

Page 1
ENGINEERING TOMORROW
Ohjelmointiopas
VLT® AutomationDrive FC 301/302
Ohjelmistoversiot, ohjauskortti MK I: 7.62, 48.2X
Ohjelmistoversio, ohjauskortti MK II: 8.10
www.danfoss./vlt
Page 2

Page 3
Sisällysluettelo Ohjelmointiopas
Sisällysluettelo
1 Johdanto
1.1 Ohjelmistoversio
1.2 Hyväksynnät
1.3 Määritelmät
1.3.1 Taajuusmuuttaja 3
1.3.2 Tulo 3
1.3.3 Moottori 3
1.3.4 Ohjearvot 4
1.3.5 Muut 4
1.4 Turvallisuus
1.5 Sähkökytkennät
1.6 Integrated Motion Controller
2 Ohjelmointi
2.1 Graanen ja numeerinen paikallisohjauspaneeli
2.1.1 LCD-näyttö 13
2.1.2 Parametrin asetusten nopea siirto eri taajuusmuuttajien välillä 15
2.1.3 Näyttötila 15
3
3
3
3
6
8
11
12
12
2.1.4 Näyttötila - näytön lukemien valinta 15
2.1.5 Parametriasetukset 17
2.1.6 Pika-asetusvalikko-painikkeen toiminnot 17
2.1.7 Ensimmäinen käyttöönotto 18
2.1.8 Päävalikkotila 19
2.1.9 Parametrin valinta 19
2.1.10 Tietojen muuttaminen 19
2.1.11 Tekstin arvon muuttaminen 19
2.1.12 Data-arvon muuttaminen 20
2.1.13 Numeeristen data-arvojen portaaton muuttaminen 20
2.1.14 Arvo, portaittain 20
2.1.15 Indeksoitujen parametrien lukeminen ja ohjelmointi 20
2.1.16 Ohjelmointi numeerisella paikallisohjauspaneelilla 20
2.1.17 LCP:n painikkeet 22
3 Parametrien kuvaukset
3.1 Parametrit: 0-** Toiminta ja näyttö
3.2 Parametrit: 1-** Kuorma ja moottori
24
24
36
3.3 Parametrit: 2-** Jarrut
3.4 Parametrit: 3-** Ohjearvo / rampit
3.5 Parametrit: 4-** Rajat/varoitukset
3.6 Parametrit: 5-** Digit. tulo/lähtö
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 1
63
70
83
94
Page 4
Sisällysluettelo
VLT® AutomationDrive FC 301/302
3.7 Parametrit: 6-** Analog. tulo/lähtö
3.8 Parametrit: 7-** Säätimet
3.9 Parametrit: 8-** Tiedons. ja aset.
3.10 Parametrit: 9-** PROFIBUS
3.11 Parametrit: 10-** DeviceNet CAN-kenttäväylä
3.12 Parametrit: 12-** Ethernet
3.13 Parametrit: 13-** Älykäs logiikka
3.14 Parametrit: 14-** Erikoistoiminnot
3.15 Parametrit: 15-** Taaj.muut. tiedot
3.16 Parametrit: 16-** Datalukemat
3.17 Parametrit: 17-** Tak.kytk.optio
3.18 Parametrit: 18-** Datalukemat 2
3.19 Parametrit: 19-** Sovellusparametrit
3.20 Parametrit: 23-** Aikaan perustuvat toiminnot
3.21 Parametrit: 30-** Erityisominaisuudet
3.22 Parametrit: 32-** MCO-perusaset.
3.23 Parametrit: 33-** MCO:n käänt. aset.
119
128
139
150
150
150
150
176
188
196
204
212
215
215
221
225
225
3.24 Parametrit: 34-** MCO-datalukemat
3.25 Parametrit: 35-** Anturitulo-optio
3.26 Parametrit: 36-** Programmable I/O Option
3.27 Parametrit: 40-** Special Settings
3.28 Parametrit: 42-** Safety Functions
3.29 Parametrit: 43-** Unit Readouts
4 Integrated Motion Controller
4.1 Johdanto
4.2 Sijoittelu, jäljitys, synkronointi
4.3 Ohjaus
5 Parametriluettelot
5.1 Johdanto
5.2 Parametriluettelot ja optiot, ohjelmistoversio 8.10 (vakio)
5.3 Parametriluettelot ja optiot, ohjelmistoversio 48.20 (IMC)
6 Vianmääritys
225
225
228
230
230
230
233
233
233
235
238
238
240
269
291
6.1 Tilasanomat
7 Liite
7.1 Symbolit, lyhenteet ja merkintätavat
Hakemisto
2 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
291
305
305
306
Page 5
Johdanto Ohjelmointiopas
1 Johdanto
1.1 Ohjelmistoversio
Ohjelmointiopas
Ohjelmistoversiot:
Ohjauskortti MK I: 7.62, 48.2X ja aiemmat versiot
Ohjauskortti MK II: 8.10
Ohjelmiston versionumeron voi lukea parametrista
parametri 15-43 Ohjelmistoversio.
Taulukko 1.1 Ohjelmistoversio
1.1.1 Ohjauskortti MK II
Ohjelmistoversio 8.03 tai uudempi voidaan asentaa
ainoastaan ohjauskorttiin MK II. Ohjelmistoversio 7.62 tai
vanhempi voidaan asentaa ainoastaan ohjauskorttiin MK I.
Tunnistat ohjauskortin version UBS-portin väristä:
MK I: Musta USB-portti.
MK II: Valkoinen USB-portti.
1.2 Hyväksynnät
1.3 Määritelmät
1.3.1 Taajuusmuuttaja
I
VLT,MAX
Maksimilähtövirta.
I
VLT,N
Taajuusmuuttajan syöttämä nimellislähtövirta.
U
VLT,MAX
Maksimilähtöjännite.
1.3.2 Tulo
Ohjauskäsky
Käynnistä ja pysäytä kytketty moottori LCP:n ja digitaalitulojen avulla.
Toiminnot on jaettu kahteen ryhmään.
Ryhmän 1 toiminnot ovat etusijalla ryhmän 2 toimintoihin
nähden.
Ryhmä 1 Nollaus, rullauspysäytys, nollaus ja rullauspysäytys,
pikapysäytys, tasavirtajarru, pysäytys ja [O]-
näppäin.
Ryhmä 2: Käynnistys, pulssikäynnistys, suunnanvaihto,
käynnistys ja suunnanvaihto, ryömintä, lähdön
lukitus
Taulukko 1.2 Toimintoryhmät
1.3.3 Moottori
Moottori käy
Lähtöakselilla on momenttia ja nopeus on välillä 0 kierrosta
minuutissa (rpm) – moottorin suurin nopeus.
f
JOG
Moottorin taajuus, kun ryömintätoiminto on aktivoitunut
(digitaaliliitinten kautta).
f
M
Moottorin taajuus.
f
MAX
Moottorin maksimitaajuus.
f
MIN
Moottorin minimitaajuus.
f
M,N
Moottorin nimellistaajuus (tyyppikilven tiedot).
I
M
Moottorin virta (todellinen).
I
M,N
Moottorin nimellisvirta (tyyppikilven tiedot).
n
M,N
Moottorin nimellisnopeus (tyyppikilven tiedot)
n
s
Synkroninen moottorin nopeus.
2 × par . 1 − 23 × 60s
ns=
n
slip
Moottorin jättämä.
P
M,N
Moottorin nimellisteho (tyyppikilven tiedot, kW tai hv).
T
M,N
Nimellismomentti (moottori).
U
M
Moottorin hetkellinen jännite.
U
M,N
Moottorin nimellisjännite (tyyppikilven tiedot).
par . 1 − 39
1 1
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 3
Page 6
175ZA078.10
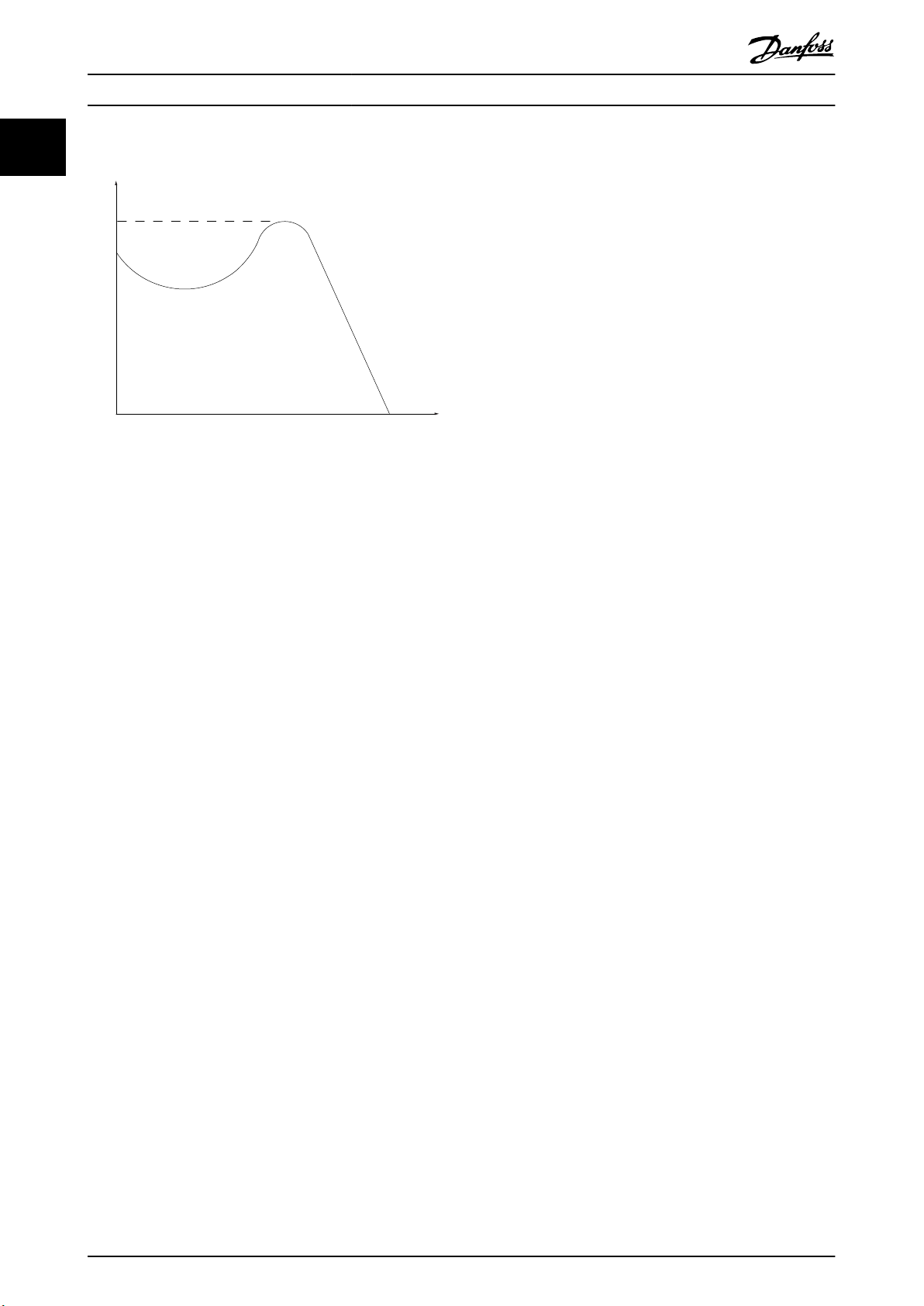
Kippimomentti
1/Min
Momentti
Johdanto
VLT® AutomationDrive FC 301/302
11
Irrotusmomentti
Kuva 1.1 Irrotusmomentti
η
VLT
Taajuusmuuttajan hyötysuhde määritetään teholähdön ja
tehosyötön välisenä suhteena.
Käynnistyksenestokäsky
Ryhmän 1 ohjauskäskyihin kuuluva pysäytyskäsky - katso
Taulukko 1.2.
Pysäytyskäsky
Ryhmän 1 ohjauskäskyihin kuuluva pysäytyskäsky - katso
Taulukko 1.2.
1.3.4 Ohjearvot
Analoginen ohjearvo
Analogiatuloihin 53 tai 54 lähetetty signaali (jännite tai
virta).
Binääriohjearvo
Sarjaporttiin lähetetty signaali.
Esivalittu ohjearvo
Määritetty esivalittu ohjearvo on määritettävä väliltä
-100 % ... +100 % ohjearvoalueesta. Kahdeksan esivalitun
ohjearvon valinta digitaaliliittimien kautta.
Pulssiohjearvo
Digitaalituloihin (liitin 29 tai 33) lähetetty pulssitaajuussignaali.
Ref
MAX
Määrittää ohjearvotulon 100 % koko asteikon arvosta
(tyypillisesti 10 V, 20 mA) ja näin saatavan ohjearvon
välisen suhteen. Suurin ohjearvo asetetaan parametrissa
parametri 3-03 Maksimiohjearvo.
Ref
MIN
Määrittää ohjearvotulon 0 % arvolla (tyypillisesti 0 V, 0 mA,
4 mA) ja näin saatavan ohjearvon välisen suhteen. Pienin
ohjearvo asetetaan parametrissa parametri 3-02 Minimioh-
jearvo.
1.3.5 Muut
Analogiatulot
Analogiatuloilla ohjataan taajuusmuuttajan eri toimintoja.
Analogiatuloja on kahta tyyppiä:
Virtatulo, 0–20 mA ja 4–20 mA
Jännitetulo, -10–+10 V DC.
Analogialähdöt
Analogialähdöt voivat tuottaa 0–20 mA:n tai 4–20 mA:n
signaalin.
Automaattinen moottorin sovitus, AMA
AMA-algoritmi määrittää kytketyn moottorin sähköiset
parametrit tämän ollessa pysähdyksissä.
Jarruvastus
Jarruvastus on moduuli, joka pystyy ottamaan vastaan
regeneratiivisessa jarrutuksessa syntyvän jarrutustehon.
Tämä regeneratiivinen jarrutusteho kasvattaa välipiirin
jännitettä, ja jarruhakkuri varmistaa, että teho syötetään
jarruvastukselle.
Vakiomomenttiasetus
Vakiomomenttiasetusta käytetään mm. hihnakuljetin-,
syrjäytyspumppu- ja nosturisovelluksissa.
Digitaalitulot
Digitaalituloilla voidaan ohjata taajuusmuuttajan eri
toimintoja.
Digitaalilähdöt
Taajuusmuuttajassa on kaksi kiinteää lähtöä, jotka tuottavat
24 V:n tasavirtasignaalin (enintään 40 mA).
DSP
Digitaalinen signaaliprosessori.
ETR
Elektroninen lämpörele on laskennallinen lämpösuojaus,
perustuen sen hetkiseen kuormitukseen ja aikaan. Sen
tarkoituksena on arvioida moottorin lämpötila.
Hiperface
Hiperface® on Stegmannin rekisteröity tavaramerkki.
Alustaminen
Jos taajuusmuuttaja alustetaan (parametri 14-22 Toimintatila), se palautetaan oletusasetuksiin.
Ajoittainen käyttö
Ajoittaisen käytön luokittelu viittaa sarjaan käyttöjaksoja.
Jokainen jakso koostuu kuormitetusta ja kuormittamattomasta vaiheesta. Käyttö voi tapahtua joko jaksottaisena
tai ei-jaksottaisena.
LCP
Paikallisohjauspaneeli muodostaa taajuusmuuttajan
täydellisen ohjaus- ja ohjelmointikäyttöliittymän. Ohjauspaneelin voi irrottaa, ja lisävarusteena saatavalla
asennussarjalla sen voi asentaa enintään 3 metrin päähän
taajuusmuuttajasta, esimerkiksi sähkökaapin oveen.
®
4 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 7

Johdanto Ohjelmointiopas
NLCP
Numeerinen paikallisohjauspaneeli taajuusmuuttajan
ohjausta ja ohjelmointia varten. Näyttö on numeerinen ja
paneelin avulla näytetään prosessiarvoja. NLCP:ssä ei ole
tallennus- ja kopiointitoimintoja.
lsb
Vähiten merkitsevä bitti.
msb
Eniten merkitsevä bitti.
MCM
Lyhenne termistä Mille Circular Mil, joka on amerikkalainen
kaapelin poikkileikkauksen mittayksikkö. 1 MCM ≡ 0.5067
mm2.
Online- ja oine-parametrit
On-line-parametrien muutokset aktivoituvat välittömästi
data-arvon muuttamisen jälkeen. Oine-parametrit
aktivoituvat, kun painat [OK].
Prosessin PID
PID-säätö pitää yllä vaadittua nopeutta, painetta,
lämpötilaa jne. säätämällä lähtötaajuutta kuormituksen
vaihtelujen mukaisesti.
PCD
Prosessiohjauksen tiedot.
Tehojakso
Katkaise verkkovirta, kunnes näyttö (LCP) on pimeä ja kytke
sitten virta uudelleen.
Pulssitulo/inkrementtienkooderi
Ulkoinen digitaalinen pulssilähetin, jota käytetään
moottorin nopeustietojen takaisinkytkentään. Pulssianturia
käytetään käyttökohteissa, joissa vaaditaan erittäin tarkkaa
nopeudenohjausta.
RCD
Vikavirtarele.
Asetukset
Tallenna parametriasetukset neljään eri asetukseen. Muuta
neljän parametriasetuksen välillä ja muokkaa yhtä asetusta
toisen asetuksen ollessa aktiivinen.
SFAVM
Staattorin virtaussuuntautuneeksi asynkroniseksi vektorimodulaatioksi kutsuttu kytkentätapa
(parametri 14-00 Kytkentätapa).
Jättämäkompensointi
Taajuusmuuttaja kompensoi moottorin jättämän kasvattamalla taajuutta mitatun moottorin kuormituksen
perusteella pitäen moottorin nopeuden lähes vakiona.
SLC
SLC (smart logic control, älykäs logiikkaohjaus) on käyttäjän
määrittämien toimien sarja, joka suoritetaan, kun SLC arvioi
siihen liittyvät käyttäjän määrittämät tapahtumat tosiksi.
(Katso kappale 3.13 Parametrit: 13-** Älykäs logiikka).
STW
Tilasana.
FC-vakioväylä
Sisältää RS485-väylän ja FC-protokollan tai MC-protokollan.
Katso parametri 8-30 Protokolla.
THD
Harmoninen kokonaissärö ilmaisee harmonisten häiriöiden
kokonaismäärän.
Termistori
Taajuusmuuttajaan tai moottoriin sijoitettu lämpötilasta
riippuva vastus.
Laukaisu
Tila, johon siirrytään vikatilanteissa, esimerkiksi jos taajuusmuuttaja ylikuumenee tai jos taajuusmuuttaja suojelee
moottoria, prosessia tai mekanismia. Taajuusmuuttaja estää
uudelleenkäynnistyksen, kunnes vian syy on korjattu.
Peruuta laukaisutila käynnistämällä taajuusmuuttaja
uudelleen. Älä käytä laukaisutilaa henkilösuojaukseen.
Laukaisun lukitus
Vikatilanteissa taajuusmuuttaja siirtyy tähän tilaan
suojatakseen itseään. Taajuusmuuttaja vaatii fyysisiä toimia,
esimerkiksi silloin kun lähdössä on oikosulku. Laukaisun
lukituksen voi peruuttaa kytkemällä verkkovirran irti,
poistamalla vian syyn ja kytkemällä taajuusmuuttajan
uudelleen. Uudelleenkäynnistys ei ole mahdollista, ennen
kuin laukaisutilasta poistutaan aktivoimalla kuittaus tai
joissakin tapauksissa ohjelmoimalla laite kuittautumaan
automaattisesti. Älä käytä lukituksen laukaisu -tilaa henkilösuojaukseen.
Muuttuva momentti
Muuttuvan momentin asetusta käytetään pumppujen ja
puhaltimien kanssa.
+
VVC
Tavanomaiseen jännite/taajuus-ohjaukseen verrattuna
Voltage Vector Control (VVC+) tarjoaa paremman
dynamiikan ja vakavuuden sekä nopeuden ohjearvon että
kuormitusmomentin muuttuessa.
60° AVM
60° asynkroninen vektorimodulaatio
(parametri 14-00 Kytkentätapa).
Tehokerroin
Tehokerroin on tekijöiden I1 ja I
Tehokerroin =
3xUxI1cosϕ
3xUxI
RMS
RMS
suhde.
Kolmivaiheohjauksen tehokerroin:
Tehokerroin =
I1xcosϕ1
I
RMS
=
I
1
silläcosϕ1 = 1
I
RMS
Tehokerroin ilmaisee, missä määrin taajuusmuuttaja
kuormittaa verkkovirran syöttöä.
Mitä alhaisempi tehokerroin, sitä korkeampi tulovirta (I
RMS
samaa kW-tehoa kohti.
I
RMS
= I
+ I
1
5
+ I
2
+ .. + I
7
2
n
2
2
Suuri tehokerroin viittaa myös harmonisten virtojen
pienuuteen.
1 1
)
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 5
Page 8
Johdanto
VLT® AutomationDrive FC 301/302
11
Taajuusmuuttajan tasavirtakuristimet tuottavat korkean
tehokertoimen, joka minimoi verkkojännitteeseen
kohdistuvan kuormituksen.
Määrätty sijainti
Sijoittelukomentojen määrittämä lopullinen määrätty
sijainti. Proiligeneraattori käyttää tätä sijaintia nopeusproilin laskemiseen.
Ohjattu sijainti
Proiligeneraattorin laskema todellisen sijainnin ohjearvo.
Taajuusmuuttaja käyttää ohjattua sijaintia sijainnin PI
asetuspisteenä.
Todellinen sijainti
Todellinen sijainti pulssianturilta tai arvo, jonka moottorin
ohjaus laskee avoimen piirin tilassa. Taajuusmuuttaja
käyttää todellista sijaintia sijainnin PI takaisinkytkentänä.
Kohdistusvirhe
Kohdistusvirhe on todellisen sijainnin ja ohjatun sijainnin
välinen ero. Kohdistusvirhe on sijainnin PI-säätimen tulo.
Sijainnin yksikkö
Sijaintiarvojen fyysinen yksikkö.
1.4 Turvallisuus
VAROITUS
SUURI JÄNNITE
Taajuusmuuttajissa esiintyy suuria jännitteitä, kun ne
ovat kytkettyinä vaihtovirtaverkkoon, tasavirtalähteeseen
tai kuorman jakoon. Jos asennus-, käynnistys- ja
huoltotöitä ei teetetä pätevällä henkilöstöllä,
seurauksena voi olla kuolema tai vakava loukkaantuminen.
Ainoastaan pätevä henkilöstö saa tehdä
•
asennus-, käynnistys- ja ylläpitotöitä.
Varmista ennen huolto- ja korjaustöiden
•
tekemistä sopivalla jännitteenmittauslaiteella,
että taajuusmuuttajassa ei ole jännitettä.
Turvallisuusmääräykset
Katkaise virransyöttö taajuusmuuttajaan aina, kun
•
korjaustöitä tehdään. Varmista, että verkkojännite
on katkaistu ja riittävä aika on kulunut ennen
moottorin ja verkkovirran pistokkeiden irrotusta.
Katso lisätietoja purkausajoista kohdasta
Taulukko 1.3.
[O] ei katkaise virransyöttöä laitteelle eikä sitä
•
saa käyttää turvakytkimenä.
Maadoita laite asianmukaisesti, suojaa käyttäjä
•
verkkojännitteeltä ja suojaa moottori ylikuormitukselta voimassa olevien kansallisten ja
paikallisten määräysten mukaan.
Maavuotovirta on suurempi kuin 3,5 mA.
•
Varmista, että valtuutettu sähköasentaja on
maadoittanut laitteiston oikein.
Älä irrota moottorin ja verkkovirran pistokkeita,
•
kun taajuusmuuttaja on kytketty sähköverkkoon.
Varmista, että verkkojännite on katkaistu ja
riittävä aika on kulunut ennen moottorin ja
verkkovirran pistokkeiden irrotusta.
Taajuusmuuttajassa on L1:n, L2:n ja L3:n lisäksi
•
muitakin jännitelähteitä, kun kuormituksenjako on
käytössä (DC-välipiirit on kytketty yhteen) ja
ulkoinen 24 V DC on asennettu. Varmista, että
kaikki jännitelähteet on kytketty irti ja riittävä aika
kulunut ennen korjaustöiden aloittamista. Katso
lisätietoja purkausajoista kohdasta Taulukko 1.3.
VAROITUS
TAHATON KÄYNNISTYS
Kun taajuusmuuttaja on kytketty verkon vaihtovirtasyöttöön, tasavirtalähteeseen tai kuorman jakoon,
moottori voi käynnistyä milloin tahansa. Tahaton
käynnistys ohjelmoinnin, huollon tai korjaustöiden
aikana saattaa aiheuttaa kuoleman, vakavan loukkaantumisen tai aineellisia vahinkoja. Moottori voi käynnistyä
ulkoisella kytkimellä, kenttäväyläkomennolla, tulon
ohjearvoviestillä LCP:stä tai vikatilan kuittauksen jälkeen.
Moottorin tahattoman käynnistyksen estäminen:
Katkaise taajuusmuuttajan syöttöjännite.
•
Paina LCP:n [O/Reset]-näppäintä ennen
•
parametrien ohjelmointia.
Johdota ja kokoa taajuusmuuttaja, moottori ja
•
kaikki käytettävät laitteet täysin ennen taajuusmuuttajan kytkemistä verkon
vaihtovirtasyöttöön, tasavirtalähteeseen tai
kuormanjakoon.
VAROITUS
PURKAUSAIKA
Taajuusmuuttajassa on tasajännitevälipiirin kondensaattoreita, joihin voi jäädä varaus, vaikka taajuusmuuttajaan
ei tule virtaa. Suurta jännitettä voi esiintyä silloinkin, kun
merkkivalot eivät pala. Jos virran katkaisun jälkeen ei
odoteta määritettyä aikaa ennen huoltoa tai korjausta,
seurauksena voi olla kuolema tai vakava loukkaantuminen.
1. Sammuta moottori.
2. Irrota verkkosyöttö, kestomagneettimoottorit ja
tasajännitevälipiirin syötöt, mukaan lukien
akkuvarmistukset, UPS ja tasajännitevälipiiriliitännät muihin taajuusmuuttajiin.
3. Odota, että kondensaattorit purkautuvat
kokonaan ennen huolto- tai korjaustöiden
tekemistä. Purkausaika on määritelty kohdassa
Taulukko 1.3.
6 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 9
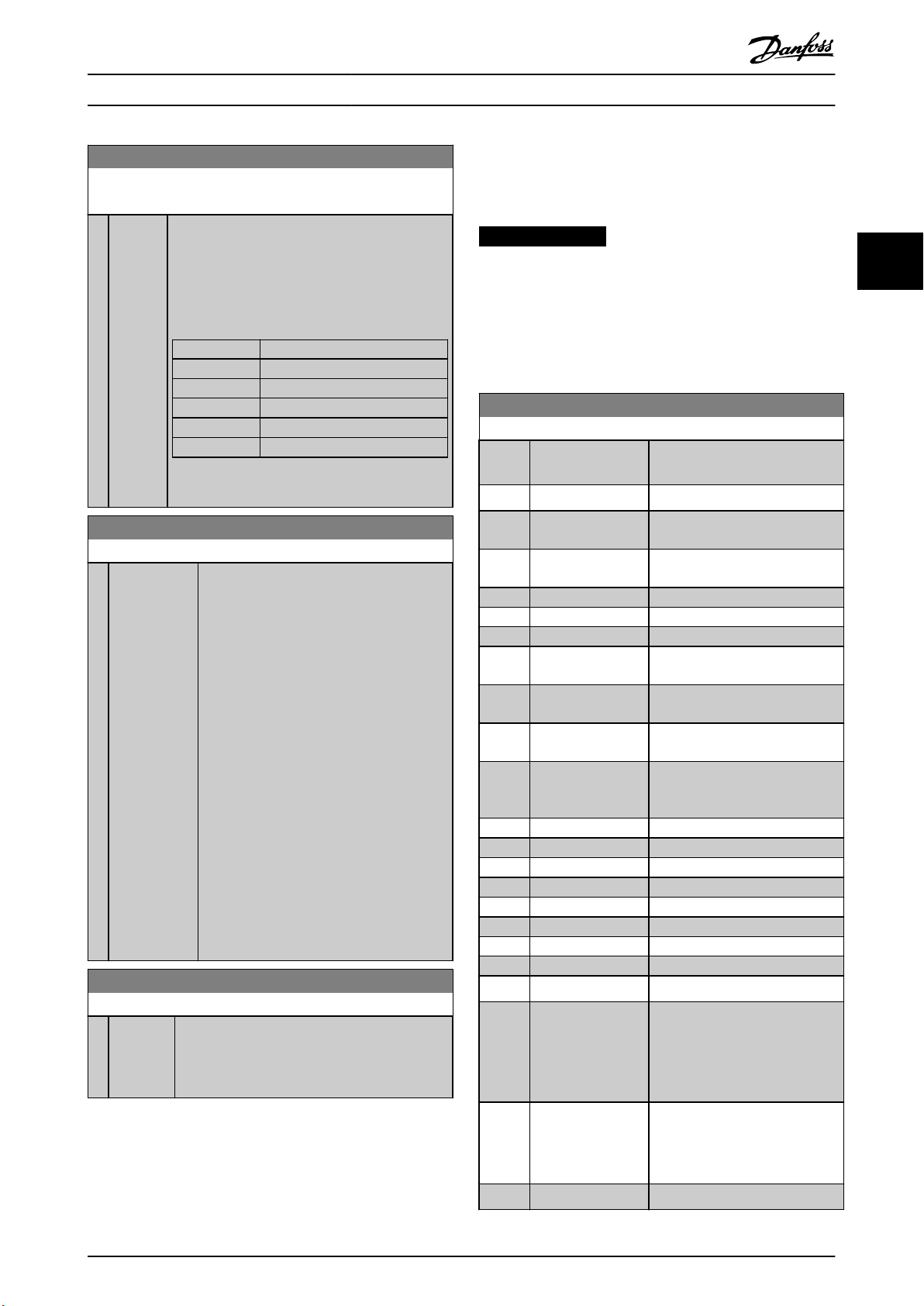
Johdanto Ohjelmointiopas
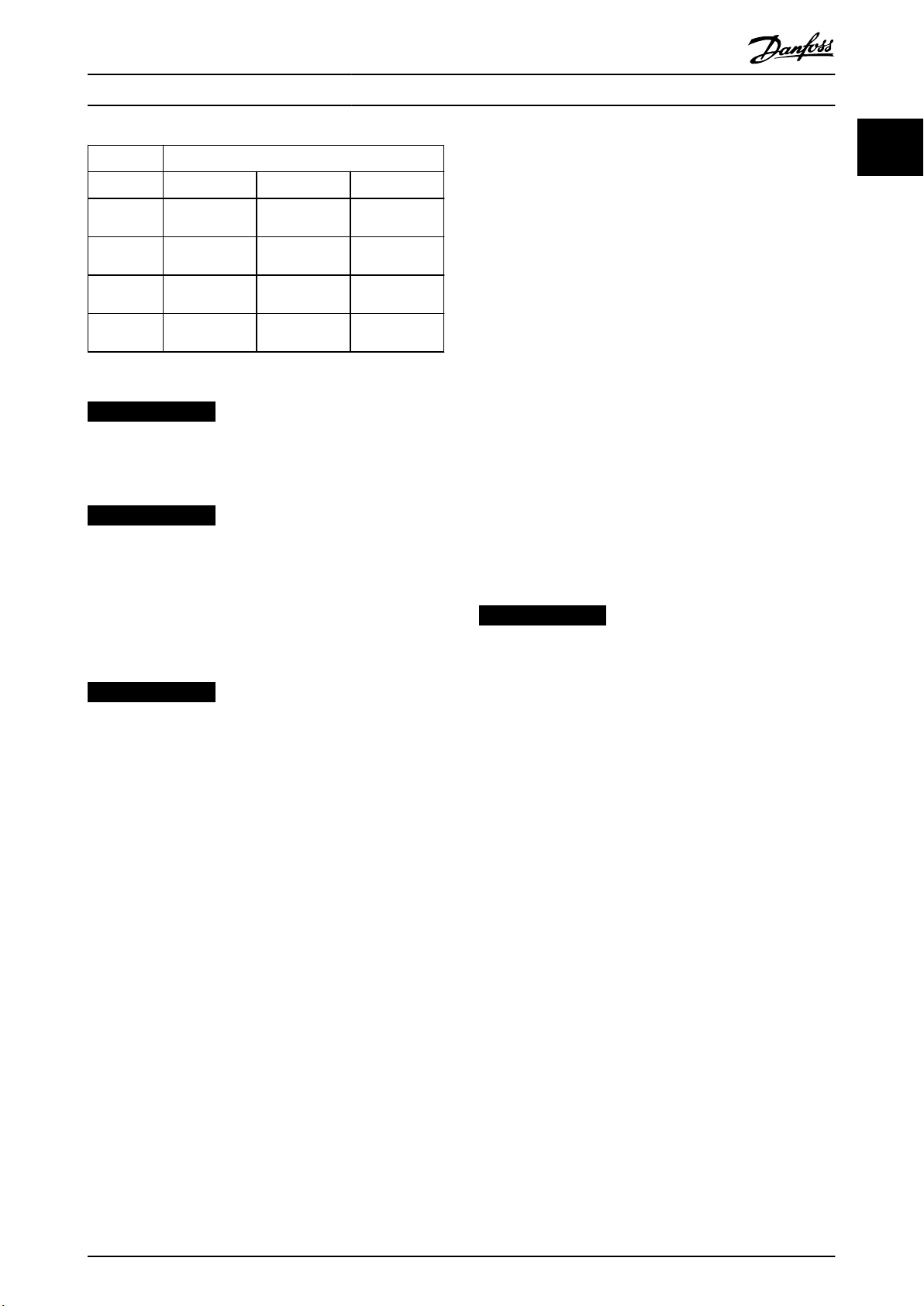
Jännite (V) Minimiodotusaika (minuuttia)
4 7 15
200–240 0.25–3.7 kW
(0.34–5 hv)
380–500 0.25–7.5 kW
(0.34–10 hv)
525–600 0.75–7.5 kW
(1–10 hv)
525–690 – 1.5–7.5 kW
Taulukko 1.3 Purkausaika
– 5.5–37 kW
(7.5–50 hv)
– 11–75 kW
(15–100 hv)
– 11–75 kW
(15–100 hv)
(2–10 hv)
(15–100 hv)
11–75 kW
HUOMAUTUS!
Noudata Safe Torque O -toimintoa käyttäessäsi kohdan
VLT® Frequency Converters - Safe Torque O käyttöohjeet
ohjeita.
HUOMAUTUS!
Ohjaussignaalit taajuusmuuttajalta tai sen sisällä voivat
joskus harvoin aktivoitua erehdyksessä, viivästyä tai
jäädä kokonaan pois. Jos niitä käytetään tilanteissa,
joissa turvallisuus on erittäin tärkeää, esimerkiksi
nostosovelluksen sähkömagneettista jarrutoimintoa
ohjatessa, näihin ohjaussignaaleihin ei pidä luottaa
ainoana keinona.
HUOMAUTUS!
Tarvittavien varotoimien huomioinnista vastaavan
konevalmistajan/järjestelmäintegroijan on tunnistettava
vaaralliset tilanteet. Laitteissa voi olla useampia
tarkkailu- ja suojauslaitteita voimassa olevien kansallisten turvallisuusmääräysten, esim. mekaanisia työkaluja
koskevan lain, tapaturmantorjuntamääräysten jne.
mukaisesti.
Nosturi, hissit ja nostimet
Ulkoisten jarrujen ohjaukseen on oltava korvautuva
järjestelmä. Taajuusmuuttaja ei voi missään olosuhteissa
olla ensisijainen turvallisuuspiiri. Noudata asianmukaisia
standardeja, esimerkiksi:
Nostimet ja nosturit: IEC 60204-32
Hissit: EN 81
Suojaustila
Kun laitteiston moottorin virralle tai tasajännitevälipiirin
jännitteelle asettama raja ylittyy, taajuusmuuttaja siirtyy
suojaustilaan. "Suojaustila" tarkoittaa PWM-modulointistrategian muutosta ja pientä kytkentätaajuutta häviöiden
minimoimiseksi. Tämä jatkuu 10 sekunnin ajan viimeisen
vian jälkeen ja parantaa taajuusmuuttajan luotettavuutta ja
kestävyyttä samalla, kun se palauttaa moottorin täyden
ohjauksen.
Nostosovelluksissa suojaustila ei ole käytettävissä, koska
taajuusmuuttaja ei yleensä pysty poistumaan tästä tilasta,
jolloin aika jarrun aktivoitumiseen pitenee, mikä ei ole
suositeltavaa.
Suojaustilan voi poistaa käytöstä asettamalla kohdan
parametri 14-26 Lauk.viive vaihtos. vian esiintyessä arvoksi 0,
mikä tarkoittaa, että taajuusmuuttaja laukaisee välittömästi,
jos jokin laitteiston rajoista ylittyy.
HUOMAUTUS!
On suositeltavaa poistaa suojaustila käytöstä nostosovelluksissa (parametri 14-26 Lauk.viive vaihtos. vian
esiintyessä = 0)
1 1
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 7
Page 10
3 Phase
power
input
DC bus
Switch Mode
Power Supply
Motor
Analog Output
Interface
relay 1
relay 2
ON=Terminated
OFF=Open
Brake
resistor
130BC931.12
91 (L1)
92 (L2)
93 (L3)
PE
88 (-)
89 (+)
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN)
0/4-20 mA
12 (+24 V OUT)
13 (+24 V OUT)
37 (D IN)
18 (D IN)
20 (COM D IN)
10 V DC
15 mA 130/200 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(COM A OUT) 39
(A OUT) 42
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0V
5V
S801
0/4-20 mA
RS485
RS485
03
+10 V DC
0/-10 V DC -
+10 V DC
+10 V DC
0/4-20 mA
0/-10 V DC -
240 V AC, 2 A
24 V DC
02
01
05
04
06
240 V AC, 2 A
24 V (PNP)
0 V (NPN)
0 V (NPN)
24 V (PNP)
19 (D IN)
24 V (PNP)
0 V (NPN)
27
24 V
0 V
(D IN/OUT)
0 V (NPN)
24 V (PNP)
(D IN/OUT)
0 V
24 V
29
24 V (PNP)
0 V (NPN)
0 V (NPN)
24 V (PNP)
33 (D IN)
32 (D IN)
1 2
ON
S201
ON
21
S202
ON=0/4-20 mA
OFF=0/-10 V DC +10 V DC
95
400 V AC, 2 A
Par. E-00
21
ON
S801
(R+) 82
(R-) 81
: Chassis
: Earth
1)
2)
1)
1)
Johdanto
VLT® AutomationDrive FC 301/302
11
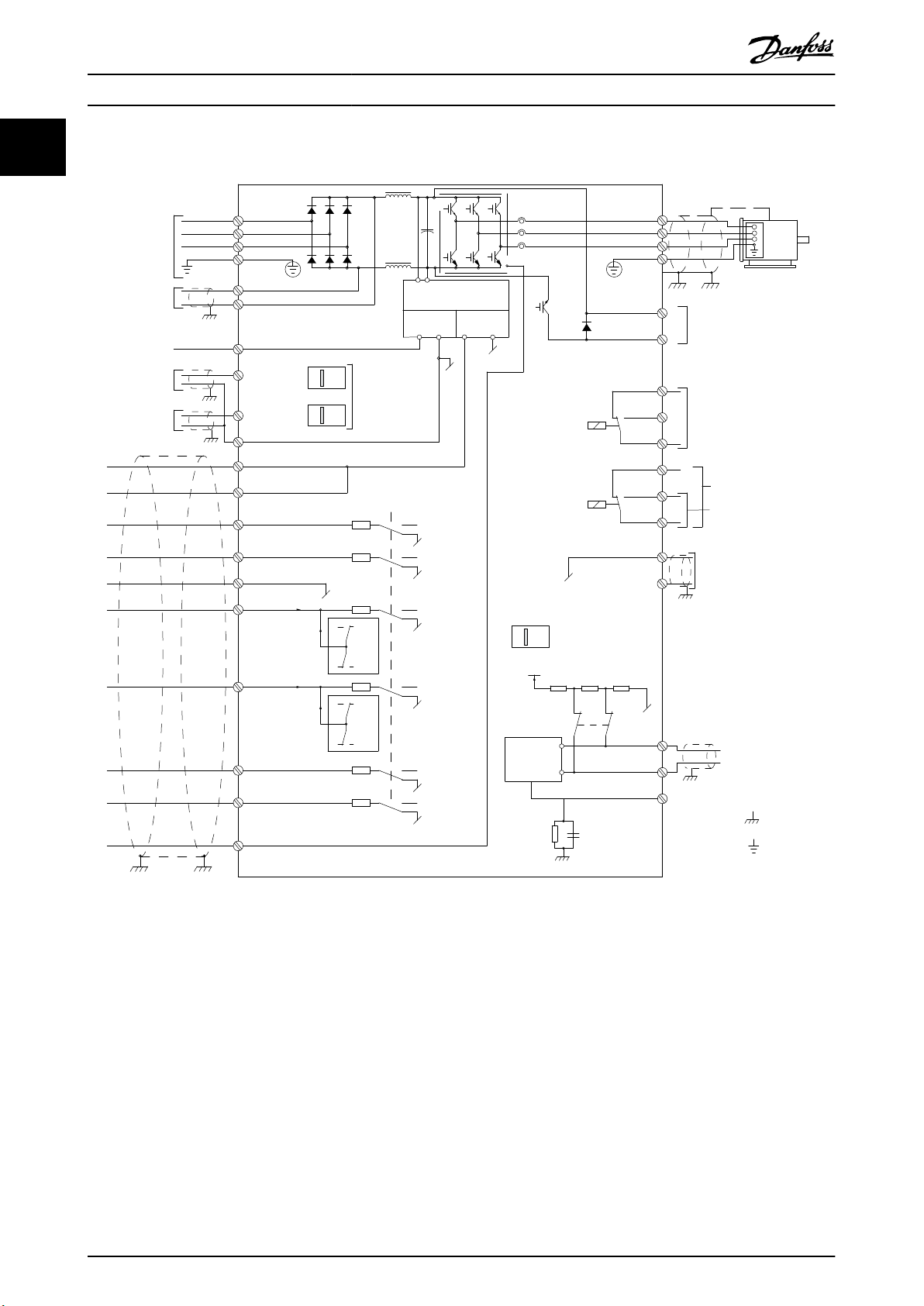
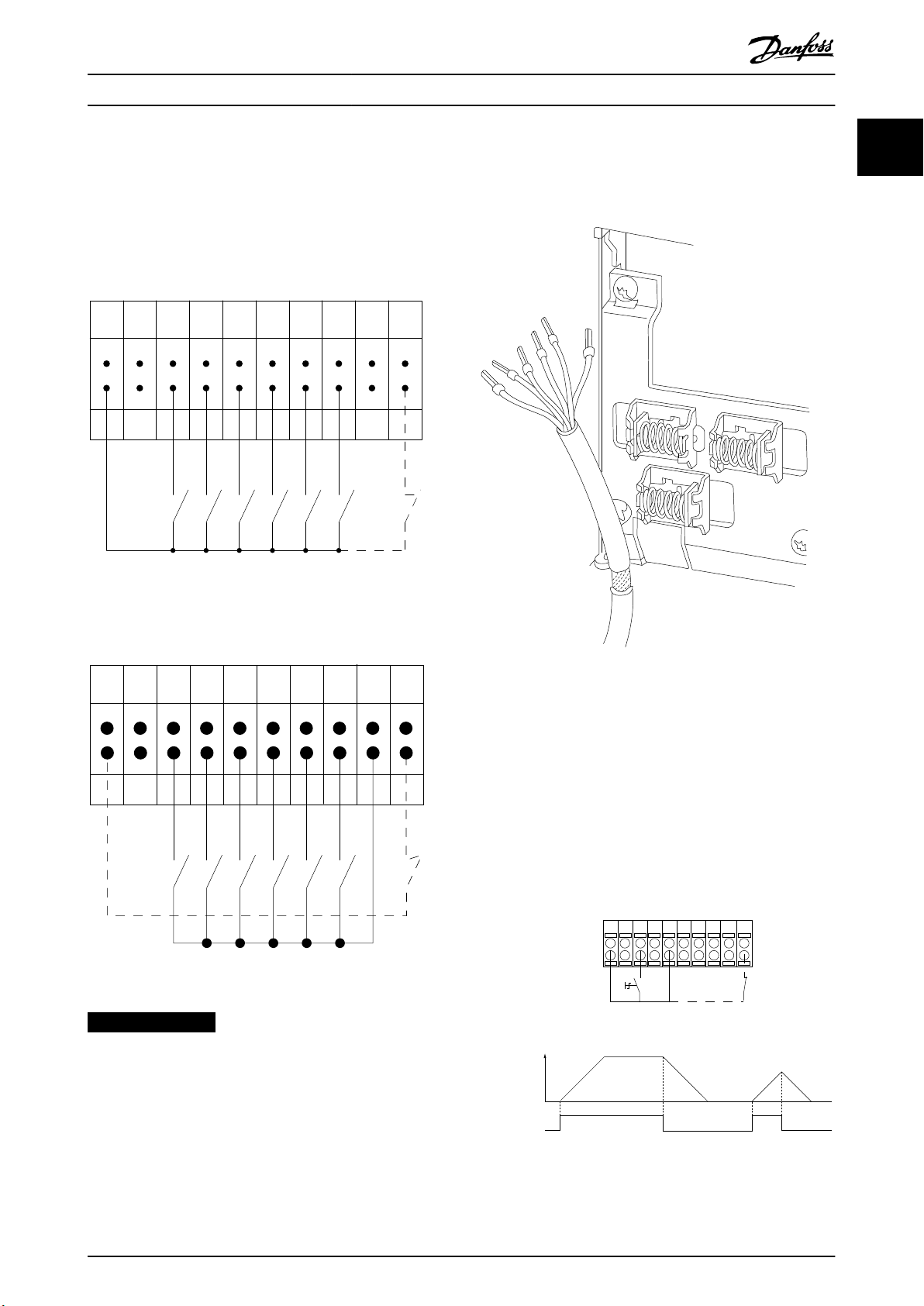
1.5 Sähkökytkennät
Kuva 1.2 Peruskytkentäkaavio
A = analoginen, D = digitaalinen
Liitintä 37 käytetään Safe Torque O -toimintoon. Katso turvallisen pysäytyksen ohjeet kohdasta VLT® Frequency Converters -
Safe Torque O -käyttöohjeet.
1) Liitin 37 ei kuuluu tuotteeseen FC 301 (paitsi kotelointityypin A1 kanssa). Releellä 2 ja liittimellä 29 ei ole toimintoa
kohdassa FC 301.
2) Älä kytke kaapelisuojaa.
Hyvin pitkät ohjauskaapelit ja analogiset signaalit voivat harvoissa tapauksissa ja kokoonpanosta riippuen aiheuttaa 50/60
Hz:n maadoitussilmukoita verkkosyöttökaapelien kohinan vuoksi.
Jos 50/60 Hz maadoitussilmukoita esiintyy, saattaa olla tarpeen murtaa suojaus tai lisätä 100 nF:n kondensaattori suojauksen
ja kotelon väliin.
8 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 11
12 13 18 19 27 29 32 33 20 37
+24 V DC
0 V DC
130BT106.10
PNP (lähde)
Digitaalitulon kytkentä
NPN (nielu)
Digitaalitulon kytkentä
12 13 18 19 27 29 32 33 20 37
+24 V DC
0 V DC
130BT107.11
130BA681.10
12 13 18 37
130BA155.12
322719 29 33 20
P 5-12 [0]
P 5-10 [8]
Käynnistys/Pysäytys
+24V
Nopeus
Turvallinen Pysäytys
Käynnistys/Pysäytys
[18]
Johdanto Ohjelmointiopas
Digitaaliset ja analogiset tulot ja lähdöt on kytkettävä erikseen taajuusmuuttajan yhteisiin tuloihin (liittimet 20, 55, 39), jotta
molemmista ryhmistä tulevat maavirrat eivät vaikuttaisi muihin ryhmiin. Esimerkiksi digitaalitulon kytkeminen päälle voi
häiritä analogista tulosignaalia.
Ohjausliittimien tulon napaisuus
Kuva 1.3 PNP (lähde)
1 1
Kuva 1.4 NPN (nielu)
HUOMAUTUS!
Ohjauskaapelien on oltava suojattuja.
Katso ohjeet ohjauskaapeleiden oikeaan liitäntään Suunnitteluoppaan kohdasta Suojattujen ohjauskaapelien
maadoitus.
Kuva 1.5 Suojattujen ohjauskaapelien maadoitus
1.5.1 Käynnistys/pysäytys
Liitin 18 = Parametri 5-10 Liitin 18, digitaalitulo [8]
Käynnistys
Liitin 27 = Parametri 5-12 Liitin 27, digitaalitulo [0] Ei
toimintoa (oletus [2] Rullaus, käänt.)
Liitin 37 = Safe Torque O (jos käytettävissä).
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 9
Kuva 1.6 Käynnistys/pysäytys
Page 12
12 13 18 37
130BA156.12
322719 29 33 20
P 5 - 12 [6]
P 5 - 10[9]
+24V
Nopeus
Käynnistys Pysäytys,
käänteinen
Turvallinen Pysäytys
Käynnistys
(18)
Pysäytys,
käänteinen(27)
12
18
27
29
32
37
+24V
Par. 5-10
Par. 5-12
Par. 5-13
Par. 5-14
130BA021.12
Nopeus RPM
P 6-15
Jänn. Ohjearvo
P 6-11 10 V
+10 V/30 mA
130BA154.11
Johdanto
VLT® AutomationDrive FC 301/302
11
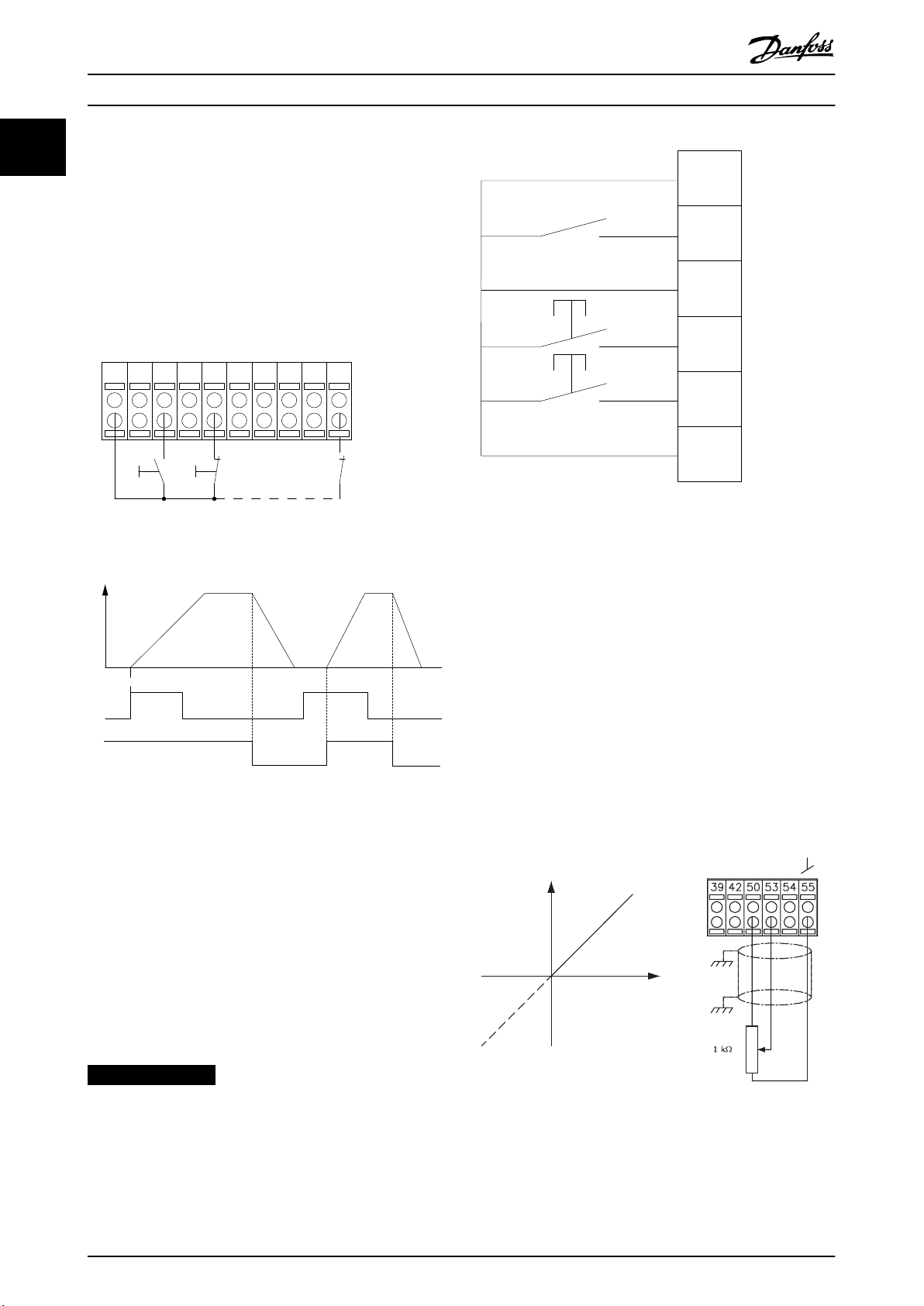
1.5.2 Pulssikäynnistys/-pysäytys
Liitin 18 = Parametri 5-10 Liitin 18, digitaalitulo [9] Pulssi-
käynnistys.
Liitin 27= Parametri 5-12 Liitin 27, digitaalitulo [6] Pysäytys,
käänteinen.
Liitin 37 = Safe Torque O (jos käytettävissä).
Kuva 1.8 Nopeus ylös / nopeus alas
1.5.4 Potentiometrin ohjearvo
Jännitteen ohjearvo potentiometrin välityksellä
Ohjearvojen lähde 1 = [1] Analoginen tulo 53
(oletus).
Liitin 53, pieni jännite = 0 V
Liitin 53, suuri jännite = 10 V
Liitin 53, pieni ohje-/takaisink.arvo = 0 kierrosta
minuutissa (rpm)
Liitin 53, suuri ohje-/takaisink.arvo = 1500
Kuva 1.7 Pulssikäynnistys/-pysäytys
kierrosta minuutissa (rpm)
Katkaisin S201 = OFF (U)
1.5.3 Nopeus ylös / nopeus alas
Liittimet 29/32 = nopeus ylös/alas
Liitin 18 = Parametri 5-10 Liitin 18, digitaalitulo [9]
Käynnistys (oletus).
Liitin 27 = Parametri 5-12 Liitin 27, digitaalitulo
[19] Ohjearvon lukitus
Liitin 29 = Parametri 5-13 Liitin 29, digitaalitulo
[21] Nopeus ylös
Liitin 32 = Parametri 5-14 Liitin 32, digitaalitulo
[22] Nopeus alas
HUOMAUTUS!
Liitin 29 vain mallissa FC x02 (x = sarjan tyyppi).
10 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Kuva 1.9 Potentiometrin ohjearvo
Page 13

