

Page 1

ENGINEERING TOMORROW
Instrukcja obsługi
VLT® Midi Drive FC 280
www.danfoss.pl/vlt
Page 2

Page 3
Page 4
Page 5
Spis zawartości Instrukcja obsługi
Spis zawartości
1 Wprowadzenie
1.1 Przeznaczenie niniejszej instrukcji
1.2 Materiały dodatkowe
1.3 Wersja dokumentu i oprogramowania
1.4 Opis produktu
1.5 Zezwolenia i certykaty
1.6 Utylizacja
2 Bezpieczeństwo
2.1 Symbole bezpieczeństwa
2.2 Wykwalikowany personel
2.3 Środki ostrożności
3 Instalacja mechaniczna
3.1 Rozpakowywanie
3.2 Środowisko instalacji
3.3 Montaż
4
4
4
4
4
6
6
7
7
7
7
9
9
9
10
4 Instalacja elektryczna
4.1 Instrukcje bezpieczeństwa
4.2 Instalacja zgodna z wymogami kompatybilności elektromagnetycznej (EMC)
4.3 Uziemienie
4.4 Rysunek schematyczny okablowania
4.5 Dostęp
4.6 Podłączenie silnika
4.7 Podłączenie zasilania AC
4.8 Okablowanie sterowania
4.8.1 Typy zacisków sterowania 19
4.8.2 Podłączanie przewodów do zacisków sterowania 20
4.8.3 Włączanie pracy silnika (zacisk 27) 21
4.8.4 Sterowanie hamulcem mechanicznym 21
4.8.5 Wymiana danych przez USB 23
4.9 Wykaz czynności kontrolnych podczas instalacji
5 Uruchomienie
5.1 Instrukcje bezpieczeństwa
13
13
13
13
15
17
17
18
19
24
26
26
5.2 Podłączanie zasilania
5.3 Obsługa lokalnego panelu sterowania
5.3.1 Numeryczny lokalny panel sterowania (NLCP) 26
5.3.2 Funkcja przycisku strzałki w prawo na NLCP 28
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 1
26
26
Page 6
Spis zawartości
VLT® Midi Drive FC 280
5.3.3 Podręczne menu na NLCP 28
5.3.4 Menu główne na NLCP 31
5.3.5 Graczny lokalny panel sterowania (GLCP) 32
5.3.6 Ustawienia parametrów 34
5.3.7 Zmienianie ustawień parametrów za pomocą GLCP 34
5.3.8 Ładowanie danych do LCP i pobieranie danych z LCP 34
5.3.9 Przywracanie nastaw domyślnych za pomocą LCP 35
5.4 Podstawowe programowanie
5.4.1 Zestaw parametrów silnika asynchronicznego 35
5.4.2 Zestaw parametrów silnika PM w trybie VVC
5.4.3 Autom. dopasowanie do silnika (AMA) 37
+
5.5 Sprawdzanie obrotów silnika
5.6 Sprawdzenie obrotów enkodera
5.7 Test sterowania lokalnego
5.8 Rozruch systemu
5.9 Moduł pamięci
5.9.1 Synchronizowanie danych przetwornicy częstotliwości z nowym modułem pamięci (tworzenie kopii zapasowej danych przetwornicy) 39
5.9.2 Kopiowanie danych do innej przetwornicy częstotliwości 39
5.9.3 Kopiowanie danych do wielu przetwornic częstotliwości 40
5.9.4 Transferowanie informacji o oprogramowaniu układowym 40
5.9.5 Wykonywanie kopii zapasowej zmian parametrów do modułu pamięci 40
5.9.6 Wymazywanie danych 41
5.9.7 Wydajność i wskaźniki transferu 41
5.9.8 Aktywacja funkcji PROFIBUS Converter 41
35
36
37
38
38
38
38
6 Safe Torque O (STO)
6.1 Środki ostrożności dla funkcji STO
6.2 Instalacja funkcji Safe Torque O
6.3 Uruchomienie funkcji STO
6.3.1 Włączanie funkcji Safe Torque O 45
6.3.2 Dezaktywacja funkcji Safe Torque O 45
6.3.3 Próba uruchomienia funkcji STO 46
6.3.4 Próba dla aplikacji STO w trybie ręcznego restartu 46
6.3.5 Próba dla aplikacji funkcji STO w trybie automatycznego restartu 46
6.4 Konserwacja i serwisowanie dla funkcji STO
6.5 Dane techniczne funkcji STO
7 Przykłady aplikacji
7.1 Wprowadzenie
7.2 Przykłady aplikacji
2 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
43
44
44
45
46
47
49
49
49
Page 7
Spis zawartości Instrukcja obsługi
7.2.1 AMA 49
7.2.2 Prędkość 49
7.2.3 Start/Stop 51
7.2.4 Reset alarmu zewnętrznego 51
7.2.5 Termistor silnika 51
7.2.6 SLC 52
8 Konserwacja, diagnostyka oraz wykrywanie i usuwanie usterek
8.1 Konserwacja i serwisowanie
8.2 Typy ostrzeżeń i alarmów
8.3 Wyświetlanie ostrzeżeń i alarmów
8.4 Lista ostrzeżeń i alarmów
8.4.1 Lista kodów ostrzeżeń i alarmów 55
8.5 Wykrywanie i usuwanie usterek
9 Dane techniczne
9.1 Dane elektryczne
9.2 Zasilanie
9.3 Wyjście silnikowe z przetwornicy i dane silnika
9.4 Warunki otoczenia
9.5 Dane techniczne kabli
9.6 Wejścia/wyjścia sterowania i dane sterowania
9.7 Momenty dokręcania złączy
9.8 Bezpieczniki i wyłączniki
9.9 Rozmiary obudów, wartości znamionowe mocy i wymiary
53
53
53
54
55
59
62
62
64
65
65
66
66
69
69
72
10 Załącznik
10.1 Symbole, skróty i konwencje
10.2 Struktura menu parametrów
Indeks
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 3
75
75
75
87
Page 8
Wprowadzenie
VLT® Midi Drive FC 280
11
1 Wprowadzenie
1.1 Przeznaczenie niniejszej instrukcji
Niniejsza instrukcja obsługi zawiera informacje dotyczące
bezpiecznej instalacji i bezpiecznego uruchomienia
przetwornicy częstotliwości VLT® Midi Drive FC 280.
Niniejsza instrukcja obsługi jest przeznaczona dla wykwali-
kowanego personelu.
Należy ją przeczytać i postępować zgodnie z nią, aby
używać przetwornicy częstotliwości w sposób bezpieczny i
profesjonalny. Szczególną uwagę należy zwrócić na
instrukcje bezpieczeństwa i ogólne ostrzeżenia. Niniejszą
instrukcję obsługi należy zawsze przechowywać w pobliżu
przetwornicy częstotliwości.
VLT® to zastrzeżony znak towarowy.
1.2 Materiały dodatkowe
Dodatkowe dostępne materiały opisujące zaawansowane
funkcje oraz procedury programowania i konserwacji
przetwornicy częstotliwości.
Opis produktu
1.4
1.4.1 Użytkowanie zgodnie z
przeznaczeniem
Przetwornica częstotliwości to energoelektroniczny
sterownik silnika przeznaczony do:
Sterowania prędkością obrotową silnika w
•
odpowiedzi na sprzężenie zwrotne z systemu lub
na zdalne polecenia z zewnętrznych sterowników.
Układ napędowy składa się z przetwornicy
częstotliwości, silnika oraz sprzętu napędzanego
przez silnik.
Monitorowania aspektów systemu i statusu
•
silnika.
Przetwornica częstotliwości może również służyć do
zabezpieczenia silnika przed przeciążeniem.
Zależnie od
być używana w niezależnej aplikacji lub jako część
większego urządzenia lub większej instalacji.
konguracji przetwornica częstotliwości może
Zalecenia Projektowe przetwornicy częstotliwości
•
VLT® Midi Drive FC 280 zawierają szczegółowe
informacje techniczne dotyczące projektu i
aplikacji przetwornicy częstotliwości.
Przewodnik programowania przetwornicy częstot-
•
liwości VLT® Midi Drive FC 280 zawiera informacje
na temat programowania oraz pełne opisy
parametrów.
Firma Danfoss udostępnia dodatkowe publikacje i
instrukcje. Patrz drives.danfoss.com/knowledge-center/
technical-documentation/ w celu zapoznania się z listą.
Wersja dokumentu i oprogramowania
1.3
Niniejsza instrukcja jest regularnie przeglądana i aktualizowana. Wszelkie sugestie dotyczące ulepszania jej są mile
widziane. Tabela 1.1 zawiera informacje dotyczące wersji
dokumentu i odpowiadającej mu wersji oprogramowania.
Wersja Uwagi
MG07A5
Aktualizacja oprogramowania i
obsługa modułu pamięci.
Wersja oprogra-
mowania
1.5
Przetwornica częstotliwości jest przeznaczona do użytku w
środowisku mieszkalnym, przemysłowym i komercyjnym
zgodnie z lokalnymi przepisami prawa i standardami.
NOTYFIKACJA
W środowisku mieszkalnym produkt ten może
powodować zakłócenia radiowe, których ograniczenie
może wymagać podjęcia dodatkowych kroków.
Przewidywalne niewłaściwe użycie
Nie należy używać przetwornicy częstotliwości w
aplikacjach, które nie są zgodne z określonymi warunkami
pracy i środowiskami eksploatacji. Należy zapewnić
zgodność z warunkami określonymi w rozdział 9 Dane
techniczne.
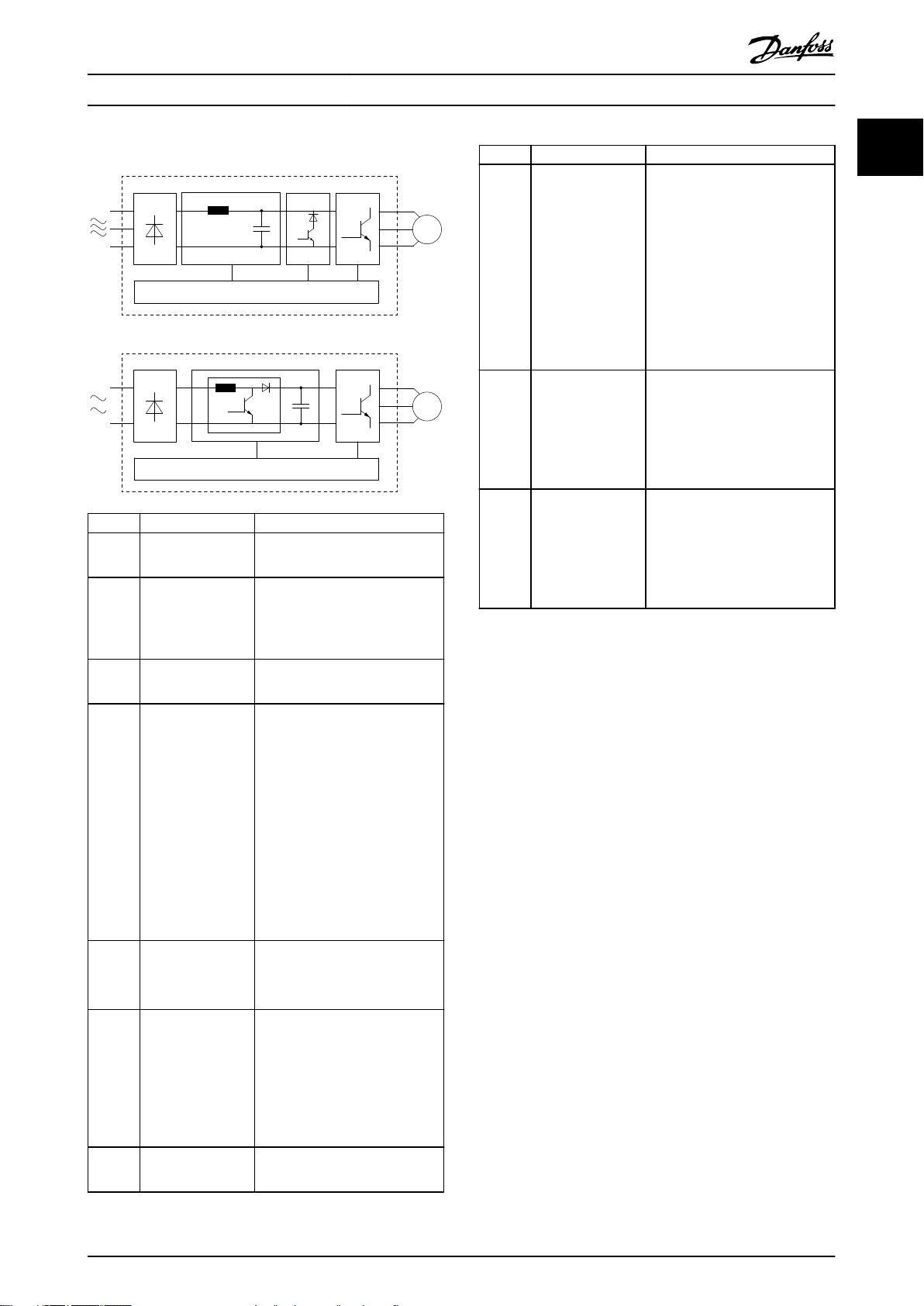
1.4.2 Schemat blokowy przetwornicy
częstotliwości
Ilustracja 1.1 przedstawia schemat blokowy wewnętrznych
części składowych przetwornicy częstotliwości.
Tabela 1.1 Wersja dokumentu i oprogramowania
4 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 9
M
7
63
4
5
21
8
10
130BE200.12
M
7
63
4
5
21
8
9
T2/T4
S2
Wprowadzenie Instrukcja obsługi
Obszar Element Funkcje
Zasilanie AC przetwornicy
1 Wejście zasilania
2 Prostownik
3 Magistrala DC
4 Dławik DC
5
6 Inwerter
7 Wyjście do silnika
Bateria kondensatorów
•
częstotliwości.
Mostek prostownika
•
przekształca prąd AC wejścia
na prąd DC do zasilania
inwertera.
Obwód pośredni szyny DC
•
przekazuje prąd DC.
Filtruje prąd obwodu
•
pośredniego DC.
Zapewniają ochronę przed
•
stanami nieustalonymi sieci
zasilającej.
Zmniejsza prąd skuteczny
•
(RMS).
Zwiększa współczynnik mocy
•
oddawany do zasilania.
Zmniejsza harmoniczne na
•
wejściu AC.
Przechowuje moc DC.
•
Zapewnia zasilanie podczas
•
krótkich zaników mocy.
Przekształca prąd DC w
•
sterowany przebieg AC PWM
(prąd zmienny o ukształtowanej fali i modulowanym
czasie trwania impulsu) do
sterowania zmiennym
wyjściem do silnika.
Sterowane zasilanie trójfazowe
•
wyjściowe do silnika.
Obszar Element Funkcje
Moc wejścia, przetwarzanie
•
wewnętrzne, wyjście oraz prąd
silnika są monitorowane w
celu zapewnienia wydajnej
pracy, kontroli i sterowania.
8 Obwód sterowania
9 PFC
10 Czopper hamulca
Ilustracja 1.1 Przykładowy schemat blokowy przetwornicy
częstotliwości
Interfejs użytkownika oraz
•
polecenia zewnętrzne są
monitorowane i wykonywane.
Możliwe jest udostępnienie
•
sterowania i wyjścia statusu.
Korekcja współczynnika mocy
•
zmienia kształt fali prądu
pobieranego przez
przetwornicę częstotliwości,
aby poprawić współczynnik
mocy.
Czopper (IGBT) hamulca jest
•
używany w obwodzie
pośrednim DC do kontrolowania napięcia DC, kiedy
obciążenie podaje energię z
powrotem.
1.4.3 Rozmiary obudów i moce
znamionowe
Informacje o rozmiarach obudów i wartościach znamionowych mocy, patrz rozdział 9.9 Rozmiary obudów, wartości
znamionowe mocy i wymiary.
1.4.4 Safe Torque O (STO)
Przetwornica częstotliwości VLT® Midi Drive FC 280
obsługuje funkcję Safe Torque O (STO). Informacje na
temat instalacji, uruchomienia, konserwacji oraz dane
techniczne funkcji STO zawiera rozdział 6 Safe Torque O
(STO).
1 1
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 5
Page 10
089
Wprowadzenie
VLT® Midi Drive FC 280
11
1.5 Zezwolenia i certykaty
Informacje na temat zgodności z ADN (European
Agreement concerning International Carriage of Dangerous
Goods by Inland Waterways — europejską umową
dotyczącą międzynarodowego przewozu towarów niebezpiecznych drogami śródlądowymi) zawiera rozdział
Instalacja zgodna z ADN w Zaleceniach Projektowych
produktu VLT® Midi Drive FC 280.
Przetwornica częstotliwości spełnia wymogi zachowywania
pamięci w wysokich temperaturach zgodnie z normą UL
508C. Więcej informacji znajduje się w rozdziale Zabezpie-
czenie termiczne silnika w Zaleceniach Projektowych
przetwornic VLT® Midi Drive FC 280.
Stosowane standardy i normy zgodności dla funkcji STO
Używanie funkcji STO na zaciskach 37 i 38 wymaga
spełnienia wszystkich wymagań dotyczących bezpieczeństwa, z uwzględnieniem stosownych przepisów
prawnych, regulacji i wytycznych. Zintegrowana funkcja
STO spełnia wymagania następujących norm:
IEC/EN 61508:2010, SIL2
•
IEC/EN 61800-5-2:2007, SIL2
•
IEC/EN 62061:2015, SILCL SIL2
•
EN ISO 13849-1:2015, kategoria 3 PL d
•
Utylizacja
1.6
Urządzeń zawierających podzespoły
elektryczne nie należy usuwać wraz z
odpadami domowymi.
Należy je zbierać oddzielnie, zgodnie z
ważnymi i aktualnie obowiązującymi
lokalnymi przepisami prawa.
6 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 11
Bezpieczeństwo Instrukcja obsługi
2 Bezpieczeństwo
2.1 Symbole bezpieczeństwa
Środki ostrożności
2.3
2 2
W niniejszym dokumencie wykorzystano poniższe symbole
bezpieczeństwa:
OSTRZEŻENIE
Oznacza potencjalnie niebezpieczną sytuację, która może
skutkować śmiercią lub poważnymi obrażeniami.
UWAGA
Oznacza potencjalnie niebezpieczną sytuację, która może
skutkować niewielkimi lub umiarkowanymi obrażeniami.
Może również przestrzegać przed niebezpiecznymi
działaniami.
NOTYFIKACJA
Wskazuje ważne informacje, w tym informacje o
sytuacjach, które mogą skutkować uszkodzeniem
urządzeń lub mienia.
2.2 Wykwalikowany personel
Bezproblemowa i bezpieczna praca przetwornicy częstotliwości wymaga właściwego i pewnego transportu oraz
przechowywania, a także właściwie wykonywanej obsługi i
konserwacji. Tylko wykwalikowany personel może
instalować lub obsługiwać ten sprzęt.
Wykwalikowany personel to przeszkolona obsługa
upoważniona do instalacji, uruchomienia, a także do
konserwacji sprzętu, systemów i obwodów zgodnie ze
stosownymi przepisami prawa. Ponadto personel musi znać
instrukcje i środki bezpieczeństwa opisane w niniejszej
instrukcji.
OSTRZEŻENIE
WYSOKIE NAPIĘCIE
Po podłączeniu zasilania wejściowego AC, zasilania DC
lub podziału obciążenia w przetwornicach częstotliwości
występuje wysokie napięcie. Wykonywanie instalacji,
rozruchu i konserwacji przez osoby inne niż wykwali-
kowany personel grozi śmiercią lub poważnymi
obrażeniami.
Instalację, rozruch i konserwację powinien
•
wykonywać wyłącznie wykwalikowany
personel.
Przed przystąpieniem do jakichkolwiek prac
•
serwisowych lub naprawy należy użyć
odpowiedniego miernika napięcia, aby upewnić
się, że w przetwornicy częstotliwości nie ma
napięcia.
OSTRZEŻENIE
PRZYPADKOWY ROZRUCH
Jeśli przetwornica częstotliwości jest podłączona do
zasilania AC, zasilania DC lub podziału obciążenia, silnik
może zostać uruchomiony w każdej chwili. Przypadkowy
rozruch podczas programowania, prac serwisowych lub
naprawy może doprowadzić do śmierci, poważnych
obrażeń ciała lub uszkodzenia mienia. Silnik może zostać
uruchomiony za pomocą przełącznika zewnętrznego,
polecenia przesłanego przez magistralę komunikacyjną,
sygnału wejściowego wartości zadanej z LCP, operacji
zdalnej z wykorzystaniem Oprogramowanie
konguracyjne MCT 10 lub poprzez usunięcie błędu.
Aby zapobiec przypadkowemu rozruchowi silnika:
Odłączyć przetwornicę częstotliwości od
•
zasilania.
Przed programowaniem parametrów nacisnąć
•
przycisk [O/Reset] na LCP.
Przed podłączeniem przetwornicy częstotliwości
•
do zasilania AC, zasilania DC lub podziału
obciążenia należy w pełni oprzewodować i
zmontować przetwornicę częstotliwości, silnik
oraz każdy napędzany sprzęt.
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 7
Page 12
Bezpieczeństwo
VLT® Midi Drive FC 280
OSTRZEŻENIE
CZAS WYŁADOWANIA
22
Przetwornica częstotliwości zawiera kondensatory
obwodu pośredniego DC, które pozostają naładowane
nawet po odłączeniu zasilania od przetwornicy. Wysokie
napięcie może występować nawet wtedy, gdy ostrzegawcze diody LED są wyłączone. Serwisowanie lub
naprawy urządzenia przed upływem określonego czasu
od odłączenia zasilania w razie nierozładowania kondensatorów mogą skutkować śmiercią lub poważnymi
obrażeniami.
Zatrzymać silnik.
•
Odłączyć zasilanie AC i zdalne źródła zasilania
•
obwodu pośredniego DC, w tym zasilanie
akumulatorowe, UPS i połączenia obwodu
pośredniego DC z innymi przetwornicami
częstotliwości.
Odłączyć lub zablokować silnik PM.
•
Zaczekać, aż kondensatory całkowicie się
•
wyładują. Minimalny czas oczekiwania
określono w Tabela 2.1.
Przed przystąpieniem do jakichkolwiek prac
•
serwisowych lub naprawy należy użyć
odpowiedniego miernika napięcia, aby upewnić
się, że kondensatory są całkowicie rozładowane.
Napięcie [V]
200–240 0,37–3,7 (0,5–5) 4
380–480
Zakres mocy
[kW(KM)]
0,37–7,5 (0,5–10) 4
11–22 (15–30) 15
Minimalny czas
oczekiwania
(minuty)
OSTRZEŻENIE
NIEBEZPIECZNY SPRZĘT
Kontakt z obracającymi się wałami i sprzętem
elektrycznym może skutkować śmiercią lub poważnymi
obrażeniami.
Należy zagwarantować, że instalację, rozruch i
•
konserwację będzie wykonywać tylko
przeszkolony i wykwalikowany personel.
Należy zagwarantować, że podczas
•
wykonywania prac elektrycznych przestrzegane
są krajowe i lokalne przepisy elektryczne.
Należy postępować zgodnie z procedurami
•
podanymi w tej instrukcji.
UWAGA
ZAGROŻENIE W PRZYPADKU WEWNĘTRZNEJ
AWARII
Wewnętrzna awaria przetwornicy częstotliwości może
skutkować poważnymi obrażeniami, kiedy przetwornica
częstotliwości nie jest poprawnie zamknięta.
Przed podłączeniem zasilania należy się
•
upewnić, że wszystkie pokrywy bezpieczeństwa
znajdują się na miejscu i są dobrze przymocowane, aby nie istniało niebezpieczeństwo ich
przypadkowego otwarcia.
Tabela 2.1 Czas wyładowania
OSTRZEŻENIE
ZAGROŻENIE ZWIĄZANE Z PRĄDEM
UPŁYWOWYM
Prądy upływowe przekraczają 3,5 mA. Niewykonanie
poprawnego uziemienia przetwornicy częstotliwości
może skutkować śmiercią lub poważnymi obrażeniami.
Należy zapewnić poprawne uziemienie
•
urządzenia przez uprawnionego elektryka.
8 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 13
130BE616.14
VLT
MADE IN
DENMARK
T/C: FC-280PK37T4E20H1BXCXXXSXXXXAX
0.37kW 0.5HP
IN: 3x380-480V 50/60Hz, 1.2/1.0A
OUT: 3x0-Vin 0-500Hz, 1.2/1.1A
IP20
P/N: 134U2184 S/N: 000000G000
Midi Drive
www.danfoss.com
CAUTION / ATTENTION:
WARNING / AVERTISSEMENT:
See manual for special condition/mains fuse
Voir manual de conditions speciales/fusibles
Enclosure: See manual
5AF3 E358502 IND.CONT.EQ.
Stored charge, wait 4 min.
Charge r
é
siduelle, attendez 4 min.
21
1
2
4
3
5
11
20
19
18
16
15
14
13
10
8
9
6
17
R
US LISTED
www.tuv.com
ID 0600000000
Danfoss A/S, 6430 Nordborg, Denmark
12
7
Instalacja mechaniczna Instrukcja obsługi
3 Instalacja mechaniczna
3.1 Rozpakowywanie
3.1.1 Dostarczone elementy
Dostarczone elementy mogą się różnić zależnie od
konguracji produktu.
Należy się upewnić, że dostarczone elementy oraz
•
informacje na tabliczce znamionowej
odpowiadają informacjom zawartym w potwierdzeniu zamówienia.
Należy sprawdzić wygląd opakowania i
•
przetwornicy częstotliwości pod kątem uszkodzeń
spowodowanych niewłaściwym obchodzeniem się
z urządzeniem podczas transportu. Wszelkie
uszkodzenia należy zgłosić
Uszkodzone części należy zachować na potrzeby
wyjaśnienia.
rmie transportowej.
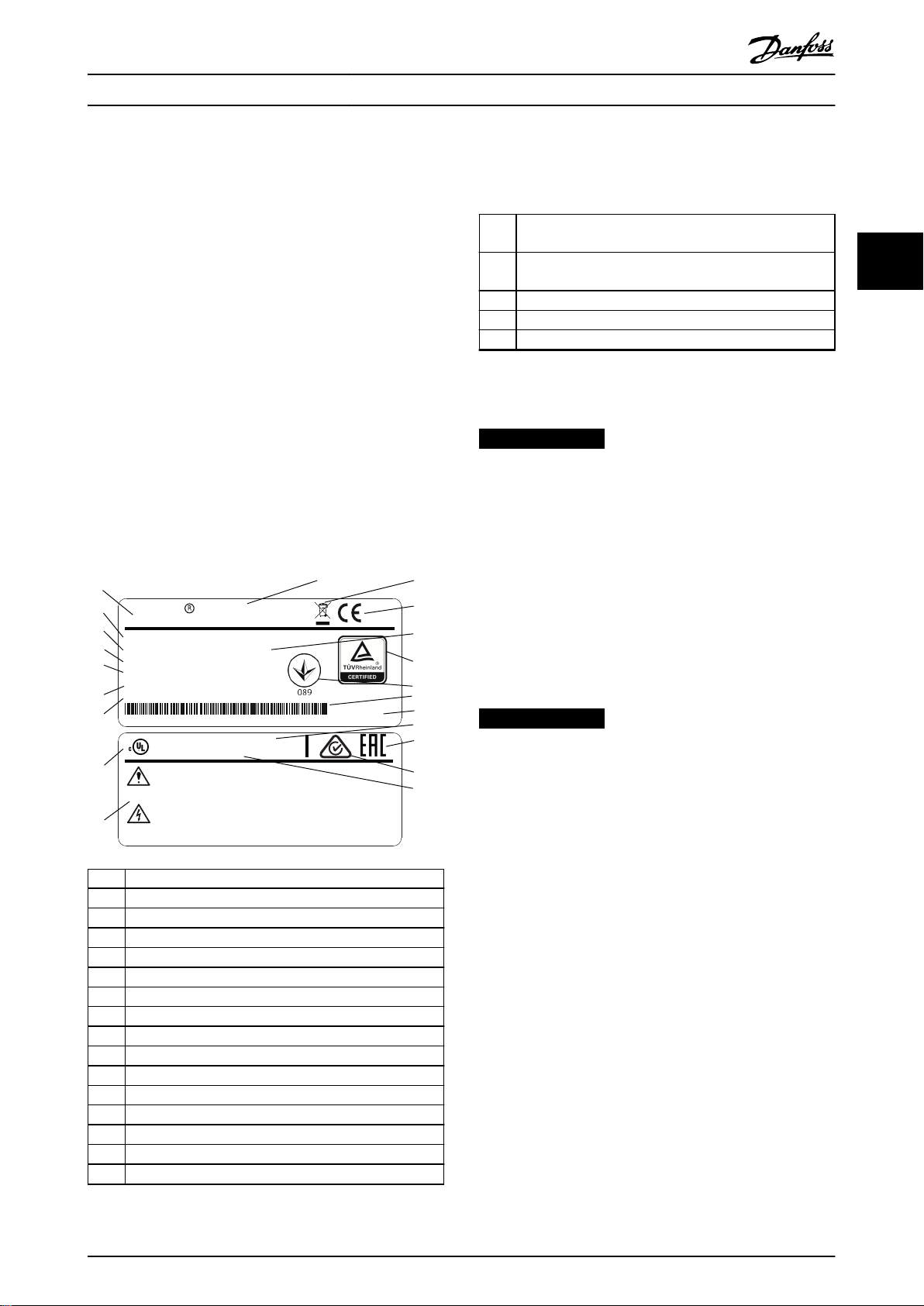
Napięcie wyjściowe, częstotliwość i prąd (przy niskim/
17
wysokim napięciu)
Napięcie wejściowe, częstotliwość i prąd (przy niskim/
18
wysokim napięciu)
19 Moc znamionowa
20 Numer zamówieniowy
21 Kod typu
Ilustracja 3.1 Tabliczka znamionowa produktu (przykład)
NOTYFIKACJA
Nie należy zdejmować tabliczki znamionowej z
przetwornicy częstotliwości. Grozi to utratą gwarancji.
Więcej informacji na temat kodu typu znajduje się w
rozdziale Kod typu w Zaleceniach Projektowych
przetwornic VLT® Midi Drive FC 280.
3.1.2 Magazynowanie
Należy się upewnić, że wymagania dotyczące magazynowania zostały spełnione. Szczegółowe informacje zawiera
rozdział 9.4 Warunki otoczenia.
3 3
1 Logo produktu
2 Nazwa produktu
3 Utylizacja
4 Oznaczenie CE
5 Numer seryjny
6 Logo TÜV
7 Logo UkrSEPRO
8 Kod kreskowy
9 Kraj pochodzenia
10 Odwołanie do typu obudowy
11 Logo EAC
12 Logo RCM
13 Odwołanie do certykatu UL
14 Dane techniczne — ostrzeżenie
15 Logo UL
16 Wartość znamionowa IP
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 9
Środowisko instalacji
3.2
NOTYFIKACJA
W środowiskach z unoszącymi się w powietrzu cieczami
lotnymi, cząsteczkami stałymi lub żrącymi gazami należy
się upewnić, że klasa IP/typu urządzenia odpowiada
środowisku instalacji. Niespełnienie wymagań
dotyczących warunków otoczenia może spowodować
skrócenie okresu eksploatacji przetwornicy częstotliwości. Należy się upewnić, że zostały spełnione
wymagania dotyczące wilgotności powietrza,
temperatury i wysokości n.p.m.
Drgania i udary
Przetwornica częstotliwości spełnia wymogi dla urządzeń
montowanych na ścianach i podłogach w budynkach
produkcyjnych oraz na panelach przykręcanych do ścian
lub podłóg.
Szczegółowe dane techniczne dotyczące warunków
otoczenia zawiera rozdział 9.4 Warunki otoczenia.
Page 14
130BE615.12
130BF642.10
G
Instalacja mechaniczna
VLT® Midi Drive FC 280
3.3 Montaż
NOTYFIKACJA
Niewłaściwy montaż może doprowadzić do
przegrzewania się i obniżonej wydajności pracy
jednostki.
33
Chłodzenie
Należy zapewnić odstępy 100 mm u góry i dołu
•
w celu umożliwienia obiegu powietrza
chłodzenia.
Podnoszenie
Aby określić bezpieczny sposób podnoszenia
•
jednostki, należy sprawdzić jej ciężar. Patrz
rozdział 9.9 Rozmiary obudów, wartości
znamionowe mocy i wymiary.
Należy upewnić się, że urządzenie dźwigowe jest
•
odpowiednie do tego zadania.
W razie potrzeby należy przenieść jednostkę za
•
pomocą dźwignika, dźwigu lub wózka widłowego
o odpowiedniej nośności znamionowej.
Do podnoszenia jednostki należy użyć przezna-
•
czonych do tego pierścieni, jeśli jednostka jest w
nie wyposażona.
Montaż
W celu dopasowania do otworów montażowych VLT® Midi
Drive FC 280 należy skontaktować się z lokalnym dostawcą
Danfoss, aby zamówić oddzielną płytę tylną.
Aby zamontować przetwornicę częstotliwości:
1. Należy upewnić się, że miejsce montażu ma
wystarczającą nośność, by unieść ciężar jednostki.
Przetwornice częstotliwości mogą być instalowane
obok siebie.
2. Umieścić jednostkę jak najbliżej silnika. Kable
silnika powinny być jak najkrótsze.
3. W celu zapewnienia obiegu powietrza chłodzenia
jednostkę należy przymocować do jednolitej,
płaskiej powierzchni lub do opcjonalnej płyty
tylnej.
4. Do mocowania naściennego należy użyć
podłużnych otworów montażowych, jeżeli takie
zapewniono.
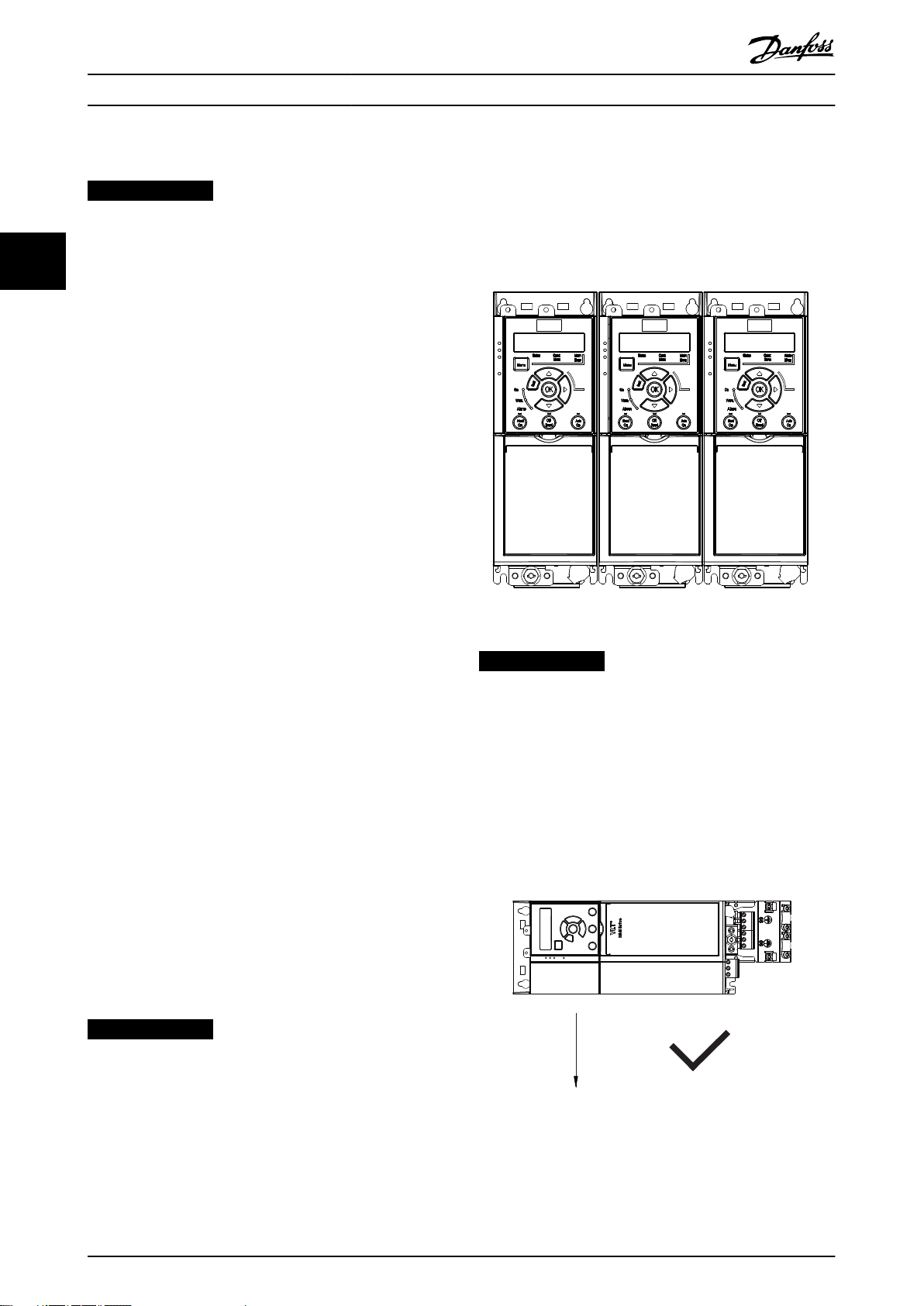
3.3.1 Montaż szeregowy
Montaż szeregowy
Wszystkie jednostki VLT® Midi Drive FC 280 mogą być
instalowane obok siebie w położeniu pionowym lub
poziomym. Jednostki nie wymagają dodatkowej wentylacji
z boku.
Ilustracja 3.2 Montaż szeregowy
NOTYFIKACJA
RYZYKO PRZEGRZANIA
Jeśli używany jest zestaw do konwersji IP21,
zamontowanie jednostek obok siebie może prowadzić do
przegrzania i uszkodzenia jednostki.
Wymagany jest co najmniej 30 mm odstęp
•
między krawędziami górnej pokrywy zestawu
do konwersji IP21.
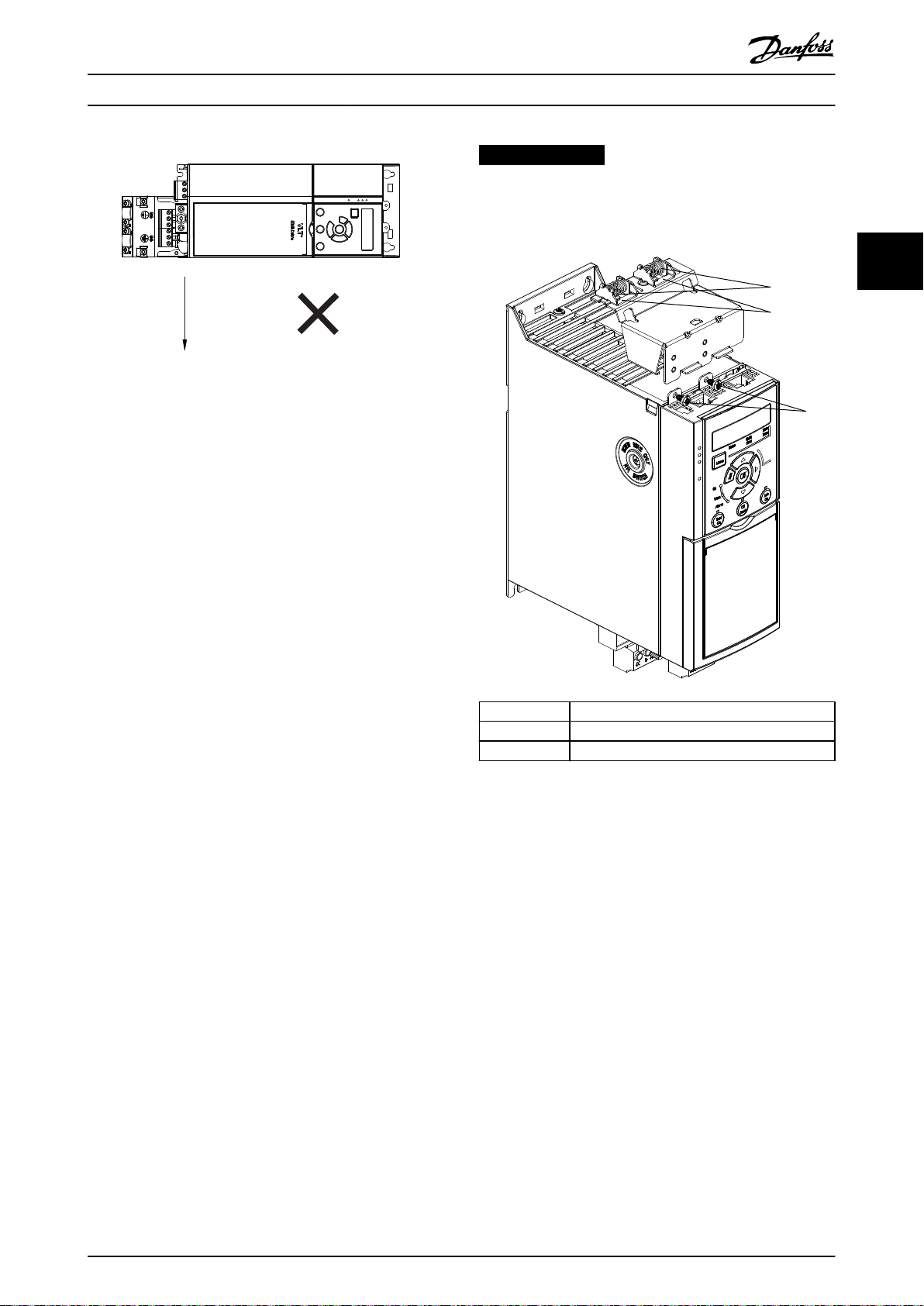
3.3.2 Montaż poziomy
NOTYFIKACJA
Wymiary otworów montażowych — patrz
rozdział 9.9 Rozmiary obudów, wartości znamionowe mocy
i wymiary.
10 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Ilustracja 3.3 Prawidłowy sposób montażu poziomego (lewym
bokiem do dołu)
Page 15
130BF643.10
G
1
2
3
130BE480.10
Instalacja mechaniczna Instrukcja obsługi
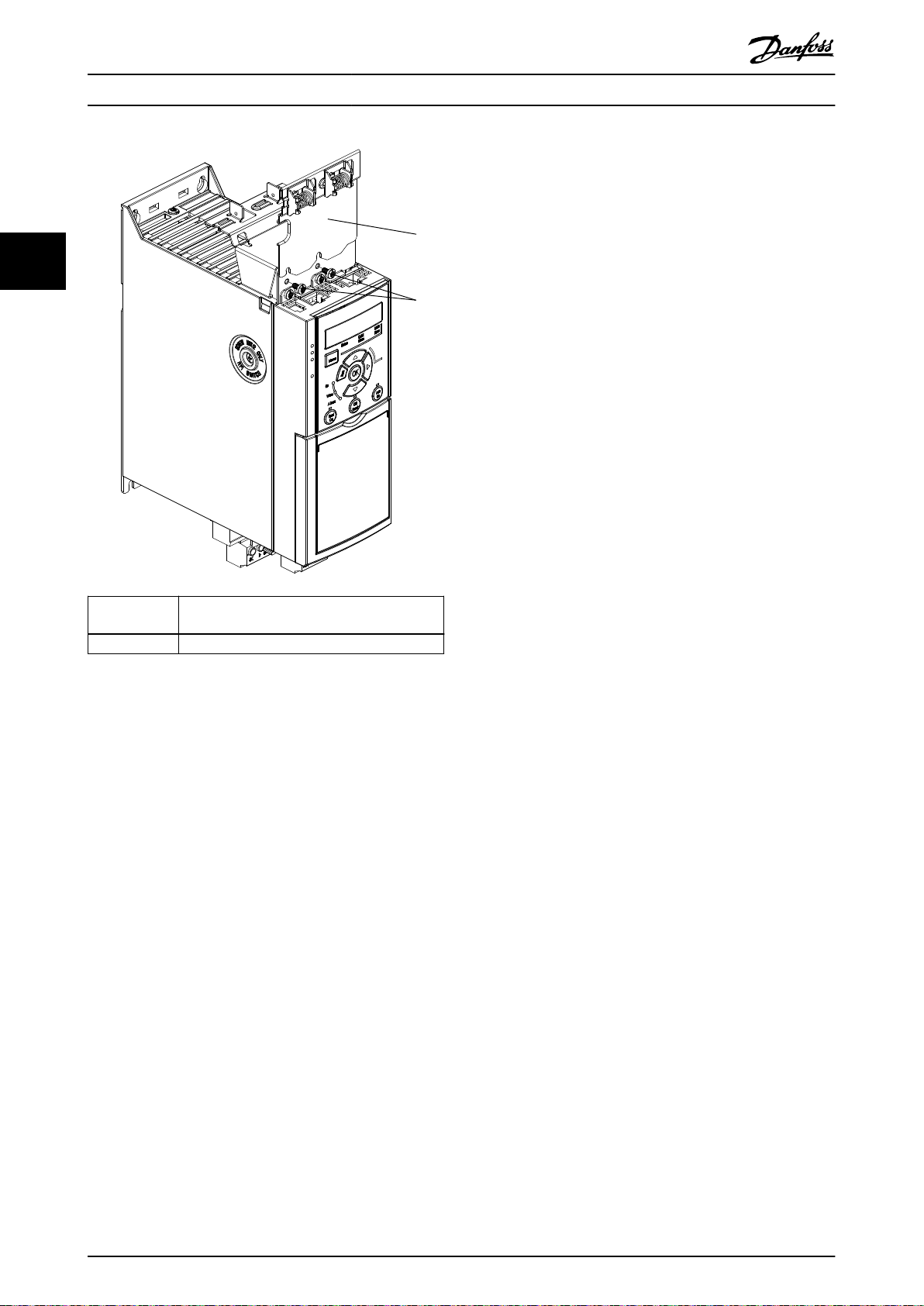
Ilustracja 3.4 Nieprawidłowy sposób montażu poziomego
(prawym bokiem do dołu)
3.3.3 Zestaw odsprzęgający dla magistrali
Zestaw odsprzęgający dla magistrali zapewnia mocowanie
mechaniczne i elektryczne oraz ekranowanie kabli dla
następujących wariantów kaset sterujących:
Kaseta sterująca z opcją PROFIBUS.
•
Kaseta sterująca z opcją PROFINET.
•
Kaseta sterująca z opcją CANOpen.
•
Kaseta sterująca z opcją Ethernet.
•
Kaseta sterująca z opcją POWERLINK.
•
Każdy zestaw odsprzęgający dla magistrali zawiera jedną
poziomą i jedną pionową płytkę odsprzęgającą mocowania
mechanicznego. Zamontowanie pionowej płytki odsprzęgającej mocowania mechanicznego jest opcjonalne.
Pionowa płytka odsprzęgająca mocowania mechanicznego
zapewnia lepsze wsparcie mechaniczne dla złączy i kabli
PROFINET, Ethernet i POWERLINK.
3.3.4 Montaż
NOTYFIKACJA
Jeśli używana jest górna pokrywa IP21, nie należy
montować pionowej płytki odsprzęgającej mocowania
mechanicznego, ponieważ jej wysokość uniemożliwia
poprawne zamocowanie górnej pokrywy IP21.
3 3
1 Sprężyny mechaniczne
2 Metalowe zaciski
3 Śruby
Ilustracja 3.5 Mocowanie poziomej płytki odsprzęgającej
mocowania mechanicznego za pomocą śrub.
Zamontować zestaw do odsprzęgania magistrali:
1. Umieścić poziomą płytkę odsprzęgającą
mocowania mechanicznego na kasecie sterującej
zamontowanej w przetwornicy częstotliwości i
przymocować płytkę przy użyciu 2 wkrętów, jak
pokazuje Ilustracja 3.5. Moment dokręcania to
0,7–1,0 Nm.
2. Opcjonalnie: Zamocować pionową płytkę
odsprzęgającą mocowania mechanicznego w
następujący sposób:
2a Wyjąć dwie sprężyny mechaniczne i dwa
metalowe zaciski z płytki poziomej.
2b Zamontować sprężyny mechaniczne i
metalowe zaciski na płytce pionowej.
2c Przymocować płytkę za pomocą dwóch
śrub, jak pokazano na Ilustracja 3.6.
Moment dokręcania to 0,7–1,0 Nm.
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 11
Page 16
130BE481.10
1
2
Instalacja mechaniczna
VLT® Midi Drive FC 280
33
1 Pionowa płytka odsprzęgająca mocowania
mechanicznego
2 Śruby
Ilustracja 3.6 Mocowanie pionowej płytki odsprzęgającej
mocowania mechanicznego za pomocą śrub.
Ilustracja 3.5 i Ilustracja 3.6 przedstawiają dławiki oparte na
protokole Ethernet (RJ45). Rzeczywisty typ dławika zależy
od wybranego wariantu magistrali komunikacyjnej dla
przetwornicy częstotliwości.
3. Należy zapewnić właściwe oprzewodowanie kabli
magistrali komunikacyjnej (PROFIBUS/CANopen)
lub wcisnąć dławiki kablowe (RJ45 dla PROFINET/
POWERLINK/Ethernet/IP) do gniazd w kasecie
sterującej.
4. 4a Umieścić kable PROFIBUS/CANopen
między sprężynowymi metalowymi
zaciskami w celu zapewnienia
mocowania mechanicznego i kontaktu
elektrycznego między ekranowanymi
sekcjami kabli i zacisków.
4b Umieścić kable PROFINET/POWERLINK/
Ethernet/IP między sprężynowymi
metalowymi zaciskami w celu
zapewnienia mocowania mechanicznego
i kontaktu elektrycznego między
kablami i zaciskami.
