


ENGINEERING TOMORROW
Manuel de conguration
VLT® Midi Drive FC 280
vlt-drives.danfoss.com

Table des matières Manuel de conguration
Table des matières
1 Introduction
1.1 Objet du Manuel de conguration
1.2 Ressources supplémentaires
1.3 Dénitions
1.4 Version de document et de logiciel
1.5 Homologations et certications
1.6 Sécurité
2 Vue d'ensemble des produits
2.1 Aperçu des tailles de boîtier
2.2 Installation électrique
2.2.1 Raccordement du moteur 15
2.2.2 Raccordement au secteur CA 16
2.2.3 Types de bornes de commande 17
2.2.4 Câblage vers les bornes de commande 18
2.3 Structures de contrôle
2.3.1 Modes de commande 18
2.3.2 Principe de fonctionnement 20
2.3.3 Structure de contrôle en mode VVC
2.3.4 Contrôle de courant interne en mode VVC
5
5
5
5
8
8
9
10
10
13
18
+
+
20
21
2.3.5 Contrôle local (Hand On) et distant (Auto On) 21
2.4 Utilisation des références
2.4.1 Limites de réf. 23
2.4.2 Mise à l'échelle des références prédénies et des références du bus 24
2.4.3 Mise à l'échelle des références analogiques et d'impulsions, et du signal de retour 24
2.4.4 Zone morte autour de zéro 25
2.5 Régulateur PID
2.5.1 Régulateur PID de vitesse 28
2.5.2 Régulateur PID de process 31
2.5.3 Paramètres pertinents du contrôle de process 32
2.5.4 Exemple de régulateur PID de process 33
2.5.5 Optimisation du contrôleur de process 35
2.5.6 Méthode de réglage de Ziegler Nichols 36
2.6 Émissions et immunité CEM
2.6.1 Généralités concernant les émissions CEM 37
2.6.2 Émission CEM 39
2.6.3 Immunité CEM 40
22
28
37
2.7 Isolation galvanique
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 1
42
Table des matières
VLT® Midi Drive FC 280
2.8 Courant de fuite à la terre
2.9 Fonctions de freinage
2.9.1 Frein de maintien mécanique 43
2.9.2 Freinage dynamique 44
2.9.3 Sélection des résistances de freinage 44
2.10 Isolation du moteur
2.10.1 Filtres sinus 46
2.10.2 Filtres dU/dt 46
2.11 Contrôleur logique avancé
2.12 Conditions d'exploitation extrêmes
2.12.1 Protection thermique du moteur 48
3 Exemples d'applications
3.1 Introduction
3.1.1 Raccordement du codeur 49
3.1.2 Sens de rotation du codeur 49
3.1.3 Système de variateur en boucle fermée 49
3.2 Exemples d'applications
42
43
46
46
47
49
49
50
3.2.1 AMA 50
3.2.2 Vitesse 50
3.2.3 Marche/arrêt 51
3.2.4 Réinitialisation d'alarme externe 52
3.2.5 Thermistance moteur 52
3.2.6 SLC 52
4 Safe Torque O (STO)
5 Installation et conguration de l'interface RS485
5.1 Introduction
5.1.1 Vue d'ensemble 55
5.1.2 Raccordement du réseau 56
5.1.3 Conguration de l'équipement 56
5.1.4 Réglage des paramètres pour communication Modbus 56
5.1.5 Précautions CEM 56
5.2 Protocole FC
5.2.1 Vue d'ensemble 56
54
55
55
56
5.2.2 FC avec Modbus RTU 57
5.3 Conguration du réseau
5.4 Structure des messages du protocole FC
5.4.1 Contenu d'un caractère (octet) 57
5.4.2 Structure du télégramme 57
2 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304
57
57
Table des matières Manuel de conguration
5.4.3 Longueur du télégramme (LGE) 57
5.4.4 Adresse (ADR) du variateur de fréquence 58
5.4.5 Octet de contrôle des données (BCC) 58
5.4.6 Champ de données 58
5.4.7 Champ PKE 58
5.4.8 Numéro de paramètre (PNU) 59
5.4.9 Indice (IND) 59
5.4.10 Valeur du paramètre (PWE) 59
5.4.11 Types de données pris en charge par le variateur de fréquence 59
5.4.12 Conversion 60
5.4.13 Mots de process (PCD) 60
5.5 Exemples
5.5.1 Écriture d'une valeur de paramètre 60
5.5.2 Lecture d'une valeur de paramètre 60
5.6 Modbus RTU
5.6.1 Connaissances préalables 61
5.6.2 Vue d'ensemble 61
5.6.3 Variateur de fréquence avec Modbus RTU 61
5.7 Conguration du réseau
5.8 Structure des messages du Modbus RTU
5.8.1 Introduction 62
5.8.2 Structure des télégrammes Modbus RTU 62
5.8.3 Champ démarrage/arrêt 62
5.8.4 Champ d'adresse 62
5.8.5 Champ de fonction 63
5.8.6 Champ de données 63
5.8.7 Champ de contrôle CRC 63
5.8.8 Adresse de registre des bobines 63
60
61
62
62
5.8.9 Comment contrôler le variateur de fréquence 65
5.8.10 Codes de fonction pris en charge par le Modbus RTU 65
5.8.11 Codes d'exceptions Modbus 65
5.9 Comment accéder aux paramètres
5.9.1 Gestion des paramètres 66
5.9.2 Stockage des données 66
5.9.3 IND (Index) 66
5.9.4 Blocs de texte 66
5.9.5 Facteur de conversion 66
5.9.6 Valeurs de paramètre 66
5.10 Exemples
5.10.1 Lecture état bobines (01 HEX) 66
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 3
66
66
Table des matières
VLT® Midi Drive FC 280
5.10.2 Forcer/écrire bobine unique (05 HEX) 67
5.10.3 Forcer/écrire bobines multiples (0F HEX) 67
5.10.4 Lecture registres de maintien (03 HEX) 68
5.10.5 Prédénir registre unique (06 HEX) 68
5.10.6 Prédénir registres multiples (10 HEX) 69
5.11 Prol de contrôle FC Danfoss
5.11.1 Mot de contrôle selon le prol FC (8-10 Protocole = Prol FC) 69
5.11.2 Mot d'état selon le prol FC (STW) 71
5.11.3 Valeur de référence de vitesse du bus 73
6 Code de type et sélection
6.1 Code de type
6.2 Références : Options, accessoires et pièces détachées
6.3 Références : résistances de freinage
6.3.1 Références : résistances de freinage 10 % 76
6.3.2 Références : résistances de freinage 40 % 78
6.4 Références : Filtres sinus
6.5 Références : Filtres dU/dt
6.6 Références : Filtres CEM externes
7 Spécications
7.1 Données électriques
7.2 Alimentation secteur
69
74
74
74
75
79
80
80
83
83
85
7.3 Puissance et données du moteur
7.4 Conditions ambiantes
7.5 Spécications du câble
7.6 Entrée/sortie de commande et données de commande
7.7 Couples de serrage des raccords
7.8 Fusibles et disjoncteurs
7.9 Rendement
7.10 Bruit acoustique
7.11 Conditions dU/dt
7.12 Exigences particulières
7.12.1 Déclassement manuel 93
7.12.2 Déclassement automatique 95
7.13 Tailles de boîtier, puissances nominales et dimensions
Indice
85
86
87
87
90
90
91
92
92
93
96
99
4 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304
Introduction Manuel de conguration
1 Introduction
1.1 Objet du Manuel de conguration
Ce Manuel de conguration est destiné aux ingénieurs de
projets et systèmes, aux consultants en conception et aux
experts en applications et produits. Les informations
techniques fournies permettent de comprendre les
capacités du variateur de fréquence pour intégration dans
des systèmes de contrôle et de surveillance de moteur. Les
détails décrits concernent le fonctionnement, les exigences
et les recommandations pour l'intégration dans un
système. Les informations sont fournies pour les caractéristiques de puissance d'entrée, la sortie de commande du
moteur et les conditions de fonctionnement ambiantes du
variateur de fréquence.
Sont aussi inclus :
les fonctions de sécurité ;
•
la surveillance de la condition de panne ;
•
des rapports d'état opérationnels ;
•
les fonctionnalités de communication série ;
•
les options et fonctions programmables.
•
Les détails de conception tels que les exigences du site, les
câbles, les fusibles, le câblage de commande, la taille et le
poids des unités et d'autres informations critiques
nécessaires à la
sont également donnés.
La consultation des informations détaillées du produit
permet, lors de la conception, de développer un système
optimal en termes de fonctionnalité et d'ecacité.
planication de l'intégration au système
Dénitions
1.3
1.3.1 Variateur de fréquence
Roue libre
L'arbre moteur se trouve en fonctionnement libre. Pas de
couple sur le moteur.
I
VLT,MAX
Courant maximal de sortie.
I
VLT,N
Courant nominal de sortie fourni par le variateur de
fréquence
U
VLT,MAX
Tension de sortie maximale.
1.3.2 Entrée
Ordres de commande
Démarrer et arrêter le moteur raccordé à l'aide du LCP et
des entrées digitales.
Les fonctions sont réparties en deux groupes.
Les fonctions du groupe 1 ont une priorité supérieure aux
fonctions du groupe 2.
Groupe 1 Arrêt précis, arrêt roue libre et réinitialisation, arrêt
précis et arrêt en roue libre, arrêt rapide, freinage
CC, arrêt et [O]
Groupe 2 Démarrage, impulsion de démarrage, inversion,
démarrage avec inversion, jogging et gel sortie
Tableau 1.1 Groupes de fonctions
1 1
VLT® est une marque déposée.
Ressources supplémentaires
1.2
Ressources disponibles pour comprendre l'utilisation et la
programmation du variateur de fréquence :
Le Manuel d'utilisation du VLT® Midi Drive FC 280
•
contient des informations sur l'installation, la mise
en service, l'application et la maintenance du
variateur de fréquence.
Le Guide de programmation du VLT® Midi Drive FC
•
280 fournit des informations sur la programmation et comporte une description complète
des paramètres.
Des publications et des manuels supplémentaires sont
disponibles auprès de Danfoss. Consulter
drives.danfoss.com/knowledge-center/technical-documentation/ pour en obtenir la liste.
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 5
1.3.3 Moteur
Moteur tourne
Couple généré sur l'arbre de sortie et vitesse de 0 tr/min à
la vitesse max. du moteur.
f
JOG
Fréquence du moteur lorsque la fonction jogging est
activée (via les bornes digitales ou le bus).
f
M
Fréquence du moteur.
f
MAX
Fréquence maximale du moteur.
f
MIN
Fréquence minimale du moteur.
f
M,N
Fréquence nominale du moteur (données de la plaque
signalétique).
I
M
Courant du moteur (eectif).
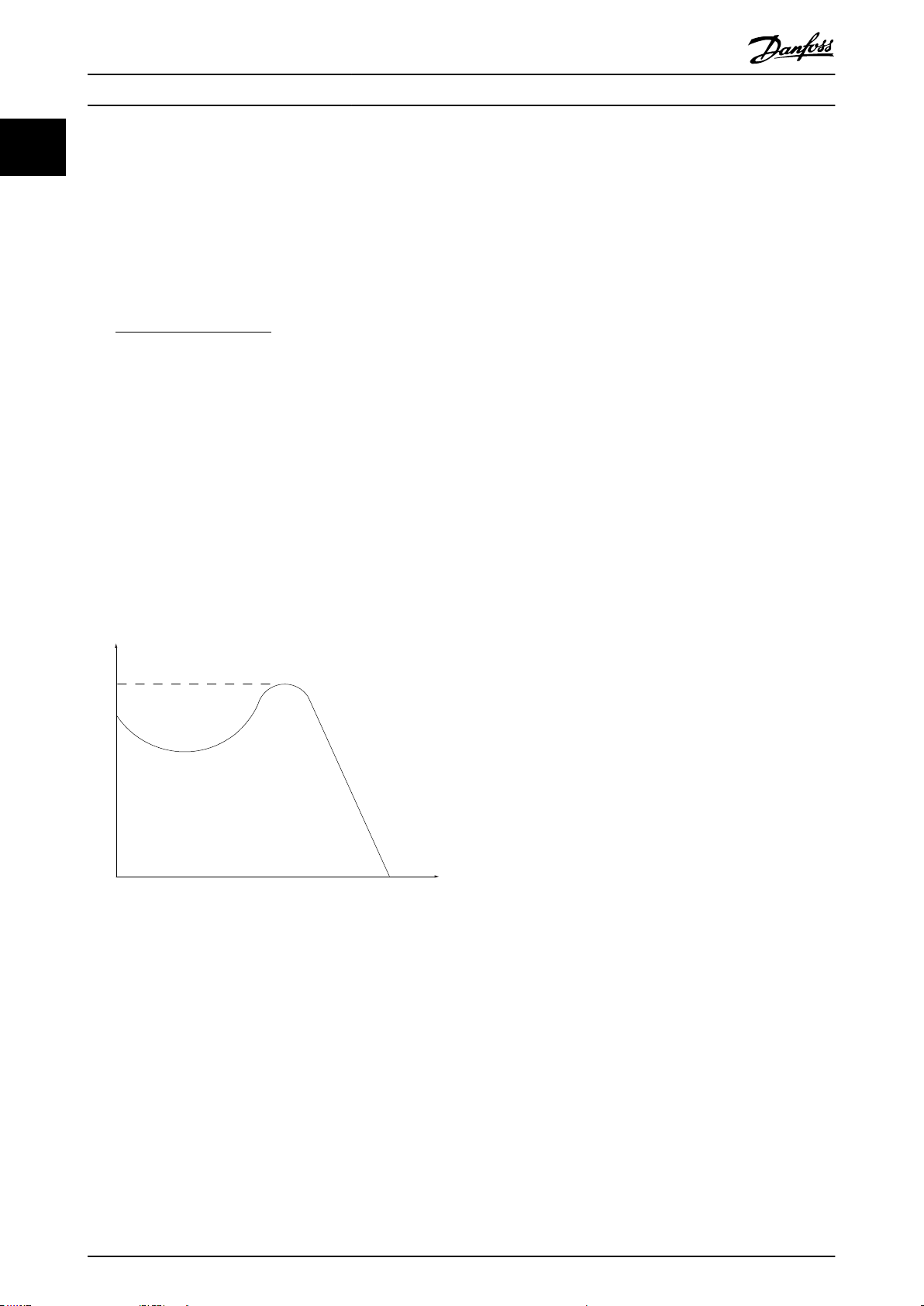
175ZA078.10
couple de décrochage
tr / mn
couple
Introduction
VLT® Midi Drive FC 280
11
I
M,N
1.3.4 Consignes
Courant nominal du moteur (données de la plaque
signalétique).
n
M,N
Vitesse nominale du moteur (données de la plaque
signalétique).
n
s
Vitesse moteur synchrone.
2 × Paramètre 1−23 × 60s
ns=
n
glissement
Paramètre 1−39
Glissement du moteur.
P
M,N
Puissance nominale du moteur (données de la plaque
signalétique en kW ou en HP).
T
M,N
Couple nominal (moteur).
U
M
Tension instantanée du moteur.
U
M,N
Tension nominale du moteur (données de la plaque
signalétique).
Couple de décrochage
Référence analogique
Un signal transmis vers les entrées analogiques 53 ou 54
peut prendre la forme de tension ou de courant.
Référence binaire
Signal appliqué via le port de communication série.
Référence prédénie
Référence prédénie réglable entre -100 % et +100 % de la
plage de référence. Huit références prédénies peuvent
être sélectionnées par l'intermédiaire des bornes digitales.
4 références prédénies peuvent être sélectionnées par
l'intermédiaire du bus
Référence d'impulsions
Signal impulsionnel appliqué aux entrées digitales (borne
29 ou 33).
Réf
MAX
Détermine la relation entre l'entrée de référence à 100 %
de la valeur de l'échelle complète (généralement 10 V,
20 mA) et la référence résultante. Valeur de référence
maximale
Réf
dénie au paramétre 3-03 Réf. max..
MIN
Détermine la relation entre l'entrée de référence à la valeur
0 % (généralement 0 V, 0 mA, 4 mA) et la référence
résultante. Valeur de référence minimum dénie au
paramétre 3-02 Référence minimale.
Illustration 1.1 Couple de décrochage
η
VLT
Le rendement du variateur de fréquence est déni comme
le rapport entre la puissance dégagée et la puissance
absorbée.
Ordre de démarrage désactivé
Ordre de démarrage désactivé faisant partie du groupe 1
d'ordres de commande. Voir le Tableau 1.1 pour en savoir
plus.
Ordre d'arrêt
Ordre d'arrêt faisant partie du groupe 1 d'ordres de
commande. Voir le Tableau 1.1 pour en savoir plus.
1.3.5 Divers
Entrées analogiques
Les entrées analogiques permettent de contrôler diverses
fonctions du variateur de fréquence.
Il en existe 2 types :
Entrée de courant : 0-20 mA et 4-20 mA.
•
Entrée de tension : 0-10 V CC.
•
Sorties analogiques
Les sorties analogiques peuvent fournir un signal de
0-20 mA ou 4-20 mA.
Adaptation automatique au moteur, AMA
L'algorithme d'AMA détermine, à l'arrêt, les paramètres
électriques du moteur raccordé.
Résistance de freinage
La résistance de freinage est un module capable
d'absorber la puissance de freinage générée lors du
freinage par récupération. Cette puissance de freinage par
récupération augmente la tension du circuit intermédiaire
et un hacheur de freinage veille à transmettre la puissance
à la résistance de freinage.
Caractéristiques de couple constant
Caractéristiques de couple constant que l'on utilise pour
toutes les applications telles que les convoyeurs à bande,
les pompes volumétriques et les grues.
6 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304
Introduction Manuel de conguration
Entrées digitales
Les entrées digitales permettent de contrôler diverses
fonctions du variateur de fréquence.
Sorties digitales
Le variateur de fréquence est doté de 2 sorties à semiconducteurs qui peuvent fournir un signal 24 V CC (max.
40 mA).
DSP
Processeur de signal numérique.
ETR
Le relais thermique électronique constitue un calcul de
charge thermique basé sur une charge et un temps
instantanés. Il permet d'estimer la température du moteur.
Bus standard FC
Inclut le bus RS485 avec le protocole FC ou MC. Voir le
paramétre 8-30 Protocol.
Initialisation
Si l'on eectue une initialisation (paramétre 14-22 Operation
Mode), le variateur de fréquence revient à ses réglages par
défaut.
Cycle d'utilisation intermittent
Une utilisation intermittente fait référence à une séquence
de cycles d'utilisation. Chaque cycle est composé d'une
période en charge et d'une période à vide. Le fonctionnement peut être périodique ou non périodique.
LCP
Le panneau de commande local constitue une interface
complète de commande et de programmation du
variateur. Le LCP est amovible. Grâce à l'option du kit
d'installation, le LCP peut être installé à une distance
maximale de 3 m (9,8 pi) du variateur de fréquence sur un
panneau frontal.
NLCP
Le panneau de commande local numérique constitue une
interface de commande et de programmation du variateur
de fréquence. L'achage est numérique et le panneau sert
à acher les valeurs de process. Le NLCP n'a pas de
fonction d'enregistrement ni de copie.
GLCP
Le panneau de commande local graphique constitue une
interface de commande et de programmation du variateur
de fréquence. L'achage est graphique et le panneau sert
à acher les valeurs de process. Le GLCP a des fonctions
d'enregistrement et de copie.
lsb
Bit de poids faible.
msb
Bit de poids fort.
MCM
Abréviation de Mille Circular Mil, unité de mesure
américaine de la section de câble. 1 MCM = 0,5067 mm2.
Paramètres en ligne/hors ligne
Les modications apportées aux paramètres en ligne sont
activées directement après modication de la valeur de
données. Pour activer les modications apportées aux
paramètres hors ligne, appuyer sur [OK].
Process PID
Le régulateur PID maintient la vitesse, la pression et la
température en adaptant la fréquence de sortie à la
variation de charge.
PCD
Données de contrôle de process.
CFP
Correction du facteur de puissance.
Cycle de puissance
Couper le secteur jusqu'à ce que l'achage (LCP) devienne
sombre, puis mettre à nouveau sous tension.
Facteur de puissance
Le facteur de puissance est le rapport entre I1 et I
Facteurde puissance =
Pour les variateurs de fréquence FC 280,
3xUxI1cosϕ1
3xUxI
RMS
cosϕ
.
RMS
1 = 1, par
conséquent :
Facteurde puissance =
I1xcosϕ1
I
RMS
=
I
I
RMS
1
Le facteur de puissance indique dans quelle mesure le
variateur de fréquence impose une charge à l'alimentation
secteur.
Plus le facteur de puissance est bas, plus l'I
RMS
est élevé
pour la même performance en kW.
I
RMS
=
I
+ I
1
5
+ I
2
+ .. + I
7
2
n
2
2
En outre, un facteur de puissance élevé indique que les
diérentes harmoniques de courant sont faibles.
Les bobines CC intégrées (T2/T4) et le CFP (S2) génèrent
un facteur de puissance élevé, ce qui minimise la charge
imposée à l'alimentation secteur.
Entrée impulsions/codeur incrémental
Générateur externe d'impulsions digitales utilisé pour
fournir un retour sur la vitesse du moteur. Le codeur est
utilisé dans des applications qui nécessitent une grande
précision de la commande de vitesse.
RCD
Relais de protection diérentielle.
Conguration
Enregistrement des réglages des paramètres dans 4
process. Basculement entre les 4 process et modication
d'un process pendant qu'un autre est actif.
SFAVM
Sigle correspondant au type de modulation appelé Stator
Flux oriented Asynchronous Vector Modulation, c'est-à-dire
modulation vectorielle asynchrone à ux statorique orienté.
1 1
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 7
Introduction
VLT® Midi Drive FC 280
11
Compensation du glissement
Le variateur de fréquence compense le glissement du
moteur en augmentant la fréquence en fonction de la
charge du moteur mesurée, la vitesse du moteur restant
ainsi quasiment constante.
Contrôleur logique avancé (SLC)
Le SLC est une séquence d'actions dénies par l'utilisateur
exécutées lorsque les événements associés dénis par
l'utilisateur sont évalués comme étant VRAI par le
contrôleur logique avancé (groupe de paramètres 13-**
Logique avancée).
STW
Mot d'état
THD
La distorsion harmonique totale indique la contribution
totale des harmoniques.
Thermistance
Résistance dépendant de la température placée à l'endroit
où la température est surveillée (variateur de fréquence ou
moteur).
Arrêt
L'arrêt est un état résultant de situations de panne.
Exemples de situations de panne :
Le variateur de fréquence est soumis à une
•
surtension.
Le variateur de fréquence protège le moteur, le
•
process ou le mécanisme.
Le redémarrage est impossible tant que l'origine de la
panne n'a pas été résolue ; l'état de déclenchement est
annulé par un reset ou, dans certains cas, grâce à un reset
programmé automatiquement. Ne pas utiliser l'alarme à
des ns de sécurité des personnes.
Alarme verrouillée
L'alarme verrouillée est un état résultant de situations de
panne lorsque le variateur de fréquence assure sa propre
protection et nécessitant une intervention physique, p. ex.
lorsqu'un court-circuit à la sortie déclenche une alarme
verrouillée. Un déclenchement verrouillé peut être annulé
par coupure de l'alimentation secteur, résolution de
l'origine de la panne et reconnexion du variateur de
fréquence. Le redémarrage est impossible tant que l'état
d'arrêt n'a pas été annulé par un reset ou, dans certains
cas, grâce à un reset programmé automatiquement. Ne pas
utiliser l'alarme verrouillée à des ns de sécurité des
personnes.
Caractéristiques de couple variable
Caractéristiques de couple variable que l'on utilise pour les
pompes et les ventilateurs.
+
VVC
Si on la compare au contrôle standard de proportion
tension/fréquence, la commande vectorielle de tension
(VVC+) améliore la dynamique et la stabilité, à la fois
lorsque la référence de vitesse est modiée et lorsqu'elle
est associée au couple de charge.
60° AVM
Fait référence au type de modulation appelé 60°
Asynchronous Vector Modulation, c'est-à-dire modulation
vectorielle asynchrone.
1.4 Version de document et de logiciel
Ce manuel est régulièrement révisé et mis à jour. Toutes
les suggestions d'amélioration sont les bienvenues. Le
Tableau 1.2 indique la version du document et la version
logicielle correspondante.
Édition Remarques
MG07B3
Tableau 1.2 Version de document et de logiciel
Plus d'informations pour la mise à jour
de POWERLINK et du logiciel.
Version
logiciel
1.3
1.5 Homologations et certications
Les variateurs de fréquence ont été conçus conformément
aux directives décrites dans cette section.
1.5.1 Marquage CE
Le marquage CE (Communauté européenne) indique que
le fabricant du produit se conforme à toutes les directives
CE applicables.
Les directives UE applicables à la conception et à la
fabrication des variateurs de fréquence sont les suivantes :
Directive basse tension
•
Directive CEM
•
Directive machines (pour les unités avec fonction
•
de sécurité intégrée)
Le marquage CE est destiné à éliminer les barrières
techniques au libre-échange entre les états de la CE et de
l'EFTA à l'intérieur de l'ECU. Le marquage CE ne fournit
aucune information sur la qualité du produit. Les spéci-
cations techniques ne peuvent pas être déduites du
marquage CE.
1.5.2 Directive basse tension
Les variateurs de fréquence sont classés comme des
composants électroniques et doivent porter le marquage
CE conformément à la directive basse tension. La directive
s'applique à tous les appareils électriques utilisés dans les
plages de tension allant de 50 à 1000 V CA et de 75 à
1500 V CC.
La directive précise que la conception de l'équipement doit
garantir la sécurité et la santé des personnes ainsi que
8 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

