

Page 1
ENGINEERING TOMORROW
Guia de Operação
VLT® AutomationDrive FC 301/302
0,25–75 kW
vlt-drives.danfoss.com
Page 2

Page 3
Page 4
Page 5
Page 6
Page 7
Índice Guia de Operação
Índice
1 Introdução
1.1 Objetivo do Manual
1.2 Recursos adicionais
1.3 Versão do Software e do Manual
1.4 Visão Geral do Produto
1.5 Tipo de aprovações e certicações
2 Segurança
2.1 Símbolos de Segurança
2.2 Pessoal qualicado
2.3 Precauções de segurança
3 Instalação Mecânica
3.1 Desembalagem
3.1.1 Itens fornecidos 8
3.2 Ambientes de instalação
3.3 Montagem
3
3
3
3
3
5
6
6
6
6
8
8
8
9
4 Instalação Elétrica
4.1 Instruções de Segurança
4.2 Instalação compatível com EMC
4.3 Aterramento
4.4 Esquemático de ação
4.5 Conexão do Motor
4.6 Ligação da Rede Elétrica CA
4.7 Fiação de Controle
4.7.1 Safe Torque O (STO) 15
4.7.2 Controle do Freio Mecânico 15
4.8 Lista de Vericação de Instalação
5 Colocação em funcionamento
5.1 Instruções de Segurança
5.2 Operação do painel de controle local
5.3 Setup do sistema
6 Conguração básica de E/S
10
10
10
10
12
14
15
15
16
18
18
19
20
21
7 Manutenção, diagnósticos e resolução de problemas
7.1 Manutenção e serviço
7.2 Tipos de Advertência e Alarme
7.3 Lista de advertências e alarmes
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 1
23
23
23
24
Page 8
Índice
VLT® AutomationDrive FC 301/302
8 Especicações
8.1 Dados Elétricos
8.1.1 Alimentação de rede elétrica 200–240 V 34
8.1.2 Alimentação de rede elétrica 380–500 V 37
8.1.3 Alimentação de rede elétrica 525–600 V (FC 302 somente) 40
8.1.4 Alimentação de rede elétrica 525–690 V (FC 302 somente) 43
8.2 Alimentação de Rede Elétrica
8.3 Saída do Motor e dados do motor
8.4 Condições ambiente
8.5 Especicações de Cabo
8.6 Entrada/Saída de controle e dados de controle
8.7 Fusíveis e Disjuntores
8.8 Torques de Aperto de Conexão
8.9 Valor Nominal da Potência, Peso e Dimensões
9 Apêndice
9.1 Símbolos, abreviações e convenções
9.2 Estrutura de Menu dos Parâmetros
34
34
46
46
47
47
47
51
59
60
66
66
66
Índice
77
2 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 9
Introdução Guia de Operação
1 Introdução
1.1 Objetivo do Manual
Este guia de operação fornece informações para a
instalação segura e a colocação em funcionamento do
conversor de frequência.
O guia de operação destina-se a ser utilizado por pessoal
qualicado.
Leia e siga as instruções para usar o conversor de
frequência de forma segura e prossional, e preste atenção
especialmente nas instruções de segurança e advertências
gerais. Mantenha sempre este guia de operação disponível
com o conversor de frequência.
VLT® é uma marca registrada.
1.2 Recursos adicionais
Outros recursos estão disponíveis para entender a
programação e as funções avançadas do conversor de
frequência.
O VLT® AutomationDrive FC 301/FC 302 Guia de
•
Programação fornece mais detalhes sobre como
trabalhar com parâmetros e mostra muitos
exemplos de aplicativos.
O VLT® AutomationDrive FC 301/FC 302 Guia de
•
Design fornece informações detalhadas sobre
recursos e funcionalidades para projetar sistemas
de controle do motor.
Instruções para operação com equipamento
•
opcional.
Publicações e manuais complementares estão disponíveis
na Danfoss. Consulte www.danfoss.com/en/search/?
lter=type%3Adocumentation%2Csegment%3Adds para
listagens.
Versão do Software e do Manual
1.3
Este manual é revisado e atualizado regularmente. Todas as
sugestões de melhoria são bem-vindas. Tabela 1.1 mostra a
versão manual e a versão de software correspondente.
Visão Geral do Produto
1.4
1.4.1 Uso pretendido
O conversor de frequência é um controlador eletrônico de
motor destinado para:
regulagem de velocidade do motor em resposta
•
ao sistema de feedback ou a comandos remotos
de controladores externos. Um sistema de drive
de potência consiste em conversor de frequência,
motor e equipamento acionado pelo motor.
Vigilância do status do motor e do sistema.
•
O conversor de frequência também pode ser usado para
proteção de sobrecarga do motor.
Dependendo da conguração, o conversor de frequência
pode ser usado em aplicações autônomas ou fazer parte
de um aparelho ou instalação maior.
O conversor de frequência é permitido para uso em
ambientes residenciais, comerciais e industriais de acordo
com as leis e normas locais.
AVISO!
Em um ambiente residencial, este produto pode causar
interferência nas frequências de rádio, que em tal caso
podem ser necessárias medidas suplementares de
mitigação.
Má utilização previsível
Não utilize o conversor de frequência em aplicações que
não são compatíveis com ambientes e condições de
operação especicados. Garanta a conformidade com as
condições especicadas em capétulo 8 Especicações.
AVISO!
A frequência de saída do conversor de frequência é
limitada a 590 Hz.
Para demandas acima de 590 Hz, entre em contato com
a Danfoss.
1 1
Edição Observações Versão do
software
MG33ATxx Correção de erros. Alterar a seção
transversal mínima do cabo para
10 mm2 (7 AWG)
Tabela 1.1 Versão do manual e do software
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 3
8,1x, 48,20 (IMC)
Page 10
1
2
3
4
5
6
7
8
9
10
11
12
13
16
17
18
19
14
6
FAN MOUNTING
QDF-30
DC-
DC+
Remove jumper to activate Safe Stop
Max. 24 Volt !
12
13 1819 27 29 32
33
20
37
0605 04
0302 01
130BF713.10
61
68
69
39
42
50
53 54
55
1
3
5
20
9
6
13
15
14
6
18
11
10
16, 17
19
14
7
8
4
2
Introdução
VLT® AutomationDrive FC 301/302
11
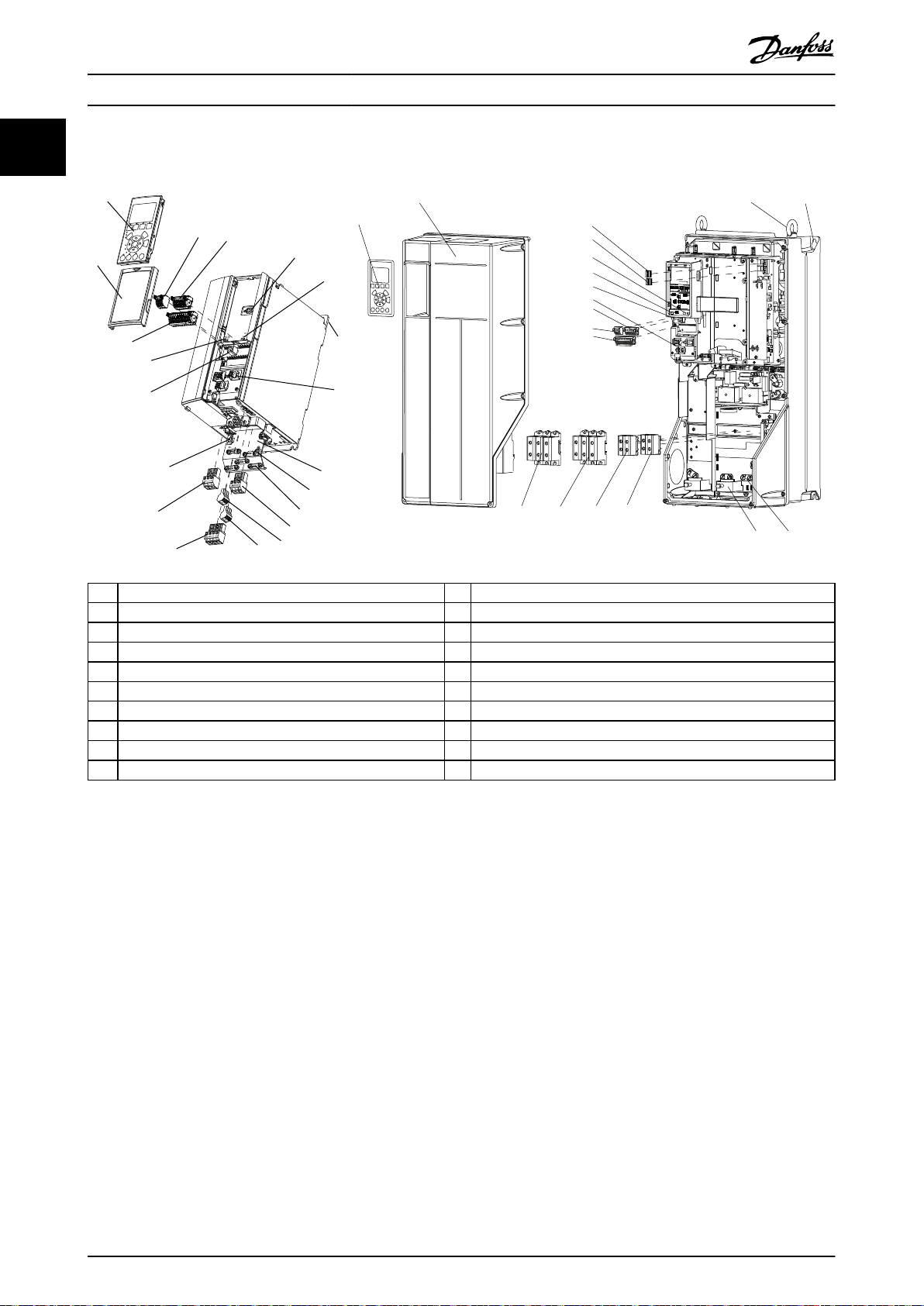
1.4.2 Visões explodidas
1 Painel de controle local (LCP) 11 Relé 2 (04, 05, 06)
2 Tampa 12 Anel de elevação
3 Bucha do eldbus RS485 13 Slot de montagem
4 Conector de entrada/saída digital 14 Conexão do terra (PE)
5 Conector de entrada/saída digital 15 Bucha da blindagem do cabo
6 Aterramento e alívio do cabo blindado 16 Terminal do freio (-81, +82)
7 Bucha USB 17 Terminal de load sharing (-88, +89)
8 Interruptor de terminação RS485 18 Terminal do motor 96 (U), 97 (V), 98 (W)
9 Chave tipo DIP para A53 e A54 19 Terminais de entrada da rede elétrica 91 (L1), 92 (L2), 93 (L3)
10 Relé 1 (01, 02, 03) 20 Conector do LCP
Ilustração 1.1 Visão explodida do tamanho do gabinete A, IP20 (esquerda), e com tamanho do gabinete tamanho C, IP55/IP66
(direita)
4 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 11
089
Introdução Guia de Operação
1.5 Tipo de aprovações e certicações
A lista a seguir é uma seleção de possíveis aprovações de
tipo e certicações para Danfoss conversores de
frequência:
1 1
AVISO!
As aprovações especícas e a certicação para o
conversor de frequência estão na plaqueta de identicação do conversor de frequência. Para mais
informações, entre em contato com o Danfoss escritório
ou parceiro local.
Para obter mais informações sobre os requisitos de
retenção de memória térmica da UL 508C, consulte a seção
Proteção térmica do motor no guia de design especíco do
produto.
Para obter mais informações sobre a conformidade com o
Acordo Europeu relativo ao Transporte Internacional de
Mercadorias Perigosas por Vias Navegáveis Internas (ADN),
consulte a seção Instalação compatível com ADN no guia de
design especíco do produto.
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 5
Page 12
Segurança
VLT® AutomationDrive FC 301/302
2 Segurança
22
2.1 Símbolos de Segurança
Precauções de segurança
2.3
Os seguintes símbolos são usados neste guia:
ADVERTÊNCIA
Indica uma situação potencialmente perigosa que pode
resultar em morte ou ferimentos graves.
CUIDADO
Indica uma situação potencialmente perigosa que pode
resultar em ferimentos leves ou moderados. Também
podem ser usados para alertar contra práticas inseguras.
AVISO!
Indica informações importantes, inclusive situações que
podem resultar em danos no equipamento ou na
propriedade.
2.2 Pessoal qualicado
São necessários transporte, armazenagem, instalação,
operação e manutenção corretos e conáveis para a
operação sem problemas e segura do conversor de
frequência. Somente pessoal qualicado tem permissão
para instalar e operar este equipamento.
Pessoal
autorizado a instalar, comissionar e manter o equipamento,
os sistemas e circuitos em conformidade com as leis e
normas pertinentes. Além disso, o pessoal qualicado deve
estar familiarizado com as instruções e medidas de
segurança descritas neste manual.
qualicado é denido como pessoal treinado,
ADVERTÊNCIA
ALTA TENSÃO
Os conversores contêm alta tensão quando estão
conectados à entrada da rede elétrica CA, alimentação
CC ou Load Sharing. Deixar de realizar a instalação, a
inicialização e a manutenção por pessoal qualicado
pode resultar em morte ou lesões graves.
Somente pessoal qualicado deve realizar a
•
instalação, a inicialização e a manutenção.
Antes de realizar qualquer serviço de
•
manutenção ou reparo, use um dispositivo de
medição de tensão adequado para se certicar
de que não há tensão residual no conversor.
ADVERTÊNCIA
PARTIDA ACIDENTAL
Quando o conversor de frequência estiver conectado à
rede elétrica CA, alimentação CC ou load sharing, o
motor pode dar partida a qualquer momento. Partida
acidental durante a programação, serviço ou serviço de
manutenção pode resultar em morte, ferimentos graves
ou danos à propriedade. O motor pode dar partida por
meio de um interruptor externo, um comando do
eldbus, um sinal de referência de entrada do LCP ou
após uma condição de falha eliminada.
Para impedir a partida do motor:
Desconecte o conversor da rede elétrica.
•
Pressione [O/Reset] no LCP, antes de
•
programar parâmetros.
Conecte toda a ação e monte completamente
•
o conversor, o motor e qualquer equipamento
acionado antes de conectar o conversor à rede
elétrica CA, alimentação CC ou load sharing.
6 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 13
Segurança Guia de Operação
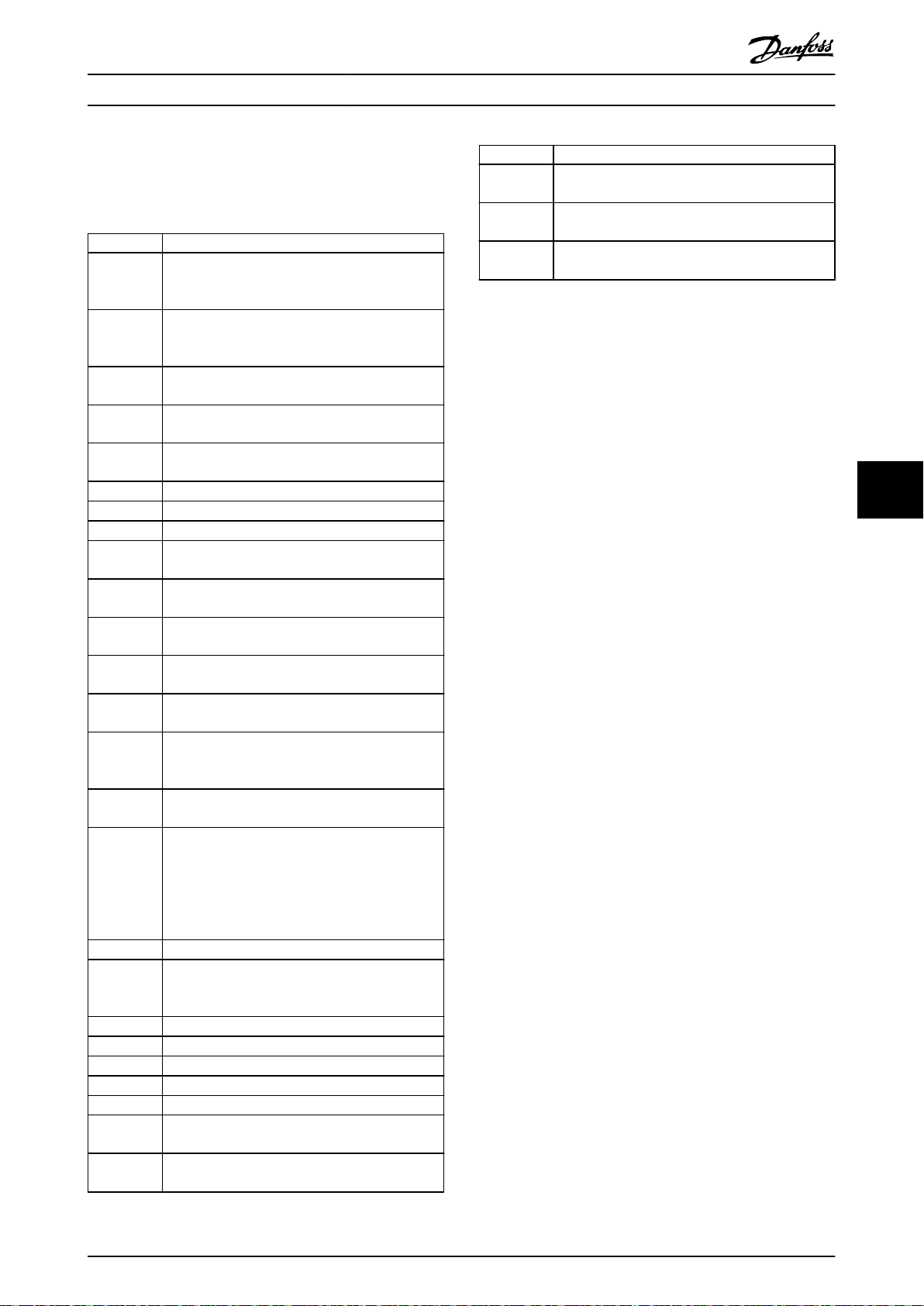
ADVERTÊNCIA
TEMPO DE DESCARGA
O conversor de frequência contém capacitores de
barramento CC, que podem permanecer carregados
mesmo quando o conversor de frequência não está
energizado. Pode haver alta tensão presente mesmo
quando as luzes indicadoras LED de advertência
estiverem apagadas. Se o tempo especicado após a
energia ter sido desligada não for aguardado para
executar ou serviço de manutenção, isto pode resultar
em morte ou ferimentos graves.
Pare o motor.
•
Desconecte as fontes de alimentação da rede
•
elétrica CA e do barramento CC, incluindo os
backups de bateria, UPS e conexões do
barramento CC para os outros conversores de
frequência.
Desconecte ou trave o motor PM.
•
Aguarde os capacitores se descarregarem por
•
completo. O tempo de espera mínimo está
especicado em Tabela 2.1 e também é visível
na etiqueta do produto, no topo do conversor
de frequência.
Antes de realizar qualquer serviço de
•
manutenção, use um dispositivo de medição de
tensão apropriado para ter certeza de que os
capacitores estejam completamente descarregados.
Tensão [V] Tempo de espera mínimo (minutos)
4 7 15
200–240 0,25–3,7 kW
(0,34–5 hp)
380–500 0,25–7,5 kW
(0,34–10 hp)
525–600 0,75–7,5 kW
(1–10 hp)
525–690 – 1,5–7,5 kW
Tabela 2.1 Tempo de descarga
– 5,5–37 kW
(7,5–50 hp)
– 11–75 kW
(15–100 hp)
– 11–75 kW
(15–100 hp)
(2–10 hp)
(15–100 hp)
11–75 kW
ADVERTÊNCIA
RISCO DE CORRENTE DE FUGA
As correntes de fuga excedem 3,5 mA. Falha em aterrar o
conversor de frequência corretamente pode resultar em
morte ou ferimentos graves.
Assegure o aterramento correto do
•
equipamento por um eletricista certicado.
ADVERTÊNCIA
PERIGO PARA O EQUIPAMENTO
Contato com eixos rotativos e equipamentos elétricos
pode resultar em morte ou ferimentos graves.
Garanta que apenas pessoal treinado e
•
qualicado realize a instalação, inicialização e
manutenção.
Garanta que o trabalho elétrico esteja em
•
conformidade com os códigos elétricos
nacionais e locais.
Siga os procedimentos deste guia.
•
ADVERTÊNCIA
ROTAÇÃO DO MOTOR ACIDENTAL
ROTAÇÃO LIVRE
A rotação acidental de motores de imã permanente gera
uma tensão e pode carregar a unidade, resultando em
morte, ferimentos graves ou danos ao equipamento.
Certique-se de que os motores de imã
•
permanente estejam bloqueados para impedir a
rotação acidental.
CUIDADO
RISCO DE FALHA INTERNA
Uma falha interna no conversor de frequência pode
resultar em lesões graves quando o conversor de
frequência não estiver fechado corretamente.
Assegure que todas as tampas de segurança
•
estão no lugar e bem presas antes de aplicar
energia.
2 2
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 7
Page 14
130BD600.11
CHASSIS/ IP20 Tamb.50
C/122 F
V LT
MADE IN DENMARK
R
P/N: 131X3537 S/N: 010122G430
0.37kW/ 0.50HP
IN: 3x200-240V 50/60Hz 2.2A
OUT: 3x0-Vin 0-590Hz 2.4A
o
CAUTION:
See manual for special condition/mains fuse
Voir manual de conditions speclales/fusibles
WARNING:
Stored charge, wait 4 min.
Charge residuelle, attendez 4 min.
* 1 3 1
X
3 5 3 7 0 1 0 1 2 2 G 4 3 0 *
`
Automation Drive
www.danfoss.com
T/C: FC-302PK37T2E20H1BGXXXXSXXXXA6BKC4XXXD0
Listed 76X1 E134261 Ind. Contr. Eq.
o
`
1
2
4
5
6
7
8
9
10
3
Instalação Mecânica
3 Instalação Mecânica
VLT® AutomationDrive FC 301/302
3.1 Desembalagem
33
3.1.1 Itens fornecidos
Os itens fornecidos variam de acordo com a conguração
do produto.
AVISO!
Não remova a plaqueta de identicação do conversor de
frequência (perda de garantia).
Certique-se de que os requisitos para armazenamento
sejam cumpridos. Consulte capétulo 8.4 Condições ambiente
para mais detalhes.
Certique-se de que os itens fornecidos e as
•
informações na plaqueta de identicação corres-
3.2 Ambientes de instalação
pondem à conrmação do pedido.
AVISO!
Inspecione visualmente a embalagem e o
•
conversor de frequência quanto a danos causados
por manuseio inadequado durante o envio.
Preencha uma reivindicação por danos com a
transportadora. Guarde as peças danicadas para
maior esclarecimento.
Em ambientes com gotículas, partículas ou gases
corrosivos em suspensão no ar, garanta que as características nominais de IP/tipo do equipamento é
compatível com o ambiente de instalação. Deixar de
atender os requisitos em relação às condições ambiente
pode reduzir o tempo de vida do conversor de
frequência. Certique-se de que os requisitos de
umidade do ar, temperatura e altitude são atendidos.
Vibração e choque
O conversor de frequência está em conformidade com os
requisitos para unidades montadas em paredes e pisos de
instalações de produção, bem como em painéis
aparafusados em paredes ou pisos.
Para obter
especicações detalhadas das condições
ambiente, consulte capétulo 8.4 Condições ambiente.
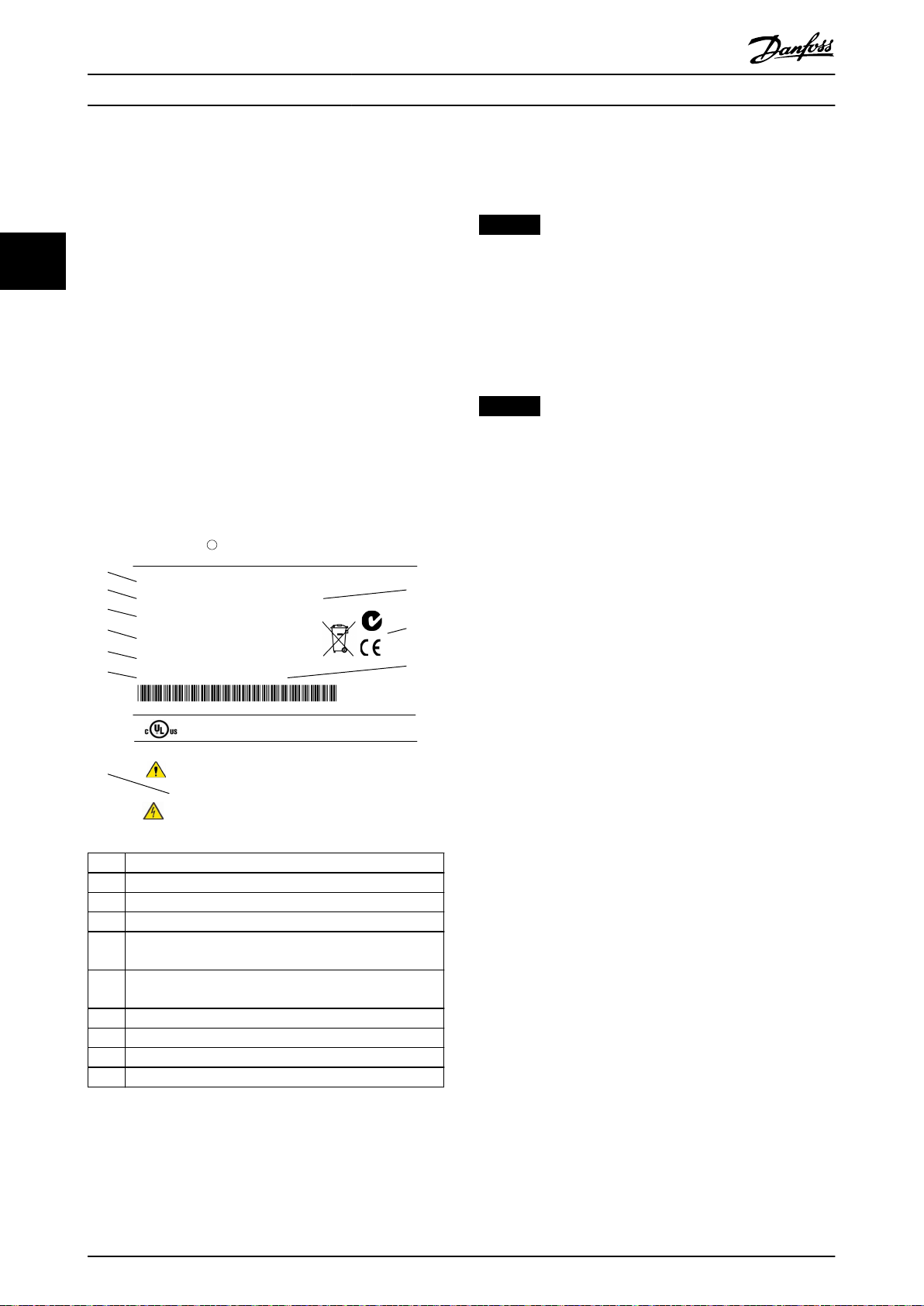
1 Código do tipo
2 Número do código
3 Número de série
4 Valor nominal da potência
Tensão de entrada, frequência e corrente (em baixa/alta
5
tensão)
Tensão de saída, frequência e corrente (em baixa/alta
6
tensão)
7 Tamanho do gabinete e características nominais do IP
8 Temperatura ambiente máxima
9 Certicações
10 Tempo de descarga (Advertência)
Ilustração 3.1 Plaqueta de identicação do produto (Exemplo)
8 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 15
a
a
130BD528.10
130BD504.10
Instalação Mecânica Guia de Operação
3.3 Montagem
AVISO!
Montagem inadequada pode resultar em superaquecimento e desempenho reduzido.
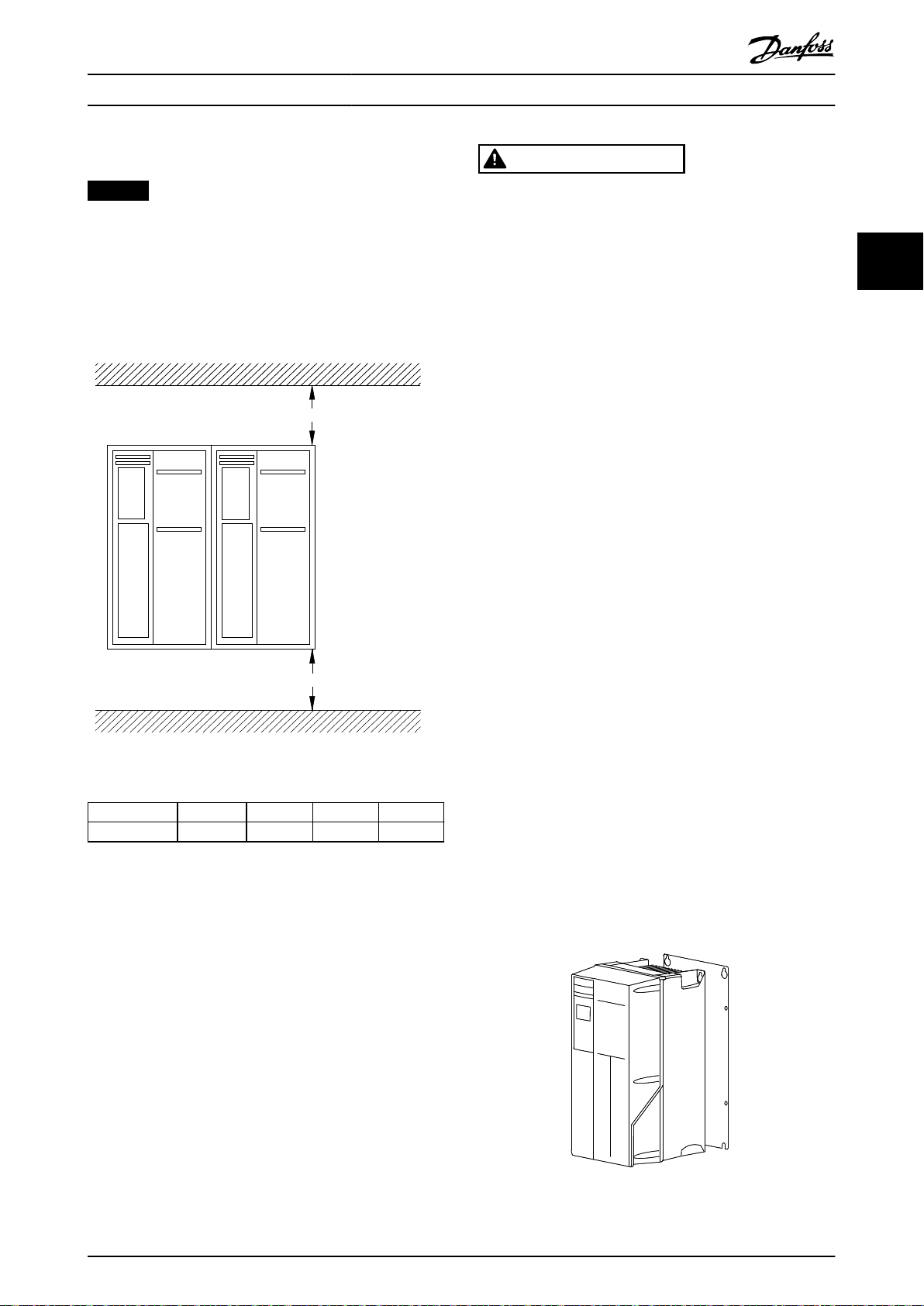
Refrigeração
Garanta que há folga acima e abaixo para o
•
resfriamento de ar. Consulte Ilustração 3.2 para
obter os requisitos de espaço.
ADVERTÊNCIA
CARGA PESADA
Cargas desbalanceadas podem cair e as cargas podem
tombar. Não adotar as precauções de içamento
adequadas aumenta o risco de morte, lesões graves ou
danos aos equipamentos.
Nunca ande sob cargas suspensas.
•
Para proteger-se contra lesões, use
•
equipamento de proteção individual como
luvas, óculos de segurança e calçados de
segurança.
Certique-se de usar dispositivos de içamento
•
com as características nominais de peso
adequado. Para determinar um método de
elevação seguro, verique o peso da unidade,
consulte capétulo 8.9 Valor Nominal da Potência,
Peso e Dimensões.
O ângulo da parte superior do módulo do
•
conversor aos cabos de elevação afeta na força
de carga máxima no cabo. Esse ângulo deverá
ser de 65° ou mais. Fixe e dimensione os cabos
de elevação corretamente.
3 3
Ilustração 3.2 Espaço de resfriamento acima e abaixo
Gabinete A1–A5 B1–B4 C1, C3 C2, C4
a [mm (pol)] 100 (3,9) 200 (7,8) 200 (7,8) 225 (8,9)
Tabela 3.1 Requisitos de espaço para uxo de ar mínimo
Elevação
Garanta que o dispositivo de içamento é
•
apropriado para a tarefa.
Se necessário, planeje um guincho, guindaste ou
•
empilhadeira com as características nominais
apropriadas para mover a unidade.
Para içamento, use anéis de guincho na unidade,
•
quando fornecidos.
Montagem
1. Garanta que a força da posição de montagem
suporta o peso da unidade. O conversor de
frequência permite instalação lado a lado.
2. Posicione a unidade o mais próximo possível do
motor. Mantenha o cabo de motor o mais curto
possível.
3. Monte a unidade na posição vertical em uma
superfície plana sólida ou na placa traseira
opcional para fornecer uxo de ar de arrefecimento.
4. Use os orifícios para montagem ranhurados para
montagem na parede, quando fornecidos.
Montagem com placa de montagem e trilhos
Uma placa de montagem é requerida quando montada em
trilhos.
Ilustração 3.3 Montagem correta com a placa de montagem
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 9
Page 16
Instalação Elétrica
4 Instalação Elétrica
VLT® AutomationDrive FC 301/302
4.1 Instruções de Segurança
Consulte capétulo 2 Segurança para instruções de
segurança gerais.
44
ADVERTÊNCIA
TENSÃO INDUZIDA
A tensão induzida dos cabos de motor de saída que
correm juntos pode carregar os capacitores do
equipamento, mesmo com o equipamento desligado e
bloqueado. Não passar os cabos de motor de saída
separadamente ou não usar cabos blindados pode
resultar em morte ou ferimentos graves.
Passe os cabos de motor de saída separa-
•
damente, ou
Use cabos blindados.
•
Tipos e características nominais dos os
Toda a ação deverá estar em conformidade com
•
as regulamentações locais e nacionais com
relação à seção transversal e aos requisitos de
temperatura ambiente.
Recomendação de o de conexão de energia: Fio
•
de cobre com classicação mínima de 75 °C
(167 °F).
Consulte capétulo 8.1 Dados Elétricos e capétulo 8.5 Especi-
cações de Cabo para tamanhos e tipos de os
recomendados.
4.2 Instalação compatível com EMC
Para obter uma instalação compatível com EMC, siga as
instruções fornecidas em capétulo 4.3 Aterramento,
capétulo 4.4 Esquemático de ação, capétulo 4.5 Conexão do
Motor, e capétulo 4.7 Fiação de Controle.
4.3 Aterramento
CUIDADO
PERIGO DE CHOQUE
O conversor de frequência pode causar uma corrente CC
no condutor PE. Não seguir a recomendação pode levar
o RCD a não fornecer a proteção pretendida.
Quando um dispositivo de proteção operado
•
por corrente residual (RCD) for usado para
proteção contra choque elétrico, somente um
RCD do Tipo B é permitido no lado da
alimentação.
Proteção de sobrecorrente
Equipamentos extra de proteção, como proteção
•
contra curto-circuito ou proteção térmica do
