

VLT® Automation Drive FC 300
High Power 사용 설명서
차례
차례
1 본 사용 설명서 이용방법
인증 3
기호 4
약어 4
2 안전 지침 및 일반 주의 사항
고전압 5
안전 지침 6
의도하지 않은 기동에 대한 주의 사항
안전 정지 7
IT 주전원 9
3 설치방법
사전 설치 11
설치 장소에 대한 계획 11
주파수 변환기 제품 확인 11
운반 및 포장 풀기 12
들어 올리기 12
3
5
6
11
외형 치수표 14
정격 출력 21
기계적인 설치 22
단자 위치 - 프레임 크기 D 24
단자 위치 - 프레임 크기 E 26
단자 위치
냉각 및 통풍 33
옵션의 현장 설치 39
Rittal 외함에 덕트 냉각 키트 설치 39
상단 전용 덕트 냉각 키트 설치 40
Rittal 외함의 상단 및 하단 덮개 설치 41
상단 및 하단 덮개 설치 41
외부 설치/ Rittal 외함용 NEMA 3R 키트
외부 설치/ 산업용 외함 NEMA 3R 키트 43
IP00s D3 및 D4 단자 덮개 설치 44
IP00s D3, D4 및 E2 케이블 클램프 브래킷 설치 44
페데스탈 설치 44
- 프레임 크기
F 30
42
주파수 변환기를 위한 주전원 쉴드 설치 45
입력 플레이트 옵션의 설치 46
D1, D2, D3 및 D4 부하 공유 옵션 설치 46
프레임 크기 F 패널 옵션 47
전기적인 설치 49
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
1
차례
VLT® Automation Drive FC 300
High Power 사용 설명서
전원 연결 49
주전원 연결 63
퓨즈 64
모터 절연 67
모터 베어링 전류 68
제어 케이블 배선 69
전기적인 설치, 제어 단자 71
연결 예 72
기동/정지 72
펄스 기동
전기적인 설치, 제어 케이블 74
S201, S202 및 S801 스위치
최종 셋업 및 시험 77
추가적인 연결 79
기계식 제동 장치 제어 79
모터 열 보호 79
/정지
4 프로그래밍 방법
그래픽 LCP 및 숫자 방식의 LCP 81
그래픽 LCP 의 프로그래밍 방법 81
숫자 방식의 현장 제어 패널을 이용한 프로그래밍 방법 81
단축 설정 83
파라미터 목록 88
5 일반사양
6 경고 및 알람
상태 메시지 125
72
76
81
111
125
경고/알람 메시지 125
인덱스
2
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
134
VLT® Automation Drive FC 300
High Power 사용 설명서
1 본 사용 설명서 이용방법
1.1.1 본 사용 설명서 이용방법
1 본 사용 설명서 이용방법
1
주파수 변환기는 전기 모터에 높은 축 성능을 제공하도록 설계되어 있습니다
변환기를 잘못 취급하면 주파수 변환기나 관련 장비가 오작동하거나 수명이 단축되거나 기타 고장 원인을 제공할 수 있습니다
본 사용 설명서는 주파수 변환기를 시작, 설치
제1장, 본 사용 설명서 이용방법에서는 사용 설명서에 대한 소개와 사용되는 인증 내용, 기호 및 약어에 관한 정보를 설명합니다.
제2장, 안전 지침 및 일반 주의 사항에서는 주파수 변환기의 올바른 취급방법에 관하여 설명합니다.
제3장, 설치방법에서는 기계적인 설치와 전기적인 설치에 대해 설명합니다.
제4장, 프로그래밍 방법에서는 현장 제어 패널을 통해 주파수 변환기를 운영 및 프로그래밍하는 방법을 설명합니다.
제5장, 일반사양에서는 주파수 변환기에 관한 기술 자료를 설명합니다.
제6장, 고장수리에서는 주파수 변환기 이용 시 발생 가능한 문제를 해결할 수 있도록 설명합니다.
FC 300 관련 인쇄물
- VLT AutomationDrive 사용 설명서 - High Power, MG.33.UX.YY 는 인버터 시운전 및 가동에 필요한 정보를 제공합니다
- VLT AutomationDrive 설계 지침서 MG.33.BX.YY 에는 인버터와 사용자 설계 및 응용에 관한 모든 기술 정보가 수록되어 있습니다
- VLT AutomationDrive 프로그래밍 지침서 MG.33.MX.YY 는 프로그래밍 방법에 관한 정보와 자세한 파라미터 설명을 제공합니다
- VLT AutomationDrive 프로피버스 사용 설명서 MG.33.CX.YY 는 프로피버스 필드버스를 통해 인버터를 제어, 감시 및 프로그래밍하는 데 필
요한 정보를 제공합니다
- VLT AutomationDrive DeviceNet 사용 설명서 MG.33.DX.YY 는 DeviceNet 필드버스를 통해 인버터를 제어
요한 정보를 제공합니다
X = 개정 번호
YY = 언어 코드
.
.
, 프로그래밍 및 고장수리할 때 유용합니다.
. 올바른 사용을 위해 본 설명서를 주의 깊게 읽어 보시기 바랍니다. 주파수
.
.
.
, 감시 및 프로그래밍하는 데 필
.
댄포스 기술 자료는홈페이지(www.danfoss.com/drives)에서도 확인할 수 있습니다.
1.1.2 인증
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
3
1 본 사용 설명서 이용방법
1.1.3 기호
VLT® Automation Drive FC 300
High Power 사용 설명서
1
사용 설명서에 사용된 기호
주의
사용자가 주의 깊게 고려해야 할 내용을 의미합니다.
일반 경고문을 의미합니다.
고전압 경고문을 의미합니다
∗
1.1.4 약어
.
초기 설정을 의미합니다
.
.
Alternating current(교류) AC
American wire gauge(미국 전선 규격
Ampere(암페어)/AMP A
Automatic Motor Adaptation(자동 모터 최적화) AMA
Current limit(전류 한계
Degrees Celsius(섭씨도)
Direct current(직류
Drive Dependent(인버터에 따라 다른 유형
Electro Magnetic Compatibility(전자기적합성
Electronic Thermal Relay(전자 써멀 릴레이
Frequency Converter(주파수 변환기) FC
Gram(그램
Hertz(헤르츠
Kilohertz(킬로헤르츠) kHz
Local Control Panel(현장 제어 패널
Meter(미터
Millihenry Inductance(밀리헨리 인덕턴스) mH
Milliampere(밀리암페어
Millisecond(밀리초
Minute(분) min
Motion Control Tool(모션컨트롤 소프트웨어
Nanofarad(나노패럿
Newton Meters(뉴튼 미터) Nm
Nominal motor current(모터 정격 전류
Nominal motor frequency(모터 정격 주파수) f
Nominal motor power(모터 정격 출력
Nominal motor voltage(모터 정격 전압
Parameter(파라미터) par.
Protective Extra Low Voltage(방호초저전압) PELV
Printed Circuit Board(인쇄회로기판
Rated Inverter Output Current(인버터 정격 출력 전류) I
Revolutions Per Minute(분당 회전수
Regenerative terminals(재생 단자) Regen
Second(초) s
Synchronous Motor Speed(동기식 모터 속도
Torque limit(토오크 한계) T
Volts(볼트) V
최대 출력 전류 I
주파수 변환기가 공급하는 정격 출력 전류 I
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
AWG
I
LIM
°C
DC
D-TYPE
EMC
ETR
g
Hz
LCP
m
mA
ms
MCT
nF
I
M,N
M,N
P
M,N
U
M,N
PCB
INV
RPM
n
s
LIM
VLT,MAX
VLT,N
4
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
VLT® Automation Drive FC 300
High Power 사용 설명서
2 안전 지침 및 일반 주의 사항
2 안전 지침 및 일반 주의 사항
2.1.1 폐기물 처리 지침
전기 부품이 포함된 장비를 일반 생활 폐기물과 함께 처리해서는 안됩니다.
해당 지역 법규 및 최신 법규에 따라 전기 및 전자장비 폐기물과 함께 분리 처리해야 합니다.
주의
전원을 차단한 후에도 주파수 변환기의 직류단 콘덴서에는 일정량의 전력이 남아 있습니다. 감전 위험을 피하려면 유지보수 작업을 하기 전에 주
전원으로부터 주파수 변환기를 연결 해제하십시오. 주파수 변환기를 유지보수하기 전에 최소한 아래 표시된 시간 만큼 기다라십시오
380 - 500 V 90 - 200 kW 20
250 - 800 kW 40분
525 - 690 V 37 - 315 kW 20분
355 - 1200 kW 30
분
분
.
2
VLT AutomationDrive
사용 설명서
소프트웨어 버전: 5.5x
이 사용 설명서는 모든 VLT AutomationDrive 주파수 변환기의 소프트웨어 버전 5.5x 에 사용할 수 있습니다.
소프트웨어 버전은 파라미터 15-43
소프트웨어 버전
에서 확인하실 수 있습니다.
2.1.2 고전압
주전원이 연결되어 있는 경우 주파수 변환기의 전압은 항상 위험합니다. 모터 또는 주파수 변환기를 올바르게 설치 또는 운전하지 않
으면 장비가 손상될 수 있으며 심각한 신체 상해 또는 사망의 원인이 될 수 있습니다
국제 규정 및 안전 관련 법규를 반드시 준수해야 합니다.
고도가 높은 곳에서의 설치
380 - 500V: 고도가 3km 이상인 곳에 설치할 경우에는 PELV 에 대해 댄포스에 문의하십시오.
525 - 690V: 고도가 2km 이상인 곳에 설치할 경우에는 PELV 에 대해 댄포스에 문의하십시오.
. 본 설명서의 지침 뿐만 아니라 관련 국내 또는
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
5

2 안전 지침 및 일반 주의 사항
2.1.3 안전 지침
VLT® Automation Drive FC 300
High Power 사용 설명서
2
• 주파수 변환기를 올바르게 접지하십시오
• 사용자를 공급 전압으로부터 보호하십시오
• 국내 및 국제 관련 규정에 따라 모터를 과부하로부터 보호하십시오.
• 모터 과부하 보호 기능은 초기 설정에 포함되어 있지 않습니다. 이 기능을 추가하려면 파라미터 1-90
고
로 설정하십시오. 북미 시장에서는 ETR 기능이 NEC 에 따라 클래스 20 모터 과부하 보호 기능을 제공합니다.
• 접지 누설 전류가 3.5mA 보다 높습니다
• [OFF] 키는 안전 스위치가 아닙니다. 이 키를 사용하더라도 주전원으로부터 주파수 변환기가 연결 해제되지 않습니다.
.
.
모터 열 보호을 ETR 트립
.
2.1.4 일반 경고
경고:
주전원으로부터 장치를 차단한 후에라도 절대로 전자부품을 만지지 마십시오. 치명적일 수 있습니다.
또한 부하 공유(직류단) 뿐만 아니라 역학적 백업용 모터 연결부와 같은 전압 입력이 차단되었는지 점검해야 합니다.
주파수 변환기 사용 시: 최소 40분을 기다리십시오.
특정 장치의 명판에 명시되어 있는 경우에 한해 대기 시간을 단축할 수 있습니다.
누설 전류
주파수 변환기의 접지 누설 전류는 3.5mA 를 초과합니다. 접지 케이블이 접지 연결부 (단자
2
하려면 케이블 단면적이 최소한 10mm
접지
편을 참조하십시오.
잔류 전류 장치
이 제품은 보호 도체에서 직류 전류를 발생시킬 수 있습니다. 잔류 전류 장치(RCD; residual current device)는 추가 보호용으로 사
용되며 이 제품의 공급 측에는 유형 B 의 RCD (시간 지연)만 사용되어야 합니다. RCD 적용 지침 MN.90.Gx.02 (x=개정 번호) 또한
참조하십시오.
주파수 변환기의 보호 접지와 RCD 는 반드시 국내 및 국제 규정에 따라 사용해야 합니다.
이거나 각각 종단된 2 정격 접지선이어야 합니다. 올바른 EMC 접지 방법은
95)에 기계적으로 올바르게 연결되도록
또는
설치 방법
ETR 경
장의
2.1.5 수리 작업을 하기 전에
1. 주전원으로부터 주파수 변환기가 연결 해제하십시오.
2. 부하 공유 어플리케이션에서 DC 버스통신 단자 88과 89를 연결 해제하십시오.
3. 직류단이 방전될 때까지 기다리십시오. 경고 라벨의 시간을 확인하십시오.
4. 모터 케이블을 분리하십시오
.
2.1.6 의도하지 않은 기동에 대한 주의 사항
주파수 변환기가 주전원에 연결되어 있는 경우에는 디지털 명령
킬 수 있습니다.
• 사용자의 안전을 고려하여 의도하지 않은 기동을 피하고자 하는 경우에는 주전원에서 주파수 변환기를 연결 해제하십시오
• 의도하지 않은 기동을 피하려면 항상 [OFF] 키를 누른 후에 파라미터를 변경하십시오.
• 전자 결함, 일시적 과부하, 주전원 공급 결함 또는 모터 연결 결함으로 인해 정지된 모터가 기동할 수 있습니다
되거나 연결 해제된 경우, 안전 정지 기능이 있는 주파수 변환기는 의도하지 않은 기동으로부터 보호합니다
, 버스통신 명령, 지령 또는 현장 제어 패널(
LCP)을(를) 이용하여 모터를 기동
. 안전 정지 단자 37이 비활성화
.
/정지시
.
6
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.

