og hændelser ved hjælp af de logiske
operatører OG, ELLER og IKKE.
Hver handling og hændelse nummereres og
sammenkædes i par (tilstande). Dette betyder, at når
hændelse [0] opfyldes (opnår værdien SAND), udføres
handling [0]. Derefter vil betingelserne for hændelse [1]
blive evalueret, og hvis de evalueres som SANDE, vil
handling [1] blive udført osv. Der evalueres kun én
hændelse ad gangen. Hvis en hændelse evalueres som
FALSK, sker der ingenting (i SLC) i løbet af det aktuelle
scanningsinterval, og der evalueres ingen andre hændelser.
Dette betyder, at SLC ved start evaluerer hændelse [0] (og
Illustration 4.7 Logiske regler
kun hændelse [0]) ved hvert scanningsinterval. Først når
hændelse [0] evalueres som SAND, udfører SLC handling [0]
og påbegynder evalueringen af hændelse [1]. Der kan
programmeres 1 til 20 hændelser og handlinger.
44 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01

130BB890.14
P1 P2 P3
Produktfunktioner
Design Guide
4.2.15 Safe Torque Off
For oplysninger om Safe Torque Off, se VLT® FC Series Safe
Torque Off betjeningsvejledning.
4.3
Danfoss VLT® FlexConcept
Danfoss VLT® FlexConcept® er en energibesparende,
fleksibel og omkostningseffektiv frekvensomformerløsning,
hovedsagligt til transportbånd. Konceptet består af VLT
OneGearDrive® drevet af VLT® AutomationDrive FC 302
eller VLT® Decentral Drive FCD 302.
OneGearDrive er grundlæggende en permanent
magnetmotor med et konisk gear. Det koniske gear kan
leveres med forskellige gearudvekslingsforhold.
®
®
4 4
Illustration 4.8 OneGearDrive
OneGearDrive kan drives af VLT® AutomationDrive FC 302
og VLT® Decentral Drive FCD 302 i følgende effektstør-
relser afhængigt af behovene i den faktiske applikation:
0,75 kW
•
1,1 kW
•
1,5 kW
•
2,2 kW
•
3,0 kW
•
Når [1] PM, ikke-udpræg. SPM er valgt i i enten FC 302 eller
FCD 302, kan OneGearDrive vælges i 1-11 Motorproducent,
og de anbefalede parametre indstilles automatisk.
®
For yderligere oplysninger, se VLT
301/FC 302 Programming Guide, VLT® OneGearDrive
Selection Guide, og www.danfoss.com/BusinessAreas/DrivesSolutions/VLTFlexConcept/
AutomationDrive FC
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 45
Systemintegration
5 Systemintegration
5.1 Omgivende driftsforhold
Design Guide
5.1.3
Temperatur og køling
5.1.1 Luftfugtighed
Selv om frekvensomformeren kan fungere korrekt ved høj
luftfugtighed (op til 95 % relativ luftfugtighed), skal
kondensdannelse altid undgås. Der er særlig stor risiko for
kondensdannelse, når frekvensomformeren er koldere end
55
fugtig omgivelsesluft. Fugten i luften kan også kondensere
på de elektroniske komponenter og forårsage kortslutninger. Kondensdannelse opstår ved apparater uden effekt.
Det er tilrådeligt at installere en kabinetvarmer, hvor der er
mulighed for kondensdannelse pga. omgivelsesforholdene.
Undgå montering i områder, som udsættes for frost.
Alternativt kan drift af frekvensomformeren i standbytilstand (med apparatet tilsluttet netforsyningen) reducere
risikoen for kondensdannelse. Sørg dog for, at effekttabet
er tilstrækkeligt til at holde frekvensomformerens kredsløb
fri for fugt.
Temperatur
5.1.2
Grænseværdierne for maksimum og minimum omgivelsestemperatur er angivet for alle frekvensomformere. Hvis
ekstreme omgivelsestemperaturer undgås, forlænges
udstyrets levetid, og hele systemets pålidelighed
optimeres. Følg anbefalingerne anført for maksimum
ydeevne og udstyrets levetid.
Selvom omformere kan fungere ved temperaturer
•
ned til -10 °C, garanteres korrekt drift ved
nominel belastning kun ved temperaturer på 0 °C
eller mere.
Maksimumgrænsen for temperatur må ikke
•
overstiges.
Levetiden for elektroniske komponenter falder
•
med 50 % for hver 10 °C, når den benyttes over
den temperatur, som den er beregnet til.
Selv apparater i beskyttelsesklasserne IP54, IP55
•
eller IP66 skal bruges inden for de angivne
omgivelsestemperaturer.
Yderligere luftkonditionering af kabinet eller
•
monteringssted kan være nødvendig.
Frekvensomformerne har indbyggede ventilatorer, der
sikrer optimal køling. Hovedventilatoren tvinger
luftstrømmen langs kølefinnerne på kølepladen, hvilket
sikrer en køling af den interne luft. Nogle effektstørrelser
har en lille sekundær ventilator tæt på styrekortet, hvilket
sikrer, at den interne luft cirkuleres, således at varme
områder undgås. Hovedventilatoren styres af frekvensomformerens interne temperatur, og hastigheden øges
gradvist med temperaturen, hvilket reducerer støj og
energiforbrug når, behovet er minimalt, og sikrer derved
maksimal køling efter behov. Ventilatorstyring kan tilpasses
via 14-52 Ventilatorstyring, for at imødekomme enhver
applikation, og for at beskytte mod negative effekter af
køling i meget kolde klimaer. I tilfælde af overtemperatur i
frekvensomformeren, derater den switchfrekvensen og –
mønster. Se kapitel 5.1.4 Manuel derating for yderligere
oplysninger.
Grænseværdierne for maksimum og minimum omgivelsestemperatur er angivet for alle frekvensomformere. Hvis
ekstreme omgivelsestemperaturer undgås, forlænges
udstyres levetid, og hele systemets pålidelighed optimeres.
Følg anbefalingerne anført for maksimum ydeevne og
udstyrets levetid.
Selvom frekvensomformere kan fungere ved
•
temperaturer ned til -10 °C, garanteres korrekt
drift ved nominel belastning kun ved
temperaturer på 0 °C eller mere.
Maksimumgrænsen for temperatur må ikke
•
overstiges.
Den maksimale gennemsnitlige 24-timers
•
temperatur må ikke overstiges.
(Den 24-timers gennemsnitlige temperatur er den
maksimale omgivelsestemperatur minus 5 °C.
Eksempel: maks. temperatur er 50°C, maksimal
24-timers gns. temperatur er 45 °C).
Overhold de højeste og laveste minimumskrav til
•
mindsteafstande (kapitel 8.2.1.1 Mindsteafstand).
Som tommelfingerregel aftager de elektroniske
•
komponenters levetid med 50 % for hver 10 °C,
når den anvendes over den beregnede
temperatur.
Selv apparater i høje beskyttelsesklasser skal følge
•
de angivne omgivelsestemperaturer.
Yderligere luftkonditionering af kabinet eller
•
monteringssted kan være nødvendig.
46 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
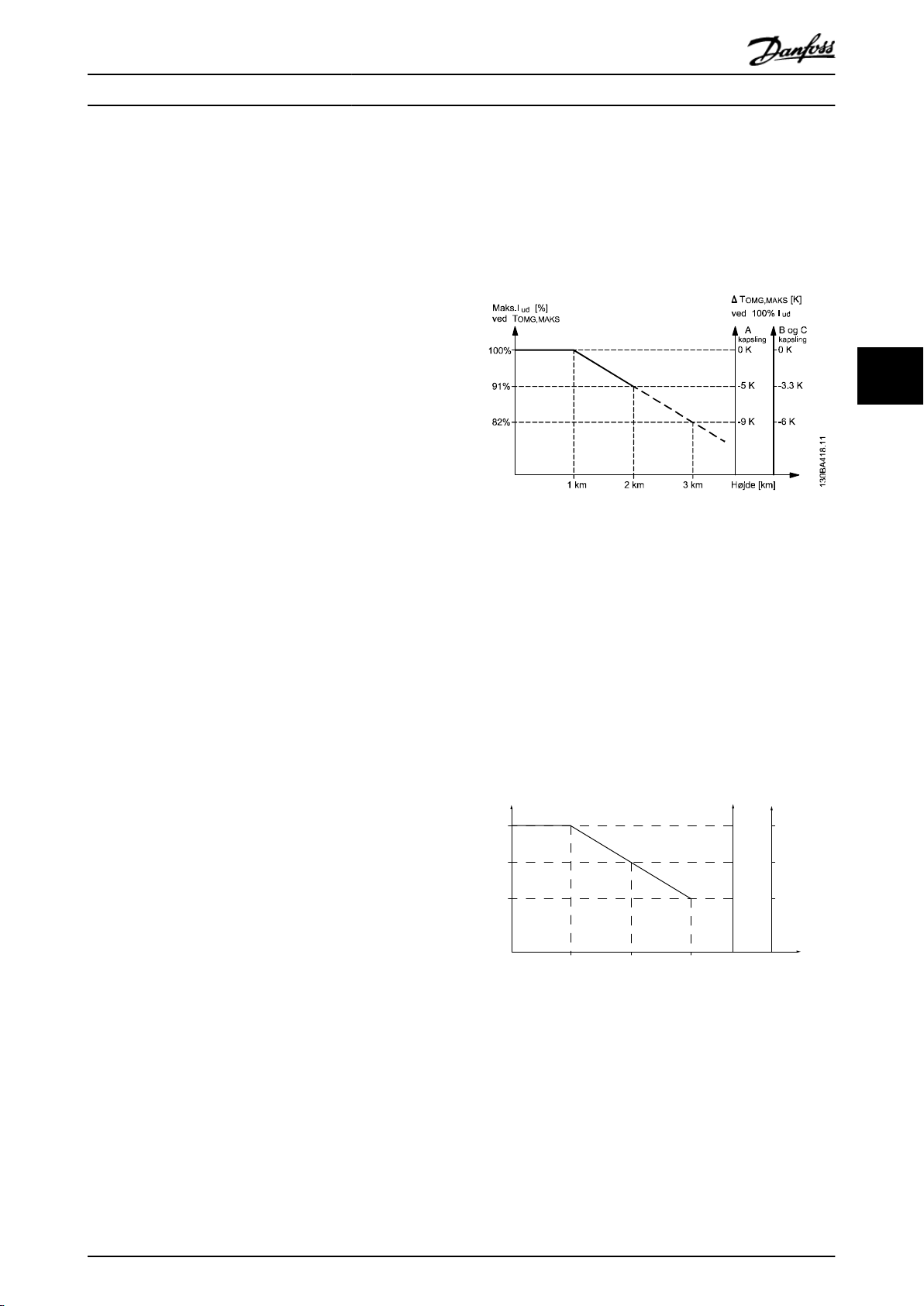
Max.I
out
(%)
at T
AMB, MAX
D, E and F enclosures
Altitude (km)
HO
NO
T
at 100% I
out
100%
96%
92%
0 K
-3 K
-6 K
1 km 2 k m 3 k m
-5 K
-8 K
-11 K
130BC015.10
AMB, MAX
Systemintegration Design Guide
5.1.4 Manuel derating
Derating bør overvejes, når en hvilken som helst af
følgende tilstande er til stede.
Drift over 1.000 m (lavt lufttryk)
•
Drift med lav hastighed
•
Lange motorkabler
•
Kabler med stort kabeltværsnit
•
Høj omgivelsestemperatur
•
Yderligere oplysninger findes i kapitel 6.2.6 Derating for
omgivelsestemperatur.
5.1.4.1
Derating for kørsel ved lav
hastighed
Når en motor er tilsluttet en frekvensomformer, er det
nødvendigt at kontrollere, at der er tilstrækkelig køling til
motoren.
Varmeniveauet afhænger af belastningen på motoren samt
af driftshastighed og -tid.
Applikationer med konstant moment (CT-tilstand)
Der kan opstå et problem ved lave O/MIN-værdier i
applikationer med konstant moment. I en applikation med
konstant moment kan en motor blive overophedet ved
lave hastigheder pga. mindre køleluft fra motorens
indbyggede ventilator.
Hvis motoren kører kontinuerligt ved en O/MIN-værdi, der
er lavere end halvdelen af den nominelle værdi, skal den
derfor forsynes med ekstra luftkøling (eller der kan
anvendes en motor, der er bygget til denne type drift).
Alternativt kan motorens belastningsniveau reduceres ved
at vælge en større motor. Konstruktionen af frekvensomformeren begrænser imidlertid motorstørrelsen.
Applikationer med variabelt (kvadratisk) moment (VT)
I VT-applikationer som centrifugalpumper og ventilatorer,
hvor momentet er proportionelt med anden potens af
hastigheden, og effekten er proportionel med tredje
potens af hastigheden, er der ikke behov for ekstra køling
eller derating af motoren.
5.1.4.2
Derating for lavt lufttryk
Når lufttrykket falder, mindskes luftens køleevne.
Ved højder under 1.000 m er derating ikke nødvendig,
men over 1.000 m skal omgivelsestemperaturen (T
OMG
)
eller den maksimale udgangsstrøm (Iud) derates i henhold
til Illustration 5.1.
Illustration 5.1 Derating af udgangsstrøm vs. højde ved T
for kapslingsstørrelser A, B og C. Ved højder over
MAKS
2.000 m, kontakt Danfoss vedrørende PELV.
OMG,
Alternativt kan omgivelsestemperaturen derates i store
højder, hvilket sikrer 100 % udgangsstrøm i store højder.
Som et eksempel på, hvordan grafen skal læses, uddybes
eksemplet ved 2.000 m for en kapslingstype B med T
= 50 °C. Ved en temperatur på 45 °C (T
MAKS
OMG, MAKS
OMG,
3,3 K) er 91 % af den nominelle udgangsstrøm tilgængelig.
Ved en temperatur på 41,7 °C er 100 % af den nominelle
udgangsstrøm tilgængelig.
Illustration 5.2 Derating af udgangsstrøm vs. højde ved T
for kapslingstype D3h.
MAKS
OMG,
5 5
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 47
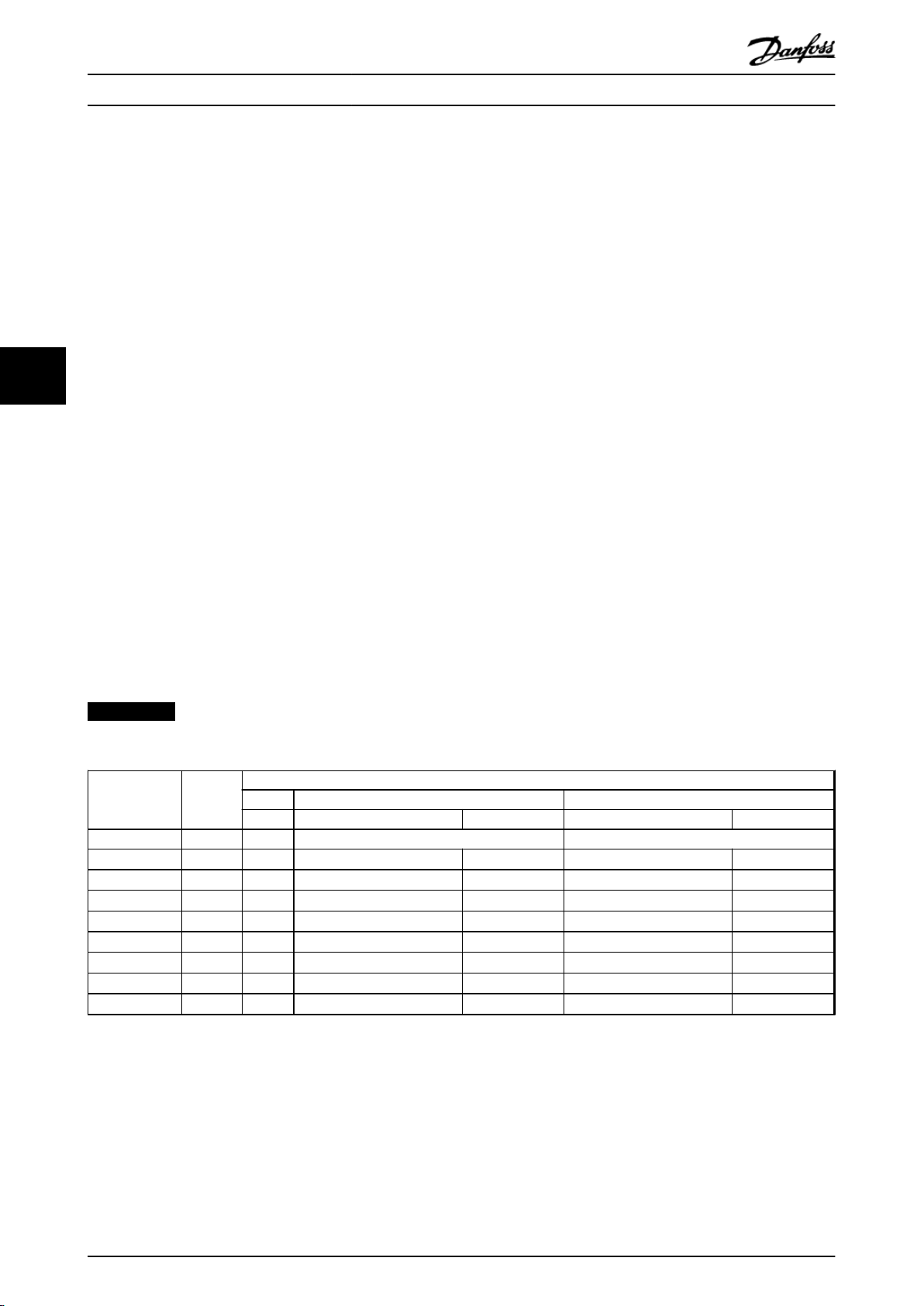
Systemintegration
Design Guide
5.1.5 Akustisk støj
Akustisk støj fra frekvensomformeren kommer fra tre kilder:
DC-link (mellemkreds) spoler
•
Drosselspole for RFI-filter
•
Interne ventilatorer
•
Se kapitel 6.2.9 Akustisk støj vedrørende klassificering af akustisk støj.
55
5.1.6 Vibrationer og rystelser
Frekvensomformeren er afprøvet i henhold til en procedure, der er baseret på IEC 68-2-6/34/35 og 36. Disse tests udsætter
apparatet for 0,7 g kræfter, over området 18 til 1.000 Hz vilkårlig, i 3 retninger i 2 timer. Alle Danfoss frekvensomformere
overholder krav, der svarer til disse forhold, når apparatet er monteret på væg eller gulv, samt ved montering i tavler, der er
boltet fast til vægge eller gulve.
Aggressive atmosfærer
5.1.7
5.1.7.1 Gasser
Aggressive gasser, som f.eks. svovlbrinte, klor eller ammoniak, kan beskadige elektriske og mekaniske komponenter i
frekvensomformeren. Forurening af køleluften kan også forårsage gradvis nedbrydning af PCB-spor og dørpakninger.
Aggressive forureningsstoffer er ofte til stede i spildevandsanlæg eller svømmehaller. Et tydeligt tegn på en aggressiv
atmosfære er korroderet kobber.
I aggressive atmosfærer anbefales det at anvende begrænsede IP-kapslinger sammen med konform-coatede printplader. Se
Tabel 5.1 for konform-coatede værdier.
BEMÆRK!
Frekvensomformeren leveres som standard med klasse 3C2-coating. Ved anmodning er 3C3-coating også tilgængelig.
Klasse
Gastype Enhed
Havsalt n/a Ingen Salttåge Salttåge
Svovloxider
Svovlbrinte
Klor
Saltsyre
Flussyre
Ammoniak
Ozon
Kvælstof
mg/m
mg/m
mg/m
mg/m
mg/m
mg/m
mg/m
mg/m
3C1 3C2 3C3
Gennemsnitlig værdi Maks. værdi Gennemsnitlig værdi Maks. værdi
3
0,1 0,3 1,0 5,0 10
3
0,01 0,1 0,5 3,0 10
3
0,01 0,1 0,03 0,3 1,0
3
0,01 0,1 0,5 1,0 5,0
3
0,003 0,01 0,03 0,1 3,0
3
0,3 1,0 3,0 10 35
3
0,01 0,05 0,1 0,1 0,3
3
0,1 0,5 1,0 3,0 9,0
Tabel 5.1 Konform-coating, klassificeringer
Maksimumværdier er værdier for forbigående stigninger, som ikke overstiger 30 minutter pr. dag.
48 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
Systemintegration
Design Guide
5.1.7.2 Støveksponering
Installation af frekvensomformere i miljøer med stor
støveksponering er ofte uundgåeligt. Støv påvirker vægeller kapslingsmonterede apparater med IP55 eller IP66
beskyttelsesklassificering, såvel som kabinetmonterede
apparater med IP21 eller IP20 beskyttelsesklassificering. De
tre aspekter, der beskrives nedenfor, skal tages med i
overvejelserne, når frekvensomformere installeres i sådanne
miljøer.
Reduceret køling
Støv danner aflejringer på overfladen af og inde i
apparatet på printplader og elektroniske komponenter.
Disse aflejringer fungerer som isolerende lag og hæmmer
varmeoverførelsen til omgivelsesluften, idet kølekapaciteten reduceres. Komponenterne bliver varmere. Dette
medfører accelereret aldring af de elektroniske
komponenter, og apparatets levetid reduceres. Støvaflejringer på kølepladen på bagsiden af apparatet reducerer
også apparatets levetid.
Køleventilatorer
Luftgennemstrømningen til køling af apparatet skabes af
køleventilatorer, som normalt er placeret på bagsiden af
apparatet. Ventilatorhjulene har små lejer, hvorigennem
støv kan trænge ind og har slibende effekt. Dette medfører
lejeskader og ventilatorfejl.
Filtre
Stærkstrømsfrekvensomformere er udstyret med køleventilatorer, som blæser varm luft ud af apparatet. Ventilatorer
over en vis størrelse er udstyret med filtermåtter. Disse
filtre kan hurtigt blive tilstoppede, når de anvendes i
meget støvede miljøer. Forebyggende forholdsregler er
nødvendige under disse forhold.
Periodisk vedligeholdelse
Under forholdene, som er beskrevet ovenfor, er det
tilrådeligt at rengøre frekvensomformeren under periodisk
vedligeholdelse. Fjern støvet fra kølepladen og ventilatorer,
og rengør filtermåtterne.
5.1.7.3
Drift af systemer i potentielt eksplosive atmosfærer skal
overholde særlige betingelser herfor. EU-direktiv 94/9/EC
beskriver drift af elektroniske apparater i potentielt
eksplosive atmosfærer.
Motorer, der styres af frekvensomformere i potentielt
eksplosive atmosfærer, skal temperaturovervåges ved hjælp
af en PTC-temperaturføler. Motorer med antændelsesbeskyttelse i klasse d eller e er godkendt til dette miljø.
Potentielt eksplosive atmosfærer
e-klassifikation består i at forhindre enhver
•
forekomst af gnistdannelse. FC 302 med
firmware-version V6.3x eller mere er udstyret med
en "ATEX ETR termisk overvågnings"-funktion til
drift af særligt godkendte Ex-e-motorer. I
kombination med et ATEX-godkendt PTCovervågningsapparat såsom PTC-termistorkort
MCB 112 kræver installationen ikke individuel
godkendelse fra en godkendende organisation,
dvs. der er ikke behov for tilpassede par.
d klassifikation består i at sikre, at en opstået
•
gnist holdes inden for et beskyttet område.
Selvom der ikke kræves godkendelse, er det
nødvendigt med særlig ledningsføring og
indeslutning.
d/e-kombination er den mest anvendes i
•
potentielt eksplosive atmosfærer. Selve motoren
har antændelsesbeskyttelsesklasse d, mens
motorens kabelføring og tilslutningsmiljø er i
overensstemmelse med e-klassificeringen. Restriktionen på tilslutningsområdet e består
maksimumspændingen, som er tilladt i dette
område. En frekvensomformers udgangsspænding
er som regel begrænset til netspændingen.
Modulering af udgangsspændingen kan generere
ikke-tilladt høj spidsspænding for e-klassifikation. I
praksis har det vist sig, at brug af sinusfiltre ved
frekvensomformerens udgang er en effektiv
metode til at dæmpe høj spidsspænding.
BEMÆRK!
Installer ikke en frekvensomformer i en potentiel
eksplosiv atmosfære. Installér frekvensomformeren i et
kabinet uden for dette område. Brug af et sinusfilter ved
udgangen på frekvensomformeren anbefales ligeledes til
at mindske dU/dt-spændingsstigningen og
spidsspænding. Hold motorkablerne så korte som muligt.
BEMÆRK!
VLT® AutomationDrive-apparater med MCB 112-option
har PTB-certificeret monitorering med motortermistorføler i potentielt eksplosive atmosfærer. Skærmede
motorkabler er ikke nødvendige ved drift af frekvensomformere med sinusudgangsfiltre.
5.1.8 Vedligeholdelse
Danfoss frekvensomformermodeller op til 90 kW er
vedligeholdelsesfri. Stærkstrømsfrekvensomformere
(110 kW-klassificeret eller mere) har indbyggede filtermåtter, som kræver periodisk rengøring af operatøren,
afhængigt af mængden af støveksponering og forureningsstoffer. Vedligeholdelsesintervaller for køleventilatorer (ca.
3 år) og kondensatorer (ca. 5 år) anbefales i de fleste
miljøer.
5 5
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 49
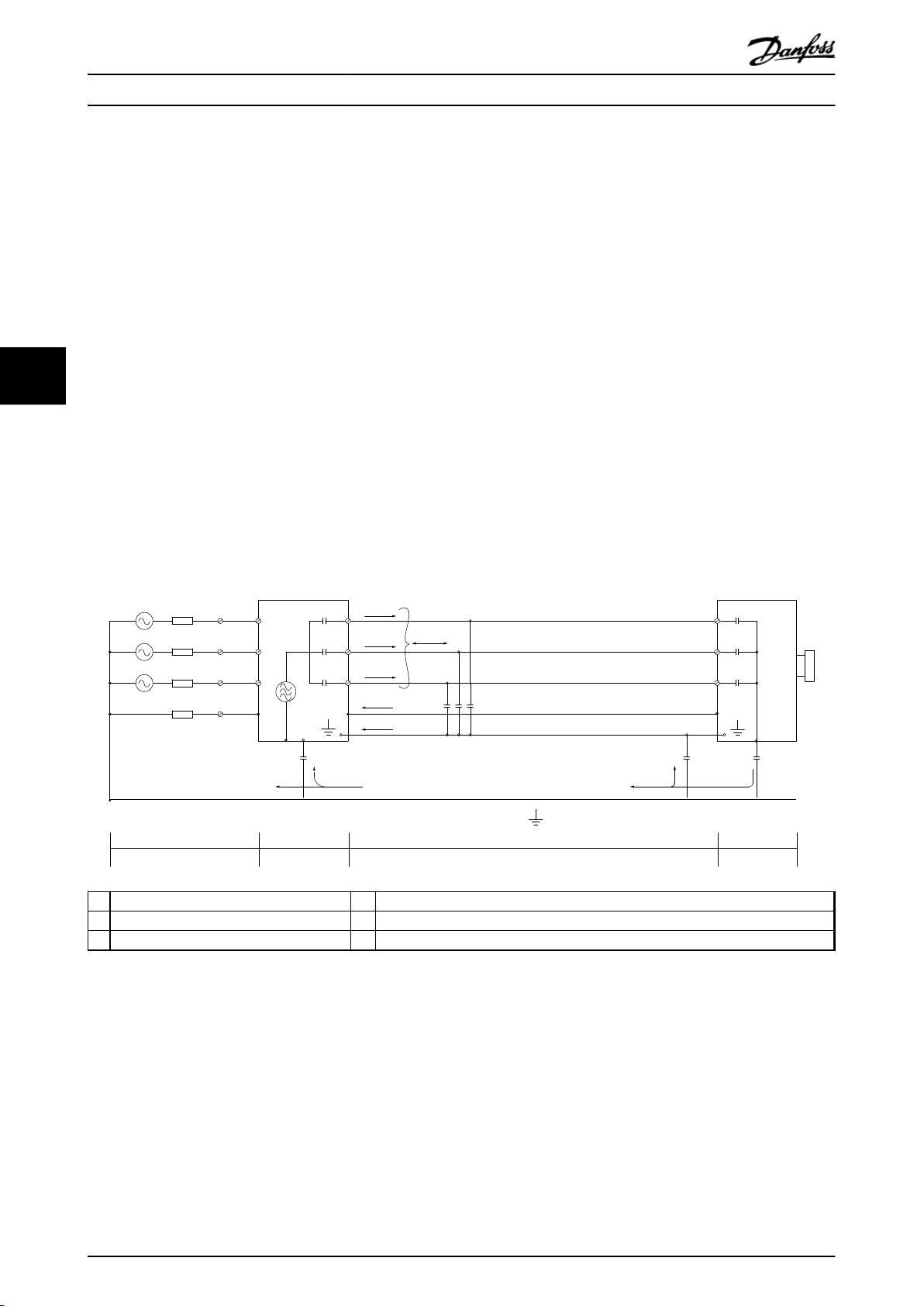
1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Systemintegration
Design Guide
5.1.9 Opbevaring
Som enhver anden form for elektronisk udstyr skal frekvensomformere opbevares tørt. Periodisk formning (kondensatoropladning) er ikke nødvendig ved opbevaring.
Det anbefales at holde udstyret forseglet i dets emballage, indtil installation finder sted.
5.2 Generelle forhold vedrørende EMC
Elektriske forstyrrelser i frekvensområdet 150 kHz til 30 MHz er normalt kabelbårne. Luftbårne forstyrrelser fra frekvensomformersystemet i området 30 MHz til 1 GHz genereres af vekselretteren, motorkablet og motoren.
Som vist i Illustration 5.3 vil kapacitans i motorkablet sammen med høj dU/dt fra motorspændingen generere lækstrømme.
55
Brug af et skærmet motorkabel øger lækstrømmen (se Illustration 5.3), fordi skærmede kabler har højere kapacitans til jord
end uskærmede kabler. Hvis lækstrømmen ikke filtreres, forårsager det øgede forstyrrelser på netforsyningen i radiofrekvensområdet under ca. 5 MHz. Eftersom lækstrømmen (I1) føres tilbage til apparatet gennem skærmen (I3), er der i princippet
kun et lille elektromagnetisk felt (I4) fra det skærmede motorkabel som vist i Illustration 5.3.
Skærmen reducerer de udstrålede forstyrrelser, men øger den lavfrekvente forstyrrelse på netforsyningen. Motorkabelskærmen skal monteres på frekvensomformerkapslingen såvel som motorkapslingen. Dette gøres bedst ved at bruge
indbyggede skærmbøjler for at undgå snoede skærmender (pigtails). Pigtails øger skærmimpedansen ved højere frekvenser,
hvilket reducerer skærmeffekten og øger lækstrømmen (I4).
Når der anvendes et skærmet kabel til relæ, styrekabel, signalinterface og bremse, skal skærmen monteres på kapslingen i
begge ender. I nogle situationer er det dog nødvendigt at bryde skærmen for at undgå strømsløjfer.
Jordledning 4 Frekvensomformer
1
2 Skærm 5 Skærmet motorkabel
3 Netspænding 6 Motor
Illustration 5.3 Situation der genererer lækstrøm
Hvis skærmen skal sættes på en monteringsplade til frekvensomformeren, skal monteringspladen være lavet af metal, fordi
skærmstrømmene skal føres tilbage til apparatet. Der skal desuden sikres god elektrisk kontakt fra monteringspladen
gennem monteringsskruerne til frekvensomformerens chassis.
Hvis der benyttes uskærmede kabler, overholdes enkelte emissionskrav ikke, skønt de fleste immunitetskrav opfyldes.
For at begrænse forstyrrelsesniveauet fra hele systemet (apparat og installation) skal motor- og bremsekabler gøres så korte
som muligt. Undgå at placere følsomme signalkabler langs med motor- og bremsekablerne. Radioforstyrrelser over 50 MHz
(luftbårne) genereres især af styreelektronikken.
50 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01