motor entre o conversor de frequência e o motor,
são necessários para aplicações com múltiplos
motores.
A fusão de entrada é necessária para fornecer
•
proteção contra curto-circuito e sobrecorrente. Se
não for fornecido de fábrica, o instalador deve
fornecer fusíveis. Consulte as características
nominais máximas do fusível em
capétulo 8.7 Fusíveis e Disjuntores.
ADVERTÊNCIA
RISCO DE CORRENTE DE FUGA
As correntes de fuga excedem 3,5 mA. Não aterrar o
conversor de frequência corretamente poderá resultar
em morte ou lesões graves.
Assegure o aterramento correto do
•
equipamento por um eletricista certicado.
Para segurança elétrica
Aterre o conversor de frequência de acordo com
•
os padrões e diretivas aplicáveis.
Use um o terra dedicado para potência de
•
entrada, potência do motor e ação de controle.
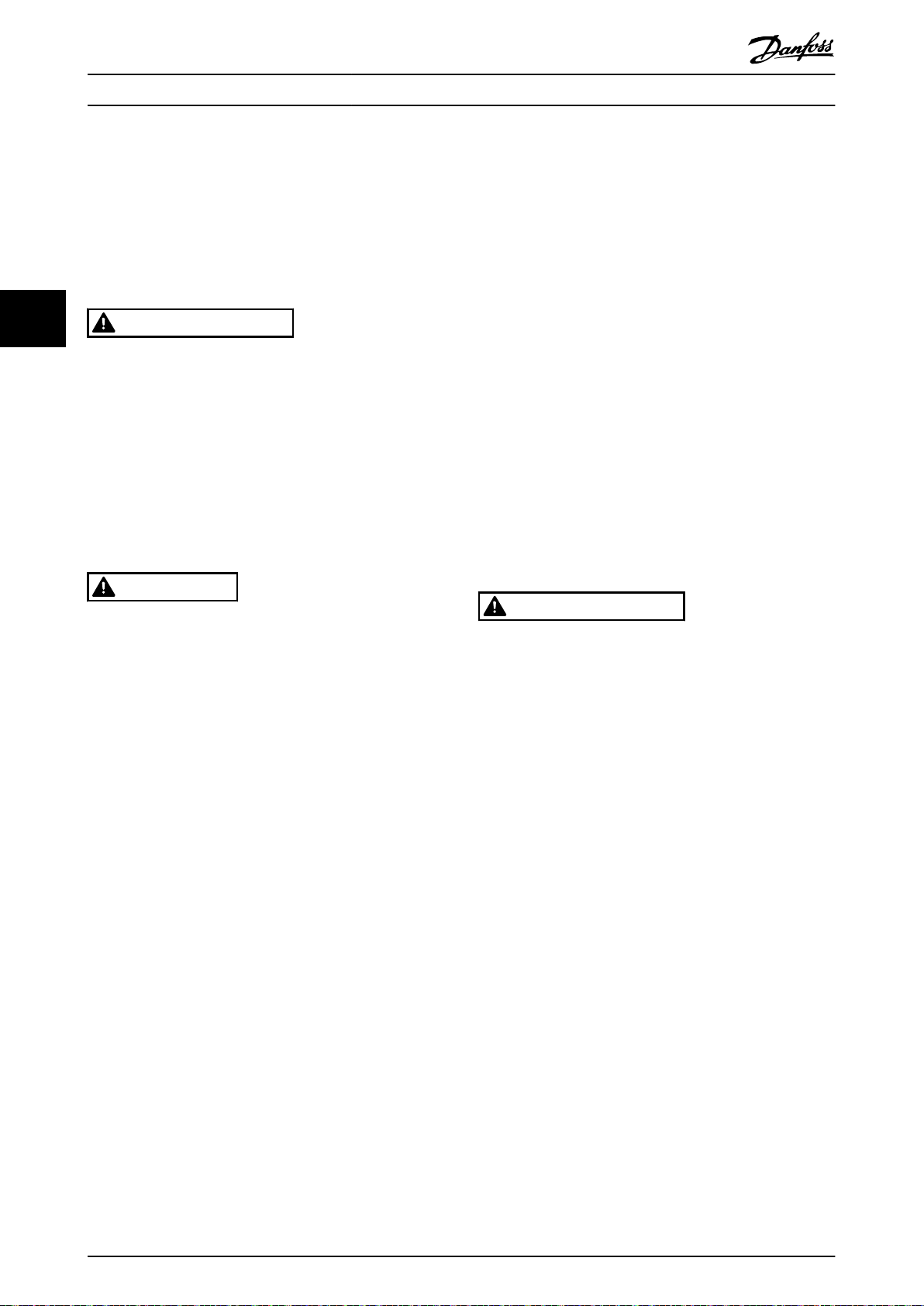
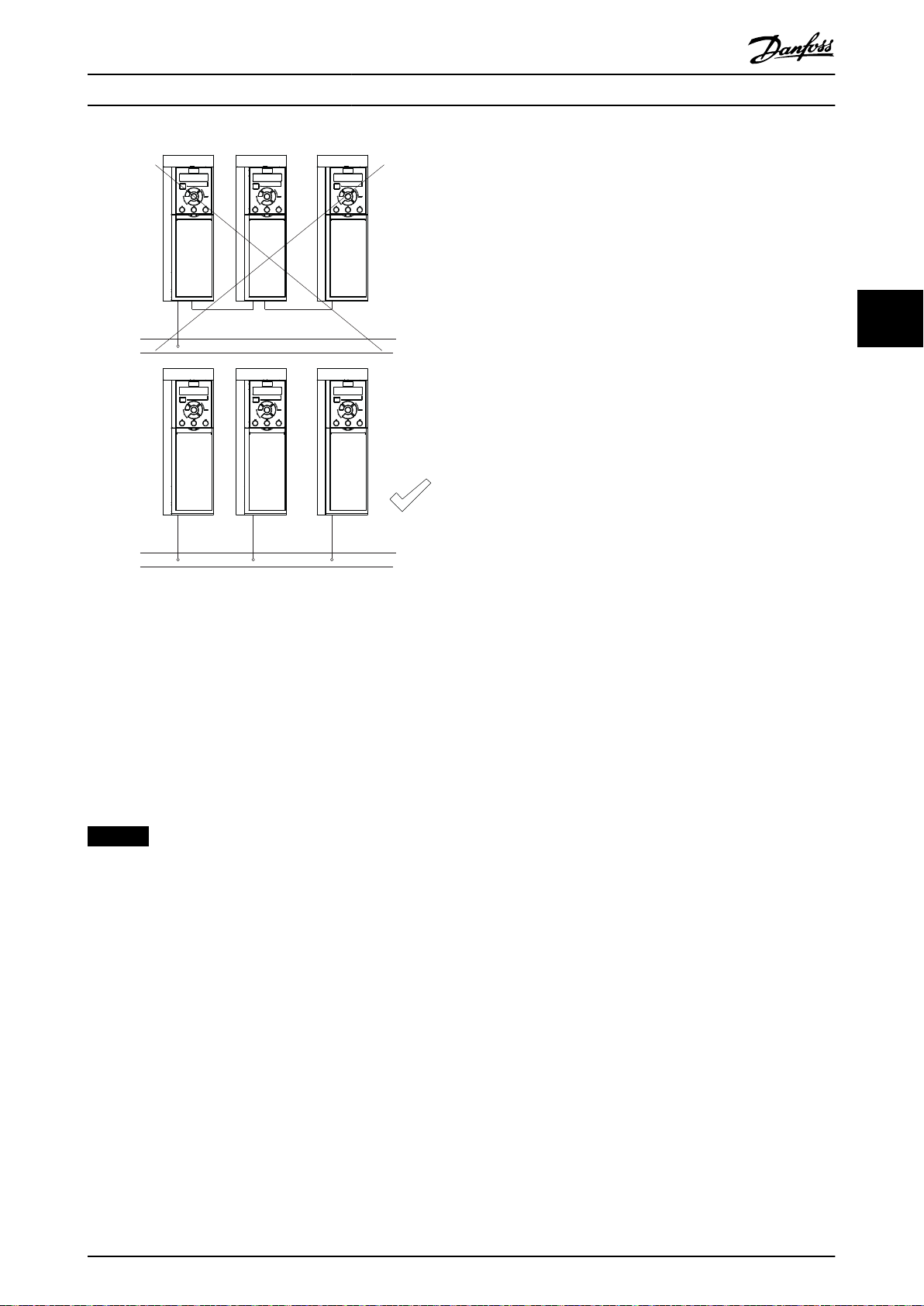
Não aterre um conversor de frequência ao outro
•
em modo encadeado (consulte Ilustração 4.1).
Mantenha as conexões do o terra tão curtas
•
quanto possível.
Atenda aos requisitos de ação do fabricante do
•
motor.
Seção transversal mínima do cabo de os terra:
•
10 mm2 (7 AWG).
Termine os os terra individuais separadamente,
•
seguindo em ambos os requisitos de dimensão
de cabo.
10 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 17
130BC500.10
FC 1
FC 1
FC 2
FC 2
FC 3
FC 3
PE
PE
Instalação Elétrica Guia de Operação
4 4
Ilustração 4.1 Princípio de aterramento
Para instalação compatível com EMC
Estabeleça um contato elétrico entre a blindagem
•
do cabo e o gabinete do conversor de frequência
usando buchas de cabo metálicas ou as
braçadeiras fornecidas com o equipamento
(consulte capétulo 4.5 Conexão do Motor).
Use o de cabo resistente para reduzir transiente
•
de ruptura.
Não use rabichos.
•
AVISO!
EQUALIZAÇÃO DO POTENCIAL
Risco de transiente de ruptura quando o potencial do
ponto de aterramento entre o conversor de frequência e
o sistema de controle for diferente. Instale cabos de
equalização entre os componentes do sistema.
Recomenda-se a seção transversal do cabo: 16 mm
(6 AWG).
2
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 11
Page 18
130BD599.11
3-phase
–
power
–
input
DC bus
Switch Mode
Power Supply
Motor
Analog Output
Interface
relay1
relay2
1)
ON=Terminated
OFF=Open
Brake
resistor
91 (L1)
92 (L2)
93 (L3)
PE
88 (-)
89 (+)
50 (+10 V OUT)
53 (A IN)
54 (A IN)
55 (COM A IN)
0/4–20 mA
12 (+24 V OUT)
13 (+24 V OUT)
37 (D IN)
1)
18 (D IN)
20 (COM D IN)
10 V DC
15 mA 130/200 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(COM A OUT) 39
(A OUT) 42
(P RS485) 68
(N RS485) 69
(COM RS485) 61
2)
0 V
5V
S801
0/4–20 mA
RS-485
RS485
03
+10 V DC
0/-10 V DC–
+10 V DC
+10 V DC
0/4–20 mA
0/-10 V DC–
240 V AC, 2 A
24 V DC
02
01
05
04
06
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
27
24 V
0 V
(D IN/OUT)
0 V (PNP)
24 V (NPN)
(D IN/OUT)
1)
0 V
24 V
29
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
1 2
ON
S201
ON
21
S202
ON=0/4–20 mA
OFF=0/-10 V DC–
+10 V DC
95
P 5-00
21
ON
S801
(R+) 82
(R-) 81
: Chassis
240 V AC, 2 A
400 V AC, 2 A
: Ground
: Ground 1
: Ground 2
: PE
Instalação Elétrica
VLT® AutomationDrive FC 301/302
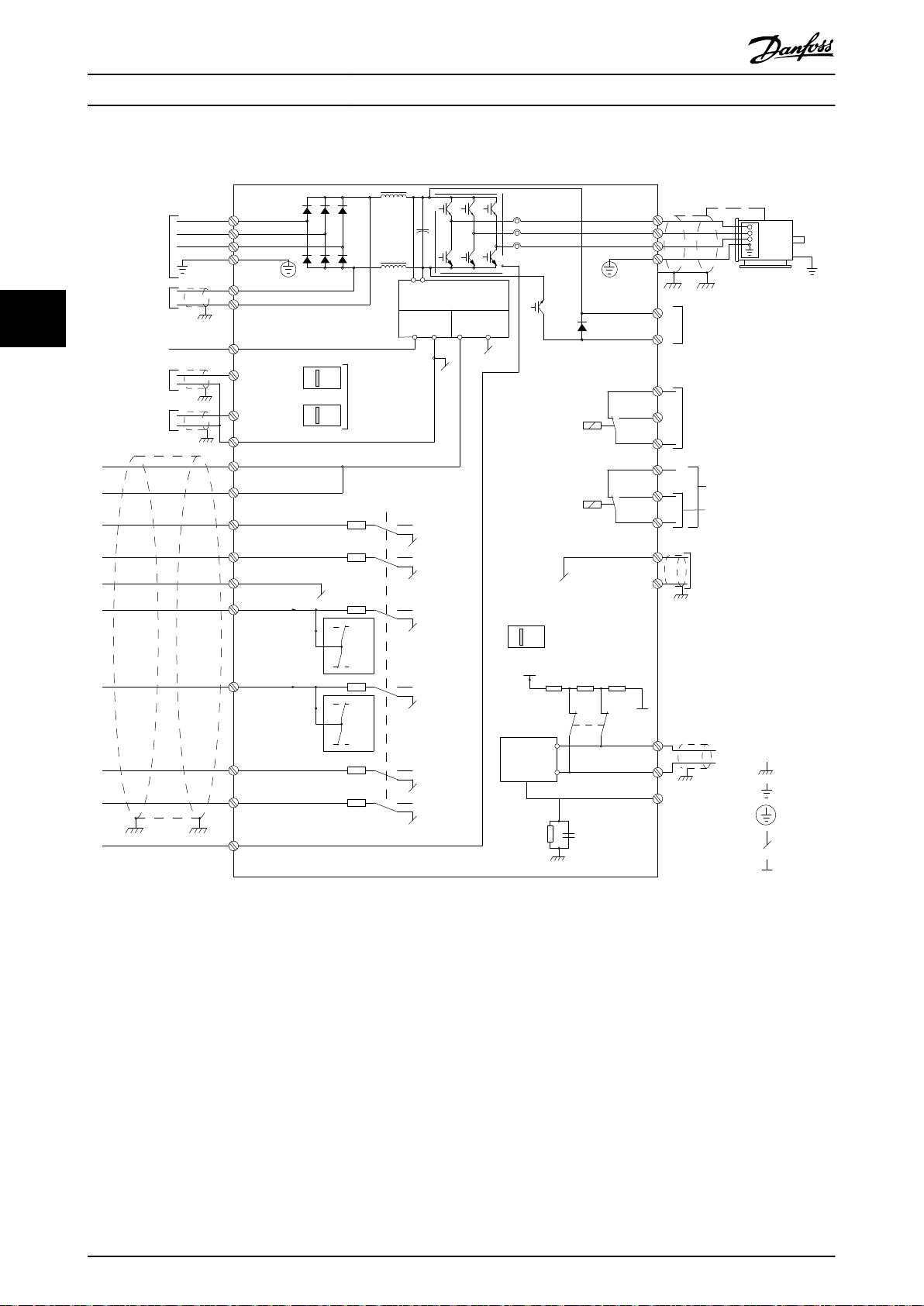
4.4 Esquemático de ação
44
Ilustração 4.2 Esquemática de ação básica
A = analógica, D = digital
1) O terminal 37 (opcional) é usado para Safe Torque O (STO). Para instruções de instalação, consulte o VLT® Guia de
Operação Safe Torque O. Para FC 301, o terminal 37 é incluído apenas no tamanho do gabinete A1. O relé 2 e o terminal 29
não têm função no FC 301.
2) Não conecte a blindagem do cabo.
12 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 19
e30bf228.11
L1
L2
L3
PE
PE
u
v
w
2
1
3
5
16
17
18
14
12
8
7
10
9
4
11
13
4
6
15
90
4
Instalação Elétrica Guia de Operação
4 4
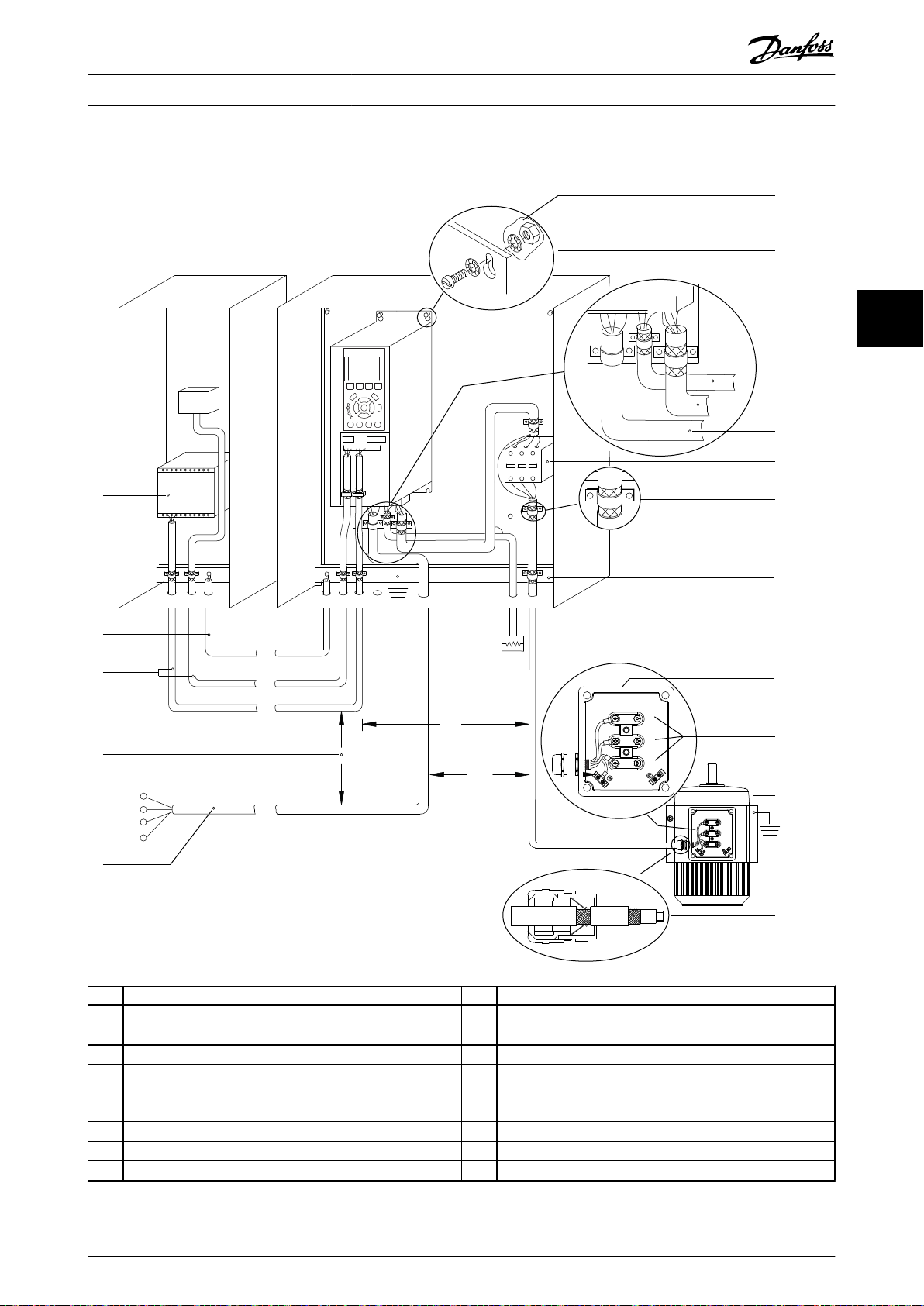
1 PLC. 10 Cabo de rede elétrica (não blindado).
2
Cabo de equalização com diâmetro mínimo de 16 mm
(6 AWG).
3 Cabos de controle. 12 Isolamento do cabo descascado.
4 Espaçamento mínimo de 200 mm (7,9 pol.) entre cabos de
controle, cabos de motor e cabos de rede elétrica.
5 Alimentação de rede elétrica. 14 Resistor de frenagem.
6 Superfície exposta (não pintada). 15 Caixa metálica.
7 Arruelas tipo estrela. 16 Conexão ao motor.
2
11 Contator de saída.
13 Barra do barramento do ponto de aterramento comum Siga
as exigências locais e nacionais para o aterramento do
gabinete.
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 13
Page 20
130BD531.10
U
V
W
96
97
98
Instalação Elétrica
8 Cabo do freio (blindado). 17 Motor.
9 Cabo de motor (blindado). 18 Bucha de cabo EMC.
Ilustração 4.3 Exemplo de instalação de EMC correta
Para obter mais informações sobre EMC, consulte capétulo 4.2 Instalação compatível com EMC
VLT® AutomationDrive FC 301/302
44
AVISO!
INTERFERÊNCIA DE EMC
Use cabos blindados para a ação do motor e de
controle, e separe os cabos de potência de entrada,
ação do motor e o de controle. A falta de isolamento
de cabos de energia, motor e controle pode resultar em
comportamento não desejado ou desempenho reduzido.
É necessário um espaçamento mínimo de 200 mm (7,9
pol.) entre os cabos de energia, do motor e de controle.
4.5 Conexão do Motor
ADVERTÊNCIA
TENSÃO INDUZIDA
A tensão induzida dos cabos de motor de saída que
correm juntos pode carregar os capacitores do
equipamento, mesmo com o equipamento desligado e
bloqueado. Se os cabos de motor de saída não forem
estendidos separadamente ou não forem utilizados
cabos blindados, o resultado poderá ser morte ou lesões
graves.
Passe os cabos de motor de saída separadamente,
•
ou
Use cabos blindados.
•
Atenda os códigos elétricos locais e nacionais
•
para tamanhos do cabo. Para obter os tamanhos
máximos dos os, consulte capétulo 8.1 Dados
Elétricos.
Atenda aos requisitos de ação do fabricante do
•
motor.
Extratores da ação do motor ou painéis de
•
•
acesso são fornecidos na base do IP21
(NEMA1/12) e unidades superiores.
Não conecte um dispositivo de mudança de
partida ou de polo (por exemplo, motor
Dahlander ou motor assíncrono de deslizamento)
entre o conversor de frequência e o motor.
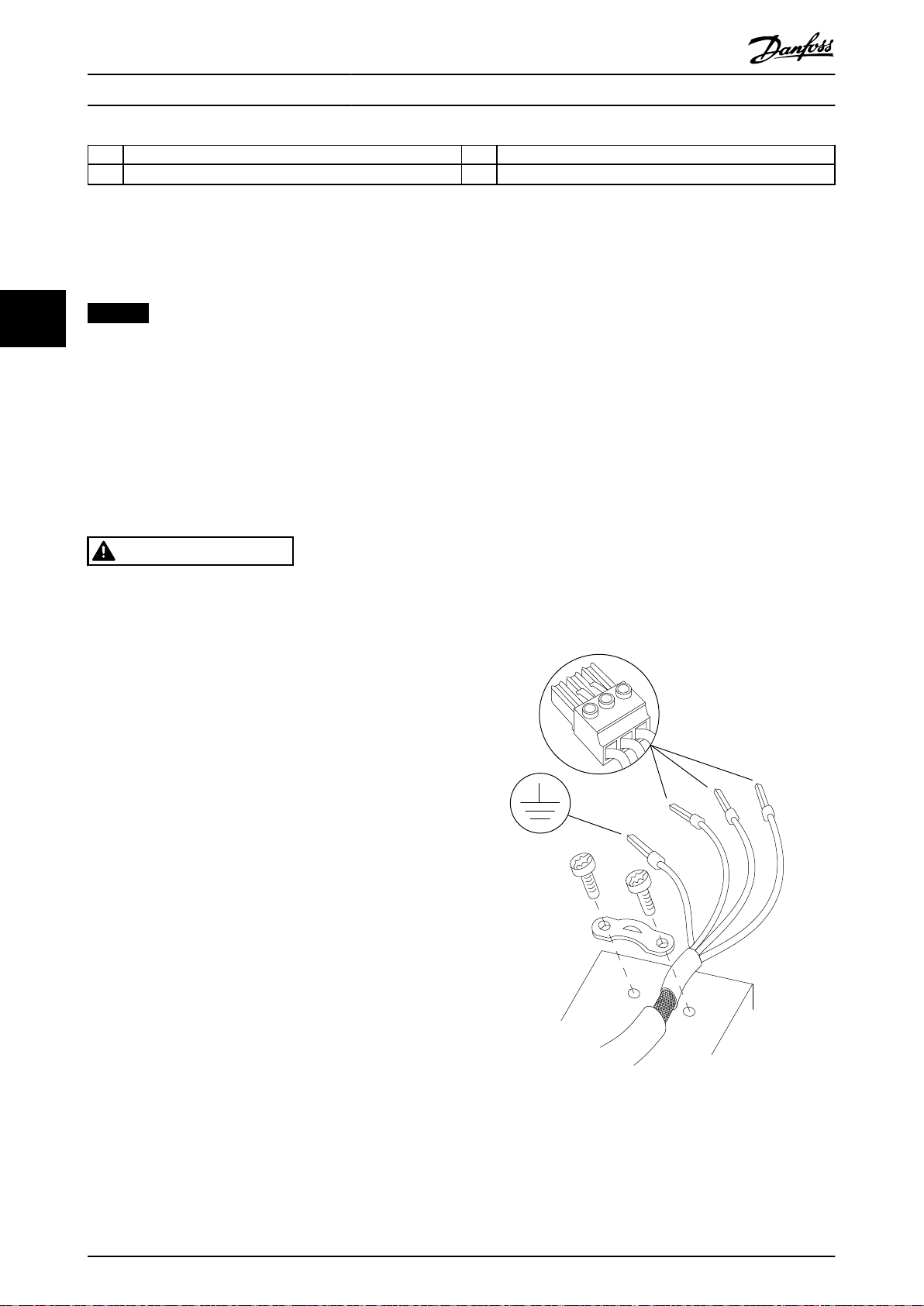
Procedimento para aterramento da blindagem do cabo
1. Descasque um pedaço do isolamento do cabo
externo.
2. Posicione o o desencapado sob a braçadeira de
cabo para estabelecer xação mecânica e contato
elétrico entre a blindagem do cabo e o ponto de
aterramento.
3. Conecte o o de aterramento ao terminal de
aterramento mais próximo de acordo com as
instruções de aterramento fornecidas em
capétulo 4.3 Aterramento, consulte Ilustração 4.4.
4. Conecte a ação trifásica do motor aos terminais
96 (U), 97 (V) e 98 (W), consulte Ilustração 4.4.
5. Aperte os terminais de acordo com as
informações fornecidas em capétulo 8.8 Torques de
Aperto de Conexão.
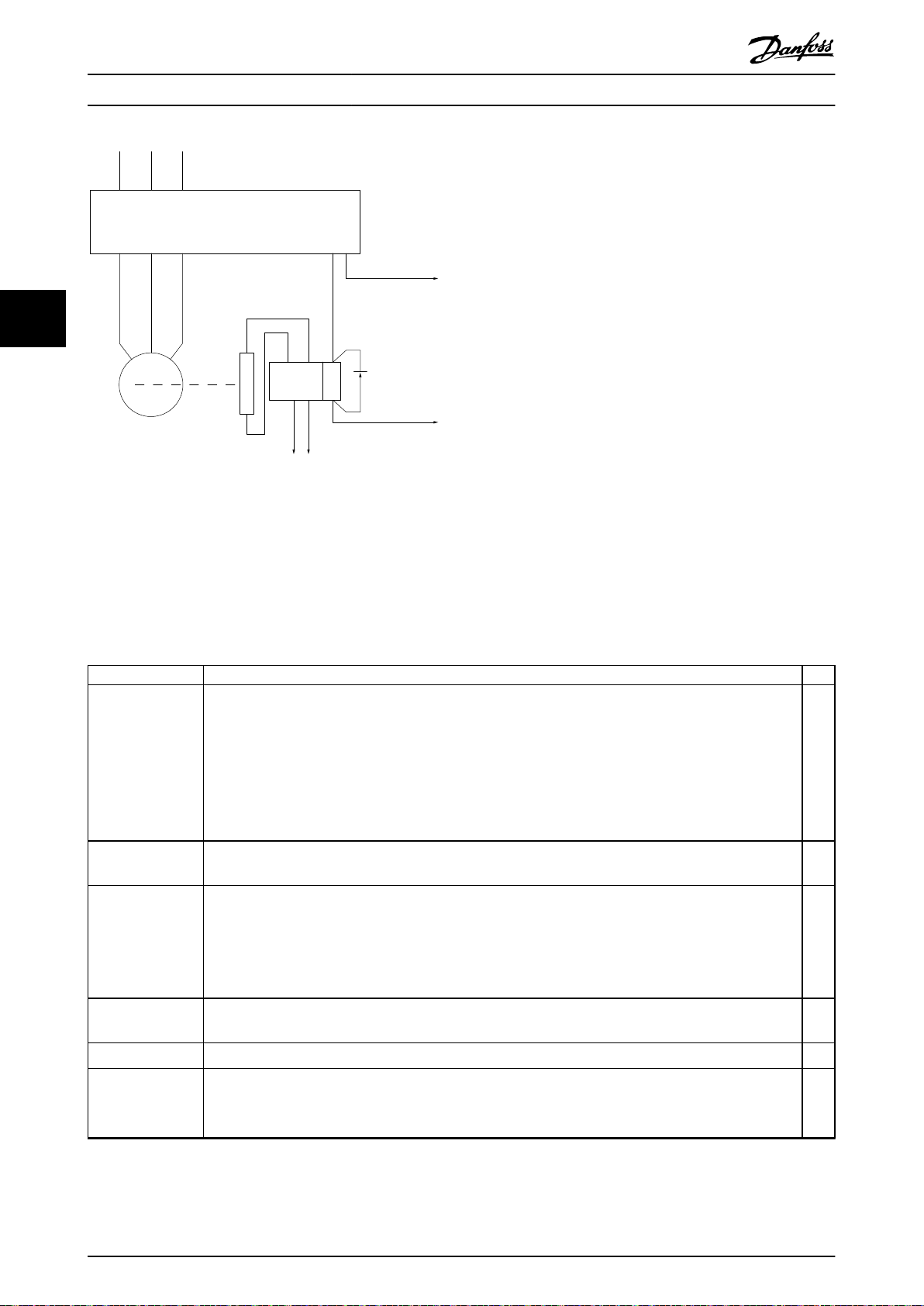
Ilustração 4.4 Conexão do motor
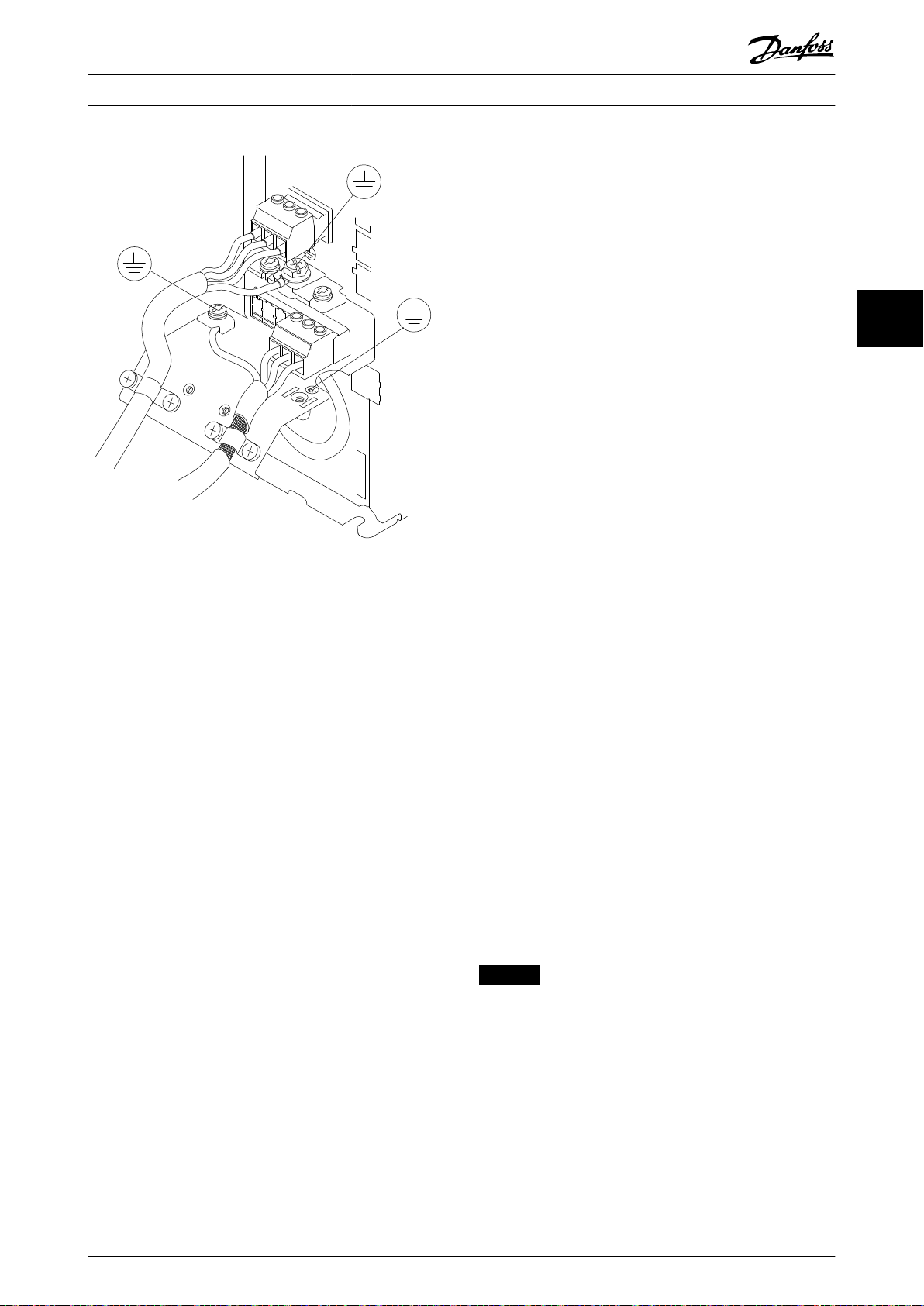
Ilustração 4.5 mostra entrada da rede elétrica, motor, e
ponto de aterramento para conversores de frequência
básica. As congurações reais variam com os tipos de
unidade e equipamentos opcionais.
14 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 21
+DC
BR-
B
M AINS
L1 L2 L3
91 92 93
RELAY 1 RELAY 2
99
U V W
MOTOR
99
130BF048.11
Instalação Elétrica Guia de Operação
Ilustração 4.5 Exemplo de ação do motor, da rede elétrica e
do aterramento
Ligação da Rede Elétrica CA
4.6
Dimensione a ação com base na corrente de
•
entrada do conversor de frequência. Para obter os
tamanhos máximos dos os, consulte
capétulo 8.1 Dados Elétricos.
Atenda os códigos elétricos locais e nacionais
•
para tamanhos do cabo.
Procedimento
1. Conecte a ação trifásica de potência de entrada
CA aos terminais L1, L2 e L3 (consulte
Ilustração 4.5).
2. Dependendo da conguração do equipamento,
conecte a potência de entrada nos terminais de
entrada da rede elétrica ou na desconexão de
entrada.
3. Aterre o cabo de acordo com as instruções de
aterramento fornecidas em
capétulo 4.3 Aterramento.
4. Quando fornecido a partir de uma fonte de rede
elétrica isolada (rede elétrica IT ou delta
utuante) ou rede TT/TN-S com um trecho
aterrado (delta aterrado), garanta que
parâmetro 14-50 Filtro de RFI esteja programado
para [0] O (Desligado). Esta conguração previne
danos ao barramento CC e reduz as correntes de
capacidade do terra de acordo com a norma IEC
61800-3.
Fiação de Controle
4.7
Isole o o de controle dos componentes de alta
•
potência no conversor de frequência.
Quando o conversor de frequência está
•
conectado a um termistor, certique-se de que o
o de controle do termistor esteja blindada e
possua um isolamento reforçado/duplo.
Recomenda-se uma tensão de alimentação de 24
V CC.
4.7.1 Safe Torque O (STO)
4.7.2 Controle do Freio Mecânico
Nas aplicações de elevação/abaixamento é necessário
controlar um freio eletromecânico.
Controle o freio utilizando uma saída do relé ou
•
saída digital (terminais 27 ou 29).
A saída deve ser mantida fechada (sem tensão)
•
durante o período em que o conversor de
frequência não puder manter o motor parado,
por exemplo, ao fato de a carga ser excessivamente pesada.
Selecione [32] Controle do freio mecânico no grupo
•
do parâmetro 5-4* Relés para aplicações com freio
eletromecânico.
O freio é liberado quando a corrente do motor
•
excede o valor em parâmetro 2-20 Corrente de
Liberação do Freio.
O freio é acionado quando a frequência de saída
•
for menor do que a frequência programada no
parâmetro 2-21 Velocidade de Ativação do Freio
[RPM] ou parâmetro 2-22 Velocidade de Ativação
do Freio [Hz], e somente se o conversor de
frequência executar um comando de parada.
Se o conversor de frequência estiver no modo alarme ou
em uma situação de sobretensão, o freio mecânico é
fechado imediatamente.
AVISO!
O conversor de frequência não é um dispositivo de
segurança. É responsabilidade de quem projetou o
sistema integrar dispositivos de segurança de acordo
com as normas nacionais de elevação pertinentes.
4 4
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 15
Page 22
130BA902.10
L1 L2 L3
U V W
02 01
A1
A2
Frequency converter
Output
relay
Command circuit
220 V AC
Mechanical
brake
Shaft
Motor
Freewheeling
diode
Brake
380 V AC
Output
contactor
input
power circuit
Instalação Elétrica
VLT® AutomationDrive FC 301/302
44
Ilustração 4.6 Conectando o Freio Mecânico ao Conversor de
Frequência
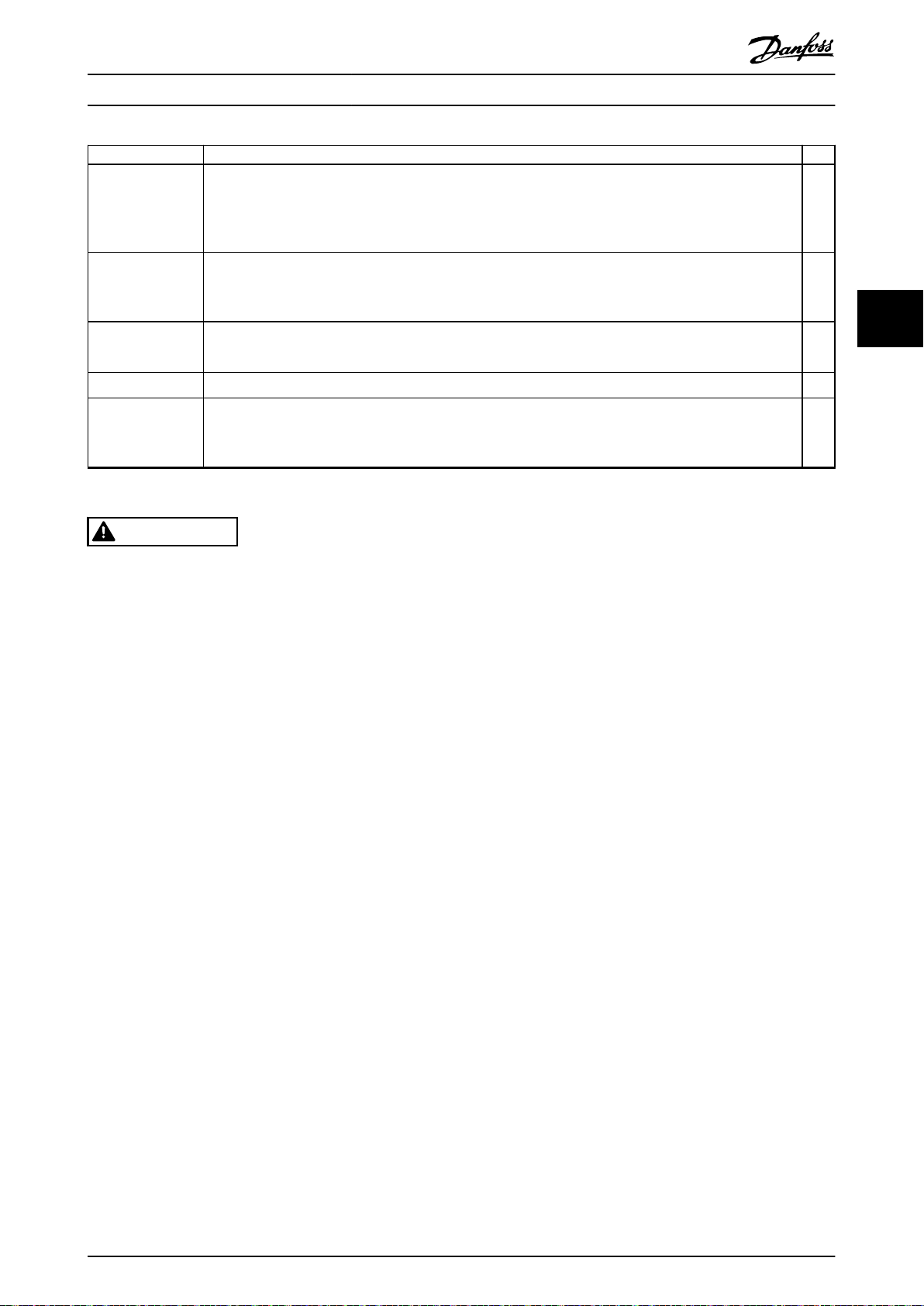
4.8 Lista de Vericação de Instalação
Antes de concluir a instalação da unidade, inspecione a instalação por completo, como está detalhado na Tabela 4.1.
Verique e marque esses itens quando concluídos.
Inspecionar Descrição
Equipamento
auxiliar
Disposição dos
cabos
Fiação de controle
Espaço para
ventilação
Condições ambiente•Verique se os requisitos para as condições ambiente foram atendidos.
Fusíveis e
disjuntores
Procure equipamentos auxiliares, chaves, disjuntores ou fusíveis/disjuntores de entrada, residindo no lado
•
de potência de entrada do conversor de frequência ou no lado de saída do motor. Certique-se de que
estão prontos para operação em velocidade total.
Verique a função e a instalação dos sensores usados para feedback para o conversor de frequência.
•
Remova qualquer tampa da correção do fator de potência no motor.
•
Ajuste todos os capacitores de correção do fator de potência no lado da rede elétrica e verique se estão
•
umedecidos.
Assegure que a ação do motor e o o de controle estão separadas ou blindadas ou em três conduítes
•
metálicos separados para isolamento de interferência de alta frequência.
Verique se há os partidos ou danicados e conexões soltas.
•
Verique se o o de controle está isolado da ação do motor e de potência para imunidade de ruído.
•
Verique a fonte de tensão dos sinais, caso necessário.
•
Recomenda-se o uso de cabo blindado ou de par trançado. Garanta que a blindagem esteja com terminação
correta.
Certique-se de que o espaço livre superior e inferior é adequado para garantir o uxo de ar necessário
•
para resfriamento, consulte capétulo 3.3.1 Montagem.
Verique se os fusíveis e os disjuntores estão corretos.
•
Verique se todos os fusíveis estão encaixados rmemente, em condições operacionais e se todos os
•
disjuntores estão na posição aberta.
☑
16 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 23
Instalação Elétrica Guia de Operação
Inspecionar Descrição
Aterramento
Fiação da energia
de entrada e de
saída
Interior do painel
Interruptores
Vibração
Tabela 4.1 Lista de Vericação de Instalação
Verique se há conexões do terra sucientes e certique-se de que essas conexões estejam bem apertadas
•
e sem oxidação.
Aterramento ao conduíte ou montagem do painel traseiro em uma superfície metálica, não é um
•
aterramento adequado.
Verique se há conexões soltas.
•
Verique se o motor e os cabos de rede elétrica estão em conduítes separados ou em cabos blindados
•
separados.
Inspecione se o interior da unidade está isento de sujeira, lascas metálicas, umidade e corrosão.
•
Verique se a unidade está montada em uma superfície metálica sem pintura.
•
Certique-se de que todas as congurações de interruptores e desconexões estão nas posições corretas.
•
Verique se a unidade está montada de maneira sólida e se estão sendo usadas montagens de choque, se
•
necessário.
Verique se há volume incomum de vibração.
•
CUIDADO
RISCO POTENCIAL NO CASO DE FALHA INTERNA
Risco de ferimentos pessoais se o conversor de frequência não estiver corretamente fechado.
Antes de aplicar potência, assegure que todas as tampas de segurança estão no lugar e bem presas.
•
☑
4 4
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 17
Page 24
Colocação em funcionamento
VLT® AutomationDrive FC 301/302
5 Colocação em funcionamento
5.1 Instruções de Segurança
Consulte capétulo 2 Segurança para instruções de
segurança gerais.
ADVERTÊNCIA
ALTA TENSÃO
55
Os conversores de frequência contêm alta tensão quando
conectados à potência de entrada da rede elétrica CA.
Instalação, inicialização e manutenção realizadas por
pessoal não qualicado poderá resultar em morte ou
lesões graves.
A instalação, inicialização e manutenção
•
deverão ser executadas somente por pessoal
qualicado.
AVISO!
As tampas frontais com sinais de advertência são parte
integrante do conversor de frequência e são
consideradas tampas de segurança. As tampas devem
estar no lugar antes de ligar a energia e em todos os
momentos.
Antes de aplicar potência:
1. Feche corretamente a tampa de segurança.
2. Verique se todas as buchas de cabo estão
apertadas rmemente.
3. Assegure que a potência de entrada da unidade
esteja desligada e bloqueada. Não cone na
chave de desconexão do conversor de frequência
para isolamento da potência de entrada.
4. Verique se não há tensão nos terminais de
entrada L1 (91), L2 (92) e L3 (93), de fase para
fase ou de fase para o terra.
5. Verique se não há tensão nos terminais de saída
96 (U), 97 (V) e 98 (W), de fase para fase e de
fase para o terra.
6. Conrme a continuidade do motor medindo os
valores de Ω em U–V (96–97), V–W (97–98) e W–
U (98–96).
7. Verique o aterramento correto do conversor de
frequência e do motor.
8. Inspecione se há conexões frouxas nos terminais
do conversor de frequência.
9. Conrme se a tensão de alimentação corresponde
à tensão do conversor de frequência e do motor.
18 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 25
130BF714.10
Auto
On
Reset
Hand
On
O
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
36.4 kW
Auto Remote Ramping
0.000
On
Alarm
Warn.
7.83 A
799 RPM
53.2 %
1
2
3
16
17
4
15
14
13
12
5
6
7
8 9 10 11
Colocação em funcionamento Guia de Operação
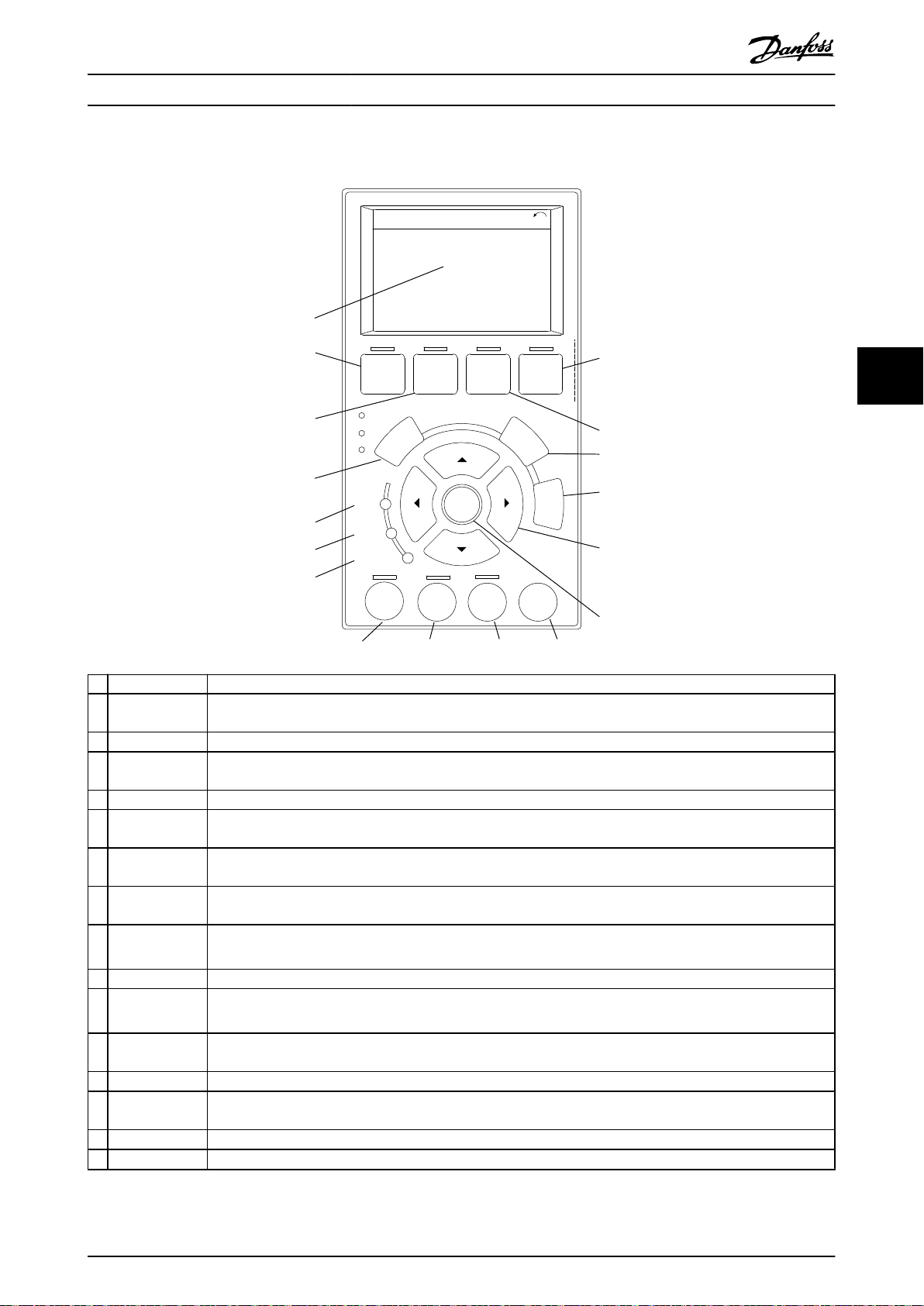
5.2 Operação do painel de controle local
5 5
Tecla Função
1 A informação mostrada na área de display dependerá da função ou menu selecionado (neste caso, congurações do
display Quick Menu Q3-13).
2 Status Mostra informações operacionais.
3 Quick Menu Permite acesso aos parâmetros de programação para obter instruções de setup iniciais e muitas instruções
detalhadas da aplicação.
4 Voltar Retorna à etapa ou lista anterior na estrutura de menu.
5 Luz indicadora
Ligado.
verde.
6 Luz indicadora
amarela.
7 Luz indicadora
vermelha.
8 [Hand On]
(Manual Ligado)
9 O (Desligado) Para o motor, mas não remove a energia para o conversor de frequência.
10 [Auto On] Coloca o sistema em modo operacional remoto.
11 Reset
(Reinicializar)
12 OK Pressione para acessar grupos do parâmetro ou para ativar uma seleção.
13 Teclas de
navegação
14 Info Pressione para obter uma denição da função exibida.
15 Cancel (Cancelar) Cancela a última alteração ou comando, desde que o modo display não seja alterado.
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 19
A luz indicadora acende quando uma advertência está ativa. Aparece um texto na área do display identicando o
Uma condição de falha faz com que a luz indicadora pisque e um texto de alarme é mostrado.
problema.
Coloca o conversor de frequência no modo de controle local, para que ele responda ao LCP.
Um sinal de parada externo por entrada de controle ou comunicação serial substitui o local [Hand On].
•
Responde a um comando de partida externo por terminais de controle ou comunicação serial.
•
Reinicializa o conversor de frequência manualmente após uma falha ser eliminada.
Pressione as teclas de navegação para mover entre os itens no menu.
Page 26
Colocação em funcionamento
Tecla Função
16 Main Menu
(Menu Principal)
17 Alarm Log
(Registro de
Alarmes)
Ilustração 5.1 Painel de Controle Local Gráco (GLCP)
Permite acesso a todos os parâmetros de programação.
Mostra uma lista das advertências atuais, os últimos 10 alarmes e o registro de manutenção.
VLT® AutomationDrive FC 301/302
5.3 Setup do sistema
55
1. Execute a adaptação automática do motor (AMA):
1a Programe os seguintes parâmetros básicos do motor, conforme mostrado Tabela 5.1 antes de executar
AMA.
1b Otimizar a compatibilidade entre o motor e o conversor de frequência por meio
parâmetro 1-29 Adaptação Automática do Motor (AMA).
2. Verique a rotação do motor.
3. Se o feedback do encoder for usado, execute as seguintes etapas:
3a Selecione [0] Malha aberta veloc. em parâmetro 1-00 Modo Conguração .
3b Selecione [1] Encoder de 24V em parâmetro 7-00 Fonte do Feedb. do PID de Veloc..
3c Pressione [Hand On].
3d
Pressione [►] para referência de velocidade positiva (parâmetro 1-06 Sentido Horário em [0] Normal).
3e Em parâmetro 16-57 Feedback [RPM], verique se o feedback é positivo.
Parâmetro 1-10 Construção do Motor
ASM PM SynRM
Parâmetro 1-20 Potência do Motor [kW]
Parâmetro 1-21 Potência do Motor [HP]
Parâmetro 1-22 Tensão do Motor X
Parâmetro 1-23 Freqüência do Motor X X
Parâmetro 1-24 Corrente do Motor X X X
Parâmetro 1-25 Velocidade nominal do motor X X X
Parâmetro 1-26 Torque nominal do Motor X X
Parâmetro 1-39 Pólos do Motor X
X
Tabela 5.1 Parâmetros básicos a serem vericados antes da AMA
20 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 27

