


MAKING MODERN LIVING POSSIBLE
Manuel de configuration
VLT® AutomationDrive FC 301/302
0,25-75 kW
www.danfoss.com/drives

Table des matières Manuel de configuration
Table des matières
1 Introduction
1.1 Objet du Manuel de configuration
1.2 Ressources supplémentaires
1.3 Abréviations, symboles et conventions
1.4 Définitions
1.5 Version de document et de logiciel
1.6 Indications de conformité
1.6.1 Marquage CE 11
1.6.1.1 Directive basse tension 11
1.6.1.2 Directive CEM 11
1.6.1.3 Directive machine 11
1.6.2 Conformité UL 11
1.6.3 Conformité C-Tick 12
1.6.4 Conformité marine 12
1.7 Instruction de mise au rebut
1.8 Sécurité
2 Sécurité
8
8
8
8
9
10
11
12
12
13
2.1 Symboles de sécurité
2.2 Personnel qualifié
2.3 Précautions de sécurité
3 Principes de fonctionnement de base
3.1 Généralités
3.2 Description du fonctionnement
3.3 Séquence de fonctionnement
3.3.1 Section redresseur 15
3.3.2 Section intermédiaire 15
3.3.3 Section d'onduleur 15
3.3.4 Option de freinage 15
3.3.5 Répartition de la charge 16
3.4 Interface de commande
3.5 Schéma de câblage
3.6 Contrôles
3.6.1 Principe de contrôle 19
3.6.2 FC 301 vs. FC 302 Principe de fonctionnement 20
3.6.3 Structure de contrôle dans VVC
plus
13
13
13
15
15
15
15
16
17
19
21
3.6.4 Structure de contrôle flux sans capteur (FC 302 seulement) 22
3.6.5 Structure de contrôle en flux avec signal de retour du moteur (FC 302 seulement) 23
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 1
Table des matières Manuel de configuration
3.6.6 PID 24
3.6.6.1 Régulateur PID de vitesse 24
3.6.6.2 Réglage du régulateur PID de vitesse 26
3.6.6.3 Régulateur PID de process 27
3.6.6.4 Régulateur PID avancé 29
3.6.7 Contrôle de courant interne en mode VVC
3.6.8 Contrôle local (Hand On) et distant (Auto On) 29
plus
29
3.7 Utilisation des références
3.7.1 Références 30
3.7.2 Limites de référence 32
3.7.3 Mise à l'échelle des références prédéfinies et des références du bus 33
3.7.4 Mise à l'échelle des références et du retour analogiques et d'impulsions 33
3.7.5 Zone morte autour de zéro 34
4 Caractéristiques produit
4.1 Caractéristiques opérationnelles automatisées
4.1.1 Protection contre les courts-circuits 38
4.1.2 Protection contre les surcharges 38
4.1.3 Détection de phase moteur manquante 39
4.1.4 Détection de défaut de phase secteur 39
4.1.5 Commutation sur la sortie 39
4.1.6 Protection surcharge 39
4.1.7 Protec. rotor verrouillé 39
4.1.8 Déclassement automatique 39
4.1.9 Optimisation automatique de l'énergie (AEO) 40
30
38
38
4.1.10 Modulation automatique de la fréquence de commutation 40
4.1.11 Déclassement automatique pour fréquence porteuse élevée 40
4.1.12 Performance de fluctuation de la puissance 40
4.1.13 Atténuation des résonances 40
4.1.14 Ventilateurs à température contrôlée 40
4.1.15 Conformité CEM 40
4.1.16 Isolation galvanique des bornes de commande 41
4.2 Fonctions de protection de l'application
41
4.2.1 Adaptation automatique au moteur 41
4.2.2 Protection thermique du moteur 41
4.2.3 Panne de secteur 42
4.2.4 Régulateur PID intégré 42
4.2.5 Redémarrage automatique 42
4.2.6 Démarrage à la volée 42
4.2.7 Couple complet à vitesse réduite 43
4.2.8 Bipasse de fréquence 43
2 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
Table des matières Manuel de configuration
4.2.9 Préchauffage du moteur 43
4.2.10 4 configurations programmables 43
4.2.11 Freinage dynamique 43
4.2.12 Commande de frein mécanique en boucle ouverte 43
4.2.13 Commande de frein mécanique en boucle ouverte/Frein mécanique de levage 44
4.2.14 Contrôleur logique avancé (SLC) 46
4.2.15 Absence sûre du couple 47
4.3 Danfoss VLT® FlexConcept
®
47
5 Intégration du système
5.1 Conditions ambiantes de fonctionnement
5.1.1 Humidité 48
5.1.2 Température 48
5.1.3 Température et refroidissement 48
5.1.4 Déclassement manuel 49
5.1.4.1 Déclassement pour fonctionnement à faible vitesse 49
5.1.4.2 Déclassement pour basse pression atmosphérique 49
5.1.5 Bruit acoustique 50
5.1.6 Vibrations et chocs 50
5.1.7 Atmosphères agressives 50
5.1.7.1 Gaz 50
5.1.7.2 Exposition à la poussière 51
5.1.7.3 Atmosphères potentiellement explosives 51
5.1.8 Maintenance 52
5.1.9 Stockage 52
5.2 Généralités concernant les normes CEM
48
48
52
5.2.1 Résultats des essais CEM 54
5.2.2 Conditions d'émission 55
5.2.3 Conditions d'immunité 55
5.2.4 Isolation du moteur 56
5.2.5 Courants des paliers de moteur 57
5.3 Perturbations alimentation secteur/harmoniques
5.3.1 Effet des harmoniques dans un système de distribution de puissance 58
5.3.2 Normes et exigences quant aux limites d'harmoniques 58
5.3.3 Atténuation des harmoniques 59
5.3.4 Calcul d'harmoniques 59
5.4 Isolation galvanique (PELV)
5.4.1 PELV - Protective Extra Low Voltage 59
5.5 Fonctions de freinage
5.5.1 Sélection de la résistance de freinage 60
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 3
57
59
60
Table des matières Manuel de configuration
6 Spécifications du produit
6.1 Données électriques
6.1.1 Alimentation secteur 200-240 V 63
6.1.2 Alimentation 380-500 V 65
6.1.3 Alimentation secteur 525-600 V (FC 302 uniquement) 68
6.1.4 Alimentation secteur 525-690 V (FC 302 uniquement) 71
6.2 Spécifications générales
6.2.1 Alimentation secteur 74
6.2.2 Puissance et données du moteur 74
6.2.3 Conditions ambiantes 75
6.2.4 Câble : spécifications 75
6.2.5 Entrée/sortie de commande et données de commande 75
6.2.6 Déclassement pour température ambiante 79
6.2.6.1 Déclassement pour température ambiante, protection de type A 79
6.2.6.2 Déclassement pour température ambiante, protections de types B 79
6.2.6.3 Déclassement pour température ambiante, protections de types C 82
6.2.7 Valeurs mesurées pour le test dU/dt 85
63
63
74
6.2.8 Rendement 87
6.2.9 Bruit acoustique 88
7 Commande
7.1 Système de configuration du variateur
7.1.1 Code type 89
7.1.2 Langue 91
7.2 Références
7.2.1 Options et accessoires 92
7.2.2 Pièces de rechange 94
7.2.3 Sacs d'accessoires 94
7.2.4 VLT AutomationDrive FC 301 95
7.2.5 Résistances de freinage pour FC 302 97
7.2.6 Autres résistances de freinage flatpack 101
7.2.7 Filtres harmoniques 103
7.2.8 Filtres sinus 105
7.2.9 Filtres dU/dt 107
89
89
92
8 Installation mécanique
8.1 Sécurité
8.2 Encombrement
8.2.1 Montage mécanique 112
8.2.1.1 Dégagement 112
4 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
109
109
109
Table des matières Manuel de configuration
8.2.1.2 Montage mural 112
9 Installation électrique
9.1 Sécurité
9.2 Câbles
9.2.1 Couple de serrage 115
9.2.2 Orifices d'entrée 116
9.2.3 Serrage du couvercle après les raccordements 120
9.3 Mise sous tension
9.3.1 Fusibles et disjoncteurs 124
9.3.1.1 Fusibles 124
9.3.1.2 Recommandations 124
9.3.1.3 Conformité CE 125
9.3.1.4 Conformité UL 128
9.4 Raccordement du moteur
9.5 Protection du courant de fuite à la terre
9.6 Raccordements supplémentaires
9.6.1 Relais 137
9.6.2 Sectionneurs et contacteurs 138
114
114
114
120
133
136
137
9.6.3 Répartition de la charge 139
9.6.4 Résistance de freinage 139
9.6.5 Logiciel PC 139
9.6.5.1 MCT 10 140
9.6.5.2 MCT 31 140
9.6.5.3 Logiciel de calcul des harmoniques (HCS) 140
9.7 Informations moteur supplémentaires
9.7.1 Câble moteur 141
9.7.2 Raccordement de plusieurs moteurs 141
9.8 Sécurité
9.8.1 Essai de haute tension 144
9.8.2 Mise à la terre CEM 144
9.8.3 Installation selon les critères ADN 144
10 Exemples d'applications
10.1 Applications couramment utilisées
10.1.1 Système de variateur en boucle fermée 150
10.1.2 Programmation de la limite de couple et d'arrêt 150
141
144
145
145
10.1.3 Programmation de la commande de vitesse 151
11 Options et accessoires
11.1 Options de communication
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 5
153
153
Table des matières Manuel de configuration
11.2 E/S, options de retour et de sécurité
11.2.1 Module d'option d'E/S à usage général MCB 101 VLT
11.2.2 Option de codeur VLT® MCB 102 154
11.2.3 Option du résolveur VLT® MCB 103 156
11.2.4 Carte relais VLT® MCB 105 158
11.2.5 Option d'interface PLC de sécurité VLT® MCB 108 160
11.2.6 Carte thermistance PTC VLT® MCB 112 161
11.2.7 Carte relais étendue VLT® MCB 113 162
11.2.8 Option d'entrée du capteur VLT® MCB 114 164
11.2.9 Option de sécurité VLT® MCB 15x 165
11.2.10 Adaptateur de l'option C VLT® MCF 106 169
®
11.3 Options de contrôle de mouvement
11.4 Accessoires
11.4.1 Résistances de freinage 171
11.4.2 Filtres sinus 171
11.4.3 Filtres dU/dt 171
11.4.4 Filtres en mode commun 171
153
153
169
171
11.4.5 Filtres harmoniques 172
11.4.6 Kit de protection IP21/Type 1 172
11.4.7 Kit de montage externe pour LCP 174
11.4.8 Support de fixation pour protections de types A5, B1, B2, C1 et C2 175
12 Installation et configuration de l'interface RS-485
12.1 Installation et configuration
12.1.1 Vue d'ensemble 177
12.2 Raccordement du réseau
12.3 Terminaison du bus
12.4 Installation et configuration de l'interface RS-485
12.5 Vue d'ensemble du protocole FC
12.6 Configuration du réseau
12.7 Structure des messages du protocole FC
12.7.1 Contenu d'un caractère (octet) 179
12.7.2 Structure du télégramme 179
12.7.3 Longueur du télégramme (LGE) 180
12.7.4 Adresse (ADR) du variateur de fréquence 180
177
177
178
178
178
179
179
179
12.7.5 Octet de contrôle des données (BCC) 180
12.7.6 Champ de données 181
12.7.7 Champ PKE 182
12.7.8 Numéro de paramètre (PNU) 182
12.7.9 Indice (IND) 182
6 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
Table des matières Manuel de configuration
12.7.10 Valeur du paramètre (PWE) 183
12.7.11 Types de données pris en charge 183
12.7.12 Conversion 183
12.7.13 Mots de process (PCD) 184
12.8 Exemples
12.8.1 Écriture d'une valeur de paramètre 184
12.8.2 Lecture d'une valeur de paramètre 184
12.9 Vue d'ensemble du Modbus RTU
12.9.1 Hypothèses de départ 185
12.9.2 Ce que l'utilisateur doit déjà savoir 185
12.9.3 Vue d'ensemble du Modbus RTU 185
12.9.4 Variateur de fréquence avec Modbus RTU 185
12.10 Configuration du réseau
12.11 Structure des messages du Modbus RTU
12.11.1 Variateur de fréquence avec Modbus RTU 186
12.11.2 Structure des messages Modbus RTU 186
12.11.3 Champ démarrage/arrêt 186
12.11.4 Champ d'adresse 187
12.11.5 Champ de fonction 187
12.11.6 Champ de données 187
12.11.7 Champ de contrôle CRC 187
184
185
186
186
12.11.8 Adresse de registre des bobines 187
12.11.9 Comment contrôler le variateur de fréquence 189
12.11.10 Codes de fonction pris en charge par le Modbus RTU 189
12.11.11 Codes d'exceptions Modbus 189
12.12 Comment accéder aux paramètres
12.12.1 Gestion des paramètres 190
12.12.2 Stockage des données 190
12.12.3 IND (Index) 190
12.12.4 Blocs de texte 190
12.12.5 Facteur de conversion 190
12.12.6 Valeurs de paramètre 190
12.13 Danfoss Profil de contrôle FC
12.13.1 Mot de contrôle conforme au Profil FC (8-10 Profil de ctrl = profil FC) 191
12.13.2 Mot d'état selon profil FC (STW) (8-10 Profil de ctrl = profil FC) 192
12.13.3 Valeur de référence de vitesse du bus 194
12.13.4 Mot de contrôle selon le Profil PROFIdrive (CTW) 194
12.13.5 Mot d'état selon le Profil PROFIdrive (STW) 196
190
191
Indice
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 7
198
Introduction Manuel de configuration
1
1 Introduction
1.1 Objet du Manuel de configuration
Le Manuel de configuration donne les informations
requises pour intégrer le variateur de fréquence dans
diverses applications.
VLT® est une marque déposée.
1.2 Ressources supplémentaires
D'autres ressources sont disponibles pour bien comprendre
les fonctions avancées et la programmation des variateurs
de fréquence ainsi que le respect des directives.
Le Manuel d'utilisation vise à fournir des
•
informations détaillées sur l'installation et la mise
en marche du variateur de fréquence.
Le Guide de programmation fournit de plus
•
amples détails sur la gestion des paramètres et
donne de nombreux exemples d'applications.
Le Manuel d'utilisation de l'Absence sûre du couple
•
•
•
Contacter un fournisseur Danfoss ou consulter le site
www.danfoss.com pour obtenir des informations complémentaires.
®
VLT
décrit comment utiliser les applications de
sécurité fonctionnelle des variateurs de fréquence
Danfoss.
Des publications et des manuels supplémentaires
sont disponibles auprès de Danfoss. Consulter le
danfoss.com/Product/Literature/Technical
+Documentation.htm pour en obtenir la liste.
La présence d'équipements optionnels peut
changer certaines des procédures décrites. Veiller
à lire les instructions fournies avec ces options
pour en connaître les exigences spécifiques.
1.3
Abréviations, symboles et conventions
Conventions
Les listes numérotées correspondent à des procédures.
Les listes à puce indiquent d'autres informations et
décrivent des illustrations.
Les textes en italique indiquent :
des références croisées
•
lien
•
note de bas de page
•
nom de paramètre, nom de groupe de
•
paramètres, option de paramètre
60° AVM Modulation vectorielle asynchrone 60°
A Ampère
CA Courant alternatif
AD Rejet d'air
AI Entrée analogique
AMA Adaptation automatique au moteur
AWG Calibre américain des fils
°C
CD Décharge constante
CM Mode commun
TC Couple constant
CC Courant continu
DI Entrée digitale
DM Mode différentiel
D-TYPE Dépend du variateur
CEM Compatibilité électromagnétique
ETR Relais thermique électronique
f
JOG
f
M
f
MAX
f
MIN
f
M,N
FC Variateur de fréquence
g Gramme
Hiperface
HP Cheval-puissance
HTL Impulsions du codeur HTL (10-30 V) - Haute
Hz Hertz
I
I
I
I
®
INV
LIM
M,N
VLT,MAX
Degrés Celsius
Fréquence du moteur lorsque la fonction
jogging est activée
Fréquence du moteur
Fréquence de sortie maximum que le variateur
de fréquence applique à sa sortie
Fréquence moteur minimale du variateur de
fréquence
Fréquence nominale du moteur
Hiperface® est une marque déposée de
Stegmann
tension logique de transistor
Courant de sortie nominal onduleur
Limite de courant
Courant nominal du moteur
Courant de sortie maximal
8 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
Introduction
I
VLT,N
kHz KiloHertz
LCP Panneau de commande local
lsb Bit de poids faible
m Mètre
mA Milliampère
MCM Mille Circular Mil
MCT Outil de contrôle du mouvement
mH Inductance en millihenry
min Minute
ms Milliseconde
msb Bit de poids fort
η
VLT
nF Nanofarad
NLCP Panneau de commande local numérique
Nm Newton-mètres
n
s
Paramètres en
ligne/hors ligne
P
rf,cont.
PCB Carte à circuits imprimés
PCD Données de process
PELV Très basse tension de protection
P
m
P
M,N
Moteur PM Moteur à magnétisation permanente
Process PID Le régulateur PID maintient les vitesse,
R
fr,nom
RCD Relais de protection différentielle
Régén Bornes régénératives
R
min
RMS Valeur quadratique moyenne
tr/min Tours par minute
R
rec
s Seconde
SFAVM Type de modulation appelé Stator Flux
STW Mot d'état
SMPS Alimentation en mode commutation
THD Distorsion harmonique totale
T
LIM
Courant nominal de sortie fourni par le
variateur de fréquence
Le rendement du variateur de vitesse est
défini comme le rapport entre la puissance
dégagée et la puissance absorbée
Vitesse du moteur synchrone
Les modifications apportées aux paramètres
en ligne sont activées directement après
modification de la valeur des données.
Puissance nominale de la résistance de
freinage (puissance moyenne pendant le
freinage continu)
Puissance de sortie nominale du variateur de
fréquence SE
Puissance nominale du moteur
pression, température, etc.
Valeur de résistance nominale qui garantit une
puissance de freinage sur l'arbre moteur de
150 %/160 % pendant une minute
Valeur de la résistance de freinage minimale
autorisée par variateur de fréquence
Valeur de résistance et résistance de la
résistance de freinage
oriented Asynchronous Vector Modulation
(modulation vectorielle asynchrone à flux
statorique orienté).
Limite de couple
Manuel de configuration
TTL Impulsions du codeur TTL (5 V) - Logique de
transistor
U
M,N
V Volts
VT Couple variable
plus
VVC
Tableau 1.1 Abréviations
Tension nominale du moteur
Commande vectorielle de tension
Les symboles suivants sont utilisés dans ce document :
AVERTISSEMENT
Indique une situation potentiellement dangereuse qui
peut entraîner des blessures graves ou le décès.
ATTENTION
Indique une situation potentiellement dangereuse qui
peut entraîner des blessures superficielles à modérées.
Ce signe peut aussi être utilisé pour mettre en garde
contre des pratiques non sûres.
AVIS!
Indique des informations importantes, y compris des
situations qui peuvent entraîner des dégâts matériels.
1.4 Définitions
Roue libre
L'arbre moteur se trouve en fonctionnement libre. Pas de
couple sur le moteur.
Résistance de freinage
La résistance de freinage est un module capable
d'absorber la puissance de freinage générée lors du
freinage par récupération. Cette puissance de freinage par
récupération augmente la tension du circuit intermédiaire
et un hacheur de freinage veille à transmettre la puissance
à la résistance de freinage.
Caractéristiques de couple constant (CC)
Caractéristiques de couple constant que l'on utilise pour
toutes les applications telles que les convoyeurs à bande,
les pompes volumétriques et les grues.
Initialisation
Si l'on effectue une initialisation (voir le par. 14-22 Mod.
exploitation), le variateur de fréquence rétablit les réglages
par défaut.
Cycle d'utilisation intermittent
Une utilisation intermittente fait référence à une séquence
de cycles d'utilisation. Chaque cycle est composé d'une
période en charge et d'une période à vide. Le fonctionnement peut être périodique ou non périodique.
1
1
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 9
Introduction Manuel de configuration
1
Process
Enregistrement des réglages des paramètres dans quatre
process. Changement d'un process à l'autre et édition d'un
process pendant qu'un autre est actif.
Compensation du glissement
Le variateur de fréquence compense le glissement du
moteur en augmentant la fréquence en fonction de la
charge du moteur mesurée, la vitesse du moteur restant
ainsi quasiment constante.
Contrôleur logique avancé (SLC)
Le SLC est une séquence d'actions définies par l'utilisateur
et exécutées lorsque les événements associés définis par
l'utilisateur sont évalués comme étant VRAI par le
contrôleur logique avancé (Groupe de paramètres 13-**
Logique avancée.
Bus standard FC
Inclut le bus RS-485 avec le protocole FC ou MC. Voir le
par. 8-30 Protocole.
Thermistance
Résistance dépendant de la température placée à l'endroit
où l'on souhaite surveiller la température (variateur de
fréquence ou moteur).
Alarme
État résultant de situations de panne, p. ex. en cas de
surchauffe du variateur de fréquence ou lorsque celui-ci
protège le moteur, le processus ou le mécanisme. Le
redémarrage est impossible tant que l'origine de la panne
n'a pas été résolue ; l'état d'alarme est annulé par un reset
ou, dans certains cas, grâce à un reset programmé automatiquement. L'alarme ne peut pas être utilisée à des fins de
sécurité des personnes.
Alarme verrouillée
État résultant de situations de panne lorsque le variateur
de fréquence assure sa propre protection et nécessitant
une intervention physique, p. ex. si la sortie du variateur
fait l'objet d'un court-circuit. Une alarme verrouillée peut
être annulée en coupant l'alimentation secteur, en
trouvant l'origine de la panne et en reconnectant le
variateur de fréquence. Le redémarrage est impossible tant
que l'état d'alarme n'a pas été annulé par un reset ou,
dans certains cas, grâce à un reset programmé automatiquement. L'alarme ne peut pas être utilisée à des fins de
sécurité des personnes.
Caractéristiques de couple variable (CV)
Caractéristiques de couple variable que l'on utilise pour les
pompes et les ventilateurs.
Facteur de puissance
Le Facteur de puissance réelle (lambda) tient compte de
toutes les harmoniques et est toujours plus petit que le
Facteur de puissance (cosPhi) qui considère uniquement la
première harmonique de courant et de tension.
P
kW
Uλ x Iλ x
cos
cosϕ=
P
kVA
=
Uλ x Iλ
ϕ
Le CosPhi est également appelé facteur de puissance de
déphasage.
Les Lambda and cosPhi sont indiqués pour les variateurs
de fréquence VLT® Danfoss au chapitre 6.2.1 Alimentation
secteur.
Le facteur de puissance indique dans quelle mesure le
variateur de fréquence impose une charge à l'alimentation
secteur.
Plus le facteur de puissance est bas, plus l'I
RMS
est élevé
pour la même performance en kW.
En outre, un facteur de puissance élevé indique que les
différents harmoniques de courant sont faibles.
Tous les variateurs de fréquence Danfoss ont des bobines
CC intégrés dans le circuit CC pour avoir un facteur de
puissance élevé et pour réduire le THD sur l'alimentation
principale.
1.5
Version de document et de logiciel
Ce manuel est régulièrement révisé et mis à jour. Toutes
les suggestions d'amélioration sont les bienvenues. Le
Tableau 1.2 indique la version du document et la version
logicielle correspondante.
Édition Remarques Version logiciel
MG33BFxx Remplace MG33BExx 6.72
Tableau 1.2 Version de document et de logiciel
10 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04

Introduction
Manuel de configuration
1.6 Indications de conformité
Les variateurs de fréquence ont été conçus conformément
aux directives décrites dans cette section.
1.6.1 Marquage CE
Un variateur de fréquence peut être utilisé seul ou intégré
à une installation plus complexe. Les dispositifs utilisés
seuls ou intégrés à un système doivent porter le marquage
CE. Les systèmes ne doivent pas porter le marquage CE
mais doivent être conformes aux conditions relatives à la
protection de base de la directive CEM.
1
1
Le marquage CE (Communauté européenne) indique que
le fabricant du produit se conforme à toutes les directives
CE applicables. Les 3 directives de l'UE applicables à la
conception et à la fabrication de variateurs de fréquence
sont la directive basse tension, la directive CEM et (pour
les dispositifs dotés d'une fonction de sécurité intégrée) la
directive sur les machines.
Le marquage CE est destiné à éliminer les barrières
techniques au libre-échange entre les états de la CE et de
l'EFTA à l'intérieur de l'ECU. Il ne fournit aucune
information sur la qualité du produit. Les spécifications
techniques ne peuvent pas être déduites du marquage CE.
1.6.1.1
Les variateurs de fréquence sont classés comme des
composants électroniques et doivent porter le marquage
CE conformément à la directive basse tension. La directive
s'applique à tous les appareils électriques utilisés dans les
plages de tension allant de 50 à 1 000 V CA et de 75 à
1 600 V CC.
La directive précise que la conception de l'équipement
doit garantir la sécurité et la santé des personnes ainsi que
celle du bétail et préserver le matériel si l'équipement est
correctement installé, entretenu et utilisé conformément à
l'usage prévu. Danfoss Le marquage CE est conforme à la
directive basse tension et fournit un certificat de
conformité à la demande.
1.6.1.2
La compatibilité électromagnétique (CEM) signifie que les
interférences électromagnétiques entre les appareils
n'altèrent pas leurs performances. Les conditions de base
relatives à la protection de la Directive CEM 2004/108/CE
indiquent que les dispositifs qui génèrent des interférences
électromagnétiques (EMI) ou dont le fonctionnement peut
être affecté par les EMI, doivent être conçus pour limiter la
génération d'interférences électromagnétiques et doivent
présenter un degré d'immunité adapté vis-à-vis des EMI
lorsqu'ils sont correctement installés, entretenus et utilisés
conformément à l'usage prévu.
Directive basse tension
Directive CEM
1.6.1.3 Directive machine
Les variateurs de fréquence sont classés comme
composants électroniques conformément à la directive
basse tension. Les variateurs de fréquence dotés d'une
fonction de sécurité intégrée doivent toutefois être
conformes à la directive sur les machines 2006/42/CE. Les
variateurs de fréquence sans fonction de sécurité ne sont
pas concernés par cette directive. Si un variateur de
fréquence est intégré au système de machines, Danfoss
précise les règles de sécurité applicables au variateur de
fréquence.
La directive machine 2006/42/CE concerne les machines
composées d'un ensemble de composants ou de dispositifs
interconnectés dont au moins un est capable de
mouvements mécaniques. La directive précise que la
conception de l'équipement doit garantir la sécurité et la
santé des personnes ainsi que celle du bétail et préserver
le matériel si l'équipement est correctement installé,
entretenu et utilisé conformément à l'usage prévu.
Lorsque les variateurs de fréquence sont utilisés sur des
machines comportant au moins une pièce mobile, le
fabricant de la machine doit fournir une déclaration
précisant la conformité avec toutes les lois et mesures de
sécurité applicables. Danfoss Les étiquettes CE sont
conformes à la directive machine pour les variateurs de
fréquence avec fonction de sécurité intégrée et fournit une
déclaration de conformité à la demande.
Conformité UL
1.6.2
Homologué UL
Illustration 1.1 UL
AVIS!
Les variateurs de fréquence présentant une protection
de type T7 (525-690 V) ne sont pas certifiés UL.
Le variateur de fréquence est conforme aux exigences de
sauvegarde de la capacité thermique de la norme UL508C.
Pour plus d'informations, se reporter au chapitre Protection
thermique du moteur du Manuel de configuration.
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 11
Introduction Manuel de configuration
1
1.6.3 Conformité C-Tick
1.6.4 Conformité marine
Pour la conformité à l'Accord européen relatif au transport
international des marchandises dangereuses par voies de
navigation intérieures (ADN), se reporter à
chapitre 9.8.3 Installation selon les critères ADN.
1.7 Instruction de mise au rebut
Ne pas jeter d'équipement contenant des
composants électriques avec les ordures
ménagères.
Il doit être collecté séparément conformément à la législation locale en vigueur.
Tableau 1.3 Instruction de mise au rebut
1.8 Sécurité
Les variateurs de fréquence contiennent des composants
haute tension et peuvent causer des blessures mortelles en
cas de mauvaise manipulation. L'installation et l'exploitation de l'équipement ne doivent être effectuées que par
des techniciens formés. Avant toute réparation, couper
d'abord l'alimentation du variateur de fréquence et
attendre le temps indiqué afin que l'énergie électrique
stockée se dissipe.
Consulter le Manuel d'utilisation fourni avec l'appareil et
disponible en ligne concernant :
le temps de décharge et
•
les consignes de sécurité et avertissements
•
détaillés.
Il convient de respecter rigoureusement les précautions et
consignes de sécurité pour garantir une exploitation sûre
du variateur de fréquence.
12 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
Sécurité Manuel de configuration
2 Sécurité
2.1 Symboles de sécurité
2.3
2 2
Précautions de sécurité
Les symboles suivants sont utilisés dans ce document :
AVERTISSEMENT
Indique une situation potentiellement dangereuse qui
peut entraîner des blessures graves ou le décès.
ATTENTION
Indique une situation potentiellement dangereuse qui
peut entraîner des blessures superficielles à modérées.
Ce signe peut aussi être utilisé pour mettre en garde
contre des pratiques non sûres.
AVIS!
Indique des informations importantes, y compris des
situations qui peuvent entraîner des dégâts matériels.
2.2 Personnel qualifié
Un transport, un stockage, une installation, une exploitation et une maintenance corrects et fiables sont
nécessaires au fonctionnement en toute sécurité et sans
problème du variateur de fréquence. Seul du personnel
qualifié est autorisé à installer ou utiliser cet équipement.
Par définition, le personnel qualifié est un personnel formé,
autorisé à installer, mettre en service et maintenir l'équipement, les systèmes et les circuits conformément aux lois
et aux réglementations en vigueur. En outre, il doit être
familiarisé avec les instructions et les mesures de sécurité
décrites dans ce document.
AVERTISSEMENT
HAUTE TENSION
Les variateurs de fréquence contiennent des tensions
élevées lorsqu'ils sont reliés à l'alimentation secteur CA.
Le non-respect de cette instruction peut entraîner la
mort ou des blessures graves.
L'installation, le démarrage et la maintenance
•
doivent être effectués uniquement par du
personnel qualifié.
AVERTISSEMENT
DÉMARRAGE IMPRÉVU
Lorsque le variateur de fréquence est relié au secteur, le
moteur peut démarrer à tout moment, ce qui peut
entraîner la mort, des blessures graves ou des dégâts
matériels. Le moteur peut être démarré par un
commutateur externe, un ordre du bus série, un signal
de référence d'entrée, via le LCP ou après la suppression
d'une condition de panne.
1. Déconnecter le variateur de fréquence du
secteur si la sécurité des personnes l'exige, afin
d'éviter un démarrage imprévu du moteur.
2. Appuyer sur [Off] sur le LCP, avant de
programmer les paramètres.
3. Le variateur de fréquence, le moteur et tous les
équipements entraînés doivent être
fonctionnels lorsque le variateur est raccordé au
secteur.
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 13

