

Page 1
ENGINEERING TOMORROW
Programming Guide
VLT® AutomationDrive FC 301/302
Softwareversioner, styrekort MK I: 7.62, 48.2X
Softwareversion, styrekort MK II: 8.10
www.vlt.dk
Page 2

Page 3
Indholdsfortegnelse Programming Guide
Indholdsfortegnelse
1 Indledning
1.1 Softwareversion
1.2 Godkendelser
1.3 Ordforklaring
1.3.1 Frekvensomformer 3
1.3.2 Indgang 3
1.3.3 Motor 3
1.3.4 Referencer 4
1.3.5 Diverse 4
1.4 Sikkerhed
1.5 Elektrisk ledningsføring
1.6 Integreret Motion Controller
2 Sådan programmeres frekvensomformeren
2.1 Graske og numeriske LCP-betjeningspaneler
2.1.1 LCD-display 13
2.1.2 Hurtig overførsel af parameterindstillinger mellem ere frekvensomformere 15
2.1.3 Display mode 15
3
3
3
3
6
8
11
12
12
2.1.4 Display mode - valg af udlæsningstilstande 15
2.1.5 Parameteropsætning 16
2.1.6 Kvikmenu, hovedfunktioner 17
2.1.7 Indledende idriftsættelse 18
2.1.8 Hovedmenutilstand 19
2.1.9 Parametervalg 19
2.1.10 Ændring af data 19
2.1.11 Ændring af en tekstværdi 19
2.1.12 Ændring af en dataværdi 20
2.1.13 Uendeligt variabel ændring af numerisk dataværdi 20
2.1.14 Værdi, trinvis 20
2.1.15 Aæsning og programmering af indekserede parametre 20
2.1.16 Sådan programmeres på det numeriske LCP-betjeningspanel 20
2.1.17 LCP-taster 22
3 Parameterbeskrivelser
3.1 Parametre: 0-** Betjening/display
3.2 Parametre: 1-** Last og motor
24
24
36
3.3 Parametre: 2-** Bremser
3.4 Parametre: 3-** Reference / ramper
3.5 Parametre: 4-** Grænser/Advarsler
3.6 Parametre: 5-** Digital ind-/udgang
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 1
62
69
81
92
Page 4
Indholdsfortegnelse
VLT® AutomationDrive FC 301/302
3.7 Parametre: 6-** Analog ind-/udgang
3.8 Parametre: 7-** Styreenheder
3.9 Parametre: 8-** Komm. og optioner
3.10 Parametre: 9-** PROFIBUS
3.11 Parametre: 10-** DeviceNet CAN-eldbus
3.12 Parametre: 12-** Ethernet
3.13 Parametre: 13-**Intelligent logik
3.14 Parametre: 14-** Specielle funkt.
3.15 Parametre: 15-** Apparatinfo.
3.16 Parametre: 16-** Dataudlæsninger
3.17 Parametre: 17-** Feedback
3.18 Parametre: 18-** Dataudlæsning 2
3.19 Parametre: 19-** Application Parameters
3.20 Parametre: 23-** Tidsbaserede funkt.r
3.21 Parametre: 30-** Specialfunktioner
3.22 Parametre: 32-** Grundl. MCO-indst.
3.23 Parametre: 33-** Grundl. MCO-indst.
117
127
137
148
148
148
148
173
185
193
201
209
211
211
218
222
222
3.24 Parametre: 34-** MCO-dataudlæsn.
3.25 Parametre: 35-** Følerindgangsoption
3.26 Parametre: 36-** Programmerbar I/O-option
3.27 Parametre: 40-** Special Settings
3.28 Parametre: 42-** Safety Functions
3.29 Parametre: 43-** Unit Readouts
4 Integreret Motion Controller
4.1 Indledning
4.2 Positionering, homing, synkronisering
4.3 Styring
5 Parameterlister
5.1 Indledning
5.2 Parameterlister og optioner, softwareversion 8.10 (standard)
5.3 Parameterlister og optioner, softwareversion 48.20 (IMC)
6 Fejlnding
222
222
225
228
228
228
231
231
231
233
236
236
238
267
290
6.1 Statusmeddelelser
7 Appendiks
7.1 Symboler, forkortelser og konventioner
Indeks
2 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
290
304
304
305
Page 5
Indledning Programming Guide
1 Indledning
1.1 Softwareversion
Programming Guide
Softwareversioner:
Styrekort MK I: 7.62, 48.2X, og tidligere versioner
Styrekort MK II: 8.10
Se softwareversionsnummeret i parameter 15-43 Software Version.
Tabel 1.1 Softwareversion
1.1.1 Styrekort MK II
Softwareversion 8.03 og senere versioner kan kun
installeres på styrekort MK II. Softwareversion 7.62 og
tidligere versioner kan kun installeres på styrekort MK I.
Identicer styrekortets version ved hjælp af farven på USBporten:
MK I: Sort USB port.
MK II: Hvid USB port.
1.2 Godkendelser
1.3 Ordforklaring
1.3.1 Frekvensomformer
I
VLT,MAKS
Maksimum udgangsstrøm.
I
VLT,N
Nominel udgangsstrøm leveret af frekvensomformeren.
U
VLT,MAKS
Maksimal udgangsspænding.
1.3.2 Indgang
Styrekommando
Start og stands den tilsluttede motor med LCP'et og de
digitale indgange.
Funktionerne er opdelt i to grupper.
Funktionerne i gruppe 1 har højere prioritet end
funktionerne i gruppe 2.
Gruppe 1 Nulstil, friløbsstop, nulstil og friløbsstop, hurtigt
stop, DC-bremse, stop, [OFF]-tasten.
Gruppe 2 Start, pulsstart, reversering, reverseret start, jog,
fastfrys udgang.
Tabel 1.2 Funktionsgrupper
1.3.3 Motor
Motor kører
Moment genereret på udgangsaksel og hastighed fra 0
O/MIN til maksimum hastighed på motor.
f
JOG
Motorfrekvensen, når jog-funktionen er aktiveret (via
digitale klemmer).
f
M
Motorfrekvens.
f
MAKS
Maksimum motorfrekvens.
f
MIN
Minimum motorfrekvens.
f
M,N
Nominel motorfrekvens (typeskiltdata).
I
M
Motorstrøm (faktisk).
I
M,N
Nominel motorstrøm (typeskiltdata).
n
M,N
Nominel motorhastighed (typeskiltdata).
n
s
Synkron motorhastighed.
2 × par . 1 − 23 × 60s
ns=
n
slip
Motorslip.
P
M,N
Nominel motoreekt (typeskiltdata i kW eller hk).
T
M,N
Nominelt moment (motor).
U
M
Aktuel motorspænding.
U
M,N
Nominel motorspænding (typeskiltdata).
par . 1 − 39
1 1
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 3
Page 6
175ZA078.10
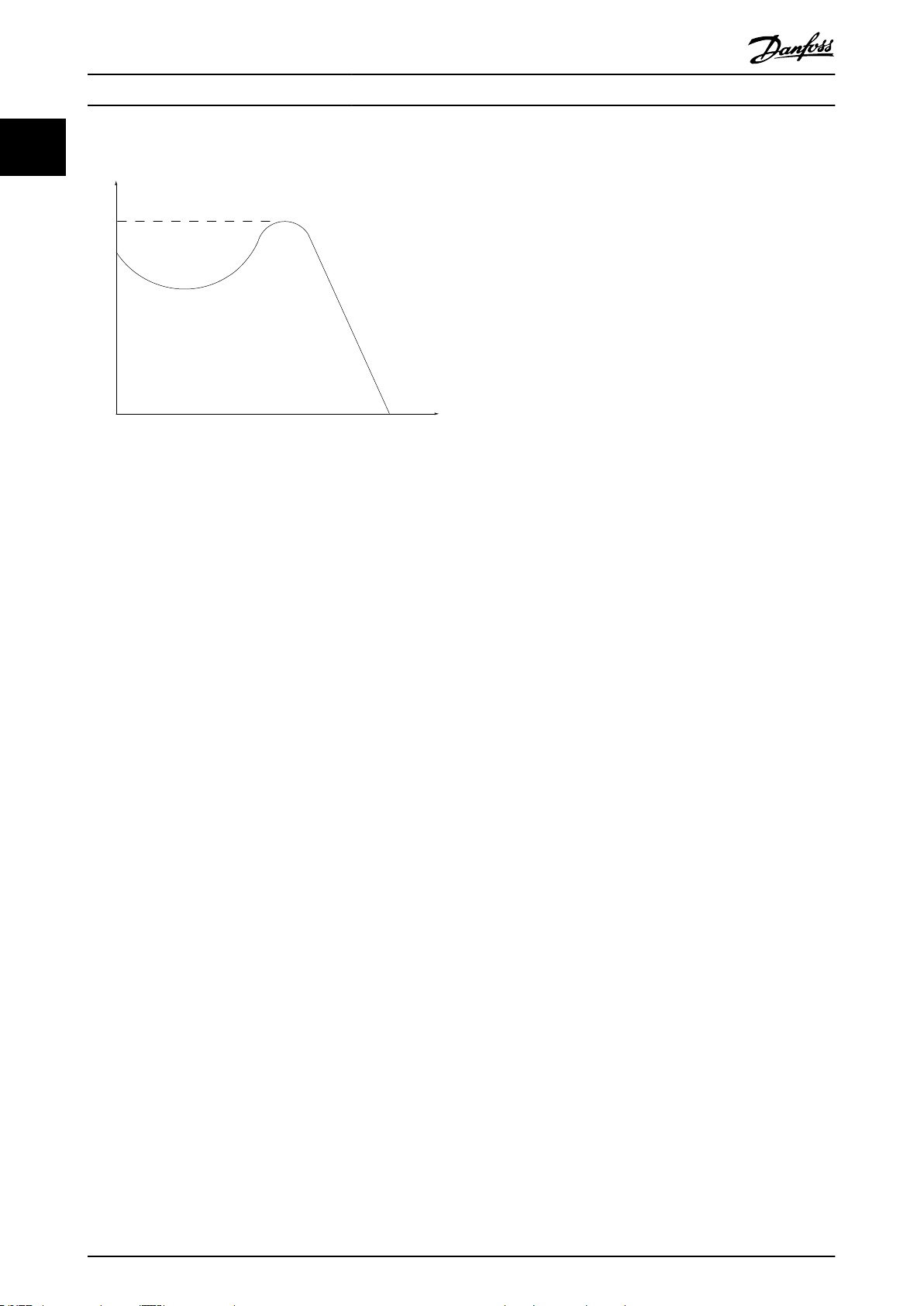
Moment
Kipgrænse
o/min
Indledning
VLT® AutomationDrive FC 301/302
11
Løsrivelsesmoment
1.3.5 Diverse
Analoge indgange
De analoge indgange bruges til at styre forskellige
funktioner i frekvensomformeren.
Der ndes to typer analoge indgange:
Strømindgang, 0–20 mA og 4–20 mA
Spændingsindgang, -10 V DC til +10 V DC.
Analoge udgange
De analoge udgange kan levere et signal på 0–20 mA, 4–
20 mA.
Automatisk motortilpasning, AMA
AMA-algoritmen bestemmer de elektriske parametre for
den tilsluttede motor ved stilstand.
Illustration 1.1 Løsrivelsesmoment
Bremsemodstand
Bremsemodstanden er et modul, som kan absorbere den
bremseeekt, der genereres ved regenerativ bremsning.
η
VLT
Frekvensomformerens virkningsgrad deneres som
forholdet mellem den afgivne og den modtagne
eekt.
Start-deaktiver-kommando
En stopkommando, der tilhører styrekommandoerne i
Gruppe 1 - se Tabel 1.2.
Stopkommando
En stopkommando, der tilhører styrekommandoerne i
Gruppe 1 - se Tabel 1.2.
1.3.4 Referencer
Analog reference
Et signal, der sendes til de analoge indgange 53 eller 54
(spænding eller strøm).
Binær reference
Et signal, der sendes til den serielle kommunikationsport.
Preset-reference
En deneret preset-reference, der kan indstilles fra -100 %
til +100 % af referenceområdet. Der kan vælges otte
preset-referencer via de digitale klemmer.
Pulsreference
Et pulsfrekvenssignal, som sendes til de digitale indgange
(klemme 29 eller 33).
Ref
MAKS
Bestemmer forholdet mellem referenceindgangen ved
100 % af fuld skalaværdi (typisk 10 V, 20 mA) og den
resulterende reference. Maksimumreferenceværdien
indstilles i parameter 3-03 Maksimumreference.
Ref
MIN
Bestemmer forholdet mellem referenceindgangen ved 0 %
af værdien (typisk 0 V, 0 mA, 4 mA) og den resulterende
reference. Minimumreferenceværdien indstilles i
parameter 3-02 Minimumreference.
Denne regenerative bremseeekt øger DC-linkspændingen, og en bremsechopper sørger for at afsætte
eekten i bremsemodstanden.
CT-karakteristik
Konstant momentkarakteristik anvendes til alle applikationer, for eksempel transportbånd, fortrængningspumper
og kraner.
Digitale indgange
De digitale indgange kan bruges til styring af forskellige
funktioner i frekvensomformeren.
Digitale udgange
Frekvensomformeren er forsynet med to Solid Stateudgange, der kan levere et 24 V DC-signal (maksimum
40 mA).
DSP
Digital signalprocessor.
ETR
Elektronisk termorelæ er en beregning af termisk
belastning baseret på aktuel belastning og tid. Den har til
formål at beregne motortemperaturen.
Hiperface
®
Hiperface® er et registreret varemærke tilhørende
Stegmann.
Initialisering
Hvis der udføres initialisering (parameter 14-22 Driftstilstand), vender frekvensomformeren tilbage til
fabriksindstillingen.
Periodisk driftscyklus
Periodisk drift betyder en sekvens af driftscyklusser. Hver
cyklus består af en periode med og en periode uden
belastning. Driften kan være enten periodisk drift eller
ikke-periodisk drift.
LCP
LCP-betjeningspanelet er en komplet
grænseade til
styring og programmering af frekvensomformeren.
Betjeningspanelet er aftageligt og kan monteres op til 3 m
4 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 7
Indledning Programming Guide
(10 fod) fra frekvensomformeren, f.eks. i et frontpanel ved
hjælp af installationssætoptionen.
NLCP
Det numeriske betjeningspanel er en grænseade til
styring og programmering af frekvensomformeren.
Displayet er numerisk, og panelet anvendes til at vise
procesværdier. NLCP'et har ingen lagrings- og kopifunktioner.
lsb
Mindst betydende bit.
msb
Mest betydende bit.
MCM
Forkortelse for Mille Circular Mil, som er en amerikansk
måleenhed for kabeltværsnit. 1 MCM = 0,5067 mm2.
Online-/oineparametre
Ændringer af onlineparametre aktiveres, umiddelbart efter
at dataværdien er ændret. Tryk på [OK] for at aktivere
ændringer af oineparametre.
Proces PID
PID-styringen opretholder den krævede hastighed og
temperatur og det ønskede tryk osv. ved at tilpasse
udgangsfrekvensen til den varierende belastning.
PCD
Processtyringsdata.
Strømcyklus
Afbryd netforsyningen, indtil displayet (LCP) slukkes. Tilslut
derefter strømmen igen.
Pulsindgang/trinvis encoder
En ekstern digital pulstransmitter, som benyttes til at
returnere oplysninger om motorhastigheden. Encoderen
anvendes i applikationer, hvor hastighedsstyringen kræver
stor nøjagtighed.
RCD
Fejlstrømsafbryder.
Opsætning
Parameterindstillinger kan gemmes i re opsætninger. Skift
mellem de re parameteropsætninger og rediger i en
opsætning, mens en anden er aktiv.
SFAVM
Switchmønster kaldet stator ux-orienteret asynkron
vektormodulering (parameter 14-00 Koblingsmønster).
Slipkompensering
Frekvensomformeren kompenserer for motorslippet ved at
give frekvensen et tilskud, der følger den målte motorbelastning, således at motorhastigheden holdes næsten
konstant.
SLC
SLC (Smart Logic Control) er en række brugerdenerede
handlinger, som afvikles, når den tilknyttede brugerde-
nerede hændelse evalueres som sand af SLC. (Se
kapitel 3.13 Parametre: 13-**Intelligent logik).
STW
Statusord.
FC-standardbus
Omfatter RS485-bus med FC-protokol eller MC-protokol. Se
parameter 8-30 Protokol.
THD
Total harmonisk forvrængning angiver det samlede bidrag
fra harmoniske strømme.
Termistor
Temperaturafhængig modstand, der placeres på frekvensomformeren eller motoren.
Trip
Tilstand, der skiftes til i fejlsituationer, for eksempel hvis
frekvensomformeren udsættes for en overtemperatur, eller
når frekvensomformeren beskytter motoren, processen eller
mekanismen. Frekvensomformeren forhindrer en genstart,
indtil årsagen til fejlen er forsvundet. Genstart frekvensomformeren for at annullere triptilstanden. Triptilstand må
ikke benyttes til personbeskyttelse.
Triplås
Frekvensomformeren benytter denne tilstand i fejlsituationer for at beskytte sig selv. Frekvensomformer kræver
fysisk indgriben, for eksempel hvis der er en kortslutning
på udgangen. En triplås kan kun annulleres ved at afbryde
netforsyningen, erne årsagen til fejlen og tilslutte
frekvensomformeren igen. Genstart forhindres, indtil triptilstanden annulleres ved at aktivere nulstilling. I nogle
tilfælde kan nulstillingen udføres automatisk via programmering. Triplåstilstand må ikke benyttes til
personbeskyttelse.
VT-karakteristik
Variabel momentkarakteristik, som anvendes til pumper og
ventilatorer.
+
VVC
Sammenlignet med almindelig spændings-/frekvensforholdsstyring giver Voltage Vector Control (VVC+) forbedret
dynamik og stabilitet både ved ændring af hastighedsreference og i forhold til belastningsmomentet.
60° AVM
60° asynkron vektormodulering (parameter 14-00 Koblingsmønster).
Eektfaktor
Eektfaktoren er forholdet mellem I1 og I
Effekt faktor =
3xUxI1cosϕ
3xUxI
RMS
RMS
.
Eektfaktoren til trefaset styring:
Effekt faktor =
I1xcosϕ1
I
RMS
=
I
1
eftersomcosϕ1 = 1
I
RMS
Eektfaktoren angiver, i hvilken grad frekvensomformeren
belaster netforsyningen.
En lavere eektfaktor betyder højere I
for den samme
RMS
kW-ydelse.
2
2
I
RMS
= I
+ I
1
5
+ I
2
+ .. + I
7
2
n
1 1
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 5
Page 8
Indledning
VLT® AutomationDrive FC 301/302
11
Derudover indikerer en høj eektfaktor, at de forskellige
harmoniske strømme er lave.
DC-spolerne i frekvensomformeren producerer en høj
eektfaktor, hvilket minimerer belastningen af netforsyningen.
Målposition
Den sidste målposition, der angives via positioneringskommandoer. Prolgeneratoren bruger denne position til at
beregne hastighedsprolen.
Ønsket position
Den faktiske positionsreference beregnet af prolgeneratoren. Frekvensomformeren bruger denne ønskede
position som sætpunkt for position PI.
Faktisk position
Den faktiske position fra en encoder eller en værdi, som
motorstyringen beregner i åben sløjfe. Frekvensomformeren bruger den faktiske position som feedback for
position PI.
Positionsfejl
Positionsfejl er forskellen mellem den faktiske position og
den ønskede position. Positionsfejlen er indgangen for PIreguleringens position.
Positionsenhed
Den fysiske enhed for positionsværdier.
Sikkerhed
1.4
ADVARSEL
HØJSPÆNDING
Frekvensomformere indeholder højspænding, når de er
tilsluttet netspændingen, DC-forsyning eller belastningsfordeling. Hvis montering, start og vedligeholdelse
udføres af personale, der ikke er uddannet til det, kan
det resultere i død eller alvorlig personskade.
Montering, start og vedligeholdelse må kun
•
udføres af personale, der er uddannet til det.
Før der foretages service- eller reparations-
•
arbejde, skal der anvendes et egnet
måleapparat til at måle spændingen og for at
sikre, at der ikke er resterende spænding i
frekvensomformeren.
skal beskyttes imod overbelastning i henhold til
gældende nationale og lokale bestemmelser.
Jordlækstrømmen overstiger 3,5 mA. Sørg for, at
•
udstyret jordes korrekt af en autoriseret elektriker.
Fjern ikke stikkene til motor- og netforsyningen,
•
når frekvensomformeren er tilsluttet netforsyningen. Kontrollér, at netforsyningen er afbrudt,
og at den fornødne tid er gået, inden motoren
og netstikkene ernes.
Frekvensomformeren har ere spændingskilder
•
end L1, L2 og L3, når der er monteret belastningsfordeling (sammenkobling af DCmellemkreds) eller ekstern 24 V DC. Kontrollér, at
alle spændingskilder er afbrudt, og at den
fornødne tid er gået, inden reparationsarbejde
påbegyndes. Aadningstiden fremgår af Tabel 1.3.
ADVARSEL
UTILSIGTET START
Når frekvensomformeren er tilsluttet netspændingen, DCforsyningen, eller belastningsfordeling, kan motoren
starte pludseligt. Utilsigtet start under programmering,
service- eller reparationsarbejde kan resultere i død,
alvorlig personskade eller beskadigelse af udstyr eller
ejendom. Motoren kan starte via en ekstern kontakt, en
eldbuskommando, et indgangsreferencesignal fra LCP'et
eller efter en slettet fejltilstand.
For at undgå utilsigtet motorstart:
Afbryd frekvensomformeren fra netforsyningen.
•
Tryk på [O/Reset] på LCP'et, før program-
•
mering af parametre.
Frekvensomformeren, motoren og det drevne
•
udstyr skal være fuldstændigt tilsluttet og
samlet, før frekvensomformeren tilsluttes
netspændingen, DC-forsyningen eller belastningsfordeling.
Sikkerhedsforskrifter
Netforsyningen til frekvensomformeren skal
•
afbrydes, når der skal udføres reparationsarbejde.
Kontrollér, at netforsyningen er afbrudt, og at den
fornødne tid er gået, inden motoren og
netstikkene ernes. Aadningstiden fremgår af
Tabel 1.3.
[O] afbryder ikke netforsyningen og må derfor
•
ikke benyttes som en sikkerhedsafbryder.
Udstyret skal jordes korrekt, brugeren skal
•
beskyttes imod forsyningsspænding, og motoren
6 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 9
Indledning Programming Guide
ADVARSEL
AFLADNINGSTID
Frekvensomformeren indeholder DC-link-kondensatorer,
der kan forblive opladede, selv når frekvensomformeren
ikke er forsynet med strøm. Der kan være højspænding
til stede, selv når LED-advarselslamperne er slukkede.
Det kan resultere i død eller alvorlig personskade, hvis
der ikke ventes det angivne tidsrum, efter at strømmen
er slået fra, før der udføres service- eller reparationsarbejde.
Stop motoren.
•
Frakobl netspændingen og de eksterne DC-link-
•
strømforsyninger, herunder reservebatterier
(backup), UPS og DC-link-tilslutninger til andre
frekvensomformere.
Afbryd eller lås PM-motor.
•
Vent, indtil kondensatorerne er helt aadede.
•
Minimumventetiden er angivet i Tabel 1.3 og
kan også ses på produktmærkatet øverst på
frekvensomformeren.
Før der foretages service- eller reparations-
•
arbejde, skal der anvendes et egnet
måleapparat til at måle spændingen og for at
sikre, at kondensatorerne er fuldt aadede.
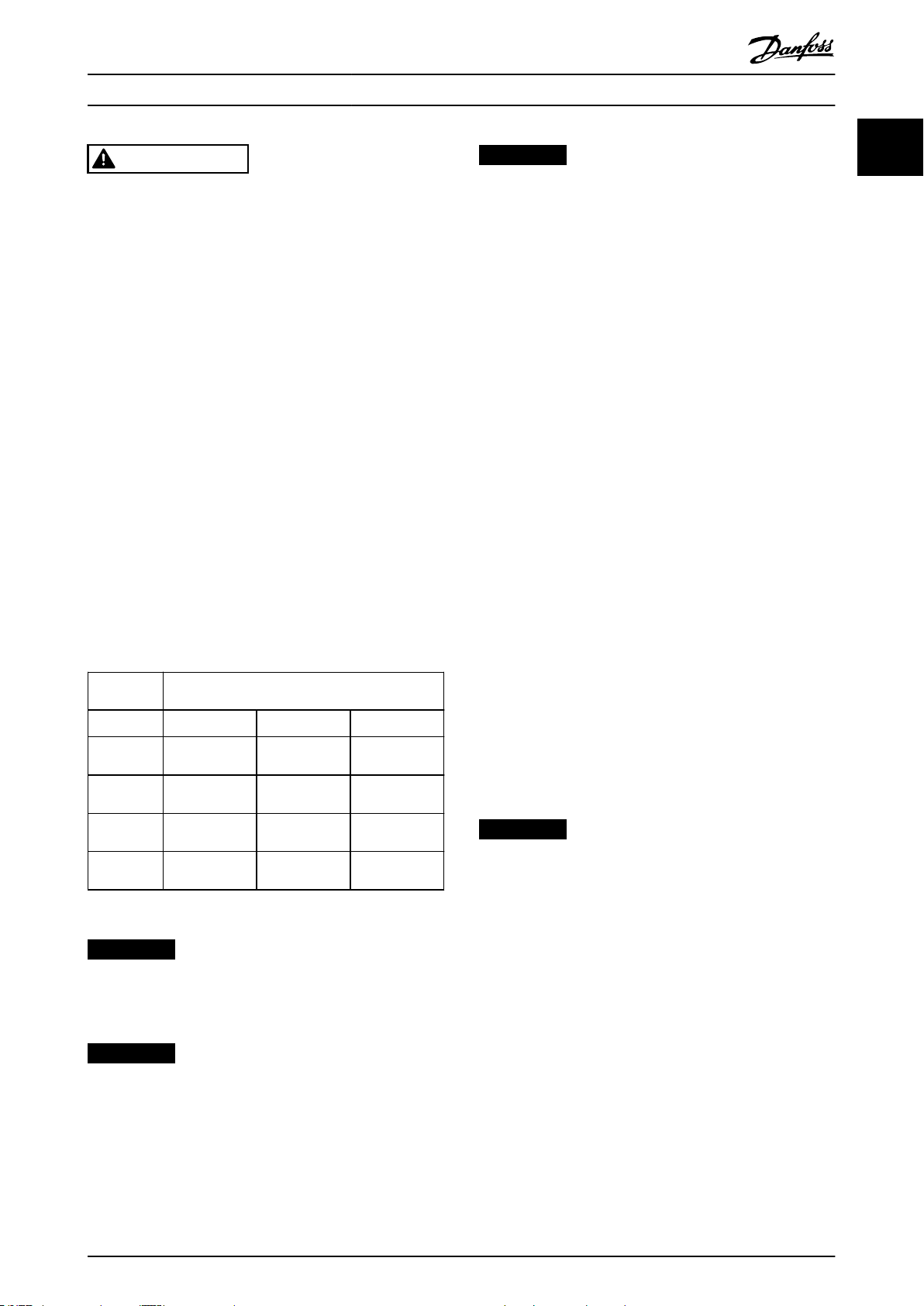
Spænding
[V]
4 7 15
200–240 0,25–3,7 kW
380–500 0,25–7,5 kW
(0,34–10 hk)
525–600 0,75–7,5 kW
525–690 – 1,5–7,5 kW
Tabel 1.3 Aadningstid
Minimumventetid (minutter)
(0,34–5 hk)
(1–10 hk)
(2–10 hk)
– 5,5–37 kW
(7,5–50 hk)
– 11–75 kW
(15–100 hk)
– 11–75 kW
(15–100 hk)
11–75 kW
(15–100 hk)
BEMÆRK!
Farlige situationer skal identiceres af maskinproducenten/integratoren, som er ansvarlig for at tage de
nødvendige forebyggende tiltag i betragtning. Yderligere
overvågnings- og beskyttelsesanordninger kan være
omfattet, altid i overensstemmelse med gældende
nationale sikkerhedsforskrifter, for eksempel lovgivning
om mekaniske værktøjer og bestemmelser om
forebyggelse af ulykker.
Kraner, lifte og hejseværker
Der skal altid være et reservesystem til styring af de
eksterne bremser. Frekvensomformeren kan under ingen
omstændigheder fungere som den primære sikringskreds.
Overhold de relevante standarder, for eksempel:
Hejseværker og kraner: IEC 60204-32
Lifte: EN 81
Beskyttelsestilstand
Når en hardwaregrænse for motorstrøm eller DC-linkspænding er overskredet, skifter frekvensomformeren til
beskyttelsestilstand. Beskyttelsestilstand betyder en
ændring af PWM-moduleringsstrategien og en lav switchfrekvens for at minimere tab. Dette fortsætter i 10 sek efter
den seneste fejl og øger driftssikkerheden og robustheden
for frekvensomformeren, mens fuld kontrol over motoren
genoprettes.
I hæve-/sænkeapplikationer er beskyttelsestilstand ikke
anvendelig, fordi frekvensomformeren vil ikke være i stand
til at forlade denne tilstand igen, og den vil derfor
forlænge tiden inden aktivering af bremsen, hvilket ikke
anbefales.
Beskyttelsestilstanden kan deaktiveres ved at indstille
parameter 14-26 Tripforsinkelse ved vekselretterfejl til 0,
hvilket betyder, at frekvensomformeren straks vil trippe,
hvis en af hardwaregrænserne overskrides.
BEMÆRK!
Deaktivering af beskyttelsestilstand i hæve-/sænkeapplikationer (parameter 14-26 Tripforsinkelse ved
vekselretterfejl = 0) anbefales.
1 1
BEMÆRK!
Følg altid instruktionerne i VLT® Frequency Converters -
Safe Torque O Betjeningsvejledning, når Safe Torque O-
funktionen anvendes.
BEMÆRK!
Styresignaler fra eller internt i frekvensomformeren kan i
sjældne tilfælde blive aktiveret ved en fejl, blive
forsinkede eller fuldstændigt udeblive. Stol ikke
udelukkende på disse styresignaler ved sikkerhedskritiske anvendelser, for eksempel ved styring af en
elektromagnetisk bremsefunktion i hæve-/sænkeapplikationer.
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 7
Page 10
3 Phase
power
input
DC bus
Switch Mode
Power Supply
Motor
Analog Output
Interface
relay 1
relay 2
ON=Terminated
OFF=Open
Brake
resistor
130BC931.12
91 (L1)
92 (L2)
93 (L3)
PE
88 (-)
89 (+)
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN)
0/4-20 mA
12 (+24 V OUT)
13 (+24 V OUT)
37 (D IN)
18 (D IN)
20 (COM D IN)
10 V DC
15 mA 130/200 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(COM A OUT) 39
(A OUT) 42
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0V
5V
S801
0/4-20 mA
RS485
RS485
03
+10 V DC
0/-10 V DC -
+10 V DC
+10 V DC
0/4-20 mA
0/-10 V DC -
240 V AC, 2 A
24 V DC
02
01
05
04
06
240 V AC, 2 A
24 V (PNP)
0 V (NPN)
0 V (NPN)
24 V (PNP)
19 (D IN)
24 V (PNP)
0 V (NPN)
27
24 V
0 V
(D IN/OUT)
0 V (NPN)
24 V (PNP)
(D IN/OUT)
0 V
24 V
29
24 V (PNP)
0 V (NPN)
0 V (NPN)
24 V (PNP)
33 (D IN)
32 (D IN)
1 2
ON
S201
ON
21
S202
ON=0/4-20 mA
OFF=0/-10 V DC +10 V DC
95
400 V AC, 2 A
Par. E-00
21
ON
S801
(R+) 82
(R-) 81
: Chassis
: Earth
1)
2)
1)
1)
Indledning
VLT® AutomationDrive FC 301/302
11
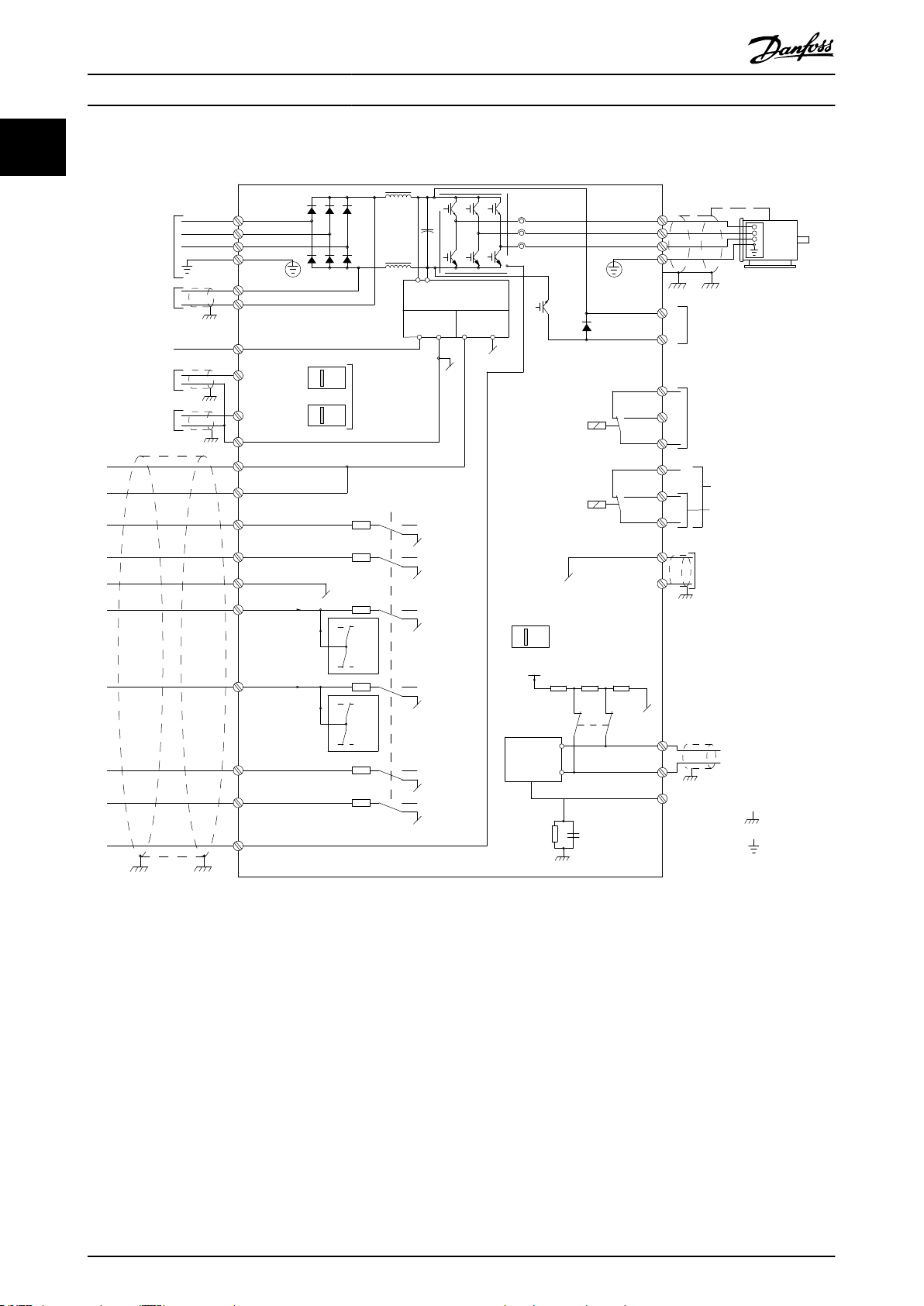
1.5 Elektrisk ledningsføring
Illustration 1.2 Skematisk tegning over grundlæggende ledningsføring
A = analog, D = digital
Klemme 37 anvendes til Safe Torque O. Installationsinstruktioner om Safe Torque O ndes i VLT® Frequency Converters -
Safe Torque O Betjeningsvejledning.
1) Klemme 37 er ikke inkluderet i FC 301 (undtagen kapslingstype A1). Relæ 2 og klemme 29 har ingen funktion i FC 301.
2) Tilslut ikke kabelskærm.
Meget lange styrekabler og analoge signaler kan i sjældne tilfælde og afhængigt af installationen resultere i 50/60 Hz
jordsløjfer på grund af støj fra netforsyningskablerne.
Hvis 50/60 Hz jordsløjfer forekommer, skal det overvejes at bryde skærmen eller at indsætte en 100 nF-kondensator mellem
skærmen og kapslingen.
8 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 11
12 13 18 19 27 29 32 33 20 37
+24 V DC
0 VDC
130BT106.10
PNP (kilde)
Ledningsføring for digital indgang
NPN (plade)
Ledningsføring for digital indgang
12 13 18 19 27 29 32 33 20 37
+24 V DC
0 VDC
130BT107.11
130BA681.10
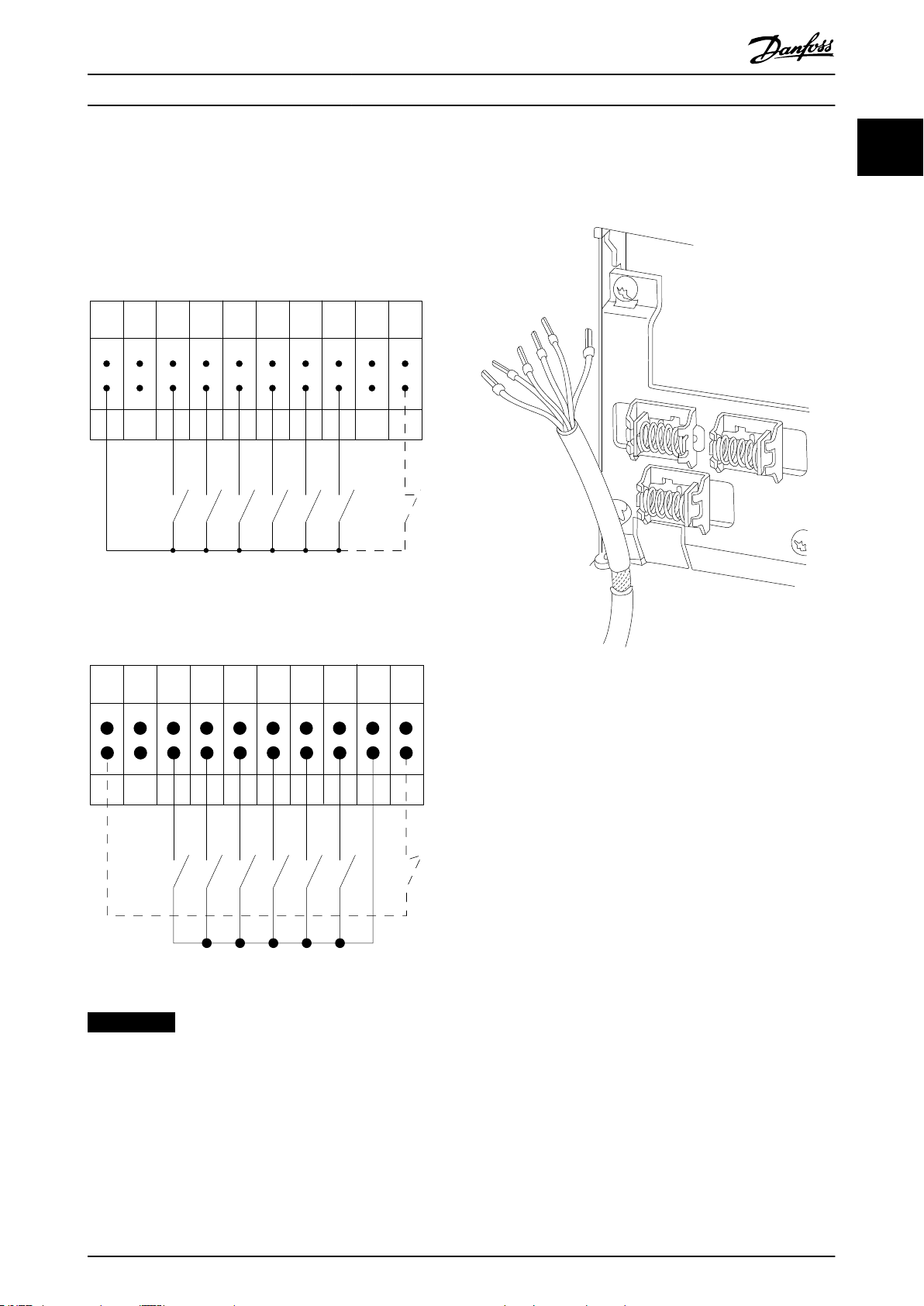
Indledning Programming Guide
Slut de digitale og analoge indgange og udgange særskilt til de fælles indgange (klemme 20, 55 og 39) på frekvensomformeren for at undgå, at jordstrømme fra begge grupper påvirker andre grupper. Indkobling på den digitale indgang kan
for eksempel forstyrre det analoge indgangssignal.
Indgangspolaritet for styreklemmerne
Illustration 1.3 PNP (kilde)
1 1
Illustration 1.4 NPN (plade)
BEMÆRK!
Styreledninger skal være skærmede/armerede.
Se afsnittet Jording af skærmede styrekabler i Design Guiden
for at opnå korrekt terminering af styrekabler.
Illustration 1.5 Jording af skærmede/armerede styreledninger
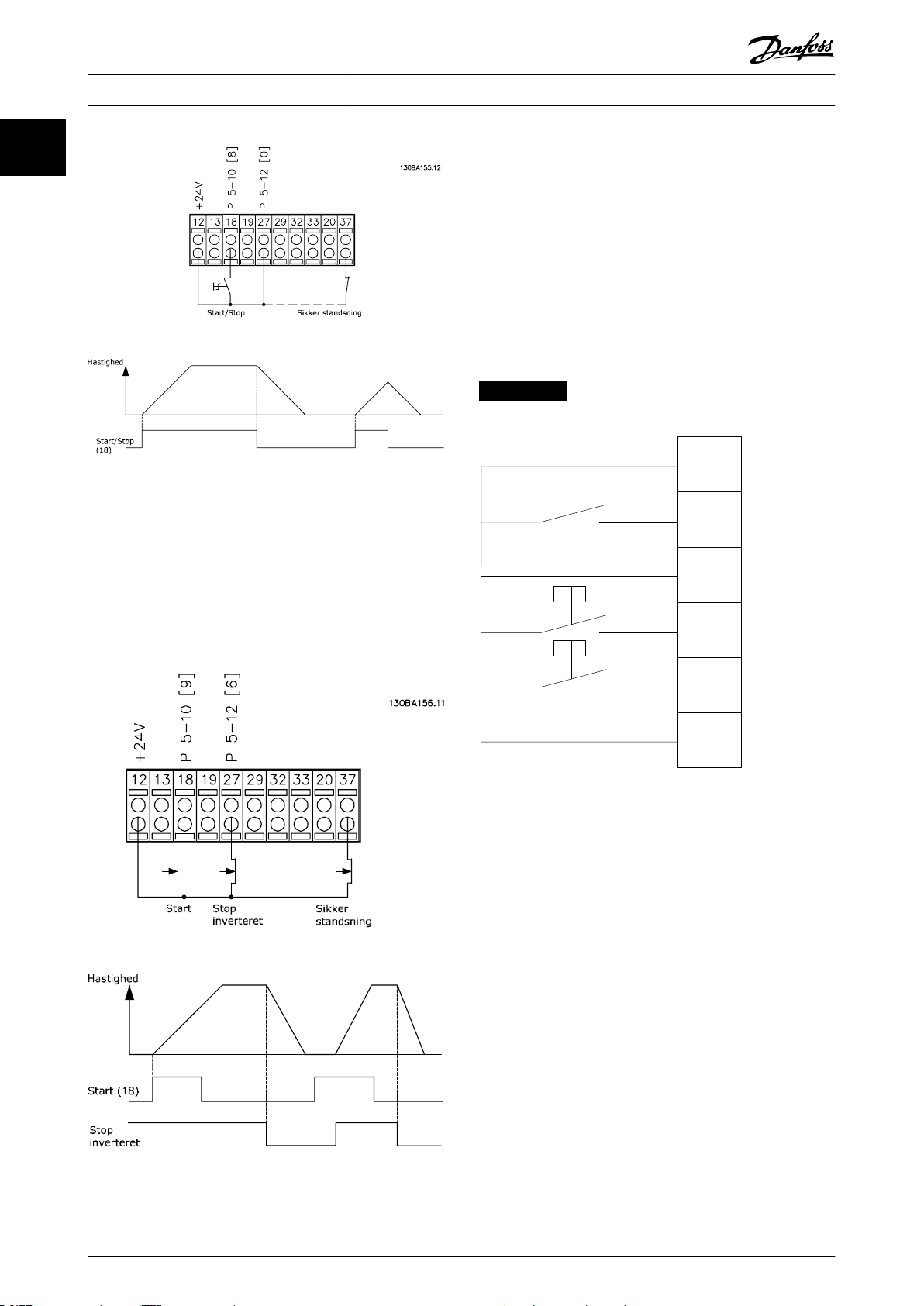
1.5.1 Start/stop
Klemme 18 = Parameter 5-10 Klemme 18, digital indgang [8]
Start.
Klemme 27 = Parameter 5-12 Klemme 27, digital indgang [0]
Ingen funktion (standard [2] Friløb inverteret).
Klemme 37 = Safe Torque O (hvis den er tilgængelig).
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 9
Page 12
12
18
27
29
32
37
+24V
Par. 5-10
Par. 5-12
Par. 5-13
Par. 5-14
130BA021.12
Indledning
VLT® AutomationDrive FC 301/302
11
1.5.3 Hastighed op/hastighed ned
Klemme 29/32 = Hastighed op/ned
Klemme 18 = Parameter 5-10 Klemme 18, digital
indgang [9] Start (standard).
Klemme 27 = Parameter 5-12 Klemme 27, digital
indgang [19] Fastfrys reference.
Klemme 29 = Parameter 5-13 Klemme 29, digital
indgang [21] Hastighed op.
Klemme 32 = Parameter 5-14 Klemme 32, digital
indgang [22] Hastighed ned.
BEMÆRK!
Klemme 29 kun i FC x02 (x = serietype).
Illustration 1.6 Start/stop
1.5.2 Pulsstart/-stop
Klemme 18 = Parameter 5-10 Klemme 18, digital indgang, [9]
Pulsstart.
Klemme 27= Parameter 5-12 Klemme 27, digital indgang, [6]
Stop inverteret.
Klemme 37 = Safe Torque O (hvis den er tilgængelig).
Illustration 1.7 Pulsstart/-stop
Illustration 1.8 Hastighed op/hastighed ned
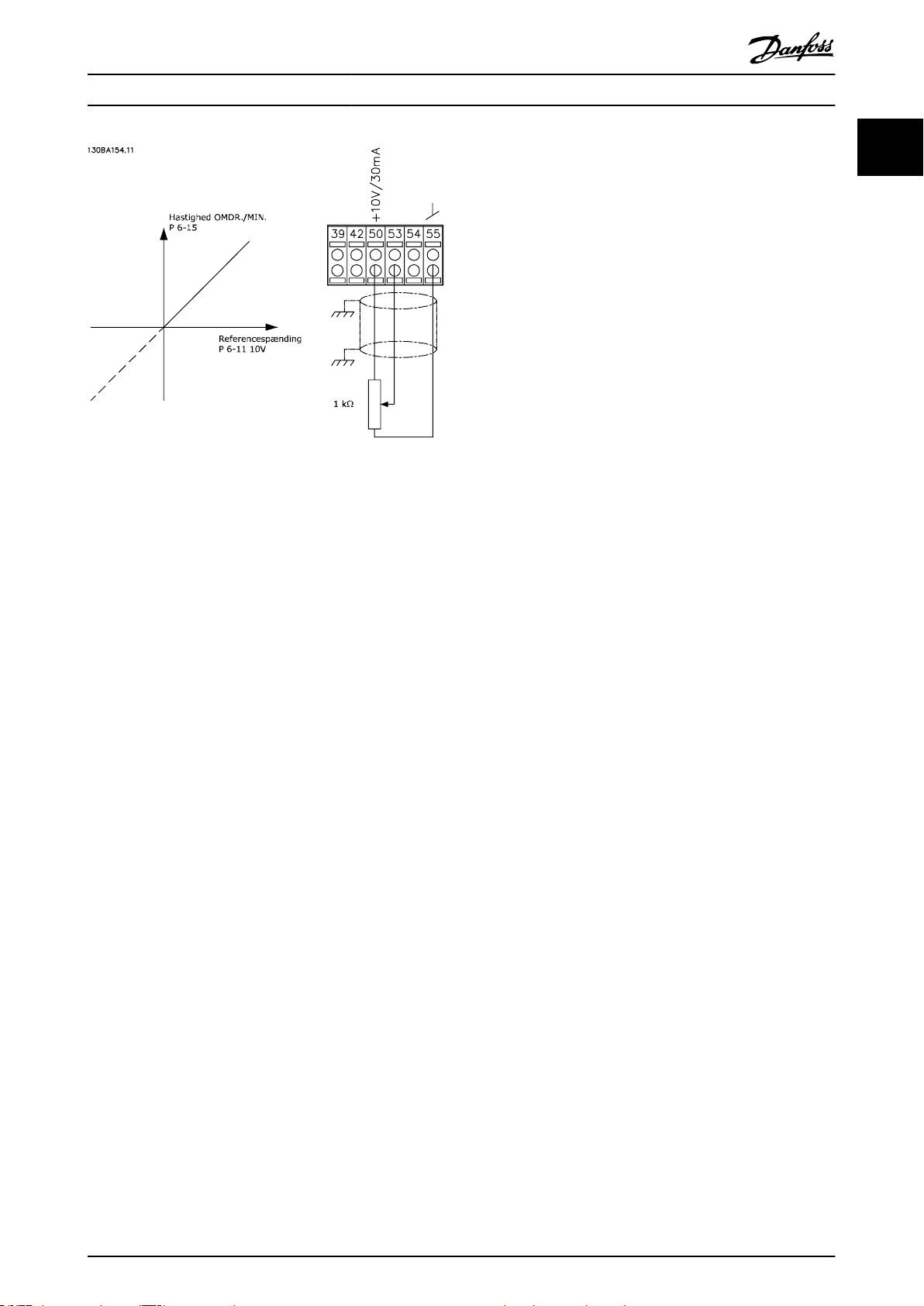
1.5.4 Potentiometerreference
Spændingsreference via et potentiometer
Referencekilde 1 = [1] Analog indgang 53
(standard).
Klemme 53, lav spænding = 0 V.
Klemme 53, høj spænding = 10 V.
Klemme 53, lav ref./feedb. = 0 O/MIN.
Klemme 53, høj ref./feedb. = 1.500 O/MIN.
Kontakt S201 = OFF (U)
10 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 13
Indledning Programming Guide
Illustration 1.9 Potentiometerreference
1.6 Integreret Motion Controller
1 1
Den integrerede motion controller (IMC) muliggør positionsstyring. Se kapitel 4 Integreret Motion Controller for
yderligere oplysninger om IMC.
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 11
Page 14
Auto
On
Reset
Hand
On
Off
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(0)
1234rpm 10,4A 43,5Hz
Run OK
43,5Hz
On
Alarm
Warn.
e30ba018.14
1
2
3
4
b
a
c
Sådan programmeres frekvens...
VLT® AutomationDrive FC 301/302
2 Sådan programmeres frekvensomformeren
22
2.1 Graske og numeriske LCPbetjeningspaneler
Nem programmering af frekvensomformeren udføres via
det graske LCP (LCP 102). Se kapitel 2.1.16 Sådan
programmeres på det numeriske LCP-betjeningspanel
vedrørende oplysninger om brug af det numeriske LCPbetjeningspanel (LCP 101).
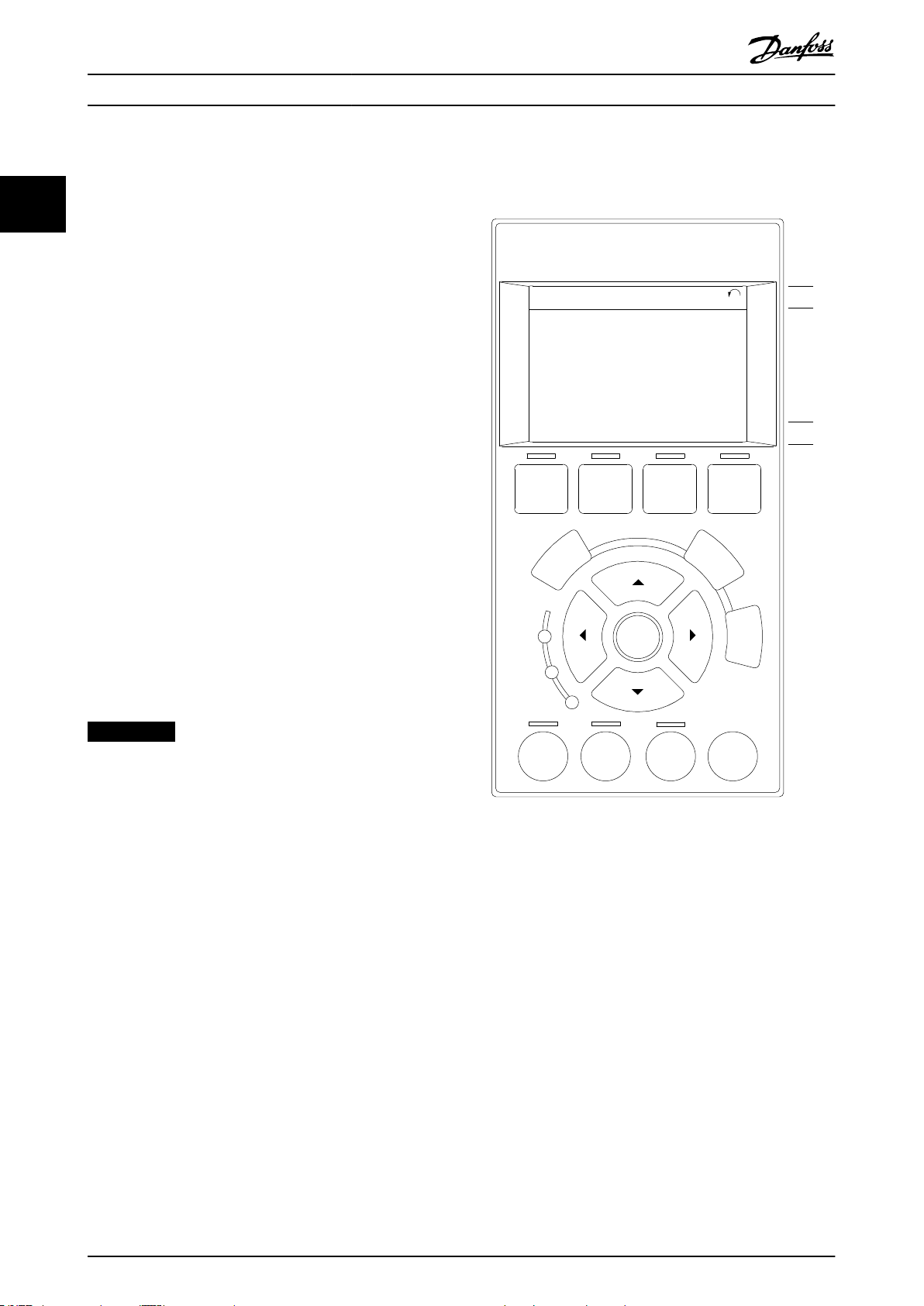
LCP'et er opdelt i re funktionsgrupper:
1. Grask display med statuslinjer.
2. Menutaster og indikatorlys – ændring af
parametre og skift mellem displayfunktioner.
3. Navigationstaster og indikatorlys.
4. Betjeningstaster og indikatorlys.
LCP'et kan vise op til fem punkter af driftsdata og samtidig
vise Status.
Displaylinjer:
a. Statuslinje: Statusmeddelelser, der viser ikoner og
grak.
b. Linje 1–2: Operatørdatalinjer med brugerde-
nerede eller brugervalgte data. Der kan tilføjes op
til én ekstra linje ved at trykke på [Status].
c. Statuslinje: Statusmeddelelser med tekst.
BEMÆRK!
Hvis opstart er forsinket, viser LCP'et meddelelsen INITIALISERING, indtil den er klar. Tilføjelse eller ernelse af
optioner kan forsinke opstart.
Illustration 2.1 LCP
12 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 15
Øverste del
Midterste del
Nederste del
Status
43 O/MIN
1,4 Hz
2,9 %
5,44 A 25,3kW
1(1)
130BP074.10
!
On
Warn.
Alarm
130BP044.10
130BP045.10
Status
Quick
Menu
Main
Menu
Alarm
Log
Sådan programmeres frekvens... Programming Guide
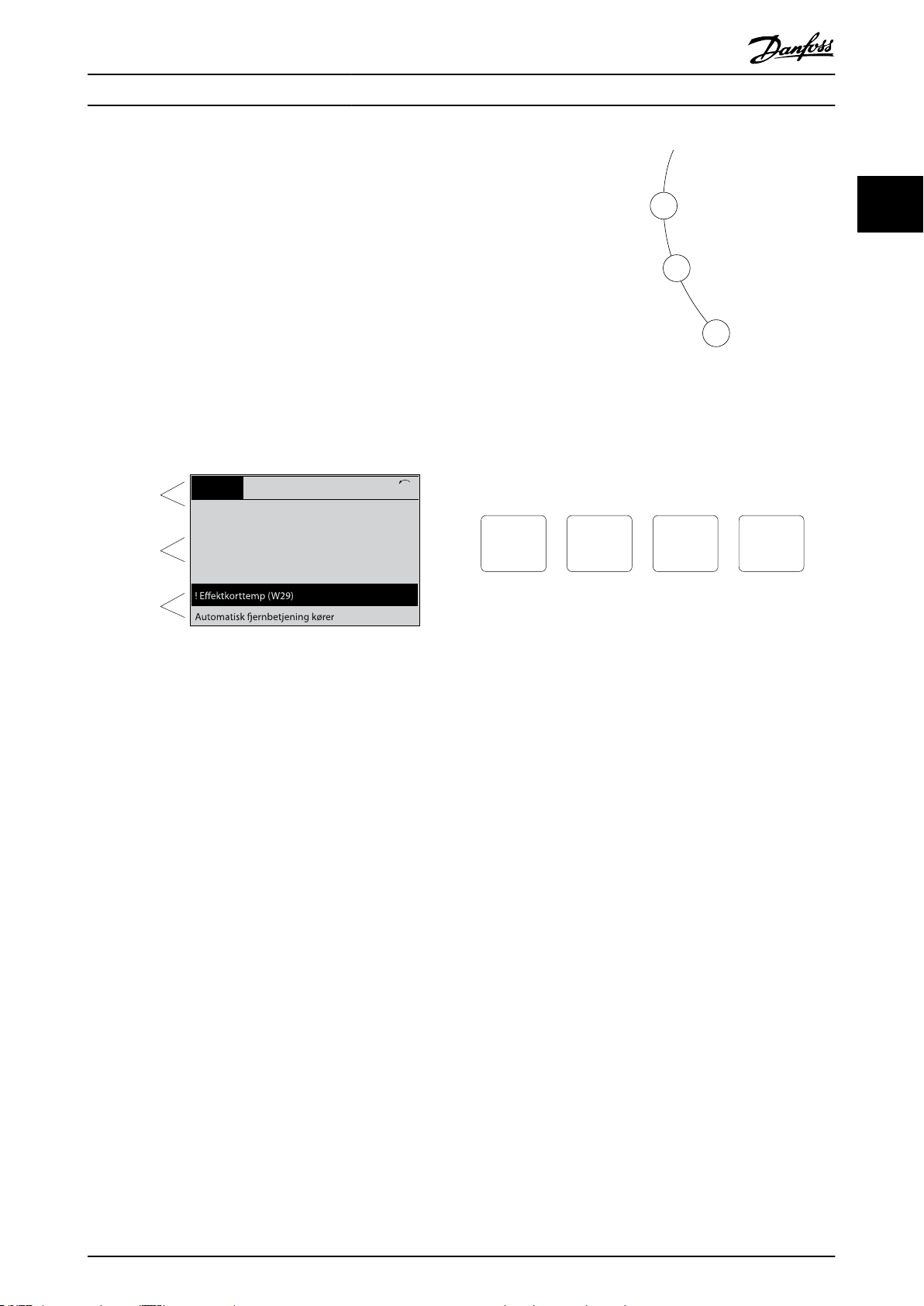
2.1.1 LCD-display
Displayet har baggrundslys og i alt seks alfanumeriske
linjer. Displaylinjerne viser omdrejningsretning (pil), den
valgte opsætning og programmeringssetup. Displayet er
opdelt i tre dele.
Øverste del
Den øverste del viser op til to målinger i normal driftsstatus.
