

Page 1

ENGINEERING TOMORROW
Guida alla Progettazione
VLT® Midi Drive FC 280
www.danfoss.it/vlt-drives
Page 2

Page 3
Sommario Guida alla Progettazione
Sommario
1 Introduzione
1.1 Scopo della Guida alla Progettazione
1.2 Risorse aggiuntive
1.3 Denizioni
1.4 Versione del documento e del software
1.5 Approvazioni e certicazioni
1.6 Sicurezza
2 Panoramica del prodotto
2.1 Panoramica sulle dimensioni del contenitore
2.2 Installazione elettrica
2.2.1 Collegamento del motore 15
2.2.2 Collegamento di rete CA 16
2.2.3 Tipi di morsetti di controllo 17
2.2.4 Collegamento ai morsetti di controllo 18
2.3 Strutture di controllo
2.3.1 Modalità di controllo 18
2.3.2 Principio di regolazione 20
2.3.3 Struttura di controllo in VVC
2.3.4 Regolatore di corrente interno in modalità VVC
5
5
5
5
8
8
9
10
10
13
18
+
+
20
21
2.3.5 Comando locale (Hand On) e remoto (Auto On) 21
2.4 Gestione dei riferimenti
2.4.1 Limiti riferimento 23
2.4.2 Messa in scala dei riferimenti preimpostati e dei riferimenti bus 24
2.4.3 Scala dei riferimenti impulsi e analogici e retroazione 24
2.4.4 Banda morta nell'intorno dello zero 25
2.5 Controllo PID
2.5.1 Regolatore di velocità PID 28
2.5.2 PID controllo di processo 31
2.5.3 Parametri rilevanti nel controllo di processo 32
2.5.4 Esempio di un PID controllo di processo 33
2.5.5 Ottimizzazione controllore di processo 35
2.5.6 Metodo di taratura Ziegler Nichols 36
2.6 Emissioni EMC e immunità
2.6.1 Considerazioni generali sulle emissioni EMC 36
2.6.2 Emissioni EMC 38
2.6.3 Immunità EMC 39
22
28
36
2.7 Isolamento galvanico
2.8 Corrente di dispersione verso terra
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 1
41
42
Page 4
Sommario
VLT® Midi Drive FC 280
2.9 Funzioni freno
2.9.1 Freno di stazionamento meccanico 43
2.9.2 Frenatura dinamica 43
2.9.3 Selezione della resistenza di frenatura 43
2.10 Isolamento del motore
2.10.1 Filtri sinusoidali 45
2.10.2 Filtri dU/dt 45
2.11 Smart Logic Controller
2.12 Condizioni di funzionamento estreme
2.12.1 Protezione termica del motore 47
3 Esempi applicativi
3.1 Introduzione
3.1.1 Collegamento encoder 49
3.1.2 Direzione dell'encoder 49
3.1.3 Sistema convertitore ad anello chiuso 49
3.2 Esempi applicativi
3.2.1 AMA 50
43
45
46
46
49
49
50
3.2.2 Velocità 50
3.2.3 Avviamento/arresto 51
3.2.4 Ripristino allarmi esterni 52
3.2.5 Termistore motore 52
3.2.6 SLC 52
4 Safe Torque O (STO)
5 Installazione e setup dell'RS485
5.1 Introduzione
5.1.1 Panoramica 55
5.1.2 Collegamento in rete 56
5.1.3 Setup hardware 56
5.1.4 Impostazione parametri per comunicazione Modbus 56
5.1.5 Precauzioni EMC 56
5.2 Protocollo FC
5.2.1 Panoramica 56
5.2.2 FC con Modbus RTU 57
54
55
55
56
5.3 Congurazione della rete
5.4 Struttura frame messaggio protocollo FC
5.4.1 Contenuto di un carattere (byte) 57
5.4.2 Struttura del telegramma 57
5.4.3 Lunghezza del telegramma (LGE) 57
2 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
57
57
Page 5
Sommario Guida alla Progettazione
5.4.4 Indirizzo del convertitore di frequenza (ADR) 58
5.4.5 Byte di controllo dati (BCC) 58
5.4.6 Il campo dati 58
5.4.7 Il campo PKE 58
5.4.8 Numero di parametro (PNU) 59
5.4.9 Indice (IND) 59
5.4.10 Valore del parametro (PWE) 59
5.4.11 Tipi di dati supportati dal convertitore di frequenza 59
5.4.12 Conversione 60
5.4.13 Parole di processo (PCD) 60
5.5 Esempi
5.5.1 Scrittura di un valore di parametro 60
5.5.2 Lettura di un valore del parametro 60
5.6 Modbus RTU
5.6.1 Conoscenze premesse 61
5.6.2 Panoramica 61
5.6.3 Convertitore di frequenza con Modbus RTU 61
5.7 Congurazione della rete
5.8 Struttura frame messaggio Modbus RTU
5.8.1 Introduzione 62
5.8.2 Struttura del telegramma Modbus RTU 62
5.8.3 Campo Start/Stop 62
5.8.4 Campo di indirizzo 63
5.8.5 Campo funzione 63
5.8.6 Campo dati 63
5.8.7 Campo di controllo CRC 63
5.8.8 Indirizzamento del registro di bobina 63
60
61
62
62
5.8.9 Controllo del convertitore di frequenza 65
5.8.10 Codici funzione supportati da Modbus RTU 65
5.8.11 Codici di eccezione Modbus 66
5.9 Come accedere ai parametri
5.9.1 Gestione dei parametri 66
5.9.2 Memorizzazione di dati 66
5.9.3 IND (Index) 67
5.9.4 Blocchi di testo 67
5.9.5 Fattore di conversione 67
5.9.6 Valori dei parametri 67
5.10 Esempi
5.10.1 Lettura stato bobine (01 hex) 67
5.10.2 Forza/Scrivi bobina singola (05 hex) 68
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 3
66
67
Page 6
Sommario
VLT® Midi Drive FC 280
5.10.3 Forza/Scrivi bobine multiple (0F hex) 68
5.10.4 Lettura dei registri di mantenimento (03 hex) 68
5.10.5 Preimposta registro singolo (06 hex) 69
5.10.6 Preimposta registri multipli (10 hex) 69
5.11 Prolo di controllo FC Danfoss
5.11.1 Parola di controllo secondo il Prolo FC (Protocollo 8-10 = Prolo FC) 70
5.11.2 Parola di stato secondo il prolo FC (STW) 71
5.11.3 Valore di riferimento della velocità bus 73
6 Codice tipo e guida alla selezione
6.1 Codice identicativo
6.2 Numeri d'ordine: opzioni, accessori e ricambi
6.3 Numeri d'ordine: Resistenze di frenatura
6.3.1 Numeri d'ordine: resistenze di frenatura 10% 76
6.3.2 Numeri d'ordine: resistenze di frenatura 40% 78
6.4 Numeri d'ordine: ltri sinusoidali
6.5 Numeri d'ordine: ltri dU/dt
6.6 Numeri d'ordine: ltri EMC esterni
7 Speciche
7.1 Dati elettrici
7.2 Alimentazione di rete
70
74
74
74
75
79
80
80
83
83
85
7.3 Uscita motore e dati motore
7.4 Condizioni ambientali
7.5 Speciche dei cavi
7.6 Ingresso/uscita di controllo e dati di controllo
7.7 Coppie di serraggio delle connessioni
7.8 Fusibili e interruttori
7.9 Rendimento
7.10 Rumorosità acustica
7.11 Condizioni dU/dt
7.12 Condizioni speciali
7.12.1 Declassamento manuale 93
7.12.2 Declassamento automatico 96
7.13 Dimensioni contenitore, potenze nominali e dimensioni
Indice
86
86
87
87
90
90
91
92
92
93
97
100
4 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 7
Introduzione Guida alla Progettazione
1 Introduzione
1.1 Scopo della Guida alla Progettazione
La presente Guida alla Progettazione è concepita per
progettisti e sistemisti, consulenti di progettazione e
specialisti delle applicazioni e di prodotto. Questo
documento fornisce informazioni tecniche per
comprendere le capacità del convertitore di frequenza per
l'integrazione nel controllo del motore e nei sistemi di
monitoraggio. Sono inoltre presenti descrizioni dettagliate
del funzionamento, i requisiti e i suggerimenti per l'integrazione del sistema. È possibile trovare informazioni sulle
caratteristiche della potenza di ingresso, sull'uscita per il
controllo del motore e sulle condizioni dell'ambiente di
esercizio per il convertitore di frequenza.
Sono altresì presenti:
Caratteristiche di sicurezza.
•
Monitoraggio delle condizioni di guasto.
•
Segnalazione dello stato di funzionamento.
•
Capacità di comunicazione seriale.
•
Opzioni e caratteristiche programmabili.
•
Sono inoltre fornite informazioni dettagliate sulla progettazione, quali requisiti del luogo di installazione, cavi,
fusibili, cavi di controllo, dimensioni e peso delle unità, e
altre informazioni essenziali necessarie per la
dell'integrazione del sistema.
Il riesame delle informazioni di prodotto dettagliate nella
fase di progettazione consente di sviluppare un sistema
ben concepito con funzionalità ed ecienza ottimali.
pianicazione
Denizioni
1.3
1.3.1 Convertitore di frequenza
Ruota libera
L'albero motore è in evoluzione libera. Nessuna coppia sul
motore.
I
VLT,MAX
Corrente di uscita massima.
I
VLT,N
Corrente di uscita nominale fornita dal convertitore di
frequenza.
U
VLT,MAX
Tensione di uscita massima.
1.3.2 Ingresso
Comandi di controllo
Avviare e arrestare il motore collegato mediante l'LCP e gli
ingressi digitali.
Le funzioni sono divise in 2 gruppi.
Le funzioni nel gruppo 1 hanno una priorità maggiore
rispetto a quelle nel gruppo 2.
Gruppo 1 Arresto di precisione, arresto a ruota libera e
ripristino, arresto di precisione e arresto a ruota
libera, arresto rapido, frenatura CC, arresto e [OFF].
Gruppo 2 Avvio, avviamento a impulsi, inversione, avvio
inverso, jog e uscita congelata.
Tabella 1.1 Gruppi di funzioni
1 1
VLT® è un marchio registrato.
Risorse aggiuntive
1.2
Risorse disponibili per comprendere il funzionamento e la
programmazione del convertitore di frequenza:
La Guida operativa VLT® Midi Drive FC 280
•
fornisce informazioni relative a installazione,
messa in funzione, applicazione e manutenzione
del convertitore di frequenza.
La Guida alla Programmazione VLT® Midi Drive FC
•
280 fornisce informazioni sulla programmazione e
comprende descrizioni complete dei parametri.
Pubblicazioni e manuali supplementari sono disponibili su
Danfoss. Vedere drives.danfoss.com/knowledge-center/
technical-documentation/ per gli elenchi.
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 5
1.3.3 Motore
Motore in funzione
Coppia generata sull'albero di trasmissione e velocità da 0
giri/min. alla velocità massima sul motore.
f
JOG
Frequenza motore quando viene attivata la funzione jog
(mediante bus o morsetti digitali).
f
M
Frequenza motore.
f
MAX
Frequenza motore massima.
f
MIN
Frequenza motore minima.
f
M,N
Frequenza nominale del motore (dati di targa).
I
M
Corrente motore (eettiva).
Page 8
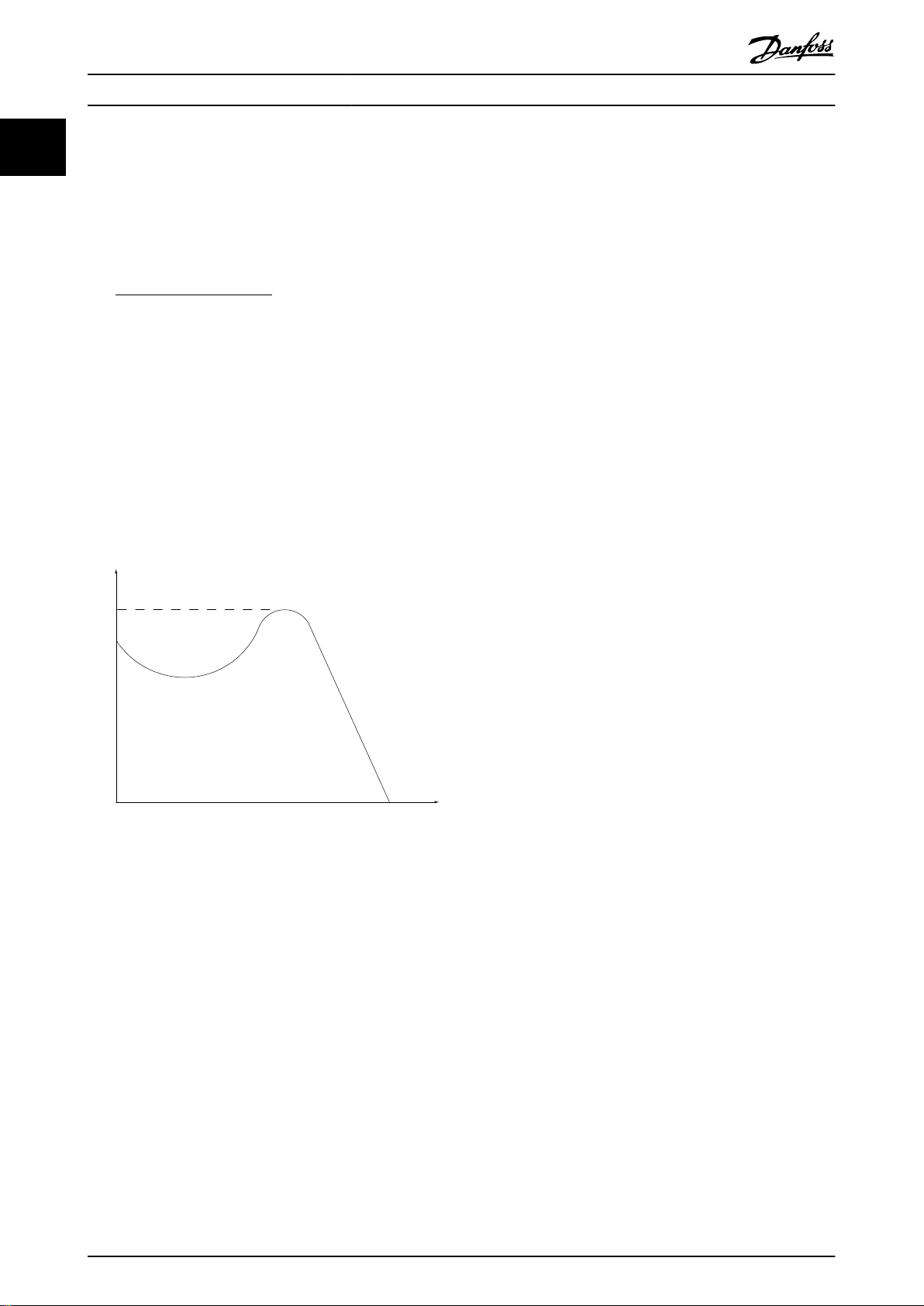
175ZA078.10
Coppia massima
Giri / min.
Coppia
Introduzione
VLT® Midi Drive FC 280
11
I
M,N
Corrente nominale del motore (dati di targa).
n
M,N
Velocità nominale del motore (dati di targa).
n
s
Velocità del motore sincrono.
2 × Parametro 1−23 × 60s
ns=
n
slip
Parametro 1−39
Scorrimento del motore.
P
M,N
Potenza nominale del motore (dati di targa in kW o cv).
T
M,N
Coppia nominale (motore).
U
M
Tensione motore istantanea.
U
M,N
Tensione nominale del motore (dati di targa).
Coppia di interruzione
Riferimento binario
Segnale trasmesso tramite la porta di comunicazione
seriale.
Riferimento preimpostato
Un riferimento preimpostato denito che può essere
impostato tra -100% e +100% dell'intervallo di riferimento.
Selezione di otto riferimenti preimpostati mediante i
morsetti digitali. Selezione di quattro riferimenti
preimpostati tramite il bus.
Riferimento impulsi
Segnale a impulsi di frequenza trasmesso agli ingressi
digitali (morsetto 29 o 33).
Ref
MAX
Determina la relazione tra l'ingresso di riferimento al 100%
del valore di fondo scala (tipicamente 10 V, 20 mA) e il
riferimento risultante. Il valore di riferimento massimo è
impostato in parametro 3-03 Riferimento max..
Ref
MIN
Determina la relazione tra l'ingresso di riferimento allo 0%
del valore (tipicamente 0 V, 0 mA, 4 mA) e il riferimento
risultante. Il valore di riferimento minimo è impostato in
parametro 3-02 Riferimento minimo.
Disegno 1.1 Coppia di interruzione
η
VLT
L'ecienza del convertitore di frequenza è denita come il
rapporto tra la potenza di uscita e quella di ingresso.
Comando per disabilitare l'avviamento
Comando per disabilitare l'avviamento appartenente ai
comandi di controllo nel gruppo 1. Per maggiori dettagli
vedere Tabella 1.1.
Comando di arresto
Comando di arresto appartenente ai comandi di controllo
nel gruppo 1. Per maggiori dettagli vedere Tabella 1.1.
1.3.4 Riferimenti
Riferimento analogico
Un segnale trasmesso agli ingressi analogici 53 o 54 può
essere in tensione o in corrente.
1.3.5 Varie
Ingressi analogici
Gli ingressi analogici vengono utilizzati per controllare varie
funzioni del convertitore di frequenza.
Esistono due tipi di ingressi analogici:
Ingresso in corrente: 0–20 mA e 4–20 mA.
•
Ingresso in tensione: 0–10 V CC.
•
Uscite analogiche
Le uscite analogiche sono in grado di fornire un segnale di
0–20 mA oppure 4–20 mA.
Adattamento automatico motore, AMA
L'algoritmo AMA determina i parametri elettrici del motore
collegato durante il suo arresto.
Resistenza di frenatura
La resistenza di frenatura è un modulo in grado di
assorbire la potenza freno generata nella fase di frenatura
rigenerativa. Questa potenza di frenatura rigenerativa
aumenta la tensione del collegamento CC e un chopper di
frenatura assicura che la potenza venga trasmessa alla
resistenza di frenatura.
Caratteristiche CT
Caratteristiche della coppia costante, usate per tutte le
applicazioni quali nastri trasportatori, pompe di trasferimento e gru.
Ingressi digitali
Gli ingressi digitali consentono di controllare varie funzioni
del convertitore di frequenza.
6 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 9

Introduzione Guida alla Progettazione
Uscite digitali
Il convertitore di frequenza presenta due stadi di uscita a
stato solido che sono in grado di fornire un segnale a 24 V
CC (massimo 40 mA).
DSP
Processore di segnali digitali.
ETR
Il relè termico elettronico è un calcolo del carico termico
basato sul carico corrente e sul tempo. È volto a stimare la
temperatura del motore.
Bus standard FC
Include il bus RS485 con protocollo FC o protocollo MC.
Vedere parametro 8-30 Protocol.
Inizializzazione
Se viene eseguita un'inizializzazione
(parametro 14-22 Operation Mode), il convertitore di
frequenza ritorna all'impostazione di fabbrica.
Duty cycle intermittente
Un ciclo di utilizzo intermittente fa riferimento a una
sequenza di duty cycle. Ogni ciclo è costituito da un
periodo a carico e da un periodo a vuoto. Il funzionamento
può avvenire con servizio periodico o aperiodico.
LCP
Il pannello di controllo locale rappresenta un'interfaccia
completa per il controllo e la programmazione del convertitore di frequenza. L'LCP è estraibile. Con il kit di
installazione in opzione è possibile installare l'LCP su un
pannello frontale a una distanza massima di 3 m (9,8 piedi)
dal convertitore di frequenza.
NLCP
Interfaccia del pannello di controllo locale numerico per il
controllo e la programmazione del convertitore di
frequenza. Il display è numerico e il pannello viene
utilizzato per mostrare i valori di processo. L'NLCP possiede
funzioni di memorizzazione e copia.
GLCP
Interfaccia del pannello di controllo locale graco per il
controllo e la programmazione del convertitore di
frequenza. Il display è graco e il pannello è usato per
mostrare I valori di processo. Il GLCP possiede funzioni di
memorizzazione e copia.
lsb
Bit meno signicativo.
msb
Bit più signicativo.
MCM
Abbreviazione di Mille Circular Mil, un'unità di misura
americana della sezione trasversale dei cavi. 1 MCM ≡
0,5067 mm2.
Parametri online/oine
Le modiche ai parametri online vengono attivate
immediatamente dopo la variazione del valore dei dati. Per
attivare le modiche ai parametri oine premere [OK].
PID di processo
Il controllo PID mantiene velocità, pressione e temperatura
regolando la frequenza di uscita in base alle variazioni del
carico.
PCD
Dati del controllo di processo.
PFC
Correzione del fattore di potenza.
Spegnere e riaccendere
Disinserire l'alimentazione di rete no a quando il display
(LCP) non si spegne, quindi reinserirla.
Fattore di potenza
Il fattore di potenza indica la relazione fra I1 e I
Fattoredi potenza =
Per i convertitori di frequenza FC 280
Fattoredi potenza =
3xUxI1cosϕ1
3xUxI
I1xcosϕ1
I
RMS
RMS
=
I
I
RMS
cosϕ
1
.
RMS
1 = 1, pertanto:
Il fattore di potenza indica in che misura il convertitore di
frequenza impone un carico sull'alimentazione di rete.
Quanto minore è il fattore di potenza, tanto maggiore è la
corrente di ingresso I
2
I
RMS
=
I
+ I
1
2
5
per lo stesso rendimento in kW.
RMS
+ I
2
+ .. + I
7
2
n
Un fattore di potenza elevato indica inoltre che le dierenti
correnti armoniche sono basse.
Le bobine CC integrate (T2/T4) e PFC (S2) producono un
elevato fattore di potenza, riducendo al minimo il carico
applicato sull'alimentazione di rete.
Ingresso a impulsi/encoder incrementale
Trasmettitore di impulsi esterno usato per retroazionare
informazioni sulla velocità del motore. L'encoder viene
usato nelle applicazioni che richiedono una grande
precisione nel controllo di velocità.
RCD
Dispositivo a corrente residua.
Setup
Salvare le impostazioni parametri in quattro setup.
Scegliere tra le quattro programmazioni parametri e
modicarne una soltanto quando questa è inattiva.
SFAVM
Acronimo che descrive la modulazione vettoriale asincrona
orientata secondo il usso dello statore del modello di
commutazione.
Compensazione dello scorrimento
Il convertitore di frequenza compensa lo scorrimento del
motore integrando la frequenza in base al carico rilevato
del motore, mantenendo costante la velocità del motore.
Smart logic control (SLC)
L'SLC è una sequenza di azioni denite dall'utente eseguite
quando gli eventi associati deniti dall'utente sono valutati
come TRUE dal Controllore smart logic (Gruppo di parametri
13-** Smart Logic).
1 1
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 7
Page 10
Introduzione
VLT® Midi Drive FC 280
11
STW
Parola di stato.
THD
La distorsione armonica totale indica il contributo totale
della distorsione armonica.
Termistore
Resistenza dipendente dalla temperatura, installata nei
punti in cui viene controllata la temperatura (convertitore
di frequenza o motore).
Scatto
Lo scatto è uno stato che si verica in situazioni di guasto.
Esempi di situazioni di guasto:
Il convertitore di frequenza è soggetto a
•
sovratensione.
Il convertitore di frequenza protegge il motore, il
•
processo o il meccanismo.
Il riavvio viene impedito nché la causa del guasto non è
scomparsa e lo stato di scatto viene annullato attivando il
ripristino oppure, talvolta, tramite la programmazione di
ripristino automatico. Non usare lo scatto per la sicurezza
personale.
Scatto bloccato
Lo scatto bloccato è uno stato che si verica in situazioni
di guasto quando il convertitore di frequenza entra in
autoprotezione e richiede un intervento manuale. Ad
esempio, un cortocircuito nell'uscita attiva uno scatto
bloccato. È possibile annullare uno scatto bloccato
scollegando la rete, eliminando la causa del guasto e
ricollegando il convertitore di frequenza all'alimentazione. Il
riavvio viene impedito no a che lo stato di scatto non
viene annullato attivando il ripristino o, talvolta, tramite
programmazione di ripristino automatico. Non usare lo
scatto bloccato per la sicurezza personale.
Caratteristiche VT
Caratteristiche coppia variabile utilizzate per pompe e
ventole.
+
VVC
Rispetto al controllo tradizionale del rapporto tensione/
frequenza, il controllo vettoriale della tensione (VVC+)
una maggiore dinamicità e stabilità in caso di variazioni del
riferimento di velocità e in funzione della coppia di carico.
60° AVM
Fare riferimento al modello di commutazione Modulazione
vettoriale asincrona 60°.
Versione del documento e del software
1.4
ore
Edizione Osservazioni
MG07B3
Tabella 1.2 Versione del documento e del software
Maggiori informazioni per POWERLINK
e aggiornamento del software.
1.5 Approvazioni e certicazioni
I convertitori di frequenza sono progettati in conformità
alle direttive descritte in questa sezione.
1.5.1 Marchio CE
Il marchio CE (Comunità Europea) indica che il fabbricante
del prodotto rispetta tutte le direttive UE pertinenti.
Le direttive UE applicabili alla progettazione e alla
produzione di convertitori di frequenza sono:
Direttiva sulla bassa tensione.
•
Direttiva EMC.
•
Direttiva macchine (per unità con una funzione di
•
sicurezza integrata).
Il marchio CE si propone di eliminare le barriere tecniche
per il commercio libero tra gli stati CE e gli stati membri
dell'associazione europea di libero scambio (EFTA)
all'interno dell'unità di conto europea (ECU). Il marchio CE
non regola la qualità del prodotto. Le
non possono essere dedotte dal marchio CE.
speciche tecniche
1.5.2 Direttiva sulla bassa tensione
I convertitori di frequenza sono classicati come
componenti elettronici e devono essere dotati di marchio
CE in conformità alla Direttiva sulla bassa tensione. La
direttiva concerne tutte le apparecchiature elettriche
funzionanti negli intervalli di tensione compresi fra 50 e
1000 V CA e fra 75 e 1500 V CC.
La direttiva aerma che le apparecchiature devono essere
congurate in modo da garantire la sicurezza e la salute di
persone e animali, la salvaguardia del materiale, facendo in
modo che l'apparecchiatura sia installata, sottoposta a
manutenzione e utilizzata correttamente come previsto.
Danfoss I marchi CE sono conformi alla Direttiva sulla bassa
tensione e, su richiesta, Danfoss fornisce una dichiarazione
di conformità.
Versione
software
1.3
Il presente manuale è revisionato e aggiornato
regolarmente. Sono bene accetti tutti i suggerimenti di
eventuali migliorie. Tabella 1.2 mostra la versione del
documento e la versione software corrispondente.
8 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 11
Introduzione Guida alla Progettazione
1.5.3 Direttiva EMC
Compatibilità elettromagnetica (EMC) signica che l'interferenza elettromagnetica tra i singoli apparecchi non ne
impedisce il funzionamento. Il requisito di protezione di
base della Direttiva EMC 2014/30/UE aerma che i
dispositivi che generano interferenza elettromagnetica
(EMI) o il cui funzionamento potrebbe essere soggetto a
interferenze elettromagnetiche devono essere progettati
per limitare la generazione di interferenze elettromagnetiche e devono avere un livello adeguato di immunità
alle interferenze elettromagnetiche quando sono installati,
sottoposti a manutenzione e usati correttamente come
previsto.
Il convertitore di frequenza può essere usato come
dispositivo standalone oppure all'interno di un impianto
più complesso. In ogni caso, i dispositivi devono essere
contrassegnati dal marchio CE. I sistemi non devono recare
il marchio CE ma devono soddisfare i requisiti di
protezione di base della direttiva EMC.
1.5.4 Conformità UL
Sicurezza
1.6
I convertitore di frequenza contengono componenti ad alta
tensione e hanno il potenziale di provocare lesioni letali se
usati in modo improprio. Soltanto il personale qualicato è
autorizzato a installare e a far funzionare l'apparecchiatura.
Non tentare di eettuare lavori di riparazione senza prima
staccare il convertitore di frequenza dall'alimentazione
elettrica e attendere il tempo prescritto no alla
dissipazione dell'energia elettrica accumulata.
Fare riferimento al Manuale di funzionamento spedito
insieme all'unità e disponibile online per:
Tempo di scarica.
•
Istruzioni di sicurezza e avvertenze dettagliate.
•
È obbligatorio osservare rigorosamente le precauzioni di
sicurezza e le note sulla sicurezza per assicurare un funzionamento sicuro del convertitore di frequenza.
1 1
Certicato UL
Disegno 1.2 UL
Norme applicate e conformità per STO
L'uso di STO sui morsetti 37 e 38 richiede che siano
soddisfatte tutte le norme di sicurezza, incluse le leggi, i
regolamenti e le direttive vigenti. La funzione STO
integrata è conforme alle seguenti norme:
IEC/EN 61508:2010, SIL2;
•
IEC/EN 61800-5-2:2007, SIL2;
•
IEC/EN 62061:2015, SILCL di SIL2;
•
EN ISO 13849-1:2015, categoria 3 PL d.
•
I convertitori di frequenza possono essere soggetti a
regolamentazioni sul controllo delle esportazioni locali e/o
nazionali.
Si utilizza un numero ECCN per classicare tutti i convertitori di frequenza soggetti a regolamentazioni sul controllo
delle esportazioni.
Il numero ECCN è indicato nei documenti forniti insieme al
convertitore di frequenza.
In caso di riesportazione, l'esportatore è tenuto ad
assicurare la conformità alle regolamentazioni sul controllo
delle esportazioni pertinenti.
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 9
Page 12
130BA870.10
130BA809.10
130BA810.10
130BA810.10
130BA810.10
Panoramica del prodotto
VLT® Midi Drive FC 280
2 Panoramica del prodotto
22
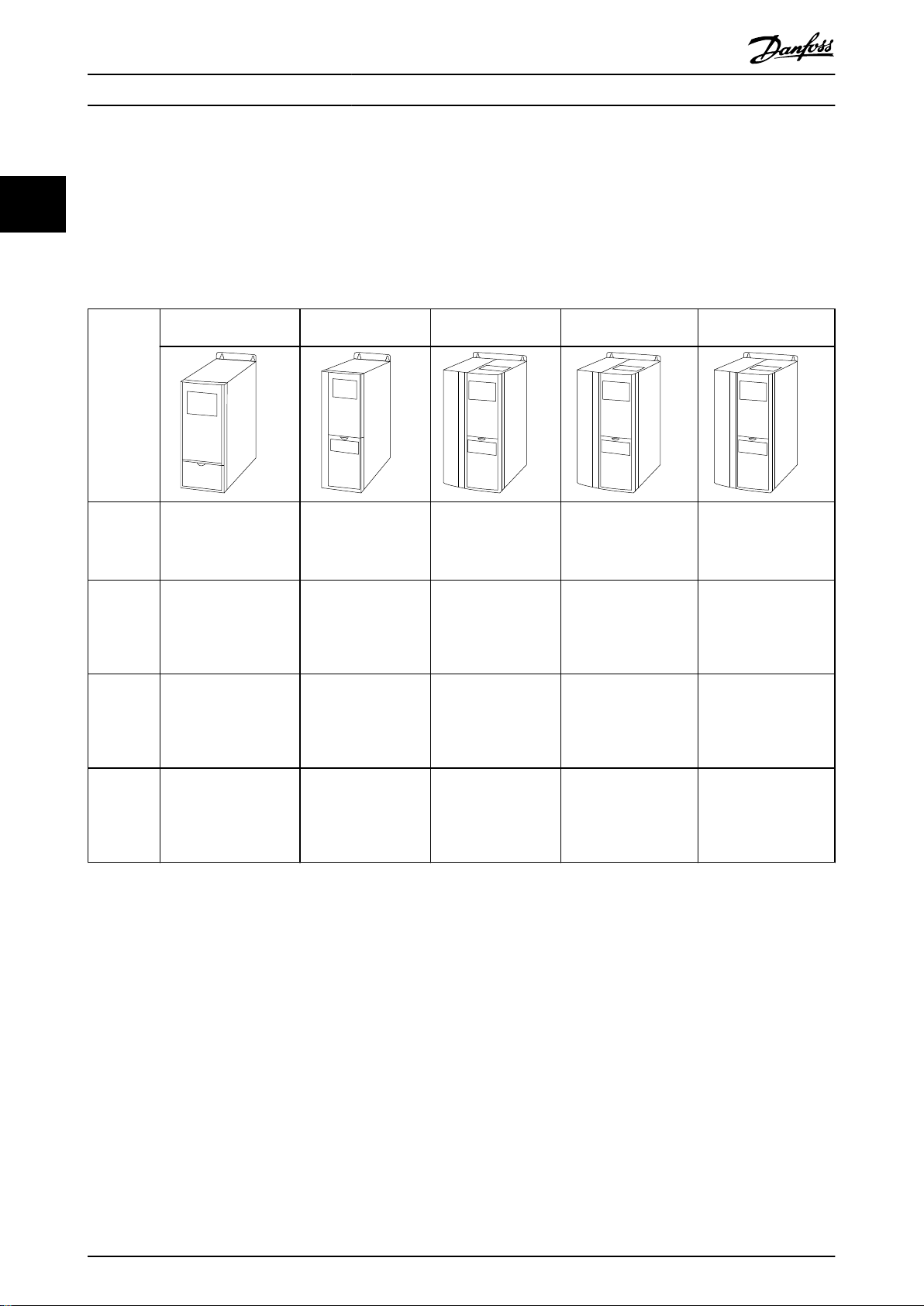
2.1 Panoramica sulle dimensioni del contenitore
La dimensione del contenitore dipende dalla gamma di potenza. Per maggiori dettagli sulle dimensioni, fare riferimento al
capitolo 7.13 Dimensioni contenitore, potenze nominali e dimensioni.
Dimensione
contenitore
Protezione
del
contenitore
)
Gamma di
potenza
[kW (cv)]
Trifase:
380–480 V
Gamma di
potenza
[kW (cv)]
Trifase:
200–240 V
Gamma di
potenza
[kW (cv)]
monofase
200–240 V
K1 K2 K3 K4 K5
1
IP20 IP20 IP20 IP20 IP20
0,37–2,2 (0,5–3,0) 3,0–5,5 (5,0–7,5) 7,5 (10) 11–15 (15–20) 18,5–22 (25–30)
0,37–1,5 (0,5–2,0) 2,2 (3,0) 3,7 (5,0) – –
0,37–1,5 (0,5–2,0) 2,2 (3,0) – – –
Tabella 2.1 Dimensioni contenitore
1) IP21 è disponibile per alcune varianti del VLT® Midi Drive FC 280. Con l'installazione delle opzioni del kit IP21 tutte le taglie di potenza possono
essere IP21.
Nella presente guida vengono sempre indicate le dimensioni del contenitore ogniqualvolta le procedure e i componenti
dieriscono da un convertitore di frequenza all'altro a seconda della dimensione sica.
Trovare la dimensione del contenitore eseguendo i passaggi riportati di seguito:
1. Ottenere le seguenti informazioni dal codice identicativo riportato sulla targa. Fare riferimento alla Disegno 2.1.
1a Gruppo prodotti e serie del convertitore di frequenza (caratteri 1–6), per esempio FC 280.
1b Potenza nominale (caratteri 7-10), per esempio PK37.
1c Tensione nominale (fasi e rete) (caratteri 11-12), per esempio T4.
2. Nella Tabella 2.2, trovare la potenza nominale e il grado di tensione e cercare la dimensione del contenitore di FC
280.
10 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 13