VLT® Automation Drive FC 300
High Power 사용 설명서
2.1.7 안전 정지
2 안전 지침 및 일반 주의 사항
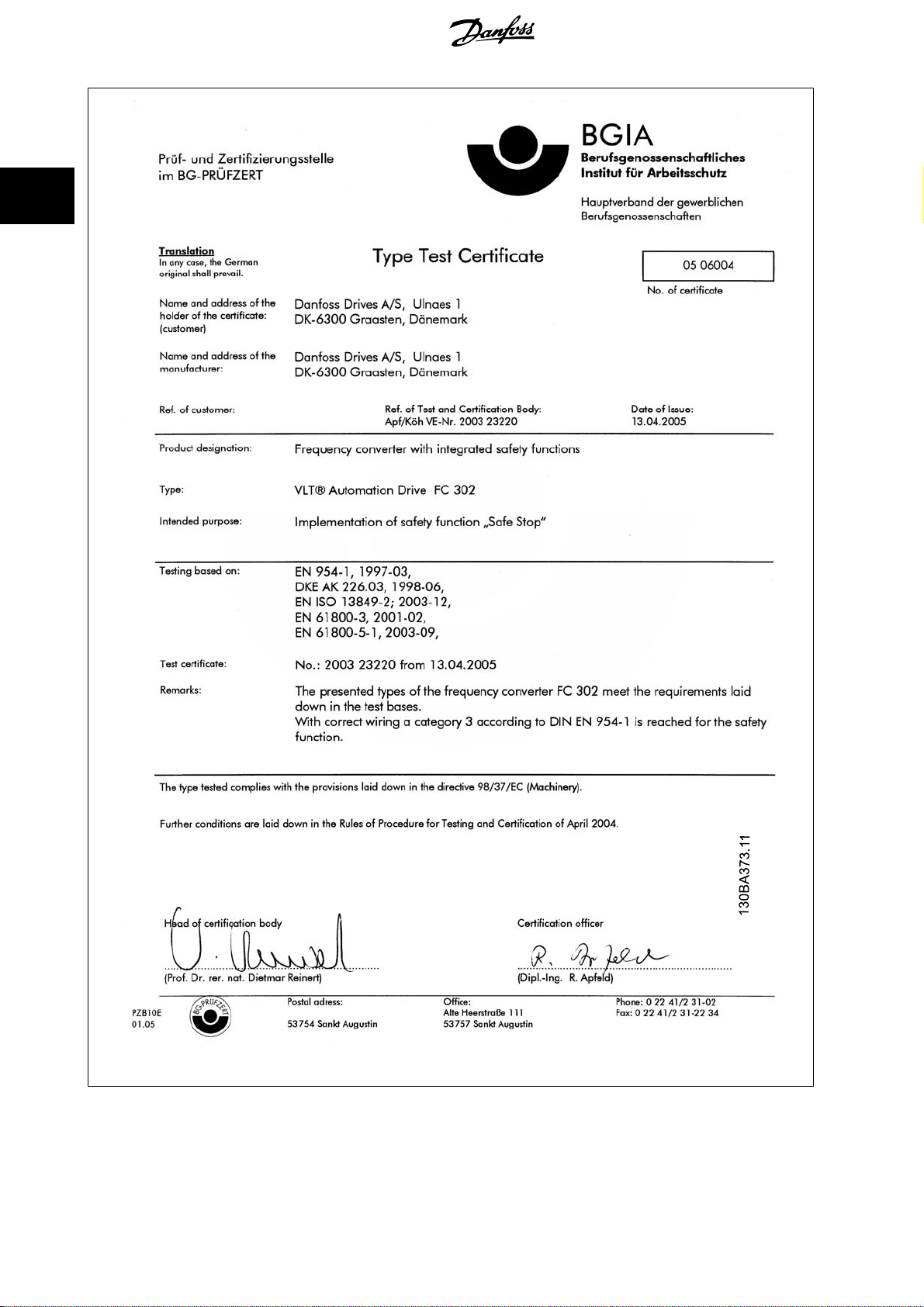
FC 302 는
이는 EN 954-1 에 규정된 안전 부문 3에 의거, 설계되고 인증되었으며 이 기능을 안전 정지라고 합니다
지 여부를 판단하기 위해서는 안전 정지 기능을 사용하기 전에 전반적인 설비의 위험도 분석을 수행해야 합니다. EN 954-1 에 규정된 안전 부문
요구사항에 의거, 안전 정지 기능을 설치하고 사용하기 위해서는 FC 300 설계 지침서 MG.33.BX.YY 의 관련 정보 및 지침을 반드시 준수해야 합니다
사용 설명서의 정보 및 지침만으로는 안전 정지 기능을 올바르고 안전하게 사용할 수 없습니다
안전 토오크 정지
(CD IEC 61800-5-2 초안에 규정됨
) 또는
정지 부문
0
(EN 60204-1 에 규정됨)과 같은 안전 기능을 수행할 수 있습니다
. 안전 정지 기능과 안전 부문이 알맞고 충분한
.
3의
.
2
.
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
7
2
2 안전 지침 및 일반 주의 사항
VLT® Automation Drive FC 300
High Power 사용 설명서
8
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
VLT® Automation Drive FC 300
High Power 사용 설명서
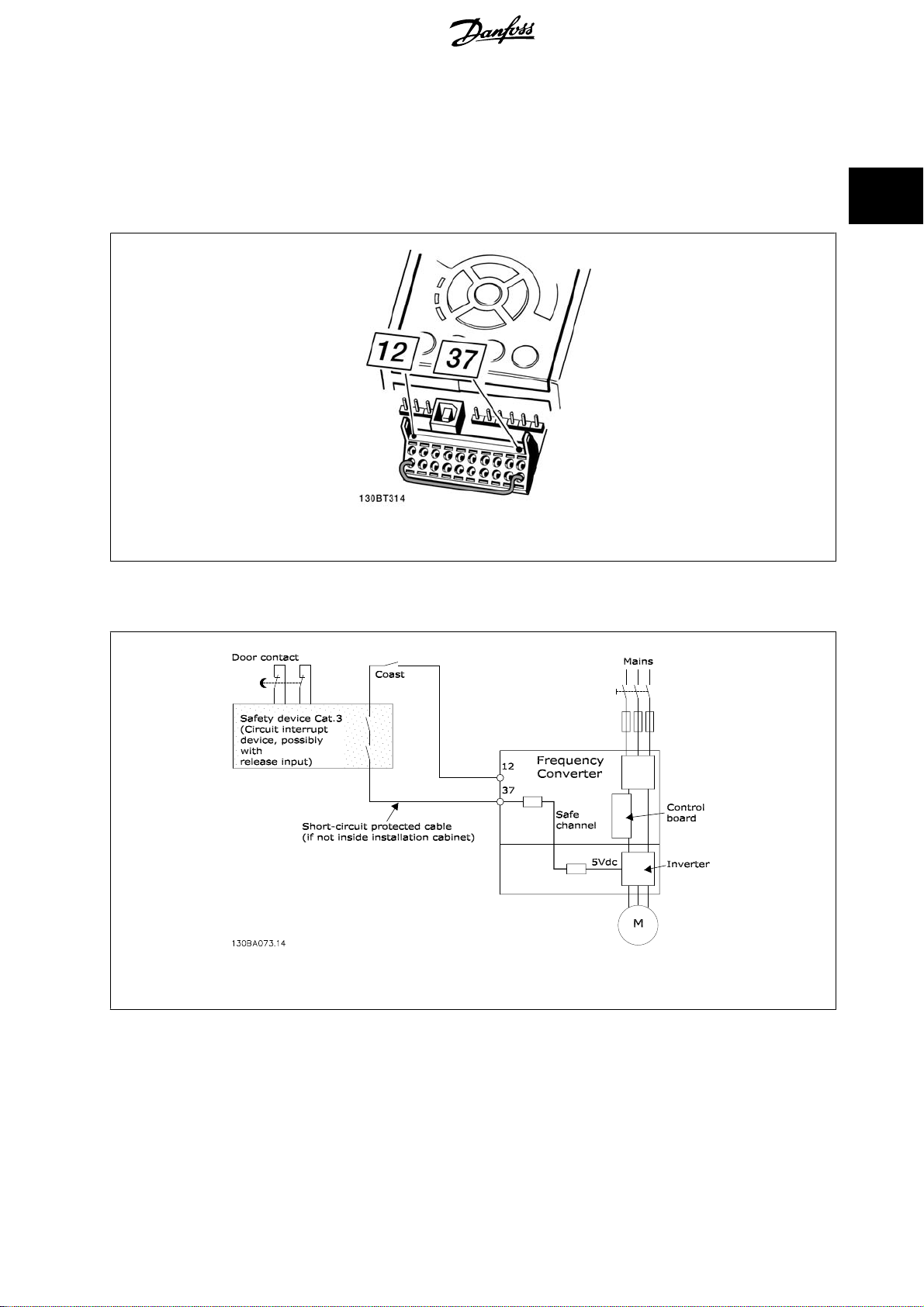
2.1.8 안전 정지 설치
2 안전 지침 및 일반 주의 사항
안전 부문 3(EN954-1)에 의거하여 부문
1. 단자
2. 단락 방지용 케이블로 단자
아래 그림은 안전 부문 3(EN 954-1)에 의거, 정지 부문 0(EN 60204-1)을 나타냅니다. 도어 개폐 접촉으로 인해 회로 간섭이 발생합니다. 이 그림은
또한 안전과 무관한 하드웨어 코스팅의 연결 방법을 나타냅니다.
37과
24V DC 간의 브리지(점퍼)는 제거되어야 합니다. 점퍼를 절단하거나 차단하는 것만으로는 부족합니다
히 제거하십시오. 그림의 점퍼를 참조하십시오.
합니다. 간섭 장치와 주파수 변환기가 동일한 설치 패널에 설치된 경우
그림 2.1: 단자
37과
24V DC 간의 점퍼를 브리지하십시오
0 정지(
EN60204)의 설치를 실행하려면, 다음 지침을 따르십시오
37에
24V DC 를 연결하십시오. 24V DC 전압 공급은 EN954-1 부문 3 회로 간섭 장치에 의해 간섭될 수 있어야
, 차폐된 케이블 대신 비차폐 케이블을 사용할 수 있습니다.
.
.
. 단락을 방지하기 위해 완전
2
2.2:
그림
안전 부문 3(EN 954-1)에 의거, 정지 부문 0(EN 60204-1)을 만족시키기 위한 필수 요소를 나타내는 그림
2.1.9 IT 주전원
파라미터 14-50
하면 RFI 성능을 A2 수준까지 낮출 수 있습니다. 525 - 690V 주파수 변환기의 경우, 파라미터
치를 개방할 수 없습니다.
RFI 필터
380 - 500V 주파수 변환기에서, RFI 필터에서 접지까지 내부 RFI 콘덴서를 연결 해제하는 데 사용할 수 있습니다. 이렇게
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
14-50
.
RFI 필터
에 이러한 기능이 없습니다. RFI 스위
.
9
3
3 설치방법
VLT® Automation Drive FC 300
High Power 사용 설명서
10
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
VLT® Automation Drive FC 300
High Power 사용 설명서
3 설치방법
3.1 사전 설치
3.1.1 설치 장소에 대한 계획
3 설치방법
주의
설치하기 전에 주파수 변환기의 설치를 계획하는 것이 중요합니다. 이 과정을 무시하면 설치 도중이나 설치 후에 추가 작업을 해야 할
수도 있습니다
다음 사항(다음 페이지의 세부 내용 및 해당 설계 지침서 참조
• 운전 시 주변 온도
• 설치 방법
• 유닛 냉각 방법
• 주파수 변환기의 위치
• 케이블 배선
• 전원 소스가 올바른 전압과 충분한 전류를 공급하는지 확인하십시오
• 모터 전류 등급이 주파수 변환기의 최대 전류 한계치 내에 있는지 확인하십시오
• 주파수 변환기에 내장된 퓨즈가 없는 경우, 외부 퓨즈의 등급이 올바른지 확인하십시오
.
)을 고려하여 최적의 설치 장소를 선정하십시오.
.
.
.
3.1.2 주파수 변환기 제품 확인
주파수 변환기 제품이 도착하면 포장에 문제가 없는지 또한 운송 중에 유닛이 손상되지 않았는지 확인하십시오. 운송 중에 유닛이 손상된 경우에는 즉
시 운송 회사에 연락하여 손해 배상을 요구하십시오.
3
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
11
3 설치방법
3.1.3 운반 및 포장 풀기
VLT® Automation Drive FC 300
High Power 사용 설명서
3
포장을 풀기 전에 주파수 변환기를 설치 장소에서 최대한 가까운 곳에 둘 것을 권장합니다
상자를 제거하고 최대한 긴 길이의 팔레트 위에 주파수 변환기를 올려 놓습니다
주의
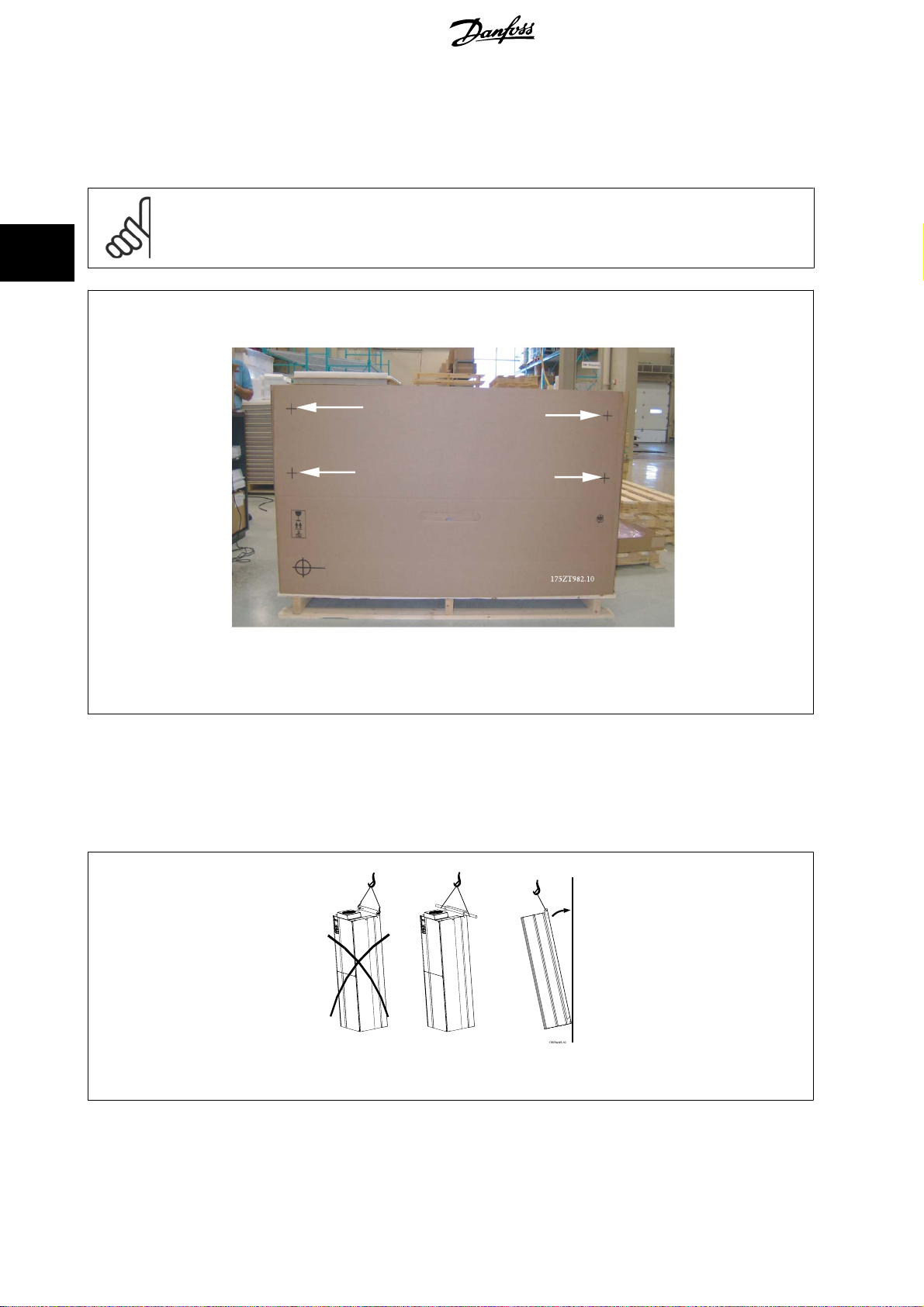
포장 상자에는 D 프레임에 장착 시 구멍을 내는 방법에 대한 보기가 포함되어 있습니다. E 크기의 경우, 이 장의 후반부에 있는
섹션을 참조하시기 바랍니다
치수표
.
.
.
외형
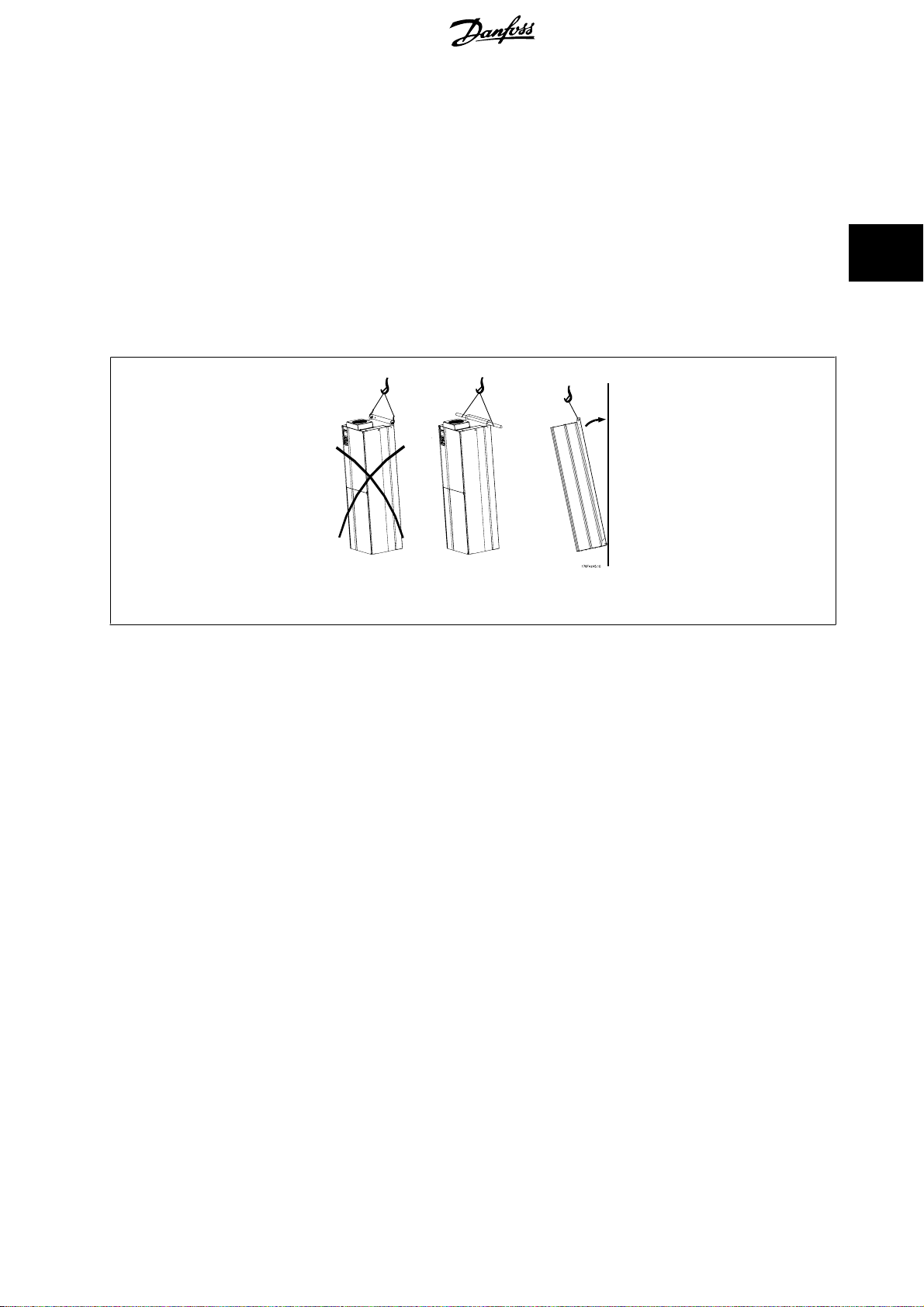
그림 3.1: 장착 방법에 대한 보기
3.1.4 들어 올리기
주파수 변환기를 들어 올릴 때는 제품에서 눈을 떼지 마십시오
멍이 구부러지지 않도록 하십시오
그림 3.2: 들어 올리는 방법(권장), 프레임 크기 D 및 E .
.
. 모든
D 및 E2(IP00) 외함의 경우, 리프팅 바를 사용하여 주파수 변환기의 리프팅용 구
12
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
VLT® Automation Drive FC 300
High Power 사용 설명서
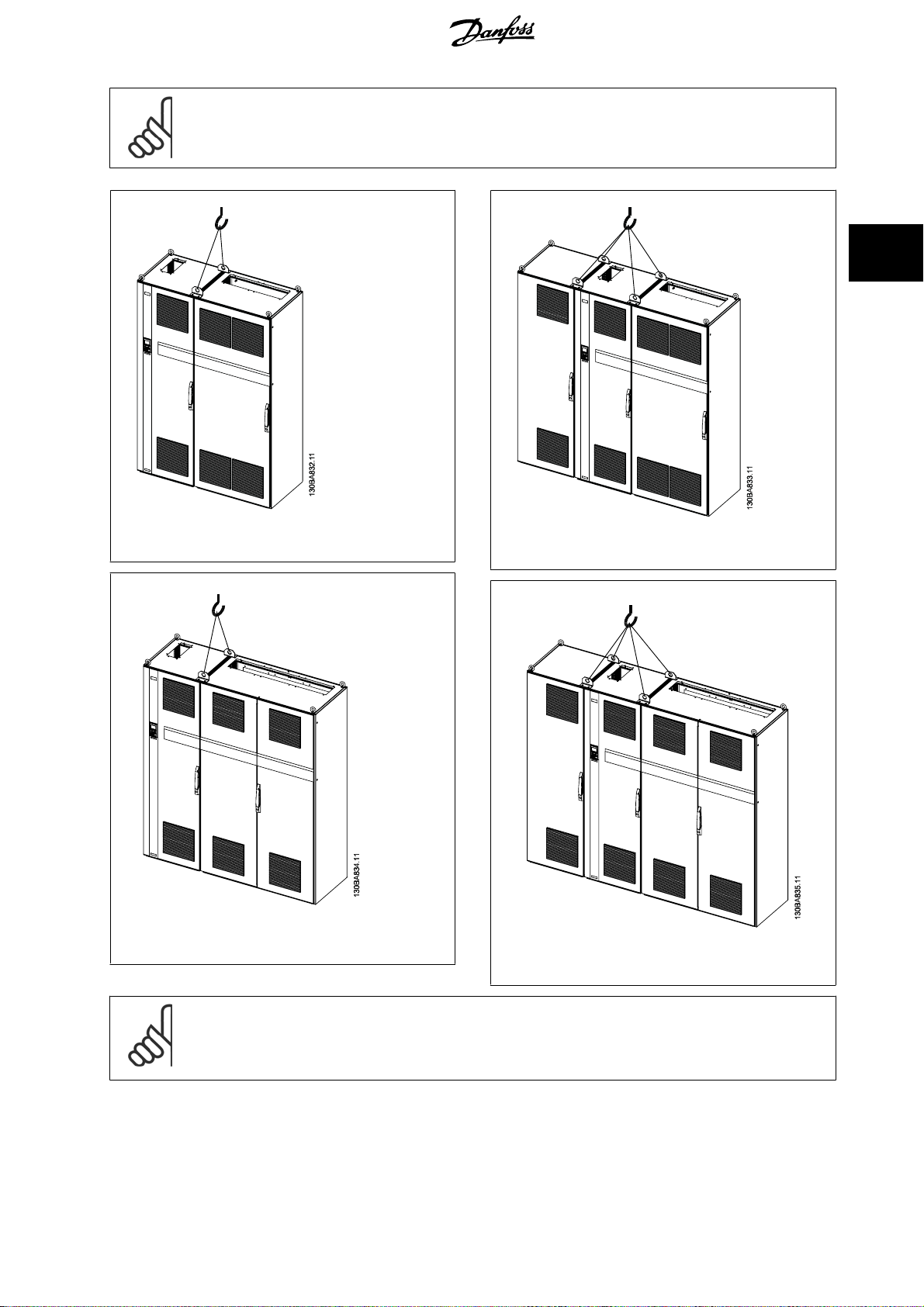
주의
리프팅 바는 주파수 변환기의 중량을 지탱할 수 있어야 합니다
최대 직경은 2.5 cm(1 inch)입니다. 인버터 상단과 리프팅 케이블 사이의 각도는 60° 이상이어야 합니다
. 각기 다른 프레임 크기의 중량은
외형 치수표
.
를 참조하십시오
3 설치방법
. 바의
3
그림 3.3: 들어 올리는 방법
그림 3.4: 들어 올리는 방법(권장), 프레임 크기 F2.
(권장), 프레임 크기
F1.
그림 3.5: 들어 올리는 방법(권장), 프레임 크기 F3.
그림 3.6: 들어 올리는 방법(권장), 프레임 크기 F4.
주의
플린스는 주파수 변환기와 동일한 패키지에 포함되어 있지만 프레임 크기 F1-F4 에 장착되어 배송되지는 않습니다
터를 냉각시키기에 충분한 통풍량을 제공하는 데 필요합니다. 최종 설치 장소에서 F 프레임은 반드시 플린스 위에 배치해야 합니다.
인버터 상단과 리프팅 케이블 사이의 각도는 60° 이상이어야 합니다.
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
. 플린스는 인버
13
3
3 설치방법
VLT® Automation Drive FC 300
High Power 사용 설명서
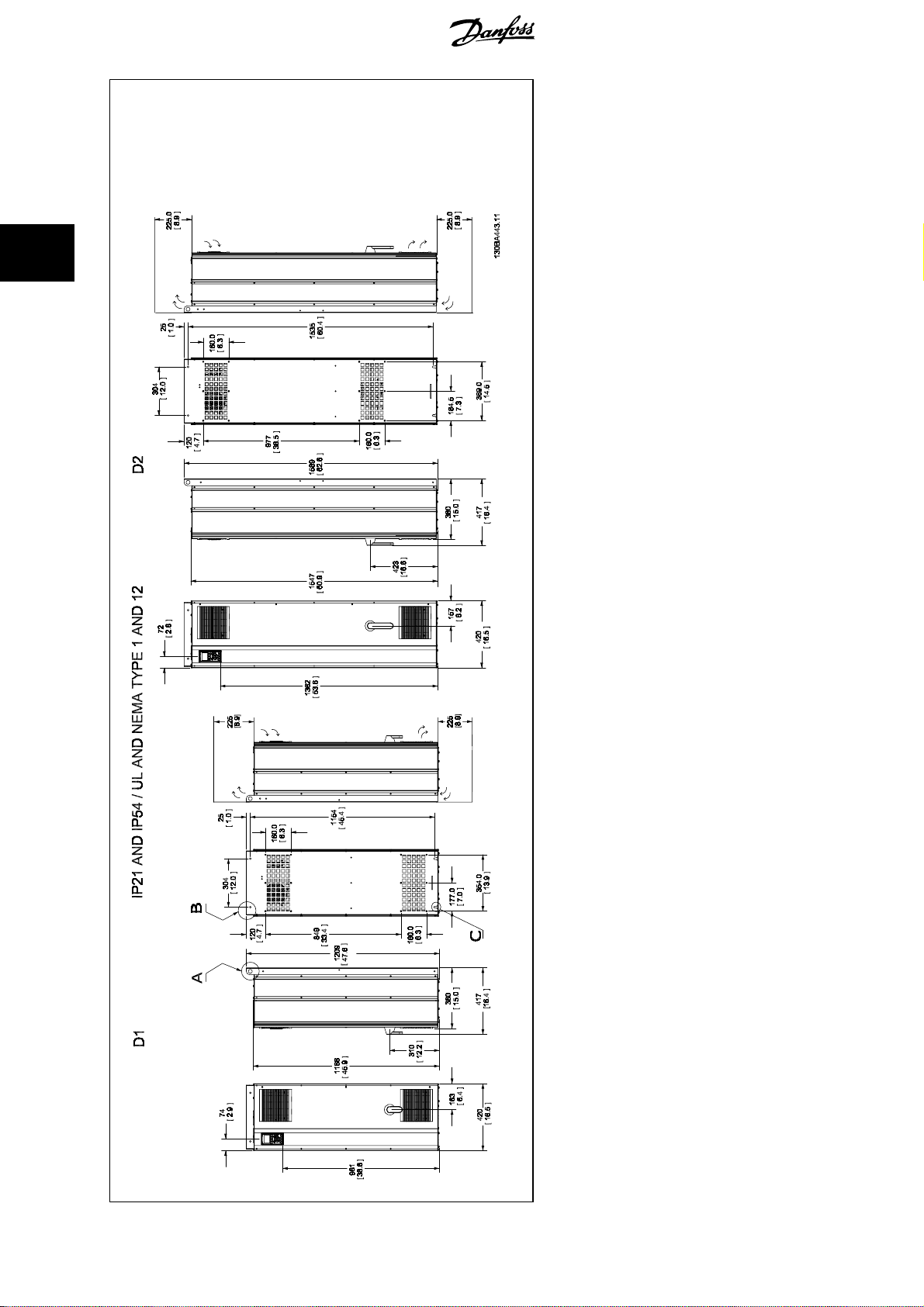
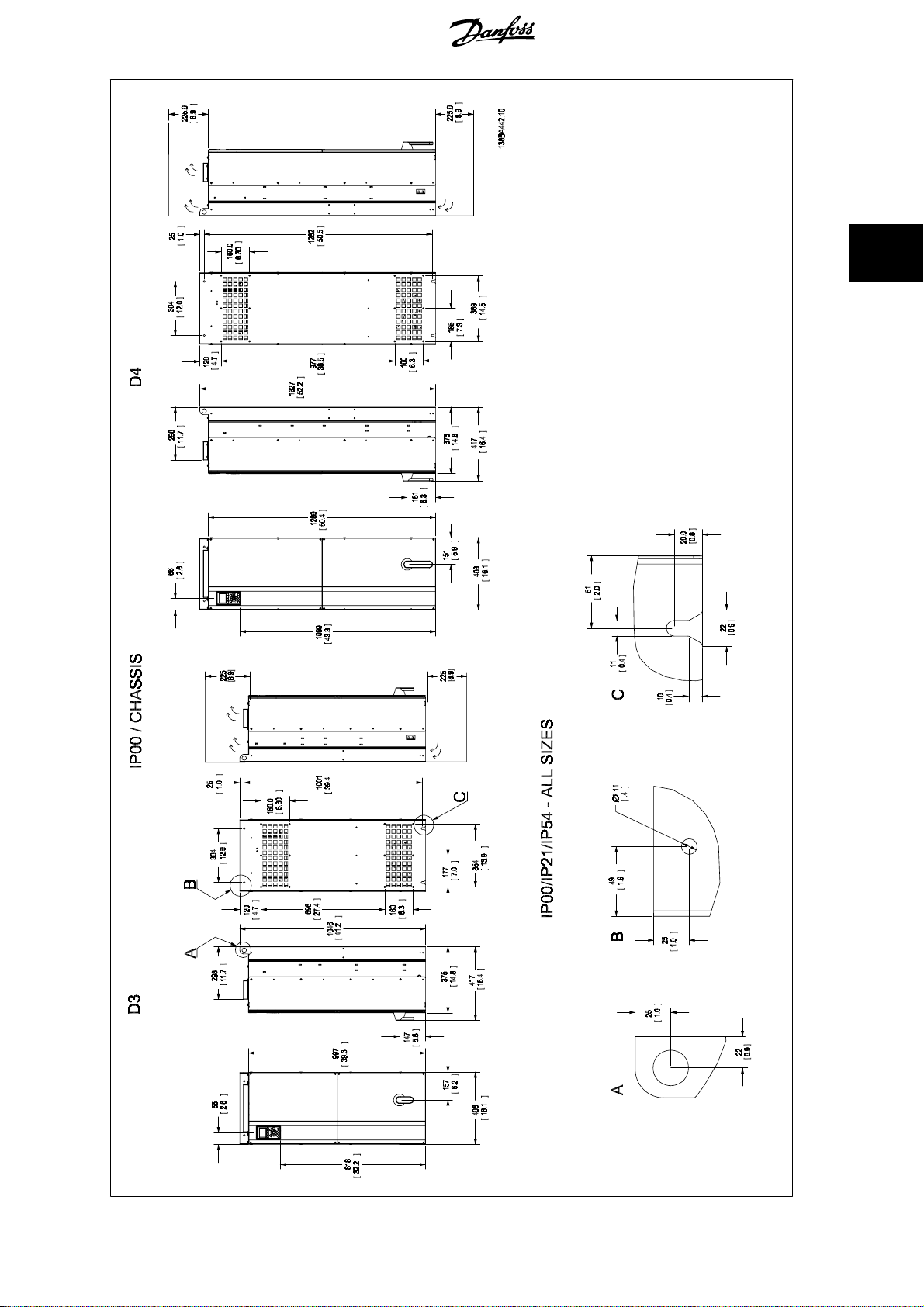
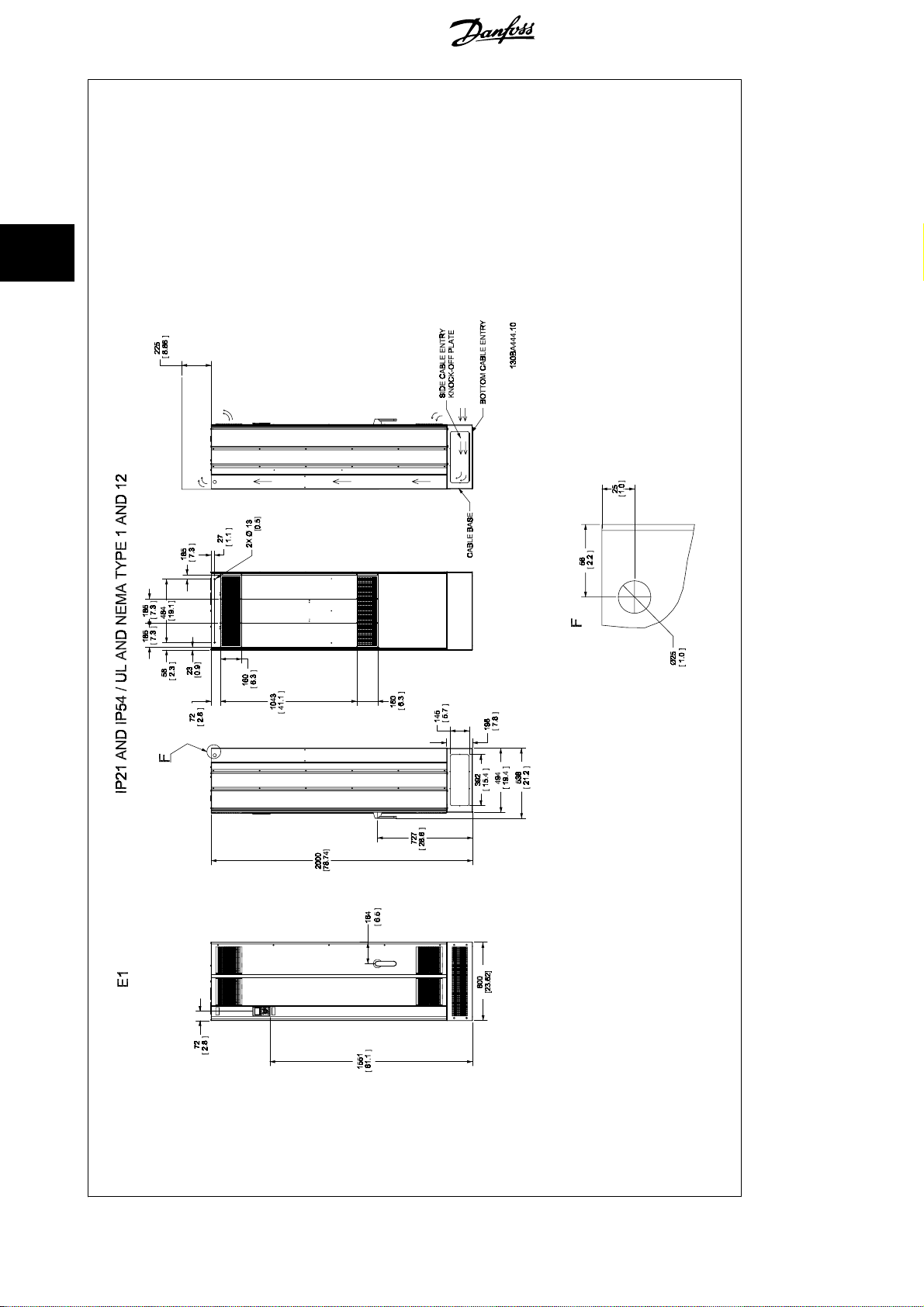
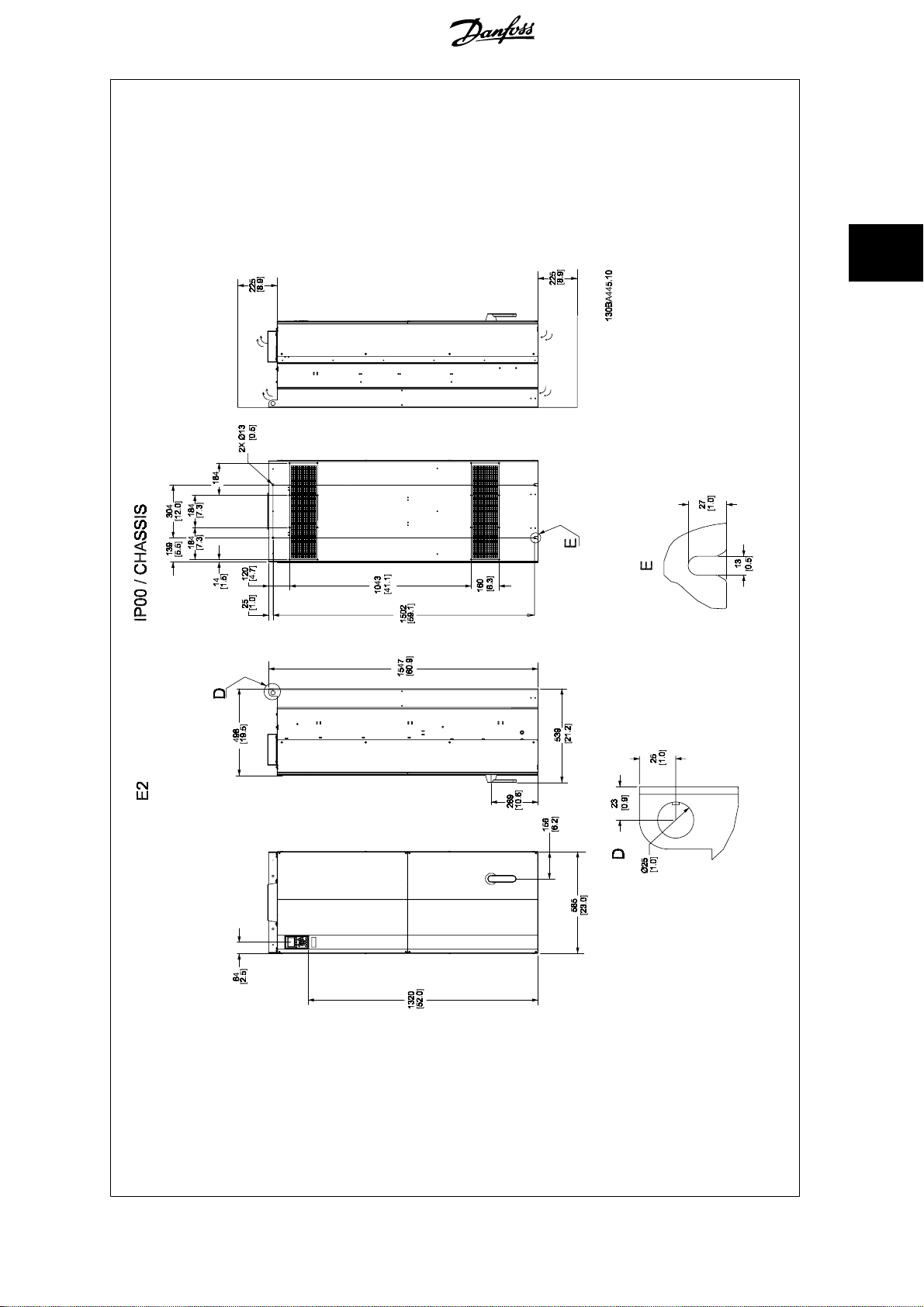
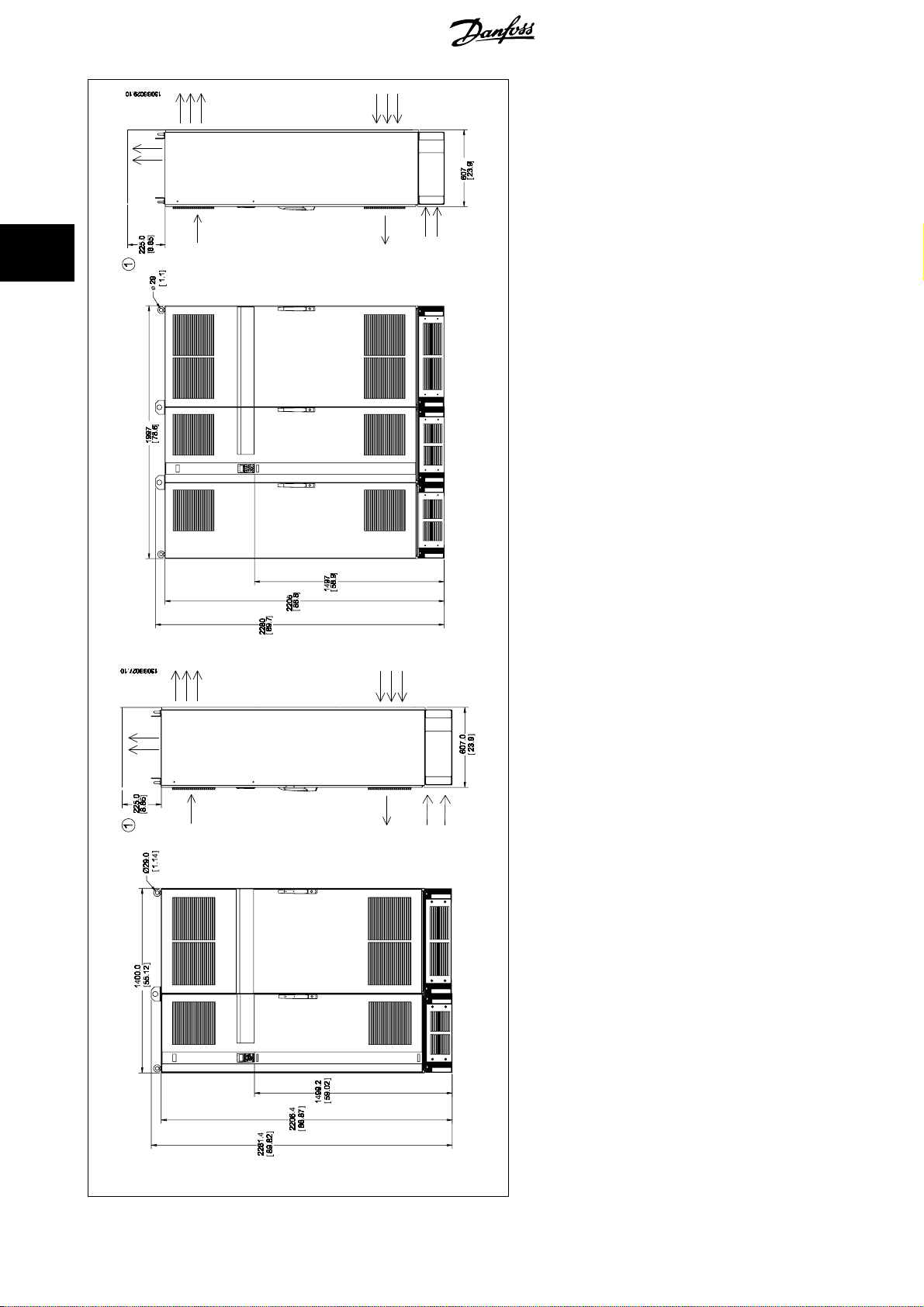
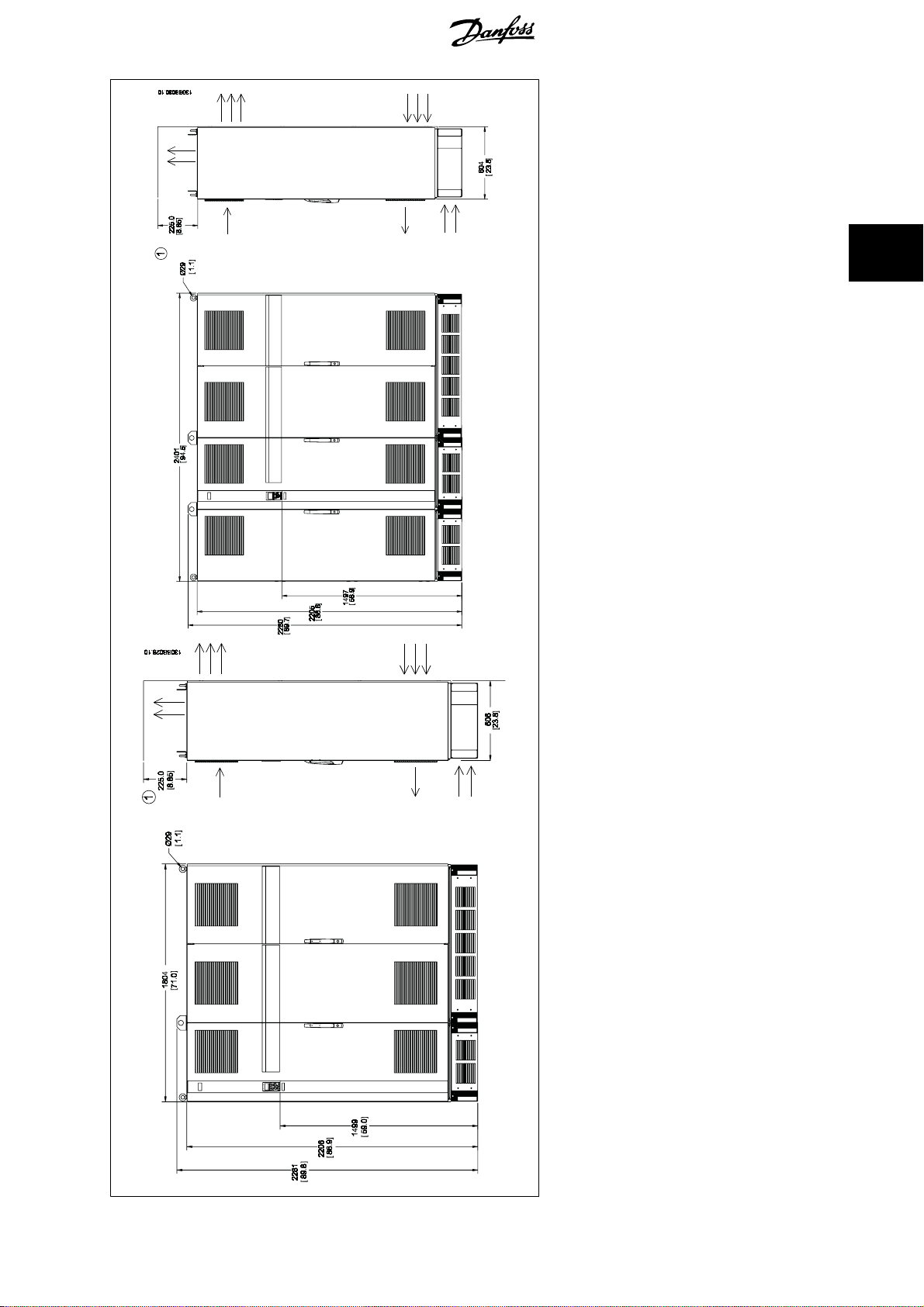
3.1.5 외형 치수표
14
* 통풍 방향에 유의하십시오.
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
VLT® Automation Drive FC 300
High Power 사용 설명서
3 설치방법
3
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
* 통풍 방향에 유의하십시오
.
15
3
3 설치방법
VLT® Automation Drive FC 300
High Power 사용 설명서
16
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
* 통풍 방향에 유의하십시오
.
VLT® Automation Drive FC 300
High Power 사용 설명서
3 설치방법
3
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
* 통풍 방향에 유의하십시오
.
17
3
3 설치방법
VLT® Automation Drive FC 300
High Power 사용 설명서
F1 IP 21/54 - NEMA 1/12 F3 IP 21/54 - NEMA 1/12
18
1) 천장에서의 최소 거리
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
VLT® Automation Drive FC 300
High Power 사용 설명서
3 설치방법
3
F2 IP 21/54 - NEMA 1/12 F4 IP 21/54 - NEMA 1/12
1) 천장에서의 최소 거리
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
19
3 설치방법
VLT® Automation Drive FC 300
High Power 사용 설명서
3
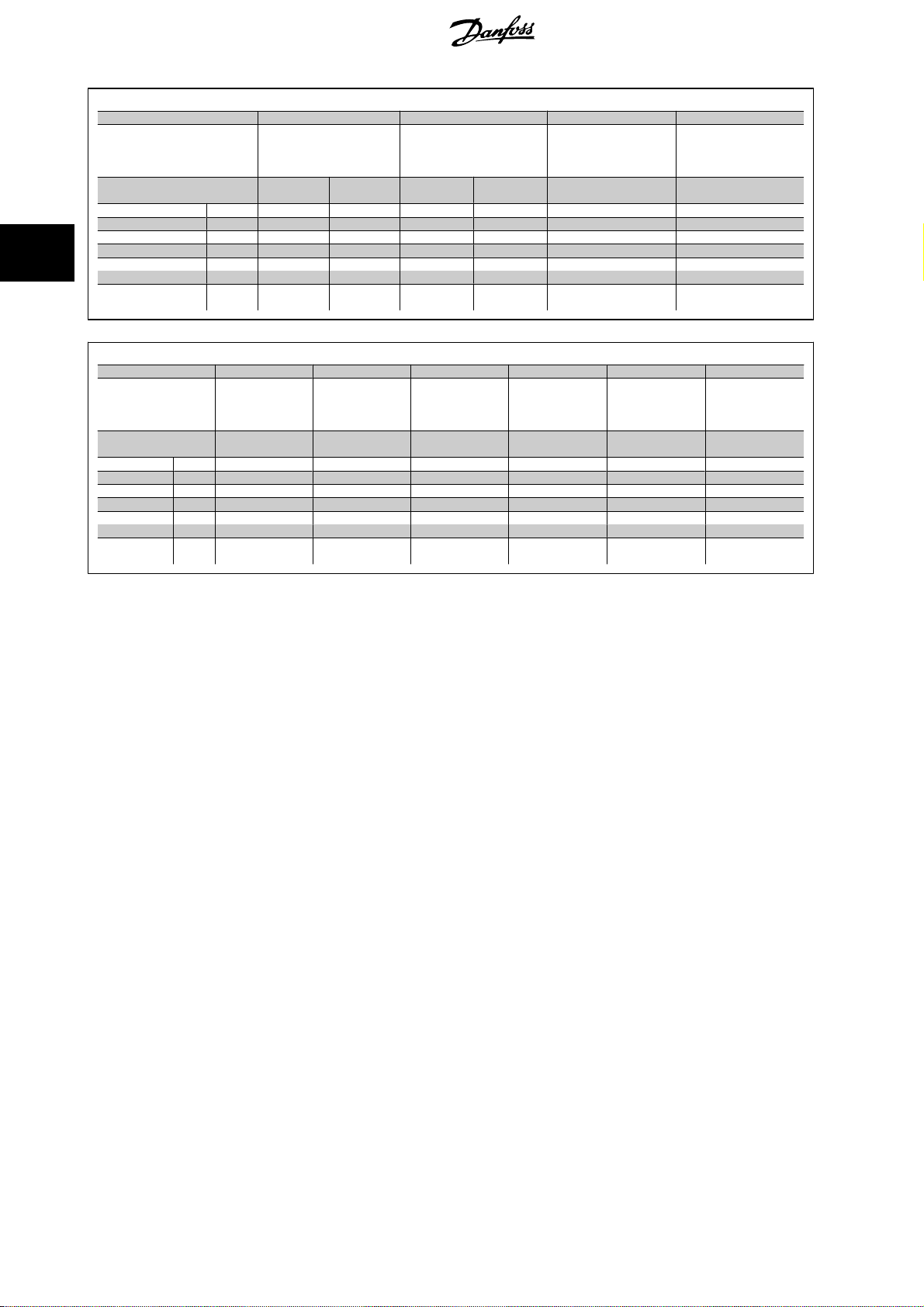
프레임 용량 D1 D2 D3 D4
IP
NEMA
포장 치수 높이 650 mm 650 mm 650 mm 650 mm 650 mm 650 mm
인버터 치수 높이 1209 mm 1209 mm 1589 mm 1589 mm 1046 mm 1327 mm
프레임 용량 E1 E2 F1 F2 F3 F4
IP
NEMA
포장 치수 높이 840 mm 831 mm 2324 mm 2324 mm 2324 mm 2324 mm
인버터 치수 높이 2000 mm 1547 mm 2204 2204 2204 2204
너비 1730 mm 1730 mm 1730 mm 1730 mm 1220 mm 1490 mm
깊이 570 mm 570 mm 570 mm 570 mm 570 mm 570 mm
너비 420 mm 420 mm 420 mm 420 mm 408 mm 408 mm
깊이 380 mm 380 mm 380 mm 380 mm 375 mm 375 mm
최대 중
량
외형 치수표, 프레임 크기 E 및 F
250 - 400kW
(380 - 500V)
355 - 560kW
(525-690V)
21, 54
Type 12
너비 2197 mm 1705 mm 1569 mm 1962 mm 2159 mm 2559 mm
깊이 736 mm 736 mm 1130 mm 1130 mm 1130 mm 1130 mm
너비 600 mm 585 mm 1400 1800 2000 2400
깊이 494 mm 498 mm 606 606 606 606
최대
중량
313 kg 277 kg 1004 1246 1299 1541
90 - 110kW
(380 - 500V)
37 - 132 kW
(525-690V)
21
Type 1
104 kg 104 kg 151 kg 151 kg 91 kg 138 kg
54
Type 1221Type 1
250 - 400kW
(380 - 500V)
355 - 560kW
(525-690V)
00
섀시
외형 치수표 , 프레임 크기 D
132 - 200kW
(380 - 500V)
160 - 315kW
(525-690V)
54
Type 1200섀시
450 - 630kW
(380 - 500V)
630 - 800kW
(525-690V)
21, 54
Type 12
710 - 800kW
(380 - 500V)
900 - 1200kW
(525-690V)
21, 54
Type 12
90 - 110kW
(380 - 500V)
37 - 132kW
(525-690V)
450 - 630kW
(380 - 500V)
630 - 800kW
(525-690V)
21, 54
Type 12
132 - 200kW
(380 - 500V)
160 - 315kW
(525-690V)
00
섀시
710 - 800kW
(380 - 500V)
900 - 1200kW
(525-690V)
21, 54
Type 12
20
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
VLT® Automation Drive FC 300
High Power 사용 설명서
3.1.6 정격 출력
프레임 크기 D1 D2 D3 D4
3 설치방법
3
외함
보호
높은 과부하 정격 전력
- 160% 과부하 토오크
프레임 크기 E1 E2 F1/F3 F2/F4
IP
NEM
A
90 - 110kW (400V 기준)
37 - 132kW (690V 기준)
21/54 21/54 00 00
Type 1/ Type 12 Type 1/ Type 12 섀시 섀시
(380 - 500V)
(525-690V)
132 - 200kW (400V 기준)
(380 - 500V)
160 - 315kW (690V 기준)
(525-690V)
90 - 110kW (400V 기준)
(380 - 500V)
37 - 132kW (690V 기준)
(525-690V)
132 - 200kW (400V 기준)
160 - 315kW (690V 기준)
(380 - 500V)
(525-690V)
외함
보호
높은 과부하 정격 전
력 - 160
IP
NEM
A
% 과부하 토
오크
21/54 00 21/54 21/54
Type 1/ Type 12 섀시 Type 1/ Type 12 Type 1/ Type 12
250 - 400kW (400V 기
)
준
(380 - 500V)
355 - 560kW (690V 기
)
준
(525-690V)
240 - 400kW (400V 기
)
준
(380 - 500V)
355 - 560kW (690V 기
)
준
(525-690V)
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
450 - 630kW (400V 기준
(380 - 500V)
630 - 800kW (690V 기준
(525-690V)
)
710 - 800kW (400V 기준
(380 - 500V)
)
900 - 1200kW (690V 기준
(525-690V)
.
)
)
21
3
VLT® Automation Drive FC 300
3 설치방법
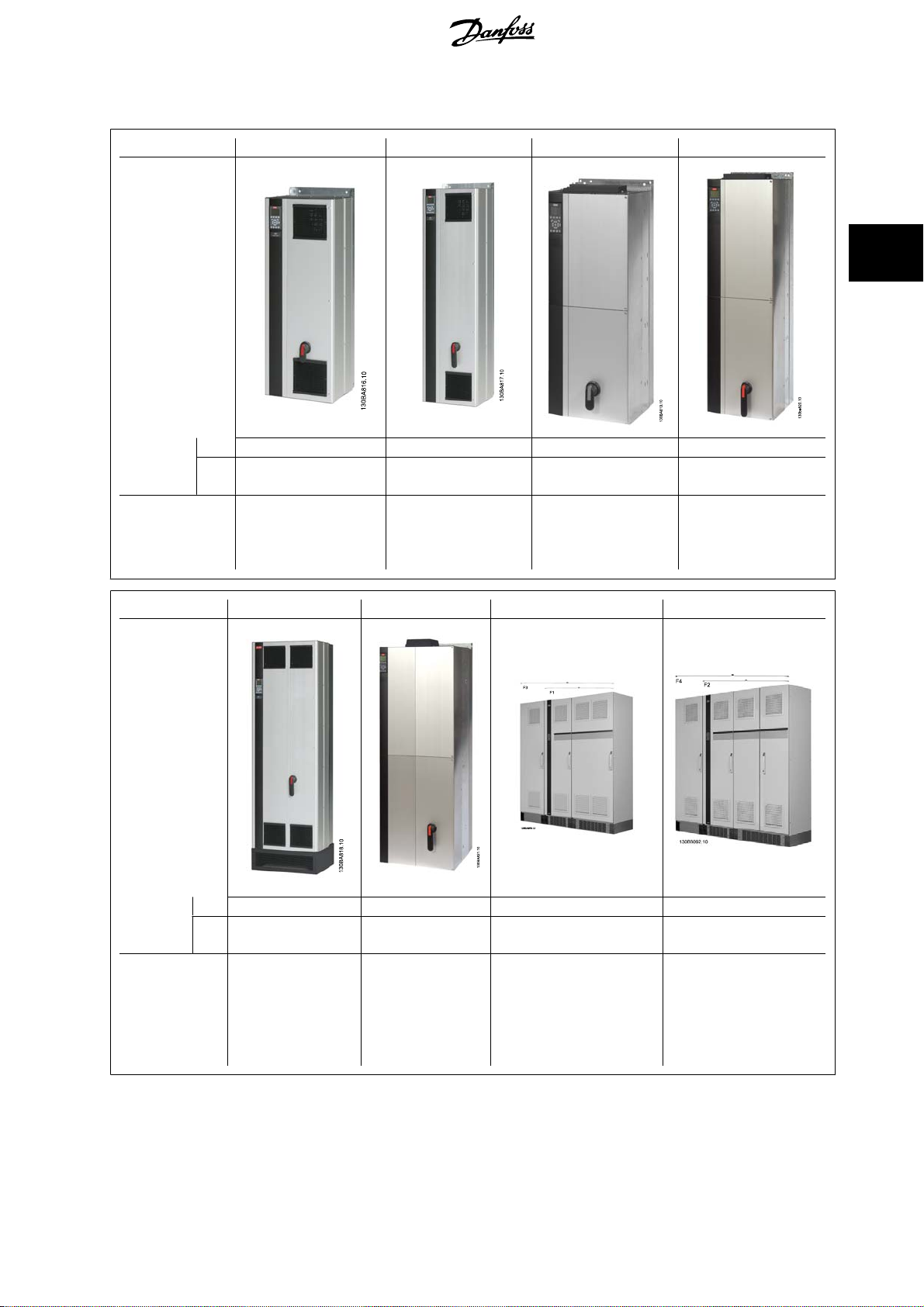
주의
F 외함은 각기 다른
쪽)으로 구성되어 있습니다. F3 및 F4 에는 정류기 캐비닛 왼쪽에 옵션 캐비닛이 하나 추가되어 있습니다. F3 은 옵션 캐비닛이 하나
추가된 F1 입니다. F4 는 옵션 캐비닛이 하나 추가된 F2 입니다.
4가지 용량(
F1, F2, F3 및 F4)으로 구성되어 있습니다. F1 및 F2 는 인버터 캐비닛(왼쪽)
High Power 사용 설명서
과 정류기 캐비닛(오른
3.2 기계적인 설치
주파수 변환기의 기계적인 설치를 준비할 때는 반드시 주의를 기울여 올바르게 설치되도록 해야 하며 설치 도중에 추가 작업이 발생하지 않도록 해야
합니다. 본 지침 후반부의 기계적인 설치 관련 도면을 면밀히 검토하여 필요한 여유 공간을 확인하십시오
3.2.1 필요한 공구
기계적인 설치를 하기 위해서는 다음과 같은 공구가 필요합니다.
• 10mm 또는 12mm 드릴날 및 드릴
•줄자
• 관련 미터기준 소켓(7-17 mm)이 있는 렌치
• 렌치 연장 공구
• IP 21/Nema 1 및 IP 54 장치의 도관 또는 케이블 글랜드용 판금 펀치
• 최소 400kg (880lbs)을 들어올릴 수 있는 리프팅 바
• 주파수 변환기를 제자리에 놓기 위한 크레인 또는 기타 리프팅 보조 장비
• Torx T50 공구는 E1 을 IP21 및 IP54 외함 유형에 설치하는 데 필요합니다
(최대
Ø 25mm (1 인치)의 막대 또는 관
.
.
..
).
3.2.2 일반 고려 사항
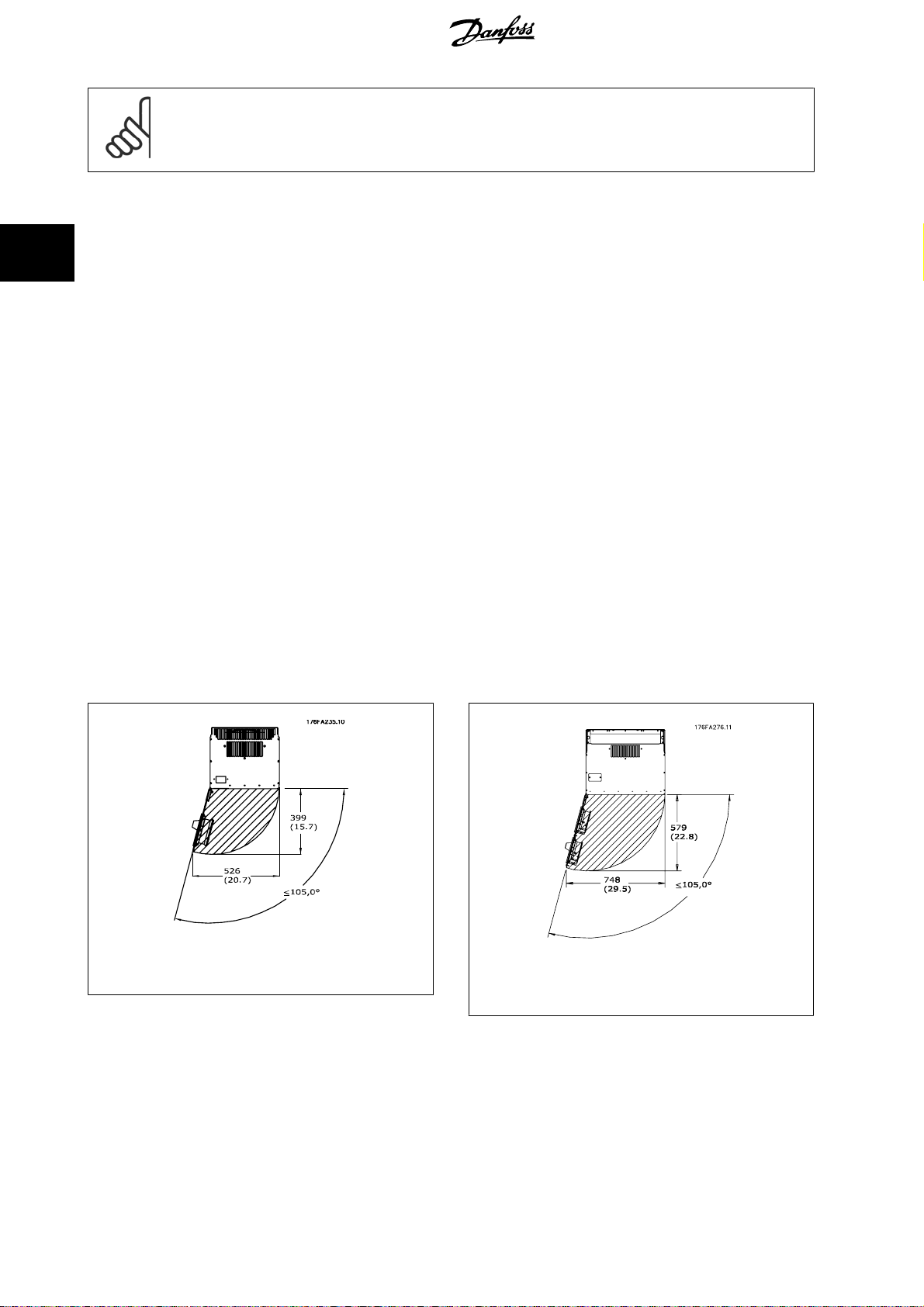
공간
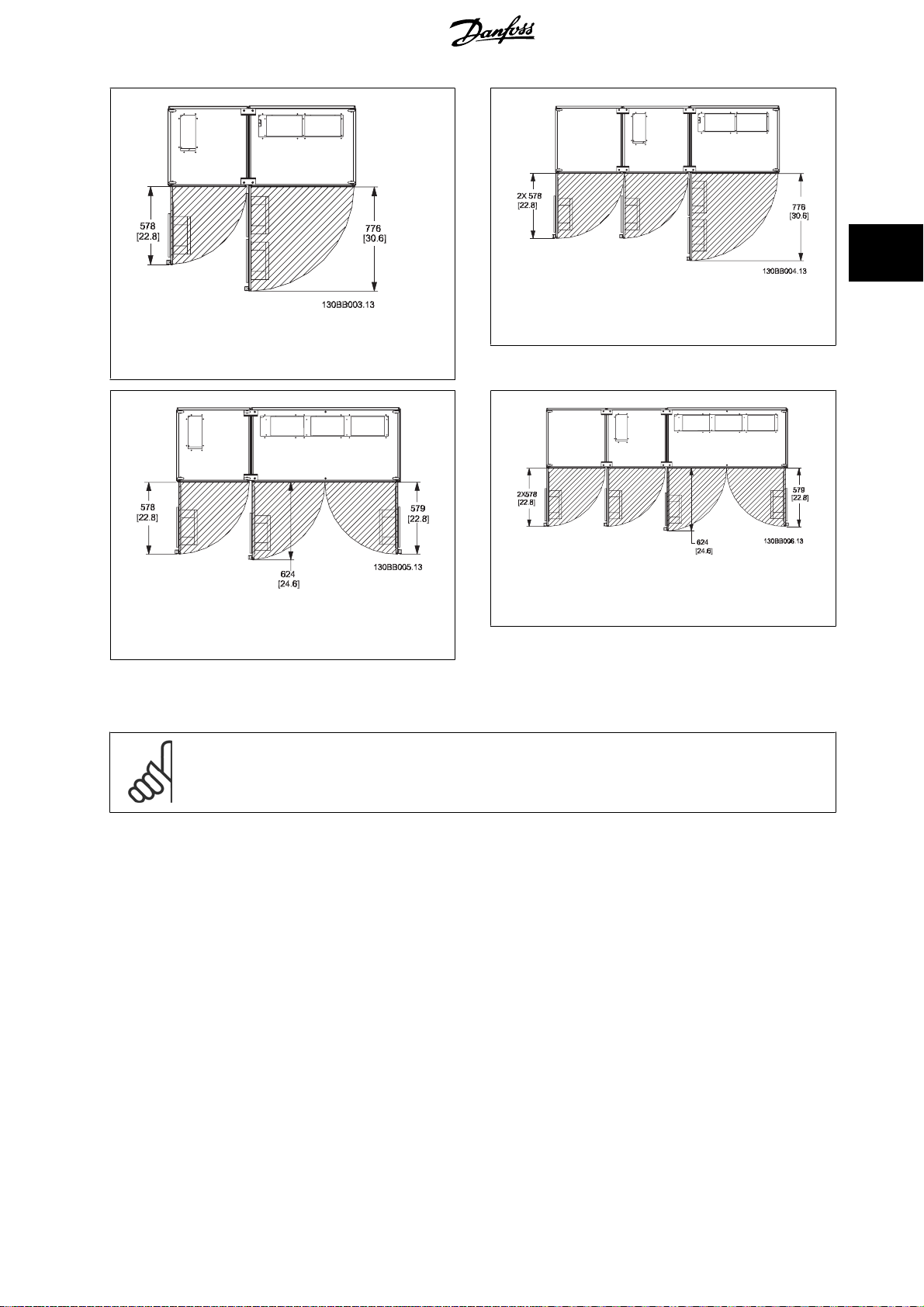
주파수 변환기 상단과 하단의 여유 공간이 통풍 및 케이블이 접근하기에 충분한지 확인하십시오
로 여유 공간을 확보해야 합니다
그림 3.7: IP21/IP54 외함 유형, 프레임 크기 D1 및 D2 전
면의 여유 공간.
.
그림 3.8: IP21/IP54 외함 유형, 프레임 크기 E1 전면의 여
유 공간.
. 패널 도어의 개폐가 가능하도록 유닛의 전면에도 추가
22
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
VLT® Automation Drive FC 300
High Power 사용 설명서
그림 3.9: IP21/IP54 외함 유형, 프레임 크기 F1 전면의 여
유 공간.
3 설치방법
그림 3.10: IP21/IP54 외함 유형, 프레임 크기 F3 전면의 여
.
유 공간
3
그림 3.12: IP21/IP54 외함 유형, 프레임 크기 F4 전면의 여
그림 3.11: IP21/IP54 외함 유형, 프레임 크기 F2 전면의 여
유 공간.
배선 여유 공간
배선 시 케이블을 구부릴 수 있는 공간 등 배선 여유 공간이 충분한 지 확인하십시오. IP00 외함은 바닥이 열리도록 되어 있으므로 케이블 클램프를 사
용하여 주파수 변환기가 장착된 외함의 뒷면 패널에 케이블을 고정해야 합니다.
주의
모든 케이블 러그/슈즈는 단자 버스통신 바의 너비 내에 장착해야 합니다
유 공간.
.
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
23
3
3 설치방법
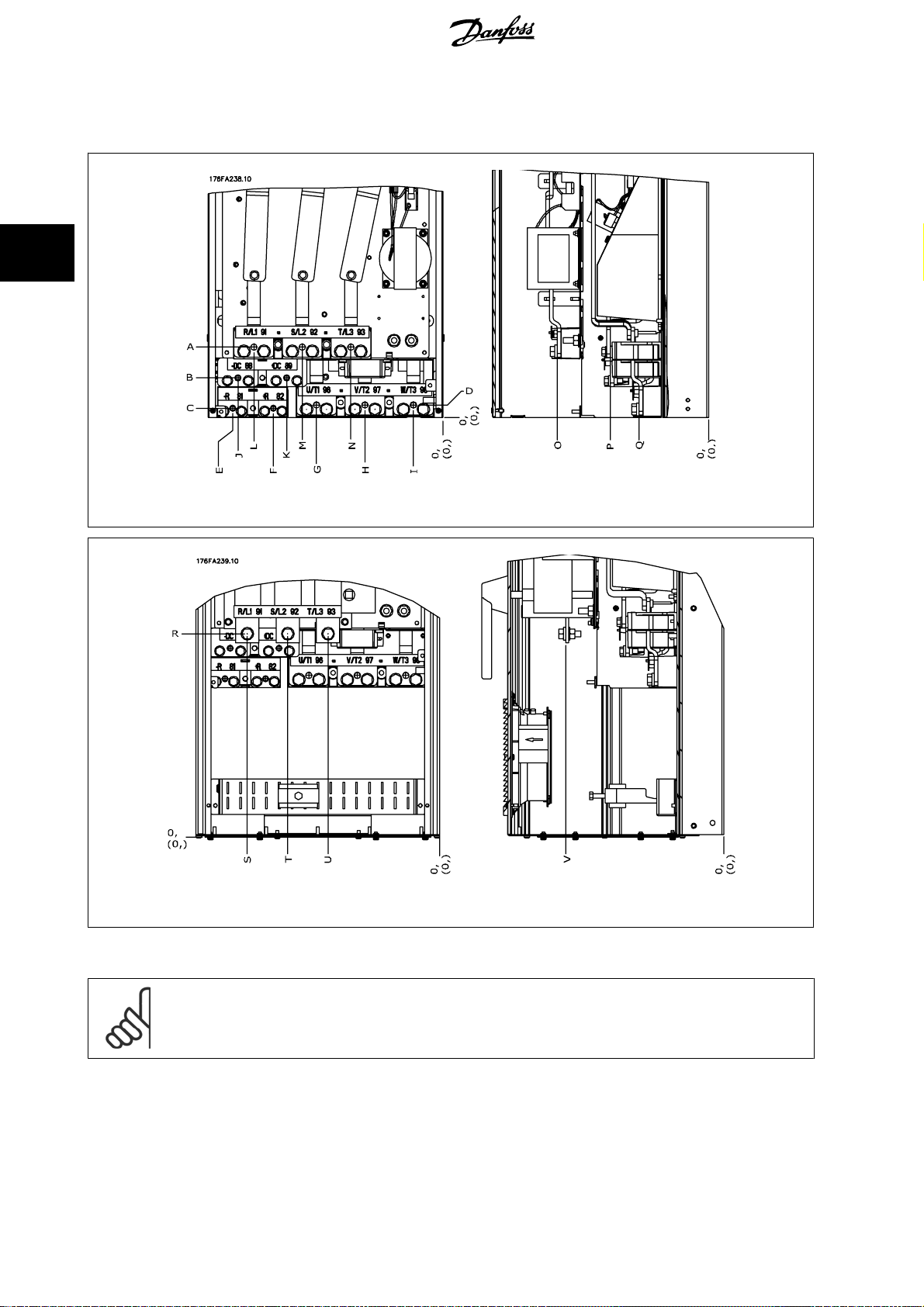
3.2.3 단자 위치 - 프레임 크기 D
케이블 배선 시 여유 공간을 계산할 때는 다음과 같은 단자 위치를 고려하십시오.
VLT® Automation Drive FC 300
High Power 사용 설명서
그림 3.13: 전원 연결 위치, 프레임 크기 D3 및 D4
그림 3.14: 차단 스위치가 있는 전원 연결 위치, 프레임 크기 D1 및 D2
전원 케이블은 무겁고 잘 구부러지지 않습니다. 케이블을 쉽게 설치하기에 가장 적합한 주파수 변환기의 위치를 고려하십시오.
주의
모든 D 프레임은 표준 입력 단자 또는 차단 스위치와 함께 사용할 수 있습니다. 모든 단자 치수는 다음 표에서 확인할 수 있습니다.
24
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.