Introduction Manuel de conguration
celle du bétail et préserver le matériel si l'équipement est
correctement installé, entretenu et utilisé conformément à
l'usage prévu. Le marquage CE de Danfoss est conforme à
la directive basse tension et Danfoss fournit une
déclaration de conformité à la demande.
1.5.3 Directive CEM
La compatibilité électromagnétique (CEM) signie que les
interférences électromagnétiques entre les appareils
n'altèrent pas leurs performances. Les conditions de base
relatives à la protection de la Directive CEM 2014/30/UE
indiquent que les dispositifs qui génèrent des interférences
électromagnétiques (EMI) ou dont le fonctionnement peut
être aecté par les EMI, doivent être conçus pour limiter la
génération d'interférences électromagnétiques et doivent
présenter un degré d'immunité adapté vis-à-vis des EMI
lorsqu'ils sont correctement installés, entretenus et utilisés
conformément à l'usage prévu.
Un variateur de fréquence peut être utilisé seul ou intégré
à une installation plus complexe. Dans ces deux cas, les
dispositifs doivent porter le marquage CE. Les systèmes ne
doivent pas porter le marquage CE mais doivent être
conformes aux conditions relatives à la protection de base
de la directive CEM.
Le numéro ECCN est indiqué dans les documents fournis
avec le variateur de fréquence.
En cas de réexportation, il incombe à l'exportateur de
veiller au respect des réglementations sur le contrôle
d'exportation en vigueur.
1.6 Sécurité
Les variateurs de fréquence contiennent des composants
haute tension et peuvent causer des blessures mortelles en
cas de mauvaise manipulation. Seul du personnel qualié
est autorisé à installer et utiliser cet équipement. Avant
toute réparation, couper d'abord l'alimentation du variateur
de fréquence et attendre la durée indiquée que l'énergie
électrique stockée se dissipe.
Consulter le Manuel d'utilisation fourni avec l'appareil et
disponible en ligne concernant :
le temps de décharge ;
•
les consignes de sécurité et avertissements
•
détaillés.
Il convient de respecter rigoureusement les précautions et
consignes de sécurité pour garantir une exploitation sûre
du variateur de fréquence.
1 1
1.5.4 Conformité UL
Homologué UL
Illustration 1.2 UL
Normes appliquées et conformité de la fonction STO
L'utilisation de la STO sur les bornes 37 et 38 nécessite de
se conformer à toutes les dispositions de sécurité, à savoir
les lois, les réglementations et les directives concernées. La
fonction STO intégrée est conforme aux normes suivantes :
CEI/EN 61508:2010, SIL2
•
CEI/EN 61800-5-2:2007, SIL2
•
CEI/EN 62061:2015, SILCL de SIL2
•
EN ISO 13849-1:2015 Catégorie 3 PL d
•
Les variateurs de fréquence peuvent être soumis à des
réglementations régionales et/ou nationales sur le contrôle
d'exportation.
Un numéro ECCN est utilisé pour classer tous les variateurs
de fréquence soumis à des réglementations sur le contrôle
d'exportation.
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 9
130BA870.10
130BA809.10
130BA810.10
130BA810.10
130BA810.10
Vue d'ensemble des produits
VLT® Midi Drive FC 280
2 Vue d'ensemble des produits
22
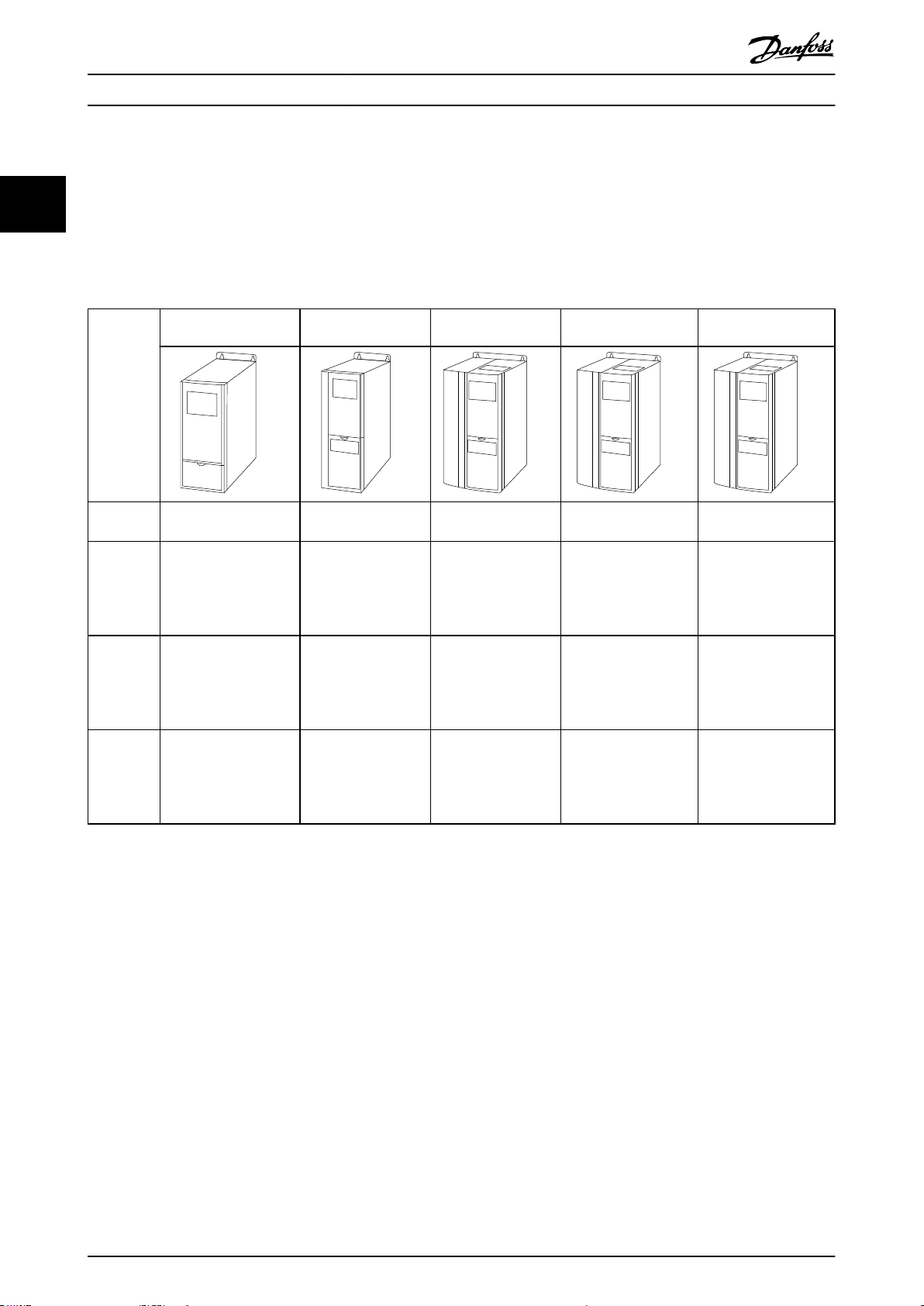
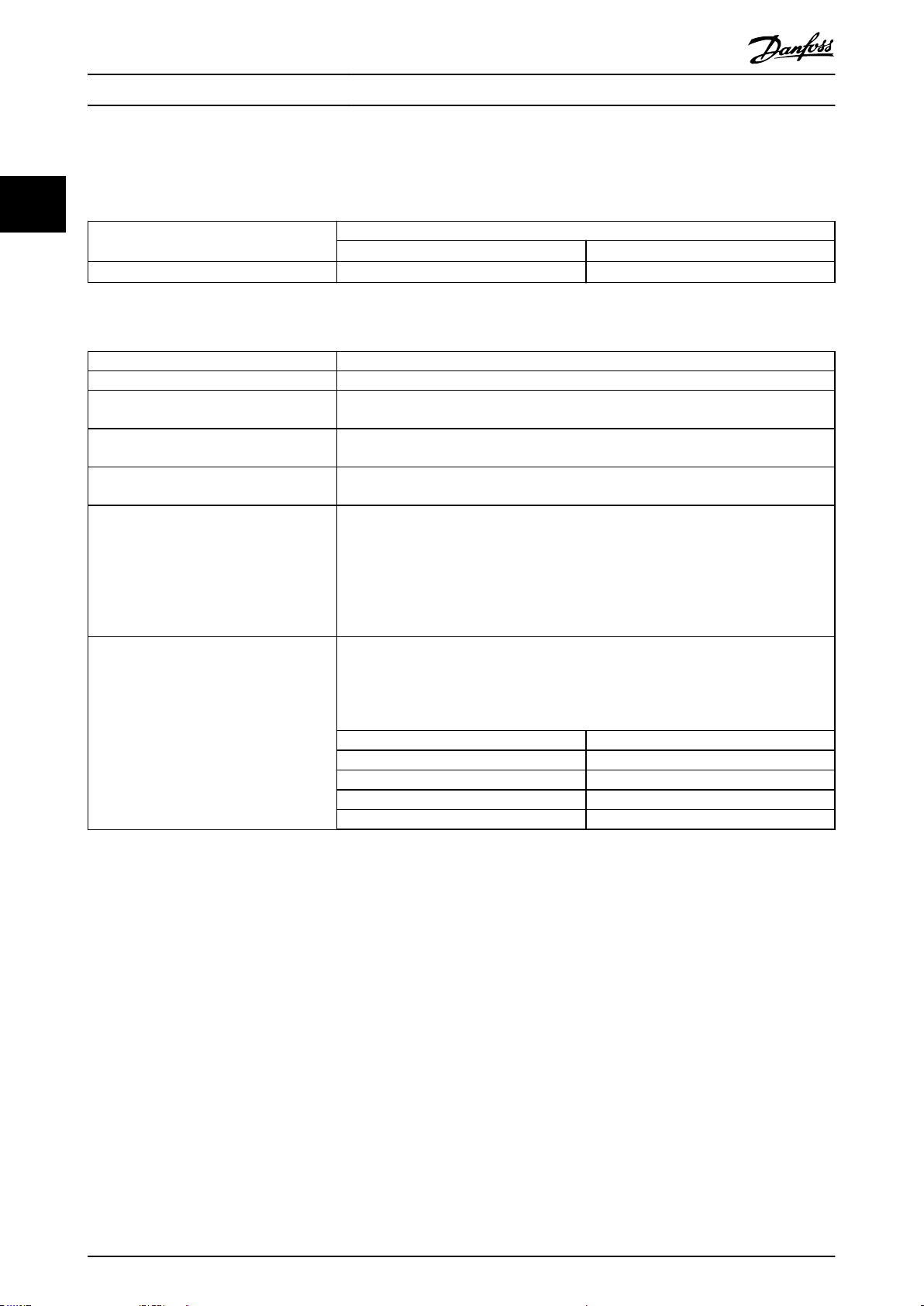
2.1 Aperçu des tailles de boîtier
La taille de boîtier dépend de la plage de puissance. Pour plus d'informations sur les dimensions, se reporter au
chapitre 7.13 Tailles de boîtier, puissances nominales et dimensions.
Taille de
boîtier
Protection
du boîtier
Plage de
puissance
[kW (HP)]
Triphasé
380-480 V
Plage de
puissance
[kW (HP)]
Triphasé
200-240 V
Plage de
puissance
[kW (HP)]
Monophasé
200-240 V
K1 K2 K3 K4 K5
1)
IP20 IP20 IP20 IP20 IP20
0,37-2,2 (0,5-3,0) 3,0-5,5 (5,0-7,5) 7,5 (10) 11–15 (15–20) 18,5-22 (25-30)
0,37-1,5 (0,5-2,0) 2,2 (3,0) 3,7 (5,0) – –
0,37-1,5 (0,5-2,0) 2,2 (3,0) – – –
Tableau 2.1 Tailles de boîtier
1) IP21 est disponible pour certaines versions du VLT® Midi Drive FC 280. En montant les options de kit IP21, toutes les puissances peuvent être de
niveau IP21.
10 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304
130BF709.10
VLT
MADE IN
DENMARK
T/C: FC-280PK37T4E20H1BXCXXXSXXXXAX
0.37kW 0.5HP
IN: 3x380-480V 50/60Hz, 1.2/1.0A
OUT: 3x0-Vin 0-500Hz, 1.2/1.1A
IP20
P/N: 134U2184 S/N: 000000G000
Midi Drive
www.danfoss.com
CAUTION / ATTENTION:
WARNING / AVERTISSEMENT:
See manual for special condition/mains fuse
Voir manual de conditions speciales/fusibles
Enclosure: See manual
5AF3 E358502 IND.CONT.EQ.
Stored charge, wait 4 min.
Charge r
é
siduelle, attendez 4 min.
R
US LISTED
www.tuv.com
ID 0600000000
Danfoss A/S, 6430 Nordborg, Denmark
1 2 3
Vue d'ensemble des produits Manuel de conguration
La taille du boîtier est mentionnée dans ce guide à chaque fois que les procédures ou les composants dièrent en fonction
de la taille physique des variateurs de fréquence.
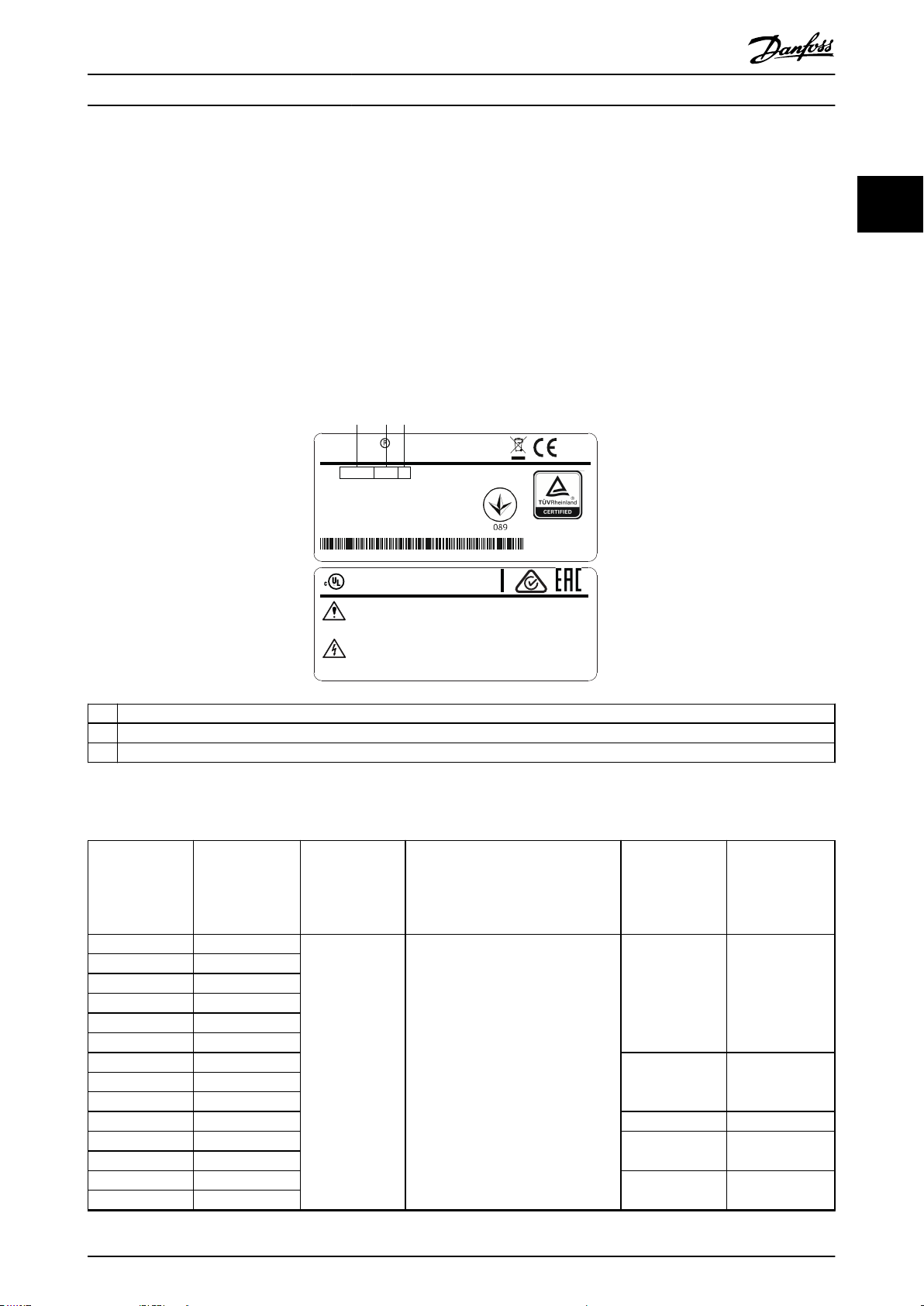
Pour trouver la taille du boîtier, suivre les étapes suivantes :
1. Obtenir les informations suivantes à partir du type de code indiqué sur la plaque signalétique. Se reporter à
l'Illustration 2.1.
1a Groupe de produits et série de variateur de fréquence (caractères 1 à 6). Par exemple : FC 280.
1b Dimensionnement puissance (caractères 7 à 10). Par exemple : PK37.
1c Tension nominale (phases et secteur) (caractères 11 et 12). Par exemple : T4.
2. Dans le Tableau 2.2, trouver le dimensionnement puissance et la tension nominale, et vérier la taille du boîtier du
FC 280.
2 2
1 Groupe de produits et série de variateur de fréquence
2 Dimensionnement puissance
3 Tension nominale (phases et secteur)
Illustration 2.1 Utiliser la plaque signalétique pour trouver la taille du boîtier
Dimension-
nement
puissance sur la
plaque
Puissance
[kW (HP)]
signalétique
PK37 0,37 (0,5)
PK55 0,55 (0,75)
PK75 0,75 (1,0)
P1K1 1,1 (1,5)
P1K5 1,5 (2,0)
P2K2 2,2 (3,0)
P3K0 3 (4,0)
P4K0 4 (5,0)
P5K5 5,5 (7,5)
P7K5 7,5 (10) K3 K3T4
P11K 11 (15)
P15K 15 (20)
P18K 18,5 (25)
P22K 22 (30)
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 11
Tension nominale
sur la plaque
Phases et tension secteur Taille de boîtier
signalétique
T4 Triphasé 380-480 V
Variateur de
fréquence
K1 K1T4
K2 K2T4
K4 K4T4
K5 K5T4
Vue d'ensemble des produits
Dimension-
nement
puissance sur la
22
plaque
signalétique
PK37 0,37 (0,5)
PK55 0,55 (0,75)
PK75 0,75 (1,0)
P1K1 1,1 (1,5)
P1K5 1,5 (2,0)
P2K2 2,2 (3,0) K2 K2T2
P3K7 3,7 (5,0) K3 K3T2
PK37 0,37 (0,5)
PK55 0,55 (0,75)
PK75 0,75 (1,0)
P1K1 1,1 (1,5)
P1K5 1,5 (2,0)
P2K2 2,2 (3,0) K2 K2S2
Tableau 2.2 Taille du boîtier du FC 280
Puissance
[kW (HP)]
Tension nominale
VLT® Midi Drive FC 280
sur la plaque
signalétique
T2 Triphasé 200-240 V
S2 Monophasé 200-240 V
Phases et tension secteur Taille de boîtier
Variateur de
fréquence
K1 K1T2
K1 K1S2
12 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304
Power
input
Switch mode
power supply
Motor
Analog output
interface
(PNP) = Source
(NPN) = Sink
ON = Terminated
OFF = Open
Brake
resistor
91 (L1/N)
92 (L2/L)
93 (L3)
PE
50 (+10 V OUT)
53 (A IN)
2)
54 (A IN)
55 (COM digital/analog I/O)
0/4−20 mA
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
10 V DC
15 mA 100 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(A OUT) 42
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0 V
5 V
S801
0/4−20 mA
RS485
RS485
03
+10 V DC
0−10 V DC
24 V DC
02
01
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
27 (D IN/OUT)
24 V
0 V
0 V (PNP)
24 V (NPN)
29 (D IN)
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
38 (STO2)
4)
37 (STO1)
4)
95
P 5-00
21
ON
(+DC/R+) 89
(R-) 81
0−10 V DC
(-DC) 88
RFI
0 V
250 V AC, 3 A
Relay 1
1)
3)
5)
5)
130BE202.18
Vue d'ensemble des produits Manuel de conguration
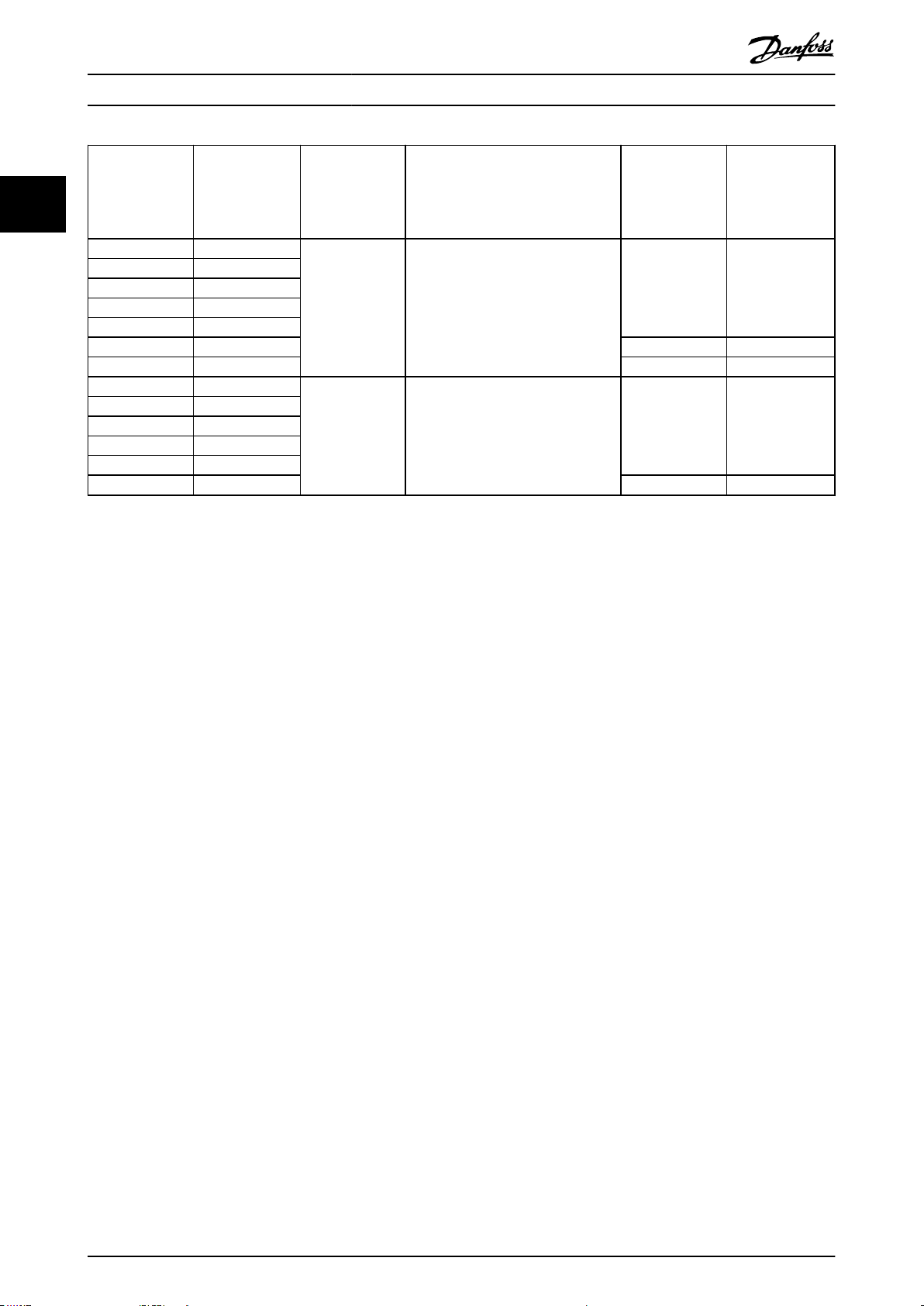
2.2 Installation électrique
Cette section décrit le câblage du variateur de fréquence.
2 2
Illustration 2.2 Dessin schématique du câblage de base
A = analogique, D = digitale
1) Le hacheur de freinage intégré n'est disponible que sur les unités triphasées.
2) La borne 53 peut également servir d'entrée digitale.
3) Le commutateur S801 (borne du bus) peut être utilisé pour permettre la terminaison sur le port RS485 (bornes 68 et 69).
4) Se reporter au chapitre 4 Safe Torque O (STO) pour le câblage adéquat de la fonction STO.
5) Le variateur de fréquence S2 (monophasé 200-240 V) ne prend pas en charge l'application de répartition de la charge.
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 13
130BF228.10
L1
L2
L3
PE
PE
u
v
w
2
1
3
5
16
17
18
14
12
8
7
10
9
4
11
13
4
4
6
15
90
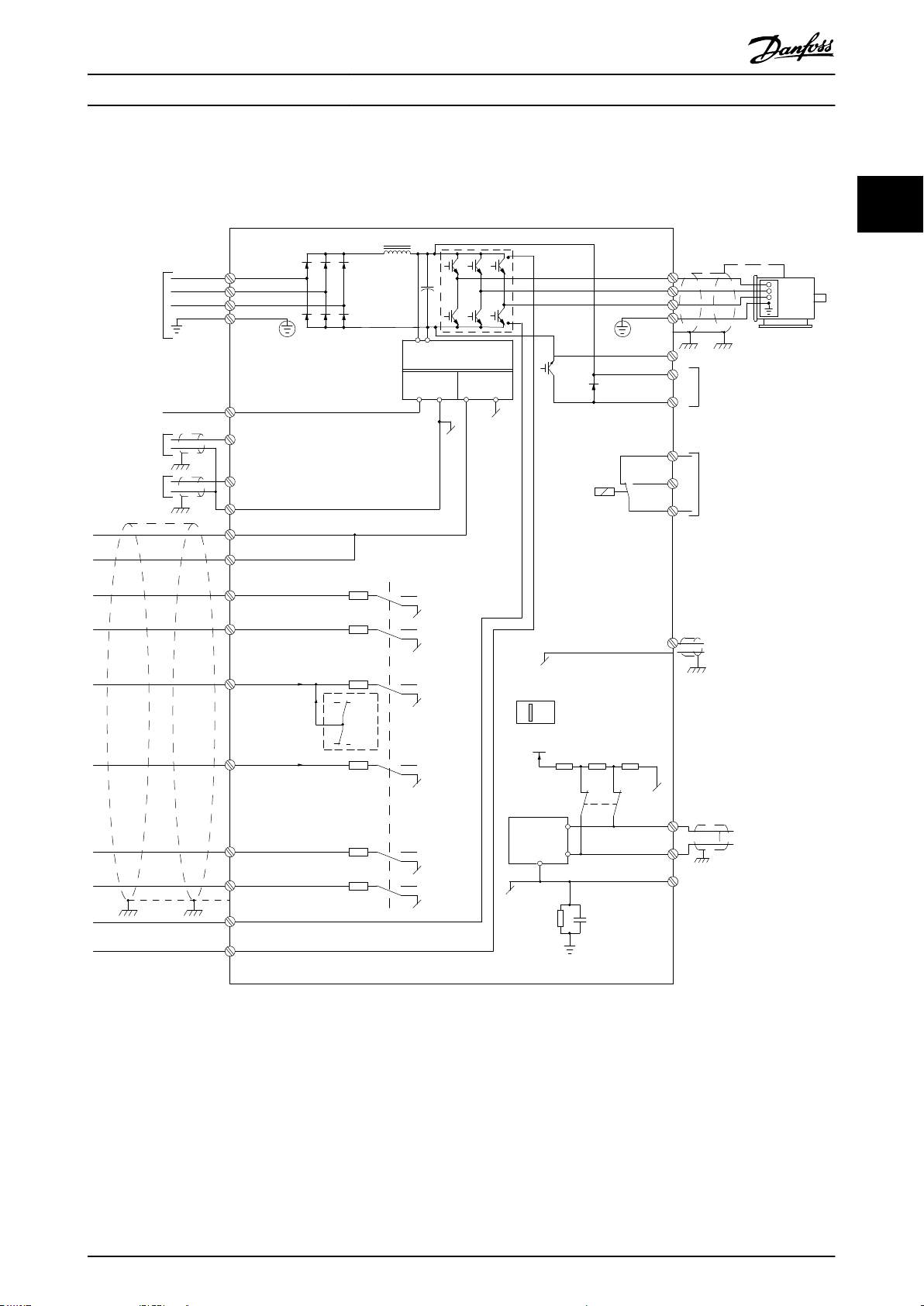
Vue d'ensemble des produits
VLT® Midi Drive FC 280
22
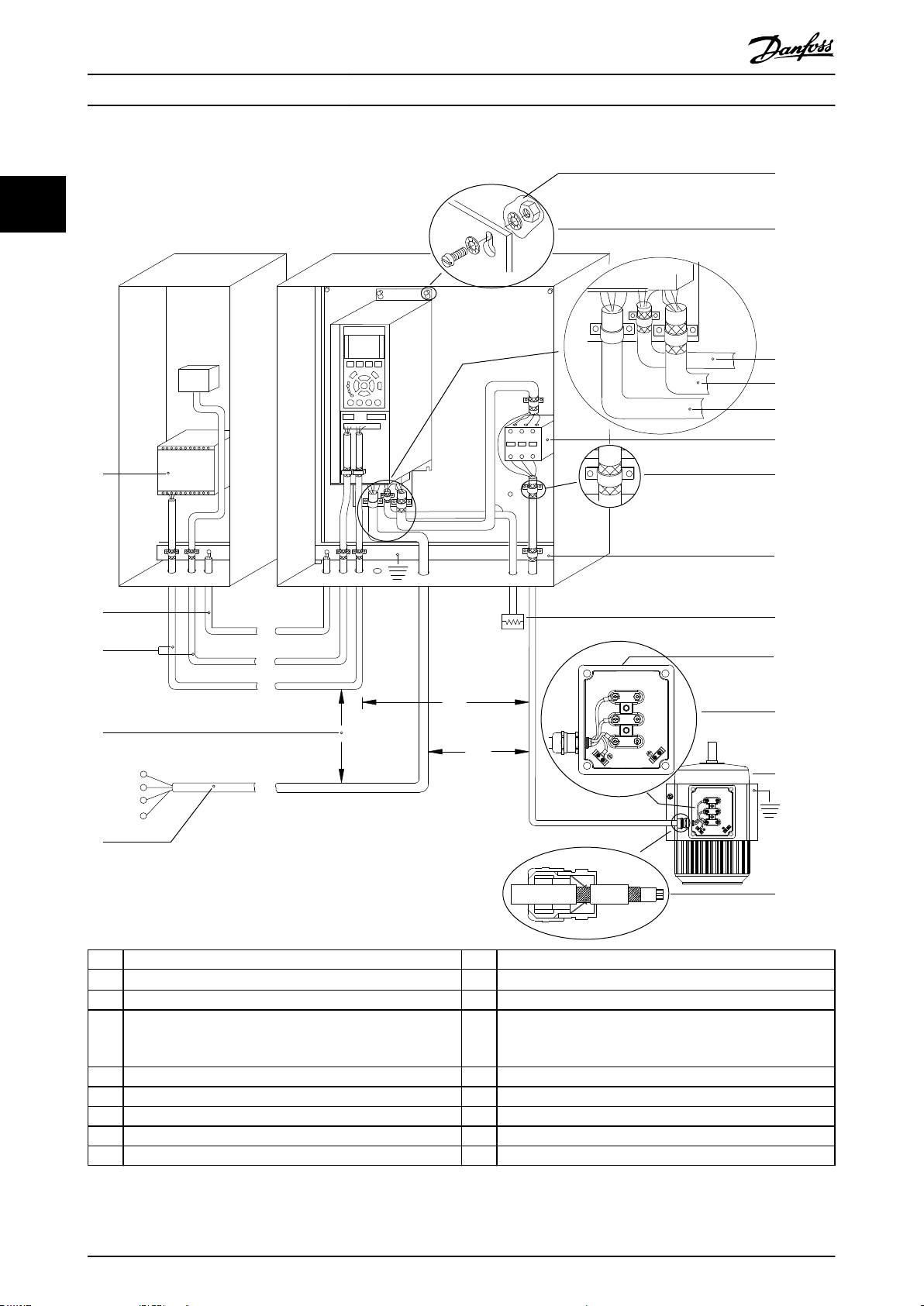
1 PLC 10 Câble secteur (non blindé)
2
Câble d'égalisation de 16 mm2 (6 AWG) minimum
3 Câbles de commande 12 Isolation de câble dénudée
4 Au moins 200 m (656 pi) entre les câbles de commande, de
moteur et secteur.
5 Alimentation secteur 14 Résistance de freinage
6 Surface nue (non peinte) 15 Boîtier métallique
7 Rondelles éventail 16 Raccordement au moteur
8 Câble de la résistance de freinage (blindé) 17 Moteur
9 Câble du moteur (blindé) 18 Presse-étoupe CEM
Illustration 2.3 Raccordement électrique typique
11 Contacteur de sortie, etc.
13 Barre omnibus de mise à la terre commune. Respecter les
réglementations nationales et locales relatives à la mise à la
terre d'armoire.
14 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304
130BD531.10
U
V
W
96
97
98
Vue d'ensemble des produits Manuel de conguration
2.2.1 Raccordement du moteur
AVERTISSEMENT
TENSION INDUITE
La tension induite des câbles du moteur de sortie
acheminés ensemble peut charger les condensateurs de
l'équipement, même lorsque ce dernier est hors tension
et verrouillé. Le fait de ne pas acheminer les câbles du
moteur de sortie séparément ou de ne pas utiliser de
câbles blindés peut entraîner la mort ou des blessures
graves.
Acheminer séparément les câbles du moteur de
•
sortie.
Utiliser des câbles blindés.
•
Respecter les réglementations locales et
•
nationales pour les sections de câble. Pour les
sections de câble maximales, voir le
chapitre 7.1 Données électriques.
Respecter les exigences de câblage spéciées par
•
le fabricant du moteur.
Des caches amovibles pour câbles moteur ou des
•
panneaux d'accès sont prévus en bas des unités
IP21 (NEMA de type 1).
Ne pas câbler un dispositif d'amorçage ou à pôles
•
commutables (p. ex. un moteur Dahlander ou un
moteur à bagues à induction) entre le variateur
de fréquence et le moteur.
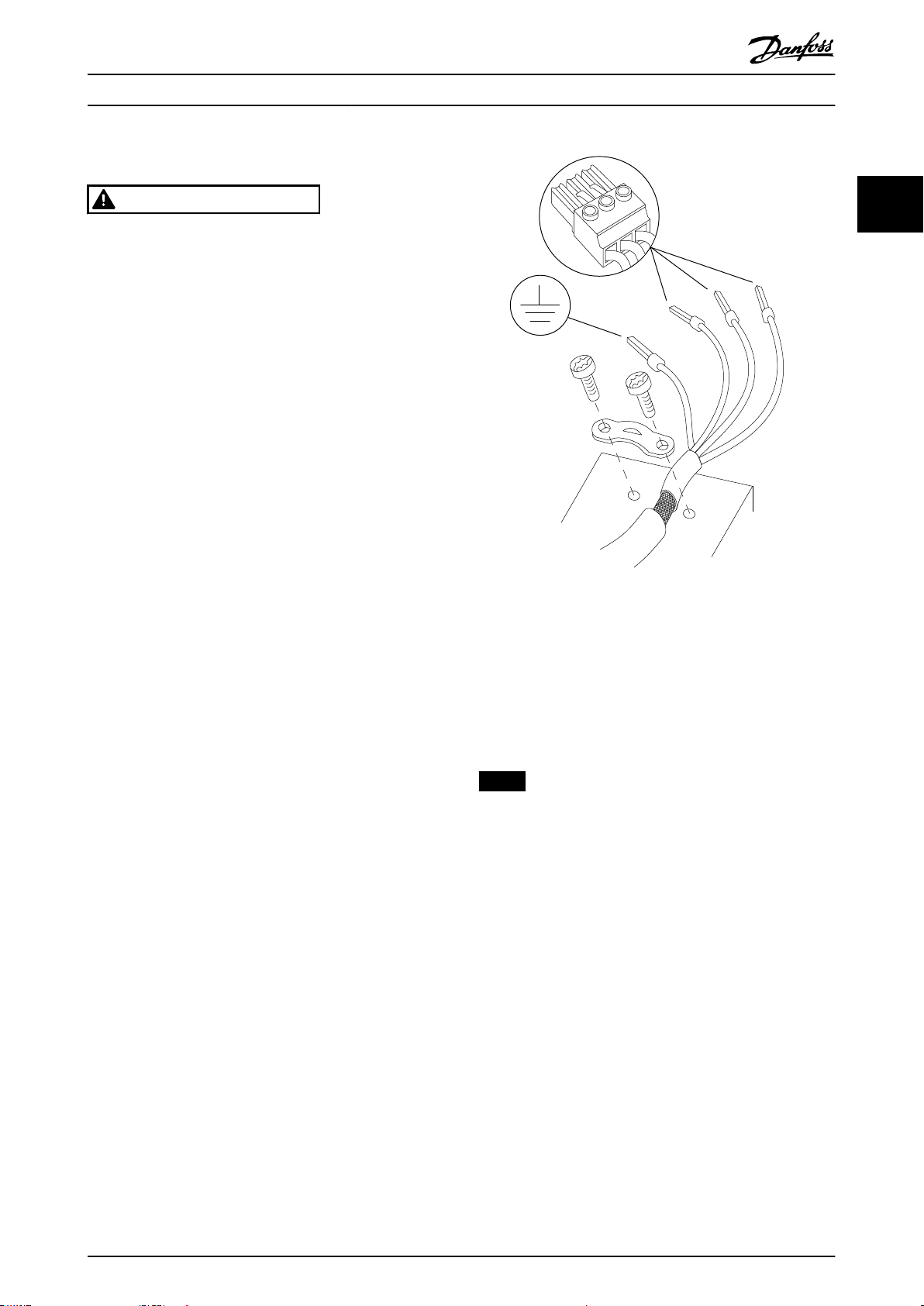
Procédure
1. Dénuder une section de l'isolation extérieure du
câble. La longueur recommandée est 10-15 mm
(0,4-0,6 po).
2. Placer le l dénudé sous l'étrier de serrage an
d'établir une xation mécanique et un contact
électrique entre le blindage de câble et la terre.
3. Relier le câble de terre à la borne de mise à la
terre la plus proche conformément aux
instructions de mise à la terre fournies au
chapitre Mise à la terre du Manuel d'utilisation du
VLT® Midi Drive FC 280. Voir l'Illustration 2.4.
4. Raccorder le câblage du moteur triphasé aux
bornes 96 (U), 97 (V) et 98 (W) comme indiqué
sur l'Illustration 2.4.
5. Serrer les bornes en respectant les informations
fournies dans le chapitre 7.7 Couples de serrage
des raccords.
2 2
Illustration 2.4 Raccordement du moteur
Le raccordement du secteur et du moteur et la mise à la
terre des variateurs de fréquence monophasés et triphasés
sont représentés sur l'Illustration 2.5, l'Illustration 2.6 et
l'Illustration 2.7 respectivement. Les congurations réelles
peuvent varier selon les types d'unités et les équipements
optionnels.
AVIS!
Sur les moteurs sans isolation de phase, papier ou autre
renforcement d'isolation convenant à un fonctionnement
avec alimentation de tension, utiliser un ltre sinus à la
sortie du variateur de fréquence.
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 15
130BE232.11
130BE231.11
130BE804.10
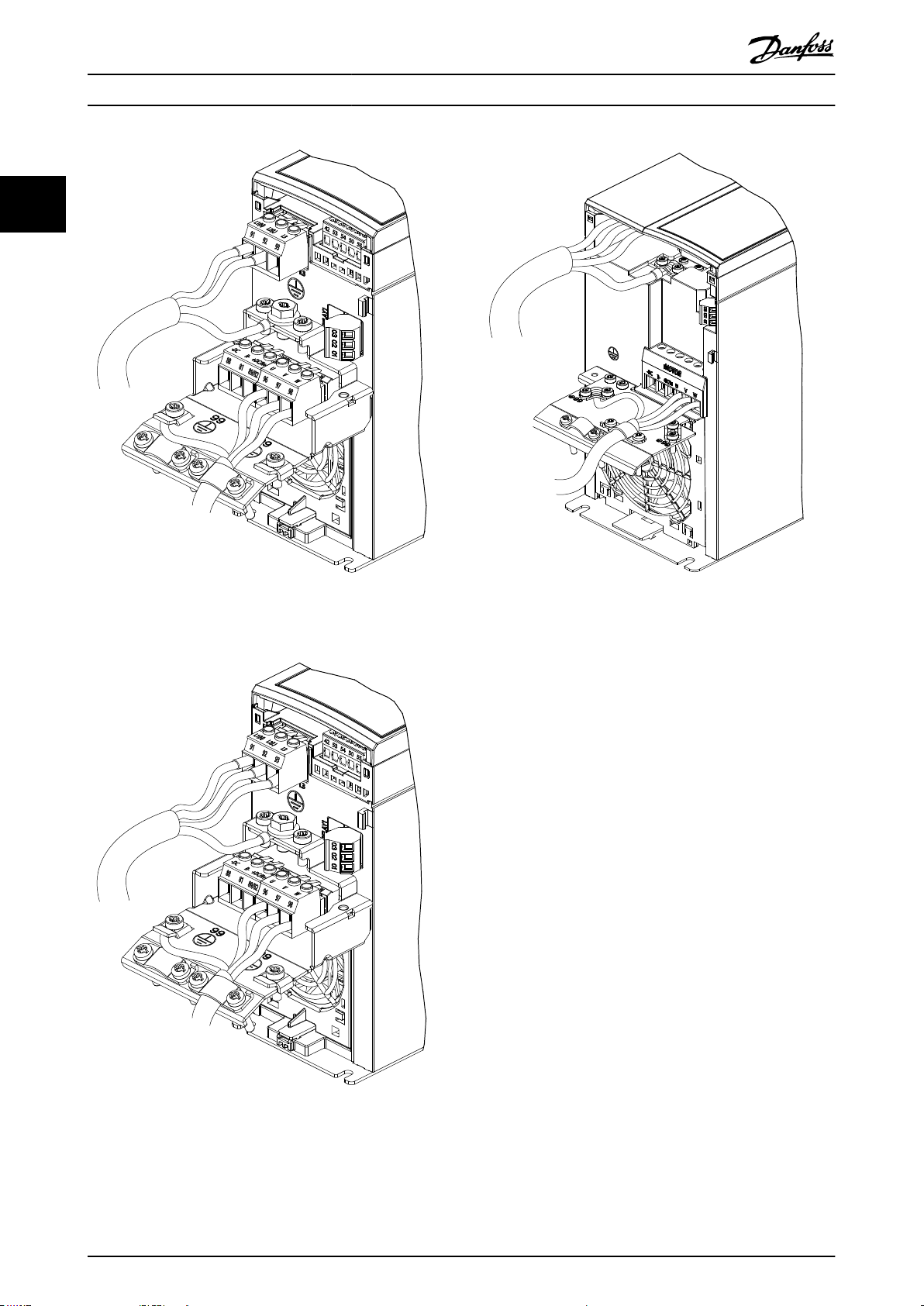
Vue d'ensemble des produits
VLT® Midi Drive FC 280
22
Illustration 2.5 Mise à la terre et raccordement du secteur et
du moteur des unités monophasées (K1, K2)
Illustration 2.6 Mise à la terre et raccordement du secteur et
du moteur des unités triphasées (K1, K2, K3)
Illustration 2.7 Mise à la terre et raccordement du secteur et
du moteur des unités triphasées (K4, K5)
2.2.2 Raccordement au secteur CA
Dimensionner les câbles selon le courant d'entrée
•
du variateur de fréquence. Pour les sections de
câble maximales, voir le chapitre 7.1 Données
électriques.
Respecter les réglementations locales et
•
nationales pour les sections de câble.
Procédure
1. Brancher les câbles de puissance d'entrée CA aux
bornes N et L pour les unités monophasées (voir
l'Illustration 2.5) ou aux bornes L1, L2 et L3 pour
les unités triphasées (voir l'Illustration 2.6 et
l'Illustration 2.7).
2. En fonction de la conguration de l'équipement,
relier l'alimentation d'entrée aux bornes d'entrée
du secteur ou à un sectionneur d'entrée.
3. Relier le câble à la terre conformément aux
instructions de mise à la terre fournies au
chapitre Mise à la terre du Manuel d'utilisation du
VLT® Midi Drive FC 280.
4. Lorsque l'alimentation provient d'une source
secteur isolée (secteur IT ou triangle isolé de la
terre) ou d'un secteur TT/TN-S avec triangle mis à
la terre, s'assurer que la vis du
an d'éviter tout dommage au circuit intermédiaire et de réduire les courants à eet de masse
ltre RFI est ôtée,
16 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304
130BE212.10
1 2
3
130BE214.10
37 38 12 13 18 19 27 29 32 33 61
42 53 54 50 55
68 69
1
3
2
Vue d'ensemble des produits Manuel de conguration
selon la norme CEI 61800-3 (voir l'Illustration 7.13,
la vis du ltre RFI se situe sur le côté du variateur
de fréquence).
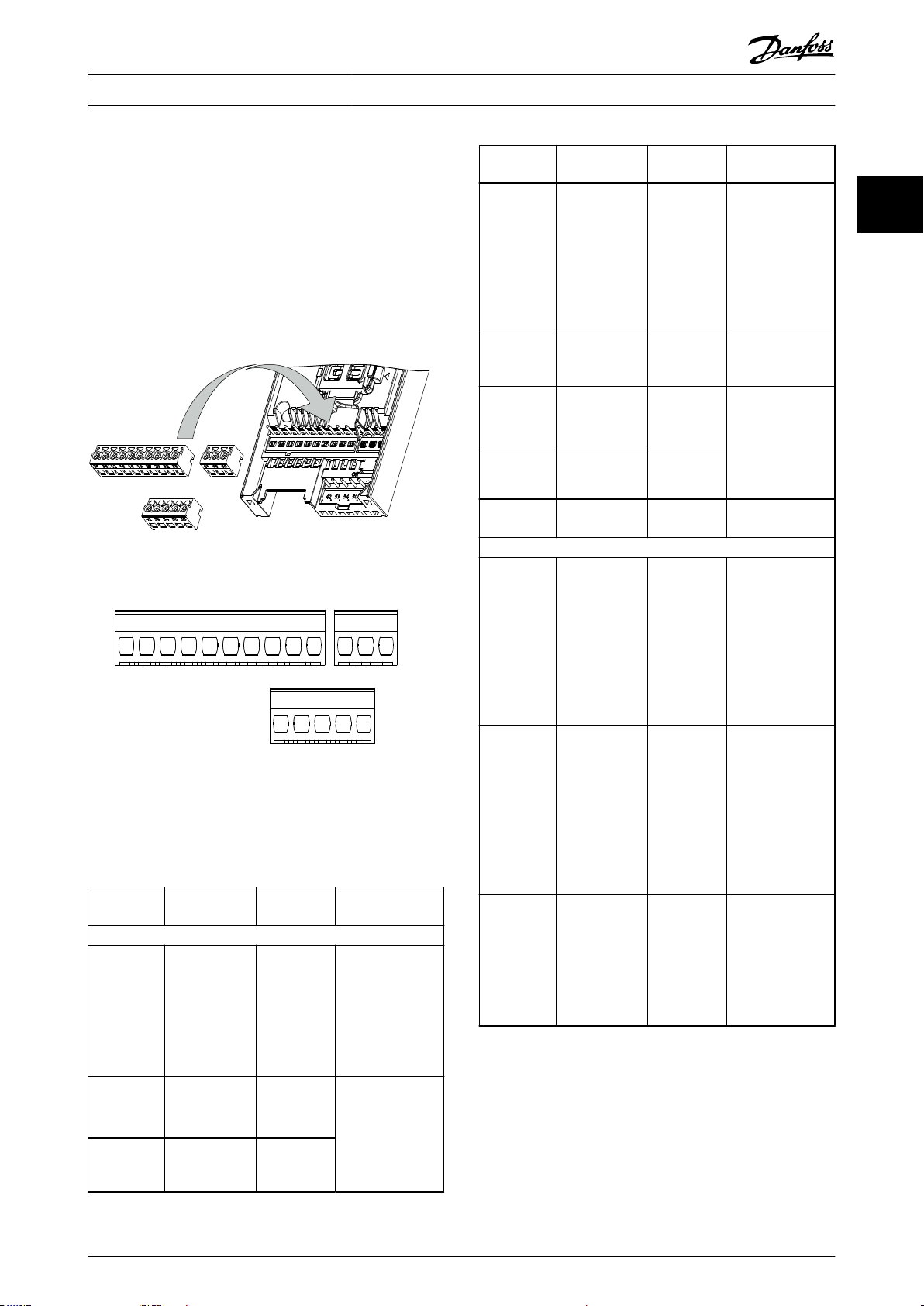
2.2.3 Types de bornes de commande
L'Illustration 2.8 montre les connecteurs amovibles du
variateur de fréquence. Les fonctions des bornes et leurs
réglages par défaut sont résumés dans le Tableau 2.3 et le
Tableau 2.4.
Illustration 2.8 Emplacement des bornes de commande
Illustration 2.9 Numéros des bornes
Voir le chapitre 7.6 Entrée/sortie de commande et données de
commande pour avoir des précisions sur les valeurs
nominales des bornes.
Borne Paramètre
E/S digitales, E/S impulsions, codeur
12, 13 – +24 V CC
Réglage par
défaut
Description
Tension d'alimentation 24 V CC. Le
courant de sortie
maximal est de
100 mA pour
toutes les charges
de 24 V.
Borne Paramètre
Paramétre 5-01
Mode born.27
27
29
32
33
37, 38 – STO
42
50 – +10 V CC
53
Paramétre 5-12
E.digit.born.27
Paramétre 5-30
S.digit.born.27
Paramétre 5-13
E.digit.born.29
Paramétre 5-14
E.digit.born.32
Paramétre 5-15
E.digit.born.33
Entrées/sorties analogiques
Paramétre 6-91
Sortie ANA
borne 42
Groupe de
paramètres 6-1*
Entrée ANA 53
Réglage par
Entrée
digitale [2]
Lâchage
Sortie digitale
[0] Inactif
[14] Jogging Entrée digitale
[0] Inactif
[0] Inactif
[0] Inactif
défaut
–
Description
Peut être
sélectionné pour
une entrée ou une
sortie digitale, ou
une sortie
impulsions. Le
réglage par défaut
est entrée digitale.
Entrée digitale,
codeur 24 V. La
borne 33 peut
également servir
d'entrée
impulsions.
Entrées de sécurité
fonctionnelle.
Sortie analogique
programmable. Le
signal analogique
est de 0-20 mA ou
4-20 mA à un
maximum de 500
Ω. Peut aussi être
conguré comme
sorties digitales.
Tension d'alimentation analogique
de 10 V CC. Un
maximum de
15 mA est généralement utilisé pour
un potentiomètre
ou une
thermistance.
Entrée analogique.
Seul le mode
tension est pris en
charge. Peut
également être
utilisé comme
entrée digitale.
2 2
18
19
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 17
Paramétre 5-10
E.digit.born.18
Paramétre 5-11
E.digit.born.19
[8]
Démarrage
[10] Inversion
Entrées digitales.
Vue d'ensemble des produits
VLT® Midi Drive FC 280
Borne Paramètre
22
54
55 – –
Tableau 2.3 Description des bornes – Entrées/sorties digitales,
Entrées/sorties analogiques
Groupe de
paramètres 6-2*
Entrée ANA 54
Réglage par
défaut
–
Description
Entrée analogique.
Peut être
sélectionnée pour
le mode tension
ou courant.
Commune aux
entrées digitales et
analogiques.
2.2.4 Câblage vers les bornes de
commande
Les connecteurs des bornes de commande peuvent être
débranchés du variateur de fréquence pour faciliter l'installation, comme indiqué sur l'Illustration 2.8.
Pour plus d'informations sur le câblage de la fonction STO,
se reporter au chapitre 4 Safe Torque
O (STO).
AVIS!
Raccourcir au maximum les câbles de commande et les
séparer des câbles de puissance élevée an de minimiser
Borne Paramètre
Communication série
61 – –
Groupe de
68 (+)
69 (-)
01, 02, 03
Tableau 2.4 Description des bornes – Communication série
paramètres 8-3*
Réglage Port FC
Groupe de
paramètres 8-3*
Réglage Port FC
Paramétre 5-40
Fonction relais
Réglage par
défaut
–
–
Relais
[1] Comm.
prête
Description
Filtre RC intégré
pour le blindage
des câbles.
UNIQUEMENT pour
la connexion du
blindage en cas de
problèmes de
CEM.
Interface RS485.
Un commutateur
de carte de
commande est
fourni pour la
résistance de la
terminaison.
Sortie relais en
forme de C. Ces
relais se trouvent à
diérents
emplacements en
fonction de la
conguration du
variateur de
fréquence et de sa
taille. Utilisable
pour une tension
CA ou CC et des
charges résistives
ou inductives.
les interférences.
1. Desserrer les vis pour les bornes.
2. Insérer les câbles de commande avec manchon
dans les fentes.
3. Serrer les vis pour les bornes.
4. S'assurer que le contact est bien établi et n'est
pas desserré. Un câblage de commande mal serré
peut être source de pannes ou d'un fonctionnement non optimal.
Voir le chapitre 7.5 Spécications du câble sur les tailles de
câble des bornes de commande et le chapitre 3 Exemples
d'applications sur les raccordements typiques des câbles de
commande.
Structures de contrôle
2.3
Un variateur de fréquence redresse la tension CA du
secteur en tension CC. La tension CC est convertie en un
courant CA d'amplitude et de fréquence variables.
La tension/le courant et la fréquence variables qui
alimentent le moteur orent des possibilités de régulation
de vitesse variable à l'inni pour les moteurs standard
triphasés à courant alternatif et les moteurs synchrones à
aimant permanent.
2.3.1 Modes de commande
Le variateur de fréquence peut contrôler la vitesse ou le
couple sur l'arbre moteur. Le variateur de fréquence
contrôle aussi le processus pour certaines applications se
servant des données de processus comme référence ou
signal de retour, p. ex. la température et la pression. Le
réglage du paramétre 1-00 Conguration Mode détermine le
type de contrôle.
18 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

