

Page 1
ENGINEERING TOMORROW
Programmierhandbuch
VLT® AutomationDrive FC 301/302
Software-Versionen, Steuerkarte MK I: 7.62, 48.2X
Software-Version, Steuerkarte MK II: 8.10
www.danfoss.de/vlt
Page 2

Page 3
Inhaltsverzeichnis Programmierhandbuch
Inhaltsverzeichnis
1 Einführung
1.1 Softwareversion
1.2 Zulassungen
1.3 Definitionen
1.3.1 Frequenzumrichter 3
1.3.2 Eingang 3
1.3.3 Motor 3
1.3.4 Sollwerteinstellung 4
1.3.5 Verschiedenes 4
1.4 Safety
1.5 Elektrische Verdrahtung
1.6 Integrierter Bewegungsregler (IMC)
2 Programmieren
2.1 Grafische und numerische LCPs
2.1.1 LCD-Display 13
2.1.2 Schnelle Übertragung von Parametereinstellungen zwischen mehreren Frequenzumrichtern 15
3
3
3
3
6
9
11
12
12
2.1.3 Anzeigemodus 15
2.1.4 Displayanzeige - Auswahl des Anzeigemodus 15
2.1.5 Parametereinstellung 17
2.1.6 Hauptfunktionen im Quick-Menü 17
2.1.7 Erste Inbetriebnahme 18
2.1.8 Hauptmenümodus 19
2.1.9 Parameterauswahl 19
2.1.10 Ändern von Daten 19
2.1.11 Ändern eines Textwerts 20
2.1.12 Ändern eines Datenwerts 20
2.1.13 Stufenlose Änderung von numerischen Datenwerten 20
2.1.14 Wert, Schritt für Schritt 20
2.1.15 Anzeigen und Programmieren von indizierten Parametern 21
2.1.16 Programmierung auf der numerischen LCP-Bedieneinheit 21
2.1.17 LCP-Tasten 22
3 Parameterbeschreibungen
3.1 Parameter: 0-** Betrieb und Display
24
24
3.2 Parameter: 1-** Motor/Last
3.3 Parameter: 2-** Bremsfunktionen
3.4 Parameter: 3-** Sollwert/Rampen
3.5 Parameter: 4-** Grenzen/Warnungen
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 1
37
65
72
85
Page 4
Inhaltsverzeichnis
VLT® AutomationDrive FC 301/302
3.6 Parameter: 5-** Digit. Ein-/Ausgänge
3.7 Parameter: 6-** Analoge Ein-/Ausg.
3.8 Parameter: 7-** PID Regler
3.9 Parameter: 8-** Opt./Schnittstellen
3.10 Parameter: 9-** PROFIBUS
3.11 Parameter: 10-**CAN/DeviceNet
3.12 Parameter: 12-** Ethernet
3.13 Parameter: 13-** Smart Logic
3.14 Parameter: 14-** Sonderfunktionen
3.15 Parameter: 15-** Info/Wartung
3.16 Parameter: 16-** Datenanzeigen
3.17 Parameter: 17-** Drehgeber Opt.
3.18 Parameter: 18-** Datenanzeigen 2
3.19 Parameter: 19-** Anwendungsparameter
3.20 Parameter: 23-** Zeitfunktionen
3.21 Parameter: 30-** Spezielle Merkmale
3.22 Parameter: 32-** MCO Grundeinstell.
97
125
135
146
157
157
157
158
184
198
206
214
222
224
225
232
236
3.23 Parameter: 33-** MCO Erw. Einstell.
3.24 Parameter: 34-** MCO-Datenanzeigen
3.25 Parameter: 35-** Fühlereingangsopt.
3.26 Parameter: 36-** Programmierbare I/O-Option
3.27 Parameter: 40-** Special Settings
3.28 Parameter: 42-** Sicherheitsfunktionen
3.29 Parameter: 43-** Einheitenanzeigen
4 Integrierter Bewegungsregler (IMC)
4.1 Einführung
4.2 Positionierung, Referenzfahrt, Synchronisierung
4.3 Steuerung/Regelung
5 Parameterlisten
5.1 Einführung
5.2 Parameterlisten und Optionen, Software-Version 8.10 (Standard)
5.3 Parameterlisten und Optionen, Softwareversion 48.20 (IMC)
6 Fehlersuche und -beseitigung
236
236
237
240
242
242
243
246
246
246
248
252
252
253
283
306
6.1 Zustandsmeldungen
7 Anhang
7.1 Symbole, Abkürzungen und Konventionen
Index
2 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
306
322
322
323
Page 5
Einführung Programmierhandbuch
1 Einführung
1.1 Softwareversion
Programmierhandbuch
Software-Versionen:
Steuerkarte MK I: 7.62, 48.2X und frühere Versionen
Steuerkarte MK II: 8.10
Die Software-Versionsnummer finden Sie unter
Parameter 15-43 Software Version.
Tabelle 1.1 Software-Version
1.1.1 Steuerkarte MK II
Die Software-Versionen ab 8.03 lassen sich nur auf der
Steuerkarte MK II installieren. Die Software-Versionen bis
einschließlich 7.62 sind nur für die Steuerkarte MK I
verwendbar. Sie können die Version der Steuerkarte an der
Farbe des USB-Anschlusses erkennen:
MK I: Schwarzer USB-Anschluss.
MK II: Weißer USB-Anschluss.
1.2 Zulassungen
1.3 Definitionen
1.3.1 Frequenzumrichter
I
VLT,MAX
Maximaler Ausgangsstrom.
I
VLT,N
Vom Frequenzumrichter gelieferter Ausgangsnennstrom.
U
VLT,MAX
Maximale Ausgangsspannung.
1.3.2 Eingang
Steuerbefehl
Sie können den angeschlossenen Motor über das LCP und
die Digitaleingänge starten und stoppen.
Die Funktionen sind in zwei Gruppen unterteilt.
Funktionen in Gruppe 1 haben eine höhere Priorität als
Funktionen in Gruppe 2.
Gruppe 1 Reset, Freilaufstopp, Reset und Freilaufstopp,
Schnellstopp, DC-Bremse, Stopp und [Off]-Taste.
Gruppe 2 Start, Puls-Start, Reversierung, Start Rücklauf,
Festdrehzahl JOG und Ausgangsfrequenz
speichern.
Tabelle 1.2 Funktionsgruppen
1.3.3 Motor
Motor läuft
An der Antriebswelle erzeugtes Drehmoment und Drehzahl
von 0 U/min zur maximalen Drehzahl am Motor.
f
JOG
Motorfrequenz bei aktivierter Funktion Festdrehzahl JOG
(über Digitalklemmen).
f
M
Motorfrequenz.
f
MAX
Maximale Motorfrequenz.
f
MIN
Minimale Motorfrequenz.
f
M,N
Motornennfrequenz (Typenschilddaten).
I
M
Motorstrom (Istwert).
I
M,N
Motornennstrom (Typenschilddaten).
n
M,N
Motornenndrehzahl (Typenschilddaten).
n
s
Synchrone Motordrehzahl.
2 × Par. . 1 − 23 × 60s
ns=
n
slip
Motorschlupf.
P
M,N
Motornennleistung (Typenschilddaten in kW oder HP).
T
M,N
Nenndrehmoment (Motor).
Par. . 1 − 39
1 1
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 3
Page 6
175ZA078.10
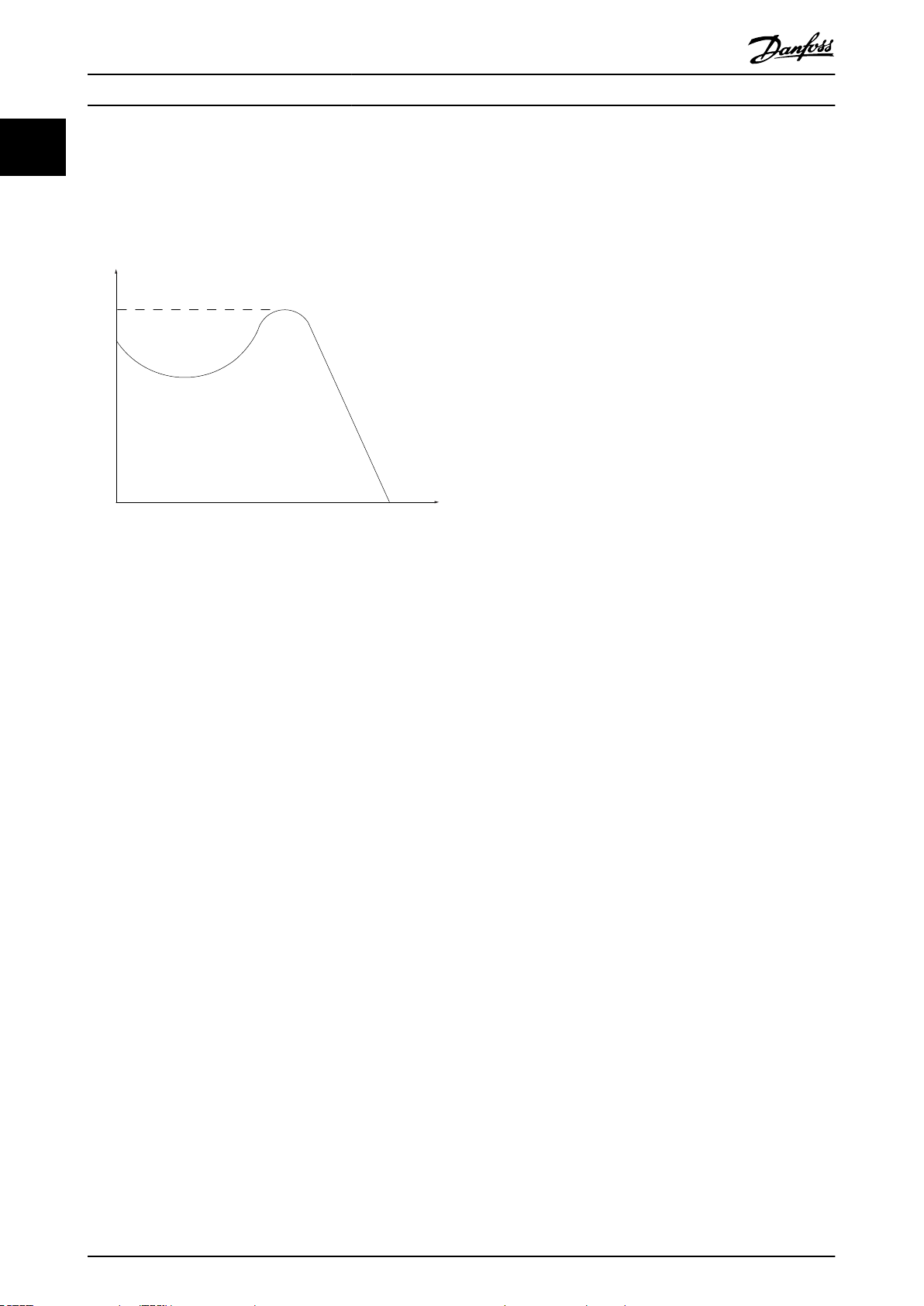
Kippgrenze
Drehzahi
Moment
Einführung
VLT® AutomationDrive FC 301/302
11
U
M
Momentanspannung des Motors.
U
M,N
Motornennspannung (Typenschilddaten).
Losbrechmoment
Abbildung 1.1 Losbrechmoment
η
VLT
Der Wirkungsgrad des Frequenzumrichters ist definiert als
das Verhältnis zwischen Leistungsabgabe und Leistungsaufnahme.
Einschaltsperrbefehl
Ein Stoppbefehl, der zur Gruppe 1 der Steuerbefehle
gehört – siehe Tabelle 1.2.
Stoppbefehl
Ein Stoppbefehl, der zur Gruppe 1 der Steuerbefehle
gehört – siehe Tabelle 1.2.
1.3.4 Sollwerteinstellung
Analogsollwert
Ein Sollwertsignal an den Analogeingängen 53 oder 54
(Spannung oder Strom).
Binärsollwert
Ein an die serielle Kommunikationsschnittstelle
übertragenes Signal.
Festsollwert
Ein definierter Festsollwert, einstellbar zwischen -100 %
und +100 % des Sollwertbereichs. Sie können bis zu 8
Festsollwerte über die Digitaleingänge auswählen.
Pulssollwert
Ein an die Digitaleingänge übertragenes Pulsfrequenzsignal
(Klemme 29 oder 33).
Ref
MAX
Bestimmt das Verhältnis zwischen dem Sollwerteingang bei
100 % des Gesamtskalenwerts (in der Regel 10 V, 20 mA)
und dem resultierenden Sollwert. Der maximale Sollwert
wird in Parameter 3-03 Maximaler Sollwert eingestellt.
Ref
MIN
Bestimmt das Verhältnis zwischen dem Sollwerteingang bei
0 % (normalerweise 0 V, 0 mA, 4 mA) und dem
resultierenden Sollwert. Der minimale Sollwert wird in
Parameter 3-02 Minimaler Sollwert eingestellt.
1.3.5 Verschiedenes
Analogeingänge
Die Analogeingänge können verschiedene Funktionen des
Frequenzumrichters steuern.
Es gibt zwei Arten von Analogeingängen:
Stromeingang, 0-20 mA und 4-20 mA
Spannungseingang, -10 V DC bis +10 V DC.
Analogausgang
Die Analogausgänge können ein Signal von 0-20 mA oder
4-20 mA ausgeben.
Automatische Motoranpassung, AMA
Der AMA-Algorithmus bestimmt die elektrischen Parameter
für den angeschlossenen Motor im Stillstand.
Bremswiderstand
Der Bremswiderstand wird zur Aufnahme der bei generatorischer Bremsung erzeugten Energie benötigt. Während
generatorischer Bremsung erhöht sich die DC-Zwischenkreisspannung. Ein Bremschopper stellt sicher, dass die
generatorische Energie an den Bremswiderstand
übertragen wird.
Konstantmoment (CT)-Kennlinie
Konstantmomentkennlinie; wird für Anwendungen wie
Förderbänder, Verdrängungspumpen und Krane eingesetzt.
Digitaleingänge
Die Digitaleingänge können verschiedene Funktionen des
Frequenzumrichters steuern.
Digitalausgänge
Der Frequenzumrichter verfügt über zwei programmierbare
Ausgänge, die ein 24-V-DC-Signal (max. 40 mA) liefern
können.
DSP
Digitaler Signalprozessor.
ETR
Das elektronische Thermorelais ist eine Berechnung der
thermischen Belastung auf Grundlage der aktuellen
Belastung und Zeit. Damit lässt sich die Motortemperatur
schätzen.
Hiperface
Hiperface® ist eine eingetragene Marke von Stegmann.
®
4 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 7

