


ENGINEERING TOMORROW
Οδηγός σχεδίασης εφαρμογών
VLT® Midi Drive FC 280
www.DanfossDrives.com

Περιεχόμενα Οδηγός σχεδίασης εφαρμογών
Περιεχόμενα
1 Εισαγωγή
1.1 Σκοπός του οδηγού σχεδίασης εφαρμογών
1.2 Πρόσθετοι πόροι
1.3 Ορισμοί
1.4 Έκδοση τεκμηρίωσης και λογισμικού
1.5 Εγκρίσεις και πιστοποιήσεις
1.6 Ασφάλεια
2 Επισκόπηση προϊόντος
2.1 Επισκόπηση μεγέθους περιβλήματος
2.2 Ηλεκτρική εγκατάσταση
2.2.1 Σύνδεση κινητήρα 15
2.2.2 Σύνδεση δικτύου ΕΡ 16
2.2.3 Τύποι ακροδεκτών ελέγχου 17
2.2.4 Καλωδίωση στους ακροδέκτες σήματος ελέγχου 18
2.3 Δομές ελέγχου
2.3.1 Τρόποι λειτουργίας ελέγχου 19
2.3.2 Αρχή ελέγχου 20
2.3.3 Δομή ελέγχου σε VVC
2.3.4 Έλεγχος εσωτερικού ρεύματος σε τρόπο λειτουργίας VVC
+
5
5
5
5
8
8
9
10
10
13
19
20
+
21
2.3.5 Τοπικός (Hand On) και Απομακρυσμένος (Auto On) χειρισμός 21
2.4 Χειρισμός τιμών αναφοράς
2.4.1 Όρια τιμών αναφοράς 23
2.4.2 Κλιμάκωση όλων των προκαθορισμένων τιμών αναφοράς και των τιμών αναφοράς διαύλου 24
2.4.3 Κλιμάκωση αναλογικών και παλμικών τιμών αναφοράς και ανάδρασης 24
2.4.4 Νεκρή ζώνη γύρω από το μηδέν 26
2.5 Έλεγχος PID
2.5.1 Έλεγχος PID ταχύτητας 29
2.5.2 Έλεγχος PID διεργασίας 32
2.5.3 Σχετικές παράμετροι του ελέγχου διεργασίας 33
2.5.4 Παράδειγμα ελέγχου PID διεργασίας 34
2.5.5 Bελτιστοποίηση ελεγκτή διεργασίας 36
2.5.6 Μέθοδος ρύθμισης Ziegler Nichols 37
2.6 Εκπομπή και Ατρωσία EMC
2.6.1 Γενικές αρχές της εκπομπής EMC 37
2.6.2 Εκπομπή EMC 39
2.6.3 Ατρωσία EMC 40
22
29
37
2.7 Γαλβανική απομόνωση
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 1
41
Περιεχόμενα
VLT® Midi Drive FC 280
2.8 Ρεύμα διαρροής προς τη γείωση
2.9 Λειτουργίες πέδης
2.9.1 Μηχανική πέδη διακοπής 43
2.9.2 Δυναμική πέδηση 43
2.9.3 Επιλογή αντιστάτη πέδησης 44
2.10 Μόνωση κινητήρα
2.10.1 Φίλτρα ημιτονοειδούς κύματος 46
2.10.2 Φίλτρα dU/dt 46
2.11 Smart Logic Controller
2.12 Ακραίες συνθήκες λειτουργίας
2.12.1 Θερμική προστασία κινητήρα 48
3 Παραδείγματα εφαρμογής
3.1 Εισαγωγή
3.1.1 Σύνδεση παλμογεννήτριας 49
3.1.2 Φορά παλμογεννήτριας 49
3.1.3 Σύστημα ρυθμιστή στροφών κλειστού βρόχου 49
3.2 Παραδείγματα εφαρμογής
42
43
45
46
47
49
49
50
3.2.1 AMA 50
3.2.2 Ταχύτητα 50
3.2.3 Εκκίνηση/σταμάτημα 51
3.2.4 Επαναφορά εξωτερικού συναγερμού 52
3.2.5 Θερμίστορ κινητήρα 52
3.2.6 SLC 52
4 Safe Torque O (STO)
5 Εγκατάσταση και ρύθμιση RS485
5.1 Εισαγωγή
5.1.1 Γενική περιγραφή 55
5.1.2 Σύνδεση δικτύου 56
5.1.3 Ρύθμιση υλικού 56
5.1.4 Ρυθμίσεις παραμέτρων για την επικοινωνία Modbus 56
5.1.5 Μέτρα EMC 56
5.2 Πρωτόκολλο FC
5.2.1 Γενική περιγραφή 56
54
55
55
56
5.2.2 FC με RTU Modbus 57
5.3 Διαμόρφωση δικτύου
5.4 Δομή πλαισίωσης του μηνύματος πρωτόκολλου FC
5.4.1 Περιεχόμενο ενός χαρακτήρα (byte) 57
5.4.2 Δομή μηνύματος 57
2 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327
57
57
Περιεχόμενα Οδηγός σχεδίασης εφαρμογών
5.4.3 Μήκος μηνύματος (LGE) 58
5.4.4 Διεύθυνση μετατροπέα συχνότητας (ADR) 58
5.4.5 Byte ελέγχου δεδομένων (BCC) 58
5.4.6 Το πεδίο δεδομένων 58
5.4.7 Το πεδίο PKE 58
5.4.8 Αριθμός παραμέτρου (PNU) 59
5.4.9 Δείκτης (IND) 59
5.4.10 Τιμή παραμέτρου (PWE) 59
5.4.11 Τύποι δεδομένων που υποστηρίζονται από τον μετατροπέα συχνότητας 60
5.4.12 Μετατροπή 60
5.4.13 Λέξεις διεργασίας (PCD) 60
5.5 Παραδείγματα
5.5.1 Εγγραφή μιας τιμής παραμέτρου 60
5.5.2 Ανάγνωση μιας τιμής παραμέτρου 61
5.6 Modbus RTU
5.6.1 Προαπαιτούμενες γνώσεις 61
5.6.2 Γενική περιγραφή 61
5.6.3 Μετατροπέας συχνότητας με Modbus RTU 62
5.7 Διαμόρφωση δικτύου
5.8 Δομή πλαισίωσης του μηνύματος Modbus RTU
5.8.1 Εισαγωγή 62
5.8.2 Δομή μηνύματος Modbus RTU 62
5.8.3 Πεδίο εκκίνησης/σταματήματος 63
5.8.4 Πεδίο διεύθυνσης 63
5.8.5 Πεδίο λειτουργίας 63
5.8.6 Πεδίο δεδομένων 63
5.8.7 Πεδίο ελέγχου CRC 63
5.8.8 Διευθυνσιοδότηση θέσεων μνήμης και καταχωρητών 64
60
61
62
62
5.8.9 Πώς να ελέγχετε τον μετατροπέα συχνότητας 66
5.8.10 Κωδικοί λειτουργιών που υποστηρίζονται από το Modbus RTU 66
5.8.11 Κωδικοί εξαίρεσης Modbus 66
5.9 Πώς γίνεται η πρόσβαση στις παραμέτρους
5.9.1 Χειρισμός παραμέτρων 67
5.9.2 Αποθήκευση δεδομένων 67
5.9.3 IND (δείκτης) 67
5.9.4 Μπλοκ κειμένου 67
5.9.5 Συντελεστής μετατροπής 67
5.9.6 Τιμές παραμέτρων 67
5.10 Παραδείγματα
5.10.1 Ανάγνωση κατάστασης περιεχομένου θέσης μνήμης (01 hex) 67
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 3
67
67
Περιεχόμενα
VLT® Midi Drive FC 280
5.10.2 Εξαναγκασμός/Εγγραφή μίας θέσης μνήμης (05 hex) 68
5.10.3 Εξαναγκασμός/εγγραφή πολλαπλών θέσεων μνήμης (0F hex) 69
5.10.4 Ανάγνωση καταχωρητών συγκράτησης (03 hex) 69
5.10.5 Προκαθορισμός ενός καταχωρητή (06 hex) 70
5.10.6 Προκαθορισμός τιμής πολλαπλών καταχωρητών (10 hex) 70
5.11 Προφίλ ελέγχου FC της Danfoss
5.11.1 Λέξη ελέγχου σύμφωνα με το προφίλ FC΄(8-10 πρωτόκολλο = προφίλ FC) 71
5.11.2 Λέξη κατάστασης σύμφωνα με το προφίλ FC (STW) 72
5.11.3 Τιμή αναφοράς ταχύτητας διαύλου 74
6 Κωδικός είδους και επιλογή
6.1 Κωδικός τύπου
6.2 Αριθμοί παραγγελίας: Επιλογές, εξαρτήματα και ανταλλακτικά
6.3 Αριθμοί παραγγελίας: Αντιστάτες πέδησης
6.3.1 Αριθμοί παραγγελίας: Αντιστάτες πέδησης 10% 77
6.3.2 Αριθμοί παραγγελίας: Αντιστάτες πέδησης 40% 79
6.4 Αριθμοί παραγγελίας: Φίλτρα ημιτονοειδούς κύματος
6.5 Αριθμοί παραγγελίας: Φίλτρα dU/dt
6.6 Αριθμοί παραγγελίας: Εξωτερικά φίλτρα ΗΜΣ
7 Προδιαγραφές
7.1 Ηλεκτρικά δεδομένα
7.2 Τροφοδοσία ρεύματος
71
75
75
75
76
80
81
81
84
84
86
7.3 Απόδοση κινητήρα και Δεδομένα κινητήρα
7.4 Συνθήκες χώρου
7.5 Προδιαγραφές καλωδίου
7.6 Είσοδος/έξοδος ελέγχου και Δεδομένα ελέγχου
7.7 Ροπές σύσφιξης σύνδεσης
7.8 Ασφάλειες και ασφαλειοδιακόπτες
7.9 Βαθμός απόδοσης
7.10 Ακουστικός θόρυβος
7.11 Συνθήκες dU/dt
7.12 Ειδικές συνθήκες
7.12.1 Μη αυτόματος υποβιβασμός 94
7.12.2 Αυτόματος υποβιβασμός 97
7.13 Μεγέθη περιβλημάτων, ονομαστικές ισχύες και διαστάσεις
Ευρετήριο
87
87
88
88
91
91
92
93
93
94
98
101
4 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

Εισαγωγή Οδηγός σχεδίασης εφαρμογών
1 Εισαγωγή
1.1 Σκοπός του οδηγού σχεδίασης
εφαρμογών
Ο παρών οδηγός σχεδίασης εφαρμογών προορίζεται για
μηχανικούς έργων και συστημάτων, συμβούλους σχεδίασης
και ειδικούς εφαρμογών και προϊόντων. Παρέχονται
τεχνικές πληροφορίες για την κατανόηση των δυνατοτήτων
του μετατροπέα συχνότητας, για την ενσωμάτωση σε
συστήματα ελέγχου και παρακολούθησης κινητήρων.
Περιγράφονται λεπτομέρειες για τη λειτουργία, τις
απαιτήσεις και προτάσεις για ενσωμάτωση σε συστήματα.
Παρέχονται τεχνικές πληροφορίες για τα χαρακτηριστικά
ισχύος εισόδου, την έξοδο για τον έλεγχο κινητήρων και τις
συνθήκες χώρου λειτουργίας για τον μετατροπέα
συχνότητας.
Περιλαμβάνονται επίσης:
Χαρακτηριστικά ασφαλείας.
•
Παρακολούθηση κατάστασης βλάβης.
•
Αναφορές λειτουργικής κατάστασης.
•
Δυνατότητες σειριακής επικοινωνίας.
•
Προγραμματιζόμενες επιλογές και χαρακτηριστικά.
•
Παρέχονται επίσης σχεδιαστικές λεπτομέρειες, όπως οι
απαιτήσεις της εγκατάστασης, τα καλώδια, οι ασφάλειες, η
καλωδίωση ελέγχου, το μέγεθος και το βάρος των μονάδων
και άλλες σημαντικές πληροφορίες, απαραίτητες για την
ολοκλήρωση του συστήματος.
Η μελέτη των λεπτομερών πληροφοριών του προϊόντος
στη φάση της σχεδίασης, επιτρέπει την ανάπτυξη ενός
καλά μελετημένου συστήματος με βέλτιστη λειτουργικότητα και απόδοση.
Ορισμοί
1.3
1.3.1 Μετατροπέας συχνότητας
Ελεύθερη κίνηση
Ο άξονας του κινητήρα βρίσκεται σε ελεύθερο τρόπο
λειτουργίας. Δεν υπάρχει ροπή στον κινητήρα.
I
VLT,MAX
Η μέγιστη ένταση ρεύματος εξόδου.
I
VLT,N
Η ονομαστική ένταση ρεύματος που παρέχεται από τον
μετατροπέα συχνότητας
U
VLT,MAX
Μέγιστη τάση εξόδου.
1.3.2 Είσοδος
Εντολές ελέγχου
Εκκινήστε και σταματήστε τον συνδεδεμένο κινητήρα
χρησιμοποιώντας τον LCP και ψηφιακές εισόδους.
Οι λειτουργίες διαιρούνται σε 2 ομάδες.
Οι λειτουργίες της ομάδας 1 έχουν μεγαλύτερη
προτεραιότητα από τις λειτουργίες της ομάδας 2.
Ομάδα 1 Ακριβές σταμάτημα, σταμάτημα με ελεύθερη
κίνηση και μηδενισμό, ακριβές σταμάτημα και
σταμάτημα με ελεύθερη κίνηση, ταχύ σταμάτημα,
πέδηση συνεχούς ρεύματος, σταμάτημα και
απενεργοποίηση [OFF].
Ομάδα 2 Εκκίνηση, έναρξη παλμού, αναστροφή, ανάστροφη
εκκίνηση, ελαφρά ώθηση και πάγωμα εξόδου.
Πίνακας 1.1 Ομάδες λειτουργιών
1 1
Το VLT® είναι σήμα κατατεθέν.
Πρόσθετοι πόροι
1.2
Πόροι που διατίθενται για την κατανόηση των λειτουργιών
και του προγραμματισμού του ρυθμιστή στροφών:
Ο Οδηγός Λειτουργίας του VLT® Midi Drive FC
•
280 , παρέχει πληροφορίες για την εγκατάσταση,
τη θέση σε λειτουργία, την εφαρμογή και τη
συντήρηση του ρυθμιστή στροφών.
Ο Οδηγός Προγραμματισμού του VLT® Midi Drive
•
FC 280, παρέχει πληροφορίες προγραμματισμού
και περιλαμβάνει ολοκληρωμένες περιγραφές των
παραμέτρων.
Συμπληρωματικές δημοσιεύσεις και εγχειρίδια διατίθενται
από την Danfoss. Ανατρέξτε στην ενότητα
drives.danfoss.com/knowledge-center/technicaldocumentation/ για καταχωρίσεις.
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 5
1.3.3 Κινητήρας
Κινητήρας σε λειτουργία
Ροπή που δημιουργείται στον άξονα εξόδου και ταχύτητα
από 0 RPM μέχρι τη μέγιστη ταχύτητα κινητήρα.
f
ΕΛΑΦΡΙΑ ΩΘΗΣΗ
Συχνότητα κινητήρα όταν είναι ενεργοποιημένη η
λειτουργία ελεύθερη ώθηση (μέσω ψηφιακών ακροδεκτών
ή διαύλου).
f
M
Συχνότητα κινητήρα.
f
ΜΕΓ.
Μέγιστη συχνότητα κινητήρα.
f
ΕΛΑΧ.
Ελάχιστη συχνότητα κινητήρα.
f
M,N
Ονομαστική συχνότητα κινητήρα (δεδομένα πινακίδας).
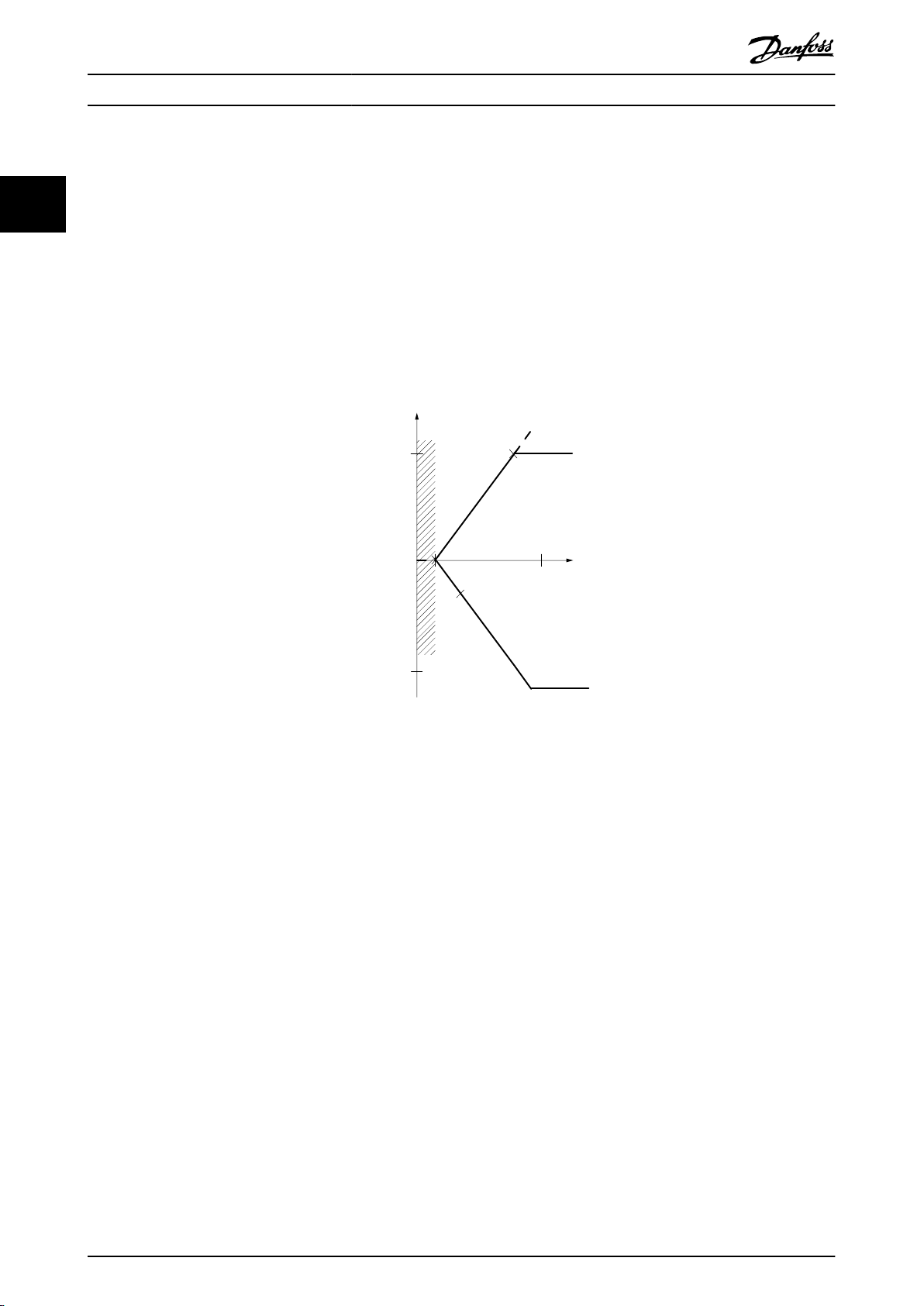
175ZA078.10
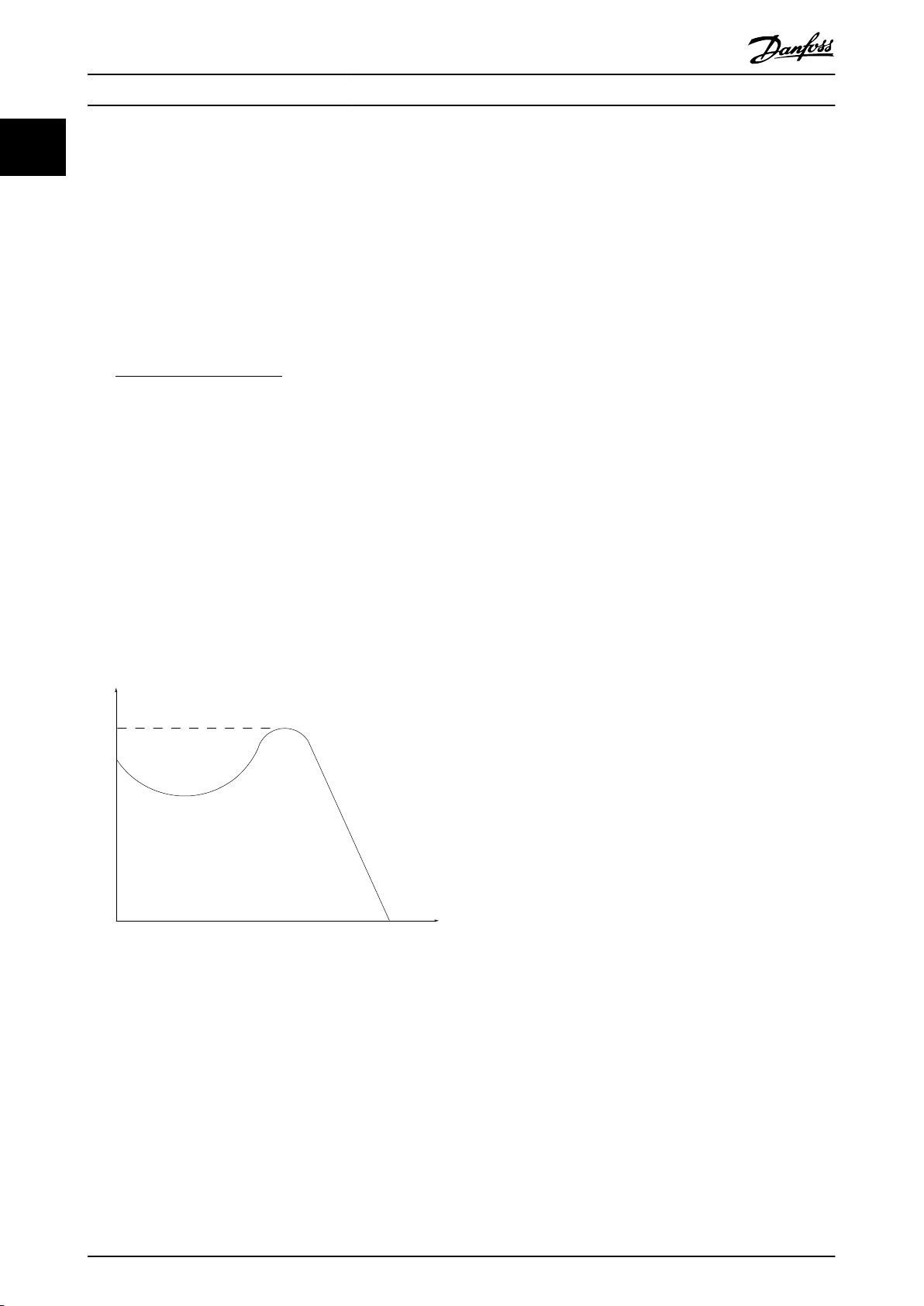
Pull-out
RPM
Torque
Εισαγωγή
VLT® Midi Drive FC 280
11
I
M
1.3.4 Τιμές αναφοράς
Ρεύμα κινητήρα (πραγματικό)
I
M,N
Ονομαστική τιμή ρεύματος κινητήρα (δεδομένα στην
πινακίδα στοιχείων).
n
M,N
Ονομαστική ταχύτητα κινητήρα (δεδομένα στην πινακίδα
στοιχείων).
n
s
Στροφές σύγχρονου κινητήρα.
2 × Παράμετρος 1−23 × 60s
ns=
n
ολίσθηση
Παράμετρος 1−39
Ολίσθηση κινητήρα.
P
M,N
Ονομαστική ισχύς κινητήρα (δεδομένα πινακίδας σε kW ή
hp).
T
M,N
Ονομαστική ροπή κινητήρα
U
M
Στιγμιαία τάση κινητήρα
U
M,N
Ονομαστική τάση λειτουργίας κινητήρα (δεδομένα
πινακίδας)
Ροπή απόσχισης
Αναλογική αναφορά
Ένα σήμα μεταφερόμενο στις αναλογικές εισόδους 53 ή 54
μπορεί να είναι τάση ή ένταση ρεύματος.
Δυαδική τιμή αναφοράς
Ένα σήμα μεταδίδεται μέσω της θύρας σειριακής επικοινωνίας.
Προκαθορισμένη τιμή αναφοράς
Να ρυθμιστεί μία καθορισμένη προεπιλεγμένη τιμή
αναφοράς από -100% έως +100% του εύρους τιμών
αναφοράς. Επιλογή 8 προκαθορισμένων τιμών αναφοράς
μέσω ψηφιακών ακροδεκτών. Επιλογή 4 προκαθορισμένων
τιμών αναφοράς μέσω του διαύλου.
Παλμική τιμή αναφοράς
Ένα σήμα παλμικής συχνότητας που μεταδίδετε στις
ψηφιακές εισόδους (ακροδέκτες 29 και 33).
Ref
ΜΕΓ.
Προσδιορίζει τη σχέση μεταξύ της τιμής αναφοράς εισόδου
στην τιμή 100% πλήρους κλίμακας (τυπικά 10 V, 20 mA) και
της τιμής αναφοράς που προκύπτει. Η μέγιστη τιμή
αναφοράς ορίζεται στην παράμετρος 3-03 Μέγιστη
επιθυμητή τιμή.
Ref
ΕΛΑΧ.
Προσδιορίζει τη σχέση μεταξύ της τιμής αναφοράς εισόδου
σε τιμή 0% (τυπικά 0 V, 0 mA, 4 mA) και της τιμής
αναφοράς που προκύπτει. Η ελάχιστη τιμή αναφοράς
ρυθμίζεται στην παράμετρος 3-02 Ελάχιστη επιθ. τιμή.
Εικόνα 1.1 Ροπή απόσχισης
η
VLT
Σαν απόδοση του ρυθμιστή στροφών ορίζεται ο λόγος
μεταξύ της εξόδου και της εισόδου ισχύος.
Εντολή απενεργοποίησης εκκίνησης
Μία εντολή απενεργοποίησης εκκίνησης που ανήκει στην
ομάδα εντολών ελέγχου 1. Ανατρέξτε στο Πίνακας 1.1 για
περισσότερες λεπτομέρειες.
Εντολή διακοπής
Μία εντολή διακοπής που ανήκει στην ομάδα εντολών
ελέγχου 1. Ανατρέξτε στο Πίνακας 1.1 για περισσότερες
λεπτομέρειες.
1.3.5 Διάφορα
Αναλογικές είσοδοι
Οι αναλογικές είσοδοι χρησιμοποιούνται για τον έλεγχο
διαφόρων λειτουργιών στο ρυθμιστή στροφών.
Υπάρχουν 2 είδη αναλογικών εισόδων:
Είσοδος ρεύματος: 0–20 mA και 4–20 mA.
•
Είσοδος τάσης: 0–10 V ΣΡ.
•
Αναλογικές έξοδοι
Οι αναλογικές έξοδοι μπορούν να παρέχουν ένα σήμα 0–20
mA ή 4–20 mA.
Αυτόματη προσαρμογή κινητήρα, AMA
Ο αλγόριθμος AMA καθορίζει τις ηλεκτρικές παραμέτρους
ενός συνδεδεμένου κινητήρα σε ακινησία.
Αντιστάτης πέδησης
Ο αντιστάτης πέδησης είναι μία μονάδα ικανή να
απορροφήσει την ισχύ πέδησης που παράγεται κατά την
πέδηση γεννήτριας. Αυτή η ισχύς πέδησης γεννήτριας
αυξάνει την τάση ζεύξης ΣΡ και ένα τρανζίστορ πέδης
εξασφαλίζει ότι η ισχύς μεταδίδεται στον αντιστάτη
πέδησης.
6 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