12 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 17
Instalacja elektryczna Instrukcja obsługi
4 Instalacja elektryczna
4.1 Instrukcje bezpieczeństwa
Patrz rozdział 2 Bezpieczeństwo. w celu zapoznania się z
ogólnymi instrukcjami bezpieczeństwa.
OSTRZEŻENIE
NAPIĘCIE INDUKOWANE
Napięcie indukowane z kabli wyjścia silnika różnych
przetwornic częstotliwości prowadzonych razem może
spowodować naładowanie kondensatorów w sprzęcie
nawet wtedy, gdy jest on wyłączony i zablokowany.
Niepoprowadzenie wyjściowych kabli silnika osobno lub
nieużycie kabli ekranowanych może skutkować śmiercią
lub poważnymi obrażeniami.
Wyjściowe kable silnika należy poprowadzić
•
osobno.
Użyć kabli ekranowanych.
•
Zablokować wszystkie przetwornice częstot-
•
liwości równocześnie.
OSTRZEŻENIE
RYZYKO PORAŻENIA PRĄDEM
Przetwornica częstotliwości może generować prąd DC w
przewodzie uziemienia, co może skutkować śmiercią lub
poważnymi obrażeniami.
Kiedy wyłącznik różnicowoprądowy RCD jest
•
używany jako zabezpieczenie przed udarem, po
stronie zasilania wolno używać tylko wyłącznika
różnicowoprądowego RCD typu B.
Niezastosowanie się do zaleceń oznacza, że wyłącznik
różnicowoprądowy RCD nie może zagwarantować
zakładanej ochrony.
Ochrona przed przetężeniem
W przypadku aplikacji z wieloma silnikami
•
wymagany jest dodatkowy sprzęt ochronny
między przetwornicą częstotliwości a silnikiem, na
przykład chroniący przed zwarciem lub
zapewniający zabezpieczenie termiczne silnika.
Zabezpieczenie przed zwarciami i ochrona przed
•
przetężeniem wymagają zabezpieczenia wejścia
przy użyciu bezpieczników. W przypadku braku
fabrycznych bezpieczników musi je zapewnić
instalator. Informacje o maksymalnych
wartościach znamionowych bezpieczników
zawiera rozdział 9.8 Bezpieczniki i wyłączniki.
Typy i wartości znamionowe przewodów
Całe okablowanie musi być zgodne z międzynaro-
•
dowymi oraz lokalnymi przepisami dotyczącymi
przekrojów poprzecznych kabli oraz temperatury
otoczenia.
Zalecenie dotyczące przewodu zasilania:
•
przewody o żyłach miedzianych z wartością
znamionową co najmniej 75°C (167 °F).
Zalecane rozmiary i typy przewodów zawiera
rozdział 9.5 Dane techniczne kabli.
4.2 Instalacja zgodna z wymogami
kompatybilności elektromagnetycznej
(EMC)
Aby zapewnić instalację elektryczną zgodną z wymogami
kompatybilności elektromagnetycznej (EMC), należy
postępować zgodnie z instrukcjami podanymi w
rozdział 4.3 Uziemienie, rozdział 4.4 Rysunek schematyczny
okablowania, rozdział 4.6 Podłączenie silnika i
rozdział 4.8 Okablowanie sterowania.
4.3 Uziemienie
OSTRZEŻENIE
ZAGROŻENIE ZWIĄZANE Z PRĄDEM
UPŁYWOWYM
Prądy upływowe przekraczają 3,5 mA. Niewykonanie
poprawnego uziemienia przetwornicy częstotliwości
może skutkować śmiercią lub poważnymi obrażeniami.
Należy zapewnić poprawne uziemienie
•
urządzenia przez uprawnionego elektryka.
Wymagania dotyczące bezpieczeństwa elektrycznego
Przetwornicę częstotliwości należy uziemić
•
zgodnie z mającymi zastosowanie standardami i
dyrektywami.
Zasilanie wejściowe, moc silnika i okablowanie
•
sterowania wymagają dedykowanych przewodów
uziemienia.
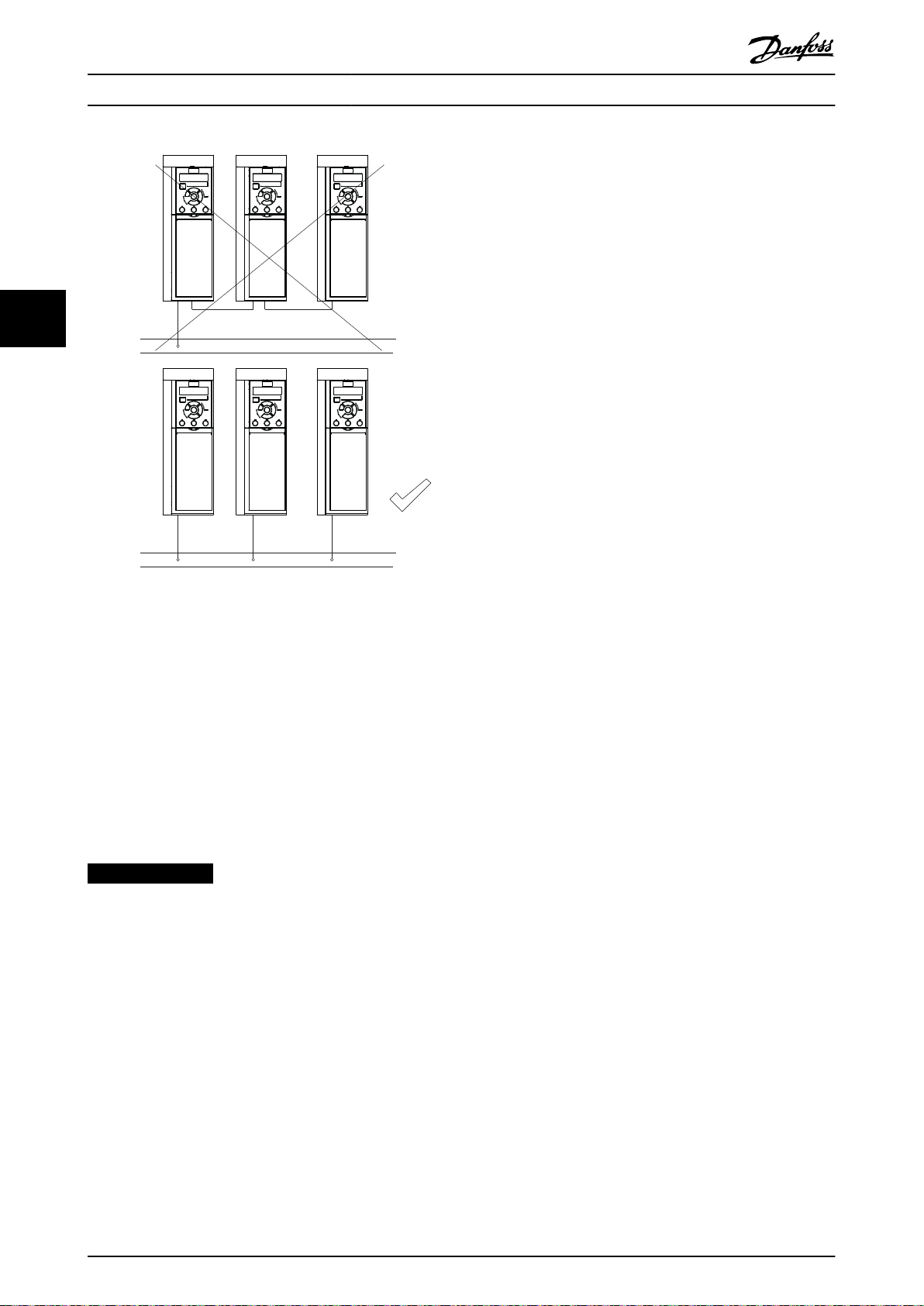
Nie wolno uziemiać więcej niż jednej
•
przetwornicy częstotliwości w układzie
łańcuchowym (patrz Ilustracja 4.1).
Połączenia przewodu uziemienia muszą być jak
•
najkrótsze.
Należy przestrzegać wymagań producenta silnika
•
dotyczących okablowania.
Minimalny przekrój poprzeczny kabla dla
•
przewodów uziemienia: 10 mm2 (7 AWG).
Dwa zakończone oddzielnie przewody uziemienia,
•
oba zgodne z wymaganiami dotyczącymi
wymiarów.
4 4
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 13
Page 18
130BC500.10
FC 1
FC 1
FC 2
FC 2
FC 3
FC 3
PE
PE
Instalacja elektryczna
VLT® Midi Drive FC 280
44
Ilustracja 4.1 Zasady uziemienia
Wymagania dotyczące instalacji zgodnej z wymogami
kompatybilności elektromagnetycznej (EMC)
Należy ustalić styk elektryczny między ekranem
•
kabla i obudową przetwornicy częstotliwości przy
użyciu metalowych dławików kablowych lub
zacisków, w które wyposażony jest sprzęt (patrz
rozdział 4.6 Podłączenie silnika).
Zaleca się użycie przewodu linkowego gęstego
•
celem ograniczenia przepięć.
Nie wolno używać skręconych odcinków ekranu
•
kabla.
NOTYFIKACJA
WYRÓWNANIE POTENCJAŁÓW
Istnieje ryzyko przebić impulsowych, gdy potencjał
uziemienia między przetwornicą częstotliwości i
systemem sterowania jest różny. Między elementami
systemu należy zainstalować kable wyrównawcze.
Zalecany przekrój poprzeczny kabla: 16 mm2 (6 AWG).
14 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 19
Power
input
Switch mode
power supply
Motor
Analog output
interface
(PNP) = Source
(NPN) = Sink
ON = Terminated
OFF = Open
Brake
resistor
91 (L1/N)
92 (L2/L)
93 (L3)
PE
50 (+10 V OUT)
53 (A IN)
2)
54 (A IN)
55 (COM digital/analog I/O)
0/4−20 mA
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
10 V DC
15 mA 100 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(A OUT) 42
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0 V
5 V
S801
0/4−20 mA
RS485
RS485
03
+10 V DC
0−10 V DC
24 V DC
02
01
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
17 V
0 V
0 V (PNP)
24 V (NPN)
29 (D IN)
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
38 (STO2)
4)
37 (STO1)
4)
95
P 5-00
21
ON
(+DC/R+) 89
(R-) 81
0−10 V DC
(-DC) 88
RFI
0 V
250 V AC, 3 A
Relay 1
1)
3)
5)
5)
130BE202.19
27 (D IN/OUT)
6)
Instalacja elektryczna Instrukcja obsługi
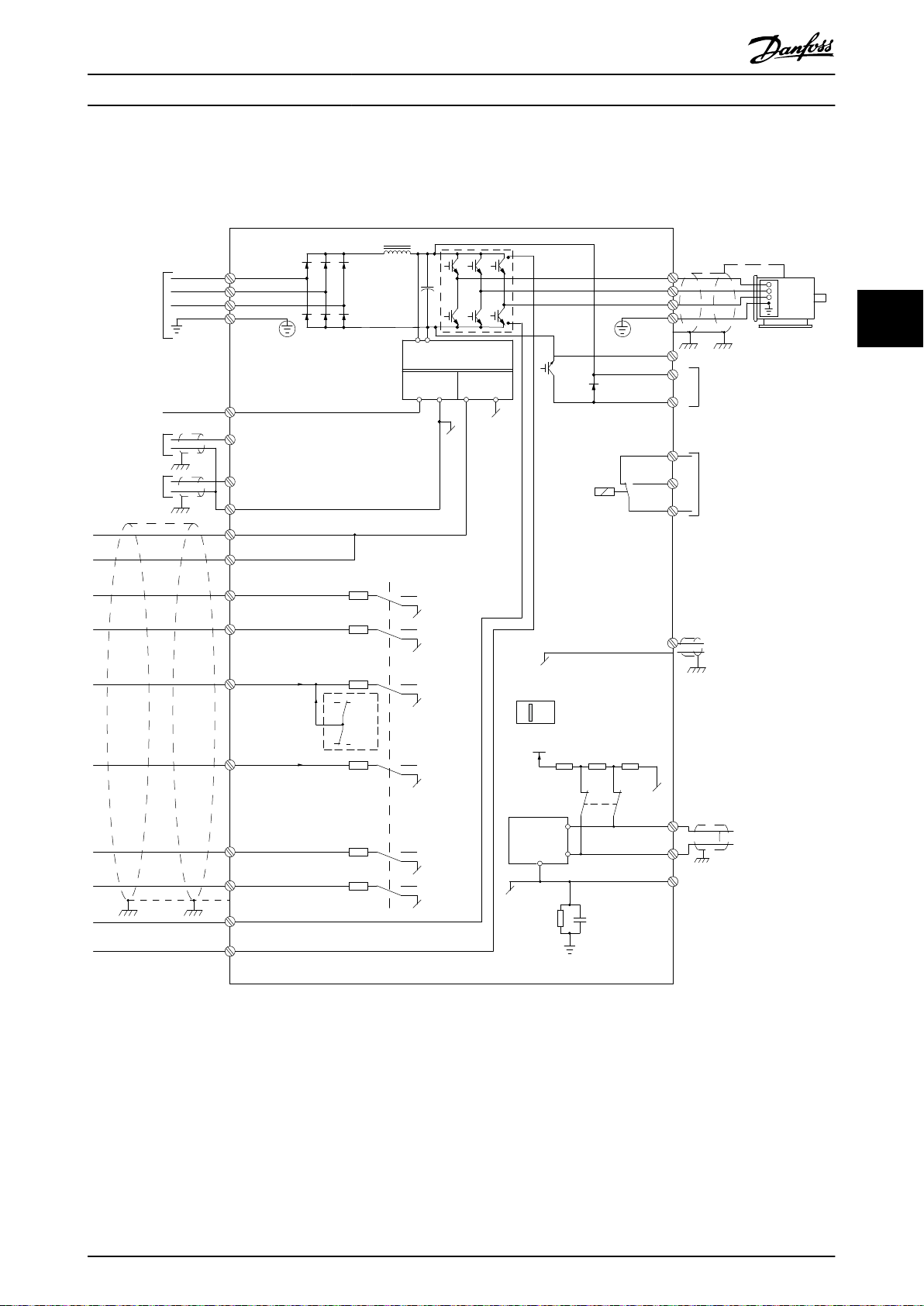
4.4 Rysunek schematyczny okablowania
W tej sekcji przedstawiono sposób okablowania przetwornicy częstotliwości.
4 4
Ilustracja 4.2 Podstawowy rysunek schematyczny okablowania
A = analogowe, D = cyfrowe
1) Wbudowany czopper (IGBT) hamulca jest dostępny tylko w jednostkach trójfazowych.
2) Zacisk 53 może być również używany jako wejście cyfrowe.
3) Przełącznik S801 (zacisk magistrali) może służyć do terminacji portu RS485 (zaciski 68 i 69).
4) Patrz rozdział 6 Safe Torque O (STO) w celu właściwego okablowania funkcji STO.
5) Przetwornica częstotliwości S2 (jednofazowa 200–240 V) nie obsługuje aplikacji z podziałem obciążenia.
6) Maksymalne napięcie wynosi 17 V dla zacisku 27 jako wyjścia analogowego.
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 15
Page 20
e30bf228.11
L1
L2
L3
PE
PE
u
v
w
2
1
3
5
16
17
18
14
12
8
7
10
9
4
11
13
4
6
15
90
4
Instalacja elektryczna
VLT® Midi Drive FC 280
44
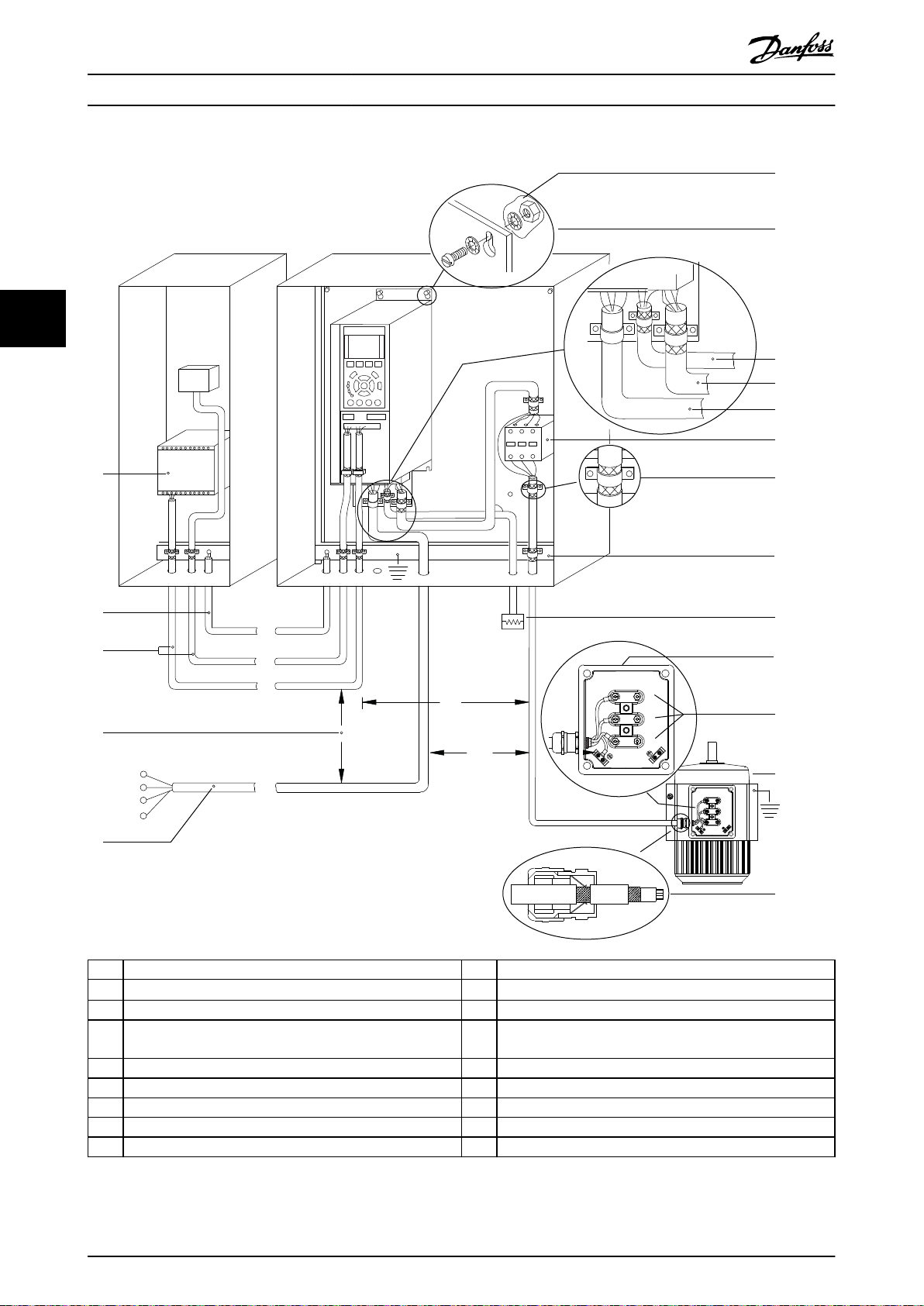
1 PLC 10 Przewód zasilania (nieekranowany)
2
Przewód wyrównawczy min. 16 mm2 (6 AWG)
3 Przewody sterownicze 12 Izolacja kabla zdjęta
4 Co najmniej 200 mm (7,87 cala) odstęp między przewodami
sterowniczymi, kablami silnika i przewodami zasilania.
5 Zasilanie 14 Rezystor hamowania
6 Goła (niemalowana) powierzchnia 15 Skrzynka metalowa
7 Podkładki odginane zębate zewnętrzne 16 Podłączenie do silnika
8 Kabel rezystora hamowania (ekranowany) 17 Silnik
9 Kabel silnika (ekranowany) 18 Dławik kablowy EMC
Ilustracja 4.3 Typowe połączenie elektryczne
11 Stycznik wyjściowy itd.
13 Szyna zbiorcza wspólnej masy. Należy przestrzegać krajowych
i lokalnych przepisów dotyczących uziemienia szafy sterującej.
16 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 21
130BC504.11
130BD531.10
U
V
W
96
97
98
Instalacja elektryczna Instrukcja obsługi
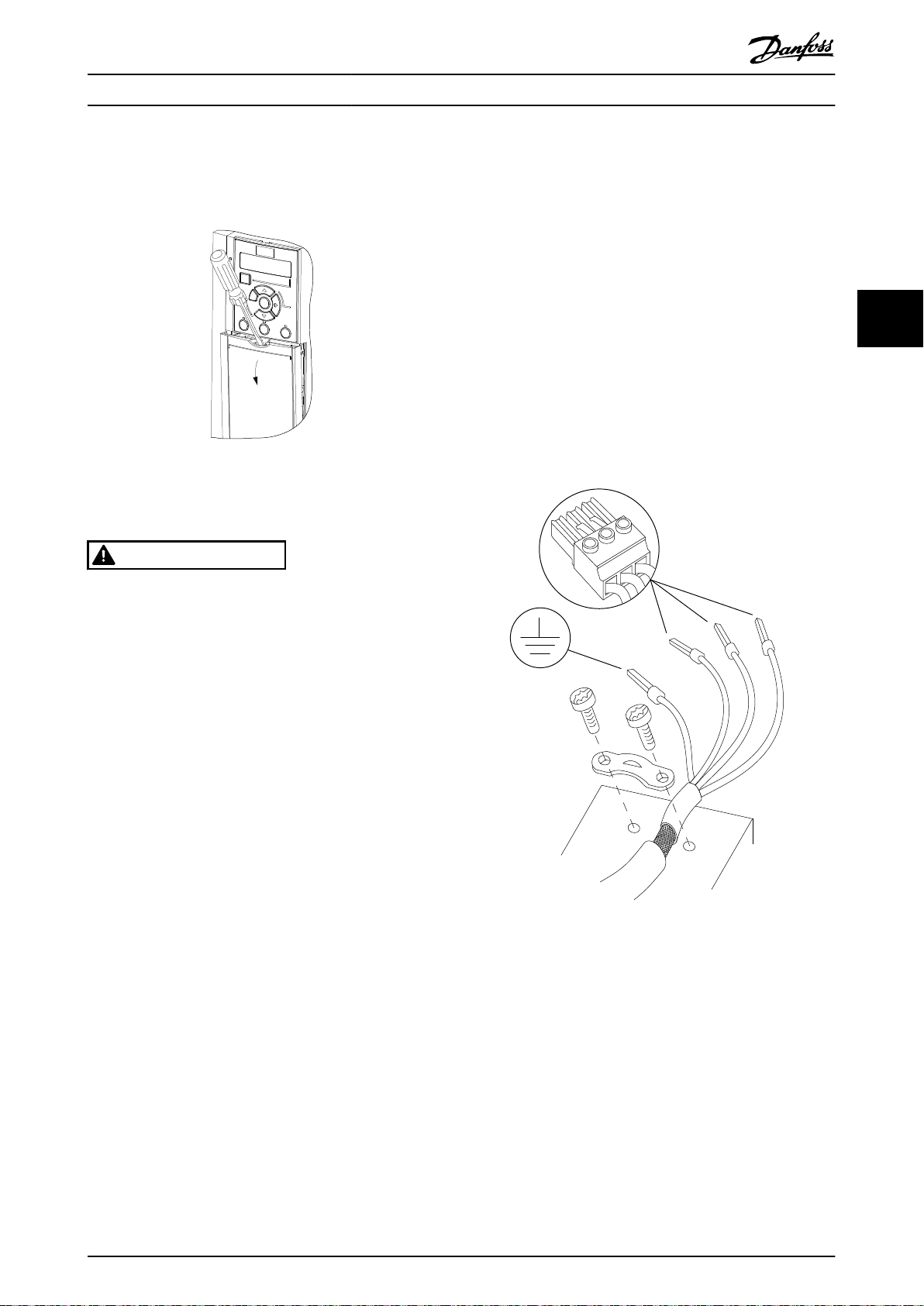
4.5 Dostęp
Odkręcić pokrywę za pomocą wkrętaka. Patrz
•
Ilustracja 4.4.
Ilustracja 4.4 Dostęp do okablowania sterowania
4.6 Podłączenie silnika
OSTRZEŻENIE
NAPIĘCIE INDUKOWANE
Napięcie indukowane z wyjściowych kabli silnika
prowadzonych razem może spowodować naładowanie
kondensatorów w sprzęcie nawet wtedy, gdy jest on
wyłączony i zabezpieczony przed włączeniem. Niepoprowadzenie wyjściowych kabli silnika osobno lub nieużycie
kabli ekranowanych może skutkować śmiercią lub
poważnymi obrażeniami.
Procedura
1. Zdjąć część zewnętrznej izolacji kabla.
2. Umieścić kabel ze zdjętą izolacją pod zaciskiem
kabla w celu jego mechanicznego zamocowania i
utworzenia elektrycznego styku między osłoną
kabla i uziemieniem.
3. Podłączyć kabel uziemienia do najbliższego
zacisku uziemienia zgodnie z instrukcjami
uziemienia podanymi w rozdział 4.3 Uziemienie.
Patrz Ilustracja 4.5.
4. Podłączyć 3-fazowe okablowanie silnika do
zacisków 96 (U), 97 (V) i 98 (W); patrz
Ilustracja 4.5.
5. Dokręcić zaciski zgodnie z informacjami
podanymi w rozdział 9.7 Momenty dokręcania
złączy.
4 4
Wyjściowe kable silnika należy poprowadzić
•
osobno.
użyć kabli ekranowanych.
•
Należy przestrzegać krajowych i lokalnych
•
przepisów elektrycznych dotyczących rozmiarów
kabli. Maksymalne przekroje kabli, patrz
rozdział 9.1 Dane elektryczne.
Należy przestrzegać wymagań producenta silnika
•
dotyczących okablowania.
Otwory na okablowanie silnika i panele dostępu
•
znajdują się u podstawy jednostek o stopniu
ochrony IP21/Typ 1.
Nie należy podłączać urządzenia rozruchowego
•
lub przełącznika biegunowości (na przykład
silnika Dahlander lub pierścieniowego silnika
indukcyjnego) między przetwornicą częstotliwości
a silnikiem.
Ilustracja 4.5 Podłączenie silnika
Podłączenie zasilania, silnika i uziemienia dla jedno- i trójfazowych przetwornic częstotliwości przedstawia
odpowiednio Ilustracja 4.6, Ilustracja 4.7 i Ilustracja 4.8.
Rzeczywista konguracja zależy od typu jednostki i
wyposażenia opcjonalnego.
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 17
Page 22
130BE232.11
130BE231.11
130BE804.10
Instalacja elektryczna
VLT® Midi Drive FC 280
44
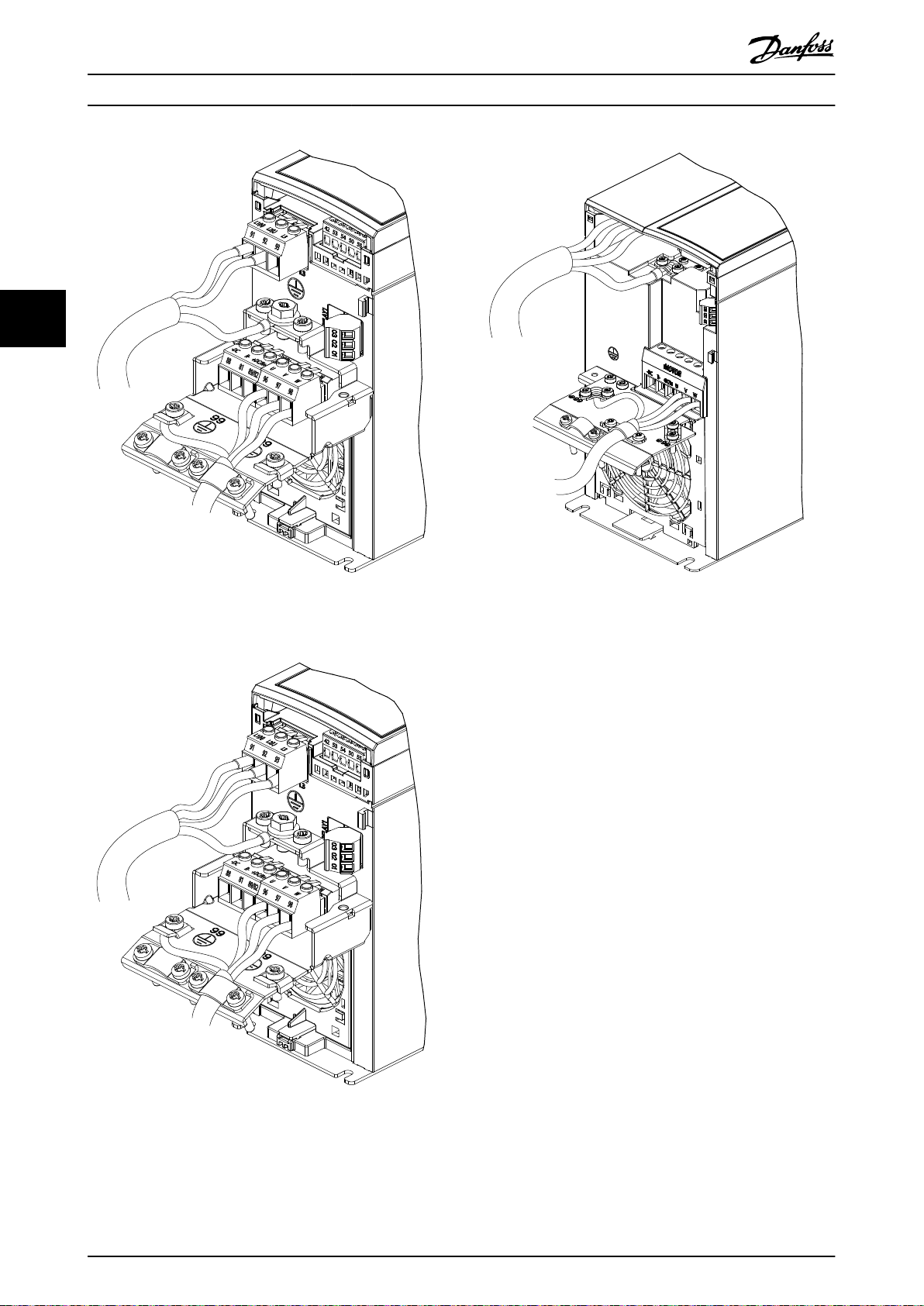
Ilustracja 4.6 Podłączenie zasilania, silnika i uziemienia dla
jednostek jednofazowych
Ilustracja 4.7 Podłączenie zasilania, silnika i uziemienia dla
jednostek trójfazowych (K1, K2, K3)
Ilustracja 4.8 Podłączenie zasilania, silnika i uziemienia dla
jednostek trójfazowych (K4, K5)
Podłączenie zasilania AC
4.7
Należy dobrać przekrój (rozmiar) przewodów na
•
podstawie prądu wejściowego przetwornicy
częstotliwości. Patrz maksymalne rozmiary
przewodów w części rozdział 9.1 Dane elektryczne.
Należy przestrzegać krajowych i lokalnych
•
przepisów elektrycznych dotyczących rozmiarów
kabli.
Procedura
1. Podłączyć przewody silnoprądowe zasilania AC do
zacisków N i L w przypadku urządzeń z jedną fazą
(patrz Ilustracja 4.6) lub do zacisków L1, L2 i L3 w
przypadku urządzeń trójfazowych (patrz
Ilustracja 4.7).
2. W zależności od konguracji sprzętu zasilanie
wejściowe należy podłączyć do zacisków
wejściowych zasilania lub rozłącznika
wejściowego.
3. Wykonać uziemienie kabla zgodnie z instrukcjami
uziemiania przedstawionymi w
rozdział 4.3 Uziemienie.
4. Jeśli przetwornica częstotliwości jest zasilana z
izolowanego źródła (zasilanie IT lub nieuziemiony
trójkąt) lub z TT/TN-S z uziemioną nogą
(uziemiony trójkąt), należy się upewnić, że śruba
ltru RFI jest wykręcona. Wyjęcie śruby RFI
18 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 23
130BE212.10
1 2
3
130BE214.10
37 38 12 13 18 19 27 29 32 33 61
42 53 54 50 55
68 69
1
3
2
Instalacja elektryczna Instrukcja obsługi
zapobiega uszkodzeniu obwodu pośredniego i
ogranicza doziemne prądy pojemnościowe
zgodnie z normą IEC 61800-3 (patrz Ilustracja 9.2,
śruba RFI znajduje się na bocznej powierzchni
przetwornicy częstotliwości).
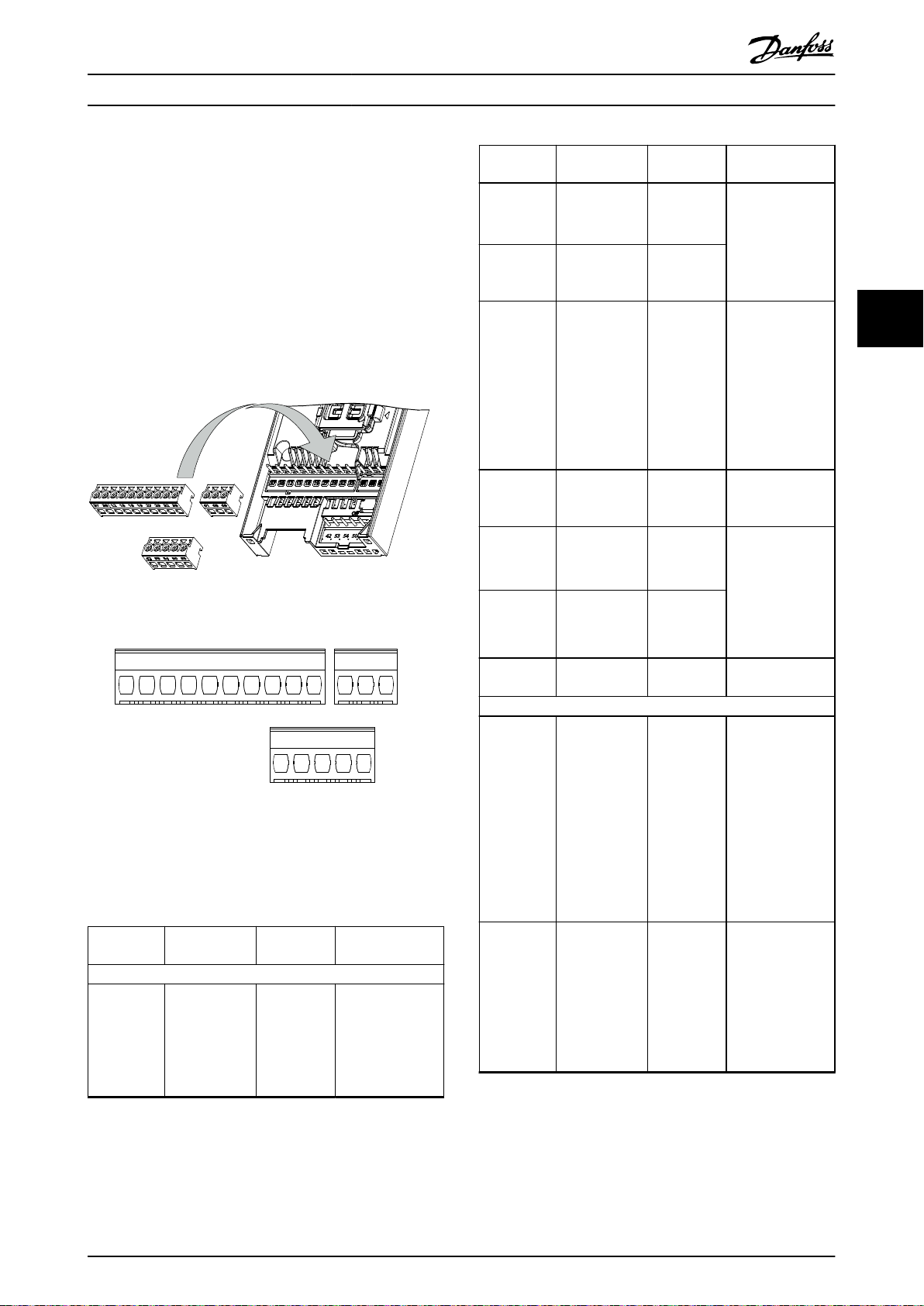
4.8 Okablowanie sterowania
4.8.1 Typy zacisków sterowania
Ilustracja 4.9 przedstawia zdejmowane dławiki przetwornicy
częstotliwości. Funkcje zacisków i ich nastawy domyślne
przedstawiono w Tabela 4.1 i Tabela 4.2.
Ilustracja 4.9 Położenie zacisków sterowania
Ilustracja 4.10 Numery zacisków
Szczegółowe informacje o wartościach znamionowych
zacisków zawiera rozdział 9.6 Wejścia/wyjścia sterowania i
dane sterowania.
Zacisk Parametr
We/Wy cyfrowe, We/Wy impulsowe, enkoder
12, 13 – +24 V DC
Nastawy
domyślne
Opis
Napięcie zasilania
24 V DC.
Maksymalny prąd
wyjściowy 100 mA
dla wszystkich
obciążeń 24 V.
Zacisk Parametr
Parametr 5-10 T
18
19
27
29
32
33
37, 38 – STO
42
50 – +10 V DC
erminal 18
Digital Input
Parametr 5-11 T
erminal 19
Digital Input
Parametr 5-01 T
erminal 27
Mode
Parametr 5-12 T
erminal 27
Digital Input
Parametr 5-30 T
erminal 27
Digital Output
Parametr 5-13 T
erminal 29
Digital Input
Parametr 5-14 T
erminal 32
Digital Input
Parametr 5-15 T
erminal 33
Digital Input
Wejścia/wyjścia analogowe
Parametr 6-91 T
erminal 42
Analog Output
Nastawy
domyślne
[8] Start
[10] Zmiana
kierunku obr.
Wejście
cyfrowe [2]
Wybieg
silnika,
odwrócony
Wyjście
cyfrowe [0]
Brak
działania
[14] Jog —
praca
manewrowa
[0] Brak
działania
[0] Brak
działania
[0] Brak
działania
Opis
Wejścia cyfrowe
Ustawia zacisk
jako wejście
cyfrowe, wyjście
cyfrowe lub
wyjście impulsowe.
Ustawienie
domyślne to
wejście cyfrowe.
Wejście cyfrowe
Wejście cyfrowe,
enkoder 24 V.
Zacisk 33 może
być również
używany jako
wejście
impulsowe.
Wejścia funkcji
bezpieczeństwa
Programowalne
wyjście
analogowe. Sygnał
analogowy ma
parametry 0–20
mA lub 4–20 mA
dla maksymalnie
500 Ω. Można
również skon-
gurować jako
wyjścia cyfrowe
Zasilanie
analogowe 10 V
DC. Dla potencjometrów i
termistorów
obciążenie
maksymalnie 15
mA.
4 4
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 19
Page 24
Instalacja elektryczna
VLT® Midi Drive FC 280
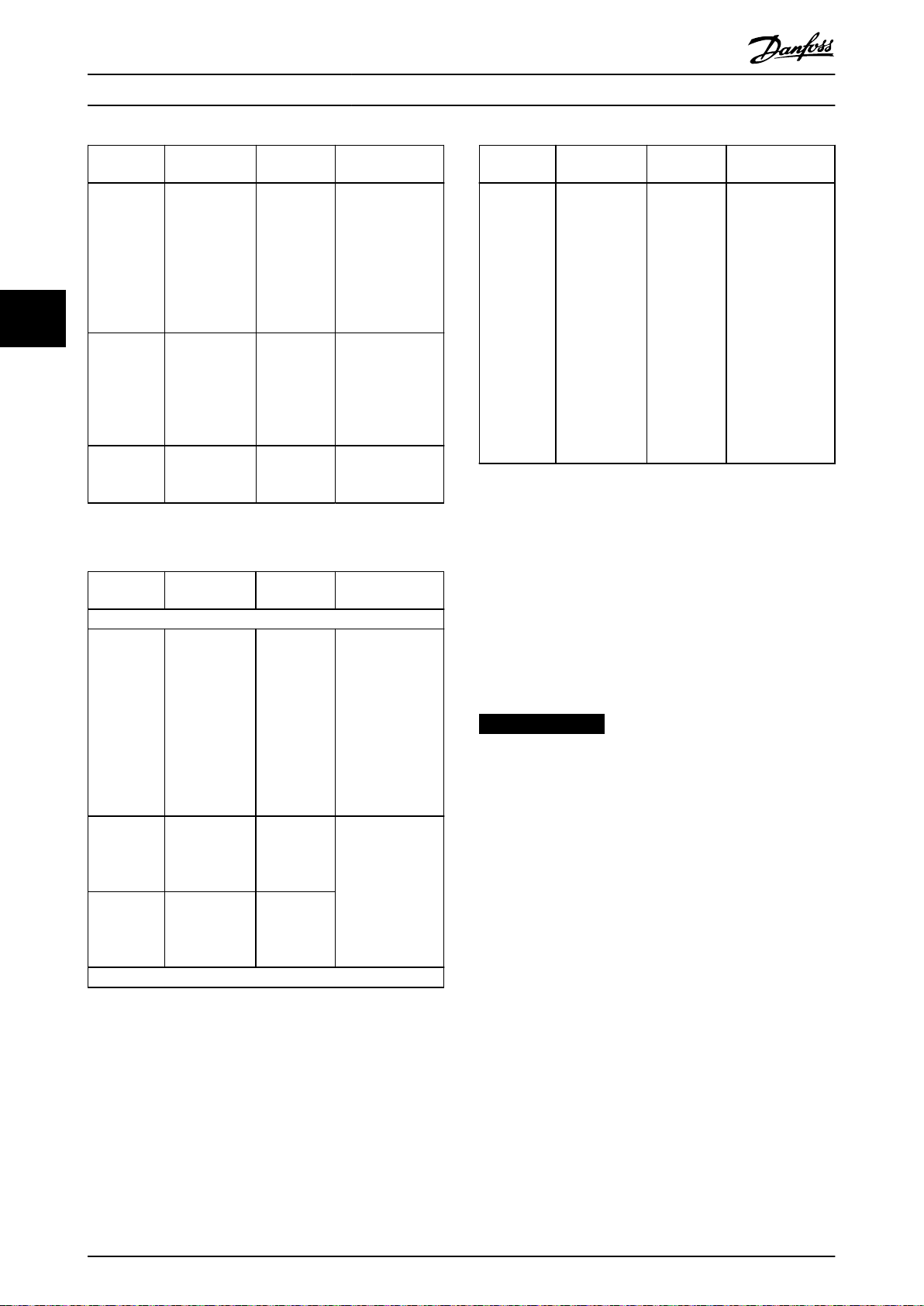
Zacisk Parametr
Grupa
parametrów
53
6-1* Analog
Input 53 (6-1*
Wejście
analogowe 53)
44
Grupa
parametrów
54
55 – –
Tabela 4.1 Opisy zacisków — Wejścia/wyjścia cyfrowe,
Wejścia/wyjścia analogowe
Zacisk Parametr
61 – –
68 (+)
69 (-)
6-2* Analog
Input 54 (6-2*
Wejście
analogowe 54)
Komunikacja szeregowa
Grupa
parametrów
8-3* Ustaw.
portu FC
Grupa
parametrów
8-3* Ustaw.
portu FC
Nastawy
domyślne
Nastawy
domyślne
Przekaźniki
–
–
–
–
Opis
Wejście
analogowe.
Obsługiwany jest
tylko tryb
napięciowy. Może
być także używane
jako wejście
cyfrowe.
Wejście
analogowe.
Możliwość wyboru
między trybem
napięcia a trybem
natężenia (prądu).
Masa dla wejść
cyfrowych i
analogowych.
Opis
Zintegrowany ltr
RC dla ekranu
kabla. Służy
WYŁĄCZNIE do
podłączania
ekranu w razie
problemów z
kompatybilnością
elektromagnetyczną (EMC).
Interfejs RS485. Na
karcie sterującej
znajduje się
przełącznik dla
rezystancji
zakończenia.
Zacisk Parametr
01, 02, 03
Tabela 4.2 Opisy zacisków — komunikacja szeregowa
Parametr 5-40 F
unction Relay
4.8.2 Podłączanie przewodów do zacisków
sterowania
Dławiki zacisków sterowania można odpiąć od
przetwornicy częstotliwości, aby ułatwić instalację, tak jak
pokazano na Ilustracja 4.9.
Więcej szczegółowych informacji o okablowaniu funkcji
STO zawiera rozdział 6 Safe Torque O (STO).
NOTYFIKACJA
Przewody sterownicze powinny być jak najkrótsze i
oddzielone od przewodów silnoprądowych mocy w celu
zminimalizowania zakłóceń.
1. Poluzować śruby zacisków.
2. Wsunąć ekranowane przewody sterownicze w
gniazda.
3. Dokręcić śruby zacisków.
4. Upewnić się, że styk trzyma mocno i że przewód
nie jest obluzowany. Luźne przewody sterowania
mogą powodować usterki urządzeń lub
nieoptymalną pracę.
Nastawy
domyślne
[1] Sterow.
gotowe
Opis
Wyjście przekaźnikowe kształtu C.
Te wyjścia przekaźnikowe są
rozmieszczone w
sposób zależny od
rozmiaru i
konguracji
przetwornicy
częstotliwości. Do
podłączenia
napięcia AC lub
DC oraz obciążenia
rezystancyjnego
lub indukcyjnego.
Przekroje poprzeczne kabli do zacisków sterowania
przedstawiono w rozdział 9.5 Dane techniczne kabli, a
typowe połączenia przewodów sterowniczych opisano w
rozdział 7 Przykłady aplikacji.
20 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 25
Instalacja elektryczna Instrukcja obsługi
4.8.3 Włączanie pracy silnika (zacisk 27)
Przetwornice częstotliwości pracujące z domyślnym programowaniem fabrycznym wymagają założenia przewodu
połączeniowego (zworki) między zaciskami 12 (lub 13) i 27.
Zacisk wejścia cyfrowego 27 służy do odbioru
•
polecenia blokady zewnętrznej sygnałem
napięciowym 24 V DC.
Jeżeli żadne urządzenie blokujące nie jest
•
używane, należy połączyć zworką zacisk
sterowania 12 (zalecany) lub 13 z zaciskiem 27.
Zworka zapewnia wewnętrzny sygnał 24 V na
zacisku 27.
Dotyczy tylko GLCP: Jeżeli wiersz statusu na dole
•
ekranu LCP wyświetla AUTOMATYCZNY ZDALNY
WYBIEG SILNIKA, oznacza to, że jednostka jest
gotowa do pracy, ale nie otrzymuje sygnału
wejściowego na zacisku 27.
NOTYFIKACJA
START NIEMOŻLIWY
Przetwornica częstotliwości nie może pracować bez
sygnału na zacisku 27, chyba że zacisk 27 zostanie
przeprogramowany.
powodu zbyt dużego obciążenia, należy
utrzymywać wyjście zamknięte (bez napięcia).
W aplikacjach wykorzystujących hamulec elektro-
•
mechaniczny należy wybrać [32] Sterowanie
hamulcem mechanicznym w grupie parametrów
5-4* Przekaźniki.
Hamulec zostaje zwolniony, kiedy prąd silnika
•
przekracza wartość zaprogramowaną w
parametr 2-20 Release Brake Current.
Hamulec zostaje załączony, kiedy częstotliwość
•
wyjściowa jest mniejsza od częstotliwości
ustawionej w parametr 2-22 Activate Brake Speed
[Hz] i tylko pod warunkiem, że przetwornica
częstotliwości wykonuje polecenie stop.
Hamulec mechaniczny natychmiast zamyka się, jeśli
przetwornica częstotliwości znajduje się w jednej z
następujących sytuacji:
W trybie alarmowym.
•
W przypadku wystąpienia przepięcia.
•
Aktywowana została funkcja STO (Safe Torque
•
O).
Wydano polecenie wybiegu silnika.
•
4 4
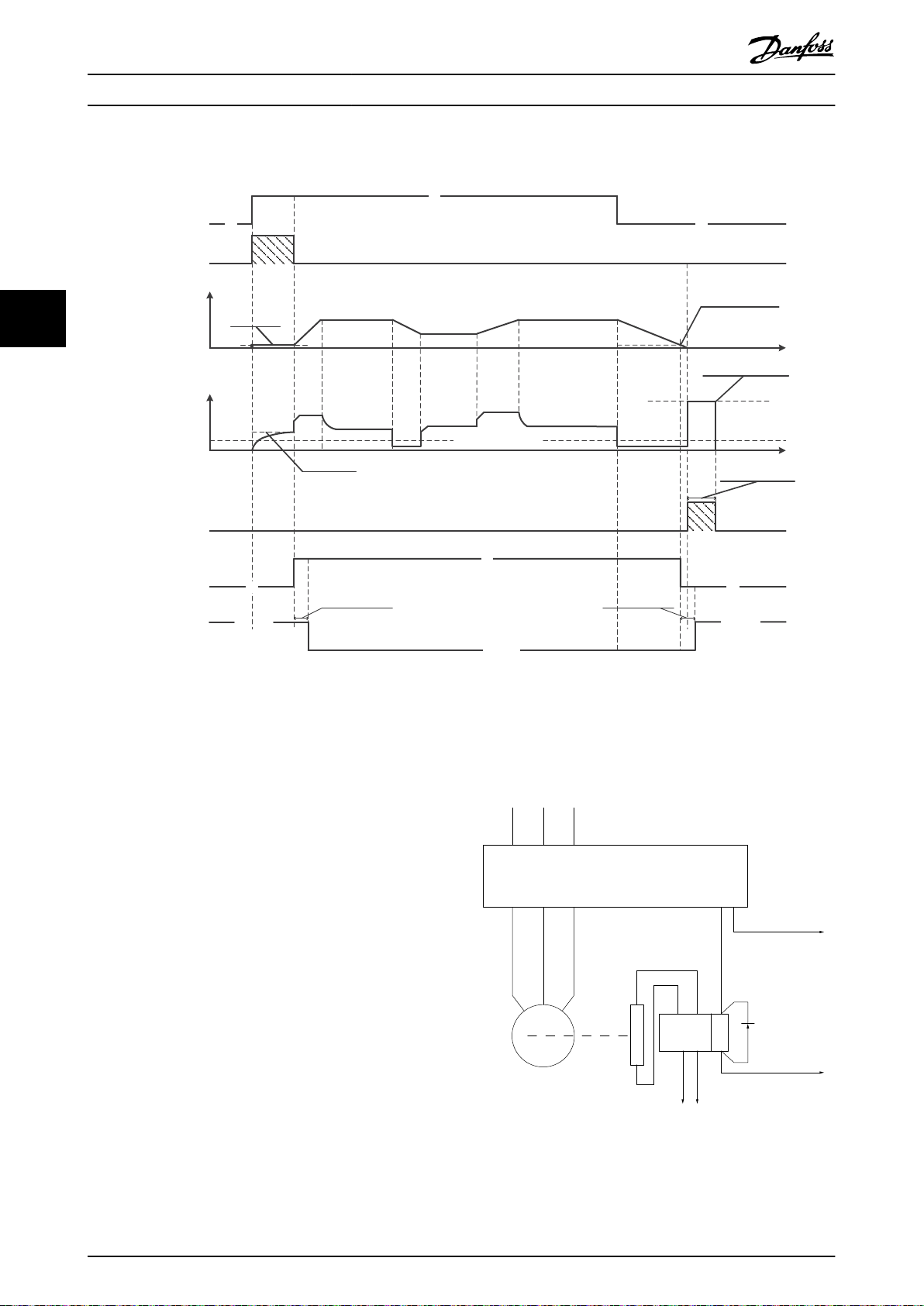
4.8.4 Sterowanie hamulcem mechanicznym
W aplikacjach dźwigowych przy podnoszeniu/
opuszczaniu wymagane jest sterowanie hamulcem
elektromechanicznym.
Sterowanie hamulcem odbywa się za pomocą
•
dowolnego wyjścia przekaźnikowego lub
cyfrowego (zacisk 27).
Tak długo, jak przetwornica częstotliwości nie
•
może utrzymać silnika w bezruchu, na przykład z
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 21
Page 26
Start Current
2)
Only support in some products.
1)
DC injection current during “Active Brake Delay” after MAV reduced to “0” . Only support in some products.
Off
On
Off
Relay
/
DO Status
Active Brake Delay
Active Brake Delay
MAV
Start Speed
Active Brake Speed
0
t
Start Delay
Off
On
Off
Start Command
Released
Activated
Reaction time of
mech
.
brake
Reaction time of
mech
.
brake
Mech
.
Brake Status
Release Brake Current
Output Current
DC Injection Current
1)
0
t
130BF687.10
Activated
Note:
2)
130BE201.11
L1(N) L2(L) L3
U V W
02 01
A1
A2
Frequency converter
Output
relay
Command circuit
220 V AC
Mechanical
brake
ShaftMotor
Freewheeling
diode
Brake power circuit
380 V AC
Output
contactor
input
Instalacja elektryczna
VLT® Midi Drive FC 280
44
Ilustracja 4.11 Hamulec mechaniczny
Przetwornica częstotliwości nie jest urządzeniem zabezpieczającym. Projektant systemu odpowiada za zintegrowanie
urządzeń zabezpieczających zgodnie z odpowiednimi
krajowymi przepisami dotyczącymi dźwigów i innych
urządzeń podnoszących.
Ilustracja 4.12 Podłączanie hamulca mechanicznego do
przetwornicy częstotliwości
22 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 27
e30bt623.11
61
68
69
+
130BB489.10
RS485
Instalacja elektryczna Instrukcja obsługi
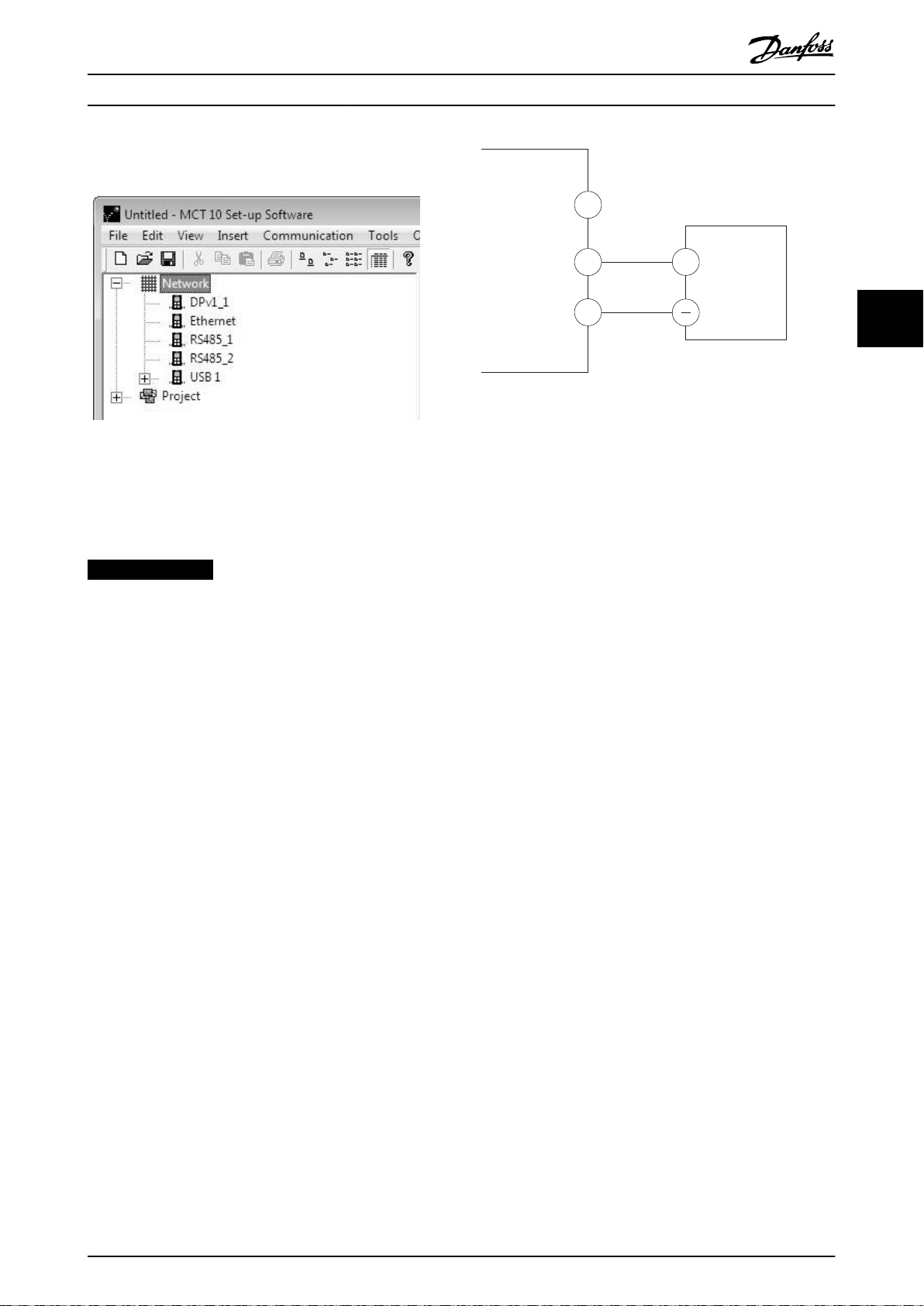
4.8.5 Wymiana danych przez USB
Ilustracja 4.13 Lista magistrali sieci
Po odłączeniu kabla USB przetwornica częstotliwości
podłączona przez port USB jest usuwana z listy magistrali
Network (Sieć).
NOTYFIKACJA
Magistrala USB nie ma możliwości ustawienia adresu ani
nazwy magistrali do skongurowania. W przypadku
podłączenia więcej niż jednej przetwornicy częstotliwości
za pomocą USB wartość nazwy magistrali będzie
automatycznie zwiększana na liście magistrali Network w
oprogramowaniu Oprogramowanie konguracyjne MCT
10.
Podłączanie więcej niż jednej przetwornicy częstotliwości
za pomocą kabla USB do komputera w przypadku
komputerów z systemem Windows XP często powoduje
zwrócenie wyjątku i awarię. Dlatego zaleca się
podłączanie tylko jednej przetwornicy częstotliwości za
pomocą kabla USB do komputera PC.
4.8.6 Komunikacja szeregowa RS485
Podłączyć przewód komunikacji szeregowej RS485 do
zacisków (+)68 i (-)69.
Ilustracja 4.14 Schemat połączeń elektrycznych komunikacji
szeregowej
skongurować podstawową komunikację szeregową,
Aby
należy wybrać poniższe parametry:
1. Typ protokołu w parametr 8-30 Protokół.
2. Adres przetwornicy częstotliwości w
parametr 8-31 Adres magistrali.
3. Szybkość transmisji w parametr 8-32 Szybkość
transmisji.
Przetwornica częstotliwości ma dwa protokoły komunikacji.
Należy przestrzegać wymagań producenta silnika
dotyczących okablowania.
Danfoss FC.
•
Modbus RTU.
•
Funkcje można zaprogramować zdalnie za pomocą
oprogramowania protokołu i połączenia RS485 lub w
grupie parametrów 8-** Communications and Options (8-**
Komunik. i opcje).
Wybór danego protokołu komunikacji zmienia różne
domyślne ustawienia parametrów w celu dopasowania ich
specykacji protokołu i udostępnia dodatkowe
do
odpowiadające mu parametry.
4 4
Zaleca się użycie ekranowanego kabla
•
komunikacji szeregowej.
Poprawne uziemienie przedstawiono w
•
rozdział 4.3 Uziemienie.
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 23
Page 28
Instalacja elektryczna
VLT® Midi Drive FC 280
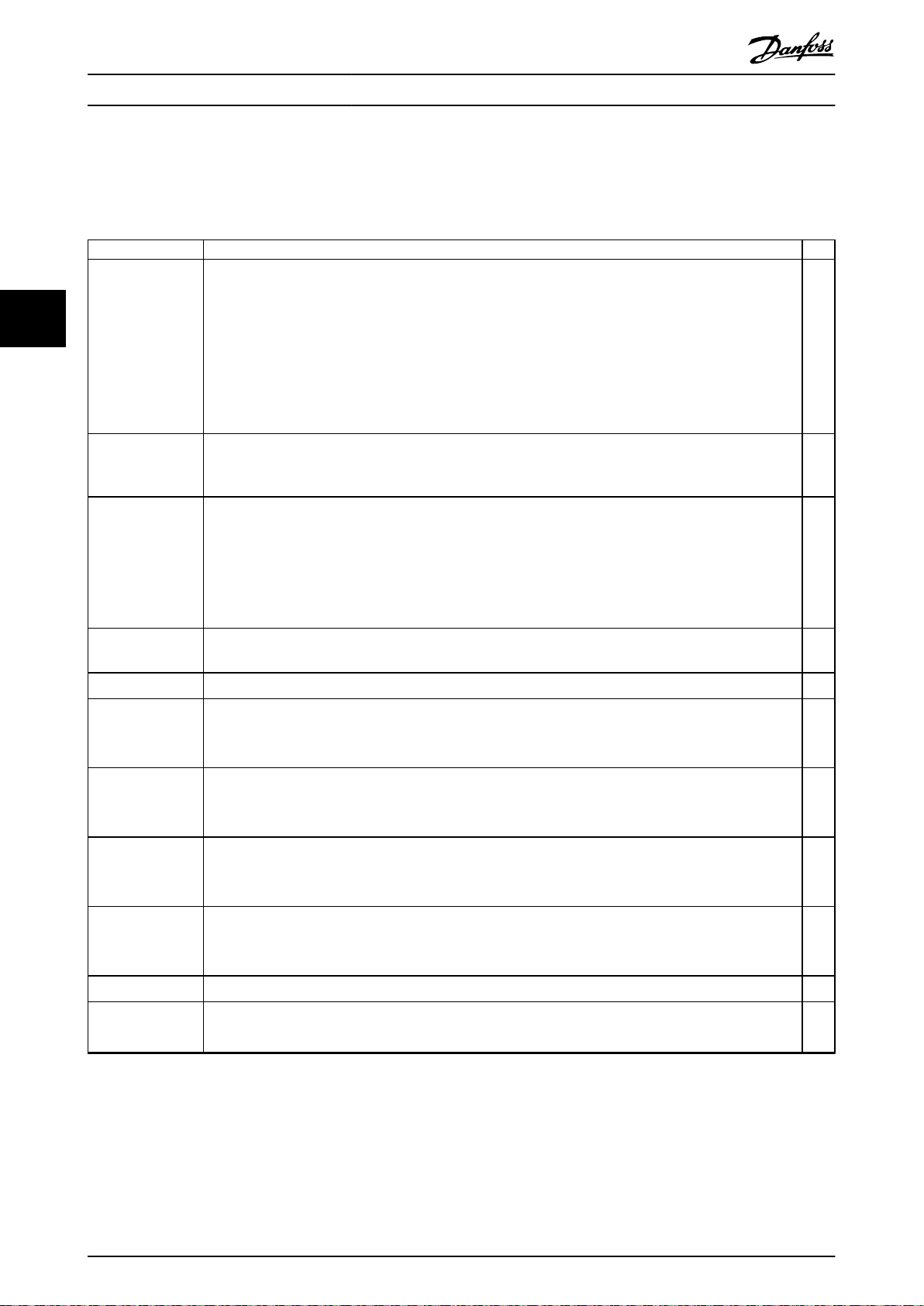
4.9 Wykaz czynności kontrolnych podczas instalacji
Przed zakończeniem instalacji jednostki należy sprawdzić całą instalację w sposób opisany w Tabela 4.3. Po zakończeniu
sprawdzania należy zaznaczyć odpowiednie pozycje, dopóki cała lista kontrolna nie zostanie wykonana.
Punkty kontrolne Opis
Urządzenia
wspomagające
44
Prowadzenie kabli
Okablowanie
sterowania
Odstęp dla obiegu
chłodzenia
Warunki otoczenia
Bezpieczniki i
wyłączniki
Uziemienie
Przewody mocy
wejściowej i
wyjściowej
Wnętrze szafy
Przełączniki
Drgania
Sprawdzić urządzenia wspomagające, przełączniki, rozłączniki lub bezpieczniki wejściowe/wyłączniki, które
•
mogą znajdować się po stronie wejścia zasilania przetwornicy częstotliwości lub po stronie wyjścia do
silnika. Upewnić się, że są gotowe do pracy z pełną prędkością.
Sprawdzić działanie i instalację czujników przekazujących sprzężenie zwrotne do przetwornicy częstot-
•
liwości.
Usunąć z silników kondensatory do korekcji współczynnika mocy.
•
Dostosować kondensatory do korekcji współczynnika mocy po stronie zasilania i upewnić się, że zostały
•
wytłumione.
Upewnić się, że okablowanie silnika i okablowanie sterowania jest odseparowane, ekranowane lub
•
poprowadzono je w trzech osobnych metalowych kanałach kablowych celem odizolowania zakłóceń na
wysokich częstotliwościach.
Sprawdzić, czy przewody nie są uszkodzone i czy połączenia nie są obluzowane.
•
Upewnić się, że okablowanie sterowania jest odizolowane od okablowania silnika i zasilania w celu
•
zapewnienia odporności na zakłócenia.
W razie potrzeby sprawdzić źródło napięcia sygnałów.
•
Zaleca się użycie kabla ekranowanego lub skrętki dwużyłowej. Sprawdzić, czy ekran jest odpowiednio
zakończony.
Upewnić się, że odstęp w górnej i dolnej części zapewnia odpowiedni przepływ powietrza chłodzenia.
•
Patrz rozdział 3.3 Montaż.
Sprawdzić, czy zostały spełnione wymagania dotyczące warunków otoczenia.
•
Sprawdzić, czy zastosowano właściwe bezpieczniki i wyłączniki.
•
Upewnić się, że bezpieczniki są solidnie zainstalowane i nadają się do pracy, a wszystkie wyłączniki są w
•
położeniu otwartym.
Sprawdzić, czy połączenia z uziemioną masą są wystarczające, dobrze zaciśnięte i nieutlenione.
•
Kanały kablowe ani mocowanie tylnego panelu do powierzchni metalowej nie są właściwym sposobem
•
uziemienia
Sprawdzić, czy połączenia nie są obluzowane.
•
Upewnić się, że kable silnika i zasilania poprowadzono oddzielnymi kanałami kablowymi lub wykonano
•
oddzielnymi kablami ekranowanymi.
Sprawdzić, czy wnętrze jednostki jest wolne od brudu, zanieczyszczeń, metalowych wiórów, wilgoci i
•
korozji.
Sprawdzić, czy jednostka jest zamontowana na niepomalowanej, metalowej powierzchni.
•
Upewnić się, czy wszystkie przełączniki i rozłączniki znajdują się we właściwym położeniu.
•
Sprawdzić, czy jednostka jest przytwierdzona na stałe lub użyto mocowań przeciwudarowych.
•
Sprawdzić, czy urządzenie nie jest narażone na nadmierne drgania.
•
☑
Tabela 4.3 Wykaz czynności kontrolnych podczas instalacji
24 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 29
Instalacja elektryczna Instrukcja obsługi
UWAGA
POTENCJALNE ZAGROŻENIE W PRZYPADKU WEWNĘTRZNEJ AWARII
Istnieje ryzyko wystąpień obrażeń ciała w przypadku nieprawidłowego zamknięcia przetwornicy częstotliwości.
Przed podłączeniem zasilania należy się upewnić, że wszystkie pokrywy bezpieczeństwa znajdują się na
•
miejscu i są dobrze przymocowane, aby nie istniało niebezpieczeństwo ich przypadkowego otwarcia.
4 4
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 25
Page 30