VLT® Automation Drive FC 300
High Power 사용 설명서
IP 21 (NEMA 1) / IP 54 (NEMA 12) IP 00 / 섀시
프레임 크기 D1 프레임 크기 D2 프레임 크기 D3 프레임 크기 D4
A 277 (10.9) 379 (14.9) 119 (4.7) 122 (4.8)
B 227 (8.9) 326 (12.8) 68 (2.7) 68 (2.7)
C 173 (6.8) 273 (10.8) 15 (0.6) 16 (0.6)
D 179 (7.0) 279 (11.0) 20.7 (0.8) 22 (0.8)
E 370 (14.6) 370 (14.6) 363 (14.3) 363 (14.3)
F 300 (11.8) 300 (11.8) 293 (11.5) 293 (11.5)
G 222 (8.7) 226 (8.9) 215 (8.4) 218 (8.6)
H 139 (5.4) 142 (5.6) 131 (5.2) 135 (5.3)
I 55 (2.2) 59 (2.3) 48 (1.9) 51 (2.0)
J 354 (13.9) 361 (14.2) 347 (13.6) 354 (13.9)
K 284 (11.2) 277 (10.9) 277 (10.9) 270 (10.6)
L 334 (13.1) 334 (13.1) 326 (12.8) 326 (12.8)
M 250 (9.8) 250 (9.8) 243 (9.6) 243 (9.6)
N 167 (6.6) 167 (6.6) 159 (6.3) 159 (6.3)
O 261 (10.3) 260 (10.3) 261 (10.3) 261 (10.3)
P 170 (6.7) 169 (6.7) 170 (6.7) 170 (6.7)
Q 120 (4.7) 120 (4.7) 120 (4.7) 120 (4.7)
R 256 (10.1) 350 (13.8) 98 (3.8) 93 (3.7)
S 308 (12.1) 332 (13.0) 301 (11.8) 324 (12.8)
T 252 (9.9) 262 (10.3) 245 (9.6) 255 (10.0)
U 196 (7.7) 192 (7.6) 189 (7.4) 185 (7.3)
V 260 (10.2) 273 (10.7) 260 (10.2) 273 (10.7)
3 설치방법
3
표 3.1: 케이블 위치는 위 그림과 같습니다. 치수는 mm (인치) 단위입니다.
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
25
3
3 설치방법
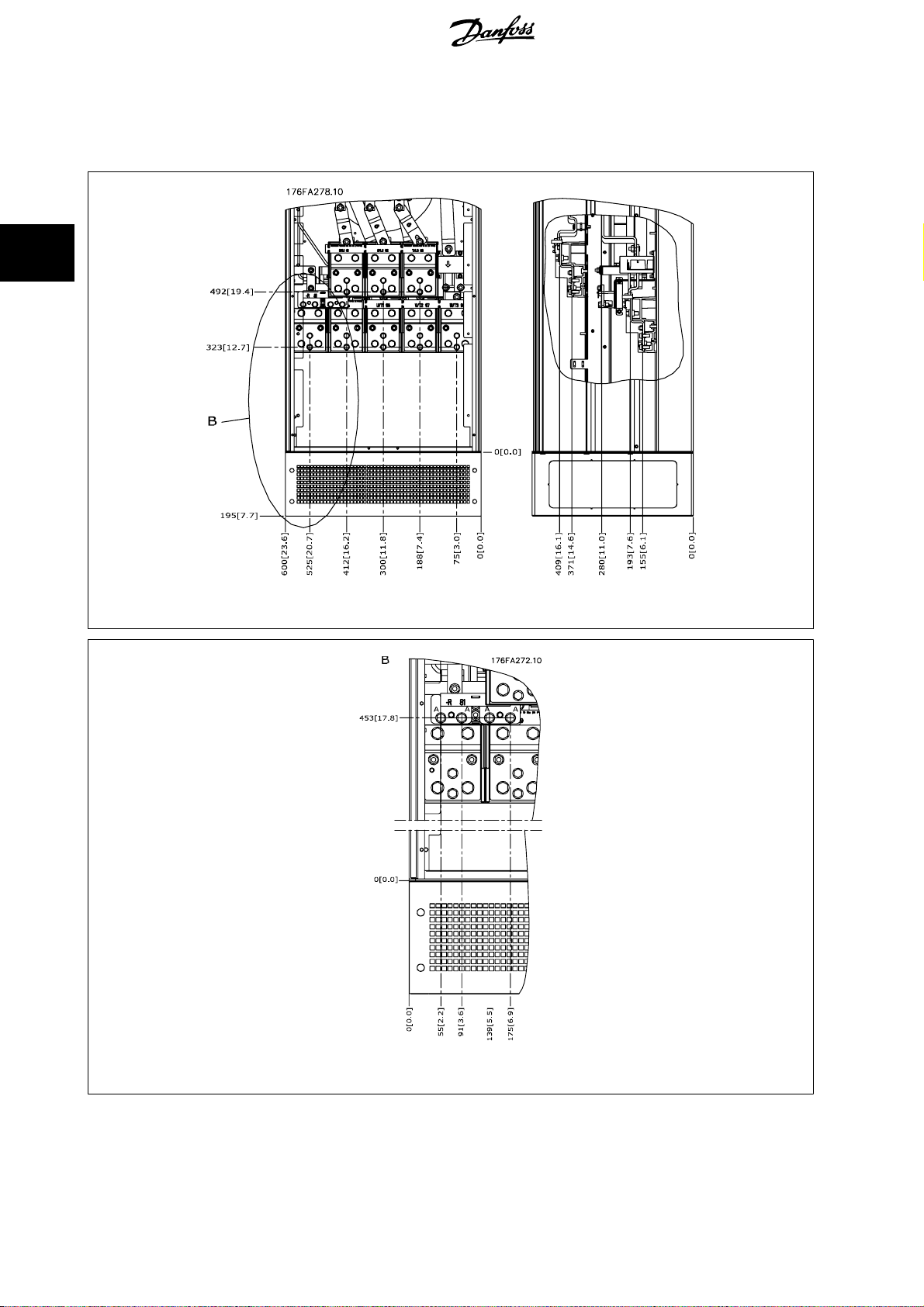
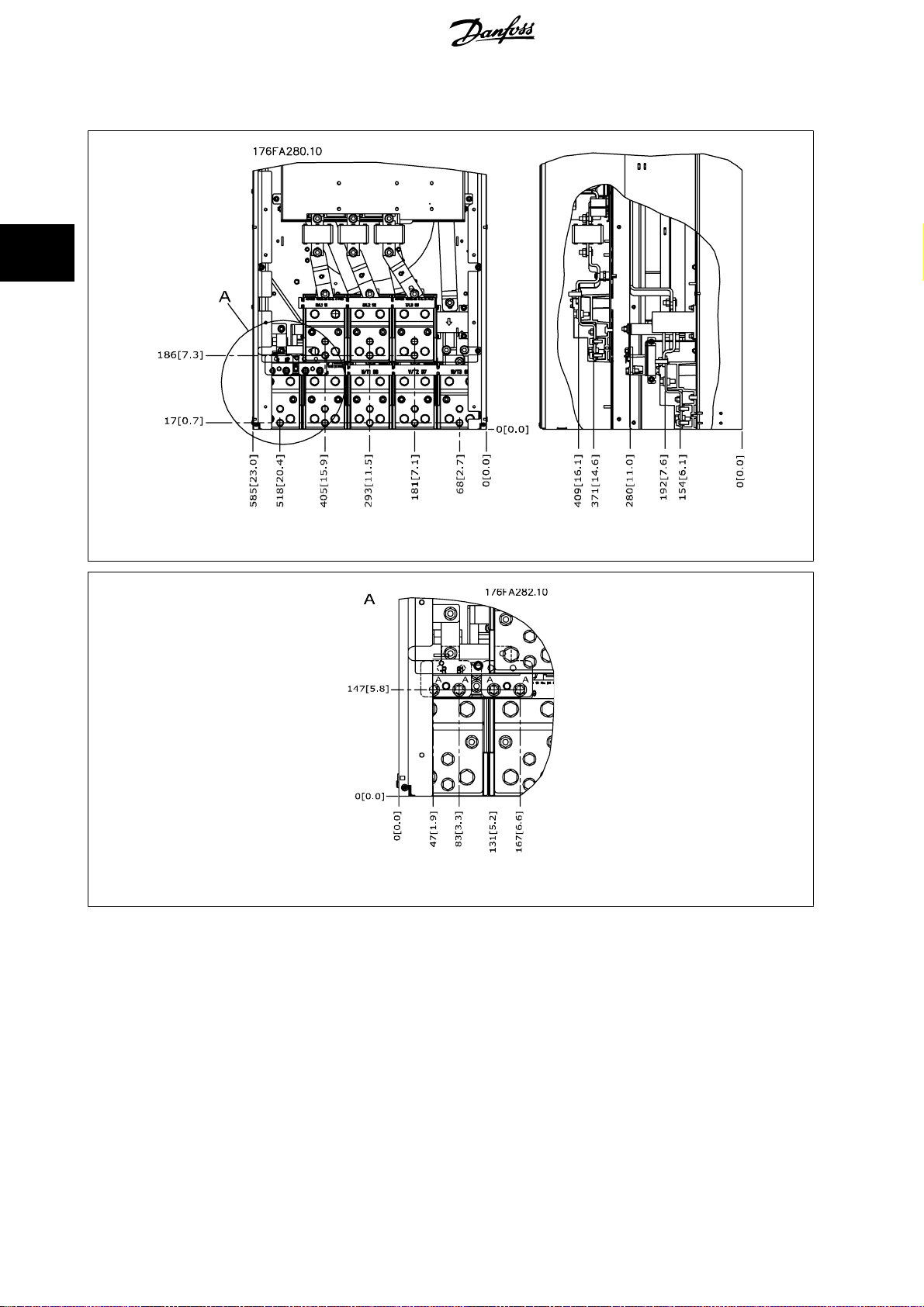
3.2.4 단자 위치 - 프레임 크기 E
단자 위치 - E1
케이블 배선 시 여유 공간을 계산할 때는 다음과 같은 단자 위치를 고려하십시오
VLT® Automation Drive FC 300
High Power 사용 설명서
.
그림 3.15: IP21 (NEMA Type 1) 및 IP54 (NEMA Type 12) 외함의 전원 연결부 위치
그림 3.16: IP21 (NEMA type 1) 및 IP54 (NEMA type 12) 외함의 전원 연결부 위치(B 의 세부 그림)
26
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
VLT® Automation Drive FC 300
High Power 사용 설명서
3 설치방법
3
그림 3.17: IP21 (NEMA type 1) 및 IP54 (NEMA type 12) 외함 차단 스위치의 전원 연결부 위치
프레임 크
기
E1
IP54/IP21 UL 및 NEMA1/NEMA12
250/315 kW (400V) 및 355/450-500/630
315/355-400/450 kW (400V) 371 (14.6) 371 (14.6) 341 (13.4) 431 (17.0) 431 (17.0) 455 (17.9)
장치 유형 차단 단자 치수
KW (690V)
381 (15.0) 253 (9.9) 253 (9.9) 431 (17.0) 562 (22.1) N/A
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
27
3
3 설치방법
단자 위치 - 프레임 크기 E2
케이블 배선 시 여유 공간을 계산할 때는 다음과 같은 단자 위치를 고려하십시오.
VLT® Automation Drive FC 300
High Power 사용 설명서
그림 3.18: IP00 외함의 전원 연결부 위치
그림 3.19: IP00 외함의 전원 연결부 위치
28
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.

VLT® Automation Drive FC 300
High Power 사용 설명서
그림 3.20: IP00 외함 차단 스위치의 전원 연결부 위치
3 설치방법
3
전원 케이블은 무겁고 잘 구부러지지 않습니다. 케이블을 쉽게 설치하기에 가장 적합한 주파수 변환기의 위치를 고려하십시오
각 단자마다 최대 4개의 케이블(케이블 러그 포함) 또는 표준형 박스 러그를 사용할 수 있습니다
그림 3.21: 단자 세부 그림
주의
위치 A 또는 B 로 전원을 연결할 수 있습니다.
. 접지는 인버터의 해당 종단점에 연결됩니다.
.
프레임 크
기
250/315 kW (400V) 및 355/450-500/630
E2
315/355-400/450 kW (400V) 383 (15.1) 244 (9.6) 334 (13.1) 424 (16.7) 109 (4.3) 149 (5.8)
장치 유형 차단 단자 치수
IPOO/섀시 A B C D E F
KW (690V)
381 (15.0) 245 (9.6) 334 (13.1) 423 (16.7) 256 (10.1) N/A
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
29
3 설치방법
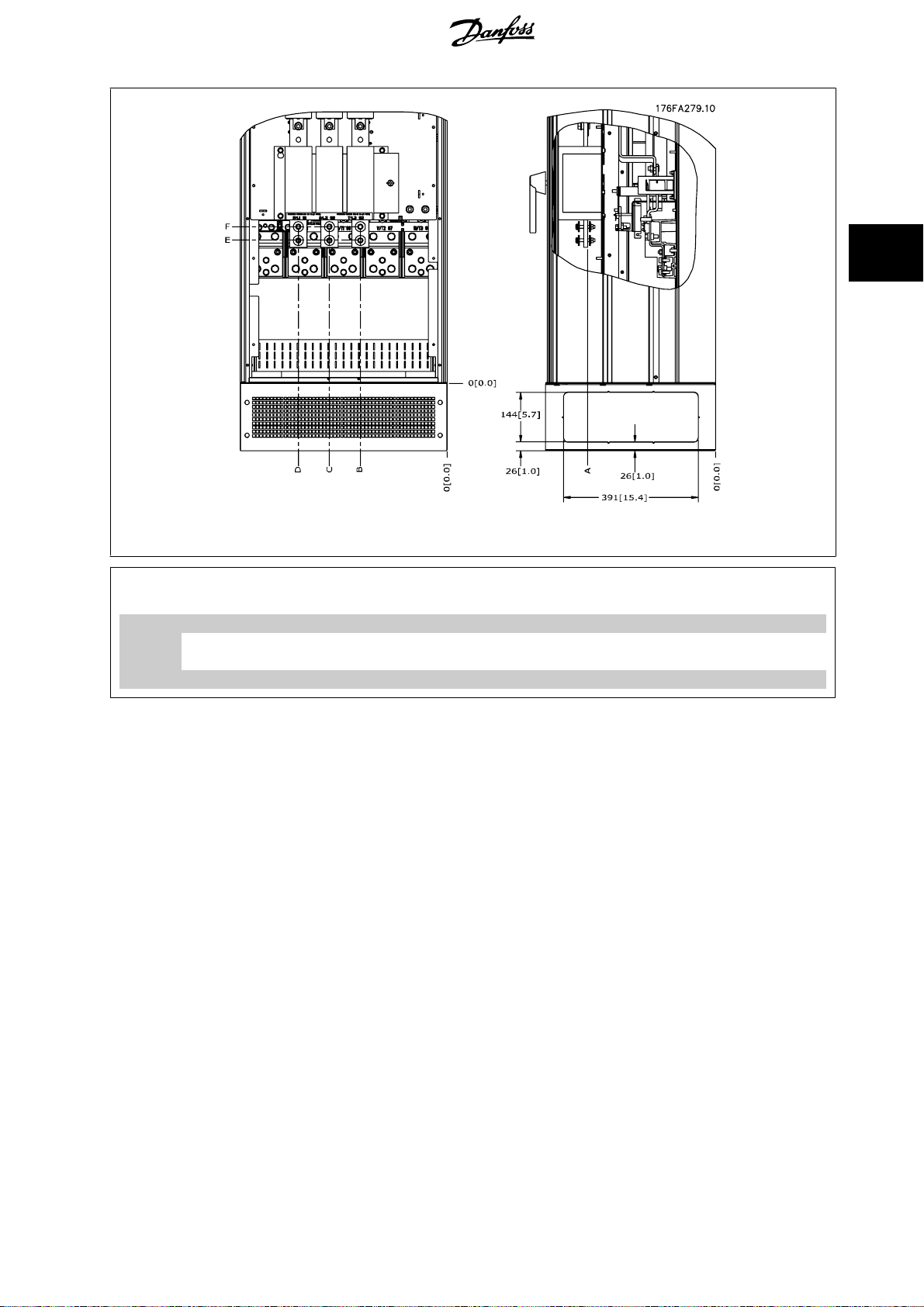
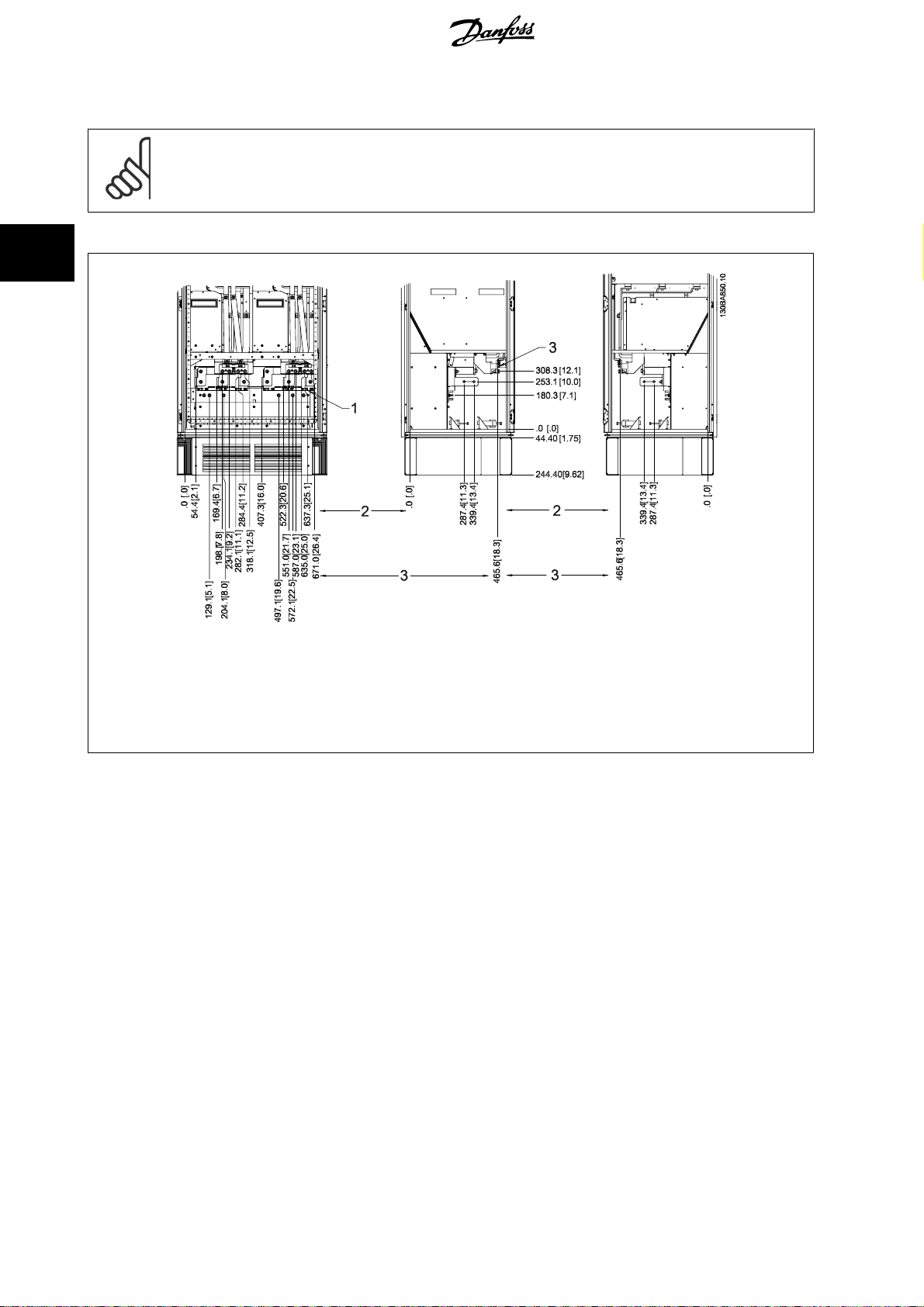
3.2.5 단자 위치 - 프레임 크기 F
주의
F 프레임에는 각기 다른 크기, F1, F2, F3 및 F4 가 있습니다. F1 과 F2 는 인버터 캐비닛(왼쪽)과 정류기 캐비닛
어 있습니다. F3 과 F4 에는 정류기 캐비닛 왼쪽에 옵션 캐비닛이 하나 추가되어 있습니다. F3 은 옵션 캐비닛이 하나 추가된 F1 입
니다. F4 는 옵션 캐비닛이 하나 추가된 F2 입니다.
VLT® Automation Drive FC 300
High Power 사용 설명서
(오른쪽)으로 구성되
3
단자 위치
- 프레임 크기
그림 3.22: 단자 위치
있습니다
1) 접지 바
2) 모터 단자
3) 제동 단자
F1 및 F3
- 인버터 캐비닛
.
- F1 및 F3 (전면, 왼쪽 측면 및 오른쪽 측면 보기
). 글랜드 플레이트는 .0 레벨보다
42 mm 아래에
30
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.