Vue d'ensemble des produits Manuel de conguration
Commande de vitesse
Il en existe deux types :
commande de la vitesse en boucle ouverte qui
•
ne nécessite pas de signal de retour du moteur
(sans capteur) ;
commande PID de la vitesse en boucle fermée
•
qui nécessite un retour vitesse vers un entrée.
Une commande de la vitesse en boucle fermée
correctement optimisée est plus précise qu'une
commande en boucle ouverte.
Sélectionner l'entrée à utiliser comme référence PID de
vitesse au paramétre 7-00 Speed PID Feedback Source.
Commande de couple
La fonction de commande de couple est utilisée dans les
applications où le couple sur l'arbre de sortie du moteur
contrôle l'application, pour contrôler la tension par
exemple. Sélectionner [2] Couple ou [4] Boucl.ouverte couple
au paramétre 1-00 Conguration Mode. Le réglage du
couple s'eectue en dénissant une référence analogique,
digitale ou contrôlée par bus. En cas d'utilisation de la
commande de couple, il est recommandé de réaliser une
procédure d'AMA complète car les données correctes du
moteur sont cruciales pour une performance optimale.
Contrôle de process
Il existe deux types de contrôle de process :
Le contrôle de process en boucle fermée, qui
•
commande la vitesse du moteur en boucle
ouverte en interne, est un régulateur PID de
process basique.
Le contrôle PID étendu de vitesse en boucle
•
ouverte, qui commande aussi la vitesse du
moteur en boucle ouverte en interne, étend la
fonction du régulateur PID de process basique en
y ajoutant de nouvelles telles qu'anticipation de
la vitesse, verrouillage, ltre de référence/signal
de retour et mise à l'échelle du gain.
2 2
Boucle fermée en mode VVC+. Cette fonction sert
•
dans les applications à variation dynamique de
l'arbre faible à moyenne et ore d'excellentes
performances sur les 4 quadrants et à toutes les
vitesses de moteur. Le signal de retour vitesse est
obligatoire. S'assurer que la résolution du codeur
est d'au moins 1024 PPR et que le câble blindé
du codeur est correctement mis à la terre car la
précision du signal de retour vitesse est cruciale.
Ajuster le paramétre 7-06 Speed PID Lowpass Filter
Time de façon à obtenir le meilleur signal de
retour vitesse.
Boucle ouverte en mode VVC+. Cette fonction est
•
utilisée dans des applications mécaniques
robustes mais la précision est limitée. La fonction
de couple en boucle ouverte fonctionne dans les
deux sens. Le couple est calculé à partir de la
mesure de courant interne du variateur de
fréquence.
Référence vitesse/couple
La référence pour ces contrôles peut être soit une
référence unique soit la somme de plusieurs références, y
compris celles mises à l'échelle de manière relative. L'utilisation des références est détaillée dans le
chapitre 2.4 Utilisation des références.
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 19
130BD974.10
L2 92
L1 91
L3 93
M
U 96
V 97
W 98
RFI switch
Inrush
R+
82
Load sharing -
88(-)
R81
Brake resistor
Load sharing +
89(+)
+
_
+
_
S
S
Cong. mode
Ref.
Process
P 1-00
High
+f max.
Low
-f max.
P 4-12
Motor speed
low limit (Hz)
P 4-14
Motor speed
high limit (Hz)
Motor
controller
Ramp
Speed
PID
P 7-20 Process feedback
1 source
P 7-22 Process feedback
2 source
P 7-00 Speed PID
feedback source
P 1-00
Cong. mode
P 4-19
Max. output freq.
-f max.
Motor
controller
P 4-19
Max. output freq.
+f max.
P 3-**
P 7-0*
130BD371.10
Vue d'ensemble des produits
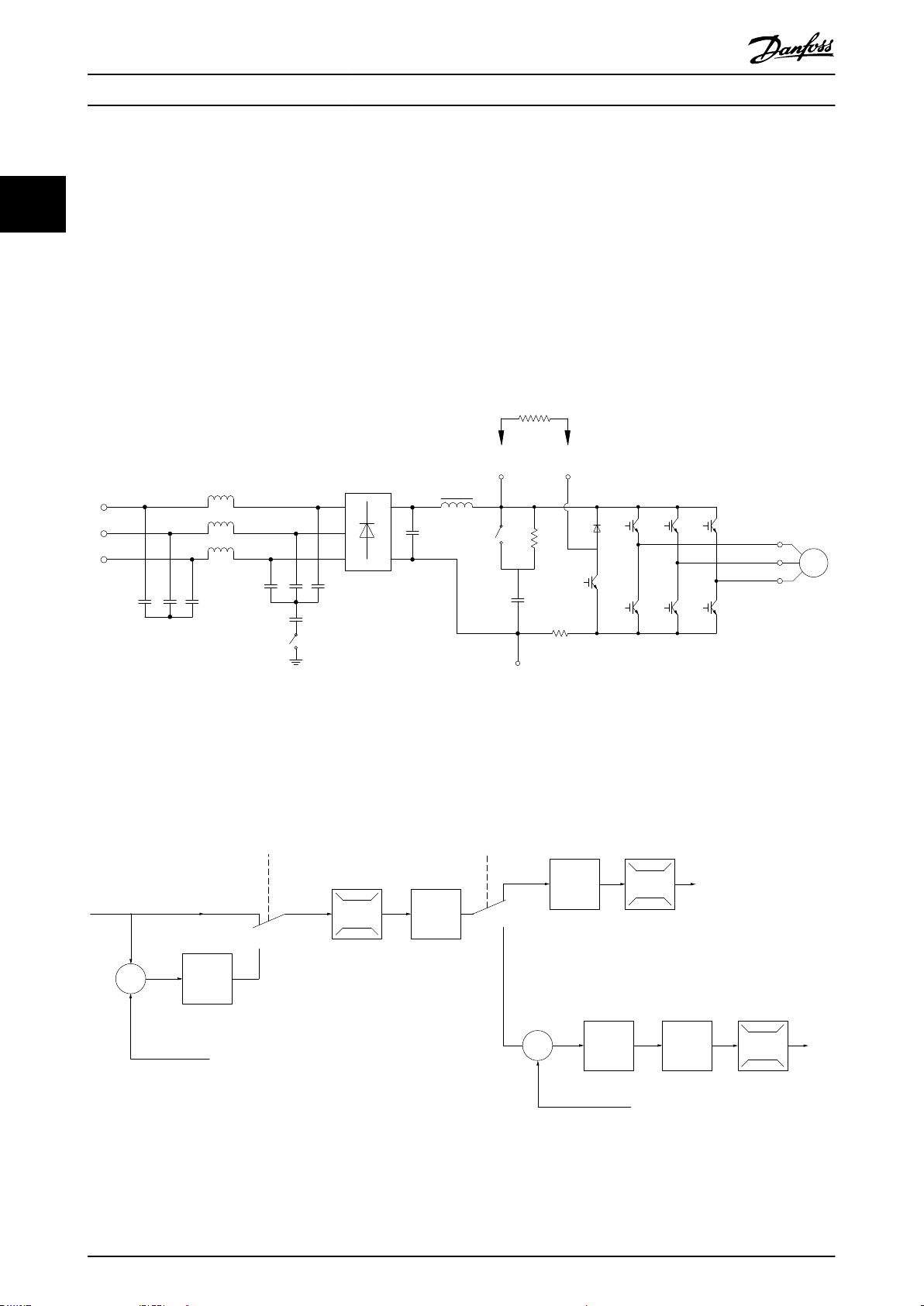
2.3.2 Principe de fonctionnement
VLT® Midi Drive FC 280
22
Le VLT® Midi Drive FC 280 est un variateur de fréquence à usage général destiné aux applications à vitesse variable. Le
principe de fonctionnement repose sur le VVC+.
Les variateurs de fréquence FC 280 peuvent prendre en charge des moteurs asynchrones et des moteurs synchrones à
aimant permanent de puissance max. 22 kW (30 HP).
Le principe de détection du courant des variateurs de fréquence FC 280 repose sur la mesure du courant dans le circuit
intermédiaire par une résistance. La protection contre le défaut de mise à la terre et le comportement en cas de courtcircuit sont gérés par la même résistance.
Illustration 2.10 Schéma de commande
2.3.3
Structure de contrôle en mode VVC
Illustration 2.11 Structure de contrôle en congurations boucles ouverte et fermée VVC
20 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304
+
+
130BP046.10
Hand
on
O
Auto
on
Reset
Hand
On
Off
Reset
Auto
On
130BB893.10
Vue d'ensemble des produits Manuel de conguration
Dans la conguration présentée sur l'Illustration 2.11, le paramétre 1-01 Motor Control Principle est réglé sur [1] VVC+ et le
paramétre 1-00 Conguration Mode sur [0] Boucle ouverte vitesse. La référence résultant du système de gestion des références
est reçue et soumise à la limite de rampe et de vitesse avant d'être transmise au contrôle du moteur. La sortie du contrôle
est alors limitée par la limite de fréquence maximale.
2 2
Si le paramétre 1-00
Conguration Mode est réglé sur [1] Boucle fermée vit., la référence résultante passe de la limite de
rampe et de vitesse à un régulateur PID de vitesse. Les paramètres du régulateur PID de vitesse se trouvent dans le groupe
de paramètres 7-0* PID vit.régul. La référence résultant du régulateur PID de vitesse est transmise au contrôle du moteur
soumis à la limite de fréquence.
Sélectionner [3] Process au paramétre 1-00
Conguration Mode an d'utiliser le régulateur PID de process pour le contrôle en
boucle fermée de la vitesse ou de la pression dans l'application contrôlée. Les paramètres du process PID se trouvent dans
les groupes de paramètres 7-2* PIDproc/ ctrl retour et 7-3* PID proc./Régul.
2.3.4
Contrôle de courant interne en mode VVC
+
Le variateur de fréquence intègre un contrôleur de limite de courant qui est activé lorsque le courant du moteur et donc le
couple dépassent les limites de couple réglées aux paramétre 4-16 Torque Limit Motor Mode, paramétre 4-17 Torque Limit
Generator Mode et paramétre 4-18 Current Limit.
Si le variateur de fréquence est en limite de courant en mode moteur ou en mode régénérateur, il tente de descendre le
plus rapidement possible en dessous des limites de couple réglées sans perdre le contrôle du moteur.
2.3.5 Contrôle local (Hand On) et distant (Auto On)
Actionner le variateur de fréquence manuellement via le panneau de commande local (LCP graphique ou numérique) ou à
distance via les entrées analogiques/digitales ou le bus de terrain.
Démarrer et arrêter le variateur de fréquence via le LCP à l'aide des touches [Hand On] et [Reset]. Régler les paramètres
suivants :
Paramétre 0-40 Touche [Hand on] sur LCP.
•
Paramétre 0-44 Touche [O/Reset] sur LCP.
•
Paramétre 0-42 Touche [Auto on] sur LCP.
•
Réinitialiser les alarmes à l'aide de la touche [Reset] ou via une entrée digitale si la borne est programmée sur Reset.
Illustration 2.12 Touches de commande du GLCP
Illustration 2.13 Touches de commande du NLCP
La référence locale force le mode de
conguration sur boucle ouverte, quel que soit le réglage du paramétre 1-00 Mode
Cong..
La référence locale est restaurée à la mise hors tension du variateur de fréquence.
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 21

No function
Analog ref.
Pulse ref.
Local bus ref.
Preset relative ref.
Preset ref.
Local bus ref.
No function
Analog ref.
Pulse ref.
Analog ref.
Pulse ref.
Local bus ref.
No function
Local bus ref.
Pulse ref.
No function
Analog ref.
Input command:
Catch up/ slow down
Catchup Slowdown
value
Freeze ref./Freeze output
Speed up/ speed down
ref.
Remote
Ref. in %
-max ref./
+max ref.
Scale to
Hz
Scale to
Nm
Scale to
process
unit
Relative
X+X*Y
/100
DigiPot
DigiPot
DigiPot
max ref.
min ref.
DigiPot
D1
P 5-1x(15)
Preset '1'
External '0'
Process
Torque
Speed
open/closed loop
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(0)
(0)
(1)
Relative scaling ref.
P 3-18
Ref.resource 1
P 3-15
Ref. resource 2
P 3-16
Ref. resource 3
P 3-17
200%
-200%
Y
X
-100%
100%
%
%
Ref./feedback range
P 3-00
Conguration mode
P 1-00
P 3-14
±100%
130BD374.10
P 16-01
P 16-02
P 3-12
P 5-1x(21)/P 5-1x(22)
P 5-1x(28)/P 5-1x(29)
P 5-1x(19)/P 5-1x(20)
P 3-04
Freeze ref.
&
increase/
decrease
ref.
Catch up/
slow
down
P 3-10
Vue d'ensemble des produits
VLT® Midi Drive FC 280
2.4 Utilisation des références
Référence locale
22
La référence locale est active lorsque le variateur de fréquence fonctionne avec la touche [Hand On] activée. Ajuster la
référence à l'aide des touches [▲]/[▼] et [◄/[►].
Référence distante
Le système de gestion des références permettant de calculer la référence distante est présenté sur l'Illustration 2.14.
Illustration 2.14 Référence distante
22 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304
Référence résultante
Somme de toutes
les références
Avant
Arriére
P 3-00 Plage de référence= [0] Min-Max
130BA184.10
-P 3-03
P 3-03
P 3-02
-P 3-02
Par. F-50 Plage de référence =[1]-Max-Max
Référence résultante
Somme de toutes
les références
-Par F-50
Par F-50
130BA185.10
Vue d'ensemble des produits Manuel de conguration
La référence distante est calculée à chaque intervalle de
balayage et comporte initialement deux types d'entrée
de référence :
1. X (consigne externe) : addition (voir
paramétre 3-04 Reference Function) de quatre
références maximum sélectionnées en externe,
comprenant toute combinaison (déterminée par
le réglage des paramétre 3-15 Reference 1 Source,
paramétre 3-16 Reference 2 Source et
paramétre 3-17 Reference 3 Source) d'une référence
prédénie xe (paramétre 3-10 Preset Reference),
de références analogiques variables, de références
d'impulsions digitales variables et de diverses
références de bus de terrain en toute unité que le
variateur de fréquence contrôle ([Hz], [tr/min],
[Nm], etc.).
2. Y (référence relative) : addition d'une référence
prédénie xe (paramétre 3-14 Preset Relative
Reference) et d'une référence analogique variable
(paramétre 3-18 Relative Scaling Reference
Resource) en [%].
Les deux types d'entrée de référence sont associés dans le
calcul suivant :
Référence distante = X + X * Y/100 %.
Si la référence relative n'est pas utilisée, régler le
paramétre 3-18 Relative Scaling Reference Resource sur [0]
Pas de fonction et le paramétre 3-14 Preset Relative Reference
sur 0 %. Les fonctions rattrapage/ralentissement et gel
référence peuvent toutes deux être activées par les entrées
digitales sur le variateur de fréquence. Les fonctions et les
paramètres sont décrits dans le Guide de programmation du
VLT® Midi Drive FC 280.
La mise à l'échelle des références analogiques est décrite
dans les groupes de paramètres 6-1* Entrée ANA 53 et 6-2*
Entrée ANA 54 et celle des références d'impulsions digitales
est décrite dans le groupe de paramètres 5-5* Entrée
impulsions.
Les limites et plages de référence sont dénies dans le
groupe de paramètres 3-0* Limites de réf.
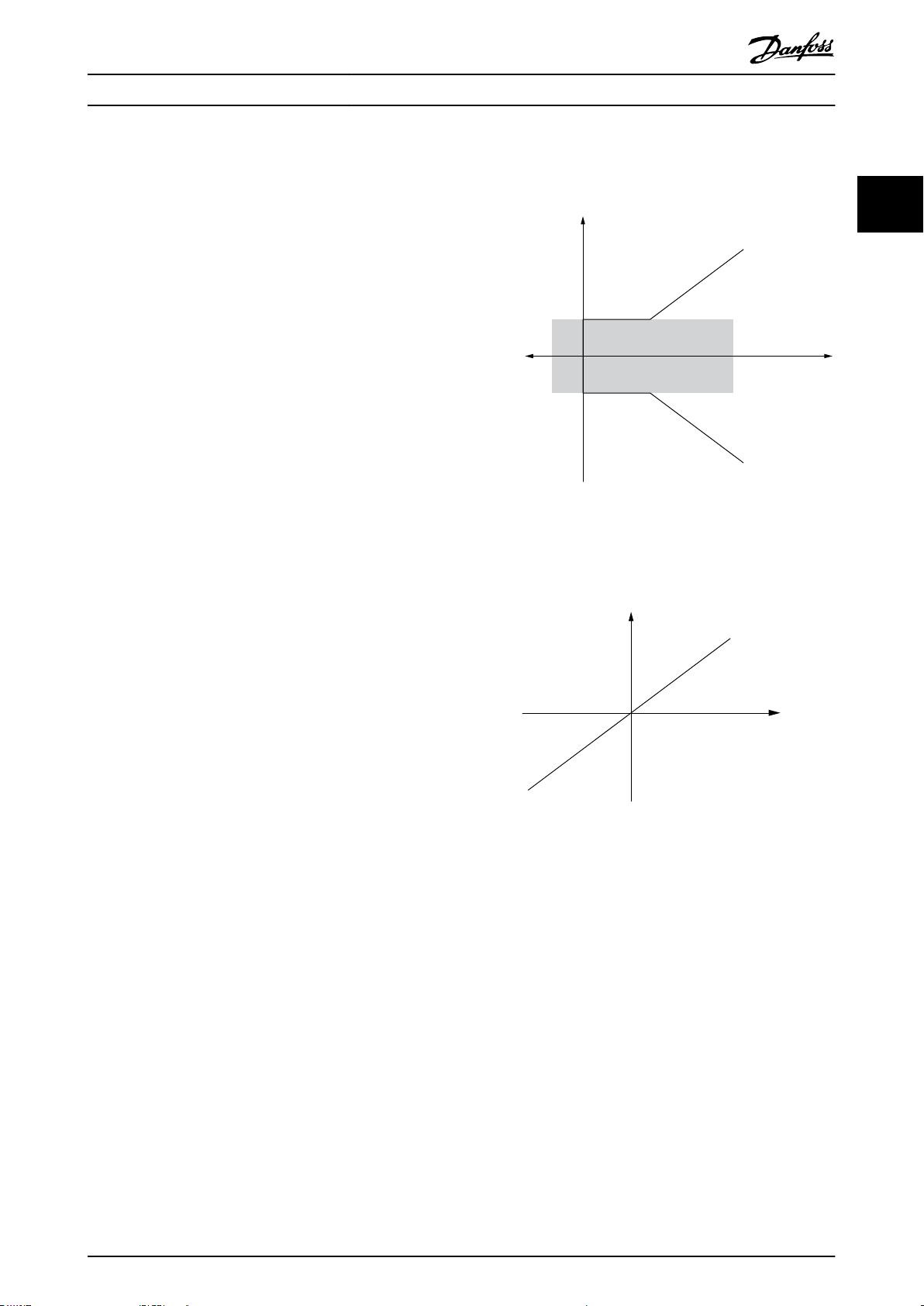
2.4.1 Limites de réf.
Les Paramétre 3-00 Plage de réf., paramétre 3-02 Référence
minimale et paramétre 3-03 Réf. max. dénissent la plage
autorisée de la somme de toutes les références. Cette
dernière est verrouillée si nécessaire. La relation entre la
référence résultante (après verrouillage) et la somme de
toutes les références est représentée sur l'Illustration 2.15 et
l'Illustration 2.16.
2 2
Illustration 2.15 Somme de toutes les références lorsque la
plage de référence est réglée sur 0
Illustration 2.16 Somme de toutes les références lorsque la
plage de référence est réglée sur 1
La valeur du paramétre 3-02 Référence minimale ne peut
pas présenter une valeur inférieure à 0, à moins que le
paramétre 1-00 Mode Cong. ne soit réglé sur [3] Process.
Dans ce cas, les relations entre la référence résultante
(après verrouillage) et la somme de toutes les références
sont telles que présentées sur l'Illustration 2.17.
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 23
130BA186.11
P 3-03
P 3-02
Somme de
toutes les
références
P 3-00 Plage de référence = [0] Min - Max
Référence résultante
Resource output
[Hz]
Resource input
Terminal X
high
High reference/
feedback value
130BD431.10
8
[V]
50
10
P1
P2
10
Low reference/
feedback value
Vue d'ensemble des produits
VLT® Midi Drive FC 280
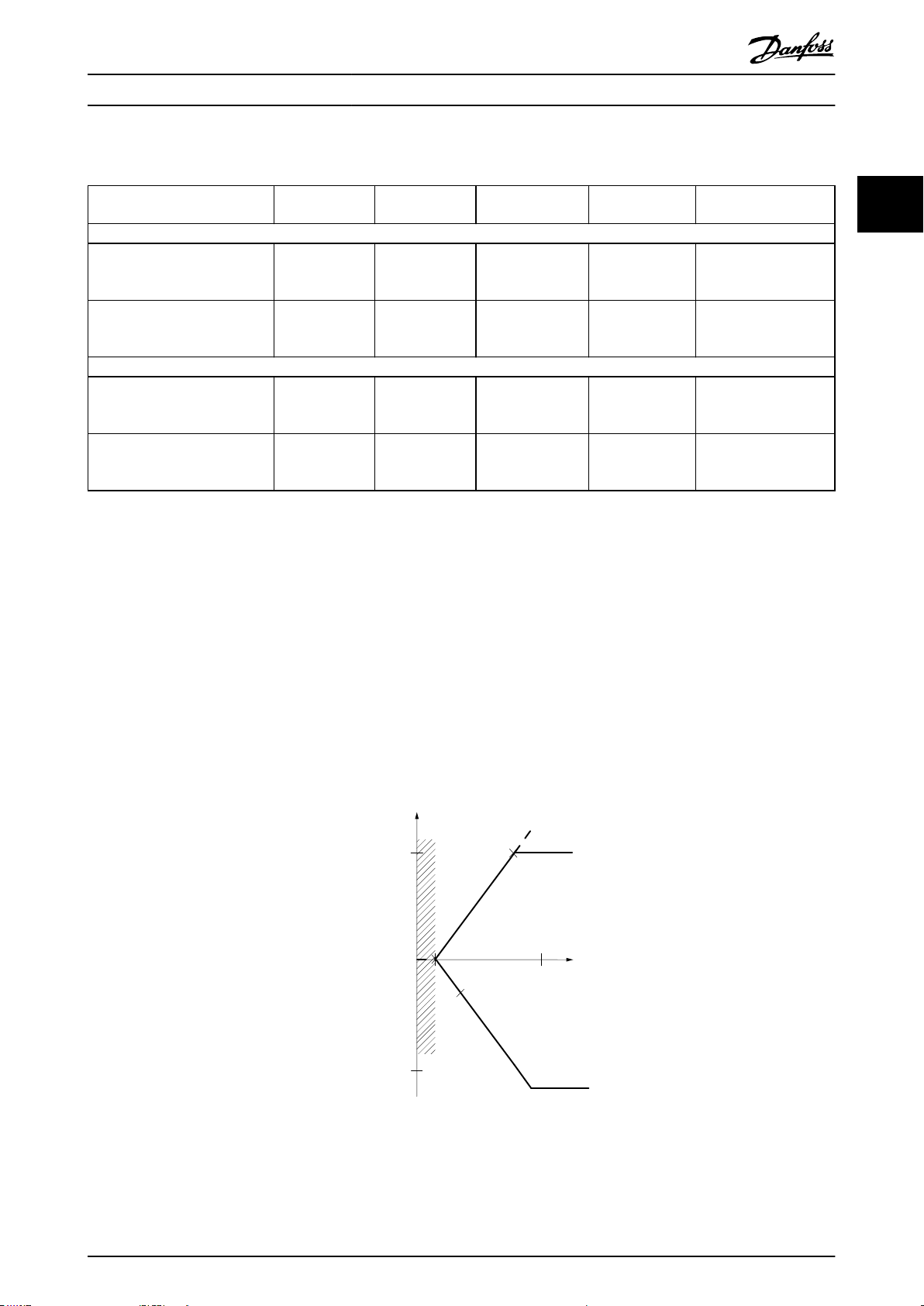
2.4.3 Mise à l'échelle des références
analogiques et d'impulsions, et du
signal de retour
22
Les références et le signal de retour sont mis à l'échelle à
partir des entrées analogiques et d'impulsions de la même
façon. La seule diérence est que les références au-dessus
ou en dessous des valeurs limites minimum et maximum
spéciées (P1 et P2 sur l'Illustration 2.18) sont verrouillées,
contrairement aux signaux de retour au-dessus ou en
dessous de ces limites.
Illustration 2.17 Somme de toutes les références lorsque la
référence minimum est réglée sur une valeur négative
2.4.2 Mise à l'échelle des références
prédénies et des références du bus
Les références prédénies sont mises à l'échelle selon
les règles suivantes :
Lorsque le paramétre 3-00 Reference Range est
•
réglé sur [0] Min - Max, la référence 0 % est égale
à 0 [unité] où « unité » peut être toute unité (à
savoir tr/min, m/s, bar, etc.) et la référence 100 %
est égale au maximum (valeur absolue du
paramétre 3-03 Maximum Reference ou du
paramétre 3-02 Référence minimale).
Lorsque le paramétre 3-00 Reference Range est
•
réglé sur [1] -Max - +Max, la référence 0 % est
égale à 0 [unité] et la référence 100 % est égale à
la référence maximale.
Les références de bus sont mises à l'échelle selon les
règles suivantes :
Lorsque le paramétre 3-00 Reference Range est
•
réglé sur [0] Min - Max, la référence 0 % est égale
à la référence minimale et la référence 100 % est
égale à la référence maximale.
Lorsque le paramétre 3-00 Reference Range est
•
réglé sur [1] -Max - +Max, la référence -100 % est
égale à -référence maximale et la référence 100 %
est égale à la référence maximale.
Illustration 2.18 Valeurs limites minimum et maximum
24 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304
Resource output
[Hz] or “No unit”
Resource input
[mA]
Quadrant 2
Quadrant 3
Quadrant 1
Quadrant 4
Terminal X high
Low reference/feedback
value
High reference/feedback
value
1
-50
165020
P1
P2
0
130BD446.10
forward
reverse
Terminal low
Vue d'ensemble des produits Manuel de conguration
Les valeurs limites P1 et P2 sont dénies dans le Tableau 2.5 en fonction de l'entrée utilisée.
Entrée Analogique 53
Mode tension
P1 = (valeur entrée minimum, valeur référence minimum)
Valeur référence minimum Paramétre 6-14 V
al.ret./
Réf.bas.born.53
Valeur entrée minimum Paramétre 6-10 Ec
h.min.U/born.53
[V]
P2 = (valeur d'entrée maximale, valeur de référence maximale)
Valeur de référence maximale Paramétre 6-15 V
al.ret./
Réf.haut.born.53
Valeur d'entrée maximale Paramétre 6-11 Ec
h.max.U/born.53
[V]
Tableau 2.5 Valeurs limites P1 et P2
Analogique 54
Mode tension
Paramétre 6-24 V
al.ret./
Réf.bas.born.54
Paramétre 6-20 Ec
h.min.U/born.54
[V]
Paramétre 6-25 V
al.ret./
Réf.haut.born.54
Paramétre 6-21 Ec
h.max.U/born.54
[V]
Analogique 54
Mode courant
Paramétre 6-24 Val.r
et./Réf.bas.born.54
Paramétre 6-22 Ech.
min.I/born.54 [mA]
Paramétre 6-25 Val.r
et./Réf.haut.born.54
Paramétre 6-23 Ech.
max.I/born.54 [mA]
Entrée impulsions29Entrée impulsions 33
Paramétre 5-52 Val.
ret./Réf.bas.born.29
Paramétre 5-50 F.b
as born.29 [Hz]
Paramétre 5-53 Val.
ret./Réf.haut.born.
29
Paramétre 5-51 F.h
aute born.29 [Hz]
Paramétre 5-57 Val.ret./
Réf.bas.born.33
Paramétre 5-55 F.bas
born.33 [Hz]
Paramétre 5-58 Val.ret./
Réf.haut.born.33
Paramétre 5-56 F.haute
born.33 [Hz]
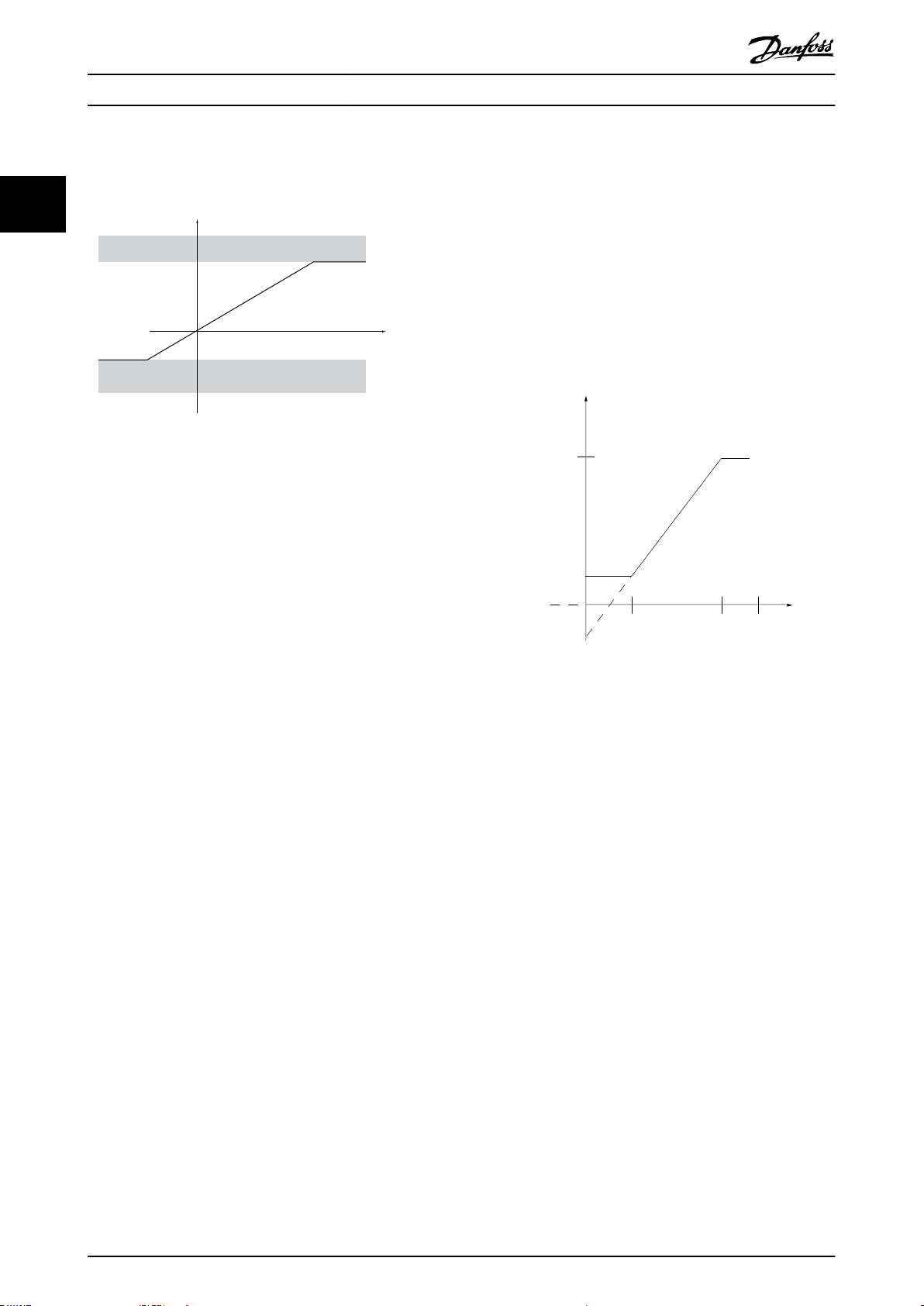
2.4.4 Zone morte autour de zéro
Parfois, la référence (dans de rares cas, le signal de retour aussi) doit présenter une zone morte autour de zéro pour assurer
l'arrêt de la machine lorsque la référence est proche de zéro.
2 2
Pour activer la zone morte et en dénir la largeur, procéder comme suit :
P1 ou P2
Régler la valeur de la référence minimale (voir le Tableau 2.5 pour les paramètres concernés) ou de la référence
•
maximale sur 0. En d'autres termes, P1 ou P2 doit se trouver sur l'axe X sur l'Illustration 2.19.
S'assurer que les deux points dénissant le graphique de mise à l'échelle se trouvent dans le même quadrant.
•
dénit les dimensions de la zone morte comme indiqué sur l'Illustration 2.19.
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 25
Illustration 2.19 Dimensions de la zone morte
20
1
10
V
V
20
1
10
-20
130BD454.10
+
Analog input 53
Low reference 0 Hz
High reference 20 Hz
Low voltage 1 V
High voltage 10 V
Ext. source 1
Range:
0.0% (0 Hz)
100.0% (20 Hz)
100.0% (20 Hz)
Ext. reference
Range:
0.0% (0 Hz)
20 Hz 10V
Ext. Reference
Absolute
0 Hz 1 V
Reference
algorithm
Reference
100.0% (20 Hz)
0.0% (0 Hz)
Range:
Limited to:
0%- +100%
(0 Hz- +20 Hz)
Limited to: -200%- +200%
(-40 Hz- +40 Hz)
Reference is scaled
according to min
max reference giving a
speed.!!!
Scale to
speed
+20 Hz
-20 Hz
Range:
Speed
setpoint
Motor
control
Range:
-8 Hz
+8 Hz
Motor
Digital input 19
Low No reversing
High Reversing
Limits Speed Setpoint
according to min max speed.!!!
Motor PID
Hz
Hz
Dead band
Digital input
General Reference
parameters:
Reference Range: Min - Max
Minimum Reference: 0 Hz (0,0%)
Maximum Reference: 20 Hz (100,0%)
General Motor
parameters:
Motor speed direction:Both directions
Motor speed Low limit: 0 Hz
Motor speed high limit: 8 Hz
Vue d'ensemble des produits
VLT® Midi Drive FC 280
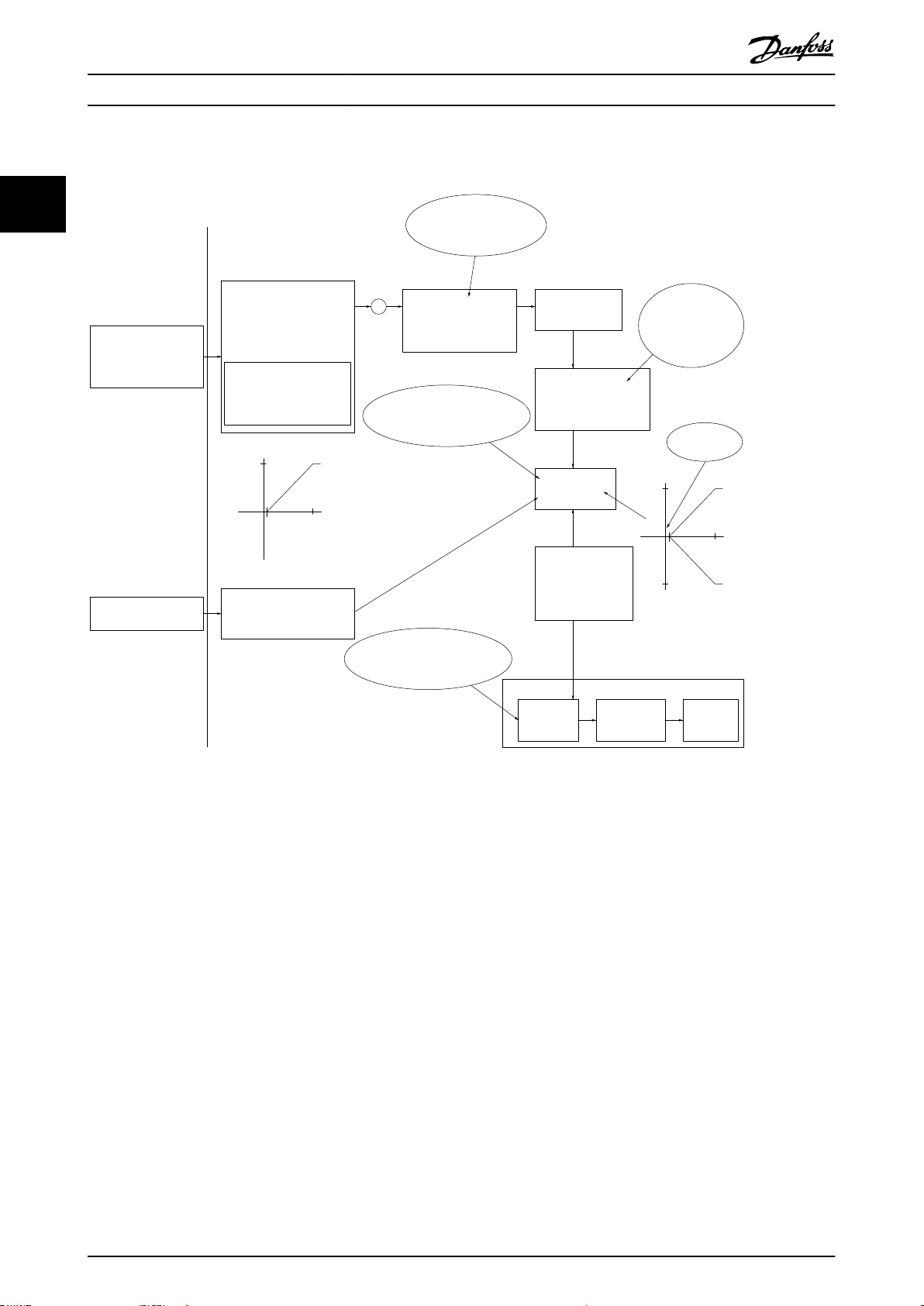
Cas 1 : référence positive avec zone morte, entrée digitale pour déclencher inversion, partie I
L'Illustration 2.20 indique comment l'entrée de référence, dont les limites sont comprises entre Min et Max, est verrouillée.
22
Illustration 2.20 Verrouillage de l'entrée de référence avec des limites comprises entre Min et Max
26 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304
+
30 Hz
1
10
20 Hz
1
10
130BD433.11
-20 Hz
V
V
Analog input 53
Low reference 0 Hz
High reference 20 Hz
Low voltage 1 V
High voltage 10 V
Ext. source 1
Range:
0.0% (0 Hz)
150.0% (30 Hz)
150.0% (30 Hz)
Ext. reference
Range:
0.0% (0 Hz)
30 Hz 10 V
Ext. Reference
Absolute
0 Hz 1 V
Reference
algorithm
Reference
100.0% (20 Hz)
0.0% (0 Hz)
Range:
Limited to:
-100%- +100%
(-20 Hz- +20 Hz)
Limited to: -200%- +200%
(-40 Hz- +40 Hz)
Reference is scaled
according to
max reference giving a
speed.!!!
Scale to
speed
+20 Hz
-20 Hz
Range:
Speed
setpoint
Motor
control
Range:
–10 Hz
+10 Hz
Motor
Digital input 19
Low No reversing
High Reversing
Limits Speed Setpoint
according to min max speed.!!!
Motor PID
Dead band
Digital input
General Reference
parameters:
Reference Range: -Max - Max
Minimum Reference: Don't care
Maximum Reference: 20 Hz (100.0%)
General Motor
parameters:
Motor speed direction: Both directions
Motor speed Low limit: 0 Hz
Motor speed high limit: 10 Hz
Vue d'ensemble des produits Manuel de conguration
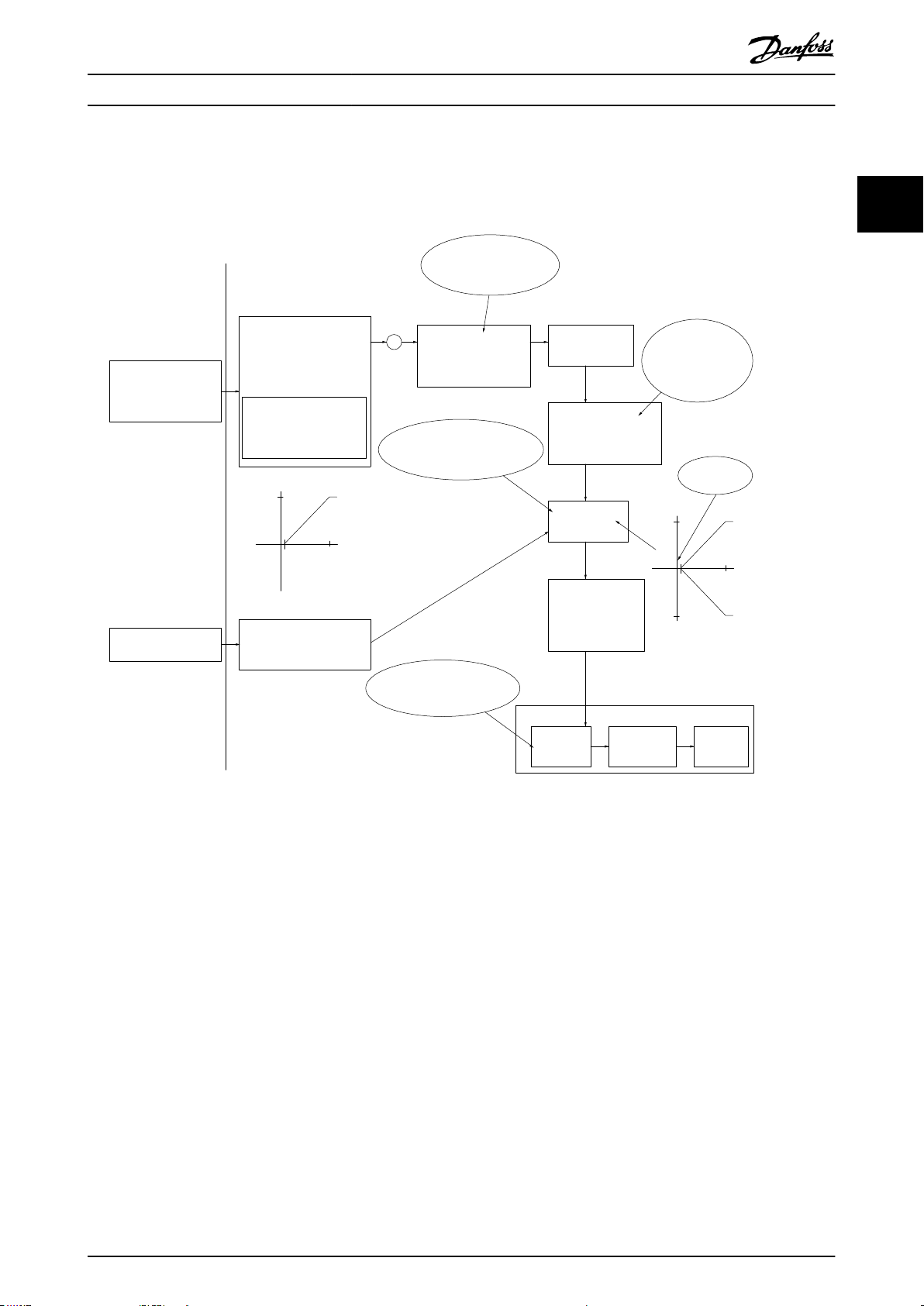
Cas 2 : référence positive avec zone morte, entrée digitale pour déclencher inversion, partie II
L'Illustration 2.21 indique comment l'entrée de référence, dont les limites ne sont pas comprises entre -Max et +Max, est
verrouillée par rapport aux limites d'entrée haute et basse avant l'ajout à la consigne externe, ainsi que comment la
consigne externe est verrouillée sur -Max à +Max par l'algorithme de référence.
2 2
Illustration 2.21 Verrouillage de l'entrée de référence avec des limites en dehors de -Max à +Maximum
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 27
Vue d'ensemble des produits
VLT® Midi Drive FC 280
2.5 Régulateur PID
2.5.1 Régulateur PID de vitesse
22
Paramétre 1-00 Mode Cong.
[1] Boucle fermée vit.
Tableau 2.6 Congurations de contrôle, commande de vitesse active
1) « Indisponible »
Paramètre Description de la fonction
Paramétre 7-00 PID vit.source ret. Sélectionner l'entrée qui fournit le signal de retour au régulateur PID de vitesse.
Paramétre 7-02 Speed PID Proportional Gain Plus la valeur est élevée, plus le contrôle est rapide. Cependant, une valeur trop élevée
Paramétre 7-03 PID vit.tps intég. Élimine l'erreur de vitesse en état stable. Des valeurs plus basses impliquent une réaction
Paramétre 7-04 PID vit.tps di. Fournit un gain proportionnel à la vitesse de modication du signal de retour. Le réglage
Paramétre 7-05 PID vit.limit gain D Dans le cas d'une application, pour laquelle la référence ou le retour change très vite, d'où
Paramétre 7-06 PID vit.tps ltre Un ltre passe-bas atténue les oscillations du signal de retour et améliore la stabilité de
signie que le mode spécique n'est absolument pas disponible.
Paramétre 1-01 Principe Contrôle Moteur
U/f
Indisponible
peut entraîner des oscillations.
plus rapide. Cependant, une valeur trop faible peut entraîner des oscillations.
de ce paramètre sur 0 désactive le diérenciateur.
un changement rapide de l'erreur, le diérenciateur peut rapidement devenir trop
dominant. Cela provient du fait qu'il réagit aux changements au niveau de l'écart. Plus
l'écart change rapidement, plus le gain diérentiel est important. Il est donc possible de
limiter le gain diérentiel de manière à pouvoir régler un temps de dérivée raisonnable en
cas de modications lentes et un gain raisonnablement rapide en cas de modications
rapides.
l'état. Un temps de ltre trop important risque cependant de détériorer la performance
dynamique du régulateur PID de vitesse.
Réglages pratiques du paramétre 7-06 Speed PID Lowpass Filter Time à partir du nombre
d'impulsions par tour du codeur (PPR) :
Codeur PPR Paramétre 7-06 PID vit.tps ltre
512 10 ms
1024 5 ms
2048 2 ms
4096 1 ms
1)
VVC
Actif
+
Tableau 2.7 Paramètres de commande de vitesse
Exemple de programmation de la commande de vitesse
Dans cet exemple, le régulateur PID de vitesse est utilisé pour maintenir une vitesse de moteur constante indépendamment
des variations de charge sur le moteur. La vitesse requise du moteur est réglée via un potentiomètre raccordé à la borne 53.
La plage de vitesse est comprise entre 0 et 1500 tr/min correspondant à 0-10 V sur le potentiomètre. Le démarrage et l'arrêt
sont commandés par un commutateur raccordé à la borne 18. Le régulateur PID de vitesse surveille le régime eectif du
moteur à l'aide d'un codeur incrémental 24 V (HTL) comme signal de retour. Le capteur du signal de retour est un codeur
(1024 impulsions par tour) raccordé aux bornes 32 et 33. La plage de fréquences d'impulsion aux bornes 32 et 33 est
4 Hz-32 kHz.
28 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