Uruchomienie
5 Uruchomienie
VLT® Midi Drive FC 280
5.1 Instrukcje bezpieczeństwa
Ogólne instrukcje bezpieczeństwa, patrz rozdział 2 Bezpie-
czeństwo.
OSTRZEŻENIE
WYSOKIE NAPIĘCIE
55
Po podłączeniu zasilania wejściowego AC w przetwornicy
częstotliwości występuje wysokie napięcie. Wykonywanie
instalacji, rozruchu i konserwacji przez osoby inne niż
wykwalikowany personel grozi śmiercią lub poważnymi
obrażeniami.
Instalacja, rozruch i konserwacja muszą być
•
wykonywane wyłącznie przez wykwalikowany
personel.
Przed podłączeniem zasilania:
1. Zamknąć poprawnie pokrywę.
2. Sprawdzić, czy wszystkie dławiki kablowe są
dobrze zamocowane.
3. Upewnić się, że zasilanie wejściowe do jednostki
jest wyłączone i zabezpieczone przed włączeniem.
Nie wolno odłączać zasilania wejściowego
wyłącznie za pomocą rozłączników przetwornicy
częstotliwości.
4. Upewnić się, że na zaciskach wejściowych L1 (91),
L2 (92) i L3 (93) nie ma napięcia międzyfazowego
oraz między fazą a uziemieniem.
5. Upewnić się, że na zaciskach wyjściowych 96 (U),
97 (V) i 98 (W) nie ma napięcia międzyfazowego
oraz między fazą a uziemieniem.
6. Potwierdzić ciągłość połączenia z silnikiem,
mierząc wartości oporu (Ω) na zaciskach U-V
(96-97), V-W (97-98) i W-U (98-96).
7. Sprawdzić, czy uziemienie przetwornicy częstotliwości i silnika wykonano poprawnie.
8. Sprawdzić, czy na zaciskach przetwornicy częstotliwości nie ma obluzowanych połączeń.
9. Sprawdzić, czy napięcie zasilania odpowiada
napięciu przetwornicy częstotliwości i silnika.
Podłączanie zasilania
5.2
Podłączyć zasilanie przetwornicy częstotliwości, wykonując
następujące kroki:
1. Sprawdzić, czy asymetria napięcia wejściowego
mieści się w zakresie 3%. W przeciwnym razie
skorygować asymetrię napięcia wejściowego
przed wykonaniem kolejnych czynności.
Powtórzyć procedurę po korekcji napięcia.
2. Upewnić się, że okablowanie urządzeń
opcjonalnych odpowiada aplikacji instalacji.
3. Upewnić się, że wszystkie urządzenia operatora
znajdują się w położeniu WYŁ (OFF). Drzwi szafy
muszą być zamknięte, a osłony dobrze przymocowane.
4. Włączyć zasilanie jednostki. Nie włączać jeszcze
samej przetwornicy częstotliwości. W przypadku
urządzeń wyposażonych w rozłącznik należy
przesunąć go do położenia WŁ. (ON), aby włączyć
zasilanie przetwornicy częstotliwości.
5.3 Obsługa lokalnego panelu sterowania
Przetwornica częstotliwości może posiadać numeryczny
lokalny panel sterowania (NLCP), graczny lokalny panel
sterowania (GLCP) lub zaślepkę. W tej sekcji opisano pracę
z panelem NLCP i GLCP.
NOTYFIKACJA
Przetwornicę częstotliwości można również
zaprogramować z komputera osobistego poprzez port
komunikacyjny RS485 lub port USB po zainstalowaniu
oprogramowania Oprogramowanie konguracyjne MCT
10. To oprogramowanie można zamówić (numer
zamówieniowy 130B1000) lub pobrać z witryny Danfoss:
drives.danfoss.com/downloads/pc-tools/#/.
5.3.1 Numeryczny lokalny panel sterowania
(NLCP)
Numeryczny lokalny panel sterowania (NLCP) jest
podzielony na cztery grupy funkcyjne.
A. Wyświetlacz numeryczny.
B. Przycisk [Menu].
C. Przyciski nawigacyjne i lampki sygnalizacyjne
(diody LED).
D. Przyciski operacyjne i lampki sygnalizacyjne
(diody LED).
26 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 31

130BC506.10
Setup 1
A
B
C
D
5
12
13 14 15
10
11
10
9
6
7
8
4
1
2
3
Menu
Status
Quick
Menu
Main
Menu
Hand
On
O
Reset
Auto
On
Back
OK
On
Warn
Alarm
130BD135.10
Setup 12
INDEX
AHP
VkW
srpm
Hz%
n2n1
n3
p5 p4
p3 p2 p1
Uruchomienie Instrukcja obsługi
B. Przycisk Menu
Przy użyciu przycisku [Menu] można wybrać status,
podręczne menu lub menu główne.
C. Lampki sygnalizacyjne (diody LED) i przyciski
nawigacyjne
Wskaźnik Dioda Funkcja
Dioda ON włącza się, kiedy
przetwornica częstotliwości pobiera
6 On Zielona
7 Warn Żółta
8 Alarm
moc z napięcia zasilania, zacisku
magistrali DC lub z zasilania
zewnętrznego 24 V.
Jeżeli wystąpią warunki powodujące
wywołanie ostrzeżenia, zapali się żółta
lampka sygnalizacyjna WARN, a na
wyświetlaczu pojawi się informacja
tekstowa na temat problemu.
W przypadku stanu błędu czerwona
Czerwo
lampka sygnalizacyjna alarmu zaczyna
na
pulsować i wyświetlany jest tekst
alarmu.
5 5
Tabela 5.2 Legenda do Ilustracja 5.1, lampki sygnalizacyjne
Ilustracja 5.1 Widok panelu NLCP
A. Wyświetlacz numeryczny
Wyświetlacz LCD ma funkcję podświetlenia oraz 1 wiersz
numeryczny. Wszystkie dane są wyświetlane na panelu
NLCP.
Numer zestawu parametrów pokazuje aktywny zestaw
parametrów oraz edytowany zestaw parametrów. Jeśli ten
sam zestaw parametrów jest aktywny i edytowany, na
ekranie pojawia się tylko jego numer (nastawa fabryczna).
1
Kiedy są to dwa różne zestawy, oba ich numery są
wyświetlane na ekranie (na przykład zestaw parametrów
12). Edytowany zestaw parametrów jest wskazywany
migającym numerem.
2 Numer parametru.
3 Wartość parametru.
Kierunek obrotów silnika jest pokazywany w lewej dolnej
4
części wyświetlacza. Mała strzałka wskazuje kierunek
obrotów.
Znaczek trójkąta wskazuje, czy LCP jest w menu Status,
5
Podręcznym menu lub Menu głównym.
Tabela 5.1 Legenda do Ilustracja 5.1, grupa A
Ilustracja 5.2 Informacje na wyświetlaczu
(diody LED)
Przycisk Funkcja
Służy do przechodzenia do poprzedniego
9 [Back]
kroku lub poziomu w strukturze
nawigacji.
Służą do przechodzenia między grupami
parametrów, parametrami i ustawieniami
10
[▲] [▼]
w parametrach oraz do zwiększania/
zmniejszania wartości parametrów.
Przyciski strzałek służą również do
ustawiania lokalnej wartości zadanej.
11 [OK]
Pozwala uzyskać dostęp do grup
parametrów lub włączyć wybór.
Służy do przechodzenia od lewej do
12
[►]
prawej w wartości parametru w celu
zmiany poszczególnych cyfr.
Tabela 5.3 Legenda do Ilustracja 5.1, przyciski nawigacyjne
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 27
Page 32

130BC440.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Uruchomienie
VLT® Midi Drive FC 280
D. Przyciski funkcyjne i lampki sygnalizacyjne (diody LED)
Przycisk Funkcja
Powoduje rozruch przetwornicy częstotliwości
w trybie sterowania lokalnego.
Zewnętrzny sygnał zatrzymania, otrzymany
13 Hand On
55
14 O/Reset
15 Auto On
Tabela 5.4 Legenda do Ilustracja 5.1, grupa D
•
na wejściu sterowania lub przez magistralę
komunikacji szeregowej, unieważnia tryb
lokalny ręczny.
Zatrzymuje silnik, ale nie odłącza zasilania od
przetwornicy częstotliwości lub służy do
ręcznego resetowania przetwornicy częstotliwości po usunięciu usterki. W trybie
alarmowym alarm jest resetowany po
usunięciu warunku alarmu.
Przełącza system w tryb pracy zdalnej.
Reaguje na zewnętrzne polecenie startu
•
przesłane przez zaciski sterowania lub
komunikację szeregową.
OSTRZEŻENIE
RYZYKO PORAŻENIA PRĄDEM ELEKTRYCZNYM
Nawet po naciśnięciu przycisku [O/Reset] napięcie jest
obecne na zaciskach przetwornicy częstotliwości.
Naciśnięcie przycisku [O/Reset] nie odłącza
przetwornicy częstotliwości od zasilania. Dotknięcie
elementów pod napięciem może skutkować śmiercią lub
poważnymi obrażeniami.
Nie należy dotykać żadnych elementów pod
•
napięciem.
5.3.2 Funkcja przycisku strzałki w prawo na
NLCP
Naciśnięcie przycisku [►] umożliwia edycję dowolnej z
czterech cyfr na wyświetlaczu. Po jednokrotnym naciśnięciu
przycisku [►] kursor przesuwa się do pierwszej cyfry i
zaczyna ona migać, jak pokazuje Ilustracja 5.3. Aby zmienić
wartość, należy użyć przycisków [▲] i [▼]. Naciśnięcie
przycisku [►] nie zmienia wartości cyfr ani miejsca
przecinka oddzielającego wartości dziesiętne.
Ilustracja 5.3 Funkcja przycisku strzałki w prawo
Przycisk [►] może być również używany do przechodzenia
między grupami parametrów. W Menu głównym należy
nacisnąć przycisk [►], aby przejść do pierwszego parametru
w następnej grupie parametrów (na przykład przejść od
parametru parametr 0-03 Regional Settings [0] Międzyna-
rodowy do parametru parametr 1-00 Conguration Mode [0]
Pętla otwarta).
NOTYFIKACJA
Podczas rozruchu LCP wyświetla komunikat INITIALISING.
Gdy komunikat ten nie jest już wyświetlany,
przetwornica częstotliwości jest gotowa do pracy.
Dodanie lub usunięcie opcji może wydłużyć czas
rozruchu.
5.3.3 Podręczne menu na NLCP
Podręczne menu zapewnia łatwy dostęp do najczęściej
używanych parametrów.
1. Aby do niego wejść, należy naciskać przycisk
[Menu], aż wskaźnik na ekranie ustawi się nad
Podręcznym menu.
2.
Za pomocą przycisków [▲] [▼] wybrać QM1 lub
QM2 i nacisnąć przycisk [OK].
3.
Naciskać przyciski [▲] [▼], aby przeglądać
parametry w Podręcznym menu.
4. Nacisnąć przycisk [OK], aby wybrać parametr.
28 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 33

Uruchomienie Instrukcja obsługi
5.
Naciskać przyciski [▲] [▼], aby zmienić wartość
ustawienia parametru.
6. Nacisnąć przycisk [OK], aby zatwierdzić zmianę.
7. Aby wyjść z danego menu, nacisnąć dwukrotnie
przycisk [Back] (lub trzykrotnie w menu QM2 i
QM3), aby wejść do menu Status, lub raz nacisnąć
przycisk [Menu], aby wejść do Menu głównego.
5 5
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 29
Page 34

130BC445.13
1-22 XXXX V
Motor
nominal
speed
QM 1
0-01 [0]
1-10 [0]
1-24 XXXX A
Language
Motor Type
1-20 XXXX kW
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Stator
Motor frequency
1-25 XXXX
1-30 XXXX
1-39 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
3-02 XXXX
3-03 XXXX
3-41 XXXX S
3-42 XXXX S
5-12
[2]
1-29 [1]
AMA
Back EMF at
1000 RPM
d-axis
QM 2
BMS
AMS
ES
5-70 XXXX
5-71 [0]
1-30 XXXX
1-39 XXXX
1-90 [0]
2-10 [0]
4-16 XXXX %
4-17 XXXX %
4-18 XXXX %
1-00 [0]
1-01 [1]
1-10 [0]
1-24 XXXX A 1-20 XXXX kW
1-22 XXXX V
Motor
nominal
speed
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Motor frequency
1-25 XXXX
1-30 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
Back EMF at
1000 RPM
d-axis
1-39 XXXX
4-14 XXXX
4-19 XXXX
Stator
QM 3
QM 4 QM 5
L10C
SFS
TBD
Motor
nominal
speed
Motor
nominal
speed
Motor current
Motor cont.
rated torque
Resistance (Rs)
Motor poles
inductance (Ld)
Asynchronous motor
Motor current
Minimum reference
Maximum reference
Ramp 1 ramp-up time
Ramp 1 ramp-down time
Terminal 27 digital input
Basic motor set-up
mode
Motor control
principle
Motor type
PM motor
PM motor
Motor
current
Motor cont.
rated torque
Stator
Resistance (Rs)
Motor poles
inductance (Ld)
Motor speed high limit [Hz]
Maximum output frequency
Asynchronous motor
Motor current
RPM
RPM
RPM
Hz
RPM
Hz
Hz
Hz
Hz
Hz
Adv. motor set-up
Resistance (Rs)
Motor poles
Motor thermal
protection
Brake function
Torque limit motor mode
Torque limit generator mode
Current limit
Encoder set-up
Terminal 32/33
pulses per revolution
Terminal 32/33
encoder direction
Changes made
Last 10 changes Since factory setting
Alarm log
Uruchomienie
VLT® Midi Drive FC 280
55
30 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Ilustracja 5.4 Struktura podręcznego menu
Page 35

130BC446.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
7
10
11
12
OK
OK
Back
8
Back
Setup 1
2 x
+
OK
9
OK
Uruchomienie Instrukcja obsługi
5.3.4 Menu główne na NLCP
Menu główne umożliwia dostęp do wszystkich parametrów.
1. Aby do niego wejść, należy naciskać przycisk
[Menu], aż wskaźnik na ekranie ustawi się nad
Menu głównym.
2.
[▲] [▼]: Przeglądanie grup parametrów.
3. Naciśnij przycisk [OK], aby wybrać grupę
parametrów.
4.
[▲] [▼]: Przeglądanie parametrów w konkretne
grupie.
5. Naciśnij przycisk [OK], aby wybrać parametr.
6.
[►] i [▲]/[▼]: Ustawianie/zmiana wartości
parametru.
7. Naciśnij przycisk [OK], aby zaakceptować wartość.
8. Aby wyjść z danego menu, nacisnąć dwukrotnie
przycisk [Back] (lub trzykrotnie dla parametrów
tablicowych) w celu wejścia do Menu głównego
lub raz nacisnąć przycisk [Menu] w celu wejścia
do menu Status.
Zasady zmiany parametrów ciągłych, wyliczeniowych i
tablicowych zawierają odpowiednio Ilustracja 5.5,
Ilustracja 5.6 i Ilustracja 5.7. Czynności na ilustracjach
zostały opisane w Tabela 5.5, Tabela 5.6 i Tabela 5.7.
5 5
Ilustracja 5.5 Interakcje w Menu głównym — parametry ciągłe
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 31
Page 36

130BC447.11
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
OK
OK
Back
7
OK
Back
130BC448.10
1
2
4
5
6
7
8
9
10
OK
Back
Back
Back
5 x
Setup 1
Setup 1
Setup 1
Setup 1
%
INDEX
%
INDEX
%
INDEX
Setup 1
INDEX
%
OK
OK
OK
Uruchomienie
VLT® Midi Drive FC 280
1 [OK]: Wyświetlany jest pierwszy parametr w grupie.
Parametry tablicowe działają w następujący sposób:
2 Aby przejść w dół do kolejnych parametrów, należy
nacisnąć przycisk [▼].
3 Naciśnij przycisk [OK], aby rozpocząć edycję.
4
[►]: Pierwsza cyfra pulsuje (można ją edytować).
5
[►]: Druga cyfra pulsuje (można ją edytować).
6
[►]: Trzecia cyfra pulsuje (można ją edytować).
7
[▼]: Zmniejsza wartość parametru, przecinek dziesiętny
zmienia się automatycznie.
8
[▲]: Zwiększa wartość parametru.
9 [Back]: Anulowanie zmian, powrót do ekranu 2.
55
[OK]: Akceptacja zmian, powrót do ekranu 2.
10
[▲][▼]: Wybór parametru w grupie.
11 [Back]: Usuwa wartość i wyświetla grupę parametrów.
12
[▲][▼]: Wybór grupy.
Tabela 5.5 Zmiana wartości parametrów ciągłych
W przypadku parametrów wyliczanych interakcja jest
podobna, ale wartość parametru jest pokazywana w
nawiasach z powodu ograniczenia liczby cyfr (cztery duże
cyfry) na wyświetlaczu NLCP, a wartość wyliczenia może
być większa niż 99. Jeśli wartość wyliczenia jest większa niż
99, na LCP może być pokazywana tylko pierwsza część
nawiasu.
Ilustracja 5.7 Interakcje w Menu głównym — parametry
tablicowe
1 [OK]: Wyświetla numery parametrów oraz wartość w
pierwszym indeksie.
2 [OK]: Można wybrać indeks.
3
[▲][▼]: Wybór indeksu.
4 [OK]: Można edytować wartość.
5
[▲][▼]: Zmiana wartości parametru (pulsuje).
6 [Back]: Anulowanie zmian.
[OK]: Akceptacja zmian.
7 [Back]: Anulowanie edycji indeksu, wybór nowego
parametru.
8
[▲][▼]: Wybór parametru w grupie.
9 [Back]: Usuwa wartość indeksu parametru i wyświetla grupę
Ilustracja 5.6 Interakcje w Menu głównym — parametry
wyliczane
1 [OK]: Wyświetlany jest pierwszy parametr w grupie.
2 Naciśnij przycisk [OK], aby rozpocząć edycję.
3
[▲][▼]: Zmiana wartości parametru (pulsuje).
4 Naciśnij przycisk [Back], aby anulować zmiany, lub [OK], aby
zatwierdzić zmiany (powrót do ekranu 2).
5
[▲][▼]: Wybór parametru w grupie.
6 [Back]: Usuwa wartość i wyświetla grupę parametrów.
7
[▲][▼]: Wybór grupy.
Tabela 5.6 Zmiana wartości parametrów wyliczanych
32 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
parametrów.
10
[▲][▼]: Wybór grupy.
Tabela 5.7 Zmiana wartości parametrów tablicowych
5.3.5 Graczny lokalny panel sterowania
(GLCP)
GLCP jest podzielony na cztery grupy funkcyjne (patrz
Ilustracja 5.8).
A. Obszar wyświetlacza.
B. Przyciski menu wyświetlacza.
C. Przyciski nawigacyjne i lampki sygnalizacyjne
(diody LED).
Page 37

130BD598.10
Auto
On
Reset
Hand
On
O
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
36.4 kW
Auto Remote Ramping
0.000
On
Alarm
Warn.
A
7.83 A
799 RPM
B
C
D
53.2 %
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18 19 20 21
Uruchomienie Instrukcja obsługi
D. Przyciski funkcyjne i przycisk resetowania.
Przycisk Funkcja
6 Status Wyświetla informacje o pracy.
Umożliwia dostęp do parametrów progra-
Quick
7
Menu
mowania dla instrukcji konguracji
wstępnego zestawu parametrów oraz wielu
szczegółowych instrukcji aplikacji.
8 Main Menu
9 Alarm Log
Umożliwia dostęp do wszystkich parametrów
programowania.
Wyświetla listę aktualnych ostrzeżeń, 10
ostatnich alarmów oraz dziennik konserwacji.
Tabela 5.9 Legenda do Ilustracja 5.8, przyciski menu
wyświetlacza
5 5
C. Przyciski nawigacyjne i lampki sygnalizacyjne (diody
LED)
Przyciski nawigacyjne służą do programowania funkcji i
przesuwania kursora. Przyciski nawigacyjne służą także do
sterowania prędkością podczas pracy w trybie lokalnym. W
tym obszarze znajdują się również trzy lampki wskaźników
statusu przetwornicy częstotliwości.
Przycisk Funkcja
10 Back
Służy do przechodzenia do poprzedniego
kroku lub listy w strukturze menu.
Służy do anulowania ostatniej zmiany lub
Ilustracja 5.8 Graczny lokalny panel sterowania (GLCP)
A. Obszar wyświetlacza
Obszar wyświetlacza jest włączany, gdy przetwornica
częstotliwości pobiera moc z napięcia zasilania, zacisku
magistrali DC lub z zasilania zewnętrznego 24 V DC.
Informacje wyświetlane na panelu LCP można dostosować
do aplikacji użytkownika. Opcje można wybrać w
11 Cancel
12 Info
Przyciski
13
nawigacyjn
14 OK
Tabela 5.10 Legenda do Ilustracja 5.8, przyciski nawigacyjne
polecenia, dopóki zawartość ekranu nie
ulegnie zmianie.
Naciśnięcie tego przycisku wywołuje denicję
wyświetlanej funkcji.
Cztery przyciski nawigacyjne pozwalają
poruszać się po elementach menu.
e
Pozwala uzyskać dostęp do grup parametrów
lub włączyć wybór.
podręcznym menu Q3-13 Ustawienia wyświetlacza.
Wyświetlacz Numer parametru Nastawy domyślne
Tabela 5.8 Legenda do Ilustracja 5.8, obszar wyświetlacza
1 0-20
2 0-21 [1614] Prąd silnika
3 0-22 [1610] Moc [kW ]
4 0-23 [1613] Częstotliwość
5 0-24 [1502] Licznik kWh
[1602] Wartość zadana
[%]
B. Przyciski menu wyświetlacza
Przyciski menu umożliwiają dostęp do menu konguracji
parametrów, przełączanie trybów wyświetlania statusu
podczas normalnej pracy oraz podgląd danych dziennika
błędów.
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 33
Wskaźnik Dioda Funkcja
Dioda ON włącza się, kiedy
przetwornica częstotliwości
15 On Zielona
pobiera moc z napięcia zasilania,
zacisku magistrali DC lub z
zasilania zewnętrznego 24 V.
Jeżeli wystąpią warunki
powodujące wywołanie
16 Warn Żółta
ostrzeżenia, zapali się żółta lampka
sygnalizacyjna WARN, a na
wyświetlaczu pojawi się informacja
tekstowa na temat problemu.
W przypadku stanu błędu
17 Alarm Czerwona
czerwona lampka sygnalizacyjna
alarmu zaczyna pulsować i
wyświetlany jest tekst alarmu.
Tabela 5.11 Legenda do Ilustracja 5.8, lampki sygnalizacyjne
(diody LED)
Page 38

Uruchomienie
VLT® Midi Drive FC 280
D. Przyciski funkcyjne i przycisk resetowania
Przyciski funkcyjne znajdują się w dolnej części LCP.
Przycisk Funkcja
Uruchamia przetwornicę częstotliwości w
Trybie ręcznym.
Zewnętrzny sygnał zatrzymania,
•
18 Hand On
55
19 Wyłączona
20 Auto On
21 Reset
Tabela 5.12 Legenda do Ilustracja 5.8, przyciski funkcyjne i
przycisk resetowania
Zatrzymuje silnik, ale nie odłącza
przetwornicy częstotliwości od zasilania.
Przełącza system w tryb pracy zdalnej.
Służy do ręcznego resetowania przetwornicy
częstotliwości po usunięciu błędu.
otrzymany na wejściu sterowania
lub przez magistralę komunikacji
szeregowej, unieważnia tryb lokalny
ręczny.
Reaguje na zewnętrzne polecenie startu
•
przesłane przez zaciski sterowania lub
komunikację szeregową.
NOTYFIKACJA
Aby wyregulować kontrast wyświetlacza, należy
przytrzymać wciśnięty przycisk [Status] i użyć przycisków
[▲]/[▼].
5.3.6 Ustawienia parametrów
Prawidłowe programowanie pod aplikacje często wymaga
ustawienia funkcji w kilku powiązanych parametrach.
Informacje o parametrach zawiera rozdział 10.2 Struktura
menu parametrów.
Dane programowania są zapisywane w wewnętrznej
pamięci przetwornicy częstotliwości.
Aby mieć kopię zapasową tych danych, można je
•
załadować do pamięci LCP.
Aby pobrać dane do innej przetwornicy częstot-
•
liwości, należy podłączyć do niej LCP i pobrać
zapisane ustawienia.
Przywrócenie nastaw fabrycznych nie zmienia
•
danych zapisanych w pamięci LCP
5.3.7 Zmienianie ustawień parametrów za
pomocą GLCP
Dostęp do parametrów w celu ich przejrzenia lub zmiany
można uzyskać za pomocą przycisków Quick Menu
(wyświetla podręczne menu) lub Main Menu (wyświetla
menu główne). Podręczne menu daje dostęp do ograniczonej liczby parametrów.
1. Nacisnąć przycisk [Quick Menu] lub [Main Menu]
na panelu LCP.
2.
Naciskać przyciski [▲] [▼], aby przeglądać grupy
parametrów. Aby wybrać grupę parametrów,
nacisnąć przycisk [OK].
3.
Naciskać przyciski [▲] [▼], aby przeglądać
parametry. Aby wybrać parametr, nacisnąć
przycisk [OK].
4.
Naciskać przyciski [▲] [▼], aby zmienić wartość
ustawienia parametru.
5.
Naciskając przyciski [◄] [►], przechodzić między
cyframi, gdy parametr dziesiętny można
edytować.
6. Nacisnąć przycisk [OK], aby zatwierdzić zmianę.
7. Nacisnąć dwukrotnie przycisk [Back], aby wejść do
menu Status, lub raz nacisnąć przycisk [Main
Menu], aby wejść do Menu głównego.
Wyświetlanie zmian
Podręczne menu Q5 — Wprowadzone zmiany wyświetla
wszystkie parametry, których wartości zmieniono w
stosunku do nastaw fabrycznych.
Na liście znajdują się tylko parametry zmienione
•
w bieżącej edycji konguracji.
Nie znajdują się na niej parametry, które zostały
•
zresetowane do wartości domyślnych.
Komunikat Puste oznacza, że żaden parametr nie
•
został zmieniony.
5.3.8 Ładowanie danych do LCP i
pobieranie danych z LCP
1. Przed załadowaniem lub pobraniem danych
należy zatrzymać silnik, naciskając przycisk [O].
2. Nacisnąć przycisk [Main Menu] parametr 0-50 LCP
Copy i nacisnąć przycisk [OK].
3. Wybrać [1] Wsztko do LCP, aby załadować dane do
LCP, lub [2] Wszystko z LCP, aby pobrać dane z
LCP.
4. Nacisnąć przycisk [OK]. Postęp ładowania lub
pobierania jest przedstawiany w postaci paska
postępu.
34 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 39

Uruchomienie Instrukcja obsługi
5. Nacisnąć przycisk [Hand On] lub [Auto On], aby
przywrócić pracę w trybie normalnym.
5.3.9 Przywracanie nastaw domyślnych za
pomocą LCP
NOTYFIKACJA
Przywrócenie nastaw domyślnych (fabrycznych) wiąże się
z ryzykiem utraty zaprogramowanych danych, danych
silnika, lokalizacji i zapisów monitorowania. Aby
utworzyć kopię zapasową (backup) tych danych, przed
inicjalizacją należy załadować dane do panelu LCP.
Przywrócenie domyślnych ustawień parametrów
przetwornicy częstotliwości wykonywane jest poprzez
inicjalizację przetwornicy. Inicjalizację można wykonać za
pomocą parametr 14-22 Operation Mode (zalecane) lub
ręcznie. Inicjalizacja nie resetuje ustawień parametrów
parametr 1-06 Clockwise Direction i parametr 0-03 Regional
Settings.
Inicjalizacja za pomocą parametr 14-22 Operation
•
Mode nie zmienia takich nastaw przetwornicy
częstotliwości, jak godziny eksploatacji, wybór
komunikacji szeregowej, dziennik błędów,
dziennik alarmów i inne funkcje monitorowania.
Ręczna inicjalizacja powoduje skasowanie
•
wszystkich danych silnika, programowania,
lokalizacji i monitoringu, przywracając nastawy
fabryczne.
Zalecana procedura inicjalizacji, za pomocą
parametr 14-22 Operation Mode.
1. Wybrać parametr 14-22 Operation Mode i nacisnąć
przycisk [OK].
2. Wybrać pozycję [2] Inicjalizacja i nacisnąć przycisk
[OK].
3. Odłączyć moc od jednostki i zaczekać aż
wyświetlacz się wyłączy.
4. Włączyć zasilanie jednostki.
Fabryczne ustawienia parametrów są przywracane podczas
rozruchu. Może on trwać nieco dłużej niż zwykle.
5. Wyświetlany jest Alarm 80, Drive initialised to
default value (Alarm 80, przetwornica częstotliwości sprowadzona do nastaw fabrycznych).
6. Nacisnąć przycisk [Reset], aby powrócić do trybu
pracy.
Procedura ręcznej inicjalizacji
1. Odłączyć moc od jednostki i zaczekać aż
wyświetlacz się wyłączy.
2. Nacisnąć i przytrzymać jednocześnie przyciski
[Status], [Main Menu] i [OK] na GLCP lub nacisnąć
jednocześnie przyciski [Menu] i [OK] na NLCP
podczas podłączania zasilania do jednostki (przez
około 5 sekund lub do momentu usłyszenia
trzasku i uruchomienia się wentylatora).
Podczas rozruchu przywracane są fabryczne, domyślne
ustawienia parametrów. Może on trwać nieco dłużej niż
zwykle.
Ręczna inicjalizacja nie resetuje następujących informacji
zapisanych w przetwornicy częstotliwości:
Parametr 15-00 Operating hours.
•
Parametr 15-03 Power Up's.
•
Parametr 15-04 Over Temp's.
•
Parametr 15-05 Over Volt's.
•
5.4 Podstawowe programowanie
5.4.1 Zestaw parametrów silnika
asynchronicznego
Wprowadzić następujące dane silnika. Dane te znajdują się
na tabliczce znamionowej silnika.
1. Parametr 1-20 Motor Power.
2. Parametr 1-22 Motor Voltage.
3. Parametr 1-23 Motor Frequency.
4. Parametr 1-24 Motor Current.
5. Parametr 1-25 Motor Nominal Speed.
Dla optymalnej wydajności w trybie VVC+ wymagane są
dodatkowe dane silnika potrzebne do
poniższych parametrów.
6. Parametr 1-30 Stator Resistance (Rs).
7. Parametr 1-31 Rotor Resistance (Rr).
8. Parametr 1-33 Stator Leakage Reactance (X1).
9. Parametr 1-35 Main Reactance (Xh).
Dane te można znaleźć w danych technicznych silnika
(zazwyczaj nie są one dostępne na tabliczce znamionowej
silnika). Uruchomić pełne AMA za pomocą opcji
parametr 1-29 Automatic Motor Adaption (AMA) [1] Aktywna
pełna AMA lub wprowadzić parametry ręcznie.
Regulacja na potrzeby konkretnej aplikacji podczas pracy
w trybie VVC
VVC+ to najbardziej niezawodny tryb sterowania. W
większości sytuacji zapewnia on optymalną wydajność bez
dalszej regulacji. W celu zapewnienia najlepszej wydajności
należy uruchomić pełne AMA.
+
skongurowania
5 5
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 35
Page 40