130BB686.12
VLT
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
12
13
18
19
20
27
29
32
33
50
53
54
55
42
39
A53
U - I
D IN
37
Conguração básica de E/S Guia de Operação
6 Conguração básica de E/S
Os exemplos nesta seção têm a nalidade de referência
rápida para aplicações comuns.
A programação do parâmetro são os valores
•
padrão regionais, a menos que indicado de outro
modo (selecionados em parâmetro 0-03 Denições
Regionais).
Os parâmetros associados aos terminais e suas
•
congurações estão mostrados ao lado dos
desenhos
As congurações do interruptor necessárias para
•
os terminais analógicos A53 ou A54 também são
mostradas.
AVISO!
Ao usar o recurso opcional Safe Torque O (STO), um o
de jumper pode ser necessário entre o terminal 12 (ou
13) e o terminal 37 para que o conversor de frequência
opere com os valores de programação padrão de fábrica.
6.1 Exemplos de Aplicações
6.1.1 Termistor do motor
CUIDADO
ISOLAMENTO DO TERMISTOR
Risco de ferimentos pessoais ou danos ao equipamento.
Use somente termistores com isolamento
•
reforçado ou duplo para atender aos requisitos
de isolamento PELV.
Parâmetros
Função Conguração
Parâmetro 1-90
Proteção
Térmica do
Motor
Parâmetro 1-93
Fonte do
Termistor
* = Valor padrão
Notas/comentários:
Se apenas uma advertência é
necessária, programe
parâmetro 1-90 Proteção Térmica
do Motor para [1] advertência do
termistor.
D IN 37 é um opcional.
[2] Desarme do
termistor
[1] Entrada
analógica 53
6
6
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 21
Tabela 6.1 Termistor do motor
Page 28

FC
+24 V
+24 V
D IN
D IN
D IN
COM
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
COM
R1R2
12
13
18
19
20
27
29
32
33
37
50
53
54
55
42
39
01
02
03
04
05
06
130BB841.10
Start ( 18)
Start
reversing (19)
Relay output
Speed
Time
Current
1-71
1-71
2-21
2-21
1-76
Open
Closed
130BB842.10
Conguração básica de E/S
6.1.2 Controle do Freio Mecânico
VLT® AutomationDrive FC 301/302
6
Parâmetros
Função Conguração
[32] Controle
Parâmetro 5-40
Função do Relé
Parâmetro 5-10
do freio
mecânico
[8] Partida*
Terminal 18
Entrada Digital
Parâmetro 5-11
Terminal 19,
[11] Partida
em reversão
Entrada Digital
Parâmetro 1-71
0.2
Atraso da
Partida
Parâmetro 1-72
Função de
Partida
Parâmetro 1-76
[5] VVC+/FLUX
no sentido
horário
I
m,n
Corrente de
Partida
Parâmetro 2-20
Corrente de
Dependente
da aplicação
Liberação do
Freio
Parâmetro 2-21
Velocidade de
Ativação do
Freio [RPM]
Metade do
deslizamento
nominal do
motor
*= Valor padrão
Notas/comentários:
–
Tabela 6.2 Controle do Freio Mecânico
Ilustração 6.1 Controle do Freio Mecânico
22 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 29

130BP086.12
Status
0.0Hz 0.000kW 0.00A
0.0Hz
0
Earth Fault [A14]
Auto Remote Trip
1(1)
Manutenção, diagnósticos e ... Guia de Operação
7 Manutenção, diagnósticos e resolução de problemas
7.1 Manutenção e serviço
Em condições de operação e pers de carga normais, o
conversor de frequência é isento de manutenção durante
toda a vida útil projetada. Para evitar panes, perigos e
danos, examine o conversor de frequência quanto ao
aperto das conexões dos terminais, à entrada de poeira e
assim por diante, regularmente, dependendo das
condições de operação. Substitua as peças desgastadas ou
danicadas por peças de reposição originais ou peças
padrão. Para serviço e suporte, entre em contato com o
fornecedor Danfoss local.
ADVERTÊNCIA
PARTIDA ACIDENTAL
Quando o conversor de frequência estiver conectado à
rede elétrica CA, alimentação CC ou load sharing, o
motor pode dar partida a qualquer momento. Partida
acidental durante a programação, serviço ou serviço de
manutenção pode resultar em morte, ferimentos graves
ou danos à propriedade. O motor pode dar partida por
meio de um interruptor externo, um comando do
eldbus, um sinal de referência de entrada do LCP ou
após uma condição de falha eliminada.
Para impedir a partida do motor:
Desconecte o conversor da rede elétrica.
•
Pressione [O/Reset] no LCP, antes de
•
programar parâmetros.
Conecte toda a ação e monte completamente
•
o conversor, o motor e qualquer equipamento
acionado antes de conectar o conversor à rede
elétrica CA, alimentação CC ou load sharing.
operar e monitorar o status do conversor de frequência.
Após a falha ser corrigida, o conversor de frequência pode
ser reiniciado. Está pronto, então, para iniciar a operação
novamente.
Redenindo o conversor de frequência após o desarme/
bloqueio por desarme
Um desarme pode ser reiniciado em qualquer uma das 4
maneiras:
Pressione [Reset] (Reinicializar) no LCP.
•
Comando de entrada de reinicialização digital.
•
Comando de entrada de reinicialização de
•
comunicação serial.
Reinicialização automática.
•
Bloqueio por desarme
A potência de entrada é reativada. O motor para por
inércia. O conversor de frequência continuará a monitorar
o status do conversor de frequência. Remova a potência de
entrada para o conversor de frequência, corrija a causa da
falha e reinicie o conversor de frequência.
Exibições de advertências e alarmes
Uma advertência é mostrada no LCP junto com
•
um número da advertência.
Um alarme pisca junto com o número do alarme.
•
7 7
7.2 Tipos de Advertência e Alarme
Advertências
Uma advertência é emitida quando uma condição de
alarme é iminente, ou quando uma condição de operação
anormal está presente e pode resultar no conversor de
frequência emitir um alarme. Uma advertência se apaga
quando a condição anormal cessa.
Alarmes
O alarme indica uma falha que exige atenção imediata. A
falha sempre dispara um desarme ou um bloqueio por
desarme. Reiniciar o sistema após um alarme
Desarme
Uma advertência é emitida quando o conversor de
frequência é desarmado, o que signica que o conversor
de frequência suspende a operação para evitar danos ao
conversor de frequência ou ao sistema. O motor para por
inércia. A lógica do conversor de frequência continuará a
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 23
Ilustração 7.1 Exemplo de alarme
Além do texto e código do alarme no LCP, existem 3 luzes
indicadoras de status.
Page 30

Back
Cancel
Info
OK
On
Alarm
Warn.
130BB467.11
Manutenção, diagnósticos e ...
Luz indicadora de
advertência
Advertência Ligado Desligado
Alarme Desligado On (piscando)
Bloqueio por
desarme
77
Ilustração 7.2 Luzes indicadoras de status
Ligado On (piscando)
7.3 Lista de advertências e alarmes
As seguintes advertências e informações de alarme
denem cada advertência ou condição de alarme,
fornecem a causa provável para a condição e detalham um
procedimento de correção ou solução de problema.
ADVERTÊNCIA 1, 10 volts baixo
A tensão do cartão de controle é menor do que 10 V do
terminal 50.
Remova parte da carga do terminal 50 pois a alimentação
de 10 V está sobrecarregada. Máximo 15 mA ou mínimo
590 Ω.
Um curto circuito em um potenciômetro conectado ou
uma ação incorreta do potenciômetro pode causar essa
condição.
Resolução de Problemas
Remova a ação do terminal 50. Se a advertência
•
desaparecer, o problema é da ação. Se a
advertência permanecer, substitua o cartão de
controle.
ADVERTÊNCIA/ALARME 2, Erro de live zero
Esta advertência ou alarme aparece somente se
programado pelo usuário no parâmetro 6-01 Função
Timeout do Live Zero. O sinal em 1 das entradas analógicas
é menor do que 50% do valor mínimo programado para
essa entrada. Fiação rompida ou dispositivo defeituoso
enviando o sinal pode causar essa condição.
Resolução de Problemas
Verique as conexões em todos os terminais de
entrada analógica. Terminais do cartão de
controle 53 e 54 para sinais, terminal 55 comum.
VLT® General Purpose I/O MCB 101 terminais 11 e
12 para sinais, terminal 10 comum. VLT® Analog
VLT® AutomationDrive FC 301/302
Luz indicadora de
alarme
I/O MCB 109 terminais 1, 3, 5 para sinais,
terminais 2, 4, 6 comuns.
Verique se a programação do conversor de
frequência e as congurações de chave correspondem ao tipo de sinal analógico.
Execute o Teste de Sinal para Terminal de
Entrada.
ADVERTÊNCIA/ALARME 3, Sem Motor
Nenhum motor conectado na saída do conversor de
frequência.
ADVERTÊNCIA/ALARME 4, Perda de fase da rede elétrica
Uma das fases está ausente, no lado da alimentação, ou o
desbalanceamento da tensão de rede está muito alto. Esta
mensagem também será exibida para uma falha no
reticador de entrada. Os opcionais estão programados em
parâmetro 14-12 Função no Desbalanceamento da Rede.
Resolução de Problemas
Verique a tensão de alimentação e as correntes
•
de alimentação do conversor de frequência.
ADVERTÊNCIA 5, Tensão do barramento CC alta
A tensão do barramento CC é maior que o limite de
advertência de alta tensão. O limite depende das características nominais da tensão do conversor de frequência. A
unidade ainda está ativa.
ADVERTÊNCIA 6, Tensão do barramento CC baixa
A tensão do barramento CC é menor que o limite da
advertência de baixa tensão. O limite depende das características nominais da tensão do conversor de frequência. A
unidade ainda está ativa.
ADVERTÊNCIA/ALARME 7, Sobretensão CC
Se a tensão do barramento CC exceder o limite, o
conversor de frequência desarma depois de algum tempo.
Resolução de Problemas
Conectar um resistor de frenagem.
•
Prolongue o tempo de rampa.
•
Mudar o tipo de rampa.
•
Ative as funções em parâmetro 2-10 Função de
•
Frenagem.
Aumentar parâmetro 14-26 Atraso Desarme-Defeito
•
Inversor.
ADVERTÊNCIA/ALARME 8, Subtensão CC
Se a tensão do barramento CC cair abaixo do limite de
subtensão, o conversor de frequência verica se um
backup de alimentação 24 V CC está conectado. Se não
houver backup de alimentação 24 V CC, o conversor de
frequência desarma após um atraso de tempo xo. O
atraso de tempo varia com o tamanho da unidade.
Resolução de Problemas
Verique se a tensão de alimentação está de
•
acordo com a tensão no conversor de frequência.
Execute um teste da tensão de entrada.
•
24 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 31

Manutenção, diagnósticos e ... Guia de Operação
Realize um teste de circuito de carga leve.
•
ADVERTÊNCIA/ALARME 9, Sobrecarga do inversor
O conversor de frequência funcionou com mais de 100%
de sobrecarga durante muito tempo e está prestes a
desconectar. O contador de proteção térmica eletrônica do
inversor emite uma advertência a 98% e desarma a 100%
com um alarme. O conversor de frequência não pode ser
reinicializado antes do contador estar abaixo de 90%.
Solução de Problemas
Compare a corrente de saída mostrada no LCP
•
com a corrente nominal do conversor de
frequência.
Compare a corrente de saída mostrada no LCP
•
com a corrente do motor medida.
Mostrar a carga térmica do conversor de
•
frequência no LCP e monitorar o valor. Ao
funcionar acima das características nominais da
corrente contínua do conversor de frequência, o
contador aumenta. Ao funcionar abaixo das
características nominais da corrente contínua do
conversor de frequência, o contador diminui.
ADVERTÊNCIA/ALARME 10, Temperatura de sobrecarga
do motor
De acordo com a proteção térmica eletrônica (ETR), o
motor está muito quente.
Selecione 1 destas opções:
O conversor de frequência emite uma advertência
•
ou um alarme quando o contador está >90% se
parâmetro 1-90 Proteção Térmica do Motor estiver
programado para advertência de opcionais.
O conversor de frequência desarma quando o
•
contador atingir 100% se parâmetro 1-90 Proteção
Térmica do Motor estiver programado para
desarme de opcionais.
A falha ocorre quando o motor funciona com mais de
100% de sobrecarga por muito tempo.
Solução de Problemas
Verique se o motor está superaquecendo.
•
Verique se o motor está mecanicamente
•
sobrecarregado.
Verique se a corrente do motor programada em
•
parâmetro 1-24 Corrente do Motor está correta.
Assegure de que os dados do motor nos
•
parâmetros 1-20 a 1-25 estão programados
corretamente.
Se houver um ventilador externo em uso,
•
verique se ele está selecionado em
parâmetro 1-91 Ventilador Externo do Motor.
Executar AMA em parâmetro 1-29 Adaptação
•
Automática do Motor (AMA) ajusta o conversor de
frequência para o motor com mais precisão e
reduz a carga térmica.
ADVERTÊNCIA/ALARME 11, Superaquecimento do
termistor do motor
Verique se o termistor está desconectado. Selecione se o
conversor de frequência emite uma advertência ou um
alarme em parâmetro 1-90 Proteção Térmica do Motor.
Solução de Problemas
Verique se o motor está superaquecendo.
•
Verique se o motor está mecanicamente
•
sobrecarregado.
Ao usar o terminal 53 ou 54, verique se o
•
termistor está conectado corretamente entre o
terminal 53 ou 54 (entrada de tensão analógica) e
o terminal 50 (alimentação de +10 V). Verique
também se o interruptor do terminal do 53 ou 54
está programado para a tensão. Verique se
parâmetro 1-93 Fonte do Termistor seleciona o
terminal 53 ou 54.
Ao usar o terminal 18, 19, 31, 32 ou 33 (entradas
•
digitais), verique se o termistor está conectado
corretamente entre o terminal de entrada digital
usado (somente entrada digital PNP) e o terminal
50. Selecione o terminal a ser usado em
parâmetro 1-93 Fonte do Termistor.
ADVERTÊNCIA/ALARME 12, Limite de torque
O torque excedeu o valor em parâmetro 4-16 Limite de
Torque do Modo Motor ou o valor em parâmetro 4-17 Limite
de Torque do Modo Gerador. Parâmetro 14-25 Atraso do
Desarme no Limite de Torque pode alterar esta advertência
de uma condição de somente advertência para uma
advertência seguida de um alarme.
Resolução de Problemas
Se o limite de torque do motor for excedido
•
durante a aceleração da rampa, prolongue o
tempo de aceleração da rampa.
Se o limite de torque do gerador for excedido
•
durante a desaceleração da rampa, prolongue o
tempo de desaceleração da rampa.
Se o limite de torque ocorrer durante a operação,
•
aumente o limite de torque. Certique-se de que
o sistema pode operar com segurança em torque
mais alto.
Verique se a aplicação produz arrasto excessivo
•
da corrente no motor.
ADVERTÊNCIA/ALARME 13, Sobrecorrente
O limite de corrente de pico do inversor (aproximadamente
200% da corrente nominal) foi excedido. A advertência
dura aproximadamente1,5 s, em seguida, o conversor de
frequência desarma e emite um alarme. Carga de choque
ou aceleração rápida com altas cargas de inércia podem
causar essa falha. Se a aceleração durante a aceleração for
rápida, a falha também pode aparecer após o backup
cinético.
Se o controle estendido de freio mecânico for selecionado,
um desarme pode ser reinicializado externamente.
7 7
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 25
Page 32
Manutenção, diagnósticos e ...
VLT® AutomationDrive FC 301/302
Solução de Problemas
Remova a energia e verique se o eixo do motor
•
pode ser girado.
Verique se a potência do motor é compatível
•
com o conversor de frequência.
Verique se os dados do motor estão corretos
•
nos parâmetros 1-20 a 1-25.
ALARME 14, Falha de aterramento (ponto de
aterramento)
Há corrente da fase de saída para o terra, no cabo entre o
conversor de frequência e o motor ou no próprio motor.
Os transdutores de corrente detectam a falha de
aterramento medindo a corrente de saída do conversor de
frequência e a corrente que vai do motor para o conversor
de frequência. A falha de aterramento é emitida se o
desvio das duas correntes for muito grande. A corrente de
saída do conversor de frequência deve ser a mesma que a
77
corrente de entrada no conversor de frequência.
Solução de Problemas
Remova a energia do conversor de frequência e
•
repare a falha de aterramento.
Verique se há falhas de aterramento no motor
•
medindo com um megômetro a resistência em
relação ao terra dos cabos de motor e do motor.
Reinicialize qualquer desvio individual de
•
potencial nos três transdutores de corrente no
conversor de frequência. Execute a inicialização
manual ou execute uma AMA completa. Esse
método é mais relevante após troca do cartão de
potência.
ALARME 15, HW incompl.
Um opcional instalado não está funcionando com o
hardware ou o software do cartão de controle presente.
Registre o valor dos seguintes parâmetros e entre em
contato com Danfoss.
Parâmetro 15-40 Tipo do FC.
•
Parâmetro 15-41 Seção de Potência.
•
Parâmetro 15-42 Tensão.
•
Parâmetro 15-43 Versão de Software.
•
Parâmetro 15-45 String de Código Real.
•
Parâmetro 15-49 ID do SW da Placa de Controle.
•
Parâmetro 15-50 ID do SW da Placa de Potência.
•
Parâmetro 15-60 Opcional Montado.
•
Parâmetro 15-61 Versão de SW do Opcional (para
•
cada slot de opcional).
ALARME 16, Curto-circuito
Há um curto-circuito no motor ou na ação do motor.
Solução de Problemas
Remova a energia do conversor de frequência e
•
repare o curto-circuito.
ADVERTÊNCIA
ALTA TENSÃO
Os conversores de frequência contêm alta tensão quando
estão conectados à entrada da rede elétrica CA,
alimentação CC ou Load Sharing. Não utilizar pessoal
qualicado para instalar, inicializar e manter o conversor
de frequência pode resultar em ferimentos graves ou
fatais.
Desconecte a energia antes de prosseguir.
•
ADVERTÊNCIA/ALARME 17, Timeout da palavra de
controle
Não há comunicação com o conversor de frequência.
A advertência está ativa somente quando
parâmetro 8-04 Função Timeout da Control Word NÃO
estiver programado para [0]
Se parâmetro 8-04 Função Timeout da Control Word estiver
programado para [5] Parada e desarme, uma advertência é
exibida e o conversor de frequência desacelera até uma
parada e mostra um alarme.
Solução de Problemas
Verique as conexões no cabo de comunicação
•
serial.
Aumentar parâmetro 8-03 Tempo de Timeout da
•
Control Word.
Verique a operação do equipamento de
•
comunicação.
Verique se a instalação correta de EMC foi
•
realizada.
ADVERTÊNCIA/ALARME 20, Erro de entrada de
temperatura
O sensor de temperatura não está conectado.
ADVERTÊNCIA/ALARME 21, Erro de parâmetro
O parâmetro está fora do intervalo. O número do
parâmetro é exibido no display.
Solução de Problemas
Programe o parâmetro afetado para um valor
•
válido.
ADVERTÊNCIA/ALARME 22, Freio mecânico do guindaste
O valor dessa advertência/alarme indica a causa:.
0 = A referência de torque não foi atingida antes do
timeout (parâmetro 2-27 Tempo da Rampa de Torque).
1 = Feedback esperado do freio não foi recebido antes do
timeout (parâmetro 2-23 Atraso de Ativação do Freio,
parâmetro 2-25 Tempo de Liberação do Freio).
O(desligado).
26 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 33
Manutenção, diagnósticos e ... Guia de Operação
ADVERTÊNCIA 23, Falha no ventilador interno
A função de advertência do ventilador é uma função de
proteção que verica se o ventilador está instalado/
funcionando. A advertência de ventilador pode ser
desativada em parâmetro 14-53 Mon.Ventldr ([0]
Desativado).
Há um sensor de feedback montado no ventilador. Se o
ventilador for comandado para funcionar e não houver
feedback do sensor, esse alarme será exibido. Este alarme
também mostra se há um erro de comunicação entre o
cartão de potência do ventilador e o cartão de controle.
Verique o registro de alarme (consulte
capétulo 5.2 Operação do painel de controle local) para o
valor de relatório associados com esta advertência.
Se o valor de relatório for 2, há um problema de hardware
com um dos ventiladores. Se o valor de relatório for 12, há
um problema de comunicação entre o cartão de potência
do ventilador e o cartão de controle.
Resolução de problemas de ventilador
Desligue e ligue o conversor de frequência e
•
verique se o ventilador funciona brevemente
durante a inicialização.
Verique se a operação do ventilador está
•
adequada. Utilize o grupo do parâmetro 43-**
Leituras de unidade para mostrar a velocidade de
cada ventilador.
Resolução de problemas do cartão de potência do
ventilador
Verique a ação entre o cartão de potência do
•
ventilador e o cartão de controle.
Poderá ser necessário substituir o cartão de
•
potência do ventilador.
Poderá ser necessário substituir o cartão de
•
controle.
ADVERTÊNCIA 24, Falha no ventilador externo
A função de advertência do ventilador é uma função de
proteção que verica se o ventilador está instalado/
funcionando. A advertência de ventilador pode ser
desativada em parâmetro 14-53 Mon.Ventldr ([0]
Desativado).
Há um sensor de feedback montado no ventilador. Se o
ventilador for comandado para funcionar e não houver
feedback do sensor, esse alarme será exibido. Esse alarme
também mostra se há um erro de comunicação entre o
cartão de potência e o cartão de controle.
Verique o registro de alarme (consulte
capétulo 5.2 Operação do painel de controle local) para o
valor de relatório associados com esta advertência.
Se o valor de relatório for 1, há um problema de hardware
com um dos ventiladores. Se o valor de relatório for 11, há
um problema de comunicação entre o cartão de potência
e o cartão de controle.
Resolução de problemas de ventilador
Desligue e ligue o conversor de frequência e
•
verique se o ventilador funciona brevemente
durante a inicialização.
Verique se a operação do ventilador está
•
adequada. Utilize o grupo do parâmetro 43-**
Leituras de unidade para mostrar a velocidade de
cada ventilador.
Resolução de problemas do cartão de potência
Verique a ação entre o cartão de potência e o
•
cartão de controle.
Poderá ser necessário substituir o cartão de
•
potência.
Poderá ser necessário substituir o cartão de
•
controle.
ADVERTÊNCIA 25, Curto-circuito no resistor de frenagem
O resistor de frenagem é monitorado durante a operação.
Se ocorrer um curto-circuito, a função de frenagem será
desabilitada e a advertência será exibida. O conversor de
frequência ainda está operacional, mas sem a função de
frenagem.
Solução de Problemas
Remova a energia do conversor de frequência e
•
substitua o resistor de frenagem (consulte
parâmetro 2-15 Vericação do Freio).
ADVERTÊNCIA/ALARME 26, Limite de carga do resistor de
frenagem
A potência transmitida ao resistor de frenagem é calculada
como um valor médio ao longo dos últimos 120 s de
tempo de operação. O cálculo é baseado na tensão do
barramento CC e no valor do resistor de frenagem
programados em parâmetro 2-16 Corr Máx Frenagem CA. A
advertência estará ativa quando a energia de frenagem
dissipada for maior do que 90% da potência do resistor de
frenagem. Se a opção [2] Desarme estiver selecionada em
parâmetro 2-13 Monitoramento da Potência d Frenagem, o
conversor de frequência desarma quando a energia de
frenagem dissipada atingir 100%.
ADVERTÊNCIA/ALARME 27, Defeito do circuito de
frenagem
O transistor do freio é monitorado durante a operação e se
ocorrer curto-circuito a função de frenagem é desativada e
uma advertência é emitida. O conversor de frequência
ainda está operacional, mas como o transistor do freio está
em curto-circuito, uma energia considerável é transmitida
ao resistor de frenagem, mesmo se estiver inativo.
Solução de Problemas
Remova a energia do conversor de frequência e
•
remova o resistor de frenagem.
ADVERTÊNCIA/ALARME 28, Vericação do freio falhou
O resistor de frenagem não está conectado ou não está
funcionando.
Solução de Problemas
Verique parâmetro 2-15 Vericação do Freio.
•
7 7
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 27
Page 34
Manutenção, diagnósticos e ...
VLT® AutomationDrive FC 301/302
ALARME 29, Temperatura do dissipador de calor
A temperatura máxima do dissipador de calor foi excedida.
A falha de temperatura não é reinicializada até a
temperatura cair abaixo de uma temperatura denida do
dissipador de calor. O pontos desarme e de reinicialização
são diferentes com base na potência do conversor de
frequência.
Solução de Problemas
Verique as seguintes condições:
A temperatura ambiente está muito alta.
•
Os cabos de motor são muito longos.
•
Espaço de ventilação incorreto acima e abaixo do
•
conversor de frequência.
Fluxo de ar obstruído ao redor do conversor de
•
frequência.
Ventilador do dissipador de calor danicado.
•
77
ALARME 30, Fase U do motor ausente
A fase U do motor, entre o conversor de frequência e o
motor, está ausente.
Dissipador de calor sujo.
•
ADVERTÊNCIA
ALTA TENSÃO
Os conversores de frequência contêm alta tensão quando
estão conectados à entrada da rede elétrica CA,
alimentação CC ou Load Sharing. Não utilizar pessoal
qualicado para instalar, inicializar e manter o conversor
de frequência pode resultar em ferimentos graves ou
fatais.
Desconecte a energia antes de prosseguir.
•
Solução de Problemas
Remova a energia do conversor de frequência e
•
verique a fase U do motor.
ALARME 31, Fase V do motor ausente
A fase V do motor, entre o conversor de frequência e o
motor, está ausente.
ADVERTÊNCIA
ALTA TENSÃO
Os conversores de frequência contêm alta tensão quando
estão conectados à entrada da rede elétrica CA,
alimentação CC ou Load Sharing. Não utilizar pessoal
qualicado para instalar, inicializar e manter o conversor
de frequência pode resultar em ferimentos graves ou
fatais.
Desconecte a energia antes de prosseguir.
•
Solução de Problemas
Remova a energia do conversor de frequência e
•
verique a fase V do motor.
ALARME 32, Fase W do motor ausente
A fase W do motor, entre o conversor de frequência e o
motor, está ausente.
ADVERTÊNCIA
ALTA TENSÃO
Os conversores de frequência contêm alta tensão quando
estão conectados à entrada da rede elétrica CA,
alimentação CC ou Load Sharing. Não utilizar pessoal
qualicado para instalar, inicializar e manter o conversor
de frequência pode resultar em ferimentos graves ou
fatais.
Desconecte a energia antes de prosseguir.
•
Solução de Problemas
Remova a energia do conversor de frequência e
•
verique a fase W do motor.
ALARME 33, Falha de inrush
Houve um excesso de energizações, durante um curto
período de tempo.
Solução de Problemas
Deixe a unidade esfriar até a temperatura de
•
operação.
ADVERTÊNCIA/ALARME 34, Falha de comunicação do
eldbus
O eldbus no cartão do opcional de comunicação não está
funcionando.
ADVERTÊNCIA/ALARME 35, Defeito de Opcional
Um alarme de opcional é recebido. O alarme é especíco
do opcional. A causa mais provável é uma falha de
comunicação ou energização.
ADVERTÊNCIA/ALARME 36, Falha de rede elétrica
Esta advertência/alarme só está ativa se a tensão de
alimentação do conversor de frequência for perdida e o
parâmetro 14-10 Falh red elétr NÃO estiver programado
como [0] Sem função. Verique os fusíveis no conversor de
frequência e a fonte de alimentação de energia da rede
elétrica para a unidade.
ALARME 37, Desbalanceamento da tensão de
alimentação
Há um desbalanceamento da corrente entre as unidades
de energia.
ALARME 38, Defeito interno
Quando ocorre um defeito interno, um número do código
denido em Tabela 7.1 é exibido.
Resolução de problemas
Desligue e ligue.
•
Verique se o opcional foi instalado
•
corretamente.
Verique se há ação solta ou ausente.
•
28 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 35
Manutenção, diagnósticos e ... Guia de Operação
Pode ser necessário entrar em contato com o fornecedor
ou o departamento de serviço da Danfoss. Anote o
número do código para obter mais orientações sobre a
resolução de problemas.
Número Texto
0 A porta de comunicação serial não pode ser inicia-
lizada: Entre em contato com o Danfoss fornecedor
ou o Danfoss departamento de serviço.
256–258 Os dados da EEPROM de energia estão com
defeito ou são muito antigos. Substitua o cartão
de potência.
512–519 Defeito interno. Entre em contato com o Danfoss
fornecedor ou o Danfoss departamento de serviço.
783 Valor de parâmetro fora dos limites mínimo/
máximo.
1024–1284 Defeito interno. Entre em contato com o Danfoss
fornecedor ou o Danfoss departamento de serviço.
1299 O software do opcional no slot A é muito antigo.
1300 O software do opcional no slot B é muito antigo.
1302 O software do opcional no slot C1 é muito antigo.
1315 O software do opcional no slot A não é suportado/
permitido.
1316 O software do opcional no slot B não é suportado/
permitido.
1318 O software do opcional no slot C1 não é
suportado/permitido.
1379–2819 Defeito interno. Entre em contato com o Danfoss
fornecedor ou o Danfoss departamento de serviço.
1792 Reinicialização de hardware do processador de
sinal digital.
1793 Os parâmetros derivados do motor não foram
transferidos corretamente para o processador de
sinal digital.
1794 Dados de potência não transferidos corretamente
para o processador de sinal digital na energização.
1795 O processador de sinal digital recebeu muitos
telegramas de SPI desconhecidos. O conversor de
frequência também utiliza esse código de falha se
o MCO não for energizado corretamente. Essa
situação pode ocorrer devido à proteção de EMC
inadequada ou aterramento incorreto.
1796 Erro de cópia da RAM.
1798 A versão de software 48.3X ou mais recente é
usada com o cartão de controle MK1. Substitua
pelo cartão de controle MKII versão 8.
2561 Substitua o cartão de controle.
2820 Estouro de empilhamento do LCP.
2821 Estouro da porta serial.
2822 Estouro da porta USB.
3072–5122 O valor de parâmetro está fora dos limites.
5123 Opcional no slot A: Hardware incompatível com o
hardware da placa de controle.
5124 Opcional no slot B: Hardware incompatível com o
hardware da placa de controle.
Número Texto
5125 Opcional no slot C0: Hardware incompatível com o
hardware da placa de controle.
5126 Opcional no slot C1: Hardware incompatível com o
hardware da placa de controle.
5376–6231 Defeito interno. Entre em contato com o Danfoss
fornecedor ou o Danfoss departamento de serviço.
Tabela 7.1 Códigos de defeito interno
ALARME 39, Sensor do dissipador de calor
Sem feedback do sensor de temperatura do dissipador de
calor.
O sinal do sensor térmico do IGBT não está disponível no
cartão de potência. O problema pode estar no cartão de
potência, no cartão do conversor do gate ou no cabo tipo
ta entre o cartão de potência e o cartão do conversor do
gate.
ADVERTÊNCIA 40, Sobrecarga do terminal de saída
digital 27
Verique a carga conectada ao terminal 27 ou remova a
conexão de curto-circuito. Verique parâmetro 5-00 Modo
I/O Digital e parâmetro 5-01 Modo do Terminal 27.
ADVERTÊNCIA 41, Sobrecarga do terminal de saída
digital 29
Verique a carga conectada ao terminal 29 ou remova a
conexão de curto circuito. Verique também
parâmetro 5-00 Modo I/O Digital e parâmetro 5-02 Modo do
Terminal 29.
ADVERTÊNCIA 42, Sobrecarga da saída digital em X30/6
ou sobrecarga da saída digital em X30/7
Para o terminal X30/6, verique a carga conectada ao
terminal X30/6 ou remova a conexão de curto-circuito.
Verique também o parâmetro 5-32 Terminal X30/6 Saída
Digital (VLT® General Purpose I/O MCB 101).
Para o terminal X30/7,
verique a carga conectada ao
terminal X30/7 ou remova a conexão de curto-circuito.
Verique o parâmetro 5-33 Terminal X30/7 Saída Digital
(VLT® General Purpose I/O MCB 101).
ALARME 43, Alimentação externa
O VLT® Extended Relay Option MCB 113 é montado sem
24 V CC externa. Conecte uma fonte de alimentação de 24
V CC externa ou especique que não é usada alimentação
externa via parâmetro 14-80 Opc.Suprid p/Fonte 24VCC
Extern, [0] Não. Uma mudança em
parâmetro 14-80 Opc.Suprid p/Fonte 24VCC Extern requer um
ciclo de energização.
ALARME 45, Falha à terra 2
Falha de aterramento.
Solução de Problemas
Verique se o aterramento está adequado e se há
•
conexões soltas.
Verique o tamanho correto dos os.
•
7 7
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 29
Page 36

Manutenção, diagnósticos e ...
VLT® AutomationDrive FC 301/302
Verique os cabos de motor para ver se há curto-
•
-circuito ou correntes de fuga.
ALARME 46, Alimentação do cartão de potência
A alimentação do cartão de potência está fora de faixa.
Outro motivo pode ser um ventilador do dissipador de
calor com defeito.
Há 3 fontes de alimentação geradas pela alimentação em
modo chaveado (SMPS) no cartão de potência:
24 V.
•
5 V.
•
±18 V.
•
Quando energizado com a VLT® 24 V DC Supply MCB 107,
somente as alimentações de 24 V e 5 V são monitoradas.
Quando energizado com tensão de rede trifásica, todas as
3 fontes de alimentação são monitoradas.
Solução de Problemas
77
ADVERTÊNCIA 47, Alimentação 24 V baixa
A alimentação do cartão de potência está fora de faixa.
Há 3 fontes de alimentação geradas pela alimentação em
modo chaveado (SMPS) no cartão de potência:
Solução de Problemas
ADVERTÊNCIA 48, Alimentação 1,8 V baixa
A alimentação de 1,8 V CC usada no cartão de controle
está fora dos limites permitidos. A alimentação é medida
no cartão de controle.
Solução de Problemas
Verique se há um cartão de potência com
•
defeito.
Verique se há um cartão de controle com
•
defeito.
Verique se há um cartão de opcional com
•
defeito.
Se uma alimentação de 24 V CC é usada,
•
verique se o fornecimento da alimentação é
adequado.
Verique se há um ventilador do dissipador de
•
calor com defeito.
24 V.
•
5 V.
•
±18 V.
•
Verique se há um cartão de potência com
•
defeito.
Verique se há um cartão de controle com
•
defeito.
Se houver um cartão de opcional, verique se há
•
sobretensão.
ADVERTÊNCIA 49, Limite de velocidade
A advertência é mostrada quando a velocidade está fora
da faixa especicada em parâmetro 4-11 Lim. Inferior da
Veloc. do Motor [RPM] e parâmetro 4-13 Lim. Superior da
Veloc. do Motor [RPM]. Quando a velocidade estiver abaixo
do limite especicado em parâmetro 1-86 Velocidade de
Desarme Baixa [RPM] (exceto ao dar partida ou parar), o
conversor de frequência desarma.
ALARME 50, Calibração AMA
Entre em contato com o fornecedor Danfoss ou com o
Departamento de serviço da Danfoss.
ALARME 51, U
As congurações de tensão do motor, corrente do motor e
potência do motor estão erradas.
Solução de Problemas
Verique as congurações nos parâmetros 1-20 a
•
1-25.
ALARME 52, AMA I
A corrente do motor está baixa demais.
Solução de Problemas
Verique as congurações em
•
parâmetro 1-24 Corrente do Motor.
ALARME 53, Motor AMA muito grande
O motor é muito grande para a AMA funcionar.
ALARME 54, Motor muito pequeno para AMA
O motor é muito pequeno para a AMA funcionar.
ALARME 55, Parâmetro AMA fora de faixa
A AMA não pode ser executada porque os valores de
parâmetro do motor estão fora do intervalo aceitável.
ALARME 56, AMA interrompida pelo usuário
A AMA é interrompida manualmente.
ALARME 57, Defeito interno da AMA
Tente reiniciar a AMA. Reinicializações repetidas podem
superaquecer o motor.
ALARME 58, Defeito interno da AMA
Entre em contato com o fornecedor do Danfoss.
ADVERTÊNCIA 59, Limite de Corrente
A corrente é maior do que o valor em
parâmetro 4-18 Limite de Corrente. Assegure de que os
dados do motor nos parâmetros 1-20 a 1-25 estão
programados corretamente. Aumente o limite de corrente
caso seja necessário. Garanta que o sistema consiga operar
com segurança em um limite mais elevado.
ADVERTÊNCIA 60, Bloqueio externo
Um sinal de entrada digital indica uma condição de falha
externa ao conversor de frequência. Um bloqueio externo
comandou o desarme do conversor de frequência.
Resolução de Problemas
Elimine a condição de falha externa.
•
Para retomar a operação normal, aplique 24 V CC
•
ao terminal programado para bloqueio externo.
Reinicialize o conversor de frequência.
•
nom
, I
AMA
nom
baixa
nom
30 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 37
Manutenção, diagnósticos e ... Guia de Operação
ADVERTÊNCIA/ALARME 61, Erro de feedback
Um erro entre a velocidade calculada e a medição da
velocidade, a partir do dispositivo de feedback.
Resolução de Problemas
Verique as congurações de advertência/alarme/
•
desativação em parâmetro 4-30 Função Perda Fdbk
do Motor.
Programe o erro tolerável em parâmetro 4-31 Erro
•
Feedb Veloc. Motor.
Programe o tempo de perda de feedback
•
tolerável em parâmetro 4-32 Timeout Perda Feedb
Motor.
ADVERTÊNCIA 62, Frequência de saída no limite máximo
Se a frequência de saída atingir o valor denido em
parâmetro 4-19 Freqüência Máx. de Saída, o conversor de
frequência emite uma advertência. A advertência cessa
quando a saída cair abaixo do limite máximo. Se o
conversor de frequência não puder limitar a frequência, ele
desarma e emite um alarme. O último caso pode acontecer
no modo de uxo se o conversor de frequência perder o
controle do motor.
Resolução de Problemas
Verique as possíveis causas na aplicação.
•
Aumente o limite de frequência de saída. Garanta
•
que o sistema pode operar com segurança com
uma frequência de saída mais alta.
ALARME 63, Freio mecânico baixo
A corrente do motor real não excedeu a corrente de
liberação do freio dentro da janela do tempo de retardo de
partida.
ADVERTÊNCIA 64, Limite de tensão
A combinação de carga e velocidade exige uma tensão do
motor mais alta do que a tensão CC real.
ADVERTÊNCIA/ALARME 65, Superaquecimento do cartão
de controle
A temperatura de desativação do cartão de controle é de
85 °C (185 °F).
Solução de Problemas
Verique se a temperatura ambiente operacional
•
está dentro dos limites.
Verique se há ltros entupidos.
•
Verique a operação do ventilador.
•
Verique o cartão de controle.
•
ADVERTÊNCIA 66, Temperatura do dissipador de calor
baixa
O conversor de frequência está muito frio para operar. Esta
advertência baseia-se no sensor de temperatura no
módulo do IGBT. Aumente a temperatura ambiente da
unidade. Além disso, uma pequena quantidade de corrente
pode ser fornecida ao conversor de frequência sempre que
o motor for parado programando parâmetro 2-00 Corrente
de Hold CC/Preaquecimento para 5% e
parâmetro 1-80 Função na Parada.
ALARME 67, Conguração do módulo opcional foi
alterada
Um ou mais opcionais foi acrescentado ou removido,
desde o último desligamento. Verique se a alteração da
conguração foi intencional e reinicialize a unidade.
ALARME 68, Parada segura ativada
Safe Torque O (STO) foi ativado. Para retomar a operação
normal, aplique 24 V CC no terminal 37 e em seguida
envie um sinal de reset (via barramento, E/S digital ou
pressionando [Reset]).
ALARME 69, Temperatura do cartão de potência
O sensor de temperatura no cartão de potência está ou
muito quente ou muito frio.
Solução de Problemas
Verique se a temperatura ambiente operacional
•
está dentro dos limites.
Verique se há ltros entupidos.
•
Verique operação do ventilador.
•
Verique o cartão de potência.
•
ALARME 70, Conguração ilegal de FC
O cartão de controle e o cartão de potência são incompatíveis. Para vericar a compatibilidade, entre em contato
com o fornecedor Danfoss com o código de tipo indicado
na plaqueta de identicação da unidade e os números de
peça dos cartões.
ALARME 71, Parada segura PTC 1
STO foi ativado a partir do VLT® PTC Thermistor Card MCB
112 (motor muito quente). A operação normal pode ser
retomada quando o MCB 112 aplicar 24 V CC no terminal
37 novamente (quando a temperatura do motor atingir um
nível aceitável) e quando a entrada digital do MCB 112 for
desativada. Quando isso ocorrer, envie um sinal de reset
(via barramento ou E/S digital ou pressionando [Reset]).
ALARME 72, Falha perigosa
STO com bloqueio por desarme. Uma combinação
inesperada de comandos de STO ocorreu:
O VLT® PTC Thermistor Card MCB 112 ativa o
•
X44/10, mas o STO não é ativado.
MCB 112 é o único dispositivo que usa STO
•
(especicado por meio da seleção [4] Alarme do
PTC 1 ou [5] PTC 1 warning em
parâmetro 5-19 Terminal 37 Parada Segura), o STO
é ativado e o X44/10 não é ativado.
ADVERTÊNCIA 73, Nova partida automática de parada
segura
STO ativado. Com a nova partida automática ativada, o
motor poderá dar partida quando a falha for removida.
ALARME 74, Termistor do PTC
Alarme relacionado ao VLT® PTC Thermistor Card MCB 112.
O PTC não está funcionando.
7 7
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 31
Page 38
Manutenção, diagnósticos e ...
VLT® AutomationDrive FC 301/302
ALARME 75, Seleção de perl ilegal
Não grave o valor do parâmetro enquanto o motor estiver
funcionando. Pare o motor antes de gravar o perl MCO
em parâmetro 8-10 Perl da Control Word.
ADVERTÊNCIA 77, Modo de energia reduzida
O conversor de frequência está operando em modo de
potência reduzida (menos do que o número permitido de
seções do inversor). Esta advertência é gerada no ciclo de
energização quando o conversor de frequência estiver
programado para funcionar com menos inversores e
permanecer ligado.
ALARME 78, Erro de tracking
A diferença entre o valor de setpoint e o valor real excede
o valor em parâmetro 4-35 Erro de Tracking.
Resolução de Problemas
Desabilite a função ou selecione um alarme/
•
advertência em parâmetro 4-34 Função Erro de
77
ALARME 79, Conguração ilegal da seção de potência
O cartão de escala tem um número de peça incorreto ou
não está instalado. Pode ser que a bucha MK102 não esteja
instalado no cartão de potência.
ALARME 80, Conversor inicializado no valor padrão
As congurações de parâmetro são inicializadas com as
congurações padrão após um reset manual. Para apagar o
alarme, reinicialize a unidade.
ALARME 81, CSIV corrompido
O arquivo do CSIV tem erros de sintaxe.
ALARME 82, Erro de parâmetro do CSIV
O CSIV falhou em inicializar um parâmetro.
ALARME 83, Combinação de opcionais ilegal
Os opcionais montados são incompatíveis.
ALARME 84, Sem opcionais de segurança
O opcional de segurança foi removido sem aplicar um
reset geral. Reconecte o opcional de segurança.
ALARME 88, Detecção de opcionais
Uma modicação no layout do opcional foi detectada.
Parâmetro 14-89 Option Detection está programado para [0]
Conguração congelada e o layout opcional foi alterado.
Tracking.
Investigue a mecânica em torno da carga e do
•
motor. Verique as conexões de feedback do
encoder do motor para o conversor de
frequência.
Selecione a função de feedback de motor no
•
parâmetro 4-30 Função Perda Fdbk do Motor.
Ajuste a faixa de erro de tracking em
•
parâmetro 4-35 Erro de Tracking e
parâmetro 4-37 Erro de Tracking Rampa.
ADVERTÊNCIA 89, Deslizamento do freio mecânico
O monitor do freio de içamento detecta uma velocidade
do motor acima de 10 rpm.
ALARME 90, Monitor de feedback
Verique a conexão do opcional de resolver/encoder e, se
necessário, substitua o VLT® Encoder Input MCB 102 ou o
VLT® Resolver Input MCB 103.
ALARME 91,
analógica 54
Coloque o interruptor S202 na posição OFF (entrada de
tensão) quando houver um sensor KTY conectado ao
terminal de entrada analógica 54.
ALARME 99, Rotor bloqueado
O rotor está bloqueado.
ADVERTÊNCIA/ALARME 104, Falha do ventilador de
mistura
O ventilador não está funcionando. O monitor do
ventilador verica se o ventilador está girando na
energização ou sempre que o ventilador de mistura for
acionado. A falha do ventilador de mistura pode ser
congurada como uma advertência ou um desarme por
alarme em parâmetro 14-53 Mon.Ventldr.
Solução de Problemas
ADVERTÊNCIA/ALARME 122, Rotação inesperada do
motor
O conversor de frequência executa uma função que requer
que o motor esteja parado, por exemplo, retenção CC para
motores PM.
ADVERTÊNCIA 163, Advertência de limite de corrente
ATEX ETR
O conversor de frequência funcionou acima da curva
característica durante mais de 50 s. A advertência é ativada
a 83% e desativada a 65% da sobrecarga térmica
permitida.
ALARME 164, Alarme do limite de corrente ATEX ETR
Operar acima da curva característica durante mais de
60 s dentro de um período de 600 s ativa o alarme e o
conversor de frequência desarma.
ADVERTÊNCIA 165, Advertência de limite de frequência
ATEX ETR
O conversor de frequência está funcionando há mais de
50 s abaixo da frequência mínima permitida
(parâmetro 1-98 ATEX ETR interpol. points freq.).
Para aplicar a mudança, ative as mudanças no
•
layout opcional em parâmetro 14-89 Option
Detection.
De forma alternativa, restaure a conguração
•
correta do opcional.
Congurações incorretas da entrada
Desligue e ligue o conversor de frequência para
•
determinar se a advertência/alarme retorna.
32 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 39