VLT® Automation Drive FC 300
High Power 사용 설명서
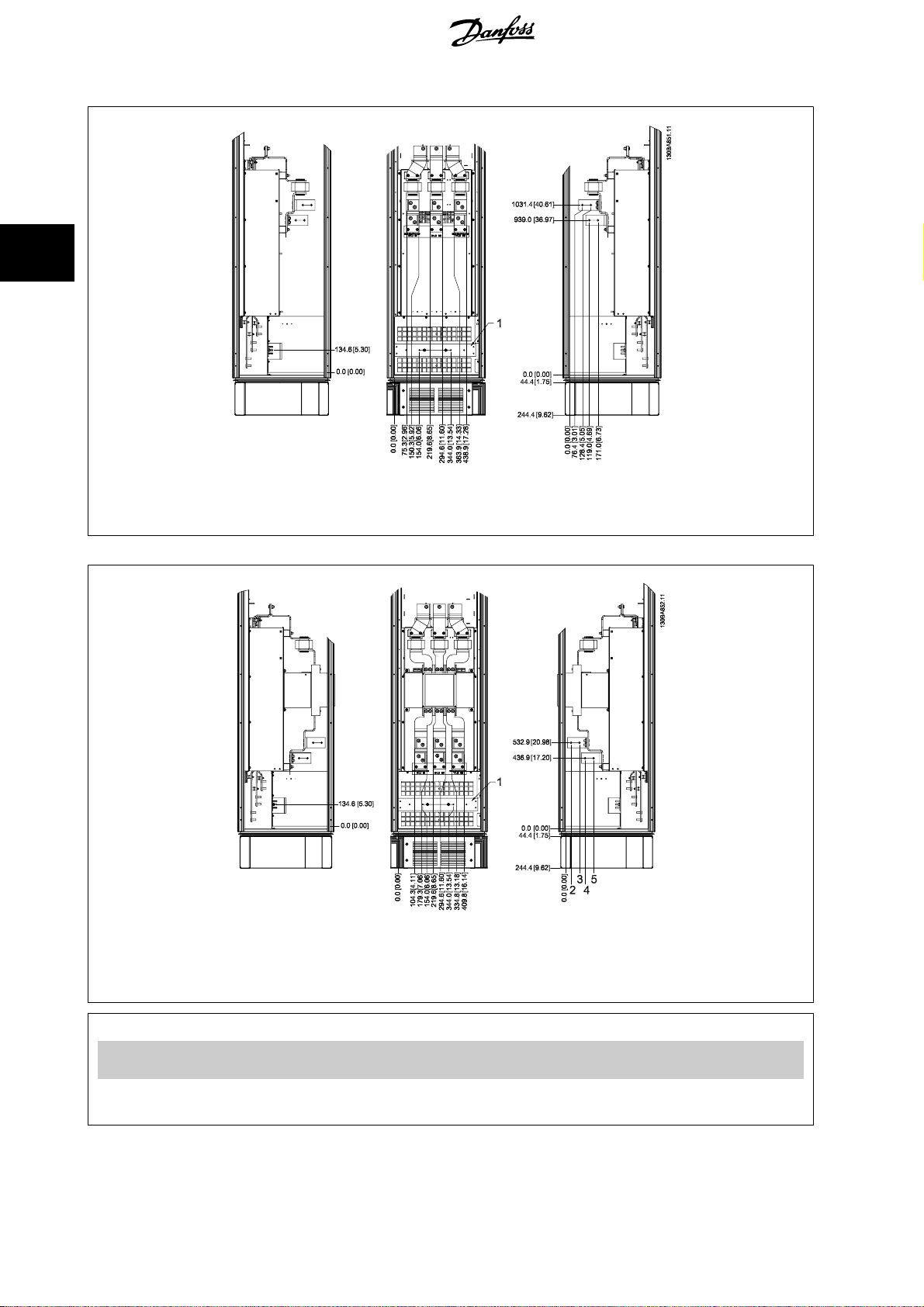
단자 위치 - 프레임 크기 F2 및 F4
3 설치방법
3
그림 3.23: 단자 위치 - 인버터 캐비닛 - F2 및 F4 (전면, 왼쪽 측면 및 오른쪽 측면 보기). 글랜드 플레이트는 .0 레벨보다 42 mm 아래에
있습니다.
1) 접지 바
단자 위치 - 정류기 (F1, F2, F3 및 F4)
그림 3.24: 단자 위치 - 정류기 (왼쪽 측면, 전면 및 오른쪽 측면 보기). 글랜드 플레이트는 .0 레벨보다 42 mm 아래에 있습니다.
1) 부하공유 단자(-)
2) 접지 바
3) 부하공유 단자(+)
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
31
3
3 설치방법
단자 위치 - 옵션 캐비닛 (F3 및 F4)
VLT® Automation Drive FC 300
High Power 사용 설명서
그림 3.25: 단자 위치 - 옵션 캐비닛 (왼쪽 측면, 전면 및 오른쪽 측면 보기). 글랜드 플레이트는 .0 레벨보다 42 mm 아래에 있습니다.
1) 접지 바
단자 위치 - 회로 차단기/ 일체형 스위치가 있는 옵션 캐비닛 (F3 및 F4)
그림 3.26: 단자 위치 - 회로 차단기/ 일체형 스위치가 있는 옵션 캐비닛 (왼쪽 측면, 전면 및 오른쪽 측면 보기). 글랜드 플레이트는 .0 레
벨보다 42 mm 아래에 있습니다.
1) 접지 바
출력 용량 2345
450kW (480V), 630-710kW
(690V)
500-800kW (480V),
800-1000kW (690V)
표 3.2: 단자 치수
32
34.9 86.9 122.2 174.2
46.3 98.3 119.0 171.0
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
VLT® Automation Drive FC 300
High Power 사용 설명서
3.2.6 냉각 및 통풍
냉각
유닛 상단과 하단의 냉각 덕트를 사용하거나 유닛 뒷면으로 배기 또는 흡기하는 방식을 사용하거나 냉각 방식을 결합하여 사용하는 등 각기 다른 방법
으로 냉각할 수 있습니다.
덕트를 이용한 냉각
주파수 변환기의 팬을 활용하여 강제 냉각하는 Rittal TS8 외함에 IP00 / 섀시 주파수 변환기을(를) 최적으로 설치하는 전용 옵션이 개발되었습니다. 외
함 상단을 통해 공기를 배출할 수도 있으나 설비 밖으로 배기되면 뒷쪽 채널의 열 손실이 제어실 내부에서 소모되지 않고 설비의 공기 조절 요구사항을
감소시킵니다.
자세한 정보는
뒷면을 이용한 냉각
뒷쪽 채널의 공기를 Rittal TS8 외함의 뒷면으로 흡기 또는 배기할 수도 있습니다
되돌려 보낼 수 있어 공기 조절 요구사항을 감소시킬 수 있습니다
Rittal 외함에 덕트 냉각 키트 설치
주의
인버터의 뒤쪽 채널에 남아있지 않은 열 손실과 외함 내부에 설치된 기타 구성품에서 생성된 추가 손실을 제거하기 위해서는 외함에
도어 팬이 필요합니다. 필요한 총 통풍량을 계산해야만 알맞은 팬을 선택할 수 있습니다. 일부 외함 제조업체는 계산용 소프트웨어(예
를 들어, Rittal Therm 소프트웨어)를 제공합니다. VLT 가 외함 내에서 유일하게 열을 생성하는 구성품이라면 주변 온도 45
D3 및 D4 인버터에 필요한 최소 통풍량은 391 m
3
/h (460 cfm)입니다
m
.
편을 참조하십시오.
.
3
. 이는 뒷쪽 채널을 통해 설비 밖으로 배기하고 열 손실을 설비 밖으로
/h (230 cfm)입니다. 주변 온도
o
45
C 에서 E2 인버터에 필요한 최소 통풍량은 782
3 설치방법
o
C에서
3
통풍
반드시 방열판에 필요한 만큼 공기가 통풍되어야 합니다. 통풍량은 아래와 같습니다.
외함 보호
IP21 / NEMA 1
IP54 / NEMA 12
IP21 / NEMA 1 F1, F2, F3 및 F4
IP54 / NEMA 12 F1, F2, F3 및 F4
IP00 / 섀시 D3 및 D4
* 팬당 통풍량. 프레임 크기 F 에는 팬이 여러 개 포함되어 있습니다.
표 3.3: 방열판 통풍
주의
팬은 다음과 같은 이유로 작동합니다.
1. AMA
2. DC 유지
3. 사전 자화
4. 직류 제동
5. 정격 전류의 60%를 초과합니다.
6. 특정 방열판 온도를 초과했습니다(전력 용량에 따라 다름).
팬이 기동하면 최소 10분간 작동합니다.
프레임 크기 도어 팬 / 상단 팬의 통풍 방열판 팬
D1 및 D2
E1 P250T5, P355T7, P400T7
E1 P315-P400T5, P500-
P560T7
E2 P250T5, P355T7, P400T7
E2 P315-P400T5, P500-
P560T7
170 m3/h (100 cfm) 765 m3/h (450 cfm)
340 m
340 m3/h (200 cfm) 1445 m3/h (850 cfm)
700 m
525 m3/h (309 cfm)* 985 m3/h (580 cfm)*
255 m
255 m3/h (150 cfm) 1105 m3/h (650 cfm)
255 m
3
/h (200 cfm) 1105 m3/h (650 cfm)
3
/h (412 cfm)* 985 m3/h (580 cfm)*
3
/h (150 cfm) 765 m3/h (450 cfm)
3
/h (150 cfm) 1445 m3/h (850 cfm)
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
33
3
VLT® Automation Drive FC 300
3 설치방법
외부 덕트
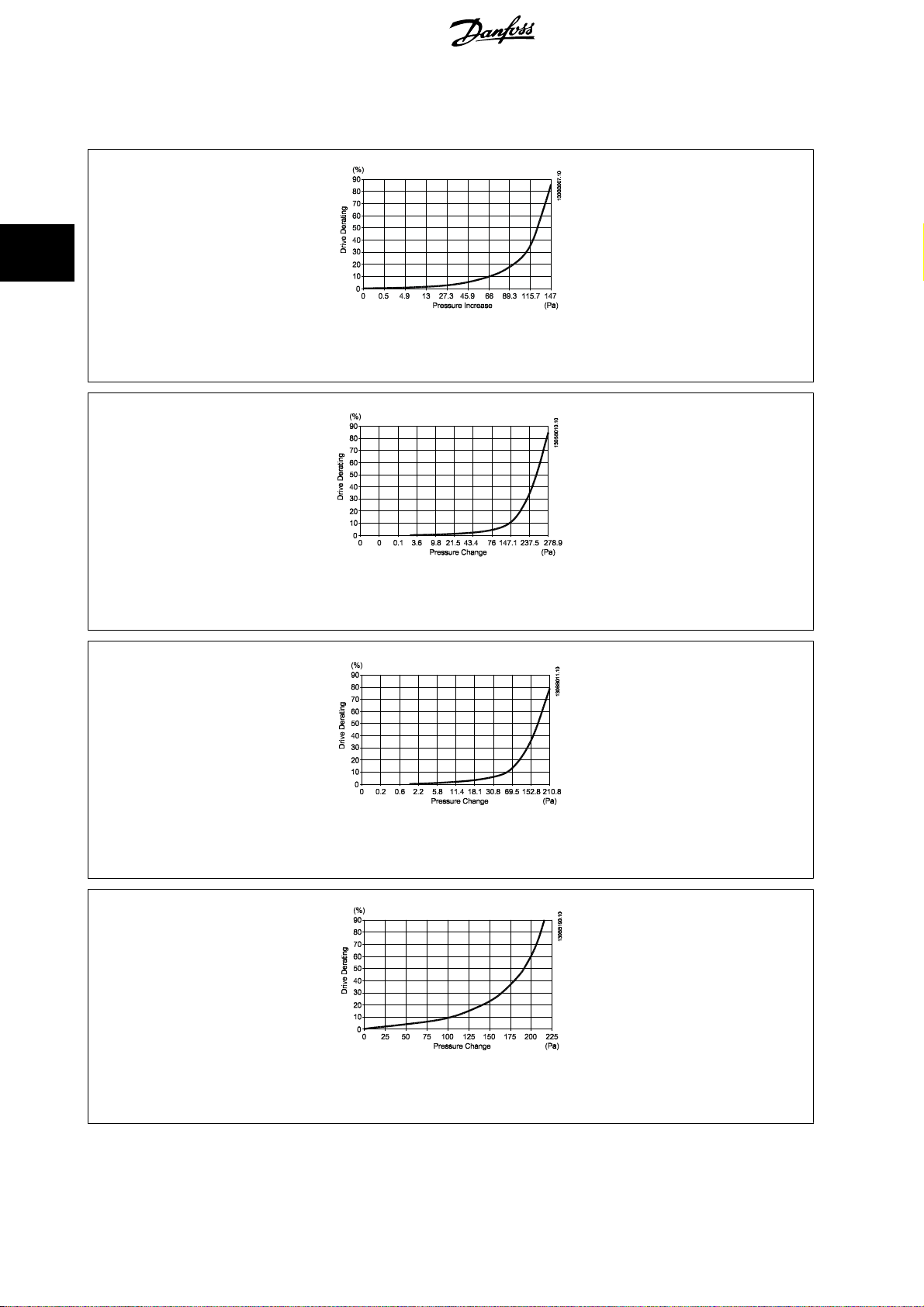
Rittal 캐비닛 외부에 덕트를 추가하는 경우, 덕트 내의 압력 감소를 계산해야 합니다. 아래 도표를 이용하여 압력 감소에 따라 주파수 변환기 용량을 감
소시킵니다.
그림 3.27: D 프레임 용량 감소와 압력 변화 간 비교
3
인버터 통풍량: 450 cfm (765 m
/h)
High Power 사용 설명서
그림 3.28: E 프레임 용량 감소와 압력 변화 간 비교 (소형 팬), P250T5 및 P355T7-P400T7
3
인버터 통풍량: 650 cfm (1105 m
그림 3.29: E 프레임 용량 감소와 압력 변화 간 비교
인버터 통풍량: 850 cfm (1445 m
/h)
(대형 팬
), P315T5-P400T5 및 P500T7-P560T7
3
/h)
그림 3.30: F1, F2, F3, F4 프레임 용량 감소와 압력 변화 간 비교
3
인버터 통풍량: 580 cfm (985 m
34
/h)
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
VLT® Automation Drive FC 300
High Power 사용 설명서
3.2.7 벽에 설치 - IP21 (NEMA 1) 및 IP54 (NEMA 12) 유닛
3 설치방법
이는 프레임 크기 D1 및 D2 에만 적용됩니다. 유닛 설치 장소를 미리 생각해 두어야 합니다
최종 설치 장소를 선정하기 전에 관련 사항을 고려하십시오
• 냉각에 필요한 여유 공간
• 도어 개폐 시 필요한 여유 공간
• 바닥에 케이블이 들어 갈 수 있는 여유 공간
장착 방법에 대한 보기를 활용하여 벽에 장착용 구멍을 표시하고 드릴로 표시된 바와 같이 구멍을 내십시오
른지 확인하십시오. 주파수 변환기 하단과 바닥 간 간격이 최소한 225mm(8.9 인치) 필요합니다. 하단에 볼트를 체결하고 그 위에 주파수 변환기를 올
려 놓으십시오. 주파수 변환기를 벽쪽으로 약간 기울인 다음 상단 볼트를 체결하십시오
.
이십시오
그림 3.31: 벽에 장착하기 위해 인버터를 들어 올리는 방법
.
.
. 냉각을 위해 바닥 및 천장과의 간격이 올바
. 주파수 변환기가 벽에 단단히 고정되도록 볼트 4개를 모두 조
3
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
35

3 설치방법
3.2.8 글랜드/도관 입구 - IP21 (NEMA 1) 및 IP54 (NEMA12)
VLT® Automation Drive FC 300
High Power 사용 설명서
3
케이블은 제품 하단의 글랜드 플레이트를 통해 연결됩니다. 플레이트를 분리하고 글랜드 또는 도관 입구 위치를 결정하십시오
구멍을 내십시오
.
주의
특정 보호 수준과 유닛의 올바른 냉각을 확보하기 위해 주파수 변환기에 글랜드 플레이트를 반드시 장착해야 합니다
트가 장착되지 않으면 주파수 변환기가 알람
그림 3.32: 글랜드 플레이트의 올바른 설치 예
69, 전력 카드 온도에서 트립될 수 카드 온도
. 도면에 표시된 부분에
. 글랜드 플레이
프레임 크기 D1 + D2
프레임 크기 E1
주파수 변환기 하단에서 본 케이블 입구 – 1) 주전원 측 2) 모터 측
36
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
VLT® Automation Drive FC 300
High Power 사용 설명서
프레임 크기 F1
프레임 크기 F2
3 설치방법
3
프레임 크기 F3
프레임 크기 F4
F1-F4: 주파수 변환기 하단에서 본 케이블 입구 - 1) 표시된 부분에 도관을 설치합니다.
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
37

3
3 설치방법
VLT® Automation Drive FC 300
High Power 사용 설명서
그림 3.33: 하단 플레이트 장착
E1 의 하단 플레이트는 외함 안쪽 또는 바깥쪽에 장착할 수 있으며 하단에 장착할 경우
블을 장착할 수 있는 등 설치 공정에 유연성을 제공합니다.
,프레임 크기
E1.
, 주파수 변환기를 페데스탈 위에 올려 놓기 전에 글랜드와 케이
3.2.9 IP21 드립 쉴드(Drip Shield) 설치 ((프레임 크기 D1 및 D2 )
IP21 등급을 충족시키기 위해 별도의 드립 쉴드(drip shield)가 아래에
설명된 대로 설치되어야 합니다
• 전면 나사 2개를 분리합니다.
• 드립 쉴드를 삽입하고 나사를 체결합니다
• 나사를 5.6 Nm (50 in-lbs)의 조임강도로 조입니다
.
.
.
38
그림 3.34: 드립 쉴드(Drip shield) 설치.
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
VLT® Automation Drive FC 300
High Power 사용 설명서
3.3 옵션의 현장 설치
3.3.1 Rittal 외함에 덕트 냉각 키트 설치
3 설치방법
이 섹션에서는 Rittal 외함에 덕트 냉각 키트와 함께 IP00 / 섀시 외함 주파수 변환기를 설치하는 방법에 관해 설명합니다
의 베이스/플린스가 필요합니다
.
. 외함와(과) 더불어
200mm
3
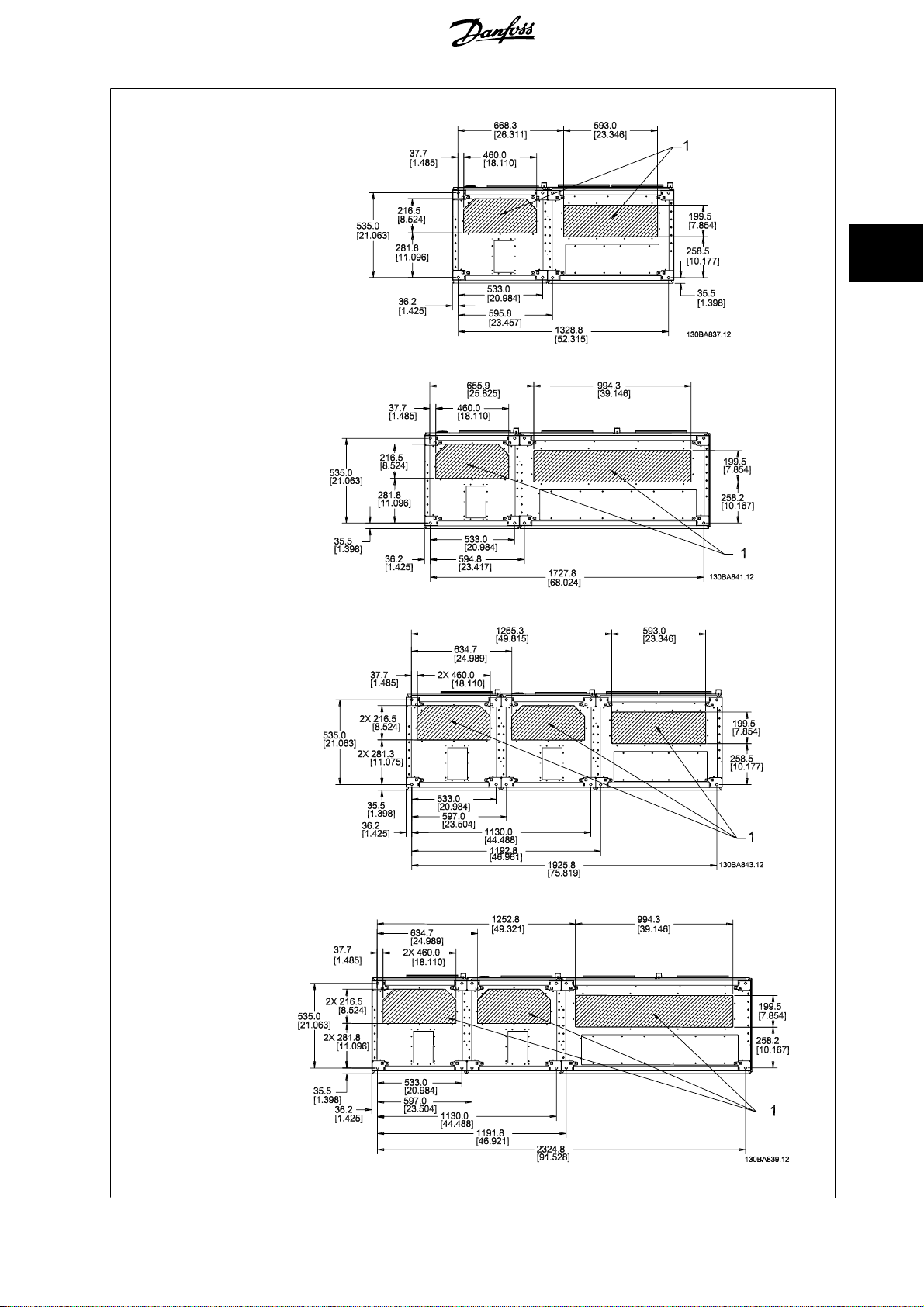
그림 3.35: Rittal TS8 외함에 IP00 설치
외함의 최소 치수는 다음과 같습니다
• D3 및 D4 프레임: 깊이 500mm 및 너비 600mm.
• E2 프레임: 깊이 600mm 및 너비 800mm.
설치 시 필요에 따라 최대 깊이 및 너비가 사용될 수 있습니다. 하나의 외함에서 여러 대의 주파수 변환기를 사용하는 경우에는 각각의 인버터를 각 인
버터 뒷면 패널에 장착하고 패널의 중간 부분끼리 연결하여 지탱할 것을 권장합니다
다(자세한 내용은 Rittal TS8 카탈로그 참조). 아래 표에 나열된 덕트 냉각 키트는 Rittal TS8 IP 20 / UL / NEMA 1 및 IP 54 / UL / NEMA 12 외함
의 IP 00 / 섀시 주파수 변환기에만 사용하기에 적합합니다
E2 프레임의 경우, 주파수 변환기의 중량 때문에 Rittal 외함 뒷면에 플레이트를 장착하는 것이 중요합니다
주의
인버터의 뒤쪽 채널에 남아있지 않은 열 손실과 외함 내부에 설치된 기타 구성품에서 생성된 추가 손실을 제거하기 위해서는 외함에
도어 팬이 필요합니다. 필요한 총 통풍량을 계산해야만 알맞은 팬을 선택할 수 있습니다. 일부 외함 제조업체는 계산용 소프트웨어(예
를 들어, Rittal Therm 소프트웨어)를 제공합니다. VLT 가 외함 내에서 유일하게 열을 생성하는 구성품이라면 주변 온도 45
D3 및 D4 인버터에 필요한 최소 통풍량은 391 m
3
/h (460 cfm)입니다
m
.
.
. 이러한 덕트 키트는 패널의
.
3
/h (230 cfm)입니다. 주변 온도 45oC 에서 E2 인버터에 필요한 최소 통풍량은 782
.
“프레임 내" 장착을 지원하지 않습니
.
o
C에서
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
39
3 설치방법
발주 정보
VLT® Automation Drive FC 300
High Power 사용 설명서
3
Rittal TS-8 외함
1800 mm 176F1824 176F1823 사용할 수 없음
2000 mm 176F1826 176F1825 176F1850
2200 mm 176F0299
주의
자세한 정보는
외부 덕트
Rittal 캐비닛 외부에 덕트를 추가하는 경우, 덕트 내의 압력 감소를 계산해야 합니다. 자세한 정보는
프레임 D3 키트 부품 번호 프레임 D4 키트 부품 번호 프레임 E2 부품 번호
덕트 키트 사용 설명서, 175R5640
을 참조하십시오.
냉각 및 통풍
편을 참조하십시오.
3.3.2 상단 전용 덕트 냉각 키트 설치
본 설명은 프레임 크기 D3, D4 및 E2 에 사용할 수 있는 뒤쪽 채널 냉각 키트의 상단부만 설치하는 경우에 관한 내용입니다. 외함과 더불어 200mm 의
통풍형 페데스탈이 필요합니다.
외함의 최소 깊이는 500mm(E2 프레임의 경우, 600mm)이며 외함의 최소 너비는 600mm(E2 프레임의 경우, 800mm)입니다. 설치 시 필요에 따라 최
대 깊이 및 너비가 사용될 수 있습니다. 하나의 외함에서 여러 대의 주파수 변환기를 사용하는 경우에는 각각의 인버터를 각 인버터 뒷면 패널에 장착하
고 패널의 중간 부분끼리 연결하여 지탱하게 합니다. 뒤쪽 채널 냉각 키트는 모든 프레임에 대해 구조면에서 매우 유사합니다. D3 및 D4 키트는 주파수
변환기의 "프레임 내" 장착을 지원하지 않습니다. E2 키트는 주파수 변환기의 추가적인 지탱을 위해 "프레임 내"에 장착됩니다.
이 키트를 설명된 바와 같이 사용하면 인버터의 주 방열판 팬을 사용하여 뒤쪽 채널을 통해 손실의 85%가 제거됩니다. 나머지 15%는 외함의 도어를 통
해 제거됩니다.
주의
자세한 정보는
발주 정보
프레임 크기 D3 및 D4: 176F1775
프레임 크기 E2: 176F1776
상단 전용 뒤쪽 채널 냉각 키트 지침, 175R1107
을 참조하십시오.
40
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
VLT® Automation Drive FC 300
High Power 사용 설명서
3.3.3 Rittal 외함의 상단 및 하단 덮개 설치
3 설치방법
IP00 주파수 변환기에 설치된 상단 및 하단 덮개는 방열판의 차가운 공기가 주파수 변환기 뒤쪽을 통해 흡기 및 배기될 수 있게 합니다
.
. 이 키트는
Rittal TS8 외함의 IP00/ 섀시 인버터에 사용하도록 설계되었으며 시험을 거쳤습니다
지침,
177R0076 을 참조하십시오.
버터 프레임 D3, D4 및 E2 에 적용할 수 있습니다
:
참고
1. 인버터의 배기 경로에 외부 덕트 작업이 추가되는 경우, 인버터의 냉각 성능을 떨어뜨리는 배압이 추가적으로 발생합니다
맞게 인버터 용량을 감소시켜야 합니다. 우선 압력 변화를 계산한 다음 본 절의 초반부에 있는 용량 감소 표를 참조합니다
2. 인버터의 뒤쪽 채널에 남아있지 않은 열 손실과 외함 내부에 설치된 기타 구성품에서 생성된 추가 손실을 제거하기 위해서는 외함에 도어 팬
이 필요합니다. 필요한 총 통풍량을 계산해야만 알맞은 팬을 선택할 수 있습니다. 일부 외함 제조업체는 계산용 소프트웨어(예를 들어, Rittal
Therm 소프트웨어)를 제공합니다
주파수 변환기가 외함 내에서 유일하게 열을 생성하는 구성품이라면 주변 온도 45°C 에서 D3 및 D4 프레임 인버터에 필요한 최소 통풍량은
3
391 m
/h (230 cfm)입니다. 주변 온도 45°C 에서 E2 프레임 인버터에 필요한 최소 통풍량은 782 m3/h (460 cfm)입니다
주의
자세한 정보는
발주 정보
프레임 크기 D3: 176F1781
프레임 크기 D4: 176F1782
프레임 크기 E2: 176F1783
상단 및 하단 덮개 - Rittal 외함
. 키트는
IP00 인
. 축소된 냉각 성능에
.
.
3.3.4 상단 및 하단 덮개 설치
.
3
상단 및 하단 덮개는 프레임 크기 D3, D4 및 E2 에 설치할 수 있습니다. 이 키트는 뒤쪽 채널의 통풍(공기 흐름)이 인버터 뒤쪽을 통해 인버터의 하단
및 상단(인버터가 벽에 직접 장착되어 있거나 용접된 외함 내부에 장착된 경우, 인버터 하단으로는 흡기되고 인버터 상단으로 배기됨)과는 반대로 흡기
및 배기되도록 하는 데 사용하도록 설계되어 있습니다.
참고:
1. 인버터의 배기 경로에 외부 덕트 작업이 추가되는 경우, 인버터의 냉각 성능을 떨어뜨리는 배압이 추가적으로 발생합니다
맞게 인버터 용량을 감소시켜야 합니다. 우선 압력 변화를 계산한 다음 본 절의 초반부에 있는 용량 감소 표를 참조합니다.
2. 인버터의 뒤쪽 채널에 남아있지 않은 열 손실과 외함 내부에 설치된 기타 구성품에서 생성된 추가 손실을 제거하기 위해서는 외함에 도어 팬
이 필요합니다. 필요한 총 통풍량을 계산해야만 알맞은 팬을 선택할 수 있습니다
Therm 소프트웨어)를 제공합니다.
주파수 변환기가 외함 내에서 유일하게 열을 생성하는 구성품이라면 주변 온도 45°C 에서 D3 및 D4 프레임 인버터에 필요한 최소 통풍량은
3
391 m
/h (230 cfm)입니다. 주변 온도 45°C 에서 E2 프레임 인버터에 필요한 최소 통풍량은 782 m3/h (460 cfm)입니다.
주의
자세한 정보는
발주 정보
프레임 크기 D3 및 D4: 176F1862
프레임 크기 E2: 176F1861
상단 및 하단 덮개 전용 지침, 175R1106 을 참조하십시오
. 일부 외함 제조업체는 계산용 소프트웨어(예를 들어
.
. 축소된 냉각 성능에
, Rittal
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
41

3
3 설치방법
3.3.5 외부 설치/ Rittal 외함용 NEMA 3R 키트
VLT® Automation Drive FC 300
High Power 사용 설명서
본 절은 주파수 변환기 프레임 D3, D4 및 E2 에 사용할 수 있는 NEMA 3R 키트 설치에 관한 내용입니다
4 외함에 설치되어 있는 이 프레임의 IP00/ 섀시 버전에 사용하도록 설계되었으며 시험을 거쳤습니다. NEMA-3R 외함은 강우, 강설에 대한 보호 수준
을 제공하는 야외용 외함입니다. NEMA-4 외함은 기후 및 물호스에 대해 보다 우수한 보호 수준을 제공하는 야외용 외함입니다.
외함의 최소 깊이는 500mm (E2 프레임의 경우, 600mm)이며 키트는 600mm (E2 프레임의 경우, 800mm) 와이드형 외함에 사용하도록 설계되어 있
습니다. 외함의 너비를 늘릴 수는 있으나 그렇게 하기 위해서는 Rittal 하드웨어가 추가로 필요합니다. 설치 시 필요에 따라 최대 깊이 및 너비가 사용될
수 있습니다.
주의
NEMA 3R 키트 추가 시 D3 및 D4 프레임에 설치된 인버터의 전류 용량이
소할 필요가 없습니다.
주의
인버터의 뒤쪽 채널에 남아있지 않은 열 손실과 외함 내부에 설치된 기타 구성품에서 생성된 추가 손실을 제거하기 위해서는 외함에
도어 팬이 필요합니다. 필요한 총 통풍량을 계산해야만 알맞은 팬을 선택할 수 있습니다. 일부 외함 제조업체는 계산용 소프트웨어(예
를 들어, Rittal Therm 소프트웨어)를 제공합니다. VLT 가 외함 내에서 유일하게 열을 생성하는 구성품이라면 주변 온도 45
D3 및 D4 인버터에 필요한 최소 통풍량은 391 m
3
/h (460 cfm)입니다
m
발주 정보
프레임 크기 D3: 176F4600
프레임 크기 D4: 176F4601
프레임 크기 E2: 176F1852
3
/h (230 cfm)입니다. 주변 온도 45oC 에서 E2 인버터에 필요한 최소 통풍량은 782
.
3% 감소됩니다
. 이 키트는
Rittal TS8 NEMA 3R 또는 NEMA
. E2 프레임에 설치된 인버터는 용량을 감
o
C에서
42
주의
자세한 정보는 설명서
175R5922
를 참조하십시오
.
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
VLT® Automation Drive FC 300
High Power 사용 설명서
3.3.6 외부 설치/ 산업용 외함 NEMA 3R 키트
3 설치방법
이 키트는 프레임 크기 D3, D4 및 E2 에 사용할 수 있습니다.
IP00/ 섀시 인버터에 사용하도록 설계되었으며 시험을 거쳤습니다. NEMA-3R 외함은 오염, 강우, 추위에 강한 야외용 외함입니다. NEMA-4 외함은
오염 및 물에 강한 외함입니다.
이 키트는 시험을 거쳤으며 UL 환경 등급 Type-3R 을 준수합니다
참고: NEMA- 3R 에 설치 시 D3 및 D4 프레임 인버터의 전류 용량은
킬 필요가 없습니다.
주의
자세한 정보는
발주 정보
프레임 크기 D3: 176F0296
프레임 크기 D4: 176F0295
프레임 크기 E2: 176F0298
외부 설치/ 산업용 외함 NEMA 3R 키트 지침, 175R1068
이 키트는 환경 등급이
.
3% 감소됩니다
NEMA-3R 또는 NEMA-4 이고 용접된 상자 구조로 된 외함의
. NEMA-3R 외함에 설치 시 E2 프레임 인버터의 용량은 감소시
을 참조하십시오
.
3
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
43

3 설치방법
3.3.7 IP00s D3 및 D4 단자 덮개 설치
VLT® Automation Drive FC 300
High Power 사용 설명서
3
단자 덮개는 프레임 크기 D3 및 D4(IP00)에 설치할 수 있습니다
주의
자세한 정보는
발주 정보
프레임 크기 D3/D4: 176F1779
단자 덮개 설치
지침,
175R1108
.
을 참조하십시오.
3.3.8 IP00s D3, D4 및 E2 케이블 클램프 브래킷 설치
모터 케이블 클램프 브래킷은 프레임 크기 D3 및 D4(IP00)에 설치할 수 있습니다.
주의
자세한 정보는
발주 정보
프레임 크기 D3: 176F1774
프레임 크기 D4: 176F1746
프레임 크기 E2: 176F1745
케이블 클램프 브래킷 키트
지침,
175R1109
를 참조하십시오.
3.3.9 페데스탈 설치
본 절은 주파수 변환기 프레임 D1 및 D2 에 페데스탈 유닛을 설치하는
방법에 관해 설명합니다
을(를) 바닥에 설치 할 수 있 게 해줍 니다
성 요소에 공기가 유입되도록 통풍구가 있습니다
도어 팬을 통해 주파수 변환기의 제어 구성 요소에 충분한 냉각 공기를
제공하고 IP21/NEMA 1 또는 IP54/NEMA 12 수준의 외함 보호를 유지
하기 위해서는 주파수 변환기 글랜드 플레이트를 반드시 설치해야 합니
.
다
. 이는 높이가
200mm 인 페데스탈로서
. 페데스탈의 전면은 각종 전원 구
.
, 프레임
그림 3.36
: 페데스탈 위의 인버터
프레임 D1 및 D2 에 모두 맞는 페데스탈은 한 가지가 있습니다. 해당 발주 번호는 176F1827 입니다. 페데스탈은 E1 프레임의 표준 사양입니다.
44
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.

VLT® Automation Drive FC 300
High Power 사용 설명서
3 설치방법
3
그림 3.37: 페데스탈에 인버터 장착
주의
자세한 정보는
페데스탈 키트 지침 설명서, 175R5642
.
를 참조하십시오
.
3.3.10 주파수 변환기를 위한 주전원 쉴드 설치
본 절은 주파수 변환기 D1, D2 및 E1 프레임에 대한 주전원 쉴드 설치에 관한 내용입니다. 금속 덮개가 표준 사양으로 포함되어 있으므로 IP00/ 섀시
버전에 설치하는 것은 불가능합니다
발주 번호
프레임 D1 및 D2: 176F0799
프레임 E1: 176F1851
:
주의
자세한 정보는 지침서
. 이 쉴드는
,
175R5923
VBG-4 요구사항을 충족합니다
을 참조하십시오
.
.
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
45

3 설치방법
3.3.11 입력 플레이트 옵션의 설치
VLT® Automation Drive FC 300
High Power 사용 설명서
3
본 절은 모든 D 및 E 프레임의 주파수 변환기에 사용할 수 있는 입력 옵션 키트의 현장 설치에 관한 내용입니다
입력 플레이트에서 RFI 필터를 제거하지 마십시오. RFI 필터를 입력 플레이트에서 제거하면 RFI 필터가 손상될 수 있습니다
주의
RFI 필터를 사용할 수 있는 경우, 입력 플레이트 조합 방식 및 RFI 필터 교체 가능성에 따라 2가지 유형의 RFI 필터가 있습니다.
한 경우에 현장 설치가 가능한 키트는 모든 전압에 대해 동일합니다
380 - 480 V
380 - 500 V
D1 모든 D1 전력 용량 176F8442 176F8450 176F8444 176F8448 176F8446
D2 모든 D2 전력 용량 176F8443 176F8441 176F8445 176F8449 176F8447
E1 FC 102/ : 315kW
FC 302: 250kW
FC 102/ : 355 - 450kW
FC 302: 315 - 400kW
525 - 690 V 퓨즈 차단 퓨즈 RFI RFI 퓨즈 RFI 차단 퓨즈
D1 FC 102/ : 45-90kW
FC 302: 37-75kW
FC 102/ : 110-160kW
FC 302: 90-132kW
D2 모든 D2 전력 용량 175L8827 175L8826 175L8825 NA NA
E1 FC 102/ : 450-500kW
FC 302: 355-400kW
FC 102/ : 560-630kW
FC 302: 500-560kW
퓨즈 차단 퓨즈 RFI RFI 퓨즈 RFI 차단 퓨즈
176F0253 176F0255 176F0257 176F0258 176F0260
176F0254 176F0256 176F0257 176F0259 176F0262
175L8829 175L8828 175L8777 NA NA
175L8442 175L8445 175L8777 NA NA
176F0253 176F0255 NA NA NA
176F0254 176F0258 NA NA NA
.
.
.
특정
주의
자세한 정보는 지침서, 175R5795 를 참조하십시오.
3.3.12 D1, D2, D3 및 D4 부하 공유 옵션 설치
부하 공유 옵션은 프레임 크기 D1, D2, D3 및 D4 에 설치할 수 있습니다.
주의
자세한 정보는
발주 정보
프레임 크기 D1/D3: 176F8456
프레임 크기 D2/D4: 176F8455
부하 공유 단자 키트 지침, 175R5637
을 참조하십시오
.
46
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.

VLT® Automation Drive FC 300
High Power 사용 설명서
3.4.1 프레임 크기 F 패널 옵션
공간 히터 및 서모스탯
프레임 크기 F 외함 주파수 변환기의 캐비닛 내부에 장착되고 자동 서모스탯을 통해 조절되는 공간 히터는 외함 내부의 습도를 조절하고 습한 환경에서
인버터 구성 요소의 수명을 연장시키는 데 도움을 줍니다
전원 콘센트가 있는 캐비닛 조명
프레임 크기 F 주파수 변환기의 캐비닛 내부에 장착된 조명은 서비스 및 유지보수하는 동안 가시성을 증대시킵니다
과 같은 2가지 전압의 전동 공구 또는 기타 장치의 임시 전원 공급장치로 활용할 수 있습니다
• 230V, 50Hz, 2.5A, CE/ENEC
• 120V, 60Hz, 5A, UL/cUL
트랜스포머 탭 셋업
캐비닛 조명 겸용 전원 콘센트 및
습니다. 380-480/ 500V380-480V 인버터는 초기에 525V 탭으로 설정되고 525-690V 인버터는 690V 탭으로 설정되어 전원이 인가되기 전에 탭이
변경되지 않는 경우, 2차 장비에 과전압이 발생하지 않도록 합니다. 정류기 캐비닛 내부에 있는 단자 T1 의 올바른 탭 설정은 아래 표를 참조하십시오.
인버터 내부의 위치에 대해서는
입력 전압 범위 선택할 탭
380V-440V 400V
441V-490V 460V
491V-550V 525V
551V-625V 575V
626V-660V 660V
661V-690V 690V
/또는 공간 히터 및 서모스탯이 트랜스포머
전원 연결
절의 정류기 그림을 참조하십시오
. 서모스탯 초기 설정값에 따라 히터는 10
.
T1 에 설치되어 있는 경우에는 올바른 입력 전압을 위해 태핑할 필요가 있
.
°C (50°F)에서 켜지고
15.6
°C (60°F)에서 꺼집니다
. 전원 콘센트가 포함된 조명은 다음
3 설치방법
.
3
NAMUR 단자
NAMUR 는 독일 내 공정 업계, 1차 화학 및 의약품 업계의 자동 기술 사용자들이 모여서 만든 국제 협회입니다. 이 옵션을 선택하면 인버터 입력 및 출
력 단자의 NAMUR 표준 규격에 맞게 단자를 구성 및 표시할 수 있습니다
필요합니다
잔류 전류 장치(RCD)
코어 밸런스 기법을 사용하여 접지된 시스템 및 고저항으로 접지된 시스템(IEC 용어로 TN 및 TT 시스템)의 접지 결함 전류를 감시합니다
전 경고(주 알람 설정포인트의
외부 "윈도우형" 전류 트랜스포머(고객이 직접 공급 및 설치
절연 저항 감시장치(IRM)
접지되지 않은 시스템(IEC 용어로 IT 시스템)의 시스템 위상 도체와 접지 간 절연 저항을 감시합니다. 여기에는 저항 사전 경고 및 절연 수준에 대한 주
알람 설정포인트가 있습니다
의 접지되지 않은(IT) 시스템에 연결할 수 있습니다
IEC 응급 정지(Pilz 안전 릴레이 포함
외함 전면에 장착된 리던던트 4선 응급 정지 푸시 버튼과 옵션 캐비닛 내부에 있는 인버터의 안전 정지 회로와 주전원 도체에 연결된 부분을 감시하는
Pilz 릴레이가 포함되어 있습니다.
수동 모터 스타터
대형 모터에 주로 필요한 전기 송풍기를 위해
됩니다. 전원은 각 모터 스타터 이전에 퓨즈 처리되어 있으며 인버터에 입력되는 전원이 꺼질 때 전원이 꺼집니다
나가 30A 인 경우에는 퓨즈 보호 회로가 주문됩니다
장치의 기능은 다음과 같습니다
.
50%)와 주 알람 설정포인트가 있습니다. 각 설정포인트와 연결된 알람 릴레이는
)가 필요합니다.
• 인버터의 안전 정지 회로에 내장
• IEC 60755 Type B 장치는 교류, 펄스 교류 및 순 교류 접지 결함 전류를 감시합니다
• 접지 결함 전류 수준
• 메모리 오류
• 테스트
• 인버터의 안전 정지 회로에 내장
• 절연 저항의 저항값을 표시하는 LCD 표시창
• 메모리 오류
• 정보, 테스트 및 리셋 버튼
/ 리셋 버튼
(설정포인트의 10-100%)을 나타내는
. 각 설정포인트와 연결된 알람 릴레이는
.
)
3상 전원을 제공합니다. 스타터용 전원은 제공된 도체, 회로 차단기 또는 차단 스위치의 부하 측에서 제공
). 인버터의 안전 정지 회로에 내장.
.
. 여기에는
LED 막대형 그래프 표시기
SPDT 알람 릴레이이며 외부용입니다
MCB 112 PTC 써미스터 카드와 MCB 113 확장형 릴레이 카드가
.
. 여기에는 사
SPDT 알람 릴레이이며 외부용입니다
. 참고: 단 하나의 절연 저항 모니터만 각각
. 최대 2개의 스타터가 허용됩니다(하
.
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
47
3
VLT® Automation Drive FC 300
3 설치방법
• 운전 스위치(on/off)
• 단락 및 과부하 보호
• 수동 리셋 기능
30암페어, 퓨즈 보호 단자
• 고객의 보조 장비의 전원 공급을 위해 입력되는 주전원 전압과 일치하는 3상 전원
• 2개의 수동 모터 스타터가 선택된 경우에는 사용할 수 없습니다
• 인버터에 입력되는 전원이 꺼질 때 단자가 꺼집니다.
• 퓨즈 보호 단자용 전원은 제공된 도체, 회로 차단기 또는 차단 스위치의 부하 측에서 제공됩니다
24 VDC 전원 공급
• 5암페어, 120 W, 24 VDC
• 출력 과전류, 과부하, 단락 및 과열로부터 보호
• 센서, PLC I/O, 도체, 온도 탐침, 표시등 및/또는 기타 전자 장치와 같이 고객이 제공한 부속 장치의 전원 공급용
• 진단에는 건식 직류 가능 접점, 녹색 직류 가능 LED 및 적색 과부하 LED 가 포함되어 있습니다.
외부 온도 감시
모터 와인딩 및/또는 베어링과 같이 외부 시스템 구성 요소의 온도를 감시하도록 설계되어 있습니다
력 모듈이 포함되어 있습니다. 모듈 10개가 모두 인버터의 안전 정지 회로에 내장되어 있으며 필드버스 네트워크를 통해 감시할 수 있습니다(별도의 모
듈/버스통신 커플러를 구매해야 합니다
범용 입력
신호 유형:
추가 기능:
정밀 써미스터 입력
특징:
(8개)
•RTD 입력(Pt100 포함), 3선 또는
• 서모커플(Thermocouple)
• 아날로그 전류 또는 아날로그 전압
• 범용 출력 1개, 아날로그 전압 또는 아날로그 전류를 위해 구성 가능
• 2개의 출력 릴레이(NO)
• 2줄 LC 디스플레이 및 LED 진단
• 센서 리드선 차단, 단락 및 잘못된 극성 감지
• 인터페이스 셋업 소프트웨어
(2개)
• 연속해서 최대 6개의 써미스터를 감시할 수 있는 각 모듈
• 선 파손 또는 센서 리드선 단락 등 결함 진단
•ATEX/UL/CSA 인증
• 필요한 경우, PTC 써미스터 옵션 카드 MCB 112 에 의해 세 번째 써미스터 입력이 제공될 수 있습니다
(테스트 기능 포함)
.
.
. 8개의 범용 입력 모듈과 2개의 정밀 써미스터 입
).
4선
.
High Power 사용 설명서
48
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.