Uruchomienie
VLT® Midi Drive FC 280
5.4.2 Zestaw parametrów silnika PM w
trybie VVC
Początkowe czynności związane z programowaniem
1. Należy ustawić parametr 1-10 Motor Construction
na następujące opcje, aby aktywować pracę
silnika PM:
1a [1] PM, niewys. SPM
1b [3] PM, salient IPM (PM, wysunięty IPM)
2. Wybrać opcję [0] Otw. pętla w
parametr 1-00 Conguration Mode.
+
55
NOTYFIKACJA
Sprzężenie zwrotne z enkodera jest nieobsługiwane w
przypadku silników PM.
Programowanie danych silnika
Wybranie 1 z opcji silnika PM w parametr 1-10 Motor
Construction spowoduje uaktywnienie parametrów
związanych z silnikiem PM w grupach parametrów 1-2*
Dane silnika, 1-3* Zaaw. dane siln. i 1-4* Zaawan. dane siln.
II.
Informacje można znaleźć na tabliczce znamionowej silnika
oraz na karcie danych technicznych silnika.
Następujące parametry muszą zostać zaprogramowane we
wskazanej kolejności:
1. Parametr 1-24 Motor Current.
2. Parametr 1-26 Motor Cont. Rated Torque.
3. Parametr 1-25 Motor Nominal Speed.
4. Parametr 1-39 Motor Poles.
5. Parametr 1-30 Stator Resistance (Rs).
Wprowadzić rezystancję uzwojenia stojana (Rs)
linia-masa. Jeśli dostępne są tylko dane faza-faza,
należy podzielić wartość przez 2, aby uzyskać
wartość dla fazy do masy (punktu początkowego).
Wartość można też zmierzyć omomierzem —
zostanie wtedy także uwzględniona rezystancja
kabla. Należy podzielić zmierzoną wartość przez 2
i wprowadzić wynik.
6. Parametr 1-37 d-axis Inductance (Ld).
Wprowadzić indukcyjność linia-masa w osi silnika
PM.
Jeśli dostępne są tylko dane linia-linia, należy
podzielić wartość przez 2, aby uzyskać wartość
dla linii do masy (punktu początkowego).
Wartość można też zmierzyć za pomocą miernika
indukcyjności — zostanie wtedy uwzględniona
indukcyjność kabla. Należy podzielić zmierzoną
wartość przez 2 i wprowadzić wynik.
7. Parametr 1-40 Back EMF at 1000 RPM.
Wprowadzić wartość indukowanej siły elektromotorycznej (EMF) linia-linia silnika PM przy 1000
obr./min prędkości mechanicznej (wartość RMS).
Indukowana siła elektromotoryczna (EMF) jest
napięciem wytwarzanym przez silnik PM, gdy nie
podłączono do niego przetwornicy częstotliwości
i jego wał jest obracany siłą zewnętrzną.
Indukowana siła elektromotoryczna (EMF) jest
zwykle określana w odniesieniu do znamionowej
prędkości obrotowej silnika lub prędkości 1000
obr./min mierzonej między dwiema liniami. Jeśli
wartość nie jest dostępna dla prędkości
obrotowej silnika 1000 obr./min, należy obliczyć
prawidłową wartość w następujący sposób: Dla
przykładu, jeżeli indukowana siła elektromotoryczna (EMF) przy 1800 obr./min jest równa 320 V,
indukowana siła elektromotoryczna (EMF) przy
1000 obr./min wynosi:
Indukowana siła elektromotoryczna (EMF) =
(napięcie/prędkość obrotowa)x1000 =
(320/1800)x1000 = 178.
Należy zaprogramować tę wartość dla parametru
parametr 1-40 Back EMF at 1000 RPM..
Test pracy silnika
1. Uruchomić silnik przy niskiej prędkości obrotowej
(100–200 obr./min). Jeśli silnik nie działa,
sprawdzić instalację, ogólne zaprogramowane
dane i dane silnika.
Parkowanie
Ta funkcja jest zalecana w sytuacjach, gdy silnik obraca się
z małą prędkością, na przykład w przypadku wentylatorów.
Ustawienia Parametr 2-06 Parking Current i
parametr 2-07 Parking Time można dostosować. W
przypadku aplikacji o dużej bezwładności należy zwiększyć
nastawy domyślne tych parametrów.
Należy uruchomić silnik przy prędkości znamionowej. Jeśli
aplikacja nie działa prawidłowo, sprawdzić ustawienia
silnika PM w trybie VVC+. Tabela 5.13 przedstawia zalecenia
dotyczące różnych aplikacji.
36 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 41
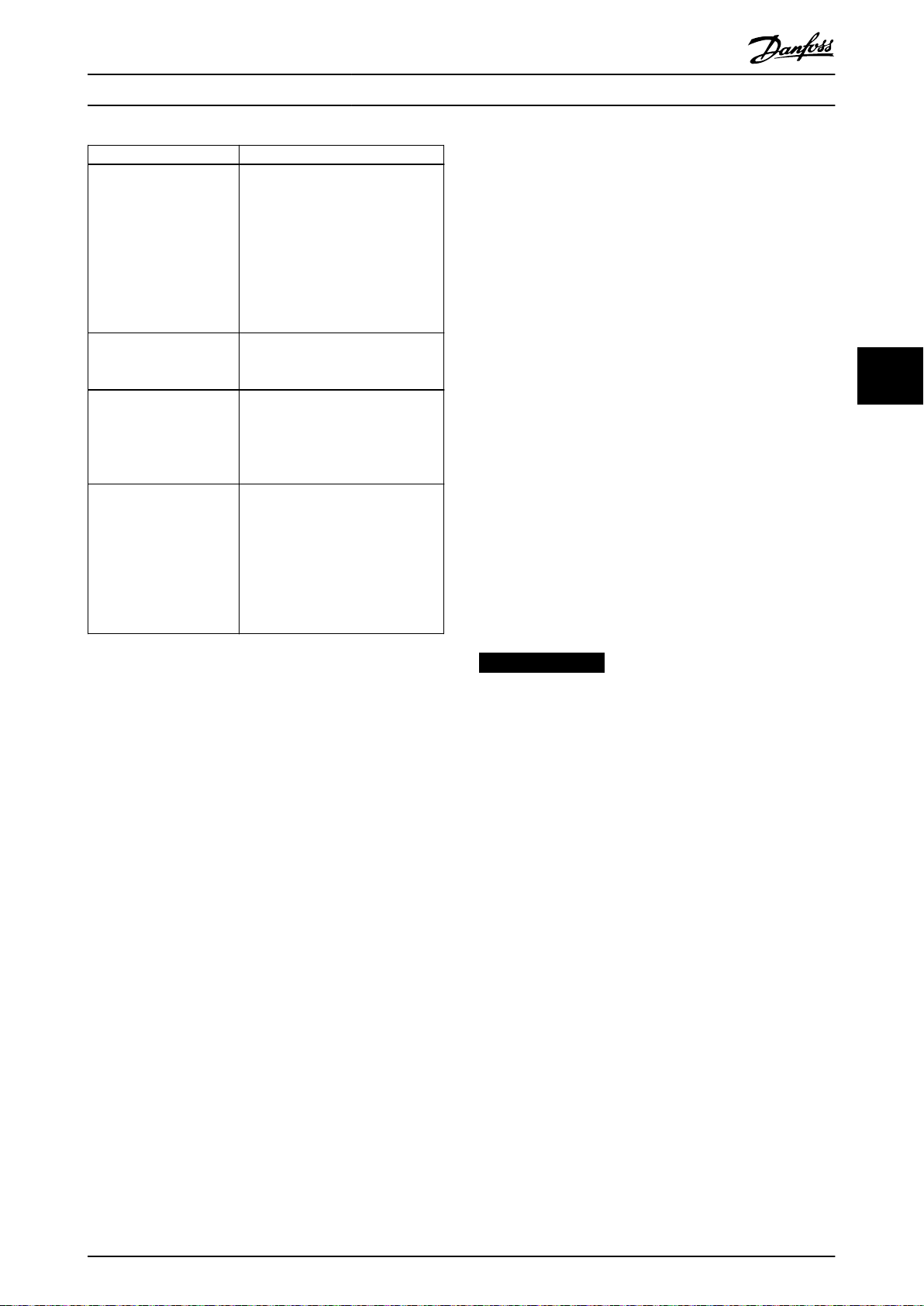
Uruchomienie Instrukcja obsługi
Aplikacja Ustawienia
Aplikacje o małej
bezwładności
I
Obciążenie/ISilnik
Aplikacje o średniej
bezwładności
50>I
Obciążenie/ISilnik
Aplikacje o dużej
bezwładności
I
Obciążenie/ISilnik
Duże obciążenie przy
niskiej prędkości
< 30% (prędkość
znamionowa)
<5
>5
>50
Zwiększyć wartość parametru
•
parametr 1-17 Voltage lter time
const. o współczynnik 5 do 10.
Zmniejszyć wartość
•
parametr 1-14 Damping Gain.
Zmniejszyć wartość (< 100%) dla
•
parametr 1-66 Min. Current at Low
Speed.
Zachować obliczone wartości.
Zwiększyć wartości
parametr 1-14 Damping Gain,
parametr 1-15 Low Speed Filter Time
Const. i parametr 1-16 High Speed
Filter Time Const.
Zwiększyć wartość
parametr 1-17 Voltage lter time
const..
Zwiększyć wartość
parametr 1-66 Min. Current at Low
Speed (>100% przez dłuższy czas
może doprowadzić do przegrzania
silnika).
Aby uruchomić AMA (automatyczne dopasowanie do
silnika), korzystając z LCP
1. Z domyślnym ustawieniem parametru podłączyć
zaciski 13 i 27 przed uruchomieniem AMA.
2. Wejść do Menu głównego.
3. Przejść do grupy parametrów 1-** Load and Motor
(1-** Obciążenie i silnik).
4. Nacisnąć przycisk [OK].
5. Ustawić parametry silnika w grupie parametrów
1-2* Motor Data (1-2* Dane silnika), korzystając z
danych z tabliczki znamionowej.
6. Ustawić długość kabla silnika w
parametr 1-42 Motor Cable Length.
7. Przejść do parametr 1-29 Automatic Motor
Adaption (AMA).
8. Nacisnąć przycisk [OK].
9. Wybrać [1] Aktywna pełna AMA.
10. Nacisnąć przycisk [OK].
11. Test zostanie wykonany automatycznie ze
wskazaniem jego ukończenia.
W zależności od mocy, ukończenie AMA zajmuje od 3 do
10 minut.
5 5
Tabela 5.13 Zalecenia dotyczące różnych aplikacji
Jeśli silnik zacznie drgać przy pewnej prędkości, należy
zwiększyć wartość parametr 1-14 Damping Gain. Należy
zwiększać ją stopniowo, małymi krokami.
Moment rozruchowy można dostosować w
parametr 1-66 Min. Current at Low Speed. Wartość 100% to
znamionowy moment rozruchowy.
5.4.3 Autom. dopasowanie do silnika (AMA)
AMA jest procedurą, którą należy uruchomić w celu
optymalizacji zgodności między przetwornicą częstotliwości
i silnikiem w trybie VVC+.
Przetwornica częstotliwości tworzy matematyczny
•
model silnika służący do sterowania wyjściowym
prądem silnika, zwiększając w ten sposób
wydajność silnika.
Niektóre typy silników nie mogą przejść pełnej
•
wersji testu. W takim przypadku należy w
parametr 1-29 Automatic Motor Adaption (AMA)
wybrać [2] Aktywna ogr. AMA.
Jeżeli pojawią się ostrzeżenia lub alarmy, patrz
•
rozdział 8.4 Lista ostrzeżeń i alarmów.
Najlepsze wyniki uzyskuje się, przeprowadzając
•
powyższą procedurę na zimnym silniku.
NOTYFIKACJA
Funkcja AMA nie powoduje uruchomienia silnika i nie
szkodzi silnikowi.
5.5 Sprawdzanie obrotów silnika
Przed uruchomieniem przetwornicy częstotliwości należy
sprawdzić kierunek obrotów silnika.
1. Nacisnąć przycisk [Hand On].
2.
Nacisnąć przycisk [►], aby wybrać dodatnią
wartość zadaną prędkości.
3. Sprawdzić, czy pokazywana wartość prędkości
jest dodatnia.
4. Sprawdzić, czy okablowanie między przetwornicą
częstotliwości i silnikiem jest prawidłowe.
5. Sprawdzić, czy silnik pracuje w kierunku zgodnym
z ustawieniem w parametr 1-06 Zgodnie z ruchem
wskazówek zegara.
5a Jeżeli parametr 1-06 Zgodnie z ruchem
wskazówek zegara ustawiono na [0]*
Normalne (domyślnie: zgodnie z ruchem
wskazówek zegara):
a. Sprawdzić, czy wał silnika
obraca się w kierunku
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 37
Page 42

Uruchomienie
VLT® Midi Drive FC 280
zgodnym z ruchem wskazówek
zegara.
b. Sprawdzić, czy strzałka na LCP
wskazuje kierunek obrotów
zgodny z ruchem wskazówek
zegara.
5b Jeżeli parametr 1-06 Zgodnie z ruchem
wskazówek zegara ustawiono na [1]
Odwrócona (przeciwnie do ruchu
wskazówek zegara):
a. Sprawdzić, czy wał silnika
55
obraca się w kierunku
przeciwnym do ruchu
wskazówek zegara.
b. Sprawdzić, czy strzałka na LCP
wskazuje kierunek przeciwny
do ruchu wskazówek zegara.
5.6 Sprawdzenie obrotów enkodera
Obroty enkodera należy sprawdzać tylko w przypadku, gdy
używana jest funkcja sprzężenia zwrotnego z enkodera.
1. Wybrać opcję [0] Otw. pętla w
parametr 1-00 Conguration Mode.
2. Wybrać opcję [1] Enkoder 24 V w
parametr 7-00 Speed PID Feedback Source.
3. Nacisnąć przycisk [Hand On].
4.
Nacisnąć przycisk [►], aby wybrać dodatnią
wartość zadaną prędkości
(parametr 1-06 Clockwise Direction przy [0]
Normalne).
5. Sprawdzić w parametr 16-57 Feedback [RPM], czy
sprzężenie zwrotne jest dodatnie.
NOTYFIKACJA
UJEMNE SPRZĘŻENIE ZWROTNE
Jeżeli sprzężenie zwrotne jest ujemne, enkoder
podłączono niewłaściwie. Należy odwrócić kierunek za
pomocą parametr 5-71 Term 32/33 Encoder Direction lub
zamienić kolejność kabli enkodera.
4. Nacisnąć przycisk [O]. Sprawdzić, czy występują
problemy ze zmniejszaniem prędkości.
Jeśli występują problemy z przyspieszaniem lub zmniejszaniem prędkości, patrz rozdział 8.5 Wykrywanie i usuwanie
usterek. Resetowanie przetwornicy częstotliwości po
wyłączeniu awaryjnym opisano w rozdział 8.2 Typy ostrzeżeń
i alarmów.
5.8 Rozruch systemu
Procedura przedstawiona w tej sekcji wymaga wykonania
okablowania i zaprogramowania aplikacji przez
użytkownika. Wykonanie poniższej procedury zaleca się po
skongurowaniu zestawu parametrów aplikacji.
1. Nacisnąć przycisk [Auto On].
2. Zastosować zewnętrzny rozkaz pracy.
3. Nastawić wartość zadaną prędkości w zakresie
prędkości.
4. Usunąć zewnętrzny rozkaz pracy.
5. Sprawdzić poziomy dźwięku i drgań silnika, aby
upewnić się, że system działa prawidłowo.
Jeżeli pojawią się ostrzeżenia lub alarmy, patrz
rozdział 8.2 Typy ostrzeżeń i alarmów w celu zresetowania
przetwornicy częstotliwości po wyłączeniu awaryjnym.
Moduł pamięci
5.9
Moduł pamięci VLT® MCM to małe urządzenie pamięci
zawierające dane takie jak:
oprogramowanie układowe przetwornicy częstot-
•
liwości (nie obejmuje oprogramowania
układowego do komunikacji na karcie sterującej),
plik PUD,
•
plik SIVP,
•
plik parametrów.
•
Moduł pamięci VLT® MCM jest wyposażeniem
dodatkowym. Przetwornica częstotliwości jest dostarczana
bez modułu pamięci zainstalowanego fabrycznie. Nowy
moduł pamięci można zamówić przy użyciu poniższych
numerów zamówieniowych.
5.7 Test sterowania lokalnego
1. Nacisnąć przycisk [Hand On], aby wprowadzić
polecenie lokalnego startu do przetwornicy
częstotliwości.
2. Przyspieszyć przetwornicę częstotliwości do
pełnej prędkości, naciskając przycisk [▲]. Przesunięcie kursora na lewo od punktu dziesiętnego
umożliwia szybszą zmianę wprowadzanych
danych.
3. Sprawdzić, czy występują problemy z przyspieszaniem.
Moduł pamięci VLT® MCM 102
Moduł pamięci VLT® MCM 103
Tabela 5.14 Numer zamówieniowy
Każdy moduł pamięci ma unikatowy numer seryjny,
którego nie można zmienić.
Opis Numer zamówieniowy
132B0359
132B0466
38 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 43

Uruchomienie Instrukcja obsługi
NOTYFIKACJA
Moduł pamięci VLT® MCM może być używany w
przetwornicy częstotliwości z oprogramowaniem
układowym w wersji 1.5 lub nowszej.
Należy wybrać odpowiednie opcje dla parametru
parametr 31-40 Memory Module Function przed
rozpoczęciem kongurowania z użyciem modułu pamięci.
Parametr 31-40 Memory
Module Function
[0] Wyłączone Funkcja pobierania i ładowania
*[1] Only Allow Download
(Zezwalaj tylko na
pobieranie)
[2] Only Allow Upload
(Zezwalaj tylko na ładowanie)
[3] Allow Both Download and
Upload (Zezwalaj na
pobieranie i ładowanie)
Tabela 5.15 Opis Parametr 31-40 Memory Module Function
Opis
danych jest wyłączona.
Zezwala tylko na pobieranie
danych z modułu pamięci do
przetwornicy częstotliwości. To
jest nastawa domyślna parametru
parametr 31-40 Memory Module
Function.
Zezwala tylko na ładowanie
danych z przetwornicy częstotliwości do modułu pamięci.
W przypadku wybrania tej opcji
przetwornica częstotliwości
najpierw pobiera dane z modułu
pamięci, a następnie dane są
ładowane z przetwornicy częstotliwości do modułu pamięci.
NOTYFIKACJA
UNIKANIE PRZYPADKOWEGO NADPISANIA DANYCH
Nastawą domyślną parametru parametr 31-40 Memory
Module Function jest [1] Only Allow Download (Zezwalaj
tylko na pobieranie). W przypadku jakiejkolwiek
aktualizacji, na przykład aktualizacji oprogramowania
układowego przez MCT 10 przy użyciu pliku OSS,
aktualizacji parametru przez LCP lub magistralę, resetu
parametrów za pomocą parametr 14-22 Operation Mode
lub resetu trzypalcowego przetwornicy częstotliwości,
zaktualizowane dane zostaną utracone po wyłączeniu i
włączeniu zasilania, ponieważ przetwornica częstotliwości
ponownie pobierze dane z modułu pamięci.
Po pobraniu danych z modułu pamięci do
•
przetwornicy częstotliwości należy wybrać
nastawę [0] Disabled (Nieaktywne) lub [2] Only
Allow Upload (Zezwalaj tylko na ładowanie) w
parametrze parametr 31-40 Memory Module
Function przed wyłączeniem i włączeniem
zasilania.
5.9.1 Synchronizowanie danych
przetwornicy częstotliwości z nowym
modułem pamięci (tworzenie kopii
zapasowej danych przetwornicy)
1. Podłączyć nowy pusty moduł pamięci do
przetwornicy częstotliwości.
2. W parametrze parametr 31-40 Memory Module
Function wybrać nastawę [2] Only Allow Upload
(Zezwalaj tylko na ładowanie) lub [3] Allow Both
Download and Upload (Zezwalaj na pobieranie i
ładowanie).
3. Załączyć zasilanie przetwornicy częstotliwości.
4. Poczekać na zakończenie synchronizacji (patrz
rozdział 5.9.7 Wydajność i wskaźniki transferu, aby
sprawdzić wskaźniki transferu na przetwornicy
częstotliwości).
NOTYFIKACJA
Aby uniknąć niezamierzonego nadpisania danych w
module pamięci, należy rozważyć skorygowanie
ustawienia parametru parametr 31-40 Memory Module
Function przed następnym wyłączeniem i włączeniem
zasilania zgodnie z innym celem operacyjnym.
5.9.2 Kopiowanie danych do innej
przetwornicy częstotliwości
1. Upewnić się, że wymagane dane zostały
załadowane do modułu pamięci (patrz
rozdział 5.9.1 Synchronizowanie danych
przetwornicy częstotliwości z nowym modułem
pamięci (tworzenie kopii zapasowej danych
przetwornicy)).
2. Odłączyć moduł pamięci i podłączyć go do nowej
przetwornicy częstotliwości.
3. Upewnić się, że na nowej przetwornicy częstotliwości wybrano nastawę [1] Only Allow Download
(Zezwalaj tylko na pobieranie) lub [3] Allow Both
Download and Upload (Zezwalaj na pobieranie i
ładowanie) w parametrze parametr 31-40 Memory
Module Function.
4. Załączyć zasilanie nowej przetwornicy częstotliwości.
5. Poczekać na zakończenie pobierania i przetransferowanie danych (patrz rozdział 5.9.7 Wydajność i
wskaźniki transferu, aby sprawdzić wskaźniki
transferu na przetwornicy częstotliwości).
5 5
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 39
Page 44

Uruchomienie
VLT® Midi Drive FC 280
NOTYFIKACJA
Aby uniknąć niezamierzonego nadpisania danych w
module pamięci, należy rozważyć skorygowanie
ustawienia parametru parametr 31-40 Memory Module
Function przed następnym wyłączeniem i włączeniem
zasilania zgodnie z innym celem operacyjnym.
5.9.4 Transferowanie informacji o
oprogramowaniu układowym
Jeśli dwie przetwornice częstotliwości mają jednakowe
napięcie i moc, informacje o oprogramowaniu układowym
można przetransferować z jednej przetwornicy częstotliwości do drugiej.
5.9.3 Kopiowanie danych do wielu
przetwornic częstotliwości
Jeśli wiele przetwornic częstotliwości ma jednakowe
55
napięcie/moc, informacje z jednej przetwornicy częstotliwości można przetransferować do pozostałych za pomocą
jednego modułu pamięci.
1. Wykonać kroki opisane w rozdział 5.9.1 Synchroni-
zowanie danych przetwornicy częstotliwości z
nowym modułem pamięci (tworzenie kopii
zapasowej danych przetwornicy), aby załadować
dane z jednej przetwornicy częstotliwości do
modułu pamięci.
2. Aby uniknąć niezamierzonego załadowania
danych do modułu pamięci urządzenia master,
upewnić się, że na pozostałych przetwornicach
częstotliwości wybrano nastawę [1] Only Allow
Download (Zezwalaj tylko na pobieranie) w
parametrze parametr 31-40 Memory Module
Function.
3. Odłączyć moduł pamięci i podłączyć go do nowej
przetwornicy częstotliwości.
4. Załączyć zasilanie nowej przetwornicy częstotliwości.
5. Poczekać na zakończenie pobierania i przetransferowanie danych (patrz rozdział 5.9.7 Wydajność i
wskaźniki transferu, aby sprawdzić wskazania
transferu na przetwornicy częstotliwości).
6. Powtórzyć kroki 3–5 dla następnej przetwornicy
częstotliwości.
NOTYFIKACJA
Dane można również pobrać do modułu pamięci z
komputera PC za pomocą Programatora modułu pamięci
VLT®.
NOTYFIKACJA
Jeśli w dowolnej z przetwornic częstotliwości zostanie
podłączony pusty moduł pamięci w celu wykonania kopii
zapasowej danych, należy zmienić ustawienie parametru
parametr 31-40 Memory Module Function na [2] Only
Allow Upload (Zezwalaj tylko na ładowanie) lub [3] Allow
Both Download and Upload (Zezwalaj na pobieranie i
ładowanie) przed następnym wyłączeniem i włączeniem
zasilania.
1. Wykonać kroki opisane w rozdział 5.9.1 Synchroni-
zowanie danych przetwornicy częstotliwości z
nowym modułem pamięci (tworzenie kopii
zapasowej danych przetwornicy), aby załadować
informacje o oprogramowaniu układowym z
jednej przetwornicy częstotliwości do modułu
pamięci.
2. Wykonać kroki opisane w
rozdział 5.9.2 Kopiowanie danych do innej
przetwornicy częstotliwości w celu przetransfe-
rowania informacji o oprogramowaniu
układowym do innej przetwornicy częstotliwości
o tym samym napięciu i mocy.
NOTYFIKACJA
Informacje o oprogramowaniu układowym można
również pobrać do modułu pamięci z komputera PC za
pomocą Programatora modułu pamięci VLT®.
5.9.5 Wykonywanie kopii zapasowej zmian
parametrów do modułu pamięci
1. Podłączyć nowy lub wymazany moduł pamięci do
przetwornicy częstotliwości.
2. W parametrze parametr 31-40 Memory Module
Function wybrać nastawę [2] Only Allow Upload
(Zezwalaj tylko na ładowanie) lub [3] Allow Both
Download and Upload (Zezwalaj na pobieranie i
ładowanie).
3. Załączyć zasilanie przetwornicy częstotliwości.
4. Poczekać na zakończenie synchronizacji (patrz
rozdział 5.9.7 Wydajność i wskaźniki transferu, aby
sprawdzić wskaźniki transferu na przetwornicy
częstotliwości).
5. Wszelkie zmiany ustawień parametrów zostaną
automatycznie zsynchronizowane z modułem
pamięci.
40 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 45

Uruchomienie Instrukcja obsługi
5.9.6 Wymazywanie danych
Moduł pamięci można wymazać przez ustawienie
parametru parametr 31-43 Erase_MM bez wyłączania i
włączania zasilania.
1. Upewnić się, że moduł pamięci jest zainstalowany
w przetwornicy częstotliwości.
2. Wybrać ustawienie[1] Erase MM (Wymaż moduł
pamięci) w parametrze parametr 31-43 Erase_MM.
3. Wszystkie pliki w module pamięci zostaną
usunięte.
4. Parametr Parametr 31-43 Erase_MM jest ustawiany
z powrotem na [0] Brak funkcji.
5.9.7 Wydajność i wskaźniki transferu
Czas transferu różnych danych między przetwornicą
częstotliwości a modułem pamięci jest różny, patrz
Tabela 5.16.
Plik danych Czas
Około 2 minut w przypadku ładowania
•
danych z przetwornicy częstotliwości
Plik oprogramowania
układowego
Plik SIVP Około 10 s.
Plik parametrów
Tabela 5.16 Wydajność transferu
1) Jeśli zmieniono parametr w przetwornicy częstotliwości, aby
załadować zaktualizowany parametr, należ y odczekać co najmniej 5
s przed wyłączeniem zasilania.
Plik
danych
Plik
oprogramowania
układoweg
o
Plik SIVP
Plik
parametró
w
Tabela 5.17 Wskaźniki transferu
1) Lampka sygnalizacyjna On znajduje się na LCP. Informacje o
położeniu i funkcjach lampki sygnalizacyjnej On zawiera
rozdział 5.3.1 Numeryczny lokalny panel sterowania (NLCP) i
rozdział 5.3.5 Graczny lokalny panel sterowania (GLCP).
1)
Podczas transferu
wyświetlany jest
tekst „Synchronizing
with Memory
Module” (Synchronizowanie z modułem
pamięci).
Brak wskaźnika
tekstowego.
do modułu pamięci.
Około 6 minut w przypadku pobierania
•
danych z modułu pamięci do
przetwornicy częstotliwości.
Około 5 s.
Wskaźniki
GLCP NLCP
Brak
wskaźnika
tekstowego
.
Lampka sygnali-
zacyjna On
Lampka sygnalizacyjna pulsuje
powoli podczas
transferu.
Lampka sygnalizacyjna nie
pulsuje.
1)
5.9.8 Aktywacja funkcji PROFIBUS
Converter
Moduł pamięci VLT® MCM 103 działa jako połączenie
modułu pamięci i modułu aktywacji w celu włączenia
funkcji PROFIBUS Converter w oprogramowaniu
układowym. Moduł pamięci VLT® MCM 103 zawiera plik
PBconver.MME, który jest połączony z indywidualnym
numerem seryjnym modułu pamięci. Plik PBconver.MME
znajduje się w kluczu dla funkcji PROFIBUS Converter.
Aby aktywować funkcję PROFIBUS Converter, należy
wybrać wersję w parametrze parametr 14-70 Compatibility
Selections.
Parametr 14-70 Compatibility
Selections
*[0] Brak funkcji Funkcja wyboru zgodności
[12] VLT®2800 3M
[13] VLT®2800 3M incl. MAV
[14] VLT®2800 12M
[15] VLT®2800 12M incl. MAV
Tabela 5.18 Opis
parametr 14-70 Compatibility Selections
Opis
jest nieaktywna.
Wybór trybu zgodności
VLT®2800 3M dla
przetwornicy częstotliwości.
Wybór trybu zgodności
VLT®2800 3M incl. MAV dla
przetwornicy częstotliwości.
Wybór trybu zgodności
VLT®2800 12M dla
przetwornicy częstotliwości.
Wybór trybu zgodności
VLT®2800 12M incl. MAV dla
przetwornicy częstotliwości.
Aktywacja funkcji PROFIBUS Converter za pomocą
modułu pamięci VLT® MCM 103
1. Podłączyć moduł pamięci do przetwornicy
częstotliwości.
2.
Wybrać ustawienie [12] VLT® 2800 3M lub [14]
VLT® 2800 12M w parametrze
parametr 14-70 Compatibility Selections.
3. Wyłączyć i włączyć zasilanie, aby uruchomić
przetwornicę częstotliwości z numerem identy-
kacyjnym
i w trybie VLT® 2800 PROFIBUS.
NOTYFIKACJA
Aby moduł pamięci VLT® MCM 103 działał jako funkcja
PROFIBUS Converter, parametr 31-40 Memory Module
Function nie może być ustawiony na [0] Disabled
(Wyłączone).
Funkcję PROFIBUS Converter można aktywować bez
modułu pamięci VLT® MCM 103 na ograniczony czas. Przed
5 5
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 41
Page 46

Uruchomienie
VLT® Midi Drive FC 280
upływem tego czasu należy podłączyć moduł pamięci VLT
MCM 103, aby zachować funkcję PROFIBUS Converter.
Aktywacja funkcji PROFIBUS Converter za pomocą
ustawień parametrów
1. Wybrać [1] Enabled (Aktywne) w parametrze
parametr 31-47 Time Limit Function.
2.
Wybrać ustawienie [12] VLT® 2800 3M lub [14]
®
2800 12M w parametrze
VLT
parametr 14-70 Compatibility Selections.
55
3. Wyłączyć i włączyć zasilanie, aby uruchomić
przetwornicę częstotliwości z numerem identy-
kacyjnym i w trybie VLT® 2800 PROFIBUS.
4. Parametr 31-48 Time Limit Remaining Time
rozpoczyna odliczanie po wyłączeniu i włączeniu
zasilania i pokazuje pozostały czas do
wykorzystania.
Po 720 godzinach czasu pracy przetwornica częstotliwości
zgłasza ostrzeżenie. Funkcja PROFIBUS Converter nadal
działa. Kiedy licznik czasu w parametr 31-48 Time Limit
Remaining Time osiągnie 0, przetwornica częstotliwości
zgłosi alarm wyłączenia awaryjnego z blokadą przy
następnym poleceniu rozruchu.
®
42 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 47

24 V
17 V
IGBT
+UDC
X3
IGBT
PELV
X3
X3
24 V
voltage
source
high-side
gate driving
circuit
diagnostic
circuit
low-side
gate driving
circuit
12
38
37
55
130BE463.12
Time
5 ms max.
Debounce time
Time
STO valid
STO invalid
Voltage
T37/38
Test pulse STO demanded
STO request
state
130BE587.12
Safe Torque O (STO) Instrukcja obsługi
6 Safe Torque O (STO)
Funkcja Safe Torque O (STO) stanowi element systemu
kontroli bezpieczeństwa. Uniemożliwia generowanie
napięcia wymaganego do obracania silnikiem, zapewniając
bezpieczeństwo w sytuacjach awaryjnych.
Funkcja STO została zaprojektowana i zatwierdzona jako
zgodna z wymogami następujących norm:
IEC/EN 61508: 2010 Poziom integralności bezpie-
•
czeństwa SIL2
IEC/EN 61800-5-2: 2007 Poziom integralności
•
bezpieczeństwa SIL2
IEC/EN 62061: 2012 SILCL, SIL2
•
EN ISO 13849-1: 2008 Kategoria 3 PL d
•
Aby osiągnąć wymagany poziom bezpieczeństwa pracy,
należy właściwie dobrać i zastosować elementy systemu
kontroli bezpieczeństwa. Przed użyciem funkcji
bezpiecznego wyłączania momentu (STO) należy przeprowadzić dokładną analizę ryzyka dotyczącą instalacji w celu
określenia, czy zastosowanie funkcji STO oraz poziomy
bezpieczeństwa są odpowiednie i wystarczające.
Funkcja STO w przetwornicy częstotliwości jest sterowana
przez zaciski sterowania 37 i 38. Gdy funkcja STO jest
aktywowana, zasilanie po stronie wysokiego sygnału i
niskiego sygnału obwodów sprzęgacza IGBT jest odcinane.
Ilustracja 6.1 pokazuje architekturę funkcji STO. Tabela 6.1
przedstawia statusy funkcji STO na podstawie tego, czy
zaciski 37 i 38 są pod napięciem.
Zacisk 37 Zacisk 38 Moment
obrotow
Ostrzeżenie lub
alarm
y
Pod napięciem
1)
Pod napięciem
Tak
2)
Brak ostrzeżeń i
alarmów
Niezasilane
3)
Niezasilane Nie Ostrzeżenie/
alarm 68: Safe
Torque O
Niezasilane Pod napięciem Nie Alarm 188: Błąd
funkcji STO.
Pod napięciem Niezasilane Nie Alarm 188: Błąd
funkcji STO.
Tabela 6.1 Status STO
1) Zakres napięcia 24 V ± 5 V, z zaciskiem 55 jako zaciskiem wartości
zadanej.
2) Moment występuje tylko wtedy, gdy przetwornica częstotliwości
pracuje.
±
3) Otwarty obwód lub napięcie w zakresie 0 V
1,5 V, z zaciskiem 55
jako zaciskiem wartości zadanej.
Filtrowanie impulsu testowego
W przypadku urządzeń bezpieczeństwa generujących
impulsy testowe na liniach sterowania STO, jeśli sygnały
impulsowe pozostają na niskim poziomie (≤1,8 V) nie
dłużej niż przez 5 ms, są one ignorowane, jak pokazuje
Ilustracja 6.2.
6
6
Ilustracja 6.2 Filtrowanie impulsu testowego
Ilustracja 6.1 Architektura funkcji STO
Tolerancja wejścia sygnału asynchronicznego
Sygnały wejściowe na dwóch zaciskach nie zawsze są
synchroniczne. Jeśli rozbieżność między dwoma sygnałami
jest dłuższa niż 12 ms, występuje alarm o błędzie funkcji
STO (alarm 188 Błąd funkcji STO).
Prawidłowe sygnały
Aby aktywować funkcję STO, oba sygnały muszą być na
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 43
niskim poziomie przez co najmniej 80 ms. Aby zakończyć
działanie funkcji STO, oba sygnały muszą być na wysokim
poziomie przez co najmniej 20 ms. Informacje o poziomach
Page 48
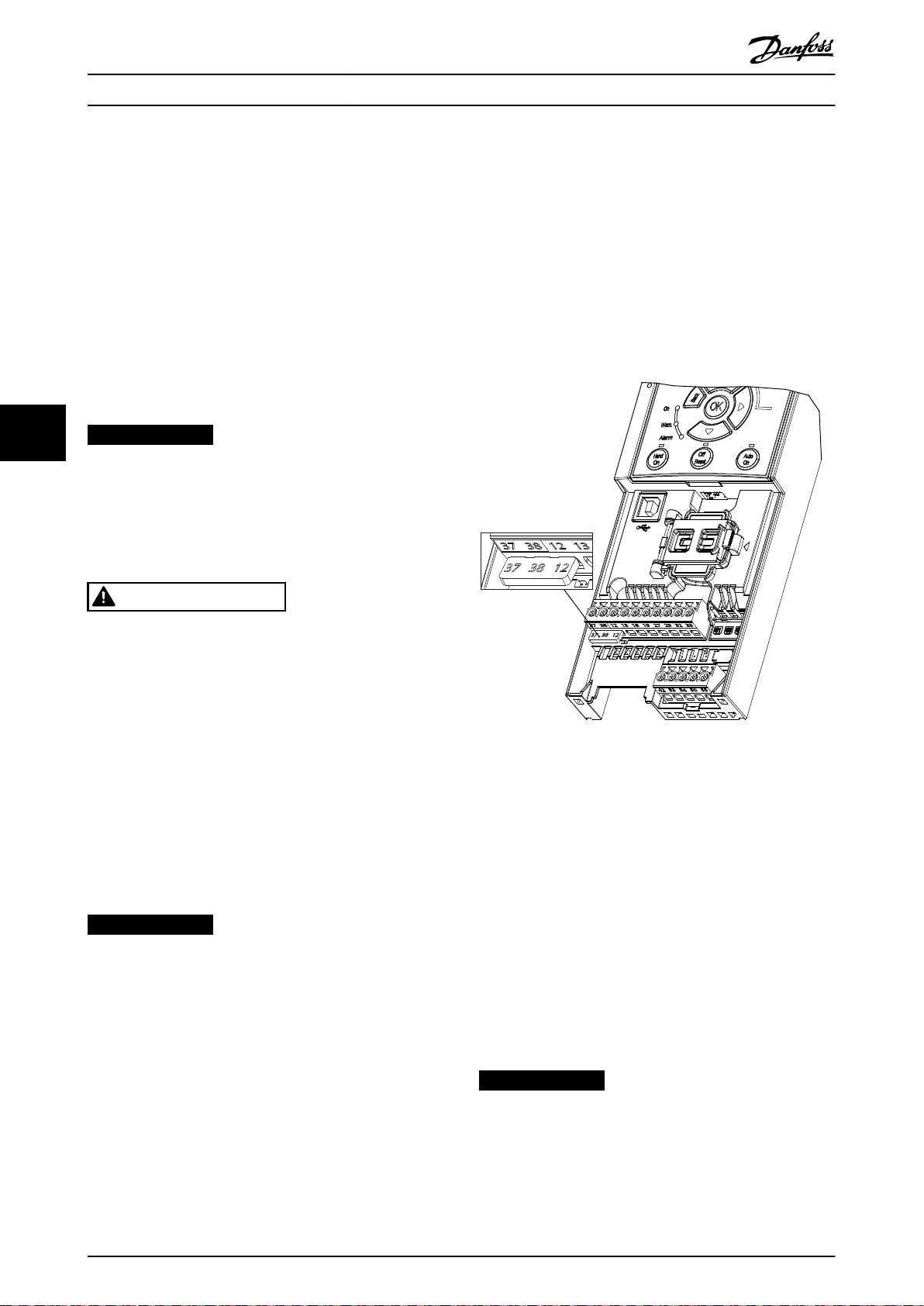
130BE213.10
Safe Torque O (STO)
VLT® Midi Drive FC 280
6
napięcia i prądzie wejściowym zacisków funkcji STO
zawiera rozdział 9.6 Wejścia/wyjścia sterowania i dane
sterowania.
6.1 Środki ostrożności dla funkcji STO
Wykwalikowany personel
Tylko wykwalikowany personel może instalować lub
obsługiwać ten sprzęt.
Wykwalikowany personel to przeszkolona obsługa
upoważniona do instalacji, uruchomienia, a także do
konserwacji sprzętu, systemów i obwodów zgodnie ze
stosownymi przepisami prawa. Ponadto personel musi znać
instrukcje i środki bezpieczeństwa opisane w niniejszej
instrukcji.
NOTYFIKACJA
Po instalacji funkcji STO należy przeprowadzić próbę
uruchomienia zgodnie ze specykacją w dokumencie
rozdział 6.3.3 Próba uruchomienia funkcji STO. Pomyślnie
zakończona próba uruchomienia jest wymagana przy
pierwszej instalacji i po każdej zmianie instalacji bezpieczeństwa.
OSTRZEŻENIE
RYZYKO PORAŻENIA PRĄDEM ELEKTRYCZNYM
Funkcja STO NIE ODŁĄCZA napięcia zasilania od
przetwornicy częstotliwości ani obwodów pomocniczych,
a więc nie zabezpiecza przed porażeniem prądem
elektrycznym. Nieprzestrzeganie nakazu odcięcia
napięcia zasilania od urządzenia i odczekania
określonego czasu może doprowadzić do śmierci lub
poważnych obrażeń.
Przed przystąpieniem do pracy na podzespołach
•
elektrycznych przetwornicy częstotliwości lub
silnika należy bezwzględnie odłączyć napięcie
zasilania i odczekać okres przedstawiony w
części dotyczącej bezpieczeństwa w
rozdział 2.3.1 Czas wyładowania.
NOTYFIKACJA
Podczas projektowania określonej aplikacji maszyny
należy wziąć pod uwagę upływ czasu i odległość, tak aby
umożliwić zatrzymanie z wybiegiem silnika (STO). Więcej
informacji dotyczących kategorii zatrzymania zawiera
norma EN 60204-1.
6.2 Instalacja funkcji Safe Torque O
Podczas podłączania silnika, zasilania AC i okablowania
sterowania należy stosować się do wskazówek bezpiecznej
instalacji zawartych w rozdział 4 Instalacja elektryczna.
Aby włączyć zintegrowaną funkcję STO, należy wykonać
następujące czynności:
1. Usunąć zworkę między zaciskami sterowania 12
(24 V), 37 i 38. Odcięcie lub przerwanie zworki
nie wystarczy do zapobieżenia wystąpieniu
zwarcia. Patrz zworka na Ilustracja 6.3.
Ilustracja 6.3 Zworka między zaciskami 12 (24 V), 37 i 38
2. Należy podłączyć dwukanałowe urządzenie
zabezpieczające (na przykład sterownik programowalny bezpieczeństwa, kurtynę świetlną,
przekaźnik bezpieczeństwa lub przycisk
zatrzymania awaryjnego) do zacisków 37 i 38 w
celu zapewnienia bezpieczeństwa. Urządzenie
musi spełniać wymagany poziom bezpieczeństwa
w oparciu o ocenę zagrożenia. Ilustracja 6.4
przedstawia schemat okablowania funkcji STO w
zastosowaniach, w których przetwornica częstotliwości i urządzenie zabezpieczające znajdują się
w tej samej szae sterującej. Ilustracja 6.5
przedstawia schemat okablowania dla funkcji STO
w zastosowaniach, w których używane jest
zasilanie zewnętrzne.
NOTYFIKACJA
Sygnał funkcji STO musi być zasilany przez obwód
napięcia bardzo niskiego z uziemieniem roboczym
(PELV).
44 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 49

130BE424.11
37
38
12
55
1
130BE425.12
24 V source
37
38
+
-
12
55
1
Safe Torque O (STO) Instrukcja obsługi
przetwornicy częstotliwości w sytuacjach wymagających
zatrzymania awaryjnego. W normalnym trybie pracy, gdy
bezpieczne wyłączenie momentu (STO) nie jest wymagane,
należy używać zwykłej funkcji zatrzymania.
NOTYFIKACJA
Jeśli funkcja STO zostaje aktywowana w czasie, gdy
przetwornica częstotliwości generuje ostrzeżenie 8 DC
undervoltage lub alarm 8 DC undervoltage (napięcie DC
poniżej dopuszczalnego), przetwornica pomija alarm 68
Safe Torque O, ale nie ma to wpływu na działanie
funkcji STO.
1 Urządzenie zabezpieczające
Ilustracja 6.4 Okablowanie funkcji STO w jednej szae
sterującej, przetwornica częstotliwości zapewnia napięcie
zasilania
1 Urządzenie zabezpieczające
Ilustracja 6.5 Okablowanie funkcji STO, zasilanie zewnętrzne
3. Należy podłączyć przewody w sposób opisany w
rozdział 4 Instalacja elektryczna i:
3a Wyeliminować ryzyko zwarcia.
3b Upewnić się, że kable funkcji STO są
ekranowane, jeśli ich długość przekracza
20 m lub znajdują się na zewnątrz szafy
sterującej.
3c Podłączyć urządzenie zabezpieczające
bezpośrednio do zacisków 37 i 38.
Uruchomienie funkcji STO
6.3
6.3.1 Włączanie funkcji Safe Torque O
Funkcję STO uruchamia się, odłączając napięcie na
zaciskach 37 i 38 przetwornicy częstotliwości.
Po aktywacji funkcji STO przetwornica częstotliwości
generuje alarm 68 Safe Torque O lub ostrzeżenie 68 Safe
Torque O, wyłącza się awaryjnie i zatrzymuje silnik z
wybiegiem. Funkcja STO służy do zatrzymywania
6.3.2 Dezaktywacja funkcji Safe Torque O
Patrz instrukcje w Tabela 6.2, aby dezaktywować funkcję
STO i wznowić normalną pracę na podstawie trybu
ponownego uruchomienia funkcji STO.
OSTRZEŻENIE
RYZYKO OBRAŻEŃ LUB ŚMIERCI
Ponowne podanie zasilania zewnętrznego 24 V DC do
zacisku 37 lub 38 zakańcza stan STO SIL2, potencjalnie
uruchamiając silnik. Nieoczekiwany rozruch silnika może
spowodować poważne obrażenia ciała lub śmierć.
Przed ponownym podaniem zasilania
•
zewnętrznego 24 V DC do zacisków 37 i 38
należy upewnić się, że przedsięwzięto wszelkie
środki bezpieczeństwa.
Tryb
restartu
Ręczny
restart
Automatyczny
restart
Tabela 6.2 Dezaktywacja funkcji STO
Czynności, które należy
wykonać, aby
dezaktywować funkcję
STO i wznowić normalną
pracę
1. Przywrócić zasilanie
zewnętrzne 24 V DC
do zacisków 37 i 38.
2. Zainicjować sygnał
Reset (przez magistralę
komunikacyjną,
We/Wy cyfrowe lub
naciskając przycisk
[Reset] na LCP).
Przywrócić zasilanie
zewnętrzne 24 V DC do
zacisków 37 i 38.
Konguracja trybu
restartu
Nastawa domyślna.
Parametr 5-19 Terminal
37/38 Safe Torque O =
[1] Safe Torque O Alarm
({1] alarm funkcji Safe
Torque O)
Parametr 5-19 Terminal
37/38 Safe Torque O= [3]
Safe Torque O Warning
(Ostrzeżenie Safe Torque
O).
6
6
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 45
Page 50

Safe Torque O (STO)
VLT® Midi Drive FC 280
6
6.3.3 Próba uruchomienia funkcji STO
Po instalacji przed pierwszym uruchomieniem należy
przeprowadzić próbę uruchomienia instalacji przy użyciu
funkcji STO.
Próbę należy przeprowadzać po każdej modykacji
instalacji lub użyciu funkcji STO.
NOTYFIKACJA
Pomyślne przeprowadzenie próby uruchomienia funkcji
STO jest wymagane po pierwszej instalacji i po każdej
zmianie wprowadzonej w instalacji.
Aby wykonać próbę uruchomienia:
Postępować zgodnie z instrukcjami w
•
rozdział 6.3.4 Próba dla aplikacji STO w trybie
ręcznego restartu, jeśli funkcja STO jest ustawiona
na tryb ręcznego restartu.
Postępować zgodnie z instrukcjami w
•
rozdział 6.3.5 Próba dla aplikacji funkcji STO w
trybie automatycznego restartu, jeśli funkcja STO
jest ustawiona na tryb automatycznego restartu.
6.3.4 Próba dla aplikacji STO w trybie
ręcznego restartu
W przypadku aplikacji, w których parametr 5-19 Terminal
37/38 Safe Torque O ustawiono na wartość domyślną [1]
Safe Torque O Alarm ([1] Alarm funkcji Safe Torque O),
należy przeprowadzić próbę uruchomienia w następujący
sposób:
1. Ustawić parametr 5-40 Function Relay na wartość
[190] Safe Function active ([190] Funkcja bezpieczeństwa aktywna).
2. Odłączyć napięcie zasilania 24 V DC od zacisków
37 i 38 za pomocą urządzenia zabezpieczającego,
gdy silnik jest napędzany przez przetwornicę
częstotliwości (sieć zasilająca nie została
odłączona).
3. Sprawdzić, czy:
3a Silnik wykona zatrzymanie z wybiegiem.
Zatrzymanie silnika może zająć dużo
czasu.
3b Jeśli zamontowano LCP, alarm 68 Safe
O jest wyświetlany na panelu
Torque
LCP. Jeśli nie zamontowano LCP, alarm
68 Safe Torque O jest rejestrowany w
parametr 15-30 Alarm Log: Error Code.
4. Przywrócić zasilanie 24 V DC do zacisków 37 i 38.
5. Upewnić się, że silnik pozostaje w stanie wybiegu,
a przekaźnik klienta jest aktywny (jeśli jest
podłączony).
6. Wysłać sygnał Reset (przez magistralę komunikacyjną, We/Wy cyfrowe lub naciskając przycisk
[Reset] na LCP).
7. Upewnić się, że silnik będzie pracować i pracuje
w pierwotnym zakresie prędkości.
Wynik testu uruchomienia jest pozytywny, jeśli wszystkie
podane powyżej etapy zostaną zaliczone.
6.3.5 Próba dla aplikacji funkcji STO w
trybie automatycznego restartu
W przypadku aplikacji, w których parametr 5-19 Terminal
37/38 Safe Torque O ustawiono na wartość [3] Safe Torque
O Warning ([3] Ostrzeżenie funkcji Safe Torque O), należy
przeprowadzić próbę uruchomienia w następujący sposób.
1. Odłączyć napięcie zasilania 24 V DC od zacisków
37 i 38 za pomocą urządzenia zabezpieczającego,
gdy silnik jest napędzany przez przetwornicę
częstotliwości (zasilanie nie zostało odłączone).
2. Sprawdzić, czy:
2a Silnik wykona zatrzymanie z wybiegiem.
Zatrzymanie silnika może zająć dużo
czasu.
2b Jeśli zamontowano LCP, ostrzeżenie 68
Safe Torque O jest wyświetlane na
panelu LCP. Jeśli nie zamontowano LCP,
ostrzeżenie 68 Safe Torque O W68 jest
rejestrowane w postaci 30 bitów jako
parametr 16-92 Warning Word.
3. Przywrócić zasilanie 24 V DC do zacisków 37 i 38.
4. Upewnić się, że silnik będzie pracować i pracuje
w pierwotnym zakresie prędkości.
Wynik testu uruchomienia jest pozytywny, jeśli wszystkie
podane powyżej etapy zostaną zaliczone.
NOTYFIKACJA
Należy zapoznać się z ostrzeżeniem dotyczącym
zachowania podczas restartu zawartym w rozdziale
rozdział 6.1 Środki ostrożności dla funkcji STO.
6.4 Konserwacja i serwisowanie dla funkcji
STO
Użytkownik odpowiada za zapewnienie środków
•
bezpieczeństwa.
Istnieje możliwość zabezpieczenia parametrów
•
przetwornicy częstotliwości za pomocą hasła.
Test funkcjonalny składa się z dwóch części:
podstawowego testu funkcjonalnego
•
diagnostycznego testu funkcjonalnego
•
Wynik testu funkcjonalnego jest pozytywny, jeśli wszystkie
kroki zostaną zakończone pomyślnie.
46 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 51

Safe Torque O (STO) Instrukcja obsługi
Podstawowy test funkcjonalny
Jeśli funkcja STO nie była używana przez rok, należy
przeprowadzić test funkcjonalny w celu wykrycia wszelkich
awarii i nieprawidłowości w działaniu funkcji STO.
1. Należy upewnić się, że parametr 5-19 Terminal
37/38 Safe Torque O jest ustawiony na wartość
[1] Safe Torque O Alarm ([1] Alarm funkcji Safe
Torque O).
2. Odłączyć zasilanie 24 V DC od zacisków 37 i 38.
3. Sprawdzić, czy na LCP jest wyświetlany alarm 68
Safe Torque O.
4. Sprawdzić, czy przetwornica częstotliwości
wyłącza się awaryjnie.
5. Sprawdzić, czy silnik wykonuje wybieg i
zatrzymuje się całkowicie po wybiegu.
6. Zainicjować sygnał startu (przez magistralę
komunikacyjną, we/wy cyfrowe lub LCP) i
sprawdzić, czy silnik się nie uruchamia.
7. Ponownie podłączyć zasilanie 24 V DC do
zacisków 37 i 38.
8. Sprawdzić, czy silnik nie jest uruchamiany
automatycznie i jest uruchamiany ponownie
wyłącznie po podaniu sygnału resetu (przez
magistralę komunikacyjną, we/wy cyfrowe lub
przycisk [Reset] na LCP).
Diagnostyczny test funkcjonalny
1. Sprawdzić czy ostrzeżenie 68 Safe Torque O i
alarm 68 Safe Torque O nie występują, gdy
zasilanie 24 V jest podłączone do zacisków 37 i
38.
2. Odłączyć zasilanie 24 V dla zacisku 37 i sprawdzić,
czy panel LCP wyświetla alarm 188, STO Function
Fault (alarm 188 Błąd funkcji STO), jeśli
zamontowano panel LCP. Jeśli nie zamontowano
panelu LCP, sprawdzić, czy alarm 188, STO
Function Fault (alarm 188 Błąd funkcji STO) został
zarejestrowany w parametr 15-30 Alarm Log: Error
Code.
3. Ponownie podłączyć zasilanie 24 V do zacisku 37 i
sprawdzić, czy resetowanie alarmu powiodło się.
4. Odłączyć zasilanie 24 V dla zacisku 38 i sprawdzić,
czy panel LCP wyświetla alarm 188, STO Function
Fault (alarm 188 Błąd funkcji STO), jeśli
zamontowano panel LCP. Jeśli nie zamontowano
panelu LCP, sprawdzić, czy alarm 188, STO
Function Fault (alarm 188 Błąd funkcji STO) został
zarejestrowany w parametr 15-30 Alarm Log: Error
Code.
5. Ponownie podłączyć zasilanie 24 V do zacisku 38 i
sprawdzić, czy resetowanie alarmu powiodło się.
6.5 Dane techniczne funkcji STO
Analiza FMEDA (tryby błędów, efekty i diagnostyka) jest
wykonywana w oparciu o następujące założenia:
VLT® Midi Drive FC 280 zajmuje 10% całego
•
budżetu awaryjnego dla pętli bezpieczeństwa
poziomu SIL2.
Współczynniki awarii są oparte na bazie danych
•
Siemens SN29500.
Współczynniki awarii są stałe, mechanizmy
•
zużycia nie są uwzględnione.
Dla każdego kanału przyjmuje się, że
•
komponenty związane z bezpieczeństwem są
typu A, z tolerancją awarii sprzętowych
wynoszącą 0.
Poziomy naprężenia średnie dla środowiska
•
przemysłowego, a temperatura robocza
elementów wynosi maksymalnie 85°C (185 °F).
Błąd bezpieczeństwa (na przykład wyjście w
•
stanie bezpiecznym) jest naprawiany w ciągu 8
godzin.
Wyjście momentu obrotowego nie jest w stanie
•
bezpiecznym.
6
6
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 47
Page 52