Systemintegration
Design Guide
5.2.1 EMC-testresultater
Følgende testresultater er opnået i et system med en frekvensomformer, et skærmet styrekabel, en styreboks med potentiometer samt en motor og et skærmet motorkabel (Ölflex Classic 100 CY) ved nominel switchfrekvens. I Tabel 5.2 er den
maksimale motorkabellængde til overensstemmelse angivet.
BEMÆRK!
Forholdene kan ændre sig betydeligt for andre opsætninger.
BEMÆRK!
Se Tabel 9.19 vedrørende parallelle motorkabler.
RFI-filtertype Kabelbåret emission Udstrålet emission
Kabellængde [m]
Standarder
og krav
H1
FC 301 0-37 kW 200-240 V 10 50 50 Nej Ja Ja
FC 302 0-37 kW 200-240 V 50 150 150 Nej Ja Ja
H2/H5
FC 301 0-3,7 kW 200-240 V Nej Nej 5 Nej Nej Ja
FC 302
0-7,5 kW 380-500 V Nej Nej 5 Nej Nej Ja
H3
FC 301 0-1,5 kW 200-240 V 2,5 25 25 Nej Ja Ja
0-1,5 kW 380-480 V 2,5 25 25 Nej Ja Ja
H4
FC 302 1,1-7,5 kW 525-690 V Nej 100 100 Nej Ja Ja
11-22 kW 525-690 V Nej 100 100 Nej Ja Ja
30-75 kW 525-690 V Nej 150 150 Nej Ja Ja
1)
Hx
FC 302 0,75-75 kW 525-600 V Nej Nej Nej Nej Nej Nej
EN 55011/CISPR 11 Klasse B Klasse A
gruppe 1
EN/IEC 61800-3 Kategori C1 Kategori C2 Kategori C3 Kategori C1 Kategori C2 Kategori C3
0-75 kW 380-480 V 10 50 50 Nej Ja Ja
0-75 kW 380-480 V 50 150 150 Nej Ja Ja
5,5-37 kW 200-240 V
11-75 kW 380-500 V
11-22 kW 525-690 V
30-75 kW 525-690 V
11-37 kW 525-690 V
2)
2)
2)
2)
3)
Nej Nej 25 Nej Nej Ja
Nej Nej 25 Nej Nej Ja
Nej Nej 25 Nej Nej Ja
Nej Nej 25 Nej Nej Ja
Nej 150 150 Nej Ja Ja
Klasse A
Gruppe 2
Klasse B Klasse A
Gruppe 1
Klasse A
Gruppe 2
5 5
Tabel 5.2 EMC-testresultater (emission) maksimal motorkabellængde
1)
Hx-versioner kan bruges i overensstemmelse med EN/IEC 61800-3 kategori C4
2)
T5, 22-45 kW og T7, 22-75 kW overholder klasse A gruppe 1 med 25 m motorkabel. Der gælder visse begrænsninger for installationen (kontakt
Danfoss for oplysninger).
Hx, H1, H2, H3, H4 eller H5 defineres i typekodepos. 16-17 for EMC-filtre, se Tabel 7.1.
3)
IP20
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 51
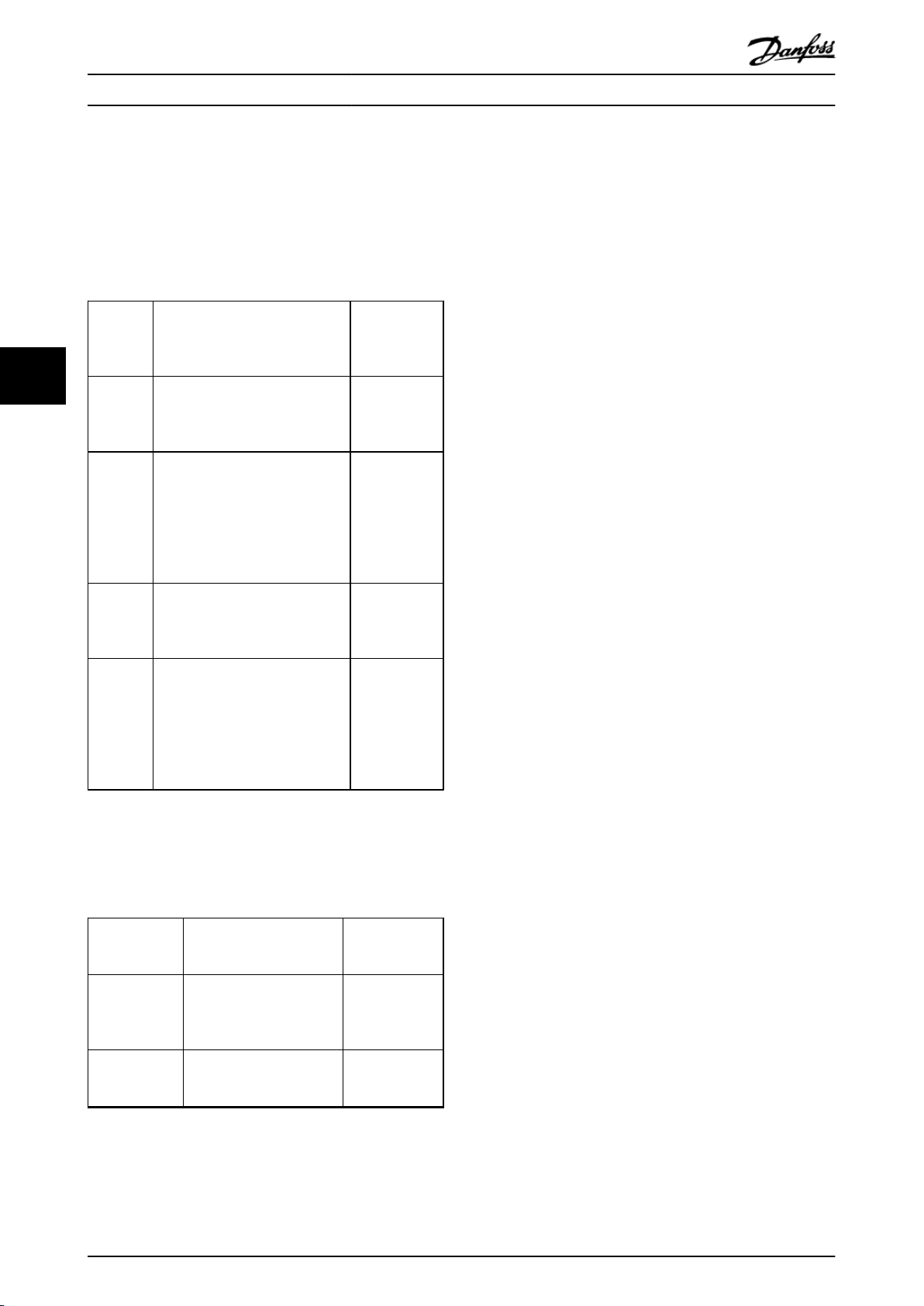
Systemintegration Design Guide
5.2.2 Emissionskrav
EMC-produktstandarden for frekvensomformere definerer
fire kategorier (C1, C2, C3 og C4) med specifikke krav til
emission og immunitet. Tabel 5.3 bestemmer definitionen
af de fire kategorier og den tilsvarende klassificering i EN
55011.
5.2.3
Immunitetskrav
Immunitetskravene til frekvensomformere afhænger af det
miljø, de monteres i. Kravene til industrimiljøer er højere
end kravene til bolig- og kontormiljøer. Alle Danfoss
frekvensomformere overholder kravene til industrimiljøer
og overholder derfor også de lavere krav til bolig- og
kontormiljøer med en stor sikkerhedsmargin.
Tilsvarende
Kategori Definition
55
C1 Frekvensomformere monteret i first
environment (bolig og kontor) med
en forsyningsspænding mindre end
1.000 V.
C2 Frekvensomformere monteret i first
environment (bolig og kontor) med
forsyningsspænding mindre end
1.000 V, som hverken er flytbare
eller af typen plug-in, og som skal
monteres og idriftsættes af en
professionel.
C3 Frekvensomformere monteret i
second environment (industri) med
en forsyningsspænding mindre end
1.000 V.
C4 Frekvensomformere monteret i
second environment med en
forsyningsspænding lig med eller
over 1.000 V eller nominel
spænding lig med eller over 400 A
eller med henblik på brug i
komplekse installationer.
Tabel 5.3 Korrelation mellem IEC 61800-3 og EN 55011
emissionsklasse i EN
55011
Klasse B
Klasse A
gruppe 1
Klasse A
gruppe 2
Ingen
grænselinje.
Der skal
udarbejdes en
EMC-plan.
For at dokumentere immunitet mod elektrisk forstyrrelse
fra elektriske fænomener er følgende immunitetstest blevet
udført i overensstemmelse med følgende grundlæggende
standarder:
EN 61000-4-2 (IEC 61000-4-2): Elektrostatiske
•
udladninger (ESD): Simulering af elektrostatiske
udladninger fra mennesker.
EN 61000-4-3 (IEC 61000-4-3): Indgående elektro-
•
magnetisk feltudstråling, amplitudemoduleret
simulering af påvirkninger fra både radar- og
radiokommunikationsudstyr og mobilt kommunikationsudstyr.
EN 61000-4-4 (IEC 61000-4-4): Burst-transienter:
•
Simulering af forstyrrelse forårsaget af kobling af
en kontaktor, et relæ eller lignende apparater.
EN 61000-4-5 (IEC 61000-4-5): Surge-transienter:
•
Simulering af transienter forårsaget af
eksempelvis lynnedslag i nærheden af installationerne.
EN 61000-4-6 (IEC 61000-4-6): RF common
•
mode: Simulering af påvirkningen fra udstyr til
radiotransmission, som er forbundet til tilslutningskablerne.
Når de generiske emissionsstandarder (kabelbårne)
anvendes, skal frekvensomformerne overholde grænserne i
Tabel 5.4.
Tilsvarende
Miljø Generisk emissionsstandard
First
environment
(bolig og
kontor)
Second
environment
(industrimiljø)
Tabel 5.4 Korrelation mellem generiske emissionsstandarder og
EN 55011
52 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
EN/IEC 61000-6-3 emissionsstandard for beboelses- og
erhvervsmiljøer samt lette
industrimiljøer.
EN/IEC 61000-6-4 emissionsstandard for industrimiljøer.
emissionsklasse i
EN 55011
Klasse B
Klasse A
gruppe 1
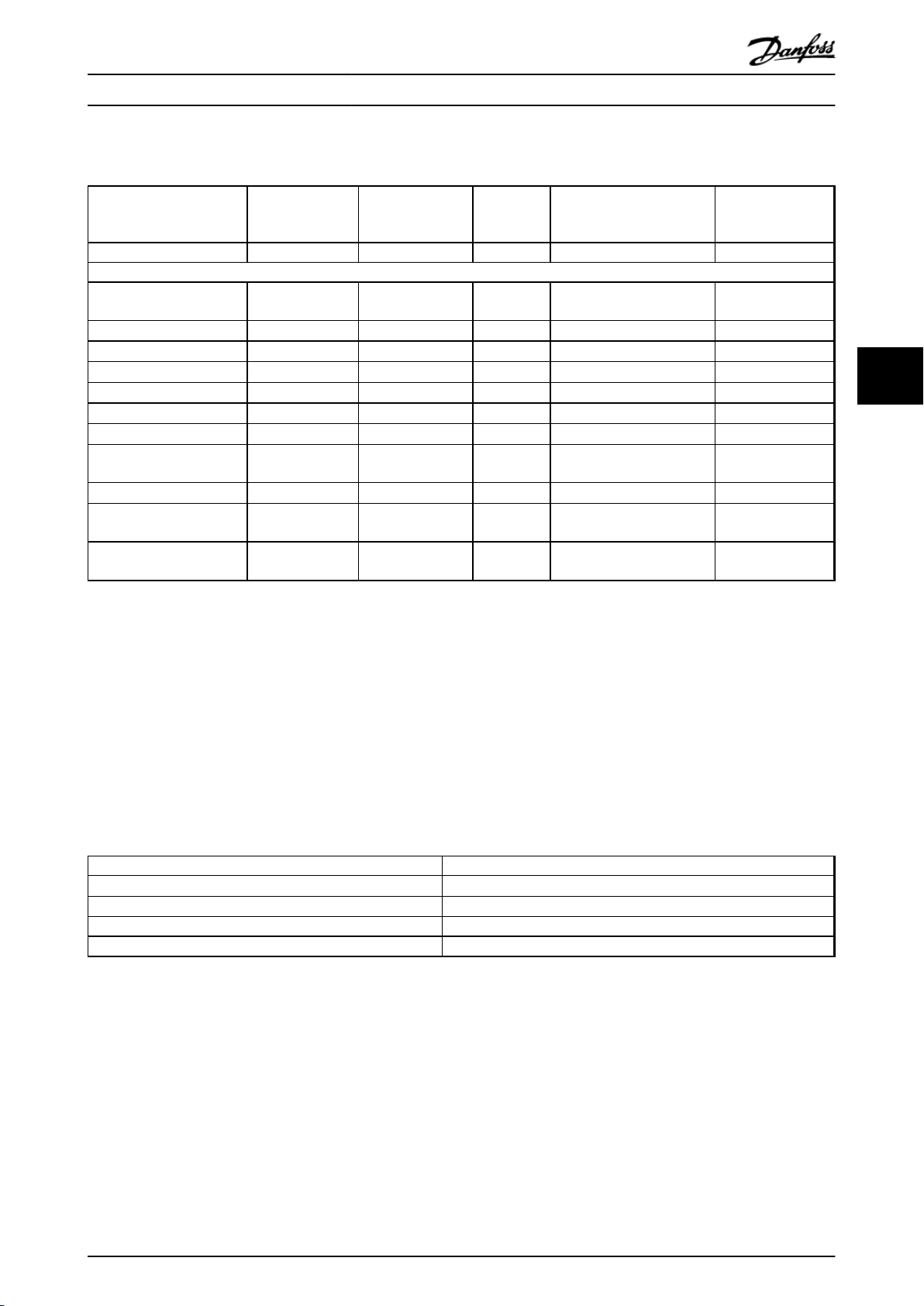
Systemintegration Design Guide
Se Tabel 5.5.
Grundlæggende standard Burst
IEC 61000-4-4
Surge
IEC 61000-4-5
ESD
IEC
61000-4-2
Udstrålet elektromagnetisk
felt
IEC 61000-4-3
RF-common
mode-spænding
IEC 61000-4-6
Godkendelseskriterier B B B A A
Spændingsområde: 200-240 V, 380-500 V, 525-600 V, 525-690 V
Net
Motor
4 kV CM
4 kV CM
Bremse 4 kV CM
Belastningsfordeling 4 kV CM
Styrekabler
2 kV CM
Standardbus 2 kV CM
Relæledninger 2 kV CM
Applikation og Fieldbus-
optioner
LCP-kabel
Ekstern 24 V DC
Kapsling
2 kV CM
2 kV CM
2 V CM
— —
2 kV/2 Ω DM
4 kV/12 Ω CM
4 kV/2 Ω
4 kV/2 Ω
4 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
1)
1)
1)
1)
1)
1)
1)
1)
0,5 kV/2 Ω DM
1 kV/12 Ω CM
— —
— —
— —
— —
— —
— —
— —
— —
— —
— —
8 kV AD
6 kV CD
10 V
10 V
10 V
10 V
10 V
10 V
10 V
10 V
10 V
10 V
10 V/m —
Tabel 5.5 EMC-immunitetsformular
1)
Strømtilførsel på kabelafskærmning
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
5 5
Motorisolering
5.2.4
Moderne design af motorer til frekvensomformerbrug har en høj grad af isolering, hvilket understøtter den nye generation
af IGBT'er med høj virkningsgrad og med høj dU/dt. Ved eftermontering i gamle motorer er det nødvendigt at bekræfte
motorisoleringen eller at dæmpe med dU/dt-filter eller om nødvendigt et sinusfilter. dU/dt
For motorkabellængder ≤ den maksimale kabellængde, der er anført i kapitel 6.2 Generelle specifikationer, anbefales motorisoleringsklassificeringerne, der er anført i Tabel 5.6. Hvis en motor har en lavere isoleringsklassificering, anbefales det at
bruge et du/dt- eller sinusfilter.
Nominel netspænding [V] Motorisolering [V]
UN ≤ 420
420 V < UN ≤ 500 Forstærket ULL = 1.600
500 V < UN ≤ 600 Forstærket ULL = 1.800
600 V < UN ≤ 690 Forstærket ULL = 2.000
Tabel 5.6 Motorisolering
Standard ULL = 1.300
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 53
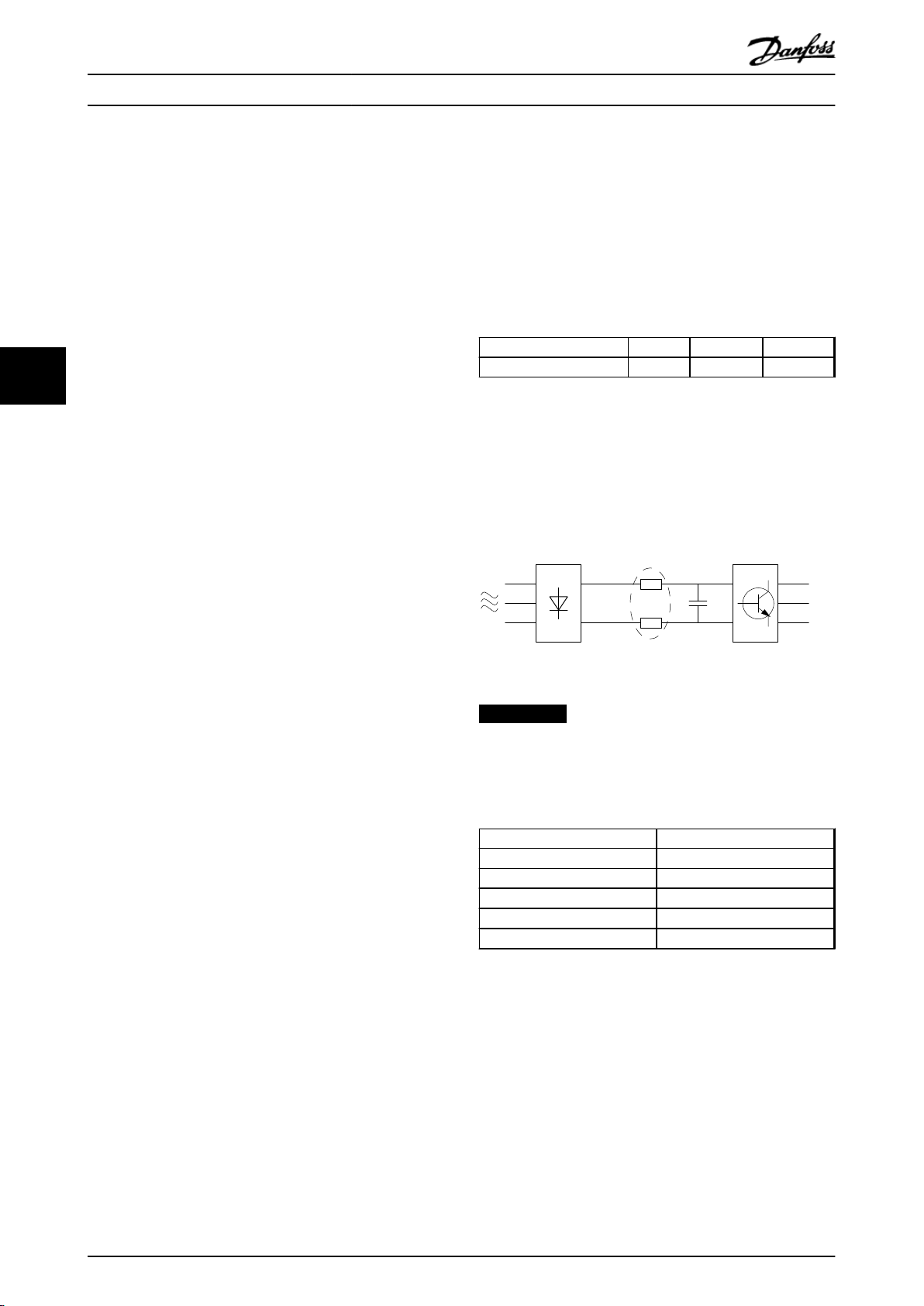
175HA034.10
Systemintegration
Design Guide
5.2.5 Motorlejestrøm
5.3
Netforsyningsforstyrrelse/harmoniske
strømme
For at minimere leje- og akselstrøm, skal følgende jordes til
den drevne maskine:
frekvensomformer
•
motor
•
drevet maskine
•
motor
•
Standardstrategier for dæmpning
55
1. Brug et isoleret leje.
2. Vær grundig med installationsprocedurer
2a Kontrollér, at motoren og belastnings-
motoren er justeret.
2b Følg EMC-installationsvejledningen
omhyggeligt.
2c Forstærk PE'en, så højfrekvensimpe-
dansen er lavere i PE'en end i
forsyningskablerne.
2d Sørg for en god højfrekvensforbindelse
mellem motoren og frekvensomformeren, f.eks. et skærmet kabel med
en 360° tilslutning i motoren og
frekvensomformeren.
2e Sørg for, at impedansen fra frekvensom-
formeren til bygningens jordspyd er
lavere end maskinens jordingsimpedans.
Dette kan være svært for pumper.
2f Sørg for en direkte jordtilslutning
mellem motoren og belastningsmotoren.
3. Reducér IGBT-switchfrekvensen.
4. Modificér vekselretterens bølgeform, 60° AVM vs.
SFAVM.
5. Montér et akseljordingssystem, eller anvend en
isolerende akselkobling
6. Påfør ledende smøring.
7. Brug minimumhastighedsindstillinger, hvis det er
muligt.
8. Forsøg at sikre, at netspændingen er balanceret
til jord. Dette kan være svært for IT-, TT- eller TNCS-systemer eller systemer med jordben.
9. Anvend et dU/dt- eller sinusfilter.
En frekvensomformer tager en ikke-sinusformet strøm fra
netforsyningen, hvilket øger indgangsstrømmen I
RMS
. En
ikke-sinusformet strøm transformeres via en Fourier-analyse
og deles i sinusbølgestrømme med forskellige frekvenser,
dvs. forskellige harmoniske strømme In med 50 Hz som
basisfrekvensen.
Harmoniske strømme I
Hz 50 250 350
Tabel 5.7 Transformeret ikke-sinusformet strøm
1
I
5
I
7
De harmoniske strømme påvirker ikke strømforbruget
direkte, men øger varmetabene i installationen
(transformer, kabler). Derfor skal harmoniske strømme
holdes på et lavt niveau for at undgå overbelastning af
transformeren og høje temperaturer i kablerne i installationer med en høj procentdel af ensretterbelastning.
Illustration 5.4 Mellemkredsspoler
BEMÆRK!
Nogle af de harmoniske strømme kan forstyrre
kommunikationsudstyr, der er sluttet til samme
transformer, eller skabe resonans i forbindelse med
effektfaktorkorrektionsenheder.
I
RMS
I
1
I
5
I
7
I
11-49
Tabel 5.8 Harmoniske strømme sammenlignet med
RMS-indgang Strøm
Frekvensomformeren er som standard forsynet med
mellemkredsspoler for at sikre lave harmoniske strømme.
DC-spolerne reducerer den samlede harmoniske
forvrængning (THD) til 40 %.
Indgangsstrøm
1,0
0,9
0,4
0,2
< 0,1
54 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
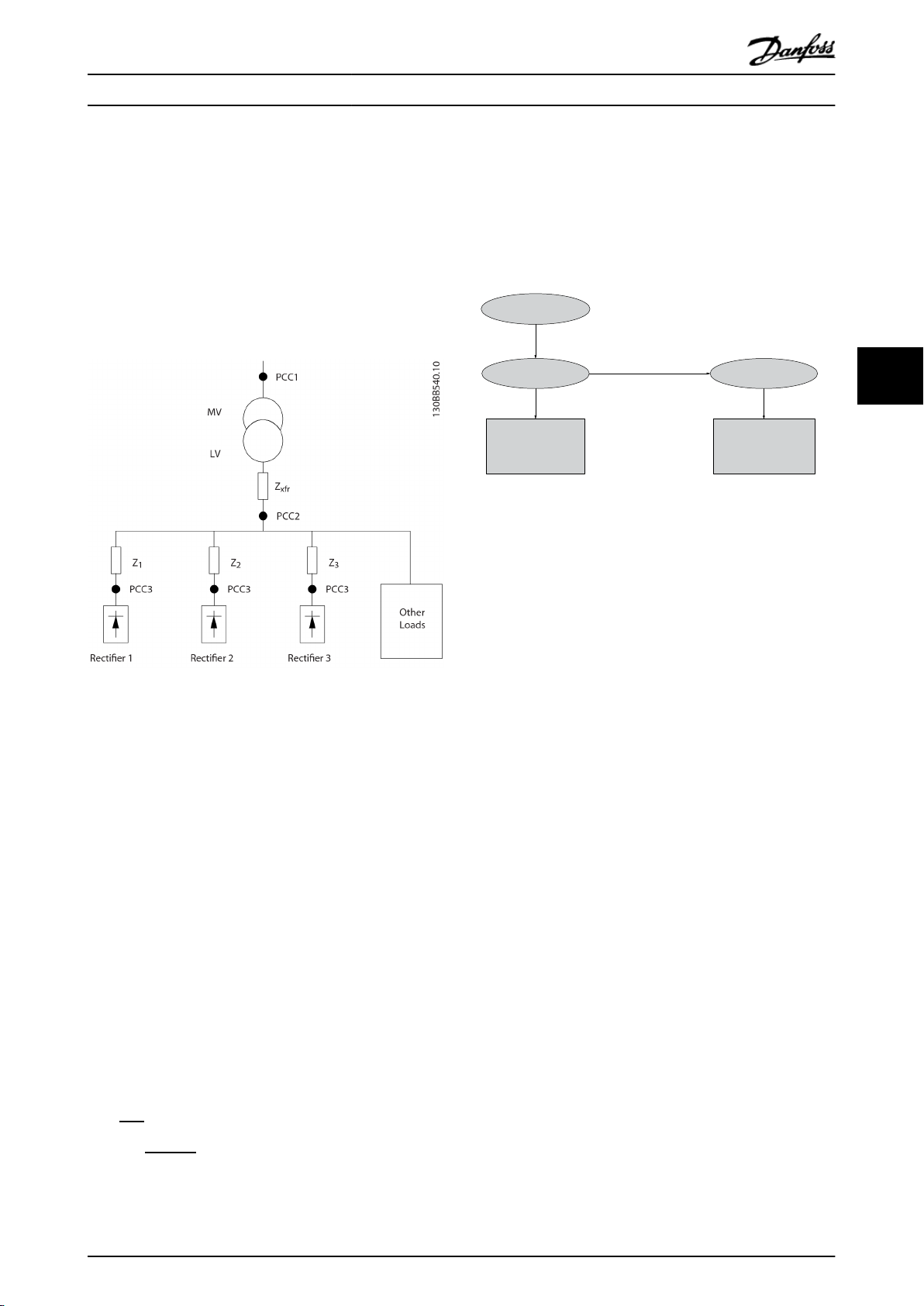
Non-linear
Current Voltage
System
Impedance
Disturbance to
other users
Contribution to
system losses
130BB541.10
Systemintegration
Design Guide
5.3.1 Påvirkninger fra harmoniske strømme
i et strømdistributionssystem
I Illustration 5.5 sluttes primærsiden af en transformer til et
fælles tilslutningspunkt PCC1 på mellemspændingsforsyningen. Transformeren har en impedans Z
strøm til et antal belastninger. Det fælles tilslutningspunkt,
hvor alle belastninger sammenkobles, er PCC2. Hver
belastning tilsluttes via kabler med impedansen Z1, Z2 og
Z3.
og leverer
xfr
Den negative påvirkning fra harmoniske strømme er
dobbelt
Harmoniske strømme bidrager til systemtab (i
•
kabelføringen, transformer)
Harmonisk spændingsforvrængning medfører
•
forstyrrelser i andre belastninger og øger tabet i
andre belastninger
Illustration 5.6 Negative virkninger af harmoniske strømme
5.3.2 Standarder og krav vedrørende
begrænsning af harmoniske strømme
5 5
Illustration 5.5 Lille distributionssystem
Harmoniske strømme, som tegnes af ikke-lineære belastninger, medfører forvrængning af spændingen pga.
spændingsfaldet på impedanserne i distributionssystemet.
Højere impedanser medfører højere niveauer af
spændingsforvrængning.
Strømforvrængningen afhænger af apparatets ydeevne og
af den individuelle belastning. Spændingsforvrængningen
afhænger af systemets ydeevne. Det er ikke muligt at
bestemme spændingsforvrængningen i PCC'en, hvis kun
belastningens harmoniske ydeevne er kendt. For at
forudsige forvrængningen i PCC'en skal konfigurationen af
distributionssystemet og de relevante impedanser være
kendt.
Et almindeligt begreb til beskrivelse af impedansen i et net
er kortslutningsforholdet R
, som defineres som forholdet
sce
mellem kortslutningens tilsyneladende effekt for
forsyningen ved PCC (Ssc) og den nominelle tilsyneladende
effekt for belastningen (S
S
ce
R
=
sce
S
hvor
S
sc
equ
=
2
U
Z
forsyning
og
S
equ
equ
=U×
).
I
equ
Kravene til begrænsning af harmoniske strømme kan være
applikationsspecifikke krav
•
standarder, der skal overholdes
•
Applikationsspecifikke krav er relevante for en specifik
installation, hvor der er tekniske årsager til begrænsning af
de harmoniske strømme.
Eksempel
En 250 kVa-transformer med to tilsluttede 110 kW-motorer
er tilstrækkelig, hvis en af motorerne forbindes direkte til
netforsyningen, og den anden forsynes via en frekvensomformer. Transformeren er imidlertid for lille, hvis begge
motorer forsynes via en frekvensomformer. Ved at bruge
ekstra metoder til reduktion af harmoniske strømme i
installationen eller ved at vælge frekvensomformervarianter
med lave harmoniske strømme kan begge motorer køre
med frekvensomformere.
Der findes flere forskellige standarder, bestemmelser og
anbefalinger for dæmpning af harmoniske strømme.
Forskellige standarder finder anvendelse i forskellige
geografiske områder og brancher. Følgende standarder er
de mest almindelige:
IEC61000-3-2
•
IEC61000-3-12
•
IEC61000-3-4
•
IEEE 519
•
G5/4
•
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 55