Manutenção, diagnósticos e ... Guia de Operação
ALARME 166, Alarme de limite de frequência ATEX ETR
O conversor de frequência operou durante mais de 60 s
(em um período de 600 s) abaixo da frequência mínima
permitida (parâmetro 1-98 ATEX ETR interpol. points freq.).
ADVERTÊNCIA 250, Nova peça de reposição
Um componente no sistema de conversores foi substituído.
Resolução de Problemas
Redena o sistema de conversores para restaurar
•
a operação normal.
ADVERTÊNCIA 251, Novo código do tipo
O cartão de potência ou outros componentes foram substituídos e o código de tipo foi alterado.
7 7
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 33
Page 40
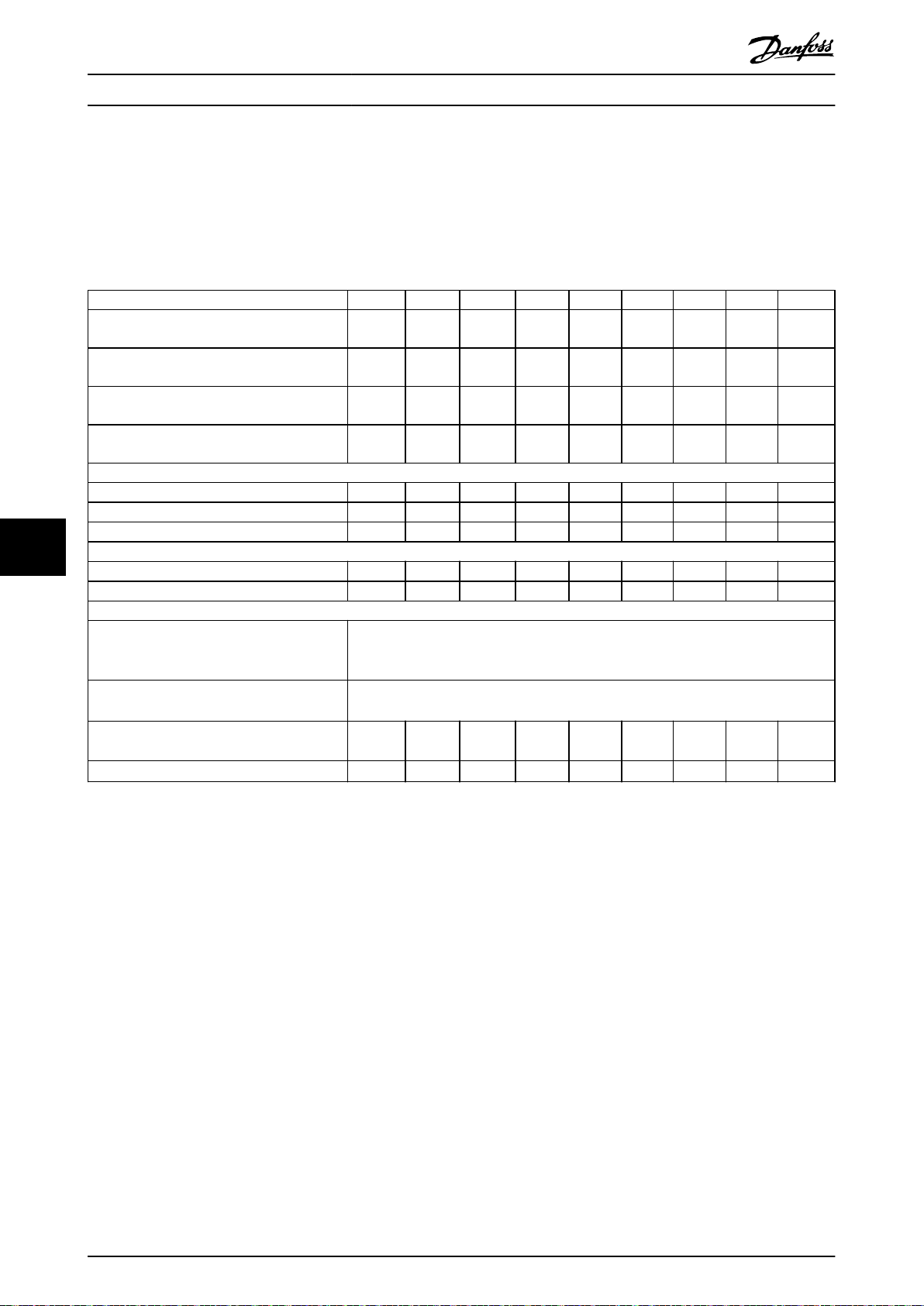
Especicações
VLT® AutomationDrive FC 301/302
8 Especicações
8.1 Dados Elétricos
8.1.1 Alimentação de rede elétrica 200–240 V
Designação do tipo PK25 PK37 PK55 PK75 P1K1 P1K5 P2K2 P3K0 P3K7
Potência no eixo típica [kW/(hp)], alta
sobrecarga
Características nominais de proteção do
gabinete metálico IP20 (FC 301 somente)
Características nominais de proteção do
gabinete metálico IP20, IP21
Características nominais de proteção do
gabinete metálico IP55, IP66
Corrente de saída
Contínuo (200–240 V) [A] 1,8 2,4 3,5 4,6 6,6 7,5 10,6 12,5 16,7
Intermitente (200–240 V) [A] 2,9 3,8 5,6 7,4 10,6 12,0 17,0 20,0 26,7
Contínuo kVA (208 V) [kVA] 0,65 0,86 1,26 1,66 2,38 2,70 3,82 4,50 6,00
88
Corrente de entrada máxima
Contínuo (200–240 V) [A] 1,6 2,2 3,2 4,1 5,9 6,8 9,5 11,3 15,0
Intermitente (200–240 V) [A] 2,6 3,5 5,1 6,6 9,4 10,9 15,2 18,1 24,0
Especicações adicionais
Seção transversal máxima do cabo
rede elétrica, motor, freio e load sharing
[mm2] ([AWG])
Seção transversal máxima do cabo
desconectar [mm2] ([AWG])
Perda de energia estimada na carga máxima
nominal [W]
Eciência
3)
4)
2),5)
2),5)
para
para
0,25
(0,34)
A1 A1 A1 A1 A1 A1 – – –
A2 A2 A2 A2 A2 A2 A2 A3 A3
A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A5 A5
21 29 42 54 63 82 116 155 185
0,94 0,94 0,95 0,95 0,96 0,96 0,96 0,96 0,96
0,37
(0,5)
0,55
(0,75)
0,75
(1,0)
4, 4, 4 (12,12,12)(mínimo 0,2 (24))
1,1
(1,5)
6, 4, 4 (10,12,12)
1,5
(2,0)
2,2
(3,0)
3,0
(4,0)
3,7
(5,0)
Tabela 8.1 Alimentação de rede elétrica 200–240 V, PK25–P3K7
34 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 41
Especicações Guia de Operação
Designação do tipo P5K5 P7K5 P11K
Sobrecarga alta/normal
1)
Potência no eixo típica [kW/(hp)] 5,5 (7,5) 7,5 (10) 7,5 (10) 11 (15) 11 (15) 15 (20)
Características nominais de proteção do gabinete metálico IP20 B3 B3 B4
Características nominais de proteção do gabinete metálico IP21,
IP55, IP66
Corrente de saída
Contínuo (200–240 V) [A] 24,2 30,8 30,8 46,2 46,2 59,4
Intermitente (sobrecarga 60 s) (200–240 V) [A] 38,7 33,9 49,3 50,8 73,9 65,3
Contínuo kVA (208 V) [kVA] 8,7 11,1 11,1 16,6 16,6 21,4
Corrente de entrada máxima
Contínuo (200–240 V) [A] 22,0 28,0 28,0 42,0 42,0 54,0
Intermitente (sobrecarga 60 s) (200–240 V) [A] 35,2 30,8 44,8 46,2 67,2 59,4
Especicações adicionais
Seção transversal máxima do cabo IP20
2),5)
para rede elétrica,
freio, motor e load sharing [mm2] ([AWG])
IP21 seção transversal máxima do cabo
2),5)
para rede elétrica, freio
e load sharing [mm2] ([AWG])
IP21 Seção transversal máxima do cabo
2),5)
para motor [mm2]
([AWG])
Seção transversal máxima do cabo
2),5)
para desconectar
[mm2] ([AWG])
Perda de energia estimada na carga máxima nominal [W]
Eciência
4)
3)
SA SN SA SN SA SN
B1 B1 B2
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35,-,- (2,-,-)
16,10,16 (6, 8, 6) 16,10,16 (6, 8, 6) 35,-,- (2,-,-)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35,25,25 (2, 4, 4)
16,10,10 (6, 8, 8)
239 310 371 514 463 602
0,96 0,96 0,96
8 8
Tabela 8.2 Alimentação de rede elétrica 200–240 V, P5K5–P11K
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 35
Page 42

Especicações
VLT® AutomationDrive FC 301/302
Designação do tipo P15K P18K P22K P30K P37K
Sobrecarga alta/normal
1)
Potência no eixo típica [kW/(hp)]
Características nominais de proteção do gabinete
metálico IP20
Características nominais de proteção do gabinete
metálico IP21, IP55, IP66
SA SN SA SN SA SN SA SN SA SN
15
(20)
18,5
(25)
18,5
(25)22(30)22(30)30(40)30(40)37(50)37(50)45(60)
B4 C3 C3 C4 C4
C1 C1 C1 C2 C2
Corrente de saída
Contínuo (200–240 V) [A] 59,4 74,8 74,8 88,0 88,0 115 115 143 143 170
Intermitente (sobrecarga 60 s) (200–240 V) [A] 89,1 82,3 112 96,8 132 127 173 157 215 187
Contínuo kVA (208 V) [kVA] 21,4 26,9 26,9 31,7 31,7 41,4 41,4 51,5 51,5 61,2
Corrente de entrada máxima
Contínuo (200–240 V) [A] 54,0 68,0 68,0 80,0 80,0 104 104 130 130 154
Intermitente (sobrecarga 60 s) (200–240 V) [A] 81,0 74,8 102 88,0 120 114 156 143 195 169
Especicações adicionais
IP20 seção transversal máxima do cabo
rede elétrica, motor, freio e load sharing
5)
para
35 (2) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
[mm2] ([AWG])
IP21, IP55, IP66 seção transversal máxima do
5)
cabo
88
para rede elétrica e motor [mm2] ([AWG])
IP21, IP55, IP66 seção transversal máxima do
cabo5) para freio e load sharing [mm2] ([AWG])
Seção transversal máxima do cabo
2),5)
para
desconectar [mm2] ([AWG])
Perda de energia estimada na carga máxima
nominal [W]
Eciência
3)
4)
50 (1) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
50 (1) 50 (1) 50 (1) 95 (3/0) 95 (3/0)
185, 150, 120
(350 MCM, 300
MCM, 4/0)
50, 35, 35 (1, 2, 2)
95, 70, 70
(3/0, 2/0, 2/0)
624 737 740 845 874 1140 1143 1353 1400 1636
0,96 0,97 0,97 0,97 0,97
Tabela 8.3 Alimentação de rede elétrica 200–240 V, P15K–P37K
36 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 43

Especicações Guia de Operação
8.1.2 Alimentação de rede elétrica 380–500 V
Designação do tipo PK37 PK55 PK75 P1K1 P1K5 P2K2 P3K0 P4K0 P5K5 P7K5
Potência no eixo típica [kW/(hp)], alta
sobrecarga
Características nominais de proteção do
gabinete metálico IP20 (FC 301 somente)
Características nominais de proteção do
gabinete metálico IP20, IP21
Características nominais de proteção do
gabinete metálico IP55, IP66
Corrente de saída de sobrecarga alta 160% por 1 minuto
Potência no eixo [kW/(hp)] 0,37
Contínuo (380–440 V) [A] 1,3 1,8 2,4 3,0 4,1 5,6 7,2 10 13 16
Intermitente (380–440 V) [A] 2,1 2,9 3,8 4,8 6,6 9,0 11,5 16 20,8 25,6
Contínuo (441–500 V) [A] 1,2 1,6 2,1 2,7 3,4 4,8 6,3 8,2 11 14,5
Intermitente (441–500 V) [A] 1,9 2,6 3,4 4,3 5,4 7,7 10,1 13,1 17,6 23,2
Contínuo kVA (400 V) [kVA] 0,9 1,3 1,7 2,1 2,8 3,9 5,0 6,9 9,0 11
Contínuo kVA (460 V) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8 5,0 6,5 8,8 11,6
Corrente de entrada máxima
Contínuo (380–440 V) [A] 1,2 1,6 2,2 2,7 3,7 5,0 6,5 9,0 11,7 14,4
Intermitente (380–440 V) [A] 1,9 2,6 3,5 4,3 5,9 8,0 10,4 14,4 18,7 23
Contínuo (441–500 V) [A] 1,0 1,4 1,9 2,7 3,1 4,3 5,7 7,4 9,9 13
Intermitente (441–500 V) [A] 1,6 2,2 3,0 4,3 5,0 6,9 9,1 11,8 15,8 20,8
Especicações adicionais
IP20, IP21 Seção transversal máxima do cabo
para rede elétrica, motor, freio e load sharing
[mm2] ([AWG])
IP55, IP66 seção transversal máxima do cabo
para rede elétrica, motor, freio e load sharing
[mm2] ([AWG])
Seção transversal máxima do cabo
desconectar [mm2] ([AWG])
Perda de energia estimada na carga máxima
nominal [W]
Eciência
3)
4)
2),5)
para
0,37
(0,5)
A1 A1 A1 A1 A1 – – – – –
A2 A2 A2 A2 A2 A2 A2 A2 A3 A3
A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A4/A5 A5 A5
(0,5)
2),5)
2),5)
35 42 46 58 62 88 116 124 187 255
0,93 0,95 0,96 0,96 0,97 0,97 0,97 0,97 0,97 0,97
0,55
(0,75)
0,55
(0,75)
0,75
(1,0)
0,75
(1,0)
1,1
(1,5)
1,1
(1,5)
4, 4, 4 (12,12,12)
(mínimo 0,2(24))
4, 4, 4 (12,12,12)
6, 4, 4 (10,12,12)
1,5
(2,0)
1,5
(2,0)
2,2
(3,0)
2,2
(3,0)
3,0
(4,0)
3,0
(4,0)
4,0
(5,0)
4,0
(5,0)
5,5
(7,5)
5,5
(7,5)
7,5
(10)
7,5
(10)
8 8
Tabela 8.4 Alimentação de rede elétrica 380–500 V (FC 302), 380–480 V (FC 301), PK37–P7K5
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 37
Page 44

Especicações
VLT® AutomationDrive FC 301/302
Designação do tipo P11K P15K P18K P22K
Sobrecarga alta/normal
1)
SA SN SA SN SA SN SA SN
Potência no eixo típica [kW/(hp)] 11 (15) 15 (20) 15 (20) 18,5 (25) 18,5 (25) 22 (30) 22 (30) 30 (40)
Características nominais de proteção do
gabinete metálico IP20
Características nominais de proteção do
gabinete metálico IP21, IP55, IP66
B3 B3 B4 B4
B1 B1 B2 B2
Corrente de saída
Contínuo (380–440 V) [A] 24 32 32 37,5 37,5 44 44 61
Intermitente (sobrecarga 60 s) (380–440 V) [A] 38,4 35,2 51,2 41,3 60 48,4 70,4 67,1
Contínuo (441–500 V) [A] 21 27 27 34 34 40 40 52
Intermitente (sobrecarga 60 s)
(441–500 V) [A]
33,6 29,7 43,2 37,4 54,4 44 64 57,2
Contínuo kVA (400 V) [kVA] 16,6 22,2 22,2 26 26 30,5 30,5 42,3
Contínuo kVA (460 V) [kVA] – 21,5 – 27,1 – 31,9 – 41,4
Corrente de entrada máxima
Contínuo (380–440 V) [A] 22 29 29 34 34 40 40 55
Intermitente (sobrecarga 60 s)
(380–440 V) [A]
35,2 31,9 46,4 37,4 54,4 44 64 60,5
Contínuo (441–500 V) [A] 19 25 25 31 31 36 36 47
88
Intermitente (sobrecarga 60 s)
(441–500 V) [A]
30,4 27,5 40 34,1 49,6 39,6 57,6 51,7
Especicações adicionais
IP21, IP55, IP66 seção transversal máxima do
2),5)
cabo
para rede elétrica, freio e load sharing
16, 10, 16 (6, 8, 6) 16, 10, 16 (6, 8, 6) 35,-,-(2,-,-) 35,-,-(2,-,-)
[mm2] ([AWG])
IP21, IP55, IP66 seção transversal máxima do
2),5)
cabo
para motor [mm2] ([AWG])
Seção transversal máxima do cabo IP20
2),5)
para rede elétrica, freio, motor e load sharing
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35, 25, 25 (2, 4, 4) 35, 25, 25 (2, 4, 4)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35,-,-(2,-,-) 35,-,-(2,-,-)
[mm2] ([AWG])
Seção transversal máxima do cabo
desconectar [mm2] ([AWG])
Perda de energia estimada na carga máxima
nominal [W]
Eciência
3)
4)
2),5)
para
16, 10, 10 (6, 8, 8)
291 392 379 465 444 525 547 739
0,98 0,98 0,98 0,98
Tabela 8.5 Alimentação de rede elétrica 380–500 V (FC 302), 380–480 V (FC 301), P11K–P22K
38 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 45

Especicações Guia de Operação
Designação do tipo P30K P37K P45K P55K P75K
5)
para rede
1)
3)
Sobrecarga alta/normal
Potência no eixo típica [kW/(hp)] 30 (40) 37 (50) 37 (50) 45 (60) 45 (60) 55 (75) 55 (75) 75 (100) 75 (100) 90 (125)
Características nominais de
proteção do gabinete metálico
IP20
Características nominais de
proteção do gabinete metálico
IP21, IP55, IP66
Corrente de saída
Contínuo (380–440 V) [A] 61 73 73 90 90 106 106 147 147 177
Intermitente (sobrecarga 60 s)
(380–440 V) [A]
Contínuo (441–500 V) [A] 52 65 65 80 80 105 105 130 130 160
Intermitente (sobrecarga 60 s)
(441–500 V) [A]
Contínuo kVA (400 V) [kVA] 42,3 50,6 50,6 62,4 62,4 73,4 73,4 102 102 123
Contínuo kVA (460 V) [kVA] – 51,8 – 63,7 – 83,7 – 104 – 128
Corrente de entrada máxima
Contínuo (380–440 V) [A] 55 66 66 82 82 96 96 133 133 161
Intermitente (sobrecarga 60 s)
(380–440 V) [A]
Contínuo (441–500 V) [A] 47 59 59 73 73 95 95 118 118 145
Intermitente (sobrecarga 60 s)
(441–500 V) [A]
Especicações adicionais
Seção transversal máxima do cabo
IP205) para rede elétrica e motor
[mm2] ([AWG])
IP20 seção transversal máxima do
cabo5) para freio e load sharing
[mm2)] ([AWG])
IP21, IP55, IP66 seção transversal
máxima do cabo
elétrica e motor [mm2] ([AWG])
IP21, IP55, IP66 seção transversal
máxima do cabo5) para freio e load
sharing [mm2] ([AWG])
Seção transversal máxima do
2),5)
cabo
para desconectar a rede
elétrica [mm2] ([AWG])
Perda de energia estimada
na carga máxima nominal [W]
Eciência
4)
SA SN SA SN SA SN SA SN SA SN
B4 C3 C3 C4 C4
C1 C1 C1 C2 C2
91,5 80,3 110 99 135 117 159 162 221 195
78 71,5 97,5 88 120 116 158 143 195 176
82,5 72,6 99 90,2 123 106 144 146 200 177
70,5 64,9 88,5 80,3 110 105 143 130 177 160
35 (2) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
35 (2) 50 (1) 50 (1) 95 (4/0) 95 (4/0)
50 (1) 50 (1) 50 (1) 150 (300 MCM) 150 (300 MCM)
50 (1) 50 (1) 50 (1) 95 (3/0) 95 (3/0)
50, 35, 35
(1, 2, 2)
570 698 697 843 891 1083 1022 1384 1232 1474
0,98 0,98 0,98 0,98 0,99
95, 70, 70
(3/0, 2/0, 2/0)
185, 150, 120
(350 MCM, 300
MCM, 4/0)
8 8
Tabela 8.6 Alimentação de rede elétrica 380–500 V (FC 302), 380–480 V (FC 301), P30K–P75K
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 39
Page 46

Especicações
VLT® AutomationDrive FC 301/302
8.1.3 Alimentação de rede elétrica 525–600 V (FC 302 somente)
Designação do tipo PK75 P1K1 P1K5 P2K2 P3K0 P4K0 P5K5 P7K5
Potência no eixo típica [kW/(hp)] 0,75 (1) 1,1 (1,5) 1,5 (2,0) 2,2 (3,0) 3 (4,0) 4 (5,0) 5,5 (7,5) 7,5 (10)
Características nominais de proteção do
gabinete metálico IP20, IP21
Características nominais de proteção do
gabinete metálico IP55
Corrente de saída
Contínuo (525–550 V) [A] 1,8 2,6 2,9 4,1 5,2 6,4 9,5 11,5
Intermitente (525–550 V) [A] 2,9 4,2 4,6 6,6 8,3 10,2 15,2 18,4
Contínuo (551–600 V) [A] 1,7 2,4 2,7 3,9 4,9 6,1 9,0 11,0
Intermitente (551–600 V) [A] 2,7 3,8 4,3 6,2 7,8 9,8 14,4 17,6
Contínuo kVA (525 V) [kVA] 1,7 2,5 2,8 3,9 5,0 6,1 9,0 11,0
Contínuo kVA (575 V) [kVA] 1,7 2,4 2,7 3,9 4,9 6,1 9,0 11,0
Corrente de entrada máxima
Contínuo (525–600 V) [A] 1,7 2,4 2,7 4,1 5,2 5,8 8,6 10,4
Intermitente (525–600 V) [A] 2,7 3,8 4,3 6,6 8,3 9,3 13,8 16,6
Especicações adicionais
Seção transversal máxima do cabo
88
elétrica, motor, freio e load sharing
[mm2] ([AWG])
Seção transversal máxima do cabo
desconectar [mm2] ([AWG])
Perda de energia estimada na carga máxima
nominal [W]
Eciência
3)
4)
2),5)
para rede
2),5)
para
A3 A3 A3 A3 A3 A3 A3 A3
A5 A5 A5 A5 A5 A5 A5 A5
4, 4, 4 (12,12,12)(mínimo 0,2 (24))
6, 4, 4 (10,12,12)
35 50 65 92 122 145 195 261
0,97 0,97 0,97 0,97 0,97 0,97 0,97 0,97
Tabela 8.7 Alimentação de rede elétrica 525–600 V (FC 302 somente), PK75–P7K5
40 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 47

Especicações Guia de Operação
Designação do tipo P11K P15K P18K P22K P30K
Carga alta/normal
1)
Potência no eixo típica [kW/(hp)] 11 (15) 15 (20) 15 (20) 18,5 (25) 18,5 (25) 22 (30) 22 (30) 30 (40) 30 (40) 37 (50)
Características nominais de proteção
do gabinete metálico IP20
Características nominais de proteção
do gabinete metálico IP21, IP55, IP66
Corrente de saída
Contínuo (525–550 V) [A] 19 23 23 28 28 36 36 43 43 54
Intermitente (525–550 V) [A] 30 25 37 31 45 40 58 47 65 59
Contínuo (551–600 V) [A] 18 22 22 27 27 34 34 41 41 52
Intermitente (551–600 V) [A] 29 24 35 30 43 37 54 45 62 57
Contínuo kVA (550 V) [kVA] 18,1 21,9 21,9 26,7 26,7 34,3 34,3 41,0 41,0 51,4
Contínuo kVA (575 V) [kVA] 17,9 21,9 21,9 26,9 26,9 33,9 33,9 40,8 40,8 51,8
Corrente de entrada máxima
Contínuo em 550 V [A] 17,2 20,9 20,9 25,4 25,4 32,7 32,7 39 39 49
intermitente em 550 V [A] 28 23 33 28 41 36 52 43 59 54
Contínuo em 575 V [A] 16 20 20 24 24 31 31 37 37 47
Intermitente em 575 V [A] 26 22 32 27 39 34 50 41 56 52
Especicações adicionais
Seção transversal máxima do cabo
2),5)
IP20
para rede elétrica, freio,
motor e load sharing [mm2] ([AWG])
IP21, IP55, IP66 seção transversal
máxima do cabo
2),5)
para rede
elétrica, freio e load sharing
[mm2] ([AWG])
IP21, IP55, IP66 seção transversal
máxima do cabo
2),5)
para motor
[mm2] ([AWG])
Seção transversal máxima do cabo
5)
para desconectar [mm2] ([AWG])
Perda de energia estimada
na carga máxima nominal [W]
Eciência
4)
3)
SA SN SA SN SA SN SA SN SA SN
B3 B3 B4 B4 B4
B1 B1 B2 B2 C1
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35,-,-(2,-,-) 35,-,-(2,-,-) 35,-,-(2,-,-)
16, 10, 10 (6, 8, 8) 16, 10, 10 (6, 8, 8) 35,-,-(2,-,-) 35,-,-(2,-,-) 50,-,- (1,-,-)
10, 10,- (8, 8,-) 10, 10,- (8, 8,-) 35, 25, 25 (2, 4, 4) 35, 25, 25 (2, 4, 4) 50,-,- (1,-,-)
2),
16, 10, 10
(6, 8, 8)
220 300 300 370 370 440 440 600 600 740
0,98 0,98 0,98 0,98 0,98
50, 35, 35
(1, 2, 2)
8 8
Tabela 8.8 Alimentação de rede elétrica 525–600 V (FC 302 somente), P11K–P30K
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 41
Page 48