Sécurité Manuel de configuration
AVERTISSEMENT
TEMPS DE DÉCHARGE
22
Le variateur de fréquence contient des condensateurs
dans le circuit intermédiaire qui peuvent rester chargés
même lorsque le variateur de fréquence n'est plus
alimenté. Le non-respect du temps d'attente spécifié
après la mise hors tension avant un entretien ou une
réparation peut entraîner le décès ou des blessures
graves.
1. Arrêter le moteur.
2. Déconnecter le secteur CA, tous les moteurs à
aimant permanent et toutes les alimentations à
distance du circuit CC y compris les batteries de
secours, les alimentations sans interruption et
les connexions du circuit CC aux autres
variateurs de fréquence.
3. Attendre que les condensateurs soient complètement déchargés avant de procéder à un
entretien ou à une réparation. Le temps
d'attente est indiqué dans le Tableau 2.1.
Tension [V] Temps d'attente minimum (minutes)
4 7 15
200-240 0,25-3,7 kW 5,5-37 kW
380-500 0,25-7,5 kW 11-75 kW
525-600 0,75-7,5 kW 11-75 kW
525-690 1,5-7,5 kW 11-75 kW
Une haute tension peut être présente même lorsque les voyants
d'avertissement sont éteints.
Tableau 2.1 Temps de décharge
AVERTISSEMENT
DANGERS LIÉS À L'ÉQUIPEMENT
Tout contact avec les arbres tournants et les matériels
électriques peut entraîner des blessures graves voire
mortelles.
L'installation, le démarrage et la maintenance
•
doivent être effectués par du personnel qualifié
uniquement.
Veiller à ce que tous les travaux électriques
•
soient conformes aux réglementations
électriques locales et nationales.
Suivre les procédures décrites dans ce manuel.
•
ATTENTION
FONCTIONNEMENT EN MOULINET
La rotation imprévue des moteurs à magnétisation
permanente expose à un risque de blessures et de
dégâts matériels.
Vérifier que les moteurs à magnétisation
•
permanente sont bien bloqués afin d'empêcher
toute rotation imprévue.
ATTENTION
DANGER POTENTIEL EN CAS DE PANNE INTERNE
Risque de blessure si le variateur de fréquence n'est pas
fermé correctement.
Avant d'appliquer de la puissance, s'assurer que
•
tous les caches de sécurité sont en place et
fermement fixés.
AVERTISSEMENT
RISQUE DE COURANT DE FUITE
Les courants de fuite à la terre dépassent 3,5 mA. Le fait
de ne pas mettre le variateur de fréquence à la terre
peut entraîner le décès ou des blessures graves.
Veiller à la mise à la terre correcte de l'équi-
•
pement par un installateur électrique certifié.
14 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
Principes de fonctionnement...
Manuel de configuration
3 Principes de fonctionnement de base
3.1 Généralités
Ce chapitre propose un aperçu des principaux assemblages
et circuits du variateur de fréquence. Il vise à décrire les
fonctions électriques internes et de traitement des signaux.
Une description de la structure interne de contrôle est
également incluse.
Sont également décrites les fonctions automatisées et
optionnelles du variateur de fréquence pour la conception
de systèmes d'exploitation robustes présentant des performances de contrôle sophistiquées et de rapports d'état.
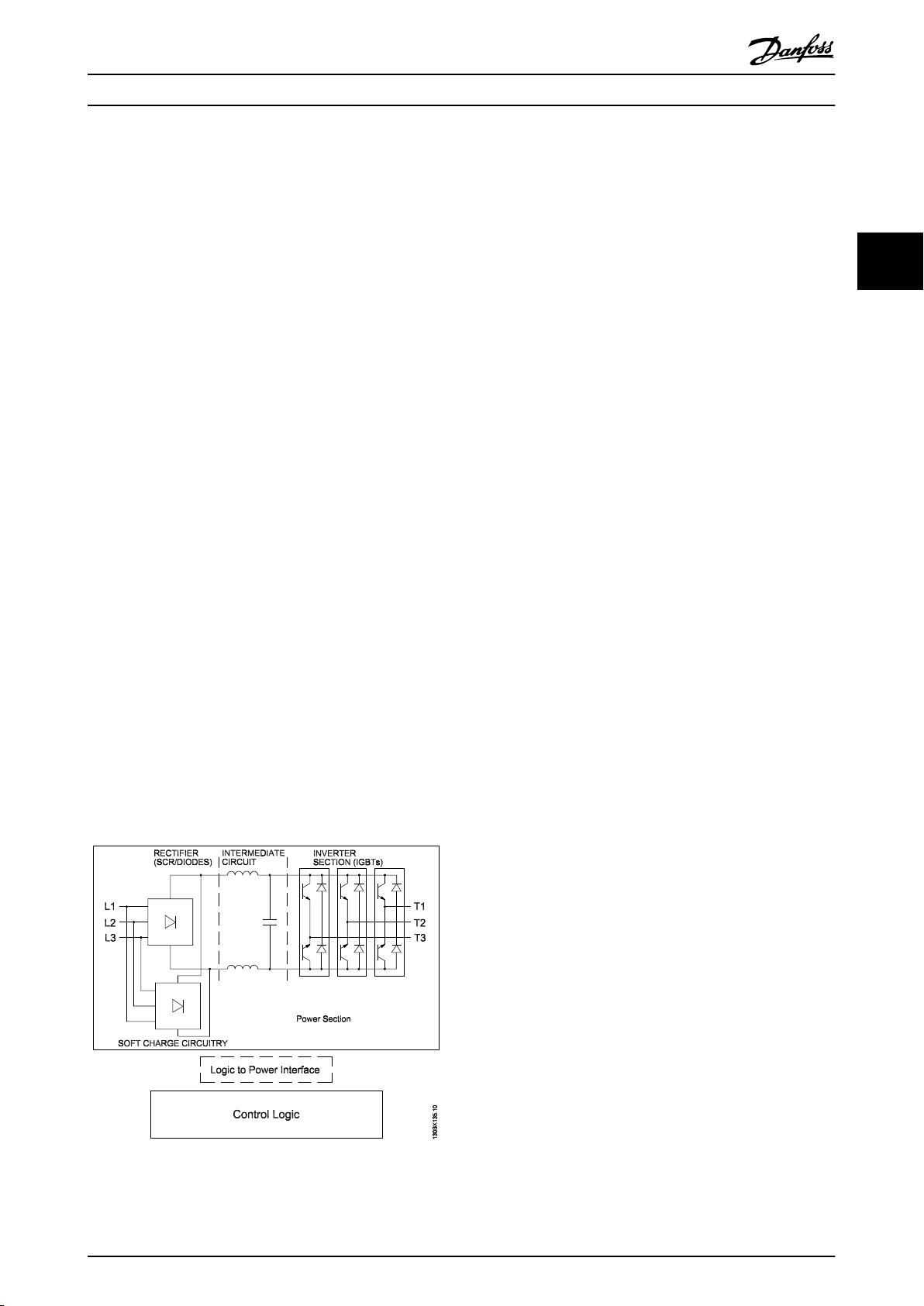
3.2 Description du fonctionnement
Le variateur de fréquence fournit une quantité régulée de
puissance CA à un moteur à induction triphasé pour
contrôler la vitesse du moteur. Le variateur de fréquence
fournit une fréquence et une tension variables au moteur.
Le variateur de fréquence est divisé en quatre modules
principaux.
Redresseur
•
Circuit intermédiaire
•
Onduleur
•
Commande et régulation
•
Au chapitre 3.3 Séquence de fonctionnement, ces modules
sont décrits dans le détail et indiquent comment les
signaux de puissance et de commande se déplacent dans
le variateur de fréquence.
3.3 Séquence de fonctionnement
3.3.1 Section redresseur
Lorsqu'une puissance est appliquée pour la première fois
au variateur de fréquence, elle entre via les bornes
d'entrée (L1, L2, L3) et arrive au sectionneur et/ou à
l'option de filtre RFI, selon la configuration de l'appareil.
3.3.2 Section intermédiaire
Après la section du redresseur, la tension passe dans la
section intermédiaire. Cette tension redressée est lissée par
un circuit de filtre sinus composé de la bobine d'induction
et de la batterie de condensateurs du bus CC.
La bobine d'induction du bus CC fournit une impédance
série au courant changeant. Ceci participe au processus de
filtrage tout en réduisant la distorsion harmonique sur la
forme d'onde du courant CA d'entrée normalement
inhérente aux circuits redresseurs.
Section d'onduleur
3.3.3
Dès qu'un ordre de fonctionnement et la référence de
vitesse sont présents, les IGBT commencent à commuter
pour créer la forme d'onde de la sortie. Cette forme
d'onde, telle que générée par le principe PWM
plus
VVC
Danfoss de la carte de commande, offre des perfor-
mances optimales et des pertes minimales dans le moteur.
3 3
Option de freinage
3.3.4
Pour les variateurs de fréquence équipés de l'option de
freinage dynamique, un IGBT de freinage, avec les bornes
81(R-) et 82(R+), est inclus pour la connexion d'une
résistance de freinage externe.
La fonction de l'IGBT de freinage consiste à limiter la
tension du circuit intermédiaire, chaque fois que la limite
de tension maximale est dépassée. Pour ce faire, l'IGBT
commute la résistance montée en externe, au niveau du
bus CC, pour supprimer la tension CC excessive présente
dans les condensateurs du bus. La tension excessive du
bus CC est généralement le résultat d'une charge trop
importante provoquant une énergie renouvelable qui
retourne vers le bus CC. Cela survient par exemple lorsque
Illustration 3.1 Logique de commande interne
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 15
la charge entraîne le moteur, ce qui fait revenir la tension
vers le circuit du bus CC.
Principes de fonctionnement... Manuel de configuration
L'installation externe de la résistance de freinage présente
les avantages suivants : choix de la résistance en fonction
des besoins de l'application, dissipation de l'énergie hors
du panneau de commande et protection du variateur de
fréquence contre les surchauffes si la résistance de freinage
est en surcharge.
3.4
Interface de commande
3.4.1 Principe de contrôle
Le variateur de fréquence reçoit une entrée de commande
de plusieurs sources.
33
Le signal de gâchette de l'IGBT de freinage émane de la
carte de commande et est transmis à l'IGBT de freinage via
la carte de puissance et la carte de commande de
gâchette. De plus, les cartes de puissance et de commande
surveillent la connexion de l'IGBT de freinage et de la
résistance de freinage pour éviter les éventuels courtscircuits ou surcharges.
Répartition de la charge
3.3.5
Les unités avec option de répartition de la charge intégrée
comportent les bornes 89 (+) CC et 88 (-) CC. Dans le
variateur de fréquence, ces bornes sont raccordées au bus
CC devant la bobine de réactance du circuit intermédiaire
et les condensateurs du bus.
L'utilisation des bornes de répartition de la charge repose
sur deux configurations différentes.
Lorsqu'elles sont câblées et correctement programmées,
les bornes de commande fournissent un retour, une
référence et d'autres signaux d'entrées au variateur de
fréquence, l'état de sortie et les conditions de défauts
depuis le variateur de fréquence, des relais à l'équipement
auxiliaire et une interface de communication série. Une
24 V commune est également fournie. Les bornes de
commande sont programmables pour plusieurs fonctions
en sélectionnant des options de paramètres via le panneau
de commande local (LCP) à l'avant de l'unité ou de sources
externes. La plupart des câbles de commande sont fournis
par le client, sauf si une commande a été passée en usine.
Panneau de commande local (mode Hand)
•
Bornes de commande analogiques, digitales et
•
analogiques/digitales programmables (mode
Auto)
Ports de communication RS-485, USB ou série
•
(mode Auto)
Dans la première méthode, les bornes sont utilisées pour
relier les circuits de bus CC de plusieurs variateurs de
fréquence entre eux. Cela permet à une unité en mode
régénératif de partager sa tension du bus excessive avec
un autre variateur de fréquence en mode entraînement
moteur. La répartition de la charge peut ainsi réduire la
nécessité de résistances de freinage dynamique externes,
tout en économisant de l'énergie. En théorie, le nombre
d'unités pouvant être raccordées de cette façon est infini.
Elles doivent toutefois toutes présenter la même tension
nominale. En outre, selon la taille et le nombre d'unités, il
peut s'avérer nécessaire d'installer des bobines de
réactance CC et des fusibles CC dans les connexions du
circuit intermédiaire et des bobines de réactance CA sur le
secteur. Une telle configuration requiert des considérations
spécifiques et ne doit pas être essayée sans consultation
préalable de Danfoss Application Engineering.
Dans la seconde méthode, le variateur de fréquence est
alimenté exclusivement par une source CC. Cette solution
est un peu plus compliquée. D'abord, une source CC est
nécessaire. Ensuite, un moyen d'abaisser la tension dans le
bus CC à la mise sous tension doit aussi être prévu. Enfin,
une source de tension secteur est indispensable pour
alimenter les ventilateurs de l'unité. Là encore, une telle
configuration ne doit pas être mise en place sans consultation préalable de Danfoss Application Engineering.
16 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
130BD599.10
3-phase
power
input
DC bus
Switch Mode
Power Supply
Motor
Analog Output
Interface
relay1
relay2
ON=Terminated
OFF=Open
Brake
resistor
91 (L1)
92 (L2)
93 (L3)
PE
88 (-)
89 (+)
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN)
0/4-20 mA
12 (+24 V OUT)
13 (+24 V OUT)
37 (D IN)
18 (D IN)
20 (COM D IN)
10 V DC
15 mA 130/200 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(COM A OUT) 39
(A OUT) 42
(P RS-485) 68
(N RS-485) 69
(COM RS-485) 61
0 V
5V
S801
0/4-20 mA
RS-485
RS-485
03
+10 V DC
0/-10 V DC -
+10 V DC
+10 V DC
0/4-20 mA
0/-10 V DC-
240 V AC, 2 A
24 V DC
02
01
05
04
06
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
27
24 V
0 V
(D IN/OUT)
0 V (PNP)
24 V (NPN)
(D IN/OUT)
0 V
24 V
29
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
1 2
ON
S201
ON
21
S202
ON=0/4-20 mA
OFF=0/-10 V DC +10 V DC
95
P 5-00
21
ON
S801
(R+) 82
(R-) 81
: Chassis
: Ground
**
240 V AC, 2 A
400 V AC, 2 A
*
*
*
Principes de fonctionnement...
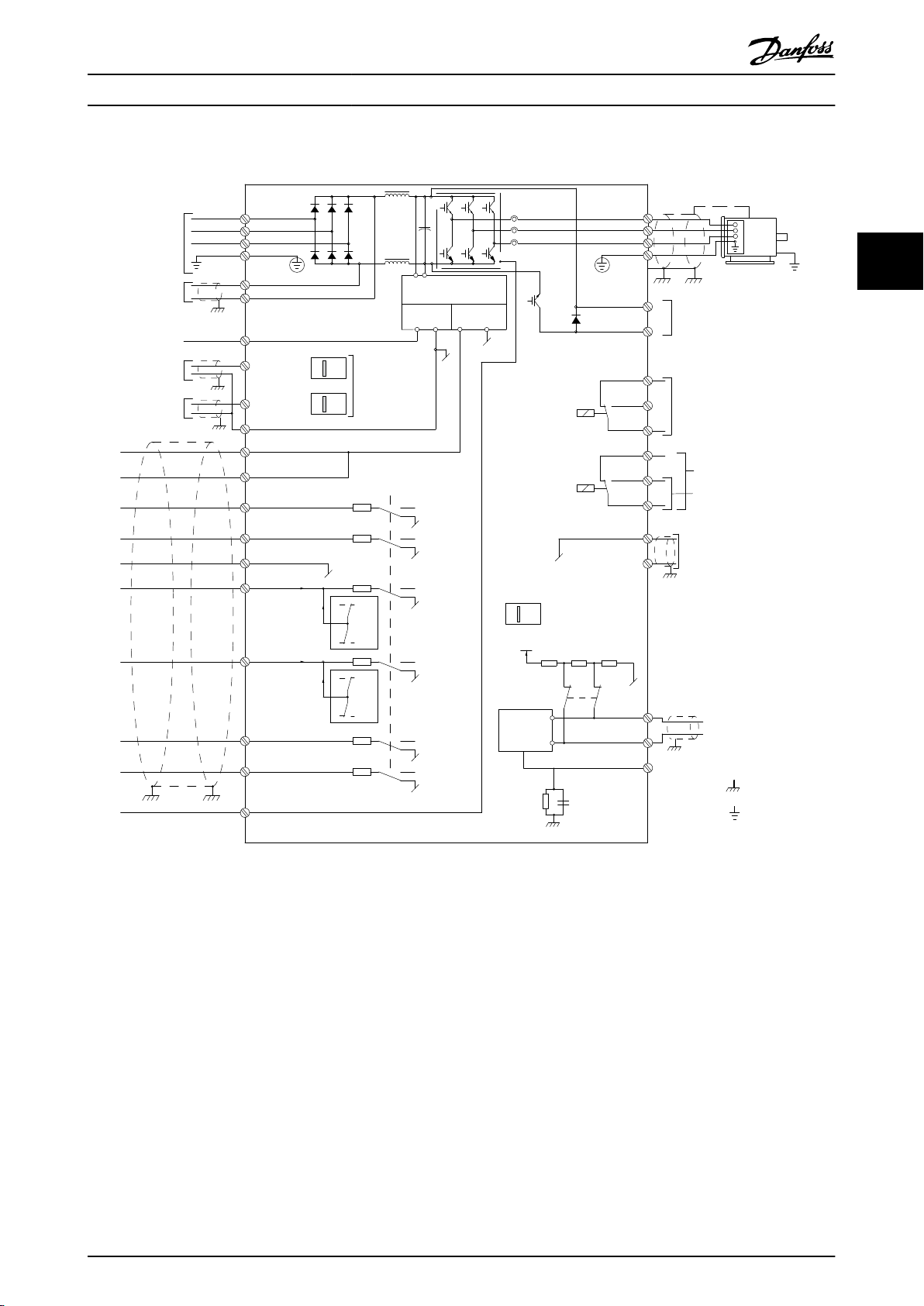
3.5 Schéma de câblage
Manuel de configuration
3 3
Illustration 3.2 Schéma de câblage de base
A = analogique, D = digitale
*La borne 37 (en option) est utilisée pour l'Absence sûre du couple. Pour les instructions d'installation de l'Absence sûre du
couple, se reporter au Manuel d'utilisation de l'Absence sûre du couple des variateurs de fréquence Danfoss VLT®. La borne 37
n'est pas incluse dans le FC 301 (sauf type de protection A1). Le relais 2 et la borne 29 n'ont aucune fonction sur le FC 301.
**Ne pas connecter le blindage.
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 17
130BD529.11
1
2
3
4
5
6
7
8
PE
U
V
W
9
L1
L2
L3
PE
10
11
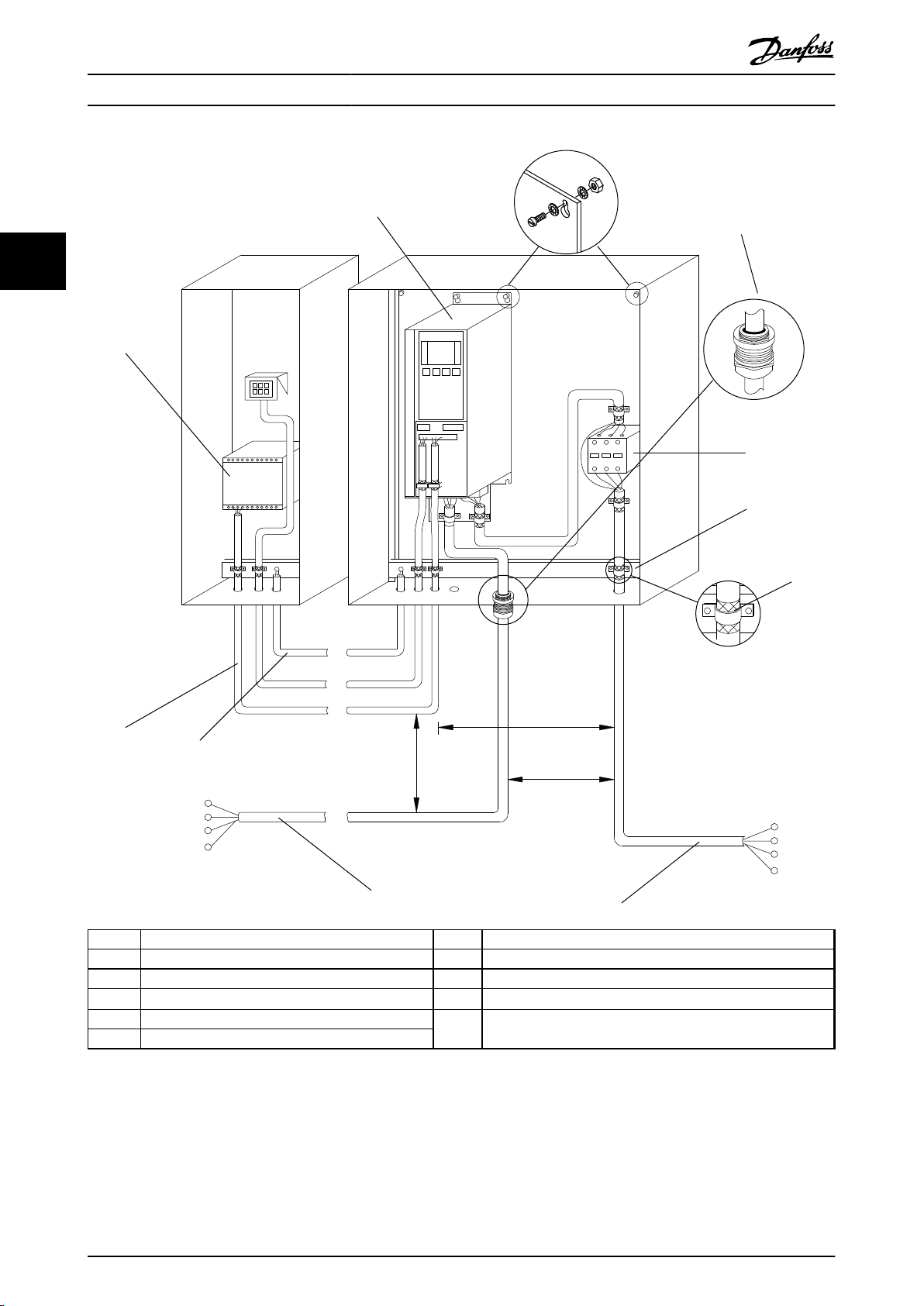
Principes de fonctionnement...
Manuel de configuration
33
1 PLC 7 Moteur, triphasé avec terre de protection (blindé)
2 Variateur de fréquence 8 Secteur, triphasé et terre de protection renforcée (non blindé)
3 Contacteur de sortie 9 Câblage de commande (blindé)
4 Étrier de serrage 10
5 Isolation de câble (dénudé)
6 Presse-étoupe
11
Égalisation de potentiel, 16 mm2 min. (0,025 po)
Espace entre le câble de commande, le câble moteur et le câble
secteur :200 mm min.
Illustration 3.3 Raccordement-électrique conforme CEM
Pour plus d'informations sur la CEM, voir le chapitre 4.1.15 Conformité CEM.
18 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
Principes de fonctionnement... Manuel de configuration
AVIS!
INTERFÉRENCES CEM
Utiliser des câbles blindés pour le câblage de commande
et du moteur, et des câbles séparés pour le câblage de
commande, d'alimentation et du moteur. Toute mauvaise
isolation des câblages de l'alimentation, du moteur et de
commande risque de provoquer une baisse de la
performance ou un comportement inattendu. Au moins
200 mm (7,9 po) d'espace entre les câbles d'alimentation,
du moteur et de commande sont nécessaires.
3.6 Contrôles
3.6.1 Principe de contrôle
Un variateur de fréquence redresse la tension CA du
secteur en tension CC, laquelle est ensuite convertie en
courant CA avec une amplitude et une fréquence variables.
La tension/le courant et la fréquence variables qui
alimentent le moteur offrent des possibilités de régulation
de vitesse variable pour les moteurs standard triphasés et
les moteurs à aimant permanent.
Le variateur de fréquence peut contrôler la vitesse ou le
couple sur l'arbre moteur. Le réglage du par. 1-00 Mode
Config. détermine le type de contrôle.
Commande de vitesse
Il en existe deux types :
Contrôle en boucle ouverte qui ne nécessite pas
•
de signal de retour du moteur (sans capteur).
Le régulateur PID en boucle fermée nécessite un
•
signal de retour de vitesse vers une entrée. Une
commande de la vitesse en boucle fermée correctement optimisée est plus précise qu'une
commande en boucle ouverte.
Commande de couple
La fonction de commande de couple est utilisée dans les
applications où le couple sur l'arbre de sortie du moteur
contrôle l'application, pour contrôler la tension par
exemple. La commande de couple est sélectionnée au par.
1-00 Mode Config., soit en boucle ouverte VVC
Boucl.ouverte couple ou en boucle fermée contrôle de flux
avec [2] Retour de vitesse du moteur. Le réglage du couple
s'effectue en ajustant une référence analogique, digitale ou
contrôlée par bus. Le facteur de limite de vitesse max. est
défini au par. 4-21 Source facteur vitesse limite. En cas
d'utilisation de la commande de couple, il est recommandé
de réaliser une procédure d'AMA complète car les données
correctes du moteur sont cruciales pour une performance
optimale.
La boucle fermée en mode flux avec le retour
•
codeur offre de meilleures performances dans les
quatre quadrants et à toutes les vitesses du
moteur.
Boucle ouverte en mode VVC
•
est utilisée dans des applications mécaniques
robustes mais la précision est limitée. La fonction
de couple en boucle ouverte fonctionne dans une
seule direction de vitesse. Le couple est calculé
sur la base de la mesure de courant interne du
variateur de fréquence.
Référence vitesse/couple
La référence pour ces contrôles peut être soit une
référence unique soit la somme de plusieurs références, y
compris celles mises à l'échelle de manière relative. L'utilisation des références est détaillée dans le chapitre
chapitre 3.7 Utilisation des références.
plus
[4]
plus
. Cette fonction
3 3
Sélectionne l'entrée à utiliser comme signal de retour du
PID de vitesse au par. 7-00 PID vit.source ret.
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 19
Principes de fonctionnement... Manuel de configuration
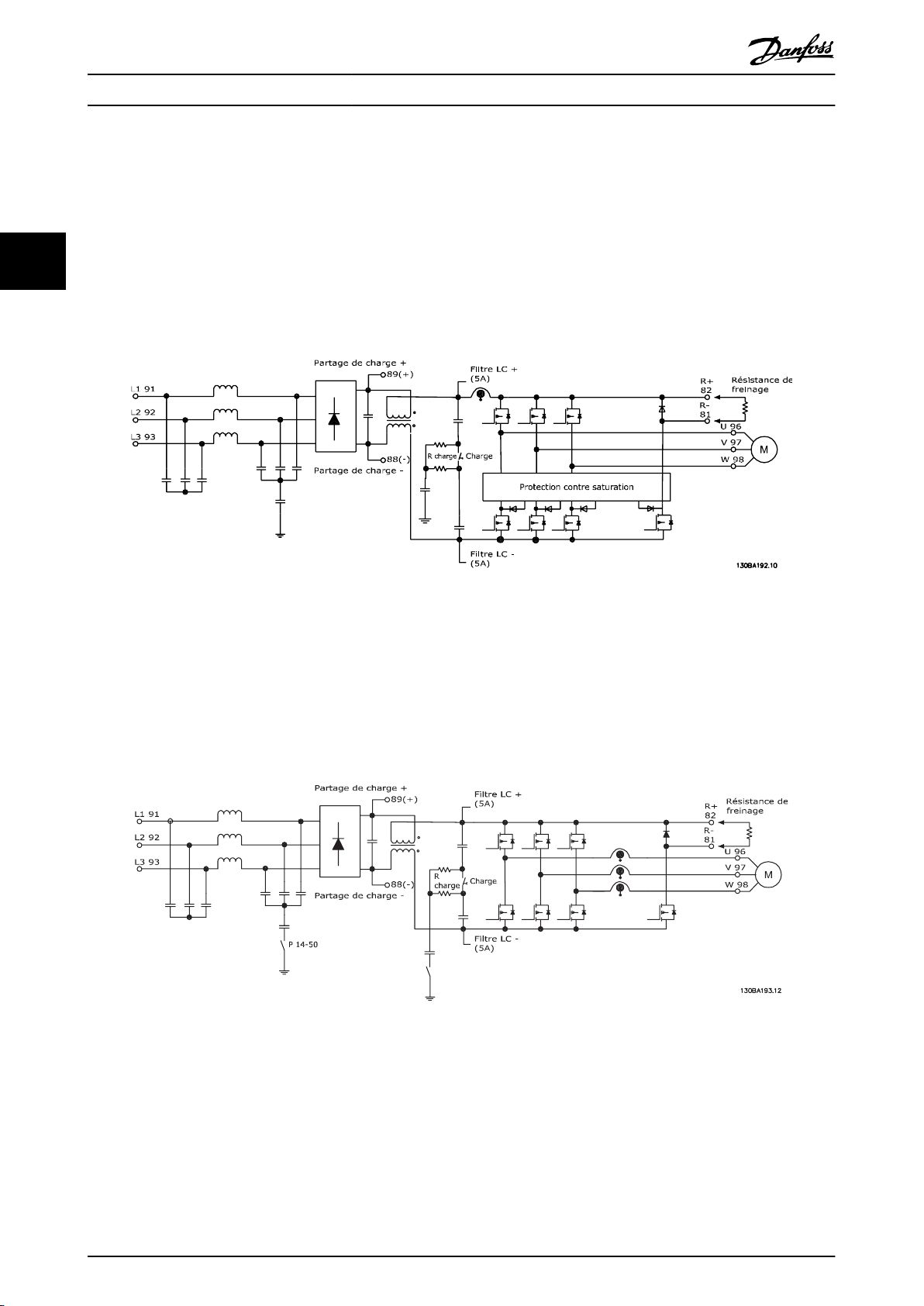
3.6.2 FC 301 vs. FC 302 Principe de fonctionnement
Le FC 301 est un variateur de fréquence à usage général destiné aux applications à vitesse variable. Son principe de
fonctionnement repose sur la commande vectorielle de tension (VVC
FC 301 peut gérer des moteurs asynchrones et PM.
Le principe de détection du courant dans le FC 301 repose sur la mesure du courant dans le circuit intermédiaire ou la
33
phase moteur. La protection contre tout défaut de mise à la terre côté moteur est résolue par un circuit de désaturation
dans les IGBT raccordés à la carte de commande.
Le comportement relatif aux courts-circuits sur le FC 301 dépend du transformateur de courant dans le circuit intermédiaire
positif et de la protection de désaturation avec signal de retour des trois IGBT inférieurs et du frein.
Illustration 3.4 Principe de fonctionnement FC 301
Le FC 302 est un variateur de fréquence haute performance destiné aux applications exigeantes. Le variateur de fréquence
peut gérer divers types de principes de fonctionnement de moteur, tels que le mode spécial U/f, VVC
flux. Le
FC 302 peut prendre en charge des moteurs synchrones à aimant permanent (servomoteurs sans balais) ainsi que des
moteurs asynchrones normaux à cage.
Le comportement relatif aux courts-circuits sur le FC 302 dépend des trois transformateurs de courant dans les phases
moteur et de la protection de désaturation avec signal de retour du frein.
plus
). Le
plus
ou le vecteur de
Illustration 3.5 Principe de fonctionnement FC 302
20 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
Principes de fonctionnement... Manuel de configuration
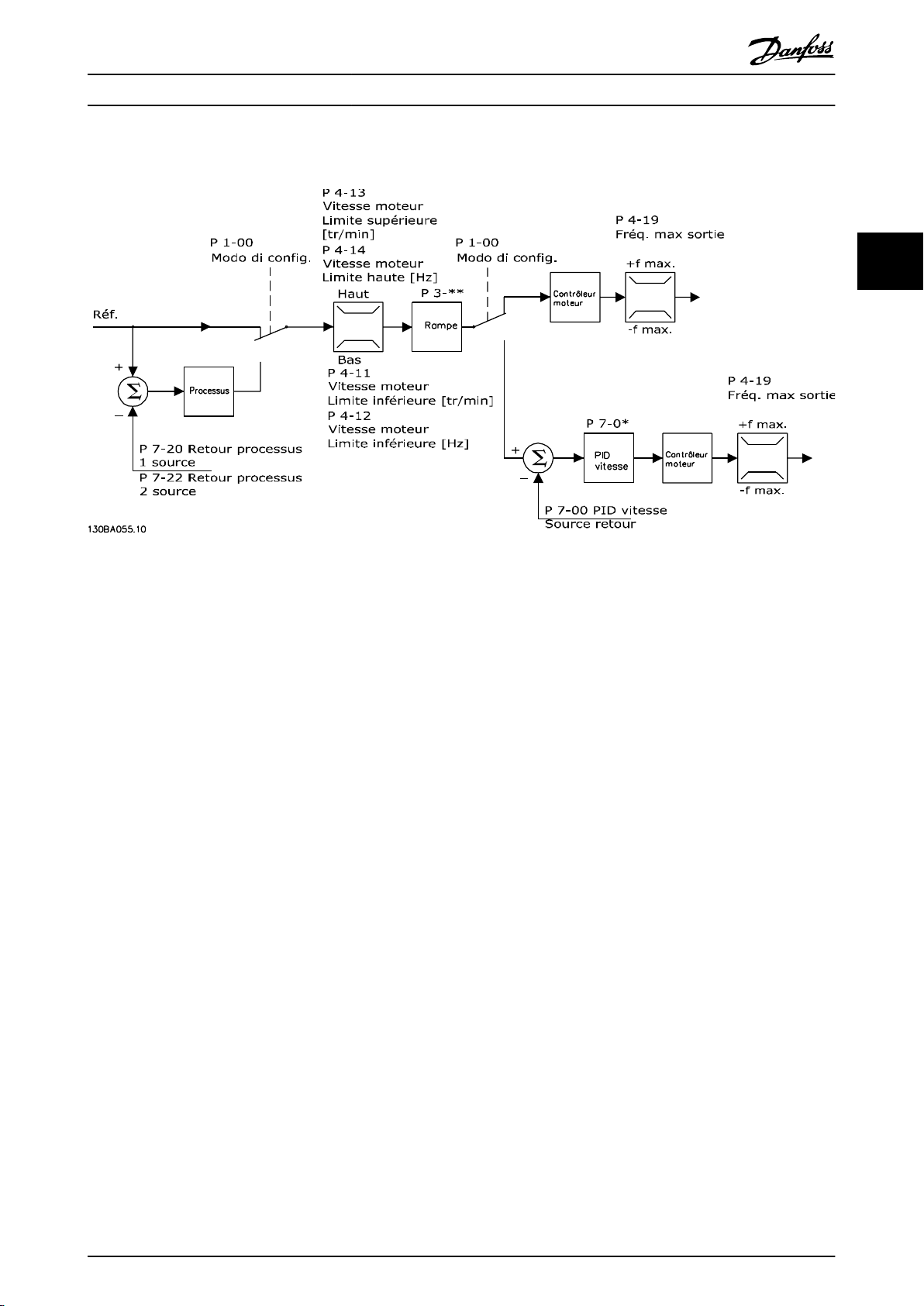
3.6.3
Structure de contrôle dans VVC
Illustration 3.6 Structure de contrôle dans les configurations en boucles ouverte et fermée VVC
plus
3 3
plus
Consulter les Paramètres actifs/inactifs dans les modes de contrôle des différents onduleurs du Guide de programmation pour
obtenir un aperçu de la configuration de contrôle disponible, selon le choix d'un moteur CA ou d'un moteur PM non
saillant. Dans la configuration présentée sur l'Illustration 3.6, le par. 1-01 Principe Contrôle Moteur est réglé sur [1] VVCplus et
le par. 1-00 Mode Config. sur [0] Boucle ouverte vit. La référence résultant du système de gestion des références est reçue et
soumise à la limite de rampe et de vitesse avant d'être transmise au contrôle du moteur. La sortie du contrôle du moteur
est alors limitée par la limite maximum de fréquence.
Si le par. 1-00 Mode Config. est réglé sur [1] Boucle fermée vit., la référence résultante passe de la limite de rampe et de
vitesse à un régulateur PID de vitesse. Les paramètres du régulateur PID de vitesse se trouvent dans le groupe de
paramètres 7-0* PID vit.régul. La référence résultant du régulateur PID de vitesse est transmise au contrôle du moteur soumis
à la limite de fréquence.
Sélectionner [3] Process au par. 1-00 Mode Config. afin d'utiliser le régulateur PID de process pour le contrôle en boucle
fermée, de la vitesse ou de la pression par exemple, dans l'application contrôlée. Les paramètres du process PID se trouvent
dans les groupes de paramètres 7-2* PIDproc/ctrl retour et7-3* PID proc./Régul.
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 21
Principes de fonctionnement... Manuel de configuration
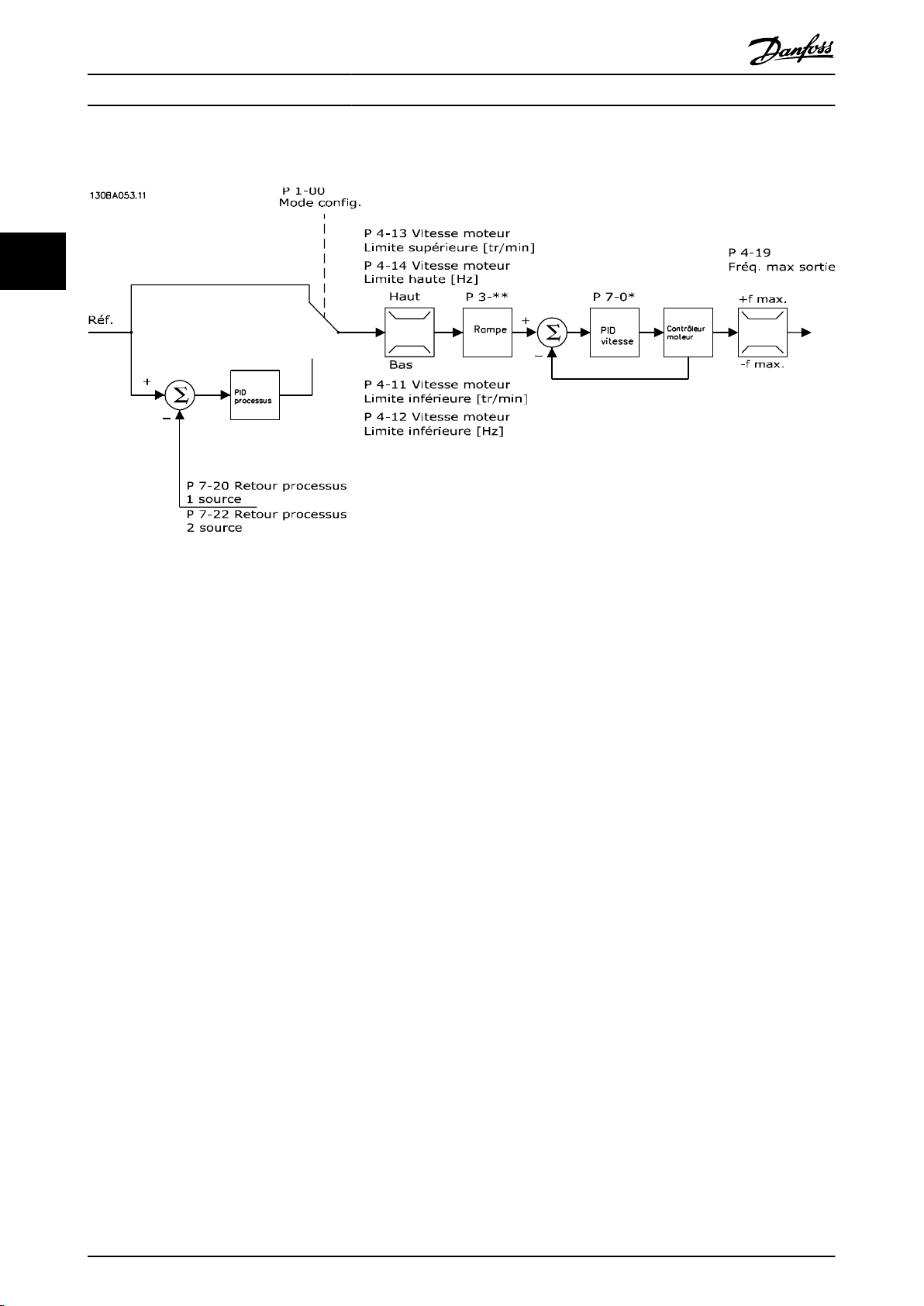
3.6.4 Structure de contrôle flux sans capteur (FC 302 seulement)
33
Illustration 3.7 Structure de contrôle dans les configurations boucles ouverte et fermée flux sans capteur
Consulter les Paramètres actifs/inactifs dans les modes de contrôle des différents onduleurs du Guide de programmation pour
obtenir un aperçu de la configuration de contrôle disponible, selon le choix d'un moteur CA ou d'un moteur PM non
saillant. Dans la configuration illustrée, le par. 1-01 Principe Contrôle Moteur est réglé sur [2] Flux ss capteur et le par.
1-00 Mode Config. sur [0] Boucle ouverte vit. La référence résultant du système de gestion des références est soumise aux
limites de rampe et de vitesse telles que déterminées par les réglages des paramètres indiqués.
Un signal de retour de la vitesse estimée est généré à destination du PID de vitesse afin de contrôler la fréquence de sortie.
Le PID de vitesse doit être défini avec ses paramètres P, I et D (groupe de paramètres 7-0* Régulateur PID de vitesse).
Sélectionner [3] Process au par. 1-00 Mode Config. afin d'utiliser le régulateur PID de process pour le contrôle en boucle
fermée, de la vitesse ou de la pression par exemple, dans l'application contrôlée. Les paramètres du process PID se trouvent
dans les groupes de paramètres 7-2* PIDproc/ et7-3* PID proc./Régul.
22 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
Principes de fonctionnement... Manuel de configuration
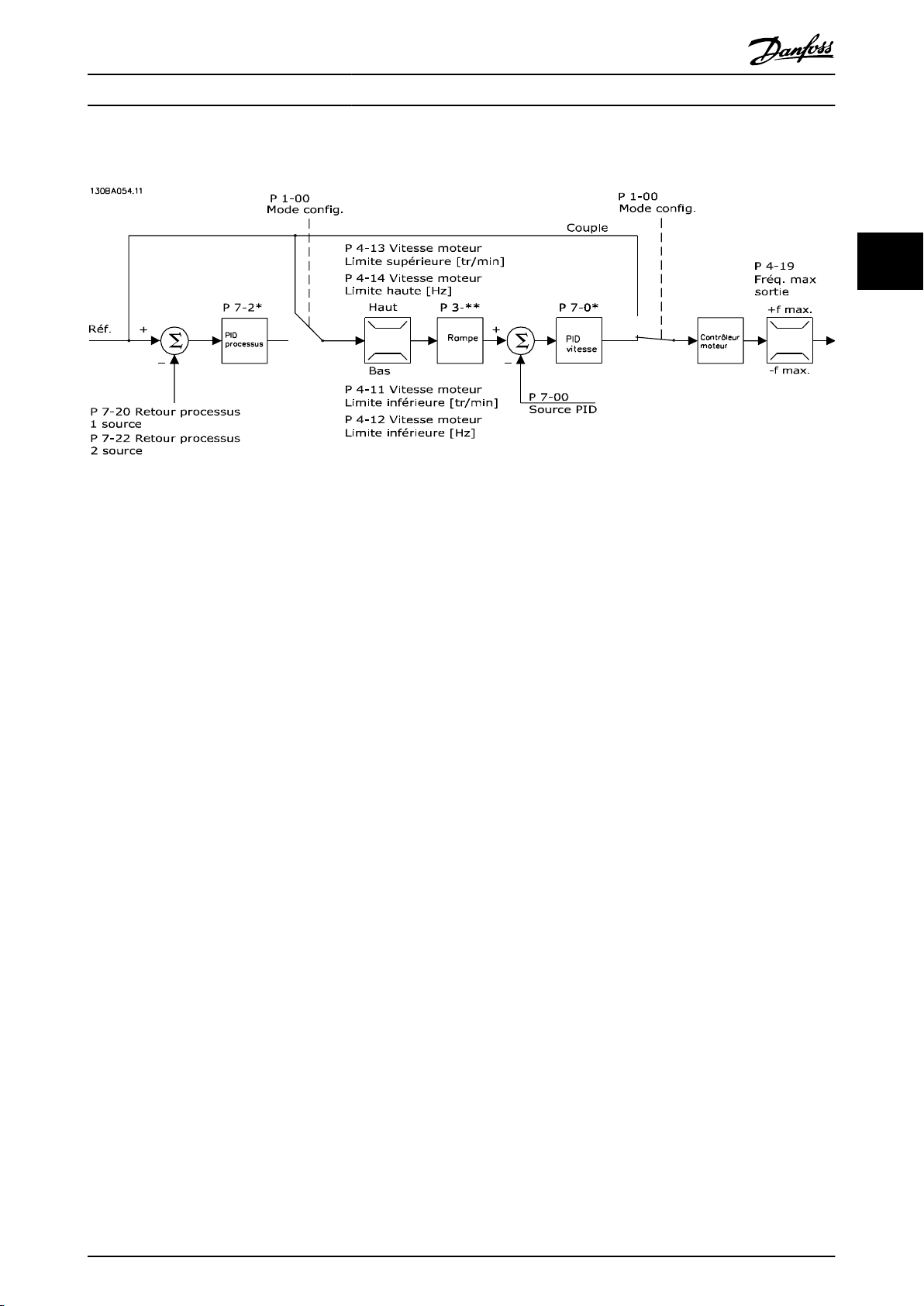
3.6.5 Structure de contrôle en flux avec signal de retour du moteur (FC 302 seulement)
Illustration 3.8 Structure de contrôle dans la configuration Flux avec signal de retour du moteur (uniquement disponible dans le FC
302) :
3 3
Consulter les Paramètres actifs/inactifs dans les modes de contrôle des différents onduleurs du Guide de programmation pour
obtenir un aperçu de la configuration de contrôle disponible, selon le choix d'un moteur CA ou d'un moteur PM non
saillant. Dans la configuration illustrée, le par. 1-01 Principe Contrôle Moteur est réglé sur [3] Flux retour moteur et le par.
1-00 Mode Config. sur [1] Boucle fermée vit.
Dans cette configuration, le contrôle du moteur repose sur un signal de retour d'un codeur ou un résolveur monté
directement sur le moteur (défini au par. 1-02 Source codeur arbre moteur).
Sélectionner [1] Boucle fermée vit. au par. 1-00 Mode Config. afin d'utiliser la référence résultante comme entrée du régulateur
PID de vitesse. Les paramètres du régulateur PID de vitesse se trouvent dans le groupe de paramètres 7-0* Régulateur PID de
vitesse.
Sélectionner [2] Couple au par. 1-00 Mode Config. pour utiliser la référence résultante directement comme une référence de
couple. La commande de couple peut être sélectionnée uniquement dans la configuration Flux avec signal de retour du
moteur (1-01 Principe Contrôle Moteur). Lorsque ce mode est sélectionné, l'unité de référence est le Nm. Il ne nécessite aucun
retour concernant le couple réel puisque celui-ci est calculé sur la base de la mesure de courant du variateur de fréquence.
Sélectionner [3] Process au par. 1-00 Mode Config. afin d'utiliser le régulateur PID de process pour le contrôle en boucle
fermée, de la vitesse ou d'une variable de process par exemple, dans l'application contrôlée.
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 23
Principes de fonctionnement... Manuel de configuration
3.6.6 PID
3.6.6.1 Régulateur PID de vitesse
Le régulateur PID maintient une vitesse de moteur constante indépendamment des variations de charge sur le moteur.
33
1-00 Mode Config.
[0] Boucle ouverte vit. ACTIF ACTIF ACTIF N.A.
[1] Boucle fermée vit. N.A. Inactif N.A. ACTIF
[2] Couple N.A. N.A. N.A. Inactif
[3] Process Inactif Inactif Inactif N.A.
[4] Boucl.ouverte couple N.A. Inactif N.A. N.A.
[5] Modulation (Wobble) Inactif Inactif Inactif Inactif
[6] Bobin. enroul. surface Inactif Inactif Inactif N.A.
[7] Boucl.ouv. vit. PID ét. Inactif Inactif Inactif N.A.
[8] Boucl.ferm.vit.PID ét. N.A. Inactif N.A. Inactif
Tableau 3.1 Configurations de contrôle avec commande de vitesse active
« N.A. » signifie que le mode spécifique n'est absolument pas disponible. « Inactif » signifie que le mode spécifique est disponible, mais que la
commande de vitesse n'est pas active dans ce mode.
1-01 Principe Contrôle Moteur
U/f Contrôle vectoriel
avancéVVC
plus
Flux ss capteur Flux retour moteur
AVIS!
Le régulateur PID de vitesse fonctionne avec la valeur de paramètre par défaut, mais le réglage précis des paramètres
est fortement recommandé afin d'optimiser les performances de commande du moteur. Il est tout particulièrement
recommandé de régler correctement les deux principes de contrôle du moteur de flux si l'on souhaite obtenir un
rendement optimal.
Tableau 3.2 résume les caractéristiques éventuellement configurables pour le contrôle de la vitesse. Voir le Guide de
programmation du VLT® AutomationDrive FC 301/FC 302 pour plus de précisions sur la programmation.
Paramètre Description de la fonction
7-00 PID vit.source ret. Sélectionner l'entrée qui fournit le signal de retour au régulateur PID de vitesse.
7-02 PID vit.gain P Plus la valeur est élevée, plus le contrôle est rapide. Cependant, une valeur trop élevée peut entraîner
des oscillations.
7-03 PID vit.tps intég.
7-04 PID vit.tps diff. Fournit un gain proportionnel à la vitesse de modification du signal de retour. Le réglage de ce
7-05 PID vit.limit gain D
Élimine l'erreur de vitesse en état stable. Une valeur faible entraîne une réaction rapide. Cependant,
une valeur trop faible peut entraîner des oscillations.
paramètre sur 0 désactive le différenciateur.
Dans le cas d'une application, pour laquelle la référence ou le retour change très vite, d'où un
changement rapide de l'erreur, le différenciateur peut rapidement devenir trop dominant. Cela
provient du fait qu'il réagit aux changements au niveau de l'écart. Plus l'écart change rapidement, plus
le gain différentiel est important. Il est donc possible de limiter le gain différentiel de manière à
pouvoir régler un temps de dérivée raisonnable en cas de modifications lentes et un gain raisonnablement rapide en cas de modifications rapides.
24 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
Principes de fonctionnement... Manuel de configuration
Paramètre Description de la fonction
Un filtre passe-bas atténue les oscillations du signal de retour et améliore la stabilité de l'état. Un
temps de filtre trop important risque cependant de détériorer la performance dynamique du
régulateur PID de vitesse.
Réglages pratiques du paramètre 7-06 pris selon le nombre d'impulsions par tour depuis le codeur
7-06 PID vit.tps filtre
7-07 Rapport démultiplic. ret.PID
vit.
7-08 Facteur d'anticipation PID
vitesse
7-09 Speed PID Error Correction
w/ Ramp
Tableau 3.2 Paramètres pertinents en matière de contrôle de vitesse
(PPR) :
Codeur PPR 7-06 PID vit.tps filtre
512 10 ms
1024 5 ms
2048 2 ms
4096 1 ms
Le variateur de fréquence multiplie le retour vitesse par ce rapport.
Le signal de référence contourne le contrôleur de vitesse de la valeur spécifiée. Cette fonction
augmente la performance dynamique de la boucle de contrôle de la vitesse.
L'erreur de vitesse entre la rampe et la vitesse réelle est comparée au réglage de ce paramètre. Si elle
dépasse la valeur de ce paramètre, elle est corrigée via la rampe de manière contrôlée.
Programmer dans l'ordre indiqué (voir le détail des réglages dans le Guide de programmation).
Le Tableau 3.3 suppose que tous les autres paramètres et commutateurs conservent leur réglage par défaut.
3 3
Fonction Paramètre Réglage
1) Veiller à ce que le moteur fonctionne correctement. Procéder comme suit :
Régler les paramètres du moteur conformément aux
données de la plaque signalétique
Exécuter une adaptation automatique du moteur 1-29 Adaptation
2) Vérifier que le moteur fonctionne et que le codeur est correctement raccordé. Procéder comme suit :
Appuyer sur la touche [Hand On] du LCP. Vérifier que le
moteur fonctionne et noter son sens de rotation (qui
sera donc le « sens positif »).
Aller au par. 16-20 Angle moteur. Faire doucement
tourner le moteur dans le sens positif. La rotation doit
être aussi lente que possible (seulement quelques tours
par minute) de manière à pouvoir déterminer si la valeur
au par. 16-20 Angle moteur augmente ou diminue.
Si le par. 16-20 Angle moteur décroît, modifier le sens de
rotation du codeur au par. 5-71 Sens cod.born.32 33.
3) Veiller à ce que les limites du variateur soient réglées sur des valeurs sûres.
Définir des limites acceptables pour les références. 3-02 Référence
Vérifier que les réglages des rampes correspondent aux
capacités du variateur et aux spécifications de fonctionnement autorisées de l’application.
1-2* Tel que spécifié par la plaque signalétique du moteur
[1] Exécuter un AMA complet
auto. au moteur
(AMA)
Définir une référence positive.
16-20 Angle
moteur
5-71 Sens
cod.born.32 33
minimale
3-03 Réf. max.
3-41 Temps
d'accél. rampe 1
3-42 Temps décél.
rampe 1
N.A. (paramètre en lecture seule) Remarque : une valeur
croissante repart à 0 lorsqu'elle atteint 65535.
[1] Sens antihoraire (si le par. 16-20 Angle moteur décroît)
0 tr/min (par défaut)
1 500 tr/min (défaut)
réglage par défaut
réglage par défaut
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 25
Principes de fonctionnement... Manuel de configuration
Fonction Paramètre Réglage
Définir des limites acceptables pour la vitesse et la
fréquence du moteur.
33
4) Configurer la commande de vitesse et sélectionner le principe de contrôle du moteur
Activation de la commande de vitesse
Sélection du principe de contrôle du moteur 1-01 Principe
5) Configurer la référence et la mettre à l’échelle par rapport à la commande de vitesse
Définir l'entrée ANA 53 comme source de référence 3-15 Ress.? Réf. 1 Inutile (par défaut)
Régler l'entrée ANA 53 0 tr/min (0 V) sur 1 500 tr/min
(10 V)
6) Configurer le signal du codeur 24 V HTL comme signal de retour pour le contrôle du moteur et de la vitesse
Définir les entrées digitales 32 et 33 comme entrées du
codeur HTL
Choisir la borne 32/33 comme signal de retour du
moteur
Choisir la borne 32/33 comme signal de retour du PID
de vitesse
7) Régler les paramètres du régulateur PID de vitesse
Consulter si nécessaire les consignes de réglage ou
procéder au réglage manuel
8) Enregistrer pour terminer
Enregistrer le réglage des paramètres sur le LCP afin de
les conserver
4-11 Vit. mot.,
limite infér. [tr/
min]
0 tr/min (par défaut)
1 500 tr/min (par défaut)
60 Hz (valeur par défaut 132 Hz)
4-13 Vit.mot.,
limite supér. [tr/
min]
4-19 Frq.sort.lim.ht
e
1-00 Mode Config.
[1] Boucle fermée vit.
[3] Flux retour moteur
Contrôle Moteur
6-1* Inutile (par défaut)
5-14 E.digit.born.32
[0] Inactif (par défaut)
5-15 E.digit.born.33
1-02 Source
Inutile (par défaut)
codeur arbre
moteur
7-00 PID vit.source
Inutile (par défaut)
ret.
7-0* Voir les consignes
0-50 Copie LCP [1] Lect.par.LCP
Tableau 3.3 Ordre de programmation
3.6.6.2
Réglage du régulateur PID de vitesse
Les consignes de réglage suivantes sont pertinentes lorsque l'on utilise l'un des principes de contrôle du moteur avec flux
dans les applications où la charge est principalement inerte (faible quantité de frottement).
La valeur du 30-83 PID vit.gain P dépend de l'inertie combinée du moteur et de la charge ; la largeur de bande sélectionnée
peut être calculée à l'aide de la formule suivante :
2
x
par.
. 1 − 20 x 9550
. 1 − 25
x
Largeur de bande rad/s
Par.
. 7 − 02 =
Inertie totale kgm
Par.
AVIS!
Le par. 1-20 Puissance moteur [kW] correspond à la puissance du moteur exprimée en [kW] (c.-à-d. saisir 4 kW au lieu de
4 000 W dans la formule).
20 rad/s est une valeur pratique pour la largeur de bande. Vérifier le résultat du calcul du 7-02 PID vit.gain P par rapport à la
formule suivante (inutile si l'on utilise un signal de retour haute résolution tel que SinCos) :
Par.
. 7 − 02
Ondulation de couple max.
MAX
0. 01 x 4 x
=
5 ms est la valeur de départ recommandée pour le 7-06 PID vit.tps filtre (une résolution de codeur plus faible nécessite une
valeur de filtre plus élevée). Une ondulation de couple max. de 3 % est généralement acceptable. Pour les codeurs
incrémentaux, la résolution se trouve soit au par. 5-70 Pts/tr cod.born.32 33 (24 V HTL sur variateur de fréquence standard),
soit au par. 17-11 Résolution (PPR) (5 V TTL sur option d'encodeur MCB 102).
Résolution codeur x Par.
2 x π
%
. 7 − 06
x
26 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
Principes de fonctionnement... Manuel de configuration
Généralement, la limite pratique maximale du par. 7-02 PID vit.gain P est déterminée par la résolution du codeur et le temps
de filtre du signal de retour, mais d'autres facteurs de l'application peuvent restreindre le par. 7-02 PID vit.gain P à une
valeur plus faible.
Pour atténuer le dépassement, le par. 7-03 PID vit.tps intég. peut être réglé sur 2,5 s environ (varie selon l'application).
Le par. 7-04 PID vit.tps diff. doit être réglé sur 0 jusqu'à ce que tout le reste soit réglé. Le cas échéant, pour terminer le
réglage, augmenter cette valeur par petits incréments.
3.6.6.3 Régulateur PID de process
Utiliser le régulateur PID de process pour contrôler les paramètres de l'application mesurés par un capteur (c.-à-d. pression,
température, débit) et affectés par le moteur raccordé par l'intermédiaire d'une pompe, d'un ventilateur ou un autre
dispositif.
Le Tableau 3.4 répertorie les configurations où le contrôle de process est possible. Lorsqu'un principe de contrôle du moteur
à vecteur de flux est utilisé, veiller également à régler les paramètres du régulateur PID de vitesse. Se reporter au
chapitre 3.6 Contrôles pour l'activation de la commande de vitesse.
1-00 Mode Config. 1-01 Principe Contrôle Moteur
U/f Contrôle vectoriel
avancéVVC
[3] Process Inactif Process Process & vitesse Process & vitesse
plus
Flux ss capteur Flux retour moteur
3 3
Tableau 3.4 Configurations de contrôle avec contrôle de process
AVIS!
Le régulateur PID de process fonctionne avec la valeur de paramètre par défaut mais le réglage précis des paramètres
est fortement recommandé afin d'optimiser le rendement du contrôle de l'application. Les deux principes de contrôle
du moteur avec flux dépendent largement, pour pouvoir atteindre leur rendement optimal, du réglage approprié du
régulateur PID de vitesse (avant même le réglage du régulateur PID de process).
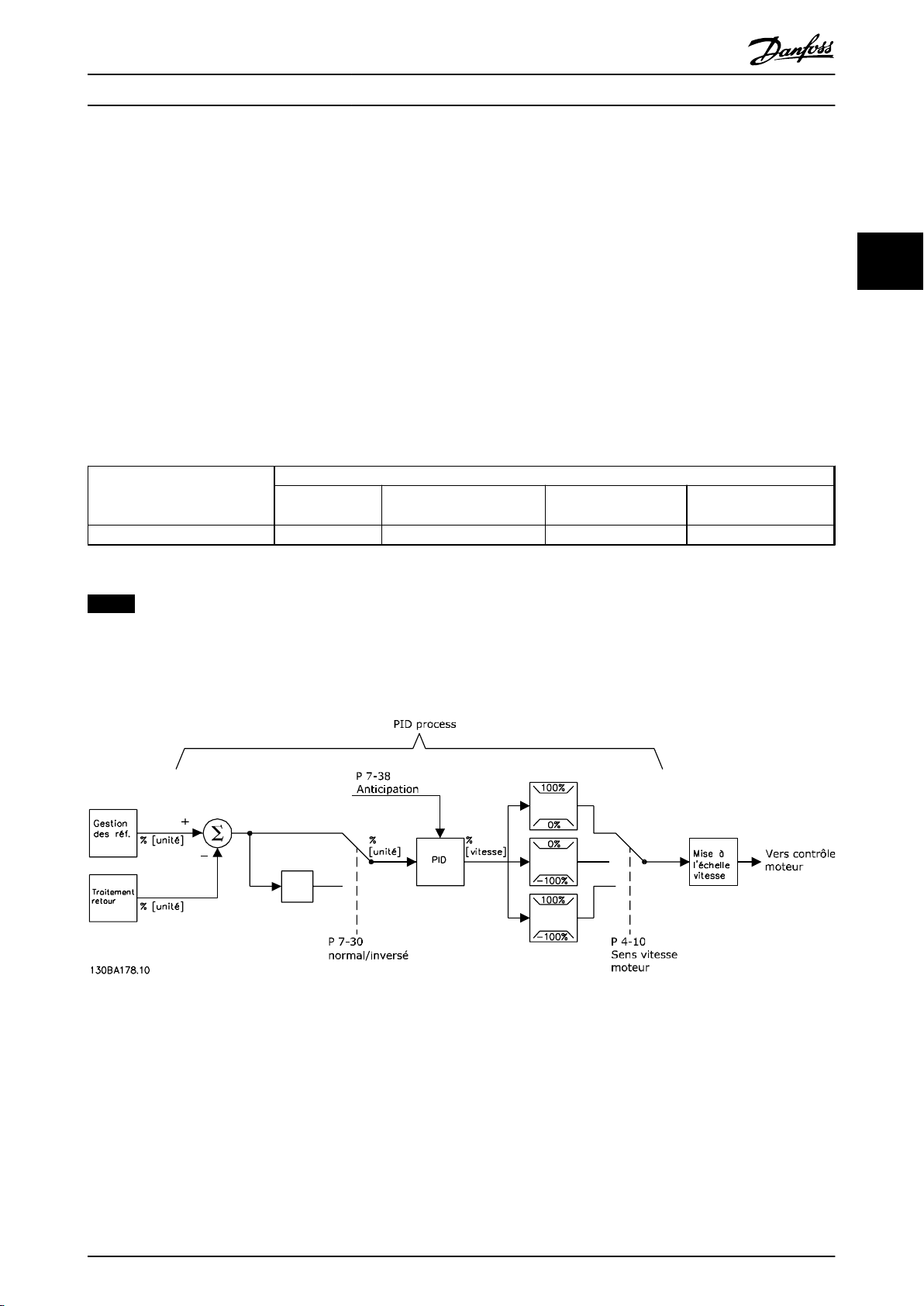
Illustration 3.9 Diagramme du régulateur PID de process
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 27
Principes de fonctionnement...
Manuel de configuration
Le Tableau 3.5 résume les caractéristiques qui peuvent être configurées pour le contrôle de process.
Paramètre Description de la fonction
7-20 PID proc./1 retour Sélectionner la source (c.-à-d. entrée analogique ou impulsions) qui fournit le signal
de retour au régulateur PID de process.
7-22 PID proc./2 retours En option : déterminer si le régulateur PID de process doit obtenir un signal de
33
7-30 PID proc./Norm.Inv.
7-31 PID proc./Anti satur. La fonction anti-saturation implique l'initialisation de l'intégrateur à une fréquence
7-32 PID proc./Fréq.dém. Dans certaines applications, un temps très long s'écoule avant d'atteindre la vitesse/
7-33 PID proc./Gain P Plus la valeur est élevée, plus le contrôle est rapide. Cependant, une valeur trop
7-34 PID proc./Tps intégral. Élimine l'erreur de vitesse en état stable. Une valeur faible entraîne une réaction
7-35 PID proc./Tps diff. Fournit un gain proportionnel à la vitesse de modification du signal de retour. Le
7-36 PID proc./ Limit.gain D. Dans le cas d'une application, pour laquelle la référence ou le retour change très
7-38 Facteur d'anticipation PID process Pour les applications dans lesquelles il existe une corrélation acceptable (et
5-54 Tps filtre pulses/29 (borne impulsions 29),
5-59 Tps filtre pulses/33 (borne impulsions 33),
6-16 Const.tps.fil.born.53 (borne analogique 53),
6-26 Const.tps.fil.born.54 (borne analogique 54)
6-36 Constante tps filtre borne X30/11
6-46 Constante tps filtre borne X30/12
35-46 Term. X48/2 Filter Time Constant
retour supplémentaire (et en spécifier la source). Si une source de retour supplémentaire est sélectionnée, les deux signaux de retour sont ajoutés avant d'être
utilisés dans le régulateur PID de process.
Sous [0] Normal, le contrôle de process répond par une augmentation de la vitesse
du moteur si le signal de retour passe en dessous de la référence. Dans la même
situation, mais sous [1] Inverse, le contrôle de process répond par une vitesse
décroissante.
correspondant à la fréquence de sortie actuelle lorsqu'une limite de fréquence ou
de couple est atteinte. Cela empêche l'intégration d'un écart qui ne peut, en aucun
cas, être compensé par un changement de vitesse. Pour désactiver cette fonction,
sélectionner [0] Inactif.
point de consigne requis. Dans ces applications, régler la vitesse fixe du moteur sur
le variateur de fréquence avant d'activer le régulateur de process peut présenter un
avantage. Pour cela, régler une valeur de démarrage du process PID (vitesse) au par.
7-32 PID proc./Fréq.dém.
élevée peut entraîner des oscillations.
rapide. Cependant, une valeur trop faible peut entraîner des oscillations.
réglage de ce paramètre sur 0 désactive le différenciateur.
vite, d'où un changement rapide de l'erreur, le différenciateur peut rapidement
devenir trop dominant. Cela provient du fait qu'il réagit aux changements au niveau
de l'écart. Plus l'écart change rapidement, plus le gain différentiel est important. Il
est donc possible de limiter le gain différentiel de manière à pouvoir régler un
temps de dérivée raisonnable en cas de modifications lentes.
quasiment linéaire) entre la référence de process et la vitesse du moteur nécessaire
à l'obtention de cette référence, le facteur d'anticipation peut servir à obtenir une
meilleure performance dynamique du régulateur PID de process.
En cas d'oscillation du signal de retour de courant/tension, il est possible d'amortir
ces oscillations au moyen d'un filtre de retour. Cette constante de temps est
l'expression de la limite de vitesse des ondulations présentes sur le signal de retour.
Exemple : si le filtre passe-bas a été réglé sur 0,1 s, la limite de vitesse est de 10
rad/s (réciproque de 0,1 s), ce qui correspond à (10/(2 x π)) = 1,6 Hz. Cela signifie
que tous les courants/tensions déviant de plus de 1,6 oscillations par seconde sont
atténués par le filtre. La commande ne porte que sur un signal de retour dont la
fréquence (vitesse) varie de moins de 1,6 Hz.
Le filtre passe-bas améliore la stabilité de l'état mais la sélection d'un temps de filtre
trop important détériore la performance dynamique du régulateur PID de process.
Tableau 3.5 Paramètres pertinents du contrôle de process
28 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04