Systemintegration Design Guide
Se AHF005/010 Design Guide for specifikke oplysninger om
hver standard.
5.4
Galvanisk adskillelse (PELV)
5.4.1 PELV – beskyttende ekstra lav
I Europa er den maksimale THVD 8%, hvis installationen er
tilsluttet via det offentlige net. Hvis installation har sin
egen transformer, er grænsen 10 % THVD. VLT
AutomationDrive er konstrueret til at modstå 10 % THVD.
®
5.3.3 Dæmpning af harmoniske strømme
I tilfælde hvor der kræves ekstra begrænsning af
55
harmoniske strømme, kan Danfoss tilbyde en lang række
dæmpningsudstyr. Disse er:
12-puls frekvensomformere
•
AHF-filtre
•
Frekvensomformere med lave harmoniske
•
strømme
Aktive filtre
•
Valget af den rette løsning afhænger af flere forskellige
faktorer:
Nettet (baggrundsforvrængning, netubalance,
•
resonans og forsyningstype (transformer/
generator))
Applikation (belastningsprofil, antal belastninger
•
og belastningsstørrelse)
Lokale/nationale krav/bestemmelser (IEEE519, IEC,
•
G5/4 osv.)
Samlede ejeromkostninger (anskaffelsesomkost-
•
ninger, effektivitet, vedligeholdelse osv.)
Overvej altid dæmpning af harmoniske strømme, hvis
transformerbelastningen har et ikke-lineært bidrag på 40 %
eller mere.
Beregning af harmoniske strømme
5.3.4
Danfoss tilbyder værktøjer til beregning af harmoniske
strømme, se kapitel 9.6.5 Pc-software.
spænding
PELV giver beskyttelse ved hjælp af en ekstra lav
spænding. Der ydes beskyttelse mod elektrisk stød, når
den elektriske forsyning er af PELV-typen, og når installationen foretages i henhold til beskrivelsen i lokale/
nationale bestemmelser om PELV-forsyninger.
Alle styreklemmer og relæklemmer 01-03/04-06 overholder
PELV (Beskyttende ekstra lav spænding), undtaget jordet
trekantben på mere end 400 V.
Den galvaniske (sikre) adskillelse opnås ved at opfylde
kravene til bedre isolering og ved at sørge for de relevante
krybninger/luftafstande. Disse krav beskrives i standarden
EN 61800-5-1.
De komponenter, der udgør den elektriske isolering i
henhold til beskrivelsen nedenfor, stemmer også overens
med kravene til højere isolering og de i EN 61800-5-1
beskrevne relevante test.
Den galvaniske adskillelse for PELV kan vises seks steder
(se Illustration 5.7):
For at bevare PELV skal alle tilslutninger til styreklemmerne
være PELV. Eksempelvis skal termistoren forstærkes/
dobbeltisoleres.
1. Strømforsyning (SMPS) inkl. signalisolering af DClink.
2. Gate drive, som kører IGBT'er (triggertransformere/optokoblere).
3. Strømtransducere.
4. Optokoblere, bremsemodul.
5. Intern inrush, RFI og temperaturmålingskredsløb.
6. Tilpassede relæer.
7. Mekanisk bremse.
56 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01

130BC968.10
1325 4
6
b
a
M
7
Systemintegration
Illustration 5.7 Galvanisk adskillelse
Design Guide
Den funktionelle galvaniske adskillelse (a og b på
tegningen) er til backupoptionen på 24 V og til RS-485standardbusgrænsefladen.
ADVARSEL
Montering ved stor højde:
Ved højder over 2.000 m, kontakt Danfoss vedrørende
PELV.
BEMÆRK!
Motorleverandører bruger ofte S5, når den tilladelige
belastning angives, hvilket er et udtryk for periodisk
driftscyklus.
Den periodiske driftscyklus for modstanden beregnes på
følgende måde:
Driftscyklus = tb/T
T = cyklustid i s
tb er bremsetid i sek (af cyklustiden)
5 5
ADVARSEL
Det kan være forbundet med livsfare at berøre de
elektriske komponenter, også efter at udstyret er koblet
fra netforsyningen.
Sørg også for, at andre spændingsindgange er afbrudt,
f.eks. belastningsfordeling (sammenkobling af DCmellemkredse) samt motortilslutning til kinetisk backup.
Vent mindst i det tidsrum, der angives i Tabel 2.1, inden
de elektriske dele berøres.
Kortere tidsrum er kun tilladt, hvis typeskiltet på det
pågældende apparat angiver det.
5.5 Bremsefunktioner
Bremsefunktionen påføres for at bremse belastningen på
motorakslen, enten som dynamisk bremsning eller
mekanisk bremsning.
Valg af bremsemodstand
5.5.1
Bremsemodstanden sikrer, at energien absorberes i
bremsemodstanden og ikke i frekvensomformeren. Se
Brake Resistor Design Guide for flere oplysninger. Hvis
mængden af kinetisk energi, der overføres til modstanden i
hver bremseperiode, ikke er kendt, kan gennemsnitseffekten beregnes på baggrund af cyklustiden og
bremsetiden, hvilket også kaldes periodisk driftscyklus.
Modstandens periodiske driftscyklus er et tegn på den
driftscyklus, hvorved modstanden er aktiv. Illustration 5.8
viser en typisk bremsecyklus.
Illustration 5.8 Typisk bremsecyklus
Bremsedrifts-
200-240 V
PK25-P11K 120 Kontinuerlig 40%
P15K-P37K 300 10% 10%
380-500 V
PK37-P75K 120 Kontinuerlig 40%
P90K-P160 600 Kontinuerlig 10%
P200-P800 600 40% 10%
525-600 V
PK75-P75K 120 Kontinuerlig 40%
525-690 V
P37K-P400 600 40% 10%
P500-P560 600
P630-P1M0 600 40% 10%
Tabel 5.9 Bremsning ved momentniveau med høj
overbelastning
1)
500 kW ved 86 % bremsemoment/560 kW ved 76 % bremse-
moment
2)
500 kW ved 130 % bremsemoment/560 kW ved 115 % bremse-
moment
Cyklustid (s)
cyklus ved
100 %
moment
40%
1)
Bremsedrifts-
cyklus ved
overmoment
(150/160 %)
10%
2)
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 57

Systemintegration
Design Guide
Danfoss tilbyder bremsemodstande med driftscyklus på
5 %, 10 % og 40 %. Hvis der anvendes en driftscyklus på
10 %, kan bremsemodstandene absorbere bremseeffekten i
10 % af cyklustiden. De resterende 90 % af cyklustiden
Danfoss anbefaler bremsemodstanden R
, dvs. en, der
rec
garanterer, at frekvensomformeren kan bremse ved højeste
bremsemoment (M
) på 160 %. Formlen kan skrives
br(%)
som:
bruges på at sprede overskydende varme.
2
U
x 100
R
Ω =
rec
P
BEMÆRK!
η
Sørg for, at modstanden er konstrueret til at håndtere
den krævede bremsetid.
Den maksimale tilladte belastning på bremsemodstanden
55
angives som spidseffekt ved en given periodisk driftscyklus,
og den kan beregnes på følgende måde:
ED driftscyklus
=
tb
T cyklus
hvor tb er bremsetiden i sekunder og T cyklus er den
samlede cyklustid.
Bremsemodstanden beregnes på følgende måde:
2
U
Ω =
P
spids
dc
R
br
hvor
motor
η
VLT
For 200 V-, 480 V-, 500 V- og 600 V-frekvensomformere
skrives R
200V :
480V :
480V :
500V :
600V :
690V :
1)
2)
motor
er typisk 0,90
er typisk 0,98
rec
R
=
rec
R
=
rec
R
=
rec
R
=
rec
R
=
rec
R
=
rec
For frekvensomformere ≤ 7,5 kW akseleffekt
For frekvensomformere 11-75 kW akseleffekt
dc
x
M
xη
br
%
VLT
x η
motor
ved et bremsemoment på 160 % som:
107780
Ω
P
motor
375300
P
motor
428914
P
motor
464923
P
motor
630137
P
motor
832664
P
motor
Ω
Ω
Ω
Ω
Ω
1
2
P
spids
= P
x Mbr [%] x η
motor
motor
x η
VLT
[W]
Bremsemodstanden afhænger af mellemkredsspændingen
(Udc).
Bremsefunktionen i FC 301 og FC 302 findes i fire områder
af netforsyningen.
Størrelse Bremse aktiv Advarsel
inden
afbrydelse
FC 301/FC 302
390 V 405 V 410 V
200-240 V
FC 301 380-480 V 778 V 810 V 820 V
FC 302 380-500 V 810 V 840 V 850 V
FC 302 525-600 V 943 V 965 V 975 V
FC 302 525-690 V 1084 V 1109 V 1130 V
Tabel 5.10 Bremsegrænser [UDC]
Afbrydelse
(trip)
BEMÆRK!
Kontrollér, at bremsemodstanden kan håndtere en
spænding på 410 V, 820 V, 850 V, 975 V eller 1130 V medmindre der anvendes Danfoss bremsemodstande.
BEMÆRK!
Den valgte kredsløbsmodstand for bremsemodstanden
må ikke overstige anbefalingen fra Danfoss. Hvis der
vælges en bremsemodstand med en højere ohmsk værdi,
opnås bremsemomentet på 160 % muligvis ikke, da der
kan være risiko for, at frekvensomformeren afbrydes af
sikkerhedsårsager.
BEMÆRK!
Hvis der opstår en kortslutning i bremsetransistoren, kan
effekttab i bremsemodstanden kun undgås ved at
afbryde netforsyningen til frekvensomformeren med en
netafbryder eller kontaktor. (Kontaktoren kan styres med
frekvensomformeren).
FORSIGTIG
Bremsemodstanden bliver varm under og efter
bremsning.
For at undgå personskade må bremsemod-
•
standen ikke berøres.
Anbring bremsemodstanden i et sikkert miljø
•
for at undgå brandfare
58 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01

Systemintegration Design Guide
FORSIGTIG
Frekvensomformere med kapslingstyper D-F er forsynet
med mere end én bremsechopper. Brug derfor en
bremsemodstand pr. bremsechopper til disse kapslingsstørrelser.
5.5.2 Kabelføring for bremsemodstand
EMC (snoede kabler/skærmning)
For at overholde den angivne EMC-ydeevne for frekvensomformeren skal skærmede kabler/ledninger anvendes.
Hvis uskærmede ledninger bruges, anbefales det, at disse
snoes for at reducere elektrisk støj fra ledningerne mellem
bremsemodstanden og frekvensomformeren.
For forstærket EMC-ydeevne skal en metalskærm anvendes.
Styring med bremsefunktion
5.5.3
Bremsen er beskyttet mod kortslutning i bremsemodstanden, og bremsetransistoren overvåges for at sikre, at
en kortslutning i transistoren registreres. Et relæ/en digital
udgang kan bruges til at beskytte bremsemodstanden
mod overbelastning i forbindelse med en fejl i frekvensomformeren.Bremsen gør det desuden muligt at udlæse den
aktuelle effekt og middeleffekten for de sidste 120 sek.
Bremsen kan også overvåge påførslen af strøm og sikre, at
den ikke overstiger en grænse, der vælges i 2-12 Bremseef-
fektgrænse (kW). I 2-13 Bremseeffektovervågning vælges den
funktion, der skal udføres, når effekten, som sendes til
bremsemodstanden, overstiger den grænse, der er
indstillet i 2-12 Bremseeffektgrænse (kW).
5 5
BEMÆRK!
Overvågningen af bremseeffekten er ikke en sikkerhedsfunktion; dette vil kræve en termisk kontakt.
Bremsemodstandskredsløbet er ikke beskyttet mod
overgang til jord.
Overspændingsstyring (OVC) (kun for bremsemodstand)
kan vælges som en alternativ bremsefunktion i
2-17 Overspændingsstyring. Denne funktion er aktiv for alle
apparater. Funktionen sikrer, at det bliver muligt at undgå
et trip, hvis DC-link-spændingen øges. Dette gøres ved at
øge udgangsfrekvensen for at begrænse spændingen fra
DC-linket. Det er en nyttig funktion, f.eks. hvis rampe nedtiden er for kort, da trip af frekvensomformeren undgås. I
denne situation forlænges rampe-ned-tiden.
BEMÆRK!
OVC kan ikke aktiveres, når der køres en PM-motor (når
1-10 Motorkonstruktion er indstillet til [1] PM, ikkeudpræg. SPM).
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 59

Produktspecifikationer Design Guide
6 Produktspecifikationer
6.1 Elektriske data
6.1.1 Netforsyning 200-240 V
Typebetegnelse PK25 PK37 PK55 PK75 P1K1 P1K5 P2K2 P3K0 P3K7
Typisk akseleffekt [kW] 0,25 0,37 0,55 0,75 1,1 1,5 2,2 3,0 3,7
IP20-kapsling (kun FC 301) A1 A1 A1 A1 A1 A1 - - Kapsling IP20/IP21 A2 A2 A2 A2 A2 A2 A2 A3 A3
IP55- eller IP66-kapsling A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A5 A5
Udgangsstrøm
Kontinuerlig (200-240 V) [A] 1,8 2,4 3,5 4,6 6,6 7,5 10,6 12,5 16,7
66
Periodisk (200-240 V) [A] 2,9 3,8 5,6 7,4 10,6 12,0 17,0 20,0 26,7
Kontinuerlig kVa (208 V) [kVa] 0,65 0,86 1,26 1,66 2,38 2,70 3,82 4,50 6,00
Maks. indgangsstrøm
Kontinuerlig (200-240 V) [A] 1,6 2,2 3,2 4,1 5,9 6,8 9,5 11,3 15,0
Periodisk (200-240 V) [A] 2,6 3,5 5,1 6,6 9,4 10,9 15,2 18,1 24,0
Yderligere specifikationer
Maks. kabeltværsnit
bremse og belastningsfordeling) [mm2] ([AWG])
Maks. kabeltværsnit
Anslået effekttab ved nominel maks.
belastning [W]
Virkningsgrad
4)
(netforsyning, motor,
4)
(afbryder) [mm2] ([AWG])
3)
2)
4, 4, 4 (12, 12, 12)
(min. 0,2 (24))
6, 4, 4 (10, 12, 12)
21 29 42 54 63 82 116 155 185
0,94 0,94 0,95 0,95 0,96 0,96 0,96 0,96 0,96
Tabel 6.1 Netforsyning 200-240 V, PK25-P3K7
60 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01

Produktspecifikationer
Design Guide
Typebetegnelse P5K5 P7K5 P11K
Høj/normal overbelastning
1)
HO NO HO NO HO NO
Typisk akseleffekt [kW] 5,5 7,5 7,5 11 11 15
Kapsling IP20 B3 B3 B4
Kapsling IP21, IP55, IP66 B1 B1 B2
Udgangsstrøm
Kontinuerlig (200-240 V) [A] 24,2 30,8 30,8 46,2 46,2 59,4
Periodisk (60 sek overbelastning) (200-240 V) [A] 38,7 33,9 49,3 50,8 73,9 65,3
Kontinuerlig kVa (208 V) [kVa] 8,7 11,1 11,1 16,6 16,6 21,4
Maks. indgangsstrøm
Kontinuerlig (200-240 V) [A] 22,0 28,0 28,0 42,0 42,0 54,0
Periodisk (60 sek overbelastning) (200-240 V) [A] 35,2 30,8 44,8 46,2 67,2 59,4
Yderligere specifikationer
IP20 maks. kabeltværsnit4) (netforsyning, bremse, motor og
belastningsfordeling) [mm2] ([AWG])
IP21 maks. kabeltværsnit4) (netforsyning, bremse og belastningsfordeling) [mm2] ([AWG])
IP21 maks. kabeltværsnit4) (motor) [mm2] ([AWG])
Maks. kabeltværsnit4) (afbryder) [mm2] ([AWG])
Anslået effekttab ved nominel maks. belastning [W]
Virkningsgrad
2)
3)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35,-,- (2,-,-)
16, 10, 16 (6, 8, 6) 16, 10, 16 (6, 8, 6) 35,-,- (2,-,-)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35, 25, 25 (2, 4, 4)
16, 10, 10 (6, 8, 8)
239 310 371 514 463 602
0,96 0,96 0,96
6 6
Tabel 6.2 Netforsyning 200-240 V, P5K5-P11K
Typebetegnelse P15K P18K P22K P30K P37K
Høj/normal overbelastning
1)
HO NO HO NO HO NO HO NO HO NO
Typisk akseleffekt [kW] 15 18,5 18,5 22 22 30 30 37 37 45
Kapsling IP20 B4 C3 C3 C4 C4
Kapsling IP21, IP55, IP66 C1 C1 C1 C2 C2
Udgangsstrøm
Kontinuerlig (200-240 V) [A] 59,4 74,8 74,8 88,0 88,0 115 115 143 143 170
Periodisk (60 sek overbelastning) (200-240 V) [A] 89,1 82,3 112 96,8 132 127 173 157 215 187
Kontinuerlig kVa (208 V) [kVa] 21,4 26,9 26,9 31,7 31,7 41,4 41,4 51,5 51,5 61,2
Maks. indgangsstrøm
Kontinuerlig (200-240 V) [A] 54,0 68,0 68,0 80,0 80,0 104 104 130 130 154
Periodisk (60 sek overbelastning) (200-240 V) [A] 81,0 74,8 102 88,0 120 114 156 143 195 169
Yderligere specifikationer
IP20 maks. kabeltværsnit (netforsyning, bremse,
motor og belastningsfordeling) [mm2] ([AWG])
IP21, IP55, IP66 maks. kabeltværsnit
(netforsyning og motor) [mm2] ([AWG])
IP21, IP55, IP66 maks. kabeltværsnit (bremse og
belastningsfordeling) [mm2] ([AWG])
Maks. kabeltværsnit4) (afbryder) [mm2] ([AWG])
Anslået effekttab ved nominel maks. belastning
3)
[W]
Virkningsgrad
2)
35 (2) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
50 (1) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
50 (1) 50 (1) 50 (1) 95 (3/0) 95 (3/0)
185, 150, 120
(350 MCM,
300 MCM, 4/0)
50, 35, 35 (1, 2, 2)
95, 70, 70
(3/0, 2/0, 2/0)
624 737 740 845 874 1140 1143 1353 1400 1636
0,96 0,97 0,97 0,97 0,97
Tabel 6.3 Netforsyning 200-240 V, P15K-P37K
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 61
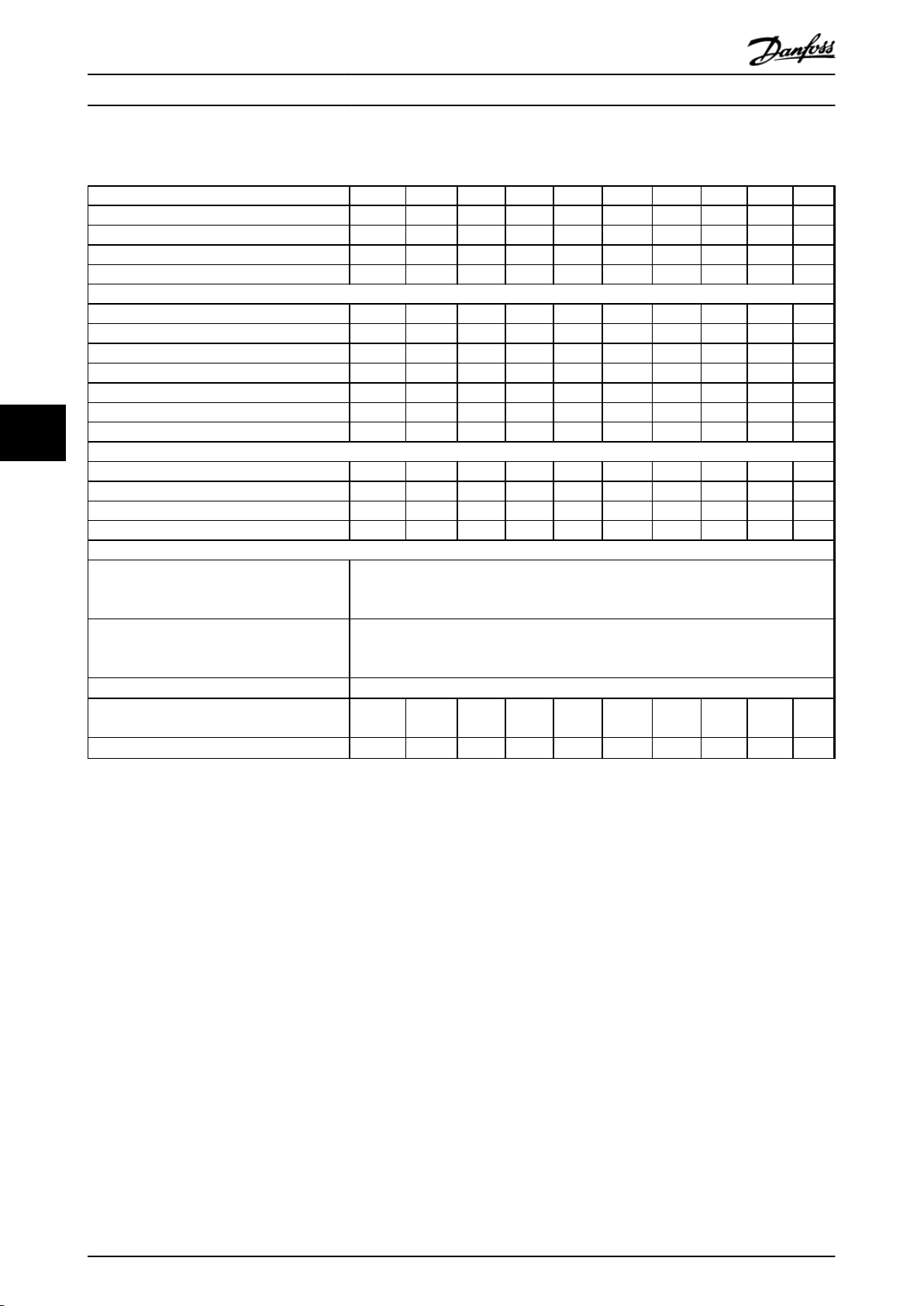
Produktspecifikationer Design Guide
6.1.2 Netforsyning 380-500 V
Typebetegnelse PK37 PK55 PK75 P1K1 P1K5 P2K2 P3K0 P4K0 P5K5 P7K5
Typisk akseleffekt [kW] 0,37 0,55 0,75 1,1 1,5 2,2 3,0 4,0 5,5 7,5
IP20-kapsling (kun FC 301) A1 A1 A1 A1 A1 - - - - Kapsling IP20/IP21 A2 A2 A2 A2 A2 A2 A2 A2 A3 A3
IP55- eller IP66-kapsling A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A5 A5
Udgangsstrøm, høj overbelastning 160 % i 1 minut
Akseleffekt [kW] 0,37 0,55 0,75 1,1 1,5 2,2 3 4 5,5 7,5
Kontinuerlig (380-440 V) [A] 1,3 1,8 2,4 3,0 4,1 5,6 7,2 10 13 16
Periodisk (380-440 V) [A] 2,1 2,9 3,8 4,8 6,6 9,0 11,5 16 20,8 25,6
Kontinuerlig (441-500 V) [A]] 1,2 1,6 2,1 2,7 3,4 4,8 6,3 8,2 11 14,5
Periodisk (441-500 V) [A 1,9 2,6 3,4 4,3 5,4 7,7 10,1 13,1 17,6 23,2
Kontinuerlig kVa (400 V) [kVa] 0,9 1,3 1,7 2,1 2,8 3,9 5,0 6,9 9,0 11
66
Kontinuerlig kVa (460 V) [kVa] 0,9 1,3 1,7 2,4 2,7 3,8 5,0 6,5 8,8 11,6
Maks. indgangsstrøm
Kontinuerlig (380-440 V) [A] 1,2 1,6 2,2 2,7 3,7 5,0 6,5 9,0 11,7 14,4
Periodisk (380-440 V) [A] 1,9 2,6 3,5 4,3 5,9 8,0 10,4 14,4 18,7 23
Kontinuerlig (441-500 V) [A]] 1,0 1,4 1,9 2,7 3,1 4,3 5,7 7,4 9,9 13
Periodisk (441-500 V) [A 1,6 2,2 3,0 4,3 5,0 6,9 9,1 11,8 15,8 20,8
Yderligere specifikationer
IP20, IP21 maks. kabeltværsnit4) (netforsyning,
motor, bremse og belastningsfordeling)
[mm2] ([AWG])
IP55, IP66 maks. kabeltværsnit4) (netforsyning,
motor, bremse og belastningsfordeling)
[mm2] ([AWG])
Maks. kabeltværsnit4) (afbryder) [mm2] ([AWG])
Anslået effekttab ved nominel maks. belastning
3)
[W]
Virkningsgrad
2)
35 42 46 58 62 88 116 124 187 255
0,93 0,95 0,96 0,96 0,97 0,97 0,97 0,97 0,97 0,97
4, 4, 4 (12, 12, 12)
(min. 0,2 (24))
4, 4, 4 (12, 12, 12)
6, 4, 4 (10, 12, 12)
Tabel 6.4 Netforsyning 380-500 V (FC 302), 380-480 V (FC 301), PK37-P7K5
62 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01