Especicações
VLT® AutomationDrive FC 301/302
Designação do tipo P37K P45K P55K P75K
Carga alta/normal
1)
SA SN SA SN SA SN SA SN
Potência no eixo típica [kW/(hp)] 37 (50) 45 (60) 45 (60) 55 (75) 55 (75) 75 (100) 75 (100) 90 (125)
Características nominais de proteção do gabinete
metálico IP20
Características nominais de proteção do gabinete
metálico IP21, IP55, IP66
C3
C1 C1 C1 C2 C2
C3
C3 C4 C4
Corrente de saída
Contínuo (525–550 V) [A] 54 65 65 87 87 105 105 137
Intermitente (525–550 V) [A] 81 72 98 96 131 116 158 151
Contínuo (551–600 V) [A] 52 62 62 83 83 100 100 131
Intermitente (551–600 V) [A] 78 68 93 91 125 110 150 144
Contínuo kVA (550 V) [kVA] 51,4 61,9 61,9 82,9 82,9 100,0 100,0 130,5
Contínuo kVA (575 V) [kVA] 51,8 61,7 61,7 82,7 82,7 99,6 99,6 130,5
Corrente de entrada máxima
Contínuo em 550 V [A] 49 59 59 78,9 78,9 95,3 95,3 124,3
intermitente em 550 V [A] 74 65 89 87 118 105 143 137
Contínuo em 575 V [A] 47 56 56 75 75 91 91 119
Intermitente em 575 V [A] 70 62 85 83 113 100 137 131
Especicações adicionais
88
Seção transversal máxima do cabo IP205) para rede
elétrica e motor [mm2] ([AWG])
IP20 seção transversal máxima do cabo5) para freio e
load sharing [mm2] ([AWG])
IP21, IP55, IP66 seção transversal máxima do cabo
5)
para rede elétrica e motor [mm2] ([AWG])
IP21, IP55, IP66 seção transversal máxima do cabo
5)
para freio e load sharing [mm2] ([AWG])
Seção transversal máxima do cabo
2),5)
para
desconectar a rede elétrica [mm2] ([AWG])
Perda de energia estimada na carga máxima nominal
3)
[W]
Eciência
4)
50 (1) 150 (300 MCM)
50 (1) 95 (4/0)
50 (1) 150 (300 MCM)
50 (1) 95 (4/0)
50, 35, 35
(1, 2, 2)
95, 70, 70
(3/0, 2/0, 2/0)
185, 150, 120
(350 MCM, 300
MCM, 4/0)
740 900 900 1100 1100 1500 1500 1800
0,98 0,98 0,98 0,98
Tabela 8.9 Alimentação de rede elétrica 525–600 V P37K–P75K (FC 302 somente), P37K–P75K
Para obter as características nominais do fusível, consulte capétulo 8.7 Fusíveis e Disjuntores.
1) Sobrecarga alta = 150% ou 160% de torque por um período de 60 s. Sobrecarga normal = 110% de torque por um período de 60 s.
2) Os 3 valores para a seção transversal máxima do cabo são para um único núcleo,
o exível e o exível com luva, respectivamente.
3) Aplica-se ao dimensionamento do resfriamento do conversor de frequência. Se a frequência de chaveamento for superior à conguração
padrão, as perdas de energia podem aumentar. O LCP e os consumos de energia típicos do cartão de controle estão incluídos. Para sabe os
dados de perda de energia de acordo com EN 50598-2, consulte drives.danfoss.com/knowledge-center/energy-eciency-directive/#/
4) Eciência medida na corrente nominal. Para obter a classe de eciência energética, consulte capétulo 8.4 Condições ambiente. Para saber as
perdas de carga parcial, consulte drives.danfoss.com/knowledge-center/energy-eciency-directive/#/.
5) A seção transversal do cabo é considerada para cabos de cobre.
42 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 49
Especicações Guia de Operação
8.1.4 Alimentação de rede elétrica 525–690 V (FC 302 somente)
Designação do tipo P1K1 P1K5 P2K2 P3K0 P4K0 P5K5 P7K5
Sobrecarga alta/normal
Potência no eixo típica [kW/(hp)] 1,1 (1,5) 1,5 (2,0) 2,2 (3,0) 3,0 (4,0) 4,0 (5,0) 5,5 (7,5) 7,5 (10)
Características nominais de proteção do gabinete
metálico IP20 A3 A3 A3 A3 A3 A3 A3
Corrente de saída
Contínuo (525–550 V) [A] 2,1 2,7 3,9 4,9 6,1 9,0 11,0
Intermitente (525–550 V) [A] 3,4 4,3 6,2 7,8 9,8 14,4 17,6
Contínuo (551–690 V) [A] 1,6 2,2 3,2 4,5 5,5 7,5 10,0
Intermitente (551–690 V) [A] 2,6 3,5 5,1 7,2 8,8 12,0 16,0
Contínuo kVA 525 V 1,9 2,5 3,5 4,5 5,5 8,2 10,0
Contínuo kVA 690 V 1,9 2,6 3,8 5,4 6,6 9,0 12,0
Corrente de entrada máxima
Contínuo (525–550 V) [A] 1,9 2,4 3,5 4,4 5,5 8,1 9,9
Intermitente (525–550 V) [A] 3,0 3,9 5,6 7,0 8,8 12,9 15,8
Contínuo (551–690 V) [A] 1,4 2,0 2,9 4,0 4,9 6,7 9,0
Intermitente (551–690 V) [A] 2,3 3,2 4,6 6,5 7,9 10,8 14,4
Especicações adicionais
Seção transversal máxima do cabo
elétrica, motor, freio e load sharing [mm2] ([AWG])
Seção transversal máxima do cabo
[mm2] ([AWG])
Perda de energia estimada na carga máxima nominal
3)
(W)
Eciência
4)
1)
2),5)
para rede
2),5)
para desconectar
HO/SEM HO/SEM HO/SEM HO/SEM HO/SEM HO/SEM HO/SEM
4, 4, 4 (12, 12, 12) (mínimo 0,2 (24)
6, 4, 4 (10, 12, 12)
44 60 88 120 160 220 300
0,96 0,96 0,96 0,96 0,96 0,96 0,96
8 8
Tabela 8.10 A3 gabinete metálico, alimentação de rede elétrica 525–690 V IP20/chassi protegido, P1K1–P7K5
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 43
Page 50
Especicações
Designação do tipo P11K P15K P18K P22K
Sobrecarga alta/normal
Potência no eixo típica a 550 V [kW/(hp)] 7,5
Potência no eixo típica a 690 V [kW/(hp)] 11
Características nominais de proteção do gabinete
metálico IP20 B4 B4 B4 B4
Características nominais de proteção do gabinete
metálico IP21, IP55 B2 B2 B2 B2
Corrente de saída
Contínuo (525–550 V) [A] 14,0 19,0 19,0 23,0 23,0 28,0 28,0 36,0
Intermitente (sobrecarga 60 s) (525–550 V) [A] 22,4 20,9 30,4 25,3 36,8 30,8 44,8 39,6
Contínuo (551–690 V) [A] 13,0 18,0 18,0 22,0 22,0 27,0 27,0 34,0
Intermitente (sobrecarga 60 s) (551–690 V) [A] 20,8 19,8 28,8 24,2 35,2 29,7 43,2 37,4
Contínua kVA (a 550 V) [kVA] 13,3 18,1 18,1 21,9 21,9 26,7 26,7 34,3
Contínua kVA (a 690 V) [kVA] 15,5 21,5 21,5 26,3 26,3 32,3 32,3 40,6
Corrente de entrada máxima
Contínua (a 550 V) [A] 15,0 19,5 19,5 24,0 24,0 29,0 29,0 36,0
Intermitente (sobrecarga de 60 s) (a 550 V) [A] 23,2 21,5 31,2 26,4 38,4 31,9 46,4 39,6
88
Contínua (a 690 V) [A] 14,5 19,5 19,5 24,0 24,0 29,0 29,0 36,0
Intermitente (sobrecarga 60 s) (a 690 V) [A] 23,2 21,5 31,2 26,4 38,4 31,9 46,4 39,6
Especicações adicionais
Seção transversal máxima do cabo
elétrica/motor, divisão da carga e freio
[mm2] ([AWG])
Seção transversal máxima do cabo
desconectar a rede elétrica [mm2] ([AWG])
Perda de energia estimada na carga máxima
nominal (W)
Eciência
3)
4)
1)
2),5)
para rede
2),5)
para
VLT® AutomationDrive FC 301/302
SA SN SA SN SA SN SA SN
11
(10)
(15)
150 220 220 300 300 370 370 440
(15)
15
(20)
0,98 0,98 0,98 0,98
11
(15)
15
(20)
15
(20)
18,5
(25)
35, 25, 25 (2, 4, 4)
16, 10, 10 (6, 8, 8)
15
(20)
18,5
(25)
18,5
(25)
22
(30)
18,5
(25)
22
(30)
22
(30)
30
(40)
Tabela 8.11 B2/B4 gabinete metálico, alimentação de rede elétrica 525–690 V IP20/IP21/IP55 - chassi/NEMA 1/NEMA 12\
(FC 302 somente), P11K–P22K
44 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 51
Especicações Guia de Operação
Designação do tipo P30K P37K P45K P55K P75K
Sobrecarga alta/normal
Potência no eixo típica a 550 V [kW/(hp)] 22
Potência no eixo típica a 690 V [kW/(hp)] 30
Características nominais de proteção do
gabinete metálico IP20 B4 C3 C3 D3h D3h
Características nominais de proteção do
gabinete metálico IP21, IP55 C2 C2 C2 C2 C2
Corrente de saída
Contínuo (525–550 V) [A] 36,0 43,0 43,0 54,0 54,0 65,0 65,0 87,0 87,0 105
Intermitente (sobrecarga 60 s)
(525–550 V) [A] 54,0 47,3 64,5 59,4 81,0 71,5 97,5 95,7 130,5 115,5
Contínuo (551–690 V) [A] 34,0 41,0 41,0 52,0 52,0 62,0 62,0 83,0 83,0 100
Intermitente (sobrecarga 60 s)
(551–690 V) [A] 51,0 45,1 61,5 57,2 78,0 68,2 93,0 91,3 124,5 110
Contínua kVA (a 550 V) [kVA] 34,3 41,0 41,0 51,4 51,4 61,9 61,9 82,9 82,9 100
Contínua kVA (a 690 V) [kVA] 40,6 49,0 49,0 62,1 62,1 74,1 74,1 99,2 99,2 119,5
Corrente de entrada máxima
Contínua (a 550 V) [A] 36,0 49,0 49,0 59,0 59,0 71,0 71,0 87,0 87,0 99,0
Intermitente (sobrecarga de 60 s)
(a 550 V) [A] 54,0 53,9 72,0 64,9 87,0 78,1 105,0 95,7 129 108,9
Contínua (a 690 V) [A] 36,0 48,0 48,0 58,0 58,0 70,0 70,0 86,0 – –
Intermitente (sobrecarga 60 s) (a 690 V) [A] 54,0 52,8 72,0 63,8 87,0 77,0 105 94,6 – –
Especicações adicionais
Seção transversal máxima do cabo5) para
rede elétrica e motor [mm2] ([AWG])
Seção transversal máxima do cabo5) para
divisão da carga e freio [mm2] ([AWG])
Seção transversal máxima do cabo
desconectar a rede elétrica [mm2] ([AWG])
Perda de energia estimada
na carga máxima nominal [W]
Eciência
4)
1)
2),5)
para
3)
SA SN SA SN SA SN SA SN SA SN
37
(30)30(40)30(40)37(50)
(40)37(50)37(50)45(60)
95, 70, 70
(3/0, 2/0, 2/0)
600 740 740 900 900 1100 1100 1500 1500 1800
0,98 0,98 0,98 0,98 0,98
(50)
45
(60)
150 (300 MCM)
45
(60)45(60)
55
(75)55(75)75(100)75(100)90(125)
95 (3/0)
185, 150, 120
(350 MCM, 300
55
(75)
MCM, 4/0)
55
(75)75(100)
–
8 8
Tabela 8.12 B4, C2, C3 gabinete metálico, alimentação de rede elétrica 525–690 V IP20/IP21/IP55 – chassi/NEMA 1/NEMA 12
(FC 302 somente), P30K–P75K
Para obter as características nominais do fusível, consulte capétulo 8.7 Fusíveis e Disjuntores.
1) Sobrecarga alta = 150% ou 160% de torque por um período de 60 s. Sobrecarga normal = 110% de torque por um período de 60 s.
2) Os 3 valores para a seção transversal máxima do cabo são para um único núcleo, o exível e o exível com luva, respectivamente.
3) Aplica-se ao dimensionamento do resfriamento do conversor de frequência. Se a frequência de chaveamento for superior à conguração
padrão, as perdas de energia podem aumentar. O LCP e os consumos de energia típicos do cartão de controle estão incluídos. Para sabe os
dados de perda de energia de acordo com EN 50598-2, consulte drives.danfoss.com/knowledge-center/energy-eciency-directive/#/
4) Eciência medida na corrente nominal. Para obter a classe de eciência energética, consulte capétulo 8.4 Condições ambiente. Para saber as
perdas de carga parcial, consulte drives.danfoss.com/knowledge-center/energy-eciency-directive/#/.
5) A seção transversal do cabo é considerada para cabos de cobre.
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 45
Page 52
Especicações
VLT® AutomationDrive FC 301/302
8.2 Alimentação de Rede Elétrica
Alimentação de rede elétrica
Terminais de alimentação (6 pulsos) L1, L2, L3
Terminais de alimentação (12 pulsos) L1-1, L2-1, L3-1, L1-2, L2-2, L3-2
Tensão de alimentação 200–240 V ±10%
Tensão de alimentação FC 301: 380–480 V/FC 302: 380–500 V ±10%
Tensão de alimentação FC 302: 525–600 V ±10%
Tensão de alimentação FC 302: 525–690 V ±10%
Tensão de rede baixa/queda da rede elétrica:
Durante baixa tensão de rede ou queda de rede, o conversor de frequência continua até que a tensão do barramento CC caia
abaixo do nível mínimo de parada, o que tipicamente corresponde a 15% abaixo da tensão de alimentação nominal mais baixa
do conversor de frequência. Energização e torque total não podem ser esperados em tensões de rede elétrica menores do que
10% abaixo da mais baixa tensão de alimentação nominal do conversor de frequência.
Frequência de alimentação 50/60 Hz ±5%
Desbalanceamento máximo temporário entre fases de rede elétrica 3,0% da tensão de alimentação nominal
Fator de potência real (λ) ≥0,9 nominal com carga nominal
Fator de potência de deslocamento (cos ϕ) Unidade próxima (>0,98)
Ligando o fornecimento de entrada L1, L2, L3 (energização) ≤7,5 kW (10 hp) Duas vezes por minuto no máximo.
Ligando o fornecimento de entrada L1, L2, L3 (energização) 11–75 kW (15–101 hp) Uma vez por minuto no máximo.
88
Ligando o fornecimento de entrada L1, L2, L3 (energização) ≥90 kW (121 hp) Uma vez por 2 minutos no máximo.
Ambiente de acordo com a EN60664-1 Categoria de sobretensão III/ grau de poluição 2
A unidade é adequada para uso em um circuito capaz de fornecer não mais do que 100.000 Amperes Simétricos RMS, no
máximo 240/500/600/690 V.
Saída do Motor e dados do motor
8.3
Saída do Motor (U, V, W)
Tensão de saída 0–100% da tensão de alimentação
Frequência de saída 0–590 Hz
Frequência de saída no modo de uxo 0–300 Hz
Chaveamento na saída Ilimitado
Tempos de rampa 0,01–3600 s
1) Dependente da tensão e potência.
Características do torque
Torque de partida (torque constante) Máximo 160% durante 60 s1) uma vez em 10 minutos
Torque de partida / sobrecarga (torque variável) Máximo 110% até 0,5 s1) uma vez em 10 minutos
Tempo de subida do torque em ux ( para 5 kHz fsw) 1 ms
Tempo de subida do Torque em VVC+ (independente de fsw) 10 ms
1) A porcentagem está relacionada ao torque nominal.
1)
46 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 53
Especicações Guia de Operação
8.4 Condições ambiente
Ambiente
Gabinete IP20/chassi, IP21/tipo 1, IP55/tipo 12, IP66/tipo 4X
Teste de vibração 1,0 g
THDv máxima 10%
Máxima umidade relativa 5–93% (IEC 721-3-3; Classe 3K3 (não condensante) durante a operação
Ambiente agressivo (IEC 60068-2-43) teste com H2S Classe Kd
Temperatura ambiente
Temperatura ambiente mínima, durante operação plena 0 °C (32 °F)
Temperatura ambiente mínima em desempenho reduzido -10 °C (14 °F)
Temperatura durante a armazenagem/transporte -25 para +65/70 °C (-13 para +149/158 °F)
Altitude máxima acima do nível do mar, sem derating
Normas de EMC, Emissão EN 61800-3
Normas de EMC, Imunidade EN 61800-3
Classe de eciência energética
1) Consulte a seção condições especiais no Guia de Design para:
Derating para temperatura ambiente elevada.
•
Derating para alta altitude.
•
2) Determinada de acordo com EN50598-2 em:
Carga nominal.
•
90% frequência nominal.
•
Conguração de fábrica da frequência de chaveamento.
•
Conguração de fábrica do padrão de chaveamento.
•
1)
2)
Máximo 50 °C (122 °F) (média de 24 horas máximo 45 °C (113 °F))
1)
1000 m (3280 pés)
IE2
8 8
Especicações de Cabo
8.5
Comprimentos de cabos e seções transversais dos cabos de controle
Comprimento de cabo de motor máximo, blindado FC 301: 50 m (164 pés)/FC 302: 150 m (492 pés)
Comprimento de cabo de motor máximo, não blindado FC 301: 75 m (246 pés)/FC 302: 300 m (984 pés)
Seção transversal máxima para terminais de controle, os exíveis/rígidos sem buchas de extremidades
de cabos 1,5 mm2/16 AWG
Seção transversal máxima para terminais de controle, cabo exível com buchas de extremidade do cabo 1 mm2/18 AWG
Seção transversal máxima para terminais de controle, cabo exível com buchas de extremidade de cabo
com colar 0,5 mm2/20 AWG
Seção transversal máxima para terminais de controle 0,25 mm2/24 AWG
1) Para cabos de energia, consulte as tabelas elétricas em capétulo 8.1 Dados Elétricos.
1)
8.6 Entrada/Saída de controle e dados de controle
Entradas digitais
Entradas digitais programáveis FC 301: 4 (5)1)/FC 302: 4 (6)
Número do terminal 18, 19, 271), 291), 32, 33
Lógica PNP ou NPN
Nível de tensão 0–24 V CC
Nível de tensão, lógica 0 PNP <5 V CC
Nível de tensão, lógica 1 PNP >10 V CC
Nível de tensão, lógica 0 NPN
Nível de tensão, lógica 1 NPN
Tensão máxima na entrada 28 V CC
Faixa de frequência de pulso 0–110 kHz
Largura de pulso mínima (ciclo útil) 4,5 ms
2)
2)
>19 V CC
<14 V CC
1)
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 47
Page 54
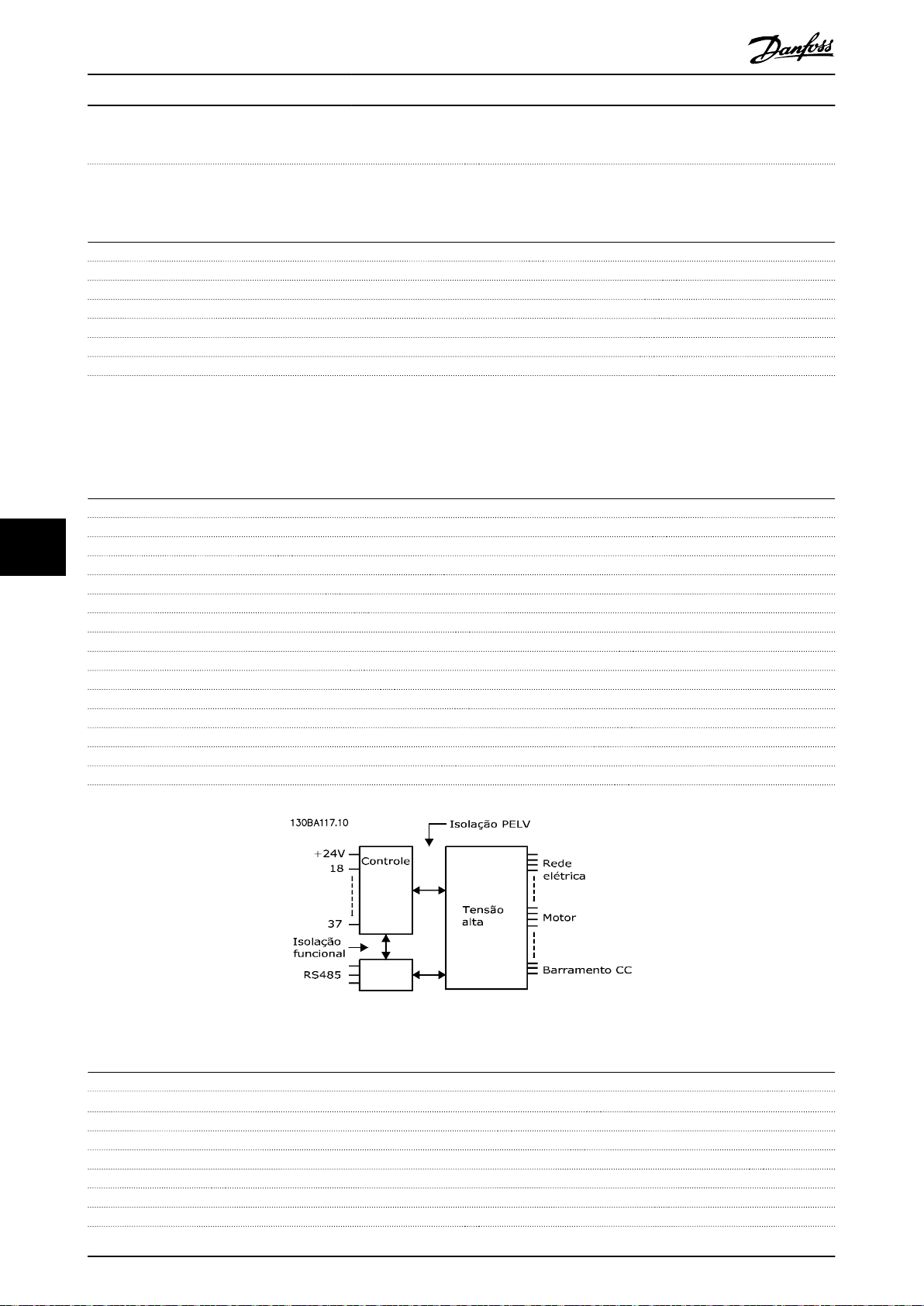
Especicações
VLT® AutomationDrive FC 301/302
Resistência de entrada, R
i
Aproximadamente 4 kΩ
1) Os terminais 27 e 29 podem também ser programados como saída.
2) Exceto terminal 37 de entrada STO.
STO terminal 37
1, 2)
(terminal 37 está xo na lógica PNP)
Nível de tensão 0–24 V CC
Nível de tensão, lógica 0 PNP <4 V CC
Nível de tensão, lógica 1 PNP >20 V CC
Tensão máxima na entrada 28 V CC
Típica corrente de entrada a 24 V 50 mA rms
Típica corrente de entrada a 20 V 60 mA rms
Capacitância de entrada 400 nF
Todas as entradas digitais são isoladas galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
1) Consulte capétulo 4.7.1 Safe Torque O (STO) para obter mais informações sobre o terminal 37 e STO.
2) Ao usar um contator com uma bobina CC interna em combinação com STO, é importante fazer um retorno para a corrente
da bobina ao desligar. Isso pode ser feito usando um diodo de roda livre (ou, alternativamente, um MOV de 30 V ou 50 V para
um tempo de resposta mais rápido) através da bobina. Os contatores típicos podem ser adquiridos com esse diodo.
Entradas analógicas
Número de entradas analógicas 2
Número do terminal 53, 54
88
Modos Tensão ou corrente
Seleção do modo Chaves S201 e S202
Modo de tensão Chave S201/chave S202 = OFF (U)
Nível de tensão -10 V a +10 V (escalonável)
Resistência de entrada, R
i
Aproximadamente 10 kΩ
Tensão máxima ±20 V
Modo de corrente Chave S201/chave S202 = ON (I)
Nível de corrente 0/4 a 20 mA (escalonável)
Resistência de entrada, R
i
Aproximadamente 200 Ω
Corrente máxima 30 mA
Resolução das entradas analógicas 10 bits (+ sinal)
Precisão das entradas analógicas Erro máx. 0,5% do fundo de escala
Largura de banda 100 Hz
As entradas analógicas são isoladas galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
Ilustração 8.1 Isolamento PELV
Entradas do pulso/encoder
Entradas do pulso/encoder programáveis 2/1
Número do terminal do pulso/encoder 291), 332)/323), 33
Frequência máxima no terminal 29, 32, 33 110 kHz (acionado por Push-pull)
Frequência máxima no terminal 29, 32, 33 5 kHz (coletor aberto)
Frequência mínima no terminal 29, 32, 33 4 Hz
Nível de tensão Consulte o grupo do parâmetro 5-1* entradas digitais no guia de programação.
Tensão máxima na entrada 28 V CC
Resistência de entrada, R
48 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
i
Aproximadamente 4 kΩ
3)
Page 55

Especicações Guia de Operação
Precisão da entrada de pulso (0,1–1 kHz) Erro máximo: 0,1% do fundo de escala
Precisão da entrada do encoder (1–11 kHz) Erro máximo: 0,05% do fundo de escala
As entradas de pulso e do encoder (terminais 29, 32, 33) são isoladas galvanicamente da tensão de alimentação (PELV) e dos
demais terminais de alta tensão.
1) FC 302 somente.
2) As entradas de pulso são 29 e 33.
3) Entradas do encoder: 32=A, 33=B.
Saída digital
Saída digital/de pulso programável 2
Número do terminal 27, 29
Nível de tensão na saída de frequência/digital 0–24 V
Corrente de saída máxima (dissipador ou fonte) 40 mA
Carga máxima na saída de frequência 1 kΩ
Carga capacitiva máxima na saída de frequência 10 nF
Frequência de saída mínima na saída de frequência 0 Hz
Frequência de saída máxima na saída de frequência 32 kHz
Precisão da saída de frequência Erro máximo: 0,1% do fundo de escala
Resolução das saídas de frequência 12 bits
1) Os terminais 27 e 29 podem também ser programados como entradas.
A saída digital está isolada galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
Saída analógica
Número de saídas analógicas programáveis 1
Número do terminal 42
Faixa atual na saída analógica 0/4 a 20 mA
Carga máxima GND - saída analógica menor que 500 Ω
Precisão na saída analógica Erro máximo: 0,5% do fundo de escala
Resolução na saída analógica 12 bits
A saída analógica está isolada galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
Cartão de controle, saída 24 V CC
Número do terminal 12, 13
Tensão de saída 24 V +1, -3 V
Carga máxima 200 mA
A fonte de alimentação de 24 V CC está isolada galvanicamente da tensão de alimentação (PELV), mas está no mesmo potencial
das entradas e saídas digital e analógica.
1)
8 8
Cartão de controle, Saída 10 V CC
Número do terminal ±50
Tensão de saída 10,5 V ±0,5 V
Carga máxima 15 mA
A alimentação de 10 V CC está isolada galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
Cartão de controle, comunicação serial RS485
Número do terminal 68 (P, TX+, RX+), 69 (N, TX-, RX-)
Número do terminal 61 Ponto comum dos terminais 68 e 69
O circuito de comunicação serial RS485 é separado funcionalmente de outros circuitos centrais e isolado galvanicamente da
tensão de alimentação (PELV).
Cartão de controle, comunicação serial USB
Padrão USB 1,1 (velocidade total)
Plugue USB Plugue USB tipo B
A conexão ao PC é realizada por meio de um cabo de USB host/dispositivo.
A conexão USB está isolada galvanicamente da tensão de alimentação (PELV) e de outros terminais de alta tensão.
A conexão do terra do USB não está isolada galvanicamente do ponto de aterramento de proteção. Utilize somente laptop
isolado para ligar-se ao conector USB do conversor de frequência.
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 49
Page 56
Especicações
Saídas do relé
Saídas do relé programáveis FC 301 todos os kW: 1/FC 302 todos os kW: 2
Relé 01 número do terminal 1–3 (freio ativado), 1–2 (freio desativado)
Máxima carga do terminal (CA-1)1) em 1–3 (NF), 1–2 (NA) (carga resistiva) 240 V CA, 2 A
Carga do terminal máxima (CA-15)1) (carga indutiva a cosφ 0,4) 240 V CA, 0,2 A
Máxima carga do terminal (CC-1)1) em 1–2 (NA), 1–3 (NF) (carga resistiva) 60 V CC, 1 A
Carga do terminal máxima (CC-13)1) (carga indutiva) 24 V CC, 0,1 A
Relé 02 (FC 302 somente) número do terminal 4–6 (freio ativado), 4–5 (freio desativado)
Máxima carga do terminal (CA-1)1) em 4–5 (NA) (carga resistiva)2),3) sobretensão cat. II 400 V CA, 2 A
Carga do terminal máxima (CA-15)1) em 4–5 (NA) (carga indutiva @ cosφ 0,4) 240 V CA, 0,2 A
Máxima carga do terminal (CC-1)1) em 4–5 (NA) (carga resistiva) 80 V CC, 2 A
Máxima carga do terminal (CC-13)1) em 4–5 (NA) (carga indutiva) 24 V CC, 0,1 A
Máxima carga do terminal (CA-1)1) em 4–6 (NF) (carga resistiva) 240 V CA, 2 A
Carga do terminal máxima (CA-15)1) em 4–6 (NF) (carga indutiva @ cosφ 0,4) 240 V CA, 0,2 A
Máxima carga do terminal (CC-1)1) em 4–6 (NF) (carga resistiva) 50 V CC, 2 A
Máxima carga do terminal (CC-13)1) em 4–6 (NF) (carga indutiva) 24 V CC, 0,1 A
Mínima carga do terminal em 1–3 (NF), 1–2 (NA), 4–6 (NF), 4–5 (NA) 24 V CC 1 mA, 24 V CA 20 mA
Ambiente de acordo com a EN 60664-1 Categoria de sobretensão III/ grau de poluição 2
1) IEC 60947 partes 4 e 5
88
Os contatos do relé são isolados galvanicamente do resto do circuito, por isolamento reforçado (PELV).
2) Categoria de sobretensão II.
3) Aplicações UL de 300 V CA 2 A.
Desempenho do cartão de controle
Intervalo de varredura 1 ms
VLT® AutomationDrive FC 301/302
Características de controle
Resolução de frequência de saída em 0–590 Hz ±0,003 Hz
Repetir a precisão da partida/parada (terminais 18, 19) ≤±0,1 ms
Tempo de resposta do sistema (terminais 18, 19, 27, 29, 32, 33) ≤2 ms
Faixa de controle da velocidade (malha aberta) 1:100 da velocidade síncrona
Faixa de controle da velocidade (malha fechada) 1:1.000 da velocidade síncrona
Precisão da velocidade (malha aberta) 30–4.000 RPM: Erro ±8 RPM
Precisão de velocidade (malha fechada), dependendo da resolução do dispositivo de
feedback 0–6000 RPM: Erro ±0,15 RPM
Precisão de controle de torque (feedback de velocidade) Erro máximo ±5% do torque nominal
Todas as características de controle são baseadas em um motor assíncrono de 4 polos.
50 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 57
Especicações Guia de Operação
8.7 Fusíveis e Disjuntores
Use fusíveis e/ou disjuntores recomendados no lado da alimentação como proteção, se houver avaria do componente
dentro do conversor de frequência (primeira falha).
AVISO!
O uso dos fusíveis no lado da alimentação é obrigatório para instalações em conformidade com IEC 60364 (CE) e NEC
2009 (UL).
Recomendações
Fusíveis do tipo gG.
•
Disjuntores do tipo Moeller. Para outros tipos de disjuntores, certique-se de que a energia no conversor de
•
frequência seja igual ou inferior à energia fornecida pelos tipos Moeller.
O uso de fusíveis e disjuntores recomendados garante que possíveis danos ao conversor de frequência sejam limitados a
danos no interior da unidade. Para obter mais informações, consulte Notas de aplicação para fusíveis e disjuntores.
Os fusíveis em capétulo 8.7.1 Conformidade com a CE a capétulo 8.7.2 Conformidade com o UL são apropriados para uso em
um circuito capaz de fornecer 100.000 A
frequência. Com o fusível adequado, as características nominais da corrente de curto circuito (SCCR) do conversor de
frequência é de100.000 A
rms
.
(simétrico), dependendo das características nominais da tensão do conversor de
rms
8 8
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 51
Page 58

Especicações
8.7.1 Conformidade com a CE
200–240 V
VLT® AutomationDrive FC 301/302
Gabinete Potência [kW (hp)] Tamanho recomendado
do fusível
A1 0,25–1,5 (0,34–2,0) gG-10 gG-25 PKZM0-16 16
A2 0,25–1,5 (0,34–2,0) gG-10 gG-25 PKZM0-25 25
2,2 (3,0) gG-16
A3 3,0 (4,0) gG-16 gG-32 PKZM0-25 25
3,7 (5,0) gG-20
A4 0,25–1,5 (0,34–2,0) gG-10 gG-32 PKZM0-25 25
2,2 (3,0) gG-16
A5 0,25–1,5 (0,34–2,0) gG-10 gG-32 PKZM0-25 25
2,2–3,0 (3,0–4,0) gG-16
3,7 (5,0) gG-20
B1 5,5 (7,5) gG-25 gG-80 PKZM4-63 63
7,5 (10,0) gG-32
B2 11,0 (15,0) gG-50 gG-100 NZMB1-A100 100
88
B3 5,5 (7,5) gG-25 gG-63 PKZM4-50 50
B4 7,5 (10,0) gG-32 gG-125 NZMB1-A100 100
11,0 (15,0) gG-50
15,0 (20,0) gG-63
C1 15,0 (20,0) gG-63 gG-160 NZMB2-A200 160
18,5 (25,0) gG-80
22,0 (30,0) gG-100 aR-160
C2 30,0 (40,0) aR-160 aR-200 NZMB2-A250 250
37,0 (50,0) aR-200 aR-250
C3 18,5 (25,0) gG-80 gG-150 NZMB2-A200 150
22,0 (30,0) aR-125 aR-160
C4 30,0 (40,0) aR-160 aR-200 NZMB2-A250 250
37,0 (50,0) aR-200 aR-250
Fusível máximo
recomendado
Disjuntor
recomendado
Moeller
Máximo nível de
desarme [A]
Tabela 8.13 200–240 V, tamanho dos gabinetes A, B e C
52 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 59

Especicações Guia de Operação
380–500 V
Gabinete Potência [kW
(hp)]
A1 0,37–1,5 (0,5–2,0) gG-10 gG-25 PKZM0-16 16
A2 0,37–3,0 (0,5–4,0) gG-10 gG-25 PKZM0-25 25
4,0 (5,0) gG-16
A3 5,5–7,5 (7,5–10,0) gG-16 gG-32 PKZM0-25 25
A4 0,37–3,0 (0,5–4,0) gG-10 gG-32 PKZM0-25 25
4,0 (5,0) gG-16
A5 0,37–3,0 (0,5–4,0) gG-10 gG-32 PKZM0-25 25
4,0–7,5 (5,0–10,0) gG-16
B1 11–15 (15,0–20,0) gG-40 gG-80 PKZM4-63 63
B2 18,5 (25,0) gG-50 gG-100 NZMB1-A100 100
22,0 (30,0) gG-63
B3 11–15 (15,0–20,0) gG-40 gG-63 PKZM4-50 50
B4 18,5 (25,0) gG-50 gG-125 NZMB1-A100 100
22,0 (30,0) gG-63
30,0 (40,0) gG-80
C1 30,0 (40,0) gG-80 gG-160 NZMB2-A200 160
37,0 (50,0) gG-100
45,0 (60,0) gG-160
C2 55,0 (75,0) aR-200 aR-250 NZMB2-A250 250
75,0 (100,0) aR-250
C3 37,0 (50,0) gG-100 gG-150 NZMB2-A200 150
45,0 (60,0) gG-160 gG-160
C4 55,0 (75,0) aR-200 aR-250 NZMB2-A250 250
75,0 (100,0) aR-250
Tamanho recomendado
do fusível
Fusível máximo
recomendado
Disjuntor Moeller
recomendado
Máximo nível de
desarme [A]
8 8
Tabela 8.14 380–500 V, tamanho dos gabinetes A, B e C
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 53
Page 60

Especicações
525–600 V
VLT® AutomationDrive FC 301/302
Gabinete Potência [kW
(hp)]
A2 0-75-4,0 (1,0–5,0) gG-10 gG-25 PKZM0-25 25
A3 5,5 (7,5) gG-10 gG-32 PKZM0-25 25
7,5 (10,0) gG-16
A5 5,5 (7,5) gG-10 gG-32 PKZM0-25 25
7,5 (10,0) gG-16
B1 11,0 (15,0) gG-25 gG-80 PKZM4-63 63
15,0 (20,0) gG-32
18,5 (25,0) gG-40
B2 22,0 (30,0) gG-50 gG-100 NZMB1-A100 100
30,0 (40,0) gG-63
B3 11,0 (15,0) gG-25 gG-63 PKZM4-50 50
15,0 (20,0) gG-32
B4 18,5 (25,0) gG-40 gG-125 NZMB1-A100 100
22,0 (30,0) gG-50
30,0 (40,0) gG-63
88
C1 37,0 (50,0) gG-63 gG-160 NZMB2-A200 160
45,0 (60,0) gG-100
55,0 (60,0) aR-160 aR-250
C2 75,0 (100,0) aR-200 aR-250 NZMB2-A250 250
C3 37,0 (50,0) gG-63 gG-150 NZMB2-A200 150
45,0 (60,0) gG-100 gG-150 NZMB2-A200
C4 55,0 (75,0) aR-160 aR-250 NZMB2-A250 250
75,0 (100,0) aR-200
Tamanho recomendado
do fusível
Fusível máximo
recomendado
Disjuntor
recomendado
Moeller
Máximo nível de
desarme [A]
Tabela 8.15 525–600 V, tamanho dos gabinetes A, B e C
525–690 V
Gabinete Potência [kW
(hp)]
A3 1,1 (1,5)
1,5 (2,0)
2,2 (3,0)
3,0 (4,0)
4,0 (5,0)
5,5 (7,5)
7,5 (10,0)
B2/B4 11,0 (15,0)
15,0 (20,0)
18,5 (25,0)
22,0 (30,0)
B4/C2 30,0 (40,0) gG-63 gG-80 – –
C2/C3 37,0 (50,0)
45,0 (60,0)
C2 55,0 (75,0)
75,0 (100,0)
Tabela 8.16 525–690 V, tamanho dos gabinetes A, B e C
Tamanho recomendado
do fusível
gG-6
gG-6
gG-6
gG-10
gG-10
gG-16
gG-16
gG-25
gG-32
gG-32
gG-40
gG-63
gG-80
gG-100
gG-125
Fusível máximo
recomendado
gG-25
gG-25
gG-25
gG-25
gG-25
gG-25
gG-25
gG-63
gG-100
gG-125
gG-160
Disjuntor
recomendado
Moeller
PKZM0-16 16
– –
– –
– –
Máximo nível de
desarme [A]
54 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 61

Especicações Guia de Operação
8.7.2 Conformidade com o UL
200–240 V
Fusível máximo recomendado
Potência
[kW (hp)]
0,25–0,37
(0,34–0,5)
0,55–1,1
(0,75–1,5)
1,5 (2,0) KTN-R-15 JKS-15 JJN-15 FNQ-R-15 KTK-R-15 LP-CC-15
2,2 (3,0) KTN-R-20 JKS-20 JJN-20 FNQ-R-20 KTK-R-20 LP-CC-20
3,0 (4,0) KTN-R-25 JKS-25 JJN-25 FNQ-R-25 KTK-R-25 LP-CC-25
3,7 (5,0) KTN-R-30 JKS-30 JJN-30 FNQ-R-30 KTK-R-30 LP-CC-30
5,5 (7,5) KTN-R-50 KS-50 JJN-50 – – –
7,5 (10,0) KTN-R-60 JKS-60 JJN-60 – – –
11,0 (15,0) KTN-R-80 JKS-80 JJN-80 – – –
15–18,5
(20,0–25,0)
22,0 (30,0) KTN-R-150 JKS-150 JJN-150 – – –
30,0 (40,0) KTN-R-200 JKS-200 JJN-200 – – –
37,0 (50,0) KTN-R-250 JKS-250 JJN-250 – – –
Bussmann
Tipo RK1
KTN-R-125 JKS-125 JJN-125 – – –
1)
KTN-R-05 JKS-05 JJN-05 FNQ-R-5 KTK-R-5 LP-CC-5
KTN-R-10 JKS-10 JJN-10 FNQ-R-10 KTK-R-10 LP-CC-10
Bussmann
Tipo J
Bussmann
Tipo T
Bussmann
Tipo CC
Bussmann
Tipo CC
Bussmann
Tipo CC
8 8
Tabela 8.17 200–240 V, tamanho dos gabinetes A, B e C
Fusível máximo recomendado
Potência
[kW (hp)]
0,25–0,37
(0,34–0,5)
0,55–1,1
(0,75–1,5)
1,5 (2,0) 5017906-016 KLN-R-15 ATM-R-15 A2K-15-R FWX-15 – – HSJ-15
2,2 (3,0) 5017906-020 KLN-R-20 ATM-R-20 A2K-20-R FWX-20 – – HSJ-20
3,0 (4,0) 5017906-025 KLN-R-25 ATM-R-25 A2K-25-R FWX-25 – – HSJ-25
3,7 (5,0) 5012406-032 KLN-R-30 ATM-R-30 A2K-30-R FWX-30 – – HSJ-30
5,5 (7,5) 5014006-050 KLN-R-50 – A2K-50-R FWX-50 – – HSJ-50
7,5 (10,0) 5014006-063 KLN-R-60 – A2K-60-R FWX-60 – – HSJ-60
11,0 (15,0) 5014006-080 KLN-R-80 – A2K-80-R FWX-80 – – HSJ-80
15–18,5
(20,0–25,0)
22,0 (30,0) 2028220-150 KLN-R-150 – A2K-150-R FWX-150 L25S-150 A25X-150 HSJ-150
30,0 (40,0) 2028220-200 KLN-R-200 – A2K-200-R FWX-200 L25S-200 A25X-200 HSJ-200
37,0 (50,0) 2028220-250 KLN-R-250 – A2K-250-R FWX-250 L25S-250 A25X-250 HSJ-250
Tabela 8.18 200–240 V, tamanho dos gabinetes A, B e C
1) Os fusíveis KTS da Bussmann podem substituir o KTN por
conversores de frequência de 240 V.
2) Os fusíveis FWH da Bussmann podem substituir o FWX por
conversores de frequência de 240 V.
3) Os fusíveis A6KR da Ferraz Shawmut podem substituir o A2KR por
conversores de frequência de 240 V.
SIBA
Tipo RK1
5017906-005 KLN-R-05 ATM-R-05 A2K-05-R FWX-5 – – HSJ-6
5017906-010 KLN-R-10 ATM-R-10 A2K-10-R FWX-10 – – HSJ-10
2028220-125 KLN-R-125 – A2K-125-R FWX-125 – – HSJ-125
Littelfuse
Tipo RK1
Ferraz-
Shawmut
Tipo CC
Ferraz-
Shawmut
Tipo RK1
Bussmann
Tipo JFHR2
3)
4) Os fusíveis A50X da Ferraz Shawmut podem substituir o A25X por
conversores de frequência de 240 V.
2)
Littelfuse
JFHR2
Ferraz-
Shawmut
4)
JFHR2
Ferraz-
Shawmut
J
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 55
Page 62

Especicações
VLT® AutomationDrive FC 301/302
380–500 V
Fusível máximo recomendado
Potência [kW (hp)]
0,37–1,1 (0,5–1,5) KTS-R-6 JKS-6 JJS-6 FNQ-R-6 KTK-R-6 LP-CC-6
1,5–2,2 (2,0–3,0) KTS-R-10 JKS-10 JJS-10 FNQ-R-10 KTK-R-10 LP-CC-10
3,0 (4,0) KTS-R-15 JKS-15 JJS-15 FNQ-R-15 KTK-R-15 LP-CC-15
4,0 (5,0) KTS-R-20 JKS-20 JJS-20 FNQ-R-20 KTK-R-20 LP-CC-20
5,5 (7,5) KTS-R-25 JKS-25 JJS-25 FNQ-R-25 KTK-R-25 LP-CC-25
7,5 (10,0) KTS-R-30 JKS-30 JJS-30 FNQ-R-30 KTK-R-30 LP-CC-30
11,0 (15,0) KTS-R-40 JKS-40 JJS-40 – – –
15,0 (20,0) KTS-R-50 JKS-50 JJS-50 – – –
18,5 (25,0) KTS-R-60 JKS-60 JJS-60 – – –
22,0 (30,0) KTS-R-80 JKS-80 JJS-80 – – –
30,0 (40,0) KTS-R-100 JKS-100 JJS-100 – – –
37,0 (50,0) KTS-R-125 JKS-125 JJS-125 – – –
45,0 (60,0) KTS-R-150 JKS-150 JJS-150 – – –
55,0 (75,0) KTS-R-200 JKS-200 JJS-200 – – –
75,0 (100,0) KTS-R-250 JKS-250 JJS-250 – – –
Bussmann
Tipo RK1
Bussmann
Tipo J
Bussmann
Tipo T
Bussmann
Tipo CC
Bussmann
Tipo CC
Bussmann
Tipo CC
88
Tabela 8.19 380–500 V, tamanho dos gabinetes A, B e C
Fusível máximo recomendado
Ferraz
Potência [kW (hp)]
0,37–1,1 (0,5–1,5) 5017906-006 KLS-R-6 ATM-R-6 A6K-6-R FWH-6 HSJ-6 – –
1,5–2,2 (2,0–3,0) 5017906-010 KLS-R-10 ATM-R-10 A6K-10-R FWH-10 HSJ-10 – –
3,0 (4,0) 5017906-016 KLS-R-15 ATM-R-15 A6K-15-R FWH-15 HSJ-15 – –
4,0 (5,0) 5017906-020 KLS-R-20 ATM-R-20 A6K-20-R FWH-20 HSJ-20 – –
5,5 (7,5) 5017906-025 KLS-R-25 ATM-R-25 A6K-25-R FWH-25 HSJ-25 – –
7,5 (10,0) 5012406-032 KLS-R-30 ATM-R-30 A6K-30-R FWH-30 HSJ-30 – –
11,0 (15,0) 5014006-040 KLS-R-40 – A6K-40-R FWH-40 HSJ-40 – –
15,0 (20,0) 5014006-050 KLS-R-50 – A6K-50-R FWH-50 HSJ-50 – –
18,5 (25,0) 5014006-063 KLS-R-60 – A6K-60-R FWH-60 HSJ-60 – –
22,0 (30,0) 2028220-100 KLS-R-80 – A6K-80-R FWH-80 HSJ-80 – –
30,0 (40,0) 2028220-125 KLS-R-100 – A6K-100-R FWH-100 HSJ-100 – –
37,0 (50,0) 2028220-125 KLS-R-125 – A6K-125-R FWH-125 HSJ-125 – –
45,0 (60,0) 2028220-160 KLS-R-150 – A6K-150-R FWH-150 HSJ-150 – –
55,0 (75,0) 2028220-200 KLS-R-200 – A6K-200-R FWH-200 HSJ-200 A50-P-225 L50-S-225
75,0 (100,0) 2028220-250 KLS-R-250 – A6K-250-R FWH-250 HSJ-250 A50-P-250 L50-S-250
SIBA
Tipo RK1
Littelfuse
Tipo RK1
Ferraz
Shawmut
Tipo CC
Ferraz
Shawmut
Tipo RK1
Bussmann
JFHR2
Shawmut
JFerraz
Shawmut
J
Ferraz
Shawmut
JFHR2
1)
Littelfuse
JFHR2
Tabela 8.20 380–500 V, tamanho dos gabinetes A, B e C
1) Os fusíveis Ferraz Shawmut A50QS podem ser substituídos por
fusíveis A50P.
56 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 63