Midterste del
Den øverste linje viser op til fem målinger med tilhørende
enheder uanset status (undtagen ved alarmer/advarsler).
Den nederste del
Den nederste del angiver altid frekvensomformerens
tilstand i statustilstand.
Illustration 2.2 Display
Det aktive setup (valgt som aktivt setup i
parameter 0-10 Aktiv opsætning) vises. Ved programmering
af en anden opsætning end det aktive setup vises
nummeret på den programmerede opsætning til højre.
Justering af displayets kontrast
Tryk på [Status] og [▲] for at gøre displayet mørkere.
Tryk på [Status] og [▼] for at gøre displayet lysere.
De este parameteropsætninger kan ændres umiddelbart
via LCP'et, medmindre der er oprettet en adgangskode via
parameter 0-60 Main Menu Password eller via
parameter 0-65 Kvikmenuadgangskode.
Indikatorlys
Ved overskridelse af visse grænseværdier tændes indikatorlyset for alarm- og/eller advarsel. En status og en
alarmtekst vises på LCP'et.
Indikatorlyset ON lyser, når frekvensomformeren får strøm
fra netspændingen, via en DC-busklemme eller en 24 V
ekstern forsyning. Samtidig er baggrundslyset tændt.
Grøn LED/On: Styredelen er aktiv.
•
Gul LED/Warn: Angiver en advarsel.
•
Blinkende rød LED/Alarm: Angiver en alarm.
•
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 13
Illustration 2.3 Indikatorlys
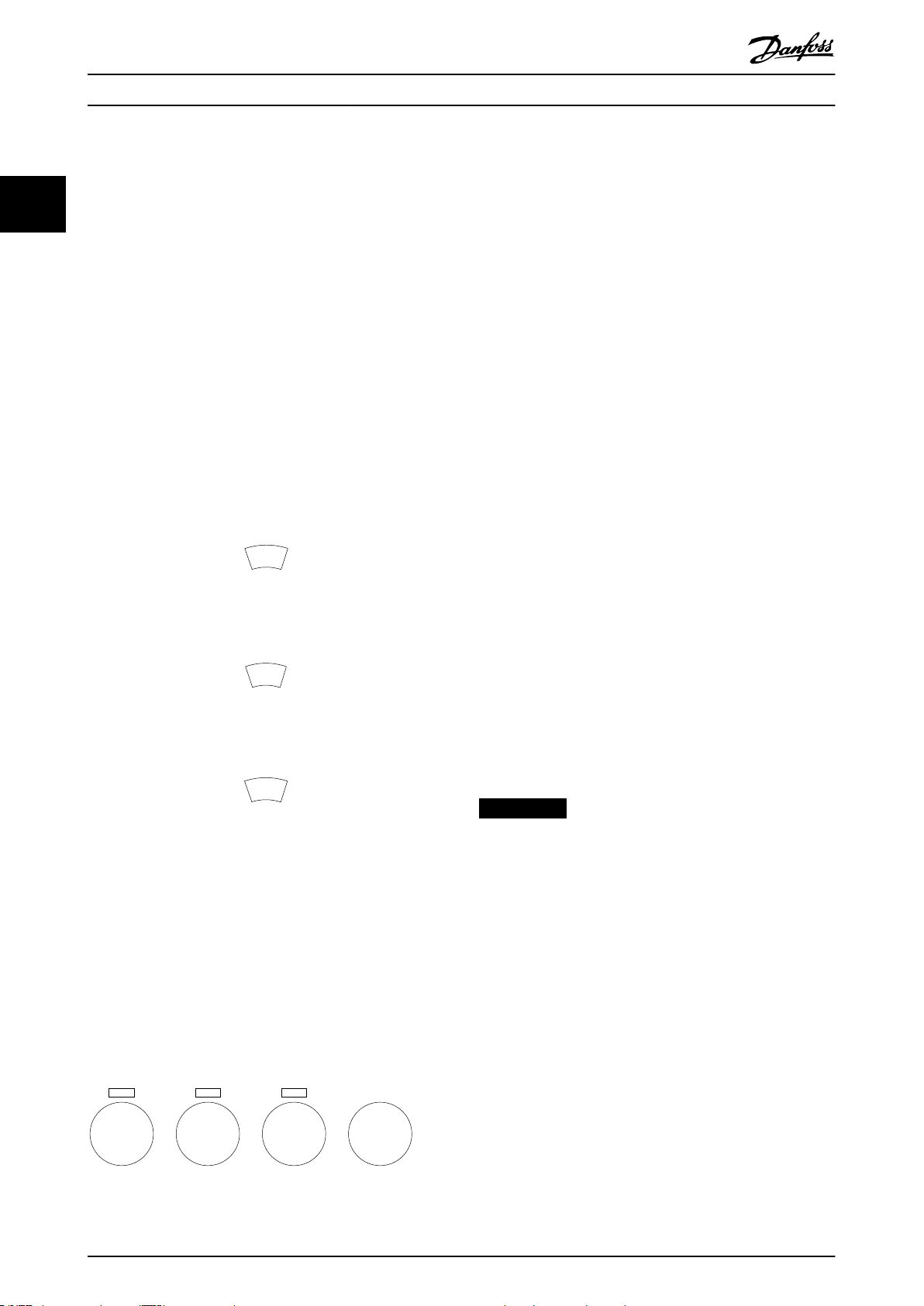
LCP-taster
Betjeningstasterne er opdelt i funktioner. Tasterne under
displayet og indikatorlamperne benyttes til parameteropsætning, herunder valg af displayvisning under normal
drift.
Illustration 2.4 LCP-taster
[Status]
Angiver status for frekvensomformeren og/eller motoren.
Vælg mellem tre forskellige udlæsninger ved at trykke på
[Status]: fem linjers udlæsninger, re linjers udlæsninger
eller Smart Logic Control.
Tryk på [Status] for at vælge visningstilstand eller for at
skifte tilbage til display mode fra enten tilstanden
kvikmenu, hovedmenu eller alarm. Brug også [Status] til at
skifte mellem enkelt eller dobbelt udlæsningstilstand.
[Quick Menu]
Giver hurtig adgang til forskellige kvikmenuer, for
eksempel:
Min personlige menu.
•
Hurtig opsætning.
•
Valgte ændringer.
•
Loggings.
•
Tryk på [Quick Menu] for at programmere de parametre,
der hører til kvikmenuen. Det er muligt at skifte direkte
mellem kvikmenutilstand og hovedmenutilstand.
[Main Menu]
Anvendes ved programmering af alle parametre.
Det er muligt at skifte direkte mellem tilstandene
hovedmenu og kvikmenu.
Der kan skydes genvej til parametrene ved at holde [Main
Menu] nede i 3 sek. Parametergenvejen giver direkte
adgang til samtlige parametre.
2 2
Page 16
B
a
c
k
C
a
n
c
e
l
I
n
f
o
e30bp046.12
Hand
On
Off
Auto
On
Reset
Sådan programmeres frekvens...
VLT® AutomationDrive FC 301/302
[Alarm Log]
Viser en alarmliste over de fem seneste alarmer (med
numrene A1–A5). Der fås yderligere oplysninger om en
22
alarm ved at trykke på navigationstasterne for at navigere
til alarmnummeret og trykke på [OK]. Der gives nu
oplysninger om frekvensomformerens tilstand, umiddelbart
før alarmtilstanden opstod.
[Back]
Går tilbage til det foregående trin eller lag i navigationsstrukturen.
[Cancel]
Den seneste ændring eller kommando annulleres, så længe
displayet ikke har ændret sig.
[Info]
Viser oplysninger om en kommando, en parameter eller en
funktion i et vilkårligt displayvindue. [Info] giver
detaljerede oplysninger, når der er brug for hjælp.
Afslut info-tilstanden ved at trykke på enten [Info], [Back]
eller [Cancel].
[Hand On]
Giver mulighed for at styre frekvensomformeren via LCP'et.
[Hand On] starter også motoren, og det er nu muligt at
angive motorhastighedsdata med navigationstasterne.
Tasten kan vælges som [1] Aktiveret eller [0] Deaktiveret via
parameter 0-40 [Hand on] Key on LCP.
Eksterne stopsignaler, der aktiveres ved hjælp af
styresignaler eller en eldbus, tilsidesætter en startkommando via LCP'et.
Følgende styresignaler er stadig aktive, når [Hand On] er
aktiveret:
[Hand On] - [O] - [Auto On].
•
Nulstil.
•
Friløbsstop, inverteret.
•
Reversering.
•
Opsætning, vælg bit 0 - Opsætning, vælg bit 1.
•
Stopkommando fra seriel kommunikation.
•
Hurtigt stop.
•
DC-bremse.
•
[O]
Illustration 2.5 Back
Standser den tilsluttede motor. Tasten kan vælges som [1]
Aktiveret eller [0] Deaktiveret via parameter 0-41 [O]-tast på
LCP. Hvis der ikke er valgt en ekstern stopfunktion, og
[O]-tasten er inaktiv, kan motoren stoppes, ved at
spændingen afbrydes.
[Auto On]
Illustration 2.6 Cancel
Gør det muligt at styre frekvensomformeren via
styreklemmerne og/eller seriel kommunikation. Når et
startsignal påføres styreklemmerne og/eller bussen, starter
frekvensomformeren. Tasten kan vælges som [1] Aktiveret
eller [0] Deaktiveret via parameter 0-42 [Auto on] tast på LCP.
Illustration 2.7 Info
Navigationstaster
De re navigationstaster bruges til at navigere mellem de
forskellige valgmuligheder i kvikmenuen, hovedmenuen og
alarmlog. Tryk på tasterne for at ytte markøren.
[OK]
Tryk på [OK] for at vælge en parameter, som er markeret
med markøren, og til at aktivere ændringen af en
parameter.
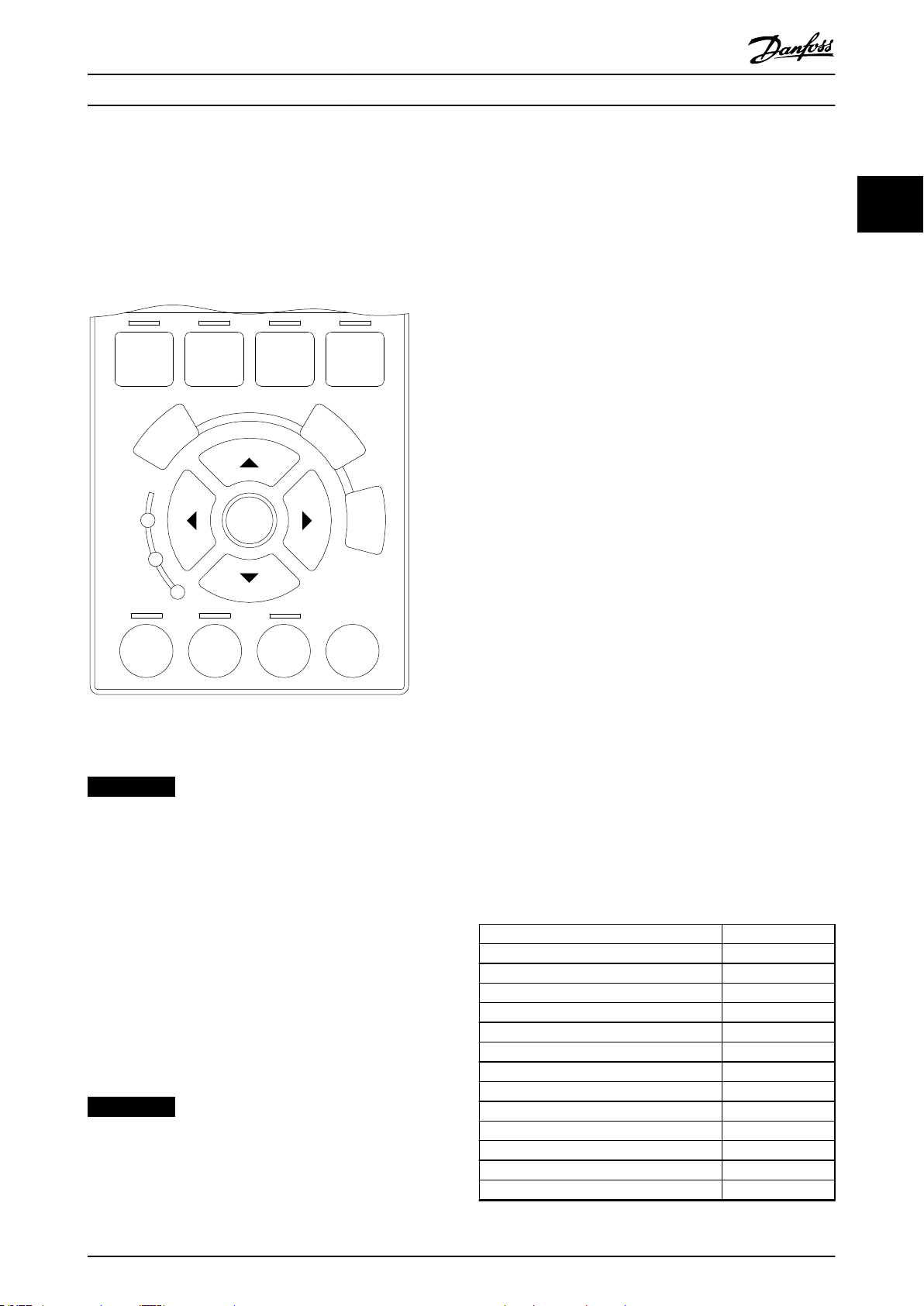
Taster til lokal betjening
Tasterne til lokal betjening er placeret nederst på LCP'et.
Illustration 2.8 Taster til lokal betjening
BEMÆRK!
Et aktivt HAND-OFF-AUTO-signal via de digitale indgange
har højere prioritet end betjeningstasterne [Hand On] –
[Auto On].
[Reset]
Anvendes til nulstilling af frekvensomformeren efter en
alarm (trip). Den kan vælges som [1] Aktiveret eller [0]
Deaktiveret via parameter 0-43 [Reset]-tast på LCP.
Der kan skydes genvej til parametrene ved at holde tasten
[Main Menu] nede i 3 sek. Parametergenvejen giver direkte
adgang til samtlige parametre.
14 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 17
Auto
on
Reset
Hand
on
O
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
On
Alarm
Warn.
130BA027.10
Sådan programmeres frekvens... Programming Guide
2.1.2 Hurtig overførsel af
parameterindstillinger mellem ere
frekvensomformere
Når opsætningen af en frekvensomformer er gennemført,
skal dataene gemmes i LCP'et eller på en pc via MCT 10opsætningssoftware.
Illustration 2.9 LCP
Datalagring i LCP
BEMÆRK!
Stop motoren, før denne handling udføres.
Sådan lagres data i LCP'et:
1. Gå til parameter 0-50 LCP Copy.
2. Tryk på [OK]-tasten.
3. Vælg [1] Alle til LCP.
4. Tryk på [OK]-tasten.
Samtlige parameterindstillinger lagres nu i LCP'et, hvilket
angives i statuslinjen. Tryk på [OK], når 100 % er nået.
Slut LCP'et til en anden frekvensomformer, og kopiér
ligeledes parameterindstillingerne til denne frekvensomformer.
Dataoverførsel fra LCP til frekvensomformer
BEMÆRK!
Stop motoren, før denne handling udføres.
Dataoverførsel fra LCP til frekvensomformer:
1. Gå til parameter 0-50 LCP Copy.
2. Tryk på [OK]-tasten.
3. Vælg [2] Alle fra LCP.
4. Tryk på [OK]-tasten.
Parameterindstillingerne, der er lagret i LCP'et, overføres nu
til frekvensomformeren, hvilket angives i statuslinjen. Tryk
på [OK], når 100 % er nået.
2.1.3 Display mode
Ved normal drift kan der kontinuerligt angives op til fem
forskellige driftsvariabler i den midterste del: 1.1, 1.2 og 1.3
samt 2 og 3.
2.1.4 Display mode - valg af
udlæsningstilstande
Der kan skiftes mellem tre forskellige udlæsningsskærmbilleder ved at trykke på [Status].
Driftsvariabler med forskellig formatering vises i hvert
enkelt statusskærmbillede senere i dette afsnit.
Tabel 2.1 viser de målinger, der kan knyttes til hver enkelt
driftsvariabel. Når der er monteret optioner, ndes der ere
målinger.
Denér linkene via
Parameter 0-20 Displaylinje 1,1, lille.
•
Parameter 0-21 Displaylinje 1,2, lille.
•
Parameter 0-22 Displaylinje 1,3, lille.
•
Parameter 0-23 Displaylinje 2, stor.
•
Parameter 0-24 Display Line 3 Large.
•
Hver udlæsningsparameter, der vælges i
parameter 0-20 Displaylinje 1,1, lille til
parameter 0-24 Display Line 3 Large, har en tilhørende skala
og tilhørende cifre efter et eventuelt decimaltegn. Jo større
numerisk værdi for en parameter, jo færre cifre vises der
efter decimaltegnet.
Eksempel: Strømudlæsning 5,25 A, 15,2 A, 105 A.
Driftsvariabel Enhed
Parameter 16-00 Control Word hex
Parameter 16-01 Reference [Unit] [Enhed]
Parameter 16-02 Reference [%] %
Parameter 16-03 Status Word hex
Parameter 16-05 Main Actual Value [%] %
Parameter 16-10 Power [kW] [kW]
Parameter 16-11 Power [hp] [hk]
Parameter 16-12 Motor Voltage [V ]
Parameter 16-13 Frequency [Hz]
Parameter 16-14 Motor current [A]
Parameter 16-16 Moment [Nm] Nm
Parameter 16-17 Hastighed [O/MIN] [O/MIN]
Parameter 16-18 Motor Thermal %
2 2
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 15
Page 18
1,1
2
3
1,3
1,2
130BP041.10
799 O/MIN
1 (1)
36,4 kw7,83 A
0,000
53,2 %
Status
1,1
1,2
2
1,3
130BP062.10
207 O/MIN
Automatisk ernbetjening kører
1 (1)
24,4 kW5,25A
6,9Hz
Status
130BP063.10
778 O/MIN
Automatisk ernbetjening kører
1 (1)
4,0 kW0,86 A
Tilstand: 0 ikke aktiv 0 (ikke aktiv)
Når: Udfør: -
Status
Sådan programmeres frekvens...
Driftsvariabel Enhed
Parameter 16-20 Motorvinkel
22
Parameter 16-30 DC Link Voltage V
Parameter 16-32 Brake Energy /s kW
Parameter 16-33 Brake Energy Average kW
Parameter 16-34 Heatsink Temp.
Parameter 16-35 Termisk inverterbelastning %
Parameter 16-36 Vekselret. nom. strøm A
Parameter 16-37 Vekselret. maks. strøm A
Parameter 16-38 SL-styreenh., tilstand
Parameter 16-39 Control Card Temp.
Parameter 16-40 Logging Buer Full
Parameter 16-50 Ekstern reference
Parameter 16-51 Pulsreference
Parameter 16-52 Feedback [enhed] [Enhed]
Parameter 16-53 Digi pot-reference
Parameter 16-60 Digital Input bin
Parameter 16-61 Terminal 53 Switch Setting V
Parameter 16-62 Analog indgang 53
Parameter 16-63 Terminal 54 Switch Setting V
Parameter 16-64 Analog indgang 54
Parameter 16-65 Analog udgang 42 [mA] [mA]
Parameter 16-66 Digital udgang [bin] [bin]
Parameter 16-67 Pulse Input #29 [Hz] [Hz]
Parameter 16-68 Frekvensindgang #33 [Hz] [Hz]
Parameter 16-69 Pulsudgang #27 [Hz] [Hz]
Parameter 16-70 Pulsudgang #29 [Hz] [Hz]
Parameter 16-71 Relay Output [bin]
Parameter 16-72 Tæller A
Parameter 16-73 Tæller B
Parameter 16-80 Fieldbus, CTW 1 hex
Parameter 16-82 Fieldbus-REF. 1 hex
Parameter 16-84 Komm.-optionsstatusord hex
Parameter 16-85 FC-port, CTW 1 hex
Parameter 16-86 FC-port, REF 1 hex
Parameter 16-90 Alarmord
Parameter 16-92 Advarselsord
Parameter 16-94 Udv. statusord
VLT® AutomationDrive FC 301/302
°C
Illustration 2.10 Statusskærm I
°C
Statusskærm II
Driftsvariablerne (1.1, 1.2, 1.3 og 2) er vist i Illustration 2.11.
I eksemplet er hastighed, motorstrøm,
frekvens valgt som variabler i første og anden linje.
Illustration 2.11 Statusskærm II
Statusskærm III
Denne tilstand viser hændelse og handling for Smart Logic
Control. Se kapitel 3.13 Parametre: 13-**Intelligent logik for
yderligere oplysninger.
motoreekt og
Tabel 2.1 Enheder
Illustration 2.12 Statusskærm III
Statusskærm I
Denne udlæsningstilstand bruges som standard efter start
eller initialisering.
2.1.5 Parameteropsætning
Tryk på [Info] for at få oplysninger om de enheder, der er
knyttet til de viste driftsvariabler (1.1, 1.2, 1.3, 2 og 3).
Driftsvariablerne er vist i Illustration 2.10.
Frekvensomformeren kan anvendes til praktisk talt alle
opgaver. Frekvensomformeren tilbyder et valg mellem to
programming modes:
Hovedmenutilstand.
•
Kvikmenutilstand.
•
16 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Hovedmenuen giver adgang til samtlige parametre.
Kvikmenuen fører brugeren igennem nogle få parametre,
som gør det muligt at betjene frekvensomformeren.
Parametre kan ændres i enten hovedmenuen eller
kvikmenuen.
Page 19
130BC916.10
Q1 My Personal Menu
Q2 Quick Setup
Q4 Smart Setup
Q5 Changes Made
0RPM 0.00A 1(1)
Quick Menus
Sådan programmeres frekvens... Programming Guide
2.1.6 Kvikmenu, hovedfunktioner
Tryk på [Quick Menu] for at se en liste over de forskellige
områder, der ndes i kvikmenuen.
Vælg Q1 Min personlige menu for at se de valgte personlige
parametre. Disse parametre er valgt i parameter 0-25 Min
personlige menu. Der kan tilføjes op til 50 forskellige
parametre i denne menu.
Illustration 2.13 Kvikmenuer
Vælg Q2 Hurtig opsætning for at gå igennem et udvalg af
parametre for at få motoren til at køre næsten optimalt.
Fabriksindstillingen for de andre parametre tager hensyn til
de ønskede styrefunktioner og kongurationen af
signalindgangene/-udgangene (styreklemmer).
Vælg Valgte ændringer for oplysninger om:
De seneste 10 ændringer. Brug [▲] [▼]-navigati-
•
onstasterne til at rulle mellem de 10 senest
ændrede parametre.
De ændringer, der er foretaget siden fabriksind-
•
stillingen.
Vælg Loggings for at få oplysninger om de viste linjeudlæsninger. Oplysningerne vises som grafer.
Kun de parametre, der er valgt i parameter 0-20 Displaylinje
1,1, lille og parameter 0-24 Display Line 3 Large, kan vises.
Der kan lagres op til 120 prøver i hukommelsen til senere
brug.
2 2
Parametervalget foretages med navigationstasterne.
Parametrene i Tabel 2.2 er tilgængelige.
Parameter indst.
Parameter 0-01 LanguageParameter 0-01 S
prog
Parameter 1-20 Motoreekt [kW] [kW]
Parameter 1-22 Motorspænding [V]
Parameter 1-23 Motorfrekvens [Hz]
Parameter 1-24 Motorstrøm [A]
Parameter 1-25 Nominel motorhastighed [O/MIN]
Parameter 5-12 Klemme 27, digital indgang
Parameter 1-29 Automatisk motortilpasning (AMA)
Parameter 3-02 Minimumreference [O/MIN]
Parameter 3-03 Maksimumreference [O/MIN]
Parameter 3-41 Rampe 1, rampe-op-tid [s]
Parameter 3-42 Rampe 1, rampe-ned-tid [s]
Parameter 3-13 Reference Site
Tabel 2.2 Valg af parametre
1) Hvis klemme 27 er indstillet til [0] Ingen funktion, er det ikke
nødvendigt med en tilslutning til +24 V på klemme 27.
[0] Ingen funktion
[1] Aktivér komplet
AMA
1)
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 17
Page 20
Quick
Menu
OK
OK
OK
OK
OK
OK
OK
OK
OK
OK
OK
OK
OK
OK
Sådan programmeres frekvens...
2.1.7 Indledende idriftsættelse
VLT® AutomationDrive FC 301/302
22
hurtig opsætning med LCP 102 (læs Tabel 2.3 fra venstre mod højre). Eksemplet gælder for applikationer med åben sløjfe.
Tryk på
Q2 Quick Menu.
Parameter 0-01 LanguageParameter 001 Sprog
Parameter 1-20 Motoreekt [kW]
Parameter 1-22 Motor Voltage
Parameter 1-23 Motorfrekvens
Parameter 1-24 Motor Current
Parameter 1-25 Motor Nominal Speed
Indstil sprog.
Indstil eekten fra motorens
typeskilt.
Indstil spændingen fra
typeskiltet.
Indstil frekvensen fra
typeskiltet.
Indstil strømmen fra typeskiltet.
Indstil hastighed i O/MIN fra
typeskiltet.
Den letteste måde at udføre den indledende idriftsættelse på er ved at trykke på [Quick Menu] og følge proceduren til
Parameter 5-12 Klemme 27, digital
indgang
Parameter 1-29 Automatisk motortilpasning (AMA)
Parameter 3-02 Minimumreference
Parameter 3-03 Maksimumreference
Parameter 3-41 Rampe 1, rampe-op-tid
Parameter 3-42 Rampe 1, rampe-nedtid
Parameter 3-13 Reference Site
Hvis klemmestandarden er [2]
Friløb inverteret, er det muligt at
ændre denne indstilling til [0]
Ingen funktion. Det er derefter
ikke nødvendigt med tilslutning
til klemme 27 for at køre AMA.
Indstil den ønskede AMAfunktion. Aktivér komplet AMA
anbefales.
Indstil minimumhastigheden for
motorakslen.
Indstil maksimumhastigheden
for motorakslen.
Indstil rampe op-tiden med
reference til synkron motorhastighed, ns.
Indstil rampe ned-tiden med
reference til synkron motorhastighed, ns.
Indstil det sted, hvorfra
referencen skal virke.
Tabel 2.3 Procedure for hurtig opsætning
18 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 21
130BP066.10
1107 O/MIN
0 - ** Betjening/display
1 - ** Last og motor
2 - ** Bremser
3 - ** Reference/ramper
3,84 A 1 (1)
Hovedmenu
130BP067.10
740O/MIN
0 -01 Sprog
[0] Engelsk
10,64A 1 [1]
0-0*
Grundlæggende indstillinger
130BP068.10
740O/MIN
0 -01 Sprog
[0] Engelsk
10,64 A 1 [1]
0-0*
Grundlæggende indstillinger
Sådan programmeres frekvens... Programming Guide
En anden enkel metode til idriftsættelse af frekvensomformeren er ved hjælp af Smart Application Set-up (SAS),
der også kan ndes ved at trykke på [Quick Menu]. Følg
anvisningerne på skærmen for at gennemføre opsætningen
af de angivne applikationer.
[Info]-tasten kan bruges under kørsel af SAS for at se
hjælpeinformation til de forskellige valg, indstillinger og
meddelelser. Følgende tre applikationer er inkluderet:
Mekanisk bremse.
•
Transportbånd.
•
Pumpe/ventilator.
•
Følgende re eldbusser kan vælges:
PROFIBUS.
•
PROFINET.
•
DeviceNet.
•
EtherNet/IP.
•
BEMÆRK!
Frekvensomformeren ignorerer startbetingelserne, når
SAS er aktiv.
BEMÆRK!
Smart-opsætning kører automatisk ved den første
opstart af frekvensomformeren eller efter en nulstilling
til fabriksindstillingerne. Hvis der ikke udføres nogen
handlinger, vil skærmen til SAS automatisk forsvinde
efter 10 minutter.
2.1.8 Hovedmenutilstand
Tryk på [Main Menu] for at komme til hovedmenutilstanden. Udlæsningen i Illustration 2.14 vises i displayet.
Den midterste og den nederste del af displayet viser en
liste med parametergrupper, som kan vælges ved at trykke
på tasterne [▲] og [▼].
Alle parametre kan ændres i hovedmenuen. Afhængigt af
kongurationsvalget (parameter 1-00 Kongurationstilstand)
kan nogle parametre imidlertid være skjult. Åben sløjfe
skjuler for eksempel alle PID-parametrene, og andre
aktiverede optioner gør ere parametergrupper synlige.
2.1.9 Parametervalg
I hovedmenutilstand er parametrene gruppeopdelt. Vælg
en parametergruppe ved hjælp af navigationstasterne.
Efter valget af parametergruppe vælges en parameter ved
hjælp af navigationstasterne.
I den midterste del af displayet vises parameternummer og
-navn sammen med den valgte parameterværdi.
Illustration 2.15 Parametervalg
2.1.10 Ændring af data
Proceduren for ændring af data er den samme i
kvikmenuen og hovedmenuen. Tryk på [OK] for at ændre
den valgte parameter.
Proceduren for ændring af data afhænger af, om den
valgte parameter repræsenterer en numerisk dataværdi
eller en tekstværdi.
2.1.11 Ændring af en tekstværdi
Hvis den valgte parameter er en tekstværdi, kan
tekstværdien ændres ved hjælp af tasterne [▲] [▼].
Flyt markøren til den værdi, der skal gemmes, og tryk på
[OK].
2 2
Illustration 2.14 Hovedmenutilstand
Hver enkelt parameter har et navn og et nummer, som
forbliver uændrede uanset programming mode. I
hovedmenutilstand er parametrene gruppeopdelt. Parameternummerets første cier (fra venstre) angiver
parametergruppenummeret.
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 19
Illustration 2.16 Ændring af en tekstværdi
Page 22
130BP069.10
1- 6*
113 O/MIN 1,78 A 1(1)
Belastn.-afh. indstilling
1 - 60 Belastningskomp. ved lav
hastighed
1
0
0 %
130BP070.10
1 - 60 Belastningskomp. ved lav
kompensation
1 0 %
Belastn.-afh. indstilling 1- 6*
729O/MIN 6,21A 1(1)
6
130BP073.10
130BP072.10
Sådan programmeres frekvens...
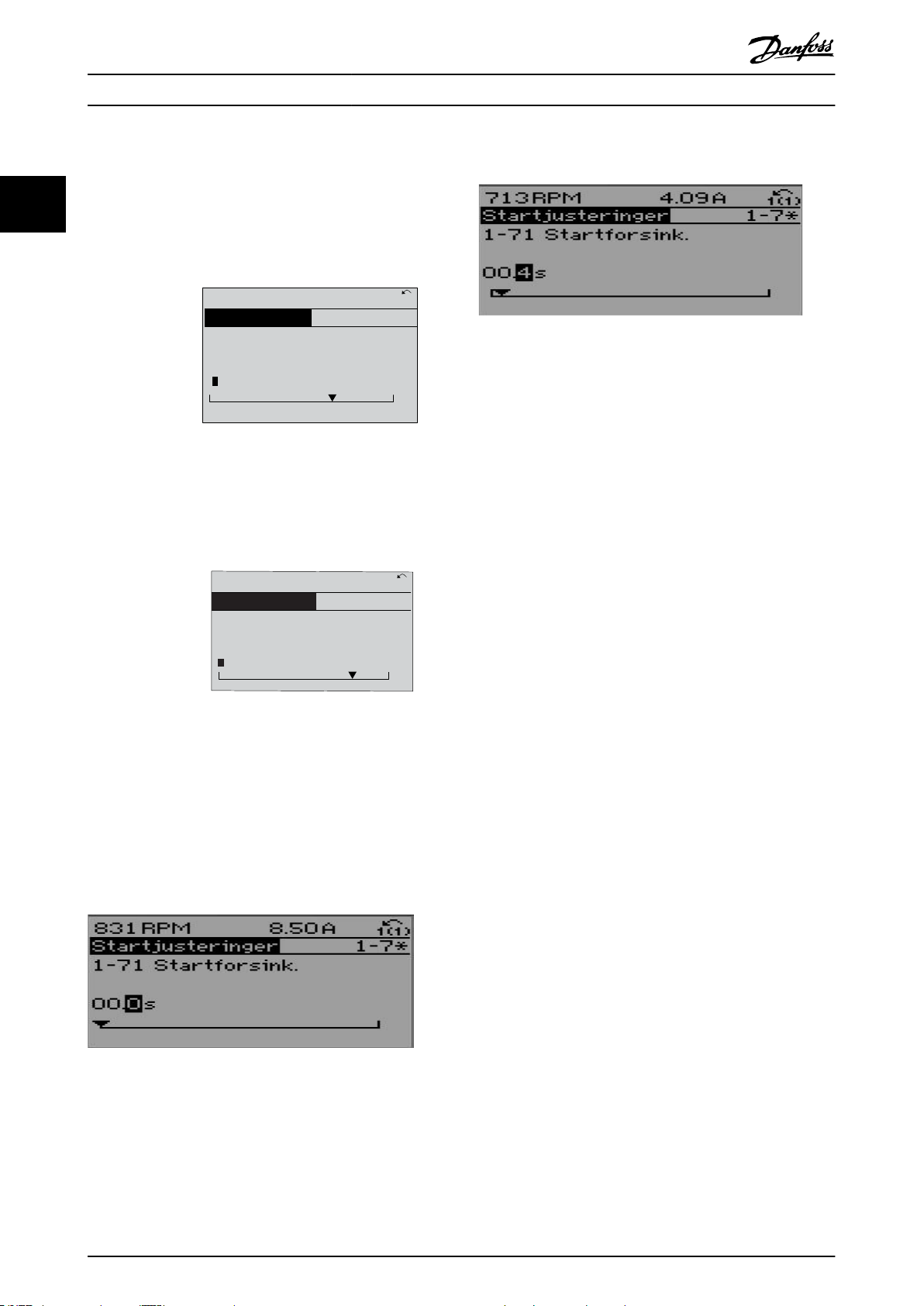
2.1.12 Ændring af en dataværdi
VLT® AutomationDrive FC 301/302
22
Hvis den valgte parameter repræsenterer en numerisk
dataværdi, kan de valgte data ændres ved hjælp af navigationstasterne [◀] [▶] og [▲] [▼]. Tryk på tasterne [◀] og [▶]
for at ytte markøren vandret.
Illustration 2.17 Ændring af en dataværdi
Tryk på tasterne [▲] [▼] for at ændre dataværdien. [▲] øger
dataværdien, og [▼] mindsker dataværdien. Flyt markøren
til den værdi, der skal gemmes, og tryk på [OK].
Illustration 2.20 Lagring
2.1.14 Værdi, trinvis
Visse parametre kan ændres trinvist. Gælder for:
Parameter 1-20 Motor Power [kW].
•
Parameter 1-22 Motor Voltage.
•
Parameter 1-23 Motor Frequency.
•
Disse parametre ændres både som en gruppe numeriske
dataværdier og som numeriske dataværdier med trinløse
ændringer.
2.1.15 Aæsning og programmering af
indekserede parametre
Illustration 2.18 Lagring af en dataværdi
2.1.13 Uendeligt variabel ændring af
numerisk dataværdi
Vælg et cier med [◀] [▶], hvis den valgte parameter
repræsenterer en numerisk dataværdi.
Illustration 2.19 Valg af
cier
Parametrene er indekseret i rækkefølge og kan gennemses
ved at rulle igennem dem.
Parameter 15-30 Fejllogbog: Fejlkode til
parameter 15-32 Alarm Log: Time indeholder en fejllog, der
kan aæses. Vælg en parameter, tryk på [OK], og tryk på
tasterne [▲] [▼] for at rulle igennem værdierne i loggen.
For eksempel ændres parameter 3-10 Preset-reference
således:
1. Vælg parameteren, tryk på [OK], og tryk på
tasterne [▲] [▼] for at rulle igennem de
indekserede værdier.
2. En parameterværdi kan ændres ved at vælge den
indekserede værdi og trykke på [OK].
3.
Redigér værdien ved at trykke på [▲] [▼].
4. Tryk på [OK] for at acceptere den nye indstilling.
5. Tryk på [Cancel] for at annullere. Tryk på [Back]
for at forlade parameteren.
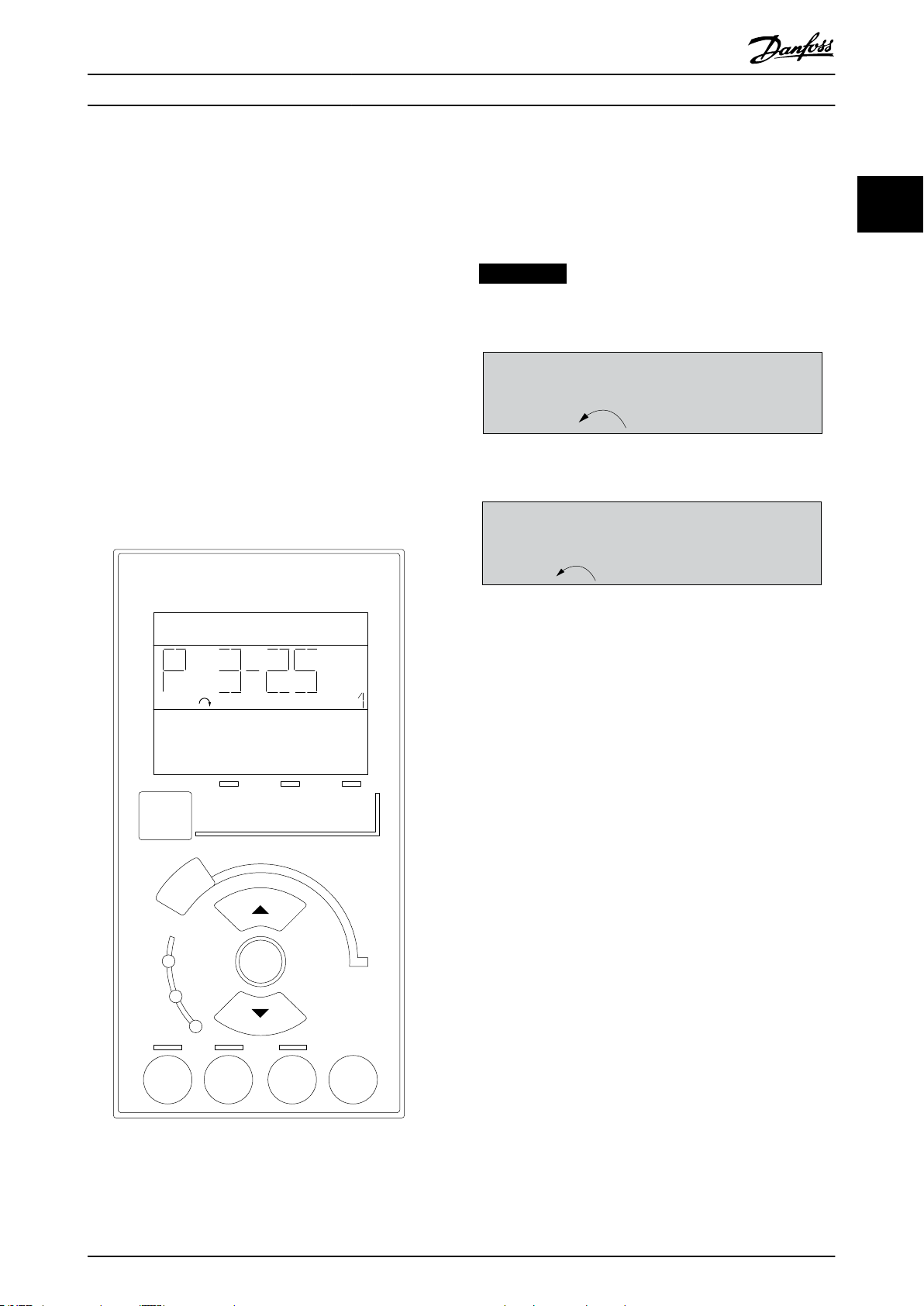
2.1.16 Sådan programmeres på det
numeriske LCP-betjeningspanel
Redigér det valgte cier trinløst med [▲] [▼].
Markøren angiver det valgte cier. Anbring markøren på
det cier, der skal gemmes, og tryk på [OK].
20 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Følgende instruktioner gælder for det numeriske LCP (LCP
101).
Betjeningspanelet er opdelt i re funktionsgrupper:
Page 23
e30ba191.11
1
Auto
On
Reset
Hand
On
Off
Menu
Status
Quick
Setup
Main
Menu
Back
2
3
4
OK
On
Alarm
Warn.
Setup
130BP077.10
22.8
rpm
Setup 1
Setup 1
130BP078.10
A 17
Sådan programmeres frekvens... Programming Guide
Numerisk display.
•
Menutaster og indikatorlys – ændring af
•
parametre og skift mellem displayfunktioner.
Navigationstaster og indikatorlys.
•
Betjeningstaster og indikatorlys.
•
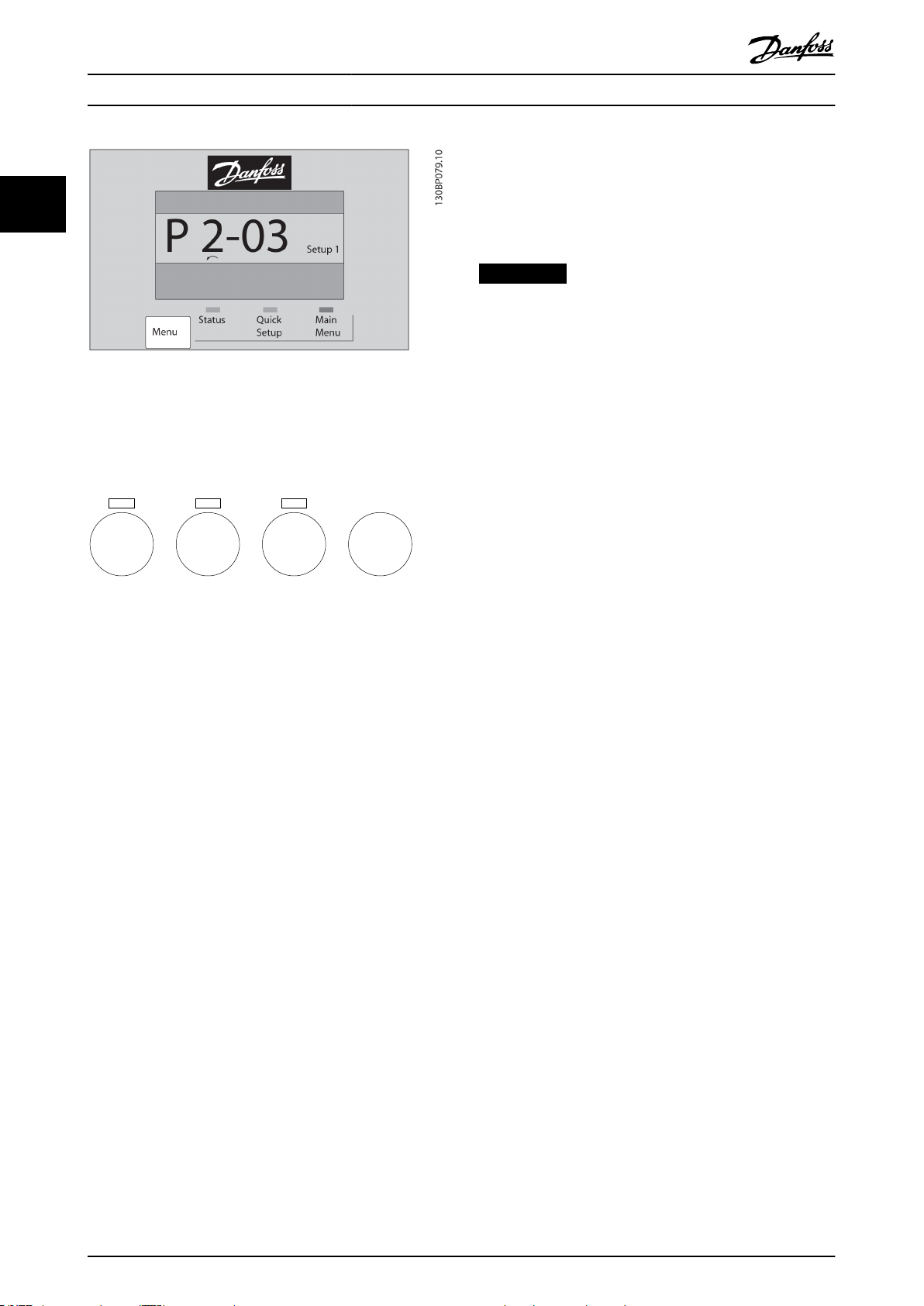
Displaylinje
Statusmeddelelser, der viser ikoner og numerisk værdi.
Indikatorlys
Grøn LED/On: Angiver, om styredelen er tændt.
•
Gul LED/Warn: Angiver en advarsel.
•
Blinkende rød LED/Alarm: Angiver en alarm.
•
LCP-taster
[Menu]
Vælg en af følgende tilstande:
Status.
•
Hurtig opsætning.
•
Hovedmenu.
•
Statustilstand
Statustilstand viser status for frekvensomformeren eller
motoren.
Hvis der forekommer en alarm, skifter NLCP automatisk til
statustilstand.
Adskillige alarmer kan vises.
BEMÆRK!
Parameterkopiering er ikke muligt med LCP 101,
numerisk LCP-betjeningspanel.
Illustration 2.22 Statustilstand
Illustration 2.23 Alarm
2 2
Hovedmenu/hurtig opsætning
Bruges til at programmere alle parametre eller kun
parametrene i kvikmenuen (se også beskrivelsen af LCP
102 i kapitel 2.1 Graske og numeriske LCP-betjenings-
paneler).
Når værdien blinker, trykkes der på [▲] eller [▼] for at
ændre parameterværdier.
1. Tryk på [Main Menu] for at vælge hovedmenu.
2. Vælg parametergruppen [xx-__], og tryk på [OK].
3. Vælg parameteren [__-xx], og tryk på [OK].
4. Hvis parameteren er en array-parameter, vælges
array-nummeret efterfulgt af tryk på [OK].
5. Vælg den krævede dataværdi, og tryk på [OK].
Parametre med funktionelle valg viser værdier som for
eksempel [1], [2] osv. Se den enkelte beskrivelse af
parametrene i kapitel 3 Parameterbeskrivelser for en
beskrivelse af de forskellige valgmuligheder.
[Back]
Bruges til at gå baglæns.
[▲] [▼] bruges til at navigere imellem kommandoer og
inden for parametre.
Illustration 2.21 LCP-taster
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 21
Page 24
e30bp046.12
Hand
On
Off
Auto
On
Reset
Sådan programmeres frekvens...
22
VLT® AutomationDrive FC 301/302
[Auto On]
Muliggør styring af frekvensomformeren via
styreklemmerne og/eller seriel kommunikation. Når et
startsignal påføres styreklemmerne og/eller bussen, starter
frekvensomformeren. Tasten kan vælges som [1] Aktiveret
eller [0] Deaktiveret via parameter 0-42 [Auto on] tast på LCP.
BEMÆRK!
Et aktivt HAND-OFF-AUTO-signal via de digitale indgange
har højere prioritet end betjeningstasterne [Hand On] og
[Auto On].
Illustration 2.24 Hovedmenu/hurtig opsætning
2.1.17 LCP-taster
Tasterne til lokal betjening er placeret nederst på LCP'et.
Illustration 2.25 LCP-taster
[Hand On]
Giver mulighed for at styre frekvensomformeren via LCP'et.
[Hand On] starter også motoren, og det er nu muligt at
angive motorhastighedsdata med navigationstasterne.
Tasten kan vælges som [1] Aktiveret eller [0] Deaktiveret via
parameter 0-40 [Hand on] Key on LCP.
Eksterne stopsignaler, der aktiveres ved hjælp af
styresignaler eller en eldbus, tilsidesætter en startkommando via LCP'et.
Følgende styresignaler er stadig aktive, når [Hand On] er
aktiveret:
[Hand On] - [O] - [Auto On].
•
Nulstil.
•
Friløbsstop, inverteret
•
Reversering.
•
Vælg opsætning, lsb – Vælg opsætning, msb.
•
Stopkommando fra seriel kommunikation.
•
Hurtigt stop.
•
DC-bremse.
•
[O]
Standser den tilsluttede motor. Tasten kan vælges som [1]
Aktiveret eller [0] Deaktiveret via parameter 0-41 [O]-tast på
LCP.
Stop motoren ved at afbryde spændingen, hvis der ikke er
valgt en ekstern stopfunktion, og [O]-tasten er inaktiv.
[Reset]
Anvendes til nulstilling af frekvensomformeren efter en
alarm (trip). Den kan vælges som [1] Aktiveret eller [0]
Deaktiveret via parameter 0-43 [Reset]-tast på LCP.
2.1.18 Initialisering til fabriksindstillinger
Der er to måder, hvorpå frekvensomformeren kan initialiseres til fabriksindstillingerne.
Anbefalet initialisering (via parameter 14-22 Driftstilstand)
1. Vælg parameter 14-22 Operation Mode.
2. Tryk på [OK].
3. Vælg [2] Initialisering.
4. Tryk på [OK].
5. Afbryd netforsyningen, og afvent, at lyset i
displayet går ud.
6. Tilslut netforsyningen igen. Frekvensomformeren
er nu nulstillet.
Parameter 14-22 Operation Mode initialiserer alt undtagen:
Parameter 14-50 RFI Filter.
•
Parameter 8-30 Protokol.
•
Parameter 8-31 Address.
•
Parameter 8-32 FC-portens baud-hast..
•
Parameter 8-35 Min. svartidsforsinkelse.
•
Parameter 8-36 Maks. svartidsforsinkelse.
•
Parameter 8-37 Maksimum forsinkelse mellem tegn.
•
Parameter 15-00 Operating hours til
•
parameter 15-05 Over Volt's.
Parameter 15-20 Historic Log: Event til
•
parameter 15-22 Historic Log: Time.
Parameter 15-30 Fejllogbog: Fejlkode til
•
parameter 15-32 Alarm Log: Time.
22 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 25