Produktspecifikationer Design Guide
Typebetegnelse P11K P15K P18K P22K
Høj/normal overbelastning
Typisk akseleffekt [kW] 11 15 15 18,5 18,5 22,0 22,0 30,0
Kapsling IP20 B3 B3 B4 B4
IP21-kapsling B1 B1 B2 B2
Kapsling IP55, IP66 B1 B1 B2 B2
Udgangsstrøm
Kontinuerlig (380-440 V) [A] 24 32 32 37,5 37,5 44 44 61
Periodisk (60 sek overbelastning) (380-440 V)
[A]
Kontinuerlig (441-500 V) [A] 21 27 27 34 34 40 40 52
Periodisk (60 s overbelastning)
(441-500 V) [A]
Kontinuerlig kVa (400 V) [kVa] 16,6 22,2 22,2 26 26 30,5 30,5 42,3
Kontinuerlig kVa (460 V) [kVa] 21,5 27,1 31,9 41,4
Maks. indgangsstrøm
Kontinuerlig (380-440 V) [A] 22 29 29 34 34 40 40 55
Periodisk (60 sek overbelastning)
(380-440 V) [A]
Kontinuerlig (441-500 V) [A] 19 25 25 31 31 36 36 47
Periodisk (60 s overbelastning)
(441-500 V) [A]
Yderligere specifikationer
IP21, IP55, IP66 maks. kabeltværsnit4) (netforsyning, bremse og belastningsfordeling)
[mm2] ([AWG])
IP21, IP55, IP66 maks. kabeltværsnit4) (motor)
[mm2] ([AWG])
IP20 maks. kabeltværsnit4) (netforsyning,
bremse, motor og belastningsfordeling)
[mm2] ([AWG])
Maks. kabeltværsnit4) (afbryder) [mm2] ([AWG])
Anslået effekttab ved nominel maks.
belastning [W]
Virkningsgrad
3)
2)
1)
HO NO HO NO HO NO HO NO
38,4 35,2 51,2 41,3 60 48,4 70,4 67,1
33,6 29,7 43,2 37,4 54,4 44 64 57,2
35,2 31,9 46,4 37,4 54,4 44 64 60,5
30,4 27,5 40 34,1 49,6 39,6 57,6 51,7
16, 10, 16 (6, 8, 6) 16, 10, 16 (6, 8, 6) 35,-,-(2,-,-) 35,-,-(2,-,-)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35, 25, 25 (2, 4, 4) 35, 25, 25 (2, 4, 4)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35,-,-(2,-,-) 35,-,-(2,-,-)
16, 10, 10 (6, 8, 8)
291 392 379 465 444 525 547 739
0,98 0,98 0,98 0,98
6 6
Tabel 6.5 Netforsyning 380-500 V (FC 302), 380-480 V (FC 301), P11K-P22K
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 63
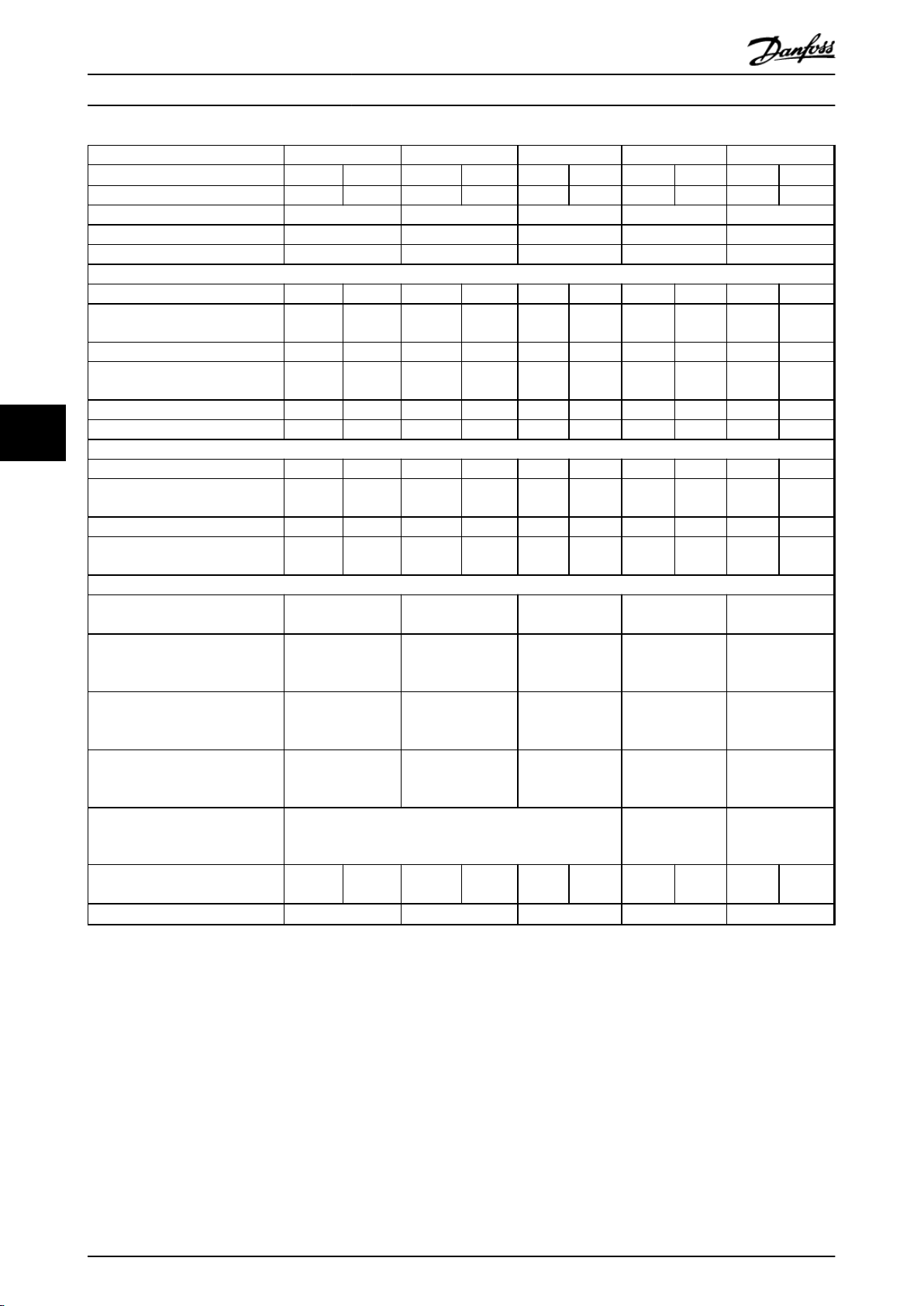
Produktspecifikationer Design Guide
Typebetegnelse P30K P37K P45K P55K P75K
Høj/normal overbelastning
Typisk akseleffekt [kW] 30 37 37 45 45 55 55 75 75 90
IP21-kapsling C1 C1 C1 C2 C2
Kapsling IP20 B4 C3 C3 C4 C4
Kapsling IP55, IP66 C1 C1 C1 C2 C2
Udgangsstrøm
Kontinuerlig (380-440 V) [A] 61 73 73 90 90 106 106 147 147 177
Periodisk (60 sek overbelastning)
(380-440 V) [A]
Kontinuerlig (441-500 V) [A] 52 65 65 80 80 105 105 130 130 160
Periodisk (60 s overbelastning)
(441-500 V) [A]
Kontinuerlig kVa (400 V) [kVa] 42,3 50,6 50,6 62,4 62,4 73,4 73,4 102 102 123
66
Kontinuerlig kVa (460 V) [kVa] 51,8 63,7 83,7 104 128
Maks. indgangsstrøm
Kontinuerlig (380-440 V) [A] 55 66 66 82 82 96 96 133 133 161
Periodisk (60 sek overbelastning)
(380-440 V) [A]
Kontinuerlig (441-500 V) [A] 47 59 59 73 73 95 95 118 118 145
Periodisk (60 sek overbelastning)
(441-500 V) [A]
Yderligere specifikationer
IP20 maks. kabeltværsnit (netforsyning og motor) [mm2] ([AWG])
IP20 maks. kabeltværsnit (bremse
og belastningsfordeling)
[mm2] ([AWG])
IP21, IP55, IP66 maks. kabeltværsnit
(netforsyning og motor)
[mm2] ([AWG])
IP21, IP55, IP66 maks. kabeltværsnit
(bremse og belastningsfordeling)
[mm2] ([AWG])
Maks. kabeltværsnit4) til
netafbrydelse [mm2] ([AWG])
Anslået effekttab
ved maks. nominel belastning [W]
Virkningsgrad
2)
1)
HO NO HO NO HO NO HO NO HO NO
91,5 80,3 110 99 135 117 159 162 221 195
78 71,5 97,5 88 120 116 158 143 195 176
82,5 72,6 99 90,2 123 106 144 146 200 177
70,5 64,9 88,5 80,3 110 105 143 130 177 160
35 (2) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
35 (2) 50 (1) 50 (1) 95 (4/0) 95 (4/0)
50 (1) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
50 (1) 50 (1) 50 (1) 95 (3/0) 95 (3/0)
50, 35, 35
(1, 2, 2)
570 698 697 843 891 1083 1022 1384 1232 1474
3)
0,98 0,98 0,98 0,98 0,99
95, 70, 70
(3/0, 2/0, 2/0)
300 MCM, 4/0)
185, 150, 120
(350 MCM,
Tabel 6.6 Netforsyning 380-500 V (FC 302), 380-480 V (FC 301), P30K-P75K
64 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01

Produktspecifikationer Design Guide
6.1.3 Netforsyning 525-600 V (kun FC 302)
Typebetegnelse PK75 P1K1 P1K5 P2K2 P3K0 P4K0 P5K5 P7K5
Typisk akseleffekt [kW] 0,75 1,1 1,5 2,2 3 4 5,5 7,5
Kapsling IP20, IP21 A3 A3 A3 A3 A3 A3 A3 A3
IP55-kapsling A5 A5 A5 A5 A5 A5 A5 A5
Udgangsstrøm
Kontinuerlig (525-550 V) [A] 1,8 2,6 2,9 4,1 5,2 6,4 9,5 11,5
Periodisk (525-550 V) [A] 2,9 4,2 4,6 6,6 8,3 10,2 15,2 18,4
Kontinuerlig (551-600 V) [A] 1,7 2,4 2,7 3,9 4,9 6,1 9,0 11,0
Periodisk (551-600 V) [A] 2,7 3,8 4,3 6,2 7,8 9,8 14,4 17,6
Kontinuerlig kVa 525 V) [kVa] 1,7 2,5 2,8 3,9 5,0 6,1 9,0 11,0
Kontinuerlig kVa (575 V) [kVa] 1,7 2,4 2,7 3,9 4,9 6,1 9,0 11,0
Maks. indgangsstrøm
Kontinuerlig (525-600 V) [A] 1,7 2,4 2,7 4,1 5,2 5,8 8,6 10,4
Periodisk (525-600 V) [A] 2,7 3,8 4,3 6,6 8,3 9,3 13,8 16,6
Yderligere specifikationer
Maks. kabeltværsnit4) (netforsyning, motor,
bremse og belastningsfordeling) [mm2] ([AWG])
Maks. kabeltværsnit4) (afbryder) [mm2] ([AWG])
Anslået effekttab ved nominel maks. belastning
3)
[W]
Virkningsgrad
2)
35 50 65 92 122 145 195 261
0,97 0,97 0,97 0,97 0,97 0,97 0,97 0,97
4, 4, 4 (12, 12, 12)
(min. 0,2 (24))
6, 4, 4 (10, 12, 12)
6 6
Tabel 6.7 Netforsyning 525-600 V (kun FC 302), PK75-P7K5
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 65
Produktspecifikationer Design Guide
Typebetegnelse P11K P15K P18K P22K P30K
Høj/normal overbelastning
Typisk akseleffekt [kW] 11 15 15 18,5 18,5 22 22 30 30 37
Kapsling IP20 B3 B3 B4 B4 B4
Kapsling IP21, IP55, IP66 B1 B1 B2 B2 C1
Udgangsstrøm
Kontinuerlig (525-550 V) [A] 19 23 23 28 28 36 36 43 43 54
Periodisk (525-550 V) [A] 30 25 37 31 45 40 58 47 65 59
Kontinuerlig (551-600 V) [A] 18 22 22 27 27 34 34 41 41 52
Periodisk (551-600 V) [A] 29 24 35 30 43 37 54 45 62 57
Kontinuerlig kVa (550 V) [kVa] 18,1 21,9 21,9 26,7 26,7 34,3 34,3 41,0 41,0 51,4
Kontinuerlig kVa (575 V) [kVa] 17,9 21,9 21,9 26,9 26,9 33,9 33,9 40,8 40,8 51,8
Maks. indgangsstrøm
Kontinuerlig ved 550 V [A] 17,2 20,9 20,9 25,4 25,4 32,7 32,7 39 39 49
66
Periodisk ved 550 V [A] 28 23 33 28 41 36 52 43 59 54
Kontinuerlig ved 575 V [A] 16 20 20 24 24 31 31 37 37 47
Periodisk ved 575 V [A] 26 22 32 27 39 34 50 41 56 52
Yderligere specifikationer
IP20 maks. kabeltværsnit4) (netforsyning, bremse, motor og
belastningsfordeling) [mm2] ([AWG])
IP21, IP55, IP66 maks. kabeltværsnit
(netforsyning, bremse og belastningsfordeling) [mm2] ([AWG])
IP21, IP55, IP66 maks. kabeltværsnit
(motor) [mm2] ([AWG])
Maks. kabeltværsnit4) (afbryder)
[mm2] ([AWG])
Anslået effekttab
ved maks. nominel belastning [W]
Virkningsgrad
2)
1)
HO NO HO NO HO NO HO NO HO NO
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35,-,-(2,-,-) 35,-,-(2,-,-) 35,-,-(2,-,-)
4)
16, 10, 10 (6, 8, 8) 16, 10, 10 (6, 8, 8) 35,-,-(2,-,-) 35,-,-(2,-,-) 50,-,- (1,-,-)
4)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35, 25, 25 (2, 4, 4) 35, 25, 25 (2, 4, 4) 50,-,- (1,-,-)
16, 10, 10
(6, 8, 8)
220 300 300 370 370 440 440 600 600 740
3)
0,98 0,98 0,98 0,98 0,98
50, 35, 35
(1, 2, 2)
Tabel 6.8 Netforsyning 525-600 V (kun FC 302), P11K-P30K
66 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
Produktspecifikationer Design Guide
Typebetegnelse P37K P45K P55K P75K
Høj/normal overbelastning
Typisk akseleffekt [kW] 37 45 45 55 55 75 75 90
Kapsling IP20 C3 C3 C3 C4 C4
Kapsling IP21, IP55, IP66 C1 C1 C1 C2 C2
Udgangsstrøm
Kontinuerlig (525-550 V) [A] 54 65 65 87 87 105 105 137
Periodisk (525-550 V) [A] 81 72 98 96 131 116 158 151
Kontinuerlig (551-600 V) [A] 52 62 62 83 83 100 100 131
Periodisk (551-600 V) [A] 78 68 93 91 125 110 150 144
Kontinuerlig kVa (550 V) [kVa] 51,4 61,9 61,9 82,9 82,9 100,0 100,0 130,5
Kontinuerlig kVa (575 V) [kVa] 51,8 61,7 61,7 82,7 82,7 99,6 99,6 130,5
Maks. indgangsstrøm
Kontinuerlig ved 550 V [A] 49 59 59 78,9 78,9 95,3 95,3 124,3
Periodisk ved 550 V [A] 74 65 89 87 118 105 143 137
Kontinuerlig ved 575 V [A] 47 56 56 75 75 91 91 119
Periodisk ved 575 V [A] 70 62 85 83 113 100 137 131
Yderligere specifikationer
IP20 maks. kabeltværsnit (netforsyning og motor)
[mm2] ([AWG])
IP20 maks. kabeltværsnit (bremse og belastningsfordeling) [mm2] ([AWG])
IP21, IP55, IP66 maks. kabeltværsnit (netforsyning og
motor) [mm2] ([AWG])
IP21, IP55, IP66 maks. kabeltværsnit (bremse og
belastningsfordeling) [mm2] ([AWG])
Maks. kabeltværsnit4) til netafbrydelse [mm2] ([AWG])
Anslået effekttab ved nominel maks. belastning [W]
Virkningsgrad
2)
1)
HO NO HO NO HO NO HO NO
50 (1) 150 (300 MCM)
50 (1) 95 (4/0)
50 (1) 150 (300 MCM)
50 (1) 95 (4/0)
50, 35, 35
(1, 2, 2)
3)
740 900 900 1100 1100 1500 1500 1800
0,98 0,98 0,98 0,98
95, 70, 70
(3/0, 2/0, 2/0)
185, 150, 120
(350 MCM,
300 MCM, 4/0)
6 6
Tabel 6.9 Netforsyning 525-600 V (kun FC 302), P37K-P75K
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 67
Produktspecifikationer
Design Guide
6.1.4 Netforsyning 525-690 V (kun FC 302)
Typebetegnelse P1K1 P1K5 P2K2 P3K0 P4K0 P5K5 P7K5
Høj/normal overbelastning
Typisk akseleffekt (kW) 1,1 1,5 2,2 3,0 4,0 5,5 7,5
IP20-kapsling A3 A3 A3 A3 A3 A3 A3
Udgangsstrøm
Kontinuerlig (525-550V) [A] 2,1 2,7 3,9 4,9 6,1 9,0 11,0
Periodisk (525-550V) [A] 3,4 4,3 6,2 7,8 9,8 14,4 17,6
Kontinuerlig (551-690 V) [A] 1,6 2,2 3,2 4,5 5,5 7,5 10,0
Periodisk (551-690 V) [A] 2,6 3,5 5,1 7,2 8,8 12,0 16,0
Kontinuerlig kVa 525 V 1,9 2,5 3,5 4,5 5,5 8,2 10,0
Kontinuerlig kVa 690 V 1,9 2,6 3,8 5,4 6,6 9,0 12,0
Maks. indgangsstrøm
66
Kontinuerlig (525-550V) [A] 1,9 2,4 3,5 4,4 5,5 8,1 9,9
Periodisk (525-550V) [A] 3,0 3,9 5,6 7,0 8,8 12,9 15,8
Kontinuerlig (551-690 V) [A] 1,4 2,0 2,9 4,0 4,9 6,7 9,0
Periodisk (551-690 V) [A] 2,3 3,2 4,6 6,5 7,9 10,8 14,4
Yderligere specifikationer
Maks. kabeltværsnit4) (netforsyning, motor, bremse og
belastningsfordeling) [mm2] ([AWG])
Maks. kabeltværsnit4) (afbryder) [mm2] ([AWG])
Anslået effekttab ved nominel maks. belastning (W)
Virkningsgrad
2)
1)
HO/NO HO/NO HO/NO HO/NO HO/NO HO/NO HO/NO
4, 4, 4 (12, 12, 12) (min. 0,2 (24)
6, 4, 4 (10, 12, 12)
3)
44 60 88 120 160 220 300
0,96 0,96 0,96 0,96 0,96 0,96 0,96
Tabel 6.10 A3 kapsling, Netforsyning 525-690 V IP20/beskyttet Chassis, P1K1-P7K5
Typebetegnelse P11K P15K P18K P22K
Høj/normal overbelastning
Typisk akseleffekt ved 550 V [kW] 7,5 11 11 15 15 18,5 18,5 22
Typisk akseleffekt ved 690 V [kW] 11 15 15 18,5 18,5 22 22 30
IP20-kapsling B4 B4 B4 B4
IP21- eller IP55-kapsling B2 B2 B2 B2
Udgangsstrøm
Kontinuerlig (525-550V) [A] 14,0 19,0 19,0 23,0 23,0 28,0 28,0 36,0
Periodisk (60 sek overbelastning) (525-550V) [A] 22,4 20,9 30,4 25,3 36,8 30,8 44,8 39,6
Kontinuerlig (551-690 V) [A] 13,0 18,0 18,0 22,0 22,0 27,0 27,0 34,0
Periodisk (60 sek overbelastning) (551-690 V) [A] 20,8 19,8 28,8 24,2 35,2 29,7 43,2 37,4
Kontinuerlig kVa (ved 550 V) [kVa] 13,3 18,1 18,1 21,9 21,9 26,7 26,7 34,3
Kontinuerlig kVa (ved 690 V) [kVa] 15,5 21,5 21,5 26,3 26,3 32,3 32,3 40,6
Maks. indgangsstrøm
Kontinuerlig (ved 550 V) (A) 15,0 19,5 19,5 24,0 24,0 29,0 29,0 36,0
Periodisk (60 sek. overbelastning ved 550 V) (A) 23,2 21,5 31,2 26,4 38,4 31,9 46,4 39,6
Kontinuerlig (ved 690 V) (A) 14,5 19,5 19,5 24,0 24,0 29,0 29,0 36,0
Periodisk (60 sek overbelastning) (ved 690 V) (A) 23,2 21,5 31,2 26,4 38,4 31,9 46,4 39,6
Yderligere specifikationer
Maks. kabeltværsnit4) (netforsyning/motor, belastningsfordeling og bremse) [mm2] ([AWG])
Maks. kabeltværsnit4) til netafbrydelse [mm2]
([AWG])
Anslået effekttab ved nominel maks. belastning
3)
(W)
Virkningsgrad
2)
1)
HO NO HO NO HO NO HO NO
35, 25, 25 (2, 4, 4)
16, 10, 10 (6, 8, 8)
150 220 220 300 300 370 370 440
0,98 0,98 0,98 0,98
Tabel 6.11 B2/B4 Kapsling, Netforsyning 525-690 V IP20/IP21/IP55 - Chassis/NEMA 1/NEMA 12 (kun FC 302), P11K-P22K
68 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
Produktspecifikationer Design Guide
Typebetegnelse P30K P37K P45K P55K P75K
Høj/normal overbelastning
Typisk akseleffekt ved 550 V (kW) 22 30 30 37 37 45 45 55 50 75
Typisk akseleffekt ved 690 V [kW] 30 37 37 45 45 55 55 75 75 90
IP20-kapsling B4 C3 C3 D3h D3h
IP21- eller IP55-kapsling C2 C2 C2 C2 C2
Udgangsstrøm
Kontinuerlig (525-550V) [A] 36,0 43,0 43,0 54,0 54,0 65,0 65,0 87,0 87,0 105
Periodisk (60 sek overbelastning)
(525-550V) [A]
Kontinuerlig (551-690 V) [A] 34,0 41,0 41,0 52,0 52,0 62,0 62,0 83,0 83,0 100
Periodisk (60 sek overbelastning)
(551-690 V) [A]
Kontinuerlig kVa (ved 550 V) [kVa] 34,3 41,0 41,0 51,4 51,4 61,9 61,9 82,9 82,9 100
Kontinuerlig kVa (ved 690 V) [kVa] 40,6 49,0 49,0 62,1 62,1 74,1 74,1 99,2 99,2 119,5
Maks. indgangsstrøm
Kontinuerlig (ved 550 V) [A] 36,0 49,0 49,0 59,0 59,0 71,0 71,0 87,0 87,0 99,0
Periodisk (60 sek overbelastning)
(ved 550 V) [A]
Kontinuerlig (ved 690 V) [A] 36,0 48,0 48,0 58,0 58,0 70,0 70,0 86,0 - Periodisk (60 sek overbelastning)
(ved 690 V) [A]
Yderligere specifikationer
Maks. kabeltværsnit (netforsyning og
motor) [mm2] ([AWG])
Maks. kabeltværsnit (belastningsfordeling
og bremse) [mm2] ([AWG])
Maks. kabeltværsnit4) til netafbrydelse
[mm2] ([AWG])
Anslået effekttab
ved maks. nominel belastning [W]
Virkningsgrad
2)
1)
HO NO HO NO HO NO HO NO HO NO
54,0 47,3 64,5 59,4 81,0 71,5 97,5 95,7 130,5 115,5
51,0 45,1 61,5 57,2 78,0 68,2 93,0 91,3 124,5 110
54,0 53,9 72,0 64,9 87,0 78,1 105,0 95,7 129 108,9
54,0 52,8 72,0 63,8 87,0 77,0 105 94,6 - -
150 (300 MCM)
95 (3/0)
95, 70, 70
(3/0, 2/0, 2/0)
3)
600 740 740 900 900 1100 1100 1500 1500 1800
0,98
0,98 0,98 0,98 0,98
185, 150, 120
(350 MCM,
300 MCM, 4/0)
-
6 6
Tabel 6.12 B4, C2, C3 Kapsling, Netforsyning 525-690 V IP20/IP21/IP55 - Chassis/NEMA1/NEMA 12 (kun FC 302), P30K-P75K
Se sikringsklassificering i kapitel 9.3.1 Sikringer og afbrydere.
1)
Høj overbelastning = 150 eller 160 % moment i løbet af 60 sek. Normal overbelastning = 110 % moment i løbet af 60 sek.
2)
Målt med 5 m skærmede motorkabler ved nominel belastning og frekvens.
3)
Det typiske effekttab sker under driftsforhold med nominel belastning og forventes at ligge inden for ±15 % (tolerancen skyldes
variationer i spændings- og kabelforhold).
Værdierne er baseret på en typisk motorvirkningsgrad (eff2/eff3-skillelinje). Motorer med mindre virkningsgrad vil ligeledes bidrage til
effekttabet i frekvensomformeren og omvendt.
Hvis switchfrekvensen øges i forhold til fabriksindstillingen, kan effekttabet stige markant.
Typisk strømforbrug for LCP og styrekort er medregnet. Flere optioner og kundebelastning kan tilføre op til 30 W til effekttabet. (Dog
typisk kun 4 W ekstra for et fuldt belastet styrekort eller optioner til port A eller port B).
Selvom målinger foretages med udstyr af meget høj kvalitet, skal der tages forbehold for en vis unøjagtighed i målingerne (± 5 %).
4)
De tre værdier for maks. kabeltværsnit er for henholdsvis enkelt kerne, fleksibel ledning og fleksibel ledning med muffe.
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 69
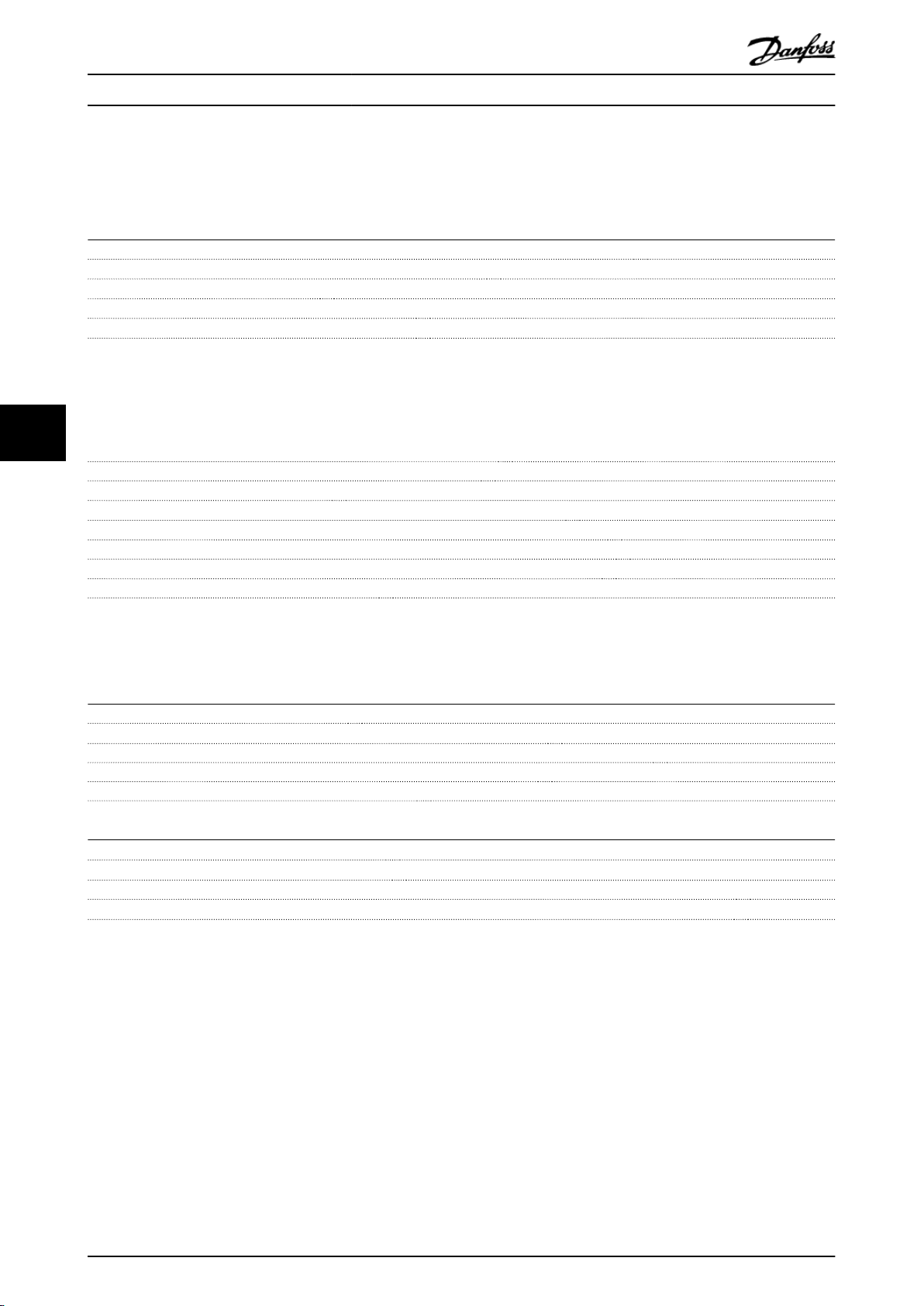
Produktspecifikationer Design Guide
6.2 Generelle specifikationer
6.2.1 Netforsyning
Netforsyning
Forsyningsklemmer (6-puls) L1, L2, L3
Forsyningsspænding 200-240 V ±10 %
Forsyningsspænding FC 301: 380-480 V/FC 302: 380-500 V ±10 %
Forsyningsspænding FC 302: 525-600 V ±10 %
Forsyningsspænding FC 302: 525-690 V ±10 %
Netspænding lav/netudfald:
I tilfælde af lav netspænding eller netudfald fortsætter frekvensomformeren, indtil mellemkredsspændingen kommer ned under
mindste stopniveau, hvilket typisk svarer til 15 % under frekvensomformerens laveste nominelle forsyningsspænding. Opstart og
fuldt moment kan ikke forventes ved netspænding lavere end 10 % under frekvensomformerens laveste nominelle forsynings-
66
spænding.
Forsyningsfrekvens 50/60 Hz ±5 %
Maks. midlertidig ubalance mellem netfaser 3,0 % af nominel forsyningsspænding
Reel effektfaktor (λ) ≥ 0,9 nominelt ved nominel belastning
Effektforskydningsfaktor (cos ϕ) tæt på 1 (> 0,98)
Kobling på forsyningsindgang L1, L2, L3 (opstarter) ≤ 7,5 kW maksimum 2 gange/min.
Kobling på forsyningsindgang L1, L2, L3 (opstarter) 11-75 kW maksimum 1 gang/min.
Kobling på forsyningsindgang L1, L2, L3 (opstarter) ≥ 90 kW maksimum 1 gang/2 min.
Miljø i henhold til EN60664-1 overspændingskategori III/forureningsgrad 2
Apparatet er egnet til brug i et kredsløb, der kan levere maks. 100.000 RMS symmetriske ampere, 240/500/600/690 V maksimum.
Motorudgang og motordata
6.2.2
Motorudgang (U, V, W)
Udgangsspænding 0-100 % af forsyningsspændingen
Udgangsfrekvens 0-590 Hz
Udgangsfrekvens i Flux mode 0-300 Hz
Kobling på udgang Ubegrænset
Rampetider 0,01-3.600 sek
Momentkarakteristikker
Startmoment (konstant moment) maksimum 160 % i 60 sek1) én gang pr. 10 min.
Start-/overmoment (variabelt moment) maksimum 110 % i op til 0,5 sek1) én gang pr. 10 min.
Momentstigetid i Flux (for 5 kHz fsw) 1 ms
Momentstigetid i VVC
1)
Procentangivelsen viser det nominelle moment.
2)
Momentresponstiden afhænger af applikationen og belastningen, men momenttrinnet fra 0 til reference er generelt
4-5 x momentstigetiden.
3)
Særlige kundeversioner med udgangsfrekvens 0-1.000 Hz fås.
plus
(uafhængigt af fsw) 10 ms
3)
70 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
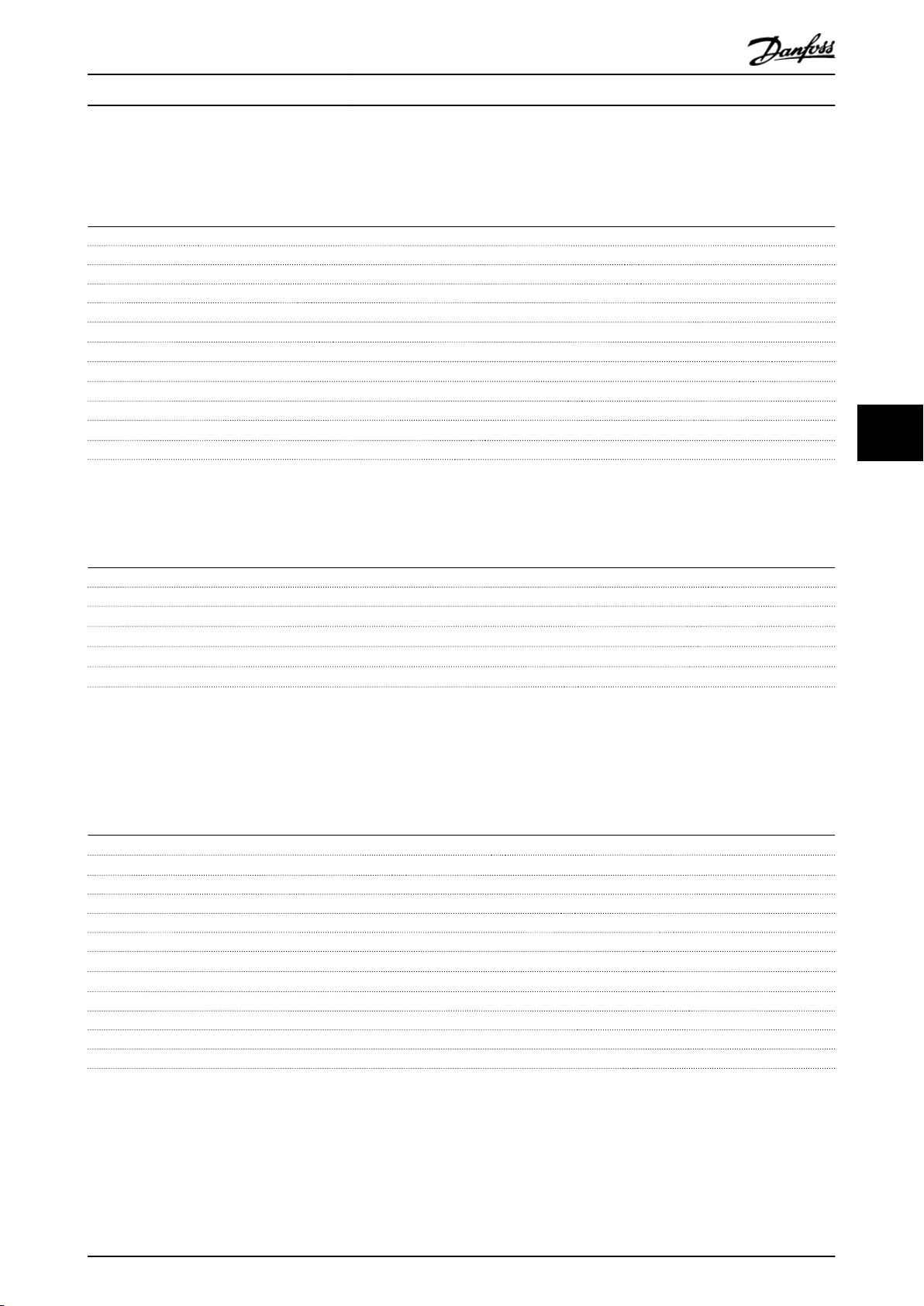
Produktspecifikationer Design Guide
6.2.3 Omgivelsesforhold
Miljø
Kapsling IP20/Chassis, IP21/Type 1, IP55/ Type 12, IP66/ Type 4X
Vibrationstest 1,0 g
Maks. THVD 10%
Maks. relativ luftfugtighed 5-93 % (IEC 721-3-3); klasse 3K3 (ikke-kondenserende) under drift
Aggressivt miljø (IEC 60068-2-43) H2S-test
Omgivelsestemperatur Maks. 50 °C (døgngennemsnit maksimum 45 °C)
Minimumomgivelsestemperatur ved fuld drift 0 °C
Minimumomgivelsestemperatur ved reduceret ydeevne - 10 °C
Temperatur ved lager/transport -25 til +65/70 °C
Maks. højde over havet uden derating 1.000 m
EMC-standarder, emission EN 61800-3, EN 55011
EMC-standarder, immunitet EN61800-3, EN 61000-6-1/2
1)
Se kapitel 5.2.1 EMC-testresultater
Kabelspecifikationer
6.2.4
klasse Kd
1)
6 6
Kabellængder og tværsnit for styrekabler
Maks. motorkabellængde, skærmet 150 m
Maks. motorkabellængde, uskærmet 300 m
Maks. tværsnit til styreklemmer, blød/ubøjelig ledning uden kabelendemuffer 1,5 mm2/16 AWG
Maks. tværsnit til styreklemmer, blød ledning med kabelendemuffer 1 mm2/18 AWG
Maks. tværsnit til styreklemmer, blød ledning med kabelendemuffer med krave 0,5 mm2/20 AWG
Minimumtværsnit til styreklemmer 0,25 mm2/24 AWG
1)
Se tabellerne over elektriske data i kapitel 6.1 Elektriske data for oplysninger om strømkabler.
1)
6.2.5 Styringsind-/udgange og styringsdata
6.2.5.1 Digitale indgange
Digitale indgange
Programmerbare digitale indgange FC 301: 4 (5)1)/FC 302: 4 (6)
Klemmenummer 18, 19, 271), 291), 32, 33
Logik PNP eller NPN
Spændingsniveau 0-24 V DC
Spændingsniveau, logisk '0' PNP < 5 V DC
Spændingsniveau, logisk '1' PNP > 10 V DC
Spændingsniveau, logisk '0' NPN
Spændingsniveau, logisk '1' NPN
Maksimumspænding på indgang 28 V DC
Pulsfrekvensområde 0-110 kHz
(Driftscyklus) min. pulsbredde 4,5 ms
Indgangsmodstand, R
i
2)
2)
> 19 V DC
< 14 V DC
ca. 4 kΩ
1)
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 71