Especicações Guia de Operação
525–600 V
Fusível máximo recomendado
Potênc
ia [kW
(hp)]
0,75–
1,1
(1,0–
1,5)
1,5–2,2
(2,0–
3,0)
3,0
(4,0)
4,0
(5,0)
5,5
(7,5)
7,5
(10,0)
11
(15,0)
15,0
(20,0)
18,5
(25,0)
22,0
(30,0)
30,0
(40,0)
37,0
(50,0)
(100,0)
Bussmann
Tipo RK1
KTS-R-5 JKS-5 JJS-6 FNQ-R-5 KTK-R-5 LP-CC-5 5017906-005 KLS-R-005 A6K-5-R HSJ-6
KTS-R-10 JKS-10 JJS-10 FNQ-R-10 KTK-R-10 LP-CC-10 5017906-010 KLS-R-010 A6K-10-R HSJ-10
KTS-R15 JKS-15 JJS-15 FNQ-R-15 KTK-R-15 LP-CC-15 5017906-016 KLS-R-015 A6K-15-R HSJ-15
KTS-R20 JKS-20 JJS-20 FNQ-R-20 KTK-R-20 LP-CC-20 5017906-020 KLS-R-020 A6K-20-R HSJ-20
KTS-R-25 JKS-25 JJS-25 FNQ-R-25 KTK-R-25 LP-CC-25 5017906-025 KLS-R-025 A6K-25-R HSJ-25
KTS-R-30 JKS-30 JJS-30 FNQ-R-30 KTK-R-30 LP-CC-30 5017906-030 KLS-R-030 A6K-30-R HSJ-30
KTS-R-35 JKS-35 JJS-35 – – – 5014006-040 KLS-R-035 A6K-35-R HSJ-35
KTS-R-45 JKS-45 JJS-45 – – – 5014006-050 KLS-R-045 A6K-45-R HSJ-45
KTS-R-50 JKS-50 JJS-50 – – – 5014006-050 KLS-R-050 A6K-50-R HSJ-50
KTS-R-60 JKS-60 JJS-60 – – – 5014006-063 KLS-R-060 A6K-60-R HSJ-60
KTS-R-80 JKS-80 JJS-80 – – – 5014006-080 KLS-R-075 A6K-80-R HSJ-80
KTS-R-100 JKS-100 JJS-100 – – – 5014006-100 KLS-R-100 A6K-100-R HSJ-100
45,0
KTS-R-125 JKS-125 JJS-125 – – – 2028220-125 KLS-R-125 A6K-125-R HSJ-125
(60,0)
55,0
KTS-R-150 JKS-150 JJS-150 – – – 2028220-150 KLS-R-150 A6K-150-R HSJ-150
(75,0)
75,0
KTS-R-175 JKS-175 JJS-175 – – – 2028220-200 KLS-R-175 A6K-175-R HSJ-175
Bussmann
Tipo J
Bussmann
Tipo T
Bussmann
Tipo CC
Bussmann
Tipo CC
Bussmann
Tipo CC
SIBA
Tipo RK1
Littelfuse
Tipo RK1
Ferraz
Shawmut
Tipo RK1
Ferraz
Shawmut
J
8 8
Tabela 8.21 525–600 V, tamanho dos gabinetes A, B e C
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 57
Page 64
Especicações
VLT® AutomationDrive FC 301/302
525–690 V
Fusível máximo recomendado
Potência
[kW (hp)]
1,1 (1,5) KTS-R-5 JKS-5 JJS-6 FNQ-R-5 KTK-R-5 LP-CC-5
1,5–2,2
(2,0–3,0)
3,0 (4,0) KTS-R15 JKS-15 JJS-15 FNQ-R-15 KTK-R-15 LP-CC-15
4,0 (5,0) KTS-R20 JKS-20 JJS-20 FNQ-R-20 KTK-R-20 LP-CC-20
5,5 (7,5) KTS-R-25 JKS-25 JJS-25 FNQ-R-25 KTK-R-25 LP-CC-25
7,5 (10,0) KTS-R-30 JKS-30 JJS-30 FNQ-R-30 KTK-R-30 LP-CC-30
11,0 (15,0) KTS-R-35 JKS-35 JJS-35 – – –
15,0 (20,0) KTS-R-45 JKS-45 JJS-45 – – –
18,5 (25,0) KTS-R-50 JKS-50 JJS-50 – – –
22,0 (30,0) KTS-R-60 JKS-60 JJS-60 – – –
30,0 (40,0) KTS-R-80 JKS-80 JJS-80 – – –
37,0 (50,0) KTS-R-100 JKS-100 JJS-100 – – –
45,0 (60,0) KTS-R-125 JKS-125 JJS-125 – – –
55,0 (75,0) KTS-R-150 JKS-150 JJS-150 – – –
88
75,0
(100,0)
Bussmann
Tipo RK1
KTS-R-10 JKS-10 JJS-10 FNQ-R-10 KTK-R-10 LP-CC-10
KTS-R-175 JKS-175 JJS-175 – – –
Bussmann
Tipo J
Bussmann
Tipo T
Bussmann
Tipo CC
Bussmann
Tipo CC
Bussmann
Tipo CC
Tabela 8.22 525–690 V, tamanho dos gabinetes A, B e C
Fusível máximo recomendado
Ferraz
Potência
[kW (hp)]
11,0 (15,0) 30 A KTS-R-30 JKS-30 JKJS-30 5017906-030 KLS-R-030 A6K-30-R HST-30
15–18,5
(20,0–25,0)
22,0 (30,0) 60 A KTS-R-60 JKS-60 JJS-60 5014006-063 KLS-R-060 A6K-60-R HST-60
30,0 (40,0) 80 A KTS-R-80 JKS-80 JJS-80 5014006-080 KLS-R-075 A6K-80-R HST-80
37,0 (50,0) 90 A KTS-R-90 JKS-90 JJS-90 5014006-100 KLS-R-090 A6K-90-R HST-90
45,0 (60,0) 100 A KTS-R-100 JKS-100 JJS-100 5014006-100 KLS-R-100 A6K-100-R HST-100
55,0 (75,0) 125 A KTS-R-125 JKS-125 JJS-125 2028220-125 KLS-150 A6K-125-R HST-125
75,0 (100,0) 150 A KTS-R-150 JKS-150 JJS-150 2028220-150 KLS-175 A6K-150-R HST-150
Tabela 8.23 525–690 V, tamanho dos gabinetes B e C
Pré-fusível
máximo
45 A KTS-R-45 JKS-45 JJS-45 5014006-050 KLS-R-045 A6K-45-R HST-45
Bussmann
E52273
RK1/JDDZ
Bussmann
E4273
J/JDDZ
Bussmann
E4273
T/JDDZ
SIBA
E180276
RK1/JDDZ
Littelfuse
E81895
RK1/JDDZ
Shawmut
E163267/
E2137
RK1/JDDZ
Ferraz
Shawmut
E2137
J/HSJ
58 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 65
Especicações Guia de Operação
8.8 Torques de Aperto de Conexão
Tamanho
do
gabinete
A2
A3
A4
A5
B1
B2 11 (15)
B3
B4
C1
C2
C3
C4
200–240 V
[kW (hp)]
0,25–2,2
(0,34–3,0)
3–3,7 (4,0–
5,0)
0,25–2,2
(0,34–3,0)
3–3,7 (4,0–
5,0)
5,5–7,5
(7,5–10,0)
5,5–7,5
(7,5–10,0)
11–15 (15–
20)
15–22 (20–
30)
30–37 (40–
50)
18,5–22
(25–30)
37–45 (50–
60)
380–500 V
[kW (hp)]
0,37–4 (0,5–
5,0)
5,5–7,5
(7,5–10,0)
0,37–4 (0,5–
5,0)
5,5–7,5
(7,5–10,0)
11–15 (15–
20)
18,5–22
(25–30)
11–15 (15–
20)
18,5–30
(25–40)
30–45 (40–
60)
55–75 (75–
100)
30–37 (40–
50)
55–75 (75–
100)
525–690 V
[kW (hp)]
–
1,1–7,5
(1,5–10,0)
–
–
–
11–22 (15–
30)
–
11–30 (15–
40)
–
30–75 (40–
100)
37–45 (50–
60)
11–22 (15–
30)
Objetivo Torque de aperto [Nm]
Rede elétrica, resistor de frenagem, load sharing, cabos de
motor.
Rede elétrica, resistor de frenagem, load sharing, cabos de
motor.
Relé. 0,5–0,6 (4,4–5,3)
Terra. 2–3 (17,7–26,6)
Rede elétrica, resistor de frenagem, cabos de load sharing. 4,5 (39,8)
Cabos de motor. 4,5 (39,8)
Relé. 0,5–0,6 (4,4–5,3)
Terra. 2–3 (17,7–26,6)
Rede elétrica, resistor de frenagem, load sharing, cabos de
motor.
Relé. 0,5–0,6 (4,4–5,3)
Terra. 2–3 (17,7–26,6)
Rede elétrica, resistor de frenagem, load sharing, cabos de
motor.
Relé. 0,5–0,6 (4,4–5,3)
Terra. 2–3 (17,7–26,6)
Rede elétrica, resistor de frenagem, cabos de load sharing. 10 (89)
Cabos de motor. 10 (89)
Relé. 0,5–0,6 (4,4–5,3)
Terra. 2–3 (17,7–26,6)
Rede elétrica, cabos de motor.
Load sharing, cabos do freio. 14 (124)
Relé. 0,5–0,6 (4,4–5,3)
Terra. 2–3 (17,7–26,6)
Rede elétrica, resistor de frenagem, load sharing, cabos de
motor.
Relé. 0,5–0,6 (4,4–5,3)
Terra. 2–3 (17,7–26,6)
Rede elétrica, cabos de motor.
Load sharing, cabos do freio. 14 (124)
Relé. 0,5–0,6 (4,4–5,3)
Terra. 2–3 (17,7–26,6)
([pol.-lb])
0,5–0,6 (4,4–5,3)
1,8 (15,9)
1,8 (15,9)
4,5 (39,8)
14 (124) (até 95 mm
(3 AWG))
24 (212) (sobre 95 mm
(3 AWG))
10 (89)
14 (124) (até 95 mm
(3 AWG))
24 (212) (sobre 95 mm
(3 AWG))
2
2
8 8
2
2
Tabela 8.24 Torque de aperto para cabos
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 59
Page 66
Especicações
VLT® AutomationDrive FC 301/302
8.9 Valor Nominal da Potência, Peso e Dimensões
374
– – –
–
(14,7)
402
401
350
257
350
420
– –
1,1–7,5
(1,5–10)
55/66
55/66
21
20
21
Tipo 12/4X
Tipo 12/4X
Tipo 1
Chassi
Tipo 1
(0,5–10)
0,75–7,5
–
(0,5–5)
(7,5–10)
0,75–7,5
(1–10)
(1–10)
(0,34–5)
0,25–3,7
(0,34–3)
0,25–2,2
(4–5)
3–3,7
0,37–7,5
0,37–4
5,5–7,5
88
390
375
268
375
(16,5)
(15,4)
(14,8)
(10,6)
(14,8)
(15,8)
(15,8)
(13,8)
(10,1)
(13,8)
242
200
130
130
90
(9,5)
(7,9)
(5,1)
(5,1)
(3,5)
242
170
170
130
–
(9,5)
(6,7)
(6,7)
(5,1)
190
190
150
– 242 (9,5)
(7,5)
(7,5)
(5,9)
(0,34–3)
0,25–2,2
(0,34–2)
200–240 V 0,25–1,5
0,37–4
(0,5–5)
(0,5–2)
20
Chassi
– –
– –
20
Chassi
–
268
200
1)
A
(10,6)
(7,9)
374
316
A
(14,7)
(12,4)
257
190
(10,1)
(7,5)
90
75
(3,5)
(3)
130
(5,1)
150
(5,9)
c 6,0 (0,24) 8.0 (0.31) 8.0 (0.31) 8.0 (0.31) 8.0 (0.31) 8,25 (0,32) 8,25 (0,32)
e ø5 (ø0,2) ø5,5 (ø0,22) ø5,5 (ø0,22) ø5,5 (ø0,22) ø5,5 (ø0,22) ø6,5 (ø0,26) ø6,5 (ø0,26)
d ø8 (ø0,31) ø11 (ø0,43) ø11 (ø0,43) ø11 (ø0,43) ø11 (ø0,43) ø12 (ø0,47) ø12 (ø0,47)
f 5 (0,2) 9 (0,35) 9 (0,35) 6,5 (0,26) 6,5 (0,26) 6 (0,24) 9 (0,35)
Tamanho do gabinete A1 A2 A3 A4 A5
Potência nominal
[kW (hp)]
380–480/500 V 0,37–1,5
525–600 V
525–690 V
IP
NEMA
Altura [mm (pol.)]
Altura da placa de montagem
Altura com placa de terminação do ponto de
60 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Distância entre os orifícios para montagem a
aterramento para cabos eldbus
Largura [mm (pol.)]
Largura da placa de montagem B
Largura da placa de montagem com opção 1 C B –
Largura da placa de montagem com opções 2 C B –
Distância entre os orifícios para montagem b 60 (2,4) 70 (2,8) 70 (2,8) 110 (4,3) 110 (4,3) 171 (6,7) 215 (8,5)
Profundidade [mm (pol.)]
Profundidade sem opcionais A/B C 207 (8,1) 205 (8,1) 207 (8,1) 205 (8,1) 207 (8,1) 175 (6,9) 200 (7,9)
Com opção A/B C 222 (8,7) 220 (8,7) 222 (8,7) 220 (8,7) 222 (8,7) 175 (6,9) 200 (7,9)
Furos de parafuso [mm (pol)]
Peso máximo [kg (lb)] 2,7 (6) 4,9 (10,8) 5,3 (11,7) 6,6 (14,6) 7 (15,4) 9,7 (21,4) 13,5/14,2 (30/31)
Torque de aperto da tampa dianteira [Nm (pol.-lb)]
Tampa de plástico (baixo IP) Clique Clique Clique – –
Page 67
Especicações Guia de Operação
(0,34–5)
0,25–3,7
(0,34–3)
0,25–2,2
(4–5)
3–3,7
(0,34–3)
0,25–2,2
(0,5–10)
0,37–7,5
0,37–4
(0,5–5)
5,5–7,5
(7,5–10)
0,37–4
(0,5–5)
(1–10)
0,75–7,5
–
(1–10)
0,75–7,5
– –
1,1–7,5
(1,5–10)
8 8
Tamanho do gabinete A1 A2 A3 A4 A5
(0,34–2)
200–240 V 0,25–1,5
Potência nominal
[kW (hp)]
(0,5–2)
380–480/500 V 0,37–1,5
– –
– –
525–600 V
525–690 V
Cobertura de metal (IP55/66) – – – 1,5 (13,3) 1,5 (13,3)
Tabela 8.25 Valores nominais da potência, peso, e dimensões, tamanho do gabinete A1–A5
1) Consulte Ilustração 8.2 e Ilustração 8.3 para orifícios para montagem superior e inferior.
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 61
Page 68
Especicações
VLT® AutomationDrive FC 301/302
20
11–15
(15–20)
(25–40)
18,5–30
11–15
5,5–7,5
15
88
(7,5–10)
18,5–22
(15–20)
(25–30)
(25–40)
18,5–30
11–15
(15–20)
(25–30)
18,5–22
11–30
–
11–22
(15–40)
20
(15–30)
21/55/66
Chassi
Chassi
Tipo 1/12/4X
520
399
650
(20,5)
(15,7)
(25,6)
595
420
(23,4)
(16,5)
495
380
624
(19,5)
(15)
(24,6)
230
165
242
(9,1)
(6,5)
(9,5)
230
205
242
(9,1)
(8,1)
(9,5)
(7,5–10)
200–240 V 5,5–7,5
(15–20)
(15–20)
–
21/55/66
Tipo 1/12/4X
–
480
1)
A
(18,9)
454
A – –
(17,9)
242
(9,5)
242
(9,5)
c 12 (0,47) 12 (0,47) 8 (0,31) –
f 9 (0,35) 9 (0,35) 7,9 (0,31) 15 (0,59)
e ø9 (ø0,35) ø9 (ø0,35) 6,8 (0,27) 8,5 (0,33)
d ø19 (ø0,75) ø19 (ø0,75) 12 (0,47) –
Tamanho do gabinete B1 B2 B3 B4
Potência nominal
[kW (hp)]
380–480/500 V 11–15
525–600 V 11–15
525–690 V
IP
NEMA
Altura [mm (pol.)]
Altura da placa de montagem
Altura com placa de terminação do ponto de aterramento para cabos
62 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Distância entre os orifícios para montagem a
eldbus
Largura [mm (pol.)]
Largura da placa de montagem B
Largura da placa de montagem com opção 1 C B
Largura da placa de montagem com opções 2 C B 242 (9,5) 242 (9,5) 225 (8,9) 230 (9,1)
Distância entre os orifícios para montagem b 210 (8,3) 210 (8,3) 140 (5,5) 200 (7,9)
Profundidade [mm (pol.)]
Profundidade sem opcionais A/B C 260 (10,2) 260 (10,2) 249 (9,8) 242 (9,5)
Com opção A/B C 260 (10,2) 260 (10,2) 262 (10,3) 242 (9,5)
Furos de parafuso [mm (pol)]
Peso máximo [kg (lb)] 23 (51) 27 (60) 12 (26,5) 23,5 (52)
Torque de aperto da tampa dianteira [Nm (pol.-lb)]
Tampa de plástico (baixo IP) Clique Clique Clique Clique
Cobertura de metal (IP55/66) 2,2 (19,5) 2,2 (19,5) – –
Page 69
Especicações Guia de Operação
11–15
(15–20)
5,5–7,5
(7,5–10)
15
(7,5–10)
(25–40)
18,5–30
11–15
(15–20)
(25–30)
18,5–22
(15–20)
(25–40)
18,5–30
11–15
(15–20)
(25–30)
18,5–22
(15–20)
11–30
(15–40)
–
11–22
(15–30)
–
8 8
200–240 V 5,5–7,5
Tamanho do gabinete B1 B2 B3 B4
Potência nominal
[kW (hp)]
380–480/500 V 11–15
525–600 V 11–15
525–690 V
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 63
Tabela 8.26 Valores nominais da potência, peso e dimensões, tamanho do gabinete B1–B4
1) Consulte Ilustração 8.2 e Ilustração 8.3 para orifícios para montagem superior e inferior.
Page 70
Especicações
Tamanho do gabinete C1 C2 C3 C4 D3h
Potência
nominal
[kW (hp)]
380–480/500 V 30–45
525–600 V 30–45
525–690 V
IP
NEMA
Altura [mm (pol.)]
Altura da placa de montagem
Altura com placa de terminação do ponto
de aterramento para cabos eldbus
Distância entre os orifícios para montagem a
Largura [mm (pol.)]
88
Largura da placa de montagem B
Largura da placa de montagem com opção
1 C
Largura da placa de montagem com opções
2 C
Distância entre os orifícios para montagem b 272 (10,7) 334 (13,1) 270 (10,6) 330 (13) –
Profundidade [mm (pol.)]
Profundidade sem opcionais A/B C 310 (12,2) 335 (13,2) 333 (13,1) 333 (13,1) 375 (14,8)
Com opção A/B C 310 (12,2) 335 (13,2) 333 (13,1) 333 (13,1) 375 (14,8)
Furos de parafuso [mm (pol)]
Peso máximo [kg (lb)] 45 (99) 65 (143) 35 (77) 50 (110) 62 (137)
Torque de aperto da tampa dianteira [Nm (pol.-lb)]
Tampa de plástico (baixo IP) Clique Clique 2 (17,7) 2 (17,7) –
Cobertura de metal (IP55/66) 2,2 (19,5) 2,2 (19,5) 2 (17,7) 2 (17,7) –
1) Consulte Ilustração 8.2 e Ilustração 8.3 para orifícios para montagem superior e inferior.
200–240 V
–
VLT® AutomationDrive FC 301/302
15–22
(20–30)
(40–60)
(40–60)
–
21/55/66
Tipo 1/12/4X
1)
A
A – –
B
B 308 (12,1) 370 (14,6) 308 (12,1) 370 (14,6) –
c 12.5 (0,49) 12.5 (0,49) – – –
d ø19 (ø0,75) ø19 (ø0,75) – – –
e ø9 (ø0,35) ø9 (ø0,35) 8,5 (0,33) 8,5 (0,33) –
f 9,8 (0,39) 9,8 (0,39) 17 (0,67) 17 (0,67) –
680
(26,8)
648
(25,5)
308
(12,1)
308
(12,1)
30–37
(40–50)
55–75
(75–100)
55–90
(75–125)
30–75
(40–100)
21/55/66
Tipo 1/12/4X
770
(30,3)
739
(29,1)
370
(14,6)
370
(14,6)
18,5–22
(25–30)
37–45
(50–60)
37–45
(50–60)
37–45
(50–60)
20
Chassi
550
(21,7)
630
(24,8)
521
(20,5)
308
(12,1)
308
(12,1)
30–37
(40–50)
55–75
(75–100)
55–90
(75–125)
37–45
(50–60)
20
Chassi
660
(26)
800
(31,5)
631
(24,8)
370
(14,6)
370
(14,6)
(75–100)
–
–
–
55–75
20
Chassi
909
(35,8)
–
–
250
(9,8)
–
Tabela 8.27 Valores nominais da potência, peso e dimensões, tamanho dos gabinetes C1–C4 e D3h
64 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 71
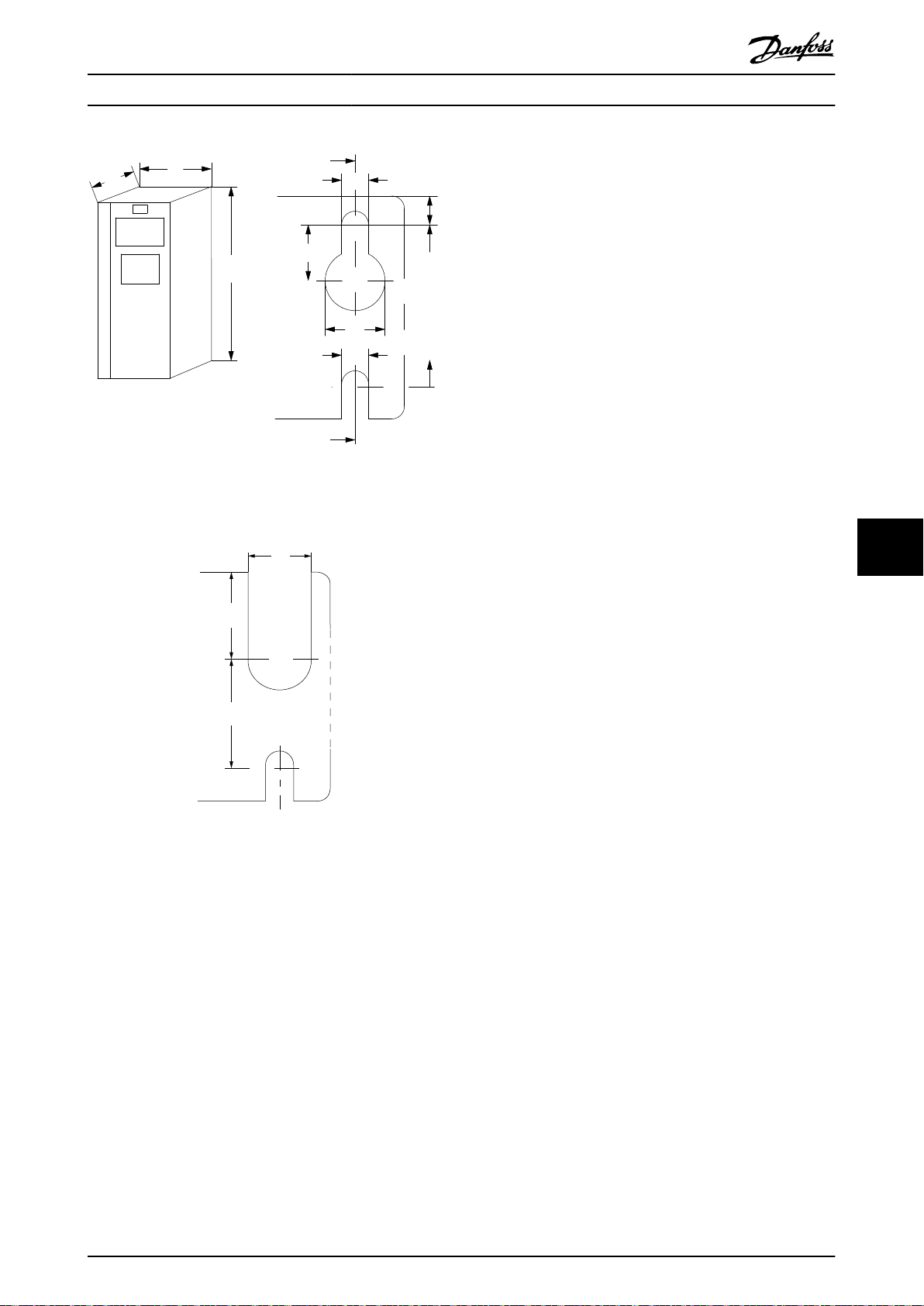
C
a
b
130BA648.12
f
e
B
A
a
d
e
b
c
a
e
f
130BA715.12
Especicações Guia de Operação
Ilustração 8.2 Orifícios para montagem superior e inferior
(consulte capétulo 8.9 Valor Nominal da Potência, Peso e
Dimensões)
Ilustração 8.3 Orifícios para montagem superior e inferior (B4,
C3 e C4)
8 8
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 65
Page 72
Apêndice
VLT® AutomationDrive FC 301/302
9 Apêndice
9.1 Símbolos, abreviações e convenções
°C
°F
CA Corrente alternada
AEO Otimização automática de energia
AWG American wire gauge
AMA Adaptação automática do motor
CC Corrente contínua
EMC Compatibilidade eletromagnética
ETR Relé térmico eletrônico
f
M,N
FC Conversor de frequência
I
INV
I
LIM
I
M,N
I
VLT,MAX
I
VLT,N
IP Proteção de entrada
99
LCP Painel de controle local
MCT Motion Control Tool
n
s
P
M,N
PELV Tensão extra baixa de proteção
PCB Placa de circuito impresso
Motor PM Motor de imã permanente
PWM Modulação por largura de pulso
RPM Rotações por minuto
Regen Terminais regenerativos
T
LIM
U
M,N
Graus Celsius
Graus Fahrenheit
Frequência do motor nominal
Corrente nominal de saída do inversor
Limite de Corrente
Corrente nominal do motor
Corrente de saída máxima
Corrente de saída nominal fornecida pelo conversor de frequência
Velocidade de sincronização do motor
Potência do motor nominal
Limite de torque
Tensão nominal do motor
Tabela 9.1 Símbolos e abreviações
Convenções
Listas numeradas indicam os procedimentos. As listas de itens indicam outras informações.
O texto em itálico indica:
Referência cruzada.
•
Link.
•
Nome do parâmetro.
•
Nome do grupo do parâmetro.
•
Opcional de parâmetro.
•
Nota de rodapé.
•
Todas as dimensões nos desenhos estão em [mm] (pol.).
Estrutura de Menu dos Parâmetros
9.2
66 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 73
Apêndice Guia de Operação
3-1* Referências
3-10 Referência Predenida
3-11 Velocidade de Jog [Hz]
limite de corrente
1-95 Tipo de sensor do termistor
1-94 ATEX ETR redução de velocidade de
3-12 Valor de catch-up/slow down
1-96 Recurso do sensor do termistor
3-13 Fonte da referência
3-14 Referência Relativa Predenida
3-15 Recurso de referência 1
interpolação
1-98 ATEX ETR frequência de pontos de
1-97 Nível limite do termistor
eixo q
3-16 Recurso de referência 2
1-99 ATEX ETR corrente de pontos de
Zero
3-18 Recurso de Referência de Escala
3-17 Recurso de referência 3
interpolação
2-** Freios
normal [RPM]
Relativa
3-19 Velocidade de jog [RPM]
2-0* Freio CC
2-00 Corrente de hold CC
3-42 Tempo de Desaceleração da Rampa 1
3-4* Rampa 1
3-40 Tipo de Rampa 1
3-41 Tempo de Aceleração da Rampa 1
[RPM]
2-02 Tempo de Frenagem CC
2-03 Velocidade de ativação do freio CC
2-01 Corrente de Freio CC
aceleração Acel.
aceleração Partida
3-48 Relação de Rampa-S da Rampa 1 na
3-47 Relação de Rampa-S da Rampa 1 na
3-46 Relação de Rampa-S da Rampa 1 na
3-45 Relação de Rampa-S da Rampa 1 na
[Hz]
2-04 Velocidade de ativação do freio CC
2-05 Referência Máxima
2-06 Corrente de Estacionamento
2-07 Tempo de Estacionamento
2-10 Função de Frenagem
2-11 Resistor do Freio (ohm)
2-1* Funções do Freio
3-5* Rampa 2
2-12 Limite da Potência de Frenagem (kW)
3-50 Tipo de Rampa 2
3-51 Tempo de Aceleração da Rampa 2
frenagem
2-13 Monitoramento da potência de
3-52 Tempo de Desaceleração da Rampa 2
2-15 Vericação do freio
3-55 Relação de Rampa-S da Rampa 2 na
2-16 Corrente máx. do freio CA
aceleração Partida
3-56 Relação de Rampa-S da Rampa 2 na
2-18 Condição da vericação do freio
2-17 Controle de Sobretensão
aceleração Acel.
2-19 Ganho de Sobretensão
desaceleração Acel.
desaceleração Partida
desaceleração Acel.
desaceleração Partida
3-58 Relação de Rampa-S da Rampa 2 na
3-57 Relação de Rampa-S da Rampa 2 na
2-22 Velocidade de Ativação do Freio [Hz]
2-21 Velocidade de ativação do freio [RPM]
2-2* Freio Mecânico
2-20 Corrente de Liberação do Freio
3-6* Rampa 3
2-23 Atraso de Ativação do Freio
3-60 Tipo de Rampa 3
2-24 Atraso da parada
3-61 Tempo de Aceleração da Rampa 3
2-25 Tempo de liberação do freio
3-62 Tempo de Desaceleração da Rampa 3
2-26 Referência de torque
3-65 Relação de Rampa-S da Rampa 3 na
2-27 Tempo de aceleração de torque
aceleração Partida
3-66 Relação de Rampa-S da Rampa 3 na
2-28 Fator de ganho do boost
2-29 Tempo de desaceleração do torque
aceleração Acel.
2-3* Avançado Freio Mecânico
desaceleração Acel.
desaceleração Partida
3-68 Relação de Rampa-S da Rampa 3 na
3-67 Relação de Rampa-S da Rampa 3 na
2-30 Ganho proporcional da posição P de
partida
2-31 Ganho proporcional do PID da
3-7* Rampa 4
velocidade de partida
2-32 Tempo integrado do PID da velocidade
3-70 Tipo de Rampa 4
de partida
aceleração Partida
3-75 Relação de Rampa-S da Rampa 4 na
3-72 Tempo de Desaceleração da Rampa 4
3-71 Tempo de Aceleração da Rampa 4
velocidade de partida
2-33 Tempo do ltro passa-baixa do PID da
3-** Referência/Rampas
3-0* Limites de Ref.
aceleração Acel.
3-76 Relação de Rampa-S da Rampa 4 na
3-00 Faixa de Referência
3-01 Unidade da Referência/Feedback
3-77 Relação de Rampa-S da Rampa 4 na
3-02 Referência Mínima
desaceleração Partida
3-03 Referência Máxima
3-04 Função de Referência
9 9
ying start
cimento de campo
modelo
Normal [Hz]
start
Velocidade
Velocidade
de Escorregamento
cimento de ressonância
Parada [rpm]
parada [RPM]
Parada Precisa
1-47 Calibração de torque
1-46 Ganho de Detecção de Posição
0-70 Data e Hora
0-71 Formato da data
9.2.1 Software 8.12
1-48 Sat. indutância Ponto
0-72 Formato da hora
1-49 Ponto de saturação da indutância do
0-73 Diferença de fuso horário
0-** Operação/Display
0-0* Congurações Básicas
0-74 DST/Horário de Verão
0-01 Idioma
1-5* Conguração de carga independente
1-50 Magnetização do Motor à Velocidade
0-77 DST/Fim do Horário de Verão
0-76 DST/Início do Horário de Verão
0-02 Unidade de velocidade de motor
0-79 Falha de Clock
0-03 Congurações Regionais
0-04 Estado operacional na energização
1-52 Velocidade Mínima de Magnetização
1-51 Velocidade mínima de magnetização
0-83 Dias De Folga Adicionais
0-81 Dias úteis
0-82 Dias úteis adicionais
(manual)
0-09 Monitor de desempenho
1-53 Frequência de deslocamento do
0-84 Hora do Fieldbus
0-85 Início do horário de verão do Fieldbus
0-10 Conguração Ativa
0-1* Operações de Setup
1-54 Redução de tensão no enfraque-
0-89 Leitura da data e hora
0-86 Final do horário de verão do Fieldbus
0-12 Este Setup é ligado a
0-11 Editar Setup
1-** Carga e Motor
0-14 Leitura: Editar Setups / Canal
0-13 Leitura: Setups Conectados
1-55 Característica U/f - U
1-0* Congurações Gerais
1-59 Frequência de pulsos de teste de
1-58 Corrente de pulsos de teste de ying
1-56 Característica U/f - F
1-02 Fonte do feedback de motor de uxo
1-00 Modo Conguração
1-01 Princípio de Controle do Motor
1-03 Características do Torque
0-15 Leitura: conguração real
0-21 Linha de Display 1,2 Pequeno
0-2* Display do LCP
0-20 Linha de Display 1,1 Pequeno
1-6* Depend. da Carga Conguração
1-60 Compensação de Carga de Baixa
1-04 Modo de sobrecarga
1-05 Conguração de modo local
1-06 Sentido Horário
0-23 Linha de Display 2 Grande
0-24 Linha de Display 3 Grande
0-22 Linha de Display 1,3 Pequeno
1-61 Compensação de Carga de Alta
1-07 Ajuste do ângulo do motor
1-1* Congurações especiais
0-25 Meu Menu Pessoal
0-3* Leitura Personalizada LCP
1-10 Construção do Motor
0-30 Unidade para leitura denida pelo
1-62 Compensação de Escorregamento
1-11 Modelo do motor
usuário
1-65 Constante de tempo de amorte-
1-63 Constante de Tempo de Compensação
1-64 Amortecimento de ressonância
Velocidade
1-14 Ganho de Amortecimento
1-16 Constante de Tempo do Filtro de Alta
1-15 Constante de Tempo do Filtro de Baixa
usuário
usuário
0-32 Valor máximo da leitura denida pelo
0-31 Valor mínimo da leitura denida pelo
1-67 Tipo de carga
1-66 Corrente Mínima em Baixa Velocidade
tensão
Velocidade
1-17 Constante de tempo do ltro de
usuário
0-37 Texto do Display 1
0-33 Fonte para leitura denida pelo
1-68 Inércia do motor
1-69 Inércia do sistema
1-18 Corrente mínima em Sem carga
1-2* Dados do Motor
0-38 Texto do Display 2
0-39 Texto do Display 3
1-7* Ajustes da Partida
1-20 Potência do motor [kW]
0-4* Teclado do LCP
1-70 Modo de Partida
1-21 Potência do motor [HP]
0-40 Tecla [Hand on] (Manual ligado) do
LCP
1-71 Retardo de Partida
1-22 Tensão do Motor
1-72 Função Partida
1-23 Frequência do Motor
0-41 [O] Tecla no LCP
1-76 Corrente de Partida
1-75 Frequências de Partida [Hz]
1-73 Flying Start
1-74 Velocidade de Partida [RPM]
1-8* Ajustes de Parada
1-29 Adaptação Automática do Motor (AMA)
1-26 Motor Cont. Torque Nominal
1-24 Corrente do Motor
1-25 Velocidade Nominal do Motor
1-3* Avançado Dados do Motor
LCP
0-45 [Drive Bypass] Tecla no LCP
0-44 Tecla [O/Reset] do LCP
0-43 [Reset] Tecla no LCP
0-42 Tecla [Auto on] (Automático Ligado) do
1-80 Função na Parada
1-30 Resistência do Estator (Rs)
0-5* Copiar/Salvar
1-82 Velocidade Mínima para Função na
1-81 Velocidade mínima para função na
1-33 Reatância Parasita do Estator (X1)
1-34 Reatância de fuga do rotor (X2)
1-31 Resistência do Rotor (Rr)
0-50 Cópia via LCP
0-51 Cópia do Setup
0-6* Senha
1-83 Função de Parada Precisa
1-36 Resistência de perda do ferro (Rfe)
1-35 Reatância Principal (Xh)
0-60 Senha do Menu Principal
0-61 Acesso ao Menu principal sem senha
1-84 Valor do Contador de Parada Precisa
1-37 Indutância do eixo-d (Ld)
0-66 Acesso ao Quick Menu sem senha
0-65 Senha do quick menu
1-85 Atraso de Compensação de Velocidade
1-9* Temper. do Motor
1-39 Polos do Motor
1-38 Indutância do eixo-q (Lq)
1-40 Força Contra Eletro Motriz a 1000 rpm
0-68 Senha dos parâmetros de segurança
0-67 Acesso à senha do barramento
1-93 Recurso do termistor
1-91 Ventilador externo do motor
1-90 Proteção Térmica do Motor
1-45 Sat. da Indutância do eixo-q (LqSat)
1-44 Sat. da Indutância do eixo-d (LdSat)
1-41 Ajuste do ângulo do motor
segurança
0-69 Proteção por senha dos parâmetros de
0-7* Programação do Relógio
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 67
Page 74

Apêndice
VLT® AutomationDrive FC 301/302
7-** Controladores
7-0* Ctrl. do PID de Velocidade
Filtro
6-16 Terminal 53 Constante de Tempo do
Velocidade
7-00 Fonte do Feedback do PID de
6-2* Entrada analógica 2
6-20 Terminal 54 Baixa Tensão
Velocidade
7-02 Ganho Proporcional no PID de
7-01 Queda do PID de velocidade
6-23 Terminal 54 Corrente Alta
6-22 Terminal 54 Corrente Baixa
6-21 Terminal 54 Alta Tensão
Velocidade
7-04 Tempo de Diferenciação do PID de
7-03 Tempo Integrado do PID de Velocidade
6-24 Terminal 54 Ref./Feedback Baixo Valor
6-25 Terminal 54 Ref./Feedback Alto Valor
6-26 Terminal 54 Constante de Tempo do
Limite de Ganho
7-06 Período do Filtro Passa Baixa do PID
7-05 Diferenciação do PID de velocidade
Filtro
6-3* Entrada Analógica 3
6-30 Terminal X30/11 Baixa tensão
de Velocidade
do PID de Velocidade
7-07 Relação de Engrenagem do Feedback
baixo Valor
6-34 Term. X30/11 Referência/Feedback
6-31 Terminal X30/11 Alta tensão
velocidade
7-08 Fator de feed forward do PID de
Valor
6-35 Term. X30/11 Referência/Feedback alto
com rampa
7-09 Correção do erro do PID de velocidade
7-1* Controle do PI de torque
ltro
6-36 Term. X30/11 Constante de tempo do
6-4* Entrada Analógica 4
7-12 Ganho proporcional do PI de torque
7-10 Fonte do feedback do PI de torque
6-41 Terminal X30/12 Alta tensão
6-40 Terminal X30/12 Baixa tensão
7-16 Tempo do ltro passa-baixa do PI de
7-13 Tempo de integração do PI de torque
baixo Valor
6-44 Term. X30/12 Referência/Feedback
torque
6-45 Term. X30/12 Referência/Feedback alto
7-18 Fator de feed forward do PI de torque
Valor
corrente
7-19 Tempo de subida do controlador de
7-2* Process Ctrl. Feedb
ltro
6-46 Term. X30/12 Constante de tempo do
6-5* Saída analógica 1
7-20 Recurso de Feedback do CL de
6-50 Terminal 42 Saída
Processo 1
6-51 Terminal 42 Escala Mínima de Saída
7-22 Recurso de Feedback do CL de
6-52 Terminal 42 Escala Máxima de Saída
Processo 2
Processo
7-32 Velocidade Inicial do PID do Processo
7-31 Anti Windup do PID do Processo
7-3* Controle PID de processo
7-30 Controle Normal/Inversão do PID de
de saída
da saída
6-54 Terminal 42 Predenição do timeout
6-53 Terminal 42 Controle de barramento
6-55 Filtro de saída analógica
6-6* Saída Analógica 2
7-33 Ganho Proporcional do PID de
6-60 Terminal X30/8 Saída
Processo
7-34 Tempo de Integração do PID de
6-61 Terminal X30/8 Escala mínima
6-62 Terminal X30/8 Escala máx.
Processo
6-63 Terminal X30/8 Controle do bus
Ganho
Processo
7-35 Tempo do Diferencial do PID de
timeout de saída
6-64 Terminal X30/8 Predenição do
Processo
7-36 Dif. do PID de Processo Limite de
7-38 Fator de Feed Forward do PID de
6-71 Terminal X45/1 Escala mínima
6-72 Terminal X45/1 Escala máx.
6-7* Saída Analógica 3
6-70 Terminal X45/1 Saída
7-39 Largura de banda na referência
6-73 Terminal X45/1 Controle do bus
processo
7-4* Avançado PID de processo I
7-40 Reinicializar a parte I do PID de
timeout de saída
6-74 Terminal X45/1 Predenição do
6-8* Saída analógica 4
7-41 PID de Processo Saída Neg. Braçadeira
6-80 Terminal X45/3 Saída
7-43 Escala de Ganho do PID de Processo
7-42 PID de processo Saída Pos. Braçadeira
6-81 Terminal X45/3 Escala mínima
6-82 Terminal X45/3 Escala máx.
em Ref. Mínima
6-83 Terminal X45/3 Controle do bus
em Ref. Máx.
7-44 Escala de Ganho do PID de Processo
timeout de saída
6-84 Terminal X45/3 Predenição do
99
#X30/6
#29
#33
#27
#29
predenido
predenido
predenido
5-30 Terminal 27 Saída Digital
4-44 Máximo de monitoramento da
3-78 Relação de Rampa-S da Rampa 4 na
5-31 Terminal 29 Saída digital
velocidade do motor
desaceleração Acel.
5-33 Terminal X30/7 Saída digital (MCB 101)
5-32 Terminal X30/6 Saída digital (MCB 101)
velocidade do motor
4-45 Timeout de monitoramento da
3-8* Outras Rampas
3-80 Tempo de Rampa do Jog
5-4* Relés
5-40 Relé de Função
4-5* Aj. Advertências
4-50 Advertência de Corrente Baixa
3-82 Tipo de rampa da parada rápida
3-81 Tempo de Rampa da Parada Rápida
5-41 Atraso de Ativação do Relé
5-42 Atraso de desligamento, relé
4-52 Advertência de velocidade baixa
4-51 Advertência de Corrente Alta
na desaceleração Partida
3-83 Relação de Rampa-S na parada rápida
5-5* Entrada de Pulso
5-50 Term. 29 Baixa Frequência
4-53 Advertência Velocidade Alta
4-54 Advertência de Referência Baixa
na desaceleração Acel.
3-84 Relação de Rampa-S na parada rápida
5-51 Term. 29 Alta Frequência
5-52 Term. 29 Ref./Feedback Baixo Valor
5-53 Term. 29 Ref./Feedback Alto Valor
5-54 Constante de tempo do ltro de pulso
4-57 Advertência de Feedback Alto
4-58 Função Fase Ausente de Motor
4-55 Advertência de Referência Alta
4-56 Advertência de Feedback Baixo
3-89 Tempo do ltro passa-baixa
3-91 Tempo de rampa
3-9* Potenciômetro Digital
3-90 Tamanho do Passo
5-55 Term. 33 Baixa Frequência
4-59 Vericação do motor na partida
4-6* Bypass de Velocidade
3-93 Limite Máximo
3-92 Restauração da Energia
5-56 Term. 33 Alta Frequência
5-57 Term. 33 Ref./Feedback Baixo Valor
5-58 Term. 33 Ref./Feedback Alto Valor
4-60 Bypass de velocidade de [RPM]
4-61 Bypass de Velocidade De [Hz]
4-62 Bypass de velocidade até [RPM]
3-94 Limite Mínimo
3-95 Atraso de Rampa
4-** Limites/Advertências
5-59 Constante de tempo do ltro de pulso
4-63 Bypass de Velocidade Até [Hz]
4-8* Limite de potência
4-1* Limites do Motor
4-10 Sentido da Rotação do Motor
5-6* Saída de Pulso
4-80 Func. do limite de potência Modo
4-11 Limite inferior da velocidade do motor
5-60 Terminal 27 Variável da Saída de Pulso
motor
[RPM]
5-62 Frequência máxima da saída de pulso
4-81 Func. do limite de potência Modo
4-12 Limite Inferior da Velocidade do Motor
gerador
[Hz]
5-65 Frequência máxima da saída de pulso
5-63 Terminal 29 Variável da saída de pulso
4-83 Modo gerador de limite de potência
4-82 Modo motor de limite de potência
motor [RPM]
4-13 Limite superior da velocidade do
5-68 Frequência máxima da saída de pulso
5-66 Terminal X30/6 Saída de pulso variável
4-9* Limites direcionais
4-90 Modo de limite direcional
4-91 Limite de velocidade positiva [RPM]
Motor [Hz]
4-16 Limite de Torque do Modo Motor
4-14 Limite Superior da Velocidade do
4-92 Limite de velocidade positivo [Hz]
4-17 Limite de Torque do Modo Gerador
5-7* Entrada do Encoder 24 V
4-93 Limite de velocidade negativo [RPM]
4-18 Limite de Corrente
5-71 Term 32/33 Sentido do Encoder
5-70 Term 32/33 Pulsos Por Revolução
4-95 Limite de torque positivo
4-94 Limite de velocidade negativo [Hz]
4-19 Frequência de Saída Máx.
4-2* Fatores de Limite
5-80 Atraso na reconexão do capacitor AHF
5-8* Opcionais de E/S
4-96 Limite de torque negativo
5-** Entrada/Saída Digital
4-21 Fonte Fator do Limite de Velocidade
4-20 Fonte Fator do Limite de Torque
5-93 Saída de pulso #27 Controle do bus
5-9* Controlado por Bus
5-90 Controle do bus digital e do relé
5-0* Modo E/S Digital
5-00 Modo de E/S digital
5-01 Modo do Terminal 27
do freio
4-24 Fator limite de vericação do freio
4-23 Fonte do fator de limite de vericação
5-94 Saída de pulso #27 Timeout
5-02 Modo do Terminal 29
5-1* Entradas Digitais
potência
4-25 Fonte do fator do motor de limite de
5-95 Saída de pulso #29 Controle do bus
5-10 Terminal 18 Entrada Digital
4-26 Fonte do fator do gerador de limite de
5-96 Saída de pulso #29 Timeout
5-12 Terminal 27 Entrada Digital
5-11 Terminal 19 Entrada Digital
potência
4-3* Monitoramento da velocidade do
5-97 Saída de pulso #X30/6 Controle do bus
5-13 Terminal 29 Entrada Digital
motor
5-98 Saída de pulso #X30/6 Timeout
5-15 Terminal 33 Entrada Digital
5-14 Terminal 32 Entrada Digital
4-31 Erro de Velocidade de Feedback de
4-30 Função Perda de Feedback de Motor
6-** Entrada/Saída Analógica
5-16 Terminal X30/2 Entrada digital
Motor
6-0* Modo E/S Analógica
5-17 Terminal X30/3 Entrada digital
4-32 Timeout Perda de Feedback de Motor
6-00 Timeout do Live Zero
5-18 Terminal X30/4 Entrada digital
4-34 Função de erro de tracking
6-01 Função Timeout do Live Zero
5-19 Terminal 37 Parada segura
4-35 Erro de tracking
6-1* Entrada analógica 1
5-20 Terminal X46/1 Entrada digital
4-36 Timeout do erro de tracking
6-11 Terminal 53 Alta Tensão
6-10 Terminal 53 Baixa Tensão
5-22 Terminal X46/5 Entrada digital
5-21 Terminal X46/3 Entrada digital
4-38 Timeout da rampa do erro de tracking
4-37 Rampa do erro de tracking
6-12 Terminal 53 Corrente baixa
5-23 Terminal X46/7 Entrada digital
4-39 Erro de tracking após o timeout de
6-14 Terminal 53 Ref./Feedback Baixo Valor
6-13 Terminal 53 Corrente alta
5-24 Terminal X46/9 Entrada digital
5-25 Terminal X46/11 Entrada digital
rampa
4-4* Monitor de velocidade
6-15 Terminal 53 Ref./Feedback Alto Valor
5-26 Terminal X46/13 Entrada digital
4-43 Função de monitoramento da
5-3* Saídas Digitais
velocidade do motor
68 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 75