M
3
96 97 9998
91 92 93 95
50
12
L1 L2L1PEL3
W PEVU
F1
L2
L3
N
PE
18
53
27
55
32
33
24 Vdc
130BD372.11
Vue d'ensemble des produits Manuel de conguration
2 2
Illustration 2.22 Programmation de la commande de vitesse
Suivre les étapes indiquées dans le Tableau 2.8 pour programmer la commande de vitesse (voir l'explication des
réglages dans le Guide de programmation).
Le Tableau 2.8 suppose que tous les autres paramètres et commutateurs conservent leur réglage par défaut.
Fonction Numéro de paramètre Réglage
1) Veiller à ce que le moteur fonctionne correctement. Procéder comme suit :
Régler les paramètres du moteur conformément aux
données de la plaque signalétique.
Eectuer une AMA. Paramétre 1-29 Automatic
2) Vérier que le moteur fonctionne et que le codeur est correctement raccordé. Procéder comme suit :
Appuyer sur [Hand On]. Vérier que le moteur fonctionne
et noter son sens de rotation (qui sera donc le sens
positif).
3) Veiller à ce que les limites du variateur de fréquence soient dénies à des valeurs sûres.
Dénir des limites acceptables pour les références. Paramétre 3-02 Minimum
Vérier que les réglages des rampes correspondent aux
capacités du variateur et aux spécications de fonctionnement autorisées de l’application.
Dénir des limites acceptables pour la vitesse et la
fréquence du moteur.
4) Congurer la commande de vitesse et sélectionner le principe de contrôle du moteur :
Groupe de par.1-2*
Données moteur
Tel que spécié par la plaque signalétique du
moteur.
[1] AMA activée compl.
Motor Adaption (AMA)
Dénir une référence positive.
0
Reference
Paramétre 3-03 Maximum
50
Reference
Paramétre 3-41 Ramp 1
Réglage par défaut
Ramp Up Time
Paramétre 3-42 Ramp 1
Réglage par défaut
Ramp Down Time
Paramétre 4-12 Motor
0 Hz
Speed Low Limit [Hz]
Paramétre 4-14 Motor
50 Hz
Speed High Limit [Hz]
Paramétre 4-19 Max
60 Hz
Output Frequency
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 29

Vue d'ensemble des produits
VLT® Midi Drive FC 280
Activation de la commande de vitesse Paramétre 1-00 Congu-
ration Mode
Sélection du principe de contrôle du moteur Paramétre 1-01 Motor
22
5) Congurer la référence et la mettre à l’échelle par rapport à la commande de vitesse :
Dénir l'entrée ANA 53 comme source de référence. Paramétre 3-15 Reference 1
Metre à l'échelle l'entrée analogique 53 de 0 Hz (0 V) à 50
Hz (10 V).
6) Congurer le signal du codeur 24 V HTL comme signal de retour pour la commande du moteur et de la vitesse :
Dénir les entrées digitales 32 et 33 comme entrées du
codeur.
Choisir la borne 32/33 comme signal de retour PID de
vitesse.
7) Régler les paramètres du régulateur PID de vitesse :
Consulter si nécessaire les consignes de réglage ou
procéder au réglage manuel.
8) Terminer :
Enregistrer le réglage des paramètres sur le LCP an de les
conserver.
Tableau 2.8 Ordre de programmation du régulateur PID de vitesse
Control Principle
Source
Groupe de paramètres 6-1*
Entrée ANA 1
Paramétre 5-14 Terminal
32 Digital Input
Paramétre 5-15 Terminal
33 Digital Input
Paramétre 7-00 Speed PID
Feedback Source
Groupe de par. 7-0* PID
vit.régul.
Paramétre 0-50 Copie LCP [1] Lect.PAR.LCP
[1] Boucle fermée vit.
+
[1] VVC
Inutile (par défaut)
Inutile (par défaut)
[82] Entrée codeur B
[83] Entrée codeur A
[1] Codeur 24 V
30 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

P 7-30
normal/inversé
PID
P 7-38
*(-1)
Anticipation
Gestion
des ref.
Traitment
retour
% [unité]
% [unité]
%
[unité]
%
[vitesse]
Mise à
l'échelle
vitesse
P 4-10
Sens vitesse
moteur
Vers
contrôle
moteur
PID Process
130BA178.10
_
+
0%
-100%
100%
0%
-100%
100%
Vue d'ensemble des produits Manuel de conguration
2.5.2 Régulateur PID de process
Le régulateur PID de process peut servir à contrôler les paramètres de l'application mesurés par un capteur (p. ex. pression,
température, débit) et aectés par le moteur raccordé par l'intermédiaire d'une pompe, d'un ventilateur ou d'autres
appareils connectés.
Le Tableau 2.9 répertorie les congurations où le contrôle de process est possible. Se reporter au chapitre 2.3 Structures de
contrôle pour l'activation de la commande de vitesse.
Paramétre 1-00 Conguration Mode Paramétre 1-01 Motor Control Principle
U/f
VVC
+
[3] Boucle fermée Boucle fermée Boucle fermée
Tableau 2.9 Conguration de la commande
AVIS!
Le régulateur PID de process fonctionne avec la valeur de paramètre par défaut mais l'ajustement des paramètres est
fortement recommandé an d'optimiser le rendement du contrôle de l'application.
2 2
Illustration 2.23 Diagramme du régulateur PID de process
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 31

Vue d'ensemble des produits
VLT® Midi Drive FC 280
2.5.3 Paramètres pertinents du contrôle de process
22
Paramètre Description de la fonction
Paramétre 7-20 Process CL Feedback 1 Resource Sélectionner la source (entrée analogique ou impulsions) qui fournit le signal de retour au
régulateur PID de process.
Paramétre 7-22 Process CL Feedback 2 Resource En option : déterminer si le régulateur PID de process doit obtenir un signal de retour
supplémentaire (et en spécier la source). Si une source de retour supplémentaire est
sélectionnée, les deux signaux de retour sont ajoutés avant d'être utilisés dans le
régulateur PID de process.
Paramétre 7-30 Process PID Normal/ Inverse
Control
Paramétre 7-31 Process PID Anti Windup La fonction anti-saturation implique l'initialisation de l'intégrateur à une fréquence corres-
Paramétre 7-32 Process PID Start Speed Dans certaines applications, un temps long s'écoule avant d'atteindre la vitesse/le point de
Paramétre 7-33 Process PID Proportional Gain Plus la valeur est élevée, plus le contrôle est rapide. Cependant, une valeur trop élevée
Paramétre 7-34 Process PID Integral Time Élimine l'erreur de vitesse en état stable. Une valeur plus basse implique une réaction plus
Paramétre 7-35 Process PID Dierentiation Time Fournit un gain proportionnel à la vitesse de modication du signal de retour. Le réglage
Paramétre 7-36 Process PID Di. Gain Limit Dans le cas d'une application, pour laquelle la référence ou le retour change très vite, d'où
Paramétre 7-38 Process PID Feed Forward
Factor
Paramétre 5-54 Pulse Filter Time Constant
•
#29 (borne impulsions 29)
Paramétre 5-59 Pulse Filter Time Constant
•
#33 (borne impulsions 33)
Paramétre 6-16 Terminal 53 Filter Time
•
Constant (borne analogique 53)
Paramétre 6-26 Terminal 54 Filter Time
•
Constant (borne analogique 54)
Sous [0] Normal, le contrôle de process répond par une augmentation de la vitesse du
moteur si le signal de retour est inférieur à la référence. Sous [1] Inverse, le contrôle de
process répond par une vitesse décroissante.
pondant à la fréquence de sortie actuelle lorsqu'une limite de fréquence ou de couple est
atteinte. Cela empêche l'intégration d'un écart qui ne peut pas être compensé par un
changement de vitesse. Désactiver cette fonction en sélectionnant [0] Inactif.
consigne requis. Dans ces applications, régler une vitesse de moteur xe sur le variateur
de fréquence avant d'activer le contrôle de process peut présenter un avantage. Dénir
une vitesse de moteur xe en réglant une valeur de démarrage de process PID (vitesse) au
paramétre 7-32 Process PID Start Speed.
peut entraîner des oscillations.
rapide. Cependant, une valeur trop faible peut entraîner des oscillations.
de ce paramètre sur 0 désactive le diérenciateur.
un changement rapide de l'erreur, le diérenciateur peut rapidement devenir trop
dominant. Cela provient du fait qu'il réagit aux changements au niveau de l'écart. Plus
l'écart change rapidement, plus le gain diérentiel est important. Il est donc possible de
limiter le gain diérentiel de manière à pouvoir régler un temps de dérivée raisonnable en
cas de modications lentes.
Pour les applications dans lesquelles il existe une corrélation acceptable (et quasiment
linéaire) entre la référence de process et la vitesse du moteur nécessaire à l'obtention de
cette référence, utiliser le facteur d'anticipation pour obtenir une meilleure performance
dynamique du régulateur PID de process.
En cas d'oscillation du signal de retour de courant/tension, utiliser un ltre passe-bas pour
amortir ces oscillations. La constante de temps du ltre d'impulsions est l'expression de la
limite de vitesse des ondulations présentes sur le signal de retour.
Exemple : si le ltre passe-bas a été réglé sur 0,1 s, la limite de vitesse est de 10 rad/s
(réciproque de 0,1 s), ce qui correspond à (10/(2 x π)) = 1,6 Hz. Cela signie que tous les
courants/tensions déviant de plus de 1,6 oscillation par seconde sont atténués par le ltre.
La commande ne porte que sur un signal de retour dont la fréquence (vitesse) varie de
moins de 1,6 Hz.
Le ltre passe-bas améliore la stabilité de l'état mais la sélection d'un temps de ltre trop
important détériore la performance dynamique du régulateur PID de process.
Tableau 2.10 Paramètres du contrôle de process
32 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

Température
vitesse du ventilateur
Transmetteur
de température
Chaleur
processus
génératant
de la Chaleur
Air froid
130BA218.10
100kW
n °CW
Transmitter
96 97 9998
91 92 93 95
50
13
L1 L2
L1
PEL3
W PEVU
F1
L2
L3
N
PE
130BF102.10
18
53
27
55
54
M
3
Vue d'ensemble des produits Manuel de conguration
2.5.4 Exemple de régulateur PID de process
L'Illustration 2.24 est un exemple de régulateur PID de
process utilisé dans une installation de ventilation :
Illustration 2.24 Régulateur PID de process dans une installation de ventilation
Dans une installation de ventilation, la température peut
être réglée entre -5 et 35 °C (23–95 °F) avec un
Illustration 2.25 Transmetteur à deux ls
potentiomètre de 0 à 10 V. Utilise le contrôle de process
pour maintenir la température à un niveau déni constant.
1. Démarrage/arrêt via commutateur raccordé à la
Il s'agit d'une commande inverse, ce qui
lorsque la température monte, la vitesse du ventilateur
augmente an de livrer davantage d'air. Lorsque la
température baisse, la vitesse diminue. Le transmetteur
utilisé est un capteur thermique dont la plage de service
va de -10 à +40 °C (14–104 °F), 4–20 mA.
signie que
borne 18
2. Référence de température via potentiomètre (-5 à
35 °C (23–95 °F), 0 à 10 V CC) raccordé à la borne
53.
3. Signal de retour de température via transmetteur
(-10 à 40 °C (14–104 °F), 4 à 20 mA) raccordé à la
borne 54.
Fonction Numéro de
paramètre
Initialiser le variateur de fréquence. Paramétre 14-2
2 Mod. exploitation
1) Régler les paramètres du moteur :
Régler les paramètres du moteur conformément
aux données de la plaque signalétique.
Groupe de
paramètres
1-2* Données
moteur
Eectuer une AMA complète. Paramétre 1-29
Adaptation
auto. au
2) Vérier que le moteur tourne dans le bon sens.
Lorsque le moteur est connecté au variateur de fréquence avec un ordre de phase direct tel que U-U, V-V, W-W, l'arbre moteur tourne
habituellement dans le sens horaire, si l'on observe l'extrémité de l'arbre.
Appuyer sur [Hand On]. Vérier la direction de
l'arbre en appliquant une référence manuelle.
moteur (AMA)
Réglage
[2] Initialisation – Mettre hors tension, puis sous tension – Appuyer
sur reset.
Comme indiqué sur la plaque signalétique du moteur.
[1] AMA activée compl.
2 2
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 33

Vue d'ensemble des produits
VLT® Midi Drive FC 280
Fonction Numéro de
paramètre
Si le moteur tourne à l'inverse du sens requis :
22
1. Changer le sens du moteur au
paramétre 4-10 Motor Speed Direction.
2. Mettre hors tension et attendre que le circuit
intermédiaire soit déchargé.
3. Intervertir deux des phases moteur.
Régler le mode de conguration. Paramétre 1-00
3) Régler la conguration des références, c.-à-d. la plage d'utilisation des références. Mettre à l'échelle l'entrée analogique dans le groupe
de paramètres 6-** E/S ana.
Dénir les unités de référence/retour.
Dénir la référence minimum (10 °C (50 °F)).
Dénir la référence maximale (80 °C (176 °F)).
Si la valeur dénie est déterminée à partir d'une
valeur prédénie (paramètre de tableau), régler les
autres sources de référence sur [0] Pas de fonction.
4) Régler les limites du variateur de fréquence :
Régler les temps de rampe sur une valeur
appropriée telle que 20 s.
Régler les limites de vitesse min.
Régler la limite max. de la vitesse du moteur.
Régler la fréquence de sortie maximum.
Dénir le paramétre 6-19 Terminal 53 mode et le paramétre 6-29 Terminal 54 mode sur le mode tension ou courant.
5) Mettre à l'échelle les entrées analogiques utilisées pour la référence et le signal de retour :
Paramétre 4-10
Direction vit.
moteur
Mode Cong.
Paramétre 3-01
Reference/
Feedback Unit
Paramétre 3-02
Minimum
Reference
Paramétre 3-03
Maximum
Reference
Paramétre 3-10
Preset
Reference
Paramétre 3-41
Ramp 1 Ramp
Up Time
Paramétre 3-42
Ramp 1 Ramp
Down Time
Paramétre 4-12
Motor Speed
Low Limit [Hz]
Paramétre 4-14
Motor Speed
High Limit [Hz]
Paramétre 4-19
Max Output
Frequency
Réglage
Sélectionner le bon sens de l'arbre moteur.
[3] Process.
[60] °C, unité à acher.
-5 °C (23 °F).
35 °C (95 °F).
[0] 35 %.
Par . 3 − 10
Ré f =
Du Paramétre 3-14 Réf.prédéf.relative au paramétre 3-18 Echelle
réf.relative [0] = Pas de fonction
20 s
20 s
10 Hz
50 Hz
60 Hz
0
× Par . 3 − 03 − par . 3 − 02 = 24, 5° C
100
34 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

Vue d'ensemble des produits Manuel de conguration
Fonction Numéro de
paramètre
Régler la basse tension de la borne 53.
Régler la haute tension de la borne 53.
Régler la valeur de retour basse de la borne 54.
Régler la valeur de retour haute de la borne 54.
Dénir la source du retour.
6) Réglages PID basiques :
Process PID, contrôle normal/inversé Paramétre 7-30
Anti-saturation du process PID Paramétre 7-31
Vitesse de démarrage du process PID. Paramétre 7-32
Enregistrer les paramètres sur le LCP. Paramétre 0-50
Paramétre 6-10
Terminal 53
Low Voltage
Paramétre 6-11
Terminal 53
High Voltage
Paramétre 6-24
Terminal 54
Low Ref./Feedb.
Value
Paramétre 6-25
Terminal 54
High Ref./
Feedb. Value
Paramétre 7-20
Process CL
Feedback 1
Resource
Process PID
Normal/
Inverse Control
Process PID
Anti Windup
PID proc./
Fréq.dém.
Copie LCP
Réglage
0 V
10 V
-5 °C (23 °F)
35 °C (95 °F)
[2] Entrée ANA 54
[0] Normal
[1] Actif
300 RPM
[1] Lect.PAR.LCP
2 2
Tableau 2.11 Exemple de conguration du régulateur PID de process
2.5.5 Optimisation du contrôleur de
process
Après avoir conguré les réglages de base comme décrit
dans le chapitre 2.5.5 Ordre de programmation, optimiser le
gain proportionnel, le temps d'action intégrale et le temps
de dérivée (paramétre 7-33 Process PID Proportional Gain,
paramétre 7-34 Process PID Integral Time et
paramétre 7-35 Process PID Dierentiation Time). Pour la
plupart des process, utiliser la procédure suivante :
1. Démarrer le moteur.
2. Régler le paramétre 7-33 Process PID Proportional
Gain sur 0,3 et l'augmenter jusqu'à ce que le
signal de retour commence, à nouveau, à varier
de manière continue. Diminuer la valeur jusqu'à
ce que le signal de retour soit stabilisé. Diminuer
le gain proportionnel de 40-60 %.
3. Régler le paramétre 7-34 Process PID Integral Time
sur 20 s et diminuer la valeur jusqu'à ce que le
signal de retour commence, à nouveau, à varier
de manière continue. Augmenter le temps
d'action intégrale jusqu'à ce que le signal de
retour se stabilise, suivi d'une augmentation de
15-50 %.
4. N'utiliser le paramétre 7-35 Process PID Dieren-
tiation Time que pour les systèmes à action rapide
(temps de dérivée). La valeur caractéristique
correspond à quatre fois le temps d'action
intégrale déni. Utiliser le diérenciateur une fois
que les réglages du gain proportionnel et du
temps d'action intégrale ont été entièrement
optimisés. Veiller à ce que les oscillations du
signal de retour soient susamment atténuées
par le ltre passe-bas.
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 35

130BA183.10
y(t)
t
P
u
Vue d'ensemble des produits
VLT® Midi Drive FC 280
AVIS!
Si nécessaire, il est possible d'activer plusieurs fois
22
démarrage/arrêt de manière à provoquer un changement
du signal de retour.
2.5.6 Méthode de réglage de Ziegler
Nichols
Pour ajuster les régulateurs PID du variateur de fréquence,
Danfoss recommande la méthode de réglage de Ziegler
Nichols.
AVIS!
Ne pas utiliser la méthode de réglage de Ziegler Nichols
dans les applications qui pourraient être endommagées
par les oscillations créées par des réglages de contrôle
marginalement stables.
Les critères de réglage des paramètres reposent sur
l'évaluation du système à la limite de la stabilité plutôt que
sur une réponse graduelle. Augmenter le gain proportionnel jusqu'à ce que des oscillations continues soient
observées (telles que mesurées sur le signal de retour), c.à-d. jusqu'à ce que le système devienne marginalement
stable. Le gain correspondant (Ku), appelé gain ultime, est
le gain pour lequel l'oscillation est obtenue. La période
d'oscillation (Pu) (appelée période ultime) est déterminée
conformément aux indications de l'Illustration 2.26 et doit
être mesurée lorsque l'amplitude de l'oscillation est faible.
Illustration 2.26 Système marginalement stable
Type de
contrôle
Contrôle PI 0,45 x K
Contrôle strict
PID
Dépassement
PID
Tableau 2.12 Réglage de Ziegler Nichols pour le régulateur
Gain proportionnel
u
0,6 x K
u
0,33 x K
u
Temps intégral Temps de
dérivée
0,833 x P
0,5 x P
u
0,5 x P
u
u
–
0,125 x P
0,33 x P
u
u
1. Ne sélectionner que le contrôle proportionnel, ce
signie que le temps intégral est réglé sur la
qui
valeur maximale, tandis que le temps de dérivée
est sur 0.
2. Augmenter la valeur du gain proportionnel
jusqu’à ce que le point d’instabilité soit atteint
(oscillations soutenues). La valeur critique du
gain, Ku, est atteinte.
3. Mesurer la période d’oscillation pour obtenir la
constante de temps critique, Pu.
4. Utiliser le Tableau 2.12 pour calculer les
paramètres nécessaires du régulateur PID.
L'opérateur peut réitérer les réglages naux du régulateur
an d'obtenir un contrôle satisfaisant.
36 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

Vue d'ensemble des produits Manuel de conguration
2.6 Émissions et immunité CEM
2.6.1 Généralités concernant les émissions CEM
Les transitoires en salves sont transmises à des fréquences comprises entre 150 kHz et 30 MHz. Des interférences rayonnées
émanant du système du variateur de fréquence (30 MHz-1 GHz) sont générées par le variateur de fréquence, le câble du
moteur et le moteur.
Les courants de fuite sont imputables aux courants capacitifs
tension du moteur.
L'utilisation d'un câble de moteur blindé augmente le courant de fuite (voir l'Illustration 2.27) car les câbles blindés ont une
capacitance par rapport à la terre supérieure à celle des câbles non blindés. L'absence de ltrage du courant de fuite se
traduit par une perturbation accentuée du réseau dans la plage d'interférence radioélectrique inférieure à 5 MHz environ.
Étant donné que le courant de fuite (I1) est renvoyé vers l'unité par le blindage (I3), il n'y a qu'un faible champ électromagnétique (I4) émis par le câble de moteur blindé.
Le blindage réduit l'interférence rayonnée mais augmente les interférences basse fréquence sur le secteur. Relier le blindage
de câble du moteur aux boîtiers du variateur de fréquence et du moteur. Pour cela, il convient d'utiliser des brides pour
blindage intégrées
l'impédance du blindage à des fréquences élevées, ce qui réduit l'eet du blindage et accroît le courant de fuite (I4).
Monter le blindage sur le boîtier aux deux extrémités si un câble blindé est utilisé aux ns suivantes :
an d'éviter des extrémités blindées torsadées (queues de cochon). Les brides pour blindage augmentent
aectant le câble du moteur et au rapport dU/dt élevé de la
2 2
Bus de terrain
•
Réseau
•
Relais
•
Câble de commande
•
Interface signal
•
Frein
•
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 37

1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Vue d'ensemble des produits
VLT® Midi Drive FC 280
Dans certaines situations, il peut toutefois s'avérer nécessaire d'interrompre le blindage pour éviter les boucles de courant.
22
1 Câble de terre
2 Blindage
3 Alimentation secteur CA
4 Variateur de fréquence
5 Câble de moteur blindé
6 Moteur
Illustration 2.27 Émission CEM
En cas de raccordement du blindage sur une plaque de montage du variateur de fréquence, utiliser une plaque métallique
an de pouvoir renvoyer les courants de blindage vers l'unité. Il importe d'assurer un bon contact électrique à partir de la
plaque de montage à travers les vis de montage et jusqu'au châssis du variateur de fréquence.
En cas d'utilisation de câbles non blindés, certaines exigences en matière d'émission ne sont pas respectées mais les
exigences d'immunité sont respectées.
Utiliser des câbles de moteur et de la résistance de freinage aussi courts que possible pour réduire le niveau d'interférences
émises par le système dans son ensemble (unité et installation). Éviter de placer les câbles secteur, du moteur et de la
résistance de freinage à côté de câbles sensibles aux perturbations. Les interférences radioélectriques supérieures à 50 MHz
(rayonnées) sont générées en particulier par les composants électroniques de commande.
38 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

Vue d'ensemble des produits Manuel de conguration
2.6.2 Émission CEM
Les résultats des essais donnés dans le Tableau 2.13 ont été obtenus sur un système regroupant un variateur de fréquence
(avec plaque de montage), un moteur et des câbles de moteur blindés.
Type de
ltre
(interne)
Filtre A2
Filtre A1
Vis CEM
du
ltre A2
retirée
Vis CEM
du
ltre A1
retirée
Tension d'alimentation/puissance nominale Classe A2/EN 55011 Classe A1/EN 55011 Classe B/EN 55011
3 x
380-480 V
0,37-22 kW
(0,5-30 HP)
–
– –
0,37-7,5 kW
(0,5-10 HP)
11-22 kW
(15-30 HP)
– –
0,37-22 kW
(0,5-30 HP)
–
2)
– –
0,37-7,5 kW
(0,5-10 HP)
11-22 kW
(15-30 HP)
2)
– –
3 x
200-240 V
1 x 200-240 V
– – 25 m (82 pi)
0,37-4 kW
(0,5-5,4 HP)
– 25 m (82 pi)
0,37-2,2 kW
(0,5-3 HP)
– – 25 m (82 pi)
– – 50 m (164 pi)
0,37-2,2 kW
(0,5-3 HP)
Par
conduction
Rayonnée
s
1)
Oui
1)
Oui
Par
conduction
Rayonnées
conduction
– – – –
– – – –
– – – – – –
25 m
(82 pi)
50 m
(164 pi)
40 m
(131 pi)
Oui – –
Oui – –
Oui
15 m
(49,2 pi)
40 m (131 pi)
Oui
Oui
Oui
1)
1)
1)
– – – – – – – –
0,37-4 kW
(0,5-5,4 HP)
– – 5 m (16,4 pi)
– – 5 m (16,4 pi)
– – – – – – –
0,37-2,2 kW
(0,5-3 HP)
0,37-2,2 kW
(0,5-3 HP)
– – – – – –
5 m (16,4 pi)
Oui
Oui
Oui
1)
1)
1)
– – – –
– – – –
– – – –
Par
Rayonnées
–
2 2
Tableau 2.13 Émission CEM (type de ltre : interne)
1) La plage de fréquences allant de 150 kHz à 30 MHz n'est pas harmonisée entre les normes CEI/EN 61800-3 et EN 55011 et n'est pas obligatoirement incluse.
2) Courant de fuite à la terre faible. Compatible avec un fonctionnement sur ELCB/secteur IT.
Les résultats des essais donnés dans le Tableau 2.14 ont été obtenus sur un système regroupant un variateur de fréquence
(avec plaque de montage), un
ltre externe, un moteur et des câbles de moteur blindés. Le variateur de fréquence triphasé
380-480 V doit être accompagné d'un ltre interne A1.
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 39

Vue d'ensemble des produits
Type de
ltre
(externe)
22
Filtre CEM
Filtre
dU/dt
Filtre
sinus
Filtre CEM
ltre sinus
Tension d'alimentation/puissance nominale Classe A2/EN 55011 Classe A1/EN 55011 Classe B/EN 55011
3 x
380-480 V
0,37-22 kW
(0,5-30 HP)
0,37-7,5 kW
(0,5-10 HP)
11-22 kW
(15-30 HP)
0,37-7,5 kW
(0,5-10 HP)
11-15 kW
(15-20 HP)
18,5-22 kW
(25-30 HP)
0,37-15 kW
(0,5-20 HP)
18,5-22 kW
+
(25-30 HP)
–
– –
–
– –
–
– –
–
– –
3 x
200-240 V
– – 100 m (328 pi)
0,37-4 kW
(0,5-5,4 HP)
– – – – – – – –
– – 150 m (492 pi)
0,37-4 kW
(0,5-5,4 HP)
– – 50 m (164 pi)
– – 150 m (492 pi)
– – 150 m (492 pi)
0,37-4 kW
(0,5-5,4 HP)
– – 150 m (492 pi)
– – – – – – – –
0,37-4 kW
(0,5-5,4 HP)
VLT® Midi Drive FC 280
1 x 200-240 V
– – – – – – –
0,37-2,2 kW
(0,5-3 HP)
– – – – – – –
0,37-2,2 kW
(0,5-3 HP)
– – – – – – –
0,37-2,2 kW
(0,5-3 HP)
– – – – – – –
0,37-2,2 kW
(0,5-3 HP)
Par
conduction
100 m (328 pi)
– – – – – –
50 m (164 pi)
150 m (492 pi)
Rayonnée
s
1)
Oui
1)
Oui
1)
Oui
1)
Oui
1)
Oui
1)
Oui
1)
Oui
1)
Oui
1)
Oui
Par
conduction
100 m
(328 pi)
100 m
(328 pi)
40 m
(131 pi)
50 m
(164 pi)
50 m
(164 pi)
100 m
(328 pi)
50 m
(164 pi)
100 m
(328 pi)
100 m
(328 pi)
Rayonnées
Oui
Oui
Oui – –
Oui – –
Oui – –
Oui – –
Oui – –
Oui – –
Oui – –
conduction
25 m
(82 pi)
40 m
(131 pi)
Par
Rayonnées
–
–
Tableau 2.14 Émission CEM (type de ltre : externe)
1) La plage de fréquences allant de 150 kHz à 30 MHz n'est pas harmonisée entre les normes CEI/EN 61800-3 et EN 55011 et n'est pas obligatoirement incluse.
2.6.3 Immunité CEM
Le VLT® Midi Drive FC 280 est conforme aux exigences relatives aux environnements industriels plus strictes que celles
relatives aux environnements résidentiels et commerciaux. Par conséquent, le FC 280 est aussi conforme aux exigences
moindres des environnements résidentiels et commerciaux avec une marge de sécurité importante.
Pour prouver l'immunité aux transitoires en salves issus de phénomènes électriques, les essais suivants d'immunité ont été
réalisés sur un système composé de :
un variateur de fréquence (avec les options nécessaires) ;
•
un câble de commande blindé ;
•
un boîtier de commande avec potentiomètre, câble de moteur et moteur.
•
40 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

Vue d'ensemble des produits Manuel de conguration
Les essais ont été eectués selon les normes de base suivantes :
EN 61000-4-2 (CEI 61000-4-2) Décharges électrostatiques (DES) : simulation de l'inuence des décharges électro-
•
statiques générées par le corps humain.
EN 61000-4-3 (CEI 61000-4-3) Immunité aux champs rayonnés : simulation avec modulation d'amplitude de
•
l'inuence des radars, matériels de radiodiusion et appareils de communication mobiles.
EN 61000-4-4 (CEI 61000-4-4) Transitoires en salves : simulation d'interférences provoquées par la commutation
•
d'un contacteur, d'un relais ou de dispositifs analogues.
EN 61000-4-5 (CEI 61000-4-5) Surtensions : simulation de transitoires provoquées, par exemple, par la foudre
•
frappant à proximité d'installations.
EN 61000-4-6 (CEI 61000-4-6) Immunité aux champs conduits : simulation de l'inuence d'équipement de
•
transmission connecté par des câbles de raccordement.
Le FC 280 est conforme à la norme CEI 61800-3. Voir le Tableau 2.15 pour des précisions.
Plage de tension : 380-480 V
Norme produit 61800-3
Décharge
Test
Critère d'acceptation B B B A A
Câble secteur – – 2 kV CN
Câble du moteur – – 4 kV CCC – 10 V
Câble de la résistance de
freinage
Câble de répartition de la
charge
Câble de relais – – 4 kV CCC – 10 V
Câble de commande – –
Câble de bus de terrain/
standard
Câble LCP – –
Boîtier
Dénitions
CD : décharge de contact
AD : Rejet d'air
électrostatique
– –
– –
– –
4 kV CD
8 kV AD
Immunité
aux champs
rayonnés
10 V/m – – –
DM : Mode diérentiel
CM : Mode commun
Salves Surtension Immunité
2 kV/2 Ω DM
2 kV/12 Ω CM
4 kV CCC – 10 V
4 kV CCC – 10 V
Longueur > 2 m
(6,6 pi)
1 kV CCC
Longueur > 2 m
(6,6 pi)
1 kV CCC
Longueur > 2 m
(6,6 pi)
1 kV CCC
CN : injection directe par couplage réseau
CCC : injection par pince de couplage capacitif
Non blindé :
1 kV/42 Ω CM
Non blindé :
1 kV/42 Ω CM
– 10 V
aux champs
conduits
10 V
10 V
10 V
2 2
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
Tableau 2.15 Immunité CEM
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 41

130BD447.11
12
4
3
ab
M
130BB955.12
a
b
Leakage current
Motor cable length
Vue d'ensemble des produits
VLT® Midi Drive FC 280
2.7 Isolation galvanique
L'isolation galvanique fonctionnelle (a et b sur
l'Illustration 2.28) est destinée à l'option de secours 24 V et
La norme PELV ore une protection grâce à une tension
22
extrêmement basse. La protection contre l'électrocution est
à l'interface du bus standard RS485.
assurée lorsque l'alimentation électrique est de type PELV
et que l'installation est réalisée selon les dispositions des
réglementations locales et nationales concernant les
alimentations PELV.
AVERTISSEMENT
Avant tout contact avec les parties électriques, s'assurer
que les autres entrées de tension, comme la répartition
de charge (connexion de circuit intermédiaire CC) et le
Toutes les bornes de commande et de relais 01-03 sont
conformes à la PELV (Protective Extra Low Voltage). Cela ne
s'applique pas aux unités sur trépied mis à la terre audessus de 400 V.
raccordement moteur en cas de sauvegarde cinétique,
ont été déconnectées. Respecter le temps de décharge
indiqué dans le chapitre Sécurité du Manuel d'utilisation
du VLT® Midi Drive FC 280. Le non-respect de ces
recommandations peut entraîner le décès ou des
L'isolation galvanique est obtenue en respectant les
blessures graves.
exigences en matière d'isolation renforcée avec les lignes
de fuite et les distances correspondantes. Ces exigences
2.8 Courant de fuite à la terre
sont décrites dans la norme EN 61800-5-1.
Suivre les réglementations locales et nationales concernant
Les composants qui forment l'isolation électrique, conformément à l'Illustration 2.28, répondent également aux
exigences en matière d'isolation renforcée avec les essais
correspondants décrits dans EN 61800-5-1.
L'isolation galvanique PELV existe à 3 endroits (voir
l'Illustration 2.28) :
Pour conserver l'isolation PELV, toutes les connexions
réalisées sur les bornes de commande doivent être de type
PELV, par exemple la thermistance doit être à isolation
double/renforcée.
la mise à la terre de protection de l'équipement en cas de
courant de fuite > 3,5 mA.
La technologie du variateur de fréquence implique une
commutation de fréquence élevée à des puissances
importantes. Cela génère un courant de fuite dans la mise
à la terre. Un courant de défaut dans le variateur de
fréquence au niveau du bornier de puissance de sortie
peut contenir une composante CC pouvant charger les
condensateurs du ltre et entraîner un courant à la terre
transitoire.
Le courant de fuite à la terre provient de plusieurs sources
et dépend des diérentes congurations du système dont
le ltrage RFI, les câbles du moteur blindés et la puissance
du variateur de fréquence.
1 Alimentation (SMPS) pour carte de commande
2 Communication entre la carte de commande et la carte de
puissance
3 Isolation entre les entrées STO et le circuit IGBT
4 Relais client
Illustration 2.29 Inuence de la longueur de câble et de la
Illustration 2.28 Isolation galvanique
42 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304
puissance sur le courant de fuite, Pa>P
b