Sådan programmeres frekvens... Programming Guide
Manuel initialisering
1. Afbryd netforsyningen, og vent på, at displayet
går ud.
2. 2a Hold [Status] – [Main Menu] – [OK] nede
samtidig under opstart af LCP 102,
grask display.
2b Tryk på [Menu] - [OK] under opstart af
det numeriske display LCP 101.
3. Slip tasterne efter 5 sek.
4. Frekvensomformeren er nu programmeret i
overensstemmelse med fabriksindstillingerne.
Denne procedure initialiserer alt undtagen:
Parameter 15-00 Operating hours.
•
Parameter 15-03 Power Up's.
•
Parameter 15-04 Over Temp's.
•
Parameter 15-05 Over Volt's.
•
BEMÆRK!
Ved en manuel initialisering nulstilles indstillingerne
også for seriel kommunikation, RFI-lter
(parameter 14-50 RFI Filter) og fejllog.
2 2
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 23
Page 26
Parameterbeskrivelser
3 Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
3.1 Parametre: 0-** Betjening/display
33
Parametre, der er tilknyttet frekvensomformerens
grundlæggende funktioner, LCP-tastfunktion og LCP-
displaykonguration.
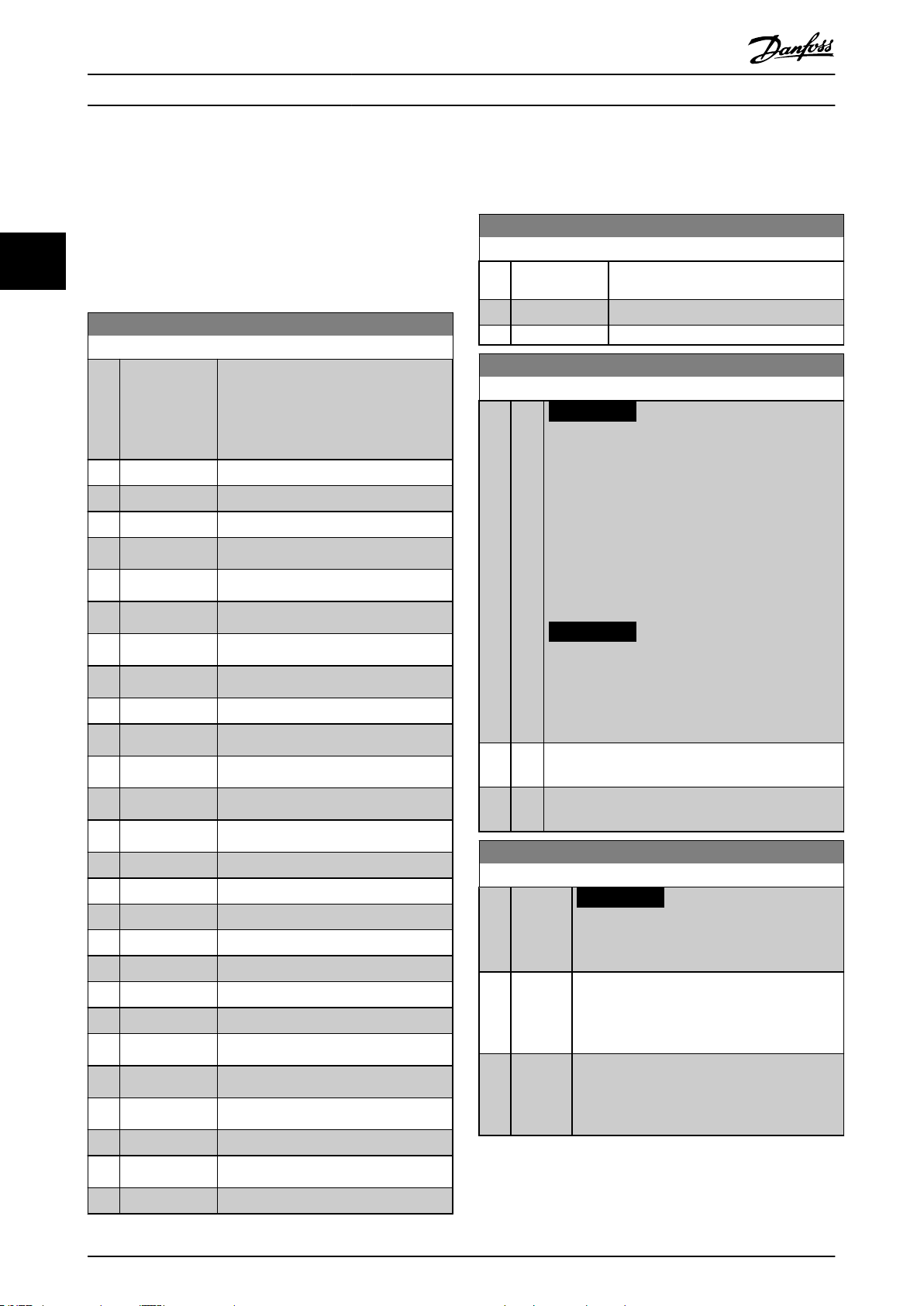
0-01 Language
0-01 Language
Option: Funktion:
[51] Bahasa
Indonesia
[52] Hrvatski Indgår i sprogpakke 3
[53] Arabic
Indgår i sprogpakke 2
Option: Funktion:
Denerer displaysprog. Frekvensomformeren leveres med re forskellige
sprogpakker. Engelsk og tysk indgår i alle
pakker. Engelsk kan ikke slettes eller
ændres.
[0] * English Indgår i sprogpakke 1–4
[1] Deutsch Indgår i sprogpakke 1–4
[2] Francais Indgår i sprogpakke 1
[3] Dansk Indgår i sprogpakke 1
[4] Spanish Indgår i sprogpakke 1
[5] Italiano Indgår i sprogpakke 1
[6] Svenska Indgår i sprogpakke 1
[7] Nederlands Indgår i sprogpakke 1
0-02 Motor Speed Unit
Option: Funktion:
BEMÆRK!
Denne parameter kan ikke justeres, mens
motoren kører.
Oplysningerne, der vises i displayet, afhænger af
indstillingerne i parameter 0-02 Motor Speed Unit og
parameter 0-03 Regional Settings. Fabriksindstillingerne
af parameter 0-02 Motor Speed Unit og
parameter 0-03 Regional Settings afhænger af det
geograske område, hvor frekvensomformeren er
leveret.
BEMÆRK!
Ændring af enheden for motorhastighed
nulstiller visse parametre til deres oprindelige
værdi. Vælg enheden for motorhastighed
[10] Chinese Indgår i sprogpakke 2
[20] Suomi Indgår i sprogpakke 1
[22] English US Indgår i sprogpakke 4
[27] Greek Indgår i sprogpakke 4
[28] Bras.port Indgår i sprogpakke 4
[36] Slovenian Indgår i sprogpakke 3
[39] Korean Indgår i sprogpakke 2
[0] RPM Vælg for at få vist motorhastighedsvariabler og
[1] * Hz Vælg for at få vist motorhastighedsvariabler og
0-03 Regionale indstillinger
Option: Funktion:
først, før andre parametre ændres.
parametre, der benytter motorhastighed (O/MIN).
parametre, der benytter udgangsfrekvens (Hz).
BEMÆRK!
[40] Japanese Indgår i sprogpakke 2
[41] Turkish Indgår i sprogpakke 4
[42] Trad.Chinese Indgår i sprogpakke 2
[43] Bulgarian Indgår i sprogpakke 3
[44] Srpski Indgår i sprogpakke 3
[45] Romanian Indgår i sprogpakke 3
[46] Magyar Indgår i sprogpakke 3
[47] Czech Indgår i sprogpakke 3
[48] Polski Indgår i sprogpakke 4
[49] Russian Indgår i sprogpakke 3
[0] * Interna-
tional
[1] USA Aktivér parameter 1-20 Motoreekt [kW ] til
Denne parameter kan ikke justeres, mens
motoren kører.
Aktivér parameter 1-20 Motoreekt [kW] til
indstilling af motoreekt i kW, og indstil
standardværdien for
parameter 1-23 Motorfrekvens til 50 Hz.
indstilling af motoreekt i hk, og indstil
standardværdien for
parameter 1-23 Motorfrekvens til 60 Hz.
[50] Thai Indgår i sprogpakke 2
24 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 27
Parameterbeskrivelser Programming Guide
0-04 Driftstilstand ved start (hand)
Option: Funktion:
Vælg den driftstilstand, der skal bruges, når
frekvensomformeren gentilsluttes til
netspænding efter nedlukning i Hand-on
mode.
[0] Genoptag Genstart frekvensomformeren, idet de
samme start-/stopindstillinger (påført via
[Hand On]/[O]), som blev valgt før
nedlukning af frekvensomformeren,
bevares.
[1] * Tvangsstop,
ref=gl.
[2] Tvangsstop,
ref=0
Genstart frekvensomformeren med en
gemt lokal reference, når der igen påføres
netspænding, og når der trykkes på [Hand
On].
Nulstil den lokale reference til 0 ved
genstart af frekvensomformeren.
3.1.1 0-1* Driftsopsætning
Denér og kontrollér de enkelte parameteropsætninger.
Frekvensomformeren har re parameteropsætninger, der
kan programmeres uafhængigt af hinanden. Derfor er
frekvensomformeren meget eksibel og kan løse
avancerede styrefunktionsproblemer, hvilket ofte vil spare
udgifter til eksternt styreudstyr. Parameteropsætninger kan
anvendes til at programmere frekvensomformeren til at
fungere i henhold til en given styreprol i en opsætning
(for eksempel motor 1 for horisontal bevægelse) og en
anden styreprol i en anden opsætning (for eksempel
motor 2 for vertikal bevægelse). Parameteropsætninger kan
også anvendes af en OEM-maskinproducent til identisk
programmering af de fabrikstilpassede frekvensomformere
til forskellige maskintyper i et størrelsesområde, så de er
indstillet til de samme parametre. Under produktion/idriftsættelse skal der blot vælges en specik opsætning,
afhængigt af hvilken maskine frekvensomformeren
installeres på.
Det aktive setup (dvs. den opsætning, som frekvensomformeren fungerer med aktuelt) kan vælges i
parameter 0-10 Aktiv opsætning og vises i LCP'et. Ved brug
af multiopsætning er det muligt at skifte mellem
opsætninger, mens frekvensomformeren kører eller er
stoppet, via digitale indgange eller serielle kommunikationskommandoer. Hvis det er nødvendigt at ændre
opsætninger under kørsel, skal det kontrolleres, at
parameter 0-12 Denne opsætning knyttet til er
programmeret som krævet. parameter 0-11 Rediger
opsætning gør det muligt at ændre parametrene inden for
enhver opsætning, mens frekvensomformeren fortsætter i
det aktive setup, som kan være en anden end den, der er
ved at blive ændret. parameter 0-51 Set-up Copy gør det
muligt at kopiere parameterindstillinger mellem
opsætninger, hvilket er medvirkende til en hurtigere idrift-
sættelse, hvis tilsvarende parameterindstillinger er
påkrævede i forskellige opsætninger.
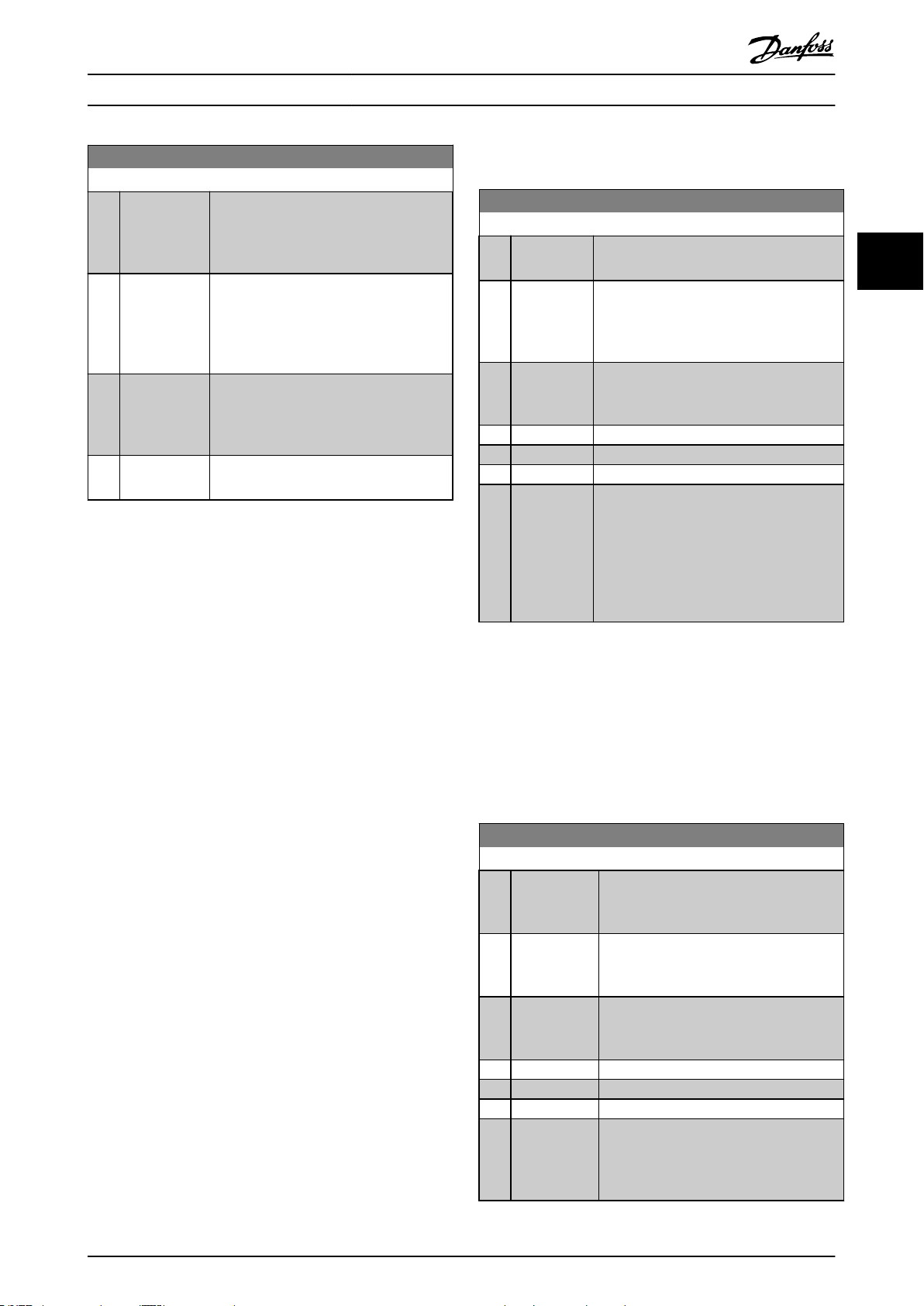
0-10 Aktiv opsætning
Option: Funktion:
Vælg den opsætning , der skal styre
frekvensomformerens funktioner.
[0] Fabriksop-
sætning
[1] * Opsætning 1 [1] Opsætning 1 til [4] Opsætning 4 er de re
[2] Opsætning 2
[3] Opsætning 3
[4] Opsætning 4
[9] Multio-
psætning
Kan ikke ændres. Den indeholder Danfossdatasættet og kan bruges som datakilde,
hvis de øvrige opsætninger skal gendannes
til en kendt tilstand.
separate parameteropsætninger. Samtlige
parametre kan programmeres i hver af disse.
Valg af ernstyrede opsætninger via de
digitale indgange og den serielle kommunikationsport. Denne opsætning anvender
indstillingerne fra parameter 0-12 Denne
opsætning knyttet til. Stop frekvensomformeren, inden der foretages ændringer af
funktioner med åben eller lukket sløjfe.
Brug parameter 0-51 Set-up Copy til at kopiere en
opsætning til en anden eller til samtlige opsætninger. Stop
frekvensomformeren inden skift mellem opsætninger, hvis
parametre mærket kan ikke ændres under drift har
forskellige værdier. For at undgå konikter, fordi den
samme parameter har forskellige indstillinger i to
forskellige opsætninger, kan opsætningerne sammenkædes
i parameter 0-12 Denne opsætning knyttet til. Parametre
med betegnelsen kan ikke kan ændres under drift er mærket
FALSK i parameterlisterne i kapitel 5 Parameterlister.
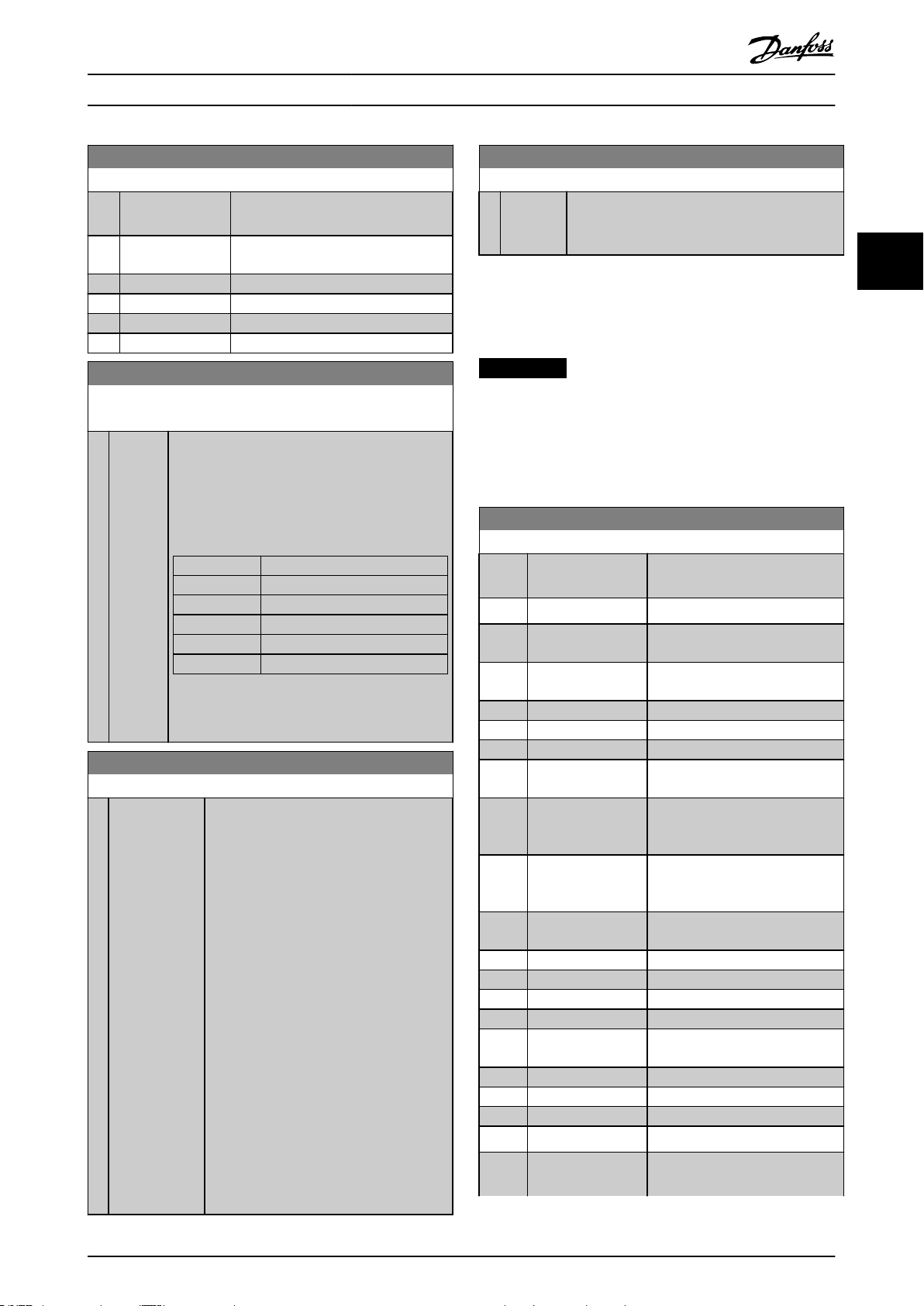
0-11 Rediger opsætning
Option: Funktion:
Vælger den opsætning, der skal redigeres
(dvs. programmeres) under driften: det
aktive setup eller et af de inaktive setups.
[0] Fabriksop-
sætning
[1] * Opsætning 1 [1] Opsæt. 1 til [4] Opsæt. 4 kan frit
[2] Opsætning 2
[3] Opsætning 3
[4] Opsætning 4
[9] Aktiv
opsætning
Kan ikke redigeres, men er nyttig som
datakilde, hvis de øvrige opsætninger skal
returneres til en kendt tilstand.
redigeres under driften uafhængigt af
hvilken opsætning, der er aktiv.
Kan også redigeres under driften. Den
valgte opsætning kan redigeres fra
forskellige kilder: LCP, FC RS485, FC USB
eller op til fem eldbus-steder.
3 3
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 25
Page 28
130BP075.10
130BP076.10
Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
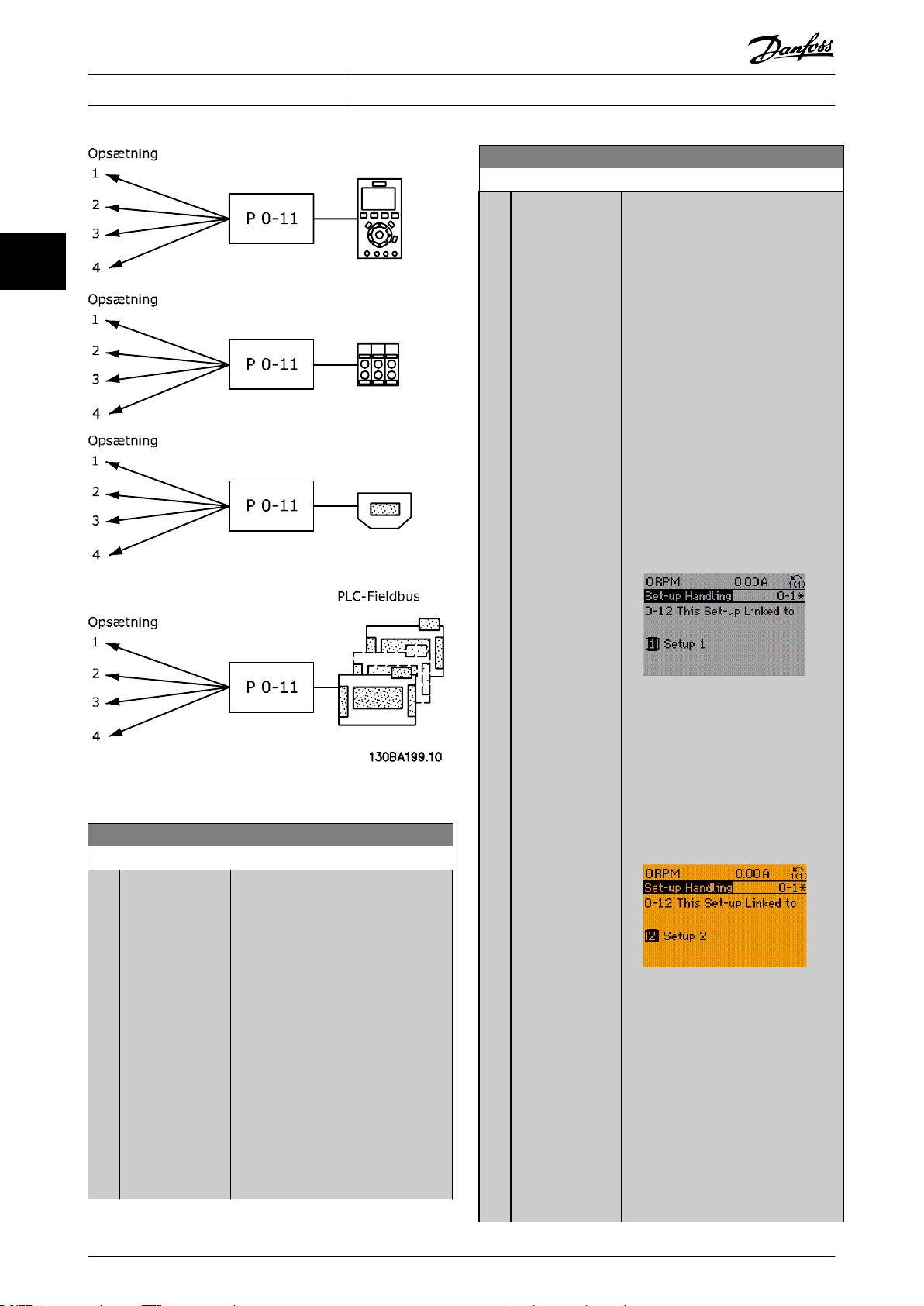
0-12 Denne opsætning knyttet til
Option: Funktion:
skifte fra én opsætning til en anden
under driften (dvs. når motoren kører).
Eksempel:
33
Brug multiopsætning til at skifte fra
opsætning 1 til opsætning 2, mens
motoren kører. Programmér først
opsætning 1, og kontrollér herefter, at
opsætning 1 og 2 er synkroniseret
(eller sammenkædet). Synkroniseringen
kan udføres på to måder:
1. Vælg følgende:
[2] Opsætning 2 i
•
parameter 0-11 Rediger
opsætning.
parameter 0-12 Denne
•
opsætning knyttet til til [1]
Opsætning 1.
Herved startes sammenkædningen
(synkroniseringen).
Illustration 3.1 Redigeringssetup
0-12 Denne opsætning knyttet til
Option: Funktion:
For at undgå konikter under skift fra
én opsætning til en anden under
driften kan opsætninger med
parametre, der ikke kan ændres under
driften, sammenkædes. Sammenkædningen sikrer, at parameterværdier, der
ikke kan ændres under driften, synkroniseres ved skift fra én opsætning til en
anden under driften. Parametre, der
ikke kan ændres under driften, er identiceret med betegnelsen FALSK i
parameterlisterne i kapitel 5 Parameter-
lister.
Parameter 0-12 Denne opsætning knyttet
til bruges, når der er valgt [9] Multiopsætning i parameter 0-10 Aktiv
opsætning. Multiopsætning bruges til at
Illustration 3.2 Opsætning 1
ELLER
2. Kopiér opsætning 1 til opsætning 2
fra opsætning 1. Indstil derefter
parameter 0-12 Denne opsætning knyttet
til til [2] Opsætning 2. Herved startes
sammenkædningen.
Illustration 3.3 Opsætning 2
Når sammenkædningen er udført, viser
parameter 0-13 Readout: Linked Set-ups
{1,2} for at indikere, at alle parametre,
der ikke kan ændres under driften, nu er
ens i opsætning 1 og 2. Hvis der
foretages ændringer af en parameter,
der ikke kan ændres under driften, for
eksempel parameter 1-30 Stator-
modstand (Rs), i opsætning 2, indføres
disse ændringer også automatisk i
26 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 29
Parameterbeskrivelser Programming Guide
0-12 Denne opsætning knyttet til
Option: Funktion:
opsætning 1. Det er nu muligt at skifte
til opsætning 1 og 2 under driften.
[0] * Ikke
sammenkædet
[1] Opsæt. 1
[2] Opsæt. 2
[3] Opsæt. 3
[4] Opsæt. 4
0-13 Readout: Linked Set-ups
Array [5]
Range: Funktion:
0* [0 -
255 ]
Se en liste over alle de opsætninger, der er kædet
sammen vha. parameter 0-12 This Set-up Linked to.
Parameteren har et indeks for hver parameteropsætning. Den viste parameterværdi for hvert indeks
repræsenterer de opsætninger, der er kædet
sammen med parameteropsætningen.
Indeks LCP-værdi
0 {0}
1 {1,2}
2 {1,2}
3 {3}
4 {4}
Tabel 3.1 Eksempel på sammenkædet
opsætning
0-14 Udlæsning: Rediger opsætninger / kanal
Range: Funktion:
0* [-2147483648
- 2147483647 ]
Se indstillingen af parameter 0-11 Rediger
opsætning for hver af de re forskellige
kommunikationskanaler. Når nummeret
vises som hex-nummer, som det er tilfældet
på LCP'et, repræsenterer hvert nummer en
kanal.
Numrene 1–4 repræsenterer et opsætningsnummer; F betyder fabriksindstilling, og A
betyder aktivt setup. Kanalrækkefølgen er
fra højre mod venstre: LCP, FC-bus, USB,
HPFB1-5.
Eksempel: Nummeret AAAAAA21h betyder
følgende:
Frekvensomformeren modtog
•
Opsætning 2 via en eldbus-kanal.
Dette valg afspejles i
parameter 0-11 Rediger opsætning.
En bruger valgte Opsætning 1 via
•
LCP'et.
Alle andre kanaler benytter det
•
aktive setup.
0-15 Readout: actual setup
Range: Funktion:
0* [0 - 255 ] Gør det muligt at udlæse det aktive setup. Kan
også gøres, når der er valgt [9] Multiopsætning i
parameter 0-10 Aktiv opsætning.
3.1.2 0-2* LCP-display
Denér de variabler, der vises i LCP'et.
BEMÆRK!
For oplysninger om at skrive displaytekster, se:
Parameter 0-37 Display Text 1.
•
Parameter 0-38 Display Text 2.
•
Parameter 0-39 Display Text 3.
•
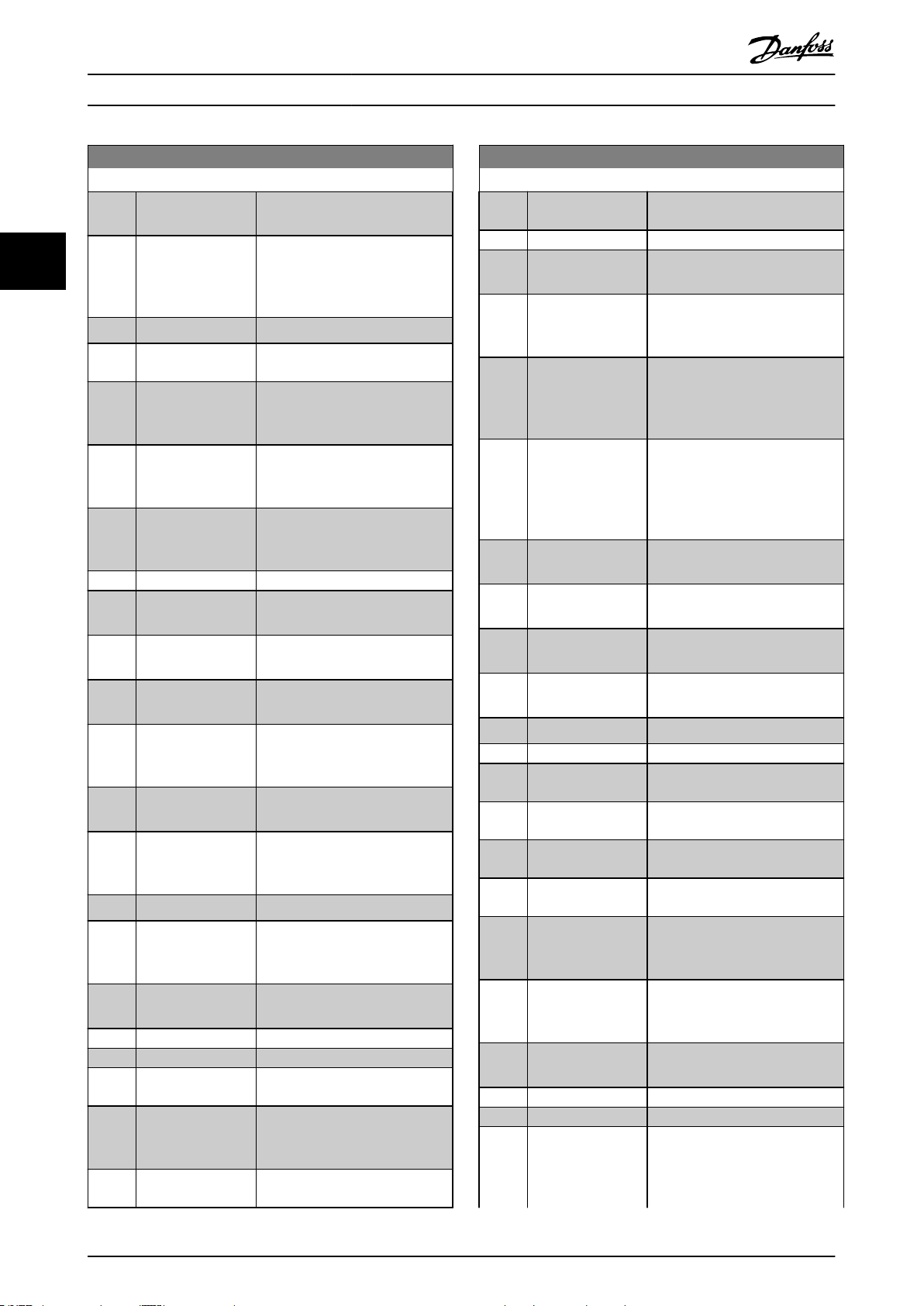
0-20 Displaylinje 1,1, lille
Option: Funktion:
Vælg en variabel, som skal vises i
displayet i linje 1, venstre position.
[0] Ingen Der er ikke valgt en displayværdi.
[9] Performance
Monitor
[15] Readout: actual
setup
[37] Displaytekst 1
[38] Displaytekst 2
[39] Displaytekst 3
[953] Probus-
advarselsord
[1005] Fejltæller for
udlæsningsaf-
sendelse
[1006] Fejltæller for
udlæsningsmod-
tagelse
[1007] Afbrydelsestæller for
udlæsningsbus
[1013] Advarselsparameter
[1230] Advarselsparameter
[1472] VLT-alarmord
[1473] VLT-advarselsord
[1474] VLT udvidet
statusord
[1501] Kørte timer
[1502] kWh-tæller
[1580] Fan Running Hours
[1600] Styreord Aktuelt styreord.
[1601] Reference [enhed] Den totale reference (summen af
digital/analog/preset/bus/fastfrys
3 3
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 27
Page 30
Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
0-20 Displaylinje 1,1, lille
Option: Funktion:
ref./catch up og slow-down) i den
valgte enhed.
[1602] Reference % Den totale reference (summen af
33
[1603] statusord Aktuelt statusord.
[1605] Vigtigste faktiske
værdi [%]
[1606] Actual Position Faktisk position i positionsenheder
[1607] Target Position Aktiv målposition i positions-
[1608] Position Error Faktisk position for PI-fejl i positi-
[1609] Tilpas. udlæs.
[1610] Eekt [kW] Den faktiske eekt, motoren
[1611] Eekt [hp] Den faktiske eekt, motoren
[1612] Motorspænding Den spænding, som tilføres
[1613] Frekvens Motorfrekvens, dvs. udgangsfre-
[1614] Motorstrøm Motorens fasestrøm målt som
[1615] Frekvens [%] Motorfrekvens, dvs. udgangsfre-
[1616] Moment [Nm] Faktisk motormoment i Nm.
[1617]*Hastighed [O/MIN] Hastighed i O/MIN (omdrejninger
[1618] Termisk motorbe-
lastning
[1619] KTY-følertemperatur
[1620] Motorvinkel
[1621] Torque [%] High
Res.
[1622] Moment [%] Aktuel motorbelastning som en
[1623] Motor Shaft Power
[kW]
digital/analog/preset/bus/fastfrys
ref./catch up og slow-down) i
procent.
Faktiske værdi som en procentdel.
valgt i parameter 17-70 Position
Unit.
enheder valgt i
parameter 17-70 Position Unit.
onsenheder valgt i
parameter 17-70 Position Unit.
forbruger, i kW.
forbruger, i hk.
motoren.
kvensen fra frekvensomformeren i
Hz.
eektiv værdi.
kvensen fra frekvensomformeren i
procent.
pr. minut), dvs. motorakselhastigheden i lukket sløjfe.
Termisk belastning på motoren,
udregnet af ETR-funktionen.
procentdel af det nominelle
motormoment.
0-20 Displaylinje 1,1, lille
Option: Funktion:
[1624] Calibrated Stator
Resistance
[1625] Moment [Nm] høj
[1630] DC Link-spænding DC-link-spænding i frekvensom-
formeren.
[1632] Bremseenergi /s Aktuel bremseeekt, der overføres
til en ekstern bremsemodstand.
Angivet som en øjebliksværdi.
[1633] Bremseenergi /2
min
[1634] Kølepl.-temp. Frekvensomformerens aktuelle
[1635] Termisk inverterbe-
lastning
[1636] Vekselret. nom.
strøm
[1637] Vekselret. maks.
strøm
[1638] SL-styreenh., tilstand Tilstanden for den hændelse,
[1639] Styrekorttemp. Styrekortets temperatur.
[1644] Speed Error [RPM]
[1645] Motor Phase U
Current
[1646] Motor Phase V
Current
[1647] Motor Phase W
Current
[1648] Speed Ref. After
Ramp [RPM]
[1650] Ekstern reference Summen af den eksterne reference
[1651] Pulsreference Frekvens i Hz tilsluttet til de
[1652] Feedback [enhed] Referenceværdi fra program-
[1653] Digi pot-reference
[1657] Feedback [RPM]
[1660] Digital indgang Signaltilstandene fra de seks
Bremseeekt, der overføres til en
ekstern bremsemodstand. Middeleekten beregnes løbende for de
seneste 120 sek.
kølepladetemperatur. Udkoblingsgrænsen er 95 ±5 °C (203 ±9 °F);
indkobling sker ved 70 ±5 °C
(203 ±9 °F).
Belastningen af vekselretterne i
procent.
Frekvensomformerens nominelle
strøm.
Frekvensomformerens
maksimumstrøm.
styreenheden har udført.
som en procentdel, dvs. summen
af analog/puls/bus.
digitale indgange (18, 19 eller 32,
33).
merede digitale indgange.
digitale klemmer (18, 19, 27, 29,
32 og 33). Der er 16 bit i alt, men
kun seks af dem anvendes.
28 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 31

Parameterbeskrivelser Programming Guide
0-20 Displaylinje 1,1, lille
Option: Funktion:
Indgang 18 svarer til den
anvendte bit længst til venstre.
Signal lavt = 0, signal højt = 1.
[1661] Klemme 53,
koblingsindstilling
[1662] Analog indgang 53 Den faktiske værdi på indgang 53,
[1663] Klemme 54,
koblingsindstilling
[1664] Analog indgang 54 Den faktiske værdi for indgang 54
[1665] Analog udgang 42
[mA]
[1666] Digital udgang [bin] Den binære værdi af alle digitale
[1667] Frekvensindgang
#29 [Hz]
[1668] Frekvensindgang
#33 [Hz]
[1669] Pulsudgang #27 [Hz] Den faktiske værdi for impulser,
[1670] Pulsudgang #29 [Hz] Den faktiske værdi for impulser,
[1671] Relæudgang [bin]
[1672] Tæller A Applikationsafhængigt (for
[1673] Tæller B Applikationsafhængigt (for
[1675] Analog indg. X30/11 Den faktiske værdi for indgang
[1676] Analog indg. X30/12 Den faktiske værdi for indgang
[1677] Analog udgang
X30/8 [mA]
Indstilling af indgangsklemme 54.
Strøm = 0, spænding = 1.
enten som en reference eller
beskyttelsesværdi.
Indstilling af indgangsklemme 54.
Strøm = 0, spænding = 1.
som reference eller beskyttelsesværdi.
Den faktiske værdi på udgang 42 i
mA. Anvend
parameter 6-50 Klemme 42, udgang
til at vælge den værdi, der skal
vises.
udgange.
Den faktiske værdi for den
frekvens, der er påført klemme 29
som en impulsindgang.
Den faktiske værdi for den
frekvens, der er påført klemme 33
som en impulsindgang.
der er påført klemme 27 i digital
udgangstilstand.
der er påført klemme 29 i digital
udgangstilstand.
eksempel SLC-styring).
eksempel SLC-styring).
X30/11 som en reference eller
beskyttelsesværdi.
X30/12 som en reference eller
beskyttelsesværdi.
Den faktiske værdi på udgang
X30/8 i mA. Anvend
parameter 6-60 Klemme X30/8,
udgang til at vælge den værdi, der
skal vises.
0-20 Displaylinje 1,1, lille
Option: Funktion:
[1678] Analog udg. X45/1
[mA]
[1679] Analog udg. X45/3
[mA]
[1680] Fieldbus, CTW 1 Styreord (CTW ), der modtages fra
busmasteren.
[1682] Fieldbus-REF. 1 Den primære referenceværdi sendt
med styreord fra busmasteren.
[1684] Komm.-optionssta-
tusord
[1685] FC-port, CTW 1 Styreord (CTW), der modtages fra
[1686] FC-port, REF 1 Statusord (STW), sendt til
[1687] Bus Readout Alarm/
Warning
[1689] Congurable Alarm/
Warning Word
[1690] Alarmord En eller ere alarmer i hex-kode.
[1691] Alarmord 2 En eller ere alarmer i hex-kode.
[1692] Advarselsord En eller ere advarsler i en hex-
[1693] Advarselsord 2 En eller ere advarsler i en hex-
[1694] Udv. statusord En eller ere statustilstande i hex-
[1836] Analog indg. X48/2
[mA]
[1837] Temp.indg. X48/4
[1838] Temp.indg. X48/7
[1839] Temp.indg. X48/10
[1860] Digital Input 2
[3110] Bypass-statusord
[3111] Bypass-driftstimer
[4235] S-CRC Value
[4282] Safe Control Word
[4283] Safe Status Word
[4285] Active Safe Func.
[4286] Safe Option Info
[9913] Klartid
[9914] Paramdb-
forespørgsler i kø
[9917] tCon1 time
[9918] tCon2 time
[9919] Time Optimize
Measure
[9920] HS-temp. (PC1)
[9921] HS-temp. (PC2)
[9922] HS-temp. (PC3)
[9923] HS-temp. (PC4)
Udvidet statusord for eldbus-
kommunikationsoption.
busmasteren.
busmasteren.
kode.
kode.
kode.
3 3
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 29
Page 32