130BF709.10
VLT
MADE IN
DENMARK
T/C: FC-280PK37T4E20H1BXCXXXSXXXXAX
0.37kW 0.5HP
IN: 3x380-480V 50/60Hz, 1.2/1.0A
OUT: 3x0-Vin 0-500Hz, 1.2/1.1A
IP20
P/N: 134U2184 S/N: 000000G000
Midi Drive
www.danfoss.com
CAUTION / ATTENTION:
WARNING / AVERTISSEMENT:
See manual for special condition/mains fuse
Voir manual de conditions speciales/fusibles
Enclosure: See manual
5AF3 E358502 IND.CONT.EQ.
Stored charge, wait 4 min.
Charge r
é
siduelle, attendez 4 min.
R
US LISTED
www.tuv.com
ID 0600000000
Danfoss A/S, 6430 Nordborg, Denmark
1 2 3
Panoramica del prodotto Guida alla Progettazione
1 Gruppo prodotti e serie del convertitore di frequenza
2 Potenza nominale
3 Tensione nominale (fasi e rete)
Disegno 2.1 Uso della targa per trovare la dimensione del
contenitore
2 2
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 11
Page 14
Panoramica del prodotto
VLT® Midi Drive FC 280
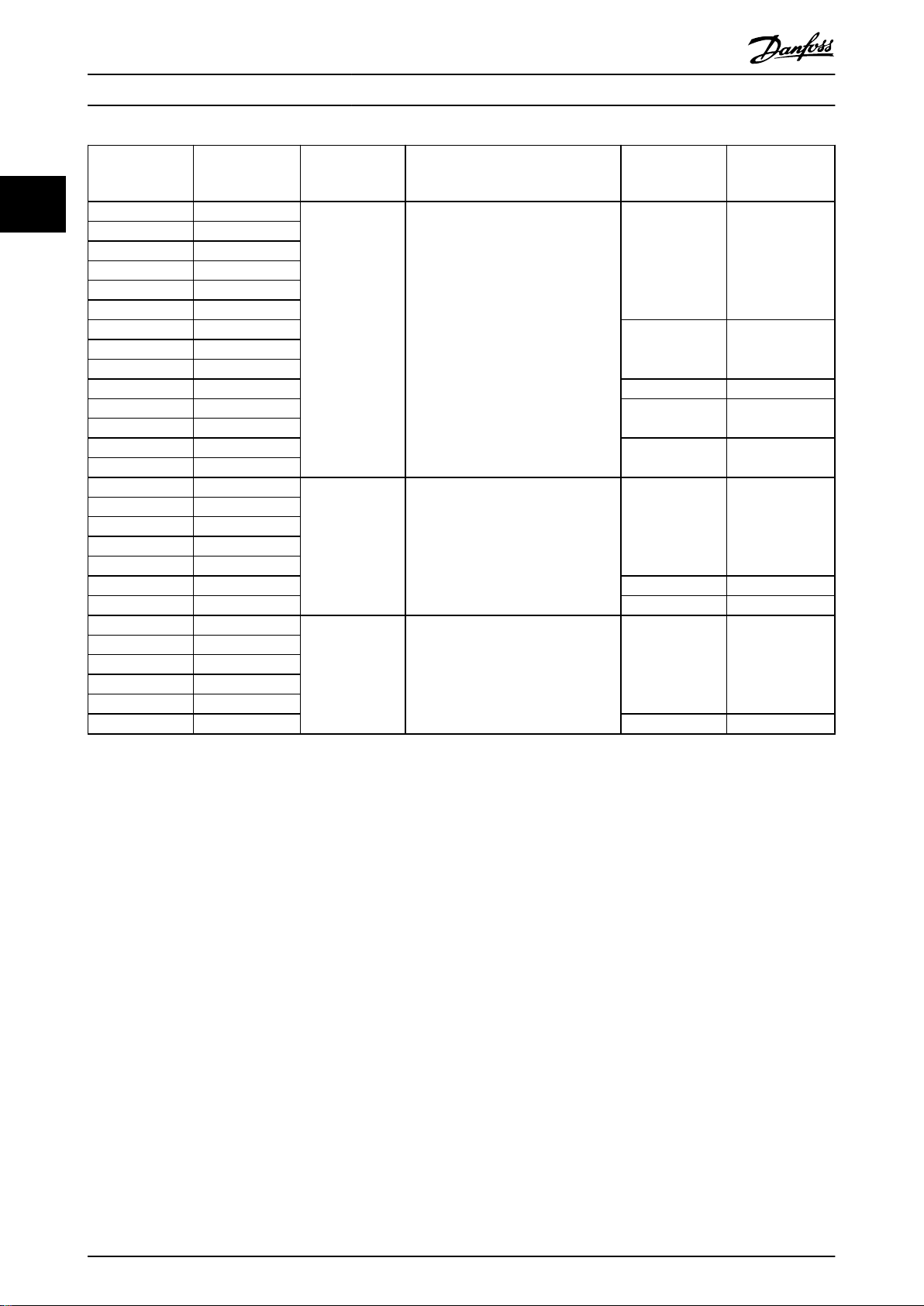
Potenza nominale
sulla targa
22
PK37 0,37 (0,5)
PK55 0,55 (0,75)
PK75 0,75 (1,0)
P1K1 1,1 (1,5)
P1K5 1,5 (2,0)
P2K2 2,2 (3,0)
P3K0 3 (4,0)
P4K0 4 (5,0)
P5K5 5,5 (7,5)
P7K5 7,5 (10) K3 K3T4
P11K 11 (15)
P15K 15 (20)
P18K 18,5 (25)
P22K 22 (30)
PK37 0,37 (0,5)
PK55 0,55 (0,75)
PK75 0,75 (1,0)
P1K1 1,1 (1,5)
P1K5 1,5 (2,0)
P2K2 2,2 (3,0) K2 K2T2
P3K7 3,7 (5,0) K3 K3T2
PK37 0,37 (0,5)
PK55 0,55 (0,75)
PK75 0,75 (1,0)
P1K1 1,1 (1,5)
P1K5 1,5 (2,0)
P2K2 2,2 (3,0) K2 K2S2
Potenza
[kW (cv)]
Tensione
nominale sulla
targa
T4 Trifase 380-480 V
T2 Trifase 200–240 V
S2 Monofase 200–240 V
Fasi e tensione di rete
Dimensione
contenitore
K1 K1T4
K2 K2T4
K4 K4T4
K5 K5T4
K1 K1T2
K1 K1S2
Convertitore di
frequenza
Tabella 2.2 Dimensioni del contenitore di FC 280
12 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 15
Power
input
Switch mode
power supply
Motor
Analog output
interface
(PNP) = Source
(NPN) = Sink
ON = Terminated
OFF = Open
Brake
resistor
91 (L1/N)
92 (L2/L)
93 (L3)
PE
50 (+10 V OUT)
53 (A IN)
2)
54 (A IN)
55 (COM digital/analog I/O)
0/4−20 mA
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
10 V DC
15 mA 100 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(A OUT) 42
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0 V
5 V
S801
0/4−20 mA
RS485
RS485
03
+10 V DC
0−10 V DC
24 V DC
02
01
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
27 (D IN/OUT)
24 V
0 V
0 V (PNP)
24 V (NPN)
29 (D IN)
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
38 (STO2)
4)
37 (STO1)
4)
95
P 5-00
21
ON
(+DC/R+) 89
(R-) 81
0−10 V DC
(-DC) 88
RFI
0 V
250 V AC, 3 A
Relay 1
1)
3)
5)
5)
130BE202.18
Panoramica del prodotto Guida alla Progettazione
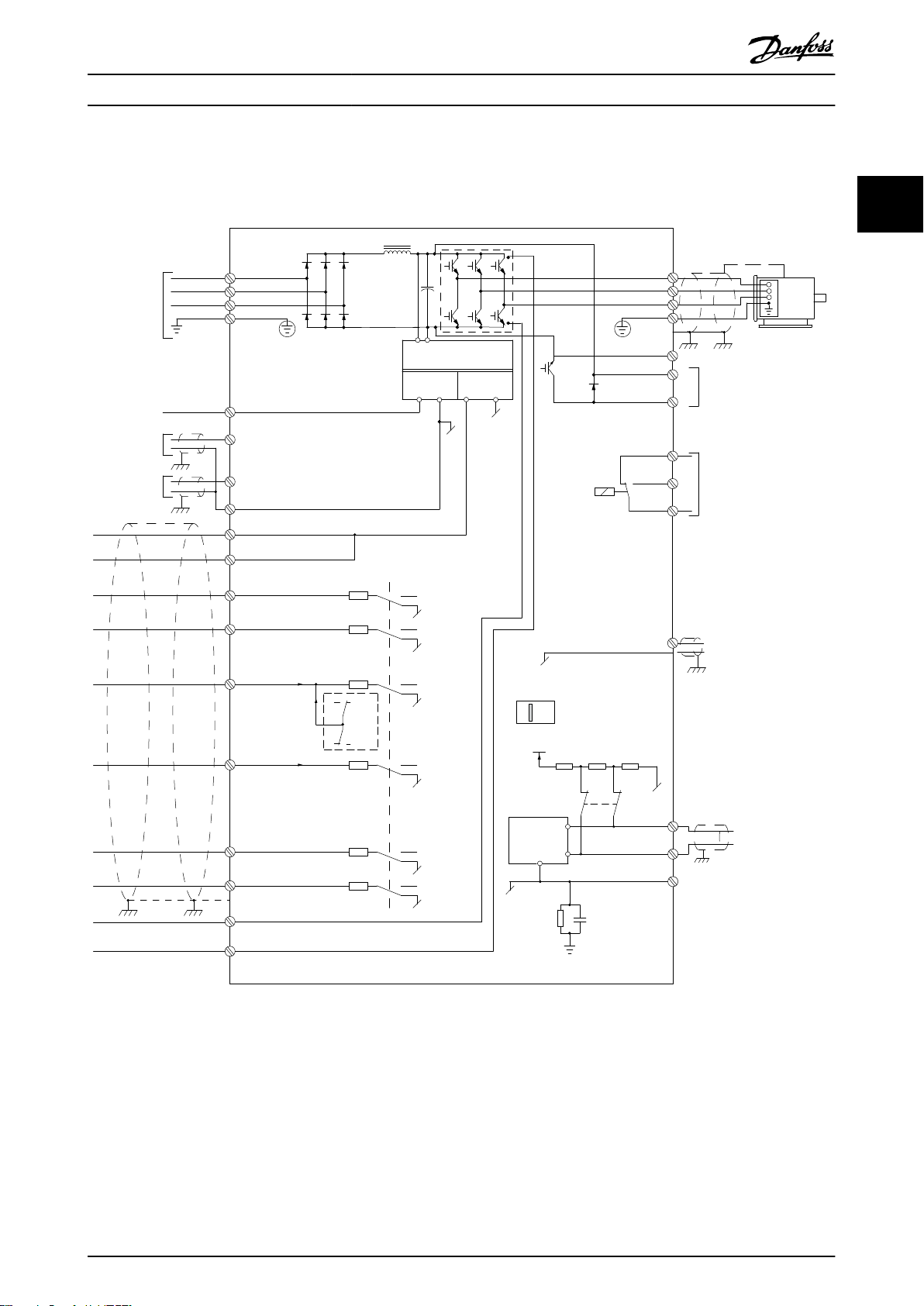
2.2 Installazione elettrica
Questa sezione descrive come cablare il convertitore di frequenza.
2 2
Disegno 2.2 Schema di cablaggio base
A = analogico, D = digitale
1) Il chopper di frenatura integrato è disponibile solo su unità trifase.
2) È possibile usare il morsetto 53 anche come ingresso digitale.
3) È possibile usare l'interruttore S801 (morsetto del bus) per abilitare la terminazione sulla porta RS485 (morsetti 68 e 69).
4) Consultare capitolo 4 Safe Torque O (STO) per il cablaggio STO corretto.
5) Il convertitore di frequenza S2 (monofase 200-240 V) non supporta l'applicazione a condivisione del carico.
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 13
Page 16
130BF228.10
L1
L2
L3
PE
PE
u
v
w
2
1
3
5
16
17
18
14
12
8
7
10
9
4
11
13
4
4
6
15
90
Panoramica del prodotto
VLT® Midi Drive FC 280
22
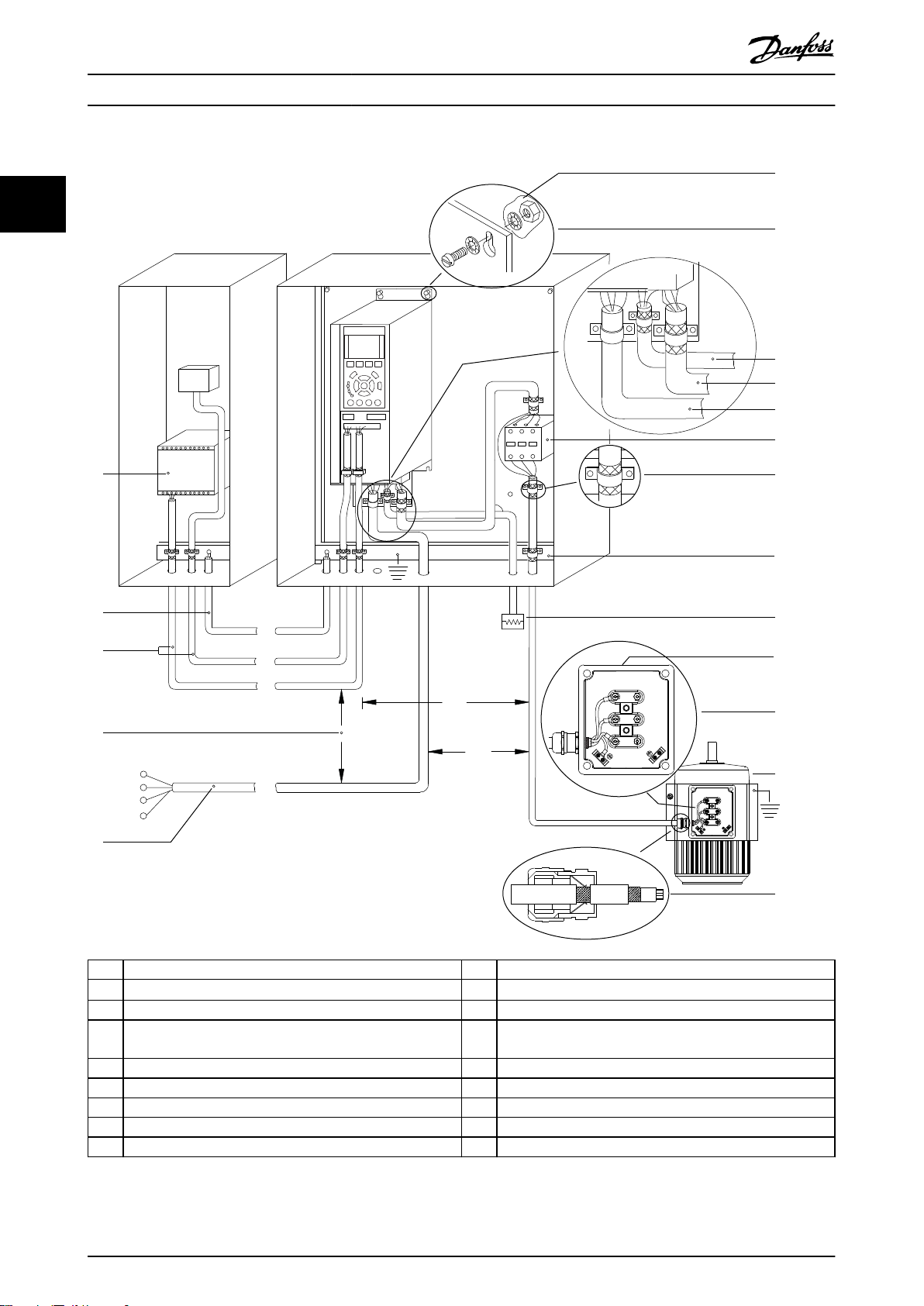
1 PLC 10 Cavo dell’alimentazione di rete (non schermato)
2
Cavo di equalizzazione (6 AWG) minimo 16 mm
3 Cavi di comando 12 Isolamento del cavo spelato
4 Almeno 200 mm (656 piedi) di spazio tra i cavi di comando, i
cavi motore e i cavi dell’alimentazione di rete.
5 Alimentazione di rete 14 Resistenza di frenatura
6 Supercie nuda (non verniciata) 15 Scatola di metallo
7 Rondelle a stella 16 Collegamento al motore
8 Cavo freno (schermato) 17 Motore
9 Cavo motore (schermato) 18 Passacavo EMC
Disegno 2.3 Collegamento elettrico tipico
2
11 Contattore di uscita, eccetera.
13 Barra collettrice comune di terra. Rispettare i requisiti
nazionali e locali per la messa a terra degli armadi.
14 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 17
130BD531.10
U
V
W
96
97
98
Panoramica del prodotto Guida alla Progettazione
2.2.1 Collegamento del motore
AVVISO
TENSIONE INDOTTA
La tensione indotta da cavi motore di uscita posati
insieme può caricare i condensatori dell'apparecchiatura
anche quando questa è spenta e disinserita. Il mancato
rispetto della posa separata dei cavi motore di uscita o il
mancato utilizzo di cavi schermati possono causare
morte o lesioni gravi.
Posare separatamente i cavi motore di uscita.
•
Usare cavi schermati.
•
Rispettare le normative elettriche nazionali e
•
locali per le dimensioni dei cavi. Per le dimensioni
massime dei cavi, consultare il capitolo 7.1 Dati
elettrici.
Rispettare i requisiti del costruttore del motore
•
relativi al cablaggio.
Sono forniti passacavi per il li del motore o
•
pannelli di accesso alla base delle unità IP21
(NEMA tipo 1).
Non cablare un dispositivo di avviamento o un
•
invertitore di poli (per esempio motore Dahlander
o un motore a induzione ad anelli) tra il convertitore di frequenza e il motore.
Procedura
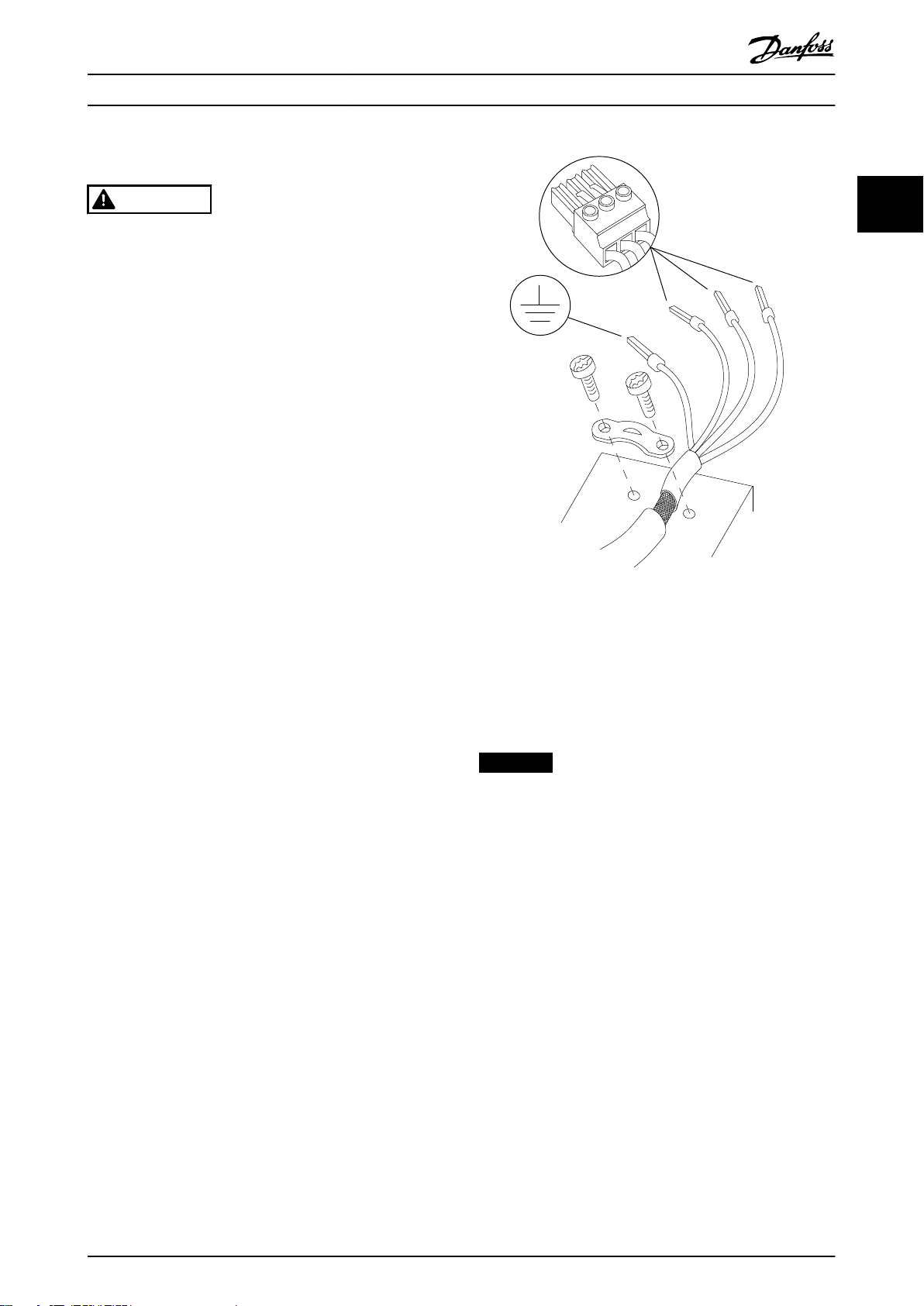
1. Sguainare una sezione dell'isolamento esterno del
cavo. La lunghezza consigliata è di 10–15 mm
(0,4-0,6 pollici).
2. Posizionare il cavo spelato sotto il pressacavo per
stabilire il ssaggio meccanico e il contatto
elettrico tra lo schermo del cavo e la terra.
3. Collegare il cavo di terra al morsetto di messa a
terra più vicino secondo le istruzioni di messa a
terra fornite nel capitolo Messa a terra nella Guida
operativa VLT® Midi Drive FC 280. Vedere
Disegno 2.4.
4. Collegare il cablaggio trifase del motore ai
5. Serrare i morsetti in base alle istruzioni fornite in
morsetti 96 (U), 97 (V) e 98 (W), come mostrato
nella Disegno 2.4.
capitolo 7.7 Coppie di serraggio delle connessioni.
2 2
Disegno 2.4 Collegamento del motore
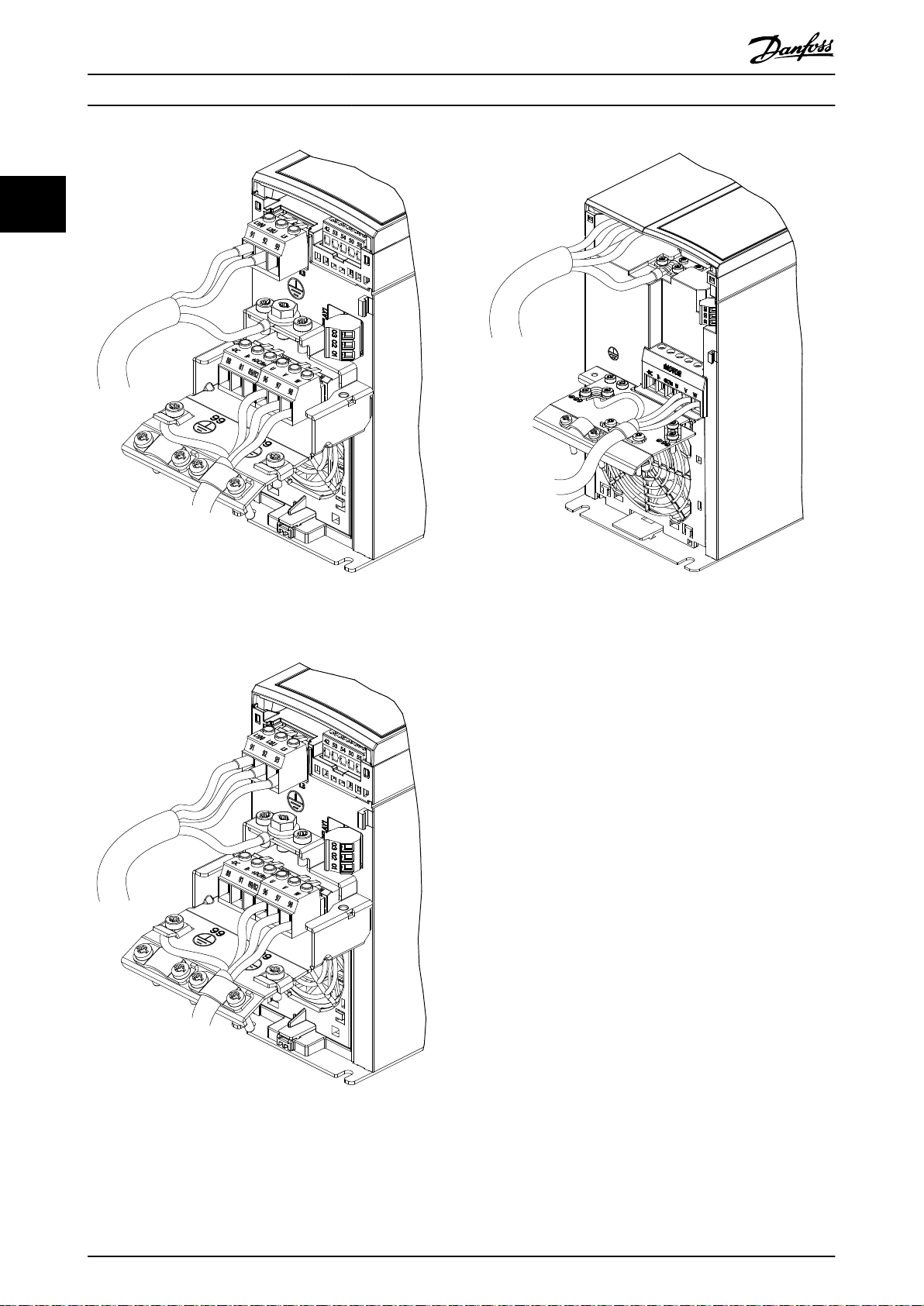
La rete, il motore e il collegamento a massa per i convertitori di frequenza monofase e trifase sono mostrati
rispettivamente in Disegno 2.5, Disegno 2.6 e Disegno 2.7.
Le congurazioni eettive variano in base ai tipi di unità e
alle apparecchiature opzionali.
AVVISO!
Nei motori senza foglio di isolamento di fase o altri
supporti di isolamento adatti al funzionamento con
un'alimentazione di tensione, usare un ltro sinusoidale
sull'uscita del convertitore di frequenza.
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 15
Page 18
130BE232.11
130BE231.11
130BE804.10
Panoramica del prodotto
VLT® Midi Drive FC 280
22
Disegno 2.5 Rete, motore e collegamento a massa per unità
monofase (K1, K2)
Disegno 2.6 Rete, motore e collegamento a massa per unità
trifase (K1, K2, K3)
Disegno 2.7 Rete, motore e collegamento a massa per unità
trifase (K4, K5)
2.2.2 Collegamento di rete CA
Calibrare il cablaggio in funzione della corrente di
•
ingresso del convertitore di frequenza. Per le
dimensioni massime del lo, consultare il
capitolo 7.1 Dati elettrici.
Rispettare le normative elettriche nazionali e
•
locali per le dimensioni dei cavi.
Procedura
1. Collegare i cavi di potenza dell'ingresso CA ai
morsetti N ed L nelle unità monofase (vedere la
Disegno 2.5), oppure ai morsetti L1, L2 ed L3 nelle
unità trifase (vedere la Disegno 2.6 e la
Disegno 2.7).
2. In base alla congurazione dell'apparecchiatura,
collegare l'alimentazione di ingresso ai morsetti di
ingresso di rete o al sezionatore di ingresso.
3. Mettere a terra il cavo secondo le istruzioni di
messa a terra nel capitolo Messa a terra nella
Guida operativa VLT® Midi Drive FC 280.
4. Quando alimentato da una sorgente di rete
isolata (rete IT o collegamento a triangolo
sospeso) o da una rete TT/TN-S con neutro a terra
(triangolo a terra), assicurarsi che la vite del
RFI sia stata rimossa. La rimozione della vite RFI
impedisce danni al collegamento CC e riduce le
correnti capacitive verso terra in conformità alla
ltro
16 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 19
130BE212.10
1 2
3
130BE214.10
37 38 12 13 18 19 27 29 32 33 61
42 53 54 50 55
68 69
1
3
2
Panoramica del prodotto Guida alla Progettazione
norma IEC 61800-3 (vedere la Disegno 7.13, la vite
RFI è situata sul lato del convertitore di
frequenza).
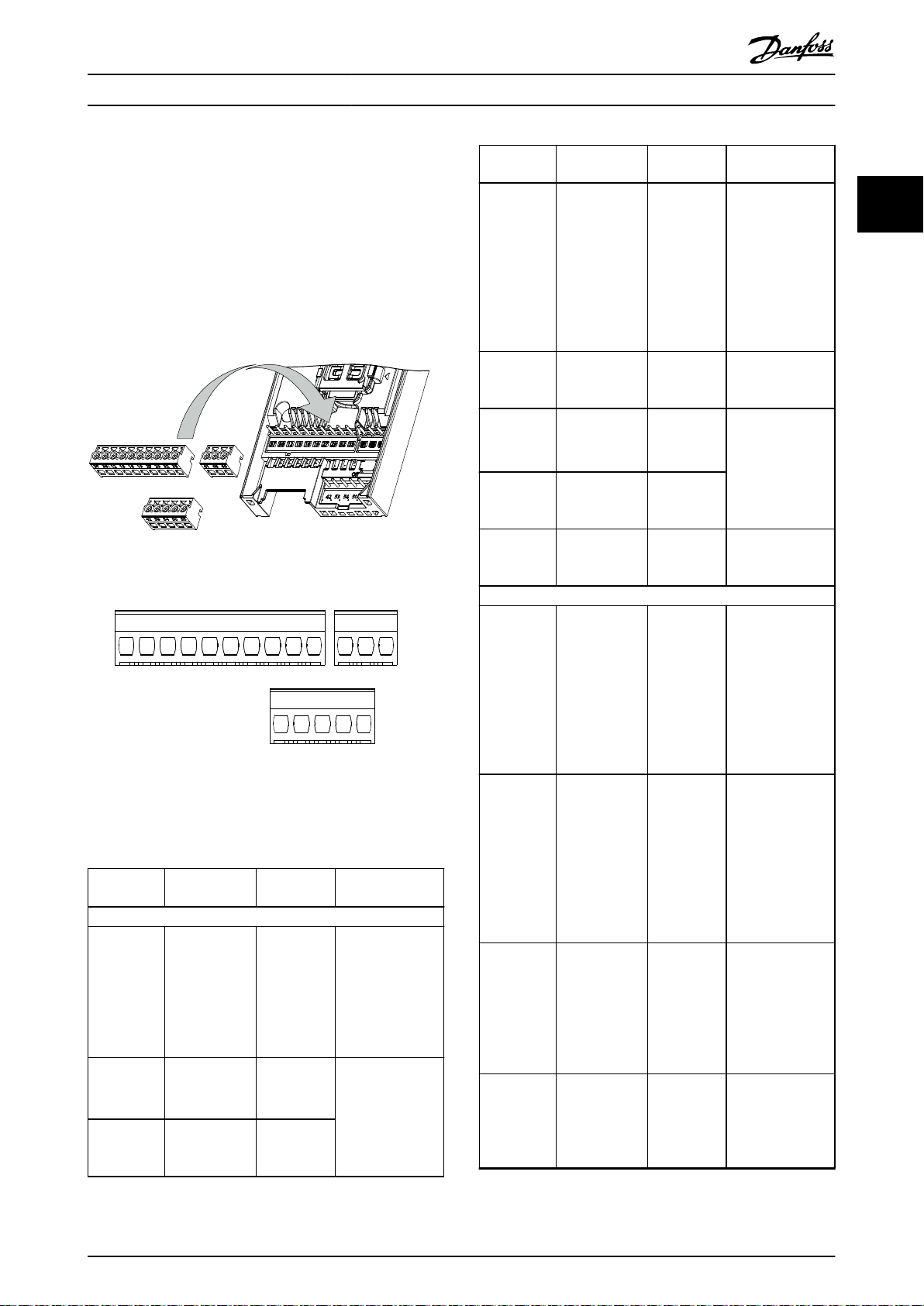
2.2.3 Tipi di morsetti di controllo
Disegno 2.8 mostra i connettori removibili del convertitore
di frequenza. Le funzioni dei morsetti e le relative
impostazioni di fabbrica sono illustrate in Tabella 2.3 e
Tabella 2.4.
Disegno 2.8 Posizioni dei morsetti di controllo
Disegno 2.9 Numeri dei morsetti
Vedere capitolo 7.6 Ingresso/uscita di controllo e dati di
controllo per dettagli sui valori nominali dei morsetti.
Morsetto Parametro
I/O digitale, I/O a impulsi, encoder
12, 13 – +24 V CC
Parametro 5-10
18
19
Ingr. digitale
morsetto 18
Parametro 5-11
Ingr. digitale
morsetto 19
Impostazion
e di fabbrica
[8]
Avviamento
[10]
Inversione
Descrizione
Tensione di
alimentazione a 24
V CC. La corrente
di uscita massima
è di 100 mA per
tutti i carichi da 24
V.
Ingressi digitali.
Morsetto Parametro
Parametro 5-01
Modo Morsetto
27
Parametro 5-12
27
29
32
33
37, 38 – STO
42
50 – +10 V CC
53
54
Ingr. digitale
morsetto 27
Parametro 5-30
Uscita dig.
morsetto 27
Parametro 5-13
Ingr. digitale
morsetto 29
Parametro 5-14
Ingr. digitale
morsetto 32
Parametro 5-15
Ingr. digitale
morsetto 33
Ingressi/uscite analogici
Parametro 6-91
Uscita
analogica
morsetto 42
Gruppo di
parametri 6-1*
Ingr. analog. 53
Gruppo di
parametri 6-2*
Ingr. analog. 54
DI [2] Evol.
libera neg.
DO [0]
Nessuna
funzione
[14] Marcia
jog
[0] Nessuna
funzione
[0] Nessuna
funzione
[0] Nessuna
funzione
Impostazion
e di fabbrica
–
–
Descrizione
Selezionabile
come ingresso
digitale, uscita
digitale o uscita a
impulsi. L'impostazione di
fabbrica è ingresso
digitale.
Ingresso digitale.
Ingresso digitale,
encoder 24 V. È
possibile usare il
morsetto 33 anche
come ingresso a
impulsi.
Ingressi di
sicurezza
funzionale.
Uscita analogica
programmabile. Il
segnale analogico
è 0–20 mA o 4–20
mA a un massimo
di 500 Ω. È anche
possibile
congurarlo come
uscite digitali.
Tensione di
alimentazione
analogica 10 V CC.
Tipicamente
vengono usati
massimo 15 mA
per un
potenziometro o
un termistore.
Ingresso analogico.
È supportata solo
la modalità
tensione. È
possibile usarlo
anche come
ingresso digitale.
Ingresso analogico.
È possibile
scegliere tra
modalità tensione
o corrente.
2 2
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 17
Page 20
Panoramica del prodotto
VLT® Midi Drive FC 280
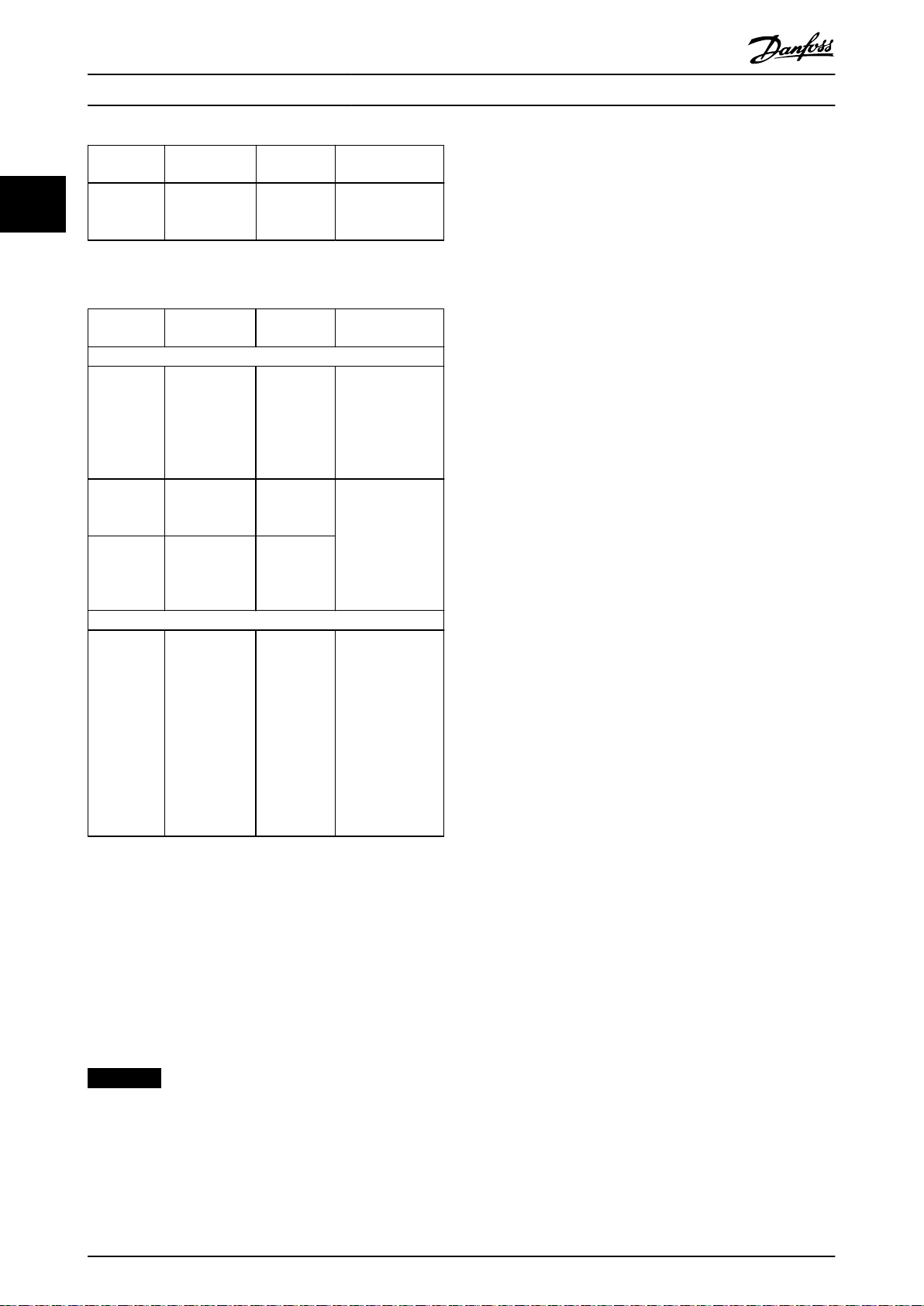
Morsetto Parametro
22
55 – –
Tabella 2.3 Descrizione dei morsetti - Ingressi/uscite digitali,
ingressi/uscite analogici
Impostazion
e di fabbrica
Descrizione
Linea comune per
ingressi digitali e
analogici.
3. Fissare le viti per i morsetti
4. Assicurarsi che il contatto sia ben saldo e non
allentato. Un cavo di controllo allentato può
causare guasti all'apparecchiatura o un funzionamento non ottimale.
Vedere capitolo 7.5 Speciche dei cavi per le dimensioni
cavo dei morsetti di controllo e capitolo 3 Esempi applicativi
per i collegamenti tipici dei cavi di comando.
Morsetto Parametro
Comunicazione seriale
61 – –
Gruppo di
68 (+)
69 (-)
01, 02, 03
Tabella 2.4 Descrizione dei morsetti - Comunicazione seriale
parametri 8-3*
FC Port Settings
Gruppo di
parametri 8-3*
FC Port Settings
Parametro 5-40
Funzione relè
Impostazion
e di fabbrica
–
–
Relè
[1] Comando
pronto
Descrizione
Filtro RC integrato
per lo schermo del
cavo. SOLTANTO
per collegare lo
schermo in caso di
problemi EMC.
Interfaccia RS485.
Per la resistenza di
terminazione è
disponibile un
interruttore sulla
scheda di
controllo.
Uscita a relè forma
C. Questi relè si
trovano in varie
posizioni in base
alla congurazione
e alla dimensione
del convertitore di
frequenza. Utilizzabile per tensione
CA o CC e carichi
induttivi o resistivi.
2.2.4 Collegamento ai morsetti di controllo
2.3 Strutture di controllo
Un convertitore di frequenza trasforma tensione CA
proveniente dalla rete in tensione CC, quindi la tensione
CC è convertita in corrente CA con ampiezza e frequenza
variabili.
Il motore viene alimentato con una tensione/corrente e
frequenza variabili, consentendo un controllo a velocità
innitamente variabile di motori CA trifase standard e di
motori sincroni a magnete permanente.
2.3.1 Modalità di controllo
Il convertitore di frequenza controlla la velocità o la coppia
sull'albero motore. Il convertitore di frequenza controlla
inoltre il processo in alcune applicazioni che si avvalgono
dei dati di processo come riferimento o per la retroazione,
ad esempio temperatura e pressione. L'impostazione
parametro 1-00 Conguration Mode determina il tipo di
controllo.
Controllo di velocità
Esistono due tipi di controllo di velocità:
Controllo ad anello aperto della velocità che non
•
richiede alcuna retroazione dal motore
(sensorless).
Controllo PID ad anello chiuso della velocità che
•
richiede una retroazione di velocità a un ingresso.
Il controllo della velocità ad anello chiuso correttamente ottimizzato presenta una maggiore
precisione rispetto al controllo ad anello aperto.
I connettori dei morsetti di controllo possono essere
scollegati dal convertitore di frequenza per facilitare
l'installazione, come mostrato in Disegno 2.8.
Selezionare l'ingresso da utilizzare per la retroazione PID di
velocità in parametro 7-00 Speed PID Feedback Source.
Controllo di coppia
Per maggiori dettagli sul cablaggio STO, fare riferimento a
capitolo 4 Safe Torque O (STO).
La funzione di controllo di coppia è utilizzata nelle
applicazioni in cui la coppia nell'albero di trasmissione del
motore controlla l'applicazione come regolazione di
AVVISO!
Mantenere quanto più corti possibile i cavi di comando e
separarli dai cavi di alta potenza per ridurre al minimo le
interferenze.
tensione. Selezionare [2] Coppia o [4] Coppia, anello aperto
in parametro 1-00 Conguration Mode. L'impostazione della
coppia avviene mediante un riferimento analogico, digitale
o controllato da bus. Durante l'esecuzione del controllo di
coppia si consiglia la completa esecuzione della procedura
AMA, poiché i dati corretti relativi al motore sono
1. Allentare le viti per i morsetti.
importanti per ottenere prestazioni ottimali.
2. Inserire i cavi di comando rivestiti negli slot.
18 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 21