Einführung Programmierhandbuch
Initialisierung
Eine Initialisierung (Parameter 14-22 Betriebsart) stellt die
Werkseinstellungen des Frequenzumrichters wieder her.
Arbeitszyklus für Aussetzbetrieb
Der Aussetzbetrieb bezieht sich auf eine Abfolge von
Arbeitszyklen. Jeder Zyklus besteht aus einem Belastungsund einem Entlastungszeitraum. Der Betrieb kann
periodisch oder nichtperiodisch sein.
LCP
Das LCP Bedienteil dient zum Steuern und Programmieren
des Frequenzumrichters. Die Bedieneinheit ist abnehmbar,
und Sie können sie mithilfe des optionalen Einbausatzes
bis zu 3 m (10 ft) entfernt vom Frequenzumrichter
anbringen (z. B. an einer Schaltschranktür).
LCP 101
Das numerische LCP Bedienteil dient zum Steuern und
Programmieren des Frequenzumrichters. Das Display ist
numerisch und die Bedieneinheit dient der Anzeige von
Prozesswerten. Das LCP 101 verfügt über keine Funktionen
zum Speichern und Kopieren.
lsb
Steht für „Least Significant Bit“; bei binärer Codierung das
Bit mit der niedrigsten Wertigkeit.
msb
Steht für „Most Significant Bit“; bei binärer Codierung das
Bit mit der höchsten Wertigkeit.
MCM
Steht für Mille Circular Mil; eine amerikanische Maßeinheit
für den Leitungsquerschnitt. 1 MCM ≈ 0,5067 mm2.
Online/Offline-Parameter
Änderungen an Online-Parametern sind sofort nach
Änderung des Datenwertes wirksam. Drücken Sie [OK], um
Änderungen an Offline-Parametern zu aktivieren.
PID-Prozess
Die PID-Regelung sorgt durch eine Anpassung der
Ausgangsfrequenz an die wechselnde Last für eine
Aufrechterhaltung von erforderlichen Werten wie Drehzahl,
Druck, Temperatur usw.
PCD
Process Control Data (Prozessregelungsdaten).
Aus- und Einschaltzyklus
Schalten Sie die Stromversorgung aus, bis das Display (LCP)
dunkel ist. Schalten Sie den Strom anschließend wieder
ein.
Pulseingang/Inkrementalgeber
Ein externer digitaler Impulsgeber für Istwertinformationen
über die Motordrehzahl. Der Drehgeber kommt in
Anwendungen zum Einsatz, bei denen eine große
Genauigkeit bei der Drehzahlregelung erforderlich ist.
Fehlerstromschutzschalter
Fehlerstromschutzschalter.
Parametersatz
Sie können die Parametereinstellungen in vier Parametersätzen speichern. Sie können zwischen den vier
Parametersätzen wechseln oder einen Satz bearbeiten,
während ein anderer Satz gerade aktiv ist.
SFAVM
Schaltmodus mit der Bezeichnung „Statorfluss-orientierte
asynchrone Vektormodulation“ (Parameter 14-00 Schalt-
muster).
Schlupfausgleich
Der Frequenzumrichter gleicht den belastungsabhängigen
Motorschlupf aus, indem er unter Berücksichtigung des
Motorersatzschaltbildes und der gemessenen Motorbelastung die Ausgangsfrequenz anpasst (nahezu konstante
Motordrehzahl).
SLC
Der SLC (Smart Logic Control) ist eine Abfolge benutzerdefinierter Aktionen, die ausgeführt werden, wenn die
zugehörigen benutzerdefinierten Ereignisse vom SLC als
„wahr“ bewertet werden. (Siehe Kapitel 3.13 Parameter: 13-
** Smart Logic).
STW (ZSW)
Zustandswort
Frequenzumrichter-Standardbus
Schließt RS485-Bus mit FC-Protokoll oder MC-Protokoll ein.
Siehe Parameter 8-30 FC-Protokoll.
THD
Total Harmonic Distortion ist die gesamte Spannungsverzerrung, die aus den einzelnen
Spannungsoberschwingungen berechnet wird.
Thermistor
Ein temperaturabhängiger Widerstand, installiert am
Frequenzumrichter oder Motor.
Abschaltung
Ein Zustand, der in Fehlersituationen eintritt, z. B. bei einer
Übertemperatur des Frequenzumrichters oder wenn der
Frequenzumrichter den Motor, den Prozess oder den
Mechanismus schützt. Der Frequenzumrichter verhindert
einen Neustart, bis die Ursache der Störung behoben
wurde. Starten Sie den Frequenzumrichter zum Beenden
des Alarmzustands neu. Sie dürfen die Abschaltung nicht
zu Zwecken der Personensicherheit verwenden.
1 1
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 5
Page 8
Einführung
VLT® AutomationDrive FC 301/302
11
Abschaltblockierung
Der Frequenzumrichter wechselt in Störungssituationen
zum Selbstschutz in diesen Zustand. Der Frequenzumrichter erfordert einen Eingriff, z. B. bei einem Kurzschluss
am Ausgang. Sie können eine Abschaltblockierung nur
durch Unterbrechen der Netzversorgung, Beheben der
Fehlerursache und erneuten Anschluss des Frequenzumrichters aufheben. Der Neustart wird verzögert, bis der
Fehlerzustand über die [Reset]-Taste am LCP quittiert wird.
In einigen Fällen erfolgt die Aufhebung automatisch (durch
vorherige Programmierung). Sie dürfen die Abschaltblockierung nicht zu Zwecken der Personensicherheit
verwenden.
VT-Kennlinie
Variable Drehmomentkennlinie; typisch bei Anwendungen
mit quadratischem Lastmomentverlauf über den Drehzahlbereich, z. B. Kreiselpumpen und Lüfter.
+
VVC
Im Vergleich zur herkömmlichen U/f-Steuerung bietet die
Spannungsvektorsteuerung (VVC+) eine verbesserte
Dynamik und Stabilität, sowohl bei Änderung des
Drehzahlsollwerts als auch in Bezug auf das LastDrehmoment.
60° AVM
60° Asynchrone Vektormodulation (Parameter 14-00 Schaltmuster).
Leistungsfaktor
Der Leistungsfaktor ist das Verhältnis zwischen I1 und I
2
5
+ I
2
7
3xUxI1cosϕ
3xUxI
I1xcosϕ1
I
EFF
+ .. + I
2
n
EFF
=
I
I
1
dacosϕ1 = 1
EFF
Leistungs− faktor =
Der Leistungsfaktor einer 3-Phasen-Regelung ist definiert
als:
Leistungs− faktor =
Der Leistungsfaktor gibt an, wie stark ein Frequenzumrichter die Netzversorgung belastet.
Je niedriger der Leistungsfaktor, desto höher der I
gleicher kW-Leistung.
=
I
2
+ I
1
I
EFF
Darüber hinaus weist ein hoher Leistungsfaktor darauf hin,
dass der Oberschwingungsstrom sehr niedrig ist.
Die in den Frequenzumrichtern eingebauten DC-Spulen
erzeugen einen hohen Leistungsfaktor. Dadurch wird die
Netzbelastung reduziert.
Zielposition
Die endgültige Zielposition, festgelegt durch Positionierungsbefehle. Der Profilgenerator verwendet diese Position
zur Berechnung dieses Drehzahlprofils.
Sollposition
Der vom Profilgenerator berechnete tatsächliche Positionssollwert. Der Frequenzumrichter verwendet diese
Sollposition als Sollwert für Position PI.
.
eff
bei
eff
Istposition
Die Istposition eines Drehgebers oder ein Wert, den die
Motorsteuerung bei Regelung ohne Rückführung
berechnet. Der Frequenzumrichter verwendet die
Istposition als Istwert für Position PI.
Positionsfehler
Der Positionsfehler ist die Differenz zwischen der Ist- und
der Sollposition. Der Positionsfehler ist der Eingang für den
PI-Positionsregler.
Positionseinheit
Die physische Einheit für Positionswerte.
1.4 Safety
WARNUNG
HOCHSPANNUNG
Bei Anschluss an Versorgungsnetz, DC-Versorgung oder
Zwischenkreiskopplung führen Frequenzumrichter
Hochspannung. Erfolgen Installation, Inbetriebnahme
und Wartung nicht durch qualifiziertes Personal, kann
dies zu schweren Verletzungen oder sogar zum Tod
führen!
Installation, Inbetriebnahme und Wartung
•
dürfen ausschließlich von qualifiziertem
Personal durchgeführt werden.
Verwenden Sie vor der Durchführung von
•
Wartungs- oder Reparaturarbeiten ein
geeignetes Spannungsmessgerät, um sicherzustellen, dass der Frequenzumrichter keine
Spannung mehr führt.
Sicherheitsvorschriften
Trennen Sie vor Reparaturarbeiten die Netzver-
•
sorgung zum Frequenzumrichter. Stellen Sie
sicher, dass die Netzversorgung unterbrochen
wurde und die erforderliche Zeit verstrichen ist,
bevor Sie die Motor- und Netzstecker ziehen.
Informationen zur Entladezeit entnehmen Sie
Tabelle 1.3.
Die [Off]-Taste unterbricht nicht die Netzver-
•
sorgung. Sie dürfen diese daher nicht als
Sicherheitsschalter verwenden.
Achten Sie auf korrekte Schutzerdung. Darüber
•
hinaus muss der Benutzer gemäß den geltenden
nationalen und lokalen Bestimmungen vor der
Versorgungsspannung geschützt werden.
Entsprechend muss der Motor vor Überlast
geschützt werden.
Der Erdableitstrom übersteigt 3,5 mA. Lassen Sie
•
die ordnungsgemäße Erdung der Geräte durch
einen zertifizierten Elektroinstallateur überprüfen.
6 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 9
Einführung Programmierhandbuch
Sie dürfen die Stecker für die Motor- und
•
Netzversorgung nicht entfernen, während der
Frequenzumrichter an die Netzspannung
angeschlossen ist. Stellen Sie sicher, dass die
Netzversorgung unterbrochen wurde und die
erforderliche Zeit verstrichen ist, bevor Sie die
Motor- und Netzstecker ziehen.
Der Frequenzumrichter hat außer den Spannungs-
•
eingängen L1, L2 und L3 noch weitere
Spannungseingänge, wenn DC-Zwischenkreiskopplung bzw. externe 24 V DC-Versorgung
installiert sind. Prüfen Sie vor Beginn der Reparaturarbeiten, ob alle Spannungseingänge getrennt
wurden und ob die erforderliche Zeit verstrichen
ist. Informationen zur Entladezeit entnehmen Sie
Tabelle 1.3.
WARNUNG
UNERWARTETER ANLAUF
Bei Anschluss des Frequenzumrichters an Versorgungsnetz, DC-Versorgung oder Zwischenkreiskopplung
kann der angeschlossene Motor jederzeit unerwartet
anlaufen. Ein unerwarteter Anlauf im Rahmen von
Programmierungs-, Service- oder Reparaturarbeiten kann
zu Sachschäden, schweren Verletzungen oder sogar zum
Tod führen! Der Motor kann über einen externen
Schalter, einen Feldbus-Befehl, ein Sollwerteingangssignal, über ein LCP oder nach einem quittierten
Fehlerzustand anlaufen.
So verhindern Sie ein unerwartetes Starten des Motors:
Trennen Sie den Frequenzumrichter vom Netz.
•
Drücken Sie [Off/Reset] am LCP, bevor Sie
•
Parameter programmieren.
Verkabeln und montieren Sie Frequenzum-
•
richter, Motor und alle angetriebenen Geräte
vollständig, bevor Sie den Frequenzumrichter an
Versorgungsnetz, DC-Versorgung oder
Zwischenkreiskopplung anschließen.
WARNUNG
ENTLADEZEIT
Der Frequenzumrichter enthält Zwischenkreiskondensatoren, die auch bei abgeschaltetem Frequenzumrichter
geladen sein können. Auch wenn die Warn-LED nicht
leuchten, kann Hochspannung anliegen. Das Nichteinhalten der angegebenen Wartezeit nach dem Trennen
der Stromversorgung vor Wartungs- oder Reparaturarbeiten kann zu schweren Verletzungen oder sogar zum
Tod führen!
Stoppen Sie den Motor.
•
Trennen Sie die Netzversorgung und alle
•
externen Zwischenkreisversorgungen,
einschließlich externer Batterie-, USV- und
Zwischenkreisverbindungen mit anderen
Frequenzumrichtern.
Trennen oder verriegeln Sie den PM-Motor.
•
Warten Sie, damit die Kondensatoren
•
vollständig entladen können. Die notwendige
Wartezeit finden Sie in Tabelle 1.3 sowie auf
dem Typenschild auf der Oberseite des
Frequenzumrichters.
Verwenden Sie vor der Durchführung von
•
Wartungs- oder Reparaturarbeiten ein
geeignetes Spannungsmessgerät, um sicherzustellen, dass die Kondensatoren vollständig
entladen sind.
Spannung
[V]
4 7 15
200–240 0,25–3,7 kW – 5,5–37 kW
380–500 0,25–7,5 kW – 11–75 kW
525–600 0,75–7,5 kW – 11–75 kW
525–690 – 1,5–7,5 kW 11–75 kW
Tabelle 1.3 Entladezeit
Mindestwartezeit (Minuten)
1 1
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 7
Page 10
Einführung
VLT® AutomationDrive FC 301/302
11
HINWEIS
Befolgen Sie bei Verwendung der Funktion „Safe Torque
Off“ immer die Anweisungen im Produkthandbuch VLT
Frequency Converters - Safe Torque Off.
®
HINWEIS
Vom Frequenzumrichter gesendete Steuersignale oder
interne Steuersignale können in seltenen Fällen fälschlicherweise aktiviert oder verzögert werden bzw. werden
überhaupt nicht gesendet. Bei der Verwendung in sicherheitskritischen Situationen, z. B. bei der Steuerung der
elektromagnetischen Bremsfunktion einer
Hubanwendung, dürfen Sie sich nicht ausschließlich auf
diese Steuersignale verlassen.
HINWEIS
Gefährliche Situationen sind vom Maschinenbauer/
Integrator zu identifizieren, der dann dafür verantwortlich ist, notwendige Schutzmaßnahmen zu ergreifen.
Sie können zusätzliche Überwachungs- und Schutzvorrichtungen vorsehen. Dabei sind immer geltende
Sicherheitsvorschriften zu beachten, z. B. Bestimmungen
für technische Anlagen, Unfallverhütungsvorschriften
usw.
Protection Mode
Wenn ein Hardwaregrenzwert des Motorstroms oder der
DC-Zwischenkreisspannung überschritten wird, wechselt
der Frequenzumrichter in den Protection Mode. „Protection
mode“ bedeutet eine Änderung der PWM-Modulationsstrategie und eine niedrige Taktfrequenz, um Verluste auf
ein Minimum zu reduzieren. Dies wird 10 s nach dem
letzten Fehler fortgesetzt und erhöht die Zuverlässigkeit
und Robustheit des Frequenzumrichters, während die
vollständige Regelung des Motors wiederhergestellt wird.
In Hub- und Vertikalförderanwendungen können Sie den
Protection Mode nicht einsetzen, da der Frequenzumrichter
diese Betriebsart nicht wieder verlassen kann und daher
die Zeit bis zur Aktivierung der Bremse verlängert. Dies ist
nicht empfehlenswert.
Der „Protection Mode“ wird durch Einstellen von
Parameter 14-26 WR-Fehler Abschaltverzögerung auf 0
deaktiviert. Dies bedeutet, dass der Frequenzumrichter
sofort abschaltet, wenn einer der Hardwaregrenzwerte
überschritten wird.
HINWEIS
Die Deaktivierung des Schutzmodus in Hubanwendungen (Parameter 14-26 WR-Fehler Abschaltverzögerung
= 0) wird empfohlen.
Vertikalförder- und Hubanwendungen
Sie müssen die Steuerung der externen Bremsen immer
redundant auslegen. Die Funktionen des Frequenzumrichters sind keinesfalls als primäre Sicherheitsschaltung zu
betrachten. Erfüllen Sie alle einschlägigen Normen, z. B.
Hebezeuge: IEC 60204-32
Aufzüge: EN 81
8 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 11
3 Phase
power
input
DC bus
Switch Mode
Power Supply
Motor
Analog Output
Interface
relay 1
relay 2
ON=Terminated
OFF=Open
Brake
resistor
130BC931.12
91 (L1)
92 (L2)
93 (L3)
PE
88 (-)
89 (+)
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN)
0/4-20 mA
12 (+24 V OUT)
13 (+24 V OUT)
37 (D IN)
18 (D IN)
20 (COM D IN)
10 V DC
15 mA 130/200 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(COM A OUT) 39
(A OUT) 42
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0V
5V
S801
0/4-20 mA
RS485
RS485
03
+10 V DC
0/-10 V DC -
+10 V DC
+10 V DC
0/4-20 mA
0/-10 V DC -
240 V AC, 2 A
24 V DC
02
01
05
04
06
240 V AC, 2 A
24 V (PNP)
0 V (NPN)
0 V (NPN)
24 V (PNP)
19 (D IN)
24 V (PNP)
0 V (NPN)
27
24 V
0 V
(D IN/OUT)
0 V (NPN)
24 V (PNP)
(D IN/OUT)
0 V
24 V
29
24 V (PNP)
0 V (NPN)
0 V (NPN)
24 V (PNP)
33 (D IN)
32 (D IN)
1 2
ON
S201
ON
21
S202
ON=0/4-20 mA
OFF=0/-10 V DC +10 V DC
95
400 V AC, 2 A
Par. E-00
21
ON
S801
(R+) 82
(R-) 81
: Chassis
: Earth
1)
2)
1)
1)
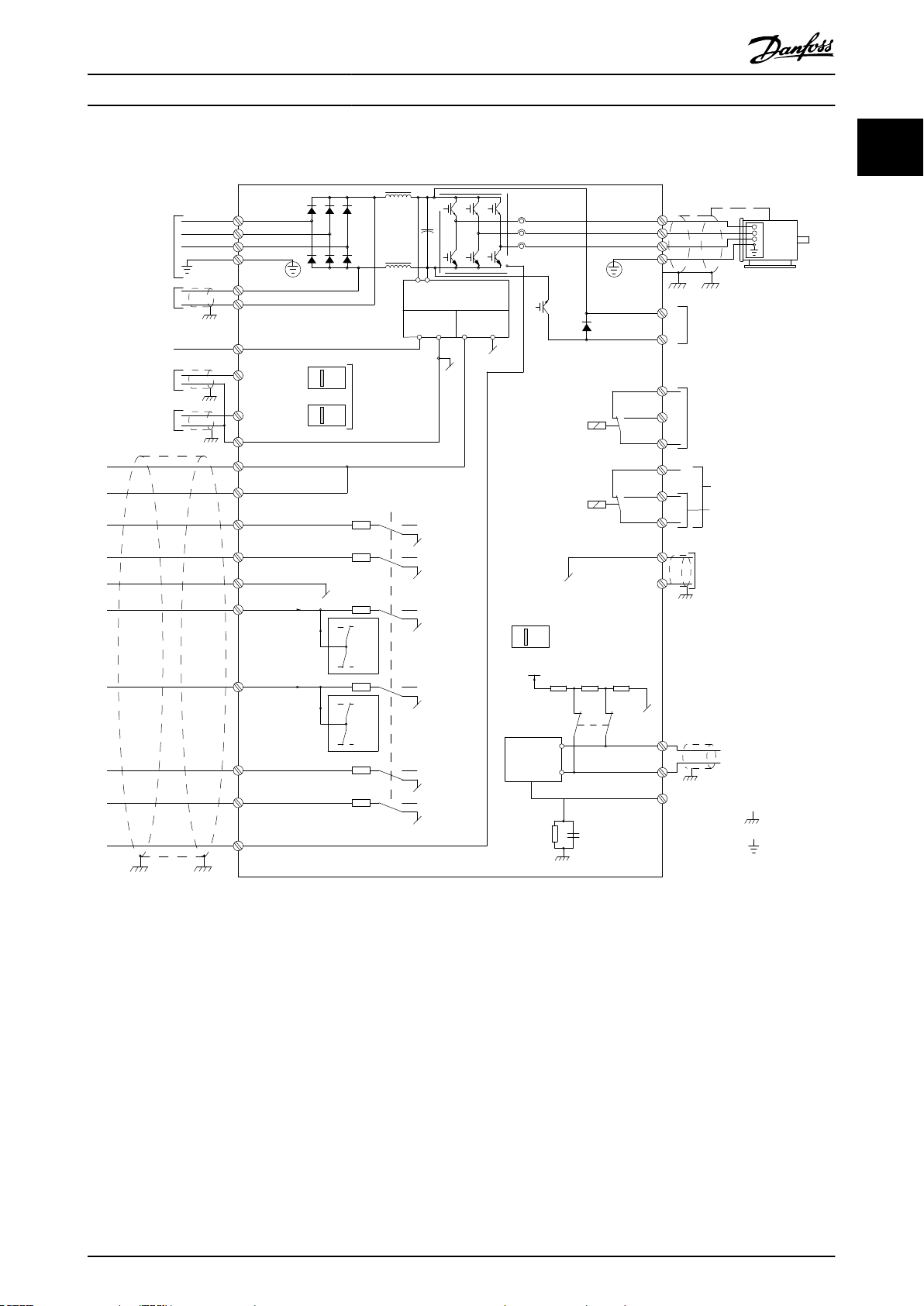
Einführung Programmierhandbuch
1.5 Elektrische Verdrahtung
1 1
Abbildung 1.2 Anschlussdiagramm des Grundgeräts
A = Analog, D = Digital
Klemme 37 wird für die Funktion Safe Torque Off genutzt. Installationsanweisungen zu Safe Torque Off (STO) finden Sie im
Produkthandbuch zu Safe Torque Off für den VLT® Frequenzumrichter.
1) Klemme 37 ist nicht Teil von FC301 (außer Bauform A1). Relais 2 und Klemme 29 haben im FC301 keine Funktion.
2) Schließen Sie den Kabelschirm nicht an.
Sehr lange Steuerleitungen und Analogsignale können in seltenen Fällen – abhänging von der Installation – aufgrund von
Störungen in den Netzkabeln zu Brummschleifen mit 50/60 Hz führen.
Wenn 50/60-Hz-Brummschleifen auftreten, müssen Sie ggf. testen, ob Sie durch einseitiges Auflegen des Kabelschirms bzw.
durch Verbinden des Kabelschirms über einen 100-nF-Kondensator mit Masse eine Besserung herbeiführen können.
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 9
Page 12
12 13 18 19 27 29 32 33 20 37
+24 VDC
0 VDC
130BT106.10
PNP (Source)
Digitaleingangsverkabelung
NPN (Sink)
Digitaleingangsverkabelung
12 13 18 19 27 29 32 33 20 37
+24 VDC
0 VDC
130BT107.11
130BA681.10
Einführung
VLT® AutomationDrive FC 301/302
11
Schließen Sie die Digital- und Analogein- und -ausgänge
aufgeteilt nach Signalart an die Bezugspotenziale des
Frequenzumrichters (Klemmen 20, 55 und 39) an, um eine
gegenseitige Beeinträchtigung durch Fehlerströme zu
vermeiden. Zum Beispiel kann durch Schalten am Digitaleingang das Analogeingangssignal gestört werden.
Eingangspolarität der Steuerklemmen
Abbildung 1.5 Erdung abgeschirmter Steuerleitungen
Abbildung 1.3 (PNP) = Quelle
Abbildung 1.4 (NPN) = Verbraucher
HINWEIS
Steuerleitungen müssen abgeschirmt sein.
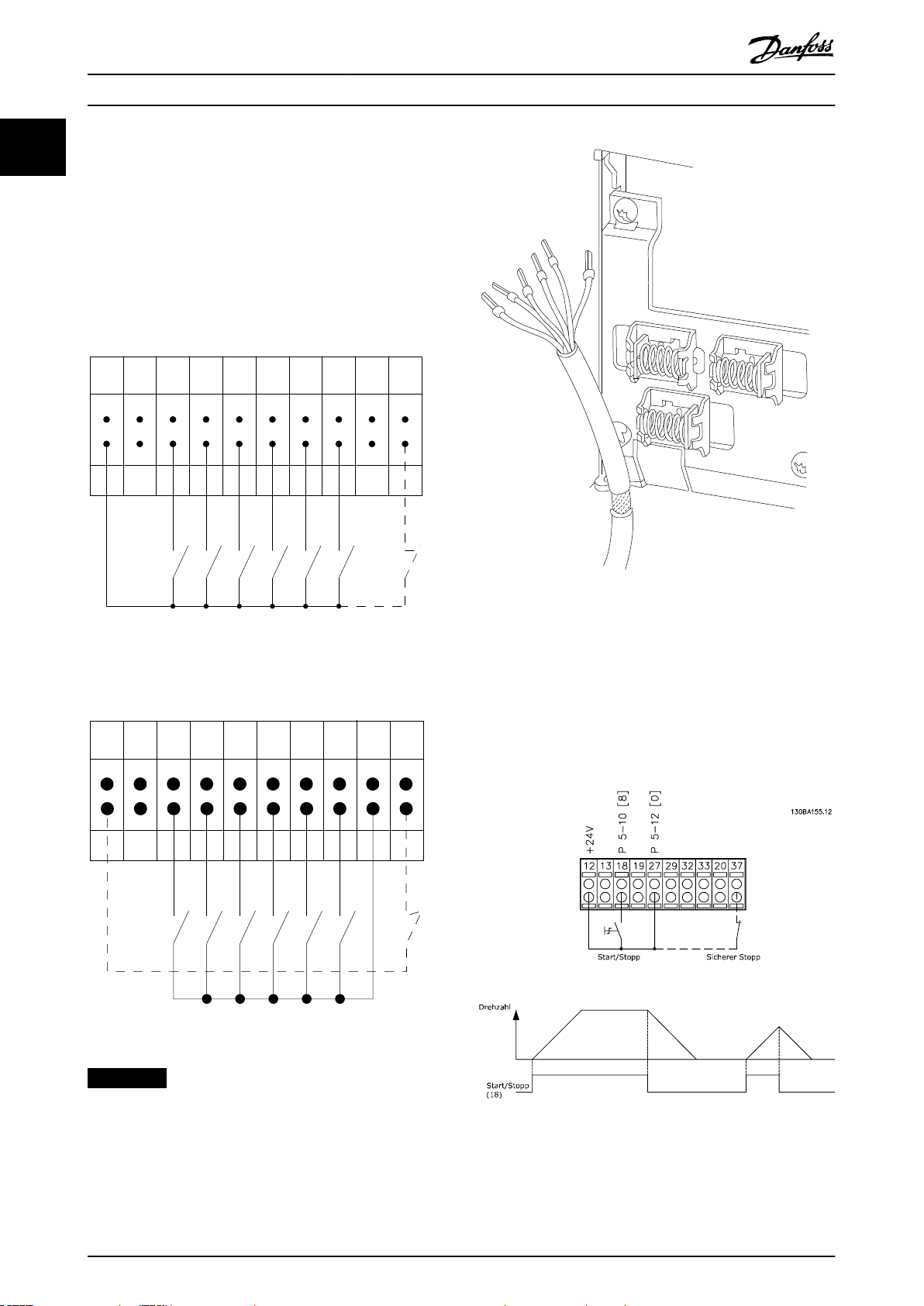
1.5.1 Start/Stopp
Klemme 18 = Parameter 5-10 Klemme 18 Digitaleingang [8]
Start.
Klemme 27 = Parameter 5-12 Klemme 27 Digitaleingang [0]
Ohne Funktion (Standardeinstellung [2] Motorfreilauf invers).
Klemme 37 = Safe Torque Off (falls verfügbar).
Abbildung 1.6 Start/Stopp
Siehe den Abschnitt Erdung abgeschirmter Steuerleitungen
im Projektierungshandbuch zum korrekten Abschluss der
Steuerleitungen.
10 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 13
12
18
27
29
32
37
+24V
Par. 5-10
Par. 5-12
Par. 5-13
Par. 5-14
130BA021.12
1 kΩ
Drehzahl UPM
P 6-15
Bezugsspannung
P 6-11 10 V
+ 10 V/30 mA
130BA154.11
Einführung Programmierhandbuch
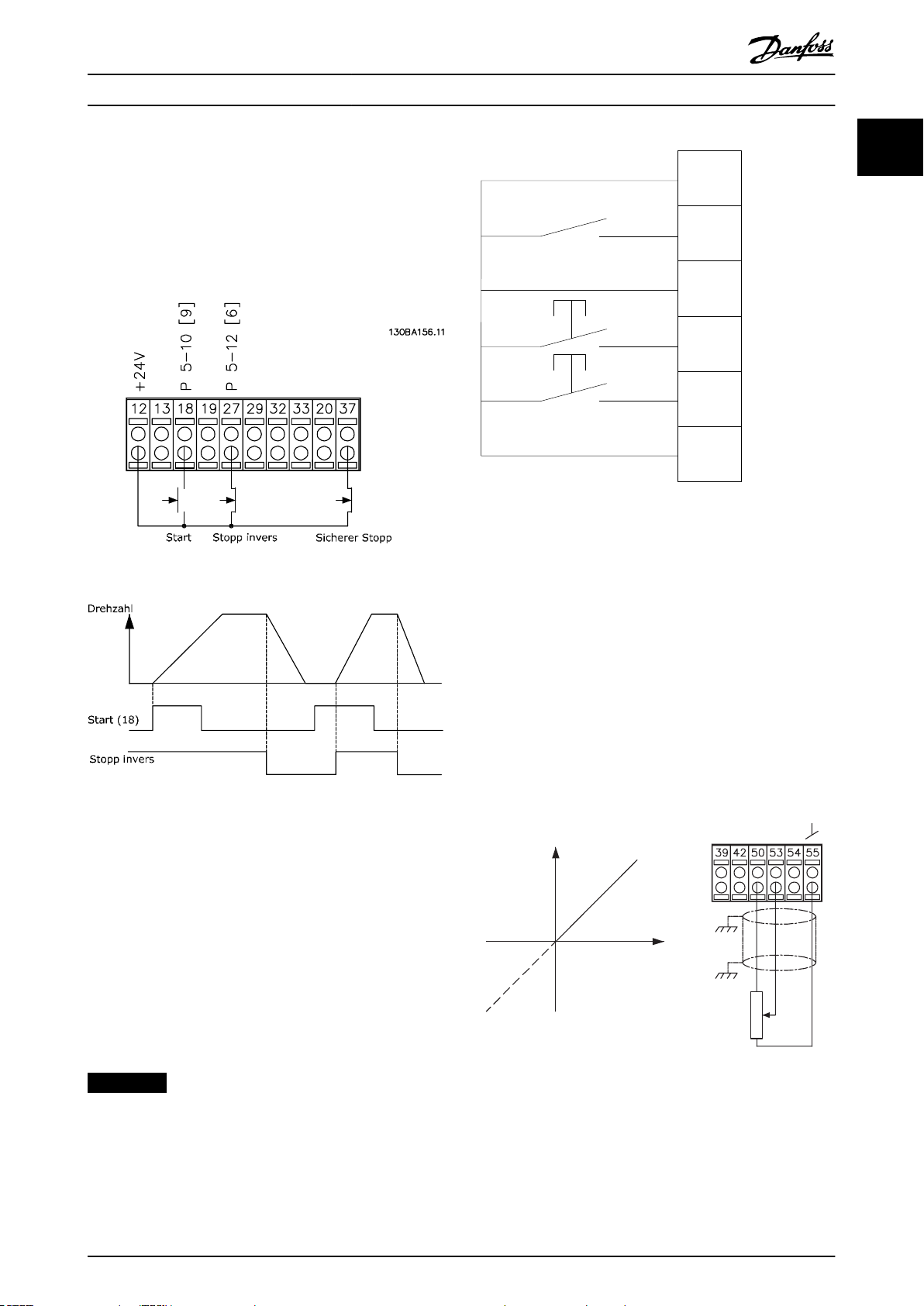
1.5.2 Puls-Start/Stopp
Klemme 18 = Parameter 5-10 Klemme 18 Digitaleingang, [9]
Puls-Start.
Klemme 27 = Parameter 5-12 Klemme 27 Digitaleingang, [6]
Stopp (inv.)
Klemme 37 = Safe Torque Off (falls verfügbar).
1 1
Abbildung 1.8 Drehzahl auf/Drehzahl ab
1.5.4 Potenziometer Sollwert
Spannungssollwert über ein Potenziometer
Sollwertquelle 1 = [1] Analogeingang 53
(Werkseinstellung).
Klemme 53, Skal. Min. Spannung = 0 V.
Klemme 53, Skal. Max. Spannung = 10 V.
Klemme 53, Min. Soll-/Istwert = 0 U/min.
Klemme 53, Max. Soll-/Istwert = 1500 U/min.
Schalter S201 = AUS (U)
Abbildung 1.7 Puls-Start/Stopp
1.5.3 Drehzahl auf/Drehzahl ab
Klemmen 29/32 = Drehzahlkorrektur auf/ab
Klemme 18 = Parameter 5-10 Klemme 18 Digitaleingang [9] Start (Werkseinstellung).
Klemme 27 = Parameter 5-12 Klemme 27 Digitaleingang [19] Sollw. speich.
Klemme 29 = Parameter 5-13 Klemme 29 Digitaleingang [21] Drehzahl auf.
Klemme 32 = Parameter 5-14 Klemme 32 Digitaleingang [22] Drehzahl ab.
HINWEIS
Klemme 29 nur bei FC x02 (x=Baureihentyp)
Abbildung 1.9 Potenziometer Sollwert
1.6 Integrierter Bewegungsregler (IMC)
Der integrierte Bewegungsregler (IMC) ermöglicht die
Positionssteuerung. Weitere Informationen zum IMC finden
Sie unter Kapitel 4 Integrierter Bewegungsregler (IMC).
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 11
Page 14
Auto
on
Reset
Hand
on
O
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(0)
1234rpm 10,4A 43,5Hz
Run OK
43,5Hz
On
Alarm
Warn.
130BA018.13
1
2
3
4
b
a
c
Programmieren
VLT® AutomationDrive FC 301/302
2 Programmieren
22
2.1 Grafische und numerische LCPs
Am einfachsten lässt sich der Frequenzumrichter über die
grafische Bedieneinheit (LCP 102) programmieren. Informationen zur numerischen Bedieneinheit LCP 101 finden Sie
in Kapitel 2.1.16 Programmierung auf der numerischen LCP-
Bedieneinheit.
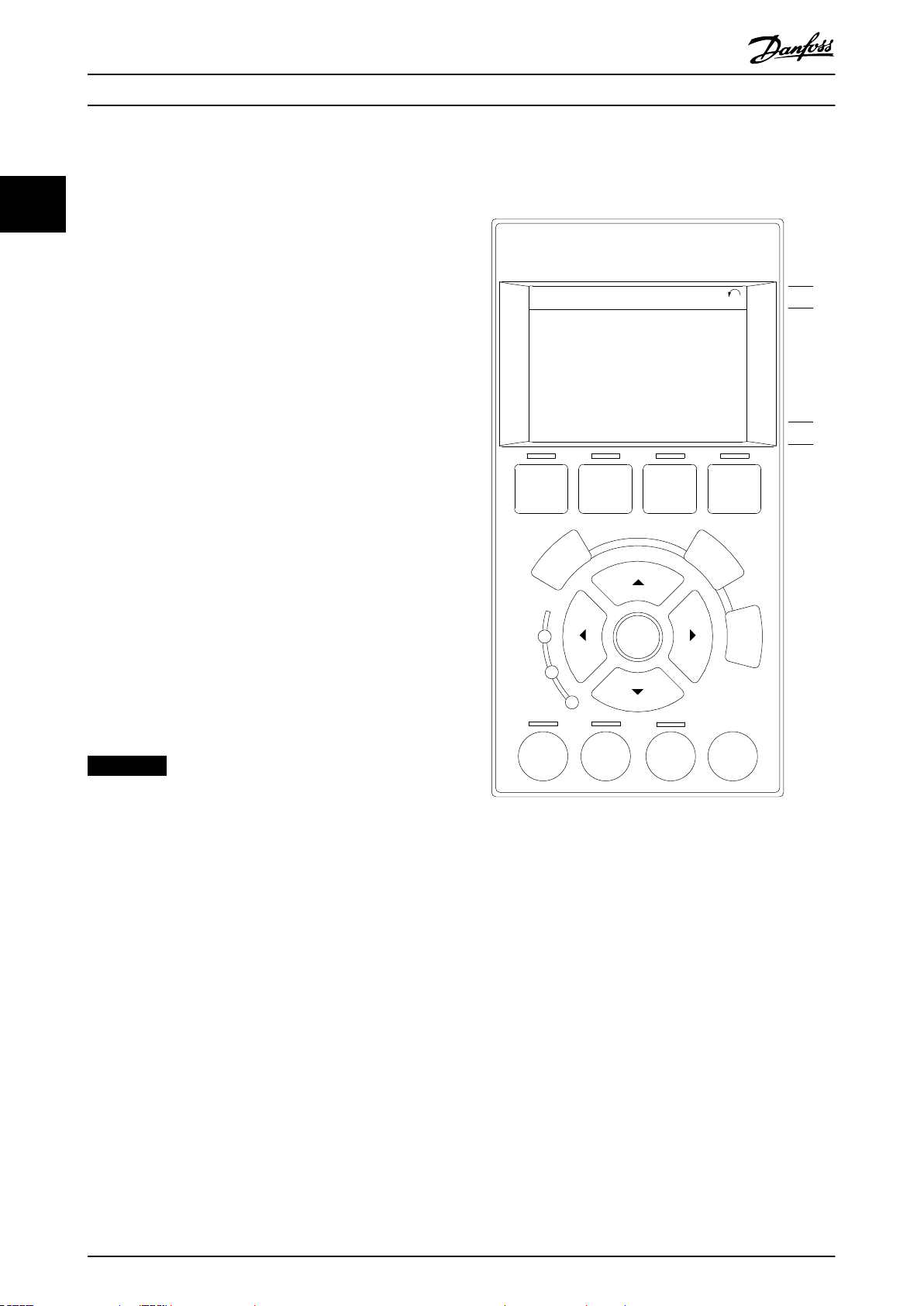
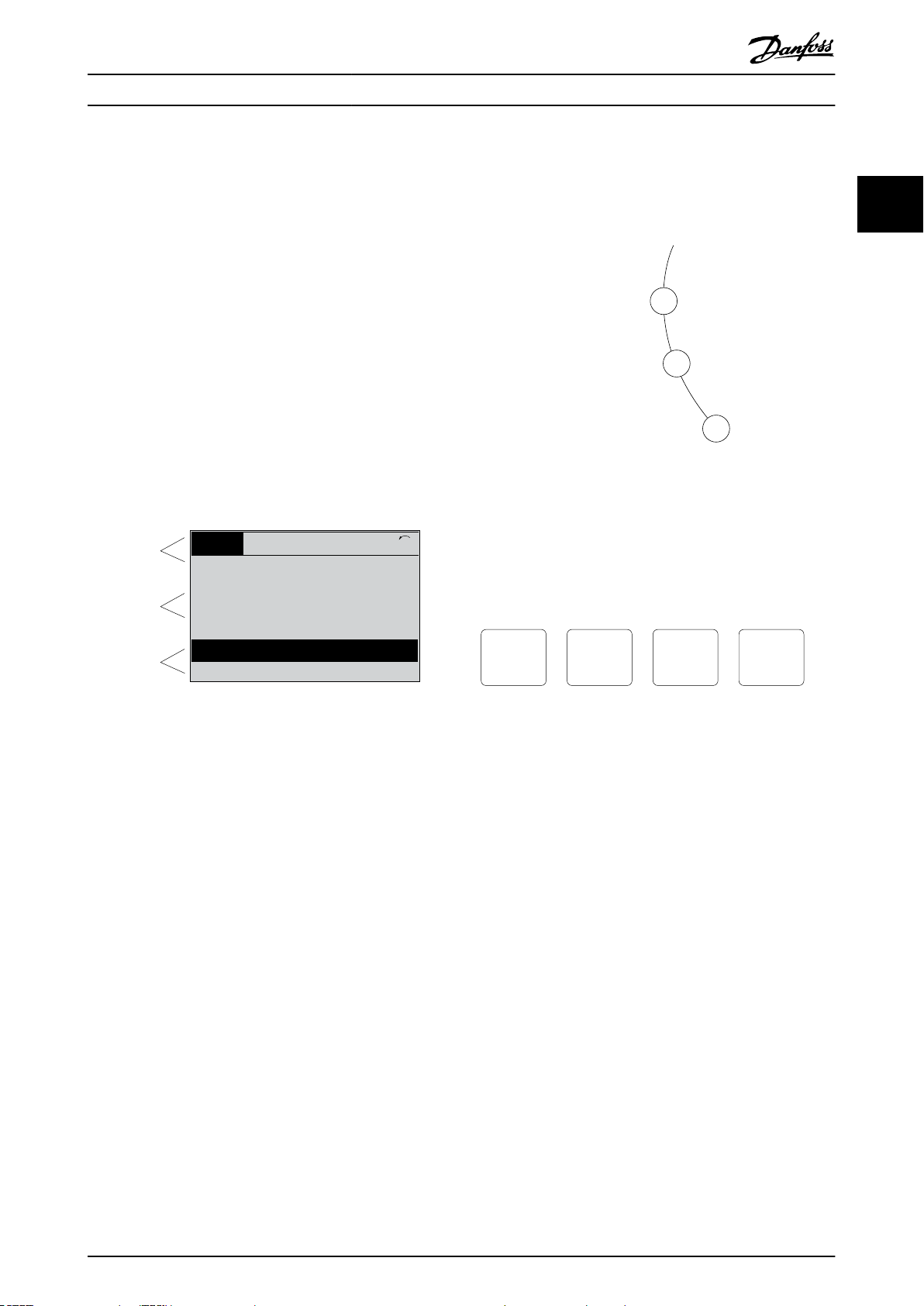
Das LCP ist in 4 Funktionsbereiche unterteilt:
1. Grafisches Display mit Statuszeilen.
2. Menütasten und Anzeigeleuchten - Änderung der
Parameter und Umschalten zwischen Displayfunktionen.
3. Navigationstasten und Anzeigeleuchten.
4. Bedientasten mit Anzeigeleuchten
Auf dem LCP-Display können Sie bei der Anzeige von
Status bis zu 5 Betriebsvariablen anzeigen.
Displayzeilen:
a. Statuszeile: Statusmeldungen mit der Anzeige
von Symbolen und Grafiken.
b. Zeile 1-2: Bedienerdatenzeilen mit Anzeige der
definierten oder gewählten Daten. Fügen Sie
durch Drücken der Taste [Status] eine zusätzliche
Zeile hinzu.
c. Statuszeile: Statusmeldungen mit angezeigtem
Text.
HINWEIS
Wenn die Inbetriebnahme verzögert wird, zeigt das LCP
die Meldung INITIALISIERUNG an, bis es betriebsbereit
ist. Das Hinzufügen oder Entfernen von Optionen kann
Abbildung 2.1 LCP
die Inbetriebnahme verzögern.
12 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 15
Oberer Bereich
Mittlerer Bereich
Unterer Bereich
Status
43 UPM
1,4 Hz
Auto-Fern-Betrieb
! Leist.teil Temp. (W29)
2,9 %
5,44 A 25,3 kW
1(1)
130BP074.10
!
On
Warn.
Alarm
130BP044.10
130BP045.10
Status
Quick
Menu
Main
Menu
Alarm
Log
Programmieren Programmierhandbuch
2.1.1 LCD-Display
Das Display verfügt über eine Hintergrundbeleuchtung und
6 alphanumerische Zeilen. Die Displayzeilen zeigen die
Drehrichtung (Pfeil), die gewählten Parametereinstellungen
sowie die aktuell gewählten Programm-Sätze an. Die
Anzeige ist in 3 Bereiche unterteilt.
Oberer Bereich
Der obere Bereich zeigt im normalen Betriebsstatus bis zu
2 Messungen.
Mittlerer Bereich
In der oberen Zeile des Arbeitsbereichs werden
unabhängig vom Zustand (außer bei Alarm oder Warnung)
bis zu 5 Messungen mit der entsprechenden Einheit
angezeigt.
Unterer Bereich
Der untere Bereich zeigt immer den Zustand des Frequenzumrichters in der Betriebsart Status an.
Grüne LED/On (An): Das Steuerteil ist betriebs-
•
bereit.
Gelbe LED/Warn.: Zeigt eine Warnung an.
•
Blinkende rote LED/Alarm: Zeigt einen Alarm an.
•
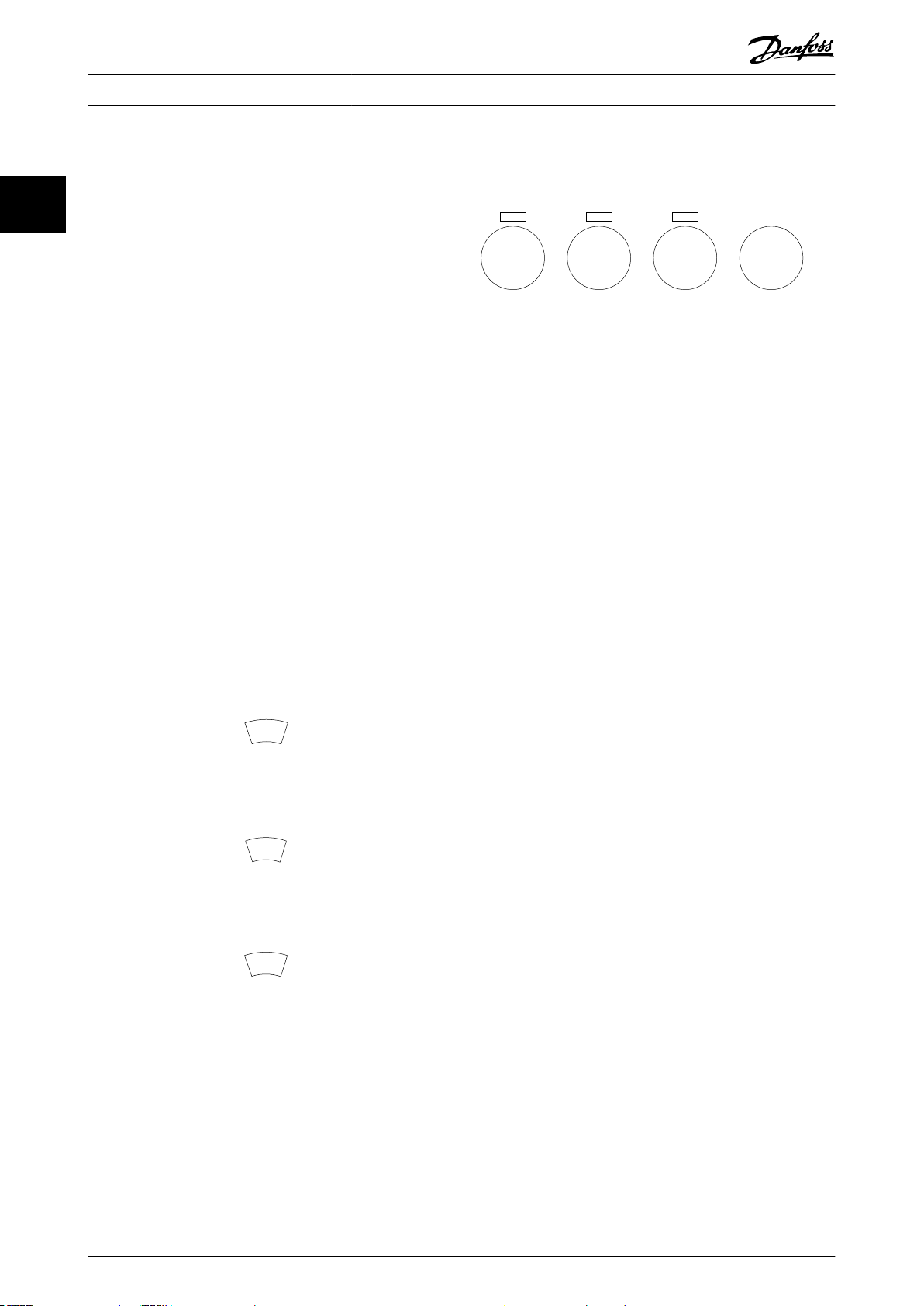
Abbildung 2.3 Anzeigeleuchten
LCP-Tasten
Die Steuertasten sind nach Funktionen aufgeteilt. Die
Tasten unter der Displayanzeige und die LED-Anzeigen
dienen zur Programmierung von Parametersätzen. Hierzu
gehört auch die Wahl der Displayanzeige im Normalbetrieb.
2 2
Abbildung 2.2 Display
Der aktive Parametersatz (als Aktiver Parametersatz in
Parameter 0-10 Aktiver Satz ausgewählt) wird angezeigt. Bei
Programmierung eines anderen Satzes als dem aktiven
Parametersatz wird die Nummer des programmierten
Satzes rechts angezeigt.
Displaykontrast anpassen
Drücken Sie [Status] und [▲], um die Helligkeit des Displays
zu verringern.
Drücken Sie [Status] und [▼], um die Helligkeit des Displays
zu erhöhen.
Sie können die meisten Parametersätze direkt über das LCP
ändern, sofern über Parameter 0-60 Main Menu Password
oder Parameter 0-65 Quick-Menü Passwort kein Passwort
erstellt wurde.
Anzeigeleuchten
Überschreiten bestimmte Betriebsgrößen vorgegebene
Grenzen, leuchtet die Alarm- und/oder Warn-LED auf. Das
LCP zeigt einen Status- und Alarmtext an.
Die On-LED ist aktiv, wenn der Frequenzumrichter an die
Netzspannung angeschlossen ist oder über eine DC-BusZwischenkreisklemme oder eine externe 24-V-DCVersorgung gespeist wird. Gleichzeitig leuchtet die
Hintergrund-Leuchtanzeige.
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 13
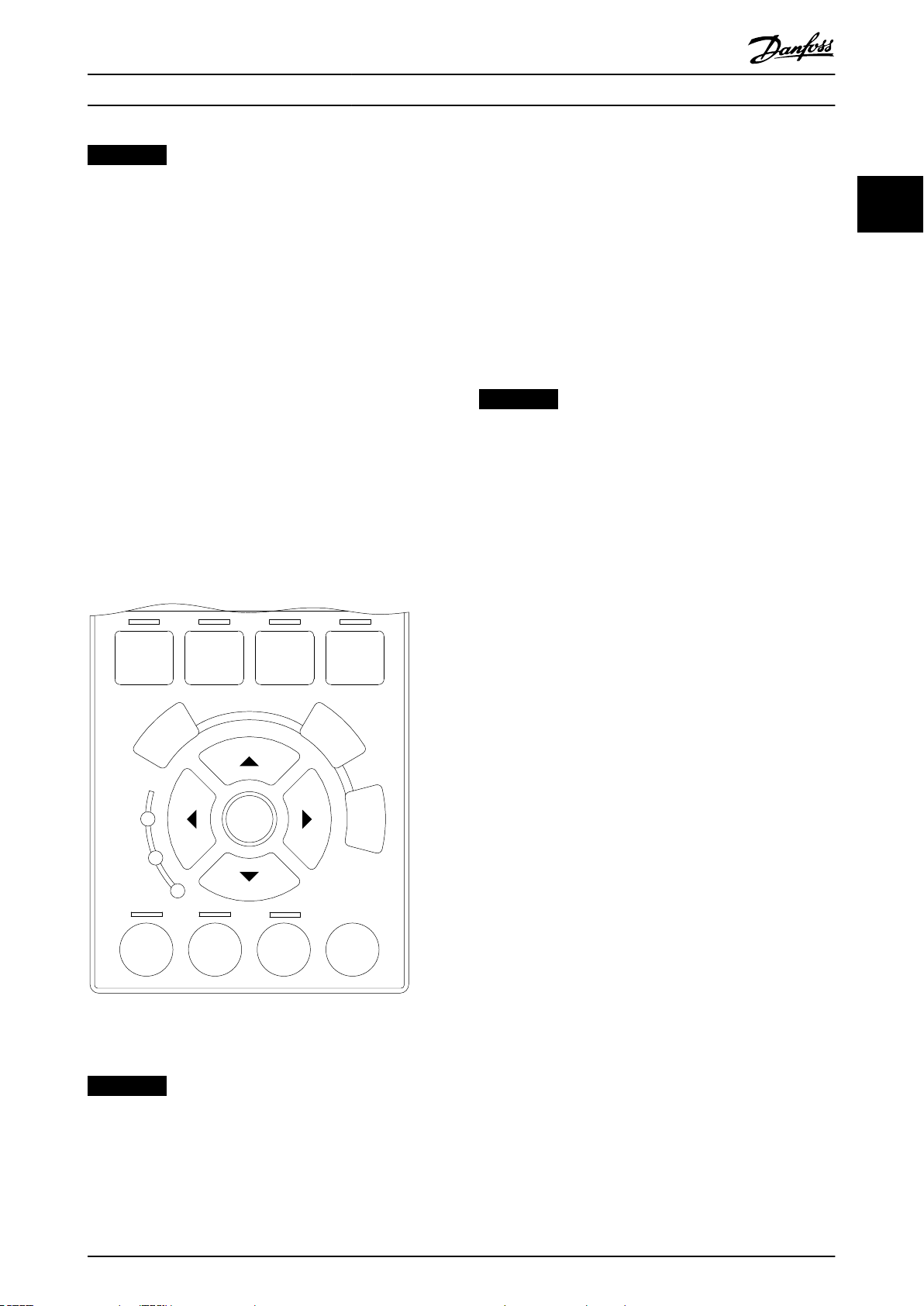
Abbildung 2.4 LCP-Tasten
[Status]
Gibt den Zustand des Frequenzumrichters und/oder des
Motors an. Durch Drücken der Taste [Status] können Sie
zwischen 3 verschiedenen Anzeigen wählen: 5 Betriebsvariablen, 4 Betriebsvariablen oder Zustand Smart Logic
Control.
[Status] dient zur Wahl der Displayanzeige. Sie können
damit aus dem Quick-Menü, dem Hauptmenü oder dem
Alarmmodus schnell zurück zur Standardanzeige wechseln.
Verwenden Sie die [Status]-Taste darüber hinaus zum
Umschalten zwischen der Anzeige von 4 oder 5 Betriebsvariablen.
[Quick Menu]
bietet schnellen Zugang zu verschiedenen Quick-Menüs,
z. B.:
Benutzer-Menü.
•
Kurzinbetriebnahme.
•
Liste geänderter Parameter.
•
Protokollierung.
•
Drücken Sie [Quick Menu], um die im Quick-Menü
enthaltenen Parameter zu programmieren. Sie können
direkt zwischen der Betriebsart Quick-Menü und der
Betriebsart Hauptmenü wechseln.
Page 16
B
a
c
k
C
a
n
c
e
l
I
n
f
o
130BP046.10
Hand
on
O
Auto
on
Reset
Programmieren
VLT® AutomationDrive FC 301/302
[Main Menu]
Dient zur Programmierung aller Parameter.
Sie können direkt zwischen Hauptmenümodus und Quick-
22
Menümodus umschalten.
Tasten für die Hand-Steuerung
Die Tasten für die Hand-Steuerung befinden sich unten am
LCP.
Gleichzeitiges Drücken der Tasten [Quick Menu] und [Main
Menu] für 3 s Dieser Parameter-Shortcut ermöglicht die
direkte Eingabe einer Parameternummer.
[Alarm Log]
Zeigt eine Liste mit den 5 letzten Alarmen an (nummeriert
Abbildung 2.8 Tasten für die Hand-Steuerung
von A1-A5). Um zusätzliche Informationen zu einem
Alarmzustand zu erhalten, markieren Sie mit Hilfe der
Navigationstasten die betreffende Alarmnummer, und
drücken Sie [OK]. Es werden Informationen zum Zustand
des Frequenzumrichters angezeigt, bevor dieser in den
Alarmzustand wechselt.
[Back]
Bringt Sie zum früheren Schritt oder zur nächsthöheren
Ebene in der Navigationsstruktur.
[Cancel]
Hebt die letzte Änderung/den letzten Befehl auf, sofern die
Anzeige nicht geändert wurde (d. h. Wechsel zu einem
anderen Parameter).
[Info]
zeigt Informationen zu einem Befehl, Parameter oder einer
Funktion im Anzeigefenster an. [Info] zeigt detaillierte
Informationen an, wenn Sie weitere Hilfe benötigen.
Sie können den Info-Modus verlassen, indem Sie entweder
[Info], [Back] oder [Cancel] drücken.
Abbildung 2.5 Back
[Hand On]
Ermöglicht die Steuerung des Frequenzumrichters über das
LCP. [Hand On] startet ebenfalls den Motor. Dann können
Sie die Motordrehzahl mit Hilfe der Navigationstasten
eingeben. Sie können die Taste über Parameter 0-40 [Hand
on] Key on LCP [1] Aktivieren oder [0] Deaktivieren.
Externe Stoppsignale, die durch Steuersignale oder einen
Feldbus aktiviert werden, heben einen über das LCP
erteilten Startbefehl auf.
Die folgenden Steuersignale sind nach wie vor wirksam,
auch wenn [Hand On] aktiviert ist.
[Hand On] – [Off ] – [Auto On].
•
Quittieren.
•
Motorfreilaufstopp invers.
•
Reversierung.
•
Satzanwahl Bit 0 – Satzanwahl Bit 1.
•
Stoppbefehl über serielle Schnittstelle.
•
Schnellstopp.
•
DC-Bremse.
•
[Off]
Dient zum Stoppen des angeschlossenen Motors. Sie
können die Taste über Parameter 0-41 [Off ]-LCP Taste [1]
Aktivieren oder [0] Deaktivieren. Ist keine externe
Stoppfunktion aktiv und die Taste [Off ] inaktiv, können Sie
Abbildung 2.6 Cancel
den Motor jederzeit durch Abschalten der Spannung
stoppen.
[Auto On]
Ermöglicht die Steuerung des Frequenzumrichters über die
Steuerklemmen und/oder serielle Schnittstelle. Legen Sie
ein Startsignal an den Steuerklemmen und/oder am Bus
Abbildung 2.7 Info
an, startet der Frequenzumrichter. Sie können die Taste
über Parameter 0-42 [Auto On]-LCP Taste [1] Aktivieren oder
[0] Deaktivieren.
Navigationstasten
Die 4 Navigationstasten dienen zur Navigation zwischen
den verschiedenen Optionen im Quick-Menü, Hauptmenü
und Alarm Log. Bewegen Sie den Cursor mit den Tasten.
[OK]
Drücken Sie diese Taste zur Auswahl eines Parameters, der
mit dem Cursor markiert wurde. Auch die Änderung eines
Parameters ist möglich.
14 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 17
Auto
on
Reset
Hand
on
O
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
On
Alarm
Warn.
130BA027.10
Programmieren Programmierhandbuch
HINWEIS
Ein aktives HAND-OFF-AUTO-Signal über die Digitaleingänge hat höhere Priorität als die Bedientasten
[Hand On] (Hand-Betrieb) – [Auto On] (Auto-Betrieb).
[Reset]
Dient zum Zurücksetzen des Frequenzumrichters nach
einem Alarm (Abschaltung). Sie können die Taste über
Parameter 0-43 [Reset]-LCP Taste [1] Aktivieren oder [0]
Deaktivieren.
Durch Gedrückthalten der Taste [Main Menu] für 3
Sekunden können Sie eine Parameternummer direkt
eingeben. Dieser Parameter-Shortcut ermöglicht die direkte
Eingabe einer Parameternummer.
2.1.2 Schnelle Übertragung von
Parametereinstellungen zwischen
mehreren Frequenzumrichtern
Speichern Sie die Daten im LCP oder mithilfe der MCT 10
Konfigurationssoftware auf einem PC, sobald die Konfiguration eines Frequenzumrichters abgeschlossen ist.
3. Wählen Sie [1] Speichern in LCP.
4. Drücken Sie die Taste [OK].
Alle Parametereinstellungen werden nun im LCP
gespeichert. Der Fortschritt des Vorgangs wird vom
Fortschrittsbalken angezeigt. Drücken Sie [OK], sobald
100 % erreicht sind.
Schließen Sie nun das LCP an einen anderen Frequenzumrichter an, und kopieren Sie die Parametereinstellungen
ebenfalls auf diesen Frequenzumrichter.
Datenübertragung vom LCP zum Frequenzumrichter
HINWEIS
Stoppen Sie vor der Durchführung dieses Vorgangs den
Motor.
So übertragen Sie Daten vom LCP zum Frequenzumrichter:
1. Gehen Sie zu Parameter 0-50 LCP Copy.
2. Drücken Sie die Taste [OK].
3. Wählen Sie [2] Lade von LCP, Alle.
4. Drücken Sie die Taste [OK].
Die im LCP gespeicherten Parametereinstellungen werden
nun im Frequenzumrichter gespeichert. Der Fortschritt des
Vorgangs wird vom Fortschrittsbalken angezeigt. Drücken
Sie [OK], sobald 100 % erreicht sind.
2 2
Abbildung 2.9 LCP
Datenspeicherung im LCP
HINWEIS
Stoppen Sie vor der Durchführung dieses Vorgangs den
Motor.
Gehen Sie zum Speichern von Daten im LCP wie folgt vor:
1. Gehen Sie zu Parameter 0-50 LCP Copy.
2. Drücken Sie die Taste [OK].
2.1.3 Anzeigemodus
Im normalen Betrieb können bis zu 5 verschiedenen
Betriebsvariablen im Arbeitsbereich angezeigt werden: 1.1,
1.2 und 1.3, sowie 2 und 3.
2.1.4 Displayanzeige - Auswahl des
Anzeigemodus
Durch Drücken von [Status] können Sie zwischen 3
verschiedenen Statusanzeigen umschalten.
Jede Statusanzeige zeigt unterschiedlich formatierte
Betriebsvariablen an (siehe dazu Beispiele unten).
Tabelle 2.1 zeigt die Messwerte an, die Sie mit den
einzelnen Betriebsvariablen verknüpfen können. Durch die
Installation von Optionen werden zusätzliche Messungen
verfügbar.
Definieren Sie die Verknüpfungen über
Parameter 0-20 Displayzeile 1.1.
•
Parameter 0-21 Displayzeile 1.2.
•
Parameter 0-22 Displayzeile 1.3.
•
Parameter 0-23 Displayzeile 2.
•
Parameter 0-24 Display Line 3 Large.
•
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 15
Page 18
1.1
2
3
1.3
1.2
130BP041.10
799 UPM
Auto-Fern-Rampe
1 (1)
36,4 kW7,83 A
0,000
53,2 %
Status
1.1
1.2
2
1.3
130BP062.10
207 UPM
Auto-Fern-Betrieb
1 (1)
24,4 kW5,25 A
6,9 Hz
Status
Programmieren
VLT® AutomationDrive FC 301/302
Jeder in Parameter 0-20 Displayzeile 1.1 bis
Parameter 0-24 Display Line 3 Large ausgewählte Anzeigepa-
rameter verfügt über eine eigene Skalierung und Ziffern
22
nach einem möglichen Dezimalkomma. Je größer der
numerische Wert eines Parameters, desto weniger Stellen
werden nach dem Dezimalkomma angezeigt.
Betriebsvariable Einheit
Parameter 16-85 FC Steuerwort 1 Hex
Parameter 16-86 FC Sollwert 1 Hex
Parameter 16-90 Alarmwort
Parameter 16-92 Warnwort
Parameter 16-94 Erw. Zustandswort
Beispiel: Stromanzeige: 5,25 A, 15,2 A, 105 A.
Tabelle 2.1 Einheiten
Betriebsvariable Einheit
Parameter 16-00 Control Word Hex
Parameter 16-01 Reference [Unit] [Einheit]
Parameter 16-02 Reference [%] %
Parameter 16-03 Status Word Hex
Parameter 16-05 Main Actual Value [%] %
Parameter 16-10 Power [kW] [kW]
Parameter 16-11 Power [hp] [PS]
Parameter 16-12 Motor Voltage [V]
Parameter 16-13 Frequency [Hz]
Parameter 16-14 Motor current [A]
Parameter 16-16 Drehmoment [Nm] Nm
Parameter 16-17 Drehzahl [UPM] [U/min]
Parameter 16-18 Motor Thermal %
Parameter 16-20 Rotor-Winkel
Parameter 16-30 DC Link Voltage V
Parameter 16-32 Brake Energy /s kW
Parameter 16-33 Brake Energy Average kW
Parameter 16-34 Heatsink Temp.
Parameter 16-35 FC Überlast %
Parameter 16-36 Nenn-WR-Strom A
Parameter 16-37 Max.-WR-Strom A
Parameter 16-38 SL Contr.Zustand
Parameter 16-39 Control Card Temp.
Parameter 16-40 Logging Buffer Full
Parameter 16-50 Externer Sollwert
Parameter 16-51 Puls-Sollwert
Parameter 16-52 Istwert [Einheit] [Einheit]
Parameter 16-53 Digitalpoti Sollwert
Parameter 16-60 Digital Input bin
Parameter 16-61 Terminal 53 Switch Setting V
Parameter 16-62 Analogeingang 53
Parameter 16-63 Terminal 54 Switch Setting V
Parameter 16-64 Analogeingang 54
Parameter 16-65 Analogausgang 42 [mA]
Parameter 16-66 Digitalausgänge [bin]
Parameter 16-67 Pulse Input #29 [Hz] [Hz]
Parameter 16-68 Pulseingang 33 [Hz] [Hz]
Parameter 16-69 Pulsausg. 27 [Hz] [Hz]
Parameter 16-70 Pulsausg. 29 [Hz] [Hz]
Parameter 16-71 Relay Output [bin]
Parameter 16-72 Zähler A
Parameter 16-73 Zähler B
Parameter 16-80 Bus Steuerwort 1 Hex
Parameter 16-82 Bus Sollwert 1 Hex
Parameter 16-84 Feldbus-Komm. Status Hex
16 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
°C
°C
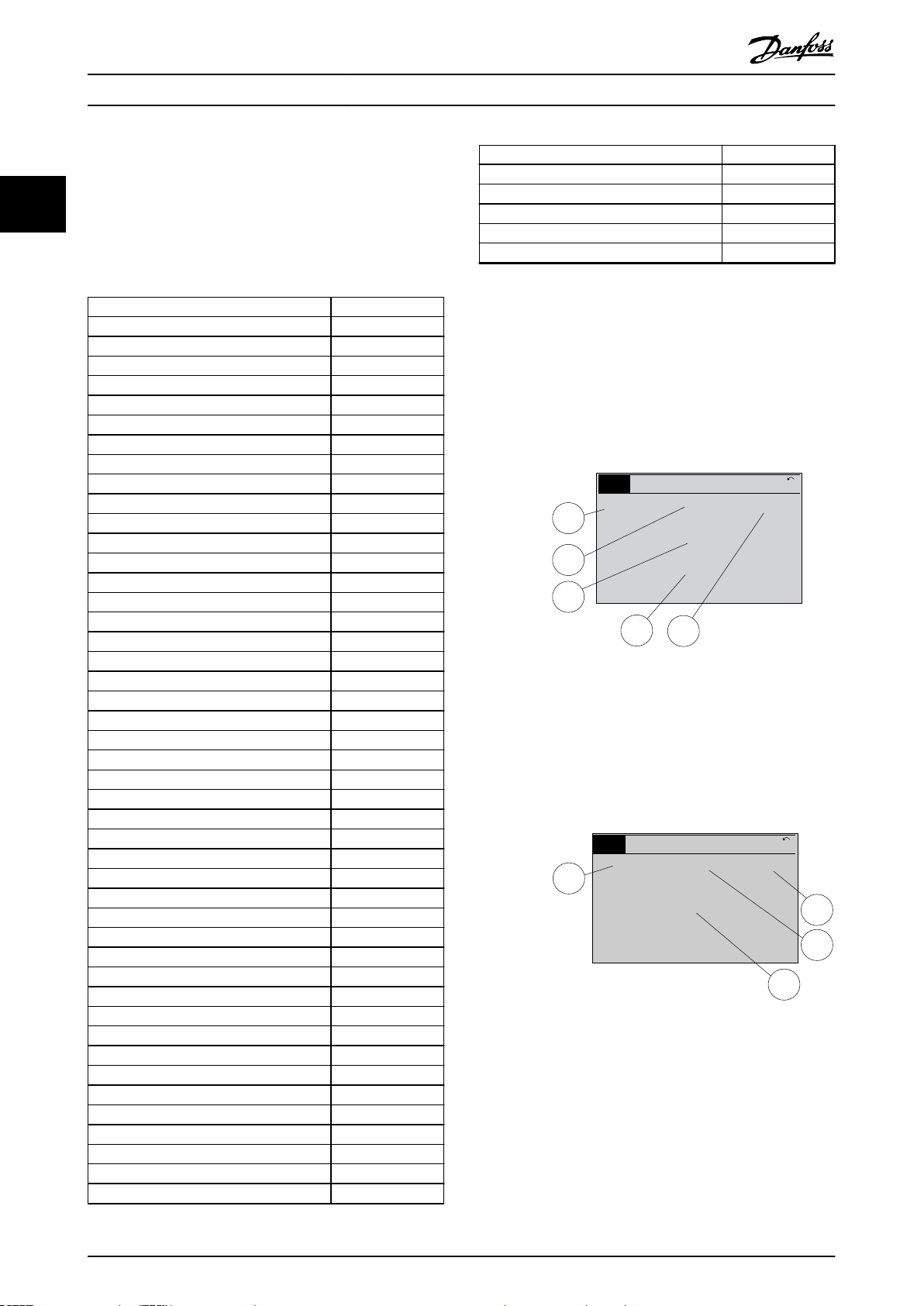
Statusanzeige I
Dieser Anzeigestatus erscheint standardmäßig nach
Inbetriebnahme oder Initialisierung.
Detaillierte Informationen zu den Einheiten, die mit den
angezeigten Betriebsvariablen (1.1, 1.2, 1.3, 2 und 3)
verknüpft sind, erhalten Sie, wenn Sie die [Info]-Taste
drücken.
Siehe die Betriebsvariablen in Abbildung 2.10.
Abbildung 2.10 Statusanzeige I
Statusanzeige II
Siehe die in Abbildung 2.11 angezeigten Betriebsvariablen
(1.1, 1.2, 1.3 und 2).
In diesem Beispiel sind als Variablen in der ersten und
zweiten Zeile „Drehzahl“, „Motorstrom“, „Motorleistung“
und „Frequenz“ ausgewählt.
Abbildung 2.11 Statusanzeige II
Page 19
130BP063.10
778 UPM
Auto-Fern-Betrieb
1 (1)
4,0 kW0,86 A
Status: 0 Aus 0 (Aus)
Wenn: Dann: -
Status
130BC916.10
Q1 My Personal Menu
Q2 Quick Setup
Q4 Smart Setup
Q5 Changes Made
0RPM 0.00A 1(1)
Quick Menus
Programmieren Programmierhandbuch
Statusanzeige III
Diese Anzeige zeigt das auszuwertende Ereignis und die
zugehörige Aktion der Smart Logic Control an. Weitere
Informationen finden Sie unter Kapitel 3.13 Parameter: 13-**
Smart Logic.
Abbildung 2.12 Statusanzeige III
2.1.5 Parametereinstellung
Der Frequenzumrichter kann für praktisch alle Einsatzgebiete verwendet werden. Sie können im
Frequenzumrichter zwischen zwei Programmiermodi
auswählen:
Hauptmenü-Modus.
•
Quick-Menu-Modus.
•
Das Hauptmenü bietet Zugriff auf alle Parameter. Im QuickMenü wird der Benutzer durch nur einige wenige
Parameter geführt, die einen Einstieg in den Betrieb des
Frequenzumrichters ermöglichen.
Ändern Sie Parameter im Hauptmenü-Modus oder im
Quick-Menü-Modus.
2.1.6 Hauptfunktionen im Quick-Menü
Wenn Sie auf [Quick Menu] drücken, zeigt die Liste die
verschiedenen Bereiche des Quick-Menüs an.
Wählen Sie Q1 Benutzer-Menü, um die Parameter
anzuzeigen, die als persönliche Parameter ausgewählt
wurden. Diese Parameter wählen Sie unter
Parameter 0-25 Benutzer-Menü aus. Sie können in diesem
Menü bis zu 50 verschiedene Parameter hinzufügen.
Wählen Sie Q2 Inbetriebnahme-Menü, um Zugriff auf eine
eingeschränkte Anzahl von Parametern zu erhalten, mit
denen Sie den Motor nahezu optimal laufen lassen
können. Die Werkseinstellungen für die anderen Parameter
berücksichtigen die erforderlichen Steuerfunktionen und
die Konfiguration der Signalein- bzw. -ausgänge (Steuerklemmen).
Die Auswahl der Parameter erfolgt über die Navigationstasten. Die in Tabelle 2.2 aufgeführten Parameter sind
zugänglich.
Parameter Einstellung
Parameter 0-01 LanguageParameter 0-01 S
prache
Parameter 1-20 Motornennleistung [kW] [kW]
Parameter 1-22 Motornennspannung [V]
Parameter 1-23 Motornennfrequenz [Hz]
Parameter 1-24 Motornennstrom [A]
Parameter 1-25 Motornenndrehzahl [U/min]
Parameter 5-12 Klemme 27 Digitaleingang
Parameter 1-29 Autom. Motoranpassung [1] Komplette AMA
Parameter 3-02 Minimaler Sollwert [U/min]
Parameter 3-03 Maximaler Sollwert [U/min]
Parameter 3-41 Rampenzeit Auf 1 [s]
Parameter 3-42 Rampenzeit Ab 1 [s]
Parameter 3-13 Reference Site
Tabelle 2.2 Parameterauswahl
1) Wird Klemme 27 auf [0] Ohne Funktion programmiert, ist auch
keine +24-V-Beschaltung an Klemme 27 notwendig.
[0] Ohne Funktion
1)
Wählen Sie Liste geänderte Par. aus, um folgende Informationen zu erhalten:
Letzte 10 Änderungen. Mit den Navigationstasten
•
[▲] [▼] können Sie zwischen den letzten 10
geänderten Parametern wechseln.
Die seit der Werkseinstellung vorgenommenen
•
Änderungen.
Wählen Sie Protokolle, um Informationen zu den
angezeigten Betriebsvariablen zu erhalten. Die Informationen werden als Kurvenbilder angezeigt.
Sie können nur unter Parameter 0-20 Displayzeile 1.1 und
Parameter 0-24 Display Line 3 Large ausgewählte Parameter
anzeigen. Sie können bis zu 120 Abtastwerte zum späteren
Abruf im Speicher ablegen.
2 2
Abbildung 2.13 Quick-Menüs
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 17
Page 20
Quick
Menu
OK
OK
OK
OK
OK
OK
OK
OK
OK
OK
OK
OK
OK
OK
Programmieren
2.1.7 Erste Inbetriebnahme
VLT® AutomationDrive FC 301/302
22
Verfahren zur Kurzinbetriebnahme über das LCP 102 (Tabelle 2.3 von links nach rechts gelesen). Das Beispiel gilt für
Regelungsanwendungen ohne Rückführung.
Drücken Sie
Q2 Quick-Menü.
Die erste Inbetriebnahme können Sie am einfachsten über die Taste [Quick Menu] durchführen. Folgen Sie dann dem
Parameter 0-01 LanguageParameter 0-01 Sprache
Parameter 1-20 Motornennleistung [kW]
Parameter 1-22 Motor Voltage
Parameter 1-23 Motornennfrequenz
Parameter 1-24 Motor Current
Legen Sie die Sprache fest.
Stellen Sie die auf dem Motor-Typenschild
angegebene Nennleistung ein.
Stellen Sie die auf dem Typenschild des
Motors angegebene Spannung ein.
Stellen Sie die auf dem Typenschild des
Motors angegebene Motornennfrequenz ein.
Stellen Sie den auf dem Typenschild des
Motors angegebenen Motornennstrom ein.
Parameter 1-25 Motor Nominal Speed
Parameter 5-12 Klemme 27 Digitaleingang
Parameter 1-29 Autom. Motoranpassung
Parameter 3-02 Minimaler Sollwert
Parameter 3-03 Maximaler Sollwert
Parameter 3-41 Rampenzeit Auf 1
Parameter 3-42 Rampenzeit Ab 1
Stellen Sie die auf dem Typenschild des
Motors angegebene Nenndrehzahl ein.
Sie können die Standardeinstellung für die
Klemme [2] Motorfreilauf (inv.) zu [0] Ohne
Funktion ändern. In diesem Fall ist für die
AMA kein Anschluss an Klemme 27
erforderlich.
Wählen Sie die gewünschte AMA-Funktion
aus. Die Aktivierung der kompletten AMA
wird empfohlen.
Legen Sie die Mindestdrehzahl der
Motorwelle fest.
Legen Sie die Höchstdrehzahl der
Motorwelle fest.
Legen Sie die Rampe-Auf-Zeit im Hinblick
auf die synchrone Motordrehzahl, ns, fest.
Legen Sie die Rampe-Ab-Zeit im Hinblick auf
die synchrone Motordrehzahl, ns, fest.
Parameter 3-13 Reference Site
Legen Sie fest, welcher Sollwert aktiv ist.
Tabelle 2.3 Verfahren zur Kurzinbetriebnahme
18 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 21
130BP066.10
1107 UPM
0 - ** Betrieb/Display
1 - ** Motor/Last
2 - ** Bremsfunktionen
3 - ** Sollwert/Rampen
3,84 A 1 (1)
Hauptmenü
130BP067.10
740 UPM
0 -01 Sprache
[0] English
10,64 A 1 [1]
0-0*
Grundeinstellungen
Programmieren Programmierhandbuch
Eine weitere Methode zur einfachen Inbetriebnahme des
Frequenzumrichters besteht bei Verwendung der Smart
Application Setup (SAS), die Sie auch durch Drücken von
[Quick Menu] finden können. Befolgen Sie die Anleitungen
auf den nachfolgenden Bildschirmen, um die aufgeführten
Anwendungen einzurichten.
Mit der [Info]-Taste können Sie während des SAS Informationen über Einstellungen, Parameter und Meldungen
beziehen. Die folgenden 3 Anwendungen sind enthalten:
Mechanische Bremse.
•
Förderband.
•
Pumpe/Lüfter.
•
Sie können die folgenden 4 Feldbusse auswählen:
PROFIBUS
•
PROFINET.
•
DeviceNet
•
EtherNet/IP.
•
HINWEIS
Der Frequenzumrichter ignoriert bei aktivem SAS die
Startbedingungen.
Jeder Parameter hat eine Bezeichnung und eine Nummer,
die unabhängig vom Programmiermodus unverändert
bleiben. Im Hauptmenümodus sind die Parameter in
Gruppen unterteilt. Die erste Stelle der Parameternummer
(von links) gibt die Nummer der Parametergruppe an.
Sie können alle Parameter im Hauptmenü ändern. Jedoch
werden je nach gewählter Konfiguration
(Parameter 1-00 Regelverfahren) ggf. einige Parameter nicht
angezeigt. Beispielsweise werden bei Anwendungen mit
Regelung ohne Rückführung alle PID-Parameter
ausgeblendet, und durch andere aktivierte Optionen
werden weitere Parametergruppen sichtbar.
2.1.9 Parameterauswahl
Im Hauptmenümodus sind die Parameter in Gruppen
unterteilt. Wählen Sie mit den Navigationstasten eine
Parametergruppe aus.
Wählen Sie nach Auswahl einer Parametergruppe einen
Parameter mithilfe der Navigationstasten.
Der Arbeitsbereich zeigt Parameternummer und -namen
sowie den ausgewählten Parameterwert an.
2 2
HINWEIS
Das Smart Setup läuft nach der ersten Netz-Einschaltung
des Frequenzumrichters oder einer Rücksetzung zu den
Werkseinstellungen automatisch an. Wenn Sie keine
Taste drücken, wird der SAS-Bildschirm nach den ersten
10 Minuten automatisch ausgeblendet.
2.1.8 Hauptmenümodus
Drücken Sie auf die Taste [Main Menu], um den Hauptmenümodus aufzurufen. Die in Abbildung 2.14 dargestellte
Anzeige erscheint auf dem Display.
Der mittlere und untere Bereich auf dem Display zeigt eine
Liste von Parametergruppen an, die Sie über die [▲]- und
[▼]-Tasten auswählen können.
Abbildung 2.15 Parameterauswahl
2.1.10 Ändern von Daten
Das Verfahren zum Ändern von Daten ist im Quick-Menüsowie im Hauptmenü-Modus identisch. Drücken Sie [OK]
zum Ändern des ausgewählten Parameters.
Das Verfahren zum Ändern der Daten richtet sich danach,
ob der ausgewählte Parameter einen numerischen
Datenwert oder einen Textwert enthält.
Abbildung 2.14 Hauptmenümodus
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 19
Page 22
130BP068.10
740 UPM
0 -01 Sprache
[0] English
10,64 A 1 [1]
0-0*
Grundeinstellungen
130BP069.10
1- 6*
113 UPM 1,78 A 1(1)
Lastabh. Einstellung
1-60 Lastausgleich
tief
1
0
0 %
130BP070.10
1-60 Lastausgleich
tief
1 0 %
Lastabh. Einstellung 1- 6*
729 UPM 6,21 A 1(1)
6
130BP073.10
130BP072.10
Programmieren
VLT® AutomationDrive FC 301/302
2.1.11 Ändern eines Textwerts
2.1.13 Stufenlose Änderung von
numerischen Datenwerten
22
Handelt es sich bei dem gewählten Parameter um einen
Textwert, so ändern Sie diesen Textwert über die Navigationstasten [▲] [▼].
Platzieren Sie den Cursor auf dem zu speichernden Wert,
und drücken Sie [OK].
Abbildung 2.16 Ändern eines Textwerts
2.1.12 Ändern eines Datenwerts
Wenn der gewählte Parameter für einen numerischen
Datenwert steht, ändern Sie den gewählten Datenwert
über die Navigationstasten [◀] [▶] und [▲] [▼]. Bewegen
Sie den Cursor mit den Tasten [◀] und [▶] horizontal.
Wenn der gewählte Parameter für einen numerischen
Datenwert steht, wählen Sie eine Ziffer mit der Taste [◀]
[▶].
Abbildung 2.19 Auswahl einer Stelle
Mit [▲] und [▼] können Sie die markierte Ziffer stufenlos
ändern.
Der Cursor zeigt die gewählte Stelle an. Platzieren Sie den
Cursor auf der zu speichernden Ziffer, und drücken Sie
[OK].
Abbildung 2.17 Ändern eines Datenwerts
Ändern Sie den Datenwert über die Tasten [▲] und [▼].
Über [▲] wird der Datenwert erhöht, über [▼] wird er
reduziert. Platzieren Sie den Cursor auf dem zu
speichernden Wert, und drücken Sie [OK].
Abbildung 2.20 Speichern
2.1.14 Wert, Schritt für Schritt
Bestimmte Parameter können Sie Schritt für Schritt ändern.
Dazu gehören folgende:
Parameter 1-20 Motor Power [kW].
•
Parameter 1-22 Motor Voltage.
•
Abbildung 2.18 Speichern eines Datenwerts
Die Parameter werden als Gruppe der numerischen
Datenwerte sowie als unendlich variierende numerische
Datenwerte geändert.
20 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Parameter 1-23 Motor Frequency.
•
Page 23
130BA191.10
1
Auto
on
Reset
Hand
on
O
Menu
Status
Quick
Setup
Main
Menu
Back
2
3
4
OK
On
Alarm
Warn.
Setup
Programmieren Programmierhandbuch
2.1.15 Anzeigen und Programmieren von
indizierten Parametern
Parameter werden bei der Platzierung in einem FIFOSpeicher indexiert.
Parameter 15-30 Fehlerspeicher: Fehlercode bis
Parameter 15-32 Alarm Log: Time enthalten einen
auslesbaren Fehlerspeicher. Wählen Sie einen Parameter
aus, drücken Sie [OK], und verwenden Sie die Navigationstasten [▲] [▼], um im Wertespeicher zu navigieren.
So wird beispielsweise Parameter 3-10 Festsollwert folgendermaßen geändert:
1. Wählen Sie einen Parameter, drücken Sie [OK],
und verwenden Sie [▲] [▼], um durch die
indizierten Werte zu blättern.
2. Wenn Sie einen Parameterwert ändern möchten,
wählen Sie den indizierten Wert und drücken Sie
[OK].
3.
Ändern Sie den Wert mithilfe der Tasten [▲] [▼].
4. Drücken Sie [OK], um die neue Einstellung zu
akzeptieren.
5. Drücken Sie [Cancel], um abzubrechen. Drücken
Sie [Back], um den Parameter zu verlassen.
LCP-Tasten
[Menu]
Wählen Sie eine der folgenden Betriebsarten:
Status.
•
Kurzinbetriebnahme.
•
Hauptmenü.
•
2 2
2.1.16 Programmierung auf der
numerischen LCP-Bedieneinheit
Die folgenden Anweisungen beziehen sich auf das
numerische LCP (LCP 101).
Die Bedieneinheit ist in vier Funktionsgruppen unterteilt:
Numerisches Display.
•
Menütasten und Anzeigeleuchten – Änderung der
•
Parameter und Umschalten zwischen Displayfunktionen.
Navigationstasten und Anzeigeleuchten.
Displayzeile
Statusmeldungen mit der Anzeige von Symbolen und
numerischem Wert.
Anzeigeleuchten
Bedientasten mit Anzeigeleuchten
•
•
•
•
Grüne LED/On (An): Zeigt an, ob das Steuerteil
eingeschaltet ist.
Gelbe LED/Warn. (Warnung): Zeigt eine Warnung
an.
Blinkende rote LED/Alarm: Zeigt einen Alarm an.
•
Abbildung 2.21 LCP-Tasten
Statusmodus
Der Statusmodus zeigt den Zustand des Frequenzumrichters oder des Motors an.
Wenn ein Alarm auftritt, wechselt das LCP 101 automatisch
in den Statusmodus.
Sie können mehrere Alarme anzeigen.
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 21
Page 24
130BP077.10
22.8
rpm
Setup 1
Setup 1
130BP078.10
A 17
130BP046.10
Hand
on
O
Auto
on
Reset
Programmieren
VLT® AutomationDrive FC 301/302
HINWEIS
Das Kopieren von Parametern ist bei der numerischen
22
LCP-Bedieneinheit (LCP 101) nicht möglich.
Abbildung 2.22 Statusmodus
Abbildung 2.23 Alarm
[Back]
Dient zur Navigation zurück.
Verwenden Sie [▲] [▼] für den Wechsel zwischen Befehlen
und zur Navigation innerhalb von Parametern.
Abbildung 2.24 Hauptmenü/Kurzinbetriebnahme
2.1.17 LCP-Tasten
Hauptmenü/Kurzinbetriebnahme
Werden zum Programmieren aller Parameter oder nur der
Parameter im Quick-Menü verwendet (siehe auch die
Beschreibung des LCP 102 in Kapitel 2.1 Grafische und
numerische LCPs).
Wenn der Wert blinkt, drücken Sie [▲] oder [▼], um
Parameterwerte zu ändern.
1. Drücken Sie auf die Taste [Main Menu], um das
Hauptmenü auszuwählen.
2. Wählen Sie die Parametergruppe [xx-__] und
drücken Sie auf [OK].
3. Wählen Sie den Parameter [__-xx] und drücken
Sie auf [OK].
4. Wenn der Parameter ein Arrayparameter ist,
wählen Sie die Arraynummer und drücken Sie auf
[OK].
5. Wählen Sie den erforderlichen Datenwert und
drücken Sie auf [OK].
Parameter mit funktionalen Anzeigewerten wie [1], [2] usw.
Eine Beschreibung der unterschiedlichen Auswahlmöglichkeiten finden Sie in den einzelnen
Parameterbeschreibungen in Kapitel 3 Parameterbeschrei-
bungen.
Die Tasten für die Hand-Steuerung befinden sich unten am
LCP.
Abbildung 2.25 LCP-Tasten
[Hand On]
Ermöglicht die Steuerung des Frequenzumrichters über das
LCP. [Hand On] startet ebenfalls den Motor. Dann können
Sie die Motordrehzahl mit Hilfe der Navigationstasten
eingeben. Sie können die Taste über Parameter 0-40 [Hand
on] Key on LCP [1] Aktivieren oder [0] Deaktivieren.
Externe Stoppsignale, die durch Steuersignale oder einen
Feldbus aktiviert werden, heben einen über das LCP
erteilten Startbefehl auf.
Die folgenden Steuersignale sind nach wie vor wirksam,
auch wenn [Hand On] aktiviert ist.
[Hand On] - [Off ] - [Auto On].
•
Quittieren.
•
Motorfreilaufstopp invers.
•
Reversierung.
•
Parametersatzauswahl lsb – Parametersatzauswahl
•
msb.
Stoppbefehl über serielle Schnittstelle.
•
Schnellstopp.
•
DC-Bremse.
•
22 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 25