Tilpasset udlæsning (værdi)
P 16–09
Tilpasset udlæsnings–
enhed P 0–30
Maks. – værdi
P 0-32
Min.–værdi
P 0–31
Kun lineære
enhender
Kvadratisk enhed (tryk)
Kubisk enhed (eekt)
Motorhastighed
Motorhastighed
Høj grænse
P 4-13 (RPM)
P 4-14 (Hz)
0
130BT105.12
Lin eæ
r enhed (f.eks. hastighed og ow)
Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
0-20 Displaylinje 1,1, lille
Option: Funktion:
[9924] HS-temp. (PC5)
[9925] HS-temp. (PC6)
[9926] HS-temp. (PC7)
33
[9927] HS-temp. (PC8)
[9951] PC Debug 0
[9952] PC Debug 1
[9953] PC Debug 2
[9954] PC Debug 3
[9955] PC Debug 4
[9956] Fan 1 Feedback
[9957] Fan 2 Feedback
[9958] PC Auxiliary Temp
[9959] Power Card Temp.
Tilpasset udlæsning
Den beregnede værdi, som skal vises, er baseret på indstillingerne i:
afhængigt af den valgte enhed i
parameter 0-30 Custom Readout Unit).
Displaytekst. Tekststreng lagret i en parameter.
•
Parameter 0-30 Custom Readout Unit.
•
Parameter 0-31 Custom Readout Min Value (kun
•
lineær).
Parameter 0-32 Custom Readout Max Value.
•
Parameter 4-13 Motor Speed High Limit [RPM].
•
Parameter 4-14 Motor Speed High Limit [Hz].
•
Faktisk hastighed.
•
0-21 Displaylinje 1,2, lille
Vælg en variabel, som skal vises i displayet i linje 1, midterste
position. Optionerne er de samme som dem, der er angivet for
parameter 0-20 Displaylinje 1,1, lille.
0-22 Displaylinje 1,3, lille
Vælg en variabel, som skal vises i displayet i linje 1, højre
position. Optionerne er de samme som dem, der er angivet for
parameter 0-20 Displaylinje 1,1, lille.
0-23 Displaylinje 2, stor
Vælg en variabel, som skal vises i displayet i linje 2. Optionerne
er de samme som angivet for parameter 0-20 Displaylinje 1,1, lille.
0-24 Displaylinje 3, stor
Vælg en variabel, som skal vises i displayet i linje 3.
0-25 Min personlige menu
Range: Funktion:
Size
related*
3.1.3 0-3* Tilpas. LCP-udlæsn.
Det er muligt at tilpasse displayets elementer til forskellige
formål:
30 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
[0 9999 ]
Tilpasset udlæsning. Værdi proportional med
•
Denér op til 50 parametre, der skal
medtages i Q1 Personlig menu, som er
tilgængelig via [Quick Menu]-tasten på LCP'et.
Parametrene vises i Q1 Personlig menu i den
rækkefølge, hvormed de programmeres i
denne array-parameter. Slet parametre ved at
indstille værdien til 0000.
Med denne funktion opnås der for eksempel
hurtig og enkel adgang til en enkelt eller op
til 50 parametre, der kræver regelmæssige
ændringer (for eksempel på grund af vedligeholdelse af anlæg), eller funktionen kan
anvendes af en OEM til at muliggøre enkel
idriftsættelse af deres udstyr.
hastighed (lineær, kvadratisk eller kubisk
Illustration 3.4 Tilpas. udlæs.
Forholdet afhænger af typen af den enhed, der er valgt i
parameter 0-30 Custom Readout Unit:
Enhedstype Hastighedsforhold
Uden dimensioner
Hastighed
Gennemstrømning, volumen
Gennemstrømning, masse
Hastighed
Længde
Temperatur
Tryk Kvadratisk
Eekt Kubisk
Tabel 3.2 Hastighedsforhold for forskellige enhedstyper
Lineær
0-30 Enhed for brugerdef. udlæsn.
Option: Funktion:
Det er muligt at programmere en
værdi, der skal vises i displayet på
LCP'et. Værdien har en lineær,
kvadratisk eller kubisk relation til
Page 33

Parameterbeskrivelser Programming Guide
0-30 Enhed for brugerdef. udlæsn.
Option: Funktion:
hastighed. Denne relation afhænger af
den valgte enhed (se Tabel 3.2). Den
faktiske beregnede værdi kan aæses i
parameter 16-09 Tilpas. udlæs. og/eller
vises i displayet ved at vælge [16-09]
Tilpas. udlæs. i
parameter 0-20 Displaylinje 1,1, lille til
parameter 0-24 Display Line 3 Large.
[0] * Ingen
[1] %
[5] PPM
[10] 1/min
[11] omdr./min.
[12] PULS/s
[20] l/s
[21] l/min
[22] l/tim
[23] m³/s
[24] m³/min
[25] m³/tim
[30] kg/s
[31] kg/min
[32] kg/tim
[33] t/min
[34] t/tim
[40] m/s
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/tim
[124] CFM
[125] fod³/s
[126] fod³/min
[127] fod³/tim
[130] pund/s
[131] pund/min
[132] pund/tim
[140] fod/s
[141] fod/min
[145] ft
[160] °F
[170] psi
[171] pd/tm2
0-30 Enhed for brugerdef. udlæsn.
Option: Funktion:
[172] tom.vandsøjle(rel.)
[173] ft WG
[176] kpsi
[177] MPa
[178] kBar
[180] HK
0-31 Min.-værdi f. brugerdef. udlæsning
Range: Funktion:
0 CustomReadoutUnit*
[ -999999.99 par. 0-32
CustomReadoutUnit]
Denne parameter angiver
minimumværdien for den
brugertilpassede udlæsning
(opstår ved stilstand). Det er
kun muligt at indstille det til
andet end 0, når der vælges en
lineær enhed i
parameter 0-30 Enhed for
brugerdef. udlæsn.. For
kvadratiske og kubiske enheder
er minimumværdien 0.
0-32 Custom Readout Max Value
Range: Funktion:
100 CustomReadoutUnit*
[ par. 0-31 -
999999.99
CustomReadoutUnit]
Denne parameter indstiller den
maksimale værdi, der skal vises,
når motorhastigheden har nået
den indstillede værdi for
parameter 4-13 Motor Speed
High Limit [RPM] eller
parameter 4-14 Motor Speed
High Limit [Hz] (afhænger af
indstillingen i
parameter 0-02 Motor Speed
Unit).
0-33 Source for User-dened Readout
Option: Funktion:
Indtast kilden for brugerdef. udlæsn.
[105] Mom. i forh. t. nom.
[240] * Default Source
0-37 Displaytekst 1
Range: Funktion:
0* [0 -
Indtast en tekst, som kan vises i det graske display,
25 ]
ved at vælge [37] Displaytekst 1 i
Parameter 0-20 Displaylinje 1,1, lille,
•
Parameter 0-21 Displaylinje 1,2, lille,
•
Parameter 0-22 Displaylinje 1,3, lille,
•
Parameter 0-23 Displaylinje 2, stor, eller
•
Parameter 0-24 Displaylinje 3, stor.
•
3 3
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 31
Page 34

Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
0-38 Displaytekst 2
Range: Funktion:
0* [0 -
25 ]
33
Indtast en tekst, som kan vises i det graske display,
ved at vælge [38] Displaytekst 2 i
Parameter 0-20 Displaylinje 1,1, lille,
•
Parameter 0-21 Displaylinje 1,2, lille,
•
Parameter 0-22 Displaylinje 1,3, lille,
•
Parameter 0-23 Displaylinje 2, stor, eller
•
Parameter 0-24 Displaylinje 3, stor.
•
0-41 [O]-tast på LCP
Option: Funktion:
[0] Deaktiveret Undgår utilsigtet standsning af frekvensom-
formeren.
[1] Aktiveret
[2] Adgangskode Undgår uautoriseret stop. Hvis
parameter 0-41 [O]-tast på LCP er indeholdt i
kvikmenuen, deneres adgangskoden i
parameter 0-65 Kvikmenuadgangskode
0-42 [Auto on] tast på LCP
0-39 Displaytekst 3
Range: Funktion:
0* [0 -
25 ]
Indtast en tekst, som kan vises i det graske display,
ved at vælge [39] Displaytekst 3 i
•
•
•
•
•
Parameter 0-20 Displaylinje 1,1, lille,
Parameter 0-21 Displaylinje 1,2, lille,
Parameter 0-22 Displaylinje 1,3, lille,
Parameter 0-23 Displaylinje 2, stor, eller
Parameter 0-24 Displaylinje 3, stor.
Option: Funktion:
[0] Deaktiveret Undgår utilsigtet start af frekvensomformeren
i auto-on mode.
[1] Aktiveret
[2] Adgangskode Undgår uautoriseret start i auto-on mode. Hvis
parameter 0-42 [Auto on] tast på LCP er
indeholdt i kvikmenuen, deneres
adgangskoden i parameter 0-65 Kvikmenuad-
gangskode
0-43 [Reset]-tast på LCP
3.1.4 0-4* LCP-tastatur
Aktivér, deaktivér og beskyt individuelle taster på LCP'et
med adgangskode.
0-40 [Hand on]-tast på LCP
Option: Funktion:
[0] Deaktiveret Der sker ingenting, når der trykkes på
[Hand On]. Vælg [0] Deaktiveret for at
undgå utilsigtet start af frekvensomformeren i Hand-on mode.
[1] Aktiveret LCP'et skifter direkte til Hand-on mode, når
der trykkes på [Hand On].
[2] Adgangskode Der kræves en adgangskode, når der
trykkes på [Hand On]. Hvis
parameter 0-40 [Hand on]-tast på LCP er
indeholdt i Min personlige menu, deneres
adgangskoden i parameter 0-65 Kvikmen-
uadgangskode. Ellers skal adgangskoden
deneres i parameter 0-60 Hovedmenu-
adgangskode.
[3] Hand ikke akt./
akt.
[4] H ik akt/akt m.
adg.k
[9] Enabled, ref = 0
Når der trykkes én gang på [Hand On],
skifter LCP'et til O-tilstand. Når der trykkes
igen, skifter LCP'et til Hand-on mode.
Samme option som [3] Hand ikke akt/akt.,
men der kræves en adgangskode (se [2]
Adgangskode).
Option: Funktion:
[0] Deaktiveret Ingen eekt, når der trykkes på [Reset].
Undgår tilfældig nulstilling af alarm.
[1] Aktiveret
[2] Adgangskode Undgår uautoriseret nulstilling. Hvis
parameter 0-43 [Reset]-tast på LCP er
indeholdt i kvikmenuen, deneres
adgangskoden i parameter 0-65 Kvikmen-
uadgangskode
[7] Aktiveret uden
OFF
[8] Adg.kode uden
OFF
Nulstiller frekvensomformeren uden at
sætte den i O-tilstand.
Nulstiller frekvensomformeren uden at
sætte den i O-tilstand. Der kræves en
adgangskode, når der trykkes på [Reset]
(se [2] Adgangskode).
0-44 [O/Reset]-tast på LCP
Aktivér eller deaktivér [O/Reset]-tasten.
Option: Funktion:
[0] Deaktiveret
[1] * Aktiveret
[2] Adgangskode
32 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 35

Parameterbeskrivelser Programming Guide
0-45 [Drive Bypass]-tast på LCP
Tryk på [O], og vælg [0] Deaktiveret for at undgå utilsigtet stop
af frekvensomformeren. Tryk på [O], og vælg [2] Adgangskode
for at undgå uautoriseret bypass af frekvensomformeren. Hvis
parameter 0-45 [Drive Bypass] Key on LCP er indeholdt i
kvikmenuen, deneres adgangskoden i parameter 0-65 Personal
Menu Password.
Option: Funktion:
[0] Deaktiveret Vælg for at deaktivere
tasten.
[1] * Aktiveret
[2] Adgangskode
3.1.5 0-5* Kopier/Gem
Kopiér parametre fra og til LCP'et. Anvend disse parametre
til at gemme og kopiere opsætninger fra én frekvensomformer til en anden.
0-50 LCP-kopi
Option: Funktion:
BEMÆRK!
Denne parameter kan ikke
justeres, mens motoren kører.
0-51 Set-up Copy
Option: Funktion:
[0] * No copy Ingen funktion.
[1] Copy to
set-up 1
[2] Copy to
set-up 2
[3] Copy to
set-up 3
[4] Copy to
set-up 4
[9] Copy to all Kopierer parametrene i den aktuelle opsætning
Kopierer samtlige parametre i det aktuelle
programmeringssetup (deneret i
parameter 0-11 Programming Set-up) til
opsætning 1.
Kopierer samtlige parametre i det aktuelle
programmeringssetup (deneret i
parameter 0-11 Programming Set-up) til
opsætning 2.
Kopierer samtlige parametre i det aktuelle
programmeringssetup (deneret i
parameter 0-11 Programming Set-up) til
opsætning 3.
Kopierer samtlige parametre i det aktuelle
programmeringssetup (deneret i
parameter 0-11 Programming Set-up) til
opsætning 4.
til hver af opsætningerne 1 til 4.
3.1.6 0-6* Adgangskode
3 3
[0] * Ingen kopi
[1] Alle til LCP Kopierer samtlige parametre i alle
opsætninger fra frekvensomformerens
hukommelse til LCP-hukommelsen.
[2] Alle fra LCP Kopierer samtlige parametre i alle
opsætninger fra LCP-hukommelsen til
frekvensomformerens hukommelse.
[3] Størr.-uafh fra LCP Kopiér kun de parametre, der er
uafhængige af motorstørrelse.
Sidstnævnte indstilling kan bruges til
at programmere adskillige frekvensomformere med de samme funktioner
uden at påvirke motordataene.
[4] Fil fra MCO til LCP
[5] Fil fra LCP til MCO
[6] Data from DYN to
LCP
[7] Data from LCP to
DYN
[9] Safety Par. from
LCP
[10] Delete LCP copy
data
Anvendes til at slette kopien, efter at
overførsel er fuldført.
0-60 Main Menu Password
Range: Funktion:
100* [-9999 -
9999 ]
Denér den adgangskode, der bruges til at få
adgang til hovedmenuen via tasten [Main
Menu]. Hvis parameter 0-61 Access to Main
Menu w/o Password er indstillet til [0] Fuld
adgang, ignoreres denne parameter.
0-61 Adgang til hovedmenu u/ adgangskode
Option: Funktion:
[0] * Fuld adgang Deaktiverer adgangskoden, der er
deneret i parameter 0-60 Main Menu
Password.
[1] LCP: ingen adg. Forhindrer uautoriseret redigering af
parametre i hovedmenuen.
[2] LCP: ingen adg. Forhindrer uautoriseret visning og
redigering af parametre i hovedmenuen.
[3] Bus: skrivebesk. Skrivebeskyttede funktioner for
parametre på eldbus og/eller FCstandardbus.
[4] Bus: ingen adg. Adgang til parametre er ikke tilladt via
eldbus og/eller FC-standardbus.
[5] Alt: skrivebesk. Skrivebeskyttelsesfunktion for parametre
på LCP, eldbus eller FC-standardbus.
[6] Alt: ingen
adgang
Ingen adgang fra LCP, eldbus eller FCstandardbus er tilladt.
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 33
Page 36

Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
Hvis [0] Fuld adgang vælges, ignoreres parameter 0-60 Main
Menu Password, parameter 0-65 Personal Menu Password og
parameter 0-66 Access to Personal Menu w/o Password.
BEMÆRK!
OEM'er kan få mere avanceret adgangskodebeskyttelse
33
ved anmodning.
0-65 Kvikmenuadgangskode
Range: Funktion:
200* [-9999 -
9999 ]
Denér den adgangskode, der bruges til at få
adgang til kvikmenuen via tasten [Quick
Menu]. Hvis parameter 0-66 Adgang til
kvikmenu uden adgangskode er indstillet til [0]
Fuld adgang, ignoreres denne parameter.
0-70 Date and Time
Range: Funktion:
Size
related*
[ 0 - 0 ] Indstiller dato og tid for det interne ur.
Det format, der skal anvendes, er angivet
i parameter 0-71 Date Format og
parameter 0-72 Time Format.
0-73 Tidszoneforskydn.
Range: Funktion:
0 min* [-780 - 780
min]
Indtast tidszoneforskydningen i forhold til
UTC. Denne parameter er påkrævet ved
automatisk tilpasning af sommertid.
0-74 DST/Summertime
Option: Funktion:
0-66 Adgang til kvikmenu uden adgangskode
Hvis parameter 0-61 Access to Main Menu w/o Password er
indstillet til [0] Fuld adgang, ignoreres denne parameter.
Option: Funktion:
[0] * Fuld adgang Deaktiverer adgangskoden, der er
deneret i parameter 0-65 Kvikmenuad-
gangskode.
[1] LCP: ingen adg. Forhindrer uautoriseret redigering af
parametre i kvikmenuen.
[3] Bus: skrivebesk. Skrivebeskyttelsesfunktioner for
kvikmenu-parametre på eldbus og/eller
FC-standardbus.
[5] Alt: skrivebesk. Skrivebeskyttelsesfunktion for kvikmenu-
parametre på LCP, eldbus eller FCstandardbus.
0-67 Adgang med bus-adgangskode
Range: Funktion:
0* [0 - 9999 ] Anvend denne parameter til at låse frekvensom-
formeren op via eldbus eller MCT 10opsætningssoftware.
[0] * O
[2] Manual
0-76 DST/Summertime Start
Range: Funktion:
Size
related*
0-77 DST/Summertime End
Range: Funktion:
Size
related*
0-79 Clock Fault
Vælg, hvordan sommertid skal håndteres. For
manuel indstilling af sommertid angives startdato
og slutdato i parameter 0-76 DST/Summertime Start
og parameter 0-77 DST/Summer time End.
[ 0 - 0 ] Indstiller datoen og tidspunktet, hvor
sommertid starter. Denne dato
programmeres i det format, der er valgt i
parameter 0-71 Date Format.
[ 0 - 0 ] Indstiller dato og tidspunkt, hvor
sommertid slutter. Denne dato
programmeres i det format, der er valgt i
parameter 0-71 Date Format.
Option: Funktion:
0-68 Safety Parameters Password
Range: Funktion:
300* [0 - 9999 ] Indtast adgangskoden for adgang til sikker-
hedsparametre. Hvis parameter 0-69 Password
Protection of Safety Parameters er indstillet til
[0] Deaktiveret, ignoreres denne parameter.
[0] Disabled
[1] Enabled
Aktiverer eller deaktiverer uradvarslen, når uret ikke
er indstillet eller er blevet nulstillet på grund af
nedlukning, og der ikke er installeret en backupfunktion. Hvis VLT® Analog I/O-option MCB 109 er
installeret, er [1] Aktiveret standard.
0-69 Password Protection of Safety Parameters
Option: Funktion:
[0] * Deaktiveret
[1] Aktiveret
34 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 37

Parameterbeskrivelser Programming Guide
0-81 Working Days
Array [7]
Array med 7 elementer [0]–[6], som vises under parameternummeret i displayet. Tryk på [OK], og gå mellem elementerne
med [▲] og [▼].
Option: Funktion:
Indstil for hver ugedag, om det er en hverdag eller en
fridag. Det første element i denne array er mandag.
Arbejdsdagene anvendes til tidsstyrede handlinger.
[0] No
[1] Yes
0-82 Additional Working Days
Array [5]
Array med 5 elementer [0]–[4], som vises under parameternummeret i displayet. Tryk på [OK], og gå mellem elementerne
med [▲] og [▼].
Range: Funktion:
Size related* [ 0 - 0 ] Denerer datoerne for ere arbejdsdage,
som normalt ville være fridage i henhold
til parameter 0-81 Working Days.
3 3
0-83 Additional Non-Working Days
Array [15]
Array med 15 elementer [0]–[14], som vises under parameternummeret i displayet. Tryk på [OK], og gå mellem elementerne
med [▲] og [▼].
Range: Funktion:
Size related* [ 0 - 0 ] Denerer datoerne for ere arbejdsdage,
som normalt ville være fridage i
henhold til parameter 0-81 Working
Days.
0-84 Time for Fieldbus
Range: Funktion:
0* [0 - 4294967295 ] Viser eldbus-tiden.
0-85 Summer Time Start for Fieldbus
Range: Funktion:
0* [0 - 4294967295 ] Viser start af sommertid for eldbus.
0-86 Summer Time End for Fieldbus
Range: Funktion:
0* [0 - 4294967295 ] Viser afslutning på sommertid for
eldbus.
0-89 Date and Time Readout
Range: Funktion:
0* [0 - 25 ] Viser den aktuelle dato og tid. Datoen og klokke-
slættet opdateres konstant.
Uret begynder ikke at tælle, før indstillingen er
ændret i forhold til den standard, der er indstillet i
parameter 0-70 Date and Time.
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 35
Page 38

Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
3.2 Parametre: 1-** Last og motor
3.2.1 1-0* Gen. indstillinger
Denér, om frekvensomformeren kører ved hastighedstilstand eller momenttilstand, og om den interne PID-
33
styring skal være aktiv eller ej.
1-00 Kongurationstilstand
Option: Funktion:
Vælg det applikationsstyreprincip, der skal
anvendes, når en ernreference (for eksempel
via analog indgang eller eldbus) er aktiv. En
ernreference kan kun være aktiv, når
parameter 3-13 Reference Site er indstillet til [0]
Kædet til hand / auto eller [1] Fjernbetjent.
[0] Hast. åben
sløjfe
[1] Hast. lukket
sløjfe
[2] Moment Aktiverer moment, lukket sløjfe-styring med
Aktiverer hastighedsstyring (uden feedbacksignalet fra motoren) med automatisk
slipkompensering for næsten konstant
hastighed ved varierende belastninger.
Kompenseringer er aktive, men kan
deaktiveres i parametergruppe 1-0* Last og
motor. Hastighedsstyringsparametrene
indstilles i parametergruppe 7-0* Hastighed,
PID-styr.
Aktiverer hastighed, lukket sløjfe-styring med
feedback. Opnå fuldt holdemoment ved 0 O/
MIN.
Angiv et feedbacksignal, og indstil PID-hastighedsstyring for øget hastighedsnøjagtighed.
Hastighedsstyringsparametrene indstilles i
parametergruppe 7-0* Hastighed, PID-styr.
feedback. Kun muligt med Flux med
motorfeedback-optionen,
parameter 1-01 Motorstyringsprincip.
BEMÆRK!
Dette gælder kun for FC 302.
[3] Proces Aktiverer brugen af processtyring i frekvens-
omformeren. Processtyringsparametrene
indstilles i parametergrupperne 7-2* Processty-
ringsfb. og 7-3* Proces, PID-reg.
[4] Moment
åben sløjfe
[5] Wobble Aktiverer wobblefunktionen i
[6] Overa-
dewinder
Aktiverer brugen af moment, åben sløjfe i
VVC+-tilstand (parameter 1-01 Motorstyrings-
princip). Indstil moment PID-parametrene i
parametergruppe 7-1* Moment PI-styr.
parameter 30-00 Wobbletilstand til
parameter 30-19 Wobbledeltafrekv. skalering.
Aktiverer specikke parametre for overadespolestyringen i parametergrupperne 7-2*
Processtyringsfb. og 7-3* Proces, PID-reg.
1-00 Kongurationstilstand
Option: Funktion:
[7] Udvidet PID-
hast. ÅS
[8] Udvidet PID-
hast. LS
[9] Positioning
Specikke parametre i parametergrupperne
7-2* Processtyringsfb. til 7-5* Adv. Process PID II.
Specikke parametre i parametergrupperne
7-2* Processtyringsfb. til 7-5* Adv. Process PID II.
BEMÆRK!
Denne option er kun tilgængelig med
softwareversion 48.XX.
Aktiverer positioneringstilst.
[10] Synchroni-
zation
BEMÆRK!
Denne option er kun tilgængelig med
softwareversion 48.XX.
Aktiverer synkroniseringstilstand.
1-01 Motorstyringsprincip
Option: Funktion:
BEMÆRK!
Denne parameter kan ikke justeres,
mens motoren kører.
Vælg, hvilket motorstyreprincip der skal
anvendes.
[0] U/f Speciel motortilstand for parallelforbundne
motorer i særlige motorapplikationer. Når U/f
er valgt, kan karakteristikken for styreprincippet redigeres i parameter 1-55 U/f-
karakteristik - U og parameter 1-56 U/fkarakteristik - F.
[1] VVC+ Voltage Vector Control-princippet er egnet til
de este applikationer. Den største fordel ved
VVC+-drift er, at det anvender en robust
motormodel.
[2] Flux uden
føler
Flux Vektorstyring uden encoderfeedback
sikrer enkel installation og robusthed mod
pludselige belastningsændringer.
BEMÆRK!
Dette gælder kun for FC 302.
[3] Flux m.
motorfeedb.
Høj nøjagtighed for hastigheds- og
momentstyring, hvilket passer til de este
krævende applikationer.
BEMÆRK!
Dette gælder kun for FC 302.
Den bedste akselydeevne opnås normalt med en af de to
Flux Vektor-styringstilstande [2] Flux uden føler og [3] Flux
m. motorfeedb.
36 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 39

ω
nom2ωnom
ω [rad/S]
P[W]
130BB655.10
T[Nm]
P
T
P
nom
T
nom
Parameterbeskrivelser Programming Guide
1-02 Flux-motorfeedbackkilde
Option: Funktion:
BEMÆRK!
Denne parameter kan ikke justeres,
mens motoren kører.
Vælg den grænseade, hvor feedback fra
motoren skal modtages.
[1] * 24 V-
encoder
[2] MCB 102 Encodermoduloption, som kun kan
A og B kanalencoder, som kun kan tilsluttes
de digitale indgangsklemmer 32/33.
Programmér klemme 32/33 til Ingen drift.
kongureres i parametergruppe 17-1* Trinv.
enc. græ..
1-03 Momentkarakteristikker
Option: Funktion:
spænding, der er tilgængelig i
generatortilstand.
P
W = ω
aksel
Dette forhold med den konstante eekt er
illustreret i Illustration 3.5:
mek.
Illustration 3.5 Konstant eekt
rad/s × T Nm
3 3
BEMÆRK!
Dette gælder kun for FC 302.
1-04 Overbelastningstilstand
[3] MCB 103 Resolver-grænseademodul (ekstraudstyr),
som kan kongureres i parametergruppe 17-5*
Resolv.-grænse.
[4] MCO-
encoder 1
[5] MCO-
encoder 2
Encodergrænseade 1 for VLT® Motion Control
MCO 305 (ekstraudstyr).
Encodergrænseade 2 for VLT® Motion Control
MCO 305 (ekstraudstyr).
1-03 Momentkarakteristikker
Option: Funktion:
BEMÆRK!
Denne parameter kan ikke justeres,
mens motoren kører.
Vælg den krævede momentkarakteristik.
VT og AEO er begge energibesparelseshandlinger.
[0]*Konstant
moment
[1] Variabelt
moment
[2] Auto
energioptim.
[5] Constant
Power
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 37
Motorakseleekt giver et konstant moment
under variabel hastighedskontrol.
Motorakseleekt giver et variabelt moment
under variabel hastighedskontrol. Indstil det
variable momentniveau i parameter 14-40 VT
Level.
Optimerer automatisk energiforbruget ved at
minimere magnetisering og frekvens via
parameter 14-41 AEO Minimum Magnetisation
og parameter 14-42 Minimum AEO Frequency.
Denne funktion giver en konstant eekt i
feltsvækningsområdet.
Motortilstandens momentform anvendes som
en grænse i generatortilstanden. Dette gøres
for at begrænse eekten i generatortilstand,
som ellers bliver betydeligt større end i
motortilstand, på grund af den høje DC-link-
Option: Funktion:
BEMÆRK!
Denne parameter kan ikke justeres,
mens motoren kører.
Anvend denne parameter til at kongurere
frekvensomformeren til enten høj eller normal
overbelastning. Når der vælges frekvensomformerstørrelse, skal de tekniske data i
Betjeningsvejledningen eller Design Guiden altid
gennemses, så man kender den tilgængelige
udgangsstrøm.
[0] * Højt
moment
[1] Normalt
moment
1-05 Lokal kongurationstilstand
Option: Funktion:
[0] Hast.,
åben
sløjfe
[1] Hast.,
lukket
sløjfe
[2] * Som tilst.-
par. 1-00
Tillader op til 160 % overmoment.
For store motorer – tillader op til 110 %
overmoment.
Vælg, hvilken applikationskongurationstilstand
(parameter 1-00 Kongurationstilstand), dvs.
applikationsstyreprincip, der skal anvendes, når
en lokal (LCP) reference er aktiv. En lokal
reference kan kun være aktiv, når
parameter 3-13 Reference Site er indstillet til [0]
Kædet til hand / auto eller [2] Lokal. Den lokale
reference er som standard kun aktiv i Hand-on
mode.
Page 40

Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
1-06 Højredrejende
3.2.2 1-1* Særlige indstillinger
Option: Funktion:
BEMÆRK!
Denne parameter kan ikke justeres, mens
motoren kører.
BEMÆRK!
Parametrene i denne parametergruppe kan ikke justeres,
mens motoren kører.
33
Denne parameter denerer termen med uret,
som svarer til retningspilen i LCP'et. Bruges til let
skift af rotationsretning på akslen uden at skifte
motorkabler.
[0] * Normal Motorakslen drejer med uret uret, når frekvens-
omformeren er tilsluttet U⇒U, V⇒V, og W⇒W til
motoren.
[1] Inverteret Motorakslen drejer mod uret, når frekvensom-
formeren er tilsluttet U⇒U, V⇒V, og W⇒W til
motoren.
1-07 Motor Angle Oset Adjust
Range: Funktion:
BEMÆRK!
Denne parameter er kun gyldig for FC 302
og kun i kombination med en PM-motor
med feedback.
0* [Manual] Funktionen af denne option afhænger af typen
af feedbackenhed. Denne option indstiller
frekvensomformeren til at bruge den motorvinkelforskydning, der er angivet i
parameter 1-41 Motorvinkelforskydning, hvis en
absolut feedbackenhed anvendes.
Hvis en trinvis feedbackenhed vælges, vil
frekvensomformeren automatisk justere
motorvinkelforskydningen ved den første start
efter opstart, eller når motordataene ændres.
[1] Auto Frekvensomformeren justerer motorvinkelforskyd-
ningen automatisk ved den første start efter
opstart, eller når motordataene ændres, uanset
hvilken feedbackenhed der er valgt. Dette
betyder, at optionerne Manual og Auto er
identiske for den trinvise encoder.
[2] Auto
Every
Start
[3] O Vælges denne option, deaktiveres den
[4] Once with
Store
Frekvensomformeren justerer motorvinkelforskydningen automatisk ved hver start, eller når
motordataene ændres.
automatiske vinkelforskydning.
Denne option opdaterer parameter 1-41 Motorvin-
kelforskydning automatisk, når vinkelværdien er 0.
Denne option gælder kun for absolutte feedbackenheder. Denne funktion anvender
rotordetektering og påfører DC-hold for at gøre
forskydningsjusteringen mere nøjagtig.
3.2.3 Opsætning af asynkron motor
Angiv følgende motordata. Find oplysningerne på
motorens typeskilt.
1. Parameter 1-20 Motor Power [kW] eller
parameter 1-21 Motor Power [HP].
2. Parameter 1-22 Motor Voltage.
3. Parameter 1-23 Motor Frequency.
4. Parameter 1-24 Motor Current.
5. Parameter 1-25 Motor Nominal Speed.
Ved kørsel med Flux-styreprincip, eller for optimal ydeevne
i VVC+ mode, er det nødvendigt med ekstra motordata til
opsætning af følgende parametre. Find dataene i motordatabladet (dataene er normalt ikke tilgængelige på
motorens typeskilt). Kør en komplet automatisk motortilpasning (AMA) med parameter 1-29 Automatisk
motortilpasning (AMA) [1] Kompl.motortilp.til, eller indtast
parametrene manuelt. Parameter 1-36 Jerntabsmodstand
(Rfe) indtastes altid manuelt.
1. Parameter 1-30 Statormodstand (Rs).
2. Parameter 1-31 Ankermodstand (Rr).
3. Parameter 1-33 Statorlækreaktans (X1).
4. Parameter 1-34 Ankerlækreaktans (X2).
5. Parameter 1-35 Hovedreaktans (Xh).
6. Parameter 1-36 Jerntabsmodstand (Rfe).
Applikationsspecik justering ved kørsel af VVC+.
VVC+ er den mest robuste betjeningstilstand. I de
situationer opnås optimal ydeevne uden yderligere
justeringer. Kør en komplet AMA for at opnå den bedste
ydeevne.
Applikationsspecik justering ved kørsel af Flux
Flux-styreprincip er det foretrukne styreprincip for optimal
akselydeevne i dynamiske applikationer. Udfør en AMA, da
denne betjeningstilstand kræver præcise motordata.
Afhængigt af applikationen kan det være nødvendigt med
yderligere justeringer.
Se Tabel 3.3 for applikationsrelaterede anbefalinger.
este
38 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 41

Parameterbeskrivelser Programming Guide
Applikation Indstillinger
Lavinerti-applikationer Behold de beregnede værdier.
Højinerti-applikationer Parameter 1-66 Min. strøm ved lav
hastighed.
Øg strømmen til en værdi mellem
standard og maksimum afhængigt af
applikationen.
Indstil rampetiderne iht. applikationen. For hurtig rampe op
medfører overstrøm eller
overmoment. For hurtig rampe ned
forårsager overspændingstrip.
Høj belastning ved lav
hastighed
Applikation uden
belastning
Kun Flux Sensorlessstyreprincip
Tabel 3.3 Anbefalinger for Flux-applikationer
Parameter 1-66 Min. strøm ved lav
hastighed.
Øg strømmen til en værdi mellem
standard og maksimum afhængigt af
applikationen.
Justér parameter 1-18 Min. Current at
No Load for at opnå en mere jævn
motordrift ved at reducere moment-
rippel og vibration.
Justér parameter 1-53 Modelskifte-
frekvens.
Eksempel 1: Hvis motoren oscillerer
ved 5 Hz og dynamisk ydeevne
kræves ved 15 Hz, indstilles
parameter 1-53 Modelskiftefrekvens til
10 Hz.
Eksempel 2: Hvis applikationen
indebærer dynamiske belastnings-
ændringer ved lav hastighed,
reduceres parameter 1-53 Modelskif-
tefrekvens. Vurdér motorfunktionen
for at sikre, at modelskiftefrekvensen
ikke begrænses for meget.
Symptomer på ukorrekt modelskifte-
frekvens er motoroscilleringer, eller
hvis frekvensomformeren tripper.
3.2.4 PM-motoropsætning
BEMÆRK!
Kun gyldig for FC 302.
Dette afsnit beskriver, hvordan en PM-motor sættes op.
Indledende programmeringstrin
Aktivér PM-motordrift ved at vælge [1] PM,ikke-udpræg.SPM
i parameter 1-10 Motor Construction.
Programmering af motordata
Når der er valgt PM-motor, er de motorrelaterede
parametre i parametergruppe 1-2* Motordata, 1-3* Av.
motordata, og 1-4* Av. motordata II er aktive.
De nødvendige data ndes på motorens typeskilt og i
motordatabladet.
Programmér følgende parametre i den angivne rækkefølge:
1. Parameter 1-24 Motor Current.
2. Parameter 1-25 Motor Nominal Speed.
3. Parameter 1-26 Motor Cont. Rated Torque.
4. Parameter 1-39 Motor Poles.
Kør en komplet AMA med parameter 1-29 Automatisk
motortilpasning (AMA) [1] Kompl.motortilp.til.
Hvis en komplet AMA ikke udføres, skal følgende
parametre kongureres manuelt:
1. Parameter 1-30 Stator Resistance (Rs)
Angiv statorviklingsmodstanden for stjernepunktet (Rs). Hvis kun fase-fase-data er
tilgængelige, skal fase-fase-værdien divideres med
2 for at få stjernepunktsværdien.
2. Parameter 1-37 d-axis Inductance (Ld)
Angiv PM-motorens d-akseinduktans
(stjernepunkt).
Hvis kun fase-fase-data er tilgængelige, skal fasefase-værdien divideres med 2 for at få
stjernepunktsværdien.
3. Parameter 1-40 Back EMF at 1000 RPM.
Angiv PM-motorens fase-fase-modelektromotoriske kraft ved 1.000 O/MIN (RMS-værdi).
Modelektromotorisk kraft er den spænding, der er
genereret af en PM-motor, når der ikke er
tilsluttet en frekvensomformer, og akslen drejes
eksternt. Denne angives normalt for nominel
motorhastighed eller for 1.000 O/MIN målt
mellem to faser. Hvis værdien ikke er tilgængelig
for en motorhastighed på 1.000 O/MIN, beregnes
den korrekte værdi som følger:
Hvis modelektromotorisk kraft er for eksempel
320 V ved 1.800 O/MIN, kan den beregnes ved
1.000 O/MIN som følger:
Modelektromotorisk kraft = (spænding/O/
MIN)x1.000 = (320/1.800)x1.000 = 178.
Test af motordrift
1. Start motoren ved lav hastighed (100–200 O/
MIN). Hvis motoren ikke kører, skal installationen,
generel programmering og motordata
kontrolleres.
2. Kontrollér, om startfunktionen i
parameter 1-70 Starttilstand passer til applikationskravene.
Rotordetektering
Denne funktion anbefales til applikationer, hvor motoren
starter fra stilstand, for eksempel pumper eller
transportbånd. På nogle motorer høres en lyd, når
frekvensomformeren udfører en rotordetektering. Dette
skader ikke motoren.
3 3
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 39
Page 42

Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
Parkering
3.2.5
SynRM-motoropsætning med VVC
+
Denne funktion anbefales til applikationer, hvor motoren
kører ved lav hastighed, for eksempel ved vindmølleeekt i
ventilatorapplikationer. Parameter 2-06 Parkeringsstrøm og
parameter 2-07 Parkeringstid kan justeres. Øg fabriksindstil-
Dette afsnit beskriver opsætning af en SynRM-motor med
VVC+.
lingen for disse parametre for applikationer med høj inerti.
33
Applikationsspecik justering ved kørsel af VVC+.
VVC+ er den mest robuste betjeningstilstand. I de este
situationer opnås optimal ydeevne uden yderligere
justeringer. Kør en komplet AMA for at opnå den bedste
ydeevne.
Start motoren ved nominel hastighed. Kontrollér PMindstillingerne for VVC+, hvis applikationen ikke kører
korrekt. Tabel 3.4 indeholder anbefalinger til forskellige
applikationer.
Applikation Indstillinger
Lavinerti-applikationer
I
Belastning/IMotor
Lavinerti-applikationer
50 >I
Højinerti-applikationer
I
Belastning/IMotor
Høj belastning ved lav
hastighed
<30 % (nominel hastighed)
Tabel 3.4 Anbefalinger til forskellige applikationer
< 5
Belastning/IMotor
> 50
> 5
Øg parameter 1-17 Voltage lter time
const. med faktor 5–10.
Reducér parameter 1-14 Damping
Gain.
Reducér parameter 1-66 Min. Current
at Low Speed (<100 %).
Behold standardværdierne.
Øg parameter 1-14 Damping Gain,
parameter 1-15 Lav hastighed, ltertidskonstant og parameter 1-16 Høj
hastighed, ltertidskonstant
Øg parameter 1-17 Voltage lter time
const.
Øg parameter 1-66 Min. Current at
Low Speed for at justere
startmoment. 100 % strøm giver
nominelt moment som startmoment.
Denne parameter er uafhængig af
parameter 30-20 Højt startmoment-tid
og parameter 30-21 High Starting
Torque Current [%]. Kørsel ved
strømniveau højere end 100 % i
længere tid kan overophede
motoren.
Hvis motoren begynder at oscillere ved en bestemt
hastighed, øges parameter 1-14 Damping Gain. Øg værdien
i små trin. Afhængigt af motoren kan denne parameter
indstilles til mellem 10–100 % højere end standardværdien.
Applikationsspecik justering ved kørsel af Flux
Flux-styreprincip er det foretrukne styreprincip for optimal
akselydeevne i dynamiske applikationer. Udfør en AMA, da
denne betjeningstilstand kræver præcise motordata.
Afhængigt af applikationen kan det være nødvendigt med
yderligere justeringer.
BEMÆRK!
Guiden SmartStart dækker den grundlæggende konguration af SynRM-motorer.
Indledende programmeringstrin
For at aktivere SynRM-motordrift vælges [5] Sync.
Reluctance i parameter 1-10 Motorkonstruktion.
Programmering af motordata
Efter at de indledende programmeringstrin er udført, er de
SynRM-motorrelaterede parametre i parametergruppe 1-2*
Motordata, 1-3* Av. motordata, og 1-4* Av. motordata II er
aktive.
Brug motortypeskiltsdataene og motordatabladet til at
programmere følgende parametre i den angivne
rækkefølge:
1. Parameter 1-23 Motorfrekvens.
2. Parameter 1-24 Motorstrøm.
3. Parameter 1-25 Nominel motorhastighed.
4. Parameter 1-26 Kont. nominelt motormoment.
Kør komplet AMA med parameter 1-29 Automatisk motortil-
pasning (AMA) [1] Kompl.motortilp.til eller angiv følgende
parametre manuelt:
1. Parameter 1-30 Statormodstand (Rs).
2. Parameter 1-37 d-akseinduktans (Ld).
3. Parameter 1-44 d-axis Inductance Sat. (LdSat).
4. Parameter 1-45 q-axis Inductance Sat. (LqSat).
5. Parameter 1-48 Inductance Sat. Point.
Applikationsspecikke justeringer
Start motoren ved nominel hastighed. Hvis applikationen
ikke kører korrekt, skal SynRM-indstillingerne for VVC
kontrolleres. Tabel 3.5 angiver applikationsspecikke
anbefalinger:
Applikation Indstillinger
Lavinerti-applikationer
I
Belastning/IMotor
Lavinerti-applikationer
50 >I
Højinerti-applikationer
I
Belastning/IMotor
< 5
Belastning/IMotor
> 50
> 5
Øg parameter 1-17 Voltage lter time
const. med faktor 5–10.
Reducér parameter 1-14 Damping
Gain.
Reducér parameter 1-66 Min. Current
at Low Speed (<100 %).
Behold standardværdierne.
Øg parameter 1-14 Damping Gain,
parameter 1-15 Lav hastighed, ltertidskonstant og parameter 1-16 Høj
hastighed, ltertidskonstant
+
Se kapitel 3.2.3 Opsætning af asynkron motor for applikationsspecikke anbefalinger.
40 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 43

Parameterbeskrivelser Programming Guide
Applikation Indstillinger
Høj belastning ved lav
hastighed
<30 % (nominel hastighed)
Dynamiske applikationer Øg parameter 14-41 Mindste magneti-
Motorstørrelser mindre
end 18 kW (24 hk)
Tabel 3.5 Anbefalinger til forskellige applikationer
Øg parameter 1-17 Voltage lter time
const.
Øg parameter 1-66 Min. Current at
Low Speed for at justere
startmoment. 100 % strøm giver
nominelt moment som startmoment.
Denne parameter er uafhængig af
parameter 30-20 Højt startmoment-tid
og parameter 30-21 High Starting
Torque Current [%]. Kørsel ved
strømniveau højere end 100 % i
længere tid kan overophede
motoren.
sering for AEO i højdynamiske
applikationer. Ved at justere
parameter 14-41 Mindste magnetisering for AEO sikres en god balance
mellem energieektivitet og
dynamik. Justér
parameter 14-42 Mindste AEOfrekvens for at angive den
minimumfrekvens, hvorved frekvensomformeren skal anvende mindst
magnetisering.
Undgå korte rampe ned-tider.
Hvis motoren begynder at oscillere ved en bestemt
hastighed, øges parameter 1-14 Dæmpningsforstærknings-
faktor. Øg værdien for dæmpningsforstærkning i små trin.
Afhængigt af motoren kan denne parameter indstilles til
mellem 10–100 % højere end standardværdien.
1-10 Motorkonstruktion
Option: Funktion:
Vælg motorkonstruktionstypen.
[0]*Asynkron Anvendes til asynkrone motorer.
[1] PM,ikke-
udpræg.SPM
Anvendes til udprægede eller ikkeudprægede PM-motorer.
PM-motorer er opdelt i to grupper med
enten overademonterede (SPM)/ikkeudprægede magneter, eller med indvendigt
monterede (IPM)/udprægede magneter.
BEMÆRK!
Dette gælder kun for FC 302.
[2] IPMSM Anvendes til udprægede eller ikke-
udprægede PM-motorer.
PM-motorer er opdelt i to grupper med
enten overademonterede (SPM)/ikke-
1-10 Motorkonstruktion
Option: Funktion:
udprægede magneter, eller med indvendigt
monterede (IPM)/udprægede magneter.
BEMÆRK!
Dette gælder kun for FC 302.
[5] SynRM Anvendes til synkrone reluktansmotorer.
BEMÆRK!
Dette gælder kun for FC 302.
Denne option er fuldt ud funktionsdygtig i rmware-version 7.31 og
nyere. Se Danfoss, før denne funktion
anvendes i en frekvensomformer med
en tidligere rmware-version.
1-11 Motormodel
Option: Funktion:
Indstiller automatisk fabriksværdierne for den
valgte motor. Hvis standardværdi Std.
Asynchron anvendes, skal indstillingerne
foretages manuelt i henhold til valget i
parameter 1-10 Motorkonstruktion.
[1] Std.
Asynchron
[2] Std. PM, non
salient
[10] Danfoss
OGD LA10
[11] Danfoss
OGD V210
1-14 Dæmpningsforstærkningsfaktor
Range: Funktion:
140%* [0 -
250 %]
Standardmotormodel, når [0] Asynkron er
valgt i parameter 1-10 Motorkonstruktion.
Kan vælges, når [1] PM, ikke-udpræg.SPM
vælges i parameter 1-10 Motorkonstruktion.
Kan vælges, når [1] PM, ikke-udpræg.SPM
vælges i parameter 1-10 Motorkonstruktion.
Kun tilgængelig for T4, T5 i 1,5–3 kW. Indstillinger indlæses automatisk for denne
specikke motor.
Kan vælges, når [1] PM, ikke-udpræg.SPM
vælges i parameter 1-10 Motorkonstruktion.
Kun tilgængelig for T4, T5 i 0,75–3 kW. Indstillinger indlæses automatisk for denne
specikke motor.
Dæmpningsforstærkning stabiliserer PMmaskinen, så den kører jævnt og stabilt. Værdien
for dæmpningsforstærkningen styrer PMmaskinens dynamiske ydeevne. Høj
dæmpningsforstærkning giver en høj dynamisk
ydeevne, og lav dæmpningsforstærkning giver en
lav dynamisk ydeevne. Den dynamiske ydeevne
er tilknyttet maskindata og belastningstype. Hvis
dæmpningsforstærkningen er for høj eller lav,
bliver styringen ustabil.
3 3
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 41
Page 44

Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
1-15 Lav hastighed, ltertidskonstant
Range: Funktion:
Size
related*
33
[0.01 - 20s]Denne tidskonstant anvendes under
10 % nominel hastighed. Opnå hurtig
styring gennem en kort dæmpningstidskonstant. Hvis denne værdi er for
kort, kan det dog gøre styringen
ustabil.
1-16 Høj hastighed, ltertidskonstant
Range: Funktion:
Size
related*
[0.01 - 20s]Denne tidskonstant benyttes over
10 % nominel hastighed. Opnå hurtig
styring gennem en kort dæmpningstidskonstant. Hvis denne værdi er for
kort, kan det dog gøre styringen
ustabil.
1-17 Spændingsltertidskonst.
Range: Funktion:
Size
related*
[0.001 - 1s]Reducerer påvirkningen fra højfrekvent
rippelstrøm og systemresonans i
beregningen af forsyningsspændingen.
Uden dette lter kan riplerne i
strømmen forvanske den beregnede
spænding og påvirke systemets
stabilitet.
1-18 Min. Current at No Load
1-20 Motoreekt [kW]
Range: Funktion:
Size
related*
[ 0.09 -
3000.00
kW]
BEMÆRK!
Denne parameter kan ikke justeres,
mens motoren kører.
Indtast den nominelle motoreekt i kW,
som fremgår af motortypeskiltsdataene.
Standardværdien svarer til frekvensomformerens nominelle ydelse.
Denne parameter er synlig i LCP'et, hvis
parameter 0-03 Regionale indstillinger er
indstillet til [0] International.
1-21 Motoreekt [HK]
Range: Funktion:
Size
related*
[ 0.09 -
3000.00
hp]
Indtast den nominelle motoreekt i hk
ud fra motortypeskiltsdataene. Standardværdien svarer til apparatets nominelle
ydelse. Denne parameter er synlig i
LCP'et, hvis parameter 0-03 Regionale
indstillinger er indstillet til [1] US.
1-22 Motorspænding
Range: Funktion:
Size
related*
[ 10 - 1000V]Indtast den nominelle
motorspænding i henhold til motortypeskiltsdata. Standardværdien svarer
til apparatets nominelle ydelse.
Range: Funktion:
0 %* [0 - 50 %] Justér denne parameter for at opnå en mere
jævn motordrift.
3.2.6 1-2* Motordata
Denne parametergruppe indeholder indgangsdata fra
1-23 Motorfrekvens
Range: Funktion:
Size
related*
[20 -
BEMÆRK!
1000
Fra softwareversion 6.72 og senere er
Hz]
frekvensomformerens udgangsfrekvens
begrænset til 590 Hz.
typeskiltet på den tilsluttede motor.
Vælg motorfrekvensværdien fra motortypeskil-
BEMÆRK!
Ændring af værdien for disse parametre påvirker indstillingen for andre parametre.
BEMÆRK!
Følgende parametre har ingen eekt, når
parameter 1-10 Motor Construction er indstillet til [1]
PM,ikke-udpr.SPM, [2] PM, udpr. IPM, [5] Sync. Reluctance:
Parameter 1-20 Motor Power [kW].
•
Parameter 1-21 Motor Power [HP].
•
Parameter 1-22 Motor Voltage.
•
Parameter 1-23 Motor Frequency.
•
tsdataene. Hvis der vælges en anden værdi
end 50 Hz eller 60 Hz, skal de belastningsuafhængige indstillinger i parameter 1-50 Motor
Magnetisation at Zero Speed tilpasses til
parameter 1-53 Modelskiftefrekvens. For drift ved
87 Hz med 230/400 V-motorer indstilles
typeskiltdata til 230 V/50 Hz. Tilpas
parameter 4-13 Motorhastighed, høj grænse [O/
MIN] og parameter 3-03 Maksimumreference for
at køre ved 87 Hz.
42 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 45