Johdanto Ohjelmointiopas
1.6 Integrated Motion Controller
Integrated Motion Controller (IMC) -ohjain mahdollistaa
sijainnin ohjauksen. Katso lisätietoja IMC:stä kohdasta
kappale 4 Integrated Motion Controller.
1 1
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 11
Page 14
Auto
On
Reset
Hand
On
Off
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(0)
1234rpm 10,4A 43,5Hz
Run OK
43,5Hz
On
Alarm
Warn.
e30ba018.14
1
2
3
4
b
a
c
Ohjelmointi
VLT® AutomationDrive FC 301/302
2 Ohjelmointi
22
2.1 Graanen ja numeerinen
paikallisohjauspaneeli
Taajuusmuuttajien ohjelmointi on helppoa graasen LCP:n
avulla (LCP 102). Tiedot numeerisen paikallisohjauspaneelin
käyttöön (LCP 101), katso kohta kappale 2.1.16 Ohjelmointi
numeerisella paikallisohjauspaneelilla.
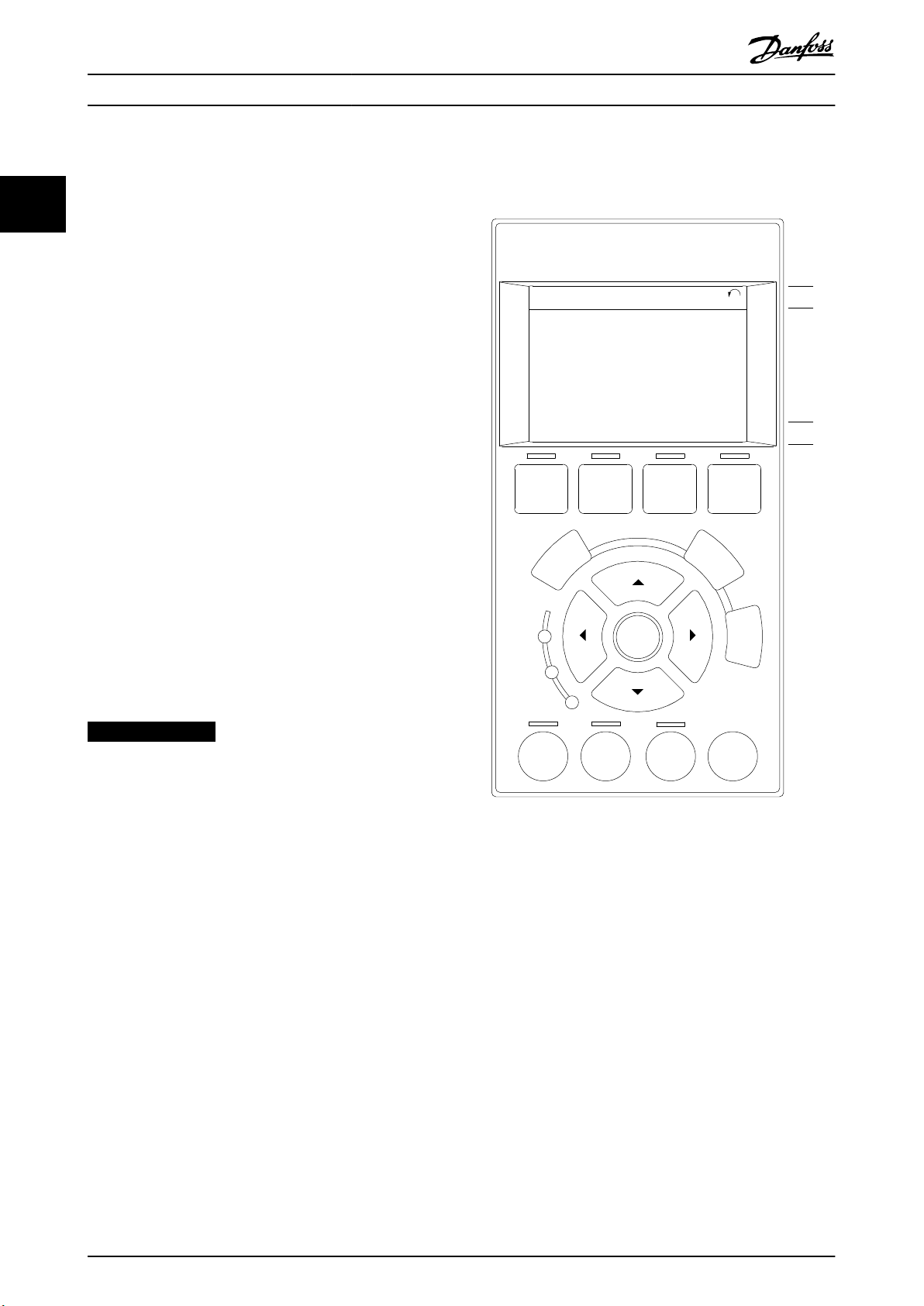
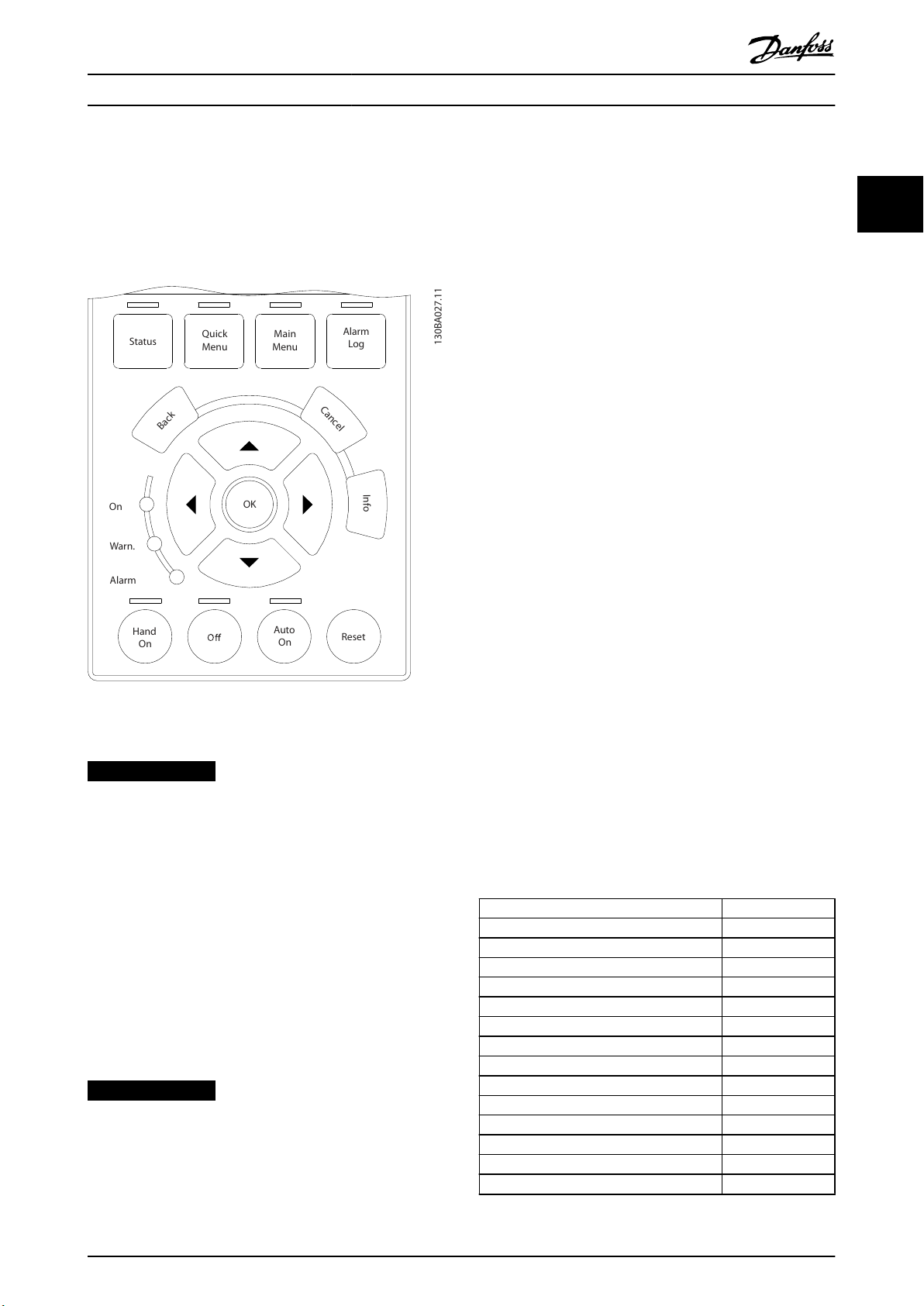
LCP jakautuu neljään toiminnalliseen ryhmään:
1. Graanen näyttö tilariveineen.
2. Valikkonäppäimet ja merkkivalot - parametrien
muuttaminen ja näytön toimintojen vaihteleminen.
3. Navigointinäppäimet ja merkkivalot
4. Toimintopainikkeet ja merkkivalot.
LCP-näytössä voi olla enintään 5 käyttötietojen kohdetta,
kun Tila on näytössä.
Näytön rivit:
a. Tilarivi: Tilaviestit, joissa näkyy kuvakkeita ja
kuvia.
b. Rivi 1 - 2: Käyttäjän tietorivit, joilla näkyy
määritetyt tai valitut tiedot. Lisää enintään 1
lisärivi painamalla [Status].
c. Tilarivi: Tilasanomat, joissa on tekstiä.
HUOMAUTUS!
Jos käynnistys viivästyy, käynnistyksen aikana LCP:ssä
näkyy viesti INITIALISING. Optioiden lisääminen tai
poistaminen voi hidastaa käynnistymistä.
Kuva 2.1 LCP
12 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 15
Yläosa
Keskiosa
Alaosa
Tila
43/min
1,4 Hz
Autom. etäkäyttö
! Tehok. lämpö (W29)
2,9 %
5,44 A 25,3 kW
1(1)
130BP074.10
!
On
Warn.
Alarm
130BP044.10
130BP045.10
Status
Quick
Menu
Main
Menu
Alarm
Log
Ohjelmointi Ohjelmointiopas
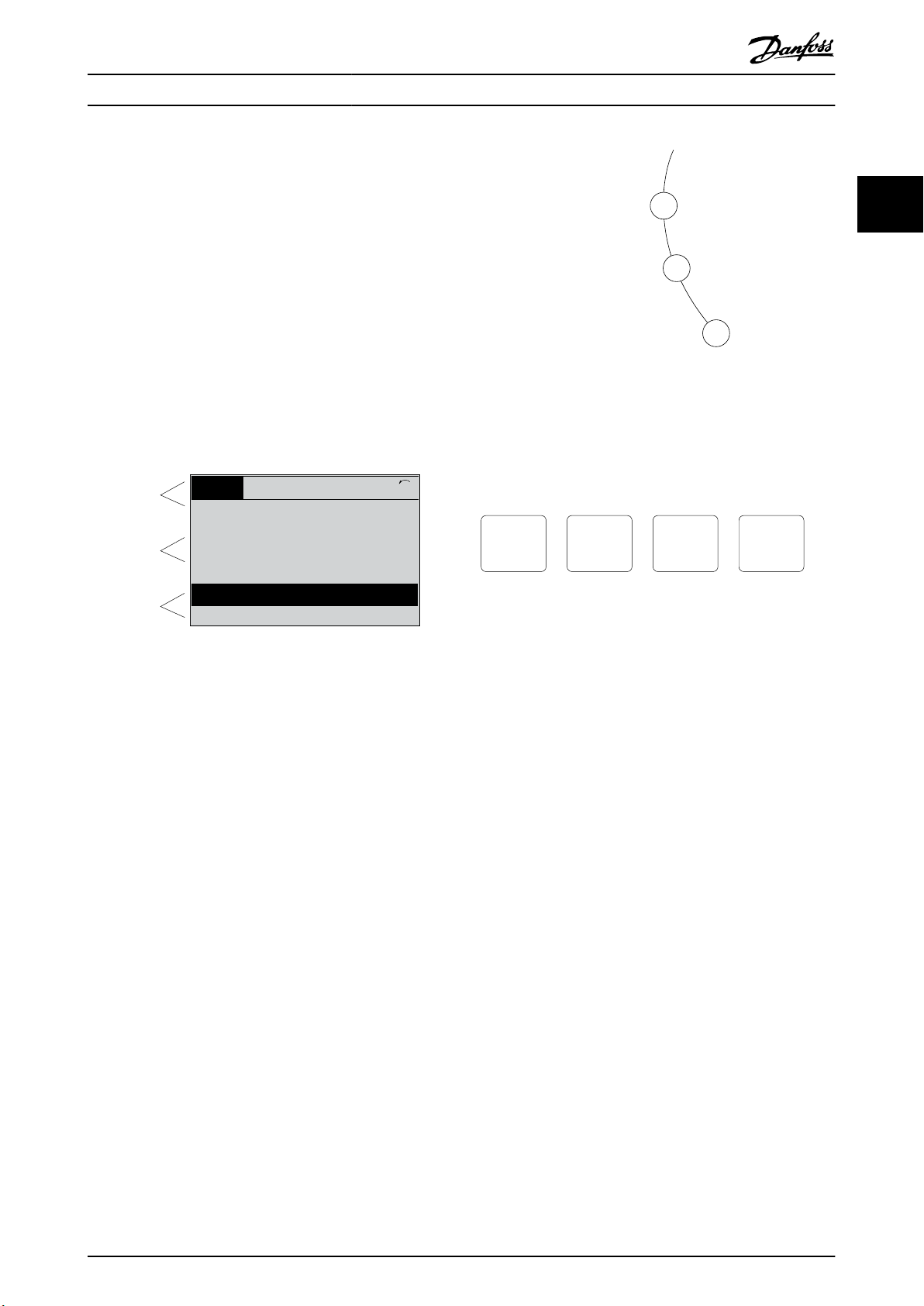
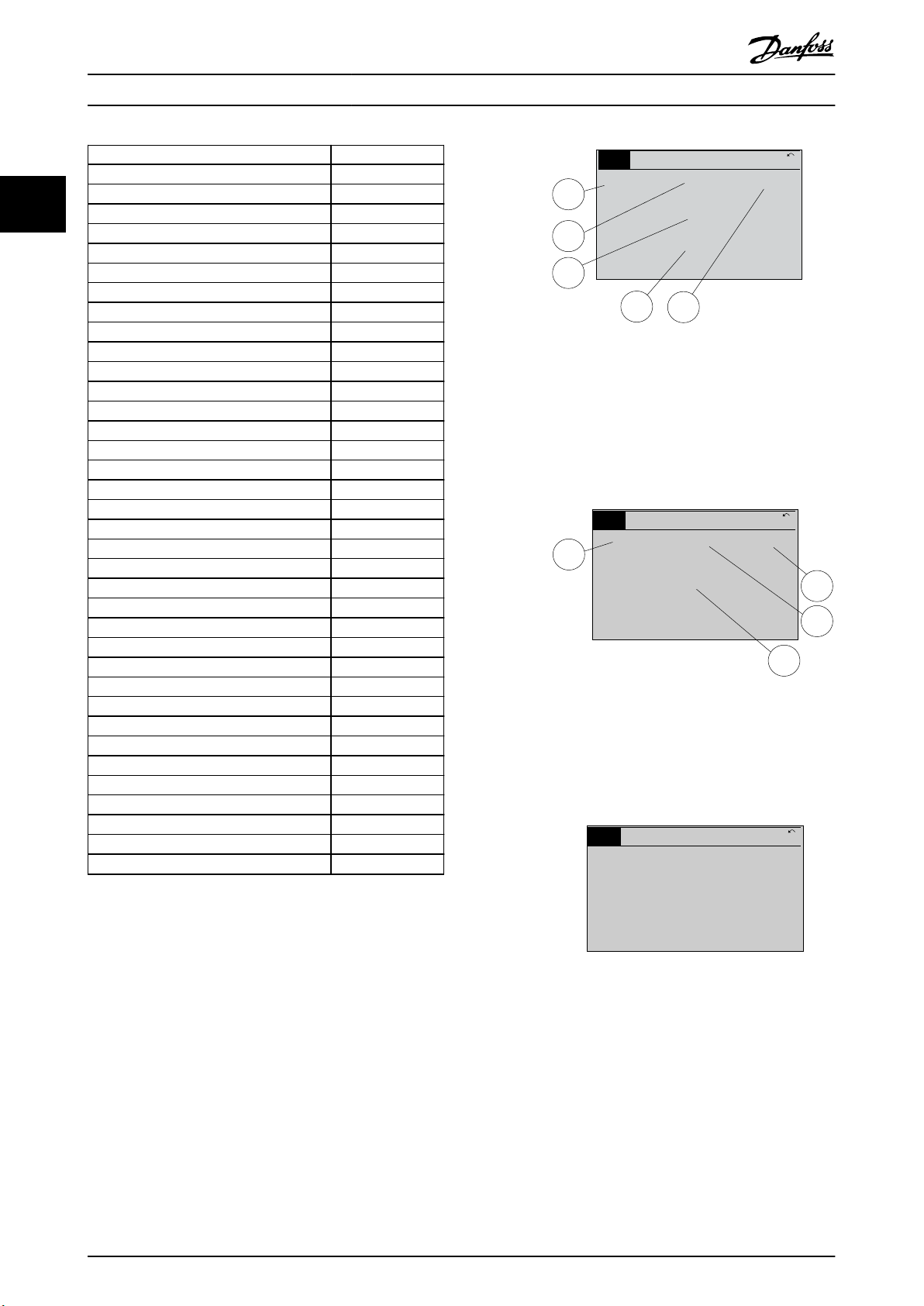
2.1.1 LCD-näyttö
Näytössä on taustavalo ja yhteensä kuusi aakkosnumeerista
riviä. Näytön rivit näyttävät pyörimissuunnan (nuoli), valitut
asetukset ja ohjelmointiasetukset. Näyttö on jaettu
kolmeen osaan.
Yläosa
Yläosassa on tavallisessa toimintatilassa enintään kaksi
mittausta.
Keskiosa
Ylärivi näyttää enintään viisi mittausta yksikköineen tilasta
riippumatta (paitsi hälytyksen/varoituksen yhteydessä).
Alin osa
Alimmassa osassa näkyy aina taajuusmuuttajan tila Tilakäyttötavalla.
Kuva 2.2 Näyttö
Aktiiviset asetukset (joka on valittu aktiivisiksi asetuksiksi
parametrissa parametri 0-10 Aktiiviset asetukset) näytetään.
Ohjelmoitaessa muussa kuin aktiivisten asetusten tilassa
ohjelmoitavan asetuksen numero näkyy oikealla.
Näytön kontrastin säätö
Paina [Status] ja [▲] halutessasi tummemman näytön.
Paina [Status] ja [▼] halutessasi kirkkaamman näytön.
Useimmat parametriasetukset voi muuttaa heti LCP:n
avulla, ellei parametrilla parametri 0-60 Päävalikon salasana
tai parametri 0-65 Pika-asetusvalik. s-sana ole luotu
salasanaa.
Merkkivalot
Jos tietyt raja-arvot ylittyvät, hälytyksen ja/tai varoituksen
merkkivalo syttyy. Tila- ja hälytysteksti tulee näkyviin
LCP:hen.
ON-merkkivalo syttyy, kun taajuusmuuttajaan kytketään
verkkojännite tai se saa jännitettä verkon, DC-väylän
liittimen tai 24 V:n ulkoisen virtalähteen kautta. Samaan
aikaan taustan merkkivalo palaa.
Vihreä LED / päällä: Ohjaussektori on toiminnassa.
•
Keltainen LED / varoitus Ilmaisee varoituksen.
•
Vilkkuva punainen LED / hälytys: Ilmaisee
•
hälytyksen.
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 13
Kuva 2.3 Merkkivalot
LCP:n painikkeet
Ohjauspainikkeet on jaettu kahteen ryhmään. Näytön ja
merkkivalojen alapuolella olevia näppäimiä käytetään
parametriasetuksiin mukaan lukien näyttötilan valinta
normaalissa toiminnassa.
Kuva 2.4 LCP:n painikkeet
[Status]
Ilmaisee taajuusmuuttajan ja/tai moottorin tilan. Voit valita
jonkin kolmesta lukemasta painamalla [Status]: viisi
rivilukemaa, neljä rivilukemaa tai Smart Logic Control.
Valitse [Status]-painikkeella näytön tila tai siirry takaisin
näyttötilaan joko pika-asetusvalikkotilasta, päävalikkotilasta
tai hälytystilasta. [Status]-painikkeella voit vaihtaa myös
yhden tai kahden lukeman tilan välillä.
[Quick Menu]
Mahdollistaa erilaisten pikavalikoiden nopean käytön,
esimerkiksi:
Oma valikko.
•
Pika-asetukset.
•
Tehdyt muutokset.
•
Lokiin tallentamiset.
•
[Quick Menu] -painikkeella voit ohjelmoida pikavalikkoon
kuuluvat parametrit. Voit vaihtaa suoraan pika-asetusvalikkotilan ja päävalikkotilan välillä.
[Main Menu] -painiketta
käytetään kaikkien parametrien ohjelmoimiseen.
Voit vaihtaa suoraan päävalikkotilan ja pika-asetusvalikkotilan välillä.
Parametrin pikakuvake voidaan suorittaa pitämällä [Main
Menu] -painiketta pohjassa kolmen sekunnin ajan.
Parametrin pikakuvakkeen avulla päästään suoraan
käyttämään mitä tahansa parametria.
2 2
Page 16
B
a
c
k
C
a
n
c
e
l
I
n
f
o
e30bp046.12
Hand
On
Off
Auto
On
Reset
Ohjelmointi
VLT® AutomationDrive FC 301/302
[Alarm Log]
Näyttää hälytysluettelon, jossa näkyvät viisi tuoreinta
hälytystä (numeroituina A1–A5). Jos haluat lisätietoja
22
jostakin hälytyksestä, siirry navigointipainikkeilla hälytyksen
numeron kohdalle ja valitse [OK]. Saat tietoa taajuusmuuttajan tilasta ennen hälytystilaan siirtymistä.
[Back]
Palauttaa sinut edelliseen vaiheeseen tai navigointirakenteen kerrokseen.
[Cancel]
Mitätöi viimeksi tekemäsi muutoksen tai antamasi
komennon, kunhan näyttöä ei ole muutettu.
[Info]
Antaa tietoa komennosta, parametrista tai toiminnosta
missä tahansa näytön ikkunassa. [Info] antaa tarkkaa tietoa
aina tarvittaessa.
Voit poistua Info-tilasta painamalla joko [Info]-, [Back]- tai
[Cancel]-painiketta.
Kuva 2.5 Back
[Hand On]
Mahdollistaa taajuusmuuttajan ohjaamisen paikallisohjauspaneelilla. [Hand on] käynnistää myös moottorin, ja nyt
moottorin nopeustiedot voidaan syöttää navigointipainikkeilla. Painikkeen asetukseksi voidaan valita [1] Käytössä tai
[0] Pois käytöstä parametrilla parametri 0-40 LCP [Hand on] näppäin.
Ohjaussignaalien tai kenttäväylän avulla aktivoidut ulkoiset
pysäytyssignaalit ohittavat LCP:llä annetun käynnistyskomennon.
Seuraavat ohjaussignaalit ovat yhä aktiivisia, kun [Hand On]
-painiketta painetaan:
[Hand on] - [O] - [Auto On].
•
Kuittaus.
•
Rullauspysäytys, käänteinen.
•
Suunnanvaihto.
•
Asetusten valintabitti 0 - asetusten valintabitti 1.
•
Sarjaliikenteestä saatava pysäytyskomento.
•
Pikapysäytys.
•
DC-jarru.
•
[O]
Pysäyttää kytketyn moottorin. Painikkeen asetukseksi
voidaan valita [1] Käytössä tai [0] Pois käytöstä parametrilla
parametri 0-41 LCP [O]-näppäin. Jos mitään ulkoista
pysäytystoimintoa ei ole valittu ja [O]-painike ei ole
Kuva 2.6 Cancel
aktiivinen, moottorin voi pysäyttää katkaisemalla verkkojännitteen.
[Auto On]
Käytetään taajuusmuuttajan ohjaamiseen ohjausliittimien
ja/tai sarjaliikenteen kautta. Kun ohjausliittimille ja/tai
väylään annetaan käynnistyssignaali, taajuusmuuttaja
Kuva 2.7 Info
käynnistyy. Painikkeen asetukseksi voidaan valita [1]
Käytössä tai [0] Pois käytöstä parametrilla parametri 0-42 LCP
[Auto on] -näppäin.
Navigointipainikkeet
Neljän navigointipainikkeen avulla voit liikkua Quick Menu-,
Main Menu- ja Alarm Log -vaihtoehtojen eri valintojen
välillä. Siirrä kohdistinta painikkeilla.
[OK]
HUOMAUTUS!
Digitaalitulojen kautta saapuvan aktiivisen HAND-OFFAUTO-signaalin prioriteetti on suurempi kuin
ohjauspainikkeiden [Hand On]-[Auto On] kautta tulevan
signaalin.
Paina kohdistimella merkityn parametrin valitsemiseen ja
parametrin muutoksen käyttöön ottamiseen.
Paikallisohjauspainikkeet
Paikallisohjauspainikkeet ovat LCP:n alareunassa.
[Reset]
Käytetään taajuusmuuttajan nollaamiseen hälytyksen
(laukaisun) jälkeen. Arvoksi voi valita [1] Käytössä tai [0]
Pois käytöstä parametrilla parametri 0-43 LCP [Reset]näppäin.
Parametrin pikakuvake voidaan suorittaa pitämällä [Main
Menu] -näppäintä pohjassa kolmen sekunnin ajan.
Parametrin pikakuvake tuottaa suoran yhteyden mihin
Kuva 2.8 Paikallisohjauspainikkeet
14 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
tahansa parametriin.
Page 17
Au t o
On R eset
Hand
On
S
ta
tus
Q
uick
M
enu
M
ain
M
enu
A
lar
m
Lo
g
Back
C
anc
el
I
n
fo
OK
On A lar m W
ar
n.
130BA027.11
Ohjelmointi Ohjelmointiopas
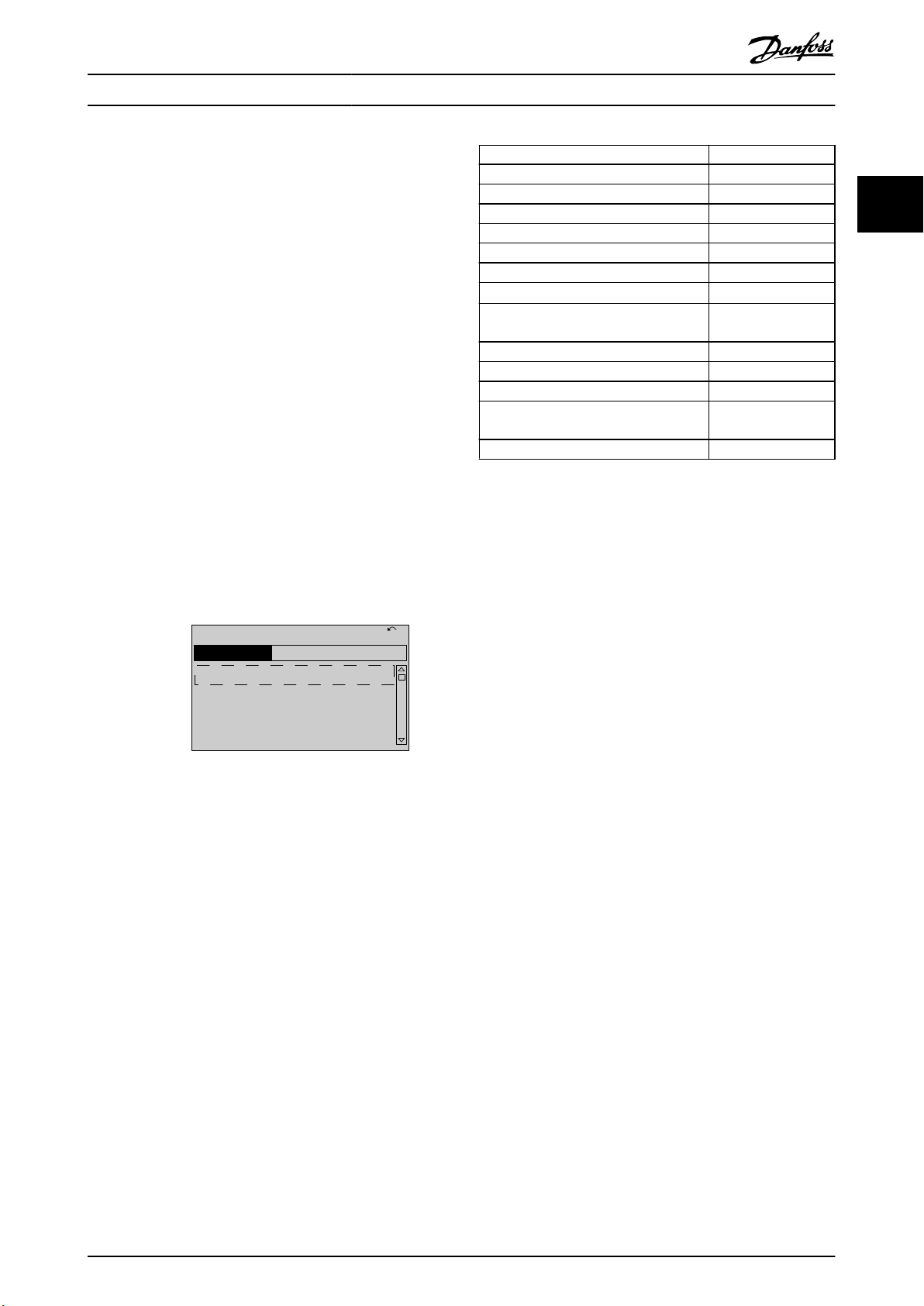
2.1.2 Parametrin asetusten nopea siirto eri
taajuusmuuttajien välillä
Kun taajuusmuuttajan asetukset ovat valmiit, suosittelemme tietojen tallentamista LCP:hen tai PC:lle MCT 10 asetusohjelmisto -asennusohjelman avulla.
Kuva 2.9 LCP
4. Paina [OK]-painiketta.
LCP:hen tallennetut parametrin asetukset siirretään nyt
toiminnon edistymistä kuvaavan palkin ilmoittamana
taajuusmuuttajaan. Kun on saavutettu lukema 100 %,
valitse [OK].
2.1.3 Näyttötila
Normaalikäytössä voidaan keskiosassa mukaan näyttää
valinnan mukaan jatkuvasti 5 käyttömuuttujaa: 1.1, 1.2, ja
1.3 sekä 2 ja 3.
2.1.4 Näyttötila - näytön lukemien valinta
Kolmen tilalukemanäytön välillä voi vaihtaa [Status]painiketta painamalla.
Muotoilultaan erilaiset käyttömuuttujat näkyvät jäljempänä
tässä osassa kussakin tilanäytössä.
Taulukko 2.1 näyttää mittaukset, jotka voi yhdistää
kuhunkin käyttömuuttujaan. Jos optioita on asennettu,
käytettävissä on lisämittauksia.
Aseta yhteydet käyttämällä
Parametri 0-20 Näytön rivi 1.1 pieni.
•
Parametri 0-21 Näytön rivi 1.2 pieni.
•
Parametri 0-22 Näytön rivi 1.3 pieni.
•
Parametri 0-23 Näytön rivi 2 suuri.
•
Parametri 0-24 Näytön rivi 3 suuri.
•
2 2
Tietojen tallentaminen LCP:hen
HUOMAUTUS!
Pysäytä moottori ennen tämän toiminnon suorittamista.
Tietojen tallentaminen LCP:hen:
1. Siirry kohtaan parametri 0-50 LCP-kopiointi.
2. Paina [OK]-painiketta.
3. Valitse [1] Kaikki LCP:hen.
4. Paina [OK]-painiketta.
Nyt kaikki parametrin asetukset tallentuvat toiminnan
edistymistä kuvaavan palkin ilmoittamana LCP:hen. Kun on
saavutettu lukema 100 %, valitse [OK].
Kytke LCP toiseen taajuusmuuttajaan ja kopioi parametrin
asetukset tähänkin taajuusmuuttajaan.
Tiedonsiirto LCP:stä taajuusmuuttajaan
HUOMAUTUS!
Pysäytä moottori ennen tämän toiminnon suorittamista.
Tiedonsiirto LCP:stä taajuusmuuttajaan:
1. Siirry kohtaan parametri 0-50 LCP-kopiointi.
2. Paina [OK]-painiketta.
3. Valitse [2] Kaikki LCP:stä.
Kullakin kohdassa parametri 0-20 Näytön rivi 1.1 pieni–
parametri 0-24 Näytön rivi 3 suuri valitulla lukemaparametrilla on oma asteikkonsa ja numeromääränsä
mahdollisen desimaalipilkun jälkeen. Mitä suurempi
parametrin numeerinen arvo on, sitä vähemmän numeroita
näytetään desimaalipilkun jälkeen.
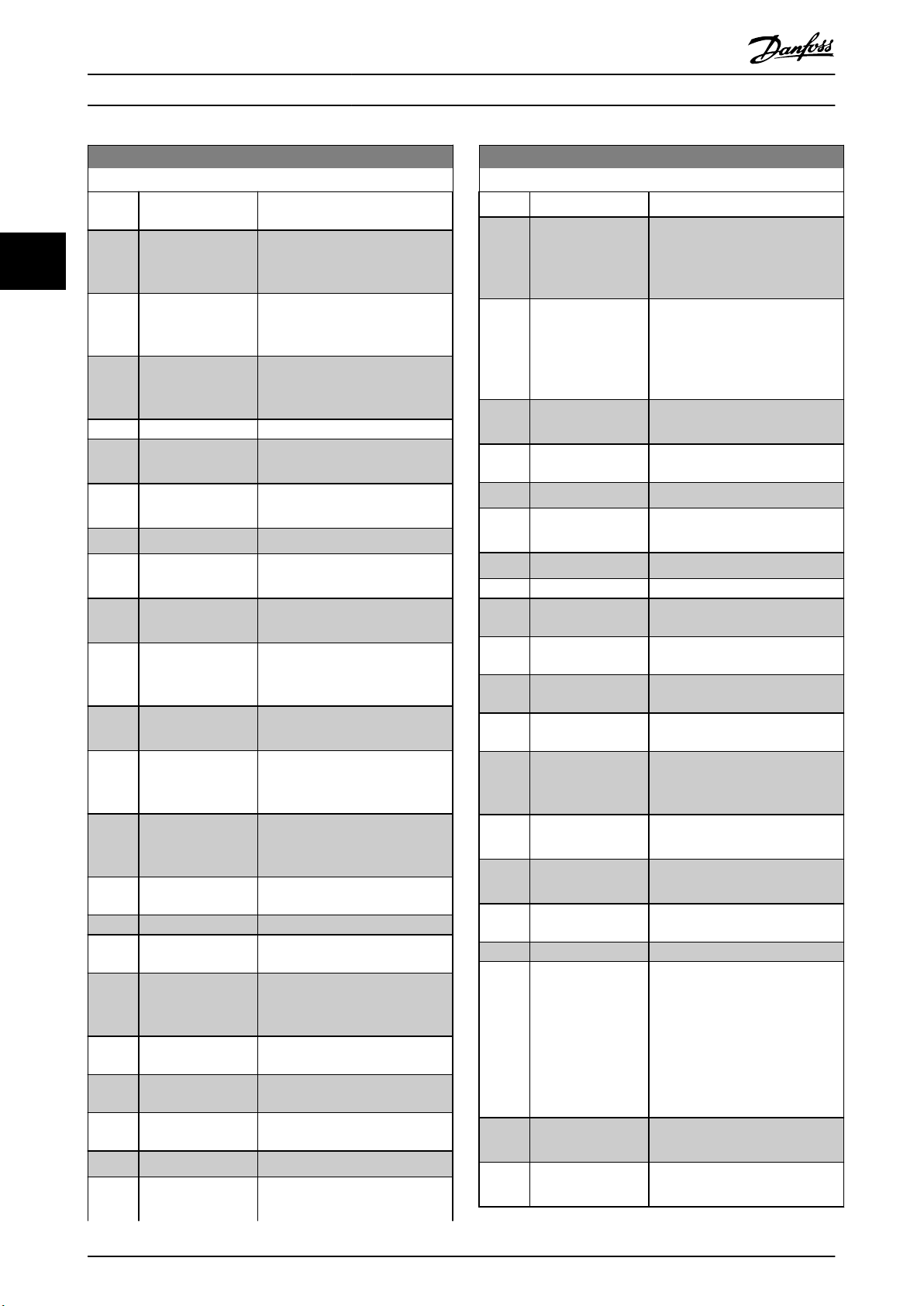
Esimerkki: Nykyinen lukema 5.25 A, 15.2 A, 105 A.
Käyttömuuttuja Yksikkö
Parametri 16-00 Ohjaussana heksa
Parametri 16-01 Ohjearvo [yks] [Yksikkö]
Parametri 16-02 Ohjearvo % %
Parametri 16-03 tilasana heksa
Parametri 16-05 Pääarvo, todellinen [%] %
Parametri 16-10 Teho [kW] [kW]
Parametri 16-11 Teho [hv] [hv]
Parametri 16-12 Moottorin jännite [V]
Parametri 16-13 Taajuus [Hz]
Parametri 16-14 Moottorin virta [A]
Parametri 16-16 Momentti [Nm] Nm
Parametri 16-17 Nopeus [RPM] [RPM]
Parametri 16-18 Moottorin terminen %
Parametri 16-20 Moott. kulma
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 15
Page 18
1.1
2
3
1.3
1.2
130BP041.10
799 RPM
Autom. etäramppaus
1 (1)
36,4 kw7,83 A
0,000
53,2 %
Tila
1.1
1.2
2
1.3
130BP062.10
207 RPM
Autom. etäkäyttö
1 (1)
24,4 kW5,25 A
6,9 Hz
Tila
130BP063.10
778 RPM
Autom. etäkäyttö
1 (1)
4,0 kW0,86 A
Tila: 0 ei käyt. 0 (ei käyt.)
Aika: Tee: -
Tila
Ohjelmointi
Käyttömuuttuja Yksikkö
Parametri 16-30 DC-välipiirin jännite V
22
Parametri 16-32 Jarruenergia /s kW
Parametri 16-33 Jarruenergia /2 min kW
Parametri 16-34 Jäähdytysrivan lämpöt.
Parametri 16-35 Vaihtosuuntaajan terminen %
Parametri 16-36 Taaj.muut nimell.virta A
Parametri 16-37 Taaj.muut maks.virta A
Parametri 16-38 SL-ohjaimen tila
Parametri 16-39 Ohj.kortin lämpöt.
Parametri 16-40 Lokimuisti täynnä
Parametri 16-50 Ulkoinen ohjearvo
Parametri 16-51 Pulssiohjearvo
Parametri 16-52 Tak.kytk. [yks] [Yksikkö]
Parametri 16-53 Dig. potent.metrin ohjearvo
Parametri 16-60 Digitaalinen tulo bin
Parametri 16-61 Liitin 53 kytkentäasetus V
Parametri 16-62 Analoginen tulo 53
Parametri 16-63 Liitin 54 kytkentäasetus V
Parametri 16-64 Analoginen tulo 54
Parametri 16-65 Analoginen lähtö 42 [mA] [mA]
Parametri 16-66 Digitaalinen lähtö [bin] [bin]
Parametri 16-67 Pulssitulo #29 [Hz] [Hz]
Parametri 16-68 Taajuus Tulo #33 [Hz] [Hz]
Parametri 16-69 Pulssilähtö #27 [Hz] [Hz]
Parametri 16-70 Pulssilähtö #29 [Hz] [Hz]
Parametri 16-71 Relelähtö [bin]
Parametri 16-72 Laskuri A
Parametri 16-73 Laskuri B
Parametri 16-80 Kenttäväylä CT W 1 heksa
Parametri 16-82 Kenttäväylä REF 1 heksa
Parametri 16-84 Tiedons. option tilasana heksa
Parametri 16-85 FC-portti CTW 1 heksa
Parametri 16-86 FC-portti REF 1 heksa
Parametri 16-90 Hälytyssana
Parametri 16-92 Varoitussana
Parametri 16-94 Ulk. tilasana
VLT® AutomationDrive FC 301/302
°C
°C
Kuva 2.10 Tilanäkymä I
Tilanäkymä II
Katso kohdassa Kuva 2.11 kuvatut käyttömuuttujat (1.1, 1.2,
1.3 ja 2).
Esimerkissä on valittu ensimmäisen ja toisen rivin
muuttujiksi, nopeus, moottorin virta, moottorin teho ja
taajuus .
Kuva 2.11 Tilanäkymä II
Tilanäkymä III
Tässä tilassa näytetään Smart Logic Control -ohjauksen
tapahtumat ja toimet. Katso lisätietoja kohdasta
kappale 3.13 Parametrit: 13-** Älykäs logiikka.
Taulukko 2.1 Yksiköt
Tilanäkymä I
Tämä lukutila on vakiotila käynnistyksen tai alustuksen
jälkeen.
Kuva 2.12 Tilanäkymä III
[Info]-painikkeella saat esiin tietoja yksiköiden yhteyksistä
näytettäviin käyttömuuttujiin (1.1, 1.2, 1.3, 2 ja 3).
Katso kohdassa Kuva 2.10 kuvatut käyttömuuttujat.
16 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 19
130BC916.10
Q1 My Personal Menu
Q2 Quick Setup
Q4 Smart Setup
Q5 Changes Made
0RPM 0.00A 1(1)
Quick Menus
Ohjelmointi Ohjelmointiopas
2.1.5 Parametriasetukset
Taajuusmuuttajaa voi käyttää lähes kaikkiin käyttökohteisiin. Taajuusmuuttajassa on käytettävissä 2
ohjelmointitilaa:
Päävalikkotila.
•
Pika-asetusvalikko-tila
•
Kaikkia parametreja voi käyttää päävalikon kautta. Pikaasetusvalikon avulla käyttäjä voi käyttää muutamia
parametreja, jolloin taajuusmuuttajan käyttäminen on
mahdollista aloittaa.
Muuta parametri joko päävalikkotilassa tai pika-asetusvalikko-tilassa.
2.1.6 Pika-asetusvalikko-painikkeen
toiminnot
Painamalla [Quick Menu] -painiketta pääset pika-asetus-
valikon eri alueiden luetteloon.
Tuo valitut henkilökohtaiset parametrit näyttöön
valitsemalla Q1 Oma valikko. Nämä parametrit valitaan
kohdassa parametri 0-25 Oma valikko. Tähän valikkoon voi
lisätä jopa 50 eri parametria.
Kuva 2.13 Pika-asetusvalikot
Parametri Asetus
Parametri 0-01 KieliParametri 0-01 Kieli
Parametri 1-20 Moottorin teho [kW] [kW]
Parametri 1-22 Moottorin jännite [V]
Parametri 1-23 Moottorin taajuus [Hz]
Parametri 1-24 Moottorin virta [A]
Parametri 1-25 Moottorin nimellisnopeus [RPM]
Parametri 5-12 Liitin 27, digitaalitulo
Parametri 1-29 Automaattinen moottorin
sovitus (AMA)
Parametri 3-02 Minimiohjearvo [RPM]
Parametri 3-03 Maksimiohjearvo [RPM]
Parametri 3-41 Ramppi 1:n nousuaika [s]
Parametri 3-42 Ramppi 1 rampin seisontaaika
Parametri 3-13 Ohjearvon paikka
Taulukko 2.2 Parametrin valinta
1) Jos liittimessä 27 on valittuna [0] Ei toimintoa, +24 V:n kytkentää
liittimeen 27 ei tarvita.
[0] Ei käytössä
[1] Täyd. AMA käytt.
[s]
1)
Valitse Changes made halutessasi tietoa seuraavista
seikoista:
Viimeiset 10 muutosta. Selaa 10 viimeksi
•
muutettua parametria [▲] [▼] navigointipainikkeilla.
Oletusasetuksen jälkeen tehdyt muutokset.
•
Valitse Lokiin tallentaminen halutessasi tietoa näyttörivin
lukemista. Tiedot näytetään kaavioina.
Vain parametreissa parametri 0-20 Näytön rivi 1.1 pieni ja
parametri 0-24 Näytön rivi 3 suuri valittuja näyttöparametreja voidaan tarkastella. Muistiin voidaan tallentaa
myöhempää käyttöä varten enintään 120 näytettä.
2 2
Käy läpi joukko parametreja, joiden avulla saat moottorin
toimimaan lähes ihanteellisesti valitsemalla Q2 Pika-
asetukset. Muiden parametrien oletusasetuksissa otetaan
huomioon tarvittavat ohjaustoiminnot ja signaalitulojen/lähtöjen (ohjausliittimien) määritykset.
Parametrit valitaan navigointipainikkeilla. Kohdan
Taulukko 2.2 parametrit ovat käytettävissä.
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 17
Page 20
Quick
Menu
OK
OK
OK
OK
OK
OK
OK
OK
OK
OK
OK
OK
OK
OK
Ohjelmointi
2.1.7 Ensimmäinen käyttöönotto
VLT® AutomationDrive FC 301/302
22
nettelyn noudattaminen LCP 102:n avulla (lue Taulukko 2.3 vasemmalta oikealle). Esimerkki koskee avoimen piirin sovelluksia.
Paina
Q2 Quick Menu.
Parametri 0-01 KieliParametri 0-01 Kieli
Parametri 1-20 Moottorin teho [kW]
Parametri 1-22 Moottorin jännite
Parametri 1-23 Moottorin taajuus
Parametri 1-24 Moottorin virta
Parametri 1-25 Moottorin nimellisnopeus
Parametri 5-12 Liitin 27, digitaalitulo
Parametri 1-29 Automaattinen
moottorin sovitus (AMA)
Aseta kieli.
Aseta moottorin tyyppikilven
mukainen teho.
Aseta tyyppikilven mukainen
jännite.
Aseta tyyppikilven mukainen
taajuus.
Aseta tyyppikilven mukainen
virta.
Aseta tyyppikilven mukainen
nopeus, kierrosta minuutissa
(rpm).
Jos liittimen oletusarvona on
[2] Rullaus, käänt., tämän
kohdan asetukseksi voidaan
vaihtaa [0] Ei toimintoa. Silloin
AMA:n suorittamiseen ei tarvita
yhteyttä liittimeen 27.
Aseta haluamasi AMA-toiminto.
Täydellisen AMA:n käyttäminen
on suositeltavaa.
Helpoin tapa laitteen ottamiseen käyttöön ensimmäisellä kerralla on [Quick Menu] -painikkeen käyttö ja pika-asetusme-
Parametri 3-02 Minimiohjearvo
Parametri 3-03 Maksimiohjearvo
Aseta moottorin akselin miniminopeus.
Aseta moottorin akselin
maksiminopeus.
Aseta rampin nousuaika viitaten
Parametri 3-41 Ramppi 1:n nousuaika
Parametri 3-42 Ramppi 1 rampin
seisonta-aika
Parametri 3-13 Ohjearvon paikka
synkroniseen moottorin
nopeuteen ns.
Aseta rampin laskuaika viitaten
synkroniseen moottorin
nopeuteen ns.
Aseta paikka, jossa ohjearvon
on toimittava.
Taulukko 2.3 Pika-asetusten käyttäminen
18 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 21
130BP066.10
1107 r/min
0 - ** Toiminta/näyttö
1 - ** Kuorm./moott.
2 - ** Jarrut
3 - ** Ohjearvo / rampit
3,84 A 1 (1)
Päävalikko
130BP067.10
740/min
0 -01 Kieli
[0] Englanti
10,64 A 1 [1]
0-0*
Perusasetukset
130BP068.10
740/min
0 -01 Kieli
[0] Englanti
10,64 A 1 [1]
0-0*
Perusasetukset
Ohjelmointi Ohjelmointiopas
Taajuusmuuttajan voi ottaa käyttöön helposti myös Älykäs
sovelluksen asetus -toiminnon (SAS) avulla. Tämä toiminto
on käytettävissä painamalla [Quick Menu] -näppäintä. Aseta
seuraavat sovellukset toimimalla näyttöön tulevien
ohjeiden mukaan.
[Info]-painiketta voi käyttää jokaisessa SAS-toiminnon
kohdassa, jos haluat nähdä eri valintojen, asetusten ja
viestien ohjeita. Toiminto sisältää seuraavat kolme
sovellusta:
Mekaaninen jarru
•
Kuljetin
•
Pumppu/puhallin.
•
Seuraavat neljä kenttäväylää ovat valittavissa:
PROFIBUS.
•
PROFINET.
•
DeviceNet.
•
EtherNet/IP.
•
HUOMAUTUS!
Taajuusmuuttaja ohittaa käynnistymisehdot, kun SAS on
aktiivinen.
Kaikkia parametreja voi muuttaa päävalikossa. Joissakin
määrityksissä (parametri 1-00 Konguraatiotila) jotkin
parametrit saattavat olla piilotettuja. Esimerkiksi avoin piiri
piilottaa kaikki PID-parametrit, ja muut valitut vaihtoehdot
tuovat useampia parametriryhmiä näkyviin.
2.1.9 Parametrin valinta
Parametrit on jaettu ryhmiin päävalikkotilassa. Valitse
parametriryhmä navigointinäppäimillä.
Valitse parametriryhmän valinnan jälkeen parametri
navigointipainikkeilla.
Näytön keskiosassa on parametrin nimi ja numero ja valittu
parametrin arvo.
Kuva 2.15 Parametrin valinta
2 2
HUOMAUTUS!
Älykäs asetustoiminto suoritetaan automaattisesti, kun
taajuusmuuttaja käynnistetään ensimmäisen kerran tai
aina tehdasasetusten palauttamisen jälkeen. Jos mitään
toimia ei tehdä, SAS-näyttö sulkeutuu automaattisesti 10
minuutin kuluttua.
2.1.8 Päävalikkotila
Siirry päävalikkotilaan painamalla [Main Menu]. Kohdan
Kuva 2.14 lukema tulee näyttöön.
Näytön ala- ja keskiosissa on joukko parametriryhmiä, jotka
voi valita [▲]- ja [▼]-painikkeella.
Kuva 2.14 Päävalikkotila
2.1.10 Tietojen muuttaminen
Tietojen muuttaminen tehdään samoin sekä pika-asetusvalikko-tilassa että päävalikkotilassa. Muuta valittu
parametri painamalla [OK]-näppäintä.
Tietojen muuttamistapa riippuu siitä, onko valitun
parametrin arvo numeerinen vai tekstimuotoinen.
2.1.11 Tekstin arvon muuttaminen
Jos valitun parametrin arvo on tekstimuotoinen, sitä
muutetaan [▲] [▼]-navigointipainikkeilla.
Aseta kohdistin tallennettavan arvon päälle ja paina [OK].
Kuva 2.16 Tekstin arvon muuttaminen
Jokaisella parametrilla on nimi ja numero, jotka säilyvät
ennallaan ohjelmointitilasta riippumatta. Parametrit on
jaettu ryhmiin päävalikkotilassa. Parametrinumeron
ensimmäinen numero (vasemmalta) ilmaisee parametriryhmän numeron.
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 19
Page 22
130BP069.10
1- 6*
113/min 1,78 A 1(1)
Kuormit. riippuva asetus
1 - 60 Pienen nopeuden kuormituksen
kompensaatio
1
0
0 %
130BP070.10
1 - 60 Pienen nopeuden kuormituksen
kompensaatio
1 0 %
Kuormit. riippuva asetus 1- 6*
729/min 6,21 A 1(1)
6
130BP073.10
130BP072.10
957RPM
1-71 High starting torque time
0. s
11.58A 1 (1)
1-7*Start Adjustments
4
Ohjelmointi
2.1.12 Data-arvon muuttaminen
VLT® AutomationDrive FC 301/302
22
Jos valitun parametrin data-arvo on numeerinen, sitä
muutetaan navigointipainikkeilla [◄] ja [►] sekä navigointipainikkeilla [▲] ja [▼]. Siirrä kohdistinta vaakasuunnassa [◀]ja [▶] -painikkeilla.
Kuva 2.20 Tallentaminen
2.1.14 Arvo, portaittain
Joitakin parametreja voi muuttaa portaittain. Tämä koskee
seuraavia:
Parametri 1-20 Moottorin teho [kW].
•
Parametri 1-22 Moottorin jännite.
Kuva 2.17 Data-arvon muuttaminen
Muuta data-arvoa painikkeilla [
arvoa ja [▼] pienentää data-arvoa. Aseta kohdistin
tallennettavan arvon päälle ja paina [OK].
] [▼]. [▲] suurentaa data-
▲
•
Parametri 1-23 Moottorin taajuus.
•
Parametreja muutetaan sekä numeeristen data-arvojen
ryhmänä että portaattomasti säädettävinä numeerisina
data-arvoina.
2.1.15 Indeksoitujen parametrien
lukeminen ja ohjelmointi
Parametrit indeksoidaan, kun ne asetetaan juoksevaan
pinoon. Parametreissa
Parametri 15-30 Vikaloki: virhekoodi–
parametri 15-32 Hälytysloki: Aika on vikaloki, jonka voi
Kuva 2.18 Data-arvon tallentaminen
lukea. Valitse parametri, paina [OK] ja selaa arvolokia
painikkeilla [▲] [▼].
2.1.13 Numeeristen data-arvojen portaaton
muuttaminen
Jos valitun parametrin data-arvo on numeerinen, valitse
numero [◀] [▶]-painikkeilla.
Esimerkiksi parametri 3-10 Esiasetettu ohjearvo muutetaan
seuraavasti:
1. Valitse parametri, paina [OK] ja selaa indeksoituja
arvoja painamalla [▲] [▼].
2. Voit muuttaa parametrin arvon valitsemalla
indeksoidun arvon ja painamalla [OK]-näppäintä.
3.
Voit muuttaa arvoa painamalla [▲] [▼].
4. Hyväksy uusi asetus painamalla [OK].
5. Peruuta [Cancel]-painikkeella. Poistu parametrista
painamalla [Back].
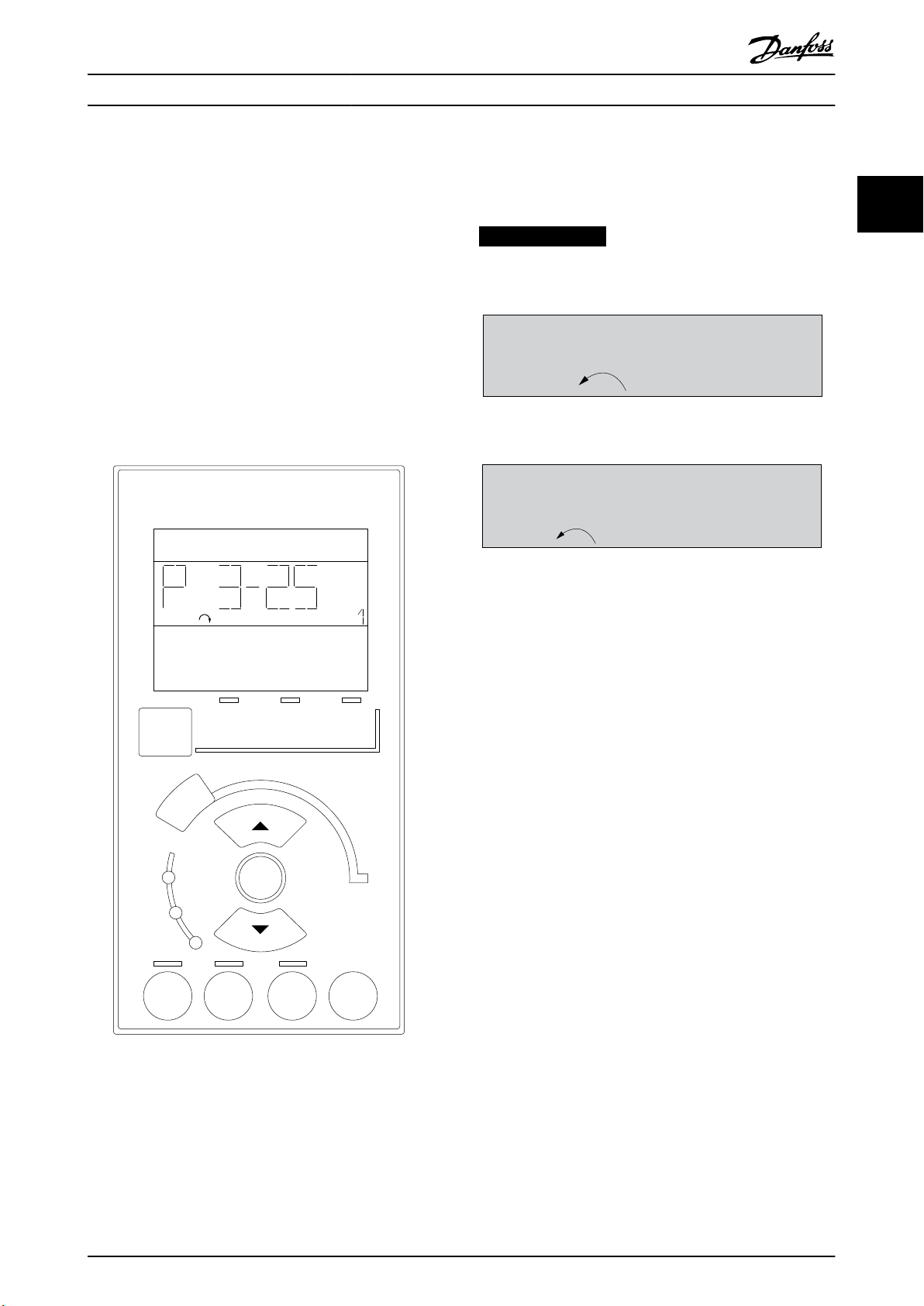
2.1.16 Ohjelmointi numeerisella
paikallisohjauspaneelilla
Seuraavat ohjeet koskevat numeerista LCP:tä (LCP 101):
Ohjauspaneeli jakautuu neljään toiminnalliseen osaan:
Numeerinen näyttö.
Kuva 2.19 Numeron valitseminen
Vaihda valittua numeroa portaattomasti [▲] [▼]-painikkeilla.
Kohdistin näyttää valitun numeron. Aseta kohdistin tallennettavan numeron päälle ja paina [OK].
20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
•
Valikkonäppäimet ja merkkivalot - parametrien
•
muuttaminen ja näytön toimintojen vaihteleminen.
Navigointinäppäimet ja merkkivalot
•
Toimintopainikkeet ja merkkivalot.
•
Page 23
e30ba191.11
1
Auto
On
Reset
Hand
On
Off
Menu
Status
Quick
Setup
Main
Menu
Back
2
3
4
OK
On
Alarm
Warn.
Setup
130BP077.10
22.8
rpm
Setup 1
Setup 1
130BP078.10
A 17
Ohjelmointi Ohjelmointiopas
Näytön rivi
Tilaviestit, joissa näkyy kuvakkeita ja numeerinen arvo.
Merkkivalot
Vihreä LED / päällä: Ilmoittaa, onko ohjaussektori
•
toiminnassa.
Keltainen LED / varoitus: Ilmaisee varoituksen.
•
Vilkkuva punainen LED / hälytys: Ilmaisee
•
hälytyksen.
LCP:n painikkeet
[Menu]
Valitse jokin seuraavista tiloista:
Tila.
•
Pika-asetukset.
•
Päävalikko
•
Tilanäyttö
Tilanäyttö näyttää taajuusmuuttajan tai moottorin tilan.
Hälytystilanteessa NLCP siirtyy automaattisesti tähän tilaan.
Näytössä voi näkyä useita hälytyksiä.
HUOMAUTUS!
Parametreja ei voi kopioida LCP 101 numeerisella paikallisohjauspaneelilla.
Kuva 2.22 Tilanäyttö
Kuva 2.23 Hälytys
2 2
Päävalikko/Pika-asetusvalikko
Käytetään kaikkien parametrien ohjelmointiin tai
ainoastaan pika-asetusvalikon parametrien ohjelmointiin
(katso myös LCP 102:n kuvaus kohdassa
kappale 2.1 Graanen ja numeerinen paikallisohjauspaneeli).
Kun arvo vilkkuu, muuta parametrin arvoa painamalla [▲]
tai [▼].
1. Valitse päävalikko painamalla [Main menu].
Kuva 2.21 LCP:n painikkeet
2. Valitse parametriryhmä [xx-__] ja paina [OK].
3. Valitse parametri [__-xx] ja paina [OK].
4. Jos parametri on ryhmäparametri, valitse ryhmän
numero ja paina [OK].
5. Valitse tarvittava data-arvo ja paina [OK].
Parametreissa, joissa on toiminnallisia vaihtoehtoja, on
arvoja kuten [1], [2] jne. Katso lisätietoja eri vaihtoehdoista
yksittäisten parametrien kuvauksista kohdassa
kappale 3 Parametrien kuvaukset.
[Back]
Käytetään taaksepäin siirtymiseen.
Painikkeita [▲] [▼] käytetään komentojen välillä ja
parametrien sisällä liikkumiseen.
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 21
Page 24
e30bp046.12
Hand
On
Off
Auto
On
Reset
Ohjelmointi
22
VLT® AutomationDrive FC 301/302
[Auto On]
Ottaa käyttöön taajuusmuuttajan ohjaamisen ohjausliittimien ja/tai sarjaliikenteen kautta. Kun ohjausliittimille
ja/tai väylään annetaan käynnistyssignaali, taajuusmuuttaja
käynnistyy. Painikkeen asetukseksi voidaan valita [1]
Käytössä tai [0] Pois käytöstä parametrilla parametri 0-42 LCP
[Auto on] -näppäin.
HUOMAUTUS!
Digitaalitulojen kautta saapuvan aktiivisen HAND-OFFAUTO-signaalin prioriteetti on suurempi kuin
Kuva 2.24 Päävalikko/Pika-asetusvalikko
ohjauspainikkeiden [Hand On] ja [Auto On] kautta
tulevan signaalin.
2.1.17 LCP:n painikkeet
Paikallisohjauksen painikkeet ovat LCP:n alareunassa.
Kuva 2.25 LCP:n painikkeet
[Hand On]
Mahdollistaa taajuusmuuttajan ohjaamisen paikallisohjauspaneelilla. [Hand on] käynnistää myös moottorin, ja nyt
moottorin nopeustiedot voi syöttää navigointipainikkeilla.
Painikkeen asetukseksi voidaan valita [1] Käytössä tai [0]
Pois käytöstä parametrilla parametri 0-40 LCP [Hand on] näppäin.
Ohjaussignaalien tai kenttäväylän avulla aktivoidut ulkoiset
pysäytyssignaalit ohittavat LCP:llä annetun käynnistyskomennon.
Seuraavat ohjaussignaalit ovat yhä aktiivisia, kun [Hand On]
-painiketta painetaan:
[Hand On] - [O] - [Auto On].
•
Kuittaus.
•
Rullauspysäytys, käänteinen.
•
Suunnanvaihto.
•
Asetusten valinta, lsb - Asetusten valinta, msb
•
Sarjaliikenteestä saatava pysäytyskomento.
•
Pikapysäytys.
•
DC-jarru.
•
[O]
Pysäyttää kytketyn moottorin. Painikkeen asetukseksi
voidaan valita [1] Käytössä tai [0] Pois käytöstä parametrilla
parametri 0-41 LCP [O]-näppäin.
Jos mitään ulkoista pysäytystoimintoa ei ole valittu ja [O]-
painike ei ole aktiivinen, pysäytä moottori katkaisemalla
verkkojännite.
[Reset]
Käytetään taajuusmuuttajan nollaamiseen hälytyksen
(laukaisun) jälkeen. Arvoksi voi valita [1] Käytössä tai [0]
Pois käytöstä parametrilla parametri 0-43 LCP [Reset]näppäin.
2.1.18 Alustaminen oletusasetuksiin
Voit alustaa taajuusmuuttajan tehdasasetuksiin kahdella
tavalla.
Suositeltava alustus (toiminnon parametri 14-22 Toimintatila avulla).
1. Valitse parametri 14-22 Toimintatila.
2. Paina [OK]-painiketta.
3. Valitse [2] Alustus.
4. Paina [OK]-painiketta.
5. Irrota verkkojännite ja odota, kunnes näyttö
sammuu.
6. Kytke verkkojännite uudelleen päälle. Taajuusmuuttaja on nyt nollattu.
Parametri 14-22 Toimintatila alustaa kaiken muun paitsi:
Parametri 14-50 RFI-suod..
•
Parametri 8-30 Protokolla.
•
Parametri 8-31 Osoite.
•
Parametri 8-32 FC-portin baudinopeus.
•
Parametri 8-35 Vasteen minimiviive.
•
Parametri 8-36 Vasteen maksimiviive.
•
Parametri 8-37 Ominaisuuksien välinen maks.viive.
•
Parametri 15-00 Käyttötunnit–
•
parametri 15-05 Ylijännitteet.
Parametri 15-20 Historialoki: Tapahtuma–
•
parametri 15-22 Historialoki: Aika.
Parametri 15-30 Vikaloki: virhekoodi–
•
parametri 15-32 Hälytysloki: Aika.
22 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 25