130BB956.12
THDv=0%
THDv=5%
Leakage current
130BB958.12
f
sw
Cable
150 Hz
3rd harmonics
50 Hz
Mains
RCD with low f
cut-
RCD with high f
cut-
Leakage current
Frequency
130BB957.11
Leakage current [mA]
100 Hz
2 kHz
100 kHz
Vue d'ensemble des produits Manuel de conguration
Le courant de fuite dépend également de la distorsion de
la ligne.
Illustration 2.31 Sources secteur du courant de fuite
2 2
Illustration 2.30 Inuence de la distorsion de la ligne sur le
courant de fuite
AVIS!
Un courant de fuite élevé peut entraîne l'extinction des
RCD. Pour éviter ce problème, ôter la vis RFI quand un
ltre est en cours de chargement.
La norme EN/CEI 61800-5-1 (norme produit concernant les
systèmes d'entraînement électriques) exige une attention
particulière si le courant de fuite dépasse 3,5 mA. La mise
à la terre doit être renforcée de l'une des façons suivantes :
Fil de terre (borne 95) d'au moins 10 mm
•
(8 AWG).
Deux ls de terre séparés respectant les
•
consignes de dimensionnement.
Voir la norme EN/CEI 61800-5-1 pour plus d'informations.
Utilisation de RCD
Lorsque des relais de protection
diérentielle (RCD), aussi
appelés disjoncteurs de mise à la terre (ELCB), sont utilisés,
respecter les éléments suivants :
Utiliser les RCD de type B uniquement, car ils
•
sont capables de détecter les courants CA et CC.
Utiliser des RCD avec un retard du courant
•
d'appel pour éviter les pannes dues aux courants
à la terre transitoires.
Dimensionner les RCD selon la conguration du
•
système et en tenant compte de l'environnement
d'installation.
2
Illustration 2.32 Inuence de la fréquence de coupure du RCD
sur la réponse/mesure
Pour plus de détails, voir la Note applicative sur les RCD.
Fonctions de freinage
2.9
2.9.1 Frein de maintien mécanique
Le frein de maintien mécanique monté directement sur
l'arbre du moteur eectue normalement un freinage
statique.
AVIS!
Lorsqu'un frein de maintien est compris dans une chaîne
de sécurité, un variateur de fréquence ne peut pas
fournir le contrôle de sécurité d'un frein mécanique.
Prévoir un circuit de redondance pour la commande de
frein dans l'installation complète.
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 43

T
ta
tc
tb
to ta
tc
tb
to ta
130BA167.10
Charge
Temps
Vitesse
Vue d'ensemble des produits
2.9.2 Freinage dynamique
VLT® Midi Drive FC 280
22
Freinage résistance : un frein IGBT maintient la
•
surtension sous un certain seuil en dirigeant
l'énergie du frein du moteur vers la résistance de
freinage connectée (paramétre 2-10 Brake Function
= [1] Freinage résistance).
Ajuster le seuil au paramétre 2-14 Brake voltage
reduce avec la gamme 70 V pour 3 x 380-480 V.
Le freinage dynamique est eectué par :
Freinage CA : l'énergie de freinage est répartie
•
dans le moteur en modiant les conditions de
Illustration 2.33 Cycle de freinage type
perte dans le moteur. La fonction de frein CA ne
peut pas être utilisée dans les applications avec
une fréquence de cycle élevée car cela entraîne
une surchaue du moteur (paramétre 2-10 Brake
Function = [2] Frein CA).
Freinage CC : un courant CC en surmodulation
•
ajouté au courant CA fonctionne comme un frein
magnétique (paramétre 2-02 DC Braking Time ≠ 0
s).
2.9.3 Sélection des résistances de freinage
Pour gérer des exigences plus élevées par freinage génératorique, une résistance de freinage est nécessaire.
L'utilisation d'une résistance de freinage garantit que la
chaleur est absorbée par celle-ci et non par le variateur de
fréquence. Pour plus d'informations, consulter le Manuel de
conguration de la résistance VLT® Brake Resistor MCE 101.
Gamme de puissance :
0,37–22 kW (0,5–30 HP) 3 x 380–480 V
0,37–3,7 kW (0,5–5 HP) 3 x 200–240 V
Durée du cycle (s) 120
Cycle d'utilisation du freinage au couple
de 100 %
Cycle d'utilisation du freinage en
surcouple (150/160 %)
Tableau 2.16 Freinage en surcouple Niveau de couple
Continu
40%
Danfoss propose des résistances de freinage avec des
cycles d'utilisation de 10 % et 40 %. Si un cycle d'utilisation de 10 % est appliqué, les résistances de freinage
sont capables d'absorber la puissance de freinage pendant
10 % du temps du cycle. Les 90 % restants du temps de
cycle sont utilisés pour évacuer la chaleur excédentaire.
Si la quantité d'énergie cinétique transférée à la résistance
à chaque période de freinage est inconnue, calculer la
puissance moyenne à partir du temps de cycle et du
temps de freinage. Le cycle d'utilisation intermittent de la
résistance indique le cycle d'utilisation pendant lequel la
résistance est active. L'Illustration 2.33 représente un cycle
de freinage typique.
Le cycle d'utilisation intermittent de la résistance est
calculé comme suit :
Cycle d'utilisation = tb/T
tb = temps de freinage en secondes.
T = temps de cycle en secondes.
AVIS!
Vérier que la résistance est conçue pour gérer le temps
de freinage requis.
La charge maximale autorisée pour la résistance de
freinage est indiquée comme une puissance de pointe à
un cycle d'utilisation intermittent donné et peut être
calculée comme suit :
Calcul de la résistance de freinage
2
U
x0 . 83
Ω =
= P
cc,fr
P
pointe
x Mfr [%] x η
moteur
moteur
x η
VLT
[W]
R
fr
où
P
pointe
Comme indiqué, la résistance de freinage dépend de la
tension du circuit intermédiaire (Ucc).
44 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

Vue d'ensemble des produits Manuel de conguration
Taille Frein activé
U
cc,fr
FC 280
3 x 380–480 V
FC 280
3 x 200–240 V
Tableau 2.17 Seuil de la résistance de freinage
770 V 800 V 800 V
390 V 410 V 410 V
Avertissement
avant
coupure
Coupure
(arrêt)
Le seuil peut être réglé au paramétre 2-14 Brake voltage
reduce, avec la gamme 70 V.
AVIS!
Plus la valeur de réduction est importante, plus rapide
est la réaction vers une surcharge du générateur. Ne doit
être utilisé que s'il y a des problèmes de surtension dans
le circuit intermédiaire.
AVIS!
Vérier que la résistance de freinage peut supporter une
tension de 410 V ou 800 V.
Danfoss recommande de calculer la résistance de freinage
R
à l'aide de la formule suivante. La résistance de
rec
freinage recommandée garantit que le variateur de
fréquence peut freiner au couple de freinage le plus élevé
(Mfr(%)) de 160 %.
AVIS!
En cas de court-circuit dans le transistor de freinage,
empêcher la dissipation de puissance dans la résistance
de freinage en utilisant un interrupteur de secteur ou un
contacteur an de déconnecter le variateur de fréquence
du secteur. Le variateur de fréquence peut contrôler le
contacteur.
AVIS!
Ne pas toucher la résistance de freinage car celle-ci peut
devenir chaude pendant le freinage. Pour éviter tout
risque d'incendie, placer la résistance de freinage dans
un environnement sûr.
2.9.4 Contrôle avec la fonction de freinage
Le frein est protégé contre les courts-circuits de la
résistance de freinage. D'autre part, le transistor de
freinage est contrôlé de manière à garantir la détection du
court-circuit du transistor. Une sortie relais/digitale peut
être utilisée pour protéger la résistance de freinage contre
la surcharge causée par une panne du variateur de
fréquence.
Le frein permet également d'acher la puissance
instantanée et la puissance moyenne des 120 dernières
secondes, et de surveiller que la puissance dégagée ne
dépasse pas une limite xée au paramétre 2-12 Brake Power
Limit (kW).
2 2
2
U
x100x0,83
R
Ω =
rec
η
est généralement égal à 0,80 (≤ 7,5 kW (10 HP)) ;
moteur
P
moteur
cc
xM
fr( % )
xη
VLT
xη
moteur
0,85 (11–22 kW (15–30 hp))
η
est généralement égal à 0,97.
VLT
Pour FC 280, R
480
V: R
rec
480
V: R
rec
au couple de freinage de 160 % s'écrit :
rec
396349
=
397903
=
P
moteur
P
moteur
Ω
Ω
1)
2)
1) Pour les variateurs de fréquence ≤ 7,5 kW (10 HP) à la
sortie d'arbre
2) Pour les variateurs de fréquence 11-22 kW (15-30 HP) à la
sortie d'arbre
AVIS!
La valeur de la résistance de freinage ne doit pas être
supérieure à celle recommandée par Danfoss. Pour les
résistances de freinage de valeur ohmique supérieure, il
est possible que l'on n'obtienne pas un couple de
freinage de 160 % puisque le variateur de fréquence
risque de disjoncter par mesure de sécurité.
La résistance doit être supérieure à R
min
.
AVIS!
La surveillance de la puissance de freinage n'est pas une
fonction de sécurité, Un interrupteur thermique est
nécessaire pour empêcher la puissance de freinage de
dépasser la limite. Le circuit de la résistance de freinage
n'est pas protégé contre les fuites à la terre.
Le contrôle de surtension (OVC) (à l'exclusion de la
résistance de freinage) peut être sélectionné comme
fonction de freinage de remplacement au
paramétre 2-17 Over-voltage Control. Cette fonction est
active pour toutes les unités et permet d'éviter un arrêt si
la tension du circuit intermédiaire augmente. Elle génère
une augmentation de la fréquence de sortie pour limiter la
tension du circuit intermédiaire. Cette fonction est utile,
par exemple si le temps de rampe de décélération est trop
court pour éviter l'arrêt du variateur de fréquence. La
rampe de décélération est alors rallongée.
AVIS!
L'OVC ne peut pas être activé lors du fonctionnement
d'un moteur PM (si le paramétre 1-10 Motor Construction
est réglé sur [1] PM, SPM non saillant).
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 45

. . .
. . .
Par. 13-11
Comparator Operator
Par. 13-43
Logic Rule Operator 2
Par. 13-51
SL Controller Event
Par. 13-52
SL Controller Action
130BB671.13
Coast
Start timer
Set Do X low
Select set-up 2
. . .
Running
Warning
Torque limit
Digital input X 30/2
. . .
=
TRUE longer than..
. . .
. . .
Vue d'ensemble des produits
VLT® Midi Drive FC 280
2.10 Isolation du moteur
La condition d'un événement peut être un état particulier
ou le fait qu'une sortie provenant d'une règle logique ou
La conception moderne des moteurs à utiliser avec des
22
variateurs de fréquence présente un niveau élevé
d'isolation pour représenter la nouvelle génération d'IGBT
d'un opérande comparateur devienne VRAI (TRUE). Cela
entraîne une action associée comme indiqué sur
l'Illustration 2.34.
haute fréquence avec un dU/dt élevé. Pour un réajustement sur des moteurs anciens, il est nécessaire de
conrmer l'isolation du moteur ou d'atténuer avec un ltre
dU/dt ou si nécessaire un ltre sinus.
2.10.1 Filtres sinus
Lorsqu'un moteur est contrôlé par un variateur de
fréquence, il émet un bruit de résonance. Ce bruit, dû à la
construction du moteur, se produit à chaque commutation
de l'onduleur du variateur de fréquence. La fréquence du
bruit des résonances correspond ainsi à la fréquence de
commutation du variateur de fréquence.
Danfoss peut proposer un ltre sinus qui atténue le bruit
acoustique du moteur.
Le ltre réduit le temps de rampe d'accélération de la
tension, la tension de charge de pointe U
d'ondulation ΔI vers le moteur, ce qui signie que le
courant et la tension deviennent quasiment sinusoïdaux.
Le bruit acoustique du moteur est ainsi réduit au strict
minimum.
et le courant
PIC
Illustration 2.34 Action associée
Le courant d'ondulation des bobines du ltre sinus génère
aussi un certain bruit. Remédier au problème en intégrant
le ltre dans une armoire ou une installation similaire.
2.10.2 Filtres dU/dt
Danfoss fournit des ltres dU/dt. Les ltres dU/dt sont des
ltres passe-bas à mode diérentiel qui réduisent les pics
de tensions entre phases de la borne du moteur et
diminuent le temps de montée jusqu'à un niveau qui
réduit la contrainte sur l'isolation des bobinages du
moteur. Ce problème est particulièrement important pour
les câbles courts du moteur.
Comparés aux ltres sinus (voir le chapitre 2.10.1 Filtres
sinus), les ltres dU/dt comportent une fréquence d'arrêt
supérieure à la fréquence de commutation.
Contrôleur logique avancé
2.11
Le Contrôleur logique avancé (SLC) est une séquence
d'actions dénies par l'utilisateur (voir
paramétre 13-52 Action contr. logique avancé [x]) exécutées
par le SLC lorsque l'événement associé déni par l'utilisateur (voir paramétre 13-51 Événement contr. log avancé
[x]) est évalué comme étant vrai par le SLC.
Les événements et actions sont numérotés et liés par
paires. Cela signie que lorsque l'événement [0] est satisfait
(atteint la valeur VRAI), l'action [0] est exécutée. Après cela,
les conditions d'événement [1] sont évaluées et si elles
s'avèrent être VRAI, l'action [1] est exécutée et ainsi de
suite. Un seul événement est évalué à chaque fois. Si un
événement est évalué comme étant FAUX, rien ne se passe
(dans le SLC) pendant l'intervalle de balayage en cours et
aucun autre événement n'est évalué. Lorsque le SLC
démarre, il évalue l'événement [0] (et uniquement
l'événement [0]) à chaque intervalle de balayage.
Uniquement lorsque l'événement [0] est évalué comme
étant vrai, le SLC exécute l'action [0] et commence
l’évaluation de l'événement [1]. Il est possible de
programmer de 1 à 20 événements et actions.
Lorsque le dernier événement/action a été exécuté, la
séquence recommence à partir de l'événement [0]/action
[0]. L'Illustration 2.35 donne un exemple avec trois
événements/actions :
46 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

130BA062.13
Etat 1
Événement 1/
Action 1
Etat 2
Événement 2/
Action 2
Événement de
démarrage P13-01
Etat 3
Événement 3/
Action 3
Etat 4
Événement 4/
Action 4
Événement
d'arrêt P13-02
Événement
d'arrêt P13-02
Événement
d'arrêt P13-02
Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
Vue d'ensemble des produits Manuel de conguration
Commutation sur la sortie
Les commutations sur la sortie entre le moteur et le
variateur de fréquence sont possibles sans limitation et ne
risquent pas d'endommager le variateur de fréquence. Des
messages d'erreur peuvent cependant apparaître.
Surtension générée par le moteur
La tension dans le circuit intermédiaire augmente lorsque
le moteur est utilisé comme générateur. Ceci se produit
dans deux cas :
La charge entraîne le moteur (à fréquence de
•
sortie constante générée par le variateur de
Illustration 2.35 Séquence avec trois événements/actions
fréquence).
Lors de la décélération (rampe descendante), si le
•
moment d'inertie est élevé, le frottement est
Comparateurs
Les comparateurs sont utilisés pour comparer des variables
continues (p. ex. fréquence de sortie, courant de sortie et
entrée analogique) à des valeurs prédénies xes.
faible et le temps de rampe de décélération est
trop court pour que l'énergie se dissipe sous
forme de perte du variateur de fréquence, du
moteur et de l'installation.
Un réglage incorrect de la compensation du
•
glissement risque d'entraîner une tension élevée
du circuit intermédiaire.
L'unité de commande peut tenter de corriger la rampe
dans la mesure du possible (paramétre 2-17 Contrôle
Surtension).
Le variateur de fréquence s'arrête an de protéger les
Illustration 2.36 Comparateurs
transistors et les condensateurs du circuit intermédiaire
quand un certain niveau de tension est atteint.
Voir les paramétre 2-10 Fonction Frein et Surtension et
Règles logiques
Associer jusqu'à trois entrées booléennes (entrées VRAI/
FAUX) à partir des temporisateurs, comparateurs, entrées
digitales, bits d'état et événements à l'aide des opérateurs
logiques ET, OU, PAS.
paramétre 2-17 Contrôle Surtension an de sélectionner la
méthode utilisée pour contrôler le niveau de tension du
circuit intermédiaire.
Chute de tension secteur
Lors d'une chute de tension secteur, le variateur de
fréquence continue de fonctionner jusqu'à ce que la
tension du circuit intermédiaire chute en dessous du seuil
d'arrêt minimal, c'est-à-dire :
314 V pour 3 x 380-480 V.
•
202 V pour 3 x 200-240 V.
•
225 V pour 1 x 200-240 V.
•
La tension secteur disponible avant la panne et la charge
Illustration 2.37 Règles logiques
du moteur déterminent le temps qui s'écoule avant l'arrêt
en roue libre de l'onduleur.
2.12 Conditions d'exploitation extrêmes
Court-circuit (phase moteur-phase)
Une mesure de courant eectuée sur chacune des trois
phases moteur ou sur le circuit intermédiaire protège le
variateur de fréquence contre les courts-circuits. Un courtcircuit entre 2 phases de sortie se traduit par un
surcourant dans le variateur de fréquence. Le variateur de
fréquence est désactivé séparément lorsque le courant de
court-circuit dépasse la valeur autorisée (alarme 16, alarme
verrouillée).
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 47
Surcharge statique en mode VVC
Quand le variateur de fréquence est en surcharge (limite
de couple au paramétre 4-16 Torque Limit Motor Mode/
paramétre 4-17 Torque Limit Generator Mode atteinte),
l'unité de commande réduit la fréquence de sortie dans le
but de réduire la charge.
En cas de surcharge extrême, un surcourant peut se
produire et faire disjoncter le variateur de fréquence après
5 à 10 secondes environ.
+
2 2

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2 000
500
200
400
300
1 000
600
t [s]
175ZA052.11
f
OUT
= 0,2 x f
M,N
f
OUT
= 2 x f
M,N
f
OUT
= 1 x f
M,N
I
MN
I
M
Vue d'ensemble des produits
VLT® Midi Drive FC 280
Le fonctionnement dans la limite de couple est restreint
dans le temps (0 à 60 s) déni au paramétre 14-25 Trip
Delay at Torque Limit.
22
2.12.1 Protection thermique du moteur
Pour protéger l'application contre des dommages graves, le
VLT® Midi Drive FC 280 dispose de plusieurs caractéris-
tiques dédiées.
Limite de couple
La limite de couple permet de protéger le moteur de toute
surcharge indépendante de la vitesse. La limite de couple
est contrôlée au paramétre 4-16 Torque Limit Motor Mode et
au paramétre 4-17 Torque Limit Generator Mode. Le
Paramétre 14-25 Trip Delay at Torque Limit contrôle le temps
qui s'écoule avant que l'avertissement de limite de couple
ne se déclenche.
Limite de courant
Le Paramétre 4-18 Current Limit contrôle la limite de
courant et le paramétre 14-24 Trip Delay at Current Limit
contrôle le temps qui s'écoule avant que l'avertissement de
limite de courant ne se déclenche.
Vitesse limite minimale
Le Paramétre 4-12 Motor Speed Low Limit [Hz]
dénit la
vitesse de sortie minimale que le variateur de fréquence
peut fournir.
Vitesse limite maximale
Le Paramétre 4-14 Motor Speed High Limit [Hz] ou le
paramétre 4-19 Max Output Frequency dénit la vitesse de
sortie maximale que le variateur de fréquence peut fournir.
ETR (relais thermique électronique)
La fonction ETR du variateur de fréquence mesure le
courant, la vitesse et la durée en cours an de calculer la
température du moteur. Elle protège également le moteur
contre toute surchaue (avertissement ou déclenchement).
Une entrée de thermistance externe est également
disponible. ETR est une caractéristique électronique qui
simule un relais bimétallique en s'appuyant sur des
mesures internes. La courbe caractéristique est indiquée
sur l'Illustration 2.38.
Illustration 2.38 ETR
L'axe des abscisses indique le rapport entre I
moteur
et I
moteur
nominale. L'axe des ordonnées représente le temps en
secondes avant que l'ETR ne se déclenche et fasse
disjoncter le variateur de fréquence. Ces courbes montrent
la vitesse nominale caractéristique à deux fois la vitesse
nominale et à 0,2 fois la vitesse nominale.
À vitesse plus faible, l'ETR se déclenche à une chaleur
inférieure en raison du refroidissement moindre du moteur.
De cette façon, le moteur est protégé contre les
surchaues même à une vitesse faible. La caractéristique
ETR calcule la température du moteur en fonction du
courant et de la vitesse réels. La température calculée est
visible en tant que paramètre d'achage au
paramétre 16-18 Motor Thermal.
48 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

130BE805.11
+24 V DC
+24 V DC
A
B
GND
12 13 18 19 3227 29 33 55
Exemples d'applications Manuel de conguration
3 Exemples d'applications
3.1 Introduction
3.1.1 Raccordement du codeur
Le but de cette consigne est de faciliter le processus de
raccordement du codeur au variateur de fréquence. Avant
d'installer le codeur, les réglages élémentaires pour un
système de contrôle de vitesse en boucle fermée sont
achés.
3 3
Illustration 3.2 Codeur incrémental 24 V, longueur de câble
maximale 5 m (16,4 pi)
3.1.2 Sens de rotation du codeur
L'ordre d'entrée des impulsions dans le variateur de
fréquence détermine le sens du codeur.
La direction horaire signie que le canal A est 90 degrés
électriques avant le canal B.
La direction antihoraire signie que le canal B est 90
degrés électriques avant A.
Le sens est déterminé en examinant l'extrémité de l'arbre.
Illustration 3.1 Codeur 24 V
3.1.3 Système de variateur en boucle
fermée
Un système de variateur comprend en général diérents
éléments tels que :
moteur ;
•
frein (multiplicateur, frein mécanique) ;
•
variateur de fréquence ;
•
codeur comme système de retour ;
•
résistance de freinage comme freinage
•
dynamique ;
transmission ;
•
charge.
•
Les applications exigeant une commande de frein
mécanique requièrent normalement une résistance de
freinage.
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 49

130BE728.10
Motor
Gearbox
Load
Transmission
Encoder Mech. brake
Brake resistor
130BF096.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
12
13
18
19
27
29
32
33
50
53
54
55
42
A OUT
D IN
+24 V
130BE204.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
0 ~10 V
+
-
FC
+24 V
130BF097.10
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
4 - 20mA
+
-
FC
+24 V
Exemples d'applications
VLT® Midi Drive FC 280
3.2.2 Vitesse
Paramètres
Fonction Réglage
Paramétre 6-10
Ech.min.U/born.530,07 V*
33
Paramétre 6-11
Ech.max.U/born.5310 V*
Paramétre 6-14
Val.ret./
Réf.bas.born.53
Paramétre 6-15
Val.ret./
Réf.haut.born.53
Paramétre 6-19
Terminal 53
mode
* = valeur par défaut
Remarques/commentaires :
0
50
[1] Tension
Illustration 3.3 Conguration élémentaire pour la commande
de vitesse en boucle fermée
Tableau 3.2 Référence de vitesse analogique (tension)
Paramètres
Exemples d'applications
3.2
Fonction Réglage
Paramétre 6-22
3.2.1 AMA
Paramètres
Fonction Réglage
Ech.min.I/born.544 mA*
Paramétre 6-23
Ech.max.I/born.5420 mA*
Paramétre 1-29
Adaptation
auto. au moteur
(AMA)
Paramétre 5-12
E.digit.born.27
* = valeur par défaut
Remarques/commentaires :
régler le groupe de paramètres
1-2* Données moteur en
fonction des spécications du
moteur.
AVIS!
Si les bornes 13 et 27 ne
sont pas connectées, régler
le paramétre 5-12 Terminal
27 Digital Input sur [0]
Inactif.
[1] AMA
activée compl.
*[2] Lâchage
Paramétre 6-24
Val.ret./
0
Réf.bas.born.54
Paramétre 6-25
Val.ret./
50
Réf.haut.born.54
Paramétre 6-29
Mode born.54
[0] Courant
* = valeur par défaut
Remarques/commentaires :
Tableau 3.3 Référence de vitesse analogique (courant)
Tableau 3.1 AMA avec borne 27 connectée
50 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

130BE208.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
≈ 5kΩ
FC
+24 V
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
130BF100.10
+24 V
130BB840.12
Speed
Reference
Start (18)
Freeze ref (27)
Speed up (29)
Speed down (32)
130BF098.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
19
18
27
29
32
33
50
53
54
55
42
+24 V 13
Exemples d'applications Manuel de conguration
Paramètres
Fonction Réglage
Paramétre 6-10
Ech.min.U/born.530,07 V*
Paramétre 6-11
Ech.max.U/born.5310 V*
Paramétre 6-14
Val.ret./
0
Réf.bas.born.53
Paramétre 6-15
Val.ret./
50
Réf.haut.born.53
Paramétre 6-19
Terminal 53
[1] Tension
mode
* = valeur par défaut
Remarques/commentaires :
Tableau 3.4 Référence de vitesse (à l'aide d'un potentiomètre
manuel)
Paramètres
Fonction Réglage
Paramétre 5-10
E.digit.born.18
Paramétre 5-12
E.digit.born.27
Paramétre 5-13
E.digit.born.29
Paramétre 5-14
E.digit.born.32
*[8] Démarrage
[19] Gel
référence
[21] Accélération
[22] Décélération
* = valeur par défaut
Remarques/commentaires :
Illustration 3.4 Accélération/décélération
3.2.3 Marche/arrêt
Paramètres
Fonction Réglage
Paramétre 5-10
E.digit.born.18
Paramétre 5-11
E.digit.born.19
Paramétre 5-12
E.digit.born.27
Paramétre 5-14
E.digit.born.32
Paramétre 5-15
E.digit.born.33
Paramétre 3-10
Réf.prédénie
Réf.prédénie 0
Réf.prédénie 1
Réf.prédénie 2
Réf.prédénie 3
* = valeur par défaut
Remarques/commentaires :
3 3
[8] Démarrage
*[10] Inversion
[0] Inactif
[16] Réf
prédénie bit 0
[17] Réf
prédénie bit 1
25%
50%
75%
100%
Tableau 3.6 Démarrage/arrêt avec inversion et 4 vitesses
prédénies
Tableau 3.5 Accélération/décélération
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 51

130BF099.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
+24 V
130BE210.11
+24 V
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
FC
D IN
+24 V
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
R1
12
13
18
19
27
29
32
33
50
53
54
55
42
01
02
03
130BE211.11
+24 V
Exemples d'applications
VLT® Midi Drive FC 280
3.2.4 Réinitialisation d'alarme externe
Paramètres
Fonction Réglage
Paramétre 5-11
E.digit.born.19
33
* = valeur par défaut
Remarques/commentaires :
[1] Reset
3.2.6 SLC
Paramètres
Fonction Réglage
Paramétre 4-30
Fonction perte
signal de retour
[1] Avertis-
sement
moteur
Paramétre 4-31
Erreur vitesse
signal de retour
50
moteur
Paramétre 4-32
Fonction tempo.
signal de retour
5 s
moteur
Paramétre 7-00
PID vit.source
ret.
[1] Codeur 24
V
Paramétre 5-70
Pts/tr cod.born.
1024*
32 33
Paramétre 13-00
Mode contr. log
[1] Actif
avancé
Tableau 3.7 Réinitialisation d'alarme externe
3.2.5 Thermistance moteur
AVIS!
Pour satisfaire aux exigences d'isolation PELV, utiliser des
thermistances à isolation renforcée ou double.
Paramétre 13-01
Événement de
démarrage
Paramétre 13-02
Événement
d'arrêt
Paramétre 13-10
Opérande
comparateur
Paramétre 13-11
Opérateur
comparateur
[19] Avertis-
sement
[44] Touche
Reset
[21] N° avertiss.
*[1] ≈
Paramétre 13-12
Paramètres
Fonction Réglage
Paramétre 1-90
Protect.
[2] Arrêt
thermistance
thermique mot.
Paramétre 1-93
Source
[1] Entrée ANA
53
Valeur
comparateur
Paramétre 13-51
Événement
contr. log
avancé
Paramétre 13-52
Action contr.
logique avancé
61
[22]
Comparateur 0
[32] Déf. sort.
dig. A bas
Thermistance
Paramétre 6-19
Tableau 3.8 Thermistance moteur
52 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304
Terminal 53
[1] Tension
mode
* = valeur par défaut
Remarques/commentaires :
Si seul un avertissement est
souhaité, régler le
paramétre 1-90 Protect.
thermique mot. sur [1] Avertis.
Thermist.

Exemples d'applications Manuel de conguration
Paramètres
Fonction Réglage
Paramétre 5-40
Fonction relais
* = valeur par défaut
Remarques/commentaires :
Si la limite dans la surveillance
du signal de retour est
dépassée, l'avertissement 61
Surveillance du signal de retour
apparaît. Le SLC surveille
l'avertissement 61 Surveillance du
signal de retour. Si l'avertissement 61, Surveillance du signal
de retour, devient vrai, le relais
1 est déclenché.
L'équipement externe peut
indiquer qu'il faut procéder à
l'entretien. Si l'erreur de signal
de retour redescend sous la
limite en moins de 5 s, le
variateur de fréquence continue
à fonctionner et l'avertissement
disparaît. Le relais 1 reste
enclenché tant que la touche
[O/Reset] n'est pas actionnée.
[80] Sortie
digitale A
3 3
Tableau 3.9 Utilisation du SLC pour régler un relais
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 53

Safe Torque O (STO)
VLT® Midi Drive FC 280
4 Safe Torque O (STO)
La fonction Safe Torque O (STO) est un composant du système de contrôle de la sécurité, qui empêche l'unité de générer
l'énergie requise pour faire tourner le moteur. La sécurité est ainsi assurée dans les situations d'urgence.
La fonction STO est conçue et approuvée comme acceptable pour les exigences suivantes :
CEI/EN 61508 : SIL2
•
44
Pour obtenir le niveau requis de sécurité fonctionnelle, sélectionner et appliquer correctement les composants du système
de contrôle de la sécurité. Avant d'utiliser la STO, procéder à une analyse approfondie des risques de l'installation
déterminer si la fonction STO et les niveaux de sécurité sont appropriés et susants.
CEI/EN 61800-5-2 : SIL2
•
CEI/EN 62061 : SILCL de SIL2
•
EN ISO 13849-1 : Catégorie 3 PL d
•
an de
Pour plus d'informations sur Safe Torque O (STO), voir le Chapitre 6 Safe Torque O (STO) du manuel d'utilisation du VLT
Midi Drive FC 280.
®
54 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

Installation et congurati... Manuel de conguration
5 Installation et conguration de l'interface RS485
5.1 Introduction
5.1.1 Vue d'ensemble
RS485 est une interface de bus à deux ls compatible avec une topologie de réseau multipoints. Les nœuds peuvent être
connectés en tant que bus ou via des câbles de dérivation depuis un tronçon de ligne commun. Un total de 32 nœuds
peuvent être connectés à 1 segment de réseau.
Les répéteurs divisent les segments de réseaux (voir l'Illustration 5.1).
5 5
Illustration 5.1 Interface bus RS485
AVIS!
Chaque répéteur fonctionne comme un nœud au sein du
segment sur lequel il est installé. Chaque nœud connecté
au sein d'un réseau donné doit disposer d'une adresse
de nœud unique pour tous les segments.
Terminer chaque segment aux deux extrémités, à l'aide du
commutateur de terminaison (S801) du variateur de
fréquence ou d'un réseau de résistances de terminaison
polarisé. Toujours utiliser un câble blindé à paire torsadée
(STP) pour le câblage du bus et suivre les règles habituelles
en matière d'installation.
Il est important de disposer d'une mise à la terre de faible
impédance du blindage à chaque nœud, y compris à
hautes fréquences. Relier alors une grande surface du
blindage à la terre, par exemple à l'aide d'un étrier de
serrage ou d'un presse-étoupe conducteur. Il est parfois
nécessaire d'appliquer des câbles d'égalisation de potentiel
pour maintenir le même potentiel de terre dans tout le
réseau, en particulier dans les installations comportant des
câbles longs.
Pour éviter toute disparité d'impédance, utiliser le même
type de câble dans l'ensemble du réseau. Lors du raccordement d'un moteur au variateur de fréquence, toujours
utiliser un câble de moteur blindé.
Câble Paire torsadée blindée (STP)
Impédance [Ω]
Longueur de
câble [m (pi)]
Tableau 5.1 Spécications du câble
120
1200 (3937) max. (y compris les câbles de
dérivation)
500 (1640) max. de poste à poste
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 55

61 68 69
N
P
COMM. GND
130BB795.10
Installation et congurati...
VLT® Midi Drive FC 280
5.1.2 Raccordement du réseau
Connecter le variateur de fréquence au réseau RS485
comme suit (voir également l'Illustration 5.2) :
1. Connecter les ls de signal à la borne 68 (P+) et à
la borne 69 (N-) sur la carte de commande
principale du variateur de fréquence.
2. Connecter le blindage de câble aux étriers de
serrage.
AVIS!
Pour réduire le bruit entre les conducteurs, utiliser des
55
câbles blindés à paires torsadées.
Paramètre Fonction
Paramétre 8-35 Ret
ard réponse min.
Paramétre 8-36 Ret
ard réponse max
Tableau 5.2 Réglages des paramètres de communication
Modbus
Spécier une temporisation minimum entre
la réception d'une demande et la
transmission d'une réponse. Cette fonction
permet de surmonter les délais d'exécution
du modem.
Spécier une temporisation maximum entre
la transmission d'une demande et l'attente
d'une réponse.
5.1.5 Précautions CEM
Pour assurer une exploitation sans interférence du réseau
RS485, Danfoss recommande les précautions CEM
suivantes.
Illustration 5.2 Raccordement du réseau
5.1.3 Conguration de l'équipement
Utiliser le commutateur de terminaison sur la carte de
commande principale du variateur de fréquence pour
terminer le bus RS485.
Le réglage d'usine du commutateur est OFF.
5.1.4 Réglage des paramètres pour
communication Modbus
AVIS!
Respecter les réglementations nationales et locales en
vigueur, par exemple à l'égard de la protection par mise
à la terre. Pour éviter une nuisance réciproque des bruits
liés aux hautes fréquences, maintenir le câble de
communication RS485 à l'écart des câbles de moteur et
de résistance de freinage. Normalement, une distance de
200 mm (8 po) est susante. Garder la plus grande
distance possible entre les câbles, notamment en cas
d'installation de câbles en parallèle sur de grandes
distances. Si le câble RS485 doit croiser un câble de
moteur et de résistance de freinage, il doit le croiser
suivant un angle de 90°.
Paramètre Fonction
Paramétre 8-30 Prot
ocole
Paramétre 8-31 Adr
esse
Paramétre 8-32 Vit.
transmission
Paramétre 8-33 Pari
té/bits arrêt
56 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304
Sélectionner le protocole d'application
fonctionnant sur l'interface RS485.
Dénir l'adresse de nœud.
AVIS!
La plage d'adresse dépend du
protocole sélectionné au
paramétre 8-30 Protocole.
Dénir la vitesse de transmission.
AVIS!
La vitesse de transmission par défaut
dépend du protocole sélectionné au
paramétre 8-30 Protocole.
Dénir la parité et le nombre de bits d'arrêt.
AVIS!
La sélection par défaut dépend du
protocole sélectionné au
paramétre 8-30 Protocole.
5.2 Protocole FC
5.2.1 Vue d'ensemble
Le protocole FC, également appelé bus FC ou bus
standard, est le bus de terrain standard de Danfoss. Il
dénit une technique d'accès selon le principe maîtreesclave pour les communications via le bus série.
Un maître et un maximum de 126 esclaves peuvent être
raccordés au bus. Le maître sélectionne chaque esclave
grâce à un caractère d'adresse dans le télégramme. Un
esclave ne peut jamais émettre sans y avoir été autorisé au
préalable, et le transfert direct de télégrammes entre les
diérents esclaves n'est pas possible. Les communications
ont lieu en mode semi-duplex.
La fonction du maître ne peut pas être transférée vers un
autre nœud (système à maître unique).