130BP046.10
Hand
on
O
Auto
on
Reset
Principes de fonctionnement...
Manuel de configuration
3.6.6.4 Régulateur PID avancé
Consulter le Guide de Programmation des VLT
AutomationDrive FC 301/FC 302 pour les paramètres du
régulateur PID avancé
®
3.6.7 Contrôle de courant interne en mode
plus
VVC
Lorsque le couple/courant moteur dépasse les limites de
couple définies aux par. 4-16 Mode moteur limite couple,
4-17 Mode générateur limite couple et 4-18 Limite courant, le
contrôle de limite de courant intégral est activé.
Si le variateur de fréquence est en limite de courant en
mode moteur ou en mode régénérateur, il tente de
descendre le plus rapidement possible en dessous des
limites de couple réglées sans perdre le contrôle du
moteur.
Contrôle local (Hand On) et distant
3.6.8
(Auto On)
Le variateur de fréquence peut être actionné manuellement via le panneau de commande locale (LCP) ou à
distance via les entrées analogiques et digitales et le bus
série. Si l'autorisation est donnée aux par. 0-40 Touche
[Hand on] sur LCP, 0-41 Touche [Off] sur LCP, 0-42 Touche
[Auto on] sur LCP et 0-43 Touche [Reset] sur LCP, il est
possible de démarrer et d'arrêter le variateur de fréquence
via le LCP à l'aide des touches [Hand On] et [Off]. Les
alarmes peuvent être réinitialisées via la touche [Reset].
Après avoir appuyé sur la touche [Hand On], le variateur
de fréquence passe en mode Hand (manuel) et suit (par
défaut) la référence locale définie à l'aide des touches
fléchées du LCP.
Après avoir appuyé sur la touche [Auto On], le variateur de
fréquence passe en mode Auto et suit (par défaut) la
référence distante. Dans ce mode, il est possible de
contrôler le variateur via les entrées digitales et diverses
interfaces série (RS-485, USB ou un bus de terrain en
option). Consulter les informations complémentaires
concernant le démarrage, l'arrêt, les rampes variables et les
configurations de paramètres, etc. dans le groupe de
paramètres 5-1* Entrées digitales ou 8-5* Communication
série.
Référence active et mode de configuration
La référence active peut correspondre à la référence locale
ou distante.
Au par. 3-13 Type référence, la référence locale peut être
sélectionnée en permanence en sélectionnant [2] Local.
Pour sélectionner en permanence la référence distante,
régler sur [1] A distance. En réglant sur [0] Mode hand/auto
(par défaut), l'emplacement de la référence dépend du
mode activé (mode Hand ou mode Auto).
Illustration 3.11 Référence active
Illustration 3.12 Mode Config.
Touches [Hand On]
[Auto on]
Hand Mode hand/auto Local
Hand ⇒ Off
Auto Mode hand/auto A distance
Auto ⇒ Off
Toutes les touches Local Local
Toutes les touches A distance A distance
Tableau 3.6 Conditions d'activation des références
locales/distantes
3-13 Type
référence
Mode hand/auto Local
Mode hand/auto A distance
Référence active
3 3
Illustration 3.10 Touches d'exploitation
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 29

Principes de fonctionnement...
Le par. 1-00 Mode Config. détermine le type de principe de
fonctionnement de l'application (à savoir le contrôle de
vitesse, le couple ou le process) utilisé lorsque la référence
distante est active. Le par. 1-05 Configuration mode Local
détermine le type de principe de fonctionnement de
l'application utilisé lorsque la référence locale est active.
33
L'une d'elles est toujours active, mais les deux ne peuvent
pas l'être en même temps.
Manuel de configuration
3.7 Utilisation des références
3.7.1 Références
Référence analogique
Signal analogique appliqué à l'entrée 53 ou 54. Le signal
peut être une tension 0-10 V (FC 301 et FC 302) ou -10 à
+10 V (FC 302). Signal de courant 0-20 mA ou 4-20 mA.
Référence binaire
Signal appliqué au port de communication série (RS-485
bornes 68-69).
Référence prédéfinie
Référence prédéfinie pouvant être réglée entre -100 % et
+100 % de la plage de référence. Huit références
prédéfinies peuvent être sélectionnées par l'intermédiaire
des bornes digitales.
Référence d'impulsions
Référence d'impulsions appliquée à la borne 29 ou 33,
sélectionnée au par.5-13 E.digit.born.29 ou 5-15 E.digit.born.
33 [32] Entrée impulsions. La mise à l'échelle est effectuée
via le groupe de paramètres 5-5* Entrée impulsions.
Ref
MAX
Détermine la relation entre l'entrée de référence à 100 %
de la valeur de l'échelle complète (généralement 10 V,
20 mA) et la référence résultante. Valeur de référence
maximum définie au par. 3-03 Réf. max.
Ref
MIN
Détermine la relation entre l'entrée de référence à la valeur
0 % (généralement 0 V, 0 mA, 4 mA) et la référence
résultante. Valeur de référence minimum définie au par.
3-02 Référence minimale.
Référence locale
La référence locale est active lorsque le variateur de
fréquence fonctionne avec la touche [Hand On] activée.
Ajuster la référence avec les touches de navigation [▲]/[▼]
et [◄]/[►].
30 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
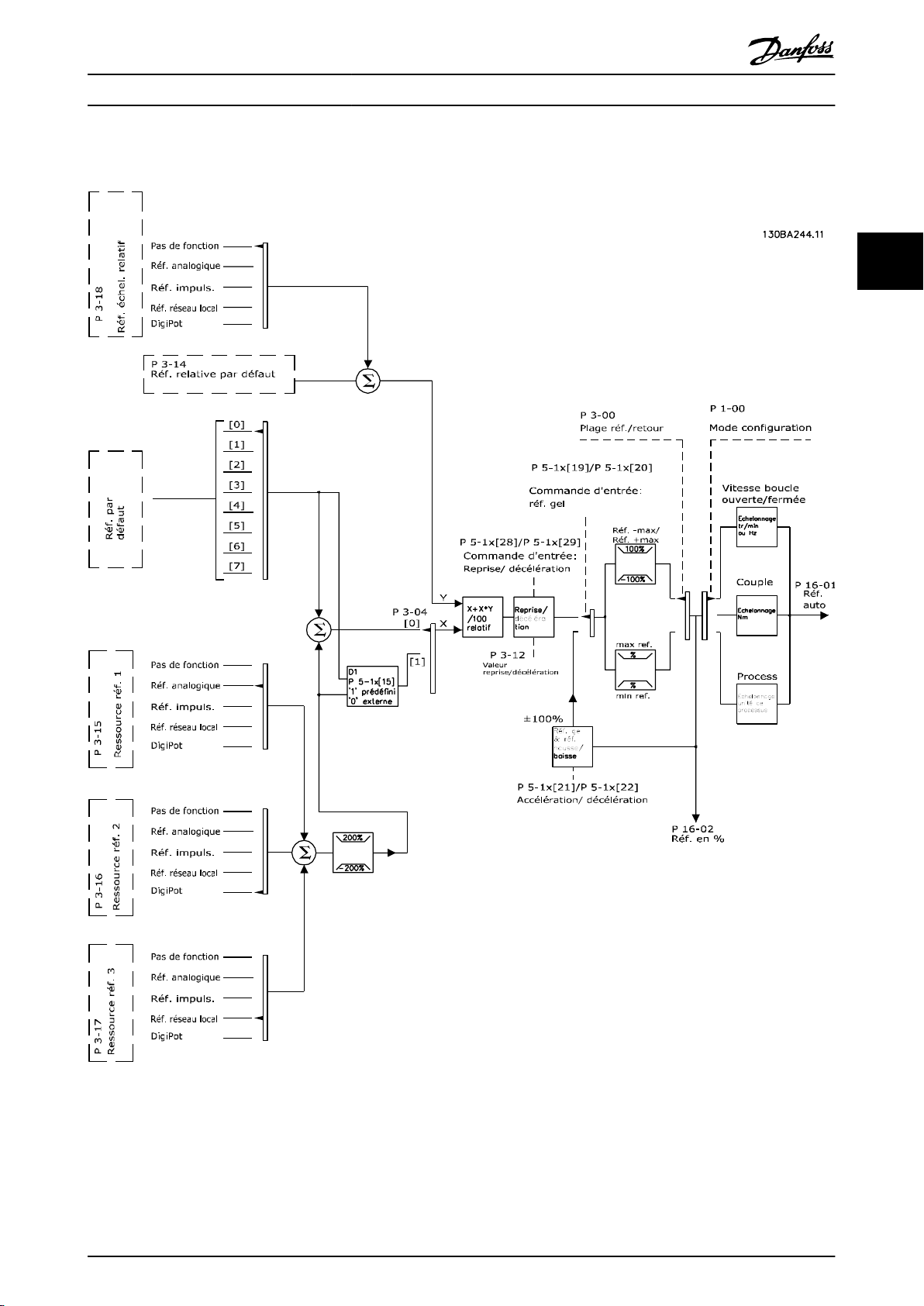
Principes de fonctionnement...
Référence distante
Le système de gestion des références permettant de calculer la référence distante est présenté sur l'Illustration 3.13.
Manuel de configuration
3 3
Illustration 3.13 Référence distante
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 31
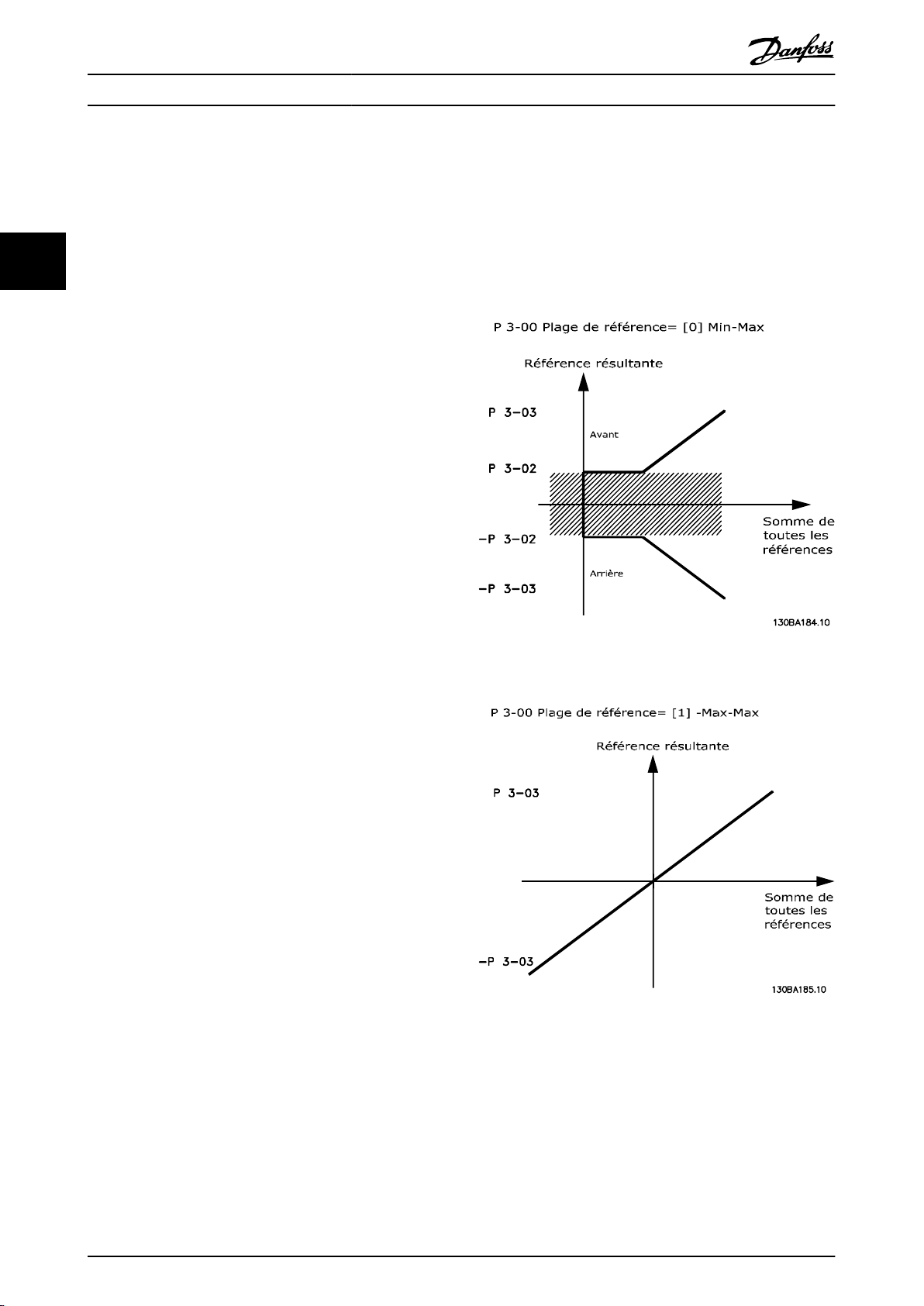
Principes de fonctionnement... Manuel de configuration
Limites de référence
La référence distante est calculée à chaque intervalle de
balayage et comporte initialement deux types d'entrée
de référence :
1.
X (référence réelle) : addition (voir 3-04 Fonction
référence) de quatre références maximum
33
Les deux types d'entrée de référence sont associés dans le
calcul suivant : Référence distante = X + X * Y / 100 %. Si
la référence relative n'est pas utilisée, le par. 3-18 Echelle
réf.relative doit être réglé sur [0] Pas de fonction et le par.
3-14 Réf.prédéf.relative sur 0%. Les fonctions rattrapage/
ralentissement et gel référence peuvent toutes deux être
activées par les entrées digitales sur le variateur de
fréquence. Les fonctions et les paramètres sont décrits
dans le Guide de programmation.
La mise à l'échelle des références analogiques est décrite
dans les groupes de paramètres 6-1* Entrée ANA 1 et 6-2*
Entrée ANA 2 et celle des références d'impulsions digitales
est décrite dans le groupe de paramètres 5-5* Entrée
impulsions.
Les limites et plages de référence sont définies dans le
groupe de paramètres 3-0* Limites de réf.
sélectionnées en externe, comprenant toute
combinaison (déterminée par le réglage des
3-15 Ress.? Réf. 1, 3-16 Ress.? Réf. 2 et 3-17 Ress.?
Réf. 3) d'une référence prédéfinie fixe
(3-10 Réf.prédéfinie), de références analogiques
variables, de références d'impulsions digitales
variables et de références de bus série variables,
et ce quel que soit le variateur de fréquence
contrôlé ([Hz], [tr/min], [Nm], etc.).
2. Y (référence relative) : addition d'une référence
prédéfinie fixe (3-14 Réf.prédéf.relative) et d'une
référence analogique variable (3-18 Echelle
réf.relative) en [%].
3.7.2
Les par.3-00 Plage de réf., 3-02 Référence minimale et
3-03 Réf. max. définissent ensemble la plage autorisée de la
somme de toutes les références. Cette dernière est
verrouillée si nécessaire. La relation entre la référence
résultante (après verrouillage) et la somme de toutes les
références est représentée sur l'Illustration 3.14.
Illustration 3.14 Relation entre la référence résultante et la
somme de toutes les références
Illustration 3.15 Référence résultante
32 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
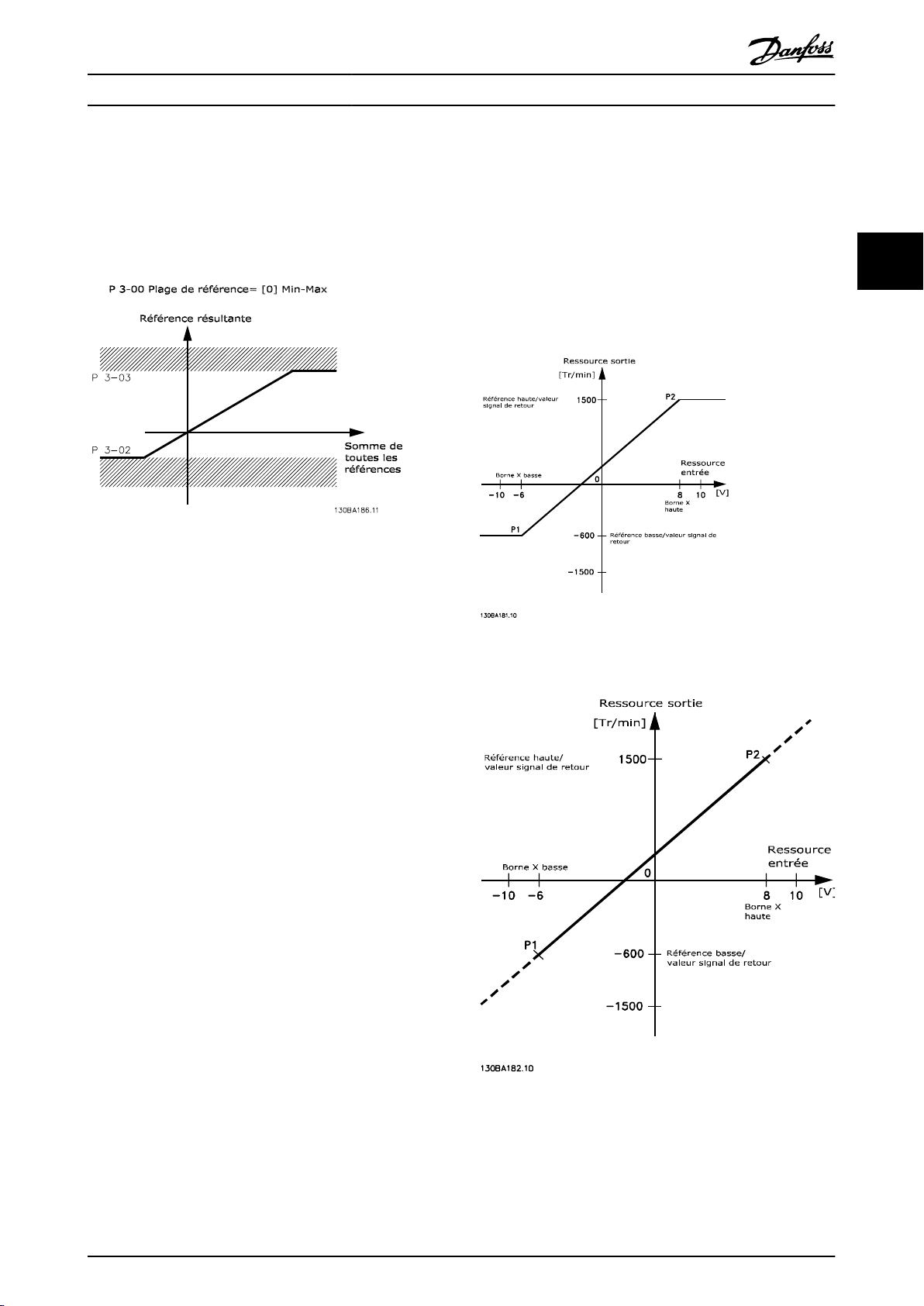
Principes de fonctionnement... Manuel de configuration
La valeur du par. 3-02 Référence minimale ne peut pas
présenter une valeur inférieure à 0, à moins que le par.
1-00 Mode Config. ne soit réglé sur [3] Process. Dans ce cas,
les relations entre la référence résultante (après
verrouillage) et la somme de toutes les références sont
telles que présentées sur l'Illustration 3.16.
Illustration 3.16 Somme de toutes les références avec le par.
1-00 Mode Config. réglé sur [3] Process
3.7.4
Mise à l'échelle des références et du
retour analogiques et d'impulsions
Les références et le signal de retour sont mis à l'échelle à
partir des entrées analogiques et d'impulsions de la même
façon. La seule différence est qu'une référence au-dessus
ou en dessous des « valeurs limites » minimale et
maximale spécifiées (P1 et P2 sur l'Illustration 3.17) est
verrouillée, contrairement à un signal de retour au-dessus
ou en dessous de ces limites.
3 3
Mise à l'échelle des références
3.7.3
prédéfinies et des références du bus
Les références prédéfinies sont mises à l'échelle selon
les règles suivantes :
Lorsque le par. 3-00 Plage de réf. : [0] Min - Max,
•
la référence 0 % est égale à 0 [unité] où « unité »
peut être toute unité (à savoir tr/min, m/s, bar,
etc.) et la référence 100 % est égale à Max. (abs.
(3-03 Réf. max.), abs. (3-02 Référence minimale)).
Lorsque le par. 3-00 Plage de réf. : [1] -Max -
•
+Max, la référence 0 % est égale à 0 [unité], la
référence -100 % est égale à -Réf. max. et la
référence 100% est égale à Réf. max.
Les références de bus sont mises à l'échelle selon les
règles suivantes :
Lorsque le par. 3-00 Plage de réf. : [0] Min - Max.
•
Pour obtenir une résolution maximum sur la
référence de bus, la mise à l'échelle est la
suivante : la référence 0 % est égale à Référence
minimale et la référence 100 % à la Réf. max.
Lorsque le par. 3-00 Plage de réf. : [1] -Max -
•
+Max, la référence -100 % est égale à -Réf. max.
et la référence 100% à Réf. max.
Illustration 3.17 Mise à l'échelle des références et du retour
analogiques et d'impulsions
Illustration 3.18 Mise à l'échelle de la sortie de référence
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 33
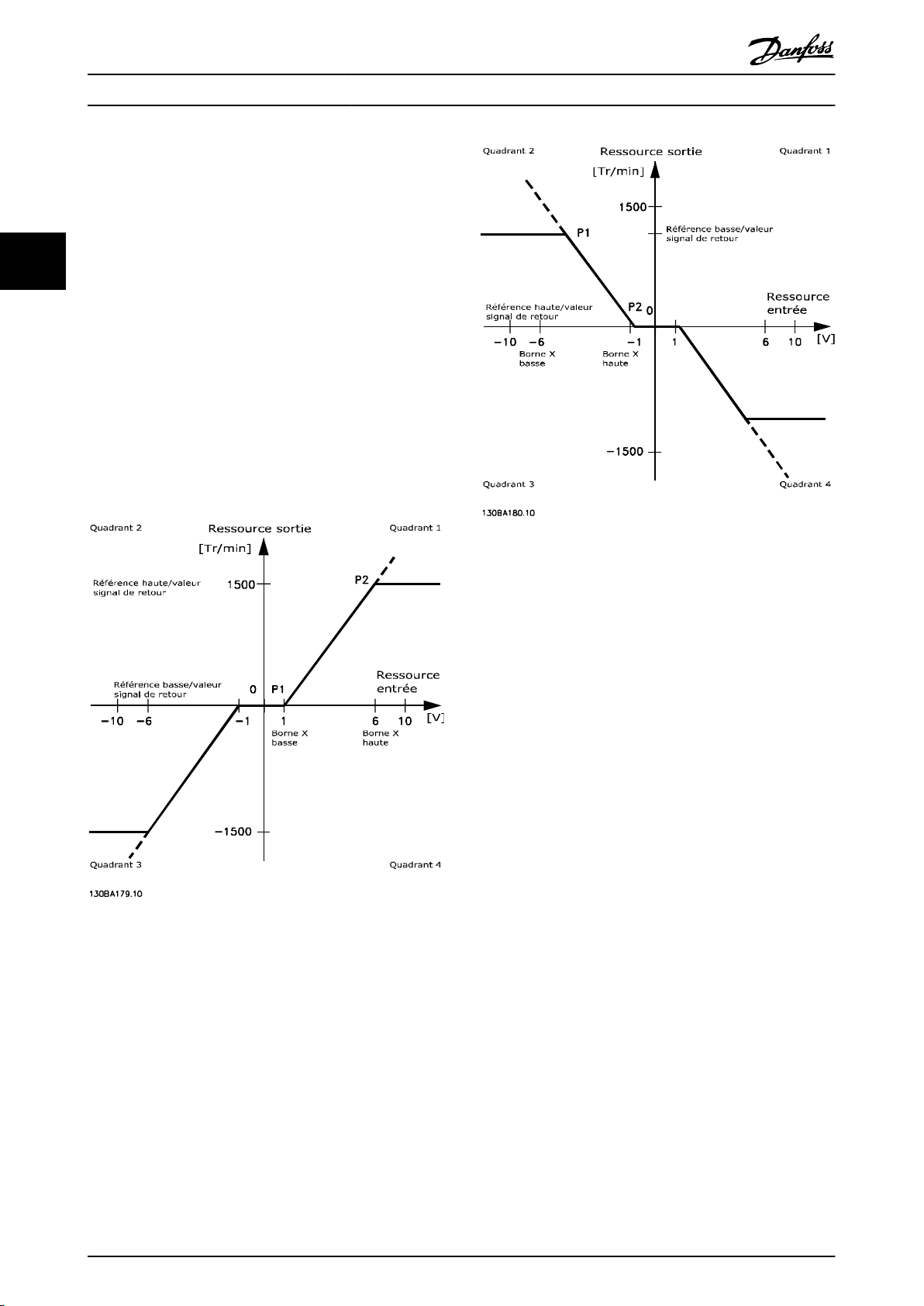
Principes de fonctionnement... Manuel de configuration
3.7.5 Zone morte autour de zéro
Dans certains cas, la référence (dans de rares cas, le signal
de retour aussi) doit présenter une zone morte autour de
zéro (c'est-à-dire qu'il faut veiller à ce que la machine soit
arrêtée lorsque la référence est proche de zéro).
33
Pour activer la zone morte et en définir la largeur,
appliquer les réglages suivants :
La valeur de la référence minimale ou de la
•
référence maximale doit être égale à zéro. En
d'autres termes, P1 ou P2 doit être sur l'axe X sur
l'Illustration 3.19.
Et les deux points définissant le graphique de
•
mise à l'échelle se trouvent dans le même
quadrant.
Les dimensions de la zone morte sont définies par P1 ou
P2, comme sur l'Illustration 3.19.
Illustration 3.20 Zone morte inversée
Illustration 3.19 Zone morte
Ainsi, une valeur limite de référence de P1 = (0 V, 0 tr/min)
ne provoque pas de zone morte. Une valeur limite de
référence de p. ex. P1 = (1 V, 0 tr/min) provoque une zone
morte de -1 V à +1 V dans ce cas, tant que la valeur limite
P2 est placée dans le Quadrant 1 ou le Quadrant 4.
34 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
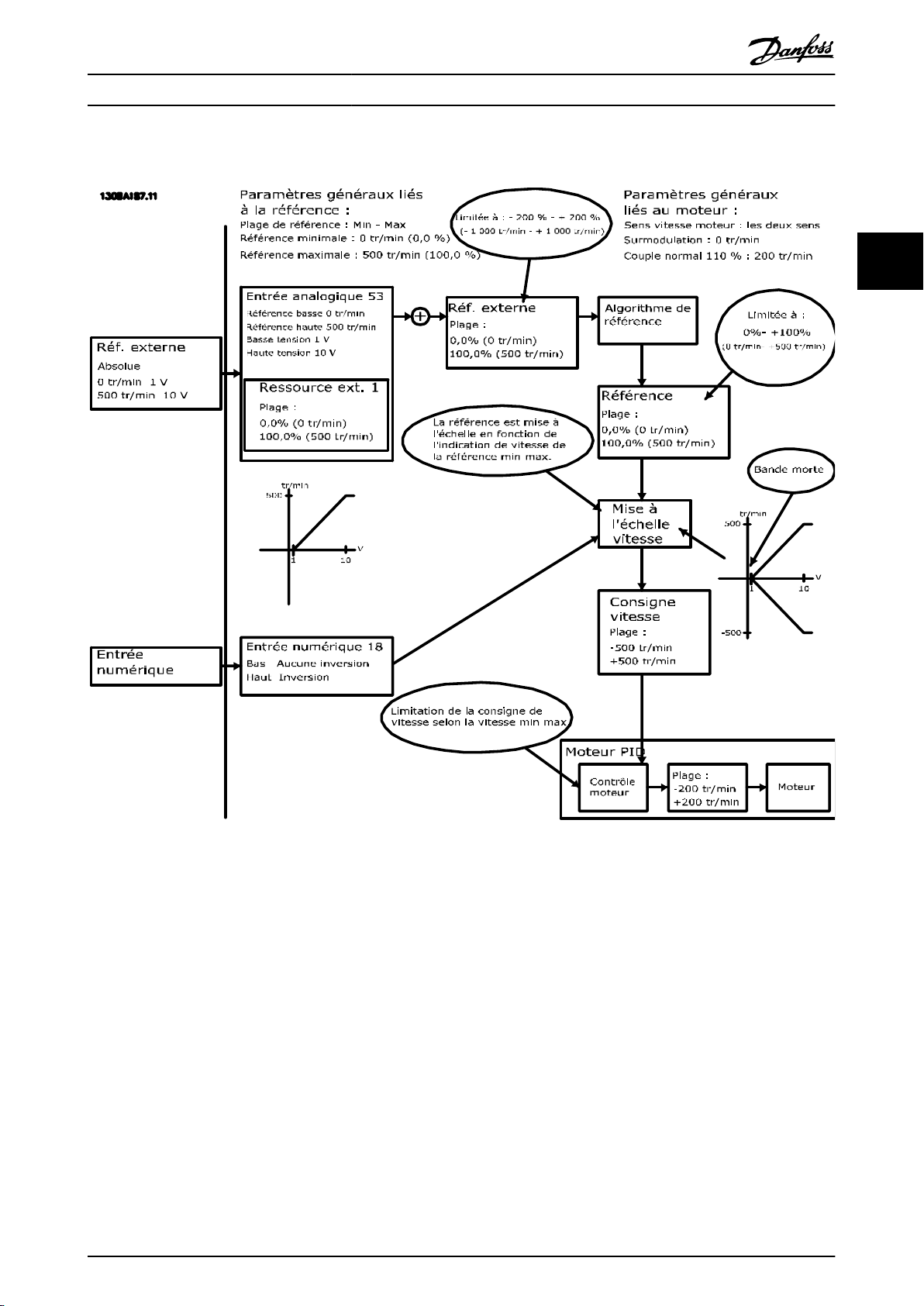
Principes de fonctionnement... Manuel de configuration
L'Illustration 3.21 présente comment l'entrée de référence, dont les limites sont comprises entre Min et Max, est verrouillée.
3 3
Illustration 3.21 Référence positive avec zone morte, entrée digitale pour déclencher l'inversion.
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 35
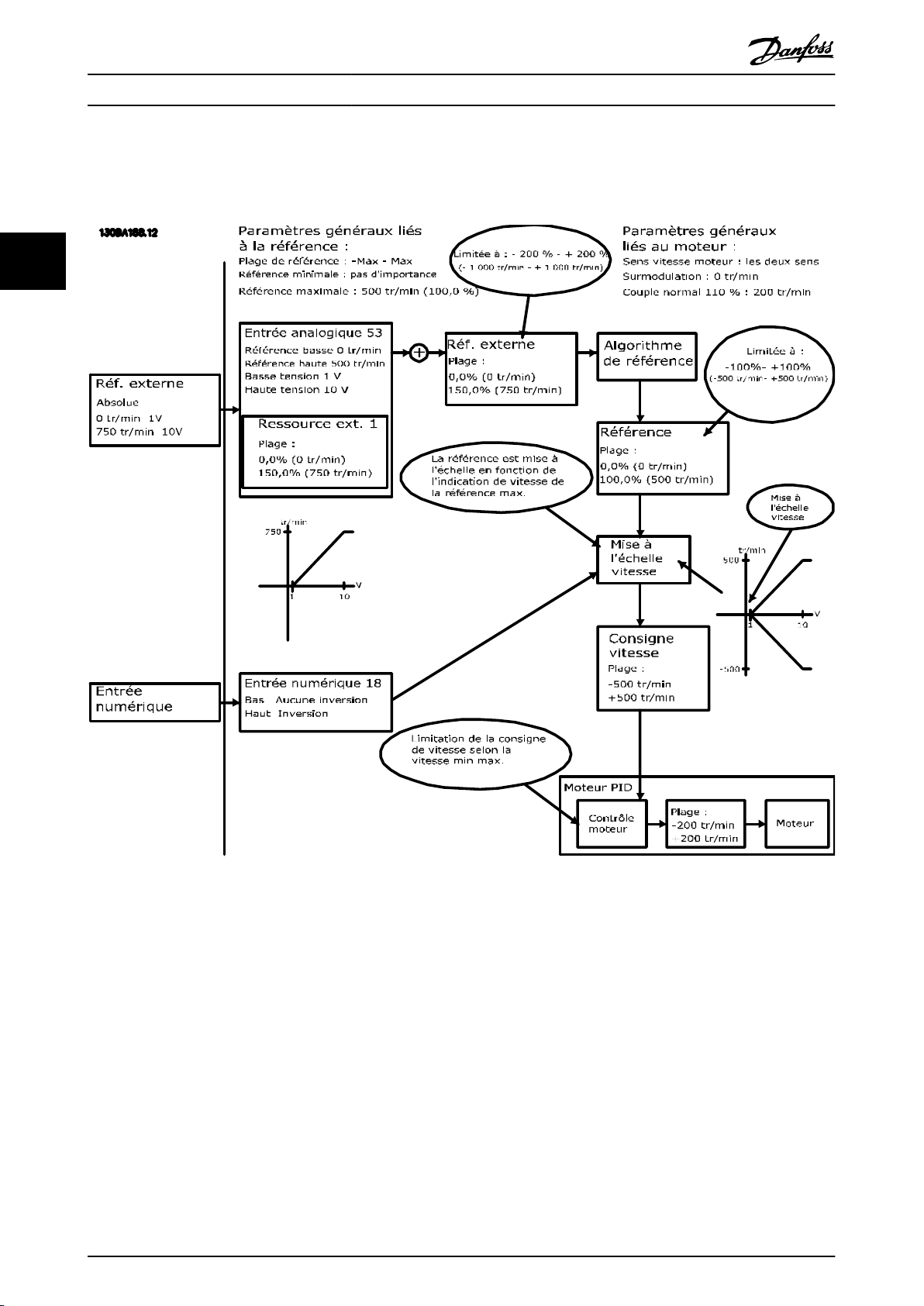
Principes de fonctionnement... Manuel de configuration
L'Illustration 3.22 présente comment l'entrée de référence, dont les limites ne sont pas comprises entre -Max et +Max, est
verrouillée par rapport aux limites d'entrée haute et basse avant l'ajout à la référence externe. L'Illustration 3.22 présente
également comment la référence réelle est verrouillée sur -Max à +Max par l'algorithme de référence.
33
Illustration 3.22 Référence positive avec zone morte, entrée digitale pour déclencher l'inversion. Règles de verrouillage.
36 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04

Principes de fonctionnement... Manuel de configuration
3 3
Illustration 3.23 Référence négative à positive avec zone morte, le signe détermine le sens, -Max à +Max.
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 37
Caractéristiques produit
Manuel de configuration
4 Caractéristiques produit
4.1.2
4.1 Caractéristiques opérationnelles
automatisées
Ces caractéristiques sont actives dès que le variateur de
fréquence est en fonctionnement. Elles ne nécessitent
44
aucune programmation ni configuration. Le fait de savoir
que ces caractéristiques sont présentes permet d'optimiser
la conception d'un système et sans doute d'éviter l'introduction de composants ou fonctionnalités redondants.
Le variateur de fréquence comporte un large éventail de
fonctions de protection intégrées afin de le protéger et de
protéger également le moteur qu'il fait fonctionner.
Protection contre les courts-circuits
4.1.1
Moteur (phase-phase)
Une mesure de courant effectuée sur chacune des trois
phases moteur ou sur le circuit intermédiaire protège le
variateur de fréquence contre les courts-circuits. Un courtcircuit entre 2 phases de sortie se traduit par un
surcourant dans l'onduleur. L'onduleur est désactivé si le
courant de court-circuit dépasse la valeur limite (alarme 16
Arrêt verrouillé).
Côté secteur
Un variateur de fréquence fonctionnant correctement
limite le courant qu'il tire de l'alimentation. Il est
recommandé d'utiliser des fusibles et/ou des disjoncteurs
du côté de l'alimentation comme protection en cas de
panne d'un composant interne au variateur de fréquence
(première panne). Voir l'chapitre 9.3 Mise sous tension pour
plus d'informations.
AVIS!
Ceci est obligatoire pour assurer la conformité à la
norme CEI 60364 pour la conformité CE et au NEC 2009
pour la conformité UL.
Résistance de freinage
Le variateur de fréquence est protégé contre les courtscircuits dans la résistance de freinage.
Répartition de la charge
Pour protéger le bus CC contre les courts-circuits et les
variateurs de fréquence contre les surcharges, installer des
fusibles CC en série avec les bornes de répartition de la
charge de toutes les unités connectées. Voir
l'chapitre 9.6.3 Répartition de la charge pour plus d'informations.
Protection contre les surcharges
Surtension générée par le moteur
La tension du circuit intermédiaire augmente lorsque le
moteur agit comme un alternateur. Ceci se produit dans
deux cas :
La charge entraîne le moteur (à une fréquence de
•
sortie constante générée par le variateur de
fréquence) : l'énergie est fournie par la charge.
Lors de la décélération (rampe descendante), si le
•
moment d'inertie est élevé, le frottement est
faible et le temps de rampe de décélération est
trop court pour que l'énergie se dissipe sous
forme de perte du variateur de fréquence, du
moteur et de l'installation.
Un réglage incorrect de la compensation du
•
glissement risque d'entraîner une tension élevée
du circuit intermédiaire.
Force contre-électromotrice FCEM issue du
•
fonctionnement du moteur PM. Si le moteur PM
est en roue libre à un régime élevé, la FCEM peut
éventuellement dépasser la tolérance de tension
maximum du variateur de fréquence et
provoquer des dommages. Pour empêcher cela,
la valeur du par. 4-19 Frq.sort.lim.hte est automatiquement limitée sur la base d'un calcul interne
reposant sur la valeur des par. 1-40 FCEM à 1000
tr/min., 1-25 Vit.nom.moteur et 1-39 Pôles moteur.
AVIS!
Pour éviter que le moteur dépasse la vitesse limite (en
raison d'effets de moulinet excessifs, par ex.), il est alors
recommandé de l'équiper d'une résistance de freinage.
La surtension peut être gérée en utilisant une fonction de
freinage (2-10 Fonction Frein et Surtension) et/ou un
contrôle de surtension (2-17 Contrôle Surtension).
Fonctions de freinage
Raccorder une résistance de freinage pour la dissipation de
l'énergie excédentaire. Le raccordement d'une résistance
de freinage permet une tension bus CC plus élevée lors du
freinage.
Le frein CA permet d'optimiser le freinage sans utiliser de
résistance de freinage. Cette fonction contrôle une
surmagnétisation du moteur en fonctionnant avec une
charge génératorique. Cette fonction peut améliorer l'OVC.
L'augmentation des pertes électriques dans le moteur
permet aux fonctions OVC d'augmenter le couple de
freinage sans dépasser la limite de surtension.
38 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04

Caractéristiques produit
Manuel de configuration
AVIS!
Le frein CA n'est pas aussi efficace que le freinage
dynamique par résistance.
Contrôle des surtensions (OVC)
L'OVC réduit le risque d'arrêt du variateur de fréquence en
raison d'une surtension sur le circuit intermédiaire. Ceci est
géré par l'extension automatique du temps de rampe.
AVIS!
L'OVC peut être activé pour le moteur PM avec tout le
cœur de contrôle, les PM VVC
les moteurs PM.
plus
, Flux OL et Flux CL pour
AVIS!
N'active pas le contrôle de surtension dans les
applications de levage.
4.1.3 Détection de phase moteur
manquante
La fonction de détection de phase moteur manquante
(4-58 Surv. phase mot.) est activée par défaut pour éviter
l'endommagement du moteur s'il manque une phase
moteur. Le réglage par défaut est de 1 000 ms, mais il
peut être ajusté pour une détection plus rapide.
Limite courant
La limite de courant est contrôlée au par. 4-18 Limite
courant et le temps avant que le variateur de fréquence ne
se déclenche est contrôlé au par. 14-24 Délais Al./Limit.C.
Limite vitesse
Vitesse limite min. : 4-11 Vit. mot., limite infér. [tr/min] ou le
par. 4-12 Vitesse moteur limite basse [Hz] limite la gamme
de vitesse d'exploitation entre 30 et 50/60 Hz, par
exemple.
Vitesse limite max. : (4-13 Vit.mot., limite supér. [tr/min] ou
4-19 Frq.sort.lim.hte) limite la fréquence de sortie max. à
celle qu'est capable de fournir le variateur de fréquence.
ETR
ETR est une caractéristique électronique qui simule un
relais bimétallique en s'appuyant sur des mesures internes.
La caractéristique est indiquée sur l'Illustration 4.1.
Limite tension
L'onduleur s'arrête afin de protéger les transistors et les
condensateurs du circuit intermédiaire quand un certain
niveau de tension programmé en dur est atteint.
Surtempérature
Le variateur de fréquence comporte des capteurs de
température intégrés et réagit immédiatement aux valeurs
critiques via les limites programmées en dur.
Protec. rotor verrouillé
4.1.7
4 4
Détection de défaut de phase secteur
4.1.4
Un fonctionnement dans des conditions de déséquilibre
important réduit la durée de vie du moteur. Les conditions
sont considérées comme sévères si le moteur fonctionne
continuellement à hauteur de la charge nominale. Le
réglage par défaut déclenche le variateur de fréquence en
cas de déséquilibre du secteur (14-12 Fonct.sur
désiqui.réseau).
Commutation sur la sortie
4.1.5
Une commutation sur la sortie entre le moteur et le
variateur de fréquence est autorisée. Des messages d'erreur
peuvent apparaître. Activer le démarrage à la volée pour
« rattraper » un moteur qui tourne à vide.
4.1.6
Protection surcharge
Limite couple
La caractéristique de limite de couple protège le moteur
contre les surcharges indépendamment de la vitesse. La
limite de couple est contrôlée au par. 4-16 Mode moteur
limite couple et/ou au par. 4-17 Mode générateur limite
couple et le temps avant que l'avertissement de limite de
couple ne se déclenche est contrôlé au par. 14-25 Délais
Al./C.limit ?.
Dans certaines situations, le rotor se verrouille suite à une
charge excessive ou à d'autres facteurs (le palier ou l'application crée une situation de rotor verrouillé). Cela entraîne
une surchauffe de l'enroulement du moteur (le
mouvement libre du rotor est nécessaire pour un refroidissement correct). Le variateur de fréquence est capable de
détecter la situation de rotor verrouillé avec un contrôle de
flux PM en boucle ouverte et un contrôle PM VVC
(30-22 Locked Rotor Protection).
Déclassement automatique
4.1.8
Le variateur vérifie constamment les niveaux critiques :
haute température critique sur la carte de
•
commande ou le radiateur ;
charge moteur élevée ;
•
haute tension du circuit intermédiaire ;
•
vitesse du moteur faible.
•
En réponse à un niveau critique, le variateur de fréquence
ajuste la fréquence de commutation. Pour des
températures internes élevées et critiques, ainsi que pour
une vitesse du moteur faible, le variateur de fréquence
peut également forcer le modèle PWM sur SFAVM.
plus
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 39