VLT® Automation Drive FC 300
High Power 사용 설명서
3.5 전기적인 설치
3.5.1 전원 연결
배선 및 퓨즈 선정
주의
케이블 일반 사항
모든 배선은 케이블 단면적과 주위 온도에 관한 국제 및 국내 관련 규정을 준수해야 합니다. UL 어플리케이션에는
필요합니다
. 75°
90°
C 및
C 구리 도체는 주파수 변환기가 열적으로 수용 가능하므로 비 UL 어플리케이션에 사용할 수 있습니다
75°
C 구리 도체가
3 설치방법
3
.
전원 케이블은 아래와 같이 연결됩니다
.
오
주파수 변환기의 보호를 위해서는 반드시 권장 퓨즈를 사용하거나 유닛에 내장된 퓨즈가 있어야 합니다
니다. 국내 규정에 따라 퓨즈를 올바르게 선정해야 합니다
주전원 스위치가 제품 내에 포함되어 있는 경우, 주전원 스위치는 주전원 연결부에 장착됩니다
주의
모터 케이블은 반드시 차폐/보호되어야 합니다. 비차폐/비보호 케이블을 사용하면 일부 EMC 규정을 준수하지 않을 수 있습니다. 차
폐/보호된 모터 케이블을 사용하여 EMC 방사 사양을 준수하십시오. 자세한 정보는 설계 지침서의
. 케이블 단면적 치수는 전류 등급 및 국내 법규에 따라 선정해야 합니다. 자세한 내용은
.
.
사양 편
을 참조하십시
. 권장 퓨즈는 퓨즈 편의 표에서 확인할 수 있습
EMC 사양
을 참조하십시오.
모터 케이블의 단면적과 길이를 올바르게 선정하려면
케이블 차폐:
차폐선 끝부분을 (돼지꼬리 모양으로) 꼬아서 설치하는 것을 절대 피하십시오. 이는 높은 주파수 대역에서 차폐 효과를 감소시킵니다. 모터 절연체 또
는 모터 컨택터를 설치하기 위해 차폐선을 끊을 필요가 있을 때에도 차폐선이 가능한 가장 낮은 HF 임피던스로 계속 연결되어 있도록 해야 합니다.
모터 케이블의 차폐선을 주파수 변환기의 디커플링 플레이트 및 모터의 금속 외함에 모두 연결하십시오.
이 때, 차폐선을 가능한 가장 넓은 면적(케이블 클램프)에 연결하십시오. 주파수 변환기 내에 제공된 설치 도구를 사용하여 이와 같이 연결할 수 있습니
다.
케이블 길이 및 단면적
주파수 변환기는 주어진 케이블 길이로 EMC 테스트를 거쳤습니다. 모터 케이블의 길이를 가능한 짧게 하여 노이즈 수준과 누설 전류량을 최소화하십
.
시오
스위칭 주파수:
모터의 청각적 소음을 줄이기 위해 주파수 변환기를 사인파 필터와 함께 사용하는 경우 파라미터 14-01
를 설정해야 합니다.
:
일반 사양
편을 참조하십시오
.
스위칭 주파수
의 지침에 따라 스위칭 주파수
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
49
3 설치방법
VLT® Automation Drive FC 300
High Power 사용 설명서
3
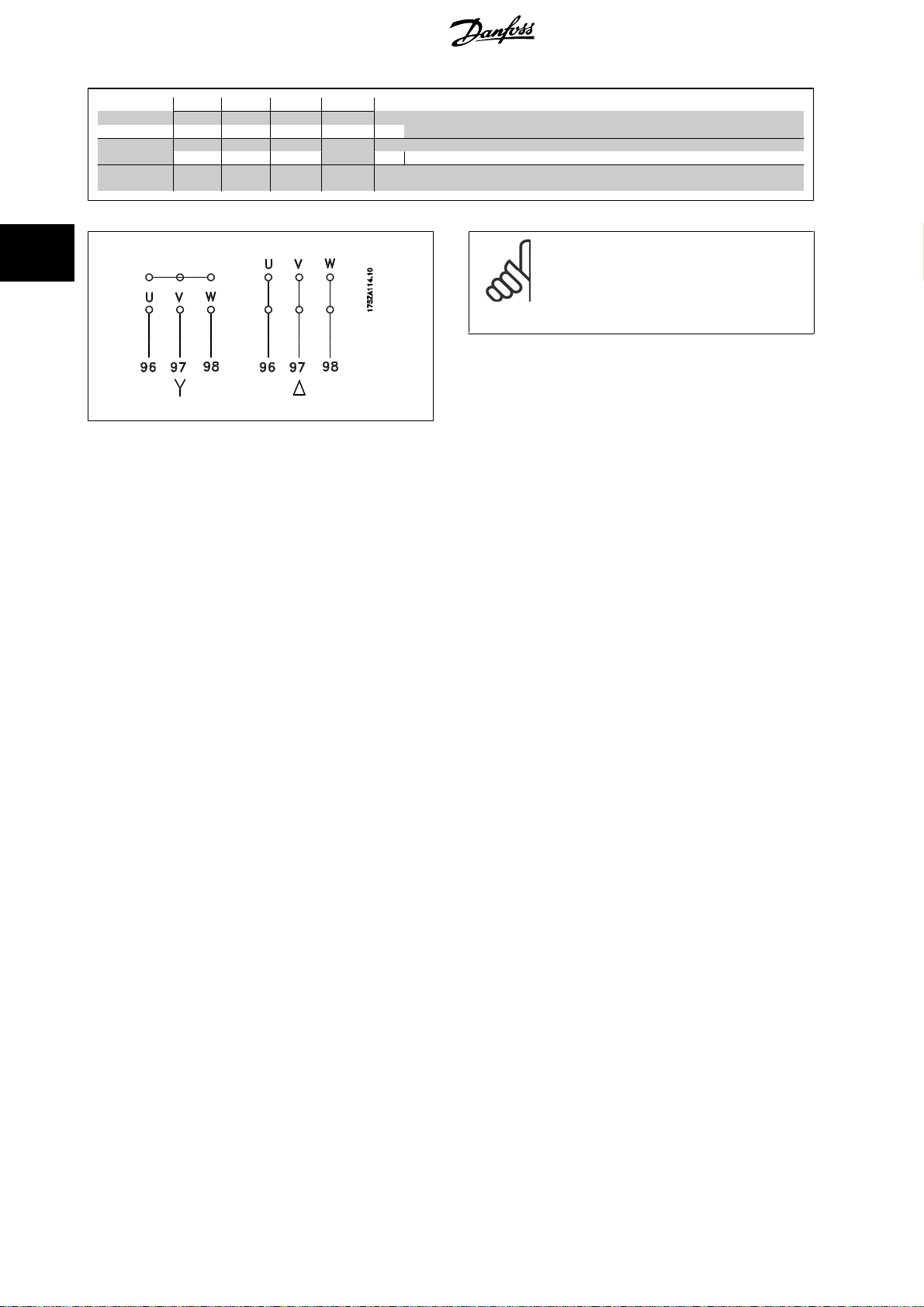
단자 번호 96 97 98 99
U1 V1 W1
U1 V1 W1
1)
접지 보호 연결
U V W
W2 U2 V2 6선식
PE
PE
PE
1)
1)
1)
모터 전압 (주전원 전압의 0-100%)
3선식
델타 연결형
스타 연결형 U2, V2, W2
U2, V2 및 W2(각기 서로 연결).
주의
주파수 변환기와 같이 전압공급장치 작동에 적합한 상
간 절연지 또는 기타 절연 보강재가 없는 모터인 경우
에는 주파수 변환기의 출력 단에 사인파 필터를 설치
하십시오
.
50
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.

VLT® Automation Drive FC 300
High Power 사용 설명서
3 설치방법
3
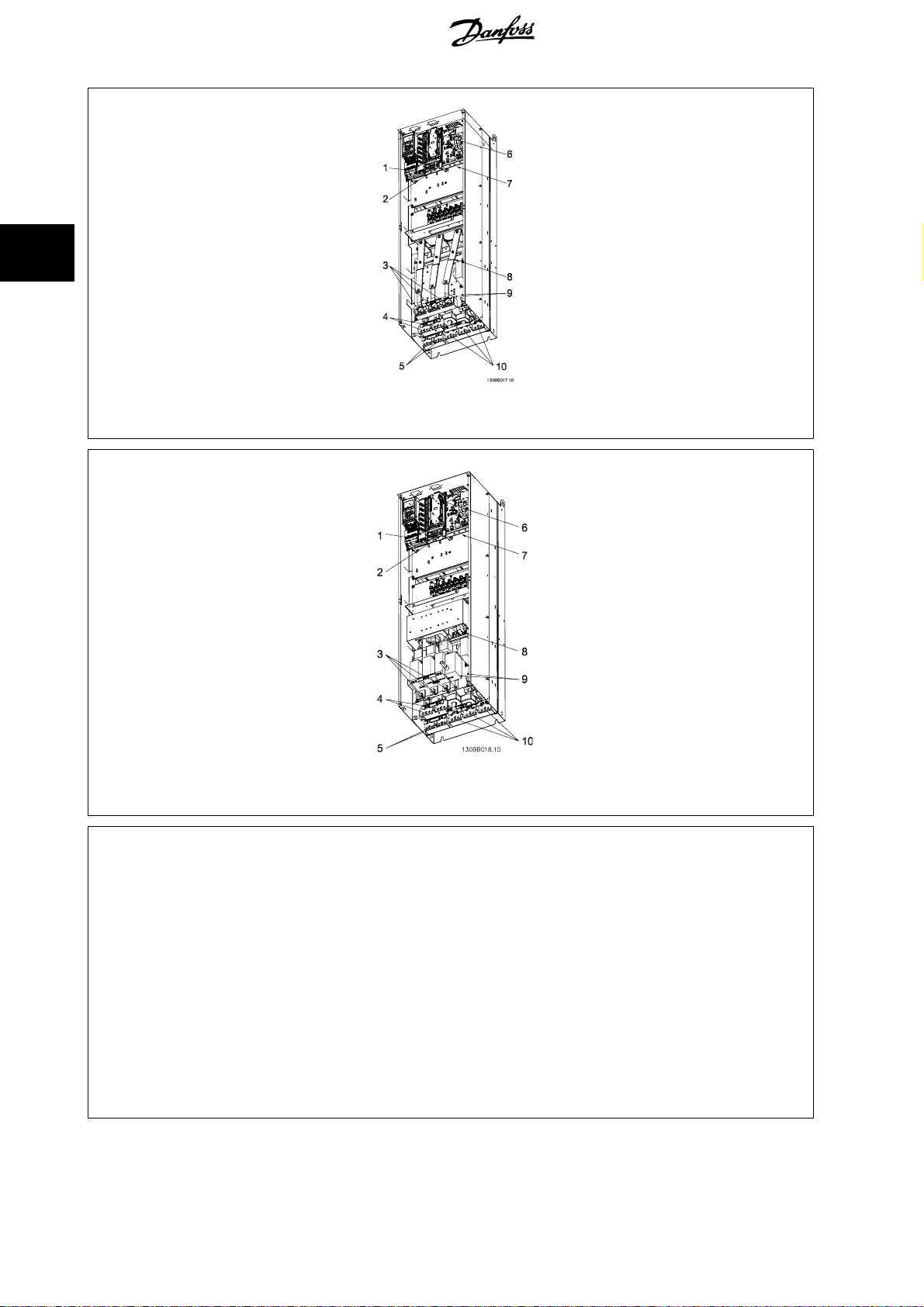
그림 3.38
그림 3.39: 소형 IP 21 (NEMA 1) 및 IP 54 (NEMA 12) (차단기, 퓨즈 및 RFI 필터 포함), 프레임 크기 D2
1) 보조 릴레이 5) 제동 장치
010203 -R+R
040506 8182
2) 온도 스위치 6) SMPS 퓨즈(부품 번호는 퓨즈 표 참조)
106 104 105 7) 보조 팬
3) 라인 100 101 102 103
R S T L1 L2 L1 L2
91 92 93 8) 팬 퓨즈(부품 번호는 퓨즈 표 참조)
L1 L2 L3 9) 주전원 접지
4) 부하 공유 10) 모터
-DC+DC U VW
88 89 96 97 98
T1 T2 T3
: 소형
IP 21 (NEMA 1) 및 IP 54 (NEMA 12), 프레임 크기 D1
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
51
3
3 설치방법
VLT® Automation Drive FC 300
High Power 사용 설명서
그림 3.40
그림 3.41
1) 보조 릴레이 5) 제동 장치
010203 -R+R
040506 8182
2) 온도 스위치 6) SMPS 퓨즈(부품 번호는 퓨즈 표 참조)
106 104 105 7) 보조 팬
3) 라인 100 101 102 103
R S T L1 L2 L1 L2
91 92 93 8) 팬 퓨즈(부품 번호는 퓨즈 표 참조)
L1 L2 L3 9) 주전원 접지
: 소형
IP 00 (섀시), 프레임 크기 D3
: 소형
IP 00 (섀시) (차단기
, 퓨즈 및
RFI 필터 포함),
프레임 크기
D4
4) 부하 공유 10) 모터
-DC+DC U VW
88 89 96 97 98
T1 T2 T3
52
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.

VLT® Automation Drive FC 300
High Power 사용 설명서
그림 3.42: IP00, 프레임 크기 D 의 접지 단자 위치
3 설치방법
3
그림 3 .43: I P 21 ( N EMA t y pe 1) 및 IP54 ( NEMA t ype 1 2 )
의 접지 단자 위치
주의
그림의 예는 D2 와 D4 입니다. D1 과 D3 는 그와 동등합니다.
그림 3.44: 소형 IP 21 (NEMA 1) 및 IP 54 (NEMA 12) 프레임 크기 E1
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
53

3
3 설치방법
VLT® Automation Drive FC 300
High Power 사용 설명서
그림 3.45
1) 보조 릴레이 5) 부하 공유
010203 -DC+DC
040506 8889
2) 온도 스위치 6) SMPS 퓨즈(부품 번호는 퓨즈 표 참조)
106 104 105 7) 팬 퓨즈(부품 번호는 퓨즈 표 참조)
3) 라인 8) 보조 팬
R S T 100 101 102 103
91 92 93 L1 L2L1L2
L1 L2 L3 9) 주전원 접지
4) 제동 장치 10) 모터
-R+R UVW
81 82 96 97 98
T1 T2 T3
: 소형
IP 00 (섀시) (차단기
, 퓨즈 및
RFI 필터 포함),
프레임 크기
E2
그림 3.46: IP00, 프레임 크기 E 의 접지 단자 위치
54
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
VLT® Automation Drive FC 300
High Power 사용 설명서
3 설치방법
3
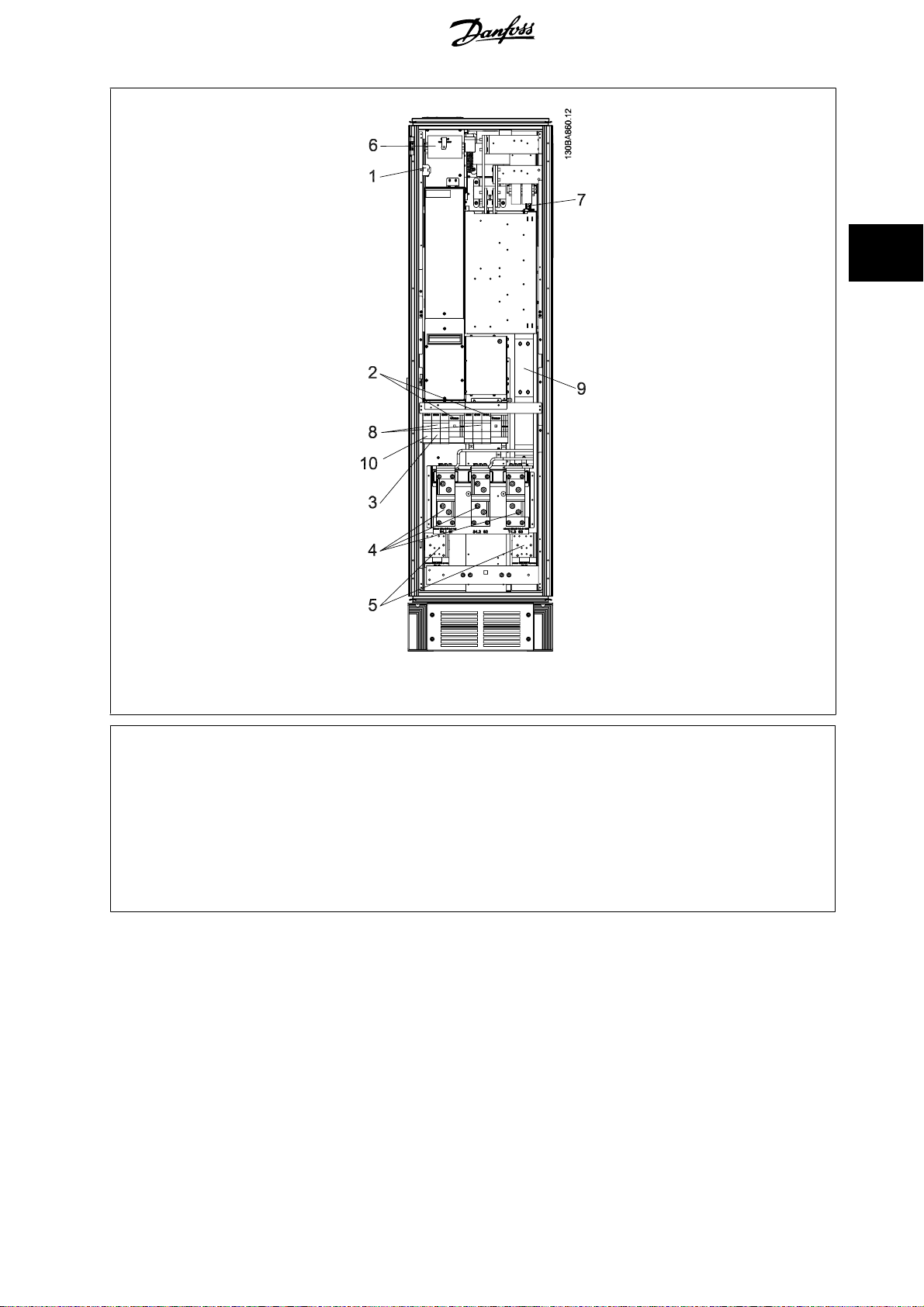
그림 3.47: 정류기 캐비닛
1) 24V DC, 5A 5) 부하 공유
T1 출력 탭 -DC +DC
온도 스위치 88 89
106 104 105 6) 제어 변압기 퓨즈 (2개 또는 4개). 부품 번호는 퓨즈 표 참조
2) 수동 모터 스타터 7) SMPS 퓨즈. 부품 번호는 퓨즈 표 참조
3) 30A 퓨즈 보호 전원 단자 8) 수동 모터 제어기 퓨즈 (3개 또는 6개). 부품 번호는 퓨즈 표 참조
4) 라인 9) 라인 퓨즈, F1 및 F2 프레임 (3개). 부품 번호는 퓨즈 표 참조
R S T 10) 30A 퓨즈 보호 전원 퓨즈
L1L2L3
, 프레임 크기
F1, F2, F3 및 F4
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
55
3
3 설치방법
VLT® Automation Drive FC 300
High Power 사용 설명서
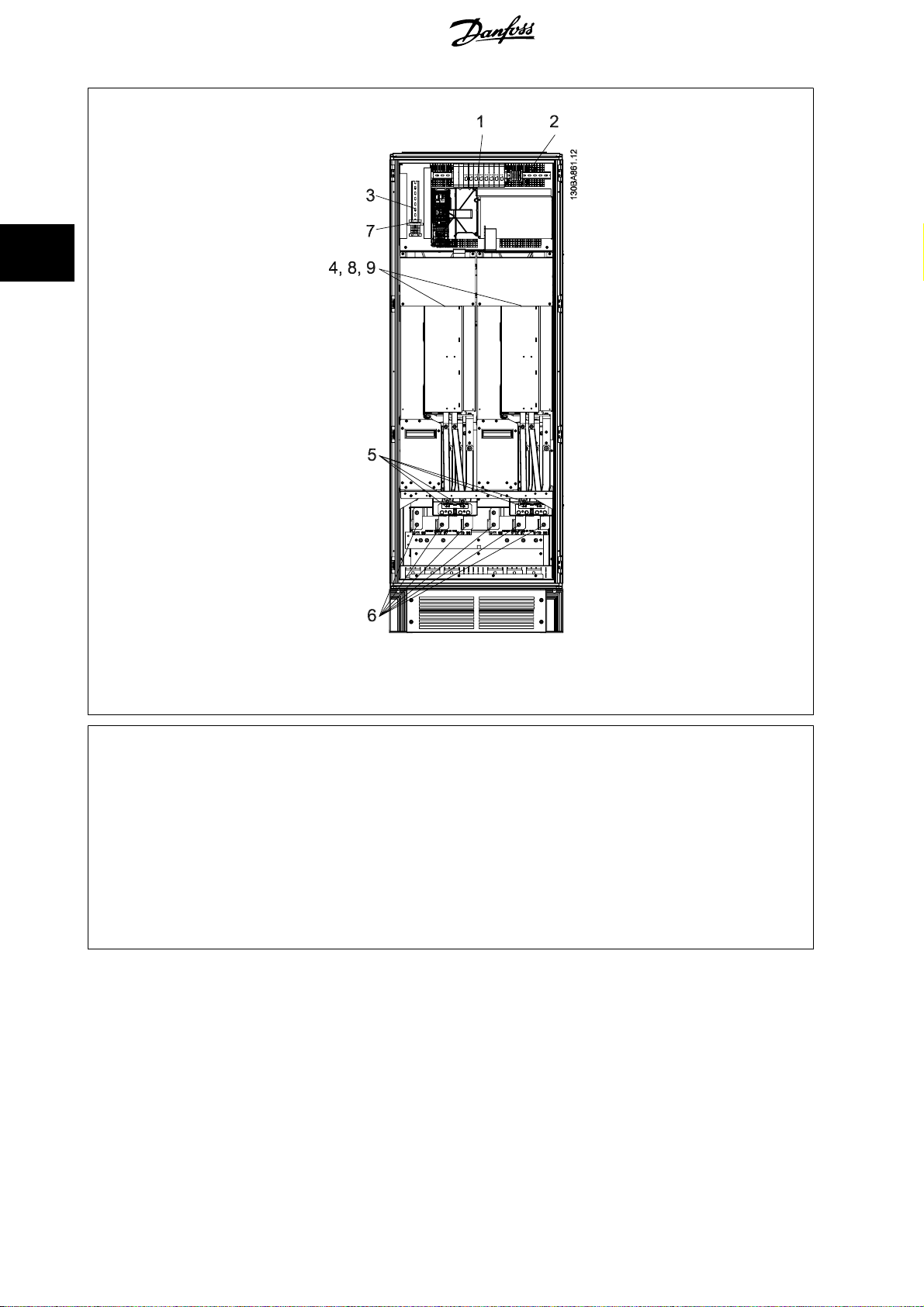
그림 3.48: 인버터 캐비닛
1) 외부 온도 감시 6) 모터
2) 보조 릴레이 U V W
010203 96 9798
040506 T1 T2T3
3) NAMUR 7) NAMUR 퓨즈. 부품 번호는 퓨즈 표 참조
4) 보조 팬 8) 팬 퓨즈. 부품 번호는 퓨즈 표 참조
100 101 102 103 9) SMPS 퓨즈. 부품 번호는 퓨즈 표 참조
L1L2L1L2
5) 제동 장치
-R+R
8182
, 프레임 크기
F1 및 F3
56
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.

VLT® Automation Drive FC 300
High Power 사용 설명서
3 설치방법
3
그림 3.49: 인버터 캐비닛
1) 외부 온도 감시 6) 모터
2) 보조 릴레이 U V W
010203 96 9798
040506 T1 T2T3
3) NAMUR 7) NAMUR 퓨즈. 부품 번호는 퓨즈 표 참조
4) 보조 팬 8) 팬 퓨즈. 부품 번호는 퓨즈 표 참조
100 101 102 103 9) SMPS 퓨즈. 부품 번호는 퓨즈 표 참조
L1L2L1L2
5) 제동 장치
-R+R
8182
, 프레임 크기
F2 및 F4
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
57

3
3 설치방법
VLT® Automation Drive FC 300
High Power 사용 설명서
그림 3.50: 옵션 캐비닛
1) Pilz 릴레이 단자 4) PILS 릴레이가 있는 안전 릴레이 코일 퓨즈
2) RCD 또는 IRM 단자 부품 번호는 퓨즈 표 참조
3) 주전원 5) 라인 퓨즈, F3 및 F4 (3 개)
R S T 부품 번호는 퓨즈 표 참조
91 92 93 6) 콘택터 릴레이 코일 (230V AC). N/C 및 N/O 보조 접점
L1 L2 L3 7) 회로 차단기 션트 트립 제어 단자 (230V AC 또는 230V DC)
, 프레임 크기
F3 및 F4
58
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.

VLT® Automation Drive FC 300
High Power 사용 설명서
3.5.2 접지
3 설치방법
주파수 변환기 설치 시 다음과 같은 기본 사항을 고려하여 전자기 호환성(EMC)을 확보하십시오
• 안전 접지: 주파수 변환기는 누설 전류량이 많기 때문에 알맞은 방법으로 접지해야 안전하다는 점에 유의하십시오
시오.
• 고주파 접지: 접지선을 가능한 짧게 연결하십시오
가장 낮은 도체 임피던스에서 각기 다른 접지 시스템을 연결하십시오. 도체를 최대한 짧게 연결하고 최대한 넓게 표면적을 사용하면 도체 임피던스가
최대한 낮아집니다.
가장 낮은 HF 임피던스를 사용하여 외함 백플레이트에 각기 다른 장치의 금속 외함이 장착됩니다
않게 할 수 있으며 장치 간 연결에 사용될 수 있는 연결 케이블에 무선 간섭 전류가 흐르는 위험을 피할 수 있습니다. 또한 이렇게 하면 무선 간섭이 줄
어들 것입니다.
낮은 HF 임피던스를 얻으려면 장치의 고정 볼트를 백플레이트에 대한 HF 연결로 사용하십시오. 고정 볼트 주변의 절연용 페인트 또는 그와 유사한 물
질을 제거할 필요가 있습니다.
.
.
. 국내 안전 규정을 적용하십
. 이렇게 하면 개별 장치가 서로 다른
HF 전압을 갖지
3.5.3 추가 보호(RCD)
국내 안전 규정에 적용하는 경우에는 ELCB 릴레이, 다중 보호 접지 또는 일반 접지를 추가 보호용으로 사용할 수 있습니다.
접지 오류가 발생하면 직류 구성 요소로 인해 잘못된 전류가 발생할 수 있습니다
ELCB 릴레이를 사용하는 경우, 반드시 국내 규정을 준수해야 합니다. 릴레이는 브리지 정류기가 장착된
가 시 순간 방전에 적합해야 합니다.
설계 지침서의
특수 조건
편 또한 참조하십시오.
.
3상 장비를 보호하는 데 적합해야 하며 전원인
3
3.5.4 RFI 스위치
접지로부터 절연된 주전원 공급장치
주파수 변환기가 절연된 주전원 소스(IT 주전원, 부동형 델타 또는 접지형 델타
14-50
RFI 필터
우, 파라미터
성능이 필요한 경우에는 모터가 병렬로 연결되어 있거나 모터 케이블 길이가 25m 이상이어야 하며 파라미터
것이 좋습니다
1)
프레임 크기 D, E 및 F 의 525-600/690V 주파수 변환기에는 적용되지 않습니다
[꺼짐]에서 섀시와 매개회로 간의 내부 RFI 콘덴서(필터 콘덴서)를 차단하여 매개회로의 손상을 방지하고 (IEC 61800-3 에 따라) 접지 용량형 전류를
줄입니다
적용 지침
요합니다
.
.
IT 주전원의 VLT, MN.90.CX.02
.
을 통해 RFI 스위치를 꺼짐(OFF)1)으로 설정하는 것이 좋습니다
또한 참조하십시오
. 전력전자기기(
) 또는 접지된 레그가 있는
. 자세한 내용은
.
IEC 61557-8)에 함께 사용할 수 있는 절연 모니터를 사용하는 것이 중
TT/TN-S 주전원에서 전원을 공급 받는 경
IEC 364-3 을 참조하십시오
14-50
RFI 필터
을 [켜짐
. 최적의
EMC
]으로 설정하는
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
59

3
VLT® Automation Drive FC 300
3 설치방법
3.5.5 토크
모든 전기 연결부를 조일 때는 올바른 토오크(조임 강도)로 조이는 것이
매우 중요합니다. 토오크가 너무 낮거나 높으면 전기 연결이 나빠질 수
있습니다. 토오크 측정용 렌치를 사용하여 정확한 토오크를 확인하십시
오.
그림 3.51: 볼트를 조일 때는 반드시 토오크 측정용 렌치를
사용하십시오
프레임 크기 단자 토오크 볼트 크기
D1, D2, D3 및 D4 주전원
모터
부하 공유
제동 장치
E1 및 E2 주전원
모터
부하 공유
제동 장치 9.5 Nm (84 in-lbs) M8
F1, F2, F3 및 F4 주전원
모터
부하 공유
제동 장치
Regen
19 Nm (168 in-lbs) M10
9.5 Nm (84 in-lbs) M8
19 NM (168 in-lbs) M10
19 Nm (168 in-lbs) M10
19 Nm (168 in-lbs)
9.5 Nm (84 in-lbs)
19 Nm (168 in-lbs)
.
M10
M8
M10
High Power 사용 설명서
표 3.4: 단자의 토오크
3.5.6 차폐된 케이블
EMC 고방지 및 저방사를 준수할 수 있도록 차폐 및 보호된 케이블을 올바른 방법으로 연결하는 것이 중요합니다
케이블 글랜드나 클램프를 사용하여 연결할 수 있습니다
• EMC 케이블 글랜드: 일반적으로 사용되는 케이블 글랜드는 최적의 EMC 연결에 사용할 수 있습니다.
• EMC 케이블 클램프: 연결을 용이하게 하는 클램프는 주파수 변환기와 함께 제공됩니다.
.
.
60
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.

VLT® Automation Drive FC 300
High Power 사용 설명서
3.5.7 모터 케이블
3 설치방법
모터는 반드시 단자 U/T1/96, V/T2/97, W/T3/98 에 연결해야 하고 접지는 단자 99에 연결해야 합니다
변환기 유닛과 함께 사용할 수 있습니다. 공장 출고 시 설정은 다음과 같이 주파수 변환기 출력이 연결된 시계 방향 회전입니다
4-10
모터 속도 방향
기능
접지
의 설정을 변경하여 모터 회전 방향을 변경할 수 있습니다
단자 번호
96, 97, 98, 99 주전원 U/T1, V/T2, W/T3
• U 상에 연결된 단자 U/T1/96
• V 상에 연결된 단자 V/T2/97
• W 상에 연결된 단자 W/T3/98
모터 케이블의 2상을 전환하거나 파라미터
파라미터 1-28
모터 회전 점검
을(를) 사용하여 표시창에 표시된 단계에 따라 모터 회전 검사를 실시할 수 있습니다.
. 모든 유형의 3상 비동기 표준 모터는 주파수
.
.
3
F 프레임 요구사항
F1/F3 요구사항: 두 인버터 모듈 단자에 연결된 와이어 개수와 짝을 이룰 수 있도록 하기 위해 모터 위상 케이블의 개수는 반드시 2의 배수 즉, 2, 4, 6
또는 8(케이블 1개는 허용되지 않음)이어야 합니다. 인버터 모듈 단자와 위상의 첫 번째 공통 지점 간 10% 이내의 연결 길이를 동일하게 할 수 있는 케
이블이 필요합니다. 권장되는 공통 지점은 모터 단자입니다.
F2/F4 요구사항: 각 인버터 모듈 단자에 연결된 와이어 개수와 짝을 이룰 수 있도록 하기 위해 모터 위상 케이블 개수는 반드시
는 12(케이블 2개는 허용되지 않음)이어야 합니다. 인버터 모듈 단자와 위상의 첫 번째 공통 지점 간 10% 이내의 연결 길이를 동일하게 할 수 있는 와
이어가 필요합니다. 권장되는 공통 지점은 모터 단자입니다
출력 정션 박스 요구사항: 각 인버터 모듈과 정션 박스의 공통 단자 간의 길이
주의
개장 어플리케이션에서 위상당 와이어 개수를 각기 다르게 요구하는 경우
하단 삽입부 캐비닛 옵션을 활용하시기 바랍니다.
.
(최소 2.5미터)와 케이블 개수는 동일해야 합니다.
, 공장에 자세한 요구사항 또는 자료를 문의하시거나 상단/
3의 배수 즉, 3, 6, 9 또
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
61
3 설치방법
3.5.8 제동 케이블 공장 출고시 제동 초퍼 옵션이 설치된 인버터
VLT® Automation Drive FC 300
High Power 사용 설명서
3
(유형 코드의 18
제동 저항 연결 케이블은 차폐되어야 하며 주파수 변환기와 직류 바 간의 최대 케이블 길이는
단자 번호
81, 82 제동 저항 단자
제동 저항에 연결되는 연결 케이블은 차폐되어야 합니다. 케이블 클램프를 이용하여 차폐선을 주파수 변환기의 전도성 백플레이트와 제동 저항의 금속
외함에 연결하십시오
제동 토오크에 맞도록 제동 케이블 단면적을 측정하십시오. 안전한 설치에 관한 자세한 정보는
시오.
F 프레임 요구사항
제동 저항은 반드시 각 인버터 모듈의 제동 저항에 연결해야 합니다
위치에 알파벳
.
공급 전압에 따라 단자에 최고 1099V DC 의 전압이 발생할 수 있다는 점에 유의하십시오.
B 가 포함된 표준형에만 해당
기능
)
25미터(82피트)입니다.
제동 지침, MI.90.Fx.yy
.
및
MI.50.Sx.yy
또한 참조하십
3.5.9 부하 공유
단자 번호 기능
88, 89 부하 공유
연결 케이블은 차폐되어야 하며 주파수 변환기와 직류 바 간의 최대 케이블 길이는
부하 공유는 여러 주파수 변환기의 직류 매개회로를 연결할 수 있게 합니다.
단자에서 최대 1099V DC 의 전압이 발생할 수 있다는 점에 유의하십시오
추가 장비에는 안전을 위해 부하 공유가 필요합니다
주전원이 차단되더라도 직류단 연결로 인해 주파수 변환기가 분리되지 않을 수 있습니다
. 자세한 내용은 부하 공유 지침
25미터(82피트)입니다.
.
MI.50.NX.YY 를 참조하십시오
.
.
62
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.

VLT® Automation Drive FC 300
High Power 사용 설명서
3.5.10 전기적 노이즈 차폐
3 설치방법
주전원 케이블을 장착하기 전에 EMC 금속 덮개를 장착하여 최상의 EMC 성능을 발휘하도록 하십시오
참고: EMC 금속 덮개는 RFI 필터이(가) 있는 유닛에만 포함되어 있습니다
그림 3.52: EMC 차폐용 금속 덮개 장착.
.
3.5.11 주전원 연결
주전원은 단자 91, 92 및 93에 연결해야 합니다. 접지는 단자
93 오른쪽에 있는 단자에 연결합니다.
.
3
단자 번호
91, 92, 93
94
주파수 변환기 명판에 표시된 주전원 전압이 공장의 전원 공급장치 전압과 일치하는지 확인하십시오
전원 공급장치가 주파수 변환기에 충분한 전류를 공급할 수 있는지 확인하십시오.
유닛에 내장된 퓨즈가 없는 경우에는 해당 퓨즈의 전류 등급이 올바른지 확인하십시오.
기능
주전원 R/L1, S/L2, T/L3
접지
.
3.5.12 외부 팬 공급
프레임 크기 D-E-F
주파수 변환기에 직류 전원이 공급되거나 전원 공급장치와는 별개로 팬을 구동해야 하는 경우에는 외부 전원 공급장치를 사용할 수 있습니다. 이는 전
원 카드에 연결됩니다
단자 번호
100, 101
102, 103
.
기능
보조 공급 S, T
내부 공급 S, T
전원 카드에 있는 커넥터는 냉각 팬의 라인 전압 연결을 제공합니다. 팬은 공장 출고 시 공통 교류 라인
공급 받도록 연결되어 있습니다. 외부 공급이 필요한 경우에는 점퍼를 제거하고 공급장치를 단자 100과 101에 연결하며 보호를 위해 반드시 5 암페어
퓨즈를 사용해야 합니다. UL 어플리케이션의 경우, 보호용으로 반드시 LittleFuse KLK-5 또는 그와 동등한 퓨즈를 사용해야 합니다.
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
(100-102와 101-103 사이의 점퍼)에서 전원을
.
63
3
VLT® Automation Drive FC 300
3 설치방법
3.5.13 퓨즈
분기 회로 보호:
전기 및 화재의 위험으로부터 설비를 보호하기 위해 설비
야 합니다
단락회로 보호:
주파수 변환기는 전기 또는 화재의 위험을 방지하기 위해 단락으로부터 보호되어야 합니다. 댄포스는 인버터에 내부 고장이 발생한 경우 아래에 언급된
퓨즈를 사용하여 서비스 기사 또는 다른 장비를 보호할 것을 권장합니다
제공합니다
과전류 보호
설비 케이블의 과열로 인한 화재 위험을 방지하려면 과부하로부터 보호해야 합니다. 주파수 변환기에는 역과부하로부터 장치를 보호하는 내부 과부하
보호 기능이 포함되어 있습니다(UL 어플리케이션 제외). 파라미터 4-18
류로부터 설비를 보호할 수 있습니다. 과전류 보호 기능은 항상 국내 규정에 따라 사용해야 합니다.
UL 비준수
.
.
, 개폐기, 기계 등의 모든 분기 회로는 국내/국제 규정에 따라 단락 및 과전류로부터 보호되어
. 주파수 변환기는 모터 출력에서 단락이 발생한 경우 완벽한 단락 보호 기능을
전류 한계
을(를) 참조하십시오. 또한 퓨즈 또는 회로 차단기를 사용하여 과전
High Power 사용 설명서
UL/cUL 을 준수하지 않아도 되는 경우 EN50178 에 부합하는 다음 퓨즈를 사용하는 것이 좋습니다
권장 사항을 준수하지 않으면 고장이 발생한 경우 주파수 변환기에 불필요한 손상을 줄 수 있습니다
P90 - P200 380 - 500 V 유형 gG
P250 - P400 380 - 500 V 유형 gR
UL 준수
380-500V, 프레임 크기 D, E 및 F
아래 퓨즈는 100,000 Arms(대칭), (인버터 전압 등급에 따라) 240V, 480V 또는 500V 또는 600V 용량의 회로에서 사용하기에 적합합니다
바르게 설치된 단락 회로 전류 등급(SCCR)은 100,000 Arms 입니다
용량/유
P90K FWH-
P110 FWH-
P132 FWH-
P160 FWH-
P200 FWH-
표 3.5: 프레임 크기 D, 라인 퓨즈, 380-500V
Bussmann
형
E1958
JFHR2**
300
350
400
500
600
Bussmann
E4273
T/JDDZ**
JJS-
300
JJS-
350
JJS-
400
JJS-
500
JJS-
600
SIBA
E180276
JFHR2
2061032.
315
2061032.
35
2061032.
4
2061032.
5
2062032.
63
.
LittelFuse
E71611
JFHR2**
L50S-300 6.6URD30D08
L50S-350 6.6URD30D08
L50S-400 6.6URD30D08
L50S-500 6.6URD30D08
L50S-600 6.6URD32D08
Ferraz-
Shawmut
E76491
JFHR2
A0315
A0350
A0400
A0500
A630
.
.
Bussmann
E4274
H/JDDZ**
NOS-
300
NOS-
350
NOS-
400
NOS-
500
NOS-
600
Bussmann
E125085
JFHR2*
170M3017 170M3018
170M3018 170M3018
170M4012 170M4016
170M4014 170M4016
170M4016 170M4016
내부
옵션
Bussmann
. 퓨즈가 올
용량/유형
P250 170M4017 700A, 700V 6.9URD31D08A0700 20 610 32.700
P315 170M6013 900A, 700V 6.9URD33D08A0900 20 630 32.900
P355 170M6013 900A, 700V 6.9URD33D08A0900 20 630 32.900
P400 170M6013 900A, 700V 6.9URD33D08A0900 20 630 32.900
6: 프레임 크기
표 3.
유형
용량/
P450 170M7081 1600A, 700V 20 695 32.1600 170M7082
P500 170M7081 1600A, 700V 20 695 32.1600 170M7082
P560 170M7082 2000A, 700V 20 695 32.2000 170M7082
P630 170M7082 2000A, 700V 20 695 32.2000 170M7082
P710 170M7083 2500A, 700V 20 695 32.2500 170M7083
P800 170M7083 2500A, 700V 20 695 32.2500 170M7083
7: 프레임 크기
표 3.
64
Bussmann PN* 등급 Ferraz Siba
E, 라인 퓨즈, 380-500V
Bussmann PN* 등급 Siba Bussmann 내부 옵션
F, 라인 퓨즈, 380-500V
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.