Εισαγωγή Οδηγός σχεδίασης εφαρμογών
Χαρακτηριστικά CT
Χαρακτηριστικά σταθερής ροπής που χρησιμοποιούνται για
εφαρμογές όπως ιμάντες μεταφοράς, αντλίες εκτοπίσματος
και γερανοί.
Ψηφιακές είσοδοι
Οι ψηφιακές είσοδοι χρησιμοποιούνται για τον έλεγχο
διαφόρων λειτουργιών στο ρυθμιστή στροφών.
Ψηφιακές έξοδοι
Ο ρυθμιστής στροφών διαθέτει 2 εξόδους στερεάς
κατάστασης που μπορούν να παρέχουν ένα σήμα 24 V ΣΡ
(μέγιστο 40 mA).
DSP
Επεξεργαστής ψηφιακού σήματος.
ETR
Το ηλεκτρονικό θερμικό ρελέ είναι ένα στοιχείο
υπολογισμού του θερμικού φορτίου βάσει του παρόντος
φορτίου και του τρέχοντος χρόνου. Ο σκοπός του είναι να
εκτιμήσει τη θερμοκρασία του κινητήρα.
Κανονικός δίαυλος FC
Περιλαμβάνει τον δίαυλο RS 485 με πρωτόκολλο FC ή
πρωτόκολλο MC. Ανατρέξτε στο παράμετρος 8-30 Protocol.
Επαναφορά εργοστασιακών ρυθμίσεων
Αν εκτελέσετε επαναφορά εργοστασιακών ρυθμίσεων
(παράμετρος 14-22 Operation Mode), ο ρυθμιστής στροφών
θα επιστρέψει στις προεπιλεγμένες ρυθμίσεις.
Διαλείπων κύκλος εργασίας
Μια τιμή αναφοράς διαλείποντος κύκλου εργασίας
αναφέρεται σε μια ακολουθία κύκλων εργασίας. Κάθε
κύκλος αποτελείται από μία περίοδο με φορτίο και μία
περίοδο χωρίς φορτίο. Η λειτουργία μπορεί να είναι
περιοδικού ή μη περιοδικού κύκλου εργασίας.
LCP
Ο τοπικός πίνακας ελέγχου αποτελεί μια πλήρη διεπαφή για
τον έλεγχο και τον προγραμματισμό του ρυθμιστή
στροφών. Ο LCP είναι αποσπώμενος. Με το προαιρετικό κιτ
εγκατάστασης, ο LCP μπορεί να εγκατασταθεί μέχρι και 3
m (9,8 ft) από τον ρυθμιστή στροφών στην πρόσοψη ενός
πίνακα.
NLCP
Η διασύνδεση του αριθμητικού τοπικού πίνακα ελέγχου για
τον έλεγχο και τον προγραμματισμό του ρυθμιστή
στροφών. Η οθόνη είναι αριθμητική και ο πίνακας χρησιμοποιείται για την ένδειξη τιμών διεργασίας. Ο NLCP διαθέτει
λειτουργίες αποθήκευσης και αντιγραφής.
GLCP
Η διασύνδεση του γραφικού τοπικού πίνακα ελέγχου για
τον έλεγχο και τον προγραμματισμό του ρυθμιστή
στροφών. Η οθόνη είναι γραφικής απεικόνισης και ο
πίνακας χρησιμοποιείται για την ένδειξη τιμών διεργασίας.
Ο GLCP διαθέτει λειτουργίες αποθήκευσης και αντιγραφής.
lsb
Λιγότερο σημαντικό bit.
msb
Περισσότερο σημαντικό bit.
MCM
Συντομογραφία για το mille circular mil, μία Αμερικάνικη
μονάδα μέτρησης διατομών καλωδίων. 1 MCM = 0,5067
mm2.
Παράμετροι on-line/o-line
Οι αλλαγές στις παραμέτρους on-line ενεργοποιούνται
αμέσως μετά την αλλαγή των τιμών των δεδομένων. Για να
ενεργοποιήσετε αλλαγές στις παραμέτρους o-line,
εισάγετε [OK].
PID διεργασίας
Ο έλεγχος PID διατηρεί την ταχύτητα, πίεση και
θερμοκρασία ρυθμίζοντας τη συχνότητα εξόδου έτσι ώστε
να αντιστοιχεί στο μεταβαλλόμενο φορτίο.
PCD
Δεδομένα ελέγχου διεργασίας.
PFC
Διόρθωση συντελεστή ισχύος.
Κύκλος ισχύος
Διακόψτε την παροχή ρεύματος μέχρι να σβήσει η οθόνη
(LCP) και μετά επαναφέρετε την παροχή.
Συντελεστής ισχύος
Ο συντελεστής ισχύος είναι η σχέση μεταξύ I1 και I
Ισχύςσυντελεστής =
Για τους FC 280 μετατροπείς συχνότητας,
Ισχύςσυντελεστής =
3xUxI1συνϕ1
3xUxI
I1xσυνϕ1
I
RMS
RMS
=
I
I
RMS
1
cosϕ
.
RMS
1 = 1, οπότε:
Ο συντελεστής ισχύος δείχνει σε ποιο βαθμό ο ρυθμιστής
στροφών επιβάλει φορτίο στην τροφοδοσία από το δίκτυο
ρεύματος.
Όσο πιο χαμηλός είναι ο συντελεστής ισχύος, τόσο πιο
υψηλό είναι το I
=
I
2
+ I
1
I
RMS
για επιδόσεις ίδιων kW.
RMS
2
5
+ I
2
+ .. + I
7
2
n
Εξάλλου, υψηλότερος συντελεστής ισχύος δείχνει ότι τα
διαφορετικά αρμονικά ρεύματα είναι χαμηλά.
Τα ενσωματωμένα πηνία ΣΡ (T2/T4) και PFC (S2) παράγουν
υψηλό συντελεστή ισχύος, ελαχιστοποιώντας το επιβαλλόμενο φορτίο στην τροφοδοσία από το δίκτυο ρεύματος.
Είσοδος παλμού/Αυξητική παλμογεννήτρια
Ένας εξωτερικός, μεταδότης ψηφιακού παλμού που
χρησιμοποιείται για να ανατροφοδοτεί πληροφορίες για την
ταχύτητα του κινητήρα. Η παλμογεννήτρια χρησιμοποιείται
σε εφαρμογές που απαιτείται μεγάλη ακρίβεια στον έλεγχο
ταχύτητας.
RCD
Συσκευή παραμένοντος ρεύματος.
Ρυθμίσεις
Αποθήκευση ρυθμίσεων παραμέτρων σε 4 ρυθμίσεις. Κάντε
εναλλαγές ανάμεσα στις 4 ρυθμίσεις παραμέτρων και
επεξεργαστείτε 1 ρύθμιση όσο αυτή είναι ανενεργή.
1 1
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 7
Εισαγωγή
VLT® Midi Drive FC 280
11
SFAVM
Ακρωνύμιο που περιγράφει τη διαμόρφωση ασύγχρονου
διανύσματος που προσανατολίζεται προς τη ροή στάτορα
μεταγόμενου μοτίβου.
Αντιστάθμιση ολίσθησης
Ο ρυθμιστής στροφών αντισταθμίζει την ολίσθηση του
κινητήρα, δίνοντας στη συχνότητα ένα συμπλήρωμα που
ακολουθεί το μετρούμενο φορτίο του κινητήρα, κρατώντας
την ταχύτητα του κινητήρα σχεδόν σταθερή.
Smart logic control (SLC)
Ο SLC είναι μία ακολουθία από ενέργειες που προσδιορίζονται από το χρήστη και εκτελούνται όταν o ελεγκτής
smart logic αξιολογήσει ως αληθή τα συσχετιζόμενα
συμβάντα που προσδιορίζονται από το χρήστη (Ομάδα
παραμέτρων 13-** Smart Logic Control).
STW
Λέξη περιγραφής κατάστασης.
THD
Η συνολική αρμονική παραμόρφωση δηλώνει τη συνολική
συμβολή της αρμονικής παραμόρφωσης.
Θερμίστορ
Ένας αντιστάτης εξαρτημένος από τη θερμοκρασία τοποθετημένος εκεί που παρακολουθείται η θερμοκρασία
(ρυθμιστής συχνότητας ή κινητήρας).
Σφάλμα
Σφάλμα είναι η κατάσταση στην οποία εισέρχεται το
σύστημα σε περιπτώσεις βλάβης. Παραδείγματα
καταστάσεων βλάβης:
+
VVC
Σε σύγκριση με τον κανονικό έλεγχο λόγου τάσης/
συχνότητας, ο έλεγχος διανύσματος τάσης (VVC+) βελτιώνει
τη δυναμική και τη σταθερότητα, τόσο όταν η τιμή
αναφοράς ταχύτητας αλλάξει, όσο και σε σχέση με τη ροπή
φορτίου.
60° AVM
Ανατρέξτε στη διαμόρφωση ασύγχρονου διανύσματος
μεταγόμενου μοτίβου 60° .
1.4 Έκδοση τεκμηρίωσης και λογισμικού
Το παρόν εγχειρίδιο αναθεωρείται και ενημερώνεται
τακτικά. Είναι ευπρόσδεκτες όλες οι προτάσεις για
βελτίωση. Το Πίνακας 1.2 υποδεικνύει την έκδοση του
εγγράφου και την αντίστοιχη έκδοση λογισμικού.
Έκδοση Παρατηρήσεις
Περισσότερες πληροφορίες για το
MG07B3
Πίνακας 1.2 Έκδοση εγχειριδίου και λογισμικού
1.5
Οι μετατροπείς συχνότητας σχεδιάζονται σε συμμόρφωση
με τις οδηγίες που περιγράφονται στην ενότητα αυτή.
POWERLINK και ενημέρωση
λογισμικού.
Εγκρίσεις και πιστοποιήσεις
Έκδοση
λογισμικού
1.3
1.5.1 Σήμανση CE
Ο ρυθμιστής στροφών υποβάλλεται σε υπέρταση.
•
Ο ρυθμιστής στροφών προστατεύει τον κινητήρα,
•
τη διεργασία ή τον μηχανισμό.
Η επανεκκίνηση εμποδίζεται μέχρι να εξαφανιστεί η αιτία
του σφάλματος και η κατάσταση σφάλματος ακυρώνεται
ενεργοποιώντας την επαναφορά, ή σε μερικές περιπτώσεις,
με προγραμματισμό για εκτέλεση αυτόματης επαναφοράς.
Μην χρησιμοποιείτε την κατάσταση σφάλματος για
προσωπική ασφάλεια.
Κλείδωμα σφάλματος
Το κλείδωμα σφάλματος είναι μια κατάσταση στην οποία
εισέρχεται το σύστημα σε καταστάσεις βλάβης, όταν ο
ρυθμιστής στροφών αυτοπροστατεύεται και απαιτεί φυσική
παρέμβαση. Για παράδειγμα, ένα βραχυκύκλωμα στην
έξοδο προκαλεί κλείδωμα σφάλματος. Ένα κλείδωμα
σφάλματος μπορεί να ακυρωθεί μόνο διακόπτοντας την
τροφοδοσία ρεύματος, απομακρύνοντας την αιτία του
σφάλματος, και επανασυνδέοντας το ρυθμιστή στροφών. Η
επανεκκίνηση εμποδίζεται μέχρι να ακυρωθεί η κατάσταση
σφάλματος ενεργοποιώντας την επαναφορά, ή σε μερικές
περιπτώσεις, με προγραμματισμό για εκτέλεση αυτόματης
επαναφοράς. Μην χρησιμοποιείτε την κατάσταση
κλειδώματος σφάλματος για προσωπική ασφάλεια.
Χαρακτηριστικά VT
Χαρακτηριστικά μεταβαλλόμενης ροπής που χρησιμοποιούνται για αντλίες και ανεμιστήρες.
Η σήμανση CE (Communauté Européenne) υποδεικνύει ότι
ο κατασκευαστής του προϊόντος συμμορφώνεται προς όλες
τις ισχύουσες οδηγίες της ΕΕ.
Οι οδηγίες της ΕΕ που εφαρμόζονται στον σχεδιασμό και
την κατασκευή των μετατροπέων συχνότητας είναι:
Η Οδηγία χαμηλής τάσης.
•
Η οδηγία σχετικά με την ηλεκτρομαγνητική
•
συμβατότητα.
Η οδηγία περί μηχανημάτων (για μονάδες με
•
ενσωματωμένη λειτουργία ασφαλείας).
Η σήμανση CE σκοπό έχει να εξαλείψει τα τεχνικά εμπόδια
στο ελεύθερο εμπόριο μεταξύ της ΕΚ και των κρατών EFTA
εντός της ΕΕ. Η σήμανση CE δεν καθορίζει την ποιότητα
του προϊόντος. Οι τεχνικές προδιαγραφές δεν μπορούν να
προκύψουν από τη σήμανση CE.
8 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327
Εισαγωγή Οδηγός σχεδίασης εφαρμογών
1.5.2 Οδηγία Χαμηλής τάσης
Οι μετατροπείς συχνότητας κατατάσσονται ως ηλεκτρονικά
εξαρτήματα και πρέπει να φέρουν τη σήμανση CE
σύμφωνα με την Οδηγία χαμηλής τάσης. Η οδηγία ισχύει
για τον ηλεκτρολογικό εξοπλισμό στις περιοχές τάσης 50–
1.000 V ΕΡ και 75–1.500 V ΣΡ.
Η οδηγία προβλέπει ότι ο σχεδιασμός του εξοπλισμού
πρέπει να διασφαλίζει την ασφάλεια και την υγεία
ανθρώπων και ζωικού δυναμικού και την προστασία των
υλικών εξασφαλίζοντας ότι ο εξοπλισμός έχει εγκατασταθεί,
συντηρείται και χρησιμοποιείται όπως προβλέπεται.
Danfoss Οι σημάνσεις CE συμμορφώνονται προς την
Οδηγία χαμηλής τάσης και η Danfoss παρέχει δήλωση
συμμόρφωσης κατόπιν αιτήματος.
1.5.3 Οδηγία σχετικά με την
ηλεκτρομαγνητική συμβατότητα
Ηλεκτρομαγνητική συμβατότητα (Electro-Magnetic
Compatibility, EMC) σημαίνει ότι οι ηλεκτρομαγνητικές
παρεμβολές μεταξύ των τμημάτων του εξοπλισμού δεν
εμποδίζουν την απόδοσή τους. Η απαίτηση βασικής
προστασίας της οδηγίας σχετικά με την ηλεκτρομαγνητική
συμβατότητα 2014/30/ΕΕ αναφέρει ότι οι συσκευές που
παράγουν ηλεκτρομαγνητική παρεμβολή (Electromagnetic
Interference - EMI) ή η λειτουργία των οποίων θα
μπορούσε να επηρεαστεί από την EMI πρέπει να σχεδιάζονται έτσι ώστε να περιορίζουν τη δημιουργία
ηλεκτρομαγνητικής παρεμβολής και πρέπει να έχουν
κατάλληλο βαθμό ατρωσίας στην EMI όταν έχουν εγκατασταθεί, συντηρούνται και χρησιμοποιούνται όπως
προβλέπεται.
Ο μετατροπέας συχνότητας μπορεί να χρησιμοποιηθεί ως
αυτόνομη συσκευή ή ως τμήμα μιας πιο σύνθετης εγκατάστασης. Σε οποιαδήποτε από αυτές τις περιπτώσεις οι
συσκευές πρέπει να φέρουν τη σήμανση CE. Τα συστήματα
δεν πρέπει να φέρουν σήμανση CE αλλά πρέπει να
συμμορφώνονται με τις βασικές προστατευτικές απαιτήσεις
της οδηγίας σχετικά με την ηλεκτρομαγνητική
συμβατότητα.
1.5.4 Συμμόρφωση κατά UL
Δηλωμένη στα UL
Εφαρμοζόμενα πρότυπα και συμμόρφωση για την STO
Η χρήση STO στους ακροδέκτες 37 και 38 προϋποθέτει
κάλυψη όλων των διατάξεων για την ασφάλεια, συμπεριλαμβανομένων των σχετικών νόμων, κανονισμών και
οδηγιών. Η ενσωματωμένη λειτουργία STO συμμορφώνεται
με τα ακόλουθα πρότυπα:
με τα ακόλουθα πρότυπα:
IEC/EN 61508:2010, SIL2
•
IEC/EN 61800-5-2:2007, SIL2
•
IEC/EN 62061:2015, SILCL του SIL2
•
EN ISO 13849-1:2015, Κατηγορία 3 PL d
•
Οι ρυθμιστές στροφών ενδέχεται να υπόκεινται σε τοπικούς
ή/και εθνικούς κανονισμούς ελέγχου εξαγωγών.
Για την ταξινόμηση όλων των ρυθμιστών στροφών που
υπόκεινται σε κανονισμούς ελέγχου εξαγωγών, χρησιμοποιείται ένας αριθμός ECCN.
Ο αριθμός ECCN παρέχεται στα συνοδευτικά έγγραφα του
ρυθμιστή στροφών.
Σε περίπτωση επανεξαγωγής, αποτελεί ευθύνη του
εξαγωγέα να διασφαλίσει τη συμμόρφωση με τους
σχετικούς κανονισμούς ελέγχου εξαγωγών.
Ασφάλεια
1.6
Οι μετατροπείς συχνότητας περιέχουν εξαρτήματα υψηλής
τάσης και έχουν τη δυνατότητα θανάσιμου τραυματισμού
σε περίπτωση μη κατάλληλου χειρισμού τους. Η
εγκατάσταση και η λειτουργία του εξοπλισμού πρέπει να
εκτελείται μόνο από εξειδικευμένο προσωπικό. Μην επιχειρήσετε να εκτελέσετε επισκευαστική εργασία χωρίς να
αποσυνδέσετε πρώτα την τροφοδοσία από τον μετατροπέα
συχνότητας και χωρίς να περιμένετε για το καθορισμένο
χρονικό διάστημα για την διάχυση της συσσωρευμένης
ηλεκτρικής ενέργειας.
Ανατρέξτε στις οδηγίες λειτουργίας που συνοδεύουν τη
μονάδα και διατίθενται και δικτυακά για:
Το χρόνο εκφόρτισης.
•
Λεπτομερείς οδηγίες και προειδοποιήσεις
•
ασφαλείας.
Η αυστηρή προσήλωση στις προφυλάξεις και τις
επισημάνσεις ασφαλείας είναι υποχρεωτική για την ασφαλή
λειτουργία του μετατροπέα συχνότητας.
1 1
Εικόνα 1.2 UL
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 9
130BA870.10
130BA809.10
130BA810.10
130BA810.10
130BA810.10
Επισκόπηση προϊόντος
VLT® Midi Drive FC 280
2 Επισκόπηση προϊόντος
22
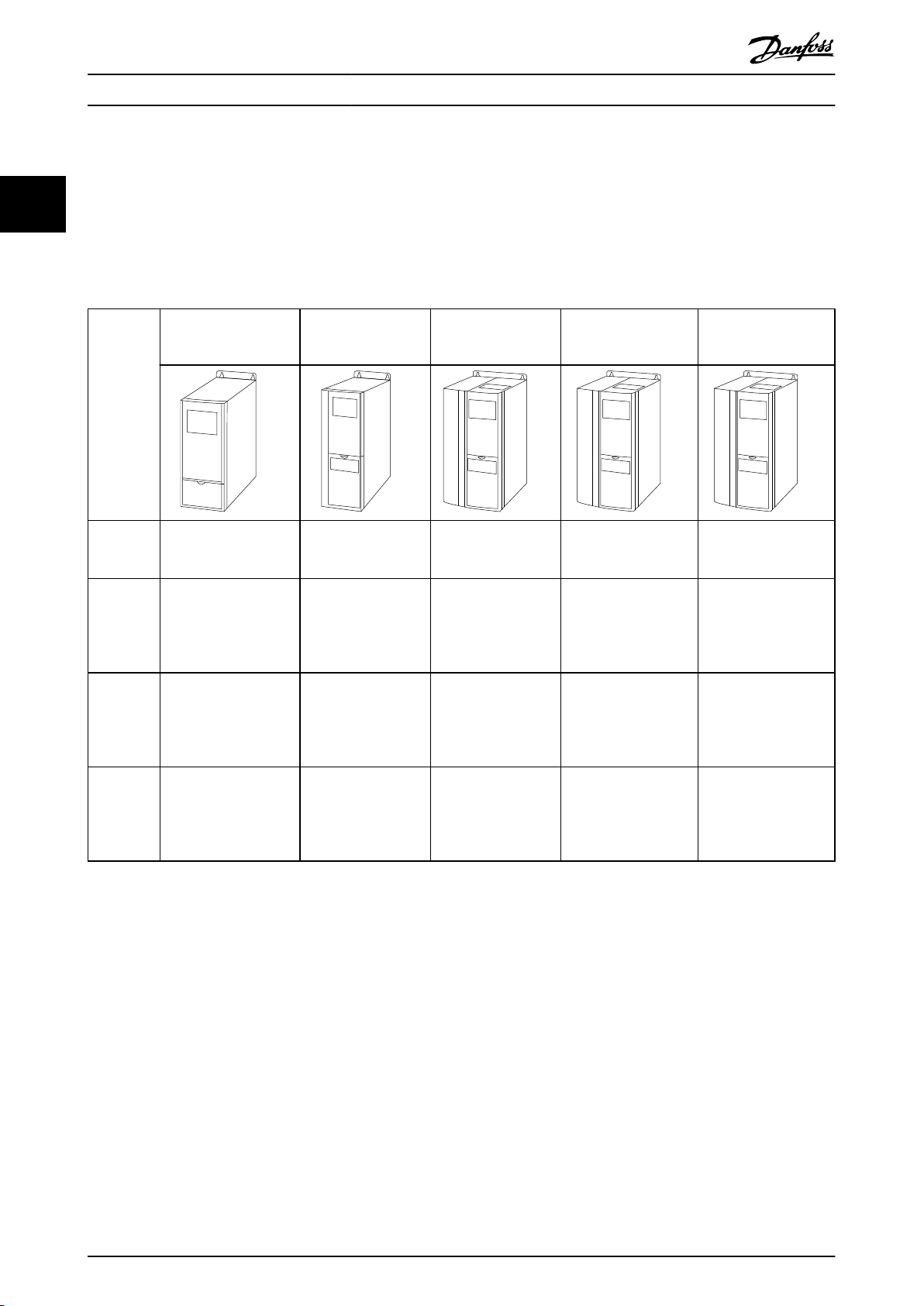
2.1 Επισκόπηση μεγέθους περιβλήματος
Το μέγεθος του περιβλήματος εξαρτάται από την περιοχή ισχύος. Για λεπτομέρειες σχετικά με τις διαστάσεις, ανατρέξτε στο
κεφάλαιο 7.13 Μεγέθη περιβλημάτων, ονομαστικές ισχύες και διαστάσεις.
Μέγεθος
περιβλήματ
ος
Προστασία
περιβλήματ
1)
ος
Περιοχή
ισχύος
[kW (hp)]
Τριφασική
380–480 V
Περιοχή
ισχύος
[kW (hp)]
Τριφασική
200–240 V
Περιοχή
ισχύος
[kW (hp)]
μονοφασική
200–240 V
K1 K2 K3 K4 K5
IP20 IP20 IP20 IP20 IP20
0,37–2,2 (0,5–3,0) 3,0–5,5 (5,0–7,5) 7,5 (10) 11–15 (15–20) 18,5–22 (25–30)
0,37–1,5 (0,5–2,0) 2,2 (3,0) 3,7 (5,0) – –
0,37–1,5 (0,5–2,0) 2,2 (3,0) – – –
Πίνακας 2.1 Μεγέθη περιβλημάτων
1) Το επίπεδο προστασίας IP21 διατίθεται για κάποιες παραλλαγές του VLT® Midi Drive FC 280. Με την τοποθέτηση των προαιρετικών κιτ IP21, όλα
τα μεγέθη ισχύος μπορούν να είναι IP21.
Το μέγεθος περιβλήματος χρησιμοποιείται στο σύνολο του παρόντος οδηγού, όποτε οι διαδικασίες ή οι διαστάσεις
διαφέρουν μεταξύ των ρυθμιστών στροφών, ανάλογα με το φυσικό μέγεθος.
Βρείτε το μέγεθος περιβλήματος, εφαρμόζοντας τα παρακάτω βήματα:
1. Βρείτε τις ακόλουθες πληροφορίες από τον κωδικό τύπου στην πινακίδα στοιχείων. Ανατρέξτε στο Εικόνα 2.1.
1a Ομάδα προϊόντων και σειρά ρυθμιστή στροφών (1–6 χαρακτήρες), για παράδειγμα FC 280.
1b Ονομαστική ισχύς (7–10 χαρακτήρες), για παράδειγμα PK37.
1c Ονομαστική τάση (φάσεις και δίκτυο ρεύματος) (11–12 χαρακτήρες), για παράδειγμα T4.
2. Εντός του Πίνακας 2.2, βρείτε την ονομαστική ισχύ και τάση και αναζητήστε το μέγεθος περιβλήματος του FC 280.
10 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327
130BF709.10
VLT
MADE IN
DENMARK
T/C: FC-280PK37T4E20H1BXCXXXSXXXXAX
0.37kW 0.5HP
IN: 3x380-480V 50/60Hz, 1.2/1.0A
OUT: 3x0-Vin 0-500Hz, 1.2/1.1A
IP20
P/N: 134U2184 S/N: 000000G000
Midi Drive
www.danfoss.com
CAUTION / ATTENTION:
WARNING / AVERTISSEMENT:
See manual for special condition/mains fuse
Voir manual de conditions speciales/fusibles
Enclosure: See manual
5AF3 E358502 IND.CONT.EQ.
Stored charge, wait 4 min.
Charge r
é
siduelle, attendez 4 min.
R
US LISTED
www.tuv.com
ID 0600000000
Danfoss A/S, 6430 Nordborg, Denmark
1 2 3
Επισκόπηση προϊόντος Οδηγός σχεδίασης εφαρμογών
1 Ομάδα προϊόντος και σειρά ρυθμιστή στροφών
2 Ονομαστική τιμή ισχύος
3 Ονομαστική τάση (φάσεις και δίκτυο ρεύματος)
Εικόνα 2.1 Χρήση της πινακίδας στοιχείων για την Εύρεση του
μεγέθους περιβλήματος
2 2
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 11
Επισκόπηση προϊόντος
VLT® Midi Drive FC 280
Ονομαστική
ισχύς στην
πινακίδα
22
στοιχείων
PK37 0,37 (0,5)
PK55 0,55 (0,75)
PK75 0,75 (1,0)
P1K1 1,1 (1,5)
P1K5 1,5 (2,0)
P2K2 2,2 (3,0)
P3K0 3 (4,0)
P5K5 5,5 (7,5)
P7K5 7,5 (10) K3 K3T4
P11K 11 (15)
P15K 15 (20)
P18K 18,5 (25)
P22K 22 (30)
PK37 0,37 (0,5)
PK55 0,55 (0,75)
PK75 0,75 (1,0)
P1K1 1,1 (1,5)
P1K5 1,5 (2,0)
P2K2 2,2 (3,0) K2 K2T2
P3K7 3,7 (5,0) K3 K3T2
PK37 0,37 (0,5)
PK55 0,55 (0,75)
PK75 0,75 (1,0)
P1K1 1,1 (1,5)
P1K5 1,5 (2,0)
P2K2 2,2 (3,0) K2 K2S2
Ισχύς
[kW (hp)]
Ονομαστική τάση
στην πινακίδα
στοιχείων
T4 τριφασικό 380–480 V
T2 τριφασικό 200–240 V
S2 Μονοφασικό 200–240 V
Φάσεις και τάση δικτύου ρεύματος
Μέγεθος
περιβλήματος
K1 K1T4
K2 K2T4P4K0 4 (5,0)
K4 K4T4
K5 K5T4
K1 K1T2
K1 K1S2
Ρυθμιστής
στροφών
Πίνακας 2.2 Μέγεθος περιβλήματος του FC 280
12 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327
Power
input
Switch mode
power supply
Motor
Analog output
interface
(PNP) = Source
(NPN) = Sink
ON = Terminated
OFF = Open
Brake
resistor
91 (L1/N)
92 (L2/L)
93 (L3)
PE
50 (+10 V OUT)
53 (A IN)
2)
54 (A IN)
55 (COM digital/analog I/O)
0/4−20 mA
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
10 V DC
15 mA 100 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(A OUT) 42
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0 V
5 V
S801
0/4−20 mA
RS485
RS485
03
+10 V DC
0−10 V DC
24 V DC
02
01
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
27 (D IN/OUT)
24 V
0 V
0 V (PNP)
24 V (NPN)
29 (D IN)
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
38 (STO2)
4)
37 (STO1)
4)
95
P 5-00
21
ON
(+DC/R+) 89
(R-) 81
0−10 V DC
(-DC) 88
RFI
0 V
250 V AC, 3 A
Relay 1
1)
3)
5)
5)
130BE202.18
Επισκόπηση προϊόντος Οδηγός σχεδίασης εφαρμογών
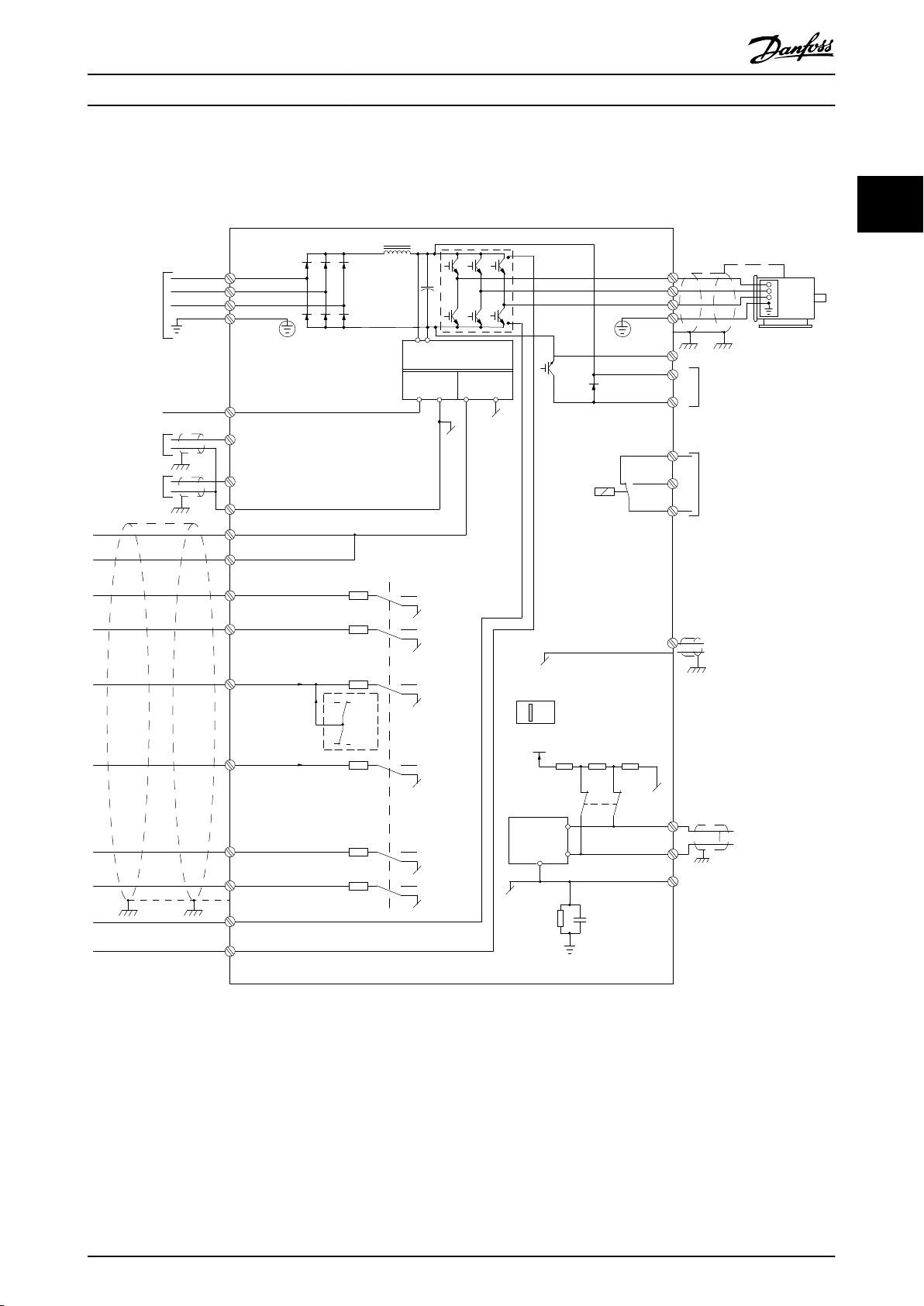
2.2 Ηλεκτρική εγκατάσταση
Η ενότητα αυτή περιγράφει τη συνδεσμολογία του ρυθμιστή στροφών.
2 2
Εικόνα 2.2 Σχηματικό διάγραμμα βασικής συνδεσμολογίας
A = αναλογικό, D = ψηφιακό
1) Το ενσωματωμένο τρανζίστορ πέδης διατίθεται μόνο στις τριφασικές μονάδες.
2) Ο ακροδέκτης 53 μπορεί επίσης να χρησιμοποιηθεί ως ψηφιακή είσοδος.
3) Ο διακόπτης S801 (ακροδέκτης διαύλου) μπορεί να χρησιμοποιηθεί για την ενεργοποίηση του τερματισμού στη θύρα RS485
(ακροδέκτες 68 και 69).
4) Ανατρέξτε στο κεφάλαιο 4 Safe Torque O (STO) για τη σωστή καλωδίωση STO.
5) Ο ρυθμιστής στροφών S2 (μονοφασικό, 200–240 V) δεν υποστηρίζει την εφαρμογή διαμοιρασμού φορτίου.
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 13
130BF228.10
L1
L2
L3
PE
PE
u
v
w
2
1
3
5
16
17
18
14
12
8
7
10
9
4
11
13
4
4
6
15
90
Επισκόπηση προϊόντος
VLT® Midi Drive FC 280
22
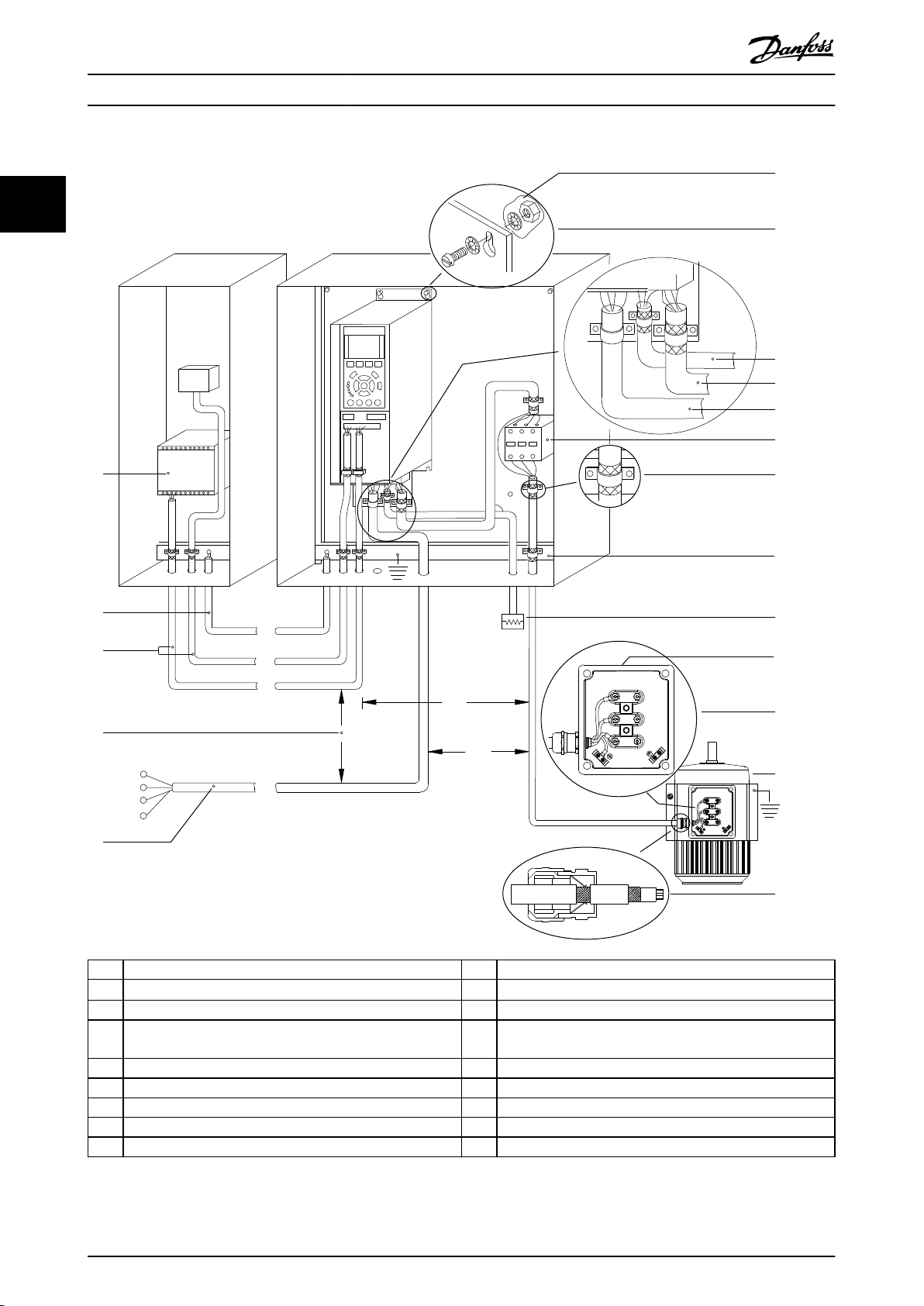
1 PLC 10 Καλώδιο δικτύου ρεύματος (χωρίς θωράκιση)
2
Ελάχιστη διατομή εξισορρόπησης φορτίων 16 mm2 (6 AWG)
3 Καλώδια ελέγχου 12 Μόνωση καλωδίων, γυμνά
4 Τουλάχιστον 200 mm (656 ft) μεταξύ των καλωδίων ελέγχου,
του κινητήρα και της παροχής δικτύου.
5 Τροφοδοσία ρεύματος 14 Αντιστάτης πέδησης
6 Γυμνή (άβαφη) επιφάνεια 15 Μεταλλικό κυτίο
7 Αστεροειδείς ροδέλες 16 Σύνδεση στον κινητήρα
8 Καλώδιο πέδης (θωρακισμένο) 17 Κινητήρας
9 Καλώδιο κινητήρα (θωρακισμένο) 18 Στυπιοθλίπτης καλωδίων ΗΜΣ
Εικόνα 2.3 Τυπική ηλεκτρική σύνδεση
11 Επαφέας εξόδου και τα συναφή.
13 Κοινός ζυγός γείωσης. Ακολουθήστε τους εθνικούς και τους
τοπικούς κανονισμούς για τη γείωση του ερμαρίου.
14 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327
130BD531.10
U
V
W
96
97
98
Επισκόπηση προϊόντος Οδηγός σχεδίασης εφαρμογών
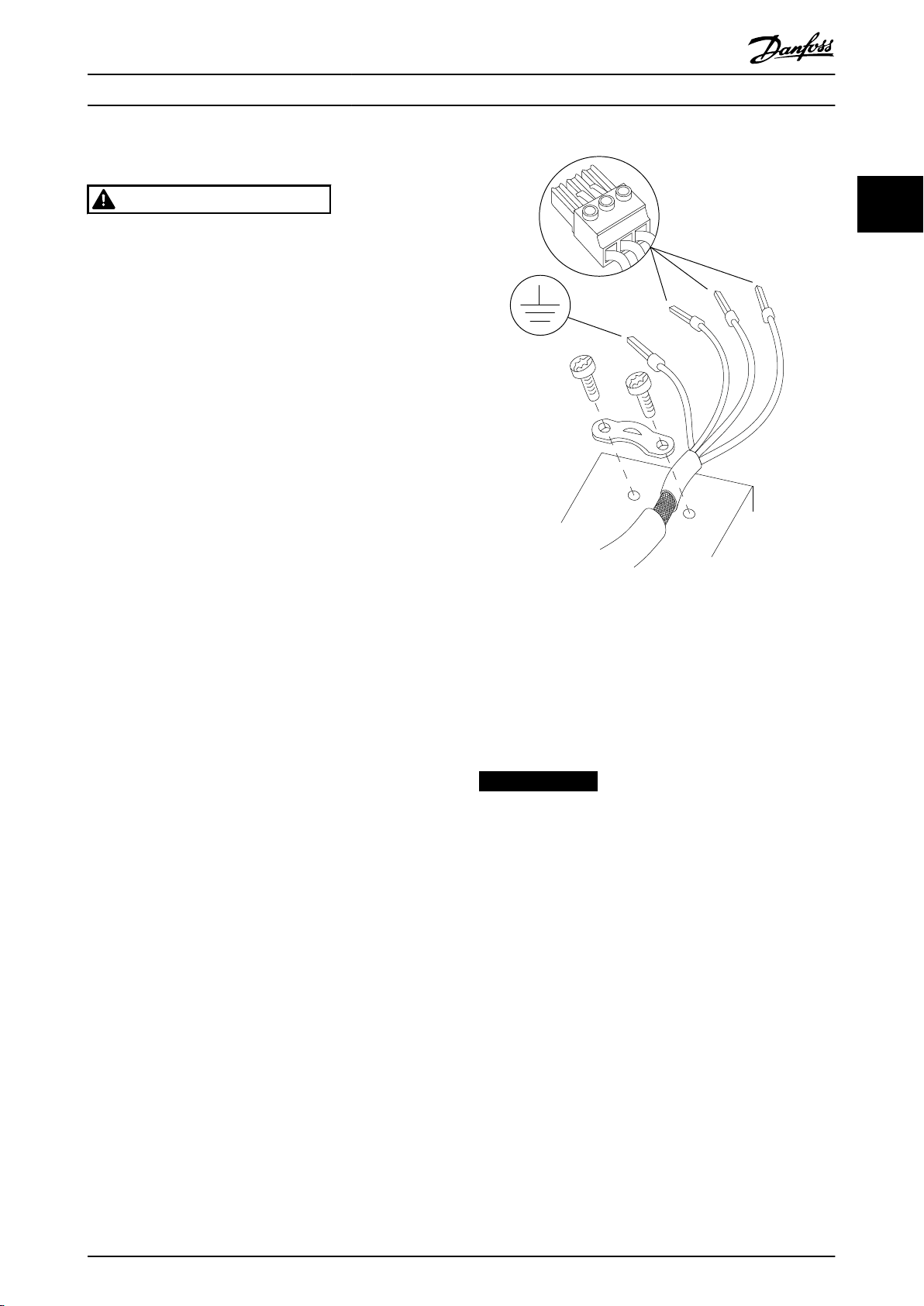
2.2.1 Σύνδεση κινητήρα
ΠΡΟΕΙΔΟΠΟΙΗΣΗ
ΕΠΑΓΟΜΕΝΗ ΤΑΣΗ
Η επαγόμενη τάση από τα καλώδια εξόδου του κινητήρα
που ακολουθούν την ίδια διαδρομή μπορεί να φορτίσει
τους πυκνωτές του εξοπλισμού ακόμα και όταν ο
εξοπλισμός είναι απενεργοποιημένος και απομονωμένος.
Η μη εφαρμογή ξεχωριστής τοποθέτησης για τα καλώδια
εξόδου του κινητήρα ή η μη χρήση θωρακισμένων
καλωδίων μπορεί να οδηγήσει σε θάνατο ή σοβαρό
τραυματισμό.
Δρομολογήστε ξεχωριστά τα καλώδια εξόδου
•
κινητήρα.
Χρησιμοποιήστε θωρακισμένα καλώδια.
•
Πρέπει να τηρούνται πάντα οι εθνικοί και τοπικοί
•
κανονισμοί σχετικά με τα μεγέθη των καλωδίων.
Για τα μέγιστα μεγέθη καλωδίων ανατρέξτε στην
ενότητα κεφάλαιο 7.1 Ηλεκτρικά δεδομένα.
Ακολουθείτε τις απαιτήσεις καλωδίωσης του
•
κατασκευαστή.
Στη βάση των μονάδων IP21 (NEMA τύπου 1)
•
παρέχονται οπές διέλευσης ή καλύμματα
πρόσβασης κινητήρα.
Μην συνδέετε μια διάταξη εκκίνησης ή αλλαγής
•
πόλων (για παράδειγμα κινητήρα Dahlander ή
κινητήρα επαγωγής δακτυλίου ολίσθησης) μεταξύ
του ρυθμιστή στροφών και του κινητήρα.
Διαδικασία
1. Αφαιρέστε ένα τμήμα της εξωτερικής μόνωσης
του καλωδίου. Το προτεινόμενο μήκος είναι 10–15
mm (0,4–0,6 in).
2. Τοποθετήστε το γυμνό καλώδιο κάτω από το
σφιγκτήρα καλωδίου για να σταθεροποιηθεί
μηχανικά και να υπάρχει ηλεκτρική επαφή μεταξύ
της θωράκισης καλωδίου και της γείωσης.
3. Συνδέστε το καλώδιο γείωσης στον πλησιέστερο
ακροδέκτη γείωσης σύμφωνα με τις οδηγίες
γείωσης που παρέχονται στο κεφάλαιο Γείωση
στον Οδηγό λειτουργίας του VLT® Midi Drive FC
280. Ανατρέξτε στο Εικόνα 2.4.
4. Συνδέστε την τριφασική καλωδίωση του κινητήρα
στους ακροδέκτες 96 (U), 97 (V) και 98 ( W), όπως
φαίνεται στο Εικόνα 2.4.
5. Σφίξτε τους ακροδέκτες σύμφωνα με τις
πληροφορίες που παρέχονται στο
κεφάλαιο 7.7 Ροπές σύσφιξης σύνδεσης.
2 2
Εικόνα 2.4 Σύνδεση κινητήρα
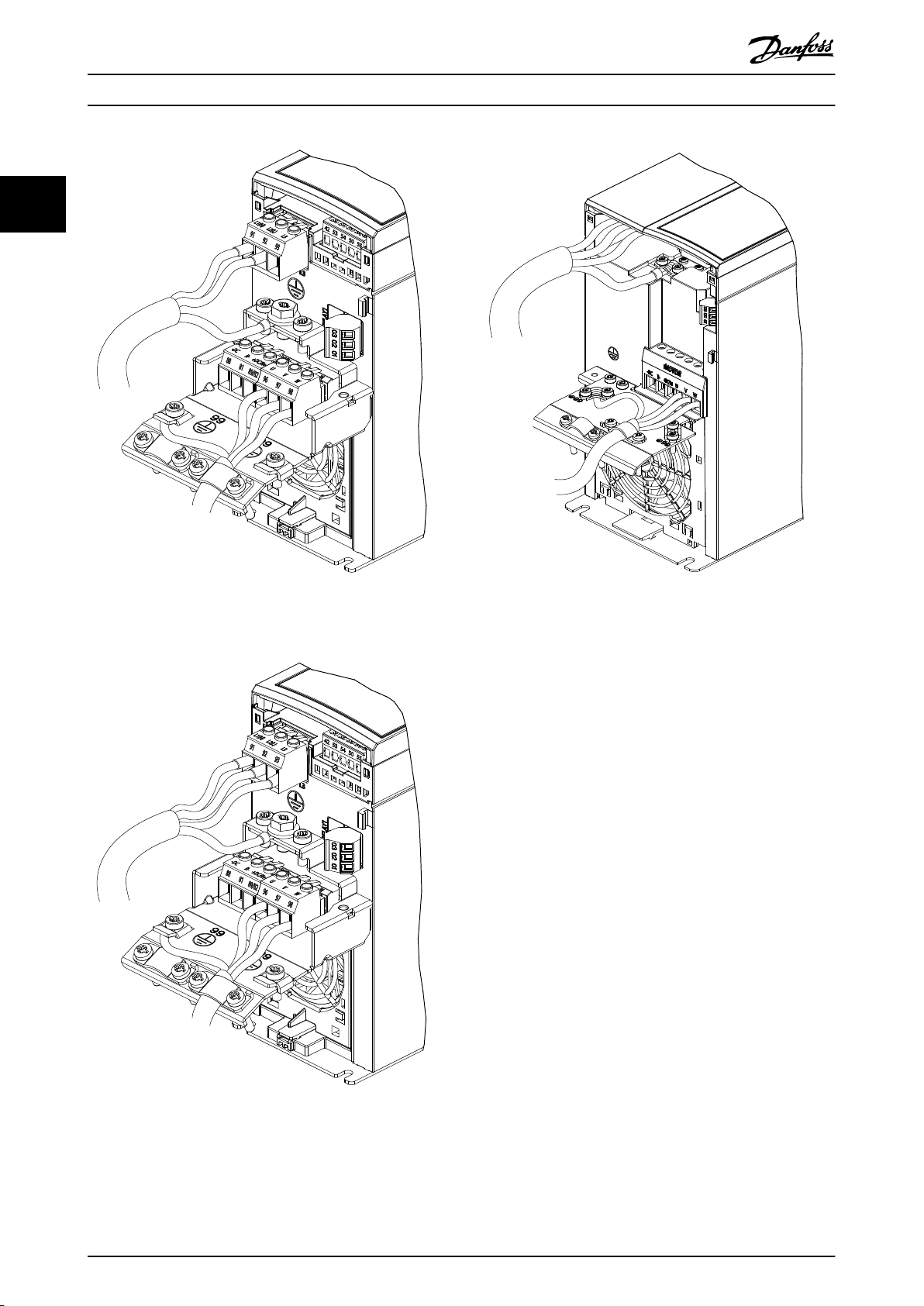
Η σύνδεση του δικτύου ρεύματος, του κινητήρα και της
γείωσης για μονοφασικούς και τριφασικούς μετατροπείς
συχνότητας απεικονίζονται στο Εικόνα 2.5, Εικόνα 2.6, και
Εικόνα 2.7, αντίστοιχα. Οι πραγματικές διαμορφώσεις
ποικίλουν, ανάλογα με τους διαφορετικούς τύπους
μονάδων και τον προαιρετικό εξοπλισμό.
ΕΙΔΟΠΟΙΗΣΗ
Σε κινητήρες χωρίς μονωτικό φάσεων, χαρτί ή άλλη
ενίσχυση μόνωσης κατάλληλη για λειτουργία με
τροφοδοσία τάσης, χρησιμοποιήστε φίλτρο
ημιτονοειδούς κύματος στην έξοδο του ρυθμιστή
στροφών.
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 15
130BE232.11
130BE231.11
130BE804.10
Επισκόπηση προϊόντος
VLT® Midi Drive FC 280
22
Εικόνα 2.5 Σύνδεση δικτύου τροφοδοσίας, κινητήρα και
γείωσης για μονοφασικές μονάδες (Κ1, Κ2)
Εικόνα 2.6 Σύνδεση δικτύου τροφοδοσίας, κινητήρα και
γείωσης για τριφασικές μονάδες (Κ1, Κ2, Κ3)
Εικόνα 2.7 Σύνδεση δικτύου τροφοδοσίας, κινητήρα και
γείωσης για τριφασικές μονάδες (Κ4, Κ5)
2.2.2 Σύνδεση δικτύου ΕΡ
Υπολογίστε τις διαστάσεις της καλωδίωσης με
•
βάση το ρεύμα εισόδου του ρυθμιστή στροφών.
Για τα μέγιστα μεγέθη καλωδίων δείτε την
κεφάλαιο 7.1 Ηλεκτρικά δεδομένα.
Πρέπει να τηρούνται πάντα οι εθνικοί και τοπικοί
•
κανονισμοί σχετικά με τα μεγέθη των καλωδίων.
Διαδικασία
1. Συνδέστε τα καλώδια εισόδου ΕΡ στους
ακροδέκτες N και L για τις μονοφασικές μονάδες
(ανατρέξτε στο Εικόνα 2.5), ή στους ακροδέκτες
L1, L2 και L3 για τις τριφασικές μονάδες
(ανατρέξτε στο Εικόνα 2.6 και στο Εικόνα 2.7).
2. Ανάλογα με τη διαμόρφωση του εξοπλισμού,
συνδέστε την ισχύ εισόδου στους ακροδέκτες
εισόδου δικτύου ρεύματος ή στον αποζεύκτη
εισόδου.
3. Γειώστε το καλώδιο σύμφωνα με τις οδηγίες
γείωσης στο κεφάλαιο Γείωση στον Οδηγό
λειτουργίας του VLT® Midi Drive FC 280.
4. Όταν η παροχή προέρχεται από μονωμένη πηγή
δικτύου (δίκτυο ΙΤ ή αγείωτο τρίγωνο) ή από
δίκτυο ΤΤ/ΤΝ-S με ένα γειωμένο σκέλος (γειωμένο
τρίγωνο) φροντίστε να αφαιρεθεί η βίδα του
φίλτρου RFI. Η αφαίρεση της βίδας RFI αποτρέπει
τη ζημιά στη ζεύξη ΣΡ και μειώνει τα χωρητικά
16 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327
130BE212.10
1 2
3
130BE214.10
37 38 12 13 18 19 27 29 32 33 61
42 53 54 50 55
68 69
1
3
2
Επισκόπηση προϊόντος Οδηγός σχεδίασης εφαρμογών
ρεύματα γείωσης σύμφωνα με το IEC 61800-3
(ανατρέξτε στο Εικόνα 7.13, η βίδα RFI βρίσκεται
στην πλευρά του ρυθμιστή στροφών).
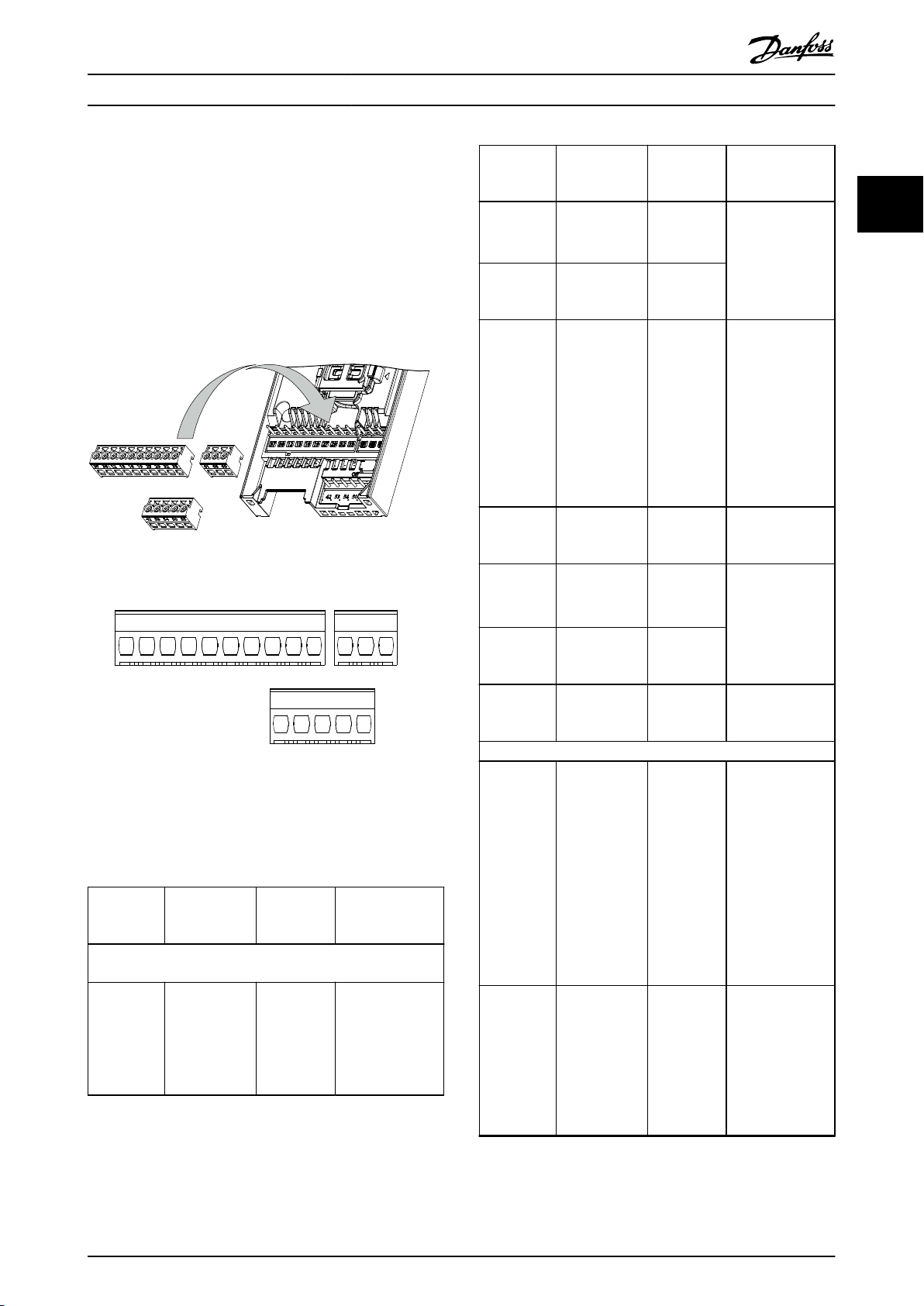
2.2.3 Τύποι ακροδεκτών ελέγχου
Η Εικόνα 2.8 παρουσιάζει τους αφαιρούμενους συνδέσμους
σύνδεσης του ρυθμιστή στροφών. Οι λειτουργίες των
ακροδεκτών και οι προεπιλεγμένες ρυθμίσεις περιγράφονται περιληπτικά στην Πίνακας 2.3 και την Πίνακας 2.4.
Εικόνα 2.8 Θέσεις ακροδεκτών ελέγχου
Εικόνα 2.9 Αριθμοί ακροδεκτών
Ανατρέξτε στο κεφάλαιο 7.6 Είσοδος/έξοδος ελέγχου και
Δεδομένα ελέγχου για λεπτομέρειες σχετικά με τα
ονομαστικά μεγέθη των ακροδεκτών.
Προεπι-
Ακροδέκτης Παράμετρος
Ψηφιακή είσοδος/έξοδος, παλμική είσοδος/έξοδος, κωδικο-
12, 13 – +24 V DC
ρύθμιση
ποιητής
λεγμένη
Περιγραφή
Τάση τροφοδοσίας
24V ΣΡ. Η μέγιστη
ένταση ρεύματος
εξόδου είναι 100
mA για όλα τα
φορτία 24 V.
Ακροδέκτης Παράμετρος
Παράμετρος
18
19
27
29
32
33
37, 38 – STO
42
50 – +10 V DC
5-10 Terminal
18 Digital Input
Παράμετρος
5-11 Terminal
19 Digital Input
Παράμετρος
5-01 Terminal
27 Mode
Παράμετρος
5-12 Terminal
27 Digital Input
Παράμετρος
5-30 Terminal
27 Digital
Output
Παράμετρος
5-13 Terminal
29 Digital Input
Παράμετρος
5-14 Terminal
32 Digital Input
Παράμετρος
5-15 Terminal
33 Digital Input
Αναλογικές είσοδοι/έξοδοι
Παράμετρος
6-91 Terminal
42 Analog
Output
Προεπι-
λεγμένη
ρύθμιση
[8] Εκκίνηση
[10]
Αναστροφή
DI [2]
Αντίστρ. ελ.
κίνηση
DO [0] Καμία
λειτουργία
[14] Ελαφρά
ώθηση
[0] Χωρίς
λειτουργία
[0] Χωρίς
λειτουργία
[0] Χωρίς
λειτουργία
Περιγραφή
2 2
Ψηφιακές είσοδοι.
Μπορεί να επιλεγεί
για ψηφιακή
είσοδο, ψηφιακή
έξοδο ή παλμική
έξοδο. Η προεπι-
λεγμένη ρύθμιση
είναι ψηφιακή
είσοδος.
Ψηφιακή είσοδος.
Ψηφιακή είσοδος,
κωδικοποιητής 24
V. Ο ακροδέκτης
33 μπορεί να
χρησιμοποιηθεί ως
παλμική είσοδος.
Είσοδοι
λειτουργικής
ασφάλειας.
Προγραμματι-
ζόμενη αναλογική
έξοδος. Το
αναλογικό σήμα
είναι 0-20 mA ή
4-20 mA σε μία
μέγιστη τιμή 500
Ω. Μπορούν
επίσης να
προγραμματιστούν
σαν ψηφιακές
έξοδοι.
Αναλογική τάση
τροφοδοσίας 10 V
ΣΡ. Ένα μέγιστο 15
mA χρησιμο-
ποιείται συνήθως
για ένα
ποτενσιόμετρο ή
θερμίστορ.
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 17