Caractéristiques produit
Manuel de configuration
AVIS!
Le déclassement automatique est différent lorsque le
par. 14-55 Filtre de sortie est réglé sur [2] Filtre sinusoïdal
fixe.
4.1.9 Optimisation automatique de
l'énergie (AEO)
44
L'optimisation automatique de l'énergie (AEO) s'adresse au
variateur de fréquence pour surveiller en permanence la
charge sur le moteur et ajuster la tension de sortie afin de
maximiser le rendement. En charge légère, la tension est
réduite et le courant du moteur est minimisé. Le moteur
bénéficie d'un meilleur rendement, d'un chauffage réduit
et d'un fonctionnement plus silencieux. Il n'est pas
nécessaire de sélectionner une courbe V/Hz car le variateur
de fréquence ajuste automatiquement la tension du
moteur.
4.1.10
Modulation automatique de la
fréquence de commutation
Le variateur de fréquence génère de courtes impulsions
électriques afin de former un modèle d'onde CA. La
fréquence porteuse correspond au rythme de ces
impulsions. Une fréquence porteuse faible (rythme faible)
provoque du bruit dans le moteur, rendant la fréquence
porteuse préférable. Une fréquence porteuse élevée génère
toutefois de la chaleur dans le variateur de fréquence, ce
qui peut limiter la quantité de courant disponible pour le
moteur. L'utilisation de transistors bipolaires à porte isolée
(IGBT) est synonyme de commutation haute vitesse.
La modulation automatique de la fréquence de
commutation régule ces conditions automatiquement pour
fournir la plus haute fréquence porteuse sans surchauffe
du variateur de fréquence. En fournissant une fréquence
porteuse régulée élevée, elle réduit le son du moteur à
basse vitesse, lorsque le contrôle du bruit audible est
critique et produit une puissance de sortie totale vers le
moteur lorsque la demande le requiert.
4.1.11
Déclassement automatique pour
fréquence porteuse élevée
Le variateur de fréquence a été conçu pour un fonctionnement continu à pleine charge à des fréquences
porteuses comprises entre 3,0 et 4,5 kHz. Une fréquence
porteuse supérieure à 4,5 kHz augmente la chaleur dans le
variateur de fréquence et requiert un déclassement du
courant de sortie.
Le variateur de fréquence comporte une fonction
automatique : le contrôle de la fréquence porteuse
dépendant de la charge. Cette fonction permet au moteur
de pouvoir profiter de la fréquence porteuse la plus élevée
possible permise par la charge.
4.1.12 Performance de fluctuation de la
puissance
Le variateur de fréquence supporte les fluctuations du
secteur telles que les transitoires, les pertes transitoires, les
courtes baisses de tension et les surtensions. Le variateur
de fréquence compense automatiquement les tensions
d'entrée de ±10 % de la valeur nominale afin de fournir
une tension moteur et un couple à plein régime. Avec le
redémarrage automatique sélectionné, le variateur de
fréquence s'allume après le déclenchement de la tension.
Avec le démarrage à la volée, le variateur de fréquence
synchronise la rotation du moteur avant le démarrage.
4.1.13
Le bruit de résonance du moteur haute fréquence peut
être éliminé par l'atténuation des résonances. L'atténuation
des fréquences à sélection manuelle ou automatique est
disponible.
4.1.14
Des capteurs placés dans le variateur de fréquence
permettent de contrôler la température des ventilateurs de
refroidissement internes. Le ventilateur de refroidissement
ne fonctionne pas pendant le fonctionnement à faible
charge ou en mode veille ou en pause. Cela réduit le bruit,
augmente l'efficacité et prolonge la durée de vie du
ventilateur.
4.1.15
Les interférences électromagnétiques (IEM) ou les interférences radio-électriques (RFI, en cas de radiofréquences)
sont des perturbations qui peuvent affecter un circuit
électrique à cause d'une induction ou d'un rayonnement
électromagnétique à partir d'une source externe. Le
variateur de fréquence a été conçu pour être conforme à
la norme sur les produits CEM pour les variateurs
CEI 61-800-3 ainsi qu'à la norme EN 55011. Pour respecter
les niveaux d'émission de la norme EN 55011, le câble du
moteur doit être blindé et correctement terminé. Pour plus
d'informations concernant la performance CEM, consulter
le chapitre 5.2.1 Résultats des essais CEM.
Atténuation des résonances
Ventilateurs à température contrôlée
Conformité CEM
40 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2 000
500
200
400
300
1 000
600
t [s]
175ZA052.11
f
OUT
= 0,2 x f
M,N
f
OUT
= 2 x f
M,N
f
OUT
= 1 x f
M,N
I
MN
I
M
Caractéristiques produit Manuel de configuration
4.1.16 Isolation galvanique des bornes de
commande
Toutes les bornes de commande et de relais de sortie sont
galvaniquement isolées de l'alimentation. Cela signifie que
le circuit de commande est entièrement protégé du
courant d'entrée. Les bornes de relais de sortie ont besoin
de leur propre mise à la terre. Cette isolation est conforme
aux exigences strictes de PELV pour l'isolation.
Les composants de l'isolation galvanique sont les suivants :
L'alimentation, notamment l'isolation du signal
•
Le pilotage des IGBT, des transformateurs
•
d'impulsions et des coupleurs optoélectroniques
Les transducteurs de courant de sortie à effet Hall
•
4.2 Fonctions de protection de l'application
Ce sont les fonctions les plus courantes programmées pour
être utilisées sur le variateur de fréquence pour une
meilleure performance du système. Elles nécessitent une
programmation ou une configuration minimum. La
disponibilité de ces fonctions permet d'optimiser la
conception d'un système et sans doute d'éviter l'introduction de fonctionnalités ou de composants redondants.
Consulter le Guide de programmation spécifique au produit
pour obtenir des instructions sur l'activation de ces
fonctions.
Adaptation automatique au moteur
4.2.1
L'adaptation automatique au moteur (AMA) est une
procédure de test automatisée qui mesure les caractéristiques électriques du moteur. L'AMA fournit un modèle
électronique précis du moteur. Elle permet au variateur de
fréquence de calculer la performance optimale et l'efficacité avec le moteur. Le recours à la procédure AMA
maximise par ailleurs la fonction d'optimisation
automatique de l'énergie. L'AMA est réalisée sans rotation
du moteur et sans désaccouplage de la charge du moteur.
Protection thermique du moteur
4.2.2
La protection thermique du moteur est disponible de 3
façons :
Via la détection directe de la température par l'un
•
des éléments suivants :
capteur PTC ou KTY dans les bobines du
-
moteur et connecté à une entrée
analogique ou digitale
le capteur PT100 ou PT1000 dans les
-
bobines ou paliers du moteur, connecté
à la carte d'entrée de capteur MCB 114
L'entrée de thermistance PTC sur la
-
carte thermistance PTC MCB 112 (agréée
ATEX)
Un thermocontact mécanique (type Klixon) sur
•
l'entrée digitale
Via le relais thermique électronique intégré (ETR).
•
L'ETR calcule la température du moteur en mesurant le
courant, la fréquence et le temps de fonctionnement. Le
variateur de fréquence affiche la charge thermique sur le
moteur en pourcentage et peut émettre un avertissement
à une consigne de surcharge programmable.
Des options programmables en cas de surcharge
permettent au variateur de fréquence d'arrêter le moteur,
de réduire la sortie ou d'ignorer la condition. Même à
faible vitesse, le variateur de fréquence satisfait aux
normes sur les surcharges de moteurs électroniques I2t de
classe 20.
4 4
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 41
Illustration 4.1 Caractéristiques ETR

Caractéristiques produit
Manuel de configuration
L'axe des abscisses indique le rapport entre I
nominale. L'axe des ordonnées représente le temps en
secondes avant que l'ETR ne se déclenche et fasse
disjoncter le variateur de fréquence. Ces courbes montrent
la vitesse nominale caractéristique à deux fois la vitesse
nominale et à 0,2 fois la vitesse nominale.
À vitesse plus faible, l'ETR se déclenche à une chaleur
inférieure en raison du refroidissement moindre du
moteur. De cette façon, le moteur est protégé contre les
44
surchauffes même à une vitesse faible. La caractéristique
ETR calcule la température du moteur en fonction du
courant et de la vitesse réels. La température calculée est
visible en tant que paramètre d'affichage au par.
16-18 Thermique moteur.
Une version spéciale de l'ETR est également disponible
pour les moteurs Ex-e dans les zones ATEX. Cette fonction
permet de saisir une courbe spécifique pour protéger le
moteur Ex-e. Le Guide de programmation guide l'utilisation
dans la configuration.
Panne de secteur
4.2.3
En cas de panne de secteur, le variateur de fréquence
continue de fonctionner jusqu'à ce que la tension présente
sur le circuit intermédiaire chute en dessous du seuil
d'arrêt minimal, qui est généralement inférieur de 15 % à
la tension nominale d'alimentation secteur du variateur. La
tension secteur disponible avant la panne et la charge du
moteur déterminent le temps qui s'écoule avant l'arrêt en
roue libre du variateur de fréquence.
moteur
et I
moteur
Sauvegarde cinétique
Cette sélection permet au variateur de fréquence de
fonctionner tant qu'il reste de l'énergie dans le système.
Pour les pannes courtes, le fonctionnement est rétabli dès
le retour du courant, sans arrêter l'application ou sans
perdre à aucun moment le contrôle. Plusieurs variantes de
sauvegarde cinétique peuvent être sélectionnées.
Le comportement du variateur de fréquence en cas de
chute de la tension peut être configuré aux par.
14-10 Panne secteur et 1-73 Démarr. volée.
4.2.4 Régulateur PID intégré
Le contrôleur à action par dérivation, intégral, différentiel
(PID) intégré est disponible, ce qui permet d'éliminer le
besoin de dispositifs de contrôle auxiliaires. Le contrôleur
du PID maintient un contrôle constant des systèmes en
boucle fermée lorsque la pression, le débit, la température
régulés ou toute autre configuration système doivent être
conservés. Le variateur de fréquence peut fournir un
contrôle autosuffisant de la vitesse du moteur en réponse
à des signaux de retour des capteurs distants.
Le variateur de fréquence adapte 2 signaux de retour de 2
dispositifs différents. Cette fonction permet de réguler un
système avec des conditions de retour différentes. Le
variateur de fréquence prend des décisions de contrôle en
comparant les deux signaux afin d'optimiser la
performance du système.
Le variateur de fréquence peut être configuré (14-10 Panne
secteur) sur différents types de comportement pendant les
chutes de tension, par exemple :
Alarme verrouillée lorsque le circuit intermédiaire
•
est épuisé
Roue libre avec démarrage à la volée lors du
•
retour du secteur (1-73 Démarr. volée)
Sauvegarde cinétique
•
Décélération ctrlée
•
Démarrage à la volée
Cette sélection permet de rattraper un moteur, à la volée,
p. ex. à cause d'une panne de courant. Cette option est
très importante pour les centrifugeuses et les ventilateurs.
Redémarrage automatique
4.2.5
Le variateur de fréquence peut être programmé pour
redémarrer automatiquement le moteur après un déclenchement mineur tel qu'une perte de puissance
momentanée ou une fluctuation. Cette fonction élimine le
besoin de réinitialisation automatique et améliore l'exploitation automatisée de systèmes contrôlés à distance. Le
nombre de tentatives de redémarrage ainsi que le temps
écoulé entre les tentatives peuvent être limités.
Démarrage à la volée
4.2.6
Le démarrage à la volée permet au variateur de fréquence
de se synchroniser avec une rotation du moteur en marche
jusqu'à la pleine vitesse, dans les deux sens. Cela évite les
déclenchements dus à une surintensité. Cela réduit les
contraintes mécaniques sur le système car le moteur ne
reçoit aucun changement soudain de la vitesse lorsque le
variateur de fréquence démarre.
42 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04

Caractéristiques produit Manuel de configuration
4.2.7 Couple complet à vitesse réduite
Le variateur de fréquence suit une courbe V/Hz variable
pour fournir un couple moteur complet, même à vitesse
réduite. Le couple de sortie total peut correspondre à la
vitesse de fonctionnement maximum du moteur. Au
contraire, les convertisseurs à couple variable fournissent
un couple de moteur réduit à faible vitesse et les convertisseurs à couple constant fournissent une tension
excessive, de la chaleur et un bruit du moteur à un niveau
inférieur à la vitesse totale.
4.2.8 Bipasse de fréquence
Sur certaines applications, le système peut présenter des
vitesses opérationnelles qui créent une résonance
mécanique. Cela génère un bruit excessif et endommage
certainement les composants mécaniques du système. Le
variateur de fréquence est doté de quatre largeurs de
bande de fréquence de dérivation programmables. Ces
dernières permettent au moteur de dépasser les vitesses
qui induisent une résonance du système.
Préchauffage du moteur
4.2.9
Pour préchauffer un moteur dans un environnement
humide, une petite quantité de courant CC peut être
chargée en continu dans le moteur pour le protéger de la
condensation et des effets d'un démarrage à froid. Ceci
permet d'éliminer la nécessité d'un appareil individuel de
chauffage.
4.2.10
Le variateur de fréquence possède quatre process qui
peuvent être programmés indépendamment les uns des
autres. Avec le multi process, il est possible de basculer
entre les fonctions programmées de façon indépendante
et activées par des entrées digitales ou une commande
série. Des process indépendants sont utilisés par exemple
pour modifier des références, pour un fonctionnement
jour/nuit ou été/hiver ou pour contrôler plusieurs moteurs.
Le process actif est affiché sur le LCP.
Les données de process peuvent être copiées d'un
variateur de fréquence à un autre en téléchargeant les
informations depuis le LCP amovible.
4 configurations programmables
4.2.11
Le freinage dynamique est effectué par :
4.2.12
Freinage dynamique
Freinage résistance
•
Un frein IGBT maintient la surtension sous un
certain seuil en dirigeant l'énergie du frein du
moteur vers la résistance de freinage connectée
(par. 2-10 Fonction Frein et Surtension = [1]).
Frein CA
•
L'énergie de freinage est répartie dans le moteur
en modifiant les conditions de perte dans le
moteur. La fonction de frein CA ne peut pas être
utilisée dans les applications avec une fréquence
de cycle élevée car cela entraîne une surchauffe
du moteur (2-10 Fonction Frein et Surtension = [2]).
Freinage CC
•
Un courant CC en surmodulation ajouté au
courant CA fonctionne comme un frein
magnétique (2-02 Temps frein CC ≠ 0 s).
Commande de frein mécanique en
boucle ouverte
Paramètres de contrôle de l'exploitation d'un frein électromagnétique (mécanique), généralement nécessaire dans
les applications de levage.
Pour cela, utiliser une sortie de relais (relais 01 ou 02) ou
une sortie digitale programmée (bornes 27 ou 29). Cette
sortie est normalement fermée lorsque le variateur de
fréquence est incapable de « maintenir » le moteur, par
exemple du fait d'une charge trop élevée. Sélectionner [32]
Ctrl frein mécanique pour des applications avec un frein
électromagnétique au par. 5-40 Fonction relais,
5-30 S.digit.born.27 ou 5-31 S.digit.born.29. En cas de
sélection de [32] Ctrl frein mécanique, le frein mécanique
est fermé lors du démarrage et jusqu'à ce que le courant
de sortie dépasse le niveau sélectionné au par.
2-20 Activation courant frein.Pendant l'arrêt, le frein
mécanique s'active jusqu'à ce que la vitesse soit inférieure
au niveau spécifié au par. 2-21 Activation vit.frein[tr/mn].
Dans une situation où le variateur de fréquence est en état
d'alarme, de surcourant ou de surtension, le frein
mécanique est immédiatement mis en circuit. C'est aussi le
cas en cas d'absence sûre du couple.
AVIS!
Les caractéristiques du mode protection et du retard de
déclenchement (14-25 Délais Al./C.limit ? et 14-26 Temps
en U limit.) peuvent retarder l'activation du frein
mécanique dans un état d'alarme. Ces caractéristiques
doivent être activées pour des applications de levage.
4 4
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 43

Caractéristiques produit
Manuel de configuration
44
Illustration 4.2 Frein mécanique
4.2.13
Le contrôle du frein mécanique de levage prend en charge les fonctions suivantes :
Commande de frein mécanique en boucle ouverte/Frein mécanique de levage
2 voies pour le signal de retour du frein mécanique afin d'assurer une plus grande protection contre les compor-
•
tements imprévus suite à une rupture de câble
Surveillance du signal de retour du frein mécanique tout au long du cycle. Cela permet de protéger le frein
•
mécanique - en particulier si plusieurs variateurs de fréquence sont raccordés au même arbre.
L'absence de rampe d'accélération jusqu'au signal de retour confirme que le frein mécanique est ouvert.
•
Contrôle de charge amélioré à l'arrêt. Si le par. 2-23 Activation retard frein est défini trop bas, l'avertissement W22
•
s'active et le couple ne peut pas suivre une rampe de décélération.
La transition lorsque le moteur reprend la charge du frein peut être configurée. Le par. 2-28 Facteur amplification
•
gain peut être augmenté afin de minimiser le mouvement. Pour une transition très souple, passer de la commande
de vitesse à la commande de position pendant le changement.
Régler le par. 2-28 Facteur amplification gain sur 0 pour activer la commande de position pendant le
•
2-25 Tps déclchment frein. Cela active les paramètres 2-30 Position P Start Proportional Gain à 2-33 Speed
PID Start Lowpass Filter Time, paramètres PID pour la commande de position.
44 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04

Freinméc.
Relais
Coupleréf.
MoteurVitesse
Prémag. Rampe couple
Temps
p. 2-27
Réf. couple 2-26
p. 2-28
Temps
desserrage
frein
p. 2-25
Rampe d'accélération 1
p. 3-41
Rampe de décélération 1
p. 3-42
Retard
arrêt
p. 2-24
Activer
retard
frein
p. 2-23
1 2 3
130BA642.12
II
I
Caractéristiques produit Manuel de configuration
4 4
Illustration 4.3 Séquence de déclenchement du frein pour la commande de frein mécanique pour levage. Cette commande de frein
est disponible en FLUX avec signal de retour du moteur uniquement, pour les moteurs PM non saillants et asynchrones.
Les paramètres 2-26 Réf. couple à 2-33 Speed PID Start Lowpass Filter Time sont disponibles uniquement pour la commande
de frein mécanique de levage (FLUX avec signal de retour du moteur). Les paramètres 2-30 Position P Start Proportional Gain
à 2-33 Speed PID Start Lowpass Filter Time peuvent être configurés pour une transition très souple de la commande de
vitesse à la commande de position pendant le par. 2-25 Tps déclchment frein, temps pendant lequel la charge est transférée
du frein mécanique vers le variateur de fréquence. Les par.
2-30 Position P Start Proportional Gain à 2-33 Speed PID Start Lowpass Filter Time sont activés lorsque le par. 2-28 Facteur
amplification gain est réglé sur 0. Voir l'Illustration 4.3 pour plus d'informations.
AVIS!
Pour prendre connaissance d'un exemple de commande de frein mécanique avancée pour des applications de levage,
voir le chapitre 10 Exemples d'applications.
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 45

. . .
. . .
Par. 13-11
Comparator Operator
Par. 13-43
Logic Rule Operator 2
Par. 13-51
SL Controller Event
Par. 13-52
SL Controller Action
130BB671.13
Coast
Start timer
Set Do X low
Select set-up 2
. . .
Running
Warning
Torque limit
Digital input X 30/2
. . .
=
TRUE longer than..
. . .
. . .
Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
Caractéristiques produit Manuel de configuration
4.2.14 Contrôleur logique avancé (SLC)
Lorsque le dernier
événement/action a été exécuté, la
séquence recommence à partir de l'événement [0]/action
Le contrôleur de logique avancé (SLC) est une séquence
d'actions définies par l'utilisateur (voir par. 13-52 Action
[0]. L'Illustration 4.5 donne un exemple avec 4 événements/
actions :
contr. logique avancé [x]) exécutées par le SLC lorsque
l'événement associé défini par l'utilisateur (voir par.
13-51 Événement contr. log avancé [x]) est évalué comme
étant VRAI par le SLC.
La condition pour un événement peut être un état
44
particulier ou qu'une sortie provenant d'une règle logique
ou d'un opérande comparateur devienne VRAI. Cela
entraîne une Action associée tel qu'indiqué sur
l'Illustration 4.4.
Illustration 4.5 Ordre d'éxécution lorsque 4 événements/
actions sont programmés
Comparateurs
Les comparateurs sont utilisés pour comparer des variables
continues (c.-à-d. fréquence de sortie, courant de sortie,
entrée analogique, etc.) à des valeurs prédéfinies fixes.
Illustration 4.6 Comparateurs
Illustration 4.4 Événement SCL et action
Règles de Logique
Les événements et actions sont numérotés et liés par
paires. Cela signifie que lorsque l'événement [0] est satisfait
(atteint la valeur VRAI), l'action [0] est exécutée. Après cela,
les conditions d'événement [1] sont évaluées et si elles
s'avèrent être VRAI, l'action [1] est exécutée et ainsi de
suite. Un seul événement est évalué à chaque fois. Si un
événement est évalué comme étant FAUX, rien ne se passe
(dans le SLC) pendant l'intervalle de balayage en cours et
aucun autre événement n'est évalué. Cela signifie que
Associer jusqu'à trois entrées booléennes (entrées VRAI/
FAUX) à partir des temporisateurs, comparateurs, entrées
digitales, bits d'état et événements à l'aide des opérateurs
logiques ET, OU, PAS.
lorsque le SLC démarre, il évalue l'événement [0] (et
uniquement l'événement [0]) à chaque intervalle de
balayage. Uniquement lorsque l'événement [0] est évalué
comme étant vrai (TRUE), le SLC exécute l'action [0] et
Illustration 4.7 Règles de Logique
commence l’évaluation de l'événement [1]. Il est possible
de programmer de 1 à 20 événements et actions.
46 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
130BB890.14
P1 P2 P3
Caractéristiques produit
Manuel de configuration
4.2.15 Absence sûre du couple
Pour en savoir plus sur l'Absence sûre du couple, se
reporter au Manuel d'utilisation de l'Absence sûre du couple
des variateurs de fréquence VLT
4.3
Danfoss VLT® FlexConcept
Danfoss VLT® FlexConcept® est une solution de variateur
de fréquence rentable, à haut rendement énergétique et
flexible destinée principalement aux convoyeurs. Le
concept comprend le variateur VLT® OneGearDrive
entraîné par le VLT® AutomationDrive FC 302 ou le VLT
Decentral Drive FCD 302.
OneGearDrive est essentiellement un moteur à aimant
permanent avec un engrenage conique. L'engrenage
conique peut être fourni avec différents rapports de
vitesse.
®
FC Series.
®
®
®
4 4
Illustration 4.8 OneGearDrive
Le OneGearDrive peut être entraîné par le VLT
AutomationDrive FC 302 et le VLT® Decentral Drive FCD
302 dans les puissances suivantes en fonction des
exigences de l'application réelle :
0,75 kW
•
1,1 kW
•
1,5 kW
•
2,2 kW
•
3,0 kW
•
Lorsque [1] PM, SPM non saillant a été sélectionné au par.
du FC 302 ou du FCD 302, le OneGearDrive peut être
sélectionné au par. 1-11 Fabricant moteur et les paramètres
recommandés sont définis automatiquement.
Pour plus d'informations, consulter le Guide de program-
mation des VLT® AutomationDrive FC 301/FC 302, le Guide
de sélection du VLT® OneGearDrive et www.danfoss.com/
BusinessAreas/DrivesSolutions/VLTFlexConcept/
®
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 47

Intégration du système
5 Intégration du système
5.1 Conditions ambiantes de
fonctionnement
Manuel de configuration
Une climatisation supplémentaire de l'armoire ou
•
du site d'installation peut s'avérer nécessaire.
5.1.1 Humidité
Même si le variateur de fréquence peut fonctionner
convenablement à une humidité relative élevée (jusqu'à
une humidité relative de 95 %), la condensation doit
55
toujours être évitée. Il existe un risque spécifique de
condensation quand le variateur de fréquence est plus
froid que l'air ambiant humide. L'humidité contenue dans
l'air peut se condenser sur les composants électroniques et
provoquer des courts-circuits. De la condensation se
dépose sur les unités non alimentées. Il est conseillé
d'installer un élément thermique dans l'armoire lorsqu'il
existe un risque de condensation lié aux conditions
ambiantes. Éviter toute installation dans des endroits
exposés au gel.
Sinon, le fait d'exploiter le variateur de fréquence en mode
veille (avec le dispositif relié au secteur) peut aider à
réduire le risque de condensation. Vérifier cependant si la
dissipation de puissance est suffisante pour garder les
circuits du variateur de fréquence secs.
Température
5.1.2
5.1.3 Température et refroidissement
Des ventilateurs sont intégrés aux variateurs de fréquence
afin de garantir un refroidissement optimal. Le ventilateur
principal force le débit d'air le long des ailettes de refroidissement du dissipateur de chaleur, ce qui garantit le
refroidissement de l'air interne. Certaines tailles de
puissance comportent un petit ventilateur secondaire près
de la carte de commande, ce qui garantit la circulation de
l'air interne afin d'éviter les points chauds. Le ventilateur
principal est contrôlé par la température interne du
variateur de fréquence et la vitesse augmente progressivement avec la température, réduisant le bruit et la
consommation d'énergie lorsque les besoins sont faibles et
garantissant un refroidissement maximal en cas de besoin.
Le contrôle du ventilateur peut être adapté via le par.
14-52 Contrôle ventil pour s'adapter à toutes les
applications, mais aussi pour une protection contre les
effets negatifs du refroidissement dans des conditions très
froides. En cas de surtempérature à l'intérieur du variateur
de fréquence, il déclasse la fréquence de commutation et
le modèle (voir le chapitre 5.1.4 Déclassement manuel pour
plus d'informations).
Les limites de température ambiante minimale et
maximale sont spécifiées pour tous les variateurs de
fréquence. Le fait d'éviter des températures ambiantes
extrêmes prolonge la durée de vie de l'équipement et
maximise la fiabilité du système global. Respecter les
recommandations répertoriées pour une performance et
une longévité optimales de l'équipement.
Même si les variateurs de fréquence peuvent
•
fonctionner à des températures pouvant
descendre jusqu'à -10 °C, le fonctionnement
correct à charge nominale est garanti à 0 °C ou
plus uniquement.
Ne pas dépasser la limite de température
•
maximale.
La durée de vie des composants électroniques
•
baisse de 50 % tous les 10 °C lorsqu'ils sont
utilisés au-dessus de leur température de
conception.
Même les dispositifs présentant des niveaux de
•
protection IP54, IP55 ou IP66 doivent être utilisés
dans les plages de température ambiante
spécifiées.
Les limites de température ambiante minimale et
maximale sont spécifiées pour tous les variateurs de
fréquence. Le fait d'éviter des températures ambiantes
extrêmes prolonge la durée de vie des variateurs de
fréquence et maximise la fiabilité du système global.
Respecter les recommandations répertoriées pour une
performance et une longévité optimales de l'équipement.
Même si les variateurs de fréquence peuvent
•
fonctionner à des températures jusqu'à -10 °C, un
fonctionnement correct à charge nominale est
garanti uniquement à 0 °C ou plus.
Ne pas dépasser la limite de température
•
maximale.
Ne pas dépasser la température moyenne sur
•
24 h maximum.
(La température moyenne sur 24 h correspond à
la température ambiante max. moins 5 °C.
Exemple : la température max. est de 50 °C et la
température moyenne maximum sur 24 h de
45 °C)
Respecter les conditions d'espace libre minimum
•
en haut et en bas (chapitre 8.2.1.1 Dégagement).
48 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
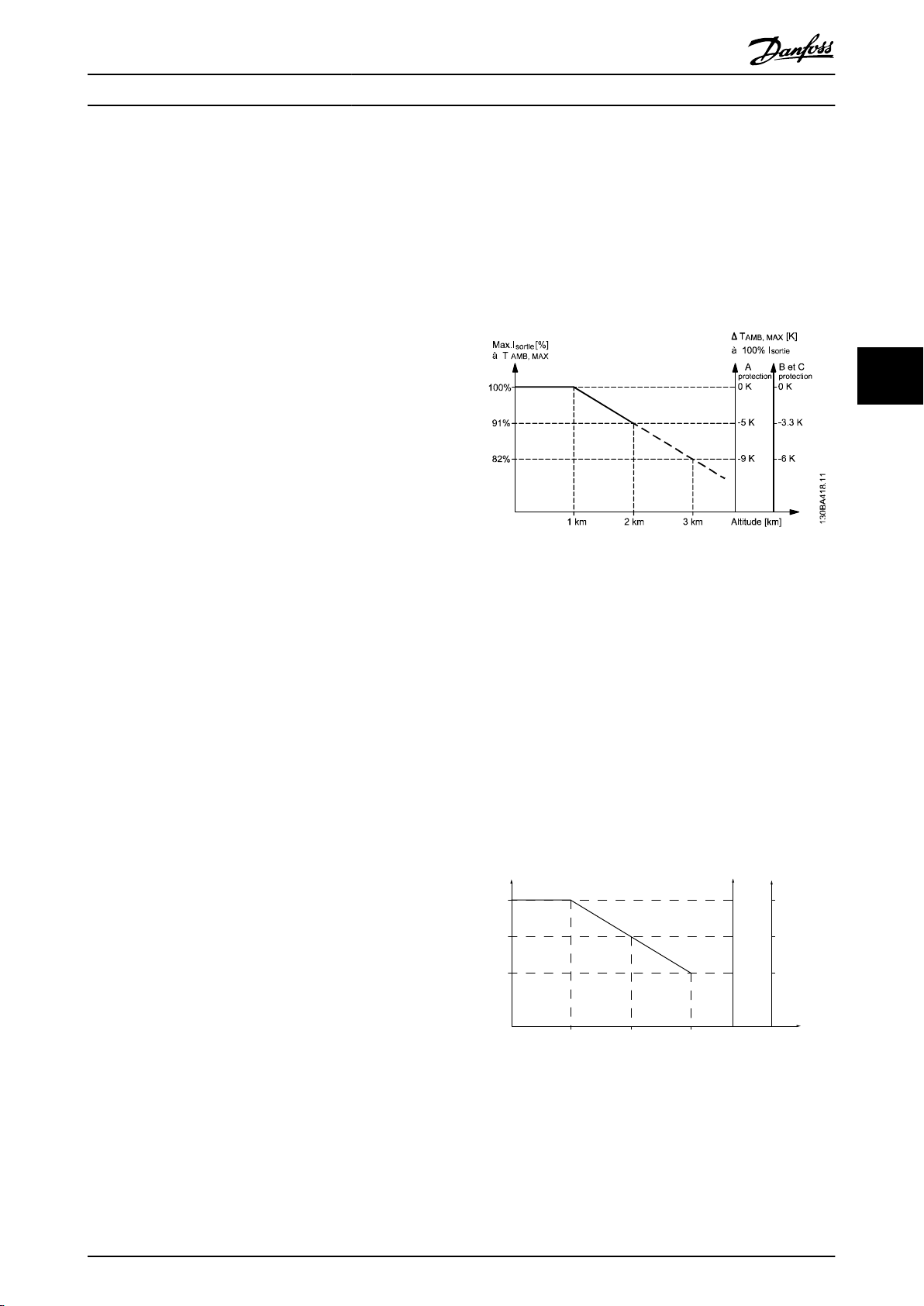
Max.I
out
(%)
at T
AMB, MAX
D, E and F enclosures
Altitude (km)
HO
NO
T
at 100% I
out
100%
96%
92%
0 K
-3 K
-6 K
1 km 2 km 3 km
-5 K
-8 K
-11 K
130BC015.10
AMB, MAX
Intégration du système Manuel de configuration
En règle générale, la durée de vie des
•
composants électroniques baisse de 50 % tous les
10 ºC lorsqu'ils sont utilisés à une température
supérieure à la température de conception.
Même les dispositifs présentant des niveaux de
•
protection élevés doivent être conformes aux
plages de température ambiante spécifiées.
Une climatisation supplémentaire de l'armoire ou
•
du site d'installation peut s'avérer nécessaire.
5.1.4 Déclassement manuel
Envisager le déclassement dans l'une des conditions
suivantes.
Fonctionnement au-dessus de 1 000 m (faible
•
pression atmosphérique)
Fonctionnement à basse fréquence
•
Câbles moteur longs
•
Câbles présentant une section large
•
Température ambiante élevée
•
Pour plus d'informations, se reporter au
chapitre 6.2.6 Déclassement pour température ambiante.
5.1.4.2
Déclassement pour basse pression
atmosphérique
La capacité de refroidissement de l'air est amoindrie en cas
de faible pression atmosphérique.
Au-dessous de 1 000 m, aucun déclassement n'est
nécessaire, mais au-dessus de 1 000 m, la température
ambiante (T
être déclassé conformément à l'Illustration 5.1.
Illustration 5.1 Déclassement du courant de sortie en fonction
de l'altitude à T
des altitudes supérieures à 2 000 m, contacter Danfoss au
sujet de la norme PELV.
) ou le courant de sortie maximal (I
AMB
pour les châssis de tailles A, B et C. À
AMB, MAX
sortie
) doit
5 5
5.1.4.1
Déclassement pour fonctionnement
à faible vitesse
Lorsqu'un moteur est raccordé à un variateur de
fréquence, il est nécessaire de vérifier que son refroidissement est adapté.
Le niveau de chauffe dépend de la charge sur le moteur
ainsi que de la vitesse et de la durée de fonctionnement.
Applications de couple constant (mode CT)
Un problème peut survenir à faible vitesse de rotation
dans des applications de couple constant. Dans une
application de couple constant, un moteur peut
surchauffer à des vitesses faibles en raison du peu d'air de
refroidissement venant du ventilateur intégré au moteur.
Si le moteur doit fonctionner en continu à une vitesse de
rotation inférieure à la moitié de la vitesse nominale, il
convient donc de lui apporter un supplément d'air de
refroidissement (ou d'utiliser un moteur conçu pour ce
type de fonctionnement).
Une autre solution consiste à réduire le degré de charge
du moteur en sélectionnant un moteur plus grand.
Cependant, la conception du variateur de fréquence
impose des limites quant à la taille du moteur.
Applications de couple variable (quadratique) (VT)
Dans les applications VT telles que pompes centrifuges et
ventilateurs, lorsque le couple est proportionnel au carré
de la vitesse et la puissance est proportionnelle au cube
de la vitesse, il n'y a pas besoin de refroidissement ou de
déclassement du moteur.
Une autre solution consiste à diminuer la température
ambiante à haute altitude et donc à garantir un courant de
sortie de 100 %. Voici un exemple de lecture du
graphique : la situation à 2 000 m est élaborée pour un
protection de type B avec T
température de 45°C (T
AMB, MAX
= 50° C. À une
AMB, MAX
- 3,3 K), 91 % du courant
de sortie nominal est disponible. À une température de
41,7 °C, 100 % du courant de sortie nominal est
disponible.
Illustration 5.2 Déclassement du courant de sortie en fonction
de l'altitude à T
pour les protections de types D3h.
AMB, MAX
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 49
Intégration du système
Manuel de configuration
5.1.5 Bruit acoustique
Le bruit acoustique du variateur de fréquence provient de 3 sources
Bobines du circuit intermédiaire CC
•
Filtre RFI obstrué
•
Ventil. int.
•
Se reporter au chapitre 6.2.9 Bruit acoustique pour obtenir les données sur le bruit acoustique.
55
5.1.6 Vibrations et chocs
Le variateur de fréquence est testé selon la procédure basée sur les normes CEI 68-2-6/34/35 et 36. Ces tests soumettent
l'appareil à des forces de 0,7 g, dans la plage de 18 à 1 000 Hz de façon aléatoire, dans 3 directions, pendant 2 heures. Tous
les variateurs de fréquence Danfoss répondent aux spécifications correspondant à ces conditions lorsque l'appareil est à
montage mural ou au sol, mais aussi lorsqu'il est monté dans les panneaux fixes au mur ou au sol.
Atmosphères agressives
5.1.7
5.1.7.1 Gaz
Les gaz agressifs, tels que le sulfure d'hydrogène, le chlore ou l'ammoniaque, peuvent endommager les composants
électriques et mécaniques du variateur de fréquence. La contamination de l'air de refroidissement peut également entraîner
la décomposition graduelle des pistes de cartes de circuit imprimé et les joints de porte. Des contaminants agressifs sont
souvent présents dans les stations d'épuration des eaux usées ou les piscines. Un signe clair d'atmosphère agressive est la
corrosion du cuivre.
Dans des atmosphères explosives, les protections IP restreintes sont recommandées avec les cartes de circuit imprimé à
revêtement conforme. Voir le Tableau 5.1 pour connaître les valeurs des revêtements conformes.
AVIS!
Le variateur de fréquence est livré en standard avec un revêtement de classe 3C2. Le revêtement de classe 3C3 est
disponible à la demande.
Classe
Type de gaz Unité
Sel marin n/a Aucun Brouillard salin Brouillard salin
Oxydes de soufre
Sulfure d'hydrogène
Chlore
Chlorure d'hydrogène
Fluorure d'hydrogène
Ammoniaque
Ozone
Azote
mg/m
mg/m
mg/m
mg/m
mg/m
mg/m
mg/m
mg/m
3C1 3C2 3C3
Valeur moyenne Valeur max. Valeur moyenne Valeur max.
3
0,1 0,3 1,0 5,0 10
3
0,01 0,1 0,5 3,0 10
3
0,01 0,1 0,03 0,3 1,0
3
0,01 0,1 0,5 1,0 5,0
3
0,003 0,01 0,03 0,1 3,0
3
0,3 1,0 3,0 10 35
3
0,01 0,05 0,1 0,1 0,3
3
0,1 0,5 1,0 3,0 9,0
Tableau 5.1 Classes des revêtements conformes
Les valeurs maximales sont des valeurs de crête transitoires qui ne doivent pas dépasser 30 minutes par jour.
50 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
Intégration du système
Manuel de configuration
5.1.7.2 Exposition à la poussière
L'installation de variateurs de fréquence dans des environnements fortement exposés à la poussière est souvent
inévitable. La poussière affecte les unités montées au mur
ou sur châssis avec un niveau de protection IP55 ou IP66
mais aussi les dispositifs à montage en armoire présentant
un niveau de protection IP21 ou IP20. Les trois aspects
décrits ci-dessous doivent être pris en compte quand des
variateurs de fréquence sont installés dans ces environnements.
Refroidissement réduit
La poussière se dépose sur la surface du dispositif et à
l'intérieur, sur les cartes de circuit imprimé et les
composants électroniques. Ces dépôts agissent comme des
couches isolantes et gênent le transfert de chaleur dans
l'air ambiant, réduisant la capacité de refroidissement. Les
composants deviennent plus chauds. Les composants
électroniques vieillissent prématurément et la durée de vie
de l'unité diminue. Les dépôts de poussière sur le radiateur
au dos de l'unité réduisent également la durée de vie de
cette dernière.
Ventilateurs de refroidissement
Le débit d'air de refroidissement de l'unité est produit par
des ventilateurs, qui sont généralement situés au dos du
dispositif. Les rotors de ventilateur disposent de petits
roulements dans lesquels la poussière peut pénétrer et agir
comme un abrasif. Cela entraîne un endommagement des
paliers et une panne du ventilateur.
Filtres
Les variateurs de fréquence haute puissance sont équipés
de ventilateurs de refroidissement qui expulsent l'air chaud
situé à l'intérieur du dispositif. Au-dessus d'une certaine
dimension, ces ventilateurs sont équipés de tapis de filtre.
Ces filtres peut rapidement se boucher s'ils sont utilisés
dans des environnements très poussiéreux. Des mesures
de prévention sont nécessaires dans ces conditions.
Maintenance périodique
Dans les conditions décrites ci-dessus, il est recommandé
de nettoyer le variateur de fréquence pendant la
maintenance périodique. Éliminer la poussière qui s'est
déposée sur le radiateur et les ventilateurs, puis nettoyer
les tapis de filtre.
5.1.7.3
Atmosphères potentiellement
explosives
Les systèmes utilisés dans des atmosphères potentiellement explosives doivent répondre aux conditions
particulières. La directive européenne 94/9/VCE décrit le
fonctionnement des dispositifs électroniques dans des
atmosphères potentiellement explosives.
La température des moteurs contrôlés par des variateurs
de fréquence dans des atmosphères potentiellement
explosives doit être surveillée avec une sonde de
température PTC. Les moteurs avec protection de classe
« d » ou « e » sont approuvés pour cet environnement.
La classification e vise à empêcher la production
•
d'étincelles. Le variateur FC 302 dont la version
micrologicielle est V6.3x ou supérieure est équipé
d'une fonction de « surveillance thermique ETR
AREX » pour le fonctionnement de moteurs Ex-e
spécialement approuvés. Associée au dispositif de
surveillance PTC agréé ATEX tel que la carte
thermistance PTC MCB 112, l'installation n'a pas
besoin d'homologation individuelle par un
organisme agréé, en d'autres termes pas besoin
de paires appariées.
La classification d vise à garantir qu'en cas d'étin-
•
celles, elle sera confinée dans un espace protégé.
Même s'ils ne requièrent aucune approbation, des
câblages et un confinements spéciaux sont
nécessaires.
La combinaison d/e est la plus utiliséé dans les
•
atmosphères potentiellement explosives. Le
moteur lui-même présente une classe de
protection contre l'inflammation « e », alors que
le câblage du moteur et l'environnement de
connexion sont exécutés en conformité avec la
classe de protection « e ». La restriction sur
l'espace de connexion « e » porte sur la tension
maximale autorisée dans cet espace. La tension
de sortie d'un variateur de fréquence se limite
généralement à la tension secteur. La modulation
de la tension de sortie peut générer une tension
de crête élevée pour la classification e. Dans la
pratique, l'utilisation d'un filtre sinus au niveau de
la sortie du variateur de fréquence s'est avérée
efficace pour atténuer les grands pics de tension.
5 5
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 51
Intégration du système Manuel de configuration
AVIS!
Ne jamais installer de variateur de fréquence dans une
atmosphère potentiellement explosive. Installer le
variateur de fréquence dans une armoire située à
l'extérieur de cette zone. L'utilisation d'un filtre sinus au
niveau de la sortie du variateur de fréquence est aussi
recommandée pour atténuer la tension de la montée
dv/dt et le pic de tension. Raccourcir au maximum les
câbles du moteur.
AVIS!
55
Les unités VLT® AutomationDrive comportant l'option
MCB 112 disposent de la surveillance par thermistance
du moteur certifiée PTB pour les atmosphères potentiellement explosives. Des câbles de moteur blindés ne sont
pas nécessaires quand les variateurs de fréquence sont
utilisés avec des filtres de sortie sinusoïdaux.
5.1.8 Maintenance
Les modèles de variateur de fréquence Danfoss sont sans
entretien jusqu' à 90 kW. Les variateurs de fréquence haute
puissance (110 kW ou plus) intègrent des tapis de filtre qui
doivent être nettoyés de temps en temps par l'opérateur,
selon l'exposition à la poussière et aux contaminants. Des
intervalles d'entretien des ventilateurs (environ 3 ans) et
des condensateurs (environ 5 ans) sont recommandés dans
la plupart des environnements.
Stockage
5.1.9
Comme tout équipement électronique, les variateurs de
fréquence doivent être entreposés dans un endroit sec.
Aucune mise en forme périodique (charge du condensateur) n'est nécessaire pendant le stockage.
5.2
Généralités concernant les normes CEM
Les interférences électriques sont généralement produites
par conduction à des fréquences comprises entre 150 kHz
et 30 MHz. Des interférences en suspension dans l'air
émanant du système du variateur de fréquence (30 MHz-1
GHz) sont notamment générées par l'onduleur, le câble du
moteur et le moteur.
Comme le montre l'Illustration 5.3, les courants de fuite
sont imputables à la capacitance dans le câble moteur et
au rapport dU/dt élevé de la tension du moteur.
La mise en œuvre d'un câble moteur blindé augmente le
courant de fuite (voir l'Illustration 5.3) car les câbles blindés
ont une capacité par rapport à la terre supérieure à celle
des câbles non blindés. L'absence de filtrage du courant de
fuite se traduit par une perturbation accentuée du réseau
dans la plage d'interférence radioélectrique inférieure à 5
MHz environ. Étant donné que le courant de fuite (I1) est
renvoyé vers l'unité via le blindage (I3), en principe, le
champ électromagnétique (I4) émis par le câble blindé du
moteur est donc faible, conformément à l'Illustration 5.3.
Le blindage réduit l'interférence rayonnée mais augmente
les perturbations basses fréquences sur le secteur. Relier le
blindage du câble moteur à la fois au côté moteur et au
côté variateur de fréquence. Pour cela, il convient d'utiliser
les brides pour blindage intégrées afin d'éviter des
extrémités blindées torsadées (queues de cochon). Les
queues de cochon augmentent l'impédance du blindage à
des fréquences élevées, ce qui réduit l'effet du blindage et
accroît le courant de fuite (I4).
En cas d'utilisation d'un câble blindé pour le relais, le câble
de commande, l'interface signal et le frein, raccorder le
blindage à la protection, aux deux extrémités. Dans
certaines situations toutefois, il est nécessaire de casser le
blindage pour éviter les boucles de courant.
Il est recommandé de garder l'équipement étanche dans
son emballage jusqu'à l'installation.
52 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04