Produktspecifikationer Design Guide
Sikker standsning, klemme 37
3, 4)
(Klemme 37 er fast PNP logik)
Spændingsniveau 0-24 V DC
Spændingsniveau, logisk '0' PNP < 4 V DC
Spændingsniveau, logisk '1' PNP > 20 V DC
Maksimumspænding på indgang 28 V DC
Typisk indgangsstrøm på 24 V 50 mA RMS
Typisk indgangsstrøm på 20 V 60 mA RMS
Indgangskapacitans 400 nF
Alle digitale indgange er galvanisk adskilt fra forsyningsspændingen (PELV) og andre højspændingsklemmer.
1)
Klemme 27 og 29 kan også programmeres som udgange.
2)
Undtagen sikker standsning, indgangsklemme 37.
3)
Se VLT® Frekvensomformere - Safe Torque Off betjeningsvejledning for yderligere oplysninger om klemme 37 og sikker
standsning.
4)
Når der anvendes en kontaktor med en DC-spole indeni i kombination med sikker standsning, er det vigtigt at sikre en returvej
66
til strømmen fra spolen, når den slukkes. Dette kan gøres ved at bruge en friløbsdiode (eller alternativt en 30 eller 50 V MOV for
hurtigere responstid) i spolen. Almindelige kontaktorer kan købes med denne diode.
Analoge indgange
Antal analoge indgange 2
Klemmenummer 53, 54
Tilstande Spænding eller strøm
Tilstandsvalg Kontakt S201 og kontakt S202
Spændingstilstand Kontakt S201/kontakt S202 = OFF (U)
Spændingsniveau -10 til +10 V (skalérbar)
Indgangsmodstand, R
i
ca. 10 kΩ
Maks. spænding ± 20 V
Strømtilstand Kontakt S201/kontakt S202 = ON (I)
Strømniveau 0/4 til 20 mA (skalérbar)
Indgangsmodstand, R
i
ca. 200 Ω
Maks. strøm 30 mA
Opløsning for analoge indgange 10 bit (+ fortegn)
Nøjagtighed for analoge indgange Maks. fejl 0,5 % af fuld skala
Båndbredde 100 Hz
Alle analoge indgange er galvanisk adskilt fra forsyningsspændingen (PELV) og andre højspændingsklemmer.
Illustration 6.1 PELV-isolering
72 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01

Produktspecifikationer
Design Guide
Puls-/encoder-indgange
Programmerbare puls-/encoder-indgange 2/1
Klemmenummer, puls/encoder 291), 332) / 323), 33
Maks. frekvens på klemme 29, 32, 33 110 kHz (push-pull-styret)
Maks. frekvens på klemme 29, 32, 33 5 kHz (åben kollektor)
Min. frekvens på klemme 29, 32, 33 4 Hz
Spændingsniveau se afsnittet om digital indgang
Maksimumspænding på indgang 28 V DC
Indgangsmodstand, R
i
ca. 4 kΩ
Pulsindgangsnøjagtighed (0,1-1 kHz) Maks. fejl: 0,1 % af fuld skala
Encoderindgangsnøjagtighed (1-11 kHz) Maks. fejl: 0,05 % af fuld skala
Puls- og encoderindgangene (klemme 29, 32, 33) er galvanisk adskilt fra forsyningsspændingen (PELV) og andre højspændingsklemmer.
1)
FC 302 kun
2)
Pulsindgangene er 29 og 33
3)
Encoderindgange: 32 = A og 33 = B
Digital udgang
Programmerbare digital/pulsudgange 2
Klemmenummer 27, 29
Spændingsniveau ved digital udgang/frekvensudgang 0-24 V
Maks. udgangsstrøm (plade eller kilde) 40 mA
Maks. belastning ved udgangsfrekvens 1 kΩ
Maks. kapacitiv belastning ved udgangsfrekvens 10 nF
Min. udgangsfrekvens ved udgangsfrekvens 0 Hz
Maks. udgangsfrekvens ved udgangsfrekvens 32 kHz
Nøjagtighed på udgangsfrekvens Maks. fejl: 0,1 % af fuld skala
Opløsning på frekvensudgange 12 bit
1)
Klemme 27 og 29 kan også programmeres som indgange.
Den digitale udgang er galvanisk adskilt fra forsyningsspændingen (PELV) og andre højspændingsklemmer.
3)
6 6
1)
Analog udgang
Antal programmerbare analoge udgange 1
Klemmenummer 42
Strømområde ved analog udgang 0/4 til 20 mA
Maks. belastning GND – analog udgang mindre end 500 Ω
Nøjagtighed på analog udgang Maks. fejl: 0,5 % af fuld skala
Opløsning på analog udgang 12 bit
Den analoge udgang er galvanisk adskilt fra forsyningsspændingen (PELV) og andre højspændingsklemmer.
Styrekort, 24 V DC-udgang
Klemmenummer 12, 13
Udgangsspænding 24 V +1, -3 V
Maks. belastning 200 mA
24 V DC-forsyningen er galvanisk adskilt fra forsyningsspændingen (PELV), men har samme potentiale som de analoge og
digitale indgange og udgange.
Styrekort, 10 V DC-udgang
Klemmenummer ±50
Udgangsspænding 10,5 V ±0,5 V
Maks. belastning 15 mA
10 V DC-forsyningen er galvanisk adskilt fra forsyningsspændingen (PELV) og andre højspændingsklemmer.
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 73

Produktspecifikationer
Design Guide
Styrekort, seriel kommunikation via RS-485
Klemmenummer 68 (P,TX+, RX+), 69 (N,TX-, RX-)
Klemmenummer 61 Fælles for klemme 68 og 69
Den serielle RS-485-kommunikationskreds er funktionelt adskilt fra andre centrale kredsløb og galvanisk adskilt fra forsyningsspændingen (PELV).
Styrekort, seriel kommunikation via USB
USB-standard 1,1 (fuld hastighed)
USB-stik USB-stik til "apparat" af B-typen
Tilslutning til pc foretages via et almindeligt værts-/apparats-USB-kabel.
USB-tilslutningen er galvanisk adskilt fra forsyningsspændingen (PELV) og andre højspændingsklemmer.
USB-jordtilslutningen er ikke galvanisk adskilt fra jordbeskyttelsen. Benyt kun en isoleret bærbar som pc-tilslutning til USB-stikket
på frekvensomformeren.
Relæudgange
66
Programmerbare relæudgange FC 301, alle kW: 1/FC 302, alle kW: 2
Relæ 01 klemmenummer 1-3 (bryde), 1-2 (slutte)
Maks. klemmebelastning (AC-1)1) på 1-3 (NC), 1-2 (NO) (resistiv belastning) 240 V AC, 2 A
Maks. klemmebelastning (AC-15)1) (induktiv belastning ved cosφ 0,4) 240 V AC, 0,2 A
Maks. klemmebelastning (DC-1)1) på 1-2 (NO), 1-3 (NC) (resistiv belastning) 60 V DC, 1 A
Maks. klemmebelastning (DC-13)1) (induktiv belastning) 24 V DC, 0,1 A
Relæ 02 (kun FC 302) Klemmenummer 4-6 (bryde), 4-5 (slutte)
Maks. klemmebelastning (AC-1)1) på 4-5 (NO) (resistiv belastning)
2)3)
Overspændingskategori II 400 V AC, 2 A
Maks. klemmebelastning (AC-15)1) på 4-5 (NO) (induktiv belastning ved cosφ 0,4) 240 V AC, 0,2 A
Maks. klemmebelastning (DC-1)1) på 4-5 (NO) (resistiv belastning) 80 V DC, 2 A
Maks. klemmebelastning (DC-13)
Maks. klemmebelastning (AC-1)
1)
på 4-5 (NO) (induktiv belastning) 24 V DC, 0,1 A
1)
på 4-6 (NC) (resistiv belastning) 240 V AC, 2 A
Maks. klemmebelastning (AC-15)1) på 4-6 (NC) (induktiv belastning ved cosφ 0,4) 240 V AC, 0,2 A
Maks. klemmebelastning (DC-1)1) på 4-6 (NC) (resistiv belastning) 50 V DC, 2 A
Maks. klemmebelastning (DC-13)
1)
på 4-6 (NC) (induktiv belastning) 24 V DC, 0,1 A
Min. klemmebelastning på 1-3 (NC), 1-2 (NO), 4-6 (NC), 4-5 (NO) 24 V DC 10 mA, 24 V AC 20 mA
Miljø i overensstemmelse med EN 60664-1 overspændingskategori III/forureningsgrad 2
1)
IEC 60947 del 4 og 5
Relækontakterne er galvanisk adskilt fra resten af kredsløbet ved forstærket isolering (PELV).
2)
Overspændingskategori II
3)
UL-applikationer 300 V AC 2A
Ydelse for styrekort
Scanningsinterval 1 ms
Styrekarakteristik
Opløsning for udgangsfrekvens ved 0-590 Hz ±0,003 Hz
Gentaget nøjagtighed for Præcis start/stop (klemme 18, 19) ≤±0,1 ms
Systemresponstid (klemme 18, 19, 27, 29, 32, 33) ≤ 2 ms
Hastighedsstyringsområde (åben sløjfe) 1:100 af synkron hastighed
Hastighedsstyringsområde (lukket sløjfe) 1:1.000 af synkron hastighed
Hastighedsnøjagtighed (åben sløjfe) 30-4.000 O/MIN: fejl ±8 O/MIN
Hastighedsnøjagtighed (lukket sløjfe), afhængigt af opløsningen for feedbackapparatet 0-6.000 O/MIN: fejl ±0,15 O/MIN
Momentstyringsnøjagtighed (hastighedsfeedback) maks. fejl ±5 % af nominelt moment
Alle styrekarakteristikker er baserede på en 4-polet asynkron motor
74 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01

2
20%
4 6 8
10
12 14 16
40%
60%
80%
100%
110%
I
out
(%)
fsw (kHz)
A1-A3 45°C, A4-A5 40°C
A1-A3 50°C, A4-A5 45°C
A1-A3 55°C, A4-A5 50°C
130BA393.10
0
0
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
A1-A3 45°C, A4-A5 40°C
A1-A3 50°C, A4-A5 45°C
A1-A3 55°C, A4-A5 50°C
0
0
130BD639.10
I
out
(%)
fsw (kHz)
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
I
out
(%)
A1-A3 45°C, A4-A5 40°C
A1-A3 50°C, A4-A5 45°C
A1-A3 55°C, A4-A5 50°C
0
0
130BA394.10
fsw (kHz)
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
I
out
(%)
A1-A3 45°C, A4-A5 40°C
A1-A3 50°C, A4-A5 45°C
A1-A3 55°C, A4-A5 50°C
0
0
130BD640.10
fsw (kHz)
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
45°C
50°C
55°C
130BA402.10
0
0
I
out
(%)
HO
B1
B2
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
0
0
I
out
(%)
NO
45°C
50°C
55°C
130BA401.11
B1
B2
Produktspecifikationer Design Guide
6.2.6 Derating for omgivelsestemperatur
6.2.6.1 Derating for omgivelsestemperatur,
kapslingstype A
60° AVM - Pulsbreddemodulering
SFAVM
Illustration 6.2 Derating af Iud for Forskellig T
OMG, MAKS
for
Kapslingstype A, ved brug af 60° AVM
SFAVM - Stator Frequency Asyncron Vector Modulation
Illustration 6.3 Derating af I
Kapslingstype A, ved brug af SFAVM
for Forskellig T
ud
OMG, MAKS
for
Illustration 6.5 Derating af Iud for Forskellig T
OMG, MAKS
for
Kapslingstype A, ved brug af SFAVM og maksimum 10 m
motorkabel
6.2.6.2
Derating for omgivelsestemperatur,
kapslingstype B
Kapslinger B, T2, T4 og T5
For kapslingstyper B og C afhænger derating også af
overbelastningstilstanden valgt i 1-04 Overbelastnings-
tilstand
60° AVM - Pulsbreddemodulering
6 6
Ved brug af kun 10 m motorkabel eller mindre i
kapslingstype A er mindre derating nødvendig. Dette er
fordi længden på motorkablet har en relativt høj
Illustration 6.6 Derating af Iud for forskellig T
OMG, MAKS
Kapslingstyper B1 og B2, ved brug af 60° AVM i høj overbelastningstilstand (160 % over moment)
for
indvirkning på anbefalet derating.
60° AVM
Illustration 6.4 Derating af I
Kapslingstype A, ved brug af 60° AVM og maksimum 10 m
motorkabel
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 75
for Forskellig T
ud
OMG, MAKS
for
Illustration 6.7 Derating af Iud for forskellig T
OMG, MAKS
for
Kapslingstyper B1 og B2, ved brug af 60° AVM i normal
overbelastningstilstand (110 % over moment)

130BB830.10
2 4
6 8
20%
10
12 14
16
f
sw
(kHz)
0
0
40%
o
50 C
60%
80%
90%
100%
o
45 C
110%
(%)
l
out
B3 & B4
HO
2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
12 14
16
o
55 C
f
sw
(kHz)
0
0
(%)
l
out
B3
B4
NO
130BB828.10
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
45°C
50°C
55°C
130BA404.10
0
0
I
out
(%)
HO
B1
B2
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
45°C
50°C
55°C
0
0
I
out
(%)
NO
130BA403.11
B1
B2
130BB834.10
2 4
6 8
20%
10
12 14
16
f
sw
(kHz)
0
0
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
B3
(%)
l
out
HO
B4
2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
12 14
16
B3
B4
f
sw
(kHz)
0
0
(%)
l
out
NO
130BB832.10
Produktspecifikationer Design Guide
Illustration 6.11 Derating af Iud for forskellig T
OMG, MAKS
for
Kapslingstyper B1 og B2, ved brug af SFAVM i normal overbe-
Illustration 6.8 Derating af Iud for forskellig T
OMG, MAKS
for
lastningstilstand (110 % over moment)
Kapslingstyper B3 og B4, ved brug af 60° AVM i høj overbe-
66
lastningstilstand (160 % over moment)
Illustration 6.12 Derating af Iud for forskellig T
OMG, MAKS
for
Kapslingstyper B3 og B4, ved brug af SFAVM i høj overbelast-
Illustration 6.9 Derating af Iud for forskellig T
OMG, MAKS
for
ningstilstand (160 % over moment)
Kapslingstyper B3 og B4, ved 60° AVM i normal overbelastningstilstand (110 % over moment)
SFAVM - Stator Frequency Asyncron Vector Modulation
Illustration 6.13 Derating af Iud for forskellig T
Illustration 6.10 Derating af I
for forskellig T
ud
OMG, MAKS
for
Kapslingstyper B1 og B2, ved brug af SFAVM i høj overbelastningstilstand (160 % over moment)
76 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
Kapslingstyper B3 og B4, ved brug af SFAVM i normal overbelastningstilstand (110 % over moment)
OMG, MAKS
for