Panoramica del prodotto Guida alla Progettazione
Anello chiuso nella modalità VVC+. Questa
•
funzione, impiegata in applicazioni con una
variazione dinamica dell'albero medio-bassa, ore
prestazioni straordinarie in tutti e quattro i
quadranti e a qualsiasi velocità del motore. Il
segnale di retroazione di velocità è obbligatorio.
Assicurarsi che la risoluzione dell'encoder sia
almeno pari a 1024 PPR e che il cavo schermato
dell'encoder sia idoneamente messo a terra,
poiché la precisione del segnale di retroazione di
velocità è importante. Tarare
parametro 7-06 Speed PID Lowpass Filter Time per
ottenere il migliore segnale di retroazione di
velocità.
Anello aperto nella modalità VVC+. La funzione
•
viene utilizzata in applicazioni robuste dal punto
di vista meccanico, tuttavia la sua precisione è
limitata. La funzione di coppia ad anello aperto
opera in due direzioni. La coppia viene calcolata
dalla misurazione corrente interna nel convertitore di frequenza.
Riferimento di velocità / coppia
Il riferimento a questi controlli può essere un riferimento
singolo oppure la somma di vari riferimenti, quali
riferimenti relativamente scalati. La gestione dei riferimenti
è spiegata nel dettaglio in capitolo 2.4 Gestione dei
riferimenti.
Controllo di processo
Esistono due tipi di controllo di processo:
Il controllo ad anello chiuso di processo, che
•
esegue l'anello aperto di velocità per controllare
internamente il motore, è un regolatore PID di
processo di base.
Il controllo ad anello aperto di velocità PID
•
esteso, che esegue anch'esso l'anello aperto di
velocità per controllare internamente il motore,
estende la funzione del regolatore PID di
processo di base aggiungendo ulteriori funzioni.
Ad esempio, controllo dell'avanzamento diretto,
serraggio,
guadagno.
ltro riferimento/retroazione e scala
2 2
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 19
Page 22
130BD974.10
L2 92
L1 91
L3 93
M
U 96
V 97
W 98
RFI switch
Inrush
R+
82
Load sharing -
88(-)
R81
Brake resistor
Load sharing +
89(+)
+
_
+
_
S
S
Cong. mode
Ref.
Process
P 1-00
High
+f max.
Low
-f max.
P 4-12
Motor speed
low limit (Hz)
P 4-14
Motor speed
high limit (Hz)
Motor
controller
Ramp
Speed
PID
P 7-20 Process feedback
1 source
P 7-22 Process feedback
2 source
P 7-00 Speed PID
feedback source
P 1-00
Cong. mode
P 4-19
Max. output freq.
-f max.
Motor
controller
P 4-19
Max. output freq.
+f max.
P 3-**
P 7-0*
130BD371.10
Panoramica del prodotto
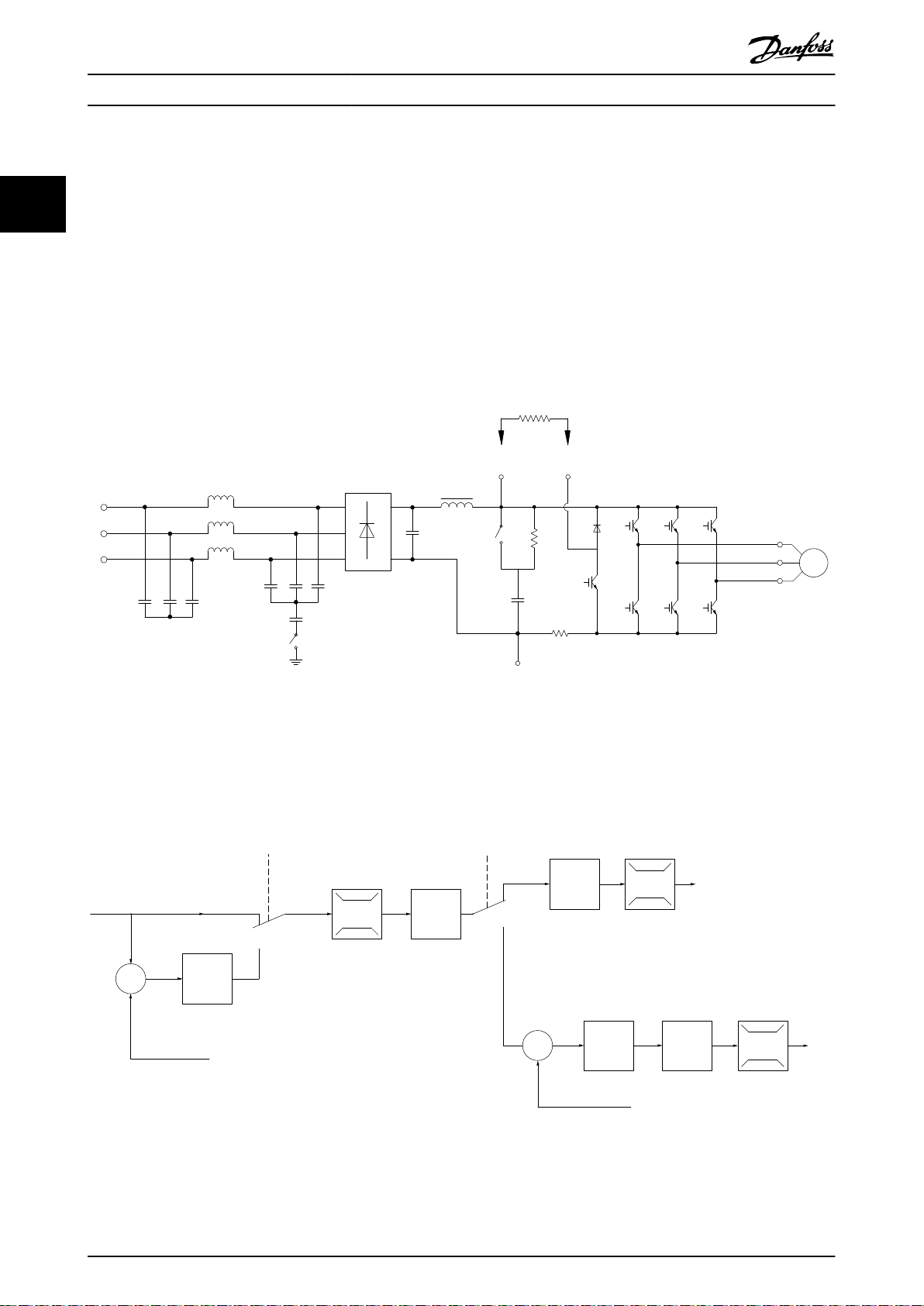
2.3.2 Principio di regolazione
VLT® Midi Drive FC 280
22
VLT® Midi Drive FC 280 è un convertitore di frequenza generico per applicazioni a velocità variabile. Il principio di
regolazione si basa su VVC+.
I convertitori di frequenza FC 280 riescono a gestire motori asincroni e motori sincroni a magnete permanente no a 22 kW
(30 cv).
Il principio di rilevamento della corrente nei convertitori di frequenza FC 280 si fonda sulla misurazione della corrente da
parte di una resistenza nel collegamento CC. La protezione dai guasti di terra e il comportamento in caso di cortocircuito
sono gestiti dalla stessa resistenza.
Disegno 2.10 Graco della regolazione
2.3.3
Struttura di controllo in VVC
Disegno 2.11 Struttura di controllo nelle congurazioni ad anello aperto e ad anello chiuso con VVC
20 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
+
+
Page 23
130BP046.10
Hand
on
O
Auto
on
Reset
Hand
On
Off
Reset
Auto
On
130BB893.10
Panoramica del prodotto Guida alla Progettazione
Nella congurazione mostrata in Disegno 2.11, parametro 1-01 Motor Control Principle è impostato su [1] VVC+ e
parametro 1-00 Conguration Mode è impostato su [0] Anello aperto. Il segnale di riferimento risultante dal sistema gestione
dei riferimenti viene ricevuto e alimentato attraverso la limitazione di rampa e di velocità prima di essere inviato al controllo
del motore. L'uscita del controllo del motore viene poi limitata dal limite di frequenza massima.
2 2
Se parametro 1-00
Conguration Mode è impostato su [1] Anello chiuso vel., il riferimento risultante passa dalla limitazione di
rampa e dalla limitazione di velocità a un regolatore di velocità PID. I parametri del regolatore di velocità PID si trovano nel
gruppo di parametri 7-0* Speed PID Ctrl. Il riferimento risultante dal regolatore di velocità PID viene inviato al controllo
motore, con intervento del limite di frequenza.
Selezionare [3] Processo in parametro 1-00
Conguration Mode per utilizzare il PID controllo di processo per il controllo ad
anello chiuso della velocità o della pressione nell'applicazione controllata. I parametri PID di processo si trovano nei gruppi di
parametri 7-2* Retroaz. reg. proc. e 7-3* Reg. PID di proc.
2.3.4
Regolatore di corrente interno in modalità VVC
+
Il convertitore di frequenza è dotato di un regolatore limitazione di corrente integrato. Questa funzione si attiva quando la
corrente motore, e quindi la coppia, è superiore ai limiti di coppia impostati in parametro 4-16 Torque Limit Motor Mode,
parametro 4-17 Torque Limit Generator Mode e parametro 4-18 Current Limit.
Quando, durante il funzionamento del motore o durante il funzionamento rigenerativo si trova al limite di corrente, il
convertitore di frequenza tenta di scendere il più rapidamente possibile sotto i limiti di coppia preimpostati senza perdere il
controllo del motore.
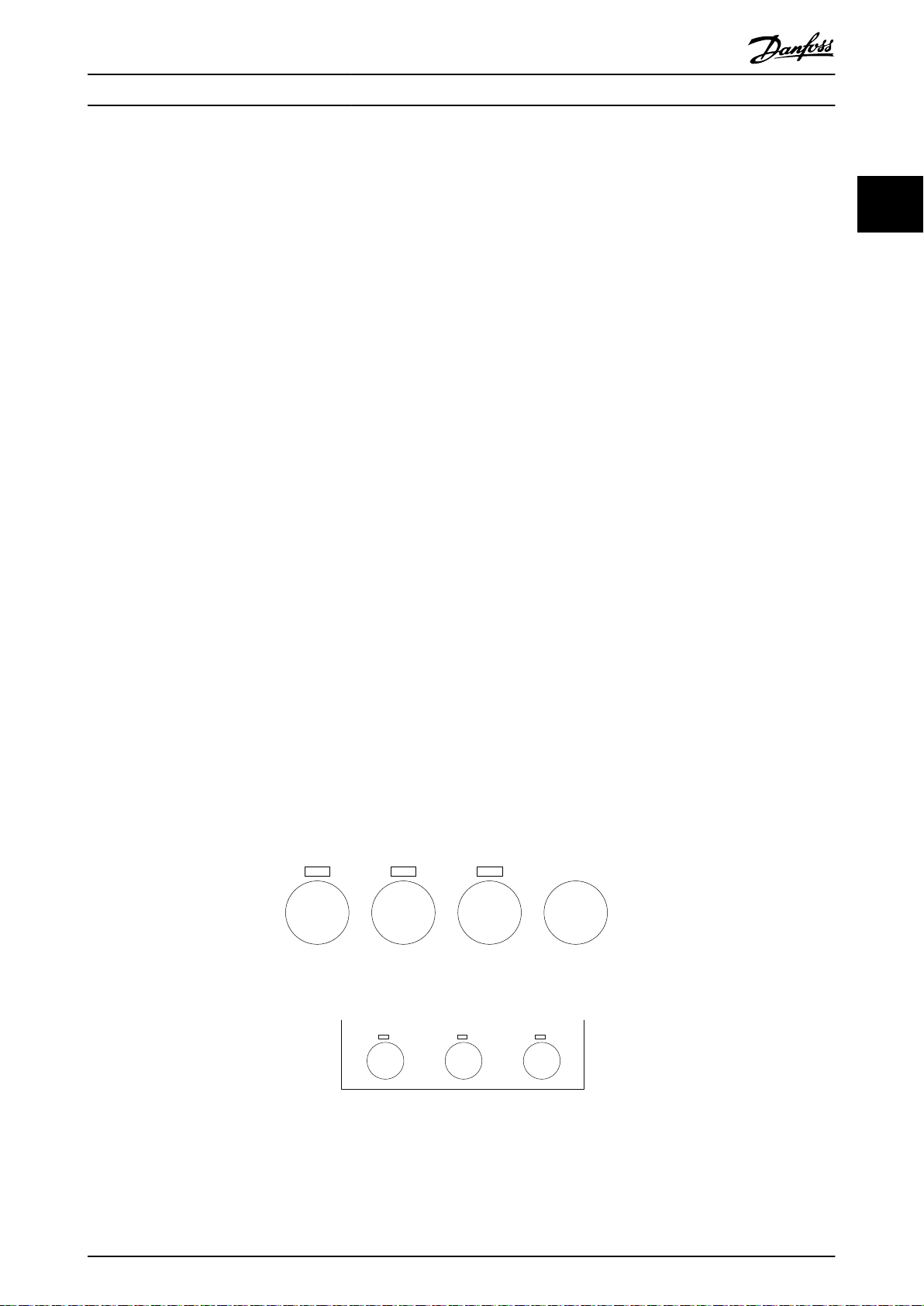
2.3.5 Comando locale (Hand On) e remoto (Auto On)
Far funzionare manualmente il convertitore di frequenza tramite il pannello di controllo locale (LCP graco o LCP numerico)
o a distanza tramite gli ingressi analogici/digitali o il bus di campo.
Avviare e arrestare il convertitore di frequenza premendo i tasti [Hand On] e [Reset] sull'LCP. Occorre eseguire il setup
mediante i parametri seguenti:
Parametro 0-40 Tasto [Hand on] sull'LCP.
•
Parametro 0-44 Tasto [O / Reset] Key sull'LCP.
•
Parametro 0-42 Tasto [Auto on] sull'LCP.
•
Ripristinare gli allarmi tramite il tasto [Reset] o tramite un ingresso digitale quando il morsetto è programmato su Ripristino.
Disegno 2.12 Tasti di comando GLCP
Disegno 2.13 Tasti di comando NLCP
Il riferimento locale forza la modalità di
congurazione a funzionare ad anello aperto, indipendentemente dall'impostazione
in parametro 1-00 Modo congurazione. Il riferimento locale viene ripristinato quando il convertitore di frequenza si spegne.
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 21
Page 24
No function
Analog ref.
Pulse ref.
Local bus ref.
Preset relative ref.
Preset ref.
Local bus ref.
No function
Analog ref.
Pulse ref.
Analog ref.
Pulse ref.
Local bus ref.
No function
Local bus ref.
Pulse ref.
No function
Analog ref.
Input command:
Catch up/ slow down
Catchup Slowdown
value
Freeze ref./Freeze output
Speed up/ speed down
ref.
Remote
Ref. in %
-max ref./
+max ref.
Scale to
Hz
Scale to
Nm
Scale to
process
unit
Relative
X+X*Y
/100
DigiPot
DigiPot
DigiPot
max ref.
min ref.
DigiPot
D1
P 5-1x(15)
Preset '1'
External '0'
Process
Torque
Speed
open/closed loop
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(0)
(0)
(1)
Relative scaling ref.
P 3-18
Ref.resource 1
P 3-15
Ref. resource 2
P 3-16
Ref. resource 3
P 3-17
200%
-200%
Y
X
-100%
100%
%
%
Ref./feedback range
P 3-00
Conguration mode
P 1-00
P 3-14
±100%
130BD374.10
P 16-01
P 16-02
P 3-12
P 5-1x(21)/P 5-1x(22)
P 5-1x(28)/P 5-1x(29)
P 5-1x(19)/P 5-1x(20)
P 3-04
Freeze ref.
&
increase/
decrease
ref.
Catch up/
slow
down
P 3-10
Panoramica del prodotto
VLT® Midi Drive FC 280
2.4 Gestione dei riferimenti
Riferimento locale
22
Il riferimento locale è attivo quando il convertitore di frequenza viene azionato con [Hand On] attivo. Regolare il riferimento
tramite [▲]/[▼] e [◄/[►].
Riferimento remoto
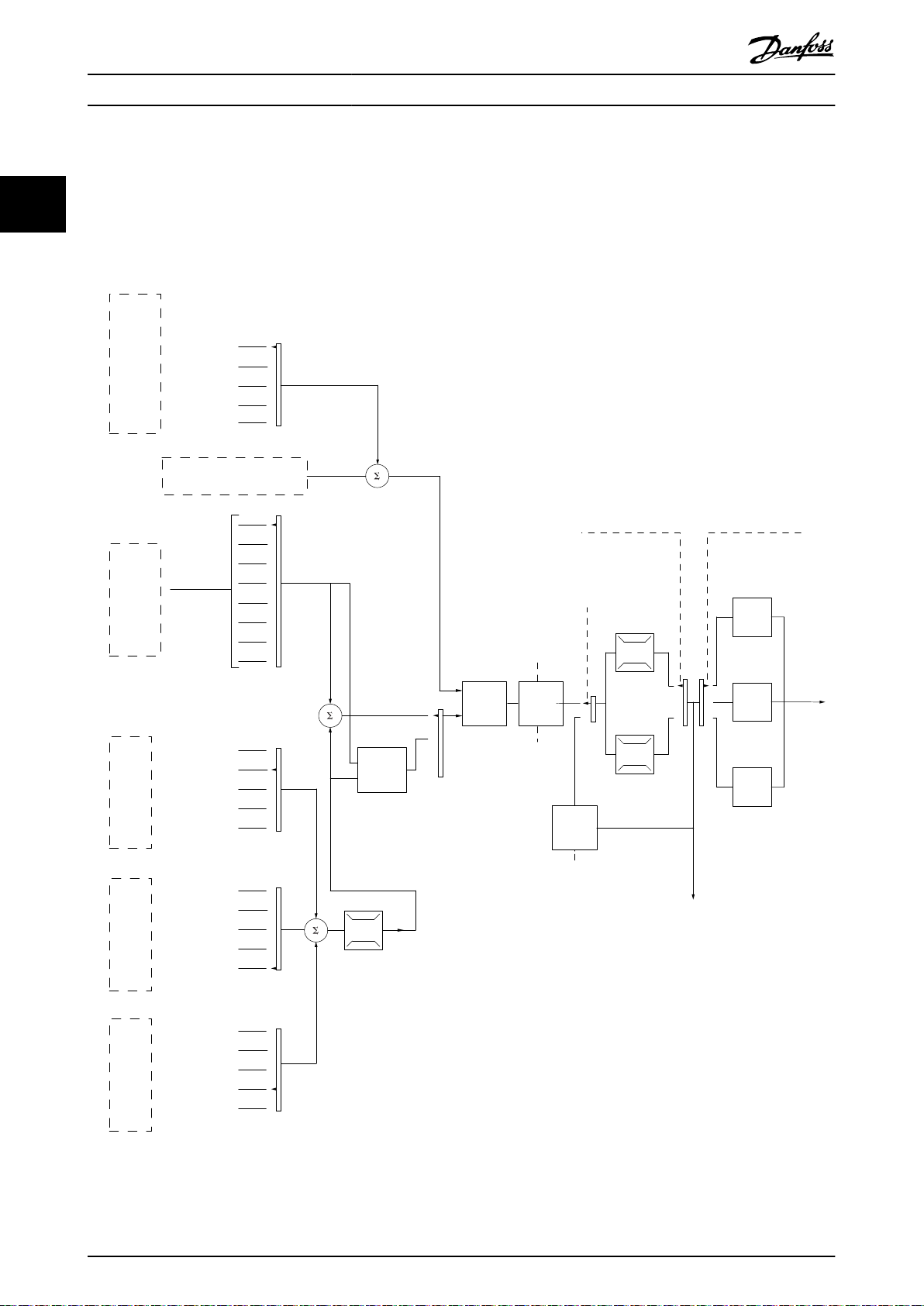
Il sistema gestione dei riferimenti per il calcolo del riferimento remoto è illustrato in Disegno 2.14.
Disegno 2.14 Riferimento remoto
22 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 25
Riferimento risultante
Somma di tutti
i riferimenti
In avanti
Inversione
P 3-00 Campo di riferimento= [0] Min-Max
130BA184.10
-P 3-03
P 3-03
P 3-02
-P 3-02
P 3-00 Campo di riferimento =[1]-Max-Max
Riferimento risultante
Somma di tutti
i riferimenti
-P 3-03
P 3-03
130BA185.10
Panoramica del prodotto Guida alla Progettazione
Il riferimento remoto viene calcolato una volta a ogni
intervallo di scansione e inizialmente è composto da
due tipi di ingressi di riferimento:
1. X (il riferimento esterno): Una somma (vedere
parametro 3-04 Reference Function) di no a
quattro riferimenti selezionati esternamente, che
comprende qualsiasi combinazione (determinata
dall'impostazione di parametro 3-15 Reference 1
Source, parametro 3-16 Reference 2 Source e
parametro 3-17 Reference 3 Source) di un
riferimento preimpostato sso
(parametro 3-10 Preset Reference), riferimenti
analogici variabili, riferimenti impulsi digitali
variabili e diversi riferimenti bus di campo in
qualsiasi unità sottoposta al monitoraggio del
convertitore di frequenza ([Hz], [RPM], [Nm], ecc.).
2. Y (il riferimento relativo): Una somma di un
riferimento preimpostato sso
(parametro 3-14 Preset Relative Reference) e un
riferimento analogico variabile
(parametro 3-18 Relative Scaling Reference
Resource) in [%].
I due tipi degli ingressi di riferimento vengono combinati
nella seguente formula:
riferimento remoto=X+X*Y/100%.
Qualora non venga impiegato il riferimento relativo,
impostare parametro 3-18 Relative Scaling Reference
Resource su [0] Nessuna funz. e parametro 3-14 Preset
Relative Reference su 0%. Gli ingressi digitali nel conver-
titore di frequenza possono attivare sia la funzione catchup/slow-down sia quella di riferimento congelato. Le
funzioni e i parametri sono descritti nella Guida alla
Programmazione VLT® Midi Drive FC 280.
La scalatura dei riferimenti analogici è descritta nei gruppi
di parametri 6-1* Ingr. analog. 53 e 6-2* Ingr. analog. 54,
mentre la scalatura dei riferimenti impulsi digitali è
descritta nel gruppo di parametri 5-5* Ingr. impulsi.
I limiti e gli intervalli del riferimento sono impostati nel
gruppo di parametri 3-0* Limiti riferimento.
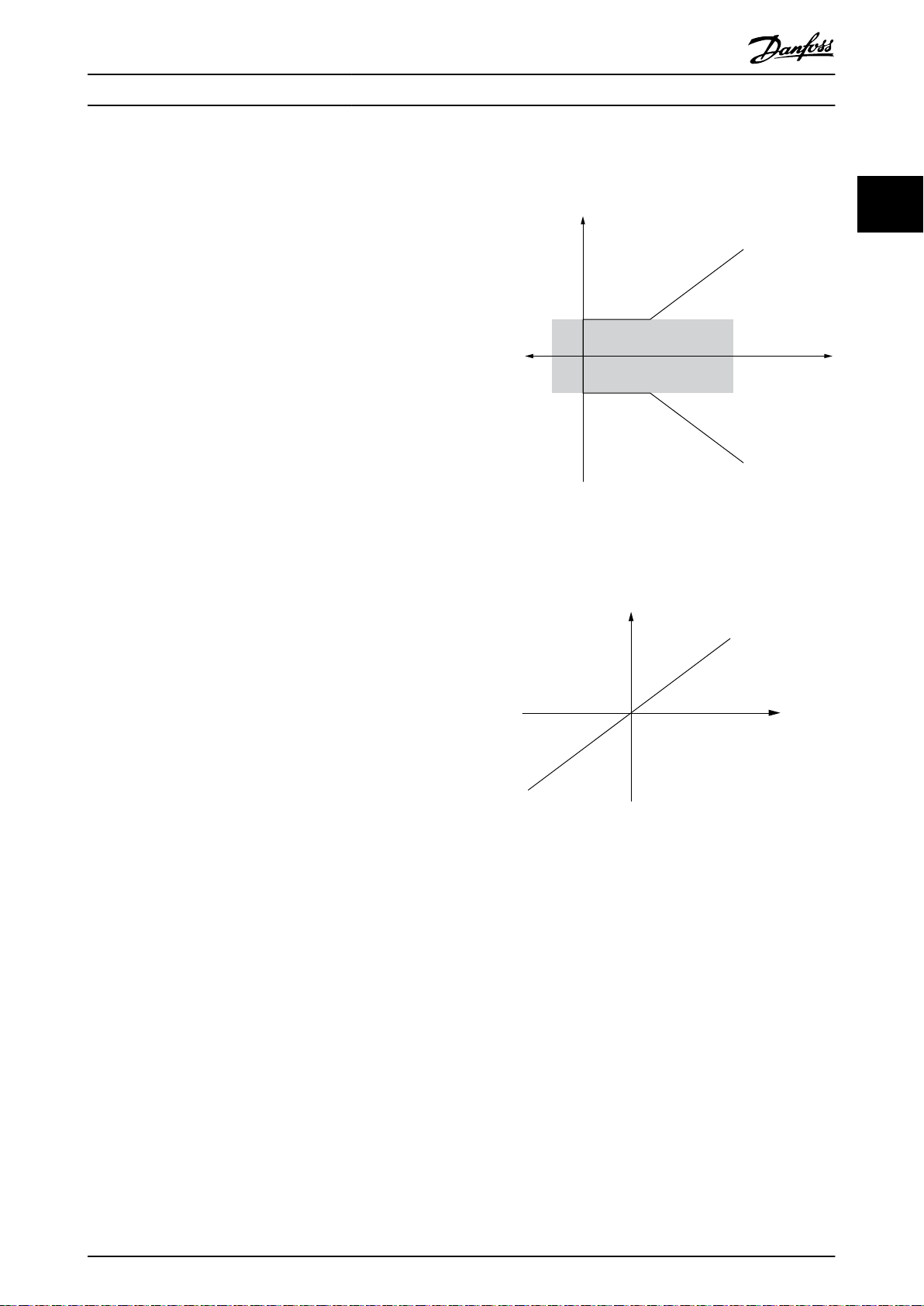
2.4.1 Limiti riferimento
Parametro 3-00 Intervallo di rif., parametro 3-02 Riferimento
minimo e parametro 3-03 Riferimento max. deniscono
l'intervallo consentito della somma di tutti i riferimenti.
All'occorrenza, la somma di tutti i riferimenti viene
bloccata. La relazione tra il riferimento risultante (dopo il
serraggio) e la somma di tutti i riferimenti è mostrata in
Disegno 2.15 e Disegno 2.16.
2 2
Disegno 2.15 Somma di tutti i riferimenti quando l'intervallo
di riferimento è impostato su 0
Disegno 2.16 Somma di tutti i riferimenti quando l'intervallo
di riferimento è impostato su 1
Non è possibile impostare il valore di
parametro 3-02 Riferimento minimo su un valore inferiore a
0, a meno che parametro 1-00 Modo congurazione sia
impostato su [3] Processo. In quel caso, le seguenti relazioni
tra il riferimento risultante (dopo il serraggio) e la somma
di tutti i riferimenti sono come mostrato nella Disegno 2.17.
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 23
Page 26
130BA186.11
P 3-03
P 3-02
Somma di tutti
i riferimenti
P 3-01 Campo di riferimento = [0] Min - Max
Riferimento risultante
Resource output
[Hz]
Resource input
Terminal X
high
High reference/
feedback value
130BD431.10
8
[V]
50
10
P1
P2
10
Low reference/
feedback value
Panoramica del prodotto
VLT® Midi Drive FC 280
2.4.3 Scala dei riferimenti impulsi e
analogici e retroazione
22
Disegno 2.17 Somma di tutti i riferimenti quando il
riferimento minimo è impostato su un valore negativo
2.4.2 Messa in scala dei riferimenti
preimpostati e dei riferimenti bus
I riferimenti preimpostati vengono messi in scala
secondo le seguenti regole:
Quando parametro 3-00 Reference Range è
•
impostato su [0] Min - Max, il riferimento dello 0%
è pari a 0 [unit], nel qual caso l'unità può essere
una qualsiasi, ad esempio giri/min., m/s e bar. Il
riferimento del 100% è pari al massimo (valore
assoluto di parametro 3-03 Maximum Reference,
valore assoluto di parametro 3-02 Riferimento
minimo)
Quando parametro 3-00 Reference Range è
•
impostato su [1] -Max - +Max, il riferimento dello
0% è pari a 0 [unit] e il riferimento del 100% è
pari al riferimento massimo.
I riferimenti bus vengono messi in scala secondo le
seguenti regole:
Quando parametro 3-00 Reference Range è
•
impostato su [0] Min - Max, il riferimento dello 0%
è pari al riferimento minimo e il riferimento del
100% è pari al riferimento massimo.
Quando parametro 3-00 Reference Range è
•
impostato su [1] -Max - +Max, il riferimento del
-100% è pari a - riferimento massimo e il
riferimento del 100% è pari al riferimento
massimo.
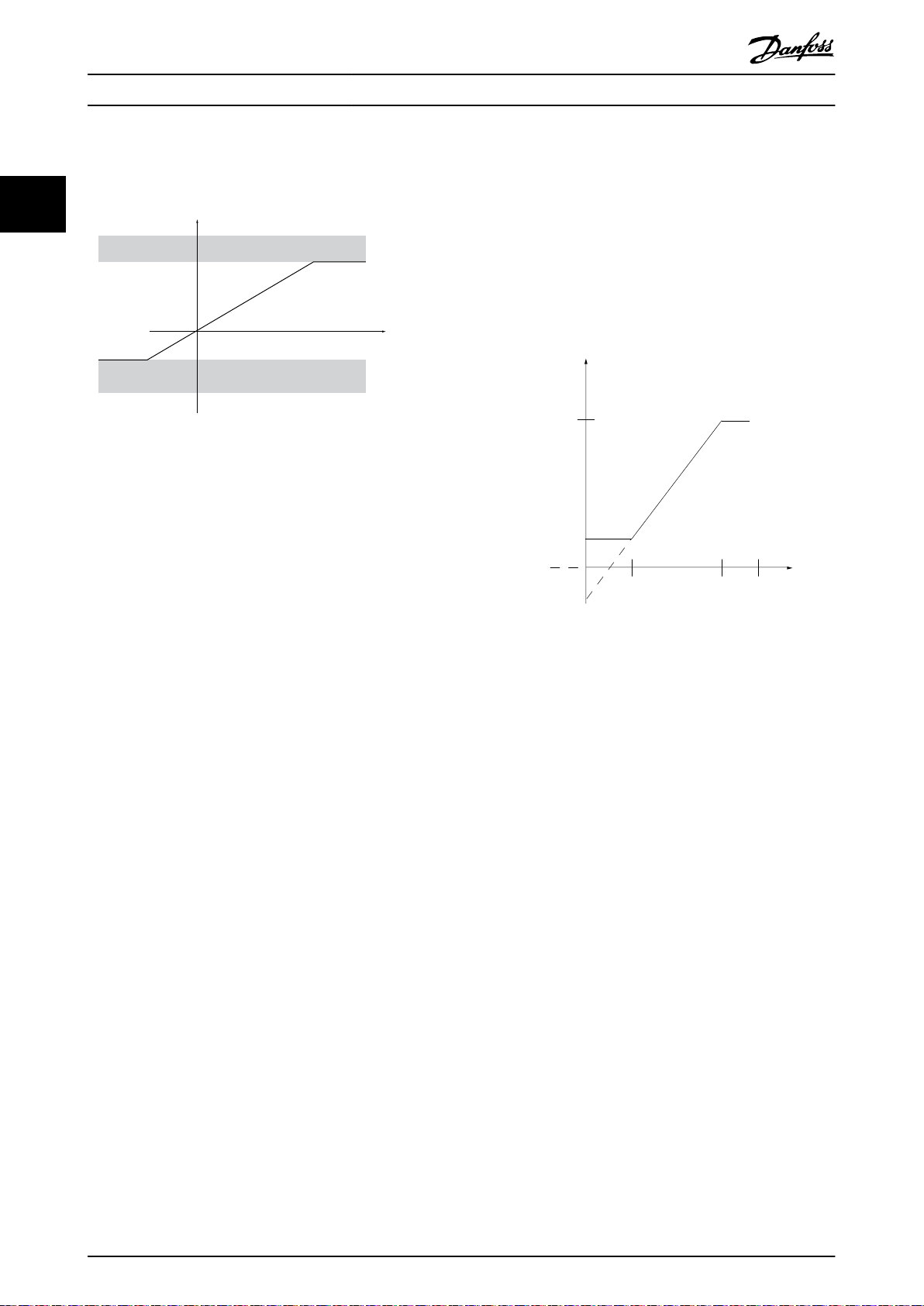
La scalatura dei riferimenti e della retroazione da ingressi
analogici e ingressi a impulsi avviene allo stesso modo.
L'unica dierenza è data dal fatto che un riferimento
superiore o inferiore ai punti nali minimo e massimo
specicati (P1 e P2 in Disegno 2.18) è bloccato, mentre le
retroazioni superiori o inferiori non lo sono.
Disegno 2.18 Punti nali minimo e massimo
24 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 27
Resource output
[Hz] or “No unit”
Resource input
[mA]
Quadrant 2
Quadrant 3
Quadrant 1
Quadrant 4
Terminal X high
Low reference/feedback
value
High reference/feedback
value
1
-50
165020
P1
P2
0
130BD446.10
forward
reverse
Terminal low
Panoramica del prodotto Guida alla Progettazione
I punti nali P1 e P2 sono deniti in Tabella 2.5 in funzione della scelta dell'ingresso.
Ingresso Analogico 53
modalità
tensione
P1=(Valore di ingresso minimo, valore di riferimento minimo)
Valore di riferimento minimo Parametro 6-14 Ri
f.basso/
val.retroaz.morsett
o 53
Valore di ingresso minimo Parametro 6-10 Te
ns. bassa
morsetto 53 [V]
P2=(Valore di ingresso massimo, valore di riferimento massimo)
Valore di riferimento massimo Parametro 6-15 Ri
f. alto/valore
retroaz. morsetto
53
Valore di ingresso massimo Parametro 6-11 Te
nsione alta
morsetto 53 [V]
Tabella 2.5 Punti nali P1 e P2
Analogico 54
modalità
tensione
Parametro 6-24 Ri
f.basso/
val.retroaz.morsett
o 54
Parametro 6-20 Te
ns. bassa
morsetto 54 [V]
Parametro 6-25 Ri
f. alto/valore
retroaz. morsetto
54
Parametro 6-21 Te
nsione alta
morsetto 54 [V]
2.4.4 Banda morta nell'intorno dello zero
Analogico 54
modalità corrente
Parametro 6-24 Rif.b
asso/
val.retroaz.morsetto
54
Parametro 6-22 Corr
. bassa morsetto 54
[mA]
Parametro 6-25 Rif.
alto/valore retroaz.
morsetto 54
Parametro 6-23 Corr
ente alta morsetto
54 [mA]
Ingresso a impulsi29Ingresso a impulsi 33
Parametro 5-52 Rif.
basso/val. retroaz.
morsetto 29
Parametro 5-50 Fre
quenza bassa
morsetto 29 [Hz]
Parametro 5-53 Rif.
alto/val. retroaz.
morsetto 29
Parametro 5-51 Fre
quenza alta mors.
29 [Hz]
Parametro 5-57 Rif.
basso/val. retroaz.
morsetto 33
Parametro 5-55 Frequenz
a bassa morsetto 33 [Hz]
Parametro 5-58 Rif. alto/
val. retroaz. morsetto 33
Parametro 5-56 Frequenz
a alta mors. 33 [Hz]
2 2
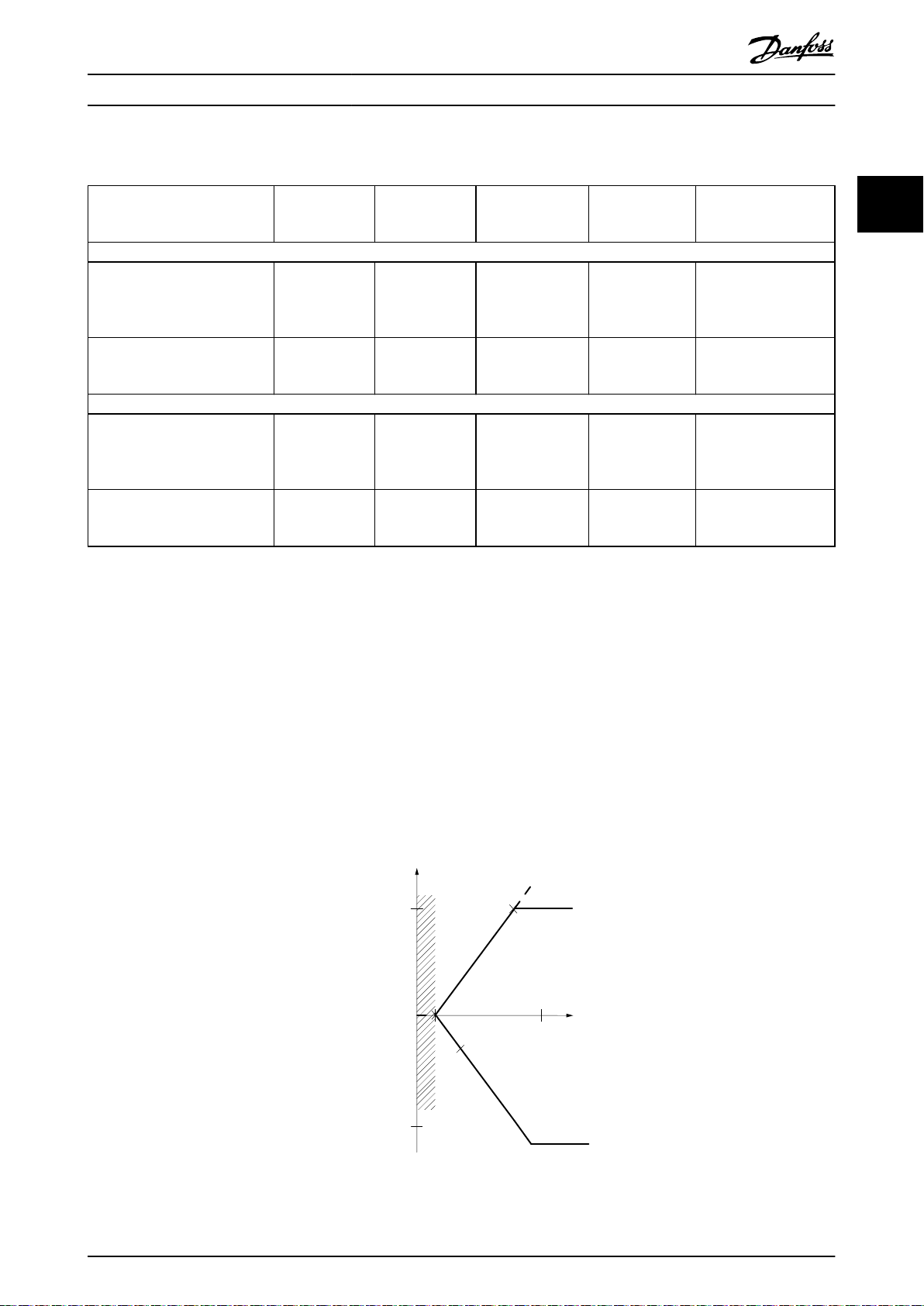
In alcuni casi, il riferimento (di rado anche la retroazione) deve avere una banda morta intorno allo 0 per garantire che la
macchina venga arrestata quando il riferimento è vicino allo 0.
Per attivare la banda morta e impostare la quantità di banda morta, eseguire quanto segue:
P1 o P2
Impostare il valore di riferimento minimo (vedere Tabella 2.5 per il relativo parametro) oppure il valore di
•
riferimento massimo sullo 0. In altre parole, P1 o P2 devono trovarsi sull'asse X in Disegno 2.19.
Accertarsi che entrambi i punti che deniscono il graco della messa in scala si trovino nello stesso quadrante.
•
deniscono le dimensioni della banda morta come mostrato in Disegno 2.19.
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 25
Disegno 2.19 Dimensioni della banda morta
Page 28

20
1
10
V
V
20
1
10
-20
130BD454.10
+
Analog input 53
Low reference 0 Hz
High reference 20 Hz
Low voltage 1 V
High voltage 10 V
Ext. source 1
Range:
0.0% (0 Hz)
100.0% (20 Hz)
100.0% (20 Hz)
Ext. reference
Range:
0.0% (0 Hz)
20 Hz 10V
Ext. Reference
Absolute
0 Hz 1 V
Reference
algorithm
Reference
100.0% (20 Hz)
0.0% (0 Hz)
Range:
Limited to:
0%- +100%
(0 Hz- +20 Hz)
Limited to: -200%- +200%
(-40 Hz- +40 Hz)
Reference is scaled
according to min
max reference giving a
speed.!!!
Scale to
speed
+20 Hz
-20 Hz
Range:
Speed
setpoint
Motor
control
Range:
-8 Hz
+8 Hz
Motor
Digital input 19
Low No reversing
High Reversing
Limits Speed Setpoint
according to min max speed.!!!
Motor PID
Hz
Hz
Dead band
Digital input
General Reference
parameters:
Reference Range: Min - Max
Minimum Reference: 0 Hz (0,0%)
Maximum Reference: 20 Hz (100,0%)
General Motor
parameters:
Motor speed direction:Both directions
Motor speed Low limit: 0 Hz
Motor speed high limit: 8 Hz
Panoramica del prodotto
VLT® Midi Drive FC 280
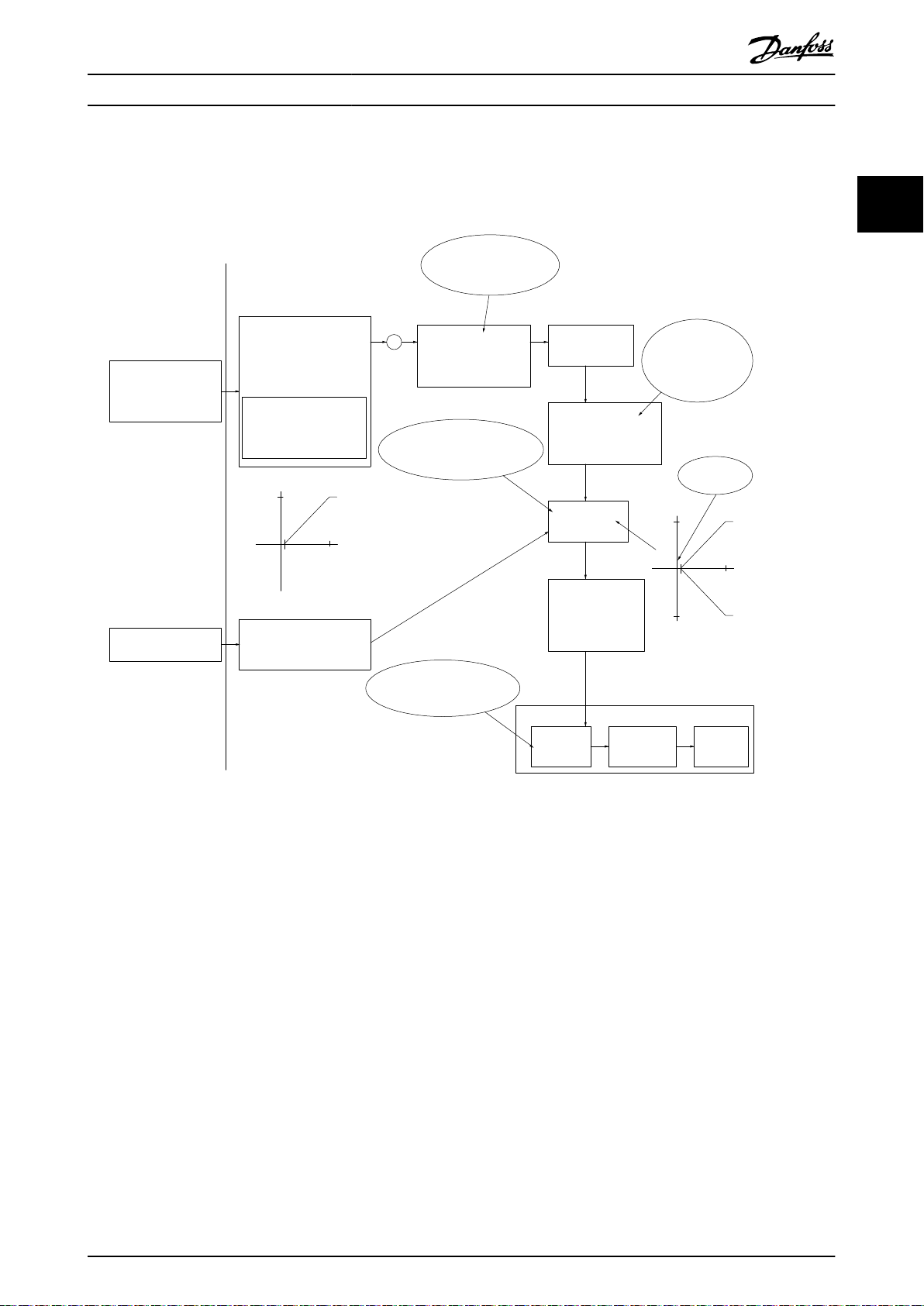
Caso 1: Riferimento positivo con banda morta, ingresso digitale per attivare l'inversione, parte I
Disegno 2.20 mostra l'azione di blocco dell'ingresso di riferimento con limiti all'interno dei limiti da minimo a massimo.
22
Disegno 2.20 Blocco dell'ingresso di riferimento con limiti all'interno di minimo - massimo
26 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 29
+
30 Hz
1
10
20 Hz
1
10
130BD433.11
-20 Hz
V
V
Analog input 53
Low reference 0 Hz
High reference 20 Hz
Low voltage 1 V
High voltage 10 V
Ext. source 1
Range:
0.0% (0 Hz)
150.0% (30 Hz)
150.0% (30 Hz)
Ext. reference
Range:
0.0% (0 Hz)
30 Hz 10 V
Ext. Reference
Absolute
0 Hz 1 V
Reference
algorithm
Reference
100.0% (20 Hz)
0.0% (0 Hz)
Range:
Limited to:
-100%- +100%
(-20 Hz- +20 Hz)
Limited to: -200%- +200%
(-40 Hz- +40 Hz)
Reference is scaled
according to
max reference giving a
speed.!!!
Scale to
speed
+20 Hz
-20 Hz
Range:
Speed
setpoint
Motor
control
Range:
–10 Hz
+10 Hz
Motor
Digital input 19
Low No reversing
High Reversing
Limits Speed Setpoint
according to min max speed.!!!
Motor PID
Dead band
Digital input
General Reference
parameters:
Reference Range: -Max - Max
Minimum Reference: Don't care
Maximum Reference: 20 Hz (100.0%)
General Motor
parameters:
Motor speed direction: Both directions
Motor speed Low limit: 0 Hz
Motor speed high limit: 10 Hz
Panoramica del prodotto Guida alla Progettazione
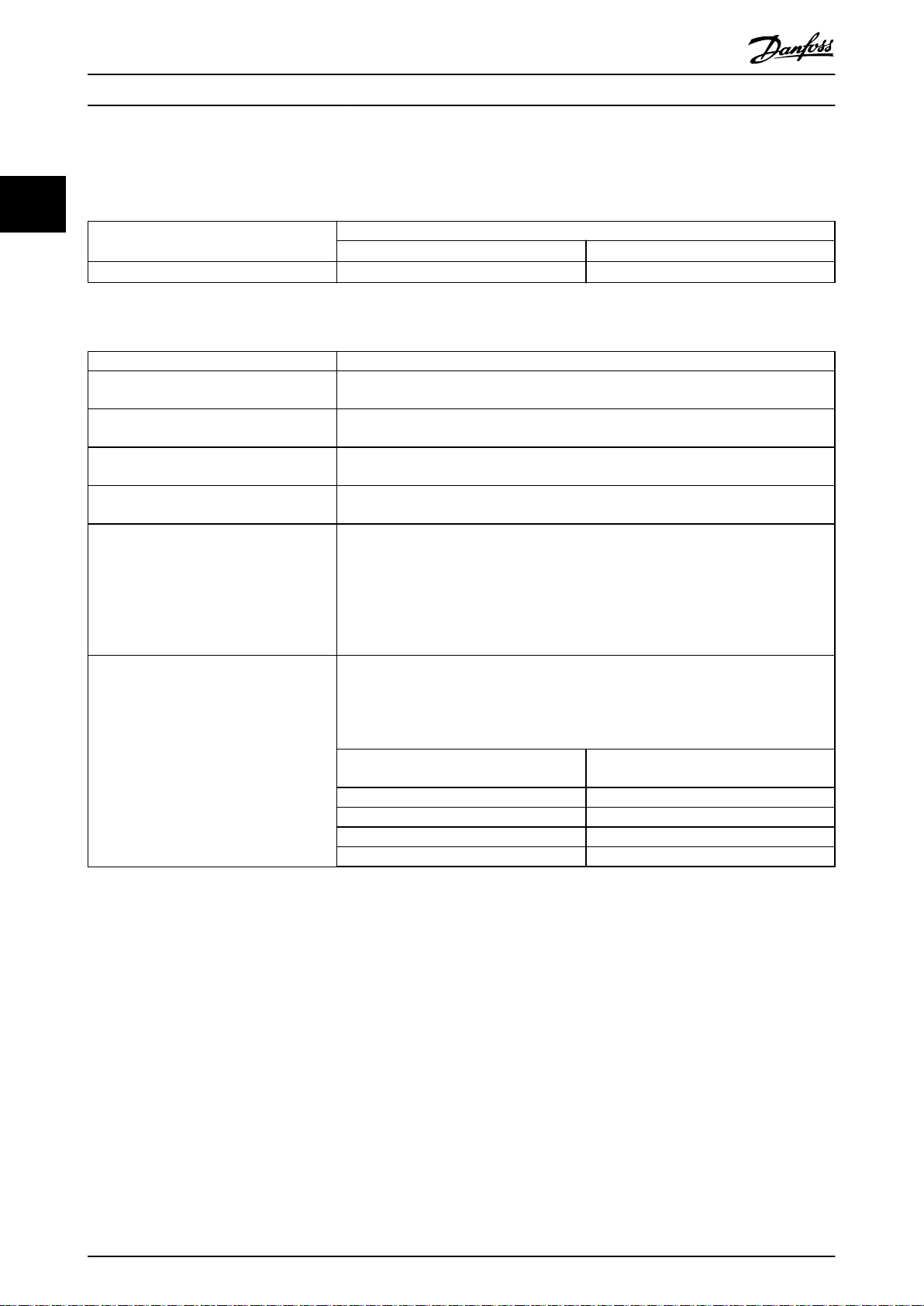
Caso 2: Riferimento positivo con banda morta, ingresso digitale per attivare l'inversione, parte II
Disegno 2.21 mostra come l'ingresso di riferimento con limiti al di fuori dei limiti da -massimo a +massimo si blocchi a limiti
basso e alto dell'ingresso prima di essere aggiunto al riferimento esterno, e come il riferimento esterno sia bloccato da massimo a +massimo dall'algoritmo di riferimento.
2 2
Disegno 2.21 Blocco dell'ingresso di riferimento con limiti al di fuori di -massimo - +massimo
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 27
Page 30
Panoramica del prodotto
VLT® Midi Drive FC 280
2.5 Controllo PID
2.5.1 Regolatore di velocità PID
22
Parametro 1-00 Modo congurazione
[1] Anello chiuso vel.
Tabella 2.6 Congurazioni di controllo, controllo di velocità attivo
1) Non disponibile indica che la modalità
Parametro Descrizione della funzione
Parametro 7-00 Fonte retroazione PID di
velocità
Parametro 7-02 Speed PID Proportional Gain Quanto più alto è il valore, tanto più rapida è la regolazione. Tuttavia, un valore troppo
Parametro 7-03 Vel. tempo integrale PID Elimina l'errore di velocità nello stato stazionario. Valori inferiori indicano una reazione più
Parametro 7-04 Vel. Tempo dierenz. PID Fornisce un guadagno proporzionale al tasso di variazione della retroazione di velocità.
Parametro 7-05 Vel., limite guad. di. PID In caso di rapidi cambi di riferimento o retroazione in una data applicazione, vale a dire di
Parametro 7-06 Vel. tempo ltro passa-basso
PID
Parametro 1-01 Principio controllo motore
U/f
Non disponibile
specica non è aatto disponibile.
Selezionare da quale ingresso deve provenire la retroazione per il PID di velocità.
elevato può causare oscillazioni.
veloce. Tuttavia, un valore troppo basso può causare oscillazioni.
Un'impostazione pari a 0 disabilita il derivatore.
variazione improvvisa dell’errore, il derivatore può presto diventare eccessivamente
dominante. Ciò si verica in quanto questo reagisce alle variazioni dell’errore. Quanto più
rapida è la variazione dell'errore, tanto maggiore è il guadagno dierenziale. È pertanto
possibile limitare il guadagno dierenziale per consentire l'impostazione di un ragionevole
tempo di derivazione per le variazioni lente e un guadagno adeguatamente rapido per le
variazioni rapide.
Un ltro passa basso che smorza le oscillazioni del segnale di retroazione e migliora le
prestazioni nello stato stazionario. Tuttavia, un tempo ltro troppo lungo deteriora la
prestazione dinamica del regolatore di velocità PID.
Impostazioni pratiche di parametro 7-06 Speed PID Lowpass Filter Time ricavate dal numero
di impulsi per giro nell'encoder (PPR):
Encoder PPR Parametro 7-06 Vel. tempo ltro passa-basso
512 10 ms
1024 5 ms
2048 2 ms
4096 1 ms
1)
VVC
Attivo
PID
+
Tabella 2.7 Parametri controllo di velocità
Esempio di programmazione del controllo di velocità
In questo esempio il regolatore di velocità PID viene utilizzato per mantenere una velocità costante del motore indipendentemente dalle variazioni di carico sul motore. La velocità del motore richiesta viene impostata tramite un potenziometro
collegato al morsetto 53. L'intervallo di velocità è pari a 0–1500 giri/min. corrispondente a 0–10 V sul potenziometro. Un
interruttore collegato al morsetto 18 controlla l'avviamento e l'arresto. Il PID di velocità monitora i giri/min. eettivi del
motore utilizzando un encoder incrementale da 24 V (HTL) come retroazione. Il sensore di retroazione è un encoder (1024
impulsi per giro) collegato ai morsetti 32 e 33. Il campo di frequenza a impulsi per i morsetti 32 e 33 è pari a 4 Hz–32 kHz.
28 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 31