Safe Torque O (STO)
VLT® Midi Drive FC 280
6
Normy bezpieczeństwa
Funkcja bezpieczeństwa Safe Torque O IEC 61800-5-2
Wydajność bezpieczeństwa
Bezpieczeństwo maszyn ISO 13849-1, IEC 62061
Bezpieczeństwo funkcjonalne IEC 61508
ISO 13849-1
Kategoria Kat. 3
Pokrycie diagnostyczne (DC) 60% (niskie)
Średni czas do niebezpiecznej awarii
(MTTFd)
Poziom wydajności PL d
IEC 61508/IEC 61800-5-2/IEC 62061
Poziom integralności bezpieczeństwa SIL2
Prawdopodobieństwo niebezpiecznej awarii na godzinę (PFH)
(tryb dużego zapotrzebowania)
Prawdopodobieństwo niebezpiecznej awarii na żądanie (PFD
dla interwału testu sprawdzającego
= 20 lat) (tryb małego zapotrzebowania)
Część bezpiecznych awarii (SFF)
Tolerancja błędu sprzętowego (HFT)
2400 lat (wysoki)
7.54E-9 (1/h)
avg
6.05E-4
Dla elementów dwukanałowych: > 84%
Dla elementów jednokanałowych: > 99%
Dla elementów dwukanałowych: HFT = 1
Dla elementów jednokanałowych: HFT = 0
Interwał testu sprawdzającego
Masa powodująca błąd (CCF) β = 5%; βD = 5%
Interwał testu diagnostycznego (DTI) 160 ms
Możliwości systemowe SC 2
Czas reakcji
Tabela 6.3 Dane techniczne funkcji STO
1) Czas reakcji to czas od stanu sygnału wejściowego wyzwalającego funkcję STO do chwili wyłączenia momentu na silniku.
2) Procedura testu sprawdzającego — patrz rozdział 6.4 Konserwacja i serwisowanie dla funkcji STO.
1)
Czas reakcji wejście-wyjście Rozmiary obudów K1–K3: maks. 50 ms
2)
20 lat
Rozmiary obudowy K4 i K5: Maks. 30 ms
48 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 53

130BF096.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
12
13
18
19
27
29
32
33
50
53
54
55
42
A OUT
D IN
+24 V
130BE204.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
0 ~10 V
+
-
FC
+24 V
Przykłady aplikacji Instrukcja obsługi
7 Przykłady aplikacji
7.1 Wprowadzenie
Przykłady w niniejszym punkcie opisują skrótowo przykłady
powszechnych aplikacji.
Ustawienia parametrów są regionalnymi
•
wartościami domyślnymi, chyba że wskazano
inaczej (wybrano w parametr 0-03 Regional
Settings).
Parametry powiązane z zaciskami i ich
•
ustawieniami przedstawiono obok ilustracji.
Pokazane zostały również wymagane ustawienia
•
przełączania dla zacisków analogowych 53 lub 54.
NOTYFIKACJA
Gdy używana jest funkcja STO (bezpiecznego wyłączania
momentu), przetwornice częstotliwości pracujące z
domyślnym programowaniem fabrycznym mogą
wymagać założenia przewodu zworki na zaciskach 12, 37
i 38.
7.2 Przykłady aplikacji
7.2.1 AMA
7.2.2 Prędkość
Parametry
Funkcja Ustawienie
Parametr 6-10
Terminal 53
Low Voltage
Parametr 6-11
Terminal 53
High Voltage
Parametr 6-14
Terminal 53
Low Ref./Feedb.
Value
Parametr 6-15
Terminal 53
High Ref./
Feedb. Value
Parametr 6-19
Terminal 53
mode
* = wartość domyślna
Uwagi/komentarze:
0,07 V*
10 V*
0
50
[1] Napięcie
7 7
Parametry
Funkcja Ustawienie
Parametr 1-29
Auto.
dopasowanie
do silnika
(AMA)
Parametr 5-12
Zacisk 27 - wej.
cyfrowe
* = wartość domyślna
Uwagi/komentarze: Ustawić
grupę parametrów 1-2* Motor
Data (1-2* Dane silnika) zgodnie
Tabela 7.1 AMA z podłączonym zaciskiem 27
z danymi technicznymi silnika.
NOTYFIKACJA
Jeśli zaciski 13 i 27 nie są
podłączone, należy ustawić
parametr 5-12 Terminal 27
Digital Input na [0] Brak
działania.
[1] Aktywna
pełna AMA
*[2] Wybieg
silnika, odwr
Tabela 7.2 Analogowa wartość zadana prędkości (napięciowa)
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 49
Page 54

130BF097.10
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
4 - 20mA
+
-
FC
+24 V
130BE208.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
≈ 5kΩ
FC
+24 V
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
130BF100.10
+24 V
130BB840.12
Speed
Reference
Start (18)
Freeze ref (27)
Speed up (29)
Speed down (32)
Przykłady aplikacji
VLT® Midi Drive FC 280
Parametry
Funkcja Ustawienie
Parametr 6-22
Terminal 54
4 mA*
Low Current
Parametr 6-23
Terminal 54
20 mA*
High Current
Parametr 6-24
Terminal 54
Low Ref./Feedb.
0
Value
Parametr 6-25
Terminal 54
High Ref./
50
Feedb. Value
Parametry
Funkcja Ustawienie
Parametr 5-10
Zacisk 18 - wej.
*[8] Start
cyfrowe
Parametr 5-12
Zacisk 27 - wej.
[19] Zatrzaś.
wart. zad.
cyfrowe
Parametr 5-13
Zacisk 29 - wej.
[21] Zwiększanie
prędk.
cyfrowe
Parametr 5-14
Zacisk 32 - wej.
[22] Zmniej-
szanie prędk.
cyfrowe
* = wartość domyślna
Uwagi/komentarze:
Parametr 6-29
Terminal 54
77
mode
[0] Prąd
* = wartość domyślna
Uwagi/komentarze:
Tabela 7.5 Zwiększanie/zmniejszanie prędkości
Tabela 7.3 Analogowa wartość zadana prędkości (prądowa)
Parametry
Funkcja Ustawienie
Parametr 6-10
Zacisk 53.
Dolna skala
0,07 V*
napięcia
Parametr 6-11
Zacisk 53.
Górna skala
10 V*
Ilustracja 7.1 Zwiększanie/zmniejszanie prędkości
napięcia
Parametr 6-14
Zacisk 53.
Dolna skala
0
zad./sprz. zwr.
Parametr 6-15
Zacisk 53.
Górna skala
50
zad./sprz. zwr.
Parametr 6-19
Terminal 53
[1] Napięcie
mode
* = wartość domyślna
Uwagi/komentarze:
Tabela 7.4 Wartość zadana prędkości (za pomocą ręcznego
potencjometru)
50 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 55

130BF098.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
19
18
27
29
32
33
50
53
54
55
42
+24 V 13
130BF099.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
+24 V
130BE210.11
+24 V
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
FC
D IN
+24 V
Przykłady aplikacji Instrukcja obsługi
7.2.3 Start/Stop
Parametry
Funkcja Ustawienie
Parametr 5-10
Zacisk 18 - wej.
cyfrowe
Parametr 5-11
Zacisk 19 - wej.
cyfrowe
Parametr 5-12
Zacisk 27 - wej.
cyfrowe
Parametr 5-14
Zacisk 32 - wej.
cyfrowe
Parametr 5-15
Zacisk 33 - wej.
cyfrowe
Parametr 3-10
Programowana
wart. zadana
Programowana wart.
zad. 0
Programowana wart.
zad. 1
Programowana wart.
zad. 2
Programowana wart.
zad. 3
* = wartość domyślna
Uwagi/komentarze:
Tabela 7.6 Start/stop ze zmianą kierunku obrotów i czterema
wartościami zadanymi prędkości
[8] Start
*[10] Zmiana
kierunku obr.
[0] Brak
działania
[16] Prog wart
zad Bit0
[17] Prog wart
zad Bit1
25%
50%
75%
100%
7.2.4 Reset alarmu zewnętrznego
Parametry
Funkcja Ustawienie
Parametr 5-11
Zacisk 19 - wej.
[1] Reset
cyfrowe
* = wartość domyślna
Uwagi/komentarze:
Tabela 7.7 Reset alarmu zewnętrznego
7.2.5 Termistor silnika
NOTYFIKACJA
Termistory muszą korzystać ze wzmocnionej lub
podwójnej izolacji, zgodnie z wymaganiami izolacji PELV.
Parametry
Funkcja Ustawienie
Parametr 1-90
Zabezp.
termiczne
silnika
Parametr 1-93
Źródło
termistor
Parametr 6-19
Terminal 53
mode
* = wartość domyślna
Uwagi/komentarze:
Jeśli wymagane jest tylko
ostrzeżenie, należy ustawić
parametr 1-90 Zabezp. termiczne
silnika na wartość [1] Termistorostrzeż.
[2] Termistor-wył
sam.
[1] Wejście
analogowe 53
[1] Napięcie
7 7
Tabela 7.8 Termistor silnika
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 51
Page 56

FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
R1
12
13
18
19
27
29
32
33
50
53
54
55
42
01
02
03
130BE211.11
+24 V
Przykłady aplikacji
VLT® Midi Drive FC 280
7.2.6 SLC
Parametry
Funkcja Ustawienie
Parametry
Funkcja Ustawienie
Parametr 4-30
Funk. utraty
[1] Ostrzeżenie
sprzęż. zwrt.
Parametr 4-31
Błąd prędk.
50
sprzęż. zwrt.
Parametr 4-32
Timeout utraty
5 s
sprzęż. zwrt.
Parametr 7-00
Prędkość PID
źródło
[1] Enkoder 24 V
sprzężenia
Parametr 5-70
Term 32/33
Pulses Per
1024*
Revolution
77
Parametr 13-00
Sterownik SL -
[1] Załączone
tryb pracy
Parametr 13-01
Początek
[19] Ostrzeżenie
zdarzenia
Parametr 13-02
Koniec
zdarzenia
Parametr 13-10
Argument
komparatora
[44] Klawisz
Reset
[21] Numer
ostrzeżenia
Tabela 7.9 Używanie SLC do ustawiania przekaźnika
Parametr 5-40
Przekaźnik,
funkcja
* = wartość domyślna
Uwagi/komentarze:
Po przekroczeniu ograniczenia
sprzężenia zwrotnego jest
generowane ostrzeżenie 61,
feedback monitor . SLC
monitoruje ostrzeżenie 61,
feedback monitor. Jeśli wartość
ostrzeżenia 61, feedback monitor
ma stan true, zostanie włączony
przekaźnik 1.
Urządzenia zewnętrzne mogą
wygenerować komunikaty o
konieczności przeprowadzenia
obsługi. Jeżeli poziom błędu
sprzężenia zwrotnego
ponownie spadnie poniżej
ograniczenia w ciągu 5 s,
przetwornica częstotliwości
będzie kontynuowała pracę, a
ostrzeżenie zostanie usunięte.
Przekaźnik 1 nadal pozostaje
aktywny do czasu naciśnięcia
przycisku
[80] SL Wyjście
cyfr A
[O/Reset].
Parametr 13-11
Operator
*[1] ≈
komparatora
Parametr 13-12
Wartość
61
komparatora
Parametr 13-51
Sterownik SL zdarzenie
Parametr 13-52
Sterownik SL funkcja
[22] Komparator
0
[32] Wyj.cyf.A w
st.nis.
52 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 57

Konserwacja, diagnostyka or... Instrukcja obsługi
8 Konserwacja, diagnostyka oraz wykrywanie i usuwanie usterek
8.1 Konserwacja i serwisowanie
W przypadku normalnych warunków pracy i prolów
obciążenia przetwornica częstotliwości nie wymaga
konserwacji przez cały okres jej eksploatacji. Przetwornica
częstotliwości wymaga kontroli stanu (sprawdzenia, czy
podłączenia na zaciskach nie są obluzowane, wnętrze jest
wolne od kurzu itd.) w określonych, regularnych odstępach
czasu, zależnych od warunków pracy. Służy to
zapobieganiu usterkom, zagrożeniom i uszkodzeniom.
Części zużyte i uszkodzone należy wymieniać na oryginalne
części zamienne. Aby uzyskać dostęp do serwisu i pomocy
technicznej, należy skontaktować się z lokalnym dostawcą
Danfoss.
OSTRZEŻENIE
PRZYPADKOWY ROZRUCH
Jeśli przetwornica częstotliwości jest podłączona do
zasilania AC, zasilania DC lub podziału obciążenia, silnik
może zostać uruchomiony w każdej chwili. Przypadkowy
rozruch podczas programowania, prac serwisowych lub
naprawy może doprowadzić do śmierci, poważnych
obrażeń ciała lub uszkodzenia mienia. Silnik może zostać
uruchomiony za pomocą przełącznika zewnętrznego,
polecenia przesłanego przez magistralę komunikacyjną,
sygnału wejściowego wartości zadanej z LCP, operacji
zdalnej z wykorzystaniem Oprogramowanie
konguracyjne MCT 10 lub poprzez usunięcie błędu.
Aby zapobiec przypadkowemu rozruchowi silnika:
Odłączyć przetwornicę częstotliwości od
•
zasilania.
Przed programowaniem parametrów nacisnąć
•
przycisk [O/Reset] na LCP.
Przed podłączeniem przetwornicy częstotliwości
•
do zasilania AC, zasilania DC lub podziału
obciążenia należy w pełni oprzewodować i
zmontować przetwornicę częstotliwości, silnik
oraz każdy napędzany sprzęt.
Typy ostrzeżeń i alarmów
8.2
Typ
ostrzeżenia/
alarmu
Ostrzeżenie Ostrzeżenie wskazuje na niezwykłe warunki pracy,
Alarm Alarm wskazuje na problem, który wymaga
Wyłączenie awaryjne
Podczas wyłączenia awaryjnego przetwornica częstotliwości
zawiesza swoją pracę, aby zapobiec uszkodzeniom
własnym lub innego sprzętu. Przy wyłączeniu awaryjnym
silnik wykonuje zatrzymanie z wybiegiem. Układy logiczne
przetwornicy częstotliwości będą pracowały nadal i
monitorowały status przetwornicy. Po usunięciu usterki
przetwornica częstotliwości jest gotowa do zresetowania.
Wył. awar. z blokadą
Podczas wyłączenia awaryjnego z blokadą przetwornica
częstotliwości zawiesza swoją pracę, aby zapobiec
uszkodzeniom własnym lub innego sprzętu. Przy
wyłączeniu awaryjnym z blokadą silnik wykonuje
zatrzymanie z wybiegiem. Układy logiczne przetwornicy
częstotliwości będą pracowały nadal i monitorowały status
przetwornicy. Przetwornica częstotliwości rozpoczyna
wyłączenie awaryjne z blokadą tylko w razie wystąpienia
poważnej awarii, która może spowodować uszkodzenie
przetwornicy częstotliwości lub innych urządzeń. Po
usunięciu usterek należy włączyć i wyłączyć zasilanie przed
zresetowaniem przetwornicy.
Opis
które prowadzą do stanu alarmowego.
Ostrzeżenie jest samoistnie usuwane, kiedy
nienormalne warunki pracy ustąpią.
natychmiastowej uwagi i reakcji. Błąd (awaria)
zawsze wyzwala wyłączenie awaryjne lub
wyłączenie awaryjne z blokadą. Należy
zresetować przetwornicę częstotliwości po
alarmie.
Przetwornicę częstotliwości można zresetować w
dowolny z czterech sposobów:
Nacisnąć przycisk [Reset]/[O/Reset].
•
Przez cyfrowe polecenie wejściowe resetu.
•
Przez polecenie wejściowe resetu z portu
•
komunikacji szeregowej.
Automatyczne resetowanie.
•
8 8
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 53
Page 58

Setup 1
Status
Quick
Menu
Main
Menu
130BD111.10
Setup 1
Status Quick
Menu
Main
Menu
130BD112.10
130BD062.10
D
Hand
On
Reset
Auto
On
OK
On
Warn
Alarm
Konserwacja, diagnostyka or...
VLT® Midi Drive FC 280
8.3 Wyświetlanie ostrzeżeń i alarmów
Ilustracja 8.1 Wyświetlacz z ostrzeżeniem
Na wyświetlaczu pojawia się alarm lub alarm wyłączenia
awaryjnego z blokadą oraz numer alarmu.
88
Ilustracja 8.2 Alarm/Alarm wyłączenia awaryjnego z blokadą
Poza tekstem i numerem alarmu na wyświetlaczu
przetwornicy częstotliwości znajdują się także 3 lampki
wskaźników statusu. Lampka sygnalizacyjna ostrzeżenia
świeci na żółto podczas ostrzeżenia. Lampka sygnalizacyjna
alarmu świeci na czerwono podczas alarmu.
Ilustracja 8.3 Lampki wskaźników statusu
54 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 59

Konserwacja, diagnostyka or... Instrukcja obsługi
8.4 Lista ostrzeżeń i alarmów
8.4.1 Lista kodów ostrzeżeń i alarmów
Znak (X) w tabeli Tabela 8.1 oznacza, że wystąpiło ostrzeżenie lub alarm.
Nr Opis
2 Błąd Live zero X X –
3 Brak silnika X – –
4
Zanik fazy zasilania
7
Przepięcie DC
Napięcie DC poniżej dopusz-
8
czalnego
9 Przeciążenie inwertera X X – Obciążenie powyżej 100% trwało zbyt długo.
Przekroczenie temperatury ETR
10
silnika
Przekroczenie temperatury
11
termistora silnika
12 Ograniczenie momentu X X –
13 Przetężenie X X X
14 Błąd doziemienia – X X Przebicie między fazą wyjściową a uziemieniem.
16 Zwarcie – X X Zwarcie w silniku lub na zaciskach silnika.
17 Time-out słowa sterującego X X – Brak komunikacji z przetwornicą częstotliwości.
25 Zwarcie rezystora hamowania – X X
26 Przeciążenie hamulca X X –
Zwarcie w hamulcu IGBT/
27
czopperze (IGBT) hamulca
28 Kontrola hamulca – X – Rezystor hamowania nie jest podłączony/nie działa.
30 Utrata fazy U – X X Brak fazy U silnika. Sprawdzić fazę.
31 Utrata fazy V – X X Brak fazy V silnika. Sprawdzić fazę.
32 Utrata fazy W – X X Brak fazy W silnika. Sprawdzić fazę.
34 Błąd magistrali komunikacyjnej X X – Wystąpiły problemy z komunikacją PROFIBUS.
35 Błąd opcji – X – Magistrala komunikacyjna wykryła błędy wewnętrzne.
36 Awaria zasilania X X –
1)
1)
1)
OstrzeżenieAlarm Wył. awar. z
blokadą
X X X
X X –
X X –
X X –
X X –
– X X
Wartość sygnału na zacisku 53 lub 54 jest niższa niż 50%
wartości ustawionej w parametr 6-10 Terminal 53 Low
Voltage, parametr 6-20 Terminal 54 Low Voltage i
parametr 6-22 Terminal 54 Low Current.
Do wyjścia przetwornicy częstotliwości nie podłączono
żadnego silnika.
Brakująca faza po stronie zasilania lub zbyt wysoka
asymetria napięcia. Należy sprawdzić napięcie zasilania.
Napięcie w obwodzie pośrednim DC przekracza ograniczenie.
Napięcie obwodu pośredniego DC spadło poniżej ograniczenia ostrzeżenia o niskim napięciu.
Silnik jest zbyt rozgrzany, ponieważ jego obciążenie
powyżej 100% trwało zbyt długo.
Termistor lub złącze termistora jest odłączone albo silnik
jest zbyt gorący.
Moment obrotowy przekroczył wartość ustawioną w
parametr 4-16 Torque Limit Motor Mode lub
parametr 4-17 Torque Limit Generator Mode.
Ograniczenie prądu szczytowego inwertera zostało
przekroczone. Jeśli ten alarm wystąpi przy załączeniu
zasilania, należy sprawdzić, czy przewody silnoprądowe
nie są błędnie podłączone do zacisków silnika.
Nastąpiło zwarcie rezystora hamowania, co spowodowało
odłączenie funkcji hamulca.
Moc przesyłana do rezystora hamowania przez ostatnie
120 s przekracza ograniczenie. Możliwe korekty:
Obniżenie energii hamowania przez zmniejszenie
prędkości lub wydłużenie czasu rozpędzania.
Nastąpiło zwarcie tranzystora hamowania, co
spowodowało odłączenie funkcji hamulca.
To ostrzeżenie/alarm jest aktywne pod warunkiem, że
napięcie zasilania do przetwornicy częstotliwości jest
mniejsze niż wartość ustawiona w parametr 14-11 Mains
Fault Voltage Level oraz że parametr parametr 14-10 Mains
Failure NIE jest ustawiony na [0] Brak funkcji.
Przyczyna
8 8
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 55
Page 60
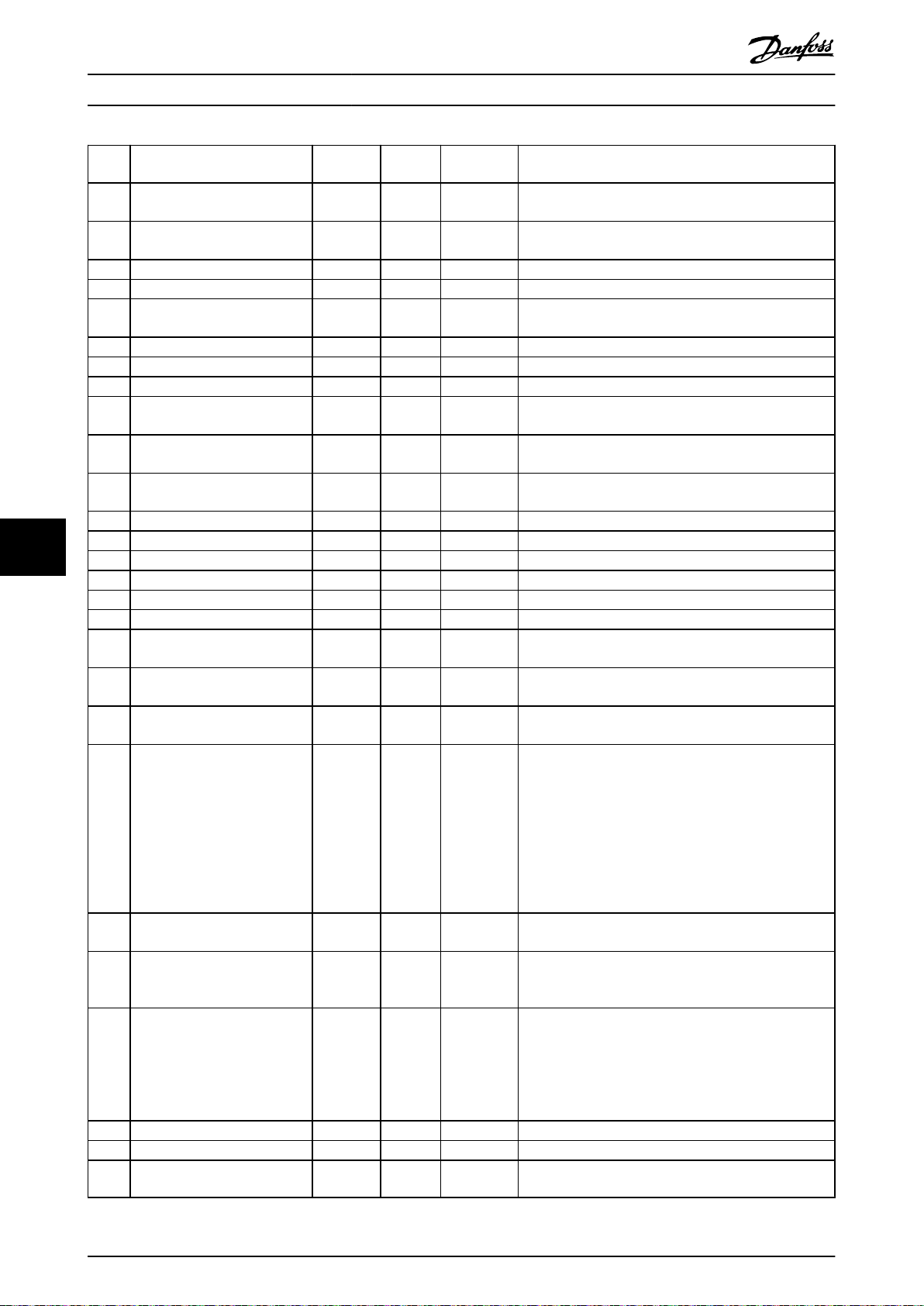
Konserwacja, diagnostyka or...
VLT® Midi Drive FC 280
Nr Opis
38 Błąd wewnętrzny – X X
40 Przeciąż. T27 X – –
46 Błąd napięcia ukł.wyzw. tranz. – X X –
47 Niskie zasilanie 24 V X X X 24 V DC może być przeciążone.
49 Ograniczenie prędkości – X –
50 Kalibracja AMA nie powiodła się – X – Wystąpił błąd kalibracji.
51 AMA sprawdzenie U
52 AMA niski I
53 AMA: Duży siln. – X –
54 AMA mały silnik – X –
55 Parametr AMA poza zakresem – X –
56 Przerw. AMA – X – AMA zostało przerwane.
88
57 AMA: Time-out – X – –
58 AMA: Wewn. – X – Kontakt Danfoss
59 Ograniczenie prądu X X – Przeciążenie przetwornicy częstotliwości.
60 Blokada zewnętrzna – X – Została włączona blokada zewnętrzna.
61 Utrata sygnału enkodera X X – –
63 Słaby hamulec mechaniczny – X –
65 Temp. karty sterującej X X X
67 Zmiana opcji – X –
68
Safe Torque O
69 Przegrzanie karty zasilającej X X X
Przetwornica częstotliwości
80
sprowadzona do wartości
domyślnej
87 Autom. hamowanie DC X – –
88 Wykrywanie opcji – X X Ta opcja została pomyślnie usunięta.
95 Zerwany pas X X – –
99 Wirnik zablokowany – X –
nom
i I
nom
2)
OstrzeżenieAlarm Wył. awar. z
nom
– X – Błędne ustawienie napięcia silnika i/lub prądu silnika.
– X – Prąd silnika jest zbyt niski. Sprawdzić ustawienia.
X X –
– X –
blokadą
Należy skontaktować się z lokalnym przedstawicielem
rmy Danfoss.
Sprawdzić obciążenie podłączone do zacisku 27 lub
usunąć połączenie powodujące zwarcie.
Prędkość silnika spadła poniżej ograniczenia określonego
w parametr 1-87 Nis.pręd.wył.aw. [Hz].
Moc silnika jest zbyt duża, aby przeprowadzić procedurę
AMA.
Moc silnika jest zbyt mała, aby przeprowadzić procedurę
AMA.
Wartości parametrów silnika są poza dopuszczalnym
zakresem. AMA nie uruchamia się.
Rzeczywisty prąd silnika nie przekroczył prądu zwalniania
hamulca w oknie czasu opóźnienia startu.
Temperatura wyłączenia karty sterującej przekroczyła
górne ograniczenie.
Wykryto nową opcję lub zamontowana opcja została
usunięta.
Aktywowana została funkcja STO (Safe Torque O). Jeśli
STO jest w trybie ręcznego restartu (domyślny), to aby
wznowić normalną pracę, należy doprowadzić zasilanie 24
V DC do zacisków 37 i 38, a następnie wysłać sygnał
Reset (przez magistralę, we/wy cyfrowe lub naciskając
przycisk [Reset]/[O Reset]). Jeśli STO jest w trybie
automatycznego restartu, to doprowadzenie zasilania 24
V DC do zacisków 37 i 38 automatycznie przywróci
przetwornicę częstotliwości do normalnej pracy.
Temperatura wyłączenia karty mocy przekroczyła górne
ograniczenie.
Wszystkie ustawienia parametrów zostały sprowadzone
do wartości domyślnych.
Występuje w zasilaniu IT, kiedy przetwornica częstotliwości wykonuje wybieg silnika, a napięcie DC przekracza
830 V dla jednostek 400 V i 425 V dla jednostek 200 V.
Silnik zużywa energię w obwodzie pośrednim DC. Funkcja
ta może zostać włączona lub wyłączona poprzez
parametr 0-07 Auto DC Braking.
Wirnik jest zablokowany.
Przyczyna
56 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 61

Konserwacja, diagnostyka or... Instrukcja obsługi
Nr Opis
120 Błąd sterowania położeniem – X – –
126 Silnik obraca się – X – Silnik PM obraca się podczas wykonywania AMA.
Zbyt wysoka indukowana siła
127
elektromotoryczna (EMF)
STO internal fault (Błąd
188
wewnętrzny funkcji STO)
nw
run
Nie podczas pracy – – –
(np
pra)
Błąd. Wpisano błędne hasło – – –
Tabela 8.1 Lista kodów ostrzeżeń i alarmów
1) Błędy te mogą być powodowane przez zniekształcenia zasilania. Problem ten może zostać rozwiązany poprzez zamontowanie
Danfoss.
2) Tego alarmu nie można resetować za pomocą parametr 14-20 Reset Mode automatycznie.
2)
OstrzeżenieAlarm Wył. awar. z
blokadą
X – –
– X –
Indukowana siła elektromotoryczna (EMF) silnika PM jest
zbyt wysoka przed uruchomieniem.
Zasilanie 24 V DC jest podłączone do tylko jednego z
dwóch zacisków STO (37 i 38) lub wykryto awarię
kanałów funkcji STO. Upewnić się, że oba zaciski są
podłączone do zasilania zewnętrznego 24 V DC i że
rozbieżność między sygnałami na dwóch zaciskach nie
przekracza 12 ms. Jeśli błąd nadal występuje, należy
skontaktować się z lokalnym dostawcą Danfoss.
Parametry można zmienić tylko wtedy, gdy silnik jest
zatrzymany.
Następuje, gdy podczas zmieniania parametru zabezpieczonego hasłem wpisano błędne hasło.
Przyczyna
ltra liniowego
8 8
Zobacz słowa alarmowe, słowa ostrzeżenia i rozszerzone słowa statusowe w celu przeprowadzenia diagnozy.
Rozszerzone
słowo
statusowe
(parametr 16-9
4 Ext. Status
Word)
Rozp./zwal. Wyłączona
Dopasowanie
AMA
Start CW/CCW Probus OFF1 active
Zwalnianie Probus OFF2 active
Doganianie Probus OFF3 active
Sprzę.zwr. wys. Zarezerwowane
Sprz.zwr. niskie Zarezerwowane
Wysoki prąd
wyjściowy
Mały prąd
wyjściowy
(parametr 16-95 Ext.
Przetwornica częstot-
Bit Hex Dec
000000
0
1
2
3
4
5
6
7
8
01
000000
02
000000
04
000000
08
000000
10
000000
20
000000
40
000000
80
000001
00
1
2
4
8
16
32 Przetężenie
64
128
256
Słowo
alarmowe
(parametr 16
-90 Alarm
Word)
Kontrola
hamulca
Temperatura
karty
zasilania
Błąd
doziemienia
Temp. karty
ster.
Time-out słstZarezer-
Ograniczenie
momentu
Przeg.term.sil.Zarezer-
Przek ETR
siln
Słowo
alarmowe 2
(parametr 1
6-91 Alarm
Word 2)
Zarezer-
wowane
Błąd
napięcia
ukł.wyzw.
tranz.
Zarezer-
wowane
Zarezer-
wowane
wowane
Zarezer-
wowane
Zarezer-
wowane
wowane
Zerwany pas
Słowo
alarmowe 3
(parametr 16
-97 Alarm
Word 3)
Błąd funkcji
STO
Alarm MM
Zarezerwowane
Zarezerwowane
Zarezerwowane
Zarezerwowane
Zarezerwowane
Zarezerwowane
Zarezerwowane
Słowo
ostrzeżenia
(parametr 16-9
2 Warning
Word)
Zarezerwowane
Temperatura
karty zasilania
Zarezerwowane
Temp. karty
ster.
Time-out sł st
Przetężenie
Ograniczenie
momentu
Przeg.term.sil.
Przek ETR siln Zerwany pas
Słowo
ostrzeżenia 2
(parametr 16-
93 Warning
Word 2)
Zarezer-
wowane
Zarezer-
wowane
Zarezer-
wowane
Zarezer-
wowane
Zarezer-
wowane
Zarezer-
wowane
Zarezer-
wowane
Zarezer-
wowane
Rozszerzone
słowo statusowe 2
Status Word 2)
Hand/Auto
Sterowanie gotowe
liwości gotowa
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 57
Page 62

Konserwacja, diagnostyka or...
VLT® Midi Drive FC 280
Słowo
alarmowe
Bit Hex Dec
000002
9
00
000004
10
00
000008
11
00
000010
12
00
000020
13
88
14
15
00
000040
00
000080
00
1024
2048
4096 Zwarcie
8192
16384
32768
(parametr 16
-90 Alarm
Word)
Przeciąż.inwer.Zarezer-
512
Niskie
napięcie DC
Przepięcie
DC
Zarezerwowane
Utrata fazy
zas
AMA
niepomyślne
Słowo
alarmowe 2
(parametr 1
6-91 Alarm
Word 2)
wowane
Urucho-
mienie nie
powiodło się
Ograni-
czenie
prędkości
Blokada
zewnętrzna
Zarezer-
wowane
Zarezer-
wowane
Zarezer-
wowane
Słowo
alarmowe 3
(parametr 16
-97 Alarm
Word 3)
Zarezerwowane
Zarezerwowane
Zarezerwowane
Zarezerwowane
Zarezerwowane
Zarezerwowane
Zarezerwowane
Słowo
ostrzeżenia
(parametr 16-9
2 Warning
Word)
Przeciąż.inwer.
Niskie napięcieDCZarezer-
Przepięcie DC
Zarezerwowane
Zarezerwowane
Utrata fazy zas
Brak silnika
Słowo
ostrzeżenia 2
(parametr 16-
93 Warning
Word 2)
Zarezer-
wowane
wowane
Zarezer-
wowane
Zarezer-
wowane
Zarezer-
wowane
Zarezer-
wowane
Autom.
hamowanieDCOVC aktywny
Rozszerzone
słowo
statusowe
(parametr 16-9
4 Ext. Status
Word)
Częst.wyj.
wysoki
Częst.wyj. niski Hamowanie DC
Kontrola
hamulca
zakończyła się
pomyślnie
Hamowanie
max
Hamowanie
Zarezer-
wowane
Rozszerzone
słowo statusowe 2
(parametr 16-95 Ext.
Status Word 2)
Szybkie zatrzymanie
Stop
Zarezerwowane
Żądanie zatrzaśnięcia
wyjścia
Zatrzaśnij wyjście
Żądanie Jog - praca
manewrowa
000100
16
00
000200
17
00
000400
18
00
000800
19
00
001000
20
00
002000
21
00
004000
22
00
008000
23
00
010000
24
00
020000
25
00
040000
26
00
08000000134217728Hamulec
27
65536
131072
262144
524288 Utrata fazy U
1048576 Utrata fazy V
2097152
4194304
8388608
16777216
33554432
67108864
Błąd Live
zero
Błąd
wewnętrzny
Przeciążenie
hamulca
Utrata fazy
W
Błąd
magistrali
komunika-
cyjnej
Niskie
zasilanie 24
V
Awaria
zasilania
Zarezerwowane
Rezystor
hamowania
IGBT
Zarezer-
wowane
Zarezer-
wowane
Zarezer-
wowane
Zarezer-
wowane
Wykrywanie
opcji
Błąd opcji
Wirnik
zablokowan
y
Błąd
sterowania
położeniem
Zarezer-
wowane
Ograni-
czenie prądu
Zarezer-
wowane
Zarezer-
wowane
Zarezerwowane
Zarezerwowane
Zarezerwowane
Zarezerwowane
Zarezerwowane
Zarezerwowane
Zarezerwowane
Zarezerwowane
Zarezerwowane
Zarezerwowane
Zarezerwowane
Zarezerwowane
Błąd Live zero
Zarezerwowane
Ograniczenie
mocy
rezystora
hamowania
Zarezerwowane
Zarezerwowane
Zarezerwowane
Błąd magistrali
komunika-
cyjnej
Niskie zasilanie
24 V
Awaria
zasilania
Ograniczenie
prądu
Zarezerwowane
Zarezerwowane
Zarezer-
wowane
Zarezer-
wowane
Zarezer-
wowane
Zarezer-
wowane
Przeciąż. T27 Reference low Opóźn. startu
Zarezer-
wowane
Moduł pamięci
Zarezer-
wowane
Zarezer-
wowane
Zarezer-
wowane
Zarezer-
wowane
Zarezer-
wowane
Hamulec AC
Zarezer-
wowane
Zarezer-
wowane
Reference high Zarezerwowane
Zarezer-
wowane
Zarezer-
wowane
Zarezer-
wowane
Zarezer-
wowane
Zarezer-
wowane
Zarezer-
wowane
Zarezer-
wowane
Jog — praca
manewrowa
Żądanie startu
Start
Uśpienie
Doładowanie
uśpienia
Praca
Obejście
Zarezerwowane
Blokada zewnętrzna
Zarezerwowane
58 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 63

Konserwacja, diagnostyka or... Instrukcja obsługi
Słowo
alarmowe
Bit Hex Dec
1000000026843545
28
2000000053687091
29
400000001073741824Safe TorqueOZarezer-
30
8000000021474836
31
Tabela 8.2 Opis słowa alarmowego, słowa ostrzeżenia i rozszerzonego słowa statusowego
6
2
48
(parametr 16
-90 Alarm
Word)
Zmiana opcji
Przetwornica
częstot-
liwości
zainicjowana
Słaby
ham.mech
Słowo
alarmowe 2
(parametr 1
6-91 Alarm
Word 2)
Zarezer-
wowane
Utrata
sygnału
enkodera
wowane
Zarezer-
wowane
Słowo
alarmowe 3
(parametr 16
-97 Alarm
Word 3)
Zarezerwowane
Zarezerwowane
Zarezerwowane
Zarezerwowane
Słowo
ostrzeżenia
(parametr 16-9
2 Warning
Word)
Utrata sygnału
enkodera
Zarezerwowane
Safe Torque
O
Zarezerwowane
ostrzeżenia 2
(parametr 16-
93 Warning
Word 2)
Zarezer-
wowane
Zbyt wysoka
indukowana
siła elektromotoryczna (EMF)
Zarezer-
wowane
Zarezer-
wowane
Słowo
Rozszerzone
słowo
statusowe
(parametr 16-9
4 Ext. Status
Word)
Zarezer-
wowane
Zarezer-
wowane
Zarezer-
wowane
Baza danych
zajęta
8.5 Wykrywanie i usuwanie usterek
Objaw Przypuszczalna przyczyna Test Rozwiązanie
Nacisnąć przycisk [Auto On] lub
[Hand On] (w zależności od trybu
pracy), aby uruchomić silnik.
Zastosować poprawny sygnał
rozruchu, aby uruchomić silnik.
Zastosować 24 V dla zacisku 27 lub
zaprogramować dla niego wartość [0]
Brak działania.
Zaprogramować prawidłowe
ustawienia. Ustawić programowaną
wartość zadaną jako aktywną w
grupie parametrów 3-1* Wartości
zadane. Sprawdzić poprawność
okablowania. Sprawdzić skalowanie
zacisków. Sprawdzić sygnał wartości
zadanej.
Silnik nie pracuje
Stop z LCP
Brak sygnału rozruchu (tryb
gotowości)
Sygnał wybiegu silnika jest aktywny
(wybieg)
Niewłaściwe źródło sygnału wartości
zadanej
Sprawdzić, czy naciśnięto przycisk
[O].
Sprawdzić poprawność ustawienia dla
zacisku 18 w parametrze
parametr 5-10 Zacisk 18 - wej. cyfrowe
(użyć nastawy fabrycznej).
Sprawdzić poprawność ustawienia
zacisku 27 w parametrze
parametr 5-12 Terminal 27 Digital Input
(użyć nastawy fabrycznej).
Sprawdzić następujące aspekty:
Czy sygnał wartości zadanej jest
•
lokalny, zdalny albo jest wartością
zadaną magistrali?
Czy programowana wartość
•
zadana jest aktywna?
Czy podłączenie zacisku jest
•
poprawne?
Czy skalowanie zacisków jest
•
poprawne?
Czy sygnał wartości zadanej jest
•
dostępny?
Rozszerzone
słowo statusowe 2
(parametr 16-95 Ext.
Status Word 2)
Aktywny start w
locie
Ostrzeżenie
dotyczące
czyszczenia radiatora
Zarezerwowane
Zarezerwowane
8 8
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 59
Page 64

Konserwacja, diagnostyka or...
Objaw Przypuszczalna przyczyna Test Rozwiązanie
Ograniczenie obrotów silnika
Silnik obraca się w
złym kierunku
Silnik nie osiąga
prędkości
maksymalnej
Prędkość obrotowa
88
silnika jest
niestabilna
Silnik pracuje ciężko
Silnik nie hamuje
Otwarte
bezpieczniki
zasilania lub
nastąpiło wyłączenie
awaryjne wyłącznika
Asymetria zasilania
przekracza 3%
Sygnał zmiany kierunku obrotów jest
aktywny
Błędnie wykonane połączenia faz
silnika
Błędnie ustawione ograniczenia
częstotliwości
Sygnał wejściowy wartości zadanej
jest nieprawidłowo skalowany
Ustawienia parametrów są prawdopodobnie nieprawidłowe
Możliwe nadmierne namagnesowanie
Ustawienia parametrów hamulca są
prawdopodobnie nieprawidłowe.
Możliwe, że czasy zwalniania są za
krótkie.
Zwarcie międzyfazowe
Przeciążenie silnika Silnik jest przeciążony dla tej aplikacji.
Obluzowane złącza
Problem z zasilaniem (patrz opis
Alarm 4, Utrata fazy zasilającej).
Problem z przetwornicą częstotliwości
VLT® Midi Drive FC 280
Sprawdzić, czy parametr 4-10 Kierunek
obrotów silnika zaprogramowano
prawidłowo.
Sprawdzić, czy dla zacisku zaprogramowano polecenie zmiany kierunku
obrotów w grupie parametrów 5-1*
Wejścia cyfrowe.
Zmienić parametr 1-06 Clockwise
Direction.
Sprawdzić ograniczenia wyjść w
parametr 4-14 Ogranicz wys. prędk.
silnika [Hz] i parametr 4-19 Maks.
częstotliwość wyjś..
Sprawdzić skalowanie sygnału
wejściowego wartości zadanej w
grupie parametrów 6-** Analog I/O
mode i grupie parametrów 3-1*
Wartości zadane.
Sprawdzić ustawienia wszystkich
parametrów silnika, w tym ustawienia
kompensacji wielkości napędowych. W
przypadku pracy w pętli zamkniętej
należy sprawdzić ustawienia PID.
Sprawdzić prawidłowość ustawień
wszystkich parametrów silnika.
Sprawdzić parametry hamulca.
Sprawdzić ustawienia czasu
rozpędzenia/zatrzymania.
Na silniku lub panelu doszło do
zwarcia międzyfazowego. Sprawdzić
silnik i panel na obecność zwarć
między fazami.
Przeprowadzić procedurę sprawdzenia
przed rozruchem pod kątem obluzowanych połączeń.
Przełożyć przewody zasilania
wejściowego o jedno miejsce na
przetwornicy częstotliwości: A do B, B
do C, C do A.
Przełożyć przewody zasilania
wejściowego o jedno miejsce na
przetwornicy częstotliwości: A do B, B
do C, C do A.
Zaprogramować prawidłowe
ustawienia.
Wyłączyć sygnał zmiany kierunku
obrotów.
Zaprogramować prawidłowe ograniczenia.
Zaprogramować prawidłowe
ustawienia.
Sprawdzić ustawienia w grupie
parametrów 6-** Analog I/O mode.
Sprawdzić ustawienia silnika w
grupach parametrów 1-2* Dane silnika,
1-3* Zaaw. dane siln. i 1-5* Nastawy
niezależne od obciąż.
Sprawdzić grupy parametrów 2-0*
Hamulec DC i 3-0* Ogr. wart. zad.
Wyeliminować wszelkie zwarcia.
Przeprowadzić próbę rozruchu i
upewnić się, że wartości prądu silnika
odpowiadają danym technicznym.
Jeżeli prąd silnika przekracza wartość
prądu pełnego obciążenia z tabliczki
znamionowej, silnik może pracować
tylko ze zmniejszonym obciążeniem.
Zwerykować dane techniczne
aplikacji.
Dokręcić obluzowane złącza.
Jeżeli asymetria przemieszcza się z
przewodem, problem leży po stronie
zasilania. Sprawdzić zasilanie.
Jeżeli asymetria pozostaje na tym
samym zacisku wejściowym, problem
tkwi w urządzeniu. Skontaktować się
z dostawcą.
60 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 65

Konserwacja, diagnostyka or... Instrukcja obsługi
Objaw Przypuszczalna przyczyna Test Rozwiązanie
Jeżeli asymetria zmienia się wraz z
Problem z silnikiem lub uzwojeniem
Asymetria prądu
silnika przekracza
3%
Hałas akustyczny lub
drgania (np. łopata
wentylatora
powoduje hałas lub
drgania przy
pewnych częstotliwościach)
Tabela 8.3 Usuwanie usterek
silnika
Problem z przetwornicą częstotliwości
Rezonans, np. w układzie silnika/
wentylatora
Zmienić położenie wyjściowych
przewodów silnika o jedno miejsce: U
do V, V do W, W do U.
Zmienić położenie wyjściowych
przewodów silnika o jedno miejsce: U
do V, V do W, W do U.
Obejść krytyczne częstotliwości za
pomocą parametrów w grupie
parametrów 4-6* Obejście prędkości.
Wyłączyć nadmodulację w
parametr 14-03 Overmodulation.
Zwiększyć tłumienie rezonansu w
parametr 1-64 Resonance Dampening.
położeniem przewodów, problem leży
po stronie silnika lub jego
okablowania. Sprawdzić silnik i jego
okablowanie.
Jeżeli asymetria pozostaje na tym
samym zacisku wyjściowym, problem
tkwi w urządzeniu. Skontaktować się
z dostawcą.
Sprawdzić, czy hałas i/lub wibracje
spadły do dopuszczalnych granic.
8 8
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 61
Page 66

Dane techniczne
9 Dane techniczne
9.1 Dane elektryczne
VLT® Midi Drive FC 280
Przetwornica częstotliwości
typowa moc na wale [kW] (KM)
Klasa ochrony obudowy IP20 (IP21/Typ 1 jako
opcja)
Prąd wyjściowy
Moc na wale [kW] 0,37 0,55 0,75 1,1 1,5 2,2 3
Ciągły (3x380–440 V) [A] 1,2 1,7 2,2 3 3,7 5,3 7,2
Ciągły (3x441–480 V) [A] 1,1 1,6 2,1 2,8 3,4 4,8 6,3
Przerywany (przeciążenie 60 s) [A] 1,9 2,7 3,5 4,8 5,9 8,5 11,5
Ciągły kVA (400 V AC) [kVA] 0,9 1,2 1,5 2,1 2,6 3,7 5,0
Ciągły kVA (480 V AC) [kVA] 0,9 1,3 1,7 2,5 2,8 4,0 5,2
Maksymalny prąd wejściowy
Ciągły (3x380–440 V) [A] 1,2 1,6 2,1 2,6 3,5 4,7 6,3
Ciągły (3x441–480 V) [A] 1,0 1,2 1,8 2,0 2,9 3,9 4,3
Przerywany (przeciążenie 60 s) [A] 1,9 2,6 3,4 4,2 5,6 7,5 10,1
Dodatkowe dane techniczne
Maksymalny przekrój poprzeczny kabla w
99
przypadku zasilania, silnika, hamulca i podziału
obciążenia [mm2 (AWG])
Szacowane straty mocy przy maksymalnym
obciążeniu znamionowym [W]
Ciężar, klasa ochrony obudowy IP20 [kg] (funty) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5) 3,6 (7,9)
Ciężar, klasa ochrony obudowy IP21 [kg] (funty) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1)
Sprawność [%]
2)
1)
PK37
0,37
(0,5)
K1 K1 K1 K1 K1 K1 K2
20,9 25,2 30 40 52,9 74 94,8
96,0 96,6 96,8 97,2 97,0 97,5 98,0
PK55
0,55
(0,75)
PK75
0,75
(1,0)
P1K1
1,1
(1,5)
4 (12)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
P3K0
3,0
(4,0)
Tabela 9.1 Zasilanie 3x380–480 V AC
62 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 67