1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
3
(%)
l
out
f
sw
(kHz)
0
0
B1 & B2
NO
130BB820.10
1 2 4
6 8
20%
10
40%
o
50 C
f
sw
(kHz)
0
0
60%
80%
90%
100%
o
45 C
110%
(%)
l
out
B1 & B2
HO
130BB822.10
1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
f
sw
(kHz)
0
0
(%)
l
out
B1 & B2
NO
130BB826.10
1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
f
sw
(kHz)
0
0
(%)
l
out
B1 & B2
HO
130BB824.10
fsw (kHz)
130BB211.10
13.6
20.4
27.2
34
I
out
(A)
30.6
1 2 64
55°C
50°C
45°C
8 10
B2 all options
fsw (kHz)
130BB212.10
40
60
80
100
I
out
(A)
90
1 2 64
55°C
50°C
45°C
8 10
B2 all options
70
20
Produktspecifikationer Design Guide
Kapslinger B, T6
60° AVM - Pulsbreddemodulering
Illustration 6.14 Derating af udgangsstrøm med switchfrekvens
og omgivelsestemperatur for 600 V-frekvensomformere,
kapslingstype B, 60° AVM, NO
Illustration 6.17 Derating af udgangsstrøm med switchfrekvens
og omgivelsestemperatur for 600 V-frekvensomformere,
kapslingstype B; SFAVM, HO
Kapslinger B, T7
Kapslinger B2 og B4, 525-690 V
60° AVM - Pulsbreddemodulering
6 6
Illustration 6.15 Derating af udgangsstrøm med switchfrekvens
og omgivelsestemperatur for 600 V-frekvensomformere,
kapslingstype B, 60° AVM, HO
Illustration 6.18 Derating af udgangsstrøm med switchfrekvens
og omgivelsestemperatur for kapslingstyper B2 og B4, 60°
AVM. Bemærk: Grafen er tegnet med strømmen som absolut
værdi og gælder for både høj og normal overbelastning.
SFAVM - Stator Frequency Asyncron Vector Modulation
SFAVM - Stator Frequency Asyncron Vector Modulation
Illustration 6.16 Derating af udgangsstrøm med switchfrekvens
og omgivelsestemperatur for 600 V-frekvensomformere,
kapslingstype B; SFAVM, NO
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 77
Illustration 6.19 Derating af udgangsstrøm med switchfrekvens
og omgivelsestemperatur for kapslingstyper B2 og B4, SFAVM.
Bemærk: Grafen er tegnet med strømmen som absolut værdi
og gælder for både høj og normal overbelastning.
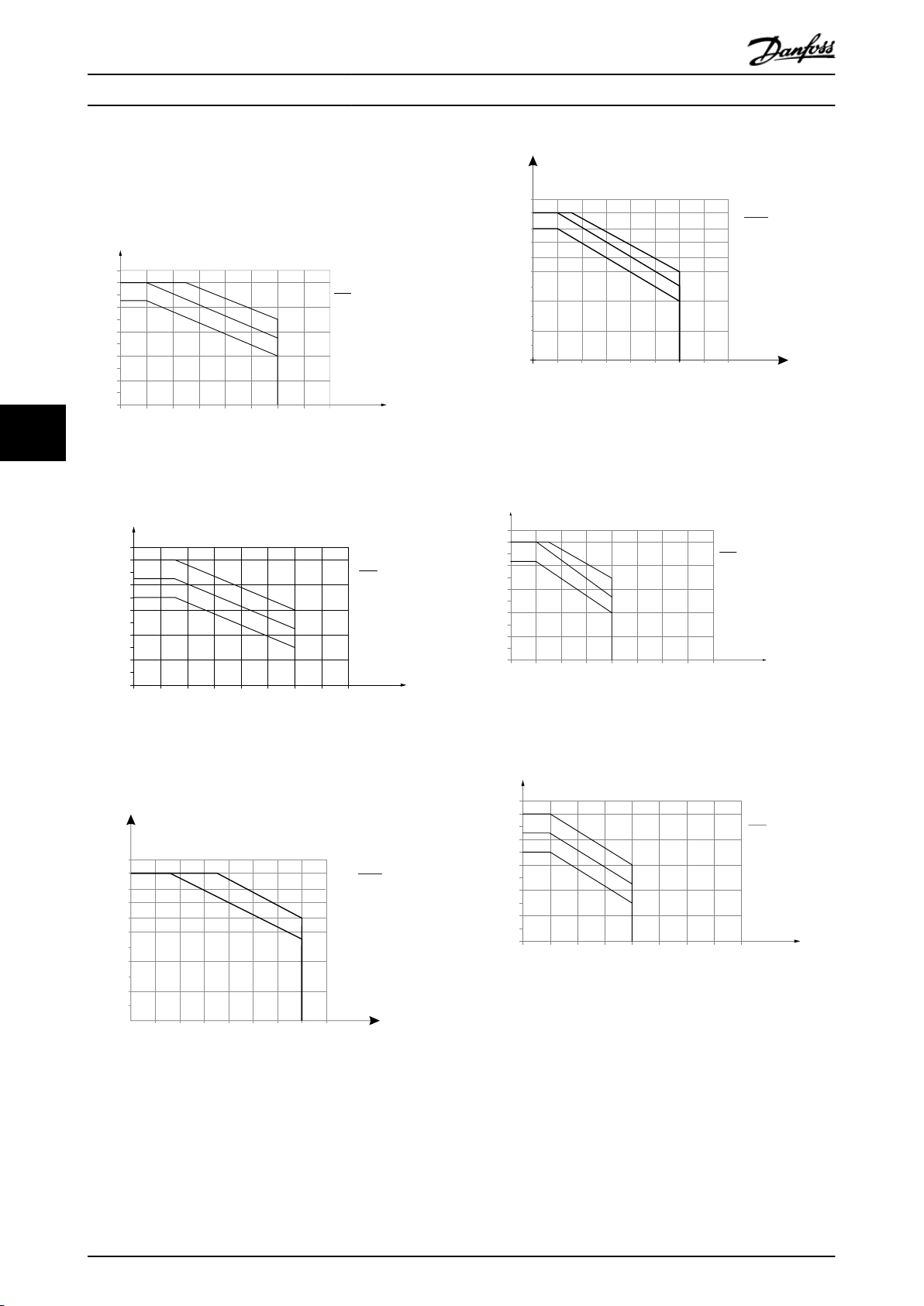
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
45°C
50°C
55°C
130BA398.10
0
0
I
out
(%)
HO
C1 & C2
130BA397.10
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
0
0
I
out
(%)
NO
45°C
50°C
55°C
C1 & C2
130BB831.10
80%
90%
100%
110%
(%)
l
out
C3 & C4
HO
2 4
6 8
20%
10
40%
60%
o
50 C
o
45 C
12 14
16
f
sw
(kHz)
2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
12 14
16
o
55 C
f
sw
(kHz)
0
0
(%)
l
out
C3 & C4
NO
130BB829.10
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
HO
f
sw
(kHz)
45°C
50°C
55°C
130BA400.10
0
0
I
out
(%)
C1 & C2
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
fsw (kHz)
0
0
I
out
(%)
NO
45°C
50°C
55°C
130BA399.10
C1 & C2
Produktspecifikationer Design Guide
6.2.6.3 Derating for omgivelsestemperatur,
kapslingstype C
Kapslinger C, T2, T4 og T5
60° AVM - Pulsbreddemodulering
Illustration 6.23 Derating af Iud for forskellig T
OMG, MAKS
for
Kapslingstyper C3 og C4, ved brug af 60° AVM i normal
66
Illustration 6.20 Derating af I
for forskellig T
ud
OMG, MAKS
for
overbelastningstilstand (110 % over moment)
Kapslingstyper C1 og C2, ved brug af 60° AVM i høj overbelastningstilstand (160 % over moment)
SFAVM - Stator Frequency Asyncron Vector Modulation
Illustration 6.21 Derating af Iud for forskellig T
OMG, MAKS
Kapslingstyper C1 og C2, ved brug af 60° AVM i normal
overbelastningstilstand (110 % over moment)
for
Illustration 6.24 Derating af Iud for forskellig T
OMG, MAKS
Kapslingstyper C1 og C2, ved brug af SFAVM i høj overbelast-
ningstilstand (160 % over moment)
for
Illustration 6.22 Derating af Iud for forskellig T
Kapslingstyper C3 og C4, ved brug af 60° AVM i høj overbelastningstilstand (160 % over moment)
78 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
Illustration 6.25 Derating af Iud for forskellig T
OMG, MAKS
for
Kapslingstyper C1 og C2, ved brug af SFAVM i normal overbelastningstilstand (110 % over moment)
OMG, MAKS
for
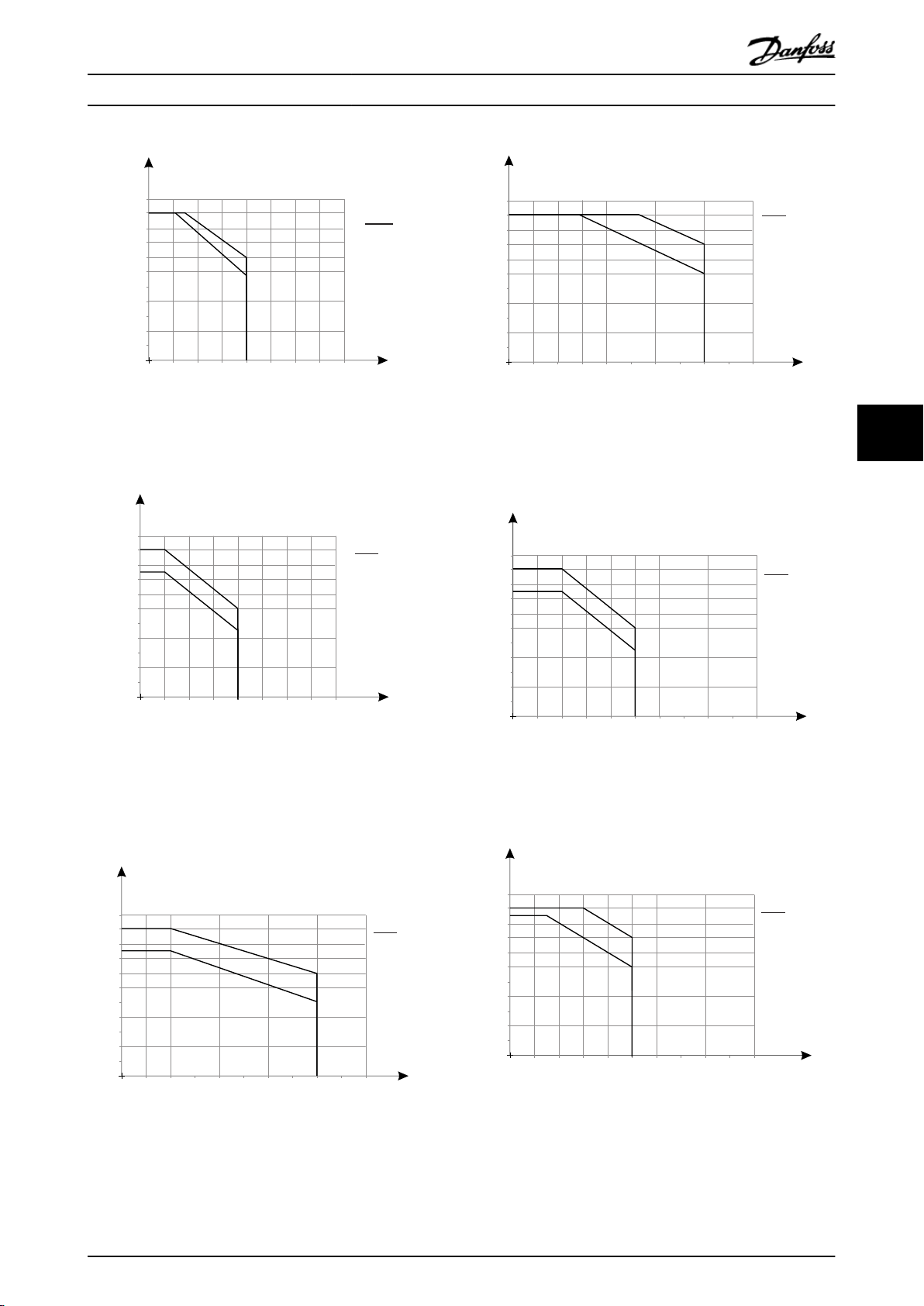
130BB835.10
80%
90%
100%
110%
C3 & C4
(%)
l
out
HO
2 4
6 8
20%
10
40%
60%
o
50 C
o
45 C
12 14
16
f
sw
(kHz)
0
0
2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
12 14
16
f
sw
(kHz)
0
0
(%)
l
out
C3 & C4
NO
130BB833.10
1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
f
sw
(kHz)
0
0
(%)
l
out
C1 & C2
NO
130BB821.10
80%
90%
100%
o
45 C
110%
(%)
l
out
C1 & C2
HO
1 2 4
6 8
20%
10
40%
60%
o
50 C
f
sw
(kHz)
0
0
130BB823.10
1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
f
sw
(kHz)
0
0
(%)
l
out
C1 & C2
NO
130BB827.10
130BB825.10
1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
f
sw
(kHz)
0
0
(%)
l
out
C1 & C2
HO
Produktspecifikationer Design Guide
Illustration 6.26 Derating af Iud for forskellig T
OMG, MAKS
for
Kapslingstyper C3 og C4, ved brug af SFAVM i høj overbelastningstilstand (160 % over moment)
Illustration 6.27 Derating af Iud for forskellig T
OMG, MAKS
for
Kapslingstyper C3 og C4, ved brug af SFAVM i normal overbelastningstilstand (110 % over moment)
Kapslingstyper C, T6
60° AVM - Pulsbreddemodulering
Illustration 6.29 Derating af udgangsstrøm med switchfrekvens
og omgivelsestemperatur for 600 V-frekvensomformere,
kapslingstype C, 60° AVM, HO
SFAVM - Stator Frequency Asyncron Vector Modulation
Illustration 6.30 Derating af udgangsstrøm med switchfrekvens
og omgivelsestemperatur for 600 V-frekvensomformere,
kapslingstype C; SFAVM, NO
6 6
Illustration 6.28 Derating af udgangsstrøm med switchfrekvens
og omgivelsestemperatur for 600 V-frekvensomformere,
kapslingstype C, 60° AVM, NO
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 79
Illustration 6.31 Derating af udgangsstrøm med switchfrekvens
og omgivelsestemperatur for 600 V-frekvensomformere,
kapslingstype C; SFAVM, HO

fsw (kHz)
130BB213.11
20.4
34
I
out
(A)
28.9
1 2 64
55°C
50°C
45°C
8 10
C2 all options
13.6
27.2
fsw (kHz)
130BB214.10
40
60
80
100
I
out
(A)
86.6
1 2 64
55°C
50°C
45°C
8 10
C2 all options
66.6
20
2
20%
4 6 8 10
40%
60%
80%
100%
110%
I
out
(%)
fsw (kHz)
I
LOAD
at T
AMB
max
130BD597.10
0
0
I
LOAD
at T
AMB
max +5 °C
I
LOAD
at T
AMB
max +5 °C
Produktspecifikationer
Design Guide
Kapslingstype C, T7
Målte værdier for dU/dt-test
6.2.7
60° AVM - Pulsbreddemodulering
For at undgå skader på motorer, uden faseadskillelsespapir
eller anden isoleringsforstærkning, der er bygget til
frekvensomformerdrift, anbefales det kraftigt at montere et
du/dt-filter eller et LC-filter på frekvensomformerens
udgang.
Når en transistor i vekselretterbroen skifter, vil spændingen
i motoren øges med et du/dt-forhold, der afhænger af:
Motorinduktans
•
Motorkabel (type, tværsnit, længde, skærmet eller
•
uskærmet)
Illustration 6.32 Derating af udgangsstrøm med switchfrekvens
66
og omgivelsestemperatur for kapslingstype C2, 60° AVM.
Bemærk: Grafen er tegnet med strømmen som absolut værdi
og gælder for både høj og normal overbelastning.
Den naturlige induktion medfører oversving i motorspidsspændingen, før den stabiliseres. Niveauet afhænger af
spændingen I DC-linket.
Spidsspændingen på motorklemmerne forårsages af
afbrydelse af IGBT'erne. Stigetid og spidsspændingen
påvirker motorens levetid. Hvis spidsspændingen er for høj,
SFAVM - Stator Frequency Asyncron Vector Modulation
påvirkes motorer uden spoleisolering negativt over tid.
Med korte motorkabler (få meter) er stigetiden og
spidsspændingen lavere. Stigetid og spidsspændingen
øges med kabellængden (100 m).
Frekvensomformeren overholder IEC 60034-25 og IEC
60034-17, hvad angår motordesign.
200-240 V (T2)
Kabellængde [m]
Netspænding [V]
Stigetid
[μs]
Upeak
[kV]
5 240 0,13 0,510 3,090
Illustration 6.33 Derating af udgangsstrøm med switchfrekvens
og omgivelsestemperatur for kapslingstype C2, SFAVM.
Bemærk: Grafen er tegnet med strømmen som absolut værdi
50 240 0,23 2,034
100 240 0,54 0,580 0,865
150 240 0,66 0,560 0,674
og gælder for både høj og normal overbelastning.
Tabel 6.13 P5K5T2
Kabellængde [m]
Netspænding [V]
Stigetid
[μs]
Upeak
[kV]
36 240 0,264 0,624 1,890
136 240 0,536 0,596 0,889
150 240 0,568 0,568 0,800
Tabel 6.14 P7K5T2
Stigetid
[μs]
Upeak
[kV]
Illustration 6.34 Derating af udgangsstrøm med switchfrekvens
og omgivelsestemperatur for kapslingstype C3
Kabellængde [m]
Netspænding [V]
30 240 0,556 0,650 0,935
100 240 0,592 0,594 0,802
150 240 0,708 0,587 0,663
80 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
Tabel 6.15 P11KT2
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
Produktspecifikationer
Design Guide
Kabellængde [m]
36 240 0,244 0,608 1,993
136 240 0,568 0,580 0,816
150 240 0,720 0,574 0,637
Tabel 6.16 P15KT2
Kabellængde [m]
36 240 0,244 0,608 1,993
136 240 0,568 0,580 0,816
150 240 0,720 0,574 0,637
Tabel 6.17 P18KT2
Kabellængde [m]
15 240 0,194 0,626 2,581
50 240 0,252 0,574 1,822
150 240 0,488 0,538 0,882
Tabel 6.18 P22KT2
Kabellængde [m]
30 240 0,300 0,598 1,594
100 240 0,536 0,566 0,844
150 240 0,776 0,546 0,562
Netspænding [V]
Netspænding [V]
Netspænding [V]
Netspænding [V]
Stigetid
[μs]
Stigetid
[μs]
Stigetid
[μs]
Stigetid
[μs]
Upeak
[kV]
Upeak
[kV]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
Kabellængde [m]
5 480 0,04755 0,739 8,035
50 480 0,207 4,548
150 480 0,6742 1,030 2,828
Tabel 6.23 P7K5T4
Kabellængde [m]
36 480 0,396 1,210 2,444
100 480 0,844 1,230 1,165
150 480 0,696 1,160 1,333
Tabel 6.24 P11KT4
Kabellængde [m]
36 480 0,396 1,210 2,444
100 480 0,844 1,230 1,165
150 480 0,696 1,160 1,333
Tabel 6.25 P15KT4
Kabellængde [m]
36 480 0,312 2,846
100 480 0,556 1,250 1,798
150 480 0,608 1,230 1,618
Netspænding [V]
Netspænding [V]
Netspænding [V]
Netspænding [V]
Stigetid
[μs]
Stigetid
[μs]
Stigetid
[μs]
Stigetid
[μs]
Upeak
[kV]
Upeak
[kV]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
6 6
Tabel 6.19 P30KT2
Kabellængde [m]
30 240 0,300 0,598 1,594
100 240 0,536 0,566 0,844
150 240 0,776 0,546 0,562
Tabel 6.20 P37KT2
Netspænding [V]
Stigetid
[μs]
Upeak
[kV]
dU/dt
[kV/μs]
380-500 V (T4)
Kabellængde [m]
5 480 0,640 0,690 0,862
50 480 0,470 0,985 0,985
150 480 0,760 1,045 0,947
Tabel 6.21 P1K5T4
Kabellængde [m]
5 480 0,172 0,890 4,156
50 480 0,310 2,564
150 480 0,370 1,190 1,770
Tabel 6.22 P4K0T4
Netspænding [V]
Netspænding [V]
Stigetid
[μs]
Stigetid
[μs]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
Tabel 6.26 P18KT4
Kabellængde [m]
15 480 0,288 3,083
100 480 0,492 1,230 2,000
150 480 0,468 1,190 2,034
Tabel 6.27 P22KT4
Kabellængde [m]
5 480 0,368 1,270 2,853
50 480 0,536 1,260 1,978
100 480 0,680 1,240 1,426
150 480 0,712 1,200 1,334
Tabel 6.28 P30KT4
Kabellængde [m]
5 480 0,368 1,270 2,853
50 480 0,536 1,260 1,978
100 480 0,680 1,240 1,426
150 480 0,712 1,200 1,334
Tabel 6.29 P37KT4
Netspænding [V]
Netspænding [V]
Netspænding [V]
Stigetid
[μs]
Stigetid
[μs]
Stigetid
[μs]
Upeak
[kV]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 81
Produktspecifikationer Design Guide
Kabellængde [m]
15 480 0,256 1,230 3,847
50 480 0,328 1,200 2,957
100 480 0,456 1,200 2,127
150 480 0,960 1,150 1,052
Tabel 6.30 P45KT4
Netspænding [V]
Stigetid
[μs]
Upeak
[kV]
dU/dt
[kV/μs]
380-500 V (T5)
Kabellængde [m]
5 480 0,371 1,170 2,523
Tabel 6.31 P55KT5
Netspænding [V]
Stigetid
[μs]
Upeak
[kV]
dU/dt
[kV/μs]
66
Kabellængde [m]
5 480 0,371 1,170 2,523
Tabel 6.32 P75KT5
Netspænding [V]
Stigetid
[μs]
Upeak
[kV]
dU/dt
[kV/μs]
600 V (T6)
Kabellængde [m]
36 600 0,304 1,560 4,105
50 600 0,300 1,550 4,133
100 600 0,536 1,640 2,448
150 600 0,576 1,640 2,278
Tabel 6.33 P15KT6
Kabellængde [m]
36 600 0,084 1,560 7,962
50 600 0,120 1,540 5,467
100 600 0,165 1,472 3,976
150 600 0,190 1,530 3,432
Tabel 6.34 P30KT6
Kabellængde [m]
15 600 0,276 1,184 4,290
Tabel 6.35 P75KT6
Netspænding [V]
Netspænding [V]
Netspænding [V]
Stigetid
[μs]
Stigetid
[μs]
Stigetid
[μs]
Upeak
[kV]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
525-690 V (T7)
Kabellængde [m]
80 690 0,58 1,728 2369
130 690 0,93 1,824 1569
180 690 0,925 1,818 1570
Tabel 6.36 P7K5T7
Kabellængde [m]
6 690 0,238 1416 4739
50 690 0,358 1764 3922
150 690 0,465 1872 3252
Tabel 6.37 P45KT7
Netspænding [V]
Netspænding [V]
Stigetid
[μs]
Stigetid
[μs]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
82 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
1.0
0.99
0.98
0.97
0.96
0.95
0.93
0.92
0% 50% 100% 200%
0.94
Relative Eciency
130BB252.11
1.01
150%
% Speed
100% load 75% load 50% load 25% load
Produktspecifikationer
Design Guide
6.2.8 Virkningsgrad
Frekvensomformerens virkningsgrad
Frekvensomformerens belastning påvirker kun i ringe grad
dens virkningsgrad.
Dette betyder også, at frekvensomformerens virkningsgrad
ikke ændres, når der vælges andre u/f-karakteristikker. U/fkarakteristikkerne påvirker imidlertid motorens
virkningsgrad.
Virkningsgraden forringes en lille smule, når switchfrekvensen indstilles til en værdi over 5 kHz. Virkningsgraden
mindskes også lidt, når motorkablet er længere end 30 m.
Beregning af virkningsgrad
Frekvensomformerens virkningsgrad ved forskellige belastninger beregnes baseret på Illustration 6.35. Faktoren i
denne graf skal ganges med den specifikke virkningsgradsfaktor, der er angivet i kapitel 6.2 Generelle specifikationer.
Motorvirkningsgrad
Virkningsgraden for en motor, der er sluttet til en frekvensomformer, afhænger af magnetiseringsniveauet. Motorens
virkningsgrad afhænger af motortypen.
Inden for et område på 75-100 % af det
•
nominelle moment er motorens virkningsgrad så
godt som konstant, både når den styres af
frekvensomformeren, og når den kører direkte på
netforsyningen.
Påvirkningen fra U/f-karakteristikken på små
•
motorer er marginal. I motorer fra 11 kW og op
er fordelene for virkningsgraden imidlertid
betydelige.
Switchfrekvensen påvirker ikke virkningsgraden i
•
små motorer. Virkningsgraden forbedres 1-2 % i
motorer fra 11 kW og op. Dette sker, fordi
motorstrømmens sinusform er næsten perfekt
ved en høj switchfrekvens.
Systemeffektivitet
Systemets virkningsgrad beregnes ved at gange frekvensomformerens virkningsgrad med motorens virkningsgrad.
Akustisk støj
6.2.9
6 6
Illustration 6.35 Typiske virkningsgradskurver
Eksempel: Antag en 55 kW, 380-480 V AC frekvensomformer med 25 % belastning ved 50 % hastighed. Grafen
viser 0,97. Den nominelle virkningsgrad for en 55 kW
frekvensomformer er 0,98. Den faktiske virkningsgrad er
derfor: 0,97 x 0,98 = 0,95.
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 83
Akustisk støj fra frekvensomformeren kommer fra tre kilder:
DC-link (mellemkreds) spoler
•
Drosselspole for RFI-filter
•
Interne ventilatorer
•
Se Tabel 6.38 vedrørende klassificering af akustisk støj.
Kapslingstype
A1 51 60
A2 51 60
A3 51 60
A4 51 60
A5 54 63
B1 61 67
B2 58 70
B4 52 62
C1 52 62
C2 55 65
C4 56 71
D3h 58 71
Tabel 6.38 Klassificering af akustisk støj
Værdier er målt 1 m fra apparatet.
50 % ventilatorha-
stighed [dBA]
Fuld ventilatorha-
stighed [dBA]
F C - P T
130BB836.10
X S A B CX X X X
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 302221 23 272524 26 28 29 31 373635343332 38 39
X D
Bestilling Design Guide
7 Bestilling
7.1 Drevkonfigurator
Illustration 7.1 Eksempel på en typekode
Brug den internetbaserede Drevkonfigurator til at konfigurere den ønskede frekvensomformer til den relevante applikation
og generere typekodestrengen. Drevkonfiguratoren genererer automatisk et 8-cifret salgsnummer, der skal afleveres til den
lokale salgsafdeling.
Det er desuden muligt at oprette en projektliste med flere produkter og sende den til en Danfoss-repræsentant.
77
Drevkonfiguratoren kan findes på den globale internetside: www.danfoss.com/drives.
Typekode
7.1.1
Eksempel på en typekode:
FC-302PK75T5E20H1BGCXXXSXXXXA0BXCXXXXD0
Tegnenes betydning i strengen kan findes i Tabel 7.1 og Tabel 7.2. I eksemplet ovenfor er en Profibus DP V1 og en 24 V
backupoption indbygget.
Beskrivelse Pos Mulige valg
Produktgruppe
Frekvensomformerserie
Nominel effekt 8-10 0,25-75 kW
Faser 11 Tre faser (T)
Netspænding 11-12 T2: 200-240 V
Kapsling 13-15 E20: IP20
RFI-filter 16-17 Hx: Der er ikke indbygget EMC-filtre i frekvensomformeren (kun 600 V-apparater)
1-3 FC 30x
4-6 301: FC 301
302: FC 302
T4: 380-480 V
T5: 380-500 V
T6: 525-600 V
T7: 525-690 V
E55: IP 55/NEMA Type 12
P20: IP20 (med bagplade)
P21: IP21/NEMA Type 1 (med bagplade)
P55: IP55/NEMA Type 12 (med bagplade)
Z20: IP 20
E66: IP 66
H1: Integreret EMC-filter. Overholder EN 55011 Klasse A1/B og EN/IEC 61800-3 Kategori 1/2
H2: Ikke noget yderligere EMC-filter. Overholder EN 55011 Klasse A2 og EN/IEC 61800-3 Kategori 3
H3:
H3 - integreret EMC-filter. Overholder EN 55011 Klasse A1/B og EN/IEC 61800-3 Kategori 1/2 (kun
kapslingstype A1)
H4: Integreret EMC-filter. Overholder EN 55011 Klasse A1 og EN/IEC 61800-3 Kategori 2
H5: Marineversioner. Samme emissionsniveauer som H2-versioner
1)
1)
84 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
Bestilling Design Guide
Beskrivelse Pos Mulige valg
Bremse 18 B: Bremsechopper medfølger
X: Ingen bremsechopper medfølger
T: Sikker standsning, ingen bremse
U: Sikker standsning, bremsechopper
Display 19 G: Grafisk LCP-betjeningspanel
N: Numerisk LCP-betjeningspanel
X: Uden LCP-betjeningspanel
Coating af
PCB
20 C: Coated PCB
R: Robust
X: Intet coated PCB
Netforsyningsoption
21 X: Ingen netforsyningsoption
1: Netafbryder
3: Netafbryder og sikring
2)
5: Netafbryder, sikring og belastningsfordeling
7: Sikring
2)
8: Netforsyningsafbryder og belastningsfordeling
A: Sikring og belastningsfordeling
D: Belastningsfordeling
3)
Tilpasning 22 X: Standardkabelindgange
O: Europæisk metrisk gevind i kabelindgange (kun A4, A5, B1, B2, C1, C2)
S: Kabelindgange, britisk standard (kun A5, B1, B2, C1 og C2)
Tilpasning 23 X: Ingen tilpasning
Softwarever-
24-27 SXXX: Seneste version – standardsoftware
sioner
Softwaresprog 28 X: Ikke brugt
1)
FC 301/kun kapslingstype A1
2)
Kun det amerikanske marked
3)
A- og B3-kapslinger har som standard indbygget belastningsfordeling
1)
2, 3)
1)
2, 3)
3)
7 7
Tabel 7.1 Bestillingstypekode Kapslingstyper A, B og C
Beskrivelse Pos Mulige valg
A-optioner 29-30 AX: Ingen A-option
A0: MCA 101 Profibus DP V1 (standard)
A4: MCA 104 DeviceNet (standard)
A6: MCA 105 CANOpen (standard)
AN: MCA 121 Ethernet IP
AL: MCA 120 ProfiNet
AQ: MCA 122 Modbus TCP
AT: MCA 113 Profibus-omformer VLT 3000
AU: MCA 114 Profibus-omformer VLT 5000
AY: MCA 123 Powerlink
A8: MCA 124 EtherCAT
B-optioner 31-32 BX: Ingen option
BK: MCB 101 Universal I/O-option
BR: MCB 102 Encoder-option
BU: MCB 103 Resolver-option
BP: MCB 105 Relæoption
BZ: MCB 108 PLC-sikkerhedsbrugergrænseflade
B2: MCB 112 PTC-termistorkort
B4: MCB 114 VLT Sensor Input
B6: MCB 150 Safe Option TTL
B7: MCB 151 Safe Option HTL
C0-optioner 33-34 CX: Ingen option
C4: MCO 305, Programmerbar bevægelsesstyreenhed
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 85
Bestilling Design Guide
Beskrivelse Pos Mulige valg
C1-optioner 35 X: Ingen option
R: MCB 113 Ekst. Relækort
Z: MCA 140 Modbus RTU OEM-option
Software til Coption/E1optioner
D-optioner 38-39 DX: Ingen option
Tabel 7.2 Bestillingstypekode, Optioner
36-37 XX: Standardstyreenhed
10: MCO 350-synkroniseringsstyring
11: MCO 351-positioneringsstyring
D0: MCB 107 Ekstern 24 V DC-backup
BEMÆRK!
For effektstørrelser over 75 kW, se VLT® AutomationDrive FC 300 90-1400 kW Design Guide.
7.1.2 Sprog
77
Frekvensomformere leveres automatisk med en sprogpakke, der er relevant for den region, den bestilles fra. De fire
regionale sprogpakker omfatter følgende sprog:
Sprogpakke 1 Sprogpakke 2 Sprogpakke 3 Sprogpakke 4
Engelsk Engelsk Engelsk Engelsk
Tysk Tysk Tysk Tysk
Fransk Kinesisk Slovensk Spansk
Dansk Koreansk Bulgarsk Engelsk, US
Hollandsk Japansk Serbisk Græsk
Spansk Thai Rumænsk Brasiliansk portugisisk
Svensk Kinesisk, traditionel Ungarsk Tyrkisk
Italiensk Bahasa-indonesisk Tjekkisk Polsk
Finsk Russisk
Tabel 7.3 Sprogpakker
Kontakt den lokale salgsafdeling for at bestille frekvensomformere med en anden sprogpakke.
86 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
Bestilling Design Guide
7.2 Bestillingsnumre
7.2.1 Optioner og tilbehør
Beskrivelse Bestillingsnr.
Ikke-coated Coated
Diverse hardware
VLT® Sæt til montering gennem tavle for kapslingstype A5
VLT® Sæt til montering gennem tavle for kapslingstype B1
VLT® Sæt til montering gennem tavle for kapslingstype B2
VLT® Sæt til montering gennem tavle for kapslingstype C1
VLT® Sæt til montering gennem tavle for kapslingstype C2
VLT® Monteringskonsoller, kapslingstype A5
VLT® Monteringskonsoller, kapslingstype B1
VLT® Monteringskonsoller, kapslingstype B2
VLT® Monteringskonsoller, kapslingstype C1
VLT® Monteringskonsoller, kapslingstype C2
VLT® IP 21/Type 1-sæt, kapslingstype A1
VLT® IP 21/Type 1-sæt, kapslingstype A2
VLT® IP 21/Type 1-sæt, kapslingstype A3
VLT® IP 21/Type 1 Top-sæt, kapslingstype A2
VLT® IP 21/Type 1 Top-sæt, kapslingstype A3
VLT® Bagplade IP55/Type12, kapslingstype A5
VLT® Bagplade IP21/Type 1, IP55/Type 12, kapslingstype B1
VLT® Bagplade IP21/Type 1, IP55/Type 12, kapslingstype B2
VLT® Bagplade IP20/Type 1, kapslingstype B4
VLT® Bagplade IP21/Type 1, IP55/Type 12, kapslingstype C1
VLT® Bagplade IP21/Type 1, IP55/Type 12, kapslingstype C2
VLT® Bagplade IP20/Type 1, kapslingstype C3
VLT® Bagplade IP20/Type 1, kapslingstype C4
VLT® Bagplade IP66/Type 4X, kapslingstype A5
VLT® Bagplade i rustfrit stål IP66/Type 4X, kapslingstype B1
VLT® Bagplade i rustfrit stål IP66/Type 4X, kapslingstype B2
VLT® Bagplade i rustfrit stål IP66/Type 4X, kapslingstype C1
VLT® Bagplade i rustfrit stål IP66/Type 4X, kapslingstype C2
VLT® Profibus Adapter Sub-D9 Connector
Profibus sigtepladesæt til IP20, kapslingstyper A1, A2 og A3 130B0524
Klemmeblok til DC-link-tilslutning på kapslingstyper A2/A3 130B1064
VLT® Skrueklemmer 130B1116
VLT® USB-forlængelse, 350 mm kabel 130B1155
VLT® USB-forlængelse, 650 mm kabel 130B1156
VLT® Kapsling A2 til 1 bremsemodstand 175U0085
VLT® Kapsling A3 til 1 bremsemodstand 175U0088
VLT® Kapsling A2 til 2 bremsemodstande 175U0087
VLT® Kapsling A3 til 2 bremsemodstande 175U0086
LCP-betjeningspanel
VLT® LCP 101 Numerisk LCP
VLT® LCP 102 Grafisk LCP
VLT® Kabel til LCP 2, 3 m
VLT® Tavlemonteringssæt til alle LCP-typer
VLT® Tavlemonteringssæt, grafisk LCP
130B1028
130B1046
130B1047
130B1048
130B1049
130B1080
130B1081
130B1082
130B1083
130B1084
130B1121
130B1122
130B1123
130B1132
130B1133
130B1098
130B3383
130B3397
130B4172
130B3910
130B3911
130B4170
130B4171
130B3242
130B3434
130B3465
130B3468
130B3491
130B1112
130B1124
130B1107
175Z0929
130B1170
130B1113
7 7
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 87