VLT® Automation Drive FC 300
High Power 사용 설명서
용량/유형 Bussmann PN* 등급 Siba
P450 170M8611 1100A, 1000V 20 781 32.1000
P500 170M8611 1100A, 1000V 20 781 32.1000
P560 170M6467 1400A, 700V 20 681 32.1400
P630 170M6467 1400A, 700V 20 681 32.1400
P710 170M8611 1100A, 1000V 20 781 32.1000
P800 170M6467 1400A, 700V 20 681 32.1400
표 3.8: 프레임 크기 F, 인버터 모듈 직류단 퓨즈, 380-500V
3 설치방법
*Bussmann 170M 퓨즈는 -/80 시각 표시기, -TN/80 Type T, -/110 또는 TN/110 Type T 표시기 퓨즈를 사용하며 외부 용도로 사용하는 경우, 그
와 크기 및 암페어가 동일한 퓨즈로 대체될 수 있습니다.
**관련 전류 등급을 가진 최소 500V 의 UL 준수 퓨즈가 UL 요구 사항을 충족시키는 데 사용될 수 있습니다.
525-690V, 프레임 크기 D, E 및 F
용량/유형
P37K 170M3013 125 2061032.125 6.6URD30D08A0125 170M3015
P45K 170M3014 160 2061032.16 6.6URD30D08A0160 170M3015
P55K 170M3015 200 2061032.2 6.6URD30D08A0200 170M3015
P75K 170M3015 200 2061032.2 6.6URD30D08A0200 170M3015
P90K 170M3016 250 2061032.25 6.6URD30D08A0250 170M3018
P110 170M3017 315 2061032.315 6.6URD30D08A0315 170M3018
P132 170M3018 350 2061032.35 6.6URD30D08A0350 170M3018
P160 170M4011 350 2061032.35 6.6URD30D08A0350 170M5011
P200 170M4012 400 2061032.4 6.6URD30D08A0400 170M5011
P250 170M4014 500 2061032.5 6.6URD30D08A0500 170M5011
P315 170M5011 550 2062032.55 6.6URD32D08A550 170M5011
표 3.9: 프레임 크기 D, 525-690V
/유형
용량
P355 170M4017 700A, 700V 6.9URD31D08A0700 20 610 32.700
P400 170M4017 700A, 700V 6.9URD31D08A0700 20 610 32.700
P500 170M6013 900A, 700V 6.9URD33D08A0900 20 630 32.900
P560 170M6013 900A, 700V 6.9URD33D08A0900 20 630 32.900
표 3.10: 프레임 크기 E, 525-690V
유형
용량/
P630 170M7081 1600A, 700V 20 695 32.1600 170M7082
P710 170M7081 1600A, 700V 20 695 32.1600 170M7082
P800 170M7081 1600A, 700V 20 695 32.1600 170M7082
P900 170M7081 1600A, 700V 20 695 32.1600 170M7082
P1M0 170M7082 2000A, 700V 20 695 32.2000 170M7082
P1M2 170M7083 2500A, 700V 20 695 32.2500 170M7083
Bussmann
E125085
JFHR2
Bussmann PN* 등급 Ferraz Siba
Bussmann PN* 등급 Siba Bussmann 내부 옵션
암페어
SIBA
E180276
JFHR2
Ferraz-Shawmut
E76491
JFHR2
내부
옵션
Bussmann
3
표 3.11: 프레임 크기 F, 라인 퓨즈, 525-690V
유형
용량/
P630 170M8611 1100A, 1000V 20 781 32. 1000
P710 170M8611 1100A, 1000V 20 781 32. 1000
P800 170M8611 1100A, 1000V 20 781 32. 1000
P900 170M8611 1100A, 1000V 20 781 32. 1000
P1M0 170M8611 1100A, 1000V 20 781 32. 1000
P1M2 170M8611 1100A, 1000V 20 781 32.1000
표 3.12: 프레임 크기 F, 인버터 모듈 직류단 퓨즈, 525-690V
*Bussmann 170M 퓨즈는 -/80
와 크기 및 암페어가 동일한 퓨즈로 대체될 수 있습니다
상기 퓨즈로 보호할 경우, 최대 100,000 rms 의 대칭 암페어, 최대 500/600/690V 를 제공할 수 있는 회로에 적합합니다.
Bussmann PN* 등급 Siba
시각 표시기
, -TN/80 Type T, -/110 또는 TN/110 Type T 표시기 퓨즈를 사용하며 외부 용도로 사용하는 경우
.
, 그
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
65
3 설치방법
보조 퓨즈
VLT® Automation Drive FC 300
High Power 사용 설명서
3
프레임 크기
D, E 및 F KTK-4 4A, 600V
표 3.13: SMPS 퓨즈
/종류
크기
P90K-P250, 380-500V KTK-4 4A, 600V
P37K-P400, 525-690V KTK-4 4A, 600V
P315-P800, 380-500V KLK-15 15A, 600V
P500-P1M2, 525-690V KLK-15 15A, 600V
표 3.14: 팬 퓨즈
크기/종류 Bussmann PN* 등급 대체 퓨즈
2.5-4.0A 퓨즈 P450-P800, 380-500V LPJ-6 SP 또는 SPI 6A, 600V 목록에 있는 클래스 J 듀얼 요
P630-P1M2,
4.0-6.3A 퓨즈 P450-P800, 380-500V LPJ-10 SP 또는 SPI 10A, 600V 목록에 있는 클래스 J 듀얼 요
P630-P1M2,
6.3 - 10A 퓨즈 P450-
P630-P1M2,
10 - 16A 퓨즈 P450-P800, 380-500V LPJ-25 SP 또는 SPI 25A, 600V 목록에 있는 클래스 J 듀얼 요
P630-P1M2,
525-690V
525-690V
P800600HP-1200HP,
380-500V
525-690V
525-690V
Bussmann PN* LittelFuse 등급
Bussmann PN* 등급
LPJ-10 SP 또는 SPI 10A, 600V 목록에 있는 클래스 J 듀얼 요
LPJ-15 SP 또는 SPI 15A, 600V 목록에 있는 클래스 J 듀얼 요
LPJ-15 SP 또는 SPI 15A, 600V 목록에 있는 클래스 J 듀얼 요
LPJ-20 SP 또는 SPI 20A, 600V 목록에 있는 클래스 J 듀얼 요
LPJ-20 SP 또는 SPI 20A, 600V 목록에 있는 클래스 J 듀얼 요
소, 시간 지연, 6A
시간 지연
소,
시간 지연
소,
소, 시간 지연, 15A
시간 지연
소,
시간 지연
소,
시간 지연
소,
소, 시간 지연, 20A
, 10A
, 10A
, 15A
, 20A
, 25A
표 3.15: 수동 모터 제어기 퓨즈
프레임 크기
F LPJ-30 SP 또는 SPI 30A, 600V 목록에 있는 클래스 J 듀얼 요소, 시
표 3.16: 30A 퓨즈 보호 단자 퓨즈
프레임 크기
F LPJ-6 SP 또는 SPI 6A, 600V 목록에 있는 클래스 J 듀얼 요소, 시
표 3.17: 제어 트랜스포머 퓨즈
프레임 크기
F GMC-800MA 800mA, 250V
표 3.18: NAMUR 퓨즈
프레임 크기
F LP-CC-6 6A, 600V 목록에 있는 클래스 CC, 6A
표 3.19: PILS 릴레이가 있는 안전 릴레이 코일 퓨즈
Bussmann PN* 등급 대체 퓨즈
간 지연, 30A
Bussmann PN* 등급 대체 퓨즈
간 지연, 6A
Bussmann PN* 등급
Bussmann PN* 등급 대체 퓨즈
66
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
VLT® Automation Drive FC 300
High Power 사용 설명서
3.5.14 주전원 차단기 - 프레임 크기 D, E 및 F
프레임 크기 출력 및 전압 유형
D1/D3 P90K-P110 380-500V 및 P90K-P132 525-690V ABB OETL-NF200A 또는 OT200U12-91
D2/D4 P132-P200 380-500V 및 P160-P315 525-690V ABB OETL-NF400A 또는 OT400U12-91
E1/E2 P250 380-500V 및 P355-P560 525-690V ABB OETL-NF600A
E1/E2 P315-P400 380-500V ABB OETL-NF800A
F3 P450 380-500V 및 P630-P710 525-690V Merlin Gerin NPJF36000S12AAYP
F3 P500-P630 380-500V 및 P800 525-690V Merlin Gerin NRK36000S20AAYP
F4 P710-P800 380-500V 및 P900-P1M2 525-690V Merlin Gerin NRK36000S20AAYP
3.5.15 F 프레임 회로 차단기
프레임 크기 출력 및 전압 유형
F3 P450 380-500V 및 P630-P710 525-690V Merlin Gerin NPJF36120U31AABSCYP
F3 P500-P630 380-500V 및 P800 525-690V Merlin Gerin NRJF36200U31AABSCYP
F4 P710 380-500V 및 P900-P1M2 525-690V Merlin Gerin NRJF36200U31AABSCYP
F4 P800 380-500V Merlin Gerin NRJF36250U31AABSCYP
3 설치방법
3
3.5.16 F 프레임 주전원 콘택터
프레임 크기 출력 및 전압 유형
F3 P450-P500 380-500V 및 P630-P800 525-690V Eaton XTCE650N22A
F3 P560 380-500V Eaton XTCE820N22A
F3 P630380-500V Eaton XTCEC14P22B
F4 P900 525-690V Eaton XTCE820N22A
F4 P710-P800 380-500V 및 P1M2 525-690V Eaton XTCEC14P22B
3.5.17 모터 절연
모터 케이블 길이가 일반사양 편의 표에 나열된 최대 케이블 길이과 같
거나 짧은 경우, 모터케이블의 전송선로 효과로 인해 피크 전압이 직류
단 전압의 최대 2배, 주전원 전압의 2.8배까지 증가할 수 있으므로 다음
과 같은 모터 절연 등급이 권장됩니다. 절연 등급이 낮은 모터의 경우,
du/dt 또는 사인파 필터의 사용을 권장합니다.
주전원 정격 전압 모터 절연
UN ≤ 420V 표준 ULL = 1300V
420V < U
500V < UN ≤ 600V 보강 ULL = 1800V
600V < U
≤ 500V 보강 ULL = 1600V
N
≤ 690V 보강 ULL = 2000V
N
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
67
VLT® Automation Drive FC 300
3 설치방법
3.5.18 모터 베어링 전류
FC 302 90kW 이상의 인버터와 함께 설치된 모든 모터에는 베어링 전류 순환을 제거하기 위해 설치된 NDE(Non-Drive End) 절연 베어링이 있어야 합
니다. DE(Drive End) 베어링 및 축 전류를 최소화하기 위해서는 인버터, 모터, 운전 설비 및 운전 설비에 대한 모터의 올바른 접지가 필요합니다
High Power 사용 설명서
.
3
표준 완화 전략
1. 절연 배어링을 사용합니다
2. 엄격한 설치 절차를 적용합니다
3. IGBT 스위칭 주파수를 낮춥니다
4. 인버터 파형(60° AVM 또는 SFAVM)을 수정합니다.
5. 축 접지 시스템을 설치하거나 절연 커플링을 사용합니다
6. 전도성 윤활제를 바릅니다.
7. 가능하면 최소 속도 설정을 사용합니다
8. 라인 전압이 접지에 대해 균형을 이루는지 확인합니다. 이 작업은 IT, TT, TN-CS 또는 접지된 레그 시스템의 경우에는 어려울 수 있습니다.
9. dU/dt 또는 sinus 필터를 사용합니다.
:
.
.
- 모터와 부하 모터가 올바르게 정렬되었는지 확인합니다.
- EMC 설치 지침을 엄격히 준수합니다
- PE 를 보강하여 PE 에서 고주파수 임피던스가 입력 전원 리드보다 낮아지게 합니다.
- 예를 들어, 차폐된 케이블로 모터와 주파수 변환기 간에 360° 연결을 하는 등 모터와 주파수 변환기 간에 양호한 고주파수 연결을 제
공합니다.
- 주파수 변환기에서 건물 접지까지의 임피던스가 설비의 접지 임피던스보다 낮아야 합니다
.
습니다
- 모터와 부하 모터 간에 직접 접지 연결을 합니다.
.
.
. 펌프의 경우에는 이 작업이 어려울 수 있
.
.
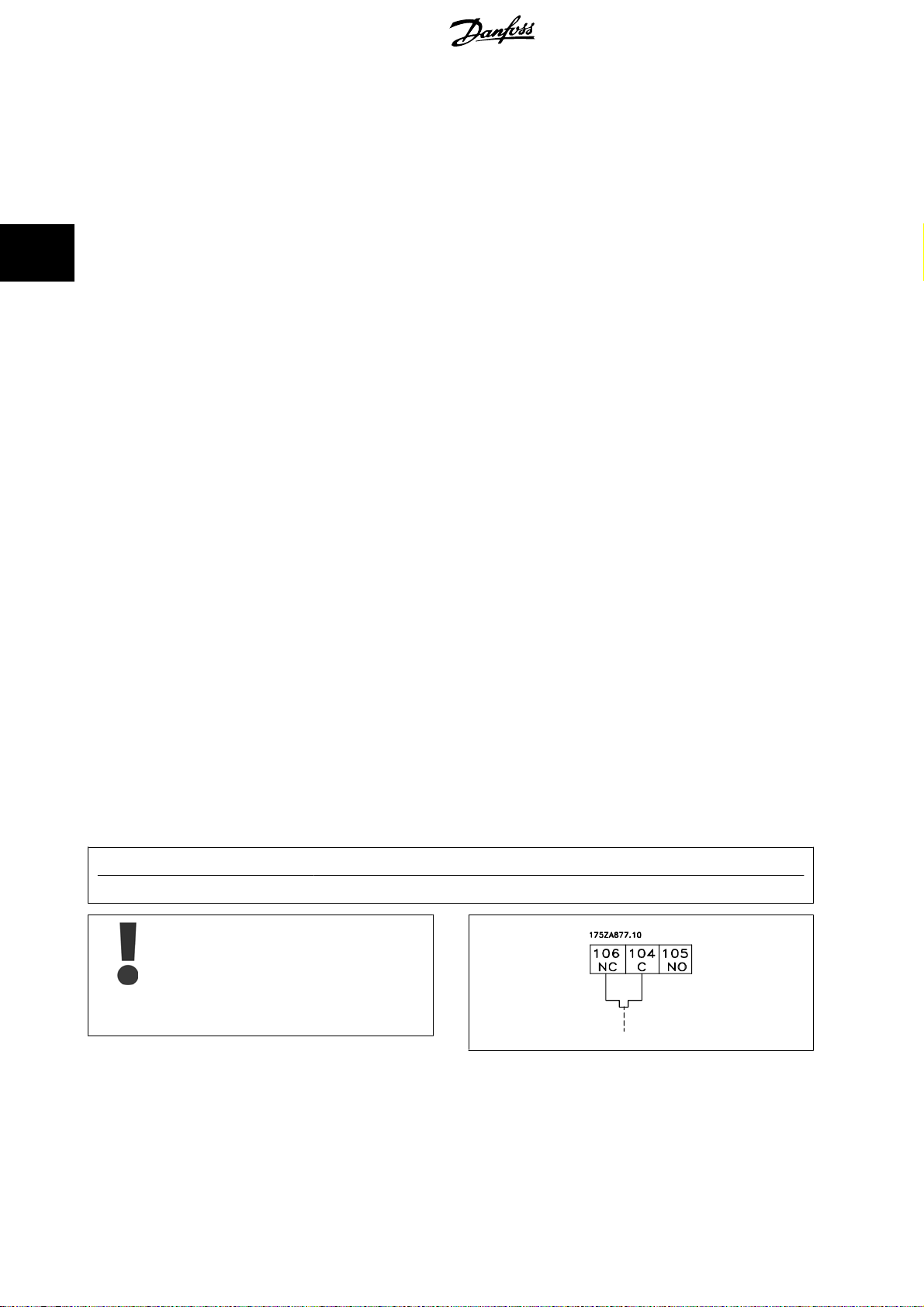
3.5.19 제동 저항 온도 스위치
프레임 크기 D-E-F
조임강도: 0.5-0.6 Nm (5 in-lbs)
나사 크기: M3
이 입력은 외부에 연결된 제동 저항의 온도를 감시하는 데 사용할 수 있습니다
동 IGBT” 시 트립합니다. 104와 105 간 연결이 닫혀 있으면 주파수 변환기는 경고/알람 27, “제동 IGBT” 시 트립합니다.
NO: 104-106 (공장 출고 시 설치된 점퍼
NO: 104-105
단자 번호
106, 104, 105 제동 저항 온도 스위치
제동 저항의 온도가 너무 많이 올라가거나 써멀 스위
치가 차단되면 주파수 변환기가 제동을 멈춥니다
터가 코스팅을 시작합니다.
KLIXON 스위치는 반드시 `NC' 상태로 설치해야 합
니다. 이 기능을 사용하지 않는 경우에는
를 반드시 함께 단락시켜야 합니다.
)
기능
. 모
106과 104
. 104와 106 간 입력이 열려 있으면 주파수 변환기는 경고/알람 27,
.
“제
68
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
VLT® Automation Drive FC 300
High Power 사용 설명서
3.5.20 제어 케이블 배선
3 설치방법
그림에서와 같이 모든 제어선을 지정된 제어 케이블 배선에 따라 고정하십시오
다는 점을 명심하십시오
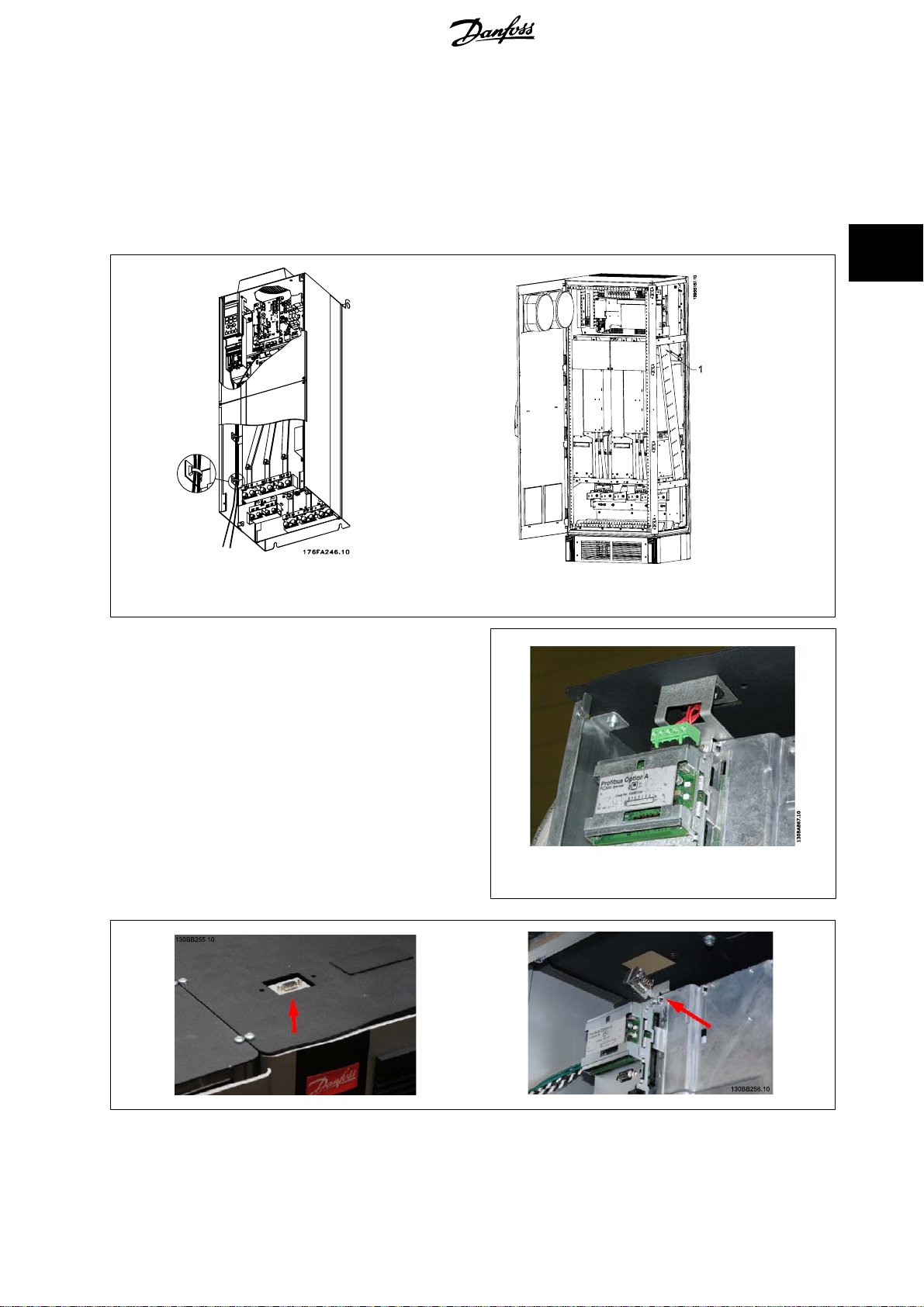
필드버스 연결
제어카드의 관련 옵션에 따라 연결됩니다. 자세한 내용은 관련 필드버스 지침을 참조하십시오. 케이블은 반드시 주파수 변환기 안쪽 좌측에 위치해야
하며 다른 제어선과 함께 고정되어야 합니다
D3 의 제어 케이블 배선 경로. D1, D2, D4, E1 및 E2 의 제어 케이블 배선은 동
일한 경로를 사용합니다
.
(그림 참조).
.
. 최적의 전기적 방지를 위해서는 올바른 방법으로 차폐선을 연결해야 한
F1/F3 의 제어 케이블 배선 경로. F2/F4 의 제어 케이블 배선은 동
일한 경로를 사용합니다
.
3
섀시 (IP00) 및 NEMA 1 유닛의 경우, 오른쪽 그림과 같이 필드버스를
유닛 상단에 연결할 수도 있습니다. NEMA 1 유닛의 경우,
트를 반드시 제거해야 합니다
필드버스 상단 연결용 키트 번호: 176F1742
.
덮개 플레이
그림 3.53: 필드버스 상단 연결
.
24V 외부 DC 공급장치 설치
조임강도: 0.5 - 0.6 Nm (5 in-lbs)
나사 크기: M3
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
69
3 설치방법
번호 기능
35 (-), 36 (+) 24V 외부 DC 공급
VLT® Automation Drive FC 300
High Power 사용 설명서
3
제어카드 및 기타 설치된 옵션 카드의 저전압 공급용으로 24V DC 외부 공급을 사용할 수 있습니다
동작(파라미터 설정 포함
)을 실행할 수 있습니다
PELV 유형의 24VDC 공급을 사용하여 주파수 변환기의 제어 단자에 올바른 갈바닉 절연(PELV 유형)을 제공하십시오
. 24V DC 가 연결되면 저전압 경고는 발생하지만 트립은 발생하지 않는다는 점에 유의하십시오
3.5.21 제어 단자 덮개
제어 케이블에 연결된 단자는 모두 LCP 밑에 있으며 (IP21/ 54 버전의 경우
) 도어를 열거나 (
IP00 버전의 경우)
. 이를 통해 주전원에 연결하지 않고도
덮개를 분리하면 접근할 수 있습니다.
LCP 의 모든
.
.
70
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
VLT® Automation Drive FC 300
High Power 사용 설명서
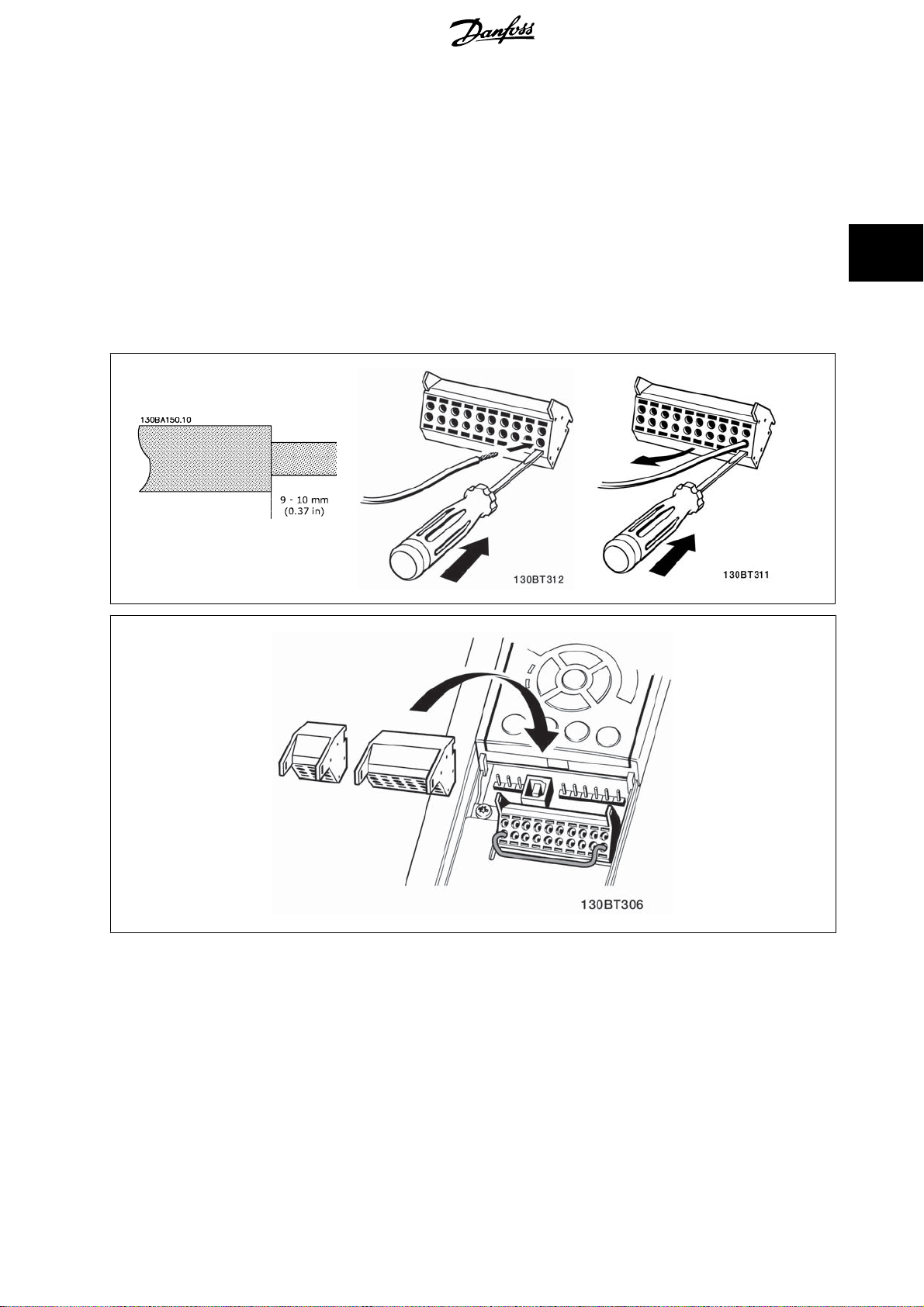
3.5.22 전기적인 설치, 제어 단자
3 설치방법
케이블을 단자에 연결하는 방법
1. 절연체를 9~10mm 정도 벗겨내십시오
2.
사각형 구멍에 드라이버
3. 바로 위나 아래의 원형 구멍에 케이블을 넣으십시오
4. 드라이브를 제거하십시오. 케이블이 단자에 고정됩니다.
케이블을 단자에서 분리하는 방법
1.
사각형 구멍에 드라이버
2. 케이블을 당기십시오.
1)
최대 0.4 x 2.5mm
1.
:
1)
를 넣으십시오.
:
1)
를 넣으십시오
.
.
.
3
2.
3.
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
71
3 설치방법
3.6 연결 예
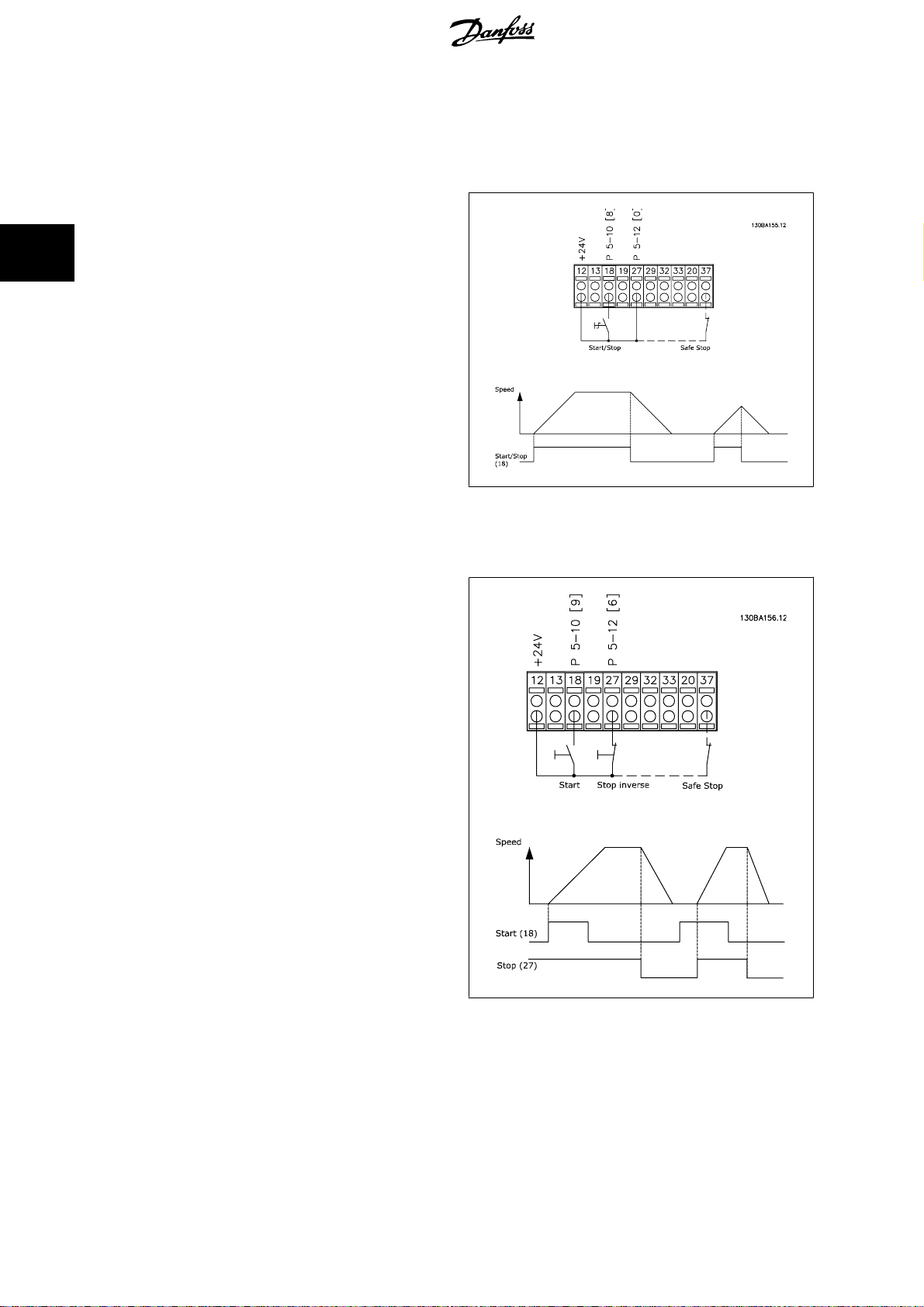
3.6.1 기동/정지
VLT® Automation Drive FC 300
High Power 사용 설명서
3
18 =
단자
단자 27 = 파라미터 5-
설정값
단자
파라미터
코스팅 인버스
37 = 안전 정지
5-10
단자
12
단자 27 디지털 입력
)
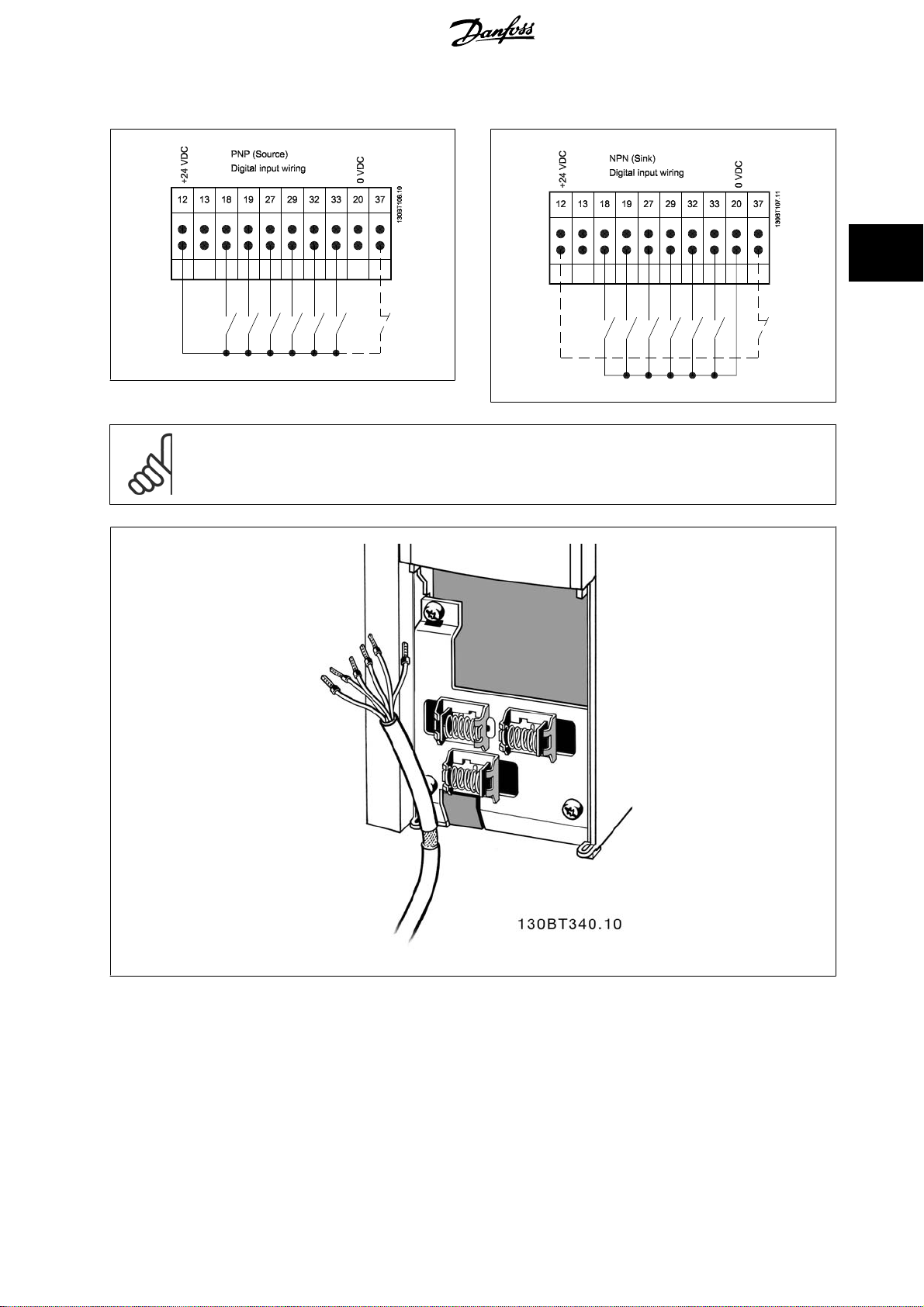
3.6.2 펄스 기동/정지
단자 18 = 파라미터 5-10
단자 27 = 파라미터
단자 37 =
안전 정지
단자 18 디지털 입력
5-12
단자 27 디지털 입력
18 디지털 입력
[8]
기동
[0]
운전하지 않음
[9]
래치 기동
[6]
정지 인버스
(초기
72
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.