Programmieren Programmierhandbuch
[Off]
Dient zum Stoppen des angeschlossenen Motors. Sie
können die Taste über Parameter 0-41 [Off ]-LCP Taste [1]
Aktivieren oder [0] Deaktivieren.
Ist keine externe Stoppfunktion aktiv und die Taste [Off]
inaktiv, können Sie den Motor jederzeit durch Abschalten
der Spannung stoppen.
[Auto On]
Ermöglicht die Steuerung des Frequenzumrichters über die
Steuerklemmen und/oder serielle Schnittstelle. Legen Sie
ein Startsignal an den Steuerklemmen und/oder am Bus
an, startet der Frequenzumrichter. Sie können die Taste
über Parameter 0-42 [Auto On]-LCP Taste [1] Aktivieren oder
[0] Deaktivieren.
HINWEIS
Ein aktives HAND-OFF-AUTO-Signal über die Digitaleingänge hat höhere Priorität als die Bedientasten
[Hand On] – [Auto On].
[Reset]
Dient zum Zurücksetzen des Frequenzumrichters nach
einem Alarm (Abschaltung). Sie können die Taste über
Parameter 0-43 [Reset]-LCP Taste [1] Aktivieren oder [0]
Deaktivieren.
2.1.18 Initialisierung auf
Werkseinstellungen
Sie können die Werkseinstellungen des Frequenzumrichters
auf zwei Weisen initialisieren.
Empfohlene Initialisierung (über
Parameter 14-22 Betriebsart)
1. Wählen Sie Parameter 14-22 Operation Mode aus.
2. Drücken Sie [OK].
3. Wählen Sie [2] Initialisierung aus.
4. Drücken Sie [OK].
5. Trennen Sie die Netzversorgung, und warten Sie,
bis das Display erlischt.
6. Stellen Sie die Verbindung zur Netzversorgung
wieder her. Der Frequenzumrichter ist nun zurückgesetzt.
Parameter 14-22 Operation Mode initialisiert alles außer:
Parameter 14-50 RFI Filter.
•
Parameter 8-30 FC-Protokoll.
•
Parameter 8-31 Address.
•
Parameter 8-32 FC-Baudrate.
•
Parameter 8-35 FC-Antwortzeit Min.-Delay.
•
Parameter 8-36 FC-Antwortzeit Max.-Delay.
•
Parameter 8-37 FC Interchar. Max.-Delay.
•
Parameter 15-00 Operating hours bis
•
Parameter 15-05 Over Volt's.
Parameter 15-20 Historic Log: Event bis
•
Parameter 15-22 Historic Log: Time.
Parameter 15-30 Fehlerspeicher: Fehlercode bis
•
Parameter 15-32 Alarm Log: Time.
Manuelle Initialisierung
1. Trennen Sie die Netzversorgung, und warten Sie,
bis das Display erlischt.
2. 2a LCP 102: Schalten Sie die Netzver-
sorgung wieder ein und drücken Sie
gleichzeitig die Tasten [Status] – [Main
Menu] – [OK].
2b LCP 101, numerische Anzeige: Drücken
Sie während der Netz-Einschaltung
[Menu] – [OK].
3. Lassen Sie die Tasten nach 5 Sekunden los.
4. Der Frequenzumrichter ist nun mit den Werkseinstellungen programmiert.
Dieses Verfahren initialisiert alles außer:
Parameter 15-00 Operating hours.
•
Parameter 15-03 Power Up's.
•
Parameter 15-04 Over Temp's.
•
Parameter 15-05 Over Volt's.
•
HINWEIS
Eine manuelle Initialisierung setzt auch die Einstellungen
der seriellen Kommunikation, des EMV-Filters
(Parameter 14-50 RFI Filter) und des Fehlerspeichers
zurück.
2 2
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 23
Page 26
Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
3 Parameterbeschreibungen
3.1 Parameter: 0-** Betrieb und Display
33
Parametergruppe zum Einstellen der allgemeinen
Grundfunktionen des Frequenzumrichters, zur Funktion der
LCP-Tasten und zur Konfiguration des LCP-Displays.
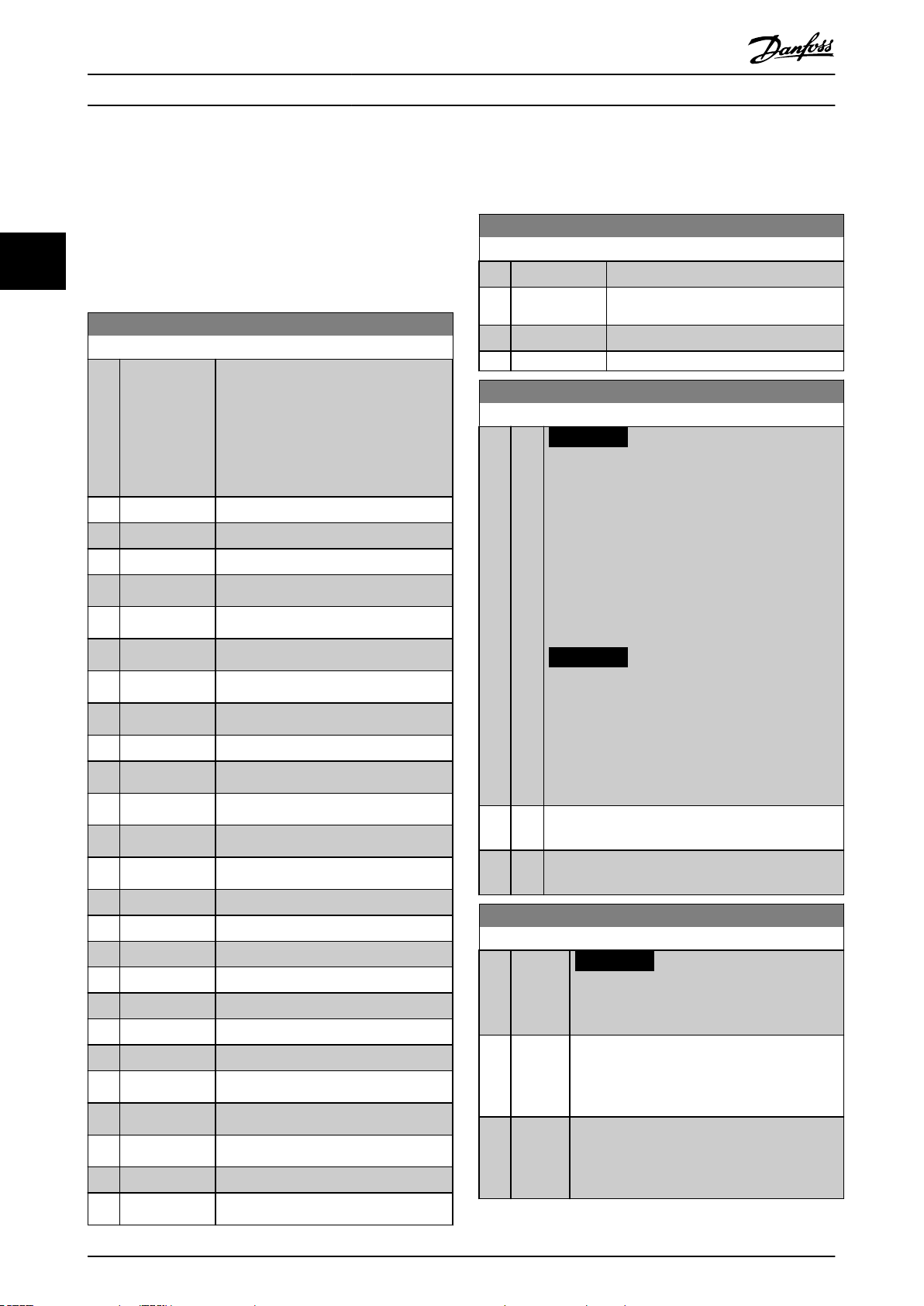
0-01 Language
0-01 Language
Option: Funktion:
[50] Thai Bestandteil von Sprachpaket 2
[51] Bahasa
Indonesia
[52] Hrvatski Bestandteil von Sprachpaket 3
Bestandteil von Sprachpaket 2
Option: Funktion:
Zur Definition der im Display
verwendeten Sprache. Der Frequenzumrichter wird mit 4 verschiedenen
Sprachpaketen geliefert. Englisch und
Deutsch sind in allen Paketen enthalten.
Sie können Englisch nicht löschen oder
ändern.
[0] * English Bestandteil der Sprachpakete 1-4
[1] Deutsch Bestandteil der Sprachpakete 1-4
[2] Francais Bestandteil von Sprachpaket 1
[3] Dansk Bestandteil von Sprachpaket 1
[4] Spanish Bestandteil von Sprachpaket 1
[5] Italiano Bestandteil von Sprachpaket 1
[6] Svenska Bestandteil von Sprachpaket 1
[53] Arabic
0-02 Motor Speed Unit
Option: Funktion:
HINWEIS
Diesen Parameter können Sie bei laufendem
Motor nicht einstellen.
Die im Display angezeigten Informationen sind von
den Einstellungen in Parameter 0-02 Motor Speed Unit
und Parameter 0-03 Regional Settings abhängig. Die
Werkseinstellungen von Parameter 0-02 Motor Speed
Unit und Parameter 0-03 Regional Settings hängen von
der Region der Welt ab, in welcher der Frequenzumrichter ausgeliefert wird.
HINWEIS
Bei Änderung der Hz/UPM-Umschaltung
werden bestimmte Parameter auf ihren
[7] Nederlands Bestandteil von Sprachpaket 1
[10] Chinese Bestandteil von Sprachpaket 2
[20] Suomi Bestandteil von Sprachpaket 1
Ausgangswert zurückgesetzt. Wählen Sie
zunächst die Motordrehzahleinheit
(Umschaltung Hz/UPM) aus, bevor Sie andere
Parameter ändern.
[22] English US Bestandteil von Sprachpaket 4
[27] Greek Bestandteil von Sprachpaket 4
[28] Bras.port Bestandteil von Sprachpaket 4
[36] Slovenian Bestandteil von Sprachpaket 3
[39] Korean Bestandteil von Sprachpaket 2
[40] Japanese Bestandteil von Sprachpaket 2
[41] Turkish Bestandteil von Sprachpaket 4
[42] Trad.Chinese Bestandteil von Sprachpaket 2
[43] Bulgarian Bestandteil von Sprachpaket 3
[44] Srpski Bestandteil von Sprachpaket 3
[45] Romanian Bestandteil von Sprachpaket 3
[46] Magyar Bestandteil von Sprachpaket 3
[47] Czech Bestandteil von Sprachpaket 3
[48] Polski Bestandteil von Sprachpaket 4
[49] Russian Bestandteil von Sprachpaket 3
[0] RPM Auswahl zur Anzeige von Motordrehzahlvariablen und
-parametern bezogen auf die Motordrehzahl (U/min).
[1] * Hz Auswahl zur Anzeige von Motordrehzahlvariablen und
-parametern bezogen auf die Ausgangsfrequenz (Hz).
0-03 Ländereinstellungen
Option: Funktion:
HINWEIS
Diesen Parameter können Sie bei
laufendem Motor nicht einstellen.
[0] * Interna-
tional
[1] US Aktiviert Parameter 1-20 Motornennleistung [kW],
Aktiviert Parameter 1-20 Motornennleistung [kW],
um die Motorleistung in kW einzustellen und
legt die Werkseinstellung von
Parameter 1-23 Motornennfrequenz auf 50 Hz fest.
um die Motorleistung in HP einzustellen und legt
die Werkseinstellung von
Parameter 1-23 Motornennfrequenz auf 60 Hz fest.
24 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 27
Parameterbeschreibungen Programmierhandbuch
0-04 Netz-Ein Modus (Hand)
Option: Funktion:
Wählt die Betriebsart des Frequenzumrichters nach Wiederzuschalten der
Netzspannung des Frequenzumrichters
nach einem Netz-Aus im Hand-Betrieb
aus.
[0] Wiederanlauf Startet den Frequenzumrichter unter
Beibehaltung derselben Start/StoppEinstellungen (eingestellt über [Hand On/
Off]) wie vor dem Netz-Aus des Frequenzumrichters neu.
[1] * LCP
Stop,Letz.Soll.
[2] LCP Stop,
Sollw.=0
Startet den Frequenzumrichter nach
Wiederanlegen der Netzspannung und
Drücken von [Hand On] mit einem
gespeicherten Ortsollwert neu.
Setzt den Ortsollwert bei Wiederanlauf
bei einem Neustart des Frequenzumrichters auf 0.
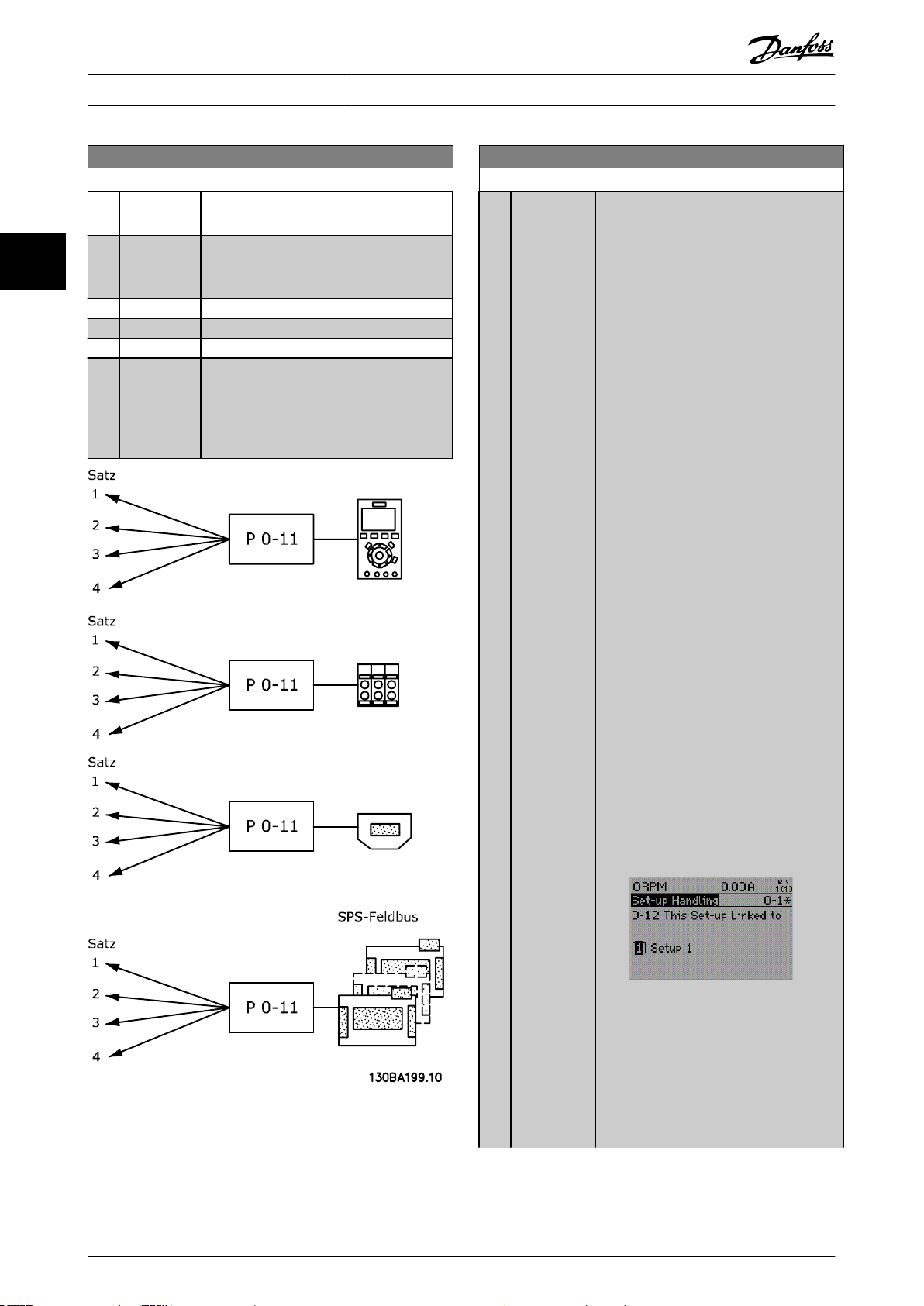
3.1.1 0-1* Parametersätze
Parameter zum Einstellen und Steuern der einzelnen
Parametersätze.
Der Frequenzumrichter verfügt über vier voneinander
unabhängig programmierbare Parametersätze. Hierdurch ist
er sehr flexibel und kann Probleme mit erweiterten Steuerfunktionen zu lösen. Häufig bedeutet dies
Kosteneinsparungen für externe Steuer- und Regeleinrichtungen. Sie können Parametersätze zur Programmierung
des Frequenzumrichters für den Betrieb anhand eines
Steuerprinzips in einem Parametersatz (z. B. Motor 1 für
horizontale Bewegung) und anhand eines anderen Steuerprinzips in einem weiteren Parametersatz (z. B. Motor 2 für
vertikale Bewegung) nutzen. Alternativ kann ein OEMMaschinenbauer Parametersätze nutzen, um alle ab Werk
eingebauten Frequenzumrichter für unterschiedliche
Maschinentypen in einer Produktreihe identisch mit den
gleichen Parametern zu programmieren. und danach
während der Produktion/Inbetriebnahme einfach einen
Parametersatz abhängig von der Maschine zu wählen, bei
der der Frequenzumrichter eingebaut ist.
Sie können den aktiven Parametersatz (d. h. der Satz, in
dem der Frequenzumrichter gerade arbeitet) über
Parameter 0-10 Aktiver Satz auswählen, und dieser wird im
LCP angezeigt. Über Externe Anwahl können Sie bei
laufendem oder gestopptem Frequenzumrichter über
Digitaleingang oder serielle Kommunikation zwischen
mehreren Parametersätzen umschalten. Falls eine
Änderung des Satzes während des Betriebs nötig sein
sollte, stellen Sie sicher, dass Parameter 0-12 Satz
verknüpfen mit wie erforderlich programmiert ist. Über
Parameter 0-11 Programm Satz können Sie Parameter in
jedem der verschiedenen Sätze programmieren,
unabhängig vom aktiven Parametersatz, mit dem der
Frequenzumrichter weiterhin laufen kann, während die
Programmierung stattfindet. Mit Parameter
Parameter 0-51 Set-up Copy können Sie Parametereinstellungen von einem Satz zum anderen kopieren, um eine
schnellere Inbetriebnahme zu ermöglichen, wenn Sie
ähnliche Parametereinstellungen in unterschiedlichen
Sätzen benötigen.
0-10 Aktiver Satz
Option: Funktion:
Wählen Sie die Konfiguration zur Steuerung
der Funktionen des Frequenzumrichters.
[0] Werksein-
stellung
[1] * Satz 1 [1] Satz 1 bis [4] Satz 4 sind die 4 separaten
[2] Satz 2
[3] Satz 3
[4] Satz 4
[9] Externe
Anwahl
Sie können diese Einstellungen nicht ändern.
Dieser Parameter enthält den Datensatz von
Danfoss, und diesen können Sie als
Datenquelle verwenden, um die anderen
Parametersätze in einen bekannten Zustand
zurück zu versetzen.
Parametersätze, in denen Sie alle Parameter
programmieren können.
Diese Option dient zur Konfigurationsauswahl
mit Hilfe von Digitaleingängen und der
seriellen Kommunikationsschnittstelle. Dieser
Satz verwendet die Einstellungen aus
Parameter 0-12 Satz verknüpfen mit. Vor
Änderungen an Funktionen mit und ohne
Rückführung muss der Frequenzumrichter
gestoppt werden.
Verwenden Sie Parameter 0-51 Set-up Copy, um einen
Parametersatz in alle anderen Parametersätze zu kopieren.
Stoppen Sie den Frequenzumrichter, bevor Sie zwischen
Parametersätzen wechseln, bei denen Parameter, die als
nicht während des Betriebs änderbar gekennzeichnet sind,
verschiedene Werte aufweisen. Wenn Sie bei der Definition
von Parametern in zwei verschiedenen Parametersätzen
Konflikte vermeiden möchten, verknüpfen Sie die Sätze mit
Parameter 0-12 Satz verknüpfen mit. Während des Betriebs
nicht änderbare Parameter können Sie an der
Kennzeichnung FALSCH in der Parameterliste in
Kapitel 5 Parameterlisten erkennen.
0-11 Programm Satz
Option: Funktion:
Wählen Sie den während des Betriebs zu
bearbeitenden (d. h. zu programmierenden)
Parametersatz aus. Dies ist entweder der
aktive Parametersatz oder einer der inaktiven
Parametersätze.
[0] Werksein-
stellung
Kann nicht bearbeitet werden, dient jedoch
als Datenquelle zum Zurücksetzen der
3 3
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 25
Page 28
130BP075.10
Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
0-11 Programm Satz
Option: Funktion:
anderen Parametersätze in einen bekannten
Zustand.
[1] * Satz 1 [1] Sie können Satz 1 bis [4] Satz 4 können
33
[2] Satz 2
[3] Satz 3
[4] Satz 4
[9] Aktiver Satz Kann auch während des Betriebs bearbeitet
während des Betriebs unabhängig vom
aktiven Parametersatz frei bearbeiten.
werden. Bearbeiten Sie den ausgewählten
Parametersatz über eine Reihe von Quellen:
LCP, FU RS485, Frequenzumrichter-USB oder
bis zu 5 Feldbus-Standorte.
0-12 Satz verknüpfen mit
Option: Funktion:
Für einen konfliktfreien Wechsel von einem
Parametersatz in einen anderen während
des Betriebs können Sie Parametersätze mit
Parametern, die während des Betriebs nicht
geändert werden können, miteinander
verknüpfen. Diese Verknüpfung sorgt für die
Synchronisierung der während des Betriebs
nicht änderbaren Parameterwerte, wenn
während des Betriebs der Parametersatz
gewechselt wird. Während des Betriebs nicht
änderbare Parameter können Sie an der
Kennzeichnung FALSCH in der Parameterliste in Kapitel 5 Parameterlisten erkennen.
Parameter 0-12 Satz verknüpfen mit wird
verwendet, wenn in Parameter 0-10 Aktiver
Satz [9] Externe Anwahl ausgewählt ist. Die
externe Anwahl ermöglicht den Wechsel
von einem Parametersatz zu einem anderen
während des Betriebs (d. h. bei laufendem
Motor).
Beispiel:
Verwenden Sie die externe Anwahl, um bei
laufendem Motor von Satz 1 zu Satz 2 zu
wechseln. Programmieren Sie zuerst
Parameter in Satz 1 und stellen Sie dann
sicher, dass Satz 1 und 2 synchronisiert
(verknüpft) werden. Die Synchronisierung
kann auf zwei Arten erfolgen:
1. Wählen Sie die folgenden Optionen:
•
•
Dadurch beginnt die Verknüpfung (Synchronisierung).
[2] Konfiguration 2 in
Parameter 0-11 Programm Satz.
Parameter 0-12 Satz verknüpfen mit
mit [1] Konfiguration 1.
Abbildung 3.2 Satz 1
ODER
2. Ist Satz 1 aktiv, kopieren Sie Satz 1 zu
Abbildung 3.1 Programm Satz
26 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Satz 2. Stellen Sie dann Parameter 0-12 Satz
verknüpfen mit auf [2] Satz 2. So beginnt die
Verknüpfung.
Page 29
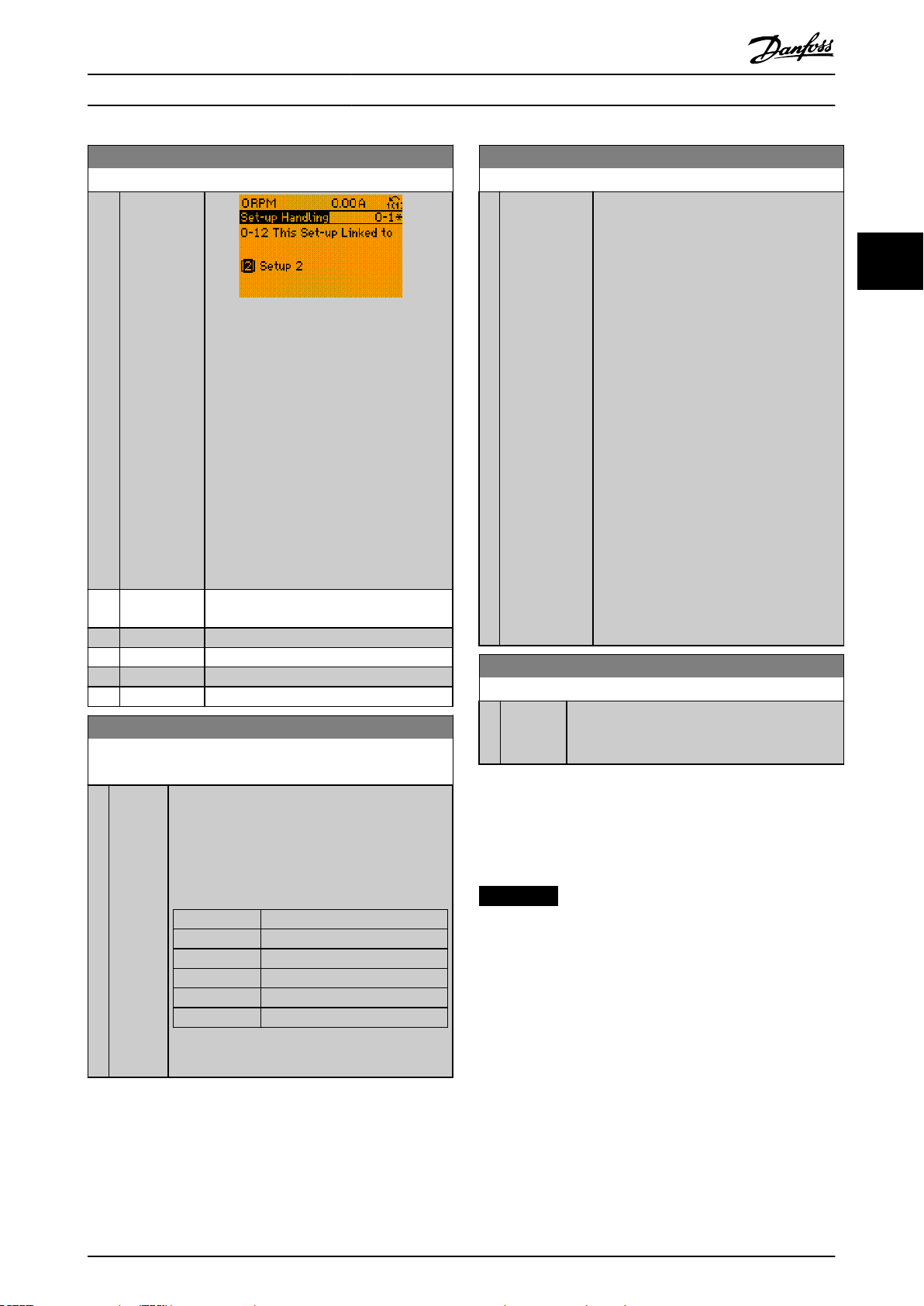
130BP076.10
Parameterbeschreibungen Programmierhandbuch
0-12 Satz verknüpfen mit
Option: Funktion:
Abbildung 3.3 Satz 2
Ist die Verknüpfung vollständig, enthält
Parameter 0-13 Readout: Linked Set-ups {1,2}
und weist so darauf hin, dass alle nicht
während des Betriebs änderbaren Parameter
nun in Satz 1 und 2 gleich sind. Liegen
Änderungen für einen nicht während des
Betriebs änderbaren Parameter vor, z. B.
Parameter 1-30 Statorwiderstand (Rs) in
Parametersatz 2, werden diese automatisch
auch in Parametersatz 1 übernommen. Nun
können Sie während des Betriebs zwischen
Parametersatz 1 und 2 wechseln.
[0] * Nicht
verknüpft
[1] Satz 1
[2] Satz 2
[3] Satz 3
[4] Satz 4
0-13 Readout: Linked Set-ups
Array [5]
Range: Funktion:
0* [0 -
255 ]
Zeigt eine Liste aller Parametersätze, die mit der
Funktion aus Parameter 0-12 This Set-up Linked to
verknüpft worden sind. Der Parameter hat 1 Index
für jeden Parametersatz. Der Wert für jeden Index
gibt an, welche Sätze mit diesem Parametersatz
verknüpft sind.
Index LCP-Wert
0 {0}
1 {1,2}
2 {1,2}
3 {3}
4 {4}
0-14 Anzeige: Par.sätze/Kanal bearbeiten
Range: Funktion:
0* [-2147483648
- 2147483647 ]
Anzeige der Einstellungen von
Parameter 0-11 Programm Satz für jeden der
4 verschiedenen Kommunikationskanäle.
Wird die Anzeige als Hex dargestellt, wie es
im LCP der Fall ist, steht jede Zahl für einen
Kanal.
Die Ziffern 1-4 stehen für die Nummer des
jeweiligen Parametersatzes. „F“ steht für
Werkseinstellung, und „A“ steht für den
aktiven Parametersatz. Von rechts nach links
lauten die Kanäle wie folgt: LCP, FC-Seriell,
USB, Feldbus 1-5.
Beispiel: Die Nummer AAAAAA21h bedeutet
Folgendes:
Der Frequenzumrichter hat über
•
einen Feldbuskanal Parametersatz 2
empfangen. Diese Auswahl ist in
Parameter 0-11 Programm Satz
aufgeführt.
Ein Benutzer hat über das LCP
•
Parametersatz 1 ausgewählt.
Alle anderen Kanäle verwenden
•
den aktiven Parametersatz.
0-15 Readout: actual setup
Range: Funktion:
0* [0 - 255 ] Ermöglicht das Auslesen des aktiven Parameter-
satzes, auch wenn [9] Mehrere Parametersätze in
Parameter 0-10 Aktiver Satz ausgewählt sind.
3.1.2 0-2* LCP-Display
Definieren Sie Variablen, die im LCP angezeigt werden
sollen.
HINWEIS
Informationen zum Erstellen von Displaytexten finden
Sie unter:
Parameter 0-37 Display Text 1.
•
Parameter 0-38 Display Text 2.
•
Parameter 0-39 Display Text 3.
•
3 3
Tabelle 3.1 Beispiel für Satzverknüpfung
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 27
Page 30
Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
0-20 Displayzeile 1.1
Option: Funktion:
Auswahl der Variable für die
Anzeige in der 1. Zeile, linke
Stelle im Display.
33
[0] Keine Kein Anzeigewert ausgewählt.
[9] Performance Monitor
[15] Readout: actual
setup
[37] Displaytext 1
[38] Displaytext 2
[39] Displaytext 3
[953] Profibus-Warnwort
[1005] Zähler Übertragungs-
fehler
[1006] Zähler Empfangs-
fehler
[1007] Zähler Bus-Off
[1013] Warnparameter
[1230] Warnparameter
[1472] VLT-Alarmwort
[1473] VLT-Warnwort
[1474] VLT Erw.
Zustandswort
[1501] Motorlaufstunden
[1502] Zähler-kWh
[1580] Fan Running Hours
[1600] Steuerwort Aktuelles Steuerwort.
[1601] Sollwert [Einheit] Zeigt den Gesamtsollwert (die
Summe aus Digital-/Analogeingang/Festsollwert/Bus/Sollw.
speichern/Frequenzkorrektur auf
und ab) in der ausgewählten
Einheit an.
[1602] Sollwert % Zeigt den Gesamtsollwert (die
Summe aus Digital-/Analogeingang/Festsollwert/Bus/Sollw.
speichern/Frequenzkorrektur auf
und ab) in Prozent an.
[1603] Zustandswort Aktuelles Zustandswort.
[1605] Hauptistwert [%] Istwert als Prozentangabe.
[1606] Actual Position Istposition in den unter
Parameter 17-70 Position Unit
ausgewählten Positionseinheiten.
[1607] Target Position Aktive Zielposition in den unter
Parameter 17-70 Position Unit
ausgewählten Positionseinheiten.
[1608] Position Error Istpositions-PI-Fehler in den unter
Parameter 17-70 Position Unit
ausgewählten Positionseinheiten.
[1609] Benutzerdefinierte
Anzeige
0-20 Displayzeile 1.1
Option: Funktion:
[1610] Leistung [kW] Aktuelle Leistungsaufnahme des
Motors in kW.
[1611] Leistung [PS] Aktuelle Leistungsaufnahme des
Motors in HP.
[1612] Motorspannung Am Motor anliegende Spannung.
[1613] Frequenz Motorfrequenz, d. h. die
Ausgangsfrequenz des Frequenzumrichters in Hz.
[1614] Motorstrom Phasenstrom des Motors als
gemessener Effektivwert.
[1615] Frequenz [%] Motorfrequenz, d. h. die
Ausgangsfrequenz des Frequenzumrichters in Prozent.
[1616] Drehmoment [Nm] Aktuelles Motordrehmoment in
Nm.
[1617]*Drehzahl [UPM] Drehzahl in UPM (Umdrehungen
pro Minute), d. h. die Motorwellendrehzahl mit Rückführung.
[1618] Therm. Motorschutz Die über die ETR-Funktion
berechnete thermische Belastung
am Motor.
[1619] KTY-Sensortem-
peratur
[1620] Rotor-Winkel
[1621] Torque [%] High Res.
[1622] Drehmoment [%] Aktuelle Motorbelastung in
Prozent des Motornenndrehmoments.
[1623] Motor Shaft Power
[kW]
[1624] Calibrated Stator
Resistance
[1625] Max. Drehmoment
[Nm]
[1630] DC-Spannung DC-Zwischenkreisspannung im
Frequenzumrichter
[1632] Bremsleistung/s Derzeitige an einen externen
Bremswiderstand übertragene
Bremsleistung.
Die Angabe erfolgt in Form eines
Augenblickswerts.
[1633] Bremsleist/2 min An einen externen Bremswi-
derstand übertragene
Bremsleistung. Die Durchschnittsleistung wird laufend für die
letzten 120 Sekunden berechnet.
[1634] Kühlkörpertemp. Aktuelle Kühlkörpertemperatur
des Frequenzumrichters. Der
Abschaltgrenzwert beträgt 95
28 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 31

Parameterbeschreibungen Programmierhandbuch
0-20 Displayzeile 1.1
Option: Funktion:
±5 °C (203 ±9 °F); die erneute
Aktivierung erfolgt bei 70 ±5 °C
(203 ±9 °F).
[1635] FC Überlast Prozentuale Last der Wechsel-
richter.
[1636] Nenn-WR-Strom Nennstrom des Frequenzum-
richters.
[1637] Max.-WR-Strom Maximaler Strom des Frequen-
zumrichters.
[1638] SL Contr.Zustand Der aktuelle Zustand des Smart
Logic Controllers.
[1639] Steuerkartentemp. Temperatur der Steuerkarte.
[1644] Speed Error [RPM]
[1645] Motor Phase U
Current
[1646] Motor Phase V
Current
[1647] Motor Phase W
Current
[1648] Speed Ref. After
Ramp [RPM]
[1650] Externer Sollwert Die Summe der externen
Sollwerte in % (Summe aus
Analog/Puls/Bus).
[1651] Puls-Sollwert Die an den Digitaleingängen (18,
19, oder 32, 33) anliegende
Frequenz in Hz.
[1652] Istwert [Einheit] Der Sollwert von den program-
mierten Digitaleingängen.
[1653] Digitalpoti Sollwert
[1657] Feedback [RPM]
[1660] Digitaleingänge Signalzustände von den 6 Digital-
klemmen (18, 19, 27, 29, 32 und
33). Insgesamt sind 16 Bits
vorhanden, aber nur sechs davon
werden verwendet. Eingang 18
entspricht dem äußersten linken
verwendeten Bit. Signal Low = 0;
Signal High = 1.
[1661] AE 53 Modus Einstellung Eingangsklemme 54.
Strom = 0; Spannung = 1.
[1662] Analogeingang 53 Der Istwert an Eingang 53 als
Soll- oder Schutzwert.
[1663] AE 54 Modus Einstellung Eingangsklemme 54.
Strom = 0; Spannung = 1.
[1664] Analogeingang 54 Istwert an Eingang 54 als Soll-
oder Schutzwert.
[1665] Analogausgang 42 Der Istwert an Ausgang 42 in mA.
Verwenden Sie
0-20 Displayzeile 1.1
Option: Funktion:
Parameter 6-50 Klemme 42 Analogausgang für die Auswahl des
anzuzeigenden Werts.
[1666] Digitalausgänge Binärwert aller Digitalausgänge.
[1667] Pulseingang 29 [Hz] Der Istwert des an Klemme 29
anliegenden Impulssignals.
[1668] Pulseingang 33 [Hz] Der Istwert des an Klemme 33
anliegenden Impulssignals.
[1669] Pulsausg. 27 [Hz] Aktuelles Pulssignal an Klemme
27 im Digitalausgang-Modus.
[1670] Pulsausg. 29 [Hz] Aktuelles Pulssignal an Klemme
29 im Digitalausgang-Modus.
[1671] Relaisausgänge
[1672] Zähler A Anwendungsabhängig (z. B. SLC-
Steuerung).
[1673] Zähler B Anwendungsabhängig (z. B. SLC-
Steuerung).
[1675] Analogeingang
X30/11
[1676] Analogeingang
X30/12
[1677] Analogausgang
X30/8 [mA]
[1678] Analogausgang
X45/1 [mA]
[1679] Analogausgang
X45/3 [mA]
[1680] Bus Steuerwort 1 Steuerwort (CTW) vom Bus-
[1682] Bus Sollwert 1 Mit dem Steuerwort vom Bus-
[1684] Feldbus-Komm.
Status
[1685] FC Steuerwort 1 Steuerwort (CTW) vom Bus-
[1686] FC Sollwert 1 An den Bus-Master gesendetes
[1687] Bus Readout Alarm/
Warning
[1689] Configurable Alarm/
Warning Word
[1690] Alarmwort Mindestens ein Alarm in Hex-
[1691] Alarmwort 2 Mindestens ein Alarm in Hex-
Istwert an Eingang X30/11 als
Soll- oder Schutzwert.
Istwert an Eingang X30/12 als
Soll- oder Schutzwert.
Der Istwert an Ausgang X30/8 in
mA. Verwenden Sie
Parameter 6-60 Klemme X30/8
Analogausgang für die Auswahl
des anzuzeigenden Werts.
Master.
Master gesendeter Hauptsollwert.
Zustandswort für erweiterte
Feldbus-Komm.option
Master.
Zustandswort.
Code.
Code.
3 3
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 29
Page 32

Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
0-20 Displayzeile 1.1
Option: Funktion:
[1692] Warnwort Mindestens eine Warnung in Hex-
Code.
[1693] Warnwort 2 Mindestens eine Warnung in Hex-
33
[1694] Erw. Zustandswort Mindestens eine Zustandsbe-
[1836] Analogeingang X48/2
[mA]
[1837] Temp. Eing. X48/4
[1838] Temp. Eing. X48/7
[1839] Temp. Eing. X48/10
[1860] Digital Input 2
[3110] Bypass-Zustandswort
[3111] Bypass-Laufstunden
[4235] S-CRC Value
[4282] Safe Control Word
[4283] Safe Status Word
[4285] Active Safe Func.
[4286] Safe Option Info
[9913] Leerlaufzeit
[9914] Paramdb Anfragen in
W.schlange
[9917] tCon1 time
[9918] tCon2 time
[9919] Time Optimize
Measure
[9920] Kühlk.Temp. LT1
[9921] Kühlk.Temp LT 2
[9922] Kühlk.Temp LT 3
[9923] Kühlk.Temp LT 4
[9924] Lühlk.Temp LT 5
[9925] Kühlk.Temp LT 6
[9926] Kühlk.Temp LT 7
[9927] Kühlk.Temp LT 8
[9951] PC Debug 0
[9952] PC Debug 1
[9953] PC Debug 2
[9954] PC Debug 3
[9955] PC Debug 4
[9956] Fan 1 Feedback
[9957] Fan 2 Feedback
[9958] PC Auxiliary Temp
[9959] Power Card Temp.
Code.
dingung in Hex-Code.
0-21 Displayzeile 1.2 Klein
Einstellung für die Displayanzeige in der 1. Zeile, mittlere Stelle.
Diese Optionen entsprechen den für Parameter 0-20 Displayzeile
1.1 aufgelisteten Funktionen.
0-22 Displayzeile 1.3 Klein
Einstellung für die Displayanzeige in der 1. Zeile, rechte Stelle.
Diese Optionen entsprechen den für Parameter 0-20 Displayzeile
1.1 aufgelisteten Funktionen.
0-23 Displayzeile 2 Groß
Einstellung für die Displayanzeige in der 2. Zeile. Die Optionen
sind identisch mit der Auflistung für Parameter 0-20 Displayzeile
1.1.
0-24 Displayzeile 3
Einstellung für die Displayanzeige in der 3. Zeile.
0-25 Benutzer-Menü
Range: Funktion:
Size
related*
[0 -
Definieren Sie bis zu 50 Parameter, die im Q1
9999 ]
Benutzer-Menü angezeigt werden sollen. Der
Zugriff auf dieses Menü erfolgt über die Taste
[Quick Menu] am LCP. Die Parameter werden
im Q1 Benutzer-Menü in der Reihenfolge
angezeigt, in der Sie in diesem Arrayparameter
programmiert wurden. Das Löschen von
Parametern erfolgt, indem Sie den Wert auf
0000 setzen.
Dies ermöglicht Ihnen zum Beispiel einen
schnellen und einfachen Zugriff auf einen bis
maximal 50 Parameter, die regelmäßig
geändert werden müssen (z. B. aus Gründen
der Anlagenwartung). Zudem ermöglicht diese
Funktion einem OEM die schnelle
Inbetriebnahme seiner Geräte.
3.1.3 0-3* LCP-Benutzerdef
Sie können die Displayelemente für verschiedene Zwecke
anpassen:
Kundenspezifische Auswahl der Anzeige. Der
•
angezeigte Wert ist proportional zur Drehzahl
(linear, radiziert oder 3. Potenz – je nach Wahl der
Einheit in Parameter 0-30 Custom Readout Unit).
Displaytext. Dies ist eine in einem Parameter
•
gespeicherte Textfolge.
Benutzerdefinierte Anzeige
Der anzuzeigende berechnete Wert basiert auf den Einstellungen in:
Parameter 0-30 Custom Readout Unit.
•
Parameter 0-31 Custom Readout Min Value (nur
•
linear).
Parameter 0-32 Custom Readout Max Value.
•
Parameter 4-13 Motor Speed High Limit [RPM].
•
Parameter 4-14 Motor Speed High Limit [Hz].
•
Istdrehzahl.
•
30 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 33

0
130BT105.12
Benutzerdefinierte Anzeige
P DR-09
Einheit für benutzerdef. Anzeige
P K-30
Max. Wert
benutzerdef.
Anzeige
P K-32
Min Wert
Anzeige
P K-31
Liniar
benutzerdef.
Lineare Einheiten (z.B. Drehzahl und Durchfluss)
Quadratische Einheit (Druck)
Kubische Einheit (Leistung)
Motordrehzahl
Max Drehzahl
P F-17 (UPM)
P F-15 (Hz)
Parameterbeschreibungen Programmierhandbuch
Abbildung 3.4 Benutzerdefinierte Anzeige
Die Beziehung hängt von der Art der in
Parameter 0-30 Custom Readout Unit ausgewählten
Maßeinheit ab:
Gerätetyp Drehzahlbeziehung
Dimensionslos
Drehzahl
Durchfluss, Volumen
Durchfluss, Masse
Velocity (Pos. Geschwindigkeit)
Länge
Temperatur
Druck Quadratisch
Leistung Kubisch
Tabelle 3.2 Drehzahlbeziehungen für verschiedene
Gerätetypen
0-30 Einheit für benutzerdefinierte Anzeige
Option: Funktion:
[0] * Ohne
[1] %
[5] PPM
[10] l/min
[11] UPM
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 31
Linear
Sie können die gewünschte Einheit für die
benutzerdefinierte Anzeige am LCP programmieren. Die ausgewählte Einheit ergibt
automatisch eine lineare, quadratische oder
kubische Skalierungsbeziehung zur Ausgangsdrehzahl. Diese Beziehung hängt von der
gewählten Einheit ab (siehe Tabelle 3.2). Sie
können den tatsächlich berechneten Wert in
Parameter 16-09 Benutzerdefinierte Anzeige
auslesen und/oder im Display durch Auswahl
von [16-09] Benutzerdefinierte Anzeige in
Parameter 0-20 Displayzeile 1.1 bis
Parameter 0-24 Display Line 3 Large anzeigen.
0-30 Einheit für benutzerdefinierte Anzeige
Option: Funktion:
[12] PULSE/s
[20] l/s
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m wg
[80] kW
[120] GPM
[121] Gal/s
[122] gal/min
[123] gal/h
[124] cfm
[125] Fuß³/s
[126] Fuß³/min
[127] Fuß³/h
[130] lb/s
[131] lb/min
[132] lb/h
[140] Fuß/s
[141] Fuß/min
[145] ft
[160] °F
[170] psi
[171] lb/in²
[172] inch wg
[173] ft wg
[176] kpsi
[177] MPa
[178] kBar
[180] PS
3 3
Page 34

Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
0-31 Min. Wert benutzerdef. Anzeige
Range: Funktion:
0 CustomReadoutUnit*
33
[ -999999.99 par. 0-32
CustomReadoutUnit]
Über diesen Parameter wird der
Mindestwert der benutzerdefinierten Anzeige (liegt bei
Drehzahl 0 vor) festgelegt. Eine
andere Einstellung als 0 ist nur
möglich, wenn Sie in
Parameter 0-30 Einheit für
benutzerdefinierte Anzeige eine
lineare Einheit auswählen. Für
Einheiten mit 2. und 3. Potenz
ist der Mindestwert 0.
0-32 Custom Readout Max Value
Range: Funktion:
100 CustomReadoutUnit*
[ par. 0-31 -
999999.99
CustomReadoutUnit]
Dieser Parameter gibt den
maximalen Wert an, der
angezeigt werden soll, wenn die
Drehzahl des Motors den
eingestellten Wert für
Parameter 4-13 Motor Speed High
Limit [RPM] oder
Parameter 4-14 Motor Speed High
Limit [Hz] erreicht hat (je nach
Einstellung in
Parameter 0-02 Motor Speed
Unit).
0-38 Displaytext 2
Range: Funktion:
0* [0 -
25 ]
Geben Sie einen im grafischen Display anzeigbaren
Text ein, indem Sie [38] Displaytext 2 in
Parameter 0-20 Displayzeile 1.1,
•
Parameter 0-21 Displayzeile 1.2,
•
Parameter 0-22 Displayzeile 1.3,
•
Parameter 0-23 Displayzeile 2, oder
•
Parameter 0-24 Displayzeile 3.
•
0-39 Displaytext 3
Range: Funktion:
0* [0 -
25 ]
Geben Sie einen im grafischen Display anzeigbaren
Text ein, indem Sie [39] Displaytext 3 in
Parameter 0-20 Displayzeile 1.1,
•
Parameter 0-21 Displayzeile 1.2,
•
Parameter 0-22 Displayzeile 1.3,
•
Parameter 0-23 Displayzeile 2, oder
•
Parameter 0-24 Displayzeile 3.
•
3.1.4 0-4* LCP-Tasten
Mit diesen Parametern können Sie einzelne Tasten des LCP
aktivieren, deaktivieren und mit einem Kennwortschutz
versehen.
0-33 Source for User-defined Readout
Option: Funktion:
Eingabe der Quelle für benutzerdefinierte Anzeige.
[105] Mom.relativ zu Nenn.
[240] * Default Source
0-37 Displaytext 1
Range: Funktion:
0* [0 -
25 ]
Geben Sie einen im grafischen Display anzeigbaren
Text ein, indem Sie [37] Displaytext 1 in
Parameter 0-20 Displayzeile 1.1,
•
Parameter 0-21 Displayzeile 1.2,
•
Parameter 0-22 Displayzeile 1.3,
•
Parameter 0-23 Displayzeile 2, oder
•
Parameter 0-24 Displayzeile 3.
•
0-40 [Hand On]-LCP Taste
Option: Funktion:
[0] Deaktiviert Keine Wirkung beim Drücken der Taste [Hand
On]. Wählen Sie [0] Deaktiviert, um ein
unbeabsichtigtes Starten des Frequenzumrichters im Handbetrieb zu vermeiden.
[1] Aktiviert Das LCP schaltet direkt in den Handbetrieb,
wenn die [Hand On]-Taste gedrückt wird.
[2] Passwort Nach Drücken von [Hand on] ist ein Passwort
erforderlich. Wenn Parameter 0-40 [Hand On]-
LCP Taste im Benutzer-Menü vorhanden ist,
definieren Sie das Passwort in
Parameter 0-65 Quick-Menü Passwort.
Andernfalls definieren Sie das Passwort in
Parameter 0-60 Hauptmenü Passwort.
[3] Hand Off/On Bei einmaligem Drücken von [Hand on]
wechselt das LCP in den Modus Aus. Bei
erneutem Drücken schaltet das LCP in den
Handbetrieb.
[4] Hand Off/On
m. Pw.
[9] Aktiviert,
Ref.= 0
Entspricht [3] Hand Aus/Eis, jedoch ist ein
Passwort erforderlich (siehe Option [2]
Passwort).
32 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 35

Parameterbeschreibungen Programmierhandbuch
0-41 [Off]-LCP Taste
Option: Funktion:
[0] Deaktiviert Unterbindet einen Ort-Stopp des Frequenzum-
richters.
[1] Aktiviert
[2] Passwort Vermeidet einen unbefugten Stopp. Ist
Parameter 0-41 [Off]-LCP Taste im Quick-Menü
enthalten, definieren Sie das Passwort in
Parameter 0-65 Quick-Menü Passwort.
0-42 [Auto On]-LCP Taste
Option: Funktion:
[0] Deaktiviert Unterbindet einen Ort-Start des Frequenzum-
richters im Auto-Betrieb.
[1] Aktiviert
[2] Passwort Unterbindet unbefugten Start in der Betriebsart
Auto On. Ist Parameter 0-42 [Auto On]-LCP Taste
im Quick-Menü enthalten, definieren Sie das
Passwort in Parameter 0-65 Quick-Menü Passwort.
0-43 [Reset]-LCP Taste
Option: Funktion:
[0] Deaktiviert Keine Wirkung, wenn die [Reset]-Taste
gedrückt wird. Unterbindet eine
versehentliche Alarmquittierung.
[1] Aktiviert
[2] Passwort Vermeidet ein unbefugtes Zurücksetzen. Ist
Parameter 0-43 [Reset]-LCP Taste im QuickMenü enthalten, definieren Sie das Passwort
in Parameter 0-65 Quick-Menü Passwort.
[7] Aktiviert
ohne AUS
[8] Passwort
ohne AUS
Der Frequenzumrichter wird zurückgesetzt,
ohne in die Betriebsart Aus versetzt zu
werden.
Der Frequenzumrichter wird zurückgesetzt,
ohne in die Betriebsart Aus versetzt zu
werden. Beim Drücken der [Reset]-Taste ist ein
Passwort erforderlich (siehe Option [2]
Passwort).
0-44 [Off/Reset]-LCP Taste
Zur Aktivierung oder Deaktivierung der [Off/Reset]-Taste.
Option: Funktion:
[0] Deaktiviert
[1] * Aktiviert
[2] Passwort
0-45 [Drive Bypass]-LCP Taste
Drücken Sie [Off ] und wählen Sie [0] Deaktiviert, um ein unbeabsichtigtes Stoppen des Frequenzumrichters zu unterbinden.
Drücken Sie [Off ] und wählen Sie [2] Passwort, um eine
unbefugte Überbrückung des Frequenzumrichters zu vermeiden.
Ist Parameter 0-45 [Drive Bypass] Key on LCP im Quick-Menü
enthalten, definieren Sie das Passwort in Parameter 0-65 Personal
Menu Password.
Option: Funktion:
[0] Deaktiviert Wählen Sie diesen
Parameter, um die Taste
zu deaktivieren.
[1] * Aktiviert
[2] Passwort
3.1.5 0-5* Kopie/Speichern
Kopieren von Parametern vom und zum LCP. Verwenden
Sie diese Parameter zum Speichern und Kopieren der
Parametersätze von einem Frequenzumrichter zum
anderen.
0-50 LCP-Kopie
Option: Funktion:
HINWEIS
Diesen Parameter können Sie
bei laufendem Motor nicht
einstellen.
[0] * Keine Kopie
[1] Speichern in LCP Kopiert alle Parameter in allen
Parametersätzen aus dem Speicher
des Frequenzumrichters in den LCPSpeicher.
[2] Lade von LCP, Alle Kopiert alle Parameter in allen
Parametersätzen vom LCP-Speicher in
den Speicher des Frequenzumrichters.
[3] Lade von LCP,nur
Fkt.
[4] Datei MCO -> LCP
[5] Datei LCP -> MCO
[6] Data from DYN to
LCP
[7] Data from LCP to
DYN
[9] Safety Par. from LCP
Kopiert nur die von der Motorgröße
unabhängigen Parameter. Sie können
die letzte Auswahl zum Programmieren mehrerer Frequenzumrichter
mit der gleichen Funktion ohne
Beeinträchtigung der Motordaten
verwenden.
3 3
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 33
Page 36

Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
0-50 LCP-Kopie
Option: Funktion:
[10] Delete LCP copy
data
33
0-51 Set-up Copy
Verwenden Sie diese Option zum
Löschen der Kopie, nachdem die
Übertragung abgeschlossen ist.
Option: Funktion:
[0] * No copy Keine Funktion.
[1] Copy to
set-up 1
[2] Copy to
set-up 2
[3] Copy to
set-up 3
[4] Copy to
set-up 4
[9] Copy to all Kopiert die Parameter im aktuellen Satz zu
Kopiert alle Parameter im aktuellen ProgrammSatz (definiert in Parameter 0-11 Programming
Set-up) zu Satz 1.
Kopiert alle Parameter im aktuellen ProgrammSatz (definiert in Parameter 0-11 Programming
Set-up) zu Satz 2.
Kopiert alle Parameter im aktuellen ProgrammSatz (definiert in Parameter 0-11 Programming
Set-up) zu Satz 3.
Kopiert alle Parameter im aktuellen ProgrammSatz (definiert in Parameter 0-11 Programming
Set-up) zu Satz 4.
jedem der Sätze 1 bis 4.
3.1.6 0-6* Passwort
0-60 Main Menu Password
Range: Funktion:
100* [-9999 -
9999 ]
0-61 Hauptmenü Zugriff ohne PW
Dieser Parameter definiert das Passwort zum
Zugriff auf das Hauptmenü über die Taste
[Main Menu]. Ist Parameter 0-61 Access to Main
Menu w/o Password auf [0] Vollständig
eingestellt, wird dieser Parameter ignoriert.
0-61 Hauptmenü Zugriff ohne PW
Option: Funktion:
[6] Alle: Kein Zugriff Kein Zugriff von LCP, Feldbus oder FU-
Standardbus zulässig.
Wird [0] Vollständig ausgewählt, werden
Parameter 0-60 Main Menu Password,
Parameter 0-65 Personal Menu Password und
Parameter 0-66 Access to Personal Menu w/o Password
ignoriert.
HINWEIS
Auf Wunsch ist ein komplexerer Kennwortschutz für
OEMs verfügbar.
0-65 Quick-Menü Passwort
Range: Funktion:
200* [-9999 -
9999 ]
0-66 Quickmenü Zugriff ohne PW
Ist Parameter 0-61 Access to Main Menu w/o Password auf [0]
Vollständig eingestellt, wird dieser Parameter ignoriert.
Option: Funktion:
[0] * Vollständig Deaktiviert das unter Parameter 0-65 Quick-
[1] LCP: Nur Lesen Verhindert das unbefugte Bearbeiten der
[3] Bus: Nur Lesen Schreibgeschützte Funktionen für
[5] Alle: Nur Lesen Schreibgeschützte Funktion für Parameter
Definieren Sie das Kennwort für den Zugriff
auf das Quick-Menü über die [Quick Menu]Taste. Ist Parameter 0-66 Quickmenü Zugriff
ohne PW auf [0] Vollständig eingestellt, wird
dieser Parameter ignoriert.
Menü Passwort definierte Passwort.
Quick-Menü-Parameter.
Parameter des Quick-Menüs bei Feldbus
und/oder FU-Standardbus.
des Quick-Menüs bei LCP, Feldbus oder FUStandardbus.
Option: Funktion:
[0] * Vollständig Deaktiviert das in Parameter 0-60 Main
Menu Password definierte Passwort.
[1] LCP: Nur Lesen Verhindert das unbefugte Bearbeiten von
Hauptmenüparametern.
[2] LCP: Kein Zugriff Verhindert das unbefugte Anzeigen und
Bearbeiten von Hauptmenüparametern.
[3] Bus: Nur Lesen Nicht veränderbare Funktionen für
Parameter am Feldbus bzw. FUStandardbus.
[4] Bus: Kein Zugriff Kein Zugriff auf Parameter über Feldbus
bzw. FU-Standardbus zulässig.
[5] Alle: Nur Lesen Nicht veränderbare Funktion für
Parameter am LCP, Feldbus bzw. FUStandardbus.
0-67 Passwort Bus-Zugriff
Range: Funktion:
0* [0 - 9999 ] Verwenden Sie diesen Parameter, um den
Frequenzumrichter über Feldbus oder MCT 10
Konfigurationssoftware zu entriegeln.
0-68 Safety Parameters Password
Range: Funktion:
300* [0 -
9999 ]
Geben Sie das Passwort für den Zugriff auf die
Sicherheitsparameter ein. Ist
Parameter 0-69 Password Protection of Safety
Parameters auf [0] Deaktiviert eingestellt, wird
dieser Parameter ignoriert.
34 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 37

Parameterbeschreibungen Programmierhandbuch
0-69 Password Protection of Safety Parameters
Option: Funktion:
[0] * Deaktiviert
[1] Aktiviert
0-70 Date and Time
Range: Funktion:
Size
related*
[ 0 - 0 ] Einstellung von Datum und Uhrzeit der
internen Uhr. Das zu verwendende
Format wird in Parameter 0-71 Date
Format und Parameter 0-72 Time Format
eingestellt.
0-73 Zeitzonenversatz
Range: Funktion:
0 min* [-780 - 780
min]
Geben Sie den Zeitzonenversatz zum
UTC ein. Dieser Parameter wird für die
automatische Sommerzeitumstellung
benötigt.
0-74 DST/Summertime
Option: Funktion:
Wählen Sie aus, wie MESZ/Sommerzeit behandelt
werden sollen. Geben Sie für manuelle MESZ/
Sommerzeit das Start- und Enddatum in
Parameter 0-76 DST/Summertime Star t und
Parameter 0-77 DST/Summertime End ein.
[0] * Off
[2] Manual
0-76 DST/Summertime Start
Range: Funktion:
Size
related*
[ 0 - 0 ] Einstellung von Datum und Uhrzeit, wenn
MESZ/Sommerzeit startet. Das Datum
wird im in Parameter 0-71 Date Format
ausgewählten Format programmiert.
0-77 DST/Summertime End
Range: Funktion:
Size
related*
[ 0 - 0 ] Einstellung von Datum und Uhrzeit, wenn
MESZ/Sommerzeit endet. Das Datum wird
im in Parameter 0-71 Date Format
ausgewählten Format programmiert.
0-79 Clock Fault
Option: Funktion:
Aktivierung oder Deaktivierung der Uhrwarnung,
wenn die Uhr nicht eingestellt oder aufgrund einer
Abschaltung quittiert wurde und kein Puffer
installiert ist. Wenn die VLT® Analog-E/AOptionskarte MCB 109 installiert ist, lautet der
Standardwert [1] Aktiviert.
[0] Disabled
[1] Enabled
0-81 Working Days
Array [7]
Array mit 7 Elementen ([0]-[6] unter der Parameternummer im
Display). Drücken Sie [OK] und gehen Sie mithilfe der Tasten [▲]
und [▼] von Element zu Element.
Option: Funktion:
Legen Sie für jeden Wochentag fest, ob es ein Arbeitsoder Nichtarbeitstag ist. Erstes Element des Arrays ist
Montag. Die Arbeitstage werden für die Zeitablaufsteuerung verwendet.
[0] No
[1] Yes
0-82 Additional Working Days
Array [5]
Array mit 5 Elementen ([0]-[4] unter der Parameternummer im
Display). Drücken Sie [OK] und gehen Sie mithilfe der Tasten [▲]
und [▼] von Element zu Element.
Range: Funktion:
Size related* [ 0 - 0 ] Datumsangaben für zusätzliche
Arbeitstage, die normalerweise
laut Parameter 0-81 Working Days
keine Arbeitstage wären.
0-83 Additional Non-Working Days
Array [15]
Array mit 15 Elementen ([0]-[14] unter der Parameternummer im
Display). Drücken Sie [OK] und gehen Sie mithilfe der Tasten [▲]
und [▼] von Element zu Element.
Range: Funktion:
Size related* [ 0 - 0 ] Datumsangaben für zusätzliche
Arbeitstage, die normalerweise
laut Parameter 0-81 Working Days
keine Arbeitstage wären.
0-84 Time for Fieldbus
Range: Funktion:
0* [0 - 4294967295 ] Zeigt die Zeit für den Feldbus an.
0-85 Summer Time Start for Fieldbus
Range: Funktion:
0* [0 - 4294967295 ] Zeigt den Beginn der Sommerzeit für den
Feldbus an.
0-86 Summer Time End for Fieldbus
Range: Funktion:
0* [0 - 4294967295 ] Zeigt das Ende der Sommerzeit für den
Feldbus an.
3 3
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 35
Page 38

Parameterbeschreibungen
0-89 Date and Time Readout
Range: Funktion:
0* [0 - 25 ] Zeigt das aktuelle Datum und die Uhrzeit an.
Datum und Uhrzeit werden kontinuierlich
aktualisiert.
33
Die Uhr beginnt erst zu zählen, wenn in
Parameter 0-70 Date and Time eine Werkseinstellung verändert wurde.
VLT® AutomationDrive FC 301/302
36 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 39

Parameterbeschreibungen Programmierhandbuch
3.2 Parameter: 1-** Motor/Last
3.2.1 1-0* Grundeinstellungen
Definieren Sie, ob der Frequenzumrichter in der Betriebsart
Drehzahlregelung oder Drehmomentregler läuft, und ob
die interne PID-Regelung aktiv sein soll.
1-00 Regelverfahren
Option: Funktion:
Wählen Sie das für die Anwendung bei
aktivem Fernsollwert (d. h. über Analogeingang oder Feldbus) zu verwendende
Steuerverfahren aus. Ein Fernsollwert kann
nur aktiv sein, wenn
Parameter 3-13 Reference Site auf [0]
Umschalt. Hand/Auto oder [1] Fern
eingestellt ist.
[0] Ohne
Rückführung
[1] Mit Drehgeber Ermöglicht Drehzahlregelung mit
[2] Drehmoment-
regler
Ermöglicht Drehzahlregelung (ohne Istwertsignal vom Motor) mit automatischem
Schlupfausgleich für nahezu konstante
Drehzahl bei variierenden Lasten.
Kompensationen sind aktiv, können aber in
der Parametergruppe 1-0* Motor/Last
angezeigt werden. Die Parameter zur
Drehzahlregelung müssen Sie in Parameter-
gruppe 7-0* PID Drehzahlregler einstellen.
Rückführung (mit Istwertsignal). Das
vollständige Haltemoment erreichen Sie bei
0 U/min.
Für eine höhere Genauigkeit der Drehzahl,
stellen Sie ein Istwertsignal zur Verfügung
und stellen Sie den PID-Drehzahlregler ein.
Die Parameter zur Drehzahlregelung
müssen Sie in Parametergruppe 7-0* PID
Drehzahlregler einstellen.
Ermöglicht eine Drehmomentregelung mit
Rückführung (mit Istwertsignal). Nur
möglich mit der Option Fluxvektor mit
Geber, Parameter 1-01 Steuerprinzip.
HINWEIS
Dies gilt nur für FC302.
[3] PID-Prozess Ermöglicht die Verwendung der Prozessre-
gelung im Frequenzumrichter. Die
Parameter für die Prozessregelung müssen
Sie in den Parametergruppen 7-2* PID-
Prozess einstellen. Istw. und 7-3* PIDProzessregler eingestellt.
[4] Drehmom. o.
Rück.
Ermöglicht die Verwendung eines
Drehmoments ohne Rückführung im VVC+Modus (Parameter 1-01 Steuerprinzip). Die
PID-Parameter für das Drehmoment müssen
1-00 Regelverfahren
Option: Funktion:
Sie in Parametergruppe 7-1* Drehmom. PIRegler einstellen.
[5] Wobbel Aktiviert die Wobble-Funktion in
Parameter 30-00 Wobbel-Modus bis
Parameter 30-19 Wobbel Deltafreq. skaliert.
[6] Flächenwickler Aktiviert die für die Steuerung des Flächen-
wicklers zuständigen Parameter in den
Parametergruppen 7-2* PID-Prozess. Istw. und
7-3* PID-Prozessregler eingestellt.
[7] Erw.PID-
Drehz.m.Rück.
[8] Erw.PID-
Drehz.o.Rück.
[9] Positioning
Spezifische Parameter in den Parameter-
gruppen 7-2* PID-Prozess. Istw. bis 7-5* Adv.
Process PID II.
Spezifische Parameter in den Parametergruppen 7-2* PID-Prozess. Istw. bis 7-5* Adv.
Process PID II.
HINWEIS
Diese Option ist nur in SoftwareVersion 48.XX verfügbar.
Zur Aktivierung des Positionierungsmodus.
[10] Synchron-
ization
HINWEIS
Diese Option ist nur in SoftwareVersion 48.XX verfügbar.
Zur Aktivierung des Synchronisierungsmodus.
1-01 Steuerprinzip
Option: Funktion:
HINWEIS
Diesen Parameter können Sie bei
laufendem Motor nicht einstellen.
Wählt das einzusetzende Motorsteuerprinzip.
[0] U/f Sondermotor-Modus für parallel geschaltete
Motoren in speziellen Motoranwendungen
verwendet. Bei Auswahl von U/f lässt sich die
Kennlinie des Steuerverfahrens in
Parameter 1-55 U/f-Kennlinie - U [V] und
Parameter 1-56 U/f-Kennlinie - f [Hz] ändern.
[1] VVCplus Das Voltage Vector Control-Verfahren eignet
sich für die meisten Anwendungen. Die
Hauptvorteile des VVC+-Verfahrens sind das
einfachere und robustere Motormodell.
[2] Fluxvektor
oh. Geber
Flux-Vektor-Steuerung ohne Geberrückführung
für einfache Installation und Widerstandsfähigkeit gegenüber plötzlichen Lastwechseln.
3 3
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 37
Page 40

ω
nom2ωnom
ω [rad/S]
P[W]
130BB655.10
T[Nm]
P
T
P
nom
T
nom
Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
1-01 Steuerprinzip
Option: Funktion:
HINWEIS
Dies gilt nur für FC302.
33
[3] Fluxvektor
mit Geber
Drehzahl- und Drehmomentregelung mit hoher
Genauigkeit, geeignet für die anspruchsvollsten
Anwendungen.
HINWEIS
Dies gilt nur für FC302.
Die beste Wellenleistung wird in der Regel durch die
Verwendung eines der beiden Fluxvektor-Steuermodi [2]
Fluxvektor oh. Geber und [3] Fluxvektor mit Geber erreicht.
1-02 Drehgeber Anschluss
Option: Funktion:
HINWEIS
Diesen Parameter können Sie bei
laufendem Motor nicht einstellen.
Wählen Sie die Schnittstelle aus, an der die
Rückführung vom Motor empfangen werden
soll.
[1]*24V/HTL-
Drehgeber
[2] Option
MCB102
Drehgeber für Kanal A und B, der nur an
die Klemmen 32/33 der Digitaleingänge
angeschlossen werden kann. Sie müssen die
Klemmen 32/33 auf Keine Funktion programmieren.
Option des Drehgebermoduls, die nur in
Parametergruppe 17-1*Inkrementalgeber
Schnittstelle.
1-03 Drehmomentverhalten der Last
Option: Funktion:
VT und AEO sind beides Vorgänge zur
Energieeinsparung.
[0]*Konstant.
Drehmoment
[1] Quadr.
Drehmoment
[2] Autom.
Energieoptim.
[5] Konstante
Leistung
Die Motorwellenleistung liefert ein
konstantes Drehmoment unter variabler
Drehzahlregelung.
Die Motorwellenleistung liefert ein variables
Drehmoment unter variabler Drehzahlregelung. Legen Sie das variable Drehmoment
in Parameter 14-40 VT Level fest.
Optimiert automatisch den Energieverbrauch, indem es die Magnetisierung und
Frequenz über Parameter 14-41 AEO
Minimum Magnetisation und
Parameter 14-42 Minimum AEO Frequency
minimiert.
Die Funktion liefert eine konstante Leistung
im Feldschwächungsbereich.
Die Drehmomentform des motorischen
Betriebs wird im generatorischen Betrieb als
Grenze verwendet. Dadurch soll die Leistung
im generatorischen Betrieb begrenzt werden,
die andernfalls durch die hohe DC-Zwischenkreisspannung, die im generatorischen
Betrieb verfügbar ist, im motorischen Betrieb
erheblich größer wird.
P
W = ω
Welle
Dieses Verhältnis mit der konstanten
Leistung ist in Abbildung 3.5 dargestellt:
rad/s × T Nm
Mech.
HINWEIS
Dies gilt nur für FC302.
[3] Option MCB
103
[4] MCO
Drehgeber 1
[5] MCO
Drehgeber 2
Optionales Resolver-Schnittstellenmodul, das
Sie in Parametergruppe 17-5* Resolver
konfigurieren können.
Drehgeberschnittstelle 1 der optionalen
VLT® Bewegungssteuerung MCO 305.
Drehgeberschnittstelle 2 der optionalen
VLT® Bewegungssteuerung MCO 305.
1-04 Überlastmodus
Option: Funktion:
1-03 Drehmomentverhalten der Last
Option: Funktion:
HINWEIS
Diesen Parameter können Sie bei
laufendem Motor nicht einstellen.
38 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Wählen Sie die erforderliche Drehmomentkennlinie.
Abbildung 3.5 Konstante Leistung
HINWEIS
Diesen Parameter können Sie bei
laufendem Motor nicht einstellen.
Verwenden Sie diesen Parameter zur
Konfiguration des Frequenzumrichters für
eine hohe oder normale Überlast.
Überprüfen Sie zur Auswahl der Frequenzumrichtergröße immer die technischen
Daten in der Bedienungsanleitung oder im
Page 41

Parameterbeschreibungen Programmierhandbuch
1-04 Überlastmodus
Option: Funktion:
Projektierungshandbuch, damit Ihnen der
verfügbare Ausgangsstrom bekannt ist.
[0]*Hohes
Übermoment
[1] Norm.
Übermom.
Ermöglicht ein Übersteigen des
Drehmoments um bis zu 160 %.
Für überdimensionierte Motoren ermöglicht ein Übersteigen des
Drehmoments um bis zu 110 %.
1-05 Hand/Ort-Betrieb Konfiguration
Option: Funktion:
Definiert, welches Regelverfahren
(Parameter 1-00 Regelverfahren), d. h.
Anwendungssteuerverfahren, bei
(Ort-)Betrieb (LCP) angewendet werden soll.
Ein Ortsollwert kann nur aktiv sein, wenn
Parameter 3-13 Reference Site auf [0]
Umschalt. Hand/Auto oder [2] Ort eingestellt
ist. Standardmäßig ist der Ortsollwert nur im
Hand-Betrieb aktiv.
[0] Drehzahl
ohne Rückf.
[1] Drehzahl mit
Rückf.
[2] * Wie Par. 1-00
1-06 Drehrichtung rechts
Option: Funktion:
HINWEIS
Diesen Parameter können Sie bei laufendem
Motor nicht einstellen.
1-07 Motor Angle Offset Adjust
Range: Funktion:
0* [Manual] Die Funktionalität dieser Option ist von der Art
des Istwertgebers abhängig. Diese Option stellt
en Frequenzumrichter auf eine Verwendung des
in Parameter 1-41 Geber-Offset eingegebenen
Rotor-Winkelversatzes ein, wenn ein Absolutistwertgeber verwendet wird.
Wenn Sie einen Inkremental-Istwertgeber
auswählen, passt der Frequenzumrichter den
Rotor-Winkelversatz beim ersten Start nach der
Netz-Einschaltung oder bei Änderung der
Motordaten automatisch an.
[1] Auto Der Frequenzumrichter passt den Rotor-Winkel-
versatz beim ersten Start nach der NetzEinschaltung oder bei Änderung der Motordaten
unabhängig vom ausgewählten Istwertgeber
automatisch an. Das heißt, dass die Optionen
Manuell und Auto für den Inkrementalgeber
identisch sind.
[2] Auto
Every
Start
[3] Off Bei Auswahl dieser Option schaltet die automa-
[4] Once with
Store
Der Frequenzumrichter passt den Rotor-Winkelversatz automatisch bei jedem Start oder bei
einer Änderung der Motordaten an.
tische Offset-Anpassung aus.
Diese Option aktualisiert automatisch
Parameter 1-41 Geber-Offset, wenn der Winkelwert
0 beträgt. Diese Option gilt nur für Absolutistwertgeber. Die Funktion verwendet die
Rotorlageerkennung und wendet anschließend
DC-Halten an, um die Offset-Anpassung genauer
zu gestalten.
3 3
Dieser Parameter definiert den Begriff Rechtslauf
entsprechend dem LCP-Richtungspfeil. Wird für
einfachen Wechsel der Laufrichtung der Wellendrehung ohne Umstecken der Motordrähte
verwendet.
[0] * Normal Die Motorwelle dreht im Rechtslauf bei folgender
Verbindung des Frequenzumrichters im Rechtslauf
mit dem Motor: U⇒U, V⇒V, und W⇒W.
[1] Invers Die Motorwelle dreht im Rechtslauf bei folgender
Verbindung des Frequenzumrichters im Rechtslauf
mit dem Motor: U⇒U, V⇒V und W⇒W.
3.2.2 1-1* Motorauswahl
HINWEIS
Sie können die Parameter in dieser Parametergruppe bei
laufendem Motor nicht ändern.
3.2.3 Einstellung von Asynchronmotoren
Geben Sie die folgenden Motordaten ein. Diese Angaben
finden Sie auf dem Motor-Typenschild.
1. Parameter 1-20 Motor Power [kW] oder
1-07 Motor Angle Offset Adjust
Range: Funktion:
HINWEIS
Dieser Parameter ist nur für FC302 und
nur in Kombination mit einem PM-Motor
mit Rückführung gültig.
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 39
Parameter 1-21 Motor Power [HP].
2. Parameter 1-22 Motor Voltage.
3. Parameter 1-23 Motor Frequency.
4. Parameter 1-24 Motor Current.
5. Parameter 1-25 Motor Nominal Speed.
Page 42

Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
Bei Betrieb im Fluxvektor-Steuerverfahren oder für
optimale Leistung im VVC+-Modus sind zusätzliche
Motordaten zur Konfiguration der folgenden Parameter
erforderlich. Die Daten finden Sie im Motordatenblatt
(diese Daten sind in der Regel nicht auf dem MotorTypenschild zu finden). Führen Sie über
33
Parameter 1-29 Autom. Motoranpassung [1] Komplette
Anpassung oder durch manuelle Eingabe der Parameter
eine komplette automatische Motoranpassung durch. Sie
müssen Parameter 1-36 Eisenverlustwiderstand (Rfe) stets
manuell eingeben.
1. Parameter 1-30 Statorwiderstand (Rs).
2. Parameter 1-31 Rotorwiderstand (Rr).
3. Parameter 1-33 Statorstreureaktanz (X1).
4. Parameter 1-34 Rotorstreureaktanz (X2).
5. Parameter 1-35 Hauptreaktanz (Xh).
6. Parameter 1-36 Eisenverlustwiderstand (Rfe).
Anwendungsspezifische Anpassung bei der
Durchführung von VVC+
VVC+ ist der robusteste Steuermodus. In den meisten
Situationen bietet dieser ohne weitere Anpassungen
optimale Leistung. Führen Sie für eine Leistungsoptimierung eine komplette AMA durch.
Anwendungsspezifische Anpassung im Fluxvektorbetrieb
Das Fluxvektor-Steuerverfahren ist der bevorzugte
Steuermodus für eine optimale Wellenleistung in
dynamischen Anwendungen. Führen Sie eine AMA durch,
da für diesen Steuermodus genaue Motordaten erforderlich
Anwendung Einstellungen
Hohe Last bei niedriger
Drehzahl
Lastfreie Anwendung Passen Sie Parameter 1-18 Min.
Nur Fluxvektor-Steuerverfahren ohne Geber
Parameter 1-66 Min. Strom bei niedr.
Drz..
Erhöhen Sie den Strom je nach
Anwendung auf einen Wert
zwischen Standard- und
Maximalwert.
Current at No Load an, um durch
Reduzierung des DrehmomentRippels und der Vibrationen einen
sanfteren Motorbetrieb zu erreichen.
Stellen Sie Parameter 1-53 Steuer-
prinzip Umschaltpunkt ein.
Beispiel 1: Wenn der Motor bei 5 Hz
oszilliert and eine dynamische
Leistung bei 15 Hz erforderlich ist,
stellen Sie Parameter 1-53 Steuer-
prinzip Umschaltpunkt auf 10 Hz ein.
Beispiel 2: Wenn bei der Anwendung
dynamische Laständerungen bei
niedriger Drehzahl erforderlich ist,
reduzieren Sie Parameter 1-53 Steuer-
prinzip Umschaltpunkt. Überwachen
Sie das Motorverhalten, um sicherzustellen, dass das Steuerprinzip
Umschaltpunkt nicht zu sehr
reduziert wird. Symptome für ein
ungeeignetes Steuerprinzip
Umschaltpunkt sind Motorschwingungen oder die Abschaltung des
Frequenzumrichters.
sind. Je nach Anwendung können weitere Anpassungen
erforderlich sein.
Tabelle 3.3 Empfehlungen für Flux-Anwendungen
Siehe Tabelle 3.3 für anwendungsbezogene Empfehlungen.
3.2.4 Konfiguration von PM-Motoren
Anwendung Einstellungen
Anwendungen mit
niedrigem Trägheitsmoment
Anwendungen mit hohem
Trägheitsmoment
Behalten Sie berechnete Werte bei.
Parameter 1-66 Min. Strom bei niedr.
Drz..
Erhöhen Sie den Strom je nach
Anwendung auf einen Wert
zwischen Standard- und
Maximalwert.
Stellen Sie die Rampenzeiten
entsprechend der Anwendung ein.
Eine zu schnelle Rampe auf
verursacht Überstrom bzw. ein zu
hohes Drehmoment. Eine zu
schnelle Rampe ab führt zu einer
Überspannungsabschaltung.
HINWEIS
Nur gültig für FC302.
In diesem Abschnitt wird beschrieben, wie ein PM-Motor
konfiguriert wird.
Erste Programmierschritte
Aktivieren Sie den PM-Motorbetrieb. Wählen Sie dazu in
Parameter 1-10 Motor Construction [1] PM, Vollpol.
Programmierung von Motordaten
Nach Auswahl eines PM-Motors sind die Parameter für PMMotoren in den Parametergruppen 1-2* Motordaten, 1-3*
Erw. Motordaten und 1-4* Erw. Motordaten II aktiv.
Die erforderlichen Informationen finden Sie auf dem
Motor-Typenschild und im Datenblatt des Motors.
Programmieren Sie die folgenden Parameter in der
angegebenen Reihenfolge:
40 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 43

Parameterbeschreibungen Programmierhandbuch
1. Parameter 1-24 Motor Current.
2. Parameter 1-25 Motor Nominal Speed.
3. Parameter 1-26 Motor Cont. Rated Torque.
4. Parameter 1-39 Motor Poles.
Führen Sie über Parameter 1-29 Autom. Motoranpassung [1]
Komplette Anpassung eine komplette AMA durch.
Wird keine komplette AMA durchgeführt, müssen Sie die
folgenden Parameter manuell konfigurieren:
1. Parameter 1-30 Stator Resistance (Rs)
Geben Sie den Widerstand der Statorwicklung
(Rs) zwischen Leiter und Bezugspotenzial an.
Wenn nur Leiter-Leiter-Daten verfügbar sind,
teilen Sie den Wert durch 2, um den Wert
zwischen Leiter und Bezugspotenzial zu erhalten.
2. Parameter 1-37 d-axis Inductance (Ld)
Geben Sie die direkte Achseninduktivität des PMMotors zwischen Leiter und Bezugspotenzial an.
Wenn nur Leiter-Leiter-Daten verfügbar sind,
teilen Sie den Wert durch 2, um den Wert
zwischen Leiter und Bezugspotenzial zu erhalten.
3. Parameter 1-40 Back EMF at 1000 RPM.
Geben Sie die Gegen-EMK des PM-Motors
zwischen zwei Außenleitern bei 1000 UPM
(Effektivwert) ein. Die Gegen-EMK ist die
Spannung, die von einem PM-Motor erzeugt wird,
wenn kein Frequenzumrichter angeschlossen ist
und die Welle extern gedreht wird. Sie wird
normalerweise bei Motornenndrehzahl oder bei
1000 UPM gemessen zwischen zwei Außenleitern
angegeben. Wenn der Wert nicht für eine
Motordrehzahl von 1000 UPM verfügbar ist,
berechnen Sie den korrekten Wert wie folgt:
Wenn die Gegen-EMK z. B. 320 V bei 1800 UPM
beträgt, kann sie wie folgt bei 1000 UPM
berechnet werden:
Gegen-EMK= (Spannung/UPM)x1000 =
(320/1800)x1000 = 178.
Testmotorbetrieb
1. Starten Sie den Motor mit niedriger Drehzahl (100
bis 200 UPM). Wenn sich der Motor nicht dreht,
überprüfen Sie die Installation, die allgemeine
Programmierung und die Motordaten.
2. Prüfen Sie, ob die Startfunktion in
Parameter 1-70 Startfunktion den Anwendungsanforderungen entspricht.
Rotorlageerkennung
Diese Funktion wird für Anwendungen empfohlen, in
denen der Motor aus dem Stillstand startet, z. B. Pumpen
oder Horizontalförderer. Bei einigen Motoren ist ein
Geräusch zu hören, wenn der Frequenzumrichter die
Rotorlageerkennung durchführt. Dies schadet dem Motor
nicht.
Parken
Diese Funktion wird für Anwendungen empfohlen, in
denen sich der Motor mit niedriger Drehzahl dreht, z. B.
Auftretens eines Windmühlen-Effekts (Motor wird durch
Last gedreht) in Lüfteranwendungen.
Parameter 2-06 Parking Strom und Parameter 2-07 Parking
Zeit können angepasst werden. Erhöhen Sie bei
Anwendungen mit hohem Trägheitsmoment die Werkseinstellung dieser Parameter.
Anwendungsspezifische Anpassung bei der
Durchführung von VVC+
VVC+ ist der robusteste Steuermodus. In den meisten
Situationen bietet dieser ohne weitere Anpassungen
optimale Leistung. Führen Sie für eine Leistungsoptimierung eine komplette AMA durch.
Starten Sie den Motor mit Nenndrehzahl. Falls die
Anwendung nicht einwandfrei funktioniert, prüfen Sie die
VVC+ PM-Einstellungen. Tabelle 3.4 enthält Empfehlungen
für verschiedene Anwendungen.
Anwendung Einstellungen
Anwendungen mit
niedrigem Trägheitsmoment
I
Anwendungen mit
niedrigem Trägheitsmoment
50>I
Anwendungen mit hohem
Trägheitsmoment
I
Hohe Last bei niedriger
Drehzahl
<30 % (Nenndrehzahl)
<5
Last/IMotor
>5
Last/IMotor
>50
Last/IMotor
Tabelle 3.4 Empfehlungen für verschiedene Anwendungen
Erhöhen Sie Parameter 1-17 Voltage
filter time const. um den Faktor 5 bis
10.
Reduzieren Sie
Parameter 1-14 Damping Gain
Reduzieren Sie Parameter 1-66 Min.
Current at Low Speed (< 100 %)
Behalten Sie die Standardwerte bei.
Erhöhen Sie Parameter 1-14 Damping
Gain, Parameter 1-15 Filter niedrige
Drehzahl und Parameter 1-16 Filter
hohe Drehzahl
Erhöhen Sie Parameter 1-17 Voltage
filter time const..
Erhöhen Sie Parameter 1-66 Min.
Current at Low Speed zur Einstellung
des Startmoments. 100 % ist
Nenndrehmoment als Startmoment.
Dieser Parameter ist unabhängig von
Parameter 30-20 Startmoment hoch
und Parameter 30-21 High Starting
Torque Current [%]. Wenn Sie für
längere Zeit in einem Strombereich
von mehr als 100 % arbeiten, kann
der Motor überhitzen.
Wenn der Motor bei einer bestimmten Drehzahl zu
schwingen beginnt, erhöhen Sie Parameter 1-14 Damping
Gain. Erhöhen Sie den Wert in kleinen Schritten. Abhängig
vom Motor können Sie diesen Parameter zwischen 10 %
und 100 % höher als den Standardwert einstellen.
3 3
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 41
Page 44

Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
Anwendungsspezifische Anpassung im Fluxvektorbetrieb
Das Fluxvektor-Steuerverfahren ist der bevorzugte
Steuermodus für eine optimale Wellenleistung in
dynamischen Anwendungen. Führen Sie eine AMA durch,
da für diesen Steuermodus genaue Motordaten erforderlich
Anwendungsspezifische Einstellungen
Starten Sie den Motor mit Nenndrehzahl. Falls die
Anwendung nicht einwandfrei funktioniert, prüfen Sie die
VVC+ SynRM-Einstellungen. Anwendungsspezifische
Empfehlungen finden Sie in Tabelle 3.5:
sind. Je nach Anwendung können weitere Anpassungen
33
erforderlich sein.
Anwendungsspezifische Empfehlungen entnehmen Sie
Kapitel 3.2.3 Einstellung von Asynchronmotoren.
3.2.5 Inbetriebnahme des Motors SynRM
mit VVC
Dieser Abschnitt enthält eine Beschreibung der
Inbetriebnahme des Motors SynRM mit VVC+.
+
HINWEIS
Der SmartStart-Assistent ermöglicht die grundlegende
Konfiguration von SynRM-Motoren.
Erste Programmierschritte
Wählen Sie zur Aktivierung des SynRM-Motorbetriebs [5]
Sync aus. Reluktanz in Parameter 1-10 Motorart.
Programmierung von Motordaten
Nachdem Sie die ersten Programmierschritte durchgeführt
haben, sind die Parameter für SynRM-Motoren in Parame-
tergruppe 1–2* Motordaten, 1–3* Erw. Motordaten und 1–4*
Erw. Motordaten II aktiv.
Verwenden Sie die Motor-Typenschilddaten und das
Motordatenblatt, um die folgenden Parameter in der
aufgeführten Reihenfolge zu programmieren:
1. Parameter 1-23 Motornennfrequenz.
2. Parameter 1-24 Motornennstrom.
3. Parameter 1-25 Motornenndrehzahl.
4. Parameter 1-26 Dauer-Nenndrehmoment.
Führen Sie über Parameter 1-29 Autom. Motoranpassung [1]
Komplette Anpassung oder durch manuelle Eingabe der
folgenden Parameter eine komplette AMA durch:
1. Parameter 1-30 Statorwiderstand (Rs).
2. Parameter 1-37 Indukt. D-Achse (Ld).
3. Parameter 1-44 d-axis Inductance Sat. (LdSat).
4. Parameter 1-45 q-axis Inductance Sat. (LqSat).
5. Parameter 1-48 Inductance Sat. Point.
Anwendung Einstellungen
Anwendungen mit
niedrigem Trägheitsmoment
I
Anwendungen mit
niedrigem Trägheitsmoment
50>I
Anwendungen mit hohem
Trägheitsmoment
I
Hohe Last bei niedriger
Drehzahl
<30 % (Nenndrehzahl)
Dynamische
Anwendungen
Motorgrößen unter 18 kW
(24 hp)
Last/IMotor
Last/IMotor
Last/IMotor
<5
>5
>50
Erhöhen Sie Parameter 1-17 Voltage
filter time const. um den Faktor 5 –
10.
Reduzieren Sie
Parameter 1-14 Damping Gain.
Reduzieren Sie Parameter 1-66 Min.
Current at Low Speed (< 100 %).
Behalten Sie die Standardwerte bei.
Erhöhen Sie Parameter 1-14 Damping
Gain, Parameter 1-15 Filter niedrige
Drehzahl und Parameter 1-16 Filter
hohe Drehzahl.
Erhöhen Sie Parameter 1-17 Voltage
filter time const..
Erhöhen Sie Parameter 1-66 Min.
Current at Low Speed zur Einstellung
des Startmoments. 100 % ist
Nenndrehmoment als Startmoment.
Dieser Parameter ist unabhängig von
Parameter 30-20 Startmoment hoch
und Parameter 30-21 High Starting
Torque Current [%]. Wenn Sie für
längere Zeit in einem Strombereich
von mehr als 100 % arbeiten, kann
der Motor überhitzen.
Erhöhen Sie
Parameter 14-41 Minimale AEOMagnetisierung für hochdynamische
Anwendungen. Durch die
Einstellung von
Parameter 14-41 Minimale AEOMagnetisierung wird ein gutes
Gleichgewicht zwischen Energieeffizienz und Dynamik gewährleistet.
Passen Sie Parameter 14-42 Minimale
AEO-Frequenz an, um die Mindestfrequenz festzulegen, bei der der
Frequenzumrichter die minimale
Magnetisierung verwenden sollte.
Vermeiden Sie kurze Rampe-AbZeiten.
Tabelle 3.5 Empfehlungen für verschiedene Anwendungen
42 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 45

Parameterbeschreibungen Programmierhandbuch
Wenn der Motor bei einer bestimmten Drehzahl zu
schwingen beginnt, erhöhen Sie
Parameter 1-14 Dämpfungsfaktor. Erhöhen Sie den Wert der
Dämpfungsverstärkung in kleinen Schritten. Abhängig vom
Motor können Sie diesen Parameter zwischen 10 % und
100 % höher als den Standardwert einstellen.
1-10 Motorart
Option: Funktion:
Auswahl der Motorart.
[0]*Asynchron Verwendung für Asynchronmotoren.
[1] PM (Oberfl.
mon.)
Verwendung für Schenkelpol- oder VollpolPM-Motoren.
PM-Motoren können in 2 Gruppen unterteilt
werden: Vollpol-Motoren mit oberflächenmontierten (SPM) Magneten oder
Schenkelpol-Motoren mit internen (IPM)
Magneten.
HINWEIS
Diese Option gilt nur für FC302.
[2] PM
(Vergraben)
Verwendung für Schenkelpol- oder VollpolPM-Motoren.
PM-Motoren können in 2 Gruppen unterteilt
werden: Vollpol-Motoren mit oberflächenmontierten (SPM) Magneten oder
Schenkelpol-Motoren mit internen (IPM)
Magneten.
HINWEIS
Diese Option gilt nur für FC302.
[5] SynRM Verwendung für Synchronreluktanzmotoren.
HINWEIS
Diese Option gilt nur für FC302.
Diese Option ist in Firmwareversionen
ab 7.31 voll funktionsfähig. Wenden
Sie sich an Danfoss, bevor Sie diese
Option bei einem Frequenzumrichter
mit einer älteren Firmwareversion
verwenden.
1-11 Motorhersteller
Option: Funktion:
Automatische Festlegung der werkseitigen
Standardwerte für den gewählten Motor.
Wenn Sie den Standardwert Std. Asynchron
verwenden, müssen Sie die Einstellungen
gemäß der Auswahl von
Parameter 1-10 Motorart festlegen.
[1] Std.
Asynchron
Standard-Motormodell, wenn [0] Asynchron in
Parameter 1-10 Motorart ausgewählt ist.
1-11 Motorhersteller
Option: Funktion:
[2] Std.-PM,
Vollpol
[10] Danfoss
OGD LA10
[11] Danfoss
OGD V210
Wählbar, wenn [1] PM, Vollpol-SPM in
Parameter 1-10 Motorart ausgewählt ist.
Wählbar, wenn [1] PM, Vollpol-SPM in
Parameter 1-10 Motorart ausgewählt ist. Nur
für T4, T5 mit 1,5–3 kW verfügbar. Die Einstellungen werden für diesen spezifischen Motor
automatisch geladen.
Wählbar, wenn [1] PM, Vollpol-SPM in
Parameter 1-10 Motorart ausgewählt ist. Nur
für T4, T5 mit 0,75–3 kW verfügbar. Die
Einstellungen werden für diesen spezifischen
Motor automatisch geladen.
1-14 Dämpfungsfaktor
Range: Funktion:
140%* [0 -
250 %]
Der Dämpfungsfaktor stabilisiert die PM-Maschine,
damit diese ruhig und stabil läuft. Der Wert des
Dämpfungsfaktors regelt die dynamische Leistung
der PM-Maschine. Ein hoher Dämpfungsfaktor
führt zu hoher dynamischer Leistung, eine
geringe Dämpfungsverstärkung führt zu einer
geringen dynamischen Leistung. Die dynamische
Leistung steht in Bezug zu den Maschinendaten
und zum Lasttyp. Wenn die Dämpfungsverstärkung zu hoch oder zu niedrig ist, wird die
Regelung instabil.
1-15 Filter niedrige Drehzahl
Range: Funktion:
Size
related*
[0.01 - 20s]Diese Zeitkonstante wird unter 10 %
Nenndrehzahl verwendet. Schnelle
Regelung erhalten Sie durch eine kurze
Dämpfungszeitkonstante. Wenn Sie
jedoch diesen Wert zu kurz wählen,
wird die Regelung instabil.
1-16 Filter hohe Drehzahl
Range: Funktion:
Size
related*
[0.01 - 20s]Diese Zeitkonstante wird über 10 %
Nenndrehzahl verwendet. Schnelle
Regelung erhalten Sie durch eine kurze
Dämpfungszeitkonstante. Wenn Sie
jedoch diesen Wert zu kurz wählen,
wird die Regelung instabil.
1-17 Spannungskonstante
Range: Funktion:
Size
related*
[0.001 1 s]
Reduziert den Einfluss des hochfrequenten Rippels und der Systemresonanz
bei der Berechnung der Versorgungsspannung. Ohne dieses Filter können
Unwelligkeiten in den Strömen die
3 3
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 43
Page 46

Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
1-17 Spannungskonstante
Range: Funktion:
berechnete Spannung verzerren und die
Stabilität des Systems beeinträchtigen.
33
1-18 Min. Current at No Load
Range: Funktion:
0 %* [0 - 50 %] Stellen Sie diesen Parameter ein, um einen
sanfteren Motorbetrieb zu erreichen.
3.2.6 1-2* Motordaten
1-21 Motornennleistung [PS]
Range: Funktion:
angezeigt, wenn Parameter 0-03 Ländereinstellungen [1] US ist.
1-22 Motornennspannung
Range: Funktion:
Size
related*
[ 10 - 1000V]Geben Sie die Motornennspannung
von den Motor-Typenschilddaten ein.
Die Werkseinstellung entspricht der
Nennleistung des Frequenzumrichters.
1-23 Motornennfrequenz
Diese Parametergruppe enthält Parameter zum Eingeben
der Motornenndaten entsprechend dem Typenschild des
angeschlossenen Motors.
HINWEIS
Eine Änderung der Werte dieser Parameter beeinflusst
die Einstellung anderer Parameter.
HINWEIS
Die folgenden Parameter haben keine Auswirkung, wenn
Parameter 1-10 Motor Construction auf [1] PM (Oberfl.
mon.), [2] PM (Vergraben), [5] Sync. Reluktanz eingestellt
ist:
Parameter 1-20 Motor Power [kW].
•
Parameter 1-21 Motor Power [HP].
•
Parameter 1-22 Motor Voltage.
•
Parameter 1-23 Motor Frequency.
•
Range: Funktion:
Size
related*
[20 1000
Hz]
HINWEIS
Ab Softwareversion 6.72 aufwärts ist die
Ausgangsfrequenz des Frequenzumrichters auf 590 Hz begrenzt.
Stellen Sie einen Motorfrequenzwert ein, der
den Motor-Typenschilddaten entspricht. Wenn
ein anderer Wert als 50 Hz oder 60 Hz
ausgewählt wird, passen Sie die lastunabhängigen Einstellungen in
Parameter 1-50 Motor Magnetisation at Zero
Speed bis Parameter 1-53 Steuerprinzip
Umschaltpunkt an. Stellen Sie für 87-Hz-Betrieb
bei 230/400-V-Motoren die Typenschilddaten
für 230 V/50 Hz ein. Passen Sie für 87-HzBetrieb Parameter 4-13 Max. Drehzahl [UPM]
und Parameter 3-03 Maximaler Sollwert an.
1-20 Motornennleistung [kW]
Range: Funktion:
Size
related*
[ 0.09 -
3000.00
kW]
HINWEIS
Diesen Parameter können Sie bei
laufendem Motor nicht einstellen.
Eingabe der Motornennleistung in kW
gemäß den Motor-Typenschilddaten. Die
Werkseinstellung entspricht der
Nennleistung des Frequenzumrichters.
Dieser Parameter wird im LCP angezeigt,
wenn Parameter 0-03 Ländereinstellungen
[0] International ist.
1-21 Motornennleistung [PS]
Range: Funktion:
Size
related*
[ 0.09 -
3000.00 hp]
Eingabe der Motornennleistung in HP
gemäß den Motor-Typenschilddaten. Die
Werkseinstellung entspricht der
Nennleistung des Frequenzumrichters.
Dieser Parameter wird auf dem LCP
1-24 Motornennstrom
Range: Funktion:
Size
related*
[ 0.10 -
10000.00 A]
Geben Sie den Motornennstrom von
den Motor-Typenschilddaten ein. Der
Frequenzumrichter verwendet die
Daten zur Berechnung von
Motordrehmoment, Motorüberlastschutz usw.
1-25 Motornenndrehzahl
Range: Funktion:
Size
related*
[10 60000 RPM]
Geben Sie die Motornenndrehzahl von
den Motor-Typenschilddaten ein. Diese
Daten werden zur Berechnung des
Schlupfausgleichs verwendet. n
- n
.
slip
1-26 Dauer-Nenndrehmoment
Range: Funktion:
Size
related*
[0.1 -
100000.0
Nm]
Geben Sie den Wert von den MotorTypenschilddaten ein. Die
Werkseinstellung entspricht der
m,n
= n
s
44 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 47

Parameterbeschreibungen Programmierhandbuch
1-26 Dauer-Nenndrehmoment
Range: Funktion:
Nennleistung. Dieser Parameter ist
verfügbar, wenn Parameter 1-10 Motorart
auf [1] PM (Oberfl. mon.) eingestellt ist, d.
h. der Parameter gilt nur für PM- und
Vollpolmotoren.
1-29 Autom. Motoranpassung
Option: Funktion:
HINWEIS
Diesen Parameter können Sie bei
laufendem Motor nicht einstellen.
Mit der AMA-Funktion wird die dynamische
Motorleistung durch automatische Optimierung
der erweiterten Motorparameter
(Parameter 1-30 Statorwiderstand (Rs) bis
Parameter 1-35 Hauptreaktanz (Xh)) bei
Motorstillstand optimiert.
Aktivieren Sie die AMA-Funktion durch Drücken
von [Hand On] nach Auswahl von Komplette
Anpassung oder [2] Reduz. Anpassung. Siehe
auch den Abschnitt Automatische Motoran-
passung im Projektierungshandbuch. Nach einer
normalen Sequenz zeigt das Display Folgendes
an: Drücken Sie [OK], um die AMA
abzuschließen. Nach dem Drücken der [OK]Taste ist der Frequenzumrichter betriebsbereit.
HINWEIS
Stellen Sie vor der Durchführung der
AMA II sicher, dass in
Parameter 14-43 Motor Cos-Phi ein Wert
eingestellt wurde.
1-29 Autom. Motoranpassung
Option: Funktion:
Motordaten beim Motorenhersteller anfragen
und diese unter Parameter 1-31 Rotorwiderstand
(Rr) bis einschließlich Parameter 1-36 Eisenverlustwiderstand (Rfe) eingeben.
Sie können die komplette AMA nicht bei
Permanentmagnetmotoren durchführen.
[2] Reduz.
Anpassung
[3] Enable
Complete
AMA II
[4] Enable
Reduced
AMA II
Führt nur eine reduzierte AMA des Statorwiderstands Rs im System durch. Diese Option ist
für Standard-Asynchron- und Vollpol-PMMotoren verfügbar.
Verwenden Sie diese Option bei Sondermotoren (z. B. S3-Motoren) und
Hochleistungsmotoren. Die Funktionalität ist
ähnlich wie bei Option [1] Komplette
Anpassung, die Optimierung erfolgt jedoch auf
Grundlage der Drehmomentkalibrierung.
Verwenden Sie diese Option bei Sondermotoren (z. B. S3-Motoren) und
Hochleistungsmotoren. Die Funktionalität ist
ähnlich wie bei Option [2] Reduz. Anpassung,
die Optimierung erfolgt jedoch auf Grundlage
der Drehmomentkalibrierung.
HINWEIS
Führen Sie zur bestmöglichen Anpassung des
•
Frequenzumrichters eine AMA an einem kalten
Motor durch.
Sie können eine AMA nicht bei laufendem
•
Motor durchführen.
Sie können die AMA bei angeschlossenem
•
Sinusfilter nicht ausführen.
3 3
[0]*Anpassung
aus
[1] Komplette
Anpassung
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 45
Führt Folgendes durch:
AMA des Statorwiderstands RS,
•
Der Rotorwiderstand Rr,
•
Die Statorstreureaktanz X1,
•
Die Rotorstreureaktanz X2 und
•
Die Hauptreaktanz Xh.
•
Wählen Sie diese Option nicht, wenn Sie einen
LC-Filter zwischen dem Frequenzumrichter und
dem Motor einsetzen.
FC301: Die vollständige AMA umfasst beim
FC301 nicht die Xh-Messung. Stattdessen wird
der Xh-Wert von der Motordatenbank
bestimmt. Die beste Anpassungsmethode ist R
(siehe Parametergruppe 1-3* Erw. Motordaten).
Um eine optimale Leistung zu erzielen, wird
empfohlen, dass Sie die erweiterten
HINWEIS
Es ist wichtig die Motorparametergruppe 1-2* Motordaten
korrekt einzustellen, da diese Parameter einen Teil des
AMA-Algorithmus bilden. Führen Sie eine automatische
Motoranpassung (AMA) durch, um optimale dynamische
Motorleistung sicherzustellen. Je nach Nennleistung des
Motors kann dies bis zu 10 Minuten dauern.
HINWEIS
Während der AMA dürfen Sie kein externes Drehmoment
erzeugen.
HINWEIS
Wenn eine der Einstellungen in Parametergruppe 1-2*
Motordaten geändert wird, kehren die erweiterten
S
Motorparameter Parameter 1-30 Statorwiderstand (Rs) bis
Parameter 1-39 Motorpolzahl auf ihre Werkseinstellung
zurück.
Page 48