Dane techniczne Instrukcja obsługi
Przetwornica częstotliwości
typowa moc na wale [kW] (KM)
Klasa ochrony obudowy IP20 (IP21/Typ 1 jako
opcja)
Prąd wyjściowy
Moc na wale 4 5,5 7,5 11 15 18,5 22
Ciągły (3x380–440 V) [A] 9 12 15,5 23 31 37 42,5
Ciągły (3x441–480 V) [A] 8,2 11 14 21 27 34 40
Przerywany (przeciążenie 60 s) [A] 14,4 19,2 24,8 34,5 46,5 55,5 63,8
Ciągły kVA (400 V AC) [kVA] 6,2 8,3 10,7 15,9 21,5 25,6 29,5
Ciągły kVA (480 V AC) [kVA] 6,8 9,1 11,6 17,5 22,4 28,3 33,3
Maksymalny prąd wejściowy
Ciągły (3x380–440 V) [A] 8,3 11,2 15,1 22,1 29,9 35,2 41,5
Ciągły (3x441–480 V) [A] 6,8 9,4 12,6 18,4 24,7 29,3 34,6
Przerywany (przeciążenie 60 s) [A] 13,3 17,9 24,2 33,2 44,9 52,8 62,3
Dodatkowe dane techniczne
Maksymalny przekrój poprzeczny kabla w
przypadku zasilania, silnika, hamulca i podziału
obciążenia [mm2 (AWG])
Szacowane straty mocy przy maksymalnym
obciążeniu znamionowym [W]
Ciężar, klasa ochrony obudowy IP20 [kg] (funty) 3,6 (7,9) 3,6 (7,9) 4,1 (9,0) 9,4 (20,7) 9,5 (20,9) 12,3 (27,1) 12,5 (27,6)
Ciężar, klasa ochrony obudowy IP21 [kg] (funty) 5,5 (12,1) 5,5 (12,1) 6,5 (14,3) 10,5 (23,1) 10,5 (23,1) 14,0 (30,9) 14,0 (30,9)
Sprawność [%]
2)
1)
P4K0
4
(5,5)
K2 K2 K3 K4 K4 K5 K5
115,5 157,5 192,8 289,5 393,4 402,8 467,5
98,0 97,8 97,7 98,0 98,1 98,0 98,0
P5K5
5,5
(7,5)
4 (12) 16 (6)
P7K5
7,5
(10)
P11K
11
(15)
P15K
15
(20)
P18K
18,5
(25)
P22K
22
(30)
9 9
Tabela 9.2 Zasilanie 3x380–480 V AC
Przetwornica częstotliwości
typowa moc na wale [kW] (KM)
Klasa ochrony obudowy IP20 (IP21/Typ 1 jako
opcja)
Prąd wyjściowy
Ciągły (3x200–240 V) [A] 2,2 3,2 4,2 6 6,8 9,6 15,2
Przerywany (przeciążenie 60 s) [A] 3,5 5,1 6,7 9,6 10,9 15,4 24,3
Ciągły kVA (230 V AC) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8 6,1
Maksymalny prąd wejściowy
Ciągły (3x200–240 V) [A] 1,8 2,7 3,4 4,7 6,3 8,8 14,3
Przerywany (przeciążenie 60 s) [A] 2,9 4,3 5,4 7,5 10,1 14,1 22,9
Dodatkowe dane techniczne
Maksymalny przekrój poprzeczny kabla w
przypadku zasilania, silnika, hamulca i podziału
obciążenia [mm2 (AWG])
Szacowane straty mocy przy maksymalnym
obciążeniu znamionowym [W]
Ciężar, klasa ochrony obudowy IP20 [kg] (funty) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5) 3,6 (7,9)
Ciężar, klasa ochrony obudowy IP21 [kg] (funty) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1) 6,5 (14,3)
Sprawność [%]
2)
1)
PK37
0,37
(0,5)
K1 K1 K1 K1 K1 K2 K3
29,4 38,5 51,1 60,7 76,1 96,1 147,5
96,4 96,6 96,3 96,6 96,5 96,7 96,7
PK55
0,55
(0,75)
PK75
0,75
(1,0)
P1K1
1,1
(1,5)
4 (12)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
P3K7
3,7
(5,0)
Tabela 9.3 Zasilanie 3x200–240 V AC
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 63
Page 68

Dane techniczne
VLT® Midi Drive FC 280
Przetwornica częstotliwości
typowa moc na wale [kW] (KM)
Klasa ochrony obudowy IP20 (IP21/Typ 1 jako opcja) K1 K1 K1 K1 K1 K2
Prąd wyjściowy
Ciągły (3x200–240 V) [A] 2,2 3,2 4,2 6 6,8 9,6
Przerywany (przeciążenie 60 s) [A] 3,5 5,1 6,7 9,6 10,9 15,4
Ciągły kVA (230 V AC) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8
Maksymalny prąd wejściowy
Ciągły (1x200–240 V) [A] 2,9 4,4 5,5 7,7 10,4 14,4
Przerywany (przeciążenie 60 s) [A] 4,6 7,0 8,8 12,3 16,6 23,0
Dodatkowe dane techniczne
Maksymalny przekrój poprzeczny kabla (zasilanie i
silnik) [mm2 (AWG)]
Szacowane straty mocy przy maksymalnym
obciążeniu znamionowym [W]
Ciężar, klasa ochrony obudowy IP20 [kg] (funty) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5)
Ciężar, klasa ochrony obudowy IP21 [kg] (funty) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1)
Sprawność [%]
Tabela 9.4 Zasilanie 1x200–240 V AC
1) Standardowa utrata mocy występuje w warunkach znamionowego obciążenia i powinna wynosić ±15% (zakres tolerancji związany jest z
różnym napięciem i stanem kabli).
99
Wartości opierają się na standardowej sprawności silnika (granica IE2/IE3). Mniej sprawne silniki przyczyniają się również do strat mocy w
przetwornicach częstotliwości, a silniki o dużej sprawności zmniejszają straty mocy.
Dotyczy wymiarowania chłodzenia przetwornicy częstotliwości. Jeśli częstotliwość przełączania będzie wyższa niż nastawa domyślna, straty mocy
mogą wzrosnąć. Uwzględniono pobór mocy panelu LCP i standardowej karty sterującej. Dodatkowe opcje i obciążenia mogą powodować do 30
W dodatkowych strat, choć zwykle w pełni obciążona karta sterująca lub magistrala komunikacyjna dodają tylko 4 W do strat mocy).
Dane dotyczące strat mocy zgodnie z normą EN 50598-2 — patrz www.danfoss.com/vltenergyeciency.
2) Zmierzono prz y użyciu 50 m ekranowanych kabli silnika przy obciążeniu znamionowym i częstotliwości znamionowej. Informacje o klasie
sprawności energetycznej — patrz rozdział 9.4 Warunki otoczenia. Straty przy częściowym obciążeniu — patrz www.danfoss.com/vltenergye-
ciency.
2)
1)
PK37
0,37
(0,5)
37,7 46,2 56,2 76,8 97,5 121,6
94,4 95,1 95,1 95,3 95,0 95,4
PK55
0,55
(0,75)
PK75
0,75
(1,0)
4 (12)
P1K1
1,1
(1,5)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
Zasilanie
9.2
Zasilanie (L1/N, L2/L, L3)
Zaciski zasilania (L1/N, L2/L, L3)
Napięcie zasilania 380–480 V: -15% (-25%)1) do +10%
Napięcie zasilania 200–240 V: -15% (-25%)1) do +10%
1) Przetwornica częstotliwości może pracować z napięciem zasilania niższym o 25% (-25%) ze zmniejszoną wydajnością.
Maksymalna moc wyjściowa przetwornicy częstotliwości wynosi 75% w przypadku napięcia wejściowego -25%, a 85% w
przypadku napięcia wejściowego -15%.
Nie można oczekiwać osiągnięcia pełnego momentu obrotowego, gdy napięcie zasilania jest niższe o ponad 10% od najniższego
znamionowego napięcia zasilania przetwornicy częstotliwości.
Częstotliwość zasilania 50/60 Hz ±5%
Maksymalna tymczasowa asymetria między fazami zasilania 3,0% napięcia znamionowego zasilania
Rzeczywisty współczynnik mocy (λ) ≥ 0,9 wartości znamionowej przy obciążeniu znamionowym
Współczynnik przesunięcia fazowego (cos ϕ) bliski jedności (> 0,98)
Przełączanie na wejściu zasilania (L1/N, L2/L, L3) (załączenia zasilania) ≤ 7,5 kW (10 KM) maks. 2 razy/min
Przełączanie na wejściu zasilania (L1/N, L2/L, L3) (załączenia zasilania) 11–22 kW (15–30 KM) maks. 1 raz/min
64 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 69

Dane techniczne Instrukcja obsługi
9.3 Wyjście silnikowe z przetwornicy i dane silnika
Wyjście silnikowe z przetwornicy (U, V, W)
Napięcie wyjściowe 0–100% napięcia zasilania
Częstotliwość wyjściowa 0–500 Hz
Częstotliwość wyjściowa w trybie VVC
Przełączanie na wyjściu Nieograniczone
Czas rozpędzania/zatrzymania 0,01–3600 s
Charakterystyka momentu
Moment rozruchowy (stały moment) maksymalnie 160% przez 60 s
Moment przeciążenia (stały moment) maksymalnie 160% przez 60 s
Prąd startowy maksymalnie 200% przez 1 s
Czas narastania momentu obrotowego w trybie VVC+ (niezależnie od fsw) maks. 50 ms
1) Wartości procentowe dotyczą znamionowego momentu obrotowego. 150% w przypadku przetwornic częstotliwości 11–22 kW
(15–30 KM).
+
0–200 Hz
9.4 Warunki otoczenia
Warunki otoczenia
Klasa ochrony obudowy, przetwornica częstotliwości IP20 (IP21/Typ 1 jako opcja)
Klasa ochrony obudowy, zestaw do konwersji IP21/Typ 1
Badanie wibracji, wszystkie rozmiary obudów 1,14 g
Wilgotność względna 5–95% (IEC 721-3-3; Klasa 3K3 (bez kondensacji) podczas pracy)
Temperatura otoczenia (w trybie przełączania DPWM)
- z obniżaniem wartości znamionowych Maks. 55°C (131°F)
- przy pełnym stałym prądzie wyjściowym Maks. 45°C (113°F)
Minimalna temperatura otoczenia podczas pracy znamionowej 0°C (32 °F)
Minimalna temperatura otoczenia przy zredukowanej wydajności -10°C (14 °F)
Temperatura podczas magazynowania/transportu -25 do +65/70°C (-13 do +149/158°F)
Maksymalna wysokość nad poziomem morza bez obniżania wartości znamionowych 1000 m (3280 ft)
Maksymalna wysokość nad poziomem morza przy obniżaniu wartości znamionowych 3000 m (9243 ft)
EN 61800-3, EN 61000-3-2, EN 61000-3-3, EN 61000-3-11,
Normy EMC, emisja
Normy EMC, odporność
Klasa sprawności energetycznej
1) Zobacz Warunki specjalne w Zaleceniach Projektowych, sekcje:
Obniżanie wartości znamionowych dla wyższych temperatur otoczenia
•
Obniżanie wartości znamionowych przy dużej wysokości nad poziomem morza
•
2) W przypadku przetwornicy VLT
eksploatacji przy pełnym obciążeniu we/wy cyfrowych/analogowych w temperaturze otoczenia wyższej niż 45°C (113°F).
3) Temperatura otoczenia dla K1S2 z obniżaniem wartości znamionowych wynosi maksymalnie 50°C (122°F).
4) Temperatura otoczenia dla K1S2 przy pełnym stałym prądzie wyjściowym wynosi maksymalnie 40°C (104°F).
5) Określana zgodnie z normą EN 50598-2 przy:
obciążeniu znamionowym,
•
90% częstotliwości znamionowej,
•
nastawie domyślnej (fabrycznej) częstotliwości kluczowania,
•
nastawie domyślnej (fabrycznej) schematu kluczowania,
•
Typ otwarty: temperatura powietrza otoczenia 45°C (113°F).
•
Typ 1 (zestaw NEMA): temperatura otoczenia 45°C (113°F).
•
5)
®
Midi Drive FC 280 w wariancie PROFIBUS, PROFINET, EtherNet/IP i POWERLINK należy unikać
EN 61000-3-12, EN 61000-6-3/4, EN 55011, IEC 61800-3
EN 61800-3, EN 61000-6-1/2, EN 61000-4-2, EN 61000-4-3
EN 61000-4-4, EN 61000-4-5, EN 61000-4-6, EN 61326-3-1
1)2)3)
IE2
1)
1)
9 9
4)
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 65
Page 70

Dane techniczne
9.5 Dane techniczne kabli
VLT® Midi Drive FC 280
Długości i przekroje kabli
Maksymalna długość kabla silnika, ekranowanego 50 m (164 ft)
Maksymalna długość kabla silnika, nieekranowanego 75 m (246 ft)
Maksymalny przekrój poprzeczny przewodu elastycznego/sztywnego podłączonego do zacisków
sterowania 2,5 mm2/14 AWG
Minimalny przekrój poprzeczny zacisków sterowania 0,55 mm2/30 AWG
Maksymalna długość kabla funkcji STO, nieekranowanego 20 m (66 ft)
1) W przypadku przewodów silnoprądowych informacje o przekrojach poprzecznych kabli zawiera Tabela 9.1, Tabela 9.2,
Tabela 9.3 i Tabela 9.4.
Aby spełniać wymagania norm EN 55011 1A i EN 55011 1B, rozmiar kabli silnika musi w pewnych przypadkach zostać
zmniejszony. Więcej szczegółów zawiera rozdział 2.6.2 Emisja EMC w Zaleceniach Projektowych przetwornic VLT® Midi Drive FC
280.
1)
9.6 Wejścia/wyjścia sterowania i dane sterowania
Wejścia cyfrowe
Numer zacisku
Logika PNP lub NPN
Poziom napięcia 0–24 V DC
Poziom napięcia, logiczne 0 PNP < 5 V DC
Poziom napięcia, logiczne 1 PNP > 10 V DC
99
Poziom napięcia, logiczne 0 NPN > 19 V DC
Poziom napięcia, logiczne 1 NPN < 14 V DC
Napięcie maksymalne na wejściu 28 V DC
Zakres częstotliwości impulsowej 4–32 kHz
(Cykl pracy) minimalna szerokość impulsu 4,5 ms
Rezystancja wejściowa, R
1) Zacisk 27 można zaprogramować również jako wyjście.
i
18, 19, 271), 29, 32, 33
Około 4 kΩ
Wejścia funkcji STO
Numer zacisku 37, 38
Poziom napięcia 0–30 V DC
Poziom napięcia, niski < 1,8 V DC
Poziom napięcia, wysoki > 20 V DC
Napięcie maksymalne na wejściu 30 V DC
Minimalny prąd wejściowy (każdy wtyk) 6 mA
1) Więcej szczegółowych informacji o wejściach funkcji STO zawiera rozdział 6 Safe Torque O (STO).
Wejścia analogowe
Liczba wejść analogowych 2
Numer zacisku 531), 54
Tryby Napięcie lub prąd
Wybór trybu Oprogramowanie
Poziom napięcia 0–10 V
Rezystancja wejściowa, R
Napięcie maksymalne -15 V do +20 V
Poziom prądu 0/4 do 20 mA (skalowany)
Rezystancja wejściowa, R
Prąd maksymalny 30 mA
Rozdzielczość dla wejść analogowych 11 bitów
Dokładność wejść analogowych Maksymalny błąd 0,5% pełnej skali
Szerokość pasma 100 Hz
Wejścia analogowe są izolowane galwanicznie od napięcia zasilania (PELV) i innych zacisków wysokiego napięcia.
1)
i
i
Około 10 kΩ
Około 200 Ω
66 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 71

Mains
Functional
isolation
PELV isolation
Motor
DC bus
High
voltage
Control
37
RS485
38
33
130BE837.10
Dane techniczne Instrukcja obsługi
1) Zacisk 53 obsługuje tylko tryb napięcia i może być również używany jako wejście cyfrowe.
Ilustracja 9.1 Izolacja galwaniczna
NOTYFIKACJA
Duża wysokość n.p.m.
W przypadku instalacji na wysokościach powyżej 2000 m n.p.m. należy skontaktować się z rmą Danfoss odnośnie PELV.
Wejścia impulsowe
Programowalne wejścia impulsowe 2
Numer zacisku impulsowego 29, 33
Maksymalna częstotliwość na zaciskach 29, 33 32 kHz (przeciwsobne)
Maksymalna częstotliwość na zaciskach 29, 33 5 kHz (otwarty kolektor)
Minimalna częstotliwość na zaciskach 29, 33 4 Hz
Poziom napięcia Patrz rozdział dot. wejścia cyfrowego
Napięcie maksymalne na wejściu 28 V DC
Rezystancja wejściowa, R
i
Dokładność wejścia impulsowego Maksymalny błąd: 0,1% pełnej skali
Około 4 kΩ
9 9
Wyjścia cyfrowe
Programowalne wyjścia cyfrowe/impulsowe 2
Numer zacisku 27
Poziom napięcia przy wyjściu cyfrowym/częstotliwościowym 0–24 V
Maksymalny prąd wyjściowy (ujście lub źródło) 40 mA
Maksymalne obciążenie przy wyjściu częstotliwościowym 1 kΩ
Maksymalne obciążenie pojemnościowe przy wyjściu częstotliwościowym 10 nF
Minimalna częstotliwość wyjściowa przy wyjściu częstotliwościowym 4 Hz
Maksymalna częstotliwość wyjściowa przy wyjściu częstotliwościowym 32 kHz
Dokładność wyjścia częstotliwościowego Maksymalny błąd: 0,1% pełnej skali
Rozdzielczość wyjścia częstotliwościowego 10 bitów
Numer zacisku (zobacz dane w wejściach analogowych) 42
Poziom napięcia przy wyjściu cyfrowym 0–17 V
1) Zacisk 27 można zaprogramować również jako wejście.
2) Zacisk 42 można również zaprogramować jako wyjście analogowe.
Wejścia analogowe są izolowane galwanicznie od napięcia zasilania (PELV) i innych zacisków wysokiego napięcia.
Wyjścia analogowe
Liczba programowalnych wyjść analogowych 1
Numer zacisku 42
Zakres prądowy przy wyjściu analogowym 0/4–20 mA
Maks. obciąż. rezystora do masy przy wyjściu analogowym 500 Ω
Napięcie maksymalne przy wyjściu analogowym 17 V
Dokładność na wyjściu analogowym Maksymalny błąd: 0,8% pełnej skali
Rozdzielczość na wyjściu analogowym 10 bitów
1) Zacisk 42 można również zaprogramować jako wyjście cyfrowe.
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 67
1)
2)
1)
Page 72

Dane techniczne
Wyjście analogowe jest izolowane galwanicznie od napięcia zasilania (PELV) i innych zacisków wysokiego napięcia.
Karta sterująca, wyjście 24 V DC
Numer zacisku 12, 13
Maksymalne obciążenie 100 mA
Zasilanie 24 V DC jest galwanicznie izolowane od napięcia zasilania (PELV), lecz posiada ten sam potencjał, co wejścia i wyjścia
analogowe i cyfrowe.
Karta sterująca, wyjście +10 V DC
Numer zacisku 50
Napięcie wyjściowe 10,5 V ±0,5 V
Maksymalne obciążenie 15 mA
Zasilanie 10 V DC jest galwanicznie izolowane od napięcia zasilania (PELV) i innych zacisków wysokiego napięcia.
Karta sterująca, komunikacja szeregowa RS485
Numer zacisku 68 (P,TX+, RX+), 69 (N,TX-, RX-)
Numer zacisku 61 Masa dla zacisków 68 i 69
Obwód komunikacji szeregowej RS485 jest izolowany galwanicznie od napięcia zasilania (PELV).
Karta sterująca, komunikacja szeregowa USB
Standard USB 1,1 (pełna szybkość)
Wtyczka USB Wtyczka USB typ B
Połączenie z komputerem PC jest nawiązywane za pomocą standardowego kabla USB host/urządzenie.
Złącze USB jest izolowane galwanicznie od napięcia zasilania (PELV) i innych zacisków wysokiego napięcia.
99
Połączenie z uziemioną masą USB nie jest izolowane galwanicznie od uziemienia ochronnego. Należy używać izolowanego
laptopa jako połączenia PC do dławika złącza USB na przetwornicy częstotliwości.
VLT® Midi Drive FC 280
Wyjścia przekaźnikowe
Programowalne wyjścia przekaźnikowe 1
Przekaźnik 01 01–03 (rozwierny), 01–02 (zwierny)
Maksymalne obciążenie zacisku (AC-1)1) na 01-02 (zwierny) (Obciążenie rezystancyjne) 250 V AC, 3 A
Maksymalne obciążenie zacisku (AC-15)1) na 01-02 (zwierny) (Obciążenie indukcyjne przy cosφ 0,4) 250 V AC, 0,2 A
Maksymalne obciążenie zacisku (AC-1)
Maksymalne obciążenie zacisku (DC-13)1) na 01-02 (zwierny) (Obciążenie indukcyjne) 24 V DC, 0,1 A
Maksymalne obciążenie zacisku (AC-1)1) na 01-03 (zwierny) (Obciążenie rezystancyjne) 250 V AC, 3 A
Maksymalne obciążenie zacisku (AC-15)1) na 01–03 (rozwierny) (Obciążenie indukcyjne przy cosφ 0,4) 250 V AC, 0,2 A
Maksymalne obciążenie zacisku (DC-1)1) na 01-03 (rozwierny) (Obciążenie rezystancyjne) 30 V DC, 2 A
Minimalne obciążenie zacisku na 01-03 (rozwierny), 01-02 (zwierny) 24 V DC 10 mA, 24 V AC 20 mA
1) IEC 60947, część 4 i 5.
Styki przekaźnikowe są izolowane galwanicznie od reszty obwodu przez wzmocnioną izolację.
Wydajność karty sterującej
Odstęp czasu skanowania 1 ms
Charakterystyka sterowania
Rozdzielczość częstotliwości wyjściowej przy 0–500 Hz ±0,003 Hz
Czas reakcji systemu (zaciski 18, 19, 27, 29, 32 i 33) ≤ 2 ms
Zakres regulacji prędkości (pętla otwarta) 1:100 prędkości synchronicznej
Dokładność prędkości (pętla otwarta) ±0,5% znamionowej prędkości
Dokładność prędkości (pętla zamknięta) ±0,1% prędkości znamionowej
Wszystkie charakterystyki sterowania opierają się na 4-biegunowym silniku asynchronicznym.
1)
na 01-02 (zwierny) (Obciążenie rezystancyjne) 30 V DC, 2 A
68 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 73

Dane techniczne Instrukcja obsługi
9.7 Momenty dokręcania złączy
Podczas wykonywania wszystkich połączeń elektrycznych należy stosować odpowiednie momenty. Zbyt mały lub zbyt duży
moment dokręcania może spowodować problemy z połączeniem elektrycznym. Aby zapewnić zastosowanie odpowiedniego
momentu, należy użyć klucza dynamometrycznego. Zalecany typ śrubokręta to SZS 0,6x3,5 mm.
Moment dokręcania [Nm (funtocale)]
Typ
obudowy
K1
K2
K3 7,5 (10) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
K4
K5
Tabela 9.5 Momenty dokręcania
Moc
[kW (KM)]
0,37–2,2
(0,5–3,0)
3,0–5,5
(4,0–7,5)
11–15
(15–20)
18,5–22
(25–30)
Zasilanie Silnik
0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
Podłączenie
DC
Hamulec Uziemienie Sterowanie Przekaźnik
9.8 Bezpieczniki i wyłączniki
Należy stosować bezpieczniki i/lub wyłączniki po stronie zasilania w celu ochrony personelu i sprzętu przed uszkodzeniem w
razie awarii komponentów wewnątrz przetwornicy częstotliwości (pierwszego błędu).
Zabezpieczenie obwodów odgałęzionych
Wszystkie obwody odgałęzione w instalacji (w tym aparaturze rozdzielczej, maszynach itp.) muszą zostać zabezpieczone
przed zwarciem i przetężeniem zgodnie z przepisami krajowymi/międzynarodowymi.
NOTYFIKACJA
Zintegrowane stałe zabezpieczenie przed zwarciami nie zapewnia zabezpieczenia obwodów odgałęzionych. Należy
zapewnić zabezpieczenie obwodów odgałęzionych zgodnie z lokalnymi i krajowymi przepisami i regulacjami.
Tabela 9.6 zawiera listę zalecanych bezpieczników i wyłączników, które zostały przetestowane.
UWAGA
RYZYKO WYSTĄPIENIA OBRAŻEŃ CIAŁA LUB USZKODZENIA MIENIA
Wadliwe działanie urządzenia lub nieprzestrzeganie zaleceń może spowodować zagrożenie dla zdrowia i życia personelu
oraz uszkodzenie przetwornicy częstotliwości i innych urządzeń.
Należy wybrać bezpieczniki zgodnie z zaleceniami. Dzięki temu potencjalne uszkodzenia przetwornicy częstot-
•
liwości będą ograniczone do wnętrza urządzenia.
9 9
NOTYFIKACJA
USZKODZENIE SPRZĘTU
Użycie bezpieczników i/lub wyłączników gwarantuje zgodność z normą IEC 60364 dla CE. Nieprzestrzeganie zaleceń
dotyczących ochrony może spowodować uszkodzenie przetwornicy częstotliwości.
Firma Danfoss zaleca stosowanie bezpieczników i wyłączników wymienionych w Tabela 9.6 i Tabela 9.7, aby zapewnić
zgodność z normami UL 508C i IEC 61800-5-1. W przypadku aplikacji innych niż UL wyłączniki powinny być zaprojektowane
do ochrony w obwodzie zdolnym dostarczyć maksymalnie 50000 A
znamionową prądu zwarcia (SCCR) przetwornicy częstotliwości można stosować w obwodzie zdolnym dostarczać nie więcej
niż 100000 A
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 69
, maksymalnie 240 V/480 V, kiedy jest on chroniony przez bezpieczniki klasy T.
rms
(symetrycznie), maks. 240 V/400 V. Wartość
rms
Page 74

Dane techniczne
VLT® Midi Drive FC 280
Rozmiar obudowy Moc [kW (KM)]
0,37 (0,5)
0,55–0,75
K1
3-fazowa 380–480 V
3-fazowa 200–240 V
99
1-fazowa 200–240 V
K2
K3 7,5 (10) PKZM0-25
K4
K5
K1
K2 2,2 (3,0)
K3 3,7 (5,0) PKZM0-25
K1
K2 2,2 (3,0) gG-25 PKZM0-20
(0,75–1,0)
1,1–1,5
(1,5–2,0)
2,2 (3,0)
3,0–5,5
(4,0–7,5)
11–15
(15–20)
18,5–22
(25–30)
0,37 (0,5) gG-10
0,55 (0,75)
0,75 (1,0)
1,1 (1,5)
1,5 (2,0)
0,37 (0,5) gG-10
0,55 (0,75)
0,75 (1,0)
1,1 (1,5)
1,5 (2,0)
Bezpiecznik niezg. zULWyłącznik niezg. z UL
(Eaton)
gG-10
PKZM0-16
gG-20
gG-25
gG-50 –
gG-80 –
gG-20
gG-25
gG-20
PKZM0-20
PKZM0-16
PKZM0-20
PKZM0-16
Tabela 9.6 Bezpiecznik i wyłącznik niezg. z UL
70 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 75

Dane techniczne Instrukcja obsługi
Rozmiar obudowy
K1
3-fazowe
380–480 V
3-fazowe
200–240 V
1-fazowa
200–240 V
K2–K3
K4
K5
K1
K2–K3
K1
K2 2,2 (3,0)
Moc
[kW (KM)]
0,37–0,75
(0,5–1,0)
1,1–1,5
(1,5–2,0)
2,2 (3,0) KTS-R-15 JKS-15 JJS-15 FNQ-R-15 KTK-R-15 LP-CC-15 KLSR-15 ATM-R15 A6K-15R
3,0–7,5
(4,0–10)
11–15
(15–20)
18,5–22
(25–30)
0,37 (0,5) KTN-R-6 JKS-6 JJN-6 FNQ-R-6 KTK-R-6 LP-CC-6 KLNR-6 ATM-R6 A2K-6R
0,55 (0,75)
0,75 (1,0)
1,1–1,5
(1,5–2,0)
2,2–3,7
(3,0–5,0)
0,37 (0,5) KTN-R-6 JKS-6 JJN-6 FNQ-R-6 KTK-R-6 LP-CC-6 KLNR-6 ATM-R6 A2K-6R
0,55 (0,75)
0,75 (1,0)
1,1–1,5
(1,5–2,0)
Klasa
RK1
KTS-R-6 JKS-6 JJS-6 FNQ-R-6 KTK-R-6 LP-CC-6 KLSR-6 ATM-R6 A6K-6R
KTS-R-10 JKS-10 JJS-10 FNQ-R-10 KTK-R-10 LP-CC-10 KLSR-10 ATM-R10 A6K-10R
KTS-R-25 JKS-25 JJS-25 FNQ-R-25 KTK-R-25 LP-CC-25 KLSR-25 ATM-R25 A6K-25R
KTS-R-50 JKS-50 JJS-50 – – – KLSR-50 – A6K-50R
KTNR-10
KTNR-15
KTNR-20
KTNR-25
KTNR-10
KTNR-15
KTNR-20
KTNR-25
Klasa J Klasa T Klasa CC Klasa CC Klasa CC Klasa RK1 Klasa CC Klasa RK1
– JKS-80 JJS-80 – – – – – –
JKS-10 JJN-10 FNQ-R-10 KTK-R-10 LP-CC-10 KLNR-10 ATM-R10 A2K-10R
JKS-15 JJN-15 FNQ-R-15 KTK-R-15 LP-CC-15 KLNR-15 ATM-R15 A2K-15R
JKS-20 JJN-20 FNQ-R-20 KTK-R-20 LP-CC-20 KLNR-20 ATM-R20 A2K-20R
JKS-25 JJN-25 – – – KLNR-25 ATM-R25 A2K-25R
JKS-10 JJN-10 FNQ-R-10 KTK-R-10 LP-CC-10 KLNR-10 ATM-R10 A2K-10R
JKS-15 JJN-15 FNQ-R-15 KTK-R-15 LP-CC-15 KLNR-15 ATM-R15 A2K-15R
JKS-20 JJN-20 FNQ-R-20 KTK-R-20 LP-CC-20 KLNR-20 ATM-R20 A2K-20R
JKS-25 JJN-25 – – – KLNR-25 ATM-R25 A2K-25R
Bussmann E4273
Littelfuse
E81895
MERSEN
E163267/
E2137
MERSEN
E163267/
E2138
9 9
Tabela 9.7 Bezpiecznik zg. z UL
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 71
Page 76

Dane techniczne
VLT® Midi Drive FC 280
9.9 Rozmiary obudów, wartości znamionowe mocy i wymiary
Moc [kW (KM)]
Wymiary [mm]
(cale)
99
Ciężar
[kg (funty)]
Otwory
montażowe
[mm (cale)]
Rozmiar
obudowy
Pojedyncza
faza
200–240 V
3-fazowe
200–240 V
3-fazowe
380–480 V
Wysokość A1 210 (8,3) 272,5 (10,7)
Wysokość A2 278 (10,9) 340 (13,4)
Szerokość B 75 (3,0) 90 (3,5) 115 (4,5) 133 (5,2) 150 (5,9)
Głębokość C 168 (6,6) 168 (6,6) 168 (6,6) 245 (9,6) 245 (9,6)
Wysokość A 338,5 (13,3) 395 (15,6)
Szerokość B 100 (3,9) 115 (4,5) 130 (5,1) 153 (6,0) 170 (6,7)
Głębokość C 183 (7,2) 183 (7,2) 183 (7,2) 260 (10,2) 260 (10,2)
Wysokość A 294 (11,6) 356 (14)
Szerokość B 75 (3,0) 90 (3,5) 115 (4,5) 133 (5,2) 150 (5,9)
Głębokość C 168 (6,6) 168 (6,6) 168 (6,6) 245 (9,6) 245 (9,6)
IP20 2,5 (5,5) 3,6 (7,9)
IP21 4,0 (8,8) 5,5 (12,1)
a 198 (7,8) 260 (10,2)
b 60 (2,4) 70 (2,8) 90 (3,5) 105 (4,1) 120 (4,7)
c 5 (0,2) 6,4 (0,25)
d 9 (0,35) 11 (0,43) 11 (0,43) 12,4 (0,49) 12,6 (0,5)
e 4,5 (0,18) 5,5 (0,22)
f 7,3 (0,29) 8,1 (0,32)
0,37
(0,5)
0,37
(0,5)
0,37
(0,5)
0,55
(0,75)
0,55
(0,75)
0,55
(0,75)
FC 280 z dolną pokrywą wejść kablowych (bez pokrywy górnej)
K1 K2 K3 K4 K5
0,75
1,1
(1,0)
(1,5)
0,75
1,1
(1,0)
(1,5)
0,75
1,1
(1,0)
(1,5)
FC 280 z zestawem IP21/UL/Typ 1
1,5
(2,0)
1,5
(2,0)
1,5
(2,0)
FC 280 IP20
2,2
(3,0)
3
(4,0
2,2
(3,0)
2,2
(3,0)
4
5,5
(5,5)
)
(7,5)
– – –
3,7
(5,0)
7,5
(10)11(15)15(20)
272,5
(10,7)
341,5
(13,4)
395
(15,6)
357
(14,1)
4,6
(10,1)
6,5
(14,3)
260
(10,2)
6,5
(0,26)
5,5
(0,22)
9,2
(0,36)
– –
317,5
(12,5)
379,5
(14,9)
425 (16,7) 520 (20,5)
391 (15,4) 486 (19,1)
8,2 (18,1) 11,5 (25,4)
10,5 (23,1) 14,0 (30,9)
297,5
(11,7)
8 (0,32) 7,8 (0,31)
6,8 (0,27) 7 (0,28)
11 (0,43) 11,2 (0,44)
18,5
(25)22(30)
410 (16,1)
474 (18,7)
390 (15,4)
Tabela 9.8 Rozmiary obudów, wartości znamionowe mocy i wymiary
72 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 77

130BE844.11
B
C
A1
A2
130BE846.10
B
A
C
Dane techniczne Instrukcja obsługi
Ilustracja 9.2 Standard z płytką odsprzęgającą mocowania mechanicznego
9 9
Ilustracja 9.3 Standard z dolną pokrywą wejść kablowych (bez górnej pokrywy)
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 73
Page 78

B
C
A
130BE845.10
C
a
b
130BA648.12
f
e
B
A
a
d
e
b
c
Dane techniczne
VLT® Midi Drive FC 280
99
Ilustracja 9.4 Standard z zestawem IP21/UL/Typ 1
Ilustracja 9.5 Górne i dolne otwory montażowe
74 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 79

Załącznik Instrukcja obsługi
10 Załącznik
10.1 Symbole, skróty i konwencje
°C
°F
AC Prąd przemienny
AEO Automatyczna optymalizacja energii
AWG Amerykańska miara kabli
AMA Automatyczne dopasowanie do silnika
DC Prąd stały
Kompatybilność elektromagnetyczna (EMC) Kompatybilność elektromagnetyczna
ETR Elektroniczny przekaźnik termiczny
f
M,N
FC Przetwornica częstotliwości
I
INV
I
LIM
I
M,N
I
VLT,MAX
I
VLT,N
IP Stopień ochrony
LCP Lokalny panel sterowania
MCT Oprogramowanie Motion Control Tool
MM Moduł pamięci
MMP Programator modułu pamięci
n
s
P
M,N
PELV Obwód bardzo niskiego napięcia z uziemieniem
PCB Płytka drukowana
Silnik PM Silnik z magnesami trwałymi
PUD Dane jednostki zasilającej
PWM Modulacja szerokości impulsu
obr./min Obroty na minutę
SIVP Specyczne wartości inicjalizacji i zabezpieczenie
STO Safe Torque O
T
LIM
U
M,N
Stopnie Celsjusza
Stopnie Fahrenheita
Częstotliwość znamionowa silnika
Znamionowy prąd wyjściowy inwertera
Ograniczenie prądu
Znamionowa wartość prądu silnika
Maksymalny prąd wyjściowy
Znamionowy prąd wyjściowy dostarczany przez przetwornicę częstotliwości
Prędkość obrotowa silnika synchronicznego
Moc znamionowa silnika
Ograniczenie momentu
Znamionowe napięcie silnika
10 10
Tabela 10.1 Symbole i skróty
Konwencje
Wszystkie wymiary są podane w mm.
•
Gwiazdka (*) wskazuje domyślne ustawienie
•
10.2 Struktura menu parametrów
parametru.
Listy numerowane oznaczają procedury.
•
Listy punktowane oznaczają inne informacje.
•
Tekst zapisany kursywą oznacza:
•
- odniesienie,
- łącze,
- nazwę parametru.
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 75
Page 80

Załącznik
0 - 0 *
0-38 Tekst na wyświetlaczu LCP 2
0-39 Tekst na wyświetlaczu LCP 3
Te same opcje co w 0-20
Te same opcje co w 0-20
VLT® Midi Drive FC 280
0 - 0 *
*[0] Brak kopiowania
[1] Kopiuj z zest.par.1
0-4* Klawiatura LCP
Te same opcje co w 0-20
[0] Wyłączone
*[1] Aktywne
0-44 Przycisk [O/Reset] na LCP
[0] Wyłączone
*[1] Aktywne
[0] Wyłączone
*[1] Aktywne
0-42 Przycisk [Auto on] na LCP
0-40 Przycisk [Hand on] na LCP
[7] Włączyć tylko [Reset]
0-5* Kopiuj/Zapisz
0-50 Kopiowanie LCP
*[0] Brak kopiowania
[3] Niez od mocy z LCP
[2] Wszystko z LCP
[1] Wszystko do LCP
[2] Kopiuj z zest.par.2
0-51 Kopiowanie zestawów parametrów
parametrów
0 - 999 *0
[0] Wysoki
[1] średnia
[2] Niski
[4] Adaptacyjne 2
dowego
[3] Adaptacyjne 1
0,0–999999,99 Jednostka własna
odczytu *100 Jednostka własna
odczytu
1-1* Wybór silnika
1-10 Budowa silnika
0 - 0 *
1-06 Zgodnie z ruchem wskazówek zegara
*[0] Normalne
[1] Odwrotne
dowego
0–999999,99 Jednostka własna odczytu
1-08 Pasmo sterowania silnikiem
*0 Jednostka własna odczytu
[3] Kopiuj z zest.par.3
[4] Kopiuj z zest.par.4
[9] Kopiuj z fabrycznego zestawu
0-6* Hasło
0-60 Hasło do menu głównego
1-** Obciążenie i silnik
1-0* Ustawienia ogólne
1-00 Tryb konguracji
*[0] Pętla otwarta
[1] Prędkość, pętla zamknięta
[2] Moment obr., pętla zamk.
[3] Proces, pętla zamknięta
[4] Moment obr., otw. pętla
[7] Rozszerz. PID prędk., otwarta pętla
1-01 Zasada sterowania silnikiem
[0] U/f
*[1] VVC+
*[0] Stały moment
[1] Zmienny moment
[2] Autooptymal.energ CT
1-03 Charakterystyka momentu
0-24 Trzecia linia wyświetlacza
0-23 Druga linia wyświetlacza
0-3* Odczyt def.użyt.LCP
0-30 Jednostka własna odczytu
[34] t/godz.
[40] m/s
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[127] ft³/h
[140] ft/s
[141] ft/min
[160] °F
[170] psi
[171] lb/in2
[172] in WG
[173] ft WG
[180] KM
[11] obr./min
[12] Impuls/s
[20] l/sek.
[21] l/min
[22] l/godz.
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/s
[31] kg/min
[32] kg/h
[0] Brak
*[1] %
[5] PPM
[10] 1/min
[33] t/min
0-31 Min. wartość odczytu niestandar-
0-32 Maks. wartość odczytu niestandar-
0-37 Tekst na wyświetlaczu 1
1010
[1662] Wejście analogowe 53
*[20] Połączone
[1663] Ustawienie zacisku 54
0-14 Odczyt: Edyt. zestawy par. / Kanał
[jednostka]
[jednostka]
[3422] Odczyt PCD 2 dla aplikacji
[3423] Odczyt PCD 3 dla aplikacji
[3424] Odczyt PCD 4 dla aplikacji
[3425] Odczyt PCD 5 dla aplikacji
[3426] Odczyt PCD 6 dla aplikacji
[3427] Odczyt PCD 7 dla aplikacji
[3428] Odczyt PCD 8 dla aplikacji
[3429] Odczyt PCD 9 dla aplikacji
[3408] Zapis PCD 8 dla aplikacji
[3409] Zapis PCD 9 dla aplikacji
[1618] Stan termiczny silnika
[1617] Prędkość [obr./min]
[3410] Zapis PCD 10 dla aplikacji
[1620] Kąt silnika
[3421] Odczyt PCD 1 dla aplikacji
[1622] Moment obrotowy [%]
[1630] Napięcie w obw. pośr. DC
[1633] Energia hamow./2 min
[1634] Temp. radiatora
[1635] Stan termiczny inwertera
[1636] Znamionowy prąd inwertera
[3406] Zapis PCD 6 dla aplikacji
[3407] Zapis PCD 7 dla aplikacji
[3405] Zapis PCD 5 dla aplikacji
[3403] Zapis PCD 3 dla aplikacji
[3404] Zapis PCD 4 dla aplikacji
[1605] Rzeczywista wartość główna [%]
[2119] Zewnętrz. wyjście 1 [%]
[1609] Odczyt niestandardowy
[3401] Zapis PCD 1 dla aplikacji
[1610] Moc [kW]
[3402] Zapis PCD 2 dla aplikacji
[1611] Moc [KM]
[1613] Częstotliwość
[1616] Moment obrotowy [Nm]
[1614] Prąd silnika
[1615] Częstotliwość [%]
[1612] Napięcie silnika
[1692] Słowo ostrzeżenia
[38] Tekst na wyświetlaczu LCP 2
[1693] Słowo ostrzeżenia 2
[39] Tekst na wyświetlaczu LCP 3
[1694] Zewnętrz. Słowo statusowe
[748] Zas. do przodu PCD
[1695] Zewnętrz. słowo statusowe 2
[1006] Odczyt licznika błędów przy odbiorze
[953] Słowo ostrzeżenia Probus
[1005] Odczyt licz. bł. transmisji przy nadaw.
[1230] Parametr ostrzeżenia
*[1602]Wartość zadana [%]
[1502] Licznik kWh
[1501] Godziny pracy
[1603] Słowo statusowe
[1600] Słowo sterujące
[1601] Wartość zadana [jednostka]
[1682] 1 REF magistrali komunik.
[7] OGD V210
[1684] STW opcji komunikacji
[8] Hoist (Dźwigowe)
[1686] 1 REF portu FC
0-2* Wyświetlacz LCP
0-20 Pozycja 1,1 wyświetlacza
[0] Brak
[37] Tekst na wyświetlaczu 1
[1674] Licznik precyzyjnego zatrzymania
[1672] Licznik A
[4] Simple Speed Close Loop (Prędkość,
[1673] Licznik B
prosta pętla zamknięta)
[5] Multi Speed (Wiele prędkości)
[1680] 1 CTW magistrali komunik.
[6] OGD LA10
[1671] Wyjście przekaźnikowe
[1669] Wyjście impulsowe 27 [Hz]
[1668] Wejście impulsowe 33 [Hz]
[1665] Wyjście analogowe 42 [mA]
[1666] Wyjście cyfrowe
[1667] Wejście impulsowe 29 [Hz]
[1664] Wejście analogowe 54
0-16 Wybór aplikacji
prosta pętla zamknięta)
[2] Lokalne/zdalne
*[0] Brak
[3] Prędkość, otwarta pętla
[1] Simple Process Close Loop (Proces,
-2147483647 - 2147483647 *0
[1690] Słowo alarmowe
[1691] Słowo alarmowe 2
[1685] 1 CTW portu FC
[2118] Zewnętrz. sprzężenie zwrotne 1
[2117] Zewnętrz. wartość zadana 1
[1893] Wyjście skal. wzmoc. PID procesu
[1892] Ograniczone wyjście PID procesu
[1698] Słowo ostrzeżenia 3
[1890] Błąd PID procesu
[1891] Wyjście PID procesu
[1697] Słowo alarmowe 3
[3430] Odczyt PCD 10 dla aplikacji
[1650] Zewnętrz. wartość zadana
[1639] Temp. karty sterującej
[1637] Maks. prąd przetwornicy
[1638] Stan sterownika SLC
[3450] Pozycja rzeczywista
[1652] Sprzężenie zwrotne [ jednostka]
[3456] Szukanie błędu
0-21 Pozycja 1,2 wyświetlacza
[1657] Sprzężenie zwrotne [obr./min]
[1653] Wart. zadana potencjometru cyfr.
Te same opcje co w 0-20
0-22 Pozycja 1,3 wyświetlacza
[1660] Wejście cyfrowe
[1661] Ustawienie zacisku 53
0-** Praca/Wyświetlacz
0-0* Ustawienia podst.
0-01 Język
*[0] Angielski
[1] Deutsch
[2] Francais
[3] Dansk
[4] Hiszpański
[5] Italiano
[28] Braz. port.
0
[112] 380–440 V/60 Hz
[120] 440–480 V/60 Hz/sieć IT
[111] 380–440 V/60 Hz/Delta
[110] 380–440 V/60 Hz/sieć IT
[101] 200–240 V/60 Hz/Delta
[102] 200–240 V/60 Hz
[22] 440–480 V/50 Hz
[100] 200–240 V/60 Hz/sieć IT
[21] 440–480 V/50 Hz/Delta
[12] 380–440 V/50 Hz
[20] 440–480 V/50 Hz/sieć IT
[11] 380–440 V/50 Hz/Delta
[2] 200–240 V/50 Hz
0-03 Ustawienia regionalne
0-04 Stan pracy przy zał. zasilania
0-02 Jednostka prędkości silnika
[0] obr./min
*[1] Hz
0-06 Typ siatki
*[1] Wym stop, w. zad.=stara
[2] Wymuszone zatrzymanie, wart. zad. =
[0] Wznów
[0] Międzynarodowy
[1] Ameryka Północna
[10] 380–440 V/50 Hz/sieć IT
[0] 200–240 V/50 Hz/sieć IT
[1] 200–240 V/50 Hz/Delta
[121] 440–480 V/60 Hz/Delta
DC)
[0] Wyłączona
0-07 Auto DC Braking (Autom. hamowanie
*[1] Załączona
0-1* Działania kong.
0-10 Aktywny zestaw par
*[9] Aktywny zestaw par
0-12 Połączone zestawy parametrów
[0] Niepołączone
[4] Zestaw par. 4
[3] Zestaw par. 3
[2] Zestaw par. 2
0-11 Programowany zestaw parametrów
[1] Zestaw par. 1
[9] Różne zest. par.
[4] Zestaw par. 4
[3] Zestaw par. 3
[2] Zestaw par. 2
*[1] Zestaw par. 1
[122] 440–480 V/60 Hz
76 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 81

Załącznik Instrukcja obsługi
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[5] PPM
[10] 1/min
[12] Impuls/s
[20] l/sek.
[21] l/min
[22] l/godz.
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/godz.
[40] m/s
[41] m/min
[124] CFM
[125] ft³/s
[126] ft³/min
[127] ft³/h
[130] funt/s
[131] funt/min
[132] funt/godz.
[140] ft/s
[145] ft
[141] ft/min
[150] funtostopa
zadanej lub sprzężenia zwrotnego
*Powiązane z rozmiarem
-4999,0–4999 Jednostka wartości
Jednostka wartości zadanej lub
sprzężenia zwrotnego
zadanej lub sprzężenia zwrotnego *0
-4999,0–4999 Jednostka wartości
*[0] Suma
[1] Zewnętrzna/programowana
[160] °F
[170] psi
[171] lb/in2
[172] in WG
[173] ft WG
[180] KM
3-02 Minimalna wartość zadana
3-03 Maksymalna wartość zadana
3-04 Funkcja wartości zadanej
3-1* Wartości zadane
3-10 Programowana wart. zadana
[1] Aktyw. (nie przy stopie)
[2] Aktywne
0 - 200 % *100 %
2-19 Wzmocnienie przepięcia
2-2* Hamulec mech.
2-20 Prąd zwalniania hamulca
0–400 Hz *0 Hz
2-22 Prędkość do załącz. hamulca [Hz]
0–5 s *0 s
2-23 Opóźnienie załącz. hamulca
2-3* Zaaw. hamulec mech.
[0] Brak
[1] %
[2] obr./min
[3] Hz
2-39 Hamulec mech. ze zm. kier.
*[0] WYŁ.
[1] WŁ.
[2] WŁ. z opóźnieniem startu
3-** Wart. zad/Cz. roz/zat
3-0* Ogr. wart. zad
3-00 Zakres wart. zadanej
*[0] Min. – Maks.
[1] -Maks - +Maks
3-01 Jednostka wart. zad./sprzęż. zwrotnego
[4] Nm
0–100 A *0 A
0 - 160 % *100 %
0 - 150 % *100 %
2-06 Prąd parkowania
2-07 Czas parkowania
0,1–60 s *3 s
*[0] Wyłączona
2-1* Funkcja ener. ham.
2-10 Funkcja hamowania
[1] Hamowanie rezystorem
0–6200 omów *Powiązane z rozmiarem
2-12 Ograniczenie mocy hamowania (kW)
2-11 Rezystor hamowania (om)
[2] Hamulec AC
0–500 Hz *0 Hz
2-01 Prąd hamowania DC
0–60 s *10 s
0 - 150 % *50 %
2-02 Czas hamowania DC
2-04 Prędkość dla załączenia hamowania DC
0 - 160 % *50 %
[5] Wejście cyfrowe 32
[6] Wejście cyfrowe 33
2-** Hamulce
2-0* Hamulec DC
2-00 Prąd trzym. stałopr. DC/podgrz. silnika
0–500 V *0 V
0,001–2000 kW *Powiązane z
rozmiarem
*[0] Wyłączone
2-17 Kontrola przepięć
2-16 Hamowanie AC, maks. prąd
2-14 Redukcja napięcia hamowania
10 10
0–100 ms *10 ms
1,0–2,0 *1,4
1-88 Wzmocnienie hamulca AC
1-85 Opóźn. kompens. prędk. precyz.zatrz.
1-9* Temperatura silnika
1-90 Zabezp. termiczne silnika
*[0] Brak zabezpieczenia
0,05–5 s *0,1 s
-400–400,0% *Powiązane z rozmiarem
0 - 300 % *100 %
[4] Wyłączenie awaryjne ETR 1
[22] Wyłączenie awaryjne ETR
[3] Ostrzeżenie ETR 1
[1] Ostrzeżenie termistora
[2] Termistor-wył sam.
0 - 500 % *100 %
1-93 Źródło termistora
0 - 120 % *50 %
0,001–0,05 s *0,005 s
[3] Wejście cyfrowe 18
[4] Wejście cyfrowe 19
[2] Wejście analogowe 54
*[0] Brak
[1] Wejście analogowe 53
0–10 s *0 s
[5] Stop licznikowy z komp.pręd. bez
0–500,0 Hz *Powiązane z rozmiarem
resetu
1-84 Wart. liczn. prec.
0 - 999999999 *100000
0 - 300 % *100 %
0–500 Hz *0 Hz
awar.
0–65535 mH *Powiązane z rozmiarem
0–10 s *5 s
1-79 Maks. czas rozruchu kompr. do wył.
1-8* Regulacja stopu
1-80 Funkcja przy stopie
*[0] Wybieg silnika
20 - 200 % *100 %
0–65535 mH *Powiązane z rozmiarem
(LqSat)
0–20 Hz *0 Hz
[1] Stop licznikowy z resetem
1-83 Funkcja precyzyjnego zatrzymania
*[0] Precyz. zatrz. rozpędz./zatrz.
1-82 Min. pręd. dla funkcji przy zatrz. [Hz]
[3] Wstępne magnesowanie
[1] Trzym. stałopr. DC/podgrz. silnika
20 - 200 % *100 %
20 - 200 % *100 %
0 - 300 % *100 %
0–1000 A *Powiązane z rozmiarem
0–500,0 Hz *Powiązane z rozmiarem
Always Ref. Dir)
1-78 Częstotl. rozr. maks. spręż. [Hz]
1-76 Prąd startowy
[5] VVC+ zg.z ruchem wsk. zeg.
[4] Praca z ruch. w poz
1-73 Start w locie
*[0] Wyłączone
[1] Aktywne
rozmiarem
[2] Zawsze aktywne
2–100 *Powiązane z rozmiarem
[3] Pręd.przy starcie cw
*[2] Wybieg siln. Czas op
[0] Trzym DC/czas opóź
[1] Ham. DC/czas opóź.
1-72 Funkcja startu
0,000–65535 mH *Powiązane z
0–65535 mH *Powiązane z rozmiarem
rozmiarem
0,0–9999,00 omów *Powiązane z
[3] Aktywne, kier. wart.zad (Enab. Ref. Dir)
[4] Aktyw. zawsze, kier. wart.zad (Enab.
1–9000 V *Powiązane z rozmiarem
1-75 Prędkość startu [Hz]
(LdSat)
0–328 ft *164 ft
0–100 m *50 m
[3] Stop z kompensacją prędkości
[2] Stop licznikowy bez resetu
0,1–10,0 Hz *1 Hz
reset
[4] Stop licznikowy z kompen. prędk. z
0–1000 V *Powiązane z rozmiarem
1-35 Reaktancja główna (Xh)
*[0] Asynchroniczny
[1] PM, niewys. SPM
1-37 Indukcyjność w osi d (Ld)
1-14 Wzmocnienie tłumienia
[3] PM, salient IPM (PM, wysunięty IPM)
0 - 250 % *120 %
1-38 Indukcyjność (Lq) w osi q
0,01–20 s *Powiązane z rozmiarem
1-15 Stała czasowa ltra niskiej prędkości
0,01–20 s *Powiązane z rozmiarem
1-16 Stała czasowa ltra wysokiej prędkości
1-40 Ind. siła elektrom. przy 1000 obr./min
1-4* Zaaw. dane siln. II
0,001–1 s *Powiązane z rozmiarem
1-17 Stała czasowa ltru napięcia
1-2* Dane silnika
1-46 Wzmocnienie wykrywania położenia
1-45 Nasycenie indukcyjności w osi q
1-44 Nasycenie indukcyjności w osi d
1-43 Długość kabla silnika w stopach
1-42 Długość kabla silnika
[12] 3,7 kW — 5 KM
[9] 1,5 kW — 2 KM
[10] 2,2 kW — 3 KM
[8] 1,1 kW — 1,5 KM
[11] 3 kW — 4 KM
[7] 0,75 kW — 1 KM
[6] 0,55 kW — 0,75 KM
[5] 0,37 kW — 0,5 KM
[4] 0,25 kW — 0,33 KM
[3] 0,18 kW — 0,25 KM
1-20 Moc silnika
[2] 0,12 kW — 0,16 KM
[13] 4 kW — 5,4 KM
1-48 Prąd przy min. indukcyjności dla osi d
[14] 5,5 kW — 7,5 KM
[15] 7,5 kW — 10 KM
1-49 Prąd przy min. indukcyjności dla osi q
[16] 11 kW — 15 KM
[17] 15 kW — 20 KM
1-5* Nast. niez. od obc.
[18] 18,5 kW — 25 KM
1-50 Strumień przy zerowej prędk.
[19] 22 kW — 30 KM
[20] 30 kW — 40 KM
1-52 Min pręd przy norm strum mag
1-22 Napięcie silnika
50–1000 V *Powiązane z rozmiarem
[2] Aktywne ograniczone AMA
1-65 Stała czasowa tłumienia rezonansu
1-30 Rezystancja stojana (Rs)
1-3* Zaaw. dane siln. I
1-66 Prąd minimalny przy niskiej prędk.
1-7* Regulacja startu
1-70 Tryb rozruchu
*[0] Detekcja
[1] Parkowanie
1-71 Opóźnienie startu
rozmiarem
0,0–9999,000 omów *Powiązane z
0–9999,000 omów *Powiązane z
rozmiarem
rozmiarem
0,0–9999,000 omów *Powiązane z
1-33 Reaktancja rozproszenia stojana (X1)
1-31 Rezystancja wirnika (Rr)
1-63 Stała czasowa kompensacji poślizgu
rozmiarem
1-64 Tłumienie rezonansu
1-29 Autom. dopasowanie do silnika (AMA)
*[0] Wyłączona
[1] Aktywne pełne AMA
1-56 Charakterystyka U/f — F
1-55 Charakterystyka U/f — U
1-23 Częstotliwość silnika
20–500 Hz *Powiązane z rozmiarem
1-6* Nast. zależ. od obc.
1-60 Kompensac. obciąż. przy niskich prędk.
rozmiarem
0,01–1000,00 A *Powiązane z
1-25 Znamionowa prędkość silnika
1-24 Prąd silnika
1-62 Kompensacja poślizgu
1-61 Kompensac. obciąż. przy wys prędk.
50–60000 obr./min *Powiązane z
rozmiarem
0,1–10000,0 Nm *Powiązane z
1-26 Ster. silnikiem moment nominalny
1-39 Bieguny silnika
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 77
Page 82