Επισκόπηση προϊόντος
VLT® Midi Drive FC 280
Προεπι-
Ακροδέκτης Παράμετρος
22
Ομάδα
53
54
55 – –
παραμέτρων
6-1* Αναλογική
είσοδος 53
Ομάδα
παραμέτρων
6-2* Αναλογική
είσοδος 54
λεγμένη
ρύθμιση
–
–
Περιγραφή
Αναλογική
είσοδος. Υποστη-
ρίζεται μόνο ο
τρόπος
λειτουργίας τάσης.
Μπορεί να
χρησιμοποιηθεί και
ως ψηφιακή
είσοδος.
Αναλογική
είσοδος. Μπορεί
να επιλεχθεί
μεταξύ των
τρόπων
λειτουργίας τάσης
ή έντασης.
Κοινό για
ψηφιακές και
αναλογικές
εισόδους.
Ακροδέκτης Παράμετρος
Παράμετρος
01, 02, 03
Πίνακας 2.4 Περιγραφές ακροδεκτών - Σειριακή επικοινωνία
5-40 Function
Relay
2.2.4 Καλωδίωση στους ακροδέκτες
σήματος ελέγχου
Οι σύνδεσμοι των ακροδεκτών σήματος ελέγχου μπορούν
Προεπι-
λεγμένη
ρύθμιση
[1] Έλ.έτοιμος
Περιγραφή
Έξοδος ρελέ
τύπου Γ. Αυτά τα
ρελέ βρίσκονται
σε διάφορες
θέσεις ανάλογα με
τη διαμόρφωση
και το μέγεθος του
ρυθμιστή
στροφών.
Χρησιμοποιείται
για τάση ΕΡ ή ΣΡ
και ομικά ή
επαγωγικά φορτία.
να αφαιρεθούν από τον μετατροπέα συχνότητας για
Πίνακας 2.3 Περιγραφές ακροδεκτών - Ψηφιακές είσοδοι/έξοδοι,
Αναλογικές είσοδοι/έξοδοι
σκοπούς ευκολίας εγκατάστασης, όπως παρουσιάζεται στο
Εικόνα 2.8.
Ακροδέκτης Παράμετρος
Σειριακή επικοινωνία
61 – –
Ομάδα
68 (+)
69 (-)
παραμέτρων
8-3* Ρυθμίσεις
θύρας FC
Ομάδα
παραμέτρων
8-3* Ρυθμίσεις
θύρας FC
Προεπι-
λεγμένη
ρύθμιση
Ρελέ
–
–
Περιγραφή
Ενσωματωμένο
φίλτρο RC για
θωράκιση
καλωδίου, ΜΟΝΟ
για σύνδεση της
θωράκισης όταν
αντιμετωπίζετε
προβλήματα EMC.
Διασύνδεση RS485.
Παρέχεται ένας
διακόπτης κάρτας
ελέγχου για
αντίσταση
τερματισμού.
Για λεπτομέρειες σχετικά με την καλωδίωση STO, ανατρέξτε
στο κεφάλαιο 4 Safe Torque O (STO).
ΕΙΔΟΠΟΙΗΣΗ
Διατηρήστε τα καλώδια ελέγχου όσο το δυνατό πιο
κοντά και ξεχωρίστε τα από τα καλώδια υψηλής ισχύος
για την ελαχιστοποίηση των παρεμβολών.
1. Χαλαρώστε τις βίδες των ακροδεκτών.
2. Εισάγετε τα μονωμένα καλώδια σήματος ελέγχου
στις σχισμές.
3. Σφίξτε τις βίδες των ακροδεκτών.
4. Βεβαιωθείτε ότι η επαφή είναι γερά σφιγμένη και
όχι χαλαρή. Τυχόν χαλαρή καλωδίωση ελέγχου
μπορεί να οδηγήσει σε σφάλματα εξοπλισμού ή
μη βέλτιστη λειτουργία.
Ανατρέξτε στο κεφάλαιο 7.5 Προδιαγραφές καλωδίου για τα
μεγέθη καλωδίων των ακροδεκτών ελέγχου και
κεφάλαιο 3 Παραδείγματα εφαρμογής για τις τυπικές
συνδέσεις καλωδίων ελέγχου.
18 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

Επισκόπηση προϊόντος Οδηγός σχεδίασης εφαρμογών
2.3 Δομές ελέγχου
Οι μετατροπείς συχνότητας ανορθώνουν την τάση ΕΡ του
δικτύου ρεύματος σε τάση ΣΡ. Κατόπιν η τάση ΣΡ
μετατρέπεται σε ρεύμα ΕΡ μεταβλητού πλάτους και
συχνότητας.
Ο κινητήρας τροφοδοτείται με μεταβλητή τάση/ρεύμα και
συχνότητα δίνοντας τη δυνατότητα απείρως μεταβλητού
ελέγχου στροφών τριφασικών τυπικών κινητήρων ΕΡ και
σύγχρονων κινητήρων μόνιμου μαγνήτη.
•
2.3.1 Τρόποι λειτουργίας ελέγχου
Ο μετατροπέας συχνότητας ελέγχει είτε τις στροφές είτε τη
ροπή του άξονα του κινητήρα. Ο μετατροπέας συχνότητας
ελέγχει επίσης τη διεργασία για κάποιες εφαρμογές που
χρησιμοποιούν τα δεδομένα της διεργασίας ως τιμή
αναφοράς ή ανάδραση, για παράδειγμα, θερμοκρασία και
πίεση. Η ρύθμιση της παράμετρος 1-00 Conguration Mode
καθορίζει το είδος του ελέγχου.
Έλεγχος ταχύτητας
Υπάρχουν 2 είδη ελέγχου ταχύτητας:
Ο έλεγχος ταχύτητας ανοικτού βρόχου που δεν
•
απαιτεί κάποια ανάδραση από τον κινητήρα
(χωρίς αισθητήρες).
Ο έλεγχος ταχύτητας PD κλειστού βρόχου που
•
απαιτεί σήμα ανάδρασης ταχύτητας σε μια
είσοδο. Ένας κατάλληλα βελτιστοποιημένος
έλεγχος ταχύτητας κλειστού βρόχου διαθέτει
μεγαλύτερη ακρίβεια σε σχέση με τον έλεγχο
ταχύτητας ανοικτού βρόχου.
Επιλέξτε την είσοδο που θα χρησιμοποιήσετε ως είσοδο
ανάδρασης PID στην παράμετρος 7-00 Speed PID Feedback
Source.
Έλεγχος ροπής
Η λειτουργία ελέγχου ροπής χρησιμοποιείται σε εφαρμογές
όπου η ροπή στον άξονα εξόδου του κινητήρα ελέγχει την
εφαρμογή όπως ο έλεγχος έντασης. Επιλέξτε [2] Κλειστός
βρόχος ροπής ή [4] Ανοικτός βρόχος ροπής στην
παράμετρος 1-00 Conguration Mode. Η ρύθμιση της ροπής
επιτυγχάνεται ορίζοντας μια αναλογική, ψηφιακή ή
ελεγχόμενη μέσω διαύλου τιμή αναφοράς. Κατά την
εκτέλεση του ελέγχου ροπής, προτείνεται η εκτέλεση
πλήρους διαδικασίας AMA επειδή τα σωστά δεδομένα του
κινητήρα είναι σημαντικά για την επίτευξη της βέλτιστης
απόδοσης.
•
Τιμή αναφοράς ταχύτητας/ροπής
Η τιμή αναφοράς αυτών των ελέγχων μπορεί να είναι είτε
μία μόνο τιμή αναφοράς ή το σύνολο διαφόρων τιμών
αναφοράς περιλαμβανομένων και σχετικά ανηγμένων τιμών
αναφοράς. Ο χειρισμός των τιμών αναφοράς επεξηγείται
λεπτομερώς στο κεφάλαιο 2.4 Χειρισμός τιμών αναφοράς.
Έλεγχος διεργασίας
Υπάρχουν 2 είδη ελέγχου διεργασίας:
•
•
Κλειστός βρόχος σε τρόπο λειτουργίας VVC+. Η
λειτουργία αυτή χρησιμοποιείται σε εφαρμογές με
μικρή έως μέτρια δυναμική μεταβολή του άξονα
και παρέχει εξαιρετική απόδοση και στα 4
τεταρτημόρια και σε όλες τις ταχύτητες κινητήρα.
Η ύπαρξη σήματος ανάδρασης ταχύτητας είναι
υποχρεωτική. Εξασφαλίστε ότι η ανάλυση της
παλμογεννήτριας είναι τουλάχιστον 1.024 PPR και
ότι το καλώδιο θωράκισης της παλμογεννήτριας
είναι σωστά γειωμένο, επειδή η ακρίβεια του
σήματος ανάδρασης ταχύτητας είναι σημαντική.
Ρυθμίστε την παράμετρος 7-06 Speed PID Lowpass
Filter Time για να λάβετε το καλύτερο σήμα
ανάδρασης ταχύτητας.
Ανοικτός βρόχος σε τρόπο λειτουργίας VVC+. Η
λειτουργία αυτή χρησιμοποιείται σε εφαρμογές
μηχανολογικά ισχυρές αλλά η ακρίβεια είναι
περιορισμένη. Η λειτουργία ροπής ανοικτού
βρόχου λειτουργεί για 2 κατευθύνσεις. Η ροπή
υπολογίζεται από την εσωτερική μέτρηση
ρεύματος στον μετατροπέα συχνότητας.
Ο έλεγχος διεργασίας κλειστού βρόχου που
εκτελεί ανοικτό βρόχο ταχύτητας για τον
εσωτερικό έλεγχο του κινητήρα, είναι ένας
βασικός ελεγκτής PID διεργασίας.
Ο εκτεταμένος έλεγχος PID διεργασίας ταχύτητας
ανοικτού βρόχου που επίσης εκτελεί ανοικτό
βρόχος ταχύτητας για τον εσωτερικό έλεγχο του
κινητήρα, επεκτείνει τη λειτουργία του βασικού
ελεγκτής PID διεργασίας προσθέτοντας
περισσότερες λειτουργίες. Για παράδειγμα,
έλεγχος κανονικής κατεύθυνσης παροχής,
σύσφιξη, φίλτρο τιμής αναφοράς/ανάδρασης και
κλιμάκωση απολαβής.
2 2
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 19
130BD974.10
L2 92
L1 91
L3 93
M
U 96
V 97
W 98
RFI switch
Inrush
R+
82
Load sharing -
88(-)
R81
Brake resistor
Load sharing +
89(+)
+
_
+
_
S
S
Cong. mode
Ref.
Process
P 1-00
High
+f max.
Low
-f max.
P 4-12
Motor speed
low limit (Hz)
P 4-14
Motor speed
high limit (Hz)
Motor
controller
Ramp
Speed
PID
P 7-20 Process feedback
1 source
P 7-22 Process feedback
2 source
P 7-00 Speed PID
feedback source
P 1-00
Cong. mode
P 4-19
Max. output freq.
-f max.
Motor
controller
P 4-19
Max. output freq.
+f max.
P 3-**
P 7-0*
130BD371.10
Επισκόπηση προϊόντος
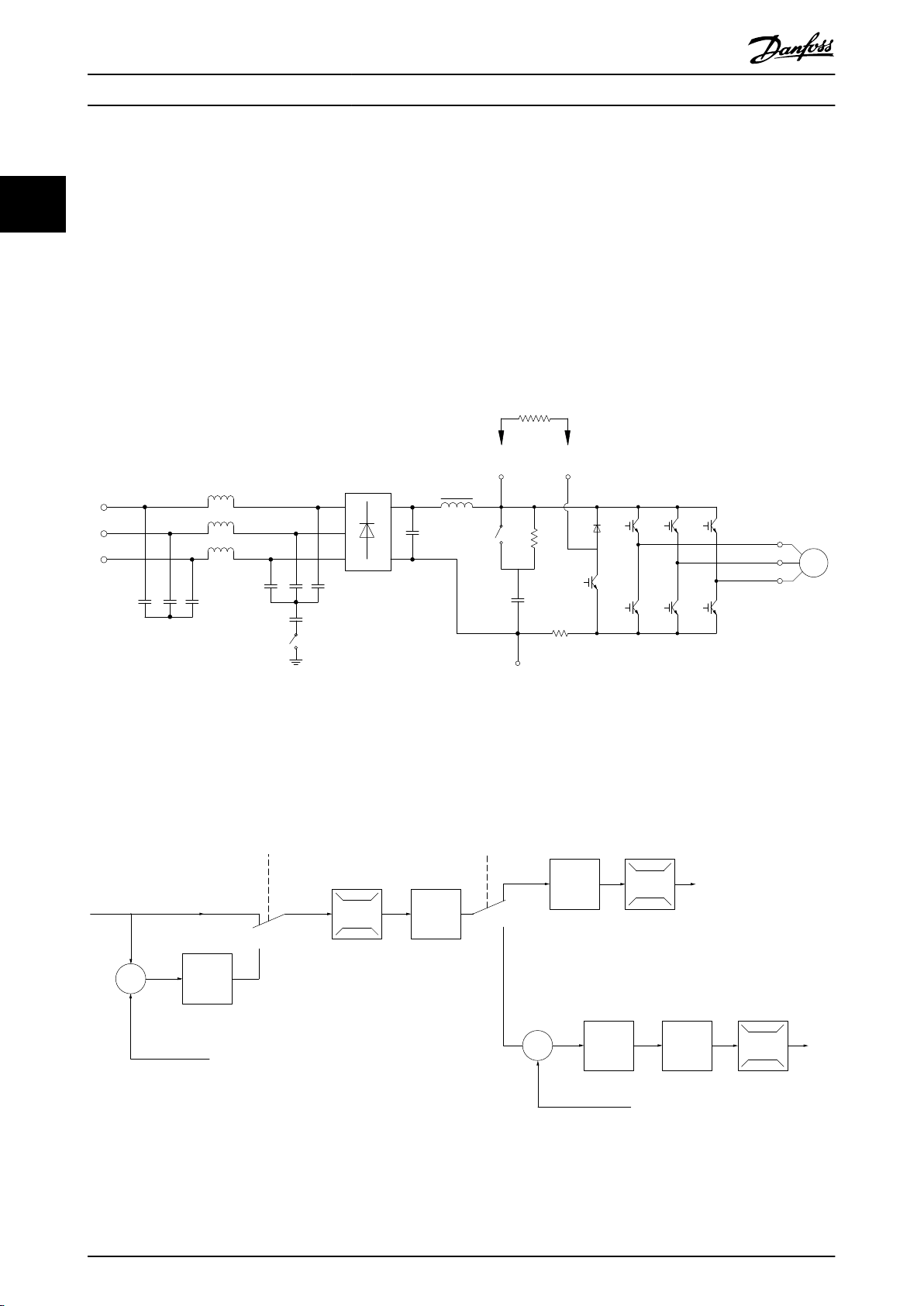
2.3.2 Αρχή ελέγχου
VLT® Midi Drive FC 280
22
VLT® Midi Drive FC 280 είναι ένας γενικής χρήσης μετατροπέας συχνότητας για εφαρμογές μεταβλητής ταχύτητας. Η αρχή
ελέγχου βασίζεται στο VVC+.
Οι μετατροπείς συχνότητας FC 280 μπορούν να χειριστούν ασύγχρονους κινητήρες και σύγχρονους κινητήρες μόνιμου
μαγνήτη μέχρι τα 22 kW (30 hp).
Η αρχή ανίχνευσης ρεύματος στους μετατροπείς συχνότητας FC 280 βασίζεται στη μέτρηση ρεύματος μέσω μιας αντίστασης
στη ζεύξη ΣΡ. Η προστασία σφάλματος γείωσης και η συμπεριφορά σε περίπτωση βραχυκυκλώματος ελέγχονται από την ίδια
αντίσταση.
Εικόνα 2.10 Διάγραμμα ελέγχου
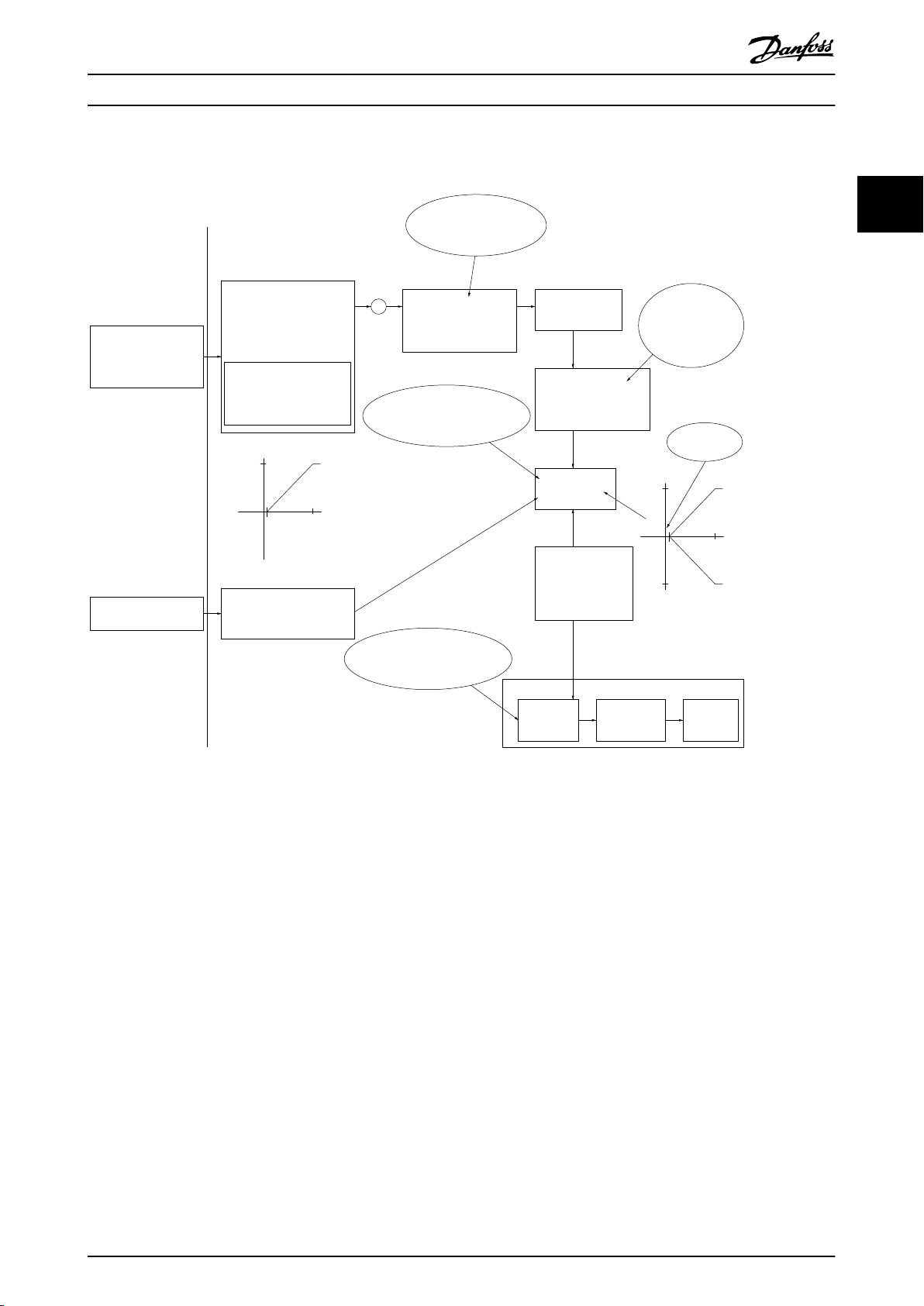
2.3.3
Δομή ελέγχου σε VVC
Εικόνα 2.11 Δομή ελέγχου σε διαμορφώσεις ανοικτού και κλειστού βρόχου σε VVC
Στη διαμόρφωση που απεικονίζεται στο Εικόνα 2.11, το παράμετρος 1-01 Motor Control Principle είναι ρυθμισμένο στο [1] VVC
+
και το παράμετρος 1-00 Conguration Mode είναι ρυθμισμένο στο [0] Speed open loop. Η προκύπτουσα τιμή αναφοράς
20 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327
+
+
130BP046.10
Hand
on
O
Auto
on
Reset
Hand
On
Off
Reset
Auto
On
130BB893.10
Επισκόπηση προϊόντος Οδηγός σχεδίασης εφαρμογών
λαμβάνεται από το σύστημα χειρισμού αναφοράς και τροφοδοτείται μέσω του περιοριστή γραμμικής μεταβολής και του
περιοριστή ταχύτητας πριν σταλεί στον έλεγχο κινητήρα. Η έξοδος του ελέγχου κινητήρα περιορίζεται τότε από το μέγιστο
όριο συχνότητας. Αν το παράμετρος 1-00 Conguration Mode είναι ρυθμισμένο στο [1] Speed closed loop, η προκύπτουσα τιμή
αναφοράς περνάει από τον περιοριστή γραμμικής μεταβολής και τον περιοριστή ταχύτητας σε ένα έλεγχο PID ταχύτητας. Οι
παράμετροι του ελέγχου PID ταχύτητας βρίσκονται στην ομάδα παραμέτρων 7-0* Speed PID Ctrl. Η προκύπτουσα τιμή
αναφοράς από τον έλεγχο PID ταχύτητας στέλνεται στον έλεγχο κινητήρα περιορισμένη από το όριο συχνότητας. Επιλέξτε [3]
Process στο παράμετρος 1-00 Conguration Mode για να χρησιμοποιήσετε τον έλεγχο διεργασίας PID για έλεγχο κλειστού
βρόχου ταχύτητας ή πίεσης στην ελεγχόμενη εφαρμογή. Οι παράμετροι διεργασίας PID βρίσκονται στις ομάδες παραμέτρων
7-2* Process Ctrl. Ανάδραση και 7-3* Process PID Ctrl.
2 2
2.3.4
Έλεγχος εσωτερικού ρεύματος σε τρόπο λειτουργίας VVC
+
Ο μετατροπέας συχνότητας διαθέτει ενσωματωμένο έλεγχο περιορισμού ρεύματος. Το χαρακτηριστικό αυτό ενεργοποιείται
όταν το ρεύμα του κινητήρα άρα και η ροπή του, είναι υψηλότερη από τα όρια ροπής που ορίζονται στο
παράμετρος 4-16 Torque Limit Motor Mode, παράμετρος 4-17 Torque Limit Generator Mode, και παράμετρος 4-18 Current Limit.
Όταν ο μετατροπέας συχνότητας βρεθεί στο όριο έντασης ρεύματος κατά την λειτουργία του κινητήρα ή κατά τη λειτουργία
αναπαραγωγής, ο μετατροπέας συχνότητας προσπαθεί να κατέβει κάτω από τα προκαθορισμένα όρια ροπής όσο το δυνατό
γρηγορότερα χωρίς να χάσει τον έλεγχο του κινητήρα.
2.3.5 Τοπικός (Hand On) και Απομακρυσμένος (Auto On) χειρισμός
Χειρισμός του ρυθμιστή στροφών με μη αυτόματο τρόπο μέσω του τοπικού πίνακα ελέγχου (γραφικός LCP ή αριθμητικός
LCP) ή απομακρυσμένα μέσω των αναλογικών/ψηφιακών εισόδων ή του τοπικού διαύλου.
Εκκινήστε και διακόψτε το ρυθμιστή στροφών πιέζοντας τα πλήκτρα [Hand On] και [Reset] στον LCP. Απαιτείται ρύθμιση
μέσω των εξής παραμέτρων:
Παράμετρος 0-40 [Hand on] Key on LCP.
•
Παράμετρος 0-44 [O/Reset] Key on LCP.
•
Παράμετρος 0-42 [Auto on] Key on LCP.
•
Επαναφέρατε τους συναγερμούς μέσω του πλήκτρου [Reset] ή μέσω μιας ψηφιακής εισόδου όταν ο ακροδέκτης έχει
προγραμματιστεί σε Επαναφορά.
Εικόνα 2.12 Πλήκτρα ελέγχου GLCP
Εικόνα 2.13 Πλήκτρα ελέγχου NLCP
Η τοπική αναφορά εξαναγκάζει την διαμόρφωση τρόπου λειτουργίας να μεταβεί σε ανοικτό βρόχο, ανεξάρτητα από τη
ρύθμιση στο παράμετρος 1-00 Conguration Mode. Η τοπική αναφορά αποκαθίσταται κατά την απενεργοποίηση του
ρυθμιστή στροφών.
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 21
No function
Analog ref.
Pulse ref.
Local bus ref.
Preset relative ref.
Preset ref.
Local bus ref.
No function
Analog ref.
Pulse ref.
Analog ref.
Pulse ref.
Local bus ref.
No function
Local bus ref.
Pulse ref.
No function
Analog ref.
Input command:
Catch up/ slow down
Catchup Slowdown
value
Freeze ref./Freeze output
Speed up/ speed down
ref.
Remote
Ref. in %
-max ref./
+max ref.
Scale to
Hz
Scale to
Nm
Scale to
process
unit
Relative
X+X*Y
/100
DigiPot
DigiPot
DigiPot
max ref.
min ref.
DigiPot
D1
P 5-1x(15)
Preset '1'
External '0'
Process
Torque
Speed
open/closed loop
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(0)
(0)
(1)
Relative scaling ref.
P 3-18
Ref.resource 1
P 3-15
Ref. resource 2
P 3-16
Ref. resource 3
P 3-17
200%
-200%
Y
X
-100%
100%
%
%
Ref./feedback range
P 3-00
Conguration mode
P 1-00
P 3-14
±100%
130BD374.10
P 16-01
P 16-02
P 3-12
P 5-1x(21)/P 5-1x(22)
P 5-1x(28)/P 5-1x(29)
P 5-1x(19)/P 5-1x(20)
P 3-04
Freeze ref.
&
increase/
decrease
ref.
Catch up/
slow
down
P 3-10
Επισκόπηση προϊόντος
VLT® Midi Drive FC 280
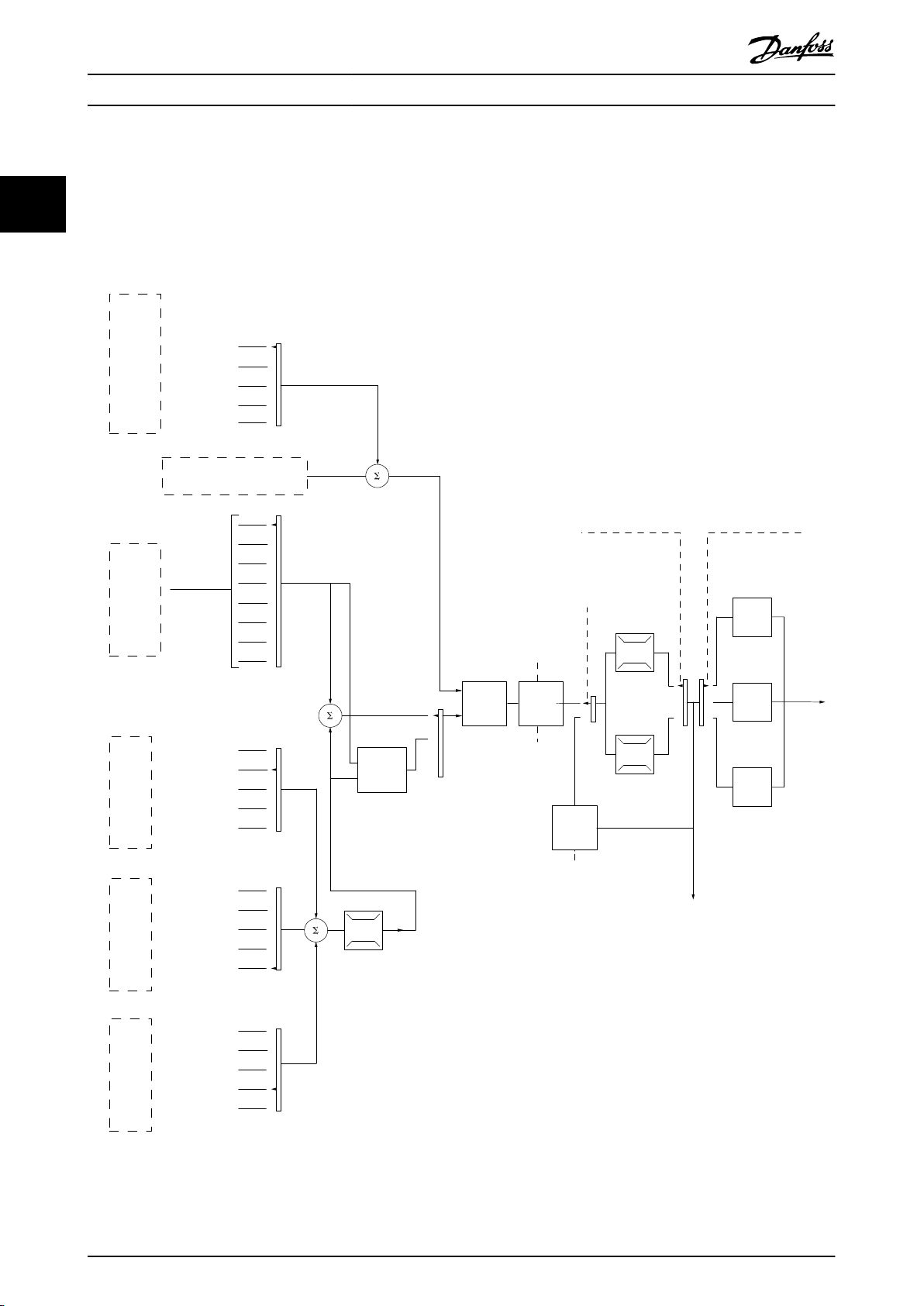
2.4 Χειρισμός τιμών αναφοράς
Τοπική αναφορά
22
Η τοπική αναφορά είναι ενεργή όταν ο μετατροπέας συχνότητας λειτουργεί με ενεργό το [Hand On]. Ρυθμίστε την τιμή
αναφοράς ανά [▲]/[▼] και [◄/[►].
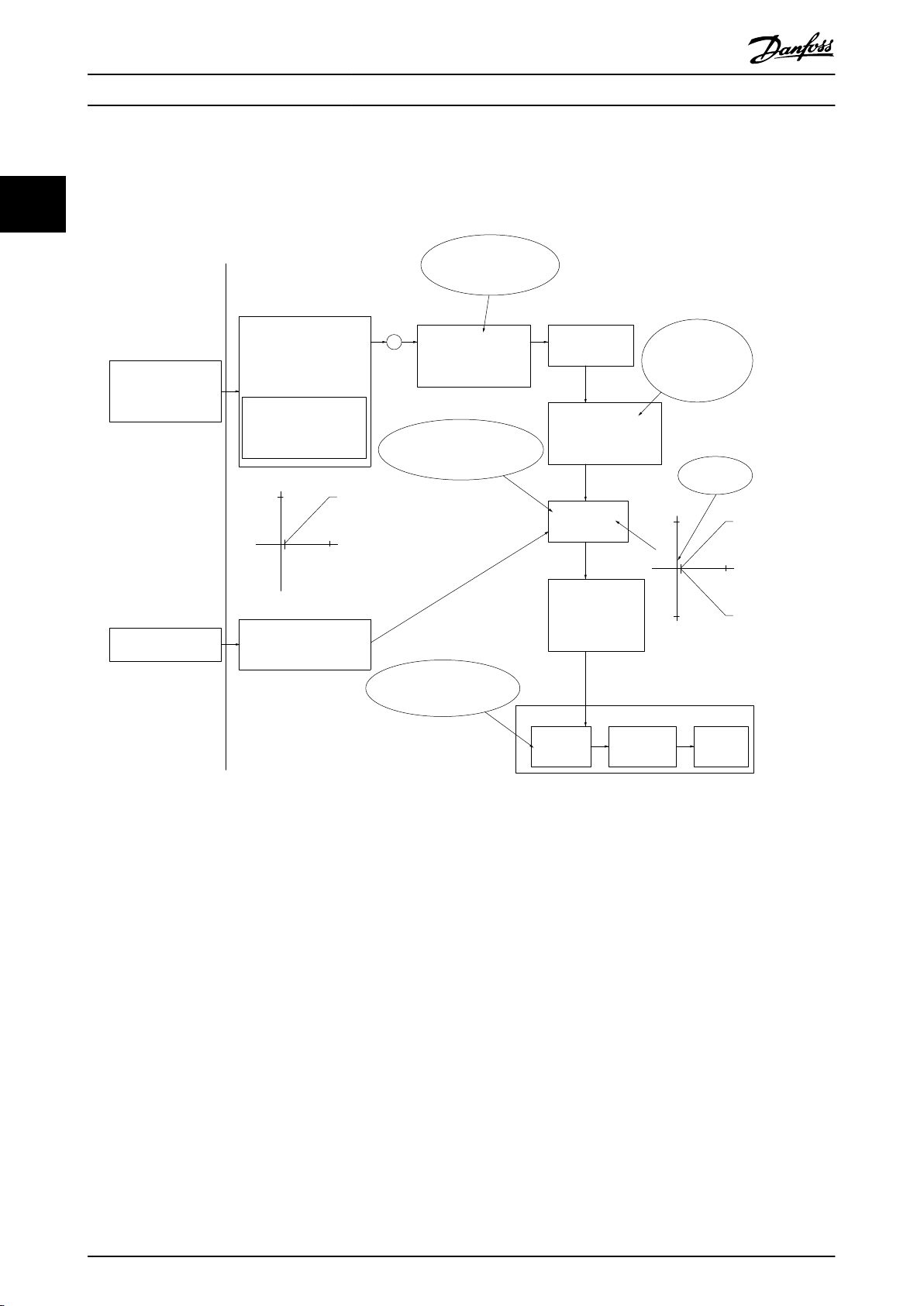
Απομακρυσμένη αναφορά
Το σύστημα χειρισμού αναφοράς για τον υπολογισμό της απομακρυσμένης αναφοράς απεικονίζεται στο Εικόνα 2.14.
Εικόνα 2.14 Απομακρυσμένη αναφορά
22 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327
Resulting reference
Sum of all
references
Forward
Reverse
P 3-00 Reference Range= [0] Min-Max
130BA184.10
-P 3-03
P 3-03
P 3-02
-P 3-02
P 3-00 Reference Range =[1]-Max-Max
Resulting reference
Sum of all
references
-P 3-03
P 3-03
130BA185.10
Επισκόπηση προϊόντος Οδηγός σχεδίασης εφαρμογών
Η απομακρυσμένη αναφορά υπολογίζεται μία φορά σε
κάθε διάστημα σάρωσης και αποτελείται αρχικά από 2
είδη εισόδων αναφοράς:
1. X (η εξωτερική αναφορά): Ένα σύνολο (ανατρέξτε
στο παράμετρος 3-04 Reference Function) από
μέχρι 4 εξωτερικά επιλεγμένες αναφορές,
αποτελούμενες από οποιονδήποτε συνδυασμό
(που καθορίζεται από τη ρύθμιση του
παράμετρος 3-15 Reference 1 Source,
παράμετρος 3-16 Reference 2 Source, και του
παράμετρος 3-17 Reference 3 Source) μιας
προκαθορισμένης τιμής αναφοράς
(παράμετρος 3-10 Preset Reference), μεταβλητών
αναλογικών αναφορών, αναφορών μεταβλητού
ψηφιακού παλμού και διάφορες αναφορές του
διαύλου επικοινωνίας σε οποιαδήποτε μονάδα
παρακολουθεί ο μετατροπέας συχνότητας ([Hz],
[RPM], [Nm] κοκ).
2. Υ (η σχετική αναφορά): Ένα σύνολο 1 σταθερής
προκαθορισμένης τιμής αναφοράς
(παράμετρος 3-14 Preset Relative Reference) ΅και 1
μεταβλητής αναλογικής αναφοράς
(παράμετρος 3-18 Relative Scaling Reference
Resource) σε [%].
Τα 2 είδη εισόδων αναφοράς συνδυάζονται με τον εξής
τύπο:
Απομακρυσμένη αναφορά=X+X*Y/100%.
Αν δεν χρησιμοποιείται η σχετική αναφορά, ρυθμίστε το
παράμετρος 3-18 Relative Scaling Reference Resource στο [0]
No function και το παράμετρος 3-14 Preset Relative Reference
στο 0%. Οι ψηφιακές είσοδοι στον μετατροπέα συχνότητας
μπορούν να ενεργοποιούν και τη λειτουργία αύξησης/
μείωσης ταχύτητας και τη λειτουργία παγώματος τιμής
αναφοράς. Οι λειτουργίες και οι παράμετροι περιγράφονται
στον VLT® Midi Drive FC 280 Οδηγό προγραμματισμού.
Η κλιμάκωση των αναλογικών τιμών αναφοράς
περιγράφεται στο ομάδες παραμέτρων 6-1* Analog Input 53
και 6-2* Analog Input 54 και η κλιμάκωση των ψηφιακών
παλμικών τιμών αναφοράς περιγράφεται στην ομάδα
παραμέτρων 5-5* Pulse Input.
Τα όρια και οι περιοχές των τιμών αναφοράς ρυθμίζονται
στην ομάδα παραμέτρων 3-0* Reference Limits.
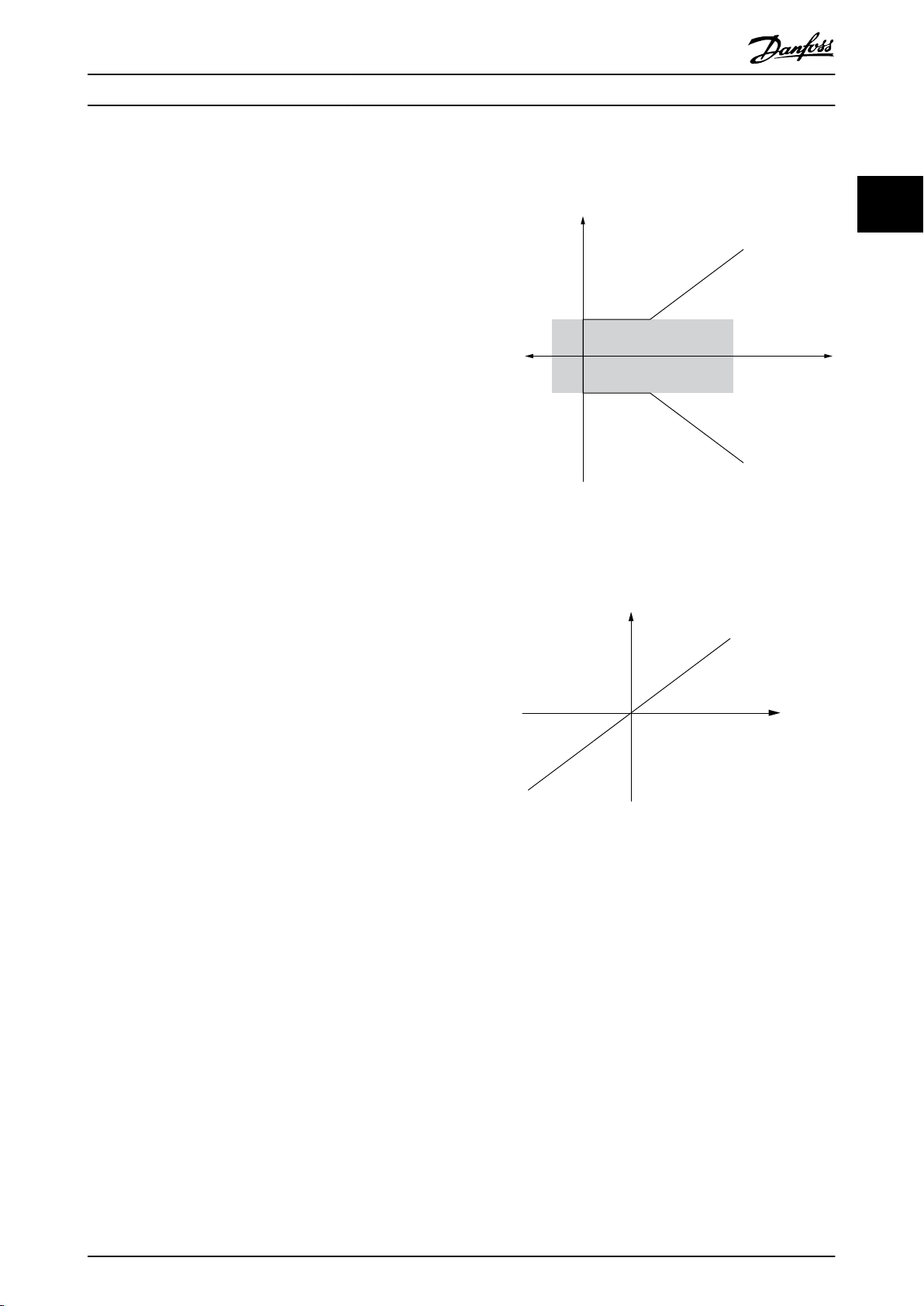
2.4.1 Όρια τιμών αναφοράς
Η Παράμετρος 3-00 Εύρος επιθυμητών τιμών,
παράμετρος 3-02 Ελάχιστη επιθ. τιμή και η
παράμετρος 3-03 Μέγιστη επιθυμητή τιμή καθορίζουν την
επιτρεπτή περιοχή του συνόλου όλων των τιμών αναφοράς.
Το σύνολο όλων των τιμών αναφοράς περιορίζεται όταν
χρειάζεται. Η σχέση μεταξύ της προκύπτουσας τιμής
αναφοράς (μετά τον περιορισμό) και του συνόλου όλων
των τιμών αναφοράς εμφανίζεται στο Εικόνα 2.15 και
Εικόνα 2.16.
2 2
Εικόνα 2.15 Σύνολο όλων των τιμών αναφοράς όταν η περιοχή
τιμής αναφοράς έχει ρυθμιστεί στο 0
Εικόνα 2.16 Σύνολο όλων των τιμών αναφοράς όταν η περιοχή
τιμής αναφοράς έχει ρυθμιστεί στο 1
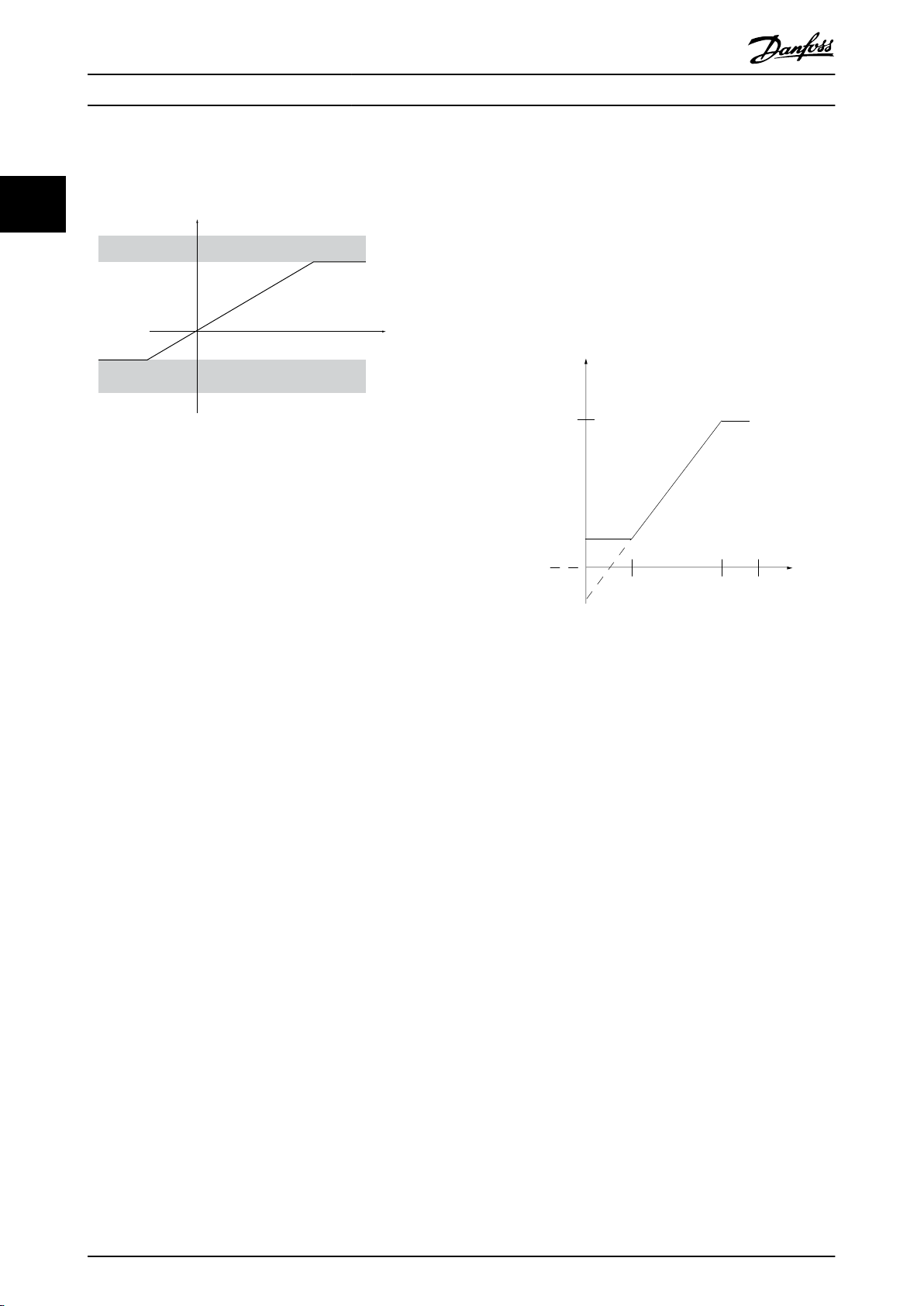
Η τιμή του παράμετρος 3-02 Ελάχιστη επιθ. τιμή δεν μπορεί
να ρυθμιστεί σε τιμή μικρότερη του 0, εκτός αν το
παράμετρος 1-00 Τρόπος λειτουργίας έχει ρυθμιστεί στο [3]
Process. Στην περίπτωση αυτή, οι εξής σχέσεις μεταξύ της
προκύπτουσας τιμής αναφοράς (μετά τον περιορισμό) και
το σύνολο όλων των τιμών αναφοράς απεικονίζεται στο
Εικόνα 2.17.
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 23
130BA186.11
P 3-03
P 3-02
Sum of all
references
P 3-00 Reference Range= [0] Min to Max
Resulting reference
Resource output
[Hz]
Resource input
Terminal X
high
High reference/
feedback value
130BD431.10
8
[V]
50
10
P1
P2
10
Low reference/
feedback value
Επισκόπηση προϊόντος
VLT® Midi Drive FC 280
2.4.3 Κλιμάκωση αναλογικών και παλμικών
τιμών αναφοράς και ανάδρασης
22
Εικόνα 2.17 Σύνολο όλων των τιμών αναφοράς όταν η
ελάχιστη τιμή αναφοράς έχει ρυθμιστεί σε αρνητική τιμή
2.4.2 Κλιμάκωση όλων των
προκαθορισμένων τιμών αναφοράς
και των τιμών αναφοράς διαύλου
Οι προκαθορισμένες τιμές αναφοράς κλιμακώνονται
σύμφωνα με τους εξής κανόνες:
Όταν το παράμετρος 3-00 Reference Range έχει
•
ρυθμιστεί στο [0] Min–Max, η τιμή αναφοράς 0%
ισούται με 0 [μονάδα] όπου η μονάδα μπορεί να
είναι οποιαδήποτε, π.χ. RPM, m/s και bar. Η τιμή
αναφοράς 100% ισούται με την μέγιστη (απόλυτη
τιμή του παράμετρος 3-03 Maximum Reference,
απόλυτη τιμή του παράμετρος 3-02 Ελάχιστη επιθ.
τιμή).
Όταν η παράμετρος 3-00 Reference Range έχει
•
ρυθμιστεί στο [1] -Max–+Max, η τιμή αναφοράς
0% ισούται με 0 [μονάδα] και η τιμή αναφοράς
100% ισούται με τη μέγιστη τιμή αναφοράς.
Οι τιμές αναφοράς διαύλου κλιμακώνονται σύμφωνα
τους εξής κανόνες:
Όταν η παράμετρος 3-00 Reference Range έχει
•
ρυθμιστεί στο [0] Min–Max η τιμή αναφοράς 0%
ισούται με την ελάχιστη τιμή αναφοράς και η τιμή
αναφοράς 100% ισούται με τη μέγιστη τιμή
αναφοράς.
Όταν η παράμετρος 3-00 Reference Range έχει
•
ρυθμιστεί στο [1] -Max–+Max, η τιμή
αναφοράς-100% ισούται με -μέγιστη τιμή
αναφοράς και η τιμή αναφοράς 100% ισούται με
τη μέγιστη τιμή αναφοράς.
Οι τιμές αναφοράς και η ανάδραση κλιμακώνονται από τις
αναλογικές και παλμικές εισόδους με τον ίδιο τρόπο. Η
μόνη διαφορά είναι ότι οι τιμές πάνω ή κάτω από τα
καθορισμένα ελάχιστα και μέγιστα όρια (P1 και P2 στο
Εικόνα 2.18) περιορίζονται ενώ οι τιμές ανάδρασης πάνω ή
κάτω από τα όρια δεν περιορίζονται.
Εικόνα 2.18 Ελάχιστο και μέγιστο όριο
24 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327
Επισκόπηση προϊόντος Οδηγός σχεδίασης εφαρμογών
Τα όρια P1 και P2 ορίζονται στο Πίνακας 2.5 ανάλογα με την επιλογή εισόδου.
Είσοδος Αναλογικός
ακροδέκτης 53
τρόπος
λειτουργίας
τάσης
P1=(ελάχιστη τιμή εισόδου, ελάχιστη τιμή αναφοράς)
Ελάχιστη τιμή αναφοράς Παράμετρος 6-14
Υψηλή τιμή
αναφ./ανάδρ.
ακροδέκτη 53
Ελάχιστη τιμή εισόδου Παράμετρος 6-10
Χαμηλή τάση
ακροδέκτη 53 [V]
P2=(Μέγιστη τιμή εισόδου, μέγιστη τιμή αναφοράς)
Μέγιστη τιμή αναφοράς Παράμετρος 6-15
Υψηλή τιμή
αναφ./ανάδρ.
ακροδέκτη 53
Μέγιστη τιμή εισόδου Παράμετρος 6-11
Υψηλή τάση
ακροδέκτη 53 [V]
Πίνακας 2.5 Όρια P1 και P2
Αναλογικός
ακροδέκτης 54
τρόπος
λειτουργίας
τάσης
Παράμετρος 6-24
Υψηλή τιμή
αναφ./ανάδρ.
ακροδέκτη 54
Παράμετρος 6-20
Χαμηλή τάση
ακροδέκτη 54 [V]
Παράμετρος 6-25
Υψηλή τιμή
αναφ./ανάδρ.
ακροδέκτη 54
Παράμετρος 6-21
Υψηλή τάση
ακροδέκτη 54 [V]
Αναλογικός
ακροδέκτης 54
τρόπος
λειτουργίας
ρεύματος
Παράμετρος 6-24 Υ
ψηλή τιμή αναφ./
ανάδρ. ακροδέκτη
54
Παράμετρος 6-22 Χα
μηλό ρεύμα
ακροδέκτη 54 [mA]
Παράμετρος 6-25 Υ
ψηλή τιμή αναφ./
ανάδρ. ακροδέκτη
54
Παράμετρος 6-23 Υ
ψηλό ρεύμα
ακροδέκτη 54 [mA]
Παλμική είσοδος29Παλμική είσοδος 33
Παράμετρος 5-52 Χ
αμηλή τιμή αναφ./
ανάδρ. ακροδέκτη
29
Παράμετρος 5-50 Χ
αμηλή συχνότητα
ακροδέκτη 29 [Hz]
Παράμετρος 5-53 Υ
ψηλή τιμή αναφ./
ανάδρ. ακροδέκτη
29
Παράμετρος 5-51 Υ
ψηλή συχνότητα
ακροδέκτη 29 [Hz]
Παράμετρος 5-57 Χαμηλή
τιμή αναφ./ανάδρ.
ακροδέκτη 33
Παράμετρος 5-55 Χαμηλή
συχνότητα ακροδέκτη 33
[Hz]
Παράμετρος 5-58 Υψηλή
τιμή αναφ./ανάδρ.
ακροδέκτη 33
Παράμετρος 5-56 Υψηλή
συχνότητα ακροδέκτη 33
[Hz]
2 2
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 25
Resource output
[Hz] or “No unit”
Resource input
[mA]
Quadrant 2
Quadrant 3
Quadrant 1
Quadrant 4
Terminal X high
Low reference/feedback
value
High reference/feedback
value
1
-50
165020
P1
P2
0
130BD446.10
forward
reverse
Terminal low
Επισκόπηση προϊόντος
VLT® Midi Drive FC 280
2.4.4 Νεκρή ζώνη γύρω από το μηδέν
22
για να εξασφαλίζεται ότι το μηχάνημα σταματά, όταν η τιμή αναφοράς είναι κοντά στο 0.
Για να ενεργοποιήσετε τη νεκρή ζώνη και για να ρυθμίσετε το μέγεθος της νεκρής ζώνης, κάντε τα εξής:
Κάποιες φορές, η αναφορά (και σε σπάνιες περιπτώσεις και η ανάδραση) θα πρέπει να έχουν μια νεκρή ζώνη γύρω από το 0
Ρυθμίσετε την ελάχιστη τιμή αναφοράς (ανατρέξτε στο Πίνακας 2.5 για την σχετικά παράμετρο) ή την μέγιστη τιμή
•
αναφοράς στο 0. Με άλλα λόγια, είτε το P1 είτε το P2 πρέπει να είναι πάνω στον άξονα των Χ στο Εικόνα 2.19.
Βεβαιωθείτε ότι και τα δύο σημεία που καθορίζουν το γράφημα κλιμάκωσης είναι στο ίδιο τεταρτημόριο.
•
Το P1 ή το P2 καθορίζει το μέγεθος της νεκρής ζώνης όπως απεικονίζεται στο Εικόνα 2.19.
Εικόνα 2.19 Μέγεθος της νεκρής ζώνης
26 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327
20
1
10
V
V
20
1
10
-20
130BD454.10
+
Analog input 53
Low reference 0 Hz
High reference 20 Hz
Low voltage 1 V
High voltage 10 V
Ext. source 1
Range:
0.0% (0 Hz)
100.0% (20 Hz)
100.0% (20 Hz)
Ext. reference
Range:
0.0% (0 Hz)
20 Hz 10V
Ext. Reference
Absolute
0 Hz 1 V
Reference
algorithm
Reference
100.0% (20 Hz)
0.0% (0 Hz)
Range:
Limited to:
0%- +100%
(0 Hz- +20 Hz)
Limited to: -200%- +200%
(-40 Hz- +40 Hz)
Reference is scaled
according to min
max reference giving a
speed.!!!
Scale to
speed
+20 Hz
-20 Hz
Range:
Speed
setpoint
Motor
control
Range:
-8 Hz
+8 Hz
Motor
Digital input 19
Low No reversing
High Reversing
Limits Speed Setpoint
according to min max speed.!!!
Motor PID
Hz
Hz
Dead band
Digital input
General Reference
parameters:
Reference Range: Min - Max
Minimum Reference: 0 Hz (0,0%)
Maximum Reference: 20 Hz (100,0%)
General Motor
parameters:
Motor speed direction:Both directions
Motor speed Low limit: 0 Hz
Motor speed high limit: 8 Hz
Επισκόπηση προϊόντος Οδηγός σχεδίασης εφαρμογών
Περίπτωση 1: Θετική τιμή αναφοράς με νεκρή ζώνη, ψηφιακή είσοδος για την ενεργοποίηση αναστροφής, μέρος I
To Εικόνα 2.20 δείχνει πώς γίνεται ο περιορισμός της τιμής αναφοράς εισόδου εντός του ελάχιστου και του μέγιστου ορίου.
2 2
Εικόνα 2.20 Περιορισμός της τιμής αναφοράς εισόδου με όρια εντός του ελάχιστου και του μέγιστου
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 27
+
30 Hz
1
10
20 Hz
1
10
130BD433.11
-20 Hz
V
V
Analog input 53
Low reference 0 Hz
High reference 20 Hz
Low voltage 1 V
High voltage 10 V
Ext. source 1
Range:
0.0% (0 Hz)
150.0% (30 Hz)
150.0% (30 Hz)
Ext. reference
Range:
0.0% (0 Hz)
30 Hz 10 V
Ext. Reference
Absolute
0 Hz 1 V
Reference
algorithm
Reference
100.0% (20 Hz)
0.0% (0 Hz)
Range:
Limited to:
-100%- +100%
(-20 Hz- +20 Hz)
Limited to: -200%- +200%
(-40 Hz- +40 Hz)
Reference is scaled
according to
max reference giving a
speed.!!!
Scale to
speed
+20 Hz
-20 Hz
Range:
Speed
setpoint
Motor
control
Range:
–10 Hz
+10 Hz
Motor
Digital input 19
Low No reversing
High Reversing
Limits Speed Setpoint
according to min max speed.!!!
Motor PID
Dead band
Digital input
General Reference
parameters:
Reference Range: -Max - Max
Minimum Reference: Don't care
Maximum Reference: 20 Hz (100.0%)
General Motor
parameters:
Motor speed direction: Both directions
Motor speed Low limit: 0 Hz
Motor speed high limit: 10 Hz
Επισκόπηση προϊόντος
VLT® Midi Drive FC 280
Περίπτωση 2: Θετική τιμή αναφοράς με νεκρή ζώνη, ψηφιακή είσοδος για την ενεργοποίηση αναστροφής, μέρος II
To Εικόνα 2.21 δείχνει πώς η τιμή αναφοράς εισόδου με όρια εκτός του -μέγιστου και +μέγιστου ορίου περιορίζεται στο
πάνω και κάτω όριο εισόδου πριν προστεθεί στην εξωτερική αναφορά και πώς η εξωτερική αναφορά περιορίζεται στο -
22
μέγιστο και +μέγιστο από τον αλγόριθμο αναφοράς.
Εικόνα 2.21 Περιορισμός της τιμής αναφοράς εισόδου με όρια εκτός του -ελάχιστου και του +μέγιστου
28 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