M
3
96 97 9998
91 92 93 95
50
12
L1 L2L1PEL3
W PEVU
F1
L2
L3
N
PE
18
53
27
55
32
33
24 Vdc
130BD372.11
Panoramica del prodotto Guida alla Progettazione
2 2
Disegno 2.22 Programmazione del controllo di velocità
Seguire le fasi in Tabella 2.8 per programmare il controllo di velocità (vedere la spiegazione delle impostazioni nella
Guida alla Programmazione)
In Tabella 2.8 si presuppone che tutti gli altri parametri e interruttori si mantengano alla rispettiva impostazione di fabbrica.
Funzione Numero di parametro Impostazione
1) Assicurarsi che il motore funzioni correttamente. Fare quanto segue:
Impostare i parametri motore usando i dati indicati nella
targa.
Eseguire un AMA. Parametro 1-29 Automatic
2) Controllare che il motore funzioni e che l'encoder sia collegato correttamente. Fare quanto segue:
Premere [Hand On]. Controllare che il motore funzioni e
annotare il senso di rotazione (indicato come senso
positivo).
3) Assicurarsi che i limiti del convertitore di frequenza siano impostati su valori sicuri:
Impostare limiti accettabili per i riferimenti. Parametro 3-02 Minimum
Vericare che le impostazioni di rampa rientrino nelle
capacità del convertitore di frequenza e nelle speciche di
funzionamento applicative consentite.
Impostare limiti accettabili per la velocità e la frequenza del
motore.
4) Congurare il controllo di velocità e selezionare il principio controllo motore:
Gruppo di parametri 1-2*
Come specicato nella targa del motore.
Motor Data
[1] Abilit.AMA compl.
Motor Adaption (AMA)
Impostare un riferimento positivo.
0
Reference
Parametro 3-03 Maximum
50
Reference
Parametro 3-41 Ramp 1
Impostazione di fabbrica
Ramp Up Time
Parametro 3-42 Ramp 1
Impostazione di fabbrica
Ramp Down Time
Parametro 4-12 Motor
0 Hz
Speed Low Limit [Hz]
Parametro 4-14 Motor
50 Hz
Speed High Limit [Hz]
Parametro 4-19 Max
60 Hz
Output Frequency
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 29
Page 32

Panoramica del prodotto
VLT® Midi Drive FC 280
Attivazione del controllo di velocità Parametro 1-00 Congu-
ration Mode
Selezione del principio controllo motore Parametro 1-01 Motor
22
5) Congurare e scalare il riferimento al controllo di velocità:
Impostare l'ingresso analogico 53 come una risorsa di
riferimento.
Scalare l'ingresso analogico 53 da 0 Hz (0 V) a 50 Hz (10 V) Gruppo di parametri 6-1*
6) Congurare il segnale encoder 24 V HTL come retroazione per il controllo motore e il controllo di velocità:
Impostare gli ingressi digitali 32 e 33 come ingressi
encoder.
Selezionare il morsetto 32/33 come retroazione PID di
velocità.
7) Tarare i parametri relativi al controllo di velocità PID:
Utilizzare i principi di taratura, se pertinenti, oppure tarare
manualmente.
8) Fine:
Salvare l'impostazione parametri nell'LCP per conservarla al
sicuro.
Tabella 2.8 Ordine di programmazione per il regolatore di velocità PID
Control Principle
Parametro 3-15 Reference 1
Source
Ingr. analog. 1
Parametro 5-14 Terminal
32 Digital Input
Parametro 5-15 Terminal
33 Digital Input
Parametro 7-00 Speed PID
Feedback Source
Gruppo di parametri 7-0*
Speed PID Ctrl.
Parametro 0-50 Copia LCP [1] Tutti a LCP
[1] Anello chiuso vel.
+
[1] VVC
Non necessario (predenito)
Non necessario (predenito)
[82] Encoder input B
[83] Ingresso encoder A
[1] Encoder 24 V
30 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 33

P 7-30
normale/inverso
PID
P 7-38
*(-1)
Feed Foward
Gestione
dei rif.
Gestione
della
retroazione
% [unità]
% [unità]
%
[unità]
%
[velocità]
Rapporto
in scala
alla
velocità
P 4-10
Direzione velocità
del motore
Al
controllo
motore
PID di Processo
130BA178.10
_
+
0%
-100%
100%
0%
-100%
100%
Panoramica del prodotto Guida alla Progettazione
2.5.2 PID controllo di processo
Il PID controllo di processo può essere impiegato per controllare i parametri dell'applicazione che possono essere misurati
da un sensore (ad esempio pressione, temperatura, usso) e inuenzati dal motore collegato tramite una pompa, una
ventola o altri dispositivi.
Tabella 2.9 mostra le congurazioni di controllo in cui è possibile il controllo di processo. Consultare capitolo 2.3 Strutture di
controllo per vericare dove è attivo il controllo di velocità.
Parametro 1-00 Conguration Mode Parametro 1-01 Motor Control Principle
U/f
VVC
+
[3] Processo Processo Processo
Tabella 2.9 Congurazione controllo
AVVISO!
Il controllo di processo PID funziona nell'impostazione parametri standard, ma è consigliabile tarare i parametri per
ottimizzare le prestazioni di controllo dell'applicazione.
2 2
Disegno 2.23 Diagramma del PID controllo di processo
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 31
Page 34

Panoramica del prodotto
VLT® Midi Drive FC 280
2.5.3 Parametri rilevanti nel controllo di processo
22
Parametro Descrizione della funzione
Parametro 7-20 Process CL Feedback 1 Resource Selezionare da quale fonte (ingresso analogico o a impulsi) il PID di processo debba
ottenere la retroazione.
Parametro 7-22 Process CL Feedback 2 Resource Opzionale: Stabilire se (e da dove) il PID di processo ottiene un segnale di retroazione
supplementare. Se viene selezionata una fonte di retroazione supplementare, i due segnali
di retroazione vengono aggiunti prima di essere usati nel PID controllo di processo.
Parametro 7-30 Process PID Normal/ Inverse
Control
Parametro 7-31 Process PID Anti Windup La funzione di antisaturazione garantisce che, al raggiungimento del limite di frequenza o
Parametro 7-32 Process PID Start Speed In alcune applicazioni può occorrere molto tempo per raggiungere la velocità/il setpoint
Parametro 7-33 Process PID Proportional Gain Quanto più alto è il valore, tanto più rapida è la regolazione. Tuttavia, un valore troppo
Parametro 7-34 Process PID Integral Time Elimina l'errore di velocità nello stato stazionario. Un valore inferiore determina una
Parametro 7-35 Process PID Dierentiation Time Fornisce un guadagno proporzionale alla percentuale di variazione della retroazione.
Parametro 7-36 Process PID Di. Gain Limit In caso di modiche rapide al riferimento o alla retroazione in una data applicazione (vale
Parametro 7-38 Process PID Feed Forward
Factor
Parametro 5-54 Pulse Filter Time Constant
•
#29 (Impulsi mors. 29)
Parametro 5-59 Pulse Filter Time Constant
•
#33 (Impulsi mors. 33)
Parametro 6-16 Terminal 53 Filter Time
•
Constant (Analogico mors. 53)
Parametro 6-26 Terminal 54 Filter Time
•
Constant (Analogico mors. 54)
Nel funzionamento [0] Normale, il controllo di processo risponde con un aumento della
velocità del motore se la retroazione presenta un valore inferiore al riferimento. Nel funzionamento [1] Inverso, il controllo di processo risponde invece con una riduzione della
velocità del motore.
del limite di coppia, l’integratore viene impostato su un guadagno che corrisponde alla
frequenza corrente. Ciò evita l’integrazione di un errore che non può essere compensato
da una variazione di velocità. Premere [0] O per disabilitare questa funzione.
richiesti. In queste applicazioni può essere conveniente impostare una velocità del motore
ssa nel convertitore di frequenza prima che il controllo di processo sia attivato. Impostare
una velocità del motore ssa denendo un valore di avviamento del PID di processo
(velocità) in parametro 7-32 Process PID Start Speed.
elevato può causare oscillazioni.
reazione più veloce. Tuttavia, un valore troppo basso può causare oscillazioni.
Un'impostazione pari a 0 disabilita il derivatore.
a dire di variazione improvvisa dell'errore), il derivatore può diventare presto eccessivamente dominante. Ciò si verica in quanto questo reagisce alle variazioni dell’errore.
Quanto più rapida è la variazione dell'errore, tanto maggiore è il guadagno dierenziale.
Pertanto il guadagno dierenziale può essere limitato per consentire l'impostazione di un
tempo di derivazione ragionevole per variazioni lente.
Nelle applicazioni in cui esiste una correlazione buona (e quasi lineare) tra il riferimento di
processo e la velocità del motore necessaria per ottenere tale riferimento, utilizzare il
fattore di feed forward per conseguire una prestazione dinamica migliore del PID controllo
di processo.
In caso di oscillazioni del segnale di retroazione della corrente/tensione, utilizzare un ltro
passa basso per smorzarle. La costante di tempo del ltro impulsi rappresenta il limite
velocità delle ondulazioni che si vericano sul segnale di retroazione.
Esempio: Se il ltro passa basso è stato impostato a 0,1 s, la velocità limite è di 10 RAD/s
(il numero reciproco di 0,1 s), corrispondente a (10/(2 x π))=1,6 Hz. Ciò signica che il ltro
smorza tutte le correnti/tensioni che variano di oltre 1,6 oscillazioni al secondo. In altre
parole, il controllo viene eettuato solo su un segnale di retroazione che varia con
frequenza (velocità) inferiore a 1,6 Hz.
Il ltro passa basso migliora le prestazioni nello stato stazionario, ma la selezione di un
tempo ltro troppo lungo deteriora la prestazione dinamica del PID controllo di processo.
Tabella 2.10 Parametri del controllo di processo
32 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 35

Temperatura
Velocità della ventola
Transmettitore
di temperatura
Calore
Processo di
generazione
del calore
Aria fredda
130BA218.10
100kW
n °CW
Transmitter
96 97 9998
91 92 93 95
50
13
L1 L2
L1
PEL3
W PEVU
F1
L2
L3
N
PE
130BF102.10
18
53
27
55
54
M
3
Panoramica del prodotto Guida alla Progettazione
2.5.4 Esempio di un PID controllo di
processo
Disegno 2.24 è un esempio di PID controllo di processo
utilizzato in un sistema di ventilazione:
Disegno 2.24 PID controllo di processo in un sistema di
ventilazione
In un sistema di ventilazione, è possibile impostare la
temperatura da -5 a +35 °C con un potenziometro da 0–10
V. Per mantenere costante la temperatura impostata, usare
il controllo di processo.
Il controllo è inverso, vale a dire che quando la
temperatura aumenta, per generare più aria viene
aumentata anche la velocità di ventilazione. Quando la
temperatura diminuisce, la velocità viene ridotta. Il trasmettitore usato è un sensore di temperatura con un intervallo
di funzionamento da -10 a +40 °C, 4–20 mA.
Funzione Numero di
Inizializzare il convertitore di frequenza. Parametro 14-2
1) Impostare i parametri motore:
Impostare i parametri motore in base ai dati di
targa.
Eseguire un AMA completo. Parametro 1-29
2) Controllare che il motore funzioni nel senso corretto.
Quando il motore è collegato al convertitore di frequenza con ordine di fase diretto come U-U; V-V; W-W, l'albero motore di norma gira in
senso orario visto dall'estremità dell'albero.
Premere [Hand On]. Controllare il senso dell'albero
applicando un riferimento manuale.
parametro
2 Modo di
funzionamento
Gruppo di
parametri 1-2*
Motor Data
Adattamento
automatico
motore (AMA)
2 2
Disegno 2.25 Trasmettitore a due li
1. Avviamento/arresto tramite l'interruttore collegato
al morsetto 18.
2. Riferimento temperatura tramite il potenziometro
(da -5 a +35 °C, 0–10 V CC) collegato al morsetto
53.
3. Retroazione della temperatura tramite il trasmettitore (da -10 a +40 °C, 4–20 mA) collegato al
morsetto 54.
Impostazione
[2] Inizializzazione - spegnere e riaccendere - premere ripristino.
Come indicato sulla targa del motore.
[1] Abilit.AMA compl..
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 33
Page 36

Panoramica del prodotto
VLT® Midi Drive FC 280
Funzione Numero di
parametro
Se il motore gira nel senso opposto a quello
22
richiesto:
1. Modicare il senso del motore in
parametro 4-10 Motor Speed Direction.
2. Scollegare la rete e attendere che il
collegamento CC si scarichi.
3. Commutare due delle fasi del motore.
Impostare la modalità di congurazione. Parametro 1-00
3) Impostare la congurazione di riferimento, ossia l'intervallo per la gestione dei riferimenti. Impostare la scala dell'ingresso analogico nel
gruppo di parametri 6-** Analog In/Out.
Impostare le unità riferimento/retroazione.
Impostare il riferimento minimo (10 °C (50 °F)).
Impostare il riferimento massimo (80 °C (176 °F)).
Se il valore impostato è determinato da un valore
predenito (parametro array), impostare altre
risorse di riferimento su [0] Nessuna funz.
4) Regolare i limiti per il convertitore di frequenza:
Impostare i tempi di rampa a un valore
appropriato come 20 s.
Impostare i limiti velocità minimi.
Impostare il limite massimo velocità del motore.
Impostare la frequenza di uscita massima.
Impostare parametro 6-19 Terminal 53 mode e parametro 6-29 Terminal 54 mode alla modalità tensione o corrente.
5) Scalare gli ingressi analogici utilizzati per riferimento e retroazione:
Parametro 4-10
Direz. velocità
motore
Modo congu-
razione
Parametro 3-01
Reference/
Feedback Unit
Parametro 3-02
Minimum
Reference
Parametro 3-03
Maximum
Reference
Parametro 3-10
Preset
Reference
Parametro 3-41
Ramp 1 Ramp
Up Time
Parametro 3-42
Ramp 1 Ramp
Down Time
Parametro 4-12
Motor Speed
Low Limit [Hz]
Parametro 4-14
Motor Speed
High Limit [Hz]
Parametro 4-19
Max Output
Frequency
Impostazione
Selezionare il senso corretto dell'albero motore.
[3] Processo.
[60] °C Unità visualizzata sul display.
-5 °C (23 °F).
35 °C (95 °F).
[0] 35%.
Par . 3 − 10
Rif =
Parametro 3-14 Rif. relativo preimpostato a parametro 3-18 Risorsa rif. in
scala relativa [0] = Nessuna funz.
20 s
20 s
10 Hz
50 Hz
60 Hz
0
× Par . 3 − 03 − par .3 − 02 = 24, 5°C
100
34 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 37

Panoramica del prodotto Guida alla Progettazione
Funzione Numero di
parametro
Impostare la bassa tensione del morsetto 53.
Impostare l'alta tensione del morsetto 53.
Impostare il valore di retroazione basso del
morsetto 54.
Impostare il valore di retroazione alto del morsetto
54.
Impostare la fonte retroazione.
6) Impostazioni di base PID:
PID di processo normale/inverso. Parametro 7-30
PID di processo anti-saturazione Parametro 7-31
Velocità di avviamento PID di processo. Parametro 7-32
Salvare i parametri sull'LCP. Parametro 0-50
Parametro 6-10
Terminal 53
Low Voltage
Parametro 6-11
Terminal 53
High Voltage
Parametro 6-24
Terminal 54
Low Ref./Feedb.
Value
Parametro 6-25
Terminal 54
High Ref./
Feedb. Value
Parametro 7-20
Process CL
Feedback 1
Resource
Process PID
Normal/
Inverse Control
Process PID
Anti Windup
PID, veloc.
avviam. [giri/
min]
Copia LCP
Impostazione
0 V
10 V
-5 °C (23 °F)
35 °C (95 °F)
[2] Ingresso analogico 54
[0] Normale
[1] On
300 giri/min.
[1] Tutti a LCP
2 2
Tabella 2.11 Esempio di setup di un PID controllo di processo
2.5.5 Ottimizzazione controllore di
processo
Una volta congurate le impostazioni di base come
illustrato in capitolo 2.5.5 Ordine di programmazione,
ottimizzare il guadagno proporzionale, il tempo di
integrazione e il tempo di derivazione
(parametro 7-33 Process PID Proportional Gain,
parametro 7-34 Process PID Integral Time e
parametro 7-35 Process PID Dierentiation Time). Nella
maggior parte dei processi completare la seguente
procedura:
1. Avviare il motore.
2. Impostare parametro 7-33 Process PID Proportional
Gain a 0,3 e aumentarlo
retroazione non ricomincia a oscillare
continuamente. Ridurre il valore nché il segnale
di retroazione non si stabilizza. Ridurre il
guadagno proporzionale del 40-60%.
nché il segnale di
3. Impostare parametro 7-34 Process PID Integral Time
a 20 s e ridurre il valore nché il segnale di
retroazione non ricomincia a oscillare
continuamente. Accrescere il tempo di
integrazione nché il segnale di retroazione non
si stabilizza, con un successivo aumento del
15-50%.
4. Usare soltanto parametro 7-35 Process PID Dieren-
tiation Time per i sistemi a reazione rapida (tempo
di derivazione). Il valore tipico è quattro volte il
tempo di integrazione impostato. Utilizzare il
derivatore quando l’impostazione del guadagno
proporzionale e del tempo di integrazione è stata
completamente ottimizzata. Assicurarsi che il ltro
passa basso smorzi sucientemente le oscillazioni
sul segnale di retroazione.
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 35
Page 38

130BA183.10
y(t)
t
P
u
Panoramica del prodotto
VLT® Midi Drive FC 280
AVVISO!
Se necessario, è possibile attivare avviamento e arresto
22
più volte per provocare una variazione del segnale di
retroazione.
3. Misurare il periodo di oscillazione per ottenere la
costante di tempo critica, Pu.
4. Utilizzare Tabella 2.12 per calcolare i parametri
necessari per il controllo PID.
L'operatore di processo può eettuare la taratura nale del
2.5.6 Metodo di taratura Ziegler Nichols
regolatore in modo iterativo per fornire un controllo
soddisfacente.
Per tarare i controlli PID del convertitore di frequenza,
Danfoss consiglia il metodo di taratura Ziegler Nichols.
AVVISO!
Non utilizzare il metodo di taratura Ziegler Nichols nelle
applicazioni che potrebbero essere danneggiate dalle
oscillazioni generate da impostazioni di controllo ai limiti
di stabilità.
I criteri per regolare i parametri sono basati piuttosto sulla
valutazione del sistema al limite di stabilità che sulla
risposta al gradino. Accrescere il guadagno proporzionale
nché non si osservano oscillazioni continue (in base alla
misurazione sulla retroazione), ossia
arriva al limite di stabilità. Il guadagno corrispondente (Ku)
viene denominato guadagno ideale e corrisponde al
guadagno in cui si ottiene l'oscillazione. Il periodo di
oscillazione (Pu) (denito periodo ideale) si stabilisce come
mostrato nella Disegno 2.26 e deve essere misurato quando
l'ampiezza di oscillazione è ridotta.
1. Selezionare soltanto il controllo proporzionale, nel
senso che il tempo di integrazione viene
impostato al valore massimo, mentre il tempo di
derivazione viene impostato a 0.
2. Aumentare il valore del guadagno proporzionale
no al raggiungimento del punto di instabilità
(oscillazioni autoindotte) e del valore critico di
guadagno, Ku.
nché il sistema non
Disegno 2.26 Sistema al limite di stabilità
Tipo di
controllo
Controllo PI 0,45 x K
Controllo
stretto PID
PID lieve
sovraelongazione
Tabella 2.12 Taratura Ziegler Nichols per il regolatore
Guadagno
proporzionale
u
0,6 x K
u
0,33 x K
u
Tempo di
integrazione
0,833 x P
0,5 x P
0,5 x P
u
u
u
Tempo di
derivazione
0,125 x P
0,33 x P
–
u
u
Emissioni EMC e immunità
2.6
2.6.1 Considerazioni generali sulle emissioni EMC
Transitori veloci vengono condotti a frequenze nell'intervallo compreso tra 150 kHz e 30 MHz. L'interferenza trasportata
dall'aria proveniente dal sistema del convertitore di frequenza nell'intervallo compreso tra 30 MHz e 1 GHz è generata dal
convertitore di frequenza, dal cavo motore e dal motore.
Le correnti capacitive presenti nel cavo motore, accoppiate con un elevato valore dU/dt nella tensione motore, generano
correnti di dispersione.
L'uso di un cavo motore schermato accresce la corrente di dispersione (vedere Disegno 2.27), poiché i cavi schermati sono
dotati di una maggiore capacità verso terra rispetto a quelli non schermati. Se la corrente di dispersione non è
provoca interferenze maggiori sulla rete nel campo di radiofrequenza al di sotto di circa 5 MHz. Poiché la corrente di
dispersione (I1) viene ritrasportata all'unità attraverso lo schermo (I3), è presente soltanto un piccolo campo elettromagnetico
(I4) dal cavo motore schermato.
Lo schermo riduce l'interferenza irradiata, ma aumenta l'interferenza a bassa frequenza sulla rete. Collegare lo schermo del
cavo motore al contenitore del convertitore di frequenza e a quello del motore. A tal
schermati integrati in modo da evitare terminali degli schermi attorcigliati (pigtail). I morsetti schermati aumentano
36 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
ne è consigliabile utilizzare morsetti
ltrata,
Page 39

1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Panoramica del prodotto Guida alla Progettazione
l'impedenza dello schermo alle frequenze più elevate, riducendo l'eetto di schermatura e aumentando la corrente di
dispersione (I4).
Montare lo schermo su entrambe le estremità del contenitore se viene usato un cavo schermato per le nalità seguenti:
bus di campo;
•
rete;
•
relè;
•
cavo di comando;
•
interfaccia di segnale;
•
freno.
•
In alcune situazioni è tuttavia necessario rimuovere lo schermo per evitare anelli di corrente.
2 2
1 Cavo di terra
2 Schermo
3 Alimentazione di rete CA
4 Convertitore di frequenza
5 Cavo motore schermato
6 Motore
Disegno 2.27 Emissioni EMC
Nel caso in cui si posizioni lo schermo su una piastra di installazione per il convertitore di frequenza, tale piastra deve essere
di metallo per ricondurre le correnti dello schermo all'unità. È necessario assicurare un buon contatto elettrico dalla piastra
di installazione allo chassis del convertitore di frequenza per mezzo delle viti di montaggio.
Quando si utilizzano cavi non schermati, è possibile che alcuni requisiti relativi alle emissioni non vengano soddisfatti
mentre i requisiti relativi all'immunità lo sono.
Per ridurre il livello di interferenza dell'intero sistema (unità e installazione), è importante che i cavi motore e i cavi freno
siano più corti possibile. Evitare di installare i cavi con un livello di segnale sensibile accanto ai cavi della rete, del motore e
del freno. Interferenze radio superiori a 50 MHz (trasportate dall'aria) vengono generate in particolare dall'elettronica di
controllo.
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 37
Page 40

Panoramica del prodotto
2.6.2 Emissioni EMC
VLT® Midi Drive FC 280
22
installazione), motore e cavi motore schermati.
Tipo di
ltro
(interno)
Filtro A2
Filtro A1
Filtro A2
Vite EMC
rimossa
Filtro A1
Vite EMC
rimossa
Tensione di alimentazione/potenza nominale Classe A2/EN 55011 Classe A1/EN 55011 Classe B/EN 55011
3x380–480 V 3x200–240 V 1x200–240 V Condotte Irradiata Condotte Irradiata Condotte Irradiata
0,37–22 kW
0,37–7,5 kW
0,37–22 kW
2)
0,37–7,5 kW
2)
(0,5–30 cv)
–
– –
(0,5–10 cv)
11–22 kW
(15–30 cv)
– –
(0,5–30 cv)
–
– –
(0,5–10 cv)
11–22 kW
(15–30 cv)
– –
– –
0,37–4 kW
(0,5–5,4 cv)
– –
– –
– – – – – – – –
0,37–4 kW
(0,5–5,4 cv)
– –
– –
–
0,37–2,2 kW
(0,5–3 cv)
0,37–2,2 kW
(0,5–3 cv)
– – – – – – –
0,37–2,2 kW
(0,5–3 cv)
0,37–2,2 kW
(0,5–3 cv)
25 m (82
piedi)
25 m (82
piedi)
– – – – – –
25 m (82
piedi)
50 m (164
piedi)
40 m (131
piedi)
– – – – – –
5 m (16,4
piedi)
5 m (16,4
piedi)
5 m (16,4
piedi)
1)
Sì
1)
Sì
1)
Sì
1)
Sì
1)
Sì
1)
Sì
1)
Sì
1)
Sì
– – – –
– – – –
25 m
(82 piedi)
50 m
(164 piedi)
40 m
(131 piedi)
– – – –
– – – –
– – – –
Sì – –
Sì – –
Sì
15 m
(49,2 piedi)
–
I risultati dei test in Tabella 2.13 sono stati ottenuti usando un sistema dotato di convertitore di frequenza (con la piastra di
Tabella 2.13 Emissioni EMC (tipo di ltro: interno)
1) Il campo di frequenza da 150 kHz a 30 MHz non è armonizzato tra IEC/EN 61800-3 e EN 55011 e non è compreso obbligatoriamente.
2) Bassa corrente di dispersione verso terra. Compatibile per il funzionamento su rete IT/ELCB.
I risultati dei test nella Tabella 2.14 sono stati ottenuti usando un sistema dotato di convertitore di frequenza (con piastra di
installazione),
ltro esterno, motore e cavi motore schermati. Il convertitore di frequenza trifase 380-480 V dovrebbe essere
dotato di un ltro interno A1.
38 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 41

Panoramica del prodotto Guida alla Progettazione
Tipo di
ltro
(esterno)
Filtro EMC
Filtro
dU/dt
Filtro
sinusoidal
Filtro EMC
ltro
sinusoidal
Tensione di alimentazione/potenza nominale Classe A2/EN 55011 Classe A1/EN 55011 Classe B/EN 55011
3x380–480 V 3x200–240 V 1x200–240 V Condotte Irradiata Condotte Irradiata Condotte Irradiata
e
+
e
0,37–22 kW
(0,5–30 cv)
–
– –
0,37–7,5 kW
(0,5–10 cv)
11–22 kW
(15–30 cv)
–
– –
0,37–7,5 kW
(0,5–10 cv)
11–15 kW
(15–20 cv)
18,5–22 kW
(25–30 cv)
–
– –
0,37–15 kW
(0,5–20 cv)
18,5–22 kW
(25–30 cv)
–
– –
– –
0,37–4 kW
(0,5–5,4 cv)
– – – – – – – –
– –
0,37–4 kW
(0,5–5,4 cv)
– –
– –
– –
0,37–4 kW
(0,5–5,4 cv)
– –
– – – – – – – –
0,37–4 kW
(0,5–5,4 cv)
– – – – – – –
0,37–2,2 kW
(0,5–3 cv)
– – – – – – –
0,37–2,2 kW
(0,5–3 cv)
– – – – – – –
0,37–2,2 kW
(0,5–3 cv)
– – – – – – –
0,37–2,2 kW
(0,5–3 cv)
100 m (328
piedi)
100 m (328
piedi)
150 m (492
piedi)
– – – – – –
50 m (164
piedi)
150 m (492
piedi)
150 m (492
piedi)
50 m (164
piedi)
150 m (492
piedi)
150 m (492
piedi)
1)
Sì
1)
Sì
1)
Sì
1)
Sì
1)
Sì
1)
Sì
1)
Sì
1)
Sì
1)
Sì
100 m
(328 piedi)
100 m
(328 piedi)
40 m
(131 piedi)
50 m
(164 piedi)
50 m
(164 piedi)
100 m
(328 piedi)
50 m
(164 piedi)
100 m
(328 piedi)
100 m
(328 piedi)
Sì
Sì
Sì – –
Sì – –
Sì – –
Sì – –
Sì – –
Sì – –
Sì – –
25 m
(82 piedi)
40 m
(131 piedi)
2 2
–
–
Tabella 2.14 Emissioni EMC (tipo di ltro: esterno)
1) Il campo di frequenza da 150 kHz a 30 MHz non è armonizzato tra IEC/EN 61800-3 e EN 55011 e non è compreso obbligatoriamente.
2.6.3 Immunità EMC
VLT® Midi Drive FC 280 è conforme ai requisiti per l'ambiente industriale, che sono più severi di quelli per l'ambiente
domestico e di ucio. Pertanto, FC 280 è conforme anche ai requisiti meno severi per l'ambiente domestico e di ucio con
un ampio margine di sicurezza.
Allo scopo di documentare l'immunità ai transitori veloci dovuti a fenomeni elettrici, sono stati eseguiti i test di immunità
riportati di seguito su un sistema composto da:
un convertitore di frequenza (con opzioni, se del caso);
•
un cavo di comando schermato;
•
una scatola di comando con potenziometro, cavo motore e motore.
•
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 39
Page 42

Panoramica del prodotto
VLT® Midi Drive FC 280
I test sono stati condotti in conformità alle seguenti norme fondamentali:
EN 61000-4-2 (IEC 61000-4-2) Scariche elettrostatiche (ESD): simulazione di scariche elettrostatiche provocate da
•
esseri umani;
22
EN 61000-4-3 (IEC 61000-4-3) Immunità irradiata: simulazione a modulazione di ampiezza degli eetti di apparec-
•
chiature di comunicazione radar e radio e di dispositivi di comunicazione mobili;
EN 61000-4-4 (IEC 61000-4-4) Oscillazioni transitorie da scoppio: simulazione di interferenze provocate dalla
•
commutazione di contattori, relè e dispositivi simili;
EN 61000-4-5 (IEC 61000-4-5) Oscillazioni transitorie da sbalzi di corrente: simulazione di oscillazioni transitorie
•
provocate, ad esempio, da fulmini che cadono vicino alle installazioni;
EN 61000-4-6 (IEC 61000-4-6) Immunità condotta: simulazione dell'impatto delle apparecchiature di trasmissione
•
radio collegate mediante cavi di connessione.
FC 280 segue la norma IEC 61800-3. Vedere Tabella 2.15 per dettagli.
Intervallo di tensione: 380–480 V
Norme di prodotto 61800-3
Test
Criterio di accettazione B B B A A
Cavo dell’alimentazione di
rete
Cavo motore
Cavo freno – – 4 kV CCC
Cavo condivisione del carico – – 4 kV CCC
Cavo relè
cavo di comando; – –
Cavo bus di campo/
standard
ESD Immunità
irradiata
– – 2 kV CN
– –
– –
– –
Transitori veloci Transitori di picco Immunità
condotta
2 kV/2 Ω Modalità
4 kV CCC
(Accoppiamento
capacitivo del
morsetto)
(Accoppiamento
capacitivo del
morsetto)
(Accoppiamento
capacitivo del
morsetto)
4 kV CCC
(Accoppiamento
capacitivo del
morsetto)
Lunghezza >2 m (6,6
piedi)
1 kV CCC
(Accoppiamento
capacitivo del
morsetto)
Lunghezza >2 m (6,6
piedi)
1 kV CCC
(Accoppiamento
capacitivo del
morsetto)
dierenziale
2 kV/12 Ω Modo Comune
– 10 V
– 10 V
– 10 V
– 10 V
Non schermato:
1 kV/42 Ω Modo Comune
Non schermato:
1 kV/42 Ω Modo Comune
10 V
10 V
10 V
RMS
RMS
RMS
RMS
RMS
RMS
RMS
40 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 43

130BD447.11
12
4
3
ab
M
Panoramica del prodotto Guida alla Progettazione
Intervallo di tensione: 380–480 V
Norme di prodotto 61800-3
Test
Criterio di accettazione B B B A A
Cavo LCP – –
Contenitore
Denizioni
CD: Contact discharge (scarica a contatto)
AD: Air Discharge (scarica in aria)
Tabella 2.15 Immunità EMC
ESD Immunità
irradiata
4 kV CD
8 kV AD
10 V/m – – –
DM: Dierential Mode (modalità
dierenziale)
CM: Common mode (Modalità comune)
Transitori veloci Transitori di picco Immunità
condotta
Lunghezza >2 m (6,6
piedi)
1 kV CCC
(Accoppiamento
capacitivo del
morsetto)
CN: iniezione diretta mediante la rete di
accoppiamento
CCC (Accoppiamento capacitivo del morsetto):
iniezione mediante morsetto di accoppiamento
capacitivo
– 10 V
2 2
RMS
2.7 Isolamento galvanico
PELV ore protezione mediante bassissima tensione. La
protezione contro le scosse elettriche è garantita se
l'alimentazione elettrica è del tipo PELV e l'installazione è
eettuata come descritto nelle norme locali e nazionali
relative all'isolamento PELV.
Tutti i morsetti di controllo e i morsetti relè 01–03 sono
conformi allo standard PELV (tensione di protezione
bassissima). Ciò non vale per il collegamento a triangolo a
terra oltre i 400 V.
L'isolamento galvanico (garantito) si ottiene ottemperando
ai requisiti relativi a un isolamento superiore e garantendo
le corrispondenti distanze di creapage (distanza minima
sulla supercie del materiale isolante fra due parti
conduttrici)/clearance (la distanza minima in aria per la
creazione potenziale di un arco tra le due parti conduttive).
Questi requisiti sono descritti nella norma EN 61800-5-1.
I componenti che costituiscono l'isolamento elettrico, come
mostrato in Disegno 2.28, sono inoltre conformi ai requisiti
relativi all'isolamento di classe superiore e al test
corrispondente come descritto nella norma EN 61800-5-1.
L'isolamento galvanico PELV può essere mostrato in tre
posizioni (vedere Disegno 2.28):
ne di mantenere i requisiti PELV, tutte le connessioni
Al
con i morsetti di controllo devono essere PELV, per
esempio, il termistore deve essere rinforzato/a doppio
isolamento.
1 Alimentazione (SMPS) per cassetta di controllo
2 Comunicazione tra scheda di potenza e cassetta di controllo
3 Isolamento tra ingressi STO e circuito IGBT
4 Relè cliente
Disegno 2.28 Isolamento galvanico
L'isolamento galvanico funzionale (a e b in Disegno 2.28)
serve per l'opzione di backup a 24 V e per l'interfaccia bus
standard RS485.
AVVISO
Prima di entrare a contatto con parti sotto tensione,
accertarsi che gli altri ingressi di tensione siano stati
scollegati, come ad esempio condivisione del carico
(collegamento del circuito intermedio CC) e il
collegamento del motore per il backup dell'energia
cinetica. Rispettare il tempo di scarica indicato nel
capitolo Sicurezza nella Guida operativa VLT® Midi Drive FC
280. Il mancato rispetto delle raccomandazioni può
causare lesioni gravi o mortali.
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 41
Page 44

130BB955.12
a
b
Leakage current
Motor cable length
130BB956.12
THDv=0%
THDv=5%
Leakage current
Panoramica del prodotto
VLT® Midi Drive FC 280
2.8 Corrente di dispersione verso terra
Rispettare le norme locali e nazionali in materia di messa a
22
terra di protezione di apparecchiature con corrente di
dispersione >3,5 mA.
La tecnologia dei convertitori di frequenza implica una
commutazione ad alta frequenza a elevati livelli di potenza.
Questa commutazione genera una corrente di dispersione
nel collegamento a massa. Una corrente di guasto nel
convertitore di frequenza in corrispondenza dei morsetti
della potenza di uscita può contenere una componente CC
in grado di caricare i condensatori del ltro e provocare
una corrente transitoria verso terra.
La corrente di dispersione verso terra è costituita da
numerosi elementi e dipende da diverse congurazioni del
sistema, quali il ltraggio RFI, i cavi motore schermati e la
potenza del convertitore di frequenza.
La corrente di dispersione dipende anche dalla distorsione
di linea.
Disegno 2.30 Inusso della distorsione di linea sulla corrente
di dispersione
Disegno 2.29 Inusso della lunghezza del cavo e della taglia di
potenza sulla corrente di dispersione, Pa>P
b
AVVISO!
Un'elevata corrente di dispersione può provocare lo
spegnimento degli RCD. Onde evitare questo problema,
rimuovere la vite RFI durante la carica di un ltro.
La norma EN/IEC61800-5-1 (azionamenti elettrici a velocità
variabile) richiede particolari precauzioni se la corrente di
dispersione supera i 3,5 mA. La messa a terra deve essere
potenziata in uno dei modi seguenti:
Filo di terra (morsetto 95) di almeno 10 mm
•
(8 AWG).
Due li di terra separati conformi alle disposizioni
•
relative alle dimensioni.
Per ulteriori informazioni consultare la norma EN/
IEC61800-5-1.
Utilizzo degli RCD
Quando si utilizzano dispositivi a corrente residua (RCD),
detti anche interruttore per le correnti di dispersione a
terra (ELCB), rispettare le seguenti regole:
Utilizzare soltanto RCD di tipo B in grado di
•
rilevare correnti CA e CC.
Utilizzare RCD con un ritardo per picchi di
•
accensione per evitare guasti provocati da
correnti di terra transitorie.
Dimensionare gli RCD in funzione della
•
razione del sistema e di considerazioni ambientali.
2
congu-
42 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 45