1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Intégration du système Manuel de configuration
1 Fil de terre 4 Variateur de fréquence
2 Écran 5 Câble moteur blindé
3 Alimentation secteur CA 6 Moteur
Illustration 5.3 Situation à l'origine de courants de fuite
5 5
En cas de raccordement du blindage sur une plaque destinée au montage du variateur de fréquence, cette plaque doit être
métallique afin de pouvoir renvoyer les courants de blindage vers l'appareil. Il importe également d'assurer un bon contact
électrique à partir de la plaque de montage à travers les vis de montage et jusqu'au châssis du variateur de fréquence.
En cas d'utilisation de câbles non blindés, certaines exigences en matière d'émission ne sont pas respectées mais les
exigences d'immunité sont respectées.
Utiliser les câbles de moteur et de la résistance de freinage les plus courts possibles pour réduire le niveau d'interférences
émises par le système dans son ensemble (unité et installation). Éviter de placer les câbles du moteur et du frein à côté de
câbles sensibles aux perturbations. Les interférences radioélectriques supérieures à 50 MHz (rayonnées) sont générées en
particulier par les composants électroniques de commande.
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 53
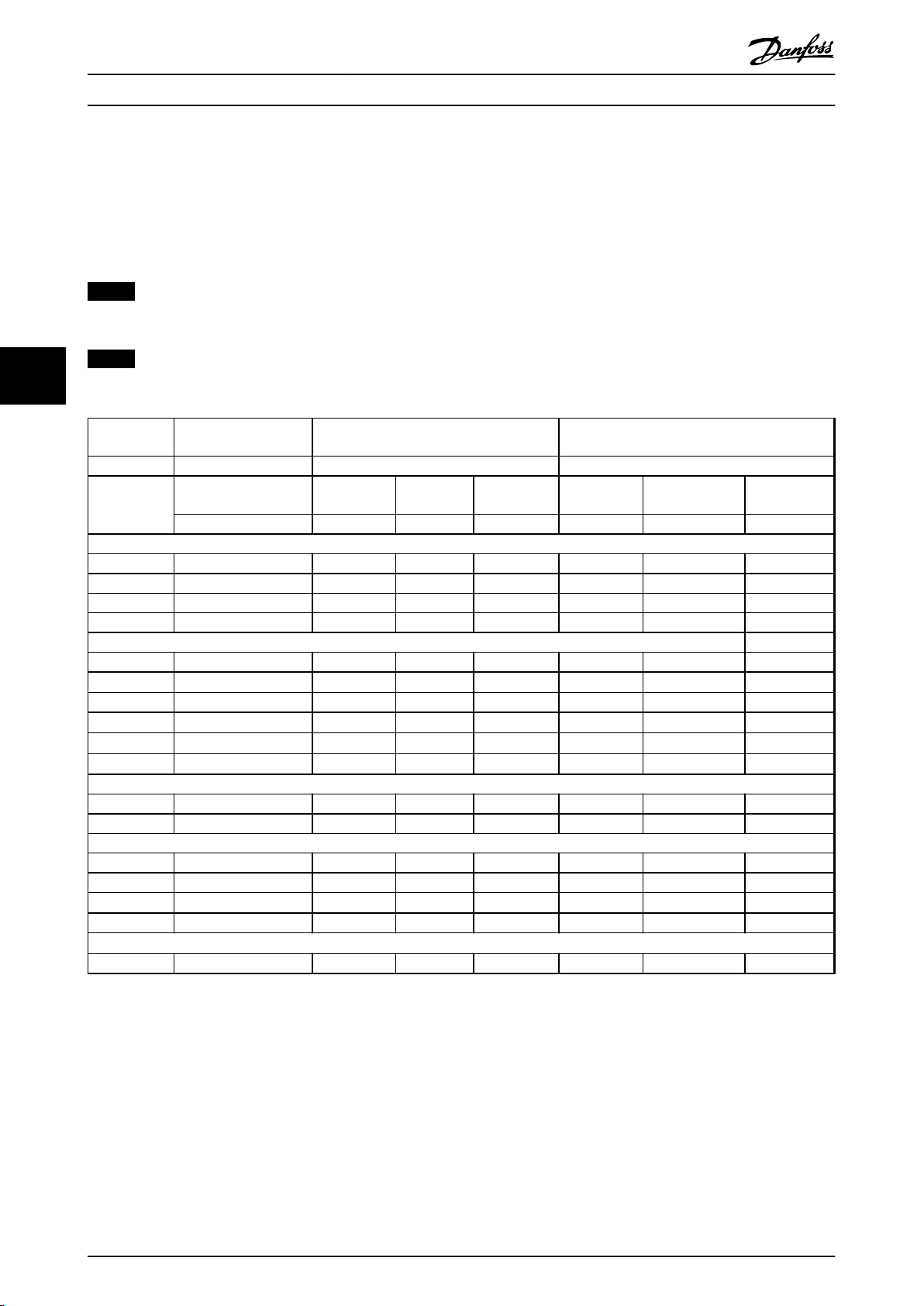
Intégration du système
Manuel de configuration
5.2.1 Résultats des essais CEM
Les résultats des essais suivants ont été obtenus sur un système regroupant un variateur de fréquence, un câble de
commande blindé, un boîtier de commande doté d'un potentiomètre ainsi qu'un moteur et un câble moteur blindé (Ölflex
Classic 100 CY) à une fréquence de commutation nominale. Le Tableau 5.2 indique les longueurs maximum de câble pour
obtenir la conformité.
AVIS!
Les conditions peuvent changer significativement pour les autres process.
AVIS!
55
Consulter le Tableau 9.19 pour les câbles moteur parallèles.
Filtre de type
RFI
Normes et
exigences
H1
FC 301 0-37 kW 200-240 V 10 50 50 Non Oui Oui
FC 302 0-37 kW 200-240 V 50 150 150 Non Oui Oui
H2/H5
FC 301 0-3,7 kW 200-240 V Non Non 5 Non Non Oui
FC 302
0-7,5 kW 380-500 V Non Non 5 Non Non Oui
H3
FC 301 0-1,5 kW 200-240V 2,5 25 25 Non Oui Oui
0-1,5 kW 380-480 V 2,5 25 25 Non Oui Oui
H4
FC 302 1,1-7,5 kW 525-690 V Non 100 100 Non Oui Oui
11-22 kW 525-690 V Non 100 100 Non Oui Oui
30-75 kW 525-690 V Non 150 150 Non Oui Oui
1)
Hx
FC 302 0,75-75 kW 525-600 V Non Non Non Non Non Non
EN 55011/CISPR 11 Classe B Classe A
EN/CEI 61800-3 Catégorie C1 Catégorie C2 Catégorie C3 Catégorie C1 Catégorie C2 Catégorie C3
0-75 kW 380-480 V 10 50 50 Non Oui Oui
0-75 kW 380-480 V 50 150 150 Non Oui Oui
5,5-37 kW 200-240 V
11-75 kW 380-500 V
11-22 kW 525-690 V
30-75 kW 525-690 V
11-37 kW 525-690 V
2)
2)
2)
2)
3
Émission transmise Émission par rayonnement
Longueur de câble [m]
Classe A
groupe 1
Non Non 25 Non Non Oui
Non Non 25 Non Non Oui
Non Non 25 Non Non Oui
Non Non 25 Non Non Oui
Non 150 150 Non Oui Oui
Groupe 2
Classe B Classe A
Groupe 1
Classe A
Groupe 2
Tableau 5.2 Résultats du test CEM (émissions) Longueur de câble du moteur maximale
1)
Les versions Hx peuvent être utilisées conformément à la norme EN/CEI 61800-3 catégorie C4.
2)
T5, 22-45 kW et T7, 22-75 kW sont conformes à la classe A groupe 1 avec un câble moteur de 25 m. Certaines restrictions s'appliquent à l'installation (contacter Danfoss pour plus de détails).
Hx, H1, H2, H3, H4 ou H5 est défini dans le code de type en pos. 16-17 pour les filtres CEM (voir le Tableau 7.1).
3)
IP20
54 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
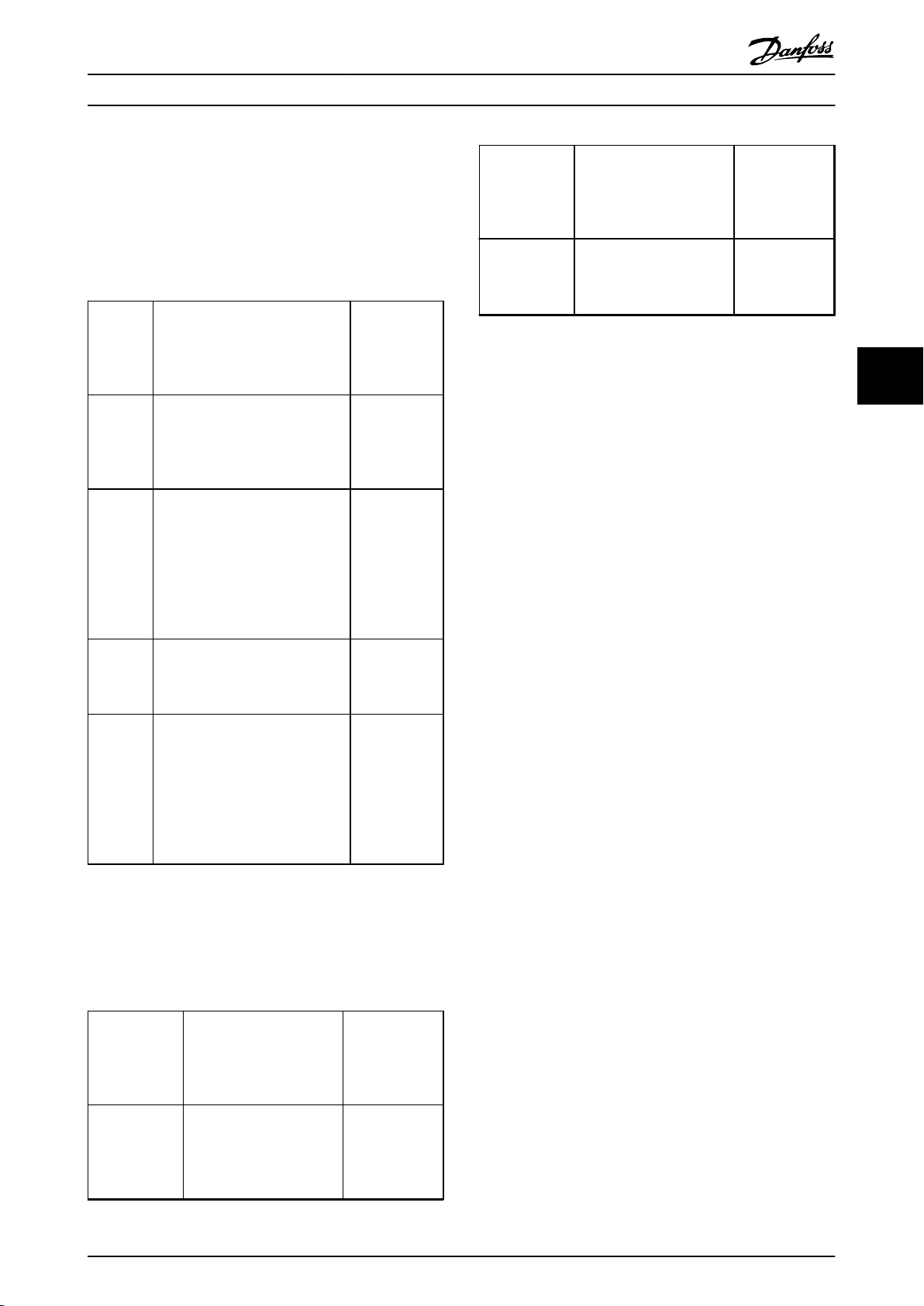
Intégration du système
Manuel de configuration
5.2.2 Conditions d'émission
La norme produit CEM pour les variateurs de fréquence
définit 4 catégories (C1, C2, C3 et C4) avec des exigences
spécifiques pour les émissions et l'immunité. Le Tableau 5.3
fournit la définition des 4 catégories et la classification
équivalente de la norme EN 55011.
Classe
d'émission
Catégorie Définition
C1 Variateurs de fréquence installés
dans un environnement premier
(habitat et commerce) avec une
tension d'alimentation inférieure à
1 000 V.
C2 Variateurs de fréquence installés
dans un environnement premier
(habitat et commerce) avec une
tension d'alimentation inférieure à
1 000 V, qui ne sont ni enfichables
ni amovibles et prévus pour être
installés et mis en service par un
professionnel.
C3 Variateurs de fréquence installés
dans un environnement second
(industriel) avec une tension
d'alimentation inférieure à 1 000 V.
C4 Variateurs de fréquence installés
dans un environnement second
avec une tension d'alimentation
égale ou supérieure à 1 000 V ou
un courant nominal égal ou
supérieur à 400 A ou prévus pour
un usage dans des systèmes
complexes.
Tableau 5.3 Corrélation entre la norme CEI 61800-3 et la
norme EN 55011
Lorsque les normes d'émissions génériques (transmises)
sont utilisées, les variateurs de fréquence doivent être
conformes aux limites définies dans le Tableau 5.4 :
Environnement
Environnement
premier
(habitat et
commerce)
Norme d'émission
générique
Norme EN/CEI 61000-6-3
concernant les émissions
dans les environnements
résidentiels, commerciaux et
de l'industrie légère.
équivalente
dans la norme
EN 55011
Classe B
Classe A
groupe 1
Classe A
groupe 2
Aucune limite.
Un plan CEM
doit être
effectué.
Classe
d'émission
équivalente
dans la norme
EN 55011
Classe B
Classe
Environnement
Environnement
second
(environnement
industriel)
Tableau 5.4 Corrélation entre la norme d'émission générique et
la norme EN 55011
Conditions d'immunité
5.2.3
Norme d'émission
générique
Norme EN/CEI 61000-6-4
concernant les émissions
dans les environnements
industriels.
d'émission
équivalente
dans la norme
EN 55011
Classe A groupe
1
Les conditions d'immunité des variateurs de fréquence
dépendent de l'environnement dans lequel ils sont
installés. Les exigences sont plus strictes pour l'environnement industriel que pour les environnements
résidentiels et commerciaux. Tous les variateurs de
fréquence Danfoss sont conformes aux exigences pour
l'environnement industriel et par conséquent aux
exigences moindres des environnements résidentiels et
commerciaux, offrant ainsi une importante marge de
sécurité.
Afin de pouvoir documenter l'immunité à l'égard d'interférences provenant de phénomènes de commutation
électrique, les essais suivants d'immunité ont été réalisés
conformément aux normes de base suivantes :
EN 61000-4-2 (CEI 61000-4-2) : décharges
•
électrostatiques (DES). Simulation de l'influence
des décharges électrostatiques générées par le
corps humain.
EN 61000-4-3 (CEI 61000-4-3) : champ électroma-
•
gnétique rayonné à modulation d'amplitude :
simulation de l'influence des radars, matériels de
radiodiffusion et appareils de communication
mobiles.
EN 61000-4-4 (CEI 61000-4-4) : rafales. Simulation
•
d'interférences provoquées par un contacteur en
ouverture, un relais ou un dispositif analogue.
EN 61000-4-5 (CEI 61000-4-5) : transitoires.
•
Simulation de transitoires provoqués, par
exemple, par la foudre dans des installations
situées à proximité.
EN 61000-4-6 (CEI 61000-4-6) : mode commun
•
RF. Simulation de l'effet d'équipement de
transmission connecté par des câbles de raccordement.
5 5
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 55

Intégration du système
Voir le par. Tableau 5.5.
Manuel de configuration
Norme de base Rafale
CEI 61000-4-4
Surtension
CEI 61000-4-5
Décharge
électro-
statique
Champ électromagnétique
rayonné
CEI 61000-4-3
Tension mode
commun RF
CEI 61000-4-6
CEI
61000-4-2
Critère d'acceptation B B B A A
Plage de tension : 200-240 V, 380-500 V, 525-600 V, 525-690 V
Ligne
Moteur
55
Frein 4 kV CM
4 kV CM
4 kV CM
Répartition de la charge 4 kV CM
Fils de commande
2 kV CM
Bus standard 2 kV CM
Fils du relais 2 kV CM
Options d'application et de
2 kV CM
bus de terrain
câble LCP
Alimentation externe
24 V CC
Protection
2 kV CM
2 V CM
— —
2 kV/2 Ω DM
4 kV/12 Ω CM
4 kV/2 Ω
4 kV/2 Ω
4 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
2 kV/2 Ω
1)
1)
1)
1)
1)
1)
1)
1)
0,5 kV/2 Ω DM
1 kV/12 Ω CM
— —
— —
— —
— —
— —
— —
— —
— —
— —
— —
8 kV AD
6 kV CD
10 V
10 V
10 V
10 V
10 V
10 V
10 V
10 V
10 V
10 V
10 V/m —
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
Tableau 5.5 Schéma d'immunité CEM
1)
Injection sur blindage de câble
Isolation du moteur
5.2.4
La conception moderne des moteurs à utiliser avec des variateurs de fréquence présente un niveau élevé d'isolation pour
représenter la nouvelle génération d'IGBT haute fréquence avec un dU/dt élevé. Pour un réajustement sur des moteurs
anciens, il est nécessaire de confirmer l'isolation du moteur ou d'atténuer avec un filtre dU/dt ou si nécessaire un filtre sinus.
dU/dt
Pour les longueurs de câble du moteur ≤ à la longueur de câble répertoriée au chapitre 6.2 Spécifications générales,
l'isolation du moteur recommandée est indiquée dans le Tableau 5.6. Si un moteur présente une valeur d'isolation nominale
inférieure, il est conseillé d'utiliser un filtre du/dt ou sinus.
Tension secteur nominale [V] Isolation du moteur [V]
UN ≤ 420
420 V < UN ≤ 500 U
500 V < UN ≤ 600 ULL renforcée = 1 800
600 V < UN ≤ 690 ULL renforcée = 2 000
Tableau 5.6 Isolation du moteur
ULL standard = 1 300
renforcée = 1 600
LL
56 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04

175HA034.10
Intégration du système
Manuel de configuration
5.2.5 Courants des paliers de moteur
Pour minimiser les courants d'entraînement des paliers et
des arbres, relier les éléments ci-dessous à la machine
entraînée :
le variateur de fréquence
•
le moteur
•
la machine entraînée
•
le moteur
•
Stratégies d'atténuation standard
1. Utiliser un palier isolé.
2. Appliquer des procédures d'installation
rigoureuses.
2a Veiller à ce que le moteur et la charge
moteur soient alignés.
2b Respecter strictement la réglementation
CEM.
2c Renforcer le PE de façon à ce que
l'impédance haute fréquence soit
inférieure dans le PE aux fils d'alimentation d'entrée.
2d Permettre une bonne connexion haute
fréquence entre le moteur et le variateur
de fréquence par exemple avec un câble
armé muni d'un raccord à 360° dans le
moteur et le variateur de fréquence.
2e Veiller à ce que l'impédance entre le
variateur de fréquence et la mise à la
terre soit inférieure à l'impédance de la
mise à la terre de la machine. Cela peut
s'avérer difficile pour les pompes.
2f Procéder à une mise à la terre directe
entre le moteur et la charge moteur.
3. Abaisser la fréquence de commutation de l'IGBT.
4. Modifier la forme de l'onde de l'onduleur, 60°
AVM au lieu de SFAVM.
5. Installer un système de mise à la terre de l'arbre
ou utiliser un raccord isolant.
6. Appliquer un lubrifiant conducteur.
7. Utiliser si possible des réglages minimum de la
vitesse.
8. Veiller à ce que la tension de la ligne soit
équilibrée jusqu'à la terre. Cela peut s'avérer
difficile pour les réseaux IT, TT, TN-CS ou les
systèmes de colonne mis à la terre.
9. Utiliser un filtre dU/dt ou sinus.
5.3
Perturbations alimentation secteur/
harmoniques
Un variateur de fréquence consomme un courant non
sinusoïdal qui accroît le courant d'entrée I
. Un courant
RMS
non sinusoïdal peut être transformé à l'aide d'une analyse
de Fourier en une somme de courants sinusoïdaux de
fréquences différentes, c'est-à-dire en harmoniques de
courant In différents dont la fréquence de base est égale à
50 Hz :
Harmoniques de courant I
Hz 50 250 350
Tableau 5.7 Courant non sinusoïdal transformé
1
I
5
I
7
Les harmoniques de courant ne contribuent pas
directement à la consommation de puissance mais elles
augmentent les pertes de chaleur de l'installation (transformateurs, câbles). De ce fait, dans les installations
caractérisées par un pourcentage élevé de charges
redressées, il convient de maintenir les harmoniques de
courant à un niveau faible afin d'éviter la surcharge du
transformateur et la surchauffe des câbles.
Illustration 5.4 Bobines du circuit intermédiaire
AVIS!
Certaines harmoniques de courant sont susceptibles de
perturber les équipements de communication reliés au
même transformateur ou de provoquer des résonances
dans les connexions avec les unités de correction du
facteur de puissance.
I
RMS
I
1
I
5
I
7
I
11-49
Tableau 5.8 Comparaison entre les harmoniques de courant
et le courant d'entrée
RMS
Pour produire des harmoniques de courant bas, le
variateur de fréquence est doté en standard de bobines de
circuit intermédiaire. Les bobines CC réduisent le taux
d'harmoniques (THD) à 40 %.
Courant d'entrée
1,0
0,9
0,4
0,2
< 0,1
5 5
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 57

Non-linear
Current Voltage
System
Impedance
Disturbance to
other users
Contribution to
system losses
130BB541.10
Intégration du système Manuel de configuration
5.3.1 Effet des harmoniques dans un
système de distribution de puissance
Un terme couramment utilisé pour décrire l'impédance
d'un réseau est le rapport de court-circuit R
, défini
sce
comme le rapport entre la puissance apparente du court-
Sur l'Illustration 5.5, un transformateur est connecté côté
primaire à un point de couplage commun PCC1, sur
l'alimentation en moyenne tension. Le transformateur
présente une impédance Z
et alimente un certain
xfr
nombre de charges. Le point de couplage commun où
circuit de l'alimentation au point PCC (Ssc) et la puissance
apparente nominale de la charge (S
S
ce
R
=
sce
S
équ
2
=
Z
alimentation
U
et
S
=U×
I
équ
où
S
sc
équ
equ
).
toutes les charges sont connectées ensemble est PCC2.
Chaque charge est connectée via des câbles présentant
une impédance Z1, Z2, Z3.
L'effet négatif des harmoniques est double
Les harmoniques de courant contribuent à des
•
pertes système (dans le câblage, transformateur).
55
La distorsion de tension des harmoniques
•
entraîne des perturbations sur les autres charges
et augmentent leurs pertes.
Illustration 5.5 Petit réseau de distribution
Les harmoniques de courant prélevées par des charges
non linéaires provoquent une distorsion de la tension en
raison de la baisse de cette dernière sur les impédances du
réseau de distribution. Des impédances supérieures
entraînent des niveaux plus élevés de distorsion de la
tension.
La distorsion de courant est liée aux performances des
appareils et à la charge individuelle. La distorsion de
tension est quant à elle liée aux performances du système.
Il est impossible de déterminer la distorsion de tension sur
le PCC en ne connaissant que les performances d'harmoniques de la charge. Pour prévoir la distorsion sur le PCC,
la configuration du système de distribution et les
impédances associées doivent être identifiées.
Illustration 5.6 Effets négatifs des harmoniques
5.3.2 Normes et exigences quant aux
limites d'harmoniques
Les exigences relatives aux limites d'harmoniques peuvent
être :
des exigences spécifiques à l'application
•
des normes à respecter
•
Les exigences spécifiques à l'application sont liées à une
installation particulière où des raisons techniques limitent
les harmoniques.
58 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04

Intégration du système
Manuel de configuration
Exemple
Un transformateur de 250 kVA avec deux moteurs de
2 110 kW connectés est suffisant si l'un des moteurs est
branché directement en ligne et que l'autre est alimenté
via un variateur de fréquence. Cependant, le transformateur est sous-dimensionné si les deux moteurs sont
alimentés par variateur de fréquence. L'utilisation de
moyens supplémentaires pour réduire les harmoniques
dans l'installation ou le choix de variantes de variateur à
charge harmonique faible permet le fonctionnement des
deux moteurs avec des variateurs de fréquence.
Il existe diverses normes, réglementations et recommandations pour atténuer les harmoniques. Différentes normes
s'appliquent dans des zones géographiques et des
industries variées. Les normes suivantes sont les plus
courantes :
IEC61000-3-2
•
IEC61000-3-12
•
IEC61000-3-4
•
IEEE 519
•
G5/4
•
Voir le Manuel de configuration de l'AHF 005/010 pour
obtenir les détails spécifiques à chaque norme.
En Europe, le THVD maximum est de 8 % si l'installation
est connectée via le réseau public. Si l'installation dispose
de son propre transformateur, la limite du THVD est de
10 %. Le VLT® AutomationDrive a été conçu pour
supporter un THVD de 10 %.
Atténuation des harmoniques
5.3.3
Lorsqu'une suppression supplémentaire des harmoniques
est nécessaire, Danfoss propose une large gamme de
matériel d'atténuation. Voici ces équipements :
variateurs à 12 impulsions,
•
filtres AHF
•
variateurs à charge harmonique faible,
•
Filtres actifs
•
Le choix de la solution appropriée dépend de plusieurs
facteurs :
réseau (distorsion de fond, déséquilibre du
•
réseau, résonance et type d'alimentation
(transformateur/générateur)) ;
application (profil, nombre et taille des charges) ;
•
exigences/réglementations locales/nationales
•
(IEEE519, CEI, G5/4, etc.) ;
coût total de propriété (coûts initiaux, rendement,
•
maintenance, etc.).
Toujours envisager une atténuation des harmoniques si la
charge du transformateur présente une contribution non
linéaire d'au moins 40 %.
5.3.4 Calcul d'harmoniques
Danfoss propose des outils de calcul des harmoniques (voir
le chapitre 9.6.5 Logiciel PC).
5.4 Isolation galvanique (PELV)
5.4.1 PELV - Protective Extra Low Voltage
La norme PELV offre une protection grâce à une tension
extrêmement basse. La protection contre l'électrocution est
assurée lorsque l'alimentation électrique est de type PELV
et que l'installation est réalisée selon les dispositions des
réglementations locales et nationales concernant les
alimentations PELV.
Toutes les bornes de commande et de relais 01-03/04-06
sont conformes à la norme PELV (Protective Extra Low
Voltage) à l'exception des unités au sol sur trépied
supérieures à 400 V.
L'isolation galvanique est obtenue en respectant les
exigences en matière d'isolation renforcée avec les lignes
de fuite et les distances correspondantes. Ces exigences
sont décrites dans la norme EN 61800-5-1.
Les composants qui forment l'isolation électrique décrite
ci-dessous répondent également aux exigences en matière
d'isolation renforcée avec les essais correspondants décrits
dans la norme EN 61800-5-1.
L'isolation galvanique PELV existe à six endroits (voir
l'Illustration 5.7) :
Pour conserver l'isolation PELV, toutes les connexions
réalisées sur les bornes de commande doivent être de type
PELV : la thermistance doit être à isolation double/
renforcée.
1. Alimentation (SMPS) comprenant une isolation de
signaux du circuit intermédiaire.
2. Pilotage des IGBT par transformateurs
d'impulsions/coupleurs optoélectroniques.
3. Transformateurs de courant.
4. Coupleur optoélectronique, module de freinage.
5. Courant d'appel interne, RFI et circuits de mesure
de la température.
6. Relais personnalisés.
7. Frein mécanique.
5 5
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 59

130BC968.10
1325 4
6
b
a
M
7
Intégration du système Manuel de configuration
5.5 Fonctions de freinage
La fonction de freinage est utilisée pour freiner la charge
sur l'arbre du moteur, par freinage dynamique ou
mécanique.
5.5.1 Sélection de la résistance de freinage
La résistance de freinage garantit que l'énergie est
absorbée par celle-ci et non par le variateur de fréquence.
Pour plus d'informations, consulter le Manuel de configu-
55
Illustration 5.7 Isolation galvanique
L'isolation galvanique fonctionnelle (a et b sur le schéma)
est destinée à l'option de secours 24 V et à l'interface du
bus standard RS-485.
AVERTISSEMENT
Installation à haute altitude :
À des altitudes supérieures à 2 000 m, merci de
contacter Danfoss en ce qui concerne la norme PELV.
AVERTISSEMENT
Tout contact avec les pièces électriques, même après la
mise hors tension de l'appareil, peut entraîner des
blessures graves voire mortelles.
Veiller également à déconnecter d'autres entrées de
tension, par exemple la répartition de charge (connexion
de circuit intermédiaire CC) et le raccordement du
moteur en cas de sauvegarde cinétique.
Avant de toucher une pièce électrique, patienter au
moins le temps indiqué dans le Tableau 2.1.
Un délai plus court est autorisé uniquement s'il est
indiqué sur la plaque signalétique de l'unité spécifique.
ration de la résistance de freinage.
Si la quantité d'énergie cinétique transférée à la résistance
à chaque période de freinage est inconnue, la puissance
moyenne peut être calculée à partir du temps de cycle et
du temps de freinage également appelé cycle d'utilisation
intermittent. Le cycle d'utilisation intermittent de la
résistance indique le cycle d'utilisation pendant lequel la
résistance est active. L'Illustration 5.8 représente un cycle
de freinage typique.
AVIS!
Les fournisseurs de moteurs utilisent souvent S5 pour
indiquer la charge autorisée qui correspond au cycle
d'utilisation intermittent.
Le cycle d'utilisation intermittent de la résistance est
calculé comme suit :
Cycle d'utilisation = tb/T
T = temps de cycle en secondes
tb est le temps de freinage en secondes (du temps de
cycle)
60 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04

Intégration du système
Manuel de configuration
La charge maximale autorisée pour la résistance de
freinage est indiquée comme une puissance de pointe à
un cycle d'utilisation intermittent donné et peut être
calculée comme suit :
Illustration 5.8 Cycle de freinage type
Cycle d'utili-
Durée du cycle
(s)
sation du
freinage au
couple de
100 %
Cycle d'utili-
sation du
freinage en
surcouple
(150/160 %)
200-240 V
PK25-P11K 120 Continu 40%
P15K-P37K 300 10% 10%
380-500 V
PK37-P75K 120 Continu 40%
P90K-P160 600 Continu 10%
P200-P800 600 40% 10%
525-600 V
PK75-P75K 120 Continu 40%
525-690 V
P37K-P400 600 40% 10%
P500-P560 600
40%
1)
10%
2)
P630-P1M0 600 40% 10%
Tableau 5.9 Freinage à un niveau de surcouple élevé
1) 500 kW au couple de freinage de 86 %/560 kW au couple de
freinage de 76 %
2) 500 kW au couple de freinage de 130 %/560 kW au couple de
freinage de 115 %
Danfoss propose des résistances de freinage avec des
cycles d'utilisation de 5 %, 10 % et 40 %. Si un cycle d'utilisation de 10 % est appliqué, les résistances de freinage
sont capables d'absorber la puissance de freinage pendant
10 % du temps du cycle. Les 90 % restants du temps de
cycle sont utilisés pour évacuer la chaleur excédentaire.
ED cycle d'utilisation
=
tb
cycle
T
où tb correspond au temps de freinage en secondes et
Tcycle au temps total du cycle.
La valeur de la résistance de freinage est calculée comme
suit :
2
U
P
pointe
cc
R
Ω =
fr
où
P
pointe
= P
x Mbr [%] x η
moteur
moteur
x η
VLT
[W]
La résistance de freinage dépend de la tension du circuit
intermédiaire (Ucc).
La fonction de freinage des FC 301 et FC 302 est définie
dans 4 zones de secteur.
Taille Frein activé Avertis-
sement avant
coupure
FC 301/FC 302
390 V 405 V 410 V
200-240 V
FC 301 380-480 V 778 V 810 V 820 V
FC 302 380-500 V 810 V 840 V 850 V
FC 302 525-600 V 943 V 965 V 975 V
FC 302 525-690 V 1084 V 1 109 V 1 130 V
Tableau 5.10 Limites de freinage [UCC]
Coupure
(arrêt
verrouillé)
AVIS!
Vérifier que la résistance de freinage peut supporter une
tension de 410 V, 820 V, 850 V, 975 V ou 1 130 V - à
moins que des résistances de freinage Danfoss soient
utilisées.
R
est la résistance de freinage recommandée par
rec
Danfoss, en d'autres termes celle qui garantit que le
variateur de fréquence peut freiner au couple de freinage
le plus élevé (M
être écrite :
) de 160 %. La formule suivante peut
fr(%)
5 5
AVIS!
Vérifier que la résistance est conçue pour gérer le temps
de freinage requis.
R
Ω =
rec
P
moteur
La valeur typique de η
La valeur typique de η
2
U
x 100
cc
x
M
xη
%
x η
VLT
moteur
VARIATEUR
fr
moteur
est de 0,90
est de 0,98
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 61

Intégration du système Manuel de configuration
Pour les variateurs de fréquence 200 V, 480 V, 500 V et
600 V, R
à un couple de freinage de 160 % s'écrit
rec
comme suit :
5.5.2 Câblage de la résistance de freinage
CEM (câbles torsadés/blindage)
Pour répondre aux normes de performance CEM spécifiées
200V :
480V :
480V :
500V :
600V :
690V :
55
1)
Pour les variateurs de fréquence ≤ 7,5 kW à la sortie d'arbre
2)
Pour les variateurs de fréquence de 11-75 kW à la sortie
107780
R
=
rec
P
le moteur
375300
R
=
rec
P
le moteur
428914
R
=
rec
P
le moteur
464923
R
=
rec
P
le moteur
630137
R
=
rec
P
le moteur
832664
R
=
rec
P
le moteur
Ω
Ω
Ω
Ω
Ω
Ω
1
2
d'arbre
du variateur de fréquence, utiliser des câbles/fils blindés. Si
des fils non blindés sont utilisés, il est recommandé de
torsader les fils pour réduire le bruit électrique émis par
ces derniers entre la résistance de freinage et le variateur
de fréquence.
Pour une performance CEM améliorée, utiliser un blindage
métallique.
5.5.3 Contrôle avec la fonction de freinage
Le frein est protégé contre les courts-circuits de la
résistance de freinage. D'autre part, le transistor de
AVIS!
La résistance du circuit de freinage choisie ne doit pas
être supérieure à celle recommandée par Danfoss. En
sélectionnant une résistance de valeur ohmique
supérieure, il est possible que l'on n'obtienne pas un
couple de freinage de 160 % puisque le variateur de
fréquence risque de disjoncter par mesure de sécurité.
freinage est contrôlé de manière à garantir la détection du
court-circuit du transistor. Il est possible d'utiliser une
sortie relais/digitale pour protéger la résistance de freinage
contre la surcharge en relation avec une panne du
variateur de fréquence.
Le frein permet également d'afficher la puissance
instantanée et la puissance moyenne des 120 dernières
secondes et de veiller à ce que la puissance dégagée ne
dépasse pas la limite fixée par l'intermédiaire du par.
AVIS!
En cas de court-circuit dans le transistor de freinage, on
empêche la dissipation de puissance dans la résistance
uniquement en utilisant un interrupteur de secteur ou
2-12 P. kW Frein Res.Au par. 2-13 Frein Res Therm,
sélectionner la fonction à exécuter lorsque la puissance
transmise à la résistance de freinage dépasse la limite
définie au par. 2-12 P. kW Frein Res.
un contacteur afin de déconnecter le variateur de
fréquence du secteur. (Le contacteur peut être
commandé par le variateur de fréquence.)
AVIS!
La surveillance de la puissance de freinage n'est pas une
fonction de sécurité, cette dernière nécessitant un
ATTENTION
thermocontact. La résistance de freinage n'est pas
protégée contre les fuites à la terre.
La résistance de freinage chauffe pendant et après le
freinage.
•
•
Pour éviter toute blessure, ne pas toucher la
résistance de freinage.
Placer la résistance de freinage dans un
environnement sûr pour éviter tout risque
d'incendie.
Le contrôle de surtension (OVC) (à l'exclusion de la
résistance de freinage) peut être sélectionné comme
fonction de freinage de remplacement au par.
2-17 Contrôle Surtension. Cette fonction est active pour
toutes les unités et permet d'éviter un arrêt si la tension
du circuit intermédiaire augmente. Elle génère une
augmentation de la fréquence de sortie pour limiter la
tension du circuit intermédiaire. Cette fonction est utile car
elle évite l'arrêt du variateur de fréquence, si la durée de
ATTENTION
Les variateurs de fréquence de types D-F contiennent
descente de rampe est trop courte par exemple. Dans
cette situation, la rampe de décélération est prolongée.
plusieurs hacheurs de freinage. Utiliser par conséquent
une résistance de freinage par hacheur de freinage pour
ces types de protection.
AVIS!
L'OVC ne peut pas être activé lors du fonctionnement
d'un moteur PM (si le par. 1-10 Construction moteur est
réglé sur [1] PM, SPM non saillant).
62 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
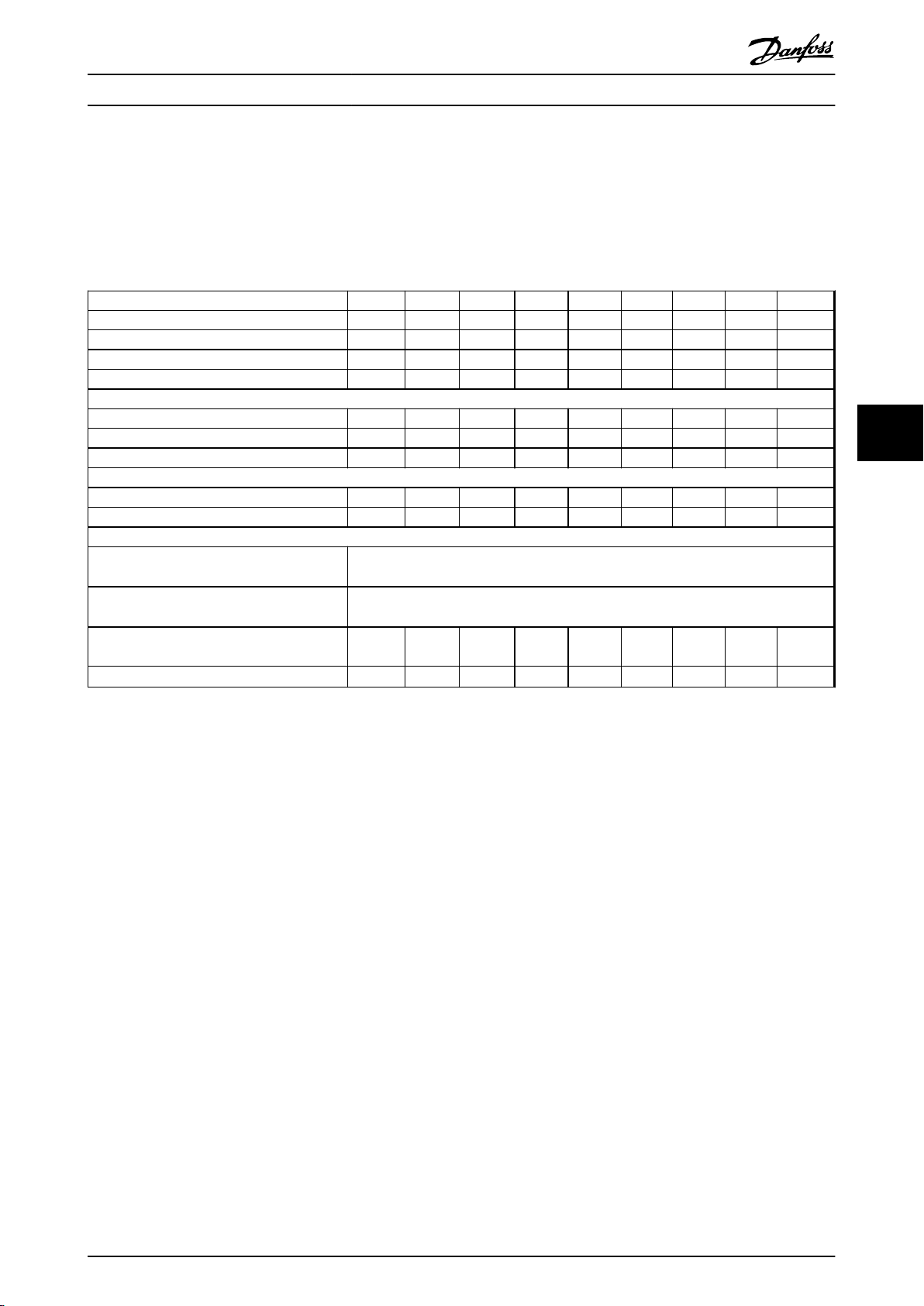
Spécifications du produit Manuel de configuration
6 Spécifications du produit
6.1 Données électriques
6.1.1 Alimentation secteur 200-240 V
Désignation du type PK25 PK37 PK55 PK75 P1K1 P1K5 P2K2 P3K0 P3K7
Sortie d'arbre typique [kW] 0,25 0,37 0,55 0,75 1,1 1,5 2,2 3,0 3,7
Protection IP20 (FC 301 uniquement) A1 A1 A1 A1 A1 A1 - - Protection IP20/IP21 A2 A2 A2 A2 A2 A2 A2 A3 A3
Protection IP55, IP66 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A5 A5
Courant de sortie
Continu (200-240 V) [A] 1,8 2,4 3,5 4,6 6,6 7,5 10,6 12,5 16,7
Intermittent (200-240 V) [A] 2,9 3,8 5,6 7,4 10,6 12,0 17,0 20,0 26,7
KVA continu (208 V) [kVA] 0,65 0,86 1,26 1,66 2,38 2,70 3,82 4,50 6,00
Courant d'entrée max.
Continu (200-240 V) [A] 1,6 2,2 3,2 4,1 5,9 6,8 9,5 11,3 15,0
Intermittent (200-240 V) [A] 2,6 3,5 5,1 6,6 9,4 10,9 15,2 18,1 24,0
Spécifications supplémentaires
Section max. de câble4) pour secteur, moteur,
frein et répartition de la charge [mm2] ([AWG])
Section max. de câble4) pour sectionneur
[mm2] ([AWG])
Perte de puissance estimée à charge nominale
3)
max. [W]
Rendement
2)
21 29 42 54 63 82 116 155 185
0,94 0,94 0,95 0,95 0,96 0,96 0,96 0,96 0,96
4, 4, 4 (12, 12, 12)
(min. 0,2 (24))
6,4,4 (10,12,12)
6 6
Tableau 6.1 Alimentation secteur 200-240 V, PK25-P3K7
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 63

Spécifications du produit
Manuel de configuration
Désignation du type P5K5 P7K5 P11K
Surcharge élevée/normale
1)
SE SN SE SN SE SN
Sortie d'arbre typique [kW] 5,5 7,5 7,5 11 11 15
Protection IP20 B3 B3 B4
Protection IP21, IP55, IP66 B1 B1 B2
Courant de sortie
Continu (200-240 V) [A] 24,2 30,8 30,8 46,2 46,2 59,4
Intermittent (surcharge de 60 s) (200-240 V) [A] 38,7 33,9 49,3 50,8 73,9 65,3
KVA continu (208 V) [kVA] 8,7 11,1 11,1 16,6 16,6 21,4
Courant d'entrée max.
Continu (200-240 V) [A] 22,0 28,0 28,0 42,0 42,0 54,0
Intermittent (surcharge de 60 s) (200-240 V) [A] 35,2 30,8 44,8 46,2 67,2 59,4
Spécifications supplémentaires
IP20, section max. de câble4) pour secteur, frein, moteur et
66
répartition de la charge [mm2] ([AWG])
Section max. de câble IP214) pour secteur, frein, répartition de la
charge [mm2] ([AWG])
Section max. de câble IP214) pour moteur [mm2] ([AWG])
Section max. de câble4) pour sectionneur [mm2] ([AWG])
Perte de puissance estimée à charge nominale max. [W]
Rendement
2)
3)
10,10,- (8,8,-) 10,10,- (8,8,-) 35,-,- (2,-,-)
16,10,16 (6,8,6) 16,10,16 (6,8,6) 35,-,- (2,-,-)
10,10,- (8,8,-) 10,10,- (8,8,-) 35,25,25 (2,4,4)
16,10,10 (6,8,8)
239 310 371 514 463 602
0,96 0,96 0,96
Tableau 6.2 Alimentation secteur 200-240 V, P5K5-P11K
Désignation du type P15K P18K P22K P30K P37K
Surcharge élevée/normale
1)
SE SN SE SN SE SN SE SN SE SN
Sortie d'arbre typique [kW] 15 18,5 18,5 22 22 30 30 37 37 45
Protection IP20 B4 C3 C3 C4 C4
Protection IP21, IP55, IP66 C1 C1 C1 C2 C2
Courant de sortie
Continu (200-240 V) [A] 59,4 74,8 74,8 88,0 88,0 115 115 143 143 170
Intermittent (surcharge de 60 s) (200-240 V) [A] 89,1 82,3 112 96,8 132 127 173 157 215 187
KVA continu (208 V) [kVA] 21,4 26,9 26,9 31,7 31,7 41,4 41,4 51,5 51,5 61,2
Courant d'entrée max.
Continu (200-240 V) [A] 54,0 68,0 68,0 80,0 80,0 104 104 130 130 154
Intermittent (surcharge de 60 s) (200-240 V) [A] 81,0 74,8 102 88,0 120 114 156 143 195 169
Spécifications supplémentaires
IP20, section max. de câble pour secteur, frein,
moteur et répartition de la charge
35 (2) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
[mm2] ([AWG])
Section max. de câble IP21, IP55, IP66 pour
secteur et moteur [mm2] ([AWG])
Section max. de câble IP21, IP55, IP66 pour frein
et répartition de la charge [mm2] ([AWG])
Section max. de câble4) pour sectionneur
[mm2] ([AWG])
Perte de puissance estimée à charge nominale
3)
max. [W]
Rendement
2)
50 (1) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
50 (1) 50 (1) 50 (1) 95 (3/0) 95 (3/0)
185, 150, 120
(350 MCM,
300 MCM, 4/0)
50, 35, 35 (1, 2, 2)
95, 70, 70
(3/0, 2/0, 2/0)
624 737 740 845 874 1140 1143 1353 1400 1636
0,96 0,97 0,97 0,97 0,97
Tableau 6.3 Alimentation secteur 200-240 V, P15K-P37K
64 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04