Επισκόπηση προϊόντος Οδηγός σχεδίασης εφαρμογών
2.5 Έλεγχος PID
2.5.1 Έλεγχος PID ταχύτητας
Παράμετρος 1-00 Τρόπος λειτουργίας
[1] Κλειστός βρόχος ταχύτητας
Πίνακας 2.6 Διαμορφώσεις ελέγχου, έλεγχος ενεργής ταχύτητας
1) Η ένδειξη «δεν διατίθεται» σημαίνει ότι ο συγκεκριμένος τρόπος λειτουργίας δεν είναι καθόλου διαθέσιμος.
Παράμετρος Περιγραφή της λειτουργίας
Παράμετρος 7-00 Ταχύτητα PID Πηγή
ανάδρασης
Παράμετρος 7-02 Speed PID Proportional Gain Όσο υψηλότερη είναι η τιμή, τόσο πιο ταχύς είναι ο έλεγχος. Όμως, μια υπερβολικά υψηλή
Παράμετρος 7-03 Χρόνος ολοκλ. PID για έλεγχο
ταχ.
Παράμετρος 7-04 Χρόνος παραγ. PID για
έλεγχο ταχ.
Παράμετρος 7-05 Όριο απολ. παραγ. PID για
έλεγχο ταχ.
Παράμετρος 7-06 Χρόνος κατωδ. φίλτρου PID
για έλ. ταχ.
Παράμετρος 1-01 Αρχή ελέγχου κινητήρα
U/f
Δεν διατίθεται
Επιλέξτε την είσοδο από την οποία λαμβάνει την ανάδρασή του το PID ταχύτητας.
τιμή μπορεί να προκαλέσει ταλαντώσεις.
Εξαλείφει το σφάλμα ταχύτητας σταθερής κατάστασης. Μικρότερες τιμές σημαίνουν
ταχύτερη απόκριση. Όμως, μια υπερβολικά χαμηλή τιμή μπορεί να προκαλέσει ταλαντώσεις.
Παρέχει απολαβή ανάλογη με τον ρυθμό μεταβολής της ανάδρασης. Η ρύθμιση στο 0
απενεργοποιεί τον διαφοριστή.
Αν σε κάποια εφαρμογή υπάρχουν ταχείες μεταβολές στην αναφορά ή στην ανάδραση, το
οποίο σημαίνει ότι το σφάλμα μεταβάλλεται συνεχώς, ο διαφοριστής μπορεί σύντομα να
κυριαρχήσει υπερβολικά. Αυτό οφείλεται στην αντίδρασή του στις μεταβολές του
σφάλματος. Όσο πιο ταχείες είναι οι μεταβολές στο σφάλμα, τόσο πιο ισχυρή είναι η
απολαβή του διαφοριστή. Ως εκ τούτου η απολαβή του διαφοριστή μπορεί να περιοριστεί
για να δώσει τη δυνατότητα ρύθμισης του λογικού χρόνο διαφόρισης για αργές μεταβολές
και ενός κατάλληλα ταχέος κέρδους για ταχείες μεταβολές.
Χαμηλοδιαβατό φίλτρο που αποσβένει τις ταλαντώσεις στο σήμα ανάδρασης και βελτιώνει
την απόδοση σταθερής κατάστασης. Όμως, μια υπερβολικά μεγάλη σταθερά χρόνου
φίλτρου χειροτερεύει την δυναμική απόδοση του ελέγχου PID ταχύτητας.
Πρακτικές ρυθμίσεις της παράμετρος 7-06 Speed PID Lowpass Filter Time που λαμβάνονται
από τον αριθμό παλμών ανά περιστροφή από την παλμογεννήτρια (PPR):
PPR Παλμογεννήτριας Παράμετρος 7-06 Χρόνος κατωδ. φίλτρου PID
512 10 ms
1024 5 ms
2048 2 ms
4096 1 ms
1)
+
VVC
Ενεργό
για έλ. ταχ.
2 2
Πίνακας 2.7 Παράμετροι ελέγχου ταχύτητας
Παράδειγμα προγραμματισμού του ελέγχου ταχύτητας
Σε αυτό το παράδειγμα, ο έλεγχος PID ταχύτητας χρησιμοποιείται για τη διατήρηση σταθερής ταχύτητας του κινητήρα
ανεξάρτητα από το μεταβαλλόμενο φορτίο στον κινητήρα. Η επιθυμητή ταχύτητα του κινητήρα ρυθμίζεται μέσω ενός
ποτενσιομέτρου συνδεδεμένου στον ακροδέκτη 53. Η περιοχή ταχύτητας είναι 0-1.500 RPM που αντιστοιχεί σε 0-10 V στο
ποτενσιόμετρο. Η εκκίνηση και το σταμάτημα ελέγχονται από ένα διακόπτη συνδεδεμένο στον ακροδέκτη 18. Ο PID
ταχύτητας παρακολουθεί τις πραγματικές RPM του κινητήρα χρησιμοποιώντας μια αυξητική παλμογεννήτρια 24 V (HTL) ως
ανάδραση. Ο αισθητήρας ανάδρασης είναι μια παλμογεννήτρια (1.024 παλμοί ανά περιστροφή) συνδεδεμένη στους
ακροδέκτες 32 και 33. Η περιοχή παλμικής συχνότητας στους ακροδέκτες 32 και 33 είναι 4 Hz–32 kHz.
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 29

M
3
96 97 9998
91 92 93 95
50
12
L1 L2L1PEL3
W PEVU
F1
L2
L3
N
PE
18
53
27
55
32
33
24 Vdc
130BD372.11
Επισκόπηση προϊόντος
VLT® Midi Drive FC 280
22
Εικόνα 2.22 Προγραμματισμός ελέγχου ταχύτητας
Ακολουθήστε τα βήματα στον Πίνακας 2.8 για να προγραμματίσετε τον έλεγχο ταχύτητας (ανατρέξτε στην επεξήγηση
των ρυθμίσεων στον οδηγό προγραμματισμού)
Στον Πίνακας 2.8, θεωρούμε ότι όλες οι άλλες παράμετροι και οι διακόπτες παραμένουν στην προεπιλεγμένη ρύθμισή τους.
Λειτουργία Αριθμός παραμέτρου Ρύθμιση
1) Βεβαιωθείτε ότι ο κινητήρας λειτουργεί κανονικά. Εκτελέστε τα εξής:
Ρυθμίστε τις παραμέτρους κινητήρα χρησιμοποιώντας τα
δεδομένα της πινακίδας στοιχείων.
Εκτελέστε μια AMA. Παράμετρος
2) Ελέγξτε ότι ο κινητήρας λειτουργεί και ότι η παλμογεννήτρια έχει προσαρμοστεί σωστά. Εκτελέστε τα εξής:
Πατήστε το πλήκτρο [Hand On]. Ελέγξτε ότι ο κινητήρας
λειτουργεί και σημειώστε τη φορά περιστροφής
(αναφέρεται και ως θετική κατεύθυνση).
3) Εξασφαλίστε ότι τα όρια του μετατροπέα συχνότητας έχουν ρυθμιστεί σε ασφαλείς τιμές:
Ρυθμίστε αποδεκτά όρια για τις τιμές αναφοράς. Παράμετρος 3-02 Minimum
Ελέγξτε ότι ρυθμίσεις γραμμικής μεταβολής είναι εντός των
δυνατοτήτων του μετατροπέα συχνότητας και των
επιτρεπτών προδιαγραφών λειτουργίας της εφαρμογής.
Ρυθμίστε αποδεκτά όρια για την ταχύτητα και τη συχνότητα
του κινητήρα.
4) Παραμετροποιήστε τον έλεγχο ταχύτητας και επιλέξτε την αρχή ελέγχου κινητήρα:
Ομάδα παραμέτρων΄1-2*
Motor Data
Όπως καθορίζονται στην πινακίδα στοιχείων
κινητήρα.
[1] Ενεργοποιήστε την πλήρη AMA
1-29 Automatic Motor
Adaption (AMA)
Ρυθμίστε θετική τιμή αναφοράς.
0
Reference
Παράμετρος
50
3-03 Maximum Reference
Παράμετρος 3-41 Ramp 1
Προεπιλεγμένη ρύθμιση
Ramp Up Time
Παράμετρος 3-42 Ramp 1
Προεπιλεγμένη ρύθμιση
Ramp Down Time
Παράμετρος 4-12 Motor
0 Hz
Speed Low Limit [Hz]
Παράμετρος 4-14 Motor
50 Hz
Speed High Limit [Hz]
Παράμετρος 4-19 Max
60 Hz
Output Frequency
30 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

Επισκόπηση προϊόντος Οδηγός σχεδίασης εφαρμογών
Ενεργοποίηση του ελέγχου ταχύτητας Παράμετρος
1-00 Conguration Mode
Επιλογή αρχής ελέγχου κινητήρα Παράμετρος 1-01 Motor
Control Principle
5) Παραμετροποιήστε και κλιμακώστε την αναφορά προς τον έλεγχο ταχύτητας:
Ρυθμίστε την αναλογική είσοδο 53 ως πηγή αναφοράς. Παράμετρος 3-15 Reference
1 Source
Κλιμακώστε την αναλογική είσοδο 53 από 0 Hz (0 V) έως
50 Hz (10 V)
6) Παραμετροποιήστε το σήμα της παλμογεννήτριας 24 V HTL ως ανάδραση για τον έλεγχο κινητήρα και τον έλεγχο ταχύτητας:
Ρυθμίστε τις ψηφιακές εισόδους 32 και 33 ως εισόδους
παλμογεννήτριας.
Επιλέξτε τους ακροδέκτες 32/33 ως ανάδραση PID
ταχύτητας.
7) Ρυθμίστε τις παραμέτρους ελέγχου PID ταχύτητας:
Χρησιμοποιήστε τις οδηγίες ρύθμισης όπου εφαρμόζονται ή
ρυθμίστε με μη αυτόματο τρόπο.
8) Τέλος:
Αποθηκεύστε τη ρύθμιση παραμέτρων στον LCP για
φύλαξη.
Πίνακας 2.8 Σειρά προγραμματισμού για τον έλεγχο PID ταχύτητας
Ομάδα παραμέτρων 6-1*
Αναλογική είσοδος 1
Παράμετρος 5-14 Terminal
32 Digital Input
Παράμετρος 5-15 Terminal
33 Digital Input
Παράμετρος 7-00 Speed
PID Feedback Source
Ομάδα παραμέτρων 7-0*
Speed PID Ctrl.
Παράμετρος 0-50 Αντιγραφ
ή LCP
[1] Κλειστός βρόχος ταχύτητας
+
[1] VVC
Δεν απαιτείται (προκαθορισμένη τιμή)
Δεν απαιτείται (προκαθορισμένη τιμή)
[82] Είσοδος παλμογ. B
[83] Είσοδος παλμογ. Α
[1] Παλμογ. 24 V
[1] Όλα στο LCP
2 2
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 31

P 7-30
normal/inverse
PID
P 7-38
*(-1)
Feed forward
Reference
Handling
Feedback
Handling
% [unit]
% [unit]
%
[unit]
%
[speed]
Scale to
speed
P 4-10
Motor speed
direction
To motor
control
Process PID
130BA178.10
_
+
0%
-100%
100%
0%
-100%
100%
Επισκόπηση προϊόντος
2.5.2 Έλεγχος PID διεργασίας
VLT® Midi Drive FC 280
22
μέσω αισθητήρα (για παράδειγμα πίεση, θερμοκρασία, ροή) και επηρεάζονται από τον συνδεδεμένο κινητήρα μέσω αντλίας,
ανεμιστήρων ή άλλων συνδεδεμένων διατάξεων.
Ο Πίνακας 2.9 δείχνει τις διαμορφώσεις ελέγχου στις οποίες είναι εφικτός ο έλεγχος διεργασίας. Ανατρέξτε στο
κεφάλαιο 2.3 Δομές ελέγχου για να δείτε αν ο έλεγχος ταχύτητας είναι ενεργός.
Ο έλεγχος PID διεργασίας μπορεί να χρησιμοποιηθεί για τον έλεγχο παραμέτρων της εφαρμογής που μπορούν να μετρηθούν
Παράμετρος 1-00 Conguration Mode Παράμετρος 1-01 Motor Control Principle
U/f
VVC
+
[3] Διεργασία Διεργασία Διεργασία
Πίνακας 2.9 Διαμόρφωση ελέγχου
ΕΙΔΟΠΟΙΗΣΗ
Ο έλεγχος PID διεργασίας λειτουργεί με την προεπιλεγμένη ρύθμιση των παραμέτρων αλλά προτείνεται να ρυθμίζετε τις
παραμέτρους για τη βελτιστοποίηση της απόδοσης του ελέγχου εφαρμογής.
Εικόνα 2.23 Διάγραμμα ελέγχου PID διεργασίας
32 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

Επισκόπηση προϊόντος Οδηγός σχεδίασης εφαρμογών
2.5.3 Σχετικές παράμετροι του ελέγχου διεργασίας
Παράμετρος Περιγραφή της λειτουργίας
Παράμετρος 7-20 Process CL Feedback 1
Resource
Παράμετρος 7-22 Process CL Feedback 2
Resource
Παράμετρος 7-30 Process PID Normal/ Inverse
Control
Παράμετρος 7-31 Process PID Anti Windup Η λειτουργία κατά της υπερδιόρθωσης εξασφαλίζει ότι όταν επιτευχθεί είτε όριο
Παράμετρος 7-32 Process PID Start Speed Σε κάποιες εφαρμογής, η επίτευξη της απαιτούμενης ταχύτητας/επιθυμητής τιμής μπορεί
Παράμετρος 7-33 Process PID Proportional Gain Όσο υψηλότερη είναι η τιμή, τόσο πιο ταχύς είναι ο έλεγχος. Όμως, μια υπερβολικά
Παράμετρος 7-34 Process PID Integral Time Εξαλείφει το σφάλμα ταχύτητας σταθερής κατάστασης. Μια χαμηλότερη τιμή σημαίνει
Παράμετρος 7-35 Process PID Dierentiation
Time
Παράμετρος 7-36 Process PID Di. Gain Limit Αν σε κάποια εφαρμογή υπάρχουν ταχείες μεταβολές στην αναφορά ή στην ανάδραση (το
Παράμετρος 7-38 Process PID Feed Forward
Factor
Παράμετρος 5-54 Pulse Filter Time Constant
•
#29 (Παλμικός ακροδέκτης 29)
Παράμετρος 5-59 Pulse Filter Time Constant
•
#33 (Παλμικός ακροδέκτης 33)
Παράμετρος 6-16 Terminal 53 Filter Time
•
Constant (Αναλογικός ακροδέκτης 53)
Παράμετρος 6-26 Terminal 54 Filter Time
•
Constant (Αναλογικός ακροδέκτης 54)
Επιλέξτε από ποια πηγή (αναλογική ή παλμική είσοδο) θα λαμβάνει την ανάδρασή του το
PID διεργασίας.
Προαιρετικά: Καθορίστε εάν (και από πού) το PID διεργασίας λαμβάνει πρόσθετο σήμα
ανάδρασης. Αν επιλεγεί πρόσθετη πηγή ανάδρασης, τα 2 σήματα ανάδρασης προστίθενται
πριν χρησιμοποιηθούν στον έλεγχο PID διεργασίας.
Με την επιλογή [0] Κανονική για τη λειτουργία, ο έλεγχος διεργασίας ανταποκρίνεται με
αύξηση της ταχύτητας του κινητήρα αν η ανάδραση έχει τιμή μικρότερη από αυτή της
αναφοράς. Αντίθετα, με την επιλογή [1] Ανάστροφη για τη λειτουργία, ο έλεγχος διεργασίας
ανταποκρίνεται με μείωση της ταχύτητας του κινητήρα.
συχνότητας είτε όριο ροπής, ο ολοκληρωτής ρυθμίζεται σε απολαβή τέτοια που να
αντιστοιχεί στην πραγματική συχνότητα. Αυτό αποτρέπει την ολοκλήρωση ενός σφάλματος
το οποίο δεν μπορεί να αντισταθμιστεί από αλλαγή ταχύτητας. Πατήστε [0] O για να
απενεργοποιήσετε αυτή τη λειτουργία.
να χρειαστεί πολύ χρόνο. Σε τέτοιες εφαρμογές, μπορεί να αποτελεί πλεονέκτημα να
ορίσετε σταθερή ταχύτητα κινητήρα από τον μετατροπέα συχνότητας πριν ενεργοποιηθεί ο
έλεγχος διεργασίας. Ορίστε μια σταθερή ταχύτητα κινητήρα ρυθμίζοντας την τιμή
εκκίνησης (ταχύτητα) του PID διεργασίας στην παράμετρος 7-32 Process PID Start Speed.
μεγάλη τιμή μπορεί να προκαλέσει ταλαντώσεις.
ταχύτερη αντίδραση. Όμως, μια υπερβολικά μικρή τιμή μπορεί να προκαλέσει ταλαντώσεις.
Παρέχει απολαβή ανάλογη με τον ρυθμό μεταβολής της ανάδρασης. Η ρύθμιση στο 0
απενεργοποιεί τον διαφοριστή.
οποίο σημαίνει ότι το σφάλμα μεταβάλλεται συνεχώς), ο διαφοριστής μπορεί σύντομα να
κυριαρχήσει υπερβολικά. Αυτό οφείλεται στην αντίδρασή του στις μεταβολές του
σφάλματος. Όσο πιο ταχείες είναι οι μεταβολές στο σφάλμα, τόσο πιο ισχυρή είναι η
απολαβή του διαφοριστή. Ως εκ τούτου η απολαβή του διαφοριστή μπορεί να περιοριστεί
για να δώσει τη δυνατότητα ρύθμισης του λογικού χρόνου διαφόρισης για αργές
μεταβολές.
Σε εφαρμογές όπου υπάρχει καλή (και σχεδόν γραμμική) συσχέτιση ανάμεσα στην τιμή
αναφοράς της διεργασίας και στην ταχύτητα του κινητήρα που απαιτείται για την επίτευξη
αυτής της τιμής αναφοράς, χρησιμοποιήστε τον συντελεστή προώθησης τροφοδοσίας για
να επιτύχετε καλύτερη δυναμική απόδοση του ελέγχου PID διεργασίας.
Αν υπάρχουν ταλαντώσεις του σήματος ρεύματος/τάσης ανάδρασης, χρησιμοποιήστε ένα
χαμηλοδιαβατό φίλτρο για να τις αποσβέσετε. Η σταθερά χρόνου φίλτρου παλμού αντιπρο-
σωπεύει το όρια ταχύτητας των κυματώσεων που παρατηρούνται στο σήμα ανάδρασης.
Παράδειγμα: Αν το χαμηλοδιαβατό φίλτρο έχει ρυθμιστεί στο 0,1 s, το όριο ταχύτητας είναι
10 RAD/s (το ανάστροφο του 0,1 s), που αντιστοιχεί σε (10/(2 x π))=1.6 Hz. Αυτό σημαίνει
ότι το φίλτρο αποσβένει όλα τα ρεύματα/τάσεις που έχουν διακύμανση μεγαλύτερη από
1,6 ταλαντώσεις ανά δευτερόλεπτο. Ο έλεγχος εκτελείται μόνο σε σήμα ανάδρασης που
μεταβάλλεται με συχνότητα (ταχύτητα) μικρότερη από 1,6 Hz.
Το χαμηλοδιαβατό φίλτρο βελτιώνει την απόδοση της σταθερής κατάστασης αλλά η
επιλογή πολύ μεγάλου χρόνου του φίλτρου χειροτερεύει την δυναμική απόδοση του
ελέγχου PID διεργασίας.
2 2
Πίνακας 2.10 Παράμετροι του ελέγχου διεργασίας
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 33

Transmitter
96 97 9998
91 92 93 95
50
13
L1 L2
L1
PEL3
W PEVU
F1
L2
L3
N
PE
130BF102.10
18
53
27
55
54
M
3
Επισκόπηση προϊόντος
VLT® Midi Drive FC 280
2.5.4 Παράδειγμα ελέγχου PID διεργασίας
22
Το Εικόνα 2.24 είναι ένα παράδειγμα ελέγχου PID
διεργασίας που χρησιμοποιείται σε σύστημα εξαερισμού:
Εικόνα 2.24 Έλεγχος PID διεργασίας σε σύστημα εξαερισμού
Σε ένα σύστημα εξαερισμού, η θερμοκρασία μπορεί να
ρυθμιστεί από -5 έως +35 °C (23–95 °F) με ένα
Εικόνα 2.25 Πομπός 2 συρμάτων
ποτενσιόμετρο 0–10 V. Για να διατηρείτε σταθερή τη
θερμοκρασία, χρησιμοποιήστε τον έλεγχο διεργασίας.
1. Εκκίνηση/σταμάτημα μέσω του διακόπτη που έχει
Ο έλεγχος είναι αντίστροφος που σημαίνει ότι με την
αύξηση της θερμοκρασία αυξάνεται η ταχύτητα εξαερισμού
για την παροχή περισσότερου αέρα. Με την πτώση της
θερμοκρασίας, μειώνεται η ταχύτητα. Ο πομπός που
χρησιμοποιείται είναι ένας αισθητήρας θερμοκρασίας με
περιοχή λειτουργίας -10 έως +40 °C (14–104 °F), 4–20 mA.
συνδεθεί στον ακροδέκτη 18.
2. Αναφορά θερμοκρασίας μέσω ποτενσιομέτρου (-5
to +35 °C (23–95 °F), 0–10 V ΣΡ) συνδεδεμένου
στον ακροδέκτη 53.
3. Ανάδραση θερμοκρασίας μέσω πομπού (-10 έως
+40 °C (14–104 °F), 4–20 mA) συνδεδεμένου στον
ακροδέκτη 54.
Λειτουργία Αριθμός
παραμέτρου
Αρχικοποιήστε τον ρυθμιστή στροφών. Παράμετρος
14-22 Operati
on Mode
1) Ρύθμιση των παραμέτρων κινητήρα:
Ρυθμίστε τις παραμέτρους κινητήρα σύμφωνα με
τα δεδομένα της πινακίδας στοιχείων.
Εκτελέστε μια πλήρη ΑΜΑ. Παράμετρος
2) Ελέγξτε ότι ο κινητήρας περιστρέφεται προς την σωστή κατεύθυνση.
Όταν ο κινητήρας είναι συνδεδεμένος στο ρυθμιστή στροφών με ορθή διάταξη φάσεων όπως U-U, V-V, W-W, ο άξονας του κινητήρα
συνήθως περιστρέφεται δεξιόστροφα κοιτώντας την πλευρά του άξονα.
Πατήστε το πλήκτρο [Hand On]. Ελέγξτε την
κατεύθυνση περιστροφής του άξονα ορίζοντας ένα
σημείο αναφοράς με το χέρι.
Ομάδα
παραμέτρων΄1-
2* Motor Data
1-29 Automati
c Motor
Adaption
(AMA)
Ρύθμιση
[2] Επαναφορά παραμέτρων - εκτελέστε μια διακοπή/επαναφορά
τροφοδοσίας - πατήστε το reset.
Όπως καταγράφονται στην πινακίδα στοιχείων κινητήρα.
[1] Ενεργοποιήστε την πλήρη AMA.
34 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