VLT® Automation Drive FC 300
High Power 사용 설명서
3.6.3 가속/감속
단자 29/32 = 가속/감속:.
5-10
단자 18 = 파라미터
설정값)
단자 27 = 파라미터
단자 29 = 파라미터
단자 32 = 파라미터 5-14
참고: 단자
29는
FC x02(x=시리즈 유형)에만 해당됩니다
3.6.4 가변 저항 지령
가변 저항을 통한 전압 지령:
지령 소스 1 = [
단자 53, 최저 전압 = 0V
단자 53, 최고 전압 = 10V
단자 53
단자 53, 최고 지령/피드백 = 1500RPM
S201 스위치 = OFF (U)
1]
, 최저 지령/피드백
단자 18 디지털 입력
5-12
단자 27 디지털 입력
5-13
단자 29 디지털 입력
단자 32 디지털 입력
아날로그 입력
= 0RPM
53
(초기 설정값
기동 [9
지령 고 정
[21]
가속
감속 [22]
.
)
3 설치방법
](초기
[19]
3
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
73

3
3 설치방법
3.7.1 전기적인 설치, 제어 케이블
VLT® Automation Drive FC 300
High Power 사용 설명서
그림 3.54: 옵션을 제외한 모든 전기 단자를 나타내는 다이어그램
단자 37은 안전 정지에 사용되는 입력입니다. 안전 정지 설치에 관한 지침은 주파수 변환기 설계 지침서의
시오. 안전 정지 및 안전 정지 설치 또한 참조하십시오
제어 케이블과 아날로그 신호용 케이블이 너무 길면 주전원 공급 케이블에서 발생되는 노이즈 때문에 설치 결과에 따라 50/60Hz 접지 루프가 발생하
는 경우도 있습니다.
이와 같은 경우에는 차폐선을 차단하거나 차폐선과 섀시 사이에 100nF 콘덴서를 설치해야 할 수도 있습니다.
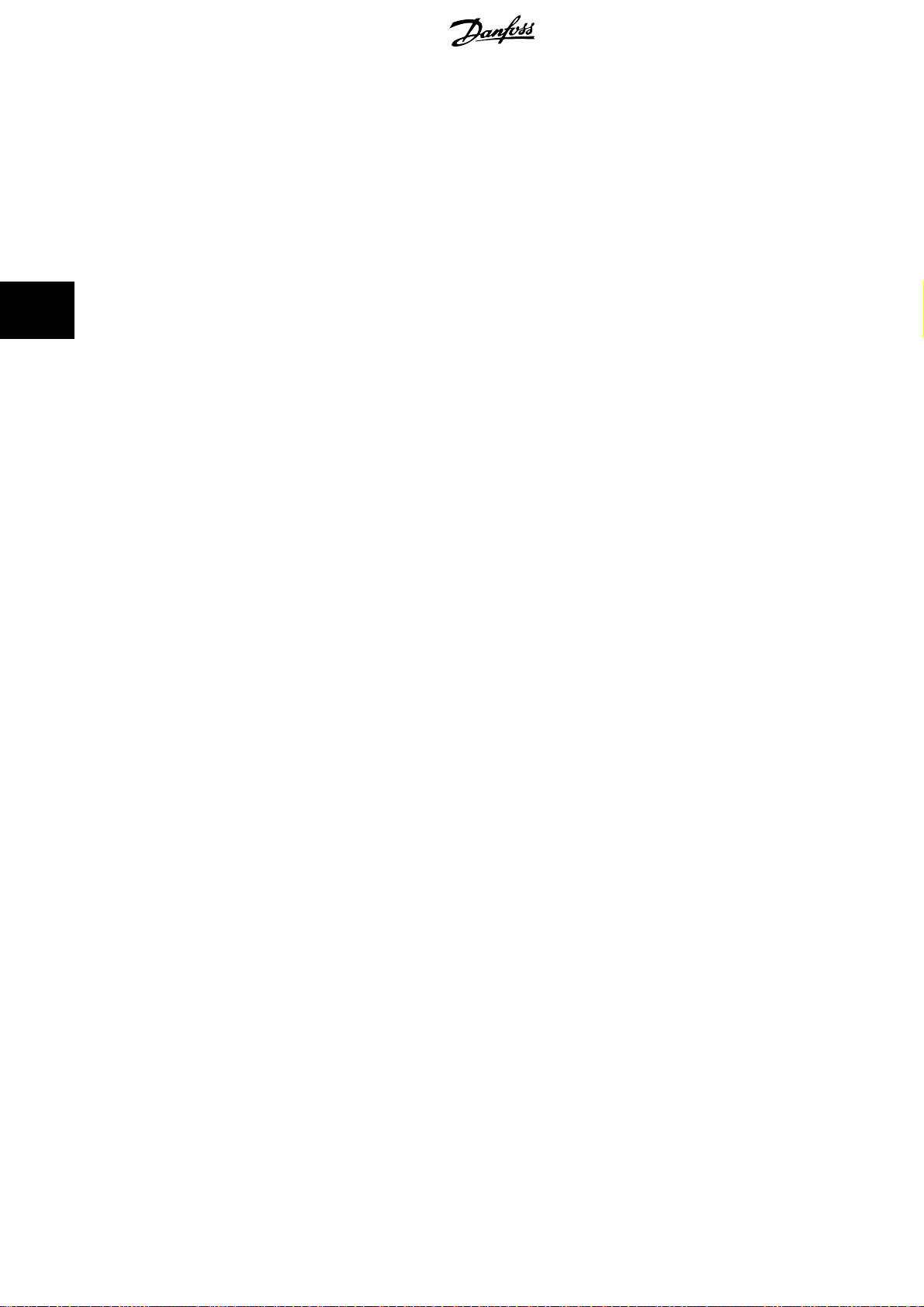
디지털 및 아날로그 입출력은 양쪽에 서로 영향을 미칠 수 있는 접지전류를 피하기 위해 주파수 변환기 공통 입력(단자 20, 55, 39)에 각각 분리해서 연
결해야 합니다. 예를 들어, 디지털 입력의 전원 공급/차단은 아날로그 입력 신호에 영향을 미칠 수 있습니다
74
.
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
안전 정지 설치
.
.
편을 참조하십
VLT® Automation Drive FC 300
High Power 사용 설명서
제어 단자의 입력 극성
주의
제어 케이블은 차폐/보호되어야 합니다.
3 설치방법
3
주파수 변환기 사용 설명서에서 설명된 바와 같이 선을 연결하십시오. 최적의 전기적 방지를 위해서는 올바른 방법으로 차폐선을 연결해야 한다는 점을
명심하십시오.
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
75

3 설치방법
3.7.2 S201, S202 및 S801 스위치
VLT® Automation Drive FC 300
High Power 사용 설명서
3
S201(A53) 스위치는 아날로그 입력 단자
단자 54의 전류(0~20mA) 또는 전압(-10~10V) 구성을 선택할 때 사용됩니다
S801 스위치(버스 종단 스위치)는 RS-485 포트(단자 68 및 69)를 종단하는데 사용할 수 있습니다
전기 설치
편에 수록된
초기 설정:
S201(A53) = 꺼짐(전압 입력)
S202(A54) = 꺼짐(전압 입력)
S801(버스 종단
S201, S202 또는 S801 의 기능을 변경할 때는 스위치에 너무 무리한 힘을 가하지 않도록 주의하십시오. 스위치를 작동할 때는
LCP 고정장치(받침대)를 분리하는 것이 좋습니다. 주파수 변환기에 전원이 인가된 상태에서 스위치를 작동해서는 안됩니다.
모든 전기 단자를 나타낸 다이어그램
) = 꺼짐
53의 전류(
0~20mA) 또는 전압(-10~10V) 구성을 선택할 때 사용되며 S202(A54) 스위치는 아날로그 입력
.
그림을 참조하십시오.
.
76
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.

VLT® Automation Drive FC 300
High Power 사용 설명서
3.8 최종 셋업 및 시험
3 설치방법
다음과 같은 절차에 따라 셋업을 시험하고 주파수 변환기 작동을 확인하십시오
1단계. 모터 명판 확인
주의
모터는 스타 연결형(Y) 또는 델타 연결형(Δ)입니다. 이 정보는 모터 명판에서 확인할 수 있습니다.
.
3
2단계. 옆에 있는 파라미터 목록의 모터 명판 데이터 입력.
파라미터 목록에 액세스하려면 [QUICK MENU] 키를 누른 다음 “Q2 단
축 설정”을 선택하십시오.
3단계. 자동 모터 최적화(AMA) 실행
AMA 을(를) 실행하면 최적 성능을 발휘할 수 있습니다. AMA 은(는) 모터 모델에 따른 다이어그램의 값을 측정합니다
1. 단자 37을 단자 12
2. 단자 27을 단자
.
하십시오
3. AMA 을(를) 실행하십시오파라미터 1-
4. 완전 및 축소 AMA 중 하나를 선택하십시오
를 분리하십시오
5. [OK] 키를 누르십시오
6. [Hand on] 키를 누르십시오. 진행 표시줄에 AMA 의 실행 여부가 표시됩니다
운전 중 AMA 정지
1. [OFF] 키를 누르면 주파수 변환기가 알람 모드로 전환되고 표시창에는 사용자에 의해 AMA 이(가) 종료되었음이 표시됩니다
AMA 실행 완료
1. 표시창에 “[OK]를 눌러 AMA 을(를
2. [OK] 키를 눌러 AMA 상태를 종료하십시오
에 연결하십시오(단자 37이 있는 경우에 한함).
12에 연결하거나
.
. 디스플레이에
파라미터
5-12
29
자동 모터 최적화 (AMA)
. 사인파 필터가 설치되어 있는 경우에는 축소
“기동하려면 [Hand on]을 누르십시오”가 표시됩니다
) 종료하십시오
.
27 디지털 입력
단자
”가 표시됩니다
1. 파라미터 1-20
파라미터 1-21
2. 파라미터 1-22
3. 파라미터 1-23
4. 파라미터 1-24
5. 파라미터 1-
를 ‘운전하지 않음’(파라미터
.
.
.
모터 출력[kW]
모터 동력 [HP]
모터 전압
모터 주파수
모터 전류
25
모터 정격 회전수
.
5-12
AMA 만 실행하거나 AMA 실행 중에만 사인파 필터
.
27 디지털 입력
단자
[0])으로 설정
.
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
77

3
VLT® Automation Drive FC 300
3 설치방법
AMA 실행 실패
1. 주파수 변환기가 알람 모드로 전환됩니다. 알람에 관한 설명은
2. [Alarm Log]의 “알림 값”에는 주파수 변환기가 알람 모드로 전환되기 전에 AMA 에 의해 실행된 마지막 측정 단계가 표시됩니다. 알람 설명
과 함께 표시되는 숫자는 고장수리하는데 도움이 됩니다
.
니다
주의
잘못 등록된 모터 명판 데이터 또는 모터 전력 용량과 주파수 변환기의 전력 용량 간의 차이가 너무 크기 때문에 AMA 이(가)
완료되지 않는 경우가 있습니다.
4단계. 속도 한계 및 가감속 시간 설정.
경고 및 알람
. 서비스를 받기 위해
장에 있습니다.
댄포스에 문의할 경우에는 숫자와 알람 내용을 언급하시기 바랍
High Power 사용 설명서
올바로
파라미터 3파라미터 3-03
표 3.20: 원하는 속도 및 가감속 시간 한계 값을 설정하십시오
파라미터 4터 4-12
파라미터 4-
4-14
터
파라미터 3-41
파라미터 3-42
02
최소 지령
최대 지령
11
모터의 저속 한계 [RPM]
모터 속도 하한 [Hz]
13
모터의 고속 한계 [RPM]
모터 속도 상한 [Hz]
1 가속 시간
1 감속 시간
또는 파라미
또는 파라미
.
78
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.

VLT® Automation Drive FC 300
High Power 사용 설명서
3.9 추가적인 연결
3.9.1 기계식 제동 장치 제어
3 설치방법
리프트 또는 엘리베이터 등에 주파수 변환기를 사용하기 위해서는 전자기계식 제동 장치를 제어할 수 있어야 합니다
• 릴레이 출력 또는 디지털 출력(단자 27 또는
• 주파수 변환기가 모터를 제어하지 못하는 동안, 예를 들어, 부하가 너무 큰 경우에도 이 출력이 전압의 인가 없이 제동 장치를 제어할 수 있도
록 하십시오
• 전자기계식 제동 장치를 사용하는 경우에는 파라미터 5-4*에서
• 모터 전류가 파라미터
• 출력 주파수가 파라미터 2-21
지 명령을 실행하고 있는 경우에만 제동 장치가 작동합니다
주파수 변환기가 알람 모드 상태이거나 과전압 상태에 있을 때는 기계식 제동 장치가 즉시 작동합니다.
.
2-20
제동 전류 해제
브레이크 시작 속도
29)을 이용하여 제동 장치를 제어하십시오.
기계제동장치제어
에 설정한 값보다 크게 되면 제동 장치가 풀립니다
또는 파라미터 2-22
.
제동 동작 속도 [Hz]
[32]를 선택하십시오.
.
에서 설정한 주파수보다 작고 주파수 변환기가 정
.
3.9.2 모터의 병렬 연결
주파수 변환기는 병렬로 연결된 모터 여러 개를 제어할 수 있습니다. 모
터의 총 전류 소모량은 주파수 변환기의 정격 출력 전류 I
않아야 합니다
.
주의
케이블 길이가 짧은 경우에만 아래 그림에서와 같이 공
통 조인트에 연결된 케이블을 사용하여 설치하는 것이
좋습니다.
을 초과하지
M,N
3
주의
여러 대의 모터가 병렬로 연결된 경우에는 파라미
1-29
터
자동 모터 최적화 (AMA)
.
없습니다
주의
주파수 변환기의 전자 써멀 릴레이(ETR)를 병렬로 연
결된 모터 시스템에서 각각의 모터 보호용으로 사용할
수 없습니다. 또한
스터 등을 장착하여 추가적인 모터 보호를 제공하십시
오(회로 차단기는 보호용으로 적합하지 않습니다
모터의 용량이 현저하게 차이가 날 경우에는 모터 기동 시와 낮은 RPM 범위에서 문제가 발생할 수 있습니다. 이는 모터 기동 시와 낮은 RPM 에서 상대
적으로 큰 저항을 가진 소형 모터에 큰 전압이 인가되기 때문입니다.
, 모터나 각각의 써멀 릴레이에 써미
기능을 사용할 수
).
3.9.3 모터 열 보호
주파수 변환기의 전자 써멀 릴레이는 모터와 일대일 대응 시의 모터 써멀 보호 기능에 대해 UL 인증을 획득하였습니다. 이를 위해서는 파라미
터 1-90
모터 열 보호를 ETR 트립
써멀 모터 보호를 위해 MCB 112 PTC 써미스터 카드도 사용할 수 있습니다. 이 카드는 폭발 위험 지역, 구역 1/21 및 구역 2/22에서의 모터 보호를 인
증하는 ATEX 인증서를 제공합니다. 자세한 정보는
으로 설정하고 파라미터 1-24
설계 지침서
모터 전류
를 참조하십시오.
을 모터 정격 전류(모터 명판 참조)로 설정해야 합니다.
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
79
4
4 프로그래밍 방법
VLT® Automation Drive FC 300
High Power 사용 설명서
80
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
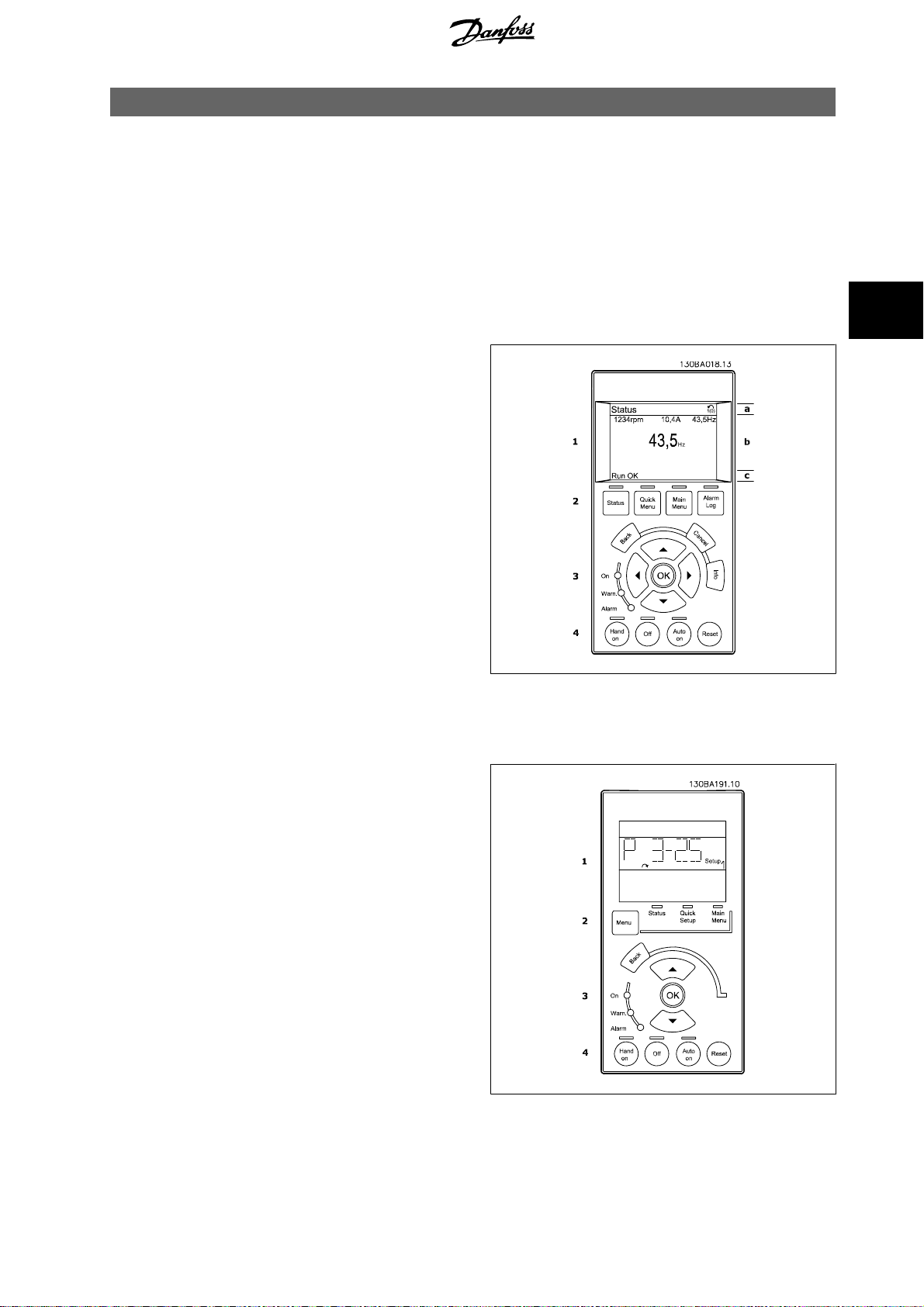
VLT® Automation Drive FC 300
High Power 사용 설명서
4 프로그래밍 방법
4 프로그래밍 방법
4.1 그래픽 LCP 및 숫자 방식의 LCP
가장 간단한 주파수 변환기 프로그래밍 방법은 그래픽 LCP 을 이용하는 방법입니다 ( 102). 숫자 방식의 현장 제어 패널을 사용할 때는 주파수 변환기
설계 지침서를 참고할 필요가 있습니다(LCP 101).
4.1.1 그래픽 LCP 의 프로그래밍 방법
다음 지침은 그래픽 LCP (LCP 102)가 있는 경우에 해당하는 내용입니다.
LCP 는 기능별로 아래와 같이 4가지로 나뉘어집니다.
1. 상태 표시줄이 포함된 그래픽 디스플레이.
2. 메뉴 키 및 표시 램프 – 파라미터 변경 및 표시 기능 전환.
3. 검색 키 및 표시 램프(LED).
4. 운전 키 및 표시 램프(LED).
모든 데이터는 그래픽 LCP 표시창에 표시되며 [Status]와 함께 최대
개의 운전 데이터를 표시할 수 있습니다
:
표시줄
a. 상태 표시줄: 상태 메시지는 아이콘과 그래픽으로 표시됩니다
b. 첫 번째/두 번째 줄: 사용자가 정의하거나 선택한 데이터가 표
시됩니다. [Status] 키를 눌러 최대 한 줄을 추가할 수 있습니
다.
c. 상태 표시줄: 상태 메시지는 텍스트로 표시됩니다.
.
5
.
4.1.2 숫자 방식의 현장 제어 패널을 이용한 프로그래밍 방법
4
다음 지침은 숫자 방식의 LCP (LCP 101)가 있는 경우에 해당하는 내용
.
입니다
LCP 는 기능별로 아래와 같이
1. 숫자 표시창.
2. 메뉴 키 및 표시 램프 – 파라미터 변경 및 표시 기능 전환
3. 검색 키 및 표시 램프(LED).
4. 운전 키 및 표시 램프(LED).
4가지로 나뉘어집니다.
.
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
81

4 프로그래밍 방법
4.1.3 초기 작동방법
VLT® Automation Drive FC 300
High Power 사용 설명서
4
가장 간단한 초기 작동방법은 단축 메뉴 버튼을 사용하여 LCP102를 통해 단축 설정 절차를 따르는 방법입니다
다음 예는 개회로 어플리케이션에 적용됩니다
아래 버튼을 누릅니다
파라미터 0-01
1-20
파라미터
파라미터 1-22
1-23
파라미터
파라미터 1-
1-25
파라미터
파라미터 5-12
.
언어
모터 출력[kW]
모터 전압
모터 주파수
24
모터 전류
모터 정격 회전수
단자 27 디지털 입력
:
Q2 단축 메뉴
언어를 설정합니다.
모터 명판 출력을 설정합니다
명판 전압을 설정합니다.
명판 주파수를 설정합니다
명판 전류를 설정합니다
명판 회전수를 RPM 단위로 설정합니다
단자 초기 설정값이
않음
으로 변경할 수 있습니다. 그리고 나서 AMA 을(를) 실행하
기 위해 단자 27과의 연결을 차단할 필요가 있습니다.
.
.
.
코스팅 인버스
.
인 경우, 이 설정을
(표를 왼쪽에서 오른쪽으로 읽으십시오).
운전하지
파라미터 1-29
3-02
파라미터
3-03
파라미터
3-41
파라미터
3-42
파라미터
3-13
파라미터
자동 모터 최적화 (AMA)
최소 지령
최대 지령
1 가속 시간
1 감속 시간
지령 위치
원하는 AMA 기능을 설정합니다. 완전 AMA 사용함을 권장합
니다.
모터 축의 최소 회전수를 설정합니다
모터 축의 최대 회전수를 설정합니다
동기식 모터 회전수(ns)에 대한 지령과 함께 가속 시간을 설정
.
합니다
동기식 모터 정격 회전수(ns)에 대한 지령과 함께 감속 시간을
설정합니다
지령을 활성화하고자 하는 위치를 설정합니다
.
.
.
.
82
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
VLT® Automation Drive FC 300
High Power 사용 설명서
4.2 단축 설정
0-01 언어
옵션: 기능:
표시창에 표시될 언어를 지정합니다. 주파수 변환기에는 4가지 언어로 구성된 패키지가 포함되어
있으므로 배송 시 선택할 수 있습니다. 기본적으로 영어와 독어는 모든 패키지에 포함되어 있습니
다. 영어는 삭제할 수도 중복 포함시킬 수도 없습니다
[0] * English 언어 패키지 1 – 4에 포함
4 프로그래밍 방법
.
[1] Deutsch 언어 패키지 1 – 4에 포함
[2] Francais 언어 패키지 1 에 포함
[3] Dansk 언어 패키지 1에 포함
[4] Spanish 언어 패키지 1에 포함
[5] Italiano 언어 패키지
Svenska 언어 패키지 1에 포함
[7] Nederlands 언어 패키지 1에 포함
Chinese 언어 패키지 2에 포함
Suomi 언어 패키지 1에 포함
English US 언어 패키지 4에 포함
Greek 언어 패키지 4에 포함
Bras.port 언어 패키지 4에 포함
Slovenian 언어 패키지 3에 포함
Korean 언어 패키지 2에 포함
Japanese 언어 패키지 2에 포함
Turkish 언어 패키지 4에 포함
1에 포함
4
Trad.Chinese 언어 패키지 2에 포함
Bulgarian 언어 패키지 3에 포함
Srpski 언어 패키지
Romanian 언어 패키지 3에 포함
Magyar 언어 패키지 3에 포함
Czech 언어 패키지
Polski 언어 패키지 4에 포함
Russian 언어 패키지
Thai 언어 패키지 2에 포함
Bahasa Indonesia 언어 패키지 2에 포함
[99] Unknown
1-20 모터 출력[kW]
:
범위
Application [Application dependant]
기능
3에 포함
3에 포함
3에 포함
:
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
83
4
4 프로그래밍 방법
dependent
*
1-22 모터 전압
:
범위
Applicatio
n
dependent
*
[Application dependant]
1-23 모터 주파수
범위: 기능:
Applicatio
n
dependent
*
[20 - 1000 Hz] 최소 – 최대 모터 주파수: 20 - 1000 Hz.
1-24 모터 전류
범위: 기능:
Applicatio
n
dependent
*
[Application dependant]
기능
모터 명판 데이터에서 모터 주파수 값을 선택합니다. 50Hz 또는 60Hz 가 아닌 주파수를 선택하는
경우에는 파라미터 1-50
관계 없이 설정한 값을 적용해야 합니다. 230/400V 모터를 사용하여 87Hz 의 운전을 하는 경우,
230V/50Hz 에 해당하는 명판 데이터를 설정합니다. 파라미터 4-13
파라미터 3-03
VLT® Automation Drive FC 300
High Power 사용 설명서
:
0 속도에서의 모터 자화
최대 지령
을(를) 87Hz 로 운전하는 모터에 적용하십시오
에서 파라미터 1-53
모델 변경 주파수
모터의 고속 한계 [RPM]
의 부하와
및
주의
모터가 운전하는 동안에는 이 파라미터를 설정할 수 없습니다
1-25 모터 정격 회전수
범위: 기능:
Applicatio
n
dependent
*
[100 - 60000 RPM] 모터 명판 데이터에 따라 모터 정격 회전수 값을 입력합니다. 이 데이터는 자동 모터 보상을 계산
하는데 사용됩니다.
주의
모터가 운전하는 동안에는 이 파라미터를 변경할 수 없습니다.
.
84
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
VLT® Automation Drive FC 300
High Power 사용 설명서
5-12 단자 27 디지털 입력
옵션: 기능:
4 프로그래밍 방법
사용 가능한 디지털 입력 범위 내에서 기능을 선택합니다.
운전하지 않음 [0]
리셋 [1]
코스팅 인버스 [2]
코스팅리셋인버스 [3]
순간 정지 인버스 [4]
직류제동 인버스 [5]
정지 인버스 [6]
기동 [8]
펄스 기동 [9]
역회전 [10]
역회전 기동 [11]
정회전 기동 사용 [12]
역회전 기동 사용 [13]
조그 [14]
프리셋 지령 비트 0 [16]
프리셋 지령 비트 1 [17]
프리셋 지령 비트
지령 고정 [19]
출력 고정 [20]
가속 [21]
감속 [22]
셋업 선택 비트 0 [23]
셋업 선택 비트
캐치업 [28]
슬로우다운 [29]
펄스 입력 [32]
가감속 비트 0 [34]
가감속 비트 1 [35]
주전원 차단 인버스 [36]
디지털 pot 증가 [55]
디지털 pot 감소 [56]
디지털 pot 제거 [57]
카운터 A 리셋 [62]
카운터 B 리셋 [65]
2
1
4
[18]
[24]
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
85
4
4 프로그래밍 방법
1-29 자동 모터 최적화 (AMA)
옵션: 기능:
AMA 기능은 모터가 정지 상태일 때 고급 모터 파라미터(파라미터 1-30 ~ 파라미터 1-35)를 최
적화하여 다이나믹 모터 성능을 최적화합니다
[1] 또는 [2]를 선택한 다음 [Hand on]을 눌러 AMA 기능을 실행하십시오
또한 참조하십시오. 정상적으로 완료되면 표시창에 “[OK] 키를 눌러 AMA 를 종료하십시오.”라는
메시지가 표시됩니다
모터가 운전하는 동안에는 이 파라미터를 설정할 수 없습니다
[0] * 꺼짐
[1] 완전 AMA 사용함 고정자 저항 R
에 대한 AMA 를 실행합니다.
스 X
h
FC 301: FC 301 의 경우 완전 AMA 에 X
베이스에서 결정됩니다. 기동 성능을 최적화하려면 파라미터 1-35를 조정해야 할 수도 있습니다.
[2] 축소 AMA 사용함 시스템에서 고정자 저항 R
사용되는 경우 이 옵션을 선택하십시오.
참고:
• AMA 기능을 사용하여 최상의 효과를 얻기 위해서는 모터가 차가운 상태에서 AMA 를 실행해야 합니다.
• 모터 구동 중에는 AMA 를 실행할 수 없습니다
• 영구 자석(PM) 모터의 경우에는 AMA 를 실행할 수 없습니다.
.
. [
OK] 키를 누른 후에 주파수 변환기를 운전할 수 있습니다
, 회전자 저항 Rr, 고정자 누설 리액턴스 X1, 회전자 누설 리액턴스 X2 및 주 리액턴
S
에 대해서만 축소 AMA 를 실행합니다. 인버터와 모터 간에 LC 필터가
s
.
측정이 포함되지 않습니다. 대신 Xh 값은 모터 데이터
h
VLT® Automation Drive FC 300
High Power 사용 설명서
.
자동 모터 최적화
.
.
편
주의
모터 파라미터
시 실행해야 합니다. 모터의 정격 규격에 따라 최대 10분 정도 걸릴 수 있습니다.
주의
AMA 실행 중에 외부 토오크가 발생하지 않도록 하십시오.
주의
파라미터 1-2*의 설정값 중 하나를 변경하면 고급 모터 파라미터
1-2*는
AMA 기능의 핵심이므로 올바르게 설정해야 합니다
3-02 최소 지령
범위: 기능:
Applicatio
n
dependent
*
[Application dependant]
3-03 최대 지령
범위: 기능:
Applicatio
n
dependent
*
[Application dependant]
. 모터가 최적 다이나믹 성능을 발휘하도록
(파라미터 1-30 ~ 1-39)는 초기 설정값으로 복원됩니다.
AMA 를 반드
86
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.

VLT® Automation Drive FC 300
High Power 사용 설명서
3-41 1 가속 시간
범위: 기능:
Applicatio
n
dependent
*
3-42 1 감속 시간
범위
Applicatio
n
dependent
*
[Application dependant]
:
[Application dependant]
기능
4 프로그래밍 방법
:
4
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
87

VLT® Automation Drive FC 300
4 프로그래밍 방법
High Power 사용 설명서
4.3 파라미터 목록
운전 중 변경
“TRUE”(참)는 주파수 변환기 운전 중에도 파라미터를 변경할 수 있음을 의미하며, “FALSE”(거짓)는 변경 작업 전에 장치를 반드시 정지해야 함을 의
미합니다.
4-Set-up(4 셋업)
'All set-up': 파라미터는 각각 4개의 설정값으로 설정할 수 있습니다. 다시 말하면
’1 set-up’: 모든 셋업의 데이터 값이 동일합니다
.
, 파라미터마다 4개의 각기 다른 데이터 값을 가질 수 있습니다.
4
변환 지수
이 숫자는 주파수 변환기에 의한 기록 및 읽기에 사용되는 변환값을 나타냅니다
변환 지수 100 67 6 5 4 3 2 1 0 -1 -2 -3 -4 -5 -6
변환 인수 1 1/60 1000000 100000 10000 1000 100 10 1 0.1 0.01 0.001 0.0001 0.00001 0.000001
데이터 유형 설명 유형
2 정수 8 Int8
3 정수
4 정수
5 부호없는
6 부호없는
7 부호없는
9 확인할 수 있는 문자열 VisStr
33 2바이트 평균값 N2
35 16 부울 변수 비트 시퀀스 V2
54 날짜 표시없는 시차 TimD
데이터 유형 33, 35 및 54에 관한 자세한 정보는 주파수 변환기
16
32
8
16
32
설계 지침서
.
를 참조하십시오.
Int16
Int32
Uint8
Uint16
Uint32
88
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
VLT® Automation Drive FC 300
High Power 사용 설명서
주파수 변환기의 파라미터는 주파수 변환기의 최적 운전을 위해 다양한 파라미터 그룹 중에서 올바르게 선택합니다.
0-** 주파수 변환기 기본 설정을 위한 운전 및 디스플레이 파라미터
4 프로그래밍 방법
1-** 부하 및 모터 파라미터에는 부하 및 모터 관련 파라미터가 포함됩니다
2-** 제동 파라미터
3-** 디지털 가변 저항 기능을 포함한 지령 및 가감속 파라미터
4-** 한계 경고, 한계와 경고 파라미터의 설정
5-** 릴레이 제어가 포함된 디지털 입력 및 출력
6-** 아날로그 입력 및 출력
7-** 제어, 속도 및 공정 제어를 위한 파라미터 설정
8-** 통신 및 옵션 파라미터, FC RS485 및 FC USB 포트 파라미터.
9-** 프로피버스 파라미터
10-** DeviceNet 및 CAN 필드버스 파라미터
13-** 스마트 로직 컨트롤러 파라미터
14-** 특수 기능 파라미터
.
4
15-** 인버터 정보 파라미터
16-** 읽기 파라미터
17-** 엔코더 옵션 파라미터
32-** MCO 305 기본 파라미터
33-** MCO 305 고급 파라미터
34-** MCO 데이터 읽기 파라미터
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
89
4
VLT® Automation Drive FC 300
4 프로그래밍 방법
4.3.1 0-** 운전/디스플레이
파라
파라미터 설명 초기값 4-set-up FC 302 에만해당운전 중 변경변환색인유형
미터
번호
#
0-0* 기본 설정
0-01 언어 [0] 영어 1 set-up TRUE - Uint8
0-02 모터 속도 단위 [0] RPM 2 set-ups FALSE - Uint8
0-03 지역 설정 [0] 국제 표준 2 set-ups FALSE - Uint8
0-04 전원 인가 시 운전 상태 (수동) [1] 강제정지,지령=이전 All set-ups TRUE - Uint8
0-1* 셋업 처리
0-10 셋업 활성화 [1] 셋업 1 1 set-up TRUE - Uint8
0-11 설정 셋업 [1] 셋업 1 All set-ups TRUE - Uint8
0-12 다음에 링크된 설정 [0] 링크 안됨 All set-ups FALSE - Uint8
0-13 읽기: 링크된 설정 0 N/A All set-ups FALSE 0 Uint16
0-14 읽기:설정/채널 편집 0 N/A All set-ups TRUE 0 Int32
0-2* LCP 디스플레이
0-20 소형 표시 1.1 1617 All set-ups TRUE - Uint16
0-21 소형 표시 1.2 1614 All set-ups TRUE - Uint16
0-22 소형 표시
0-23 둘째 줄 표시 1613 All set-ups TRUE - Uint16
0-24 셋째 줄 표시 1602 All set-ups TRUE - Uint16
0-25 개인 메뉴 ExpressionLimit 1 set-up TRUE 0 Uint16
0-3* LCP 사용자읽기
0-30 사용자 정의 읽기 단위 [0] 없음 All set-ups TRUE - Uint8
0-31 사용자 정의 읽기 최소값 0.00 CustomReadoutUnit All set-ups TRUE -2 Int32
사용자 정의 읽기 최대값
0-32
0-4* LCP 키패드
0-40 LCP 의 [수동 운전] 키 null All set-ups TRUE - Uint8
0-41 LCP 의 [꺼짐] 키 null All set-ups TRUE - Uint8
0-42 LCP 의 [자동 운전] 키 null All set-ups TRUE - Uint8
0-43 LCP 의 [리셋
0-5* 복사/저장
0-50 LCP 복사 [0] 복사하지 않음 All set-ups FALSE - Uint8
0-51 셋업 복사 [0] 복사하지 않음 All set-ups FALSE - Uint8
0-6* 비밀번호
0-60 주 메뉴 비밀번호 100 N/A 1 set-up TRUE 0 Int16
0-61 비밀번호 없이 주 메뉴 접근 [0] 완전 접근 1 set-up TRUE - Uint8
0-65 단축 메뉴 비밀번호 200 N/A 1 set-up TRUE 0 Int16
0-66 비밀번호 없이 단축 메뉴 접근 [0] 완전 접근 1 set-up TRUE - Uint8
0-67 Bus Password Access 0 N/A All set-ups TRUE 0 Uint16
1.3
] 키
1610 All set-ups TRUE - Uint16
100.00
CustomReadoutUnit
null All set-ups TRUE - Uint8
All set-ups TRUE -2 Int32
High Power 사용 설명서
90
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
VLT® Automation Drive FC 300
High Power 사용 설명서
4.3.2 1-** 부하/모터
파라
파라미터 설명 초기값 4-set-up FC 302 에만해당운전 중 변경변환색인유형
미터
번호
#
1-0* 일반 설정
1-00 구성 모드 null All set-ups TRUE - Uint8
1-01 모터 제어 방식 null All set-ups FALSE - Uint8
1-02 플럭스 모터 피드백 소스 [1] 24V 엔코더 All set-ups x FALSE - Uint8
1-03 토오크 특성 [0] 일정 토오크 All set-ups TRUE - Uint8
1-04 과부하 모드 [0] 높은 토오크 All set-ups FALSE - Uint8
1-05 현장 모드 구성 [2] 모드 P.1-00 으로 All set-ups TRUE - Uint8
1-1* 모터 선택
1-10 모터 구조 [0] 비동기형 All set-ups FALSE - Uint8
1-2* 모터 데이터
1-20 모터 출력[kW] ExpressionLimit All set-ups FALSE 1 Uint32
1-21 모터 동력 [HP] ExpressionLimit All set-ups FALSE -2 Uint32
1-22 모터 전압 ExpressionLimit All set-ups FALSE 0 Uint16
1-23 모터 주파수 ExpressionLimit All set-ups FALSE 0 Uint16
1-24 모터 전류 ExpressionLimit All set-ups FALSE -2 Uint32
1-25 모터 정격 회전수 ExpressionLimit All set-ups FALSE 67 Uint16
1-26 모터 일정 정격 토오크 ExpressionLimit All set-ups FALSE -1 Uint32
1-29
자동 모터 최적화 (AMA) [0] 꺼짐 All set-ups FALSE - Uint8
1-3* 고급 모터 데이터
1-30 고정자 저항 (Rs) ExpressionLimit All set-ups FALSE -4 Uint32
1-31 회전자 저항 (Rr) ExpressionLimit All set-ups FALSE -4 Uint32
1-33 고정자 누설 리액턴스 (X1) ExpressionLimit All set-ups FALSE -4 Uint32
1-34 회전자 누설 리액턴스 (X2) ExpressionLimit All set-ups FALSE -4 Uint32
1-35 주 리액턴스 (Xh) ExpressionLimit All set-ups FALSE -4 Uint32
1-36 철 손실 저항 (Rfe) ExpressionLimit All set-ups FALSE -3 Uint32
1-37 d 축 인덕턴스 (Ld) ExpressionLimit All set-ups x FALSE -4 Int32
1-39 모터 극수 ExpressionLimit All set-ups FALSE 0 Uint8
1-40 1000 RPM 에서의 역회전 EMF ExpressionLimit All set-ups x FALSE 0 Uint16
1-41 모터각 오프셋 0 N/A All set-ups FALSE 0 Int16
1-5* 부하 독립적 설정
1-50 0 속도에서의 모터 자화 100 % All set-ups TRUE 0 Uint16
1-51 최소 속도의 일반 자화 [RPM] ExpressionLimit All set-ups TRUE 67 Uint16
1-52 최소 속도의 일반 자화 [Hz] ExpressionLimit All set-ups TRUE -1 Uint16
1-53 모델 변경 주파수 ExpressionLimit All set-ups x FALSE -1 Uint16
1-55 U/f 특성 - U ExpressionLimit All set-ups TRUE -1 Uint16
1-56
U/f 특성 - F ExpressionLimit All set-ups TRUE -1 Uint16
1-6* 부하 의존적 설정
1-60 저속 운전 부하 보상 100 % All set-ups TRUE 0 Int16
1-61 고속 운전 부하 보상 100 % All set-ups TRUE 0 Int16
1-62 슬립 보상 ExpressionLimit All set-ups TRUE 0 Int16
1-63 슬립 보상 시상수 ExpressionLimit All set-ups TRUE -2 Uint16
1-64 공진 제거 100 % All set-ups TRUE 0 Uint16
1-65 공진 제거 시상수 5 ms All set-ups TRUE -3 Uint8
1-66 최저 속도의 최소 전류 100 % All set-ups x TRUE 0 Uint8
1-67 부하 유형 [0] 수동 부하 All set-ups x TRUE - Uint8
1-68 최소 관성 ExpressionLimit All set-ups x FALSE -4 Uint32
1-69 최대 관성 ExpressionLimit All set-ups x FALSE -4 Uint32
1-7* 기동 조정
1-71 기동 지연 0.0 s All set-ups TRUE -1 Uint8
1-72 기동 기능 [2] 코스팅/지연 시간 All set-ups TRUE - Uint8
1-73 플라잉 기동 [0] Disabled All set-ups FALSE - Uint8
1-74 기동 속도 [RPM] ExpressionLimit All set-ups TRUE 67 Uint16
1-75 기동 속도 [Hz] ExpressionLimit All set-ups TRUE -1 Uint16
기동 전류 0.00 A All set-ups TRUE -2 Uint32
1-76
1-8* 정지 조정
1-80 정지 시 기능 [0] 코스팅 All set-ups TRUE - Uint8
1-81 정지 시 기능을 위한 최소 속도 [RPM] ExpressionLimit All set-ups TRUE 67 Uint16
1-82 정지 시 기능을 위한 최소 속도 [Hz] ExpressionLimit All set-ups TRUE -1 Uint16
1-83 정밀 정지 기능 [0] 정밀 가감속 정지 All set-ups FALSE - Uint8
1-84 정밀 정지 카운터값 100000 N/A All set-ups TRUE 0 Uint32
1-85 정밀 정지 속도 보상 지연 10 ms All set-ups TRUE -3 Uint8
1-9* 모터 온도
1-90 모터 열 보호 [0] 보호하지 않음 All set-ups TRUE - Uint8
1-91 모터 외부 팬 [0] 아니오 All set-ups TRUE - Uint16
1-93 써미스터 리소스 [0] 없음 All set-ups TRUE - Uint8
1-95 KTY 센서 유형 [0] KTY 센서 1 All set-ups x TRUE - Uint8
1-96 KTY 써미스터 리소스 [0] 없음 All set-ups x TRUE - Uint8
1-97 KTY 임계값 80 °C 1 set-up x TRUE 100 Int16
4 프로그래밍 방법
4
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
91