Spécifications du produit Manuel de configuration
6.1.2 Alimentation 380-500 V
Désignation du type PK37 PK55 PK75 P1K1 P1K5 P2K2 P3K0 P4K0 P5K5 P7K5
Sortie d'arbre typique [kW] 0,37 0,55 0,75 1,1 1,5 2,2 3,0 4,0 5,5 7,5
Protection IP20 (FC 301 uniquement) A1 A1 A1 A1 A1 - - - - Protection IP20/IP21 A2 A2 A2 A2 A2 A2 A2 A2 A3 A3
Protection IP55, IP66 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A5 A5
Courant de sortie Surcharge élevée de 160 % pendant 1 minute
Sortie d'arbre [kW] 0,37 0,55 0,75 1,1 1,5 2,2 3 4 5,5 7,5
Continu (380-440 V) [A] 1,3 1,8 2,4 3,0 4,1 5,6 7,2 10 13 16
Intermittent (380-440 V) [A] 2,1 2,9 3,8 4,8 6,6 9,0 11,5 16 20,8 25,6
Continu (441-500 V) [A] 1,2 1,6 2,1 2,7 3,4 4,8 6,3 8,2 11 14,5
Intermittent (441-500 V) [A] 1,9 2,6 3,4 4,3 5,4 7,7 10,1 13,1 17,6 23,2
KVA continu (400 V) [kVA] 0,9 1,3 1,7 2,1 2,8 3,9 5,0 6,9 9,0 11
KVA continu (460 V) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8 5,0 6,5 8,8 11,6
Courant d'entrée max.
Continu (380-440 V) [A] 1,2 1,6 2,2 2,7 3,7 5,0 6,5 9,0 11,7 14,4
Intermittent (380-440 V) [A] 1,9 2,6 3,5 4,3 5,9 8,0 10,4 14,4 18,7 23
Continu (441-500 V) [A] 1,0 1,4 1,9 2,7 3,1 4,3 5,7 7,4 9,9 13
Intermittent (441-500 V) [A] 1,6 2,2 3,0 4,3 5,0 6,9 9,1 11,8 15,8 20,8
Spécifications supplémentaires
IP20, IP21, section max. de câble4) pour secteur,
moteur, frein et répartition de la charge
[mm2] ([AWG])
IP55, IP66, section max. de câble4) pour secteur,
moteur, frein et répartition de la charge
[mm2] ([AWG])
Section max. de câble4) pour sectionneur
[mm2] ([AWG])
Perte de puissance estimée à charge nominale
3)
max. [W]
Rendement
2)
35 42 46 58 62 88 116 124 187 255
0,93 0,95 0,96 0,96 0,97 0,97 0,97 0,97 0,97 0,97
4, 4, 4 (12, 12, 12)
(min. 0,2 (24))
4,4,4 (12,12,12)
6,4,4 (10,12,12)
6 6
Tableau 6.4 Alimentation 380-500 V (FC 302), 380-480 V (FC 301), PK37-P7K5
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 65
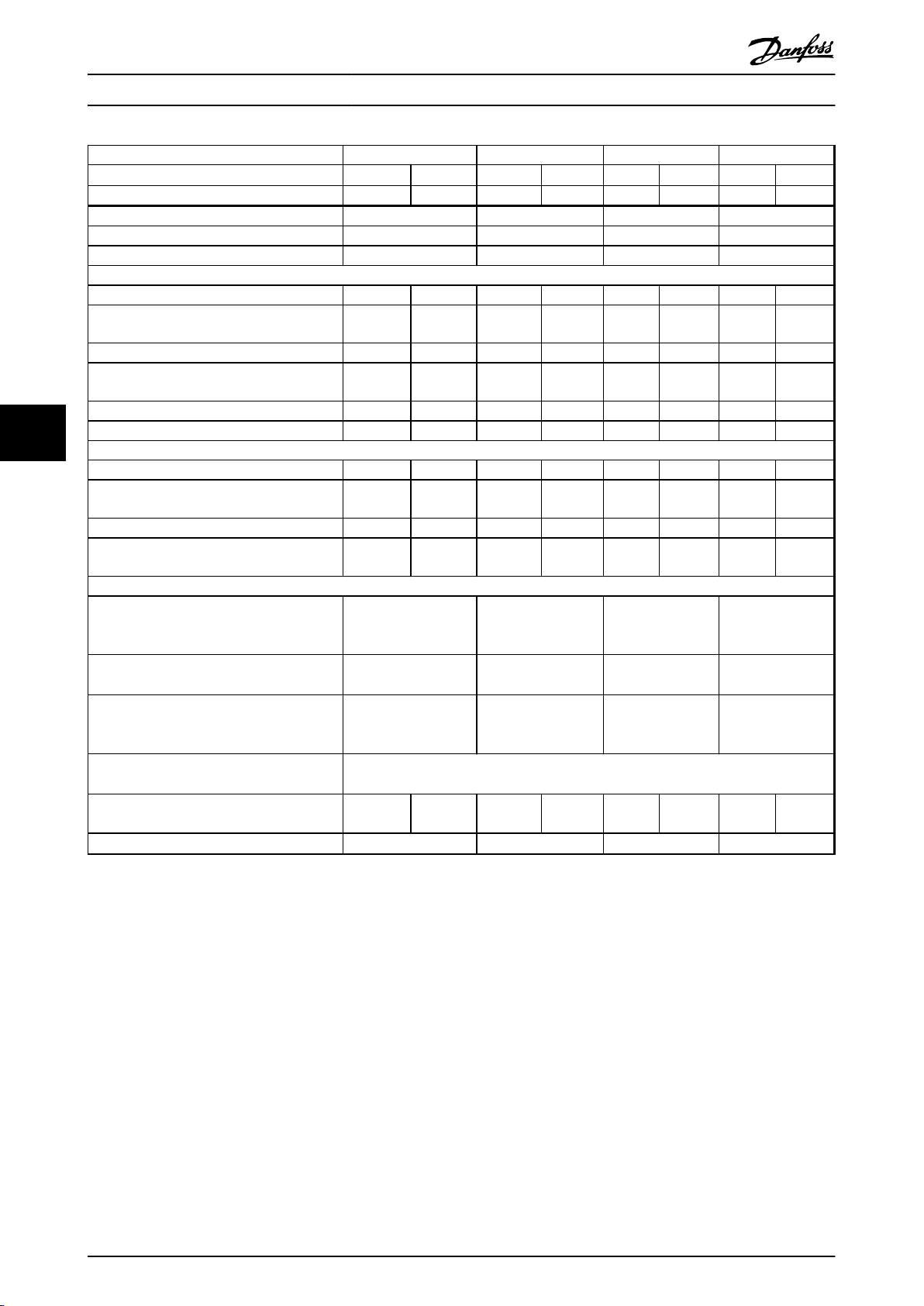
Spécifications du produit Manuel de configuration
Désignation du type P11K P15K P18K P22K
Surcharge élevée/normale
Sortie d'arbre typique [kW] 11 15 15 18,5 18,5 22,0 22,0 30,0
Protection IP20 B3 B3 B4 B4
Protection IP21 B1 B1 B2 B2
Protection IP55, IP66 B1 B1 B2 B2
Courant de sortie
Continu (380-440 V) [A] 24 32 32 37,5 37,5 44 44 61
Intermittent (surcharge de 60 s) (380-440 V)
[A]
Continu (441-500 V) [A] 21 27 27 34 34 40 40 52
Intermittent (surcharge de 60 s)
(441-500 V) [A]
KVA continu (400 V) [kVA] 16,6 22,2 22,2 26 26 30,5 30,5 42,3
66
KVA continu (460 V) [kVA] 21,5 27,1 31,9 41,4
Courant d'entrée max.
Continu (380-440 V) [A] 22 29 29 34 34 40 40 55
Intermittent (surcharge de 60 s)
(380-440 V) [A]
Continu (441-500 V) [A] 19 25 25 31 31 36 36 47
Intermittent (surcharge de 60 s)
(441-500 V) [A]
Spécifications supplémentaires
Section max. de câble IP21, IP55, IP664) pour
secteur, frein et répartition de la charge
[mm2] ([AWG])
Section max. de câble IP21, IP55, IP664) pour
moteur [mm2] ([AWG])
IP20, section max. de câble4) pour secteur,
frein, moteur et répartition de la charge
[mm2] ([AWG])
Section max. de câble4) pour sectionneur
[mm2] ([AWG])
Perte de puissance estimée à charge nominale
3)
max. [W]
Rendement
2)
1)
SE SN SE SN SE SN SE SN
38,4 35,2 51,2 41,3 60 48,4 70,4 67,1
33,6 29,7 43,2 37,4 54,4 44 64 57,2
35,2 31,9 46,4 37,4 54,4 44 64 60,5
30,4 27,5 40 34,1 49,6 39,6 57,6 51,7
16, 10, 16 (6, 8, 6) 16, 10, 16 (6, 8, 6) 35,-,-(2,-,-) 35,-,-(2,-,-)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35, 25, 25 (2, 4, 4) 35, 25, 25 (2, 4, 4)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35,-,-(2,-,-) 35,-,-(2,-,-)
16, 10, 10 (6, 8, 8)
291 392 379 465 444 525 547 739
0,98 0,98 0,98 0,98
Tableau 6.5 Alimentation 380-500 V (FC 302), 380-480 V (FC 301), P11K-P22K
66 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
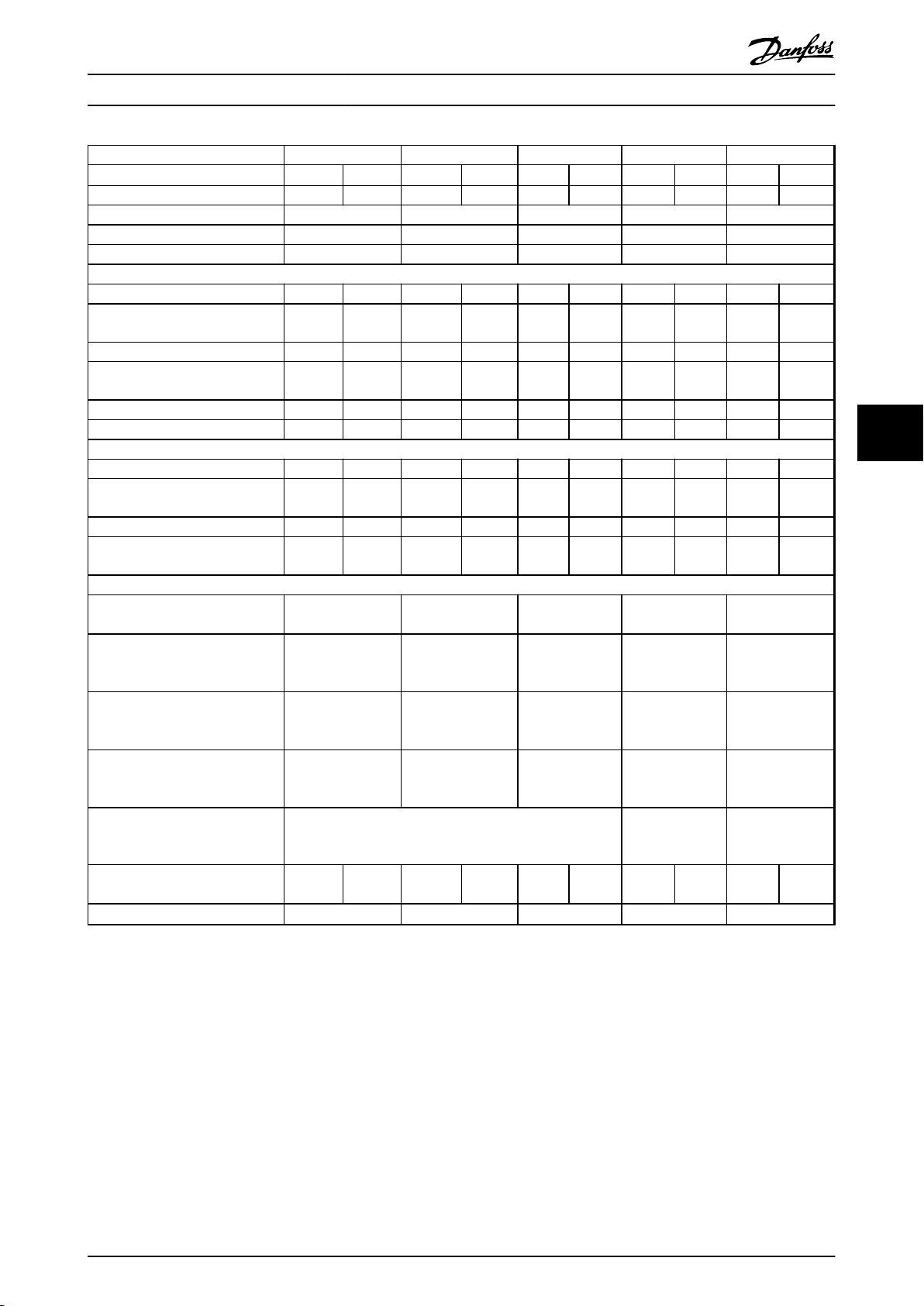
Spécifications du produit Manuel de configuration
Désignation du type P30K P37K P45K P55K P75K
4)
1)
pour
3)
Surcharge élevée/normale
Sortie d'arbre typique [kW] 30 37 37 45 45 55 55 75 75 90
Protection IP21 C1 C1 C1 C2 C2
Protection IP20 B4 C3 C3 C4 C4
Protection IP55, IP66 C1 C1 C1 C2 C2
Courant de sortie
Continu (380-440 V) [A] 61 73 73 90 90 106 106 147 147 177
Intermittent (surcharge de 60 s)
(380-440 V) [A]
Continu (441-500 V) [A] 52 65 65 80 80 105 105 130 130 160
Intermittent (surcharge de 60 s)
(441-500 V) [A]
KVA continu (400 V) [kVA] 42,3 50,6 50,6 62,4 62,4 73,4 73,4 102 102 123
KVA continu (460 V) [kVA] 51,8 63,7 83,7 104 128
Courant d'entrée max.
Continu (380-440 V) [A] 55 66 66 82 82 96 96 133 133 161
Intermittent (surcharge de 60 s)
(380-440 V) [A]
Continu (441-500 V) [A] 47 59 59 73 73 95 95 118 118 145
Intermittent (surcharge de 60 s)
(441-500 V) [A]
Spécifications supplémentaires
IP20, section max. de câble pour
secteur et moteur [mm2] ([AWG])
IP20, section max. de câble pour
frein et répartition de la charge
[mm2] ([AWG])
Section max. de câble IP21, IP55,
IP66 pour secteur et moteur
[mm2] ([AWG])
Section max. de câble IP21, IP55,
IP66 pour frein et répartition de la
charge [mm2] ([AWG])
Section max. de câble
sectionneur [mm2] ([AWG])
Perte de puissance estimée
à charge nominale max. [W]
Rendement
2)
SE SN SE SN SE SN SE SN SE SN
91,5 80,3 110 99 135 117 159 162 221 195
78 71,5 97,5 88 120 116 158 143 195 176
82,5 72,6 99 90,2 123 106 144 146 200 177
70,5 64,9 88,5 80,3 110 105 143 130 177 160
35 (2) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
35 (2) 50 (1) 50 (1) 95 (4/0) 95 (4/0)
50 (1) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
50 (1) 50 (1) 50 (1) 95 (3/0) 95 (3/0)
50, 35, 35
(1, 2, 2)
570 698 697 843 891 1083 1022 1384 1232 1474
0,98 0,98 0,98 0,98 0,99
95, 70, 70
(3/0, 2/0, 2/0)
185, 150, 120
(350 MCM,
300 MCM, 4/0)
6 6
Tableau 6.6 Alimentation secteur 380-500 V (FC 302), 380-480 V (FC 301), P30K-P75K
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 67

Spécifications du produit Manuel de configuration
6.1.3 Alimentation secteur 525-600 V (FC 302 uniquement)
Désignation du type PK75 P1K1 P1K5 P2K2 P3K0 P4K0 P5K5 P7K5
Sortie d'arbre typique [kW] 0,75 1,1 1,5 2,2 3 4 5,5 7,5
Protection IP20, IP21 A3 A3 A3 A3 A3 A3 A3 A3
Protection IP55 A5 A5 A5 A5 A5 A5 A5 A5
Courant de sortie
(Continu 525-550 V) [A] 1,8 2,6 2,9 4,1 5,2 6,4 9,5 11,5
Intermittent (525-550 V) [A] 2,9 4,2 4,6 6,6 8,3 10,2 15,2 18,4
Continu (551-600 V) [A] 1,7 2,4 2,7 3,9 4,9 6,1 9,0 11,0
Intermittent (551-600 V) [A] 2,7 3,8 4,3 6,2 7,8 9,8 14,4 17,6
KVA continu (525 V) [kVA] 1,7 2,5 2,8 3,9 5,0 6,1 9,0 11,0
KVA continu (575 V) [kVA] 1,7 2,4 2,7 3,9 4,9 6,1 9,0 11,0
Courant d'entrée max.
66
Continu (525-600 V) [A] 1,7 2,4 2,7 4,1 5,2 5,8 8,6 10,4
Intermittent (525-600 V) [A] 2,7 3,8 4,3 6,6 8,3 9,3 13,8 16,6
Spécifications supplémentaires
Section max. de câble4) pour secteur, moteur,
frein et répartition de la charge [mm2] ([AWG])
Section max. de câble4) pour sectionneur
[mm2] ([AWG])
Perte de puissance estimée à charge nominale
3)
max. [W]
Rendement
2)
35 50 65 92 122 145 195 261
0,97 0,97 0,97 0,97 0,97 0,97 0,97 0,97
4, 4, 4 (12, 12, 12)
(min. 0,2 (24))
6,4,4 (10,12,12)
Tableau 6.7 Alimentation secteur 525-600 V (FC 302 uniquement), PK75-P7K5
68 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
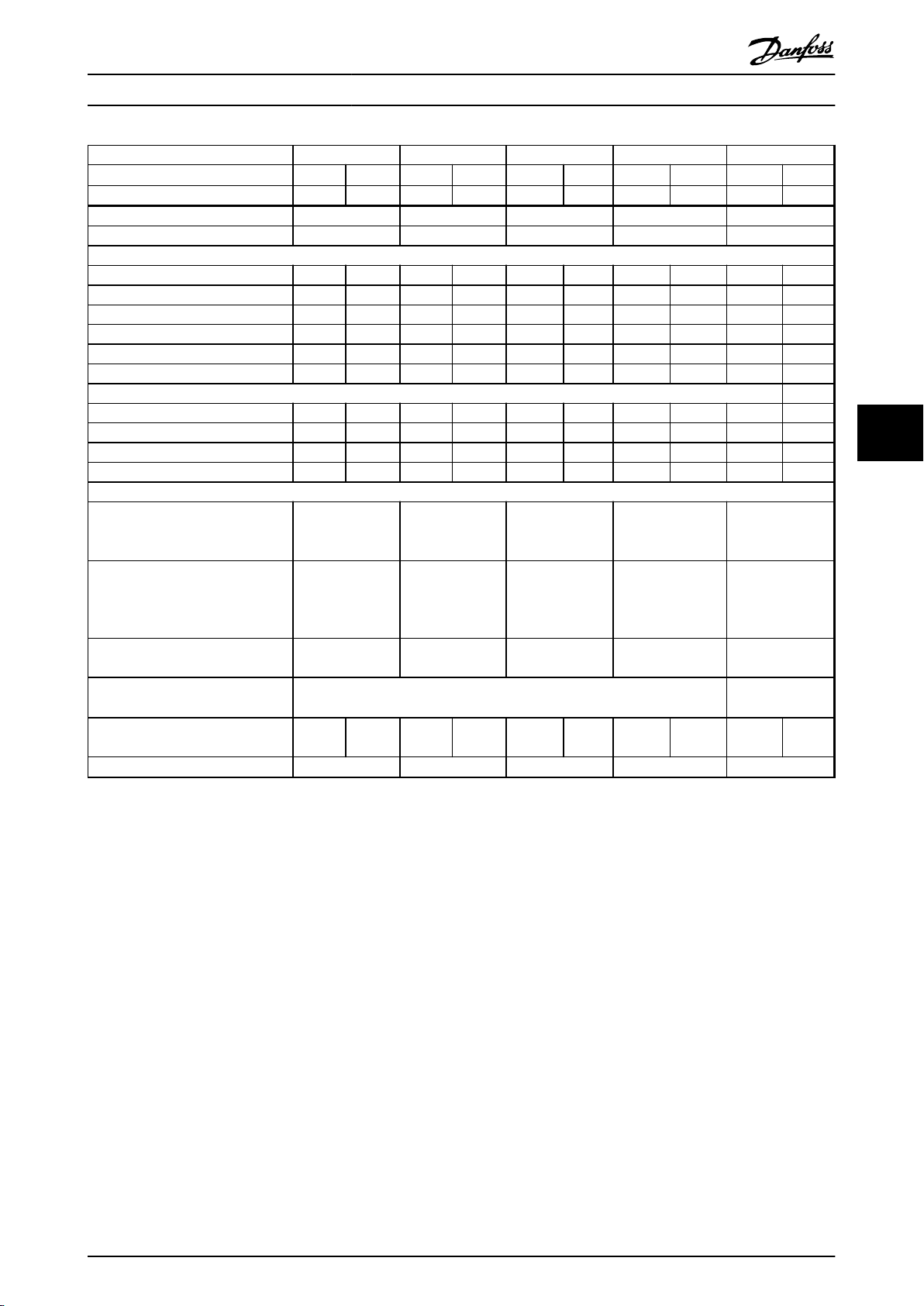
Spécifications du produit Manuel de configuration
Désignation du type P11K P15K P18K P22K P30K
Surcharge élevée/normale
Sortie d'arbre typique [kW] 11 15 15 18,5 18,5 22 22 30 30 37
Protection IP20 B3 B3 B4 B4 B4
Protection IP21, IP55, IP66 B1 B1 B2 B2 C1
Courant de sortie
(Continu 525-550 V) [A] 19 23 23 28 28 36 36 43 43 54
Intermittent (525-550 V) [A] 30 25 37 31 45 40 58 47 65 59
Continu (551-600 V) [A] 18 22 22 27 27 34 34 41 41 52
Intermittent (551-600 V) [A] 29 24 35 30 43 37 54 45 62 57
KVA continu (550 V) [kVA] 18,1 21,9 21,9 26,7 26,7 34,3 34,3 41,0 41,0 51,4
KVA continu (575 V) [kVA] 17,9 21,9 21,9 26,9 26,9 33,9 33,9 40,8 40,8 51,8
Courant d'entrée max.
Continu à 550 V [A] 17,2 20,9 20,9 25,4 25,4 32,7 32,7 39 39 49
Intermittent à 550 V [A] 28 23 33 28 41 36 52 43 59 54
Continu à 575 V [A] 16 20 20 24 24 31 31 37 37 47
Intermittent à 575 V [A] 26 22 32 27 39 34 50 41 56 52
Spécifications supplémentaires
IP20, section max. de câble4) pour
secteur, frein, moteur et répartition
de la charge [mm2] ([AWG])
Section max. de câble IP21, IP55,
IP664) pour secteur, frein et
répartition de la charge
[mm2] ([AWG])
Section max. de câble IP21, IP55,
IP664) pour moteur [mm2] ([AWG])
Section max. de câble4) pour
sectionneur [mm2] ([AWG])
Perte de puissance estimée
à charge nominale max. [W]
Rendement
2)
1)
3)
SE SN SE SN SE SN SE SN SE SN
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35,-,-(2,-,-) 35,-,-(2,-,-) 35,-,-(2,-,-)
16, 10, 10 (6, 8, 8) 16, 10, 10 (6, 8, 8) 35,-,-(2,-,-) 35,-,-(2,-,-) 50,-,- (1,-,-)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35, 25, 25 (2, 4, 4) 35, 25, 25 (2, 4, 4) 50,-,- (1,-,-)
16, 10, 10
(6, 8, 8)
220 300 300 370 370 440 440 600 600 740
0,98 0,98 0,98 0,98 0,98
50, 35, 35
(1, 2, 2)
6 6
Tableau 6.8 Alimentation secteur 525-600 V (FC 302 uniquement), P11K-P30K
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 69
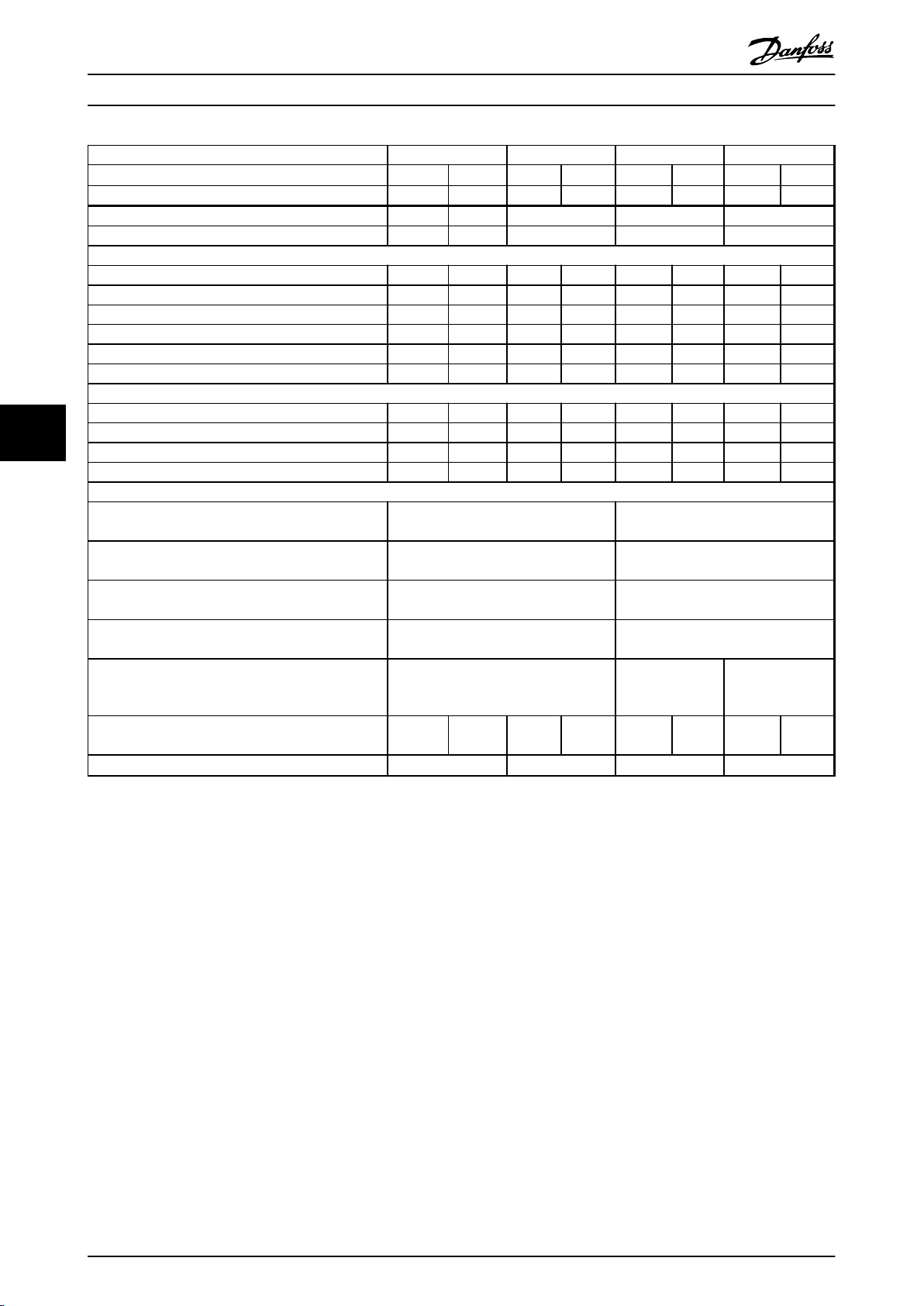
Spécifications du produit Manuel de configuration
Désignation du type P37K P45K P55K P75K
Surcharge élevée/normale
Sortie d'arbre typique [kW] 37 45 45 55 55 75 75 90
Protection IP20 C3 C3 C3 C4 C4
Protection IP21, IP55, IP66 C1 C1 C1 C2 C2
Courant de sortie
(Continu 525-550 V) [A] 54 65 65 87 87 105 105 137
Intermittent (525-550 V) [A] 81 72 98 96 131 116 158 151
Continu (551-600 V) [A] 52 62 62 83 83 100 100 131
Intermittent (551-600 V) [A] 78 68 93 91 125 110 150 144
KVA continu (550 V) [kVA] 51,4 61,9 61,9 82,9 82,9 100,0 100,0 130,5
KVA continu (575 V) [kVA] 51,8 61,7 61,7 82,7 82,7 99,6 99,6 130,5
Courant d'entrée max.
Continu à 550 V [A] 49 59 59 78,9 78,9 95,3 95,3 124,3
66
Intermittent à 550 V [A] 74 65 89 87 118 105 143 137
Continu à 575 V [A] 47 56 56 75 75 91 91 119
Intermittent à 575 V [A] 70 62 85 83 113 100 137 131
Spécifications supplémentaires
IP20, section max. de câble pour secteur et moteur
[mm2] ([AWG])
IP20, section max. de câble pour frein et répartition de
la charge [mm2] ([AWG])
Section max. de câble IP21, IP55, IP66 pour secteur et
moteur [mm2] ([AWG])
Section max. de câble IP21, IP55, IP66 pour frein et
répartition de la charge [mm2] ([AWG])
Section max. de câble
[mm2] ([AWG])
Perte de puissance estimée à charge nominale max.
3)
[W]
Rendement
2)
1)
4)
pour sectionneur
SE SN SE SN SE SN SE SN
50 (1) 150 (300 MCM)
50 (1) 95 (4/0)
50 (1) 150 (300 MCM)
50 (1) 95 (4/0)
50, 35, 35
(1, 2, 2)
740 900 900 1100 1100 1500 1500 1800
0,98 0,98 0,98 0,98
95, 70, 70
(3/0, 2/0, 2/0)
185, 150, 120
(350 MCM,
300 MCM, 4/0)
Tableau 6.9 Alimentation secteur 525-600 V (FC 302 uniquement), P37K-P75K
70 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
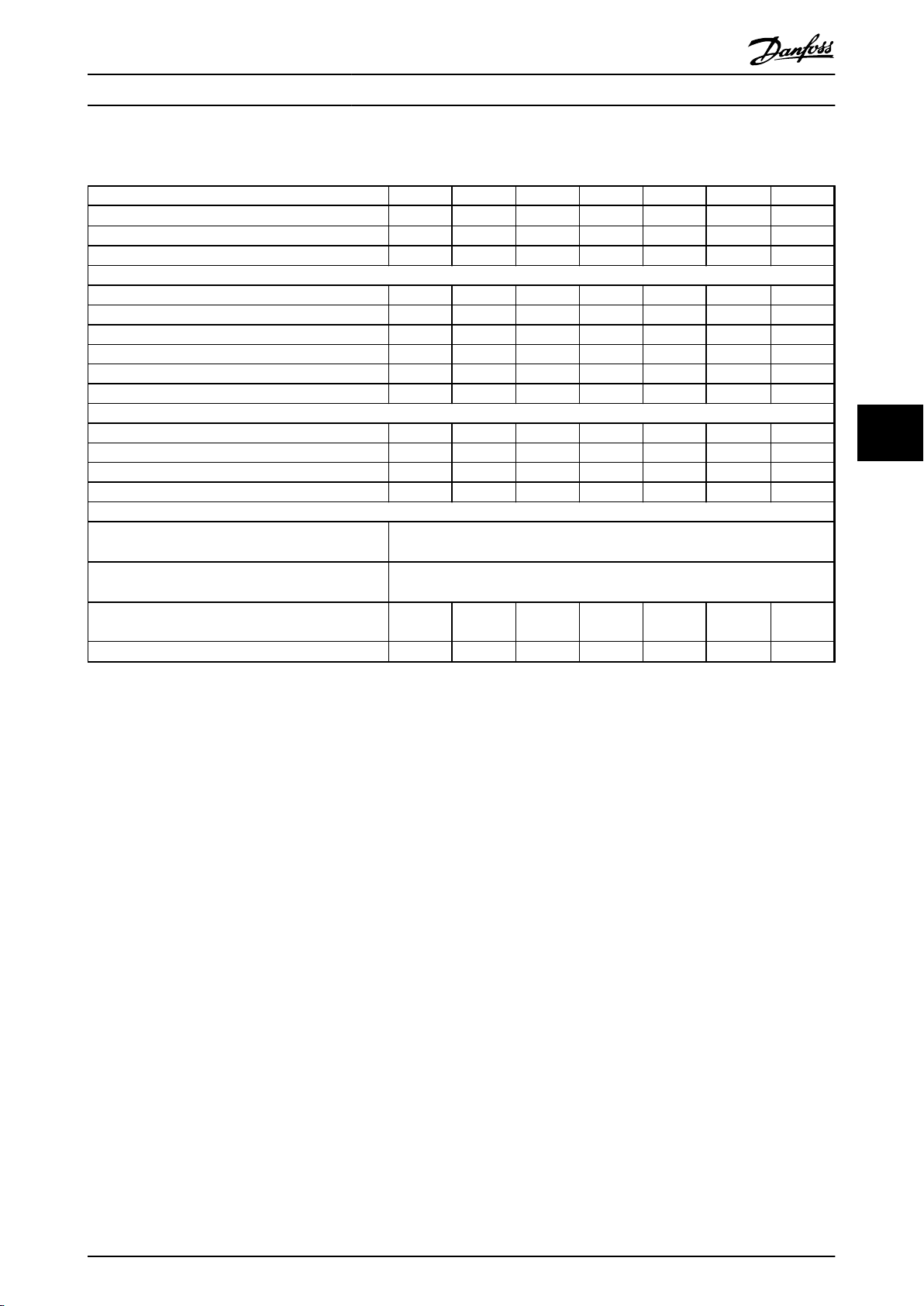
Spécifications du produit Manuel de configuration
6.1.4 Alimentation secteur 525-690 V (FC 302 uniquement)
Désignation du type P1K1 P1K5 P2K2 P3K0 P4K0 P5K5 P7K5
Surcharge élevée/normale
Sortie d'arbre typique (kW) 1,1 1,5 2,2 3,0 4,0 5,5 7,5
Protection IP20 A3 A3 A3 A3 A3 A3 A3
Courant de sortie
Continu (525-550 V) [A] 2,1 2,7 3,9 4,9 6,1 9,0 11,0
Intermittent (525-550 V) [A] 3,4 4,3 6,2 7,8 9,8 14,4 17,6
Continu (551-690 V) [A] 1,6 2,2 3,2 4,5 5,5 7,5 10,0
Intermittent (551-690 V) [A] 2,6 3,5 5,1 7,2 8,8 12,0 16,0
KVA continu 525 V 1,9 2,5 3,5 4,5 5,5 8,2 10,0
KVA continu 690 V 1,9 2,6 3,8 5,4 6,6 9,0 12,0
Courant d'entrée max.
Continu (525-550 V) [A] 1,9 2,4 3,5 4,4 5,5 8,1 9,9
Intermittent (525-550 V) [A] 3,0 3,9 5,6 7,0 8,8 12,9 15,8
Continu (551-690 V) [A] 1,4 2,0 2,9 4,0 4,9 6,7 9,0
Intermittent (551-690 V) [A] 2,3 3,2 4,6 6,5 7,9 10,8 14,4
Spécifications supplémentaires
Section max. de câble4) pour secteur, moteur, frein et
répartition de la charge [mm2] ([AWG])
Section max. de câble4) pour sectionneur
[mm2] ([AWG])
Perte de puissance estimée à charge nominale max.
3)
[W]
Rendement
2)
1)
SE/SN SE/SN SE/SN SE/SN SE/SN SE/SN SE/SN
4, 4, 4 (12, 12, 12) (min. 0,2 (24)
6, 4, 4 (10, 12, 12)
44 60 88 120 160 220 300
0,96 0,96 0,96 0,96 0,96 0,96 0,96
6 6
Tableau 6.10 Protection A3, alimentation secteur 525-690 V IP20/Châssis protégé, P1K1-P7K5
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 71

Spécifications du produit Manuel de configuration
Désignation du type P11K P15K P18K P22K
Surcharge élevée/normale
Sortie d'arbre typique à 550 V [kW] 7,5 11 11 15 15 18,5 18,5 22
Sortie d'arbre typique à 690 V [kW] 11 15 15 18,5 18,5 22 22 30
Protection IP20 B4 B4 B4 B4
Protection IP21, IP55 B2 B2 B2 B2
Courant de sortie
Continu (525-550 V) [A] 14,0 19,0 19,0 23,0 23,0 28,0 28,0 36,0
Intermittent (surcharge de 60 s) (525-550 V) [A] 22,4 20,9 30,4 25,3 36,8 30,8 44,8 39,6
Continu (551-690 V) [A] 13,0 18,0 18,0 22,0 22,0 27,0 27,0 34,0
Intermittent (surcharge de 60 s) (551-690 V) [A] 20,8 19,8 28,8 24,2 35,2 29,7 43,2 37,4
kVA continu (à 550 V) [kVA] 13,3 18,1 18,1 21,9 21,9 26,7 26,7 34,3
kVA continu (à 690 V) [kVA] 15,5 21,5 21,5 26,3 26,3 32,3 32,3 40,6
Courant d'entrée max.
66
Continu (à 550 V) [A] 15,0 19,5 19,5 24,0 24,0 29,0 29,0 36,0
Intermittent (surcharge 60 s) (à 550 V) [A] 23,2 21,5 31,2 26,4 38,4 31,9 46,4 39,6
Continu (à 690 V) [A] 14,5 19,5 19,5 24,0 24,0 29,0 29,0 36,0
Intermittent (surcharge 60 s) (à 690 V) [A] 23,2 21,5 31,2 26,4 38,4 31,9 46,4 39,6
Spécifications supplémentaires
Section max. du câble4) pour secteur/moteur,
répartition de la charge et frein [mm2] ([AWG])
Section max. de câble
[mm2] ([AWG])
Perte de puissance estimée à charge nominale max.
3)
[W]
Rendement
2)
1)
4)
pour sectionneur
SE SN SE SN SE SN SE SN
35, 25, 25 (2, 4, 4)
16,10,10 (6, 8, 8)
150 220 220 300 300 370 370 440
0,98 0,98 0,98 0,98
Tableau 6.11 Protection B2/B4, alimentation secteur 525-690 V IP20/IP21/IP55 - Châssis/NEMA 1/NEMA 12 (FC 302 uniquement),
P11K-P22K
72 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04

Spécifications du produit
Manuel de configuration
Désignation du type P30K P37K P45K P55K P75K
Surcharge élevée/normale
1)
SE SN SE SN SE SN SE SN SE SN
Sortie d'arbre typique à 550 V (kW) 22 30 30 37 37 45 45 55 50 75
Sortie d'arbre typique à 690 V [kW] 30 37 37 45 45 55 55 75 75 90
Protection IP20 B4 C3 C3 D3h D3h
Protection IP21, IP55 C2 C2 C2 C2 C2
Courant de sortie
Continu (525-550 V) [A] 36,0 43,0 43,0 54,0 54,0 65,0 65,0 87,0 87,0 105
Intermittent (surcharge de 60 s)
(525-550 V) [A] 54,0 47,3 64,5 59,4 81,0 71,5 97,5 95,7 130,5 115,5
Continu (551-690 V) [A] 34,0 41,0 41,0 52,0 52,0 62,0 62,0 83,0 83,0 100
Intermittent (surcharge de 60 s)
(551-690 V) [A] 51,0 45,1 61,5 57,2 78,0 68,2 93,0 91,3 124,5 110
kVA continu (à 550 V) [kVA] 34,3 41,0 41,0 51,4 51,4 61,9 61,9 82,9 82,9 100
kVA continu (à 690 V) [kVA] 40,6 49,0 49,0 62,1 62,1 74,1 74,1 99,2 99,2 119,5
Courant d'entrée max.
Continu (à 550 V) [A] 36,0 49,0 49,0 59,0 59,0 71,0 71,0 87,0 87,0 99,0
Intermittent (surcharge 60 s) (à 550 V) [A] 54,0 53,9 72,0 64,9 87,0 78,1 105,0 95,7 129 108,9
Continu (à 690 V) [A] 36,0 48,0 48,0 58,0 58,0 70,0 70,0 86,0 - Intermittent (surcharge 60 s) (à 690 V) [A] 54,0 52,8 72,0 63,8 87,0 77,0 105 94,6 - -
Spécifications supplémentaires
Section max. du câble pour secteur et
moteur [mm2] ([AWG])
Section max. du câble pour répartition de
la charge et frein [mm2] ([AWG])
Section max. de câble
4)
pour sectionneur
[mm2] ([AWG])
Perte de puissance estimée
à charge nominale max. [W]
Rendement
2)
3)
95, 70, 70
(3/0, 2/0, 2/0)
600 740 740 900 900 1100 1100 1500 1500 1800
0,98
0,98 0,98 0,98 0,98
150 (300 MCM)
95 (3/0)
185, 150, 120
(350 MCM,
300 MCM, 4/0)
-
6 6
Tableau 6.12 Protection B4, C2, C3, alimentation secteur 525-690 V IP20/IP21/IP55 - Châssis/NEMA1/NEMA 12 (FC 302 uniquement),
P30K-P75K
Pour les calibres des fusibles, voir le chapitre 9.3.1 Fusibles et disjoncteurs.
1)
Surcharge élevée (SE) = couple de 150 ou 160 % pendant 60 s. Surcharge normale =couple de 110 % pendant 60 s.
2)
Mesuré avec des câbles moteur blindés de 5 m à la charge et à la fréquence nominales.
3)
La perte de puissance typique, mesurée dans des conditions de charge nominales, est de
±
15 % (la tolérance est liée à la variété des
conditions de tension et de câblage).
Les valeurs s'appuient sur le rendement typique d'un moteur (limite eff2/eff3). Les moteurs de moindre rendement renforcent également
la perte de puissance du variateur de fréquence et vice versa.
Si la fréquence de commutation est supérieure à la valeur nominale, les pertes de puissance peuvent augmenter considérablement.
Les puissances consommées par le LCP et la carte de commande sont incluses. Les options supplémentaires et la charge placée par
l'utilisateur peuvent ajouter jusqu'à 30 W aux pertes. (Bien qu'il soit typique d'avoir 4 W supplémentaires uniquement pour une carte de
commande à pleine charge ou des options pour l'emplacement A ou B, chacun).
Même si les mesures sont relevées avec du matériel de pointe, des imprécisions peuvent être admises pour (± 5 %).
4)
Les trois valeurs pour la section de câble max. correspondent respectivement à un câble monoconducteur, à un fil souple et à un fil
souple avec manchon.
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 73

Spécifications du produit Manuel de configuration
6.2 Spécifications générales
6.2.1 Alimentation secteur
Alimentation secteur
Bornes d'alimentation (6 impulsions) L1, L2, L3
Tension d'alimentation 200-240 V ±10 %
Tension d'alimentation FC 301: 380-480 V/FC 302 : 380-500 V ±10 %
Tension d'alimentation FC 302: 525-600 V ±10 %
Tension d'alimentation FC 302: 525-690 V ±10 %
Tension secteur faible/Chute de la tension secteur :
En cas de tension secteur basse ou de chute de la tension secteur, le variateur de fréquence continue de fonctionner jusqu'à ce
que la tension présente sur le circuit intermédiaire descende sous le seuil d'arrêt minimum, qui correspond généralement à 15 %
de moins que la tension nominale d'alimentation la plus basse du variateur de fréquence. Mise sous tension et couple complet
66
ne sont pas envisageables à une tension secteur inférieure à 10 % de la tension nominale d'alimentation secteur du variateur de
fréquence.
Fréquence d'alimentation 50/60 Hz ±5 %
Écart temporaire max. entre phases secteur 3,0 % de la tension nominale d'alimentation
Facteur de puissance réelle (λ) ≥ 0,9 à charge nominale
Facteur de puissance de déphasage (cos ϕ) près de l'unité (> 0,98)
Commutation sur l'entrée d'alimentation L1, L2, L3 (mises sous tension) ≤ 7,5 kW maximum 2 fois/min
Commutation sur l'entrée d'alimentation L1, L2, L3 (hausses de puissance) 11-75 kW maximum 1 fois/min
Commutation sur l'entrée d'alimentation L1, L2, L3 (mises sous tension) ≥ 90 kW maximum 1 fois/2 min
Environnement conforme à la norme EN 60664-1 catégorie de surtension III/degré de pollution 2
L'utilisation de l'unité convient sur un circuit limité à 100 000 ampères symétriques RMS, 240/500/600/690 V maximum.
Puissance et données du moteur
6.2.2
Puissance du moteur (U, V, W)
Tension de sortie 0-100 % de la tension d'alimentation
Fréquence sortie 0-590 Hz
Fréquence de sortie en mode Flux 0-300 Hz
Commutation sur la sortie Illimitée
Temps de rampe 0,01-3 600 s
Caractéristiques de couple
Couple de démarrage (couple constant) maximum 160 % pendant 60 s1) une fois en 10 min
Couple de démarrage/surcouple (couple variable) maximum 110 % jusqu'à 0,5 s1) une fois en 10 min.
Temps de montée du couple en FLUX (pour fsw égale à 5 kHz) 1 ms
Temps de montée du couple en VVC
1)
*Le pourcentage se réfère au couple nominal.
2)
Le temps de réponse du couple dépend de l'application et de la charge, mais en général, le temps de passage du couple de 0 à
la valeur de référence est égal à 4-5 x le temps de montée du couple.
3)
Les versions spéciales client avec fréquence de sortie de 0 à 1 000 Hz sont disponibles.
plus
(indépendant de fsw) 10 ms
3)
74 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04

Spécifications du produit Manuel de configuration
6.2.3 Conditions ambiantes
Environnement
Protection IP20/Châssis, IP21/Type 1, IP55/ Type 12, IP66/ Type 4X
Essai de vibration 1,0 g
THVD max. 10%
Humidité relative max. 5-93 % (CEI 721-3-3) ; classe 3K3 (non condensante) pendant le fonctionnement
Environnement agressif (CEI 60068-2-43) test H2S
Température ambiante 50 °C max. (moyenne sur 24 heures maximum 45 °C)
Température ambiante min. en pleine exploitation 0 °C
Température ambiante min. en exploitation réduite - 10 °C
Température durant le stockage/transport -25 à +65/70 °C
Altitude max. au-dessus du niveau de la mer sans déclassement 1 000 m
Normes CEM, Émission EN 61800-3, EN 55011
Normes CEM, Immunité EN61800-3, EN 61000-6-1/2
1)
Voir le chapitre 5.2.1 Résultats des essais CEM
Câble : spécifications
6.2.4
classe Kd
1)
6 6
Longueurs et sections des câbles de commande
Longueur max. du câble du moteur, blindé 150 m
Longueur max. du câble du moteur, non blindé 300 m
Section max. des bornes de commande, fil souple/rigide sans manchon d'extrémité de câble 1,5 mm2/16 AWG
Section max. des bornes de commande, fil souple avec manchons d'extrémité de câble 1 mm2/18 AWG
Section max. des bornes de commande, fil souple avec manchons d'extrémité de câble et collier 0,5 mm2/20 AWG
Section minimale des bornes de commande 0,25 mm2/24 AWG
1)
Pour les câbles de puissance, voir les tableaux de données électriques au chapitre 6.1 Données électriques.
1)
6.2.5 Entrée/sortie de commande et données de commande
6.2.5.1 Entrées digitales
Entrées digitales
Entrées numériques programmables FC 301: 4 (5)1)/FC 302: 4 (6)
N° de borne 18, 19, 271), 291), 32, 33
Logique PNP ou NPN
Niveau de tension 0-24 V CC
Niveau de tension, « 0 » logique PNP < 5 V CC
Niveau de tension, « 1 » logique PNP > 10 V CC
Niveau de tension, « 0 » logique NPN
Niveau de tension, « 1 » logique NPN
Tension maximale sur l'entrée 28 V CC
Plage de fréquence d'impulsion 0-110 kHz
(Cycle d'utilisation) durée de l'impulsion min. 4,5 ms
Résistance d'entrée, Ri env. 4 kΩ
2)
2)
> 19 V CC
< 14 V CC
1)
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 75

Spécifications du produit Manuel de configuration
Arrêt de sécurité, borne 37
3, 4)
(borne 37 logique PNP)
Niveau de tension 0-24 V CC
Niveau de tension, « 0 » logique PNP < 4 V CC
Niveau de tension, « 1 » logique PNP > 20 V CC
Tension maximale sur l'entrée 28 V CC
Courant d'entrée typique à 24 V 50 mA rms
Courant d'entrée typique à 20 V 60 mA rms
Capacitance d'entrée 400 nF
Toutes les entrées digitales sont isolées galvaniquement de la tension d'alimentation (PELV) et d'autres bornes haute tension.
1)
Les bornes 27 et 29 peuvent aussi être programmées comme sorties.
2)
Sauf entrée de l'arrêt de sécurité, borne 37.
3)
Consulter le Manuel d'utilisation des variateurs de fréquence VLT® - Absence sûre du couple pour en savoir plus sur la borne 37
et l'Arrêt de sécurité.
4)
En cas d'utilisation d'un contacteur comportant une bobine CC en association avec l'arrêt de sécurité, il est important de
66
prévoir un chemin de retour pour le courant venant de la bobine lors de sa mise hors tension. Cela peut être obtenu en installant
dans la bobine une diode de roue libre (ou bien un MOV de 30 ou 50 V pour un temps de réponse plus court). Les contacteurs
typiques peuvent être achetés avec cette diode.
Entrées analogiques
Nombre d'entrées analogiques 2
N° de borne 53, 54
Modes Tension ou courant
Sélection du mode Commutateurs S201 et S202
Mode tension Commutateur S201/commutateur S202 = Inactif (U)
Niveau de tension -10 à +10 V (échelonnable)
Résistance d'entrée, Ri env. 10 kΩ
Tension max. ± 20 V
Mode courant Commutateur S201/commutateur S202 = Actif (I)
Niveau de courant 0/4 à 20 mA (échelonnable)
Résistance d'entrée, Ri env. 200 Ω
Courant max. 30 mA
Résolution des entrées analogiques 10 bits (signe +)
Précision des entrées analogiques Erreur max. 0,5 % de l'échelle totale
Largeur de bande 100 Hz
Les entrées analogiques sont isolées galvaniquement de la tension d'alimentation (PELV) et d'autres bornes haute tension.
Illustration 6.1 Isolation PELV
76 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04

Spécifications du produit
Manuel de configuration
Entrées codeur/impulsions
Entrées codeur/impulsions programmables 2/1
Numéro de borne impulsion/codeur 291), 332) / 323), 33
Fréquence max. à la borne 29, 32, 33 110 kHz (activation push-pull)
Fréquence max. à la borne 29, 32, 33 5 kHz (collecteur ouvert)
Fréquence min. à la borne 29, 32, 33 4 Hz
Niveau de tension Voir la section concernant l'entrée digitale
Tension maximale sur l'entrée 28 V CC
Résistance d'entrée, Ri env. 4 kΩ
Précision d'entrée d'impulsion (0,1-1 kHz) Erreur max. : 0,1 % de l'échelle totale
Précision d'entrée du codeur (1-11 kHz) Erreur max. : 0,05 % de l'échelle totale
Les entrées d'impulsions et du codeur (bornes 29, 32, 33) sont isolées galvaniquement de la tension d'alimentation (PELV) et
d'autres bornes haute tension.
1)
FC 302 uniquement
2)
Les entrées d'impulsions sont 29 et 33
3)
Entrées codeur : 32 = A et 33 = B
Sortie digitale
Sorties digitales/impulsions programmables 2
N° de borne 27, 29
Niveau de tension à la sortie digitale/en fréquence 0-24 V
Courant de sortie max. (récepteur ou source) 40 mA
Charge max. à la sortie en fréquence 1 kΩ
Charge capacitive max. à la sortie en fréquence 10 nF
Fréquence de sortie min. à la sortie en fréquence 0 Hz
Fréquence de sortie max. à la sortie en fréquence 32 kHz
Précision de la sortie en fréquence Erreur max. : 0,1 % de l'échelle totale
Résolution des sorties en fréquence 12 bits
1)
Les bornes 27 et 29 peuvent être programmées comme entrée.
La sortie digitale est isolée galvaniquement de la tension d'alimentation (PELV) et d'autres bornes haute tension.
3)
6 6
1)
Sortie analogique
Nombre de sorties analogiques programmables 1
N° de borne 42
Plage de courant de la sortie analogique 0/4 à 20 mA
Charge max. à la terre - sortie analogique inférieure à 500 Ω
Précision de la sortie analogique Erreur max. : 0,5 % de l'échelle totale
Résolution de la sortie analogique 12 bits
La sortie analogique est isolée galvaniquement de la tension d'alimentation (PELV) et d'autres bornes haute tension.
Carte de commande, sortie 24 V CC
N° de borne 12, 13
Tension de sortie 24 V +1, -3 V
Charge max. 200 mA
L'alimentation 24 V CC est isolée galvaniquement de la tension d'alimentation (PELV) tout en ayant le même potentiel que les
entrées et sorties analogiques et digitales.
Carte de commande, sortie 10 V CC
N° de borne ±50
Tension de sortie 10,5 V ±0,5 V
Charge max. 15 mA
L'alimentation 10 V CC est isolée galvaniquement de la tension d'alimentation (PELV) et d'autres bornes haute tension.
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 77
Spécifications du produit
Manuel de configuration
Carte de commande, communication série RS-485
N° de borne 68 (P,TX+, RX+), 69 (N,TX-, RX-)
Borne n° 61 Commun des bornes 68 et 69
Le circuit de communication série RS-485 est séparé fonctionnellement des autres circuits centraux et isolé galvaniquement de la
tension d'alimentation (PELV).
Carte de commande, communication série USB
Norme USB 1.1 (Pleine vitesse)
Fiche USB Fiche « appareil » USB de type B
La connexion au PC est réalisée via un câble USB standard hôte/dispositif.
La connexion USB est isolée galvaniquement de la tension d'alimentation (PELV) et d'autres bornes haute tension.
La mise à la terre USB n'est pas isolée galvaniquement de la terre de protection. Utiliser uniquement un ordinateur portable isolé
en tant que connexion PC au connecteur USB sur le variateur de fréquence.
Sorties relais
66
Sorties relais programmables FC 301, tous kW : 1/FC 302, tous kW : 2
N° de borne relais 01 1-3 (interruption), 1-2 (établissement)
Charge max. sur les bornes (CA-1)1) sur 1-3 (NF), 1-2 (NO) (charge résistive) 240 V CA, 2 A
Charge max. sur les bornes (CA-15)1) (charge inductive à cosφ 0,4) 240 V CA, 0,2 A
Charge max. sur les bornes (CC-1)1) sur 1-2 (NO), 1-3 (NF) (charge résistive) 60 V CC, 1 A
Charge max. sur les bornes (CC-13)1) (charge inductive) 24 V CC, 0,1 A
Relais 02 (FC 302 uniquement) Numéro de borne 4-6 (interruption), 4-5 (établissement)
Charge max. sur les bornes (CA-1)
1)
sur 4-5 (NO) (charge résistive)
2)3)
Surtension cat. II 400 V CA, 2 A
Charge max. sur les bornes (CA-15)1) sur 4-5 (NO) (charge inductive à cosφ 0,4) 240 V CA, 0,2 A
Charge max. sur les bornes (CC-1)1) sur 4-5 (NO) (charge résistive) 80 V CC, 2 A
Charge max. sur les bornes (CC-13)1) sur 4-5 (NO) (charge inductive) 24 V CC, 0,1 A
Charge max. sur les bornes (CA-1)1) sur 4-6 (NF) (charge résistive) 240 V CA, 2 A
Charge max. sur les bornes (CA-15)1) sur 4-6 (NF) (charge inductive à cosφ 0.4) 240 V CA, 0,2 A
Charge max. sur les bornes (CC-1)1) sur 4-6 (NF) (charge résistive) 50 V CC, 2 A
Charge max. sur les bornes (CC-13)1) sur 4-6 (NF) (charge inductive) 24 V CC, 0,1 A
Charge min. sur les bornes 1-3 (NF), 1-2 (NO), 4-6 (NF), 4-5 (NO) 24 V CC 10 mA, 24 V CA 20 mA
Environnement conforme à la norme EN 60664-1 catégorie de surtension III/degré de pollution 2
1)
CEI 60947 parties 4 et 5
Les contacts de relais sont isolés galvaniquement du reste du circuit par une isolation renforcée (PELV).
2)
Catégorie de surtension II
3)
Applications UL 300 V CA 2A
Performance de la carte de commande
Intervalle de balayage 1 ms
Caractéristiques de contrôle
Résolution de fréquence de sortie à 0-590 Hz ±0,003 Hz
Précision de reproductibilité de Dém/arrêt précis (bornes 18, 19) ≤±0,1 ms
Temps de réponse système (bornes 18, 19, 27, 29, 32, 33) ≤ 2 ms
Plage de commande de vitesse (boucle ouverte) 1:100 de la vitesse synchrone
Plage de commande de vitesse (boucle fermée) 1:1000 de la vitesse synchrone
Précision de vitesse (boucle ouverte) 30-4 000 tr/min : erreur ±8 tr/min
Précision de vitesse (boucle fermée) fonction de la résolution du dispositif du signal de
retour 0-6 000 tr/min : erreur ±0,15 tr/min
Précision de commande du couple (retour de vitesse) erreur max. ±5 % du couple nominal
Toutes les caractéristiques de contrôle sont basées sur un moteur asynchrone 4 pôles.
78 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04