Επισκόπηση προϊόντος Οδηγός σχεδίασης εφαρμογών
Λειτουργία Αριθμός
παραμέτρου
Αν ο κινητήρας περιστρέφεται αντίθετα από την
απαιτούμενη κατεύθυνση:
1. Αλλάξτε την κατεύθυνση περιστροφής στην
παράμετρος 4-10 Motor Speed Direction.
2. Διακόψτε την παροχή δικτύου και περιμένετε
να εκφορτιστεί η ζεύξη ΣΡ.
3. Αλλάξτε αμοιβαία 2 από τις φάσεις του
κινητήρα.
Ορίστε τον τρόπο λειτουργίας διαμόρφωσης. Παράμετρος
3) Ρυθμίστε την διαμόρφωση αναφοράς, δηλαδή την περιοχή για τον χειρισμό τιμών αναφοράς. Ρυθμίστε την κλιμάκωση της αναλογικής
εισόδου΄στην ομάδα παραμέτρων 6-** Analog In/Out.
Ορίστε τις μονάδες μέτρησης αναφοράς/
ανάδρασης.
Ορίστε την ελάχιστη τιμή αναφοράς (10 °C (50 °F)).
Ορίστε την μέγιστη τιμή αναφοράς (80 °C
(176 °F)).
Αν η ορισμένη τιμή καθορίζεται από μια προκαθο-
ρισμένη τιμή (παράμετρος πίνακα), ρυθμίστε τις
άλλες πηγές αναφοράς στο [0] No Function.
4) Προσαρμόστε τα όρια του ρυθμιστή στροφών:
Ρυθμίστε τους χρόνους γραμμικής μεταβολής σε
μια κατάλληλη τιμή όπως 20 s.
Ρυθμίστε τα ελάχιστα όρια ταχύτητας.
Ρυθμίστε το υψηλότερο όριο ταχύτητα κινητήρα.
Ρυθμίστε την μέγιστη συχνότητα εξόδου.
Ρυθμίστε την παράμετρος 6-19 Terminal 53 mode και την παράμετρος 6-29 Terminal 54 mode σε τρόπο λειτουργίας τάσης ή ρεύματος.
5) Κλιμακώστε τις αναλογικές εισόδους που χρησιμοποιούνται για αναφορά και ανάδραση:
Παράμετρος
4-10 Motor
Speed
Direction
1-00 Congur
ation Mode
Παράμετρος
3-01
Reference/
Feedback Unit
Παράμετρος
3-02 Minimum
Reference
Παράμετρος
3-03
Maximum
Reference
Παράμετρος
3-10 Preset
Reference
Παράμετρος
3-41 Ramp 1
Ramp Up Time
Παράμετρος
3-42 Ramp 1
Ramp Down
Time
Παράμετρος
4-12 Motor
Speed Low
Limit [Hz]
Παράμετρος
4-14 Motor
Speed High
Limit [Hz]
Παράμετρος
4-19 Max
Output
Frequency
Ρύθμιση
Επιλέξτε τη σωστή κατεύθυνση περιστροφής του άξονα του κινητήρα.
[3] Διεργασία.
[60]
Στην οθόνη εμφανίζεται η μονάδα °
-5 °C (23 °F).
35 °C (95 °F).
[0] 35%.
Par . 3 − 10
Αναφ. =
Παράμετρος 3-14 Προεπιλεγμένη σχετική επιθυμητή τιμή έως
παράμετρος 3-18 Πηγή επιθ. τιμής σχετικής διαβάθμισης [0] = Χωρίς
λειτουργία.
20 s
20 s
10 Hz
50 Hz
60 Hz
0
× Par . 3 − 03 − par . 3 − 02 = 24, 5°C
100
C.
2 2
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 35

Επισκόπηση προϊόντος
VLT® Midi Drive FC 280
Λειτουργία Αριθμός
παραμέτρου
Ρυθμίστε την χαμηλή τάση του ακροδέκτη 53.
22
Ρυθμίστε την υψηλή τάση του ακροδέκτη 53.
Ρυθμίστε τη χαμηλή τιμή ανάδρασης του
ακροδέκτη 54.
Ρυθμίστε την υψηλή τιμή ανάδρασης του
ακροδέκτη 54.
Ορίστε την πηγή ανάδρασης.
6) Βασικές ρυθμ. PID:
PID διεργασίας κανονικός/αντίστροφος Παράμετρος
Προστασία υπερδιόρθωσης PID διεργασίας Παράμετρος
Ταχύτητα έναρξης PID διεργασίας Παράμετρος
Αποθήκευση παραμέτρων στο LCP. Παράμετρος
Παράμετρος
6-10 Terminal
53 Low Voltage
Παράμετρος
6-11 Terminal
53 High
Voltage
Παράμετρος
6-24 Terminal
54 Low Ref./
Feedb. Value
Παράμετρος
6-25 Terminal
54 High Ref./
Feedb. Value
Παράμετρος
7-20 Process
CL Feedback 1
Resource
7-30 Process
PID Normal/
Inverse Control
7-31 Process
PID Anti
Windup
7-32 Process
PID Start
Speed
0-50 LCP Copy
Ρύθμιση
0 V
10 V
-5 °C (23 °F)
35 °C (95 °F)
[2] Αναλογ. είσ. 54
[0] Κανονικό
[1] On
300 RPM
[1] Όλα στο LCP
Πίνακας 2.11 Παράδειγμα ρύθμισης ελέγχου PID διεργασίας
2.5.5 Bελτιστοποίηση ελεγκτή διεργασίας
μέχρι να σταθεροποιηθεί το σήμα ανάδρασης.
Μειώστε την αναλογική απολαβή κατά 40-60%.
Μετά την παραμετροποίηση των βασικών ρυθμίσεων όπως
περιγράφεται στο κεφάλαιο 2.5.5 Σειρά προγραμματισμού,
βελτιστοποιήστε την αναλογική απολαβή, τον χρόνο
ολοκλήρωσης και τον χρόνο διαφόρισης
(παράμετρος 7-33 Process PID Proportional Gain,
παράμετρος 7-34 Process PID Integral Time, και
παράμετρος 7-35 Process PID Dierentiation Time). Στις
περισσότερες διεργασίες, ολοκληρώστε την παρακάτω
διαδικασία:
1. Ξεκινήστε τον κινητήρα.
2. Ρυθμίστε την παράμετρος 7-33 Process PID
Proportional Gain στο 0,3 και αυξήστε την τιμής
της μέχρι να αρχίσει και πάλι το σήμα ανάδρασης
3. Ρυθμίστε την παράμετρος 7-34 Process PID Integral
Time στα 20 s και μειώστε την τιμή μέχρι να
αρχίσει ξανά να έχει συνεχή διακύμανση το σήμα
ανάδρασης. Αυξήστε τον χρόνο ολοκλήρωσης
μέχρι να σταθεροποιηθεί το σήμα ανάδρασης και
αυξήστε περαιτέρω κατά 15-50%.
4. Χρησιμοποιήστε την παράμετρος 7-35 Process PID
Dierentiation Time για συστήματα άμεσης
απόκρισης (χρόνος διαφόρισης. Η τυπική τιμή
είναι 4 φορές ο ρυθμισμένος χρόνος
ολοκλήρωσης. Χρησιμοποιήστε τον διαφοριστή
όταν έχει γίνει πλήρης βελτιστοποίηση της
ρύθμισης της αναλογικής απολαβής και του
χρόνου ολοκλήρωσης. Εξασφαλίστε ότι το
να έχει συνεχή διακύμανση. Μειώστε την τιμή
36 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

130BA183.10
y(t)
t
P
u
Επισκόπηση προϊόντος Οδηγός σχεδίασης εφαρμογών
χαμηλοδιαβατό φίλτρο αποσβένει επαρκώς τις
ταλαντώσεις στο σήμα ανάδρασης.
ΕΙΔΟΠΟΙΗΣΗ
Αν είναι απαραίτητο, μπορεί να γίνει ενεργοποίηση της
εκκίνησης/σταματήματος αρκετές φορές ώστε να
προκληθεί μεταβολή του σήματος ανάδρασης.
2.5.6 Μέθοδος ρύθμισης Ziegler Nichols
Για τη ρύθμιση των ελέγχων PID του ρυθμιστή στροφών, η
Danfoss προτείνει τη μέθοδο ρύθμισης Ziegler Nichols.
ΕΙΔΟΠΟΙΗΣΗ
Μην χρησιμοποιείτε τη μέθοδο ρύθμισης Ziegler Nichols
σε εφαρμογές όπου μπορεί να προκληθεί ζημιά από τις
ταλαντώσεις που παράγονται από οριακά σταθερές
ρυθμίσεις ελέγχου.
Τα κριτήρια για τη ρύθμιση των παραμέτρων βασίζονται
στην εκτίμηση του συστήματος στο όριο της σταθερότητας
αντί για την λήψη απόκρισης σε βηματική διέγερση.
Αυξήστε την αναλογική απολαβή μέχρι να παρατηρηθούν
συνεχείς ταλαντώσεις (όπως μετρούνται στην ανάδραση)
δηλαδή μέχρι το σύστημα να είναι οριακά σταθερό. Η
αντίστοιχη απολαβή (Ku) καλείται τελική απολαβή και είναι
η απολαβή στην οποία παρατηρείται ταλάντωση. Η
περίοδος της ταλάντωσης (Pu) (που καλείται τελική
περίοδος) καθορίζεται όπως απεικονίζεται στο Εικόνα 2.26
και θα πρέπει να μετριέται όταν το πλάτος της ταλάντωσης
είναι μικρό.
1. Επιλέξτε μόνο τον αναλογικό έλεγχο πράγμα που
σημαίνει ότι ο ολοκληρωτικός χρόνος είναι
ρυθμισμένος στη μέγιστη τιμή ενώ ο χρόνος
διαφόρισης είναι ρυθμισμένος στο 0.
2. Αυξήστε την τιμή της αναλογικής απολαβής μέχρι
να φτάσετε στο σημείο σταθερότητας
(συντηρούμενες ταλαντώσεις) και μέχρι να
φτάσετε στην κρίσιμη τιμή της απολαβής Ku.
3. Μετρήστε την περίοδο της ταλάντωσης για να
βρείτε την κρίσιμη σταθερά χρόνου, Pu.
4. Χρησιμοποιήστε τον Πίνακας 2.12 για να
υπολογίσετε τις απαραίτητες παραμέτρους
ελέγχου PID.
Ο χειριστής της διεργασίας μπορεί να κάνει την τελική
ρύθμιση του ελέγχου με επαναλήψεις ώστε να λάβει
ικανοποιητικό έλεγχο.
Εικόνα 2.26 Οριακά σταθερό σύστημα
Είδος ελέγχου Αναλογική
απολαβή
Έλεγχος PI 0,45 x K
Αυστηρός
έλεγχος PID
PID με κάποια
υπερύψωση
Πίνακας 2.12 Ρύθμιση Ziegler Nichols του ελεγκτή
0,6 x K
0,33 x K
u
u
u
Ολοκλη-
ρωτικός
χρόνος
0,833 x P
0,5 x P
u
0,5 x P
u
u
Χρόνος
διαφόρισης
–
0,125 x P
0,33 x P
2 2
u
u
Εκπομπή και Ατρωσία EMC
2.6
2.6.1 Γενικές αρχές της εκπομπής EMC
Η μεταβατική αιχμή τάσης εκπέμπεται σε συχνότητες της περιοχής 150 kHz έως 30 MHz. Η ασύρματη παρεμβολή από το
σύστημα του ρυθμιστή στροφών στην περιοχή μεταξύ 30 MHz έως 1 GHz παράγεται από τον ρυθμιστή στροφών, το
καλώδιο κινητήρα και τον κινητήρα.
Τα χωρητικά ρεύματα στο καλώδιο κινητήρα σε συνδυασμό με υψηλό ρυθμό dU/dt από την τάση του κινητήρα παράγουν
ρεύματα διαρροής.
Η χρήση θωρακισμένου καλωδίου κινητήρα αυξάνει το ρεύμα διαρροής (ανατρέξτε στο Εικόνα 2.27) επειδή τα θωρακισμένα
καλώδια έχουν μεγαλύτερη χωρητικότητα ως προς το ρεύμα σε σχέση με τα μη θωρακισμένα καλώδια. Αν δεν φιλτραριστεί
το ρεύμα διαρροής, προκαλεί μεγαλύτερη παρεμβολή στο δίκτυο ρεύματος στην περιοχή ραδιοσυχνοτήτων κάτω από τα 5
MHz περίπου. Επειδή το ρεύμα διαρροής (I1) μεταφέρεται πίσω προς τη μονάδα μέσω της θωράκισης (I3), υπάρχει μόνο ένα
μικρό ηλεκτρομαγνητικό πεδίο (I4) από το θωρακισμένο καλώδιο του κινητήρα.
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 37

1
2
z
z
z
L1
L2
L3
PE
U
V
W
C
S
I
2
I
1
I
3
I
4
C
S
C
S
C
S
C
S
I
4
C
S
z
PE
3
4
5
6
175ZA062.12
Επισκόπηση προϊόντος
VLT® Midi Drive FC 280
Η θωράκιση μειώνει την εκπεμπόμενη παρεμβολή αλλά αυξάνει την παρεμβολή χαμηλών συχνοτήτων στο δίκτυο ρεύματος.
Συνδέστε τη θωράκιση καλωδίου΄κινητήρα στο περίβλημα του ρυθμιστή στροφών και στο περίβλημα του κινητήρα. Αυτό
επιτυγχάνεται καλύτερα χρησιμοποιώντας ενσωματωμένους σφιγκτήρες θωράκισης για να αποφύγετε τις ελικοειδείς
22
απολήξεις καλωδίων θωράκισης. Οι σφιγκτήρες θωράκισης αυξάνουν την εμπέδηση της θωράκισης στις υψηλότερες
συχνότητες πράγμα που μειώνει την επίδραση της θωράκισης και αυξάνει το ρεύμα διαρροής (I4).
Στερεώστε τη θωράκιση στο περίβλημα και στις δύο άκρες αν χρησιμοποιείται θωρακισμένο καλώδιο στις εξής περιπτώσεις:
Τοπικός δίαυλος
•
Δίκτυο
•
Ρελέ
•
Καλώδιο σημάτων ελέγχου
•
Διασύνδεση σήματος
•
Πέδηση
•
Σε κάποιες περιπτώσεις όμως, είναι απαραίτητο να διακοπεί η θωράκιση για την αποφυγή βρόχων ρεύματος.
1 Καλώδιο γείωσης
2 Θωράκιση
3 Παροχή δικτύου ΕΡ
4 Ρυθμιστής στροφών
5 Θωρακισμένο καλώδιο κινητήρα
6 Κινητήρας
Εικόνα 2.27 Εκπομπή EMC
Εάν τοποθετείτε τη θωράκιση σε πλάκα τοποθέτησης για τον ρυθμιστή στροφών, χρησιμοποιήστε μεταλλική πλάκα
τοποθέτησης για να επιστρέφουν τα ρεύματα θωράκισης πίσω στη μονάδα. Εξασφαλίστε καλή ηλεκτρική επαφή από την
πλάκα τοποθέτησης μέσω των βιδών στερέωσης προς το πλαίσιο του ρυθμιστή στροφών.
Κατά τη χρήση μη θωρακισμένων καλωδίων, δεν υπάρχει συμμόρφωση με κάποιες απαιτήσεις εκπομπής αν και πληρούνται
οι απαιτήσεις ατρωσίας.
Για τη μείωση της στάθμης παρεμβολής από ολόκληρο το σύστημα (μονάδα και εγκατάσταση) κρατήστε τα καλώδια
κινητήρα και πέδης σε όσο το δυνατό μικρότερο μήκος. Αποφεύγετε να τοποθετείτε καλώδια με ευαίσθητη στάθμη σήματος
δίπλα σε καλώδια τροφοδοσίας, κινητήρα και πέδης. Η ραδιοπαρεμβολή με συχνότητα άνω των 50 MHz (ασύρματη)
παράγεται ειδικότερα από τα ηλεκτρονικά ελέγχου.
38 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

Επισκόπηση προϊόντος Οδηγός σχεδίασης εφαρμογών
2.6.2 Εκπομπή EMC
Τα αποτελέσματα των δοκιμών στον Πίνακας 2.13 έχουν προκύψει χρησιμοποιώντας σύστημα με ρυθμιστή στροφών (με την
πλάκα τοποθέτησης), κινητήρα και θωρακισμένα καλώδια κινητήρα.
Είδος
φίλτρου
(εσωτερικ
ό)
Φίλτρο Α2
Φίλτρο Α1
Φίλτρο Α2
Με τη
βίδα ΗΜΣ
βγαλμένη
)
Φίλτρο Α1
Με τη
βίδα ΗΜΣ
βγαλμένη
)
Τάση παροχής/ονομαστική ισχύς Κατηγορία A2/EN 55011
3x380–480 V 3x200–240 V 1x200–240 V
0,37–22 kW
(0,5–30 hp)
0,37–7,5 kW
(0,5–10 hp)
11–22 kW
(15–30 hp)
0,37–22 kW
(0,5–30 hp)
2
0,37–7,5 kW
(0,5–10 hp)
11–22 kW
(15–30 hp)
2
–
– –
– –
–
– –
– –
– – 25 m (82 ft)
0,37–4 kW
(0,5–5,4 hp)
0,37–2,2 kW
(0,5–3 hp)
– – 25 m (82 ft)
– – 50 m (164 ft)
0,37–2,2 kW
(0,5–3 hp)
– – – – – – – –
0,37–4 kW
(0,5–5,4 hp)
0,37–2,2 kW
(0,5–3 hp)
– – 5 m (16,4 ft)
– – 5 m (16,4 ft)
0,37–2,2 kW
(0,5–3 hp)
Λόγω
αγωγιμότητας
– 25 m (82 ft)
Λόγω
ακτινο-
βολίας
Ναι
Ναι
1)
1)
– – – – – –
1)
Ναι
1)
Ναι
40 m (131 ft)
Ναι
1)
– – – – – – –
– – – – – –
1)
Ναι
1)
Ναι
5 m (16,4 ft)
Ναι
1)
Κατηγορία A1/EN
55011
Λόγω
αγωγιμότητ
ας
Λόγω
ακτινο-
βολίας
Κατηγορία B/EN 55011
Λόγω
αγωγιμότη
τας
– – – –
– – – –
25 m
(82 ft)
50 m
(164 ft)
40 m
(131 ft)
Ναι – –
Ναι – –
Ναι
15 m
(49,2 ft)
– – – –
– – – –
– – – –
Λόγω
ακτινο-
βολίας
–
2 2
Πίνακας 2.13 Ηλεκτρομαγνητική εκπομπή (Τύπος φίλτρου: εσωτερικό)
1) Η περιοχή συχνοτήτων από 150 kHz έως 30 MHz δεν έχει εναρμονιστεί μεταξύ των IEC/EN 61800-3 και EN 55011 και δεν περιλαμβάνεται
υποχρεωτικά.
2) Χαμηλό ρεύμα διαρροής προς τη γείωση. Συμβατό να λειτουργεί σε δίκτυο ρεύματος ELCB/IT.
Τα αποτελέσματα των δοκιμών στον Πίνακας 2.14 έχουν προκύψει χρησιμοποιώντας σύστημα με ρυθμιστή στροφών (με την
πλάκα τοποθέτησης), εξωτερικό φίλτρο, κινητήρα και θωρακισμένα καλώδια κινητήρα. Ο 3-φασικός ρυθμιστής στροφών
380–480 V πρέπει να διαθέτει εσωτερικό φίλτρο A1.
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 39

Επισκόπηση προϊόντος
Τύπος
φίλτρου
(εξωτερικ
22
ό)
Φίλτρο
ΗΜΣ
Φίλτρο
dU/dt
Φίλτρο
ημιτονοειδ
ούς
κύματος
Φίλτρο
ΗΜΣ+
φίλτρο
ημιτονοειδ
ούς
κύματος
Τάση παροχής/ονομαστική ισχύς Κατηγορία A2/EN 55011
3x380–480 V 3x200–240 V 1x200–240 V
0,37–22 kW
(0,5–30 hp)
–
– –
0,37–7,5 kW
(0,5–10 hp)
11–22 kW
(15–30 hp)
–
– –
0,37–7,5 kW
(0,5–10 hp)
11–15 kW
(15–20 hp)
18,5–22 kW
(25–30 hp)
–
– –
0,37–15 kW
(0,5–20 hp)
18,5–22 kW
(25–30 hp)
–
– –
– – 100 m (328 ft)
0,37–4 kW
(0,5–5,4 hp)
– – – – – – – –
– – 150 m (492 ft)
0,37–4 kW
(0,5–5,4 hp)
– – 50 m (164 ft)
– – 150 m (492 ft)
– – 150 m (492 ft)
0,37–4 kW
(0,5–5,4 hp)
– – 150 m (492 ft)
– – – – – – – –
0,37–4 kW
(0,5–5,4 hp)
VLT® Midi Drive FC 280
Κατηγορία A1/EN
55011
Λόγω
αγωγιμότητας
– – – – – – –
0,37–2,2 kW
(0,5–3 hp)
– – – – – – –
0,37–2,2 kW
(0,5–3 hp)
– – – – – – –
0,37–2,2 kW
(0,5–3 hp)
– – – – – – –
0,37–2,2 kW
(0,5–3 hp)
100 m (328 ft)
– – – – – –
50 m (164 ft)
150 m (492 ft)
Λόγω
ακτινο-
βολίας
Ναι
Ναι
Ναι
Ναι
Ναι
Ναι
Ναι
Ναι
Ναι
1)
1)
1)
1)
1)
1)
1)
1)
1)
Λόγω
αγωγιμότητ
ας
100 m
(328 ft)
100 m
(328 ft)
40 m
(131 ft)
50 m
(164 ft)
50 m
(164 ft)
100 m
(328 ft)
50 m
(164 ft)
100 m
(328 ft)
100 m
(328 ft)
Λόγω
ακτινο-
βολίας
Ναι
Ναι
Ναι – –
Ναι – –
Ναι – –
Ναι – –
Ναι – –
Ναι – –
Ναι – –
Κατηγορία B/EN 55011
Λόγω
αγωγιμότη
τας
25 m
(82 ft)
40 m
(131 ft)
Λόγω
ακτινο-
βολίας
–
–
Πίνακας 2.14 Ηλεκτρομαγνητική εκπομπή (Τύπος φίλτρου: εξωτερικό)
1) Η περιοχή συχνοτήτων από 150 kHz έως 30 MHz δεν έχει εναρμονιστεί μεταξύ των IEC/EN 61800-3 και EN 55011 και δεν περιλαμβάνεται
υποχρεωτικά.
2.6.3 Ατρωσία EMC
Το VLT® Midi Drive FC 280 συμμορφώνεται με τις απαιτήσεις για βιομηχανικό περιβάλλον, που είναι πιο αυστηρές από τις
απαιτήσεις για περιβάλλοντα οικίας και γραφείου. Έτσι, FC 280 συμμορφώνεται επίσης με τις χαμηλότερες απαιτήσεις για
περιβάλλοντα οικίας και γραφείου με μεγάλο περιθώριο ασφαλείας.
Για την τεκμηρίωση της ατρωσίας από μεταβατικές αιχμές τάσης από ηλεκτρικά φαινόμενα, έχουν γίνει οι ακόλουθες δοκιμές
ατρωσίας σε ένα σύστημα που αποτελείται από:
Ένα ρυθμιστή στροφών (με εξτρά αν σχετίζονται).
•
Ένα θωρακισμένο καλώδιο σημάτων ελέγχου.
•
40 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

Επισκόπηση προϊόντος Οδηγός σχεδίασης εφαρμογών
Ένα κιβώτιο ελέγχου με ποτενσιόμετρο, καλώδιο κινητήρα και κινητήρα.
•
Οι δοκιμές εκτελέστηκαν σύμφωνα με τα εξής βασικά πρότυπα:
EN 61000-4-2 (IEC 61000-4-2) Ηλεκτροστατικές εκκενώσεις (ESD): Εξομοίωση ηλεκτροστατικών εκκενώσεων από
•
ανθρώπους.
EN 61000-4-3 (IEC 61000-4-3) Ατρωσία από εκπεμπόμενη ακτινοβολία: Εξομοίωση με διαμόρφωση πλάτους των
•
επιδράσεων του εξοπλισμού ραντάρ και ραδιοεπικοινωνιών και του εξοπλισμού κινητών επικοινωνιών.
EN 61000-4-4 (IEC 61000-4-4) Μεταβατικές αιχμές τάσης: Εξομοίωση παρεμβολής που προκαλείται από μεταγωγή
•
αγωγού, ρελέ ή αντίστοιχων διατάξεων.
EN 61000-4-5 (IEC 61000-4-5) Αιφνίδια μεταβατικά φαινόμενα: Εξομοίωση μεταβατικών φαινομένων που
•
προκαλούνται, για παράδειγμα, από κεραυνούς που πέφτουν κοντά σε εγκαταστάσεις.
EN 61000-4-6 (IEC 61000-4-6) Ατρωσία από ακτινοβολία μέσω αγωγιμότητας: Εξομοίωση της επίδρασης
•
εξοπλισμού ραδιομετάδοσης που συνδέεται με καλώδια σύνδεσης.
Ο FC 280 ακολουθεί το πρότυπο IEC 61800-3. Ανατρέξτε στο Πίνακας 2.15 για λεπτομέρειες.
Περιοχή τάσης: 380–480 V
Πρότυπο προϊόντος 61800-3
ESD Ατρωσία
Δοκιμή
Κριτήριο αποδοχής B B B A A
Καλώδιο δικτύου ρεύματος – – 2 kV CN
Καλώδιο κινητήρα – – 4 kV CCC – 10 V
Καλώδιο πέδης – – 4 kV CCC – 10 V
Καλώδιο διαμοιρασμού
φορτίου
Καλώδιο ρελέ – – 4 kV CCC – 10 V
Καλώδιο σημάτων ελέγχου – –
Τυπικό καλώδιο/καλώδιο
τοπικού διαύλου
Καλώδιο LCP – –
Περίβλημα
Ορισμοί
CD: Εκφόρτιση μέσω επαφής
AD: Εκφόρτιση μέσω αέρα
– –
– –
4 kV CD
8 kV AD
από
ακτινοβολία
10 V/m – – –
DM: Διαφορικός τρόπος λειτουργίας
CM: Κοινός τρόπος λειτουργίας
Αιχμή τάσης Κρούση τάσης Ατρωσία από
αγώγιμη παρεμβ.
2 kV/2 Ω DM
2 kV/12 Ω CM
4 kV CCC – 10 V
Μήκος >2 m (6,6 ft)
1 kV CCC
Μήκος >2 m (6,6 ft)
1 kV CCC
Μήκος >2 m (6,6 ft)
1 kV CCC
Μη θωρακισμένο:
1 kV/42 Ω CM
Μη θωρακισμένο:
1 kV/42 Ω CM
– 10 V
CN: Άμεση έγχυση μέσω δικτύου σύζευξης
CCC: Έγχυση μέσω σφιγκτήρα χωρητικής
σύζευξης
10 V
10 V
10 V
2 2
RMS
RMS
RMS
RMS
RMS
RMS
RMS
RMS
Πίνακας 2.15 Ατρωσία EMC
Γαλβανική απομόνωση
2.7
πολύ χαμηλή τάση) Αυτό δεν ισχύει σε κλάδο γειωμένου
τριγώνου άνω των 400 V.
Το σύστημα PELV παρέχει προστασία μέσω πολύ χαμηλής
τάσης. Η προστασία από ηλεκτροπληξία εξασφαλίζεται
όταν η παροχή ρεύματος είναι τύπου PELV και η
εγκατάσταση έχει γίνει όπως ορίζεται στους τοπικούς/
κρατικούς κανονισμούς για την τροφοδοσία PELV.
Η γαλβανική (εξασφαλισμένη) απομόνωση επιτυγχάνεται
εκπληρώνοντας τις απαιτήσεις για υψηλότερη απομόνωση
και παρέχοντας τις ανάλογες αποστάσεις ερπυσμού/
διακένου. Οι απαιτήσεις αυτές περιγράφονται στο πρότυπο
EN-61800-5-1.
Όλοι οι ακροδέκτες ελέγχου και οι ακροδέκτες ρελέ 01-03
συμμορφώνονται με τις απαιτήσεις PELV (προστατευτική
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 41

130BD447.11
12
4
3
ab
M
130BB955.12
a
b
Leakage current
Motor cable length
130BB956.12
THDv=0%
THDv=5%
Leakage current
Επισκόπηση προϊόντος
VLT® Midi Drive FC 280
Τα μέρη που απαρτίζουν την ηλεκτρική απομόνωση, όπως
απεικονίζεται στο Εικόνα 2.28, πληρούν επίσης τις
απαιτήσεις για υψηλότερη απομόνωση και τη σχετική
22
δοκιμή όπως περιγράφεται στο EN 61800-5-1.
Η γαλβανική απομόνωση PELV μπορεί να φανεί σε 3
σημεία (βλ. Εικόνα 2.28):
Η τεχνολογία του μετατροπέα συχνότητας συνεπάγεται
υψηλές συχνότητες σε υψηλή ισχύ. Αυτή η μεταγωγή
δημιουργεί ένα ρεύμα διαρροής στη σύνδεση γείωσης.
Τυχόν εσφαλμένο ρεύμα στο μετατροπέα συχνότητας στα
τερματικά ισχύος εξόδου ενδέχεται να περιλαμβάνει
συνιστώσα ΣΡ που μπορεί να φορτίσει τους πυκνωτές
φίλτρου και να προκαλέσει μεταβατικό ρεύμα γείωσης.
Για να διατηρηθεί η συμμόρφωση PELV, όλες οι συνδέσεις
που γίνονται στους ακροδέκτες ελέγχου πρέπει να είναι
PELV, για παράδειγμα το θερμίστορ πρέπει να έχει
ενισχυμένη/διπλή μόνωση.
Το ρεύμα διαρροής προς τη γείωση αποτελείται από
διάφορες συνιστώσες και εξαρτάται από διάφορες διαμορφώσεις του συστήματος συμπεριλαμβανομένου του
φίλτρου RFI, των θωρακισμένων καλωδίων κινητήρα και
της ισχύος του μετατροπέα συχνότητας.
1 Τροφοδοσία ρεύματος (SMPS) για την μονάδα ελέγχου
2 Επικοινωνία μεταξύ της κάρτας ισχύος και της μονάδας
ελέγχου
3 Απομόνωση μεταξύ των εισόδων STO και του κυκλώματος
IGBT
4 Ρελέ πελάτη
Εικόνα 2.29 Επίδραση του μήκους του καλωδίου και του
μεγέθους ισχύος στο ρεύμα διαρροής, Pa>P
b
Εικόνα 2.28 Γαλβανική απομόνωση
Η λειτουργική γαλβανική απομόνωση (a και b στο
Εικόνα 2.28) είναι για την προαιρετική εφεδρεία 24 V και για
την διασύνδεση του τυποποιημένου διαύλου RS485.
ΠΡΟΕΙΔΟΠΟΙΗΣΗ
Πριν ακουμπήσετε τυχόν ηλεκτρικά εξαρτήματα,
εξασφαλίστε ότι έχουν αποσυνδεθεί οι άλλες είσοδοι
τάσης όπως ο διαμοιρασμός φορτίου (ζεύξη του
ενδιάμεσου κυκλώματος DC) και η σύνδεση κινητήρα για
την κινητική εφεδρεία. Τηρείτε τον χρόνο εκφόρτισης
που αναφέρεται στο κεφάλαιο Ασφάλεια στον Οδηγό
λειτουργίας του VLT® Midi Drive FC 280. Η αποτυχία
τήρησης των συστάσεων μπορεί να οδηγήσει σε θάνατο
ή σοβαρό τραυματισμό.
2.8 Ρεύμα διαρροής προς τη γείωση
Τηρείτε τους εθνικούς και τοπικούς κανόνες σχετικά με την
προστατευτική γείωση του εξοπλισμού με ρεύμα διαρροής
>3,5 mA.
Το ρεύμα διαρροής εξαρτάται επίσης από την
παραμόρφωση γραμμής.
Εικόνα 2.30 Επίδραση της παραμόρφωσης γραμμής στο ρεύμα
διαρροής
42 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

130BB958.12
f
sw
Cable
150 Hz
3rd harmonics
50 Hz
Mains
RCD with low f
cut-
RCD with high f
cut-
Leakage current
Frequency
130BB957.11
Leakage current [mA]
100 Hz
2 kHz
100 kHz
Επισκόπηση προϊόντος Οδηγός σχεδίασης εφαρμογών
ΕΙΔΟΠΟΙΗΣΗ
Το υψηλό ρεύμα διαρροής μπορεί να προκαλέσει την
απενεργοποίηση των RCD. Για να αποφευχθεί το
πρόβλημα αυτό, κατά τη φόρτιση ενός φίλτρου
αφαιρέστε τη βίδα RFI.
Το EN/IEC61800-5-1 (Πρότυπο προϊόντος συστήματος
ισχύος ρυθμιστή στροφών) απαιτεί ιδιαίτερη προσοχή, αν
το ρεύμα διαρροής υπερβαίνει τα 3,5 mA. Η γείωση πρέπει
να ενισχυθεί με 1 από τους παρακάτω τρόπους:
Καλώδιο γείωσης (ακροδέκτης 95) με διατομή
•
τουλάχιστον 10 mm2 (8 AWG).
2 ξεχωριστά καλώδια γείωσης που να συμμορφώ-
•
νονται με τους κανονισμούς διαστάσεων.
Δείτε το πρότυπο EN/IEC61800-5-1 για περισσότερες
πληροφορίες.
Χρήση συσκευών υπολειμματικού ρεύματος (RCD)
Όπου χρησιμοποιούνται συσκευές υπολειμματικού
ρεύματος (RCD), επίσης γνωστές και ως διακόπτες
κυκλώματος διαρροής γείωσης (ELCB), πρέπει να υπάρχει
συμμόρφωση με τα παρακάτω:
Χρησιμοποιείτε RCD μόνο τύπου Β, που μπορούν
•
να ανιχνεύουν εναλλασσόμενα και συνεχή
ρεύματα.
Χρησιμοποιείτε RCD με καθυστέρηση εισροής για
•
την αποφυγή σφαλμάτων που προκαλούνται από
μεταβατικά ρεύματα γείωσης.
Επιλέξτε τη διάσταση των RCD λαμβάνοντας
•
υπόψη τη ρύθμιση παραμέτρων συστήματος και
τις περιβαλλοντικές παραμέτρους.
Εικόνα 2.32 Επίδραση της συχνότητας αποκοπής του RCD στην
αναλογία Ανταποκρίθηκε σε/Μετρήθηκε
Για περισσότερες λεπτομέρειες, ανατρέξτε στη σημείωση
εφαρμογής του RCD.
Λειτουργίες πέδης
2.9
2.9.1 Μηχανική πέδη διακοπής
Μια μηχανική πέδη διακοπής στερεωμένη απευθείας πάνω
στον άξονα εκτελεί κανονικά στατική πέδηση.
2 2
Εικόνα 2.31 Βασικές συνιστώσες του ρεύματος διαρροής
ΕΙΔΟΠΟΙΗΣΗ
Όταν η μηχανική πέδη διακοπής περιλαμβάνεται σε μια
αλυσίδα ασφαλείας, ο ρυθμιστής στροφών δεν μπορεί να
εγγυηθεί ασφαλή έλεγχο της μηχανικής πέδης. Να
συμπεριλάβετε εφεδρικό κύκλωμα για τον έλεγχο της
πέδης στη συνολική εγκατάσταση.
2.9.2 Δυναμική πέδηση
Η δυναμική πέδηση επιτυγχάνεται μέσω:
Αντιστάτη πέδησης: Ένα τρανζίστορ πέδης
•
διατηρεί την υπέρταση κάτω από ένα
συγκεκριμένο όριο διευθετώντας την ενέργεια
πέδησης από τον κινητήρα στη συνδεδεμένη
αντίσταση πέδησης (παράμετρος 2-10 Brake
Function = [1] Αντιστάτης πεδ.).
Ρυθμίστε το κατώφλι στην παράμετρος 2-14 Brake
voltage reduce, με περιοχή 70 V για 3x380–480 V.
Πέδη ΕΡ: Η ενέργεια πέδησης διανέμεται στον
•
κινητήρα με αλλαγή των συνθηκών απωλειών
στον κινητήρα. Η λειτουργία πέδης ΕΡ δεν μπορεί
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 43

T
ta
tc
tb
to ta
tc
tb
to ta
130BA167.10
Charge
Temps
Vitesse
Επισκόπηση προϊόντος
VLT® Midi Drive FC 280
να χρησιμοποιηθεί σε εφαρμογές με μεγάλη
συχνότητα εναλλαγών επειδή αυτό υπερθερμαίνει
τον κινητήρα (παράμετρος 2-10 Brake Function =
22
[2] Πέδη ΕΡ).
Πέδη ΣΡ: Ένα υπερδιαμορφωμένο ρεύμα ΣΡ που
•
προστίθεται στο ρεύμα ΕΡ λειτουργεί ως πέδη
δινορευμάτων (παράμετρος 2-02 DC Braking
Time≠0 s).
2.9.3 Επιλογή αντιστάτη πέδησης
Περιοχή ισχύος:
0,37–22 kW (0,5–30 hp) 3x380–480 V
0,37–3,7 kW (0,5–5 hp) 3x200–240 V
Χρόνος κύκλου (s) 120
Κύκλος εργασίας πέδησης σε ροπή 100% Συνεχής
Κύκλος εργασίας πέδησης σε υπερροπή
(150/160%)
Πίνακας 2.16 Πέδηση σε υψηλό επίπεδο ροπής υπερφόρτωσης
40%
Η Danfoss διαθέτει αντιστάτες πέδησης με κύκλο εργασίας
10% και 40%. Αν έχει εφαρμοστεί κύκλος εργασίας 10%, οι
Για τη διαχείριση των υψηλότερων απαιτήσεων λόγω της
πέδησης γεννήτριας, απαιτείται αντιστάτης πέδησης. Η
χρήση αντιστάτη πέδησης εξασφαλίζει ότι η θερμότητα
απορροφάται στον αντιστάτη πέδησης και όχι στον
αντιστάτες πέδησης μπορούν να απορροφούν ισχύ
πέδησης για το 10% του χρόνου κύκλου. Το υπόλοιπο 90%
του χρόνου κύκλου χρησιμοποιείται για την απαγωγή της
υπερβολικής θερμότητας.
μετατροπέα συχνότητας. Για περισσότερες πληροφορίες,
ανατρέξτε στον Οδηγό σχεδίασης του VLT® Αντιστάτη
πέδησης MCE 101.
Εάν η ποσότητα κινητικής ενέργειας που μεταφέρεται στον
αντιστάτη σε κάθε περίοδο πέδησης δεν είναι γνωστή,
υπολογίστε τη μέση ισχύ με βάση τον χρόνο κύκλου και
τον χρόνο πέδησης. Ο διαλείπων κύκλος εργασίας του
αντιστάτη αποτελεί μια ένδειξη του κύκλου εργασίας κατά
ΕΙΔΟΠΟΙΗΣΗ
Εξασφαλίστε ότι ο αντιστάτης είναι σχεδιασμένος να
διαχειρίζεται τον απαιτούμενο χρόνο πέδησης.
Το μέγιστο επιτρεπτό φορτίο στον αντιστάτη πέδησης
αναφέρεται ως μέγιστη ισχύς σε ένα δεδομένο διαλείποντα
κύκλο εργασίας και μπορεί να υπολογιστεί ως:
τον οποίο είναι ενεργός ο αντιστάτης. Το Εικόνα 2.33
απεικονίζει ένα τυπικό κύκλο πέδησης.
Ο διαλείπων κύκλος εργασίας του αντιστάτη υπολογίζεται
ως εξής:
Κύκλος εργασίας = tb/T
Υπολογισμός αντίστασης πέδησης
2
U
x0 . 83
Ω =
dc,br
P
κορυφή
R
br
όπου
P
peak
= P
x Mbr [%] x η
motor
motor
x η
VLT
[W]
Όπως φαίνεται, η αντίσταση πέδησης εξαρτάται από την
τάση της ζεύξης ΣΡ (Udc).
tb είναι ο χρόνος πέδησης σε δευτερόλεπτα.
T = χρόνος κύκλου σε δευτερόλεπτα.
Μέγεθος Ενεργή πέδη
U
dc,br
FC 280
3x380–480 V
FC 280
3x200–240 V
770 V 800 V 800 V
390 V 410 V 410 V
Προειδο-
ποίηση πριν
την διακοπή
Διακοπή
(σφάλμα)
Πίνακας 2.17 Κατώφλι της αντίστασης πέδησης
Το κατώφλι μπορεί να ρυθμιστεί στην
παράμετρος 2-14 Brake voltage reduce, με περιοχή 70 V.
Εικόνα 2.33 Τυπικός κύκλος πέδησης
44 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