130BA065.12
P 1-30
R
Fe
X
h
R'
r
R
s
U
1
I
1
P 1-33
P 1-34
P 1-31P 1-35P 1-36
X'
2δ
X
1δ
Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
HINWEIS
AMA funktioniert problemlos bei einem Motor, der um 1
Größe kleiner ist, in der Regel auch bei einem Motor, der
2 Größen kleiner ist, aber selten bei Motoren, die 3
Größen kleiner sind, und niemals bei Motoren, die 4
33
Größen kleiner sind. Beachten Sie, dass die Genauigkeit
der gemessenen Motordaten abnimmt, wenn Sie mit
Motoren arbeiten, die kleiner als die Nenngröße des
Frequenzumrichters sind.
1-30 Statorwiderstand (Rs)
Range: Funktion:
HINWEIS
Für Schenkelpol-PM-Motoren:
Die AMA ist nicht verfügbar.
Wenn nur Leiter-Leiter-Daten bereitstehen, teilen Sie den Wert durch 2,
um den Wert zwischen Leiter und
Sternpunkt zu erhalten. Messen Sie
den Wert alternativ mit einem
3.2.7 1-3* Erw. Motordaten
Ohmmeter, damit auch der Kabelwiderstand berücksichtigt wird. Teilen
Parameter für erweiterte Motordaten. Vergewissern Sie sich,
dass die Motordaten in Parameter 1-30 Statorwiderstand (Rs)
Sie den gemessenen Wert durch 2
und geben Sie das Ergebnis ein.
bis Parameter 1-39 Motorpolzahl dem Motor entsprechen.
Die Werkseinstellungen basieren auf gängigen Daten
normaler Standardmotoren. Falsche Eingaben in die
Motorparameter können zu Fehlfunktionen oder
ungewollten Reaktionen des Frequenzumrichters führen.
Falls die Motordaten unbekannt sind, wird die
Durchführung einer AMA (Automatische Motoranpassung)
empfohlen. Siehe Parameter 1-29 Autom. Motoranpassung.
Sie können die Parametergruppen 1-3* Erw. Motordaten und
1-4* Erw. Motordaten II bei laufendem Motor nicht ändern.
HINWEIS
Der Parameterwert wird nach jeder
Momentkalibrierung aktualisiert,
wenn Option [3] 1.Start mit speichern
oder Option [4] bei jedem Start mit
speichern in Parameter
Parameter 1-47 Momentkalibrierung
niedr. Drehzahl ausgewählt ist.
HINWEIS
Eine einfache Überprüfung des Summenwerts von X1 +
Xh besteht im Dividieren der Leiter-Leiter-Spannung
durch sqrt(3) und durch erneutes Dividieren dieses
Ergebnisses durch den Motor-Leerlaufstrom. [VL-L/
sqrt(3)]/INL = X1 + Xh, siehe Abbildung 3.6. Diese Werte
sind für ein ordnungsgemäßes Magnetisieren des Motors
wichtig. Für Hochpolmotoren wird diese Überprüfung
dringend empfohlen.
Abbildung 3.6 Ersatzschaltbild eines Asynchronmotors
1-30 Statorwiderstand (Rs)
Range: Funktion:
Size
related*
46 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
[ 0.0140 -
140.0000
Ohm]
Stellen Sie hier den Wert des Statorwiderstands gemäß Motorersatzschaltbild ein.
Geben Sie den Wert von einem Motordatenblatt ein oder führen Sie eine AMA an
einem kalten Motor aus.
1-31 Rotorwiderstand (Rr)
Range: Funktion:
Size
related*
[ 0.0100 -
100.0000
Ohm]
HINWEIS
Parameter 1-31 Rotorwiderstand (Rr)
hat keine Auswirkungen, wenn
Parameter 1-10 Motor Construction
auf [1] PM (Oberfl. mon.) SPM, [5]
Sync. Reluctance eingestellt ist.
Stellen Sie den Wert für den Rotorwiderstand Rr ein, um die Wellenleistung mit
Hilfe einer der folgenden Methoden zu
verbessern:
•
•
•
Führen Sie eine AMA an einem
kalten Motor durch. Der Frequenzumrichter misst den Wert am
Motor. Alle Kompensationen
werden auf 100 % zurückgesetzt.
Geben Sie den Wert für R
manuell ein. Den Wert erhalten
Sie vom Motorhersteller.
Verwenden Sie die Werkseinstellung für Rr. Der
Frequenzumrichter ermittelt
anhand der MotorTypenschilddaten automatisch
einen Standardwert.
r
Page 49

Parameterbeschreibungen Programmierhandbuch
1-33 Statorstreureaktanz (X1)
Range: Funktion:
Size
related*
[ 0.0400 -
400.0000
Ohm]
HINWEIS
Dieser Parameter ist nur für
Asynchronmotoren relevant.
Stellen Sie die Statorstreureaktanz des
Motors mit Hilfe einer der folgenden
Methoden ein:
•
•
•
Siehe Abbildung 3.6.
HINWEIS
Der Parameterwert wird nach jeder
Momentkalibrierung aktualisiert,
wenn Option [3] 1st start with store
oder Option [4] Every start with store
in Parameter
Parameter 1-47 Momentkalibrierung
niedr. Drehzahl ausgewählt ist.
1-34 Rotorstreureaktanz (X2)
Range: Funktion:
Size
related*
[ 0.0400 -
400.0000
Ohm]
HINWEIS
Dieser Parameter ist nur für
Asynchronmotoren relevant.
Stellen Sie die Rotorstreureaktanz des
Motors mit Hilfe einer der folgenden
Methoden ein:
•
•
•
Führen Sie eine AMA an einem
kalten Motor durch. Der Frequenzumrichter misst den Wert am
Motor.
Geben Sie den Wert für X
manuell ein. Den Wert erhalten
Sie vom Motorhersteller.
Verwenden Sie die Werkseinstellung für X1. Der
Frequenzumrichter ermittelt
anhand der MotorTypenschilddaten automatisch
einen Standardwert.
Führen Sie eine AMA an einem
kalten Motor durch. Der Frequenzumrichter misst den Wert am
Motor.
Geben Sie den Wert für X
manuell ein. Den Wert erhalten
Sie vom Motorhersteller.
Verwenden Sie die Werkseinstellung für X2. Der
Frequenzumrichter ermittelt
anhand der Motor-
1
2
1-34 Rotorstreureaktanz (X2)
Range: Funktion:
Typenschilddaten automatisch
einen Standardwert.
Siehe Abbildung 3.6.
HINWEIS
Der Parameterwert wird nach jeder
Momentkalibrierung aktualisiert,
wenn Option [3] 1st start with store
oder Option [4] Every start with store
in Parameter
Parameter 1-47 Momentkalibrierung
niedr. Drehzahl ausgewählt ist.
1-35 Hauptreaktanz (Xh)
Range: Funktion:
Size
related*
1-36 Eisenverlustwiderstand (Rfe)
Range: Funktion:
Size
related*
1-37 Indukt. D-Achse (Ld)
Range: Funktion:
Size
related*
[ 1.0000 -
10000.0000
Ohm]
[ 0 -
10000.000
Ohm]
[0.0 -
1000.0
mH]
Stellen Sie die Hauptreaktanz des Motors
mit Hilfe einer der folgenden Methoden
ein:
1. Führen Sie eine AMA an einem
kalten Motor durch. Der
Frequenzumrichter misst den
Wert am Motor.
2. Geben Sie den Wert Xh manuell
ein. Den Wert erhalten Sie vom
Motorhersteller.
3. Verwenden Sie die Werkseinstellung Xh. Der
Frequenzumrichter ermittelt
anhand der MotorTypenschilddaten automatisch
einen Standardwert.
Definiert den Eisenverlustwiderstand
(RFe) zum Ausgleich von Eisenverlust im
Motor.
Der Wert RFe wird bei Ausführung der
AMA nicht ermittelt.
Der Wert RFe ist besonders in
Anwendungen zur Drehmomentregelung wichtig. Ist RFe unbekannt, so
belassen Sie Parameter 1-36 Eisenverlust-
widerstand (Rfe) in der Werkseinstellung.
Geben Sie die direkte Achseninduktivität
des PM-Motors zwischen Leiter und
Sternpunkt an. Den Wert können Sie dem
Datenblatt des Permanentmagnetmotors
entnehmen.
3 3
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 47
Page 50

Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
1-37 Indukt. D-Achse (Ld)
Range: Funktion:
Wenn nur Leiter-Leiter-Daten bereitstehen,
teilen Sie den Wert durch 2, um den Wert
zwischen Leiter und Sternpunkt zu
33
erhalten. Messen Sie den Wert alternativ
mit einem Induktivitätsmessgerät.
Hierdurch wird die Induktivität des Kabels
berücksichtigt. Teilen Sie den gemessenen
Wert durch 2 und geben Sie das Ergebnis
ein.
Dieser Parameter ist nur aktiv, wenn
Parameter 1-10 Motorart auf [1] PM, Vollpol
(Permanentmagnet-Motor) oder [5] Sync.
Reluctance eingestellt ist.
Verwenden Sie diesen Parameter für eine
Auswahl mit einer Dezimalstelle.
Verwenden Sie Parameter 30-80 D-Achsen-
Induktivität (Ld) für eine Auswahl mit drei
Dezimalstellen .
Nur FC302.
HINWEIS
Der Parameterwert wird nach jeder
Momentkalibrierung aktualisiert,
wenn Option [3] 1.Start mit speichern
oder Option [4] bei jedem Start mit
speichern in Parameter
Parameter 1-47 Momentkalibrierung
auf Parameter 1-23 Motornennfrequenz und
Parameter 1-25 Motornenndrehzahl
1-40 Gegen-EMK bei 1000 UPM
Range: Funktion:
Size
related*
[0 -
HINWEIS
9000
Dieser Parameter ist nur aktiv, wenn
V]
Parameter 1-10 Motorart auf Optionen
eingestellt ist, die PM (Permanentmagnet)-Motoren aktivieren.
Einstellung der Nenn-Gegen-EMK für eine
Motordrehzahl von 1000 U/min.
Die Gegen-EMK ist die Spannung, die von
einem PM-Motor erzeugt wird, wenn kein
Frequenzumrichter angeschlossen ist und die
Welle extern gedreht wird. Die Gegen-EMK
wird normalerweise bei Motornenndrehzahl
oder bei 1000 U/min gemessen zwischen zwei
Außenleitern angegeben. Wenn der Wert nicht
für eine Motordrehzahl von 1000 U/min
verfügbar ist, berechnen Sie den korrekten
Wert wie folgt: Wenn die Gegen-EMK z. B.
320 V bei 1800 U/min beträgt, können Sie sie
bei 1000 U/min berechnen:
Beispiel
Gegen-EMK 320 V bei 1800 U/min. GegenEMK= (Spannung/U/min)*1000 =
(320/1800)*1000 = 178.
niedr. Drehzahl ausgewählt ist.
HINWEIS
Bei der Verwendung von PM-Motoren
1-38 Indukt. Q-Achse (Lq)
Range: Funktion:
Size related* [0.000 - 1000
mH]
Legen Sie den Wert der
Induktivität der Q-Achse fest.
Siehe Motordatenblatt.
1-39 Motorpolzahl
Range: Funktion:
Size related* [2 - 132 ] Geben Sie die Anzahl der Motorpole
ein.
1-41 Geber-Offset
Range: Funktion:
0* [-32768
- 32767 ]
empfiehlt sich der Einsatz von Bremswiderständen.
HINWEIS
Dieser Parameter ist nur aktiv, wenn
Parameter 1-10 Motorart auf [1] PM, Vollpol
(Permanentmagnetmotor) eingestellt ist.
Motorp
Tabelle 3.6 zeigt die typischen Nenndrehzahlen
verschiedener Motortypen in Abhängigkeit von der Polzahl.
~nn bei 50 Hz ~nn bei 60 Hz
olzahl
2 2700–2880 3250–3460
4 1350–1450 1625–1730
6 700–960 840–1153
Tabelle 3.6 Polzahl für normale Drehzahlbereiche
Eingabe des richtigen Versatzwinkels zwischen
dem PM-Motor und der Indexposition des installierten Drehgebers/Resolvers. Der Wertebereich
von 0 – 32768 entspricht 0-2 x pi (Bogenmaß).
Wenn Geber-Offset unbekannt: Wenden Sie nach
dem Anlaufen des Frequenzumrichters DC-Halten
an und geben Sie den Wert von
Parameter 16-20 Rotor-Winkel in diesen Parameter
ein.
Sie müssen für andere Frequenzen ausgelegte Motoren
separat definieren. Der Motorpolwert ist immer eine
gerade Zahl, da sie sich auf die Gesamtpolzahl bezieht,
nicht auf Polpaare. Der Frequenzumrichter erstellt den
Ausgangswert von Parameter 1-39 Motorpolzahl basierend
48 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 51

Parameterbeschreibungen Programmierhandbuch
1-44 d-axis Inductance Sat. (LdSat)
Range: Funktion:
Size
related*
[0 1000
mH]
Dieser Parameter entspricht der Induktivitätssättigung von Ld. Idealerweise hat
dieser Parameter denselben Wert wie
Parameter 1-37 Indukt. D-Achse (Ld). Wenn
der Motorhersteller eine Induktivitätskurve liefert, geben Sie den
Induktivitätswert bei 200 % des
Nennwerts ein.
1-45 q-axis Inductance Sat. (LqSat)
Range: Funktion:
Size
related*
[0 1000
mH]
Dieser Parameter entspricht der Induktivitätssättigung von Lq. Idealerweise hat
dieser Parameter denselben Wert wie
Parameter 1-38 Indukt. Q-Achse (Lq). Wenn
der Motorhersteller eine Induktivitätskurve liefert, geben Sie den
Induktivitätswert bei 200 % des
Nennwerts ein.
1-46 Verstärkung Positionserkennung
Range: Funktion:
120 %* [20 -
200 %]
Zur Einstellung der Amplitude des Testimpulses während der Positionserkennung
beim Start. Stellen Sie diesen Parameter
zur Optimierung der Positionsmessung ein.
1-47 Momentkalibrierung niedr. Drehzahl
Option: Funktion:
Verwenden Sie diesen Parameter zur Optimierung
der Drehmomentschätzung im gesamten Drehzahlbereich. Das geschätzte Drehmoment basiert auf der
[0] Aus
[1] 1. Start
nach
NetzEin
[2] Jeder
Start
Wellenleistung, P
darauf, dass der Wert Rs korrekt ist. In dieser Formel
muss der Wert Rs der Verlustleistung in Motor, Kabel
und Frequenzumrichter entsprechen. Wenn Sie
diesen Parameter aktivieren, berechnet der Frequenzumrichter bei der Netz-Einschaltung den Wert Rs,
sodass eine optimale Drehmomentschätzung und
somit eine optimale Leistung gewährleistet werden
kann. Nutzen Sie diese Funktion, wenn es nicht
möglich ist, Parameter 1-30 Statorwiderstand (Rs) auf
jede Frequenz einzustellen, um Kabellänge, Frequenzumrichterverluste und Temperaturabweichungen
am Motor auszugleichen.
Kalibrierung beim ersten Einschalten nach der NetzEinschaltung und Beibehaltung dieses Werts, bis
durch einen Aus- und Einschaltzyklus ein Reset
erfolgt.
Kalibrierung bei jedem Start, Ausgleich möglicher
Änderungen der Motortemperatur seit dem letzten
= Pm - Rs x I2. Achten Sie
Welle
1-47 Momentkalibrierung niedr. Drehzahl
Option: Funktion:
Einschalten. Der Wert wird nach einem Aus- und
Einschaltzyklus quittiert.
[3] 1st
start
with
store
[4] Every
start
with
store
Der Frequenzumrichter kalibriert das Drehmoment
beim ersten Einschalten nach der Netz-Einschaltung.
Diese Option wird zur Aktualisierung der Motorparameter verwendet:
Parameter 1-30 Statorwiderstand (Rs).
•
Parameter 1-33 Statorstreureaktanz (X1).
•
Parameter 1-34 Rotorstreureaktanz (X2).
•
Parameter 1-37 Indukt. D-Achse (Ld).
•
Der Frequenzumrichter kalibriert das Drehmoment
bei jedem Start, Ausgleich möglicher Änderungen
der Motortemperatur seit dem letzten Einschalten.
Diese Option wird zur Aktualisierung der Motorparameter verwendet:
Parameter 1-30 Statorwiderstand (Rs).
•
Parameter 1-33 Statorstreureaktanz (X1).
•
Parameter 1-34 Rotorstreureaktanz (X2).
•
Parameter 1-37 Indukt. D-Achse (Ld).
•
1-48 Inductance Sat. Point
Range: Funktion:
Size
related*
[1 -
HINWEIS
500
Nehmen Sie eine AMA vor, um den Wert
%]
dieses Parameters einzustellen.
Bearbeiten Sie den Wert nur dann
manuell, wenn die Anwendung einen
anderen als den durch die AMA
ermittelten Wert benötigt.
Wählen Sie die d-Achsen-Induktivitätssättigungsgrenze aus. Der Frequenzumrichter nutzt
diesen Wert, um die Leistung von SynRMMotoren zu optimieren.
Wählen Sie den Wert, der mit dem Punkt
übereinstimmt, an dem die Induktivität dem
Mittelwert von Parameter 1-37 Indukt. D-Achse
(Ld) und Parameter 1-44 d-axis Inductance Sat.
(LdSat) entspricht, in Prozent des Nennstroms.
3 3
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 49
Page 52

Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
1-49 q-Axis Inductance Saturation Point
Range: Funktion:
Size
related*
33
[ 0 -
HINWEIS
200
Nehmen Sie eine AMA vor, um den Wert
%]
dieses Parameters einzustellen.
Bearbeiten Sie den Wert nur dann
manuell, wenn die Anwendung einen
anderen als den durch die AMA
ermittelten Wert benötigt.
Geben Sie die q-Achsen-Induktivitätssättigungsgrenze ein. Der Frequenzumrichter nutzt
diesen Wert, um die Leistung von IPM-Motoren
zu optimieren.
Wählen Sie den Wert, der mit dem Punkt
übereinstimmt, an dem die Induktivität dem
Durchschnitt von Parameter 1-38 Indukt. Q-
Achse (Lq) und Parameter 1-45 q- axis Inductance
Sat. (LqSat) entspricht, in Prozent des
Nennstroms.
1-51 Min Speed Normal Magnetising [RPM]
Über das LCP-Display wird dieser Parameter nicht angezeigt.
Range: Funktion:
Size
related*
[10 300 RPM]
HINWEIS
Parameter 1-51 Min Speed Normal
Magnetising [RPM] hat keine
Auswirkungen, wenn
Parameter 1-10 Motor
Construction=[1] PM, Vollpol.
Stellen Sie die erforderliche Drehzahl für
den normalen Magnetisierungsstrom ein.
Wenn die eingestellte Drehzahl niedriger
als die Schlupfdrehzahl des Motors ist,
haben Parameter 1-50 Motor Magneti-
sation at Zero Speed und
Parameter 1-51 Min Speed Normal
Magnetising [RPM] keine Bedeutung.
Verwenden Sie diesen Parameter
zusammen mit Parameter 1-50 Motor
Magnetisation at Zero Speed. Siehe
Tabelle 3.6.
3.2.8 1-5* Lastunabh. Einstellung
1-52 Min. Drehzahl norm. Magnetis. [Hz]
1-50 Motor Magnetisation at Zero Speed
Über das LCP-Display wird dieser Parameter nicht angezeigt.
Range: Funktion:
100 %* [0 -
300 %]
HINWEIS
Parameter 1-50 Motor Magnetisation at
Zero Speedhat keine Auswirkungen, wenn
Parameter 1-10 Motor Construction = [1]
PM (Oberfl. mon.).
Verwenden Sie diesen Parameter zusammen mit
Parameter 1-51 Min Speed Normal Magnetising
[RPM], wenn beim Betrieb mit niedriger
Drehzahl eine angepasste thermische Belastung
des Motors gewünscht wird.
Geben Sie den Wert als Prozentsatz des Magnetisierungsnennstroms ein. Eine zu niedrige
Einstellung kann ein reduziertes Drehmoment
an der Motorwelle bewirken.
Abbildung 3.7 Motormagnetisierung
Range: Funktion:
Size
related*
[ 0 -
250.0 Hz]
Stellen Sie die erforderliche Frequenz für
de normalen Magnetisierungsstrom ein.
Wenn die eingestellte Frequenz niedriger
als die Schlupffrequenz des Motors ist, ist
Parameter 1-50 Motor Magnetisation at
Zero Speed inaktiv.
Verwenden Sie diesen Parameter
zusammen mit Parameter 1-50 Motor
Magnetisation at Zero Speed. Siehe
Abbildung 3.7.
1-53 Steuerprinzip Umschaltpunkt
Range: Funktion:
Size
related*
[ 4 -
HINWEIS
18.0
Diesen Parameter können Sie bei
Hz]
laufendem Motor nicht einstellen.
Flux-Modellwechsel
Eingabe des Frequenzwerts für den Wechsel
zwischen zwei Modellen, zur Bestimmung der
Motordrehzahl. Wählen Sie den Wert basierend
auf den Einstellungen in
Parameter 1-00 Regelverfahren und
Parameter 1-01 Steuerprinzip.
Es gibt die folgenden Optionen:
50 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 53

Parameterbeschreibungen Programmierhandbuch
1-53 Steuerprinzip Umschaltpunkt
Range: Funktion:
Wechseln zwischen Flux-Modell 1
•
und Flux-Modell 2.
Wechseln zwischen variablem
•
Strommodell und Flux-Modell 2.
Kein Wechsel zwischen Modellen bei
•
niedriger Drehzahl, wenn
Parameter 40-50 Flux Sensorless Model
Shift auf Option [0] Aus eingestellt ist.
HINWEIS
Dies gilt nur für FC302.
Flux-Modell 1 – Flux-Modell 2
Dieses Modell wird verwendet, wenn
Parameter 1-00 Regelverfahren auf [1] Drehzahl
mit Rückf. oder [2] Drehmoment und
Parameter 1-01 Steuerprinzip auf [3] Flux mit
Geber eingestellt ist. Mit diesem Parameter
können Sie den Umschaltpunkt einstellen, bei
dem der Frequenzumrichter zwischen FluxModell 1 und Flux-Modell 2 wechselt, was bei
einigen sensiblen Anwendungen zur Drehzahlund Drehmomentregelung hilfreich ist.
Abbildung 3.8 Parameter 1-00 Regelverfahren = [1] Drehzahl mit Rückf. oder [2]
Drehmoment und Parameter 1-01 Steuerprinzip = [3] Flux mit Geber
Variabler Strom – Flux-Modell – ohne Geber
Dieses Modell wird verwendet, wenn
Parameter 1-00 Regelverfahren auf [0] Ohne
Rückführung und Parameter 1-01 Steuerprinzip
auf [2] Fluxvektor oh. Geber eingestellt ist.
Bei Drehzahlregelung ohne Rückführung im
Fluxvektorbetrieb wird die Drehzahl anhand
der Strommessung und des Motormodells
ermittelt.
Unter f
richter mit einem konstanten Strommodell.
Über f
Flux-Modell im Frequenzumrichter betrieben.
x 0,1 arbeitet der Frequenzum-
norm
x 0,125 wird der Motor mit dem
norm
1-53 Steuerprinzip Umschaltpunkt
Range: Funktion:
Abbildung 3.9 Parameter 1-00 Regelver-
fahren = [0] Ohne Rückführung,
Parameter 1-01 Steuerprinzip = [2] Flux ohne
Geber
1-54 Sp.-Reduz. bei Feldschwächung
Range: Funktion:
0 V* [0 - 100V]Der Wert dieses Parameters reduziert die
verfügbare Höchstspannung für den Fluxvektor
des Motors bei Feldschwächung, damit mehr
Spannung zur Aufrechterhaltung des
Drehmoments zur Verfügung steht. Durch die
Erhöhung des Werts wird die Gefahr eines
Kippens bei hoher Drehzahl erhöht.
1-55 U/f-Kennlinie - U [V]
Array [6]
Range: Funktion:
Size
related*
[0 1000 V]
Mit diesem Parameter können Sie die
Spannung an den einzelnen Frequenzpunkten einstellen, um eine zum Motor
passende U/f-Kennlinie zu erhalten.
Die zugehörigen Frequenzen definieren Sie
in Parameter 1-56 U/f-Kennlinie - f [Hz].
Dieser Parameter ist ein Arrayparameter
[0-5], der nur zugänglich ist, wenn
Parameter 1-01 Steuerprinzip auf [0] U/f
eingestellt ist.
1-56 U/f-Kennlinie - f [Hz]
Array [6]
Range: Funktion:
Size
related*
[ 0 -
1000.0 Hz]
Mit diesem Parameter können Sie die
Frequenz der gewählten U/f-Kennlinie
einstellen.
Die zugehörige Spannung definieren Sie
in Parameter 1-55 U/f-Kennlinie - U [ V].
Dieser Parameter ist ein Arrayparameter
[0-5], der nur zugänglich ist, wenn
Parameter 1-01 Steuerprinzip auf [0] U/f
eingestellt ist.
3 3
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 51
Page 54

Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
1-59 Fangschaltung Testpulse Frequenz
Range: Funktion:
Size
related*
33
Abbildung 3.10 U/f-Kennlinie
[ 0 -
Asynchronmotor: Zur Festlegung der Frequenz
500 %
für die Motorfangschaltungs-Testimpulse, die
]
zur Erkennung der Motorrichtung verwendet
werden. Bei Asynchronmotoren bedeutet der
Wert 100 %, dass der Schlupf doppelt so
hoch ist. Erhöhen Sie diesen Wert, um das
erzeugte Drehmoment zu reduzieren.
Bei Synchronmotoren ist dieser Wert der
Prozentwert n
Oberhalb dieses Werts wird immer eine
Motorfangschaltung durchgeführt. Unterhalb
dieses Werts wird der Startmodus in
Parameter 1-70 Startfunktion ausgewählt.
des freilaufenden Motors.
m,n
3.2.9 1-6* Lastabh. Einstellung
1-57 Torque Estimation Time Constant
Range: Funktion:
150 ms* [50 - 1000
ms]
HINWEIS
Dieser Parameter gilt nur mit
Softwareversion 48.XX.
Geben Sie die Zeitkonstante für die
Drehmomentbestimmung unter dem
Modelländerungspunkt im FluxvektorSteuerverfahren ohne Geber ein.
1-58 Fangschaltung Testpulse Strom
Range: Funktion:
Size
related*
[ 0 -
HINWEIS
200 %
Dieser Parameter ist nur in VVC
]
verfügbar.
+
1-60 Lastausgleich tief
Range: Funktion:
100 %* [0 -
300 %]
Motorgröße Kreuzungspunkt
0,25–7,5 kW <10 Hz
Geben Sie einen Prozentwert für den
Spannungsausgleich im Verhältnis zur Last bei
Motorbetrieb mit niedriger Drehzahl ein, und
erzielen Sie die optimale U/f-Kennlinie. Der
Frequenzbereich, in dem dieser Parameter
aktiv ist, hängt von der Motorgröße ab.
HINWEIS
Dieser Parameter wirkt sich nur auf PMMotoren aus.
Zur Festlegung des Strombereichs für die
Motorfangschaltungs-Testimpulse, die zur
Erkennung der Motorrichtung verwendet
werden. 100 % bedeutet I
Wert so ein, dass er hoch genug ist, um eine
Geräuschbeeinträchtigung zu vermeiden, und
niedrig genug, damit die Genauigkeit nicht
beeinträchtigt wird (der Strom muss vor dem
nächsten Puls auf Null sinken können).
Reduzieren Sie den Wert, um das erzeugte
Drehmoment zu reduzieren.
Der Standardwert für Asynchronmotoren ist
30 %, bei PM-Motoren kann er jedoch
variieren. Bei PM-Motoren werden bei der
Einstellung des Werts die Gegen-EMK und die
D-Achsen-Induktivität des Motors angepasst.
52 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
. Stellen Sie den
m,n
Abbildung 3.11 Kreuzungspunkt
1-61 Lastausgleich hoch
Range: Funktion:
100 %* [0 -
300 %]
Geben Sie einen Prozentwert für den
Spannungsausgleich im Verhältnis zur Last bei
Motorbetrieb mit hoher Drehzahl ein, und
erzielen Sie die optimale U/f-Kennlinie. Der
Frequenzbereich, in dem dieser Parameter
aktiv ist, hängt von der Motorgröße ab.
Page 55

Parameterbeschreibungen Programmierhandbuch
Motorgröße Kreuzungspunkt
0,25–7,5 kW >10 Hz
Tabelle 3.7 Umschaltfrequenz
1-62 Schlupfausgleich
Range: Funktion:
Size
related*
[-500
500 %]
Geben Sie den Prozentwert für den Schlupfausgleich ein, um eine Kompensation für
Toleranzen im Wert von n
Der Schlupfausgleich wird automatisch, d. h.
anhand der Motornenndrehzahl n
errechnet.
Wenn Parameter 1-00 Regelverfahren auf [1]
Mit Drehgeber oder [2] Drehmomentregler
(Drehmomentregelung mit Rückführung) oder
Parameter 1-01 Steuerprinzip auf [0] U/f
(spezieller Motormodus) gesetzt ist, ist diese
Funktion nicht aktiv.
M,N
1-63 Slip Compensation Time Constant
Range: Funktion:
Size
related*
[0.05
- 5 s]
HINWEIS
Parameter 1-63 Slip Compensation Time
Constanthat keine Auswirkungen, wenn
Parameter 1-10 Motor Construction = [1]
PM (Oberfl. mon.).
Geben Sie die Schlupfausgleichsreaktionsgeschwindigkeit ein. Ein hoher Wert führt zu
einer langsamen, ein niedriger Wert zu einer
schnellen Reaktion. Verwenden Sie bei
Niederfrequenzresonanzproblemen die
längere Zeiteinstellung.
1-64 Resonance Dampening
Range: Funktion:
Size
related*
[0 -
HINWEIS
500 %
Parameter 1-64 Resonance Dampening
]
hat keine Auswirkungen, wenn
Parameter 1-10 Motor Construction=[1]
PM (Oberfl. mon.).
Geben Sie den Wert für die Resonanzdämpfung ein. Legen Sie
Parameter 1-64 Resonance Dampening und
Parameter 1-65 Resonance Dampening Time
Constant fest, um Probleme mit Hochfrequenz-
resonanzen zu eliminieren. Zum Reduzieren
der Resonanzschwankungen erhöhen Sie den
Wert von Parameter 1-64 Resonance
Dampening.
vorzunehmen.
M,N
1-65 Resonance Dampening Time Constant
Range: Funktion:
5 ms* [5 - 50
ms]
HINWEIS
Parameter 1-65 Resonance Dampening
Time Constanthat keine Auswirkungen,
wenn Parameter 1-10 Motor Construction
= [1] PM (Oberfl. mon.).
Legen Sie Parameter 1-64 Resonance Dampening
und Parameter 1-65 Resonance Dampening Time
Constant fest, um Probleme mit Hochfrequenzresonanzen zu eliminieren. Geben Sie die
Zeitkonstante mit der besten Dämpfung ein.
1-66 Min. Strom bei niedr. Drz.
Range: Funktion:
Size
related*
[ 1 -
HINWEIS
200 %
Ist Parameter 40-50 Flux Sensorless
]
Model Shift auf [0] Aus eingestellt, wird
dieser Parameter ignoriert.
Geben Sie den minimalen Motorstrom bei
niedriger Drehzahl ein; siehe
Parameter 1-53 Steuerprinzip Umschaltpunkt.
Ein Erhöhen dieses Stroms verbessert das
Motordrehmoment bei niedriger Drehzahl.
Parameter 1-66 Min. Strom bei niedr. Drz. wird
nur aktiviert, wenn Parameter 1-00 Regelver-
fahren auf [0] Ohne Rückführung eingestellt ist.
Der Frequenzumrichter läuft mit konstantem
Strom durch den Motor bei Drehzahlen unter
10 Hz.
Bei Drehzahlen über 10 Hz wird der Motor
über das Motor-Flux-Modell im Frequenzumrichter gesteuert.
Parameter 4-16 Momentengrenze motorisch
und/oder Parameter 4-17 Momentengrenze
generatorisch passen Parameter 1-66 Min.
Strom bei niedr. Drz. automatisch an. Der
Parameter mit dem höchsten Wert passt
Parameter 1-66 Min. Strom bei niedr. Drz. an.
Die Stromeinstellung unter
Parameter 1-66 Min. Strom bei niedr. Drz. ergibt
sich aus dem Drehmoment erzeugenden
Strom und dem Magnetisierungsstrom.
Beispiel: Stellen Sie Parameter 4-16 Momenten-
grenze motorisch auf 100 % und
Parameter 4-17 Momentengrenze generatorisch
auf 60 % ein. Parameter 1-66 Min. Strom bei
niedr. Drz. wird je nach Motorgröße
automatisch auf ca. 127 % angepasst.
3 3
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 53
Page 56

Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
1-67 Lasttyp
Dieser Parameter gilt nur für FC302.
Option: Funktion:
[0] * Passiv Für Förderbänder, Lüfter- und Pumpenanwen-
dungen.
33
[1] Aktiv Für Hubanwendungen. Mit dieser Option kann die
Rampe des Frequenzumrichters bei 0 U/min
auffahren. Wenn [1] Aktiv ausgewählt ist, stellen Sie
Parameter 1-66 Min. Strom bei niedr. Drz. so ein, dass
die Einstellung dem maximalen Drehmoment
entspricht.
1-70 Startfunktion
Wählen Sie den Startmodus. Dies wird zur Initialisierung des VVC
+
-Steuerungskerns für den zuvor freilaufenden Motor
durchgeführt. Durch beide Optionen werden Drehzahl und
Winkel geschätzt. Nur aktiv für PM- und SynRM-Motoren in VVC+.
Option: Funktion:
ausgewählt). Parkstrom und -zeit
können Sie in Parameter 2-06 Parking
Strom und Parameter 2-07 Parking Zeit
konfigurieren.
[2] Rotor Det. w/
Parking
1-68 Massenträgheit Min.
Range: Funktion:
0 kgm²* [0.0000 -
10000.0000
kgm²]
Eingabe des Motorträgheitsmoments
zur Erzielung einer besseren Drehmomentanzeige und somit zur besseren
Einschätzung des mechanischen
Drehmoments der Welle. Nur beim
Flux-Steuerverfahren verfügbar.
1-69 Massenträgheit Max.
Range: Funktion:
Size
related*
[0000 -
10000.0000
kgm²]
HINWEIS
Nur gültig für FC302.
Sie können diesen Parameter
bei laufendem Motor nicht
einstellen.
Nur aktiv bei Flux ohne
Rückführung. Zur Ermittlung des
Beschleunigungsmoments bei
niedriger Drehzahl. Verwendet im
Drehmomentgrenzenregler.
3.2.10 1-7* Startfunktion
1-70 Startfunktion
Wählen Sie den Startmodus. Dies wird zur Initialisierung des VVC
+
-Steuerungskerns für den zuvor freilaufenden Motor
durchgeführt. Durch beide Optionen werden Drehzahl und
Winkel geschätzt. Nur aktiv für PM- und SynRM-Motoren in VVC+.
Option: Funktion:
[0] * Rotorlageerkennung Zur Schätzung des elektrischen
Winkels des Rotors und zu dessen
Verwendung als Startpunkt. Standardauswahl für VLT® AutomationDriveAnwendungen.
[1] Parken Durch die Parkfunktion wird ein
Gleichstrom an der Statorwicklung
angelegt und der Rotor dreht sich
zum elektrischen Nullpunkt (wird in
der Regel bei HVAC-Anwendungen
1-71 Startverzög.
Range: Funktion:
0 s* [0 - 25.5s]Dieser Parameter bezieht sich auf die in
Parameter 1-72 Startfunktion ausgewählte
Startfunktion.
Geben Sie die vor Beginn der Beschleunigung
erforderliche Zeitverzögerung ein.
1-72 Startfunktion
Option: Funktion:
Wählen Sie die Startfunktion, die während der
eingestellten Startverzögerung ausgeführt
wird. Dieser Parameter ist mit
Parameter 1-71 Startverzög. verknüpft.
[0] DC Halten Während der Anlaufverzögerungszeit wird der
Motor mit einem DC-Haltestrom angesteuert
(Parameter 2-00 DC-Haltestrom).
[1] DC Bremse Während der Anlaufverzögerungszeit wird DC-
Bremsstrom (Parameter 2-01 DC-Bremsstrom)
ausgeführt.
[2]*Freilauf/
Verz.zeit
[3] Startdrz. Re.
Der Motor befindet sich für die Dauer der
Anlaufverzögerungszeit im Freilauf (Wechselrichter aus).
Nur mit VVC+ möglich.
Schließen Sie die in
Parameter 1-74 Startdrehzahl [UPM] und
Parameter 1-76 Startstrom beschriebene
Funktion während der Anlaufverzögerungszeit
an.
Unabhängig vom durch das Sollwertsignal
übermittelten Wert passt die Ausgangsdrehzahl die Einstellung der Startdrehzahl in
Parameter 1-74 Startdrehzahl [UPM] oder
Parameter 1-75 Startdrehzahl [Hz] an, und der
Ausgangsstrom entspricht der Einstellung des
Startstroms in Parameter 1-76 Star tstrom. Diese
Funktion wird in der Regel bei Hubanwendungen ohne Kontergewicht und
insbesondere bei Anwendungen mit
Konusläufer-Motor verwendet, bei dem der
54 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 57

Parameterbeschreibungen Programmierhandbuch
1-72 Startfunktion
Option: Funktion:
Start im Rechtslauf erfolgt, gefolgt von einer
Drehung in die Sollwertrichtung.
[4] Start
Sollrichtung
[5] VVC+/Flux
Re.
[6] Mech.
Bremse
[7] VVC+/Flux
counter-cw
Nur mit VVC+ möglich.
Zum Erhalt der in Parameter 1-74 Startdrehzahl
[UPM] und Parameter 1-76 Star tstrom
beschriebenen Funktion während der Anlaufverzögerungszeit. Der Motor dreht in die per
Sollwert eingestellte Richtung. Wenn das
Sollwertsignal gleich 0 ist, wird
Parameter 1-74 Startdrehzahl [UPM] ignoriert,
und die Ausgangsdrehzahl ist gleich 0. Der
Ausgangsstrom entspricht der Einstellung des
Startstroms in Parameter 1-76 Star tstrom.
Nur für die in Parameter 1-74 Startdrehzahl
[UPM] beschriebene Funktion. Der Startstrom
wird automatisch berechnet. Diese Funktion
verwendet die Startdrehzahl nur bei der
Anlaufverzögerungszeit. Unabhängig von dem
für das Sollwertsignal eingestellten Wert ist die
Ausgangsdrehzahl identisch mit der in
Parameter 1-74 Startdrehzahl [UPM]
eingestellten Startdrehzahl. [3] Startdrz. Re. und
[5] VVC+/Flux Re. werden in der Regel bei
Hubanwendungen verwendet. [4] Start
Sollrichtung wird insbesondere bei
Anwendungen mit Kontergewicht und
horizontaler Bewegung verwendet.
Zur Verwendung der Funktionen zur
mechanischen Bremssteuerung
(Parameter 2-24 Stopp-Verzögerung bis
Parameter 2-28 Verstärkungsfaktor). Dieser
Parameter ist nur im Flux-Steuerverfahren in
einem Modus mit oder ohne Geber aktiv.
1-73 Motorfangschaltung
Option: Funktion:
Funktion. Bei Aktivierung von
Parameter 1-73 Motorfangschaltung werden
Parameter 1-58 Fangschaltung Testpulse Strom
und Parameter 1-59 Fangschaltung Testpulse
Frequenz zur Festlegung der Bedingungen für
die Motorfangschaltung verwendet.
[2] Immer
aktiviert
[3] Enabled Ref.
Dir.
[4] Enab. Always
Ref. Dir.
HINWEIS
Diese Funktion ist nicht für Hubanwendungen zu
empfehlen.
Um bei Leistungsstufen über 55 kW optimale Leistung zu
erzielen, muss der Fluxvektorbetrieb verwendet werden.
HINWEIS
Um die beste Leistung bei einer Motorfangschaltung zu
erzielen, müssen die Parameter Parameter 1-30 Statorwi-
derstand (Rs) bis Parameter 1-35 Hauptreaktanz (Xh)
korrekt eingestellt sein.
1-74 Startdrehzahl [UPM]
Range: Funktion:
Size
related*
[0 600
RPM]
Einstellen einer Motorstartdrehzahl. Nach
dem Startsignal steigt die Ausgangsdrehzahl
sprunghaft auf den eingestellten Wert an.
Stellen Sie die Startfunktion in
Parameter 1-72 Startfunktion auf [3] Startdrz.
Re., [4] Start Sollrichtung oder [5] VVC+/Flux
Re. ein, und stellen Sie die Anlaufverzöge-
rungszeit in Parameter 1-71 Startverzög. ein.
3 3
1-73 Motorfangschaltung
Option: Funktion:
HINWEIS
Diesen Parameter können Sie bei
laufendem Motor nicht einstellen.
Mit dieser Funktion kann der Frequenzumrichter einen Motor, der aufgrund eines
Netzausfalls unkontrolliert läuft, „fangen“.
[0] Deaktiviert Ohne Funktion
[1] Aktiviert Ermöglicht dem Frequenzumrichter, einen
drehenden Motor abzufangen und ihn zu
steuern.
Wenn Parameter 1-73 Motorfangschaltung
aktiviert ist, haben Parameter 1-71 Startverzög.
und Parameter 1-72 Startfunktion keine
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 55
1-75 Startdrehzahl [Hz]
Range: Funktion:
Size
related*
[ 0 -
500.0
Hz]
Dieser Parameter kann für Hub- und Vertikalförderanwendungen (Verschiebeanker).
Einstellen einer Motorstartdrehzahl. Nach dem
Startsignal steigt die Ausgangsdrehzahl
sprunghaft auf den eingestellten Wert an.
Stellen Sie die Startfunktion in
Parameter 1-72 Startfunktion auf [3] Startdrz.
Re. [4] Start Sollrichtung oder [5] VVC+/Flux Re.
ein, und stellen Sie die Anlaufverzögerungszeit in Parameter 1-71 Startverzög. ein.
Page 58

Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
1-76 Startstrom
Range: Funktion:
0A* [ 0 -
par.
1-24
33
A]
Einige Motoren, z. B. Verschiebeanker-Motoren,
benötigen einen zusätzlichen Strom/eine zusätzliche
Startdrehzahl, damit sich der Rotor in Bewegung
setzt. Stellen Sie zum Erreichen dieser Steigerung
den erforderlichen Strom in
Parameter 1-76 Startstrom ein. Stellen Sie
Parameter 1-74 Startdrehzahl [UPM] ein. Stellen Sie
Parameter 1-72 Startfunktion auf [3] Startdrz. Re. [4]
Start Sollrichtung ein, und stellen Sie in
Parameter 1-71 Startverzög. eine Anlaufverzöge-
rungszeit ein.
Dieser Parameter kann für Hub- und Vertikalförderanwendungen (Verschiebeanker).
3.2.11 1-8* Stoppfunktion
1-80 Funktion bei Stopp
Option: Funktion:
Funktion des Frequenzumrichters, die nach
einem Stoppsignal und dem Erreichen der
in Parameter 1-81 Min Speed for Function at
Stop [RPM] eingestellten Drehzahl ausgeführt
wird.
[0]*Motorfreilauf Lässt den Motor im Motorfreilauf. Der Motor
ist vom Frequenzumrichter getrennt.
[1] DC-Halten Versorgt den Motor mit einem DC-
Haltestrom (siehe Parameter 2-00 DC-
Haltestrom).
[2] Motortest Überprüft, ob ein Motor angeschlossen
wurde.
[3] Vormagneti-
sierung
Baut bei gestopptem Motor ein Magnetfeld
auf. Auf diese Weise kann der Motor bei
folgenden Startbefehlen schnell
Drehmoment erzeugen (nur Asynchronmotoren). Diese Vormagnetisierungsfunktion
ist beim ersten Startbefehl ohne Wirkung.
Für das Vormagnetisieren des Motors vor
dem ersten Startbefehl stehen zwei andere
Lösungen zur Verfügung:
Starten Sie den Frequenzumrichter
•
mit einem Sollwert von 0 U/min,
und warten Sie 2 – 4 RotorZeitkonstanten, bevor Sie den
Drehzahl-Sollwert erhöhen.
Verwenden Sie die Startverzö-
•
gerung mit DC-Halten:
Stellen Sie
•
Parameter 1-71 Startverzög
. auf die erforderliche
1-80 Funktion bei Stopp
Option: Funktion:
Vormagnetisierungszeit
ein (2 – 4 Rotor-Zeitkonstanten – siehe die
Beschreibung der
Zeitkonstanten in diesem
Abschnitt).
Stellen Sie
•
Parameter 1-72 Startfunkti
on auf [0] DC Halten oder
auf [1] DC Bremse ein.
Stellen Sie die
•
Stromstärke für DC-Halten
oder DC-Bremsstrom
(Parameter 2-00 DC-
Haltestrom oder
Parameter 2-01 DCBremsstrom) so ein, dass
sie I_pre-mag = Unom/
(1,73 x Xh) entspricht.
Beispiel für Rotor-Zeitkonstanten =
(Xh+X2)/(6,3*Freq_nom*Rr)
1 kW = 0,2 s
10 kW = 0,5 s
100 kW = 1,7 s
1000 kW = 2,5 s
[4] DC-SpannungU0Bei gestopptem Motor wird die Spannung
bei 0 Hz durch Parameter 1-55 U/f-Kennlinie -
U [V] [0] definiert.
[5] Freilauf b.
min.Sollw.
[6] Motortest,
Alarm
Wenn der Sollwert unter Parameter 1-81 Ein.-
Drehzahl für Stoppfunktion [UPM] liegt, wird
der Motor vom Frequenzumrichter getrennt.
1-81 Min Speed for Function at Stop [RPM]
Range: Funktion:
Size related* [0 - 600
RPM]
Definiert die Drehzahl zum
Aktivieren von
Parameter 1-80 Function at Stop.
1-82 Min Speed for Function at Stop [Hz]
Range: Funktion:
Size related* [ 0 - 20.0
Hz]
Stellen Sie die Ausgangsfrequenz ein,
bei der Parameter 1-80 Function at
Stop aktiviert werden soll.
56 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 59

Parameterbeschreibungen Programmierhandbuch
1-83 Präziser Stopp-Funktion
Option: Funktion:
HINWEIS
Diesen Parameter können Sie bei
laufendem Motor nicht einstellen.
Nur gültig für FC302.
[0]*Präz.
Rampenstopp
[1] ZStopp
m.Reset
[2] ZStopp
o.Reset
[3] Drz. Stopp Stoppt unabhängig von der aktuellen
[4] Drz. ZStopp
m.Reset
Nur optimal, wenn die Betriebsgeschwindigkeit, z. B. die Betriebsdrehzahl eines
Förderbands, konstant ist. Dies ist eine
Regelung ohne Rückführung. Erreicht ein
drehzahlkompensiertes Stoppen an einer
definierten Position.
Zählt die Pulsanzahl, in der Regel von einem
Drehgeber, und erzeugt ein Stoppsignal
nach einer vorprogrammierten Pulszahl –
Parameter Parameter 1-84 Präziser Stopp-Wert
– wurde an Klemme 29 oder Klemme 33
empfangen.
Dies ist eine direkte Rückführung mit
Regelung mit einseitiger Rückführung.
Die Zählerfunktion wird beim Startsignal
(beim Wechsel von Stopp zu Start) aktiviert
(Zeitgebung wird gestartet). Nach jedem
präzisen Stopp wird die Anzahl der beim
Rampe Ab auf 0 UPM gezählten Pulse
zurückgesetzt.
Entspricht [2] Zähler (Reset), aber die Anzahl
der beim Rampe Ab auf 0 UPM wird vom in
Parameter 1-84 Präziser Stopp-Wert
eingegebenen Zählerwert abgezogen.
Mit dieser Quittierfunktion können Sie eine
zusätzliche Entfernung, die bei einer Rampe
Ab zurückgelegt wurde, ausgleichen und die
Auswirkungen einer allmählichen Abnutzung
der mechanischen Bauteile reduzieren.
Drehzahl immer genau am gleichen Punkt.
Wenn die vorliegende Drehzahl die (in
Parameter 4-19 Max. Ausgangsfrequenz
eingestellte) maximale Drehzahl
unterschreitet, wird das Stoppsignal intern
verzögert.
Die Berechnung der Verzögerung erfolgt
anhand der Solldrehzahl des Frequenzumrichters und nicht auf Grundlage der
aktuellen Drehzahl. Vergewissern Sie sich,
dass der Frequenzumrichter angelaufen ist,
bevor Sie den drehzahlkompensierten Stopp
aktivieren.
Entspricht Stopp mit Drehzahlausgleich, aber
die Anzahl der beim Rampe ab auf 0 UPM
gezählten Impulse wird bei jedem präzisen
Stopp zurückgesetzt.
1-83 Präziser Stopp-Funktion
Option: Funktion:
[5] Drz. ZStopp
o.Reset
Entspricht Stopp mit Drehzahlausgleich, aber
die Anzahl der beim Rampe Ab auf 0 UPM
wird vom in Parameter 1-84 Präziser Stopp-
Wert eingegebenen Zählerwert abgezogen.
Mit dieser Quittierfunktion können Sie eine
zusätzliche Entfernung, die bei einer Rampe
Ab zurückgelegt wurde, ausgleichen und die
Auswirkungen einer allmählichen Abnutzung
der mechanischen Bauteile reduzieren.
Die Funktionen Präziser Stopp sind vorteilhaft in
Anwendungen, bei denen eine hohe Präzision erforderlich
ist.
Wenn Sie einen Standard-Stoppbefehl verwenden, wird die
Genauigkeit durch die interne Zeit für die Aufgabe
bestimmt. Bei der Funktion Präziser Stopp ist dies nicht der
Fall. Sie eliminiert die Abhängigkeit von der internen Zeit
für die Aufgabe und erhöht die Genauigkeit erheblich.
Die Toleranz des Frequenzumrichters wird in der Regel
durch seine Zeit für die Aufgabe vorgegeben. Durch
Verwendung seiner speziellen Funktion Präziser Stopp ist
die Toleranz unabhängig von der Aufgabenzeit, da das
Stoppsignal die Ausführung des Programms des Frequenzumrichters sofort unterbricht. Die Funktion Präziser Stopp
erzeugt eine hoch reproduzierbare Verzögerung vom
Auslösen des Stoppsignals bis zum Beginn des Rampe AbVorgangs. Zum Bestimmen dieser Verzögerung müssen Sie
einen Test ausführen, da es sich um eine Summe aus
Sensor, SPS, Frequenzumrichter und mechanischen
Bauteilen handelt.
Um eine optimale Genauigkeit sicherzustellen, sollten beim
Rampe Ab-Vorgang mindestens 10 Zyklen erfolgen, siehe:
Parameter 3-42 Rampenzeit Ab 1.
•
Parameter 3-52 Rampenzeit Ab 2.
•
Parameter 3-62 Rampenzeit Ab 3.
•
Parameter 3-72 Rampenzeit Ab 4.
•
Die Konfiguration der Funktion Präziser Stopp erfolgt hier;
die Aktivierung erfolgt über DI an Klemme 29 oder
Klemme 33.
1-84 Präziser Stopp-Wert
Range: Funktion:
100000* [0 -
999999999 ]
Eingabe des Zählerwerts für die
integrierte Funktion Präziser Stopp,
Parameter 1-83 Präziser Stopp-Funktion.
Die maximal zulässige Frequenz an
Klemme 29 oder 33 ist 110 kHz.
3 3
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 57
Page 60

Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
1-84 Präziser Stopp-Wert
Range: Funktion:
HINWEIS
Nicht verwendet bei der Auswahl
von [0] Precise ramp stop und [3]
33
Speed comp stop in
Parameter 1-83 Präziser StoppFunktion.
1-85 Verzögerung Drehzahlkompensation
Range: Funktion:
10
ms*
[0 100
ms]
Eingabe der Verzögerungszeit für Sensoren, SPS
usw. zur Verwendung in Parameter 1-83 Präziser
Stopp-Funktion. Im Modus für drehzahlkompensierten Stopp hat die Verzögerungszeit bei
verschiedenen Frequenzen großen Einfluss auf
die Stoppfunktion.
HINWEIS
Nicht verwendet bei der Auswahl von [0]
Precise ramp stop, [1] Cnt stop with reset
und [2] Cnt stop w/o reset in
Parameter 1-83 Präziser Stopp-Funktion.
3.2.12 1-9* Motortemperatur
1-90 Thermischer Motorschutz
Option: Funktion:
Den thermischen Motorschutz können Sie
über eine Reihe von Verfahren realisieren:
Mittels eines PTC-Sensors in den
•
mit einem der Analog- oder Digitaleingänge verbundenen
Motorwicklungen
(Parameter 1-93 Thermistor Source).
Siehe Kapitel 3.2.13 PTC-Thermistor-
verbindung.
Mittels eines KTY-Sensors in den
•
Motorwicklungen verbunden mit
einem Analogeingang
(Parameter 1-96 KTY-Sensoran-
schluss). Siehe Kapitel 3.2.14 KTYSensorverbindung.
Durch Berechnung (ETR = Elektron-
•
isches Thermorelais) der
thermischen Belastung, basierend
auf der tatsächlichen Motorbelastung und der Zeit. Die
berechnete thermische Belastung
wird mit dem Motornennstrom I
und der Motornennfrequenz f
M,N
M,N
1-90 Thermischer Motorschutz
Option: Funktion:
verglichen. Siehe Kapitel 3.2.15 ETR
und Kapitel 3.2.16 ATEX ETR.
Mittels eines mechanischen
•
Thermoschalters (Klixon-Schalter).
Siehe Kapitel 3.2.17 Klixon-Schalter.
Für den nordamerikanischen Markt: Die ETRFunktionen bieten einen Motorüberlastschutz
der Klasse 20 gemäß NEC.
[0] Kein
Motorschutz
[1] Thermistor
Warnung
[2] Thermistor
Abschalt.
[3] ETR Warnung1Berechnet die Last, wenn Satz 1 aktiv ist,
[4] ETR Alarm 1 Berechnet die Last, wenn Satz 1 aktiv ist,
[5] ETR Warnung
2
[6] ETR Alarm 2
[7] ETR Warnung
3
[8] ETR Alarm 3
[9] ETR Warnung
4
[10] ETR Alarm 4
[20] ATEX ETR Aktiviert die thermische Überwachungs-
Dauerhaft überlasteter Motor, wenn keine
Warnung oder Abschaltung des Frequenzumrichters erforderlich ist.
Aktiviert eine Warnung, wenn der
angeschlossene Thermistor oder KTY-Sensor
im Motor bei einer Motorübertemperatur
auslöst.
Stoppt (Abschaltung) den Frequenzumrichter,
wenn der angeschlossene Thermistor oder
KTY-Sensor im Motor bei einer Motorübertemperatur auslöst.
Der Thermistorabschaltwert muss mehr als
3 kΩ betragen.
Integrieren Sie zum Wicklungsschutz einen
Thermistor (PTC-Sensor) im Motor.
und aktiviert eine Warnung auf der Anzeige,
wenn der Motor überlastet ist. Programmieren Sie ein Warnsignal über einen der
Digitalausgänge.
und stoppt (Abschaltung) den Frequenzumrichter, wenn der Motor überlastet ist.
Programmieren Sie ein Warnsignal über
einen der Digitalausgänge. Das Signal wird
bei einer Warnung und bei einer
Abschaltung des Frequenzumrichters
(Übertemperaturwarnung) ausgelöst.
funktion für Ex-e-Motoren für ATEX. Aktiviert
Parameter 1-94 ATEX ETR I-Grenze Gesw. red.,
Parameter 1-98 ATEX ETR interpol. f-Pkt. und
Parameter 1-99 ATEX ETR interpol. I-Pkt..
58 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 61

Parameterbeschreibungen Programmierhandbuch
1-90 Thermischer Motorschutz
Option: Funktion:
[21] Advanced
ETR
HINWEIS
Wenn [20] ATEX ETR ausgewählt ist, befolgen Sie die
Anweisungen im entsprechenden Kapitel des Projektie-
rungshandbuchs sowie die Anweisungen des
Motorherstellers.
HINWEIS
Wenn [20] ATEX ETR ausgewählt wird, stellen Sie
Parameter 4-18 Stromgrenze auf 150 % ein.
3.2.13 PTC-Thermistorverbindung
Abbildung 3.13 PTC-Thermistorverbindung - Digitaleingang
Bei Verwendung eines Analogeingangs und 10 V als
Stromversorgung
Beispiel: Der Frequenzumrichter schaltet sich ab, wenn die
Motortemperatur zu hoch ist.
Parametereinstellung:
Stellen Sie Parameter 1-90 Thermischer Motorschutz
•
auf [2] Thermistor Abschalt. ein.
Stellen Sie Parameter 1-93 Thermistor Source auf
•
[2] Analogeingang 54 ein.
3 3
Abbildung 3.12 PTC-Profil
Bei Verwendung eines Digitaleingangs und 10 V als
Stromversorgung:
Beispiel: Der Frequenzumrichter schaltet sich ab, wenn die
Motortemperatur zu hoch ist.
Parametereinstellung:
Stellen Sie Parameter 1-90 Thermischer Motorschutz
•
auf [2] Thermistor Abschalt. ein.
Stellen Sie Parameter 1-93 Thermistor Source auf
•
[6] Digitaleingang ein.
Abbildung 3.14 PTC-Thermistorverbindung - Analogeingang
Eingang
Digital/Analog
Digital 10 V
Analog 10 V
Tabelle 3.8 Abschaltwerte
Versorgungsspannung
Abschaltwerte
<800 Ω⇒2,7 kΩ
<3,0 kΩ⇒3,0 kΩ
HINWEIS
Prüfen Sie, ob die gewählte Versorgungsspannung der
Spezifikation des benutzten Thermistorelements
entspricht.
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 59
Page 62

0
500
1000
1500
2000
2500
3000
3500
4000
4500
-25 0 25 50 75 100 125 1 50
Temperature [°C]
Resistance [Ohm]
KTY type 1 KTY type 2 KTY type 3
130BB917.10
1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2.000
500
200
400
300
1.000
600
t [s]
175ZA052.11
fOUT = 0,2 x f M,N
fOUT = 2 x f M,N
fOUT = 1 x f M,N
IMN
IM
Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
3.2.14 KTY-Sensorverbindung
HINWEIS
Wenn die Temperatur des Motors durch einen Thermistor
HINWEIS
nur FC302.
oder KTY-Sensor verwendet wird, wird die PELV (Schutzkleinspannung - Protective extra low voltage) im Falle
von Kurzschlüssen zwischen Motorwicklungen und
33
KTY-Sensoren werden insbesondere in PermanentmagnetServomotoren (PM-Motoren) zur dynamischen Anpassung
Sensor nicht kompiliert. Zur Übereinstimmung mit der
PELV müssen Sie den Sensor zusätzlich isolieren.
von Motorparametern als Statorwiderstand
(Parameter 1-30 Statorwiderstand (Rs)) für PM-Motoren und
3.2.15 ETR
auch als Rotorwiderstand (Parameter 1-31 Rotorwiderstand
(Rr)) für Asynchronmotoren verwendet, je nach Wicklungstemperatur. Die Berechnung lautet:
Bei den Berechnungen wird die bei niedriger Drehzahl
herabgesetzte Kühlung eines im Motor integrierten Lüfters
berücksichtigt.
Rs = Rs
x(1 + αcuxΔT) Ω wenn αcu = 0 . 00393
20°C
KTY-Sensoren können für den Motorschutz verwendet
werden (Parameter 1-97 KTY-Schwellwert).
FC302 kann mit drei KTY-Sensortypen arbeiten, die in
Parameter 1-95 KTY-Sensortyp definiert sind. Sie können die
tatsächliche Sensortemperatur über Parameter 16-19 KTY-
Sensortemperatur auslesen.
Abbildung 3.16 ETR-Profil
3.2.16 ATEX ETR
Die VLT® PTC Thermistor Card MCB 112 bietet ATEXanerkannte Überwachung der Motortemperatur. Alternativ
können Sie auch eine externe PTC-Schutzvorrichtung mit
ATEX-Zulassung verwenden.
Abbildung 3.15 Auswahl KTY-Typ
KTY-Sensor 1: 1 kΩ bei 100 °C (212 °F) (z. B. Philips KTY
84-1)
KTY-Sensor 2: 1 kΩ bei 25 °C (77 °F) (z. B. Philips KTY 83-1)
KTY-Sensor 3: 2 kΩ bei 25 °C (77 °F) (z. B. Infineon KTY-10)
HINWEIS
Verwenden Sie für diese Funktion ausschließlich Motoren
mit ATEX Ex-e-Zulassung. Siehe Motor-Typenschild,
Zulassungszertifikat, Datenblatt oder wenden Sie sich an
den Motorhersteller.
60 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 63

Parameterbeschreibungen Programmierhandbuch
Beim Steuern eines Ex-e-Motors mit erhöhter Sicherheit
müssen Sie bestimmte Einschränkungen einhalten. Die zu
programmierenden Parameter sind in Tabelle 3.9
aufgeführt.
Funktion Einstellung
Parameter 1-90 Thermischer
Motorschutz
Parameter 1-94 ATEX ETR I-Grenze
Gesw. red.
Parameter 1-98 ATEX ETR interpol.
f-Pkt.
Parameter 1-99 ATEX ETR interpol.
I-Pkt.
Parameter 1-23 Motornennfrequenz
Parameter 4-19 Max. Ausgangsfrequenz
Parameter 4-18 Stromgrenze Durch 1-90 [20] zwangsweise
Parameter 5-15 Klemme 33
Digitaleingang
Parameter 5-19 Klemme 37
Sicherer Stopp
Parameter 14-01 Taktfrequenz Überprüfen Sie, ob der
Parameter 14-26 WR-Fehler
Abschaltverzögerung
Tabelle 3.9 Parameter
[20] ATEX ETR
20%
Motor-Typenschild.
Geben Sie den gleichen Wert
wie für Parameter 4-19 Max.
Ausgangsfrequenz ein.
Motor-Typenschild, ggf.
reduziert bei langen
Motorkabeln, Sinusfilter oder
reduzierte Versorgungsspannung.
auf 150 %
[80] PTC-Karte 1
[4] PTC 1 Alarm
Standardwert die Anforderung
vom Motor-Typenschild erfüllt.
Ist dies nicht der Fall,
verwenden Sie einen
Sinusfilter.
0
HINWEIS
Vergleichen Sie die vom Motorenhersteller angegebene
minimale Taktfrequenz mit der minimalen Taktfrequenz
des Frequenzumrichters, der Werkseinstellung in
Parameter 14-01 Taktfrequenz. Wenn der Frequenzumrichter diese Anforderung nicht erfüllt, verwenden Sie
einen Sinusfilter.
3.2.17 Klixon-Schalter
Der thermische Klixon-Trennschalter verfügt über eine
KLIXON®-Metallschale. Bei einer vordefinierten Überlast
führt die durch den Stromfluss durch die Schale
verursachte Wärme zu einer Abschaltung.
Bei Verwendung eines Digitaleingangs und 24 V als
Stromversorgung:
Beispiel: Der Frequenzumrichter schaltet sich ab, wenn die
Motortemperatur zu hoch ist.
Parametereinstellung:
Stellen Sie Parameter 1-90 Thermischer Motorschutz
•
auf [2] Thermistor Abschalt. ein.
Stellen Sie Parameter 1-93 Thermistor Source auf
•
[6] Digitaleingang ein.
Abbildung 3.17 Thermistorverbindung
1-91 Motor External Fan
Option: Funktion:
[0] * No Kein externer Lüfter erforderlich, d. h. die
Motorleistung wird bei niedriger Drehzahl reduziert.
[1] Yes Ein externer Motorlüfter (Fremdbelüftung) wird
verwendet, daher ist bei niedriger Drehzahl keine
Leistungsreduzierung notwendig. Der Lüfter folgt der
oberen Kurve in Abbildung 3.16 (f
der Motorstrom unter dem Motornennstrom liegt
(siehe Parameter 1-24 Motor Current). Überschreitet der
Motorstrom den Nennstrom, reduziert der Frequenzumrichter die Betriebszeit so, als ob kein Lüfter
montiert ist.
= 1 x f
out
M,N
), wenn
3 3
Weitere Informationen zur thermischen Überwachung nach
ATEX ETR finden Sie in Anwendungshinweis für die
thermische Überwachungsfunktion des FC 300 nach ATEX ETR.
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 61
Page 64

Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
1-93 Thermistor Source
Option: Funktion:
HINWEIS
Diesen Parameter können Sie bei
laufendem Motor nicht einstellen.
33
HINWEIS
Stellen Sie den Digitaleingang in
Beispiel:
Aktueller Sollwert = 50 U/min
Parameter 1-94 ATEX ETR I-Grenze Gesw. red. = 20 %
Resultierender Sollwert = 40 U/min
1-95 KTY-Sensortyp
Option: Funktion:
HINWEIS
Nur gültig für FC302.
Parameter 5-00 Digital I/O Mode auf [0]
PNP - Aktiv bei 24 V ein.
Wählen Sie den Eingang für den Anschluss
des Thermistors (PTC-Sensor) aus. Die
Auswahl einer Analogeingang-Option [1]
Analogeingang 53 oder [2] Analogeingang 54
ist nicht möglich, wenn der Analogeingang
bereits als Sollwertquelle verwendet wird
(ausgewählt unter Parameter 3-15 Reference 1
Source, Parameter 3-16 Reference 2 Source oder
Parameter 3-17 Reference 3 Source).
Bei der Verwendung der VLT® PTC Thermistor
Card MCB 112 müssen Sie immer [0] Keine
auswählen.
[0] * None
[1] Analog
Input 53
[2] Analog
Input 54
[3] Digital input
18
[4] Digital input
19
[5] Digital input
32
[6] Digital input
33
1-94 ATEX ETR I-Grenze Gesw. red.
[0] * KTY-Sensor 1
[1] KTY-Sensor 2
[2] KTY-Sensor 3
[3] Pt1000
1-96 KTY-Sensoranschluss
Option: Funktion:
[0] * Ohne
[2] Analog-
eingang
54
Wählen Sie den zu verwendenden Thermistorsensor.
1 kΩ bei 100 °C (212 °F).
1 kΩ bei 25 °C (77 °F).
2 kΩ bei 25 °C (77 °F).
HINWEIS
Nur gültig für FC302.
Auswahl der Analogeingangsklemme 54 als
KTY-Sensoreingang. Sie können Klemme 54
nicht als Thermistorquelle verwenden, wenn sie
ansonsten als Sollwert verwendet wird (siehe
Parameter 3-15 Variabler Sollwert 1 bis
Parameter 3-17 Variabler Sollwert 3).
HINWEIS
Verbindung zwischen Thermistorsensor
und Klemme 54 und 55 (GND). Siehe
Abbildung 3.15.
Range: Funktion:
0 %* [0 - 100 %]
HINWEIS
Nur gültig für FC302.
Nur angezeigt, wenn
Parameter 1-90 Thermischer Motorschutz auf
[20] ATEX ETR gesetzt ist.
Konfigurieren Sie die Reaktion für einen Betrieb innerhalb
der Ex-e-Stromgrenze.
0 %: Der Frequenzumrichter nimmt keine Änderungen vor,
sondern gibt nur Warnung 163 ATEX ETR cur.lim.warning
aus.
>0 %: Der Frequenzumrichter gibt Warnung 163 ATEX ETR I-
Grenze Warnung aus und reduziert die Motordrehzahl
entsprechend Rampe 2 (Parametergruppe 3-5* Rampe 2).
1-97 KTY-Schwellwert
Range: Funktion:
80 °C* [ -40 - 220 °C] Wählen Sie den Schwellwert des Thermis-
torsensors für den thermischen
Motorschutz aus.
1-98 ATEX ETR interpol. f-Pkt.
Range: Funktion:
Size
related*
[ 0 - 1000.0
Hz]
HINWEIS
Nur gültig für FC302.
Nur angezeigt, wenn
Parameter 1-90 Thermischer
Motorschutz auf [20] gesetzt ist.
62 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 65

1 0 0 %
8 0 %
4 0 %
5 Hz 15 Hz 25 Hz 50 Hz
130BB909.10
Parameterbeschreibungen Programmierhandbuch
Geben Sie die vier Frequenzpunkte [Hz] vom MotorTypenschild in dieses Array ein. Tabelle 3.10 zeigt das
Beispiel der Frequenz-/Strompunkte.
Verwenden Sie die 4 Stromwerte [A] vom MotorTypenschild. Berechnen Sie die Werte des
Motornennstroms in Prozent, Im/I
x 100 [%], und geben
m,n
Sie diese in dieses Array ein.
HINWEIS
Sie müssen alle Frequenz-/Stromgrenzenpunkte vom
Motor-Typenschild oder Motordatenblatt programmieren.
Zusammen mit Parameter 1-98 ATEX ETR interpol. f-Pkt.
ergibt sich aus diesen eine Tabelle (f [Hz],I [%]).
3 3
HINWEIS
Sie müssen alle Frequenz-/Stromgrenzenpunkte vom
Motor-Typenschild oder Motordatenblatt programmieren.
3.2.18 PM-Einstellungen
Wenn [2] Std. PM, non salient in Parameter 1-10 Motorart
ausgewählt ist, geben Sie die Motorparameter manuell in
der folgenden Reihenfolge ein:
1. Parameter 1-24 Motornennstrom.
2. Parameter 1-26 Dauer-Nenndrehmoment.
Abbildung 3.18 Beispiel für thermische Begrenzungskurve
ATEX ETR
x-Achse: fm [Hz]
y-Achse: Im/I
Parameter 1-98 ATEX ETR interpol.
f-Pkt.
[0]=5 Hz [0]=40%
[1]=15 Hz [1]=80%
[2]=25 Hz [2]=100%
[3]=50 Hz [3]=100%
Tabelle 3.10 Interpolationspunkte
x 100 [%]
m,n
Parameter 1-99 ATEX ETR
interpol. I-Pkt.
Alle Betriebspunkte unterhalb der Kurve sind kontinuierlich
zulässig. Die Werte oberhalb der Linie werden jedoch nur
für begrenzte Zeit als Funktion der Überlast berechnet. Bei
einem Maschinenstrom größer als 1,5 x Nennspannung
erfolgt sofort eine Abschaltung.
1-99 ATEX ETR interpol. I-Pkt.
Nur angezeigt, wenn Parameter 1-90 Thermischer Motorschutz auf
[20] oder [21] gesetzt ist.
Range: Funktion:
Size related* [0 - 100 %]
HINWEIS
Nur gültig für FC302.
Definition der Kurve der thermischen
Begrenzung. Ein Beispiel finden Sie in
Parameter 1-98 ATEX ETR interpol. fPkt..
3. Parameter 1-25 Motornenndrehzahl.
4. Parameter 1-39 Motorpolzahl.
5. Parameter 1-30 Statorwiderstand (Rs).
6. Parameter 1-37 Indukt. D-Achse (Ld).
7. Parameter 1-40 Gegen-EMK bei 1000 UPM.
Für PM-Motoren wurden die folgenden Parameter
hinzugefügt:
1. Parameter 1-41 Geber-Offset.
2. Parameter 1-07 Motor Angle Offset Adjust.
3. Parameter 1-14 Dämpfungsfaktor.
4. Parameter 1-47 Momentkalibrierung niedr. Drehzahl.
5. Parameter 1-58 Fangschaltung Testpulse Strom.
6. Parameter 1-59 Fangschaltung Testpulse Frequenz.
7. Parameter 1-70 Startfunktion.
8. Parameter 30-20 Startmoment hoch.
9. Parameter 30-21 High Starting Torque Current [%].
HINWEIS
Sie müssen die Standardparameter weiterhin konfigurieren (z. B. Parameter 4-19 Max. Ausgangsfrequenz).
Anwendung Einstellungen
Anwendungen mit
niedrigem Trägheitsmoment
I
Last/IMotor
<5
Erhöhen Sie Parameter 1-17 Voltage
filter time const. um den Faktor 5 bis
10.
Reduzieren Sie
Parameter 1-14 Damping Gain
Reduzieren Sie Parameter 1-66 Min.
Current at Low Speed (< 100 %)
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 63
Page 66

Parameterbeschreibungen
Anwendung Einstellungen
Anwendungen mit
niedrigem Trägheitsmoment
50>I
Anwendungen mit hohem
33
Trägheitsmoment
I
Last/IMotor
Hohe Last bei niedriger
Drehzahl
<30 % (Nenndrehzahl)
Tabelle 3.11 Empfehlungen für VVC+-Anwendungen
Last/IMotor
> 50
>5
Behalten Sie berechnete Werte bei.
Erhöhen Sie Parameter 1-14 Damping
Gain, Parameter 1-15 Filter niedrige
Drehzahl und Parameter 1-16 Filter
hohe Drehzahl
Erhöhen Sie Parameter 1-17 Voltage
filter time const..
Erhöhen Sie Parameter 1-66 Min.
Current at Low Speed (>100 % über
längere Zeit kann den Motor
überhitzen).
VLT® AutomationDrive FC 301/302
Wenn der Motor bei einer bestimmten Drehzahl zu
schwingen beginnt, erhöhen Sie Parameter 1-14 Damping
Gain. Erhöhen Sie den Wert in kleinen Schritten. Abhängig
vom Motor kann ein guter Wert für diesen Parameter 10 %
oder 100 % höher als der Standardwert sein.
Stellen Sie das Startmoment in Parameter 1-66 Min. Current
at Low Speed ein. 100 % ist Nenndrehmoment als
Startmoment.
Anwendung Einstellungen
Anwendungen mit
niedrigem Trägheitsmoment
Anwendungen mit hohem
Trägheitsmoment
Hohe Last bei niedriger
Drehzahl
Behalten Sie berechnete Werte bei.
Parameter 1-66 Min. Strom bei niedr.
Drz..
Erhöhen Sie die Drehzahl je nach
Anwendung auf einen Wert
zwischen Standard- und
Maximalwert.
Stellen Sie die Rampenzeiten
entsprechend der Anwendung ein.
Eine zu schnelle Rampe auf
verursacht Überstrom bzw. ein zu
hohes Drehmoment. Eine zu
schnelle Rampe ab führt zu einer
Überspannungsabschaltung.
Parameter 1-66 Min. Strom bei niedr.
Drz..
Erhöhen Sie die Drehzahl je nach
Anwendung auf einen Wert
zwischen Standard- und
Maximalwert.
Tabelle 3.12 Empfehlungen für Flux-Anwendungen
Stellen Sie das Startmoment in Parameter 1-66 Min. Strom
bei niedr. Drz. ein. 100 % ist Nenndrehmoment als
Startmoment.
64 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 67

Parameterbeschreibungen Programmierhandbuch
3.3 Parameter: 2-** Bremsfunktionen
3.3.1 2-0* DC Halt/DC Bremse
Parametergruppe zur Konfiguration der DC-Bremse- und
DC-Haltefunktionen.
2-00 DC-Haltestrom
Range: Funktion:
50%* [ 0 -
2-01 DC-Bremsstrom
Range: Funktion:
50%* [ 0 -
HINWEIS
160
Der maximale Wert hängt vom
%]
Motornennstrom ab.
Vermeiden Sie Anlegen eines Stroms von
100 % über zu lange Zeit. Es kann den Motor
beschädigen.
Geringe Werte der DC-Halten-Funktion führen
zu größeren Strömen als erwartet, mit
höheren Motorleistungsgrößen. Dieser Fehler
verstärkt sich bei steigender Motorleistung.
Der angegebene Haltestrom bezieht sich in Prozent
auf den in Parameter 1-24 Motornennstrom festgelegten Motornennstrom I
entsprechen I
Dieser Parameter hält die Motorfunktion
(Haltemoment) oder wärmt den Motor vor.
Dieser Parameter ist aktiv, wenn DC-Halten in
Parameter 1-72 Startfunktion [0] oder
Parameter 1-80 Funktion bei Stopp [1] ausgewählt
wurde.
M,N
.
. 100 % DC-Haltestrom
M,N
HINWEIS
1000
Der maximale Wert hängt vom
%]
Motornennstrom ab.
Vermeiden Sie Anlegen eines Stroms von
100 % über zu lange Zeit. Es kann den
Motor beschädigen.
2-02 DC Braking Time
Range: Funktion:
10 s* [0 - 60 s] Legen Sie die Dauer des DC-Bremsstroms in
Parameter 2-01 DC Brake Current fest, sobald
dieser aktiviert wurde.
2-03 DC-Bremse Ein [UPM]
Range: Funktion:
Size related* [ 0 - par.
4-13 RPM]
Aktiviert und definiert die Einsatzdrehzahl für den DC-Bremsstrom
aus Parameter 2-01 DC-Bremsstrom
nach einem Stoppsignal.
2-04 DC-Bremse Ein [Hz]
Range: Funktion:
Size
related*
[ 0 - par.
4-14 Hz]
HINWEIS
Parameter 2-04 DC-Bremse Ein [Hz]
hat keine Auswirkungen, wenn
Parameter 1-10 Motor Construction
= [1] PM (Oberfl. mon.).
Aktiviert und definiert die Einsatzdrehzahl für den DC-Bremsstrom aus
Parameter 2-01 DC-Bremsstrom nach
einem Stoppsignal.
2-05 Maximaler Sollwert
Range: Funktion:
Size
related*
[ par. 3-02 -
999999.999
ReferenceFeedbackUnit]
Dies ist ein Zugriffsparameter zu
Parameter 3-03 Maximaler Sollwert
für ältere Produkte. Der maximale
Sollwert bestimmt den Höchstwert
aus der Summe aller Sollwerte. Die
maximale Sollwerteinheit entspricht
der Optionsauswahl in
Parameter 1-00 Regelverfahren und
der Einheit in Parameter 3-01 Soll-/
Istwerteinheit.
3 3
Der angegebene Strom bezieht sich in Prozent auf
den in Parameter 1-24 Motornennstrom festgelegten
Motornennstrom I
entsprechen I
Der DC-Bremsstrom wird bei einem Stoppbefehl
angewendet, wenn die Drehzahl niedriger als der in
Parameter 2-03 DC-Bremse Ein [UPM] eingestellte
Grenzwert ist; wenn die Funktion DC-Bremse invers
aktiv ist oder über die serielle Kommunikationsschnittstelle aktiviert wird. Der Parkstrom ist
während der Zeitdauer aus Parameter 2-02 DC
Braking Time aktiv.
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 65
. 100 % DC-Bremsstrom
M,N
.
M,N
2-06 Parking Strom
Range: Funktion:
50 %* [ 0 -
1000 %]
Stellen Sie den Strom in Prozent des
Motornennstroms ein,
Parameter 1-24 Motornennstrom. Dieser wird
bei Aktivierung in Parameter 1-70 Startfunktion
verwendet.
2-07 Parking Zeit
Range: Funktion:
3 s* [0.1 - 60 s] Legen Sie die Dauer des Parkstroms in
Parameter 2-06 Parking Strom fest, sobald
dieser aktiviert wurde.
Page 68

Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
3.3.2 2-1* Generator. Bremsen
2-12 Brake Power Limit (kW)
Range: Funktion:
Parametergruppe zur Auswahl der dynamischen Bremsparameter. Gilt nur für Frequenzumrichter mit Bremschopper.
2-10 Bremsfunktion
33
Option: Funktion:
[0] Aus Es ist kein Bremswiderstand installiert.
[1] Bremswi-
derstand
[2] AC-
Bremse
Ein Bremswiderstand ist zur Ableitung der
überschüssigen Bremsenergie als Wärme im
System integriert. Bei angeschlossenem Bremswiderstand ist beim Bremsen (generatorischer
Betrieb) eine höhere Zwischenkreisspannung
verfügbar. Die Funktion Bremswiderstand ist nur
bei Frequenzumrichtern mit eingebauter
Bremselektronik verfügbar.
Verbessert die Bremsung ohne Verwendung eines
Bremswiderstands. Dieser Parameter steuert eine
Übermagnetisierung des Motors bei Betrieb mit
einer generatorischen Last. Mit dieser Funktion
können Sie die OVC-Funktion verbessern. Durch
Erhöhen der elektrischen Verluste im Motor kann
die OVC-Funktion das Bremsmoment erhöhen,
ohne die Überspannungsgrenze zu überschreiten.
HINWEIS
Die AC-Bremse ist weniger effizient als das
dynamische Bremsen mit Widerstand.
Die AC-Bremse ist im VVC+-Betrieb mit und
ohne Rückführung verfügbar.
verwendet und gibt daher an, wenn eine
Warnung/ein Alarm ausgegeben wird.
Zur Berechnung des Parameter 2-12 Brake
Power Limit (kW) können Sie die folgende
Formel verwenden.
P
br, avg
P
br,avg
Bremswiderstand abgeführt wird. Rbr ist
der Widerstand des Bremswiderstands. t
ist die aktive Bremsdauer innerhalb der
Zeitdauer von 120 s, Tbr.
Ubr ist die Gleichspannung, wenn der
Bremswiderstand aktiv ist. Dies ist von der
Einheit folgendermaßen abhängig:
T2 Einheiten: 390 V
T4 Einheiten: 810 V
T5 Einheiten: 810 V
T6 Einheiten: 943 V/1099 V für die
Baugrößen D bis F
T7 Einheiten: 1099 V
2
U
V × tbrs
br
W =
RbrΩ × Tbrs
ist die Durchschnittsleistung, die im
br
HINWEIS
Unabhängig davon, ob R
unbekannt ist oder Tbr von 120 s
abweicht, der praktische Ansatz ist
der Betrieb der Bremsanwendung;
lesen Sie
Parameter 16-33 Bremsleist/2 min aus
br
und geben Sie diesen Wert
2-11 Brake Resistor (ohm)
+ 20 % in Parameter 2-12 Bremswi-
derstand Leistung (kW).
Range: Funktion:
Size
related*
2-12 Brake Power Limit (kW)
Range: Funktion:
Size
related*
[ 5.00 -
65535.00
Ohm]
[ 0.001 -
2000.000
kW]
Stellen Sie den Wert des Bremswiderstand
in Ω ein. Dieser Wert dient zur Leistungsüberwachung des Bremswiderstands
(siehe Parameter 2-13 Brake Power
Monitoring). Dieser Parameter ist nur bei
Frequenzumrichtern mit eingebauter
Bremselektronik aktiv.
Verwenden Sie diesen Parameter für
Werte ohne Dezimalstellen. Für eine
Auswahl mit zwei Dezimalstellen
verwenden Sie Parameter 30-81 Bremswi-
derstand (Ohm).
Parameter 2-12 Brake Power Limit (kW ) ist
die erwartete Durchschnittsleistung, die
über einen Zeitraum von 120 s im
Bremswiderstand abgeführt wird. Dieser
Wert wird als Überwachungsgrenze für
Parameter 16-33 Bremsleist/2 min
2-13 Bremswiderst. Leistungsüberwachung
Option: Funktion:
Dieser Parameter ist nur bei Frequenzumrichtern mit Bremse aktiv.
Dieser Parameter ermöglicht Leistungsüberwachung des Bremswiderstands. Die
Berechnung der Leistung erfolgt anhand
des Widerstands (Parameter 2-11 Brake
Resistor (ohm)), der Zwischenkreisspannung und der Einschaltzeit des
Widerstands.
[0] * Deaktiviert Keine Bremsleistungsüberwachung
erforderlich.
[1] Warnung Aktiviert eine Warnung am Display, wenn
die über die Einschaltzeit an den
Bremswiderstand übertragene Leistung
100 % der Überwachungsgrenze
(Parameter 2-12 Brake Power Limit (kW ))
überschreitet.
66 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 69

Parameterbeschreibungen Programmierhandbuch
2-13 Bremswiderst. Leistungsüberwachung
Option: Funktion:
Der Frequenzumrichter zeigt die Warnung
nicht mehr an, wenn die übertragene
Leistung unter 80 % der Überwachungsgrenze sinkt.
[2] Alarm Steigt die berechnete Leistung auf über
100 % der Überwachungsgrenze, so
schaltet der Frequenzumrichter ab und
zeigt einen Alarm an.
[3] Warnung/Alarm Der Frequenzumrichter gibt bei
Überschreiten der Überwachungsgrenze
eine Warnung aus und schaltet dann mit
einem Alarm ab.
[4] Warning 30s
[5] Trip 30s
[6] Warning & trip
30s
[7] Warning 60s
[8] Trip 60s
[9] Warning & trip
60s
[10] Warning 300s
[11] Trip 300s
[12] Warning & trip
300s
[13] Warning 600s
[14] Trip 600s
[15] Warning & trip
600s
Ist die Leistungsüberwachung auf [0] Deaktiviert oder [1]
Warnung eingestellt, bleibt die Bremsfunktion auch bei
Überschreiten der Überwachungsgrenze aktiv. Dies kann zu
einer thermischen Überlastung des Widerstands führen.
Zusätzlich kann eine Meldung über Relais bzw. die Digitalausgänge erfolgen. Die typische Messgenauigkeit für die
Leistungsüberwachung hängt von der Genauigkeit des
Widerstands ab (min. ±20 %).
2-15 Bremswiderstand Test
Option: Funktion:
Parameter 2-15 Bremswiderstand Test ist nur bei
Frequenzumrichtern mit eingebauter
Bremselektronik aktiv.
Funktion zum Überprüfen und Überwachen des
Bremswiderstandes. Dieser Parameter definiert,
welche Funktion beim Erkennen eines Fehlers
am Bremswiderstand ausgeführt werden soll.
2-15 Bremswiderstand Test
Option: Funktion:
HINWEIS
Die Funktion zum Trennen des Bremswiderstands wird bei der Netz-Einschaltung
getestet. Der Test „Brems-IGBT“ erfolgt
jedoch nur, wenn kein Bremsen
stattfindet. Bei einer Warnung oder
Abschaltung wird die Bremsfunktion
getrennt.
Die Testsequenz lautet wie folgt:
1. Der Überlagerungsscheitelwert im DCZwischenkreis wird ohne Bremsen 300
ms lang gemessen.
2. Der Überlagerungsscheitelwert im DCZwischenkreis wird 300 ms lang mit
eingeschalteter Bremse gemessen.
3. Wenn der Überlagerungsscheitelwert
im DC-Zwischenkreis beim Bremsen
niedriger als der Überlagerungsscheitelwert im DC-Zwischenkreis vor dem
Bremsen +1 % ist: Der Bremswiders-
tandstest ist fehlgeschlagen und zeigt
eine Warnung oder einen Alarm an.
4. Wenn der Überlagerungsscheitelwert
im DC-Zwischenkreis beim Bremsen
höher ist als der Überlagerungsscheitelwert im DC-Zwischenkreis vor dem
Bremsen +1 %: Bremswiderstandstest ist
in Ordnung.
[0]*Deaktiviert Überwacht den Bremswiderstand und die
Brems-IGBT auf einen Kurzschluss während des
Betriebs. Bei einem Kurzschluss wird Warnung
25 Bremswiderst. angezeigt.
[1] Warnung Überwacht den Bremswiderstand und die
Brems-IGBT auf einen Kurzschluss und führt bei
der Netz-Einschaltung einen Test auf eine
Trennung des Bremswiderstands durch.
[2] Alarm Führt eine Überwachung auf einen Kurzschluss
oder eine Trennung des Bremswiderstands oder
einen Kurzschluss der Brems-IGBT durch. Bei
einem Fehler schaltet der Frequenzumrichter ab
und zeigt einen Alarm an (Abschaltblockierung).
[3] Stopp und
Absch.
Führt eine Überwachung auf einen Kurzschluss
oder eine Trennung des Bremswiderstands oder
einen Kurzschluss der Brems-IGBT durch. Wenn
ein Fehler auftritt, wird der Frequenzumrichter
auf Motorfreilauf heruntergefahren und schaltet
anschließend ab. Es wird ein Alarm mit
Abschaltblockierung angezeigt (z. B. Warnung
25, 27 oder 28).
3 3
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 67
Page 70

Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
2-15 Bremswiderstand Test
Option: Funktion:
[4] AC-Bremse Führt eine Überwachung auf einen Kurzschluss
oder eine Trennung des Bremswiderstands oder
einen Kurzschluss der Brems-IGBT durch. Wenn
33
[5] Abschaltb-
lockierung
ein Fehler auftritt, führt der Frequenzumrichter
eine geregelte Rampe ab aus. Diese Option ist
nur für FC302 verfügbar.
2-18 Bremswiderstand Testbedingung
Range: Funktion:
[0] * Bei Netz-Ein Der Bremswiderstandstest wird bei
einer Netz-Einschaltung durchgeführt.
[1] Nach Motorfreilauf Der Bremswiderstandstest wird nach
einem Motorfreilauf durchgeführt.
2-19 Überspannungsverstärkung
Range: Funktion:
100 %* [10 - 200 %] Wählen Sie Überspannungsverstärkung.
HINWEIS
Beheben Sie eine Warnung, die in Zusammenhang mit
[0] Deaktiviert oder [1] Warnung auftritt, indem Sie die
Netzversorgung aus- und wieder einschalten. Zuvor
müssen Sie den Fehler beheben. Bei [0] Deaktiviert oder
[1] Warnung läuft der Frequenzumrichter selbst bei
einem festgestellten Fehler weiter.
2-16 AC-Bremse max. Strom
Range: Funktion:
100 %* [ 0 - 1000.0 %] Geben Sie den max. zulässigen
Motorstrom während der ACBremsfunktion ein. Zu hohe Ströme
können die Motorwicklung überhitzen.
HINWEIS
Parameter 2-16 AC-Bremse max. Strom hat keine Auswir-
kungen, wenn Parameter 1-10 Motor Construction=[1] PM,
Vollpol.
2-17 Überspannungssteuerung
Option: Funktion:
Mit der Überspannungssteuerung wird das
Risiko reduziert, dass der Frequenzumrichter
aufgrund einer Überspannung im
Zwischenkreis durch generatorische Leistung
von der Last abschaltet.
[0] * Deaktiviert Keine Überspannungssteuerung erforderlich.
[1] Aktiv (ohne
Stopp)
[2] Aktiviert Aktiviert Überspannungssteuerung.
Bei Auswahl von Aktiv (ohne Stopp) ist die
Überspannungssteuerung wirksam, sofern
kein Stoppsignal zum Stoppen des Frequenzumrichters verwendet wird.
3.3.3 2-2* Mech. Bremse
Parameter zum Steuern des Betriebs eines elektromagnetischen (mechanischen) Bremse, wie sie in der Regel für
Hubanwendungen benötigt wird.
Zum Steuern einer mechanische Bremse ist ein Relaisausgang (Relais 01 oder Relais 02) oder ein programmierter
Digitalausgang (Klemme 27 oder 29) erforderlich. In
Situationen, in denen der Frequenzumrichter nicht in der
Lage ist, den Motor anzuhalten (aufgrund einer
übermäßigen Last), muss dieser Ausgang in der Regel
geschlossen sein. Wählen Sie für Anwendungen mit einer
elektromagnetischen Bremse unter Parameter 5-40 Relais-
funktion, Parameter 5-30 Klemme 27 Digitalausgang oder
Parameter 5-31 Klemme 29 Digitalausgang die Option [32]
Mechanische Bremse aus. Bei Auswahl von [32] Mechanische
Bremse ist die mechanische Bremse beim Anlaufen
geschlossen, bis der Ausgangsstrom über dem unter
Parameter 2-20 Bremse öffnen bei Motorstrom ausgewählten
Niveau liegt. Beim Stoppen wird die mechanische Bremse
aktiviert, wenn die Drehzahl unter den unter
Parameter 2-21 Bremse schliessen bei Motordrehzahl festgelegten Wert fällt. Tritt am Frequenzumrichter ein
Alarmzustand, ein Überstrom oder eine Überspannung auf,
so wird die mechanische Bremse sofort geschlossen. Dies
gilt auch bei der Funktion Safe Torque Off.
HINWEIS
Die Schutzmodus- und Abschaltverzögerungsfunktionen
(Parameter 14-25 Drehmom.grenze Verzögerungszeit und
Parameter 14-26 WR-Fehler Abschaltverzögerung) können
die Aktivierung der mechanischen Bremse in einem
Alarmzustand möglicherweise verzögern. Bei Hubanwendungen müssen Sie diese Funktionen daher deaktivieren.
HINWEIS
Aktivieren Sie die Überspannungssteuerung nicht bei
Hubanwendungen.
68 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 71

Parameterbeschreibungen Programmierhandbuch
3 3
Abbildung 3.19 Mechanische Bremsung
2-20 Bremse öffnen bei Motorstrom
Range: Funktion:
Size
related*
[ 0 par.
16-37 A]
Stellen Sie den Motorstrom auf ein Lösen
der mechanischen Bremse bei einem
Startzustand ein. Der Standardwert besteht
aus dem Maximalstrom, den der Wechselrichter für die jeweilige Leistungsgröße
bereitstellen kann. Die Obergrenze wird
unter Parameter 16-37 Max.-WR-Strom
angegeben.
HINWEIS
Wenn der Steuerausgang der
mechanischen Bremse ausgewählt,
aber keine mechanische Bremse
angeschlossen ist, funktioniert diese
Funktion aufgrund eines zu
niedrigen Motorstroms nicht mit der
Werkseinstellung.
2-21 Bremse schliessen bei Motordrehzahl
Range: Funktion:
Size
related*
[ 0 - par.
4-53 RPM]
Stellen Sie die Motordrehzahl auf eine
Aktivierung der mechanischen Bremse
bei einem Stoppzustand ein. Die obere
Drehzahlgrenze wird in
Parameter 4-53 Warnung Drehz. hoch
festgelegt.
2-22 Bremse schließen bei Motorfrequenz
Range: Funktion:
Size related* [ 0 - 5000.0
Hz]
Definiert, bei welcher
Motorfrequenz nach einem
Stoppsignal die mechanische
Bremse wieder aktiviert wird.
2-23 Mech. Bremse Verzögerungszeit
Range: Funktion:
0 s* [0 - 5s]Geben Sie die Bremsverzögerungszeit des
Motorfreilaufs nach der Rampe-Ab Zeit ein. Die
Welle wird auf einer Drehzahl von Null mit vollem
Haltemoment gehalten. Stellen Sie sicher, dass die
mechanische Bremse die Last blockiert hat, bevor
der Motor in den Motorfreilauf geht. Siehe
Abschnitt Mechanische Bremssteuerung im Projektie-
rungshandbuch.
Stellen Sie zur Anpassung des Übergangs der Last
auf die mechanische Bremse Parameter 2-23 Mech.
Bremse Verzögerungszeit und Parameter 2-24 StoppVerzögerung ein.
Die Einstellung der Parameter zur BremsenVerzögerungszeit beeinträchtigt nicht das
Drehmoment. Der Frequenzumrichter registriert
nicht, dass die mechanische Bremse die Last hält.
Nach der Einstellung von Parameter 2-23 Mech.
Bremse Verzögerungszeit sinkt das Drehmoment
innerhalb weniger Minuten auf null. Die plötzliche
Drehmomentänderung führt zu Bewegungen und
Geräuschentwicklung.
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 69
Page 72

Mech.Bremse
Relais
Drehmoment-Sollw.
Motor-drehzahl
Vormagnetis. Drehmomen-
trampenzeit
P. 2-27
Drehmomentsollw. 2-26
Verstärkungsfaktor
P. 2-28
Bremsfreigabezeit
P. 2-25
Rampe 1 Auf
P. 3-41
Rampe 1 Ab
P. 3-42
Stoppverzögerung
P. 2-24
Bremsverzögerung
aktivieren
P. 2-23
1 2 3
130BA642.12
II
B
Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
2-24 Stopp-Verzögerung
Range: Funktion:
0 s* [0 - 5s]Legen Sie das Zeitintervall ab dem Zeitpunkt, an
dem der Motor gestoppt wird, bis zum Schließen
der Bremse fest.
33
Stellen Sie zur Anpassung des Übergangs der Last
auf die mechanische Bremse Parameter 2-23 Mech.
Bremse Verzögerungszeit und Parameter 2-24 StoppVerzögerung ein.
Dieser Parameter ist Teil der Stoppfunktion.
2-25 Bremse lüften Zeit
Range: Funktion:
0.20 s* [0 - 5 s] Dieser Wert definiert die Zeitdauer bis zum
Öffnen der mechanische Bremse. Dieser
Parameter muss als Timeout wirken, wenn
Bremsenrückführung aktiviert ist.
können Sie die mechanische Bremse schützen insbesondere, wenn mehrere Frequenzumrichter
mit derselben Welle verbunden sind.
Keine Rampe Auf, bis die Rückführung bestätigt,
•
dass die mechanische Bremse geöffnet ist.
Verbesserte Lastregelung beim Stopp. Wenn der
•
Wert von Parameter 2-23 Mech. Bremse Verzögerungszeit zu niedrig eingestellt ist, wird Warnung
22 Sollw. Mechanische Bremse aktiviert, und eine
Rampe Ab des Drehmoments ist nicht zulässig.
Sie können den Übergang bei der Übertragung
•
der Last von der Bremse an den Motor konfigurieren. Zur Minimierung der Bewegung können
Sie Parameter 2-28 Verstärkungsfaktor erhöhen.
Ändern Sie für einen reibungslosen Übergang
während des Vorgangs die Einstellung von
Drehzahlregelung zu Positionsregelung.
- Stellen Sie Parameter 2-28 Verstärkungs-
3.3.4 Mechanische Bremse in Hub- und
Vertikalförderanwendungen
Die Regelung der mechanischen Bremse in Hub- und
Vertikalförderanwendungen unterstützt die folgenden
Funktionen:
2 Kanäle für den Istwert der mechanischen
•
Bremse für einen zusätzlichen Schutz gegen
faktor auf 0 ein, um die
Positionssteuerung während
Parameter 2-02 DC-Bremszeit zu
aktivieren. Hierdurch aktivieren Sie die
PID-Parameter Parameter 2-30 Position P
Start Proportional Gain bis
Parameter 2-33 Speed PID Start Lowpass
Filter Time für die Positionssteuerung.
unerwartetes Verhalten aufgrund eines
Kabelbruchs.
Überwachung der Rückführung der mechanischen
•
Bremse über den gesamten Zyklus. Hiermit
Abbildung 3.20 Sequenz zum Lüften der Bremse bei mechanischer Bremsansteuerung für Vertikalförder- und Hubanwendungen
70 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 73

Parameterbeschreibungen Programmierhandbuch
Parameter 2-26 Drehmomentsollw. bis Parameter 2-33 Speed
PID Start Lowpass Filter Time sind nur für die mechanische
Bremssteuerung für Hubanwendungen (Flux mit MotorIstwert) verfügbar.
2-26 Drehmomentsollw.
Range: Funktion:
0 %* [ -300
300 %]
Der Wert definiert das an der geschlossenen
mechanischen Bremse anliegende Drehmoment
vor dem Lösen.
Das Drehmoment/die Last an einem Kran ist
positiv und liegt zwischen 10 und 160 %. Stellen
Sie zum Erreichen eines optimalen Startpunkts
Parameter 2-26 Drehmomentsollw. auf ca. 70 % ein.
Drehmoment/Last an einem Aufzug können
positiv oder negativ sein und zwischen -160 %
und 160 % liegen. Stellen Sie zum Erreichen eines
optimalen Startpunkts Parameter 2-26 Drehmo-
mentsollw. auf 0 % ein.
Je größer die Drehmomentabweichung ist
(Parameter 2-26 Drehmomentsollw. gegenüber Ist-
Drehmoment), desto mehr Bewegung tritt beim
Lastübergang auf.
2-27 Drehmoment Rampenzeit
Range: Funktion:
0.2 s* [0 - 5 s] Der Wert definiert die Dauer der Drehmomentrampe im Rechtslauf. Der Wert 0
ermöglicht eine sehr schnelle Magnetisierung
im Flux-Steuerverfahren.
2-28 Verstärkungsfaktor
Range: Funktion:
1* [0 -
Nur bei Flux mit Rückführung aktiv. Die Funktion
4 ]
gewährleistet einen reibungslosen Übergang vom
Drehmomentregelungsmodus zum Drehzahlregelungsmodus, wenn die Last von der Bremse an den
Motor übertragen wird.
Erhöhen Sie den Faktor zur Minimierung der
Bewegungen. Aktivieren Sie die Funktion Erweiterte
mechanische Bremse (Parametergruppe 2-3* Erw.
mechanische Bremse), indem Sie
Parameter 2-28 Verstärkungsfaktor auf 0 einstellen.
3.3.5 2-3* Erw. Mechanische Bremse
Sie können Parameter 2-30 Position P Start Proportional Gain
bis Parameter 2-33 Speed PID Start Lowpass Filter Time für
einen sehr sanften Übergang von der Drehzahlregelung zur
Positionssteuerung während Parameter 2-25 Bremse lüften
Zeit - der Zeitraum, in der die Last von der mechanischen
Bremse an den Frequenzumrichter übertragen wird.
Parameter 2-30 Position P Start Proportional Gain bis
Parameter 2-33 Speed PID Start Lowpass Filter Time sind
aktiviert, wenn Parameter 2-28 Verstärkungsfaktor auf 0
eingestellt ist. Nähere Informationen finden Sie unter
Abbildung 3.20.
2-30 Position P Start Proportional Gain
Range: Funktion:
0.0000* [0.0000 - 1.0000 ]
2-31 Speed PID Start Proportional Gain
Range: Funktion:
0.0150* [0.0000 - 1.0000 ]
2-32 Speed PID Start Integral Time
Range: Funktion:
200.0 ms* [1.0 - 20000.0 ms]
2-33 Speed PID Start Lowpass Filter Time
Range: Funktion:
10.0 ms* [0.1 - 100.0 ms]
2-34 Zero Speed Position P Proportional Gain
Range: Funktion:
0.0000* [0.0000 -
1.0000 ]
HINWEIS
Dieser Parameter ist nur mit
Softwareversion 48.XX
verfügbar.
Eingabe der Proportionalverstärkung
für die Positionsregelung bei
Stillstand im Drehzahlmodus.
3 3
2-29 Torque Ramp Down Time
Range: Funktion:
0 s* [0 - 5 s] Drehmoment Rampe-Ab-Zeit.
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 71
Page 74

Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
3.4 Parameter: 3-** Sollwert/Rampen
Parameter zum Einstellen der Sollwertverarbeitung, von
Grenzwerten und Bereichen und zur Konfiguration der
Reaktion des Frequenzumrichters auf Änderungen.
33
3.4.1 3-0* Sollwertgrenzen
3-00 Sollwertbereich
Option: Funktion:
Wählen Sie den Bereich für das Sollwertsignal und
für das Istwertsignal aus. Die Signalwerte können nur
positiv oder positiv und negativ sein. Der minimale
Grenzwert kann einen negativen Wert besitzen, es
sei denn unter Parameter 1-00 Regelverfahren wurde
[1] Mit Drehgeber oder [3] PID-Prozess ausgewählt.
[0] Min.
bis
Max.
[1] -Max.
bis +
Max.
3-01 Soll-/Istwerteinheit
Option: Funktion:
[0] Ohne
[1] %
[2] U/min [UPM]
[3] Hz
[4] Nm
[5] PPM
[10] l/min
[12] PULSE/s
[20] l/s
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
Wählen Sie den Bereich für das Sollwertsignal und
für das Istwertsignal aus. Die Signalwerte können nur
positiv oder positiv und negativ sein. Der minimale
Grenzwert kann einen negativen Wert besitzen, es
sei denn unter Parameter 1-00 Regelverfahren wurde
[1] Mit Drehgeber oder [3] PID-Prozess ausgewählt.
Für sowohl positive als auch negative Werte (beide
Laufrichtungen, relativ zur Parameter 4-10 Motor
Drehrichtung).
Definiert die technische Einheit des PIDProzessreglers für die Anzeige des Soll-/
Istwertes. Parameter 1-00 Regelverfahren
muss [3] Prozess oder [8] Erweiterte PID-
Regelung sein.
3-01 Soll-/Istwerteinheit
Option: Funktion:
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m wg
[80] kW
[120] GPM
[121] Gal/s
[122] gal/min
[123] gal/h
[124] cfm
[125] Fuß³/s
[126] Fuß³/min
[127] Fuß³/h
[130] lb/s
[131] lb/min
[132] lb/h
[140] Fuß/s
[141] Fuß/min
[145] ft
[150] lb ft
[160] °F
[170] psi
[171] lb/in²
[172] inch wg
[173] ft wg
[180] PS
3-02 Minimaler Sollwert
Range: Funktion:
Size
related*
[ -999999.999 par. 3-03
ReferenceFeedbackUnit]
Zur Eingabe des minimalen Sollwerts.
Der minimale Sollwert bestimmt den
Mindestwert aus der Summe aller
Sollwerte.
Der minimale Sollwert ist nur aktiv,
wenn Parameter 3-00 Sollwertbereich
auf [0] Min.- Max. eingestellt ist.
Die minimale Sollwerteinheit
entspricht:
•
•
Wenn die Option [10] Synchronisierung in
Die Konfiguration von
Parameter 1-00 Regelverfahren: für [1] Mit Drehgeber,
UPM; für [2] Drehmoment,
Nm.
der unter
Parameter 3-01 Soll-/Istwerteinheit ausgewählten
Einheit.
72 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 75

Parameterbeschreibungen Programmierhandbuch
3-02 Minimaler Sollwert
Range: Funktion:
Parameter 1-00 Regelverfahren
ausgewählt ist, definiert dieser
Parameter die maximale Drehzahlabweichung, wenn der in
Parameter 3-26 Master Offset
definierte Positionsversatz
durchgeführt wird.
3-03 Maximaler Sollwert
Range: Funktion:
Size
related*
[ par. 3-02 -
999999.999
ReferenceFeedbackUnit]
Geben Sie den maximalen Sollwert
ein. Der maximale Sollwert bestimmt
den Höchstwert aus der Summe aller
Sollwerte.
Die Einheit für die maximale Sollwerteinheit entspricht:
Die in
•
Parameter 1-00 Regelverfahren ausgewählte
Konfiguration: Für [1] Mit
Drehgeber, UPM; für [2]
Drehmoment, Nm.
der unter
•
Parameter 3-00 Sollwertbereich ausgewählten
Einheit.
Wenn [9] Positionierung in
Parameter 1-00 Regelverfahren
ausgewählt wird, definiert dieser
Parameter die Standarddrehzahl für
die Positionierung.
3-04 Reference Function
Option: Funktion:
[0] Sum Zur Addition von externen und Festsollwert-
quellen.
[1] External/
Preset
Zur Auswahl der externen oder der FestSollwertquelle.
Dient zum Wechsel zwischen externem
Sollwert und Festsollwert per Befehl oder
Digitaleingang.
3-05 On Reference Window
Range: Funktion:
Size
related*
[0 - 999999.999
ReferenceFeedbackUnit]
HINWEIS
Dieser Parameter ist nur mit
Softwareversion 48.XX
verfügbar.
3-05 On Reference Window
Range: Funktion:
Öffnen Sie das Toleranzfenster für
den In-Referenz- oder In-Ziel-Status.
Je nach in Parameter 1-00 Regelver-
fahren ausgewählter Option definiert
dieser Parameter Folgendes:
Drehzahlmodus: Drehzahl-
•
fenster für In-ReferenzStatus.
Drehmomentmodus:
•
Drehmomentfenster für InReferenz-Status.
Positionsmodus: Drehzahl-
•
fenster für In-Ziel-Status.
Nähere Angaben finden Sie
auch in Parameter 3-08 On
Target Window.
3-06 Minimum Position
Range: Funktion:
-100000
CustomReadoutUnit2*
[ -2147483648
- 2147483647
CustomReadoutUnit2]
HINWEIS
Dieser Parameter ist nur
mit Softwareversion 48.XX
verfügbar.
Zur Eingabe der minimalen
Position. Dieser Parameter
definiert den Positionsbereich
im linearen Achsenmodus
(Parameter 17-76 Position Axis
Mode) und in der Positionsbegrenzungsfunktion
(Parameter 4-73 Position Limit
Function).
3-07 Maximum Position
Range: Funktion:
100000
CustomReadoutUnit2*
[ -2147483647
- 2147483647
CustomReadoutUnit2]
HINWEIS
Dieser Parameter ist nur mit
Softwareversion 48.XX
verfügbar.
Zur Eingabe der maximalen
Position. Dieser Parameter
definiert den Positionsbereich im
linearen und Achsenmodus
(Parameter 17-76 Position Axis
Mode).
Positionsbereichsgrenzen:
Linear:
•
Parameter 3-06 Minimum
Position bis
3 3
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 73
Page 76

Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
3-07 Maximum Position
3.4.2 3-1* Sollwerteinstellung
Range: Funktion:
Parameter 3-07 Maximum
Position.
Drehend: 0–
•
33
Die Positionsbegrenzungsfunktion
verwendet diesen Parameter
(Parameter 4-73 Position Limit
Function).
Parameter 3-07 Maximum
Position.
3-08 On Target Window
Range: Funktion:
5 CustomReadoutUnit2*
[0 2147483647
CustomReadoutUnit2]
HINWEIS
Dieser Parameter ist nur
mit Softwareversion 48.XX
verfügbar.
Der Frequenzumrichter
behandelt die Positionierung
als abgeschlossen und sendet
das Zielsignal, wenn die
Istposition in
Parameter 3-08 On Target
Window liegt (für die Dauer
von Parameter 3-09 On Target
Time) und die Istdrehzahl
weniger als Parameter 3-05 On
Reference Window beträgt.
Wählen Sie einen oder mehrere Festsollwerte aus. Wählen
Sie Festsollwertbit 0/1/2 [16], [17] oder [18] für die
entsprechenden Digitaleingänge in Parametergruppe 5-1*
Digitaleingänge aus.
3-10 Festsollwert
Array [8]
Bereich: 0-7
Range: Funktion:
0 %* [-100 -
100 %]
Geben Sie bis zu acht unterschiedliche
Festsollwerte (0-7) mittels Array-Programmierung
in diesen Parameter ein. Der Festsollwert wird als
Prozentwert des Werts Ref
(Parameter 3-03 Maximaler Sollwert) angegeben.
Wenn ein Sollwert
(Parameter 3-02 Minimaler Sollwert) programmiert
wurde, wird der Festsollwert als prozentualer
Anteil des gesamten Sollwertbereichs, d. h.
anhand der Differenz zwischen Sollwert
Sollwert
Wert zu Sollwert
der Verwendung von Festsollwerten FestsollwertBit 0/1/2 [16], [17] oder [18] für die
entsprechenden Digitaleingänge in Parameter-
gruppe 5-1* Digitaleingänge aus.
, berechnet. Anschließend wird der
MIN
MIN
MAX
ungleich 0
MIN
und
MAX
hinzuaddiert. Wählen Sie bei
3-09 On Target Time
Range: Funktion:
1 ms* [0 - 60000
ms]
HINWEIS
Dieser Parameter ist nur mit
Softwareversion 48.XX verfügbar.
Eingabe der Zeit zur Bewertung des InZiel-Fensters, siehe auch
Parameter 3-08 On Target Window.
Abbildung 3.21 Festsollwert
Festsollwert-Bit 2 1 0
Festsollwert 0 0 0 0
Festsollwert 1 0 0 1
Festsollwert 2 0 1 0
Festsollwert 3 0 1 1
Festsollwert 4 1 0 0
Festsollwert 5 1 0 1
Festsollwert 6 1 1 0
Festsollwert 7 1 1 1
Tabelle 3.13 Festsollwert-Bits
74 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 77

X
100
%
0-100
Z
Y
X+X*Y/100
P 3-14
130BA278.10
Parameterbeschreibungen Programmierhandbuch
3-11 Festdrehzahl Jog [Hz]
Range: Funktion:
Size
related*
[ 0 - par.
4-14 Hz]
Die Festdrehzahl JOG ist eine feste
Ausgangsdrehzahl, bei deren Aktivierung
der Frequenzumrichter in Betrieb ist.
Nähere Angaben finden Sie auch in
Parameter 3-80 Rampenzeit JOG.
3-12 Frequenzkorrektur Auf/Ab
Range: Funktion:
0 %* [0 -
Geben Sie einen (relativen) Prozentwert ein, der
100 %]
dem eigentlichen Sollwert hinzugefügt oder von
ihm abgezogen wird, um eine Drehzahlkorrektur
auf bzw. eine Drehzahlkorrektur ab zu erreichen.
Wenn Frequenzkorrektur über einen der Digitaleingänge (Parameter 5-10 Klemme 18
Digitaleingang bis Parameter 5-15 Klemme 33
Digitaleingang) ausgewählt wurde, wird der
(relative) Prozentwert dem Gesamt-Sollwert
hinzugefügt. Wenn Drehzahl ab über einen der
Digitaleingänge (Parameter 5-10 Klemme 18 Digital-
eingang bis Parameter 5-15 Klemme 33
Digitaleingang) ausgewählt wurde, wird der
(relative) Prozentwert vom Gesamt-Sollwert
abgezogen. Über die DigiPot-Funktion haben Sie
Zugriff auf weitere Funktionen. Siehe Parameter-
gruppe 3-9* Digitales Potentiometer.
3-14 Preset Relative Reference
Range: Funktion:
0 %* [-100
100 %]
Abbildung 3.22 Relativer Festsollwert
Der aktuelle Sollwert, X, wird mit dem in
Parameter 3-14 Preset Relative Reference
eingestellten Prozentwert Y erhöht oder reduziert.
Hierdurch ergibt sich der aktuelle Sollwert Z. Der
aktuelle Sollwert (X) ist die Summe der
ausgewählten Eingänge in:
Parameter 3-15 Reference 1 Source.
•
Parameter 3-16 Reference 2 Source.
•
Parameter 3-17 Reference 3 Source.
•
Parameter 8-02 Control Source.
•
3 3
3-13 Sollwertvorgabe
Option: Funktion:
Bestimmung, welche Sollwertvorgabe aktiviert
wird.
[0]*Umschalt.
Hand/Auto
[1] Fern Verwenden des Fernsollwerts im Hand-Betrieb
[2] Ort Verwenden des Ortsollwerts im Hand-Betrieb
Verwenden des Ortsollwerts im Hand-Betrieb
oder des Fernsollwerts in der Betriebsart Auto.
und in der Betriebsart Auto.
und in der Betriebsart Auto.
HINWEIS
Bei Einstellung von [2] Ort startet der
Frequenzumrichter nach einem Netz-Aus
erneut mit dieser Einstellung.
[3] Linked to
H/A MCO
Wählen Sie diese Option, um den FFACC-Faktor
in Parameter Parameter 32-66 Vorsteuerung der
Beschleunigung zu aktivieren. Durch die
Aktivierung von FFACC werden der Jitter
reduziert und die Übertragung des Bewegungsreglers zur Steuerkarte des Frequenzumrichters
beschleunigt. Dies führt zu schnelleren
Antwortzeiten für dynamische Anwendungen
und Positionsregelung. Weitere Informationen
zum FFACC finden Sie im VLT® Produkthandbuch
Bewegungssteuerung MCO 305.
Abbildung 3.23 Aktueller Sollwert
3-15 Variabler Sollwert 1
Option: Funktion:
Dieser Parameter bestimmt die Quelle
des ersten Sollwertsignals. Es ist möglich,
bis zu drei variable Sollwertsignale zu
definieren (Parameter 3-15 Variabler
Sollwert 1, Parameter 3-16 Variabler
Sollwert 2 und Parameter 3-17 Variabler
Sollwert 3), die den Gesamtsollwert
bilden. Die Summe der Sollwertsignale
legt die aktuellen Sollwerte fest.
[0] Deaktiviert
[1] Analogeingang
53
[2] Analogeingang
54
[7] Pulseingang 29
[8] Pulseingang 33
[11] Bus Sollwert Sollwert der Klemmen 68 und 69.
[20] Digitalpoti
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 75
Page 78

Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
3-15 Variabler Sollwert 1
Option: Funktion:
[21] Analogeing.
X30-11
[22] Analogeing.
33
X30-12
[29] Analogeingang
X48/2
VLT® General Purpose I/O MCB 101
VLT® General Purpose I/O MCB 101
3-16 Variabler Sollwert 2
Option: Funktion:
Dieser Parameter bestimmt die Quelle
des zweiten Sollwertsignals. Es ist
möglich, bis zu drei variable Sollwertsignale zu definieren
(Parameter 3-15 Variabler Sollwert 1,
Parameter 3-16 Variabler Sollwert 2 und
Parameter 3-17 Variabler Sollwert 3), die
den Gesamtsollwert bilden. Die Summe
der Sollwertsignale legt die aktuellen
Sollwerte fest.
[0] Deaktiviert
[1] Analogeingang
53
[2] Analogeingang
54
[7] Pulseingang 29
[8] Pulseingang 33
[11] Bus Sollwert Sollwert der Klemmen 68 und 69.
[20] Digitalpoti
[21] Analogeing.
X30-11
[22] Analogeing.
X30-12
[29] Analogeingang
X48/2
3-17 Variabler Sollwert 3
Option: Funktion:
[8] Pulseingang 33
[11] Bus Sollwert Sollwert der Klemmen 68 und 69.
[20] Digitalpoti
[21] Analogeing.
X30-11
[22] Analogeing.
X30-12
[29] Analogeingang
X48/2
3-18 Relativ. Skalierungssollw. Ressource
Option: Funktion:
HINWEIS
Diesen Parameter können Sie bei
laufendem Motor nicht einstellen.
Wählen Sie einen variablen Wert aus, der
dem (unter Parameter 3-14 Preset Relative
Reference definierten) Festwert
hinzugefügt werden soll. Die Summe des
variablen und des relativen Festsollwert
(mit Y in Abbildung 3.24 markiert) wird
mit dem aktuellen Sollwert (mit X in
Abbildung 3.24 markiert) multipliziert. Das
Produkt hieraus wird anschließend zum
eigentlichen Sollwert addiert (X+X*Y/
100), um den resultierenden eigentlichen
Sollwert anzugeben.
Abbildung 3.24 Resultierender
aktueller Sollwert
3-17 Variabler Sollwert 3
Option: Funktion:
Dieser Parameter bestimmt die Quelle
des dritten Sollwertsignals. Es ist
möglich, bis zu drei variable Sollwertsignale zu definieren
(Parameter 3-15 Variabler Sollwert 1,
Parameter 3-16 Variabler Sollwert 2 und
Parameter 3-17 Variabler Sollwert 3), die
den Gesamtsollwert bilden. Die Summe
der Sollwertsignale legt die aktuellen
Sollwerte fest.
[0] Deaktiviert
[1] Analogeingang
53
[2] Analogeingang
54
[7] Pulseingang 29
76 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
[0] * Deaktiviert
[1] Analogeingang
53
[2] Analogeingang
54
[7] Pulseingang 29
[8] Pulseingang 33
[11] Bus Sollwert Sollwert der Klemmen 68 und 69.
[20] Digitalpoti
[21] Analogeing.
X30-11
[22] Analogeing.
X30-12
[29] Analogeingang
X48/2
Page 79

Parameterbeschreibungen Programmierhandbuch
3-19 Festdrehzahl Jog [UPM]
Range: Funktion:
Size
related*
[ 0 par.
4-13
RPM]
Geben Sie einen Wert für die Festdrehzahl
n
ein, bei der es sich um eine feste
JOG
Ausgangsdrehzahl handelt. Der Frequenzumrichter läuft bei dieser Drehzahl, wenn die
Festdrehzahlfunktion aktiviert ist.
Parameter 4-13 Max. Drehzahl [UPM]
begrenzt die max. Einstellung.
Nähere Angaben finden Sie auch in
Parameter 3-80 Rampenzeit JOG.
3.4.3 3-2* Sollwerte II
3-20 Preset Target
Range: Funktion:
0 CustomReadoutUnit2*
[-2147483648 2147483647
CustomReadoutUnit2]
HINWEIS
Dieser Parameter ist nur
mit Softwareversion
48.XX verfügbar.
Array [8]
Einstellen von bis zu 8
Zielpositionen. Wählen Sie
mittels der Digitaleingänge
oder Feldbus-Steuerwort aus
den 8 voreingestellten
Positionen aus.
3-22 Master Scale Numerator
Range: Funktion:
definieren die Getriebeübersetzung zwischen
Master und Follower im Synchronisierungsmodus.
MasterUmdrehungen =
× FollowerUmdrehungen
3-23 Master Scale Denominator
Range: Funktion:
1* [-2147483648 -
2147483647 ]
HINWEIS
Dieser Parameter ist nur mit
Softwareversion 48.XX
verfügbar.
Siehe Parameter 3-22 Master Scale
Numerator.
3-24 Master Lowpass Filter Time
Range: Funktion:
20 ms* [1 - 2000 ms]
HINWEIS
Dieser Parameter ist nur mit
Softwareversion 48.XX verfügbar.
Zur Eingabe der Zeitkonstante für die
Master-Drehzahlberechnung im
Synchronisierungsmodus.
Par . 3 − 22
Par . 3 − 23
3 3
3-21 Touch Target
Range: Funktion:
0 CustomReadoutUnit2*
[-2147483648 2147483647
CustomReadoutUnit2]
HINWEIS
Dieser Parameter ist nur
mit Softwareversion 48.XX
verfügbar.
Eingabe der Zielposition im
Touch-Probe-Positionierungsmodus. Dieser Parameter
definiert den Abstand vom
Erkennungsereignis des TouchProbe-Sensors zur finalen
Zielposition in Positionseinheiten.
3-22 Master Scale Numerator
Range: Funktion:
1* [-2147483648
- 2147483647 ]
HINWEIS
Dieser Parameter ist nur mit Softwareversion 48.XX verfügbar.
Parameter 3-22 Master Scale Numerator und
Parameter 3-23 Master Scale Denominator
3-25 Master Bus Resolution
Range: Funktion:
65536* [128 - 65536 ]
HINWEIS
Dieser Parameter ist nur mit
Softwareversion 48.XX verfügbar.
Zur Eingabe der Auflösung des FeldbusMaster-Signals (Feldbussollwert 1) im
Synchronisierungsmodus.
3-26 Master Offset
Range: Funktion:
0 CustomReadoutUnit2*
[-2147483648
- 2147483647
CustomReadoutUnit2]
HINWEIS
Dieser Parameter ist nur mit
Softwareversion 48.XX
verfügbar.
Zur Eingabe des Positionsversatzes zwischen Master und
Follower im Synchronisierungsmodus. Dieser Wert wird
bei jeder Aktivierung eines
Digitaleingangs mit Option [113]
Enable Reference oder Bit 5 des
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 77
Page 80

P 3-*2
Ramp (X) Down
Time (Dec)
P 4-13
High-limit
RPM
Reference
n
s
P 4-11
Low limit
t
dec
Time
P 3-*1
Ramp (X)Up
Time (Acc)
t
acc
130BA872.10
Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
3-26 Master Offset
Range: Funktion:
Feldbus-Steuerworts zur
Follower-Position hinzugefügt.
Parameter 3-02 Minimaler
33
Sollwert definiert die maximale
Abweichung von der MasterIstdrehzahl während der
Ausführung des Versatzes.
3-27 Virtual Master Max Ref
Range: Funktion:
50.0
Hz*
[0.0 -
590.0
Hz]
HINWEIS
Dieser Parameter ist nur mit Softwareversion 48.XX verfügbar.
Zur Eingabe des maximalen Sollwerts für den
virtuellen Master. Der tatsächliche Sollwert ist
unter Verwendung der in
Parameter 3-15 Variabler Sollwert 1
ausgewählten Quelle oder des Feldbussollwerts
1 relativ zu diesem Wert. Die Drehrichtung wird
durch das Vorwärts/Rückwärts-Signal an einem
Digitaleingang oder Feldbus geregelt.
Verwenden Sie Parametergruppe 3-6* Rampe 3
zum Konfigurieren von Beschleunigung und
Verzögerung.
3.4.4 Rampen
3-4* Rampe 1
Konfigurieren Sie die folgenden Rampenparameter für jede
der vier Rampen (Parametergruppen 3-4* Rampe 1, 3-5*
Rampe 2, 3-6* Rampe 3 und 3-7* Rampe 4):
Rampentyp,
•
Rampenzeiten (Dauer von Beschleunigung und
•
Verzögerung) und
Grad der Erschütterungskompensation für S-
•
Rampen.
Beginnen Sie, indem Sie die linearen Rampenzeiten
entsprechend Abbildung 3.25 und Abbildung 3.26 einstellen.
Abbildung 3.25 Lineare Rampenzeiten
3-28 Master Offset Speed Ref
Range: Funktion:
1500
RPM*
[0 65000
RPM]
HINWEIS
Dieser Parameter ist nur mit Softwareversion 48.XX verfügbar.
Geben Sie den Drehzahlsollwert ein, um den
Master-Versatz im Synchronisierungsmodus
zu ändern. Um die Kompatibilität mit den
Softwareversionen 48.01 und 48.10 zu
gewährleisten, ist dieser Parameter nur aktiv,
wenn Parameter 3-02 Minimaler Sollwert auf
0 eingestellt ist.
Wenn S-Rampen ausgewählt wurden, stellen Sie den
erforderlichen Grad für die nicht-lineare Kompensation von
Erschütterungen ein. Stellen Sie diese Erschütterungskompensation ein, indem Sie das Verhältnis von Rampe-aufund Rampe-ab-Zeiten definieren, bei denen
Beschleunigung und Verzögerung variabel sind (d. h.
zunehmend oder abnehmend). Die Beschleunigungs- und
Verzögerungseinstellungen für S-Rampen werden als
Prozentsatz der eigentlichen Rampenzeit definiert.
Abbildung 3.26 Lineare Rampenzeiten
78 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 81

Parameterbeschreibungen Programmierhandbuch
3-40 Rampentyp 1
Option: Funktion:
HINWEIS
Wenn Sie [1] S-Rampe konst.Ruck
auswählen und den Sollwert während
der Rampe ändern, können Sie die
Rampenzeit verlängern, um eine
ruckfreie Bewegung zu erzeugen. Dies
kann zu einer längeren Start- oder
Stoppzeit führen.
Möglicherweise ist eine zusätzliche
Anpassung der S-Formen oder der
Schaltinitiatoren erforderlich.
Wählen Sie den Rampentyp entsprechend
den Anforderungen an Beschleunigung/
Verzögerung aus.
Eine lineare Rampe sorgt für eine konstante
Beschleunigung bzw. Verzögerung. Eine SRampe ergibt eine nicht lineare
Beschleunigung und gleicht Rucke in der
Anwendung aus.
[0]*Linear
[1] S-Rampe
konst.Ruck
[2] S-Rampe
konst. Zeit
3-41 Rampenzeit Auf 1
Range: Funktion:
Size
related*
[ 0.01
- 3600
s]
3-42 Rampenzeit Ab 1
Range: Funktion:
Size
related*
[ 0.01
- 3600
s]
Beschleunigung mit geringstmöglichem Ruck.
Die S-Rampe basiert auf den unter
Parameter 3-41 Rampenzeit Auf 1 und
Parameter 3-42 Rampenzeit Ab 1 eingestellten
Werten.
Geben Sie die Rampe-Auf Zeit ein, d. h. die
Beschleunigungszeit von 0 UPM bis zur
synchronen Motordrehzahl nS. Wählen Sie die
Rampe-auf-Zeit so, dass der Ausgangsstrom
die in Parameter 4-18 Stromgrenze festgelegte
Stromgrenze während des Beschleunigens
nicht überschreitet. Der Wert 0,00 entspricht
im Drehzahlmodus 0,01 s. Beachten Sie auch
die Hinweise zur Rampe-Ab-Zeit unter
Parameter 3-42 Rampenzeit Ab 1.
Par . 3 − 41 =
Geben Sie die Rampe-Ab Zeit ein, d. h. die
Verzögerungszeit von der synchronen
Motordrehzahl ns bis zu 0 UPM. Wählen Sie
eine Rampe-Ab Zeit, die bei generatorischem
Motorbetrieb nicht zu einer Überspannung im
Wechselrichter führt, und so, dass der
erzeugte Strom die unter
t
s xns UPM
Beschl.
Sollw. UPM
3-42 Rampenzeit Ab 1
Range: Funktion:
Parameter 4-18 Stromgrenze eingestellte
Stromgrenze nicht überschreitet. Der Wert
0,00 entspricht im Drehzahlmodus 0,01 s.
Beachten Sie die Rampe-Auf Zeit unter
Parameter 3-41 Rampenzeit Auf 1.
t
s xns UPM
Par . 3 − 42 =
dec
Sollw. UPM
3-45 SS-Form Anfang (Rampe Auf 1)
Range: Funktion:
50 %* [ 1 -
99 %]
Zur Eingabe des Verhältnisses der gesamten
Rampe-Auf-Zeit (Parameter 3-41 Rampenzeit Auf
1), in der sich das Beschleunigungsmoment
erhöht. Ein hoher Prozentsatz minimiert
ruckartige Drehmomentänderungen in der
Anwendung, da hierbei der Erschütterungsausgleich höher ist.
3-46 S-Form Ende (Rampe Auf 1)
Range: Funktion:
50 %* [ 1 -
99 %]
Zur Eingabe des Verhältnisses der gesamten
Rampe-Auf-Zeit (Parameter 3-41 Rampenzeit Auf
1), in der sich das Beschleunigungsmoment
reduziert. Ein hoher Prozentsatz minimiert
ruckartige Drehmomentänderungen in der
Anwendung, da hierbei der Erschütterungsausgleich höher ist.
3-47 S-Form Anfang (Rampe Ab 1)
Range: Funktion:
50 %* [ 1 -
99 %]
Zur Eingabe des Verhältnisses der gesamten
Rampe-Ab-Zeit (Parameter 3-42 Rampenzeit Ab
1), in der sich das Verzögerungsdrehmoment
erhöht. Ein hoher Prozentsatz minimiert
ruckartige Drehmomentänderungen in der
Anwendung, da hierbei der Erschütterungsausgleich höher ist.
3-48 S-Form Ende (Rampe Ab 1)
Range: Funktion:
50 %* [ 1 -
99 %]
Zur Eingabe des Verhältnisses der gesamten
Rampe-Ab-Zeit (Parameter 3-42 Rampenzeit Ab
1), in der sich das Verzögerungsdrehmoment
reduziert. Ein hoher Prozentsatz minimiert
ruckartige Drehmomentänderungen in der
Anwendung, da hierbei der Erschütterungsausgleich höher ist.
3 3
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 79
Page 82

Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
3.4.5 3-5* Rampe 2
3-52 Rampenzeit Ab 2
Range: Funktion:
Zur Auswahl der Rampenparameter siehe Parametergruppe
3-4* Rampe 1.
3-50 Rampentyp 2
33
Option: Funktion:
Wählen Sie den Rampentyp entsprechend
den Anforderungen an Beschleunigung/
Verzögerung aus. Eine lineare Rampe sorgt
für eine konstante Beschleunigung bzw.
Verzögerung. Eine S-Rampe ergibt eine nicht
lineare Beschleunigung und gleicht Rucke in
der Anwendung aus.
[0]*Linear
[1] S-Rampe
konst.Ruck
[2] S-Rampe
konst. Zeit
Beschleunigung mit geringstmöglichem Ruck.
Die S-Rampe basiert auf den unter
Parameter 3-51 Rampenzeit Auf 2 und
Parameter 3-52 Rampenzeit Ab 2 eingestellten
Werten.
3-55 S-Form Anfang (Rampe Auf 2)
Range: Funktion:
50 %* [ 1 -
99 %]
3-56 S-Form Ende (Rampe Auf 2)
Range: Funktion:
50 %* [ 1 -
99 %]
HINWEIS
Wenn Sie [1] S-Rampe konst.Ruck auswählen und den
Sollwert während der Rampe ändern, können Sie die
Rampenzeit verlängern, um eine ruckfreie Bewegung zu
erzeugen. Dies kann zu einer längeren Start- oder
Stromgrenze nicht überschreitet. Der Wert
0,00 entspricht im Drehzahlmodus 0,01 s.
Beachten Sie die Rampe-Auf Zeit unter
Parameter 3-51 Rampenzeit Auf 2.
t
s xns UPM
Par . 3 − 52 =
Zur Eingabe des Verhältnisses der gesamten
Rampe-Auf-Zeit (Parameter 3-51 Rampenzeit Auf
2), in der sich das Beschleunigungsmoment
erhöht. Ein hoher Prozentsatz minimiert
ruckartige Drehmomentänderungen in der
Anwendung, da hierbei der Erschütterungsausgleich höher ist.
Zur Eingabe des Verhältnisses der gesamten
Rampe-Auf-Zeit (Parameter 3-51 Rampenzeit Auf
2), in der sich das Beschleunigungsmoment
reduziert. Ein hoher Prozentsatz minimiert
ruckartige Drehmomentänderungen in der
Anwendung, da hierbei der Erschütterungsausgleich höher ist.
dec
Sollw. UPM
Stoppzeit führen.
Möglicherweise ist eine zusätzliche Anpassung der SFormen oder der Schaltinitiatoren erforderlich.
3-51 Rampenzeit Auf 2
Range: Funktion:
Size
related*
[ 0.01
- 3600
s]
Geben Sie die Rampe-Auf-Zeit ein, d. h. die
Beschleunigungszeit von 0 UPM bis zur
Motornenndrehzahl ns. Wählen Sie die
Rampe-auf-Zeit so, dass der Ausgangsstrom
die in Parameter 4-18 Stromgrenze festgelegte
Stromgrenze während des Beschleunigens
nicht überschreitet. Der Wert 0,00 entspricht
im Drehzahlmodus 0,01 s. Beachten Sie auch
die Hinweise zur Rampe-Ab-Zeit unter
Parameter 3-52 Rampenzeit Ab 2.
t
s xns UPM
Par . 3 − 51 =
Beschl.
Sollw. UPM
3-52 Rampenzeit Ab 2
3-57 S-Form Anfang (Rampe Ab 2)
Range: Funktion:
50 %* [ 1 -
99 %]
Zur Eingabe des Verhältnisses der gesamten
Rampe-Ab-Zeit (Parameter 3-52 Rampenzeit Ab
2), in der sich das Verzögerungsdrehmoment
erhöht. Ein hoher Prozentsatz minimiert
ruckartige Drehmomentänderungen in der
Anwendung, da hierbei der Erschütterungsausgleich höher ist.
3-58 S-Form Ende (Rampe Ab 2)
Range: Funktion:
50 %* [ 1 -
99 %]
Zur Eingabe des Verhältnisses der gesamten
Rampe-Ab-Zeit (Parameter 3-52 Rampenzeit Ab
2), in der sich das Verzögerungsdrehmoment
reduziert. Ein hoher Prozentsatz minimiert
ruckartige Drehmomentänderungen in der
Anwendung, da hierbei der Erschütterungsausgleich höher ist.
Range: Funktion:
Size
related*
[ 0.01
- 3600
s]
Geben Sie die Rampe-ab-Zeit ein, d. h. die
Verzögerungszeit von der Motornenndrehzahl
ns bis 0 UPM. Wählen Sie eine Rampe-Ab-Zeit,
die bei generatorischem Motorbetrieb nicht
zu einer Überspannung im Frequenzumrichter
führt, und so, dass der erzeugte Strom die
unter Parameter 4-18 Stromgrenze eingestellte
80 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 83

Parameterbeschreibungen Programmierhandbuch
3.4.6 3-6* Rampe 3
Zum Konfigurieren der Rampenparameter siehe Parameter-
gruppe 3-4* Rampe 1.
3-60 Rampentyp 3
Option: Funktion:
Wählen Sie den Rampentyp entsprechend
den Anforderungen für Beschleunigung und
Verzögerung aus. Eine lineare Rampe sorgt
für eine konstante Beschleunigung bzw.
Verzögerung. Eine S-Rampe ergibt eine nicht
lineare Beschleunigung und gleicht Rucke in
der Anwendung aus.
[0]*Linear
[1] S-Rampe
konst.Ruck
[2] S-Rampe
konst. Zeit
Beschleunigt mit geringstmöglichem Ruck.
Die S-Rampe basiert auf den unter
Parameter 3-61 Rampenzeit Auf 3 und
Parameter 3-62 Rampenzeit Ab 3 eingestellten
Werten.
HINWEIS
Wenn Sie [1] S-Rampe konst.Ruck auswählen und den
Sollwert während der Rampe ändern, können Sie die
Rampenzeit verlängern, um eine ruckfreie Bewegung zu
erzeugen. Dies kann zu einer längeren Start- oder
Stoppzeit führen.
Möglicherweise ist eine zusätzliche Anpassung der SFormen oder der Schaltinitiatoren erforderlich.
3-61 Rampenzeit Auf 3
Range: Funktion:
Size
related*
3-62 Rampenzeit Ab 3
Range: Funktion:
Size
related*
[ 0.01
- 3600
s]
[ 0.01
- 3600
s]
Geben Sie die Rampe-Auf-Zeit ein, d. h. die
Beschleunigungszeit von 0 UPM bis zur
Motornenndrehzahl ns. Wählen Sie die
Rampe-auf-Zeit so, dass der Ausgangsstrom
die in Parameter 4-18 Stromgrenze festgelegte
Stromgrenze während des Beschleunigens
nicht überschreitet. Der Wert 0,00 entspricht
im Drehzahlmodus 0,01 s. Beachten Sie auch
die Hinweise zur Rampe-Ab-Zeit unter
Parameter 3-62 Rampenzeit Ab 3.
Geben Sie die Rampe-ab-Zeit ein, d. h. die
Verzögerungszeit von der Motornenndrehzahl
ns bis 0 UPM. Wählen Sie eine Rampe-Ab Zeit,
die bei generatorischem Motorbetrieb nicht
zu einer Überspannung im Wechselrichter
führt, und so, dass der erzeugte Strom die
unter Parameter 4-18 Stromgrenze eingestellte
Stromgrenze nicht überschreitet. Der Wert
3-62 Rampenzeit Ab 3
Range: Funktion:
0,00 entspricht im Drehzahlmodus 0,01 s.
Beachten Sie die Rampe-Auf Zeit unter
Parameter 3-61 Rampenzeit Auf 3.
t
s xns UPM
Par . 3 − 62 =
dec
Sollw. UPM
3-65 S-Form Anfang (Rampe Auf 3)
Range: Funktion:
50 %* [ 1 -
99 %]
Zur Eingabe des Verhältnisses der gesamten
Rampe-Auf-Zeit (Parameter 3-61 Rampenzeit Auf
3), in der sich das Beschleunigungsmoment
erhöht. Ein hoher Prozentsatz minimiert
ruckartige Drehmomentänderungen in der
Anwendung, da hierbei der Erschütterungsausgleich höher ist.
3-66 S-Form Ende (Rampe Auf 3)
Range: Funktion:
50 %* [ 1 -
99 %]
Zur Eingabe des Verhältnisses der gesamten
Rampe-Auf-Zeit (Parameter 3-61 Rampenzeit Auf
3), in der sich das Beschleunigungsmoment
reduziert. Ein hoher Prozentsatz minimiert
ruckartige Drehmomentänderungen in der
Anwendung, da hierbei der Erschütterungsausgleich höher ist.
3-67 S-Form Anfang (Rampe Ab 3)
Range: Funktion:
50 %* [ 1 -
99 %]
Zur Eingabe des Verhältnisses der gesamten
Rampe-Ab-Zeit (Parameter 3-62 Rampenzeit Ab
3), in der sich das Verzögerungsdrehmoment
erhöht. Ein hoher Prozentsatz minimiert
ruckartige Drehmomentänderungen in der
Anwendung, da hierbei der Erschütterungsausgleich höher ist.
3-68 S-Form Ende (Rampe Ab 3)
Range: Funktion:
50 %* [ 1 -
99 %]
Zur Eingabe des Verhältnisses der gesamten
Rampe-Ab-Zeit (Parameter 3-62 Rampenzeit Ab
3), in der sich das Verzögerungsdrehmoment
reduziert. Ein hoher Prozentsatz minimiert
ruckartige Drehmomentänderungen in der
Anwendung, da hierbei der Erschütterungsausgleich höher ist.
3 3
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 81
Page 84

Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
3.4.7 3-7* Rampe 4
3-72 Rampenzeit Ab 4
Range: Funktion:
Zum Konfigurieren der Rampenparameter siehe Parametergruppe 3-4* Rampe 1.
3-70 Rampentyp 4
33
Option: Funktion:
Wählen Sie den Rampentyp entsprechend
den Anforderungen für Beschleunigung und
Verzögerung aus. Eine lineare Rampe sorgt
für eine konstante Beschleunigung bzw.
Verzögerung. Eine S-Rampe ergibt eine nicht
lineare Beschleunigung und gleicht Rucke in
der Anwendung aus.
[0]*Linear
[1] S-Rampe
konst.Ruck
[2] S-Rampe
konst. Zeit
Beschleunigt mit geringstmöglichem Ruck.
Die S-Rampe basiert auf den unter
Parameter 3-71 Rampenzeit Auf 4 und
Parameter 3-72 Rampenzeit Ab 4 eingestellten
Werten.
3-75 S-Form Anfang (Rampe Auf 4)
Range: Funktion:
50 %* [ 1 -
99 %]
3-76 S-Form Ende (Rampe Auf 4)
Range: Funktion:
50 %* [ 1 -
99 %]
HINWEIS
Wenn Sie [1] S-Rampe konst.Ruck auswählen und den
Sollwert während der Rampe ändern, können Sie die
Rampenzeit verlängern, um eine ruckfreie Bewegung zu
erzeugen. Dies kann zu einer längeren Start- oder
Stromgrenze nicht überschreitet. Der Wert
0,00 entspricht im Drehzahlmodus 0,01 s.
Beachten Sie die Rampe-Auf Zeit unter
Parameter 3-71 Rampenzeit Auf 4.
t
s xns UPM
Par . 3 − 72 =
Zur Eingabe des Verhältnisses der gesamten
Rampe-Auf-Zeit (Parameter 3-71 Rampenzeit Auf
4), in der sich das Beschleunigungsmoment
erhöht. Ein hoher Prozentsatz minimiert
ruckartige Drehmomentänderungen in der
Anwendung, da hierbei der Erschütterungsausgleich höher ist.
Zur Eingabe des Verhältnisses der gesamten
Rampe-Auf-Zeit (Parameter 3-71 Rampenzeit Auf
4), in der sich das Beschleunigungsmoment
reduziert. Ein hoher Prozentsatz minimiert
ruckartige Drehmomentänderungen in der
Anwendung, da hierbei der Erschütterungsausgleich höher ist.
dec
Sollw. UPM
Stoppzeit führen.
Möglicherweise sind weitere Anpassungen der S-Formen
oder der Schaltinitiatoren erforderlich.
3-71 Rampenzeit Auf 4
Range: Funktion:
Size
related*
[ 0.01
- 3600
s]
Geben Sie die Rampe-auf-Zeit ein, d. h. die
Beschleunigungszeit von 0 UPM bis zur
Motornenndrehzahl ns. Wählen Sie die
Rampe-auf-Zeit so, dass der Ausgangsstrom
die in Parameter 4-18 Stromgrenze festgelegte
Stromgrenze während des Beschleunigens
nicht überschreitet. Der Wert 0,00 entspricht
im Drehzahlmodus 0,01 s. Beachten Sie auch
die Hinweise zur Rampe-Ab-Zeit unter
Parameter 3-72 Rampenzeit Ab 4.
t
s xns UPM
Par . 3 − 71 =
Beschl.
Sollw. UPM
3-72 Rampenzeit Ab 4
3-77 S-Form Anfang (Rampe Ab 4)
Range: Funktion:
50 %* [ 1 -
99 %]
Zur Eingabe des Verhältnisses der gesamten
Rampe-Ab-Zeit (Parameter 3-72 Rampenzeit Ab
4), in der sich das Verzögerungsdrehmoment
erhöht. Ein hoher Prozentsatz minimiert
ruckartige Drehmomentänderungen in der
Anwendung, da hierbei der Erschütterungsausgleich höher ist.
3-78 S-Form Ende (Rampe Ab 4)
Range: Funktion:
50 %* [ 1 -
99 %]
Zur Eingabe des Verhältnisses der gesamten
Rampe-Ab-Zeit (Parameter 3-72 Rampenzeit Ab
4), in der sich das Verzögerungsdrehmoment
reduziert. Ein hoher Prozentsatz minimiert
ruckartige Drehmomentänderungen in der
Anwendung, da hierbei der Erschütterungsausgleich höher ist.
Range: Funktion:
Size
related*
[ 0.01
- 3600
s]
Geben Sie die Rampe-ab-Zeit ein, d. h. die
Verzögerungszeit von der Motornenndrehzahl
ns bis 0 UPM. Wählen Sie eine Rampe-Ab Zeit,
die bei generatorischem Motorbetrieb nicht
zu einer Überspannung im Wechselrichter
führt, und so, dass der erzeugte Strom die
unter Parameter 4-18 Stromgrenze eingestellte
82 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 85

Parameterbeschreibungen Programmierhandbuch
3.4.8 3-8* Weitere Rampen
3-80 Rampenzeit JOG
Range: Funktion:
Size
related*
Abbildung 3.27 Rampenzeit JOG
[0.01
Geben Sie die Rampenzeit JOG ein, d. h. die
- 3600
Zeit für Beschleunigung/Verzögerungszeit
s]
zwischen 0 U/min und der Motornennfrequenz
ns. Vergewissern Sie sich, dass der resultierende
für die vorliegende Rampenzeit JOG
erforderliche Ausgangsstrom nicht die unter
Parameter 4-18 Stromgrenze festgelegte
Stromgrenze überschreitet. Die Rampenzeit
JOG beginnt bei Aktivierung eines Jog-Signals
über das LCP, einen ausgewählten Digitaleingang oder die serielle
Kommunikationsschnittstelle. Wenn der
Zustand der Festdrehzahl JOG deaktiviert wird,
gelten die normalen Rampenzeiten.
3 3
Abbildung 3.28 Rampenzeit Schnellstopp
3-82 Rampentyp Schnellstopp
Option: Funktion:
Wählen Sie den Rampentyp entsprechend
den Anforderungen für Beschleunigung
und Verzögerung aus. Eine lineare Rampe
sorgt für eine konstante Beschleunigung
bzw. Verzögerung. Eine S-Rampe ergibt
eine nicht lineare Beschleunigung und
gleicht Rucke in der Anwendung aus.
[0] * Linear
[1] S-Rampe
konst.Ruck
[2] S-Rampe konst.
Zeit
Par . 3 − 80 =
t
Festdrehzahl JOG
ΔFestdrehzahl JOGJOG Par. . 3 − 19 UPM
s xns UPM
3-81 Rampenzeit Schnellstopp
Range: Funktion:
Size
related*
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 83
[0.01 3600 s]
Geben Sie die Schnellstopprampenzeit ein, d.
h. die Verzögerungszeit von der synchronen
Motordrehzahl bis zu 0 UPM. Stellen Sie
sicher, dass im Wechselrichter aus dem
generatorischen Betrieb des Motors, der zum
Erzielen der vorgegebenen Rampe-Ab-Zeit
notwendig ist, keine Überspannung im
Wechselrichter entsteht. Stellen Sie außerdem
sicher, dass der erzeugte Strom, der zum
Erreichen der vorgegebenen Rampe-Ab-Zeit
notwendig ist, nicht die Stromgrenze
überschreitet (die Stromgrenze wird unter
Parameter 4-18 Stromgrenze festgelegt). Der
Schnellstopp wird über ein Signal an einem
ausgewählten Digitaleingang oder über die
serielle Kommunikationsschnittstelle aktiviert.
3-83 Schnellstopp S-Form Anfang Start
Range: Funktion:
50 %* [ 1 -
99 %]
Zur Eingabe des Verhältnisses der gesamten
Rampe-Ab-Zeit (Parameter 3-42 Rampenzeit Ab
1), in der sich das Verzögerungsdrehmoment
erhöht. Ein hoher Prozentsatz minimiert
ruckartige Drehmomentänderungen in der
Anwendung, da hierbei der Erschütterungsausgleich höher ist.
3-84 Schnellstopp S-Form Ende
Range: Funktion:
50 %* [ 1 -
99 %]
Zur Eingabe des Verhältnisses der gesamten
Rampe-Ab-Zeit (Parameter 3-42 Ramp 1 Ramp
Down Time), in der sich das Verzögerungsdrehmoment reduziert. Ein hoher Prozentsatz
minimiert ruckartige Drehmomentänderungen
in der Anwendung, da hierbei der Erschütterungsausgleich höher ist.
Page 86

Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
3-89 Ramp Lowpass Filter Time
Range: Funktion:
1 ms* [1 - 200 ms] Mithilfe dieses Parameters können Sie die
Sanftheit von Drehzahländerungen
einstellen.
33
3.4.9 3-9* Digitalpoti
Die Digitalpotentiometer-Funktion ermöglicht dem
Benutzer die Erhöhung oder Reduzierung des
resultierenden Sollwerts durch Anpassung der Konfiguration der Digitaleingänge über die Funktionen Erhöhen,
Vermindern oder Löschen. Zur Aktivierung der Funktion
3-91 Digitalpoti Rampenzeit
Range: Funktion:
1s* [0 -
3600 s]
Geben Sie die Rampenzeit ein, die zum Anpassen
des Sollwerts 0–100 % der festgelegten Funktion
des digitalen Potentiometers (Erhöhen, Vermindern
oder Löschen) benötigt wird.
Wenn Erhöhen/Vermindern länger als die in
Parameter 3-95 Rampenverzögerung eingestellte
Rampenverzögerungszeit aktiviert ist, erfolgt eine
Rampe auf/ab mit dem aktuellen Sollwert gemäß
dieser Rampenzeit. Die Rampenzeit wird als die Zeit
definiert, die zum Anpassen des Sollwerts durch
den in Parameter 3-90 Step Size festgelegten Einzelschritt benötigt wird.
müssen Sie mindestens einen Digitaleingang auf Erhöhen
oder Vermindern programmieren.
3-92 Power Restore
Option: Funktion:
[0] * Off Mit diesem Parameter können Sie den Sollwert des
digitalen Potentiometers nach einer Netz-Einschaltung
auf 0 % zurücksetzen.
[1] On Stellt den letzten Digitalpoti-Sollwert nach einer Netz-
Einschaltung wieder her.
Abbildung 3.29 Erhöhung des aktuellen Sollwerts
3-93 Maximum Limit
Range: Funktion:
100 %* [-200 -
200 %]
Einstellen des maximalen zulässigen Werts
für den resultierenden Sollwert. Dies wird
empfohlen, wenn das digitale Potentiometer zur Feineinstellung des
resultierenden Sollwerts verwendet wird.
Abbildung 3.30 Erhöhung/Reduzierung des aktuellen Sollwerts
3-90 Step Size
Range: Funktion:
0.10 %* [0.01 200 %]
Eingabe der Schrittgröße für die Erhöhung/
Verringerung als Prozentsatz der synchronen
Motordrehzahl, ns. Wird ein DigitalpotiAuf/Ab-Signal angelegt, so erhöht/verringert
sich der resultierende Sollwert entsprechend
dem in diesem Parameter eingestellten Wert.
3-94 Digitalpoti Min. Grenze
Range: Funktion:
-100 %* [-200 200 %]
Einstellen des minimalen zulässigen Werts
für den resultierenden Sollwert. Dies wird
empfohlen, wenn das digitale Potenziometer zur Feineinstellung des
resultierenden Sollwerts verwendet wird.
3-95 Rampenverzögerung
Range: Funktion:
Size
related*
[ 0
Eingabe der Verzögerung zur Aktivierung der
- 0 ]
Funktion des digitalen Potentiometers, bevor
der Frequenzumrichter beginnt, die Rampe
auf/ab zu fahren. Der Sollwert aktiviert das Aufund Abfahren der Rampe mit einer Verzögerung
von 0 ms, sobald Erhöhen/Vermindern aktiviert
wird. Nähere Angaben finden Sie auch in
Parameter 3-91 Digitalpoti Rampenzeit.
84 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 87