2
20%
4 6 8
10
12 14 16
40%
60%
80%
100%
110%
I
out
(%)
fsw (kHz)
A1-A3 45°C, A4-A5 40°C
A1-A3 50°C, A4-A5 45°C
A1-A3 55°C, A4-A5 50°C
130BA393.10
0
0
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
A1-A3 45°C, A4-A5 40°C
A1-A3 50°C, A4-A5 45°C
A1-A3 55°C, A4-A5 50°C
0
0
130BD639.10
I
out
(%)
fsw (kHz)
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
I
out
(%)
A1-A3 45°C, A4-A5 40°C
A1-A3 50°C, A4-A5 45°C
A1-A3 55°C, A4-A5 50°C
0
0
130BA394.10
fsw (kHz)
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
I
out
(%)
A1-A3 45°C, A4-A5 40°C
A1-A3 50°C, A4-A5 45°C
A1-A3 55°C, A4-A5 50°C
0
0
130BD640.10
fsw (kHz)
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
45°C
50°C
55°C
130BA402.10
0
0
I
out
(%)
HO
B1
B2
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
0
0
I
out
(%)
NO
45°C
50°C
55°C
130BA401.11
B1
B2
Spécifications du produit Manuel de configuration
SFAVM
6.2.6 Déclassement pour température
ambiante
6.2.6.1 Déclassement pour température
ambiante, protection de type A
60° AVM - Modulation par largeur d'impulsion
Illustration 6.2 Déclassement de I
pour protections de type A, utilisant 60° AVM
MAX
pour différentes T
sortie
AMB,
SFAVM : Stator Frequency Asyncron Vector Modulation
(modulation vectorielle asynchrone à fréquence
statorique)
Illustration 6.3 Déclassement de I
pour protections de type A, utilisant SFAVM
MAX
pour différentes T
sortie
AMB,
Illustration 6.5 Déclassement de I
pour des protections de type A, utilisant SFAVM et un
MAX
pour différentes T
sortie
AMB,
câble moteur de 10 m maximum
6.2.6.2
Déclassement pour température
ambiante, protections de types B
Protection B, T2, T4 et T5
Pour les protections de types B et C, le déclassement
dépend également du mode de surcharge sélectionné au
par. 1-04 Mode de surcharge
60° AVM - Modulation par largeur d'impulsion
Illustration 6.6 Déclassement de I
pour protections de types B1 et B2, utilisant 60° AVM en
MAX
mode de surcharge élevée (surcouple de 160 %)
pour différentes T
sortie
AMB,
6 6
En cas d'utilisation de câble de moteur de 10 m ou moins
dans une protection de type A, un déclassement moindre
est nécessaire. Cela vient du fait que la longueur du câble
de moteur a une influence relativement importante sur le
déclassement recommandé.
60° AVM
Illustration 6.7 Déclassement de I
pour protections de types B1 et B2, utilisant 60° AVM en
Illustration 6.4 Déclassement de I
pour des protections de type A, utilisant 60° AVM et un
MAX
câble moteur de 10 m maximum
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 79
pour différentes T
sortie
AMB,
MAX
mode de surcharge normale (surcouple de 110 %)
pour différentes T
sortie
AMB,
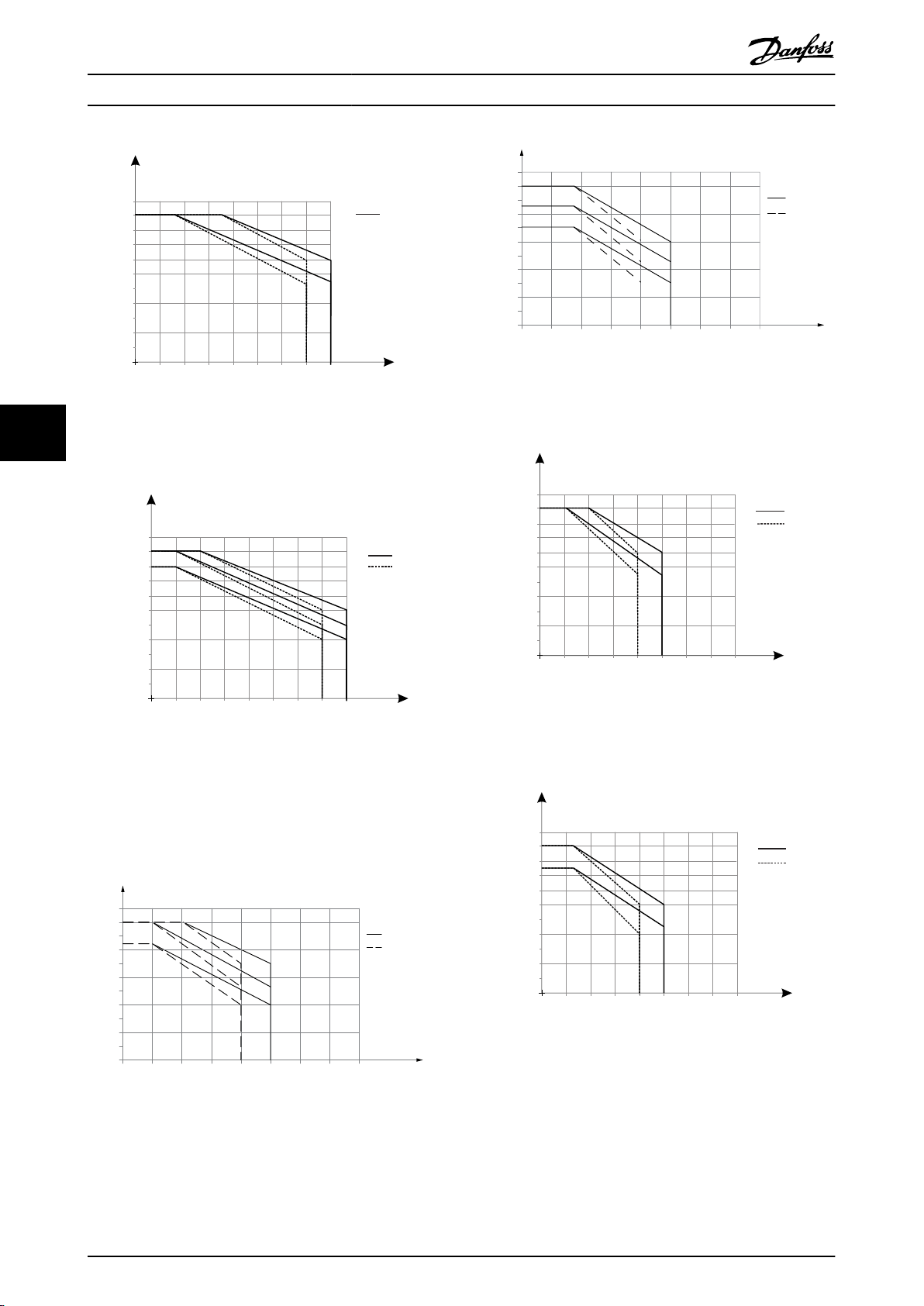
130BB830.10
2 4
6 8
20%
10
12 14
16
f
sw
(kHz)
0
0
40%
o
50 C
60%
80%
90%
100%
o
45 C
110%
(%)
l
out
B3 & B4
HO
2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
12 14
16
o
55 C
f
sw
(kHz)
0
0
(%)
l
out
B3
B4
NO
130BB828.10
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
45°C
50°C
55°C
130BA404.10
0
0
I
out
(%)
HO
B1
B2
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
45°C
50°C
55°C
0
0
I
out
(%)
NO
130BA403.11
B1
B2
130BB834.10
2 4
6 8
20%
10
12 14
16
f
sw
(kHz)
0
0
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
B3
(%)
l
out
HO
B4
2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
12 14
16
B3
B4
f
sw
(kHz)
0
0
(%)
l
out
NO
130BB832.10
Spécifications du produit Manuel de configuration
Illustration 6.11 Déclassement de I
pour protections de types B1 et B2, utilisant SFAVM en
MAX
Illustration 6.8 Déclassement de I
pour protections de types B3 et B4, utilisant 60° AVM en
MAX
66
mode de surcharge élevée (surcouple de 160 %)
pour différentes T
sortie
AMB,
mode de surcharge normale (surcouple de 110 %)
Illustration 6.12 Déclassement de I
pour protections de types B3 et B4, utilisant SFAVM en
MAX
Illustration 6.9 Déclassement de I
pour protections de types B3 et B4, utilisant 60° AVM en
MAX
pour différentes T
sortie
AMB,
mode de surcharge élevée (surcouple de 160 %)
pour différentes T
sortie
pour différentes T
sortie
AMB,
AMB,
mode de surcharge normale (surcouple de 110 %)
SFAVM : Stator Frequency Asyncron Vector Modulation
(modulation vectorielle asynchrone à fréquence
statorique)
Illustration 6.13 Déclassement de I
pour protections de types B3 et B4, utilisant SFAVM en
MAX
mode de surcharge normale (surcouple de 110 %)
Illustration 6.10 Déclassement de I
pour protections de types B1 et B2, utilisant SFAVM en
MAX
mode de surcharge élevée (surcouple de 160 %)
80 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
pour différentes T
sortie
AMB,
pour différentes T
sortie
AMB,
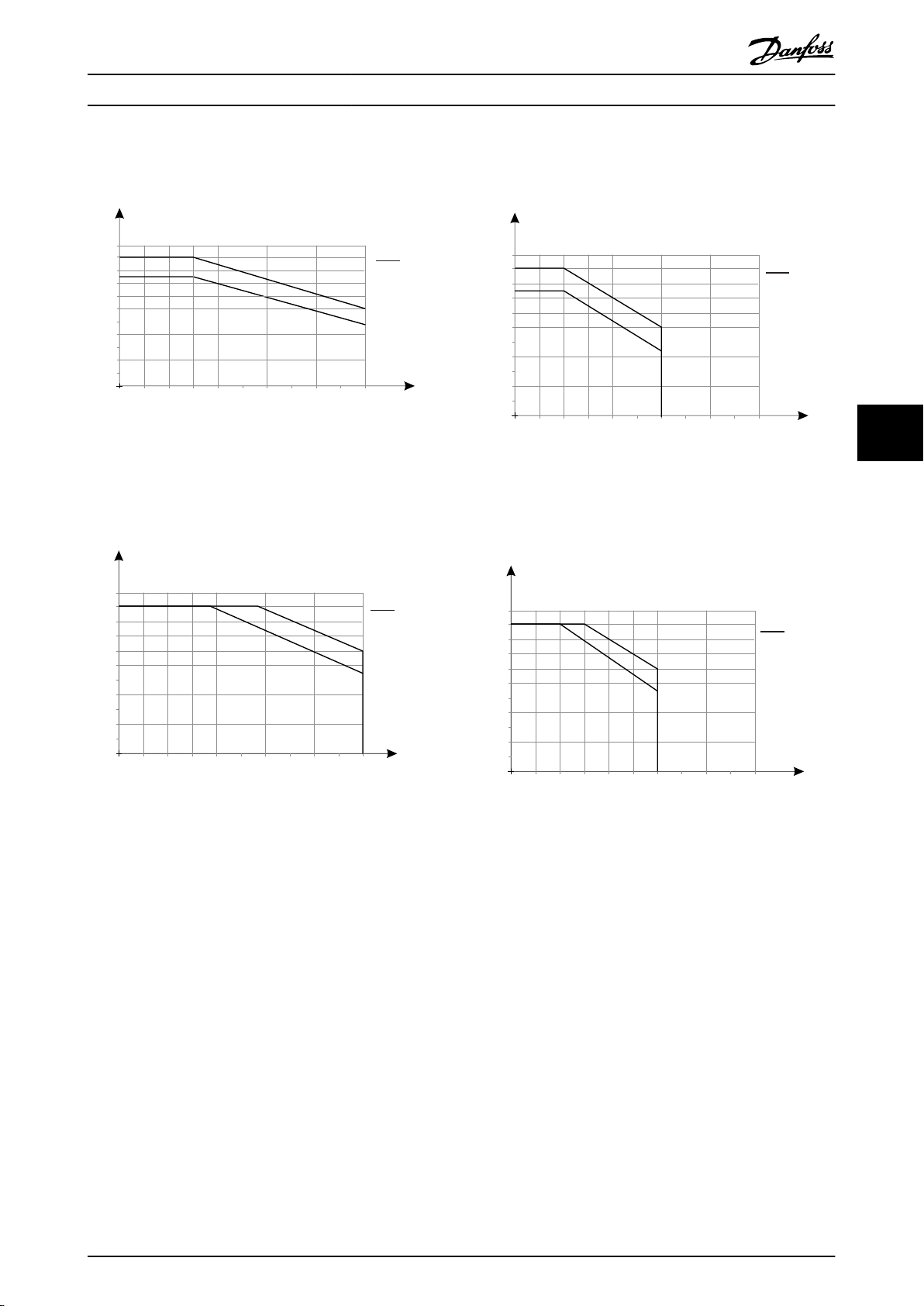
1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
3
(%)
l
out
f
sw
(kHz)
0
0
B1 & B2
NO
130BB820.10
1 2 4
6 8
20%
10
40%
o
50 C
f
sw
(kHz)
0
0
60%
80%
90%
100%
o
45 C
110%
(%)
l
out
B1 & B2
HO
130BB822.10
1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
f
sw
(kHz)
0
0
(%)
l
out
B1 & B2
NO
130BB826.10
1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
f
sw
(kHz)
0
0
(%)
l
out
B1 & B2
HO
130BB824.10
Spécifications du produit Manuel de configuration
Protections B, T6
60° AVM - Modulation par largeur d'impulsion
Illustration 6.14 Déclassement du courant de sortie avec
fréquence de commutation et température ambiante pour
variateurs de fréquence de 600 V, protection de type B,
60º AVM, SN
SFAVM : Stator Frequency Asyncron Vector Modulation
(modulation vectorielle asynchrone à fréquence
statorique)
Illustration 6.16 Déclassement du courant de sortie avec
fréquence de commutation et température ambiante pour
variateurs de fréquence de 600 V, protection de type B,
SFAVM, SN
6 6
Illustration 6.15 Déclassement du courant de sortie avec
fréquence de commutation et température ambiante pour
variateurs de fréquence de 600 V, protection de type B,
60º AVM, SE
Illustration 6.17 Déclassement du courant de sortie avec
fréquence de commutation et température ambiante pour
variateurs de fréquence de 600 V, protection de type B,
SFAVM, SE
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 81
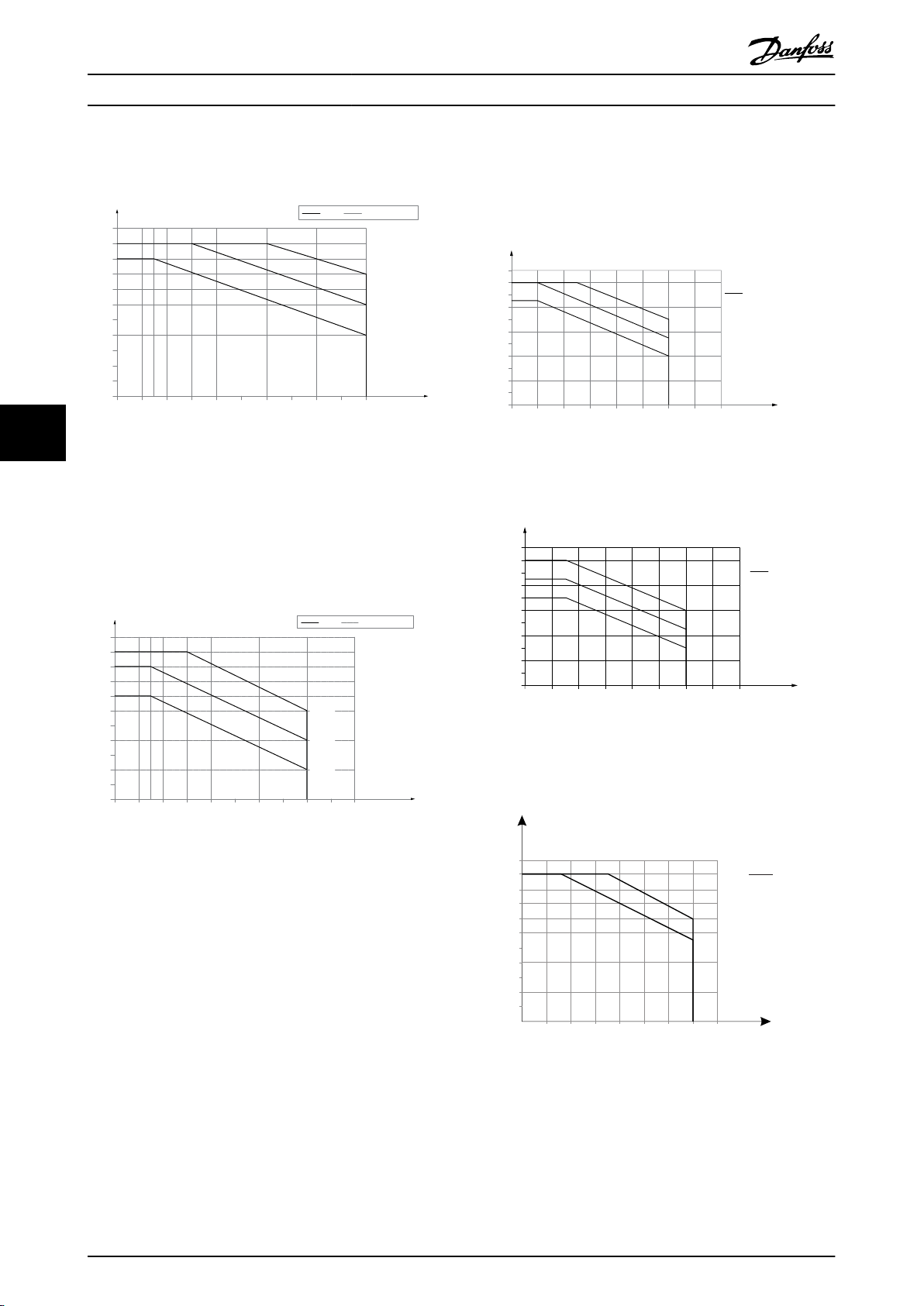
fsw (kHz)
130BB211.10
13.6
20.4
27.2
34
I
out
(A)
30.6
1 2 64
55°C
50°C
45°C
8 10
B2 all options
fsw (kHz)
130BB212.10
40
60
80
100
I
out
(A)
90
1 2 64
55°C
50°C
45°C
8 10
B2 all options
70
20
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
45°C
50°C
55°C
130BA398.10
0
0
I
out
(%)
HO
C1 & C2
130BA397.10
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
f
sw
(kHz)
0
0
I
out
(%)
NO
45°C
50°C
55°C
C1 & C2
130BB831.10
80%
90%
100%
110%
(%)
l
out
C3 & C4
HO
2 4
6 8
20%
10
40%
60%
o
50 C
o
45 C
12 14
16
f
sw
(kHz)
Spécifications du produit Manuel de configuration
Protections B, T7
Protections B2 et B4, 525-690 V
6.2.6.3
Déclassement pour température
ambiante, protections de types C
60° AVM - Modulation par largeur d'impulsion
Protections C, T2, T4 et T5
60° AVM - Modulation par largeur d'impulsion
66
Illustration 6.18 Déclassement du courant de sortie avec
fréquence de commutation et température ambiante pour
protections de types B2 et B4, 60° AVM. Remarque : le
Illustration 6.20 Déclassement de I
pour protections de types C1 et C2, utilisant 60° AVM en
MAX
mode surcharge élevée (surcouple de 160 %)
graphique est dessiné avec le courant comme valeur absolue
et convient pour des surcharges normale et élevée.
pour différentes T
sortie
AMB,
SFAVM : Stator Frequency Asyncron Vector Modulation
(modulation vectorielle asynchrone à fréquence
statorique)
Illustration 6.21 Déclassement de I
pour protections de types C1 et C2, utilisant 60° AVM en
MAX
pour différentes T
sortie
mode surcharge normale (surcouple de 110 %)
Illustration 6.19 Déclassement du courant de sortie avec
fréquence de commutation et température ambiante pour
protections de types B2 et B4, SFAVM. Remarque : le
graphique est dessiné avec le courant comme valeur absolue
et convient pour des surcharges normale et élevée.
Illustration 6.22 Déclassement de I
pour protections de types C3 et C4, utilisant 60° AVM en
MAX
82 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
mode surcharge élevée (surcouple de 160 %)
pour différentes T
sortie
AMB,
AMB,
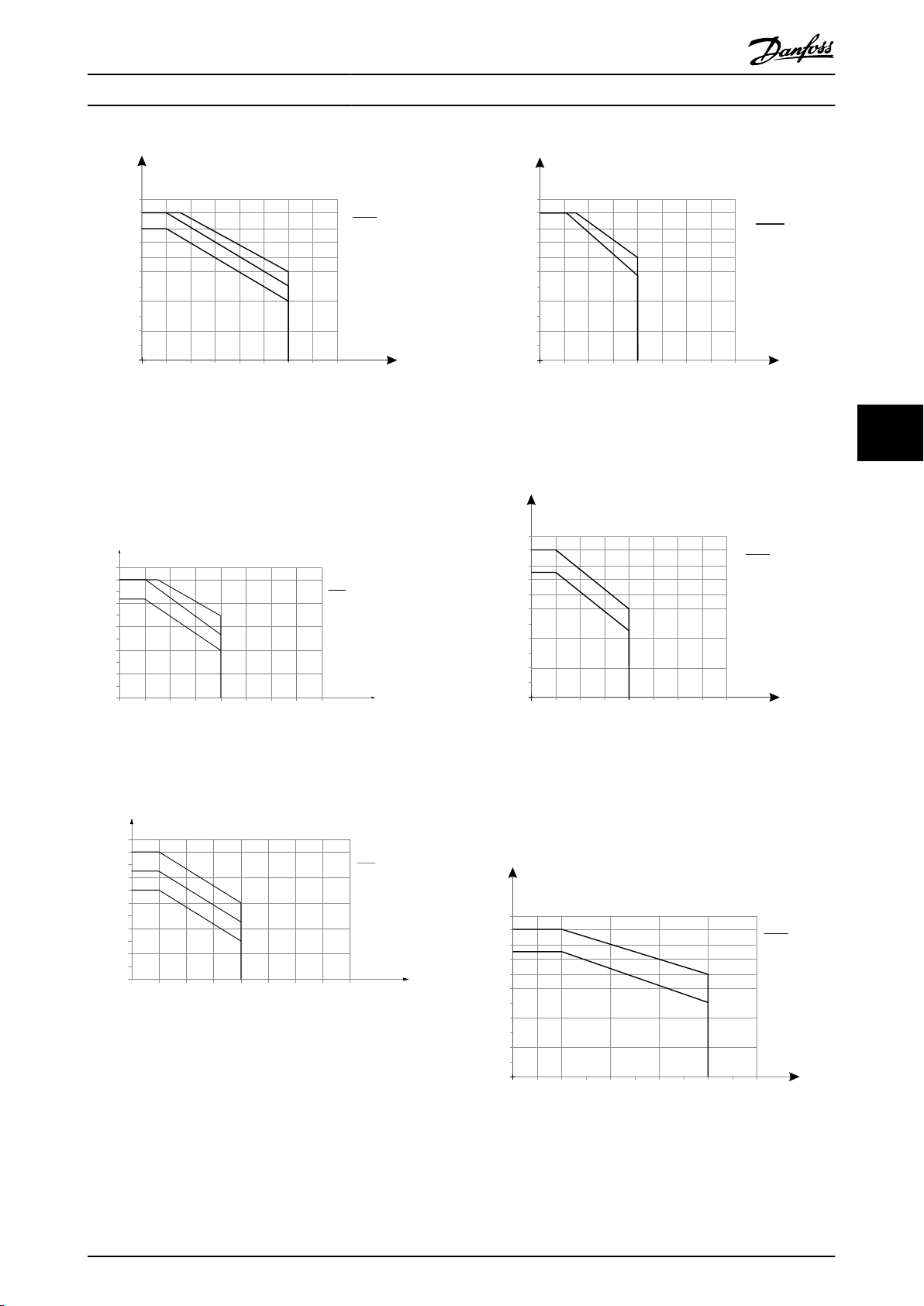
2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
12 14
16
o
55 C
f
sw
(kHz)
0
0
(%)
l
out
C3 & C4
NO
130BB829.10
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
HO
f
sw
(kHz)
45°C
50°C
55°C
130BA400.10
0
0
I
out
(%)
C1 & C2
2
20%
4 6 8 10 12 14 16
40%
60%
80%
100%
110%
fsw (kHz)
0
0
I
out
(%)
NO
45°C
50°C
55°C
130BA399.10
C1 & C2
130BB835.10
80%
90%
100%
110%
C3 & C4
(%)
l
out
HO
2 4
6 8
20%
10
40%
60%
o
50 C
o
45 C
12 14
16
f
sw
(kHz)
0
0
2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
12 14
16
f
sw
(kHz)
0
0
(%)
l
out
C3 & C4
NO
130BB833.10
1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
f
sw
(kHz)
0
0
(%)
l
out
C1 & C2
NO
130BB821.10
Spécifications du produit Manuel de configuration
Illustration 6.23 Déclassement de I
pour protections de types C3 et C4, utilisant 60° AVM en
MAX
pour différentes T
sortie
AMB,
mode surcharge normale (surcouple de 110 %)
SFAVM : Stator Frequency Asyncron Vector Modulation
(modulation vectorielle asynchrone à fréquence
statorique)
Illustration 6.24 Déclassement de I
pour protections de types C1 et C2, utilisant SFAVM en
MAX
mode surcharge élevée (surcouple de 160 %)
pour différentes T
sortie
AMB,
Illustration 6.26 Déclassement de I
pour protections de types C3 et C4, utilisant SFAVM en
MAX
pour différentes T
sortie
mode surcharge élevée (surcouple de 160 %)
Illustration 6.27 Déclassement de I
pour protections de types C3 et C4, utilisant SFAVM en
MAX
pour différentes T
sortie
mode surcharge normale (surcouple de 110 %)
Protections de types C, T6
60° AVM - Modulation par largeur d'impulsion
AMB,
6 6
AMB,
Illustration 6.25 Déclassement de I
pour protections de types C1 et C2, utilisant SFAVM en
MAX
pour différentes T
sortie
AMB,
mode surcharge normale (surcouple de 110 %)
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 83
Illustration 6.28 Déclassement du courant de sortie avec
fréquence de commutation et température ambiante pour
variateurs de fréquence de 600 V, protection de type C,
60º AVM, SN.
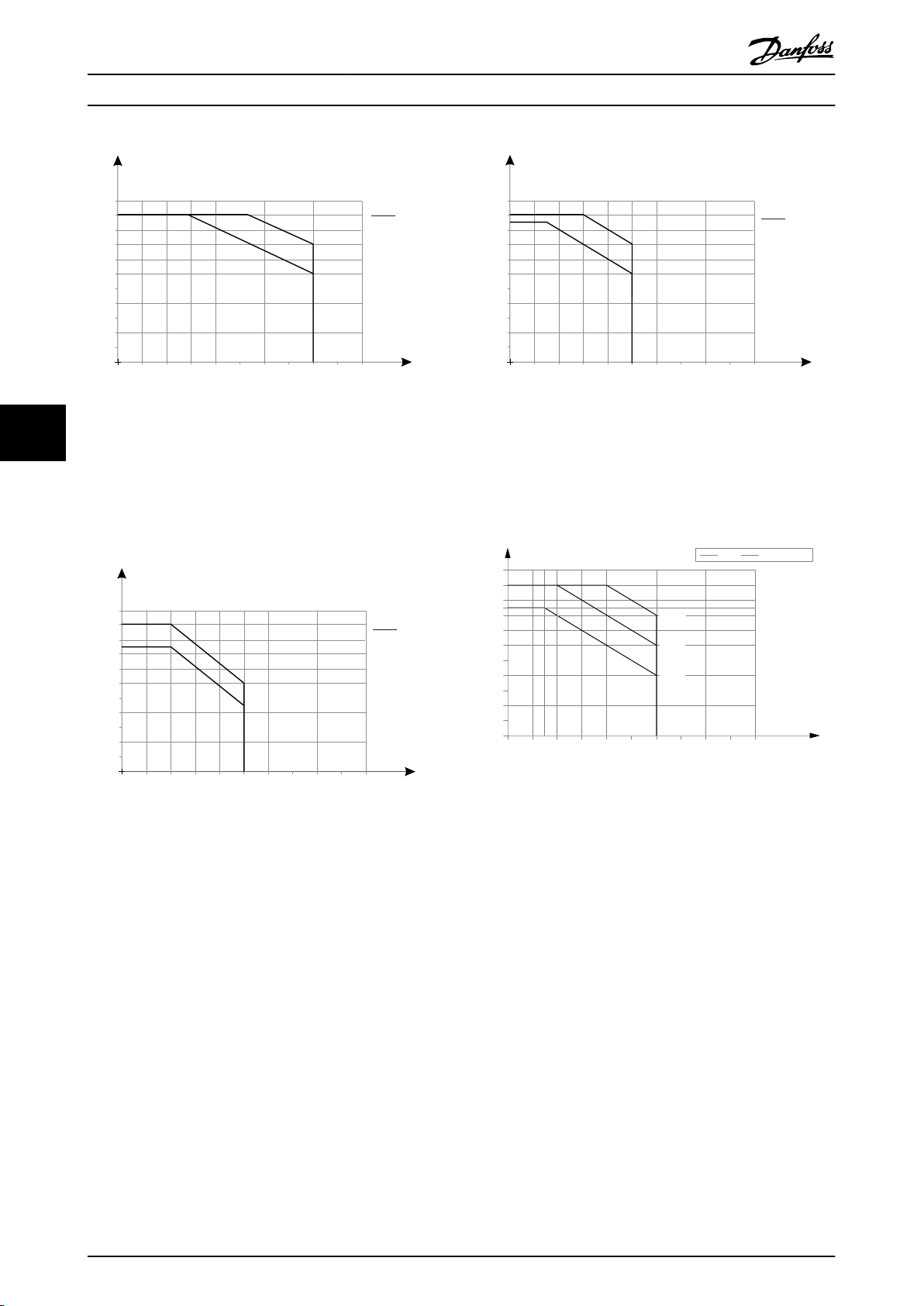
80%
90%
100%
o
45 C
110%
(%)
l
out
C1 & C2
HO
1 2 4
6 8
20%
10
40%
60%
o
50 C
f
sw
(kHz)
0
0
130BB823.10
1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
f
sw
(kHz)
0
0
(%)
l
out
C1 & C2
NO
130BB827.10
130BB825.10
1 2 4
6 8
20%
10
40%
60%
80%
90%
100%
o
50 C
o
45 C
110%
f
sw
(kHz)
0
0
(%)
l
out
C1 & C2
HO
fsw (kHz)
130BB213.11
20.4
34
I
out
(A)
28.9
1 2 64
55°C
50°C
45°C
8 10
C2 all options
13.6
27.2
Spécifications du produit Manuel de configuration
Illustration 6.29 Déclassement du courant de sortie avec
fréquence de commutation et température ambiante pour
66
variateurs de fréquence de 600 V, protections de types C,
60º AVM, SE.
SFAVM : Stator Frequency Asyncron Vector Modulation
(modulation vectorielle asynchrone à fréquence
Illustration 6.31 Déclassement du courant de sortie avec
fréquence de commutation et température ambiante pour
variateurs de fréquences de 600 V, protections de types C,
SFAVM, SE
Protection de type C, T7
60° AVM - Modulation par largeur d'impulsion
statorique)
Illustration 6.32 Déclassement du courant de sortie avec
fréquence de commutation et température ambiante pour
Illustration 6.30 Déclassement du courant de sortie avec
fréquence de commutation et température ambiante pour
variateurs de fréquences de 600 V, protections de types C,
SFAVM, SN
protection de type C2, 60° AVM. Remarque : le graphique est
dessiné avec le courant comme valeur absolue et convient
pour des surcharges normale et élevée.
84 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
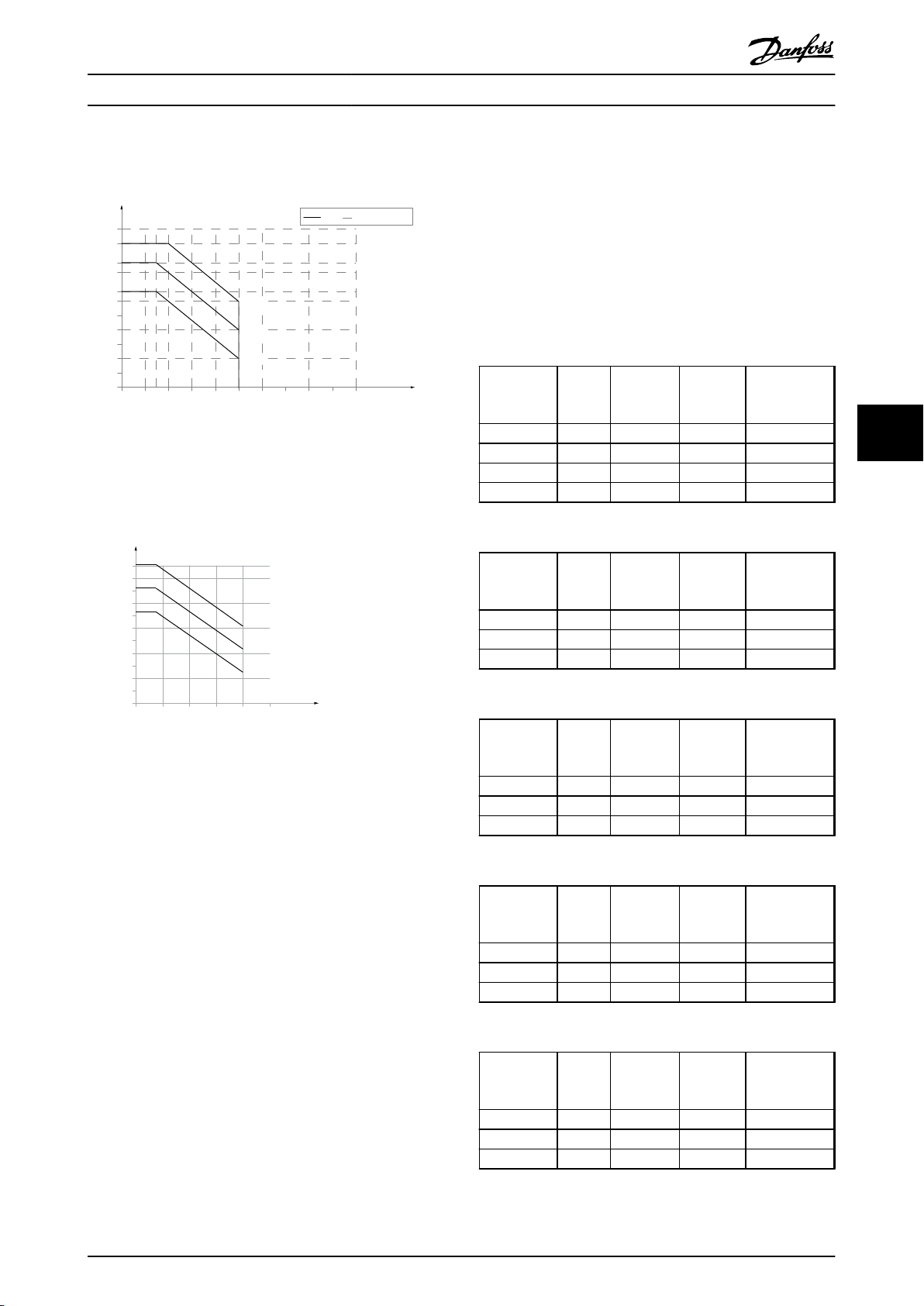
fsw (kHz)
130BB214.10
40
60
80
100
I
out
(A)
86.6
1 2 64
55°C
50°C
45°C
8 10
C2 all options
66.6
20
2
20%
4 6 8 10
40%
60%
80%
100%
110%
I
out
(%)
fsw (kHz)
I
LOAD
at T
AMB
max
130BD597.10
0
0
I
LOAD
at T
AMB
max +5 °C
I
LOAD
at T
AMB
max +5 °C
Spécifications du produit
Manuel de configuration
SFAVM : Stator Frequency Asyncron Vector Modulation
(modulation vectorielle asynchrone à fréquence
statorique)
Illustration 6.33 Déclassement du courant de sortie avec
fréquence de commutation et température ambiante pour
protection de type C2, SFAVM. Remarque : le graphique est
dessiné avec le courant comme valeur absolue et convient
pour des surcharges normale et élevée.
Une tension de pointe trop élevée affecte principalement
les moteurs dépourvus d'isolation de bobines entre phases.
Avec des câbles moteur courts (quelques mètres), le temps
de montée et le pic de tension sont plus faibles. Le temps
de montée et le pic de tension augmentent avec la
longueur du câble (100 m).
Le variateur de fréquence est conforme aux normes CEI
60034-25 et CEI 60034-17 pour la construction du moteur.
200-240 V (T2)
Tension
Longueur
de câble [m]
secteur
[V]
5 240 0,13 0,510 3,090
50 240 0,23 2,034
100 240 0,54 0,580 0,865
150 240 0,66 0,560 0,674
Tableau 6.13 P5K5T2
Tension
Longueur
de câble [m]
secteur
[V]
36 240 0,264 0,624 1,890
136 240 0,536 0,596 0,889
150 240 0,568 0,568 0,800
Temps de
montée
[μs]
Temps de
montée
[μs]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
6 6
Tableau 6.14 P7K5T2
Illustration 6.34 Déclassement du courant de sortie avec
fréquence de commutation et température ambiante pour
protection de type C3
Longueur
de câble [m]
Tension
secteur
[V]
Temps de
montée
[μs]
Upeak
[kV]
30 240 0,556 0,650 0,935
100 240 0,592 0,594 0,802
Valeurs mesurées pour le test dU/dt
6.2.7
Pour éviter l'endommagement des moteurs sans papier
d'isolation de phase ou autre renforcement d'isolation
prévus pour l'exploitation du variateur de fréquence, il est
vivement recommandé d'installer un filtre dU/dt ou LC à la
sortie du variateur de fréquence.
Quand un transistor est activé dans le pont de l'onduleur,
la tension appliquée au moteur augmente selon un
150 240 0,708 0,587 0,663
Tableau 6.15 P11KT2
Temps de
montée
[μs]
Upeak
[kV]
Longueur
de câble [m]
Tension
secteur
[V]
36 240 0,244 0,608 1,993
136 240 0,568 0,580 0,816
150 240 0,720 0,574 0,637
rapport dU/dt dépendant :
de l'nductance moteur
•
du câble moteur (type, section, longueur,
•
blindage ou non)
L'auto-induction entraîne un pic de tension du moteur
avant de se stabiliser. Le niveau dépend de la tension dans
le circuit intermédiaire.
Le pic de tension sur les bornes du moteur est causé par
l'activation des IGBT. Le temps de montée et la tension de
pointe influencent tous deux la durée de vie du moteur.
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 85
Tableau 6.16 P15KT2
Temps de
montée
[μs]
Upeak
[kV]
Longueur
de câble [m]
Tension
secteur
[V]
36 240 0,244 0,608 1,993
136 240 0,568 0,580 0,816
150 240 0,720 0,574 0,637
Tableau 6.17 P18KT2
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
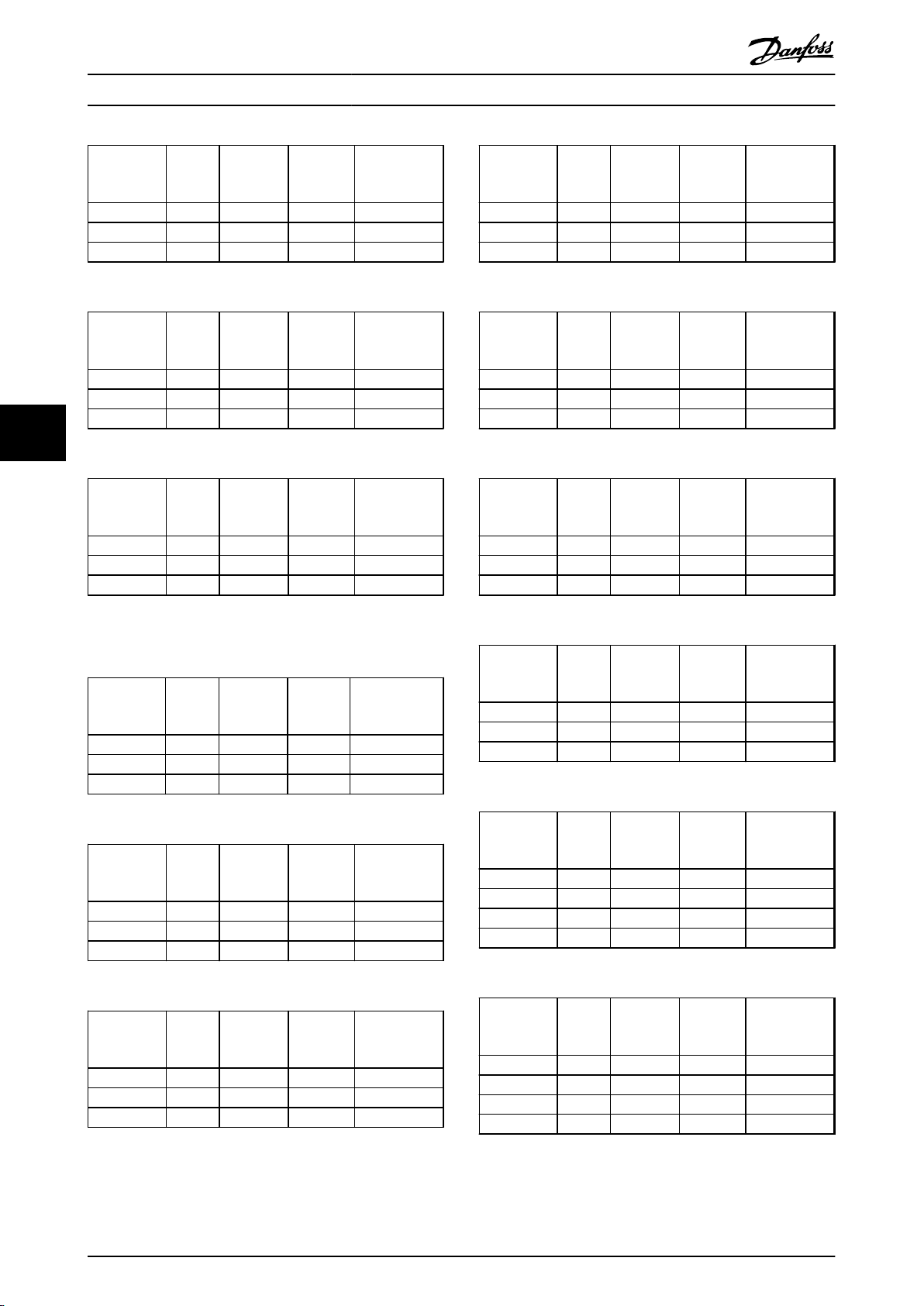
Spécifications du produit
Manuel de configuration
Tension
Longueur
de câble [m]
15 240 0,194 0,626 2,581
50 240 0,252 0,574 1,822
150 240 0,488 0,538 0,882
Tableau 6.18 P22KT2
Longueur
de câble [m]
30 240 0,300 0,598 1,594
100 240 0,536 0,566 0,844
150 240 0,776 0,546 0,562
66
Tableau 6.19 P30KT2
Longueur
de câble [m]
30 240 0,300 0,598 1,594
100 240 0,536 0,566 0,844
150 240 0,776 0,546 0,562
secteur
[V]
Tension
secteur
[V]
Tension
secteur
[V]
Temps de
montée
[μs]
Temps de
montée
[μs]
Temps de
montée
[μs]
Upeak
[kV]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
Tension
Longueur
de câble [m]
36 480 0,396 1,210 2,444
100 480 0,844 1,230 1,165
150 480 0,696 1,160 1,333
Tableau 6.24 P11KT4
Longueur
de câble [m]
36 480 0,396 1,210 2,444
100 480 0,844 1,230 1,165
150 480 0,696 1,160 1,333
Tableau 6.25 P15KT4
Longueur
de câble [m]
36 480 0,312 2,846
100 480 0,556 1,250 1,798
150 480 0,608 1,230 1,618
secteur
[V]
Tension
secteur
[V]
Tension
secteur
[V]
Temps de
montée
[μs]
Temps de
montée
[μs]
Temps de
montée
[μs]
Upeak
[kV]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
Tableau 6.20 P37KT2
380-500 V (T4)
Tension
Longueur
de câble [m]
5 480 0,640 0,690 0,862
50 480 0,470 0,985 0,985
150 480 0,760 1,045 0,947
Tableau 6.21 P1K5T4
Longueur
de câble [m]
5 480 0,172 0,890 4,156
50 480 0,310 2,564
150 480 0,370 1,190 1,770
Tableau 6.22 P4K0T4
Longueur
de câble [m]
5 480 0,04755 0,739 8,035
50 480 0,207 4,548
150 480 0,6742 1,030 2,828
Tableau 6.23 P7K5T4
secteur
[V]
Tension
secteur
[V]
Tension
secteur
[V]
Temps de
montée
[μs]
Temps de
montée
[μs]
Temps de
montée
[μs]
Upeak
[kV]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
Tableau 6.26 P18KT4
Tension
Longueur
de câble [m]
15 480 0,288 3,083
100 480 0,492 1,230 2,000
150 480 0,468 1,190 2,034
Tableau 6.27 P22KT4
Longueur
de câble [m]
5 480 0,368 1,270 2,853
50 480 0,536 1,260 1,978
100 480 0,680 1,240 1,426
150 480 0,712 1,200 1,334
Tableau 6.28 P30KT4
Longueur
de câble [m]
5 480 0,368 1,270 2,853
50 480 0,536 1,260 1,978
100 480 0,680 1,240 1,426
150 480 0,712 1,200 1,334
Tableau 6.29 P37KT4
secteur
[V]
Tension
secteur
[V]
Tension
secteur
[V]
Temps de
montée
[μs]
Temps de
montée
[μs]
Temps de
montée
[μs]
Upeak
[kV]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
86 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04