Επισκόπηση προϊόντος Οδηγός σχεδίασης εφαρμογών
ΕΙΔΟΠΟΙΗΣΗ
Όσο μεγαλύτερη η τιμή μείωσης, τόσο ταχύτερη η
αντίδραση σε υπερφόρτωση γεννήτριας. Θα πρέπει να
χρησιμοποιείται αν υπάρχουν προβλήματα υπέρτασης
της τάσης ζεύξης ΣΡ.
ΕΙΔΟΠΟΙΗΣΗ
Εξασφαλίστε ότι ο αντιστάτης πέδησης έχει τη
δυνατότητα χειρισμού τάσης 410 V ή 800 V.
Η Danfoss προτείνει τον υπολογισμό της τιμής του
αντιστάτη πέδησης R
με τον ακόλουθο τύπο. Η προτει-
rec
νόμενη τιμή αντίστασης πέδησης εγγυάται ότι ο
μετατροπέας συχνότητας μπορεί να εκτελέσει πέδηση στη
μέγιστη ροπή πέδησης (M
2
U
x100x0,83
R
rec
H η
Ω =
τυπικά είναι 0,80 (≤7,5 kW (10 hp)). 0,85 (11–
motor
dc
P
xM
motor
br( % )
xη
br(%)
VLT
) του 160%.
xη
motor
22 kW (15–30 hp))
Η η
είναι τυπικά 0,97
VLT
Για τον FC 280, Η R
στο 160% της ροπής πέδησης
rec
γράφεται ως εξής:
480
480
V: R
V: R
rec
rec
396349
=
397903
=
P
P
motor
motor
Ω
Ω
1)
2)
1) Για μετατροπείς συχνότητας με απόδοση στον άξονα
≤7,5 kW (10 hp).
2) Για μετατροπείς συχνότητας με απόδοση στον άξονα 11–
22 kW (15–30 hp).
ΕΙΔΟΠΟΙΗΣΗ
Η αντίσταση του αντιστάτη πέδησης δεν πρέπει να είναι
υψηλότερη από την τιμή που προτείνει η Danfoss. Για
αντιστάτες πέδησης με μεγαλύτερη ωμική τιμή, η ροπή
πέδησης 160% μπορεί να μην επιτευχθεί επειδή ο
μετατροπέας συχνότητας μπορεί να διακόψει για λόγους
ασφαλείας.
Η αντίσταση θα πρέπει να είναι μεγαλύτερη από την R
min
ΕΙΔΟΠΟΙΗΣΗ
Σε περίπτωση βραχυκυκλώματος στο τρανζίστορ πέδης,
εμποδίστε την απορρόφηση ισχύος στον αντιστάτη
πέδης χρησιμοποιώντας ένα γενικό διακόπτη ή έναν
επαφέα για να αποσυνδέσετε το δίκτυο ρεύματος από το
μετατροπέα συχνότητας. Ο μετατροπέας συχνότητας
μπορεί να ελέγχει τον επαφέα.
ΕΙΔΟΠΟΙΗΣΗ
Μην ακουμπάτε τον αντιστάτη πέδησης επειδή μπορεί να
αποκτήσει υψηλή θερμοκρασία κατά την πέδηση. Για να
αποτρέψετε τον κίνδυνο πυρκαγιάς, τοποθετήστε τον
αντιστάτη πέδησης σε ασφαλές περιβάλλον.
2.9.4 Έλεγχος της λειτουργίας πέδησης
Η πέδη είναι προστατευμένη από βραχυκύκλωμα του
αντιστάτη πέδησης και το τρανζίστορ πέδης παρακολουθείται για να εξασφαλιστεί ότι τυχόν βραχυκύκλωμα του
τρανζίστορ θα ανιχνευτεί. Μια έξοδος ρελέ/ψηφιακή
έξοδος μπορεί να χρησιμοποιηθεί για να προστατεύσει τον
αντιστάτη πέδησης από υπερφόρτωση που προκαλείται
από βλάβη του ρυθμιστή στροφών.
Επιπροσθέτως, η πέδη δίνει τη δυνατότητα ένδειξης της
στιγμιαίας ισχύος και της μέσης ισχύος για τα τελευταία
120 s. Η πέδη μπορεί επίσης να παρακολουθεί την ενεργοποίηση ισχύος και να εξασφαλίζει ότι δεν υπερβαίνει το
όριο που έχει επιλεγεί στην παράμετρος 2-12 Brake Power
Limit (kW).
ΕΙΔΟΠΟΙΗΣΗ
Η παρακολούθηση της ισχύος πέδης δεν αποτελεί
λειτουργία ασφαλείας. Για να αποτραπεί η υπέρβαση του
ορίου από την ισχύ πέδης, απαιτείται θερμικός
διακόπτης. Το κύκλωμα του αντιστάτη πέδησης δεν
προστατεύεται από διαρροή προς τη γείωση.
Ο έλεγχος υπέρτασης (OVC) (αποκλειστικός αντιστάτης
πέδησης) μπορεί να επιλεγεί ως εναλλακτική λειτουργία
πέδησης στην παράμετρος 2-17 Over-voltage Control. Η
λειτουργία αυτή είναι ενεργή σε όλες τις μονάδες. Η
λειτουργία εξασφαλίζει ότι μπορεί να αποφευχθεί το
σφάλμα αν αυξηθεί η τάση της ζεύξης ΣΡ. Αυτό επιτυγχάνεται αυξάνοντας τη συχνότητα εξόδου για να
περιοριστεί η τάση από την ζεύξη ΣΡ. Είναι χρήσιμη
λειτουργία, για παράδειγμα αν ο χρόνος γραμμικής
μείωσης είναι πολύ μικρός ώστε να αποφευχθεί η
πρόκληση σφαλμάτων του ρυθμιστή στροφών. Σε αυτή την
περίπτωση, ο χρόνος γραμμικής μείωσης παρατείνεται.
.
ΕΙΔΟΠΟΙΗΣΗ
Ο OVC μπορεί να ενεργοποιηθεί κατά τη λειτουργία ενός
κινητήρα PM (όταν η παράμετρος 1-10 Motor Construction
έχει ρυθμιστεί στο [1] PM μη εξέχον SPM).
2.10 Μόνωση κινητήρα
Ο σύγχρονος σχεδιασμός των κινητήρων για χρήση με
μετατροπείς συχνότητας διαθέτει υψηλό βαθμό μόνωσης
για να ανταποκρίνεται στη νέα γενιά IGBT υψηλών
επιδόσεων με υψηλό dU/dt. Για την ανακατασκευή παλαιών
κινητήρων, είναι απαραίτητο να επαληθεύεται η μόνωση
του κινητήρα ή να μετριάζεται με φίλτρο dU/dt ή εάν είναι
απαραίτητο με φίλτρο ημιτονοειδούς κύματος.
2 2
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 45

. . .
. . .
Par. 13-11
Comparator Operator
Par. 13-43
Logic Rule Operator 2
Par. 13-51
SL Controller Event
Par. 13-52
SL Controller Action
130BB671.13
Coast
Start timer
Set Do X low
Select set-up 2
. . .
Running
Warning
Torque limit
Digital input X 30/2
. . .
=
TRUE longer than..
. . .
. . .
Επισκόπηση προϊόντος
VLT® Midi Drive FC 280
2.10.1 Φίλτρα ημιτονοειδούς κύματος
22
Όταν ο ρυθμιστής στροφών ελέγχει έναν κινητήρα, ο
κινητήρας εκπέμπει θόρυβο συντονισμού. Αυτός ο
θόρυβος, ο οποίος οφείλεται στο σχεδιασμό του κινητήρα,
προκαλείται κάθε φορά που ενεργοποιείται ένας διακόπτης
αναστροφέα μέσα στο ρυθμιστή στροφών. Συνεπώς, η
συχνότητα του θορύβου συντονισμού αντιστοιχεί στη
συχνότητα μεταγωγής του ρυθμιστή στροφών.
Η Danfoss παρέχει ένα φίλτρο ημιτονοειδούς κύματος για
την απόσβεση του ακουστικού θορύβου του κινητήρα.
Το φίλτρο μειώνει το χρόνο γραμμικής αύξησης της τάσης,
την τάση φορτίου κορυφής U
ΚΟΡΥΦΗΣ
, και το ρεύμα
κυμάτωσης ΔI στον κινητήρα, πράγμα που σημαίνει ότι το
ρεύμα και η τάση γίνονται σχεδόν ημιτονοειδείς. Συνεπώς,
ο ακουστικός θόρυβος κινητήρα μειώνεται στο ελάχιστο.
Το ρεύμα κυμάτωσης στις περιελίξεις του φίλτρου
ημιτονοειδούς κύματος προκαλεί επίσης κάποιο θόρυβο.
Αυτό το πρόβλημα μπορεί να λυθεί ενσωματώνοντας το
φίλτρο σε ερμάριο ή παρόμοιο εξοπλισμό.
2.10.2 Φίλτρα dU/dt
Η Danfoss παρέχει φίλτρα dU/dt. Τα φίλτρα dU/dt έχουν
διαφορική λειτουργία. Χαμηλοδιαβατά φίλτρα που
μειώνουν τις τάσεις κορυφής φάσης προς φάση των
ακροδεκτών του κινητήρα και μείωση του χρόνου αύξησης
σε ένα επίπεδο το οποίο μειώνει τις καταπονήσεις στη
μόνωση των περιελίξεων του κινητήρα. Αυτό αποτελεί
σημαντικό πρόβλημα στα καλώδια κινητήρα μικρού
μήκους.
Σε σύγκριση με τα φίλτρα ημιτονοειδούς κύματος
(ανατρέξτε στο κεφάλαιο 2.10.1 Φίλτρα ημιτονοειδούς
κύματος), τα φίλτρα dU/dt έχουν συχνότητα αποκοπής
πάνω από τη συχνότητα μεταγωγής.
Smart Logic Controller
2.11
O Ευφυής λογικός έλεγχος (SLC) είναι μια αλληλουχία
ενεργειών καθορισμένων από το χρήστη (βλ.
παράμετρος 13-52 Ενέργεια ελεγκτή SL [x]) που εκτελείται
από το SLC όταν το σχετιζόμενο καθορισμένο από το
χρήστη συμβάν (βλ. παράμετρος 13-51 Συμβάν ελεγκτή SL
[x]) αποτιμάται ως αληθές από το SLC.
Η συνθήκη ενός συμβάντος μπορεί να είναι μια
συγκεκριμένη κατάσταση ή το γεγονός ότι η έξοδος από το
λογικό κανόνα ή τον τελεστή σύγκρισης γίνεται αληθής.
Αυτό οδηγεί σε μια συνδεδεμένη ενέργεια όπως απεικονίζεται στο Εικόνα 2.34.
Εικόνα 2.34 Συνδεδεμένη ενέργεια
Τα συμβάντα και οι ενέργειες είναι αριθμημένα και
συνδεδεμένα σε ζεύγη (καταστάσεις). Αυτό σημαίνει ότι
όταν πληρείται το συμβάν [0] (αποκτά την τιμή αληθές),
εκτελείται η ενέργεια [0]. Κατόπιν τούτου, εκτιμώνται οι
συνθήκες του συμβάντος [1] και αν αποτιμηθεί ως αληθές,
θα εκτελεστεί η ενέργεια [1] κλπ. Μόνο 1 συμβάν εκτιμάται
την κάθε φορά. Αν ένα συμβάν αποτιμηθεί ως ψευδές, δε
συμβαίνει τίποτε (στο SLC) κατά τη διάρκεια του τρέχοντος
διαστήματος σάρωσης και δεν εκτιμούνται άλλα συμβάντα.
Όταν ξεκινά το SLC, αποτιμά το συμβάν [0] (και μόνο το
συμβάν [0]) σε κάθε διάστημα σάρωσης. Μόνο όταν το
συμβάν [0] αποτιμηθεί ως αληθές, θα εκτελέσει το SLC την
ενέργεια [0] και θα ξεκινήσει την αποτίμηση του συμβάντος
[1]. Μπορείτε να προγραμματίσετε από 1 έως 20 συμβάντα
και ενέργειες.
Όταν εκτελεστεί το(η) τελευταίο(-α) συμβάν/ενέργεια, η
αλληλουχία ξεκινά ξανά από το(τη) συμβάν [0]/ενέργεια [0].
Η Εικόνα 2.35 δείχνει ένα παράδειγμα με 3 συμβάντα/
ενέργειες:
46 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

130BA062.14
State 1
13-51.0
13-52.0
State 2
13-51.1
13-52.1
Start
event P13-01
State 3
13-51.2
13-52.2
State 4
13-51.3
13-52.3
Stop
event P13-02
Stop
event P13-02
Stop
event P13-02
Par. 13-11
Comparator Operator
=
TRUE longer than.
. . .
. . .
Par. 13-10
Comparator Operand
Par. 13-12
Comparator Value
130BB672.10
. . .
. . .
. . .
. . .
Par. 13-43
Logic Rule Operator 2
Par. 13-41
Logic Rule Operator 1
Par. 13-40
Logic Rule Boolean 1
Par. 13-42
Logic Rule Boolean 2
Par. 13-44
Logic Rule Boolean 3
130BB673.10
Επισκόπηση προϊόντος Οδηγός σχεδίασης εφαρμογών
2.12 Ακραίες συνθήκες λειτουργίας
Βραχυκύκλωμα (φάση με φάση κινητήρα)
Ο ρυθμιστής στροφών προστατεύεται από βραχυκυκλώματα μέσω μέτρησης ρεύματος σε κάθε μία από τις 3
φάσεις του κινητήρα ή στη ζεύξη ΣΡ. Ένα βραχυκύκλωμα
μεταξύ 2 φάσεων εξόδου προκαλεί υπερένταση στον
ρυθμιστή στροφών. Ο ρυθμιστής στροφών απενεργοποιείται αυτόματα, όταν το ρεύμα βραχυκύκλωσης
υπερβαίνει την επιτρεπτή τιμή (συναγερμός 16, κλείδωμα
σφάλματος).
Εικόνα 2.35 Αλληλουχία με 3 Συμβάντα/Ενέργειες
Συγκριτές
Οι συγκριτές χρησιμοποιούνται για να συγκρίνουν συνεχείς
μεταβλητές (π.χ. συχνότητα, ρεύμα εξόδου, αναλογική
είσοδο κτλ.) με σταθερές προκαθορισμένες τιμές.
Εικόνα 2.36 Συγκριτές
Λογικοί κανόνες
Συνδυάστε έως και 3 δυαδικές εισόδους (εισόδους αληθείς/
ψευδείς) από χρονοδιακόπτες, συγκριτές, ψηφιακές
εισόδους, bit κατάστασης και συμβάντα χρησιμοποιώντας
τους λογικούς τελεστές and, or και not.
Εικόνα 2.37 Λογικοί κανόνες
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 47
Μεταγωγή στην έξοδο
Η μεταγωγή της εξόδου μεταξύ του κινητήρα και του
ρυθμιστή στροφών επιτρέπεται κανονικά και δεν προκαλεί
βλάβη στον ρυθμιστή στροφών. Όμως, μπορεί να
εμφανιστούν μηνύματα σφαλμάτων.
Υπέρταση από κινητήρα
Η τάση στη ζεύξη ΣΡ αυξάνεται όταν ο κινητήρας
λειτουργεί ως γεννήτρια. Αυτό συμβαίνει στις εξής
περιπτώσεις:
Το φορτίο οδηγεί τον κινητήρα (σε σταθερή
•
συχνότητα εξόδου από τον ρυθμιστή στροφών).
Αν η ροπή αδράνειας είναι υψηλή κατά την
•
επιβράδυνση (γραμμική μείωση), η τριβή είναι
χαμηλή και ο χρόνος γραμμικής μείωσης είναι
υπερβολικά μικρός ώστε να μεταδοθεί η ενέργεια
ως απώλεια στον ρυθμιστή στροφών, τον
κινητήρα και την εγκατάσταση.
Η λανθασμένη ρύθμισης της αντιστάθμισης
•
ολίσθησης μπορεί να προκαλέσει μεγαλύτερη
τάση ζεύξης ΣΡ.
Η μονάδα ελέγχου μπορεί να προσπαθήσει να διορθώσει
την γραμμική μεταβολή (παράμετρος 2-17 Έλεγχος
υπέρτασης).
Αν η τάση φτάσει συγκεκριμένη στάθμη, ο ρυθμιστής
στροφών απενεργοποιείται για να προστατεύσει τα
τρανζίστορ και τους πυκνωτές της ζεύξης ΣΡ.
Για να επιλέξετε τη μέθοδο που χρησιμοποιείται για τον
έλεγχο στάθμης τάσης της ζεύξης ΣΡ, ανατρέξτε στην
παράμετρος 2-10 Λειτουργία πέδης και
παράμετρος 2-17 Έλεγχος υπέρτασης.
Πτώση τάσης δικτύου ρεύματος
Κατά τη διάρκεια πτώσης τάσης δικτύου ρεύματος, ο
ρυθμιστής στροφών συνεχίζει΄να λειτουργεί μέχρι η τάση
της ζεύξης ΣΡ να πέσει κάτω από την ελάχιστη στάθμη
σταματήματος, που είναι:
314 V για 3x380–480 V.
•
202 V για 3x200–240 V.
•
225 V για 1x200–240 V.
•
Η τάση του δικτύου ρεύματος πριν την πτώση και το
φορτίο κινητήρα καθορίζουν πόσο χρόνο χρειάζεται ο
αναστροφέας για να μπει σε ελεύθερη κίνηση.
2 2

Επισκόπηση προϊόντος
Στατική υπερφόρτωση σε τρόπο λειτουργίας VVC+.
Όταν ο ρυθμιστής στροφών υπερφορτωθεί, και η ροπή
φτάσει στο όριο στην παράμετρος 4-16 Torque Limit Motor
22
Mode/παράμετρος 4-17 Torque Limit Generator Mode, η
μονάδα ελέγχου μειώνει τη συχνότητα εξόδου για μειώσει
το φορτίο.
Αν η υπερφόρτωση είναι έντονη, μπορεί να σημειωθεί
υπερένταση που θα αναγκάσει τον ρυθμιστή στροφών να
διακόψει μετά από περίπου 5-10 s.
Η λειτουργία εντός του ορίου ροπής είναι χρονικά
περιορισμένη (0–60 s) στην παράμετρος 14-25 Trip Delay at
Torque Limit.
VLT® Midi Drive FC 280
2.12.1 Θερμική προστασία κινητήρα
Για την προστασία της εφαρμογής από σοβαρή ζημιά, ο
VLT® Midi Drive FC 280 παρέχει πολλά εξειδικευμένα
χαρακτηριστικά.
Όριο ροπής
Το όριο ροπής προστατεύει τον κινητήρα από την
υπερφόρτωση ανεξάρτητα από την ταχύτητα. Το όριο
ροπής ελέγχεται στην παράμετρος 4-16 Torque Limit Motor
Mode και παράμετρος 4-17 Torque Limit Generator Mode. Η
Παράμετρος 14-25 Trip Delay at Torque Limit ελέγχει τον
χρόνο πριν ενεργοποιηθεί η προειδοποίηση σφάλματος
ορίου ροπής.
Όριο έντασης ρεύματος
Η Παράμετρος 4-18 Current Limit ελέγχει το όριο ρεύματος
και η παράμετρος 14-24 Trip Delay at Current Limit ελέγχει
το χρόνο πριν ενεργοποιηθεί η προειδοποίηση σφάλματος
ορίου ρεύματος.
Ελάχιστο όριο ταχύτητας
Η Παράμετρος 4-12 Motor Speed Low Limit [Hz] ορίζει την
ελάχιστη ταχύτητα εξόδου που μπορεί να παρέχει ο
μετατροπέας συχνότητας.
Μέγιστο όριο ταχύτητας
Η Παράμετρος 4-14 Motor Speed High Limit [Hz] ή η
παράμετρος 4-19 Max Output Frequency ορίζει τη μέγιστη
ταχύτητα εξόδου που μπορεί να παρέχει ο μετατροπέας
συχνότητας.
ETR (ηλεκτρονικό θερμικό ρελέ)
Η λειτουργία ETR του μετατροπέα συχνότητας μετρά το
πραγματικό ρεύμα, την ταχύτητα και το χρόνο για να
υπολογίσει τη θερμοκρασία του κινητήρα. Η λειτουργία
προστατεύει επίσης τον κινητήρα από υπερθέρμανση
(προειδοποίηση ή ενεργοποίηση σφάλματος). Διατίθεται
επίσης είσοδος εξωτερικού θερμίστορ. Το ETR είναι ένα
ηλεκτρονικό χαρακτηριστικό που εξομοιώνει το διμεταλλικό
ρελέ με βάση τις εσωτερικές μετρήσεις. Η χαρακτηριστική
καμπύλη απεικονίζεται στο Εικόνα 2.38.
Εικόνα 2.38 ETR
Ο άξονας Χ απεικονίζει το λόγο του I
ονομαστικό I
δευτερόλεπτα πριν το ETR διακόψει και δώσει ένδειξη
σφάλματος στον μετατροπέα συχνότητας. Οι καμπύλες
δείχνουν την χαρακτηριστική της ονομαστικής ταχύτητα
στο διπλάσιο και στο 0,2 x της ονομαστικής ταχύτητας.
Σε χαμηλότερες ταχύτητες, το ETR διακόπτει σε
χαμηλότερες θερμοκρασίας λόγω της μικρότερης ψύξης
του κινητήρα. Με τον τρόπο αυτό, ο κινητήρας προστατεύεται από την υπερθερμασμένη ακόμα και σε χαμηλές
ταχύτητες. Το χαρακτηριστικό ETR υπολογίζει τη
θερμοκρασία του κινητήρα με βάση το πραγματικό ρεύμα
και την ταχύτητα. Η υπολογιζόμενη θερμοκρασία
εμφανίζεται ως παράμετρος ένδειξης στην
παράμετρος 16-18 Motor Thermal.
. Ο άξονας Υ απεικονίζει τον χρόνο σε
motor
ως προς το
motor
48 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

130BE805.11
+24 V DC
+24 V DC
A
B
GND
12 13 18 19 3227 29 33 55
B
A
B
A
130BA646.10
CW
CCW
Παραδείγματα εφαρμογής Οδηγός σχεδίασης εφαρμογών
3 Παραδείγματα εφαρμογής
3.1 Εισαγωγή
3.1.1 Σύνδεση παλμογεννήτριας
Σκοπός των οδηγιών αυτών είναι η διευκόλυνση ρύθμισης
της σύνδεσης της παλμογεννήτριας στον μετατροπέα
συχνότητας. Πριν τη ρύθμιση της παλμογεννήτριας, εμφανίζονται οι βασικές ρυθμίσεις ενός συστήματος ελέγχου
ταχύτητας κλειστού βρόχου.
3 3
Εικόνα 3.2 Αυξητική παλμογεννήτρια 24 V, μέγιστο μήκος
καλωδίου 5 m (16,4 ft)
3.1.2 Φορά παλμογεννήτριας
Η σειρά με την οποία οι παλμοί μπαίνουν στον μετατροπέα
συχνότητας καθορίζει την κατεύθυνση της παλμογεννήτριας.
Η δεξιόστροφη κατεύθυνση σημαίνει ότι το κανάλι Α έχει
διαφορά φάσης 90 μοιρών πριν το κανάλι Β.
Η αριστερόστροφη κατεύθυνση σημαίνει ότι το κανάλι Β
έχει διαφορά φάσης 90 μοιρών πριν το Α.
Η κατεύθυνση καθορίζεται κοιτώντας προς το άκρο του
άξονα.
3.1.3 Σύστημα ρυθμιστή στροφών κλειστού
βρόχου
Ένα σύστημα ελέγχου στροφών αποτελείται από
περισσότερα μέρη όπως:
Κινητήρας.
•
Πέδη (μειωτήρας στροφών, μηχανική πέδη).
•
Μετατροπέας συχνότητας.
•
Παλμογεννήτρια ως σύστημα ανάδρασης.
•
Αντιστάτης πέδησης για δυναμική πέδηση.
•
Σύστημα μετάδοσης.
•
Φορτίο.
•
Οι εφαρμογές που απαιτούν έλεγχο μηχανικής πέδης
χρειάζονται συνήθως αντιστάτη πέδησης.
Εικόνα 3.1 Παλμογ. 24 V
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 49

130BE728.10
Motor
Gearbox
Load
Transmission
Encoder Mech. brake
Brake resistor
130BF096.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
12
13
18
19
27
29
32
33
50
53
54
55
42
A OUT
D IN
+24 V
130BE204.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
0 ~10 V
+
-
FC
+24 V
130BF097.10
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
4 - 20mA
+
-
FC
+24 V
Παραδείγματα εφαρμογής
VLT® Midi Drive FC 280
3.2.2 Ταχύτητα
Παράμετροι
Λειτουργία Ρύθμιση
Παράμετρος
33
Low Voltage
Παράμετρος
6-11 Terminal 53
High Voltage
Παράμετρος
6-14 Terminal 53
Low Ref./Feedb.
Value
Παράμετρος
6-15 Terminal 53
High Ref./Feedb.
Value
Παράμετρος
6-19 Terminal 53
mode
* = Προεπιλεγμένη τιμή
Σημειώσεις/σχόλια:
Εικόνα 3.3 Βασική ρύθμιση για τον έλεγχο ταχύτητας κλειστού
βρόχου
6-10 Terminal 53
0,07 V*
10 V*
0
50
[1] Τάση
Πίνακας 3.2 Αναλογική τιμή αναφοράς ταχύτητας (Τάση)
Παραδείγματα εφαρμογής
3.2
Παράμετροι
3.2.1 AMA
Λειτουργία Ρύθμιση
Παράμετρος
Παράμετροι
Λειτουργία Ρύθμιση
Παράμετρος 1-29
Αυτόματη
προσαρμογή
κινητήρα (AMA)
Παράμετρος 5-12
Ψηφιακή είσοδος
ακροδέκτη 27
[1] Ενεργο-
ποίηση
πλήρους
AMA
*[2] Αντίστρ.
ελ. κίνηση
* = Προεπιλεγμένη τιμή
Σημειώσεις/σχόλια: Ρυθμίστε
την ομάδα παραμέτρων 1-2*
Δεδομένα κινητήρα ανάλογα με
τις προδιαγραφές του κινητήρα.
ΕΙΔΟΠΟΙΗΣΗ
Εάν οι ακροδέκτες 13 και
27 δεν είναι συνδεδεμένοι,
ρυθμίστε το
παράμετρος 5-12 Terminal
27 Digital Input σε [0] Χωρίς
λειτουργία.
6-22 Terminal 54
4 mA*
Low Current
Παράμετρος
6-23 Terminal 54
20 mA*
High Current
Παράμετρος
6-24 Terminal 54
Low Ref./Feedb.
0
Value
Παράμετρος
6-25 Terminal 54
High Ref./Feedb.
50
Value
Παράμετρος
6-29 Terminal 54
[0] Ρεύμα
mode
* = Προεπιλεγμένη τιμή
Σημειώσεις/σχόλια:
Πίνακας 3.3 Αναλογική τιμή αναφοράς ταχύτητας (Ένταση)
Πίνακας 3.1 AMA με T27 συνδεδεμένο
50 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

130BE208.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
≈ 5kΩ
FC
+24 V
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
130BF100.10
+24 V
130BB840.12
Speed
Reference
Start (18)
Freeze ref (27)
Speed up (29)
Speed down (32)
130BF098.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
19
18
27
29
32
33
50
53
54
55
42
+24 V 13
Παραδείγματα εφαρμογής Οδηγός σχεδίασης εφαρμογών
Παράμετροι
Λειτουργία Ρύθμιση
Παράμετρος 6-10
Χαμηλή τάση
ακροδέκτη 53
Παράμετρος 6-11
Υψηλή τάση
ακροδέκτη 53
Παράμετρος 6-14
Υψηλή τιμή αναφ./
ανάδρ. ακροδέκτη
53
Παράμετρος 6-15
Υψηλή τιμή αναφ./
ανάδρ. ακροδέκτη
53
Παράμετρος
6-19 Terminal 53
mode
* = Προεπιλεγμένη τιμή
Σημειώσεις/σχόλια:
Πίνακας 3.4 Τιμή αναφοράς ταχύτητας (με τη χρήση
Χειροκίνητου ποτενσιόμετρου)
Παράμετροι
Λειτουργία Ρύθμιση
Παράμετρος 5-10
Ψηφιακή είσοδος
ακροδέκτη 18
Παράμετρος 5-12
Ψηφιακή είσοδος
ακροδέκτη 27
Παράμετρος 5-13
Ψηφιακή είσοδος
ακροδέκτη 29
Παράμετρος 5-14
Ψηφιακή είσοδος
ακροδέκτη 32
* = Προεπιλεγμένη τιμή
Σημειώσεις/σχόλια:
Πίνακας 3.5 Επιτάχυνση/επιβράδυνση
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 51
0,07 V*
10 V*
0
50
[1] Τάση
*[8] Εκκίνηση
[19] Πάγωμα
τιμής
αναφοράς
[21]
Επιτάχυνση
[22]
Επιβράδυνση
Εικόνα 3.4 Επιτάχυνση/επιβράδυνση
3.2.3 Εκκίνηση/σταμάτημα
Παράμετροι
Λειτουργία Ρύθμιση
Παράμετρος 5-10
Ψηφιακή είσοδος
ακροδέκτη 18
Παράμετρος 5-11
Ψηφιακή είσοδος
ακροδέκτη 19
Παράμετρος 5-12
Ψηφιακή είσοδος
ακροδέκτη 27
Παράμετρος 5-14
Ψηφιακή είσοδος
ακροδέκτη 32
Παράμετρος 5-15
Ψηφιακή είσοδος
ακροδέκτη 33
Παράμετρος 3-10
Προεπιλεγμένη
επιθυμητή τιμή
Προκαθορισμένη
τιμή αναφοράς 0
Προκαθορισμένη
τιμή αναφοράς 1
Προκαθορισμένη
τιμή αναφοράς 2
Προκαθορισμένη
τιμή αναφοράς 3
* = Προεπιλεγμένη τιμή
Σημειώσεις/σχόλια:
Πίνακας 3.6 Εκκίνηση/σταμάτημα με αναστροφή και 4
προκαθορισμένες ταχύτητες
[8] Εκκίνηση
*[10]
Αναστροφή
[0] Χωρίς
λειτουργία
[16]
Προκαθο-
ρισμένη τιμή
αναφοράς bit
0
[17]
Προκαθο-
ρισμένη τιμή
αναφοράς bit
1
25%
50%
75%
100%
3 3

130BF099.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
+24 V
130BE210.11
+24 V
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
FC
D IN
+24 V
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
R1
12
13
18
19
27
29
32
33
50
53
54
55
42
01
02
03
130BE211.11
+24 V
Παραδείγματα εφαρμογής
VLT® Midi Drive FC 280
3.2.4 Επαναφορά εξωτερικού συναγερμού
Παράμετροι
Λειτουργία Ρύθμιση
Παράμετρος 5-11
Ψηφιακή είσοδος
33
ακροδέκτη 19
* = Προεπιλεγμένη τιμή
Σημειώσεις/σχόλια:
[1]
Επαναφορά
3.2.6 SLC
Παράμετροι
Λειτουργία Ρύθμιση
Παράμετρος 4-30
Λειτουργία
απώλειας
ανάδρασης
[1] Προειδοποίηση
κινητήρα
Παράμετρος 4-31
Σφάλμα
ταχύτητας
50
ανάδρασης
κινητήρα
Παράμετρος 4-32
Τέλος χρ.
απώλειας ανάδρ.
5 s
κιν.
Παράμετρος 7-00
Ταχύτητα PID
Πηγή ανάδρασης
[1] Παλμογ.
24 V
Παράμετρος
5-70 Term 32/33
Pulses Per
1024*
Revolution
Παράμετρος 13-0
Πίνακας 3.7 Επαναφορά εξωτερικού συναγερμού
3.2.5 Θερμίστορ κινητήρα
ΕΙΔΟΠΟΙΗΣΗ
Για να πληρούνται οι απαιτήσεις μόνωσης PELV, να
χρησιμοποιείτε ενισχυμένη ή διπλή μόνωση στα
θερμίστορ.
0 Τρόπος
λειτουργίας
ελεγκτή SL
Παράμετρος 13-0
1 Συμβάν
έναρξης
Παράμετρος 13-0
2 Συμβάν
διακοπής
Παράμετρος 13-1
0 Παράγοντας
κυκλώματος
σύγκρισης
[1] On
[19] Προειδοποίηση
[44] Πλήκτρο
επαναφοράς
[21] Αρ.
προειδοποίησης
Παράμετρος 13-1
Παράμετροι
Λειτουργία Ρύθμιση
Παράμετρος 1-90
Θερμ. προστ.
[2] Σφάλμα
θερμίστορ
κινητ.
Παράμετρος 1-93
Πηγή θερμίστορ
[1] Αναλογική
είσοδος 53
Παράμετρος
Πίνακας 3.8 Θερμίστορ κινητήρα
52 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327
6-19 Terminal 53
[1] Τάση
mode
* = Προεπιλεγμένη τιμή
Σημειώσεις/σχόλια:
Αν επιθυμείτε μόνο μία
προειδοποίηση, ρυθμίστε την
παράμετρος 1-90 Θερμ. προστ.
κινητ. στο [1] Προειδ. θερμίσ τορ.
1 Τελεστής
κυκλώματος
σύγκρισης
Παράμετρος 13-1
2 Τιμή
κυκλώματος
σύγκρισης
Παράμετρος 13-5
1 Συμβάν ελεγκτή
SL
Παράμετρος 13-5
2 Ενέργεια
ελεγκτή SL
*[1] ≈
61
[22] Συγκριτής
0
[32]
Ρύθμ.ψηφ.εξ.
Α χαμ.

Παραδείγματα εφαρμογής Οδηγός σχεδίασης εφαρμογών
Παράμετροι
Λειτουργία Ρύθμιση
Παράμετρος 5-40
Λειτουργία ρελέ
* = Προεπιλεγμένη τιμή
Σημειώσεις/σχόλια:
Εάν γίνει υπέρβαση στην
παρακολούθηση ανάδρασης,
προκύπτει η ένδειξη warning
61, feedback monitor. Το SLC
παρακολουθεί το σήμα warning
61, feedback monitor. Αν το
σήμα warning 61, feedback
monitor γίνει αληθές ενεργοποιείται το ρελέ 1.
Εξωτερικός εξοπλισμός θα
μπορούσε να υποδείξει ότι
απαιτείται σέρβις. Αν το
σφάλμα ανάδρασης πέσει κάτω
από το όριο πάλι μέσα σε 5
δευτ., ο ρυθμιστής στροφών
συνεχίζει και η προειδοποίηση
εξαφανίζεται. Το ρελέ 1
παραμένει οπλισμένο μέχρι να
πατηθεί το
[80] Ψηφιακή
έξοδος SL A
[O/Reset].
3 3
Πίνακας 3.9 Χρήση SLC για τη ρύθμιση ενός ρελέ
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 53

Safe Torque O (STO)
VLT® Midi Drive FC 280
4 Safe Torque O (STO)
Η λειτουργία Safe Torque O (STO) είναι μια συνιστώσα ενός συστήματος ελέγχου ασφάλειας. Η STO αποτρέπει τη μονάδα
από το να παράγει την ενέργεια που απαιτείται για την περιστροφή του κινητήρα, διασφαλίζοντας έτσι την ασφάλεια σε
περιστάσεις εκτάκτου ανάγκης.
Η λειτουργία STO είναι σχεδιασμένη και εγκεκριμένη ως κατάλληλη για τις απαιτήσεις των:
IEC/EN 61508: SIL2
44
•
IEC/EN 61800-5-2: SIL2
•
IEC/EN 62061: SILCL του SIL2
•
EN ISO 13849-1: Κατηγορία 3 PL d
•
Για την επίτευξη του απαιτούμενου επιπέδου λειτουργικής ασφάλειας, επιλέξτε και εφαρμόστε κατάλληλα τη συνιστώσα στο
σύστημα ελέγχου ασφάλειας. Πριν τη χρήση της STO εκτελέστε εκτεταμένη ανάλυση κινδύνων στην εγκατάσταση, για να
προσδιορίσετε αν η λειτουργικότητα της STO και τα επίπεδα ασφάλειας είναι κατάλληλα και επαρκή.
Για περισσότερες πληροφορίες αναφορικά με τη λειτουργία safe torque
(STO) στον Οδηγό χειρισμού VLT® Midi Drive FC 280 Operating Guide.
o (STO), ανατρέξτε στο κεφάλαιο 6 Safe Torque O
54 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

drop cable
Εγκατάσταση και ρύθμιση RS4... Οδηγός σχεδίασης εφαρμογών
5 Εγκατάσταση και ρύθμιση RS485
5.1 Εισαγωγή
5.1.1 Γενική περιγραφή
Το RS485 είναι μια διασύνδεση διαύλου επικοινωνίας 2 συρμάτων με τοπολογία δικτύου πολλαπλών τερματισμών. Οι κόμβοι
μπορούν να συνδεθούν ως δίαυλος ή μέσω καλωδίων τερματισμού από μια κοινή γραμμή κορμού. Σε 1 τμήμα δικτύου
μπορεί να συνδεθεί ένα σύνολο 32 κόμβων.
Τα τμήματα δικτύου χωρίζονται με αναμεταδότες, ανατρέξτε στο Εικόνα 5.1.
5 5
Εικόνα 5.1 Διασύνδεση διαύλου RS485
ΕΙΔΟΠΟΙΗΣΗ
Κάθε αναμεταδότης λειτουργεί ως κόμβος εντός του
τμήματος στο οποίο έχει εγκατασταθεί. Κάθε κόμβος που
συνδέεται σε ένα δεδομένο δίκτυο πρέπει να έχει
μοναδική διεύθυνση κόμβου για το σύνολο των
τμημάτων.
Τερματίστε κάθε τμήμα και στα δυο άκρα, χρησιμοποιώντας είτε το διακόπτη τερματισμού (S801) των
μετατροπέων συχνότητας η πολωμένο δίκτυο αντίστασης
τερματισμού. Χρησιμοποιείτε πάντα θωρακισμένο καλώδιο
συνεστραμμένου ζεύγους (STP) για την καλωδίωση διαύλου
και ακολουθείτε την ορθή πρακτική εγκατάστασης.
Η σύνδεση χαμηλής σύνθετης αντίστασης γείωσης της
θωράκισης σε κάθε κόμβο είναι σημαντική, συμπεριλαμβανομένων των υψηλών συχνοτήτων. Συνεπώς, συνδέστε μια
μεγάλη επιφάνεια της θωράκισης στη γείωση, για
παράδειγμα με σφιγκτήρα καλωδίου ή αγώγιμο στυπιοθλίπτη καλωδίου. Μερικές φορές, είναι απαραίτητο να
χρησιμοποιήσετε καλώδια εξισορρόπησης δυναμικού για
να διατηρήσετε το ίδιο δυναμικό γείωσης σε όλο το δίκτυο,
ιδιαίτερα σε εγκαταστάσεις με καλώδια μεγάλου μήκους.
Για να αποτρέψετε την αναντιστοιχία σύνθετης αντίστασης,
να χρησιμοποιείτε τον ίδιο τύπο καλωδίου σε ολόκληρο το
δίκτυο. Κατά τη σύνδεση κινητήρα στο μετατροπέα
συχνότητας,να χρησιμοποιείτε πάντα θωρακισμένο καλώδιο
κινητήρα.
Καλώδιο Θωρακισμένο συνεστραμμένο ζεύγος (STP)
Σύνθετη
αντίσταση [Ω]
Μήκος
καλωδίου [m
(ft)]
Πίνακας 5.1 Προδιαγραφές καλωδίου
120
Μέγιστο 1.200 (3.937) (περιλαμβανομένων των
αγωγών τερματισμού).
Μέγιστο 500 (1.640) από σταθμό σε σταθμό.
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 55

61 68 69
N
P
COMM. GND
130BB795.10
Εγκατάσταση και ρύθμιση RS4...
VLT® Midi Drive FC 280
5.1.2 Σύνδεση δικτύου
Συνδέστε τον μετατροπέα συχνότητας στο δίκτυο RS485 ως
εξής (βλ. επίσης Εικόνα 5.2):
1. Συνδέσετε τα καλώδια σήματος στον ακροδέκτη
68 (P+) και στον ακροδέκτη 69 (N-) στη βασική
πλακέτα ελέγχου του μετατροπέα συχνότητας.
2. Συνδέστε τη θωράκιση καλωδίου στους
σφιγκτήρες καλωδίου.
ΕΙΔΟΠΟΙΗΣΗ
Για να μειώσετε το θόρυβο μεταξύ των αγωγών, χρησιμο-
55
ποιήστε θωρακισμένα καλώδια συνεστραμμένου ζεύγους.
Εικόνα 5.2 Σύνδεση δικτύου
Παράμετρος Λειτουργία
Παράμετρος
8-33 Parity / Stop
Bits
Παράμετρος
8-35 Minimum
Response Delay
Παράμετρος
8-36 Maximum
Response Delay
Πίνακας 5.2 Ρυθμίσεις παραμέτρων επικοινωνίας Modbus
Ρυθμίστε την ισοτιμία και τον αριθμό των bit
διακοπής.
ΕΙΔΟΠΟΙΗΣΗ
Η προκαθορισμένη επιλογή εξαρτάται
από το πρωτόκολλο που έχει επιλεγεί
στην παράμετρος 8-30 Protocol.
Ορίστε έναν ελάχιστο χρόνο καθυστέρησης
μεταξύ της παραλαβής ενός αιτήματος και
της μετάδοσης μίας απάντησης. Η
λειτουργία αυτή χρησιμοποιείται για την
υπέρβαση των καθυστερήσεων ανταπό-
κρισης μόντεμ.
Ορίστε το μέγιστο χρόνο καθυστέρησης
μεταξύ της μετάδοσης ενός αιτήματος και
της λήψης μίας απάντησης.
5.1.5 Μέτρα EMC
5.1.3 Ρύθμιση υλικού
Για τον τερματισμό του διαύλου RS485, χρησιμοποιήστε
τον διακόπτη τερματισμού στην κύρια πλακέτα ελέγχου
του μετατροπέα συχνότητας.
Η εργοστασιακή ρύθμιση για το διακόπτη είναι OFF.
5.1.4 Ρυθμίσεις παραμέτρων για την
επικοινωνία Modbus
Παράμετρος Λειτουργία
Παράμετρος
8-30 Protocol
Παράμετρος
8-31 Address
Επιλέξτε το πρωτόκολλο εφαρμογής για
εκτέλεση στη διασύνδεση RS485.
Ρυθμίστε τη διεύθυνση κόμβου.
ΕΙΔΟΠΟΙΗΣΗ
Η περιοχή διευθύνσεων εξαρτάται από
το πρωτόκολλο που έχει επιλεγεί στην
παράμετρος 8-30 Protocol.
Για να επιτύχετε τη λειτουργία του δικτύου RS485 χωρίς
παρεμβολές, η Danfoss συνιστά τη λήψη των εξής μέτρων
EMC.
ΕΙΔΟΠΟΙΗΣΗ
Να τηρείτε τους σχετικούς κρατικούς και τοπικούς
κανονισμούς, για παράδειγμα όσον αφορά στην σύνδεση
της γείωσης προστασίας. Για να αποτρέψετε την επαγωγή
υψίσυχνου θορύβου μεταξύ των καλωδίων, κρατήστε το
καλώδιο επικοινωνιών RS485 σε απόσταση από τον
κινητήρα και τα καλώδια του αντιστάτη πέδησης.
Κανονικά, επαρκεί μια απόσταση 200 mm (8 in).
Κρατήστε τη μεγαλύτερη δυνατή απόσταση μεταξύ των
καλωδίων, ειδικά όπου τα καλώδια είναι παράλληλα και
σε μεγάλες αποστάσεις. Όπου είναι αναπόφευκτη η
διασταύρωση, το καλώδιο RS485 πρέπει να διασταυρώνεται με τα καλώδια του κινητήρα και του αντιστάτη
πέδησης με γωνία 90°.
5.2 Πρωτόκολλο FC
Παράμετρος
8-32 Baud Rate
Επιλέξτε τον ρυθμό Baud.
ΕΙΔΟΠΟΙΗΣΗ
Ο προεπιλεγμένος ρυθμός baud
εξαρτάται από το πρωτόκολλο που
έχει επιλεγεί στην
παράμετρος 8-30 Protocol.
5.2.1 Γενική περιγραφή
Το πρωτόκολλο FC, που αναφέρεται επίσης ως δίαυλος FC
ή τυπικός δίαυλος, είναι το συνηθισμένο πρωτόκολλο
τοπικού διαύλου της Danfoss. Ορίζει μια τεχνική
πρόσβασης που ακολουθεί την αρχή κύριας/εξαρτημένης
μονάδας για την επικοινωνία μέσω τοπικού διαύλου.
Στο δίαυλο επικοινωνίας μπορούν να συνδεθούν μια κύρια
και το πολύ 126 εξαρτημένες μονάδες. Η κύρια επιλέγει τις
διάφορες εξαρτημένες μονάδες μέσω ενός χαρακτήρα
διεύθυνσης στο μήνυμα. Η ίδια η εξαρτημένη μονάδα δεν
μπορεί ποτέ να μεταδώσει χωρίς πρώτα να της ζητηθεί να
56 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