Parameterbeskrivelser Programming Guide
1-24 Motorstrøm
Range: Funktion:
Size
related*
[ 0.10 -
10000.00 A]
Indtast den nominelle motorstrøm,
som fremgår af motortypeskiltsdataene. Dataene anvendes til
beregning af moment, overbelastningsbeskyttelse af motor osv.
1-25 Nominel motorhastighed
Range: Funktion:
Size
related*
[10 60000 RPM]
Indtast værdien for den nominelle
motorhastighed, som fremgår af
motortypeskiltsdataene. Dataene
bruges til beregning af motorkompensering. n
= ns - n
m,n
1-26 Kont. nominelt motormoment
Range: Funktion:
Size
related*
[0.1 -
100000.0
Nm]
Indtast værdien fra motortypeskiltsdataene. Standardværdien svarer til den
nominelle ydelse. Denne parameter er
tilgængelig, når parameter 1-10 Motorkon-
struktion er indstillet til [1] PM,ikkeudpræg.SPM, [2] PM, udpræget IPM, [5]
Sync. Reluctance, dvs. parameteren er kun
gyldig for PM-motorer og ikkeudprægede SPM-motorer.
1-29 Automatisk motortilpasning (AMA)
Option: Funktion:
BEMÆRK!
Denne parameter kan ikke
justeres, mens motoren kører.
AMA-funktionen optimerer motorens
dynamiske ydeevne ved automatisk at
optimere de avancerede motorparametre (parameter 1-30 Statormodstand
(Rs) til parameter 1-35 Hovedreaktans
(Xh)), når motoren står stille.
Aktivér AMA-funktionen ved at trykke
på [Hand On], når der er valgt Aktivér
komplet AMA eller [2] Aktivér begrænset
AMA. Se også afsnittet Automatisk
motortilpasning i Design Guiden. Efter en
normal sekvens viser displayet: Tryk på
[OK] for at afslutte AMA. Efter tryk på
[OK] er frekvensomformeren klar til
drift.
BEMÆRK!
Sørg for, at der er indstillet en
værdi i parameter 14-43 Motor-
Cosphi før kørsel af AMA II.
slip
1-29 Automatisk motortilpasning (AMA)
Option: Funktion:
[0]*Ikke aktiv
[1] Kompl.motortilp.til Udfører
AMA for statormodstand RS,
•
Rotormodstand Rr,
•
Statorlækreaktans X1,
•
Rotorlækreaktans X2, og
•
Hovedreaktans Xh.
•
Vælg ikke denne option, hvis der
benyttes et LC-lter imellem frekvens-
.
[2] Red. mot.tilpas. til Udfører en begrænset AMA på stator-
[3] Enable Complete
AMA II
[4] Enable Reduced
AMA II
omformeren og motoren.
FC 301: Komplet AMA omfatter ikke Xhmåling for FC 301. I stedet bestemmes
Xh-værdien fra motordatabasen. RS er
den bedste justeringsmetode (se
parametergruppe 1-3* Av. motordata).
Det anbefales at indhente de
avancerede motordata fra motorproducenten for at indtaste dem i
parameter 1-31 Ankermodstand (Rr) til
parameter 1-36 Jerntabsmodstand (Rfe)
for bedste ydeevne.
Komplet AMA kan ikke udføres på
permanente magnetmotorer.
modstanden Rs udelukkende i systemet.
Denne option er tilgængelig for
standard asynkrone motorer og ikkeudprægede PM-motorer.
Anvend denne option med specielle
motorer (for eksempel S3-motorer) og
højeektmotorer. Denne funktion svarer
til optionen [1] Kompl.motortilp.til, men
optimiseringen udføres på baggrund af
momentkalibrering.
Anvend denne option med specielle
motorer (for eksempel S3-motorer) og
højeektmotorer. Denne funktion svarer
til optionen [2] Red. mot.tilpas. til, men
optimiseringen udføres på baggrund af
momentkalibrering.
3 3
BEMÆRK!
For at opnå den bedst mulige tilpasning for
•
frekvensomformeren skal AMA gennemføres på
en kold motor.
AMA kan ikke udføres, mens motoren kører.
•
AMA kan ikke køre med et tilsluttet sinuslter.
•
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 43
Page 46

130BA065.12
P 1-30
R
Fe
X
h
R'
r
R
s
U
1
I
1
P 1-33
P 1-34
P 1-31P 1-35P 1-36
X'
2δ
X
1δ
Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
BEMÆRK!
Det er vigtigt at indstille motorparametergruppe i 1-2*
Motordata korrekt, da disse udgør en del af AMA-
algoritmen. Udfør en AMA for at opnå optimal dynamisk
motorydeevne. Det kan tage op til 10 minutter,
afhængigt af motorens nominelle eekt.
33
BEMÆRK!
Undgå at generere eksternt moment under udførelse af
AMA.
BEMÆRK!
Hvis en af indstillingerne i parametergruppe 1-2*
Motordata ændres, skifter parameter 1-30 Statormodstand
(Rs) til parameter 1-39 Motorpoler (de avancerede
motorparametre) tilbage til fabriksindstillingen.
BEMÆRK!
AMA fungerer fejlfrit på en motorstørrelse ned, virker
typisk på to motorstørrelser ned, fungerer sjældent på
tre størrelser ned og aldrig på re størrelser ned. Husk,
at nøjagtigheden for de målte motordata vil være
dårligere ved drift på motorer, der er mindre end
nominel frekvensomformerstørrelse.
3.2.7 1-3* Av. motordata
Parametre for avancerede motordata. Kontrollér, at
motordataene i parameter 1-30 Statormodstand (Rs) til
parameter 1-39 Motorpoler passer til motoren. Fabriksindstillingerne er baseret på standardmotorværdier. Hvis
motorparametrene ikke indstilles korrekt, kan der opstå en
defekt i frekvensomformersystemet. Hvis motordataene er
ukendte, anbefales det at køre en AMA (automatisk
motortilpasning). Se parameter 1-29 Automatisk motortil-
pasning (AMA).
Parametergrupper 1-3* Av. motordata og 1-4* Av. motordata
II kan ikke justeres, mens motoren kører.
Illustration 3.6 Diagram, der svarer til motor for en asynkron
motor
1-30 Statormodstand (Rs)
Range: Funktion:
Size
related*
[ 0.0140 -
140.0000
Ohm]
Indstil statormodstandsværdien
(stjernepunkt). Indtast værdien fra
motordatabladet, eller udfør en AMA på
en kold motor.
BEMÆRK!
Til udprægede PM-motorer:
AMA er ikke tilgængelig.
Hvis kun fase-fase-data er tilgængelige, skal fase-fase-værdien
divideres med 2 for at opnå stjernepunktsværdien. Det er også muligt
at måle værdien med et ohmmeter.
Dette tager også kablets modstand i
betragtning. Dividér den målte
værdi med 2, og indtast resultatet.
BEMÆRK!
Parameterværdien opdateres efter
hver momentkalibrering, hvis [3] 1st
start with store eller [4] Every start
with store er valgt i parameter
parameter 1-47 Momentkal. ved lav
hastighed
BEMÆRK!
En simpel kontrol af værdien af summen af X1 + Xh
udføres ved at dele linje til linje-motorspændingen med
kvadratroden(3) og dividere denne værdi med
motorstrømmen uden belastning. [VL-L/kvadratrod(3)]/I
NL
= X1 + Xh, se Illustration 3.6. Disse værdier er vigtige for
at magnetisere motoren korrekt. For højpolede motorer
anbefales det kraftigt at udføre denne kontrol.
44 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
1-31 Ankermodstand (Rr)
Range: Funktion:
Size
related*
[ 0.0100
-
100.0000
Ohm]
BEMÆRK!
Parameter 1-31 Ankermodstand (Rr)
har ingen eekt, når
parameter 1-10 Motor Construction er
indstillet til [1] PM,ikke-udpr.SPM, [5]
Sync. Reluctance.
Indstil rotormodstandsværdien Rr for at
forbedre akselydeevnen ved at benytte en
af disse metoder:
•
Kør en AMA på en kold motor.
Frekvensomformeren måler
Page 47

Parameterbeskrivelser Programming Guide
1-31 Ankermodstand (Rr)
Range: Funktion:
•
•
1-33 Statorlækreaktans (X1)
Range: Funktion:
Size
related*
[ 0.0400 -
400.0000
Ohm]
BEMÆRK!
Denne parameter er kun relevant for
asynkrone motorer.
Indstil motorens statorlækreaktans med en
af disse metoder:
•
•
•
Se Illustration 3.6.
BEMÆRK!
Parameterværdien opdateres efter
hver momentkalibrering, hvis [3] 1st
start with store eller [4] Every start
with store er valgt i parameter
parameter 1-47 Momentkal. ved lav
hastighed
1-34 Ankerlækreaktans (X2)
Range: Funktion:
Size
related*
[ 0.0400 -
400.0000
Ohm]
BEMÆRK!
Denne parameter er kun relevant for
asynkrone motorer.
Indstil motorens rotorlækreaktans med en
af disse metoder:
værdien fra motoren. Alle kompenseringer nulstilles til 100 %.
Indtast Rr-værdien manuelt.
Indhent værdien fra motorleverandøren.
Anvend Rr-fabriksindstillingen.
Frekvensomformeren etablerer
indstillingen baseret på motortypeskiltsdataene.
Kør en AMA på en kold motor.
Frekvensomformeren måler
værdien fra motoren.
Indtast X1-værdien manuelt.
Indhent værdien fra motorleverandøren.
Anvend X1-fabriksindstillingen.
Frekvensomformeren etablerer
indstillingen baseret på motortypeskiltsdataene.
1-34 Ankerlækreaktans (X2)
Range: Funktion:
Kør en AMA på en kold motor.
•
Frekvensomformeren måler
værdien fra motoren.
Indtast X2-værdien manuelt.
•
Indhent værdien fra motorleverandøren.
Anvend X2-fabriksindstillingen.
•
Frekvensomformeren etablerer
indstillingen baseret på motortypeskiltsdataene.
Se Illustration 3.6.
BEMÆRK!
Parameterværdien opdateres efter
hver momentkalibrering, hvis [3] 1st
start with store eller [4] Every start
with store er valgt i parameter
parameter 1-47 Momentkal. ved lav
hastighed
1-35 Hovedreaktans (Xh)
Range: Funktion:
Size
related*
1-36 Jerntabsmodstand (Rfe)
Range: Funktion:
Size
related*
[ 1.0000 -
10000.0000
Ohm]
[ 0 -
10000.000
Ohm]
Indstil motorens hovedreaktans ved
hjælp af en af disse metoder:
1. Kør en AMA på en kold motor.
2. Indtast Xh-værdien manuelt.
3. Brug Xh-fabriksindstillingen.
Indtast den tilsvarende jerntabsmodstandsværdi (RFe) for at kompensere for
jerntab i motoren.
RFe-værdien kan ikke ndes ved at
udføre en AMA.
R
-værdien er især vigtig i momentsty-
Fe
ringsapplikationer. Hvis RFe er ukendt,
skal parameter 1-36 Jerntabsmodstand
(Rfe) forblive i fabriksindstilling.
3 3
Frekvensomformeren måler
værdien fra motoren.
Indhent værdien fra motorleverandøren.
Frekvensomformeren etablerer
indstillingen baseret på
motortypeskiltsdataene.
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 45
Page 48

Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
1-37 d-akseinduktans (Ld)
Range: Funktion:
Size
related*
33
[0.0 -
1000.0
mH]
Angiv PM-motorens d-akseinduktans
(stjernepunkt). Værdien fås fra databladet
for den permanente magnetmotor.
Hvis kun fase-fase-data er tilgængelige, skal
fase-fase-værdien divideres med 2 for at
opnå stjernepunktsværdien. Det er også
muligt at måle værdien med et
induktansmeter. Dette også vil tage hensyn
til kablets induktans. Dividér den målte
værdi med 2, og indtast resultatet.
Denne parameter er kun aktiv, når
parameter 1-10 Motorkonstruktion er
indstillet til [1] PM,ikke-udpræg.SPM
(permanent magnetmotor) eller [5] Sync.
Reluctance.
Anvend denne parameter for et valg med
én decimal. Anvend parameter 30-80 d-
akseinduktans (Ld) for et valg med tre
decimaler. Kun
FC 302.
BEMÆRK!
Parameterværdien opdateres efter
hver momentkalibrering, hvis [3] 1st
start with store eller [4] Every start
with store er valgt i parameter
parameter 1-47 Momentkal. ved lav
hastighed
1-40 Modelektromot.kraft v. 1000 O/MIN
Range: Funktion:
Size
related*
[0 -
BEMÆRK!
9000
Denne parameter er kun aktiv, når
V]
parameter 1-10 Motorkonstruktion er
indstillet til valg, der aktiverer PMmotorer (permanent magnetmotor).
Indstil den nominelle modelektromotoriske
kraft for motoren, når der køres 1.000 O/MIN.
Modelektromotorisk kraft er den spænding,
der er genereret af en PM-motor, når der ikke
er tilsluttet en frekvensomformer, og akslen
drejes eksternt. Modelektromotorisk kraft
angives normalt for nominel motorhastighed
eller for 1.000 O/MIN målt mellem to faser.
Hvis værdien ikke er tilgængelig for en
motorhastighed på 1.000 O/MIN, beregnes den
korrekte værdi som følger. Hvis modelektromotorisk kraft er for eksempel 320 V ved 1.800 O/
MIN, kan den beregnes ved 1.000 O/MIN:
Eksempel
Modelektromotorisk kraft 320 V ved 1.800 O/
MIN. Modelektromotorisk kraft = (spænding/O/
MIN)*1.000 = (320/1.800)*1.000 = 178.
BEMÆRK!
Ved brug af PM-motorer anbefales det
at anvende bremsemodstande.
1-38 q-akseinduktans (Lq)
Range: Funktion:
Size related* [0.000 - 1000
mH]
Angiv værdien for q-akseinduktansen. Se motordatabladet.
1-39 Motorpoler
Range: Funktion:
Size related* [2 - 132 ] Indtast antallet af motorpoler.
Poler ~nn@ 50 Hz ~nn@ 60 Hz
2 2700–2880 3250–3460
4 1350–1450 1625–1730
6 700–960 840–1153
Tabel 3.6 Antal poler for normale hastighedsområder
Tabel 3.6 viser antallet af poler for normale hastighedsområder for forskellige motortyper. Denér motorer, der er
konstrueret til andre frekvenser, særskilt. Værdien for
motorpolen er altid et lige tal, da det henviser til antallet
af poler, ikke polpar. Frekvensomformeren opretter den
indledende indstilling for parameter 1-39 Motorpoler
baseret på parameter 1-23 Motorfrekvens og
parameter 1-25 Nominel motorhastighed.
1-41 Motorvinkelforskydning
Range: Funktion:
0* [-32768
- 32767 ]
BEMÆRK!
Denne parameter er kun aktiv, når
parameter 1-10 Motorkonstruktion er
indstillet til [1] PM,ikke-udpræg.SPM
(permanent magnetmotor).
Angiv den korrekte forskydningsvinkel mellem PMmotoren og indekspositionen (med en
omdrejning) eller den monterede encoder eller
resolver. Værdiområdet for 0–32.768 svarer til 0–2
x pi (radians). Sådan opnås forskydningsvinkelværdien: Efter opstart af frekvensomformeren skal
der påføres DC-hold, og værdien for
parameter 16-20 Motorvinkel skal indtastes i denne
parameter.
46 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 49

Parameterbeskrivelser Programming Guide
1-44 d-axis Inductance Sat. (LdSat)
Range: Funktion:
Size
related*
[0 1000 mH]
Denne parameter svarer til induktansmætningen for Ld. Ideelt set vil denne
parameter have samme værdi som
parameter 1-37 d-akseinduktans (Ld). Hvis
motorleverandøren oplyser en induktionskurve, skal der indtastes en
induktionsværdi på 200 % af den
nominelle værdi.
1-45 q-axis Inductance Sat. (LqSat)
Range: Funktion:
Size
related*
[0 1000 mH]
Denne parameter svarer til induktansmætningen af Lq. Ideelt set vil denne
parameter have samme værdi som
parameter 1-38 q-akseinduktans (Lq). Hvis
motorleverandøren oplyser en induktionskurve, skal der indtastes en
induktionsværdi på 200 % af den
nominelle værdi.
1-46 Positionsregistrer.forst.
Range: Funktion:
120 %* [20 - 200 %] Justerer testpulsens amplitude under
positionsregistrering ved start. Justér
denne parameter for at forbedre positionsmålingen.
1-47 Momentkal. ved lav hastighed
Option: Funktion:
Anvend denne parameter til at optimere momentestimatet i hele hastighedsområdet. Det estimerede
[0] Fra
[1] 1. start
efter
opstart
[2] Hver
start
[3] 1st start
with
store
moment er baseret på akseleekten, P
* I2. Sørg for, at Rs-værdien er korrekt. Rs-værdien i
denne formel svarer til eekttabet i motor, kabel
og frekvensomformer. Når denne parameter er
aktiv, beregner frekvensomformeren Rs-værdien,
når den starter, hvilket sikrer et optimalt momentestimat og dermed optimal ydeevne. Anvend denne
funktion i de tilfælde, hvor det ikke er muligt at
justere parameter 1-30 Statormodstand (Rs) på hver
frekvensomformer for at kompensere for
kabellængde, frekvensomformertab og temperaturafvigelse på motor.
Kalibrerer ved første start efter opstart og holder
denne værdi indtil nulstilling ved en strømcyklus.
Kalibrerer ved hver start og kompenserer for en
mulig ændring i motortemperaturen siden sidste
opstart. Værdien nulstilles efter en strømcyklus.
Frekvensomformeren kalibrerer momentet ved den
første start efter opstart. Denne option bruges til
at opdatere motorparametre:
aksel
= Pm - R
1-47 Momentkal. ved lav hastighed
Option: Funktion:
Parameter 1-30 Statormodstand (Rs).
•
Parameter 1-33 Statorlækreaktans (X1).
•
Parameter 1-34 Ankerlækreaktans (X2).
•
Parameter 1-37 d-akseinduktans (Ld).
•
[4] Every
start
with
store
Frekvensomformeren kalibrerer momentet ved hver
start og kompenserer for en mulig ændring i
motortemperaturen siden sidste opstart. Denne
option bruges til at opdatere motorparametre:
Parameter 1-30 Statormodstand (Rs).
•
Parameter 1-33 Statorlækreaktans (X1).
•
Parameter 1-34 Ankerlækreaktans (X2).
•
Parameter 1-37 d-akseinduktans (Ld).
•
1-48 Inductance Sat. Point
Range: Funktion:
Size
related*
[1 500 %]
BEMÆRK!
Kør en AMA for at indstille værdien i
denne parameter. Rediger kun værdien
manuelt, når applikationen kræver en
anden værdi end den, der bestemmes
af AMA.
Vælg d-akse induktansmætningspunktet.
Frekvensomformeren anvender denne værdi
til at optimere SynRM-motorernes ydeevne.
Vælg den værdi, der svarer til det punkt,
hvor induktansen er lig med middelværdien
af parameter 1-37 d- akseinduktans (Ld) og
s
parameter 1-44 d-axis Inductance Sat. (LdSat),
som en procentdel af den nominelle strøm.
1-49 q-Axis Inductance Saturation Point
Range: Funktion:
Size
related*
[ 0 200 %]
BEMÆRK!
Kør en AMA for at indstille værdien i
denne parameter. Rediger kun
værdien manuelt, når applikationen
kræver en anden værdi end den, der
bestemmes af AMA.
Indtast q-akse induktansmætningspunktet.
Frekvensomformeren anvender denne værdi
til at optimere IPM-motorernes ydeevne.
Vælg den værdi, der svarer til det punkt,
hvor induktansen er lig med gennemsnitsværdien af parameter 1-38 q- akseinduktans
(Lq) og parameter 1-45 q-axis Inductance Sat.
(LqSat), som en procentdel af den nominelle
strøm.
3 3
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 47
Page 50

Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
3.2.8 1-5* Belast.-uafh. indst.
1-52 Min. hast. v. normal magnet. [Hz]
Range: Funktion:
1-50 Motor Magnetisation at Zero Speed
Denne parameter er ikke synlig i LCP'et.
Range: Funktion:
33
100 %* [0 -
300 %]
BEMÆRK!
Parameter 1-50 Motor Magnetisation at
Zero Speed har ingen eekt, når
parameter 1-10 Motor Construction = [1]
PM,ikke-udpr.SPM.
Anvend denne parameter sammen med
parameter 1-51 Min Speed Normal Magnetising
[RPM] for at opnå en anden termisk belastning
på motoren ved kørsel ved lav hastighed.
Indtast en værdi, som er en procentdel af den
nominelle magnetiseringsstrøm. Hvis indstillingen er for lav, skal momentet for motorakslen
reduceres.
Illustration 3.7 Motormagnetisering
1-51 Min Speed Normal Magnetising [RPM]
Denne parameter er ikke synlig i LCP'et.
Range: Funktion:
Size
related*
[10 300 RPM]
BEMÆRK!
Parameter 1-51 Min Speed Normal
Magnetising [RPM] har ingen eekt,
når parameter 1-10 Motor
Size
related*
[ 0 -
250.0 Hz]
Indstil den påkrævede frekvens for
normal magnetiseringsstrøm. Hvis
frekvensen er indstillet lavere end
motorslipfrekvensen, er
parameter 1-50 Motor Magnetisation at
Zero Speed inaktiv.
Anvend denne parameter sammen med
parameter 1-50 Motor Magnetisation at
Zero Speed. Se Illustration 3.7.
1-53 Modelskiftefrekvens
Range: Funktion:
Size
related*
[ 4 -
BEMÆRK!
18.0
Denne parameter kan ikke justeres, mens
Hz]
motoren kører.
Skift af Flux-model
Indtast frekvensværdien for skift mellem to
modeller til bestemmelse af motorhastighed.
Vælg den værdi, der er baseret på indstillingerne i parameter 1-00
og parameter 1-01 Motorstyringsprincip.
Der er følgende muligheder:
•
•
•
BEMÆRK!
Dette gælder kun for FC 302.
Kongurationstilstand
Skift mellem Flux-model 1 og Fluxmodel 2.
Skift mellem variabel strømtilstand og
Flux-model 2.
Intet skift mellem modeller ved lav
hastighed, hvis parameter 40-50 Flux
Sensorless Model Shift er indstillet til [0]
Ikke aktiv.
Construction = [1] PM,ikkeudpræg.SPM.
Indstil den påkrævede hastighed for
normal magnetiseringsstrøm. Hvis
hastigheden er indstillet lavere end
motorsliphastigheden, har
parameter 1-50 Motor Magnetisation at
Zero Speed og parameter 1-51 Min Speed
Normal Magnetising [RPM] ingen
betydning.
Anvend denne parameter sammen med
parameter 1-50 Motor Magnetisation at
Zero Speed. Se Tabel 3.6.
Flux-model 1 – Flux-model 2
Denne model anvendes, når
parameter 1-00 Kongurationstilstand er indstillet
til [1] Hast. lukket sløjfe eller [2] Moment, og
parameter 1-01 Motorstyringsprincip er indstillet
til [3] Flux m. motorfeedb. Med denne parameter
er det muligt at foretage en justering af skiftepunktet, hvor frekvensomformeren skifter
mellem Flux-model 1 og Flux-model 2, hvilket
er nyttigt i nogle følsomme hastigheds- og
momentstyringsapplikationer.
48 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 51

Parameterbeskrivelser Programming Guide
1-53 Modelskiftefrekvens
Range: Funktion:
Illustration 3.10 Parameter 1-00 Kongurati-
onstilstand = [1] Hast. lukket sløjfe eller [2]
Moment og parameter 1-01 Motorstyrings-
princip = [3] Flux m. motorfeedb.
Variabel strøm – Flux-model – Sensorless
Denne model anvendes, når
parameter 1-00 Kongurationstilstand er indstillet
til [0] Hast. åben sløjfe, og
parameter 1-01 Motorstyringsprincip er indstillet
til [2] Flux uden føler.
I hastighed, åben sløjfe i Flux mode, bestemmes
hastigheden af strømmålingen.
Under f
norm
en variabel strømmodel. Over f
frekvensomformeren på Flux-model.
x 0,1 kører frekvensomformeren på
x 0,125 kører
norm
1-55 U/f-karakteristik - U
Array [6]
Range: Funktion:
parameter 1-01 Motorstyringsprincip er
indstillet til [0] U/f.
1-56 U/f-karakteristik - F
Array [6]
Range: Funktion:
Size
related*
[ 0 -
1000.0
Hz]
Indtast frekvenspunkterne for manuelt at
denere en u/f-karakteristik, der svarer til
motoren.
Spændingen ved hvert punkt deneres i
parameter 1-55 U/f-karakteristik - U.
Denne parameter er en array-parameter
[0–5], og der er kun adgang til denne, når
parameter 1-01 Motorstyringsprincip er
indstillet til [0] U/f.
3 3
Illustration 3.11 Parameter 1-00 Kongurati-
onstilstand = [0] Hast. åben sløjfe,
parameter 1-01 Motorstyringsprincip = [2] Flux
uden føler
1-54 Voltage reduction in eldweakening
Range: Funktion:
0 V* [0 - 100V]Værdien af denne parameter reducerer den
maksimale spænding, der er tilgængelig for
Flux af motoren i feltsvækning, hvilket giver
momentet mere spænding. Øgning af værdien
øger risikoen for stilstand ved høj hastighed.
1-55 U/f-karakteristik - U
Array [6]
Range: Funktion:
Size
related*
[0 1000 V]
Indtast spændingen ved hvert
frekvenspunkt for manuelt at denere en
u/f-karakteristik, der svarer til motoren.
Frekvenspunkterne deneres i
parameter 1-56 U/f-karakteristik - F.
Denne parameter er en array-parameter [0–
5], og der er kun adgang til denne, når
Illustration 3.12 U/f-karakteristik
1-57 Torque Estimation Time Constant
Range: Funktion:
150 ms* [50 - 1000
ms]
BEMÆRK!
Denne parameter er kun gyldig
med softwareversion 48.XX.
Indtast tidskonstanten for momentestimatet under modelskiftepunktet i
Flux Sensorless og styreprincip.
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 49
Page 52

130BA046.11
60%
0%
100%
U
m
Frekvensskift
f
out
Par.1-60 Par.1-61
Udgngs–
frekvens
Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
1-58 Indk p rot mot testimpulsstr
Range: Funktion:
Size
related*
[ 0 200 %]
BEMÆRK!
Denne parameter er kun tilgængelig i
VVC+.
33
BEMÆRK!
Denne parameter har kun en eekt på
PM-motorer.
Indstiller strømniveauet for de ying starttestpulser, der anvendes til at registrere
motorretningen. 100 % betyder I
værdien til at være høj nok til at undgå
støjpåvirkning, men lav nok til at undgå at
påvirke nøjagtigheden (strømmen skal
kunne falde til nul før den næste puls).
Reducér værdien for at reducere det
genererede moment.
Standard er 30 % for asynkrone motorer,
men kan variere for PM-motorer. For at
justere PM-motorer optimeres værdien for
modelektromotorisk kraft og d-akseinduktansen.
m,n
. Justér
Illustration 3.13 Omskifter
1-61 Belastningskomp. ved høj hast.
Range: Funktion:
100 %* [0 -
300 %]
Indtast den procentvise værdi for at
kompensere for spænding i forhold til
belastning, når motoren kører ved høj
hastighed, og opnå optimal u/f-karakteristik.
Motorstørrelsen afgør det frekvensområde,
hvori denne parameter er aktiv.
1-59 Indk på rot mot testimpulsfrek
Range: Funktion:
Size
related*
[ 0 500 %]
Asynkron motor: Indstil frekvensen for de
ying start-testpulser, der anvendes til at
registrere motorretningen. For asynkrone
motorer betyder en værdi på 100 %, at
slippet fordobles. Øg denne værdi for at
reducere det genererede moment.
For synkrone motorer er denne værdi
procentdelen n
Over denne værdi udføres ying start altid.
Under denne værdi vælges starttilstanden i
parameter 1-70 Starttilstand.
3.2.9 1-6* Belastn.-afh. Indstilling
1-60 Belastningskomp. ved lav hastighed
Range: Funktion:
100 %* [0 -
300 %]
Indtast den procentvise værdi for at
kompensere for spænding i forhold til
belastning, når motoren kører ved lav
hastighed, og opnå optimal u/f-karakteristik.
Motorstørrelsen afgør det frekvensområde,
hvori denne parameter er aktiv.
af den fritkørende motor.
m,n
Motorstørrelse Omskifter
0,25–7,5 kW >10 Hz
Tabel 3.7 Omkoblingsfrekvens
1-62 Slipkompensering
Range: Funktion:
Size
related*
[-500
500 %]
Indtast den procentvise værdi for slipkompensering for at kompensere for tolerancer i
værdien n
automatisk, dvs. på grundlag af den nominelle
motorhastighed n
Denne funktion er ikke aktiv, når
parameter 1-00 Kongurationstilstand er
indstillet til [1] Hast. lukket sløjfe eller [2]
Moment momentstyring med hastighedsfeedback, eller når
parameter 1-01 Motorstyringsprincip er indstillet
til [0] U/f speciel motortilstand.
. Slipkompensering beregnes
M,N
.
M,N
Motorstørrelse Omskifter
0,25–7,5 kW <10 Hz
50 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 53

Parameterbeskrivelser Programming Guide
1-63 Slip Compensation Time Constant
Range: Funktion:
Size
related*
[0.05 5 s]
BEMÆRK!
Parameter 1-63 Slip Compensation
Time Constant har ingen eekt, når
parameter 1-10 Motor Construction =
[1] PM,ikke-udpr.SPM.
Indtast reaktionshastigheden for slipkompensering. En høj værdi giver en langsom
reaktion, og en lav værdi giver en hurtig
reaktion. Hvis der opstår problemer med
lavfrekvensresonans, skal der anvendes en
længere tidsindstilling.
1-64 Resonance Dampening
Range: Funktion:
Size
related*
[0 500 %]
BEMÆRK!
Parameter 1-64 Resonance Dampening
har ingen eekt, når
parameter 1-10 Motor Construction = [1]
PM,ikke-udpræg.SPM.
Indtast resonansdæmpningsværdien. Indstil
parameter 1-64 Resonance Dampening og
parameter 1-65 Resonance Dampening Time
Constant for at eliminere højfrekvente
resonansproblemer. Øg værdien af
parameter 1-64 Resonance Dampening for at
reducere resonansoscilleringen.
1-65 Resonance Dampening Time Constant
Range: Funktion:
5 ms* [5 - 50
ms]
BEMÆRK!
Parameter 1-65 Resonance Dampening
Time Constant har ingen eekt, når
parameter 1-10 Motor Construction = [1]
PM,ikke-udpr.SPM.
Indstil parameter 1-64 Resonance Dampening og
parameter 1-65 Resonance Dampening Time
Constant for at eliminere højfrekvente resonans-
problemer. Indtast den tidskonstant, der giver
den bedste dæmpning.
1-66 Min. strøm ved lav hastighed
Range: Funktion:
Size
related*
[ 1 -
BEMÆRK!
200 %
Hvis parameter 40-50 Flux Sensorless
]
Model Shift er indstillet til [0] Ikke aktiv,
ignoreres denne parameter.
Angiv minimummotorstrømmen ved lav
hastighed, se parameter 1-53 Modelskifte-
1-66 Min. strøm ved lav hastighed
Range: Funktion:
frekvens. Hvis denne strøm øges, forbedres
motormoment ved lav hastighed.
Parameter 1-66 Min. strøm ved lav hastighed
aktiveres udelukkende, når
parameter 1-00 Kongurationstilstand [0] Hast.
åben sløjfe. Frekvensomformeren kører med
konstant strøm gennem motoren for
hastigheder under 10 Hz.
For hastigheder over 10 Hz styrer Fluxmotormodellen i frekvensomformeren
motoren. Parameter 4-16 Momentgrænse for
motordrift og/eller parameter 4-17 Momentgrænse for generatordrift justerer automatisk
parameter 1-66 Min. strøm ved lav hastighed.
Parameteren med den højeste værdi justerer
parameter 1-66 Min. strøm ved lav hastighed.
Strømindstillingen i parameter 1-66 Min. strøm
ved lav hastighed er sammensat af den
momentgenererede strøm og magnetiseringsstrømmen.
Eksempel: Indstil parameter 4-16 Moment-
grænse for motordrift til 100 % og
parameter 4-17 Momentgrænse for generatordrift til 60 %. Parameter 1-66 Min. strøm ved
lav hastighed justeres automatisk til ca. 127 %,
afhængigt af motorstørrelsen.
1-67 Belastningstype
Denne parameter er kun gyldig for FC 302.
Option: Funktion:
[0] * Passiv
belastning
[1] Aktiv belastning Til hæve-/sænkeapplikationer. Denne
Til transportbånd, ventilatorer og
pumpeapplikationer.
option lader frekvensomformeren rampe
op ved 0 O/MIN. Når [1] Aktiv belastning
er valgt, indstilles parameter 1-66 Min.
strøm ved lav hastighed til et niveau, der
svarer til det maksimale moment.
1-68 Minimuminerti
Range: Funktion:
0
kgm²*
[0.0000 -
10000.0000
kgm²]
BEMÆRK!
Denne parameter kan ikke justeres,
mens motoren kører.
Nødvendigt for en gennemsnitlig
beregning af inerti. Angiv minimum
inertimoment for det mekaniske system.
Parameter 1-68 Minimuminerti og
parameter 1-69 Maksimuminerti anvendes
til forjustering af proportionalforstærkningen i hastighedsstyringen, se
3 3
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 51
Page 54

Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
1-68 Minimuminerti
Range: Funktion:
parameter 30-83 Hastighed, PID-propor tionalforstærkning. Kun
FC 302.
33
1-69 Maksimuminerti
Range: Funktion:
Size
related*
[0000 -
10000.0000
kgm²]
BEMÆRK!
Kun gyldig for FC 302.
Denne parameter kan ikke
justeres, mens motoren kører.
Kun aktiv i Flux åben sløjfe. Anvendt
til at beregne accelerationsmomentet
ved lav hastighed. Anvendt i
momentgrænsestyreenheden.
3.2.10 1-7* Startjusteringer
1-70 Starttilstand
Vælg starttilstand. Dette gøres for at initialisere VVC+-styrekernen
for tidligere fritkørende PM-motorer. Begge valg estimerer
hastigheden og vinklen. Kun aktiv for PM- og SynRM-motorer i
VVC+.
Option: Funktion:
[0] * Rotorregistrering Beregner rotorens elektriske vinkel og
bruger dette som et startpunkt.
Standardvalg for VLT® AutomationDriveapplikationer.
[1] Parkeringstid Parkeringsfunktionen påfører DC-strøm
over statorviklingen og roterer rotoren
til elektrisk nulposition (typisk valgt for
HVAC-applikationer). Parkeringsstrøm og
tid kongureres i
parameter 2-06 Parkeringsstrøm og
parameter 2-07 Parkeringstid.
[2] Rotor Det. w/
Parking
1-71 Startforsink.
Range: Funktion:
0 s* [0 - 25.5s]Denne parameter henviser til startfunktionen
valgt i parameter 1-72 Startfunktion.
Indtast den nødvendige tidsforsinkelse, inden
accelerationen påbegyndes.
1-72 Startfunktion
Option: Funktion:
Vælg startfunktionen under startforsinkelse.
Denne parameter er knyttet til
parameter 1-71 Startforsink..
1-72 Startfunktion
Option: Funktion:
[0] DC-hold/
fors.-tid
[1] DC-
bremse/
fors.-tid
[2]*Friløb/
forsink.-tid
[3] Starthast
ur
[4] Horisontal
drift
[5] VVC+/Flux
med uret
[6] Hævmek.
Bremsfrig.
Tilfører strøm til motoren med en DCholdestrøm (parameter 2-00 DC-holdestrøm)
under startforsinkelsestiden.
Tilfører strøm til motoren med en DCbremsestrøm (parameter 2-01 DC-bremsestrøm)
under startforsinkelsestiden.
Motoren kører i friløb under startforsinkelsestiden (vekselretter deaktiveret).
Kun muligt med VVC+.
Tilslut funktionen beskrevet i
parameter 1-74 Starthastighed [O/MIN] og
parameter 1-76 Startstrøm i startforsinkel-
sestiden.
Uanset hvilken værdi, der er påført af referencesignalet, påfører udgangshastigheden
indstillingen fra starthastigheden i
parameter 1-74 Starthastighed [O/MIN] eller
parameter 1-75 Starthastighed [Hz], og udgangs-
strømmen svarer til indstillingen fra
startstrømmen i parameter 1-76 Startstrøm.
Denne funktion anvendes typisk i hæve-/
sænkeapplikationer uden modvægt og især i
applikationer med en konusmotor, hvor starten
er med uret, efterfulgt af rotation i referenceretningen.
Kun muligt med VVC+.
For at opnå funktionen beskrevet i
parameter 1-74 Starthastighed [O/MIN] og
parameter 1-76 Startstrøm under startforsinkel-
sestiden. Motoren roterer i referenceretningen.
Hvis referencesignalet er lig 0, ignoreres
parameter 1-74 Starthastighed [O/MIN], og
udgangshastigheden er lig 0. Udgangsstrømmen svarer til indstillingen for
startstrømmen i parameter 1-76 Startstrøm.
Kun for funktionen beskrevet i
parameter 1-74 Starthastighed [O/MIN]. Startstrømmen beregnes automatisk. Denne funktion
anvender kun starthastigheden i startforsinkelsestiden. Uanset hvilken værdi, der er påført af
referencesignalet, er udgangshastigheden lig
med indstillingen fra starthastigheden i
parameter 1-74 Starthastighed [O/MIN]. [3] Start
speed/current clockwise og [5] VVC+/Flux med
uret anvendes typisk i hæve-/sænkeapplika-
tioner. [4] Start speed/current in reference
direction anvendes især i applikationer med
modvægt og horisontal bevægelse.
Til anvendelse af mekaniske bremsestyringsfunktioner (parameter 2-24 Stopforsinkelse til
parameter 2-28 Boost-faktorforst.). Denne
parameter er kun aktiv i Flux-styreprincippet, i
52 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 55

Parameterbeskrivelser Programming Guide
1-72 Startfunktion
Option: Funktion:
en tilstand med motorfeedback eller sensorless
mode.
[7] VVC+/Flux
counter-cw
1-73 Indkobling på roterende motor
Option: Funktion:
BEMÆRK!
Denne parameter kan ikke justeres,
mens motoren kører.
Denne funktion gør det muligt at fange en
motor, som roterer frit som følge af et
netudfald.
[0] Deaktiveret Ingen funktion
[1] Aktiveret Aktiverer frekvensomformeren til at fange og
styre en roterende motor.
Når parameter 1-73 Indkobling på roterende
motor er aktiveret, har
parameter 1-71 Startforsink. og
parameter 1-72 Startfunktion ingen funktion.
Når parameter 1-73 Indkobling på roterende
motor er aktiveret, bruges parameter 1-58 Indk
p rot mot testimpulsstr og parameter 1-59 Indk
på rot mot testimpulsfrek til at specicere
betingelserne for ying start.
[2] Altid aktiveret
[3] Enabled Ref.
Dir.
[4] Enab. Always
Ref. Dir.
BEMÆRK!
Denne funktion anbefales ikke til hæve-/sænkeapplikationer.
For eektniveauer over 55 kW skal der anvendes Flux
mode for at opnå den bedste ydeevne.
BEMÆRK!
For at opnå den bedste ying start-ydelse skal de
avancerede motordata, parameter 1-30 Statormodstand
(Rs) til parameter 1-35 Hovedreaktans (Xh), være korrekte.
1-74 Starthastighed [O/MIN]
Range: Funktion:
Size
related*
[0 600
RPM]
Indstil en starthastighed for motoren. Efter
startsignalet springer udgangshastigheden
til den indstillede værdi. Indstil startfunktionen i parameter 1-72 Startfunktion til [3]
Starthast ur, [4] Horisontal drift eller [5] VVC+/
1-74 Starthastighed [O/MIN]
Range: Funktion:
Flux med uret, og indstil en startforsinkelsestid i parameter 1-71 Startforsink..
1-75 Starthastighed [Hz]
Range: Funktion:
Size
related*
[ 0 -
500.0
Hz]
Denne parameter kan anvendes til hæve-/
sænkeapplikationer (konusanker). Indstil en
starthastighed for motoren. Efter startsignalet
springer udgangshastigheden til den
indstillede værdi. Indstil startfunktionen i
parameter 1-72 Startfunktion til [3] Starthast
ur, [4] Horisontal drift eller [5] VVC+/Flux med
uret, og indstil en startforsinkelsestid i
parameter 1-71 Startforsink..
1-76 Startstrøm
Range: Funktion:
0A* [ 0 -
par.
1-24
A]
Visse motorer, som for eksempel konusankermotorer, har behov for ekstra strøm/starthastighed
for at frigøre rotoren. Dette ekstra boost opnås ved
at indstille den nødvendige strøm i
parameter 1-76 Startstrøm. Indstil
parameter 1-74 Starthastighed [O/MIN]. Indstil
parameter 1-72 Startfunktion til [3] Starthast ur og [4]
Horisontal drift, og indstil en startforsinkelsestid i
parameter 1-71 Startforsink..
Denne parameter kan anvendes til hæve-/sænkeapplikationer (konusanker).
3.2.11 1-8* Stopjusteringer
1-80 Funktion ved stop
Option: Funktion:
Vælg frekvensomformerfunktionen efter en
stopkommando, eller efter hastigheden er
rampet ned til indstillingerne i
parameter 1-81 Min Speed for Function at Stop
[RPM].
[0]*Friløb Lader motoren rotere i friløb. Motoren
afbrydes fra frekvensomformeren.
[1] DC-hold/
motorforvarm.
[2] Motorcheck Kontrollerer, om der er tilsluttet en motor.
[3] Formagneti-
sering
Forsyner motoren med en DC-holdestrøm (se
parameter 2-00 DC-holdestrøm).
Opbygger et magnetisk felt, mens motoren er
stoppet. Herved kan motoren producere
moment hurtigt ved efterfølgende startkommandoer (kun asynkrone motorer). Denne
formagnetiseringsfunktion hjælper ikke den
allerførste startkommando.
3 3
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 53
Page 56

Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
1-80 Funktion ved stop
Option: Funktion:
Der ndes to forskellige løsninger til formagnetisering af maskinen til den første
startkommando:
Start frekvensomformeren med en
33
[4] DC-spændingU0Når motoren er standset, denerer
[5] Coast at low
reference
[6] Motorcheck,
alarm
•
0 O/MIN-reference, og vent 2–4
rotortidskonstanter, før hastighedsreferencen øges.
Anvend startforsinkelsen med DC-
•
hold:
Indstil
•
parameter 1-71 Startforsink.
til den ønskede formagnetiseringstid (2–4
rotortidskonstanter, se
beskrivelsen af tidskonstanter senere i dette
afsnit).
Indstil
•
parameter 1-72 Startfunktio
n til enten [0] DC-hold eller
[1] DC-bremse.
Indstil DC-hold eller DC-
•
bremsestrømstyrken
(parameter 2-00 DC-
holdestrøm eller
parameter 2-01 DCbremsestrøm) til at være lig
l_pre-mag = Unom/(1,73 x
Xh)
Prøverotortidskonstanter =
(Xh+X2)/(6,3*Freq_nom*Rr)
1 kW = 0,2 sek
10 kW = 0,5 sek
100 kW = 1,7 sek
1.000 kW = 2,5 sek
parameter 1-55 U/f-karakteristik - U [0]
spændingen ved 0 Hz.
Når referencen er under parameter 1-81 Min.-
hast. for funktion v. stop [O/MIN], afbrydes
motoren fra frekvensomformeren.
1-81 Min Speed for Function at Stop [RPM]
Range: Funktion:
Size related* [0 - 600
RPM]
Indstil den hastighed, der skal
aktivere parameter 1-80 Function at
Stop.
1-82 Min Speed for Function at Stop [Hz]
Range: Funktion:
Size related* [ 0 - 20.0
Hz]
Indstil den udgangsfrekvens, hvor
parameter 1-80 Function at Stop skal
aktiveres.
1-83 Præcis stopfunktion
Option: Funktion:
BEMÆRK!
Denne parameter kan ikke justeres,
mens motoren kører.
Kun gyldig for FC 302.
[0]*Præcist
rampestop
[1] Tællerstop
m/nul
[2] Tællerstop
u/nul
[3] Hast.-komp
stop
[4] Kom kont.
st. m/nul
[5] Kom kont
st. u/ nul
Kun optimal når driftshastigheden, for
eksempel for transportbåndet, er konstant.
Dette er en åben sløjfe-styring. Opnår høj
repetitiv præcision ved stoppunktet.
Tæller antallet af pulser, typisk fra en encoder,
og genererer et stopsignal, efter at et forprogrammeret antal pulser, som er deneret i
parameter 1-84 Tællerværdi for præcist stop, er
modtaget ved klemme 29 eller klemme 33.
Dette er en direkte feedback med ensrettet
lukket sløjfe-styring.
Tællerfunktionen er aktiveret (starter timing) på
anken af startsignalet (når det skifter fra stop
til start). Efter hvert præcist stop nulstilles det
antal pulser, der er talt under rampe ned til
0 O/MIN.
Samme som [2] Tællerstop m/nul, men antallet
af pulser, der er talt under rampe ned, til 0 O/
MIN, trækkes fra den tællerværdi, der er
indtastet i parameter 1-84 Tællerværdi for præcist
stop.
Denne nulstillingsfunktion kan anvendes til at
kompensere for den ekstra distance under
rampe ned og til at reducere indvirkningen af
det gradvise slid på mekaniske dele.
Stopper på præcist samme punkt, uanset den
aktuelle hastighed. Stopsignalet forsinkes
internt, når den aktuelle hastighed er lavere
end maksimumhastigheden (indstillet i
parameter 4-19 Maks. udgangsfrekvens).
Forsinkelsen beregnes på grundlag af frekvensomformerens referencehastighed og ikke på
grundlag af den faktiske hastighed. Kontrollér,
at frekvensomformeren har rampet op, før det
hastighedskompenserede stop aktiveres.
Samme som Hast.-komp stop, men efter hvert
præcist stop nulstilles antallet af pulser, der er
talt under rampe ned til 0 O/MIN.
Samme som Hast.-komp stop, men antallet af
pulser, der er talt under rampe ned, til 0 O/
MIN, trækkes fra den tællerværdi, der er
54 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 57

Parameterbeskrivelser Programming Guide
1-83 Præcis stopfunktion
Option: Funktion:
indtastet i parameter 1-84 Tællerværdi for præcist
stop.
Denne nulstillingsfunktion kan anvendes til at
kompensere for den ekstra distance under
rampe ned og til at reducere indvirkningen af
det gradvise slid på mekaniske dele.
De præcise stopfunktioner er en fordel i applikationer, hvor
høj præcision er påkrævet.
Hvis en standardstopkommando benyttes, bestemmes
nøjagtigheden af den interne opgavetid. Dette er ikke
tilfældet ved brug af den præcise stopfunktion. Den
erner
afhængigheden af opgavetiden og øger nøjagtigheden
markant.
Frekvensomformerens tolerance ses normalt af dens
opgavetid. Ved at anvende dens særlige præcise
stopfunktion er tolerancen imidlertid uafhængig af
opgavetiden, da stopsignalet straks afbryder udførelsen af
frekvensomformerprogrammet. Den præcise stopfunktion
giver en høj reproducerbar forsinkelse, fra stopsignalet er
afgivet, indtil rampe ned starter. Kør en test for at nde
denne forsinkelse, da den er summen af føler, PLC,
frekvensomformer og mekaniske dele.
For at sikre højst mulig nøjagtighed skal der være mindst
10 cyklusser under rampe ned, se:
Parameter 3-42 Rampe 1, rampe-ned-tid.
•
Parameter 3-52 Rampe 2, rampe-ned-tid.
•
Parameter 3-62 Rampe 3, rampe-ned-tid.
•
Parameter 3-72 Rampe 4, rampe-ned-tid.
•
Den præcise stopfunktion indstilles her og aktiveres fra DI
ved klemme 29 eller klemme 33.
1-84 Tællerværdi for præcist stop
Range: Funktion:
100000* [0 -
999999999 ]
Indtast den tællerværdi, der skal
anvendes i den integrerede præcise
stopfunktion, parameter 1-83 Præcis
stopfunktion.
Den maksimalt tilladelige frekvens på
klemme 29 eller 33 er 110 kHz.
BEMÆRK!
Anvendes ikke til valgmulighederne [0] Præcist rampestop og
[3] Hast.-komp stop i
parameter 1-83 Præcis
stopfunktion.
1-85 Hast.komp.fors. ved præc. stop
Range: Funktion:
10 ms* [0 - 100
ms]
Indtast forsinkelsestiden for følere, PLC'er osv.
til brug i parameter 1-83 Præcis stopfunktion. I
hastighedskompenseret stoptilstand har
forsinkelsestiden ved forskellige frekvenser en
stor indydelse på stopfunktionen.
BEMÆRK!
Anvendes ikke til valgmulighederne [0]
Præcist rampestop, [1] Tællerstop m/nul
og [2] Tællerstop u/nul i
parameter 1-83 Præcis stopfunktion.
3.2.12 1-9* Motortemperatur
1-90 Termisk motorbeskyttelse
Option: Funktion:
Termisk motorbeskyttelse kan implementeres
ved hjælp af en række teknikker:
Via en PTC-føler i motorviklingerne,
•
der er tilsluttet en af de analoge eller
digitale indgange
(parameter 1-93 Thermistor Source). Se
kapitel 3.2.13 PTC-termistortilslutning.
Via en KTY-føler i motorviklingerne,
•
der er tilsluttet en analog indgang
(parameter 1-96 KTY-termistorres-
source). Se kapitel 3.2.14 KTYfølertilslutning.
Via beregning (ETR = elektronisk
•
termorelæ) af den termiske
belastning, baseret på den aktuelle
belastning og tid. Den beregnede
termiske belastning sammenlignes
med den nominelle motorstrøm I
og den nominelle motorfrekvens f
Se kapitel 3.2.15 ETR og
kapitel 3.2.16 ATEX ETR.
Via en mekanisk termisk kontakt
•
(Klixon-type). Se kapitel 3.2.17 Klixon.
Til det nordamerikanske marked: ETRfunktionerne sikrer overbelastningsbeskyttelse
af motoren, klasse 20, i overensstemmelse
med NEC.
[0] Ingen
beskyttelse
[1] Termistorad-
varsel
En konstant overbelastet motor, når der ikke
kræves en advarsel eller et trip af frekvensomformeren.
Aktiverer en advarsel, når en tilsluttet
termistor eller KTY-føler i motoren reagerer i
tilfælde af en overtemperatur i motoren.
M,N
M,N
3 3
.
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 55
Page 58

Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
1-90 Termisk motorbeskyttelse
3.2.13 PTC-termistortilslutning
Option: Funktion:
[2] Termistor-
trip
33
[3] ETR-
advarsel 1
[4] ETR trip 1 Beregner belastningen, når opsætning 1 er
[5] ETR-
advarsel 2
[6] ETR trip 2
[7] ETR-
advarsel 3
[8] ETR trip 3
[9] ETR-
advarsel 4
[10] ETR trip 4
[20] ATEX ETR Aktiverer den termiske overvågningsfunktion
[21] Advanced
ETR
Stopper (tripper) frekvensomformeren, når den
tilsluttede termistor eller KTY-føler i motoren
reagerer i tilfælde af en overtemperatur i
motoren.
Termistorens udkoblingsværdi skal være mere
end 3 kΩ.
Der kan indbygges en termistor (PTC-føler) i
motoren med henblik på beskyttelse af
viklinger.
Beregner belastningen, når opsætning 1 er
aktiv, og aktiverer en advarsel i displayet, når
motoren er overbelastet. Programmér et
advarselssignal via en af de digitale udgange.
aktiv, og stopper (tripper) frekvensomformeren, når motoren er overbelastet.
Programmér et advarselssignal via en af de
digitale udgange. Signalet vises i tilfælde af en
advarsel, og hvis frekvensomformeren tripper
(termisk advarsel).
for Ex-e-motorer til ATEX. Aktiverer
parameter 1-94 ATEX ETR cur.lim. speed
reduction, parameter 1-98 ATEX ETR interpol.
points freq. og parameter 1-99 ATEX ETR
interpol points current.
Illustration 3.14 PTC-prol
Anvend en digital indgang og 10 V som forsyning:
Eksempel: Frekvensomformeren tripper, når motortemperaturen er for høj.
Parameteropsætning:
Indstil parameter 1-90 Termisk motorbeskyttelse til
•
[2] Termistor-trip.
Indstil parameter 1-93 Thermistor Source til [6]
•
Digital indgang.
BEMÆRK!
Hvis [20] ATEX ETR vælges, skal instruktionerne, der er
beskrevet i det dedikerede kapitel i Design Guiden, og de
instruktioner, der er givet af motorproducenten, følges.
BEMÆRK!
Hvis [20] ATEX ETR vælges, skal
parameter 4-18 Strømgrænse indstilles til 150 %.
56 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Illustration 3.15 PTC-termistortilslutning - Digital indgang
Anvend en analog indgang og 10 V som forsyning:
Eksempel: Frekvensomformeren tripper, når motortemperaturen er for høj.
Parameteropsætning:
Indstil parameter 1-90 Termisk motorbeskyttelse til
•
[2] Termistor-trip.
Indstil parameter 1-93 Thermistor Source til [2]
•
Analog indgang 54.
Page 59