Apêndice Guia de Operação
13-20 Temporizador do Controlador do SL
12-30 Parâmetro de Advertência
13-4* Regras Lógicas
12-31 Referência da Rede
13-40 Regra Lógica Booleana 1
12-32 Controle da Rede
Processo
13-41 Operador de Regra Lógica 1
12-33 Revisão do CIP
13-42 Regra Lógica Booleana 2
12-34 Código CIP do Produto
Processo
13-43 Operador de Regra Lógica 2
12-35 Parâmetro do EDS
13-44 Regra Lógica Booleana 3
12-37 Temporizador de Inibição do COS
13-5* Estados
13-51 Evento do Controlador do SL
12-38 Filtro COS
12-4* Modbus TCP
13-52 Ação de controle do SL
13-9* Alertas denidos pelo usuário
12-41 Contador de mensagem do escravo
12-40 Parâmetro de status
13-90 Disparo de aler ta
12-42 Contador de mensagem de exceção do
13-91 Ação de alerta
13-92 Alert Text
escravo
12-5* EtherCAT
13-99 Alert Status Word
13-98 Alert Warning Word
13-9* Leituras denidas pelo usuário
13-97 Alert Alarm Word
12-50 Alias de estação congurada
12-51 Endereço da estação congurada
12-59 Status do EtherCAT
12-6* PowerLink da Ethernet
14-** Funções Especiais
14-0* Chaveamento do Inversor
14-00 Padrão de chaveamento
12-63 Timeout de Ethernet básica
12-60 ID do Nó
12-62 Timeout de SDO
14-03 Sobremodulação
14-04 Redução de ruído acústico
14-01 Frequência de Chaveamento
12-68 Contadores cumulativos
12-67 Contadores de limite
12-66 Limites
de processo.
14-06 Compensação de tempo ocioso
14-1* Falha de rede elétrica
12-69 Status do PowerLink de Ethernet
12-8* Outros Serviços Ethernet
processo.
14-10 Falha de rede elétrica
12-80 Servidor de FTP
14-11 Nível de tensão de falha da rede
12-81 Servidor HTTP
elétrica
12-82 Serviço SMTP
14-14 Cin. Backup, Timeout
14-12 Resposta a desbalanceamento de rede
12-83 Agente SNMP
12-84 Detecção de conito de endereços
14-15 Cin. Backup, desarme com recuperação
12-85 Último conito de ACD
14-16 Cin. Backup, ganho
14-2* Reset do desarme
Transparente
12-89 Porta do Canal de Soquete
Automática
14-20 Modo Reinicializar
14-21 Tempo de uma Nova Partida
12-91 Cross-Over Automático
12-9* Serviços Ethernet Avançados
12-90 Diagnóstico de Cabo
14-22 Modo Operação
12-92 Espionagem IGMP
14-23 Conguração do typecode
12-93 Comprimento Errado de Cabo
14-24 Atraso do Desarme no Limite de
12-94 Proteção contra Broadcast Storm
Torque
Corrente
14-26 Atraso do desarme na falha do
14-25 Atraso do Desarme no Limite de
12-95 Timeout de inatividade
12-96 Cong. da Porta
12-98 Contadores de Interface
12-97 Prioridade de QoS
inversor
12-99 Contadores de Mídia
14-29 Código de Serviço
14-28 Programações de Produção
13-** Smart Logic
13-0* Denições do SLC
14-3* Ctrl. Limite de Corrente
13-00 Modo Controlador do SL
14-31 Ctrl Lim Corrente, Tempo de
14-30 Ctrl Lim Corrente, Ganho Proporcional
13-01 Iniciar Evento
13-02 Parar Evento
Processo
Integração
13-03 Reinicializar o SLC
Processo
campo
14-35 Proteção contra estol
14-36 Função enfraquecimento do campo
14-37 Velocidade de enfraquecimento do
14-32 Ctrl Lim Corrente, Tempo do Filtro
13-1* Comparadores
13-10 Operando do Comparador
13-11 Operador do Comparador
13-12 Valor do Comparador
14-4* Otimização de Energia
14-40 Nível do VT
14-41 Magnetização Mínima do AEO
13-16 RS-FF Operando R
13-1* Flip Flops RS
13-15 RS-FF Operando S
13-2* Temporizadores
9 9
dados de processo
dados de processo
10-10 Seleção do tipo de dados de processo
8-57 Selecionar Prodrive OFF2
7-45 Recurso Process PID Feed Fwd
10-11 Gravação da Cong dos Dados de
8-58 Selecionar Prodrive OFF3
7-46 Process PID Feed Fwd normal/ inverso,
10-15 Controle da Rede
10-14 Referência da Rede
10-13 Parâmetro de Advertência
10-12 Leitura da Cong dos Dados de
8-81 Contador de Erros do Bus
8-82 Mensagens do Escravo Recebidas
8-83 Contador de Erros do Escravo
8-80 Contador de Mensagens do Bus
8-8* Diagnóstico da Porta do FC
Ctrl.
7-48 Feed Forward do PCD
7-49 Saída Normal/Inv. do PID de Processo
8-9* Jog do bus
Ctrl.
7-5* Avançado PID de processo II
7-50 PID estendido do PID de processo
10-2* Filtros COS
8-90 Velocidade do Jog do Bus 1
7-51 Ganho do Process PID Feed Fwd
10-22 Filtro COS 3
10-23 Filtro COS 4
10-20 Filtro COS 1
10-21 Filtro COS 2
10-3* Acesso ao Parâmetro
10-30 Índice da matriz
10-31 Armazenar Valores dos Dados
8-91 Velocidade do Jog do Bus 2
9-** PROFIdrive
7-52 Aceleração do Process PID Feed Fwd
7-53 Desaceleração do Process PID Feed
9-16 Conguração de Leitura do PCD
9-00 Setpoint
9-07 Valor Real
9-15 Conguração de Gravação do PCD
9-18 Endereço do Nó
Filtro
Filtro
Fwd
7-57 Fb. do PID de Processo Tempo do
7-56 Ref. do PID de Processo Tempo do
10-32 Revisão do Devicenet
10-33 Gravar Sempre
10-34 Código de produto do DeviceNet
drive
9-22 Seleção de Telegrama
9-19 Número do sistema da unidade de
8-** Com. e Opcionais
8-0* Congurações Gerais
8-01 Tipo de Controle
10-39 Parâmetros F do Devicenet
10-5* CANopen
9-27 Edição do Parâmetro
9-23 Parâmetros para Sinais
8-02 Origem da control word
8-03 Tempo de timeout de control word
10-50 Gravação da conguração dos dados
9-28 Controle de Processo
9-44 Contador de Mensagem de Falha
8-05 Função nal do timeout
8-04 Função de timeout de control word
10-51 Leitura da conguração dos dados de
9-45 Código de Falha
8-06 Reset do timeout da control word
9-47 № do Defeito
8-07 Acionador de Diagnóstico
12-** Ethernet
12-0* Congurações IP
9-52 Contador da Situação do defeito
9-53 Warning Word do Probus
8-08 Filtragem de leitura
8-1* Ctrl. Congurações da Word
12-01 Endereço IP
12-02 Máscara de Sub-rede
12-00 Alocação do Endereço IP
9-65 Número do Perl
9-63 Baud Rate Real
9-64 Identicação do Dispositivo
8-10 Perl da Control Word
8-13 Status word STW congurável
8-14 CTW Congurável da Control Word
12-03 Gateway Padrão
9-67 Control Word 1
8-17 Warning e alarm word conguráveis
12-05 Contrato de Aluguel Expira
12-04 Servidor DHCP
9-68 Status Word 1
9-70 Editar Setup
8-19 Código do Produto
8-3* Congurações da Porta do FC
12-06 Servidores de Nome
9-71 Valor dos Dados Salvos Probus
8-30 Protocolo
12-07 Nome do Domínio
12-08 Nome do Host
12-09 Endereço Físico
12-10 Status do Link
12-11 Duração do Link
12-1* Parâmetros de Link de Ethernet
9-82 Parâmetros Denidos (3)
9-83 Parâmetros Denidos (4)
9-80 Parâmetros Denidos (1)
9-81 Parâmetros Denidos (2)
9-72 ProbusDriveReset
9-75 Identicação do DO
8-36 Atraso de Resposta Máximo
8-34 Tempo de ciclo estimado
8-35 Atraso de Resposta Mínimo
8-33 Bits de Parada / Paridade
8-31 Endereço
8-32 Baud Rate da porta do FC
12-13 Velocidade do Link
12-12 Negociação Automática
9-84 Parâmetros Denidos (5)
9-85 Parâmetros Denidos (6)
8-37 Atraso máximo inter-caractere
8-4* Denição de protocolo FC MC
12-14 Link Duplex
9-90 Parâmetros Alterados (1)
8-40 Seleção de Telegrama
12-19 Supervisor End. IP
12-18 Supervisor MAC
9-92 Parâmetros Alterados (3)
9-91 Parâmetros Alterados (2)
8-42 Conguração de Gravação do PCD
8-41 Parâmetros para Sinais
12-2* Dados do Processo
9-93 Parâmetros Alterados (4)
8-43 Conguração de Leitura do PCD
12-20 Instância de Controle
9-94 Parâmetros Alterados (5)
8-45 Comando da transação BTM
12-22 Leitura da Cong dos Dados de
12-21 Gravação da Cong dos Dados de
9-99 Contador de Revisões do Probus
10-** Fieldbus CAN
10-0* Congurações comuns
8-48 Erros máximos do BTM
8-46 Status da transação BTM
8-47 Timeout do BTM
10-00 Protocolo CAN
8-49 Registro do erro BTM
12-23 Tamanho da gravação da cong dos
10-02 ID do MAC
10-01 Seleção de Baud Rate
8-5* Digital/Bus
8-50 Selecionar parada por inércia
12-24 Tamanho da leitura da cong dos
10-05 Leitura do Contador de Erros de
8-51 Selecionar Parada Rápida
12-27 Endereço mestre
12-28 Armazenar Valores dos Dados
Recepção
Transmissão
10-06 Leitura do Contador de Erros de
8-53 Selecionar Partida
8-54 Selecionar Reversão
8-52 Selecionar Freio CC
12-29 Gravar Sempre
12-3* EtherNet/IP
10-07 Leitura do contador de bus o
10-1* DeviceNet
8-56 Selecionar Referência Predenida
8-55 Selecionar Setup
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 69
Page 76

Apêndice
VLT® AutomationDrive FC 301/302
18-45 Saída analógica X49/11
18-44 Saída analógica X49/9
16-87 Alarme/Aviso da leitura do barramento
16-86 REF 1 da Porta do FC
18-5* Advertências/alarmes ativos
18-55 Números de alarmes ativos
18-56 Números de advertências ativas
18-6* Entradas e Saídas 2
16-89 Alarm/Warning Word congurável
16-9* Leituras de Diagnóstico
16-90 Alarm Word
16-91 Alarm Word 2
18-60 Entrada Digital 2
18-7* Status do reticador
18-70 Tensão de rede
16-94 Ext. Status Word
16-93 Warning Word 2
16-92 Warning Word
18-71 Frequência da rede elétrica
16-95 Ext. Status Word 2
18-75 Tensão CC do reticador
18-72 Desbalanceamento de rede elétrica
16-96 Word de manutenção
17-** Feedback de posição
18-9* Leituras do PID
17-1* Inc. Enc. interface
18-90 Erro do PID de Processo
17-10 Tipo de sinal
18-91 Saída do PID de Processo
17-11 Resolução (PPR)
18-92 Saída Presa do PID de Processo
17-2* Abs. encoder, interface
18-93 Ganho escalonado de Saída do PID de
17-20 Seleção do protocolo
Processo
17-21 Resolução (Posições/Rev)
22-** Aplicação Funções
17-22 Rotações multiturnos
22-0* Diversos
22-00 Atraso de bloqueio externo
17-25 Velocidade do relógio
17-24 Comprimento dos dados do SSI
23-** Funções baseadas em tempo
23-0* Ações temporizadas
23-00 Tempo LIGADO
17-34 Baud rate da HIPERFACE
17-26 Formato dos dados do SSI
17-5* Interface do resolver
23-01 Ação LIGADO
23-02 Tempo DESLIGADO
23-03 Ação DESLIGADO
17-52 Frequência de entrada
17-50 Polos
17-51 Tensão de entrada
23-08 Modo de Ações Temporizadas
23-04 Ocorrência
23-0* Congurações de ações temporizadas
17-59 Interface do resolver
17-56 Encoder Sim. Resolução
17-53 Relação de transformação
23-09 Reativação de Ações Temporizadas
23-1* Manutenção
23-10 Item de manutenção
17-61 Monitoramento do sinal de feedback
17-60 Sentido do feedback
17-6* Monitoramento e aplicação
23-11 Ação de manutenção
23-12 Base do tempo de manutenção
17-7* Escala de posição
17-70 Unidade de posição
23-14 Data e hora da manutenção
23-13 Intervalo de tempo de manutenção
17-72 Numerador da unidade de posição
17-71 Escala da unidade de posição
23-1* Reset de Manutenção
23-15 Reinicializar Word de Manutenção
17-73 Denominador da unidade de posição
17-74 Desvio da posição
Preventiva
18-** Leituras de Dados 2
23-16 Texto de manutenção
30-** Recursos Especiais
18-0* Log de Manutenção
18-00 Log de manutenção: Item
30-0* Wobbler
30-00 Modo wobble
18-01 Log de manutenção: Ação
18-02 Log de manutenção: Hora
de escala
30-05 Frequência de jump do wobble [%]
30-04 Frequência de jump do wobble [Hz]
30-03 Frequência delta do wobble Recurso
30-02 Frequência delta do wobble [%]
30-01 Frequência delta do wobble [Hz]
Velocidade
Velocidade
18-27 Reset do opcional de segurança Est.
18-03 Log de manutenção: Data e Hora
18-28 Reset do opcional de segurança Meas.
18-2* Leituras do motor
30-07 Tempo da sequência de wobble
30-06 Tempo de jump do wobble
de velocidade
18-29 Reset do opcional de segurança Erro
30-08 Aceleração/desaceleração do tempo de
18-3* Leituras analógicas
wobble
30-09 Função randômica do wobble
18-36 Entrada analógica X48/2 [mA]
18-37 Temp. Entr. X48/4
30-11 Relação randômica do wobble máx.
30-10 Relação de wobble
18-39 Temp. Entr. X48/10
18-38 Temp. Entr. X48/7
30-12 Relação randômica do wobble mínima
18-4* Leituras de dados do PGIO
18-43 Saída analógica X49/7
99
Terminal 53
Terminal 54
16-21 Torque [%] Alta Res.
16-22 Torque [%]
conversor de frequência
15-46 Nº da solicitação de pedido do
14-43 Cosphi do Motor
14-42 Frequência AEO mínima
16-23 Potência do eixo do motor [kW]
15-47 Nº da solicitação de pedido do cartão
14-5* Ambiente
16-24 Resistência do estator calibrado
de potência
14-50 Filtro de RFI
16-25 Torque [Nm] Alto
15-48 Nº do Id do LCP
14-51 Compensação do barramento CC
16-3* Status do conversor
16-30 Tensão do Barramento CC
15-50 ID do SW da Placa de Potência
15-49 ID do SW da Placa de Controle
14-53 Monitor do ventilador
14-52 Controle do Ventilador
16-32 Energia do freio /s
16-31 Temperatura do sistema
frequência
15-51 Número de série do conversor de
14-56 Capacitância do ltro de saída
14-55 Filtro de Saída
16-33 Média de energia do freio
15-53 Número de Série do Cartão de
14-57 Indutância do ltro de saída
16-34 Temperatura do Dissipador de Calor
Potência
14-59 Número real de unidades de inversor
16-36 Inv. Nom. Corrente
16-35 Térmico do Inversor
15-54 Nome do arquivo cong
15-58 Nome do arquivo de setup inteligente
14-6* Derate Automático
14-60 Função no Superaquecimento
16-38 Estado do Controlador do SL
16-39 Temperatura do Cartão de Controle
16-37 Inv. Corrente máx.
15-59 Nome do arquivo
15-6* Ident. do Opcional
15-60 Opcional Montado
14-61 Função na Sobrecarga do Inversor
14-62 Inv. Corr Derate de Sobrecarga
14-7* Compatibilidade
16-40 Buer cheio de registro
16-41 Linha de status LCP Fundo
16-42 Contador do log de serviço
opcional
15-61 Versão do SW do Opcional
15-62 Nº da solicitação de pedido do
14-72 Alarm Word legado
14-73 Warning word legado
14-74 Leg. Ext. Status Word
16-46 Corrente V da fase do motor
16-45 Corrente U da fase do motor
16-43 Status das Ações Temporizadas
15-71 Versão do SW do Opcional - Slot A
15-70 Opcional no Slot A
15-63 Nº de série do opcional
externo
14-8* Opcionais
14-80 Opcional alimentado por 24 VCC
16-48 Velocidade Ref. Após rampa [RPM]
16-49 Origem da falha de corrente
16-47 Corrente W da fase do motor
15-74 Opcional no Slot C0/E0
15-73 Versão do SW do opcional - Slot B
15-72 Opcional no Slot B
14-89 Detecção de Opcionais
14-88 Armazenagem de dados do opcional
14-9* Congurações de Defeito
16-51 Referência de pulso
16-5* Ref. e Feedback
16-50 Referência Externa
15-76 Opcional no Slot C1/E1
15-77 Versão do SW do opcional - Slot C1/E1
15-75 Versão do SW do opcional - Slot C0/E0
14-90 Nível de Defeito
15-** Informação do Drive
15-0* Dados Operacionais
16-57 Feedback [rpm]
16-52 Feedback[Unidade]
16-53 Referência do DigiPot
16-6* Entradas e Saídas
16-60 Entrada digital
16-61 Conguração do Chaveamento do
do ventilador
15-89 Contador de mudança de conguração
15-80 Horas de funcionamento do ventilador
15-81 Horas de funcionamento predenidas
15-8* Dados operacionais II
15-00 Horas de funcionamento
15-01 Horas de Funcionamento
15-9* Informações do Parâmetro
15-02 Contador de kWh
15-03 Energizações
15-04 Superaquecimentos
15-05 Sobretensões
16-63 Conguração do Chaveamento do
16-62 Entrada analógica 53
15-92 Parâmetros Denidos
15-93 Parâmetros modicados
15-98 Identicação do drive
Funcionamento
15-07 Reinicializar Contador de Horas de
15-06 Reinicializar Contador de kWh
16-64 Entrada analógica 54
15-99 Metadados de Parâmetro
16-** Exibição dos Dados
15-1* Congurações do registro de dados
15-10 Fonte do registro
16-65 Saída Analógica 42 [mA]
16-0* Status Geral
15-11 Intervalo do registro
16-66 Saída Digital [bin]
16-67 Frequência Entrada #29 [Hz]
16-01 Referência [Unidade]
16-00 Control Word
15-13 Modo de registro
15-12 Evento de disparo
16-68 Frequência Entrada #33 [Hz]
16-06 Posição Real
16-09 Leitura Personalizada
16-03 Status Word
16-02 Referência %
16-05 Valor Real Principal [%]
16-1* Status do Motor
16-10 Potência [kW]
16-11 Potência [hp]
16-12 Tensão do Motor
15-31 Registro de falhas Valor
15-14 Amostragens antes do disparo
15-20 Registro do histórico Evento
15-21 Registro do histórico Valor
15-22 Registro do histórico Hora
15-2* Registro do histórico
15-30 Registro de falhas Código de Erro
15-3* Registro de Falhas
15-32 Registro de falhas Hora
16-14 Corrente do Motor
16-15 Frequência [%]
16-13 Frequência
15-33 Registro de falhas: Data e Hora
15-4* Identicação do drive
15-40 Tipo do FC
16-8* Porta do FC e Fieldbus
16-16 Torque [Nm]
15-41 Seção de Potência
16-82 REF 1 do Fieldbus
16-80 CTW 1 do Fieldbus
16-18 Térmico Calculado do Motor
16-17 Velocidade [RPM]
15-42 Tensão
15-43 Versão do Software
16-85 CTW 1 da Porta do FC
16-84 Comunicação Opcional ST W
16-20 Ângulo do Motor
16-19 Temperatura do sensor do termistor
15-45 String do Código do Tipo Real
15-44 String do Código de Pedido
16-79 Saída analógica X45/3 [mA]
16-78 Saída Anal. X45/1 [mA]
16-77 Saída Anal. X30/8 [mA]
16-75 Entr. Anal. X30/11
16-76 Entr. Anal. X30/12
16-73 Contador B
16-74 Prec. Parar Contador
16-71 Saída do relé [bin]
16-72 Contador A
16-70 Saída de Pulso #29 [Hz]
16-69 Saída de Pulso #27 [Hz]
70 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 77

Apêndice Guia de Operação
34-41 Saídas Digitais
34-5* Dados do Processo
33-53 Terminal X57/4 Entrada digital
33-52 Terminal X57/3 Entrada digital
limitado
34-50 Posição Real
34-51 Posição comandada
34-52 Posição atual do mestre
33-56 Terminal X57/7 Entrada digital
33-55 Terminal X57/6 Entrada digital
33-54 Terminal X57/5 Entrada digital
34-53 Posição índice do escravo
33-57 Terminal X57/8 Entrada digital
34-54 Posição índice do mestre
33-58 Terminal X57/9 Entrada digital
34-55 Posição da curva
33-59 Terminal X57/10 Entrada digital
34-56 Erro de Track
34-57 Erro de sincronismo
33-61 Terminal X59/1 Entrada digital
33-60 Terminal X59/1 e Modo X59/2
início
34-58 Velocidade real
33-62 Terminal X59/2 Entrada digital
34-60 Status da sincronização
34-59 Velocidade real do mestre
33-64 Terminal X59/2 Saída digital
33-63 Terminal X59/1 Saída digital
de início
34-61 Status do eixo
33-65 Terminal X59/3 Saída digital
34-62 Status do programa
33-66 Terminal X59/4 Saída digital
34-64 MCO 302 Status
33-67 Terminal X59/5 Saída digital
34-65 MCO 302 Controle
33-68 Terminal X59/6 Saída digital
34-66 Contador de erros do SPI
33-69 Terminal X59/7 Saída digital
34-7* Leitura de diagnósticos
34-70 Alarm Word MCO 1
33-70 Terminal X59/8 Saída digital
33-8* Parâmetros globais
da posição
34-71 Alarm Word MCO 2
33-80 Número do programa ativado
escravo
35-** Opcional de entrada do sensor
35-0* Temp. Modo de entrada
33-81 Estado de energização
33-82 Monitoramento do status do drive
temperatura
ltro
35-06 Função do alarme do sensor de
35-04 Term. X48/10 Unidade de temperatura
35-05 Term. X48/10 Tipo de entrada
35-03 Term. X48/7 Tipo de entrada
35-02 Term. X48/7 Unidade de temperatura
35-01 Term. X48/4 Tipo de entrada
35-00 Term. X48/4 Unidade de temperatura
33-87 Estado do terminal no alarme
33-86 Terminal no alarme
33-85 MCO Alimentada p/24 VCC Externa
33-83 Comportamento após o erro
33-84 Comportamento depois de Esc.
33-88 Status word no alarme
35-1* Temp. Entr. X48/4
35-14 Term. X48/4 Constante de tempo do
35-15 Term. X48/4 Temperatura, Monitor de
35-16 Term. X48/4 Temperatura baixa, Limite
33-95 X60 Baud rate do serial RS485 MCO
33-90 X62 ID do nó CAN MCO
33-94 X60 Terminação do serial RS485 MCO
33-91 X62 Baud rate CAN MCO
33-9* Congurações da porta do MCO
34-** Leitura de dados do MCO
34-0* Par. Gravação PCD
35-17 Term. X48/4 Temperatura alta, Limite
34-01 PCD 1 Gravar no MCO
35-2* Temp. Entr. X48/7
35-24 Term. X48/7 Constante de tempo do
34-03 PCD 3 Gravar no MCO
34-02 PCD 2 Gravar no MCO
ltro
34-04 PCD 4 Gravar no MCO
ltro
Limite
35-27 Term. X48/7 Temperatura alta, Limite
35-25 Term. X48/7 Temperatura, Monitor de
35-26 Term. X48/7 Temperatura baixa, Limite
35-3* Temp. Entr. X48/10
35-34 Term. X48/10 Constante de tempo do
34-09 PCD 9 Gravar no MCO
34-10 PCD 10 Gravar no MCO
34-08 PCD 8 Gravar no MCO
34-06 PCD 6 Gravar no MCO
34-07 PCD 7 Gravar no MCO
34-05 PCD 5 Gravar no MCO
35-35 Term. X48/10 Temperatura, Monitor de
34-2* Par Ler PCD
35-36 Term. X48/10 Temperatura baixa,
34-21 PCD 1 Ler do MCO
34-22 PCD 2 Ler do MCO
35-37 Term. X48/10 Temperatura alta, Limite
34-23 PCD 3 Ler do MCO
35-4* Entrada analógica X48/2
34-24 PCD 4 Ler do MCO
35-43 Term. X48/2 Corrente alta,
35-42 Term. X48/2 Corrente baixa,
34-25 PCD 5 Ler do MCO
34-26 PCD 6 Ler do MCO
Valor
35-44 Term. X48/2 Referência/Feedback baixo
34-27 PCD 7 Ler do MCO
34-28 PCD 8 Ler do MCO
ltro
Valor
35-46 Term. X48/2 Constante de tempo do
35-45 Term. X48/2 Referência/Feedback alto
34-29 PCD 9 Ler do MCO
34-30 PCD 10 Ler do MCO
34-4* Entradas e Saídas
34-40 Entradas Digitais
9 9
nização do marcador
escravo
mestre
do escravo
forward
limite nal
32-89 Desaceleração para baixo para jerk
32-9* Desenvolvimento.
32-13 Controle do encoder 2
32-14 ID do nó do encoder 2
32-12 Numerador da Unidade do Usuário
escalonada
30-19 Frequência delta do wobble
30-2* Avançado Ajuste de Partida
33-00 Forçar INÍCIO
32-90 Depurar fonte
33-** MCO Adv. Congurações
33-0* Movimento de Início
32-15 Proteção CAN do encoder 2
32-31 Resolução incremental
32-3* Encoder 1
32-30 Tipo de sinal incremental
30-23 Tempo de Detecção do Rotor
30-22 Proteção de Rotor Bloqueado
30-21 Corrente de Torque de Partida Alta [%]
30-20 Tempo do Torque de Partida Alto [s]
33-01 Ajuste de ponto zero da posição de
32-33 Resolução absoluta
32-32 Protocolo absoluto
Bloqueado [s]
30-24 Erro de velocidade de detecção do
33-03 Velocidade de movimento de início
33-02 Rampa para movimento de início
absoluto
32-35 Comprimento de dados do encoder
rotor bloqueado [%]
30-25 Atraso de carga leve [s]
33-04 Comportamento durante movimento
32-36 Frequência do relógio do encoder
30-26 Corrente de carga leve [%]
33-1* Sincronização
absoluto
32-37 Geração do relógio do encoder
30-27 Velocidade de carga leve [%]
30-5* Conguração da unidade
33-10 Fator de sincronização do mestre
absoluto
30-50 Modo do ventilador do dissipador de
33-12 Ajuste da posição para sincronização
33-11 Fator de sincronização do escravo
absoluto
32-38 Comprimento de cabo do encoder
calor
30-8* Compatibilidade (I)
33-14 Limite da velocidade relativa do
33-13 Janela de precisão para sincronização
32-43 Controle do encoder 1
32-40 Terminação do encoder
32-39 Monitoramento do encoder
30-83 Ganho Proporcional no PID de
30-80 Indutância do eixo-d (Ld)
30-81 Resistor do Freio (ohm)
33-16 Número marcador para escravo
33-15 Número marcador para mestre
32-45 Proteção CAN do encoder 1
32-44 ID do nó do encoder 1
32-5* Fonte do Feedback
Processo
Velocidade
30-84 Ganho Proporcional do PID de
33-26 Filtro de velocidade
33-23 Iniciar comportamento para sincro-
32-64 Largura de banda do PID
32-63 Valor limite p/ soma integral
30-96 Porta
30-97 Ação de timeout do WiFi
33-24 Número marcador para defeito
32-68 Comportamento inverso para escravo
32-67 Erro máx. de posição tolerado
32-66 Aceleração de feed forward
32-65 Velocidade de feed forward
31-02 Atraso de tempo do desarme do
31-** Opcion.Bypass
31-00 Modo bypass
31-01 Atraso de tempo de partida do bypass
33-28 Conguração do ltro marcador
do PID
32-69 Tempo de amostragem para controle
bypass
31-03 Ativação Modo Teste
33-29 Tempo do ltro para ltro marcador
33-30 Correção máxima do marcador
perl
32-70 Tempo de varredura para o gerado de
31-10 Status Word-Bypass
31-11 Horas de funcionamento do bypass
33-31 Tipo de sincronização
33-32 Adaptação da velocidade do feed
(ativação)
32-72 Tamanho da janela de controle
32-71 Tamanho da janela de controle
31-19 Ativação do bypass remoto
32-** Congurações básicas do MCO
32-0* Encoder 2
33-34 Tempo do ltro para ltro marcador
33-33 Janela do ltro de velocidade
(desativação)
32-74 Tempo do ltro do erro de posição
32-73 Tempo do ltro de limite integral
32-01 Resolução incremental
32-02 Protocolo absoluto
32-00 Tipo de sinal incremental
33-4* Manuseio do Limite
33-40 Comportamento no interruptor de
32-81 Rampa mais curta
32-80 Velocidade máxima (encoder)
32-8* Velocidade e Aceleração
32-05 Comprimento de dados do encoder
32-03 Resolução absoluta
32-04 Baud rate do encoder absoluto X55
33-42 Limite nal positivo do software
33-41 Limite nal negativo do software
32-82 Tipo de rampa
32-83 Resolução de velocidade
absoluto
32-06 Frequência do relógio do encoder
33-43 Limite nal negativo do software ativo
32-84 Velocidade padrão
absoluto
33-22 Janela de tolerância do marcador do
33-21 Janela de tolerância do marcador do
33-20 Tipo de marcador do escravo
33-19 Tipo de marcador do mestre
33-18 Distância do marcador do escravo
33-17 Distância do marcador do mestre
32-52 Fonte do mestre
32-51 MCO 302 Last Will
32-50 Fonte do escravo
30-9* LCP com WiFi
30-90 SSID
30-91 Canal
32-6* Controlador PID
30-92 Senha
32-60 Fator proporcional
32-61 Fator derivativo
30-93 Tipo de segurança
30-94 Endereço IP
32-62 Fator integral
30-95 Máscara de sub-rede
33-27 Ajuste do tempo do ltro
33-25 Número marcador para pronto
33-44 Limite nal positivo do software ativo
32-85 Aceleração padrão
32-07 Geração do relógio do encoder
33-46 Valor limite na janela de destino
33-45 Tempo na janela de destino
limitado
32-86 Aceleração para cima para jerk
absoluto
32-08 Comprimento de cabo do encoder
33-47 Tamanho da janela de destino
33-5* Conguração de E/S
limitado
32-87 Aceleração para baixo para jerk
absoluto
32-09 Monitoramento do encoder
33-51 Terminal X57/2 Entrada digital
33-50 Terminal X57/1 Entrada digital
limitado
32-88 Desaceleração para cima para jerk
32-10 Direção rotacional
32-11 Denominador da Unidade do Usuário
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 71
Page 78

Apêndice
VLT® AutomationDrive FC 301/302
99
Nº
600-44 Contador de Mensagem de Falha
600-47 № do Defeito
600-52 Contador da Situação do defeito
601-** PROFIdrive 2
601-22 Tel. canal de segurança do PROFIdrive
Acel.
Partida
42-36 Senha nível 1
42-37 Buer da senha nível 1
42-4* SS1
42-40 Tipo
42-41 Perl da rampa
42-42 Tempo de atraso
42-46 Velocidade zero
42-44 Taxa de desaceleração
42-45 Delta V
42-43 Delta T
42-48 Relação de Rampa-S na desaceleração
42-47 Tempo de rampa
42-49 Relação de Rampa-S na desaceleração
42-5* SLS
42-51 Limite de velocidade
42-50 Velocidade interrompida
42-52 Reação à falha de segurança
42-53 Iniciar rampa
42-54 Tempo de desaceleração
42-8* Status
42-80 Status opcional de segurança
42-82 Control Word de segurança
42-81 Status opcional de segurança 2
42-6* Fieldbus seguro
42-60 Seleção de Telegrama
42-61 Endereço de destino
42-83 Status Word de segurança
42-85 Função de segurança ativa
42-87 Tempo até teste manual
42-88 Versão do arquivo de personalização
42-86 Informação de segurança opcional
suportada
42-89 Versão do arquivo de personalização
42-9* Especial
42-90 Opcional de reinicialização segura
43-** Leituras de unidade
43-0* Status do componente
43-00 Temperatura do componente
43-02 ID SW do componente
43-01 Temperatura auxiliar
43-1* Status do cartão de potência
ventilador
43-11 Temperatura HS fase V
43-10 Temperatura HS fase U
43-2* Status do cartão de potência do
43-20 Velocidade do ventilador A FPC
43-21 Velocidade do ventilador B FPC
43-15 Velocidade do ventilador C PC
43-14 Velocidade do ventilador B PC
43-13 Velocidade do ventilador A PC
43-12 Temperatura HS fase W
43-22 Velocidade do ventilador C FPC
43-23 Velocidade do ventilador D FPC
43-24 Velocidade do ventilador E FPC
43-25 Velocidade do ventilador F FPC
600-** PROFIsafe
600-22 PROFIdrive/Tel. seguro Selecionado
Barramento CC
40-45 Registro de falhas Control Word
40-44 Registro de falhas Tensão do
36-05 Terminal X49/11 Modo
36-04 Terminal X49/9 Modo
36-** Opcional de E/S programável
36-0* Modo E/S
36-03 Terminal X49/7 Modo
36-4* Saída X49/7
36-40 Terminal X49/7 Saída analógica
36-42 Terminal X49/7 Escala mínima
36-43 Terminal X49/7 Escala máx.
36-45 Terminal X49/7 Timeout Predenido
36-44 Terminal X49/7 Controle do bus
36-5* Saída X49/9
36-50 Terminal X49/9 Saída analógica
36-52 Terminal X49/9 Escala mínima
36-53 Terminal X49/9 Escala máx.
36-55 Terminal X49/9 Timeout Predenido
36-54 Terminal X49/9 Controle do bus
36-6* Saída X49/11
36-60 Terminal X49/11 Saída analógica
36-63 Terminal X49/11 Escala máx.
36-62 Terminal X49/11 Escala mínima
36-65 Terminal X49/11 Timeout Predenido
36-64 Terminal X49/11 Controle do bus
40-** Congurações especiais
40-4* Estend. Registro de Falhas
40-41 Registro de falhas Frequência
40-40 Registro de falhas Ext. Referência
40-42 Registro de falhas Corrente
40-43 Registro de falhas Tensão
40-46 Registro de falhas Status Word
40-5* Congurações de controle avançadas
40-50 Mudança do modelo do uxo
sensorless
40-51 Fluxo sensorless Corr. Ganho
42-** Funções de segurança
42-1* Monitoramento de velocidade
42-10 Fonte de velocidade medida
42-11 Resolução do encoder
42-12 Sentido do Encoder
42-15 Filtro de feedback
42-14 Tipo de feedback
42-13 Relação de engrenagem
42-17 Erro de tolerância
42-18 Temporizador de velocidade zero
42-19 Limite de velocidade zero
42-2* Entrada Segura
42-23 Tempo de sinal estável
42-21 Tipo
42-22 Tempo de discrepância
42-24 Comportamento de nova partida
42-3* Geral
42-20 Função segura
42-35 Valor S-CRC
42-31 Fonte do reset
42-33 Nome denido do parâmetro
42-30 Reação a falha externa
72 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 79