0 1 32 4 5 6 7
195NA036.10
Bit de
départ
Parité
paire
bit
d'arrêt
STX LGE ADR DATA BCC
195NA099.10
Installation et congurati... Manuel de conguration
La couche physique est le RS485, utilisant donc le port
RS485 intégré au variateur de fréquence. Le protocole FC
prend en charge diérents formats de télégramme :
un format court de 8 octets pour les données de
•
process ;
un format long de 16 octets qui comporte
•
également un canal de paramètres ;
un format utilisé pour les textes.
•
5.2.2 FC avec Modbus RTU
Le protocole FC ore l'accès au mot de contrôle et à la
référence du bus du variateur de fréquence.
Le mot de contrôle permet au maître Modbus de contrôler
plusieurs fonctions importantes du variateur de fréquence :
Démarrage
•
Arrêt du variateur de fréquence de plusieurs
•
façons :
- Arrêt en roue libre
- Arrêt rapide
- Arrêt avec freinage par injection de
courant continu
- Arrêt normal (rampe)
Reset après un arrêt causé par une panne
•
Fonctionnement à plusieurs vitesses prédénies
•
Fonctionnement en sens inverse
•
Changement du process actif
•
Contrôle des 2 relais intégrés au variateur de
•
fréquence
La référence du bus est généralement utilisée pour
commander la vitesse. Il est également possible d'accéder
aux paramètres, de lire leurs valeurs et le cas échéant,
d'écrire leurs valeurs. Les paramètres permettent d'accéder
à une diversité d'options de commande, dont le contrôle
de la consigne du variateur de fréquence lorsque son
régulateur PI interne est utilisé.
Structure des messages du protocole FC
5.4
5.4.1 Contenu d'un caractère (octet)
Chaque caractère transmis commence par un bit de
départ. Ensuite, 8 bits de données, correspondant à un
octet, sont transmis. Chaque caractère est sécurisé par un
bit de parité. Ce bit est réglé sur 1 lorsqu'il atteint la parité.
La parité est atteinte en présence d'un nombre égal de 1 s
dans les 8 bits de données et le bit de parité au total. Le
caractère se termine par un bit d'arrêt et se compose au
total de 11 bits.
Illustration 5.3 Contenu d'un caractère
5.4.2 Structure du télégramme
Chaque télégramme présente la structure suivante :
Caractère de départ (STX) = 02 Hex.
•
Un octet indiquant la longueur du télégramme
•
(LGE).
Un octet indiquant l'adresse (ADR) du variateur
•
de fréquence.
Viennent ensuite plusieurs octets de données (nombre
variable, en fonction du type de télégramme).
Un octet de contrôle des données (BCC) termine le
télégramme.
Illustration 5.4 Structure du télégramme
5.4.3 Longueur du télégramme (LGE)
5 5
Conguration du réseau
5.3
Pour activer le protocole FC du variateur de fréquence,
dénir les paramètres suivants :
Paramètre Réglage
Paramétre 8-30 Protocole FC
Paramétre 8-31 Adresse 1–126
Paramétre 8-32 Vit. transmission 2400–115200
Paramétre 8-33 Parité/bits arrêt
Tableau 5.3 Paramètres d'activation du protocole
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 57
Parité à nombre pair, 1
bit d'arrêt (défaut)
La longueur du télégramme comprend le nombre d'octets
de données auquel s'ajoutent l'octet d'adresse ADR et
l'octet de contrôle des données BCC.
4 octets de données LGE = 4 + 1 + 1 = 6 octets
12 octets de données LGE = 12 + 1 + 1 = 14 octets
Télégrammes contenant des textes
Tableau 5.4 Longueur des télégrammes
1) 10 correspond aux caractères
(dépend de la longueur du texte).
101) + n octets
xes tandis que n est variable

ADRLGESTX PCD1 PCD2 BCC
130BA269.10
PKE IND
130BA270.10
ADRLG ESTX PCD1 PCD2 BCCCh1 Ch2 Chn
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BB918.10
PKE IND
PWE
high
PWE
low
AK PNU
Parameter
commands
and replies
Parameter
number
Installation et congurati...
VLT® Midi Drive FC 280
5.4.4 Adresse (ADR) du variateur de
fréquence
Bloc de texte
Un bloc de texte est utilisé pour lire ou écrire des textes
via le bloc de données.
Format d'adresse 1–126
Bit 7 = 1 (format d'adresse 1–126 actif).
•
Bit 0-6 = adresse du variateur de fréquence 1-126.
•
Bit 0-6 = 0 diusion.
•
L'esclave renvoie l'octet d'adresse sans modication dans le
Illustration 5.7 Bloc de texte
5.4.7 Champ PKE
télégramme de réponse au maître.
Le champ PKE contient deux sous-champs :
55
5.4.5 Octet de contrôle des données (BCC)
La somme de contrôle est calculée comme une fonction
Ordre et réponse de paramètres (AK)
•
Numéro de paramètre (PNU)
•
XOR. Avant de recevoir le premier octet du télégramme, la
somme de contrôle calculée est égale à 0.
5.4.6 Champ de données
La construction de blocs de données dépend du type de
télégramme. Il existe trois types de télégrammes et le type
de télégramme est valable aussi bien pour les télégrammes
de commande (maître⇒esclave) que pour les télégrammes
de réponse (esclave⇒maître).
Voici les 3 types de télégramme :
Bloc de process (PCD)
Un PCD est composé d'un bloc de données de 4 octets (2
mots) et comprend :
Mot de contrôle et valeur de référence (du maître
•
à l'esclave)
Mot d'état et fréquence de sortie actuelle (de
•
l'esclave au maître)
Illustration 5.5 Bloc de process
Bloc de paramètres
Un bloc de paramètres est utilisé pour le transfert de
paramètres entre le maître et l'esclave. Le bloc de données
est composé de 12 octets (6 mots) et contient également
le bloc de process.
Illustration 5.6 Bloc de paramètres
Illustration 5.8 Champ PKE
Les bits 12 à 15 sont utilisés pour le transfert d'ordres de
paramètres du maître à l'esclave ainsi que pour la réponse
traitée par l'esclave et renvoyée au maître.
Ordres de paramètres maître ⇒ esclave
Numéro bit Ordre de paramètre
15 14 13 12
0 0 0 0 Pas d'ordre.
0 0 0 1 Lire la valeur du paramètre.
0 0 1 0
0 0 1 1
1 1 0 1
1 1 1 0
1 1 1 1 Lire texte
Tableau 5.5 Ordres de paramètres
Écrire la valeur du paramètre en RAM
(mot).
Écrire la valeur du paramètre en RAM
(mot double).
Écrire la valeur du paramètre en RAM et
EEPROM (mot double).
Écrire la valeur du paramètre en RAM et
EEPROM (mot).
58 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

Installation et congurati... Manuel de conguration
Réponse esclave ⇒ maître
Numéro bit Réponse
15 14 13 12
0 0 0 0 Pas de réponse.
0 0 0 1 Valeur du paramètre transmise (mot).
0 0 1 0
0 1 1 1 Ordre impossible à exécuter.
1 1 1 1 Texte transmis
Tableau 5.6 Réponse
Valeur du paramètre transmise (mot
double).
S'il est impossible d'exécuter l'ordre, l'esclave envoie la
réponse 0111 Exécution commande impossible et publie les
messages d'erreur suivants indiqués dans le Tableau 5.7.
Code de défaut Spécication FC
0 Numéro de paramètre illégal.
1 Impossible de modier le paramètre.
2 Limite supérieure ou inférieure dépassée
3 Sous-index corrompu
4 Pas de zone
5 Type de données erroné
6 Inutilisé.
7 Inutilisé.
9 Élément de description non disponible
11 Aucun accès en écriture au paramètre
15 Aucun texte disponible
17 Non applicable en fonction
18 Autres erreurs
100 –
>100 –
130 Pas d'accès du bus pour ce paramètre
131 Écriture du process usine impossible
132 Pas d'accès LCP
252 Visionneuse inconnue
253 Requête non prise en charge
254 Attribut inconnu
255 Pas d'erreur
Tableau 5.7 Rapport esclave
5.4.8 Numéro de paramètre (PNU)
composé de 2 octets, un octet de poids faible et un octet
de poids fort.
Seul l'octet de poids faible est utilisé comme un indice.
5.4.10 Valeur du paramètre (PWE)
Le bloc valeur du paramètre se compose de 2 mots (4
octets) et la valeur dépend de l'ordre donné (AK). Le maître
exige une valeur de paramètre lorsque le bloc PWE ne
contient aucune valeur. Pour modier une valeur de
paramètre (écriture), écrire la nouvelle valeur dans le bloc
PWE et l'envoyer du maître à l'esclave.
Lorsqu'un esclave répond à une demande de paramètre
(ordre de lecture), la valeur actuelle du paramètre du bloc
PWE est transmise et renvoyée au maître. Si un paramètre
contient plusieurs options de données, p. ex.
paramétre 0-01 Langue, choisir la valeur de données en
saisissant la valeur dans le bloc PWE. La communication
série permet de lire uniquement les paramètres de type de
données 9 (séquence de texte).
Les Paramétre 15-40 Type. FC à paramétre 15-53 N° série
carte puissance contiennent le type de données 9.
À titre d'exemple, le paramétre 15-40 Type. FC permet de
lire l'unité et la plage de tension secteur. Lorsqu'une
séquence de texte est transmise (lue), la longueur du
télégramme est variable et les textes présentent des
longueurs variables. La longueur du télégramme est
indiquée dans le 2e octet du télégramme (LGE). Lors d'un
transfert de texte, le caractère d'indice indique s'il s'agit
d'un ordre de lecture ou d'écriture.
An de pouvoir lire un texte via le bloc PWE, régler l'ordre
de paramètre (AK) sur F Hex. L'octet haut du caractère
d'indice doit être 4.
5.4.11 Types de données pris en charge par
le variateur de fréquence
Non signé signie que le télégramme ne comporte pas de
signe.
5 5
Les bits 0 à 11 sont utilisés pour le transfert des numéros
de paramètre. La fonction du paramètre concerné est
dénie dans la description des paramètres dans le Guide de
programmation du VLT® Midi Drive FC 280.
5.4.9 Indice (IND)
L'indice est utilisé avec le numéro de paramètre pour
l'accès lecture/écriture aux paramètres dotés d'un indice, p.
Types de données Description
3 Nombre entier 16 bits
4 Nombre entier 32 bits
5 Non signé 8 bits
6 Non signé 16 bits
7 Non signé 32 bits
9 Séquence de texte
Tableau 5.8 Types de données
ex. le paramétre 15-30 Journal alarme : code. L'indice est
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 59

E19E H
PKE IND PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA092.10
119E H
PKE
IND
PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA093.10
1155 H
PKE IND PWE
high
PWE
low
0000 H 0000 H 0000 H
130BA094.10
130BA267.10
1155 H
PKE
IND
0000 H 0000 H 03E8 H
PWE
high
PWE
low
Installation et congurati...
VLT® Midi Drive FC 280
5.4.12 Conversion
Valeur de données 1000 correspondant à 100 Hz, voir le
chapitre 5.4.12 Conversion.
Le Guide de programmation comporte une description des
attributs de chaque paramètre. Les valeurs de paramètre
Le télégramme est tel que présenté à l'Illustration 5.9.
ne sont transmises que sous la forme de nombres entiers.
Les facteurs de conversion sont utilisés pour transmettre
des nombres décimaux.
Le Paramétre 4-12 Vitesse moteur limite basse [Hz] a un
facteur de conversion de 0,1. Pour prérégler la fréquence
Illustration 5.9 Télégramme
minimale sur 10 Hz, transmettre la valeur 100. Un facteur
55
multipliée par 0,1. La valeur 100 est donc interprétée
comme 10,0.
de conversion de 0,1
signie que la valeur transmise est
AVIS!
Le Paramétre 4-14 Vitesse moteur limite haute [Hz] est un
mot unique, et l'ordre de paramètre pour l'écriture dans
Indice de conversion Facteur de conversion
74 3600
2 100
1 10
0 1
-1 0,1
-2 0,01
-3 0,001
-4 0,0001
-5 0,00001
Tableau 5.9 Conversion
l'EEPROM est E. Le Paramétre 4-14 Vitesse moteur limite
haute [Hz] correspond à 19E en hexadécimal.
La réponse de l'esclave au maître est indiquée à
l'Illustration 5.10.
Illustration 5.10 Réponse du maître
5.4.13 Mots de process (PCD)
Le bloc de mots de process est divisé en deux blocs,
chacun de 16 bits, qui apparaissent toujours dans l'ordre
indiqué.
PCD 1 PCD 2
Télégramme de contrôle (mot de contrôle
maître⇒esclave)
Télégramme de contrôle (esclave⇒maître)
Mot d'état
Tableau 5.10 Mots de process (PCD)
Exemples
5.5
Valeur de
référence
Fréquence de
sortie actuelle
5.5.1 Écriture d'une valeur de paramètre
Changer le paramétre 4-14 Vitesse moteur limite haute [Hz]
sur 100 Hz.
Écrire les données en EEPROM.
PKE = E19E Hex – Écriture d'un mot unique au
paramétre 4-14 Vitesse moteur limite haute [Hz] :
IND = 0000 Hex
•
PWE
•
PWE
•
= 0000 Hex
HAUT
= 03E8 Hex
BAS
5.5.2 Lecture d'une valeur de paramètre
Lire la valeur au paramétre 3-41 Temps d'accél. rampe 1.
PKE = 1155 Hex – Lire la valeur au paramétre 3-41 Temps
d'accél. rampe 1 :
IND = 0000 Hex
•
PWE
•
PWE
•
Illustration 5.11 Télégramme
Si la valeur au paramétre 3-41 Temps d'accél. rampe 1 est
égale à 10 s, la réponse de l'esclave au maître est telle
qu'aché à l'Illustration 5.12.
Illustration 5.12 Réponse
= 0000 Hex
HAUT
= 0000 Hex
BAS
60 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

Installation et congurati... Manuel de conguration
3E8 Hex correspond à 1000 au format décimal. L'indice de
conversion du paramétre 3-41 Temps d'accél. rampe 1 est -2,
c.-à-d. 0,01.
Le Paramétre 3-41 Temps d'accél. rampe 1 est du type Non
signé 32 bits.
5.6 Modbus RTU
5.6.1 Connaissances préalables
Danfoss part du principe que le contrôleur installé prend
en charge les interfaces mentionnées dans ce manuel et
que toutes les exigences et restrictions concernant le
contrôleur et le variateur de fréquence sont strictement
respectées.
Le Modbus RTU intégré (terminal distant) est conçu pour
communiquer avec n'importe quel contrôleur prenant en
charge les interfaces
entendu que l'utilisateur connaît parfaitement les capacités
et les limites du contrôleur.
dénies dans ce document. Il est
5.6.2 Vue d'ensemble
Cette section décrit le procédé qu'utilise un contrôleur
pour accéder à un autre dispositif, indépendamment du
type de réseau de communication physique. Cela inclut la
manière dont le Modbus RTU répond aux demandes d'un
autre dispositif et comment les erreurs sont détectées et
signalées. Il établit également un format commun pour la
structure et le contenu des champs de télégramme.
Pendant les communications sur un réseau Modbus RTU, le
protocole :
détermine la façon dont chaque contrôleur
•
apprend l'adresse de son dispositif ;
dont il reconnaît un télégramme qui lui est
•
adressé ;
détermine les actions à entreprendre ;
•
extrait les données et les informations contenues
•
dans le télégramme.
Si une réponse est nécessaire, le contrôleur élabore et
envoie le télégramme de réponse.
Les contrôleurs communiquent à l'aide d'une technique
maître-esclave dans lequel le maître peut initier des
transactions (appelées requêtes). Les esclaves répondent en
fournissant au maître les données demandées ou en
eectuant l'action demandée dans la requête.
Le maître peut s'adresser à un esclave en particulier ou
transmettre un télégramme à diusion générale à tous les
esclaves. Les esclaves renvoient une réponse aux requêtes
qui leur sont adressées individuellement. Aucune réponse
n'est renvoyée aux requêtes à diusion générale du maître.
Le protocole Modbus RTU établit le format de la requête
du maître en indiquant les informations suivantes :
l'adresse du dispositif (ou diusion) ;
•
un code de fonction dénissant l'action requise ;
•
toutes les données à envoyer ;
•
un champ de contrôle d'erreur.
•
Le télégramme de réponse de l'esclave est également
construit en utilisant le protocole Modbus. Il contient des
champs conrmant l'action entreprise, toute donnée à
renvoyer et un champ de contrôle d'erreur. Si une erreur se
produit lors de la réception du télégramme ou si l'esclave
est incapable d'eectuer l'action demandée, ce dernier
élabore et envoie un message d'erreur. Sinon, une temporisation se produit.
5.6.3 Variateur de fréquence avec Modbus
RTU
Le variateur de fréquence communique au format Modbus
RTU sur l'interface intégrée RS485. Le Modbus RTU ore
l'accès au mot de contrôle et à la référence du bus du
variateur de fréquence.
Le mot de contrôle permet au maître Modbus de contrôler
plusieurs fonctions importantes du variateur de fréquence :
Démarrage
•
Divers arrêts :
•
- Arrêt en roue libre
- Arrêt rapide
- Arrêt avec freinage par injection de
courant continu
- Arrêt normal (rampe)
Reset après un arrêt causé par une panne
•
Fonctionnement à plusieurs vitesses
•
Fonctionnement en sens inverse
•
Changement du process actif
•
Contrôle du relais intégré du variateur de
•
fréquence
La référence du bus est généralement utilisée pour
commander la vitesse. Il est également possible d'accéder
aux paramètres, de lire leurs valeurs et le cas échéant,
d'écrire leurs valeurs. Les paramètres permettent d'accéder
à une diversité d'options de commande, dont le contrôle
de la consigne du variateur de fréquence lorsque son
régulateur PI interne est utilisé.
prédénies
5 5
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 61

Installation et congurati...
VLT® Midi Drive FC 280
5.7 Conguration du réseau
reconnaître la n du télégramme. Les télégrammes
partiaux sont détectés et des erreurs apparaissent. Les
Pour activer le Modbus RTU sur le variateur de fréquence,
régler les paramètres suivants :
caractères pour la transmission doivent être au format
hexadécimal 00 à FF dans chaque champ. Le variateur de
fréquence surveille en permanence le bus du réseau,
Paramètre Réglage
Paramétre 8-30 Protocole Modbus RTU
Paramétre 8-31 Adresse 1–247
Paramétre 8-32 Vit. transmission 2400–115200
Paramétre 8-33 Parité/bits arrêt
Parité à nombre pair, 1 bit
d'arrêt (défaut)
même pendant les intervalles silencieux. Lorsqu'un
variateur de fréquence ou un dispositif reçoit le premier
champ (le champ d'adresse), il le décode pour déterminer
à quel dispositif le message s'adresse. Les télégrammes du
Modbus RTU adressés à zéro sont les télégrammes à
diusion générale. Aucune réponse n'est permise pour les
télégrammes à diusion générale. Une structure de
55
Tableau 5.11 Conguration du réseau
5.8 Structure des messages du Modbus RTU
5.8.1 Introduction
télégramme typique est présentée dans le Tableau 5.14.
Démarra
ge
T1-T2-T3-
T4
Adresse Fonction Données
8 bits 8 bits N x 8 bits 16 bits
Contrôle
CRC
Fin
T1-T2-T3-
T4
Les contrôleurs sont congurés pour communiquer sur le
réseau Modbus à l'aide du mode RTU (terminal distant) ;
Tableau 5.14 Structure de télégramme Modbus RTU typique
chaque octet d'un télégramme contient 2 caractères de
4 bits hexadécimaux. Le format de chaque octet est
5.8.3 Champ démarrage/arrêt
indiqué dans le Tableau 5.12.
Les télégrammes commencent avec une période
Bit de
démar
rage
Octet de données Arrêt/
parité
Arrêt
silencieuse d'au moins 3,5 intervalles de caractère mise en
œuvre sous la forme d'un multiple d'intervalles à la vitesse
de transmission du réseau sélectionnée (indiqué comme
démarrage T1-T2-T3-T4). Le premier champ transmis est
l'adresse du dispositif. Après transfert du dernier caractère,
Tableau 5.12 Format de chaque octet
une période similaire d'au moins 3,5 intervalles de
caractère marque la n du télégramme. Un nouveau
Système de
codage
Bits par octet
Champ de contrôle
d'erreur
Binaire 8 bits, hexadécimal 0-9, A-F.
2 caractères hexadécimaux contenus dans
chaque champ à 8 bits du télégramme.
1 bit de démarrage.
•
8 bits de données, bit de plus faible
•
poids envoyé en premier.
1 bit pour parité paire/impaire ; pas de
•
bit en l'absence de parité.
1 bit d'arrêt si la parité est utilisée ;
•
2 bits en l'absence de parité.
Contrôle de redondance cyclique (CRC).
télégramme peut commencer après cette période.
Transmettre la structure entière du télégramme comme
une suite ininterrompue. Si une période silencieuse de plus
de 1,5 intervalle de caractère se produit avant achèvement
de la structure, le dispositif de réception élimine le
télégramme incomplet et considère que le prochain octet
est le champ d'adresse d'un nouveau télégramme. De
même, si un nouveau télégramme commence avant 3,5
intervalles de caractère après un télégramme, le dispositif
de réception le considère comme la suite du télégramme
précédent. Cela entraîne une temporisation (pas de
réponse de l'esclave), puisque la valeur du champ CRC nal
n'est pas valide pour les télégrammes combinés.
Tableau 5.13 Détails des octets
5.8.2 Structure des télégrammes Modbus
5.8.4 Champ d'adresse
RTU
Le dispositif de transmission place un télégramme Modbus
RTU dans un cadre avec un début connu et un point nal.
Cela permet aux dispositifs de réception de commencer au
début du télégramme, de lire la portion d'adresse, de
déterminer à quel dispositif il s'adresse (ou tous les
dispositifs si le télégramme est à diusion générale) et de
62 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304
Le champ d'adresse d'une structure de télégramme
contient 8 bits. Les adresses des dispositifs esclaves valides
sont comprises dans une plage de 0 à 247 décimal.
Chaque dispositif esclave dispose d'une adresse dans la
plage de 1 à 247 (0 est réservé au mode de diusion
générale que tous les esclaves reconnaissent). Un maître
s'adresse à un esclave en plaçant l'adresse de l'esclave
dans le champ d'adresse du télégramme. Lorsque l'esclave
envoie sa réponse, il place sa propre adresse dans ce

Installation et congurati... Manuel de conguration
champ d'adresse pour faire savoir au maître quel esclave
est en train de répondre.
5.8.5 Champ de fonction
Le champ de fonction d'une structure de télégramme
contient 8 bits. Les codes valides gurent dans une plage
comprise entre 1 et FF. Les champs de fonction sont
utilisés pour le transfert de télégrammes entre le maître et
l'esclave. Lorsqu'un télégramme est envoyé par un maître à
un dispositif esclave, le champ de code de fonction
indique à l'esclave le type d'action à eectuer. Lorsque
l'esclave répond au maître, il utilise le champ de code de
fonction pour indiquer soit une réponse normale (sans
erreur) soit le type d'erreur survenue (appelée réponse
d'exception).
Pour une réponse normale, l'esclave renvoie simplement le
code de fonction d'origine. Pour une réponse d'exception,
l'esclave renvoie un code équivalent au code de fonction
d'origine avec son bit de plus fort poids réglé sur "1"
logique. De plus, l'esclave place un code unique dans le
champ de données du télégramme de réponse. Ce code
indique au maître le type d'erreur survenue ou la raison de
l'exception. Se reporter également au chapitre 5.8.10 Codes
de fonction pris en charge par le Modbus RTU et au
chapitre 5.8.11 Codes d'exceptions Modbus.
5.8.6 Champ de données
la valeur réelle reçue dans le champ CRC. Si les 2 valeurs
ne sont pas égales, une temporisation du temps du bus se
produit. Le champ de contrôle d'erreur contient une valeur
binaire de 16 bits mise en œuvre sous la forme de deux
octets de 8 bits. Après la mise en œuvre, l'octet de poids
faible du champ est joint en premier, suivi de l'octet de
poids fort. L'octet de poids fort du CRC est le dernier octet
envoyé dans le télégramme.
5.8.8 Adresse de registre des bobines
En Modbus, toutes les données sont organisées dans des
registres de bobines et de maintien. Les bobines
contiennent un seul bit, tandis que les registres de
maintien contiennent un mot à 2 octets (c.-à-d. 16 bits).
Toutes les adresses de données des télégrammes du
Modbus sont référencées sur zéro. La première occurrence
d'un élément de données est adressée comme un élément
0. Par exemple : la bobine connue comme bobine 1 dans
un contrôleur programmable est adressée comme bobine
0000 dans le champ d'adresse de données d'un
télégramme du Modbus. La bobine 127 décimal est
adressée comme bobine 007EHEX (126 décimal).
Le registre de maintien 40001 est adressé comme registre
0000 dans le champ d'adresse de données du télégramme.
Le champ de code de fonction spécie déjà une exploitation « registre de maintien ». La référence 4XXXX est
donc implicite. Le registre de maintien 40108 est adressé
comme registre 006BHEX (107 décimal).
5 5
Le champ de données est construit en utilisant des
ensembles de 2 chires hexadécimaux, dans la plage de 00
à FF au format hexadécimal. Ces chires sont composés
d'un caractère RTU. Le champ de données des
télégrammes envoyés par le maître à un dispositif esclave
contient des informations complémentaires que l'esclave
doit utiliser pour eectuer l'action conséquente.
Les informations peuvent inclure des éléments tels que :
Adresses de registre ou de bobine
•
Quantité d'éléments devant être gérés
•
Compte des octets de données réelles dans le
•
champ
5.8.7 Champ de contrôle CRC
Les télégrammes comportent un champ de contrôle
d'erreur, fonctionnant sur la base d'une méthode de
contrôle de redondance cyclique (CRC). Le champ CRC
vérie le contenu du télégramme entier. Il s'applique
indépendamment de la méthode de contrôle de la parité
utilisée pour chaque caractère du télégramme. Le dispositif
de transmission calcule la valeur CRC, puis joint le CRC
comme étant le dernier champ du télégramme. Le
dispositif de réception recalcule un CRC lors de la
réception du télégramme et compare la valeur calculée à
Numéro
de
bobine
1–16 Mot de contrôle du variateur de
17–32 Plage de référence de vitesse ou de
33–48 Mot d'état du variateur de
49–64 Mode boucle ouverte : fréquence
65
66–65536 Réservé. –
Tableau 5.15 Registre des bobines
Description Sens du signal
fréquence (voir le Tableau 5.16).
consigne du variateur de fréquence
0x0-0xFFFF (-200 %... ~200 %).
fréquence (voir le Tableau 5.17).
de sortie du variateur de fréquence.
Mode boucle fermée : signal de
retour du variateur de fréquence.
Contrôle d'écriture du paramètre
(maître vers esclave).
0 = les modications de paramètres
sont écrits dans la RAM du
variateur.
1 = les modications de paramètres
sont écrites dans la RAM et
l'EEPROM du variateur de fréquence.
Maître vers
esclave
Maître vers
esclave
Esclave vers
maître
Esclave vers
maître
Maître vers
esclave
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 63

Installation et congurati...
VLT® Midi Drive FC 280
Bobine 0 1
01 Référence prédénie lsb
02 Référence prédénie msb
03 Freinage CC Pas de freinage CC
04 Arrêt en roue libre Pas d'arrêt en roue libre
05 Arrêt rapide Pas d'arrêt rapide
06 Gel fréquence Pas de gel fréquence
07 Arrêt rampe Démarrage
08 Pas de reset Reset
09 Pas de jogging Jogging
10 Rampe 1 Rampe 2
55
11 Données non valides Données valides
12 Relais 1 inactif Relais 1 actif
13 Relais 2 inactif Relais 2 actif
14 Process lsb
15 –
16 Pas d'inversion Inversion
Tableau 5.16 Mot de contrôle du variateur de fréquence
(prol FC)
Adresse
bus
0 1 40001 Réservé
1 2 40002 Réservé
2 3 40003 Réservé
3 4 40004 Libre – –
4 5 40005 Libre – –
5 6 40006 Communication Modbus Lecture/
6 7 40007 Dernier code de défaut Lecture seule Code de défaut reçu de la base de données paramètre ; se
7 8 40008 Dernier registre d'erreur Lecture seule Adresse du registre avec lequel la dernière erreur est
8 9 40009 Pointeur d'index Lecture/
9 10 40010 Paramétre 0-01 Langue Accès
19 20 40020 Paramétre 0-02 Unité vit.
29 30 40030 Paramétre 0-03 Réglages
Registre
du bus
1)
Registre
PLC
Contenu Accès Description
écriture
écriture
dépendant du
paramètre
Accès
mot.
régionaux
dépendant du
paramètre
Accès
dépendant du
paramètre
Bobine 0 1
33 Commande non prête Commande prête
34 Variateur de fréquence
non prêt
35 Arrêt en roue libre Arrêt de sécurité
36 Pas d'alarme Alarme
37 Non utilisé Non utilisé
38 Non utilisé Non utilisé
39 Non utilisé Non utilisé
40 Absence d'avertissement Avertissement
41 Pas à référence À référence
42 Mode Hand Mode Auto
43 Hors de la plage de
fréquences
44 Arrêté Fonctionne
45 Non utilisé Non utilisé
46 Pas d'avertis. de tension Avertissement de tension
47 Pas dans limite de courant Limite de courant
48 Sans avertis. thermique Avertis.thermiq.
Tableau 5.17 Mot d'état du variateur de fréquence (prol FC)
–
–
–
Réservé aux variateurs de fréquence existants VLT® 5000 et
VLT® 2800
Réservé aux variateurs de fréquence existants VLT® 5000 et
VLT® 2800
Réservé aux variateurs de fréquence existants VLT® 5000 et
VLT® 2800
TCP uniquement. Réservé au Modbus TCP
(paramétre 12-28 Stock.val.données et
paramétre 12-29 Toujours stocker – Enregistrement dans
l'EEPROM p. ex.)
reporter à WHAT 38295 pour plus de détails.
survenue. Se reporter à WHAT 38296 pour plus de détails.
Sous-indice de paramètre disponible. Se reporter à WHAT
38297 pour plus de détails
Paramétre 0-01 Langue (registre Modbus = numéro de
paramètre 10)
Espace de 20 octets réservé par paramètre dans Map
Modbus
Paramétre 0-02 Unité vit. mot.
Espace de 20 octets réservé par paramètre dans Map
Modbus
Paramétre 0-03 Réglages régionaux
Espace de 20 octets réservé par paramètre dans Map
Modbus
Variateur de fréquence prêt
Dans plage de fréq.
Tableau 5.18 Adresse/registres
1) La valeur écrite dans le télégramme Modbus RTU doit être égale à 1 ou inférieure au numéro du registre. Exemple : lire le registre du Modbus 1
en écrivant la valeur 0 dans le télégramme.
64 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

Installation et congurati... Manuel de conguration
5.8.9 Comment contrôler le variateur de
fréquence
Ce chapitre décrit les codes pouvant être utilisés dans les
champs de fonction et de données d'un télégramme du
Modbus RTU.
5.8.10 Codes de fonction pris en charge
par le Modbus RTU
Le Modbus RTU prend en charge l'utilisation des codes de
fonction suivants dans le champ de fonction d'un
télégramme :
Fonction Code de fonction (hex)
Lecture bobines 1
Lecture registres de maintien 3
Écriture bobine unique 5
Écriture registre unique 6
Écriture bobines multiples F
Écriture registres multiples 10
Obtention compteur événement
comm.
Rapport ID esclave 11
Tableau 5.19 Codes de fonction
Fonction Code de
fonction
Diagnostics 8 1 Redémarrer communi-
Tableau 5.20 Codes de fonction
Code de
sousfonction
2 Renvoyer registre de
10 Nettoyer compteurs et
11 Renvoyer comptage
12 Renvoyer comptage
13 Renvoyer comptage
14 Renvoyer comptage
B
Sous-fonction
cation
diagnostic
registre de diagnostic
message bus
erreur communication
bus
erreurs esclave
message esclave
5.8.11 Codes d'exceptions Modbus
Pour plus d'informations sur la structure d'une réponse
d'exception, se reporter au chapitre 5.8.5 Champ de
fonction.
Code Nom Signication
Le code de fonction reçu dans la requête
ne correspond pas une action autorisée
pour le serveur (ou esclave). Cela peut
venir du fait que le code de fonction n'est
applicable qu'à des dispositifs plus récents
Fonction non
1
autorisée
Adresse de
2
données
illégale
Valeur de
3
données
illégale
Échec du
4
dispositif
esclave
Tableau 5.21 Codes d'exceptions Modbus
et n'a pas été implémenté dans l'unité
sélectionnée. Cela peut également
signier que le serveur (ou esclave) est
dans un état incorrect pour traiter une
demande de ce type, par exemple parce
qu'il n'est pas conguré pour renvoyer les
valeurs du registre.
L'adresse de données reçue dans la
requête n'est pas une adresse autorisée
pour le serveur (ou esclave). Plus spéci-
quement, la combinaison du numéro de
référence et de la longueur du transfert
n'est pas valide. Pour un contrôleur avec
100 registres, une requête avec oset de
96 et longueur de 4 réussit, tandis qu'une
requête avec oset de 96 et longueur de
5 génère l'exception 02.
Une valeur contenue dans le champ de
données de la requête n'est pas autorisée
pour le serveur (esclave). Cela signale une
erreur dans la structure du reste d'une
requête complexe, p. ex. la longueur
impliquée est incorrecte. Cela NE signie
PAS qu'un élément de données envoyé
pour stockage dans un registre présente
une valeur en dehors de l'attente du
programme d'application, puisque le
protocole Modbus n'a pas connaissance
de la signication d'une valeur particulière
dans un registre particulier.
Une erreur irréparable s'est produite alors
que le serveur (ou esclave) tentait
d'eectuer l'action demandée.
5 5
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 65

Installation et congurati...
VLT® Midi Drive FC 280
5.9 Comment accéder aux paramètres
5.9.1 Gestion des paramètres
Le PNU (numéro de paramètre) est traduit depuis l'adresse
du registre contenue dans le télégramme lecture ou
écriture Modbus. Le numéro du paramètre est traduit vers
le Modbus en tant que décimal (10 x numéro de
paramètre).
Exemples
Achage du paramétre 3-12 Rattrap/ralentiss (16 bits) : le
55
registre de maintien 3120 conserve la valeur des
paramètres. Une valeur de 1352 (décimale) signie que le
paramètre est réglé sur 12,52 %.
Achage du paramétre 3-14 Réf.prédéf.relative (32 bits) : les
registres de maintien 3410 et 3411 conservent la valeur
des paramètres. Une valeur de 11300 (décimale) signie
que le paramètre est réglé sur 1113,00.
Pour plus d'informations sur les paramètres, la taille et
l'indice de conversion, consulter le Guide de programmation
du VLT® Midi Drive FC 280.
5.9.2 Stockage des données
La bobine 65 décimal détermine si les données écrites sur
le variateur de fréquence sont enregistrées dans l'EEPROM
et dans la RAM (bobine 65 = 1) ou uniquement dans la
RAM (bobine 65 = 0).
5.9.5 Facteur de conversion
Une valeur de paramètre ne peut être transmise que sous
la forme d'un nombre entier. Utiliser un facteur de
conversion pour transférer les décimales.
5.9.6 Valeurs de paramètre
Types de données standard
Les types de données standard sont int16, int32, uint8,
uint16 et uint32. Ils sont stockés comme 4x registres
(40001-4FFFF). Les paramètres sont lus à l'aide de la
fonction 03 Hex Lecture registres de maintien. Ils sont
écrits à l'aide de la fonction 6 HEX Prédénir registre
unique pour 1 registre (16 bits) et de la fonction 10 HEX
Prédénir registres multiples pour 2 registres (32 bits). Les
tailles lisibles vont de 1 registre (16 bits) à 10 registres (20
caractères).
Types de données non standard
Les types de données non standard sont des chaînes de
texte et sont stockés comme registres 4x (40001-4FFFF).
Les paramètres sont lus à l'aide de la fonction 3 HEX
Lecture registres de maintien et sont écrits à l'aide de la
fonction 10 HEX Prédénir registres multiples. Les tailles
lisibles vont de 1 registre (2 caractères) à 10 registres
(20 caractères).
Exemples
5.10
Les exemples suivants illustrent divers ordres du Modbus
RTU.
5.9.3 IND (Index)
Certains paramètres du variateur de fréquence sont des
paramètres de tableau, par exemple le
paramétre 3-10 Réf.prédénie. Comme le Modbus ne prend
pas en charge les tableaux dans les registres de maintien,
le variateur de fréquence a réservé le registre de maintien
9 comme pointeur vers le tableau. Avant de lire ou d'écrire
dans un paramètre de tableau, régler le registre de
maintien 9. Le réglage du registre de maintien sur la valeur
2 entraîne le placement de la lecture/écriture suivante dans
les paramètres de tableau de l'indice 2.
5.9.4 Blocs de texte
On accède aux paramètres stockés sous forme de chaînes
de texte comme on le fait pour les autres paramètres. La
taille maximum d'un bloc de texte est de 20 caractères. Si
une demande de lecture d'un paramètre contient plus de
caractères que n'en contient le paramètre, la réponse est
tronquée. Si la demande de lecture d'un paramètre
contient moins de caractères que n'en contient le
paramètre, la réponse comporte des espaces.
5.10.1 Lecture état bobines (01 HEX)
Description
Cette fonction lit l'état ON/OFF des sorties discrètes
(bobines) du variateur de fréquence. La diusion générale
n'est jamais prise en charge pour les lectures.
Requête
Le télégramme de requête spécie la bobine de démarrage
et la quantité de bobines à lire. Les adresses des bobines
partent de zéro, c.-à-d. que la bobine 33 est adressée
comme étant la 32.
Exemple de requête de lecture des bobines 33-48 (mot
d'état) depuis le dispositif esclave 01.
66 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

Installation et congurati... Manuel de conguration
Nom du champ Exemple (HEX)
Adresse esclave 01 (adresse du variateur de
fréquence)
Fonction 01 (lecture bobines)
Adresse démarrage niveau
haut
Adresse démarrage niveau
bas
Nb de points niveau haut 00
Nb de points niveau bas 10 (16 décimaux)
Contrôle d'erreur (CRC) –
Tableau 5.22 Requête
00
20 (32 décimaux) Bobine 33
Réponse
Dans le télégramme de réponse, l'état des bobines est
compressé sous forme d'une bobine par bit du champ de
données. L'état est indiqué par : 1 = ON ; 0 = OFF. Le lsb
du premier octet de données contient la bobine à qui
s'adresse la requête. Les autres bobines se suivent vers le
caractère de poids fort de cet octet et de poids faible à
poids fort dans les octets suivants.
Si la quantité de bobine renvoyée n'est pas un multiple de
huit, les bits restants de l'octet de données nal sont
remplacés par des zéros (vers le caractère de poids fort de
l'octet). Le champ de comptage des octets spécie le
nombre d'octets de données complets.
Nom du champ Exemple (HEX)
Adresse esclave 01 (adresse du variateur de
fréquence)
Fonction 05 (écriture bobine unique)
Adresse bobine niveau haut 00
Adresse bobine niveau bas 40 (64 au format décimal) Bobine
65
Forcer données niveau haut FF
Forcer données niveau bas 00 (FF 00 = ON)
Contrôle d'erreur (CRC) –
Tableau 5.24 Requête
5 5
Réponse
La réponse normale est un écho de la requête envoyé
après que l'état de la bobine a été forcé.
Nom du champ Exemple (HEX)
Adresse esclave 01
Fonction 05
Forcer données niveau haut FF
Forcer données niveau bas 00
Quantité bobines niveau haut 00
Quantité bobines niveau bas 01
Contrôle d'erreur (CRC) –
Tableau 5.25 Réponse
Nom du champ Exemple (HEX)
Adresse esclave 01 (adresse du variateur de
fréquence)
Fonction 01 (lecture bobines)
Comptage d'octets 02 (2 octets de données)
Données (bobines 40-33) 07
Données (bobines 48-41) 06 (STW = 0607hex)
Contrôle d'erreur (CRC) –
Tableau 5.23 Réponse
AVIS!
Les bobines et registres sont adressés explicitement avec
un décalage de -1 dans Modbus.
La bobine 33 est adressée comme bobine 32, par
exemple.
5.10.2 Forcer/écrire bobine unique (05 HEX)
Description
Cette fonction force la bobine sur ON ou sur OFF. Lors
d'une diusion générale, la fonction force les mêmes
références de bobines dans tous les esclaves liés.
Requête
Le télégramme de requête spécie de forcer la bobine 65
(contrôle d'écriture de paramètre). Les adresses des
bobines partent de zéro, c.-à-d. que la bobine 65 est
adressée comme étant la 64. Forcer données = 00 00HEX
(OFF) ou FF 00HEX (ON).
5.10.3 Forcer/écrire bobines multiples (0F
HEX)
Description
Cette fonction force chaque bobine d'une séquence de
bobine sur ON ou sur OFF. Lors d'une diusion générale, la
fonction force les mêmes références de bobines dans tous
les esclaves liés.
Requête
Le télégramme de requête spécie de forcer les bobines 17
à 32 (consigne de vitesse).
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 67