Załącznik
[15] Prog.war.zad.,wł.
[14] Jog — praca manewrowa
[13] Aktyw.start do tyłu
[16] Prog wart zad Bit0
[17] Prog wart zad Bit1
[18] Prog wart zad Bit2
[19] Zatrz. wart. zad.
[21] Zwiększanie prędkości
[20] Zatrzaśnij wyjście
[23] Bit 0 wyb.zest.par.
[22] Zmniejszanie prędkości
[28] Doganianie
[24] Bit 1 wyb.zest.par.
[29] Zwalnianie
[34] Bit 0 rozp./zatrz.
VLT® Midi Drive FC 280
Te same opcje co w 5-12
[32] Wejście impulsowe
Te same opcje co w 5-10
Te same opcje co w 5-12
5-19 Zacisk 37/38 - Safe Torque O
[30] Wejście licznika
[32] Wejście impulsowe
[82] Encoder input B
[83] Encoder input Z
5-15 Zacisk 33 - wej. cyfrowe
5-14 Zacisk 32 - wej. cyfrowe
[81] Encoder input A
*[1] Alarm funkcji Safe Torque O
[3] Ostrzeżenie funkcji Safe Torque O
Te same opcje co w 5-12
[30] Wejście licznika
5-13 Zacisk 29 - wej. cyfrowe
[163] Pos. Idx Bit1
[164] Pos. Idx Bit2
[171] Limit switch cw inverse
[172] Limit switch ccw inverse
[162] Pos. Idx Bit0
[160] Go To Target Pos.
[155] HW Limit Positive Inv
[156] HW Limit Negative Inv
[74] Aktyw. PID
[150] Go To Home
[73] Reset PID część I
[65] Zerowanie licznika B
[55] Zw. pot. cyfrowego
[56] Zmn. pot. cyfrowego
[58] Skok poten. cyfr.
[57] Zerow. poten. cyfr.
[45] Start impulsowy ze zm kier wir.
[51] Blokada zewn.
[35] Bit 1 rozp./zatrz.
[62] Zerowanie licznika A
[61] Licznik A (w dół)
[60] Licznik A (w górę)
[72] Odwrotny błąd PID
[63] Licznik B (w górę)
[64] Licznik B (w dół)
[157] Pos. Quick Stop Inv
[151] Home Ref. Switch
[11] Start ze zm kier obr
[6] Stop odwrócony
[0] Brak działania
[1] Reset
[2] Wybieg silnika, odwr
[3] Wyb.siln.i reset,odwr.
[163] Pos. Idx Bit1
[164] Pos. Idx Bit2
[171] Limit switch cw inverse
[172] Limit switch ccw inverse
[72] Odwrotny błąd PID
[63] Licznik B (w górę)
[64] Licznik B (w dół)
[16] Prog wart zad Bit0
[17] Prog wart zad Bit1
[19] Zatrz. wart. zad.
[15] Prog.war.zad.,wł.
[28] Doganianie
[29] Zwalnianie
[34] Bit 0 rozp./zatrz.
[27] Precyz. star t i stop
[24] Bit 1 wyb.zest.par.
[26] Precyz. stop, odwr.
[23] Bit 0 wyb.zest.par.
[21] Zwiększanie prędkości
[22] Zmniejszanie prędkości
[20] Zatrzaśnij wyjście
[18] Prog wart zad Bit2
[45] Start impulsowy ze zm kier wir.
[35] Bit 1 rozp./zatrz.
[40] Precyz.start impuls.
[41] Prec.stop imp.,odw.
[61] Licznik A (w dół)
[60] Licznik A (w górę)
[58] Skok poten. cyfr.
[56] Zmn. pot. cyfrowego
[57] Zerow. poten. cyfr.
[51] Blokada zewn.
[55] Zw. pot. cyfrowego
[65] Zerowanie licznika B
[62] Zerowanie licznika A
[151] Home Ref. Switch
[73] Reset PID część I
[162] Pos. Idx Bit0
[157] Pos. Quick Stop Inv
[160] Go To Target Pos.
[156] HW Limit Negative Inv
[155] HW Limit Positive Inv
[74] Aktyw. PID
[150] Go To Home
5-12 Zacisk 27 - wej. cyfrowe
5-11 Zacisk 19 - wej. cyfrowe
[8] Start
[4] Szybkie zatrzym., odwr.
[5] Hamowanie DC, odwr.
[12] Aktyw.start do przodu
[9] Start impulsowy
[10] Zmiana kierunku obr.
1010
JednSterProcesem
JednSterProcesem
-4999–4999 JednSterProcesem *4999
-4999–4999 JednSterProcesem *-4999
0–50 Hz *20 Hz
[6] Przełącz na pętlę otw.
4-31 Błąd prędk. sprzęż. zwrt.
3-92 Przywrócenie zasilania
*[0] Wyłączona
[1] Załączona
0–60 s *0,05 s
4-32 Timeout utraty sprzęż. zwrt.
4-40 Ostrzeżenie częst. Niski
4-4* Ostrzeżenia reg. 2
-200 - 200 % *-100 %
-200 - 200 % *100 %
3-94 Ograniczenie minimalne
3-93 Ograniczenie maksymalne
0–500 Hz *Powiązane z rozmiarem
4-41 Ostrzeżenie częst. Wysoki
0–3600000 ms *1000 ms
3-95 Opóźnienie rozpędzania/zatrzymania
0–500 Hz *Powiązane z rozmiarem
3-96 Maks.ograniczenie przełącznika
0 - 200 *0
4-42 Adjustable Temperature Warning
(wartość zadana)
0 - 200 % *25 %
4-5* Regul. Ostrzeżenia
4-** Ogr. / Ostrz.
4-50 Ostrzeżenie o małym prądzie
4-1* Ogr. silnika
0–500,00 A *Powiązane z rozmiarem
0–500 A *0 A
4-51 Ostrzeżenie o dużym prądzie
4-10 Kierunek obrotów silnika
*[0] Zgod. z ruchem wsk.zeg.
[2] Oba kierunki
-4999 - 4999 *-4999
4-54 Ostrzeżenie o niskiej wartości zadanej
0–1500 obr./min *Powiązane z
4-11 Dolna granica pr.obr.silnika [obr./min]
-4999 - 4999 *4999
4-55 Ostrzeż. o wysokiej wartości zadanej
rozmiarem
4-12 Dolna granica prędk. obr. silnika [Hz]
4-56 Ostrzeżenie o niskim sprzęż.zwr
0–400,0 Hz *0 Hz
0–60000 obr./min *Powiązane z
4-13 Górna granica pr.obr.silnika [obr./min]
4-57 Ostrzeżenie o wys.sprzęż.zwr.
rozmiarem
0–500 Hz *0 Hz
0–500 Hz *0 Hz
4-58 Funkcja braku faz y silnika
[0] Wyłączona
*[1] Załączona
4-6* Prędkość zabr.
4-61 Prędkości zabronione od: [obr/min]
4-63 Prędkości zabronione do [Hz]
5-** Wej./Wyj. cyfr.
5-0* Tryb we/wy. cyfr
5-00 Tryb wejścia cyfrowego
0–1000% *Powiązane z rozmiarem
4-18 Ograniczenie prądu
0–500 Hz *Powiązane z rozmiarem
4-19 Maks. częstotliwość wyjś.
4-2* Czynn.ograniczenia
4-20 Źródło czynnika ogr.mom.obr.
*[0] Brak funkcji
0 - 1000 % *100 %
0–1000% *Powiązane z rozmiarem
0,1–500 Hz *65 Hz
4-17 Ogranicz momentu w trybie generat.
4-16 Ogranicz momentu w trybie silnikow.
4-14 Górna granica prędk. obr. silnika [Hz]
*[0] PNP
[2] Wej. analogowe 53
[1] NPN
[4] Wej. anal. 53 rozw.
*[0] Wejście
[1] Wyjście
5-01 Tryb zacisku 27
5-1* Wejścia cyfrowe
5-10 Zacisk 18 - wej. cyfrowe
[0] Brak działania
[1] Reset
[2] Wybieg silnika, odwr
[3] Wyb.siln.i reset,odwr.
4-22 Break Away Boost
[6] Wej. analogowe 54
[8] Wej. anal. 54 rozw.
[4] Wej. anal. 53 rozw.
*[0] Brak funkcji
[2] Wej. analogowe 53
4-21 Źródło czynnika ograniczenia prędkości
[6] Wej. analogowe 54
[8] Wej. anal. 54 rozw.
[4] Szybkie zatrzym., odwr.
*[0] Wyłączona
[5] Hamowanie DC, odwr.
[1] Załączona
*[8] Start
[9] Start impulsowy
[10] Zmiana kierunku obr.
[6] Stop odwrócony
[0] Wyłączone
[1] Ostrzeżenie
4-3* Monit.wart.zad.
4-30 Funkcja przy utracie sprz. zwr. silnika
[11] Start ze zm kier obr
*[2] Wyłączenie awaryjne
[12] Aktyw.start do przodu
[3] Jog — praca manewrowa
[13] Aktyw.start do tyłu
[4] Zatrzaś. wyj.
[14] Jog — praca manewrowa
[5] Prędkość maks.
Te same opcje co w 3-15
-100 - 100 % *0 %
0 - 100 % *0 %
0–500,0 Hz *5 Hz
-100 - 100 % *0 %
[8] Wejście częstot. 33
[11] Wartość zadana magistrali lokalnej
[7] Wejście częstotl. 29
[2] Wejście analogowe 54
3-15 Źródło wartości zadanej 1
[0] Brak funkcji
3-12 Wartość doganiania/zwalniania
3-11 Prędkość pracy manewrowej [Hz]
3-14 Programowana względna wart. zadana
*[1] Wejście analogowe 53
Te same opcje co w 3-15
[8] Wejście częstot. 33
[11] Wartość zadana magistrali lokalnej
[7] Wejście częstotl. 29
[2] Wejście analogowe 54
[1] Wejście analogowe 53
*[0] Brak funkcji
3-18 Źródło wart. zadanej skalowanej wzgl.
3-17 Źródło wartości zadanej 3
[32] PCD magistrali
3-16 Źródło wartości zadanej 2
[20] Potencjometr cyfrowy
3-3* Gł. us.czas.roz/zat
3-31 Ramp Down w/ dir. Change
*[0] Wyłączona
[3] Czas zatrzymania 3
[4] Czas zatrzymania 4
[2] Czas zatrzymania 2
[1] Czas zatrzymania 1
*[0] Liniowy
[1] Sinusoid. rozp./zatrzym.
[9] Czas rozpędz/zatrzym. dla szybk. zatrz.
3-4* Czas rozp/zatrz 1 (Rampa 1)
[2] Rozpędzanie/zatrzymanie – sinusoida 2
3-40 Typ prolu rozpędz./zatrzym. 1
0,01–3600 s *Powiązane z rozmiarem
0,01–3600 s *Powiązane z rozmiarem
3-41 Czas rozpędzania 1
Taka sama treść jak w 3-4*
Taka sama treść jak w 3-4*
Taka sama treść jak w 3-4*
3-42 Czas zatrzymania 1
3-5* Czas rozp/zatrz 2 (Rampa 2)
3-6* Czas rozp/zatrz 3 (Rampa 3)
3-7* Czas rozp/zatrz 4 (Rampa 4)
3-8* Inne cz. rozp/zatrz
3-80 Czas rozpędz./zatrz. pracy manew. -
jog
0,01–3600 s *Powiązane z rozmiarem
0,01–3600 s *Powiązane z rozmiarem
0,01–200% *0,10%
3-81 Czas rozpędz/zatrzym. dla szybk. zatrz.
3-9* Potencjometr cyfr.
3-90 Wielkość kroku
78 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 83

Załącznik Instrukcja obsługi
[28] Doganianie
[29] Zwalnianie
[34] Bit 0 rozp./zatrz.
[35] Bit 1 rozp./zatrz.
6-18 Zacisk 53 - wej. cyfrowe
*[0] Brak działania
-4999 - 4999 *0
[1] Reset
[2] Wybieg silnika, odwr
-4999–4999 *Powiązane z rozmiarem
[4] Szybkie zatrzym., odwr.
[5] Hamowanie DC, odwr.
[6] Stop odwrócony
[3] Wyb.siln.i reset,odwr.
27
[12] Aktyw.start do przodu
[8] Start
[10] Zmiana kierunku obr.
4–32000 Hz *5000 Hz
1 - 4096 *1024
[24] Bit 1 wyb.zest.par.
[22] Zmniejszanie prędkości
[23] Bit 0 wyb.zest.par.
[20] Zatrzaśnij wyjście
[21] Zwiększanie prędkości
[18] Prog wart zad Bit2
[19] Zatrz. wart. zad.
[17] Prog wart zad Bit1
[15] Prog.war.zad.,wł.
[16] Prog wart zad Bit0
[14] Jog — praca manewrowa
[13] Aktyw.start do tyłu
[11] Start ze zm kier obr
[51] Blokada zewn.
[55] Zw. pot. cyfrowego
[56] Zmn. pot. cyfrowego
0 - 0xFFFFFFFF *0
0–20 mA *20 mA
0–20 mA *4 mA
0–10 V *10 V
0–10 V *0,07 V
*[1] Tryb napięciowy
[6] Wejście cyfrowe
6-19 Tryb zacisku 53
[163] Pos. Idx Bit1
[164] Pos. Idx Bit2
[171] Limit switch cw inverse
[172] Limit switch ccw inverse
6-23 Zacisk 54. Górny zakres prądu
6-22 Zacisk 54. Dolny zakres prądu
6-21 Zacisk 54. Górny zakres napięcia
6-2* Wejście analogowe 54
6-20 Zacisk 54. Dolny zakres napięcia
wartość
0–10 V *10 V
0–10 V *0,07 V
-4999–4999 *Powiązane z rozmiarem
wartość
-4999 - 4999 *0
0,01–10 s *0,01 s
[72] Odwrotny błąd PID
[58] Skok poten. cyfr.
[57] Zerow. poten. cyfr.
0 - 100 % *0 %
[151] Home Ref. Switch
[73] Reset PID część I
0 - 100 % *0 %
1–99 s *10 s
[162] Pos. Idx Bit0
[156] HW Limit Negative Inv
[157] Pos. Quick Stop Inv
[160] Go To Target Pos.
[155] HW Limit Positive Inv
[74] Aktyw. PID
[150] Go To Home
5-58 Zacisk 33. wys.wart.zad./sprzęż.zwrot.
5-57 Zacisk 33 niska.wart.zad./sprzęż.zwr.
[40] Poza zakr.war.zad.
[37] Bit 12 słowa steruj.
[32] Sterow.ham.mech.
[36] Bit 11 słowa ster.
[83] Wyjście cyfr. SL D
[82] Wyjście cyfr. SL C
[81] Wyjście cyfr. SL B
[80] SL Wyjście cyfr A
5-6* Wyjście impulsowe
5-60 Zmienna wyjścia impulsowego zacisku
[41] Poniżej wartości zadanej
[42] Powy. wart. zad.
[160] Brak alarmu
[91] Encoder emulate output A
*[0] Brak działania
[45] Ster.mag.
[46] Ster. magistr., time out: Załączona
[161] Praca ze zm.kier.obr
[165] Lok.war.zad. aktywna
[45] Ster.mag.
[47] Ster. magistr., time out: Wyłączona
[166] Zda.war.zad. aktywna
[48] Timeout ster.mag.
[56] Ostrzeżenie dotyczące czyszczenia
[167] Polecenie Start akt.
[100] Częstotliwość wyjściowa
radiatora, górna wart.
[168] Prz.cz. w trybie hand
[102] Sprzężenie zwrotne procesu
[101] Wartość zadana
[60] Komparator 0
[61] Komparator 1
[169] Tryb Auto
[170] Homing Completed
[103] Prąd silnika
[62] Komparator 2
[171] Pozycja docelowa osiągnięta
[105] Mo.obr.wzgl.znam.
[104] Moment wzg. ogran.
[63] Komparator 3
[64] Komparator 4
[172] Błąd sterowania położeniem
[173] Position Mech Brake
[106] Moc
[107] Prędkość
[70] Reguła logiczna 0
[65] Komparator 5
[193] Tryb uśpienia
[190] Funkcja STO aktywna
[109] Maks. częst.wyj.
[71] Reguła logiczna 1
[194] Funkcja dla zerwanego pasa
[113] Ograniczone wyj. PID
[72] Reguła logiczna 2
[239] Błąd funkcji STO
5-62 Maks. częst. wyjścia impulsowego 27
5-7* Wej. enkodera 24V
5-71 Zacisk 32/33 Kierunek enkodera
*[0] Zgod. z ruchem wsk.zeg.
5-70 Zacisk 32/33 Liczba impulsów na obrót
[1] Przeciwny do ruchu wsk. zegara
5-93 Wyj. impulsowe 27 ster. magistr.
5-9* Ster. przez magistr.
5-90 Cyfr. przekaźnik ster. magistr.
5-94 Wyj. impulsowe 27. Zaprogr. time-out
6-** We/wy analogowe
6-0* Tryb we/wy analog
6-00 Czas time-out Live zero
6-01 Funkcja time-out Live zero
[2] Stop
[3] Jog -pr. manew
*[0] Wyłączona
[1] Zatrzaśnij wyjście
[4] Prędk. maks.
[5] Stop i wył. awaryjne
6-1* Wejście analogowe 53
6-10 Zacisk 53. Dolny zakres napięcia
6-14 Zacisk 53. Dolna skala zad./sprz. zwr.
6-11 Zacisk 53. Górny zakres napięcia
6-16 Zacisk 53. Stała czasowa ltru
6-15 Zacisk 53. Górna skala zad./sprz. zwr.
10 10
0–600 s *0,01 s
0–600 s *0,01 s
0–31999 Hz *4 Hz
5-41 Przekaźnik, Opóźnienie załącz.
[190] Funkcja STO aktywna
[193] Tryb uśpienia
[167] Polecenie Start akt.
[168] Prz.cz. w trybie hand
[169] Tryb Auto
[170] Homing Completed
[171] Pozycja docelowa osiągnięta
[166] Zda.war.zad. aktywna
[161] Praca ze zm.kier.obr
[165] Lok.war.zad. aktywna
[160] Brak alarmu
[83] Wyjście cyfr. SL D
[82] Wyjście cyfr. SL C
[81] Wyjście cyfr. SL B
[75] Reguła logiczna 5
[80] SL Wyjście cyfr A
[73] Reguła logiczna 3
[74] Reguła logiczna 4
cyfrowe
0–600 s *0,01 s
0–600 s *0,01 s
5-35 Opóźnienie wyłączenia, wyjście
5-34 Opóźnienie załączenia, wyjście cyfrowe
5-4* Przekaźniki
5-40 Przekaźnik, funkcja
[0] Brak działania
[4] Czuwanie/ brak ostrzeżenia
[5] Praca
[3] Przetw got/zd ster
*[1] Sterow. gotowe
[2] Przetwornica gotowa
[172] Błąd sterowania położeniem
[9] Alarm
[8] Pr.z war.zad./brak ost.
[6] Praca / brak ostrzeż
[7] Pr.w zakr./brak ost.
[173] Position Mech Brake
[10] Alarm lub ostrzeż.
[11] Przy ogran. momentu
[12] Prąd poza zakresem
[194] Funkcja dla zerwanego pasa
[13] Prąd poniż.dol.wart.
5-42 Przekaźnik, Opóźnienie wyłącz.
[239] Błąd funkcji STO
[15] Poza zakresem częstotliwości
[14] Prąd pow.gór.wart.
5-5* Wejście impulsowe
5-50 Zacisk 29 - niska częstotliwość
[21] Ostrzeżenie termicz.
[18] Poza zakr. sprzęż.
[20] Sprz.zw.pow.gór.war.
[19] Sprz.zw.pon.dol.war.
[16] Poniżej częst., niski
[17] Częst poza ogr, wys
-4999 - 4999 *0
1–32000 Hz *32000 Hz
5-52 Zacisk 29 niska.wart.zad./sprzęż.zwr.
5-51 Zacisk 29 - wysoka częstotliwość
[24] Gotowa, brak przepięcia/podnapięcia
[22] Gotowa, brak ostrzeżenia termicznego
[23] Zd.wa.za.,got.,b.TW
[25] Zm.ki.obr.
5-53 Zacisk 29. wys.wart.zad./sprzęż.zwrot.
[26] Magistrala OK
-4999–4999 *Powiązane z rozmiarem
[27] Ogr. momentu i stop
5-55 Zacisk 33 - niska częstotliwość
[28] Hamulec, brak ostrzeżeń
0–31999 Hz *4 Hz
1–32000 Hz *32000 Hz
5-56 Zacisk 33 - wysoka częstotliw.
[31] Przekaźnik 123
[30] Błąd hamulca (IGBT)
[29] Got. ham.,brak bł.
radiatora, górna wart.
[73] Reguła logiczna 3
[74] Reguła logiczna 4
5-3* Wyjścia cyfrowe
5-30 Wyjście cyfrowe zacisku 27
*[0] Brak działania
[70] Reguła logiczna 0
[71] Reguła logiczna 1
[64] Komparator 4
[26] Magistrala OK
[29] Got. ham.,brak bł.
[27] Ogr. momentu i stop
[24] Gotowa, brak przepięcia/podnapięcia
[22] Gotowa, brak ostrzeżenia termicznego
[23] Zd.wa.za.,got.,b.TW
[12] Prąd poza zakresem
[15] Poza zakresem częstotliwości
[13] Prąd poniż.dol.wart.
[14] Prąd pow.gór.wart.
[9] Alarm
[10] Alarm lub ostrzeż.
[8] Pr.z war.zad./brak ost.
[5] Praca
[6] Praca / brak ostrzeż
[7] Pr.w zakr./brak ost.
[4] Czuwanie/ brak ostrzeżenia
[1] Sterow. gotowe
[2] Przetwornica gotowa
[3] Przetw got/zd ster
[11] Przy ogran. momentu
[21] Ostrzeżenie termicz.
[18] Poza zakr. sprzęż.
[20] Sprz.zw.pow.gór.war.
[19] Sprz.zw.pon.dol.war.
[16] Poniżej częst., niski
[17] Częst poza ogr, wys
[25] Zm.ki.obr.
[61] Komparator 1
[60] Komparator 0
[55] Wyjście impulsowe
[56] Ostrzeżenie dotyczące czyszczenia
[47] Ster. magistr., time out: Wyłączona
[45] Ster.mag.
[46] Ster. magistr., time out: Załączona
[43] Ogr. rozszerz. PID
[41] Poniżej wartości zadanej
[42] Powy. wart. zad.
[40] Poza zakr.war.zad.
[37] Bit 12 słowa steruj.
[31] Przekaźnik 123
[32] Sterow.ham.mech.
[36] Bit 11 słowa ster.
[30] Błąd hamulca (IGBT)
[28] Hamulec, brak ostrzeżeń
[65] Komparator 5
[62] Komparator 2
[63] Komparator 3
[75] Reguła logiczna 5
[72] Reguła logiczna 2
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 79
Page 84

Załącznik
0,5–6000 s *1 s
[3] Opcja A
8-03 Czas time-out sterowania
8-04 Funkcja time-out sterowania
*[0] Wyłączona
[1] Zatrzaśnij wyjście
[2] Stop
[3] Jog -pr. manew
[4] Prędk. maks.
[5] Stop i wył. awaryjne
VLT® Midi Drive FC 280
[83] Wyj. cyfrowe SL D
[93] Alarm68 lub Alarm188
8-14 Kongurowalne słowo sterujące CTW
[82] Wyj. cyfrowe SL C
[81] Wyj. cyfrowe SL B
[75] Reguła logiczna 5
[72] Reguła logiczna 2
[70] Reguła logiczna 0
[71] Reguła logiczna 1
[64] Komparator 4
[61] Komparator 1
[40] Poza zakr.war.zad.
[60] Komparator 0
*[0] Nieaktywne
[1] Wyzw. przy alarmach
[2] Wyzw. alarm/ostrzeż.
8-07 Aktywacja diagnostyki
8-1* Kontrol. słowa ster.
8-10 Prol słowa sterującego
*[0] Prol FC
[1] Prol PROFIdrive
[5] ODVA
[7] CANopen DSP 402
8-13 Kongurowalne słowo statusowe STW
[0] Brak funkcji
*[1] Nast. fabr. prolu
[2] Tylko alarm 68
[10] Status T18 DI
[11] Status T19 DI
[12] Status T27 DI
[3] Wył. zew. alarm 68
[13] Status T29 DI
[30] Błąd hamulca (IGBT)
[14] Status T32 DI
[15] Status T33 DI
[21] Ostrzeżenie termicz.
[65] Komparator 5
[62] Komparator 2
[63] Komparator 3
[80] Wyj. cyfrowe SL A
[73] Reguła logiczna 3
[74] Reguła logiczna 4
[0] Brak
*[1] Prol domyślny
[6] Aktyw. PID
8-19 Kod produktu
[5] Reset PID część I
[4] Odwrotny błąd PID
[2] CT W ważne, aktywność niska
[11] Wartość zadana magistrali lokalnej
Kontrol.
[32] PCD magistrali
7-46 PID proc. pos. do prz. norm./odwr.
0 - 100 % *100 %
wart.zad
0 - 100 % *100 %
-100 - 100 % *100 %
-100 - 100 % *-100 %
[8] Wejście częstot. 33
[7] Wejście częstotl. 29
[2] Wejście analogowe 54
[1] Wejście analogowe 53
*[0] Brak funkcji
7-45 Źródło pos. do prz. PID procesu
7-44 Skala wzm. PID proc. przy maks. w.zad.
7-43 Skala wzm. PID proc. przy min.
[1] Tak
7-41 Wyjście PID procesu neg. zacisk
7-42 Wyjście PID procesu poz. zacisk
*[0] Nie
[1] Odwrotne
*[0] Normalne
7-48 Zas. do przodu PCD
0 - 65535 *0
*[0] Normalne
[1] Odwrotne
7-49 Norm./odwr. wyjście PID proc. Kontrol.
7-5* Zaaw. PID II procesu
7-50 PID procesu rozszerzony PID
[0] Wyłączone
*[1] Aktywne
0 - 100 *1
7-51 Wzmoc. pos. do prz. PID procesu
7-52 Rozpędz. pos. do prz. PID procesu
0,01–100 s *0,01 s
0,01–100 s *0,01 s
7-53 Zatrz. pos. do prz. PID procesu
7-56 Wart. zad. PID procesu czas ltra
0,001–1 s *0,001 s
0,001–1 s *0,001 s
8-02 Źródło sterowania
7-57 Sprz. zwr. PID procesu czas ltra
7-6* Konwersja sprzężenia zwrotnego
7-60 Sprzężenie zwrotne 1 konwersja
[1] Tylko cyfrowe
*[0] Liniowy
[1] Pierwiastek kwadratowy
7-62 Sprzężenie zwrotne 2 konwersja
*[0] Liniowy
[1] Pierwiastek kwadratowy
8-** Komunik. i opcje
8-0* Ustawienia ogólne
8-01 Miejsce sterowania
[2] Tylko słowo steruj.
*[0] Cyfr. i słowo steruj.
[2] FC USB
[0] Brak
[1] Port FC
1010
0,0001–32 *1
prędk.
1–6000 ms *10 ms
1 - 20 *5
0–200 ms *30 ms
2–20000 ms *8 ms
0–1 *0,015
7-05 Współ.róż.regul.PID różniczkowania PID
7-04 Czas różniczkowania PID prędkości
7-03 Czas całkowania PID prędk.
7-02 Wmoc. proporc. reg. PID prędk.
*[20] Brak
7-06 St czasowa ltra dolnoprzep. PID
0 - 500 % *0 %
7-07 Współ. przełoż. sprzęż.zwr. PID prędk.
7-08 Współ. wyprzedzenia pręd.reg. PID
7-1* Torque PID Ctrl.
radiatora, górna wart.
0,002–2 s *0,020 s
0 - 500 % *100 %
[4] Wejście częstot. 33
[3] Wejście częstotl. 29
[2] Wejście analogowe 54
*[0] Brak funkcji
[1] Wejście analogowe 53
7-22 Reg.proc., zam.pętla, źródło sprz.zw. 2
[3] Wejście częstotl. 29
[4] Wejście częstot. 33
[2] Wejście analogowe 54
*[0] Brak funkcji
7-12 Wzmoc. proporc. PID momentu
7-13 Czas całkowania PID momentu
[1] Wejście analogowe 53
7-20 Reg.proc., zam.pętla, źródło sprz.zw. 1
7-2* Ster. proc, sprz. zwr.
7-3* Regul.PID procesu
7-30 Regulacja PID procesu norm./odwr.
*[0] Normalne
[1] Odwrotne
7-31 Przetwarzanie Anti-windup PID
[0] Wyłączona
*[1] Załączona
7-32 Prędkość startowa PID procesu
0–6000 obr./min *0 obr./min
0–10 *0,01
7-33 Wzmoc. proporcjonalne PID procesu
7-34 Stała czasowa całkowania PID procesu
0 - 200 % *0 %
procesu
0–20 s *0 s
PID
0,10–9999 s *9999 s
7-35 Stała czasowa różniczkowania PID
0 - 200 % *100 %
1 - 50 *5
7-36 Różniczk.PID procesu różniczkowania
0 - 16384 *0
0 - 200 % *0 %
7-38 Współcz. wyprz. regulatora PID procesu
prędkości
0 - 200 % *5 %
7-39 Na referencyjnej szerokości pasma
7-4* Zaaw. PID I procesu
7-40 Reset części I PID procesu
6-94 Zacisk 42. Skala maks. wyjścia
[15] Poza zakresem częstotliwości
6-96 Zacisk 42. Ster. wyj. przez magistralę
7-** Regulatory
7-0* Reg. PID prędkości
7-00 Źródło sprzęż. zwrotnego PID
[1] Enkoder 24V
[23] Zd.wa.za.,got.,b.TW
[24] Gotowa, brak przepięcia/podnapięcia
[21] Ostrzeżenie termicz.
[22] Gotowa, brak ostrzeżenia termicznego
[20] Sprz.zw.pow.gór.war.
[18] Poza zakr. sprzęż.
[19] Sprz.zw.pon.dol.war.
[16] Poniżej częst., niski
[17] Częst poza ogr, wys
[9] Wejście częstot. 33
[8] Wejście częstotl. 29
[7] Wejście analogowe 54
[6] Wejście analogowe 53
[28] Hamulec, brak ostrzeżeń
[25] Zm.ki.obr.
[26] Magistrala OK
[27] Ogr. momentu i stop
[29] Got. ham.,brak bł.
6-24 Zacisk 54. Dolna skala zad./sprz. zwr.
[30] Błąd hamulca (IGBT)
[31] Przekaźnik 123
-4999 - 4999 *0
6-25 Zacisk 54. Górna skala zad./sprz. zwr.
[40] Poza zakr.war.zad.
[37] Bit 12 słowa steruj.
[32] Sterow.ham.mech.
[36] Bit 11 słowa ster.
-4999–4999 *Powiązane z rozmiarem
0,01–10 s *0,01 s
6-26 Zacisk 54. Stała czasowa ltru
6-29 Tryb zacisku 54
[42] Powy. wart. zad.
[41] Poniżej wartości zadanej
[0] Tryb prądowy
*[1] Tryb napięciowy
[172] Błąd sterowania położeniem
[193] Tryb uśpienia
[194] Funkcja dla zerwanego pasa
[198] Bypass napędu
[11] Przy ogran. momentu
[12] Prąd poza zakresem
6-93 Zacisk 42. Skala min. wyjścia
[14] Prąd pow.gór.wart.
[13] Prąd poniż.dol.wart.
[167] Polecenie Start akt.
[168] Prz.cz. w trybie hand
[169] Tryb Auto
[170] Homing Completed
[171] Pozycja docelowa osiągnięta
[72] Reguła logiczna 2
[106] Moc
[107] Prędkość
[111] Speed Feedback
[75] Reguła logiczna 5
[113] Ograniczone wyj. PID
[4] Czuwanie/ brak ostrzeżenia
[5] Praca
*[0] Brak działania
[1] Sterow. gotowe
[2] Przetwornica gotowa
6-92 Zacisk 42 - wyjście cyfrowe
[139] Sterow. magistrali
[143] Ext. CL 1
[254] Napięcie w obw. pośr. DC
[6] Praca / brak ostrzeż
[3] Przetw got/zd ster
[56] Ostrzeżenie dotyczące czyszczenia
[1] 4–20 mA
[2] Wyjście cyfrowe
[61] Komparator 1
*[0] Brak działania
6-91 Zacisk 42 - wyjście analogowe
[100] Częstotliwość wyjściowa
[102] Sprzężenie zwrotne procesu
[101] Wartość zadana
[105] Mo.obr.wzgl.znam.
[103] Prąd silnika
[104] Moment wzg. ogran.
[47] Ster. magistr., time out: Wyłączona
[45] Ster.mag.
[46] Ster. magistr., time out: Załączona
6-9* Wyjście analogowe/cyfrowe 42
6-90 Tryb zacisku 42
*[0] 0–20 mA
[70] Reguła logiczna 0
[71] Reguła logiczna 1
[64] Komparator 4
[65] Komparator 5
[62] Komparator 2
[63] Komparator 3
[60] Komparator 0
[166] Zda.war.zad. aktywna
[161] Praca ze zm.kier.obr
[165] Lok.war.zad. aktywna
[160] Brak alarmu
[83] Wyjście cyfr. SL D
[82] Wyjście cyfr. SL C
[81] Wyjście cyfr. SL B
[80] SL Wyjście cyfr A
[73] Reguła logiczna 3
[74] Reguła logiczna 4
[173] Position Mech Brake
[9] Alarm
[10] Alarm lub ostrzeż.
[8] Pr.z war.zad./brak ost.
[7] Pr.w zakr./brak ost.
80 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 85

Załącznik Instrukcja obsługi
[108] PPO 8
[1633] Energia hamow./2 min
Te same opcje co w 9-15 i 9-16
9-23 Parametry dla sygnałów
9-27 Edycja parametru
[0] Wyłączone
[200] Komunikat użytk.1
[1634] Temp. radiatora
[1635] Stan termiczny inwertera
*[1] Aktywne
[1652] Sprzężenie zwrotne [ jednostka]
[1650] Zewnętrz. wartość zadana
[1638] Stan sterownika SLC
[1639] Temp. karty sterującej
9-28 Regulacja procesu
[1653] Wart. zadana potencjometru cyfr.
[0] Nieaktywne
*[1] Aktyw. cykl. mastera
[1657] Sprzężenie zwrotne [obr./min]
[1660] Wejście cyfrowe
9-44 Licznik komunikatów o błędach
[1661] Ustawienie zacisku 53
1 - 126 *126
0 - 65535 *1037
[102] PPO 2
[103] PPO 3
[104] PPO 4
[105] PPO 5
[106] PPO 6
*[100] Brak
[3450] Pozycja rzeczywista
[3456] Szukanie błędu
9-18 Adres węzła
[1693] Słowo ostrzeżenia 2
[3403] Zapis PCD 3 dla aplikacji
[1694] Zewnętrz. Słowo statusowe
[3404] Zapis PCD 4 dla aplikacji
[1695] Zewnętrz. słowo statusowe 2
[3405] Zapis PCD 5 dla aplikacji
[1697] Słowo alarmowe 3
[3406] Zapis PCD 6 dla aplikacji
[1671] Wyjście przekaźnikowe
[1672] Licznik A
[1673] Licznik B
wartość
[696] Zacisk 42. Ster. wyj. przez magistralę
[748] Zas. do przodu PCD
[1674] Licznik precyzyjnego zatrzymania
[890] Prędkość 1 pracy jog z magistrali
[1669] Wyjście impulsowe 27 [Hz]
[1668] Wejście impulsowe 33 [Hz]
[1666] Wyjście cyfrowe
[1663] Ustawienie zacisku 54
[1662] Wejście analogowe 53
[553] Zacisk 29. wys.wart.zad./sprzęż.zwrot.
[417] Ogranicz momentu w trybie generat.
[1667] Wejście impulsowe 29 [Hz]
[1664] Wejście analogowe 54
[1665] Wyjście analogowe 42 [mA]
wartość
[593] Wyj. impulsowe 27 ster. magistr.
[615] Zacisk 53. Górna skala zad./sprz. zwr.
[558] Zacisk 33. wys.wart.zad./sprzęż.zwrot.
[590] Cyfr. przekaźnik ster. magistr.
[625] Zacisk 54. Górna skala zad./sprz. zwr.
[1684] STW opcji komunikacji
[891] Prędkość 2 pracy jog z magistrali
[1691] Słowo alarmowe 2
[1685] 1 CTW portu FC
[3402] Zapis PCD 2 dla aplikacji
[1680] 1 CTW magistrali komunik.
[1682] 1 REF magistrali komunik.
[3401] Zapis PCD 1 dla aplikacji
[1692] Słowo ostrzeżenia
[1690] Słowo alarmowe
[1698] Słowo ostrzeżenia 3
[3407] Zapis PCD 7 dla aplikacji
[3421] Odczyt PCD 1 dla aplikacji
[3408] Zapis PCD 8 dla aplikacji
[3409] Zapis PCD 9 dla aplikacji
[3423] Odczyt PCD 3 dla aplikacji
[3410] Zapis PCD 10 dla aplikacji
9-16 Konguracja odczytu PCD
[0] Brak
[1500] Godziny eksploatacji
[1501] Godziny pracy
[1502] Licznik kWh
[1600] Słowo sterujące
[1602] Wartość zadana [%]
[1601] Wartość zadana [jednostka]
[3428] Odczyt PCD 8 dla aplikacji
[3429] Odczyt PCD 9 dla aplikacji
[3430] Odczyt PCD 10 dla aplikacji
[3427] Odczyt PCD 7 dla aplikacji
[3425] Odczyt PCD 5 dla aplikacji
[3426] Odczyt PCD 6 dla aplikacji
[3424] Odczyt PCD 4 dla aplikacji
[3422] Odczyt PCD 2 dla aplikacji
9-19 Numer sys. przetwornicy częstotliwości
[1609] Odczyt niestandardowy
[1610] Moc [kW]
[1605] Rzeczywista wartość główna [%]
[1611] Moc [KM]
[1603] Słowo statusowe
9-22 Wybór komunikatu
[1612] Napięcie silnika
[1] Standardowy komunikat 1
[1613] Częstotliwość
[101] PPO 1
[1615] Częstotliwość [%]
[1616] Moment obrotowy [Nm]
[1617] Prędkość [obr./min]
[1614] Prąd silnika
[107] PPO 7
[1630] Napięcie w obw. pośr. DC
[1620] Kąt silnika
[1622] Moment obrotowy [%]
[1618] Stan termiczny silnika
10 10
0 - 4294967295 *0
0–655 *Powiązane z rozmiarem
0 - 4294967295 *0
0 - 4294967295 *0
0 - 4294967295 *0
0 - 4294967295 *0
0 - 4294967295 *0
0–1500 obr./min *100 obr./min
0–1500 obr./min *200 obr./min
0 - 65535 *0
0 - 65535 *0
jog
8-56 Wybór programowanej wart. zadanej
[0] Wejście cyfrowe
[11] [1611] Moc [KM]
[10] [1610] Moc [kW]
0–2147483647 *Powiązane z rozmiarem
8-3* Ustaw. portu FC
[1] Magistrala
[12] [1612] Napięcie silnika
8-30 Protokół
[2] Logiczne I
[13] [1613] Częstotliwość
*[0] FC
*[3] Logiczne LUB
[14] [1614] Prąd silnika
[2] Modbus RTU
8-57 Wybór Prodrive WYŁ2
[15] [1615] Częstotliwość [%]
8-31 Adres
[0] Wejście cyfrowe
[1] Magistrala
[16] [1616] Moment obrotowy [Nm]
[17] [1618] Stan termiczny silnika
0,0–247 *1
8-32 Szybkość transmisji
[2] Logiczne I
[18] [1630] Napięcie w obw. pośr. DC
[0] 2400 bodów
*[3] Logiczne LUB
[19] [1634] Temp. radiatora
[1] 4800 bodów
*[0] Nie resetuj
8-85 Błędy time-outu slave
[32] [1673] Licznik B
0,1–10,0 s *Powiązane z rozmiarem
8-84 Wysł. komunikaty slave
8-83 Liczba błędów slave
[35] [1694] Zewnętrz. Słowo statusowe
[33] [1690] Słowo alarmowe
[34] [1692] Słowo ostrzeżenia
8-5* Wej. binarne/Mag.
8-50 Wybór wybiegu silnika
8-42 Konguracja zapisu PCD
[0] Brak
[2] [303] Maksymalna wartość zadana
[1] [302] Minimalna wartość zadana
8-4* Nast. MC prot.
[0] Wejście cyfrowe
8-58 Wybór Prodrive WYŁ3
[1] Magistrala
[2] Logiczne I
*[3] Logiczne LUB
8-7* Wersja oprogramowania protokołu
8-8* Diagnostyka portu FC
8-80 Licznik komunikatów magistrali
8-79 Wersja oprogr. rmware protokołu
przełącznika
przełącznika
[22] [1650] Zewnętrz. wartość zadana
[23] [1652] Sprzężenie zwrotne [ jednostka]
[20] [1635] Stan termiczny inwertera
[21] [1638] Stan sterownika SLC
[3] 19200 bodów
[4] 38400 bodów
[5] 57600 bodów
[2] 9600 bodów
[24] [1660] Wejście cyfrowe 18, 19, 27, 33
[25] [1661] Zacisk 53. Ustawienie
[6] 76800 bodów
[7] 115200 bodów
8-33 Parzystość / Bity stopu
[26] [1662] Wejście analogowe 53
[27] [1663] Zacisk 54. Ustawienie
[1] Nieparzystość, 1 bit stopu
[0] Parzystość, 1 bit stopu
[2] Brak parzystości, 1 bit stopu
[28] [1664] Wejście analogowe 54
[3] Brak parz., 2 bity stopu
8-81 Liczba błędów magistrali
[30] [1671] Wyjście przekaźnikowe
[29] [1665] Wyjście analogowe 42 [mA]
0,0010–0,5 s *0,01 s
8-35 Minimalne opóźn. odpowiedzi
8-82 Otrz. komunikaty slave
[31] [1672] Licznik A
8-36 Maksymalne opóźnienie odpowiedzi
[1] Reset licznika
8-88 Reset diagnostyki portu FC
[0] Wejście cyfrowe
[1] Magistrala
[2] Logiczne I
*[3] Logiczne LUB
[6] [352] Czas zatrzymania 2
[5] [351] Czas rozpędzania 2
[4] [342] Czas zatrzymania 1
[3] [341] Czas rozpędzania 1
8-9* Sprzężenie zwrotne magistrali
8-51 Wybór szybkiego zatrzym.
[7] [380] Czas rozpędz./zatrz. pracy
8-90 Prędkość 1 pracy jog z magistrali
[0] Wejście cyfrowe
manew. - jog
8-91 Prędkość 2 pracy jog z magistrali
[1] Magistrala
[2] Logiczne I
[9] [412] Dolna granica prędk. obr. silnika
[8] [381] Czas szybkiego zatrzymania
*[3] Logiczne LUB
[Hz]
9-** PROFIdrive
8-52 Wybór hamowania DC
[10] [414] Górna granica prędk. obr. silnika
9-00 Wartość zadana
[0] Wejście cyfrowe
[1] Magistrala
[Hz]
[11] [590] Cyfr. przekaźnik ster. magistr.
9-07 Wartość aktualna
9-15 Konguracja zapisu PCD
[2] Logiczne I
*[3] Logiczne LUB
8-53 Wybór startu
zacisku 45
[12] [676] Sterowanie magistralą wyjściem
[13] [696] Zacisk 42. Ster. wyj. przez
[0] Brak
[0] Wejście cyfrowe
magistralę
[303] Maksymalna wartość zadana
[302] Minimalna wartość zadana
[1] Magistrala
[2] Logiczne I
[16] REF portu FC
[15] CTW portu FC
[312] Wartość doganiania/zwalniania
[341] Czas rozpędzania 1
*[3] Logiczne LUB
8-54 Wybór zmiany kierunku obr.
8-43 Konguracja odczytu PCD
[0] Brak
[380] Czas rozpędz./zatrz. pracy manew. -
[351] Czas rozpędzania 2
[352] Czas zatrzymania 2
[342] Czas zatrzymania 1
[0] Wejście cyfrowe
[1] Magistrala
[2] Logiczne I
*[3] Logiczne LUB
[1] [1500] Godziny eksploatacji
[2] [1501] Godziny pracy
[3] [1502] Licznik kWh
[4] [1600] Słowo sterujące
8-55 Wybór zestawu parametrów
[5] [1601] Wartość zadana [jednostka]
[416] Ogranicz momentu w trybie silnikow.
[414] Górna granica prędk. obr. silnika [Hz]
[381] Czas rozpędz/zatrzym. dla szybk. zatrz.
[412] Dolna granica prędk. obr. silnika [Hz]
[0] Wejście cyfrowe
[1] Magistrala
[2] Logiczne I
*[3] Logiczne LUB
[9] [1609] Odczyt niestandardowy
[8] [1605] Rzeczywista wartość główna [%]
[7] [1603] Słowo statusowe
[6] [1602] Wartość zadana %
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 81
Page 86