0
500
1000
1500
2000
2500
3000
3500
4000
4500
-25 0 25 50 75 10 0 125 150
Temperature [°C]
Resistance [Ohm]
KTY type 1 KTY type 2 KTY type 3
130BB917.10
Parameterbeskrivelser Programming Guide
Illustration 3.16 PTC-termistortilslutning - Analog indgang
3 3
Indgang
digital/analog
Digital 10 V
Analog 10 V
Tabel 3.8 Grænseværdier for udkobling
Forsynings-
spænding
Grænseværdier
for udkobling
<800 Ω⇒2,7 kΩ
<3,0 kΩ⇒3,0 kΩ
BEMÆRK!
Kontrollér, at den valgte forsyningsspænding svarer til
specikationen for det anvendte termistorelement.
3.2.14 KTY-følertilslutning
BEMÆRK!
Kun FC 302.
KTY-følere anvendes især i servomotorer med permanent
magnet (PM-motorer) i forbindelse med dynamisk justering
af motorparametre som statormodstand
(parameter 1-30 Statormodstand (Rs)) for PM-motorer og
rotormodstand (parameter 1-31 Ankermodstand (Rr)) for
asynkrone motorer afhængigt af viklingstemperaturen.
Beregningsformlen er:
Illustration 3.17 Valg af KTY-type
KTY-føler 1: 1 kΩ ved 100 °C (212 °F) (for eksempel Philips
KTY 84-1)
KTY-føler 2: 1 kΩ ved 25 °C (77 °F) (for eksempel Philips
KTY 83-1)
KTY-føler 3: 2 kΩ ved 25 °C (77 °F) (for eksempel
Inneon
KTY-10)
BEMÆRK!
Hvis motorens temperatur udnyttes gennem en termistor
eller en KTY-føler, overholdes PELV ikke, hvis der er
kortslutninger mellem motorviklinger og føler. Tilføj
ekstra isolering til føleren for at overholde PELV.
3.2.15 ETR
Rs
= Rs
x(1 + αcuxΔT)
20°C
Ω hvor
KTY-følere kan bruges til beskyttelse af motorer
(parameter 1-97 KTY-grænseniveau).
FC 302 kan håndtere tre typer KTY-følere, der deneres i
parameter 1-95 KTY-følertype. Den faktiske følertemperatur
kan udlæses fra parameter 16-19 KTY-følertemperatur.
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 57
α
= 0 . 00393
cu
Beregningerne estimerer behovet for en lavere belastning
ved en lavere hastighed grundet mindre køling fra den
ventilator, der er indbygget i motoren.
Page 60

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2000
500
200
400
300
1000
600
t [s]
175ZA052.11
fUD = 0,2 x f M,N
fUD = 2 x f M,N
fUD = 1 x f M,N
IMN
IM
Parameterbeskrivelser
33
Illustration 3.18 ETR-prol
3.2.16 ATEX ETR
VLT® PTC Thermistor Card MCB 112 tilbyder ATEX-godkendt
overvågning af motortemperaturen. Alternativt kan et
eksternt ATEX-godkendt PTC-beskyttelsesapparat anvendes.
BEMÆRK!
Anvend kun ATEX Ex-e-godkendte motorer til denne
funktion. Se motorens typeskilt, godkendelsescertikat,
datablad, eller kontakt motorproducenten.
VLT® AutomationDrive FC 301/302
Funktion indst.
Parameter 1-90 Termisk motorbeskyttelse
Parameter 1-94 ATEX ETR cur.lim.
speed reduction
Parameter 1-98 ATEX ETR interpol.
points freq.
Parameter 1-99 ATEX ETR interpol
points current
Parameter 1-23 Motorfrekvens Indtast den samme værdi
Parameter 4-19 Maks. udgangsfrekvens
Parameter 4-18 Strømgrænse Tvunget til 150 % ved 1–90
Parameter 5-15 Klemme 33, digital
indgang
Parameter 5-19 Klemme 37 Sikker
standsning
Parameter 14-01 Koblingsfrekvens Kontrollér, at standardvær-
Parameter 14-26 Tripforsinkelse ved
vekselretterfejl
[20] ATEX ETR
20%
Motorens typeskilt.
som for parameter 4-19 Maks.
udgangsfrekvens.
Motorens typeskilt, muligvis
reduceret for lange
motorkabler, sinuslter eller
reduceret forsyningsspænding.
[20]
[80] PTC-kort 1
[4] PTC 1 Alarm
dierne opfylder kravene fra
motorens typeskilt. Hvis ikke,
skal der anvendes et
sinuslter.
0
Det er vigtigt, at der er visse begrænsninger ved styring af
Tabel 3.9 Parametre
en Ex-e-motor med forøget sikkerhed. Parametrene, der
skal programmeres, illustreres i Tabel 3.9.
BEMÆRK!
Sammenlign minimumswitchfrekvensen, der er angivet af
motorproducenten, med frekvensomformerens
minimumswitchfrekvens, standardværdien i
parameter 14-01 Koblingsfrekvens. Hvis frekvensomformeren ikke overholder dette krav, skal der benyttes et
sinuslter.
Der kan ndes oplysninger om ATEX ETR termisk
overvågning i Applikationsanvisning FC 300 ATEX ETR
Thermal Monitoring Function.
3.2.17 Klixon
Den termiske afbryder af typen Klixon anvender en
KLIXON®-metaldisk. Varmen, som er skabt af strømmen
gennem disken, forårsager et trip ved en forudbestemt
overbelastning.
Anvend en digital indgang og 24 V som forsyning:
58 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Eksempel: Frekvensomformeren tripper, når motortemperaturen er for høj.
Page 61

Parameterbeskrivelser Programming Guide
Parameteropsætning:
Indstil parameter 1-90 Termisk motorbeskyttelse til
•
[2] Termistor-trip.
Indstil parameter 1-93 Thermistor Source til [6]
•
Digital indgang.
Illustration 3.19 Termistorforbindelse
1-91 Motor External Fan
Option: Funktion:
[0] * No Ingen ekstern ventilator er påkrævet, dvs. motoren
derates ved lav hastighed.
[1] Yes Anvender en ekstern motorventilator (ekstern
ventilation), så derating af motoren er ikke påkrævet
ved lav hastighed. Den øvre kurve i Illustration 3.18 (f
= 1 x f
nominel motorstrøm (se parameter 1-24 Motor Current).
Hvis motorstrømmen overstiger den nominelle strøm,
reduceres driftstiden stadig, som hvis der ikke var
monteret en ventilator.
) følges, hvis motorstrømmen er lavere end
M, N
1-93 Thermistor Source
Option: Funktion:
BEMÆRK!
Denne parameter kan ikke justeres,
mens motoren kører.
BEMÆRK!
Digital indgang skal indstilles til [0]
PNP - aktiv ved 24 V i
parameter 5-00 Digital I/O Mode.
Vælg den indgang, som termistoren (PTCføler) skal kobles til. Der kan ikke vælges en
analog indgangsoption [1] Analog indgang 53
eller [2] Analog indgang 54, hvis den analoge
indgang allerede er i brug som referencekilde
(valgt i parameter 3-15 Reference 1 Source,
parameter 3-16 Reference 2 Source eller
parameter 3-17 Reference 3 Source).
Når VLT® PTC-termistorkort
MCB 112anvendes, skal [0] Ingen altid vælges.
[0] * None
[1] Analog
Input 53
1-93 Thermistor Source
Option: Funktion:
[2] Analog
Input 54
[3] Digital input
18
[4] Digital input
19
[5] Digital input
32
[6] Digital input
33
1-94 ATEX ETR cur.lim. speed reduction
Range: Funktion:
0 %* [0 - 100 %]
BEMÆRK!
Kun gyldig for FC 302.
Kun synlig, hvis parameter 1-90 Termisk
motorbeskyttelse er indstillet til [20] ATEX ETR.
Kongurér reaktionen for drift i Ex-e-strømgrænse.
0 %: Frekvensomformeren ændrer intet, bortset fra at
ud
udstede advarsel 163 ATEX ETR cur.lim.warning.
>0 %: Frekvensomformeren udsteder advarsel 163 ATEX ETR
cur.lim.warning og reducerer motorhastigheden efter rampe
2 (parametergruppe 3-5* Rampe 2).
Eksempel:
Aktuel reference = 50 O/MIN
Parameter 1-94 ATEX ETR cur.lim. speed reduction = 20 %
Resulterende reference = 40 O/MIN
1-95 KTY-følertype
Option: Funktion:
BEMÆRK!
Kun gyldig for FC 302.
Vælg den anvendte type termistorføler.
[0] * KTY-føler 1
[1] KTY-føler 2
[2] KTY-føler 3
[3] Pt1000
1 kΩ ved 100 °C (212 °F).
1 kΩ ved 25 °C (77 °F).
2 kΩ ved 25 °C (77 °F).
1-96 KTY-termistorressource
Option: Funktion:
BEMÆRK!
Kun gyldig for FC 302.
Vælg analog indgang 54, der skal bruges som
termistorfølerindgang. Klemme 54 kan ikke
vælges som termistorkilde, hvis den ellers
anvendes som reference (se
3 3
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 59
Page 62

1 0 0 %
8 0 %
4 0 %
5 Hz 15 Hz 25 Hz 50 Hz
130BB909.10
Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
1-96 KTY-termistorressource
Option: Funktion:
parameter 3-15 Referenceressource 1 til
parameter 3-17 Referenceressource 3).
BEMÆRK!
33
Tilslutning af termistorføler mellem
klemme 54 og 55 (GND). Se
Parameter 1-98 ATEX ETR interpol.
points freq.
[0] = 5 Hz [0]=40%
[1] = 15 Hz [1]=80%
[2] = 25 Hz [2]=100%
[3] = 50 Hz [3]=100%
Tabel 3.10 Interpolationspunkter
Parameter 1-99 ATEX ETR
interpol points current
Illustration 3.17.
Alle driftspunkter under kurven er altid tilladt. Over kurven
[0] * Ingen
[2] Analog
indgang
54
1-97 KTY-grænseniveau
Range: Funktion:
80 °C* [ -40 - 220 °C] Vælg termistorfølerens grænseniveau for
termisk motorbeskyttelse.
1-98 ATEX ETR interpol. points freq.
er de imidlertid kun tilladt i en begrænset periode, der
beregnes som en funktion af overbelastningen. Hvis
motorstrømmen er større end 1,5 gange den nominelle
strøm, slukkes der omgående.
1-99 ATEX ETR interpol points current
Kun synlig, hvis parameter 1-90 Termisk motorbeskyttelse er
indstillet til [20] eller [21].
Range: Funktion:
Size related* [0 - 100 %]
BEMÆRK!
Kun gyldig for FC 302.
Range: Funktion:
Size related* [ 0 - 1000.0
Hz]
BEMÆRK!
Kun gyldig for FC 302.
Kun synlig, hvis
parameter 1-90 Termisk motorbeskyttelse er indstillet til [20].
Indtast de re frekvenspunkter [Hz] fra motorens typeskilt i
Brug de re strømpunkter [A] fra motorens typeskilt.
Værdierne skal beregnes som en procentdel af den
nominelle motorstrøm, Im/I
dette array.
Denition af termisk begrænsningskurve. Der ndes et eksempel
under parameter 1-98 ATEX ETR
interpol. points freq..
x 100 [%], og indsættes i
m,n
dette array. Tabel 3.10 viser eksemplet med frekvens-/
strømpunkter.
Sammen med parameter 1-98 ATEX ETR interpol. points freq.
udgør de en tabel (f [Hz],I [%]).
BEMÆRK!
Alle frekvens-/strømgrænsepunkter fra motorens
typeskilt eller datablad skal programmeres.
BEMÆRK!
Alle frekvens-/strømgrænsepunkter fra motorens
typeskilt eller datablad skal programmeres.
Illustration 3.20 Eksempel på ATEX ETR termisk begræns-
ningskurve
x-akse: fm [Hz]
y-aksen: Im/I
60 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
x 100 [%]
m,n
3.2.18 PM-indstillinger
Hvis [2] Std. PM, non salient er valgt i
parameter 1-10 Motorkonstruktion, skal motorparametrene
indtastes manuelt i følgende rækkefølge:
1. Parameter 1-24 Motorstrøm.
2. Parameter 1-26 Kont. nominelt motormoment.
3. Parameter 1-25 Nominel motorhastighed.
4. Parameter 1-39 Motorpoler.
5. Parameter 1-30 Statormodstand (Rs).
6. Parameter 1-37 d-akseinduktans (Ld).
7. Parameter 1-40 Modelektromot.kraft v. 1000 O/MIN.
Følgende parametre er tilføjet for PM-motorer.
Page 63

Parameterbeskrivelser Programming Guide
1. Parameter 1-41 Motorvinkelforskydning.
2. Parameter 1-07 Motor Angle Oset Adjust.
3. Parameter 1-14 Dæmpningsforstærkningsfaktor.
4. Parameter 1-47 Momentkal. ved lav hastighed.
5. Parameter 1-58 Indk p rot mot testimpulsstr.
6. Parameter 1-59 Indk på rot mot testimpulsfrek.
7. Parameter 1-70 Starttilstand.
8. Parameter 30-20 Højt startmoment-tid.
9. Parameter 30-21 High Starting Torque Current [%].
BEMÆRK!
Standardparametre skal stadig kongureres (for
eksempel parameter 4-19 Maks. udgangsfrekvens).
Applikation Indstillinger
Lavinertiapplikationer
I
Belastning/IMotor
Lavinertiapplikationer
50 >I
Højinertiapplikationer
I
Belastning/IMotor
Høj belastning ved lav
hastighed
<30 % (nominel hastighed)
< 5
Belastning/IMotor
> 50
> 5
Øg parameter 1-17 Voltage lter time
const. med faktor 5–10.
Reducér parameter 1-14 Damping
Gain.
Reducér parameter 1-66 Min. Current
at Low Speed (<100 %).
Behold de beregnede værdier.
Øg parameter 1-14 Damping Gain,
parameter 1-15 Lav hastighed, ltertidskonstant og parameter 1-16 Høj
hastighed, ltertidskonstant
Øg parameter 1-17 Voltage lter time
const.
Øg parameter 1-66 Min. Current at
Low Speed (>100 % i længere tid
kan overophede motoren).
Applikation Indstillinger
Lavinertiapplikationer Behold de beregnede værdier.
Højinertiapplikationer Parameter 1-66 Min. strøm ved lav
hastighed.
Øg hastigheden til en værdi mellem
standard og maksimum afhængigt af
applikationen.
Indstil rampetiderne iht. applikationen. For hurtig rampe op
medfører overstrøm/overmoment.
For hurtig rampe ned forårsager
overspændingstrip.
Høj belastning ved lav
hastighed
Tabel 3.12 Anbefalinger for Flux-applikationer
Parameter 1-66 Min. strøm ved lav
hastighed.
Øg hastigheden til en værdi mellem
standard og maksimum afhængigt af
applikationen.
Justér startmoment i parameter 1-66 Min. strøm ved lav
hastighed. Ved 100 % fås nominelt moment som
startmoment.
3 3
Tabel 3.11 Anbefalinger til VVC+-applikationer
Hvis motoren begynder at oscillere ved en bestemt
hastighed, øges parameter 1-14 Damping Gain. Øg værdien
i små trin. Afhængigt af motoren kan en god værdi for
denne parameter være 10 % eller 100 % højere end
standardværdien.
Justér startmoment i parameter 1-66 Min. Current at Low
Speed. Ved 100 % fås nominelt moment som startmoment.
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 61
Page 64

Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
3.3 Parametre: 2-** Bremser
3.3.1 2-0* DC-bremse
Parametergruppe til konguration af DC-bremsen og DCholdefunktionerne.
33
2-00 DC-holdestrøm
Range: Funktion:
50%* [ 0 -
BEMÆRK!
160
Maksimumværdien afhænger af den
%]
nominelle motorstrøm.
Undgå 100 % strøm for længe. Det kan
beskadige motoren.
Lave værdier for DC-hold producerer større
strømme end forventet med større motoreffektstørrelser. Denne fejl øges i takt med
motoreekten.
Indtast en værdi for holdestrøm som en procentdel
af den nominelle motorstrøm I
parameter 1-24 Motorstrøm. 100 % DC-holdestrøm
svarer til I
Denne parameter holder motorfunktionen
(holdemoment) eller forvarmer motoren.
Denne parameter er aktiv, hvis DC-hold er valgt i
parameter 1-72 Startfunktion [0] eller
parameter 1-80 Funktion ved stop [1].
2-01 DC-bremsestrøm
Range: Funktion:
50%* [ 0 -
1000
%]
BEMÆRK!
Maksimumværdien afhænger af den
nominelle motorstrøm.
Undgå 100 % strøm for længe. Det kan
beskadige motoren.
Indtast en værdi for strøm som en procentdel af
den nominelle motorstrøm I
parameter 1-24 Motorstrøm. 100 % DC-bremsestrøm
svarer til I
DC-bremsestrøm påføres med en stopkommando,
når hastigheden er lavere end den grænse, der er
indstillet i parameter 2-03 DC-bremseindkoblingshast.
[omdr./min.]; når funktionen Inverteret DC-bremse
er aktiv, eller via den serielle kommunikationsport.
Bremsestrømmen er aktiv i den periode, der er
indstillet i parameter 2-02 DC Braking Time.
M,N
M,N
indstillet i
M,N
.
, se
M,N
.
2-02 DC Braking Time
Range: Funktion:
10 s* [0 - 60 s] Indstil varigheden af DC-bremsestrømmen i
parameter 2-01 DC Brake Current, når den er
blevet aktiveret.
2-03 DC-bremseindkoblingshast. [omdr./min.]
Range: Funktion:
Size
related*
[ 0 - par.
4-13 RPM]
Indstil DC-bremseindkoblingshastigheden
til aktivering af den DC-bremsestrøm, der
er indstillet i parameter 2-01 DC-
bremsestrøm ved en stopkommando.
2-04 DC-bremseindkoblingshast. [Hz]
Range: Funktion:
Size
related*
[ 0 par. 4-14
Hz]
BEMÆRK!
Parameter 2-04 DC-bremseindkoblingshast. [Hz] har ingen eekt, når
parameter 1-10 Motor Construction =
[1] PM,ikke-udpr.SPM.
Indstil DC-bremseindkoblingshastigheden til
aktivering af den DC-bremsestrøm, der er
indstillet i parameter 2-01 DC-bremsestrøm
efter en stopkommando.
2-05 Maksimumreference
Range: Funktion:
Size
related*
[ par. 3-02 -
999999.999
ReferenceFeedbackUnit]
Dette er en adgangsparameter til
parameter 3-03 Maksimumreference
for ældre produkter. Maksimumreferencen er den højeste værdi, der
kan opnås ved at lægge samtlige
referencer sammen. Maksimumreferenceenheden passer til den option,
der er valgt i
parameter 1-00 Kongurationstilstand
og apparatet i
parameter 3-01 Reference-/feedbackenhed.
2-06 Parkeringsstrøm
Range: Funktion:
50 %* [ 0 -
1000 %]
Indstil strømmen som en procentdel af den
nominelle motorstrøm,
parameter 1-24 Motorstrøm. Anvendes ved
aktivering i parameter 1-70 Starttilstand.
2-07 Parkeringstid
Range: Funktion:
3 s* [0.1 - 60s]Indstil varigheden af parkeringsstrømmen, der
er indstillet i parameter 2-06 Parkeringsstrøm, når
den er aktiveret.
62 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 65

Parameterbeskrivelser Programming Guide
3.3.2 2-1* Bremseenergifunkt.
Parametergruppe til valg af dynamiske bremseparametre.
Kun gyldigt for frekvensomformere med bremsechopper.
2-10 Bremsefunktion
Option: Funktion:
[0] Ikke aktiv Der er ikke monteret en bremsemodstand.
[1] Modstands-
bremse
[2] AC-bremse Forbedrer bremsning uden brug af en bremse-
Der er indbygget en bremsemodstand i
systemet for udledning af overskydende
bremseenergi som varme. Ved tilslutning af en
bremsemodstand kan en højere DC-linkspænding under bremsning (generatordrift)
tillades. Modstandsbremsefunktionen er kun
aktiv i frekvensomformere med en indbygget
dynamisk bremse.
modstand. Denne parameter styrer en
overmagnetisering af motoren ved kørsel med
en generatorisk belastning. Denne funktion
kan forbedre OVC-funktionen. Når de elektriske
tab i motoren øges, kan OVC-funktionen øge
bremsemomentet uden at overstige overspændingsgrænsen.
BEMÆRK!
AC-bremsen er ikke så eektiv som
dynamisk bremsning med modstand.
AC-bremse er for VVC+ i både åben og
lukket sløjfe.
2-12 Brake Power Limit (kW)
Range: Funktion:
Følgende formel kan benyttes til at
beregne parameter 2-12 Brake Power Limit
(kW).
P
W =
br, gns
P
er den gennemsnitlige bremse-
br,gns
eekt, der afsættes i bremsemodstanden.
Rbr er modstanden for bremsemodstanden. tbr er den aktive bremsetid inden
for perioden på 120 sek, Tbr.
Ubr er DC-spændingen, hvor bremsemodstanden er aktiv. Dette afhænger af
apparatet på følgende måde:
T2-apparater: 390 V
T4-apparater: 810 V
T5-apparater: 810 V
T6-apparater: 943 V/1.099 V for D- og Fkapslinger
T7-apparater: 1.099 V
BEMÆRK!
Hvis Rbr ikke er kendt, eller hvis T
er forskellig fra 120 sek, er den
mest praktiske metode at køre
bremseapplikationen, udlæse
parameter 16-33 Bremseenergi /2 min
og derefter angive
+ 20 % i parameter 2-12 Bremseef-
fektgrænse (kW).
2
U
V × tbrs
br
RbrΩ × Tbrs
3 3
br
2-11 Brake Resistor (ohm)
Range: Funktion:
Size
related*
[ 5.00 -
65535.00
Ohm]
Indstil bremsemodstandsværdien i Ω.
Værdien bruges til overvågning af eekt til
bremsemodstand i parameter 2-13 Brake
Power Monitoring. Denne parameter er kun
aktiv i frekvensomformere med en
indbygget dynamisk bremse.
Anvend denne parameter for værdier
uden decimaler. Anvend
parameter 30-81 Bremsemodst. (ohm) for et
valg med to decimaler.
2-12 Brake Power Limit (kW)
Range: Funktion:
Size
related*
[ 0.001 -
2000.000
kW]
Parameter 2-12 Brake Power Limit (kW ) er
den forventede gennemsnitseekt, der
afsættes i bremsemodstanden over en
periode på 120 sek. Den bruges som
overvågningsgrænse i
parameter 16-33 Bremseenergi /2 min og
angiver dermed, hvornår en advarsel/
alarm skal afgives.
2-13 Bremseeektovervågning
Option: Funktion:
Denne parameter er kun aktiv i frekvensomformere med en bremse.
Denne parameter aktiverer overvågning af
eekten til bremsemodstanden. Eekten
beregnes på grundlag af modstanden
(parameter 2-11 Brake Resistor (ohm)), DClink-spændingen og modstandens
driftstid.
[0] * Ikke aktiv Det er ikke nødvendigt med en bremseef-
fektovervågning.
[1] Advarsel Aktiverer en advarsel i displayet, når
eekten, som overføres i løbet af
driftstiden, overstiger 100 % af overvågningsgrænsen (parameter 2-12 Brake Power
Limit (kW)).
Advarslen forsvinder, når den overførte
eekt falder under 80 % af overvågningsgrænsen.
[2] Trip 120s Tripper frekvensomformeren og viser en
alarm, når den beregnede eekt
overstiger 100 % af overvågningsgrænsen.
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 63
Page 66

Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
2-13 Bremseeektovervågning
Option: Funktion:
[3] Advarsel og trip Aktiverer begge ovenstående, herunder
advarsel, trip og alarm.
[4] Warning 30s
33
[5] Trip 30s
[6] Warning & trip
30s
[7] Warning 60s
[8] Trip 60s
[9] Warning & trip
60s
[10] Warning 300s
[11] Trip 300s
[12] Warning & trip
300s
[13] Warning 600s
[14] Trip 600s
[15] Warning & trip
600s
Hvis eektovervågning er indstillet til [0] Ikke aktiv eller [1]
Advarsel, forbliver bremsefunktionen aktiv, selv hvis
overvågningsgrænsen overstiges. Dette kan føre til termisk
overbelastning af modstanden. Det er også muligt at
generere en advarsel via et relæ/en digital udgang.
Målenøjagtigheden for eektovervågningen afhænger af
nøjagtigheden af modstanden for modstanden (bedre end
±20 %).
2-15 Bremsekontrol
Option: Funktion:
Parameter 2-15 Bremsekontrol er kun aktiv i
frekvensomformere med en indbygget dynamisk
bremse.
Vælg typen af test og overvågningsfunktion for at
kontrollere tilslutningen til bremsemodstanden,
eller om der er en bremsemodstand til stede, og
vis derefter en advarsel eller alarm i tilfælde af en
fejl.
2-15 Bremsekontrol
Option: Funktion:
3. Hvis DC-link-rippelstrømmens amplitude
under bremsning er lavere end DC-linkrippelstrømmens amplitude før
bremsning + 1 %: Bremsekontrol har
svigtet ved at returnere en advarsel eller
alarm.
4. Hvis DC-link-rippelstrømmens amplitude
under bremsning er højere end DC-linkrippelstrømmens amplitude før
bremsning + 1 %: Bremsekontrol er OK .
[0]*Ikke
aktiv
[1] Advarsel Overvåger bremsemodstand og bremse-IGBT for
[2] Trip Overvåger kortslutninger eller afbrydelse af
[3] Stop og
trip
[4] AC-
bremse
[5] Triplås
Overvåger bremsemodstand og bremse-IGBT for
kortslutning under driften. Hvis der opstår en
kortslutning, vises Advarsel 25 Bremsemodstand
kortsluttet.
en kortslutning og kører en test for afbrydelse af
bremsemodstand under opstart.
bremsemodstanden eller en kortslutning af
bremse-IGBT'en. Hvis der opstår en fejl, kobler
frekvensomformeren ud og viser samtidig en
alarm (triplåst).
Overvåger kortslutninger eller afbrydelse af
bremsemodstanden eller en kortslutning af
bremse-IGBT'en. Hvis der opstår en fejl, ramper
frekvensomformeren ned til friløb og tripper
derefter. Der vises en triplåsalarm (for eksempel
advarsler 25, 27 eller 28).
Overvåger kortslutninger eller afbrydelse af
bremsemodstanden eller en kortslutning af
bremse-IGBT'en. Hvis der opstår en fejl, foretager
frekvensomformeren en kontrolleret rampe ned.
Denne option er kun tilgængelig for FC 302.
BEMÆRK!
Fjern en advarsel, der er opstået med [0] Ikke aktiv eller
BEMÆRK!
Bremsemodstandens afbrydelsesfunktion
testes under opstart. Bremse-IGBT-testen
udføres imidlertid, når der ikke bremses.
[1] Advarsel, ved at genstarte netforsyningen. Fejlen skal
først rettes. For [0] Ikke aktiv eller [1] Advarsel bliver
frekvensomformeren ved med at køre, selv om der er
fundet en fejl.
En advarsel eller et trip afbryder bremsefunktionen.
Testrækkefølgen er:
1. DC-link-rippelstrømmens amplitude
måles i 300 ms uden bremsning.
2. DC-link-rippelstrømmens amplitude
måles i 300 ms, mens bremsen er
aktiveret.
2-16 AC-bremse maks. strøm
Range: Funktion:
100 %* [ 0 - 1000.0 %] Indtast den maksimalt tilladelige strøm
ved brug af AC-bremsning for at undgå
overophedning af motorviklingerne.
64 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 67

Parameterbeskrivelser Programming Guide
BEMÆRK!
Parameter 2-16 AC-bremse maks. strøm har ingen eekt,
når parameter 1-10 Motor Construction= [1] PM,ikkeudpræg.SPM.
2-17 Overspændingsstyring
Option: Funktion:
Overspændingsstyringen (OVC) reducerer
risikoen for, at frekvensomformeren tripper
ved en overspænding på DC-linket, der
skyldes generativ eekt fra belastningen.
[0] * Deaktiveret Ingen OVC krævet.
[1] Aktiv (ikke
v.stands)
[2] Aktiveret Aktiverer OVC.
Aktiverer OVC, undtagen når et stopsignal
anvendes til at stoppe frekvensomformeren.
BEMÆRK!
OVC må ikke være aktiveret i hæve-/sænkeapplikationer.
2-18 Bremsekontrolbetingelse
Range: Funktion:
[0] * Ved opstart Bremsekontrol udføres ved opstart.
[1] Efter friløbssit. Bremsekontrol udføres efter friløbssitua-
tioner.
For at styre mekanisk bremsning er det nødvendigt med
en relæudgang (relæ 01 eller relæ 02) eller en
programmeret digital udgang (klemme 27 eller 29). Denne
udgang skal som regel være lukket i perioder, hvor
frekvensomformeren ikke kan holde motoren, for eksempel
pga. en for stor belastning. I parameter 5-40 Funktionsrelæ,
parameter 5-30 Klemme 27, digital udgang eller
parameter 5-31 Klemme 29, digital udgang vælges [32]
Mekanisk bremsestyring for applikationer med en elektro-
magnetisk bremse. Når [32] Mekanisk bremsestyring vælges,
er den mekaniske bremsning lukket fra start, og indtil
udgangsstrømmen er over det niveau, der er valgt i
parameter 2-20 Bremsefrigørelsesstrøm. Under en standsning
aktiveres den mekaniske bremsning, når hastigheden er
under det niveau, der er angivet i parameter 2-21 Bremse-
aktiveringshast. [O/MIN]. Hvis frekvensomformeren går i
alarmtilstand, en overstrømssituation eller en overspændingssituation, indkobler den mekaniske bremsning
øjeblikkeligt. Dette er også tilfældet i forbindelse med Safe
Torque O.
BEMÆRK!
Beskyttelsestilstands- og tripforsinkelsesfunktioner
(parameter 14-25 Trip-forsinkelse ved momenegrænse og
parameter 14-26 Tripforsinkelse ved vekselretterfejl) kan
forsinke aktiveringen af den mekaniske bremsning i en
alarmtilstand. Disse funktioner skal deaktiveres i hæve-/
sænkeapplikationer.
3 3
2-19 Over-voltage Gain
Range: Funktion:
100 %* [10 - 200 %] Vælg overspændingsforstærkning.
3.3.3 2-2* Mekanisk bremse
Parametre til styring af driften af en elektromagnetisk
(mekanisk) bremse. Dette kræves typisk i hæve-/sænkeapplikationer.
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 65
Page 68

Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
33
Illustration 3.21 Mekanisk bremsning
2-20 Bremsefrigørelsesstrøm
Range: Funktion:
Size
related*
[ 0 par.
16-37 A]
Indstil motorstrømmen til frigørelse af den
mekaniske bremsning, når en starttilstand er
til stede. Fabriksværdien er den
maksimumstrøm, som vekselretteren kan
levere til den pågældende eektstørrelse.
Den øvre grænse er angivet i
parameter 16-37 Vekselret. maks. strøm.
BEMÆRK!
Når udgangen mekanisk bremsestyring er valgt, men der ikke er
tilsluttet mekanisk bremsning,
fungerer funktionen ikke ved fabriksindstilling på grund af for lav
motorstrøm.
2-21 Bremseaktiveringshast. [O/MIN]
Range: Funktion:
Size
related*
[ 0 - par.
4-53 RPM]
Indstil den motorhastighed, den
mekaniske bremsning skal aktiveres ved,
når en stoptilstand er til stede. Øvre
hastighedsgrænse angives i
parameter 4-53 Advarsel, hastighed høj.
2-22 Bremseaktiveringshast. [Hz]
Range: Funktion:
Size related* [ 0 - 5000.0 Hz] Indstil motorfrekvensen for
aktivering af mekanisk bremsning,
når en stoptilstand er til stede.
2-23 Bremseaktiveringsforsinkelse
Range: Funktion:
0 s* [0 -
Indtast bremseforsinkelsestiden for friløb efter rampe
5 s]
ned-tiden. Akslen holdes ved stilstand med fuldt
holdemoment. Kontrollér, at den mekaniske
bremsning har låst lasten, før motoren går i friløbstilstand. Se Mekanisk bremsestyring i Design Guiden.
For at justere overgangen af belastningen til den
mekaniske bremsning indstilles
parameter 2-23 Bremseaktiveringsforsinkelse og
parameter 2-24 Stopforsinkelse.
Indstilling af bremseforsinkelsesparametre påvirker
ikke momentet. Frekvensomformeren registrerer ikke,
at den mekaniske bremsning holder belastningen.
Efter indstilling af parameter 2-23 Bremseaktiverings-
forsinkelse falder momentet til nul efter et par
minutter. Den pludselige momentændring medfører
bevægelse og støj.
66 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 69

Mek.Bremse
ForstærkningBoost
Relæ
Momentref.
MotorHastighed
Formagnet.
Momentrampe
Tid
p. 2-27
Momentref. 2-26
Boost-faktorfors.
p. 2-28
Bremse
Frigivelse
Tid
p. 2-25
Rampe 1 opp. 3-41 Rampe 1 nedp. 3-42 Stop
Forsinkelse
p. 2-24
Aktiver
Bremse
Forsinkelse
p. 2-23
1 2 3
130BA642.12
II
I
Parameterbeskrivelser Programming Guide
2-24 Stopforsinkelse
Range: Funktion:
0 s* [0 - 5s]Indstil tidsintervallet fra det tidspunkt, hvor
motoren standses, indtil bremsen lukker.
For at justere overgangen af belastningen til den
mekaniske bremsning indstilles
parameter 2-23 Bremseaktiveringsforsinkelse og
parameter 2-24 Stopforsinkelse.
Denne parameter er en del af standsningsfunktionen.
2-25 Bremsefrigørelsestid
Range: Funktion:
0.20 s* [0 - 5 s] Denne værdi denerer det tidsrum, det tager
for den mekaniske bremse at åbne. Denne
parameter skal fungere som en timeout, når
bremsefeedback aktiveres.
3.3.4 Mekanisk hæve-/sænkebremse
Den mekaniske hæve-/sænkebremsestyring understøtter
følgende funktioner:
To kanaler til mekanisk bremsefeedback for
•
yderligere beskyttelse mod utilsigtet adfærd som
følge af et ødelagt kabel.
Overvågning af mekanisk bremsefeedback under
•
den komplette cyklus. Dette hjælper med til at
beskytte den mekaniske bremse, især hvis ere
frekvensomformere er forbundet til den samme
aksel.
Ingen rampe op før feedback bekræfter, at den
•
mekaniske bremse er åben.
Forbedret belastningsstyring ved stop. Hvis
•
værdien i parameter 2-23 Bremseaktiveringsforsinkelse er for lille, aktiveres Advarsel 22 H/s mk
brems, og momentet får ikke lov til at rampe ned.
Overgangen, hvor motoren overtager belast-
•
ningen fra bremsen, kan kongureres.
Parameter 2-28 Boost-faktorforst. kan øges for at
minimere bevægelse. For at opnå en jævn
overgang ændres indstillingen fra hastighedsstyring til positionsstyring under omkoblingen.
- Indstil parameter 2-28 Boost-faktorforst.
til 0 for at aktivere positionsstyring
under parameter 2-02 DC-bremseholdetid
Dette aktiverer parameter 2-30 Position P
Start Proportional Gain til
parameter 2-33 Speed PID Start Lowpass
Filter Time, som er PID-parametre til
positionsstyring.
3 3
Illustration 3.22 Bremsefrigørelsessekvens for den mekaniske hæve-/sænkebremsestyring
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 67
Page 70

Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
Parameter 2-26 Moment-reference til parameter 2-33 Speed
3.3.5 2-3* Adv. Mech Brake
PID Start Lowpass Filter Time er kun tilgængelige for den
mekaniske hæve-/sænkebremsestyring (Flux med
motorfeedback).
Parameter 2-30 Position P Start Proportional Gain til
parameter 2-33 Speed PID Start Lowpass Filter Time kan
indstilles til meget jævn overgang fra hastighedsstyring til
33
Range: Funktion:
0 %* [ -300
300 %]
Værdien denerer det moment, der påføres imod
den lukkede mekaniske bremse før udløsning.
Momentet/belastningen på en kran er positiv og
mellem 10–160 %. For at opnå det bedste
startpunkt indstilles parameter 2-26 Moment-
reference til ca. 70 %.
Momentet/belastningen på et hejseværk kan være
både positivt og negativt og mellem -160 % og
+160 %. For at opnå det bedste startpunkt
indstilles parameter 2-26 Moment-reference til 0 %.
Jo højere momentfejlen er
(parameter 2-26 Moment-reference vs. faktisk
moment), jo mere bevægelse under belastningsovergangen.
2-26 Moment-reference
positionsstyring under parameter 2-25 Bremsefrigørelsestid –
tiden fra belastningen overføres fra den mekaniske bremse
til frekvensomformeren. Parameter 2-30 Position P Start
Proportional Gain til parameter 2-33 Speed PID Start Lowpass
Filter Time er aktiverede, når parameter 2-28 Boostfaktorforst. er indstillet til 0. Se Illustration 3.22 for
yderligere oplysninger.
2-30 Position P Start Proportional Gain
Range: Funktion:
0.0000* [0.0000 - 1.0000 ]
2-31 Speed PID Start Proportional Gain
Range: Funktion:
0.0150* [0.0000 - 1.0000 ]
2-32 Speed PID Start Integral Time
Range: Funktion:
2-27 Moment-rampetid
200.0 ms* [1.0 - 20000.0 ms]
Range: Funktion:
0.2 s* [0 - 5 s] Værdien denerer varigheden for momentrampen i retning med uret. Værdien 0 aktiverer
meget hurtig magnetisering i Flux-styreprincippet.
2-33 Speed PID Start Lowpass Filter Time
Range: Funktion:
10.0 ms* [0.1 - 100.0 ms]
2-34 Zero Speed Position P Proportional Gain
2-28 Boost-faktorforst.
Range: Funktion:
1* [0 -
4 ]
Kun aktiv i Flux lukket sløjfe. Funktionen sikrer en
jævn overgang fra momentstyringstilstand til hastighedsstyringstilstand, når motoren overtager
belastningen fra bremsen.
Øges for at minimere bevægelse. Aktivér avanceret
mekanisk bremsning (parametergruppe 2-3* Adv.
Mech Brake) ved at indstille parameter 2-28 Boost-
faktorforst. til 0.
Range: Funktion:
0.0000* [0.0000 -
1.0000 ]
BEMÆRK!
Denne parameter er kun
tilgængelig med softwareversion
48.XX.
Indtast proportionalforstærkningen
for positionsstyring ved stilstand i
hastighedstilstand.
2-29 Torque Ramp Down Time
Range: Funktion:
0 s* [0 - 5 s] Momentets rampe ned-tid.
68 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 71

Parameterbeskrivelser Programming Guide
3.4 Parametre: 3-** Reference / ramper
Parametre til referencehåndtering, denition af begrænsninger samt konguration af frekvensomformerens reaktion
på ændringer.
3.4.1 3-0* Referencegrænser
3-00 Referenceområde
Option: Funktion:
Vælg området for referencesignalet og feedbacksignalet. Signalværdier kan være udelukkende
positive, eller positive og negative. Minimumgrænsen kan have en negativ værdi, medmindre [1]
Hast. lukket sløjfe eller [3] Proces vælges i
parameter 1-00 Kongurationstilstand.
[0] Min -
Maks
[1] - Maks -
+ Maks
3-01 Reference-/feedback-enhed
Option: Funktion:
[0] Ingen
[1] %
[2] O/MIN
[3] Hz
[4] Nm
[5] PPM
[10] 1/min
[12] PULS/s
[20] l/s
[21] l/min
[22] l/tim
[23] m³/s
[24] m³/min
[25] m³/tim
[30] kg/s
[31] kg/min
[32] kg/tim
[33] t/min
[34] t/tim
[40] m/s
Vælg området for referencesignalet og feedbacksignalet. Signalværdier kan være udelukkende
positive, eller positive og negative. Minimumgrænsen kan have en negativ værdi, medmindre [1]
Hast. lukket sløjfe eller [3] Proces vælges i
parameter 1-00 Kongurationstilstand.
For både positive og negative værdier (begge
retninger, i forhold til parameter 4-10 Motorhastig-
hedsretning).
Vælg den enhed, der skal anvendes i
PID-processtyringsreferencer og feedbacks.
Parameter 1-00 Kongurationstilstand
skal være enten [3] Proces eller [8]
Udvidet PID-hast. LS.
3-01 Reference-/feedback-enhed
Option: Funktion:
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/tim
[124] CFM
[125] fod³/s
[126] fod³/min
[127] fod³/tim
[130] pund/s
[131] pund/min
[132] pund/tim
[140] fod/s
[141] fod/min
[145] ft
[150] pund fod
[160] °F
[170] psi
[171] pd/tm2
[172] tom.vandsøjle(rel.)
[173] ft WG
[180] HK
3-02 Minimumreference
Range: Funktion:
Size
related*
[ -999999.999 par. 3-03
ReferenceFeedbackUnit]
Indtast minimumreferencen.
Minimumreferencen er den laveste
værdi, der kan opnås ved at lægge
samtlige referencer sammen.
Minimumreferencen er kun aktiv, hvis
parameter 3-00 Referenceområde er
indstillet til [0] Min.- Maks.
Minimumreferenceenheden passer til:
•
•
Hvis optionen [10] Synkronisering er
valgt i parameter 1-00 Kongurations-
tilstand, denerer denne parameter
3 3
Kongurationen af
parameter 1-00 Kongurationstilstand: til [1] Hast. lukket
sløjfe, O/MIN; til [2] Moment,
Nm.
Enheden valgt i
parameter 3-01 Reference-/
feedback-enhed.
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 69
Page 72

Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
3-02 Minimumreference
Range: Funktion:
maksimumhastighedsafvigelsen, når
oset-positionen deneret i
parameter 3-26 Master Oset udføres.
33
3-03 Maksimumreference
Range: Funktion:
Size
related*
[ par. 3-02 -
999999.999
ReferenceFeedbackUnit]
Indtast maksimumreferencen.
Maksimumreferencen er den højeste
værdi, der kan opnås ved at lægge
samtlige referencer sammen.
Maksimumreferenceenheden passer
til:
Kongurationen, der er
•
valgt i
parameter 1-00 Kongurationstilstand: til [1] Hast. lukket
sløjfe, O/MIN; til [2] Moment,
Nm.
Enheden valgt i
•
parameter 3-00 Referenceområde.
Hvis [9] Positionering er valgt i
parameter 1-00 Kongurationstilstand,
denerer denne parameter standardhastigheden for positionering.
3-04 Reference Function
Option: Funktion:
[0] Sum Opsummerer både eksterne og preset-referen-
cekilder.
[1] External/
Preset
Anvend enten preset- eller ekstern referencekilde.
Skift mellem ekstern og preset via en
kommando eller en digital indgang.
3-05 On Reference Window
Range: Funktion:
Size
related*
[0 - 999999.999
ReferenceFeedbackUnit]
BEMÆRK!
Denne parameter er kun
tilgængelig med softwareversion 48.XX.
Indtast tolerancevinduet for På
reference eller on target-status.
Afhængigt af optionen, der er valgt
i parameter 1-00 Kongurations-
tilstand, denerer denne parameter
følgende:
3-05 On Reference Window
Range: Funktion:
Hastighedstilstand: Hastig-
•
hedsvindue for på
reference-status.
Momenttilstand: Moment-
•
vindue for på referencestatus.
Positionstilstand: Hastig-
•
hedsvindue for on targetstatus. Se også
parameter 3-08 On Target
Window.
3-06 Minimum Position
Range: Funktion:
-100000
CustomReadoutUnit2*
[ -2147483648
- 2147483647
CustomReadoutUnit2]
BEMÆRK!
Denne parameter er kun
tilgængelig med softwareversion 48.XX.
Indtast minimumpositionen.
Denne parameter denerer
positionsområdet i lineær
aksetilstand
(parameter 17-76 Position Axis
Mode) og i positionsgrænsefunktionen
(parameter 4-73 Position Limit
Function).
3-07 Maximum Position
Range: Funktion:
100000
CustomReadoutUnit2*
[ -2147483647
- 2147483647
CustomReadoutUnit2]
BEMÆRK!
Denne parameter er kun
tilgængelig med softwareversion 48.XX.
Indtast maksimumpositionen.
Denne parameter denerer positionsområdet i lineær og
aksetilstand
(parameter 17-76 Position Axis
Mode).
Positionsområdegrænse:
Lineær:
•
Parameter 3-06 Minimum
Position til
parameter 3-07 Maximum
Position.
Rotation: 0–
•
parameter 3-07 Maximum
Position.
70 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 73

Parameterbeskrivelser Programming Guide
3-07 Maximum Position
Range: Funktion:
Positionsgrænsefunktionen bruger
denne parameter
(parameter 4-73 Position Limit
Function).
3-08 On Target Window
Range: Funktion:
5 CustomReadoutUnit2*
[0 2147483647
CustomReadoutUnit2]
BEMÆRK!
Denne parameter er kun
tilgængelig med softwareversion 48.XX.
Frekvensomformeren betragter
positioneringen som fuldendt
og sender on target-signalet,
når den faktiske position er
inden for indstillingerne i
parameter 3-08 On Target
Window og varigheden af
parameter 3-09 On Target Time,
og når den faktiske hastighed
er mindre end
parameter 3-05 On Reference
Window.
3-10 Preset-reference
Array [8]
Område: 0–7
Range: Funktion:
ference) programmeres, beregnes presetreferencen som en procentdel af hele
referenceområdet, dvs. på grundlag af forskellen
mellem Ref
til Ref
MIN
preset-reference bit 0/1/2 [16], [17] eller [18]
vælges for de tilsvarende digitale indgange i
parametergruppe 5-1* Digitale indgange.
Illustration 3.23 Preset-reference
og Ref
MAKS
. Ved brug af preset-referencer skal
. Derefter føjes værdien
MIN
3 3
3-09 On Target Time
Range: Funktion:
1 ms* [0 - 60000
ms]
BEMÆRK!
Denne parameter er kun
tilgængelig med softwareversion
48.XX.
Indtast tiden for evaluering af on targetvinduet. Se også parameter 3-08 On
Target Window.
3.4.2 3-1* Referencer
Vælg preset-reference(r). Vælg Preset-ref. bit 0/1/2 [16], [17]
eller [18] for de tilsvarende digitale indgange i parameter-
gruppe 5-1* Digitale indgange.
3-10 Preset-reference
Array [8]
Område: 0–7
Range: Funktion:
0 %* [-100
100 %]
Indtast op til otte forskellige preset-referencer (0–
7) i denne parameter ved hjælp af array-programmering. Preset-referencen angives som en
procentdel af værdien Ref
(parameter 3-03 Maksimumreference). Hvis en
Ref
forskellig fra 0 (parameter 3-02 Minimumre-
MIN
MAKS
Preset-ref. bit 2 1 0
Preset-ref. 0 0 0 0
Preset-ref. 1 0 0 1
Preset-ref. 2 0 1 0
Preset-ref. 3 0 1 1
Preset-ref. 4 1 0 0
Preset-ref. 5 1 0 1
Preset-ref. 6 1 1 0
Preset-ref. 7 1 1 1
Tabel 3.13 Preset-reference bits
3-11 Jog-hastighed [Hz]
Range: Funktion:
Size
related*
[ 0 - par.
4-14 Hz]
Ved jog-hastighed forstås en fast
udgangshastighed, som frekvensomformeren kører med, når jogfunktionen aktiveres.
Se også parameter 3-80 Jog-rampetid.
3-12 Catch up/slow down
Range: Funktion:
0 %* [0 -
Indtast en procentværdi (relativ), som enten vil
100 %]
blive lagt til eller trukket fra den faktiske reference
for catch up eller slow-down. Hvis der er valgt
catch up via en af de digitale indgange
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 71
Page 74

Relativ
Z=X+X*Y/100
Resulterende
faktisk
reference
Y
X
130BA059.12
Z
X
100
%
0-100
Z
Y
X+X*Y/100
P 3-14
130BA278.10
Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
3-12 Catch up/slow down
Range: Funktion:
(parameter 5-10 Klemme 18, digital indgang til
parameter 5-15 Klemme 33, digital indgang), vil
procentværdien (relativ) blive lagt til den totale
33
reference. Hvis der er valgt slow-down via en af de
digitale indgange (parameter 5-10 Klemme 18,
digital indgang til parameter 5-15 Klemme 33, digital
indgang), vil procentværdien (relativ) blive trukket
fra den totale reference. Opnå udvidet funktionalitet med DigiPot-funktionen. Se
parametergruppe 3-9* Digitalt pot.-meter.
Illustration 3.24 Preset relativ reference
3-13 Referencested
Option: Funktion:
Vælg det referencested, der skal aktiveres.
[0]*Kædet til
hand / auto
[1] Fjernbetjent Anvend ernreference i både hand-on mode
[2] Lokal Anvend lokalreference i både hand-on
[3] Linked to H/A
MCO
3-14 Preset Relative Reference
Range: Funktion:
0 %* [-100
100 %]
Anvend lokal reference i hand mode, eller
ernreference i auto mode.
og auto-on mode.
mode og auto-on mode.
BEMÆRK!
Når den er indstillet til [2] Lokal, vil
frekvensomformeren starte igen med
denne indstilling efter en nedlukning.
Vælg denne for at aktivere FFACC-faktoren i
parameter 32-66 Accelerationsfremføring. Ved
at aktivere FFACC reduceres rystelser, og
overgangen fra bevægelsesstyreenheden til
styrekortet i frekvensomformeren sker
hurtigere. Dette medfører hurtigere responstider for dynamiske applikationer og
positionsstyring. Se VLT® Motion Control
MCO 305 Betjeningsvejledning for ere
oplysninger om FFACC.
Den faktiske reference, X, forøges eller mindskes
med procentdelen Y, der er indstillet i
parameter 3-14 Preset Relative Reference.
Dette resulterer i den faktiske reference Z. Den
faktiske reference (X) er summen af de indgange,
der er valgt i:
Parameter 3-15 Reference 1 Source.
•
Parameter 3-16 Reference 2 Source.
•
Parameter 3-17 Reference 3 Source.
•
Parameter 8-02 Control Source.
•
Illustration 3.25 Faktisk reference
3-15 Referenceressource 1
Option: Funktion:
Vælg den referenceindgang, der skal
benyttes til det første referencesignal.
Parameter 3-15 Referenceressource 1,
parameter 3-16 Referenceressource 2 og
parameter 3-17 Referenceressource 3
denerer op til tre forskellige referencesignaler. Summen af disse
referencesignaler denerer den
faktiske reference.
[0] Ingen funktion
[1] Analog indgang 53
[2] Analog indgang 54
[7] Frekvensindgang 29
[8] Frekvensindgang 33
[11] Lokal busreference Reference fra klemme 68 og 69.
[20] Digitalt pot.-meter
[21] Analog indg.
X30-11
[22] Analog indg.
X30-12
[29] Analog indg. X48/2
VLT® General Purpose I/O MCB 101
VLT® General Purpose I/O MCB 101
3-16 Referenceressource 2
Option: Funktion:
Vælg den referenceindgang, der skal
benyttes til det andet referencesignal.
Parameter 3-15 Referenceressource 1,
parameter 3-16 Referenceressource 2 og
parameter 3-17 Referenceressource 3
denerer op til tre forskellige referencesignaler. Summen af disse
referencesignaler denerer den
faktiske reference.
72 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 75