4
VLT® Automation Drive FC 300
4 프로그래밍 방법
4.3.3 2-** 제동 장치
파라
파라미터 설명 초기값 4-set-up FC 302 에만해당운전 중 변경변환색인유형
미터
번호
#
2-0* 직류 제동
2-00 직류 유지 전류 50 % All set-ups TRUE 0 Uint8
2-01 직류 제동 전류 50 % All set-ups TRUE 0 Uint16
2-02 직류 제동 시간 10.0 s All set-ups TRUE -1 Uint16
2-03 직류 제동 동작 속도 [RPM] ExpressionLimit All set-ups TRUE 67 Uint16
2-04 직류 제동 동작 속도 [Hz] ExpressionLimit All set-ups TRUE -1 Uint16
2-05 Maximum Reference MaxReference (P303) All set-ups TRUE -3 Int32
2-1* 제동 에너지 기능
2-10 제동 기능 null All set-ups TRUE - Uint8
2-11 제동 저항 (ohm) ExpressionLimit All set-ups TRUE 0 Uint16
2-12 제동 동력 한계(kW) ExpressionLimit All set-ups TRUE 0 Uint32
2-13 제동 동력 감시 [0] 꺼짐 All set-ups TRUE - Uint8
2-15 제동 검사 [0] 꺼짐 All set-ups TRUE - Uint8
2-16 교류 제동 최대 전류 100.0 % All set-ups TRUE -1 Uint32
2-17 과전압 제어 [0] 사용안함 All set-ups TRUE - Uint8
2-18
Brake Check Condition [0] At Power Up All set-ups TRUE - Uint8
2-2* 기계식 제동 장치
2-20 제동 전류 해제 ImaxVLT (P1637) All set-ups TRUE -2 Uint32
2-21 브레이크 시작 속도 ExpressionLimit All set-ups TRUE 67 Uint16
2-22 제동 동작 속도 [Hz] ExpressionLimit All set-ups TRUE -1 Uint16
2-23 브레이크 응답 지연 0.0 s All set-ups TRUE -1 Uint8
2-24 Stop Delay 0.0 s All set-ups TRUE -1 Uint8
2-25 Brake Release Time 0.20 s All set-ups TRUE -2 Uint16
2-26 Torque Ref 0.00 % All set-ups TRUE -2 Int16
2-27 Torque Ramp Time 0.2 s All set-ups TRUE -1 Uint8
2-28 Gain Boost Factor 1.00 N/A All set-ups TRUE -2 Uint16
High Power 사용 설명서
92
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.

VLT® Automation Drive FC 300
High Power 사용 설명서
4.3.4 3-** 지령 / 가감속
파라
파라미터 설명 초기값 4-set-up FC 302 에만해당운전 중 변경변환색인유형
미터
번호
#
3-0* 지령 한계
3-00 지령 범위 null All set-ups TRUE - Uint8
3-01 지령/피드백 단위 null All set-ups TRUE - Uint8
3-02 최소 지령 ExpressionLimit All set-ups TRUE -3 Int32
3-03 최대 지령 ExpressionLimit All set-ups TRUE -3 Int32
지령 기능 [0] 합계 All set-ups TRUE - Uint8
3-04
3-1* 지령
3-10 프리셋 지령 0.00 % All set-ups TRUE -2 Int16
3-11 조그 속도 [Hz] ExpressionLimit All set-ups TRUE -1 Uint16
3-12 캐치업/슬로우다운 값 0.00 % All set-ups TRUE -2 Int16
3-13 지령 위치 [0] 수동/자동에 링크 All set-ups TRUE - Uint8
3-14 프리셋 상대 지령 0.00 % All set-ups TRUE -2 Int32
3-15 지령 리소스
3-16 지령 리소스 2 null All set-ups TRUE - Uint8
3-17 지령 리소스 3 null All set-ups TRUE - Uint8
3-18 상대 스케일링 지령 리소스 [0] 기능 없음 All set-ups TRUE - Uint8
3-19 조그 속도 [RPM] ExpressionLimit All set-ups TRUE 67 Uint16
3-4* 가감속 1
3-40 가감속 1 유형 [0] 선형 All set-ups TRUE - Uint8
3-41 1 가속 시간 ExpressionLimit All set-ups TRUE -2 Uint32
3-42 1 감속 시간 ExpressionLimit All set-ups TRUE -2 Uint32
3-45 가감속1가속시작시 S 가감속률 50 % All set-ups TRUE 0 Uint8
3-46 가감속1가속종료시 S 가감속률 50 % All set-ups TRUE 0 Uint8
3-47 가감속1감속시작시 S 가감속률 50 % All set-ups TRUE 0 Uint8
3-48 가감속1감속종료시 S 가감속률 50 % All set-ups TRUE 0 Uint8
3-5* 가감속 2
3-50 가감속 2 유형 [0] 선형 All set-ups TRUE - Uint8
3-51 2 가속 시간 ExpressionLimit All set-ups TRUE -2 Uint32
3-52 2 감속 시간 ExpressionLimit All set-ups TRUE -2 Uint32
3-55 가감속2가속시작시 S 가감속률 50 % All set-ups TRUE 0 Uint8
3-56 가감속2가속종료시 S 가감속률 50 % All set-ups TRUE 0 Uint8
3-57 가감속2감속시작시 S 가감속률 50 % All set-ups TRUE 0 Uint8
3-58 가감속2감속종료시 S 가감속률 50 % All set-ups TRUE 0 Uint8
3-6* 가감속 3
3-60 가감속 3 유형 [0] 선형 All set-ups TRUE - Uint8
3-61 3 가속 시간 ExpressionLimit All set-ups TRUE -2 Uint32
3-62 3 감속 시간 ExpressionLimit All set-ups TRUE -2 Uint32
3-65 가감속3가속시작시 S 가감속률 50 % All set-ups TRUE 0 Uint8
3-66 가감속3가속종료시 S 가감속률 50 % All set-ups TRUE 0 Uint8
3-67 가감속3감속시작시 S 가감속률 50 % All set-ups TRUE 0 Uint8
3-68 가감속3감속종료시 S 가감속률 50 % All set-ups TRUE 0 Uint8
3-7* 가감속 4
3-70 가감속 4 유형 [0] 선형 All set-ups TRUE - Uint8
3-71 4 가속 시간 ExpressionLimit All set-ups TRUE -2 Uint32
3-72 4 감속 시간 ExpressionLimit All set-ups TRUE -2 Uint32
3-75 가감속4가속시작시 S 가감속률 50 % All set-ups TRUE 0 Uint8
3-76 가감속4가속종료시 S 가감속률 50 % All set-ups TRUE 0 Uint8
3-77 가감속4감속시작시 S 가감속률 50 % All set-ups TRUE 0 Uint8
3-78 가감속4감속종료시 S 가감속률 50 % All set-ups TRUE 0 Uint8
3-8* 기타 가감속
3-80 조그 가감속 시간 ExpressionLimit All set-ups TRUE -2 Uint32
3-81 순간 정지 가감속 시간 ExpressionLimit 2 set-ups TRUE -2 Uint32
3-82 Quick Stop Ramp Type [0] 선형 All set-ups TRUE - Uint8
3-83 Quick Stop S-ramp Ratio at Decel. Start 50 % All set-ups TRUE 0 Uint8
3-84 Quick Stop S-ramp Ratio at Decel. End 50 % All set-ups TRUE 0 Uint8
3-9* 디지털 전위차계
3-90 단계별 크기 0.10 % All set-ups TRUE -2 Uint16
3-91 가감속 시간 1.00 s All set-ups TRUE -2 Uint32
3-92 전력 복구 [0] 꺼짐 All set-ups TRUE - Uint8
3-93 최대 한계 100 % All set-ups TRUE 0 Int16
3-94 최소 한계 -100 % All set-ups TRUE 0 Int16
3-95 가감속 지연 ExpressionLimit All set-ups TRUE -3 TimD
1
null All set-ups TRUE - Uint8
4 프로그래밍 방법
4
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
93
4
VLT® Automation Drive FC 300
4 프로그래밍 방법
4.3.5 4-** 한계 / 경고
파라
파라미터 설명 초기값 4-set-up FC 302 에만해당운전 중 변경변환색인유형
미터
번호
#
4-1* 모터 한계
4-10 모터 속도 방향 null All set-ups FALSE - Uint8
4-11 모터의 저속 한계 [RPM] ExpressionLimit All set-ups TRUE 67 Uint16
4-12 모터 속도 하한 [Hz] ExpressionLimit All set-ups TRUE -1 Uint16
4-13 모터의 고속 한계 [RPM] ExpressionLimit All set-ups TRUE 67 Uint16
4-14 모터 속도 상한 [Hz] ExpressionLimit All set-ups TRUE -1 Uint16
4-16 모터 운전의 토오크 한계 ExpressionLimit All set-ups TRUE -1 Uint16
4-17 재생 운전의 토오크 한계 100.0 % All set-ups TRUE -1 Uint16
4-18 전류 한계 ExpressionLimit All set-ups TRUE -1 Uint32
4-19
최대 출력 주파수 132.0 Hz All set-ups FALSE -1 Uint16
4-2* 한계 상수
4-20 토오크 한계 상수 소스 [0] 기능 없음 All set-ups TRUE - Uint8
4-21 속도 한계 상수 소스 [0] 기능 없음 All set-ups TRUE - Uint8
4-3* 모터 피드백 감시
4-30 모터 피드백 손실 기능 [2] 트립 All set-ups TRUE - Uint8
4-31 모터 피드백 속도 오류 300 RPM All set-ups TRUE 67 Uint16
4-32 모터 피드백 손실 시간 초과 0.05 s All set-ups TRUE -2 Uint16
4-34 Tracking Error Function [0] Disable All set-ups TRUE - Uint8
4-35 Tracking Error 10 RPM All set-ups TRUE 67 Uint16
4-36 Tracking Error Timeout 1.00 s All set-ups TRUE -2 Uint16
4-37 Tracking Error Ramping 100 RPM All set-ups TRUE 67 Uint16
4-38 Tracking Error Ramping Timeout 1.00 s All set-ups TRUE -2 Uint16
4-39 Tracking Error After Ramping Timeout 5.00 s All set-ups TRUE -2 Uint16
4-5* 경고 조정
4-50 저전류 경고 0.00 A All set-ups TRUE -2 Uint32
4-51 고전류 경고 ImaxVLT (P1637) All set-ups TRUE -2 Uint32
4-52 저속 경고 0 RPM All set-ups TRUE 67 Uint16
4-53 고속 경고
4-54 지령 낮음 경고 -999999.999 N/A All set-ups TRUE -3 Int32
4-55 지령 높음 경고 999999.999 N/A All set-ups TRUE -3 Int32
4-56 피드백 낮음 경고
4-57 피드백 높음 경고
4-58 모터 결상 시 기능 null All set-ups TRUE - Uint8
4-6* 속도 바이패스
4-60 바이패스 시작 속도[RPM] ExpressionLimit All set-ups TRUE 67 Uint16
4-61 바이패스 시작 속도 [Hz] ExpressionLimit All set-ups TRUE -1 Uint16
4-62 바이패스 종결 속도[RPM] ExpressionLimit All set-ups TRUE 67 Uint16
4-63 바이패스 종결 속도 [Hz] ExpressionLimit All set-ups TRUE -1 Uint16
outputSpeedHighLimit
(P413) All set-ups TRUE 67 Uint16
-999999.999
ReferenceFeedbackUnit
999999.999
ReferenceFeedbackUnit All set-ups TRUE -3 Int32
All set-ups TRUE -3 Int32
High Power 사용 설명서
94
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.

VLT® Automation Drive FC 300
High Power 사용 설명서
4.3.6 5-** 디지털 입/출력
파라
파라미터 설명 초기값 4-set-up FC 302 에만해당운전 중 변경변환색인유형
미터
번호
#
5-0* 디지털 I/O 모드
5-00 디지털 I/O 모드 [0] PNP All set-ups FALSE - Uint8
5-01 단자 27 모드 [0] 입력 All set-ups TRUE - Uint8
5-02
5-1* 디지털 입력
5-10 단자 18 디지털 입력 null All set-ups TRUE - Uint8
5-11 단자 19 디지털 입력 null All set-ups TRUE - Uint8
5-12 단자 27 디지털 입력 null All set-ups TRUE - Uint8
5-13 단자 29 디지털 입력 null All set-ups x TRUE - Uint8
5-14 단자 32 디지털 입력 null All set-ups TRUE - Uint8
5-15 단자 33 디지털 입력 null All set-ups TRUE - Uint8
5-16 단자 X30/2 디지털 입력 null All set-ups TRUE - Uint8
5-17 단자 X30/3 디지털 입력 null All set-ups TRUE - Uint8
5-18 단자 X30/4 디지털 입력 null All set-ups TRUE - Uint8
5-19 Terminal 37 Safe Stop [1] Safe Stop Alarm 1 set-up TRUE - Uint8
5-20 Terminal X46/1 Digital Input [0] 운전하지 않음 All set-ups TRUE - Uint8
5-21 Terminal X46/3 Digital Input [0] 운전하지 않음 All set-ups TRUE - Uint8
5-22 Terminal X46/5 Digital Input [0] 운전하지 않음 All set-ups TRUE - Uint8
5-23 Terminal X46/7 Digital Input [0] 운전하지 않음 All set-ups TRUE - Uint8
5-24 Terminal X46/9 Digital Input [0] 운전하지 않음 All set-ups TRUE - Uint8
5-25 Terminal X46/11 Digital Input [0] 운전하지 않음 All set-ups TRUE - Uint8
5-26
5-3* 디지털 출력
5-30 단자 27 디지털 출력 null All set-ups TRUE - Uint8
5-31 단자 29 디지털 출력 null All set-ups x TRUE - Uint8
5-32 단자 X30/6 디지털 출력(MCB 101) null All set-ups TRUE - Uint8
5-33 단자 X30/7 디지털 출력(MCB 101) null All set-ups TRUE - Uint8
5-4* 릴레이
5-40 릴레이 기능 null All set-ups TRUE - Uint8
5-41 작동 지연
5-42 차단 지연, 릴레이 0.01 s All set-ups TRUE -2 Uint16
5-5* 펄스 입력
5-50 단자 29 최저 주파수 100 Hz All set-ups x TRUE 0 Uint32
5-51 단자 29 최고 주파수 100 Hz All set-ups x TRUE 0 Uint32
5-52 단자 29 최저 지령/피드백 값
5-53 단자 29 최고 지령/피드백 값 ExpressionLimit All set-ups x TRUE -3 Int32
5-54 펄스 필터 시상수 #29 100 ms All set-ups x FALSE -3 Uint16
5-55 단자 33 최저 주파수 100 Hz All set-ups TRUE 0 Uint32
5-56 단자 33 최고 주파수 100 Hz All set-ups TRUE 0 Uint32
5-57 단자 33 최저 지령/피드백 값
5-58 단자 33 최고 지령/피드백 값 ExpressionLimit All set-ups TRUE -3 Int32
5-59
5-6* 펄스 출력
5-60 단자 27 펄스 출력 변수 null All set-ups TRUE - Uint8
5-62 펄스 출력 최대 주파수
5-63 단자 29 펄스 출력 변수 null All set-ups x TRUE - Uint8
5-65 펄스 출력 최대 주파수 #29 ExpressionLimit All set-ups x TRUE 0 Uint32
5-66 단자 X30/6 펄스 출력 변수 null All set-ups TRUE - Uint8
5-68 펄스 출력 최대 주파수 #X30/6 ExpressionLimit All set-ups TRUE 0 Uint32
5-7* 24V 엔코더 입력
5-70 단자 32/33
5-71 단자 32/33 엔코더 방향 [0] 시계 방향 All set-ups FALSE - Uint8
5-9* 버스통신 제어
5-90 디지털 및 릴레이 버스통신 제어 0 N/A All set-ups TRUE 0 Uint32
5-93 펄스 출력 #27 버스통신 제어 0.00 % All set-ups TRUE -2 N2
5-94 펄스 출력 #27 시간 초과 프리셋 0.00 % 1 set-up TRUE -2 Uint16
5-95 펄스 출력 #29 버스통신 제어 0.00 % All set-ups x TRUE -2 N2
5-96 펄스 출력 #29 시간 초과 프리셋 0.00 % 1 set-up x TRUE -2 Uint16
5-97 Pulse Out #X30/6 Bus Control 0.00 % All set-ups TRUE -2 N2
5-98 Pulse Out #X30/6 Timeout Preset 0.00 % 1 set-up TRUE -2 Uint16
모드
단자 29
Terminal X46/13 Digital Input [0] 운전하지 않음 All set-ups TRUE - Uint8
, 릴레이
펄스 필터 시상수 #33 100 ms All set-ups FALSE -3 Uint16
#27
분해능
[0] 입력 All set-ups x TRUE - Uint8
0.01 s All set-ups TRUE -2 Uint16
ReferenceFeedbackUnit
ReferenceFeedbackUnit All set-ups TRUE -3 Int32
0.000
All set-ups x TRUE -3 Int32
0.000
ExpressionLimit All set-ups TRUE 0 Uint32
1024 N/A All set-ups FALSE 0 Uint16
4 프로그래밍 방법
4
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
95

4
VLT® Automation Drive FC 300
4 프로그래밍 방법
4.3.7 6-** 아날로그 입/출력
파라
파라미터 설명 초기값 4-set-up FC 302 에만해당운전 중 변경변환색인유형
미터
번호
#
6-0* 아날로그 I/O 모드
6-00 외부 지령 보호 시간 10 s All set-ups TRUE 0 Uint8
6-01 외부 지령 보호 기능 [0] 꺼짐 All set-ups TRUE - Uint8
6-1* 아날로그 입력 1
6-10 단자 53 최저 전압 0.07 V All set-ups TRUE -2 Int16
6-11 단자 53 최고 전압 10.00 V All set-ups TRUE -2 Int16
6-12 단자 53 최저 전류 0.14 mA All set-ups TRUE -5 Int16
6-13 단자 53 최고 전류 20.00 mA All set-ups TRUE -5 Int16
6-14 단자 53 최저 지령/피드백 값 0 ReferenceFeedbackUnit All set-ups TRUE -3 Int32
6-15 단자 53 최고 지령
6-16 단자 53 필터 시정수 0.001 s All set-ups TRUE -3 Uint16
6-2* 아날로그 입력 2
6-20 단자 54 최저 전압 0.07 V All set-ups TRUE -2 Int16
6-21 단자 54 최고 전압 10.00 V All set-ups TRUE -2 Int16
6-22 단자 54 최저 전류 0.14 mA All set-ups TRUE -5 Int16
6-23 단자 54 최고 전류 20.00 mA All set-ups TRUE -5 Int16
6-24 단자 54 최저 지령/피드백 값 0 ReferenceFeedbackUnit All set-ups TRUE -3 Int32
6-25 단자 54 최고 지령/피드백 값 ExpressionLimit All set-ups TRUE -3 Int32
6-26 단자 54 필터 시정수 0.001 s All set-ups TRUE -3 Uint16
6-3* 아날로그 입력 3
6-30 단자 X30/11 저전압 0.07 V All set-ups TRUE -2 Int16
6-31 단자 X30/11 고전압 10.00 V All set-ups TRUE -2 Int16
6-34 단자 X30/11 최저 지령/피드백값 0 ReferenceFeedbackUnit All set-ups TRUE -3 Int32
6-35 단자 X30/11 최고 지령/
6-36 단자 X30/11 필터 시정수 0.001 s All set-ups TRUE -3 Uint16
6-4* 아날로그 입력 4
6-40 단자 X30/12 저전압 0.07 V All set-ups TRUE -2 Int16
6-41 단자 X30/12 고전압 10.00 V All set-ups TRUE -2 Int16
6-44 단자 X30/12 최저 지령/피드백값 0 ReferenceFeedbackUnit All set-ups TRUE -3 Int32
6-45 단자 X30/12 최고 지령/
6-46 단자 X30/12 필터 시정수 0.001 s All set-ups TRUE -3 Uint16
6-5* 아날로그 출력 1
6-50 단자 42 출력 null All set-ups TRUE - Uint8
6-51 단자 42 최소 출력 범위 0.00 % All set-ups TRUE -2 Int16
6-52 단자 42 최대 출력 범위 100.00 % All set-ups TRUE -2 Int16
6-53 단자 42 출력 버스통신 제어 0.00 % All set-ups TRUE -2 N2
6-54 단자 42 출력 시간 초과 프리셋 0.00 % 1 set-up TRUE -2 Uint16
6-55
Terminal 42 Output Filter [0] Off 1 set-up TRUE - Uint8
6-6* 아날로그 출력 2
6-60 단자 X30/8 출력 null All set-ups TRUE - Uint8
6-61 단자 X30/8 최소 범위 0.00 % All set-ups TRUE -2 Int16
6-62 단자 X30/8 최대 범위 100.00 % All set-ups TRUE -2 Int16
6-63 Terminal X30/8 Bus Control 0.00 % All set-ups TRUE -2 N2
Terminal X30/8 Output Timeout Preset 0.00 % 1 set-up TRUE -2 Uint16
6-64
6-7* Analog Output 3
6-70 Terminal X45/1 Output null All set-ups TRUE - Uint8
6-71 Terminal X45/1 Min. Scale 0.00 % All set-ups TRUE -2 Int16
6-72 Terminal X45/1 Max. Scale 100.00 % All set-ups TRUE -2 Int16
6-73 Terminal X45/1 Bus Control 0.00 % All set-ups TRUE -2 N2
Terminal X45/1 Output Timeout Preset 0.00 % 1 set-up TRUE -2 Uint16
6-74
6-8* Analog Output 4
6-80 Terminal X45/3 Output null All set-ups TRUE - Uint8
6-81 Terminal X45/3 Min. Scale 0.00 % All set-ups TRUE -2 Int16
6-82 Terminal X45/3 Max. Scale 100.00 % All set-ups TRUE -2 Int16
6-83 Terminal X45/3 Bus Control 0.00 % All set-ups TRUE -2 N2
6-84 Terminal X45/3 Output Timeout Preset 0.00 % 1 set-up TRUE -2 Uint16
/피드백 값
피드백값
피드백값
ExpressionLimit All set-ups TRUE -3 Int32
ExpressionLimit All set-ups TRUE -3 Int32
ExpressionLimit All set-ups TRUE -3 Int32
High Power 사용 설명서
96
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.

VLT® Automation Drive FC 300
High Power 사용 설명서
4.3.8 7-** 컨트롤러
파라
파라미터 설명 초기값 4-set-up FC 302 에만해당운전 중 변경변환색인유형
미터
번호
#
7-0* 속도 PID 제어
7-00 속도 PID 피드백 소스 null All set-ups FALSE - Uint8
7-02 속도 PID 비례 이득 ExpressionLimit All set-ups TRUE -3 Uint16
7-03 속도 PID 적분 시간 ExpressionLimit All set-ups TRUE -4 Uint32
7-04 속도 PID 미분 시간 ExpressionLimit All set-ups TRUE -4 Uint16
7-05 속도 PID 미분 이득 한계 5.0 N/A All set-ups TRUE -1 Uint16
7-06 속도 PID 저주파 통과 필터 시간 10.0 ms All set-ups TRUE -4 Uint16
7-07 Speed PID Feedback Gear Ratio 1.0000 N/A All set-ups FALSE -4 Uint32
7-08 속도 PID 피드포워드 상수 0 % All set-ups FALSE 0 Uint16
7-1* Torque PI Ctrl.
7-12 Torque PI Proportional Gain 100 % All set-ups TRUE 0 Uint16
7-13 Torque PI Integration Time 0.020 s All set-ups TRUE -3 Uint16
7-2* 공정제어기피드백
7-20 공정 폐회로 피드백 1 리소스 [0] 기능 없음 All set-ups TRUE - Uint8
7-22 공정 폐회로 피드백
7-3* 공정 PID 제어기
7-30 공정 PID 정/역 제어 [0] 정 All set-ups TRUE - Uint8
7-31 공정 PID 와인드업 방지 [1] 켜짐 All set-ups TRUE - Uint8
7-32 공정 PID 기동 속도 0 RPM All set-ups TRUE 67 Uint16
7-33 공정 PID 비례 이득 0.01 N/A All set-ups TRUE -2 Uint16
7-34 공정 PID 적분 시간 10000.00 s All set-ups TRUE -2 Uint32
7-35 공정 PID 미분 시간 0.00 s All set-ups TRUE -2 Uint16
7-36 공정 PID 미분 이득 한계 5.0 N/A All set-ups TRUE -1 Uint16
7-38 공정 PID 피드포워드 상수 0 % All set-ups TRUE 0 Uint16
7-39 지령 대역폭에 따름 5 % All set-ups TRUE 0 Uint8
7-4* Adv. Process PID I
7-40 Process PID I-part Reset [0] 아니오 All set-ups TRUE - Uint8
7-41 Process PID Output Neg. Clamp -100 % All set-ups TRUE 0 Int16
7-42 Process PID Output Pos. Clamp 100 % All set-ups TRUE 0 Int16
7-43 Process PID Gain Scale at Min. Ref. 100 % All set-ups TRUE 0 Int16
7-44 Process PID Gain Scale at Max. Ref. 100 % All set-ups TRUE 0 Int16
7-45 Process PID Feed Fwd Resource [0] 기능 없음 All set-ups TRUE - Uint8
7-46 Process PID Feed Fwd Normal/ Inv. Ctrl. [0] 정 All set-ups TRUE - Uint8
7-49
Process PID Output Normal/ Inv. Ctrl. [0] 정 All set-ups TRUE - Uint8
7-5* Adv. Process PID II
7-50 Process PID Extended PID [1] 사용함 All set-ups TRUE - Uint8
7-51 Process PID Feed Fwd Gain 1.00 N/A All set-ups TRUE -2 Uint16
7-52 Process PID Feed Fwd Ramp up 0.01 s All set-ups TRUE -2 Uint32
7-53 Process PID Feed Fwd Ramp down 0.01 s All set-ups TRUE -2 Uint32
7-56 Process PID Ref. Filter Time 0.001 s All set-ups TRUE -3 Uint16
7-57 Process PID Fb. Filter Time 0.001 s All set-ups TRUE -3 Uint16
2 리소스
[0] 기능 없음 All set-ups TRUE - Uint8
4 프로그래밍 방법
4
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
97
4
VLT® Automation Drive FC 300
4 프로그래밍 방법
4.3.9 8-** 통신 및 옵션
파라
파라미터 설명 초기값 4-set-up FC 302 에만해당운전 중 변경변환색인유형
미터
번호
#
8-0* 일반 설정
8-01 제어 장소 [0] 디지털 및 제어 워드 All set-ups TRUE - Uint8
8-02 제어워드 소스 null All set-ups TRUE - Uint8
8-03 제어워드 타임아웃 시간 1.0 s 1 set-up TRUE -1 Uint32
8-04 제어워드 타임아웃 기능 null 1 set-up TRUE - Uint8
8-05 타임아웃 종단점 기능 [1] 재개 설정 1 set-up TRUE - Uint8
8-06 제어워드 타임아웃 리셋 [0] 리셋하지 않음 All set-ups TRUE - Uint8
진단 트리거 [0] 사용안함 2 set-ups TRUE - Uint8
8-07
8-1* 제어워드 설정
8-10 컨트롤 워드 프로필 [0] FC 프로필 All set-ups TRUE - Uint8
8-13 구성 가능한 상태 워드 STW null All set-ups TRUE - Uint8
8-14
Configurable Control Word CTW [1] Profile default All set-ups TRUE - Uint8
8-3* FC 단자 설정
8-30 프로토콜 [0] FC 1 set-up TRUE - Uint8
8-31 주소 1 N/A 1 set-up TRUE 0 Uint8
8-32 FC 포트 통신 속도 null 1 set-up TRUE - Uint8
8-33 Parity / Stop Bits
8-35 최소 응답 지연 10 ms All set-ups TRUE -3 Uint16
8-36 최대 응답 지연 ExpressionLimit 1 set-up TRUE -3 Uint16
8-37
최대 특성간 지연 ExpressionLimit 1 set-up TRUE -5 Uint16
8-4* MC 프로토콜설정
8-40 텔레그램 선정 [1] 표준 텔레그램 1 2 set-ups TRUE - Uint8
8-5* 디지털/통신
8-50 코스팅 선택 [3] 논리 OR All set-ups TRUE - Uint8
8-51 순간 정지 선택 [3] 논리 OR All set-ups TRUE - Uint8
8-52 직류 제동 선택 [3] 논리 OR All set-ups TRUE - Uint8
8-53 기동 선택 [3] 논리 OR All set-ups TRUE - Uint8
8-54 역회전 선택 [3] 논리 OR All set-ups TRUE - Uint8
8-55 셋업 선택 [3] 논리 OR All set-ups TRUE - Uint8
프리셋 지령 선택 [3] 논리 OR All set-ups TRUE - Uint8
8-56
8-8* FC Port Diagnostics
8-80 Bus Message Count 0 N/A All set-ups TRUE 0 Uint32
8-81 Bus Error Count 0 N/A All set-ups TRUE 0 Uint32
8-82 Slave Messages Rcvd 0 N/A All set-ups TRUE 0 Uint32
8-83 Slave Error Count 0 N/A All set-ups TRUE 0 Uint32
8-9* 통신 조그
8-90 통신 조그
8-91 통신 조그 2속 200 RPM All set-ups TRUE 67 Uint16
1속
[0] Even Parity, 1 Stop
Bit
100 RPM All set-ups TRUE 67 Uint16
1 set-up TRUE - Uint8
High Power 사용 설명서
98
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
VLT® Automation Drive FC 300
High Power 사용 설명서
4.3.10 9-** 프로피버스
파라
파라미터 설명 초기값 4-set-up FC 302 에만해당운전 중 변경변환색인유형
미터
번호
#
9-00 설정 값 0 N/A All set-ups TRUE 0 Uint16
9-07 실제 값 0 N/A All set-ups FALSE 0 Uint16
9-15 PCD 쓰기 구성 ExpressionLimit 2 set-ups TRUE - Uint16
9-16 PCD 읽기 구성 ExpressionLimit 2 set-ups TRUE - Uint16
9-18 노드 주소 126 N/A 1 set-up TRUE 0 Uint8
9-22 텔레그램 선택 [108] PPO 8 1 set-up TRUE - Uint8
9-23 신호용 파라미터 0 All set-ups TRUE - Uint16
9-27 파라미터 편집 [1] 사용함 2 set-ups FALSE - Uint16
9-28 공정 제어 [1] 주기적 마스터 사용 2 set-ups FALSE - Uint8
9-44 결함 메시지 카운터 0 N/A All set-ups TRUE 0 Uint16
9-45 결함 코드 0 N/A All set-ups TRUE 0 Uint16
9-47 결함 번호 0 N/A All set-ups TRUE 0 Uint16
9-52 결함 상황 카운터 0 N/A All set-ups TRUE 0 Uint16
9-53 프로피버스 경고 워드 0 N/A All set-ups TRUE 0 V2
9-63 실제 통신 속도 [255] 통신속도 없음 All set-ups TRUE - Uint8
9-64 장치 ID 0 N/A All set-ups TRUE 0 Uint16
9-65 프로파일 번호 0 N/A All set-ups TRUE 0
9-67 제어 워드 1 0 N/A All set-ups TRUE 0 V2
9-68 상태 워드 1 0 N/A All set-ups TRUE 0 V2
9-71 프로피버스 저장 데이터 값 [0] 꺼짐 All set-ups TRUE - Uint8
9-72 프로피버스드라이브 리셋 [0] 동작하지 않음 1 set-up FALSE - Uint8
9-80 정의된 파라미터 (1) 0 N/A All set-ups FALSE 0 Uint16
9-81 정의된 파라미터
9-82 정의된 파라미터 (3) 0 N/A All set-ups FALSE 0 Uint16
9-83 정의된 파라미터 (4) 0 N/A All set-ups FALSE 0 Uint16
9-84 정의된 파라미터
9-90 변경된 파라미터 (1) 0 N/A All set-ups FALSE 0 Uint16
9-91 변경된 파라미터 (2) 0 N/A All set-ups FALSE 0 Uint16
9-92 변경된 파라미터
9-93 변경된 파라미터 (4) 0 N/A All set-ups FALSE 0 Uint16
9-94 변경된 파라미터 (5) 0 N/A All set-ups FALSE 0 Uint16
9-99 Profibus Revision Counter 0 N/A All set-ups TRUE 0 Uint16
(2)
(5)
(3)
0 N/A All set-ups FALSE 0 Uint16
0 N/A All set-ups FALSE 0 Uint16
0 N/A All set-ups FALSE 0 Uint16
4 프로그래밍 방법
4
OctStr
[2]
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
99
4
VLT® Automation Drive FC 300
4 프로그래밍 방법
4.3.11 10-** 캔 필드버스
파라
파라미터 설명 초기값 4-set-up FC 302 에만해당운전 중 변경변환색인유형
미터
번호 #
10-0* 공통 설정
10-0
캔 프로토콜 null 2 set-ups FALSE - Uint8
0
10-0
통신속도 선택 null 2 set-ups TRUE - Uint8
1
10-0
2 MAC ID ExpressionLimit 2 set-ups TRUE 0 Uint8
10-0
전송오류 카운터 읽기 0 N/A All set-ups TRUE 0 Uint8
5
10-0
6 수신오류 카운터 읽기 0 N/A All set-ups TRUE 0 Uint8
10-0
7
통신 종류 카운터 읽기 0 N/A All set-ups TRUE 0 Uint8
10-1* 디바이스넷
10-1
0
공정 데이터 유형 선택 null All set-ups TRUE - Uint8
10-1
1 공정 데이터 구성 쓰기 ExpressionLimit All set-ups TRUE - Uint16
10-1
공정 데이터 구성 읽기 ExpressionLimit All set-ups TRUE - Uint16
2
10-1
3 경고 파라미터 0 N/A All set-ups TRUE 0 Uint16
10-1
Net 지령 [0] 꺼짐 2 set-ups TRUE - Uint8
4
10-1
Net 제어 [0] 꺼짐 2 set-ups TRUE - Uint8
5
10-2* COS 필터
10-2
COS 필터 1 0 N/A All set-ups FALSE 0 Uint16
0
10-2
COS 필터 2 0 N/A All set-ups FALSE 0 Uint16
1
10-2
2 COS 필터 3 0 N/A All set-ups FALSE 0 Uint16
10-2
3
COS 필터 4 0 N/A All set-ups FALSE 0 Uint16
10-3* 파라미터 연결
10-3
0
배열 인덱스 0 N/A 2 set-ups TRUE 0 Uint8
10-3
1 데이터 저장 값 [0] 꺼짐 All set-ups TRUE - Uint8
10-3
2
디바이스넷 개정판 ExpressionLimit All set-ups TRUE 0 Uint16
10-3
3 항상 저장 [0] 꺼짐 1 set-up TRUE - Uint8
10-3
4
DeviceNet 제품 코드 ExpressionLimit 1 set-up TRUE 0 Uint16
10-3
9
디바이스넷 F 파라미터 0 N/A All set-ups TRUE 0 Uint32
10-5* CAN Open
10-5
0
공정 데이터 구성 쓰기 ExpressionLimit 2 set-ups TRUE - Uint16
10-5
공정 데이터 구성 읽기 ExpressionLimit 2 set-ups TRUE - Uint16
1
High Power 사용 설명서
100
MG.33.U3.39 - VLT®는 댄포스의 등록 상표입니다
.
 Loading...
Loading...