Bestilling Design Guide
Beskrivelse Bestillingsnr.
Ikke-coated Coated
VLT® Tavlemonteringssæt, numerisk LCP
VLT® LCP-monteringssæt, med/uden LCP
VLT® LCP-monteringssæt til blændplade IP55/66, 8 m
VLT® Grafisk LCP-betjeningspanel (LCP 102)
VLT® Blændplade, med Danfoss-logo, IP55/66
Optioner til port A
VLT® Profibus DP V1 MCA 101
VLT® DeviceNet MCA 104
VLT® CAN Open MCA 105
VLT® PROFIBUS Converter MCA 113
VLT® PROFIBUS Converter MCA 114
VLT® PROFINET MCA 120
VLT® EtherNet/IP MCA 121
VLT® Modbus TCP MCA 122
77
POWERLINK 130B1489 130B1490
EtherCAT 130B5546 130B5646
VLT® DeviceNet MCA 104
Optioner til port B
VLT® Universal I/O MCB 101
VLT® Encoderindgang MCB 102
VLT® Resolverindgang MCB 103
VLT® Relæoption MCB 105
VLT® Safe PLC I/O MCB 108
VLT® PTC-termistorkort MCB 112
VLT® Safe Option MCB 140
VLT® Safe Option MCB 141
VLT® Safe Option MCB 150
VLT® Safe Option MCB 151
Monteringssæt til C-optioner
VLT® Monteringssæt til C-optioner, 40 mm, kapslingstyper A2/A3
VLT® Monteringssæt til C-optioner, 60 mm, kapslingstyper A2/A3
VLT® Monteringssæt til C-optioner, kapslingstype A5
VLT® Monteringssæt til C-optioner, kapslingstyper B/C/D/E/F (undtagen B3)
VLT® Monteringssæt til C-optioner, 40 mm, kapslingstype B3
VLT® Monteringssæt til C-optioner, 60 mm, kapslingstype B3
Optioner til port C
VLT® Bevægelsesstyring MCO 305
VLT® Synkroniseringsstyreenhed MCO 350
VLT® Positions styreenhed MCO 351
Center Winder-styreenhed 130B1165 130B1166
VLT® Udvidet relækort MCB 113
VLT® C-option Adapter MCF 106
Option til port D
VLT® 24 V DC-forsyning MCB 107
VLT® EtherNet/IP MCA 121
VLT® Sæt til overvågning af lækstrøm, kapslingstyper A2/A3
VLT® Sæt til overvågning af lækstrøm, kapslingstype B3
VLT® Sæt til overvågning af lækstrøm, kapslingstype B4
VLT® Sæt til overvågning af lækstrøm, kapslingstype C3
130B1114
130B1117
130B1129
130B1078
130B1077
130B1100 130B1200
130B1102 130B1202
130B1103 130B1205
130B1245
130B1246
130B1135 130B1235
130B1119 130B1219
130B1196 130B1296
130B1102 130B1202
130B1125 130B1212
130B1115 130B1203
130B1127 130B1227
130B1110 130B1210
130B1120 130B1220
130B1137
130B6443
130B6447
130B3280
130B3290
130B7530
130B7531
130B7532
130B7533
130B1413
130B1414
130B1134 130B1234
130B1152 130B1252
130B1153 120B1253
130B1164 130B1264
130B1230
130B1108 130B1208
175N2584
130B5645
130B5764
130B5765
130B6226
88 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
Bestilling Design Guide
Beskrivelse Bestillingsnr.
Ikke-coated Coated
VLT® Sæt til overvågning af lækstrøm, kapslingstype C4
Pc-software
VLT® Motion Ctrl Tool MCT 10, 1 licens
VLT® Motion Ctrl Tool MCT 10, 5 licenser
VLT® Motion Ctrl Tool MCT 10, 10 licenser
VLT® Motion Ctrl Tool MCT 10, 25 licenser
VLT® Motion Ctrl Tool MCT 10, 50 licenser
VLT® Motion Ctrl Tool MCT 10, 100 licenser
VLT® Motion Ctrl Tool MCT 10, >100 licenser
Optioner kan bestilles som fabriksmonterede. Se bestillingsoplysninger i kapitel 7.1 Drevkonfigurator.
Tabel 7.4 Bestillingsnumre for optioner og tilbehør
Reservedele
7.2.2
130B5647
130B1000
130B1001
130B1002
130B1003
130B1004
130B1005
130B1006
Benyt VLT shop eller konfiguratoren for at finde de reservedele, der er tilgængelige for din version, VLTShop.danfoss.com.
7.2.3 Tilbehørsposer
Type Beskrivelse Bestillingsnr.
Tilbehørsposer
Tilbehørspose A1 Tilbehørspose, kapslingstype A1 130B1021
Tilbehørspose A2/A3 Tilbehørspose, kapslingstype A2/A3 130B1022
Tilbehørspose A5 Tilbehørspose, kapslingstype A5 130B1023
Tilbehørspose A1-A5 Tilbehørspose, kapslingstyper A1-A5 Bremse- og belastningsfordelingsstik 130B0633
Tilbehørspose B1 Tilbehørspose, kapslingstype B1 130B2060
Tilbehørspose B2 Tilbehørspose, kapslingstype B2 130B2061
Tilbehørspose B3 Tilbehørspose, kapslingstype B3 130B0980
Tilbehørspose B4 Tilbehørspose, kapslingstype B4, 18.5-22 kW 130B1300
Tilbehørspose B4 Tilbehørspose, kapslingstype B4, 30 kW 130B1301
Tilbehørspose C1 Tilbehørspose, kapslingstype C1 130B0046
Tilbehørspose C2 Tilbehørspose, kapslingstype C2 130B0047
Tilbehørspose C3 Tilbehørspose, kapslingstype C3 130B0981
Tilbehørspose C4 Tilbehørspose, kapslingstype C4, 55 kW 130B0982
Tilbehørspose C4 Tilbehørspose, kapslingstype C4, 75 kW 130B0983
Tabel 7.5 Bestillingsnumre for tilbehørsposer
7 7
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 89

Bestilling
Design Guide
7.2.4 VLT AutomationDrive FC 301
T2, Horisontal bremsning 10 % driftscyklus
FC 301 Horisontal bremsning 10 % driftscyklus
Frekvensomformerdata
Netfor-
synings-
type
P
m
[kW]
R
[Ω]
min
R
br.nom
[Ω]
R
[Ω]
rec
P
T2 0,25 368 415,9 410 0,100 175u3004 - - - 1,5 0,5
T2 0,37 248 280,7 300 0,100 175u3006 - - - 1,5 0,6
T2 0,55 166 188,7 200 0,100 175u3011 - - - 1,5 0,7
T2 0,75 121 138,4 145 0,100 175u3016 - - - 1,5 0,8
T2 1,1 81,0 92,0 100 0,100 175u3021 - - - 1,5 0,9
T2 1,5 58,5 66,5 70 0,200 175u3026 - - - 1,5 1,6
T2 2,2 40,2 44,6 48 0,200 175u3031 - - - 1,5 1,9
T2 3 29,1 32,3 35 0,300 175u3325 - - - 1,5 2,7
77
T2 3,7 22,5 25,9 27 0,360 175u3326 175u3477 175u3478 - 1,5 3,5
T2 5,5 17,7 19,7 18 0,570 175u3327 175u3442 175u3441 - 1,5 5,3
T2 7,5 12,6 14,3 13 0,680 175u3328 175u3059 175u3060 - 1,5 6,8
T2 11 8,7 9,7 9 1,130 175u3329 175u3068 175u3069 - 2,5 10,5
T2 15 5,3 7,5 5,7 1,400 175u3330 175u3073 175u3074 - 4 15
T2 18,5 5,1 6,0 5,7 1,700 175u3331 175u3483 175u3484 - 4 16
T2 22 3,2 5,0 3,5 2,200 175u3332 175u3080 175u3081 - 6 24
T2 30 3,0 3,7 3,5 2,800 175u3333 175u3448 175u3447 - 10 27
T2 37 2,4 3,0 2,8 3,200 175u3334 175u3086 175u3087 - 16 32
Data for bremsemodstand Installation
Danfoss varenummer
br.cont.
[kW]
Ledning
IP54
Skruek-
lemme
IP21
Skruek-
lemme
IP65
Bolt
connection
IP20
Kabeltv-
ærsnit
[mm2]
Termo-
relæ
[A]
Tabel 7.6 T2, Horisontal bremsning 10 % driftscyklus
FC 301 Vertikal bremsning 40 % driftscyklus
Data for bremsemodstand Installation
Danfoss varenummer
br.cont.
[kW]
Ledning
IP54
Skruek-
lemme
IP21
Skruek-
lemme
IP65
Bolt
connection
IP20
Kabeltv-
ærsnit
[mm2]
Netfor-
synings-
type
Frekvensomformerdata
P
[kW]
R
m
min
[Ω]
R
br.nom
[Ω]
R
[Ω]
P
rec
T2 0,25 368 415,9 410 0,100 175u3004 - - - 1,5 0,5
T2 0,37 248 280,7 300 0,200 175u3096 - - - 1,5 0,8
T2 0,55 166 188,7 200 0,200 175u3008 - - - 1,5 0,9
T2 0,75 121 138,4 145 0,300 175u3300 - - - 1,5 1,3
T2 1,1 81,0 92,0 100 0,450 175u3301 175u3402 175u3401 - 1,5 2
T2 1,5 58,5 66,5 70 0,570 175u3302 175u3404 175u3403 - 1,5 2,7
T2 2,2 40,2 44,6 48 0,960 175u3303 175u3406 175u3405 - 1,5 4,2
T2 3 29,1 32,3 35 1,130 175u3304 175u3408 175u3407 - 1,5 5,4
T2 3,7 22,5 25,9 27 1,400 175u3305 175u3410 175u3409 - 1,5 6,8
T2 5,5 17,7 19,7 18 2,200 175u3306 175u3412 175u3411 - 1,5 10,4
T2 7,5 12,6 14,3 13 3,200 175u3307 175u3414 175u3413 - 2,5 14,7
T2 11 8,7 9,7 9 5,500 - 175u3176 175u3177 - 4 23
T2 15 5,3 7,5 5,7 6,000 - - - 175u3233 10 33
T2 18,5 5,1 6,0 5,7 8,000 - - - 175u3234 10 38
T2 22 3,2 5,0 3,5 9,000 - - - 175u3235 16 51
T2 30 3,0 3,7 3,5 14,000 - - - 175u3224 25 63
T2 37 2,4 3,0 2,8 17,000 - - - 175u3227 35 78
Termo-
relæ
[A]
Tabel 7.7 T2, Vertikal bremsning 40 % driftscyklus
90 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01

Bestilling
Design Guide
FC 301 Horisontal bremsning 10 % driftscyklus
Frekvensomformerdata
Netfor-
synings-
type
P
[kW]
R
R
m
[Ω]
min
R
br.nom
[Ω]
rec
[Ω]
P
Data for bremsemodstand Installation
Danfoss varenummer
br.cont.
[kW]
Ledning
IP54
Skrue-
klemme
IP21
Skrue-
klemme
IP65
Bolt
connection
IP20
Kabeltv-
ærsnit
[mm2]
T4 0,37 1000 1121,4 1200 0,100 175u3000 - - - 1,5 0,3
T4 0,55 620 749,8 850 0,100 175u3001 - - - 1,5 0,4
T4 0,75 485 547,6 630 0,100 175u3002 - - - 1,5 0,4
T4 1,1 329 365,3 410 0,100 175u3004 - - - 1,5 0,5
T4 1,5 240 263,0 270 0,200 175u3007 - - - 1,5 0,8
T4 2,2 161 176,5 200 0,200 175u3008 - - - 1,5 0,9
T4 3 117 127,9 145 0,300 175u3300 - - - 1,5 1,3
T4 4 86,9 94,6 110 0,450 175u3335 175u3450 175u3449 - 1,5 1,9
T4 5,5 62,5 68,2 80 0,570 175u3336 175u3452 175u3451 - 1,5 2,5
T4 7,5 45,3 49,6 56 0,680 175u3337 175u3027 175u3028 - 1,5 3,3
T4 11 34,9 38,0 38 1,130 175u3338 175u3034 175u3035 - 1,5 5,2
T4 15 25,3 27,7 28 1,400 175u3339 175u3039 175u3040 - 1,5 6,7
T4 18,5 20,3 22,3 22 1,700 175u3340 175u3047 175u3048 - 1,5 8,3
T4 22 16,9 18,7 19 2,200 175u3357 175u3049 175u3050 - 1,5 10,1
T4 30 13,2 14,5 14 2,800 175u3341 175u3055 175u3056 - 2,5 13,3
T4 37 10,6 11,7 12 3,200 175u3359 175u3061 175u3062 - 2,5 15,3
T4 45 8,7 9,6 9,5 4,200 - 175u3065 175u3066 - 4 20
T4 55 6,6 7,8 7,0 5,500 - 175u3070 175u3071 - 6 26
T4 75 4,2 5,7 5,5 7,000 - - - 175u3231 10 36
Termo-
relæ
[A]
7 7
Tabel 7.8 T4, Horisontal bremsning 10 % driftscyklus
FC 301 Vertikal bremsning 40 % driftscyklus
Frekvensomformerdata
Netfor-
synings-
type
[kW]
P
R
m
[Ω]
min
R
br.nom
[Ω]
R
[Ω]
P
rec
Data for bremsemodstand Installation
Danfoss varenummer
br.cont.
[kW]
Ledning
IP54
Skrue-
klemme
IP21
Skrue-
klemme
IP65
Bolt
connection
IP20
Kabeltv-
ærsnit
[mm2]
T4 0,37 1000 1121,4 1200 0,200 175u3101 - - - 1,5 0,4
T4 0,55 620 749,8 850 0,200 175u3308 - - - 1,5 0,5
T4 0,75 485 547,6 630 0,300 175u3309 - - - 1,5 0,7
T4 1,1 329 365,3 410 0,450 175u3310 175u3416 175u3415 - 1,5 1
T4 1,5 240 263,0 270 0,570 175u3311 175u3418 175u3417 - 1,5 1,4
T4 2,2 161 176,5 200 0,960 175u3312 175u3420 175u3419 - 1,5 2,1
T4 3 117 127,9 145 1,130 175u3313 175u3422 175u3421 - 1,5 2,7
T4 4 86,9 94,6 110 1,700 175u3314 175u3424 175u3423 - 1,5 3,7
T4 5,5 62,5 68,2 80 2,200 175u3315 175u3138 175u3139 - 1,5 5
T4 7,5 45,3 49,6 56 3,200 175u3316 175u3428 175u3427 - 1,5 7,1
T4 11 34,9 38,0 38 5,000 - - - 175u3236 1,5 11,5
T4 15 25,3 27,7 28 6,000 - - - 175u3237 2,5 14,7
T4 18,5 20,3 22,3 22 8,000 - - - 175u3238 4 19
T4 22 16,9 18,7 19 10,000 - - - 175u3203 4 23
T4 30 13,2 14,5 14 14,000 - - - 175u3206 10 32
T4 37 10,6 11,7 12 17,000 - - - 175u3210 10 38
T4 45 8,7 9,6 9,5 21,000 - - - 175u3213 16 47
T4 55 6,6 7,8 7,0 26,000 - - - 175u3216 25 61
T4 75 4,2 5,7 5,5 36,000 - - - 175u3219 35 81
Termo-
relæ
[A]
Tabel 7.9 T4, Vertikal bremsning 40 % driftscyklus
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 91

Bestilling
Design Guide
7.2.5 Bremsemodstande for FC 302
FC 302 Horisontal bremsning 10 % driftscyklus
Frekvensomformerdata
Netfor-
synings-
type
P
m
[kW]
R
[Ω]
min
R
br.nom
[Ω]
R
[Ω]
rec
P
T2 0,25 380 475,3 410 0,100 175u3004 - - - 1,5 0,5
T2 0,37 275 320,8 300 0,100 175u3006 - - - 1,5 0,6
T2 0,55 188 215,7 200 0,100 175u3011 - - - 1,5 0,7
T2 0,75 130 158,1 145 0,100 175u3016 - - - 1,5 0,8
T2 1,1 81,0 105,1 100 0,100 175u3021 - - - 1,5 0,9
T2 1,5 58,5 76,0 70 0,200 175u3026 - - - 1,5 1,6
T2 2,2 45,0 51,0 48 0,200 175u3031 - - - 1,5 1,9
T2 3 31,5 37,0 35 0,300 175u3325 - - - 1,5 2,7
T2 3,7 22,5 29,7 27 0,360 175u3326 175u3477 175u3478 - 1,5 3,5
77
T2 5,5 17,7 19,7 18 0,570 175u3327 175u3442 175u3441 - 1,5 5,3
T2 7,5 12,6 14,3 13,0 0,680 175u3328 175u3059 175u3060 - 1,5 6,8
T2 11 8,7 9,7 9,0 1,130 175u3329 175u3068 175u3069 - 2,5 10,5
T2 15 5,3 7,5 5,7 1,400 175u3330 175u3073 175u3074 - 4 14,7
T2 18,5 5,1 6,0 5,7 1,700 175u3331 175u3483 175u3484 - 4 16
T2 22 3,2 5,0 3,5 2,200 175u3332 175u3080 175u3081 - 6 24
T2 30 3,0 3,7 3,5 2,800 175u3333 175u3448 175u3447 - 10 27
T2 37 2,4 3,0 2,8 3,200 175u3334 175u3086 175u3087 - 16 32
Data for bremsemodstand Installation
Danfoss varenummer
br.cont.
[kW]
Ledning
IP54
Skrue-
klemme
IP21
Skrue-
klemme
IP65
Bolt
connection
IP20
Kabeltv-
ærsnit
[mm2]
Termo-
relæ
[A]
Tabel 7.10 T2, Horisontal bremsning 10 % driftscyklus
FC 302 Vertikal bremsning 40 % driftscyklus
Frekvensomformerdata
Netfor-
synings-
type
P
[kW]
R
R
m
[Ω]
min
R
br.nom
[Ω]
rec
[Ω]
P
Data for bremsemodstand Installation
Danfoss varenummer
br.cont.
[kW]
Ledning
IP54
Skrue-
klemme
IP21
Skrue-
klemme
IP65
Bolt
connection
IP20
Kabeltv-
ærsnit
[mm2]
T2 0,25 380 475,3 410 0,100 175u3004 - - - 1,5 0,5
T2 0,37 275 320,8 300 0,200 175u3096 - - - 1,5 0,8
T2 0,55 188 215,7 200 0,200 175u3008 - - - 1,5 0,9
T2 0,75 130 158,1 145 0,300 175u3300 - - - 1,5 1,3
T2 1,1 81,0 105,1 100 0,450 175u3301 175u3402 175u3401 - 1,5 2
T2 1,5 58,5 76,0 70 0,570 175u3302 175u3404 175u3403 - 1,5 2,7
T2 2,2 45,0 51,0 48 0,960 175u3303 175u3406 175u3405 - 1,5 4,2
T2 3 31,5 37,0 35 1,130 175u3304 175u3408 175u3407 - 1,5 5,4
T2 3,7 22,5 29,7 27 1,400 175u3305 175u3410 175u3409 - 1,5 6,8
T2 5,5 17,7 19,7 18 2,200 175u3306 175u3412 175u3411 - 1,5 10,4
T2 7,5 12,6 14,3 13,0 3,200 175u3307 175u3414 175u3413 - 2,5 14,7
T2 11 8,7 9,7 9,0 5,500 - 175u3176 175u3177 - 4 23
T2 15 5,3 7,5 5,7 6,000 - - - 175u3233 10 33
T2 18,5 5,1 6,0 5,7 8,000 - - - 175u3234 10 38
T2 22 3,2 5,0 3,5 9,000 - - - 175u3235 16 51
T2 30 3,0 3,7 3,5 14,000 - - - 175u3224 25 63
T2 37 2,4 3,0 2,8 17,000 - - - 175u3227 35 78
Termo-
relæ
[A]
Tabel 7.11 T2, Vertikal bremsning 40 % driftscyklus
92 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01