1.0
0.99
0.98
0.97
0.96
0.95
0.93
0.92
0% 50% 100% 200%
0.94
Relative Eciency
130BB252.11
1.01
150%
% Speed
100% load 75% load 50% load 25% load
Spécifications du produit Manuel de configuration
Tension
Longueur
de câble [m]
15 480 0,256 1,230 3,847
50 480 0,328 1,200 2,957
100 480 0,456 1,200 2,127
150 480 0,960 1,150 1,052
Tableau 6.30 P45KT4
secteur
[V]
Temps de
montée
[μs]
Upeak
[kV]
dU/dt
[kV/μs]
380-500 V (T5)
Tension
Longueur
de câble [m]
5 480 0,371 1,170 2,523
Tableau 6.31 P55KT5
Longueur
de câble [m]
5 480 0,371 1,170 2,523
Tableau 6.32 P75KT5
secteur
[V]
Tension
secteur
[V]
Temps de
montée
[μs]
Temps de
montée
[μs]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
600 V (T6)
Tension
Longueur
de câble [m]
36 600 0,304 1,560 4,105
50 600 0,300 1,550 4,133
100 600 0,536 1,640 2,448
150 600 0,576 1,640 2,278
Tableau 6.33 P15KT6
Longueur
de câble [m]
36 600 0,084 1,560 7,962
50 600 0,120 1,540 5,467
100 600 0,165 1,472 3,976
150 600 0,190 1,530 3,432
secteur
[V]
Tension
secteur
[V]
Temps de
montée
[μs]
Temps de
montée
[μs]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
525-690 V (T7)
Tension
Longueur
de câble [m]
80 690 0,58 1,728 2369
130 690 0,93 1,824 1569
180 690 0,925 1,818 1570
Tableau 6.36 P7K5T7
Longueur
de câble [m]
6 690 0,238 1416 4739
50 690 0,358 1764 3922
150 690 0,465 1872 3252
Tableau 6.37 P45KT7
6.2.8
secteur
[V]
Tension
secteur
[V]
Rendement
Temps de
montée
[μs]
Temps de
montée
[μs]
Upeak
[kV]
Upeak
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
Rendement du variateur de fréquence
La charge du variateur de fréquence a peu d'influence sur
son rendement.
Cela signifie aussi que le rendement du variateur de
fréquence n'est pas modifié en choisissant différentes
caractéristiques tension/fréquence. Ces dernières affectent
cependant le rendement du moteur.
Le rendement baisse un peu lorsque la fréquence de
commutation est réglée sur une valeur supérieure à 5 kHz.
Le rendement baisse également un peu lorsque le câble
moteur dépasse 30 m.
Calcul du rendement
Calculer le rendement du variateur de fréquence à
différentes charges selon l'Illustration 6.35. Multiplier le
facteur de ce graphique par le facteur de rendement
spécifique répertorié dans le chapitre 6.2 Spécifications
générales.
6 6
Tableau 6.34 P30KT6
Tension
Longueur
de câble [m]
15 600 0,276 1,184 4,290
Tableau 6.35 P75KT6
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 87
secteur
[V]
Temps de
montée
[μs]
Upeak
[kV]
dU/dt
[kV/μs]
Illustration 6.35 Courbes de rendement typique

Spécifications du produit Manuel de configuration
Exemple : prenons comme hypothèse un variateur de
fréquence 55 kW, 380-480 V CA avec une charge de 25 %,
à 50 % de sa vitesse. Le graphique montre 0,97 ; le
rendement nominal pour le variateur 55 kW est de 0,98. Le
rendement réel est donc : 0,97 x 0,98=0,95.
Classes d'efficacité
Le rendement d'un moteur raccordé à un variateur de
fréquence est lié au niveau de magnétisation. Le
rendement du moteur dépend de son type.
Dans la plage de 75 à 100 % du couple nominal,
•
le rendement du moteur sera pratiquement
constant dans les deux cas d'exploitation avec le
variateur de fréquence et avec l'alimentation
directe par le secteur.
L'influence de la caractéristique tension/fréquence
66
•
sur les petits moteurs est marginale, mais avec
des moteurs de 11 kW et plus, les avantages sur
le rendement sont significatifs.
La fréquence de commutation n'affecte pas le
•
rendement des petits moteurs. Les moteurs de
11 kW et plus ont un meilleur rendement (1 à 2
%). Le rendement est amélioré puisque la
sinusoïde du courant du moteur est presque
parfaite à fréquence de commutation élevée.
Rendement du système
Pour calculer le rendement du système, multiplier le
rendement du variateur de fréquence par le rendement du
moteur.
Bruit acoustique
6.2.9
Le bruit acoustique du variateur de fréquence provient de
3 sources
Bobines du circuit intermédiaire CC
•
Filtre RFI obstrué
•
Ventil. int.
•
Se reporter au Tableau 6.38 pour obtenir les données sur le
bruit acoustique.
Vitesse du
Type de protection
A1 51 60
A2 51 60
A3 51 60
A4 51 60
A5 54 63
B1 61 67
B2 58 70
B4 52 62
C1 52 62
C2 55 65
C4 56 71
D3h 58 71
Tableau 6.38 Caractéristiques du bruit acoustique
Les valeurs sont mesurées à 1 m de l'unité.
ventilateur à 50 %
[dBA]
Vitesse maximale
du ventilateur
[dBA]
88 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04

F C - P T
130BB836.10
X S A B CX X X X
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 302221 23 272524 26 28 29 31 373635343332 38 39
X D
Commande Manuel de configuration
7 Commande
7.1 Système de configuration du variateur
Illustration 7.1 Exemple de code type
Configurer le variateur de fréquence adapté à l'application et générer le type de code string à partir du système de configuration du variateur sur Internet. Le système de configuration génère automatiquement une référence de vente à 8 chiffres à
envoyer au service commercial local.
Par ailleurs, il est possible d'établir une liste de projets comportant plusieurs produits et de l'envoyer à un représentant de
Danfoss.
Le système de configuration du variateur se trouve sur le site Internet : www.danfoss.com/drives.
Code type
7.1.1
Exemple de code type :
FC-302PK75T5E20H1BGCXXXSXXXXA0BXCXXXXD0
La signification des caractères de la chaîne est définie dans les Tableau 7.1 et Tableau 7.2. Dans l'exemple ci-dessus, un
Profibus DP V1 et une option de secours 24 V sont inclus dans le variateur.
Description Pos. Choix possibles
Groupe de
produits
Série de
variateur
Dimensionnement
puissance
Phases 11 Triphasé (T)
Tension
secteur
Protection 13-15 E20 : IP20
1-3 FC 30x
4-6 301: FC 301
302: FC 302
8-10 0,25-75 kW
11-12 T2 : 200-240 V
T4 : 380-480 V
T5 : 380-500 V
T6 : 525-600 V
T7 : 525-690 V
E55 : IP55/NEMA Type 12
P20 : IP20 (avec plaque arrière)
P21 : IP21/NEMA Type 1 (avec plaque arrière)
P55 : IP55/NEMA Type 12 (avec plaque arrière)
Z20 : IP20
E66 : IP66
1)
7 7
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 89

Commande Manuel de configuration
Description Pos. Choix possibles
Filtre RFI 16-17 Hx : Aucun filtre CEM intégré dans le variateur de fréquence (unités de 600 V uniquement)
H1 : Filtre CEM intégré. Conforme à la norme EN 55011 classe A1/B et EN/CEI 61800-3 catégorie 1/2
H2 : Pas de filtre CEM supplémentaire. Conforme à EN 55011 classe A2 et EN/CEI 61800-3 catégorie 3
H3 :
H3 - filtre CEM intégré. Conforme à la norme EN 55011 classe A1/B et EN/CEI 61800-3 catégorie 1/2
(protection de type A1 uniquement)
H4 : Filtre CEM intégré. Conforme aux normes EN 55011 classe A1 et EN/CEI 61800-3 catégorie 2
H5 : Versions marines. Conforme aux mêmes niveaux d'émissions que les versions H2
Frein 18 B : Hacheur de freinage inclus
X : Aucun hacheur de freinage inclus
T : Arrêt de sécurité, pas de frein
U : Hacheur de freinage à arrêt de sécurité
Affichage 19 G : Panneau de commande local graphique (LCP)
N : Panneau de commande local numérique (LCP)
X : Aucun panneau de commande local
Tropicalisation
PCB
77
Option
secteur
20 C : PCB tropicalisé
R : Renforcé
X : PCB non tropicalisé
21 X : Pas d'option secteur
1 : Sectionneur secteur
3 : Sectionneur secteur et fusible
5 : Sectionneur secteur, fusible et répartition de la charge
7 : Fusible
2)
8 : Sectionneur secteur et répartition de la charge
A : Fusible et répartition de la charge
D : Répartition de la charge
3)
Adaptation 22 X : Entrées de câble standard
O : Filetage métrique européen dans les entrées de câble (A4, A5, B1, B2, C1, C2 uniquement)
S : Entrées de câble impériales (A5, B1, B2, C1 et C2 uniquement)
Adaptation 23 X : Pas d'adaptation
Version du
24-27 SXXX : Dernière version - logiciel standard
logiciel
Langue du
28 X : Non utilisé
logiciel
1)
FC 301/Protection de type A1 uniquement
2)
Marché des Etats-Unis uniquement
3)
La répartition de la charge est intégrée par défaut aux châssis A et B3
1)
1)
1)
2)
2, 3)
3)
2, 3)
Tableau 7.1 Code type de commande Protections de types A, B et C
Description Pos. Choix possibles
Options A 29-30 AX : Pas d'option A
A0 : Profibus DP V1 MCA 101 (standard)
A4 : DeviceNet MCA 104 (standard)
A6 : CANOpen MCA 105 (standard)
AN : MCA 121 Ethernet IP
AL : MCA 120 ProfiNet
AQ : MCA-122 Modbus TCP
AT : Variateur MCA 113 Profibus VLT 3000
AU : Variateur MCA 114 Profibus VLT 5000
AY : MCA 123 Powerlink
A8 : MCA 124 EtherCAT
90 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04

Commande
Description Pos. Choix possibles
Options B 31-32 BX : Pas d'option
BK : MCB 101 option E/S à usage général
BR : Option du codeur MCB 102
BU : Option du résolveur MCB 103
BP : MCB 105 Carte option 3 relais
BZ : Interface PLC de sécurité MCB 108
B2 : Carte thermistance PTC MCB 112
B4 : Entrée de capteur MCB 114 VLT
B6 : Option de sécurité MCB 150 TTL
B7 : Option de sécurité MCB 151 HTL
Options C0 33-34 CX : Pas d'option
C4 : MCO 305, contrôleur de mouvement programmable
Options C1 35 X : Pas d'option
R : L'option de relais externe MCB 113
Z : Option OEM Modbus RTU MCA-140
Logiciel option
C/options E1
Options D 38-39 DX : Pas d'option
36-37 XX : Contrôleur standard
10 : Contrôleur de synchronisation MCO 350
11 : Contrôleur de positionnement MCO 351
D0 : Secours 24 V CC MCB 107 ext.
Manuel de configuration
7 7
Tableau 7.2 Code type de commande, Options
AVIS!
Pour les puissances supérieures à 75 kW, consulter le Manuel de configuration du VLT® AutomationDrive FC 300
90-1 400 kW.
7.1.2 Langue
Les variateurs de fréquence sont livrés automatiquement avec un ensemble de langues adapté à la région d'où provient la
commande. Quatre ensembles régionaux de langues comprennent les langues suivantes :
Ensemble de langues 1 Ensemble de langues 2 Ensemble de langues 3 Ensemble de langues 4
Anglais Anglais Anglais Anglais
Allemand Allemand Allemand Allemand
french Chinois Slovène Espagnol
Danois Coréen Bulgare Anglais américain
Néerlandais Japonais Serbe Grec
Espagnol Thaï Roumain Portugais brésilien
Suédois Chinois traditionnel Hongrois Turc
Italien Indonésien Tchèque Polonais
Finnois Russe
Tableau 7.3 Ensembles de langues
Pour commander des variateurs de fréquence avec un autre ensemble de langues, contacter le bureau commercial local .
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 91

Commande Manuel de configuration
7.2 Références
7.2.1 Options et accessoires
Description Référence
Non tropicalisé Tropicalisé
Matériel divers
Kit du panneau VLT® avec protection de type A5
Kit du panneau VLT® avec protection de type B1
Kit du panneau VLT® avec protection de type B2
Kit du panneau VLT® avec protection de type C1
Kit du panneau VLT® avec protection de type C2
Supports de fixation du VLT® pour protection de type A5
Supports de fixation du VLT® pour protection de type B1
Supports de fixation du VLT® pour protection de type B2
Supports de fixation du VLT® pour protection de type C1
77
Supports de fixation du VLT® pour protection de type C2
Kit VLT® IP 21/Type 1, protection de type A1
Kit VLT® IP 21/Type 1, protection de type A2
Kit VLT® IP 21/Type 1, protection de type A3
Kit supérieur VLT® IP 21/Type 1, protection de type A2
Kit supérieur VLT® IP 21/Type 1, protection de type A3
Plaque arrière VLT® IP55/Type12, protection de type A5
Plaque arrière VLT® IP21/Type 1, IP55/Type 12, protection de type B1
Plaque arrière VLT® IP21/Type 1, IP55/Type 12, protection de type B2
Plaque arrière VLT® IP20/Type 1, protection de type B4
Plaque arrière VLT® IP21/Type 1, IP55/Type 12, protection de type C1
Plaque arrière VLT® IP21/Type 1, IP55/Type 12, protection de type C2
Plaque arrière VLT® IP20/Type 1, protection de type C3
Plaque arrière VLT® IP20/Type 1, protection de type C4
Plaque arrière VLT® IP66/Type 4X, protection de type A5
Plaque arrière en acier inoxydable VLT® IP66/Type 4X, protection de type B1
Plaque arrière en acier inoxydable VLT® IP66/Type 4X, protection de type B2
Plaque arrière en acier inoxydable VLT® IP66/Type 4X, protection de type C1
Plaque arrière en acier inoxydable VLT® IP66/Type 4X, protection de type C2
Connecteur SUB-D9 adaptateur Profibus VLT
Kit de plaque écran Profibus pour IP20, protections de types A1, A2 et A3 130B0524
Bloc de raccordement pour la connexion CC sur protections de types A2/A3 130B1064
Bornes à vis VLT
Extension USB VLT®, câble de 350 mm 130B1155
Extension USB VLT®, câble de 650 mm 130B1156
Châssis arrière VLT® A2 pour 1 résistance de freinage 175U0085
Châssis arrière VLT® A3 pour 1 résistance de freinage 175U0088
Châssis arrière VLT® A2 pour 2 résistances de freinage 175U0087
Châssis arrière VLT® A3 pour 2 résistances de freinage 175U0086
Panneau de commande local
Panneau de commande local numérique LCP 101 VLT
Panneau de commande local graphique LCP 102 VLT
Câble VLT® pour LCP 2, 3 m
Kit de montage du panneau VLT® pour tous les types de LCP
Kit de montage du panneau VLT®, LCP graphique
®
®
®
®
130B1028
130B1046
130B1047
130B1048
130B1049
130B1080
130B1081
130B1082
130B1083
130B1084
130B1121
130B1122
130B1123
130B1132
130B1133
130B1098
130B3383
130B3397
130B4172
130B3910
130B3911
130B4170
130B4171
130B3242
130B3434
130B3465
130B3468
130B3491
130B1112
130B1116
130B1124
130B1107
175Z0929
130B1170
130B1113
92 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04

Commande Manuel de configuration
Description Référence
Non tropicalisé Tropicalisé
Kit de montage du panneau VLT®, LCP numérique
Kit de montage du LCP VLT®, sans LCP
Couvercle aveugle du kit de montage du LCP VLT® IP55/66, 8 m
Panneau de commande LCP 102 VLT®, graphique
Couvercle aveugle VLT®, avec logo Danfoss, IP55/66
Options pour emplacement A
VLT® Profibus DP V1 MCA 101
VLT® DeviceNet MCA 104
VLT® CAN Open MCA 105
Convertisseur VLT® PROFIBUS MCA 113
Convertisseur VLT® PROFIBUS MCA 114
VLT® PROFINET MCA 120
VLT® EtherNet/IP MCA 121
VLT® Modbus TCP MCA 122
POWERLINK 130B1489 130B1490
EtherCAT 130B5546 130B5646
VLT® DeviceNet MCA 104
Options pour emplacement B
E/S à usage général MCB 101 VLT
Entrée codeur VLT® MCB 102
Entrée résolveur VLT® MCB 103
Option relais VLT® MCB 105
E/S PLC de sécurité VLT® MCB 108
Carte thermistance PTC VLT® MCB 112
Option de sécurité VLT® MCB 140
Option de sécurité VLT® MCB 141
Option de sécurité VLT® MCB 150
Option de sécurité VLT® MCB 151
Kits de montage des options C
Kit de montage VLT® pour option C, 40 mm, protections de types A2/A3
Kit de montage VLT® pour option C, 60 mm, protections de types A2/A3
Kit de montage VLT® pour option C, protection de type A5
Kit de montage VLT® pour option C, protections de types B/C/D/E/F (sauf B3)
Kit de montage VLT® pour option C, 40 mm, protection de type B3
Kit de montage VLT® pour option C, 60 mm, protection de type B3
Options pour emplacement C
Contrôleur de mouvement VLT® MCO 305
Contr. de synchronisation VLT® MCO 350
Contrôleur de position VLT® MCO 351
Contrôleur bobineuse centrale 130B1165 130B1166
Carte relais étendue VLT® MCB 113
Adaptateur de l'option C VLT® MCF 106
Option pour D
Option d'alimentation 24 V CC VLT® MCB 107
VLT® EtherNet/IP MCA 121
Kit de moniteur de courant de fuite VLT®, protections de types A2/A3
Kit de moniteur de courant de fuite VLT®, protection de type B3
Kit de moniteur de courant de fuite VLT®, protection de type B4
Kit de moniteur de courant de fuite VLT®, protection de type C3
®
130B1114
130B1117
130B1129
130B1078
130B1077
130B1100 130B1200
130B1102 130B1202
130B1103 130B1205
130B1245
130B1246
130B1135 130B1235
130B1119 130B1219
130B1196 130B1296
130B1102 130B1202
130B1125 130B1212
130B1115 130B1203
130B1127 130B1227
130B1110 130B1210
130B1120 130B1220
130B1137
130B6443
130B6447
130B3280
130B3290
130B7530
130B7531
130B7532
130B7533
130B1413
130B1414
130B1134 130B1234
130B1152 130B1252
130B1153 120B1253
130B1164 130B1264
130B1230
130B1108 130B1208
175N2584
130B5645
130B5764
130B5765
130B6226
7 7
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 93
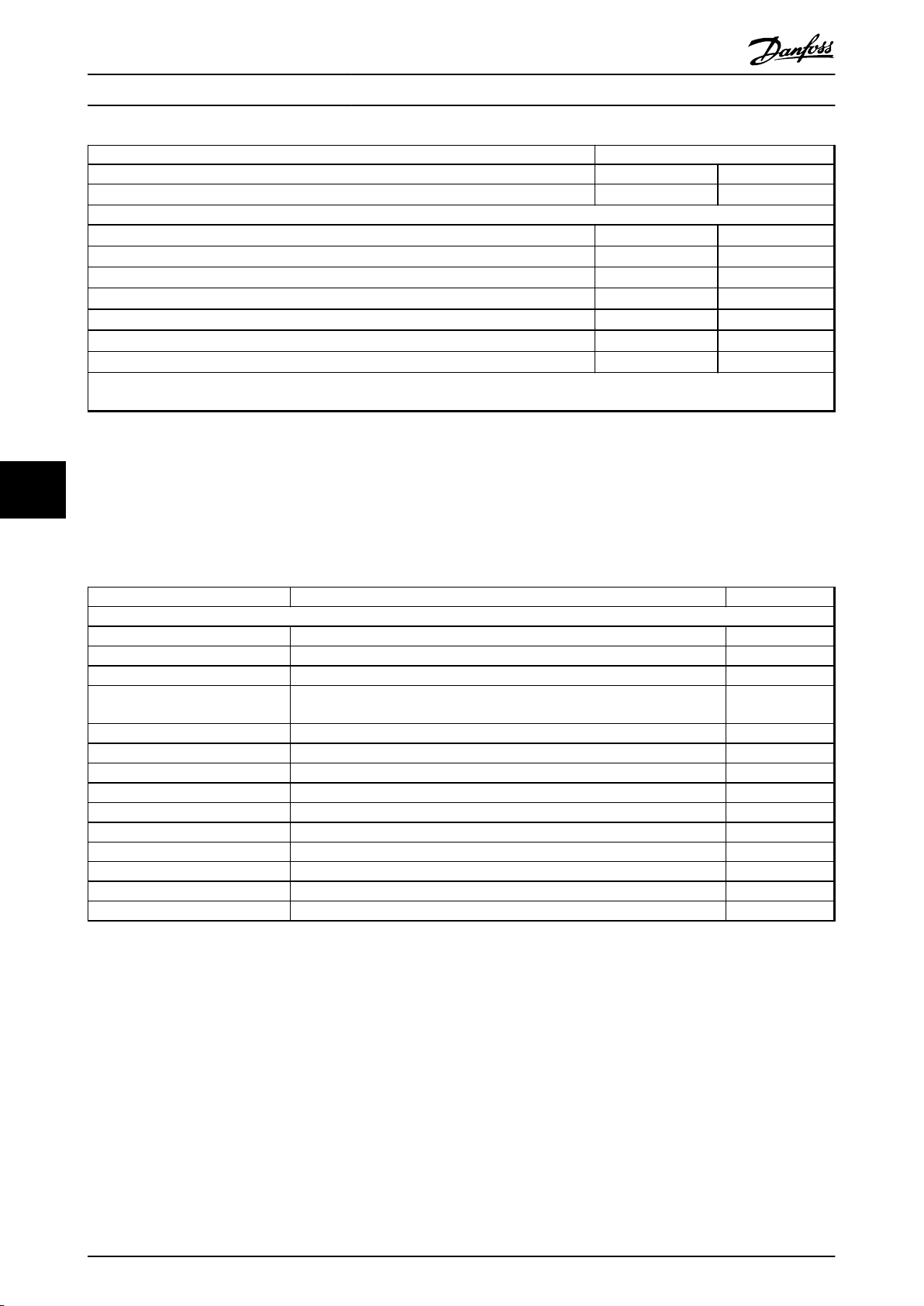
Commande Manuel de configuration
Description Référence
Non tropicalisé Tropicalisé
Kit de moniteur de courant de fuite VLT®, protection de type C4
Logiciel PC
Outil de contrôle du mouvement VLT® MCT 10, 1 licence
Outil de contrôle du mouvement VLT® MCT 10, 5 licences
Outil de contrôle du mouvement VLT® MCT 10, 10 licences
Outil de contrôle du mouvement VLT® MCT 10, 25 licences
Outil de contrôle du mouvement VLT® MCT 10, 50 licences
Outil de contrôle du mouvement VLT® MCT 10, 100 licences
Outil de contrôle du mouvement VLT® MCT 10, >100 licences
Il est possible de commander les options en tant qu'options incorporées en usine (voir les informations concernant les commandes au
chapitre 7.1 Système de configuration du variateur).
Tableau 7.4 Références des options et accessoires
Pièces de rechange
7.2.2
130B5647
130B1000
130B1001
130B1002
130B1003
130B1004
130B1005
130B1006
77
Consulter l'atelier VLT ou le système de configuration pour connaître les pièces de rechange disponibles pour vos spécifications, VLTShop.danfoss.com.
7.2.3 Sacs d'accessoires
Type Description Référence
Sacs d'accessoires
Sac d'accessoires A1 Sac d'accessoires, protection de type A1 130B1021
Sac d'accessoires A2/A3 Sac d'accessoires, protections de types A2/A3 130B1022
Sac d'accessoires A5 Sac d'accessoires, protection de type A5 130B1023
Sac d'accessoires A1–A5 Sac d'accessoires, protections de types A1-A5 Connecteur de frein et de
répartition de charge
Sac d'accessoires B1 Sac d'accessoires, protection de type B1 130B2060
Sac d'accessoires B2 Sac d'accessoires, protection de type B2 130B2061
Sac d’accessoires B3 Sac d'accessoires, protection de type B3 130B0980
Sac d’accessoires B4 Sac d'accessoires, protection de type B4, 18,5-22 kW 130B1300
Sac d’accessoires B4 Sac d'accessoires, protection de type B4, 30 kW 130B1301
Sac d'accessoires C1 Sac d'accessoires, protection de type C1 130B0046
Sac d'accessoires C2 Sac d'accessoires, protection de type C2 130B0047
Sac d'accessoires C3 Sac d'accessoires, protection de type C3 130B0981
Sac d'accessoires C4 Sac d'accessoires, protection de type C4, 55 kW 130B0982
Sac d'accessoires C4 Sac d'accessoires, protection de type C4, 75 kW 130B0983
Tableau 7.5 Références des sacs d'accessoires
130B0633
94 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
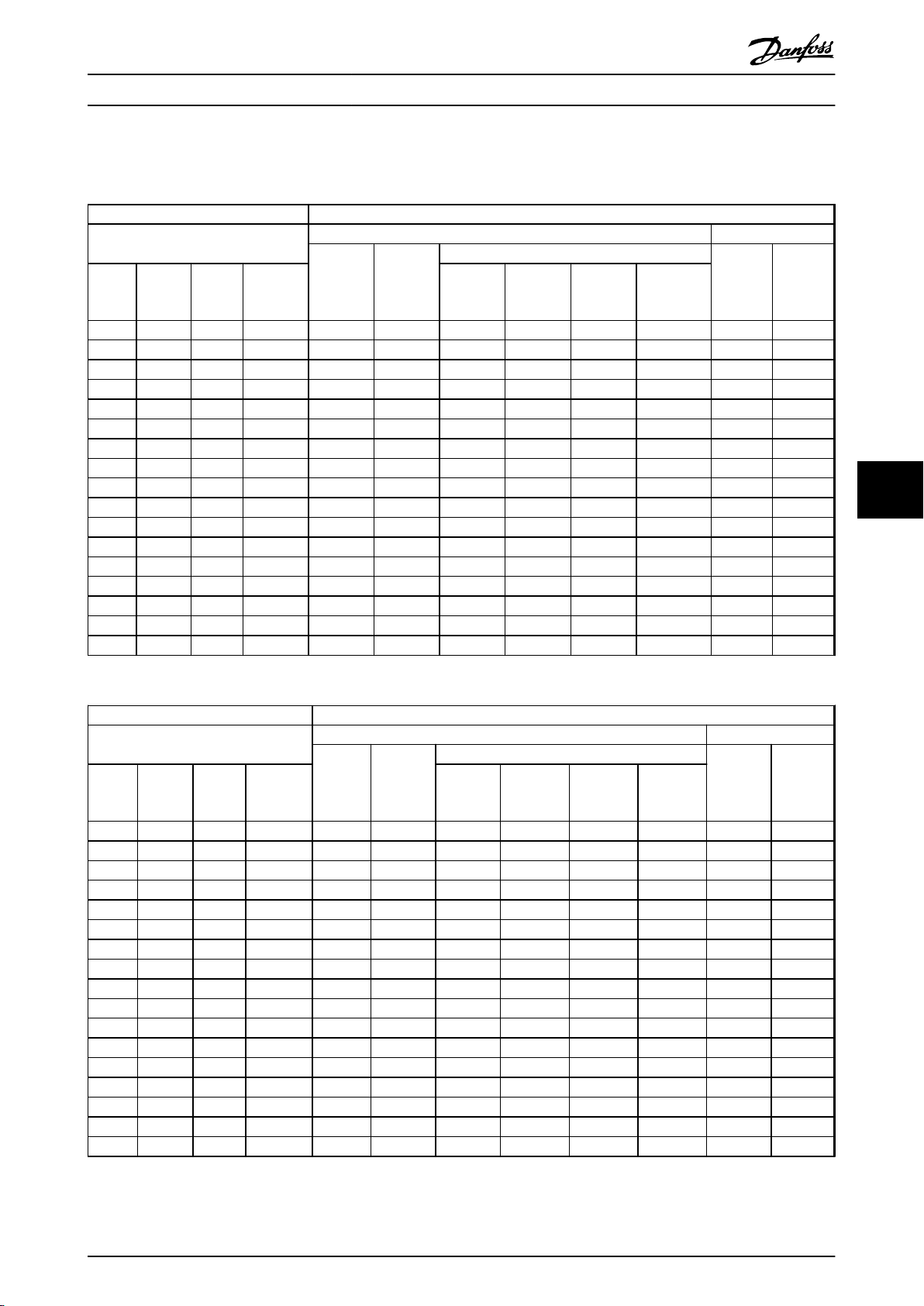
Commande
Manuel de configuration
7.2.4 VLT AutomationDrive FC 301
T2, Freinage horizontal, cycle d'utilisation 10 %
FC 301 Cycle d'utilisation de 10 % du freinage horizontal
Données du variateur de fréquence
R
Type
secteur
P
[kW]
R
m
min
[Ω]
R
br.nom
[Ω]
rec
[Ω]
T2 0,25 368 415,9 410 0,100 175u3004 - - - 1,5 0,5
T2 0,37 248 280,7 300 0,100 175u3006 - - - 1,5 0,6
T2 0,55 166 188,7 200 0,100 175u3011 - - - 1,5 0,7
T2 0,75 121 138,4 145 0,100 175u3016 - - - 1,5 0,8
T2 1,1 81,0 92,0 100 0,100 175u3021 - - - 1,5 0,9
T2 1,5 58,5 66,5 70 0,200 175u3026 - - - 1,5 1,6
T2 2,2 40,2 44,6 48 0,200 175u3031 - - - 1,5 1,9
T2 3 29,1 32,3 35 0,300 175u3325 - - - 1,5 2,7
T2 3,7 22,5 25,9 27 0,360 175u3326 175u3477 175u3478 - 1,5 3,5
T2 5,5 17,7 19,7 18 0,570 175u3327 175u3442 175u3441 - 1,5 5,3
T2 7,5 12,6 14,3 13 0,680 175u3328 175u3059 175u3060 - 1,5 6,8
T2 11 8,7 9,7 9 1,130 175u3329 175u3068 175u3069 - 2,5 10,5
T2 15 5,3 7,5 5,7 1,400 175u3330 175u3073 175u3074 - 4 15
T2 18,5 5,1 6,0 5,7 1,700 175u3331 175u3483 175u3484 - 4 16
T2 22 3,2 5,0 3,5 2,200 175u3332 175u3080 175u3081 - 6 24
T2 30 3,0 3,7 3,5 2,800 175u3333 175u3448 175u3447 - 10 27
T2 37 2,4 3,0 2,8 3,200 175u3334 175u3086 175u3087 - 16 32
Données de la résistance de freinage Installation
P
br.cont.
[kW]
Fil IP54
Référence Danfoss
Borne à
vis IP21
Borne à
vis IP65
Bolt
connection
IP20
Section
du câble
[mm2]
Thermo
relais
[A]
7 7
Tableau 7.6 T2, Freinage horizontal, cycle d'utilisation 10 %
FC 301 Freinage vertical, cycle d'utilisation 40 %
Données du variateur de fréquence
Type
secteur
P
m
[kW]
R
[Ω]
min
R
br.nom
[Ω]
R
[Ω]
rec
Données de la résistance de freinage Installation
P
br.cont.
[kW]
Fil IP54
Référence Danfoss
Borne à vis
Borne à vis
IP21
IP65
Bolt
connection
IP20
Section
du câble
[mm2]
T2 0,25 368 415,9 410 0,100 175u3004 - - - 1,5 0,5
T2 0,37 248 280,7 300 0,200 175u3096 - - - 1,5 0,8
T2 0,55 166 188,7 200 0,200 175u3008 - - - 1,5 0,9
T2 0,75 121 138,4 145 0,300 175u3300 - - - 1,5 1,3
T2 1,1 81,0 92,0 100 0,450 175u3301 175u3402 175u3401 - 1,5 2
T2 1,5 58,5 66,5 70 0,570 175u3302 175u3404 175u3403 - 1,5 2,7
T2 2,2 40,2 44,6 48 0,960 175u3303 175u3406 175u3405 - 1,5 4,2
T2 3 29,1 32,3 35 1,130 175u3304 175u3408 175u3407 - 1,5 5,4
T2 3,7 22,5 25,9 27 1,400 175u3305 175u3410 175u3409 - 1,5 6,8
T2 5,5 17,7 19,7 18 2,200 175u3306 175u3412 175u3411 - 1,5 10,4
T2 7,5 12,6 14,3 13 3,200 175u3307 175u3414 175u3413 - 2,5 14,7
T2 11 8,7 9,7 9 5,500 - 175u3176 175u3177 - 4 23
T2 15 5,3 7,5 5,7 6,000 - - - 175u3233 10 33
T2 18,5 5,1 6,0 5,7 8,000 - - - 175u3234 10 38
T2 22 3,2 5,0 3,5 9,000 - - - 175u3235 16 51
T2 30 3,0 3,7 3,5 14,000 - - - 175u3224 25 63
T2 37 2,4 3,0 2,8 17,000 - - - 175u3227 35 78
Thermo
relais
[A]
Tableau 7.7 T2, Freinage vertical, cycle d'utilisation 40 %
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 95
Commande
Manuel de configuration
FC 301 Cycle d'utilisation de 10 % du freinage horizontal
Données du variateur de fréquence
Type
secteur
P
[kW]
R
m
min
[Ω]
R
br.nom
[Ω]
R
[Ω]
rec
Données de la résistance de freinage Installation
P
br.cont.
[kW]
Fil IP54
Référence Danfoss
Borne à
vis IP21
Borne à
vis IP65
Bolt
connection
IP20
Section
du câble
[mm2]
Thermo
relais
[A]
T4 0,37 1000 1 121,4 1200 0,100 175u3000 - - - 1,5 0,3
T4 0,55 620 749,8 850 0,100 175u3001 - - - 1,5 0,4
T4 0,75 485 547,6 630 0,100 175u3002 - - - 1,5 0,4
T4 1,1 329 365,3 410 0,100 175u3004 - - - 1,5 0,5
T4 1,5 240 263,0 270 0,200 175u3007 - - - 1,5 0,8
T4 2,2 161 176,5 200 0,200 175u3008 - - - 1,5 0,9
T4 3 117 127,9 145 0,300 175u3300 - - - 1,5 1,3
T4 4 86,9 94,6 110 0,450 175u3335 175u3450 175u3449 - 1,5 1,9
T4 5,5 62,5 68,2 80 0,570 175u3336 175u3452 175u3451 - 1,5 2,5
T4 7,5 45,3 49,6 56 0,680 175u3337 175u3027 175u3028 - 1,5 3,3
T4 11 34,9 38,0 38 1,130 175u3338 175u3034 175u3035 - 1,5 5,2
77
T4 15 25,3 27,7 28 1,400 175u3339 175u3039 175u3040 - 1,5 6,7
T4 18,5 20,3 22,3 22 1,700 175u3340 175u3047 175u3048 - 1,5 8,3
T4 22 16,9 18,7 19 2,200 175u3357 175u3049 175u3050 - 1,5 10,1
T4 30 13,2 14,5 14 2,800 175u3341 175u3055 175u3056 - 2,5 13,3
T4 37 10,6 11,7 12 3,200 175u3359 175u3061 175u3062 - 2,5 15,3
T4 45 8,7 9,6 9,5 4,200 - 175u3065 175u3066 - 4 20
T4 55 6,6 7,8 7,0 5,500 - 175u3070 175u3071 - 6 26
T4 75 4,2 5,7 5,5 7,000 - - - 175u3231 10 36
Tableau 7.8 T4, Freinage horizontal, cycle d'utilisation 10 %
FC 301 Freinage vertical, cycle d'utilisation 40 %
Données du variateur de fréquence
Type
secteur
P
m
[kW]
R
[Ω]
min
R
br.nom
[Ω]
R
[Ω]
rec
Données de la résistance de freinage Installation
P
br.cont.
[kW]
Fil IP54
Référence Danfoss
Borne à vis
Borne à vis
IP21
IP65
Bolt
connection
IP20
Section
du câble
[mm2]
T4 0,37 1000 1 121,4 1200 0,200 175u3101 - - - 1,5 0,4
T4 0,55 620 749,8 850 0,200 175u3308 - - - 1,5 0,5
T4 0,75 485 547,6 630 0,300 175u3309 - - - 1,5 0,7
T4 1,1 329 365,3 410 0,450 175u3310 175u3416 175u3415 - 1,5 1
T4 1,5 240 263,0 270 0,570 175u3311 175u3418 175u3417 - 1,5 1,4
T4 2,2 161 176,5 200 0,960 175u3312 175u3420 175u3419 - 1,5 2,1
T4 3 117 127,9 145 1,130 175u3313 175u3422 175u3421 - 1,5 2,7
T4 4 86,9 94,6 110 1,700 175u3314 175u3424 175u3423 - 1,5 3,7
T4 5,5 62,5 68,2 80 2,200 175u3315 175u3138 175u3139 - 1,5 5
T4 7,5 45,3 49,6 56 3,200 175u3316 175u3428 175u3427 - 1,5 7,1
T4 11 34,9 38,0 38 5,000 - - - 175u3236 1,5 11,5
T4 15 25,3 27,7 28 6,000 - - - 175u3237 2,5 14,7
T4 18,5 20,3 22,3 22 8,000 - - - 175u3238 4 19
T4 22 16,9 18,7 19 10,000 - - - 175u3203 4 23
T4 30 13,2 14,5 14 14,000 - - - 175u3206 10 32
T4 37 10,6 11,7 12 17,000 - - - 175u3210 10 38
T4 45 8,7 9,6 9,5 21,000 - - - 175u3213 16 47
T4 55 6,6 7,8 7,0 26,000 - - - 175u3216 25 61
T4 75 4,2 5,7 5,5 36,000 - - - 175u3219 35 81
Thermo
relais
[A]
Tableau 7.9 T4, Freinage vertical, cycle d'utilisation 40 %
96 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
Commande
Manuel de configuration
7.2.5 Résistances de freinage pour FC 302
FC 302 Cycle d'utilisation de 10 % du freinage horizontal
Données du variateur de fréquence
R
Type
secteur
P
[kW]
R
m
min
[Ω]
R
br.nom
[Ω]
rec
[Ω]
T2 0,25 380 475,3 410 0,100 175u3004 - - - 1,5 0,5
T2 0,37 275 320,8 300 0,100 175u3006 - - - 1,5 0,6
T2 0,55 188 215,7 200 0,100 175u3011 - - - 1,5 0,7
T2 0,75 130 158,1 145 0,100 175u3016 - - - 1,5 0,8
T2 1,1 81,0 105,1 100 0,100 175u3021 - - - 1,5 0,9
T2 1,5 58,5 76,0 70 0,200 175u3026 - - - 1,5 1,6
T2 2,2 45,0 51,0 48 0,200 175u3031 - - - 1,5 1,9
T2 3 31,5 37,0 35 0,300 175u3325 - - - 1,5 2,7
T2 3,7 22,5 29,7 27 0,360 175u3326 175u3477 175u3478 - 1,5 3,5
T2 5,5 17,7 19,7 18 0,570 175u3327 175u3442 175u3441 - 1,5 5,3
T2 7,5 12,6 14,3 13,0 0,680 175u3328 175u3059 175u3060 - 1,5 6,8
T2 11 8,7 9,7 9,0 1,130 175u3329 175u3068 175u3069 - 2,5 10,5
T2 15 5,3 7,5 5,7 1,400 175u3330 175u3073 175u3074 - 4 14,7
T2 18,5 5,1 6,0 5,7 1,700 175u3331 175u3483 175u3484 - 4 16
T2 22 3,2 5,0 3,5 2,200 175u3332 175u3080 175u3081 - 6 24
T2 30 3,0 3,7 3,5 2,800 175u3333 175u3448 175u3447 - 10 27
T2 37 2,4 3,0 2,8 3,200 175u3334 175u3086 175u3087 - 16 32
Données de la résistance de freinage Installation
P
br.cont.
[kW]
Fil IP54
Référence Danfoss
Borne à
vis IP21
Borne à
vis IP65
Bolt
connection
IP20
Section
de
câble
[mm2]
Thermo
relais
[A]
7 7
Tableau 7.10 T2, Freinage horizontal, cycle d'utilisation 10 %
FC 302 Freinage vertical, cycle d'utilisation 40 %
Données du variateur de fréquence
Type
secteur
P
[kW]
R
m
min
[Ω]
R
br.nom
[Ω]
R
[Ω]
rec
Données de la résistance de freinage Installation
P
br.cont.
[kW]
Fil IP54
Référence Danfoss
Borne à
vis IP21
Borne à
vis IP65
Bolt
connection
IP20
Section
du câble
[mm2]
T2 0,25 380 475,3 410 0,100 175u3004 - - - 1,5 0,5
T2 0,37 275 320,8 300 0,200 175u3096 - - - 1,5 0,8
T2 0,55 188 215,7 200 0,200 175u3008 - - - 1,5 0,9
T2 0,75 130 158,1 145 0,300 175u3300 - - - 1,5 1,3
T2 1,1 81,0 105,1 100 0,450 175u3301 175u3402 175u3401 - 1,5 2
T2 1,5 58,5 76,0 70 0,570 175u3302 175u3404 175u3403 - 1,5 2,7
T2 2,2 45,0 51,0 48 0,960 175u3303 175u3406 175u3405 - 1,5 4,2
T2 3 31,5 37,0 35 1,130 175u3304 175u3408 175u3407 - 1,5 5,4
T2 3,7 22,5 29,7 27 1,400 175u3305 175u3410 175u3409 - 1,5 6,8
T2 5,5 17,7 19,7 18 2,200 175u3306 175u3412 175u3411 - 1,5 10,4
T2 7,5 12,6 14,3 13,0 3,200 175u3307 175u3414 175u3413 - 2,5 14,7
T2 11 8,7 9,7 9,0 5,500 - 175u3176 175u3177 - 4 23
T2 15 5,3 7,5 5,7 6,000 - - - 175u3233 10 33
T2 18,5 5,1 6,0 5,7 8,000 - - - 175u3234 10 38
T2 22 3,2 5,0 3,5 9,000 - - - 175u3235 16 51
T2 30 3,0 3,7 3,5 14,000 - - - 175u3224 25 63
T2 37 2,4 3,0 2,8 17,000 - - - 175u3227 35 78
Thermo
relais
[A]
Tableau 7.11 T2, Freinage vertical, cycle d'utilisation 40 %
MG33BF04 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. 97

Commande
Manuel de configuration
FC 302 Cycle d'utilisation de 10 % du freinage horizontal
Données du variateur de fréquence
Type
secteur
P
[kW]
R
m
min
[Ω]
R
br.nom
[Ω]
R
[Ω]
rec
Données de la résistance de freinage Installation
P
br.cont.
[kW]
Fil IP54
Référence Danfoss
Borne à
vis IP21
Borne à
vis IP65
Bolt
connection
IP20
Section
du câble
[mm2]
Thermo
relais
[A]
T5 0,37 1000 1 389,2 1200 0,100 175u3000 - - - 1,5 0,3
T5 0,55 620 928,8 850 0,100 175u3001 - - - 1,5 0,4
T5 0,75 558 678,3 630 0,100 175u3002 - - - 1,5 0,4
T5 1,1 382 452,5 410 0,100 175u3004 - - - 1,5 0,5
T5 1,5 260 325,9 270 0,200 175u3007 - - - 1,5 0,8
T5 2,2 189 218,6 200 0,200 175u3008 - - - 1,5 0,9
T5 3 135 158,5 145 0,300 175u3300 - - - 1,5 1,3
T5 4 99,0 117,2 110 0,450 175u3335 175u3450 175u3449 - 1,5 1,9
T5 5,5 72,0 84,4 80 0,570 175u3336 175u3452 175u3451 - 1,5 2,5
T5 7,5 50,0 61,4 56 0,680 175u3337 175u3027 175u3028 - 1,5 3,3
T5 11 36,0 41,2 38 1,130 175u3338 175u3034 175u3035 - 1,5 5,2
77
T5 15 27,0 30,0 28 1,400 175u3339 175u3039 175u3040 - 1,5 6,7
T5 18,5 20,3 24,2 22 1,700 175u3340 175u3047 175u3048 - 1,5 8,3
T5 22 18,0 20,3 19 2,200 175u3357 175u3049 175u3050 - 1,5 10,1
T5 30 13,4 15,8 14 2,800 175u3341 175u3055 175u3056 - 2,5 13,3
T5 37 10,8 12,7 12 3,200 175u3359 175u3061 175u3062 - 2,5 15,3
T5 45 8,8 10,4 9,5 4,200 - 175u3065 175u3066 - 4 20
T5 55 6,5 8,5 7,0 5,500 - 175u3070 175u3071 - 6 26
T5 75 4,2 6,2 5,5 7,000 - - - 175u3231 10 36
Tableau 7.12 T5, Freinage horizontal, cycle d'utilisation 10 %
FC 302 Freinage vertical, cycle d'utilisation 40 %
Données du variateur de fréquence
Type
secteur
P
[kW]
R
m
min
[Ω]
R
br.nom
[Ω]
R
[Ω]
rec
Données de la résistance de freinage Installation
P
br.cont.
[kW]
Fil IP54
Référence Danfoss
Borne à
vis IP21
Borne à
vis IP65
Bolt
connection
IP20
Section
du câble
[mm2]
T5 0,37 1000 1 389,2 1200 0,200 175u3101 - - - 1,5 0,4
T5 0,55 620 928,8 850 0,200 175u3308 - - - 1,5 0,5
T5 0,75 558 678,3 630 0,300 175u3309 - - - 1,5 0,7
T5 1,1 382 452,5 410 0,450 175u3310 175u3416 175u3415 - 1,5 1
T5 1,5 260 325,9 270 0,570 175u3311 175u3418 175u3417 - 1,5 1,4
T5 2,2 189 218,6 200 0,960 175u3312 175u3420 175u3419 - 1,5 2,1
T5 3 135 158,5 145 1,130 175u3313 175u3422 175u3421 - 1,5 2,7
T5 4 99,0 117,2 110 1,700 175u3314 175u3424 175u3423 - 1,5 3,7
T5 5,5 72,0 84,4 80 2,200 175u3315 175u3138 175u3139 - 1,5 5
T5 7,5 50,0 61,4 56 3,200 175u3316 175u3428 175u3427 - 1,5 7,1
T5 11 36,0 41,2 38 5,000 - - - 175u3236 1,5 11,5
T5 15 27,0 30,0 28 6,000 - - - 175u3237 2,5 14,7
T5 18,5 20,3 24,2 22 8,000 - - - 175u3238 4 19
T5 22 18,0 20,3 19 10,000 - - - 175u3203 4 23
T5 30 13,4 15,8 14 14,000 - - - 175u3206 10 32
T5 37 10,8 12,7 12 17,000 - - - 175u3210 10 38
T5 45 8,8 10,4 9,5 21,000 - - - 175u3213 16 47
T5 55 6,5 8,5 7,0 26,000 - - - 175u3216 25 61
T5 75 4,2 6,2 5,5 36,000 - - - 175u3219 35 81
Thermo
relais
[A]
Tableau 7.13 T5, Freinage vertical, cycle d'utilisation 40 %
98 Danfoss A/S © Rév. 2014-04-04 Tous droits réservés. MG33BF04
 Loading...
Loading...