Apêndice Guia de Operação
3-65 Rel. Rampa 3 Rampa-S Início Acel.
2-30 Position P Start Proportional Gain
3-66 Rel. Rampa 3 Rampa-S Final Acel.
2-31 Speed PID Start Proportional Gain
3-67 Rel. Rampa 3 Ramp-S Iníc Desac
2-32 Speed PID Start Integral Time
3-68 Rel. Rampa 3 Rampa-S Final Desac.
2-33 Speed PID Start Lowpass Filter Time
3-7* Rampa 4
3-70 Tipo de Rampa 4
Gain
2-34 Zero Speed Position P Proportional
3-72 Tempo de Desaceleração da Rampa 4
3-71 Tempo de Aceleração da Rampa 4
3-** Referência/Rampas
3-0* Limits de Referênc
3-76 Rel. Rampa 4 Rampa-S Final Aceler.
3-75 Rel. Rampa 4 Rampa-S Início Aceler.
3-00 Intervalo de Referência
3-01 Unidade da Referência/Feedback
3-78 Rel. Rampa 4 Rampa-S no Final Desac.
3-77 Rel. Rampa 4 Rampa-S Início Desac.
3-02 Referência Mínima
3-03 Referência Máxima
3-8* Outras Rampas
3-80 Tempo de Rampa do Jog
3-04 Função de Referência
3-05 On Reference Window
3-82 Tipo de Rampa da Parada Rápida
3-81 Tempo de Rampa da Parada Rápida
3-06 Minimum Position
3-07 Maximum Position
3-83 ParadRápid Rel.S-ramp na Decel.
3-08 On Target Window
Partida
3-09 On Target Time
3-84 ParadRápid Rel.S-ramp na Decel. Final
3-1* References
3-89 Ramp Lowpass Filter Time
3-91 Tempo de Rampa
3-9* Potenciôm. Digital
3-90 Tamanho do Passo
3-13 Tipo de Referência
3-12 Valor de Catch Up/Slow Down
3-10 Referência Predenida
3-11 Velocidade de Jog [Hz]
3-94 Limite Mínimo
3-95 Atraso da Rampa de Velocidade
3-93 Limite Máximo
3-92 Restabelecimento da Energia
3-14 Referência Relativa Pré-denida
3-17 Fonte da Referência 3
3-15 Fonte da Referência 1
3-16 Fonte da Referência 2
4-** Limites/Advertêncs
4-1* Limites do Motor
4-10 Sentido de Rotação do Motor
4-11 Lim. Inferior da Veloc. do Motor [RPM]
3-19 Velocidade de Jog [RPM]
3-18 Fonte d Referência Relativa Escalonada
3-2* References II
3-20 Preset Target
4-12 Lim. Inferior da Veloc. do Motor [Hz]
3-21 Touch Target
[RPM]
4-18 Limite de Corrente
4-19 Freqüência Máx. de Saída
4-16 Limite de Torque do Modo Motor
4-17 Limite de Torque do Modo Gerador
4-14 Lim. Superior da Veloc do Motor [Hz]
4-13 Lim. Superior da Veloc. do Motor
3-22 Master Scale Numerator
3-23 Master Scale Denominator
3-24 Master Lowpass Filter Time
3-25 Master Bus Resolution
3-26 Master Oset
3-27 Virtual Master Max Ref
4-2* Fator. Limite
3-28 Master Oset Speed Ref
3-4* Rampa de velocid 1
4-24 Brake Check Limit Factor
4-23 Brake Check Limit Factor Source
4-20 Fte Fator de Torque Limite
4-21 Fte Fator Limite de veloc
4-3* Mon. Veloc.Motor
4-30 Função Perda Fdbk do Motor
3-47 Rel. Rampa 1 Rampa-S Início Desac.
3-46 Rel. Rampa 1 Rampa-S Final Acel.
3-45 Rel. Rampa 1 Rampa-S Início Acel.
3-42 Tempo de Desaceleração da Rampa 1
3-41 Tempo de Aceleração da Rampa 1
3-40 Tipo de Rampa 1
4-35 Erro de Tracking
4-34 Função Erro de Tracking
4-32 Timeout Perda Feedb Motor
4-31 Erro Feedb Veloc. Motor
3-48 Rel. Rampa 1 Rampa-S Final Desac.
3-51 Tempo de Aceleração da Rampa 2
3-5* Rampa de velocid 2
3-50 Tipo de Rampa 2
4-36 Erro de Tracking Timeout
4-37 Erro de Tracking Rampa
3-55 Rel. Rampa 2 Rampa-S Início Acel.
3-52 Tempo de Desaceleração da Rampa 2
4-39 Erro de Trackg pós Timeout Rampa
4-38 Erro de Tracking Timeout Rampa
3-57 Rel. Rampa 2 Rampa-S Início Desac.
3-56 Rel. Rampa 2 Rampa-S Final Acel.
4-4* Speed Monitor
4-43 Motor Speed Monitor Function
4-44 Motor Speed Monitor Max
4-45 Motor Speed Monitor Timeout
3-58 Rel. Rampa 2 Rampa-S Final Desacel.
3-62 Tempo de Desaceleração da Rampa 3
3-6* Rampa 3
3-60 Tipo de Rampa 3
3-61 Tempo de Aceleração da Rampa 3
9 9
Frenagem
1-67 Tipo de Carga
1-68 Inércia Mínima
1-66 Corrente Mín. em Baixa Velocidade
1-04 Modo Sobrecarga
1-03 Características de Torque
1-02 Fonte Feedbck.Flux Motor
dos Parâmetros
9.2.2 Estrutura de Menu
1-69 Inércia Máxima
1-7* Ajustes da Partida
1-05 Cong. Modo Local
1-06 Sentido Horário
0-** Operação/Display
1-70 PM Start Mode
1-07 Motor Angle Oset Adjust
0-0* Programaç.Básicas
0-01 Idioma
1-71 Atraso da Partida
1-1* Seleção do Motor
0-02 Unidade da Veloc. do Motor
1-72 Função de Partida
1-10 Construção do Motor
1-73 Flying Start
1-11 Motor Model
0-03 Denições Regionais
0-04 Estado Operacion. na Energiz.(Manual)
1-74 Velocidade de Partida [RPM]
1-18 Min. Current at No Load
1-76 Corrente de Partida
1-75 Velocidade de Partida [Hz]
1-80 Função na Parada
1-81 Veloc.Mín.p/Função na Parada[RPM]
1-8* Ajustes de Parada
1-82 Veloc. Mín p/ Funcionar na Parada [Hz]
1-24 Corrente do Motor
1-23 Freqüência do Motor
1-22 Tensão do Motor
1-2* Dados do Motor
1-20 Potência do Motor [kW]
1-21 Potência do Motor [HP]
0-09 Performance Monitor
0-1* Operações Set-up
0-13 Leitura: Setups Conectados
0-10 Setup Ativo
0-11 Editar SetUp
0-12 Este Set-up é dependente de
1-9* Temper. do Motor
1-25 Velocidade nominal do motor
0-14 Leitura: Editar Setups/ Canal
1-90 Proteção Térmica do Motor
1-26 Torque nominal do Motor
0-15 Readout: actual setup
0-2* Display do LCP
1-93 Fonte do Termistor
1-91 Ventilador Externo do Motor
1-29 Adaptação Automática do Motor (AMA)
1-3* DadosAvanç d Motr
0-20 Linha do Display 1.1 Pequeno
1-94 ATEX ETR cur.lim. speed reduction
1-95 Sensor Tipo KTY
1-31 Resistência do Rotor (Rr)
1-30 Resistência do Estator (Rs)
0-22 Linha do Display 1.3 Pequeno
0-21 Linha do Display 1.2 Pequeno
1-96 Recurso Termistor KTY
1-33 Reatância Parasita do Estator (X1)
0-23 Linha do Display 2 Grande
1-97 Nível Limiar d KTY
1-34 Reatância Parasita do Rotor (X2)
0-24 Linha do Display 3 Grande
1-99 ATEX ETR interpol points current
1-98 ATEX ETR interpol. points freq.
1-36 Resistência de Perda do Ferro (Rfe)
1-35 Reatância Principal (Xh)
0-25 Meu Menu Pessoal
0-3* Leitura do LCP
2-** Freios
1-37 Indutância do eixo-d (Ld)
0-30 Unid p/ parâm def p/ usuário
2-00 Corrente de Hold CC
2-0* Frenagem CC
1-38 q-axis Inductance (Lq)
1-39 Pólos do Motor
0-32 Vlr máx d leitur denid p/usuáro
0-31 Valor Mín da Leitura Def p/Usuário
2-02 Tempo de Frenagem CC
2-01 Corrente de Freio CC
1-41 O Set do Ângulo do Motor
1-40 Força Contra Eletromotriz em 1000RPM
0-33 Source for User-dened Readout
0-37 Texto de Display 1
2-04 Veloc.Acion.d FreioCC [Hz]
2-03 Veloc.Acion Freio CC [RPM]
1-45 q-axis Inductance Sat. (LqSat)
1-44 d-axis Inductance Sat. (LdSat)
0-38 Texto de Display 2
0-39 Texto de Display 3
0-4* Teclado do LCP
1-46 Position Detection Gain
1-47 Torque Calibration
0-40 Tecla [Hand on] (Manual ligado) do
2-1* Funções do Freio
1-48 d-axis Inductance Sat. Point
1-49 q-axis Inductance Sat. Point
LCP
0-41 Tecla [O] do LCP
2-10 Função de Frenagem
2-11 Resistor de Freio (ohm)
1-50 Magnetização do Motor a 0 Hz
1-5* Prog Indep Carga
LCP
0-42 Tecla [Auto on] (Automát. ligado) do
0-43 Tecla [Reset] do LCP
2-13 Monitoramento da Potência d
2-15 Vericação do Freio
2-12 Limite da Potência de Frenagem (kW)
[RPM]
1-52 Veloc Mín de Magnetiz. Norm. [Hz]
1-51 Veloc Mín de Magnetizção Norm.
0-44 [O/Reset] Key on LCP
0-45 Tecla [Drive Bypass] LCP
2-16 AC brake Max. Current
2-17 Controle de Sobretensão
1-54 Voltage reduction in eldweakening
1-53 Freq. Desloc. Modelo
1-55 Características U/f - U
0-5* Copiar/Salvar
0-50 Cópia do LCP
0-51 Cópia do Set-up
0-6* Senha
2-18 Vericação da Condição do Freio
1-56 Características U/f - F
2-19 Over-voltage Gain
2-2* Freio Mecânico
1-57 Torque Estimation Time Constant
1-58 Corrente de Pulsos de Teste Flystart
0-60 Senha do Menu Principal
0-61 Acesso ao Menu Principal s/ Senha
2-23 Atraso de Ativação do Freio
2-24 Atraso da Parada
2-22 Velocidade de Ativação do Freio [Hz]
2-21 Velocidade de Ativação do Freio [RPM]
2-20 Corrente de Liberação do Freio
Velocid
1-59 Freqüência de Pulsos de Teste Flystart
0-65 Senha do Quick Menu (Menu Rápido)
0-66 Acesso QuickMenu(MenuRápido)s/
1-6* Prog Dep. Carga
1-60 Compensação de Carga em Baix
senha
0-67 Acesso à Senha do Bus
1-61 Compensação de Carga em Alta
0-68 Safety Parameters Password
2-07 Parking Time
2-05 Referência Máxima
2-06 Parking Current
2-25 Tempo de Liberação do Freio
Velocid
0-69 Password Protection of Safety
2-26 Ref. de Torque
1-62 Compensação de Escorregamento
Parameters
2-28 Fator de Ganho do Boost
2-27 Tempo da Rampa de Torque
Escorregam
1-63 Const d Tempo d Compens
1-** Carga e Motor
1-0* Programaç Gerais
2-3* Adv. Mech Brake
1-64 Amortecimento da Ressonância
1-65 Const Tempo Amortec Ressonânc
1-00 Modo Conguração
1-01 Principio de Controle do Motor
2-29 Torque Ramp Down Time
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 73
Page 80
Apêndice
8-82 Mensagem Receb. do Escravo
8-83 Contagem de Erros do Escravo
8-9* Bus Jog
8-90 Velocidade de Jog 1 via Bus
8-91 Velocidade de Jog 2 via Bus
9-** PROFIdrive
9-00 Setpoint
9-07 Actual Value
9-15 PCD Write Conguration
9-16 PCD Read Conguration
9-18 Node Address
9-22 Telegram Selection
9-23 Parameters for Signals
9-19 Drive Unit System Number
Master
Denominator
VLT® AutomationDrive FC 301/302
Processo
10-07 Leitura do Contador de Bus o
9-27 Parameter Edit
9-28 Process Control
9-45 Fault Code
9-52 Fault Situation Counter
9-44 Fault Message Counter
9-53 Probus Warning Word
9-47 Fault Number
9-63 Actual Baud Rate
9-64 Device Identication
9-65 Prole Number
9-68 Status Word 1
9-70 Edit Set-up
9-71 Probus Save Data Values
9-67 Control Word 1
9-72 ProbusDriveReset
9-75 DO Identication
9-80 Dened Parameters (1)
9-81 Dened Parameters (2)
9-82 Dened Parameters (3)
9-83 Dened Parameters (4)
9-91 Changed Parameters (2)
9-84 Dened Parameters (5)
9-85 Dened Parameters (6)
9-90 Changed Parameters (1)
9-99 Probus Revision Counter
9-93 Changed Parameters (4)
9-94 Changed Parameters (5)
9-92 Changed Parameters (3)
10-** Fieldbus CAN
10-00 Protocolo CAN
10-0* Programaç Comuns
10-06 Leitura do Contador de Erros d Recepç
10-02 MAC ID
10-05 Leitura do Contador de Erros d Transm
10-01 Seleção de Baud Rate
10-1* DeviceNet
10-10 Seleção do Tipo de Dados de Processo
10-11 GravaçãoCong dos Dados de Processo
10-12 Leitura da Cong dos Dados d
10-13 Parâmetro de Advertência
10-14 Referência da Rede
10-15 Controle da Rede
7-39 Larg Banda Na Refer.
7-35 Tempo de Difer. do PID de veloc
7-36 Dif.do PID de Proc.- Lim. de Ganho
7-38 Fator do Feed Forward PID de Proc.
7-91 Position PI Droop
7-9* Position PI Ctrl.
7-90 Position PI Feedback Source
7-92 Position PI Proportional Gain
7-93 Position PI Integral Time
7-95 Position PI Feebback Scale
7-94 Position PI Feedback Scale Numerator
7-99 Position PI Minimum Ramp Time
7-97 Position PI Maximum Speed Above
7-98 Position PI Feed Forward Factor
8-01 Tipo de Controle
8-** Com. e Opcionais
8-0* Programaç Gerais
8-02 Origem da Control Word
8-04 Função Timeout da Control Word
8-05 Função Final do Timeout
8-06 Reset do Timeout da Control Word
8-03 Tempo de Timeout da Control Word
8-08 Filtragem de leitura
8-07 Trigger de Diagnóstico
8-1* Prog. Ctrl. Word
8-10 Perl da Control Word
8-13 Status Word STW Congurável
8-14 Control Word Congurável CTW
8-17 Congurable Alarm and Warningword
8-19 Product Code
8-3* Cong Port de Com
8-30 Protocolo
8-33 Bits Parid./Parad
8-31 Endereço
8-32 Baud Rate da Porta do FC
8-35 Atraso Mínimo de Resposta
8-36 Atraso Máx de Resposta
8-34 Tempo de ciclo estimado
8-37 Atraso Máx Inter-Caractere
8-4* FC Conj. Protocolo MC do
8-40 Seleção do telegrama
8-41 Parameters for Signals
8-42 Conguração de gravação do PCD
8-43 Conguração de Leitura do PCD
8-5* Digital/Bus
8-50 Seleção de Parada por Inércia
8-52 Seleção de Frenagem CC
8-51 Seleção de Parada Rápida
8-53 Seleção da Partida
8-54 Seleção da Reversão
8-55 Seleção do Set-up
8-56 Seleção da Referência Pré-denida
8-57 Prodrive OFF2 Select
8-58 Prodrive OFF3 Select
8-8* Diagn.Porta do FC
8-80 Contagem de Mensagens do Bus
8-81 Contagem de Erros do Bus
99
Veloc
veloc
velocid.
Filtro
6-46 Term. X30/12 Constante Tempo do
5-55 Term. 33 Baixa Freqüência
5-54 Const de Tempo do Filtro de Pulso #29
6-51 Terminal 42 Escala Mínima de Saída
6-5* Saída Analógica 1
6-50 Terminal 42 Saída
5-57 Term. 33 Ref./Feedb.Valor Baixo
5-56 Term. 33 Alta Freqüência
5-58 Term. 33 Ref./Feedb. Valor Alto
6-52 Terminal 42 Escala Máxima de Saída
5-59 Const de Tempo do Filtro de Pulso #33
6-53 Terminal 42 Ctrl Saída Bus
5-6* Saída de Pulso
6-54 Terminal 42 Predef. Timeout Saída
5-60 Terminal 27 Variável da Saída d Pulso
6-55 Terminal 42 Filtro de Saída
5-62 Freq Máx da Saída de Pulso #27
6-6* Saída Analógica 2
5-63 Terminal 29 Variável da Saída d Pulso
6-60 Terminal X30/8 Saída
5-65 Freq Máx da Saída de Pulso #29
6-61 Terminal X30/8 Escala mín
5-66 Terminal X30/6 Saída de Pulso Variável
6-63 Terminal X30/8 Controle de Bus
6-62 Terminal X30/8 Escala máx.
5-68 Freq Máx do Pulso Saída #X30/6
5-7* Entrad d Encdr-24V
6-64 Terminal X30/8 Predef. Timeout Saída
6-7* Saída Analógica 3
5-71 Term 32/33 Sentido do Encoder
5-70 Term 32/33 Pulsos Por Revolução
6-70 Terminal X45/1 Saída
5-72 Term 32/33 Encoder Type
6-72 Terminal X45/1 Máx. Escala
6-71 Terminal X45/1 Mín Escala
5-8* Saída do encoder
5-80 AHF Cap Reconnect Delay
6-74 Terminal X45/1 Predef. Timeout Saída
6-73 Terminal X45/1 Ctrl de Bus
5-9* Bus Controlado
5-90 Controle Bus Digital & Relé
6-8* Saída Analógia 4
5-93 Saída de Pulso #27 Ctrl. Bus
6-80 Terminal X45/3 Saída
5-94 Saída de Pulso #27 Timeout Predef.
6-82 Terminal X45/3 Máx Escala
6-81 Terminal X45/3 Mín Escala
5-96 Saída de Pulso #29 Timeout Predef.
5-95 Saída de Pulso #29 Ctrl Bus
6-83 Terminal X45/3 Ctrl de Bus
5-97 Saída de Pulso #X30/6 Controle de Bus
6-84 Terminal X45/3 Predef. Timeout Saída
5-98 Saída de Pulso #30/6 Timeout Predef.
7-** Controladores
7-0* Contrl. PID de Veloc
6-** Entrad/Saíd Analóg
6-0* Modo E/S Analógico
Velocidad
7-09 Speed PID Error Correction w/ Ramp
7-08 Fator Feed Forward PID Veloc
7-06 Tempo d FiltrPassabaixa d PID d veloc
7-07 Veloc.PID Fdbck Rel.Engrenag
7-00 Fonte do Feedb. do PID de Veloc.
6-14 Terminal 53 Ref./Feedb. Valor Baixo
6-15 Terminal 53 Ref./Feedb. Valor Alto
6-16 Terminal 53 Const. de Tempo do Filtro
6-10 Terminal 53 Tensão Baixa
6-13 Terminal 53 Corrente Alta
6-11 Terminal 53 Tensão Alta
6-12 Terminal 53 Corrente Baixa
6-2* Entrada Analógica 2
6-00 Timeout do Live Zero
6-01 Função Timeout do Live Zero
6-1* Entrada Analógica 1
6-20 Terminal 54 Tensão Baixa
7-1* Torque PI Ctrl.
7-10 Torque PI Feedback Source
7-12 Ganho Proporcional do PI de Torque
6-24 Terminal 54 Ref./Feedb. Valor Baixo
6-25 Terminal 54 Ref./Feedb. Valor Alto
6-23 Terminal 54 Corrente Alta
6-21 Terminal 54 Tensão Alta
6-22 Terminal 54 Corrente Baixa
7-05 Lim do Ganho Diferencial do PID d
7-04 Tempo de Diferenciação do PID d
7-03 Tempo de Integração do PID de
7-01 Speed PID Droop
7-02 Ganho Proporcional do PID de
7-13 Tempo de Integração do PI de Torque
6-26 Terminal 54 Const. de Tempo do Filtro
7-16 Torque PI Lowpass Filter Time
6-3* Entrada Analógica 3
7-18 Torque PI Feed Forward Factor
6-30 Terminal X30/11 Tensão Baixa
7-19 Current Controller Rise Time
6-31 Terminal X30/11 Tensão Alta
7-2* Feedb Ctrl. Process
6-34 Term. X30/11 Ref./Feedb. Valor Baixo
7-20 Fonte de Feedback 1 PID de Processo
6-35 Term. X30/11 Ref./Feedb. Valor Alto
7-22 Fonte de Feedback 2 PID de Processo
6-36 Term. X30/11 Constante Tempo do
7-3* Ctrl. PID Processos
7-30 Cntrl Norml/Invers do PID d Proc.
Filtro
6-4* Entrada Analógica 4
7-31 Anti Windup PID de Proc
6-40 Terminal X30/12 Tensão Baixa
7-32 Velocidade Inicial do PID do Processo
6-41 Terminal X30/12 Tensão Alta
7-33 Ganho Proporc. do PID de Processo
6-44 Term. X30/12 Ref./Feedb. Valor Baixo
7-34 Tempo de Integr. do PID de velocid.
6-45 Term. X30/12 Ref./Feedb. Valor Alto
4-5* Ajuste Advertência
4-50 Advertência de Corrente Baixa
4-51 Advertência de Corrente Alta
4-52 Advertência de Velocidade Baixa
4-74 Start Fwd/Rev Function
4-53 Advertência de Velocidade Alta
4-54 Advert. de Refer Baixa
4-58 Função de Fase do Motor Ausente
4-55 Advert. Refer Alta
4-56 Advert. de Feedb Baixo
4-57 Advert. de Feedb Alto
4-6* Bypass de Velocidd
4-60 Bypass de Velocidade de [RPM]
4-62 Bypass de Velocidade até [RPM]
4-63 Bypass de Velocidade até [Hz]
4-61 Bypass de Velocidade de [Hz]
4-71 Maximum Position Error
4-7* Position Monitor
4-70 Position Error Function
4-73 Position Limit Function
4-72 Position Error Timeout
4-75 Touch Timout
5-** Entrad/Saíd Digital
5-0* Modo E/S Digital
5-00 Modo I/O Digital
5-13 Terminal 29, Entrada Digital
5-12 Terminal 27, Entrada Digital
5-01 Modo do Terminal 27
5-11 Terminal 19, Entrada Digital
5-02 Modo do Terminal 29
5-1* Entradas Digitais
5-10 Terminal 18 Entrada Digital
5-14 Terminal 32, Entrada Digital
5-15 Terminal 33 Entrada Digital
5-16 Terminal X30/2 Entrada Digital
5-17 Terminal X30/3 Entrada Digital
5-3* Saídas Digitais
5-30 Terminal 27 Saída Digital
5-31 Terminal 29 Saída Digital
5-32 Terminal X30/6 Saída Digital
5-33 Terminal X30/7 Saída Digital
5-4* Relés
5-40 Função do Relé
5-41 Atraso de Ativação do Relé
5-42 Atraso de Desativação do Relé
5-5* Entrada de Pulso
5-50 Term. 29 Baixa Freqüência
5-53 Term. 29 Ref./Feedb. Valor Alto
5-51 Term. 29 Alta Freqüência
5-52 Term. 29 Ref./feedb. Valor Baixo
5-25 Terminal X46/11 Entrada Digital
5-26 Terminal X46/13 Entrada Digital
5-23 Terminal X46/7 Entrada Digital
5-24 Terminal X46/9 Entrada Digital
5-22 Terminal X46/5 Entrada Digital
5-20 Terminal X46/1 Entrada Digital
5-21 Terminal X46/3 Entrada Digital
5-19 Terminal 37 Parada Segura
5-18 Terminal X30/4 Entrada Digital
74 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 81
Apêndice Guia de Operação
16-25 Torque [Nm] Alto
16-24 Calibrated Stator Resistance
16-22 Torque [%]
16-23 Motor Shaft Power [kW ]
16-21 Torque [%] High Res.
16-20 Ângulo do Motor
16-18 Térmico Calculado do Motor
16-19 Temperatura Sensor KTY
16-16 Torque [Nm]
16-17 Velocidade [RPM]
16-15 Freqüência [%]
16-13 Freqüência
16-1* Status do Motor
16-10 Potência [kW]
16-14 Corrente do motor
16-11 Potência [hp]
16-12 Tensão do motor
16-3* Status do VLT
16-30 Tensão de Conexão CC
16-35 Térmico do Inversor
16-32 Energia de Frenagem /s
16-33 Energia de Frenagem /2 min
16-34 Temp. do Dissipador de Calor
16-36 Corrente Nom.do Inversor
16-37 Corrente Máx.do Inversor
16-39 Temp.do Control Card
16-38 Estado do SLC
16-40 Buer de Logging Cheio
16-41 Linha de status LCP Fundo
16-49 Origem da Falha de Corrente
16-48 Speed Ref. After Ramp [RPM]
16-47 Motor Phase W Current
16-46 Motor Phase V Current
16-45 Motor Phase U Current
16-44 Speed Error [RPM]
16-5* Referência&Fdback
16-50 Referência Externa
16-52 Feedback [Unidade]
16-51 Referência de Pulso
16-53 Referência do DigiPot
16-57 Feedback [RPM]
16-6* Entradas e Saídas
16-60 Entrada digital
16-63 Denição do Terminal 54
16-65 Saída Analógica 42 [mA]
16-61 Denição do Terminal 53
16-62 Entrada Analógica 53
16-67 Entr. Freq. #29 [Hz]
16-64 Entrada Analógica 54
16-66 Saída Digital [bin]
16-71 Saída do Relé [bin]
16-70 Saída de Pulso #29 [Hz]
16-68 Entr. Freq. #33 [Hz]
16-69 Saída de Pulso #27 [Hz]
16-76 Entr. Analógica X30/12
16-73 Contador B
16-75 Entr. Analógica X30/11
16-77 Saída Analógica X30/8 [mA]
16-72 Contador A
15-13 Modo Logging
14-12 Função no Desbalanceamento da Rede
12-59 EtherCAT Status
15-14 Amostragens Antes do Disparo
15-2* Registr.doHistórico
14-15 Kin. Backup Trip Recovery Level
14-14 Kin. Backup Time Out
12-6* Ethernet PowerLink
12-60 Node ID
15-20 Registro do Histórico: Evento
15-21 Registro do Histórico: Valor
14-16 Kin. Backup Gain
14-2* Reset do desarme
12-63 Basic Ethernet Timeout
12-62 SDO Timeout
15-22 Registro do Histórico: Tempo
15-3* Registro de Falhas
14-20 Modo Reset
14-21 Tempo para Nova Partida Automática
12-66 Threshold
12-67 Threshold Counters
15-30 Registro de Falhas: Código da Falha
14-22 Modo Operação
12-68 Cumulative Counters
15-31 Reg. de Falhas:Valor
14-23 Progr CódigoTipo
12-69 Ethernet PowerLink Status
15-32 Registro de Falhas: Tempo
15-4* Identic. do VLT
14-24 AtrasoDesarmLimCorrnte
14-25 Atraso do Desarme no Limite de
12-8* OutrosServEthernet
12-80 Servidor de FTP
15-40 Tipo do FC
Torque
12-81 Servidor HTTP
15-41 Seção de Potência
14-26 Atraso Desarme-Defeito Inversor
12-82 Serviço SMTP
15-42 Tensão
15-43 Versão de Software
14-29 Código de Service
14-28 Programações de Produção
Transparente
12-89 Porta do Canal de Soquete
15-45 String de Código Real
15-44 String do Código de Compra
14-30 Ganho Proporcional-Contr.Lim.Corrente
14-3* Ctrl.Limite de Corr
12-9* Serv Ethernet Avançad
12-90 Diagnóstico de Cabo
15-48 Nº do Id do LCP
15-47 Nº. de Pedido da Placa de Potência.
15-46 Nº. do Pedido do Cnvrsr de Freqüência
14-35 Stall Protection
14-31 Tempo Integração-Contr.Lim.Corrente
14-32 Contr Lim. Corrente, Tempo de Filtro
12-92 Espionagem IGMP
12-93 Comprimento Errado de Cabo
12-91 Auto Cross Over
15-49 ID do SW da Placa de Controle
15-50 ID do SW da Placa de Potência
14-36 Fieldweakening Function
14-4* Otimiz. de Energia
12-94 Prot.contra Interf.Broadcast
12-95 Filtro para Interferência de Broadcast
15-53 Nº. Série Cartão de Potência
15-51 Nº. Série Conversor de Freq.
14-40 Nível do VT
14-41 Magnetização Mínima do AEO
12-96 Port Cong
12-98 Contadores de Interface
15-59 Nome do arquivo CSIV
15-58 Smart Setup Filename
15-6* Ident. do Opcional
14-43 Cosphi do Motor
14-42 Freqüência AEO Mínima
14-5* Ambiente
12-99 Contadores de Mídia
13-** Smart Logic
13-0* Denições do SLC
15-62 N°. do Pedido do Opcional
15-60 Opcional Montado
15-61 Versão de SW do Opcional
14-50 Filtro de RFI
14-51 DC Link Compensation
14-52 Controle do Ventilador
13-00 Modo do SLC
13-01 Iniciar Evento
13-02 Parar Evento
15-70 Opcional no Slot A
15-71 Versão de SW do Opcional - Slot A
15-63 N° Série do Opcional
14-53 Mon.Ventldr
14-55 Filtro Saída
14-56 Capacitância do Filtro Saída
13-03 Resetar o SLC
13-1* Comparadores
13-10 Operando do Comparador
15-74 Opcional no Slot C0
15-73 Versão de SW do Opcional - Slot B
15-72 Opcional no Slot B
14-59 Número Real de Unidades Inversoras
14-57 Indutância do Filtro de Saída
14-7* Compatibilidade
13-11 Operador do Comparador
13-12 Valor do Comparador
13-1* RS Flip Flops
15-77 Versão de SW do Opcional no Slot C1
15-76 Opcional no Slot C1
15-75 Versão de SW do Opcional no Slot C0
15-8* Operating Data II
15-81 Preset Fan Running Hours
15-80 Fan Running Hours
15-89 Conguration Change Counter
15-92 Parâmetros Denidos
15-9* Inform. do Parâm.
15-93 Parâmetros Modicados
15-98 Identic. do VLT
15-99 Metadados de Parâmetro
16-** Leitura de Dados
16-0* Status Geral
16-01 Referência [Unidade]
16-00 Control Word
16-06 Actual Position
16-08 Position Error
16-07 Target Position
16-09 Leit.Personalz.
16-03 Status Word
16-02 Referência %
16-05 Valor Real Principal [%]
9 9
14-89 Option Detection
14-88 Option Data Storage
14-74 Leg. Ext. Status Word
14-72 Alarm Word do VLT
14-73 Warning Word do VLT
14-8* Opcionais
14-80 Opc.Suprid p/Fonte 24VCC Extern
14-9* Cong.para Falhas
14-90 Nível de Falha
15-** Informação do VLT
15-0* Dados Operacionais
13-44 Regra Lógica Booleana 3
13-42 Regra Lógica Booleana 2
13-16 RS-FF Operand R
13-15 RS-FF Operand S
13-2* Temporizadores
13-20 Temporizador do SLC
13-4* Regras Lógicas
13-43 Operador de Regra Lógica 2
13-41 Operador de Regra Lógica 1
13-40 Regra Lógica Booleana 1
13-5* Estados
15-00 Horas de funcionamento
13-51 Evento do SLC
15-01 Horas em Funcionamento
15-02 Medidor de kWh
13-52 Ação do SLC
14-** Funções Especiais
15-03 Energizações
14-0* Chveamnt d Invrsr
15-04 Superaquecimentos
14-00 Padrão de Chaveamento
15-05 Sobretensões
14-01 Freqüência de Chaveamento
15-07 Reinicialzar Contador de Horas de Func
15-06 Reinicializar o Medidor de kWh
15-1* Def. Log de Dados
15-10 Fonte do Logging
14-03 Sobremodulação
14-04 PWM Randômico
14-06 Dead Time Compensation
14-1* Lig/Deslig RedeElét
15-11 Intervalo de Logging
14-10 Falh red elétr
15-12 Evento do Disparo
14-11 Tensã Red na FalhaRed.Elétr.
Processo
10-2* Filtros COS
10-3* Acesso ao Parâm.
10-30 Índice da Matriz
10-32 Revisão da DeviceNet
10-31 Armazenar Valores dos Dados
10-33 Gravar Sempre
10-34 Cód Produto DeviceNet
10-39 Parâmetros F do Devicenet
10-5* CANopen
10-50 Gravação Cong. Dados Processo
10-51 Leitura Cong. Dados Processo.
12-** Ethernet
12-0* Cong. IP
12-01 Endereço IP
12-00 Alocação do Endereço IP
10-22 Filtro COS 3
10-23 Filtro COS 4
10-20 Filtro COS 1
10-21 Filtro COS 2
12-03 Gateway Padrão
12-02 Máscara da Subnet
12-05 Contrato de Aluguel Expira Em
12-04 Servidor do DHCP
12-1* Par.Link Ethernet
12-10 Status do Link
12-11 Duração do Link
12-13 Velocidade do Link
12-12 Negociação Automática
12-14 Link Duplex
12-22 Leitura de Cong dos Dados d
12-21 Grav.Cong.Dados de Processo
12-23 Process Data Cong Write Size
12-2* Dados d Proc
12-20 Instância de Controle
12-08 Nome do Host
12-09 Endereço Físico
12-07 Nome do Domínio
12-06 Servidores de Nome
12-29 Gravar Sempre
12-27 Master Address
12-28 Armazenar Valores dos Dados
12-24 Process Data Cong Read Size
12-32 Controle da Rede
12-3* EtherNet/IP
12-30 Parâmetro de Advertência
12-31 Referência da Rede
12-33 Revisão do CIP
12-38 Filtro COS
12-37 Temporizador para Inibir o COS
12-35 Parâmetro do EDS
12-34 Código CIP do Produto
12-4* Modbus TCP
12-42 Slave Exception Message Count
12-40 Status Parameter
12-41 Slave Message Count
12-5* EtherCAT
12-50 Congured Station Alias
12-51 Congured Station Address
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 75
Page 82
Apêndice
VLT® AutomationDrive FC 301/302
600-52 Fault Situation Counter
600-44 Fault Message Counter
42-9* Special
42-90 Restart Safe Option
600-47 Fault Number
600-** PROFIsafe
600-22 PROFIdrive/safe Tel. Selected
601-** PROFIdrive 2
601-22 PROFIdrive Safety Channel Tel. No.
99
35-37 Term. X48/10 High Temp. Limit
17-92 Position Control Selection
35-4* Analog Input X48/2
35-42 Term. X48/2 Low Current
17-94 Rotary Absolute Direction
17-93 Master Oset Selection
35-43 Term. X48/2 High Current
18-** Leituras de Dados 2
35-46 Term. X48/2 Filter Time Constant
35-45 Term. X48/2 High Ref./Feedb. Value
35-44 Term. X48/2 Low Ref./Feedb. Value
18-3* Analog Readouts
18-36 Entrada analógica X48/2 [mA]
18-37 EntradaTemp X48/4
42-** Safety Functions
42-1* Speed Monitoring
18-38 EntradaTemp X48/7
18-39 EntradaTemp X48/10
42-11 Encoder Resolution
42-10 Measured Speed Source
18-5* Active Alarms/Warnings
18-55 Active Alarm Numbers
42-13 Gear Ratio
42-14 Feedback Type
42-12 Encoder Direction
18-56 Active Warning Numbers
18-6* Inputs & Outputs 2
18-60 Digital Input 2
42-18 Zero Speed Timer
42-15 Feedback Filter
42-17 Tolerance Error
30-20 High Starting Torque Time [s]
30-** Recursos Especiais
30-2* Adv. Start Adjust
42-19 Zero Speed Limit
30-21 High Starting Torque Current [%]
42-2* Safe Input
30-22 Locked Rotor Protection
42-20 Safe Function
30-23 Locked Rotor Detection Time [s]
42-21 Type
30-24 Locked Rotor Detection Speed Error
42-22 Discrepancy Time
[%]
42-24 Restart Behaviour
42-23 Stable Signal Time
30-8* Compatibilidade (I)
30-80 Indutância do eixo-d (Ld)
42-3* General
42-30 External Failure Reaction
30-83 Ganho Proporcional do PID de
30-81 Resistor de Freio (ohm)
42-35 S-CRC Value
42-33 Parameter Set Name
42-31 Reset Source
Velocidad
30-84 Ganho Proporcional do PID de Proc
31-** OpcionlBypass
42-36 Level 1 Password
31-00 Bypass Mode
42-4* SS1
31-01 Bypass Start Time Delay
42-40 Type
31-02 Bypass Trip Time Delay
42-41 Ramp Prole
42-42 Delay Time
31-10 Bypass Status Word
31-03 Test Mode Activation
42-43 Delta T
42-44 Deceleration Rate
31-11 Bypass Running Hours
31-19 Remote Bypass Activation
42-45 Delta V
42-46 Zero Speed
35-** Sensor Input Option
35-0* Temp. Input Mode
42-47 Ramp Time
35-00 Term. X48/4 Temperature Unit
42-48 S-ramp Ratio at Decel. Start
42-49 S-ramp Ratio at Decel. End
35-02 Term. X48/7 Temperature Unit
35-01 Term. Tipo de Entrada X48/4
42-5* SLS
42-50 Cut O Speed
35-03 Term. Tipo de Entrada X48/7
35-04 Term. X48/10 Temperature Unit
42-51 Speed Limit
42-52 Fail Safe Reaction
35-06 FunçãoAlarm Sensor de Temper.
35-05 Term. Tipo de Entrada X48/10
42-54 Ramp Down Time
42-53 Start Ramp
35-1* Temp. Input X48/4
35-14 Term. X48/4 Filter Time Constant
42-6* Safe Fieldbus
42-60 Telegram Selection
35-16 Term. X48/4 Low Temp. Limit
35-15 Term. X48/4 Temp. Monitor
42-61 Destination Address
35-17 Term. X48/4 High Temp. Limit
42-8* Status
42-80 Safe Option Status
35-2* Temp. Input X48/7
35-24 Term. X48/7 Filter Time Constant
42-82 Safe Control Word
42-81 Safe Option Status 2
35-26 Term. X48/7 Low Temp. Limit
35-25 Term. X48/7 Temp. Monitor
42-83 Safe Status Word
35-27 Term. X48/7 High Temp. Limit
42-86 Safe Option Info
42-85 Active Safe Func.
35-3* Temp. Input X48/10
35-34 Term. X48/10 Filter Time Constant
42-88 Supported Customization File Version
42-89 Customization File Version
35-36 Term. X48/10 Low Temp. Limit
35-35 Term. X48/10 Temp. Monitor
Comunicação
16-89 Congurable Alarm/Warning Word
16-87 Bus Readout Alarm/Warning
16-86 REF 1 da Porta Serial
16-85 CTW 1 da Porta Serial
16-84 StatusWord do Opcional d
16-82 REF 1 do Fieldbus
16-83 Fieldbus REF 2
16-80 CTW 1 do Fieldbus
16-78 Saída Anal. X45/1 [mA]
16-79 Saída Analógica X45/3 [mA]
16-8* FieldbusPorta do FC
16-9* Leitura dos Diagnós
16-90 Alarm Word
16-94 Status Word Estendida
16-93 Warning Word 2
16-91 Alarm Word 2
16-92 Warning Word
17-** Opção d Feedbck
17-1* Interf. Encoder Inc
17-10 Tipo de Sinal
17-11 Resolução (PPR)
17-21 Resolução (Posições/Rev)
17-22 Multiturn Revolutions
17-2* Interf. Encoder Abs
17-20 Seleção do Protocolo
17-24 Comprim. Dados SSI
17-34 Bauderate da HIPERFACE
17-25 Veloc. Relógio
17-26 Formato Dados SSI
17-5* Interface do Resolver
17-50 Pólos
17-51 Tensão Entrad
17-52 Freq de Entrada
17-53 Rel de transformação
17-56 Encoder Sim. Resolution
17-59 Interface Resolver
17-6* Monitor. e Aplic.
17-60 Sentido doFeedback
17-61 Monitoram. Sinal Encoder
17-7* Position Scaling
17-70 Position Unit
17-71 Position Unit Scale
17-74 Position Oset
17-72 Position Unit Numerator
17-73 Position Unit Denominator
17-75 Position Recovery at Power-up
17-76 Position Axis Mode
17-77 Position Feedback Mode
17-8* Position Homing
17-80 Homing Function
17-81 Home Sync Function
17-82 Home Position
17-83 Homing Speed
17-84 Homing Torque Limit
17-85 Homing Timout
17-9* Position Cong
17-90 Absolute Position Mode
17-91 Relative Position Mode
76 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 83

Índice Guia de Operação
Índice
A
Abreviações............................................................................................ 66
Adaptação automática do motor................................................... 20
Adaptação automática do motor (AMA)
Advertência........................................................................................ 30
Advertências
Advertências...................................................................................... 23
Lista de................................................................................................. 24
Alarmes
Alarmes................................................................................................ 23
Lista de................................................................................................. 24
Alta tensão.......................................................................................... 6, 18
AMA
AMA...................................................................................................... 20
consulte também Adaptação automática do motor
Ambiente................................................................................................. 47
Analógico
Saída analógica................................................................................. 49
Armazenagem.......................................................................................... 8
Aterramento............................................................................. 14, 15, 18
C
CA
Entrada CA.......................................................................................... 15
Rede elétrica CA............................................................................... 15
Cabo
de motor....................................................................................... 10, 14
Comprimento do cabo e seção transversal............................ 47
Disposição dos cabos..................................................................... 16
Especicação do cabo.................................................................... 47
Cabo blindado................................................................................ 14, 16
Cartão de controle
Advertência........................................................................................ 31
Cartão de controle............................................................. 24, 49, 50
Comunicação serial......................................................................... 49
Comunicação serial USB................................................................ 49
RS485.................................................................................................... 49
Saída CC, 10 V.................................................................................... 49
Cartão de potência
Advertência........................................................................................ 31
Certicações.............................................................................................. 5
Chave de desconexão......................................................................... 18
Choque....................................................................................................... 8
Comando remoto.................................................................................... 3
Comprimento do o..................................................................... 10, 14
Comunicação serial
Comunicação serial......................................................................... 49
Comunicação serial USB................................................................ 49
RS485.................................................................................................... 49
Condição ambiente............................................................................. 47
Conduzir................................................................................................... 16
Conexão CC............................................................................................. 24
Controlador externo.............................................................................. 3
Controle
Característica de controle............................................................. 50
Fiação................................................................................................... 10
Fiação de controle.................................................................... 14, 16
Controle do freio mecânico....................................................... 15, 22
Convenção.............................................................................................. 66
Corrente
CC........................................................................................................... 10
de entrada.......................................................................................... 15
Corrente de fuga.............................................................................. 7, 10
Curto circuito......................................................................................... 26
D
Delta aterrado........................................................................................ 15
Delta utuante....................................................................................... 15
Desarme
Bloqueio por desarme.................................................................... 23
Desarme....................................................................................... 21, 23
Desbalanceamento de tensão......................................................... 24
Desempenho.......................................................................................... 50
Dimensão................................................................................................ 60
Disjuntor........................................................................................... 16, 51
Dissipador de calor
Advertência................................................................................. 29, 31
E
Eciência energética..... 34, 35, 36, 37, 38, 39, 40, 41, 42, 43, 44,
45, 47
Elevação...................................................................................................... 9
EN 50598-2.............................................................................................. 47
Entrada
Desconexão da entrada................................................................. 15
Energia de entrada.......................................................................... 10
analógica............................................................................................. 48
digital................................................................................................... 47
Fiação da potência de entrada.................................................... 17
Potência de entrada................................................... 14, 15, 16, 23
Sinal de entrada................................................................................ 30
Terminal de entrada................................................................. 15, 18
Entrada analógica................................................................................. 24
Entradas do pulso/encoder.............................................................. 48
Equalização do potencial................................................................... 11
Equipamento auxiliar.......................................................................... 16
Equipamento opcional....................................................................... 14
Espaço para ventilação....................................................................... 16
F
Feedback................................................................................................. 16
Feedback do sistema............................................................................. 3
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 77
Page 84

Índice
VLT® AutomationDrive FC 301/302
Fiação
Esquemática de ação................................................................... 13
de controle......................................................................................... 14
de controle do termistor............................................................... 15
do motor............................................................................................. 14
Filtro de RFI............................................................................................. 15
Flux............................................................................................................ 22
Fusível.................................................................................. 10, 16, 28, 51
G
GLCP.......................................................................................................... 20
consulte também Painel de controle local
gráco
I
IEC 61800-3............................................................................................. 15
Instalação
Ambiente de instalação................................................................... 8
Lista de vericação.......................................................................... 16
Instalação compatível com EMC..................................................... 10
Instalação Elétrica................................................................................. 10
Instalação mecânica............................................................................... 8
Interferência de EMC........................................................................... 14
Isolação de interferência.................................................................... 16
Itens fornecidos....................................................................................... 8
L
Load Sharing...................................................................................... 6, 23
M
Manutenção........................................................................................... 23
Montagem.......................................................................................... 9, 16
Motor
Advertência................................................................................. 25, 28
Cabo de motor........................................................................... 10, 14
Desempenho de saída (U, V, W).................................................. 46
Fiação do motor........................................................................ 14, 16
Potência do motor........................................................................... 10
Proteção de sobrecarga do motor............................................... 3
Proteção térmica do motor.......................................................... 21
Rotação do motor acidental........................................................... 7
Saída do motor................................................................................. 46
Status do motor.................................................................................. 3
Superaquecimento.......................................................................... 25
Termistor............................................................................................. 21
Termistor do motor......................................................................... 21
N
Nível de tensão...................................................................................... 47
P
Painel de controle local gráco....................................................... 20
Partida acidental.............................................................................. 6, 23
PELV........................................................................................................... 21
Perda de fase.......................................................................................... 24
Peso........................................................................................................... 60
Pessoal qualicado................................................................................. 6
Placa traseira............................................................................................. 9
Plaqueta de identicação.................................................................... 8
Ponto de aterramento
Advertência........................................................................................ 29
Potência
Conexão de energia........................................................................ 10
Fator de potência............................................................................. 16
de entrada.......................................................................................... 18
Valor nominal da potência........................................................... 60
Programação.......................................................................................... 24
Proteção de sobrecorrente................................................................ 10
R
Recursos adicionais................................................................................ 3
Rede elétrica
Alimentação de rede elétrica.................................. 40, 41, 42, 46
Referência
Referência........................................................................................... 21
Refrigeração.............................................................................................. 9
Reinicializar............................................................................................. 23
Requisitos da folga................................................................................. 9
Reset.......................................................................................................... 31
Resistor de frenagem
Advertência........................................................................................ 27
Rotação livre............................................................................................. 7
Rotor
Advertência........................................................................................ 32
RS485
RS485.................................................................................................... 49
S
Safe Torque O
Advertência........................................................................................ 31
Saída
Fiação de energia de saída........................................................... 17
analógica............................................................................................. 49
digital................................................................................................... 49
Saída CC, 10 V......................................................................................... 49
Saída do relé........................................................................................... 50
Segurança.................................................................................................. 7
Serviço...................................................................................................... 23
Setup do sistema.................................................................................. 20
Símbolo.................................................................................................... 66
Sinal analógico...................................................................................... 24
Solução de Problemas
Advertências e alarmes.................................................................. 24
78 Danfoss A/S © 05/2018 Todos os direitos reservados. MG33AT28
Page 85

Índice Guia de Operação
T
Tempo de descarga................................................................................ 7
Tensão de alimentação......................................................... 15, 18, 28
Terminal
de saída................................................................................................ 18
Terminal de entrada............................................................................. 24
Termistor
Advertência........................................................................................ 31
Terra
Aterramento...................................................................................... 16
Conexão do terra.............................................................................. 16
Fio terra................................................................................................ 10
Tipo de aprovações................................................................................ 5
Torque
Característica do torque................................................................ 46
Limite.................................................................................................... 25
Torque de aperto da tampa dianteira............................. 60, 62, 64
Transiente de ruptura.......................................................................... 11
U
Uso pretendido........................................................................................ 3
V
Ventiladores
Advertência................................................................................. 27, 32
Vibração...................................................................................................... 8
Visão explodida....................................................................................... 4
MG33AT28 Danfoss A/S © 05/2018 Todos os direitos reservados. 79
Page 86
A Danfoss não aceita qualquer responsabilidade por possíveis erros constantes de catálogos, brochuras ou outros materiais impressos. A Danfoss reserva-se o direito de alterar os seus produtos sem
aviso prévio. Esta determinação aplica-se também a produtos já encomendados, desde que tais modicações não impliquem em mudanças nas especicações acordadas. Todas as marcas
registradas constantes deste material são propriedade das respectivas empresas. Danfoss e o logotipo Danfoss são marcas registradas da Danfoss A/S. Todos os direitos reservados.
Danfoss A/S
Ulsnaes 1
DK-6300 Graasten
vlt-drives.danfoss.com
130R0300 MG33AT28 05/2018
*MG33AT28*
 Loading...
Loading...