Relativ
Z=X+X*Y/100
Resulterende
faktisk
reference
Y
X
130BA059.12
Z
Parameterbeskrivelser Programming Guide
3-16 Referenceressource 2
Option: Funktion:
[0] Ingen funktion
[1] Analog indgang 53
[2] Analog indgang 54
[7] Frekvensindgang 29
[8] Frekvensindgang 33
[11] Lokal busreference Reference fra klemme 68 og 69.
[20] Digitalt pot.-meter
[21] Analog indg. X30-11
[22] Analog indg. X30-12
[29] Analog indg. X48/2
3-17 Referenceressource 3
Option: Funktion:
Vælg den referenceindgang, der skal
benyttes til det tredje referencesignal.
Parameter 3-15 Referenceressource 1,
parameter 3-16 Referenceressource 2 og
parameter 3-17 Referenceressource 3
denerer op til tre forskellige referencesignaler. Summen af disse
referencesignaler denerer den
faktiske reference.
[0] Ingen funktion
[1] Analog indgang 53
[2] Analog indgang 54
[7] Frekvensindgang 29
[8] Frekvensindgang 33
[11] Lokal busreference Reference fra klemme 68 og 69.
[20] Digitalt pot.-meter
[21] Analog indg. X30-11
[22] Analog indg. X30-12
[29] Analog indg. X48/2
3-18 Relativ skalering, referenceressource
Option: Funktion:
BEMÆRK!
Denne parameter kan ikke justeres,
mens motoren kører.
3-18 Relativ skalering, referenceressource
Option: Funktion:
Illustration 3.26 Resulterende faktisk
reference
[0] * Ingen funktion
[1] Analog
indgang 53
[2] Analog
indgang 54
[7] Frekvens-
indgang 29
[8] Frekvens-
indgang 33
[11] Lokal
busreference
[20] Digitalt pot.-
meter
[21] Analog indg.
X30-11
[22] Analog indg.
X30-12
[29] Analog indg.
X48/2
Reference fra klemme 68 og 69.
3-19 Jog-hastighed [O/MIN]
Range: Funktion:
Size
related*
[ 0 - par.
4-13
RPM]
Indtast en værdi for jog-hastighed n
som er en fast udgangshastighed.
Frekvensomformeren kører med denne
hastighed, når jog-funktionen aktiveres.
Maksimumgrænsen er deneret i
parameter 4-13 Motorhastighed, høj grænse
[O/MIN].
Se også parameter 3-80 Jog-rampetid.
3.4.3 3-2* References II
JOG
3 3
,
Vælg en variabel værdi, der skal føjes til
den faste værdi
parameter 3-14 Preset Relative Reference).
Summen af den faste og den variable
værdi (mærket Y i Illustration 3.26) ganges
med den faktiske reference (mærket X i
Illustration 3.26). Dette produkt føjes
derefter til den faktiske reference (X+X*Y/
100) for at give den resulterende faktiske
reference.
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 73
(deneret i
3-20 Preset Target
Range: Funktion:
0 CustomReadoutUnit2*
[-2147483648 2147483647
CustomReadoutUnit2]
BEMÆRK!
Denne parameter er kun
tilgængelig med softwareversion 48.XX.
Array [8]
Indstil op til otte målpositioner. Vælg mellem de otte
forudindstillede positioner
ved hjælp af digitale
Page 76

Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
3-20 Preset Target
Range: Funktion:
indgange eller eldbus-
styreordet.
33
3-21 Touch Target
Range: Funktion:
0 CustomReadoutUnit2*
[-2147483648 2147483647
CustomReadoutUnit2]
BEMÆRK!
Denne parameter er kun
tilgængelig med softwareversion 48.XX.
3-24 Master Lowpass Filter Time
Range: Funktion:
Indtast tidskonstanten for beregning af
masterhastighed i synkroniseringstilstand.
3-25 Master Bus Resolution
Range: Funktion:
65536* [128 - 65536 ]
BEMÆRK!
Denne parameter er kun
tilgængelig med softwareversion
48.XX.
Indtast målpositionen i touch
probe-positioneringstilstand.
Denne parameter denerer
afstanden fra den registrerede
hændelse i touch probeføleren til den endelige
målposition i positionsenheder.
3-22 Master Scale Numerator
Range: Funktion:
1* [-2147483648
- 2147483647 ]
BEMÆRK!
Denne parameter er kun tilgængelig
med softwareversion 48.XX.
Parameter 3-22 Master Scale Numerator og
parameter 3-23 Master Scale Denominator
denerer gearudvekslingsforholdet mellem
master og slave i synkroniseringstilstand.
Masteromdrejninger =
× Slaveomdrejninger
3-23 Master Scale Denominator
Range: Funktion:
1* [-2147483648 -
2147483647 ]
BEMÆRK!
Denne parameter er kun
tilgængelig med softwareversion 48.XX.
Se parameter 3-22 Master Scale
Numerator.
Par . 3 − 22
Par . 3 − 23
3-26 Master Oset
Range: Funktion:
0 CustomReadoutUnit2*
[-2147483648
- 2147483647
CustomReadoutUnit2]
3-27 Virtual Master Max Ref
Range: Funktion:
50.0
[0.0 -
Hz*
590.0
Hz]
Indtast opløsningen for eldbus-master-
signalet (eldbus-reference 1) i
synkroniseringstilstand.
BEMÆRK!
Denne parameter er kun
tilgængelig med softwareversion 48.XX.
Indtast positionsoset mellem
master og slave i synkroniseringstilstand. Værdien tilføjes
follower-positionen ved hver
aktivering af en digital indgang
med optionen [113] Enable
Reference eller bit 5 i eldbus-
styreordet.
Parameter 3-02 Minimumreference denerer den maksimale
afvigelse fra den faktiske masterhastighed under udførelsen af
oset.
BEMÆRK!
Denne parameter er kun tilgængelig
med softwareversion 48.XX.
3-24 Master Lowpass Filter Time
Range: Funktion:
20 ms* [1 - 2000 ms]
BEMÆRK!
Denne parameter er kun
tilgængelig med softwareversion
48.XX.
74 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Indtast maksimumreferencen for den virtuelle
master. Den faktiske reference er indstillet
relativt til denne værdi, idet kilden valgt i
parameter 3-15 Referenceressource 1 eller
eldbus-reference 1 bruges. Omdrejningsretningen styres af signalet fremad/reverseret på
en digital indgang eller eldbus. Anvend
parametergruppe 3-6* Rampe 3 til at
kongurere acceleration og deceleration.
Page 77

P 3-*2
Ramp (X) Down
Time (Dec)
P 4-13
High-limit
RPM
Reference
n
s
P 4-11
Low limit
t
dec
Time
P 3-*1
Ramp (X)Up
Time (Acc)
t
acc
130BA872.10
130BA168.10
Rampe (X)
S-rampeforhold
ved acc.slut
Rampe (X)
S-rampeforhold
ved decel.slut
Rampe (X)
S-rampe–
forhold
ved–
decel.slut
Ryk kompenseret
Rampe (X)
op-tid
Rampe (X)
S-rampe–
forhold
ved acc.–
slut
Lineær
Hastighed
Rampe (X)
ned-tid
Parameterbeskrivelser Programming Guide
3-28 Master Oset Speed Ref
Range: Funktion:
1500
RPM*
[0 65000
RPM]
BEMÆRK!
Denne parameter er kun tilgængelig
med softwareversion 48.XX.
Indtast hastighedsreferencen for ændring af
master-oset i synkroniseringstilstand. For
at sikre kompatibilitet med softwareversionerne 48.01 og 48.10 er denne
parameter kun aktiv, når
parameter 3-02 Minimumreference er
indstillet til 0.
Illustration 3.28 Lineære rampetider
3-40 Rampe 1, type
3.4.4 Ramper
3-4* Rampe 1
Option: Funktion:
BEMÆRK!
Hvis [1] Konst. ryk f S-rampe vælges, og
For hver af de re ramper (parametergrupper 3-4* Rampe 1,
3-5* Rampe 2, 3-6* Rampe 3 og 3-7* Rampe 4) skal følgende
rampeparametre kongureres:
Rampetype
•
Rampetider (varighed af acceleration og decele-
•
ration) og
Niveau for rykkompensering for S-ramper.
•
referencen ændres under rampning, kan
rampetiden blive forlænget for at opnå
en rykfri bevægelse, hvilket kan
resultere i en længere start- eller
stoptid.
Yderligere justering af S-rampeforhold
eller skift af initiatorer kan blive
nødvendig.
Start med at indstille de lineære rampetider, der svarer til
Illustration 3.27 og Illustration 3.28.
[0] * Lineær
[1] Konst. ryk
f S-rampe
[2] Konst. tid f
S-rampe
Illustration 3.27 Lineære rampetider
Vælg rampetype afhængigt af kravene til
forløbet af acceleration/deceleration.
En lineær rampe giver en konstant acceleration
under rampning. En S-rampe giver en ikkelineær acceleration og kompenserer for ryk i
applikationen.
Acceleration med lavest muligt ryk.
S-rampe baseret på værdierne i
parameter 3-41 Rampe 1, rampe-op-tid og
parameter 3-42 Rampe 1, rampe-ned-tid.
3-41 Rampe 1, rampe-op-tid
Range: Funktion:
Hvis S-ramperne vælges, skal niveauet for de krævede ikkelineære rykkompenseringer indstilles. Indstil
rykkompenseringen ved at denere proportionen af rampe
op- og rampe ned-tider, hvor accelerationen og decelerationen er variable (dvs. stigende eller faldende). Srampeaccelerations- og decelerationsindstillingerne er
deneret som en procentdel af den faktiske rampetid.
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 75
Size
related*
[ 0.01 3600 s]
Indtast rampe op-tiden, dvs. accelerationstiden fra 0 O/MIN til den synkrone
motorhastighed nS. Vælg en rampe op-tid,
der forhindrer udgangsstrømmen i at
overstige strømgrænsen i
parameter 4-18 Strømgrænse under
rampning. Værdien 0,00 svarer til 0,01 sek i
hastighedstilstand. Se rampe ned-tid i
parameter 3-42 Rampe 1, rampe-ned-tid.
t
s xns O/ MIN
Par . 3 − 41 =
acc
ref O/MIN
3 3
Page 78

Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
3-42 Rampe 1, rampe-ned-tid
3.4.5 3-5* Rampe 2
Range: Funktion:
Size
related*
33
[ 0.01
- 3600
s]
Indtast rampe ned-tiden, dvs. decelerationstiden fra den synkrone motorhastighed n
til 0 O/MIN. Vælg en rampe ned-tid, således
at der ikke opstår overspænding i vekselretteren på grund af regenerativ motordrift,
og så den genererede strøm ikke overstiger
den strømgrænse, der er indstillet i
parameter 4-18 Strømgrænse. Værdien 0,00
svarer til 0,01 sek i hastighedstilstand. Se
rampe op-tid i parameter 3-41 Rampe 1,
rampe-op-tid.
t
s xns O/ MIN
Par . 3 − 42 =
dec
ref O/MIN
3-45 Rampe 1 S-rampeforhold ved acc.-start
Range: Funktion:
50 %* [ 1 -
99 %]
Indtast den andel af den totale rampe op-tid
(parameter 3-41 Rampe 1, rampe-op-tid), hvor
accelerationsmomentet tiltager. Jo større den
procentuelle værdi er, desto større rykkompensering opnås, og således opstår der færre
momentryk i applikationen.
3-46 Rampe 1 S-rampeforhold ved acc.-slut
Range: Funktion:
50 %* [ 1 -
99 %]
Indtast den andel af den totale rampe op-tid
(parameter 3-41 Rampe 1, rampe-op-tid), hvor
accelerationsmomentet aftager. Jo større den
procentuelle værdi er, desto større rykkompensering opnås, og således opstår der færre
momentryk i applikationen.
3-47 Ramp1 S-rampfh v.dec.start
Range: Funktion:
50 %* [ 1 -
99 %]
Indtast den andel af den totale rampe ned-tid
(parameter 3-42 Rampe 1, rampe-ned-tid), hvor
decelerationsmomentet tiltager. Jo større den
procentuelle værdi er, desto større rykkompensering opnås, og således opstår der færre
momentryk i applikationen.
Ved valg af rampeparametre, se parametergruppe 3-4*
Rampe 1.
s
3-50 Rampe 2, type
Option: Funktion:
Vælg rampetype afhængigt af kravene til
forløbet af acceleration/deceleration. En lineær
rampe giver en konstant acceleration under
rampning. En S-rampe giver en ikke-lineær
acceleration og kompenserer for ryk i applikationen.
[0] * Lineær
[1] Konst. ryk f
S-rampe
[2] Konst. tid f
S-rampe
Acceleration med lavest muligt ryk.
S-rampe baseret på værdierne i
parameter 3-51 Rampe 2, rampe-op-tid og
parameter 3-52 Rampe 2, rampe-ned-tid.
BEMÆRK!
Hvis [1] Konst. ryk f S-rampe vælges, og referencen
ændres under rampning, kan rampetiden blive forlænget
for at opnå en rykfri bevægelse, hvilket kan resultere i
en længere start- eller stoptid.
Yderligere justering af S-rampeforhold eller skift af
initiatorer kan blive nødvendig.
3-51 Rampe 2, rampe-op-tid
Range: Funktion:
Size
related*
3-52 Rampe 2, rampe-ned-tid
[ 0.01 3600 s]
Indtast rampe op-tiden, dvs. accelerationstiden fra 0 O/MIN til den nominelle
motorhastighed ns. Vælg en rampe op-tid,
således at udgangsstrømmen ikke overstiger
strømgrænsen i parameter 4-18 Strømgrænse
under rampning. Værdien 0,00 svarer til
0,01 sek i hastighedstilstand. Se rampe nedtid i parameter 3-52 Rampe 2, rampe-ned-tid.
t
s xns O/ MIN
Par . 3 − 51 =
acc
ref O/MIN
Range: Funktion:
3-48 Rampe 1 S-rampeforhold ved decel.-slut
Range: Funktion:
50 %* [ 1 -
99 %]
Indtast den andel af den totale rampe ned-tid
(parameter 3-42 Rampe 1, rampe-ned-tid), hvor
decelerationsmomentet aftager. Jo større den
procentuelle værdi er, desto større rykkompensering opnås, og således opstår der færre
momentryk i applikationen.
Size
related*
[ 0.01
- 3600
s]
Indtast rampe ned-tiden, dvs. decelerationstiden fra den nominelle motorhastighed
ns til 0 O/MIN. Vælg en rampe ned-tid,
således at der ikke opstår overspænding i
frekvensomformeren på grund af regenerativ
motordrift, og så den genererede strøm ikke
overstiger den strømgrænse, der er indstillet i
parameter 4-18 Strømgrænse. Værdien 0,00
svarer til 0,01 sek i hastighedstilstand. Se
rampe op-tid i parameter 3-51 Rampe 2,
rampe-op-tid.
t
s xns O/ MIN
Par . 3 − 52 =
dec
ref O/MIN
76 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 79

Parameterbeskrivelser Programming Guide
3-55 Rampe 2 S-rampeforhold ved acc.-start
Range: Funktion:
50 %* [ 1 -
99 %]
Indtast den andel af den totale rampe op-tid
(parameter 3-51 Rampe 2, rampe-op-tid), hvor
accelerationsmomentet tiltager. Jo større den
procentuelle værdi er, desto større rykkompensering opnås, og således opstår der færre
momentryk i applikationen.
3-56 Rampe 2 S-rampeforhold ved acc.-slut
Range: Funktion:
50 %* [ 1 -
99 %]
Indtast den andel af den totale rampe op-tid
(parameter 3-51 Rampe 2, rampe-op-tid), hvor
accelerationsmomentet aftager. Jo større den
procentuelle værdi er, desto større rykkompensering opnås, og således opstår der færre
momentryk i applikationen.
3-57 Ramp2 S-rampfh v.dec.start
Range: Funktion:
50 %* [ 1 -
99 %]
Indtast den andel af den totale rampe ned-tid
(parameter 3-52 Rampe 2, rampe-ned-tid), hvor
decelerationsmomentet tiltager. Jo større den
procentuelle værdi er, desto større rykkompensering opnås, og således opstår der færre
momentryk i applikationen.
3-58 Rampe 2 S-rampeforhold ved decel.-slut
Range: Funktion:
50 %* [ 1 -
99 %]
Indtast den andel af den totale rampe ned-tid
(parameter 3-52 Rampe 2, rampe-ned-tid), hvor
decelerationsmomentet aftager. Jo større den
procentuelle værdi er, desto større rykkompensering opnås, og således opstår der færre
momentryk i applikationen.
3.4.6 3-6* Rampe 3
Se parametergruppe 3-4* Rampe 1 vedrørende konguration
af rampeparametre.
3-60 Rampe 3, type
Option: Funktion:
Vælg rampetype afhængigt af kravene til
forløbet af acceleration og deceleration. En
lineær rampe giver en konstant acceleration
under rampning. En S-rampe giver en ikkelineær acceleration og kompenserer for ryk i
applikationen.
[0] * Lineær
[1] Konst. ryk f
S-rampe
Accelererer med lavest muligt ryk.
3-60 Rampe 3, type
Option: Funktion:
[2] Konst. tid f
S-rampe
S-rampe baseret på værdierne i
parameter 3-61 Rampe 3, rampe-op-tid og
parameter 3-62 Rampe 3, rampe-ned-tid.
BEMÆRK!
Hvis [1] Konst. ryk f S-rampe vælges, og referencen
ændres under rampning, kan rampetiden blive forlænget
for at opnå en rykfri bevægelse, hvilket kan resultere i
en længere start- eller stoptid.
Yderligere justering af S-rampeforhold eller skift af
initiatorer kan blive nødvendig.
3-61 Rampe 3, rampe-op-tid
Range: Funktion:
Size
related*
3-62 Rampe 3, rampe-ned-tid
Range: Funktion:
Size
related*
3-65 Rampe 3 S-rampeforhold ved acc.-start
Range: Funktion:
50 %* [ 1 -
[ 0.01
- 3600
s]
99 %]
[ 0.01 3600 s]
Indtast rampe op-tiden, som er accelerationstiden fra 0 O/MIN til den nominelle
motorhastighed ns. Vælg en rampe op-tid,
således at udgangsstrømmen ikke overstiger
strømgrænsen i parameter 4-18 Strømgrænse
under rampning. Værdien 0,00 svarer til
0,01 sek i hastighedstilstand. Se rampe nedtid i parameter 3-62 Rampe 3, rampe-ned-tid.
Indtast rampe ned-tiden, som er decelerationstiden fra den nominelle motorhastighed
ns til 0 O/MIN. Vælg en rampe ned-tid,
således at der ikke opstår overspænding i
vekselretteren på grund af regenerativ
motordrift, og så den genererede strøm ikke
overstiger den strømgrænse, der er indstillet i
parameter 4-18 Strømgrænse. Værdien 0,00
svarer til 0,01 sek i hastighedstilstand. Se
rampe op-tid i parameter 3-61 Rampe 3,
rampe-op-tid.
t
s xns O/ MIN
Par . 3 − 62 =
Indtast den andel af den totale rampe op-tid
(parameter 3-61 Rampe 3, rampe-op-tid), hvor
accelerationsmomentet tiltager. Jo større den
procentuelle værdi er, desto større rykkompensering opnås, og således opstår der færre
momentryk i applikationen.
dec
ref O/MIN
3 3
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 77
Page 80

Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
3-66 Rampe 3 S-rampeforhold ved acc.-slut
Range: Funktion:
50 %* [ 1 -
99 %]
33
Indtast den andel af den totale rampe op-tid
(parameter 3-61 Rampe 3, rampe-op-tid), hvor
accelerationsmomentet aftager. Jo større den
procentuelle værdi er, desto større rykkompensering opnås, og således opstår der færre
momentryk i applikationen.
3-67 Ramp3 S-rampfh v.dec.start
Range: Funktion:
50 %* [ 1 -
99 %]
Indtast den andel af den totale rampe ned-tid
(parameter 3-62 Rampe 3, rampe-ned-tid), hvor
decelerationsmomentet tiltager. Jo større den
procentuelle værdi er, desto større rykkompensering opnås, og således opstår der færre
momentryk i applikationen.
3-68 Rampe 3 S-rampeforhold ved decel.-slut
Range: Funktion:
50 %* [ 1 -
99 %]
Indtast den andel af den totale rampe ned-tid
(parameter 3-62 Rampe 3, rampe-ned-tid), hvor
decelerationsmomentet aftager. Jo større den
procentuelle værdi er, desto større rykkompensering opnås, og således opstår der færre
momentryk i applikationen.
3-71 Rampe 4, rampe-op-tid
Range: Funktion:
Size
related*
[ 0.01 3600 s]
Indtast rampe op-tiden, dvs. accelerationstiden fra 0 O/MIN til den nominelle
motorhastighed ns. Vælg en rampe op-tid,
således at udgangsstrømmen ikke overstiger
strømgrænsen i parameter 4-18 Strømgrænse
under rampning. Værdien 0,00 svarer til
0,01 sek i hastighedstilstand. Se rampe nedtid i parameter 3-72 Rampe 4, rampe-ned-tid.
Par . 3 − 71 =
3-72 Rampe 4, rampe-ned-tid
Range: Funktion:
Size
related*
[ 0.01
- 3600
s]
Indtast rampe ned-tiden, som er decelerationstiden fra den nominelle motorhastighed
ns til 0 O/MIN. Vælg en rampe ned-tid,
således at der ikke opstår overspænding i
vekselretteren på grund af regenerativ
motordrift, og så den genererede strøm ikke
overstiger den strømgrænse, der er indstillet i
parameter 4-18 Strømgrænse. Værdien 0,00
svarer til 0,01 sek i hastighedstilstand. Se
rampe op-tid i parameter 3-71 Rampe 4,
rampe-op-tid.
Par . 3 − 72 =
t
s xns O/ MIN
acc
ref O/MIN
t
s xns O/ MIN
dec
ref O/MIN
3.4.7 3-7* Rampe 4
Se parametergruppe 3-4* Rampe 1 vedrørende konguration
af rampeparametre.
3-70 Rampe 4, type
Option: Funktion:
Vælg rampetype afhængigt af kravene til
forløbet af acceleration og deceleration. En
lineær rampe giver en konstant acceleration
under rampning. En S-rampe giver en ikkelineær acceleration og kompenserer for ryk i
applikationen.
[0] * Lineær
[1] Konst. ryk f
S-rampe
[2] Konst. tid f
S-rampe
Accelererer med lavest muligt ryk.
S-rampe baseret på værdierne i
parameter 3-71 Rampe 4, rampe-op-tid og
parameter 3-72 Rampe 4, rampe-ned-tid.
BEMÆRK!
Hvis [1] Konst. ryk f S-rampe vælges, og referencen
ændres under rampning, kan rampetiden blive forlænget
for at opnå en rykfri bevægelse, hvilket kan resultere i
en længere start- eller stoptid.
Yderligere justering af S-rampeforhold eller skift af
initiatorer kan blive nødvendig.
3-75 Rampe 4 S-rampeforhold ved acc.-start
Range: Funktion:
50 %* [ 1 -
99 %]
Indtast den andel af den totale rampe op-tid
(parameter 3-71 Rampe 4, rampe-op-tid), hvor
accelerationsmomentet tiltager. Jo større den
procentuelle værdi er, desto større rykkompensering opnås, og således opstår der færre
momentryk i applikationen.
3-76 Rampe 4 S-rampeforhold ved acc.-slut
Range: Funktion:
50 %* [ 1 -
99 %]
Indtast den andel af den totale rampe op-tid
(parameter 3-71 Rampe 4, rampe-op-tid), hvor
accelerationsmomentet aftager. Jo større den
procentuelle værdi er, desto større rykkompensering opnås, og således opstår der færre
momentryk i applikationen.
3-77 Ramp4 S-rampfh v.dec.start
Range: Funktion:
50 %* [ 1 -
99 %]
Indtast den andel af den totale rampe ned-tid
(parameter 3-72 Rampe 4, rampe-ned-tid), hvor
decelerationsmomentet tiltager. Jo større den
procentuelle værdi er, desto større rykkompensering opnås, og således opstår der færre
momentryk i applikationen.
78 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 81

130BA070.10
o/min
P 4-13 o/min
høj grænse
P 1-25
motorhastighed
P 3-19
jog-hastighed
P 4-11 o/min
lav grænse
t
jog
P 3-80
Rampe
op-tid
t
jog
P 3-80
Rampe
ned-tid
130BA069.10
o/min
P 4-13 o/min
høj grænse
Reference
P 1-25
motorhastighed
P 4-11 o/min
lav grænse
P 3-81
Qrampe
Qstop
Tid
Parameterbeskrivelser Programming Guide
3-78 Rampe 4 S-rampeforhold ved decel.-slut
Range: Funktion:
50 %* [ 1 -
99 %]
Indtast den andel af den totale rampe ned-tid
(parameter 3-72 Rampe 4, rampe-ned-tid), hvor
decelerationsmomentet aftager. Jo større den
procentuelle værdi er, desto større rykkompensering opnås, og således opstår der færre
momentryk i applikationen.
3.4.8 3-8* Andre ramper
3-80 Jog-rampetid
Range: Funktion:
Size
related*
[0.01
Indtast jog-rampetiden, dvs. accelerations-/
- 3600
decelerationstiden mellem 0 O/MIN og den
s]
nominelle motorfrekvens ns. Sørg for, at den
resulterende udgangsstrøm, der er krævet for
den givne jog-rampetid, ikke overstiger
strømgrænsen i parameter 4-18 Strømgrænse.
Jog-rampetiden starter efter aktivering af et
jog-signal via LCP'et, en valgt digital indgang
eller den serielle kommunikationsport. Når jogtilstand er deaktiveret, gælder de normale
rampetider.
3-81 Kvikstop rampetid
Range: Funktion:
aktiveres med et signal på en valgt digital
indgang eller via den serielle kommunikationsport.
3 3
Illustration 3.30 Kvikstop rampetid
3-82 Kvikstop rampetype
Option: Funktion:
Vælg rampetype afhængigt af kravene til
forløbet af acceleration og deceleration.
En lineær rampe giver en konstant acceleration under rampning. En S-rampe giver
en ikke-lineær acceleration og
kompenserer for ryk i applikationen.
[0] * Lineær
[1] Konst. ryk f S-
rampe
[2] Konst. tid f S-
rampe
Illustration 3.29 Jog-rampetid
t
s xns O/ MIN
Par . 3 − 80 =
jog
Δ joghastighed par .3 − 19 O/ MIN
3-81 Kvikstop rampetid
Range: Funktion:
Size
related*
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 79
[0.01 3600 s]
Indtast rampe ned-tiden for hurtigt stop, dvs.
decelerationstiden fra den synkrone
motorhastighed til 0 O/MIN. Sørg for, at der
ikke opstår overspænding i vekselretteren på
grund af regenerativ motordrift, der er
krævet for at opnå den givne rampe ned-tid.
Sørg også for, at den genererede strøm, der
er krævet for at opnå den givne rampe nedtid, ikke overstiger strømgrænsen (indstillet i
parameter 4-18 Strømgrænse). Hurtigt stop
Range: Funktion:
50 %* [ 1 -
99 %]
Indtast den andel af den totale rampe ned-tid
(parameter 3-42 Rampe 1, rampe-ned-tid), hvor
decelerationsmomentet tiltager. Jo større den
procentuelle værdi er, desto større rykkompensering opnås, og således opstår der færre
momentryk i applikationen.
3-84 Kvikstop S-rampeforh. ved decel. slut
Range: Funktion:
50 %* [ 1 -
99 %]
Indtast den andel af den totale rampe ned-tid
(parameter 3-42 Ramp 1 Ramp Down Time), hvor
decelerationsmomentet aftager. Jo større den
procentuelle værdi er, desto større rykkompensering opnås, og således opstår der færre
momentryk i applikationen.
3-83 Kvikstop S-rampeforh. ved decel. Start
Page 82

Hastighed
Tid (s)
Reducer
Forøg
130BA159.11
P 3-95
Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
3-89 Ramp Lowpass Filter Time
Range: Funktion:
1 ms* [1 - 200 ms] Anvend denne parameter til at indstille,
hvor jævnt hastigheden ændres.
33
3.4.9 3-9* Digitalt pot.-meter
Med det digitale potentiometer kan den faktiske reference
øges eller reduceres ved at justere opsætningen af de
digitale indgange med funktionerne forøg, reducer eller
ryd. For at aktivere funktionen skal mindst én digital
3-91 Rampetid
Range: Funktion:
justere referencen trinvis, som angivet i
parameter 3-90 Step Size.
3-92 Power Restore
Option: Funktion:
[0] * O Nulstiller den digitale potentiometerreference til 0 %
efter opstart.
[1] On Gendanner den seneste digitale potentiometerre-
ference ved opstart.
indgang indstilles til forøg eller reducer.
3-93 Maximum Limit
Range: Funktion:
Illustration 3.31 Øg den faktiske reference
100 %* [-200 -
200 %]
3-94 Minimumgrænse
Indstil den tilladte maksimumværdi for den
resulterende reference. Dette anbefales,
hvis det digitale potentiometer anvendes
til njustering af den resulterende
reference.
Range: Funktion:
-100 %* [-200 200 %]
Indstil den tilladte minimumværdi for den
resulterende reference. Dette anbefales,
hvis det digitale potentiometer anvendes
til njustering af den resulterende
reference.
Illustration 3.32 Øg/reducer den faktiske reference
3-90 Step Size
Range: Funktion:
0.10 %* [0.01 200 %]
Indtast den trinvise størrelse, der kræves ved
forøg/reducer, som en procentdel af den
synkrone motorhastighed, ns. Hvis forøg/
reducer aktiveres, forøges eller reduceres
den resulterende reference med den værdi,
der er indstillet i denne parameter.
3-91 Rampetid
Range: Funktion:
1s* [0 -
3600 s]
Indtast rampetiden, dvs. tidsintervallet for justering
af referencen fra 0–100 % af den specicerede
digitale potentiometerfunktion (forøg, reducer eller
ryd).
Hvis forøg/reducer er aktiveret i længere tid end
den rampeforsinkelsesperiode, der er angivet i
parameter 3-95 Rampeforsinkelse, rampes den
faktiske reference op/ned iht. denne rampetid.
Rampetiden er deneret som den tid, det tager at
3-95 Rampeforsinkelse
Range: Funktion:
Size
related*
[ 0 -
Indtast den nødvendige forsinkelse fra
0 ]
aktivering af den digitale potentiometerfunktion, indtil frekvensomformeren begynder
at rampe referencen. Referencen begynder at
rampe med en forsinkelse på 0 ms, når forøg/
reducer aktiveres. Se også
parameter 3-91 Rampetid.
80 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 83

Parameterbeskrivelser Programming Guide
3.5 Parametre: 4-** Grænser/Advarsler
3.5.1 4-1* Motorgrænser
Denerer motorens moment-, strøm- og hastighedsgrænse,
samt frekvensomformerens reaktion, når disse grænser
overskrides.
En grænse kan generere en meddelelse i displayet. En
advarsel vil altid generere en meddelelse i displayet eller
eldbussen. En overvågningsfunktion kan aktivere en
på
advarsel eller et trip, hvorefter frekvensomformeren vil
stoppe og generere en alarmmeddelelse.
4-10 Motorhastighedsretning
Option: Funktion:
BEMÆRK!
Denne parameter kan ikke justeres, mens
motoren kører.
Vælg den krævede motorhastighedsretning.
Anvend denne parameter for at undgå uønsket
reversering. Når parameter 1-00
tilstand er indstillet til [3] Proces, indstilles
parameter 4-10 Motorhastighedsretning til [0] Med
uret som standard. Indstillingen i
parameter 4-10 Motorhastighedsretning begrænser
ikke mulighederne for indstilling af
parameter 4-13 Motorhastighed, høj grænse [O/
MIN].
[0] Med uret Referencen indstilles til omdrejning med uret.
Reverseringsindgangen (standardklemme 19) skal
være åben.
[1] Imod uret Referencen indstilles til omdrejning mod uret.
Reverseringsindgangen (standardklemme 19) skal
være lukket. Hvis reversering kræves, mens
reverseringsindgangen er åben, kan motorretningen ændres ved hjælp af
parameter 1-06 Højredrejende.
[2] Begge
retninger
Muliggør at motoren kan rotere i begge
retninger.
4-11 Motorhastighed, lav grænse [O/MIN]
Range: Funktion:
Size
related*
[ 0 - par.
4-13
RPM]
Indtast den minimale grænse for
motorhastigheden. Motorhastighedens
nedre grænse kan indstilles, så den svarer
til producentens anbefalede minimummotorhastighed. Den nedre grænse for
motorhastighed må ikke overstige indstillingen i parameter 4-13 Motorhastighed,
høj grænse [O/MIN].
Kongurations-
4-12 Motorhastighed, lav grænse [Hz]
Range: Funktion:
Size
related*
[ 0 - par.
4-14 Hz]
Indtast den minimale grænse for
motorhastigheden. Den nedre grænse for
motorhastighed kan indstilles, så den
svarer til motorakslens mindste udgangsfrekvens. Den nedre grænse for
motorhastighed må ikke overstige indstillingen i parameter 4-14 Motor Speed High
Limit [Hz].
4-13 Motorhastighed, høj grænse [O/MIN]
Range: Funktion:
Size
related*
[ par.
4-11 60000
RPM]
Indtast maksimumgrænsen for motorhastighed. Motorhastighed, høj grænse
kan indstilles, så den svarer til
producentens maksimale nominelle
motorhastighed. Motorhastigheden, høj
grænse, skal overstige indstillingen i
parameter 4-11 Motorhastighed, lav
grænse [O/MIN].
4-14 Motor Speed High Limit [Hz]
Range: Funktion:
Size
related*
[ par.
4-12 par. 4-19
Hz]
Indtast den øvre grænse for motorhastighed i Hz. Parameter 4-14 Motor Speed
High Limit [Hz] kan indstilles, så den svarer
til producentens anbefalede maksimale
motorhastighed. Motorhastighed, høj
grænse, skal overstige værdien i
parameter 4-12 Motor Speed Low Limit [Hz].
Udgangsfrekvensen må ikke overstige 10 %
af switchfrekvensen
(parameter 14-01 Switching Frequency).
4-16 Momentgrænse for motordrift
Range: Funktion:
Size related* [ 0 - 1000.0 %] Denne funktion begrænser
momentet på akslen for at
beskytte den mekaniske installation.
BEMÆRK!
Hvis man ændrer parameter 4-16 Momentgrænse for
motordrift, når parameter 1-00 Kongurationstilstand er
indstillet til [0] Hast. åben sløjfe, genjusteres
parameter 1-66 Min. strøm ved lav hastighed automatisk.
BEMÆRK!
Momentgrænsen reagerer på det faktiske, ikke-ltrerede
moment, herunder momentspidser. Dette er ikke det
moment, der ses fra LCP'et eller eldbussen, da det er
ltreret.
3 3
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 81
Page 84

Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
4-17 Momentgrænse for generatordrift
Range: Funktion:
100 %* [ 0 - 1000.0 %] Denne funktion begrænser momentet
på akslen for at beskytte den
mekaniske installation.
33
4-18 Strømgrænse
Range: Funktion:
Size
related*
[ 1.0 -
1000.0
%]
BEMÆRK!
Hvis [20] ATEX ETR vælges i
parameter 1-90 Termisk motorbeskyttelse, skal
parameter 4-18 Strømgrænse
strømgrænse indstilles til 150 %.
Dette er en sand strømgrænsefunktion, der
fortsætter inden for det oversynkrone
område. På grund af feltsvækning falder
motormomentet ved strømgrænsen
imidlertid tilsvarende, når stigningen i
spændingen stopper over motorens synkroniserede hastighed.
4-19 Maks. udgangsfrekvens
Range: Funktion:
Size
related*
[ 1 -
BEMÆRK!
590
Denne parameter kan ikke justeres,
Hz]
mens motoren kører.
BEMÆRK!
Den maksimale udgangsfrekvens må
ikke overstige 10 % af vekselretterens
switchfrekvens
(parameter 14-01 Koblingsfrekvens).
Sætter en øvre grænse for udgangsfrekvens af
hensyn til sikkerheden ved applikationer, hvor
overhastighed skal undgås. Denne grænse er
den øvre i alle kongurationer (uafhængigt af
indstillingen i parameter 1-00 Kongurations-
tilstand).
4-20 Momentgrænsefaktorkilde
Option: Funktion:
tionstilstand er i Hast. åben sløjfe eller Hast.
lukket sløjfe.
[0] * Ingen funkt
[2] Ana. ind. 53
[4] Ana. ind. 53
inv
[6] Ana. ind. 54
[8] Ana. ind. 54
inv
[10] Ana. ind.
X30-11
[12] Ana. ind.
X30-11 inv
[14] Ana. ind.
X30-12
[16] Ana. ind.
X30-12 inv
4-21 Hastighedsgrænsefaktorkilde
Option: Funktion:
Vælg en analog indgang for skalering af
indstillingerne i parameter 4-19 Maks.
udgangsfrekvens 0–100 % (eller omvendt).
Signalniveauerne, der svarer til 0 % og
100 %, deneres i den analoge indgangsskalering, for eksempel parametergruppe
6-1* Analog indgang 1. Denne parameter
er kun aktiv, når parameter 1-00 Kongu-
rationstilstand er i [4] Moment åben sløjfe.
[0] * Ingen funkt
[2] Ana. ind. 53
[4] Ana. ind. 53 inv
[6] Ana. ind. 54
[8] Ana. ind. 54 inv
[10] Ana. ind. X30-11
[12] Ana. ind. X30-11
inv
[14] Ana. ind. X30-12
[16] Ana. ind. X30-12
inv
4-20 Momentgrænsefaktorkilde
Option: Funktion:
Vælg en analog indgang for skalering af
indstillingerne i parameter 4-16 Moment-
grænse for motordrift og
parameter 4-17 Momentgrænse for generatordrift fra 0–100 % (eller inverteret).
Signalniveauerne, der svarer til 0 % og
100 %, deneres i den analoge indgangsskalering, for eksempel parametergruppe
6-1* Analog indgang 1. Denne parameter
er kun aktiv, når parameter 1-00 Kongura-
82 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
4-23 Brake Check Limit Factor Source
Vælg indgangskilden til funktionen i parameter 2-15 Bremsekontrol. Hvis ere frekvensomformere udfører en bremsekontrol
samtidig, vil modstanden i nettet medføre et spændingsfald på
netforsyningen eller i DC-linket, og en falsk bremsekontrol kan
opstå. Anvend en ekstern strømføler på hver bremsemodstand.
Hvis en applikation kræver en 100 % gyldig bremsekontrol,
tilsluttes føleren til en analog indgang.
Option: Funktion:
[0] * DC-link voltage Frekvensomformeren udfører
en bremsekontrol ved at
overvåge DC-link-
Page 85

Parameterbeskrivelser Programming Guide
4-23 Brake Check Limit Factor Source
Vælg indgangskilden til funktionen i parameter 2-15 Bremsekontrol. Hvis ere frekvensomformere udfører en bremsekontrol
samtidig, vil modstanden i nettet medføre et spændingsfald på
netforsyningen eller i DC-linket, og en falsk bremsekontrol kan
opstå. Anvend en ekstern strømføler på hver bremsemodstand.
Hvis en applikation kræver en 100 % gyldig bremsekontrol,
tilsluttes føleren til en analog indgang.
Option: Funktion:
spændingen.
Frekvensomformeren påfører
strøm i bremsemodstanden,
hvilket reducerer DC-linkspændingen.
[1] Analog Input 53 Vælg en ekstern strømføler
til bremseovervågning.
[2] Analog Input 54 Vælg en ekstern strømføler
til bremseovervågning.
4-24 Brake Check Limit Factor
Range: Funktion:
98 %* [0 -
100 %]
Indtast den grænsefaktor, som
parameter 2-15 Bremsekontrol anvender ved
udførsel af bremsekontrol. Frekvensomformeren
bruger grænsefaktoren, afhængigt af valget i
parameter 4-23 Brake Check Limit Factor Source:
[0] DC-link-spænding – frekvensomformeren
anvender faktoren til EEPROM-dataene i DC-linket.
[1] Analog indgang 53 eller [2] Analog indgang 54
– bremsekontrollen mislykkes, hvis indgangsstrømmen på den analoge indgang er lavere end
den maksimale indgangsstrøm ganget med
grænsefaktoren.
I følgende konguration mislykkes bremsekontrollen eksempelvis, hvis indgangsstrømmen er
lavere end 16 mA:
En strømtransducer med et område på
•
4–20 mA er tilsluttet analog indgang 53.
Parameter 4-24 Brake Check Limit Factor
•
er indstillet til 80 %.
4-25 Power Limit Motor Factor Source
Vælg det input, der skalerer værdien i parameter 4-82 Power Limit
Motor Mode fra 0 % til 100 %.
Option: Funktion:
[0] * Ingen funkt
[2] Ana. ind. 53
[4] Ana. ind. 53 inv
[6] Ana. ind. 54
[8] Ana. ind. 54 inv
[10] Ana. ind. X30-11
[12] Ana. ind. X30-11 inv
[14] Ana. ind. X30-12
[16] Ana. ind. X30-12 inv
4-26 Power Limit Gener. Factor Source
Vælg det input, der skalerer værdien i parameter 4-83 Power Limit
Generator Mode fra 0 % til 100 %.
Option: Funktion:
[0] * Ingen funkt
[2] Ana. ind. 53
[4] Ana. ind. 53 inv
[6] Ana. ind. 54
[8] Ana. ind. 54 inv
[10] Ana. ind. X30-11
[12] Ana. ind. X30-11 inv
[14] Ana. ind. X30-12
[16] Ana. ind. X30-12 inv
3.5.2 4-3* Motorhast. mon.
Parametergruppen omfatter overvågning og håndtering af
motorfeedbackenheder, som for eksempel encodere,
resolvers osv.
4-30 Motorfeedbacktabfunktion
Option: Funktion:
Denne funktion anvendes til overvågning
med henblik på overensstemmelse i
feedbacksignal, dvs. hvis feedbacksignalet
er tilgængeligt.
Vælg, hvilken handling frekvensomformeren skal udføre, hvis der registreres
en feedbackfejl. Den valgte handling skal
nde sted, når feedbacksignalet er
forskelligt fra udgangshastigheden af den
værdi, der er indstillet i
parameter 4-31 Motorfeedbackhastighedsfejl i længere tid end den værdi, der
er indstillet i parameter 4-32 Timeout for
motorfeedbacktab.
[0] Deaktiveret
[1] Advarsel
[2] Trip
[3] Jog
[4] Fastfrys udgang
[5] Maks. hast.
[6] Skift til åben
sløjfe
[7] Vælg opsætn. 1
[8] Vælg opsætn. 2
[9] Vælg opsætn. 3
[10] Vælg opsætn. 4
[11] stop & trip
Advarsel 90 Feedbackoverv. er aktiv, så snart værdien i
parameter 4-31 Motorfeedbackhastighedsfejl er overskredet,
uanset indstillingen i parameter 4-32 Timeout for motorfeedbacktab. Advarsel/alarm 61 Feedbackfejl er tilknyttet
motorfeedbacktabsfunktionen.
3 3
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 83
Page 86

Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
4-31 Motorfeedbackhastighedsfejl
Range: Funktion:
300 RPM* [1 - 600 RPM] Vælg maksimum tilladte fejl i
hastighed (udgangshastighed vs.
feedback).
33
4-34 Sporingsfejlfunktion
Option: Funktion:
[1] Advarsel
[2] Trip
[3] Trip efter
stop
Advarsel/Alarm 78 Sporingsfejl er knyttet til sporingsfejlfunktionen.
4-35 Sporingsfejl
Range: Funktion:
10
RPM*
[1 - 600
RPM]
Indtast den maksimalt tilladte hastighedsfejl
mellem motorhastigheden og udgangen for
rampe, når der ikke rampes. I åben sløjfe er
motorhastigheden estimeret, og i lukket
sløjfe er det feedback fra encoder/resolver.
4-36 Sporingsfejl timeout
Range: Funktion:
1 s* [0 - 60 s] Indtast det timeout-tidsrum, hvori en fejl større
end den værdi, der er indstillet i
parameter 4-35 Sporingsfejl, er tilladt.
Illustration 3.33 Motorfeedbackhastighedsfejl
4-32 Timeout for motorfeedbacktab
Range: Funktion:
Size
related*
[0 60 s]
Indstil den timeout-værdi, der tillader, at
hastighedsfejlen, der er indstillet i
parameter 4-31 Motorfeedbackhastighedsfejl,
overskrides, før aktivering af den funktion,
der er valgt i parameter 4-30 Motorfeedback-
tabfunktion.
4-34 Sporingsfejlfunktion
Option: Funktion:
Denne funktion anvendes til at overvåge, at
applikationen følger den forventede hastighedsprol. I lukket sløjfe sammenlignes
hastighedsreferencen til PID med encoderfeedback (ltreret). I åben sløjfe kompenseres
hastighedsreferencen til PID for slip og sammenlignes med den frekvens, der sendes til motoren
(parameter 16-13 Frekvens).
Reaktionen aktiveres, hvis den målte forskel er
mere end angivet i parameter 4-35 Sporingsfejl
for det tidsrum, der er angivet i
parameter 4-36 Sporingsfejl timeout.
En sporingsfejl i lukket sløjfe er ikke et tegn på,
at der er en fejl med feedbacksignalet. En
sporingsfejl kan skyldes momentgrænse ved for
store belastninger.
[0] Deaktiver
4-37 Sporingsfejlsrampning
Range: Funktion:
100
RPM*
[1 - 600
RPM]
Indtast den maksimalt tilladte hastighedsfejl mellem motorhastigheden og
udgangen for rampe, når der rampes. I
åben sløjfe er motorhastigheden estimeret,
og i lukket sløjfe er det encoderen, der
måler hastigheden.
4-38 Sporingsfejl rampetimeout
Range: Funktion:
1 s* [0 - 60 s] Indtast det timeout-tidsrum, hvori en fejl større
end den værdi, der er indstillet i
parameter 4-37 Sporingsfejlsrampning, er tilladt
under rampning.
4-39 Sporingsfejl efter rampetimeout
Range: Funktion:
5 s* [0 - 60 s] Indtast det timeout-tidsrum efter rampning,
hvor parameter 4-37 Sporingsfejlsrampning og
parameter 4-38 Sporingsfejl rampetimeout stadig
er aktive.
84 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 87

Speed
nRef
-nRef
0rpm
Time
130BE199.10
Parameterbeskrivelser Programming Guide
3.5.3 4-4* Speed Monitor
4-43 Motor Speed Monitor Function
Option: Funktion:
BEMÆRK!
Denne parameter er kun tilgængelig i
Flux-styreprincippet.
Vælg, hvordan frekvensomformeren skal
reagere, når overvågningsfunktionen for
motorhastighed registrerer overhastighed
eller forkert omdrejningsretning.
Når overvågningen af motorhastighed er
aktiv, registrerer frekvensomformeren en fejl,
hvis følgende betingelser er sande for en
tidsperiode, der er
parameter 4-45 Motor Speed Monitor Timeout:
Den faktiske hastighed er forskellig
•
fra referencehastigheden i
parameter 16-48 Speed Ref. After
Ramp [RPM].
Forskellen mellem hastighederne
•
overskrider værdien i
parameter 4-44 Motor Speed Monitor
Max.
Ved hastighed med lukket sløjfe er den
faktiske hastighed feedbacken fra encoderen,
målt i den tidsperiode, der er deneret i
parameter 7-06 Hastighed, PID-lavpasltertid. I
åben sløjfe er den faktiske hastighed den
estimerede motorhastighed.
speciceret i
4-43 Motor Speed Monitor Function
Option: Funktion:
[5] Maks. hast.
[6] Skift til åben
sløjfe
[7] Vælg
opsætn. 1
[8] Vælg
opsætn. 2
[9] Vælg
opsætn. 3
[10] Vælg
opsætn. 4
[11] stop & trip
[12] Trip/Warning Frekvensomformeren afgiver alarm 101 Speed
monitor under kørsel, og advarsel 101 Speed
monitor i stop- eller friløbstilstand. Denne
option er kun tilgængelig ved drift med
lukket sløjfe.
[13] Trip/Catch Vælg, hvornår der er behov for at fange en
belastning, for eksempel når mekanisk
bremsning fejler. Denne option er kun
tilgængelig i lukket sløjfe.
Frekvensomformeren tripper og afgiver alarm
101 Speed monitor under kørsel. I stoptilstand
fanger frekvensomformeren en roterende
belastning og afgiver advarsel 101 Speed
monitor.
I catch-tilstand anvender frekvensomformeren
holdemoment til at kontrollere
nulhastigheden på en potentielt defekt
bremse (lukket sløjfe). Send et nyt startsignal
til frekvensomformeren for at forlade denne
tilstand. Friløb eller Safe Torque O afslutter
også denne funktion.
3 3
4-44 Motor Speed Monitor Max
Massiv
linje
Stiplet
linje
Illustration 3.34 Hastighedsreference og
maksimum tilladte hastighedsforskel
[0] Deaktiveret
[1] Advarsel Frekvensomformeren afgiver advarsel 101
Speed monitor, når hastigheden ligger uden
for grænsen.
[2] Trip Frekvensomformeren tripper og afgiver alarm
101 Speed monitor.
[3] Jog
[4] Fastfrys
udgang
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 85
Parameter 16-48 Speed Ref. After
Ramp [RPM]
Parameter 4-44 Motor Speed
Monitor Max
Range: Funktion:
300
RPM*
[10 - 500
RPM]
BEMÆRK!
Kun tilgængelig for Fluxstyreprincip.
Indtast den maksimum tilladte hastighedsafvigelse mellem den faktiske
mekaniske akselhastighed og værdien i
parameter 16-48 Speed Ref. After Ramp
[RPM].
Page 88

Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
4-45 Motor Speed Monitor Timeout
Range: Funktion:
0.1 s* [0 - 60
s]
33
BEMÆRK!
Kun tilgængelig for Flux-styreprincip.
Indtast den timeout-periode, hvori en afvigelse,
der er indstillet i parameter 4-44 Motor Speed
Monitor Max, er tilladt. Timeren for denne
parameter nulstilles, hvis afvigelsen ophører
med at overskride værdien i
parameter 4-44 Motor Speed Monitor Max.
4-51 Advarsel, strøm høj
Range: Funktion:
samt på relæudgang 01 eller 02 (kun FC
302). Se Illustration 3.35.
4-52 Advarsel, hastighed lav
Range: Funktion:
0 RPM* [ 0 - par.
4-53 RPM]
Indtast værdien n
overstiger denne grænse, viser displayet
Hastighed lav. Signaludgangene kan
programmeres til at give et statussignal på
klemme 27 eller 29 (kun FC 302) samt på
relæudgang 01 eller 02 (kun FC 302).
. Når motorhastigheden
LAV
3.5.4 4-5* Just.-advarsler
4-53 Advarsel, hastighed høj
Anvend disse parametre til at justere advarselsgrænser for
strøm, hastighed, reference og feedback.
Advarsler vises på LCP'et og kan programmeres til at være
udgange eller til udlæsning via eldbus i det udvidede
statusord.
Range: Funktion:
Size
related*
[ par. 4-52
- 60000
RPM]
Indtast n
stigheden overstiger denne værdi, viser
displayet Hastighed høj. Signaludgangene kan programmeres til at give
et statussignal på klemme 27 eller 29
samt på relæudgang 01 eller 02. Se
Illustration 3.35.
-værdien. Når motorha-
HØJ
Illustration 3.35 Justerbare advarsler
4-50 Advarsel, strøm lav
Range: Funktion:
0 A* [ 0 - par.
4-51 A]
Indtast I
falder under denne grænse, viser displayet
Strøm lav. Signaludgangene kan programmeres
til at give et statussignal på klemme 27 eller 29
(kun FC 302) samt på relæudgang 01 eller 02
(kun FC 302). Se Illustration 3.35.
-værdien. Når motorstrømmen
LAV
4-51 Advarsel, strøm høj
Range: Funktion:
Size
related*
[ par. 4-50
- par.
16-37 A]
Indtast l
HØJ
overstiger denne grænse, viser displayet
Strøm høj. Signaludgangene kan
programmeres til at give et statussignal
på klemme 27 eller 29 (kun FC 302)
-værdien. Når motorstrømmen
4-54 Advarsel, reference lav
Range: Funktion:
-999999.999* [ -999999.999 par. 4-55 ]
Indtast den nedre referencegrænse. Når den faktiske
reference er under denne
grænse, viser displayet Ref
Signaludgangene kan
programmeres til at give et
statussignal på klemme 27 eller
29 (kun FC 302) samt på
relæudgang 01 eller 02 (kun FC
302).
4-55 Advarsel, reference høj
Range: Funktion:
999999.999* [ par. 4-54 -
999999.999 ]
Indtast den øvre referencegrænse.
Når den faktiske reference
overstiger denne grænse, viser
displayet Ref
kan programmeres til at give et
statussignal på klemme 27 eller 29
(kun FC 302) samt på relæudgang
01 eller 02 (kun FC 302).
4-56 Advarsel, feedback lav
Range: Funktion:
Size
related*
[ -999999.999 par. 4-57
ReferenceFeedbackUnit]
Indtast den nedre feedbackgrænse. Når feedback falder
under denne grænse, viser
displayet Feedb
gangene kan programmeres til
. Signaludgangene
høj
. Signalud-
Lav
LAV
.
86 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 89

Parameterbeskrivelser Programming Guide
4-56 Advarsel, feedback lav
Range: Funktion:
at give et statussignal på
klemme 27 eller 29 (kun FC 302)
samt på relæudgang 01 eller 02
(kun FC 302).
4-57 Advarsel, feedback høj
Range: Funktion:
Size
related*
[ par. 4-56 -
999999.999
ReferenceFeedbackUnit]
Indtast den øvre feedbackgrænse. Når feedback overstiger
denne grænse, viser displayet
feedback
kan programmeres til at give et
statussignal på klemme 27 eller
29 (kun FC 302) samt på
relæudgang 01 eller 02 (kun FC
302).
. Signaludgangene
Høj
4-58 Manglende motorfasefunktion
Option: Funktion:
BEMÆRK!
Denne parameter kan ikke justeres, mens
motoren kører.
Den manglende motorfasefunktion registrerer, om
motorfasen mangler, mens motoren roterer. Viser
alarm 30, 31 eller 32 i tilfælde af en manglende
motorfase. Aktivér denne funktion for at undgå
motorskade.
Se også kapitel 3.5.5 Kombinationer af parametrene
4-58 og 4-59.
[0] Deaktiv. Frekvensomformeren udsteder ikke en alarm for
manglende motorfase. Anbefales ikke på grund af
risiko for motorskade.
[1] Trip 100msFor en hurtig registreringstid og alarm i tilfælde
af en manglende motorfase.
[2] Trip 1000
ms
[3] Trip
100ms
3ph
detec.
Særlig option, der er relevant for applikationer
med kraner, hvor en lille belastning sænkes,
hvilket betyder, at frekvensomformeren undgår
falsk detektering af manglende motorfase.
Denne option er en reduceret version af option
[1] Trip 100 ms.
Manglende en-fase håndteres som i option [1]
Trip 100 ms. Tre-fasedetektering er reduceret
sammenlignet med option [1] Trip 100 ms.
Tre-fasedetekteringen fungerer kun ved opstart
og i det lave hastighedsområde, hvor en
betydelig strøm løber, hvorved falske trips ved lav
motorstrøm undgås.
4-58 Manglende motorfasefunktion
Option: Funktion:
BEMÆRK!
Kun tilgængelig for FC 302 Flux lukket
sløjfe.
[5] Motor
Check
Frekvensomformeren registrerer automatisk, når
motoren er afbrudt, og genoptager driften, når
motoren er tilsluttet igen.
BEMÆRK!
Kun gyldig for FC 302.
4-59 Motor Check At Start
Option: Funktion:
BEMÆRK!
Denne parameter kan ikke justeres, mens
motoren kører.
BEMÆRK!
Kun gyldig for FC 302.
Anvend denne parameter til at registrere den
manglende motorfase under motorstilstand. Viser
alarm 30 U-fasetab, alarm 31 V-fasetab eller alarm 32
W-fasetab i tilfælde af en manglende motorfase
under stilstand. Anvend denne funktion, før en
mekanisk bremse frigøres. Aktivér denne funktion
for at undgå motorskade.
Se også kapitel 3.5.5 Kombinationer af parametrene
4-58 og 4-59.
[0]*Ikke
aktiv
[1] Aktiv Frekvensomformeren kontrollerer, om alle tre
Når parameter 4-59 Motor Check At Start er indstillet til [1]
Aktiv, må parameter 4-58 Manglende motorfasefunktion ikke
indstilles til følgende optioner:
[0] Deaktiv.
•
[5] Motor check.
•
FORSIGTIG
RISIKO FOR MOTORSKADE
Brug af denne option kan medføre
motorskade.
Frekvensomformeren udsteder ikke en alarm for
manglende motorfase.
motorfaser er til stede inden hver start. Kontrollen
udføres uden nogen form for bevægelse på ASMmotorer. For PM- og SynRM-motorer udføres
kontrollen som en del af positionsdetekteringen.
3 3
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 87
Page 90

Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
3.5.5 4-6* Hastighedsbypass
4-70 Position Error Function
Option: Funktion:
Nogle systemer kræver, at visse udgangsfrekvenser eller hastigheder undgås på grund af resonansproblemer i
systemet. Der kan undgås maksimum re frekvens- eller
33
hastighedsområder.
[0] * Deaktiveret Frekvensomformeren overvåger ikke positions-
4-60 Bypass-hastighed fra [O/MIN]
Array [4]
[1] Advarsel Frekvensomformeren afgiver en advarsel, når
Range: Funktion:
Size related* [ 0 - par.
4-13 RPM]
4-61 Bypass Speed From [Hz]
Array [4]
Nogle systemer kræver, at visse
udgangshastigheder undgås på
grund af resonansproblemer i
systemet. Angiv nedre grænser for
de hastigheder, der skal undgås.
[2] Trip Frekvensomformeren tripper, når den
4-71 Maximum Position Error
Range: Funktion:
1000 CustomReadoutUnit2*
Range: Funktion:
Size related* [ 0 - par.
4-14 Hz]
Nogle systemer kræver, at visse
udgangsfrekvenser eller -hastigheder
undgås på grund af resonansproblemer i systemet. Angiv nedre
grænser for de hastigheder, der skal
undgås.
4-62 Bypass-hastighed til [O/MIN]
Array [4]
Range: Funktion:
Size related* [ 0 - par.
4-13 RPM]
Nogle systemer kræver, at visse
udgangshastigheder undgås på
grund af resonansproblemer i
systemet. Angiv øvre grænser for
de hastigheder, der skal undgås.
4-72 Position Error Timeout
position og den ønskede position. Positionsfejlen er indgangen for PI-reguleringens
position.
fejlen.
den maksimalt tilladte positionsfejl overskrides.
Frekvensomformeren fortsætter driften.
maksimalt tilladte positionsfejl overskrides.
[0 2147483647
CustomReadoutUnit2]
BEMÆRK!
Denne parameter er kun
tilgængelig med softwareversion 48.XX.
Indtast den maksimalt tilladte
positionssporingsfejl i positionsenheder, der deneres i
parametergruppe 17-7* Position
Scaling. Hvis værdien
overskrides i løbet af den tid,
der er indstillet i
parameter 4-72 Position Error
Timeout, aktiveres positionsfejl-
funktionen i
parameter 4-70 Position Error
Function.
Range: Funktion:
4-63 Bypass-hastighed til [Hz]
Array [4]
Range: Funktion:
Size related* [ 0 - par.
4-14 Hz]
Nogle systemer kræver, at visse
udgangshastigheder undgås på
grund af resonansproblemer i
systemet. Angiv øvre grænser for de
hastigheder, der skal undgås.
0.100s* [0.000 -
60.000 s]
BEMÆRK!
Denne parameter er kun tilgængelig
med softwareversion 48.XX.
Hvis fejlen, der er deneret i
parameter 4-71 Maximum Position Error, er til
stede i længere tid end tiden i denne
parameter, aktiverer frekvensomformeren
den funktion, der er valgt i
parameter 4-70 Position Error Function.
3.5.6 4-7* Position Monitor
4-73 Position Limit Function
4-70 Position Error Function
Option: Funktion:
BEMÆRK!
Denne parameter er kun tilgængelig
med softwareversion 48.XX.
Vælg den funktion, der aktiveres, når positionsfejlen overskrider den maksimalt tilladte værdi.
Positionsfejl er forskellen mellem den faktiske
Option: Funktion:
BEMÆRK!
Denne parameter er kun tilgængelig med
softwareversion 48.XX.
Vælg den funktion, der aktiveres, når positionsfejlen ligger uden for de grænser, der er
88 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 91

Parameterbeskrivelser Programming Guide
4-73 Position Limit Function
Option: Funktion:
deneret i parameter 3-06 Minimum Position og
parameter 3-07 Maximum Position.
[0] Disabled Frekvensomformeren overvåger ikke positions-
grænserne.
[1] Warning Frekvensomformeren afgiver en advarsel, når
positionen ligger uden for grænserne.
[2] Warning &
Trip
[3]*Abs. Pos.
Mode Stop
[4] Abs. Pos.
Md. Stop &
Trip
[5] Position
Stop
[6] Position
Stop & Trip
[7] Speed
Stop
[8] Speed
Stop & Trip
Frekvensomformeren afgiver en advarsel, når
den indstillede målposition ligger uden for
grænserne. Frekvensomformeren starter positioneringen og tripper, når positionsgrænsen er
nået.
Frekvensomformeren overvåger kun positionsgrænserne i absolut positioneringstilstand.
Frekvensomformeren afgiver en advarsel og
stopper ved positionsgrænsen, når målpositionen ligger uden for positionsgrænserne.
Frekvensomformeren overvåger kun positionsgrænserne i absolut positioneringstilstand.
Frekvensomformeren stopper ved positionsgrænsen og tripper, når målpositionen ligger
uden for positionsgrænserne.
Når den indstillede målposition ligger uden for
positionsgrænsen, bruger frekvensomformeren
positionsgrænsen som målposition. Denne
option fungerer i alle driftstilstande, herunder
hastigheds- og momentstyring. Frekvensomformeren afgiver en advarsel, når den er ved
positionsgrænsen.
Når den indstillede målposition ligger uden for
positionsgrænsen, bruger frekvensomformeren
positionsgrænsen som målposition. Denne
option fungerer i alle driftstilstande, herunder
hastigheds- og momentstyring. Frekvensomformeren tripper, når den er ved
positionsgrænsen.
Når den indstillede målposition ligger uden for
positionsgrænserne, udfører frekvensomformeren en rampe-ned og stopper ved
positionsgrænsen. Denne option fungerer i alle
driftstilstande. Frekvensomformeren afgiver en
advarsel ved stop.
Når den indstillede målposition ligger uden for
positionsgrænserne, udfører frekvensomformeren en rampe-ned og stopper ved
positionsgrænsen. Denne option fungerer i alle
driftstilstande. Frekvensomformeren tripper ved
stop.
4-74 Start Fwd/Rev Function
Option: Funktion:
BEMÆRK!
Denne parameter er kun tilgængelig
med softwareversion 48.XX.
Vælg den handling, som frekvensomformeren
skal udføre, når der er et aktivt signal på en
digital indgang, hvor optionerne [12] Start
mulig fremad eller [13] Start mulig rev. er valgt.
Frekvensomformeren udfører den funktion, der
er valgt i denne parameter, når den rammer
en slutgrænseafbrydelse, og derefter er
bevægelsen kun tilladt i modsat retning. Hvis
der er valgt en option med trip, kan frekvensomformeren kun genoptage bevægelse efter
nulstilling.
[0]*Stop Frekvensomformeren stopper motoren.
[1] Stop &
Warning
[2] Stop & Trip Frekvensomformeren stopper motoren og
[3] Qstop Frekvensomformeren udfører hurtigt stop.
[4] Qstop &
Warning
[5] Qstop &
Trip
[6] Coast Frekvensomformeren får motoren til at køre i
[7] Coast &
Warning
[8] Coast &
Trip
[9] Zero Speed
Ref
4-75 Touch Timout
Range: Funktion:
6000.0 s* [0.1 -
6000.0 s]
Frekvensomformeren stopper motoren og viser
advarsel 215, Start Fwd/Rev.
tripper med alarm 215, Start Fwd/Rev.
Frekvensomformeren udfører hurtigt stop og
viser advarsel 215, Start Fwd/Rev.
Frekvensomformeren udfører hurtigt stop og
tripper med alarm 215, Start Fwd/Rev.
friløb.
Frekvensomformeren får motoren til at køre i
friløb og viser advarsel 215, Start Fwd/Rev.
Frekvensomformeren får motoren til at køre i
friløb og tripper med alarm 215, Start Fwd/Rev.
Frekvensomformeren ramper ned og holder
motoren magnetiseret ved nulhastighed. I
positions- og synkroniseringstilstand forbliver
positionsstyreenheden aktiv og holder den
faktiske position.
Indtast timeout for touch probe-positioneringen. Når touch probe-positioneringen
er aktiv, tripper frekvensomformeren med
alarm 216, Touch Timeout, hvis frekvensomformeren ikke registrerer touch probeføleren inden for dette tidsrum. Værdien
6.000 er lig med O.
3 3
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 89
Page 92

e30bg235.11
TT
TT
nn
nn
Driving
Driving
Braking
Braking
T
12
3 4
par. 4-91,
par. 4-92
par. 4-95
par. 4-96
n
par. 4-93,
par. 4-94
33
Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
3.5.7 4-8* Power Limit
Parametre til konguration af eektgrænsefunktionen.
4-80 Power Limit Func. Motor Mode
Vælg, om eektgrænsefunktionen er aktiveret. Dener motortilstandens eektgrænse i parameter 4-82 Power Limit Motor Mode.
Option: Funktion:
[0] * Disabled
[1] Enabled
[2] When Activated Aktivering via en digital
indgang eller en eldbus.
4-81 Power Limit Func. Generator Mode
Vælg, om eektgrænsefunktionen er aktiveret i generatortilstand.
Dener motortilstandens eektgrænse i parameter 4-83 Power
Limit Generator Mode.
Option: Funktion:
[0] * Disabled
[1] Enabled
[2] When Activated Aktivering via en digital
indgang eller en eldbus.
4-82 Power Limit Motor Mode
Range: Funktion:
100.0 %* [0.0 -
200.0 %]
Indtast den maksimale udgangseekt,
når eektgrænsefunktionen er aktiv.
Relaterede parametre:
parameter 1-20 Motoreekt [kW ],
parameter 1-21 Motoreekt [HK].
4-83 Power Limit Generator Mode
Range: Funktion:
100.0 %* [0.0 -
200.0 %]
Indtast den maksimale genererende
eekt, når eektgrænsefunktionen er
aktiv. Relaterede parametre:
parameter 1-20 Motoreekt [kW ],
parameter 1-21 Motoreekt [HK ].
3.5.8 4-9* Directional Limits
Funktionaliteten for retningsmæssige grænser gør det
muligt at specicere forskellige moment- og hastighedsgrænser for forskellige kombinationer af retning for
momentapplikationer og omdrejningsretning. Se et
eksempel i Illustration 3.36. I eksemplet viser kvadranterne
1–4 forskellige kombinationer af omdrejningsretning og
retning for momentapplikation, samt de parametre, der
optræder i forskellige kvadranter.
Illustration 3.36 Retningsmæssige grænser
En hastighedsgrænseværdi kan ikke overskride værdien i
parameter 4-13 Motorhastighed, høj grænse [O/MIN] eller
parameter 4-14 Motorhastighed, høj grænse [Hz]. En
momentgrænseværdi kan ikke overskride værdien i
parameter 4-16 Momentgrænse for motordrift eller
parameter 4-17 Momentgrænse for generatordrift.
4-90 Directional Limit Mode
Vælg, om de retningsmæssige grænser er aktiverede. Når de
retningsmæssige grænser er aktiverede, er det muligt at
specicere forskellige hastigheds- og momentgrænser for omdrejningsretninger med og mod uret.
Option: Funktion:
[0] * Disabled Retningsmæssige grænser er
deaktiverede.
[1] Speed Retningsmæssige grænser er
aktive for hastighedsværdierne.
[2] Torque Retningsmæssige grænser er
aktive for momentværdierne.
[3] Speed and Torque Retningsmæssige grænser er
aktive for både moment- og
hastighedsværdier.
4-91 Positive Speed Limit [RPM]
Range: Funktion:
Size related* [ 0 - par. 4-13
RPM]
Indtast grænsen for motorhastighed, når
omdrejningsretningen er med
uret.
90 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 93

Parameterbeskrivelser Programming Guide
4-92 Positive Speed Limit [Hz]
Range: Funktion:
Size related* [ 0 - par. 4-14
Hz]
Indtast grænsen for motorhastighed, når
omdrejningsretningen er med
uret.
4-93 Negative Speed Limit [RPM]
Range: Funktion:
Size related* [ 0 - par. 4-13
RPM]
Indtast grænsen for motorhastighed, når
omdrejningsretningen er mod
uret.
4-94 Negative Speed Limit [Hz]
Range: Funktion:
Size related* [ 0 - par. 4-14
Hz]
Indtast grænsen for motorhastighed, når
omdrejningsretningen er mod
uret.
3 3
4-95 Positive Torque limit
Range: Funktion:
Size related* [ 0 - 160.0 %] Indtast grænsen for motormoment,
når omdrejningsretningen er med
uret.
4-96 Negative Torque limit
Range: Funktion:
Size related* [ 0 - 160.0 %] Indtast grænsen for motormoment,
når omdrejningsretningen er mod
uret.
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 91
Page 94

Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
3.6 Parametre: 5-** Digital ind-/udgang
3.6.1 5-0* Digital I/O-tilstand
Gruppe 1 Nulstil, friløbsstop, nulstil og friløbsstop, hurtigt
stop, DC-bremse, stop og [O]-tasten.
Gruppe 2 Start, pulsstart, reversering, reverseret start, jog,
fastfrys udgang.
Parametre til kongurering af indgangen og udgangen via
NPN og PNP.
33
5-00 Digital I/O-tilstand
Option: Funktion:
BEMÆRK!
Udfør en strømcyklus for at aktivere
parameteren, så snart den er blevet ændret.
De digitale indgange og programmerede digitale
udgange kan forprogrammeres til brug i enten PNPeller NPN-systemer.
[0] * PNP
[1] NPN
Handling ved positive retningspulser (↕). PNPsystemer trækkes ned til GND.
Handling ved negative retningspulser (↕). NPNsystemer trækkes op til +24 V internt i
frekvensomformeren.
5-01 Terminal 27 Mode
Option: Funktion:
BEMÆRK!
Denne parameter kan ikke justeres, mens
motoren kører.
[0] * Input Denerer klemme 27 som en digital indgang.
[1] Output Denerer klemme 27 som en digital udgang.
5-02 Klemme 29, tilstand
Option: Funktion:
BEMÆRK!
Denne parameter er kun tilgængelig for FC
302.
[0] * Indgang Denerer klemme 29 som en digital indgang.
[1] Udgang Denerer klemme 29 som en digital udgang.
3.6.2 5-1* Digitale indgange
De digitale indgange kan bruges til at vælge forskellige
funktioner i frekvensomformeren. Tabel 3.15 viser, hvilke
funktioner der kan tildeles digitale indgange.
Funktionerne i gruppe 1 har højere prioritet end
funktionerne i gruppe 2.
Tabel 3.14 Funktionsgrupper
Digital indgangs-
funktion
Ingen funktion [0] Alle, klemme 32, 33
Nulstil [1] Alle
Friløb inverteret [2] Alle, klemme 27
Friløb og reset inv. [3] Alle
Kvikstop, inverteret [4] Alle
DC-bremse inv. [5] Alle
Stop inverteret [6] Alle
start [8] Alle, klemme 18
Pulsstart [9] Alle
Reversering [10] Alle, klemme 19
Start reverseret [11] Alle
Start mulig fremad [12] Alle
Start mulig rev. [13] Alle
Jog [14] Alle, klemme 29
Preset-reference til [15] Alle
Preset-ref. bit 0 [16] Alle
Preset-ref. bit 1 [17] Alle
Preset-ref. bit 2 [18] Alle
Fastfrys reference [19] Alle
Fastfrys udgang [20] Alle
Hastighed op [21] Alle
Hastighed ned [22] Alle
Opsætning, vælg bit 0 [23] Alle
Opsætning, vælg bit 1 [24] Alle
Præcist stop, inv. [26] 18, 19
Præcis start, stop [27] 18, 19
Catch up [28] Alle
Slow down [29] Alle
Tællerindgang [30] 29, 33
Pulse input edge
triggered
Pulse input time based [32] 29, 33
Rampebit 0 [34] Alle
Rampebit 1 [35] Alle
Præcis pulsstart [40] 18, 19
Puls præc. stop inv. [41] 18, 19
Ekstern sikring [51] –
DigiPot-forøgelse [55] Alle
DigiPot-reduktion [56] Alle
DigiPot-ryd [57] Alle
DigiPot hæv/sænk [58] Alle
Tæller A (op) [60] 29, 33
Tæller A (ned) [61] 29, 33
Nulstil tæller A [62] Alle
Tæller B (op) [63] 29, 33
Vælg Klemme
[31] 29, 33
92 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 95

Parameterbeskrivelser Programming Guide
Digital indgangs-
funktion
Tæller B (ned) [64] 29, 33
Nulstil tæller B [65] Alle
Mek. bremsefeedb. [70] Alle
Mek. bremsefeedb. veks.r. [71] Alle
PID-fejl invert. [72] Alle
PID-nulst. I del [73] Alle
PID-aktiv [74] Alle
MCO-specik [75] Alle
PTC-kort 1 [80] Alle
Prodrive OFF2 [91] Alle
Prodrive OFF3 [92] Alle
Light Load Detection [94] Alle
Mains Loss [96] 32, 33
Mains Loss Inverse [97] 32, 33
Start edge triggered [98] Alle
Safety option reset [100] –
Enable master oset [108] Alle
Start virtual master [109] Alle
Start homing [110] Alle
Activate touch [111] Alle
Relative position [112] Alle
Enable reference [113] Alle
Sync. to Pos. Mode [114] Alle
Home sensor [115] 18, 32, 33
Home sensor inverse [116] 18, 32, 33
Touch sensor [117] 18, 32, 33
Touch sensor inverse [118] 18, 32, 33
Speed mode [119] Alle
Power Limit Mot. [231] Alle
Power Limit Gen. [232] Alle
Power Limit Both [233] Alle
Tabel 3.15 Digital indgangsfunktion
Vælg Klemme
VLT® AutomationDrive FC 301/FC 302 standardklemmer er
18, 19, 27, 29, 32 og 33. VLT® General Purpose I/O
MCB 101-klemmer er X30/2, X30/3 og X30/4.
Klemme 29 fungerer som en udgang, men kun i FC 302.
Funktioner, som kun gælder for en enkelt digital indgang,
er angivet i den tilknyttede parameter.
Alle digitale indgange kan programmeres til disse
funktioner:
[0] Ingen
funktion
[1] Nulstil Nulstiller frekvensomformeren efter en trip/
[2] Friløb
inverteret
Ingen reaktion på signaler, der sendes til
klemmen.
alarm. Ikke alle alarmer kan nulstilles.
(Standard, digital indgang 27): Friløbsstop,
inverteret indgangssignal (NL). Frekvensomformeren lader motoren rotere i friløb. Logisk
0⇒friløbsstop.
[3] Friløb og
reset inv.
[4] Kvikstop,
inverteret
[5] DC-bremse
inv.
[6] Stop
inverteret
Nulstilling og friløbsstop inverteret indgang
(NL). Lader motoren rotere i friløb og nulstiller
frekvensomformeren. Logisk 0⇒friløbsstop og
nulstilling.
Inverteret indgang (NL). Genererer en
standsning i overensstemmelse med
rampetiden for hurtigt stop, der er indstillet i
parameter 3-81 Kvikstop rampetid. Når motoren
standser, kan akslen rotere i friløb. Logisk
0⇒hurtigt stop.
Inverteret indgangssignal til DC-bremsning
(NL). Standser motoren ved at påføre den en
DC-strøm i en bestemt periode. Se
parameter 2-01 DC-bremsestrøm til
parameter 2-03 DC-bremseindkoblingshast.
[omdr./min.]. Funktionen er kun aktiv, når
værdien i parameter 2-02 DC Braking Time er
forskellig fra 0. Logisk 0⇒DC-bremse.
Funktionen Stop inverteret. Genererer en
stopfunktion, når den valgte klemme skifter
fra logisk niveau 1 til logisk niveau 0.
Standsning gennemføres i henhold til den
valgte rampetid:
Parameter 3-42 Rampe 1, rampe-ned-
•
tid,
Parameter 3-52 Rampe 2, rampe-ned-
•
tid,
Parameter 3-62 Rampe 3, rampe-ned-
•
tid, og
Parameter 3-72 Rampe 4, rampe-ned-
•
tid.
BEMÆRK!
Når frekvensomformeren har nået
momentgrænsen og har modtaget en
stopkommando, er det ikke sikkert, at
den standser af sig selv. Kongurér en
digital udgang med [27] Mom.-grænse &
stop for at sikre, at frekvensomformeren standser. Tilslut denne
digitale udgang til en digital indgang,
der er kongureret til friløb.
[8] start (Standard, digital indgang 18): Vælg start til
en start/stop-kommando. Logisk 1 = start,
logisk 0 = stop.
[9] Pulsstart Hvis der påføres en puls i minimum 2 ms,
starter motoren. Motoren standser, når
inverteret stop aktiveres, eller der afgives en
nulstillingskommando (via en digital indgang).
[10] Reversering (Standard, digital indgang 19): Skifter rotati-
onsretning på motorakslen. Vælg logisk 1 for
at reversere. Reverseringssignalet skifter kun
rotationsretning. Det aktiverer ikke startfunktionen. Vælg begge retninger i
parameter 4-10 Motorhastighedsretning.
3 3
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 93
Page 96

Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
Funktionen er ikke aktiv med processen
lukket sløjfe.
[11] Start
reverseret
[12] Start mulig
33
fremad
[13] Start mulig
rev.
[14] Jog (Standard, digital indgang 29): Aktivér jog-
[15] Preset-
reference til
[16] Preset-ref.
bit 0
[17] Preset-ref.
bit 1
[18] Preset-ref.
bit 2
Preset-ref. bit 2 1 0
Preset-ref. 0 0 0 0
Preset-ref. 1 0 0 1
Preset-ref. 2 0 1 0
Preset-ref. 3 0 1 1
Preset-ref. 4 1 0 0
Preset-ref. 5 1 0 1
Preset-ref. 6 1 1 0
Preset-ref. 7 1 1 1
Tabel 3.16 Preset-reference bit
[19] Fastfrys
reference
[20] Fastfrys
udgang
Anvendes til start/stop og til reversering på
den samme ledning. Signaler på start er ikke
tilladt samtidig.
Frigør bevægelser mod uret og muliggør
retninger med uret.
Frigør bevægelser med uret og muliggør
retninger mod uret.
hastighed. Se parameter 3-11 Jog-hastighed
[Hz].
Skifter mellem ekstern reference og presetreference. Det forudsættes, at [1] Ekstern/
preset er valgt i parameter 3-04 Reference
Function. Logisk 0 = ekstern reference er aktiv;
logisk 1 = en af de otte preset-referencer er
aktive.
Preset-reference bit 0, 1 og 2 giver mulighed
for at vælge mellem en af de otte presetreferencer i henhold til Tabel 3.16.
Det samme som [16] Preset-ref. bit 0.
Det samme som [16] Preset-ref. bit 0.
Fastfryser den faktiske reference, som nu er
udgangspunkt/betingelse for, at [21] Hastighed
op og [22] Hastighed ned kan benyttes. Hvis
Hastighed op/ned anvendes, følger hastighedsændringen altid rampe 2 (parameter 3-51 Rampe
2, rampe-op-tid og parameter 3-52 Rampe 2,
rampe-ned-tid) i området 0–
parameter 3-03 Maksimumreference.
Fastfryser den faktiske motorfrekvens (Hz), som
nu er udgangspunkt/betingelse for, at [21]
Hastighed op og [22] Hastighed ned kan
benyttes. Hvis Hastighed op/ned anvendes,
følger hastighedsændringen altid rampe 2
(parameter 3-51 Rampe 2, rampe-op-tid og
parameter 3-52 Rampe 2, rampe-ned-tid) i
området 0–parameter 1-23 Motorfrekvens.
[21] HastighedopVælg [21] Hastighed op og [22] Hastighed ned til
Uændret hastighed 0 0
Reduceret med %-værdi 1 0
Forøget med %-værdi 0 1
Reduceret med %-værdi 1 1
Tabel 3.17 Shut Down/Catch Up
[22] Hastighed ned Samme som [21] Hastighed op.
[23] Opsætning,
vælg bit 0
[24] Opsætning,
vælg bit 1
[26] Præcist stop,
inv.
[27] Præcis start,
stop
BEMÆRK!
Hvis Fastfrys udgang er aktiv, kan
frekvensomformeren ikke standses via et
lavt [8] Start-signal. Stop frekvensomformeren via en klemme, der er
programmeret til [2] Friløb inverteret eller
[3] Friløb og reset inv.
digital styring af hastighed op/ned (motorpotentiometer). Aktivér funktionen ved at vælge
enten [19] Fastfrys reference eller [20] Fastfrys
udgang. Hvis Hastighed op/ned aktiveres i
mindre end 400 ms, øges/formindskes den heraf
resulterende reference med 0,1 %. Hvis
Hastighed op/ned er aktiveret i mere end
400 ms, vil den resulterende reference følge
indstillingen i rampe op/ned-parametrene 3x1/3-x2.
Shut down Catch up
Vælg [23] Opsætning, vælg 0 eller [24]
Opsætning, vælg 1 for at vælge mellem en
af de re opsætninger. Indstil
parameter 0-10 Aktiv opsætning til
Multiopsætn.
(Standard, digital indgang 32): Samme som
[23] Opsætning, vælg 0.
Sender et inverteret stopsignal, når den
præcise stopfunktion er aktiveret i
parameter 1-83 Præcis stopfunktion.
Funktionen Præcis stop, inverteret er
tilgængelig for klemme 18 eller 19.
Anvendes når [0] Præcist rampestop er valgt
i parameter 1-83 Præcis stopfunktion.
Funktionen Præcis start, stop er tilgængelig
for klemmerne 18 og 19.
Præcis start sørger for, at den vinkel, som
rotoren drejer i fra stilstand til reference, er
den samme for hver start (for samme
rampetid, samme sætpunkt). Denne
funktion er lig det præcise stop, hvor
vinklen, som rotoren drejer i fra reference til
stilstand, er den samme for hvert stop.
Når [1] Tællerstop m/nul eller [2] Tællerstop
u/nul i parameter 1-83 Præcis stopfunktion
anvendes:
Frekvensomformeren har brug for et præcist
stopsignal, før værdien fra
parameter 1-84 Tællerværdi for præcist stop
94 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 97

Pulse
Sample time
130BB463.10
Speed [rpm] Spe ed [rpm]
Time[sec] Time[sec]a b
130BB462.10
Read Timer:
20 timer tides
Read Timer:
20 timer tides
Time Start
Time counter
Sample time
Timer
Pulse
130BB464.10
Parameterbeskrivelser Programming Guide
nås. Hvis dette signal ikke leveres, stopper
frekvensomformeren ikke, når værdien i
parameter 1-84 Tællerværdi for præcist stop
nås.
Udløser præcis start, stop udløses af en
digital indgang. Funktionen er tilgængelig
for klemmerne 18 og 19.
[28] Catch up Forøger referenceværdien med en
procentdel (relativ), der er indstillet i
parameter 3-12 Catch up/slow down.
[29] Slow down Reducerer referenceværdien med en
procentdel (relativ), der er indstillet i
parameter 3-12 Catch up/slow down.
[30] Tællerindgang Præcis stopfunktion i parameter 1-83 Præcis
stopfunktion fungerer som tællerstop eller
som hastighedskompenseret tællerstop med
eller uden nulstilling. Tællerværdien skal
indstilles i parameter 1-84 Tællerværdi for
præcist stop.
[31] Pulse edge
triggered
Tæller antallet af pulsanker pr. prøvetid.
Dette giver en højere opløsning ved højere
frekvenser, men er ikke så præcis ved lavere
frekvenser. Anvend dette pulsprincip til
encodere med lav opløsning (for eksempel
30 PPR).
Illustration 3.37 Pulsanker pr. prøvetid
[32] Pulse time-
based
Måler varigheden mellem pulsanker. Dette
giver en højere opløsning ved lavere
frekvenser, men er ikke så præcis ved
højere frekvenser. Dette princip har en
afbrydelsesfrekvens, som gør det uegnet til
encodere med lave opløsninger (for
eksempel 30 PPR) ved lave hastigheder.
a: Lav encoderopløsning
b: Standardencoderopløsning
Illustration 3.38 Varigheden mellem
pulsanker
[34] Rampebit 0 Giver mulighed for at vælge mellem en af
de re tilgængelige ramper i overensstemmelse med Tabel 3.18.
[35] Rampebit 1 Samme som [34] Rampebit 0.
Preset-rampebit 1 0
Rampe 1 0 0
Rampe 2 0 1
Rampe 3 1 0
Rampe 4 1 1
Tabel 3.18 Preset-rampebit
[40] Præcis
pulsstart
En præcis pulsstart kræver kun en puls
på 3 ms på klemme 18 eller 19.
Når [1] Tællerstop m/nul eller [2] Tællerstop
u/nul i parameter 1-83 Præcis stopfunktion
anvendes.
Når referencen nås, aktiverer frekvensomformeren det præcise stopsignal internt.
Dette betyder, at frekvensomformeren
udfører præcist stop, når tællerværdien for
parameter 1-84 Tællerværdi for præcist stop
nås.
[41] Puls præc.
stop inv.
Sender et aåst stopsignal, når den
præcise stopfunktion er aktiveret i
parameter 1-83 Præcis stopfunktion.
Funktionen aåst og præcist inverteret
stop er tilgængelig på klemme 18 eller 19.
[51] Ekstern sikring Denne funktion gør det muligt at sende
en ekstern fejl til frekvensomformeren.
Denne fejl behandles på samme måde
som en alarm, der er udløst internt.
[55] DigiPot-
forøgelse
Forøgelse-signal til den digitale potentiometerfunktion, der er beskrevet i
parametergruppe 3-9* Digitalt pot.- meter.
[56] DigiPot-
reduktion
Reducér signalet til den digitale potentiometerfunktion, der er beskrevet i
parametergruppe 3-9* Digitalt pot.- meter.
[57] DigiPot-ryd Rydder den digitale potentiometerre-
ference, der er beskrevet i parametergruppe
3-9* Digitalt pot.- meter.
[60] Tæller A (kun klemme 29 eller 33). Indgang til
trinvis tælling i SLC-tælleren.
[61] Tæller A (kun klemme 29 eller 33). Indgang til
trinvis nedtælling i SLC-tælleren.
[62] Nulstil tællerAIndgang til nulstilling af tæller A.
[63] Tæller B (kun klemme 29 eller 33). Indgang til
trinvis tælling i SLC-tælleren.
[64] Tæller B (kun klemme 29 eller 33). Indgang til
trinvis nedtælling i SLC-tælleren.
[65] Nulstil tæller B Indgang til nulstilling af tæller B.
[70] Mek.
bremsefeedb.
Bremsefeedback til hæve-/sænkeapplika-
tioner: Indstil
parameter 1-01 Motorstyringsprincip til [3]
Flux m. motorfeedb, indstil
parameter 1-72 Startfunktion to [6]
Hævmek. Bremsfrig.
3 3
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 95
Page 98

Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
[71] Mek.
bremsefeedb.
veks.r
[72] PID-fejl invert. Når den er aktiveret, inverterer denne
33
[73] PID-nulst. I del Når den er aktiveret, nulstiller denne
[74] PID-aktiv Aktiverer den udvidede proces PID-
[80] PTC-kort 1 Alle digitale indgange kan indstilles til [80]
[91] Prodrive
OFF2
[92] Prodrive
OFF3
[94] Light Load
Detection
Inverteret bremsefeedback til hæve-/
sænkeapplikationer.
option den resulterende fejl fra proces PIDreguleringen. Kun tilgængelig, hvis
parameter 1-00 Kongurationstilstand er
indstillet til [6] Overadewinder, [7] Udvidet
PID-hast. ÅS eller [8] Udvidet PID-hast. LS.
option I-delen af proces PID-reguleringen.
Svarer til parameter 7-40 Process PID I-del
nulstilling. Kun tilgængelig, hvis
parameter 1-00 Kongurationstilstand er
indstillet til [6] Overadewinder, [7] Udvidet
PID-hast. ÅS eller [8] Udvidet PID-hast. LS.
regulering. Svarer til parameter 7-50 Process
PID udvidet PID. Kun tilgængelig, hvis
parameter 1-00 Kongurationstilstand er
indstillet til [7] Udvidet PID-hast. ÅS eller [8]
Udvidet PID-hast. LS.
PTC-kort 1. Dog må kun én digital indgang
indstilles til dette.
Funktionen er den samme som den
tilsvarende styreordsbit for Probus/
Pronet-optionen.
Funktionen er den samme som den
tilsvarende styreordsbit for Probus/
Pronet-optionen.
Evakueringstilstand for lifte eller elevatorer.
Denne funktion magnetiserer motoren, før
den mekaniske bremse åbnes. Bevægelsen
starter i den retning (op eller ned), der er
deneret i VLT® Lift Controller MCO 361,
ved hjælp af hastigheden i
parameter 30-27 Light Load Speed [%].
Denne bevægelse forsætter i det tidsrum,
der er angivet i parameter 30-25 Light Load
Delay [s], mens strømmen måles. Hvis
motorstrømmen overstiger referencestrømmen i parameter 30-26 Light Load
Current [%], blokeres liften. Retningen
reverseres efter forsinkelsestiden, der er
angivet i parameter 30-25 Light Load Delay
[s]. For at denne funktion skal køre er det
nødvendigt med en start- eller reverseret
startkommando, samt at dette digitale
input vælges.
[97] Mains Loss
Inverse
[98] Start edge
triggered
[100] Safe Option
Reset
[107] Target Inverse Ændrer tegnet for den indstillede
[108] Enable master
oset
[109] Start virtual
master
[110] Start homing
BEMÆRK!
Flying start overskriver light load
detection.
[96] Mains Loss Vælg for at forbedre kinetisk backup.
Når netspændingen går tilbage til et
niveau, der er tæt på (men stadig lavere
[111] Aktivér touch
end) detekteringsniveauet, øges udgangs-
hastigheden, og kinetisk backup forbliver
aktiv. Send et statussignal til frekvensom-
formeren for at undgå denne situation. Når
et signal på den digitale indgang er lav
(0), slukker frekvensomformeren kraftigt for
kinetisk backup.
BEMÆRK!
Kun tilgængelig for pulsindgange på
klemme 32/33.
Når et signal på den digitale indgang er
lav (1), slukker frekvensomformeren
kraftigt for kinetisk backup. Se beskrivelsen
i [96] Mains loss for yderligere informa-
tioner.
BEMÆRK!
Kun tilgængelig for pulsindgange på
klemme 32/33.
Startkommando udløst af anke. Holder
startkommandoen i live. Kan anvendes til
en start-tryktast.
Nulstiller sikkerhedsoptionen. Kun
tilgængelig når sikkerhedsoptionen er
monteret.
målposition. Hvis den indstillede
målposition for eksempel er 1.000, ændrer
aktiveringen af denne option værdien til
-1000.
BEMÆRK!
Denne option er kun tilgængelig
med softwareversion 48.XX.
Aktiverer master oset, der er valgt i
parameter 3-26 Master Oset, når
parameter 17-93 Master
valgmulighederne fra [1] Absolute til [5]
Relative Touch Sensor.
Oset Selection har
BEMÆRK!
Denne option er kun tilgængelig
med softwareversion 48.XX.
Starter virtual master, der er kongureret i
parameter 3-27 Virtual Master Max Ref.
BEMÆRK!
Denne option er kun tilgængelig
med softwareversion 48.XX.
Starter homing-funktionen, der er valgt i
parameter 17-80 Homing Function. Skal
forblive høj, indtil homing er udført, ellers
annulleres homing.
BEMÆRK!
Denne option er kun tilgængelig
med softwareversion 48.XX.
Aktiverer overvågning af touch sensor-
indgangen.
96 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
Page 99

Parameterbeskrivelser Programming Guide
[112] Relative
position
[113] Enable
reference
[114] Sync. to Pos.
Mode
[115] Home sensor
[116] Home sensor
inv.
[117] Touch sensor
BEMÆRK!
Denne option er kun tilgængelig
med softwareversion 48.XX.
Denne option vælger mellem absolut og
relativ positionering. Denne option er
gyldig for den næste positioneringskommando.
BEMÆRK!
Denne option er kun tilgængelig
med softwareversion 48.XX.
Positioneringstilstand: Frekvensomformeren
aktiverer den valgte positioneringstype og
målposition og starter bevægelsen mod
det nye mål. Bevægelsen starter enten
omgående, eller når den aktive positionering er udført afhængigt af
indstillingerne i parameter 17-90 Absolute
Position Mode og parameter 17-91 Relative
Position Mode.
Synkroniseringstilstand: Et højt signal låser
den faktiske follower-position til den
faktiske master-position. Followeren starter
og indhenter masteren. Et lavt signal
stopper synkroniseringen, og followeren
udfører et kontrolleret stop.
BEMÆRK!
Denne option er kun tilgængelig
med softwareversion 48.XX.
Vælg positionering i synkroniseringstilstand.
BEMÆRK!
Denne option er kun tilgængelig
med softwareversion 48.XX.
Normalt åben kontakt til denition af
home-positionen. Funktionen er deneret i
parameter 17-80 Homing Function. Kun
tilgængelig ved digitale indgange 18, 32
og 33.
BEMÆRK!
Denne option er kun tilgængelig
med softwareversion 48.XX.
Normalt lukket kontakt til denition af
home-positionen. Funktionen er deneret i
parameter 17-80 Homing Function. Kun
tilgængelig ved digitale indgange 18, 32
og 33.
BEMÆRK!
Denne option er kun tilgængelig
med softwareversion 48.XX.
Normalt åben kontakt. Fungerer som en
reference for touch probe-positionering.
Kun tilgængelig ved digitale indgange 18,
32 og 33.
[118] Touch sensor
BEMÆRK!
Denne option er kun tilgængelig
med softwareversion 48.XX.
Normalt lukket kontakt. Fungerer som en
reference for touch probe-positionering.
Kun tilgængelig ved digitale indgange 18,
32 og 33.
[119] Speed mode
BEMÆRK!
Denne option er kun tilgængelig
med softwareversion 48.XX.
Vælg hastighedstilstand, når [9] Positioning
eller [10] Synchronization er valgt i
[231] Power Limit
Mot.
[232] Power Limit
Gen.
[233] Power Limit
Both
parameter 1-00
Hastighedsreference er indstillet af referen-
ceressource 1 eller eldbus REF1 relativt til
parameter 3-03 Maksimumreference.
Vælg denne option for at aktivere eekt-
grænsefunktionen i motortilstand. Se
parametergruppe 4-8* Power Limit.
Vælg denne option for at aktivere eekt-
grænsefunktionen i genereringstilstand. Se
parametergruppe 4-8* Power Limit.
Vælg denne option for at aktivere eekt-
grænsefunktionen i både motor- og
genereringstilstand. Se parametergruppe
4-8* Power Limit.
Kongurationstilstand.
5-10 Klemme 18, digital indgang
Option: Funktion:
[8] * Start Funktionerne er beskrevet under parametergruppe
5-1* Digitale indgange.
5-11 Klemme 19, digital indgang
Option: Funktion:
[10] * Reversering Funktionerne er beskrevet under parameter-
gruppe 5-1* Digitale indgange.
5–12 Klemme 27, digital indgang
Option: Funktion:
[2] * Inverteret friløb Funktionerne er beskrevet under parame-
tergruppe 5-1* Digitale indgange.
5–13 Klemme 29, digital indgang
Option: Funktion:
BEMÆRK!
Denne parameter er kun tilgængelig for FC
302.
Vælg funktionen blandt de tilgængelige digitale
indgange og de ekstra optioner [60] Tæller A (op), [61]
Tæller A (ned), [63] Tæller B (op) og [64] Tæller B (ned).
Tællere anvendes i Smart Logic Control-funktioner.
[14] * Jog Funktionerne er beskrevet under parametergruppe
5-1* Digitale indgange.
3 3
MG33MO01 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. 97
Page 100

Parameterbeskrivelser
VLT® AutomationDrive FC 301/302
5-14 Klemme 32, digital indgang
Option: Funktion:
Vælg funktionen blandt de tilgængelige digitale
indgange.
Ingen funktion Funktionerne er beskrevet under parameter-
33
gruppe 5-1* Digitale indgange.
5-15 Klemme 33, digital indgang
Option: Funktion:
Vælg funktionen blandt de tilgængelige
digitale indgange og de ekstra optioner [60]
Tæller A (op), [61] Tæller A (ned), [63] Tæller B
(op) og [64] Tæller B (ned). Tællere anvendes i
Smart Logic Control-funktioner.
[0] * Ingen
funktion
Funktionerne er beskrevet under parameter-
gruppe 5-1* Digitale indgange.
5-16 Klemme X30/2, digital indgang
Option: Funktion:
[0] * Ingen funktion Denne parameter er aktiv, når options-
modulet VLT® Universal I/O MCB 101 er
monteret i frekvensomformeren.
Funktionerne er beskrevet under parameter-
gruppe 5-1* Digitale indgange.
5-17 Klemme X30/3, digital indgang
Option: Funktion:
[0] * Ingen funktion Denne parameter er aktiv, når options-
modulet VLT® Universal I/O MCB 101 er
monteret i frekvensomformeren.
Funktionerne er beskrevet under parameter-
gruppe 5-1* Digitale indgange.
5-18 Klemme X30/4, digital indgang
Option: Funktion:
[0] * Ingen funktion Denne parameter er aktiv, når options-
modulet VLT® Universal I/O MCB 101 er
monteret i frekvensomformeren.
Funktionerne er beskrevet under parameter-
gruppe 5-1* Digitale indgange.
5-19 Klemme 37 Sikker standsning
Anvend denne parameter til at kongurere funktionen Safe
Torque O. En advarselsmeddelelse får frekvensomformeren til at
lade motoren friløbe og aktiverer automatisk genstart. En
alarmmeddelelse får frekvensomformeren til at lade motoren
friløbe og kræver en manuel genstart (via en eldbus, Digital I/O
eller ved at trykke på [RESET] på LCP'et). Når VLT® PTC
Thermistor Card MCB 112 er monteret, kongureres PTCoptionerne for at opnå de fuldstændige fordele ved håndtering
af alarmen.
Option: Funktion:
[1] Sikker standsns.al. Frekvensomformeren kører i friløb,
når Safe Torque O er aktiveret.
Manuel nulstilling fra LCP, en
digital indgang eller eldbus.
5-19 Klemme 37 Sikker standsning
Anvend denne parameter til at kongurere funktionen Safe
Torque O. En advarselsmeddelelse får frekvensomformeren til at
lade motoren friløbe og aktiverer automatisk genstart. En
alarmmeddelelse får frekvensomformeren til at lade motoren
friløbe og kræver en manuel genstart (via en eldbus, Digital I/O
eller ved at trykke på [RESET] på LCP'et). Når VLT® PTC
Thermistor Card MCB 112 er monteret, kongureres PTCoptionerne for at opnå de fuldstændige fordele ved håndtering
af alarmen.
Option: Funktion:
[3] Adv. - sikker
stands.
[4] PTC 1 Alarm Frekvensomformeren kører i friløb,
[5] PTC 1 Advars. Frekvensomformeren kører i friløb,
[6] PTC 1 & Relæ A
[7] PTC 1 & Relæ W
[8] PTC 1 & Relæ A/W Denne option gør det muligt at
Frekvensomformeren kører i friløb,
når Safe Torque O er aktiveret
(klemme 37 ikke aktiv). Når
kredsløbet til Safe Torque O igen
indkobles, fortsætter frekvensomformeren uden manuel nulstilling.
når Safe Torque O er aktiveret.
Manuel nulstilling fra LCP, en
digital indgang eller eldbus.
når Safe Torque O er aktiveret
(klemme 37 ikke aktiv). Når
kredsløbet til Safe Torque O igen
indkobles, fortsætter frekvensomformeren uden manuel nulstilling,
medmindre en digital indgang
indstillet til [80] PTC-kort 1 stadig er
aktiv.
Denne option bruges, når VLT
PTC-termistorkort MCB 112
sammen med en stop-tast sendes
via et sikkerhedsrelæ til klemme
37. Frekvensomformeren kører i
friløb, når Safe Torque O er
aktiveret. Manuel nulstilling fra LCP,
en digital indgang eller eldbus.
Denne option bruges, når VLT
PTC-termistorkort MCB 112
sammen med en stop-tast sendes
via et sikkerhedsrelæ til klemme
37. Frekvensomformeren kører i
friløb, når Safe Torque O er
aktiveret (klemme 37 ikke aktiv).
Når kredsløbet til Safe Torque O
igen indkobles, fortsætter frekvensomformeren uden manuel
nulstilling, medmindre en digital
indgang indstillet til [80] PTC-kort 1
stadig er aktiv.
anvende en kombination af en
alarm og en advarsel.
®
®
98 Danfoss A/S © 01/2018 Alle rettigheder forbeholdes. MG33MO01
 Loading...
Loading...