130BB958.12
f
sw
Cable
150 Hz
3rd harmonics
50 Hz
Mains
RCD with low f
cut-
RCD with high f
cut-
Leakage current
Frequency
130BB957.11
Leakage current [mA]
100 Hz
2 kHz
100 kHz
Panoramica del prodotto Guida alla Progettazione
2.9.2 Frenatura dinamica
Disegno 2.31 Contributo della rete alla corrente di dispersione
La frenatura dinamica viene assicurata da:
Freno reostatico: Un IGBT freno mantiene la
•
sovratensione sotto una determinata soglia
deviando l'energia del freno dal motore alla
resistenza freno collegata (parametro 2-10 Brake
Function = [1] Freno resistenza).
Regolare la soglia in parametro 2-14 Brake voltage
reduce, con intervallo 70 V per 3x380–480 V.
Freno CA: L'energia frenante è distribuita nel
•
motore cambiando le condizioni di perdita nel
motore. La funzione freno CA non può essere
usata in applicazioni con elevata frequenza di
fermate e ripartenze, poiché ciò surriscalda il
motore (parametro 2-10 Brake Function = [2] Freno
CA).
Freno CC: Una corrente CC sovramodulata
•
aggiunta alla corrente CA funge da freno rallentatore a correnti parassite (parametro 2-02 DC
Braking Time≠0 s).
2.9.3 Selezione della resistenza di frenatura
Per gestire una richiesta superiore della frenatura rigenerativa, è necessaria una resistenza di frenatura. L'utilizzo di
una resistenza di frenatura garantisce che il calore venga
assorbito dalla resistenza di frenatura e non dal convertitore di frequenza. Per maggiori informazioni vedere la
Guida alla Progettazione VLT® Brake Resistor MCE 101.
2 2
Disegno 2.32 L'inusso della frequenza di disinserimento
dell'RCD su ciò a cui si risponde / che viene misurato
Per maggiori dettagli consultare le Note sull'applicazione
RCD.
Funzioni freno
2.9
2.9.1 Freno di stazionamento meccanico
Normalmente un freno di stazionamento meccanico
montato direttamente sull'albero motore eettua una
frenata statica.
AVVISO!
Quando il freno di stazionamento è inserito in una
catena di sicurezza, il convertitore di frequenza non può
assicurare un controllo sicuro del freno meccanico.
Includere un circuito di ridondanza per il controllo del
freno nell'intero impianto.
Se la quantità di energia cinetica trasferita alla resistenza in
ogni intervallo di frenatura non è nota, calcolare la potenza
media sulla base del tempo di ciclo e dell'intervallo di
frenatura. Il duty cycle intermittente della resistenza è
un'indicazione del duty cycle a cui lavora la resistenza.
Disegno 2.33 illustra un tipico ciclo di frenatura.
Il duty cycle intermittente per la resistenza viene calcolata
come segue:
Duty cycle = tb/T
tb equivale al tempo di frenatura in secondi.
T = tempo di ciclo in secondi.
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 43
Page 46
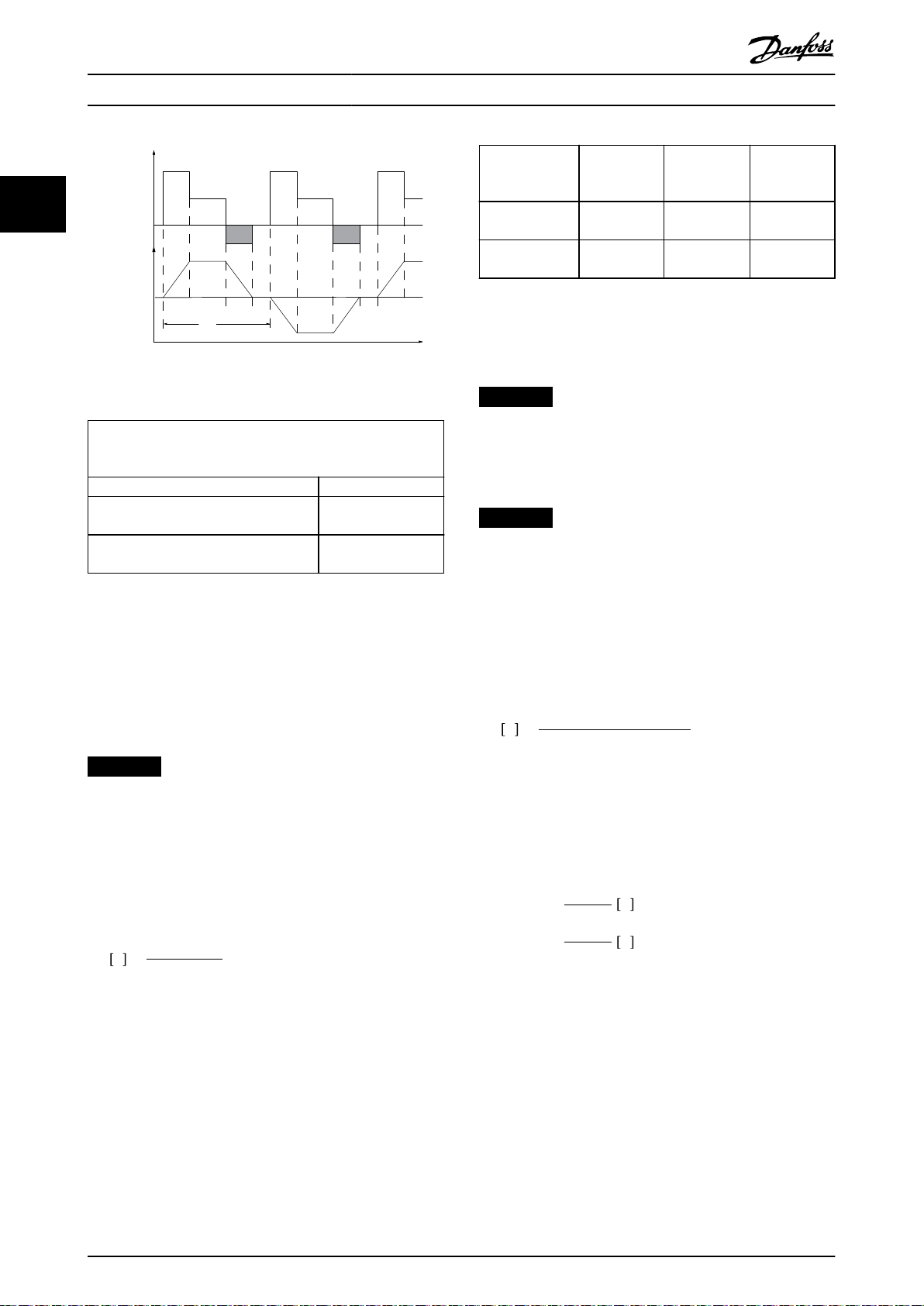
T
ta
tc
tb
to ta
tc
tb
to ta
130BA167.10
Carico
Tempo
Velocità
Panoramica del prodotto
VLT® Midi Drive FC 280
Dimensioni Freno attivo
U
dc,br
22
FC 280
3x380–480 V
FC 280
3x200–240 V
Tabella 2.17 Soglia della resistenza di frenatura
770 V 800 V 800 V
390 V 410 V 410 V
Avviso prima
del disinserimento
Disinserimento
(scatto)
La soglia può essere regolata in parametro 2-14 Brake
voltage reduce, con intervallo 70 V.
Disegno 2.33 Ciclo di frenatura tipico
AVVISO!
Gamma di potenza:
0,37–22 kW (0,5–30 cv) 3x380–480 V
0,37–3,7 kW (0,5–5 cv) 3x200–240 V
Tempo di ciclo (s) 120
Duty cycle di frenatura al 100% della
coppia
Duty cycle di frenatura in caso di sovraccoppia (150/160%)
Tabella 2.16 Frenata a un livello elevato di coppia di
sovraccarico
Continuo
40%
Danfoss fornisce resistenze di frenatura con duty cycle del
10% e del 40%. Se viene applicato un duty cycle del 10%,
le resistenze di frenatura possono assorbire la potenza
freno per il 10% del tempo di ciclo. Il rimanente 90% del
tempo di ciclo è utilizzato per dissipare il calore in eccesso.
AVVISO!
Assicurarsi che la resistenza sia progettata per gestire il
tempo di frenatura necessario.
Maggiore è il valore della riduzione più rapida è la
reazione al sovraccarico del generatore. Deve essere
utilizzata soltanto in caso di problemi di sovratensione
nella tensione del collegamento CC.
AVVISO!
Accertarsi che la resistenza di frenatura sia in grado di
tollerare una tensione di 410 V o 800 V.
Danfoss consiglia di calcolare la resistenza di frenatura R
in base alla seguente formula. La resistenza di frenatura
consigliata garantisce che il convertitore di frequenza sia in
grado di frenare alla coppia di frenata massima (M
160%.
2
U
x100x0,83
R
Ω =
rec
η
è di norma pari a 0,80 (≤7,5 kW (10 cv)); 0,85 (11–22
motor
dc
P
motor
xM
br( % )
xη
VLT
xη
motor
kW (15–30 cv))
η
è di norma pari a 0,97
VLT
br(%)
rec
) del
Il carico massimo consentito sulla resistenza di frenatura è
indicato come potenza di picco in un duty cycle
intermittente dato e può essere calcolato come:
Calcolo della resistenza di frenatura
2
U
x0 . 83
Ω =
dc,br
P
peak
R
br
in cui
P
peak
= P
x Mbr [%] x η
motor
motor
x η
VLT
[W]
Per FC 280, R
come:
480
V: R
480
V: R
1) Per convertitori di frequenza con potenza all'albero ≤7,5
kW (10 cv).
2) Per convertitori di frequenza con potenza all'albero 11-22
kW (15-30 cv).
a una coppia di frenata 160% è espresso
rec
rec
rec
396349
=
397903
=
P
P
motor
motor
Ω
Ω
1)
2)
Come mostrato, la resistenza di frenatura dipende dalla
tensione del collegamento CC (Udc).
44 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 47

Panoramica del prodotto Guida alla Progettazione
AVVISO!
La resistenza della resistenza di frenatura non deve
essere superiore al valore consigliato da Danfoss. Per
resistenze di frenatura con un valore ohmico superiore,
la coppia di frenata 160% può non essere raggiunta,
poiché il convertitore di frequenza potrebbe disinserirsi
per ragioni di sicurezza.
La resistenza deve essere superiore a R
min
.
AVVISO!
Se si verica un cortocircuito nel transistor di frenatura,
impedire la dissipazione di potenza nella resistenza di
frenatura utilizzando un interruttore di rete o un
contattore per scollegare dalla rete il convertitore di
frequenza. Il convertitore di frequenza può controllare il
contattore.
AVVISO!
Non toccare la resistenza di frenatura perché può
diventare calda durante la frenatura. Onde evitare il
rischio d'incendio, posizionare la resistenza di frenatura
in un ambiente sicuro.
2.9.4 Controllo con funzione freno
Il freno è protetto contro i cortocircuiti della resistenza di
frenatura e il transistor di frenatura viene controllato per
rilevarne eventuali cortocircuiti. È possibile impiegare
un'uscita digitale/relè per proteggere la resistenza di
frenatura dal sovraccarico dovuto a un guasto nel convertitore di frequenza.
Inoltre, il freno consente la visualizzazione della potenza
istantanea e della potenza media degli ultimi 120 s. Il freno
può anche monitorare la potenza a recupero di energia ed
assicurare che non superi un limite selezionato in
parametro 2-12 Brake Power Limit (kW).
AVVISO!
Il monitoraggio della potenza di frenatura non è una
funzione di sicurezza. Occorre un interruttore termico per
impedire che la potenza di frenatura superi il limite. Il
circuito della resistenza di frenatura non è protetto dalla
dispersione verso terra.
È possibile selezionare Controllo sovratensione (OVC)
(resistenza di frenatura esclusiva) come funzione freno
alternativa nel parametro 2-17 Over-voltage Control. Questa
funzione è attiva per tutte le unità. La funzione consente di
evitare uno scatto se la tensione del collegamento CC
aumenta. Ciò avviene aumentando la frequenza di uscita
per limitare la tensione dal collegamento CC. Si tratta di
una funzione utile, ad esempio quando il tempo rampa di
decelerazione è troppo breve per evitare che il convertitore
di frequenza scatti. In questo caso, il tempo rampa di
decelerazione viene prolungato.
AVVISO!
È possibile attivare l'OVC mentre è in funzione un
motore PM (quando parametro 1-10 Motor Construction è
impostato su [1] PM, non salient SPM).
2.10 Isolamento del motore
I motori di nuova progettazione da usare con convertitori
di frequenza dispongono di alto grado di isolamento per
far fronte alla nuova generazione di IGBT ad alta ecienza
con un dU/dt elevato. Per il retrot in motori vecchi è
necessario confermare l'isolamento del motore o mitigare
con il ltro dU/dt oppure, se necessario, un ltro
sinusoidale.
2.10.1 Filtri sinusoidali
Quando un motore è controllato da un convertitore di
frequenza, è soggetto a fenomeni di risonanza. Questo
disturbo, causato dalle caratteristiche costruttive del
motore, si verica a ogni attivazione di uno degli
interruttori dell'inverter nel convertitore di frequenza. La
frequenza del disturbo di risonanza corrisponde quindi alla
frequenza di commutazione del convertitore di frequenza.
Danfoss fornisce un ltro sinusoidale per attenuare il
rumore acustico del motore.
Il ltro riduce il tempo rampa di accelerazione della
tensione, la tensione del carico di picco U
oscillazioni di corrente ΔI al motore, il che
corrente e la tensione diventano quasi sinusoidali. In
questo modo il rumore acustico del motore viene ridotto
al minimo.
Anche le oscillazioni di corrente nelle bobine del ltro
sinusoidale producono disturbi. Risolvere il problema
integrando il ltro in un armadio o simili.
2.10.2 Filtri dU/dt
Danfoss fornisce ltri dU/dt che sono ltri in modalità
dierenziale, ltri passa-basso che riducono le tensioni di
picco fase-fase sul morsetto del motore e il tempo di salita
a un livello che riduce la sollecitazione sull'isolamento in
corrispondenza degli avvolgimenti del motore. Ciò è un
problema soprattutto con cavi motore corti.
Rispetto ai ltri sinusoidali (consultare il capitolo 2.10.1 Filtri
sinusoidali), i ltri dU/dt hanno una frequenza di disinse-
rimento superiore alla frequenza di commutazione.
e le
PEAK
signica che la
2 2
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 45
Page 48

. . .
. . .
Par. 13-11
Comparator Operator
Par. 13-43
Logic Rule Operator 2
Par. 13-51
SL Controller Event
Par. 13-52
SL Controller Action
130BB671.13
Coast
Start timer
Set Do X low
Select set-up 2
. . .
Running
Warning
Torque limit
Digital input X 30/2
. . .
=
TRUE longer than..
. . .
. . .
130BA062.13
Stato 1
Evento 1/
Azione 1
Stato 2
Evento 2/
Azione 2
Evento avviamento
P13-01
Stato 3
Evento 3/
Azione 3
Stato 4
Evento 4/
Azione 4
Evento arresto
P13-02
Evento arresto
P13-02
Evento arresto
P13-02
Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
Panoramica del prodotto
VLT® Midi Drive FC 280
2.11 Smart Logic Controller
Lo Smart Logic Control (SLC) è una sequenza di azioni
22
denite dall'utente (vedere parametro 13-52 Azione regol. SL
[x]) eseguite dall'SLC quando l'evento denito dall'utente
associato (vedere parametro 13-51 Evento regol. SL [x]) è
valutato come TRUE dall'SLC.
La condizione per un evento può essere un particolare
stato oppure il fatto che l'uscita generata da una regola
logica o da un comparatore di operandi diventi TRUE.
Questo dà luogo a un'azione associata come descritto in
Disegno 2.34.
Disegno 2.35 Sequenza con tre eventi/azioni
Comparatori
I comparatori sono utilizzati per confrontare variabili
continue (ad esempio frequenza di uscita, corrente di
uscita e ingresso analogico) con i valori preimpostati ssi.
Disegno 2.36 Comparatori
Regole logiche
Combinare no a tre ingressi booleani (ingressi TRUE/
FALSE) di timer, comparatori, ingressi digitali, bit di stato
ed eventi utilizzando gli operatori logici AND, OR e NOT.
Disegno 2.34 Azione associata
Tutti gli eventi e le azioni sono numerati e collegati
formando delle coppie (stati). Questo signica che quando
l'evento [0] è soddisfatto (raggiunge il valore TRUE), viene
eseguita l'azione [0]. In seguito, le condizioni dell'evento [1]
vengono valutate e, se sono valutate come TRUE, viene
eseguita l'azione [1], e così via. Verrà valutato un solo
evento alla volta. Se un evento viene valutato come FALSE,
durante l'intervallo di scansione corrente non succede nulla
(nell'SLC) e non vengono valutati altri eventi. Quando
inizia, l'SLC valuta l'evento [0] (e soltanto l'evento [0]) a
ciascun intervallo di scansione. Soltanto se l'evento [0]
viene valutato come TRUE, l'SLC esegue l'azione [0] e inizia
a valutare l'evento [1]. È possibile programmare 1–20
eventi e azioni.
Una volta eseguito l'ultimo evento/azione, la sequenza
inizia da capo dall'evento [0]/azione [0]. Disegno 2.35
mostra un esempio con tre eventi/azioni:
46 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Disegno 2.37 Regole logiche
2.12 Condizioni di funzionamento estreme
Cortocircuito (motore fase-fase)
Il convertitore di frequenza è protetto contro i cortocircuiti
tramite misurazioni della corrente eettuate in ciascuna
delle tre fasi del motore o nel collegamento CC. Un
cortocircuito tra due fasi di uscita provoca una
sovracorrente nel convertitore di frequenza. Il convertitore
di frequenza viene disinserito singolarmente quando la
corrente di cortocircuito supera il valore consentito
(allarme 16, Short Circuit).
Page 49

1,21,0 1,4
30
10
20
100
60
40
50
1,81,6 2,0
2000
500
200
400
300
1000
600
t [s]
175ZA052.11
fOUT = 0,2 x f M,N
fOUT = 2 x f M,N
fOUT = 1 x f M,N
IMN
IM
Panoramica del prodotto Guida alla Progettazione
Commutazione sull'uscita
2.12.1 Protezione termica del motore
La commutazione sull’uscita tra il motore e il convertitore
di frequenza è assolutamente possibile e non danneggia il
convertitore di frequenza. Tuttavia, è possibile che vengano
Per proteggere l'applicazione da gravi danni, VLT® Midi
Drive FC 280 ore numerose funzioni speciche.
2 2
visualizzati messaggi di guasto.
Sovratensione generata dal motore
La tensione nel collegamento CC subisce un aumento
quando il motore funziona da generatore. Ciò avviene nei
seguenti casi:
Il carico aziona il motore (con frequenza di uscita
•
costante dal convertitore di frequenza).
Limite di coppia
Il limite di coppia protegge il motore dai sovraccarichi,
indipendentemente dalla velocità. Il limite di coppia è
controllato in parametro 4-16 Torque Limit Motor Mode e
parametro 4-17 Torque Limit Generator Mode.
Parametro 14-25 Trip Delay at Torque Limit controlla il
tempo prima che scatti l'avviso limite di coppia.
Se durante la decelerazione (rampa di decele-
•
razione) il momento d'inerzia è elevato, l'attrito è
basso e il tempo rampa di decelerazione è troppo
breve per consentire la dissipazione dell'energia
sotto forma di perdite nel convertitore di
frequenza, nel motore e nell'impianto.
Un'impostazione non corretta della compen-
•
sazione dello scorrimento può causare una
maggiore tensione del collegamento CC.
L'unità di controllo potrebbe tentare di correggere il valore
di rampa, se possibile (parametro 2-17 Controllo
sovratensione).
Il convertitore di frequenza si disinserisce per proteggere i
transistor e i condensatori del collegamento CC quando
viene raggiunto un determinato livello di tensione.
Per selezionare il metodo usato per controllare il livello di
tensione del collegamento CC, vedere
parametro 2-10 Funzione freno e parametro 2-17 Controllo
sovratensione.
Caduta di tensione di rete
Durante la caduta di tensione di rete, il convertitore di
frequenza continua a funzionare no a quando la tensione
Limite di corrente
Parametro 4-18 Current Limit controlla il limite di corrente, e
parametro 14-24 Trip Delay at Current Limit controlla il
tempo prima che scatti l'avviso limite di corrente.
Limite velocità minima
Parametro 4-12 Motor Speed Low Limit [Hz] imposta la
velocità di uscita minima che il convertitore di frequenza
può fornire.
Limite velocità massimo
Parametro 4-14 Motor Speed High Limit [Hz] o
parametro 4-19 Max Output Frequency imposta la velocità di
uscita massima che il convertitore di frequenza può fornire.
ETR (relè termico elettronico)
La funzione ETR del convertitore di frequenza misura il
valore
eettivo di corrente, velocità e tempo per calcolare
la temperatura del motore. La funzione protegge inoltre il
motore dal surriscaldamento (avviso o scatto). È anche
disponibile un ingresso termistore esterno. L'ETR è una
funzione elettronica che simula un relè a bimetallo
basandosi su misure interne. La caratteristica viene
mostrata in Disegno 2.38.
del collegamento CC non scende al di sotto del livello
minimo di funzionamento, pari a:
314 V per 3x380–480 V;
•
202 V per 3x200–240 V;
•
225 V per 1x200–240 V.
•
La tensione di rete precedente alla caduta di tensione e il
carico del motore determinano il tempo occorrente all'inverter per raggiungere la ruota libera.
+
Sovraccarico statico nella modalità VVC
Quando il convertitore di frequenza è sovraccaricato, viene
raggiunto il limite di coppia in parametro 4-16 Torque Limit
Motor Mode/parametro 4-17 Torque Limit Generator Mode,
l'unità di controllo riduce la frequenza di uscita per ridurre
il carico.
Se il sovraccarico è eccessivo, può vericarsi una
Disegno 2.38 ETR
sovracorrente che causa il disinserimento del convertitore
di frequenza dopo circa 5-10 s.
Il funzionamento entro il limite di coppia può essere
limitato nel tempo (0-60 s) in parametro 14-25 Trip Delay at
Torque Limit.
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 47
Page 50

Panoramica del prodotto
VLT® Midi Drive FC 280
L'asse X mostra il rapporto tra I
Y mostra il tempo in secondi che precede il momento in
cui l'ETR si disinserisce e fa scattare il convertitore di
22
frequenza. Le curve illustrano la caratteristica a una
velocità doppia della velocità nominale e a una velocità
pari a 0,2 volte la velocità nominale.
A velocità più bassa l'ETR si disinserisce a livelli di calore
inferiori a causa del minor rareddamento del motore. In
tal modo il motore è protetto dal surriscaldamento anche a
bassa velocità. La funzione ETR calcola la temperatura del
motore basandosi sull'eettiva corrente e velocità. La
temperatura calcolata è visibile come un parametro di
visualizzazione in parametro 16-18 Motor Thermal.
motor
e I
motor
nominale. L'asse
48 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 51

130BE805.11
+24 V DC
+24 V DC
A
B
GND
12 13 18 19 3227 29 33 55
B
A
B
A
130BA646.10
CW
CCW
Esempi applicativi Guida alla Progettazione
3 Esempi applicativi
3.1 Introduzione
3.1.1 Collegamento encoder
Lo scopo di queste istruzioni è quello di facilitare il setup
del collegamento dell’encoder al convertitore di frequenza.
Prima di impostare l'encoder vengono visualizzate le
impostazioni di base per un sistema di controllo di velocità
ad anello chiuso.
3 3
Disegno 3.2 Encoder incrementale 24 V, lunghezza massima
del cavo 5 m
3.1.2 Direzione dell'encoder
L'ordine in cui gli impulsi arrivano nel convertitore di
frequenza determina la direzione dell'encoder.
La direzione in senso orario signica che il canale A si
trova a 90° elettrici prima del canale B.
La direzione in senso antiorario signica che il canale B si
trova a 90° elettrici prima del canale A.
La direzione è stabilita osservando l'estremità dell'albero.
3.1.3 Sistema convertitore ad anello chiuso
Il sistema convertitore si compone generalmente di più
elementi, quali:
Motore.
Disegno 3.1 Encoder 24 V
•
Freno (riduttore, freno meccanico).
•
Convertitore di frequenza.
•
Encoder quale sistema di retroazione.
•
Resistenza freno per il freno dinamico.
•
Trasmissione.
•
Carico.
•
Le applicazioni che richiedono il controllo del freno
meccanico hanno in genere bisogno di una resistenza di
frenatura.
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 49
Page 52

130BE728.10
Motor
Gearbox
Load
Transmission
Encoder Mech. brake
Brake resistor
130BF096.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
12
13
18
19
27
29
32
33
50
53
54
55
42
A OUT
D IN
+24 V
130BE204.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
0 ~10 V
+
-
FC
+24 V
130BF097.10
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
4 - 20mA
+
-
FC
+24 V
Esempi applicativi
VLT® Midi Drive FC 280
3.2.2 Velocità
Parametri
Funzione Impostazione
Parametro 6-10
33
morsetto 53
Parametro 6-11
Tensione alta
morsetto 53
Parametro 6-14
Rif.basso/
val.retroaz.mors
etto 53
Parametro 6-15
Rif. alto/valore
retroaz.
morsetto 53
Parametro 6-19
Terminal 53
mode
* = Valore predenito
Note/commenti:
Disegno 3.3 Setup di base per il controllo di velocità ad anello
chiuso
Tens. bassa
0,07 V*
10 V*
0
50
[1] Tensione
3.2
3.2.1 AMA
Tabella 3.1 AMA con T27 collegato
50 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Esempi applicativi
Parametri
Funzione Impostazione
Parametro 1-29
Adattamento
automatico
[1] Abilit.AMA
compl.
motore (AMA)
Parametro 5-12 I
ngr. digitale
morsetto 27
*[2] Evol. libera
neg.
* = Valore predenito
Note/commenti: Impostare il
gruppo di parametri 1-2* Motor
Data in base alle speciche del
motore.
AVVISO!
Se i morsetti 13 e 27 non
sono connessi, impostare
parametro 5-12 Terminal 27
Digital Input su [0] Nessuna
funzione.
Tabella 3.2 Riferimento di velocità analogico (tensione)
Parametri
Funzione Impostazione
Parametro 6-22
Corr. bassa
4 mA*
morsetto 54
Parametro 6-23
Corrente alta
20 mA*
morsetto 54
Parametro 6-24
Rif.basso/
val.retroaz.mors
0
etto 54
Parametro 6-25
Rif. alto/valore
retroaz.
50
morsetto 54
Parametro 6-29
Modo morsetto54[0] Corrente
* = Valore predenito
Note/commenti:
Tabella 3.3 Riferimento di velocità analogico (corrente)
Page 53

130BE208.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
≈ 5kΩ
FC
+24 V
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
130BF100.10
+24 V
130BB840.12
Speed
Reference
Start (18)
Freeze ref (27)
Speed up (29)
Speed down (32)
130BF098.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
19
18
27
29
32
33
50
53
54
55
42
+24 V 13
Esempi applicativi Guida alla Progettazione
Parametri
Funzione Impostazione
Parametro 6-10
Tens. bassa
morsetto 53
Parametro 6-11
Tensione alta
morsetto 53
Parametro 6-14
Rif.basso/
val.retroaz.mors
etto 53
Parametro 6-15
Rif. alto/valore
retroaz.
morsetto 53
Parametro 6-19
Terminal 53
mode
* = Valore predenito
Note/commenti:
Tabella 3.4 Riferimento di velocità (utilizzando un
potenziometro manuale)
Parametri
Funzione Impostazione
Parametro 5-10
Ingr. digitale
morsetto 18
Parametro 5-12
Ingr. digitale
morsetto 27
Parametro 5-13
Ingr. digitale
morsetto 29
Parametro 5-14
Ingr. digitale
morsetto 32
* = Valore predenito
Note/commenti:
Tabella 3.5 Accelerazione/decelerazione
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 51
0,07 V*
10 V*
0
50
[1] Tensione
*[8] Avviamento
[19] Blocco
riferimento
[21] Accelerazione
[22] Decelerazione
Disegno 3.4 Accelerazione/decelerazione
3.2.3 Avviamento/arresto
Parametri
Funzione Impostazione
Parametro 5-10
Ingr. digitale
morsetto 18
Parametro 5-11
Ingr. digitale
morsetto 19
Parametro 5-12
Ingr. digitale
morsetto 27
Parametro 5-14
Ingr. digitale
morsetto 32
Parametro 5-15
Ingr. digitale
morsetto 33
Parametro 3-10
Riferim preimp.
Rif. preimp. 0
Rif. preimp. 1
Rif. preimp. 2
Rif. preimp. 3
* = Valore predenito
Note/commenti:
Tabella 3.6 Avviamento/arresto con inversione e quattro
velocità preimpostate
[8] Avviamento
*[10] Inversione
[0] Nessuna
funzione
[16] Rif. preimp.
bit 0
[17] Rif. preimp.
bit 1
25%
50%
75%
100%
3 3
Page 54

130BF099.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
+24 V
130BE210.11
+24 V
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
FC
D IN
+24 V
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
R1
12
13
18
19
27
29
32
33
50
53
54
55
42
01
02
03
130BE211.11
+24 V
Esempi applicativi
VLT® Midi Drive FC 280
3.2.4 Ripristino allarmi esterni
Parametri
Funzione Impostazione
Parametro 5-11
33
morsetto 19
* = Valore predenito
Note/commenti:
Ingr. digitale
[1] Ripristino
3.2.6 SLC
Parametri
Funzione Impostazione
Parametro 4-30
Funzione di
perdita
[1] Avviso
retroazione
motore
Parametro 4-31
Errore di velocità
retroazione
50
motore
Parametro 4-32
Timeout perdita
retroazione
5 s
motore
Parametro 7-00
Fonte
retroazione PID
[1] Encoder 24
V
di velocità
Parametro 5-70
Term 32/33
1024*
Impulsi per giro
Parametro 13-00
Modo regol. SL
[1] On
Parametro 13-01
Tabella 3.7 Ripristino allarmi esterni
3.2.5 Termistore motore
AVVISO!
Per soddisfare i requisiti di isolamento PELV, utilizzare un
isolamento doppio o rinforzato sui termistori.
Evento
avviamento
Parametro 13-02
Evento arresto
Parametro 13-10
Comparatore di
operandi
Parametro 13-11
Comparatore di
operandi
[19] Avviso
[44] Tasto
Reset
[21] Numero di
avviso
*[1] ≈
Parametro 13-12
Parametri
Funzione Impostazione
Parametro 1-90
Protezione
[2] Termistore,
scatto
termica motore
Parametro 1-93
Fonte termistore
[1] Ingr.
analog. 53
Valore
comparatore
Parametro 13-51
Evento regol. SL
Parametro 13-52
Azione regol. SL
61
[22]
Comparatore 0
[32] Imp. usc.
dig. A bassa
Parametro 6-19
Terminal 53
Tabella 3.8 Termistore motore
52 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
mode
* = Valore predenito
Note/commenti:
Se si desidera solo un avviso,
impostare
parametro 1-90 Protezione
termica motore su [1] Termistore,
avviso.
[1] Tensione
Page 55

Esempi applicativi Guida alla Progettazione
Parametri
Funzione Impostazione
Parametro 5-40
Funzione relè
* = Valore predenito
Note/commenti:
se il limite nel monitor di
retroazione viene superato,
viene generato l'avviso 61,
Feedback Monitor (monitor di
retroazione). L'SLC monitora
l'avviso 61, Feedback Monitor
(monitor di retroazione). Se
l'avviso 61, Feedback Monitor
(monitor di retroazione) diventa
true, viene attivato il relè 1.
L'attrezzatura esterna può
indicare che è necessaria una
manutenzione. Se l'errore di
retroazione torna a scendere al
di sotto del limite entro 5 s, il
convertitore di frequenza
continua a funzionare e l'avviso
scompare. Il relè 1 continua
nché non viene premuto [O/
Reset].
[80] Uscita
digitale SL A
3 3
Tabella 3.9 Utilizzo dell'SLC per impostare un relè
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 53
Page 56

Safe Torque O (STO)
VLT® Midi Drive FC 280
4 Safe Torque O (STO)
La funzione Safe Torque O (STO) è un componente in un sistema di controllo di sicurezza che impedisce all'unità di
generare l'energia necessaria a far ruotare il motore, garantendo pertanto sicurezza in situazioni di emergenza.
Il convertitore di frequenza con funzionalità STO è progettato e ritenuto conforme in base ai requisiti previsti dalle seguenti
normative:
IEC/EN 61508: SIL2;
44
•
IEC/EN 61800-5-2: SIL2;
•
IEC/EN 62061: SILCL di SIL2;
•
EN ISO 13849-1: Categoria 3 PL d.
•
Per ottenere il livello desiderato di sicurezza operativa, selezionare e applicare adeguatamente i componenti nel sistema di
controllo di sicurezza. Prima di usare la funzione STO,
determinare se la funzione STO e i livelli di sicurezza sono adeguati e sucienti.
eettuare un'analisi approfondita dei rischi sull'impianto, al ne di
Per maggiori informazioni su Safe Torque O (STO), consultare il capitolo 6 Safe Torque O (STO) nella Guida operativa VLT
Midi Drive FC 280.
®
54 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 57
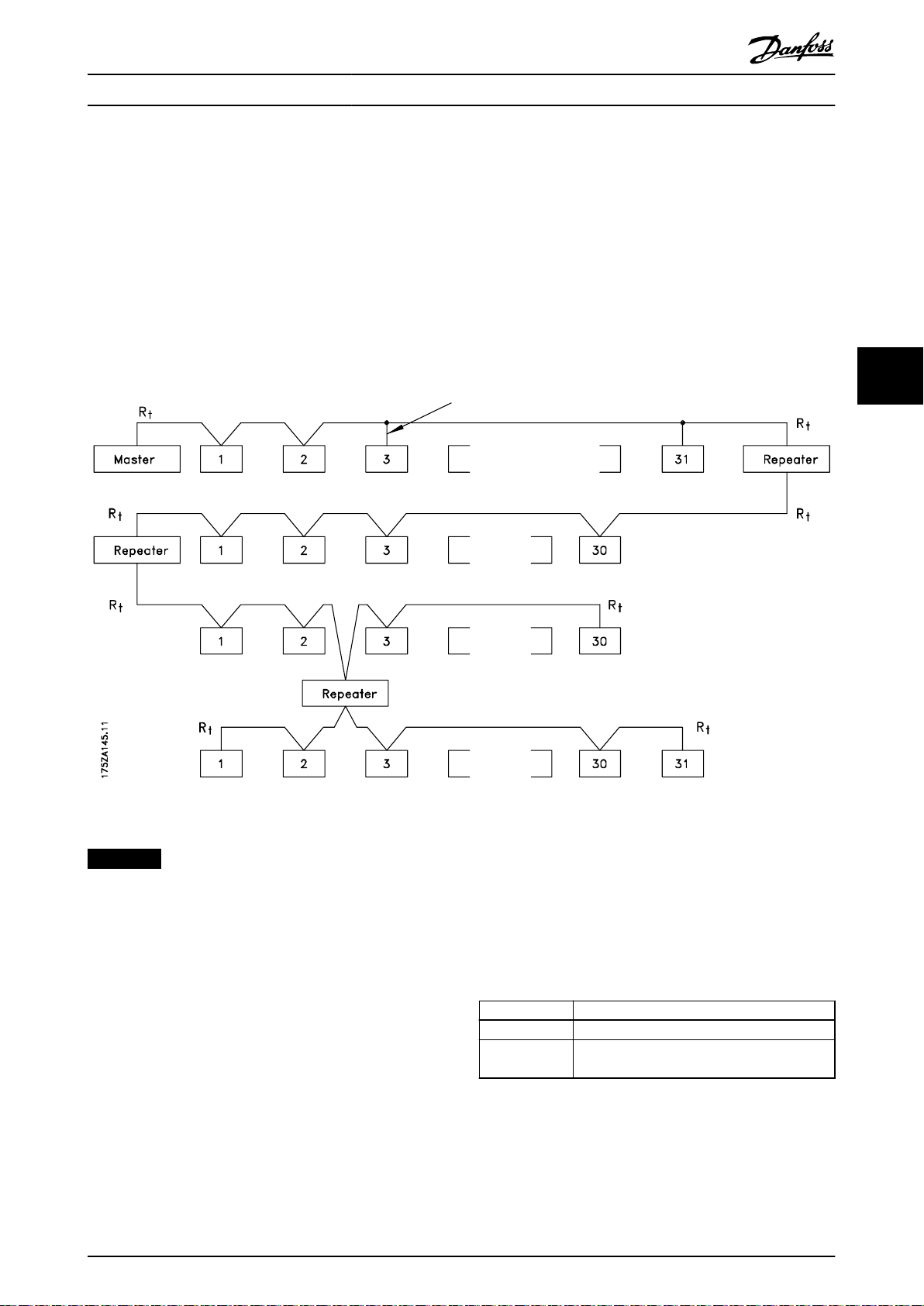
drop cable
Installazione e setup dell'... Guida alla Progettazione
5 Installazione e setup dell'RS485
5.1 Introduzione
5.1.1 Panoramica
L'RS485 è un'interfaccia bus a due li, compatibile con topologia di rete multi-drop. I nodi possono essere collegati come un
bus oppure tramite cavi di discesa da una linea dorsale comune. A un segmento di rete possono essere collegati no a 32
nodi.
I ripetitori separano i vari segmenti di rete, vedere Disegno 5.1.
5 5
Disegno 5.1 Interfaccia bus RS485
AVVISO!
Ciascun ripetitore funziona come un nodo all'interno del
segmento nel quale è installato. Ogni nodo collegato
all'interno di una data rete deve avere un indirizzo nodo
unico attraverso tutti i segmenti.
Terminare entrambe le estremità di ogni segmento
utilizzando l'interruttore di terminazione (S801) dei convertitori di frequenza oppure una rete resistiva polarizzata di
terminazione. Utilizzare sempre un doppino intrecciato
schermato (STP) per il cablaggio del bus e attenersi alle
buone prassi di installazione.
È importante assicurare un collegamento a massa a bassa
impedenza dello schermo in corrispondenza di ogni nodo,
anche alle alte frequenze. Pertanto, collegare a terra
un'ampia
un pressacavo o un passacavo conduttivo. Talvolta si rende
supercie dello schermo, per esempio mediante
necessario utilizzare cavi di equalizzazione del potenziale
per mantenere lo stesso potenziale di terra in tutta la rete,
soprattutto negli impianti in cui sono presenti cavi lunghi.
Per prevenire un disadattamento d'impedenza, utilizzare
sempre lo stesso tipo di cavo in tutta la rete. Quando si
collega un motore al convertitore di frequenza, utilizzare
sempre un cavo motore schermato.
Cavo Doppino intrecciato schermato (STP)
Impedenza [Ω]
Lunghezza del
cavo [m]
Tabella 5.1 Speciche dei cavi
120
Al massimo 1200 (comprese le derivazioni).
Al massimo 500 da stazione a stazione.
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 55
Page 58

61 68 69
N
P
COMM. GND
130BB795.10
Installazione e setup dell'...
VLT® Midi Drive FC 280
5.1.2 Collegamento in rete
Collegare il convertitore di frequenza alla rete RS485 nel
modo seguente (vedere anche Disegno 5.2):
1. Collegare i li di segnale al morsetto 68 (P+) e al
morsetto 69 (N-) sul quadro di comando
principale del convertitore di frequenza.
2. Collegare lo schermo del cavo ai pressacavi.
AVVISO!
Per ridurre il disturbo tra i conduttori, utilizzare doppini
intrecciati schermati.
Parametro Funzione
Parametro 8-35 Rita
rdo minimo
risposta
Parametro 8-36 Rita
rdo max. risposta
Tabella 5.2 Impostazione parametri comunicazione Modbus
Specicare un tempo di ritardo minimo tra
la ricezione di una richiesta e la trasmissione
di una risposta. La funzione è destinata a
superare i tempi di attesa del modem.
Specicare un tempo di ritardo massimo tra
la trasmissione di una richiesta e la ricezione
di una risposta.
5.1.5 Precauzioni EMC
55
Per ottenere un funzionamento della rete RS485 privo di
interferenze, Danfoss consiglia le seguenti precauzioni EMC.
AVVISO!
Disegno 5.2 Collegamento in rete
5.1.3 Setup hardware
Per terminare il bus RS485 usare l'interruttore di
terminazione sul quadro di comando principale del convertitore di frequenza.
L'impostazione di fabbrica per l'interruttore è OFF.
Rispettare sempre le norme nazionali e locali in materia,
ad esempio quelle riguardanti il collegamento della
messa a terra di protezione. Tenere il cavo di comunicazione RS485 lontano dai cavi motore e della resistenza
di frenatura al ne di evitare l'accoppiamento di disturbi
ad alta frequenza tra i cavi. Normalmente è suciente
una distanza di 200 mm. Mantenere la massima distanza
possibile tra i cavi, in particolare quando sono posati in
parallelo per lunghe distanze. Quando la posa incrociata
è inevitabile, il cavo RS485 deve incrociare i cavi motore
e i cavi della resistenza di frenatura con un angolo di
90°.
5.1.4 Impostazione parametri per
comunicazione Modbus
Parametro Funzione
Parametro 8-30 Pro
tocollo
Parametro 8-31 Indi
rizzo
Parametro 8-32 Bau
d rate
Parametro 8-33 Pari
tà / bit di stop
Selezionare il protocollo dell'applicazione da
utilizzare sull'interfaccia RS485.
Impostare l'indirizzo nodo.
AVVISO!
L'intervallo di indirizzi dipende dal
protocollo selezionato in
parametro 8-30 Protocollo.
Impostare il baud rate.
AVVISO!
Il baud rate predenito dipende dal
protocollo selezionato in
parametro 8-30 Protocollo.
Impostare la parità e il numero di bit di
stop.
AVVISO!
La selezione predenita dipende dal
protocollo selezionato in
parametro 8-30 Protocollo.
5.2 Protocollo FC
5.2.1 Panoramica
Il protocollo FC, chiamato anche bus FC o bus Standard, è
il bus di campo standard Danfoss. Denisce una tecnica di
accesso secondo il principio master/slave per comunicazioni tramite un bus di campo.
Un master e un numero massimo di 126 slave possono
essere collegati al bus. I singoli slave vengono selezionati
dal master tramite un carattere di indirizzo nel telegramma.
Uno slave non può mai trasmettere senza che gli venga
prima chiesto di farlo, e un trasferimento diretto di
telegrammi tra i singoli slave non è possibile. Le comunicazioni avvengono in modalità half duplex.
La funzione master non può essere trasferita a un altro
nodo (sistema a master singolo).
56 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 59

0 1 32 4 5 6 7
195NA036.10
Bit di
start
Parità Bit di
stop
STX LGE ADR DATA BCC
195NA099.10
Installazione e setup dell'... Guida alla Progettazione
Il livello sico è RS485, quindi utilizza la porta RS485
integrata nel convertitore di frequenza. Il protocollo FC
supporta diversi formati di telegramma;
Un formato breve a 8 byte per i dati di processo.
•
Un formato lungo a 16 byte che include anche
•
un canale parametri.
Un formato utilizzato per testi.
•
5.2.2 FC con Modbus RTU
Il protocollo FC consente l'accesso alla parola di controllo e
al riferimento bus del convertitore di frequenza.
La parola di controllo consente al master Modbus di
controllare varie funzioni importanti del convertitore di
frequenza:
Avviamento.
•
Arresto del convertitore di frequenza in vari modi:
•
- Arresto a ruota libera.
- Arresto rapido.
- Arresto freno CC.
- Arresto normale (rampa).
Ripristino dopo uno scatto in caso di guasto.
•
Funzionamento a varie velocità preimpostate.
•
Marcia in senso inverso.
•
Modica del setup attivo.
•
Controllo dei due relè integrati nel convertitore di
•
frequenza.
Il riferimento bus è generalmente usato per il controllo di
velocità. È anche possibile accedere ai parametri, leggere i
loro valori e dove possibile, modicarli. Accedendo ai
parametri è possibile una serie di opzioni di controllo,
come il controllo del setpoint del convertitore di frequenza
quando viene utilizzato il controllore PI interno.
Struttura frame messaggio protocollo
5.4
FC
5.4.1 Contenuto di un carattere (byte)
Ogni carattere trasmesso inizia con un bit di start. In
seguito sono trasmessi 8 bit di dati, corrispondenti a un
byte. Ogni carattere è vericato tramite un bit di parità.
Questo bit è impostato su 1 quando raggiunge la parità. La
parità si ottiene in presenza di un numero pari di 1 s negli
8 bit di dati e nel bit di parità nel totale. Un carattere è
completato da un bit di stop, formato complessivamente
da 11 bit.
Disegno 5.3 Contenuto di un carattere
5.4.2 Struttura del telegramma
Ogni telegramma ha la seguente struttura:
Carattere di start (STX) = 02 hex.
•
Un byte che indica la lunghezza del telegramma
•
(LGE).
Un byte indicante l'indirizzo del convertitore di
•
frequenza (ADR).
Seguono numerosi byte di dati (variabili in base al tipo di
telegramma).
Il telegramma termina con un byte di controllo dati (BCC).
Disegno 5.4 Struttura del telegramma
5 5
Congurazione della rete
5.3
Per abilitare il protocollo FC per il convertitore di
frequenza, impostare i seguenti parametri.
Parametro Impostazione
Parametro 8-30 Protocollo FC
Parametro 8-31 Indirizzo 1–126
Parametro 8-32 Baud rate 2400–115200
Parametro 8-33 Parità / bit di stop
Tabella 5.3 Parametri per abilitare il protocollo
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 57
Parità pari, 1 bit di stop
(default)
5.4.3 Lunghezza del telegramma (LGE)
La lunghezza del telegramma è costituita dal numero di
byte di dati, più il byte indirizzo ADR più il byte di
controllo dati BCC.
4 byte di dati LGE = 4+1+1 = 6 byte
12 byte di dati LGE = 12+1+1 = 14 byte
Telegrammi contenenti testo
Tabella 5.4 Lunghezza di telegrammi
1) Il valore 10 rappresenta i caratteri ssi, mentre n è variabile (in
funzione della lunghezza del testo).
101)+n byte
Page 60

ADRLGESTX PCD1 PCD2 BCC
130BA269.10
PKE IND
130BA270.10
ADRLGESTX PCD1 PCD2 BCCCh1 Ch2 Chn
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BB918.10
PKE IND
PWE
high
PWE
low
AK PNU
Parameter
commands
and replies
Parameter
number
Installazione e setup dell'...
VLT® Midi Drive FC 280
5.4.4 Indirizzo del convertitore di frequenza
(ADR)
Blocco di testo
Il blocco di testo è utilizzato per leggere o scrivere testi
mediante il blocco di dati.
Formato indirizzo 1–126
Bit 7 = 1 (formato indirizzi 1–126 attivo).
•
Bit 0–6 = indirizzo del convertitore di frequenza
•
Disegno 5.7 Blocco di testo
1–126.
Bit 0–6 = 0 broadcast.
•
5.4.7 Il campo PKE
Lo slave restituisce il byte di indirizzo al master senza
variazioni nel telegramma di risposta.
55
5.4.5 Byte di controllo dati (BCC)
Il campo PKE contiene due campi secondari:
Comando relativo ai parametri e risposta (AK)
•
Numeri dei parametri (PNU)
•
La checksum viene calcolata come una funzione XOR.
Prima che venga ricevuto il primo byte nel telegramma, la
checksum calcolata è 0.
5.4.6 Il campo dati
La struttura dei blocchi di dati dipende dal tipo di
telegramma. Vi sono tre tipi di telegramma, utilizzati sia
per la funzione di controllo (master⇒slave) che di risposta
(slave⇒master).
I 3 tipi di telegrammi sono:
Blocco processo (PCD)
Il PCD è costituito da un blocco di dati di quattro byte (2
parole) e contiene:
Parola di controllo e valore di riferimento (dal
•
master allo slave)
Parola di stato e frequenza di uscita attuale (dallo
•
slave al master).
Disegno 5.5 Blocco processo
Blocco parametri
Il blocco parametri è usato per la trasmissione dei
parametri fra master e slave. Il blocco di dati è costituito
da 12 byte (6 parole) e contiene anche il blocco di
processo.
Disegno 5.6 Blocco parametri
Disegno 5.8 Campo PKE
I bit 12–15 trasferiscono i comandi relativi ai parametri dal
master allo slave e restituiscono le risposte elaborate dallo
slave al master.
Comandi relativi ai parametri master⇒slave
Numero di bit Comando relativo ai parametri
15 14 13 12
0 0 0 0 Nessun comando.
0 0 0 1 Lettura valore del parametro.
0 0 1 0
0 0 1 1
1 1 0 1
1 1 1 0
1 1 1 1 Lettura testo.
Tabella 5.5 Comandi relativi ai parametri
Scrittura valore del parametro nella RAM
(parola).
Scrittura valore del parametro nella RAM
(parola doppia).
Scrittura valore del parametro nella RAM
e nella EEPROM (parola doppia).
Scrittura valore del parametro nella RAM
e nella EEPROM (parola).
58 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 61