Ohjelmointi Ohjelmointiopas
Manuaalinen alustus
1. Irrota laite verkkovirrasta ja odota, kunnes näyttö
sammuu.
2. 2a Paina [Status] - [Main Menu] - [OK]
samaan aikaan kun graanen näyttö LCP
102 käynnistyy.
2b Paina [Menu] [OK], kun LCP 101
numeerinen näyttö käynnistyy.
3. Vapauta painikkeet viiden sekunnin kuluttua.
4. Nyt taajuusmuuttaja on ohjelmoitu oletusasetusten mukaan.
Tämä toimenpide alustaa kaiken muun paitsi:
Parametri 15-00 Käyttötunnit.
•
Parametri 15-03 Käynnistyksiä.
•
Parametri 15-04 Ylilämpötilat.
•
Parametri 15-05 Ylijännitteet.
•
HUOMAUTUS!
Manuaalinen alustus palauttaa myös sarjaliikenteen, RFIsuodattimen asetukset (parametri 14-50 RFI-suod.) ja
vikalokin asetukset.
2 2
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 23
Page 26
Parametrien kuvaukset
3 Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
3.1 Parametrit: 0-** Toiminta ja näyttö
33
Taajuusmuuttajan perustoimintoihin liittyvät parametrit,
LCP-näppäinten toiminta ja LCP-näytön asetukset.
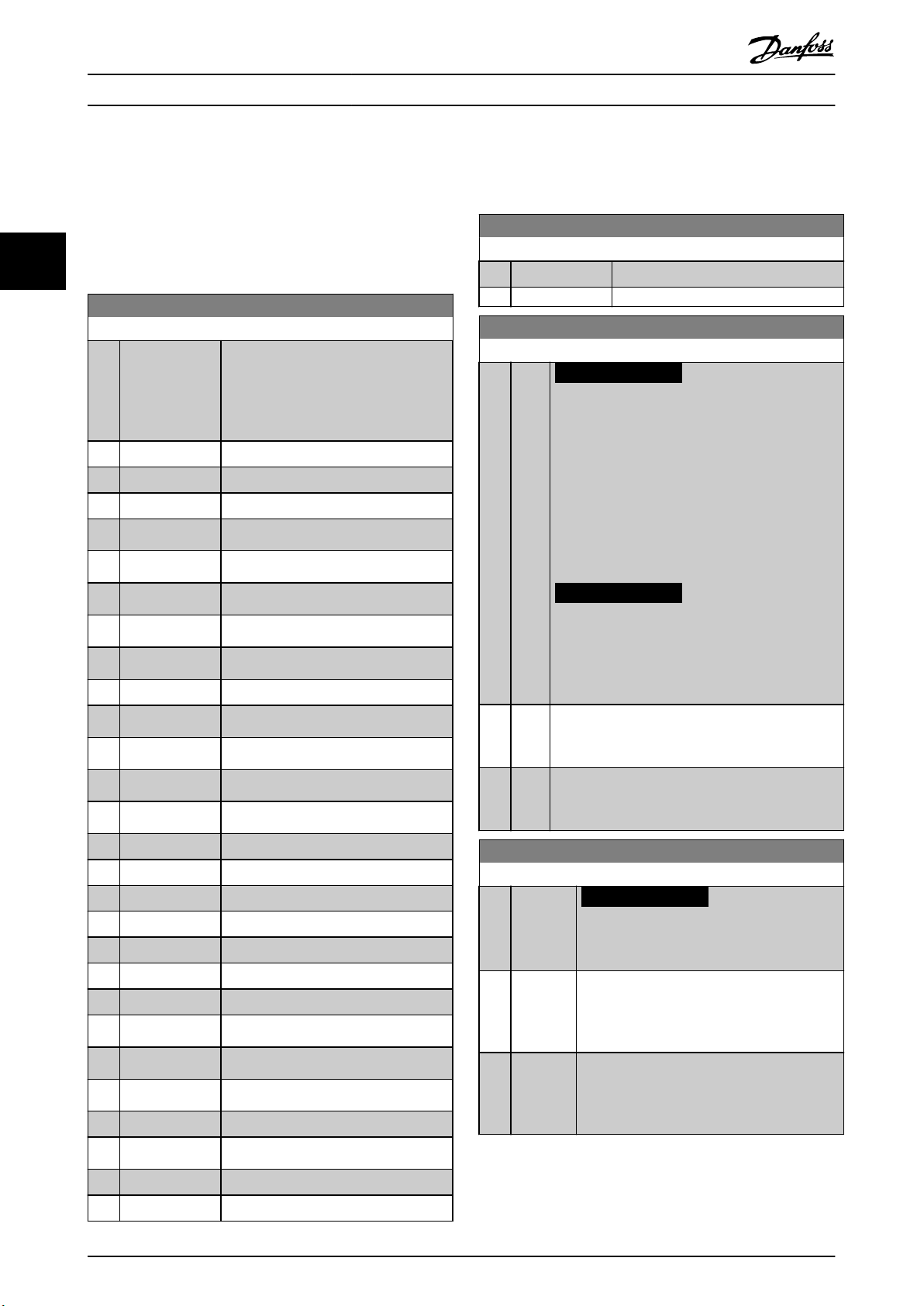
0-01 Kieli
Optio: Toiminto:
Määrittää näytön kielen. Taajuusmuuttajan mukana toimitetaan neljä
erilaista kielipakettia. Englanti ja saksa
sisältyvät kaikkiin paketteihin. Englannin
kieltä ei voi poistaa eikä muokata.
[0] * English Osa kielipaketteja 1–4
[1] Deutsch Osa kielipaketteja 1–4
[2] Francais Osa kielipakettia 1
[3] Dansk Osa kielipakettia 1
[4] Spanish Osa kielipakettia 1
[5] Italiano Osa kielipakettia 1
[6] Svenska Osa kielipakettia 1
[7] Nederlands Osa kielipakettia 1
0-01 Kieli
Optio: Toiminto:
[52] Hrvatski Osa kielipakettia 3
[53] Arabic
0-02 Moottorin nopeusyks.
Optio: Toiminto:
HUOMAUTUS!
Tätä parametria ei voi muokata moottorin
käydessä.
Näytössä näkyvät tiedot riippuvat parametrien
parametri 0-02 Moottorin nopeusyks. ja
parametri 0-03 Paikalliset asetukset asetuksista.
Parametrien parametri 0-02 Moottorin nopeusyks. ja
parametri 0-03 Paikalliset asetukset oletusasetukset
riippuvat siitä, mihin päin maailmaa taajuusmuuttaja
toimitetaan.
HUOMAUTUS!
Moottorin nopeuden yksikön muuttaminen
palauttaa tietyt parametrit alkuarvoonsa.
Valitse moottorin nopeuden yksikkö ennen
muiden parametrien muokkaamista.
[10] Chinese Osa kielipakettia 2
[20] Suomi Osa kielipakettia 1
[22] English US Osa kielipakettia 4
[27] Greek Osa kielipakettia 4
[28] Bras.port Osa kielipakettia 4
[0] 1/minValitse moottorin nopeuden muuttujien ja
parametrien näyttäminen moottorin nopeuden
avulla (kierrosta minuutissa (rpm)).
[1] * Hz Valitse moottorin nopeuden muuttujien ja
parametrien näyttäminen moottorin lähtötaajuuden
(Hz) avulla.
[36] Slovenian Osa kielipakettia 3
[39] Korean Osa kielipakettia 2
[40] Japanese Osa kielipakettia 2
[41] Turkish Osa kielipakettia 4
[42] Trad.Chinese Osa kielipakettia 2
[43] Bulgarian Osa kielipakettia 3
[44] Srpski Osa kielipakettia 3
[45] Romanian Osa kielipakettia 3
[46] Magyar Osa kielipakettia 3
[47] Czech Osa kielipakettia 3
[48] Polski Osa kielipakettia 4
[49] Russian Osa kielipakettia 3
[50] Thai Osa kielipakettia 2
[51] Bahasa Indonesia Osa kielipakettia 2
24 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
0-03 Paikalliset asetukset
Optio: Toiminto:
HUOMAUTUS!
Tätä parametria ei voi muokata
moottorin käydessä.
[0] * Kansain-
välinen
[1] US Aktivoi parametri 1-20 Moottorin teho [kW], jos
Aktivoi parametri 1-20 Moottorin teho [kW], jos
haluat asettaa tehon kilowatteina (kW) ja
asettaa parametrin parametri 1-23 Moottorin
taajuus oletusarvoksi 50 Hz.
haluat asettaa tehon hevosvoimina (hp) ja
asettaa parametrin parametri 1-23 Moottorin
taajuus oletusarvoksi 60 Hz.
Page 27
Parametrien kuvaukset Ohjelmointiopas
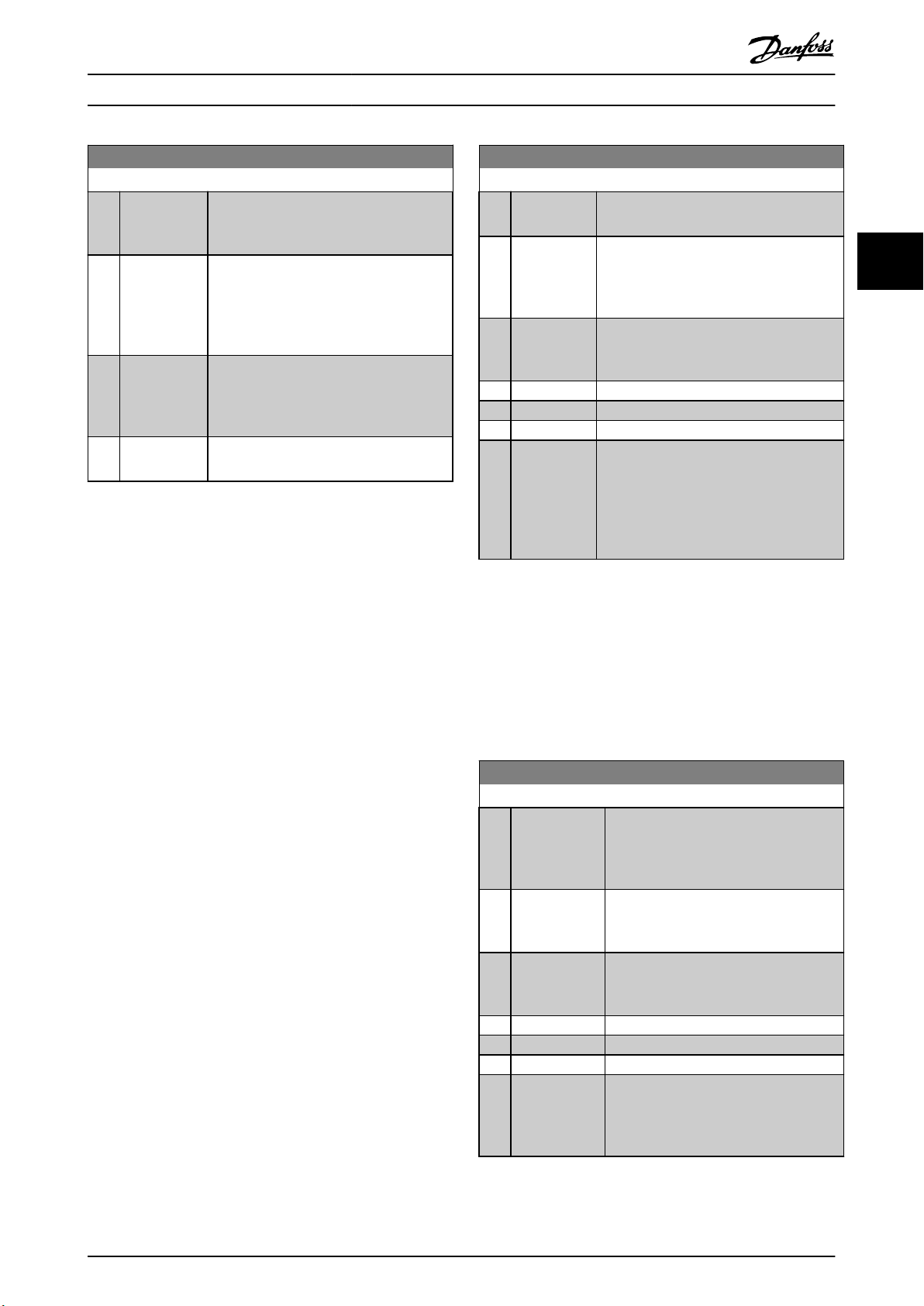
0-04 Käyttötila käynnistettäessä (käsi)
Optio: Toiminto:
Valitse käyttötila kytkettäessä taajuusmuuttajaa uudelleen verkkojännitteeseen
virtakatkoksen jälkeen käsitilassa.
[0] Palauta Käynnistä taajuusmuuttaja uudelleen ennen
taajuusmuuttajan sammuttamista valitut
käynnistyksen ja pysäytyksen asetukset
(käytetään [Hand On/O] -painikkeella)
säilyttäen.
[1] * Pakkopys.,
ohj=vanha
[2] Pakkopysäytys,
ohj=0
Käynnistä taajuusmuuttaja uudelleen tallennetulla paikallisohjearvolla, kun
verkkojännite on palautunut ja on painettu
[Hand On] -painiketta.
Palauta paikallisohjearvoksi 0, kun taajuusmuuttaja käynnistetään uudelleen.
3.1.1 0-1* Asetustoiminnot
Aseta ja ohjaa yksittäisten parametrien asetuksia.
Taajuusmuuttajassa on neljä erillistä parametriasetusta,
jotka voi ohjelmoida toisistaan riippumatta. Tämä tekee
taajuusmuuttajasta erittäin joustavan ja se mahdollistaa
monimutkaisten ohjauksen toiminnallisuuksien ongelmien
ratkaisemisen – usein ilman ulkoisen ohjauslaitteiston
aiheuttamia kustannuksia. Parametriasetuksia voi käyttää
taajuusmuuttajan ohjelmointiin sen käyttämiseksi yhden
ohjausmallin mukaan yhdessä asetuksessa (esimerkiksi
moottori 1 vaakasuuntaiselle liikkeelle) ja toisen ohjausmallin mukaan toisessa asetuksessa (esimerkiksi moottori 2
pystysuuntaiselle liikkeelle). OEM-konevalmistaja voi myös
käyttää parametriasetuksia kaikkien tehtaalla asennettujen
taajuusmuuttajien ohjelmoimiseen eri konetyyppejä varten
samojen parametrien tuottamiseksi koko mallistoon.
Tuotannon/käyttöönoton aikana voit yksinkertaisesti valita
tietyn asetuksen sen mukaan, mihin koneeseen taajuusmuuttaja on asennettu.
Aktiiviset asetukset (siis taajuusmuuttajassa parhaillaan
käytössä olevat asetukset) voi valita parametrissa
parametri 0-10 Aktiiviset asetukset ja ne näytetään LCP:ssä.
Moniasetuksia käytettäessä asetuksia voidaan muuttaa
taajuusmuuttajan ollessa käynnissä tai pysähdyksissä,
digitaalitulon tai sarjaliikennekomentojen avulla. Jos
asetuksia on syytä muuttaa taajuusmuuttajan ollessa
käynnissä, on varmistettava, että parametri
parametri 0-12 Nämä asetukset yhteydessä on ohjelmoitu
vaatimusten mukaan. Parametrin parametri 0-11 Muokkaa
aset. avulla voidaan muokata parametreja minkä tahansa
asetusten sisällä taajuusmuuttajan toimiessa edelleen
aktiivisilla asetuksillaan, jotka voivat poiketa muokattavista
asetuksista. Parametrin parametri 0-51 Asetusten kopio
avulla voidaan kopioida parametriasetuksia eri asetusten
välillä, jolloin käyttöönotto onnistuu nopeammin, jos eri
asetuksissa tarvitaan samanlaisia parametriasetuksia.
0-10 Aktiiviset asetukset
Optio: Toiminto:
Valitse asetukset , joilla ohjataan taajuusmuuttajan toimintoja.
[0] Tehdasaset Ei voi muuttaa. Ne sisältävät Danfossin
datajoukon, ja niitä voidaan käyttää datan
lähteenä palautettaessa muita asetuksia
tunnettuun tilaan.
[1] * Asetukset 1 [1] Asetukset 1 –[4] Asetukset 4 ovat neljä
erillistä parametriasetusta, joiden puitteissa
kaikki parametrit voidaan ohjelmoida.
[2] Asetukset 2
[3] Asetukset 3
[4] Asetukset 4
[9] Moniase-
tukset
Etäohjauksen valinnat digitaalitulojen ja
sarjaliikenneportin avulla. Tässä asetuksessa
käytetään parametrin parametri 0-12 Nämä
asetukset yhteydessä asetuksia. Pysäytä
taajuusmuuttaja ennen kuin teet muutoksia
avoimen ja suljetun piirin toimintoihin.
Kopioi asetukset yhteen tai kaikkiin muihin asetuksiin
parametrin parametri 0-51 Asetusten kopio avulla. Sammuta
taajuusmuuttaja ennen asetusten vaihtamista, jos
merkinnällä "ei muutettavissa käytön aikana" varustetuilla
parametreilla on eri arvot. Vältä saman parametrin ristiriitaisia asetuksia kaksien eri asetusten puitteissa yhdistämällä
asetukset parametrin parametri 0-12 Nämä asetukset
yhteydessä avulla. Parametrit, jotka eivät ole muutettavissa
käytön aikana, on merkitty EPÄTOSIKSI parametriluetteloissa
kohdassa kappale 5 Parametriluettelot.
0-11 Muokkaa aset.
Optio: Toiminto:
Valitse käytön aikana muokattavat (eli
ohjelmoitavat) asetukset; joko aktiiviset
asetukset tai jokin ei-aktiivisista
asetuksista.
[0] Tehdasaset. Ei voi muokata, mutta ne ovat hyödyllisiä
tiedonlähteenä haluttaessa palata muista
asetuksista tunnettuun tilaan.
[1] * Asetukset 1 [1] Asetuksia 1–[4] Asetukset 4 voi muokata
käytön aikana vapaasti, aktiivisista
asetuksista riippumatta.
[2] Asetukset 2
[3] Asetukset 3
[4] Asetukset 4
[9] Aktiiviset
asetukset
Voidaan muokata myös käytön aikana.
Muokkaa eri lähteistä peräisin olevia
valittuja asetuksia: LCP, FC RS485, FC USB
tai enintään viittä kenttäväyläkohdetta.
3 3
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 25
Page 28
130BA199.10
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
P 0-11
P 0-11
P 0-11
P 0-11
Set-up
Set-up
Set-up
Set-up
PLC Fieldbus
130BP075.10
130BP076.10
Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
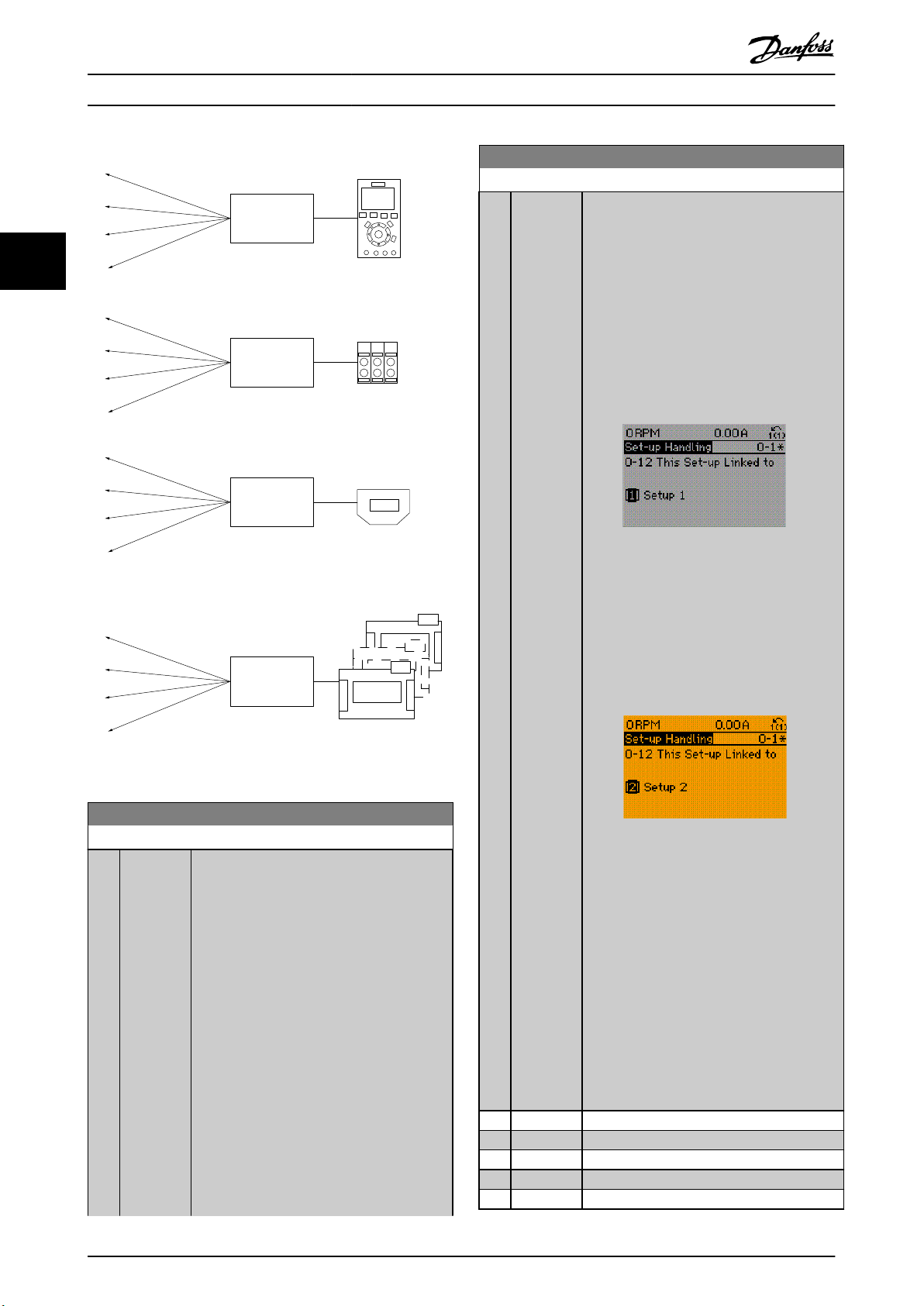
0-12 Nämä asetukset yhteydessä
Optio: Toiminto:
ensin parametrit Asetuksissa 1, ja varmista
sitten, että Asetukset 1 ja Asetukset 2 on
synkronoitu (tai linkitetty). Synkronoinnin voi
33
tehdä kahdella tavalla:
1. Valitse seuraavista vaihtoehdoista:
[2] Asetukset 2 kohdassa
•
parametri 0-11 Muokkaa aset..
parametri 0-12 Nämä asetukset
•
yhteydessä kohtaan [1] Asetukset 1.
Tämä käynnistää linkitysprosessin (synkronoinnin).
Kuva 3.1 Muokkaa asetuksia
0-12 Nämä asetukset yhteydessä
Optio: Toiminto:
Jotta muutokset asetuksista toisiin
onnistuisivat ristiriidoitta käytön aikana, linkitä
asetuksia, jotka sisältävät parametreja, joita ei
voi muuttaa käytön aikana. Linkitys varmistaa
sellaisten parametrien arvojen synkronoinnin,
jotka eivät ole muutettavissa käytön aikana,
mikä mahdollistaa siirtymisen asetuksista
toisiin käytön aikana. Parametrit, jotka eivät ole
muutettavissa käytön aikana, tunnistaa
merkinnästä EPÄTOSI parametriluetteloissa
kohdassa kappale 5 Parametriluettelot.
Parametri 0-12 Nämä asetukset yhteydessä on
vaihtoehdon [9] Moniasetukset käytössä
kohdassa parametri 0-10 Aktiiviset asetukset.
Moniasetusten avulla siirrytään asetuksista
toisiin käytön aikana (eli moottorin käydessä).
Esimerkki:
Siirry moniasetusten avulla Asetuksista 1
Asetuksiin 2 moottorin käydessä. Ohjelmoi
Kuva 3.2 Asetukset 1
TAI
2. Pysy edelleen asetuksissa 1 ja kopioi
asetukset 1 asetuksiin 2. Aseta sitten
parametrin parametri 0-12 Nämä asetukset
yhteydessä arvoksi [2] Asetukset 2. Tämä aloittaa
linkitysprosessin.
Kuva 3.3 Asetukset 2
Kun linkitys on tehty, parametri 0-13 Lukema:
Linkitetyt asetukset -kohdassa lukee {1,2}, mikä
tarkoittaa, että kaikki parametrit, jotka eivät ole
muutettavissa käytön aikana, ovat nyt samat
kohdissa Asetukset 1 ja Asetukset 2. Jos
parametriin, joka ei ole muutettavissa käytön
aikana, esimerkiksi parametri 1-30 Staattorin
resistanssi (Rs), tehdään muutoksia kohdassa
Asetukset 2, ne muuttuvat automaattisesti
myös kohdassa Asetukset 1. Käytön aikana
voidaan nyt vaihtaa asetusten 1 ja asetusten 2
välillä.
[0] * Ei linkitetty
[1] Asetukset 1
[2] Asetukset 2
[3] Asetukset 3
[4] Asetukset 4
26 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 29
Parametrien kuvaukset Ohjelmointiopas
0-13 Lukema: Linkitetyt asetukset
Ryhmä [5]
Alue: Toiminto:
0* [0 -
255 ]
Katso luettelo kaikista asetuksista, jotka on
linkitetty parametrin parametri 0-12 Nämä asetukset
yhteydessä avulla. Parametrissa on yksi indeksi
kullekin parametriasetukselle. Kunkin indeksin
kohdalla näkyvä arvo ilmaisee, mitkä asetukset on
linkitetty kyseiseen parametriasetukseen.
Indeksi LCP:n arvo
0 {0}
1 {1,2}
2 {1,2}
3 {3}
4 {4}
Taulukko 3.1 Asetusten linkityksen esimerkki
0-14 Lukema: Muokkaa asetuksia/kanavaa
Alue: Toiminto:
0* [-2147483648
- 2147483647 ]
Katso parametrin parametri 0-11 Muokkaa
aset. asetus kullekin neljästä tiedonsiirtokanavasta. Kun numero näkyy heksamuodossa,
kuten LCP:ssä, jokainen numero tarkoittaa
yhtä kanavaa.
Numerot 1–4 tarkoittavat asetusten numeroa;
F tarkoittaa tehdasasetusta; ja A tarkoittaa
aktiivisia asetuksia. Kanavat ovat oikealta
vasemmalle: LCP, FC-väylä, USB, HPFB1-5.
Esimerkki: Numero AAAAAA21h tarkoittaa
seuraavaa:
Taajuusmuuttaja vastaanotti
•
asetuksen Asetukset 2 kenttäväyläkanavan kautta. Valinta näkyy
kohdassa parametri 0-11 Muokkaa
aset..
Käyttäjä valitsi asetuksen 1 LCP:n
•
avulla.
Kaikki muut kanavat käyttävät
•
aktiivisia asetuksia.
0-15 Readout: actual setup
Alue: Toiminto:
0* [0 - 255 ] Tämän avulla on mahdollista lukea aktiiviset
asetukset myös silloin, kun parametrissa
parametri 0-10 Aktiiviset asetukset on valittu [9]
Moniasetukset.
3.1.2 0-2* LCP-näyttö
Määrittää LCP:ssä näytettävät muuttujat.
HUOMAUTUS!
Katso lisätietoja näytön tekstien kirjoittamisesta
kohdasta:
Parametri 0-37 Näytön teksti 1.
•
Parametri 0-38 Näytön teksti 2.
•
Parametri 0-39 Näytön teksti 3.
•
0-20 Näytön rivi 1.1 pieni
Optio: Toiminto:
Valitse muuttuja näytön riville 1,
vasen paikka.
[0] Ei mitään Näytettävää arvoa ei ole valittu.
[9] Performance
Monitor
[15] Readout: actual
setup
[37] Näytön teksti 1
[38] Näytön teksti 2
[39] Näytön teksti 3
[953] Probus-
varoitussana
[1005] Lähetys
virhelaskurin lukema
[1006] Vastaanotto
virhelaskurin lukema
[1007] Lukemaväylän
käytöstäpoisto-
laskuri
[1013] Varoitusparametri
[1230] Varoitusparametri
[1472] VLT:n hälytyssana
[1473] VLT:n varoitussana
[1474] VLT:n ulk. tilasana
[1501] Käyntitunnit
[1502] Kilowattituntilaskuri
[1580] Fan Running Hours
[1600] Ohjaussana Nykyinen ohjaussana
[1601] Ohjearvo [yks] Kokonaisohjearvo (digitaalisen/
analogisen/esivalitun/väylän/
lukituksen ohjearvon/kiinniajon ja
hidastuksen summa) valittuina
yksikköinä.
[1602] Ohjearvo % Kokonaisohjearvo (digitaalisen/
analogisen/esivalitun/väylän/
lukituksen ohjearvon/kiinniajon ja
hidastuksen summa) prosentteina.
[1603] tilasana Nykyinen tilasana.
3 3
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 27
Page 30
Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
0-20 Näytön rivi 1.1 pieni
Optio: Toiminto:
[1605] Pääarvo, todellinen
[%]
[1606] Actual Position Todellinen sijainti kohdassa
33
[1607] Target Position Aktiivinen määrätty sijainti
[1608] Position Error Todellisen sijainnin kohdistusvirhe
[1609] Oma lukema
[1610] Teho [kW] Moottorin ottama todellinen teho
[1611] Teho [hv] Moottorin ottama todellinen teho
[1612] Moottorin jännite Moottorille syötetty jännite.
[1613] Taajuus Moottorin taajuus, siis taajuus-
[1614] Moottorin virta Moottorin vaihevirta hetkelli-
[1615] Taajuus [%] Moottorin taajuus, siis taajuus-
[1616] Momentti [Nm] Moottorin todellinen vääntömo-
[1617]*Nopeus [RPM] Nopeus kierroksina minuutissa
[1618] Moottorin terminen Moottoriin kohdistuva terminen
[1619] KTY-anturin
lämpötila
[1620] Moott. kulma
[1621] Torque [%] High
Res.
[1622] Momentti [%] Moottorin nykyinen kuormitus
[1623] Motor Shaft Power
[kW]
[1624] Calibrated Stator
Resistance
[1625] Momentti [Nm]
suuri
[1630] DC-välipiirin jännite DC-välipiirin jännite.
[1632] Jarruenergia /s Ulkoiseen jarruvastukseen siirretty
Todellinen arvo prosenttiosuutena.
parametri 17-70 Position Unit
valittuina sijaintiyksiköinä.
kohdassa parametri 17-70 Position
Unit valittuina sijaintiyksiköinä.
kohdassa parametri 17-70 Position
Unit valittuina sijaintiyksiköinä.
kilowatteina.
hevosvoimina.
muuttajan lähtötaajuus hertseinä.
sarvona mitattuna.
muuttajan lähtötaajuus
prosentteina.
mentti (Nm).
(RPM), siis moottorin akselin
nopeus suljetussa silmukassa.
kuormitus ETR-toiminnolla
laskettuna.
prosentteina moottorin nimellismomentista.
nykyinen jarruteho.
0-20 Näytön rivi 1.1 pieni
Optio: Toiminto:
Ilmoitetaan hetkellisenä arvona.
[1633] Jarruenergia /2 min Ulkoiseen jarruvastukseen siirretty
jarruteho. Keskitehoa lasketaan
jatkuvasti viimeisten 120 sekunnin
keskiarvona.
[1634] Jäähdytysrivan
lämpöt.
[1635] Vaihtosuuntaajan
terminen
[1636] Taaj.muut
nimell.virta
[1637] Taaj.muut maks.virta Taajuusmuuttajan maksimivirta.
[1638] SL-ohjaimen tila Ohjauksen suorittaman
[1639] Ohj.kortin lämpöt. Ohjauskortin lämpötila.
[1644] Speed Error [RPM]
[1645] Motor Phase U
Current
[1646] Motor Phase V
Current
[1647] Motor Phase W
Current
[1648] Speed Ref. After
Ramp [RPM]
[1650] Ulkoinen ohjearvo Ulkoisten ohjearvojen summa
[1651] Pulssiohjearvo Digitaalituloihin (18, 19 tai 32, 33)
[1652] Tak.kytk. [yks] Ohjelmoitujen digitaalitulojen
[1653] Dig. potent.metrin
ohjearvo
[1657] Feedback [RPM]
[1660] Digitaalinen tulo Signaalien tilat kuudelta digitaa-
[1661] Liitin 53 kytken-
täasetus
[1662] Analoginen tulo 53 Tulon 53 todellinen arvo
Taajuusmuuttajan senhetkinen
jäähdytyselementin lämpötila.
Katkaisuraja on 95 ±5 °C
(203 ±9 °F); kytkentä tapahtuu
lämpötilassa 70 ±5 °C (203 ±9 °F).
Vaihtosuuntaajien kuormitus
prosentteina.
Taajuusmuuttajan nimellisvirta.
tapahtuman tila.
prosentteina eli analogisen/pulssi-/
väyläohjearvojen summa.
kytketty taajuus hertseinä.
ohjearvo.
liselta liittimeltä (18, 19, 27, 29, 32
ja 33). Yhteensä bittejä on 16,
mutta vain kuudessa niistä
käytetään. Tulo 18 vastaa
äärimmäisenä vasemmalla olevaa
käytettävää bittiä. Signaali heikko=
0 Signaali vahva = 1.
Liittimen 54 tulo. Virta = 0; Jännite
= 1.
ohjearvona tai suojausarvona.
28 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 31

Parametrien kuvaukset Ohjelmointiopas
0-20 Näytön rivi 1.1 pieni
Optio: Toiminto:
[1663] Liitin 54 kytken-
täasetus
[1664] Analoginen tulo 54 Tulon 54 todellinen arvo
[1665] Analoginen lähtö 42
[mA]
[1666] Digitaalinen lähtö
[bin]
[1667] Taajuus Tulo #29
[Hz]
[1668] Taajuus Tulo #33
[Hz]
[1669] Pulssilähtö #27 [Hz] Liittimeen 27 digitaalilähtötilassa
[1670] Pulssilähtö #29 [Hz] Liittimeen 29 digitaalilähtötilassa
[1671] Relelähtö [bin]
[1672] Laskuri A Riippuu sovelluksesta (esimerkiksi
[1673] Laskuri B Riippuu sovelluksesta (esimerkiksi
[1675] Analog. tulo X30/11 Tulon X30/11 todellinen arvo
[1676] Analog. tulo X30/12 Tulon X30/12 todellinen arvo
[1677] Analoginen lähtö
X30/8 [mA]
[1678] Analoginen lähtö
X45/1 [mA]
[1679] Analoginen lähtö
X45/3 [mA]
[1680] Kenttäväylä CTW 1 Väyläisännältä saatu ohjaussana
[1682] Kenttäväylä REF 1 Väyläisännältä ohjaussanan kanssa
[1684] Tiedons. option
tilasana
Liittimen 54 tulo. Virta = 0; Jännite
= 1.
ohjearvona tai määriteltynä
arvona.
Lähdön 42 todellinen arvo
milliampeereina. Valitse näytettävä
arvo parametrin
parametri 6-50 Liitin 42, lähtö
avulla.
Kaikkien digitaalilähtöjen
binääriarvo.
Liittimeen 29 pulssitulona
kohdistettu todellinen arvo.
Liittimeen 33 pulssitulona
kohdistettu todellinen arvo.
käytettyjen pulssien todellinen
arvo.
käytettyjen pulssien todellinen
arvo.
SLC-ohjaus).
SLC-ohjaus).
ohjearvona tai määriteltynä
arvona.
ohjearvona tai määriteltynä
arvona.
Lähdön X30/8 todellinen arvo
milliampeereina. Valitse näytettävä
arvo parametrin
parametri 6-60 Liitin X30/8 lähtö
avulla.
(CTW).
lähetetty pääohjearvo.
Laajennettu kenttäväylän tietoliikenneoption tilasana.
0-20 Näytön rivi 1.1 pieni
Optio: Toiminto:
[1685] FC-portti CTW 1 Väyläisännältä saatu ohjaussana
(CTW).
[1686] FC-portti REF 1 Väyläisännälle lähetetty tilasana
(STW).
[1687] Bus Readout Alarm/
Warning
[1689] Congurable Alarm/
Warning Word
[1690] Hälytyssana 1 tai useampi hälytys
heksakoodina.
[1691] Hälytyssana 2 1 tai useampi hälytys
heksakoodina.
[1692] Varoitussana 1 tai useampi varoitus
heksakoodina.
[1693] Varoitussana 2 1 tai useampi varoitus
heksakoodina.
[1694] Ulk. tilasana 1 tai useampi toimintatila
heksakoodina.
[1836] Analogiatulo X48/2
[mA]
[1837] Lämpöt.tulo X48/4
[1838] Lämpöt.tulo X48/7
[1839] Lämpöt.tulo X48/10
[1860] Digital Input 2
[3110] Ohitustilasana
[3111] Ohituskäyntitunnit
[4235] S-CRC Value
[4282] Safe Control Word
[4283] Safe Status Word
[4285] Active Safe Func.
[4286] Safe Option Info
[9913] Joutokäyntiaika
[9914] Parambd-pyyntöjä
jonossa
[9917] tCon1 time
[9918] tCon2 time
[9919] Time Optimize
Measure
[9920] HS-lämpö (PC1)
[9921] HS-lämpö (PC2)
[9922] HS-lämpö (PC3)
[9923] HS-lämpö (PC4)
[9924] HS-lämpö (PC5)
[9925] HS-lämpö (PC6)
[9926] HS-lämpö (PC7)
[9927] HS-lämpö (PC8)
[9951] PC Debug 0
[9952] PC Debug 1
[9953] PC Debug 2
[9954] PC Debug 3
3 3
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 29
Page 32

Mukaut. lukema (arvo)
P 16-09
Mukaut. lukeman
yks. P 0-30
Maks. arvo
P 0-32
Min. arvo
P 0-31
Vain lineaar.
yks.
Neliöll. yks. (paine)
Kuutioyks. (teho)
Moott. nop.
Moott. nop.
yläraja
P 4-13 (1/min)
P 4-14 (Hz)
0
130BT105.12
Li ne aar yks . (e s im . n op . ja vir t.)
Parametrien kuvaukset
0-20 Näytön rivi 1.1 pieni
Optio: Toiminto:
[9955] PC Debug 4
[9956] Fan 1 Feedback
[9957] Fan 2 Feedback
33
[9958] PC Auxiliary Temp
[9959] Power Card Temp.
VLT® AutomationDrive FC 301/302
Parametri 4-13 Moott. nopeuden yläraja [RPM].
•
Parametri 4-14 Moott. nopeuden yläraja [Hz].
•
Todellinen nopeus
•
0-21 Näytön rivi 1.2 pieni
Valitse muuttuja näytön riville 1, keskimmäinen paikka. Optiot
ovat samat kuin kohdassa parametri 0-20 Näytön rivi 1.1 pieni
luetellut.
0-22 Näytön rivi 1.3 pieni
Valitse muuttuja näytön riville 1, oikea paikka. Optiot ovat samat
kuin kohdassa parametri 0-20 Näytön rivi 1.1 pieni luetellut.
0-23 Näytön rivi 2 suuri
Valitse muuttuja näytön riville 2. Optiot ovat samat kuin kohdassa
parametri 0-20 Näytön rivi 1.1 pieni luetellut.
Kuva 3.4 Oma lukema
3.1.3 0-3* LCP:n oma lukema
Näytön elementtejä voidaan muokata eri tarkoituksiin:
Laskettu näytettävä arvo perustuu asetuksiin parametreissa:
30 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
0-24 Näytön rivi 3 suuri
Valitse rivillä 3 näytettävä muuttuja.
0-25 Oma valikko
Alue: Toiminto:
Size
related*
[0 9999 ]
Oma lukema. Arvo suhteessa nopeuteen
•
Aseta enintään 50 parametria, jotka
näytetään Q1 Omassa valikossa ja joita voi
käyttää LCP:n [Quick Menu] -näppäimellä.
Parametrit näytetään Q1 Omassa valikossa
siinä järjestyksessä, jossa ne on ohjelmoitu
tähän ryhmäparametriin. Poista parametrit
asettamalla arvoksi "0000".
Tätä voidaan käyttää esimerkiksi haluttaessa
muokata nopeasti ja helposti vain yhtä tai
enintään 50 parametria, joita on muutettava
säännöllisesti (esimerkiksi tehtaan ylläpitosyistä). Alkuperäinen laitevalmistaja voi tällä
toiminnolla mahdollistaa myös laitteiston
helpon käyttöönoton.
(lineaarinen, neliö tai kuutio parametrissa
parametri 0-30 Oma lukemayksikkö valitusta
yksiköstä riippuen).
Näytön teksti. Parametriin tallennettu merkkijono.
•
Oma lukema
Parametri 0-30 Oma lukemayksikkö.
•
Parametri 0-31 Oman lukeman minimiarvo
•
(ainoastaan lineaarinen).
Parametri 0-32 Oman lukeman maksimiarvo.
•
Suhde riippuu yksikön tyypistä, joka on valittu parametrissa
parametri 0-30 Oma lukemayksikkö:
Laitteen tyyppi Nopeussuhde
Ei yksikköä
Nopeus
Virtaus, tilavuus
Virtaus, massa
Nopeus
Pituus
Lämpötila
Paine Neliö
Teho Kuutio
Taulukko 3.2 Nopeussuhteet eri yksikkötyypeille
Lineaarinen
0-30 Käyttäjän määrittämän lukeman yksikkö
Optio: Toiminto:
LCP:n näytöllä näytettävän arvon voi ohjelmoida.
Arvolla on lineaarinen suhde, neliösuhde tai
kuutiosuhde nopeuteen. Tämä suhde riippuu
valitusta yksiköstä (katso Taulukko 3.2).
Todellisen lasketun arvon voi lukea parametrista
parametri 16-09 Oma lukema ja/tai sen voi
näyttää näytössä valitsemalla [16-09] Oma
lukema parametrissa parametri 0-20 Näytön rivi
1.1 pieni–parametri 0-24 Näytön rivi 3 suuri.
[0] * Ei mitään
[1] %
[5] PPM
[10] 1/min
[11] 1/min
[12] PULSSI/s
[20] l/s
Page 33

Parametrien kuvaukset Ohjelmointiopas
0-30 Käyttäjän määrittämän lukeman yksikkö
Optio: Toiminto:
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[125] ft3/s
[126] ft3/min
[127] ft³/h
[130] lb/s
[131] lb/min
[132] lb/h
[140] ft/s
[141] ft/min
[145] ft
[160] °F
[170] psi
[171] lb/in²
[172] in wg
[173] ft WG
[176] kpsi
[177] MPa
[178] kBar
[180] HP
0-31 Käytt. määrittämän lukeman minimio
Alue: Toiminto:
0 CustomReadoutUnit*
[ -999999.99 par. 0-32
CustomReadoutUnit]
Tämä parametri asettaa
minimiarvon omalle lukemalle
(tapahtuu nollanopeudella). Voit
asettaa nollasta eroavan arvon
ainoastaan valittaessa
lineaarinen yksikkö parametrissa
0-31 Käytt. määrittämän lukeman minimio
Alue: Toiminto:
parametri 0-30 Käyttäjän
määrittämän lukeman yksikkö.
Neliöllisten ja kuutiollisten
yksiköiden minimiarvo on 0.
0-32 Oman lukeman maksimiarvo
Alue: Toiminto:
100 CustomReadoutUnit*
[ par. 0-31 -
999999.99
CustomReadoutUnit]
Tämä parametri asettaa
maksimiarvon, joka näytetään
moottorin nopeuden saavuttaessa parametrissa
parametri 4-13 Moott. nopeuden
yläraja [RPM] ja
parametri 4-14 Moott. nopeuden
yläraja [Hz] asetetun arvon
(riippuu parametrin
parametri 0-02 Moottorin
nopeusyks. asetuksesta).
0-33 Source for User-dened Readout
Optio: Toiminto:
Syötä käyttäjän määrittämän
lukeman lähde.
[105] Momentti suht. nimell.
[240] * Default Source
0-37 Näytön teksti 1
Alue: Toiminto:
0* [0 -
25 ]
Syötä teksti, joka näytetään graasessa näytössä, kun
valitaan [37] Näytön teksti 1 parametrissa
Parametri 0-20 Näytön rivi 1.1 pieni,
•
Parametri 0-21 Näytön rivi 1.2 pieni,
•
Parametri 0-22 Näytön rivi 1.3 pieni,
•
Parametri 0-23 Näytön rivi 2 suuri tai
•
Parametri 0-24 Näytön rivi 3 suuri.
•
0-38 Näytön teksti 2
Alue: Toiminto:
0* [0 -
25 ]
Syötä teksti, joka näytetään graasessa näytössä, kun
valitaan [38] Näytön teksti 2 parametrissa
Parametri 0-20 Näytön rivi 1.1 pieni,
•
Parametri 0-21 Näytön rivi 1.2 pieni,
•
Parametri 0-22 Näytön rivi 1.3 pieni,
•
Parametri 0-23 Näytön rivi 2 suuri tai
•
Parametri 0-24 Näytön rivi 3 suuri.
•
3 3
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 31
Page 34

Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
0-39 Näytön teksti 3
Alue: Toiminto:
0* [0 -
25 ]
33
Syötä teksti, joka näytetään graasessa näytössä, kun
valitaan [39] Näytön teksti 3 parametrissa
Parametri 0-20 Näytön rivi 1.1 pieni,
•
Parametri 0-21 Näytön rivi 1.2 pieni,
•
Parametri 0-22 Näytön rivi 1.3 pieni,
•
Parametri 0-23 Näytön rivi 2 suuri tai
•
Parametri 0-24 Näytön rivi 3 suuri.
•
3.1.4 0-4* LCP-näppäimistö
0-42 LCP [Auto on] -näppäin
Optio: Toiminto:
[0] Pois käytöstä Vältä taajuusmuuttajan tahaton käynnistys
Auto On -tilassa.
[1] Käytössä
[2] Salasana Estää luvattoman käynnistyksen Auto On -
tilassa. Jos parametri parametri 0-42 LCP [Auto
on] -näppäin on mukana pika-asetusvalikossa,
määritä salasana parametrissa
parametri 0-65 Pika-asetusvalik. s-sana.
0-43 LCP [Reset]-näppäin
Optio: Toiminto:
Ota käyttöön, poista käytöstä ja suojaa salasanalla LCP:n
yksittäisiä painikkeita.
0-40 LCP [Hand on] -näppäin
Optio: Toiminto:
[0] Pois
käytöstä
[1] Käytössä LCP siirtyy suoraan käsikäyttötilaan, kun [Hand
[2] Salasana [Hand On] -painikkeen painamisen jälkeen
[3] Käsik. pois/
päälle
[4] Käsik. pois/
pääl sal.
[9] Enabled, ref
= 0
[Hand on] -painikkeen painamisella ei ole
vaikutusta. Vältä taajuusmuuttajan tahaton
käynnistys käsikäyttötilassa valitsemalla [0] Pois
käytöstä.
On] -painiketta painetaan.
vaaditaan salasana. Jos parametri
parametri 0-40 LCP [Hand on] -näppäin sisältyy
Omaan valikkoon, määritä salasana parametrissa
parametri 0-65 Pika-asetusvalik. s-sana. Määritä
salasana muussa tapauksessa parametrissa
parametri 0-60 Päävalikon salasana.
Kun [Hand On] -painiketta painetaan kerran,
LCP siirtyy Pois-tilaan. LCP siirtyy suoraan
käsikäyttötilaan, kun [Hand On] -painiketta
painetaan.
Sama kuin [3] Käsik. pois/päälle, mutta salasana
vaaditaan (katso optio [2] Salasana).
0-41 LCP [O]-näppäin
Optio: Toiminto:
[0] Pois käytöstä Estää taajuusmuuttajan pysäyttämisen
vahingossa.
[1] Käytössä
[2] Salasana Estää luvattoman pysäytyksen. Jos parametri
parametri 0-41 LCP [O]-näppäin on mukana
pika-asetusvalikossa, määritä salasana
parametrissa parametri 0-65 Pika-asetusvalik. ssana.
[0] Pois käytöstä [Reset]-näppäimen painamisella ei vaikutusta.
Estää hälytyksen kuittauksen vahingossa.
[1] Käytössä
[2] Salasana Estää luvattoman nollauksen. Jos parametri
parametri 0-43 LCP [Reset]-näppäin on mukana
pika-asetusvalikossa, määritä salasana
parametrissa parametri 0-65 Pika-asetusvalik. ssana.
[7] Käytössä
ilman katk.
[8] Salasana
ilman katk.
Kuittaa taajuusmuuttajan asettamatta sitä O-
tilaan.
Kuittaa taajuusmuuttajan asettamatta sitä Otilaan. [Reset]-painiketta painettaessa
vaaditaan salasana (katso optio [2] Salasana).
0-44 LCP:n [O/Reset]-näppäin
Poista [O/Reset]-painike käytöstä tai ota se käyttöön.
Optio: Toiminto:
[0] Pois käytöstä
[1] * Käytössä
[2] Salasana
0-45 LCP:n [taajuusmuuttajan ohitus] -näppäin
Vältä taajuusmuuttajan tahaton pysähtyminen painamalla [O] ja
valitsemalla [0] Pois käytöstä. Vältä taajuusmuuttajan luvaton
ohitus painamalla [O] ja valitsemalla [2] Salasana. Jos parametri
parametri 0-45 LCP:n [taajuusmuuttajan ohitus] -näppäin on
mukana pika-asetusvalikossa, määritä salasana parametrissa
parametri 0-65 Oman valikon salasana.
Optio: Toiminto:
[0] Pois käytöstä Poista painike käytöstä
valitsemalla tämä.
[1] * Käytössä
[2] Salasana
32 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 35

Parametrien kuvaukset Ohjelmointiopas
3.1.5 0-5* Kopioi/tallenna
Kopioi parametrit LCP:hen ja LCP:stä. Käytä näitä
parametreja asetusten kopioimiseen taajuusmuuttajalta
toiselle.
0-50 LCP-kopiointi
Optio: Toiminto:
HUOMAUTUS!
Tätä parametria ei voi muokata
moottorin käydessä.
[0] * Ei kopiota
[1] Kaikki LCP:hen Kopioi kaikki parametrit kaikilla
asetuksilla taajuusmuuttajan muistista
LCP:n muistiin.
[2] Kaikki LCP:stä Kopioi kaikki parametrit kaikilla
asetuksilla LCP:n muistista taajuusmuuttajan muistiin.
[3] Teh. riippum. LCP Kopioi ainoastaan parametrit, jotka ovat
riippumattomia moottorin koosta.
Viimeksi mainittua valintaa voi käyttää
useiden taajuusmuuttajien ohjelmoimiseen samalla toiminnolla
vaikuttamatta moottorin dataan.
[4] Tied. MCO - LCP
[5] Tied. LCP - MCO
[6] Data from DYN to
LCP
[7] Data from LCP to
DYN
[9] Safety Par. from
LCP
[10] Delete LCP copy
data
0-51 Asetusten kopio
Optio: Toiminto:
[0] * Ei kopiota Ei toimintoa
[1] Kopioi
asetuksiin 1
[2] Kopioi
asetuksiin 2
[3] Kopioi
asetuksiin 3
[4] Kopioi
asetuksiin 4
Käytä kopion poistamiseen siirron
jälkeen.
Kopioi kaikki parametrit nykyisissä
ohjelmointiasetuksissa (määritetty par.
parametri 0-11 Ohjelmointiasetukset)
asetuksiin 1.
Kopioi kaikki parametrit nykyisissä
ohjelmointiasetuksissa (määritetty par.
parametri 0-11 Ohjelmointiasetukset)
asetuksiin 2.
Kopioi kaikki parametrit nykyisissä
ohjelmointiasetuksissa (määritetty par.
parametri 0-11 Ohjelmointiasetukset)
asetuksiin 3.
Kopioi kaikki parametrit nykyisissä
ohjelmointiasetuksissa (määritetty par.
0-51 Asetusten kopio
Optio: Toiminto:
parametri 0-11 Ohjelmointiasetukset)
asetuksiin 4.
[9] Kopioi kaikkiin Kopioi nykyisten asetusten parametrit
kaikkiin asetuksiin 1–4.
3.1.6 0-6* Salasana
0-60 Päävalikon salasana
Alue: Toiminto:
100* [-9999 -
9999 ]
Määritä salasana, jonka avulla päävalikkoa voi
käyttää [Main Menu] -painikkeella. Jos
parametrin parametri 0-61 Päävalikon käyttö
ilman salasanaa asetus on [0] Täysi
käyttöoikeus, tämä parametri jätetään
huomiotta.
0-61 Päävalikon käyttö ilman salasanaa
Optio: Toiminto:
[0] * Täysi
käyttöoikeus
[1] LCP: Vain luku Estä päävalikon parametrien luvaton
[2] LCP: Ei käyttöoik. Estä päävalikon parametrien luvaton
[3] Väylä: Vain luku Vain luku -toiminnot parametreille
[4] Väylä: Ei
käyttöoik.
[5] Kaikki: Vain luku Vain luku -toiminnot parametreille
[6] Kaikki: Ei
käyttöoik.
Poistaa käytöstä salasanan, joka on
määritetty par. parametri 0-60 Päävalikon
salasana.
muokkaaminen.
tarkastelu ja muokkaaminen.
kenttäväylässä ja/tai taajuusmuuttajan
vakioväylässä.
Parametrien käyttöä ei sallita kenttäväylän ja/tai taajuusmuuttajan
vakioväylän kautta.
LCP:ssä, kenttäväylässä tai taajuusmuuttajan vakioväylässä.
Käyttöä ei sallita LCP:stä, kenttäväylästä
tai taajuusmuuttajan vakioväylästä käsin.
Jos [0] Täysi käyttöoikeus on valittuna, parametrit
parametri 0-60 Päävalikon salasana, parametri 0-65 Oman
valikon salasana ja parametri 0-66 Oman valikon käyttö
ilman salasanaa jätetään huomiotta.
HUOMAUTUS!
OEM-laitteisiin saa pyynnöstä monimutkaisemman
salasanasuojauksen.
0-65 Pika-asetusvalik. s-sana
Alue: Toiminto:
200* [-9999 -
9999 ]
Määritä salasana, jolla voit muokata pikaasetusvalikkoa [Quick Menu] -painikkeella.
3 3
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 33
Page 36

Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
0-65 Pika-asetusvalik. s-sana
Alue: Toiminto:
Jos parametrin parametri 0-66 Pikaasetusvalik. käyttö ilman s-sanaa asetus on [0]
Täysi käyttöoikeus, tämä parametri jätetään
33
huomiotta.
0-66 Pika-asetusvalik. käyttö ilman s-sanaa
Jos parametrin parametri 0-61 Päävalikon käyttö ilman salasanaa
asetus on [0] Täysi käyttöoikeus, tämä parametri jätetään
huomiotta.
Optio: Toiminto:
[0] * Täysi käyttöoikeus Poistaa käytöstä salasanan, joka on
määritetty par. parametri 0-65 Pika-
asetusvalik. s-sana.
[1] LCP: Vain luku Estää pika-asetusvalikon parametrien
luvattoman muokkaamisen.
[3] Väylä: Vain luku Vain luku -toiminnot pika-asetusvalikon
parametreille kenttäväylässä ja/tai
taajuusmuuttajan vakioväylässä.
[5] Kaikki: Vain luku Vain luku -toiminto pika-asetusvalikon
parametreille LCP:ssä, kenttäväylässä tai
taajuusmuuttajan vakioväylässä.
0-67 Pääsy väylään salasanalla
Alue: Toiminto:
0* [0 - 9999 ] Tämän parametrin avulla voit poistaa taajuus-
muuttajan lukituksen kenttäväylän tai MCT 10 asetusohjelmisto -ohjelmiston avulla.
0-73 Aikavyöhyke-ero
Alue: Toiminto:
0 min* [-780 - 780 min] Syötä aikavyöhyke-ero suhteessa
UTC:hen. Tämä parametri vaaditaan
kesäajan automaattiseen säätöön.
0-74 DST/kesäaika
Optio: Toiminto:
Valitse, kuinka kesäaikaa käsitellään. Jos
haluat määrittää kesäajan käsin, aseta
alkamispäivä ja päättymispäivä kohdissa
parametri 0-76 DST/kesäajan alku ja
parametri 0-77 DST/kesäajan päättyminen.
[0] * Ei käytössä
[2] Manuaalinen
0-76 DST/kesäajan alku
Alue: Toiminto:
Size
related*
[ 0 - 0 ] Asettaa päivän ja kellonajan, jolloin
kesäaika alkaa. Päiväys ohjelmoidaan
kohdassa parametri 0-71 Päiväyksen muoto
valitussa muodossa.
0-77 DST/kesäajan päättyminen
Alue: Toiminto:
Size
related*
[ 0 - 0 ] Asettaa päivän ja kellonajan, jolloin
kesäaika päättyy. Päiväys ohjelmoidaan
kohdassa parametri 0-71 Päiväyksen muoto
valitussa muodossa.
0-79 Kellovika
0-68 Safety Parameters Password
Alue: Toiminto:
300* [0 - 9999 ] Anna turvallisuusparametrien salasana. Jos
parametri 0-69 Password Protection of Safety
Parameters-parametrin asetus on [0] Pois
käytöstä, tämä parametri jätetään huomiotta.
0-69 Password Protection of Safety Parameters
Optio: Toiminto:
[0] * Pois käytöstä
[1] Käytössä
Optio: Toiminto:
Ottaa käyttöön tai poistaa käytöstä kellovaroituksen, joka annetaan kun kelloa ei ole asetettu
tai se on nollautunut sähkökatkon vuoksi eikä
varakelloa ole asennettu. Jos VLT®Analog I/O
Option MCB 109 on asennettu, oletusarvo on [1]
Käytössä.
[0] Pois
käytöstä
[1] Käytössä
0-81 Työpäivät
0-70 Päiväys ja aika
Alue: Toiminto:
Size
related*
[ 0 - 0 ] Asettaa sisäisen kellon päiväyksen ja ajan.
Käytettävä muoto määritetään parametreissa parametri 0-71 Päiväyksen muoto ja
parametri 0-72 Ajan muoto.
Ryhmä [7]
Näytössä parametrinumeron alapuolella näytettävä 7elementtinen [0]–[6] ryhmä. Paina [OK] ja siirry elementtien välillä
painikkeilla [▲] ja [▼].
Optio: Toiminto:
Määritä kunkin viikonpäivän osalta, onko
kyseessä työpäivä vai vapaapäivä. Ryhmän
ensimmäinen elementti on maanantai. Työpäiviä
käytetään ajastettuihin toimintoihin.
[0] Ei käytössä
[1] Kyllä
34 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 37

Parametrien kuvaukset Ohjelmointiopas
0-82 Lisätyöpäivät
Ryhmä [5]
Näytössä parametrinumeron alapuolella näytettävä 5elementtinen [0]–[4] ryhmä. Paina [OK] ja siirry elementtien välillä
painikkeilla [▲] ja [▼].
Alue: Toiminto:
Size related* [ 0 - 0 ] Määrittää ne lisätyöpäivät, jotka
parametri 0-81 Työpäivät:n mukaan
olisivat normaalisti vapaapäiviä.
0-83 Lisävapaapäivät
Ryhmä [15]
Näytössä parametrinumeron alapuolella näytettävä 15elementtinen [0]–[14] ryhmä. Paina [OK] ja siirry elementtien
välillä painikkeilla [▲] ja [▼].
Alue: Toiminto:
Size related* [ 0 - 0 ] Määrittää ne lisätyöpäivät, jotka
parametri 0-81 Työpäivät:n mukaan
olisivat normaalisti vapaapäiviä.
3 3
0-84 Time for Fieldbus
Alue: Toiminto:
0* [0 - 4294967295 ] Näyttää kenttäväylän ajan.
0-85 Summer Time Start for Fieldbus
Alue: Toiminto:
0* [0 - 4294967295 ] Näyttää kenttäväylän kesäajan alkamisen.
0-86 Summer Time End for Fieldbus
Alue: Toiminto:
0* [0 - 4294967295 ] Näyttää kenttäväylän kesäajan
päättymisen.
0-89 Päiväys- ja aikalukema
Alue: Toiminto:
0* [0 - 25 ] Näyttää nykyisen päiväyksen ja ajan. Päivämäärä ja
aika päivittyvät jatkuvasti.
Kello ei ala käydä, ennen kuin on määritetty
oletusasetuksesta poikkeava asetus kohdassa
parametri 0-70 Päiväys ja aika.
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 35
Page 38

Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
3.2 Parametrit: 1-** Kuorma ja moottori
3.2.1 1-0* Yleiset asetukset
Määritä, toimiiko taajuusmuuttaja nopeustilassa vai
momenttitilassa ja onko sisäisen PID-ohjauksen oltava
33
aktiivinen vai ei.
1-00 Konguraatiotila
Optio: Toiminto:
parametri 30-19 Aaltoilun taaj.muutos
skaalattu.
[6] Pintakelain Ottaa käyttöön pintakelaimen ohjauksen
parametrit parametriryhmässä 7-2* Pros. ohj.
tak.kytk. ja 7.3* Prosessi PID-säätö.
1-00 Konguraatiotila
Optio: Toiminto:
Valitse sovelluksen ohjausperiaate, jota
käytetään, kun etäohjearvo (analogiatulon tai
kenttäväylän kautta) on aktiivinen.
Etäohjearvo voi olla aktiivinen ainoastaan, kun
parametri 3-13 Ohjearvon paikka on [0] Yht.
käsi/aut.käytt tai [1] Etä.
[0] Av. piirin
nopeus
[1] Sulj. piirin
nopeus
[2] Momentti Ottaa käyttöön momentin suljetun piirin
Ottaa käyttöön nopeuden ohjauksen (ilman
takaisinkytkentäsignaalia moottorilta)
automaattisen jättämäkompensoinnin kanssa
lähes vakionopeuden tuottamiseksi vaihtelevilla kuormilla.
Kompensoinnit ovat aktiivisena, mutta ne voi
poistaa käytöstä parametriryhmässä 1-0*
Kuorma ja moottori. Aseta nopeuden
ohjauksen parametrit parametriryhmässä 7-0*
Nopeus PID-säätö.
Ottaa käyttöön nopeuden suljetun piirin
ohjauksen takaisinkytkennän kanssa. Saat
täyden pitomomentin nopeudella 0 kierrosta
minuutissa (rpm).
Paranna nopeuden tarkkuutta järjestämällä
takaisinkytkentäsignaali ja aseta nopeuden
PID:n ohjaus. Aseta nopeuden ohjauksen
parametrit parametriryhmässä 7-0* Nopeus
PID-säätö.
ohjauksen takaisinkytkennän kanssa.
Mahdollista ainoastaan Flux moottorin takaisin-
kytkennällä -option avulla,
parametri 1-01 Moottorin ohjausperiaate.
[7] Laaj. PID
nopeus OL
[8] Laaj. PID
nopeus CL
[9] Positioning
[10] Synchroni-
zation
Erityiset parametrit parametriryhmässä 7-2*
Pros. ohj. tak.kytk - 7-5* Adv. Process PID II.
Erityiset parametrit parametriryhmässä 7-2*
Pros. ohj. tak.kytk - 7-5* Adv. Process PID II.
HUOMAUTUS!
Tämä vaihtoehto on käytettävissä
ainoastaan ohjelmistoversiossa 48.XX.
Ottaa sijoitustilan käyttöön.
HUOMAUTUS!
Tämä vaihtoehto on käytettävissä
ainoastaan ohjelmistoversiossa 48.XX.
Ottaa synkronointitilan käyttöön.
HUOMAUTUS!
Koskee ainoastaan FC 302 -taajuusmuuttajaa.
[3] Prosessi Ottaa taajuusmuuttajassa käyttöön prosessin
ohjauksen. Aseta prosessin ohjauksen
parametrit parametriryhmässä 7-2* Pros. ohj.
tak.kytk. ja 7.3* Prosessi PID-säätö.
[4] Momentti,
avoin piiri
[5] Pyyhkäisy-
toiminto
36 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Ottaa käyttöön momentin avoimen piirin VVC
+
-tilassa (parametri 1-01 Moottorin ohjauspe-
riaate). Aseta momentin PID:n parametrit
parametriryhmässä 7-1* Momentti PI ohjaus.
Ottaa wobble-toiminnon käyttöön parametreissa parametri 30-00 Aaltois.tila -
Page 39

Parametrien kuvaukset Ohjelmointiopas
1-01 Moottorin ohjausperiaate
Optio: Toiminto:
HUOMAUTUS!
Tätä parametria ei voi muokata moottorin
käydessä.
Valitse käytettävä moottorin ohjausperiaate.
[0] U/f Erikoismoottoritila, rinnan kytketyille mootto-
reille moottorien erikoissovelluksissa. Kun U/f on
valittu, ohjausperiaatteen ominaisuuksia voi
muokata parametreissa parametri 1-55 U/f-
ominaiskäyrä - U ja parametri 1-56 U/fominaiskäyrä - F.
[1] VVC+ Voltage Vector Control -periaate sopii useimpiin
sovelluksiin. VVC+-käytön tärkein etu on, että se
käyttää kestävää moottorimallia.
[2] Flux
anturiton
Flux-vektoriohjaus ilman pulssianturin takaisinkytkentää, yksinkertaisiin asennuksiin, kestää
äkillisiä kuorman muutoksia.
HUOMAUTUS!
Koskee ainoastaan FC 302 -taajuusmuuttajaa.
[3] Flux moott.
tak.kytk.
Erittäin tarkka nopeuden ja momentin ohjaus,
sopii vaativimpiin sovelluksiin.
HUOMAUTUS!
Koskee ainoastaan FC 302 -taajuusmuuttajaa.
Yleensä paras akselisuorituskyky saadaan käyttämällä 2
Flux-vektoriohjaustilaa [2] Flux anturiton ja [3] Flux moott.
tak.kytk.
1-02 Flux moott. tak.kytk.lähde
Optio: Toiminto:
HUOMAUTUS!
Tätä parametria ei voi muokata
moottorin käydessä.
Valitse liitäntä, jolle vastaanotetaan
takaisinkytkentä moottorilta.
[1] * 24V enkooderi A- ja B-kanavan pulssianturi, jonka voi
yhdistää ainoastaan digitaalituloliittimiin
32/33. Ohjelmoi liittimien 32/33 asetukseksi
Ei toimintoa.
[2] MCB 102 Pulssianturimoduulioptio, jonka voi
määrittää parametrir yhmässä 17-1* Ink. Enc.
liitäntä
1-02 Flux moott. tak.kytk.lähde
Optio: Toiminto:
HUOMAUTUS!
Koskee ainoastaan FC 302 -taajuusmuuttajaa.
[3] MCB 103 Valinnainen resolveriliitäntämoduuli, jonka
voi määrittää parametriryhmässä 17-5*
Resolveriliitäntä.
[4] MCO-
pulssianturi 1
[5] MCO-
pulssianturi 2
Valinnaisen VLT®Motion Control MCO 305
pulssianturiliitäntä 1.
Valinnaisen VLT®Motion Control MCO 305
pulssianturiliitäntä 2.
1-03 Momentin ominaiskäyrä
Optio: Toiminto:
HUOMAUTUS!
Tätä parametria ei voi muokata
moottorin käydessä.
Valitse haluttu momentin ominaiskäyrä.
VT ja AEO ovat molemmat energiaa
säästäviä toimintoja.
[0]*Vakiomomentti Moottorin akseliteho antaa vakiomomentin
nopeudenohjauksen vaihdellessa.
[1] Muuttuva
momentti
[2] Autom.energia
optim.
[5] Constant
Power
Moottorin akseliteho antaa muuttuvan
momentin nopeudenohjauksen vaihdellessa.
Aseta muuttuva momenttitaso kohdassa
parametri 14-40 VT-taso.
Optimoi automaattisesti energiankulutuksen
minimoimalla magnetisoinnin ja taajuuden
kohtien parametri 14-41 AEO:n minimimag-
netointi ja parametri 14-42 AEO:n
minimitaajuus avulla.
Toiminto tuo jatkuvan tehon alueella, jolla
kenttä heikkenee.
Moottoritilan momentin muotoa käytetään
rajana generaattoritilassa. Tämä tehdään
generaattoritilassa tehon rajoittamiseksi,
joka muuten kasvaa huomattavaksi
suuremmaksi kuin moottoritilassa generaattoritilassa käytettävissä olevan suuren DCvälipiirin jännitteen vuoksi.
P
W = ω
akseli
Tämä suhde vakiotehoon esitetään
kohdassa Kuva 3.5:
rad/s × T Nm
mek.
3 3
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 37
Page 40

ω
nom2ωnom
ω [rad/S]
P[W]
130BB655.10
T[Nm]
P
T
P
nom
T
nom
Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
1-03 Momentin ominaiskäyrä
Optio: Toiminto:
33
Kuva 3.5 Constant Power
1-04 Ylikuormitustila
Optio: Toiminto:
HUOMAUTUS!
Tätä parametria ei voi muokata
moottorin käydessä.
1-06 Suunta myötäpäivään
Optio: Toiminto:
Tämä parametri määrittää ehdon myötäpäivään
vastaamaan LCP:n suuntanuolta. Käytetään
helpottamaan akselin pyörimissuunnan vaihtoa
ilman moottorin johtimien vaihtoa.
[0] * Normaali Moottori pyörii myötäpäivään, kun taajuus-
muuttaja on kytketty moottoriin U⇒U, V⇒V ja
W⇒W.
[1] Käänteinen Moottori pyörii vastapäivään, kun taajuus-
muuttaja on kytketty moottoriin U⇒U, V⇒V ja
W⇒W.
1-07 Motor Angle Oset Adjust
Alue: Toiminto:
HUOMAUTUS!
Tämä parametri on käytettävissä
ainoastaan FC 302 -taajuusmuuttajassa ja
Tämän parametrin avulla taajuusmuuttajan
joko normaalille tai suurelle ylikuormitukselle.
Tarkista aina tekniset tiedot käyttöoppaasta tai
[0] * Suuri
momentti
[1] Normaali
momentti
suunnitteluoppaasta käytettävissä olevan
lähtövirran varmistamiseksi, kun valitset
taajuusmuuttajan kokoa.
Sallii jopa 160 % ylimomentin.
Ylisuurelle moottorille - sallii jopa 110 %
ylimomentin.
0* [Manual] Tämän vaihtoehdon toiminnallisuus riippuu
1-05 Paikall. tilan kong.
Optio: Toiminto:
Valitse, mitä sovelluksen konguraatiotilaa
(parametri 1-00 Konguraatiotila), siis
sovelluksen ohjausperiaatetta, käytetään, kun
paikallinen (LCP) ohjearvo on aktiivinen.
Paikallinen ohjearvo voi olla aktiivinen
ainoastaan, kun parametri 3-13 Ohjearvon
paikka on [0] Yht. käsi/aut.käytt tai [2]
Paikallinen. Oletusarvon mukaan paikallisoh-
jearvo on aktiivinen ainoastaan
käsikäyttötilassa.
[0] Av. piirin
nop.ohj.
[1] Sulj. piirin
nop.ohj.
[2] * Kuten tila par
1-00
[1] Auto Taajuusmuuttaja säätää moottorin kulmapoik-
[2] Auto
Every Start
[3] O Tämän vaihtoehdon valitseminen poistaa
[4] Once with
Store
1-06 Suunta myötäpäivään
Optio: Toiminto:
HUOMAUTUS!
Tätä parametria ei voi muokata
38 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
moottorin käydessä.
ainoastaan yhdessä takaisinkytkennällä
varustetun PM-moottorin kanssa.
takaisinkytkentälaitteen tyypistä. Tämä vaihtoehto
asettaa taajuusmuuttajan käyttämään
parametrissa parametri 1-41 Moottorinkulman
Oset määritettyä moottorin kulmapoikkeamaa,
jos käytössä on absoluuttinen takaisinkytkentälaite.
Jos valittuna on inkrementaalinen takaisinkytkentälaite, taajuusmuuttaja muuntaa moottorin
kulmapoikkeaman automaattisesti virrankytkennän jälkeisen ensimmäisen käynnistyksen
aikana tai kun moottorin tietoja muutetaan.
keamaa automaattisesti virrankytkennän jälkeisen
ensimmäisen käynnistyksen aikana tai kun
moottorin tiedot ovat muuttuneet valitusta
takaisinkytkentälaitteesta riippumatta. Tämä
tarkoittaa, että asetukset Manual ja Auto ovat
inkrementtienkooderissa identtisiä.
Taajuusmuuttaja säätää moottorin kulmapoikkeamaa automaattisesti jokaisen käynnistyksen
aikana tai kun moottorin tiedot ovat muuttuneet.
automaattisen poikkeaman säädön käytöstä.
Tämä vaihtoehto päivittää parametrin
parametri 1-41 Moottorinkulman Oset automaat-
tisesti, kun kulman arvo on 0. Vaihtoehto on
käytettävissä ainoastaan absoluuttisille takaisinkytkentälaitteille. Toiminto käyttää roottorin
tunnistusta ja käyttää sitten tasavirtapitoa
poikkeaman säädön tarkemmaksi tekemiseen.
Page 41
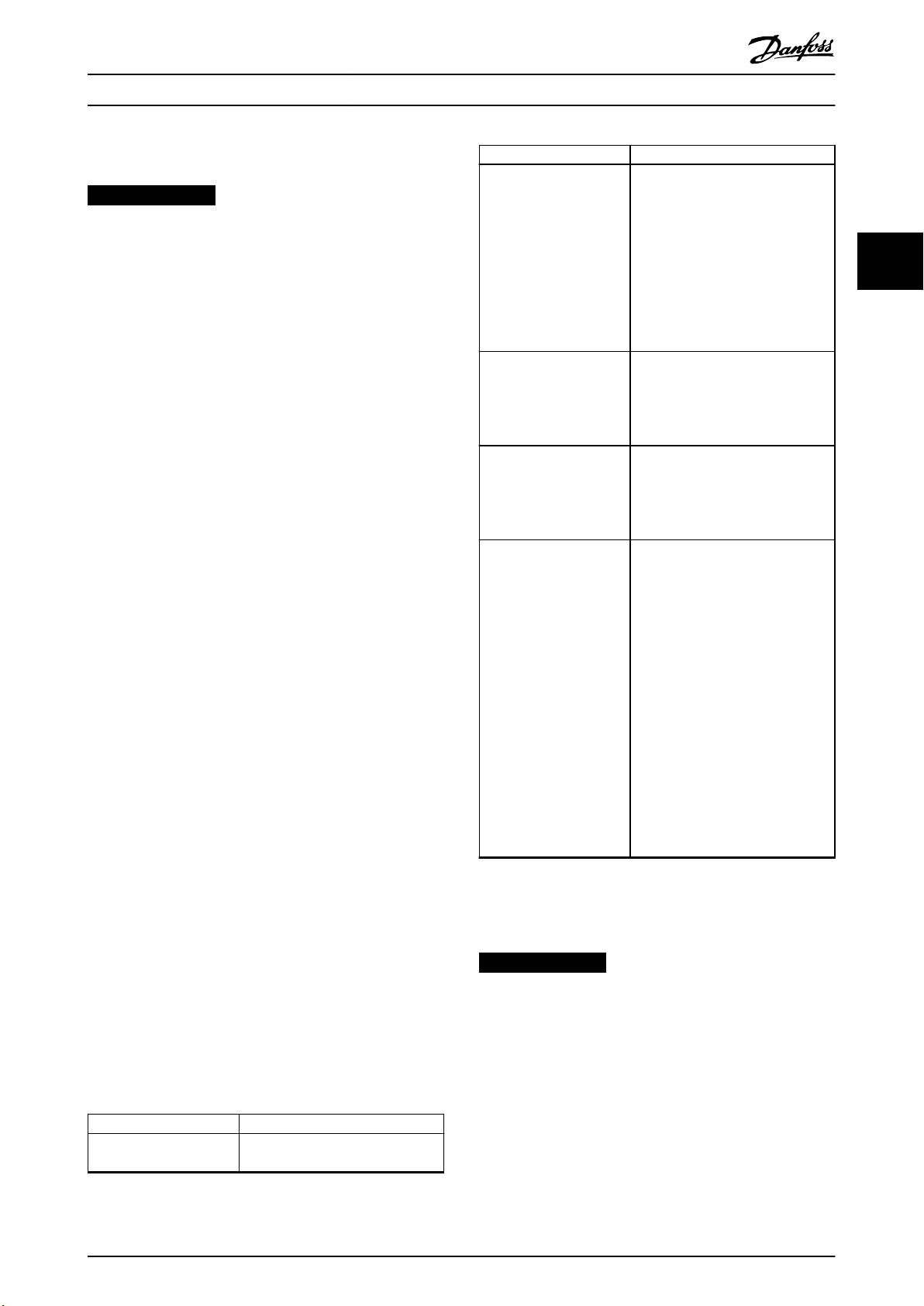
Parametrien kuvaukset Ohjelmointiopas
3.2.2 1-1* Moottorin valinta
HUOMAUTUS!
Tämän parametriryhmän parametreja ei voi muokata
moottorin käydessä.
3.2.3 Asynkronisen moottorin asetukset
Anna seuraavat moottoritiedot. Tiedot ovat moottorin
tyyppikilvessä.
1. Parametri 1-20 Moottorin teho [kW] tai
parametri 1-21 Moott. teho [hv].
2. Parametri 1-22 Moottorin jännite.
3. Parametri 1-23 Moottorin taajuus.
4. Parametri 1-24 Moottorin virta.
5. Parametri 1-25 Moottorin nimellisnopeus.
Kun laite käy Flux-ohjausperiaatteen avulla tai kun VVC+tilassa halutaan optimaalinen suorituskyky, seuraavien
parametrien määrittämiseen vaaditaan lisää moottoritietoja.
Tiedot ovat moottorin datalehdellä (nämä tiedot eivät
yleensä ole moottorin tyyppikilvessä). Suorita täydellinen
automaattinen moottorin sovitus (AMA) parametrilla
parametri 1-29 Automaattinen moottorin sovitus (AMA) [1]
Täyd. AMA käytt. tai anna parametrit manuaalisesti.
Parametri 1-36 Rautahäviön resistanssi (Rfe) syötetään aina
manuaalisesti.
1. Parametri 1-30 Staattorin resistanssi (Rs).
2. Parametri 1-31 Roottorin resistanssi (Rr).
3. Parametri 1-33 Staattorin vuodon resistanssi (X1).
4. Parametri 1-34 Roottorin vuodon reaktanssi (X2).
5. Parametri 1-35 Pääreaktanssi (Xh).
6. Parametri 1-36 Rautahäviön resistanssi (Rfe).
Sovellus Asetukset
Korkean inertian
sovellukset
Suuri kuorma pienellä
nopeudella
Kuormaton sovellus Saat tasaisemman moottorin
Ainoastaan anturiton Fluxohjausperiaate
Parametri 1-66 Min.virta pienellä
nopeudella.
Suurenna virtaa oletusarvon ja
suurimman arvon väliseen arvoon
sovelluksesta riippuen.
Määritä sovellusta vastaavat
ramppiajat. Liian nopea ramppiaika
aiheuttaa ylivirran tai ylimomentin.
Liian nopea ramppi aiheuttaa ylijännitelaukaisun.
Parametri 1-66 Min.virta pienellä
nopeudella.
Suurenna virtaa oletusarvon ja
suurimman arvon väliseen arvoon
sovelluksesta riippuen.
toiminnan alentamalla momentin
värähtelyä ja värinää säätämällä
arvoa parametri 1-18 Min. Current at
No Load.
Säädä arvoa parametri 1-53 Mallin
vaihtotaajuus.
Esimerkki 1: Jos moottori oskilloi
arvolla 5 Hz ja dynaamista tehoa
tarvitaan arvolla 15 Hz, aseta
parametri 1-53 Mallin vaihtotaajuusarvoksi 10 Hz.
Esimerkki 2: Jos sovellus edellyttää
dynaamisia kuorman muutoksia
alhaisella nopeudella, pienennä
parametri 1-53 Mallin vaihtotaajuusarvoa. Tarkkaile moottorin toimintaa
ja varmista, että mallin vaihtonopeutta ei pienennetä liikaa. Väärän
mallin siirtotaajuuden oireita ovat
moottorin oskillointi tai taajuusmuuttajan laukaisu.
3 3
Sovelluskohtainen säätö ajettaessa VVC
+
Taulukko 3.3 Flux-sovellusten suositukset
VVC+ on hyvä yleinen ohjaustila. Useimmissa tilanteissa sen
suorituskyky on optimaalinen ilman lisäsäätöjä. Suorita
3.2.4 PM-moottorin asetus
täydellinen AMA parhaan suorituskyvyn takaamiseksi.
Sovelluskohtainen säätö ajettaessa Flux-ohjausta
Flux-ohjausperiaate on suositelluin ohjausperiaate optimaa-
HUOMAUTUS!
Koskee ainoastaan mallia FC 302.
liseen akselitehoon dynaamisissa sovelluksissa. Suorita
AMA, sillä tämä ohjaustila edellyttää tarkkoja moottori-
Tässä osassa kuvataan, miten PM-moottori määritetään.
tietoja. Sovelluksesta riippuen saatetaan tarvita lisäsäätöjä.
Katso sovellukseen liittyviä suosituksia kohdasta
Taulukko 3.3.
Alkuohjelmoinnin vaiheet
Aktivoi PM-moottorin käyttö valitsemalla [1] PM, ei avonapa
SPM kohdassa parametri 1-10 Moott. rakenne.
Sovellus Asetukset
Alhaisen inertian
sovelluksiin
Merkitse lasketut arvot muistiin.
Moottoritietojen ohjelmointi
Kun yksi PM-moottoreista on valittu, PM-moottoriin liittyvät
parametrit parametriryhmissä 1-2* Moottoridata, 1-3* Laaj.
moottoritied. ja 1-4* Laaj. moottoritied. II ovat aktiivisia.
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 39
Page 42
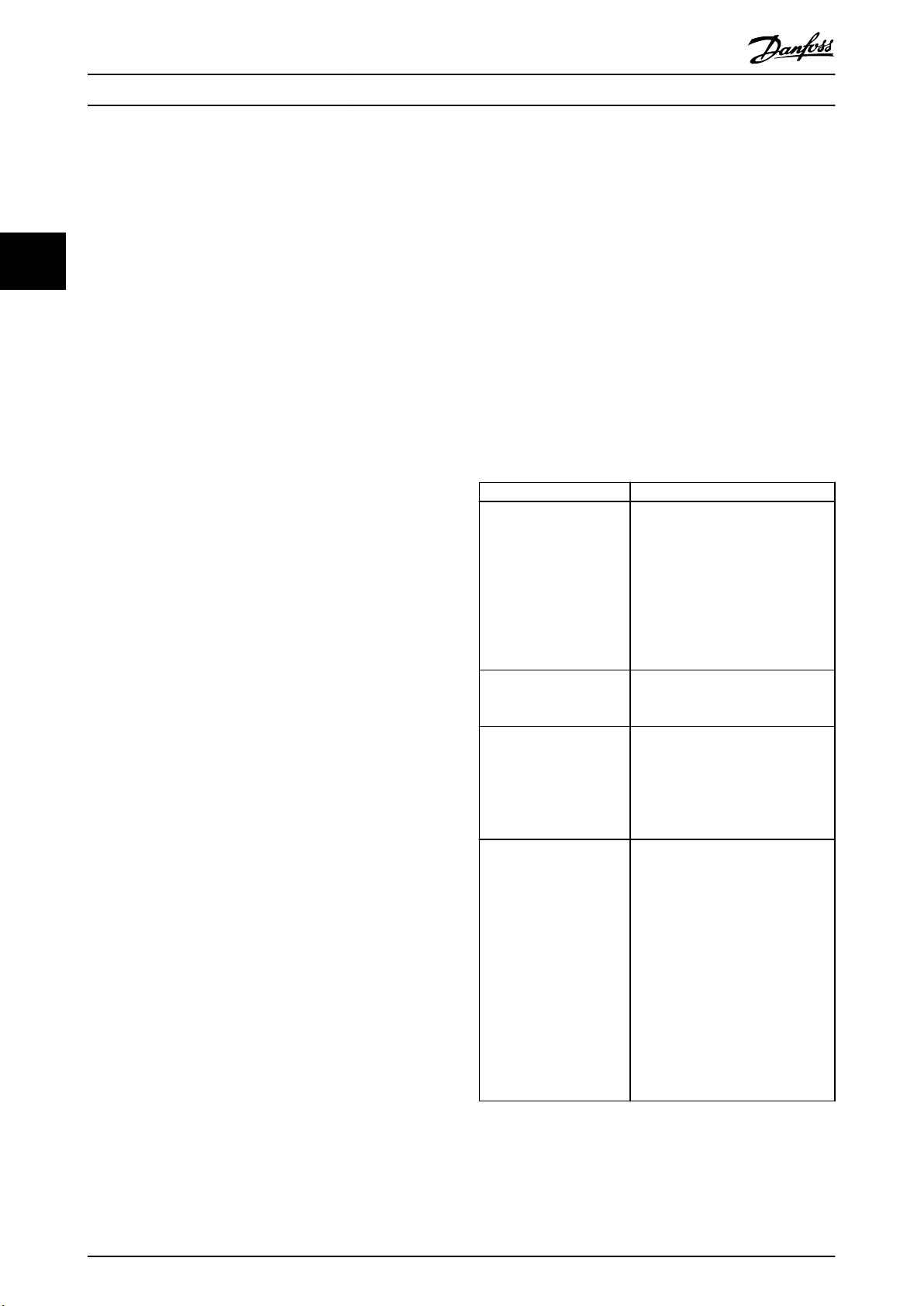
Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
Tarvittavat tiedot ovat moottorin tyyppikilvessä ja
moottorin datalehdellä.
Ohjelmoi seuraavat parametrit luetellussa järjestyksessä:
1. Parametri 1-24 Moottorin virta.
2. Parametri 1-25 Moottorin nimellisnopeus.
33
3. Parametri 1-26 Moott. jatk. nimell.momentti.
4. Parametri 1-39 Moottorin napaluku.
Suorita täydellinen AMA käyttämällä
parametri 1-29 Automaattinen moottorin sovitus (AMA) [1]
Täyd. AMA käytt.
Jos täydellistä AMA:a ei tehdä, aseta seuraavat parametrit
manuaalisesti:
1. Parametri 1-30 Staattorin resistanssi (Rs)
Syötä linja yhteiseen staattorikäämin resistanssiin
(Rs). Jos käytettävissä on ainoastaan tiedot linjasta
taajuusmuuttaja tekee roottorin tunnistuksen. Tämä ei
vahingoita moottoria.
Paikoitus
Tämä toiminto on suositeltava sovelluksille, joissa moottori
pyörii hitaalla nopeudella, esimerkiksi puhallinsovellusten
tuulimyllyilmiö. Parametri 2-06 Paikoitusvirta ja
parametri 2-07 Paikoitusaika ovat säädettävissä. Suurenna
näiden parametrien tehdasasetuksia sovelluksissa, joissa on
kyseessä suuri hitaus.
Sovelluskohtainen säätö ajettaessa VVC
+
VVC+ on hyvä yleinen ohjaustila. Useimmissa tilanteissa sen
suorituskyky on optimaalinen ilman lisäsäätöjä. Suorita
täydellinen AMA parhaan suorituskyvyn takaamiseksi.
Käynnistä moottori nimellisnopeudella. Jos sovellus ei käy
hyvin, tarkista VVC+ PM -asetukset. Taulukko 3.4 sisältää
suosituksia eri sovelluksille
linjaan, se on jaettava 2:lla linjasta yhteiseen arvon saavuttamiseksi.
2. Parametri 1-37 d-akselin induktanssi (Ld)
Syötä PM-moottorin linjasta yhteiseen -arvo
suoran akselin induktanssiin.
Jos käytettävissä on ainoastaan tiedot linjasta
linjaan, se on jaettava 2:lla linjasta yhteiseen arvon saavuttamiseksi.
3. Parametri 1-40 Paluu EMF nop. 1000 1/min.
Syötä linjasta linjaan PM-moottorin SMV:n
palautus 1000 kierrosta minuutissa (rpm) (RMSarvo). SMV:n palautusarvo on PM-moottorin
tuottama jännite silloin, kun taajuusmuuttajaa ei
ole kytketty ja akselia pyöritetään ulkopuolelta.
Yleensä se ilmoitetaan suhteessa moottorin
nimellisnopeuteen tai 1000 kierrokseen
minuutissa kahden linjan väliltä mitattuna. Jos
arvoa ei ole saatavana moottorin nopeudella
1000 kierrosta minuutissa (rpm), laske oikea arvo
seuraavasti:
Jos SMV:n palautus on esimerkiksi 320 V
nopeudella 1800 kierrosta minuutissa (rpm), se
voidaan laskea kierrosten ollessa 1000 RPM
seuraavasti:
SMV:n palautus = (jännite/RPM)x1000 =
(320/1800)x1000 = 178.
Testaa moottorin toiminta
1. Käynnistä moottori pienellä nopeudella (100–200
kierrosta minuutissa (rpm)). Jos moottori ei pyöri,
tarkista asennus, yleinen ohjelmointi ja moottorin
tiedot.
2. Tarkasta, että käynnistystoiminto kohdassa
parametri 1-70 Käynnistystila vastaa sovelluksen
vaatimuksia.
Sovellus Asetukset
Alhaisen inertian
sovelluksiin
I
Load/IMotor
Alhaisen inertian
sovelluksiin
50>I
Korkean inertian
sovellukset
I
Load/IMotor
Suuri kuorma pienellä
nopeudella
<30 % (nimellisnopeus)
<5
Load/IMotor
Taulukko 3.4 Suositukset eri sovelluksille
>5
>50
Suurenna parametri 1-17 Jännitteen
suodatinaikavakio-arvoa kertoimella
5–10.
Pienennä arvoa
parametri 1-14 Vaimennuksen
vahvistus.
Pienennä arvoa
parametri 1-66 Min.virta pienellä
nopeudella (<100 %).
Säilytä oletusarvot.
Suurenna parametri 1-14 Vaimen-
nuksen vahvistus-,
parametri 1-15 Suodatinaikavakio,
hidas nopeus- ja
parametri 1-16 Suodatinaikavakio,
suuri nopeus-arvoa.
Suurenna parametria
parametri 1-17 Jännitteen suodatinaikavakio
Säädä käynnistysmomenttia suurentamalla parametri 1-66 Min.virta
pienellä nopeudella-arvoa. 100 %
tuottaa käynnistysmomentiksi
nimellismomentin. Tämä parametri
on riippuvainen arvoista
parametri 30-20 High Starting Torque
Time [s] ja parametri 30-21 High
Starting Torque Current [%]). Yli
100 % virtatason käyttäminen
pitkään voi ylikuumentaa moottorin.
Roottorin tunnistus
Tätä toimintoa suositellaan sovelluksissa, joissa moottori
käynnistyy pysähdyksistä esimerkiksi pumpuissa ja kuljettimissa. Joissakin moottoreissa kuuluu ääni, kun
Jos moottori alkaa oskilloida tietyllä nopeudessa,
suurennaparametri 1-14 Vaimennuksen vahvistus -arvoa.
Suurenna arvoa pienin askelin. Moottorista riippuen tämän
40 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 43

Parametrien kuvaukset Ohjelmointiopas
parametrin voi asettaa 10 % tai 100 % oletusarvoa
suuremmaksi.
Sovelluskohtainen säätö ajettaessa Flux-ohjausta
Flux-ohjausperiaate on suositelluin ohjausperiaate optimaaliseen akselitehoon dynaamisissa sovelluksissa. Suorita
AMA, sillä tämä ohjaustila edellyttää tarkkoja moottoritietoja. Sovelluksesta riippuen saatetaan tarvita lisäsäätöjä.
Katso sovellukseen liittyviä suosituksia kohdasta
kappale 3.2.3 Asynkronisen moottorin asetukset .
3.2.5
SynRM-moottorin asetukset VVC+:n
avulla
Tässä osassa kuvataan, miten SynRM-moottori määritetään
VVC+:n avulla.
HUOMAUTUS!
SmartStart-avustaja kattaa SynRM-moottorien perusasetusten määrittämisen.
Alkuohjelmoinnin vaiheet
Ota SynRM-moottorin toiminta käyttöön valitsemalla [5]
Sync. Reluktanssi kohdassa parametri 1-10 Moott. rakenne.
Moottoritietojen ohjelmointi
Alkuohjelmoinnin vaiheiden jälkeen SynRM-moottoriin
liittyvät parametrit parametriryhmissä 1-2* Moottoridata,
1-3* Laaj., moottoritied. ja 1-4* Laaj. moottoritied. II ovat
aktiivisia.
Käytä moottorin tyyppikilven ja moottorin datalehden
tietoja seuraavien parametrien ohjelmoimiseen mainitussa
järjestyksessä:
1. Parametri 1-23 Moottorin taajuus.
2. Parametri 1-24 Moottorin virta.
3. Parametri 1-25 Moottorin nimellisnopeus.
4. Parametri 1-26 Moott. jatk. nimell.momentti.
Suorita täydellinen AMA käyttämällä
parametri 1-29 Automaattinen moottorin sovitus (AMA) [1]
Täyd. AMA käytt. tai anna seuraavat parametrit manuaa-
lisesti.
1. Parametri 1-30 Staattorin resistanssi (Rs).
2. Parametri 1-37 d-akselin induktanssi (Ld).
3. Parametri 1-44 d-axis Inductance Sat. (LdSat).
4. Parametri 1-45 q-axis Inductance Sat. (LqSat).
5. Parametri 1-48 Inductance Sat. Point.
Sovelluskohtaiset säädöt
Käynnistä moottori nimellisnopeudella. Jos sovellus ei käy
hyvin, tarkista VVC+ SynRM -asetukset. Kohdassa
Taulukko 3.5 on sovelluskohtaisia suosituksia:
Sovellus Asetukset
Alhaisen inertian
sovelluksiin
I
Load/IMotor
Alhaisen inertian
sovelluksiin
50>I
Korkean inertian
sovellukset
I
Load/IMotor
Suuri kuorma pienellä
nopeudella
<30 % (nimellisnopeus)
Dynamiikan sovellukset Suurenna erittäin dynaamisissa
Alle 18 kW (24 hv)
moottorikoot
<5
Load/IMotor
Taulukko 3.5 Suositukset eri sovelluksille
>5
>50
Suurenna parametri 1-17 Jännitteen
suodatinaikavakio-arvoa kertoimella
5–10.
Pienennä arvoa
parametri 1-14 Vaimennuksen
vahvistus.
Pienennä arvoa
parametri 1-66 Min.virta pienellä
nopeudella (<100 %).
Säilytä oletusarvot.
Suurenna parametri 1-14 Vaimen-
nuksen vahvistus-,
parametri 1-15 Suodatinaikavakio,
hidas nopeus- ja
parametri 1-16 Suodatinaikavakio,
suuri nopeus-arvoa.
Suurenna parametria
parametri 1-17 Jännitteen suodatinaikavakio
Säädä käynnistysmomenttia suurentamalla parametri 1-66 Min.virta
pienellä nopeudella-arvoa. 100 %
tuottaa käynnistysmomentiksi
nimellismomentin. Tämä parametri
on riippuvainen arvoista
parametri 30-20 High Starting Torque
Time [s] ja parametri 30-21 High
Starting Torque Current [%]). Yli
100 % virtatason käyttäminen
pitkään voi ylikuumentaa moottorin.
sovelluksissa parametri 14-41 AEO:n
minimimagnetointi-arvoa. Parametrin
parametri 14-41 AEO:n minimimagnetointi säätäminen varmistaa hyvän
tasapainon energiatehokkuuden ja
dynamiikan välillä. Aseta pienin
taajuus, jolla taajuusmuuttaja käyttää
pienintä magnetisointia, säätämällä
parametria parametri 14-42 AEO:n
minimitaajuus.
Vältä lyhyitä rampin laskuaikoja.
Jos moottori alkaa oskilloida tietyllä nopeudessa,
suurennaparametri 1-14 Vaimennuksen vahvistus -arvoa.
Suurenna vaimennuksen vahvistusarvoa pienin askelin.
Moottorista riippuen tämän parametrin voi asettaa 10 % tai
100 % oletusarvoa suuremmaksi.
3 3
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 41
Page 44

Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
1-10 Moott. rakenne
Optio: Toiminto:
Valitse moottorin rakenteen tyyppi
[0]*Asynkron. Käytä asynkronisille moottoreille.
33
[1] PM, ei
avonapa
SPM
Käytä avonapaisille tai ei-avonapaisille PMmoottoreille.
PM-moottorit jaetaan kahteen ryhmään ja
niissä on joko pinta-asennetut (SPM)/eiavonapaiset magneetit tai sisäisesti asennetut
(IPM)/avonapaiset magneetit.
HUOMAUTUS!
Vaihtoehto on käytettävissä ainoastaan
mallille FC 302.
[2] PM, salient
IPM
Käytä avonapaisille tai ei-avonapaisille PMmoottoreille.
PM-moottorit jaetaan kahteen ryhmään ja
niissä on joko pinta-asennetut (SPM)/eiavonapaiset magneetit tai sisäisesti asennetut
(IPM)/avonapaiset magneetit.
HUOMAUTUS!
1-11 Motor Model
Optio: Toiminto:
Asetukset ladataan automaattisesti tälle
tietylle moottorille.
[11] Danfoss
OGD V210
Käytettävissä ainoastaan kun [1] PM, non-
salient SPM on valittu parametrille
parametri 1-10 Moott. rakenne. Käytettävissä
ainoastaan malleille T4, T5 0.75–3 kW
tehoisina. Asetukset ladataan automaattisesti
tälle tietylle moottorille.
1-14 Vaimennuksen vahvistus
Alue: Toiminto:
140%* [0 -
250 %]
Vaimennuksen vahvistus vakauttaa kestomagneettimoottorin käymään tasaisesti ja vakaasti.
Vaimennuksen vahvistuksen arvo ohjaa
kestomagneettikoneen dynaamista tehoa. Suuri
vaimennuksen vahvistus tuottaa suuren
dynaamisen tehon ja pieni vaimennuksen
vahvistus tuottaa alhaisen dynaamisen tehon.
Dynaaminen teho liittyy koneen tietoihin ja
kuorman tyyppiin. Jos vaimennuksen vahvistusarvo on liian pieni tai suuri, ohjaus muuttuu
epävakaaksi.
Vaihtoehto on käytettävissä ainoastaan
mallille FC 302.
1-15 Suodatinaikavakio, hidas nopeus
Alue: Toiminto:
[5] SynRM Käytä synkronisille reluktanssimoottoreille.
HUOMAUTUS!
Vaihtoehto on käytettävissä ainoastaan
mallille FC 302.
Tämä vaihtoehto on täysin toiminnallinen laiteohjelmiston versiosta 7.31
alkaen. Ota yhteys Danfoss -yritykseen
ennen tämän vaihtoehdon käyttämistä
taajuusmuuttajassa, jossa on vanhempi
laiteohjelmistoversio.
1-11 Motor Model
Optio: Toiminto:
Asettaa automaattisesti tehdasasetukset
valitulle moottorille. Jos oletusarvoa Std.
Asynchron käytetään, määritä asetukset
manuaalisesti valinnan parametri 1-10 Moott.
rakenne mukaisesti.
[1] Std.
Asynkron.
[2] Std. PM, non
salient
[10] Danfoss
OGD LA10
Oletusarvon mukaan käytettävä moottorin
malli, kun parametrissa parametri 1-10 Moott.
rakenne on valittu [0] Asynchron.
Käytettävissä ainoastaan kun [1] PM, non-
salient SPM on valittu parametrille
parametri 1-10 Moott. rakenne.
Käytettävissä ainoastaan kun [1] PM, nonsalient SPM on valittu parametrille
parametri 1-10 Moott. rakenne. Käytettävissä
ainoastaan malleille T4, T5 1,5–3 kW tehoisina.
Size related* [0.01 - 20s]Tätä aikavakiota käytetään alle
10 %:n nimellisnopeudella. Lyhyt
vaimennuksen aikavakio tuottaa
nopean ohjauksen. Mutta jos arvo on
liian lyhyt, ohjauksesta tulee
epävakaa.
1-16 Suodatinaikavakio, suuri nopeus
Alue: Toiminto:
Size related* [0.01 - 20s]Tätä aikavakiota käytetään yli 10 %:n
nimellisnopeudella. Lyhyt vaimennuksen aikavakio tuottaa nopean
ohjauksen. Mutta jos arvo on liian
lyhyt, ohjauksesta tulee epävakaa.
1-17 Jännitteen suodatinaikavakio
Alue: Toiminto:
Size
related*
[0.001 - 1 s] Pienentää suuritaajuuksisen
värähtelyn vaikutusta ja järjestelmän
resonanssia syöttöjännitteen laskutoimituksessa. Ilman tätä suodatinta
virtavärähtelyt voivat vääristää
lasketun jännitteen ja vaikuttaa järjestelmän vakauteen.
42 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 45
Parametrien kuvaukset Ohjelmointiopas
1-18 Min. Current at No Load
Alue: Toiminto:
0 %* [0 - 50 %] Säädä tätä parametria moottorin tasaisemman
toiminnan tuottamiseksi,
3.2.6 1-2* Moottoridata
Tämä parametriryhmä sisältää syötettävän datan kytketyn
moottorin tyyppikilvestä.
HUOMAUTUS!
Näiden parametrien arvon muuttaminen vaikuttaa
muiden parametrien asetukseen.
HUOMAUTUS!
Seuraavilla parametreilla ei ole vaikutusta, kun
parametri 1-10 Moott. rakenne on [1] PM, non-salient SPM,
[2] PM, salient IPM, [5] Sync. Reluctance:
Parametri 1-20 Moottorin teho [kW].
•
Parametri 1-21 Moott. teho [hv].
•
Parametri 1-22 Moottorin jännite.
•
Parametri 1-23 Moottorin taajuus.
•
1-22 Moottorin jännite
Alue: Toiminto:
mukaan. Oletusarvo vastaa laitteen
nimellislähtötehoa.
1-23 Moottorin taajuus
Alue: Toiminto:
Size
related*
[20 1000
Hz]
HUOMAUTUS!
Ohjelmistoversiosta 6.72 alkaen taajuusmuuttajan lähtötaajuus on rajoitettu
590 Hz:iin.
Valitse moottorin taajuusarvo moottorin
tyyppikilven tiedoista. Jos valittu arvo on muu
kuin 50 Hz tai 60 Hz, kuormituksesta riippumattomia asetuksia on korjattava kohdissa
parametri 1-50 Moott. magnetisointi, kun
nopeus 0 - parametri 1-53 Mallin vaihtotaajuus.
Käytettäessä 230/400 V moottoreita 87 Hz
taajuudella, aseta tyyppikilpitiedot 230 V / 50
Hz mukaan. Jos käytät 87 Hz taajuudella,
mukauta parametri 4-13 Moott. nopeuden
yläraja [RPM] ja parametri 3-03 Maksimiohjearvo.
3 3
1-20 Moottorin teho [kW]
Alue: Toiminto:
Size
related*
[ 0.09 -
3000.00
kW]
HUOMAUTUS!
Tätä parametria ei voi muokata
moottorin käydessä.
Ilmoita moottorin nimellisteho (kW)
moottorin tyyppikilven tietojen mukaan.
Oletusarvo vastaa taajuusmuuttajan
nimellislähtöä.
Tämä parametri näkyy LCP:ssä, jos
parametri 0-03 Paikalliset asetukset on [0]
Kansainvälinen.
1-21 Moott. teho [hv]
Alue: Toiminto:
Size
related*
[ 0.09 -
3000.00 hp]
Ilmoita moottorin nimellisteho (HP)
moottorin tyyppikilven tietojen
mukaan. Oletusarvo vastaa laitteen
nimellislähtötehoa. Tämä parametri
näkyy LCP:ssä, jos
parametri 0-03 Paikalliset asetukset on
[1] US.
1-22 Moottorin jännite
Alue: Toiminto:
Size related* [ 10 - 1000 V] Ilmoita moottorin nimellisjännite
moottorin tyyppikilven tietojen
1-24 Moottorin virta
Alue: Toiminto:
Size
related*
[ 0.10 -
10000.00 A]
Ilmoita moottorin nimellinen virtaarvo moottorin tyyppikilven
tietojen mukaan. Tätä tietoa
käytetään vääntömomentin,
moottorin ylikuormitussuojan jne.
laskentaan.
1-25 Moottorin nimellisnopeus
Alue: Toiminto:
Size
related*
[10 - 60000
RPM]
Ilmoita moottorin nimellisnopeusarvo moottorin tyyppikilven
tietojen mukaan. Tätä tietoa
käytetään moottorin automaattisten
kompensointien laskentaan. n
ns - n
.
slip
1-26 Moott. jatk. nimell.momentti
Alue: Toiminto:
Size
related*
[0.1 -
100000.0
Nm]
Ilmoita arvo moottorin tyyppikilven
tietojen mukaan. Oletusarvo vastaa
nimellislähtötehoa. Tämä parametri on
käytettävissä, kun parametri 1-10 Moott.
rakenne on [1] PM, ei avonapa SPM,
parametria voi siis käyttää ainoastaan
kestomagneettimoottoreille ja ei
avonapa SPM -moottoreille.
m,n
=
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 43
Page 46

Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
1-29 Automaattinen moottorin sovitus (AMA)
Optio: Toiminto:
HUOMAUTUS!
Tätä parametria ei voi muokata
moottorin käydessä.
33
AMA-toiminto optimoi dynaamisen moottorin
tehon optimoimalla automaattisesti moottorin
lisäparametrit (parametrit
parametri 1-30 Staattorin resistanssi (Rs) parametri 1-35 Pääreaktanssi (Xh)) moottorin
ollessa pysähdyksissä.
Aktivoi AMA-toiminto painamalla [Hand on] näppäintä valittuasi Täyd. AMA käytt. tai [2]
Rajoit. AMA käyttöön. Katso myös Suunnitteluoppaan kohta Automaattinen moottorin
sovitus. Tavallisen suorituksen ja lopetuksen
jälkeen näytössä on teksti: Lopeta AMA
painamalla [OK]. Kun olet painanut [OK]-
näppäintä, taajuusmuuttaja on valmiina
käyttöön.
HUOMAUTUS!
Varmista, että arvo on asetettu kohdassa
parametri 14-43 Moott. cos- ennen
AMA II:n suorittamista.
[0]*Ei käytössä
[1] Täyd. AMA
käytt.
[2] Rajoit. AMA
käyttöön
Tekee
AMA:n staattorin resistanssille RS,
•
Roottorin resistanssille Rr,
•
Staattorin vuotoreaktanssille X1,
•
Roottorin vuotoreaktanssille X2 ja
•
Pääreaktanssille X
•
Älä valitse tätä vaihtoehtoa, jos taajuusmuuttajan ja moottorin välillä käytetään LCsuodatinta.
FC 301 Täydellinen AMA ei sisällä Xh-mittausta
mallissa FC 301. Sen sijaan Xh-arvo määritetään
moottorin tietokannasta. RS on paras säätömenetelmä (katso 1-3* Laaj. moottoritiedot).
Parhaan suorituskyvyn takaamiseksi on
suositeltavaa hankkia laajennetut moottoritiedot moottorin valmistajalta, jotta ne voi
syöttää parametreihin parametri 1-31 Roottorin
resistanssi (Rr)–parametri 1-36 Rautahäviön
resistanssi (Rfe).
Täydellistä AMA:a ei voi suorittaa kestomagneettimoottoreille.
Suorittaa järjestelmässä ainoastaan staattorin
resistanssin Rs rajoitetun AMA:n. Tämä
vaihtoehto on käytettävissä tavallisille asynkro-
h
1-29 Automaattinen moottorin sovitus (AMA)
Optio: Toiminto:
nisille moottoreille sekä ei-avonapa
kestomagneettimoottoreille.
[3] Enable
Complete
AMA II
[4] Enable
Reduced
AMA II
Käytä tätä valintaa erikoismoottorien (esim. S3moottorien) ja korkean tehon moottorien
yhteydessä. Toiminnallisuus vastaa valintaa [1]
Täyd. AMA käytt., mutta optimointi tehdään
vääntömomentin kalibroinnin perusteella.
Käytä tätä valintaa erikoismoottorien (esim. S3moottorien) ja korkean tehon moottorien
yhteydessä. Toiminnallisuus vastaa valintaa [2]
Rajoit. AMA käyttöön, mutta optimointi tehdään
vääntömomentin kalibroinnin perusteella.
HUOMAUTUS!
Jotta taajuusmuuttajan sovitus onnistuisi
•
parhaalla mahdollisella tavalla, suorita AMA
kylmälle moottorille.
AMA:a ei voi suorittaa moottorin käydessä.
•
AMA:a ei voi tehdä, jos siniaaltosuodatin on
•
yhdistetty.
HUOMAUTUS!
Moottorin parametriryhmän 1-2* Moottoridata määrittäminen oikein on tärkeää, koska ryhmän parametrit
ovat osa AMA-algoritmia. Tee AMA optimaalisen
dynaamisen moottorin tehon saavuttamiseksi. Se voi
kestää enintään 10 minuuttia riippuen moottorin
nimellistehosta.
HUOMAUTUS!
Vältä ulkoisen väännön tuottamista AMA:n aikana.
HUOMAUTUS!
Jos jotakin parametriryhmän 1-2* Moottoridata
asetuksista muutetaan, parametri 1-30 Staattorin
resistanssi (Rs)–parametri 1-39 Moottorin napaluku,
moottorin lisäparametrit palaavat oletusasetuksiin.
HUOMAUTUS!
AMA toimii ongelmitta 1 moottorin kokoluokkaa
alempana, tyypillisesti se toimii 2 moottorin kokoluokkaa
alempana, vain harvoin 3 kokoa pienempänä eikä
milloinkaan 4 kokoa pienempänä. Huomaa, että mitatun
moottoridatan tarkkuus on huonompi, kun käytetään
taajuusmuuttajan nimelliskokoa pienempiä moottoreita.
44 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 47