0 1 32 4 5 6 7
195NA036.10
Start
bit
Even Stop
Parity bit
STX LGE ADR D ATA BCC
195NA099.10
Εγκατάσταση και ρύθμιση RS4... Οδηγός σχεδίασης εφαρμογών
το κάνει και έτσι η απευθείας μετάδοση μηνυμάτων μεταξύ
των διαφόρων εξαρτημένων μονάδων δεν είναι εφικτή. Οι
επικοινωνίες γίνονται σε λειτουργία μισού duplex.
Η λειτουργία της κύριας δεν μπορεί να ανατεθεί σε άλλο
κόμβο (σύστημα μίας κύριας μονάδας).
Το φυσικό επίπεδο είναι το RS485, και έτσι αξιοποιεί τη
θύρα RS485 που βρίσκεται ενσωματωμένη στον
μετατροπέα συχνότητας. Το πρωτόκολλο FC υποστηρίζει
διάφορες μορφοποιήσεις μηνυμάτων:
Μια μικρή μορφοποίηση 8 byte για τα δεδομένα
•
διεργασίας.
Μια μεγάλη μορφοποίηση 16 bytes που
•
περιλαμβάνει επίσης ένα δίαυλο παραμέτρου.
Μια μορφοποίηση που χρησιμοποιείται για
•
κείμενα.
5.2.2 FC με RTU Modbus
Το πρωτόκολλο FC παρέχει πρόσβαση στη λέξη ελέγχου
και στην αναφορά διαύλου του μετατροπέα συχνότητας.
Η λέξη ελέγχου δίνει τη δυνατότητα στον κύριο του
Modbus να ελέγχει πολλές σημαντικές λειτουργίες του
μετατροπέα συχνότητας:
Εκκίνηση.
•
Διακοπή του μετατροπέα συχνότητας με πολλούς
•
τρόπους:
- Σταμάτημα με ελεύθερη κίνηση.
- Γρήγορο σταμάτημα.
- Σταμάτημα με πέδη ΣΡ.
- Κανονικό σταμάτημα (με γραμμική
μεταβολή).
Επαναφορά μετά από σφάλμα.
•
Λειτουργία σε διάφορες προκαθορισμένες
•
ταχύτητες.
Ανάστροφη λειτουργία.
•
Αλλαγή των ενεργών ρυθμίσεων.
•
Έλεγχος των 2 ρελέ που είναι ενσωματωμένα
•
στον μετατροπέα συχνότητας.
Η αναφορά διαύλου χρησιμοποιείται συνήθως για τον
έλεγχο ταχύτητας. Είναι επίσης εφικτή η πρόσβαση στις
παραμέτρους, η ανάγνωση των τιμών και όπου αυτό είναι
δυνατό, η εγγραφή τιμών σε αυτές. Η πρόσβαση στις
παραμέτρους παρέχει μια γκάμα από επιλογές ελέγχου, που
περιλαμβάνουν τον έλεγχο του σημείου ρύθμισης του
μετατροπέα συχνότητας στο οποίο γίνεται χρήση του
εσωτερικού του ελεγκτή ΡΙ.
Διαμόρφωση δικτύου
5.3
Για να ενεργοποιήσετε το πρωτόκολλο FC για τον
μετατροπέα συχνότητας, ρυθμίστε τις εξής παραμέτρους.
Παράμετρος Ρύθμιση
Παράμετρος 8-30 Protocol FC
Παράμετρος 8-31 Address 1–126
Παράμετρος 8-32 Baud Rate 2400–115200
Παράμετρος 8-33 Parity / Stop Bits
Πίνακας 5.3 Παράμετροι για την ενεργοποίηση του
πρωτοκόλλου
Μονή ισοτιμία, 1 bit
διακοπής (προεπιλογή)
5.4 Δομή πλαισίωσης του μηνύματος
πρωτόκολλου FC
5.4.1 Περιεχόμενο ενός χαρακτήρα (byte)
Κάθε χαρακτήρας που μεταδόθηκε ξεκινά με ένα bit
εκκίνησης. Μετά μεταδίδονται 8 bit δεδομένων, που
αντιστοιχούν σε ένα byte. Όλοι οι χαρακτήρες προστατεύονται από αλλοίωση μέσω ενός bit ισοτιμίας. Όταν
υπάρχει ισοτιμία, το bit παίρνει την τιμή 1. Ισοτιμία υπάρχει
όταν υπάρχει ίσος αριθμός από 1 στα 8 bit δεδομένων και
στο bit ισοτιμίας συνολικά. Ο χαρακτήρας συμπληρώνεται
με ένα bit διακοπής και αποτελείται από 11 bit συνολικά.
Εικόνα 5.3 Περιεχόμενο ενός χαρακτήρα
5.4.2 Δομή μηνύματος
Το μήνυμα έχει την εξής δομή:
Χαρακτήρας εκκίνησης (STX) = 02 hex.
•
Ένα byte που δηλώνει το μήκος μηνύματος (LGE).
•
Ένα byte που δηλώνει τη διεύθυνση του
•
μετατροπέα συχνότητας (ADR).
Ακολουθούν πολλά byte δεδομένων (ο αριθμός τους είναι
μεταβλητός και εξαρτάται από το είδος του μηνύματος).
Το μήνυμα το ολοκληρώνει ένα byte ελέγχου δεδομένων
(BCC).
Εικόνα 5.4 Δομή μηνύματος
5 5
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 57

ADRLGESTX PCD1 PCD2 BCC
130BA269.10
PKE INDADRLGESTX PCD1 PCD2 BCC
130BA271.10
PWE
high
PWE
low
PKE IND
130BA270.10
ADRLGESTX PCD1 PCD2 BCCCh1 Ch2 Chn
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BB918.10
PKE IND
PWE
high
PWE
low
AK PNU
Parameter
commands
and replies
Parameter
number
Εγκατάσταση και ρύθμιση RS4...
5.4.3 Μήκος μηνύματος (LGE)
VLT® Midi Drive FC 280
Το μήκος μηνύματος είναι ο αριθμός των byte δεδομένων
Εικόνα 5.5 Μπλοκ διεργασίας
συν το byte διεύθυνσης ADR συν το byte ελέγχου
δεδομένων BCC.
Μπλοκ παραμέτρων
4 byte δεδομένων LGE=4+1+1=6 byte
12 byte δεδομένων LGE=12+1+1=14 byte
Μηνύματα που περιέχουν κείμενα
Πίνακας 5.4 Το μήκος των μηνυμάτων
55
1) Ο αριθμός 10 αντιπροσωπεύει τους σταθερούς χαρακτήρες, ενώ το
n είναι μεταβλητό (ανάλογα με το μήκος του κειμένου).
101)+n byte
Το μπλοκ παραμέτρων χρησιμοποιείται για τη μεταφορά
παραμέτρων μεταξύ της κύριας και των εξαρτημένων
μονάδων. Το μπλοκ δεδομένων αποτελείται από 12 byte (6
λέξεις) και περιέχει επίσης το μπλοκ διεργασίας.
Εικόνα 5.6 Μπλοκ παραμέτρων
5.4.4 Διεύθυνση μετατροπέα συχνότητας
(ADR)
Διαμόρφωση διεύθυνσης 1-126
Bit 7 = 1 (ενεργή διαμόρφωση διεύθυνσης 1–126).
•
Bit 0–6 = διεύθυνση μετατροπέα συχνότητας 1–
•
126.
Bit 0–6 = 0 μήνυμα προς όλους.
•
Η εξαρτημένη μονάδα επιστρέφει το byte διεύθυνσης
χωρίς μεταβολή στην κύρια μονάδα στο μήνυμα
απάντησης.
5.4.5 Byte ελέγχου δεδομένων (BCC)
Μπλοκ κειμένου
Το μπλοκ κειμένου χρησιμοποιείται για την ανάγνωση ή
την εγγραφή κειμένων μέσου του μπλοκ δεδομένων.
Εικόνα 5.7 Μπλοκ κειμένου
5.4.7 Το πεδίο PKE
Το πεδίο PKE περιέχει 2 δευτερεύοντα πεδία:
Εντολή και απόκριση παραμέτρου (ΑΚ)
•
Αριθμός παραμέτρου (PNU)
•
Το άθροισμα ελέγχου υπολογίζεται με τη συνάρτηση XOR.
Πριν γίνει λήψη του πρώτου byte του μηνύματος, το
υπολογιζόμενο άθροισμα ελέγχου είναι 0.
5.4.6 Το πεδίο δεδομένων
Η δομή των μπλοκ δεδομένων εξαρτάται από το είδος του
μηνύματος. Υπάρχουν 3 είδη μηνύματος και το είδος ισχύει
και για τα μηνύματα ελέγχου (κύρια⇒εξαρτημένη μονάδα)
και για τα μηνύματα απάντησης (εξαρτημένη
μονάδα⇒κύρια).
Τα 3 είδη μηνυμάτων είναι:
Μπλοκ διεργασίας (PCD)
Το PCD αποτελείται από ένα μπλοκ δεδομένων 4 byte (2
λέξεων) και περιέχει:
•
•
Λέξη ελέγχου και τιμή αναφοράς΄(από την κύρια
προς την εξαρτημένη μονάδα)
Λέξη περιγραφής κατάστασης και τρέχουσα
συχνότητα εξόδου (από την εξαρτημένη μονάδα
προς την κύρια)
Εικόνα 5.8 Πεδίο PKE
Τα bit 12-15 μεταφέρουν εντολές παραμέτρων από την
κύρια προς την εξαρτημένη μονάδα και επιστρέφουν τις
επεξεργασμένες αποκρίσεις της εξαρτημένης μονάδας προς
την κύρια.
58 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

Εγκατάσταση και ρύθμιση RS4... Οδηγός σχεδίασης εφαρμογών
Εντολές παραμέτρου από την κύρια⇒εξαρτημένη μονάδα
Αριθμός bit Εντολή παραμέτρου
15 14 13 12
0 0 0 0 Χωρίς εντολή.
0 0 0 1 Ανάγνωση τιμής παραμέτρου.
0 0 1 0
0 0 1 1
1 1 0 1
1 1 1 0
1 1 1 1 Ανάγνωση κειμένου.
Πίνακας 5.5 Εντολές παραμέτρου
Απόκριση από εξαρτημένη μονάδα⇒κύρια
Αριθμός bit Απόκριση
15 14 13 12
0 0 0 0 Χωρίς απόκριση.
0 0 0 1 Μετάδοση τιμής παραμέτρου (λέξη).
0 0 1 0
0 1 1 1 Η εντολή δεν μπορεί να εκτελεστεί.
1 1 1 1 Το κείμενο μεταδόθηκε.
Εγγραφή τιμής παραμέτρου στη RAM
(λέξη).
Εγγραφή τιμής παραμέτρου στη RAM
(διπλή λέξη).
Εγγραφή τιμής παραμέτρου στη RAM και
στην EEPROM (διπλή λέξη).
Εγγραφή τιμής παραμέτρου στη RAM και
στην EEPROM (λέξη).
Μετάδοση τιμής παραμέτρου (διπλή
λέξη).
Κωδικός
σφάλματος
131
132 Χωρίς πρόσβαση LCP.
252 Άγνωστος θεατής.
253 Το αίτημα δεν υποστηρίζεται.
254 Άγνωστη παράμετρος.
255 Χωρίς σφάλμα.
Πίνακας 5.7 Αναφορά εξαρτημένης μονάδας
Δεν είναι εφικτή η εγγραφή στις ρυθμίσεις
εργοστασίου.
Προδιαγραφή FC
5.4.8 Αριθμός παραμέτρου (PNU)
Τα bit 0-11 μεταφέρουν τους αριθμούς παραμέτρων. Η
λειτουργία της σχετικής παραμέτρου καθορίζεται στην
περιγραφή παραμέτρου στον Οδηγό προγραμματισμού του
VLT® Midi Drive FC 280.
5.4.9 Δείκτης (IND)
O δείκτης χρησιμοποιείται σε συνδυασμό με τον αριθμό
παραμέτρου για την ανάγνωση/εγγραφή παραμέτρων
πρόσβασης με δείκτη, για παράδειγμα,
παράμετρος 15-30 Alarm Log: Error Code. Ο δείκτης
αποτελείται από 2 byte: ένα κάτω byte και ένα άνω byte.
5 5
Πίνακας 5.6 Απόκριση
Αν η εντολή δεν μπορεί να εκτελεστεί, η εξαρτημένη
μονάδα στέλνει την απόκριση 0111 Η εντολή δεν μπορεί να
εκτελεστεί και εξάγει τις εξής αναφορές βλάβης στον
Πίνακας 5.7.
Κωδικός
σφάλματος
0 Άκυρος αριθμός παραμέτρου.
1 Η παράμετρος δεν μπορεί να μεταβληθεί.
2
3 Η τιμή subindex έχει αλλοιωθεί.
4 Δεν υπάρχει συστοιχία.
5 Εσφαλμένος τύπος δεδομένων.
6 Δεν χρησιμοποιείται.
7 Δεν χρησιμοποιείται.
9 Το στοιχείο περιγραφής δεν είναι διαθέσιμο.
11
15 Δεν υπάρχει διαθέσιμο κείμενο.
17 Δεν ισχύει κατά τη λειτουργία.
18 Άλλα σφάλματα.
100 –
>100 –
130
Έχει γίνει υπέρβαση του ανώτατου ή του
κατώτερου ορίου.
Δεν υπάρχει πρόσβαση εγγραφής
παραμέτρου.
Δεν υπάρχει πρόσβαση διαύλου για αυτή
την παράμετρο.
Προδιαγραφή FC
Μόνο το κάτω byte χρησιμοποιείται ως δείκτης.
5.4.10 Τιμή παραμέτρου (PWE)
Το μπλοκ τιμής παραμέτρου αποτελείται από 2 λέξεις (4
byte) και η τιμή εξαρτάται από την καθορισμένη εντολή
(ΑΚ). Η κύρια μονάδα παρακινεί για τιμή παραμέτρου όταν
το μπλοκ PWE δεν περιέχει τιμή. Για να γίνει αλλαγή μιας
τιμής παραμέτρου (εγγραφή), γράψτε τη νέα τιμή στο
μπλοκ PWE και στείλτε το από την κύρια στην εξαρτημένη
μονάδα.
Όταν μια εξαρτημένη μονάδα αποκρίνεται σε ένα αίτημα
παραμέτρου (εντολή ανάγνωσης), γίνεται μετάδοση της
τρέχουσας τιμής παραμέτρου στο μπλοκ PWE και
επιστρέφεται στην κύρια. Αν μια παράμετρος περιέχει
διάφορες επιλογές δεδομένων, για παράδειγμα
παράμετρος 0-01 Language, επιλέξτε την τιμή των
δεδομένων εισάγοντας την τιμή στο μπλοκ PWE. Η
σειριακή επικοινωνία μπορεί μόνο να διαβάσει
παραμέτρους που περιέχουν δεδομένου τύπου 9
(συμβολοσειρά κειμένου).
Η Παράμετρος 15-40 FC Type έως την
παράμετρος 15-53 Power Card Serial Number περιέχουν
δεδομένα τύπου 9.
Για παράδειγμα, διαβάστε το μέγεθος μονάδας και την
περιοχή της τάσης δικτύου στην παράμετρος 15-40 FC Type.
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 59

E19E H
PKE IND PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA092.10
119E H
PKE
IND
PWE
high
PWE
low
0000 H 0000 H 03E8 H
130BA093.10
Εγκατάσταση και ρύθμιση RS4...
VLT® Midi Drive FC 280
Κατά την μετάδοση μιας συμβολοσειράς κειμένου
5.4.13 Λέξεις διεργασίας (PCD)
(ανάγνωση), το μήκος του μηνύματος είναι μεταβλητό και
τα κείμενα έχουν διάφορα μεγέθη. Το μήκος μηνύματος
καθορίζεται στο 2ο byte του μηνύματος΄(LGE). Κατά την
χρήση της μεταφοράς κειμένου, ο χαρακτήρας δείχνει αν
Το μπλοκ των λέξεων διεργασίας διαιρείται σε 2 μπλοκ των
16 bit το οποίο γίνεται πάντα με την καθορισμένη
αλληλουχία.
πρόκειται για εντολή ανάγνωσης ή εγγραφής.
PCD 1 PCD 2
Για την ανάγνωση κειμένου μέσω του μπλοκ PWE, ρυθμίστε
την εντολή παραμέτρου (ΑΚ) σε F hex. Το πάνω byte του
χαρακτήρα δείκτη πρέπει να είναι 4.
55
5.4.11 Τύποι δεδομένων που
υποστηρίζονται από τον μετατροπέα
συχνότητας
Χωρίς πρόσημο σημαίνει ότι δεν υπάρχει πρόσημο τελεστή
στο μήνυμα.
Τύποι δεδομένων Περιγραφή
3 Ακέραιος 16
4 Ακέραιος 32
5 Χωρίς πρόσημο 8
6 Χωρίς πρόσημο 16
7 Χωρίς πρόσημο 32
9 Συμβολοσειρά κειμένου
Πίνακας 5.8 Τύποι δεδομένων
5.4.12 Μετατροπή
Μήνυμα ελέγχου (λέξη ελέγχου από την
κύρια⇒προς την εξαρτημένη μονάδα)
Μήνυμα ελέγχου (από την εξαρτημένη
μονάδα⇒προς την κύρια) λέξης περιγραφής
κατάστασης
Πίνακας 5.10 Λέξεις διεργασίας (PCD)
Τιμή αναφοράς
Τρέχουσα
συχνότητα εξόδου
5.5 Παραδείγματα
5.5.1 Εγγραφή μιας τιμής παραμέτρου
Αλλαγή της παράμετρος 4-14 Motor Speed High Limit [Hz]
στα 100 Hz.
Εγγραφή των δεδομένων στην EEPROM.
PKE = E19E hex - Εγγραφή μονής λέξης στην
παράμετρος 4-14 Motor Speed High Limit [Hz]:
IND = 0000 hex.
•
PWEHIGH = 0000 hex.
•
PWELOW = 03E8 hex.
•
Τιμή δεδομένων 1000, που αντιστοιχεί στα 100 Hz,
ανατρέξτε στο κεφάλαιο 5.4.12 Μετατροπή.
Ο οδηγός προγραμματισμού περιέχει τις περιγραφές των
χαρακτηριστικών κάθε παραμέτρου. Οι τιμές παραμέτρων
μεταδίδονται ως ακέραιοι αριθμοί μόνο. Για τη μεταφορά
Το μήνυμα μοιάζει με αυτό στο Εικόνα 5.9.
των δεκαδικών χρησιμοποιούνται συντελεστές μετατροπής.
Η Παράμετρος 4-12 Motor Speed Low Limit [Hz] έχει
συντελεστή μετατροπής 0,1. Για να γίνει προεπιλογή της
ελάχιστης συχνότητας στα 10 Hz, μεταδώστε την τιμή 100.
Ο συντελεστής μετατροπής 0,1 σημαίνει ότι η τιμή που
μεταδόθηκε έχει πολλαπλασιαστεί κατά 0,1. Έτσι η τιμή 100
εκλαμβάνεται ως 10,0.
Δείκτης μετατροπής Συντελεστής μετατροπής
Πίνακας 5.9 Μετατροπή
60 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327
74 3600
2 100
1 10
0 1
-1 0,1
-2 0,01
-3 0,001
-4 0,0001
-5 0,00001
Εικόνα 5.9 Μήνυμα
ΕΙΔΟΠΟΙΗΣΗ
Η Παράμετρος 4-14 Motor Speed High Limit [Hz] είναι
μονή λέξη και η εντολή παραμέτρου για εγγραφή στην
EEPROM είναι E. Η Παράμετρος 4-14 Motor Speed High
Limit [Hz] είναι 19E στο δεκαεξαδικό.
Η απόκριση από την εξαρτημένη μονάδα προς την κύρια
απεικονίζεται στο Εικόνα 5.10.
Εικόνα 5.10 Απόκριση από την κύρια

1155 H
PKE IND PWE
high
PWE
low
0000 H 0000 H 0000 H
130BA094.10
130BA267.10
1155 H
PKE
IND
0000 H 0000 H 03E8 H
PWE
high
PWE
low
Εγκατάσταση και ρύθμιση RS4... Οδηγός σχεδίασης εφαρμογών
5.5.2 Ανάγνωση μιας τιμής παραμέτρου
Ανάγνωση της τιμής στην παράμετρος 3-41 Ramp 1 Ramp
Up Time.
PKE = 1155 hex - Ανάγνωση τιμής παραμέτρου στην
παράμετρος 3-41 Ramp 1 Ramp Up Time:
IND = 0000 hex.
•
PWE
•
PWE
•
Εικόνα 5.11 Μήνυμα
Αν η τιμή στην παράμετρος 3-41 Ramp 1 Ramp Up Time
είναι 10 s, η απόκριση από την εξαρτημένη μονάδα προς
την κύρια εμφανίζεται στο Εικόνα 5.12.
Εικόνα 5.12 Απόκριση
Το 3E8 hex αντιστοιχεί στο 1000 δεκαδικό. Ο δείκτης
μετατροπής για την παράμετρος 3-41 Ramp 1 Ramp Up Time
είναι -2, δηλαδή, 0,01. Η
Παράμετρος 3-41 Ramp 1 Ramp Up Time είναι τύπου Χωρίς
πρόσημο 32.
Modbus RTU
5.6
= 0000 hex.
HIGH
= 0000 hex.
LOW
5.6.1 Προαπαιτούμενες γνώσεις
5.6.2 Γενική περιγραφή
Ανεξάρτητα από τον τύπο των φυσικών δικτύων επικοινωνίας, η ενότητα αυτή περιγράφει τη διεργασία που
χρησιμοποιεί ένας ελεγκτής για να ζητήσει πρόσβαση σε
άλλη συσκευή. Η διεργασία περιλαμβάνει τον τρόπο που η
Modbus RTU ανταποκρίνεται σε αιτήματα από άλλη
συσκευή και τον τρόπο ανίχνευσης και αναφοράς
σφαλμάτων. Καθορίζει επίσης μια κοινή μορφοποίηση για
την διάταξη και τα περιεχόμενα των πεδίων του μηνύματος.
Κατά την επικοινωνία μέσω δικτύου Modbus RTU, το
πρωτόκολλο:
Καθορίζει τον τρόπο με τον οποίο κάθε ελεγκτής
•
μαθαίνει την διεύθυνση της συσκευής του.
Αναγνωρίζει ένα μήνυμα που προορίζεται για
•
αυτό.
Καθορίζει την ενέργεια που θα εκτελέσει.
•
Εξάγει τα τυχόν δεδομένα ή άλλες πληροφορίες
•
που περιέχονται στο μήνυμα.
Αν απαιτείται απόκριση, ο ελεγκτής δημιουργεί το μήνυμα
απόκρισης και το στέλνει.
Οι ελεγκτές επικοινωνούν χρησιμοποιώντας μια τεχνική
κύριας/εξαρτημένης μονάδας κατά την οποία μόνο η κύρια
μονάδα μπορεί να ξεκινήσει συναλλαγές (που καλούνται
ερωτήσεις). Οι εξαρτημένες μονάδες αποκρίνονται
παρέχοντας στην κύρια τα ζητούμενα δεδομένα ή
ενεργώντας σύμφωνα με τις εντολές στο αίτημα.
Η κύρια μονάδα μπορεί να απευθυνθεί σε συγκεκριμένες
εξαρτημένες μονάδες ή να εκκινήσει ένα μήνυμα που
απευθύνεται σε όλες τις εξαρτημένες μονάδες. Οι
εξαρτημένες μονάδες επιστρέφουν μια απόκριση στα
ερωτήματα που απευθύνονται ατομικά σε αυτές. Δεν
επιστρέφονται αποκρίσεις σε ερωτήματα προς όλους από
την κύρια μονάδα.
5 5
Η Danfoss θεωρεί ότι ο εγκατεστημένος ελεγκτής
υποστηρίζει τις διασυνδέσεις αυτού του εγχειριδίου και
τηρεί αυστηρά όλες τις απαιτήσεις και περιορισμούς που
ορίζονται στον ελεγκτή και στον μετατροπέα συχνότητας.
Η ενσωματωμένη Modbus RTU (απομακρυσμένη τερματική
συσκευή) έχει σχεδιαστεί να επικοινωνεί με οποιονδήποτε
ελεγκτή που υποστηρίζει τις διασυνδέσεις που ορίζονται
στο παρόν εγχειρίδιο. Θεωρείται ότι ο χρήστης έχει πλήρη
γνώση των δυνατοτήτων και περιορισμών του ελεγκτή.
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 61
Το πρωτόκολλο Modbus RTU καθορίζει τη μορφοποίηση
για το αίτημα της κύριας μονάδας παρέχοντας τις εξής
πληροφορίες:
Τη διεύθυνση της συσκευής (ή το μήνυμα προς
•
όλους).
Ένα κωδικό λειτουργίας που καθορίζει την
•
απαιτούμενη ενέργεια.
Τυχόν δεδομένα προς αποστολή.
•
Ένα πεδίο ελέγχου σφάλματος.
•
Το μήνυμα απόκρισης της εξαρτημένης μονάδας δημιουργείται επίσης με το πρωτόκολλο Modbus. Περιέχει πεδία
επιβεβαίωσης της ενέργειας που έγινε, τυχόν δεδομένων
προς επιστροφή και ένα πεδίο ελέγχου σφάλματος. Αν κατά
τη λήψη του μηνύματος σημειωθεί σφάλμα ή αν η
εξαρτημένη μονάδα δεν μπορεί να εκτελέσει την
ζητούμενη ενέργεια, η εξαρτημένη μονάδα δημιουργεί και
στέλνει ένα μήνυμα σφάλματος. Εναλλακτικά, σημειώνεται
εκπνοή χρόνου.

Εγκατάσταση και ρύθμιση RS4...
VLT® Midi Drive FC 280
5.6.3 Μετατροπέας συχνότητας με Modbus
RTU
Ο μετατροπέας συχνότητας επικοινωνεί με μορφοποίηση
Modbus RTU μέσω της ενσωματωμένης διασύνδεσης
RS485. Το Modbus RTU παρέχει πρόσβαση στη λέξη
περιγραφής ελέγχου και στην αναφορά διαύλου του
μετατροπέα συχνότητας.
Η λέξη ελέγχου δίνει τη δυνατότητα στην κύρια μονάδα
του Modbus να ελέγχει πολλές σημαντικές λειτουργίες του
55
μετατροπέα συχνότητας:
Εκκίνηση.
•
Διάφορες διακοπές:
•
- Σταμάτημα με ελεύθερη κίνηση.
- Γρήγορο σταμάτημα.
- Σταμάτημα με πέδη ΣΡ.
- Κανονικό σταμάτημα (με γραμμική
μεταβολή).
Επαναφορά μετά από σφάλμα.
•
Λειτουργία σε διάφορες προκαθορισμένες
•
ταχύτητες.
Ανάστροφη λειτουργία.
•
Αλλαγή των ενεργών ρυθμίσεων.
•
Έλεγχος του ενσωματωμένου ρελέ του
•
μετατροπέα συχνότητας.
Η αναφορά διαύλου χρησιμοποιείται συνήθως για τον
έλεγχο ταχύτητας. Είναι επίσης εφικτή η πρόσβαση στις
παραμέτρους, η ανάγνωση των τιμών και όπου αυτό είναι
δυνατό, η εγγραφή τιμών σε αυτές. Η πρόσβαση στις
παραμέτρους παρέχει μια γκάμα από επιλογές ελέγχου, που
περιλαμβάνουν τον έλεγχο του σημείου ρύθμισης του
μετατροπέα συχνότητας στο οποίο γίνεται χρήση του
εσωτερικού του ελεγκτή ΡΙ.
Διαμόρφωση δικτύου
5.7
Για να ενεργοποιήσετε το Modbus RTU στον μετατροπέα
συχνότητας, ρυθμίστε τις εξής παραμέτρους.
Παράμετρος Ρύθμιση
Παράμετρος 8-30 Protocol Modbus RTU
Παράμετρος 8-31 Address 1–247
Παράμετρος 8-32 Baud Rate 2400–115200
Παράμετρος 8-33 Parity / Stop Bits
Πίνακας 5.11 Διαμόρφωση δικτύου
Μονή ισοτιμία, 1 bit διακοπής
(προεπιλογή)
Δομή πλαισίωσης του μηνύματος
5.8
Modbus RTU
5.8.1 Εισαγωγή
Οι ελεγκτές έχουν ρυθμιστεί να επικοινωνούν στο δίκτυο
Modbus χρησιμοποιώντας τη λειτουργία RTU (μονάδα
απομακρυσμένου τερματικού) με κάθε byte στο μήνυμα να
περιέχει 2 δεκαεξαδικούς χαρακτήρες 4 bit. Η
μορφοποίηση κάθε byte εμφανίζεται στον Πίνακας 5.12.
Bit
εκκίνη
σης
Πίνακας 5.12 Μορφοποίηση όλων των byte
Σύστημα κωδικο-
ποίησης
Bit ανά byte
Πεδίο ελέγχου
σφάλματος
Πίνακας 5.13 Λεπτομέρειες byte
Byte δεδομένων Διακο
Δυαδικό 8 bit, δεκαεξαδικό 0-9, Α-F.
2 δεκαεξαδικοί χαρακτήρες που περιέχονται
σε κάθε πεδίο 8 bit του μηνύματος.
1 bit εκκίνησης.
•
8 bit δεδομένων, με το λιγότερο
•
σημαντικό bit να αποστέλλεται πρώτο.
1 bit για ζυγή/μονή ισοτιμία, κανένα bit
•
αν δεν χρησιμοποιείται η ισοτιμία
1 bit διακοπής αν χρησιμοποιείται η
•
ισοτιμία, 2 bit αν δεν χρησιμοποιείται η
ισοτιμία.
Κυκλικός έλεγχος πλεονασμού (CRC).
πή/
ισοτιμί
α
Διακο
πή
5.8.2 Δομή μηνύματος Modbus RTU
Η συσκευή που μεταδίδει τοποθετεί ένα μήνυμα Modbus
RTU μέσα σε ένα πλαίσιο με γνωστό σημείο έναρξης και
λήξης. Αυτό δίνει τη δυνατότητα στις συσκευές λήψης να
ξεκινούν από την αρχή του μηνύματος, να διαβάζουν το
τμήμα διεύθυνσης, να καθορίζουν σε ποια συσκευή
απευθύνεται (ή σε όλες τις συσκευές αν το μήνυμα
απευθύνεται σε όλους) και να αναγνωρίζουν πότε το
μήνυμα ολοκληρώνεται. Τα ατελή μηνύματα ανιχνεύονται
και ως αποτέλεσμα δηλώνονται σφάλματα. Οι χαρακτήρες
προς μετάδοση πρέπει να ακολουθούν δεκαεξαδική
μορφοποίηση 00–FF σε κάθε πεδίο. Ο μετατροπέας
συχνότητας παρακολουθεί συνεχώς το δίκτυο του διαύλου
και κατά τη διάρκεια των διαλλειμάτων χωρίς κίνηση. Όταν
ληφθεί το πρώτο πεδίο (το πεδίο διεύθυνσης), κάθε
μετατροπέας συχνότητας ή συσκευή το αποκωδικοποιεί για
να βρει σε ποια συσκευή απευθύνεται. Τα μηνύματα
Modbus RTU που απευθύνονται στο 0 είναι μηνύματα προς
όλους. Η μη απόκριση είναι επιτρεπτή για τα μηνύματα
62 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

Εγκατάσταση και ρύθμιση RS4... Οδηγός σχεδίασης εφαρμογών
προς όλους. Ένα τυπικό πλαίσιο μηνύματος εμφανίζεται
στον Πίνακας 5.14.
Έναρξη
T1-T2-T3-
Πίνακας 5.14 Τυπική δομή μηνύματος Modbus RTU
ΔιεύθυνσηΛειτουργίαΔεδομέναΈλεγχος
T4
8 bit 8 bit N x 8 bits 16 bit
CRC
Λήξη
T1-T2-T3-
T4
5.8.3 Πεδίο εκκίνησης/σταματήματος
Τα μηνύματα ξεκινούν με μια περίοδο χωρίς κίνηση με
διαστήματα τουλάχιστον 3,5 χαρακτήρων. Η περίοδος
χωρίς κίνηση υλοποιείται ως πλήθος διαστημάτων
χαρακτήρων στον επιλεγμένο ρυθμό baud του δικτύου
(εμφανίζονται ως Εκκίνηση Τ1-Τ2-Τ3-Τ4). Το πρώτο πεδίο
προς μετάδοση είναι η διεύθυνση της συσκευής. Μετά τον
τελευταίο χαρακτήρα που μεταδόθηκε, μια παρόμοια
περίοδος διάρκειας τουλάχιστον 3,5 χαρακτήρων δηλώνει
τη λήξη του μηνύματος. Μετά από αυτή την περίοδο
μπορεί να ξεκινήσει νέο μήνυμα.
Μετάδοση ολόκληρου του πλαισίου του μηνύματος ως
συνεχής ροή. Αν πριν την ολοκλήρωση του πλαισίου
παρατηρηθεί περίοδος χωρίς κίνηση μεγαλύτερη του
διαστήματος 1,5 χαρακτήρα, η συσκευή δέκτης απορρίπτει
το ημιτελές μήνυμα και θεωρεί ότι το επόμενο byte είναι
το πεδίο διεύθυνσης ενός νέου μηνύματος. Παρόμοια, αν
ξεκινήσει ένα νέο μήνυμα πριν το διάστημα 3,5
χαρακτήρων μετά από το προηγούμενο μήνυμα, η συσκευή
δέκτης το θεωρεί συνέχεια του προηγούμενου μηνύματος.
Η συμπεριφορά αυτή προκαλεί εκπνοή χρόνου (δεν
υπάρχει απόκριση από την εξαρτημένη μονάδα), επειδή η
τιμή στο τελικό πεδίο CRC δεν είναι έγκυρη για τα
συνδυασμένα μηνύματα.
5.8.4 Πεδίο διεύθυνσης
Το πεδίο διεύθυνσης ενός πλαισίου μηνύματος περιέχει 8
bit. Οι έγκυρες διευθύνσεις εξαρτημένων μονάδων
βρίσκονται στην περιοχή 0-247 δεκαδικό. Στις μεμονωμένες
εξαρτημένες μονάδες ανατίθενται διευθύνσεις στην
περιοχή 1-247. Το 0 είναι δεσμευμένο για την λειτουργία
μετάδοσης σε όλους, που αναγνωρίζουν όλες οι
εξαρτημένες μονάδες. Μια κύρια μονάδα απευθύνεται σε
μια εξαρτημένη μονάδα τοποθετώντας τη διεύθυνση της
εξαρτημένης μονάδας στο πεδίο διεύθυνσης του
μηνύματος. Όταν η εξαρτημένη μονάδα στείλει την
απόκρισή της, τοποθετεί την δική της διεύθυνση στο πεδίο
διεύθυνσης για να δώσει τη δυνατότητα στην κύρια
μονάδα να αντιληφθεί ποια εξαρτημένη μονάδα
αποκρίνεται.
5.8.5 Πεδίο λειτουργίας
Το πεδίο λειτουργίας ενός πλαισίου μηνύματος περιέχει 8
bit. Οι έγκυροι κωδικοί βρίσκονται στην περιοχή 1-FF. Τα
πεδία λειτουργίας χρησιμοποιούνται για την αποστολή
μηνυμάτων μεταξύ κύριας και εξαρτημένης μονάδας. Όταν
αποστέλλεται ένα μήνυμα από την κύρια σε μια
εξαρτημένη μονάδα, το πεδίο κωδικού λειτουργίας λέει
στην εξαρτημένη μονάδα τι είδους ενέργεια να εκτελέσει.
Όταν η εξαρτημένη μονάδα αποκριθεί στη κύρια,
χρησιμοποιεί το πεδίο κωδικού λειτουργίας για να
επισημάνει είτε μια κανονική (χωρίς σφάλματα) απόκριση ή
ότι έχει σημειωθεί κάποιου είδους λάθος (καλείται
απόκριση εξαίρεσης).
Για να είναι κανονική η απόκριση, η εξαρτημένη μονάδα
απλά επιστρέφει τον αρχικό κωδικό λειτουργίας. Σε
περίπτωση απόκρισης εξαίρεσης, η εξαρτημένη μονάδα
επιστρέφει ένα κωδικό που είναι ισοδύναμος με τον αρχικό
κωδικό λειτουργίας με το πιο σημαντικό του bit σε τιμή 1.
Επίσης, η εξαρτημένη μονάδα τοποθετεί ένα μοναδικό
κωδικό στο πεδίο δεδομένων του μηνύματος απόκρισης. Ο
κωδικός αυτός πληροφορεί την κύρια μονάδα για το είδος
του σφάλματος που σημειώθηκε ή τον λόγο για την
εξαίρεση. Επίσης ανατρέξτε στο κεφάλαιο 5.8.10 Κωδικοί
λειτουργιών που υποστηρίζονται από το Modbus RTU και στο
κεφάλαιο 5.8.11 Κωδικοί εξαίρεσης Modbus.
5.8.6 Πεδίο δεδομένων
Το πεδίο δεδομένων αποτελείται από σετ 2 δεκαεξαδικών
ψηφίων, στην περιοχή 00-FF δεκαεξαδικό. Τα ψηφία αυτά
αποτελούνται από 1 χαρακτήρα RTU. Το πεδίο δεδομένων
μηνυμάτων που αποστέλλονται από μια κύρια σε
εξαρτημένη συσκευή περιέχει πρόσθετες πληροφορίες της
οποίες πρέπει να χρησιμοποιήσει η εξαρτημένη μονάδα για
να αποδώσει ανάλογα.
Οι πληροφορίες μπορούν να περιλαμβάνουν είδη όπως:
Διευθύνσεις θέσεων μνήμης ή καταχωρητών.
•
Η ποσότητα των ειδών προς χειρισμό.
•
Ο αριθμός των πραγματικών byte δεδομένων στο
•
πεδίο.
5.8.7 Πεδίο ελέγχου CRC
Τα μηνύματα περιλαμβάνουν ένα πεδίο ελέγχου σφάλματος
που λειτουργεί με βάση τη μέθοδο κυκλικού ελέγχου
πλεονασμού (CRC). Το πεδίο CRC ελέγχει τα περιεχόμενα
ολόκληρου του μηνύματος. Εφαρμόζεται ανεξάρτητα προς
οποιαδήποτε μέθοδο ελέγχου ισοτιμία που χρησιμοποιείται
για τους μεμονωμένους χαρακτήρες του μηνύματος. Η
συσκευή που μεταδίδει υπολογίζει την τιμή CRC και
προσθέτει το CRC ως τελευταίο πεδίο στο μήνυμα. Η
συσκευή που λαμβάνει υπολογίζει εκ νέου το CRC κατά τη
λήψη του μηνύματος και συγκρίνει την πραγματική τιμή
5 5
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 63

Εγκατάσταση και ρύθμιση RS4...
VLT® Midi Drive FC 280
που ελήφθη στο πεδίο CRC. Εάν οι 2 τιμές δεν συμφωνούν
θα σημειωθεί εκπνοή χρόνου διαύλου επικοινωνίας. Το
πεδίο ελέγχου σφάλματος περιέχει μια δυαδική τιμή 16 bit
Αριθμός
θέσης
μνήμης
που υλοποιείται ως 2 byte των 8 bit. Μετά την υλοποίηση,
το μικρότερης αξίας byte του πεδίου προστίθεται πρώτο,
ακολουθούμενο από το byte μεγάλης αξίας. Το μεγάλης
αξίας byte CRC είναι το τελευταίο byte που αποστέλλεται
στο μήνυμα.
65
5.8.8 Διευθυνσιοδότηση θέσεων μνήμης
και καταχωρητών
55
Στο Modbus όλα τα δεδομένα οργανώνονται σε θέσεις
μνήμης και σε καταχωρητές συγκράτησης. Οι θέσεις
μνήμης κρατούν ένα μόνο bit ενώ οι καταχωρητές
συγκράτησης κρατούν μια λέξη 2 byte (δηλαδή 16 bit).
Όλες οι διευθύνσεις μνήμης στα μηνύματα Modbus
αναφέρονται ως προς το 0. Η πρώτη εμφάνιση ενός
αντικειμένου δεδομένων διευθυνσιοδοτείται ως είδος με
αριθμό 0. Για παράδειγμα: Η θέση μνήμης που αναφέρεται
ως θέση μνήμη 1 σε έναν προγραμματιζόμενο ελεγκτή
διευθυνσιοδοτείται ως θέση μνήμης 0000 στο πεδίο
διεύθυνσης δεδομένων ενός μηνύματος Modbus. Η θέση
μνήμης 127 δεκαδικό διευθυνσιοδοτείται ως θέση μνήμης
007E hex (126 δεκαδικό).
Ο καταχωρητής συγκράτησης 40001 διευθυνσιοδοτείται ως
καταχωρητής 0000 στο πεδίο διεύθυνσης δεδομένων του
μηνύματος. Το πεδίο κωδικού λειτουργίας ήδη καθορίζει
λειτουργία καταχωρητή συγκράτησης. Έτσι, η αναφορά
4XXXX είναι έμμεση. Ο καταχωρητής συγκράτησης 40108
διευθυνσιοδοτείται ως καταχωρητής 006B hex (107
δεκαδικό).
Αριθμός
θέσης
μνήμης
1–16 Λέξη περιγραφής ελέγχου ρυθμιστή
17–32 Περιοχή τιμών αναφοράς ταχύτητας
33–48 Λέξη περιγραφής κατάστασης
49–64 Λειτουργία ανοικτού βρόχου:
Περιγραφή Κατεύθυνση
σήματος
Από την κύρια
στροφών (βλ. Πίνακας 5.16).
ή σημείου ρύθμισης ρυθμιστή
στροφών 0x0–0xFFFF (-200% ...
~200%).
ρυθμιστή στροφών (βλ.
Πίνακας 5.17).
Συχνότητα εξόδου ρυθμιστή
στροφών.
Λειτουργία κλειστού βρόχου: Σήμα
ανάδρασης ρυθμιστή στροφών.
προς την
εξαρτημένη
μονάδα
Από την κύρια
προς την
εξαρτημένη
μονάδα
Από την
εξαρτημένη
μονάδα προς
την κύρια
Από την
εξαρτημένη
μονάδα προς
την κύρια
66–65536 Δεσμευμένο. –
Πίνακας 5.15 Καταχωρητής θέσεων μνήμης
Θέση
μνήμης
01 Λιγότερο σημαντικό bit προκαθορισμένης αναφοράς
02 Πιο σημαντικό bit προκαθορισμένης αναφοράς
03 Πέδη ΣΡ Χωρίς πέδη ΣΡ
04 Σταμάτημα με
05 Γρήγορο σταμάτημα Χωρίς γρήγορο σταμάτημα
06 Συχνότητα παγώματος Χωρίς συχνότητα παγώματος
07 Σταμάτημα με γραμ.
08 Χωρίς επαναφορά Επαναφορά
09 Χωρίς ελαφρά ώθηση Ελαφρά ώθηση
10 Γραμμική μεταβολή 1 Γραμμική μεταβολή 2
11 Μη έγκυρα δεδομένα Έγκυρα δεδομένα
12 Ρελέ 1 o Ρελέ 1 on
13 Ρελέ 2 o Ρελέ 2 on
14 Λιγότερο σημαντικό bit ρύθμισης
15 –
16 Χωρίς αναστροφή Αναστροφή
Πίνακας 5.16 Λέξη περιγραφής ελέγχου ρυθμιστή στροφών
(προφίλ FC)
Θέση
μνήμης
33 Έλεγχος ανέτοιμος Έλεγχος έτοιμος
34 Ρυθμιστής στροφών
35 Σταμάτημα με ελεύθερη
36 Χωρίς συναγερμό Συναγερμός
37 Δεν χρησιμοποιείται Δεν χρησιμοποιείται
38 Δεν χρησιμοποιείται Δεν χρησιμοποιείται
39 Δεν χρησιμοποιείται Δεν χρησιμοποιείται
40 Χωρίς προειδοποίηση Προειδοποίηση
41 Εκτός αναφοράς Εντός αναφοράς
42 Χειροκίνητη λειτουργία Αυτόματη λειτουργία
43 Εκτός περιοχής
Περιγραφή Κατεύθυνση
σήματος
Έλεγχος εγγραφής παραμέτρου (από
την κύρια προς την εξαρτημένη
μονάδα)
0 = Οι αλλαγές των παραμέτρων
εγγράφονται στη RAM του ρυθμιστή
στροφών.
1 = Οι αλλαγές των παραμέτρων
εγγράφονται στη RAM και στην
EEPROM του ρυθμιστή στροφών.
0 1
Σταμάτημα χωρίς ελεύθερη
ελεύθερη κίνηση
μείωση
0 1
ανέτοιμος
κίνηση
συχνότητας
κίνηση
Εκκίνηση
Ρυθμιστής στροφών
έτοιμος
Κλείσιμο ασφαλείας
Εντός περιοχής συχνότητας
Από την κύρια
προς την
εξαρτημένη
μονάδα
64 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