Załącznik
[1697] Słowo alarmowe 3
[1695] Zewnętrz. słowo statusowe 2
[1694] Zewnętrz. Słowo statusowe
VLT® Midi Drive FC 280
8 - 32 *16
8 - 32 *16
12-29 Zawsze zapamięta
*[0] Wyłączona
*[0] Wyłączona
[2] Zapisz wsz. zest. par.
[1698] Słowo ostrzeżenia 3
[3421] Odczyt PCD 1 dla aplikacji
[3422] Odczyt PCD 2 dla aplikacji
[3423] Odczyt PCD 3 dla aplikacji
[3424] Odczyt PCD 4 dla aplikacji
[3425] Odczyt PCD 5 dla aplikacji
[3426] Odczyt PCD 6 dla aplikacji
[3427] Odczyt PCD 7 dla aplikacji
[3428] Odczyt PCD 8 dla aplikacji
[3429] Odczyt PCD 9 dla aplikacji
[3430] Odczyt PCD 10 dla aplikacji
[3450] Pozycja rzeczywista
[3456] Szukanie błędu
12-23 Rozm zapis kong. danych procesu
12-24 Rozm odczyt kong. danych procesu
12-28 Zachowaj wartości danych
[1] Załączona
12-3* EtherNet/IP
12-30 Parametr ostrzeżenia
0 - 2147483647 *0
12-31 Sieciowa wartość zadana
*[0] Wyłączona
[1] Załączona
12-32 Sterowanie sieciowe
*[0] Wyłączona
[1] Załączona
0–65535 *Powiązane z rozmiarem
12-33 Wersja CIP
12-34 Kod produktu CIP
0–65535 *Powiązane z rozmiarem
0 - 0 *0
12-35 Parametr EDS
12-37 Zegar blok. COS
0 - 65535 *0
0 - 65535 *0
12-38 Filtr COS
12-6* Ethernet PowerLink
12-60 ID węzła
1 - 239 *1
0–2000000000 ms *30000 ms
12-62 Timeout SDO
12-63 Podstawowy timeout ethernet
0–2000000,000 ms *5000,000 ms
0 - 2000000000 *15
12-66 Wartości progowe
12-67 Liczniki progu
0 - 2147483647 *0
0 - 4294967295 *0
12-69 Status Ethernet PowerLink
12-68 Liczniki zbiorcze
[3404] Zapis PCD 4 dla aplikacji
[3405] Zapis PCD 5 dla aplikacji
[3406] Zapis PCD 6 dla aplikacji
[3407] Zapis PCD 7 dla aplikacji
[3408] Zapis PCD 8 dla aplikacji
[3409] Zapis PCD 9 dla aplikacji
[3410] Zapis PCD 10 dla aplikacji
12-22 Odczyt konguracji danych procesu
[0] Brak
[1502] Licznik kWh
[1600] Słowo sterujące
[1500] Godziny eksploatacji
[1501] Godziny pracy
[1671] Wyjście przekaźnikowe
[1672] Licznik A
[1673] Licznik B
[1657] Sprzężenie zwrotne [obr./min]
[1652] Sprzężenie zwrotne [ jednostka]
[1653] Wart. zadana potencjometru cyfr.
[1639] Temp. karty sterującej
[1609] Odczyt niestandardowy
[1610] Moc [kW]
[1611] Moc [KM]
[1612] Napięcie silnika
[1605] Rzeczywista wartość główna [%]
[1602] Wartość zadana [%]
[1603] Słowo statusowe
[1601] Wartość zadana [jednostka]
[1613] Częstotliwość
[1614] Prąd silnika
[1615] Częstotliwość [%]
[1618] Stan termiczny silnika
[1616] Moment obrotowy [Nm]
[1634] Temp. radiatora
[1633] Energia hamow./2 min
[1630] Napięcie w obw. pośr. DC
[1620] Kąt silnika
[1622] Moment obrotowy [%]
[1617] Prędkość [obr./min]
[1650] Zewnętrz. wartość zadana
[1635] Stan termiczny inwertera
[1638] Stan sterownika SLC
[1663] Ustawienie zacisku 54
[1662] Wejście analogowe 53
[1660] Wejście cyfrowe
[1661] Ustawienie zacisku 53
[1669] Wyjście impulsowe 27 [Hz]
[1668] Wejście impulsowe 33 [Hz]
[1667] Wejście impulsowe 29 [Hz]
[1665] Wyjście analogowe 42 [mA]
[1666] Wyjście cyfrowe
[1664] Wejście analogowe 54
[1674] Licznik precyzyjnego zatrzymania
[1684] STW opcji komunikacji
[1691] Słowo alarmowe 2
[1685] 1 CTW portu FC
[1692] Słowo ostrzeżenia
[1693] Słowo ostrzeżenia 2
[1690] Słowo alarmowe
1010
wartość
[590] Cyfr. przekaźnik ster. magistr.
12-01 Adres IP
[593] Wyj. impulsowe 27 ster. magistr.
0 - 4294967295 *0
wartość
[625] Zacisk 54. Górna skala zad./sprz. zwr.
[615] Zacisk 53. Górna skala zad./sprz. zwr.
0 - 4294967295 *0
12-02 Maska podsieci
12-03 Domyślna brama
0 - 4294967295 *0
[748] Zas. do przodu PCD
[696] Zacisk 42. Ster. wyj. przez magistralę
0 - 2147483647 *0
12-04 Serwer DHCP
[890] Prędkość 1 pracy jog z magistrali
12-05 Dzierżawa wygasa
[3403] Zapis PCD 3 dla aplikacji
[1682] 1 REF magistrali komunik.
[3401] Zapis PCD 1 dla aplikacji
[3402] Zapis PCD 2 dla aplikacji
[1680] 1 CTW magistrali komunik.
[891] Prędkość 2 pracy jog z magistrali
0 - 4294967295 *0
0 - 4294967295 *0
1 - 48 *0
12-06 Serwery nazw
12-07 Nazwa domeny
12-08 Nazwa hosta
1 - 48 *0
0 - 9999 *0
0 - 17 *0
12-09 Adres zyczny
0 - 9999 *0
9-91 Zmienione parametry (2)
12-1* Parametry połączenia ethernetowego
9-92 Zmienione parametry (3)
12-10 Stan połączenia
0 - 9999 *0
*[0] Brak połączenia
9-93 Zmienione parametry (4)
[1] Połączenie
0 - 9999 *0
0–0 *Powiązane z rozmiarem
12-11 Trwałość połączenia
0 - 9999 *0
9-94 Zmienione parametry (5)
12-12 Autom. negocjacja
[0] Wyłączona
*[1] Załączona
0 - 65535 *0
9-99 Licznik wersji Probus
10-** Mag. kom. CAN
12-13 Prędkość połączenia
*[0] Brak
10-01 Wybór szybkości transmisji
10-0* Ustawienia wspólne
[2] 100 Mbps
[1] 10 Mbps
[16] 10 kbit/s
[17] 20 kbit/s
12-14 Dupleks połączenia
[18] 50 kbit/s
[0] Half Duplex
*[20] 125 kbit/s
*[1] Full Duplex
[21] 250 kbit/s
12-18 Adres MAC nadzor.
[22] 500 kbit/s
0 - 2147483647 *0
[23] 800 kb/s
12-19 Adres IP nadzor.
[24] 1000 kb/s
0 - 2147483647 *0
10-02 ID węzła
12-2* Dane procesu
1 - 127 *127
12-20 Wystąpienie sterowania
10-05 Odczyt licz. bł. transmisji przy nadaw.
0–255 *Powiązane z rozmiarem
0 - 255 *0
12-21 Zapis kong danych procesu
10-06 Odczyt licznika błędów przy odbiorze
[0] Brak
0 - 255 *0
[302] Minimalna wartość zadana
[303] Maksymalna wartość zadana
10-31 Zachowaj wartości danych
10-3* Dostęp do param.
[341] Czas rozpędzania 1
[312] Wartość doganiania/zwalniania
*[0] Wyłączona
[2] Zapisz wsz. zest. par.
[342] Czas zatrzymania 1
[351] Czas rozpędzania 2
10-33 Zawsze zapamięta
[3] Zapisz edyt.zest.par.
[352] Czas zatrzymania 2
*[0] Wyłączona
[380] Czas rozpędz./zatrz. pracy manew. -
[1] Załączona
jog
[381] Czas rozpędz/zatrzym. dla szybk. zatrz.
12-** Ethernet
12-0* Ustawienia IP
[558] Zacisk 33. wys.wart.zad./sprzęż.zwrot.
[553] Zacisk 29. wys.wart.zad./sprzęż.zwrot.
[417] Ogranicz momentu w trybie generat.
[416] Ogranicz momentu w trybie silnikow.
[414] Górna granica prędk. obr. silnika [Hz]
[412] Dolna granica prędk. obr. silnika [Hz]
[0] RĘCZNY
[1] DHCP
[2] BOOTP
*[10] DCP
12-00 Przypisanie adresu IP
[20] ID węzła źródł.
0 - 9999 *0
0 - 9999 *0
0 - 9999 *0
0 - 9999 *0
0 - 9999 *0
0 - 65535 *0
0 - 0 *0
9-45 Kod błędu
0 - 0 *0
9-47 Nr błędu
9-52 Licznik sytuacji awaryjnych
0 - 1000 *0
9-53 Słowo ostrzeżenia Probus
0 - 65535 *0
9-63 Rzeczyw. szybk. transmisji
[0] 9,6 kbit/s
[1] 19,2 kbit/s
[2] 93,75 kbit/s
[3] 187,5 kbit/s
[4] 500 kbit/s
[6] 1500 kbit/s
[7] 3000 kbit/s
[8] 6000 kbit/s
[9] 12000 kbit/s
[10] 31,25 kbit/s
[11] 45,45 kbit/s
0 - 0 *0
0 - 0 *0
0 - 65535 *0
0 - 65535 *0
9-71 Zapis wartości danych Probus
*[9] Aktywny zestaw par
[3] Zestaw par. 3
[4] Zestaw par. 4
9-64 Identykacja urządzenia
9-65 Numer prolu
9-67 Słowo sterujące 1
*[255] Nie ustal.pręd.trans.
9-68 Słowo statusowe 1
[2] Zestaw par. 2
9-70 Edytowany zestaw parametrów
[1] Zestaw par. 1
9-72 ProbusDriveReset
*[0] Wyłączona
[1] Zapisz wsz. zest. par.
*[0] Brak działania
[1] Reset przy włączeniu zasil.
[2] Zach.reset zał.zasil
[3] Reset opcji kom.
0 - 65535 *0
9-81 Zdeniowane parametry (2)
9-82 Zdeniowane parametry (3)
9-75 Identyf. obiektu przetwornicy częst.
9-80 Zdeniowane parametry (1)
9-83 Zdeniowane parametry (4)
0 - 9999 *0
9-84 Zdeniowane parametry (5)
9-85 Zdeniowane parametry (6)
9-90 Zmienione parametry (1)
82 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 87

Załącznik Instrukcja obsługi
[74] SL Time-out 7
[83] Zerwany pas
13-52 Akcja sterownika SLC
[73] SL Time-out 6
[70] SL Time-out 3
[71] SL Time-out 4
[60] Reguła logiczna 4
[50] Komparator 4
[36] Wejście cyfr. DI29
[39] Polecenie Start
[34] Wejście cyfr. DI19
[35] Wejście cyfr. DI27
[32] SL Time-out 2
[33] Wejście cyfr. DI18
[30] SL Time-out 0
[31] SL Time-out 1
[28] Reguła logiczna 2
[29] Reguła logiczna 3
[26] Reguła logiczna 0
[27] Reguła logiczna 1
[24] Komparator 2
[25] Komparator 3
[23] Komparator 1
[22] Komparator 0
[51] Komparator 5
[40] Napęd zatrzymany
[42] Autores.po wy.awa.
[72] SL Time-out 5
[61] Reguła logiczna 5
*[0] Wyłączone
[1] Brak działania
[26] Hamowanie DC
[27] Wybieg silnika
[28] Zatrzaśnij wyjście
[29] Uruchom zegar 0
[24] Stop
[22] Praca
[25] Szybkie zatrzymanie
[23] Praca ze zmianą kier
[2] Wyb.zest.para. 1
[10] Wyb.prog.war.za,0
[3] Wyb.zest.para. 2
Te same opcje co w 13-42
Te same opcje co w 13-41
Te same opcje co w 13-40
[18] Wyb cz rozp/zatrz 1
[19] Wyb cz rozp/zatrz 2
[17] Wyb.prog.war.za.7
[16] Wyb.prog.war.za.6
[15] Wyb.prog.war.za.5
[14] Wyb.prog.war.za.4
[13] Wyb.prog.war.za.3
[12] Wyb.prog.war.za.2
[11] Wyb.prog.war.za.1
[4] Wyb.zest.para. 3
[5] Wyb.zest.para. 4
[34] Wyj.cyf.C w st.nis.
[35] Wyj.cyf.D w st.nis.
[33] Wyj.cyf.B w st.nis.
[30] Uruchom zegar 1
[31] Uruchom zegar 2
[32] Wyj.cyf.A w st.nis.
[23] Komparator 1
[36] Wejście cyfr. DI29
[4] Zgodnie z wart. zad.
[24] Komparator 2
[39] Polecenie Start
[7] Prąd poza zakresem
*[0] Wyłączone
[1] I
[2] LUB
[3] I NIE
[4] LUB NIE
[73] SL Time-out 6
[74] SL Time-out 7
[83] Zerwany pas
[71] SL Time-out 4
[36] Wejście cyfr. DI29
[42] Autores.po wy.awa.
[35] Wejście cyfr. DI27
[33] Wejście cyfr. DI18
[34] Wejście cyfr. DI19
[31] SL Time-out 1
[32] SL Time-out 2
[29] Reguła logiczna 3
[30] SL Time-out 0
[27] Reguła logiczna 1
[28] Reguła logiczna 2
[25] Komparator 3
[26] Reguła logiczna 0
[60] Reguła logiczna 4
[51] Komparator 5
[50] Komparator 4
[39] Polecenie Start
[40] Napęd zatrzymany
[72] SL Time-out 5
[61] Reguła logiczna 5
[70] SL Time-out 3
13-41 Reguła logiczna - operator 1
[5] NIE I
[6] NIE LUB
[7] NIE I NIE
[8] NIE LUB NIE
13-42 Reguła logiczna - argument 2
13-5* Stany
13-51 Zdarzenie sterownika SLC
*[0] Fałsz
[1] Prawda
[2] Praca
[3] W zakresie
[4] Zgodnie z wart. zad.
[7] Prąd poza zakresem
[9] Prąd > gór.wart.
[8] Prąd < dol.wart.
[16] Ostrzeżenie termicz.
[18] Zmiana kierunku obr.
[17] Zasil. poza zakresem
[19] Ostrzeżenie
[20] Alarm (wył. awar.)
[21] Alarm(wył.aw.z blok)
13-44 Reguła logiczna - argument 3
13-43 Reguła logiczna - operator 2
10 10
-9999 - 9999 *0
0–3600 s *0 s
[1] Resetuj SLC
[83] Zerwany pas
13-03 Resetuj SLC
[73] SL Time-out 6
[72] SL Time-out 5
[61] Reguła logiczna 5
[70] SL Time-out 3
[51] Komparator 5
[50] Komparator 4
*[40] Napęd zatrzymany
[42] Autores.po wy.awa.
[17] Zasil. poza zakresem
[16] Ostrzeżenie termicz.
[8] Prąd < dol.wart.
[9] Prąd > gór.wart.
[71] SL Time-out 4
[60] Reguła logiczna 4
[23] Komparator 1
[22] Komparator 0
[21] Alarm(wył.aw.z blok)
[18] Zmiana kierunku obr.
[19] Ostrzeżenie
[20] Alarm (wył. awar.)
*[0] Nie resetuj SLC
[74] SL Time-out 7
[25] Komparator 3
[24] Komparator 2
13-1* Komparatory
[27] Reguła logiczna 1
[28] Reguła logiczna 2
[29] Reguła logiczna 3
[26] Reguła logiczna 0
13-10 Argument komparatora
[33] Wejście cyfr. DI18
*[0] Wyłączone
[34] Wejście cyfr. DI19
[1] Wartość zadana %
[35] Wejście cyfr. DI27
[2] Sprzężenie zwrotne %
[36] Wejście cyfr. DI29
[3] Prędkość obrotowa silnika
[4] Prąd silnika
*[39] Polecenie Start
[40] Napęd zatrzymany
[13] Wejście analogowe AI54
[6] Moc silnika
[7] Napięcie silnika
[12] Wejście analogowe AI53
[51] Komparator 5
[60] Reguła logiczna 4
[50] Komparator 4
[42] Autores.po wy.awa.
[18] Wejście impulsowe FI29
[61] Reguła logiczna 5
[19] Wejście impulsowe FI33
[83] Zerwany pas
[20] Numer alarmu
13-02 Koniec zdarzenia
[30] Licznik A
[0] Fałsz
[31] Licznik B
13-11 Operator komparatora
*[1] W przybliżeniu równe (~)
[2] Więcej niż (>)
13-12 Wartość komparatora
[0] Mniej niż (<)
[1] Prawda
[2] Praca
[3] W zakresie
[4] Zgodnie z wart. zad.
[7] Prąd poza zakresem
13-2* Zegary
13-20 Zegar sterownika SLC
[17] Zasil. poza zakresem
[16] Ostrzeżenie termicz.
[8] Prąd < dol.wart.
[9] Prąd > gór.wart.
[18] Zmiana kierunku obr.
13-4* Reguły logiczne
[19] Ostrzeżenie
*[0] Fałsz
[1] Prawda
[2] Praca
13-40 Reguła logiczna - argument 1
[22] Komparator 0
[23] Komparator 1
[21] Alarm(wył.aw.z blok)
[20] Alarm (wył. awar.)
[3] W zakresie
[24] Komparator 2
[8] Prąd < dol.wart.
[7] Prąd poza zakresem
[4] Zgodnie z wart. zad.
[25] Komparator 3
[26] Reguła logiczna 0
[27] Reguła logiczna 1
[18] Zmiana kierunku obr.
[17] Zasil. poza zakresem
[16] Ostrzeżenie termicz.
[9] Prąd > gór.wart.
[30] SL Time-out 0
[31] SL Time-out 1
[28] Reguła logiczna 2
[29] Reguła logiczna 3
[19] Ostrzeżenie
[32] SL Time-out 2
[20] Alarm (wył. awar.)
[33] Wejście cyfr. DI18
[21] Alarm(wył.aw.z blok)
[34] Wejście cyfr. DI19
[22] Komparator 0
[35] Wejście cyfr. DI27
12-98 Liczniki interfejsu
0 - 4294967295 *4000
12-99 Liczniki mediów
0 - 4294967295 *0
*[0] Wyłączona
[1] Załączona
13-01 Początek zdarzenia
[0] Fałsz
[1] Prawda
[2] Praca
13-** Logiczny ster. zd.
13-0* Nastawy SLC
13-00 Tryb sterownika SLC
[3] W zakresie
0–63 *Powiązane z rozmiarem
[255] Mirror wew. port na 2
12-97 Priorytet QoS
[254] Mirror wew. port na 1
[0] Wyłączone
*[1] Aktywne
12-89 Port kanału przezroczystego gniazda
0 - 65535 *4000
12-9* Zaawansowane usługi ethernetowe
-1 - 20 % *-1 %
12-94 Ochrona przed zakłóc. transmisji
0 - 3600 *120
12-95 Time out nieaktywności
12-96 Konguracja portów
[0] Normalne
[1] Mirror port 1 na 2
[10] Port 1 wyłączony
[11] Port 2 wyłączony
[2] Mirror port 2 na 1
0 - 65535 *0
12-90 Diagnostyka przewodów
*[0] Wyłączone
[1] Aktywne
12-91 Autom. krosowanie (Auto Cross-Over)
[0] Wyłączone
*[1] Aktywne
12-92 Podsłuch IGMP
[0] Wyłączone
*[1] Aktywne
12-93 Błędna dł. przewodów
0 - 4294967295 *0
[0] Wyłączone
*[1] Aktywne
*[0] Wyłączone
[1] Aktywne
12-81 Serwer HTTP
*[0] Wyłączone
[1] Aktywne
12-82 Usługa SMTP
*[0] Wyłączone
12-8* Inne usługi ethernetowe
12-80 Serwer FTP
[1] Aktywne
12-83 Agent SNMP
12-84 Wykrywanie koniktów adresów
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 83
Page 88

Załącznik
-4999–4999 Jednostka wartości zadanej
0 - 65535 *0
VLT® Midi Drive FC 280
Jednostka własna odczytu
0–9999 Jednostka własna odczytu *0
-200 - 200 % *0 %
0 - 65535 *0
-200 - 200 % *0 %
wartości zadanej lub sprzężenia
zwrotnego
lub sprzężenia zwrotnego *0 Jednostka
0–1000 kW *0 kW
0–1000 KM *0 KM
0–6553,5 Hz *0 Hz
0–65535 V *0 V
0–6553,5% *0%
0–655,35 A *0 A
-30000–30000 obr./min *0 obr./min
-30000–30000 Nm *0 Nm
0 - 65535 *0
0 - 100 % *0 %
-200 - 200 % *0 %
0–10000 kW *0 kW
0–65535 V *0 V
-128–127°C *0°C
0 - 255 % *0 %
0–655,35 A *0 A
0–655,35 A *0 A
0–65535°C *0°C
0 - 20 *0
-200 - 200 % *0 %
15-41 Sekcja mocy
16-05 Rzeczywista wartość główna [%]
0 - 20 *0
15-42 Napięcie
16-09 Odczyt niestandardowy
0 - 20 *0
0 - 0 *0
15-43 Wersja oprogramowania
16-1* Status silnika
15-44 Kod zamów. typu
16-11 Moc [KM]
16-10 Moc [kW]
0 - 40 *0
0 - 41 *0
15-45 Aktualny ciąg kodu typu
16-13 Częstotliwość
16-12 Napięcie silnika
częstotl.
0 - 0 *0
15-46 Nr zamówieniowy przetwornicy
15-48 Nr ID LCP
16-15 Częstotliwość [%]
16-14 Prąd silnika
0 - 0 *0
0 - 0 *0
15-50 Karta mocy ID SW
15-49 Karta sterująca ID SW
16-17 Prędkość [obr./min]
16-16 Moment obrotowy [Nm]
0 - 0 *0
0 - 0 *0
15-51 Nr seryjny przetwornicy częstotliwości
15-52 Informacje OEM
16-03 Słowo statusowe
0 - 255 *0
-32767 - 32767 *0
15-31 Przyczyna błędu wewnętrznego
16-02 Wartość zadana [%]
15-4* Identyf. przetwornicy częst.
0 - 0 *0
15-40 Typ FC
16-01 Wartość zadana [jednostka]
[1] Reset licznika
15-3* Alarm Log
15-30 Rejestr alarmów: kod błędu
16-20 Kąt silnika
16-18 Stan termiczny silnika
0 - 0 *0
15-53 Nr seryjny karty mocy
16-22 Moment obrotowy [%]
0 - 0 *0
0 - 255 *0
0 - 16 *0
15-57 Wersja pliku
15-59 Nazwa pliku
16-3* Status przetwornicy
15-6* Identykacja opcji
16-30 Napięcie w obw. pośr. DC
15-60 Opcja zamontowana
16-33 Energia hamow./2 min
0–30 *Powiązane z rozmiarem
15-61 Wersja SW opcji
0–20 *Powiązane z rozmiarem
16-35 Stan termiczny inwertera
16-34 Temp. radiatora
0 - 30 *0
15-71 Wersja SW opcji gniazda A
15-70 Opcja w gnieździe A
16-36 Znamionowy prąd inwertera
0 - 20 *0
15-9* Info. o parametrach
16-37 Maks. prąd przetwornicy
0 - 2000 *0
15-92 Parametry zdeniowane
15-97 Typ aplikacji
16-39 Temp. karty sterującej
16-38 Stan sterownika SLC
0 - 0xFFFFFFFF *0
0 - 56 *0
15-98 Identyf. przetwornicy częst.
15-99 Metadane parametrów
16-5* Wart zad i sprz zwr
0 - 9999 *0
16-50 Zewnętrz. wartość zadana
16-** Odczyty danych
16-0* Status ogólny
16-52 Sprzężenie zwrotne [jednostka]
16-00 Słowo sterujące
1010
20–1000 Hz *Powiązane z rozmiarem
*[0] Wyłączone
[1] Aktywne
kompensacja czasu martwego
14-65 Obniżanie wart. znam. prędkości —
14-7* Kompatybilność
14-70 Compatibility Selections
*[0] Brak funkcji
[12] VLT2800 3M
[14] VLT2800 12M
[13] VLT2800 3M incl. MAV
0 - 65535 *0
[15] VLT2800 12M incl. MAV
14-8* Opcje
14-88 Magazynowanie danych opcji
14-89 Wykrywanie opcji
*[0] Zabezp. kong. opcji
[1] Włącz. zmiana opcji
14-9* Ustawienia błędu
14-90 Poziom błędu
*[3] Wył. awar. z blokadą
[4] Wył. awar. i opóź. reset
[5] Start w locie
15-** Inf. o przetw. częst
15-0* Dane eksploat.
0–0x7f. h *0 h
0–0x7f. h *0 h
15-01 Godziny pracy
15-00 Godziny eksploatacji
0–2147483647 kWh *0 kWh
15-02 Licznik kWh
0 - 2147483647 *0
15-04 Przekroczenia temp.
15-03 Załączenia zasilania
0 - 65535 *0
0 - 65535 *0
15-05 Przepięcia
15-06 Resetowanie licznika kWh
*[0] Nie resetuj
[1] Reset licznika
15-07 Resetowanie licznika godzin pracy
*[0] Nie resetuj
zerowy poziom prądu
[1] Filtr sinusoidalny
14-6* Automatyczne obniżenie
14-61 Funkcja przy przec. inwertera
*[0] Wyłączenie awaryjne
[1] Obniżenie wartości znamionowych
14-63 Min. częstotliwość przełączania
*[2] 2,0 kHz
[3] 3,0 kHz
[4] 4,0 kHz
[5] 5,0 kHz
[6] 6,0 kHz
[7] 8,0 kHz
14-64 Kompensacja czasu martwego —
[8] 10,0 kHz
[9] 12,0 kHz
[10] 16,0 kHz
[1] Reset serwis.
[3] Reset oprogramowania
0–100 *Powiązane z rozmiarem
14-08 Współczynnik wzmocnienia tłumienia
14-29 Kod serwisowy
0–100% *Powiązane z rozmiarem
0 - 0xFFFFFFFF *0
14-09 Nadanie napięcia wst. czasu martwego
14-3* Reg. ogr. prądu
— poziom prądu
14-30 Ster. ogr. prądu, wzmoc. proporc.
0–100% *Powiązane z rozmiarem
0 - 500 % *100 %
14-31 Ster.ogr. prądu, czas całkowania
14-1* Zasilanie zał/wył
14-10 Awaria zasilania:
0,002–2 s *0,020 s
14-32 Ster. ogr. prądu, stała czasowa ltru
[1] Kontr.zatrz.wg ramp-down
*[0] Brak funkcji
1–100 ms *5 ms
[2] Kontr.ramp-down, wył.awar.
0 - 200 % *100 %
40 - 75 % *66 %
AEO
40 - 90 % *66 %
14-40 VT poziom
[6] Alarm
[4] Kinetic back-up
[7] Kinetic back-up, wył.aw. z odzysk.
[5] Kinetic back-up, wył. aw.
[3] Wybieg silnika
powr.
14-5* Środowisko
100–800 V *Powiązane z rozmiarem
14-12 Odpowiedź na niezrównoważenie
14-11 Poziom napięcia przy błędzie zasilania
14-51 Kompensacja napięcia DC
[0] Wyłączona
zasilania
*[0] Wyłączenie awaryjne
14-44 Optymalizacja prądu po osi d dla IPM
14-41 Minimalne magnesowanie dla trybu
14-4* Optymaliz.energii
*[1] Załączona
[1] Ostrzeżenie
14-52 Sterow. wentylatorem
[2] Wyłączone
[6] Constant-o mode
[5] Constant-on mode
0–60000,000 Jednostka wartości
14-15 Czas kinet odzysku powr. z wył. aw.
[7] On-when-Inverter-is-on-else-o Mode
*[8] Variable-speed mode
zadanej lub sprzężenia zwrotnego
*Powiązane z rozmiarem
14-55 Filtr wyjściowy
14-2* Funkcje Reset
*[0] Brak ltra
14-20 Tryb resetowania
0–60 s *60 s
[2] Inicjalizacja
*[0] Normalna praca
[4] 4,0 kHz
[5] 5,0 kHz
14-24 Opóź. wył. awar. przy ogr. prądu
[6] 6,0 kHz
0–60 s *60 s
[7] 8,0 kHz
14-25 Opóźn. wył. aw. przy ogran. mom.
[8] 10,0 kHz
[9] 12,0 kHz
[0] Wyłączenie awaryjne
*[1] Ostrzeżenie
14-28 Ustawienia fabryczne
14-27 Działanie przy błędzie falownika
14-03 Nadmodulacja
[0] Wyłączona
*[1] Załączona
[10] 16,0 kHz
*[0] Brak działania
14-07 Poziom kompensacji czasu martwego
0–600 s *10 s
14-22 Tryb pracy
14-21 Czas automatycznego restartu
[14] Reset przy wł. zasil.
[13] Ciągły automatyczny reset
[12] Reset automat. x 20
[11] Reset automat. x 15
[10] Reset automat. x 10
[9] Reset automat. x 9
[8] Reset automat. x 8
[7] Reset automat. x 7
[6] Reset automat. x 6
[5] Reset automat. x 5
[4] Reset automat. x 4
[3] Reset automat. x 3
[2] Reset automat. x 2
*[0] Reset ręczny
[1] Reset automat. x 1
[73] Uruchom zegar 6
[74] Uruchom zegar 7
[72] Uruchom zegar 5
[70] Uruchom zegar 3
[71] Uruchom zegar 4
[60] Zerowanie licznika A
[61] Zerowanie licznika B
[41] Wyj.cyf.D w st.wys.
[40] Wyj.cyf.C w st.wys.
[38] Wyj.cyf.A w st.wys.
[39] Wyj.cyf.B w st.wys.
14-** Funkcje specjalne
14-0* Przeł. inwertera
14-01 Częstotliwość przełączania
[0] Ran3
[1] Ran5
[2] 2,0 kHz
[3] 3,0 kHz
84 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 89

Załącznik Instrukcja obsługi
-1073741824 - 1073741824 *500000
*[0] Nieaktywne
[1] Aktywne
33-43 Ujemne ogr. programowe aktywne
*[0] Wyłączona
[1] Załączona
30-23 Czas wykryw. blokowania wirnika [s]
30-22 Zabezp. zablok. wirnika
-999999,999– 999999,999
Jedn.zewnętrz.PID1 *0
Jedn.zewnętrz.PID1
33-44 Dodatnie ogr. programowe aktywne
0,05–1 s *0,10 s
0 - 100 % *0 %
*[0] Nieaktywne
31-** Special Option
1 - 10000 *512
[1] Aktywne
33-47 Okno pozycji docelowej
[0] Wyłączone
31-4* Moduł pamięci
31-40 Funkcja modułu pamięci
odwrócona 1
34-01 Zapis PCD 1 dla aplikacji
34-** Motion Control Data Readouts
34-0* Par. zapisu PCD
[3] Allow Both Download and Upload
*[1] Only Allow Download
[2] Only Allow Upload
1
0 - 65535 *0
34-02 Zapis PCD 2 dla aplikacji
0 - 2 *0
31-41 MM Information
0–10 *0,01
0 - 65535 *0
34-03 Zapis PCD 3 dla aplikacji
31-42 Congure Memory Module Access
*[0] Brak działania
0,01–10000 s *10000 s
0 - 65535 *0
[1] Set MM to read only
0–10 s *0 s
0 - 65535 *0
34-04 Zapis PCD 4 dla aplikacji
31-43 Erase_MM
[2] Set MM to read write
1 - 50 *5
0 - 65535 *0
34-05 Zapis PCD 5 dla aplikacji
*[0] Brak funkcji
[1] Erase MM
34-06 Zapis PCD 6 dla aplikacji
31-47 Time Limit Function
0 - 65535 *0
*[0] Wyłączone
34-07 Zapis PCD 7 dla aplikacji
[1] Aktywne
0 - 65535 *0
31-48 Time Limit Remaining Time
34-08 Zapis PCD 8 dla aplikacji
0–720 h *720 h
0 - 65535 *0
34-09 Zapis PCD 9 dla aplikacji
32-** Motion Control Basic Settings
32-1* Jednostka użytkownika
0–600 s *10 s
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
0 - 65535 *0
34-29 Odczyt PCD 9 dla aplikacji
33-02 Czas rozp./zatrz. dla ruchu do poz.wyj.
1–1000 ms *10 ms
34-30 Odczyt PCD 10 dla aplikacji
33-03 Prędkość ruchu do pozycji wyjściowej
0 - 65535 *0
-1500–1500 obr./min *100 obr./min
34-5* Dane procesu
34-50 Pozycja rzeczywista
33-04 Zachowanie podczas ruchu do poz.wyj.
*[1] Odwróc. bez indeksu
-1073741824 - 1073741824 *0
34-56 Szukanie błędu
[3] Do przodu bez indeksu
33-4* Obsł. ograniczenia
-2147483647 - 2147483647 *0
-1073741824 - 1073741824 *-500000
33-41 Ujemne ograniczenie programowe
33-42 Dodatnie ograniczenie programowe
0 - 65535 *0
0 - 65535 *0
34-10 Zapis PCD 10 dla aplikacji
34-2* Par. odczytu PCD
1 - 65535 *1
1 - 65535 *1
32-11 Mianownik jednostki użytkownika
32-12 Licznik jednostki użytkownika
34-21 Odczyt PCD 1 dla aplikacji
32-6* PID
0 - 65535 *0
34-22 Odczyt PCD 2 dla aplikacji
1 - 2147483648 *2000000
32-67 Maks. tolerowany błąd położenia
0 - 65535 *0
34-23 Odczyt PCD 3 dla aplikacji
32-8* Velocity & Acceleration
32-80 Maksymalna dozwolona prędkość
1–30000 obr./min *1500 obr./min
34-24 Odczyt PCD 4 dla aplikacji
32-81 Ster. ruchem - czas szybkiego zatrz.
50–3600000 ms *1000 ms
34-25 Odczyt PCD 5 dla aplikacji
33-** Motion Control Adv. Settings
33-0* Ruch w poz. wyj.
34-26 Odczyt PCD 6 dla aplikacji
33-00 Tryb ruchu do poz. wyj.
*[0] Not forced
34-27 Odczyt PCD 7 dla aplikacji
[1] Forced manual homing
[2] Forced automated homing
34-28 Odczyt PCD 8 dla aplikacji
-1073741824 - 1073741824 *0
33-01 Oset poz.wyj.
10 10
0–400,0 *0
0–600 s *60 s
-100 - 100 % *0 %
obudzenia
0 - 100 % *10 %
0–400,0 *10
0–600 s *10 s
0–3600 s *0 s
0–3600 s *0 s
0–600 s *10 s
5 - 100 % *10 %
0–60 s *Powiązane z rozmiarem
0–200,0% *Powiązane z rozmiarem
21-19 Zewnętrz. wyjście 1 [%]
0–0xFFFFFFFFUL *0
0–0xFFFFFFFFUL *0
16-98 Słowo ostrzeżenia 3
16-97 Słowo alarmowe 3
16-95 Zewnętrz. słowo statusowe 2
-200 - 200 *0
JednSterProcesem
-4999–4999 JednSterProcesem *0
16-57 Sprzężenie zwrotne [obr./min]
16-53 Wart. zadana potencjometru cyfr.
21-2* Zew. CL 1 PID
0 - 4294967295 *0
-30000–30000 obr./min *0 obr./min
21-20 Zewnętrz. regulacja PID standardowa/
18-** Odczyty danych 2
18-5* Memory Module Readout
16-6* Wejścia i wyjścia
16-60 Wejście cyfrowe
*[0] Normalne
[1] Odwrotne
0–0xFFFFFFFFUL *0
18-51 Przyczyna ostrzeżenia modułu pamięci
0 - 4095 *0
16-61 Ustawienie zacisku 53
21-21 Zewnętrz. wzmocnienie proporcjonalne
0 - 0 *0
18-52 Identykator modułu pamięci
18-9* Odczyty PID
[1] Tryb napięciowy
[6] Wejście cyfrowe
16-62 Wejście analogowe 53
21-22 Zewnętrz. czas całkowania 1
18-90 Błąd PID procesu
0 - 20 *1
21-24 Zewnętrz. ogranicz. różniczkowania PID
21-23 Zewnętrz. czas różniczkowania 1
-200 - 200 % *0 %
-200 - 200 % *0 %
-200 - 200 % *0 %
18-92 Ograniczone wyjście PID procesu
18-91 Wyjście PID procesu
0 - 20 *1
16-64 Wejście analogowe 54
[0] Tryb prądowy
[1] Tryb napięciowy
16-63 Ustawienie zacisku 54
22-** Funkcje Funkcje
18-93 Wyjście skal. wzmoc. PID procesu
16-65 Wyjście analogowe 42 [mA]
22-0* Inne
22-02 Tryb sterowania CL trybem uśpienia
-200 - 200 % *0 %
21-** Zewnętrz. Pętla zamknięta
0–20 mA *0 mA
16-66 Wyjście cyfrowe
*[0] Normalne
[1] Uproszczone
21-0* Zew. autodostr. CL
21-09 Rozszerzone PID wł.
0 - 63 *0
16-67 Wejście impulsowe 29 [Hz]
22-4* Tryb uśpienia
22-40 Minimalny czas pracy
*[0] Wyłączone
[1] Aktywny zew. CL1 PID
21-1* Zew. wart. zad./sprz. zwr. CL 1
0 - 130000 *0
0 - 130000 *0
16-68 Wejście impulsowe 33 [Hz]
22-41 Minimalny czas uśpienia
22-43 Prędkość obudzenia [Hz]
-999999,999– 999999,999
Jedn.zewnętrz.PID1 *0
21-11 Zewnętrz. minimalna wartość zadana 1
0 - 40000 *0
16-71 Wyjście przekaźnikowe
16-69 Wyjście impulsowe 27 [Hz]
Jedn.zewnętrz.PID1
0 - 31 *0
22-44 Różnica wart.zad./sprz.zwr. prędkości
1
21-12 Zewnętrz. maksymalna wartość zadana
-32768 - 32767 *0
16-72 Licznik A
22-45 Wartość zadana doładowania
Jedn.zewnętrz.PID1 *100
-999999.999– 999999.999
-32768 - 32767 *0
16-73 Licznik B
22-46 Maksymalny czas doładowania
Jedn.zewnętrz.PID1
21-13 Źródło wartości zadanej zewn. 1
0 - 2147483647 *0
16-74 Licznik precyzyjnego zatrzymania
22-47 Prędkość uśpienia [Hz]
*[0] Brak funkcji
[1] Wejście analogowe 53
16-80 1 CTW magistrali komunik.
16-8* Mag. kom i port FC
22-48 Czas opóźnienia uśpienia
[7] Wejście częstotl. 29
[2] Wejście analogowe 54
0 - 65535 *0
16-82 1 REF magistrali komunik.
22-49 Czas opóźnienia wybudzenia
22-6* Wykrywanie zerwanego pasa
22-60 Funkcja dla zerwanego pasa
*[0] Wyłączona
[1] Ostrzeżenie
[4] Wejście częstot. 33
[3] Wejście częstotl. 29
[2] Wejście analogowe 54
*[0] Brak funkcji
[1] Wejście analogowe 53
[8] Wejście częstot. 33
21-14 Źródło sprzężenia zwrotnego zewn. 1
0 - 65535 *1084
0 - 65535 *0
-32768 - 32767 *0
16-84 STW opcji komunikacji
-32768 - 32767 *0
16-86 1 REF portu FC
16-85 1 CTW portu FC
[2] Wyłączenie awaryjne
22-61 Moment zerwanego pasa
Jedn.zewnętrz.PID1 *0
-999999,999– 999999,999
21-15 Zewnętrz. wartość zadana 1
0–0xFFFFFFFFUL *0
16-9* Odczyty diagnostyki
16-90 Słowo alarmowe
22-62 Opóźnienie zerwanego pasa
Jedn.zewnętrz.PID1
21-17 Zewnętrz. wartość zadana 1
0–0xFFFFFFFFUL *0
16-91 Słowo alarmowe 2
30-** Funkcje specjalne
[jednostka]
16-92 Słowo ostrzeżenia
30-21 Prąd wysokiego momentu rozruch. [%]
30-2* Zaaw. regul. startu
30-20 Czas wysokiego momentu rozruch. [s]
-999999,999– 999999,999
Jedn.zewnętrz.PID1 *0
Jedn.zewnętrz.PID1
21-18 Zewnętrz. sprzężenie zwrotne 1
0–0xFFFFFFFFUL *0
0–0xFFFFFFFFUL *0
16-94 Zewnętrz. Słowo statusowe
16-93 Słowo ostrzeżenia 2
[jednostka]
0–0xFFFFFFFFUL *0
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 85
Page 90

Załącznik
VLT® Midi Drive FC 280
1010
0 - 255 *0
37-** Ustawienia aplikacji
37-0* ApplicationMode
37-00 Tryb aplikacji
*[0] Drive mode
[2] Position Control
0 - 1073741824 *0
0–1000 ms *200 ms
0–1000 ms *200 ms
[0] Nieaktywne
*[1] Włączone
37-08 Pos. Hold Delay
0–10000 ms *0 ms
37-09 Pos. Coast Delay
37-10 Pos. Brake Delay
37-11 Pos. Brake Wear Limit
37-12 Pos. PID Anti Windup
50–100000 ms *5000 ms
50–100000 ms *5000 ms
*[0] Bezwzględna
[1] Względna
37-04 Pos. Prędkość
1–30000 obr./min *100 obr./min
37-05 Pos. Czas rozpędzania
37-06 Pos. Czas zatrzymania
37-07 Pos. Auto Brake Ctrl
-1073741824 - 1073741824 *0
37-03 Pos. Typ
*[0] Enkoder 24V
37-02 Pos. Target
37-01 Pos. Feedback Source
37-1* Position Control
[0] Nieaktywne
*[1] Włączone
1 - 10000 *1000
37-13 Pos. PID Output Clamp
[9] PID Error Too Big
[12] Rev. Operation
[20] Can not nd home position
[3] Neg. HW Limit
[7] Brake Wear Limit
*[0] Brak błędu
[1] Homing Needed
*[0] No Blocking
[1] Block Reverse
[2] Block Forward
*[0] Ramp Down&Brake
37-15 Pos. Direction Block
*[0] DI
[1] Magistrala komunikacyjna
37-14 Pos. Ctrl. Source
[1] Brake Directly
37-17 Pos. Ctrl Fault Behaviour
37-18 Pos. Ctrl Fault Reason
[2] Pos. HW Limit
[8] Szybkie zatrzymanie
[4] Pos. SW Limit
[5] Neg. SW Limit
37-19 Pos. New Index
[13] Fwd. Operation
86 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 91

Indeks Instrukcja obsługi
Indeks
A
AMA z podłączonym zaciskiem 27................................................. 49
Auto on.............................................................................................. 34, 38
B
Bezpieczeństwo....................................................................................... 8
Bezpiecznik............................................................................... 13, 24, 69
Błąd
Dziennik błędów.............................................................................. 33
C
Chłodzenie.............................................................................................. 10
Czas wyładowania.................................................................................. 8
D
Dane techniczne................................................................................... 23
Długość kabla........................................................................................ 66
Drgania....................................................................................................... 9
Komunikacja szeregowa
Komunikacja szeregowa........................................... 23, 34, 53, 68
Komunikacja szeregowa USB...................................................... 68
Konserwacja........................................................................................... 53
Kontrola.................................................................................................... 24
Konwencja............................................................................................... 75
L
Lista ostrzeżeń i alarmów.................................................................. 57
M
Magazynowanie...................................................................................... 9
Materiały dodatkowe............................................................................. 4
Menu główne.................................................................................. 31, 33
Moment dokręcania zacisku............................................................. 69
Moment obrotowy
Charakterystyka momentu........................................................... 65
Montaż............................................................................................... 10, 24
Montaż poziomy................................................................................... 10
Montaż szeregowy............................................................................... 10
F
Filtr RFI...................................................................................................... 19
H
Hand on.................................................................................................... 34
I
IEC 61800-3...................................................................................... 19, 65
Inicjalizacja
Procedura............................................................................................ 35
Procedura ręczna............................................................................. 35
Instalacja.................................................................................................. 24
Instalacja zgodna z wymogami kompatybilności elektromag-
netycznej (EMC)...... 13
Izolacja przeciwzakłóceniowa.......................................................... 24
Izolowane zasilanie.............................................................................. 19
K
Kabel ekranowany................................................................................ 24
Karta sterująca
Komunikacja szeregowa RS485.................................................. 68
Komunikacja szeregowa USB...................................................... 68
Wydajność.......................................................................................... 68
Wyjście +10 V DC............................................................................. 68
Wyjście 24 V DC................................................................................ 68
Klasa sprawności energetycznej..................................................... 65
Kompatybilność elektromagnetyczna (EMC)............................. 65
N
Napięcie zasilania.......................................................................... 26, 68
Nastawy domyślne............................................................................... 35
Nieuziemiony trójkąt........................................................................... 19
O
Obniżanie wartości znamionowych.............................................. 65
Obroty enkodera................................................................................... 38
Ochrona przed przetężeniem.......................................................... 13
Odstęp dla obiegu chłodzenia........................................................ 24
Otwarta pętla......................................................................................... 68
P
PELV.................................................................................................... 51, 68
Płyta tylna................................................................................................ 10
Podłączenie zasilania........................................................................... 13
Podnoszenie........................................................................................... 10
Podręczne menu............................................................................ 28, 33
Podział obciążenia.................................................................................. 7
Postępowanie z odpadami.................................................................. 6
Poziom napięcia.................................................................................... 66
Prąd DC....................................................................................................... 5
Prąd upływowy................................................................................. 8, 13
Prąd wyjściowy...................................................................................... 67
Programowanie....................................................................... 21, 33, 34
Prowadzenie kabli................................................................................ 24
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 87
Page 92

Indeks
VLT® Midi Drive FC 280
Przebieg AC............................................................................................... 5
Przekaźnik klienta................................................................................. 46
Przekrój poprzeczny............................................................................ 66
Przekrój poprzeczny kabla................................................................ 17
Przepięcie................................................................................................ 14
Przewody mocy wyjściowej.............................................................. 24
Przycisk funkcyjny......................................................................... 27, 33
Przycisk Menu.......................................................................... 27, 32, 33
Przycisk nawigacyjny............................................................ 27, 32, 33
Przypadkowy rozruch..................................................................... 7, 53
R
Recykling.................................................................................................... 6
Rejestr alarmów.................................................................................... 33
Reset..................................................................................... 33, 34, 35, 53
Rozkaz pracy........................................................................................... 38
Rozłącznik................................................................................................ 26
Rozmiar przewodu............................................................................... 13
Rozruch.................................................................................................... 35
S
Serwis........................................................................................................ 53
SIL2............................................................................................................... 6
SILCL, SIL2.................................................................................................. 6
Silnik
Dane...................................................................................................... 37
Dane silnika........................................................................................ 35
Kabel silnika................................................................................ 13, 17
Moc silnika................................................................................... 13, 33
Obroty.................................................................................................. 37
Prąd................................................................................................... 5, 37
Prąd silnika......................................................................................... 33
Status...................................................................................................... 4
Wyjście silnikowe z przetwornicy............................................... 65
Zabezpieczenie................................................................................... 4
Zabezpieczenie termiczne silnika................................................ 6
Skrót.......................................................................................................... 75
Sprawność energetyczna..................................................... 62, 63, 64
Sprzężenie zwrotne............................................................................. 24
Sprzężenie zwrotne z systemu........................................................... 4
Ś
Środowisko instalacji............................................................................. 9
S
Standardy i normy zgodności dla funkcji STO.............................. 6
Sterowanie
Charakterystyka................................................................................ 68
Okablowanie........................................................................ 13, 20, 24
Zacisk sterowania...................................................................... 34, 57
Sterowanie hamulcem mechanicznym........................................ 21
Sterowanie lokalne.............................................................................. 34
STO
Automatyczny restart.............................................................. 45, 46
Dane techniczne............................................................................... 47
Dezaktywacja.................................................................................... 45
Konserwacja....................................................................................... 46
Próba uruchomienia....................................................................... 46
Ręczny restart............................................................................. 45, 46
Włączanie............................................................................................ 45
Struktura menu..................................................................................... 33
Symbol...................................................................................................... 75
T
Tabliczka znamionowa.......................................................................... 9
Termistor.................................................................................................. 51
U
Udary........................................................................................................... 9
Urządzenia opcjonalne....................................................................... 26
Urządzenia wspomagające............................................................... 24
Uziemienie
Połączenie z uziemioną masą...................................................... 24
Przewód uziemienia........................................................................ 13
Uziemienie......................................................................... 17, 18, 24, 26
Uziemiony trójkąt................................................................................. 19
Użytkowanie zgodnie z przeznaczeniem....................................... 4
W
Wartość zadana..................................................................................... 33
Wartość zadana prędkości......................................................... 38, 49
Warunki otoczenia............................................................................... 65
Wejścia
Wejście analogowe.......................................................................... 66
Wejście cyfrowe................................................................................ 66
Wejście impulsowe.......................................................................... 67
Wejście
Moc..................................................................................... 5, 18, 24, 26
Napięcie wejściowe......................................................................... 26
Prąd....................................................................................................... 18
Przewody zasilania wejściowego............................................... 24
Zacisk............................................................................................. 18, 26
Zasilanie wejściowe......................................................................... 13
Wejście AC.......................................................................................... 5, 18
Wejście cyfrowe..................................................................................... 21
Współczynnik mocy........................................................................ 5, 24
Wyjścia
Wyjście analogowe.......................................................................... 67
Wyjście cyfrowe................................................................................ 67
Wyjście przekaźnikowe...................................................................... 68
Wykwalikowany personel.................................................................. 7
Wyłącznik................................................................................................. 24
88 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. MG07A549
Page 93

Indeks Instrukcja obsługi
Wymagany odstęp............................................................................... 10
Wyrównanie potencjałów................................................................. 14
Wysokie napięcie............................................................................. 7, 26
Wyświetlacz numeryczny.................................................................. 27
Z
Zabezpieczenie obwodów odgałęzionych................................. 69
Zabezpieczenie przed stanami nieustalonymi............................. 5
Zabezpieczenie termiczne................................................................... 6
Zaciski
Zacisk sterowania...................................................................... 34, 57
Zacisk wyjściowy.............................................................................. 26
Zasilanie
Dane zasilania................................................................................... 62
Napięcie............................................................................................... 33
(L1/N, L2/L, L3).................................................................................. 64
Zasilanie AC........................................................................................ 5, 18
Zdalne polecenie..................................................................................... 4
Zestaw parametrów............................................................................. 38
Zewnętrzne polecenie.......................................................................... 5
Zewnętrzny sterownik........................................................................... 4
Zezwolenie i certykat.......................................................................... 6
Zworka...................................................................................................... 21
MG07A549 Danfoss A/S © 08/2018 Wszelkie prawa zastrzeżone. 89
Page 94
Danfoss Sp. z o.o.
ul. Chrzanowska 5
05-825 Grodzisk Mazowiecki
Telefon:(22) 755 07 00
Telefax:(22) 755 07 01
e-mail:info@danfoss.pl
http://www.danfoss.pl
Danfoss nie ponosi odpowiedzialności za możliwe błędy drukarskie w katalogach, broszurach i innych materiałach drukowanych. Dane techniczne zawarte w broszurze mogą ulec zmianie bez
wcześniejszego uprzedzenia, jako efekt stałych ulepszeń i modykacji naszych urządzeń. Wszelkie znaki towarowe w tym materiale są własnością odpowiednich spółek. Danfoss, logotyp Danfoss są
znakami towarowymi Danfoss A/S. Wszelkie prawa zastrzeżone.
Danfoss A/S
Ulsnaes 1
DK-6300 Graasten
vlt-drives.danfoss.com
132R0153 MG07A549 08/2018
*MG07A549*
 Loading...
Loading...