Installazione e setup dell'... Guida alla Progettazione
Risposta slave⇒master
Numero di bit Risposta
15 14 13 12
0 0 0 0 Nessuna risposta.
0 0 0 1 Valore di parametro trasmesso (parola).
0 0 1 0
0 1 1 1 Impossibile eseguire il comando.
1 1 1 1 Testo trasmesso.
Tabella 5.6 Risposta
Valore di parametro trasmesso (parola
doppia).
Se il comando non può essere eseguito, lo slave invia la
risposta 0111 Impossibile eseguire il comando ed emette i
messaggi di errore seguenti in Tabella 5.7.
Codice di guasto Specica FC
0 Numero parametro non consentito.
1 Il parametro non può essere modicato.
2 Limiti superiore o inferiore superati.
3 Indice secondario corrotto.
4 Nessun array.
5 Tipo di dati errato.
6 Non utilizzato.
7 Non utilizzato.
9 Elemento descrittivo non disponibile.
11 Nessun accesso scrittura parametro.
15 Nessun testo disponibile.
17 Non applicabile quando in funzione.
18 Altri errori.
100 –
>100 –
130
131 Ripristino setup di fabbrica impossibile.
132 Nessun accesso all'LCP.
252 Visualizzatore sconosciuto.
253 Richiesta non supportata.
254 Attributo sconosciuto.
255 Nessun errore.
Tabella 5.7 Rapporto di slave
Nessun accesso al bus per questo
parametro.
5.4.8 Numero di parametro (PNU)
5.4.9 Indice (IND)
L'indice è usato insieme al numero di parametro per un
accesso di lettura/scrittura ai parametri con un indice, ad
esempio, parametro 15-30 Log allarme: Codice guasto.
L'indice consiste di 2 byte: un byte basso e un byte alto.
Solo il byte basso è utilizzato come indice.
5.4.10 Valore del parametro (PWE)
Il blocco del valore di parametro consiste di due parole (4
byte) e il valore dipende dal comando denito (AK). Il
master richiede un valore di parametro quando il blocco
PWE non contiene alcun valore. Per cambiare un valore di
parametro (scrittura), scrivere il nuovo valore nel blocco
PWE e inviarlo dal master allo slave.
Se lo slave risponde alla richiesta di parametro (comando
di lettura), il valore di parametro corrente nel blocco PWE è
trasmesso e rinviato al master. Se un parametro contiene
diverse opzioni dati, ad esempio parametro 0-01 Lingua,
selezionare il valore dei dati inserendone il valore nel
blocco PWE. La comunicazione seriale è in grado di leggere
solo i parametri contenenti il tipo di dati 9 (stringa di
testo).
I parametri da Parametro 15-40 Tipo FC a
parametro 15-53 N. di serie scheda di potenza contengono il
tipo di dati 9.
Ad esempio, leggere le dimensioni dell'unità e l'intervallo
della tensione di rete in parametro 15-40 Tipo FC. Quando
viene trasmessa una stringa di testo (lettura), la lunghezza
del telegramma e dei testi è variabile. La lunghezza del
telegramma è
denita nel secondo byte del telegramma
(LGE). Quando si trasmettono testi, il carattere indice indica
se si tratta di un comando di lettura o di scrittura.
Per leggere un testo mediante il blocco PWE, impostare il
comando relativo ai parametri (AK) su F esadecimale. Il
carattere indice del byte alto deve essere 4.
5.4.11 Tipi di dati supportati dal
convertitore di frequenza
5 5
I bit 0-11 trasmettono i numeri dei parametri. La funzione
del parametro in questione è denita nella descrizione dei
Senza rma signica che il telegramma non contiene alcun
segno operativo.
parametri nella Guida alla Programmazione VLT® Midi Drive
FC 280.
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 59
Page 62
E19E H
PKE IND PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA092.10
119E H
PKE
IND
PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA093.10
Installazione e setup dell'...
VLT® Midi Drive FC 280
Tipi di dati Descrizione
3 Numero intero 16
4 Numero intero 32
5 Senza rma 8
6 Senza rma 16
7 Senza rma 32
9 Stringa di testo
Tabella 5.8 Tipi di dati
Esempi
5.5
5.5.1 Scrittura di un valore di parametro
Cambiare parametro 4-14 Limite alto velocità motore [Hz] a
100 Hz.
Scrivere i dati nella EEPROM.
PKE = E19E hex - Scrittura parola singola in
parametro 4-14 Limite alto velocità motore [Hz]:
5.4.12 Conversione
55
La Guida alla Programmazione contiene le descrizioni degli
attributi di ciascun parametro. I valori dei parametri
vengono trasferiti solo come numeri interi. I fattori di
conversione sono utilizzati per trasmettere i decimali.
Parametro 4-12 Limite basso velocità motore [Hz] ha un
Valore dati 1000, corrispondente a 100 Hz, vedere
capitolo 5.4.12 Conversione.
Il telegramma avrà l'aspetto di Disegno 5.9.
IND = 0000 hex.
•
PWEHIGH = 0000 hex.
•
PWELOW = 03E8 hex.
•
fattore di conversione di 0,1. Per preimpostare la frequenza
minima a 10 Hz, trasmettere il valore 100. Un fattore di
conversione di 0,1
signica che il valore trasmesso è
moltiplicato per 0,1. Il valore 100 è quindi percepito come
10,0.
Disegno 5.9 Telegramma
Indice di conversione Fattore di conversione
74 3600
2 100
1 10
0 1
-1 0,1
-2 0,01
-3 0,001
-4 0,0001
-5 0,00001
AVVISO!
Parametro 4-14 Limite alto velocità motore [Hz] è una
parola singola e il comando relativo ai parametri per la
scrittura nell'EEPROM è E. Parametro 4-14 Limite alto
velocità motore [Hz] è 19E in esadecimale.
La risposta dallo slave al master è mostrata in Disegno 5.10.
Tabella 5.9 Conversione
5.4.13 Parole di processo (PCD)
Il blocco delle parole di processo è diviso in due blocchi di
16 bit, che si presentano sempre nella sequenza denita.
PCD 1 PCD 2
Telegramma di controllo (parola di controllo
master⇒slave)
Telegramma di controllo parola di stato
(slave⇒master)
Tabella 5.10 Parole di processo (PCD)
60 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Valore di
riferimento
Frequenza di
uscita attuale
Disegno 5.10 Risposta dal master
5.5.2 Lettura di un valore del parametro
Leggere il valore in parametro 3-41 Rampa 1 tempo di
accel..
PKE = 1155 hex - Lettura valore del parametro in
parametro 3-41 Rampa 1 tempo di accel.:
IND = 0000 hex.
•
PWE
•
PWE
•
= 0000 hex.
HIGH
= 0000 hex.
LOW
Page 63

1155 H
PKE IND PWE
high
PWE
low
0000 H 0000 H 0000 H
130BA094.10
130BA267.10
1155 H
PKE
IND
0000 H 0000 H 03E8 H
PWE
high
PWE
low
Installazione e setup dell'... Guida alla Progettazione
Se è necessaria una risposta, il controllore crea il
Disegno 5.11 Telegramma
Se il valore in parametro 3-41 Rampa 1 tempo di accel. è 10
s, la risposta dallo slave al master è mostrata in
Disegno 5.12.
Disegno 5.12 Risposta
3E8 hex corrisponde a 1000 decimale. L'indice di
conversione per parametro 3-41 Rampa 1 tempo di accel. è
-2, vale a dire 0,01.
Parametro 3-41 Rampa 1 tempo di accel. è del tipo Senza
rma 32.
Modbus RTU
5.6
5.6.1 Conoscenze premesse
Danfoss presuppone che il controllore installato supporti le
interfacce descritte nel presente manuale e che vengano
osservati scrupolosamente tutti i requisiti richiesti dal
controllore nonché dal convertitore di frequenza.
Il Modbus RTU integrato (Remote Terminal Unit) è
progettato per comunicare con qualsiasi controllore che
supporta le interfacce denite nel presente manuale. Si
presuppone che l'utente abbia piena conoscenza delle
capacità e dei limiti del controllore.
5.6.2 Panoramica
Indipendentemente dal tipo di reti di comunicazione
siche, la presente sezione descrive il processo che un
controllore utilizza per richiedere l'accesso a un altro
dispositivo. Ciò include il modo in cui il Modbus RTU
risponderà a richieste da un altro dispositivo e il modo in
cui gli errori verranno rilevati e segnalati. Stabilisce anche
un formato comune per il layout e i contenuti dei campi
dei telegrammi.
Durante le comunicazioni su una rete Modbus RTU, il
protocollo:
Determina il modo in cui ogni controllore rileva
•
l'indirizzo di dispositivo.
Riconosce un telegramma indirizzato a esso.
•
Determina quali azioni eseguire.
•
telegramma di risposta e lo invia.
I controllori comunicano utilizzando la tecnica master/slave
nella quale solo il master può iniziare le transazioni
(chiamate interrogazioni). Gli slave rispondono fornendo al
master i dati richiesti oppure eseguendo l'azione richiesta
nell'interrogazione.
Il master può indirizzare singoli slave oppure iniziare un
telegramma di broadcast a tutti gli slave. Gli slave
restituiscono una risposta alle interrogazioni che sono
indirizzate a loro singolarmente. Non vengono restituite
risposte alle interrogazioni broadcast dal master.
Il protocollo Modbus RTU stabilisce il formato per l'interrogazione del master fornendo le informazioni seguenti:
Il telegramma di risposta del dispositivo slave è costruito
anche usando il protocollo Modbus. Contiene campi che
confermano l'azione adottata, eventuali dati da restituire e
un campo per il controllo degli errori. Se si verica un
errore nella ricezione del telegramma o se lo slave non è in
grado di eettuare l'azione richiesta, lo slave genera un
messaggio di errore e lo invia. In alternativa, si verica una
temporizzazione.
5.6.3 Convertitore di frequenza con
Il convertitore di frequenza comunica nel formato Modbus
RTU tramite l'interfaccia RS485 incorporata. Modbus RTU
consente l'accesso alla parola di controllo e riferimento bus
del convertitore di frequenza.
La parola di controllo consente al master Modbus di
controllare varie funzioni importanti del convertitore di
frequenza:
Estrae dati o altre informazioni contenuti nel
•
telegramma.
L'indirizzo del dispositivo (o broadcast).
•
Un codice di funzione che denisce un'azione
•
richiesta.
Qualsiasi dato da inviare.
•
Un campo di controllo degli errori.
•
Modbus RTU
Avviamento.
•
Diversi arresti:
•
- Arresto a ruota libera.
- Arresto rapido.
- Arresto freno CC.
- Arresto normale (rampa).
Ripristino dopo uno scatto in caso di guasto.
•
Funzionamento a varie velocità preimpostate.
•
Marcia in senso inverso.
•
5 5
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 61
Page 64
Installazione e setup dell'...
VLT® Midi Drive FC 280
Modicare il setup attivo.
•
Controllare il relè incorporato del convertitore di
•
frequenza.
Il riferimento bus è generalmente usato per il controllo di
velocità. È anche possibile accedere ai parametri, leggere i
loro valori e, dove possibile, modicarli. Accedendo ai
parametri è possibile una serie di opzioni di controllo,
come il controllo del setpoint del convertitore di frequenza
quando viene utilizzato il controllore PI interno.
5.7 Congurazione della rete
55
Per abilitare Modbus RTU sul convertitore di frequenza,
impostare i seguenti parametri:
Parametro Impostazione
Parametro 8-30 Protocollo Modbus RTU
Parametro 8-31 Indirizzo 1–247
Parametro 8-32 Baud rate 2400–115200
Parametro 8-33 Parità / bit di stop
Tabella 5.11 Congurazione della rete
Struttura frame messaggio Modbus RTU
5.8
Parità pari, 1 bit di stop
(default)
5.8.1 Introduzione
5.8.2 Struttura del telegramma Modbus
RTU
Il dispositivo trasmittente inserisce un telegramma Modbus
RTU in un frame con un punto di inizio e di ne noti.
Questo consente ai dispositivi riceventi di iniziare all'inizio
del telegramma, leggere la porzione di indirizzo,
determinare quale è il dispositivo di destinazione (o tutti i
dispositivi, se il telegramma viene inviato in broadcast), e
riconoscere quando il telegramma è stato completato. I
telegrammi parziali vengono rilevati e di conseguenza
vengono impostati gli errori. I caratteri per la trasmissione
devono essere in formato esadecimale 00–FF in ogni
campo. Il convertitore di frequenza monitora
continuamente il bus di rete, anche durante gli intervalli
silenti. Quando viene ricevuto il primo campo (il campo di
indirizzo), ogni convertitore di frequenza o dispositivo lo
decodica al ne di determinare la periferica indirizzata. I
telegrammi Modbus RTU con indirizzo 0 sono telegrammi
broadcast. Non è consentita alcuna risposta a telegrammi
broadcast. Un telegramma frame tipico è mostrato in
Tabella 5.14.
Inizio Indirizzo Funzione Dati
T1-T2-T3-
T4
8 bit 8 bit N x 8 bit 16 bit
Controllo
CRC
Fine
T1-T2-T3-
T4
I controllori sono impostati per comunicare sulla rete
Modbus usando la modalità RTU (Remote Terminal Unit),
con ogni byte nel telegramma contenente due caratteri
esadecimali a 4 bit. Il formato per ogni byte è mostrato in
Tabella 5.12.
Bit di
start
Tabella 5.12 Formato per ciascun byte
Sistema di codica 8 bit binario, esadecimale 0–9, A–F.
Bit per byte
Campo di controllo
errori
Tabella 5.13 Dettagli relativi ai byte
Byte dati Stop/
Due caratteri esadecimali contenuti in ogni
campo a 8 bit del telegramma.
1 bit di start.
•
8 bit dati, bit meno signicativo inviato
•
per primo.
1 bit per parità pari/dispari; nessun bit
•
per nessuna parità.
1 bit di stop se si utilizza parità; 2 bit in
•
caso di nessuna parità.
Controllo di ridondanza ciclica (CRC).
parità
Arrest
o
Tabella 5.14 Tipica struttura del telegramma Modbus RTU
5.8.3 Campo Start/Stop
I telegrammi iniziano con una pausa di almeno 3,5
intervalli di carattere. Il periodo silente è implementato
come un multiplo di intervalli di caratteri al baud rate della
rete selezionato (mostrato come Start T1-T2-T3-T4). Il primo
campo che deve essere trasmesso è l'indirizzo del
dispositivo. In seguito all'ultimo carattere trasmesso, un
periodo simile di almeno 3,5 intervalli di carattere segna la
ne del telegramma. Dopo questo periodo può iniziare un
nuovo telegramma.
Trasmettere l'intero frame del telegramma come un usso
continuo. Se si verica una pausa di oltre 1,5 caratteri
prima che il frame sia completato, il dispositivo ricevente
cancella il telegramma incompleto e presume che il byte
successivo sarà il campo di indirizzo di un nuovo
telegramma. Allo stesso modo, se un nuovo telegramma
inizia prima di 3,5 intervalli di carattere dopo un
telegramma precedente, il dispositivo ricevente lo
considera una continuazione del telegramma precedente.
Ciò provoca una temporizzazione (nessuna risposta dallo
slave), poiché il valore nel campo CRC nale non è valido
per i telegrammi combinati.
62 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 65

Installazione e setup dell'... Guida alla Progettazione
5.8.4 Campo di indirizzo
Il campo di indirizzo di un frame telegramma contiene 8
bit. Gli indirizzi validi del dispositivo slave sono compresi
nell'intervallo 0-247 decimale. Ai singoli dispositivi slave
vengono assegnati indirizzi nell'intervallo compreso tra 1 e
247. Il valore 0 è riservato al modo broadcast, riconosciuto
da tutti gli slave. Un master indirizza uno slave inserendo
l'indirizzo slave nel campo di indirizzo del telegramma.
Quando lo slave invia la sua risposta, colloca il suo proprio
indirizzo in questo campo di indirizzo per segnalare al
master quale slave sta rispondendo.
5.8.5 Campo funzione
Il campo funzione di un frame telegramma contiene 8 bit. I
codici validi sono compresi nell'intervallo tra 1 e FF. I
campi funzione sono usati per la trasmissione di
telegrammi tra master e slave. Quando un telegramma
viene inviato da un dispositivo master a uno slave, il
campo del codice funzione segnala allo slave che tipo di
azione debba
master, usa il campo codice funzione per indicare una
risposta normale (senza errori) oppure per indicare che si è
vericato un errore (risposta di eccezione).
Per una risposta normale lo slave restituisce semplicemente
il codice funzione originale. Per una risposta di eccezione,
lo slave restituisce un codice che è equivalente al codice
funzione originale con il suo bit più signicativo impostato
su 1 logico. Inoltre lo slave colloca un codice unico nel
campo dati del telegramma di risposta. Questo codice
segnala al master il tipo di errore che si è vericato oppure
la ragione dell'eccezione. Fare riferimento anche a
capitolo 5.8.10 Codici funzione supportati da Modbus RTU e
capitolo 5.8.11 Codici di eccezione Modbus.
eettuare. Quando lo slave risponde al
5.8.6 Campo dati
Il campo dati è costruito usando serie di due cifre
esadecimali nell'intervallo compreso tra 00 e FF
esadecimale. Queste cifre sono costituite da un carattere
RTU. Il campo dati di telegrammi inviati da un master a un
dispositivo slave contiene ulteriori informazioni che lo slave
deve usare per eettuare l'intervento previsto.
5.8.7 Campo di controllo CRC
I telegrammi includono un campo per il controllo degli
errori basato su un metodo con controllo di ridondanza
ciclica (CRC). Il campo CRC controlla i contenuti dell'intero
telegramma. Viene applicato indipendentemente da
qualsiasi metodo di controllo parità per i singoli caratteri
del telegramma. Il dispositivo trasmittente calcola il valore
CRC e quindi aggiunge il CRC come ultimo campo nel
telegramma. Il dispositivo ricevente ricalcola un CRC
durante la ricezione del telegramma e confronta il valore
calcolato con il valore eettivo ricevuto nel campo CRC. La
mancata corrispondenza di due valori determina un
timeout del bus. Il campo per il controllo degli errori
contiene un valore binario a 16 bit implementato come
due byte a 8 bit. Dopo l'implementazione, il byte di ordine
inferiore del campo viene aggiunto per primo, seguito dal
byte di ordine superiore. Il byte di ordine superiore CRC è
l'ultimo byte inviato nel telegramma.
5.8.8 Indirizzamento del registro di bobina
In Modbus, tutti i dati sono organizzati in bobine e registri
di mantenimento. Le bobine gestiscono un singolo bit,
mentre i registri di mantenimento gestiscono una parola a
2 byte (vale a dire 16 bit). Tutti gli indirizzi di dati nei
telegrammi Modbus sono riferiti allo 0. Alla prima
occorrenza di un elemento dati viene assegnato l'indirizzo
dell'elemento numero 0. Per esempio: la bobina nota come
coil 1 in un controllore programmabile viene indirizzata
come bobina 0000 nel campo di indirizzo dati di un
telegramma Modbus. La bobina 127 in codice decimale
viene indirizzata come coil 007Ehex (126 in codice
decimale).
Il registro di mantenimento 40001 viene indirizzato come
registro 0000 nel campo di indirizzo dati del telegramma. Il
campo codice funzione specica già un funzionamento
'registro di mantenimento'. Pertanto il riferimento 4XXXX è
implicito. Il registro di mantenimento 40108 viene
indirizzato come registro 006Bhex (107 in codice decimale).
5 5
Le informazioni possono includere elementi come:
Indirizzi di bobina o di registro.
•
Quantità di elementi da gestire.
•
Conteggio dei byte di dati eettivi nel campo.
•
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 63
Page 66
Installazione e setup dell'...
VLT® Midi Drive FC 280
Numero
di bobina
1–16 Parola di controllo del convertitore
17–32 Velocità del convertitore di
33–48 Parola di stato del convertitore di
49–64 Modalità ad anello aperto:
55
65
66–65536 Riservato. –
Tabella 5.15 Registro bobina
Descrizione Direzione del
segnale
Dal master allo
di frequenza (vedere Tabella 5.16).
frequenza o intervallo di riferimento
setpoint 0x0–0xFFFF (-200% ...
~200%).
frequenza (vedere Tabella 5.17).
frequenza di uscita del convertitore
di frequenza.
Modalità ad anello chiuso: segnale
di retroazione convertitore di
frequenza.
Controllo di scrittura parametro (dal
master allo slave).
0 = Le modiche ai parametri
vengono memorizzate nella RAM
del convertitore di frequenza.
1 = Le modiche ai parametri
vengono memorizzate nella RAM e
nell'EEPROM del convertitore di
frequenza.
slave
Dal master allo
slave
Dallo slave al
master
Dallo slave al
master
Dal master allo
slave
Bobina 0 1
15 –
16 Nessuna inversione Inversione
Tabella 5.16 Parola di controllo convertitore di frequenza
(prolo FC)
Bobina 0 1
33 Comando non pronto Comando pronto
34 Convertitore di frequenza
non pronto
35 Arresto a ruota libera Chiuso per sicurezza
36 Nessun allarme Allarme
37 Non utilizzato Non utilizzato
38 Non utilizzato Non utilizzato
39 Non utilizzato Non utilizzato
40 Nessun avviso Avviso
41 Non nel riferimento Nel riferimento
42 Modalità manuale Modalità Automatico
43 Fuori campo di frequenza Nel campo di frequenza
44 Arrestato In funzione
45 Non utilizzato Non utilizzato
46 Nessun avviso tensione Avviso tensione
47 Non nel limite di corrente Limite di corrente
48 Nessun avviso termico Avviso termico
Tabella 5.17 Parola di stato convertitore di frequenza
(prolo FC)
Convertitore di frequenza
pronto
Bobina 0 1
01 Riferimento preimpostato, lsb
02 Riferimento preimpostato, msb
03 Freno CC Nessun freno CC
04 Arresto a ruota libera Nessun arresto a ruota libera
05 Arresto rapido Nessun arresto rapido
06 Frequenza congelata Nessuna frequenza congelata
07 Arresto rampa Avviamento
08 Nessun ripristino Ripristino
09 Nessun jog Jog
10 Rampa 1 Rampa 2
11 Dati non validi Dati validi
12 Relè 1 o Relè 1 on
13 Relè 2 o Relè 2 on
14 Setup LSB
64 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 67

Installazione e setup dell'... Guida alla Progettazione
Indirizzo
bus
0 1 40001 Riservato
1 2 40002 Riservato
2 3 40003 Riservato
3 4 40004 Libero – –
4 5 40005 Libero – –
5 6 40006 Comunicazione Modbus Lettura/
6 7 40007 Ultimo codice di guasto Sola lettura Codice di guasto ricevuto dal database parametri, per i
7 8 40008 Registro ultimo errore Sola lettura Indirizzo del registro in cui si è vericato l'ultimo errore,
8 9 40009 Puntatore indice Lettura/
9 10 40010 Parametro 0-01 Lingua Dipendente
19 20 40020 Parametro 0-02 Unità velocità
29 30 40030 Parametro 0-03 Impostazioni
Registro
1)
bus
Registro
PLC
Contenuto Accesso Descrizione
Riservato per compatibilità con convertitori di
frequenza VLT® 5000 e VLT® 2800.
Riservato per compatibilità con convertitori di
frequenza VLT® 5000 e VLT® 2800.
Riservato per compatibilità con convertitori di
frequenza VLT® 5000 e VLT® 2800.
Solo TCP. Riservato per Modbus TCP
(parametro 12-28 Memorizzare i valori di dati e
parametro 12-29 Memorizzare sempre - memorizzato in,
ad esempio, EEPROM).
dettagli vedere WHAT 38295.
per i dettagli vedere WHAT 38296.
Sottoindice del parametro a cui accedere. Per i dettagli
vedere WHAT 38297.
Parametro 0-01 Lingua (Registro Modbus = numero
parametro 10)
20 byte di spazio riservati al parametro nella mappa
Modbus.
Parametro 0-02 Unità velocità motore
20 byte di spazio riservati al parametro nella mappa
Modbus.
Parametro 0-03 Impostazioni locali
20 byte di spazio riservati al parametro nella mappa
Modbus.
motore
locali
–
–
–
scrittura
scrittura
dall'accesso al
parametro
Dipendente
dall'accesso al
parametro
Dipendente
dall'accesso al
parametro
5 5
Tabella 5.18 Indirizzo/registri
1) Il valore scritto nel telegramma Modbus RTU deve essere uno o inferiore al numero di registro. Ad esempio, Lettura registro Modbus 1 scrivendo
il valore 0 nel telegramma.
5.8.9 Controllo del convertitore di
frequenza
Questa sezione descrive i codici che possono essere
utilizzati nei campi funzione e nei campi dati di un
telegramma Modbus RTU.
5.8.10 Codici funzione supportati da
Modbus RTU
Modbus RTU supporta l'uso dei seguenti codici funzione
Funzione Codice funzione (hex)
Lettura bobine 1
Lettura registri di mantenimento 3
Scrittura bobina singola 5
Scrittura registro singolo 6
Scrittura bobine multiple F
Scrittura registri multipli 10
Ottieni contatore eventi com. B
Riporta ID slave 11
Tabella 5.19 Codici funzione
nel campo funzione di un telegramma:
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 65
Page 68

Installazione e setup dell'...
VLT® Midi Drive FC 280
Funzione Codice
funzione
Diagnostica 8 1 Riavvia comunicazione.
55
Tabella 5.20 Codici funzione
5.8.11 Codici di eccezione Modbus
Per una spiegazione completa della struttura di una
Codice
sottofunzio
ne
2 Restituisce il registro
10 Azzera i contatori e il
11 Restituisce il conteggio
12 Restituisce il conteggio
13 Restituisce il conteggio
14 Restituisce il conteggio
Sottofunzione
diagnostico.
registro diagnostico.
messaggi bus.
degli errori di comunicazione bus.
degli errori slave.
messaggi slave.
Codic
e
3
4
Tabella 5.21 Codici di eccezione Modbus
Nome Signicato
Un valore contenuto nel campo dati di
interrogazione non è un valore consentito
per un server (o slave). Questo indica un
guasto nella struttura della parte residua
di una richiesta complessa, ad esempio
Valore dei
dati non
consentito
Guasto al
dispositivo
slave
che la lunghezza implicita è scorretta.
NON signica che un elemento di dati
trasmesso per la memorizzazione in un
registro abbia un valore al di fuori
dell'ambito del programma di
applicazione, poiché il protocollo Modbus
non conosce il signicato dei valori nei
registri.
Si è vericato un errore irreversibile
mentre il server (o slave) tentava di
eseguire l'azione richiesta.
5.9 Come accedere ai parametri
5.9.1 Gestione dei parametri
risposta del codice di eccezione, consultare
capitolo 5.8.5 Campo funzione.
Il PNU (numero di parametro) viene tradotto dall'indirizzo
di registro contenuto nel telegramma di lettura o scrittura
Codic
e
1
2
Nome Signicato
Il codice funzione ricevuto nell'interrogazione non è un'azione consentita per il
server (o slave). La causa può essere il
fatto che il codice funzione è applicabile
soltanto ai dispositivi più nuovi e non è
Funzione non
consentita
Indirizzo dati
non
consentito
stato implementato nell'unità selezionata.
Potrebbe anche indicare che il server (o
slave) è in uno stato sbagliato per
elaborare una richiesta di questo tipo, ad
esempio perché non è congurato ed è
stato sollecitato di indicare i valori di
registro.
L'indirizzo dati ricevuto nell'interrogazione
non è un indirizzo consentito per il server
(o slave). Più specicamente, non è valida
la combinazione di numero di riferimento
e lunghezza di trasferimento. Per un
controllore con 100 registri, una richiesta
con oset 96 e lunghezza 4 ha successo,
mentre una richiesta con oset 96 e
lunghezza 5 genera l'eccezione 02.
Modbus. Il numero di parametro viene convertito in
Modbus come (10 x numero di parametro) decimale.
Esempi
Lettura parametro 3-12 Valore di catch-up/slow down (16
bit): il registro di mantenimento 3120 contiene il valore dei
parametri. Un valore di 1352 (decimale) signica che il
parametro è impostato sul 12,52%.
Lettura parametro 3-14 Rif. relativo preimpostato (32 bit): i
registri di mantenimento 3410 e 3411 contengono i valori
dei parametri. Un valore di 11300 (decimale) signica che il
parametro è impostato su 1113,00.
Per informazioni su parametri, dimensioni e indice di
conversione consultare la Guida alla Programmazione VLT
®
Midi Drive FC 280.
5.9.2 Memorizzazione di dati
La bobina 65 in codice decimale determina se i dati scritti
nel convertitore di frequenza vengono memorizzati
nell'EEPROM e nella RAM (bobina 65 = 1) oppure soltanto
nella RAM (bobina 65 = 0).
66 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 69

Installazione e setup dell'... Guida alla Progettazione
5.9.3 IND (Index)
Alcuni parametri nel convertitore di frequenza sono
parametri array, ad esempio parametro 3-10 Riferim preimp..
Poiché il Modbus non supporta gli array nei registri di
mantenimento, il convertitore di frequenza ha riservato il
registro di mantenimento 9 come puntatore all'array. Prima
di leggere o scrivere un parametro array, impostare il
registro di mantenimento su 9. L'impostazione del registro
di mantenimento al valore di 2 fa sì che tutti i seguenti
parametri array di lettura/scrittura siano nell'indice 2.
5.9.4 Blocchi di testo
Ai parametri memorizzati come stringhe di testo si accede
allo stesso modo come agli altri parametri. La grandezza
massima dei blocchi di testo è 20 caratteri. Se una richiesta
di lettura per un parametro prevede più caratteri di quelli
memorizzati dal parametro, la risposta viene troncata. Se la
richiesta di lettura per un parametro prevede meno
caratteri di quelli memorizzati dal parametro, la risposta
viene riempita con spazi.
5.9.5 Fattore di conversione
Un valore parametrico può essere trasmesso solo sotto
forma di numero intero. Per trasmettere i decimali, usare
un fattore di conversione.
Esempi
5.10
I seguenti esempi illustrano i vari comandi Modbus RTU.
5.10.1 Lettura stato bobine (01 hex)
Descrizione
Questa funzione legge lo stato ON/OFF di uscite discrete
(bobine) nel convertitore di frequenza. Il broadcast non
viene mai supportato per letture.
Interrogazione
Il telegramma di interrogazione specica la bobina di
partenza e la quantità di bobine che devono essere lette.
Gli indirizzi delle bobine iniziano da 0, vale a dire che la
bobina 33 viene indirizzata come 32.
Esempio di una richiesta di lettura delle bobine 33-48
(parola di stato) dal dispositivo slave 01.
Nome campo Esempio (hex)
Indirizzo slave 01 (indirizzo del convertitore di
frequenza)
Funzione 01 (lettura bobina)
Indirizzo iniziale HI 00
Indirizzo iniziale LO 20 (32 decimale) bobina 33
Numero di punti HI 00
Numero di punti LO 10 (16 decimale)
Controllo errori (CRC) –
5 5
5.9.6 Valori dei parametri
Tipi di dati standard
I tipi di dati standard sono int 16, int 32, uint 8, uint 16 e
uint 32. Sono memorizzati come registri 4x (40001 –
4FFFF). I parametri vengono letti utilizzando la funzione 03
hex lettura registri di mantenimento. I parametri vengono
scritti usando la funzione 6 hex preimposta un registro
singolo per un registro (16 bit) e la funzione 10 hex
preimposta registri multipli per due registri (32 bit). Le
grandezze leggibili vanno da un registro (16 bit) no a
dieci registri (20 caratteri).
Tipi di dati non standard
I tipi di dati non standard sono stringhe di testo e
vengono memorizzati come registri 4x (40001–4FFFF). I
parametri vengono letti usando la funzione 03 hex lettura
registri di mantenimento e scritti usando la funzione 10
hex preimposta registri multipli. Le grandezze leggibili
vanno da un registro (due caratteri) no a dieci registri (20
caratteri).
Tabella 5.22 Interrogazione
Risposta
Lo stato nel telegramma di risposta è composto da 1 bit
per ogni bobina impaccata nel campo dati. Lo stato è
indicato come: 1 = ON; 0 = OFF. L'lsb meno signicativo
del primo byte dati restituito contiene la bobina indirizzata
nell'interrogazione. Le altre bobine seguono nei bit più
signicativi questo byte e nell'ordine da meno signicativo
a più signicativo nei byte successivi.
Se la quantità di bobine restituite non è un multiplo di
otto, i rimanenti bit nel byte di dati nale sono completati
con valori pari a 0 (in direzione dei bit più signicativi del
byte). Il campo conteggio byte specica il numero di byte
di dati completi.
Nome campo Esempio (hex)
Indirizzo slave 01 (indirizzo del convertitore di
frequenza)
Funzione 01 (lettura bobina)
Conteggio byte 02 (2 byte di dati)
Dati (bobine 40–33) 07
Dati (bobine 48–41) 06 (STW = 0607hex)
Controllo errori (CRC) –
Tabella 5.23 Risposta
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 67
Page 70

Installazione e setup dell'...
VLT® Midi Drive FC 280
AVVISO!
Bobine e registri sono indirizzati in maniera esplicita con
un oset -1 in Modbus.
AVVISO!
Gli indirizzi delle bobine iniziano da 0, vale a dire che la
bobina 17 viene indirizzata come 16.
La bobina 33 viene ad esempio indirizzata come bobina
32.
5.10.2 Forza/Scrivi bobina singola (05 hex)
Descrizione
Questa funzione permette di forzare lo stato della bobina
su ON o su OFF. Nel modo broadcast, la funzione forza gli
55
stessi riferimenti bobina in tutti gli slave collegati.
Interrogazione
Il telegramma di interrogazione stabilisce che la bobina 65
(controllo scrittura parametri) deve essere forzata. Gli
indirizzi delle bobine iniziano da 0, vale a dire che la
bobina 65 viene indirizzata come 64. Settaggio dati = 00
00 hex (OFF) oppure FF 00 hex (ON).
Nome campo Esempio (hex)
Indirizzo slave 01 (indirizzo del convertitore di
frequenza)
Funzione 05 (scrittura bobina singola)
Indirizzo bobina HI 00
Indirizzo bobina LO 40 (64 decimale) bobina 65
Settaggio dati HI FF
Settaggio dati LO 00 (FF 00 = ON)
Controllo errori (CRC) –
Tabella 5.24 Interrogazione
Risposta
La risposta normale è un'eco dell'interrogazione, restituita
dopo aver forzato lo stato della bobina.
Nome campo Esempio (hex)
Indirizzo slave 01
Funzione 05
Settaggio dati HI FF
Settaggio dati LO 00
Quantità di bobine HI 00
Quantità di bobine LO 01
Controllo errori (CRC) –
Nome campo Esempio (hex)
Indirizzo slave
Funzione 0F (scrittura di bobine multiple)
Indirizzo bobina HI 00
Indirizzo bobina LO 10 (indirizzo bobina 17)
Quantità di bobine HI 00
Quantità di bobine LO 10 (16 bobine)
Conteggio byte 02
Settaggio dati HI
(bobine 8–1)
Settaggio dati LO
(bobine 16–9)
Controllo errori (CRC) –
Tabella 5.26 Interrogazione
01 (indirizzo del convertitore di
frequenza)
20
00 (riferimento = 2000 hex)
Risposta
La risposta normale restituisce l'indirizzo dello slave, il
codice funzione, l'indirizzo di avvio e la quantità di bobine
forzate.
Nome campo Esempio (hex)
Indirizzo slave 01 (indirizzo del convertitore di
frequenza)
Funzione 0F (scrittura di bobine multiple)
Indirizzo bobina HI 00
Indirizzo bobina LO 10 (indirizzo bobina 17)
Quantità di bobine HI 00
Quantità di bobine LO 10 (16 bobine)
Controllo errori (CRC) –
Tabella 5.27 Risposta
5.10.4 Lettura dei registri di mantenimento
(03 hex)
Descrizione
Questa funzione legge i contenuti dei registri di
mantenimento nello slave.
Tabella 5.25 Risposta
5.10.3 Forza/Scrivi bobine multiple (0F hex)
Interrogazione
Il telegramma di interrogazione identica il registro iniziale
e la quantità di registri che devono essere letti. Gli indirizzi
di registro iniziano da zero, vale a dire che i registri 1–4
Descrizione
Questa funzione forza ogni bobina in una sequenza di
bobine su on oppure o. Durante il broadcast, la funzione
forza gli stessi riferimenti bobina in tutti gli slave collegati.
vengono indirizzati come 0–3.
Esempio: Lettura parametro 3-03 Riferimento max., registro
03030.
Interrogazione
Il telegramma di interrogazione specica che le bobine da
17 a 32 (setpoint velocità) debbano essere forzate.
68 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 71

Installazione e setup dell'... Guida alla Progettazione
Nome campo Esempio (hex)
Indirizzo slave 01
Funzione 03 (Lettura registri di mantenimento)
Indirizzo iniziale HI 0B (Indirizzo registro 3029)
Indirizzo iniziale LO D5 (Indirizzo registro 3029)
Numero di punti HI 00
Numero di punti LO
Controllo errori (CRC) –
Tabella 5.28 Interrogazione
02 – (parametro 3-03 Riferimento max. è
lungo 32 bit, cioè due registri)
Risposta
I dati di registro nel telegramma di risposta sono impaccati
come 2 byte per registro, con i contenuti binari allineati a
destra all'interno di ogni byte. In ogni registro il primo byte
contiene i bit più signicativi e il secondo quelli meno
signicativi.
Esempio: hex 000088B8 = 35.000 = 35 Hz.
Nome campo Esempio (hex)
Indirizzo slave 01
Funzione 03
Conteggio byte 04
Dati HI (registro 3030) 00
Dati LO (registro 3030) 16
Dati HI (registro 3031) E3
Dati LO (registro 3031) 60
Controllo errori (CRC) –
Tabella 5.29 Risposta
5.10.5 Preimposta registro singolo (06 hex)
Descrizione
Questa funzione preimposta un valore in un singolo
registro di mantenimento.
Interrogazione
Il telegramma di interrogazione specica il riferimento
registro da preimpostare. Gli indirizzi di registro iniziano da
zero, vale a dire che il registro 1 viene indirizzato come 0.
Esempio: Scrittura nel parametro 1-00 Modo congurazione,
registro 1000.
Nome campo Esempio (hex)
Indirizzo slave 01
Funzione 06
Indirizzo registro HI 03 (indirizzo registro 999)
Indirizzo registro LO E7 (indirizzo registro 999)
Preimpostazione dati HI 00
Preimpostazione dati LO 01
Controllo errori (CRC) –
Risposta
La risposta normale è un'eco dell'interrogazione, restituita
dopo aver trasferito i contenuti del registro.
Nome campo Esempio (hex)
Indirizzo slave 01
Funzione 06
Indirizzo registro HI 03
Indirizzo registro LO E7
Preimpostazione dati HI 00
Preimpostazione dati LO 01
Controllo errori (CRC) –
5 5
Tabella 5.31 Risposta
5.10.6 Preimposta registri multipli (10 hex)
Descrizione
Questa funzione preimposta i valori in una sequenza di
registri di mantenimento.
Interrogazione
Il telegramma di interrogazione specica i riferimenti
registro da preimpostare. Gli indirizzi di registro iniziano da
zero, vale a dire che il registro 1 viene indirizzato come 0.
Esempio di una richiesta a preimpostare due registri
(impostare parametro 1-24 Corrente motore su 738 (7,38 A)):
Nome campo Esempio (hex)
Indirizzo slave 01
Funzione 10
Indirizzo iniziale HI 04
Indirizzo iniziale LO 07
Numero di registri HI 00
Numero di registri LO 02
Conteggio byte 04
Scrittura dati HI (Registro 4: 1049) 00
Scrittura dati LO (Registro 4: 1049) 00
Scrittura dati HI (Registro 4: 1050) 02
Scrittura dati LO (Registro 4: 1050) E2
Controllo errori (CRC) –
Tabella 5.32 Interrogazione
Risposta
La risposta normale restituisce l'indirizzo slave, il codice
funzione, l'indirizzo iniziale e la quantità di registri
preimpostati.
Tabella 5.30 Interrogazione
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 69
Page 72

Speed ref.CTW
Master-follower
130BA274.11
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bit
no.:
Installazione e setup dell'...
VLT® Midi Drive FC 280
Nome campo Esempio (hex)
Indirizzo slave 01
Funzione 10
Indirizzo iniziale HI 04
Indirizzo iniziale LO 19
Numero di registri HI 00
Numero di registri LO 02
Controllo errori (CRC) –
Tabella 5.33 Risposta
Valore di
riferimento
programmato
1 Parametro 3-10 Riferim preimp. [0] 0 0
2 Parametro 3-10 Riferim preimp. [1] 0 1
3 Parametro 3-10 Riferim preimp. [2] 1 0
4 Parametro 3-10 Riferim preimp. [3] 1 1
Tabella 5.35 Bit di controllo
Parametro
Bit01Bit
00
AVVISO!
5.11 Prolo di controllo FC Danfoss
55
5.11.1 Parola di controllo secondo il Prolo
FC (Protocollo 8-10 = Prolo FC)
Disegno 5.13 Parola di controllo secondo il prolo FC
Bit Valore del bit = 0 Valore del bit = 1
00 Valore di riferimento Selezione esterna lsb
01 Valore di riferimento Selezione esterna msb
02 Freno CC Rampa
03 Rotazione libera Nessuna rotazione libera
04 Arresto rapido Rampa
Mantenimento
05
frequenza di uscita
06 Arresto rampa Avviamento
07 Nessuna funzione Ripristino
08 Nessuna funzione Jog
09 Rampa 1 Rampa 2
10 Dati non validi Dati validi
11 Relè 01 aperto Relè 01 attivo
12 Relè 02 aperto Relè 02 attivo
Programmazione
13
parametri
15 Nessuna funzione Inversione
Utilizzare rampa
Selezione lsb
In parametro 8-56 Selezione rif. preimpostato, denire
come il bit 00/01 sia abbinato alla funzione
corrispondente sugli ingressi digitali.
Bit 02, Freno CC
Bit 02 = 0: determina una frenatura in CC e l'arresto.
Impostare la corrente di frenata e la durata in
parametro 2-01 Corrente di frenatura CC e
parametro 2-02 Tempo di frenata CC.
Bit 02 = 1: attiva la rampa.
Bit 03, Rotazione libera
Bit 03 = 0: il convertitore di frequenza rilascia immediatamente il motore (i transistor di uscita sono spenti) e si
muove a ruota libera
no all'arresto.
Bit 03 = 1: se le altre condizioni di avviamento sono
soddisfatte, il convertitore di frequenza avvia il motore.
In parametro 8-50 Selezione ruota libera, denire come il bit
03 sia abbinato alla funzione corrispondente sull'ingresso
digitale.
Bit 04, Arresto rapido
Bit 04 = 0: fa sì che la velocità del motore deceleri no ad
arrestarsi (impostato nel parametro 3-81 Tempo rampa arr.
rapido).
Bit 05, Mantenimento frequenza di uscita
Bit 05 = 0: la frequenza di uscita attuale (in Hz) viene
congelata. Modicare la frequenza di uscita bloccata
soltanto con gli ingressi digitali programmati su [21] Accele-
razione e [22] Decelerazione (da parametro 5-10 Ingr. digitale
morsetto 18 a parametro 5-13 Ingr. digitale morsetto 29).
Tabella 5.34 Parola di controllo secondo il prolo FC
Spiegazione dei bit di controllo
Bit 00/01
I bit 00 e 01 vengono utilizzati per selezionare fra i quattro
valori di riferimento, preprogrammati in
parametro 3-10 Riferim preimp. secondo Tabella 5.35.
70 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 73