130BA065.12
P 1-30
R
Fe
X
h
R'
r
R
s
U
1
I
1
P 1-33
P 1-34
P 1-31P 1-35P 1-36
X'
2δ
X
1δ
Parametrien kuvaukset Ohjelmointiopas
3.2.7 1-3* Laaj. moottoritied.
Moottorin lisätietojen parametrit. Varmista, että kohtien
parametri 1-30 Staattorin resistanssi (Rs)–
parametri 1-39 Moottorin napaluku moottoritiedot vastaavat
moottoria. Oletusasetukset perustuvat vakiomoottorin
arvoihin. Jos moottorin parametreja ei ole asetettu oikein,
taajuusmuuttajajärjestelmässä saattaa esiintyä toimintahäiriö. Suosittelemme AMA:n (automaattinen moottorin
sovitus) suorittamista, jos et tiedä moottorin tietoja. Katso
parametri 1-29 Automaattinen moottorin sovitus (AMA).
Parametriryhmiä 1-3* Laaj. moottoritied. ja 1-4* Laaj. moottoritied. II ei voi muokata moottorin käydessä.
HUOMAUTUS!
X1 + Xh -summan yksinkertainen tarkistustapa on jakaa
moottorin jännite linjasta linjaan arvolla neliöjuuri(3) ja
jakaa tämä arvo moottorin kuormittamattomalla virralla.
[VL-L/sqrt(3)]/INL = X1 + Xh, katso Kuva 3.6. Nämä arvot
ovat tärkeitä moottorin oikeaa magnetointia varten. On
erittäin suositeltavaa tehdä tämä tarkistus korkeanapaisille moottoreille.
Kuva 3.6 Asynkronisen moottorin moottorimallien vastaavuuskaavio
1-30 Staattorin resistanssi (Rs)
Alue: Toiminto:
HUOMAUTUS!
Parametrin arvo päivitetään
jokaisen momentin kalibroinnin
jälkeen, jos vaihtoehto [3] 1st start
with store tai vaihtoehto [4] Every
start with store on valittu
parametrissa parametri 1-47 Torque
Calibration.
1-31 Roottorin resistanssi (Rr)
Alue: Toiminto:
Size
related*
[ 0.0100 -
100.0000
Ohm]
HUOMAUTUS!
Parametrilla Parametri 1-31 Roottorin
resistanssi (Rr) ei ole vaikutusta, kun
parametri 1-10 Moott. rakenne-asetus
on [1] PM, ei avonapa SPM, [5] Sync.
Reluctance.
Paranna akselitehoa asettamalla roottorin
resistanssin Rr arvo jollakin seuraavista
tavoista:
•
•
•
3 3
Suorita AMA moottorin ollessa
kylmä. Taajuusmuuttaja mittaa
arvon moottorista. Kaikki
kompensaatiot palautetaan
arvoon 100 %.
Syötä Rr-arvo manuaalisesti. Kysy
arvo moottorin toimittajalta.
Käytä Rr-oletusasetusta. Taajuusmuuttaja määrittää asetuksen
moottorin tyyppikilven tietojen
pohjalta.
1-30 Staattorin resistanssi (Rs)
Alue: Toiminto:
Size
related*
[ 0.0140 -
140.0000
Ohm]
Aseta staattorin resistanssin arvo linjasta
yhteiseen. Syötä arvo moottorin
datalehdeltä tai suorita AMA moottorin
ollessa kylmä.
1-33 Staattorin vuodon resistanssi (X1)
Alue: Toiminto:
Size
related*
[ 0.0400 -
400.0000
Ohm]
HUOMAUTUS!
Tällä parametrilla on merkitystä
ainoastaan asynkronisissa moottoreissa.
HUOMAUTUS!
Avonapaiset PM-moottorit:
AMA ei ole käytettävissä.
Jos käytettävissä on tiedot linjasta
linjaan, se on jaettava 2:lla linjasta
yhteiseen (tähtipiste) -arvon
saavuttamiseksi. Voit myös mitata
arvon ohmimittarin avulla. Tämä
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 45
ottaa huomioon myös kaapelin
resistanssin. Jaa mitattu arvo
kahdella ja syötä tulos.
Aseta staattorin vuodon reaktanssi
jollakin seuraavista menetelmistä:
Suorita AMA moottorin ollessa
•
kylmä. Taajuusmuuttaja mittaa
arvon moottorista.
Syötä X1-arvo manuaalisesti.
•
Kysy arvo moottorin toimittajalta.
Käytä X1-oletusasetusta.
•
Taajuusmuuttaja määrittää
Page 48

Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
1-33 Staattorin vuodon resistanssi (X1)
Alue: Toiminto:
asetuksen moottorin tyyppikilven tietojen pohjalta.
Katso .Kuva 3.6.
33
HUOMAUTUS!
Parametrin arvo päivitetään
jokaisen momentin kalibroinnin
jälkeen, jos vaihtoehto [3] 1st start
with store tai vaihtoehto [4] Every
start with store on valittu
parametrissa parametri 1-47 Torque
Calibration.
1-35 Pääreaktanssi (Xh)
Alue: Toiminto:
muuttaja mittaa arvon
moottorista.
2. Syötä Xh-arvo manuaalisesti.
Kysy arvo moottorin toimittajalta.
3. Käytä Xh-oletusasetusta.
Taajuusmuuttaja määrittää
asetuksen moottorin tyyppikilven tietojen pohjalta.
1-36 Rautahäviön resistanssi (Rfe)
Alue: Toiminto:
1-34 Roottorin vuodon reaktanssi (X2)
Alue: Toiminto:
Size
related*
[ 0.0400 -
400.0000
Ohm]
HUOMAUTUS!
Tällä parametrilla on merkitystä
ainoastaan asynkronisissa moottoreissa.
Aseta roottorin vuotoreaktanssi jollakin
seuraavista menetelmistä:
Suorita AMA moottorin ollessa
•
kylmä. Taajuusmuuttaja mittaa
arvon moottorista.
Syötä X2-arvo manuaalisesti.
•
Kysy arvo moottorin toimittajalta.
Käytä X2-oletusasetusta.
•
Taajuusmuuttaja määrittää
asetuksen moottorin tyyppikilven tietojen pohjalta.
Katso .Kuva 3.6.
HUOMAUTUS!
Parametrin arvo päivitetään
jokaisen momentin kalibroinnin
jälkeen, jos vaihtoehto [3] 1st start
with store tai vaihtoehto [4] Every
start with store on valittu
parametrissa parametri 1-47 Torque
Calibration.
Size
related*
1-37 d-akselin induktanssi (Ld)
Alue: Toiminto:
Size
related*
[ 0 -
10000.000
Ohm]
[0.0 -
1000.0
mH]
Syötä vastaava rautahäviön resistanssin
(RFe) arvo moottorissa tapahtuvien
rautahäviöiden kompensoimiseksi.
RFe-arvoa ei saa selville AMA:a suorittamalla.
R
-arvo on erityisen tärkeä momentti-
Fe
ohjaussovelluksissa. Jos RFe ei ole
tiedossa, jätä parametrin
parametri 1-36 Rautahäviön resistanssi
(Rfe) arvoksi oletusasetus.
Syötä PM-moottorin linjasta yhteiseen -arvo
suoran akselin induktanssiin. Arvo löytyy
kestomagneettimoottorin tiedoista.
Jos käytettävissä on vain tiedot linjasta
linjaan, se on jaettava 2:lla linja-yhteinen
(tähtipiste) -arvon määrittämiseksi. Voit
myös mitata arvon induktanssimittarin
avulla. Tämä ottaa huomioon myös kaapelin
induktanssin. Jaa mitattu arvo kahdella ja
syötä tulos.
Tämä parametri on käytettävissä vain, jos
parametrin parametri 1-10 Moott. rakenne
asetuksena on [1] PM, ei avonapa SPM
(kestomagneettimoottori) tai [5] Sync.
Reluctance.
Käytä tätä parametria valintaan, jossa on 1
desimaali. Jos valinnassa on 3 desimaalia,
käytä ainoastaan parametria
parametri 30-80 d-akselin induktanssi (Ld)
FC 302.
1-35 Pääreaktanssi (Xh)
Alue: Toiminto:
Size
related*
[ 1.0000 -
10000.0000
Ohm]
Aseta moottorin pääreaktanssi jollakin
seuraavista menetelmistä:
1. Suorita AMA moottorin
ollessa kylmä. Taajuus-
HUOMAUTUS!
Parametrin arvo päivitetään jokaisen
momentin kalibroinnin jälkeen, jos
vaihtoehto [3] 1st start with store tai
vaihtoehto [4] Every start with store
on valittu parametrissa
parametri 1-47 Torque Calibration.
46 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 49

Parametrien kuvaukset Ohjelmointiopas
1-38 q-axis Inductance (Lq)
Alue: Toiminto:
Size related* [0.000 - 1000 mH] Aseta q-akselin induktanssin
arvo. Katso moottorin
datalehti.
1-39 Moottorin napaluku
Alue: Toiminto:
Size related* [2 - 132 ] Syötä moottorin napojen määrä.
Napaluku~nn@ 50 Hz ~nn@ 60 Hz
2 2700–2880 3250–3460
4 1350–1450 1625–1730
6 700–960 840–1153
Taulukko 3.6 Normaalien nopeusalueiden navan numero
Taulukko 3.6 näyttää napojen numeron eri moottorityyppien normaaleilla nopeusalueilla. Aseta muille
taajuuksille suunnitellut moottorit erikseen. Moottorin
napojen arvo on aina parillinen luku, koska se viittaa
napojen, ei napaparien kokonaismäärään. Taajuusmuuttaja
luo par. parametri 1-39 Moottorin napaluku alkuasetuksen
par. parametri 1-23 Moottorin taajuus ja
parametri 1-25 Moottorin nimellisnopeus pohjalta.
1-40 Paluu EMF nop. 1000 1/min
Alue: Toiminto:
Size
related*
[0 9000
V]
HUOMAUTUS!
Tämä parametri on käytettävissä
ainoastaan, kun parametri 1-10 Moott.
rakenne on asetettu valinnoissa, jotka
mahdollistavat PM-moottorit
(kestomagneettimoottorit).
1-40 Paluu EMF nop. 1000 1/min
Alue: Toiminto:
HUOMAUTUS!
PM-moottoreita käytettäessä on
suositeltavaa käyttää jarruvastuksia.
1-41 Moottorinkulman Oset
Alue: Toiminto:
0* [-32768 -
32767 ]
1-44 d-axis Inductance Sat. (LdSat)
Alue: Toiminto:
Size
related*
HUOMAUTUS!
Tämä parametri on käytettävissä vain, jos
parametrin parametri 1-10 Moott. rakenne
asetuksena on [1] PM, ei avonapa SPM
(kestomagneettimoottori).
Syötä oikea PM-moottorin ja yhdistetyn
pulssianturin tai resolverin indeksoidun asennon
(yksi käännös) välinen oset-kulma. Arvoalue 0–
32768 arvoa 0–2 x pii (radiaani). Oset-kulman
arvon hankkiminen: Käytä taajuusmuuttajan
käynnistyksen jälkeen tasavirtapitoa ja syötä
tähän parametriin kohdanparametri 16-20 Moott.
kulma arvo.
[0 - 1000
mH]
Tämä parametri vastaa Ld:n
induktanssin saturaatiota. Ihannetapauksessa tämän parametrin arvo on
sama kuin parametri 1-37 d-akselin
induktanssi (Ld). Jos moottorin toimittaja
on antanut induktiokäyrän, tähän on
annettava induktioarvo, joka on 200 %
nimellisvirrasta.
3 3
Aseta SMV:n palautuksen nimellisarvo
moottorille 1000 kierrosta minuutissa (rpm)
käytettäessä.
SMV:n palautusarvo on PM-moottorin
tuottama jännite silloin, kun taajuusmuuttajaa
ei ole kytketty ja akselia pyöritetään
ulkopuolelta. SMV:n palautusarvo ilmoitetaan
yleensä suhteessa moottorin nimellisnopeuteen tai 1000 kierrokseen minuutissa
kahden linjan väliltä mitattuna. Jos arvoa ei
ole saatavana moottorin nopeudella 1000
kierrosta minuutissa (rpm), laske oikea arvo
seuraavasti. Jos SMV:n palautus on esimerkiksi
320 V nopeudella 1800 kierrosta minuutissa
(rpm), se voidaan laskea seuraavasti
nopeudelle 1000 kierrosta minuutissa (rpm):
Esimerkki
SMV:n palautus 320 V nopeudella 1800
kierrosta minuutissa (rpm) SMV:n palautus =
(jännite/RPM)*1000 = (320/1800)*1000 = 178.
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 47
1-45 q-axis Inductance Sat. (LqSat)
Alue: Toiminto:
Size
related*
[0 - 1000
mH]
Tämä parametri vastaa Lq:n
induktanssin saturaatiota. Ihannetapauksessa tämän parametrin arvo on
sama kuin parametri 1-38 q-axis
Inductance (Lq). Jos moottorin toimittaja
on antanut induktiokäyrän, tähän on
annettava induktioarvo, joka on 200 %
nimellisvirrasta.
1-46 Asennontunnistuksen vahvistus
Alue: Toiminto:
120 %* [20 - 200 %] Säätää testipulssin amplitudin asennon
tunnistuksen aikana käynnistyksen
yhteydessä. Säädä tätä parametria
parantaaksesi mittausta.
Page 50

Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
1-47 Torque Calibration
Optio: Toiminto:
Käytä tätä parametria vääntömomentin arvion
optimointiin täyden nopeuden alueella. Arvioitu
vääntömomentti perustuu akselitehoon, P
33
[0] O
[1] 1st
start
after
pwrup
[2] Every
start
[3] 1st
start
with
store
[4] Every
start
with
store
Rs x I2. Varmista, että arvo Rs on oikein. Tässä
kaavassa arvo Rs on yhtä suuri kuin moottorin,
kaapelin ja taajuusmuuttajan tehohäviö. Kun tämä
parametri on aktiivinen, taajuusmuuttaja laskee Rsarvon käynnistyksen aikana ja varmistaa
optimaalisen vääntömomentin arvion ja optimaalisen
tehon. Käytä tätä ominaisuutta tapauksissa, joissa ei
ole mahdollista muokata kunkin taajuusmuuttajan
arvoa parametri 1-30 Staattorin resistanssi (Rs)
kaapelin pituuden ja taajuusmuuttajan häviöiden
sekä moottorin lämpötilapoikkeaman kompensoimiseksi.
Kalibroi virran kytkemisen jälkeen ensimmäisen
käynnistyksen yhteydessä ja säilyttää arvon, kunnes
se nollataan tehojakson avulla.
Kalibroi jokaisen käynnistyksen yhteydessä ja
kompensoi moottorin lämpötilan mahdollisen
muutoksen edellisen käynnistyksen jälkeen. Arvo
nollataan tehojakson jälkeen.
Taajuusmuuttaja kalibroi vääntömomentin virran
kytkemisen jälkeen tehtävän ensimmäisen käynnistyksen jälkeen. Tätä vaihtoehtoa käytetään moottorin
parametrien päivittämiseen:
Parametri 1-30 Staattorin resistanssi (Rs).
•
Parametri 1-33 Staattorin vuodon resistanssi
•
(X1).
Parametri 1-34 Roottorin vuodon reaktanssi
•
(X2).
Parametri 1-37 d-akselin induktanssi (Ld).
•
Taajuusmuuttaja kalibroi vääntömomentin jokaisen
käynnistyksen yhteydessä ja kompensoi moottorin
lämpötilan mahdollisen muutoksen edellisen
käynnistyksen jälkeen. Tätä vaihtoehtoa käytetään
moottorin parametrien päivittämiseen:
Parametri 1-30 Staattorin resistanssi (Rs).
•
Parametri 1-33 Staattorin vuodon resistanssi
•
(X1).
Parametri 1-34 Roottorin vuodon reaktanssi
•
(X2).
Parametri 1-37 d-akselin induktanssi (Ld).
•
shaft
= Pm -
1-48 Inductance Sat. Point
Alue: Toiminto:
Size
related*
[1 500 %]
HUOMAUTUS!
Aseta tämän parametrin arvo suorittamalla AMA. Muokkaa arvoa
manuaalisesti vain, jos käyttökohde
edellyttää muuta arvoa kuin AMA:n
määrittämä.
Valitse d-akselin induktanssin saturaatiopiste.
Taajuusmuuttaja käyttää tätä arvoa
optimoimaan SynRM-moottorien
suorituskyvyn.
Valitse arvo, joka vastaa pistettä, jossa
induktanssi on yhtä suuri kuin
parametri 1-37 d-akselin induktanssi (Ld):n ja
parametri 1-44 d-axis Inductance Sat. (LdSat):n
keskimääräinen arvo nimellisvirran
prosenttina.
1-49 q-Axis Inductance Saturation Point
Alue: Toiminto:
Size
related*
[ 0 200 %]
HUOMAUTUS!
Aseta tämän parametrin arvo suorittamalla AMA. Muokkaa arvoa
manuaalisesti vain, jos käyttökohde
edellyttää muuta arvoa kuin AMA:n
määrittämä.
Syötä q-akselin induktanssin saturaatiopiste.
Taajuusmuuttaja käyttää tätä arvoa
optimoimaan IPM-moottorien suorituskyvyn.
Valitse arvo, joka vastaa pistettä, jossa
induktanssi on yhtä suuri kuin
parametri 1-38 q-axis Inductance (Lq):n ja
parametri 1-45 q-axis Inductance Sat. (LqSat):n
keskimääräinen arvo nimellisvirran
prosenttina.
48 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 51

Parametrien kuvaukset Ohjelmointiopas
3.2.8 1-5* Kuorm.riippum. as.
1-50 Moott. magnetisointi, kun nopeus 0
Tämä parametri ei ole näkyvissä LCP:ssä.
Alue: Toiminto:
100 %* [0 -
300 %]
1-51 Min.nopeus norm. magnetointi [RPM]
Tämä parametri ei ole näkyvissä LCP:ssä.
Alue: Toiminto:
Size
related*
HUOMAUTUS!
Parametrilla Parametri 1-50 Moott.
magnetisointi, kun nopeus 0 ei ole
vaikutusta, kun parametri 1-10 Moott.
rakenne = [1] PM, ei avonapa SPM.
Käytä tätä parametria yhdessä parametrin
parametri 1-51 Min.nopeus norm. magnetointi
[RPM] kanssa saadaksesi eri lämpökuormituksen
moottorille sen käydessä pienellä nopeudella.
Syötä arvo, joka on prosenttiosuus nimellisestä
magnetointivirrasta. Jos asetus on liian pieni,
moottorin akselin momentti voi pienentyä.
Kuva 3.7 Moottorin magnetointi
[10 300
RPM]
HUOMAUTUS!
Parametrilla
Parametri 1-51 Min.nopeus norm.
magnetointi [RPM] ei ole vaikutusta,
kun parametri 1-10 Moott. rakenne =
[1] PM, ei avonapa SPM.
Aseta haluttu nopeus normaalille magnetisointivirralle. Jos nopeusasetus on
moottorin jättämänopeutta alempi,
parametreilla parametri 1-50 Moott.
magnetisointi, kun nopeus 0 ja
parametri 1-51 Min.nopeus norm.
magnetointi [RPM] ei ole merkitystä.
Käytä tätä parametria parametrin
parametri 1-50 Moott. magnetisointi, kun
nopeus 0 kanssa. Katso Taulukko 3.6.
1-52 Min.nopeus norm. magnetointi [Hz]
Alue: Toiminto:
Size
related*
[ 0 -
250.0 Hz]
Aseta haluttu taajuus normaalille
magnetisointivirralle. Jos taajuus on
asetettu pienemmäksi kuin moottorin
jättämätaajuus, parametri
parametri 1-50 Moott. magnetisointi, kun
nopeus 0 ei ole aktiivinen.
Käytä tätä parametria parametrin
parametri 1-50 Moott. magnetisointi, kun
nopeus 0 kanssa. Katso Kuva 3.7.
1-53 Mallin vaihtotaajuus
Alue: Toiminto:
Size
related*
[ 4 -
HUOMAUTUS!
18.0
Tätä parametria ei voi muokata
Hz]
moottorin käydessä.
Flux-mallin vaihto
Syötä taajuusarvo kahden mallin väliselle
vaihdolle moottorin nopeuden määrittämistä
varten. Valitse arvo parametrien
parametri 1-00
parametri 1-01 Moottorin ohjausperiaate
asetusten perusteella.
Valittavina ovat seuraavat optiot:
•
•
•
Konguraatiotila ja
Vaihto ux-mallin 1 ja ux-mallin 2
välillä.
Vaihto muuttuvan virtatilan ja ux-
mallin 2 välillä.
Ei vaihtoa mallien välillä alhaisessa
nopeudessa, jos parametri 40-50 Flux
Sensorless Model Shift on asetettu
tilaan [0] Pois päältä.
HUOMAUTUS!
Koskee ainoastaan FC 302 -taajuusmuuttajaa.
Flux-malli 1 – Flux-malli 2
Tätä mallia käytetään, kun parametrin
parametri 1-00 Konguraatiotila asetus on [1]
Sulj. piirin nopeus tai [2] Momentti ja parametrin
parametri 1-01 Moottorin ohjausperiaate asetus
on [3] Flux moott. tak.kytk. Tämän parametrin
avulla on mahdollista muokata vaihtopistettä,
jossa taajuusmuuttaja vaihtaa ux-mallin 1 ja
ux-mallin 2 välillä. Siitä on hyötyä eräissä
herkissä nopeus- ja momenttiohjaussovelluksissa.
3 3
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 49
Page 52

P 1-53
130BA146.11
f
out
f
N,M
x 0.125 f
N,M
x 0.1
Flux model 2Flux model 1
P 1-53
130BA147.10
x 0.1
Variable
current
model
Flux model 2
f
out
f
N,M
f
N,M
x 0.125
Moottorin Jännite
Par 1-55 [x]
Lähtötaajuus
Par 1-56 [x]
1-55[5]
1-55[4]
1-55[3]
1-55[2]
1-55[1]
1-55[0]
1-56
[0]
1-56
[1]
1-56
[2]
1-56
[3]
1-56
[4]
1-56
[5]
130BA166.10
Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
1-53 Mallin vaihtotaajuus
Alue: Toiminto:
1-55 U/f-ominaiskäyrä - U
Matriisi [6]
Alue: Toiminto:
Tämä parametri on ryhmäparametri [0–5],
ja se toimii vain, kun parametrin
33
Kuva 3.10 Parametri 1-00 Konguraatiotila =
[1] Sulj. piirin nopeus tai [2] Momentti ja
parametri 1-01 Moottorin ohjausperiaate =
[3] Flux moott. tak.kytk.
Muuttuva virta - ux-malli - anturiton
Tätä mallia käytetään, kun parametrin
parametri 1-00 Konguraatiotila asetus on [0] Av.
piirin nopeus ja parametrin
parametri 1-01 Moottorin ohjausperiaate asetus
on [2] Flux anturiton.
Flux-tilan nopeuden avoimessa piirissä nopeus
määritetään virtamittauksesta.
Arvon f
käy muuttuva virta -mallin mukaan. Arvon f
x 0.1 alapuolella taajuusmuuttaja
norm
norm
x 0.125 yläpuolella taajuusmuuttaja käy ux-
mallin mukaan.
1-56 U/f-ominaiskäyrä - F
Matriisi [6]
Alue: Toiminto:
Size
related*
[ 0 -
1000.0 Hz]
parametri 1-01 Moottorin ohjausperiaate
asetuksena on [0] U/f.
Syötä taajuuspisteet siten, että niistä
muodostuu manuaalisesti moottoria
vastaava U/f-ominaiskäyrä.
Kunkin pisteen jännite määritetään
parametrissa parametri 1-55 U/f-
ominaiskäyrä - U.
Tämä parametri on ryhmäparametri [0–5],
ja se toimii vain, kun parametrin
parametri 1-01 Moottorin ohjausperiaate
asetuksena on [0] U/f.
Kuva 3.11 Parametri 1-00
Konguraatiotila =
[0] Av. piirin nopeus,
parametri 1-01 Moottorin ohjausperiaate =
[2] Flux-anturiton
Kuva 3.12 U/f-ominaiskäyrä
1-54 Voltage reduction in eldweakening
Alue: Toiminto:
0 V* [0 - 100 V] Tämän parametrin arvo alentaa moottorin
kentän heikentämiseen käytettävissä olevaa
maksimijännitettä ja tuottaa enemmän
jännitettä vääntömomentille. Arvon suurentaminen lisää suurella nopeudella
pysähtymisen riskiä.
1-57 Torque Estimation Time Constant
Alue: Toiminto:
150 ms* [50 - 1000
ms]
HUOMAUTUS!
Tämä parametri on käytettävissä
ainoastaan ohjelmistoversiossa
48.XX.
1-55 U/f-ominaiskäyrä - U
Matriisi [6]
Alue: Toiminto:
Size
related*
[0 1000 V]
Syötä jokaiseen taajuuspisteeseen jännite
siten, että niistä muodostuu manuaalisesti
moottoria vastaava U/f-ominaiskäyrä.
Taajuuspisteet on määritetty parametrissa
parametri 1-56 U/f-ominaiskäyrä - F.
50 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Syötä vääntömomentin arvion aikavakio
mallin vaihtopisteen alapuolelle ux-
anturiton -ohjausperiaatteessa.
Page 53

130BA046.11
60%
0%
100%
U
m
Vaihto
f
iähtö
Par.1-60 Par.1-61
Parametrien kuvaukset Ohjelmointiopas
1-58 Pyör. moott. kytk. testipulssien virta
Alue: Toiminto:
Size
related*
[ 0 -
HUOMAUTUS!
200 %
Tämä parametri on saatavana vain VVC
]
+
-taajuusmuuttajalle.
HUOMAUTUS!
Tämä parametri on käytettävissä
ainoastaan PM-moottoreissa.
Asettaa virtatason pyörivään moottoriin
kytkeytymisen testipulsseille, joita käytetään
moottorin suunnan tunnistamiseen. 100 %
tarkoittaa I
välttämään kohinan vaikutus, mutta riittävän
alhaiseksi, jotta tarkkuus ei heikkene (virran on
pystyttävä putoamaan nollaan ennen
seuraavaa pulssia). Pienennä tuotettua vääntömomenttia arvoa pienentämällä.
Asynkronisten moottorien oletusarvo on 30 %,
mutta se saattaa vaihdella PM-moottoreille.
PM-moottorien säätöä varten arvo virittyy
moottorin SMV:n palautuksen ja d-akselin
induktanssin mukaan.
1-59 Pyör. moott. kytk. testipulssien taajuus
Alue: Toiminto:
Size
related*
3.2.9 1-6* Kuorm. riippuv. As.
1-60 Kuormit. kompens. pienellä nopeudella
Alue: Toiminto:
100 %* [0 -
[ 0 500 %]
300 %]
Asynkroninen moottori: Aseta taajuus
pyörivään moottoriin kytkeytymisen
testipulsseille, joita käytetään moottorin
suunnan tunnistamiseen. Asynkronisille
moottoreille arvo 100 % tarkoittaa, että
jättämä kaksinkertaistuu. Pienennä tuotettua
vääntömomenttia arvoa suurentamalla.
Synkronimoottoreille tämä arvo on prosentuaalinen osuus vapaasti pyörivän moottorin
n
-arvosta. Tämän arvon yläpuolella
m,n
tehdään aina kytkeytyminen pyörivään
moottoriin. Tämän arvon alapuolella käynnistymistila valitaan parametrissa
parametri 1-70 Käynnistystila.
Syötä prosenttiarvo, jolla jännite kompensoidaan suhteessa kuormaan, kun moottori
käy pienellä nopeudella ja haluat tuottaa
optimaalisen U/f-ominaiskäyrän. Moottorin
koko määrittää taajuusalueen, jolla tämä
parametri on aktiivinen.
. Säädä arvo riittävän suureksi
m,n
Moottorin koko Siirtymä
0,25–7,5 kW <10 Hz
Kuva 3.13 Siirtymä
1-61 Kuorm. kompens. suurella nopeudella
Alue: Toiminto:
100 %* [0 -
300 %]
Moottorin koko Siirtymä
0,25–7,5 kW >10 Hz
Taulukko 3.7 Siirtymän taajuus
Syötä prosenttiarvo, jolla jännite kompensoidaan suhteessa kuormaan, kun moottori
käy suurella nopeudella ja haluat tuottaa
optimaalisen U/f-ominaiskäyrän. Moottorin
koko määrittää taajuusalueen, jolla tämä
parametri on aktiivinen.
1-62 Jättämäkompensointi
Alue: Toiminto:
Size
related*
[-500
500 %]
Syötä jättämäkompensoinnin %-arvo
kompensoidaksesi toleransseja arvossa n
Jättämäkompensointi lasketaan automaattisesti eli moottorin nimellisnopeuden n
perusteella.
Tämä toiminto ei ole aktiivinen, kun
parametri parametri 1-00 Konguraatiotila on
[1] Sulj. piirin nopeus tai [2] Momentti
momenttiohjaus nopeuden takaisinkytkennällä tai kun parametri
parametri 1-01 Moottorin ohjausperiaate on [0]
U/f erikoismoottoritila.
M,N
M,N
3 3
.
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 51
Page 54

Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
1-63 Jättämäkompensoinnin aikavakio
Alue: Toiminto:
Size
related*
[0.05 5 s]
HUOMAUTUS!
Parametrilla Parametri 1-63 Jättämäkompensoinnin aikavakio ei ole
33
vaikutusta, kun parametri 1-10 Moott.
rakenne = [1] PM, ei avonapa SPM.
Syötä jättämäkompensoinnin reaktionopeus.
Suuri arvo antaa hitaan reagoinnin ja pieni
arvo tekee reagoinnista nopeaa. Jos ilmenee
pieneen taajuuteen liittyviä resonanssiongelmia, käytä suurempaa aika-asetusta.
1-64 Resonanssivaimennus
Alue: Toiminto:
Size
related*
[0 500 %]
HUOMAUTUS!
Parametrilla Parametri 1-64 Resonanssivaimennus ei ole vaikutusta, kun
parametri 1-10 Moott. rakenne = [1] PM,
ei avonapa SPM.
Syötä resonanssin vaimennusarvo. Aseta
parametri 1-64 Resonanssivaimennus ja
parametri 1-65 Resonanssivaimennuksen
aikavakio auttamaan suuritaajuuksisten
resonanssiongelmien poistamisessa.
Resonanssin oskillointia pienennetään
lisäämällä parametrin
parametri 1-64 Resonanssivaimennus arvoa.
1-66 Min.virta pienellä nopeudella
Alue: Toiminto:
Syötä pienin moottorivirta pienellä nopeudella,
katso parametri 1-53 Mallin vaihtotaajuus.
Tämän virran suurentaminen parantaa
moottorin momenttia pienellä nopeudella.
Parametri 1-66 Min.virta pienellä nopeudella on
käytössä ainoastaan, kun parametrin
parametri 1-00 Konguraatiotila asetus on [0]
Av. piirin nopeus. Alle 10 Hz nopeuksilla
taajuusmuuttaja käy moottorin läpi kulkevalla
vakiovirralla.
Yli 10 Hz nopeuksille taajuusmuuttajan
moottorin ux-malli ohjaa moottoria.
Parametri 4-16 Moottoritilan momenttiraja ja/tai
parametri 4-17 Generatiivinen momenttiraja
säätävät automaattisesti parametria
parametri 1-66 Min.virta pienellä nopeudella.
Arvoiltaan suurin parametri säätää parametria
parametri 1-66 Min.virta pienellä nopeudella.
Parametrin parametri 1-66 Min.virta pienellä
nopeudella virta-asetus muodostuu momenttia
tuottavasta virrasta ja magnetointivirrasta.
Esimerkki: Aseta parametrin
parametri 4-16 Moottoritilan momenttiraja
arvoksi 100 % ja parametrin
parametri 4-17 Generatiivinen momenttiraja
arvoksi 60 %. Parametrin
Parametri 1-66 Min.virta pienellä nopeudella
arvoksi säätyy automaattisesti noin 127 %
moottorin koosta riippuen.
1-65 Resonanssivaimennuksen aikavakio
Alue: Toiminto:
5 ms* [5 - 50
ms]
HUOMAUTUS!
Parametrilla Parametri 1-65 Resonanssivaimennuksen aikavakio ei ole
vaikutusta, kun parametri 1-10 Moott.
rakenne = [1] PM, ei avonapa SPM.
Aseta parametri 1-64 Resonanssivaimennus ja
parametri 1-65 Resonanssivaimennuksen
aikavakio auttamaan suuritaajuuksisten
resonanssiongelmien poistamisessa. Syötä
parhaan vaimennuksen tuottava aikavakio.
1-66 Min.virta pienellä nopeudella
Alue: Toiminto:
Size
related*
[ 1 -
HUOMAUTUS!
200 %
Jos parametri 40-50 Flux Sensorless
]
Model Shift-parametrin asetus on [0] Pois
käytöstä, tämä parametri jätetään
huomiotta.
1-67 Kuormitustyyppi
Tämä parametri on käytettävissä ainoastaan mallissa FC 302.
Optio: Toiminto:
[0] * Passiiv.
kuorm.
[1] Aktiiv.
kuorm.
Kuljettimille, puhaltimelle ja pumppusovelluksiin.
Käytä nostosovelluksiin. Tämä vaihtoehto
sallii taajuusmuuttajan rampin nousun
nopeudesta 0 kierrosta minuutissa (rpm).
Kun [1] Aktiiv. kuorm. on valittuna, aseta
parametri maksimimomenttia vastaavalle
parametri 1-66 Min.virta pienellä nopeudella
tasolle.
1-68 Minimi inertia
Alue: Toiminto:
0 kgm²* [0.0000 -
10000.0000
kgm²]
Paranna moottorin momentin
lukemaa ja siten arviota akselin
mekaanisesta vääntömomentista
syöttämällä moottorin inertia. Käytettävissä ainoastaan ux-
ohjausperiaatteessa.
52 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 55

Parametrien kuvaukset Ohjelmointiopas
1-69 Maksimi inertia
Alue: Toiminto:
Size
related*
[0000 -
10000.0000
kgm²]
HUOMAUTUS!
Koskee ainoastaan mallia FC
302.
Tätä parametria ei voi muokata
moottorin käydessä.
Aktiivinen vain avoimessa uxpiirissä. Käytetään
kiihdytysmomentin laskemiseen
pienellä nopeudella. Käytetään
momenttirajan säätimessä.
3.2.10 1-7* Käynnistyssäädöt
1-70 Käynnistystila
Valitse käynnistystila. Tämä tehdään VVC+-ohjausytimen alustamiseksi aikaisemmin vapaasti käyvää moottoria varten. Kumpikin
valinta arvioi nopeuden ja kulman. Aktiivinen ainoastaan PM- ja
SynRM-moottoreissa VVC+-tilassa.
Optio: Toiminto:
[0] * Roottorin
tunnistus
[1] Paikoitus Paikoitustoiminto käyttää tasavirtaa
[2] Rotor Det. w/
Parking
1-71 Käynnistysviive
Alue: Toiminto:
0 s* [0 - 25.5 s] Tämä parametri koskee kohdassa
1-72 Käynnistystoiminto
Optio: Toiminto:
[0] Tasavir-
tapito/viive
Arvioi roottorin sähköisen kulman ja
käyttää kulmaa aloituspisteenä.
Vakiovalinta VLT® AutomationDrivesovelluksiin.
staattorin käämin yli ja pyörittää
roottoria sähköiseen 0-asentoon
(valitaan yleensä HVAC-sovelluksiin).
Paikoitusvirta ja -aika määritetään
parametreissa parametri 2-06 Paikoi-
tusvirta ja parametri 2-07 Paikoitusaika.
parametri 1-72 Käynnistystoiminto valittua
käynnistystoimintoa.
Ilmoita tarvittava aikaviive ennen kiihdytyksen
aloittamista.
Valitse käynnistysviiveen aikana käytettävä
käynnistystoiminto. Tämä parametri linkittyy
parametriin parametri 1-71 Käynnistysviive.
Virroittaa moottorin tasavirtapitovirralla
(parametri 2-00 DC-pitovirta) käynnistysviiveen
aikana.
1-72 Käynnistystoiminto
Optio: Toiminto:
[1] Tasavir-
tajarru/viive
[2]*Rullaus-/
viiveaika
[3] Käynn.nop.
myötäp.
[4] Vaakataso-
käyttö
[5] VVC+/Flux
myötäp.
[6] Nost. mek.
j.rele
Virroittaa moottorin tasajarrutuspitovirralla
(parametri 2-01 DC-jarrun virta) käynnistysviiveen aikana.
Moottori rullasi käynnistysviiveen aikana
(vaihtosuuntaaja pois päältä).
Mahdollinen ainoastaan VVC+-taajuusmuuttajassa.
Yhdistä kohdassa parametri 1-74 Käynnistys-
nopeus [RPM] kuvattu toiminto ja
parametri 1-76 Käynnistysvirta käynnistysvii-
peessä.
Ohjearvoviestin käyttämästä arvosta
riippumatta lähtönopeus käyttää parametrin
parametri 1-74 Käynnistysnopeus [RPM] tai
parametri 1-75 Käynnistysnopeus [Hz] käynnis-
tysnopeutta ja lähtövirta vastaa parametrin
parametri 1-76 Käynnistysvirta käynnistysvirran
asetusta. Tätä toimintoa käytetään tyypillisesti
nostosovelluksiin ilman vastapainoa ja
erityisesti sovelluksiin, joissa on myötäpäivään
käynnistyvä ja sitten ohjearvon suuntaan
pyörivä kartioankkurimoottori.
Mahdollinen ainoastaan VVC+-taajuusmuuttajassa.
Kohdissa parametri 1-74 Käynnistysnopeus
[RPM] ja parametri 1-76 Käynnistysvirta käynnistysviipeen aikana kuvatun toiminnon
tuottamiseksi. Moottori pyörii ohjearvon
suuntaan. Jos ohjearvoviesti on nolla (0),
parametri parametri 1-74 Käynnistysnopeus
[RPM] ohitetaan ja lähtönopeudeksi tulee nolla
(0). Lähtövirta vastaa parametrissa
parametri 1-76 Käynnistysvirta asetettua
käynnistysvirtaa.
Ainoastaan kohdassa parametri 1-74 Käynnistys-
nopeus [RPM] kuvatulle toiminnolle.
Käynnistysvirta lasketaan automaattisesti. Tämä
toiminto käyttää ainoastaan käynnistysviiveajan
käynnistysnopeutta. Lähtönopeus on ohjearvoviestin asettamasta arvosta riippumatta
parametrin parametri 1-74 Käynnistysnopeus
[RPM] käynnistysnopeusasetus. Asetuksia [3]
Käynn. nop. myötäp. ja [5] VVC+/Flux myötäp.
käytetään tyypillisesti nostosovelluksissa.
Asetusta [4] Käynn. nop/virta ohjearvosuunt.
käytetään erityisesti vastapainolla varustetuissa
sovelluksissa ja vaakasuuntaiselle liikkeelle.
Mekaanisen jarrun ohjaustoimintojen käyttämiseksi (parametri 2-24 Pysäytysviive –
parametri 2-28 Vahv. lisäjännitekerroin). Tämä
parametri on aktiivinen ainoastaan ux-ohjaus-
periaatteessa, moottorin takaisinkytkentää
käyttävässä tilassa tai anturittomassa tilassa.
3 3
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 53
Page 56

Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
1-72 Käynnistystoiminto
Optio: Toiminto:
[7] VVC+/Flux
counter-cw
1-73 Kytkeyt. pyöriv. moott.
33
Optio: Toiminto:
HUOMAUTUS!
Tätä parametria ei voi muokata
moottorin käydessä.
Tämän toiminnon avulla voidaan ajaa kiinni
moottori, joka pyörii vapaasti sähkökatkon
seurauksena.
[0] Pois
käytöstä
[1] Käytössä Sallii taajuusmuuttajan ajaa kiinni pyörivään
[2] Käytössä
aina
[3] Enabled Ref.
Dir.
[4] Enab.
Always Ref.
Dir.
Pois käytöstä
moottoriin ja ohjata sitä.
Kun parametri 1-73 Kytkeyt. pyöriv. moott. on
käytössä, parametreilla parametri 1-71 Käynnis-
tysviive ja parametri 1-72 Käynnistystoiminto ei
ole toimintoa. Kun parametri 1-73 Kytkeyt.
pyöriv. moott. on käytössä, parametreja
parametri 1-58 Pyör. moott. kytk. testipulssien
virta ja parametri 1-59 Pyör. moott. kytk.
testipulssien taajuus käytetään pyörivään
moottoriin kytkeytymisen ehtojen määrittämiseen.
1-74 Käynnistysnopeus [RPM]
Alue: Toiminto:
Vaakatasokäyttö tai [5] VVC+/Flux myötäp. ja
aseta käynnistysviiveen aika kohdassa
parametri 1-71 Käynnistysviive.
1-75 Käynnistysnopeus [Hz]
Alue: Toiminto:
Size
related*
[ 0 -
500.0
Hz]
Tätä parametria voi käyttää nostosovelluksiin (kartioankkuri) Aseta moottorin
käynnistysnopeus Käynnistyssignaalin
jälkeen lähtönopeus hyppää asetusarvoon.
Aseta kohdassa parametri 1-72 Käynnistys-
toiminto käynnistystoiminnoksi [3] Käynn.
nop. myötäp., [4] Vaakatasokäyttö tai [5] VVC
+
/Flux myötäp. ja aseta käynnistysviiveen
aika kohdassa parametri 1-71 Käynnistysviive.
1-76 Käynnistysvirta
Alue: Toiminto:
0A* [ 0 -
par.
1-24 A]
Jotkin moottorit, esimerkiksi kartioankkurimoottorit, tarvitsevat suuremman virran/
käynnistysnopeuden roottorin irt kytkemiseksi.
Saat tämän lisäyksen asettamalla tarvittavan virran
kohdassa parametri 1-76 Käynnistysvirta. Aseta
parametri 1-74 Käynnistysnopeus [RPM]. Aseta
kohdassa parametri 1-72 Käynnistystoiminto
käynnistystoiminnoksi [3] Käynn. nop. myötäp. tai
[4] Vaakatasokäyttö ja aseta käynnistysviiveen aika
kohdassa parametri 1-71 Käynnistysviive.
Tätä parametria voi käyttää nostosovelluksiin
(kartioankkuri)
3.2.11 1-8* Pysäytyssäädöt
HUOMAUTUS!
Tätä toimintoa ei suositella nostosovelluksiin.
Yli 55 kW tehotasoilla on käytettävä ux-tilaa parhaan
suorituskyvyn saavuttamiseksi.
HUOMAUTUS!
Parhaan pyörivään moottoriin kytkeytymisen
suorituskyvyn saavuttamiseksi parametrien
parametri 1-30 Staattorin resistanssi (Rs) –
parametri 1-35 Pääreaktanssi (Xh) on oltava oikein.
1-74 Käynnistysnopeus [RPM]
Alue: Toiminto:
Size
related*
[0 - 600
RPM]
Aseta moottorin käynnistysnopeus
Käynnistyssignaalin jälkeen lähtönopeus
hyppää asetusarvoon. Aseta kohdassa
parametri 1-72 Käynnistystoiminto käynnistystoiminnoksi [3] Käynn. nop. myötäp., [4]
1-80 Toiminto pysäytet.
Optio: Toiminto:
Valitse taajuusmuuttajan toiminto pysäytyskomennon jälkeen tai sen jälkeen, kun nopeus on
hidastettu asetuksiin, jotka on määritetty
parametrissa parametri 1-81 Min.nopeus
toiminnolle pysäyt. [rpm].
[0]*Rullaus Jättää moottorin vapaaseen tilaan. Moottori on
kytketty irti taajuusmuuttajasta.
[1] Tasavir-
tapito
[2] Moott.
tark.
[3] Esimag-
netointi
Moottorille syötetään tasavirtapitovirta (katso
parametri 2-00 DC-pitovirta).
Tarkistaa, onko moottori kytketty.
Muodostaa magneettikentän moottorin ollessa
pysäytettynä. Tämän avulla moottori voi tuottaa
peräkkäisille käynnistyskomennoille momenttia
nopeasti (ainoastaan asynkroniset moottorit).
54 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 57

Parametrien kuvaukset Ohjelmointiopas
1-80 Toiminto pysäytet.
Optio: Toiminto:
Tämä esimagnetointitoiminto ei auta aivan
ensimmäisen käynnistyskomennon yhteydessä.
Koneen esimagnetoimiseksi ensimmäistä käynnistyskomentoa varten on käytettävissä kaksi
erilaista ratkaisua:
Käynnistä taajuusmuuttaja 0 kierrosta
•
minuutissa (rpm) ohjearvolla ja odota 2–
4 roottorin aikavakiota ennen nopeuden
ohjearvon suurentamista.
Käytä käynnistysviivettä tasavirtapidolla:
•
Aseta parametrissa
•
parametri 1-71 Käynnistysviive
vaadittava esimagnetointiaika
(2–4 roottorin aikavakiota.
Katso aikavakioiden kuvaus
jäljempänä tässä luvussa.)
Aseta parametrin
•
parametri 1-72 Käynnistystoiminto arvoksi joko [0]
Tasavirtapito tai [1] Tasavirtajarrutus.
Aseta tasavirtapidon tai tasavir-
•
tajarrutuksen virran
suuruusluokka
(parametri 2-00 DC-pitovirta tai
parametri 2-01 DC-jarrun virta)
yhtä suureksi kuin I_pre-mag =
Unom/1.73x Xh).
Roottorin aikavakion näyteajat =
(Xh+X2)/(6.3*Freq_nom*Rr)
1 kW = 0.2 s
10 kW = 0.5 s
100 kW = 1.7 s
1000 kW = 2.5 s
[4] DC-
jännite
U0
[5] Coast at
low
reference
[6] Moott.
tark,
hälytys
Kun moottori on pysäytettynä, parametri 1-55 U/f-
ominaiskäyrä - U [0] määrittää jännitteen 0 Hz
taajuudella.
Kun ohjearvo on pienempi kuin
parametri 1-81 Min.nopeus toiminnolle pysäyt.
[rpm], moottori kytketään irti taajuusmuuttajasta.
1-81 Min.nopeus toiminnolle pysäyt. [rpm]
Alue: Toiminto:
Size related* [0 - 600 RPM] Aseta nopeus, jolla
parametri 1-80 Toiminto pysäytet.
aktivoidaan.
1-82 Min.nopeus toiminnolle pysäyt. [Hz]
Alue: Toiminto:
Size related* [ 0 - 20.0 Hz] Aseta lähtötaajuus, jolla aktivoidaan
parametri 1-80 Toiminto pysäytet..
1-83 Täsmällinen pysäytystoiminto
Optio: Toiminto:
HUOMAUTUS!
Tätä parametria ei voi muokata
moottorin käydessä.
Koskee ainoastaan mallia FC 302.
[0]*Tarkka
ramppipys.
[1] Lask. pys. ja
noll.
[2] Lask.pys., ei
noll.
[3] Nop. komp.
pys.
[4] Komp.
lask.pys.
+noll.
Optimaalinen ainoastaan, kun toimintanopeus
on vakio, esimerkiksi kuljettimen hihnan
nopeus. Tämä on avoimen piirin ohjaus.
Tuottaa pysäytyspisteessä suuren toistuvan
tarkkuuden.
Laskee pulssien määrän, tyypillisesti pulssianturilta saadun, ja tuottaa pysäytyssignaalin,
kun parametrissa parametri 1-84 Täsm.
pysäytyslaskurin arvo esimääritetty pulssimäärä
on vastaanotettu liittimeen 29 tai liittimeen 33.
Tämä on suora takaisinkytkentä yksisuuntaisen
suljetun piirin kanssa.
Laskuritoiminto aktivoidaan (aloittaa
ajoituksen) käynnistyssignaalin alussa (kun
signaali muuttuu pysäytyksestä aloitukseksi).
Rampin 0 kierrosta minuutissa (rpm)
nopeuteen laskun aikana lasketut pulssit
nollataan kunkin täsmällisen pysäytyksen
jälkeen.
Sama kuin [2] Lask. pys. ja noll., mutta rampin
0 kierrosta minuutissa (rpm) nopeuteen laskun
aikana laskettujen pulssien määrä vähennetään
kohdassa parametri 1-84 Täsm. pysäytyslaskurin
arvo syötetystä laskuriarvosta.
Tätä nollaustoimintoa voi käyttää kompensoimaan rampin laskun aikaisen lisämatkan ja
vähentämään mekaanisten osien vähitellen
tapahtuvan mekaanisen kulumisen vaikutusta.
Pysäyttää tarkasti samaan kohtaan kulloisestakin nopeudesta riippumatta.
Pysäytyssignaalia viivästetään sisäisesti, kun
kulloinenkin nopeus on pienempi kuin suurin
nopeus (asetetaan parametrissa
parametri 4-19 Enimmäislähtötaajuus).
Viive lasketaan taajuusmuuttajan ohjearvonopeuden perusteella, ei todellisen nopeuden
perusteella. Varmista, että taajuusmuuttaja on
rampannut ylös ennen nopeuskompensoidun
pysäytyksen aktivoimista.
Sama kuin Nop. komp. pys., mutta rampin 0
kierrosta minuutissa (rpm) nopeuteen laskun
3 3
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 55
Page 58

Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
1-83 Täsmällinen pysäytystoiminto
Optio: Toiminto:
aikana lasketut pulssit nollataan kunkin
täsmällisen pysäytyksen jälkeen.
[5] Komp.
33
lask.p, ei
noll
Sama kuin Nop. komp. pys., mutta rampin 0
kierrosta minuutissa (rpm) nopeuteen laskun
aikana laskettujen pulssien määrä vähennetään
kohdassa parametri 1-84 Täsm. pysäytyslaskurin
arvo syötetystä laskuriarvosta.
Tätä nollaustoimintoa voi käyttää kompensoimaan rampin laskun aikaisen lisämatkan ja
vähentämään mekaanisten osien vähitellen
tapahtuvan mekaanisen kulumisen vaikutusta.
1-85 Täsm. p.nop. komp.viive
Alue: Toiminto:
10
ms*
[0 100 ms]
Syötä anturien, PLC:iden jne. kohdassa
parametri 1-83 Täsmällinen pysäytystoiminto
käytettävä viiveaika. Nopeuskompensoitu
pysäytys -tilassa eri taajuuksien viiveaika
vaikuttaa pysäytystoimintoon huomattavasti.
HUOMAUTUS!
Ei käytössä valinnoissa [0] Tarkka
ramppipys., [1] Lask.pys ja noll. ja [2]
Lask.pys., ei noll. parametrissa
parametri 1-83 Täsmällinen pysäytystoiminto.
Täsmälliset pysäytystoiminnot ovat hyödyllisiä sovelluksissa,
joissa vaaditaan suurta tarkkuutta.
Tavallista pysäytyskomentoa käytettäessä tarkkuus
3.2.12 1-9* Moottorin lämpötila
määräytyy sisäisen tehtäväajan mukaan. Näin ei tapahdu
käytettäessä täsmällistä pysäytystoimintoa. Se poistaa
riippuvuuden tehtäväajasta ja parantaa tarkkuutta
olennaisesti.
Taajuusmuuttajan toleranssi määräytyy yleensä sen
tehtäväajasta. Toisaalta täsmällistä pysäytystoimintoa
käytettäessä toleranssi ei riipu tehtäväajasta, sillä pysäytyssignaali keskeyttää taajuusmuuttajan ohjelman
suorittamisen välittömästi. Täsmällinen pysäytystoiminto
tuottaa erittäin tarkasti toistettavan viipeen pysäytyssignaalin antamisesta alas ramppauksen alkuun. Tekemällä
testin voit määrittää tämän viipeen, sillä se on anturin,
PLC:n, taajuusmuuttajan ja mekaanisten osien summa.
Ihanteellisen tarkkuuden saavuttamiseksi alas ramppauksen
aikana pitäisi olla vähintään 10 sykliä, katso:
Parametri 3-42 Ramppi 1 rampin seisonta-aika.
•
Parametri 3-52 Ramppi 2 rampin seisonta-aika.
•
Parametri 3-62 Ramppi 3 rampin seisonta-aika.
•
Parametri 3-72 Ramppi 4 rampin seisonta-aika.
•
Täsmällinen pysäytystoiminto määritetään tässä ja se
otetaan käyttöön digitaalitulon avulla liittimessä 29 tai 33.
1-84 Täsm. pysäytyslaskurin arvo
Alue: Toiminto:
100000* [0 -
999999999 ]
Syötä laskurin arvo, jota käytetään
integroidussa täsmällisessä pysäytystoiminnossa parametri 1-83 Täsmällinen
pysäytystoiminto.
Suurin sallittu taajuus liittimessä 29 tai
33 on 110 kHz.
HUOMAUTUS!
Ei käytössä valinnoissa [0] Tarkka
ramppipys. ja [3] Nop. komp. pys.
kohdassa
parametri 1-83 Täsmällinen
pysäytystoiminto.
1-90 Moottorin lämpösuojaus
Optio: Toiminto:
Moottorin lämpösuojaus voidaan toteuttaa
erilaisilla tekniikoilla:
Moottorin käämitysten PTC-anturilla,
•
joka on kytketty yhteen analogisista
tai digitaalisista tuloista
(parametri 1-93 Termistorilähde).
Katso kappale 3.2.13 PTC-termistori-
yhteys.
Analogiseen tuloon kytketyn
•
moottorin käämityksen KTY-anturin
välityksellä (parametri 1-96 KTY-
termistorin resurssi). Katso
kappale 3.2.14 KTY-sensorin kytkentä.
Laskemalla lämpökuormitus (ETR =
•
elektroninen lämpörele) todellisen
kuormituksen ja ajan pohjalta.
Laskettua lämpökuormitusta
verrataan moottorin nimellisvirtaan
I
ja moottorin nimellistaajuuteen
M,N
f
. Katso myös kappale 3.2.15 ETR
M,N
ja kappale 3.2.16 ATEX ETR.
Mekaanisen lämpökytkimen (Klixon-
•
tyyppisen) kautta, Katso
kappale 3.2.17 Klixon.
Pohjois-Amerikan markkinoita varten: ETRtoiminto antaa NEC:n mukaisen luokan 20
moottorin ylikuormitussuojan.
[0] Ei suojausta Jatkuvasti ylikuormitettu moottori, kun
varoitusta tai taajuusmuuttajan laukaisua ei
tarvita.
[1] Termistorin
varoitus
Aktivoi varoituksen, kun kytketty termistori tai
KTY-anturi moottorissa reagoi moottorin
ylikuumentuessa.
56 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 59