Installation et congurati...
VLT® Midi Drive FC 280
AVIS!
Les adresses des bobines partent de zéro, c.-à-d. que la
bobine 17 est adressée comme étant la 16.
Nom du champ Exemple (HEX)
Adresse esclave
Fonction 0F (écriture bobines multiples)
Adresse bobine niveau haut 00
Adresse bobine niveau bas 10 (adresse bobine 17)
Quantité bobines niveau haut 00
55
Quantité bobines niveau bas 10 (16 bobines)
Comptage d'octets 02
Forcer données niveau haut
(bobines 8–1)
Forcer données niveau bas
(bobines 16–9)
Contrôle d'erreur (CRC) –
01 (adresse du variateur de
fréquence)
20
00 (référence=2000 HEX)
Nom du champ Exemple (HEX)
Adresse esclave 01
Fonction 03 (Lecture registres de maintien)
Adresse démarrage
niveau haut
Adresse démarrage
niveau bas
Nb de points niveau
haut
Nb de points niveau
bas
Contrôle d'erreur (CRC) –
Tableau 5.28 Requête
0B (adresse du registre 3029)
D5 (adresse du registre 3029)
00
02 - (le paramétre 3-03 Réf. max.
comporte 32 bits, soit 2 registres)
Réponse
Les données de registre du télégramme de réponse sont
compressées en deux octets par registre, avec le contenu
binaire justié à droite dans chaque octet. Le premier octet
de chaque registre contient les bits de poids fort et le
Tableau 5.26 Requête
Réponse
La réponse normale renvoie l'adresse de l'esclave, le code
de fonction, l'adresse de démarrage et la quantité de
bobines forcées.
Nom du champ Exemple (HEX)
Adresse esclave 01 (adresse du variateur de
fréquence)
Fonction 0F (écriture bobines multiples)
Adresse bobine niveau haut 00
Adresse bobine niveau bas 10 (adresse bobine 17)
Quantité bobines niveau haut 00
Quantité bobines niveau bas 10 (16 bobines)
Contrôle d'erreur (CRC) –
second les bits de poids faible.
Exemple : Hex 000088B8 = 35,000 = 35 Hz.
Nom du champ Exemple (HEX)
Adresse esclave 01
Fonction 03
Comptage d'octets 04
Données niveau haut (registre 3030) 00
Données niveau bas (registre 3030) 16
Données niveau haut (registre 3031) E3
Données niveau bas (registre 3031) 60
Contrôle d'erreur (CRC) –
Tableau 5.29 Réponse
5.10.5 Prédénir registre unique (06 HEX)
Tableau 5.27 Réponse
Description
5.10.4 Lecture registres de maintien (03
HEX)
Description
Cette fonction lit le contenu des registres de maintien dans
l'esclave.
Requête
Le télégramme de requête spécie le registre de
démarrage et la quantité de registres à lire. Les adresses
des registres partent de zéro, c.-à-d. que les registres 1–4
sont adressés comme étant les registres 0–3.
Exemple : lecture du paramétre 3-03 Réf. max., registre
03030.
Cette fonction prédénit une valeur dans un registre de
maintien unique.
Requête
Le télégramme de requête spécie la référence du registre
à prédénir. Les adresses des registres partent de zéro, c.-àd. que le registre 1 est adressé comme 0.
Exemple : Écrire au paramétre 1-00 Mode Cong., registre
1000
68 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

Speed ref.CTW
Master-follower
130BA274.11
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bit
no.:
Installation et congurati... Manuel de conguration
Nom du champ Exemple (HEX)
Adresse esclave 01
Fonction 06
Adresse registres niveau haut 03 (adresse du registre 999)
Adresse registres niveau bas E7 (adresse du registre 999)
Prédénir données niveau
haut
Prédénir données niveau bas 01
Contrôle d'erreur (CRC) –
Tableau 5.30 Requête
00
Réponse
La réponse normale est un écho de la requête, renvoyé
après que le contenu du registre a été accepté.
Nom du champ Exemple (HEX)
Adresse esclave 01
Fonction 06
Adresse registres niveau haut 03
Adresse registres niveau bas E7
Prédénir données niveau
haut
Prédénir données niveau bas 01
Contrôle d'erreur (CRC) –
Tableau 5.31 Réponse
00
5.10.6 Prédénir registres multiples (10
HEX)
Description
Cette fonction prédénit des valeurs dans une séquence
de registres de maintien.
Requête
Le télégramme de requête spécie les références du
registre à prédénir. Les adresses des registres partent de
zéro, c.-à-d. que le registre 1 est adressé comme 0.
Exemple de requête pour prédénir deux registres
(paramétre 1-24 Courant moteur = 738 (7,38 A)) :
Nom du champ Exemple (HEX)
Adresse esclave 01
Fonction 10
Adresse démarrage niveau haut 04
Adresse démarrage niveau bas 07
Nb de registres niveau haut 00
Nb de registres niveau bas 02
Comptage d'octets 04
Écriture données niveau haut (registre
4 : 1049)
Écriture données niveau bas (registre
4 : 1049)
Écriture données niveau haut (registre
4 : 1050)
Écriture données niveau bas (registre
4 : 1050)
Contrôle d'erreur (CRC) –
Tableau 5.32 Requête
00
00
02
E2
Réponse
La réponse normale renvoie l'adresse de l'esclave, le code
de fonction, l'adresse de démarrage et la quantité de
registres prédénis.
Nom du champ Exemple (HEX)
Adresse esclave 01
Fonction 10
Adresse démarrage niveau haut 04
Adresse démarrage niveau bas 19
Nb de registres niveau haut 00
Nb de registres niveau bas 02
Contrôle d'erreur (CRC) –
Tableau 5.33 Réponse
Prol de contrôle FC Danfoss
5.11
5.11.1 Mot de contrôle selon le prol FC
(8-10 Protocole = Prol FC)
5 5
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 69
Illustration 5.13 Mot de contrôle selon le prol FC

Installation et congurati...
VLT® Midi Drive FC 280
Bit Valeur de bit = 0 Valeur de bit = 1
00 Valeur de référence Sélection externe lsb
01 Valeur de référence Sélection externe msb
02 Freinage CC Rampe
03 Roue libre Pas de roue libre
04 Arrêt rapide Rampe
Maintien fréquence
05
de sortie
06 Arrêt rampe Démarrage
07 Pas de fonction Reset
08 Pas de fonction Jogging
55
09 Rampe 1 Rampe 2
10 Données non valides Données valides
11 Relais 01 ouvert Relais 01 actif
12 Relais 02 ouvert Relais 02 actif
Conguration des
13
paramètres
15 Pas de fonction Sens arrière
Tableau 5.34 Mot de contrôle selon le prol FC
Utiliser rampe
Sélection lsb
Signication des bits de contrôle
Bit 04, Arrêt rapide
Bit 04 = 0 : entraîne la vitesse du moteur à suivre la rampe
de décélération rapide jusqu'à l'arrêt (réglé au
paramétre 3-81 Temps rampe arrêt rapide).
Bit 05, Maintien fréquence de sortie
Bit 05 = 0 : la fréquence de sortie actuelle (en Hz) est
gelée. Modier la fréquence de sortie gelée uniquement à
l'aide des entrées digitales programmées sur [21] Accélé-
ration et [22] Décélération (paramétre 5-10 E.digit.born.18 à
paramétre 5-13 E.digit.born.29).
AVIS!
Si la fonction Gel sortie est active, le variateur de
fréquence ne peut s'arrêter qu'en procédant de l'une des
manières suivantes :
Bit 03, arrêt en roue libre.
•
Bit 02, freinage CC.
•
Entrée digitale réglée sur [5] Frein NF-CC, [2]
•
Lâchage ou [3] Roue libre NF
(paramétre 5-10 E.digit.born.18 à
paramétre 5-13 E.digit.born.29).
Bits 00/01
Utiliser les bits 00 et 01 pour choisir entre les quatre
valeurs de référence préprogrammées au
paramétre 3-10 Réf.prédénie selon le Tableau 5.35.
Valeur de
référence
programmée
1 Paramétre 3-10 Réf.prédénie [0] 0 0
2 Paramétre 3-10 Réf.prédénie [1] 0 1
3 Paramétre 3-10 Réf.prédénie [2] 1 0
4 Paramétre 3-10 Réf.prédénie [3] 1 1
Paramètre
Bit01Bit
00
Bit 06, Arrêt/marche rampe
Bit 06 = 0 : entraîne l'arrêt, la vitesse du moteur suit la
rampe de décélération jusqu'à l'arrêt via le paramètre de
rampe de décélération sélectionné.
Bit 06 = 1 : permet au variateur de fréquence de lancer le
moteur si les autres conditions de démarrage sont
remplies.
Dans le paramétre 8-53 Sélect.dém., dénir la liaison entre le
bit 06 Arrêt/marche et la fonction correspondante de
l'entrée digitale.
Tableau 5.35 Bits de contrôle
Bit 07, Reset
Bit 07 = 0 : pas de reset.
AVIS!
Dans le paramétre 8-56 Sélect. réf. par défaut, dénir la
liaison entre les bits 00/01 et la fonction correspondante
des entrées digitales.
Bit 07 = 1 : remet à zéro un état de défaut. Le reset est
activé au début du signal, c'est-à-dire au passage de 0
logique à 1 logique.
Bit 08, Jogging
Bit 08 = 1 : le Paramétre 3-11 Fréq.Jog. [Hz] détermine la
Bit 02, Freinage CC
Bit 02 = 0 : entraîne le freinage CC et l'arrêt. Le courant de
freinage et la durée sont dénis aux
paramétre 2-01 Courant frein CC et paramétre 2-02 Temps
frein CC.
Bit 02 = 1 : mène à la rampe.
Bit 03, Roue libre
Bit 03 = 0 : le variateur de fréquence lâche immédiatement
le moteur (les transistors de sortie s'éteignent) et il s'arrête
en roue libre.
Bit 03 = 1 : le variateur de fréquence lance le moteur si les
autres conditions de démarrage sont remplies.
Dans le paramétre 8-50 Sélect.roue libre, dénir la liaison
fréquence de sortie.
Bit 09, Choix de rampe 1/2
Bit 09 = 0 : la rampe 1 est active (paramétre 3-41 Temps
d'accél. rampe 1 à paramétre 3-42 Temps décél. rampe 1).
Bit 09 = 1 : la rampe 2 (paramétre 3-51 Temps d'accél.
rampe 2 à paramétre 3-52 Temps décél. rampe 2) est active.
Bit 10, Données non valides/valides
Indique au variateur de fréquence dans quelle mesure le
mot de contrôle doit être utilisé ou ignoré.
Bit 10 = 0 : le mot de contrôle est ignoré.
Bit 10 = 1 : le mot de contrôle est utilisé. Cette fonction
est pertinente car le télégramme contient toujours le mot
de contrôle, indépendamment du type de télégramme.
entre le bit 03 et la fonction correspondante de l'entrée
digitale.
70 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

Output freq.STW
Bit
no.:
Follower-master
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BA273.11
Installation et congurati... Manuel de conguration
Désactiver le mot de contrôle s'il ne doit pas être utilisé
pour mettre à jour ou lire des paramètres.
Bit 11, Relais 01
Bit 11 = 0 : le relais n'est pas activé.
Bit 11 = 1 : le relais 01 est activé si [36] Mot contrôle bit 11
est sélectionné au paramétre 5-40 Fonction relais.
Bit 12, Relais 02
Bit 12 = 0 : le relais 02 n'est pas activé.
Bit 12 = 1 : le relais 02 est activé si [37] Mot contrôle bit 12
est sélectionné au paramétre 5-40 Fonction relais.
Bit 13, Sélection de process
Utiliser le bit 13 pour choisir entre les deux process selon
le Tableau 5.36.
Cette fonction n'est possible que lorsque [9] Multi process
est sélectionné au paramétre 0-10 Process actuel.
Utiliser le paramétre 8-55 Sélect.proc. pour dénir la liaison
entre le bit 13 et la fonction correspondante des entrées
digitales.
Bit 15 Inverse
Bit 15 = 0 : pas d'inversion.
Bit 15 = 1 : Inversion. Dans le réglage par défaut,
l'inversion est réglée sur Entrée dig. au
paramétre 8-54 Sélect.Invers.. Le bit 15 n'implique une
inversion qu'à condition d'avoir sélectionné [2] Digital et
bus ou [3] Digital ou bus pour la communication série.
5.11.2 Mot d'état selon le prol FC (STW)
Régler le paramétre 8-30 Protocole sur [0] FC.
Conguration Bit 13
1 0
2 1
Tableau 5.36 Process de menu
Illustration 5.14 Mot d'état
Bit Bit = 0 Bit = 1
00 Commande non prête Commande prête
01 Variateur de fréquence non
prêt
02 Roue libre Actif
03 Pas d'erreur Arrêt
04 Pas d'erreur Erreur (pas de déclen-
05 Réservé –
06 Pas d'erreur Alarme verrouillée
07 Absence d'avertissement Avertissement
08
Vitesse ≠ référence
09 Commande locale Contrôle par bus
10 Hors limite fréquence Limite de fréquence OK
11 Inactif Fonctionne
12 Variateur de fréquence OK Arrêté, démarrage
13 Tension OK Tension dépassée
14 Couple OK Couple dépassé
15 Temporisation OK Temporisation dépassée
Tableau 5.37 Mot d'état selon le prol FC
Variateur de fréquence prêt
chement)
Vitesse = référence
automatique
Explication des bits d'état
Bit 00, Commande non prête/prête
Bit 00 = 0 : le variateur de fréquence disjoncte.
Bit 00 = 1 : les commandes du variateur de fréquence sont
prêtes mais le composant de puissance n'est pas forcément
alimenté (en cas d'alimentation externe 24 V des
commandes).
Bit 01, variateur de fréquence prêt
Bit 01 = 0 : le variateur de fréquence n'est pas prêt.
Bit 01 = 1 : le variateur de fréquence est prêt à
fonctionner.
Bit 02, Arrêt roue libre
Bit 02 = 0 : le variateur de fréquence lâche le moteur.
Bit 02 = 1 : le variateur de fréquence démarre le moteur à
l'aide d'un ordre de démarrage.
Bit 03, Pas d'erreur/alarme
Bit 03 = 0 : le variateur de fréquence n'est pas en état de
panne.
Bit 03 = 1 : le variateur de fréquence disjoncte. Pour
rétablir le fonctionnement, appuyer sur [Reset].
Bit 04, Pas d'erreur/erreur (pas de déclenchement)
Bit 04 = 0 : le variateur de fréquence n'est pas en état de
panne.
Bit 04 = 1 : le variateur de fréquence indique une erreur
mais ne disjoncte pas.
Bit 05, Inutilisé
Le bit 05 du mot d'état n'est pas utilisé.
Bit 06, Pas d'erreur/alarme verrouillée
Bit 06 = 0 : le variateur de fréquence n'est pas en état de
panne.
5 5
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 71

Installation et congurati...
Bit 06 = 1 : le variateur de fréquence a disjoncté et est
verrouillé.
Bit 07, Absence d'avertissement/avertissement
Bit 07 = 0 : Il n'y a pas d'avertissements.
Bit 07 = 1 : un avertissement s'est produit.
Bit 08, référence/vitesse = référence
Bit 08 = 0 : le moteur tourne mais la vitesse actuelle est
diérente de la référence de vitesse réglée. Ceci peut par
exemple être le cas au moment des accélérations et
décélérations de rampe en cas d'arrêt/marche.
Bit 08 = 1 : la vitesse du moteur est égale à la référence de
55
vitesse réglée.
Bit 09, Commande locale/contrôle par bus
Bit 09 = 0 : [O/Reset] est activé sur l'unité de commande
ou [2] Local est sélectionné au paramétre 3-13 Type
référence. Il n'est pas possible de commander le variateur
de fréquence via la communication série.
Bit 09 = 1 : il est possible de commander le variateur de
fréquence via le bus de terrain/la communication série.
Bit 10, Hors limite fréquence
Bit 10 = 0 : la fréquence de sortie a atteint la valeur réglée
au paramétre 4-12 Vitesse moteur limite basse [Hz] ou
paramétre 4-14 Vitesse moteur limite haute [Hz].
Bit 10 = 1 : la fréquence de sortie gure dans les limites
mentionnées.
Bit 11, Pas d'exploitation/exploitation
Bit 11 = 0 : le moteur ne fonctionne pas.
Bit 11 = 1 : Le variateur de fréquence a un signal de
démarrage sans roue libre.
Bit 12, Variateur de fréquence OK/arrêté, démarrage
automatique
Bit 12 = 0 : le variateur de fréquence n'est pas soumis à
une surtempérature temporaire.
Bit 12 = 1 : le variateur de fréquence s'arrête à cause d'une
surtempérature mais l'unité ne disjoncte pas et poursuit
son fonctionnement dès que la surtempérature revient à la
normale.
Bit 13, Tension OK/limite dépassée
Bit 13 = 0 : absence d'avertissement de tension.
Bit 13 = 1 : La tension CC dans le circuit intermédiaire du
variateur de fréquence est trop basse ou trop élevée.
Bit 14, Couple OK/limite dépassée
Bit 14 = 0 : le courant du moteur est inférieur à la limite de
courant sélectionnée au paramétre 4-18 Current Limit.
Bit 14 = 1 : la limite de courant dénie au
paramétre 4-18 Current Limit est dépassée.
Bit 15, Temporisation OK/limite dépassée
Bit 15 = 0 : les temporisations de protection thermique du
moteur et de protection thermique n'ont pas dépassé
100 %.
Bit 15 = 1 : l'une des temporisations dépasse 100 %.
VLT® Midi Drive FC 280
72 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

Actual output
frequency
STW
Follower-slave
Speed referenceCTW
Master-slave
16bit
130BA276.11
Reverse Forward
Par.3-00 set to
(1) -max- +max
Max reference Max reference
Par.3-00 set to
(0) min-max
Max reference
Forward
Min reference
100%
(4000hex)
-100%
(C000hex)
0%
(0hex)
Par.3-03 0 Par.3-03
Par.3-03
(4000hex)(0hex)
0% 100%
Par.3-02
130BA277.10
Installation et congurati... Manuel de conguration
5.11.3 Valeur de référence de vitesse du bus
La vitesse de référence est transmise au variateur de fréquence par une valeur relative en %. La valeur est transmise sous
forme d'un mot de 16 bits ; la valeur entière 16384 (4000 hexadécimal) correspond à 100 %. Les nombres négatifs sont
exprimés en complément de 2. La fréquence de sortie réelle (MAV) est mise à l'échelle de la même façon que la référence
du bus.
Illustration 5.15 Fréquence de sortie réelle (MAV)
La référence et la MAV sont toujours mises à l'échelle de la façon suivante :
5 5
Illustration 5.16 Référence et MAV
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 73

130BF710.10
FC-280PK37T4E20H1BXCXXXSXXXXAX
1 7 11 13 16 18 24 293 20
Code de type et sélection
VLT® Midi Drive FC 280
6 Code de type et sélection
6
6.1 Code de type
Le type de code est une chaîne de caractères décrivant la
conguration du variateur de fréquence, voir
l'Illustration 6.1.
Illustration 6.1 Code de type
Les chires indiqués dans le Tableau 6.1 se rapportent à la
position de la lettre/du chire du type de code string, en
lisant de gauche à droite.
Groupes de produits 1–2
Série de variateurs de fréquence 4–6
Dimensionnement puissance 7–10
Phases 11
Tension secteur 12
Boîtier 13–15
Filtre RFI 16–17
Frein 18
Achage (LCP) 19
Tropicalisation PCB 20
Option secteur 21
Adaptation A 22
Adaptation B 23
Version du logiciel 24–27
Langue du logiciel 28
Options A 29–30
Références : Options, accessoires et
6.2
pièces détachées
Options et accessoires Référence
VLT® Memory Module MCM 102
VLT® Memory Module Programmer
MCM 101
VLT® Control Panel LCP 21 (numérique)
VLT® Control Panel LCP 102
(graphique)
Adaptateur LCP graphique 132B0281
VLT® Control Panel LCP, couvercle
aveugle
Kit de conversion IP21/Type 1, K1 132B0335
Kit de conversion IP21/Type 1, K2 132B0336
Kit de conversion IP21/Type 1, K3 132B0337
Kit de conversion IP21/Type 1, K4 132B0338
Kit de conversion IP21/Type 1, K5 132B0339
Plaque d'adaptation, VLT® 2800 taille A
Plaque d'adaptation, VLT® 2800 taille B
Plaque d'adaptation, VLT® 2800 taille C
Plaque d'adaptation, VLT® 2800 taille D
VLT® 24 V DC supply MCB 106
Kit de montage externe pour LCP
comprenant câble de 3 m (10 pi)
Kit de montage du LCP, sans LCP 130B1117
1) Disponible à la mi-2017.
1)
1)
Tableau 6.2 Références des options et accessoires
132B0359
134B0792
132B0254
130B1107
132B0262
132B0363
132B0364
132B0365
132B0366
132B0368
132B0102
Tableau 6.1 Positions des caractères dans le type de code
À partir du système de
conguration du variateur en ligne,
un client peut congurer le variateur de fréquence adapté
à une application donnée et générer le type de code
string. Le système de conguration du variateur génère
automatiquement une référence de vente à 8 chires à
envoyer au service commercial local.
Une autre option consiste à établir une liste de projets
comportant plusieurs produits et l'envoyer à un
représentant Danfoss.
Le système de
conguration du variateur se trouve sur le
site Internet : vltcong.danfoss.com.
74 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

Code de type et sélection Manuel de conguration
Pièces de rechange Référence
6.3
Références : résistances de freinage
Sac d'accessoires FC 280, ches 132B0350
Ventilateur 50 x 20 IP21 PWM 132B0351
Ventilateur 60 x 20 IP21 PWM 132B0352
Ventilateur 70 x 20 IP21 PWM 132B0353
Ventilateur 92 x 38 IP21 PWM 132B0371
Ventilateur 120 x 38 IP21 PWM 132B0372
Boîtier de protection borniers de taille
K1
Boîtier de protection borniers de taille
K2
Boîtier de protection borniers de taille
K3
Boîtier de protection borniers de taille
K4
Boîtier de protection borniers de taille
K5
Kit de connexion à la terre du câble du
bus, FC 280
Kit de connexion, E/S d'alimentation,
K1
Kit de connexion, E/S d'alimentation,
K2/K3
Kit de connexion, E/S d'alimentation,
K4/K5
Carte de commande VLT® – Standard
Carte de commande VLT® – CANopen
Carte de commande VLT® – PROFIBUS
Carte de commande VLT® – PROFINET
Carte de commande VLT® – Ethernet/IP
Carte de commande VLT® –
POWERLINK
132B0354
132B0355
132B0356
132B0357
132B0358
132B0369
132B0373
132B0374
132B0375
132B0345
132B0346
132B0347
132B0348
132B0349
132B0378
Danfoss propose une gamme complète de diérentes
résistances spécialement conçues pour nos variateurs de
fréquence. Voir le chapitre 2.9.4 Contrôle avec la fonction de
freinage pour le dimensionnement des résistances de
freinage. Cette section regroupe les références des
résistances de freinage. La résilience de la résistance de
freinage donnée par référence peut être supérieure à R
rec
Dans ce cas, le couple de freinage réel peut être inférieur
au couple de freinage le plus élevé que le variateur de
fréquence peut fournir.
.
6
6
Tableau 6.3 Références des pièces de rechange
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 75

Code de type et sélection
VLT® Midi Drive FC 280
6.3.1 Références : résistances de freinage 10 %
6
Dimension-
nement
puissance
Triphasé
380-480 V
(T4)
PK37 0,37 (0,5) 890 1041,98 989
PK55 0,55 (0,75) 593 693,79 659
PK75 0,75 (1,0) 434 508,78 483
P1K1 1,1 (1,5) 288 338,05 321
P1K5 1,5 (2,0) 208 244,41 232
P2K2 2,2 (3,0) 139 163,95 155
P3K0 3 (4,0) 100 118,86 112
P4K0 4 (5,0) 74 87,93 83
P5K5 5,5 (7,5) 54 63,33 60
P7K5 7,5 (10) 38 46,05 43
P11K 11 (15) 27 32,99 31
P15K 15 (20) 19 24,02 22
P18K 18,5 (25) 16 19,36 18
P22K 22 (30) 16 18,00 17
P
m (HO)
[kW (HP)]
R
min
[Ω] [Ω] [Ω]
R
fr. nom
R
rec
P
fr. moy
[kW (HP)] 175Uxxxx [s]
0,030
(0,040)
0,045
(0,060)
0,061
(0,080)
0,092
(0,120)
0,128
(0,172)
0,190
(0,255)
0,262
(0,351)
0,354
(0,475)
0,492
(0,666)
0,677
(0,894)
0,945
(1,267)
1,297
(1,739)
1,610
(2,158)
1,923
(2,578)
Référence Période Section
3000 120 1,5 (16) 0,3 139
3001 120 1,5 (16) 0,4 131
3002 120 1,5 (16) 0,4 129
3004 120 1,5 (16) 0,5 132
3007 120 1,5 (16) 0,8 145
3008 120 1,5 (16) 0,9 131
3300 120 1,5 (16) 1,3 131
3335 120 1,5 (16) 1,9 128
3336 120 1,5 (16) 2,5 127
3337 120 1,5 (16) 3,3 132
3338 120 1,5 (16) 5,2 130
3339 120 1,5 (16) 6,7 129
3340 120 1,5 (16) 8,3 132
3357 120 1,5 (16) 10,1 128
de câble
[mm
(AWG)]
1)
2
Relais
thermique
[A] [%]
Couple de
freinage
max. avec
résistance
Tableau 6.4 FC 280 – Secteur : triphasé 380-480 V (T4), cycle d'utilisation de 10 %
76 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

Code de type et sélection Manuel de conguration
Dimension-
nement
puissance
Triphasé
200-240 V
(T2)
PK37 0,37 (0,5) 225 263,22 250
PK55 0,55 (0,75) 151 176,90 168
PK75 0,75 (1,0) 110 129,92 123
P1K1 1,1 (1,5) 73 86,77 82
P1K5 1,5 (2,0) 53 62,70 59
P2K2 2,2 (3,0) 35 42,06 39
P3K7 3,7 (5,0) 20 24,47 23
Tableau 6.5 FC 280 – Secteur : triphasé 200-240 V (T2), cycle d'utilisation de 10 %
1) L'ensemble du câblage doit être conforme aux réglementations nationales et locales en matière de sections de câble et de température
ambiante.
P
m (HO)
[kW (HP)]
R
min
[Ω] [Ω] [Ω]
R
fr. nom
R
rec
P
fr. moy
[kW (HP)] 175Uxxxx [s]
0,030
(0,040)
0,045
(0,060)
0,062
(0,083)
0,092
(0,120)
0,128
(0,172)
0,190
(0,255)
0,327
(0,439)
Référence Période Section
3006 120 1,5 (16) 0,6 140
3011 120 1,5 (16) 0,7 142
3016 120 1,5 (16) 0,8 143
3021 120 1,5 (16) 0,9 139
3026 120 1,5 (16) 1,6 143
3031 120 1,5 (16) 1,9 140
3326 120 1,5 (16) 3,5 145
de câble
[mm
(AWG)]
1)
2
Relais
thermique
[A] [%]
Couple de
freinage
max. avec
résistance
6
6
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 77

Code de type et sélection
VLT® Midi Drive FC 280
6.3.2 Références : résistances de freinage 40 %
6
Dimensionnement
puissance
Triphasé
380-480 V
(T4)
PK37 0,37 (0,5) 890 1041,98 989
PK55 0,55 (0,75) 593 693,79 659
PK75 0,75 (1,0) 434 508,78 483
P1K1 1,1 (1,5) 288 338,05 321
P1K5 1,5 (2,0) 208 244,41 232
P2K2 2,2 (3,0) 139 163,95 155
P3K0 3 (4,0) 100 118,86 112
P4K0 4 (5,0) 74 87,93 83
P5K5 5,5 (7,5) 54 63,33 60
P7K5 7,5 (10) 38 46,05 43
P11K 11 (15) 27 32,99 31
P15K 15 (20) 19 24,02 22
P18K 18,5 (25) 16 19,36 18
P22K 22 (30) 16 18,00 17
P
m (HO)
[kW (HP)]
R
min
[Ω] [Ω] [Ω]
R
fr. nom
R
rec
P
fr. moy
[kW (HP)] 175Uxxxx [s]
0,127
(0,170)
0,191
(0,256)
0,260
(0,349)
0,391
(0,524)
0,541
(0,725)
0,807
(1,082)
1,113
(1,491)
1,504
(2,016)
2,088
(2,799)
2,872
(3,850)
4,226
(5,665)
5,804
(7,780)
7,201
(9,653)
8,604
(11,534)
Référence Période Section
3101 120 1,5 (16) 0,4 139
3308 120 1,5 (16) 0,5 131
3309 120 1,5 (16) 0,7 129
3310 120 1,5 (16) 1 132
3311 120 1,5 (16) 1,4 145
3312 120 1,5 (16) 2,1 131
3313 120 1,5 (16) 2,7 131
3314 120 1,5 (16) 3,7 128
3315 120 1,5 (16) 5 127
3316 120 1,5 (16) 7,1 132
3236 120 2,5 (14) 11,5 130
3237 120 2,5 (14) 14,7 129
3238 120 4 (12) 19 132
3203 120 4 (12) 23 128
de câble
[mm2]
Relais
1)
thermique
[A] [%]
Couple de
freinage
max. avec
résistance
Tableau 6.6 FC 280 – Secteur : triphasé 380-480 V (T4), cycle d'utilisation de 40 %
78 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

Code de type et sélection Manuel de conguration
Dimension-
nement
puissance
Triphasé
200-240 V
(T2)
PK37 0,37 (0,5) 225 263,22 250
PK55 0,55 (0,75) 151 176,90 168
PK75 0,75 (1,0) 110 129,92 123
P1K1 1,1 (1,5) 73 86,77 82
P1K5 1,5 (2,0) 53 62,70 59
P2K2 2,2 (3,0) 35 42,06 39
P3K7 3,7 (5,0) 20 24,47 23
Tableau 6.7 FC 280 – Secteur : triphasé 200-240 V (T2), cycle d'utilisation de 40 %
1) L'ensemble du câblage doit être conforme aux réglementations nationales et locales en matière de sections de câble et de température
ambiante.
P
m (HO)
[kW (HP)]
R
min
[Ω] [Ω] [Ω]
R
fr. nom
R
rec
P
fr. moy
[kW (HP)] 175Uxxxx [s]
0,129
(0,173)
0,192
(0,257)
0,261
(0,350)
0,391
(0,524)
0,541
(0,725)
0,807
(1,082)
1,386
(1,859)
Référence Période Section
3096 120 1,5 (16) 0,8 140
3008 120 1,5 (16) 0,9 142
3300 120 1,5 (16) 1,3 143
3301 120 1,5 (16) 2 139
3302 120 1,5 (16) 2,7 143
3303 120 1,5 (16) 4,2 140
3305 120 1,5 (16) 6,8 145
de câble
[mm
(AWG)]
1)
2
Relais
thermique
[A] [%]
Couple de
freinage
max. avec
résistance
6
6
Références : Filtres sinus
6.4
Fréquence
Caractéristiques de puissance et de courant des variateurs
de fréquence
[kW
(HP)]
– –
– –
0,37
(0,5)
– – 1,1 (1,5) 3 1,1 (1,5) 2,8
0,55
(0,75)
0,75 (1) 4,2 2,2 (3) 5,3 2,2 (3) 4,8
1,1 (1,5) 6 3 (4) 7,2 3 (4) 6,3
1,5 (2) 6,8 – – – –
– – 4 (5,5) 9 4 (5,5) 8,2 10 9,5 7,5 6 130B2409 130B2444
2,2 (3) 9,6 5,5 (7,5) 12 5,5 (7,5) 11
3,7 (5) 15,2 7,5 (10) 15,5 7,5 (10) 14
– – 11 (15) 23 11 (15) 21 24 23 18 5 130B2412 130B2447
– – 15 (20) 31 15 (20) 27
– –
[A]
200-240 V 200-240 V 200-240 V 50 Hz 60 Hz 100 Hz – IP00 IP20
2,2 0,75 (1) 2,2 0,75 (1) 2,1
3,2 1,5 (2) 3,7 1,5 (2) 3,4
[kW
(HP)]
0,37
(0,5)
0,55
(0,75)
18,5
(25)
[A]
1,2
1,7
37
[kW
(HP)]
0,37
(0,5)
0,55
(0,75)
18,5
(25)
[A] [A] [A] [A] [kHz] – –
1,1
1,6
34
Courant nominal du ltre
2,5 2,5 2 6 130B2404 130B2439
4,5 4 3,5 6 130B2406 130B2441
8 7,5 5,5 6 130B2408 130B2443
17 16 13 6 130B2411 130B2446
38 36 28,5 5 130B2413 130B2448
de
commutati
1)
on
Référence
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 79

6
Code de type et sélection
Caractéristiques de puissance et de courant des variateurs
de fréquence
[kW
(HP)]
– – 22 (30) 42,5 22 (30) 40 48 45,5 36 5 130B2281 130B2307
Tableau 6.8 Filtre sinus pour variateurs de fréquence avec 380-480 V
1) La fréquence de commutation peut être déclassée à 3 kHz en raison de la fréquence de sortie (inférieure à 60 % de la vitesse normale), d'une
surcharge ou d'une surchaue. Le client peut remarquer le bruit diérent qu'émet le ltre.
[A]
[kW
(HP)]
[A]
VLT® Midi Drive FC 280
[kW
(HP)]
[A] [A] [A] [A] [kHz] – –
Courant nominal du ltre
Fréquence
de
commutati
1)
on
Référence
Les paramètres suggérés pour l'exploitation avec un ltre sinus sont réglés comme suit :
Régler le paramétre 14-55 Filtre de sortie sur [1] Filtre de sortie Sinus.
•
Régler la valeur qui convient pour chaque ltre dans le paramétre 14-01 Fréq. commut.. Lorsque [1] Filtre de sortie
•
Sinus est déni au paramétre 14-55 Filtre de sortie, les options inférieures à 5 kHz dans le paramétre 14-01 Fréq.
commut. sont automatiquement retirées.
6.5 Références : Filtres dU/dt
Caractéristiques de puissance et de courant des
variateurs de fréquence
380-440 V 441-480 V
[kW (HP)] [A] [kW (HP)] [A] [A] [A] – – –
11 (15) 23 11 (15) 21
15 (20) 31 15 (20) 27
18,5 (25) 37 18,5 (25) 34
22 (30) 42,5 22 (30) 40
Tableau 6.9 Filtres dU/dt pour variateurs de fréquence avec 380-480 V
Courant nominal du ltre Référence
380 @ 60 Hz
200-400/440
@ 50 Hz
44 40 130B2835 130B2836 130B2837
460/480 @
60 Hz
500/525 @
50 Hz
IP00 IP20 IP54
6.6 Références : Filtres CEM externes
Pour le K1S2 et le K2S2 avec des ltres CEM externes repris dans le Tableau 6.10, la longueur maximale du câble blindé est
de 100 m (328 pi) selon la norme EN/CEI 61800-3 C2 (EN 55011 A1) ou de 40 m (131,2 pi) selon la norme EN/CEI 61800-3 C1
(EN 55011 B).
Pour le K1T4, le K2T4 et le K3T4 avec un ltre A1 interne et des ltres CEM externes repris dans le Tableau 6.10, la longueur
maximale du câble blindé est de 100 m (328 pi) selon la norme EN/CEI 61800-3 C2 (EN 55011 A1) ou de 25 m (82 pi) selon
la norme EN/CEI 61800-3 C1 (EN 55011 B).
80 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

130BF872.10
a1
a1
A
am
a2
e1
e1
c1
f1
fm
6-D1
4-Dm
6-D1
b1
bm
B
C
Code de type et sélection Manuel de conguration
Référence du ltre CEM 134B5466 134B5467 134B5463 134B5464 134B5465
Taille de boîtier du variateur de fréquence K1S2 K2S2 K1T4 K2T4 K3T4
Dimensions A [mm (po)] 250 (9,8) 312,5 (12,3) 250 (9,8) 312,5 (12,3)
Dimensions a1 [mm (po)] 234 (9,2) 303 (11,9) 234 (9,2) 303 (11,9)
Dimensions a2 [mm (po)] 19,5 (0,77) 21,3 (0,84) 19,5 (0,77) 21,3 (0,84)
Dimensions am [mm (po)] 198 (7,8) 260 (10,2) 198 (7,8) 260 (10,2)
Dimensions B [mm (po)] 75 (2,95) 90 (3,54) 75 (2,95) 90 (3,54) 115 (4,53)
Dimensions b1 [mm (po)] 55 (2,17) 70 (2,76) 55 (2,17) 70 (2,76) 90 (3,54)
Dimensions bm [mm (po)] 60 (2,36) 70 (2,76) 60 (2,36) 70 (2,76) 90 (3,54)
Dimensions C [mm (po)] 50 (1,97)
Dimensions c1 [mm (po)] 22,7 (0,89)
Dimensions D1 [mm (po)] Ø5,3 (Ø0,21)
Dimensions Dm [mm (po)] M4 M5 M4 M5
Dimensions e1 [mm (po)] 6,5 (0,26) 5 (0,20) 6,5 (0,26) 5 (0,20)
Dimensions f1 [mm (po)] 10 (0,39) 12,5 (0,49)
Dimensions fm [mm (po)] 7,5 (0,30)
Vis de montage du ltre CEM M5
Vis de montage pour le variateur de
fréquence
Poids [kg (lb)] 1,10 (2,43)
M4 M5 M4 M5
10 (0,39) 7,5 (0,30) 10 (0,39)
1,50 (3,31) 1,20 (2,65) 1,90 (4,19) 2,10 (4,63)
12,5 (0,49)
6
6
Tableau 6.10 Détails du ltre CEM pour K1-K3
Illustration 6.2 Dimensions du ltre CEM pour K1-K3
Pour le K4T4 et le K5T4 avec un ltre A1 interne ou avec des ltres CEM externes repris dans le Tableau 6.11, la longueur
maximale du câble blindé est de 100 m (328 pi) selon la norme EN/CEI 61800-3 C2 (EN 55011 A1) ou de 25 m (82 pi) selon
la norme EN/CEI 61800-3 C1 (EN 55011 B).
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 81

H
B
K
C
A
D
J
G
E
F
l
1
L
1
130BC247.10
Code de type et sélection
VLT® Midi Drive FC 280
6
Puissance [kW (HP)]
Taille 380-480 V
11–15
(15–20)
18,5-22
(25-30)
Type A B C D E F G H I J K L1
FN3258-30-47 270 50 85 240 255 30 5,4 1 10,6 M5 25 40
FN3258-42-47 310 50 85 280 295 30 5,4 1 10,6 M5 25 40
Tableau 6.11 Détails du ltre CEM pour K4-K5
Couple
[Nm (po-lb)]
1,9-2,2
(16,8-19,5)
1,9-2,2
(16,8-19,5)
Poids [kg (lb)] Référence
1,2
(2,6)
1,4
(3,1)
132B0246
132B0247
Illustration 6.3 Dimensions du ltre CEM pour K4–K5
82 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

Spécications Manuel de conguration
7 Spécications
7.1 Données électriques
Variateur de fréquence
Sortie d'arbre typique [kW (HP)]
Protection nominale IP20 (IP21/Type 1 en
option)
Courant de sortie
Sortie d'arbre [kW] 0,37 0,55 0,75 1,1 1,5 2,2 3
Continu (3 x 380-440 V) [A] 1,2 1,7 2,2 3 3,7 5,3 7,2
Continu (3 x 441-480 V) [A] 1,1 1,6 2,1 2,8 3,4 4,8 6,3
Intermittent (surcharge 60 s) [A] 1,9 2,7 3,5 4,8 5,9 8,5 11,5
kVA continu (400 V CA) [kVA] 0,9 1,2 1,5 2,1 2,6 3,7 5,0
kVA continu (480 V CA) [kVA] 0,9 1,3 1,7 2,5 2,8 4,0 5,2
Courant d'entrée maximal
Continu (3 x 380-440 V) [A] 1,2 1,6 2,1 2,6 3,5 4,7 6,3
Continu (3 x 441-480 V) [A] 1,0 1,2 1,8 2,0 2,9 3,9 4,3
Intermittent (surcharge 60 s) [A] 1,9 2,6 3,4 4,2 5,6 7,5 10,1
Autres spécications
Section max. de câble (secteur, moteur, frein et
répartition de la charge) [mm2 (AWG)]
Perte de puissance estimée à charge nominale
max. [W]
Poids, protection nominale IP20 [kg (lb)] 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5) 3,6 (7,9)
Poids, protection nominale IP21 [kg (lb)] 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1)
Rendement [%]
1)
2)
PK37
0,37
(0,5)
K1 K1 K1 K1 K1 K1 K2
20,9 25,2 30 40 52,9 74 94,8
96,0 96,6 96,8 97,2 97,0 97,5 98,0
PK55
0,55
(0,75)
PK75
0,75
(1,0)
P1K1
1,1
(1,5)
4 (12)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
P3K0
3,0
(4,0)
7 7
Tableau 7.1 Alimentation secteur 3 x 380-480 V CA
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 83