Output freq.STW
Bit
no.:
Follower-master
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BA273.11
Installazione e setup dell'... Guida alla Progettazione
AVVISO!
Se è attiva l'uscita congelata, è possibile arrestare il
convertitore di frequenza soltanto in uno dei modi
seguenti:
Bit 06, Arresto/avviamento rampa
Bit 06 = 0: provoca un arresto e fa sì che la velocità del
motore deceleri no all'arresto mediante il parametro della
rampa di decelerazione selezionato.
Bit 06 = 1: consente al convertitore di frequenza di avviare
il motore se le altre condizioni di avviamento sono
soddisfatte.
Nel parametro 8-53 Selez. avvio, denire come il bit 06
arresto/avviamento rampa sia abbinato alla funzione
corrispondente sull'ingresso digitale.
Bit 07, Ripristino
Bit 07 = 0: nessun ripristino.
Bit 07 = 1: ripristina uno scatto. Il ripristino è attivato sul
fronte di salita del segnale, cioè durante il passaggio da 0
logico a 1 logico.
Bit 08, Jog
Bit 08 = 1: Parametro 3-11 Velocità di jog [Hz] determina la
frequenza di uscita.
Bit 09, Selezione della rampa 1/2
Bit 09 = 0: è attiva la rampa 1 (dal parametro 3-41 Rampa 1
tempo di accel. al parametro 3-42 Rampa 1 tempo di decel.).
Bit 09 = 1: è attiva la rampa 2 (dal parametro 3-51 Rampa 2
tempo di accel. al parametro 3-52 Rampa 2 tempo di decel.).
Bit 10, Dati non validi/dati validi
Comunicare al convertitore di frequenza se utilizzare o
ignorare la parola di controllo.
Bit 10 = 0: la parola di controllo viene ignorata.
Bit 10 = 1: la parola di controllo viene utilizzata. Questa
funzione è rilevante perché il telegramma contiene sempre
la parola di controllo, indipendentemente dal tipo di
telegramma. Se la parola di controllo non è necessaria
quando si aggiorna o legge un parametro, disattivarla.
Bit 11, Relè 01
Bit 11 = 0: relè non attivato.
Bit 11 = 1: relè 01 attivato, a condizione che [36] Bit 11 par.
di contr. sia selezionato nel parametro 5-40 Funzione relè.
Bit 12, Relè 02
Bit 12 = 0: il relè 02 non è attivato.
Bit 12 = 1: relè 02 attivato, a condizione che [37] Bit 12 par.
di contr. sia selezionato nel parametro 5-40 Funzione relè.
Bit 03, Arresto a ruota libera;
•
Bit 02, Freno CC;
•
ingresso digitale programmato su [5] Freno CC
•
neg., [2] Evol. libera neg. o [3] Ruota lib. e ripr.
inv. (da parametro 5-10 Ingr. digitale morsetto 18
a parametro 5-13 Ingr. digitale morsetto 29).
Bit 13, selezione del setup
Utilizzare il bit 13 per selezionare fra i due setup del menu
in base alla Tabella 5.36.
Setup Bit 13
1 0
2 1
Tabella 5.36 Setup menu
La funzione è possibile soltanto se è selezionato [9] Multi
setup nel parametro 0-10 Setup attivo.
Per
denire come il bit 13 sia abbinato alla funzione
corrispondente sugli ingressi digitali, usare il
parametro 8-55 Selez. setup.
Bit 15 Inversione
Bit 15 = 0: nessuna inversione.
Bit 15 = 1: inversione. Nell'impostazione di fabbrica,
l'inversione è impostata in parametro 8-54 Selez. inversione.
Il bit 15 determina l'inversione solo se vengono selezionati
comunicazione seriale, [2] Logica E oppure [3] Logica O.
5.11.2 Parola di stato secondo il prolo FC
(STW)
Impostare parametro 8-30 Protocollo su [0] FC.
Disegno 5.14 Parola di stato
Bit Bit = 0 Bit = 1
00 Comando non pronto Comando pronto
01 Convertitore di frequenza
non pronto
02 Rotazione libera Abilitare
03 Nessun errore Scatto
04 Nessun errore Errore (nessuno scatto)
05 Riservato –
06 Nessun errore Scatto bloccato
07 Nessun avviso Avviso
08
Velocità≠riferimento
09 Funzionamento locale Controllo bus
10 Fuori dal limite di
frequenza
11 Nessuna funzione In funzione
12 Convertitore di frequenzaOKArrestato, avvio automatico
Convertitore di frequenza
pronto
Velocità = riferimento
Limite di frequenza OK
5 5
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 71
Page 74

Installazione e setup dell'...
VLT® Midi Drive FC 280
Bit Bit = 0 Bit = 1
13 Tensione OK Tensione superata
14 Coppia OK Coppia superata
15 Timer OK Timer superato
Tabella 5.37 Parola di stato secondo il prolo FC
Spiegazione dei bit di stato
Bit 00, Comando non pronto/pronto
Bit 00 = 0: il convertitore di frequenza scatta.
Bit 00 = 1: i comandi del convertitore di frequenza sono
55
pronti ma la sezione di potenza non è necessariamente
alimentata (in caso di alimentazione esterna a 24 V ai
comandi).
Bit 01, Convertitore di frequenza pronto
Bit 01 = 0: il convertitore di frequenza non è pronto.
Bit 01 = 1: il convertitore di frequenza è pronto per il
funzionamento.
Bit 02, Arresto a ruota libera
Bit 02 = 0: il convertitore di frequenza rilascia il motore.
Bit 02 = 1: il convertitore di frequenza avvia il motore con
un comando di avviamento.
Bit 03, Nessun errore/scatto
Bit 03 = 0: il convertitore di frequenza non è in modalità di
guasto.
Bit 03 = 1: il convertitore di frequenza scatta. Per
ripristinare il funzionamento, premere [Reset].
Bit 04, Nessun errore/errore (nessuno scatto)
Bit 04 = 0: il convertitore di frequenza non è in modalità di
guasto.
Bit 04 = 1: il convertitore di frequenza visualizza un errore
ma non scatta.
Bit 05, Non utilizzato
Il bit 05 non è utilizzato nella parola di stato.
Bit 06, Nessun errore/scatto bloccato
Bit 06 = 0: il convertitore di frequenza non è in modalità di
guasto.
Bit 06 = 1: il convertitore di frequenza è scattato e si è
bloccato.
Bit 07, nessun avviso/avviso
Bit 07 = 0: non sono presenti avvisi.
Bit 07 = 1: è stato inviato un avviso.
Bit 08, velocità di riferimento/velocità=riferimento
Bit 08 = 0: il motore è in funzione, ma la velocità attuale è
diversa dalla velocità di riferimento preimpostata. Può
vericarsi quando la velocità accelera/decelera durante
l'avviamento/arresto.
Bit 08 = 1: la velocità del motore corrisponde al riferimento
di velocità preimpostato.
Bit 09, Funzionamento locale/controllo bus
Bit 09 = 0: [O/Reset] viene attivato sull'unità di controllo o
è selezionato [2] Locale nel parametro 3-13 Sito di
riferimento. Non è possibile controllare il convertitore di
frequenza mediante la comunicazione seriale.
Bit 09 = 1: è possibile controllare il convertitore di
frequenza tramite il bus di campo/la comunicazione seriale.
Bit 10, Fuori dal limite di frequenza
Bit 10 = 0: la frequenza di uscita ha raggiunto il valore
impostato nel parametro 4-12 Limite basso velocità motore
[Hz] oppure nel parametro 4-14 Limite alto velocità motore
[Hz].
Bit 10 = 1: la frequenza di uscita rientra nei limiti deniti.
Bit 11, nessun funzionamento/funzionamento
Bit 11 = 0: il motore non è in funzione.
Bit 11 = 1: il convertitore di frequenza ha un segnale di
avviamento senza ruota libera.
Bit 12, Convertitore di frequenza OK/arresto, avvio
automatico
Bit 12 = 0: non è presente una sovratemperatura
temporanea sul convertitore di frequenza.
Bit 12 = 1: il convertitore di frequenza si arresta a causa
della sovratemperatura, ma l’unità non scatta e riprende il
funzionamento quando la sovratemperatura si normalizza.
Bit 13, Tensione OK/limite superato
Bit 13 = 0: non ci sono avvisi relativi alla tensione.
Bit 13 = 1: la tensione CC nel collegamento CC del convertitore di frequenza è troppo bassa o troppo alta.
Bit 14, Coppia OK/limite superato
Bit 14 = 0: la corrente motore è inferiore rispetto al limite
di corrente selezionato nel parametro 4-18 Current Limit.
Bit 14 = 1: il limite di corrente nel parametro 4-18 Current
Limit è stato superato.
Bit 15, Timer OK/limite superato
Bit 15 = 0: i timer per la protezione termica del motore e
per la protezione termica non hanno superato il 100%.
Bit 15 = 1: uno dei timer supera il 100%.
72 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 75

Actual output
frequency
STW
Follower-slave
Speed referenceCTW
Master-slave
16bit
130BA276.11
Reverse Forward
Par.3-00 set to
(1) -max- +max
Max reference Max reference
Par.3-00 set to
(0) min-max
Max reference
Forward
Min reference
100%
(4000hex)
-100%
(C000hex)
0%
(0hex)
Par.3-03 0 Par.3-03
Par.3-03
(4000hex)(0hex)
0% 100%
Par.3-02
130BA277.10
Installazione e setup dell'... Guida alla Progettazione
5.11.3 Valore di riferimento della velocità bus
Il valore di riferimento della velocità viene trasmesso al convertitore di frequenza come valore percentuale relativo. Il valore
viene trasmesso sotto forma di una parola di 16 bit. Il valore intero 16384 (4000 hex) corrisponde a 100%. I numeri negativi
sono formattati utilizzando un complemento a due. La frequenza di uscita attuale (MAV) viene messa in scala allo stesso
modo del riferimento bus.
Disegno 5.15 Frequenza di uscita attuale (MAV)
Il riferimento e il MAV vengono messi in scala nel modo seguente:
5 5
Disegno 5.16 Riferimento e MAV
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 73
Page 76

130BF710.10
FC-280PK37T4E20H1BXCXXXSXXXXAX
1 7 11 13 16 18 24 293 20
Codice tipo e guida alla se...
VLT® Midi Drive FC 280
6 Codice tipo e guida alla selezione
6
6.1 Codice identicativo
Il codice identicativo è una stringa di caratteri che
descrive la congurazione del convertitore di frequenza,
vedere la Disegno 6.1.
Disegno 6.1 Codice identicativo
I numeri indicati nella Tabella 6.1 si riferiscono alla
posizione della lettera/del numero nel codice identicativo,
letto da sinistra a destra.
Gruppi di prodotto 1–2
Serie convertitori di frequenza 4–6
Potenza nominale 7–10
Fasi 11
Tensione di rete 12
Contenitore 13–15
Filtro RFI 16–17
Freno 18
Display (LCP) 19
Rivestimento PCB 20
Opzione di rete 21
Adattamento A 22
Adattamento B 23
Release software 24–27
Lingua software 28
Opzioni A 29–30
Numeri d'ordine: opzioni, accessori e
6.2
ricambi
Opzioni e accessori Numero d'ordine
VLT® Memory Module MCM 102
VLT® Memory Module Programmer
MCM 101
VLT® Control Panel LCP 21 (Numerico)
VLT® Control Panel LCP 102 (Graco)
Adattatore LCP graco 132B0281
VLT® Control Panel LCP copertura cieca
Kit di conversione IP21/Tipo 1, K1 132B0335
Kit di conversione IP21/Tipo 1, K2 132B0336
Kit di conversione IP21/Tipo 1, K3 132B0337
Kit di conversione IP21/Tipo 1, K4 132B0338
Kit di conversione IP21/Tipo 1, K5 132B0339
Piastra di adattamento, VLT® 2800
taglia A
Piastra di adattamento, VLT® 2800
taglia B
Piastra di adattamento, VLT® 2800
taglia C
Piastra di adattamento, VLT® 2800
taglia D
Alimentazione a 24 V CC VLT® MCB
106
Kit di montaggio remoto LCP, con cavo
di 3 m (10 piedi)
Kit di montaggio LCP, con/senza LCP 130B1117
1) Disponibile da metà 2017.
1)
1)
Tabella 6.2 Numeri d'ordine per opzioni e accessori
132B0359
134B0792
132B0254
130B1107
132B0262
132B0363
132B0364
132B0365
132B0366
132B0368
132B0102
Tabella 6.1 Posizioni dei caratteri nel codice identicativo
Il conguratore del convertitore di frequenza disponibile
online consente ai clienti di congurare il convertitore di
frequenza adatto per una data applicazione e di generare il
codice identicativo. Il conguratore del convertitore di
frequenza genera automaticamente un numero di vendita
di otto cifre da fornire all'ucio vendite locale.
Inoltre, si ha la possibilità di stabilire una lista di progetto
con vari prodotti e inviarla a un rivenditore Danfoss.
conguratore del convertitore di frequenza è disponibile
Il
nel sito Internet globale: vltcong.danfoss.com.
74 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 77
Codice tipo e guida alla se... Guida alla Progettazione
Ricambi Numero d'ordine
6.3
Numeri d'ordine: Resistenze di frenatura
Busta per accessori FC 280 spine 132B0350
Ventola 50x20 IP21 PWM 132B0351
Ventola 60x20 IP21 PWM 132B0352
Ventola 70x20 IP21 PWM 132B0353
Ventola 92x38 IP21 PWM 132B0371
Ventola 120x38 IP21 PWM 132B0372
Coprimorsetti contenitore di taglia K1 132B0354
Coprimorsetti contenitore di taglia K2 132B0355
Coprimorsetti contenitore di taglia K3 132B0356
Coprimorsetti contenitore di taglia K4 132B0357
Coprimorsetti contenitore di taglia K5 132B0358
Kit di disaccoppiamento del cavo bus,
FC 280
Kit di disaccoppiamento, I/O alimentazione, K1
Kit di disaccoppiamento, I/O alimentazione, K2/K3
Kit di disaccoppiamento, I/O alimentazione, K4/K5
Cassetta di controllo VLT® - standard
Cassetta di controllo VLT® - CANopen
Cassetta di controllo VLT® - PROFIBUS
Cassetta di controllo VLT® - PROFINET
Cassetta di controllo VLT® - EtherNet/IP
Cassetta di controllo VLT® POWERLINK
132B0369
132B0373
132B0374
132B0375
132B0345
132B0346
132B0347
132B0348
132B0349
132B0378
Danfoss ore una vasta gamma di resistenze diverse
progettate specicamente per i nostri convertitori di
frequenza. Vedere capitolo 2.9.4 Controllo con funzione freno
per il dimensionamento delle resistenze di frenatura. In
questa sezione sono elencati i numeri d'ordine delle
resistenze di frenatura. La resistenza della resistenza di
frenatura data dai numeri d'ordine può essere maggiore di
R
. In questo caso, l'eettiva coppia di frenata potrebbe
rec
essere inferiore alla coppia di frenata massima che il
convertitore di freno può garantire.
6
6
Tabella 6.3 Numeri d'ordine per parti di ricambio
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 75
Page 78

Codice tipo e guida alla se...
VLT® Midi Drive FC 280
6.3.1 Numeri d'ordine: resistenze di frenatura 10%
6
Potenza
nominale
Trifase
380–480 V
(T4)
PK37 0,37 (0,5) 890 1041,98 989
PK55 0,55 (0,75) 593 693,79 659
PK75 0,75 (1,0) 434 508,78 483
P1K1 1,1 (1,5) 288 338,05 321
P1K5 1,5 (2,0) 208 244,41 232
P2K2 2,2 (3,0) 139 163,95 155
P3K0 3 (4,0) 100 118,86 112
P4K0 4 (5,0) 74 87,93 83
P5K5 5,5 (7,5) 54 63,33 60
P7K5 7,5 (10) 38 46,05 43
P11K 11 (15) 27 32,99 31
P15K 15 (20) 19 24,02 22
P18K 18,5 (25) 16 19,36 18
P22K 22 (30) 16 18,00 17
P
m (HO)
[kW (cv)]
R
[Ω] [Ω] [Ω]
min
R
br. nom
R
rec
P
br avg
[kW (cv)] 175Uxxxx [s]
0,030
(0,040)
0,045
(0,060)
0,061
(0,080)
0,092
(0,120)
0,128
(0,172)
0,190
(0,255)
0,262
(0,351)
0,354
(0,475)
0,492
(0,666)
0,677
(0,894)
0,945
(1,267)
1,297
(1,739)
1,610
(2,158)
1,923
(2,578)
Numero
d'ordine
3000 120 1,5 (16) 0,3 139
3001 120 1,5 (16) 0,4 131
3002 120 1,5 (16) 0,4 129
3004 120 1,5 (16) 0,5 132
3007 120 1,5 (16) 0,8 145
3008 120 1,5 (16) 0,9 131
3300 120 1,5 (16) 1,3 131
3335 120 1,5 (16) 1,9 128
3336 120 1,5 (16) 2,5 127
3337 120 1,5 (16) 3,3 132
3338 120 1,5 (16) 5,2 130
3339 120 1,5 (16) 6,7 129
3340 120 1,5 (16) 8,3 132
3357 120 1,5 (16) 10,1 128
Periodo Sezione
trasversal
e dei
1)
cavi
2
[mm
(AWG)]
Relè
termico
massima con
[A] [%]
Coppia di
freno
resistenza
Tabella 6.4 FC 280 - Rete: trifase 380–480 V (T4), con duty cycle del 10%
76 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 79

Codice tipo e guida alla se... Guida alla Progettazione
Potenza
nominale
Trifase
200–240 V
(T2)
PK37 0,37 (0,5) 225 263,22 250
PK55 0,55 (0,75) 151 176,90 168
PK75 0,75 (1,0) 110 129,92 123
P1K1 1,1 (1,5) 73 86,77 82
P1K5 1,5 (2,0) 53 62,70 59
P2K2 2,2 (3,0) 35 42,06 39
P3K7 3,7 (5,0) 20 24,47 23
Tabella 6.5 FC 280 - Rete: trifase 200–240 V (T2), con duty cycle del 10%
1) Tutto il cablaggio deve rispettare sempre le norme nazionali e locali relative alle sezioni trasversali dei cavi e alla temperatura ambiente.
P
m (HO)
[kW (cv)]
R
[Ω] [Ω] [Ω]
min
R
br. nom
R
rec
P
br avg
[kW (cv)] 175Uxxxx [s]
0,030
(0,040)
0,045
(0,060)
0,062
(0,083)
0,092
(0,120)
0,128
(0,172)
0,190
(0,255)
0,327
(0,439)
Numero
d'ordine
Periodo Sezione
trasversal
e dei
1)
cavi
[mm
(AWG)]
3006 120 1,5 (16) 0,6 140
3011 120 1,5 (16) 0,7 142
3016 120 1,5 (16) 0,8 143
3021 120 1,5 (16) 0,9 139
3026 120 1,5 (16) 1,6 143
3031 120 1,5 (16) 1,9 140
3326 120 1,5 (16) 3,5 145
Relè
termico
2
[A] [%]
Coppia di
freno
massima con
resistenza
6
6
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 77
Page 80

Codice tipo e guida alla se...
VLT® Midi Drive FC 280
6.3.2 Numeri d'ordine: resistenze di frenatura 40%
6
Potenza
nominale
Trifase
380–480 V
(T4)
PK37 0,37 (0,5) 890 1041,98 989
PK55 0,55 (0,75) 593 693,79 659
PK75 0,75 (1,0) 434 508,78 483
P1K1 1,1 (1,5) 288 338,05 321
P1K5 1,5 (2,0) 208 244,41 232
P2K2 2,2 (3,0) 139 163,95 155
P3K0 3 (4,0) 100 118,86 112
P4K0 4 (5,0) 74 87,93 83
P5K5 5,5 (7,5) 54 63,33 60
P7K5 7,5 (10) 38 46,05 43
P11K 11 (15) 27 32,99 31
P15K 15 (20) 19 24,02 22
P18K 18,5 (25) 16 19,36 18
P22K 22 (30) 16 18,00 17
P
m (HO)
[kW (cv)]
R
[Ω] [Ω] [Ω]
min
R
br. nom
R
rec
P
br avg
[kW (cv)] 175Uxxxx [s]
0,127
(0,170)
0,191
(0,256)
0,260
(0,349)
0,391
(0,524)
0,541
(0,725)
0,807
(1,082)
1,113
(1,491)
1,504
(2,016)
2,088
(2,799)
2,872
(3,850)
4,226
(5,665)
5,804
(7,780)
7,201
(9,653)
8,604
(11,534)
Numero
d'ordine
3101 120 1,5 (16) 0,4 139
3308 120 1,5 (16) 0,5 131
3309 120 1,5 (16) 0,7 129
3310 120 1,5 (16) 1 132
3311 120 1,5 (16) 1,4 145
3312 120 1,5 (16) 2,1 131
3313 120 1,5 (16) 2,7 131
3314 120 1,5 (16) 3,7 128
3315 120 1,5 (16) 5 127
3316 120 1,5 (16) 7,1 132
3236 120 2,5 (14) 11,5 130
3237 120 2,5 (14) 14,7 129
3238 120 4 (12) 19 132
3203 120 4 (12) 23 128
Periodo Sezione
trasversal
e dei
1)
cavi
[mm2]
Relè
termico
massima con
[A] [%]
Coppia di
freno
resistenza
Tabella 6.6 FC 280 - Rete: trifase 380–480 V (T4), con duty cycle del 40%
78 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 81

Codice tipo e guida alla se... Guida alla Progettazione
Potenza
nominale
Trifase
200–240 V
(T2)
PK37 0,37 (0,5) 225 263,22 250
PK55 0,55 (0,75) 151 176,90 168
PK75 0,75 (1,0) 110 129,92 123
P1K1 1,1 (1,5) 73 86,77 82
P1K5 1,5 (2,0) 53 62,70 59
P2K2 2,2 (3,0) 35 42,06 39
P3K7 3,7 (5,0) 20 24,47 23
Tabella 6.7 FC 280 - Rete: trifase 200–240 V (T2), con duty cycle del 40%
1) Tutto il cablaggio deve rispettare sempre le norme nazionali e locali relative alle sezioni trasversali dei cavi e alla temperatura ambiente.
P
m (HO)
[kW (cv)]
R
[Ω] [Ω] [Ω]
min
R
br. nom
R
rec
P
br avg
[kW (cv)] 175Uxxxx [s]
0,129
(0,173)
0,192
(0,257)
0,261
(0,350)
0,391
(0,524)
0,541
(0,725)
0,807
(1,082)
1,386
(1,859)
Numero
d'ordine
Periodo Sezione
trasversal
e dei
1)
cavi
[mm
(AWG)]
3096 120 1,5 (16) 0,8 140
3008 120 1,5 (16) 0,9 142
3300 120 1,5 (16) 1,3 143
3301 120 1,5 (16) 2 139
3302 120 1,5 (16) 2,7 143
3303 120 1,5 (16) 4,2 140
3305 120 1,5 (16) 6,8 145
Relè
termico
2
[A] [%]
Coppia di
freno
massima con
resistenza
6
6
Numeri d'ordine: ltri sinusoidali
6.4
Frequenza
Potenza e correnti nominali del convertitore di frequenza Corrente nominale del ltro
[kW
(cv)]
– –
– –
0,37
(0,5)
– – 1,1 (1,5) 3 1,1 (1,5) 2,8
0,55
(0,75)
0,75 (1) 4,2 2,2 (3) 5,3 2,2 (3) 4,8
1,1 (1,5) 6 3 (4) 7,2 3 (4) 6,3
1,5 (2) 6,8 – – – –
– – 4 (5,5) 9 4 (5,5) 8,2 10 9,5 7,5 6 130B2409 130B2444
2,2 (3) 9,6 5,5 (7,5) 12 5,5 (7,5) 11
3,7 (5) 15,2 7,5 (10) 15,5 7,5 (10) 14
– – 11 (15) 23 11 (15) 21 24 23 18 5 130B2412 130B2447
– – 15 (20) 31 15 (20) 27
– –
[A]
200–240 V 200–240 V 200–240 V 50 Hz 60 Hz 100 Hz – IP00 IP20
2,2 0,75 (1) 2,2 0,75 (1) 2,1
3,2 1,5 (2) 3,7 1,5 (2) 3,4
[kW
(cv)]
0,37
(0,5)
0,55
(0,75)
18,5
(25)
[A]
1,2
1,7
37
[kW
(cv)]
0,37
(0,5)
0,55
(0,75)
18,5
(25)
[A] [A] [A] [A] [kHz] – –
1,1
1,6
34
2,5 2,5 2 6 130B2404 130B2439
4,5 4 3,5 6 130B2406 130B2441
8 7,5 5,5 6 130B2408 130B2443
17 16 13 6 130B2411 130B2446
38 36 28,5 5 130B2413 130B2448
di
commutazi
1)
one
Numero d'ordine
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 79
Page 82

6
Codice tipo e guida alla se...
Potenza e correnti nominali del convertitore di frequenza Corrente nominale del ltro
[kW
(cv)]
– – 22 (30) 42,5 22 (30) 40 48 45,5 36 5 130B2281 130B2307
Tabella 6.8 Filtri sinusoidali per convertitori di frequenza con 380-480 V
1) La frequenza di commutazione potrebbe essere ridotta a 3 kHz a causa della velocità di uscita (meno del 60% della velocità normale), di
sovraccarico o di sovratemperatura. Il cliente potrebbe notare la modica di disturbo del ltro.
[A]
[kW
(cv)]
[A]
VLT® Midi Drive FC 280
[kW
(cv)]
[A] [A] [A] [A] [kHz] – –
Frequenza
di
commutazi
1)
one
Numero d'ordine
Le impostazioni parametri suggerite per il funzionamento con ltro sinusoidale sono le seguenti:
Impostare [1] Filtro sinusoidale nel parametro 14-55 Filtro uscita.
•
Impostare il valore adatto per singolo ltro nel parametro 14-01 Freq. di commutaz.. Quando [1] Filtro sinusoidale è
•
impostato nel parametro 14-55 Filtro uscita, le opzioni inferiori a 5 kHz nel parametro 14-01 Freq. di commutaz. sono
rimosse automaticamente.
6.5 Numeri d'ordine: ltri dU/dt
Potenza e correnti nominali del convertitore di
frequenza
380-440 V 441-480 V
[kW (cv)] [A] [kW (cv)] [A] [A] [A] – – –
11 (15) 23 11 (15) 21
15 (20) 31 15 (20) 27
18,5 (25) 37 18,5 (25) 34
22 (30) 42,5 22 (30) 40
Tabella 6.9 Filtri dU/dt per convertitori di frequenza con 380-480 V
Corrente nominale del ltro Numero d'ordine
380 a 60 Hz
200–400/440
a 50 Hz
44 40 130B2835 130B2836 130B2837
460/480 a 60
Hz
500/525 a 50
Hz
IP00 IP20 IP54
6.6 Numeri d'ordine: ltri EMC esterni
Per K1S2 e K2S2, con ltri EMC esterni elencati nella Tabella 6.10, è possibile ottenere la lunghezza massima del cavo
schermato di 100 m (328 piedi) secondo la norma EN/IEC 61800-3 C2 (EN 55011 A1) o 40 m (131,2 piedi) secondo la norma
EN/IEC 61800-3 C1 (EN 55011 B).
Per K1T4, K2T4 e K3T4 con ltro A1 interno, con ltri EMC esterni elencati nella Tabella 6.10, è possibile ottenere la
lunghezza massima del cavo schermato di 100 m (328 piedi) secondo la norma EN/IEC 61800-3 C2 (EN 55011 A1) o 25 m
(82 piedi) secondo la norma EN/IEC 61800-3 C1 (EN 55011 B).
80 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 83

130BF872.10
a1
a1
A
am
a2
e1
e1
c1
f1
fm
6-D1
4-Dm
6-D1
b1
bm
B
C
Codice tipo e guida alla se... Guida alla Progettazione
Numero d'ordine del ltro EMC 134B5466 134B5467 134B5463 134B5464 134B5465
Dimensioni del contenitore del convertitore di frequenza
Dimensioni A [mm (pollici)] 250 (9,8) 312,5 (12,3) 250 (9,8) 312,5 (12,3)
Dimensioni a1 [mm (pollici)] 234 (9,2) 303 (11,9) 234 (9,2) 303 (11,9)
Dimensioni a2 [mm (pollici)] 19,5 (0,77) 21,3 (0,84) 19,5 (0,77) 21,3 (0,84)
Dimensioni am [mm (pollici)] 198 (7,8) 260 (10,2) 198 (7,8) 260 (10,2)
Dimensioni B [mm (pollici)] 75 (2,95) 90 (3,54) 75 (2,95) 90 (3,54) 115 (4,53)
Dimensioni b1 [mm (pollici)] 55 (2,17) 70 (2,76) 55 (2,17) 70 (2,76) 90 (3,54)
Dimensioni bm [mm (pollici)] 60 (2,36) 70 (2,76) 60 (2,36) 70 (2,76) 90 (3,54)
Dimensioni C [mm (pollici)] 50 (1,97)
Dimensioni c1 [mm (pollici)] 22,7 (0,89)
Dimensioni D1 [mm (pollici)] Ø5,3 (Ø0,21)
Dimensioni Dm [mm (pollici)] M4 M5 M4 M5
Dimensioni e1 [mm (pollici)] 6,5 (0,26) 5 (0,20) 6,5 (0,26) 5 (0,20)
Dimensioni f1 [mm (pollici)] 10 (0,39) 12,5 (0,49)
Dimensioni fm [mm (pollici)] 7,5 (0,30)
Viti di montaggio per ltro EMC M5
Viti di montaggio per convertitore di
frequenza
Peso [kg (libbre)] 1,10 (2,43)
K1S2 K2S2 K1T4 K2T4 K3T4
10 (0,39) 7,5 (0,30) 10 (0,39)
M4 M5 M4 M5
1,50 (3,31) 1,20 (2,65) 1,90 (4,19) 2,10 (4,63)
12,5 (0,49)
6
6
Tabella 6.10 Dettagli del ltro EMC per K1–K3
Disegno 6.2 Dimensioni del ltro EMC per K1–K3
Per K4T4 e K5T4 con ltro A1 interno, con ltri EMC esterni elencati nella Tabella 6.11, è possibile ottenere la lunghezza
massima del cavo schermato di 100 m (328 piedi) secondo la norma EN/IEC 61800-3 C2 (EN 55011 A1) o 25 m (82 piedi)
secondo la norma EN/IEC 61800-3 C1 (EN 55011 B).
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 81
Page 84

H
B
K
C
A
D
J
G
E
F
l
1
L
1
130BC247.10
Codice tipo e guida alla se...
VLT® Midi Drive FC 280
6
Potenza [kW (cv)]
Taglia 380-480 V
11–15
(15–20)
18,5–22
(25–30)
Tipo A B C D E F G H I J K L1
FN3258-30-47 270 50 85 240 255 30 5,4 1 10,6 M5 25 40
FN3258-42-47 310 50 85 280 295 30 5,4 1 10,6 M5 25 40
Tabella 6.11 Dettagli del ltro EMC per K4–K5
Coppia
[Nm (pollici-libbre)]
1,9–2,2
(16,8–19,5)
1,9–2,2
(16,8–19,5)
Peso [kg
(libbre)]
1,2
(2,6)
1,4
(3,1)
Numero
d'ordine
132B0246
132B0247
Disegno 6.3 Dimensioni del ltro EMC per K4–K5
82 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 85

Speciche Guida alla Progettazione
7 Speciche
7.1 Dati elettrici
Potenza all'albero standard
del convertitore di frequenza [kW (cv)]
Grado di protezione contenitore IP20 (IP21/tipo
1 come opzione)
Corrente di uscita
Potenza all'albero [kW] 0,37 0,55 0,75 1,1 1,5 2,2 3
Continua (3x380–440 V) [A] 1,2 1,7 2,2 3 3,7 5,3 7,2
Continua (3x441–480 V) [A] 1,1 1,6 2,1 2,8 3,4 4,8 6,3
Intermittente (sovraccarico 60 s) [A] 1,9 2,7 3,5 4,8 5,9 8,5 11,5
kVa continui (400 V CA) [kVa] 0,9 1,2 1,5 2,1 2,6 3,7 5,0
kVa continui (480 V CA) [kVa] 0,9 1,3 1,7 2,5 2,8 4,0 5,2
Corrente di ingresso massima
Continua (3x380–440 V) [A] 1,2 1,6 2,1 2,6 3,5 4,7 6,3
Continua (3x441–480 V) [A] 1,0 1,2 1,8 2,0 2,9 3,9 4,3
Intermittente (sovraccarico 60 s) [A] 1,9 2,6 3,4 4,2 5,6 7,5 10,1
Altre speciche
Sezione trasversale dei cavi massima (rete,
motore, freno e condivisione del carico) [mm
(AWG)]
Perdita di potenza stimata al carico nominale
massimo [W]
Peso, grado di protezione contenitore IP20 [kg
(libbre)]
Peso, grado di protezione contenitore IP21 [kg
(libbre)]
Ecienza [%]
1)
2)
PK37
0,37
(0,5)
K1 K1 K1 K1 K1 K1 K2
2
20,9 25,2 30 40 52,9 74 94,8
2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5) 3,6 (7,9)
4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1)
96,0 96,6 96,8 97,2 97,0 97,5 98,0
PK55
0,55
(0,75)
PK75
0,75
(1,0)
P1K1
1,1
(1,5)
4 (12)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
P3K0
3,0
(4,0)
7 7
Tabella 7.1 Alimentazione di rete 3x380–480 V CA
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 83
Page 86

Speciche
VLT® Midi Drive FC 280
Potenza all'albero standard
del convertitore di frequenza [kW (cv)]
Grado di protezione contenitore IP20 (IP21/tipo
1 come opzione)
P4K0
4
(5,4)
K2 K2 K3 K4 K4 K5 K5
P5K5
5,5
(7,5)
P7K5
7,5
(10)
P11K
11
(15)
P15K
15
(20)
P18K
18,5
(25)
P22K
22
(30)
Corrente di uscita
Potenza all'albero 4 5,5 7,5 11 15 18,5 22
Continua (3x380–440 V) [A] 9 12 15,5 23 31 37 42,5
Continua (3x441–480 V) [A] 8,2 11 14 21 27 34 40
Intermittente (sovraccarico 60 s) [A] 14,4 19,2 24,8 34,5 46,5 55,5 63,8
kVa continui (400 V CA) [kVa] 6,2 8,3 10,7 15,9 21,5 25,6 29,5
kVa continui (480 V CA) [kVa] 6,8 9,1 11,6 17,5 22,4 28,3 33,3
Corrente di ingresso massima
Continua (3x380–440 V) [A] 8,3 11,2 15,1 22,1 29,9 35,2 41,5
Continua (3x441–480 V) [A] 6,8 9,4 12,6 18,4 24,7 29,3 34,6
Intermittente (sovraccarico 60 s) [A] 13,3 17,9 24,2 33,2 44,9 52,8 62,3
Altre speciche
77
Sezione trasversale dei cavi massima (rete,
motore, freno e condivisione del carico) [mm
2
4 (12) 16 (6)
(AWG)]
Perdita di potenza stimata al carico nominale
massimo [W]
1)
Peso, grado di protezione contenitore IP20 [kg
(libbre)]
Grado di protezione contenitore IP21 [kg
(libbre)]
Ecienza [%]
2)
115,5 157,5 192,8 289,5 393,4 402,8 467,5
3,6 (7,9) 3,6 (7,9) 4,1 (9,0) 9,4 (20,7) 9,5 (20,9) 12,3 (27,1) 12,5 (27,6)
5,5 (12,1) 5,5 (12,1) 6,5 (14,3) 10,5 (23,1) 10,5 (23,1) 14,0 (30,9) 14,0 (30,9)
98,0 97,8 97,7 98,0 98,1 98,0 98,0
Tabella 7.2 Alimentazione di rete 3x380–480 V CA
Potenza all'albero standard
del convertitore di frequenza [kW (cv)]
Grado di protezione contenitore IP20 (IP21/tipo
1 come opzione)
PK37
0,37
(0,5)
K1 K1 K1 K1 K1 K2 K3
PK55
0,55
(0,75)
PK75
0,75
(1,0)
P1K1
1,1
(1,5)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
P3K7
3,7
(5,0)
Corrente di uscita
Continua (3x200–240 V) [A] 2,2 3,2 4,2 6 6,8 9,6 15,2
Intermittente (sovraccarico 60 s) [A] 3,5 5,1 6,7 9,6 10,9 15,4 24,3
kVa continui (230 V CA) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8 6,1
Corrente di ingresso massima
Continua (3x200–240 V) [A] 1,8 2,7 3,4 4,7 6,3 8,8 14,3
Intermittente (sovraccarico 60 s) [A] 2,9 4,3 5,4 7,5 10,1 14,1 22,9
Altre speciche
Sezione trasversale dei cavi massima (rete,
motore, freno e condivisione del carico) [mm
2
4 (12)
(AWG)]
Perdita di potenza stimata al carico nominale
massimo [W]
1)
Peso, grado di protezione contenitore IP20 [kg
(libbre)]
Grado di protezione contenitore IP21 [kg
(libbre)]
Ecienza [%]
2)
29,4 38,5 51,1 60,7 76,1 96,1 147,5
2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5) 3,6 (7,9)
4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1) 6,5 (14,3)
96,4 96,6 96,3 96,6 96,5 96,7 96,7
Tabella 7.3 Alimentazione di rete 3x200–240 V CA
84 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 87
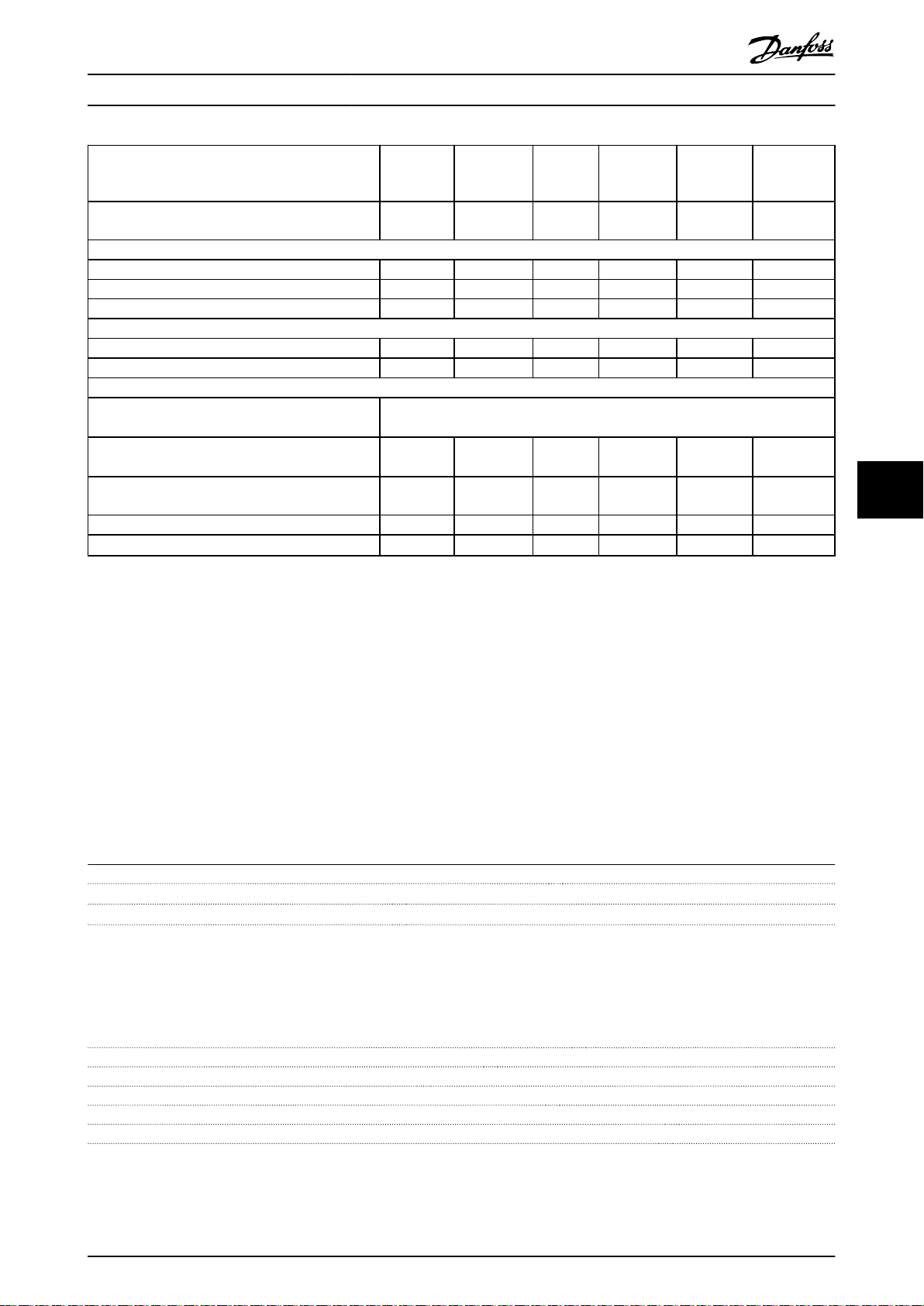
Speciche Guida alla Progettazione
Potenza all'albero standard
del convertitore di frequenza [kW (cv)]
Grado di protezione contenitore IP20 (IP21/tipo 1
come opzione)
Corrente di uscita
Continua (3x200–240 V) [A] 2,2 3,2 4,2 6 6,8 9,6
Intermittente (sovraccarico 60 s) [A] 3,5 5,1 6,7 9,6 10,9 15,4
kVa continui (230 V CA) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8
Corrente di ingresso massima
Continua (1x200-240 V) [A] 2,9 4,4 5,5 7,7 10,4 14,4
Intermittente (sovraccarico 60 s) [A] 4,6 7,0 8,8 12,3 16,6 23,0
Altre speciche
Sezione trasversale dei cavi massima per rete e
motore [mm2 (AWG)]
Perdita di potenza stimata al carico nominale
massimo [W]
Peso, grado di protezione contenitore IP20 [kg
(libbre)]
Grado di protezione contenitore IP21 [kg (libbre)] 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1)
Ecienza [%]
Tabella 7.4 Alimentazione di rete 1x200-240 V CA
1) La perdita di potenza standard è a condizioni di carico nominale ed è prevista essere entro il ±15% (la tolleranza si riferisce alle diverse tensioni
e ai tipi di cavo).
I valori si basano sul rendimento di un motore standard (limite IE2/IE3). I motori a scarso rendimento contribuiscono anch'essi alla perdita di
potenza nel convertitore di frequenza, mentre i motori con un rendimento elevato la riducono.
Ciò vale per il dimensionamento del rareddamento del convertitore di frequenza. Se la frequenza di commutazione è superiore all'impostazione
di fabbrica, le perdite di potenza a volte aumentano. Si tiene conto anche del consumo di potenza tipico dell'LCP e della scheda di controllo. Altre
opzioni e il carico del cliente possono aggiungere no a 30 W alle perdite, nonostante tipicamente si tratti soltanto di 4 W supplementari per una
scheda di controllo o un bus di campo completamente carichi.
Per dati sulla perdita di potenza secondo EN 50598-2, consultare www.danfoss.com/vltenergyeciency.
2) Misurato utilizzando cavi motore schermati di 50 m (164 piedi) a carico e frequenza nominali. Per la classe di ecienza energetica, vedere
capitolo 7.4 Condizioni ambientali. Per perdite di carico della parte, vedere www.danfoss.com/vltenergyeciency.
1)
2)
PK37
0,37
(0,5)
K1 K1 K1 K1 K1 K2
37,7 46,2 56,2 76,8 97,5 121,6
2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5)
94,4 95,1 95,1 95,3 95,0 95,4
PK55
0,55
(0,74)
PK75
0,75
(1,0)
4 (12)
P1K1
1,1
(1,5)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
7 7
Alimentazione di rete
7.2
Alimentazione di rete (L1/N, L2/L, L3)
Morsetti di alimentazione (L1/N, L2/L, L3)
Tensione di alimentazione 380–480 V: da -15% (-25%)1) a +10%
Tensione di alimentazione 200–240 V: da -15% (-25%)1) a +10%
1) Il convertitore di frequenza può funzionare a una tensione di ingresso del -25% con prestazioni ridotte. La potenza di uscita
massima del convertitore di frequenza è pari al 75% se la tensione di ingresso è -25% e pari all'85% se la tensione di ingresso è
-15%.
Il funzionamento alla coppia massima non è possibile se la tensione di rete è oltre il 10% al di sotto della tensione di alimentazione nominale minima del convertitore di frequenza.
Frequenza di alimentazione 50/60 Hz ±5%
Sbilanciamento temporaneo massimo tra le fasi di rete 3,0% della tensione di alimentazione nominale
Fattore di potenza reale (λ) ≥0,9 nominale al carico nominale
Fattore di dislocazione di potenza (cos ϕ) Prossimo all'unità (>0,98)
Commutazione sull'alimentazione di ingresso (L1/N, L2/L, L3) (accensioni) ≤7,5 kW (10 cv) Massimo 2 volte/minuto
Commutazione sull'alimentazione di ingresso (L1/N, L2/L, L3) (accensioni) 11–22 kW (15–30 cv) Al massimo 1 volta/minuto
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 85
Page 88
Speciche
VLT® Midi Drive FC 280
7.3 Uscita motore e dati motore
Uscita motore (U, V, W)
Tensione di uscita 0–100% della tensione di alimentazione
Frequenza di uscita 0–500 Hz
Frequenza di uscita in modalità VVC
Commutazione sull'uscita Illimitata
Tempo di rampa 0,01–3600 s
Caratteristiche della coppia
Coppia di avviamento (coppia costante) Al massimo 160% per 60 s1)
Coppia di sovraccarico (coppia costante) Al massimo 160% per 60 s1)
Corrente di avviamento Al massimo 200% per 1 s
Tempo di salita di coppia in modalità VVC+ (indipendente da fsw) Massimo 50 ms
1) La percentuale si riferisce alla coppia nominale. È pari al 150% per convertitori di frequenza 11–22 kW (15–30 cv).
+
0–200 Hz
7.4 Condizioni ambientali
77
Condizioni ambientali
Classe IP IP20 (IP21/NEMA tipo 1 come opzione)
Test di vibrazione, contenitori di tutte le dimensioni 1,14 g
Umidità relativa 5–95% (IEC 721-3-3; classe 3K3 (senza condensa) durante il funzionamento
Temperatura ambiente (modalità di commutazione DPWM)
- con declassamento Al massimo 55 °C (131 °F)
- a piena corrente di uscita costante Al massimo 45 °C (113 °F)
Temperatura ambiente minima durante il funzionamento a pieno regime 0 °C (32 °F)
Temperatura ambiente minima con prestazioni ridotte -10 °C (14 °F)
Temperatura durante l'immagazzinamento/il trasporto Da -25 a +65/70 °C (da -13 a +149/158 °F)
Altezza massima sopra il livello del mare senza declassamento 1000 m (3280 piedi)
Altezza massima sopra il livello del mare con declassamento 3000 m (9243 piedi)
EN 61800-3, EN 61000-3-2, EN 61000-3-3, EN 61000-3-11,
Norme EMC, emissione
Norme EMC, immunità
Classe di ecienza energetica
1) Consultare il capitolo 7.12 Condizioni speciali per:
declassamento in caso di temperatura ambiente elevata;
•
declassamento per altitudini elevate.
•
2) Per la variante PROFIBUS, PROFINET EtherNet/IP e POWERLINK di VLT
si surriscaldi, evitare il pieno carico I/O digitale/analogico a una temperatura ambiente superiore a 45 °C (113 °F).
3) La temperatura ambiente per K1S2 con declassamento è al massimo pari a 50
4) La temperatura ambiente per K1S2 a piena corrente di uscita costante è al massimo pari a 40 °C (104 °F).
5) Determinato secondo la EN50598-2 al:
carico nominale;
•
90% della frequenza nominale;
•
Impostazione di fabbrica della frequenza di commutazione;
•
impostazione di fabbrica del modello di commutazione;
•
tipo aperto: temperatura dell'aria circostante 45 °C (113 °F);
•
tipo 1 (kit NEMA): temperatura ambiente 45 °C (113 °F).
•
5)
EN 61000-3-12, EN 61000-6-3/4, EN 55011, IEC 61800-3
EN 61800-3, EN 61000-6-1/2, EN 61000-4-2, EN 61000-4-3
EN 61000-4-4, EN 61000-4-5, EN 61000-4-6, EN 61326-3-1
®
Midi Drive FC 280, per evitare che la scheda di controllo
°
C (122 °F).
1)2)3)
IE2
4)
86 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 89