Parameterbeschreibungen Programmierhandbuch
3.5 Parameter: 4-** Grenzen/Warnungen
3.5.1 4-1* Motor Grenzen
Definieren Sie Drehmoment-, Strom- und Drehzahlgrenzen
für den Motor und die Reaktion des Frequenzumrichters,
falls die Grenzen überschritten werden.
Eine Grenze kann eine Meldung im Display erzeugen. Eine
Warnung erzeugt immer eine Meldung im Display oder am
Feldbus. Eine Überwachungsfunktion kann eine Warnung
oder einen Alarm auslösen. Daraufhin stoppt der Frequenzumrichter und erzeugt eine Alarmmeldung.
4-10 Motor Drehrichtung
Option: Funktion:
HINWEIS
Diesen Parameter können Sie bei
laufendem Motor nicht einstellen.
Zur Auswahl der erforderlichen Motordrehrichtung(en). Verwenden Sie diesen Parameter,
um unerwünschte Reversierung zu vermeiden.
Wenn Parameter 1-00 Regelverfahren auf [3] PID-
Prozess eingestellt ist, wird
Parameter 4-10 Motor Drehrichtung
standardmäßig auf [0] Nur Rechts eingestellt.
Durch die Einstellung unter
Parameter 4-10 Motor Drehrichtung werden die
Einstellungsoptionen für Parameter 4-13 Max.
Drehzahl [UPM] nicht eingeschränkt.
[0] Nur Rechts Der Sollwert ist auf Rechtslauf eingestellt.
Reversierungseingang (Werkseinstellung
Klemme 19) muss offen sein.
[1] Nur Links Der Sollwert ist auf Linkslauf eingestellt.
Reversierungseingang (Werkseinstellung
Klemme 19) muss geschlossen sein. Wenn eine
Reversierung bei offenem Reversierungseingang
erforderlich ist, können Sie die Motorrichtung
über Parameter 1-06 Drehrichtung rechts ändern.
[2] Beide
Richtungen
4-11 Min. Drehzahl [UPM]
Range: Funktion:
Size
related*
Ermöglicht Motorlauf in beide Richtungen.
[ 0 - par.
4-13
RPM]
Geben Sie die Untergrenze für die
Motordrehzahl ein. Sie können die min.
Motordrehzahl so einstellen, dass sie der
vom Hersteller empfohlenen minimalen
Motordrehzahl entspricht. Die min.
Motordrehzahl darf die Einstellung in
Parameter 4-13 Max. Drehzahl [UPM] nicht
überschreiten.
4-12 Min. Frequenz [Hz]
Range: Funktion:
Size
related*
[ 0 par. 4-14
Hz]
Geben Sie die Untergrenze für die
Motordrehzahl ein. Sie können die min.
Motordrehzahl so einstellen, dass sie der
minimalen Ausgangsfrequenz der
Motorwelle entspricht. Die min.
Motordrehzahl darf die Einstellung in
Parameter 4-14 Motor Speed High Limit [Hz]
nicht überschreiten.
4-13 Max. Drehzahl [UPM]
Range: Funktion:
Size
related*
[ par.
4-11 60000
RPM]
Geben Sie die Obergrenze für die
Motordrehzahl ein. Sie können die
maximale Motordrehzahl entsprechend
der empfohlenen maximalen
Motornenndrehzahl des Herstellers
einstellen. Die max. Motordrehzahl darf
die Einstellung in Parameter 4-11 Min.
Drehzahl [UPM] nicht überschreiten.
4-14 Motor Speed High Limit [Hz]
Range: Funktion:
Size
related*
[ par.
4-12 par. 4-19
Hz]
Geben Sie die Obergrenze der
Motordrehzahl in Hz ein.
Parameter 4-14 Motor Speed High Limit [Hz]
können Sie gemäß der empfohlenen
maximalen Motordrehzahl des Herstellers
einstellen. Die max. Motordrehzahl darf den
Wert in Parameter 4-12 Motor Speed Low
Limit [Hz] überschreiten. Die Ausgangsfrequenz darf 10 % der Taktfrequenz
(Parameter 14-01 Switching Frequency) nicht
überschreiten.
4-16 Momentengrenze motorisch
Range: Funktion:
Size related*
Anwendungsabhängig*
[ 0 - 1000.0 %]
[Anwendungsabhängig]
Diese Funktion begrenzt
das Drehmoment am
Schaft zum Schutz der
mechanischen Installation.
HINWEIS
Durch eine Änderung von Parameter 4-16 Momentengrenze motorisch, wenn Parameter 1-00 Regelverfahren
auf [0] Ohne Rückführung eingestellt ist, wird
Parameter 1-66 Min. Strom bei niedr. Drz. automatisch neu
angepasst.
3 3
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 85
Page 88
Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
HINWEIS
Die Drehmomentgrenze reagiert auf das tatsächliche,
ungefilterte Drehmoment, einschließlich aller Drehmomentspitzen. Dies ist nicht das Drehmoment, das am LCP
oder über den Feldbus angezeigt wird, da dieses
Drehmoment gefiltert ist.
33
4-17 Momentengrenze generatorisch
Range: Funktion:
100 %* [ 0 - 1000.0 %] Diese Funktion begrenzt das
Drehmoment am Schaft zum Schutz
der mechanischen Installation.
4-18 Stromgrenze
Range: Funktion:
Size
related*
[ 1.0 -
1000.0
%]
HINWEIS
Wenn unter Parameter 1-90 Thermischer
Motorschutz [20] ATEX ETR ausgewählt
ist, müssen Sie die Stromgrenze in
Parameter 4-18 Stromgrenze auf 150 %
einstellen.
Dies ist eine echte Stromgrenzenfunktion, die
im übersynchronen Bereich fortgesetzt wird.
Aufgrund der Feldschwächung fällt das
Motordrehmoment bei der Stromgrenze
entsprechend ab, wenn die Erhöhung der
Spannung über der synchronisierten
Motordrehzahl endet.
4-20 Variable Drehmomentgrenze
Option: Funktion:
Wählen Sie einen Analogeingang zur
Skalierung der Einstellungen in
Parameter 4-16 Momentengrenze motorisch
und Parameter 4-17 Momentengrenze
generatorisch von 0 bis 100 % (oder
invers). Die Signalpegel, die 0 % und
100 % entsprechen, definieren Sie z. B. in
Parametergruppe 6-1* Analogeingang 1
zur Skalierung des Analogeingangs.
Dieser Parameter ist nur aktiv, wenn
Parameter 1-00 Regelverfahren mit oder
ohne Rückführung eingestellt ist.
[0] * Ohne Funktion
[2] Analogeing. 53
[4] Analogeing. 53
inv.
[6] Analogeing. 54
[8] Analogeing. 54
inv.
[10] Analogeing.
X30-11
[12] An.eing. X30-11
inv.
[14] Analogeing.
X30-12
[16] An.eing. X30-12
inv.
4-21 Variable Drehzahlgrenze
4-19 Max. Ausgangsfrequenz
Range: Funktion:
Size
related*
[ 1 -
HINWEIS
590
Diesen Parameter können Sie bei
Hz]
laufendem Motor nicht einstellen.
HINWEIS
Die maximale Ausgangsfrequenz darf
10 % der Wechselrichtertaktfrequenz
(Parameter 14-01 Taktfrequenz) nicht
überschreiten.
Gibt das absolute Limit der Ausgangsfrequenz
an. Dies gewährleistet eine erhöhte Sicherheit in
Anwendungen, in denen eine Überdrehzahl
unbedingt vermieden werden muss. Diese
Grenze ist in allen Konfigurationen absolut
(unabhängig von der Einstellung in
Parameter 1-00 Regelverfahren).
Option: Funktion:
Wählen Sie einen Analogeingang zur
Skalierung der Einstellungen in
Parameter 4-19 Max. Ausgangsfrequenz
von 0 bis 100 % (oder umgekehrt). Die
Signalpegel, die 0 % und 100 %
entsprechen, definieren Sie z. B. in
Parametergruppe 6-1* Analogeingang 1
zur Skalierung des Analogeingangs.
Dieser Parameter ist nur aktiv, wenn sich
Parameter 1-00 Regelverfahren in
Parameter [4] Drehmom. o. Rück.
befindet.
[0] * Ohne Funktion
[2] Analogeing. 53
[4] Analogeing. 53
inv.
[6] Analogeing. 54
[8] Analogeing. 54
inv.
[10] Analogeing.
X30-11
[12] An.eing. X30-11
inv.
86 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 89

Parameterbeschreibungen Programmierhandbuch
4-21 Variable Drehzahlgrenze
Option: Funktion:
[14] Analogeing.
X30-12
[16] An.eing. X30-12
inv.
4-23 Brake Check Limit Factor Source
Auswahl der Eingangsquelle für die Funktion in
Parameter 2-15 Bremswiderstand Test. Wenn mehrere Frequenzumrichter gleichzeitig einen Bremswiderstandstest durchführen, führt
der Widerstand im Netz zu einem Spannungsabfall am Netzversorgungs- oder Zwischenkreis, und ein fehlerhafter
Bremswiderstandstest wird ggf. durchgeführt. Verwenden Sie an
jedem Bremswiderstand jeweils einen externen Stromwandler.
Wenn bei einer Anwendung ein zu 100 % gültiger Bremswiderstandstest durchgeführt wird, schließen Sie den Wandler an einen
Analogeingang an.
Option: Funktion:
[0] * DC-link voltage Der Frequenzumrichter prüft den
Bremswiderstandstest durch, indem
er die DC-Zwischenkreisspannung
überwacht. Der Frequenzumrichter
speist den Strom in den Bremswiderstand, wodurch die
Zwischenkreisspannung reduziert
wird.
[1] Analog Input53Wählen Sie einen externen
Stromwandler für die Überwachung
der Bremse.
[2] Analog Input54Wählen Sie einen externen
Stromwandler für die Überwachung
der Bremse.
4-24 Brake Check Limit Factor
Range: Funktion:
98%* [0 -
100 %
]
Geben Sie die von Parameter 2-15 Bremswiderstand
Test beim Bremswiderstandstest verwendete
Grenze ein. Der Frequenzumrichter verwendet die
Grenze abhängig von der Auswahl in
Parameter 4-23 Brake Check Limit Factor Source:
[0] Zwischenkreisspannung - der Frequenzumrichter
wendet die Grenze auf die EEPROM-Daten im
Zwischenkreis an.
[1] Analogeingang 53 oder [2] Analogeingang 54 der Bremswiderstandstest schlägt fehl, wenn der
Eingangsstrom am Analogeingang geringer als das
Produkt aus maximalem Eingangsstrom und
Grenze ist.
Beispielsweise schlägt bei der folgenden Konfiguration der Bremswiderstandstest fehl, wenn der
Eingangsstrom unter 16 mA liegt:
4-24 Brake Check Limit Factor
Range: Funktion:
Ein Stromwandler mit einem Bereich von
•
4-20 mA ist an Analogeingang 53
angeschlossen.
Parameter 4-24 Brake Check Limit Factor ist
•
auf 80 % eingestellt.
4-25 Power Limit Motor Factor Source
Wählen Sie den Eingang, der den Wert in Parameter 4-82 Power
Limit Motor Mode von 0 – 100 % skaliert.
Option: Funktion:
[0] * Ohne Funktion
[2] Analogeing. 53
[4] Analogeing. 53 inv.
[6] Analogeing. 54
[8] Analogeing. 54 inv.
[10] Analogeing. X30-11
[12] An.eing. X30-11 inv.
[14] Analogeing. X30-12
[16] An.eing. X30-12 inv.
4-26 Power Limit Gener. Factor Source
Wählen Sie den Eingang, der den Wert in Parameter 4-83 Power
Limit Generator Mode von 0 – 100 % skaliert.
Option: Funktion:
[0] * Ohne Funktion
[2] Analogeing. 53
[4] Analogeing. 53 inv.
[6] Analogeing. 54
[8] Analogeing. 54 inv.
[10] Analogeing. X30-11
[12] An.eing. X30-11 inv.
[14] Analogeing. X30-12
[16] An.eing. X30-12 inv.
3.5.2 4-3* Drehzahl Überwach.
Die Parametergruppe enthält Einstellungen zur
Überwachung und Verarbeitung von Istwerten von
Drehgebern, Resolvern usw.
4-30 Drehgeberüberwachung Funktion
Option: Funktion:
Diese Funktion wird zur Überwachung
der Konsistenz im Istwertsignal
verwendet, d. h. ob das Istwertsignal
verfügbar ist.
Definiert das Verhalten des Frequenzumrichters bei Erkennung eines
Istwertfehlers. Die gewählte Aktion wird
ausgeführt, wenn das Istwertsignal mit
dem in Parameter 4-31 Drehgeber max.
Fehlabweichung festgelegten Wert länger
3 3
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 87
Page 90

Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
4-30 Drehgeberüberwachung Funktion
Option: Funktion:
als der in Parameter 4-32 Drehgeber
Timeout-Zeit festgelegte Wert von der
Ausgangsdrehzahl abweicht.
33
[0] Deaktiviert
[1] Warnung
[2] Alarm
[3] Festdrz. (JOG)
[4] Drehz. speich.
[5] Max. Drehzahl
[6] Regelung o.
Geber
[7] Anwahl
Datensatz 1
[8] Anwahl
Datensatz 2
[9] Anwahl
Datensatz 3
[10] Anwahl
Datensatz 4
[11] Stopp und Alarm
Warnung 90 Drehgeberüberwachung ist aktiv, sobald der
Wert in Parameter 4-31 Drehgeber max. Fehlabweichung
überschritten wird, unabhängig von der Einstellung von
Parameter 4-32 Drehgeber Timeout-Zeit. Warnung/Alarm 61
Istwertfehler steht in Bezug zur Verlustfunktion des MotorIstwerts.
4-31 Drehgeber max. Fehlabweichung
Range: Funktion:
300 RPM* [1 - 600 RPM] Definiert den maximal zulässigen
Drehzahlfehler (Ausgangsdrehzahl
gegenüber Istwert).
4-32 Drehgeber Timeout-Zeit
Range: Funktion:
Size
related*
[0 - 60s]Definiert in Parameter 4-31 Drehgeber max.
Fehlabweichung, wie lange der Drehzahlfehler überschritten sein muss, bevor die
Funktion in Parameter 4-30 Drehgeberüber-
wachung Funktion ausgeführt wird.
4-34 Drehgeberüberwachung Funktion
Option: Funktion:
Diese Funktion wird zur Überwachung
verwendet, ob die Anwendung dem
erwarteten Drehzahlprofil folgt. Bei einer
Regelung mit Rückführung wird der Drehzahlsollwert zum PID mit der Geberrückführung
(gefiltert) verglichen. Bei einer Regelung ohne
Rückführung wird der Drehzahlsollwert zum
PID schlupfkompensiert und mit der Frequenz
verglichen, die zum Motor gesendet wird
(Parameter 16-13 Frequenz).
Die Reaktion wird aktiviert, wenn die
gemessene Differenz höher ist als in
Parameter 4-35 Drehgeber-Fehler für die in
Parameter 4-36 Drehgeber-Fehler Timeout-Zeit
festgelegte Zeit angegeben.
Ein Drehgeber-Fehler bei Regelung mit
Rückführung ist kein Hinweis darauf, dass ein
Problem mit dem Istwertsignal besteht. Ein
Drehgeber-Fehler kann sich aus der Drehmomentgrenze bei zu großen Lasten ergeben.
[0] Deaktiviert
[1] Warnung
[2] Alarm
[3] Alarm nach
Stopp
Warnung/Alarm 78 Spurfehler steht im Bezug zur Spurfehlerfunktion.
4-35 Drehgeber-Fehler
Range: Funktion:
10
RPM*
Abbildung 3.31 Drehgeber max. Fehlabweichung
88 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
[1 - 600
RPM]
Geben Sie die maximal zulässigen Drehzahlabweichung zwischen der Motordrehzahl
und dem Rampen-Ausgang bei keiner gleichzeitigen Rampe ein. Bei einer Regelung ohne
Rückführung wird die Motordrehzahl
geschätzt, und bei einer Regelung mit
Rückführung wird der Istwert vom
Drehgeber/Resolver verwendet.
Page 91

Speed
nRef
-nRef
0rpm
Time
130BE199.10
Parameterbeschreibungen Programmierhandbuch
4-36 Drehgeber-Fehler Timeout-Zeit
Range: Funktion:
1 s* [0 - 60 s] Eingabe des Timeout-Zeitraums, in dem eine
den in Parameter 4-35 Drehgeber-Fehler
eingestellten Wert überschreitende Abweichung
zulässig ist.
4-37 Drehgeber-Fehler Rampe
Range: Funktion:
100
RPM*
[1 - 600
RPM]
Geben Sie den maximal zulässigen Drehzahlabweichung zwischen der Motordrehzahl
und dem Rampen-Ausgang bei Rampe ein.
Bei einer Regelung ohne Rückführung wird
die Motordrehzahl geschätzt, und bei einer
Regelung mit Rückführung wird der Istwert
vom Drehgeber/Resolver verwendet.
4-38 Drehgeber-Fehler Rampe Timeout-Zeit
Range: Funktion:
1 s* [0 - 60 s] Geben Sie den Timeout-Zeitraum ein, in dem
eine den in Parameter 4-37 Drehgeber-Fehler
Rampe eingestellten Wert überschreitende
Abweichung während der Rampe zulässig ist.
4-39 Drehgeber-Fehler nach Rampen-Timeout
Range: Funktion:
5 s* [0 - 60 s] Eingabe des Timeout-Zeitraums nach der
Rampe, wobei Parameter 4-37 Drehgeber-Fehler
Rampe und Parameter 4-38 Drehgeber-Fehler
Rampe Timeout-Zeit weiterhin aktiv sind.
4-43 Motor Speed Monitor Function
Option: Funktion:
Parameter 16-48 Speed Ref. After
Ramp [RPM] ab.
Die Differenz zwischen den
•
Drehzahlen überschreitet den Wert
in Parameter 4-44 Motor Speed
Monitor Max.
Bei Drehzahl mit Rückführung stellt die
tatsächliche Drehzahl den Istwert des
Drehgebers dar, der in der in
Parameter 7-06 Drehzahlregler Tiefpassfilterzeit
festgelegten Zeit gemessen wird. Bei einer
Regelung ohne Rückführung ist die
tatsächliche Drehzahl identisch mit der
geschätzten Motordrehzahl.
Durchgezogene Linie
Gestrichelte
Linie
Abbildung 3.32 Drehzahlsollwert und
maximal zulässige Drehzahldifferenz
Parameter 16-48 Speed Ref.
After Ramp [RPM]
Parameter 4-44 Motor Speed
Monitor Max
3 3
[0] Deaktiviert
3.5.3 4-4* Drehzahlüberwachung
4-43 Motor Speed Monitor Function
Option: Funktion:
HINWEIS
Dieser Parameter ist nur im Flux-Steuerverfahren verfügbar.
Wählen Sie die Reaktion des Frequenzumrichters für den Fall aus, dass die
Motordrehzahl-Überwachungsfunktion eine zu
hohe Drehzahl oder eine falsche Drehrichtung
erkennt.
Bei aktiver Motordrehzahlüberwachung
erkennt der Frequenzumrichter einen Fehler,
falls die folgenden Bedingungen für einen in
Parameter 4-45 Motor Speed Monitor Timeout
festgelegten Zeitraum zutreffen.
Die tatsächliche Drehzahl weicht von
•
der Solldrehzahl in
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 89
[1] Warnung Der Frequenzumrichter meldet Warnung 101,
Speed monitor, wenn die Drehzahl außerhalb
des zulässigen Bereichs liegt.
[2] Alarm Der Frequenzumrichter schaltet ab und
meldet Alarm 101, Speed monitor.
[3] Festdrz.
(JOG)
[4] Drehz.
speich.
[5] Max.
Drehzahl
[6] Regelung o.
Geber
[7] Anwahl
Datensatz 1
[8] Anwahl
Datensatz 2
[9] Anwahl
Datensatz 3
[10] Anwahl
Datensatz 4
[11] Stopp und
Alarm
Page 92

Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
4-43 Motor Speed Monitor Function
3.5.4 4-5* Warnungen Grenzen
Option: Funktion:
[12] Trip/
Warning
33
[13] Trip/Catch Wählen Sie diese Option aus, wenn Sie eine
Der Frequenzumrichter meldet Alarm 101,
Drehzahlüberwachung im Betriebsmodus und
Warnung 101, Speed monitor im Stopp- oder
Freilaufmodus. Diese Option ist nur im Betrieb
mit Rückführung verfügbar.
Last abfangen müssen, wenn beispielsweise
die mechanische Bremse ausfällt. Diese
Option ist nur im Betrieb mit Rückführung
verfügbar.
Der Frequenzumrichter schaltet ab und
meldet Alarm 101, Speed monitor im
Betriebsmodus. Im Stoppmodus fängt der
Frequenzumrichter die fliegende Last ab und
meldet Warnung 101, Speed monitor.
Im Abfangmodus verwendet der Frequenzumrichter das Haltemoment zur Steuerung der
Nulldrehzahl bei einer eventuell fehlerhaften
Bremse (mit Rückführung). Um diesen Modus
zu verlassen, senden Sie ein neues Startsignal
an den Frequenzumrichter. Ein Motorfreilauf
oder die STO-Funktion (Safe Torque Off)
beendet ebenfalls die Funktion.
Verwenden Sie diese Parameter zum Anpassen von
Warnungsgrenzen für Strom, Drehzahl, Sollwert und
Istwert.
Auf dem LCP werden Warnungen angezeigt, die als
Ausgänge programmiert oder über Feldbus in das
erweiterte Zustandswort ausgelesen werden können.
Abbildung 3.33 Einstellbare Warnungen
4-44 Motor Speed Monitor Max
Range: Funktion:
300
RPM*
[10 - 500
RPM]
HINWEIS
Nur beim Flux-Steuerverfahren
verfügbar.
Eingabe der maximal zulässigen Drehzahlabweichung zwischen der tatsächlichen
Drehzahl der mechanischen Welle und
dem Wert in Parameter 16-48 Speed Ref.
After Ramp [RPM].
4-45 Motor Speed Monitor Timeout
Range: Funktion:
0.1 s* [0 - 60
s]
HINWEIS
Nur beim Flux-Steuerverfahren verfügbar.
Eingabe des Timeout-Zeitraums, in dem eine in
Parameter 4-44 Motor Speed Monitor Max
definierte Abweichung zulässig ist. Der Timer für
diesen Parameter wird zurückgesetzt, sobald die
Abweichung den Wert in Parameter 4-44 Motor
Speed Monitor Max nicht mehr überschreitet.
4-50 Warnung Strom niedrig
Range: Funktion:
0 A* [ 0 - par.
4-51 A]
Geben Sie den Min.-Stromwert I
der Motorstrom dieses Limit unterschreitet,
zeigt das Display die Meldung Strom niedrig an.
Sie können die Signalausgänge programmieren,
ein Statussignal an Klemme 27 oder 29 (nur
FC302) und an Relaisausgang 01 oder 02 (nur
FC302) zu erzeugen. Siehe Abbildung 3.33.
4-51 Warnung Strom hoch
Range: Funktion:
Size
related*
[ par.
4-50 - par.
16-37 A]
Geben Sie den Max.-Stromwert I
Wenn der Motorstrom diesen Grenzwert
überschreitet, zeigt das Display die
Meldung Strom hoch an. Sie können die
Signalausgänge programmieren, ein
Statussignal an Klemme 27 oder 29 (nur
FC302) und an Relaisausgang 01 oder 02
(nur FC302) zu erzeugen. Siehe
Abbildung 3.33.
4-52 Warnung Drehz. niedrig
Range: Funktion:
0 RPM* [ 0 - par.
4-53 RPM]
Eingabe des Werts n
Motordrehzahl diesen Grenzwert
überschreitet, zeigt das Display die Meldung
Drehzahl niedrig an. Sie können die Signalausgänge programmieren, ein Statussignal
. Wenn die
LOW
ein. Wenn
LOW
HIGH
ein.
90 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 93

Parameterbeschreibungen Programmierhandbuch
4-52 Warnung Drehz. niedrig
Range: Funktion:
an Klemme 27 oder 29 (nur FC302) und an
Relaisausgang 01 oder 02 (nur FC302) zu
erzeugen.
4-53 Warnung Drehz. hoch
Range: Funktion:
Size
related*
[ par.
4-52 60000
RPM]
Geben Sie den maximalen Drehzahlwert
ein. Wenn die Motordrehzahl diesen
Wert überschreitet, zeigt das Display die
Meldung Drehzahl hoch an. Sie können
die Signalausgänge programmieren, ein
Statussignal an Klemme 27 oder 29 und
an Relaisausgang 01 oder 02 zu
erzeugen. Siehe Abbildung 3.33.
4-54 Warnung Sollwert niedr.
Range: Funktion:
-999999.999* [ -999999.999 -
par. 4-55 ]
Geben Sie den minimalen
Sollwert ein. Wenn der
tatsächliche Sollwert diese
Grenze unterschreitet, wird auf
dem Display Sollwert
angezeigt. Sie können die Signalausgänge programmieren, ein
Statussignal an Klemme 27 oder
29 (nur FC302) und an Relaisausgang 01 oder 02 (nur FC302)
zu erzeugen.
4-55 Warnung Sollwert hoch
Range: Funktion:
999999.999* [ par. 4-54 -
999999.999 ]
Geben Sie den maximalen Sollwert
ein. Wenn der tatsächliche Sollwert
diesen Grenzwert überschreitet,
zeigt das Display Sollwert
Sollwert
hoch
Signalausgänge programmieren,
ein Statussignal an Klemme 27
oder 29 (nur FC302) und an Relaisausgang 01 oder 02 (nur FC302) zu
erzeugen.
4-56 Warnung Istwert niedr.
Range: Funktion:
Size
related*
[ -999999.999 par. 4-57
ReferenceFeedbackUnit]
Zur Eingabe der IstwertUntergrenze. Wenn der Istwert
unter diese Grenze fällt, zeigt
das Display Istwert
können die Signalausgänge
programmieren, ein Statussignal
an Klemme 27 oder 29 (nur
FC302) und an Relaisausgang 01
NIEDRIG
an. Sie können die
an. Sie
niedrig
4-56 Warnung Istwert niedr.
Range: Funktion:
oder 02 (nur FC302) zu
erzeugen.
4-57 Warnung Istwert hoch
Range: Funktion:
Size
related*
[ par. 4-56 -
999999.999
ReferenceFeedbackUnit]
Zur Eingabe der IstwertObergrenze. Wenn die
Motordrehzahl diesen Grenzwert
überschreitet, zeigt das Display
die Meldung Istwert
können die Signalausgänge
programmieren, ein Statussignal
an Klemme 27 oder 29 (nur
FC302) und an Relaisausgang 01
oder 02 (nur FC302) zu
erzeugen.
hoch
an. Sie
4-58 Motorphasen Überwachung
Option: Funktion:
HINWEIS
Diesen Parameter können Sie bei
laufendem Motor nicht einstellen.
Die Funktion Fehlende Motorphase erkennt,
ob die Motorphase während der
Motordrehung fehlt. Zeigt bei einer fehlenden
Motorphase den Alarm 30, 31 oder 32 an.
Aktivieren Sie diese Funktion, um einen
Motorschaden zu vermeiden.
Nähere Angaben finden Sie auch in
Kapitel 3.5.5 Kombinationen der Parameter 4-58
und 4-59.
[0] Deaktiviert Der Frequenzumrichter gibt keinen Alarm
aufgrund einer fehlenden Motorphase aus.
Diese Option wird aufgrund der Gefahr eines
Motorschadens nicht empfohlen.
[1] Abschaltung
100 ms
[2] Abschaltung
1000 ms
[3] Abschalt.
100ms 3Ph.erk
Für eine schnelle Erkennungszeit und einen
Alarm bei einer fehlenden Motorphase.
Spezielle Option, relevant für Krananwendungen beim Absenken einer geringen Last,
bei dem der Frequenzumrichter einer falsche
Erkennung fehlender Motorphasen vermeidet.
Diese Option ist eine reduzierte Version der
Option [1] Abschaltung 100 ms.
1-phasig fehlend wird wie in Option [1]
Abschaltung 100 ms gehandhabt. Die 3phasige Erkennung wird im Vergleich zu
Option [1] Abschaltung 100 ms reduziert.
Die 3-phasige Erkennung funktioniert nur
beim Anlaufen und im niedrigen Drehzahl-
3 3
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 91
Page 94

Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
4-58 Motorphasen Überwachung
Option: Funktion:
bereich, wenn ein hoher Strom vorhanden ist,
wodurch fehlerhafte Abschaltungen bei
geringem Motorstrom vermieden werden.
33
HINWEIS
Nur verfügbar bei FC302 Flux mit
Rückführung.
[5] Motor Check Der Frequenzumrichter erkennt automatisch
eine Trennung des Motors und setzt den
Betrieb fort, wenn der Motor wieder
angeschlossen wird.
HINWEIS
Nur gültig für FC302.
Wenn Parameter 4-59 Motor Check At Start auf [1] Ein
eingestellt ist, stellen Sie Parameter 4-58 Motorphasen
Überwachung nicht auf die folgenden Optionen ein:
[0] Deaktiviert.
•
[5] Motortest.
•
3.5.5 4-6* Drehz.ausblendung
Bei einigen Systemen ist es notwendig, bestimmte
Ausgangsfrequenzen oder -drehzahlen zu vermeiden, um
Resonanzprobleme im System zu verhindern. Sie können
maximal vier Frequenz- oder Drehzahlbereiche vermeiden.
4-60 Ausbl. Drehzahl von [UPM]
Array [4]
Range: Funktion:
4-59 Motor Check At Start
Option: Funktion:
HINWEIS
Diesen Parameter können Sie bei laufendem
Motor nicht einstellen.
Size related* [ 0 - par.
4-13 RPM]
Bei einigen Systemen kann es
notwendig sein, bestimmte
Ausgangsdrehzahlen zu vermeiden,
um Resonanzprobleme im System zu
verhindern. Geben Sie hier die
unteren Grenzen der zu
vermeidenden Drehzahlen ein.
HINWEIS
Nur gültig für FC302.
Verwenden Sie diesen Parameter, um die fehlende
Motorphase bei Motorstillstand zu erkennen. Zeigt
Alarm 30, Motorphase U fehlt, Alarm 31, Motor Phase V
fehlt oder Alarm 32, Motorphase W fehlt bei einer
fehlenden Motorphase im Stillstand an. Verwenden Sie
diese Funktion vor dem Lösen einer mechanischen
Bremse. Aktivieren Sie diese Funktion, um einen
Motorschaden zu vermeiden.
Nähere Angaben finden Sie auch in
Kapitel 3.5.5 Kombinationen der Parameter 4-58 und
4-59.
[0]*Aus
VORSICHT
GEFAHR VOR MOTORSCHÄDEN
Die Verwendung dieser Funktion kann zu
einem Motorschaden führen.
Der Frequenzumrichter gibt keinen Alarm aufgrund
einer fehlenden Motorphase aus.
[1] Ein Vor jedem Start überprüft der Frequenzumrichter, ob
alle 3 Motorphasen vorhanden sind. Die Prüfung wird
ohne Bewegung an ASM-Motoren durchgeführt. Bei
PM- und SynRM-Motoren wird die Prüfung als Teil der
Positionserkennung durchgeführt.
4-61 Bypass Speed From [Hz]
Array [4]
Range: Funktion:
Size related* [ 0 - par.
4-14 Hz]
Bei einigen Systemen ist es
notwendig, bestimmte Ausgangsfrequenzen oder -drehzahlen zu
vermeiden, um Resonanzprobleme im
System zu verhindern. Geben Sie hier
die unteren Grenzen der zu
vermeidenden Drehzahlen ein.
4-62 Ausbl. Drehzahl bis [UPM]
Array [4]
Range: Funktion:
Size related* [ 0 - par.
4-13 RPM]
Bei einigen Systemen kann es
notwendig sein, bestimmte
Ausgangsdrehzahlen zu vermeiden,
um Resonanzprobleme im System zu
verhindern. Geben Sie hier die
Maximalgrenzen der zu
vermeidenden Drehzahlen ein.
4-63 Ausbl. Drehzahl bis [Hz]
Array [4]
Range: Funktion:
Size related* [ 0 - par.
4-14 Hz]
Bei einigen Systemen kann es
notwendig sein, bestimmte
Ausgangsdrehzahlen zu vermeiden,
um Resonanzprobleme im System zu
92 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 95

Parameterbeschreibungen Programmierhandbuch
4-63 Ausbl. Drehzahl bis [Hz]
Array [4]
Range: Funktion:
verhindern. Geben Sie hier die
Maximalgrenzen der zu
vermeidenden Drehzahlen ein.
3.5.6 4-7* Positionsüberwachung
4-70 Positionsfehlerfunktion
Option: Funktion:
HINWEIS
Dieser Parameter ist nur mit Softwareversion 48.XX verfügbar.
Auswahl der Funktion, die aktiviert wird,
wenn der Positionsfehler den maximal
zulässigen Wert überschreitet. Der Positionsfehler ist die Differenz zwischen der Ist- und
der Sollposition. Der Positionsfehler ist der
Eingang für den PI-Positionsregler.
[0] * Deaktiviert Der Frequenzumrichter überwacht nicht den
Positionsfehler.
[1] Warnung Der Frequenzumrichter gibt eine Warnung
aus, wenn der maximal zulässige Positionsfehler überschritten wird. Der
Frequenzumrichter setzt den Betrieb fort.
[2] Abschaltung Der Frequenzumrichter schaltet ab, wenn der
maximal zulässige Positionsfehler
überschritten wird.
4-71 Maximum Position Error
Range: Funktion:
1000 CustomReadoutUnit2*
[0 2147483647
CustomReadoutUnit2]
HINWEIS
Dieser Parameter ist nur
mit Softwareversion 48.XX
verfügbar.
Eingabe des maximal
zulässigen Positions-DrehgeberFehlers in Positionseinheiten,
die in Parametergruppe 17-7*
Position Scaling (Positionsskalierung) definiert sind. Wenn
dieser Wert während der in
Parameter 4-72 Position Error
Timeout eingestellten Zeit
überschritten wird, wird die
Positionsfehlerfunktion in
Parameter 4-70 Position Error
Function aktiviert.
4-72 Position Error Timeout
Range: Funktion:
0.100s* [0.000 -
60.000 s]
HINWEIS
Dieser Parameter ist nur mit Softwareversion 48.XX verfügbar.
Wenn der in Parameter 4-71 Maximum
Position Error definierte Wert länger als die
in diesem Parameter definierte Zeit
vorhanden ist, aktiviert der Frequenzumrichter die in Parameter 4-70 Position Error
Function ausgewählte Funktion.
4-73 Position Limit Function
Option: Funktion:
HINWEIS
Dieser Parameter ist nur mit Softwareversion 48.XX verfügbar.
Wählen Sie die Funktion aus, die aktiviert wird,
wenn die Position außerhalb den in
Parameter 3-06 Minimum Position und
Parameter 3-07 Maximum Position definierten
Grenzen liegt.
[0] Disabled Der Frequenzumrichter überwacht nicht die
Positionsgrenzen.
[1] Warning Der Frequenzumrichter gibt eine Warnung aus,
wenn die Position außerhalb der Grenzen liegt.
[2] Warning &
Trip
[3]*Abs. Pos.
Mode
Stop
[4] Abs. Pos.
Md. Stop
& Trip
[5] Position
Stop
Der Frequenzumrichter gibt eine Warnung aus,
wenn das Ziel außerhalb der Positionsgrenzen
liegt. Der Frequenzumrichter startet die Positionierung und schaltet anschließend ab, wenn die
Positionsgrenze erreicht ist.
Der Frequenzumrichter überwacht die Positionsgrenzen nur im absoluten
Positionierungsmodus. Der Frequenzumrichter
gibt eine Warnung aus und stoppt an der Positionsgrenze, wenn die Zielposition außerhalb der
Positionsgrenzen liegt.
Der Frequenzumrichter überwacht die Positionsgrenzen nur im absoluten
Positionierungsmodus. Der Frequenzumrichter
stoppt an der Positionsgrenze und schaltet ab,
wenn die Zielposition außerhalb der Positionsgrenzen liegt.
Wenn das eingestellte Ziel außerhalb der Positionsgrenzen liegt, verwendet der
Frequenzumrichter die Positionsgrenze als Ziel.
Diese Option funktioniert in allen Betriebsmodi,
einschließlich Drehzahl- und Drehmomentregelung. Der Frequenzumrichter gibt an der
Grenzposition eine Warnung aus.
3 3
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 93
Page 96

Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
4-73 Position Limit Function
Option: Funktion:
[6] Position
Stop &
Trip
33
[7] Speed
Stop
[8] Speed
Stop &
Trip
Wenn das eingestellte Ziel außerhalb der Positionsgrenzen liegt, verwendet der
Frequenzumrichter die Positionsgrenze als Ziel.
Diese Option funktioniert in allen Betriebsmodi,
einschließlich Drehzahl- und Drehmomentregelung. Der Frequenzumrichter schaltet an der
Grenzposition ab.
Wenn das eingestellte Ziel außerhalb der Positionsgrenzen liegt, führt der Frequenzumrichter
eine Rampe Ab durch und stoppt an der
Grenzposition. Diese Option funktioniert in allen
Betriebsmodi. Der Frequenzumrichter gibt am
Stopp eine Warnung aus.
Wenn das eingestellte Ziel außerhalb der Positionsgrenzen liegt, führt der Frequenzumrichter
eine Rampe Ab durch und stoppt an der
Grenzposition. Diese Option funktioniert in allen
Betriebsmodi. Der Frequenzumrichter schaltet
bei einem Stopp ab.
4-74 Start Fwd/Rev Function
Option: Funktion:
[5] Qstop &
Trip
[6] Coast Der Frequenzumrichter führt einen
[7] Coast &
Warning
[8] Coast &
Trip
[9] Zero Speed
Ref
Der Frequenzumrichter führt den Schnellstopp
durch und schaltet mit der Meldung Alarm
215, Start Fwd/Rev ab.
Motorfreilauf durch.
Der Frequenzumrichter führt einen
Motorfreilauf durch und zeigt Warnung 215,
Start Fwd/Rev an.
Der Frequenzumrichter führt einen
Motorfreilauf durch und schaltet mit der
Meldung Alarm 215, Start Fwd/Rev ab.
Der Frequenzumrichter fährt den Motor über
Rampe auf Nulldrehzahl und sorgt dafür, dass
der Motor bei dieser Drehzahl weiterhin
magnetisiert ist. Im Positionierungs- und
Synchronisierungsmodus bleibt der Positionsregler aktiv und behält die Istposition bei.
4-75 Touch Timout
4-74 Start Fwd/Rev Function
Option: Funktion:
HINWEIS
Dieser Parameter ist nur mit SoftwareVersion 48.XX verfügbar.
Wählen Sie die Aktion aus, die der Frequenzumrichter ausführt, wenn an einem
Digitaleingang mit den ausgewählten
Optionen [12] Start nur Rechts oder [13] Start
nur Links ein aktives Signal erfasst wird.
Der Frequenzumrichter führt die in diesem
Parameter ausgewählte Funktion aus, wenn er
bis zu einem Endbegrenzungsschalter fährt
und die Bewegung dann nur in der
umgekehrten Richtung möglich ist. Wenn eine
Option mit Abschaltung ausgewählt ist, kann
der Frequenzumrichter die Bewegung nach
dem Zurücksetzen fortfahren.
[0]*Stop Der Frequenzumrichter stoppt den Motor.
Range: Funktion:
6000.0s* [0.1 -
6000.0 s]
Geben Sie den Timeout-Wert für die
Touch-Probe-Positionierung ein. Wenn der
Frequenzumrichter bei aktiver TouchProbe-Positionierung den Touch-ProbeSensor innerhalb dieser Zeit nicht erkennt,
schaltet der Frequenzumrichter mit der
Meldung Alarm 216, Touch-Proben-Timeout
ab. Der Wert 6000 entspricht Aus.
[1] Stop &
Warning
[2] Stop & Trip Der Frequenzumrichter stoppt den Motor und
[3] Qstop Der Frequenzumrichter führt den Schnellstopp
[4] Qstop &
Warning
94 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Der Frequenzumrichter stoppt den Motor und
zeigt Warnung 215, Start Fwd/Rev an.
schaltet mit der Meldung Alarm 215, Start
Fwd/Rev ab.
durch.
Der Frequenzumrichter führt den Schnellstopp
durch und zeigt Warnung 215, Start Fwd/Rev
an.
Page 97

e30bg235.11
TT
TT
nn
nn
Driving
Driving
Braking
Braking
T
12
3 4
par. 4-91,
par. 4-92
par. 4-95
par. 4-96
n
par. 4-93,
par. 4-94
Parameterbeschreibungen Programmierhandbuch
3.5.7 4-8* Power Limit
Parameter zur Konfiguration der Leistungsbegrenzungsfunktion.
4-80 Power Limit Func. Motor Mode
Wählen Sie aus, ob die Leistungsbegrenzungsfunktion aktiviert
ist. Definieren Sie die Leistungsgrenze für den Motorbetrieb in
Parameter 4-82 Power Limit Motor Mode.
Option: Funktion:
[0] * Disabled
[1] Enabled
[2] When Activated Aktivierung über Digital-
eingang oder Feldbus.
4-81 Power Limit Func. Generator Mode
Wählen Sie aus, ob die Leistungsbegrenzungsfunktion im Generatorbetrieb aktiviert ist. Definieren Sie die Leistungsgrenze für den
Motorbetrieb in Parameter 4-83 Power Limit Generator Mode.
Option: Funktion:
[0] * Disabled
[1] Enabled
[2] When Activated Aktivierung über Digital-
eingang oder Feldbus.
3.5.8 4-9* Directional Limits
Die richtungsabhängige Begrenzungsfunktion erlaubt es,
verschiedene Drehmoment- und Drehzahlgrenzen für
verschiedene Kombinationen von Drehmomentwirkrichtung und Drehrichtung festzulegen. Ein Beispiel finden
Sie in Abbildung 3.34. In der Abbildung zeigen die
Quadranten 1-4 verschiedene Kombinationen von
Drehrichtung und Drehmomentwirkrichtung sowie die
Parameter, die in verschiedenen Quadranten wirken.
3 3
4-82 Power Limit Motor Mode
Range: Funktion:
100.0 %* [0.0 -
200.0 %]
Geben Sie die maximale Ausgangsleistung
ein, wenn die Leistungsbegrenzungsfunktion aktiviert ist. Zugehörige
Parameter: Parameter 1-20 Motornenn-
leistung [kW],
Parameter 1-21 Motornennleistung [PS].
Abbildung 3.34 Directional Limits (richtungsabhängige
Begrenzung)
Ein Drehzahlgrenzwert darf den Wert von
4-83 Power Limit Generator Mode
Range: Funktion:
100.0 %* [0.0 -
200.0 %]
Geben Sie die maximale Generatorleistung ein, wenn die
Leistungsbegrenzungsfunktion aktiviert ist.
Zugehörige Parameter:
Parameter 1-20 Motornennleistung [kW],
Parameter 1-21 Motornennleistung [PS].
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 95
Parameter 4-13 Max. Drehzahl [UPM] oder
Parameter 4-14 Max Frequenz [Hz] nicht überschreiten. Ein
Drehmomentgrenzwert darf den Wert von
Parameter 4-16 Momentengrenze motorisch oder
Parameter 4-17 Momentengrenze generatorisch nicht
überschreiten.
4-90 Directional Limit Mode
Wählen Sie aus, ob die richtungsabhängige Begrenzung aktiviert
ist. Bei aktivierter richtungsabhängiger Begrenzung lassen sich
verschiedene Drehzahl- und Drehmomentgrenzen für Links- und
Rechtslauf festlegen.
Option: Funktion:
[0] * Disabled Richtungsabhängige
Begrenzung ist aktiviert.
[1] Speed Richtungsabhängige
Begrenzung der Drehzahl ist
aktiviert.
[2] Torque Richtungsabhängige
Begrenzung des Drehmoments
ist aktiviert.
Page 98

Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
4-90 Directional Limit Mode
Wählen Sie aus, ob die richtungsabhängige Begrenzung aktiviert
ist. Bei aktivierter richtungsabhängiger Begrenzung lassen sich
verschiedene Drehzahl- und Drehmomentgrenzen für Links- und
Rechtslauf festlegen.
33
Option: Funktion:
[3] Speed and Torque Richtungsabhängige
Begrenzung von Drehmoment
und Drehzahl ist aktiviert.
4-91 Positive Speed Limit [RPM]
Range: Funktion:
Size related* [ 0 - par. 4-13
RPM]
Geben Sie die Grenze für die
Motordrehzahl bei Rechtslauf
ein.
4-92 Positive Speed Limit [Hz]
Range: Funktion:
Size related* [ 0 - par. 4-14
Hz]
Geben Sie die Grenze für die
Motordrehzahl bei Rechtslauf
ein.
4-93 Negative Speed Limit [RPM]
Range: Funktion:
Size related* [ 0 - par. 4-13
RPM]
Geben Sie die Grenze für die
Motordrehzahl bei Linkslauf ein.
4-94 Negative Speed Limit [Hz]
Range: Funktion:
Size related* [ 0 - par. 4-14
Hz]
Geben Sie die Grenze für die
Motordrehzahl bei Linkslauf ein.
4-95 Positive Torque limit
Range: Funktion:
Size related* [ 0 - 160.0 %] Geben Sie die Grenze für das
Motordrehmoment bei Rechtslauf
ein.
4-96 Negative Torque limit
Range: Funktion:
Size related* [ 0 - 160.0 %] Geben Sie die Grenze für das
Motordrehmoment bei Linkslauf
ein.
96 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
Page 99

Parameterbeschreibungen Programmierhandbuch
3.6 Parameter: 5-** Digit. Ein-/Ausgänge
3.6.1 5-0* Grundeinstellungen
Parameter zum Konfigurieren von Ein- und Ausgängen
mithilfe von NPN und PNP.
5-00 Schaltlogik
Option: Funktion:
HINWEIS
Führen Sie einen Aus- und Einschaltzyklus
durch, um den Parameter nach dessen
Änderung zu aktivieren.
Digitaleingänge und programmierte Digitalausgänge
sind für einen Betrieb in PNP- oder NPN-Systemen
vorprogrammierbar.
[0] * PNP
[1] NPN
Aktion bei positiven Richtungspulsen (↕). PNPSysteme werden an GND geschaltet.
Aktion bei negativen Richtungspulsen (↕). NPNSysteme werden an +24 V geschaltet (intern im
Frequenzumrichter).
5-01 Terminal 27 Mode
Option: Funktion:
HINWEIS
Diesen Parameter können Sie bei laufendem
Motor nicht einstellen.
[0] * Input Definiert Klemme 27 als Digitaleingang.
[1] Output Definiert Klemme 27 als Digitalausgang.
5-02 Klemme 29 Funktion
Option: Funktion:
HINWEIS
Dieser Parameter ist nur für FC302
verfügbar.
[0] * Eingang Definiert Klemme 29 als Digitaleingang.
[1] Ausgang Definiert Klemme 29 als Digitalausgang.
3.6.2 5-1* Digitaleingänge
Die Digitaleingänge dienen zur Auswahl verschiedener
Funktionen im Frequenzumrichter. Tabelle 3.15 zeigt,
welche Funktionen Digitaleingängen zugeordnet werden
können.
Funktionen in Gruppe 1 haben eine höhere Priorität als
Funktionen in Gruppe 2.
Gruppe 1 Reset, Freilaufstopp, Reset und Freilaufstopp,
Schnellstopp, DC-Bremse, Stopp und [Off]-Taste.
Gruppe 2 Start, Puls-Start, Reversierung, Start Rücklauf,
Festdrehzahl JOG und Ausgangsfrequenz
speichern.
Tabelle 3.14 Funktionsgruppen
Funktion des Digitaleingangs
Ohne Funktion [0] Alle, Klemme 32, 33
Reset [1] Alle
Motorfreilauf invers [2] Alle, Klemme 27
Mot.freil./Res. inv. [3] Alle
Schnellst.rampe (inv) [4] Alle
DC-Bremse invers [5] Alle
Stopp (invers) [6] Alle
Start [8] Alle, Klemme 18
Puls-Start [9] Alle
Reversierung [10] Alle, Klemme 19
Start + Reversierung [11] Alle
Start nur Rechts [12] Alle
Start nur Links [13] Alle
Festdrehzahl JOG [14] Alle, Klemme 29
Festsollwert ein [15] Alle
Festsollwert Bit 0 [16] Alle
Festsollwert Bit 1 [17] Alle
Festsollwert Bit 2 [18] Alle
Sollwert speichern [19] Alle
Drehz. speich. [20] Alle
Drehzahl auf [21] Alle
Drehzahl ab [22] Alle
Satzanwahl Bit 0 [23] Alle
Satzanwahl Bit 1 [24] Alle
Präz. Stopp invers [26] 18, 19
Präziser Start, Stopp [27] 18, 19
Frequenzkorrektur Auf [28] Alle
Frequenzkorrektur Ab [29] Alle
Zählereingang [30] 29, 33
Pulseingang flankengesteuert
Pulseingang zeitbasiert [32] 29, 33
Rampe Bit 0 [34] Alle
Rampe Bit 1 [35] Alle
Präziser Puls-Start [40] 18, 19
Wählen Sie Anschluss
[31] 29, 33
3 3
MG33MO03 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. 97
Page 100

Parameterbeschreibungen
VLT® AutomationDrive FC 301/302
Funktion des Digitaleingangs
Präz. Puls-Stopp inv. [41] 18, 19
Externe Verriegelung [51] –
DigiPot Auf [55] Alle
33
DigiPot Ab [56] Alle
DigiPot löschen [57] Alle
DigiPot Heben [58] Alle
Zähler A (+1) [60] 29, 33
Zähler A (-1) [61] 29, 33
Reset Zähler A [62] Alle
Zähler B (+1) [63] 29, 33
Zähler B (-1) [64] 29, 33
Reset Zähler B [65] Alle
Mech. Bremse Signal [70] Alle
Mech. Bremse Signal inv. [71] Alle
PID-Fehler inv. [72] Alle
PID-Reset I-Anteil [73] Alle
PID aktiviert [74] Alle
MCO-spezifisch [75] Alle
PTC-Karte 1 [80] Alle
PROFIdrive OFF2 [91] Alle
PROFIdrive OFF3 [92] Alle
Erkennung von leichter
Last
Netzausfall [96] 32, 33
Netzausfall invers [97] 32, 33
Start flankengesteuert [98] Alle
Sicherheitsoption – Reset [100] –
Master-Versatz aktivieren [108] Alle
Virtuellen Master starten [109] Alle
Referenzfahrt starten [110] Alle
Touch aktivieren [111] Alle
Relative Position [112] Alle
Sollwert aktivieren [113] Alle
Sync. an Pos. Modus [114] Alle
Referenzfahrt-Sensor [115] 18, 32, 33
Referenzfahrt-Sensor
invers
Touch-Sensor [117] 18, 32, 33
Touch-Sensor invers [118] 18, 32, 33
Drehzahlmodus [119] Alle
Power Limit Mot. [231] Alle
Power Limit Gen. [232] Alle
Power Limit Both [233] Alle
Tabelle 3.15 Funktion des Digitaleingangs
Wählen Sie Anschluss
[94] Alle
[116] 18, 32, 33
Nur für einen speziellen Digitaleingang vorgesehene
Funktionen werden im zugehörigen Parameter angegeben.
Sie können alle Digitaleingänge auf die folgenden
Funktionen programmieren:
[0] Ohne Funktion Keine Reaktion auf Signale, die an die
Klemme übertragen werden.
[1] Reset Setzt den Frequenzumrichter nach dem
Ausschalten/nach einem Alarm zurück. Sie
können nicht alle Alarme quittieren.
[2] Motorfreilauf
invers
[3] Mot.freil./Res.
inv.
[4] Schnellst.rampe
(inv)
[5] DC-Bremse
invers
[6] Stopp (invers) Stopp, invertierte Funktion. Erzeugt eine
(Werkseinstellung Digitaleingang 27):
Freilaufstopp, invertierter Eingang (NC).
Der Frequenzumrichter belässt den Motor
im Motorfreilauf. Logisch
„0“⇒Freilaufstopp.
Reset und Freilaufstopp, invertierter
Eingang (NC). Motor bleibt im
Motorfreilauf und Frequenzumrichter wird
quittiert. Logisch „0“⇒Motorfreilaufstopp
und Reset.
Invertierter Eingang (NC). Es wird ein
Stopp gemäß Schnellstopp-Rampenzeit
Parameter 3-81 Rampenzeit Schnellstopp
ausgeführt. Nach Anhalten des Motors
dreht die Motorwelle im Motorfreilauf.
Logisch „0“⇒Schnellstopp.
Invertierter Eingang für DC-Bremse (NC).
Hält den Motor durch Anlegen einer DCSpannung für einen bestimmten Zeitraum
an. Siehe Parameter 2-01 DC-Bremsstrom
bis Parameter 2-03 DC-Bremse Ein [UPM].
Die Funktion ist nur aktiv, wenn der Wert
in Parameter 2-02 DC Braking Time
ungleich 0 ist. Logisch „0“ ⇒DC-Bremse.
Stoppfunktion, wenn die ausgewählte
Klemme von einer logischen 1 zu einer
logischen 0 wechselt.
Das Stoppen erfolgt entsprechend der
gewählten Rampenzeit:
Parameter 3-42 Rampenzeit Ab 1,
•
Parameter 3-52 Rampenzeit Ab 2,
•
Parameter 3-62 Rampenzeit Ab 3
•
und
Parameter 3-72 Rampenzeit Ab 4.
•
Die VLT® AutomationDrive FC301/FC302-Standardklemmen
sind 18, 19, 27, 29, 32 und 33. Die VLT® General Purpose
I/O MCB 101-Klemmen sind X30/2, X30/3 und X30/4.
Funktionen der Klemme 29 ausschließlich als Ausgang in
FC302.
98 Danfoss A/S © 01/2018 Alle Rechte vorbehalten. MG33MO03
 Loading...
Loading...