Spécications
VLT® Midi Drive FC 280
Variateur de fréquence
Sortie d'arbre typique [kW (HP)]
Protection nominale IP20 (IP21/Type 1 en
option)
Courant de sortie
Sortie d'arbre 4 5,5 7,5 11 15 18,5 22
Continu (3 x 380-440 V) [A] 9 12 15,5 23 31 37 42,5
Continu (3 x 441-480 V) [A] 8,2 11 14 21 27 34 40
Intermittent (surcharge 60 s) [A] 14,4 19,2 24,8 34,5 46,5 55,5 63,8
kVA continu (400 V CA) [kVA] 6,2 8,3 10,7 15,9 21,5 25,6 29,5
kVA continu (480 V CA) [kVA] 6,8 9,1 11,6 17,5 22,4 28,3 33,3
Courant d'entrée maximal
Continu (3 x 380-440 V) [A] 8,3 11,2 15,1 22,1 29,9 35,2 41,5
Continu (3 x 441-480 V) [A] 6,8 9,4 12,6 18,4 24,7 29,3 34,6
Intermittent (surcharge 60 s) [A] 13,3 17,9 24,2 33,2 44,9 52,8 62,3
Autres spécications
77
Section max. de câble (secteur, moteur, frein et
répartition de la charge) [mm2 (AWG)]
Perte de puissance estimée à charge nominale
max. [W]
Poids, protection nominale IP20 [kg] (lb) 3,6 (7,9) 3,6 (7,9) 4,1 (9,0) 9,4 (20,7) 9,5 (20,9) 12,3 (27,1) 12,5 (27,6)
Poids, protection nominale IP21 [kg (lb)] 5,5 (12,1) 5,5 (12,1) 6,5 (14,3) 10,5 (23,1) 10,5 (23,1) 14,0 (30,9) 14,0 (30,9)
Rendement [%]
1)
2)
P4K0
4
(5,4)
K2 K2 K3 K4 K4 K5 K5
115,5 157,5 192,8 289,5 393,4 402,8 467,5
98,0 97,8 97,7 98,0 98,1 98,0 98,0
P5K5
5,5
(7,5)
4 (12) 16 (6)
P7K5
7,5
(10)
P11K
11
(15)
P15K
15
(20)
P18K
18,5
(25)
P22K
22
(30)
Tableau 7.2 Alimentation secteur 3 x 380-480 V CA
Variateur de fréquence
Sortie d'arbre typique [kW (HP)]
Protection nominale IP20 (IP21/Type 1 en
option)
Courant de sortie
Continu (3 x 200-240 V) [A] 2,2 3,2 4,2 6 6,8 9,6 15,2
Intermittent (surcharge 60 s) [A] 3,5 5,1 6,7 9,6 10,9 15,4 24,3
kVA continu (230 V CA) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8 6,1
Courant d'entrée maximal
Continu (3 x 200-240 V) [A] 1,8 2,7 3,4 4,7 6,3 8,8 14,3
Intermittent (surcharge 60 s) [A] 2,9 4,3 5,4 7,5 10,1 14,1 22,9
Autres spécications
Section max. de câble (secteur, moteur, frein et
répartition de la charge) [mm2 (AWG)]
Perte de puissance estimée à charge nominale
max. [W]
Poids, protection nominale IP20 [kg] (lb) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5) 3,6 (7,9)
Poids, protection nominale IP21 [kg (lb)] 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1) 6,5 (14,3)
Rendement [%]
1)
2)
Tableau 7.3 Alimentation secteur 3 x 200-240 V CA
PK37
0,37
(0,5)
K1 K1 K1 K1 K1 K2 K3
29,4 38,5 51,1 60,7 76,1 96,1 147,5
96,4 96,6 96,3 96,6 96,5 96,7 96,7
PK55
0,55
(0,75)
PK75
0,75
(1,0)
P1K1
1,1
(1,5)
4 (12)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
P3K7
3,7
(5,0)
84 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

Spécications Manuel de conguration
Variateur de fréquence
Sortie d'arbre typique [kW (HP)]
Protection nominale IP20 (IP21/Type 1 en option) K1 K1 K1 K1 K1 K2
Courant de sortie
Continu (3 x 200-240 V) [A] 2,2 3,2 4,2 6 6,8 9,6
Intermittent (surcharge 60 s) [A] 3,5 5,1 6,7 9,6 10,9 15,4
kVA continu (230 V CA) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8
Courant d'entrée maximal
Continu (1 x 200-240 V) [A] 2,9 4,4 5,5 7,7 10,4 14,4
Intermittent (surcharge 60 s) [A] 4,6 7,0 8,8 12,3 16,6 23,0
Autres spécications
Section max. du câble (secteur et moteur) [mm
(AWG)]
Perte de puissance estimée à charge nominale max.
1)
[W]
Poids, protection nominale IP20 [kg] (lb) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5)
Poids, protection nominale IP21 [kg (lb)] 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1)
Rendement [%]
Tableau 7.4 Alimentation secteur 1 x 200-240 V CA
1) La perte de puissance typique, mesurée dans des conditions de charge nominales, est de ±15 % (la tolérance est liée à la variété des conditions
de tension et de câblage).
Les valeurs s'appuient sur le rendement typique d'un moteur (limite IE2/IE3). Les moteurs de moindre rendement renforcent la perte de puissance
du variateur de fréquence, tandis que les moteurs à fort rendement la réduisent.
S'applique au dimensionnement du refroidissement de variateur de fréquence. Si la fréquence de commutation est supérieure au réglage par
défaut, les pertes de puissance peuvent augmenter. Les puissances consommées par le LCP et la carte de commande sont incluses. D'autres
options et la charge client peuvent accroître les pertes de 30 W max. (bien que généralement on compte seulement 4 W supplémentaires pour
une carte de commande ou un bus de terrain à pleine charge).
Pour les données des pertes de puissance selon la norme EN 50598-2, consulter www.danfoss.com/vltenergyeciency.
2) Mesuré avec des câbles de moteur blindés de 50 m (164 pi) à la charge et à la fréquence nominales. Pour la classe d'ecacité énergétique, voir
le chapitre 7.4 Conditions ambiantes. Pour les pertes de charge partielles, voir www.danfoss.com/vltenergyeciency.
2)
2
PK37
0,37
(0,5)
37,7 46,2 56,2 76,8 97,5 121,6
94,4 95,1 95,1 95,3 95,0 95,4
PK55
0,55
(0,74)
PK75
0,75
(1,0)
4 (12)
P1K1
1,1
(1,5)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
7 7
Alimentation secteur
7.2
Alimentation secteur (L1/N, L2/L, L3)
Bornes d'alimentation (L1/N, L2/L, L3)
Tension d'alimentation 380-480 V : -15 % (-25 %)1) à +10 %
Tension d'alimentation 200-240 V : -15 % (-25 %)1) à +10 %
1) Le variateur de fréquence peut fonctionner à -25 % de la tension d'entrée en performance réduite. La puissance de sortie
maximale du variateur de fréquence est de 75 % à -25 % de la tension d'entrée et de 85 % à -15 % de la tension d'entrée.
Un couple complet n'est pas envisageable à une tension secteur plus de 10 % en dessous de la tension nominale d'alimentation
secteur du variateur de fréquence.
Fréquence d'alimentation 50/60 Hz ±5 %
Écart temporaire maximum entre phases secteur 3,0 % de la tension nominale d'alimentation
Facteur de puissance réelle (λ) ≥ 0,9 à charge nominale
Facteur de puissance de déphasage (cos ϕ) Proche de 1 (> 0,98)
Commutation sur l'entrée d'alimentation L1, L2, L3 (mises sous tension) ≤ 7,5 kW (10 HP) Maximum 2 fois/minute
Commutation sur l'entrée d'alimentation (L1/N, L2/L, L3) (mises sous tension) 11-22 kW (15-30 HP) Maximum 1 fois/minute
7.3 Puissance et données du moteur
Puissance du moteur (U, V, W)
Tension de sortie 0-100 % de la tension d’alimentation
Fréquence de sortie 0-500 Hz
Fréquence de sortie en mode VVC
+
0–200 Hz
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 85

Spécications
Commutation sur la sortie Illimitée
Temps de rampe 0,01–3600 s
Caractéristiques de couple
Couple de démarrage (couple constant) Maximum 160 % pendant 60 s
Surcouple (couple constant) Maximum 160 % pendant 60 s
Courant de démarrage Maximum 200 % pendant 1 s
Temps de montée du couple en mode VVC+ (indépendant de fsw) 50 ms maximum
1) *Le pourcentage se réfère au couple nominal. Pour les variateurs de fréquence 11-22 kW (15-30 HP), il est de 150 %.
VLT® Midi Drive FC 280
1)
1)
7.4 Conditions ambiantes
Conditions ambiantes
Classe IP IP20 (IP21/NEMA type 1 en option)
Essai de vibration, toute taille de boîtier 1,14 g
Humidité relative 5-95 % (CEI 721-3-3 ; classe 3K3 (non condensante) pendant le fonctionnement)
Température ambiante (en mode de commutation DPWM)
77
- avec déclassement Maximum 55 °C (131 °F)
- à courant de sortie constant max. Maximum 45 °C (113 °F)
Température ambiante min. en pleine exploitation 0 °C (32 °F)
Température ambiante min. en exploitation réduite -10 °C (14 °F)
Température durant le stockage/transport -25 à +65/70 °C (-13 à +149/158 °F)
Altitude max. au-dessus du niveau de la mer sans déclassement 1000 m (3280 pi)
Altitude max. au-dessus du niveau de la mer avec déclassement 3000 m (9243 pi)
EN 61800-3, EN 61000-3-2, EN 61000-3-3, EN 61000-3-11,
Normes CEM, Émission
Normes CEM, Immunité
Classe d'ecacité énergétique
1) Se reporter au chapitre 7.12 Exigences particulières pour :
Déclassement pour température ambiante élevée
•
Déclassement à haute altitude
•
2) Sur les variantes PROFIBUS, PROFINET, EtherNet/IP et POWERLINK du VLT
carte de commande, éviter une pleine charge E/S digitale/analogique à une température ambiante supérieure à 45 °C (113 °F).
3) La température ambiante pour K1S2 sans déclassement est au maximum de 50
4) La température ambiante pour K1S2 à plein courant de sortie constant est au maximum de 40 °C (104 °F).
5) Déterminée d'après la norme EN 50598-2 à :
Charge nominale
•
90 % de la fréquence nominale
•
Fréquence de commutation réglée en usine
•
Type de modulation réglé en usine
•
Type ouvert : température de l'air environnant 45 °C (113 °F).
•
Type 1 (kit NEMA) : température ambiante 45 °C (113 °F).
•
5)
EN 61000-3-12, EN 61000-6-3/4, EN 55011, CEI 61800-3
EN 61800-3, EN 61000-6-1/2, EN 61000-4-2, EN 61000-4-3
EN 61000-4-4, EN 61000-4-5, EN 61000-4-6, EN 61326-3-1
®
Midi Drive FC 280, pour éviter toute surchaue de la
°
C (122 °F).
1)2)3)
4)
IE2
86 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

Spécications Manuel de conguration
7.5 Spécications du câble
Longueurs de câble
Longueur max. du câble du moteur, blindé 50 m (164 pi)
Longueur max. du câble du moteur, non blindé 75 m (246 pi)
Section max. des bornes de commande, l souple/rigide 2,5 mm2/14 AWG
Section minimale des bornes de commande 0,55 mm2/30 AWG
Longueur max. du câble d'entrée STO, non blindé 20 m (66 pi)
1) Pour les sections de câbles de puissance, voir le Tableau 7.1, le Tableau 7.2, le Tableau 7.3 et le Tableau 7.4.
Pour respecter les normes EN 55011 1A et EN 55011 1B, il convient dans certains cas de réduire le câble du moteur. Voir le
chapitre 2.6.2 Émission CEM pour en savoir plus.
1)
7.6 Entrée/sortie de commande et données de commande
Entrées digitales
N° de borne
Logique PNP ou NPN
Niveau de tension 0-24 V CC
Niveau de tension, 0 logique PNP < 5 V CC
Niveau de tension, 1 logique PNP > 10 V CC
Niveau de tension, "0" logique NPN > 19 V CC
Niveau de tension, "1" logique NPN < 14 V CC
Tension maximale sur l'entrée 28 V DC
Plage de fréquence d'impulsion 4-32 kHz
(Cycle d'utilisation) durée de l'impulsion min. 4,5 ms
Résistance d'entrée, R
1) La borne 27 peut aussi être programmée comme sortie.
i
18, 19, 271), 29, 32, 33
Environ 4 kΩ
7 7
Entrées STO
N° de borne 37, 38
Niveau de tension 0-30 V CC
Niveau de tension, bas < 1,8 V CC
Niveau de tension, haut > 20 V CC
Tension maximale sur l'entrée 30 V CC
Courant d'entrée minimum (chaque broche) 6 mA
Entrées analogiques
Nombre d'entrées analogiques 2
N° de borne 531), 54
Modes Tension ou courant
Sélection du mode Logiciel
Niveau de tension 0–10 V
Résistance d'entrée, R
Tension maximale -15 V à +20 V
Niveau de courant 0/4 à 20 mA (échelonnable)
Résistance d'entrée, R
Courant maximal 30 mA
Résolution des entrées analogiques 11 bits
Précision des entrées analogiques Erreur max. 0,5 % de l'échelle totale
Largeur de bande 100 Hz
Les entrées analogiques sont isolées galvaniquement de la tension d'alimentation (PELV) et d'autres bornes haute tension.
1) La borne 53 prend en charge uniquement le mode tension et peut également servir d'entrée digitale.
i
i
Environ 10 kΩ
Environ 200 Ω
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 87

Mains
Functional
isolation
PELV isolation
Motor
DC bus
High
voltage
Control
37
RS485
38
33
130BE837.10
Spécications
Illustration 7.1 Isolation galvanique
VLT® Midi Drive FC 280
AVIS!
HAUTE ALTITUDE
Pour une installation à des altitudes supérieures à 2000 m (6562 pi), contacter Danfoss pour la norme PELV.
77
Entrées impulsions programmables 2
Nombre de bornes impulsion 29, 33
Fréquence maximale aux bornes 29, 33 32 kHz (activation push-pull)
Fréquence maximale aux bornes 29, 33 5 kHz (collecteur ouvert)
Fréquence minimale aux bornes 29, 33 4 Hz
Niveau de tension Voir la section sur les entrées numériques
Tension maximale sur l'entrée 28 V DC
Entrées impulsions
Résistance d'entrée, R
i
environ 4 kΩ
Précision d'entrée impulsions Erreur maximale : 0,1 % de l'échelle totale
Sorties digitales
Sorties digitales/impulsions programmables 1
N° de borne 27
1)
Niveau de tension à la sortie digitale/impulsion 0–24 V
Courant de sortie max. (récepteur ou source) 40 mA
Charge max. à la sortie en fréquence 1 kΩ
Charge capacitive max. à la sortie en fréquence 10 nF
Fréquence de sortie min. à la sortie en fréquence 4 Hz
Fréquence de sortie max. à la sortie en fréquence 32 kHz
Précision de la sortie en fréquence Erreur maximale : 0,1 % de l'échelle totale
Résolution de la sortie en fréquence 10 bits
1) La borne 27 peut également être programmée comme entrée.
La sortie digitale est isolée galvaniquement de la tension d'alimentation (PELV) et d'autres bornes haute tension.
Sorties analogiques
Nombre de sorties analogiques programmables 1
N° de borne 42
Plage de courant de la sortie analogique 0/4–20 mA
Résistance max. à la masse de la sortie analogique 500 Ω
Précision de la sortie analogique Erreur maximale : 0,8 % de l'échelle totale
Résolution de la sortie analogique 10 bits
La sortie analogique est isolée galvaniquement de la tension d'alimentation (PELV) et d'autres bornes haute tension.
Carte de commande, sortie 24 V CC
N° de borne 12, 13
Charge maximale 100 mA
L'alimentation 24 V CC est isolée galvaniquement de la tension d'alimentation (PELV). L'alimentation a toutefois le même
potentiel que les entrées et sorties analogiques et numériques.
88 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

Spécications Manuel de conguration
Carte de commande, sortie +10 V CC
N° de borne 50
Tension de sortie 10,5 V ±0,5 V
Charge maximale 15 mA
L'alimentation 10 V CC est isolée galvaniquement de la tension d'alimentation (PELV) et d'autres bornes haute tension.
Carte de commande, communication série RS485
N° de borne 68 (P,TX+, RX+), 69 (N,TX-, RX-)
Borne n° 61 Commun des bornes 68 et 69
Le circuit de communication série RS485 est isolé galvaniquement de la tension d'alimentation (PELV).
Carte de commande, communication série USB
Norme USB 1,1 (pleine vitesse)
Fiche USB Fiche USB de type B
La connexion au PC est réalisée via un câble USB standard hôte/dispositif.
La connexion USB est isolée galvaniquement de la tension d'alimentation (PELV) et d'autres bornes haute tension.
La mise à la terre USB n'est pas galvaniquement isolée de la protection par mise à la terre. Utiliser uniquement un ordinateur
portable isolé en tant que connexion PC au connecteur USB sur le variateur de fréquence.
Sorties relais
Sorties relais programmables 1
Relais 01 01–03 (NF), 01–02 (NO)
Charge maximale sur les bornes (CA-1)1) sur 01-02 (NO) (charge résistive) 250 V CA, 3 A
Charge maximale sur les bornes (CA-15)1) sur 01-02 (NO) (charge inductive à cosφ 0,4) 250 V CA, 0,2 A
Charge maximale sur les bornes (CC-1)1) sur 01-02 (NO) (charge résistive) 30 V CC, 2 A
Charge maximale sur les bornes (CC-13)1) sur 01-02 (NO) (charge inductive) 24 V CC, 0,1 A
Charge maximale sur les bornes (CA-1)1) sur 01-03 (NF) (charge résistive) 250 V CA, 3 A
Charge maximale sur les bornes (CA-15)1) sur 01-03 (NF) (charge inductive à cosφ 0,4) 250 V CA, 0,2 A
Charge maximale sur les bornes (CC-1)1) sur 01-03 (NF) (charge résistive) 30 V CC, 2 A
Charge minimale sur les bornes sur 01-03 (NF), 01-02 (NO) 24 V CC 10 mA, 24 V CA 20 mA
1) CEI 60947 parties 4 et 5.
Les contacts de relais sont isolés galvaniquement du reste du circuit par une isolation renforcée.
7 7
Performance de la carte de commande
Intervalle de balayage 1 ms
Caractéristiques de contrôle
Résolution de fréquence de sortie à 0-500 Hz ±0,003 Hz
Temps de réponse système (bornes 18, 19, 27, 29, 32 et 33) ≤ 2 ms
Plage de commande de vitesse (boucle ouverte) 1:100 de la vitesse synchrone
Précision de vitesse (boucle ouverte) ±0,5 % de la vitesse nominale
Vitesse, précision (boucle fermée) ±0,1 % de la vitesse nominale
Toutes les caractéristiques de contrôle sont basées sur un moteur asynchrone 4 pôles.
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 89

Spécications
VLT® Midi Drive FC 280
7.7 Couples de serrage des raccords
Lors du serrage de tous les raccordements électriques, il est important de serrer avec le bon couple. Des couples trop faibles
ou trop élevés peuvent provoquer des problèmes de raccordement électrique. Utiliser une clé dynamométrique pour
garantir un couple correct. Il est recommandé d'utiliser un tournevis plat de type SZS 0,6 x 3,5 mm.
Couple [Nm (po-lb)]
Type de
boîtier
K1
K2
K3 7,5 (10) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
K4
K5
Puissance
[kW (HP)]
0,37-2,2
(0,5-3,0)
3,0-5,5
(4,0-7,5)
11–15
(15–20)
18,5-22
(25-30)
Secteur Moteur
0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
Raccor-
dement CC
Frein Terre Commande Relais
77
Tableau 7.5 Couples de serrage
7.8 Fusibles et disjoncteurs
Utiliser des fusibles et/ou des disjoncteurs du côté de l'alimentation comme protection du personnel d'entretien et de l'équipement en cas de panne d'un composant interne au variateur de fréquence (première panne).
Protection du circuit de dérivation
Protéger tous les circuits de dérivation d'une installation (notamment appareillage de connexion et machines) contre les
courts-circuits et les surcourants, conformément aux règlements nationaux et internationaux.
AVIS!
La protection intégrale contre les courts-circuits par semi-conducteurs n'assure pas la protection du circuit de
dérivation. Prévoir une protection du circuit de dérivation conformément aux réglementations nationales et locales.
Le Tableau 7.6 présente les fusibles recommandés et les disjoncteurs qui ont été testés.
ATTENTION
RISQUE DE BLESSURES ET DE DOMMAGES À L'ÉQUIPEMENT
Le non-respect de ces recommandations peut entraîner des risques pour le personnel et endommager le variateur de
fréquence et d'autres équipements en cas de dysfonctionnement.
Choisir les fusibles en fonction des recommandations. Les dommages éventuels peuvent être limités à
•
l'intérieur du variateur de fréquence.
AVIS!
DOMMAGES MATÉRIELS
L'utilisation de fusibles et/ou de disjoncteurs est obligatoire an d'assurer la conformité aux normes CEI 60364 pour CE.
Le non-respect des recommandations relatives à la protection peut endommager le variateur de fréquence.
Danfoss recommande d'utiliser les fusibles et les disjoncteurs mentionnés dans le Tableau 7.6 pour garantir la conformité à
UL 508C ou à la norme CEI 61800-5-1. Pour les applications non conformes à UL, prévoir des disjoncteurs conçus pour
protéger un circuit capable de fournir un maximum de 50 000 A
le courant nominal de court-circuit du variateur de fréquence (SCCR) convient à un circuit capable de fournir un maximum
de 100 000 A
90 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304
, 240 V/480 V.
rms
(symétriques), 240 V/400 V. Avec des fusibles de classe T,
rms

1.0
0.99
0.98
0.97
0.96
0.95
0.93
0.92
0% 50% 100% 200%
0.94
Relative Eciency
130BB252.11
1.01
150%
% Speed
100% load 75% load 50% load 25% load
Spécications Manuel de conguration
Taille de boîtier Puissance [kW (HP)]
K1
Triphasé 380-480 V
Triphasé 200-240 V
Monophasé 200-240 V
K2
K3 7,5 (10) PKZM0-25
K4
K5
K1
K2 2,2 (3,0)
K3 3,7 (5,0) PKZM0-25
K1
K2 2,2 (3,0) gG-25 PKZM0-20 JJN-25
Fusible non
conforme à UL
0,37 (0,5)
0,55-0,75
(0,74-1,0)
1,1-1,5
(1,48-2,0)
2,2 (3,0) JJS-15
3,0-5,5
(4,0-7,5)
11–15
(15–20)
18,5-22
(25-30)
0,37 (0,5) gG-10
0,55 (0,74)
0,75 (1,0) JJN-15
1,1 (1,48)
1,5 (2,0)
0,37 (0,5) gG-10
0,55 (0,74)
0,75 (1,0) JJN-15
1,1 (1,48)
1,5 (2,0)
gG-10
gG-20
gG-25
gG-50 – JJS-50
gG-80 – JJS-80
gG-20
gG-25
gG-20
Disjoncteur non
conforme à UL
(Eaton)
PKZM0-16
PKZM0-20
PKZM0-16
PKZM0-20
PKZM0-16
Fusible UL
(Bussmann, classe T)
JJS-6
JJS-10
JJS-25
JJN-6
JJN-10
JJN-20
JJN-25
JJN-6
JJN-10
JJN-20
7 7
Tableau 7.6 Fusible et disjoncteur
Rendement
7.9
Rendement du variateur de fréquence (η
La charge du variateur de fréquence a peu d'inuence sur
son rendement. En général, le rendement résultant de la
fréquence nominale du moteur f
règle s'applique également que le moteur développe
100 % du couple nominal de l'arbre ou uniquement 75 %,
par exemple en cas de charges partielles.
Cela signie aussi que le rendement du variateur de
fréquence n'est pas modié en choisissant diérentes
caractéristiques tension/fréquence.
Ces dernières aectent cependant le rendement du
moteur.
Le rendement baisse un peu lorsque la fréquence de
commutation est réglée sur une valeur supérieure à la
valeur par défaut. Le rendement baisse également un peu
en présence d'une tension secteur de 480 V ou d'un câble
moteur dont la longueur dépasse 30 m (98,4 pi).
Calcul du rendement du variateur de fréquence
Calculer le rendement du variateur de fréquence à
diérentes charges selon l'Illustration 7.2. Multiplier le
facteur à l'Illustration 7.2 par le facteur de rendement
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 91
)
VLT
est identique. Cette
M,N
spécique répertorié dans les tableaux de spécications du
chapitre 7.1 Données électriques :
Illustration 7.2 Courbes de rendement typique
Rendement du moteur (η
MOTEUR
)
Le rendement d'un moteur raccordé à un variateur de
fréquence est lié au niveau de magnétisation. D'une
manière générale, on peut dire que ce rendement est
comparable à celui qui résulte d'une exploitation alimentée
par le secteur. Le rendement du moteur dépend de son
type.

Spécications
VLT® Midi Drive FC 280
Dans la plage de 75 à 100 % du couple nominal, le
rendement du moteur est pratiquement constant dans les
deux cas d'exploitation avec le variateur de fréquence et
avec l'alimentation directe par le secteur.
Lorsque l'on utilise des petits moteurs, l'inuence de la
caractéristique tension/fréquence sur le rendement est
marginale, mais avec les moteurs de 11 kW (14,8 HP) et
plus, les avantages sont signicatifs.
En général, la fréquence de commutation n'aecte pas le
L'auto-induction provoque un pic de tension moteur U
avant de se stabiliser à un niveau déterminé par la tension
présente dans le circuit intermédiaire. Le temps de montée
et le pic de tension U
vie du moteur. Un pic de tension trop élevé aecte les
moteurs dépourvus d'isolation de bobines entre phases.
Plus le câble du moteur est long, plus le temps de montée
et le pic de tension sont élevés.
•
inductance.
inuencent tous deux la durée de
PIC
PIC
rendement des petits moteurs. Le rendement des moteurs
à partir de 11 kW (14,8 HP) est amélioré (1-2 %), puisque la
sinusoïde du courant du moteur est presque parfaite à
fréquence de commutation élevée.
Rendement du système (η
SYSTÈME
)
Pour calculer le rendement du système, multiplier le
rendement du variateur de fréquence (η
rendement du moteur (η
77
η
SYSTÈME
= η
VLT
x η
MOTEUR
MOTEUR
) :
) par le
VLT
L'activation des IGBT cause un pic de tension sur les
bornes du moteur. Le VLT® Midi Drive FC 280 est conforme
aux exigences de la norme CEI 60034-25 concernant les
moteurs conçus pour être contrôlés par des variateurs de
fréquence. Le FC 280 est également conforme à la norme
CEI 60034-17 concernant les moteurs standard contrôlés
par des variateurs de fréquence.
Les données dU/dt suivantes sont mesurées du côté de la
borne du moteur :
7.10 Bruit acoustique
Le bruit acoustique du variateur de fréquence a 3
sources :
Bobines du circuit intermédiaire CC.
•
Ventilateur intégré.
•
Filtre RFI obstrué.
•
Valeurs de base mesurées à 1 m (3,3 pi) de l'unité :
Taille de
boîtier [kW
(HP)]
K1
0,37–2,2
(0,5–3,0)
K2
3,0–5,5 (4,0–7,5)
K3
7,5 (10)
K4
11–15 (15–20)
K5
18,5–22 (25–30)
Tableau 7.7 Valeurs de base mesurées
Conditions dU/dt
7.11
Vitesse du
ventilateur à
80 % [dBA]
41,4 42,7 33
50,3 54,3 32,9
51 54,2 33
59 61,1 32,9
64,6 65,6 32,9
Vitesse
maximale du
ventilateur
[dBA]
Bruit de fond
Quand un transistor est activé dans le pont du variateur de
fréquence, la tension appliquée au moteur augmente selon
un rapport dU/dt dépendant des facteurs suivants :
type de câble du moteur ;
•
section du câble du moteur ;
•
longueur du câble du moteur ;
•
câble du moteur blindé ou non ;
•
Longueur de
câble
[m (pi)]
5 (16,4) 400 0,0904 0,718 6,41
50 (164) 400 0,292 1,05 2,84
5 (16,4) 480 0,108 0,835 6,20
50 (164) 480 0,32 1,25 3,09
Tableau 7.8 Données dU/dt du FC 280, 2,2 kW (3,0 HP),
3 x 380-480 V
Longueur de
câble
[m (pi)]
5 (16,4) 400 0,096 0,632 5,31
50 (164) 400 0,306 0,99 2,58
5 (16,4) 480 0,118 0,694 4,67
50 (164) 480 0,308 1,18 3,05
Tableau 7.9 Données dU/dt du FC 280, 5,5 kW (7,5 HP),
3 x 380-480 V
Longueur
de câble
[m (pi)]
5 (16,4) 400 0,128 0,732 4,54
50 (164) 400 0,354 1,01 2,27
5 (16,4) 480 0,134 0,835 5,03
50 (164) 480 0,36 1,21 2,69
Tableau 7.10 Données dU/dt du FC 280, 7,5 kW (10 HP),
3 x 380-480 V
Tension
secteur
[V]
Tension
secteur
[V]
Tension
secteur
[V]
Temps de
montée
[μs]
Temps de
montée
[μs]
Temps de
montée
[μs]
U
[kV]
U
[kV]
U
[kV]
PIC
PIC
PIC
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
92 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
Switching Frequency [kHz]
Output Current
45C
50C
55C
130BE889.10
(1)
(2)
Spécications Manuel de conguration
Longueur de
câble
[m (pi)]
5 (16,4) 400 0,26 0,84 2,57
50 (164) 400 0,738 1,07 1,15
5 (16,4) 480 0,334 0,99 2,36
50 (164) 480 0,692 1,25 1,44
Tableau 7.11 Données dU/dt du FC 280, 15 kW (20 HP),
3 x 380-480 V
Longueur de
câble
[m (pi)]
5 (16,4) 400 0,258 0,652 2,01
50 (164) 400 0,38 1,03 2,15
5 (16,4) 480 0,258 0,752 2,34
50 (164) 480 0,4 1,23 2,42
Tableau 7.12 Données dU/dt du FC 280, 22 kW (30 HP),
3 x 380-480 V
Longueur de
câble
[m (pi)]
5 (16,4) 240 0,0712 0,484 5,44
50 (164) 240 0,224 0,594 2,11
Tableau 7.13 Données dU/dt du FC 280, 1,5 kW (2,0 HP),
3 x 200-240 V
Longueur de
câble
[m (pi)]
5 (16,4) 240 0,072 0,468 5,25
50 (164) 240 0,208 0,592 2,28
Tension
secteur
[V]
Tension
secteur
[V]
Tension
secteur
[V]
Tension
secteur
[V]
Temps de
montée
[μs]
Temps de
montée
[μs]
Temps de
montée
[μs]
Temps de
montée
[μs]
U
[kV]
U
[kV]
U
PIC
[kV]
U
PIC
[kV]
PIC
PIC
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
Longueur de
câble
[m (pi)]
5 (16,4) 240 0,112 0,368 2,64
50 (164) 240 0,116 0,362 2,51
Tableau 7.17 Données dU/dt du FC 280, 2,2 kW (3,0 HP),
1 x 200-240 V
Tension
secteur
[V]
Temps de
montée
[μs]
U
[kV]
PIC
dU/dt
[kV/μs]
7.12 Exigences particulières
Dans certaines conditions, où l'exploitation du variateur de
fréquence est complexe, on peut envisager un déclassement. Parfois, ce déclassement doit être réalisé
manuellement.
Dans d'autres conditions, le variateur de fréquence eectue
automatiquement un déclassement si nécessaire. Le déclassement permet de garantir les performances à des étapes
critiques, où l'arrêt constituerait une alternative.
7.12.1 Déclassement manuel
Le déclassement manuel est à envisager dans les cas
suivants :
Pression atmosphérique : pour une installation à
•
des altitudes supérieures à 1000 m (3281 pi)
Vitesse du moteur : lors d'une exploitation
•
continue à bas régime dans des applications à
couple constant
Température ambiante : plus de 45 °C (113 °F).
•
Pour plus de détails, se reporter aux
Illustration 7.3 à Illustration 7.12.
7 7
Tableau 7.14 Données dU/dt du FC 280, 2,2 kW (3,0 HP),
3 x 200-240 V
Longueur de
câble
[m (pi)]
5 (16,4) 240 0,092 0,526 4,56
50 (164) 240 0,28 0,6 1,72
Tableau 7.15 Données dU/dt du FC 280, 3,7 kW (5,0 HP),
3 x 200-240 V
Longueur de
câble
[m (pi)]
5 (16,4) 240 0,088 0,414 3,79
50 (164) 240 0,196 0,593 2,41
Tableau 7.16 Données dU/dt du FC 280, 1,5 kW (2,0 HP),
1 x 200-240 V
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 93
Tension
secteur
[V]
Tension
secteur
[V]
Temps de
montée
[μs]
Temps de
montée
[μs]
U
PIC
[kV]
U
PIC
[kV]
dU/dt
[kV/μs]
dU/dt
[kV/μs]
(1) Courant de sortie
(2) Fréquence de commutation [kHz]
Illustration 7.3 Courbe de déclassement K1T4

0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BE890.10
(1) Output Current
(2) Switching Frequency [kHz]
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BE891.10
(2) Switching Frequency [kHz]
(1) Output Current
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BE892.10
(2) Switching Frequency [kHz]
(1) Output Current
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BE893.10
(1) Output Current
(2) Switching Frequency [kHz]
Spécications
VLT® Midi Drive FC 280
(1) Courant de sortie
(2) Fréquence de commutation [kHz]
(2) Fréquence de commutation [kHz]
Illustration 7.6 Courbe de déclassement K4T4
(1) Courant de sortie
77
Illustration 7.4 Courbe de déclassement K2T4
(1) Courant de sortie
(2) Fréquence de commutation [kHz]
(1) Courant de sortie
(2) Fréquence de commutation [kHz]
Illustration 7.7 Courbe de déclassement K5T4
Illustration 7.5 Courbe de déclassement K3T4
94 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BF104.10
(1) Output Current
(2) Switching Frequency [kHz]
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BF105.10
(1) Output Current
(2) Switching Frequency [kHz]
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BF106.10
(1) Output Current
(2) Switching Frequency [kHz]
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BF107.10
(1) Output Current
(2) Switching Frequency [kHz]
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BF107.10
(1) Output Current
(2) Switching Frequency [kHz]
Spécications Manuel de conguration
(1) Courant de sortie
(2) Fréquence de commutation [kHz]
Illustration 7.8 Courbe de déclassement K1T2
(1) Courant de sortie
(2) Fréquence de commutation [kHz]
Illustration 7.9 Courbe de déclassement K2T2
(1) Courant de sortie
(2) Fréquence de commutation [kHz]
Illustration 7.11 Courbe de déclassement K1S2
7 7
(1) Courant de sortie
(2) Fréquence de commutation [kHz]
(1) Courant de sortie
(2) Fréquence de commutation [kHz]
Illustration 7.10 Courbe de déclassement K3T2
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 95
Illustration 7.12 Courbe de déclassement K2S2
AVIS!
La fréquence de commutation nominale est de 6 kHz
pour K1-K3, 5 kHz pour K4-K5.
7.12.2 Déclassement automatique
Le variateur de fréquence vérie constamment les niveaux
critiques :
température trop élevée sur le dissipateur de
•
chaleur ;
charge moteur élevée ;
•
vitesse du moteur faible ;
•
signaux de protection(surtension/sous-tension,
•
surcourant, défaut de mise à la terre et courtcircuit) enclenchés.

Spécications
VLT® Midi Drive FC 280
En réponse à un niveau critique, le variateur de fréquence
ajuste la fréquence de commutation.
7.13 Tailles de boîtier, puissances nominales et dimensions
Puissance [kW
(HP)]
77
Dimensions
[mm (po)]
Poids
[kg (lb)]
Trous de
xation [mm
(po)]
Taille de
boîtier
Monophasé
200-240 V
Triphasé
200-240 V
Triphasé
380-480 V
Hauteur A1 210 (8,3) 272,5 (10,7)
Hauteur A2 278 (10,9) 340 (13,4)
Largeur B 75 (3,0) 90 (3,5) 115 (4,5) 133 (5,2) 150 (5,9)
Profondeur C 168 (6,6) 168 (6,6) 168 (6,6) 245 (9,6) 245 (9,6)
Hauteur A 338,5 (13,3) 395 (15,6)
Largeur B 100 (3,9) 115 (4,5) 130 (5,1) 153 (6,0) 170 (6,7)
Profondeur C 183 (7,2) 183 (7,2) 183 (7,2) 260 (10,2) 260 (10,2)
Hauteur A 294 (11,6) 356 (14)
Largeur B 75 (3,0) 90 (3,5) 115 (4,5) 133 (5,2) 150 (5,9)
Profondeur C 168 (6,6) 168 (6,6) 168 (6,6) 245 (9,6) 245 (9,6)
IP20 2,5 (5,5) 3,6 (7,9)
IP21 4,0 (8,8) 5,5 (12,1)
a 198 (7,8) 260 (10,2)
f 60 (2,4) 70 (2,8) 90 (3,5) 105 (4,1) 120 (4,7)
c 5 (0,2) 6,4 (0,25)
d 9 (0,35) 11 (0,43) 11 (0,43) 12,4 (0,49) 12,6 (0,5)
e 4,5 (0,18) 5,5 (0,22)
f 7,3 (0,29) 8,1 (0,32)
0,37
(0,5)
0,37
(0,5)
0,37
(0,5)
0,55
(0,75)
0,55
(0,75)
0,55
(0,75)
FC 280 avec couvercle d'entrée de câble inférieur (sans couvercle supérieur)
K1 K2 K3 K4 K5
0,75
(1,0)
0,75
(1,0)
0,75
(1,0)
1,1
(1,5)
1,1
(1,5)
1,1
(1,5)
FC 280 avec kit IP21/UL/Type 1
1,5
(2,0)
1,5
(2,0)
1,5
(2,0)
FC 280 IP20
2,2
(3,0)
3
(4,0
2,2
(3,0)
2,2
(3,0)
4
5,5
(5,5)
)
(7,5)
– – –
3,7
(5,0)
7,5
(10)11(15)15(20)
272,5
(10,7)
341,5
(13,4)
395
(15,6)
357
(14,1)
4,6
(10,1)
6,5
(14,3)
260
(10,2)
6,5
(0,26)
5,5
(0,22)
9,2
(0,36)
– –
317,5
(12,5)
379,5
(14,9)
425 (16,7) 520 (20,5)
391 (15,4) 486 (19,1)
8,2 (18,1) 11,5 (25,4)
10,5 (23,1) 14,0 (30,9)
297,5
(11,7)
8 (0,32) 7,8 (0,31)
6,8 (0,27) 7 (0,28)
11 (0,43) 11,2 (0,44)
18,5
(25)22(30)
410 (16,1)
474 (18,7)
390 (15,4)
Tableau 7.18 Tailles de boîtier, puissances nominales et dimensions
96 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304

130BE844.11
B
C
A1
A2
130BE846.10
B
A
C
Spécications Manuel de conguration
7 7
Illustration 7.13 Standard avec plaque de connexion à la terre
Illustration 7.14 Standard avec couvercle d'entrée de câble inférieur (sans couvercle supérieur)
MG07B304 Danfoss A/S © 05/2017 Tous droits réservés. 97

B
C
A
130BE845.10
C
a
b
130BA648.12
f
e
B
A
a
d
e
b
c
Spécications
VLT® Midi Drive FC 280
77
Illustration 7.15 Standard avec kit IP21/UL/Type 1
Illustration 7.16 Trous de xation supérieurs et inférieurs
98 Danfoss A/S © 05/2017 Tous droits réservés. MG07B304
 Loading...
Loading...