Bestilling
Design Guide
FC 302 Horisontal bremsning 10 % driftscyklus
Frekvensomformerdata
Netfor-
synings-
type
P
[kW]
R
R
m
[Ω]
min
R
br.nom
[Ω]
rec
[Ω]
P
Data for bremsemodstand Installation
Danfoss varenummer
br.cont.
[kW]
Ledning
IP54
Skrue-
klemme
IP21
Skrue-
klemme
IP65
Bolt
connection
IP20
Kabeltv-
ærsnit
[mm2]
T5 0,37 1000 1389,2 1200 0,100 175u3000 - - - 1,5 0,3
T5 0,55 620 928,8 850 0,100 175u3001 - - - 1,5 0,4
T5 0,75 558 678,3 630 0,100 175u3002 - - - 1,5 0,4
T5 1,1 382 452,5 410 0,100 175u3004 - - - 1,5 0,5
T5 1,5 260 325,9 270 0,200 175u3007 - - - 1,5 0,8
T5 2,2 189 218,6 200 0,200 175u3008 - - - 1,5 0,9
T5 3 135 158,5 145 0,300 175u3300 - - - 1,5 1,3
T5 4 99,0 117,2 110 0,450 175u3335 175u3450 175u3449 - 1,5 1,9
T5 5,5 72,0 84,4 80 0,570 175u3336 175u3452 175u3451 - 1,5 2,5
T5 7,5 50,0 61,4 56 0,680 175u3337 175u3027 175u3028 - 1,5 3,3
T5 11 36,0 41,2 38 1,130 175u3338 175u3034 175u3035 - 1,5 5,2
T5 15 27,0 30,0 28 1,400 175u3339 175u3039 175u3040 - 1,5 6,7
T5 18,5 20,3 24,2 22 1,700 175u3340 175u3047 175u3048 - 1,5 8,3
T5 22 18,0 20,3 19 2,200 175u3357 175u3049 175u3050 - 1,5 10,1
T5 30 13,4 15,8 14 2,800 175u3341 175u3055 175u3056 - 2,5 13,3
T5 37 10,8 12,7 12 3,200 175u3359 175u3061 175u3062 - 2,5 15,3
T5 45 8,8 10,4 9,5 4,200 - 175u3065 175u3066 - 4 20
T5 55 6,5 8,5 7,0 5,500 - 175u3070 175u3071 - 6 26
T5 75 4,2 6,2 5,5 7,000 - - - 175u3231 10 36
Termo-
relæ
[A]
7 7
Tabel 7.12 T5, Horisontal bremsning 10 % driftscyklus
FC 302 Vertikal bremsning 40 % driftscyklus
Frekvensomformerdata
Netfor-
synings-
type
[kW]
R
P
R
m
[Ω]
min
R
br.nom
[Ω]
rec
[Ω]
P
Data for bremsemodstand Installation
Danfoss varenummer
br.cont.
[kW]
Ledning
IP54
Skrue-
klemme
IP21
Skrue-
klemme
IP65
Bolt
connection
IP20
Kabeltv-
ærsnit
[mm2]
T5 0,37 1000 1389,2 1200 0,200 175u3101 - - - 1,5 0,4
T5 0,55 620 928,8 850 0,200 175u3308 - - - 1,5 0,5
T5 0,75 558 678,3 630 0,300 175u3309 - - - 1,5 0,7
T5 1,1 382 452,5 410 0,450 175u3310 175u3416 175u3415 - 1,5 1
T5 1,5 260 325,9 270 0,570 175u3311 175u3418 175u3417 - 1,5 1,4
T5 2,2 189 218,6 200 0,960 175u3312 175u3420 175u3419 - 1,5 2,1
T5 3 135 158,5 145 1,130 175u3313 175u3422 175u3421 - 1,5 2,7
T5 4 99,0 117,2 110 1,700 175u3314 175u3424 175u3423 - 1,5 3,7
T5 5,5 72,0 84,4 80 2,200 175u3315 175u3138 175u3139 - 1,5 5
T5 7,5 50,0 61,4 56 3,200 175u3316 175u3428 175u3427 - 1,5 7,1
T5 11 36,0 41,2 38 5,000 - - - 175u3236 1,5 11,5
T5 15 27,0 30,0 28 6,000 - - - 175u3237 2,5 14,7
T5 18,5 20,3 24,2 22 8,000 - - - 175u3238 4 19
T5 22 18,0 20,3 19 10,000 - - - 175u3203 4 23
T5 30 13,4 15,8 14 14,000 - - - 175u3206 10 32
T5 37 10,8 12,7 12 17,000 - - - 175u3210 10 38
T5 45 8,8 10,4 9,5 21,000 - - - 175u3213 16 47
T5 55 6,5 8,5 7,0 26,000 - - - 175u3216 25 61
T5 75 4,2 6,2 5,5 36,000 - - - 175u3219 35 81
Termo-
relæ
[A]
Tabel 7.13 T5, Vertikal bremsning 40 % driftscyklus
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 93
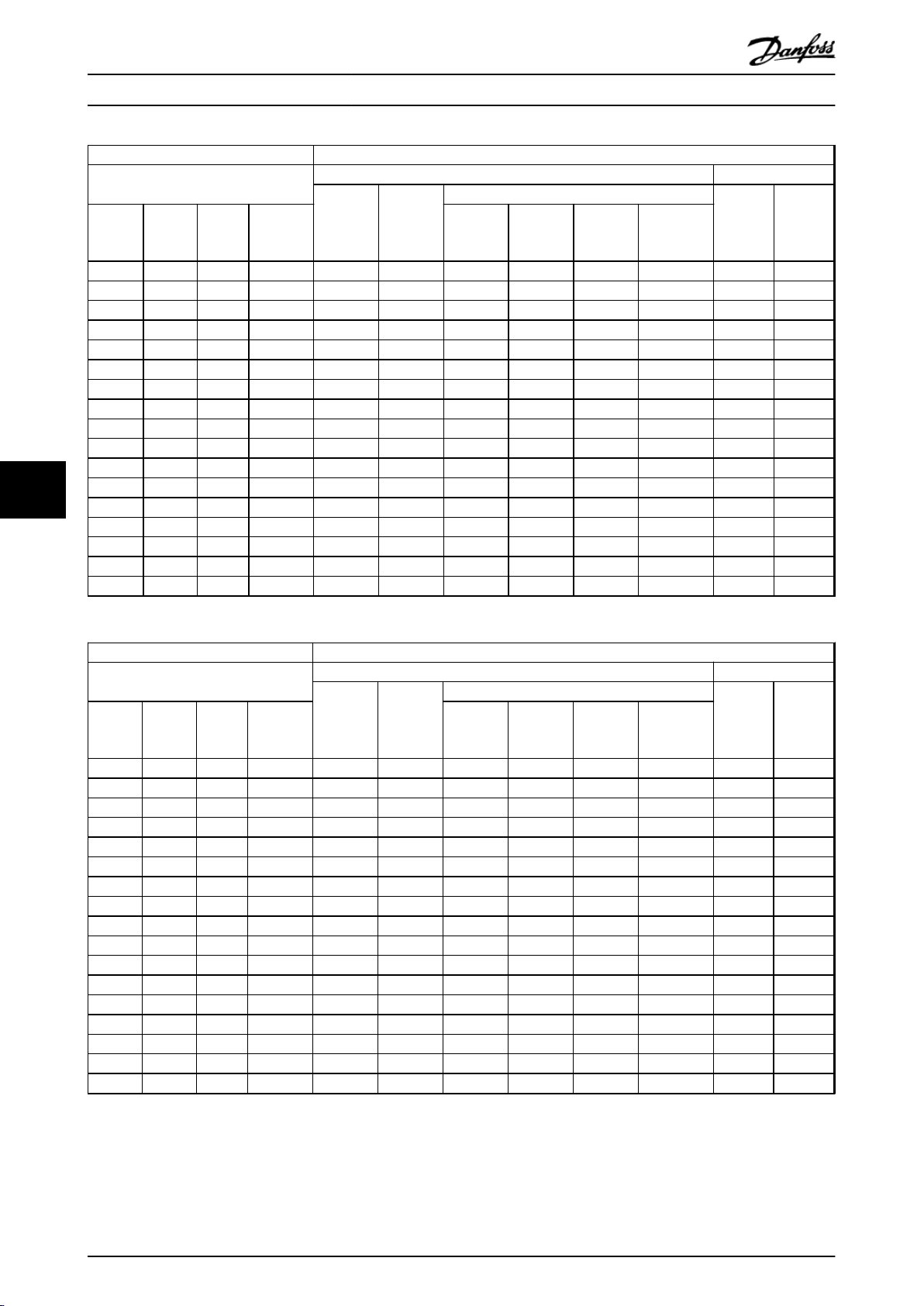
Bestilling
Design Guide
FC 302 Horisontal bremsning 10 % driftscyklus
Frekvensomformerdata
Netfor-
synings-
type
[kW]
R
P
R
m
[Ω]
min
R
br.nom
[Ω]
rec
[Ω]
P
Data for bremsemodstand Installation
Danfoss varenummer
br.cont.
[kW]
Ledning
IP54
Skrue-
klemme
IP21
Skrue-
klemme
IP65
Bolt
connection
IP20
Kabeltv-
ærsnit
[mm2]
Termo-
relæ
[A]
T6 0,75 620 914,2 850 0,100 175u3001 - - - 1,5 0,4
T6 1,1 550 611,3 570 0,100 175u3003 - - - 1,5 0,4
T6 1,5 380 441,9 415 0,200 175u3005 - - - 1,5 0,7
T6 2,2 260 296,4 270 0,200 175u3007 - - - 1,5 0,8
T6 3 189 214,8 200 0,300 175u3342 - - - 1,5 1,1
T6 4 135 159,2 145 0,450 175u3343 175u3012 175u3013 - 1,5 1,7
T6 5,5 99,0 114,5 100 0,570 175u3344 175u3136 175u3137 - 1,5 2,3
T6 7,5 69,0 83,2 72 0,680 175u3345 175u3456 175u3455 - 1,5 2,9
T6 11 48,6 56,1 52 1,130 175u3346 175u3458 175u3457 - 1,5 4,4
T6 15 35,1 40,8 38 1,400 175u3347 175u3460 175u3459 - 1,5 5,7
T6 18,5 27,0 32,9 31 1,700 175u3348 175u3037 175u3038 - 1,5 7
77
T6 22 22,5 27,6 27 2,200 175u3349 175u3043 175u3044 - 1,5 8,5
T6 30 17,1 21,4 19 2,800 175u3350 175u3462 175u3461 - 2,5 11,4
T6 37 13,5 17,3 14 3,200 175u3358 175u3464 175u3463 - 2,5 14,2
T6 45 10,8 14,2 13,5 4,200 - 175u3057 175u3058 - 4 17
T6 55 8,8 11,6 11 5,500 - 175u3063 175u3064 - 6 21
T6 75 6,6 8,4 7,0 7,000 - - - 175u3245 10 32
Tabel 7.14 T6, Horisontal bremsning 10 % driftscyklus
FC 302 Vertikal bremsning 40 % driftscyklus
Frekvensomformerdata
Netfor-
synings-
type
P
[kW]
R
R
m
[Ω]
min
R
br.nom
[Ω]
rec
[Ω]
P
Data for bremsemodstand Installation
Danfoss varenummer
br.cont.
[kW]
Ledning
IP54
Skrue-
klemme
IP21
Skrue-
klemme
IP65
Bolt
connection
IP20
Kabeltv-
ærsnit
[mm2]
T6 0,75 620 914,2 850 0,280 175u3317 175u3104 175u3105 - 1,5 0,6
T6 1,1 550 611,3 570 0,450 175u3318 175u3430 175u3429 - 1,5 0,9
T6 1,5 380 441,9 415 0,570 175u3319 175u3432 175u3431 - 1,5 1,1
T6 2,2 260 296,4 270 0,960 175u3320 175u3434 175u3433 - 1,5 1,8
T6 3 189 214,8 200 1,130 175u3321 175u3436 175u3435 - 1,5 2,3
T6 4 135 159,2 145 1,700 175u3322 175u3126 175u3127 - 1,5 3,3
T6 5,5 99,0 114,5 100 2,200 175u3323 175u3438 175u3437 - 1,5 4,4
T6 7,5 69,0 83,2 72 3,200 175u3324 175u3440 175u3439 - 1,5 6,3
T6 11 48,6 56,1 52 5,500 - 175u3148 175u3149 - 1,5 9,7
T6 15 35,1 40,8 38 6,000 - - - 175u3239 2,5 12,6
T6 18,5 27,0 32,9 31 8,000 - - - 175u3240 4 16
T6 22 22,5 27,6 27 10,000 - - - 175u3200 4 19
T6 30 17,1 21,4 19 14,000 - - - 175u3204 10 27
T6 37 13,5 17,3 14 17,000 - - - 175u3207 10 35
T6 45 10,8 14,2 13,5 21,000 - - - 175u3208 16 40
T6 55 8,8 11,6 11 26,000 - - - 175u3211 25 49
T6 75 6,6 8,4 7,0 30,000 - - - 175u3241 35 66
Termo-
relæ
[A]
Tabel 7.15 T6, Vertikal bremsning 40 % driftscyklus
94 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
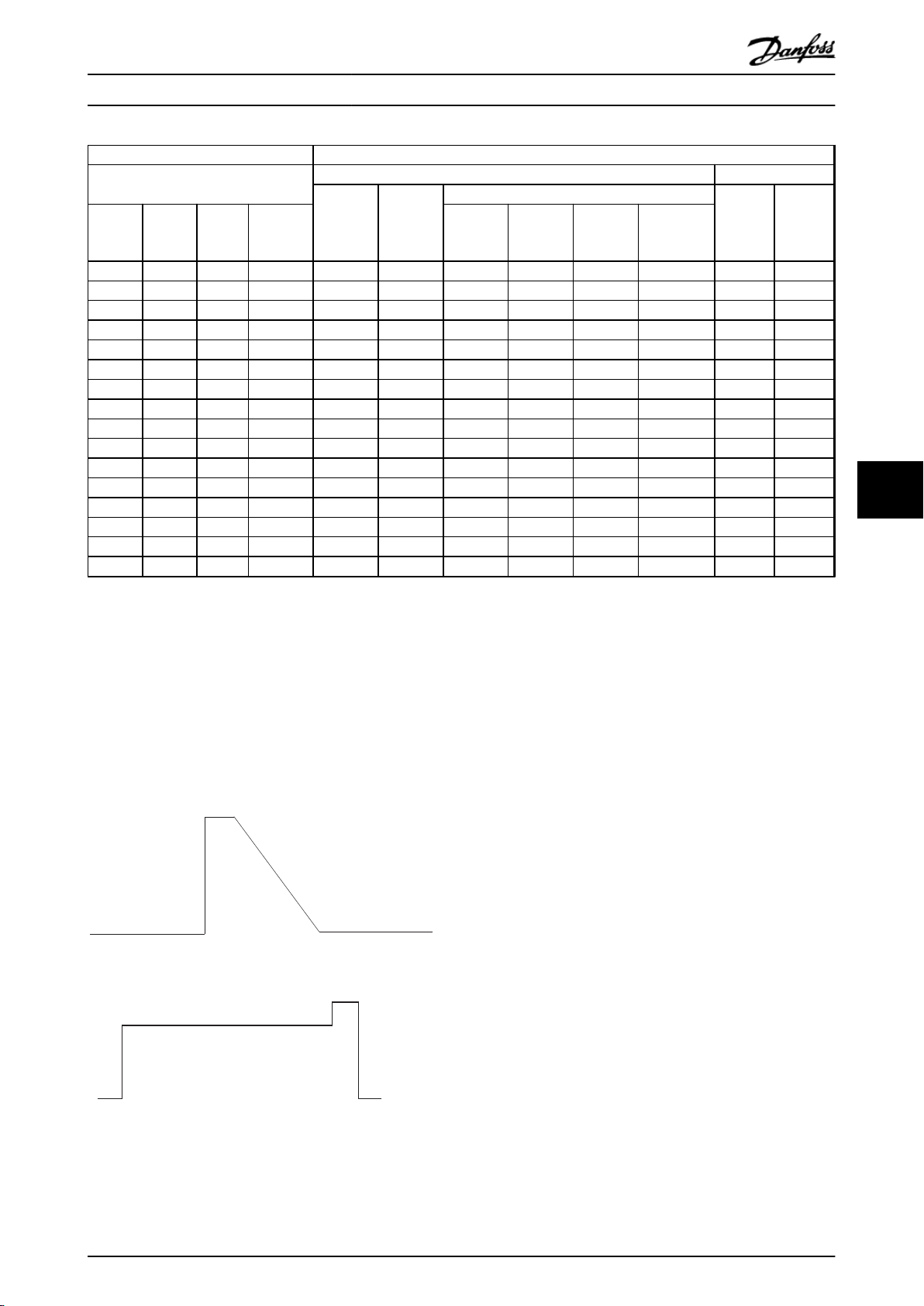
150/160%
175UA067.10
100%
150/160%
175UA068.10
Bestilling Design Guide
FC 302 Vertikal bremsning 40 % driftscyklus
Frekvensomformerdata
Netfor-
synings-
type
P
[kW]
R
R
m
[Ω]
min
R
br.nom
[Ω]
rec
[Ω]
P
T7 1,1 620 830 630 0,360 - 175u3108 175u3109 - 1,5 0,8
T7 1,5 513 600 570 0,570 - 175u3110 175u3111 - 1,5 1
T7 2,2 340 403 415 0,790 - 175u3112 175u3113 - 1,5 1,3
T7 3 243 292 270 1,130 - 175u3118 175u3119 - 1,5 2
T7 4 180 216 200 1,700 - 175u3122 175u3123 - 1,5 2,8
T7 5,5 130 156 145 2,200 - 175u3106 175u3107 - 1,5 3,7
T7 7,5 94 113 105 3,200 - 175u3132 175u3133 - 1,5 5,2
T7 11 69,7 76,2 72 4,200 - 175u3142 175u3143 - 1,5 7,2
T7 15 46,8 55,5 52 6,000 - - - 175u3242 2,5 10,8
T7 18,5 36,0 44,7 42 8,000 - - - 175u3243 2,5 13,9
T7 22 29,0 37,5 31 10,000 - - - 175u3244 4 18
T7 30 22,5 29,1 27 14,000 - - - 175u3201 10 23
T7 37 18,0 23,5 22 17,000 - - - 175u3202 10 28
T7 45 13,5 19,3 15,5 21,000 - - - 175u3205 16 37
T7 55 13,5 15,7 13,5 26,000 - - - 175u3209 16 44
T7 75 8,8 11,5 11 36,000 - - - 175u3212 25 57
Data for bremsemodstand Installation
Danfoss varenummer
br.cont.
[kW]
Ledning
IP54
Skrue-
klemme
IP21
Skrue-
klemme
IP65
Bolt
connection
IP20
Kabeltv-
ærsnit
[mm2]
Termo-
relæ
[A]
7 7
Tabel 7.16 T7, Vertikal bremsning 40 % driftscyklus
Horisontal bremsning: Driftscyklus på 10 % og maksimum 120 sek repetitionshastigheder i henhold til referencen for bremseprofil. Gennemsnitseffekt svarer til 6 %.
Vertikal bremsning: Driftscyklus på 40 % og maksimum 120 sek repetitionshastigheder i henhold til referencen for bremseprofil. Gennemsnitseffekt
svarer til 27 %.
Kabeltværsnit: Anbefalet min. værdi baseret på PVC-isoleret kobberkabel og en omgivelsestemperatur på 30 °C med normalt varmetab.
Al kabelføring skal overholde nationale og lokale bestemmelser vedrørende kabeltværsnit og omgivelsestemperatur.
Termorelæ: Bremsestrømsindstilling for eksternt termorelæ. Alle modstande har en indbygget termorelækontakt N.C.
IP54 er med 1.000 mm fast uskærmet kabel. Vertikal og horisontal montering. Derating nødvendig ved horisontal montering.
IP21 og IP65 er med skrueklemme til kabelterminering. Vertikal og horisontal montering. Derating nødvendig ved horisontal montering.
IP20 er med bolt-tilslutning til kabelterminering. Gulvmontering.
Illustration 7.2 Horisontale belastninger
Illustration 7.3 Vertikale belastninger
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 95
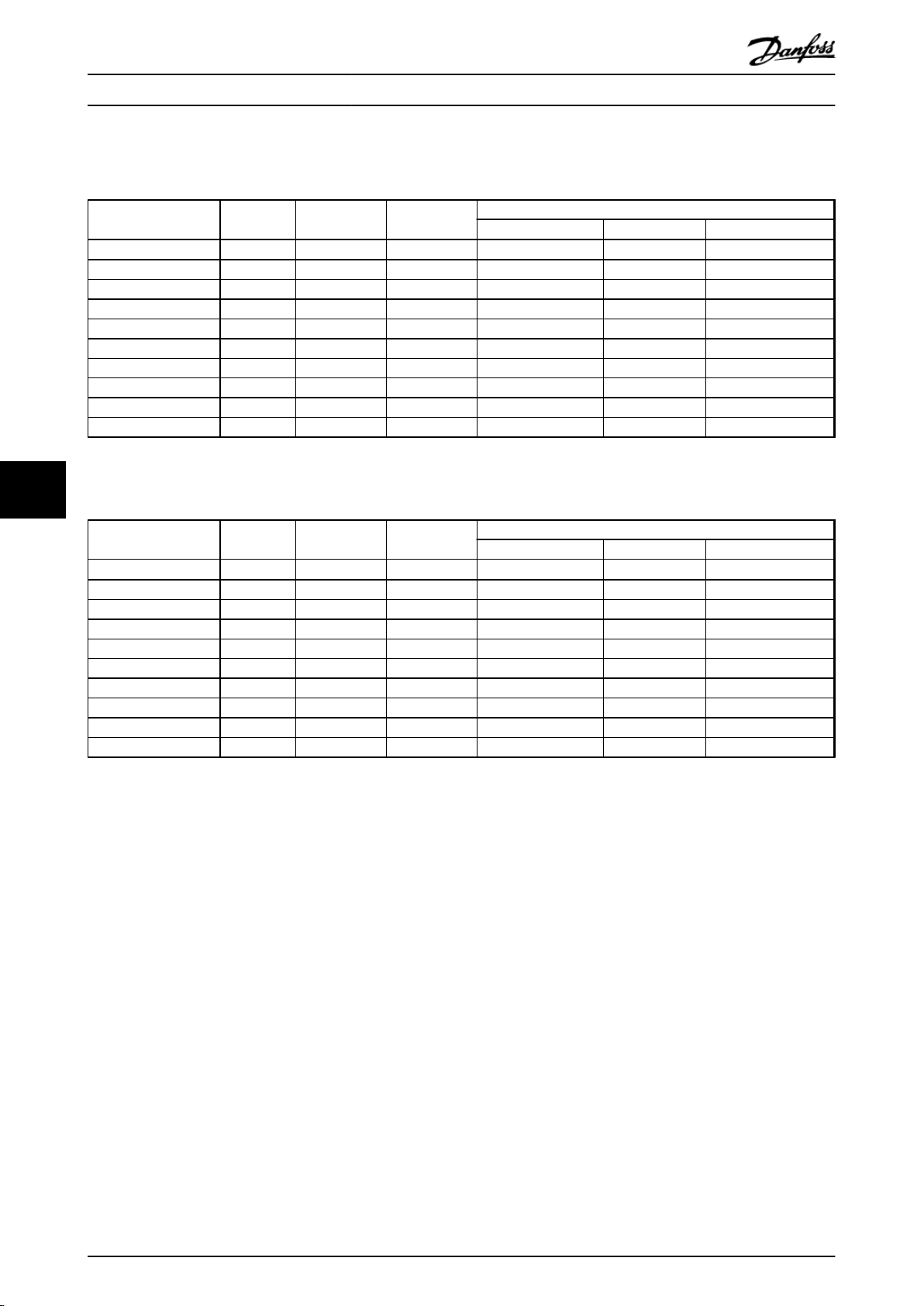
Bestilling Design Guide
7.2.6 Andre flat-pack bremsemodstande
Flat-pack IP65 til horisontale transportbånd
FC 301
T2 [kW]
P
m
R
min
R
br, nom
R
pr. genstand
rec
[Ω] [Ω] [Ω//W]
Driftscyklus Bestillingsnr.
[%] 175Uxxxx
PK25 0,25 368 416 430/100 40 1002
PK37 0,37 248 281 330/100 eller 310/200 27 eller 55 1003 eller 0984
PK55 0,55 166 189 220/100 eller 210/200 20 eller 37 1004 eller 0987
PK75 0,75 121 138 150/100 eller 150/200 14 eller 27 1005 eller 0989
P1K1 1,1 81,0 92 100/100 eller 100/200 10 eller 19 1006 eller 0991
P1K5 1,5 58,5 66,5 72/200 14 0992
P2K2 2,2 40,2 44,6 50/200 10 0993
P3K0 3 29,1 32,3 35/200 eller 72/200 7 14 0994 eller 2 x 0992
P3K7 3,7 22,5 25,9 60/200 11 2 x 0996
Tabel 7.17 Andre flat-packs for frekvensomformere med netforsyning
FC 301 Netforsyning: 200-240 V (T2)
77
Flat-pack IP65 til horisontale transportbånd
FC 302
P
m
T2 [kW]
PK25 0,25 380 475 430/100 40 1002
PK37 0,37 275 321 330/100 eller 310/200 27 eller 55 1003 eller 0984
PK55 0,55 188 216 220/100 eller 210/200 20 eller 37 1004 eller 0987
PK75 0,75 130 158 150/100 eller 150/200 14 eller 27 1005 eller 0989
P1K1 1,1 81,0 105,1 100/100 eller 100/200 10 eller 19 1006 eller 0991
P1K5 1,5 58,5 76,0 72/200 14 0992
P2K2 2,2 45,0 51,0 50/200 10 0993
P3K0 3 31,5 37,0 35/200 eller 72/200 7 eller 14 0994 eller 2 x 0992
P3K7 3,7 22,5 29,7 60/200 11 2 x 0996
R
min
R
br. nom
R
pr. genstand
rec
[Ω] [Ω] [Ω/W]
Driftscyklus Bestillingsnr.
[%] 175Uxxxx
Tabel 7.18 Andre flat-packs for frekvensomformere med netforsyning
FC 302 Netforsyning: 200-240 V (T2)
96 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
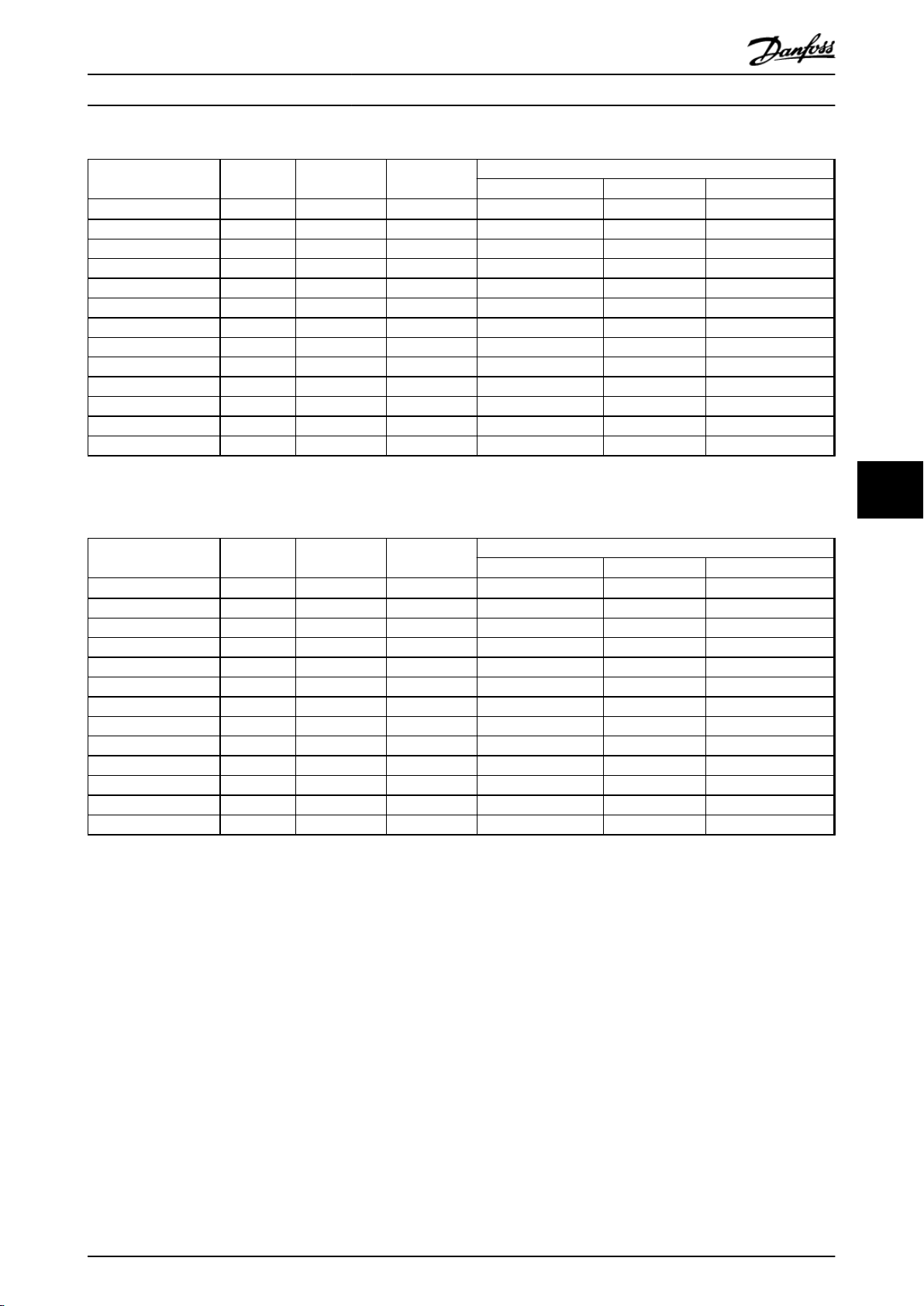
Bestilling Design Guide
FC 301
P
m
T4 [kW]
PK37 0,37 620 1121 830/100 30 1000
PK55 0,55 620 750 830/100 20 1000
PK75 0,75 485 548 620/100 eller 620/200 14 eller 27 1001 eller 0982
P1K1 1,1 329 365 430/100 eller 430/200 10 eller 20 1002 eller 0983
P1K5 1,5 240,0 263,0 310/200 14 0984
P2K2 2,2 161,0 176,5 210/200 10 0987
P3K0 3 117,0 127,9 150/200 eller 300/200 7 eller 14 0989 eller 2 x 0985
P4K0 4 87 95 240/200 10 2 x 0986
P5K5 5,5 63 68 160/200 8 2 x 0988
P7K5 7,5 45 50 130/200 6 2 x 0990
P11K 11 34,9 38,0 80/240 5 2 x 0090
P15K 15 25,3 27,7 72/240 4 2 x 0091
Tabel 7.19 Andre flat-packs for frekvensomformere med netforsyning
FC 301 Netforsyning: 380-480 V (T4)
R
min
R
br. nom
[Ω] [Ω] [Ω/W]
Flat-pack IP65 til horisontale transportbånd
R
pr. genstand Driftscyklus Bestillingsnr.
rec
[%] 175Uxxxx
7 7
FC 302
T5 [kW]
P
m
R
min
R
br. nom
[Ω] [Ω] [Ω/W]
PK37 0,37 620 1389 830/100 30 1000
PK55 0,55 620 929 830/100 20 1000
PK75 0,75 558 678 620/100 eller 620/200 14 eller 27 1001 eller 0982
P1K1 1,1 382 453 430/100 eller 430/200 10 eller 20 1002 eller 0983
P1K5 1,5 260,0 325,9 310/200 14 0984
P2K2 2,2 189,0 218,6 210/200 10 0987
P3K0 3 135,0 158,5 150/200 eller 300/200 7 eller 14 0989 eller 2 x 0985
P4K0 4 99 117 240/200 10 2 x 0986
P5K5 5,5 72 84 160/200 8 2 x 0988
P7K5 7,5 50 61 130/200 6 2 x 0990
P11K 11 36,0 41,2 80/240 5 2 x 0090
P15K 15 27,0 30,0 72/240 4 2 x 0091
Tabel 7.20 Andre flat-packs for frekvensomformere med netforsyning
FC 302 Netforsyning: 380-500 V (T5)
IP65 er en flat-pack-type med fast kabel.
Flat-pack IP65 til horisontale transportbånd
R
pr. genstand
rec
Driftscyklus Bestillingsnr.
[%] 175Uxxxx
MG33BF01 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. 97
Bestilling Design Guide
7.2.7 Harmoniske filtre
Harmoniske filtre bruges til at reducere harmonisk strøm på nettet.
AHF 010: 10 % strømforvrængning
•
AHF 005: 5 % strømforvrængning
•
Køling og ventilation
IP20: Afkøles ved naturlig konvektion eller med indbyggede ventilatorer. IP00: Yderligere tvungen køling er påkrævet. Sørg
for at sikre tilstrækkelig luftstrøm gennem filteret under installation for at undgå overophedning af filteret. Luftstrøm på
minimum 2 m/s er påkrævet gennem filteret.
Effekt og strømklassifi-
ceringer
[kW] [A] [kW] [A] IP00 IP20 IP00 IP20
PK37-P4K0 1,2-9 3 10 130B1392 130B1229 130B1262 130B1027
77
P5K5-P7K5 14,4 7,5 14 130B1393 130B1231 130B1263 130B1058
P11K 22 11 22 130B1394 130B1232 130B1268 130B1059
P15K 29 15 29 130B1395 130B1233 130B1270 130B1089
P18K 34 18,5 34 130B1396 130B1238 130B1273 130B1094
P22K 40 22 40 130B1397 130B1239 130B1274 130B1111
P30K 55 30 55 130B1398 130B1240 130B1275 130B1176
P37K 66 37 66 130B1399 130B1241 130B1281 130B1180
P45K 82 45 82 130B1442 130B1247 130B1291 130B1201
P55K 96 55 96 130B1443 130B1248 130B1292 130B1204
P75K 133 75 133 130B1444 130B1249 130B1293 130B1207
Tabel 7.21 Harmoniske filtre for 380-415 V, 50 Hz
Effekt og strømklassifi-
ceringer
[kW] [A] [kW] [A] IP00 IP20 IP00 IP20
PK37-P4K0 1,2-9 3 10 130B3095 130B2857 130B2874 130B2262
P5K5-P7K5 14,4 7,5 14 130B3096 130B2858 130B2875 130B2265
P11K 22 11 22 130B3097 130B2859 130B2876 130B2268
P15K 29 15 29 130B3098 130B2860 130B2877 130B2294
P18K 34 18,5 34 130B3099 130B2861 130B3000 130B2297
P22K 40 22 40 130B3124 130B2862 130B3083 130B2303
P30K 55 30 55 130B3125 130B2863 130B3084 130B2445
P37K 66 37 66 130B3026 130B2864 130B3085 130B2459
P45K 82 45 82 130B3127 130B2865 130B3086 130B2488
P55K 96 55 96 130B3128 130B2866 130B3087 130B2489
P75K 133 75 133 130B3129 130B2867 130B3088 130B2498
Typisk
motor
Typisk
motor
Filtrets strømklassifi-
cering
50 Hz
Filtrets strømklassifi-
cering
60 Hz
Bestillingsnr. AHF 005 Bestillingsnr. AHF 010
Bestillingsnr. AHF 005 Bestillingsnr. AHF 010
Tabel 7.22 Harmoniske filtre for 380-415 V, 60 Hz
98 Danfoss A/S © Rev. 2014-04-04 Alle rettigheder forbeholdes. MG33BF01
 Loading...
Loading...