Speciche Guida alla Progettazione
7.5 Speciche dei cavi
Lunghezze del cavo
Lunghezza massima del cavo motore, schermato 50 m (164 piedi)
Lunghezza massima del cavo motore, non schermato 75 m (246 piedi)
Sezione trasversale massima dei morsetti di controllo, lo essibile/rigido 2,5 mm2/14 AWG (American Wire Gauge)
Sezione trasversale minima dei morsetti di controllo 0,55 mm2/30 AWG (American Wire Gauge)
Lunghezza massima del cavo d'ingresso dell'STO, non schermato 20 m (66 piedi)
1) Per le sezioni trasversali dei cavi di potenza, vedere Tabella 7.1, Tabella 7.2, Tabella 7.3 e Tabella 7.4.
Per la conformità alle norme EN 55011 1A e EN 55011 1B, in alcuni casi è necessario ridurre la lunghezza dei cavi motore. Per
maggiori dettagli vedere capitolo 2.6.2 Emissioni EMC.
1)
7.6 Ingresso/uscita di controllo e dati di controllo
Ingressi digitali
Numero morsetto
Logica PNP o NPN
Livello di tensione 0–24 V CC
Livello di tensione, logica 0 PNP <5 V CC
Livello di tensione, logica 1 PNP >10 V CC
Livello di tensione, logica 0 NPN >19 V CC
Livello di tensione, logica 1 NPN <14 V CC
Tensione massima in ingresso 28 V CC
Campo di frequenza impulsi 4–32 kHz
Modulazione di larghezza minima (duty cycle) 4,5 ms
Resistenza di ingresso, R
1) Il morsetto 27 può anche essere programmato come uscita.
i
18, 19, 271), 29, 32, 33
Circa 4 kΩ
7 7
Ingressi STO
Numero morsetto 37, 38
Livello di tensione 0–30 V CC
Livello di tensione, basso <1,8 V CC
Livello di tensione, alto >20 V CC
Tensione massima in ingresso 30 V CC
Corrente di ingresso minima (ogni pin) 6 mA
Ingressi analogici
Numero di ingressi analogici 2
Numero morsetto 531), 54
Modalità Tensione o corrente
Selezione modalità Software
Livello di tensione 0–10 V
Resistenza di ingresso, R
Tensione massima da -15 V a +20 V
Livello di corrente Da 0/4 a 20 mA (convertibile in scala)
Resistenza di ingresso, R
Corrente massima 30 mA
Risoluzione per gli ingressi analogici 11 bit
Precisione degli ingressi analogici Errore massimo 0,5% della scala intera
Larghezza di banda 100 Hz
Gli ingressi analogici sono isolati galvanicamente dalla tensione di alimentazione (PELV) e dagli altri morsetti ad alta tensione.
1) Il morsetto 53 supporta soltanto la modalità tensione e può anche essere usato come ingresso digitale.
i
i
Circa 10 kΩ
Circa 200 Ω
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 87
Page 90

Mains
Functional
isolation
PELV isolation
Motor
DC bus
High
voltage
Control
37
RS485
38
33
130BE837.10
Speciche
Disegno 7.1 Isolamento galvanico
VLT® Midi Drive FC 280
AVVISO!
ALTITUDINI ELEVATE
Per un'installazione ad altitudini superiori ai 2000 m, contattare Danfoss per informazioni relative a PELV.
77
Ingressi a impulsi programmabili 2
Numero morsetto a impulsi 29, 33
Frequenza massima in corrispondenza dei morsetti 29 e 33 32 kHz (comando push-pull)
Frequenza massima in corrispondenza dei morsetti 29 e 33 5 kHz (collettore aperto)
Frequenza minima in corrispondenza dei morsetti 29 e 33 4 Hz
Livello di tensione Vedere la sezione sull'ingresso digitale
Tensione massima in ingresso 28 V CC
Resistenza di ingresso, Ri Circa 4 kΩ
Precisione dell'ingresso a impulsi Errore massimo: 0,1% della scala intera
Uscite digitali
Uscite digitali/impulsi programmabili 1
Ingressi a impulsi
Numero morsetto 27
1)
Livello di tensione sull'uscita digitale/frequenza di uscita 0–24 V
Corrente di uscita massima (sink o source) 40 mA
Carico massimo alla frequenza di uscita 1 kΩ
Carico capacitivo massimo alla frequenza di uscita 10 nF
Frequenza di uscita minima in corrispondenza della frequenza di uscita 4 Hz
Frequenza di uscita massima in corrispondenza della frequenza di uscita 32 kHz
Precisione della frequenza di uscita Errore massimo: 0,1% della scala intera
Risoluzione della frequenza di uscita 10 bit
1) Il morsetto 27 può essere programmato come ingresso.
L'uscita digitale è isolata galvanicamente dalla tensione di alimentazione (PELV) e dagli altri morsetti ad alta tensione.
Uscite analogiche
Numero delle uscite analogiche programmabili 1
Numero morsetto 42
Intervallo di corrente in corrispondenza dell'uscita analogica 0/4–20 mA
Carico massimo della resistenza verso massa sull'uscita analogica 500 Ω
Precisione sull'uscita analogica Errore massimo: 0,8% della scala intera
Risoluzione sull'uscita analogica 10 bit
L'uscita analogica è isolata galvanicamente dalla tensione di alimentazione (PELV) e dagli altri morsetti ad alta tensione.
Scheda di controllo, tensione di uscita a 24 V CC
Numero morsetto 12, 13
Carico massimo 100 mA
L’alimentazione a 24 V CC è isolata galvanicamente dalla tensione di alimentazione (PELV). Tuttavia, l'alimentazione ha lo stesso
potenziale degli ingressi e delle uscite analogici e digitali.
88 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 91

Speciche Guida alla Progettazione
Scheda di controllo, tensione di uscita a +10 V CC
Numero morsetto 50
Tensione di uscita 10,5 V ±0,5 V
Carico massimo 15 mA
L’alimentazione 10 V CC è isolata galvanicamente dalla tensione di alimentazione (PELV) e da altri morsetti ad alta tensione.
Scheda di controllo, comunicazione seriale RS485
Numero morsetto 68 (P,TX+, RX+), 69 (N,TX-, RX-)
Numero morsetto 61 Comune per i morsetti 68 e 69
Il circuito di comunicazione seriale RS485 è isolato galvanicamente dalla tensione di alimentazione (PELV).
Scheda di controllo, comunicazione seriale USB
USB standard 1.1 (piena velocità)
Spina USB Spina USB tipo B
Il collegamento al PC viene eettuato mediante un cavo USB dispositivo/host standard.
Il collegamento USB è isolato galvanicamente dalla tensione di alimentazione (PELV) nonché dagli altri morsetti ad alta tensione.
Il collegamento a massa USB non è isolato galvanicamente dalla messa a terra di protezione. Usare solo un computer portatile
isolato come collegamento PC al connettore USB sul convertitore di frequenza.
Uscite a relè
Uscite a relè programmabili 1
Relè 01 01–03 (NC), 01–02 (NO)
Carico massimo sui morsetti (CA-1)1) su 01-02 (NO) (carico resistivo) 250 V CA, 3 A
Carico massimo sui morsetti (CA-15)
Carico massimo sui morsetti (CC-1)1) su 01–02 (NO) (carico resistivo) 30 V CC, 2 A
Carico massimo sui morsetti (CC-13)1) su 01–02 (NO) (carico induttivo) 24 V CC, 0,1 A
Carico massimo sui morsetti (CA-1)1) su 01–03 (NC) (carico resistivo) 250 V CA, 3 A
Carico massimo sui morsetti (CA-15)1)su 01–03 (NC) (carico induttivo @ cosφ 0,4) 250 V CA, 0,2 A
Carico massimo sui morsetti (CC-1)
Carico minimo sui morsetti su 01–03 (NC), 01–02 (NO) 24 V CC 10 mA, 24 V CA 20 mA
1) IEC 60947 parti 4 e 5.
I contatti del relè sono isolati galvanicamente dal resto del circuito mediante un isolamento rinforzato.
1)
su 01-02 (NO) (carico induttivo @ cosφ 0,4) 250 V CA, 0,2 A
1)
su 01–03 (NC) (carico resistivo) 30 V CC, 2 A
7 7
Prestazioni scheda di controllo
Intervallo di scansione 1 ms
Caratteristiche di comando
Risoluzione della frequenza di uscita a 0–500 Hz ±0,003 Hz
Tempo di risposta del sistema (morsetti 18, 19, 27, 29, 32 e 33) ≤2 ms
Intervallo controllo di velocità (anello aperto) 1:100 della velocità sincrona
Precisione della velocità (anello aperto) ±0,5% della velocità nominale
Precisione della velocità (anello chiuso) ±0,1% della velocità nominale
Tutte le caratteristiche di comando si basano su un motore asincrono a 4 poli.
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 89
Page 92

Speciche
VLT® Midi Drive FC 280
7.7 Coppie di serraggio delle connessioni
Assicurarsi di utilizzare la coppia corretta quando si serrano i collegamenti elettrici. Una coppia troppo bassa o troppo alta a
volte provoca problemi di collegamento elettrico. Per assicurare che vengano applicate coppie corrette, usare una chiave
dinamometrica. Il tipo di cacciavite a testa piatta consigliato è SZS 0,6x3,5 mm.
Coppia [Nm (pollici-libbre)]
Tipo di
contenitore
K1
K2
K3 7,5 (10) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
K4
K5
Potenza
[kW (cv)]
0,37–2,2
(0,5–3,0)
3,0–5,5
(4,0–7,5)
11–15
(15–20)
18,5–22
(25–30)
Rete Motore
0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
Collegament
o in CC
Freno Terra Controllo Relè
77
Tabella 7.5 Coppie di serraggio
7.8 Fusibili e interruttori
Usare i fusibili e/o gli interruttori sul lato di alimentazione
per proteggere il personale preposto alla manutenzione e
l'apparecchiatura da lesioni e danni in caso di guasto di un
componente all'interno del convertitore di frequenza
(primo guasto).
Protezione del circuito di derivazione
Proteggere tutti i circuiti di derivazione in un impianto
(compresi i commutatori e le macchine) da cortocircuiti e
sovracorrenti, conformemente a quanto previsto dalle
norme nazionali/internazionali.
AVVISO!
La protezione da cortocircuito allo stato solido integrata
non fornisce una protezione del circuito di derivazione.
Assicurare una protezione del circuito di derivazione in
conformità alle regole e normative nazionali e locali.
Tabella 7.6 elenca i fusibili raccomandati e gli interruttori
che sono stati testati.
ATTENZIONE
RISCHIO DI LESIONI PERSONALI E DANNI AD
APPARECCHIATURE
Il malfunzionamento o la mancata osservanza delle
raccomandazioni potrebbe provocare rischi al personale
e danni al convertitore di frequenza o ad altre apparecchiature.
Selezionare i fusibili sulla base delle raccoman-
•
dazioni. I possibili danni possono essere limitati
all'interno del convertitore di frequenza.
AVVISO!
DANNI ALL'APPARECCHIATURA
L'uso di fusibili e/o di interruttori è obbligatorio per
assicurare la conformità alla norma IEC 60364 della CE.
La mancata osservanza delle raccomandazioni di
protezione può provocare danni al convertitore di
frequenza.
Danfoss raccomanda l'uso di fusibili e interruttori nella
Tabella 7.6 al ne di assicurare la conformità a UL 508C o
IEC 61800-5-1. Per applicazioni non UL, dimensionare gli
interruttori per la protezione in un circuito in grado di
fornire un massimo di 50000 A
massimo. La corrente nominale di cortocircuito (SCCR) del
convertitore di frequenza è adatta per l'uso su un circuito
capace di fornire non più di 100000 A
massimo quando è protetto da fusibili di classe T.
(simmetrici), 240 V/400 V
rms
, 240 V/480 V
rms
90 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 93

1.0
0.99
0.98
0.97
0.96
0.95
0.93
0.92
0% 50% 100% 200%
0.94
Relative Eciency
130BB252.11
1.01
150%
% Speed
100% load 75% load 50% load 25% load
Speciche Guida alla Progettazione
Dimensione contenitore Potenza [kW (cv)] Fusibile non UL
0,37 (0,5)
gG-10
gG-20
gG-25
gG-50 – JJS-50
gG-80 – JJS-80
gG-20
gG-25
gG-20
Trifase 380-480 V
Trifase 200–240 V
Monofase 200–240 V
0,55–0,75
K1
K2
K3 7,5 (10) PKZM0-25
K4
K5
K1
K2 2,2 (3,0)
K3 3,7 (5,0) PKZM0-25
K1
K2 2,2 (3,0) gG-25 PKZM0-20 JJN-25
(0,74–1,0)
1,1–1,5
(1,48–2,0)
2,2 (3,0) JJS-15
3,0–5,5
(4,0–7,5)
11–15
(15–20)
18,5–22
(25–30)
0,37 (0,5) gG-10
0,55 (0,74)
0,75 (1,0) JJN-15
1,1 (1,48)
1,5 (2,0)
0,37 (0,5) gG-10
0,55 (0,74)
0,75 (1,0) JJN-15
1,1 (1,48)
1,5 (2,0)
Interruttore non
UL
(Eaton)
PKZM0-16
PKZM0-20
PKZM0-16
PKZM0-20
PKZM0-16
Fusibile UL
(Bussmann, classe T)
JJS-6
JJS-10
JJS-25
JJN-6
JJN-10
7 7
JJN-20
JJN-25
JJN-6
JJN-10
JJN-20
Tabella 7.6 Fusibile e interruttore
Rendimento
7.9
Rendimento dei convertitori di frequenza (η
Il carico applicato sul convertitore di frequenza ha poca
inuenza sul suo rendimento. In linea generale, il
rendimento alla frequenza nominale del motore f
stesso. Questa regola si applica persino quando il motore
fornisce il 100% della coppia nominale dell’albero, o
quando essa è soltanto pari al 75%, ad esempio in
presenza di carichi parziali.
Ciò signica anche che il rendimento del convertitore di
frequenza non varia pur selezionando caratteristiche U/f
diverse.
Tuttavia le caratteristiche U/f inuenzano il rendimento del
motore.
Il rendimento si riduce lievemente impostando la
frequenza di commutazione a un valore superiore a quello
predenito. Anche se la tensione di rete è 480 V o se il
cavo motore è più lungo di 30 m il rendimento viene
leggermente ridotto.
Calcolo del rendimento del convertitore di frequenza
Calcolare il rendimento del convertitore di frequenza a
carichi dierenti in base a Disegno 7.2. Moltiplicare il
fattore in Disegno 7.2 per il fattore di rendimento specico
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 91
)
VLT
M,N
è lo
riportato nelle tabelle delle speciche in capitolo 7.1 Dati
elettrici:
Disegno 7.2 Curve di rendimento tipiche
Rendimento del motore (η
MOTOR
)
Il rendimento di un motore collegato al convertitore di
frequenza dipende dal livello di magnetizzazione. In
generale, il rendimento è buono quanto con il funzionamento di rete. Il rendimento del motore dipende dal
tipo di motore.
Nell'intervallo pari al 75–100% della coppia nominale, il
rendimento del motore è praticamente costante, indipen-
Page 94

Speciche
VLT® Midi Drive FC 280
dentemente dal fatto che il motore sia controllato da un
convertitore di frequenza o che sia collegato direttamente
alla rete.
Nei motori di piccole dimensioni, l’inuenza della caratteristica U/f sul rendimento è marginale, mentre se si
impiegano motori a partire da 11 kW (14,8 cv) e oltre, i
vantaggi sono notevoli.
L'induttanza intrinseca genera una sovraelongazione U
PEAK
nella tensione motore prima di stabilizzarsi a un livello
determinato dalla tensione nel collegamento CC. Il tempo
di salita e la tensione di picco U
inuenzano la durata
PEAK
del motore. Valori della tensione di picco troppo elevati
inuenzano i motori senza isolamento dell'avvolgimento di
fase. Maggiore è la lunghezza del cavo motore, superiori
sono il tempo di salita e la tensione di picco.
In generale, la frequenza di commutazione non inuisce
sul rendimento dei motori di piccole dimensioni. Nei
motori da 11 kW (14,8 cv) e oltre il rendimento è superiore
dell'1-2% perché la forma sinusoidale della corrente motore
è quasi perfetta a elevate frequenze di commutazione.
Rendimento del sistema (η
SYSTEM
)
Per calcolare le prestazioni del sistema, è necessario
moltiplicare le prestazioni del convertitore di frequenza
(η
) per le prestazioni del motore (η
VLT
η
= η
SYSTEM
77
7.10 Rumorosità acustica
VLT
x η
MOTOR
MOTOR
):
La rumorosità acustica del convertitore di frequenza
proviene da 3 fonti:
Bobine del circuito intermedio CC.
•
Ventola integrata.
•
Bobine ltro RFI.
•
I valori tipici, misurati a una distanza di 1 m dall'unità:
La commutazione degli IGBT provoca una tensione di picco
sui morsetti del motore. VLT® Midi Drive FC 280 è
conforme alla norma IEC 60034-25 relativa ai motori
progettati per essere controllati da convertitori di
frequenza. FC 280 è inoltre conforme alla norma IEC
60034-17 relativa ai motori normalizzati controllati da
convertitori di frequenza.
I dati dU/dt seguenti sono misurati sul lato del morsetto
del motore:
Tension
Lunghezza
del cavo
[m (piedi)]
5 (16,4) 400 0,0904 0,718 6,41
50 (164) 400 0,292 1,05 2,84
5 (16,4) 480 0,108 0,835 6,20
50 (164) 480 0,32 1,25 3,09
e
di rete
[V]
Tempo di
salita
[μsec]
U
[kV]
PEAK
dU/dt
[kV/μsec]
Dimensione
contenitore
[kW (cv)]
K1
0,37–2,2
(0,5–3,0)
K2
3,0–5,5 (4,0–7,5)
K3
7,5 (10)
K4
11–15 (15–20)
K5
18,5–22 (25–30)
Tabella 7.7 Valori misurati tipici
Condizioni dU/dt
7.11
80% della
velocità delle
ventole [dBA]
41,4 42,7 33
50,3 54,3 32,9
51 54,2 33
59 61,1 32,9
64,6 65,6 32,9
Velocità
massima delle
ventole [dBA]
Disturbo di
sottofondo
Se un transistor nel ponte del convertitore di frequenza
scatta, la tensione nel motore aumenta di un rapporto
dU/dt legato ai seguenti fattori:
il tipo del cavo motore;
•
la sezione trasversale del cavo motore;
•
la lunghezza del cavo motore;
•
il fatto che il cavo motore sia o non sia
•
schermato;
induttanza.
•
Tabella 7.8 Dati dU/dt per FC 280, 2,2 kW (3,0 cv),
3x380–480 V
Tension
Lunghezza
del cavo
[m (piedi)]
5 (16,4) 400 0,096 0,632 5,31
50 (164) 400 0,306 0,99 2,58
5 (16,4) 480 0,118 0,694 4,67
50 (164) 480 0,308 1,18 3,05
Tabella 7.9 Dati dU/dt per FC 280, 5,5 kW (7,5 cv),
3x380–480 V
Lunghezza
del
cavo
[m (piedi)]
5 (16,4) 400 0,128 0,732 4,54
50 (164) 400 0,354 1,01 2,27
5 (16,4) 480 0,134 0,835 5,03
50 (164) 480 0,36 1,21 2,69
Tabella 7.10 Dati dU/dt per FC 280, 7,5 kW (10 cv),
3x380–480 V
e
di rete
[V]
Tension
e
di rete
[V]
Tempo di
salita
[μsec]
Tempo di
salita
[μsec]
U
PEAK
[kV]
U
PEAK
[kV]
dU/dt
[kV/μsec]
dU/dt
[kV/μsec]
92 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 95

Speciche Guida alla Progettazione
Tension
Lunghezza
del cavo
[m (piedi)]
5 (16,4) 400 0,26 0,84 2,57
50 (164) 400 0,738 1,07 1,15
5 (16,4) 480 0,334 0,99 2,36
50 (164) 480 0,692 1,25 1,44
Tabella 7.11 Dati dU/dt per FC 280, 15 kW (20 cv),
3x380–480 V
Lunghezza
del cavo
[m (piedi)]
5 (16,4) 400 0,258 0,652 2,01
50 (164) 400 0,38 1,03 2,15
5 (16,4) 480 0,258 0,752 2,34
50 (164) 480 0,4 1,23 2,42
Tabella 7.12 Dati dU/dt per FC 280, 22 kW (30 cv),
3x380–480 V
Lunghezza
del cavo
[m (piedi)]
5 (16,4) 240 0,0712 0,484 5,44
50 (164) 240 0,224 0,594 2,11
Tabella 7.13 Dati dU/dt per FC 280, 1,5 kW (2,0 cv),
3x200–240 V
e
di rete
[V]
Tension
e
di rete
[V]
Tension
e
di rete
[V]
Tempo di
salita
[μsec]
Tempo di
salita
[μsec]
Tempo di
salita
[μsec]
U
[kV]
U
[kV]
U
PEAK
[kV]
PEAK
PEAK
dU/dt
[kV/μsec]
dU/dt
[kV/μsec]
dU/dt
[kV/μsec]
Tension
Lunghezza
del cavo
[m (piedi)]
5 (16,4) 240 0,088 0,414 3,79
50 (164) 240 0,196 0,593 2,41
Tabella 7.16 Dati dU/dt per FC 280, 1,5 kW (2,0 cv),
1x200–240 V
Lunghezza
del cavo
[m (piedi)]
5 (16,4) 240 0,112 0,368 2,64
50 (164) 240 0,116 0,362 2,51
Tabella 7.17 Dati dU/dt per FC 280, 2,2 kW (3,0 cv),
1x200–240 V
e
di rete
[V]
Tension
e
di rete
[V]
Tempo di
salita
[μsec]
Tempo di
salita
[μsec]
U
[kV]
U
[kV]
PEAK
PEAK
dU/dt
[kV/μsec]
dU/dt
[kV/μsec]
7.12 Condizioni speciali
In particolari condizioni, quando il funzionamento del
convertitore di frequenza è reso dicile, considerare il
declassamento. In alcuni casi il declassamento deve essere
eettuato manualmente.
In altre condizioni, il convertitore di frequenza esegue
automaticamente un certo grado di declassamento quando
necessario. Il declassamento viene eseguito per assicurare
prestazioni in fasi critiche, quando l'alternativa potrebbe
essere uno scatto.
7.12.1 Declassamento manuale
7 7
Tension
Lunghezza
del cavo
[m (piedi)]
5 (16,4) 240 0,072 0,468 5,25
50 (164) 240 0,208 0,592 2,28
Tabella 7.14 Dati dU/dt per FC 280, 2,2 kW (3,0 cv),
3x200–240 V
Lunghezza
del cavo
[m (piedi)]
5 (16,4) 240 0,092 0,526 4,56
50 (164) 240 0,28 0,6 1,72
Tabella 7.15 Dati dU/dt per FC 280, 3,7 kW (5,0 cv),
3x200–240 V
e
di rete
[V]
Tension
e
di rete
[V]
Tempo di
salita
[μsec]
Tempo di
salita
[μsec]
U
PEAK
[kV]
U
PEAK
[kV]
dU/dt
[kV/μsec]
dU/dt
[kV/μsec]
È possibile prendere in considerazione il declassamento
manuale in caso di:
pressione dell'aria – per installazioni ad altitudini
•
superiori a 1000 m (3281 piedi);
velocità del motore - per funzionamento continuo
•
a basso numero di giri/min. nelle applicazioni con
coppia costante;
temperatura ambiente – superiore a 45 °C
•
(113 °F), per i dettagli vedere dalla Disegno 7.3
alla Disegno 7.12.
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 93
Page 96
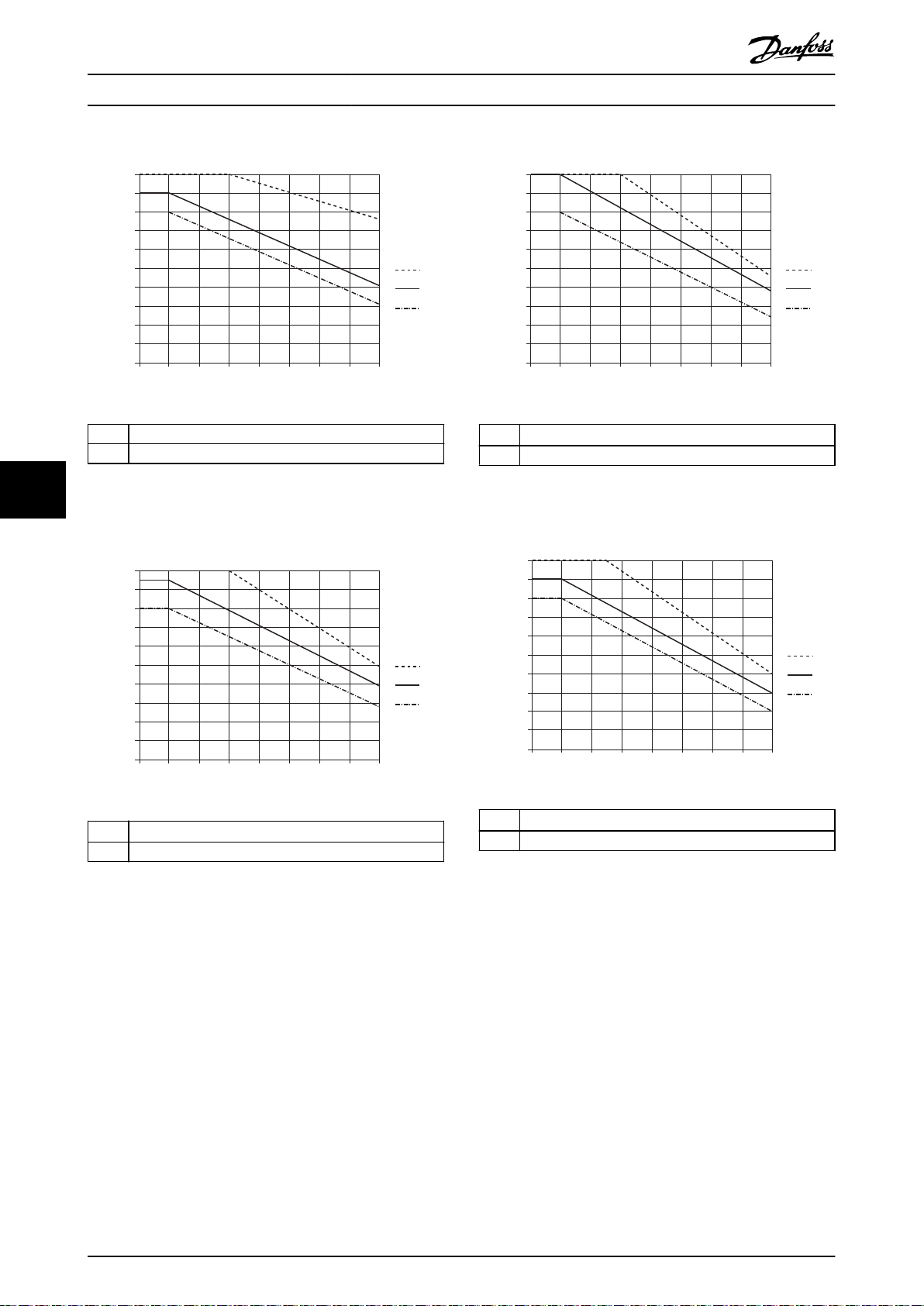
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
Switching Frequency [kHz]
Output Current
45C
50C
55C
130BE889.10
(1)
(2)
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BE890.10
(1) Output Current
(2) Switching Frequency [kHz]
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BE891.10
(2) Switching Frequency [kHz]
(1) Output Current
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BE892.10
(2) Switching Frequency [kHz]
(1) Output Current
Speciche
VLT® Midi Drive FC 280
(1) Corrente di uscita
(2) Frequenza di commutazione [kHz]
77
Disegno 7.3 Curva di declassamento K1T4
(1) Corrente di uscita
(2) Frequenza di commutazione [kHz]
Disegno 7.4 Curva di declassamento K2T4
(1) Corrente di uscita
(2) Frequenza di commutazione [kHz]
Disegno 7.5 Curva di declassamento K3T4
(1) Corrente di uscita
(2) Frequenza di commutazione [kHz]
Disegno 7.6 Curva di declassamento K4T4
94 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 97

0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BE893.10
(1) Output Current
(2) Switching Frequency [kHz]
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BF104.10
(1) Output Current
(2) Switching Frequency [kHz]
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BF105.10
(1) Output Current
(2) Switching Frequency [kHz]
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BF106.10
(1) Output Current
(2) Switching Frequency [kHz]
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BF107.10
(1) Output Current
(2) Switching Frequency [kHz]
Speciche Guida alla Progettazione
(1) Corrente di uscita
(2) Frequenza di commutazione [kHz]
Disegno 7.7 Curva di declassamento K5T4
(1) Corrente di uscita
(2) Frequenza di commutazione [kHz]
Disegno 7.8 Curva di declassamento K1T2
(1) Corrente di uscita
(2) Frequenza di commutazione [kHz]
Disegno 7.10 Curva di declassamento K3T2
7 7
(1) Corrente di uscita
(2) Frequenza di commutazione [kHz]
(1) Corrente di uscita
(2) Frequenza di commutazione [kHz]
Disegno 7.9 Curva di declassamento K2T2
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 95
Disegno 7.11 Curva di declassamento K1S2
Page 98

0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BF107.10
(1) Output Current
(2) Switching Frequency [kHz]
Speciche
VLT® Midi Drive FC 280
AVVISO!
La frequenza di commutazione nominale è di 6 kHz per
K1–K3, 5 kHz per K4–K5.
7.12.2 Declassamento automatico
Un convertitore di frequenza controlla costantemente i
livelli critici:
Alta temperatura critica nel dissipatore.
•
Carico del motore elevato.
•
Velocità del motore ridotta.
•
Vengono azionati i segnali di protezione
(1) Corrente di uscita
(2) Frequenza di commutazione [kHz]
Disegno 7.12 Curva di declassamento K2S2
•
(sovratensione/sotto tensione, sovracorrente,
guasto verso terra e cortocircuito).
In risposta a un livello critico, il convertitore di frequenza
adegua la frequenza di commutazione.
77
96 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
Page 99

Speciche Guida alla Progettazione
7.13 Dimensioni contenitore, potenze nominali e dimensioni
Taglia di
potenza [kW
(cv)]
Dimensioni
[mm (pollici)]
Peso
[kg (libbre)]
Fori di
montaggio
[mm (pollici)]
Dimensione
contenitore
Monofase
200–240 V
Trifase:
200–240 V
Trifase:
380–480 V
Altezza A1 210 (8,3) 272,5 (10,7)
Altezza A2 278 (10,9) 340 (13,4)
Larghezza B 75 (3,0) 90 (3,5) 115 (4,5) 133 (5,2) 150 (5,9)
Profondità C 168 (6,6) 168 (6,6) 168 (6,6) 245 (9,6) 245 (9,6)
Altezza A 338,5 (13,3) 395 (15,6)
Larghezza B 100 (3,9) 115 (4,5) 130 (5,1) 153 (6,0) 170 (6,7)
Profondità C 183 (7,2) 183 (7,2) 183 (7,2) 260 (10,2) 260 (10,2)
Altezza A 294 (11,6) 356 (14)
Larghezza B 75 (3,0) 90 (3,5) 115 (4,5) 133 (5,2) 150 (5,9)
Profondità C 168 (6,6) 168 (6,6) 168 (6,6) 245 (9,6) 245 (9,6)
IP20 2,5 (5,5) 3,6 (7,9)
IP21 4,0 (8,8) 5,5 (12,1)
a 198 (7,8) 260 (10,2)
b 60 (2,4) 70 (2,8) 90 (3,5) 105 (4,1) 120 (4,7)
c 5 (0,2) 6,4 (0,25)
d 9 (0,35) 11 (0,43) 11 (0,43) 12,4 (0,49) 12,6 (0,5)
e 4,5 (0,18) 5,5 (0,22)
f 7,3 (0,29) 8,1 (0,32)
0,37
(0,5)
0,37
(0,5)
0,37
(0,5)
0,55
(0,75)
0,55
(0,75)
0,55
(0,75)
FC 280 con coperchio ingresso cavi inferiore (senza coperchio superiore)
K1 K2 K3 K4 K5
0,75
(1,0)
0,75
(1,0)
0,75
(1,0)
1,1
(1,5)
1,1
(1,5)
1,1
(1,5)
FC 280 con IP21/UL/tipo 1 kit
1,5
(2,0)
1,5
(2,0)
1,5
(2,0)
FC 280 IP20
2,2
(3,0)
3
(4,0
2,2
(3,0)
2,2
(3,0)
4
5,5
(5,5)
)
(7,5)
– – –
3,7
(5,0)
7,5
(10)11(15)15(20)
272,5
(10,7)
341,5
(13,4)
395
(15,6)
357
(14,1)
4,6
(10,1)
6,5
(14,3)
260
(10,2)
6,5
(0,26)
5,5
(0,22)
9,2
(0,36)
– –
317,5
(12,5)
379,5
(14,9)
425 (16,7) 520 (20,5)
391 (15,4) 486 (19,1)
8,2 (18,1) 11,5 (25,4)
10,5 (23,1) 14,0 (30,9)
297,5
(11,7)
8 (0,32) 7,8 (0,31)
6,8 (0,27) 7 (0,28)
11 (0,43) 11,2 (0,44)
18,5
(25)22(30)
410 (16,1)
474 (18,7)
390 (15,4)
7 7
Tabella 7.18 Dimensioni contenitore, potenze nominali e dimensioni
MG07B306 Danfoss A/S © 05/2017 Tutti i diritti riservati. 97
Page 100
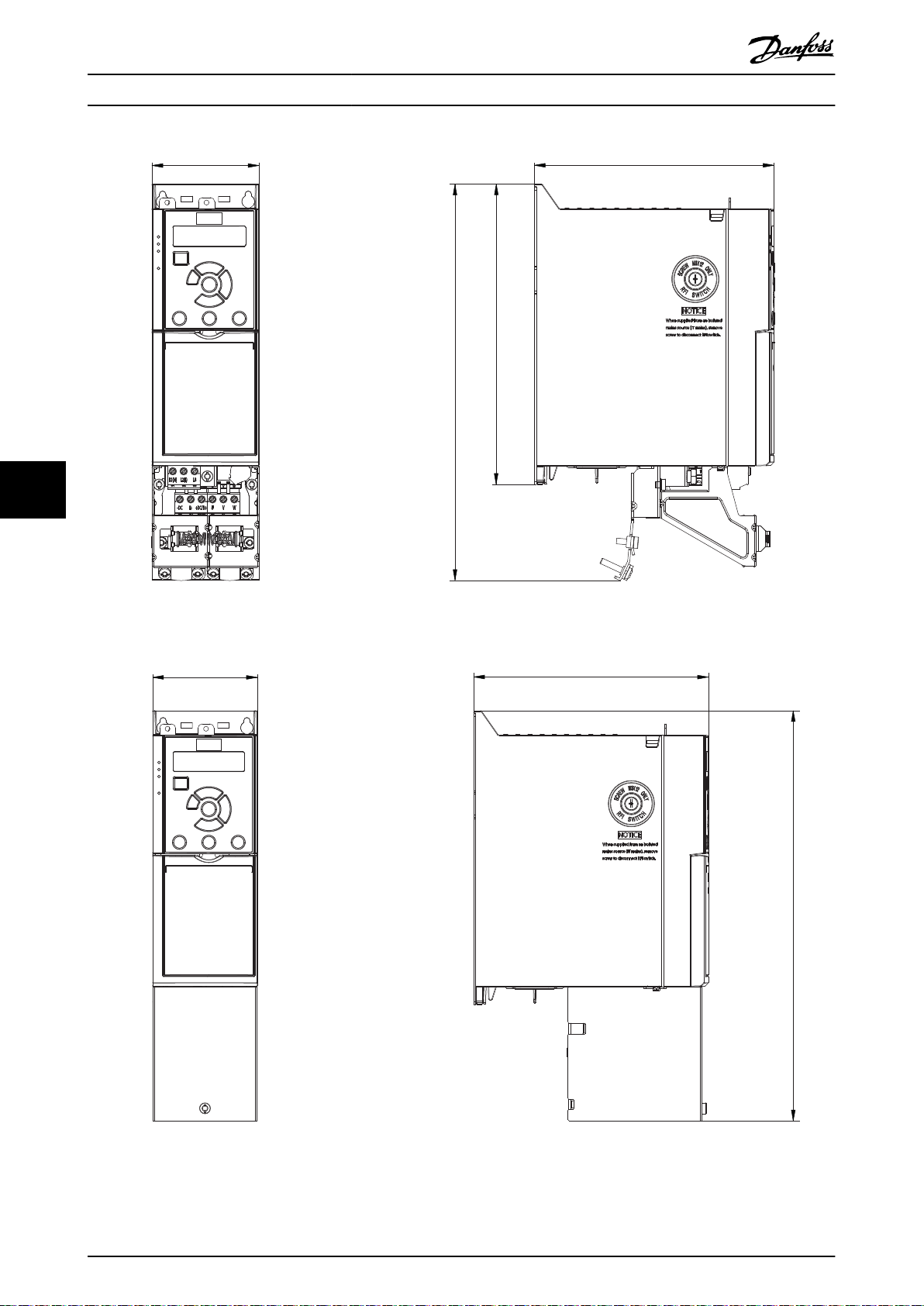
130BE844.11
B
C
A1
A2
130BE846.10
B
A
C
Speciche
VLT® Midi Drive FC 280
77
Disegno 7.13 Standard con piastra di disaccoppiamento
Disegno 7.14 Standard con coperchio ingresso cavi inferiore (senza coperchio superiore)
98 Danfoss A/S © 05/2017 Tutti i diritti riservati. MG07B306
 Loading...
Loading...