1330
550
250
-20°C
175HA183.10
4000
3000
R
(Ω)
nominel
nimellinen -5°C
nimellinen +5°C
[°C]
PTC / Thermistor
R
OFF
ON
<800 Ω
+10V
130BA152.10
>2.7 kΩ
12 13 18 37322719 29 33 20
5550
39 42 53 54
Parametrien kuvaukset Ohjelmointiopas
1-90 Moottorin lämpösuojaus
Optio: Toiminto:
[2] Termistorin
laukaisu
[3] ETR-varoitus1Laskee kuormituksen, kun asetukset 1 ovat
[4] ETR-laukaisu1Laskee kuormituksen, kun asetukset 1 ovat
[5] ETR-varoitus
2
[6] ETR-laukaisu
2
[7] ETR-varoitus
3
[8] ETR-laukaisu
3
[9] ETR-varoitus
4
[10] ETR-laukaisu
4
[20] ATEX ETR Aktivoi lämpövalvontatoiminnon Ex-e-mootto-
[21] Advanced
ETR
HUOMAUTUS!
Jos [20] ATEX ETR on valittuna, toimi suunnitteluoppaan
asiaa koskevan luvun ohjeiden sekä moottorin
valmistajan ohjeiden mukaisesti.
HUOMAUTUS!
Jos [20] ATEX ETR on valittuna, aseta parametrin
parametri 4-18 Virtaraja arvoksi 150 %.
Pysäyttää (laukaisee) taajuusmuuttajan, kun
kytketty termistori tai KTY-anturi moottorissa
reagoi moottorin ylikuumentuessa.
Termistorin poiskytkeytymisarvon on oltava >
3 kΩ.
Integroi moottorin termistori (PTC-anturi)
käämityksen suojausta varten.
aktiivisina, ja aktivoi varoituksen näytölle, kun
moottori on ylikuormittunut. Ohjelmoi
varoitussignaali jonkin digitaalilähdön kautta.
aktiivisina, ja pysäyttää (laukaisee) taajuusmuuttajan, kun moottori on ylikuormittunut.
Ohjelmoi varoitussignaali jonkin digitaalilähdön kautta. Signaali tulee näkyviin
varoitustilanteessa ja taajuusmuuttajan
lauetessa (terminen varoitus).
reihin ATEX-olosuhteisiin. Mahdollistaa
toiminnot parametri 1-94 ATEX ETR cur.lim.
speed reduction, parametri 1-98 ATEX ETR
interpol. points freq. ja parametri 1-99 ATEX ETR
interpol points current.
3.2.13 PTC-termistoriyhteys
Kuva 3.14 PTC-proili
Käyttäen digitaalituloa ja 10 V:n syöttöä:
Esimerkki: Taajuusmuuttaja laukaisee, kun moottorin
lämpötila on liian korkea.
Parametriasetukset:
Aseta kohdan parametri 1-90 Moottorin
•
lämpösuojaus asetukseksi [2] Termistorin laukaisu.
Aseta kohdan parametri 1-93 Termistorilähde
•
asetukseksi [6] Digitaalitulo.
Kuva 3.15 PTC-termistoriyhteys - digitaalitulo
Käyttäen analogista tuloa ja 10 V:n syöttöä:
Esimerkki: Taajuusmuuttaja laukaisee, kun moottorin
lämpötila on liian korkea.
Parametriasetukset:
Aseta kohdan parametri 1-90 Moottorin
•
lämpösuojaus asetukseksi [2] Termistorin laukaisu.
Aseta kohdan parametri 1-93 Termistorilähde
•
asetukseksi [2] Analoginen tulo 54.
3 3
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 57
Page 60
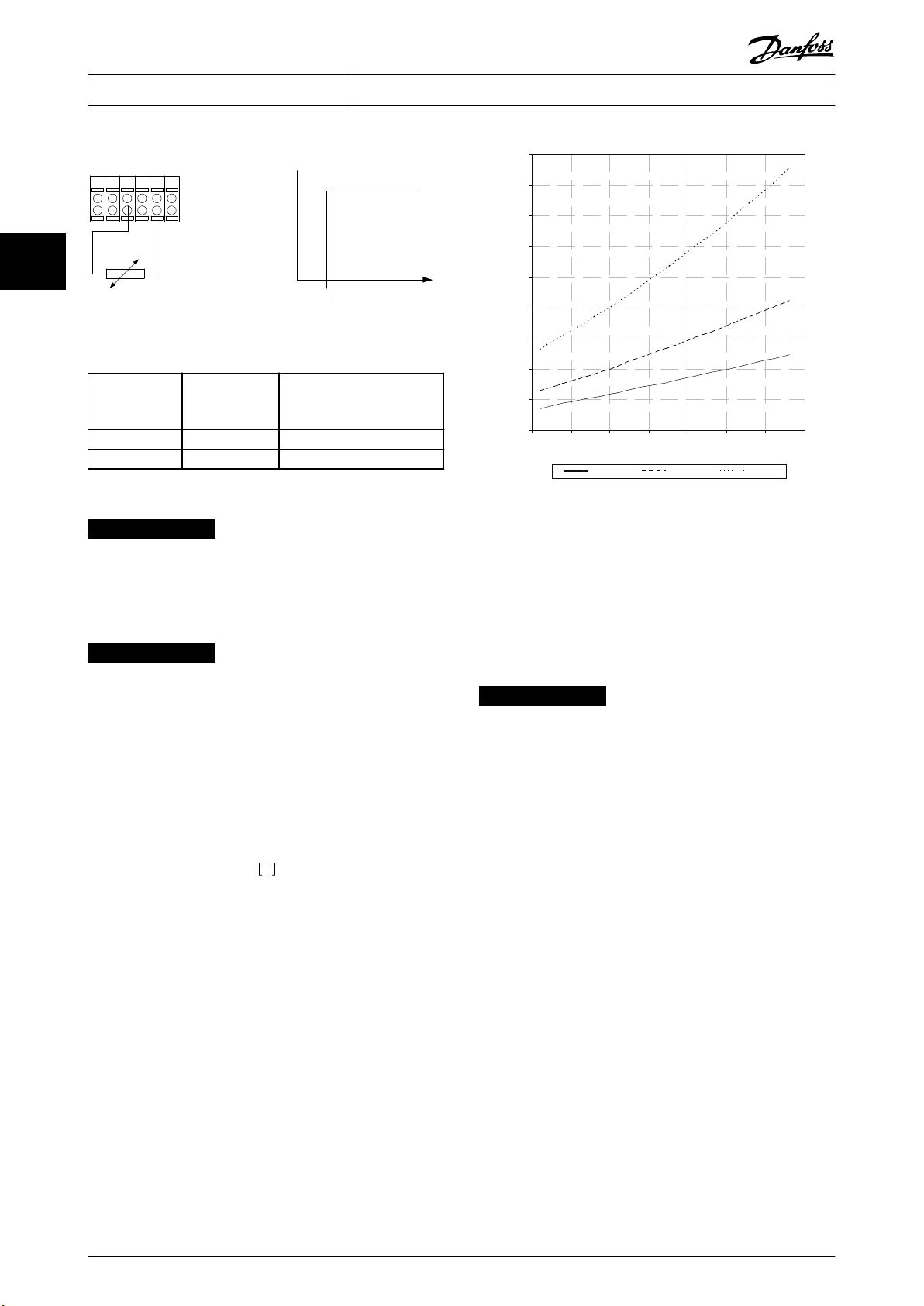
555039 42 53 54
R
<3.0 k Ω
>3.0 k Ω
+10V
130BA153.11
PTC / Termistori
POIS
PÄÄI IF
0
500
1000
1500
2000
2500
3000
3500
4000
4500
-25 0 25 5 0 75 100 125 150
Temperature [°C]
Resistance [Ohm]
KTY type 1 KTY type 2 KTY type 3
130BB917.10
Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
33
Kuva 3.16 PTC-termistoriyhteys - analogiatulo
Tulo
digitaalinen/
analoginen
Digitaalinen 10 V
Analoginen 10 V
Taulukko 3.8 Poiskytkeytymisen kynnysarvot
Syöttöjännite Poiskytkeytymisen
kynnysarvot
<800 Ω⇒2.7 kΩ
<3.0 kΩ⇒3.0 kΩ
HUOMAUTUS!
Tarkista, että valittu syöttöjännite vastaa käytetyn termistorielementin arvoja.
3.2.14 KTY-sensorin kytkentä
HUOMAUTUS!
vain FC 302.
KTY-antureita käytetään erityisesti kestomagneettiservomoottoreissa (PM-moottoreissa) moottorin parametrien
säätämiseksi dynaamisesti, kuten staattorin resistanssin
(parametri 1-30 Staattorin resistanssi (Rs)) PM-moottoreissa
ja myös roottorin resistanssin (parametri 1-31 Roottorin
resistanssi (Rr)) asynkronisissa moottoreissa, moottorin
käämityksen lämpötilasta riippuen. Kaava on:
Kuva 3.17 KTY-tyypin valinta
KTY-anturi 1: 1 kΩ 100 °C:n (212 °F:n) lämpötilassa
(esimerkiksi Philips KTY 84-1)
KTY-anturi 2: 1 kΩ 25 °C:n (77 °F:n) lämpötilassa
(esimerkiksi Philips KTY 83-1)
KTY-anturi 3: 2 kΩ 25 °C:n (77 °F:n lämpötilassa)
(esimerkiksi
Inneon KTY-10)
HUOMAUTUS!
Jos moottorin lämpötilaa käytetään termistorin tai KTYanturin kautta, PELV-vaatimukset eivät toteudu, jos
moottorin käämitysten ja anturin välillä on oikosulkuja.
PELV-vaatimusten täyttämiseksi anturiin on asennettava
lisäeristystä.
3.2.15 ETR
Rs
= Rs
x(1 + αcuxΔT)
20°C
KTY-antureita voi käyttää moottorin suojaukseen
(parametri 1-97 KTY-kynnystaso).
FC 302 -taajuusmuuttajaan sopii kolme eri KTY-anturityyppiä, jotka on määritetty kohdassa parametri 1-95 KTY-
anturityyppi. Kulloisenkin anturin lämpötilan voi lukea
parametrista parametri 16-19 KTY-anturin lämpötila.
58 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Ω jossa
α
= 0 . 00393
cu
Laskelmissa arvioidaan pienemmän kuormituksen tarve
pienemmillä nopeuksilla moottoriin sisältyvän puhaltimen
vähäisemmän jäähdytyksen vuoksi.
Page 61

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2000
500
200
400
300
1000
600
t [s]
175ZA052.11
fOUT = 0,2 x f M,N
fOUT = 2 x f M,N
fOUT = 1 x f M,N
IMN
IM
PTC / Thermistor
OFF
ON
+24V
12 13 18 3732
A
2719 29 33B20
GND
R<6.6 k Ω >10.8 k Ω
130BA151.11
Parametrien kuvaukset Ohjelmointiopas
Kuva 3.18 ETR-proili
3.2.16 ATEX ETR
Toiminta Asetus
Parametri 5-15 Liitin 33,
digitaalitulo
Parametri 5-19 Liitin 37
turvapysäytys
Parametri 14-01 Kytkentätaajuus
Parametri 14-26 Lauk.viive
vaihtos. vian esiintyessä
Taulukko 3.9 Parametrit
[80] PTC-kor tti 1
[4] PTC 1 Hälytys
Tarkista, että oletusarvo täyttää
moottorin tyyppikilven
vaatimuksen. Ellei, käytä siniaaltosuodatinta.
0
HUOMAUTUS!
Vertaa moottorin valmistajan asettamaa minikytkentätaajuusvaatimusta taajuusmuuttajan
minimikytkentätaajuuden oletusarvoon parametrissa
parametri 14-01 Kytkentätaajuus. Jos taajuusmuuttaja ei
täytä tätä vaatimusta, on käytettävä siniaaltosuodatinta.
3 3
VLT® PTC Thermistor Card MCB 112 tarjoaa moottorin
lämpötilan ATEX-hyväksytyn valvonnan. Vaihtoehtoisesti
voidaan käyttää ulkoista ATEX-hyväksyttyä PTC-suojalaitetta.
HUOMAUTUS!
Käytä tähän toimintoon vain ATEX Ex-e -hyväksyttyjä
moottoreita. Katso moottorin tyyppikilpi, hyväksyntätodistus ja datalehti tai ota yhteyttä moottorin
toimittajaan.
Ohjattaessa Ex-e-moottoria "lisäturvallisuusehdoin on
tärkeää varmistaa tietyt rajoitukset. Ohjelmoitavat
parametrit kuvataan kohdassa Taulukko 3.9.
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 59
Toiminta Asetus
Parametri 1-90 Moottorin
lämpösuojaus
Parametri 1-94 ATEX ETR
cur.lim. speed reduction
Parametri 1-98 ATEX ETR
interpol. points freq.
Parametri 1-99 ATEX ETR
interpol points current
Parametri 1-23 Moottorin
taajuus
Parametri 4-19 Enimmäislähtötaajuus
Parametri 4-18 Virtaraja Pakotettu arvoon 150 %
[20] ATEX ETR
20%
Moottorin tyyppikilpi.
Syötä sama arvo kuin
parametrissa
parametri 4-19 Enimmäislähtötaajuus.
Moottorin tyyppikilpi, mahdollisesti redusoituna pitkien
moottorikaapeleiden, siniaaltosuodattimen tai alennetun
verkkojännitteen vuoksi
parametrilla 1-90 [20]
Lisätietoja ATEX ETR:n lämpövalvonnasta on kohdassa
Sovellushuomautus FC 300 ATEX ETR lämpövalvontatoiminnolle.
3.2.17 Klixon
Klixon-tyyppisessä lämpökatkaisimessa käytetään KLIXON®metallilautasta. Ennalta määrätyllä ylikuormituksella
lautasen läpi kulkevan virran aiheuttava lämpö aiheuttaa
laukaisun.
Käyttäen digitaalituloa ja 24 V:n syöttöä:
Esimerkki: Taajuusmuuttaja laukaisee, kun moottorin
lämpötila on liian korkea.
Parametriasetukset:
Aseta kohdan parametri 1-90 Moottorin
•
lämpösuojaus asetukseksi [2] Termistorin laukaisu.
Aseta kohdan parametri 1-93 Termistorilähde
•
asetukseksi [6] Digitaalitulo.
Kuva 3.19 Termistoriyhteys
Page 62

Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
1-91 Moott. ulk. puhallin
Optio: Toiminto:
[0] * Ei
käytössä
[1] Kyllä Käyttää ulkoista puhallinta (ulkoinen
33
Ulkoista puhallinta ei vaadita, moottorin tehoa
siis redusoidaan pienellä nopeudella.
ilmanvaihto), joten moottorin tehoa ei tarvitse
redusoida pienellä nopeudella. Kohdan
Kuva 3.18ylempää käyrää (f
noudatetaan, jos moottorivirta on pienempi
kuin moottorin nimellisvirta (katso
parametri 1-24 Moottorin virta). Jos moottorivirta
on suurempi kuin nimellisvirta, käyttöaika
pienenee edelleen kuin jos puhallinta ei ole
asennettu.
out
= 1 x f
M,N
)
1-93 Termistorilähde
Optio: Toiminto:
HUOMAUTUS!
Tätä parametria ei voi muokata
moottorin käydessä.
1-94 ATEX ETR cur.lim. speed reduction
Alue: Toiminto:
Näkyvillä ainoastaan, jos
parametri 1-90 Moottorin lämpösuojaus on
[20] ATEX ETR.
Aseta reaktio Ex-e-virran rajalla käyttämiselle.
0%: Taajuusmuuttaja ei muuta mitään, se vain antaa
varoituksen 163, ATEX ETR cur.lim.warning.
>0%: Taajuusmuuttaja antaa varoituksen 163, ATEX ETR
cur.lim.warning ja redusoi moottorin nopeutta rampin 2
mukaan (parametriryhmä 3-5* Ramppi 2).
Esimerkki:
Todellinen ohjearvo = 50 kierrosta minuutissa (rpm)
Parametri 1-94 ATEX ETR cur.lim. speed reduction = 20%
Tuloksena saatava ohjearvo = 40 kierrosta minuutissa (rpm)
1-95 KTY-anturityyppi
Optio: Toiminto:
HUOMAUTUS!
Koskee ainoastaan mallia FC 302.
HUOMAUTUS!
Aseta digitaalitulon asetukseksi [0]
PNP - akt. jännitt. 24V parametrissa
parametri 5-00 Digit. I/O-tila.
Valitse tuloliitäntä, johon termistori (PTCanturi) tulee kytkeä. Analogista tulooptiota [1] Analoginen tulo 53 tai [2]
Analoginen tulo 54 ei voi valita, jos
analoginen tulo on jo käytössä ohjearvojen
lähteenä (valittu parametrissa
parametri 3-15 Ohjearvo 1 Lähde,
parametri 3-16 Ohjearvo 2 Lähde tai
parametri 3-17 Ohjearvo 3 Lähde).
Valitse VLT® PTC Thermistor Card MCB 112
käytettäessä aina [0] Ei toimintoa.
[0] * Ei mitään
[1] Analoginen
tulo 53
[2] Analoginen
tulo 54
[3] Digit.tulo 18
[4] Digit.tulo 19
[5] Digit.tulo 32
[6] Digit.tulo 33
1-94 ATEX ETR cur.lim. speed reduction
Alue: Toiminto:
0 %* [0 - 100 %]
HUOMAUTUS!
Koskee ainoastaan mallia FC 302.
[0] * KTY-anturi 1
[1] KTY-anturi 2
[2] KTY-anturi 3
[3] Pt1000
1-96 KTY-termistorin resurssi
Optio: Toiminto:
[0] * Ei mitään
[2] Analoginen
tulo 54
Valitse termistorianturin käytettävä tyyppi.
1 kΩ 100 °C:ssa (212 °F:ssa).
1 kΩ 25 °C:ssa (77 °F:ssa).
2 kΩ 25 °C:ssa (77 °F:ssa).
HUOMAUTUS!
Koskee ainoastaan mallia FC 302.
Analogisen tuloliittimen 54 valitseminen
termistorianturin tulona käytettäväksi.
Liitintä 54 ei voi valita termistoriresurssiksi,
jos sitä muuten käytetään ohjearvona
(katso parametri 3-15 Ohjear voresurssi 1–
parametri 3-17 Ohjearvoresurssi 3).
HUOMAUTUS!
Termistorianturin kytkeminen
liitinten 54 ja 55 väliin (GND). Katso
Kuva 3.17.
60 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 63

1 0 0 %
8 0 %
4 0 %
5 Hz 15 Hz 25 Hz 50 Hz
130BB909.10
Parametrien kuvaukset Ohjelmointiopas
1-97 KTY-kynnystaso
Alue: Toiminto:
80 °C* [ -40 - 220 °C] Valitse moottorin lämpösuojauksen
termistorianturin kynnystaso.
1-98 ATEX ETR interpol. points freq.
Alue: Toiminto:
Size related* [ 0 - 1000.0
Hz]
HUOMAUTUS!
Koskee ainoastaan mallia FC
302.
Näkyvillä ainoastaan, jos
parametri 1-90 Moottorin
lämpösuojaus on [20].
Syötä tähän ryhmään neljä taajuuspistettä [Hz] moottorin
tyyppikilvestä. Taulukko 3.10 näyttää taajuus-/virtapisteiden
esimerkin.
HUOMAUTUS!
Kaikki moottorin tyyppikilven tai datalehden taajuuden/
virran rajan pisteet on ohjelmoitava.
1-99 ATEX ETR interpol points current
Näkyvillä ainoastaan, jos parametri 1-90 Moottorin lämpösuojaus
on [20] tai [21].
Alue: Toiminto:
Size related* [0 - 100 %]
HUOMAUTUS!
Koskee ainoastaan mallia FC
302.
Lämpörajoituskäyrän määritys. Katso
esimerkiksi parametri 1-98 ATEX ETR
interpol. points freq..
Käytä moottorin tyyppikilven neljää virtapistettä. Laskea
arvo prosenttiosuutena moottorin nimellisvirrasta , Im/I
m,n
100 [%] ja syötä tämä arvo ryhmään.
Yhdessä arvon parametri 1-98 ATEX ETR interpol. points freq.
kanssa nämä tuottavat taulukon (f [Hz],I [%]).
HUOMAUTUS!
Kaikki moottorin tyyppikilven tai datalehden taajuuden/
virran rajan pisteet on ohjelmoitava.
3 3
x
3.2.18 PM-asetukset
Jos [2] Std. PM, non-salient on valittu kohdassa
parametri 1-10 Moott. rakenne, syötä moottorin parametrit
manuaalisesti seuraavassa järjestyksessä:
1. Parametri 1-24 Moottorin virta.
2. Parametri 1-26 Moott. jatk. nimell.momentti.
3. Parametri 1-25 Moottorin nimellisnopeus.
4. Parametri 1-39 Moottorin napaluku.
5. Parametri 1-30 Staattorin resistanssi (Rs).
Kuva 3.20 ATEX ETR -lämpörajoituskäyrän esimerkki
x-akseli: f
y-akseli: Im/I
Parametri 1-98 ATEX ETR interpol.
points freq.
[0]=5 Hz [0]=40%
[1]=15 Hz [1]=80%
[2]=25 Hz [2]=100%
[3]=50 Hz [3]=100%
Taulukko 3.10 Interpolointipisteet
Kaikki käyrän alapuolella olevat pisteet sallitaan jatkuvasti.
Linjan yläpuolella ne kuitenkin sallitaan ainoastaan
m
[Hz]
x 100 [%]
m,n
Parametri 1-99 ATEX ETR
interpol points current
rajoitetun ajan, joka lasketaan ylikuormituksen funktiona.
Jos koneen virta on yli 1.5 kertaa nimellisvirta, sammutus
on välitön.
6. Parametri 1-37 d-akselin induktanssi (Ld).
7. Parametri 1-40 Paluu EMF nop. 1000 1/min.
Seuraavat parametrit on lisätty PM-moottoreita varten.
1. Parametri 1-41 Moottorinkulman Oset.
2. Parametri 1-07 Motor Angle Oset Adjust.
3. Parametri 1-14 Vaimennuksen vahvistus.
4. Parametri 1-47 Torque Calibration.
5. Parametri 1-58 Pyör. moott. kytk. testipulssien virta.
6. Parametri 1-59 Pyör. moott. kytk. testipulssien
taajuus.
7. Parametri 1-70 Käynnistystila.
8. Parametri 30-20 High Starting Torque Time [s].
9. Parametri 30-21 High Starting Torque Current [%].
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 61
Page 64

Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
HUOMAUTUS!
Vakioparametrit on edelleen konguroitava (esimerkiksi
parametri 4-19 Enimmäislähtötaajuus).
Sovellus Asetukset
33
Alhaisen inertian
sovelluksiin
I
Load/IMotor
Alhaisen inertian
sovelluksiin
50>I
Korkean inertian
sovellukset
I
Load/IMotor
Suuri kuorma pienellä
nopeudella
<30 % (nimellisnopeus)
<5
Load/IMotor
> 50
>5
Suurenna parametri 1-17 Jännitteen
suodatinaikavakio-arvoa kertoimella
5–10.
Pienennä arvoa
parametri 1-14 Vaimennuksen
vahvistus.
Pienennä arvoa
parametri 1-66 Min.virta pienellä
nopeudella (<100 %).
Merkitse lasketut arvot muistiin.
Suurenna parametri 1-14 Vaimen-
nuksen vahvistus-,
parametri 1-15 Suodatinaikavakio,
hidas nopeus- ja
parametri 1-16 Suodatinaikavakio,
suuri nopeus-arvoa.
Suurenna parametria
parametri 1-17 Jännitteen suodatinaikavakio
Suurennaparametri 1-66 Min.virta
pienellä nopeudella -arvoa (pitkäai-
kainen >100 % voi aiheuttaa
moottorin ylikuumenemisen).
Sovellus Asetukset
Alhaisen inertian
sovelluksiin
Korkean inertian
sovellukset
Suuri kuorma pienellä
nopeudella
Taulukko 3.12 Flux-sovellusten suositukset
Merkitse lasketut arvot muistiin.
Parametri 1-66 Min.virta pienellä
nopeudella.
Suurenna nopeutta oletusarvon ja
suurimman arvon väliseen arvoon
sovelluksesta riippuen.
Aseta sovellusta vastaavat
ramppiajat. Liian nopea rampin
nousu aiheuttaa ylivirran/
ylimomentin. Liian nopea rampin
lasku aiheuttaa ylijännitelaukaisun.
Parametri 1-66 Min.virta pienellä
nopeudella.
Suurenna nopeutta oletusarvon ja
suurimman arvon väliseen arvoon
sovelluksesta riippuen.
Säädä käynnistysmomenttia suurentamalla
parametri 1-66 Min.virta pienellä nopeudella-arvoa. 100 %
tuottaa käynnistysmomentiksi nimellismomentin.
Taulukko 3.11 Suosituksia VVC+-sovelluksiin
Jos moottori alkaa oskilloida tietyllä nopeudessa,
suurennaparametri 1-14 Vaimennuksen vahvistus -arvoa.
Suurenna arvoa pienin askelin. Moottorista riippuen tälle
parametrille hyvä arvo on 10 % tai 100 % suurempi kuin
oletusarvo.
Säädä käynnistysmomenttia suurentamalla
parametri 1-66 Min.virta pienellä nopeudella-arvoa. 100 %
tuottaa käynnistysmomentiksi nimellismomentin.
62 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 65

Parametrien kuvaukset Ohjelmointiopas
3.3 Parametrit: 2-** Jarrut
3.3.1 2-0* DC-jarru
Parametriryhmä tasavirtajarrutus- ja tasavirtapitotoimintojen määrittämiseksi.
2-00 DC-pitovirta
Alue: Toiminto:
50%* [ 0 -
2-01 DC-jarrun virta
Alue: Toiminto:
50%* [ 0 -
2-02 DC-jarrutusaika
Alue: Toiminto:
10 s* [0 - 60 s] Aseta DC-jarrutusvirran kesto parametrissa
HUOMAUTUS!
160 %
Maksimiarvo riippuu moottorin nimellis-
]
virrasta.
Vältä käyttämästä 100 % virtaa liian pitkään.
Se voi vahingoittaa moottoria.
Pieni DC-pidon arvo tuottaa suuremmilla
moottoritehoilla odotettua suurempia
virtoja. Tämä virhe suurenee moottorin
tehon kasvaessa.
Ilmoita pitovirran arvo prosentteina moottorin
nimellisvirrasta I
parametri 1-24 Moottorin virta. 100 % tasavirtapitovirta vastaa arvoa I
Tämä parametri pitää moottorin pysähdyksissä
(pitomomentti) tai esilämmittää sen.
Tämä parametri on aktiivinen, jos DC-pito on
valittuna parametrissa parametri 1-72 Käynnistys-
toiminto [0] tai parametri 1-80 Toiminto pysäytet. [1].
, joka on määritetty parametrissa
M,N
.
M,N
HUOMAUTUS!
1000 %
]
Maksimiarvo riippuu moottorin nimellisvirrasta.
Vältä käyttämästä 100 % virtaa liian
pitkään. Se voi vahingoittaa moottoria.
Ilmoita arvo prosentteina moottorin nimellisvirrasta I
parametri 1-24 Moottorin virta. 100 % tasavirtajarrutuksen virta vastaa arvoa I
DC-jarrun virtaa käytetään pysäytyskomennossa,
kun nopeus on pienempi kuin kohdassa
parametri 2-03 DC-jarrun kytkeytymisnop. [1/min]
asetettu raja; kun tasavirtajarru, käänteistoiminto
on aktiivinen tai sarjaliikenneportin kautta.
Jarrutusvirta on aktiivinen parametrissa
parametri 2-02 DC-jarrutusaika määritetyn ajan.
, joka on määritetty parametrissa
M,N
.
M.N
parametri 2-01 DC-jarrun virta, kun se on
aktivoitu.
2-03 DC-jarrun kytkeytymisnop. [1/min]
Alue: Toiminto:
Size related* [ 0 - par.
4-13 RPM]
Aseta tasavirtajarrun katkaisunopeus parametrissa
parametri 2-01 DC-jarrun virta
asetetulle tasavirtajarrun virran
aktivoinnille kun pysäytyskomento
annetaan.
2-04 DC-jarrun kytkeytymisnop. [Hz]
Alue: Toiminto:
Size
related*
[ 0 - par.
4-14 Hz]
HUOMAUTUS!
Parametrilla Parametri 2-04 DCjarrun kytkeytymisnop. [Hz] ei ole
vaikutusta, kun
parametri 1-10 Moott. rakenneasetus on [1] PM, ei avonapa SPM.
Aseta tasavirtajarrun katkaisunopeus
parametrissa parametri 2-01 DC-jarrun
virta asetetulle tasavirtajarrun virran
aktivoinnille kun pysäytyskomento
annetaan.
2-05 Maksimiohjearvo
Alue: Toiminto:
Size
related*
[ par. 3-02 -
999999.999
ReferenceFeedbackUnit]
Tämä on käyttöparametri vanhoja
tuotteita varten kohdalle
parametri 3-03 Maksimiohjearvo.
Maksimiohjearvo on suurin arvo,
joka saadaan laskemalla yhteen
kaikki ohjearvot. Maksimiohjearvon
yksikkö vastaa kohdassa
parametri 1-00 Konguraatiotila
valittua vaihtoehtoa ja kohdassa
parametri 3-01 Ohjearvo/tak.kytk.yks.
valittua yksikköä.
2-06 Paikoitusvirta
Alue: Toiminto:
50 %* [ 0 -
1000 %]
Aseta virta prosenttiosuutena moottorin
nimellisvirrasta, parametri 1-24 Moottorin
virta. Käytössä, kun otettu käyttöön
parametrissa parametri 1-70 Käynnistystila.
2-07 Paikoitusaika
Alue: Toiminto:
3 s* [0.1 - 60 s] Aseta kohdassa parametri 2-06 Paikoitusvirta
määritetyn paikoitusvirran kesto, kun se on
otettu käyttöön.
3 3
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 63
Page 66

Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
3.3.2 2-1* Jarruen. toiminnot
2-12 Jarrutehon raja (kW)
Alue: Toiminto:
Parametriryhmä, jolla valitaan dynaamisten jarrujen
parametrit. Käytettävissä ainoastaan taajuusmuuttajissa,
joissa on jarruhakkuri.
33
2-10 Jarrun toiminto
Optio: Toiminto:
[0] Ei käytössä Jarruvastusta ei ole asennettu.
[1] Vastusjarru Järjestelmään kuuluu jarruvastus ylimääräisen
jarruenergian muuttamiseksi lämmöksi. Kun
kytkettynä on jarruvastus, saadaan suurempi DCvälipiirin jännite jarrutuksen aikana (generoiva
käyttö). Vastusjarrutoiminto on käytössä vain
taajuusmuuttajissa, joissa on integroitu
dynaaminen jarru.
[2] AC-jarru Tehostaa jarrutusta käyttämättä jarruvastusta.
Tämä parametri ohjaa moottorin ylimagnetisoitumista, kun sitä käytetään generatiivisella
kuormituksella. Tämä toiminto voi parantaa OVCtoimintoa. Moottorin sähköisten hävikkien
lisääminen mahdollistaa sen, että OVC-toiminto
lisää jarrutusmomenttia ylittämättä jännitteen
ylärajaa.
HUOMAUTUS!
AC-jarru ei ole yhtä tehokas kuin
dynaaminen jarrutus vastuksella.
Parametrin parametri 2-12 Jarrutehon raja
(kW) laskentaan voi käyttää seuraavaa
kaavaa.
P
br, avg
P
br,avg
johdetaan pois jarruvastuksessa, Rbr on
jarruvastuksen resistanssi. tbr on aktiivinen
jarrutusaika 120 sekunnin aikana, Tbr.
Ubr on tasajännite silloin, kun jarruvastus
on aktiivinen. Tämä riippuu laitteesta
seuraavasti:
T2-laitteet: 390 V
T4-laitteet: 810 V
T5-laitteet: 810 V
T6-laitteet: 943 V/1099 V D–F-rungoille
T7-laitteet: 1 099 V
2
U
V × tbrs
br
W =
RbrΩ × Tbrs
on keskimääräinen teho, joka
HUOMAUTUS!
Jos Rbr on tuntematon tai jos Tbr ei
ole 120 s, käytännöllinen ratkaisu on
suorittaa jarrusovellus, lukea
parametri parametri 16-33 Jarrue-
nergia /2 min ja sitten syöttää tämä
+ 20% kohdassa
parametri 2-12 Jarrutehon raja (kW).
Vaihtovirtajarru on VVC+-tilaan sekä
avoimessa että suljetussa piirissä.
2-13 Jarrutustehon valvonta
Optio: Toiminto:
2-11 Jarruvastus (ohm)
Alue: Toiminto:
Size
related*
[ 5.00 -
65535.00
Ohm]
Aseta jarruvastusarvo Ω. Arvoa käytetään
jarruvastuksen tehon valvontaan
parametrissa parametri 2-13 Jarrutustehon
valvonta. Tämä parametri on käytössä vain
taajuusmuuttajissa, joissa on integroitu
dynaaminen jarru.
Käytä tätä parametria arvoille, joissa ei ole
desimaaleja. Jos valinnassa on kaksi
desimaalia, käytä parametria
parametri 30-81 Jarruvastus (ohm).
2-12 Jarrutehon raja (kW)
Alue: Toiminto:
Size
related*
[ 0.001 -
2000.000
kW]
Parametri 2-12 Jarrutehon raja (kW ) on
odotettu keskiteho, joka jarruvastuksessa
johdetaan pois 120 sekunnin kuluessa. Sitä
käytetään tarkkailurajana parametrille
parametri 16-33 Jarruenergia /2 min, joten
se ratkaisee, milloin annetaan varoitus/
hälytys.
[0] * Ei käytössä Jarrutustehon tarkkailu ei ole tarpeen.
[1] Varoitus Aktivoi näytölle tulevan varoituksen, jos
[2] Laukaisu Laukaisee taajuusmuuttajan ja tuo näytölle
[3] Varoitus/
laukaisu
[4] Warning 30s
[5] Trip 30s
Tämä parametri on käytössä vain taajuusmuuttajissa, joissa on jarru.
Tässä parametrissa voidaan valvoa jarrutusvastukselle syötettävää tehoa. Teho
lasketaan resistanssin
(parametri 2-11 Jarruvastus (ohm)), DCvälipiirin jännitteen ja vastuksen käyttöajan
pohjalta.
käytön aikana siirretty teho ylittää 100 %
valvontarajasta (parametri 2-12 Jarrutehon
raja (kW)).
Varoitus häviää, kun siirretty teho laskee
alle 80 prosenttiin valvontarajasta.
varoituksen, kun laskettu teho ylittää
100 % valvontarajasta.
Ota käyttöön molemmat edellä mainitut,
mukaan lukien varoitus, laukaisu ja hälytys.
64 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 67

Parametrien kuvaukset Ohjelmointiopas
2-13 Jarrutustehon valvonta
Optio: Toiminto:
[6] Warning & trip
30s
[7] Warning 60s
[8] Trip 60s
[9] Warning & trip
60s
[10] Warning 300s
[11] Trip 300s
[12] Warning & trip
300s
[13] Warning 600s
[14] Trip 600s
[15] Warning & trip
600s
Jos tehon valvonnan asetuksena on [0] Ei käytössä tai [1]
Varoitus, jarrutoiminto pysyy aktiivisena, vaikka valvontaraja
ylittyisi. Tämä voi aiheuttaa vastuksen ylikuumenemisen.
Varoitus voidaan saada aikaan myös releen/digitaalilähtöjen
kautta. Tehon valvonnan mittaustarkkuus riippuu vastuksen
resistanssin tarkkuudesta (parempi kuin ± 20 %).
2-15 Jarrun tarkistus
Optio: Toiminto:
Parametri 2-15 Jarrun tarkistus on käytössä vain
taajuusmuuttajissa, joissa on integroitu
dynaaminen jarru.
Valitse testaus- ja tarkkailutoiminnon tyyppi
tarkistaaksesi jarruvastuksen kytkennän tai sen,
onko jarruvastusta, ja näytä varoitus tai hälytys
vikatilanteessa.
HUOMAUTUS!
Jarruvastuksen irtikytkentätoiminto
testataan käynnistyksen aikana. Jarrun
IGBT-testi suoritetaan kuitenkin silloin,
kun jarrua ei käytetä. Varoitus tai
laukaisu katkaisee jarrutoiminnon.
2-15 Jarrun tarkistus
Optio: Toiminto:
4. Jos DC-välipiirin heilahteluväli jarrutettaessa on suurempi kuin DC-välipiirin
heilahteluväli ennen jarrutusta + 1 %:
Jarrun tarkistus on OK.
[0]*Ei käytössä Tarkkailee jarruvastusta ja jarrun IGBT:tä
käytönaikaisen oikosulun varalta. Oikosulun
sattuessa näyttöön tulee Hälytys 25 Jarruvastus.
[1] Varoitus Tarkkailee jarruvastusta ja jarrun IGBT:tä
oikosulun varalta ja suorittaa testin jarruvastuksen irtikytkemiseksi käynnistyksen aikana.
[2] Laukaisu Tarkkailee jarruvastuksen oikosulun tai irtikyt-
kennän varalta tai jarrun IGBT:n oikosulun
varalta. Vian sattuessa taajuusmuuttaja katkaisee
toiminnan ja antaa näytöllä hälytyksen
(laukaisun lukitus).
[3] Pysäyt./
lauk.
[4] AC-jarru Tarkkailee jarruvastuksen oikosulun tai irtikyt-
[5] Laukaisun
lukitus
Tarkkailee jarruvastuksen oikosulun tai irtikytkennän varalta tai jarrun IGBT:n oikosulun
varalta. Vian sattuessa taajuusmuuttaja hidastaa
vauhtiaan rullaukseen ja laukeaa sitten.
Näyttöön tulee laukaisun lukituksesta johtuva
hälytys (esimerkiksi varoitus 25, 27 tai 28).
kennän varalta tai jarrun IGBT:n oikosulun
varalta. Vian sattuessa taajuusmuuttaja hidastaa
vauhtiaan ohjatusti. Tämä optio on saatavana
vain FC 302 -malliin.
HUOMAUTUS!
Voit poistaa [0] Ei käytössä- tai [1] Varoitus -asetuksen
yhteydessä ilmaantuvan varoituksen katkaisemalla ja
kytkemällä verkkojännitteen. Vika on ensin korjattava.
Jos asetuksena on [0] Ei käytössä tai [1] Varoitus, taajuusmuuttaja käy edelleen, vaikka vika olisi havaittu.
3 3
Testisekvenssi on seuraavanlainen:
1. DC-välipiirin vaihtelun amplitudi
mitataan 300 ms:n aikana ilman
jarrutusta.
2. DC-välipiirin vaihtelun amplitudi
mitataan 300 ms:n aikana jarru
kytkettynä.
3. Jos DC-välipiirin heilahteluväli jarrutettaessa on pienempi kuin DC-välipiirin
heilahteluväli ennen jarrutusta +1 %:
Jarrun tarkistus epäonnistui ja antoi
varoituksen tai hälytyksen.
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 65
2-16 AC-jarrun maks. virta
Alue: Toiminto:
100 %* [ 0 - 1000.0 %] Syötä vaihtovirtajarrutuksen suurin
sallittu virta moottorin käämitysten
ylikuumenemisen välttämiseksi.
HUOMAUTUS!
Parametrilla Parametri 2-16 AC-jarrun maks. virta ei ole
vaikutusta, kun parametri 1-10 Moott. rakenne = [1] PM, ei
avonapa SPM.
Page 68

Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
2-17 Ylijännitevalvonta
Optio: Toiminto:
Ylijänniteohjaus (OVC) vähentää taajuusmuuttajan laukeamisriskiä DC-välipiirin
ylijännitteen johdosta, joka johtuu kuormi-
33
[0] * Pois käytöstä OVC:tä ei tarvita.
[1] Käytössä (ei
pysäyt.)
[2] Käytössä Ottaa OVC:n käyttöön
tuksen tuottavasta tehosta.
Aktivoi OVC:n paitsi kun taajuusmuuttajan
pysäyttämiseen käytetään pysäytyssignaalia.
HUOMAUTUS!
Älä ota OVC:ta käyttöön nostosovelluksissa.
2-18 Jarrutarkistustila
Alue: Toiminto:
[0] * Käynnistettäessä Jarrun tarkistus tehdään käynnistyksen
yhteydessä.
[1] Rullaustil. jälkeen Jarrun tarkistus tehdään rullaustilanteiden
jälkeen.
2-19 Over-voltage Gain
Alue: Toiminto:
100 %* [10 - 200 %] Valitse ylijännitteen vahvistus.
Mekaanisen jarrutuksen ohjaamiseen tarvitaan relelähtö
(rele 01 tai rele 02) tai ohjelmoitu digitaalilähtö (liitin 27 tai
29). Normaalisti tämä lähtö on pidettävä suljettuna silloin,
kun taajuusmuuttaja ei pysty "pitämään" moottoria
esimerkiksi liian suuren kuorman vuoksi. Valitse [32] Mek.
jarrun ohjaus sovelluksissa, joissa asetuksena on sähkömagneettinen jarru kohdassa parametri 5-40 Toimintorele,
parametri 5-30 Liitin 27, digitaalinen lähtö tai
parametri 5-31 Liitin 29, digitaalinen lähtö. Kun asetukseksi
valitaan [32] Mek. jarrun ohjaus, mekaaninen jarru on
suljettu käynnistyksestä siihen asti, kunnes lähtövirta ylittää
tason, joka on valittu kohdassa parametri 2-20 Jarrun
vapautusvirta. Pysäytyksen aikana mekaaninen jarrutus
aktivoituu, kun nopeus laskee alle tason, joka on määritetty
kohdassa parametri 2-21 Aktivoi jarrutusnopeus [RPM]. Jos
taajuusmuuttaja joutuu hälytystilaan tai ylivirta- tai ylijännitetilaan, mekaaninen jarrutus kytkeytyy välittömästi päälle.
Tämä tapahtuu myös Safe Torque O -toiminnon
yhteydessä.
HUOMAUTUS!
Suojaustila ja laukaisun viivetoiminnot
(parametri 14-25 Laukaisun viive momenttirajalla ja
parametri 14-26 Lauk.viive vaihtos. vian esiintyessä) voivat
viivästyttää mekaanisen jarrutuksen kytkeytymistä
hälytystilassa. Nämä toiminnot on poistettava käytöstä
nostosovelluksissa.
3.3.3 2-2* Mekaaninen jarru
Parametrit sähkömagneettisen (mekaanisen) jarrun
toiminnan ohjaamiseen, jollaista tyypillisesti tarvitaan
nostosovelluksissa.
66 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 69

Start
term.18
1=on
0=o
Shaft speed
Start delay time
on
o
Brake delay time
Time
Output current
Relay 01
Pre-magnetizing
current or
DC hold current
Reaction time EMK brake
Par 2-20
Release brake current
Par 1-76 Start current/
Par 2-00 DC hold current
Par 1-74
Start speed
Par 2-21
Activate brake
speed
Mechanical brake
locked
Mechanical brake
free
Par 1-71
Par 2-23
130BA074.12
Parametrien kuvaukset Ohjelmointiopas
3 3
Kuva 3.21 Mekaaninen jarrutus
2-20 Jarrun vapautusvirta
Alue: Toiminto:
Size
related*
[ 0 - par.
16-37 A]
Aseta moottorin virta mekaanisen jarrun
vapautusta varten, kun pysäytys on
käynnissä. Oletusarvona on maksimivirta,
jonka vaihtosuuntaaja pystyy antamaan
kyseiselle teholle. Yläraja määritetään
kohdassa parametri 16-37 Taaj.muut
maks.virta.
HUOMAUTUS!
Kun mekaanisen jarrun ohjauslähtö
on valittuna mutta mekaanista
jarrutusta ei ole kytketty, toiminto ei
toimi oletusasetuksella liian pienen
2-21 Aktivoi jarrutusnopeus [RPM]
Alue: Toiminto:
Size
related*
[ 0 - par.
4-53 RPM]
moottorivirran vuoksi.
Aseta moottorin nopeus mekaanisen
jarrutuksen aktivointia varten, kun
järjestelmässä on pysäytystila.
Nopeuden yläraja määritetään
kohdassa parametri 4-53 Varoitus
suuresta nopeudesta.
2-22 Aktivoi jarrutusnopeus [Hz]
Alue: Toiminto:
Size related* [ 0 - 5000.0 Hz] Aseta moottorin taajuus
2-23 Aktivoi jarrutusviive
Alue: Toiminto:
0s* [0
mekaanisen jarrutuksen
aktivointia varten, kun järjestelmässä on pysäytystila.
Syötä rullauksen jarrutuksen viiveaika hidastusajan
- 5
kuluttua. Akselin nopeus pidetään nollassa täydellä
s]
pitomomentilla. Varmista, että mekaaninen jarrutus on
lukinnut kuorman ennen moottorin siirtymistä rullaustilaan. Katso Suunnitteluoppaan jakso Mekaanisen jarrun
ohjaus.
Säädä kuorman siirtymä mekaaniseen jarrutukseen
asettamalla parametri 2-23 Aktivoi jarrutusviive ja
parametri 2-24 Pysäytysviive.
Jarruviiveen parametrien asettaminen ei vaikuta
vääntömomenttiin. Taajuusmuuttaja ei havaitse, että
mekaaninen jarrutus pitää kuormaa.
Parametrin parametri 2-23 Aktivoi jarrutusviive
asettamisen jälkeen vääntömomentti putoaa nollaksi
muutaman minuutin jälkeen. Äkillinen vääntömomentin muutos aiheuttaa liikettä ja melua.
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 67
Page 70

Mek.Jarrut
vahvistusLisäjännite
Rele
Momenttiohjearvo
MoottoriNopeus
Esimag momentin ramppi
Aika
p. 2-27
Mom. ohjearvo 2-26
Vahv. lisäjännitekerroin
p. 2-28
Jarrut
Vapautus
Aika
p. 2-25
Rampin 1 nousu
p. 3-41
Rampin 1 lasku
p. 3-42
Pysäytys
Viive
p. 2-24
Aktivoi
Jarrut
Viive
p. 2-23
1 2 3
130BA642.12
II
I
Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
2-24 Pysäytysviive
Alue: Toiminto:
0 s* [0 - 5s]Aseta aika moottorin pysäytyshetkestä jarrun
sulkeutumiseen.
Säädä kuorman siirtymä mekaaniseen jarrutukseen
33
asettamalla parametri 2-23 Aktivoi jarrutusviive ja
parametri 2-24 Pysäytysviive.
Tämä parametri on osa pysäytystoimintoa.
suojaamaan mekaanista jarrua, erityisesti, jos
samalle akselille on yhdistetty useita taajuusmuuttajia.
Ei rampin nousua ennen kuin takaisinkytkentä
•
vahvistaa, että mekaaninen jarru on auki.
Parempi kuorman hallinta pysähdyksissä. Jos
•
parametrin parametri 2-23 Aktivoi jarrutusviive arvo
on liian alhainen, Varoitus 22 Nost. mek. j.
aktivoituu eikä momentin rampin laskua sallit.
2-25 Jarrun vapautusaika
Alue: Toiminto:
0.20 s* [0 - 5 s] Tämä arvo määrittää mekaanisen jarrun
avautumisajan. Tämän parametrin on
toimittava aikakatkaisuna, kun jarrun takaisinkytkentä on aktiivinen.
Siirtymän kuorman vaihtuessa jarrulta moottorille
•
voi määrittää. parametrin Parametri 2-28 Vahv.
lisäjännitekerroin arvoa voi suurentaa liikkeen
minimoimiseksi. Saat tasaisen siirtymän
muuttamalla asetuksen nopeuden ohjauksesta
sijainnin ohjaukseen muutoksen aikana.
- Aseta parametrin parametri 2-28 Vahv.
3.3.4 Nostimen mekaaninen jarru
Nostimen mekaaninen jarru tukee seuraavia toimintoja:
kahta kanavaa mekaanisen jarrutuksen takaisin-
•
kytkentää varten katkenneen kaapelin
aiheuttamalta tahattomalta toiminnalta paremmin
suojaamiseksi.
Mekaanisen jarrutuksen takaisinkytkennän
•
lisäjännitekerroin arvoksi 0, jos haluat
käyttää sijainnin ohjausta toiminnon
parametri 2-02 DC-jarrutusaika aikana.
Tämä ottaa käyttöön parametrit
parametri 2-30 Position P Start Proportional Gain–parametri 2-33 Speed PID
Start Lowpass Filter Time, jotka ovat
sijainnin ohjauksen PID-parametreja.
valvonta koko jakson ajan. Tämä auttaa
Kuva 3.22 Jarrun vapautusprosessi nostimen mekaanisen jarrun ohjausta varten
68 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 71

Parametrien kuvaukset Ohjelmointiopas
Parametri 2-26 Mom. ohjearvo–parametri 2-33 Speed PID
Start Lowpass Filter Time ovat käytettävissä nostimen
mekaanisen jarrun ohjaukseen (ux moottorin takaisinkytkennän kanssa).
2-26 Mom. ohjearvo
Alue: Toiminto:
0 %* [ -300 -
300 %]
Arvo määrittää momentin, jota käytetään
suljettua mekaanista jarrua vastaan ennen sen
vapauttamista
Nosturin kuorma/momentti on positiivinen ja se
on 10–160 %. Saat parhaan aloituspisteen
asettamalla parametrin parametri 2-26 Mom.
ohjearvo arvoksi noin 70 %.
Noston momentti/kuorma voi olla sekä
positiivinen että negatiivinen ja se voi olla -160–
160 %. Saat parhaan aloituspisteen asettamalla
parametrin parametri 2-26 Mom. ohjearvo arvoksi
noin 0 %.
Mitä suurempi momenttivirhe on
(parametri 2-26 Mom. ohjearvo todelliseen
momenttiin verrattuna), sitä enemmän kuorman
vaihdon aikana on liikettä.
2-27 Momentin ramppiaika
Alue: Toiminto:
0.2 s* [0 - 5 s] Arvo määrittää momentin rampin keston
myötäpäivään. Arvo 0 ottaa erittäin nopean
magnetoinnin käyttöön Flux-ohjausperiaatteessa.
parametri 2-33 Speed PID Start Lowpass Filter Time
aktivoidaan, kun parametrin parametri 2-28 Vahv. lisäjännitekerroin arvoksi asetetaan 0. Katso lisätietoja kohdasta
Kuva 3.22.
2-30 Position P Start Proportional Gain
Alue: Toiminto:
0.0000* [0.0000 - 1.0000 ]
2-31 Speed PID Start Proportional Gain
Alue: Toiminto:
0.0150* [0.0000 - 1.0000 ]
2-32 Speed PID Start Integral Time
Alue: Toiminto:
200.0 ms* [1.0 - 20000.0 ms]
2-33 Speed PID Start Lowpass Filter Time
Alue: Toiminto:
10.0 ms* [0.1 - 100.0 ms]
2-34 Zero Speed Position P Proportional Gain
Alue: Toiminto:
0.0000* [0.0000 -
1.0000 ]
HUOMAUTUS!
Tämä parametri on käytettävissä
ainoastaan ohjelmistoversiossa
48.XX.
Syötä sijainnin ohjauksen suhteellinen
vahvistus pysähdyksissä nopeustilassa.
3 3
2-28 Vahv. lisäjännitekerroin
Alue: Toiminto:
1* [0 -
4 ]
Aktiivinen vain suljetussa ux-piirissä. Toiminto
varmistaa sujuvan siirtymisen momentinvalvontatilasta nopeudensäätötilaan, kun moottori ottaa
kuorman jarruilta.
Pienennä liikettä suurentamalla arvoa. Aktivoi
kehittynyt mekaaninen jarrutus (parametriryhmä 2-3*
Adv. Mech. Brake) asettamalla parametrin
parametri 2-28 Vahv. lisäjännitekerroin arvoksi 0.
2-29 Torque Ramp Down Time
Alue: Toiminto:
0 s* [0 - 5 s] Momentin rampin laskuaika.
3.3.5 2-3* Adv. Mech Brake
Parametrit Parametri 2-30 Position P Start Proportional Gain–
parametri 2-33 Speed PID Start Lowpass Filter Time voi
asettaa erittäin tasaista nopeuden ohjaukselta sijainnin
ohjaukselle vaihtoa varten parametri 2-25 Jarrun
vapautusaika-ajan aikana – aika, jolloin kuorma siirretään
mekaaniselta jarrulta taajuusmuuttajalle.
Parametri 2-30 Position P Start Proportional Gain–
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 69
Page 72

Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
3.4 Parametrit: 3-** Ohjearvo / rampit
Ohjearvon käsittelyn, rajoitusten määrittämisen ja taajuusmuuttajan muutoksiin reagoinnin määrittämisen
parametrit.
33
3.4.1 3-0* Ohjearvon rajat
3-00 Ohjearvon alue
Optio: Toiminto:
Valitse ohjearvoviestin ja takaisinkytkentäsignaalin
alue. Signaalin arvot voivat olla ainoastaan positiivisia
tai sekä positiivisia että negatiivisia. Alarajalla voi olla
negatiivinen arvo, ellei parametrissa
parametri 1-00 Konguraatiotila ole valittu [1] Av.
piirin nopeus tai [3] Prosessi.
[0] Min -
[1] -Max -
3-01 Ohjearvo/tak.kytk.yks.
Optio: Toiminto:
[0] Ei mitään
[1] %
[2] rpm
[3] Hz
[4] Nm
[5] PPM
[10] 1/min
[12] PULSSI/s
[20] l/s
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
Valitse ohjearvoviestin ja takaisinkytkentäsignaalin
Max
alue. Signaalin arvot voivat olla ainoastaan positiivisia
tai sekä positiivisia että negatiivisia. Alarajalla voi olla
negatiivinen arvo, ellei parametrissa
parametri 1-00 Konguraatiotila ole valittu [1] Av.
piirin nopeus tai [3] Prosessi.
Sekä positiiviset että negatiiviset arvot (kumpaankin
+ Max
suuntaan suhteessa parametriin
parametri 4-10 Moott.pyör.nop suunta).
Valitse prosessin PID-ohjauksen ohjearvoissa ja
takaisinkytkennöissä käytettävä yksikkö.
Parametrin Parametri 1-00 Konguraatiotila on
oltava [3] Prosessi tai [8] Laaj. PID-nopeus CL.
3-01 Ohjearvo/tak.kytk.yks.
Optio: Toiminto:
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[125] ft3/s
[126] ft3/min
[127] ft³/h
[130] lb/s
[131] lb/min
[132] lb/h
[140] ft/s
[141] ft/min
[145] ft
[150] lb ft
[160] °F
[170] psi
[171] lb/in²
[172] in wg
[173] ft WG
[180] HP
3-02 Minimiohjearvo
Alue: Toiminto:
Size
related*
[ -999999.999 par. 3-03
ReferenceFeedbackUnit]
Ilmoita minimiohjearvo. Minimiohjearvo on pienin arvo, joka saadaan
laskemalla yhteen kaikki ohjearvot.
Minimiohjearvo on aktiivinen vain,
kun kohdan parametri 3-00 Ohjearvon
alue asetuksena on [0] Min - Max.
Minimiohjearvon yksikön vastaavuudet:
•
•
Jos kohdassa parametri 1-00 Kongu-
raatiotila on valittu [10]
Synchronization, tämä parametri
määrittää nopeuden suurimman
poikkeaman, kun tehdään kohdassa
Kohdan
parametri 1-00 Konguraatiotila määritys: [1] Sulj. piirin
nopeus, kierrosta minuutissa
(rpm); [2] Momentti, Nm.
Kohdassa
parametri 3-01 Ohjearvo/
tak.kytk.yks. valittu yksikkö.
70 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 73

Parametrien kuvaukset Ohjelmointiopas
3-02 Minimiohjearvo
Alue: Toiminto:
parametri 3-26 Master Oset
määritettyä sijainnin eroa.
3-03 Maksimiohjearvo
Alue: Toiminto:
Size
related*
[ par. 3-02 -
999999.999
ReferenceFeedbackUnit]
Ilmoita maksimiohjearvo. Maksimiohjearvo on suurin arvo, joka saadaan
laskemalla yhteen kaikki ohjearvot.
Maksimiohjearvon yksikön vastaavuudet:
Kohdassa
•
parametri 1-00 Konguraatiotila valittu kokoonpano.
[1] Sulj. piirin nopeus,
kierrosta minuutissa (rpm);
[2] Momentti, Nm.
Kohdassa
•
parametri 3-00 Ohjearvon
alue valittu yksikkö.
Jos kohdassa parametri 1-00 Kongu-
raatiotila on valittu [9] Positioning,
tämä parametri määrittää asemoinnin
oletusnopeuden.
3-04 Ohjearvotoiminto
Optio: Toiminto:
[0] Summa Laskee yhteen sekä ulkoiset että esivalitut
ohjearvojen lähteet.
[1] Ulkoinen/
esivalittu
Käytä joko esivalittua tai ulkoista ohjearvojen
lähdettä.
Siirry ulkoisen ja esivalitun välillä digitaalitulon komennoilla.
3-05 On Reference Window
Alue: Toiminto:
Size
related*
[0 - 999999.999
ReferenceFeedbackUnit]
HUOMAUTUS!
Tämä parametri on käytettävissä ainoastaan
ohjelmistoversiossa 48.XX.
Anna toleranssialue ohjearvon tai
tavoitteen tilan saavuttamiselle.
Tämä parametri määrittää kohdan
parametri 1-00 Konguraatiotila
valinnasta riippuen seuraavat:
Nopeustila Nopeusalueen
•
ohjearvon saavuttamisen
tilalle.
Momenttitila: Momentti-
•
alueen ohjearvon
saavuttamisen tilalle.
3-05 On Reference Window
Alue: Toiminto:
Sijaintitila: Nopeusalueen
•
tavoitetilan saavuttamiselle. Katso myös
parametri 3-08 On Target
Window.
3-06 Minimum Position
Alue: Toiminto:
-100000
CustomReadoutUnit2*
[ -2147483648
- 2147483647
CustomReadoutUnit2]
HUOMAUTUS!
Tämä parametri on käytettävissä ainoastaan
ohjelmistoversiossa 48.XX.
Anna minimisijainti. Tämä
parametri määrittää sijaintialueen lineaarisen akselin
tilassa (parametri 17-76 Position
Axis Mode) ja sijainnin rajoitustoiminnon
(parametri 4-73 Position Limit
Function).
3-07 Maximum Position
Alue: Toiminto:
100000
CustomReadoutUnit2*
[ -2147483647
- 2147483647
CustomReadoutUnit2]
HUOMAUTUS!
Tämä parametri on käytettävissä ainoastaan
ohjelmistoversiossa 48.XX.
Anna maksimisijainti. Tämä
parametri määrittää sijaintialueen
lineaarisessa ja akselitilassa
(parametri 17-76 Position Axis
Mode)..
Sijainnin alueen rajat:
Lineaarinen:
•
Parametri 3-06 Minimum
Position –
parametri 3-07 Maximum
Position.
Pyörivä: 0–
•
parametri 3-07 Maximum
Position.
Sijainnin raja -toiminto käyttää
tätä parametria
(parametri 4-73 Position Limit
Function).
3 3
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 71
Page 74

[P 5-13=Preset ref. bit 0]
Preset
[P 5-14=Preset ref. bit 1]
[P 5-15=Preset ref. bit 2]
10101010
76543210
29
12
(+24V)
11001100
32
11110000
33
130BA149.10
Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
3-08 On Target Window
Alue: Toiminto:
5 CustomReadoutUnit2*
33
3-09 On Target Time
Alue: Toiminto:
1 ms* [0 - 60000
ms]
[0 2147483647
CustomReadoutUnit2]
HUOMAUTUS!
Tämä parametri on käytettävissä ainoastaan
ohjelmistoversiossa 48.XX.
Taajuusmuuttaja katsoo sijoittamisen valmiiksi ja lähettää
tavoitteessa-signaalin, kun
todellinen sijainti on arvon
parametri 3-08 On Target
Window sisällä parametrin
parametri 3-09 On Target Time
ajan verran ja todellinen
nopeus on alle
parametri 3-05 On Reference
Window.
HUOMAUTUS!
Tämä parametri on käytettävissä
Kuva 3.23 Esivalittu ohjearvo
Esival. ohj. bitti 2 1 0
Esival. ohj. 0 0 0 0
Esival. ohj. 1 0 0 1
Esival. ohj. 2 0 1 0
Esival. ohj. 3 0 1 1
Esiasetettu ohjearvo 4 1 0 0
Esiasetettu ohjearvo 5 1 0 1
Esiasetettu ohjearvo 6 1 1 0
Esiasetettu ohjearvo 7 1 1 1
Taulukko 3.13 Esiasetetut ohjearvobitit
ainoastaan ohjelmistoversiossa
48.XX.
3-11 Ryömintänopeus [Hz]
Alue: Toiminto:
Syötä aika tavoite saavutettu -alueen
arviointia varten, katso parametri 3-08 On
Target Window.
3.4.2 3-1* Ohjearvot
Valitse esiasetettu ohjearvo. Valitse Esival. ohj. bitti 0/1/2
[16], [17] tai [18] vastaaville digitaalituloille parametriryhmässä 5-1* Digit. tulot.
3-10 Esiasetettu ohjearvo
Matriisi [8]
Alue: 0-7
Alue: Toiminto:
0 %* [-100 -
100 %]
Aseta tähän parametriin enintään kahdeksan
erilaista esivalittua ohjearvoa (0–7) ryhmäohjelmoinnin keinoin. Esiasetettu ohjearvo ilmoitetaan
prosentteina arvosta Ref
(parametri 3-03 Maksimiohjearvo). Jos
ohjelmoidaan Ref
parametri 3-02 Minimiohjearvo), esiasetettu
ohjearvo lasketaan prosentteina koko ohjearvoalueesta, siis arvojen Ref
pohjalta. Myöhemmin arvo lisätään arvoon Ref
Kun käytössä ovat esiasetetut ohjearvot, valitse
esivalitun ohjearvon ohjearvobitti 0/1/2 [16], [17]
tai [18] vastaaville digitaalituloille parametriryhmässä 5-1* Digit. tulot.
MAX
joka ei ole 0
MIN
MAX
ja Ref
MIN
erotuksen
MIN
Size
related*
[ 0 - par.
4-14 Hz]
3-12 Kiinniajo ylös/alas arvo
Alue: Toiminto:
0 %* [0 -
100 %]
.
Syötä prosentuaalinen (suhteellinen) arvo, joka
lisätään tai vähennetään todellisesta ohjearvosta
ylös tai alas kiinniajoa varten. Jos kiinniajo ylös on
valittu jossakin digitaalitulossa
(parametri 5-10 Liitin 18, digitaalitulo–
parametri 5-15 Liitin 33, digitaalitulo), prosentuaalinen (suhteellinen) arvo lisätään
kokonaisohjearvoon. Jos hidastus on valittu
jossakin digitaalitulossa (parametri 5-10 Liitin 18,
digitaalitulo–parametri 5-15 Liitin 33, digitaalitulo),
prosentuaalinen (suhteellinen) arvo vähennetään
kokonaisohjearvosta. Hanki laajennettu toiminnallisuus digit. potent.metri -toiminnon avulla. Katso
parametriryhmä 3-9* Digit. pot.metri.
Ryömintänopeus on kiinteä
lähtönopeus, jolla taajuusmuuttaja
toimii, kun ryömintätoiminto
aktivoidaan.
Katso myös parametri 3-80 Ryöm.
ramppiaika.
72 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 75

X
100
%
0-100
Z
Y
X+X*Y/100
P 3-14
130BA278.10
Parametrien kuvaukset Ohjelmointiopas
3-13 Ohjearvon paikka
Optio: Toiminto:
Valitse aktivoitava ohjearvon paikka.
[0]*Yht. käsi/
aut.käytt.
[1] Etä Käytä etäohjearvoa sekä käsikäyttötilassa että
[2] Paikallinen Käytä paikallisohjearvoa sekä käsikäyttötilassa
Käytä paikallisohjearvoa käsikäyttötilassa tai
etäohjearvoa automaattitilassa.
automaattitilassa.
että automaattitilassa.
HUOMAUTUS!
Kun asetuksena on [2] Paikallinen,
taajuusmuuttaja käynnistyy tällä
asetuksella uudelleen virran katkaisemisen jälkeen.
[3] Linked to
H/A MCO
3-14 Esiaset. suhteellinen ohjearvo
Alue: Toiminto:
0 %* [-100
100 %]
Kuva 3.24 Esiaset. suhteellinen ohjearvo
Valitsemalla tämän vaihtoehdon voit ottaa
käyttöön FFACC-kertoimen parametrissa
parametri 32-66 Kiihdytyksen syöttö eteenpäin.
FFACC:n ottaminen käyttöön pienentää
heilahteluja ja tekee siirtymän liikkeen
ohjaimelta taajuusmuuttajan ohjauskortille
nopeammaksi. Tämä tuottaa nopeammat
vasteajat dynaamisiin sovelluksiin ja sijainnin
hallintaan. Katso lisätietoja FFACCtoiminnosta VLT® liikkeen ohjain MCO 305
Käyttöopas.
Todellista ohjearvoa, X, suurennetaan tai pienennetään prosenttiosuudella Y, joka on asetettu
parametrissa parametri 3-14 Esiaset. suhteellinen
ohjearvo.
Tämä tuottaa todellisen ohjearvon Z. Todellinen
ohjearvo (X) on seuraavissa kohdissa valittujen
tulojen summa:
Parametri 3-15 Ohjearvo 1 Lähde.
•
Parametri 3-16 Ohjearvo 2 Lähde.
•
Parametri 3-17 Ohjearvo 3 Lähde.
•
Parametri 8-02 Ohjauslähde.
•
Kuva 3.25 Todellinen ohjearvo
3-15 Ohjearvoresurssi 1
Optio: Toiminto:
Valitse ohjearvotulo, jota käytetään
ensimmäiseen ohjearvoviestiin.
Parametri 3-15 Ohjearvoresurssi 1,
parametri 3-16 Ohjearvoresurssi 2 ja
parametri 3-17 Ohjearvoresurssi 3
määrittävät enintään kolme erilaista
ohjearvoviestiä. Näiden ohjearvosignaalien summa ratkaisee todellisen
ohjearvon.
[0] Ei toimintoa
[1] Analoginen tulo 53
[2] Analoginen tulo 54
[7] Taajuustulo 29
[8] Taajuustulo 33
[11] Paik. väylän
ohjearvo
[20] Digit. pot.metri
[21] Analog. tulo X30-11
[22] Analog. tulo X30-12
[29] Analogiatulo X48/2
Viitearvo liittimistä 68 ja 69.
VLT® General Purpose I/O MCB 101
VLT® General Purpose I/O MCB 101
3-16 Ohjearvoresurssi 2
Optio: Toiminto:
Valitse ohjearvotulo, jota käytetään
toiseen ohjearvoviestiin.
Parametri 3-15 Ohjearvoresurssi 1,
parametri 3-16 Ohjearvoresurssi 2 ja
parametri 3-17 Ohjearvoresurssi 3
määrittävät enintään kolme erilaista
ohjearvoviestiä. Näiden ohjearvosignaalien summa ratkaisee todellisen
ohjearvon.
[0] Ei toimintoa
[1] Analoginen tulo 53
[2] Analoginen tulo 54
[7] Taajuustulo 29
[8] Taajuustulo 33
[11] Paik. väylän ohjearvo Viitearvo liittimistä 68 ja 69.
3 3
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 73
Page 76

Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
3-16 Ohjearvoresurssi 2
Optio: Toiminto:
[20] Digit. pot.metri
[21] Analog. tulo X30-11
[22] Analog. tulo X30-12
33
[29] Analogiatulo X48/2
3-17 Ohjearvoresurssi 3
Optio: Toiminto:
Valitse ohjearvotulo, jota käytetään
kolmanteen ohjearvoviestiin.
Parametri 3-15 Ohjearvoresurssi 1,
parametri 3-16 Ohjearvoresurssi 2 ja
parametri 3-17 Ohjearvoresurssi 3
määrittävät enintään kolme erilaista
ohjearvoviestiä. Näiden ohjearvosignaalien summa ratkaisee todellisen
ohjearvon.
[0] Ei toimintoa
[1] Analoginen tulo 53
[2] Analoginen tulo 54
[7] Taajuustulo 29
[8] Taajuustulo 33
[11] Paik. väylän ohjearvo Viitearvo liittimistä 68 ja 69.
[20] Digit. pot.metri
[21] Analog. tulo X30-11
[22] Analog. tulo X30-12
[29] Analogiatulo X48/2
3-18 Suhteellisen skaal. ohjearvoresurssi
Optio: Toiminto:
[1] Analoginen tulo
53
[2] Analoginen tulo
54
[7] Taajuustulo 29
[8] Taajuustulo 33
[11] Paik. väylän
ohjearvo
[20] Digit. pot.metri
[21] Analog. tulo
X30-11
[22] Analog. tulo
X30-12
[29] Analogiatulo
X48/2
Viitearvo liittimistä 68 ja 69.
3-19 Ryömintänopeus [RPM]
Alue: Toiminto:
Size
related*
[ 0 - par.
4-13 RPM]
Syötä arvo ryömintänopeudelle n
on kiinteä lähtönopeus. Taajuusmuuttaja
toimii tällä nopeudella, kun ryömintätoiminto on aktiivinen. Maksimiraja
määritetään kohdassa
parametri 4-13 Moott. nopeuden yläraja
[RPM].
Katso myös parametri 3-80 Ryöm.
ramppiaika.
JOG
, joka
3-18 Suhteellisen skaal. ohjearvoresurssi
Optio: Toiminto:
HUOMAUTUS!
Tätä parametria ei voi muokata
moottorin käydessä.
Valitse muuttuva arvo, joka lisätään
kiinteään arvoon (määritetty parametrissa
parametri 3-14 Esiaset. suhteellinen
ohjearvo). Kiinteiden ja muuttuvien
arvojen summa (merkitty kirjaimella Y
kohdassa Kuva 3.26) kerrotaan todellisella
ohjearvolla (merkitty kirjaimella X
kohdassa Kuva 3.26). Tämä tulo lisätään
sitten todelliseen ohjearvoon (X+X*Y/100)
lopullisen todellisen ohjearvon saamiseksi.
Kuva 3.26 Lopullinen todellinen
ohjearvo
3.4.3 3-2* Ohjearvot II
3-20 Preset Target
Alue: Toiminto:
0 CustomReadoutUnit2*
[-2147483648 2147483647
CustomReadoutUnit2]
HUOMAUTUS!
Tämä parametri on käytettävissä ainoastaan
ohjelmistoversiossa 48.XX.
Matriisi [8]
Aseta enintään kahdeksan
kohdesijaintia. Valitse
kahdeksasta esivalitusta
ohjearvosta digitaalitulojen tai
kenttäväylän ohjaussanan
avulla.
[0] * Ei toimintoa
74 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 77

Parametrien kuvaukset Ohjelmointiopas
3-21 Touch Target
Alue: Toiminto:
0 CustomReadoutUnit2*
[-2147483648 2147483647
CustomReadoutUnit2]
HUOMAUTUS!
Tämä parametri on käytettävissä ainoastaan
ohjelmistoversiossa 48.XX.
Syötä kohdesijainti kosketusanturi-sijoitustilassa. Tämä
parametri määrittää etäisyyden
kosketusanturin tunnistustapahtumasta lopulliseen
tavoitesijaintiin sijainnin
yksikköinä.
3-22 Master Scale Numerator
Alue: Toiminto:
1* [-2147483648 -
2147483647 ]
HUOMAUTUS!
Tämä parametri on käytettävissä
ainoastaan ohjelmistoversiossa 48.XX.
Parametrit Parametri 3-22 Master Scale
Numerator ja parametri 3-23 Master Scale
Denominator määrittävät isännän ja orjan
välisen välityssuhteen synkronointitilassa.
Isäntäkierroksia =
× Orjakierroksia
3-23 Master Scale Denominator
Alue: Toiminto:
1* [-2147483648 -
2147483647 ]
HUOMAUTUS!
Tämä parametri on käytettävissä
ainoastaan ohjelmistoversiossa
48.XX.
Katso parametri 3-22 Master Scale
Numerator.
3-24 Master Lowpass Filter Time
Alue: Toiminto:
20 ms* [1 - 2000 ms]
HUOMAUTUS!
Tämä parametri on käytettävissä
ainoastaan ohjelmistoversiossa
48.XX.
Syötä synkronointitilassa isännän
nopeuden laskemiseen käytettävä
aikavakio.
Par . 3 − 22
Par . 3 − 23
3-25 Master Bus Resolution
Alue: Toiminto:
65536* [128 -
65536 ]
HUOMAUTUS!
Tämä parametri on käytettävissä
ainoastaan ohjelmistoversiossa
48.XX.
Syötä synkronointitilan kenttäväylän
isäntäsignaalin (kenttäväylän ohjearvo 1)
tarkkuus.
3-26 Master Oset
Alue: Toiminto:
0 CustomReadoutUnit2*
[-2147483648
- 2147483647
CustomReadoutUnit2]
HUOMAUTUS!
Tämä parametri on käytettävissä ainoastaan
ohjelmistoversiossa 48.XX.
Syötä isännän ja orjan välinen
poikkeama synkronointitilassa.
Tämä arvo lisätään seuraajan
sijaintiin digitaalitulon kunkin
aktivoinnin yhteydessä
vaihtoehdon [113] Enable
Reference tai kenttäväylän
ohjaussanan bitin 5 kanssa.
Parametri 3-02 Minimiohjearvo
määrittää suurimman
poikkeaman isännän todelliseen
nopeuteen nähden poikkeaman
suorittamisen aikana.
3-27 Virtual Master Max Ref
Alue: Toiminto:
50.0
Hz*
[0.0 -
590.0 Hz]
HUOMAUTUS!
Tämä parametri on käytettävissä
ainoastaan ohjelmistoversiossa 48.XX.
Syötä virtuaali-isännän maksimiohjearvo.
Todellinen ohjearvo asetetaan suhteessa
tähän arvoon käyttäen kohdassa
parametri 3-15 Ohjearvoresurssi 1 valittua
lähdettä tai kenttäväylän ohjearvoa 1.
Pyörimissuuntaa ohjaa digitaalitulon tai
kenttäväylän eteen-/taaksesignaali. Aseta
kiihdytys ja hidastus parametriryhmän 3-6*
Ramppi 3 avulla.
3 3
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 75
Page 78

P 3-*2
R
amp (
X) D o wn
T
ime (D
ec)
P 4-13
H
igh-limit
R
PM
R
ef
er
enc
e
n
s
P 4-11
L o w limit
t
dec
T
ime
P 3-*1
R
amp (
X) Up
T
ime ( A c
c)
t
a
cc
130BA872.11
130BA168.10
Ramppi (X) S-rampin
suhde kiihd. lopussa
Nykimisen kompensointi
Rampin (X)
nousuaika
Ramppi (X)
S-rampin
suhde kiihd.
lopussa
Lineaarinen
Nopeus
Rampin (X)
Seisonta-aika
Ramppi (X)
S-rampin
suhde hid.
lopussa
Ramppi (X) S-rampin
suhde hid. lopussa
Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
3-28 Master Oset Speed Ref
Alue: Toiminto:
1500
RPM*
33
[0 65000
RPM]
HUOMAUTUS!
Tämä parametri on käytettävissä
ainoastaan ohjelmistoversiossa
48.XX.
Syötä nopeuden ohjearvo isännän
poikkeaman muuttamiseksi synkronointitilassa. Jotta taataan yhdenmukaisuus
ohjelmistoversioiden 48.01 ja 48.10 kanssa,
tämä parametri on aktiivinen vain, kun
parametri 3-02 Minimiohjearvo:n arvo on 0.
Kuva 3.28 Lineaariset ramppiajat
3-40 Ramppi 1 tyyppi
3.4.4 Rampit
3-4* Ramppi 1
Optio: Toiminto:
HUOMAUTUS!
Jos [1] S-rampin vakionyintä on valittu
Aseta rampin parametrit kullekin neljälle rampille (parametriryhmät 3-4* Ramppi 1, 3-5* Ramppi 2, 3-6* Ramppi 3 ja
3-7* Ramppi 4):
Ramppityyppi,
•
Ramppiajat (kiihdytyksen ja hidastuksen kesto) ja
•
Nykäyskompensoinnin tyyppi S-rampeille.
•
Aloita asettamalla lineaariset ramppiajat kohtien Kuva 3.27
ja Kuva 3.28 mukaisesti.
ja ohjearvoa rampin aikana
muutetaan, ramppiaika saattaa
pidentyä nykäyksettömän liikkeen
toteuttamiseksi, mikä saattaa
aiheuttaa pidemmän käynnistys- tai
pysäytysajan.
S-ramppisuhteiden tai kytkentäkäynnistimien lisäsäätö saattaa olla
tarpeen.
Valitse ramppityyppi kiihdytyksen/
hidastuksen vaatimusten mukaisesti.
Lineaarinen ramppi tuottaa rampin aikana
vakiokiihdytyksen. S-ramppi tuottaa
epälineaarisen kiihdytyksen ja kompensoi
sovelluksen nykäyksen.
[0] * Lineaarinen
[1] S-rampin
vakionyintä
[2] S-rampin
vakioaika
Kuva 3.27 Lineaariset ramppiajat
Jos S-rampit on valittu, aseta tarvittava epälineaarisen
nykäyksen kompensaation taso. Aseta nykäyksen kompensaatio määrittämällä rampin nousu- ja laskuaikojen osuus,
jossa kiihdytys ja hidastus ovat muuttuvia (siis suurenevat
tai pienenevät). S-rampin kiihdytys- ja hidastusasetukset
3-41 Ramppi 1:n nousuaika
Alue: Toiminto:
Size
related*
[ 0.01
- 3600
s]
määritetään todellisen ramppiajan prosentuaalisena
osuutena.
76 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Kiihdytys mahdollisimman vähäisellä
nykäyksellä.
S-ramppi kohdissa parametri 3-41 Ramppi
1:n nousuaika ja parametri 3-42 Ramppi 1
rampin seisonta-aika asetettujen arvojen
perusteella.
Syötä rampin nousuaika eli kiihdytysaika
0:sta synkroniseen moottorin nopeuteen nS.
Valitse sellainen rampin nousuaika, joka
estää lähtövirtaa ylittämästä ramppauksen
aikana kohdan parametri 4-18 Virtaraja
virtarajaa. Arvo 0.00 vastaa 0.01 sekuntia
nopeustilassa. Katso rampin laskuaika
parametri 3-42 Ramppi 1 rampin seisonta-aika.
t
s xns kierr./ min.
Par . 3 − 41 =
kiihd.
ohjearvo kierr./ min.
Page 79

Parametrien kuvaukset Ohjelmointiopas
3-42 Ramppi 1 rampin seisonta-aika
Alue: Toiminto:
Size
related*
[ 0.01
- 3600
s]
Ilmoita rampin laskuaika eli hidastusaika
synkronisesta moottorin nopeudesta n
arvoon 0 kierrosta minuutissa (rpm). Valitse
rampin laskuaika niin, että ylijännitettä ei
esiinny vaihtosuuntaajassa moottorin regeneratiivisen toiminnan vuoksi eikä tuotettu
virta ylitä kohdassa parametri 4-18 Virtaraja
määritettyä virtarajaa. Arvo 0.00 vastaa 0.01
sekuntia nopeustilassa. Katso rampin
nousuaika par. parametri 3-41 Ramppi 1:n
nousuaika.
t
s xns kierr./ min.
Par . 3 − 42 =
dec
ohjearvo kierr./ min.
3-45 Ramppi 1 S-ramppisuhde kiihd. alussa
Alue: Toiminto:
50 %* [ 1 -
99 %]
Syötä rampin kokonaisnousuajan osuus
(parametri 3-41 Ramppi 1:n nousuaika), jossa
kiihdytysmomentti suurenee. Mitä suurempi
prosentuaalinen arvo on, sitä suurempi
tuotettu nykäyksen kompensaatio on ja siten
sovelluksessa esiintyvät momenttinykäykset
ovat pienempiä.
3-46 Ramppi 1 S-ramppisuhde kiihd. lopussa
Alue: Toiminto:
50 %* [ 1 -
99 %]
Syötä rampin kokonaisnousuajan osuus
(parametri 3-41 Ramppi 1:n nousuaika), jossa
kiihdytysmomentti pienenee. Mitä suurempi
prosentuaalinen arvo on, sitä suurempi
tuotettu nykäyksen kompensaatio on ja siten
sovelluksen momenttinykäykset ovat
pienempiä.
3-47 Ramppi 1 S-ramppisuhde hidast. alussa
Alue: Toiminto:
50 %* [ 1 -
99 %]
Syötä rampin kokonaislaskuajan osuus
(parametri 3-42 Ramppi 1 rampin seisonta-aika),
jossa hidastusmomentti suurenee. Mitä
suurempi prosentuaalinen arvo on, sitä
suurempi tuotettu nykäyksen kompensaatio on
ja siten sovelluksen momenttinykäykset ovat
pienempiä.
3-48 Ramppi 1 S-ramppisuhde hidast. lopussa
Alue: Toiminto:
50 %* [ 1 -
99 %]
Syötä rampin kokonaislaskuajan osuus
(parametri 3-42 Ramppi 1 rampin seisonta-aika),
jossa hidastusmomentti pienenee. Mitä
suurempi prosentuaalinen arvo on, sitä
suurempi tuotettu nykäyksen kompensaatio on
ja siten sovelluksen momenttinykäykset ovat
pienempiä.
3.4.5 3-5* Ramppi 2
Katso lisätietoja ramppiparametrien valinnasta kohdasta
s
Parametriryhmä 3-4* Ramppi 1.
3-50 Ramppi 2 tyyppi
Optio: Toiminto:
Valitse ramppityyppi kiihdytyksen/
hidastuksen vaatimusten mukaisesti.
Lineaarinen ramppi tuottaa rampin aikana
vakiokiihdytyksen. S-ramppi tuottaa
epälineaarisen kiihdytyksen ja kompensoi
sovelluksen nykäyksen.
[0] * Lineaarinen
[1] S-rampin
vakionyintä
[2] S-rampin
vakioaika
Kiihdytys mahdollisimman vähäisellä
nykäyksellä.
S-ramppi kohdissa parametri 3-51 Ramppi
2:n nousuaika ja parametri 3-52 Ramppi 2
rampin seisonta-aika asetettujen arvojen
perusteella.
3 3
HUOMAUTUS!
Jos [1] S-rampin vakionyintä on valittu ja ohjearvoa
rampin aikana muutetaan, ramppiaika saattaa pidentyä
nykäyksettömän liikkeen toteuttamiseksi, mikä saattaa
aiheuttaa pidemmän käynnistys- tai pysäytysajan.
S-ramppisuhteiden tai kytkentäkäynnistimien lisäsäätö
saattaa olla tarpeen.
3-51 Ramppi 2:n nousuaika
Alue: Toiminto:
Size
related*
3-52 Ramppi 2 rampin seisonta-aika
Alue: Toiminto:
Size
related*
[ 0.01
- 3600
s]
[ 0.01
- 3600
s]
Syötä rampin nousuaika eli kiihdytysaika
0:sta moottorin nimellisnopeuteen ns. Valitse
sellainen rampin nousuaika, että lähtövirta ei
ylitä ramppauksen aikana kohdan
parametri 4-18 Virtaraja virtarajaa. Arvo 0.00
vastaa 0.01 sekuntia nopeustilassa. Katso
rampin laskuaika parametri 3-52 Ramppi 2
rampin seisonta-aika.
t
s xns kierr./ min.
Par . 3 − 51 =
Syötä rampin laskuaika eli hidastusaika
moottorin nimellisnopeudesta ns arvoon 0
kierrosta minuutissa (rpm). Valitse rampin
laskuaika niin, että ylijännitettä ei esiinny
taajuusmuuttajassa moottorin regeneratiivisen toiminnan vuoksi eikä tuotettu virta
ylitä kohdassa parametri 4-18 Virtaraja
määritettyä virtarajaa. Arvo 0.00 vastaa 0.01
sekuntia nopeustilassa. Katso rampin
nousuaika par. parametri 3-51 Ramppi 2:n
nousuaika.
kiihd.
ohjearvo kierr./ min.
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 77
Page 80

Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
3-52 Ramppi 2 rampin seisonta-aika
Alue: Toiminto:
t
s xns kierr./ min.
Par . 3 − 52 =
dec
ohjearvo kierr./ min.
3-55 Ramppi 2 S-ramppisuhde kiihd. alussa
33
Alue: Toiminto:
50 %* [ 1 -
99 %]
Syötä rampin kokonaisnousuajan osuus
(parametri 3-51 Ramppi 2:n nousuaika), jossa
kiihdytysmomentti suurenee. Mitä suurempi
prosentuaalinen arvo on, sitä suurempi
tuotettu nykäyksen kompensaatio on ja siten
sovelluksen momenttinykäykset ovat
pienempiä.
3-60 Ramppi 3 tyyppi
Optio: Toiminto:
vakiokiihdytyksen. S-ramppi tuottaa
epälineaarisen kiihdytyksen ja kompensoi
sovelluksen nykäyksen.
[0] * Lineaarinen
[1] S-rampin
vakionyintä
[2] S-rampin
vakioaika
Kiihdyttää mahdollisimman vähäisellä
nykäyksellä.
S-ramppi kohdissa parametri 3-61 Ramppi
3:n nousuaika ja parametri 3-62 Ramppi 3
rampin seisonta-aika asetettujen arvojen
perusteella.
HUOMAUTUS!
3-56 Ramppi 2 S-ramppisuhde kiihd. lopussa
Alue: Toiminto:
50 %* [ 1 -
99 %]
Syötä rampin kokonaisnousuajan osuus
(parametri 3-51 Ramppi 2:n nousuaika), jossa
kiihdytysmomentti pienenee. Mitä suurempi
prosentuaalinen arvo on, sitä suurempi
tuotettu nykäyksen kompensaatio on ja siten
sovelluksen momenttinykäykset ovat
pienempiä.
3-57 Ramppi 2 S-ramppisuhde hidast. alussa
Alue: Toiminto:
50 %* [ 1 -
99 %]
Syötä rampin kokonaislaskuajan osuus
(parametri 3-52 Ramppi 2 rampin seisonta-aika),
jossa hidastusmomentti suurenee. Mitä
suurempi prosentuaalinen arvo on, sitä
suurempi tuotettu nykäyksen kompensaatio on
ja siten sovelluksen momenttinykäykset ovat
pienempiä.
3-58 Ramppi 2 S-ramppisuhde hidast. lopussa
Alue: Toiminto:
50 %* [ 1 -
99 %]
Syötä rampin kokonaislaskuajan osuus
(parametri 3-52 Ramppi 2 rampin seisonta-aika),
jossa hidastusmomentti pienenee. Mitä
suurempi prosentuaalinen arvo on, sitä
suurempi tuotettu nykäyksen kompensaatio on
ja siten sovelluksen momenttinykäykset ovat
pienempiä.
3.4.6 3-6* Ramppi 3
Aseta ramppiparametrit, katso parametriryhmä 3-4* Ramppi
1.
3-60 Ramppi 3 tyyppi
Optio: Toiminto:
Valitse ramppityyppi kiihdytyksen ja
hidastuksen vaatimusten mukaisesti.
Lineaarinen ramppi tuottaa rampin aikana
Jos [1] S-rampin vakionyintä on valittu ja ohjearvoa
rampin aikana muutetaan, ramppiaika saattaa pidentyä
nykäyksettömän liikkeen toteuttamiseksi, mikä saattaa
aiheuttaa pidemmän käynnistys- tai pysäytysajan.
S-ramppisuhteiden tai kytkentäkäynnistimien lisäsäätö
saattaa olla tarpeen.
3-61 Ramppi 3:n nousuaika
Alue: Toiminto:
Size
related*
[ 0.01 3600 s]
Syötä rampin nousuaika eli kiihdytysaika
0:sta moottorin nimellisnopeuteen ns.
Valitse sellainen rampin nousuaika, että
lähtövirta ei ylitä ramppauksen aikana
kohdan parametri 4-18 Virtaraja virtarajaa.
Arvo 0.00 vastaa 0.01 sekuntia nopeustilassa. Katso rampin laskuaika
parametri 3-62 Ramppi 3 rampin seisontaaika.
3-62 Ramppi 3 rampin seisonta-aika
Alue: Toiminto:
Size
related*
[ 0.01
- 3600
s]
Syötä rampin laskuaika eli hidastusaika
moottorin nimellisnopeudesta ns arvoon 0
kierrosta minuutissa (rpm). Valitse rampin
laskuaika niin, että ylijännitettä ei esiinny
vaihtosuuntaajassa moottorin regeneratiivisen toiminnan vuoksi eikä tuotettu virta
ylitä kohdassa parametri 4-18 Virtaraja
määritettyä virtarajaa. Arvo 0.00 vastaa 0.01
sekuntia nopeustilassa. Katso rampin
nousuaika par. parametri 3-61 Ramppi 3:n
nousuaika.
t
s xns kierr./ min.
Par . 3 − 62 =
dec
ohjearvo kierr./ min.
3-65 Ramppi 3 S-ramppisuhde kiihd. alussa
Alue: Toiminto:
50 %* [ 1 -
99 %]
Syötä rampin kokonaisnousuajan osuus
(parametri 3-61 Ramppi 3:n nousuaika), jossa
kiihdytysmomentti suurenee. Mitä suurempi
prosentuaalinen arvo on, sitä suurempi
78 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 81

Parametrien kuvaukset Ohjelmointiopas
3-65 Ramppi 3 S-ramppisuhde kiihd. alussa
Alue: Toiminto:
tuotettu nykäyksen kompensaatio on ja siten
sovelluksen momenttinykäykset ovat
pienempiä.
3-66 Ramppi 3 S-ramppisuhde kiihd. lopussa
Alue: Toiminto:
50 %* [ 1 -
99 %]
Syötä rampin kokonaisnousuajan osuus
(parametri 3-61 Ramppi 3:n nousuaika), jossa
kiihdytysmomentti pienenee. Mitä suurempi
prosentuaalinen arvo on, sitä suurempi
tuotettu nykäyksen kompensaatio on ja siten
sovelluksen momenttinykäykset ovat
pienempiä.
3-67 Ramppi 3 S-ramppisuhde hidast. alussa
Alue: Toiminto:
50 %* [ 1 -
99 %]
Syötä rampin kokonaislaskuajan osuus
(parametri 3-62 Ramppi 3 rampin seisonta-aika),
jossa hidastusmomentti suurenee. Mitä
suurempi prosentuaalinen arvo on, sitä
suurempi tuotettu nykäyksen kompensaatio on
ja siten sovelluksen momenttinykäykset ovat
pienempiä.
3-70 Ramppi 4 tyyppi
Optio: Toiminto:
rampin seisonta-aika asetettujen arvojen
perusteella.
HUOMAUTUS!
Jos [1] S-rampin vakionyintä on valittu ja ohjearvoa
rampin aikana muutetaan, ramppiaika saattaa pidentyä
nykäyksettömän liikkeen toteuttamiseksi, mikä saattaa
aiheuttaa pidemmän käynnistys- tai pysäytysajan.
S-ramppisuhteiden tai kytkentäkäynnistimien lisäsäädöt
saattavat olla tarpeen.
3-71 Ramppi 4:n nousuaika
Alue: Toiminto:
Size
related*
[ 0.01
- 3600
s]
Syötä rampin nousuaika eli kiihdytysaika
0:sta moottorin nimellisnopeuteen ns. Valitse
sellainen rampin nousuaika, että lähtövirta ei
ylitä ramppauksen aikana kohdan
parametri 4-18 Virtaraja virtarajaa. Arvo 0.00
vastaa 0.01 sekuntia nopeustilassa. Katso
rampin laskuaika parametri 3-72 Ramppi 4
rampin seisonta-aika.
t
s xns kierr./ min.
Par . 3 − 71 =
kiihd.
ohjearvo kierr./ min.
3 3
3-68 Ramppi 3 S-ramppisuhde hidast. lopussa
Alue: Toiminto:
50 %* [ 1 -
99 %]
Syötä rampin kokonaislaskuajan osuus
(parametri 3-62 Ramppi 3 rampin seisonta-aika),
jossa hidastusmomentti pienenee. Mitä
suurempi prosentuaalinen arvo on, sitä
suurempi tuotettu nykäyksen kompensaatio on
ja siten sovelluksen momenttinykäykset ovat
pienempiä.
3.4.7 3-7* Ramppi 4
Aseta ramppiparametrit, katso parametriryhmä 3-4* Ramppi
1.
3-70 Ramppi 4 tyyppi
Optio: Toiminto:
Valitse ramppityyppi kiihdytyksen ja
hidastuksen vaatimusten mukaisesti.
Lineaarinen ramppi tuottaa rampin aikana
vakiokiihdytyksen. S-ramppi tuottaa
epälineaarisen kiihdytyksen ja kompensoi
sovelluksen nykäyksen.
[0] * Lineaarinen
[1] S-rampin
vakionyintä
[2] S-rampin
vakioaika
Kiihdyttää mahdollisimman vähäisellä
nykäyksellä.
S-ramppi kohdissa parametri 3-71 Ramppi
4:n nousuaika ja parametri 3-72 Ramppi 4
3-72 Ramppi 4 rampin seisonta-aika
Alue: Toiminto:
Size
related*
[ 0.01
- 3600
s]
Syötä rampin laskuaika eli hidastusaika
moottorin nimellisnopeudesta ns arvoon 0
kierrosta minuutissa (rpm). Valitse rampin
laskuaika niin, että ylijännitettä ei esiinny
vaihtosuuntaajassa moottorin regeneratiivisen toiminnan vuoksi eikä tuotettu virta
ylitä kohdassa parametri 4-18 Virtaraja
määritettyä virtarajaa. Arvo 0.00 vastaa 0.01
sekuntia nopeustilassa. Katso rampin
nousuaika par. parametri 3-71 Ramppi 4:n
nousuaika.
t
s xns kierr./ min.
Par . 3 − 72 =
dec
ohjearvo kierr./ min.
3-75 Ramppi 4 S-ramppisuhde kiihd. alussa
Alue: Toiminto:
50 %* [ 1 -
99 %]
Syötä rampin kokonaisnousuajan osuus
(parametri 3-71 Ramppi 4:n nousuaika), jossa
kiihdytysmomentti suurenee. Mitä suurempi
prosentuaalinen arvo on, sitä suurempi
tuotettu nykäyksen kompensaatio on ja siten
sovelluksen momenttinykäykset ovat
pienempiä.
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 79
Page 82

130BA070.10
Time
P 3-80
RPM
P 4-13 RPM
high limit
P 1-25
Motor speed
Jog speed
P 3-19
P 3-80
Ramp up
(acc)
Ramp down
(dec)
t jog t jog
P 4-11 RPM
low limit
130BA069.10
Time
RPM
P 4-13 RPM
high limit
Reference
P 1-25
Motor speed
low limit
P 4-11 RPM
P 3-81
Qramp
Qstop
Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
3-76 Ramppi 4 S-ramppisuhde kiihd. lopussa
Alue: Toiminto:
50 %* [ 1 -
99 %]
33
Syötä rampin kokonaisnousuajan osuus
(parametri 3-71 Ramppi 4:n nousuaika), jossa
kiihdytysmomentti pienenee. Mitä suurempi
prosentuaalinen arvo on, sitä suurempi
tuotettu nykäyksen kompensaatio on ja siten
sovelluksen momenttinykäykset ovat
pienempiä.
3-77 Ramppi 4 S-ramppisuhde hidast. alussa
Alue: Toiminto:
50 %* [ 1 -
99 %]
3-78 Ramppi 4 S-ramppisuhde hidast. lopussa
Alue: Toiminto:
50 %* [ 1 -
99 %]
3.4.8 3-8* Muut rampit
Syötä rampin kokonaislaskuajan osuus
(parametri 3-72 Ramppi 4 rampin seisonta-aika),
jossa hidastusmomentti suurenee. Mitä
suurempi prosentuaalinen arvo on, sitä
suurempi tuotettu nykäyksen kompensaatio on
ja siten sovelluksen momenttinykäykset ovat
pienempiä.
Syötä rampin kokonaislaskuajan osuus
(parametri 3-72 Ramppi 4 rampin seisonta-aika),
jossa hidastusmomentti pienenee. Mitä
suurempi prosentuaalinen arvo on, sitä
suurempi tuotettu nykäyksen kompensaatio on
ja siten sovelluksen momenttinykäykset ovat
pienempiä.
Kuva 3.29 Ryöm. ramppiaika
t
s xns kierr./ min.
Par . 3 − 80 =
ryömintä
Δryömintänopeus par . 3 − 19 kierr./min.
3-81 Pikapysäytyksen ramppiaika
Alue: Toiminto:
Size
related*
[0.01
- 3600
s]
Ainoastaan väylä.
Ilmoita pikapysäytyksen rampin laskuaika eli
hidastusaika synkronisesta moottorin
nopeudesta arvoon 0 kierrosta minuutissa
(rpm). Varmista, että ylijännitettä ei esiinny
vaihtosuuntaajassa halutun rampin laskuajan
edellyttämän moottorin regeneratiivisen
toiminnan vuoksi. Varmista myös, että
halutun rampin laskuajan saavuttamiseksi
vaadittava virta ei ylitä virtarajaa (asetetaan
kohdassa parametri 4-18 Virtaraja). Pikapysäytys aktivoidaan valitun digitaaliliitännän tai
sarjaportin signaalin kautta.
3-80 Ryöm. ramppiaika
Alue: Toiminto:
Size
related*
[0.01 3600 s]
Syötä ryöminnän ramppiaika eli kiihdytys-/
hidastusaika 0:n ja moottorin nimellistaajuuden ns välillä. Varmista, että näin saatava
lähtövirta ryöminnän ramppiajalle ei ylitä
kohdan parametri 4-18 Virtaraja virtarajaa.
Ryöminnän ramppiaika alkaa, kun ryömintäsignaali on aktivoitu LCP:stä, valitusta
digitaalitulosta tai sarjaliikenneportista käsin.
Kun ryömintätila poistetaan käytöstä,
normaalit ramppiajat ovat käytössä
80 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Kuva 3.30 Pikapysäytyksen ramppiaika
Page 83

Speed
Time (s)
Inc
130BA158.11
P 3-95
Speed
Time (s)
Dec
Inc
130BA159.11
P 3-95
Parametrien kuvaukset Ohjelmointiopas
3-82 Pikapysäytyksen ramppityyppi
Optio: Toiminto:
Valitse ramppityyppi kiihdytyksen ja
hidastuksen vaatimusten mukaisesti.
Lineaarinen ramppi tuottaa rampin
aikana vakiokiihdytyksen. S-ramppi
tuottaa epälineaarisen kiihdytyksen ja
kompensoi sovelluksen nykäyksen.
[0] * Lineaarinen
[1] S-rampin
vakionyintä
[2] S-rampin vakioaika
3-83 Pikapys. S-ramppisuht. hid. käynn.
Alue: Toiminto:
50 %* [ 1 -
99 %]
Syötä rampin kokonaislaskuajan osuus
(parametri 3-42 Ramppi 1 rampin seisonta-aika),
jossa hidastusmomentti suurenee. Mitä
suurempi prosentuaalinen arvo on, sitä
suurempi tuotettu nykäyksen kompensaatio on
ja siten sovelluksen momenttinykäykset ovat
pienempiä.
3-84 Pikapys. S-ramppisuht. hid. loppu
Alue: Toiminto:
50 %* [ 1 -
99 %]
Syötä rampin kokonaislaskuajan osuus
(parametri 3-42 Ramppi 1 rampin seisonta-aika),
jossa hidastusmomentti pienenee. Mitä
suurempi prosentuaalinen arvo on, sitä
suurempi tuotettu nykäyksen kompensaatio on
ja siten sovelluksen momenttinykäykset ovat
pienempiä.
3-89 Ramp Lowpass Filter Time
Alue: Toiminto:
1 ms* [1 - 200 ms] Aseta tämän parametrin avulla, miten
nopeasti nopeus muuttuu.
3.4.9 3-9* Digit. pot.metri
Digitaalisen potentiometrin avulla voit suurentaa tai
pienentää todellista ohjearvoa säätämällä digitaalitulojen
asetusta suurennus-, pienennys- tai tyhjennystoimintojen
avulla. Aktivoi toiminto asettamalla vähintään 1 digitaalitulo suurenemaan tai pienenemään.
Kuva 3.31 Suurenna todellista ohjearvoa
Kuva 3.32 Suurenna/pienennä todellista ohjearvoa
3-90 Askelkoko
Alue: Toiminto:
0.10 %* [0.01 200 %]
Syötä suurentamisen/pienentämisen
vaadittu askelkoko moottorin synkronisen
nopeus ns prosenttiosuutena. Jos
suurennus/pienennys on aktivoitu,
tuloksena saatavaa ohjearvoa suurennetaan
tai pienennetään tässä parametrissa
määritetyllä arvolla.
3-91 Ramppiaika
Alue: Toiminto:
1s* [0 -
3600 s]
Syötä ramppiaika eli digitaalisen potentiometrin
määritetyn toiminnon (suurenna, pienennä tai
tyhjennä) ohjearvon 0–100 % säädön aika.
Jos suurenna/pienennä on aktivoituna parametrissa
parametri 3-95 Ramppiviive määritettyä rampin
viiveaikaa kauemmin, todellinen ohjearvo
rampataan ylös/alas tämän ramppiajan mukaan.
Ramppiaika määritetään aikana, joka käytetään
ohjearvon säätämiseen kohdassa
parametri 3-90 Askelkoko määritetyllä askelkoolla.
3-92 Tehon palautus
Optio: Toiminto:
[0] * Ei käytössä Nollaa digitaalisen potentiometrin ohjearvon
käynnistyksen jälkeen arvoon 0 %.
[1] Käytössä Palauttaa digitaalisen potentiometrin ohjearvon
käynnistyksen yhteydessä.
3 3
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 81
Page 84

Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
3-93 Maksimiraja
Alue: Toiminto:
100 %* [-200 -
200 %]
33
Aseta tuloksena saatavan ohjearvon
suurin sallittu arvo. Tätä suositellaan, jos
digitaalista potentiometriä käytetään
tuloksena saatavan ohjearvon hienosäätämiseen.
3-94 Minimiraja
3-95 Ramppiviive
Alue: Toiminto:
Size
related*
[ 0 -
Syötä viive, joka vaaditaan digitaalinen
0 ]
potentiometri -toiminnon aktivoinnista siihen,
että taajuusmuuttaja alkaa rampata
ohjearvoon. Kun viive on 0 ms, ohjearvo alkaa
rampata, kun suurennus/pienennys
aktivoidaan. Katso myös
parametri 3-91 Ramppiaika.
Alue: Toiminto:
-100 %* [-200 200 %]
Aseta tuloksena saatavan ohjearvon
pienin sallittu arvo. Tätä suositellaan, jos
digitaalista potentiometriä käytetään
tuloksena saatavan ohjearvon hienosäätämiseen.
82 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 85

Parametrien kuvaukset Ohjelmointiopas
3.5 Parametrit: 4-** Rajat/varoitukset
3.5.1 4-1* Moottorin rajat
Määritä vääntömomentti-, virta- ja nopeusrajat moottorille
ja reaktio taajuusmuuttajalle, kun rajat ylittyvät.
Raja voi tuottaa viestin näyttöön. Varoitus tuottaa aina
viestin näyttöön tai kenttäväylään. Valvontatoiminto saattaa
aloittaa varoituksen tai laukaisun, minkä jälkeen taajuusmuuttaja pysähtyy ja tuottaa hälytysviestin.
4-10 Moott.pyör.nop suunta
Optio: Toiminto:
HUOMAUTUS!
Tätä parametria ei voi muokata
moottorin käydessä.
Valitse tarvittava moottorin nopeuden
suunta. Käytä tätä parametria suojana
tahattomalta suunnanvaihdolta. Kun
parametrin parametri 1-00
asetus on [3] Prosessi, parametrin
parametri 4-10 Moott.pyör.nop suunta asetus
on oletusarvoisesti [0] Myötäpäivään.
Parametrin parametri 4-10 Moott.pyör.nop
suunta asetus ei rajoita parametrin
parametri 4-13 Moott. nopeuden yläraja [RPM]
asetusvaihtoehtoja.
[0] Myötäpäivään Ohjearvoksi on määritetty pyöritys
myötäpäivään. Suunnanvaihtotulon (oletusliitin 19) on oltava auki.
[1] Vastapäivään Ohjearvoksi on määritetty pyöritys
vastapäivään. Suunnanvaihtotulon (oletusliitin
19) on oltava kiinni. Jos suunnanvaihto
tarvitaan, kun suunnanvaihto-tulo on auki,
moottorin suunnan voi vaihtaa parametrilla
parametri 1-06 Suunta myötäpäivään.
[2] Molem.
suunnat
Sallii moottorin pyöriä kumpaankin suuntaan.
4-11 Moott. nopeuden alaraja [RPM]
Alue: Toiminto:
Size
related*
[ 0 - par.
4-13 RPM]
Aseta moottorin nopeuden alaraja.
Moottorin nopeuden alaraja voidaan
asettaa vastaamaan valmistajan suosittelemaa moottorin vähimmäisnopeutta.
Moottorin nopeuden alaraja ei saa olla
suurempi kuin parametrin
parametri 4-13 Moott. nopeuden yläraja
[RPM] asetus.
Konguraatiotila
4-12 Moott. nopeuden alaraja [Hz]
Alue: Toiminto:
Size
related*
[ 0 - par.
4-14 Hz]
Aseta moottorin nopeuden alaraja.
Moottorin nopeuden alaraja voidaan
asettaa vastaamaan moottorin akselin
pienintä lähtötaajuutta. Moottorin
nopeuden alaraja ei saa olla suurempi
kuin parametrin parametri 4-14 Moott.
nopeuden yläraja [Hz] asetus.
4-13 Moott. nopeuden yläraja [RPM]
Alue: Toiminto:
Size
related*
[ par. 4-11
- 60000
RPM]
Aseta moottorin nopeuden yläraja.
Moottorin nopeuden yläraja voidaan
asettaa vastaamaan suurinta valmistajan
sallimaa moottorin nimellisnopeutta.
Moottorin nopeuden ylärajan on oltava
suurempi kuin parametrin
parametri 4-11 Moott. nopeuden alaraja
[RPM] asetus.
4-14 Moott. nopeuden yläraja [Hz]
Alue: Toiminto:
Size
related*
[ par.
4-12 par. 4-19
Hz]
Aseta moottorin nopeuden maksimiraja
(Hz). Parametri 4-14 Moott. nopeuden
yläraja [Hz] voidaan asettaa vastaamaan
suurinta valmistajan sallimaa moottorin
nimellisnopeutta. Moottorin nopeuden
ylärajan on oltava suurempi kuin
parametrin parametri 4-12 Moott. nopeuden
alaraja [Hz] asetus. Lähtötaajuus saa olla
enintään 10 % kytkentätaajuudesta
(parametri 14-01 Kytkentätaajuus).
4-16 Moottoritilan momenttiraja
Alue: Toiminto:
Size related*
Riippuu
sovelluksesta*
[ 0 - 1000.0 %]
[Riippuu
sovelluksesta]
Tämä toiminto
rajoittaa akselin
momentin
mekaanisen
asennuksen suojaamiseksi.
HUOMAUTUS!
Jos parametria parametri 4-16 Moottoritilan momenttiraja
muutetaan, kun parametrin parametri 1-00 Konguraa-
tiotila asetus on [0] Av. piirin nopeus, parametria
parametri 1-66 Min.virta pienellä nopeudella säädetään
automaattisesti uudelleen.
3 3
HUOMAUTUS!
Momenttiraja reagoi todelliseen, suodattamattomaan
momenttiin, momenttipiikit mukaan lukien. Tämä ei ole
momentti, joka näytetään LCP:ssä tai kenttäväylässä, sillä
se on suodatettu.
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 83
Page 86

Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
4-17 Generatiivinen momenttiraja
Alue: Toiminto:
100 %* [ 0 - 1000.0 %] Tämä toiminto rajoittaa akselin
momentin mekaanisen asennuksen
suojaamiseksi.
33
4-18 Virtaraja
Alue: Toiminto:
Size
related*
[ 1.0 -
1000.0 %
]
HUOMAUTUS!
Jos [20] ATEX ETR on valittuna
parametrissa parametri 1-90 Moottorin
lämpösuojaus, aseta parametrin
parametri 4-18 Virtaraja arvoksi
150 %.
Tämä on todellinen virtarajatoiminto, joka
jatkuu ylisynkronisella alueella. Kentän
heikentymisen vuoksi moottorin momentti
kuitenkin laskee virtarajalla vastaavasti, kun
jännitteen suureneminen pysähtyy
moottorin synkronoidun nopeuden
yläpuolella.
4-20 Momenttirajatekijän lähde
Optio: Toiminto:
parametri 1-00 Konguraatiotila on
avoimen piirin nopeus tai suljetun piirin
nopeus.
[0] * Ei toimintoa
[2] Analogitulo 53
[4] Analogitulo 53
käänt
[6] Analogitulo 54
[8] Analogitulo 54
käänt
[10] Analogitulo
X30-11
[12] An.tulo X30-11
käänt
[14] Analogitulo
X30-12
[16] An.tulo X30-12
käänt
4-21 Nopeusrajatekijän lähde
Optio: Toiminto:
4-19 Enimmäislähtötaajuus
Alue: Toiminto:
Size
related*
[ 1 590
Hz]
HUOMAUTUS!
Tätä parametria ei voi muokata
moottorin käydessä.
HUOMAUTUS!
Maksimilähtötaajuus saa olla enintään
10 % vaihtosuuntaajan kytkentätaajuudesta
(parametri 14-01 Kytkentätaajuus).
Tuottaa lähtötaajuuden lopullisen rajan
turvallisuuden parantamiseksi sovelluksissa,
joissa on vältettävä ylinopeutta. Tämä raja on
lopullinen kaikissa kokoonpanoissa
(parametrin parametri 1-00 Konguraatiotila
asetuksesta riippumatta).
4-20 Momenttirajatekijän lähde
Optio: Toiminto:
Valitse parametrien
parametri 4-16 Moottoritilan momenttiraja ja parametri 4-17 Generatiivinen
momenttiraja asetusten 0–100 % (tai
käänteinen) skaalauksessa käytettävä
analogiatulo. 0 % ja 100 % vastaavat
signaalitasot määritetään analogiatulon
skaalauksessa, esimerkiksi parametri-
ryhmässä 6-1* Analoginen tulo 1. Tämä
parametri on aktiivinen ainoastaan, kun
[0] * Ei toimintoa
[2] Analogitulo 53
[4] Analogitulo 53
käänt
[6] Analogitulo 54
[8] Analogitulo 54
käänt
[10] Analogitulo
X30-11
[12] An.tulo X30-11
käänt
[14] Analogitulo
X30-12
[16] An.tulo X30-12
käänt
Valitse parametrin
parametri 4-19 Enimmäislähtötaajuus
asetusten 0–100 % (tai toisin päin)
skaalauksessa käytettävä analogiatulo.
0 % ja 100 % vastaavat signaalitasot
määritetään analogiatulon
skaalauksessa, esimerkiksi parametri-
ryhmässä 6-1* Analoginen tulo 1. Tämä
parametri on aktiivinen ainoastaan, kun
parametri 1-00 Konguraatiotila on [4]
Momentti, avoin piiri.
84 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 87

Parametrien kuvaukset Ohjelmointiopas
4-23 Brake Check Limit Factor Source
Valitse tulon lähde kohdan parametri 2-15 Jarrun tarkistus
toiminnolle: Jos moni taajuusmuuttaja tekee jarrun tarkistusta
samaan aikaan, sähköverkon resistanssi aiheuttaa jännitteen
alenemisen verkkovirrassa tai tasajännitevälipiirissä ja tällöin voi
tapahtua väärä jarrun tarkistus. Käytä kaikissa jarruvastuksissa
ulkoista virta-anturia. Jos sovellus vaatii 100 % kelpaavan jarrun
tarkistuksen, kytke anturi analogiatuloon.
Optio: Toiminto:
[0] * DC-link voltage Taajuusmuuttaja tekee jarrun
tarkistuksen valvomalla
tasajännitevälipiirin
jännitettä. Taajuusmuuttaja
syöttää virtaa jarruvastukseen, joka alentaa
tasajännitevälipiirin
jännitettä.
[1] Analog Input 53 Valitse ulkoisen virta-anturin
käyttäminen jarrun
valvontaan.
[2] Analog Input 54 Valitse ulkoisen virta-anturin
käyttäminen jarrun
valvontaan.
4-25 Power Limit Motor Factor Source
Valitse tulo, joka skaalaa arvon kohdassa parametri 4-82 Power
Limit Motor Mode 0 %:sta 100 %:iin.
Optio: Toiminto:
[10] Analogitulo X30-11
[12] An.tulo X30-11 käänt
[14] Analogitulo X30-12
[16] An.tulo X30-12 käänt
4-26 Power Limit Gener. Factor Source
Valitse tulo, joka skaalaa arvon kohdassa parametri 4-83 Power
Limit Generator Mode 0 %:sta 100 %:iin.
Optio: Toiminto:
[0] * Ei toimintoa
[2] Analogitulo 53
[4] Analogitulo 53 käänt
[6] Analogitulo 54
[8] Analogitulo 54 käänt
[10] Analogitulo X30-11
[12] An.tulo X30-11 käänt
[14] Analogitulo X30-12
[16] An.tulo X30-12 käänt
3 3
4-24 Brake Check Limit Factor
Alue: Toiminto:
98 %* [0 -
100 %]
Syötä rajakerroin, jota parametri 2-15 Jarrun
tarkistus käyttää jarrun tarkistuksessa. Taajuusmuuttaja käyttää rajakerrointa parametrin
parametri 4-23 Brake Check Limit Factor Source
valinnasta riippuen:
[0] DC-link voltage - taajuusmuuttaja käyttää
kerrointa tasajännitevälipiirin EEPROM-tietoihin.
[1] Analog Input 53 tai [2] Analog Input 54 - jarrun
tarkistus epäonnistuu, jos analogiatulon tulovirta
on alempi kuin rajakertoimella kerrottu maksimitulovirta.
Jarrun tarkistus epäonnistuu esimerkiksi
seuraavassa kokoonpanossa, jos tulovirta on alle
16 mA:
Analogiatuloon 53 on kytketty
•
virtamuunnin, jonka alue on 4–20 mA.
Parametrin Parametri 4-24 Brake Check
•
Limit Factor asetus on 80 %.
4-25 Power Limit Motor Factor Source
Valitse tulo, joka skaalaa arvon kohdassa parametri 4-82 Power
Limit Motor Mode 0 %:sta 100 %:iin.
Optio: Toiminto:
[0] * Ei toimintoa
[2] Analogitulo 53
[4] Analogitulo 53 käänt
[6] Analogitulo 54
[8] Analogitulo 54 käänt
3.5.2 4-3* Moottorin tak.kytk. tarkk.
Tähän parametriryhmään sisältyy esimerkiksi pulssianturien
ja resolverien kaltaisten moottorin takaisinkytkentälaitteiden valvonta ja käsittely.
4-30 Moottorin tak.kytk. menetystoiminto
Optio: Toiminto:
Tätä toimintoa käytetään takaisinkytkentäsignaalin yhdenmukaisuuden valvomiseen,
jos takaisinkytkentäsignaali on käytettävissä.
Valitse, mikä toimenpide taajuusmuuttajan
on tehtävä, jos havaitaan takaisinkytkentävika. Valittu toimenpide tehdään, kun
takaisinkytkentäsignaali poikkeaa
parametrissa parametri 4-31 Moottorin
tak.kytk. nopeusvirhe asetetusta lähtönopeudesta yli parametrissa
parametri 4-32 Moott. tak.kytk. menet.
aikak. asetetun ajan.
[0] Pois käytöstä
[1] Varoitus
[2] Laukaisu
[3] Ryömintä
[4] Lähdön lukitus
[5] Maks.nopeus
[6] Vaihda av. piiriin
[7] Valitse aset. 1
[8] Valitse aset. 2
[9] Valitse aset. 3
[10] Valitse aset. 4
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 85
Page 88

Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
4-30 Moottorin tak.kytk. menetystoiminto
Optio: Toiminto:
[11] Pysäyt. & lauk.
Varoitus 90, Tak.kytk valv. on aktiivinen, kun parametrin
parametri 4-31 Moottorin tak.kytk. nopeusvirhe arvo ylittyy
33
parametrin parametri 4-32 Moott. tak.kytk. menet. aikak.
asetuksesta riippumatta. Varoitus/Hälytys 61, Seurantavirhe
liittyy moottorin takaisinkytkentähäviö -toimintoon.
4-31 Moottorin tak.kytk. nopeusvirhe
Alue: Toiminto:
300 RPM* [1 - 600 RPM] Valitse suurin sallittu nopeusvirhe
(lähtönopeus takaisinkytkentään
verrattuna).
4-34 Seurantavirhetoiminto
Optio: Toiminto:
jättämän varalta ja sitä verrataan moottorille
lähetettyyn taajuuteen (parametri 16-13 Taajuus).
Reaktio aktivoidaan, jos mitattu ero on suurempi
kuin parametrissa parametri 4-35 Seurantavirhe
määritetty arvo parametrissa
parametri 4-36 Seurantavirhe aikakat. määritettyä
aikaa kauemmin.
Suljetun piirin seurantavirhe ei tarkoita, että
takaisinkytkentäsignaalissa on ongelmia. Seurantavirhe voi suurilla kuormilla olla momenttirajan
aiheuttama.
[0] Ei
käytössä
[1] Varoitus
[2] Laukaisu
[3] Lauk. pys.
jälkeen
Varoitus/Hälytys 78, Seurantavirhe liittyy moottorin seurantavirhetoimintoon.
4-35 Seurantavirhe
Alue: Toiminto:
10 RPM* [1 - 600
RPM]
Syötä suurin sallittu moottorin nopeuden
ja rampin lähdön välinen nopeusvirhe, kun
ramppi ei ole käytössä. Avoimessa piirissä
moottorin nopeus arvioidaan ja suljetussa
piirissä se on takaisinkytkentä pulssianturilta/resolverilta.
Kuva 3.33 Moottorin tak.kytk. nopeusvirhe
4-32 Moott. tak.kytk. menet. aikak.
Alue: Toiminto:
Size
related*
[0 - 60s]Aseta aikakatkaisun aika, jonka verran
sallitaan parametrissa
parametri 4-31 Moottorin tak.kytk.
nopeusvirhe asetetun nopeusvirheen
ylittäminen ennen kuin parametrissa
parametri 4-30 Moottorin tak.kytk. menetystoiminto valittu toiminto otetaan käyttöön.
4-34 Seurantavirhetoiminto
Optio: Toiminto:
Tätä toimintoa käytetään valvomaan, että
sovellus noudattaa odotettua nopeusproilia.
Suljetussa piirissä PID:lle saapuvaa nopeuden
ohjearvoa verrataan pulssianturin takaisinkytkentään (suodatettu). Avoimessa piirissä PID:lle
saapuvan nopeuden ohjearvo kompensoidaan
4-36 Seurantavirhe aikakat.
Alue: Toiminto:
1 s* [0 - 60 s] Syötä aikakatkaisujakso, jolloin sallitaan
parametrissa parametri 4-35 Seurantavirhe
asetettua arvoa suurempi virhe.
4-37 Seurantavirhe ramppaus
Alue: Toiminto:
100
RPM*
[1 - 600
RPM]
Syötä suurin sallittu moottorin nopeuden
ja rampin lähdön välinen nopeusvirhe,
kun ramppi on käytössä. Avoimessa
piirissä moottorin nopeus arvioidaan ja
suljetussa piirissä pulssianturi mittaa
nopeuden.
4-38 Seurantavirhe rampp. aikakatk.
Alue: Toiminto:
1 s* [0 - 60 s] Syötä aikakatkaisujakso, jolloin sallitaan
parametrissa parametri 4-37 Seurantavirhe
ramppaus asetettua arvoa suurempi virhe.
86 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 89

Speed
nRef
-nRef
0rpm
Time
130BE199.10
Parametrien kuvaukset Ohjelmointiopas
4-39 Seur.virhe rampp. aikak. jälk.
Alue: Toiminto:
5 s* [0 - 60 s] Syötä aikakatkaisujakso ramppauksen jälkeen,
jolloin parametri 4-37 Seurantavirhe ramppaus ja
parametri 4-38 Seurantavirhe rampp. aikakatk.
ovat edelleen aktiivisia.
3.5.3 4-4* Speed Monitor
4-43 Motor Speed Monitor Function
Optio: Toiminto:
HUOMAUTUS!
Tämä parametri on käytettävissä
ainoastaan ux-ohjausperiaatteessa.
Valitse, miten taajuusmuuttaja reagoi, kun
moottorin nopeusvalvonta -toiminto
tunnistaa ylinopeuden tai väärän pyörimissuunnan.
Kun moottorin nopeusvalvonta on
aktiivinen, taajuusmuuttaja tunnistaa
virheen, jos seuraavat ehdot ovat tosi
parametrissa parametri 4-45 Motor Speed
Monitor Timeout määritetyn ajan:
Todellinen nopeus eroaa
•
parametrin parametri 16-48 Speed
Ref. After Ramp [RPM] ohjearvosta.
Nopeuksien välinen erotus ylittää
•
parametrin parametri 4-44 Motor
Speed Monitor Max arvon.
Nopeuden suljetussa piirissä todellinen
nopeus on takaisinkytkentä pulssianturilta
mitattuna parametrissa parametri 7-06 PID -
alipäästösuodatusaika määritettynä aikana.
Avoimessa piirissä todellinen nopeus on
moottorin arvioitu nopeus.
4-43 Motor Speed Monitor Function
Optio: Toiminto:
[1] Varoitus Taajuusmuuttaja raportoi varoituksen 101,
Speed monitor, kun nopeus on rajan
ulkopuolella.
[2] Laukaisu Taajuusmuuttaja laukaisee ja raportoi
hälytyksen 101, Speed monitor.
[3] Ryömintä
[4] Lähdön lukitus
[5] Maks.nopeus
[6] Vaihda av.
piiriin
[7] Valitse aset. 1
[8] Valitse aset. 2
[9] Valitse aset. 3
[10] Valitse aset. 4
[11] Pysäyt. & lauk.
[12] Trip/Warning Taajuusmuuttaja raportoi käyntitilassa
hälytyksen 101, Speed monitor ja pysähdystai rullaustilassa varoituksen 101, Speed
monitor. Tämä vaihtoehto on käytettävissä
ainoastaan suljetun piirin toiminnassa.
[13] Trip/Catch Valitse, milloin kuorma on ajettava kiinni,
esimerkiksi mekaanisen jarrutuksen vikaantuessa. Tämä vaihtoehto on käytettävissä
ainoastaan suljetussa piirissä.
Taajuusmuuttaja laukaisee ja raportoi
hälytyksen 101, Speed monitor käyntitilassa.
Pysäytystilassa taajuusmuuttaja ajaa kiinni
pyörivään kuormaan ja raportoi hälytyksen
101, Speed monitor.
Kiinniajotilassa taajuusmuuttaja käyttää
pitomomenttia nollanopeuden ohjaamiseen
mahdollisesti virheellisesti toimivaan jarruun
(suljettu piiri). Poistu tästä tilasta
lähettämällä taajuusmuuttajalle uusi
käynnistyssignaali. Myös rullaus tai Safe
Torque O päättää tämän toiminnon.
3 3
4-44 Motor Speed Monitor Max
Alue: Toiminto:
300
Yhtenäinen
viiva
Katkoviiva Parametri 4-44 Motor Speed
Kuva 3.34 Nopeuden ohjearvo ja suurin
sallittu nopeusero
[0] Pois käytöstä
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 87
Parametri 16-48 Speed Ref.
After Ramp [RPM]
Monitor Max
RPM*
[10 - 500
RPM]
HUOMAUTUS!
Käytettävissä ainoastaan uxohjausperiaatteessa.
Syötä todellisen mekaanisen akselinopeuden ja parametrin
parametri 16-48 Speed Ref. After Ramp
[RPM] välinen suurin sallittu nopeus-
poikkeama.
Page 90

130BA064.10
(P 4-18)
(P 4-51)
(P 4-50)
(P 4-11) (P 4-53)(P 4-52) (P 4-13)
I
HIGH
I
LOW
n
LOW
n
HIGH
n
motor
I
motor
REF
ON REF
IN RANGE
I
LIM
n
MAX
n
MIN
[RPM]
Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
4-45 Motor Speed Monitor Timeout
Alue: Toiminto:
0.1 s* [0 - 60
s]
HUOMAUTUS!
Käytettävissä ainoastaan ux-ohjausperiaatteessa.
33
Syötä aikakatkaisujakso, jolloin sallitaan
parametrissa parametri 4-44 Motor Speed Monitor
Max asetettu poikkeama. Tämän parametrin
ajastin nollataan, jos poikkeama pysähtyy
parametrin parametri 4-44 Motor Speed Monitor
Max arvon ylittäen.
4-51 Varoitus suuresta virrasta
Alue: Toiminto:
27 tai 29 (vain FC 302) samoin kuin
relelähdön 01 tai 02 (vain FC 302)
kautta. Katso kohta Kuva 3.35.
4-52 Varoitus alhaisesta nopeudesta
Alue: Toiminto:
0 RPM* [ 0 - par.
4-53 RPM]
Syötä n
-arvo. Kun moottorin nopeus
LOW
ylittää tämän rajan, näytöllä lukee Alh.
nopeus. Signaalilähdöt voidaan ohjelmoida
antamaan tilaviesti liittimen 27 tai 29 (vain
FC 302) samoin kuin relelähdön 01 tai 02
(vain FC 302) kautta.
3.5.4 4-5* Sääd. varoitukset
4-53 Varoitus suuresta nopeudesta
Tämän parametriryhmän avulla voit säätää varoitusrajoja
virralle, nopeudelle, ohjearvolle ja takaisinkytkennälle.
Varoitukset näytetään LCP:ssä ja ne voi ohjelmoida
lähdöiksi tai luettaviksi kenttäväylän kautta laajennetussa
tilasanassa.
Alue: Toiminto:
Size
related*
[ par. 4-52 60000 RPM]
Syötä n
nopeus ylittää tämän rajan, näytöllä
lukee Suuri nopeus. Signaalilähdöt
voidaan ohjelmoida antamaan
tilaviesti liittimien 27 tai 29 samoin
kuin relelähtöjen 01 tai 02 kautta.
Katso kohta Kuva 3.35.
-arvo. Kun moottorin
HIGH
Kuva 3.35 Säädettävät varoitukset
4-50 Varoitus alhaisesta virrasta
Alue: Toiminto:
0 A* [ 0 - par.
4-51 A]
4-51 Varoitus suuresta virrasta
Syötä I
-arvo Jos moottorin virta laskee
LOW
tämän rajan alapuolelle, näytöllä lukee Virta
alhainen. Signaalilähdöt voidaan ohjelmoida
antamaan tilaviesti liittimen 27 tai 29 (vain FC
302) samoin kuin relelähdön 01 tai 02 (vain FC
302) kautta. Katso kohta Kuva 3.35.
Alue: Toiminto:
Size
related*
[ par. 4-50
- par. 16-37
A]
Syötä I
HIGH
ylittää tämän rajan, näytöllä lukee Virta
korkea. Signaalilähdöt voidaan
ohjelmoida antamaan tilaviesti liittimen
-arvo. Jos moottorin virta
4-54 Varoitus pieni ohjearvo
Alue: Toiminto:
-999999.999* [ -999999.999 par. 4-55 ]
Syötä ohjearvon alaraja. Jos
todellinen ohjearvo laskee alle
tämän rajan, näytölle tulee
teksti Ref
voidaan ohjelmoida antamaan
tilaviesti liittimen 27 tai 29 (vain
FC 302) samoin kuin relelähdön
01 tai 02 (vain FC 302) kautta.
4-55 Varoitus suuri ohjearvo
Alue: Toiminto:
999999.999* [ par. 4-54 -
999999.999 ]
Syötä ohjearvon yläraja. Jos
todellinen ohjearvo ylittää tämän
rajan, näytölle tulee teksti Ref
Signaalilähdöt voidaan ohjelmoida
antamaan tilaviesti liittimen 27 tai
29 (vain FC 302) samoin kuin
relelähdön 01 tai 02 (vain FC 302)
kautta.
4-56 Varoitus pieni tak.kytk.
Alue: Toiminto:
Size
related*
[ -999999.999 - par.
4-57 ReferenceFeedbackUnit]
Kirjoita takaisinkytkennän
alaraja. Jos takaisinkytkentä
laskee alle tämän rajan,
näytölle tulee teksti Tak.kytk
Signaalilähdöt voidaan
ohjelmoida antamaan tilaviesti
. Signaalilähdöt
LOW
high
Mat
.
.
88 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 91

Parametrien kuvaukset Ohjelmointiopas
4-56 Varoitus pieni tak.kytk.
Alue: Toiminto:
liittimen 27 tai 29 (vain FC 302)
samoin kuin relelähdön 01 tai
02 (vain FC 302) kautta.
4-57 Varoitus korkea tak.kytk.
Alue: Toiminto:
Size
related*
[ par. 4-56 -
999999.999
ReferenceFeedbackUnit]
Kirjoita takaisinkytkennän
yläraja. Jos takaisinkytkentä
ylittää tämän rajan, näytölle
tulee teksti Tak.kytk.
lilähdöt voidaan ohjelmoida
antamaan tilaviesti liittimen 27
tai 29 (vain FC 302) samoin
kuin relelähdön 01 tai 02 (vain
FC 302) kautta.
4-58 Moottorin vaihetoiminto puuttuu
Optio: Toiminto:
HUOMAUTUS!
Tätä parametria ei voi muokata moottorin
käydessä.
Puuttuva moottorin vaihe -toiminto havaitsee,
puuttuko moottorista moottorin pyörimisen
aikana vaihe. Näyttää hälytyksen 30, 31 tai 32,
jos moottorista puuttuu vaihe. Ota tämä
toiminto käyttöön moottorin vahingoittumisen
estämiseksi.
Katso myös kappale 3.5.5 Parametrien 4-58 ja 4-59
yhdistelmä..
[0] Pois
käytöstä
[1] Laukaisu
100 ms
[2] Laukaisu
1000 ms
[3] Trip 100ms
3ph detec.
Taajuusmuuttaja ei anna varoitusta puuttuvasta
moottorin vaiheesta. Ei suositella moottorin
vahingoittumisriskin vuoksi.
Tuottaa nopean havaitsemisen, jos moottorista
puuttuu vaihe.
Nosturisovelluksia laskettaessa pientä kuormaa
koskeva erikoisvaihtoehto, joka sallii taajuusmuuttajan välttää väärät puuttuvan moottorin
vaiheen tunnistukset.
Tämä vaihtoehto on vaihtoehdon [1] Laukaisu
100 ms pienennetty versio.
1 puuttuva vaihe käsitellään vaihtoehtona [1]
Laukaisu 100 ms. 3-vaihetunnistus on pienempi
kuin vaihtoehdossa [1] Laukaisu 100 ms.
3-vaihetunnistus toimii ainoastaan käynnistyksen
yhteydessä ja alhaisella nopeusalueella, jossa
kulkee huomattava virta, jolloin vältetään väärät
laukaisut pienen moottorivirran aikana.
Kork
Signaa-
4-58 Moottorin vaihetoiminto puuttuu
Optio: Toiminto:
HUOMAUTUS!
Käytettävissä ainoastaan FC 302 -mallin
suljetussa ux-piirissä.
[5] Motor
Check
Taajuusmuuttaja tunnistaa automaattisesti, kun
moottori irrotetaan ja jatkaa toimintaa, kun
moottori kytketään uudelleen.
HUOMAUTUS!
Koskee ainoastaan mallia FC 302.
4-59 Motor Check At Start
Optio: Toiminto:
HUOMAUTUS!
Tätä parametria ei voi muokata moottorin
käydessä.
HUOMAUTUS!
Koskee ainoastaan mallia FC 302.
Käytä tätä parametria puuttuvan moottorivaiheen tunnistukseen, kun moottori ei pyöri.
Näyttää hälytyksen 30, U-vaihevika, hälytyksen 31,
V-vaihevika tai hälytyksen 32, W-vaihevika, jos
jokin vaihe puuttuu, kun moottori ei pyöri. Käytä
tätä toimintoa ennen mekaanisen jarrun
irrottamista. Ota tämä toiminto käyttöön
moottorin vahingoittumisen estämiseksi.
Katso myös kappale 3.5.5 Parametrien 4-58 ja
4-59 yhdistelmä..
[0]*Ei
käytössä
[1] Käytössä Taajuusmuuttaja tarkistaa ennen kutakin
Kun parametrin parametri 4-59 Motor Check At Start asetus
on [1] Käytössä, älä aseta parametrille
parametri 4-58 Moottorin vaihetoiminto puuttuu seuraavia
vaihtoehtoja:
HUOMIO
MOOTTORIN VAHINGOITTUMISEN VAARA
Tämän vaihtoehdon käyttäminen saattaa
vahingoittaa moottoria.
Taajuusmuuttaja ei anna varoitusta puuttuvasta
moottorin vaiheesta.
käynnistystä, ovatko kaikki kolme moottorin
vaihetta olemassa. ASM-moottoreissa tarkistus
tehdään ilman mitään liikettä. PM- ja SynRMmoottoreissa tarkistus tehdään sijainnin
tunnistuksen osana.
3 3
[0] Pois käytöstä.
•
[5] Motor check.
•
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 89
Page 92

Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
3.5.5 4-6* Ohitusnopeus
4-70 Sijaintivirhe-toiminto
Optio: Toiminto:
Joissakin järjestelmissä joitakin lähtötaajuuksia tai nopeuksia on vältettävä järjestelmän resonanssiongelmien
vuoksi. Enintään 4 taajuus- tai nopeusaluetta voidaan
välttää.
33
4-60 Ohitusnopeus nopeudesta [RPM]
Matriisi [4]
Alue: Toiminto:
Size related* [ 0 - par. 4-13
RPM]
4-61 Ohitusnopeus taajuudesta [Hz]
Matriisi [4]
Joissakin järjestelmissä joitakin
lähtötaajuuksia tai -nopeuksia on
syytä välttää järjestelmän
resonanssiongelmien vuoksi. Syötä
vältettävien nopeuksien alaraja.
[0] * Pois
käytöstä
[1] Varoitus Taajuusmuuttaja antaa varoituksen, kun suurin
[2] Laukaisu Taajuusmuuttaja laukaisee, kun suurin sallittu
4-71 Maximum Position Error
Alue: Toiminto:
1000 CustomReadoutUnit2*
sijainnin välinen ero. Kohdistusvirhe on sijainnin
PI-säätimen tulo.
Taajuusmuuttaja ei valvo sijaintivirhettä.
sallittu sijaintivirhe ylittyy. Taajuusmuuttaja
jatkaa toimintaa.
sijaintivirhe ylittyy.
[0 2147483647
CustomReadoutUnit2]
HUOMAUTUS!
Tämä parametri on käytettävissä ainoastaan
ohjelmistoversiossa 48.XX.
Alue: Toiminto:
Size related* [ 0 - par. 4-14
Hz]
4-62 Ohitusnopeus nopeuteen [RPM]
Matriisi [4]
Alue: Toiminto:
Size related* [ 0 - par. 4-13
RPM]
Joissakin järjestelmissä joitakin
lähtötaajuuksia tai -nopeuksia on
vältettävä järjestelmän resonanssiongelmien vuoksi. Syötä
vältettävien nopeuksien alaraja.
Joissakin järjestelmissä joitakin
lähtötaajuuksia tai -nopeuksia on
syytä välttää järjestelmän
resonanssiongelmien vuoksi. Syötä
vältettävien nopeuksien yläraja.
Syötä suurin sallittu sijainnin
seurantavirhe parametriryhmässä 17-7* Position scaling
määritettyinä sijaintiyksikköinä.
Jos tämä arvo ylittyy
parametrissa
parametri 4-72 Position Error
Timeout määritetyn ajan
parametrin
parametri 4-70 Position Error
Function sijaintivirhetoiminto
aktivoituu.
4-72 Position Error Timeout
Alue: Toiminto:
4-63 Ohitusnopeus taajuuteen [Hz]
Matriisi [4]
Alue: Toiminto:
Size related* [ 0 - par. 4-14
Hz]
Joissakin järjestelmissä joitakin
lähtötaajuuksia tai -nopeuksia on
syytä välttää järjestelmän
resonanssiongelmien vuoksi. Syötä
vältettävien nopeuksien yläraja.
3.5.6 4-7* Sijainnin valvonta
0.100 s* [0.000 -
60.000 s]
HUOMAUTUS!
Tämä parametri on käytettävissä
ainoastaan ohjelmistoversiossa
48.XX.
Jos parametrissa parametri 4-71 Maximum
Position Error määritetty virhe esiintyy
kauemmin kuin tämän parametrin aika,
taajuusmuuttaja aktivoi parametrissa
parametri 4-70 Position Error Function
valitun toiminnon.
4-70 Sijaintivirhe-toiminto
Optio: Toiminto:
HUOMAUTUS!
Tämä parametri on käytettävissä
ainoastaan ohjelmistoversiossa 48.XX.
Valitse toiminto, joka aktivoidaan, kun sijaintivirhe ylittää suurimman sallitun alueen.
Kohdistusvirhe on todellisen sijainnin ja ohjatun
90 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
4-73 Position Limit Function
Optio: Toiminto:
HUOMAUTUS!
Tämä parametri on käytettävissä
ainoastaan ohjelmistoversiossa 48.XX.
Valitse toiminto, joka aktivoidaan, kun sijainti
on parametreissa parametri 3-06 Minimum
Page 93

Parametrien kuvaukset Ohjelmointiopas
4-73 Position Limit Function
Optio: Toiminto:
Position ja parametri 3-07 Maximum Position
määritettyjen rajojen ulkopuolella.
[0] Disabled Taajuusmuuttaja ei valvo sijainnin rajoja.
[1] Warning Taajuusmuuttaja antaa varoituksen, kun sijainti
on rajojen ulkopuolella.
[2] Warning &
Trip
[3]*Abs. Pos.
Mode Stop
[4] Abs. Pos.
Md. Stop &
Trip
[5] Position
Stop
[6] Position
Stop & Trip
[7] Speed Stop Kun asetettu kohde on on sijainnin rajojen
[8] Speed Stop
& Trip
Taajuusmuuttaja antaa varoituksen, kun
asetettu kohde on sijainnin rajojen
ulkopuolella. Taajuusmuuttaja aloittaa
asemoinnin ja laukaisee, kun sijainnin raja on
saavutettu.
Taajuusmuuttaja valvoo sijainnin rajoja
ainoastaan absoluuttisessa asemointitilassa.
Taajuusmuuttaja antaa varoituksen ja pysähtyy
sijainnin rajalle, kun asetettu kohde on sijainnin
rajojen ulkopuolella.
Taajuusmuuttaja valvoo sijainnin rajoja
ainoastaan absoluuttisessa asemointitilassa.
Taajuusmuuttaja pysähtyy sijainnin rajalle ja
laukaisee, kun asetettu kohde on sijainnin
rajojen ulkopuolella.
Kun asetettu kohde on sijainnin rajojen
ulkopuolella, taajuusmuuttaja käyttää sijainnin
rajaa kohteena. Tämä vaihtoehto toimii kaikissa
toimintailoissa, nopeus- ja momenttiohjaus
mukaan lukien. Taajuusmuuttaja antaa rajasijainnissa varoituksen.
Kun asetettu kohde on sijainnin rajojen
ulkopuolella, taajuusmuuttaja käyttää sijainnin
rajaa kohteena. Tämä vaihtoehto toimii kaikissa
toimintailoissa, nopeus- ja momenttiohjaus
mukaan lukien. Taajuusmuuttaja laukaisee
rajasijainnissa.
ulkopuolella, taajuusmuuttaja tekee rampin
laskun ja pysäyttää rajasijaintiin. Tämä
vaihtoehto toimii kaikissa toimintatiloissa:
Taajuusmuuttaja antaa pysähdyksissä
varoituksen.
Kun asetettu kohde on on sijainnin rajojen
ulkopuolella, taajuusmuuttaja tekee rampin
laskun ja pysäyttää rajasijaintiin. Tämä
vaihtoehto toimii kaikissa toimintatiloissa:
Taajuusmuuttaja laukaisee pysähdyksissä.
4-74 Start Fwd/Rev Function
Optio: Toiminto:
Valitse toiminto, jonka taajuusmuuttaja
suorittaa, kun digitaalitulossa on aktiivinen
signaali ja valittuina optiot [12] Enable Start
Forward tai [13] Enable Start Reverse.
Taajuusmuuttaja suorittaa tässä parametrissa
valitun toiminnon saavuttaessaan päätyrajakytkimen, jonka jälkeen liike sallitaan
ainoastaan vastakkaiseen suuntaan. Kun
valitaan laukaisuoptio, taajuusmuuttajan liike
voidaan palauttaa vain nollaamalla.
[0]*Stop Taajuusmuuttaja pysäyttää moottorin.
[1] Stop &
Warning
[2] Stop & Trip Taajuusmuuttaja pysäyttää moottorin,
[3] Qstop Taajuusmuuttaja suorittaa pikapysäytyksen.
[4] Qstop &
Warning
[5] Qstop &
Trip
[6] Coast Taajuusmuuttaja rullaa moottoria.
[7] Coast &
Warning
[8] Coast &
Trip
[9] Zero Speed
Ref
Taajuusmuuttaja pysäyttää moottorin ja
näyttää varoituksen 215, Start Fwd/Rev.
laukaisee ja näyttää varoituksen 215, Start Fwd/
Rev.
Taajuusmuuttaja suorittaa pikapysäytyksen ja
näyttää varoituksen 215, Start Fwd/Rev.
Taajuusmuuttaja suorittaa pikapysäytyksen,
laukaisee ja näyttää varoituksen 215, Start Fwd/
Rev.
Taajuusmuuttaja rullaa moottoria ja näyttää
varoituksen 215, Start Fwd/Rev.
Taajuusmuuttaja rullaa moottoria, laukaisee ja
näyttää varoituksen 215, Start Fwd/Rev.
Taajuusmuuttaja hidastaa moottoria ja pitää
sen magnetoituna nollanopeudella. Sijoitteluja synkronointitiloissa sijainnin ohjain pysyy
aktiivisena ja pitää todellisen sijainnin.
4-75 Touch Timout
Alue: Toiminto:
6000.0 s* [0.1 -
6000.0 s]
Syötä kosketusanturin sijoittelun
aikakatkaisu. Kun kosketusanturin
sijoittelu on aktiivinen eikä taajuusmuuttaja havaitse kosketusanturia tässä
ajassa, taajuusmuuttaja laukaisee ja antaa
hälytyksen 216, Touch Timeout. Arvo 6000
on yhtä kuin Pois käytöstä.
3 3
4-74 Start Fwd/Rev Function
Optio: Toiminto:
HUOMAUTUS!
Tämä parametri on käytettävissä
ainoastaan ohjelmistoversiossa 48.XX.
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 91
Page 94

e30bg235.11
TT
TT
nn
nn
Driving
Driving
Braking
Braking
T
12
3 4
par. 4-91,
par. 4-92
par. 4-95
par. 4-96
n
par. 4-93,
par. 4-94
Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
3.5.7 4-8* Power Limit
Parametrit tehon rajoitustoiminnan määrittämiseen.
4-80 Power Limit Func. Motor Mode
Valitse, otetaanko tehon rajoitustoiminto käyttöön. Aseta tehon
33
rajoituksen moottoritila kohdassa parametri 4-82 Power Limit
Motor Mode.
Optio: Toiminto:
[0] * Disabled
[1] Enabled
[2] When Activated Aktivointi digitaalitulon
tai kenttäväylän kautta.
4-81 Power Limit Func. Generator Mode
Valitse, otetaanko tehon rajoitustoiminto käyttöön generointitilassa. Aseta tehon rajoituksen moottoritila kohdassa
parametri 4-83 Power Limit Generator Mode.
Optio: Toiminto:
[0] * Disabled
[1] Enabled
[2] When Activated Aktivointi digitaalitulon
tai kenttäväylän kautta.
4-82 Power Limit Motor Mode
Alue: Toiminto:
100.0 %* [0.0 -
200.0 %]
Syötä enimmäislähtöteho, kun tehon
rajoitustoiminto on aktiivinen. Tähän
liittyvät parametrit:
parametri 1-20 Moottorin teho [kW],
parametri 1-21 Moott. teho [hv].
4-83 Power Limit Generator Mode
Alue: Toiminto:
100.0 %* [0.0 -
200.0 %]
Syötä enimmäisgenerointiteho, kun
tehon rajoitustoiminto on aktiivinen.
Tähän liittyvät parametrit:
parametri 1-20 Moottorin teho [kW],
parametri 1-21 Moott. teho [hv].
3.5.8 4-9* Directional Limits
Kuva 3.36 Suuntarajat
Nopeusraja-arvo ei voi ylittää parametri 4-13 Moott.
nopeuden yläraja [RPM]:n tai parametri 4-14 Moott.
nopeuden yläraja [Hz]:n arvoa. Momenttiraja-arvo ei voi
ylittää parametri 4-16 Moottoritilan momenttiraja:n tai
parametri 4-17 Generatiivinen momenttiraja:n arvoa.
4-90 Directional Limit Mode
Valitse, otetaanko suuntarajat käyttöön. Kun suuntarajat ovat
käytössä, voidaan määrittää eri nopeus- ja momenttirajoja
pyörimissuunnille myötä- ja vastapäivään.
Optio: Toiminto:
[0] * Disabled Suuntarajat ovat poissa
käytöstä.
[1] Speed Suuntarajat on aktiivisia
nopeusarvojen osalta.
[2] Torque Suuntarajat on aktiivisia
momenttiarvojen osalta.
[3] Speed and Torque Suuntarajat on aktiivisia niin
momentti- kuin nopeusarvojen
osalta.
Suuntarajat-toiminnolla voit määrittää eri vääntömomenttija nopeusrajat momenttisovellusten suunnan ja
pyörimissuunnan erilaisille yhdistelmille. Katso esimerkiksi
Kuva 3.36. Kuvassa sektoreilla 1–4 on erilaisia pyörimissuunnan ja momenttisovellusten suunnan yhdistelmiä ja
parametreja, jotka toimivat eri sektoreilla.
92 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
4-91 Positive Speed Limit [RPM]
Alue: Toiminto:
Size related* [ 0 - par. 4-13
RPM]
Aseta moottorin nopeuden
raja, kun pyörimissuunta on
myötäpäivään.
4-92 Positive Speed Limit [Hz]
Alue: Toiminto:
Size related* [ 0 - par. 4-14
Hz]
Aseta moottorin nopeuden raja,
kun pyörimissuunta on
myötäpäivään.
Page 95

Parametrien kuvaukset Ohjelmointiopas
4-93 Negative Speed Limit [RPM]
Alue: Toiminto:
Size related* [ 0 - par. 4-13
RPM]
Aseta moottorin nopeuden
raja, kun pyörimissuunta on
vastapäivään.
4-94 Negative Speed Limit [Hz]
Alue: Toiminto:
Size related* [ 0 - par. 4-14 Hz] Aseta moottorin nopeuden raja,
kun pyörimissuunta on
vastapäivään.
4-95 Positive Torque limit
Alue: Toiminto:
Size related* [ 0 - 160.0 %] Aseta moottorin vääntömomentin
raja, kun pyörimissuunta on
myötäpäivään.
4-96 Negative Torque limit
Alue: Toiminto:
Size related* [ 0 - 160.0 %] Aseta moottorin vääntömomentin
raja, kun pyörimissuunta on
vastapäivään.
3 3
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 93
Page 96

Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
3.6 Parametrit: 5-** Digit. tulo/lähtö
3.6.1 5-0* Digit. I/O-tila
Parametrit tulon ja lähdön määrittämiseksi NPN:n ja PNP:n
Ryhmä 1 Nollaus, rullaus pysähdyksiin, nollaus ja rullaus
pysähdyksiin, pikapysäytys, tasavirtajarru, pysäytys
ja [O]-painike.
Ryhmä 2: Käynnistys, pulssikäynnistys, suunnanvaihto,
käynnistys käänteinen, ryömintä ja lähdön lukitus.
avulla.
33
5-00 Digit. I/O-tila
Optio: Toiminto:
HUOMAUTUS!
Aktivoi parametri sen muuttamisen jälkeen
tekemällä tehojakso.
Digitaaliset tulot ja ohjelmoidut digitaalilähdöt
voidaan ohjelmoida ennalta käytettäviksi joko PNP- tai
NPN-järjestelmissä.
[0] * PNP
[1] NPN
Toiminnot positiivisiin suuntapulsseihin (↕). PNPjärjestelmät vedetään alas asetukseen GND.
Toiminnot negatiivisiin suuntapulsseihin (↕). NPNjärjestelmät vedetään ylös arvoon +24 V
taajuusmuuttajan sisällä.
5-01 Liittimen 27 tila
Optio: Toiminto:
HUOMAUTUS!
Tätä parametria ei voi muokata moottorin
käydessä.
[0] * Tulo Määrittää liittimen 27 digitaalituloksi.
[1] Ulostulo Määrittää liittimen 27 digitaalilähdöksi.
5-02 Liittimen 29 tila
Optio: Toiminto:
HUOMAUTUS!
Tämä parametri on saatavana vain FC 302malliin.
[0] * Tulo Määrittää liittimen 29 digitaalituloksi.
[1] Ulostulo Määrittää liittimen 29 digitaalilähdöksi.
3.6.2 5-1* Digit. tulot
Digitaalituloja käytetään taajuusmuuttajan eri toimintojen
valitsemiseen. Taulukko 3.15 näyttää digitaalituloille
määritettävissä olevat toiminnot.
Ryhmän 1 toiminnot ovat etusijalla ryhmän 2 toimintoihin
nähden.
Taulukko 3.14 Toimintoryhmät
Digitaalitulon toiminto Valitse Liitin
Ei toimintoa [0] Kaikki, liitin 32, 33
Kuittaus [1] Kaikki
Rullaus, käänt. [2] Kaikki, liitin 27
Rull. ja noll., käänt. [3] Kaikki
Pikapysäytys, käänt. [4] Kaikki
Tasav.jarru, käänt. [5] Kaikki
Pysäytys, käänteinen [6] Kaikki
Käynnistys [8] Kaikki, liitin 18
Pulssikäynnistys [9] Kaikki
Suunnanvaihto [10] Kaikki, liitin 19
Käynn. ja suun.vaihto [11] Kaikki
Käynn. eteen käyttöön [12] Kaikki
Käynn. käänt. käytt. [13] Kaikki
Ryömintä [14] Kaikki, liitin 29
Esiv. ohjearvo käyt. [15] Kaikki
Esival. ohj. bitti 0 [16] Kaikki
Esival. ohj. bitti 1 [17] Kaikki
Esival. ohj. bitti 2 [18] Kaikki
Ohjearvon lukitus [19] Kaikki
Lähdön lukitus [20] Kaikki
Nopeus ylös [21] Kaikki
Nopeus alas [22] Kaikki
Aset. valinta, bitti 0 [23] Kaikki
Aset. valinta, bitti 1 [24] Kaikki
Tarkka pys., käänt. [26] 18, 19
Tarkka käynn., pys. [27] 18, 19
Kiinniajo [28] Kaikki
Hidastaa [29] Kaikki
Laskurin tulo [30] 29, 33
Pulssitulo, reunaliipaistava
Pulssitulo [32] 29, 33
Ramppibitti 0 [34] Kaikki
Ramppibitti 1 [35] Kaikki
Tarkka lukkokäynn. [40] 18, 19
Pulssipys. käänt. [41] 18, 19
Ulkoinen lukitus [51] –
Suur. digit.pot.metri [55] Kaikki
Väh. digit. pot.metri [56] Kaikki
Tyhj. digit. pot.metri [57] Kaikki
DigiPot-nosto [58] Kaikki
Laskuri A (ylös) [60] 29, 33
Laskuri A (alas) [61] 29, 33
Nollaa laskuri A [62] Kaikki
Laskuri B (ylös) [63] 29, 33
[31] 29, 33
94 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 97

Parametrien kuvaukset Ohjelmointiopas
Digitaalitulon toiminto Valitse Liitin
Laskuri B (alas) [64] 29, 33
Nollaa laskuri B [65] Kaikki
Mek. jarrun tak.kytk. [70] Kaikki
Mek. jarrun tak.k. Taaj.m. [71] Kaikki
PID-virhe käänt. [72] Kaikki
PID-nollaus I osa [73] Kaikki
PID käytössä [74] Kaikki
MCO-kohtainen [75] Kaikki
PTC-kortti 1 [80] Kaikki
PROFIdrive OFF2 [91] Kaikki
PROFIdrive OFF3 [92] Kaikki
Light load detection [94] Kaikki
Mains Loss [96] 32, 33
Mains loss inverse [97] 32, 33
Start edge triggered [98] Kaikki
Safety option reset [100] –
Enable master oset [108] Kaikki
Start virtual master [109] Kaikki
Start homing [110] Kaikki
Activate touch [111] Kaikki
Relative position [112] Kaikki
Enable reference [113] Kaikki
Sync. to Pos. Mode [114] Kaikki
Home sensor [115] 18, 32, 33
Home sensor Inv. [116] 18, 32, 33
Touch sensor [117] 18, 32, 33
Touch sensor Inv. [118] 18, 32, 33
Speed mode [119] Kaikki
Power Limit Mot. [231] Kaikki
Power Limit Gen. [232] Kaikki
Power Limit Both [233] Kaikki
Taulukko 3.15 Digitaalitulon toiminto
VLT® AutomationDrive FC 301/FC 302 -mallien
vakioliittimet ovat 18, 19, 27, 29, 32 ja 33. VLT® General
Purpose I/O MCB 101 -liittimet ovat X30/2, X30/3 ja X30/4.
Liitin 29 toimii lähtönä ainoastaan mallissa FC 302.
Vain yhdelle digitaalitulolle omistetut toiminnot ilmoitetaan
kyseisessä parametrissa.
Kaikki digitaalitulot voidaan ohjelmoida näihin toimintoihin:
[0] Ei toimintoa Ei reaktiota liittimeen tuleviin signaaleihin.
[1] Kuittaus Kuittaa taajuusmuuttajan laukaisun/hälytyksen
jälkeen. Kaikkia hälytyksiä ei voi kuitata.
[2] Rullaus,
käänt.
[3] Rull. ja noll.,
käänt.
(Oletusdigitaalitulo 27): Rullaus pysähdyksiin,
käänteinen tulo (norm. kiinni). Taajuusmuuttaja jättää moottorin vapaaseen tilaan.
Looginen 0⇒rullauspysäytys.
Nollaus ja rullaus pysähdyksiin, käänteinen
tulo (norm. kiinni). Jättää moottorin
vapaaseen tilaan ja kuittaa taajuusmuuttajan.
Looginen 0⇒rullaus pysähdyksiin ja kuittaus.
[4] Pikapysäytys,
käänt.
[5] Tasav.jarru,
käänt.
[6] Pysäytys,
käänteinen
Käänteinen tulo (norm. kiinni) Johtaa
pysäytykseen pikapysäytyksen ramppiajan
mukaisesti, joka on määritetty kohdassa
parametri 3-81 Pikapysäytyksen ramppiaika.
Kun moottori pysähtyy, akseli on vapaassa
tilassa. Looginen 0⇒pikapysäytys.
Tasavirtajarrutuksen käänteinen tulo (norm.
kiinni) Pysäyttää moottorin tuomalla siihen
tasavirtaa tietyn ajan. Katso
parametri 2-01 DC-jarrun virta parametri 2-03 DC-jarrun kytkeytymisnop. [1/
min]. Toiminto on aktiivinen vain, jos
parametrin parametri 2-02 DC-jarrutusaika
arvo ei ole 0. Looginen 0⇒tasavirtajarru.
Pysäytä käänteinen toiminto. Luo pysäytystoiminnon, kun valittu liitin siirtyy loogiselta
tasolta 1 tasolle 0.
Pysäytys suoritetaan valitun ramppiajan
mukaisesti:
Parametri 3-42 Ramppi 1 rampin
•
seisonta-aika,
Parametri 3-52 Ramppi 2 rampin
•
seisonta-aika,
Parametri 3-62 Ramppi 3 rampin
•
seisonta-aika ja
Parametri 3-72 Ramppi 4 rampin
•
seisonta-aika.
HUOMAUTUS!
Kun taajuusmuuttaja on momenttirajalla ja vastaanottanut
pysäytyskomennon, se ei välttämättä
pysähdy itsestään. Aseta taajuusmuuttajan pysähtymisen
varmistamiseksi digitaalilähdön
asetukseksi [27] Mom.raja & STOP.
Kytke tämä digitaalilähtö rullaukseksi
määritettyyn digitaalituloon.
[8] Käynnistys (Oletusdigitaalitulo 18): Valitse käynnistys-/
pysäytyskomennon käynnistys. Looginen 1 =
käynnistys, looginen 0 = pysäytys.
[9] Pulssikäyn-
nistys
[10] Suunnan-
vaihto
Moottori käynnistyy, jos liittimeen syötetään
vähintään 2 ms kestävä pulssi. Moottori
pysähtyy, jos "Pysäytys, käänteinen"
aktivoidaan tai annetaan nollauskomento
(digitaalitulon kautta).
(Oletusdigitaalitulo 19). Vaihda moottorin
akselin pyörimissuunta. Vaihda suunta
valitsemalla looginen 1. Suunnanvaihtoviesti
vaihtaa ainoastaan pyörimissuunnan. Se ei
aktivoi käynnistystoimintoa. Valitse molemmat
suunnat kohdassa
parametri 4-10 Moott.pyör.nop suunta.
3 3
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 95
Page 98

Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
Toiminto ei ole aktiivinen prosessin suljetussa
piirissä.
[11] Käynn. ja
suun.vaihto
[12] Käynn. eteen
33
käyttöön
[13] Käynn.
käänt. käytt.
[14] Ryömintä (Oletusdigitaalitulo 29): Aktivoi ryömintä-
[15] Esiv.
ohjearvo
käyt.
[16] Esival. ohj.
bitti 0
[17] Esival. ohj.
bitti 1
[18] Esival. ohj.
bitti 2
Käytetään käynnistykseen/pysäytykseen ja
suunnanvaihtoon samalla johtimella. Käynnistyssignaaleja ei ole sallittu samaan aikaan.
Poistaa käytöstä liikkeen vastapäivään ja
mahdollistaa liikkeen myötäpäivään.
Poistaa käytöstä liikkeen myötäpäivään ja
mahdollistaa liikkeen vastapäivään.
nopeus. Katso parametri 3-11 Ryömintänopeus
[Hz].
Vaihtaa ulkoisesta ohjearvosta esivalittuun
ohjearvoon ja päinvastoin. Tällöin oletetaan,
että kohdassa parametri 3-04 Ohjearvotoiminto
on valittu [1] Ulkoinen/esivalittu. Looginen 0 =
ulkoinen ohjearvo aktiivinen; Looginen 1 =
yksi kahdeksasta esiasetetusta ohjearvosta on
aktiivinen.
Esival. ohj.bittien 0, 1 ja 2 avulla voit valita
yhden kahdeksasta esivalitusta ohjearvosta
taulukon Taulukko 3.16 mukaisesti.
Sama kuin [16] Esival. ohj. bitti 0.
Sama kuin [16] Esival. ohj. bitti 0.
[21] Nopeus
ylös
Ei nopeuden muutosta 0 0
Vähennetty %-arvolla 1 0
Lisätty %-arvolla 0 1
Vähennetty %-arvolla 1 1
Taulukko 3.17 Sulje/Kiinniajo
HUOMAUTUS!
Jos lähdön lukitus on aktiivinen, taajuusmuuttajaa ei voi pysäyttää pienellä [8]
Käynnistys -signaalilla. Pysäytä taajuusmuuttaja liittimellä, jonka asetukseksi on
ohjelmoitu [2] Rullaus, käänt. tai [3] Rull.
ja noll., käänt.
Valitse [21] Nopeus ylös ja [22] Nopeus alas, jos
halutaan ohjata nopeuden muutoksia digitaalisesti (moottorin potentiometri). Ota tämä
toiminto käyttöön valitsemalla joko [19]
Ohjearvon lukitus tai [20] Lähdön lukitus. Jos
Nopeus ylös/alas on aktiivinen alle 400 millisekunnin ajan, kokonaisohjearvoa suurennetaan/
pienennetään 0,1 %. Jos Nopeus ylös/alas on
aktiivinen yli 400 millisekunnin ajan, kokonaisohjearvo noudattaa rampin nousu/lasku parametrin asetusta 3-x1/3-x2.
Sulje Kiinniajo
Esival. ohj. bitti 2 1 0
Esival. ohj. 0 0 0 0
Esival. ohj. 1 0 0 1
Esival. ohj. 2 0 1 0
Esival. ohj. 3 0 1 1
Esiasetettu ohjearvo 4 1 0 0
Esiasetettu ohjearvo 5 1 0 1
Esiasetettu ohjearvo 6 1 1 0
Esiasetettu ohjearvo 7 1 1 1
Taulukko 3.16 Esivalittu ohjearvobitti
[19] Ohjearvon
lukitus
[20] Lähdön
lukitus
Lukitsee kulloisenkin ohjearvon, joka on nyt
lähtökohta/ehto toimintojen [21] Nopeus ylös ja
[22] Nopeus alas käytölle. Jos nopeus ylös/alas
on käytössä, nopeuden muutos seuraa aina
ramppia 2 (parametri 3-51 Ramppi 2:n nousuaika
ja parametri 3-52 Ramppi 2 rampin seisonta-aika)
alueella 0–parametri 3-03 Maksimiohjearvo.
Lukitsee kulloisenkin moottorin taajuuden (Hz),
joka on nyt lähtökohta/ehto toimintojen [21]
Nopeus ylös ja [22] Nopeus alas käytölle. Jos
nopeus ylös/alas on käytössä, nopeuden
muutos seuraa aina ramppia 2
(parametri 3-51 Ramppi 2:n nousuaika ja
parametri 3-52 Ramppi 2 rampin seisonta-aika)
alueella 0–parametri 1-23 Moottorin taajuus.
[22] Nopeus alas Sama kuin [21] Nopeus ylös.
[23] Aset.
valinta, bitti
0
[24] Aset.
valinta, bitti
1
[26] Tarkka
pysäytys,
käänt.
[27] Tarkka
käynn., pys.
Valitse jokin neljästä asetuksesta valitsemalla
[23] Aset. valinta, bitti 0 tai [24] Aset. valinta,
bitti 1. Aseta kohdan parametri 0-10 Aktiiviset
asetukset asetukseksi Moniasetukset.
(Oletusdigitaalitulo 32): Sama kuin [23] Aset.
valinta, bitti 0.
Lähettää käänteisen pysäytyssignaalin, kun
täsmällinen pysäytystoiminto on aktivoitu
kohdassa parametri 1-83 Täsmällinen pysäytys-
toiminto.
Täsmällisen pysäytyksen käänteinen toiminto
on käytettävissä liittimille 18 tai 19.
Käytä tätä, kun [0] Tarkka ramppipys on
valittuna parametrille
parametri 1-83 Täsmällinen pysäytystoiminto.
Täsmällinen käynnistys, pysäytys on käytettävissä liittimillä 18 ja 19.
Täsmällinen käynnistys varmistaa, että kulma,
jonka roottori kääntyy pysähdyksistä
ohjearvoon, on sama joka käynnistyksellä
(samalla ramppiajalla, samalla asetuspisteellä).
Tämä toiminto vastaa täsmällistä pysäytystä,
jossa kulma, jonka roottori kääntyy
ohjearvosta pysähdyksiin, on sama joka
pysäytyksellä.
Kun käytössä on parametrin
parametri 1-83 Täsmällinen pysäytystoiminto
96 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
Page 99

Pulse
Sample time
130BB463.10
Speed [rpm] Spee d [rpm]
Time[sec] Time[sec]a b
130BB462.10
Read Timer:
20 timer tides
Read Timer:
20 timer tides
Time Start
Time counter
Sample time
Timer
Pulse
130BB464.10
Parametrien kuvaukset Ohjelmointiopas
vaihtoehto [1] Lask.pys. ja noll. tai [2] Lask.pys.,
ei noll.
Taajuusmuuttaja tarvitsee täsmällisen
pysäytyksen signaalin, ennen kuin parametrin
parametri 1-84 Täsm. pysäytyslaskurin arvo arvo
on saavutettu. Jos signaalia ei anneta, taajuusmuuttaja ei pysähdy, kun parametrin
parametri 1-84 Täsm. pysäytyslaskurin arvo arvo
on saavutettu.
Laukaise täsmällinen käynnistys, pysäytys
digitaalitulolla: Toiminto on käytettävissä
liittimissä 18 ja 19.
[28] Kiinniajo Suurentaa ohjearvoa tietyllä prosenttimäärällä
(suhteessa), joka on määritetty kohdassa
parametri 3-12 Kiinniajo ylös/alas arvo.
[29] Hidastaa Pienentää ohjearvoa tietyllä prosenttimäärällä
(suhteessa), joka on määritetty kohdassa
parametri 3-12 Kiinniajo ylös/alas arvo.
[30] Laskurin
tulo
[31] Pulse edge
triggered
[32] Pulssitulo Mittaa pulssisivujen välisen ajan. Näin saadaan
Täsmällinen pysäytystoiminto kohdassa
parametri 1-83 Täsmällinen pysäytystoiminto
toimii laskuripysäytyksenä tai nopeuden
mukaan kompensoituna laskuripysäytyksenä
nollauksella tai ilman. Laskurin arvo on
määritettävä kohdassa parametri 1-84 Täsm.
pysäytyslaskurin arvo.
Laskee pulssisivujen määrän näytteenottoajan
kuluessa. Näin saadaan suurempi tarkkuus
suurilla tarkkuuksilla, mutta tulos ei ole yhtä
tarkka pienemmillä tarkkuuksilla. Käytä tätä
pulssiperiaatetta pulssiantureille, joiden
tarkkuus on alhainen (esimerkiksi 30 PPR).
Kuva 3.37 Pulssisivujen määrä näytteenottoajan kuluessa
suurempi tarkkuus pienemmillä taajuuksilla,
mutta tulos ei ole yhtä tarkka suuremmilla
tarkkuuksilla. Tällä periaatteella on katkaisutaajuus, joka tekee siitä sopimattoman
pulssiantureihin, joiden resoluutiot ovat hyvin
pieniä (esim. 30 PPR) pienillä nopeuksilla.
a: Pieni pulssianturin
tarkkuus
b: Normaali
pulssianturin tarkkuus
Kuva 3.38 Pulssisivujen välinen aika
[34] Ramppibitti0Ottaa käyttöön yhden neljästä käytettävissä
olevasta rampista kohdan Taulukko 3.18
mukaisesti.
[35] Ramppibitti1Sama kuin [34] Ramppibitti 0.
Esival. ramppibitti 1 0
Ramppi 1 0 0
Ramppi 2 0 1
Ramppi 3 1 0
Ramppi 4 1 1
Taulukko 3.18 Esivalittu ramppibitti
[40] Tarkka
lukkokäynn.
Tarkka lukkokäynnistys vaatii ainoastaan 3
ms:n pulssin liittimeen 18 tai 19.
Kun käytössä on parametrin
parametri 1-83 Täsmällinen pysäytystoiminto
vaihtoehto [1] Lask.pys. ja noll. tai [2]
Lask.pys., ei noll.
Kun ohjearvo on saavutettu, taajuusmuuttaja ottaa sisäisesti käyttöön tarkan
pysäytyksen signaalin. Tämä tarkoittaa, että
taajuusmuuttaja suorittaa tarkan
pysäytyksen, kun parametrin
parametri 1-84 Täsm. pysäytyslaskurin arvo
laskuriarvo on saavutettu.
[41] Pulssipys.
käänt.
Lähettää lukituspysäytyssignaalin, kun
täsmällinen pysäytystoiminto on aktivoitu
kohdassa parametri 1-83 Täsmällinen
pysäytystoiminto. Tarkka käänteinen lukituspysäytystoiminto on saatavana liittimiin 18
tai 19.
[51] Ulkoinen
lukitus
Toiminnon avulla voidaan antaa taajuusmuuttajaan ulkoinen vika. Tätä vikaa
käsitellään samoin kuin sisäisesti luotua
hälytystä.
[55] Suur.
dig.pot.metri
Suurenna-signaali digitaaliselle potentiometritoiminnolle, joka kuvataan
parametriryhmässä 3-9* Digit. pot. metri
[56] Väh. digit.
pot.metri
Pienennä-signaali digitaaliselle potentiometritoiminnolle, joka kuvataan
parametriryhmässä 3-9* Digit. pot. metri
[57] Tyhj. digit.
pot.metri
Tyhjentää digitaalisen potentiometrin
ohjearvon, joka kuvataan parametriryhmässä 3-9* Digit. pot. metri
[60] Laskuri A (Ainoastaan liitin 29 tai 33). SLC-laskurissa
tapahtuvan yhteenlaskennan tulo.
[61] Laskuri A (Ainoastaan liitin 29 tai 33). SLC-laskurissa
tapahtuvan vähennyslaskennan tulo.
3 3
MG33MO20 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. 97
Page 100

Parametrien kuvaukset
VLT® AutomationDrive FC 301/302
[62] Nollaa laskuriALaskurin A nollaustulos.
[63] Laskuri B (Ainoastaan liitin 29 tai 33). SLC-laskurissa
tapahtuvan yhteenlaskennan tulo.
[64] Laskuri B (Ainoastaan liitin 29 tai 33). SLC-laskurissa
tapahtuvan vähennyslaskennan tulo.
33
[65] Nollaa laskuriBLaskurin B nollaustulo.
käännetään parametrissa
parametri 30-25 Light Load Delay [s]
määritetyn viiveajan jälkeen. Ominaisuuden
käyttämistä varten vaaditaan käynnistystai käynnistys käänteinen -käsky yhdessä
tämän digitaalitulon valinnan kanssa.
HUOMAUTUS!
Kytkeytyminen pyörivään moottoriin
[70] Mek. jarrun
tak.kytk.
[71] Mek. jarrun
tak.k. Taaj.m
[72] PID-virhe
käänt.
[73] PID-nollaus I
osa
[74] PID käytössä Mahdollistaa laajennetun prosessin PID-
[80] PTC-kortti 1 Kaikkien digitaalitulojen arvoksi voidaan
[91] PROFIdrive
OFF2
[92] PROFIdrive
OFF3
[94] Light Load
Detection
Jarrun takaisinkytkentä nostosovelluksiin:
Aseta parametrin parametri 1-01 Moottorin
ohjausperiaate arvoksi [3] Flux moottorin
tak.kytkennällä; aseta parametrin
parametri 1-72 Käynnistystoiminto arvoksi
[6] Nost. mek. j.rele.
Käänteinen jarrun takaisinkytkentä
nostosovelluksiin.
Kun tämä on käytössä, se kääntää
prosessin PID-säätimestä saatavan virheen.
Käytettävissä vain, jos
parametri 1-00 Konguraatiotila-asetuksena
on [6] Pintakelain, [7] Laaj. PID nopeus OL
tai [8] Laaj. PID nopeus CL.
Kun tämä on käytössä, se resetoi prosessin
PID-säätimen I-osan. Vastaa parametria
parametri 7-40 Prosessin PID I osan noll..
Käytettävissä vain, jos
parametri 1-00 Konguraatiotila-asetuksena
on [6] Pintakelain, [7] Laaj. PID nopeus OL
tai [8] Laaj. PID nopeus CL.
säätimen käytön. Vastaa parametria
parametri 7-50 Prosessin PID Laajennettu
PID. Käytettävissä vain, jos
parametri 1-00 Konguraatiotila-asetuksena
on [7] Laaj. PID nopeus OL tai [8] Laaj. PID
nopeus CL.
määrittää [80] PTC-kortti 1. Tämä vaihtoehto
tulee kuitenkin määrittää vain yhdelle
digitaalitulolle.
Toiminto on sama kuin PROFIBUS/
PROFINET-option vastaava ohjaussanabitti.
Toiminto on sama kuin PROFIBUS/
PROFINET-option vastaava ohjaussanabitti.
Hissien tai liukuportaiden evakuointitila.
Toiminto magnetoi moottorin ennen
mekaanisen jarrun avaamista. Liike
käynnistyy VLT® Lift Controller MCO 361:n
määrittämään suuntaan (ylös tai alas)
parametrissa parametri 30-27 Light Load
Speed [%] määritetyllä nopeudella. Tämä
liike jatkuu parametrissa
parametri 30-25 Light Load Delay [s]
määritetyn ajan samalla virtaa mitaten. Jos
moottorin virta ylittää parametrin
parametri 30-26 Light Load Current [%]
ohjearvovirran, nosto estetään. Suunta
ohittaa kevyen kuorman tunnistuksen.
[96] Mains Loss Paranna kineettistä varmistusta valitsemalla
tämä.
Kun verkkojännite palaa tasolle, joka on
lähellä tunnistustasoa (mutta edelleen sitä
alempi), lähtönopeus suurenee ja
kineettiset varmistukset pysyvät aktiivisina.
Vältä tämä tilanne lähettämällä taajuusmuuttajalle tilasignaali. Kun digitaalitulon
signaali on matala (0), taajuusmuuttaja
pakottaa kineettiset varmistukset pois
päältä.
HUOMAUTUS!
Käytettävissä ainoastaan pulssituloille liittimissä 32/33.
[97] Verkkovika
käänt.
Kun digitaalitulon signaali on korkea (1),
taajuusmuuttaja pakottaa kineettiset
varmistukset pois päältä. Katso lisätietoja
vaihtoehdon [96] Mains loss kuvauksesta.
HUOMAUTUS!
Käytettävissä ainoastaan pulssituloille liittimissä 32/33.
[98] Start edge
triggered
[100] Safe Option
Reset
[107] Target Inverse Vaihtaa määrätyn sijainnin etumerkin. Jos
[108] Enable Master
Oset
Reunaliipaisimella tehty käynnistyskomento. Pitää käynnistyskomennon
aktiivisena. Voidaan käyttää käynnistyspainikkeeseen.
Kuittaa turvallisuusoption. Käytettävissä
ainoastaan, kun turvallisuusoptio on
asennettu.
määrätty sijainti on esimerkiksi 1000,
tämän option aktivointi muuttaa arvoksi
-1000.
HUOMAUTUS!
Tämä vaihtoehto on käytettävissä
ainoastaan ohjelmistoversiossa
48.XX.
Aktivoi parametrissa parametri 3-26 Master
Oset valitun isäntäpoikkeaman, kun
parametri 17-93 Master Oset Selectionasetuksena on valinta välillä [1] Absolute –
[5] Relative Touch Sensor.
98 Danfoss A/S © 01/2018 Kaikki oikeudet pidätetään. MG33MO20
 Loading...
Loading...