Εγκατάσταση και ρύθμιση RS4... Οδηγός σχεδίασης εφαρμογών
Θέση
μνήμης
44 Σταματημένο Λειτουργία
45 Δεν χρησιμοποιείται Δεν χρησιμοποιείται
46 Χωρίς προειδοποίηση
Διεύθυνση
διαύλου
0 1 40001 Δεσμευμένο
1 2 40002 Δεσμευμένο
2 3 40003 Δεσμευμένο
3 4 40004 Ελεύθερο – –
4 5 40005 Ελεύθερο – –
5 6 40006 Διαμόρφωση Modbus Ανάγνωση/
6 7 40007 Πιο πρόσφατος κωδικός
7 8 40008 Καταχωρητής πιο
8 9 40009 Ένδειξη δείκτη Ανάγνωση/
9 10 40010 Παράμετρος 0-01 Γλώσσα Εξαρτάται από
19 20 40020 Παράμετρος 0-02 Μονάδα
29 30 40030 Παράμετρος 0-03 Τοπικές
0 1
τάσης
Καταχωρητής
διαύλου
1)
Καταχωρητής
PLC
Θέση
μνήμης
47 Εκτός ορίου ρεύματος Όριο έντασης ρεύματος
48 Χωρίς θερμική προειδο-
Προειδοποίηση τάσης
Περιεχόμενο Πρόσβαση Περιγραφή
σφάλματος
πρόσφατου σφάλματος
ταχύτητας κινητήρα
ρυθμίσεις
0 1
ποίηση
Πίνακας 5.17 Λέξη περιγραφής κατάστασης ρυθμιστή στροφών
(προφίλ FC)
–
–
–
Εγγραφή
Μόνο
ανάγνωση
Μόνο
ανάγνωση
Εγγραφή
την πρόσβαση
της
παραμέτρου
Εξαρτάται από
την πρόσβαση
της
παραμέτρου
Εξαρτάται από
την πρόσβαση
της
παραμέτρου
Θερμική προειδοποίηση
Δεσμευμένο για τους παλαιούς μετατροπείς
τάσεις VLT® 5000 και VLT® 2800.
Δεσμευμένο για τους παλαιούς μετατροπείς
τάσεις VLT® 5000 και VLT® 2800.
Δεσμευμένο για τους παλαιούς μετατροπείς
τάσεις VLT® 5000 και VLT® 2800.
Μόνο TCP. Δεσμευμένο για το Modbus TCP
(παράμετρος 12-28 αποθήκευση Τιμών
δεδομένων και παράμετρος 12-29 Αποθήκευση
όλων - αποθηκευμένο στην EEPROM για
παράδειγμα).
Κωδικός σφάλματος που ελήφθη από την βάση
παραμέτρων, ανατρέξτε στο WHAT 38295 για
λεπτομέρειες.
Διεύθυνση του καταχωρητή για τον οποίο
σημειώθηκε το πιο πρόσφατο σφάλμα,
ανατρέξτε στο WHAT 38296 για λεπτομέρειες.
Υποδείκτης της παραμέτρου προς πρόσβαση.
Ανατρέξτε στο WHAT 38297 για λεπτομέρειες.
Παράμετρος 0-01 Γλώσσα (καταχωρητής
Modbus = αριθμός παραμέτρου 10)
Χώρος 20 bytes δεσμευμένος για την
παράμετρο στον χάρτη Modbus.
Παράμετρος 0-02 Μονάδα ταχύτητας κινητήρα
Χώρος 20 bytes δεσμευμένος για την
παράμετρο στον χάρτη Modbus.
Παράμετρος 0-03 Τοπικές ρυθμίσεις
Χώρος 20 bytes δεσμευμένος για την
παράμετρο στον χάρτη Modbus.
5 5
Πίνακας 5.18 Διεύθυνση/Καταχωρητές
1) Η τιμή που αναγράφεται στο μήνυμα Modbus RTU πρέπει να είναι 1 ή μικρότερη από τον αριθμό καταχωρητή. Για παράδειγμα. διαβάστε τον
καταχωρητή Modbus 1 γράφοντας την τιμή 0 στο μήνυμα.
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 65

Εγκατάσταση και ρύθμιση RS4...
VLT® Midi Drive FC 280
5.8.9 Πώς να ελέγχετε τον μετατροπέα
5.8.11 Κωδικοί εξαίρεσης Modbus
συχνότητας
Για την πλήρη επεξήγηση της δομής μιας απόκρισης
Η ενότητα αυτή περιγράφει τους κωδικούς που μπορείτε
να χρησιμοποιήσετε στα πεδία λειτουργίας και δεδομένων
ενός μηνύματος Modbus RTU.
5.8.10 Κωδικοί λειτουργιών που
υποστηρίζονται από το Modbus RTU
Το Modbus RTU υποστηρίζει τη χρήση των εξής κωδικών
55
λειτουργιών στο πεδίο λειτουργίας ενός μηνύματος:
Λειτουργία Κωδικός λειτουργίας
(hex)
Ανάγνωση θέσεων μνήμης 1
Ανάγνωση καταχωρητών συγκράτησης 3
Εγγραφή μίας θέσης μνήμης 5
Εγγραφή ενός καταχωρητή 6
Εγγραφή πολλαπλών θέσεων μνήμης F
Εγγραφή πολλαπλών καταχωρητών 10
Λήψη μετρητή συμβάντων επικοι-
νωνίας
Αναφορά αριθμού εξαρτημένης
μονάδας
Πίνακας 5.19 Κωδικοί λειτουργιών
Λειτουργία Κωδικός
λειτουργί
ας
Διαγνωστικά 8 1 Επανεκκίνηση επικοι-
Πίνακας 5.20 Κωδικοί λειτουργιών
Κωδικός
επιμέρους
λειτουργίας
2 Επιστροφή καταχωρητή
10 Μηδενισμός μετρητών
11 Επιστροφή μετρητή
12 Επιστροφή μετρητή
13 Επιστροφή μετρητή
14 Επιστροφή μετρητή
B
11
Επιμέρους λειτουργία
νωνίας.
διαγνωστικών.
και καταχωρητή διαγνω-
στικών.
μηνυμάτων διαύλου.
σφαλμάτων μηνυμάτων
διαύλου.
σφαλμάτων εξαρτημένων
μονάδων.
μηνυμάτων εξαρτημένων
μονάδων.
κωδικού εξαίρεσης, ανατρέξτε στην κεφάλαιο 5.8.5 Πεδίο
λειτουργίας.
Κωδι
κός
Πίνακας 5.21 Κωδικοί εξαίρεσης Modbus
Όνομα Σημασία
Ο κωδικός λειτουργία που ελήφθη με το
αίτημα δεν αποτελεί επιτρεπτή ενέργεια
για τον server (ή την εξαρτημένη μονάδα).
Αυτό μπορεί να οφείλεται στο γεγονός ότι
ο κωδικός λειτουργίας ισχύει μόνο για τις
νεότερες συσκευές και δεν είχε υλοποιηθεί
1
2
3
4
Μη έγκυρη
λειτουργία
Μη έγκυρη
διεύθυνση
δεδομένων
Μη έγκυρη
τιμή
δεδομένων
Βλάβη
εξαρτημένης
συσκευής
στην επιλεγμένη μονάδα. Μπορεί επίσης
να σημαίνει ότι ο server (ή η εξαρτημένη
μονάδα) βρίσκεται σε λανθασμένη
κατάσταση όσον αφορά στην επεξεργασία
ενός αιτήματος τέτοιου τύπου επειδή, για
παράδειγμα, δεν έχει διαμορφωθεί αλλά
του ζητείται να επιστρέψει τιμές
καταχωρητών.
Η διεύθυνση δεδομένων που ελήφθη με
το αίτημα δεν είναι επιτρεπτή διεύθυνση
για τον server (ή την εξαρτημένη μονάδα).
Πιο συγκεκριμένα, ο συνδυασμός αριθμού
αναφοράς και μήκους μετάδοσης δεν είναι
έγκυρος. Σε έναν ελεγκτή με 100
καταχωρητές, ένα αίτημα με μετατόπιση
96 και μήκος 4 είναι επιτυχημένο, ενώ ένα
αίτημα με μετατόπιση 96 και μήκος 5
προκαλεί την εμφάνιση εξαίρεσης 02.
Μια τιμή που περιέχεται στο πεδίο
δεδομένων του αιτήματος δεν είναι
επιτρεπτή τιμή για τον server (ή την
εξαρτημένη μονάδα). Αυτό αποτελεί
ένδειξη προβλήματος στην δομή του
υπόλοιπου ενός σύνθετου αιτήματος όπως
ότι το υπονοούμενο μήκος είναι
λανθασμένο. ΔΕΝ σημαίνει ότι το στοιχείο
δεδομένων που υποβλήθηκε για
αποθήκευση σε κάποιο καταχωρητή έχει
τιμή εκτός αυτών που αναμένονται από το
πρόγραμμα της εφαρμογής, επειδή το
πρωτόκολλο Modbus δεν γνωρίζει τη
σημασία οποιασδήποτε τιμής κάποιου
καταχωρητή.
Σημειώθηκε σφάλμα χωρίς δυνατότητα
ανάκτησης ενόσω ο server (ή η
εξαρτημένη μονάδα) επιχειρούσε να
εκτελέσει την απαιτούμενη ενέργεια.
66 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

Εγκατάσταση και ρύθμιση RS4... Οδηγός σχεδίασης εφαρμογών
5.9 Πώς γίνεται η πρόσβαση στις
παραμέτρους
5.9.1 Χειρισμός παραμέτρων
Ο PNU (αριθμός παραμέτρου) μεταφράζεται από τη
διεύθυνση καταχωρητή που περιέχεται στο μήνυμα
ανάγνωσης ή εγγραφής του Modbus. Ο αριθμός
παραμέτρου μεταφράζεται στο Modbus ως (10 x αριθμός
παραμέτρου) στο δεκαδικό.
Παραδείγματα
Ανάγνωση της παράμετρος 3-12 Τιμή αύξησης/μείωσης ταχ.
(16 bit): Ο καταχωρητής συγκράτησης 3120 έχει
αποθηκευμένη την τιμή της παραμέτρου. Μια τιμή 1352
(δεκαδικό) σημαίνει ότι η παράμετρος έχει ρυθμιστεί στο
12,52%.
Ανάγνωση της παράμετρος 3-14 Προεπιλεγμένη σχετική
επιθυμητή τιμή (32 bit): Οι καταχωρητές συγκράτησης 3410
και 3411 έχουν αποθηκευμένες τις τιμές των παραμέτρων.
Μια τιμή 11300 (δεκαδικό),σημαίνει ότι η τιμή της
παραμέτρου έχει ρυθμιστεί στο 1113,00.
Για πληροφορίες σχετικά με τις παραμέτρους, το μέγεθος
και τον δείκτη μετατροπής, ανατρέξτε στον Οδηγό
προγραμματισμού του VLT® Midi Drive FC 280.
5.9.2 Αποθήκευση δεδομένων
Το περιεχόμενο της θέσης μνήμης 65 δεκαδικό καθορίζει
αν τα δεδομένα που έχουν εγγραφεί στον μετατροπέα
συχνότητας έχουν αποθηκευτεί στην EEPROM και στη RAM
(περιεχόμενο θέση μνήμης 65 = 1) ή μόνο στη RAM
(περιεχόμενο θέσης μνήμης 65 = 0).
5.9.3 IND (δείκτης)
Κάποιες παράμετροι στον μετατροπέα συχνότητας είναι
παράμετροι πίνακα, για παράδειγμα η
παράμετρος 3-10 Προεπιλεγμένη επιθυμητή τιμή. Επειδή το
Modbus δεν υποστηρίζει πίνακες στους καταχωρητές
συγκράτησης, ο μετατροπέας συχνότητας έχει δεσμεύσει
τον καταχωρητή συγκράτησης 9 ως δείκτη προς τον
πίνακα. Πριν την ανάγνωση ή την εγγραφή μιας
παραμέτρου πίνακα, ορίστε την τιμή του καταχωρητή
συγκράτησης 9. Ο ορισμός του καταχωρητή συγκράτησης
με την τιμή 2 έχει σαν αποτέλεσμα όλες οι ακόλουθες
αναγνώσεις/εγγραφές σε παραμέτρους πίνακα να γίνονται
στον δείκτη 2.
5.9.4 Μπλοκ κειμένου
Η πρόσβαση στις παραμέτρους που έχουν αποθηκευτεί ως
συμβολοσειρές κειμένου γίνεται με τον ίδιο τρόπο όπως
και για τις άλλες παραμέτρους. Το μέγιστο μέγεθος μπλοκ
κειμένου είναι 20 χαρακτήρες. Αν ένα αίτημα ανάγνωσης
για μια παράμετρο αφορά περισσότερους χαρακτήρες από
αυτούς που κρατά η παράμετρος, η απόκριση είναι
αποκομμένη. Αν ένα αίτημα ανάγνωσης για μια παράμετρο
αφορά λιγότερους χαρακτήρες από αυτούς που κρατά η
παράμετρος, η απόκριση συμπληρώνεται με κενούς
χαρακτήρες.
5.9.5 Συντελεστής μετατροπής
Η τιμή μιας παραμέτρου μπορεί να μεταδοθεί μόνο ως
ακέραιος αριθμός. Για τη μεταφορά δεκαδικών, χρησιμο-
ποιήστε ένα συντελεστή μετατροπής.
5.9.6 Τιμές παραμέτρων
Τυποποιημένοι τύποι δεδομένων
Οι τυποποιημένοι τύποι δεδομένων είναι οι ακέραιος 16,
ακέραιος 32, ακέραιος χωρίς πρόσημο 8, ακέραιος χωρίς
πρόσημο 16 και ακέραιος χωρίς πρόσημο 32.
Αποθηκεύονται ως καταχωρητές 4x (40001-4FFFF). Η
ανάγνωση των παραμέτρων γίνεται με τη χρήση της
λειτουργίας 03 hex ανάγνωσης καταχωρητών συγκράτησης.
Η εγγραφή των παραμέτρων γίνεται χρησιμοποιώντας τη
λειτουργία 6 hex προκαθορισμού μονού καταχωρητή για 1
καταχωρητή (16 bit) και τη λειτουργία 10 hex προκαθο-
ρισμού πολλαπλών καταχωρητών για 2 καταχωρητές (32
bit). Τα αναγνώσιμα μεγέθη κυμαίνονται από τον 1
καταχωρητή (16 bit) μέχρι τους 10 καταχωρητές (20
χαρακτήρες).
Μη τυποποιημένοι τύποι δεδομένων
Οι μη τυποποιημένοι τύποι δεδομένων είναι συμβολοσειρές
κειμένου και αποθηκεύονται ως καταχωρητές 4x
(40001-4FFFF). Η ανάγνωση των παραμέτρων γίνεται
χρησιμοποιώντας τη λειτουργία 03 hex ανάγνωσης
καταχωρητών συγκράτησης και η εγγραφή χρησιμο-
ποιώντας τη λειτουργία 10 hex προκαθορισμού πολλαπλών
καταχωρητών. Τα αναγνώσιμα μεγέθη κυμαίνονται από τον
1 καταχωρητή (2 χαρακτήρες) μέχρι τους 10 καταχωρητές
(20 χαρακτήρες).
Παραδείγματα
5.10
Τα ακόλουθα παραδείγματα επιδεικνύουν διάφορες εντολές
Modbus RTU.
5.10.1 Ανάγνωση κατάστασης
περιεχομένου θέσης μνήμης (01 hex)
Περιγραφή
Η λειτουργία αυτή εκτελεί ανάγνωση της κατάστασης ON/
OFF ξεχωριστών εξόδων (περιεχομένου θέσεων μνήμης)
στον ρυθμιστή στροφών. Κατά την ανάγνωση δεν υποστηρίζεται ποτέ η εντολή προς όλους.
Αίτημα
Το μήνυμα ερωτήματος καθορίζει την αρχική θέση μνήμης
και την ποσότητα θέσεων μνήμης προς ανάγνωση. Οι
διευθύνσεις θέσεων μνήμης ξεκινούν από το 0, και έτσι η
5 5
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 67

Εγκατάσταση και ρύθμιση RS4...
VLT® Midi Drive FC 280
πρόσβαση στην 33η θέση μνήμης γίνεται με τον αριθμό
32.
5.10.2 Εξαναγκασμός/Εγγραφή μίας θέσης
μνήμης (05 hex)
Παράδειγμα αιτήματος για την ανάγνωση των θέσεων
μνήμης 33-48 (λέξη περιγραφής κατάστασης) από την
εξαρτημένη συσκευή 01.
Περιγραφή
Η λειτουργία αυτά εξαναγκάζει τη θέση μνήμης να πάρει
τιμή είτε ΟΝ είτε OFF. Όταν γίνεται μετάδοση σε όλους, η
Όνομα πεδίου Παράδειγμα (hex)
Διεύθυνση εξαρτημένης
μονάδας
Λειτουργία 01 (ανάγνωση θέσεων μνήμης)
Υψηλό byte αρχικής
55
διεύθυνσης
Χαμηλό byte αρχικής
διεύθυνσης
Υψηλό Byte αριθμού
θέσεων
Χαμηλό byte αριθμού
θέσεων
Έλεγχος σφάλματος (CRC) –
Πίνακας 5.22 Αίτημα
01 (διεύθυνση ρυθμιστή στροφών)
00
20 (32 δεκαδικό) θέση μνήμης 33
00
10 (16 δεκαδικό)
Απόκριση
Η κατάσταση της θέσης μνήμης στο μήνυμα απόκρισης
περιέχεται με τη λογική 1 θέσης μνήμης ανά bit του πεδίου
δεδομένων. Η κατάσταση υποδεικνύεται ως: 1 = ON. 0 =
OFF. Το λιγότερο σημαντικό bit του πρώτου byte
δεδομένων περιέχει το περιεχόμενο της θέσης μνήμης για
την οποία γίνεται το αίτημα. Οι άλλες θέσεις μνήμης
λειτουργία αυτή θέτει στις θέσεις μνήμης τις ίδιες τιμές
αναφοράς για όλες τις συνδεδεμένες εξαρτημένες μονάδες.
Αίτημα
Το μήνυμα αιτήματος καθορίζει ότι πρέπει να γίνει
εξαναγκασμός της θέσης μνήμης 65 (παράμετρος ελέγχου
εγγραφής). Οι διευθύνσεις των θέσεων μνήμης ξεκινούν
από το 0 οπότε για την 65η θέση μνήμης χρησιμοποιούμε
τον αριθμό 64. Δεδομένα εξαναγκασμού = 00 00 hex (OFF)
ή FF 00 hex (ON).
Όνομα πεδίου Παράδειγμα (hex)
Διεύθυνση εξαρτημένης
μονάδας
Λειτουργία 05 (εγγραφή μίας θέσης μνήμης)
Υψηλό byte διεύθυνσης
θέσης μνήμης
Χαμηλό byte διεύθυνσης
θέσης μνήμης
Εξαναγκασμός δεδομένων
σε υψηλή τιμή
Εξαναγκασμός δεδομένων
σε χαμηλή τιμή
Έλεγχος σφάλματος (CRC) –
01 (διεύθυνση μετατροπέα
συχνότητας)
00
40 (64 δεκαδικό) Θέση μνήμης 65
FF
00 (FF 00 = ON)
ακολουθούν προς το άκρο μεγαλύτερης αξίας αυτού του
byte και από χαμηλότερη αξία προς μεγαλύτερη αξία στα
Πίνακας 5.24 Αίτημα
επόμενα byte.
Αν η επιστρεφόμενη ποσότητα θέσεων μνήμης δεν είναι
πολλαπλάσια του 8, τα εναπομείναντα bit του τελευταίου
byte δεδομένων συμπληρώνονται με 0 (προς την άκρη
μεγάλης αξίας του byte). Το πεδίο μέτρησης byte καθορίζει
τον αριθμό των συμπληρωμένων byte δεδομένων.
Όνομα πεδίου Παράδειγμα (hex)
Διεύθυνση εξαρτημένης
μονάδας
Λειτουργία 01 (ανάγνωση θέσεων μνήμης)
Μετρητής byte 02 (2 byte δεδομένων)
Δεδομένα (θέσεις μνήμης
40-33)
Δεδομένα (θέσεις μνήμης
48-41)
Έλεγχος σφάλματος (CRC) –
Πίνακας 5.23 Απόκριση
01 (διεύθυνση ρυθμιστή στροφών)
07
06 (STW = 0607hex)
Απόκριση
Η κανονική απόκριση είναι αντίγραφο του αιτήματος που
επιστρέφεται αφότου έχει γίνει ο εξαναγκασμός της
κατάστασης της θέσης μνήμης.
Όνομα πεδίου Παράδειγμα (hex)
Διεύθυνση εξαρτημένης
μονάδας
Λειτουργία 05
Εξαναγκασμός δεδομένων σε
υψηλή τιμή
Εξαναγκασμός δεδομένων σε
χαμηλή τιμή
Υψηλό byte ποσότητας θέσεων
μνήμης
Χαμηλό byte ποσότητας θέσεων
μνήμης
Έλεγχος σφάλματος (CRC) –
01
FF
00
00
01
ΕΙΔΟΠΟΙΗΣΗ
Πίνακας 5.25 Απόκριση
Οι θέσεις μνήμης και οι καταχωρητές διευθυνσιοδοτούνται ρητά με απόκλιση -1 στο Modbus.
Για παράδειγμα, η πρόσβαση στη θέση μνήμης 33 γίνεται
με τον αριθμό 32.
68 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

Εγκατάσταση και ρύθμιση RS4... Οδηγός σχεδίασης εφαρμογών
5.10.3 Εξαναγκασμός/εγγραφή πολλαπλών
θέσεων μνήμης (0F hex)
Περιγραφή
Η λειτουργία αυτά εξαναγκάζει κάθε θέση μνήμης σε μια
σειρά θέσεων μνήμης να πάρει τιμή είτε on είτε o. Όταν
γίνεται μετάδοση σε όλους, η λειτουργία αυτή θέτει στις
θέσεις μνήμης τις ίδιες τιμές αναφοράς για όλες τις
συνδεδεμένες εξαρτημένες μονάδες.
Αίτημα
Το μήνυμα αιτήματος καθορίζει ότι πρέπει να γίνει
εξαναγκασμός των θέσεων μνήμης 17-32 (σημείο ρύθμισης
ταχύτητας).
ΕΙΔΟΠΟΙΗΣΗ
Οι διευθύνσεις θέσεων μνήμης ξεκινούν από το 0, και
έτσι η πρόσβαση στην 17η θέση μνήμης γίνεται με τον
αριθμό 16
Όνομα πεδίου Παράδειγμα (hex)
Διεύθυνση εξαρτημένης
μονάδας
Λειτουργία
Υψηλό byte διεύθυνσης θέσης
μνήμης
Χαμηλό byte διεύθυνσης
θέσης μνήμης
Υψηλό byte ποσότητας
θέσεων μνήμης
Χαμηλό byte ποσότητας
θέσεων μνήμης
Μετρητής byte 02
Εξαναγκασμός δεδομένων σε
υψηλή τιμή
(θέσεις μνήμης 8–1)
Εξαναγκασμός δεδομένων σε
υψηλή τιμή
(θέσεις μνήμης 16–9)
Έλεγχος σφάλματος (CRC) –
Πίνακας 5.26 Αίτημα
Απόκριση
Η κανονική απόκριση επιστρέφει τη διεύθυνση της
εξαρτημένης μονάδας, τον κωδικό λειτουργίας, την αρχική
διεύθυνση και την ποσότητα θέσεων μνήμης για
εξαναγκασμό.
01 (διεύθυνση μετατροπέα
συχνότητας)
0F (εγγραφή πολλαπλών θέσεων
μνήμης)
00
10 (διεύθυνση μνήμης 17)
00
10 (16 θέσεις μνήμης)
20
00 (τιμή αναφοράς = 2000 hex)
Όνομα πεδίου Παράδειγμα (hex)
Διεύθυνση εξαρτημένης
μονάδας
Λειτουργία 0F (εγγραφή πολλαπλών θέσεων
Υψηλό byte διεύθυνσης θέσης
μνήμης
Χαμηλό byte διεύθυνσης
θέσης μνήμης
Υψηλό byte ποσότητας
θέσεων μνήμης
Χαμηλό byte ποσότητας
θέσεων μνήμης
Έλεγχος σφάλματος (CRC) –
Πίνακας 5.27 Απόκριση
01 (διεύθυνση μετατροπέα
συχνότητας)
μνήμης)
00
10 (διεύθυνση μνήμης 17)
00
10 (16 θέσεις μνήμης)
5.10.4 Ανάγνωση καταχωρητών
συγκράτησης (03 hex)
Περιγραφή
Η λειτουργία αυτά διαβάζει τα περιεχόμενα των
καταχωρητών συγκράτησης στην εξαρτημένη μονάδα.
Αίτημα
Το μήνυμα ερωτήματος καθορίζει τον αρχικό καταχωρητή
και την ποσότητα καταχωρητών προς ανάγνωση. Οι
διευθύνσεις των καταχωρητών ξεκινούν από το 0, και έτσι
η πρόσβαση στους καταχωρητές 1-4 γίνεται με τους
αριθμούς 0-3.
Παράδειγμα: Ανάγνωση της παράμετρος 3-03 Maximum
Reference, καταχωρητής 03030.
Όνομα πεδίου Παράδειγμα (hex)
Διεύθυνση εξαρτημένης
μονάδας
Λειτουργία
Υψηλό byte αρχικής
διεύθυνσης
Χαμηλό byte αρχικής
διεύθυνσης
Υψηλό Byte αριθμού
θέσεων
Χαμηλό byte αριθμού
θέσεων
Έλεγχος σφάλματος
(CRC)
01
03 (Ανάγνωση καταχωρητών
συγκράτησης)
0B (διεύθυνση καταχωρητή 3029)
D5 (διεύθυνση καταχωρητή 3029)
00
02 – (η παράμετρος 3-03 Maximum
Reference έχει μήκος 32 bit, άρα 2
καταχωρητές)
–
5 5
Πίνακας 5.28 Αίτημα
Απόκριση
Τα δεδομένα καταχωρητή στο μήνυμα απόκρισης καταχωρούνται ως 2 byte ανά καταχωρητή, με το δυαδικό
περιεχόμενο στοιχισμένο δεξιά σε κάθε byte. Σε κάθε
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 69

Εγκατάσταση και ρύθμιση RS4...
VLT® Midi Drive FC 280
καταχωρητή, το 1ο byte περιέχει τα bit υψηλής τιμής και το
2ο περιέχει τα bit χαμηλής τιμής.
Παράδειγμα: hex 000088B8 = 35.000 = 35 Hz.
Όνομα πεδίου Παράδειγμα (hex)
Διεύθυνση εξαρτημένης μονάδας 01
Λειτουργία 03
Μετρητής byte 04
Υψηλό byte δεδομένων (καταχωρητής
3030)
Χαμηλό byte δεδομένων (καταχωρητής
55
3030)
Υψηλό byte δεδομένων (καταχωρητής
3031)
Χαμηλό byte δεδομένων (καταχωρητής
3031)
Έλεγχος σφάλματος (CRC) –
Πίνακας 5.29 Απόκριση
00
16
E3
60
Όνομα πεδίου Παράδειγμα (hex)
Διεύθυνση εξαρτημένης
μονάδας
Λειτουργία 06
Υψηλό byte διεύθυνσης
καταχωρητή
Χαμηλό byte διεύθυνσης
καταχωρητή
Υψηλό byte δεδομένων
προκαθορισμένης τιμής
Χαμηλό byte δεδομένων
προκαθορισμένης τιμής
Έλεγχος σφάλματος (CRC) –
Πίνακας 5.31 Απόκριση
01
03
E7
00
01
5.10.6 Προκαθορισμός τιμής πολλαπλών
καταχωρητών (10 hex)
Περιγραφή
5.10.5 Προκαθορισμός ενός καταχωρητή
(06 hex)
Η λειτουργία αυτή εγγράφει προκαθορισμένες τιμές σε μια
σειρά καταχωρητών συγκράτησης.
Αίτημα
Περιγραφή
Η λειτουργία αυτή εγγράφει μια προκαθορισμένη τιμή σε
έναν καταχωρητή συγκράτησης.
Αίτημα
Το μήνυμα ερωτήματος καθορίζει την τιμή αναφοράς του
καταχωρητή που θα γίνει προκαθορισμένη. Οι διευθύνσεις
των καταχωρητών ξεκινούν από το 0, και έτσι η πρόσβαση
στον καταχωρητή 1 γίνεται με τον αριθμό 0.
Παράδειγμα: Εγγραφή στην παράμετρος 1-00 Τρόπος
λειτουργίας, καταχωρητής 1000.
Όνομα πεδίου Παράδειγμα (hex)
Διεύθυνση εξαρτημένης
μονάδας
Λειτουργία 06
Υψηλό byte διεύθυνσης
καταχωρητή
Χαμηλό byte διεύθυνσης
καταχωρητή
Υψηλό byte δεδομένων
προκαθορισμένης τιμής
Χαμηλό byte δεδομένων
προκαθορισμένης τιμής
Έλεγχος σφάλματος (CRC) –
Πίνακας 5.30 Αίτημα
01
03 (διεύθυνση καταχωρητή 999)
E7 (διεύθυνση καταχωρητή 999)
00
01
Το μήνυμα ερωτήματος καθορίζει τις τιμές αναφοράς των
καταχωρητών που θα προκαθοριστούν. Οι διευθύνσεις των
καταχωρητών ξεκινούν από το 0, και έτσι η πρόσβαση
στον καταχωρητή 1 γίνεται με τον αριθμό 0. Παράδειγμα
αιτήματος για τον προκαθορισμό 2 καταχωρητών (ρυθμίστε
την παράμετρος 1-24 Motor Current σε 738 (7.38 A)):
Όνομα πεδίου Παράδειγμα (hex)
Διεύθυνση εξαρτημένης μονάδας 01
Λειτουργία 10
Υψηλό byte αρχικής διεύθυνσης 04
Χαμηλό byte αρχικής διεύθυνσης 07
Υψηλό byte αριθμού καταχωρητών 00
Χαμηλό byte αριθμού καταχωρητών 02
Μετρητής byte 04
Εγγραφή υψηλού byte δεδομένων
(καταχωρητής 4: 1049)
Εγγραφή χαμηλού byte δεδομένων
(καταχωρητής 4: 1049)
Εγγραφή υψηλού byte δεδομένων
(καταχωρητής 4: 1050)
Εγγραφή χαμηλού byte δεδομένων
(καταχωρητής 4: 1050)
Έλεγχος σφάλματος (CRC) –
Πίνακας 5.32 Αίτημα
00
00
02
E2
Απόκριση
Η κανονική απόκριση είναι αντίγραφο του αιτήματος που
επιστρέφεται αφότου περάσουν τα περιεχόμενα του
καταχωρητή.
70 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327
Απόκριση
Η κανονική απόκριση επιστρέφει τη διεύθυνση της
εξαρτημένης μονάδας, τον κωδικό λειτουργίας, την αρχική
διεύθυνση και την ποσότητα καταχωρητών για
εξαναγκασμό.

Speed ref.CTW
Master-follower
130BA274.11
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Bit
no.:
Εγκατάσταση και ρύθμιση RS4... Οδηγός σχεδίασης εφαρμογών
Όνομα πεδίου Παράδειγμα (hex)
Διεύθυνση εξαρτημένης μονάδας 01
Λειτουργία 10
Υψηλό byte αρχικής διεύθυνσης 04
Χαμηλό byte αρχικής διεύθυνσης 19
Υψηλό byte αριθμού καταχωρητών 00
Χαμηλό byte αριθμού
καταχωρητών
Έλεγχος σφάλματος (CRC) –
Πίνακας 5.33 Απόκριση
02
5.11 Προφίλ ελέγχου FC της Danfoss
5.11.1 Λέξη ελέγχου σύμφωνα με το
προφίλ FC΄(8-10 πρωτόκολλο =
προφίλ FC)
Εικόνα 5.13 Λέξη ελέγχου σύμφωνα με το προφίλ FC
Επεξήγηση των bit ελέγχου
Bit 00/01
Τα bit 00 και 01 χρησιμοποιούνται για την επιλογή μεταξύ
των 4 τιμών αναφοράς, οι οποίες είναι προ-προγραμματισμένες στην παράμετρος 3-10 Προεπιλεγμένη επιθυμητή τιμή
σύμφωνα με τον Πίνακας 5.35.
Προγραμμα-
τισμένη τιμή
αναφοράς
1
2
3
4
Πίνακας 5.35 Bit ελέγχου
Παράμετρος 3-10 Προεπιλεγμένη
επιθυμητή τιμή [0]
Παράμετρος 3-10 Προεπιλεγμένη
επιθυμητή τιμή [1]
Παράμετρος 3-10 Προεπιλεγμένη
επιθυμητή τιμή [2]
Παράμετρος 3-10 Προεπιλεγμένη
επιθυμητή τιμή [3]
Παράμετρος
Bit01Bit
00
0 0
0 1
1 0
1 1
ΕΙΔΟΠΟΙΗΣΗ
Στην παράμετρος 8-56 Επιλογή προεπιλ. επιθυμητής τιμής,
καθορίστε πώς τα bit 00/01 συνεργάζονται με την
αντίστοιχη λειτουργία στις ψηφιακές εισόδους.
5 5
Bit Τιμή bit = 0 Τιμή bit = 1
00 Τιμή αναφοράς
01 Τιμή αναφοράς
02 Πέδη ΣΡ Γραμμική μεταβολή
03 Ελεύθερη κίνηση Χωρίς ελεύθερη κίνηση
04 Γρήγορο σταμάτημα Γραμμική μεταβολή
Πάγωμα συχνότητας
05
εξόδου
Σταμάτημα με γραμ.
06
μείωση
07 Καμία λειτουργία Επαναφορά
08 Καμία λειτουργία Ελαφρά ώθηση
Γραμμική μεταβολή
09
1
Μη έγκυρα
10
δεδομένα
11 Ρελέ 01 ανοικτό Ρελέ 01 ενεργό
12 Ρελέ 02 ανοικτό Ρελέ 02 ενεργό
Ρύθμιση
13
παραμέτρων
15 Καμία λειτουργία Αναστροφή
Πίνακας 5.34 Λέξη ελέγχου σύμφωνα με το προφίλ FC
Λιγότερο σημαντικό bit
εξωτερικής επιλογής
Περισσότερο σημαντικό bit
εξωτερικής επιλογής
Χρήση γραμ. μεταβολής
Εκκίνηση
Γραμμική μεταβολή 2
Έγκυρα δεδομένα
Λιγότερο σημαντικό bit επιλογής
Bit 02, πέδη ΣΡ
Bit 02 = 0: Οδηγεί σε πέδηση ΣΡ και σταμάτημα. Ορίστε το
ρεύμα πέδησης και τη διάρκεια στην
παράμετρος 2-01 Ρεύμα πέδης DC και
παράμετρος 2-02 Χρόνος πέδησης DC.
Bit 02 = 1: Οδηγεί σε γραμμική μεταβολή.
Bit 03, ελεύθερη κίνηση
Bit 03 = 0: Ο ρυθμιστής στροφών απελευθερώνει αμέσως
τον κινητήρα (τα τρανζίστορ εξόδου κλείνουν) και εκτελεί
ελεύθερη κίνηση μέχρι να σταματήσει.
Bit 03 = 1: Αν πληρούνται οι άλλες συνθήκες εκκίνησης, ο
ρυθμιστής στροφών εκκινεί τον κινητήρα.
Στην παράμετρος 8-50 Επιλογή ελεύθερης κίνησης, καθορίστε
πώς το bit 03 συνεργάζονται με την αντίστοιχη λειτουργία
σε ψηφιακή είσοδο.
Bit 04, γρήγορο σταμάτημα
Bit 04 = 0: Αναγκάζει τις στροφές του κινητήρα να
μειωθούν γραμμικά μέχρι το σταμάτημα (ορίστε στην
παράμετρος 3-81 Χρόνος αν./καθ. γρήγορης διακοπής).
Bit 05, πάγωμα συχνότητας εξόδου
Bit 05 = 0: Γίνεται πάγωμα της συχνότητας εξόδου (σε Hz).
Αλλάξτε την παγωμένη συχνότητα εξόδου μόνο με τις
ψηφιακές εισόδους που έχουν προγραμματιστεί για [21]
Επιτάχυνση και [22] Επιβράδυνση (παράμετρος 5-10 Ψηφιακή
είσοδος ακροδέκτη 18 έως παράμετρος 5-13 Ψηφιακή
είσοδος ακροδέκτη 29).
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 71

Output freq.STW
Bit
no.:
Follower-master
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
130BA273.11
Εγκατάσταση και ρύθμιση RS4...
VLT® Midi Drive FC 280
ΕΙΔΟΠΟΙΗΣΗ
Αν είναι ενεργό το πάγωμα εξόδου, ο ρυθμιστής
στροφών μπορεί να σταματήσει με 1 από τους
ακόλουθους τρόπους:
Bit 03 σταμάτημα με ελεύθερη κίνηση.
•
Bit 02, πέδη ΣΡ.
•
Με τις ψηφιακές εισόδους προγραμματισμένες
•
ως [5] Αντίστρ. πέδη DC, [2] Αντίστρ. ελ. κίνηση, ή
[3] Αντίστρ. ελ.κίν./επαν.
(παράμετρος 5-10 Ψηφιακή είσοδος ακροδέκτη 18
55
Bit 06, Σταμάτημα/εκκίνηση με γραμμική μεταβολή
Bit 06 = 0: Ξεκινά το σταμάτημα και εξαναγκάζει την
ταχύτητα του κινητήρα να μειωθεί με γραμμικό τρόπο
μέχρι το σταμάτημα μέσω της επιλεγόμενης παραμέτρου
γραμμικής μείωσης.
Bit 06 = 1: Δίνει τη δυνατότητα στον ρυθμιστή στροφών να
εκκινεί τον κινητήρα αν πληρούνται οι άλλες συνθήκες
εκκίνησης.
Στην παράμετρος 8-53 Επιλογή εκκίνησης, καθορίστε τον
τρόπο με τον οποίο το bit 06 σταμάτημα/εκκίνηση με
γραμ. μεταβολή συνεργάζεται με την αντίστοιχη λειτουργία
σε μια ψηφιακή είσοδο.
Bit 07, Επαναφορά
Bit 07 = 0: Χωρίς επαναφορά.
Bit 07 = 1: Επαναφορά από σφάλμα. Η επαναφορά ενεργοποιείται στην προπορευόμενη ακμή του σήματος, δηλαδή
όταν γίνεται η μεταγωγή από το λογικό 0 στο λογικό 1.
Bit 08, ελαφρά ώθηση
Bit 08 = 1: Παράμετρος 3-11 Ταχύτητα ελαφράς ώθησης [Hz]
καθορίζει τη συχνότητα εξόδου.
Bit 09, Επιλογή γραμ. μεταβολής 1/2
Bit 09 = 0: Η γραμ. μεταβολή 1 είναι ενεργή
(παράμετρος 3-41 Άνοδος/Κάθοδος 1 Χρόνος ανόδου έως
παράμετρος 3-42 Άνοδος/Κάθοδος 1 Χρόνος καθόδου).
Bit 09 = 1: Η γραμ. μεταβολή 2 είναι ενεργή
(παράμετρος 3-51 Άνοδος/Κάθοδος 2 Χρόνος ανόδου έως
παράμετρος 3-52 Άνοδος/Κάθοδος 2 Χρόνος καθόδου).
Bit 10, Μη έγκυρα δεδομένα/έγκυρα δεδομένα
Καθορίστε αν ο ρυθμιστής στροφών θα χρησιμοποιεί ή
αγνοεί τη λέξη ελέγχου.
Bit 10 = 0: Η λέξη ελέγχου αγνοείται.
Bit 10 = 1: Η λέξη ελέγχου χρησιμοποιείται. Η λειτουργία
αυτή χρησιμοποιείται επειδή το μήνυμα περιέχει πάντα την
λέξη ελέγχου, ανεξάρτητα από το είδος μηνύματος. Αν η
λέξη ελέγχου δεν χρειάζεται κατά την ενημέρωση ή την
ανάγνωση της παραμέτρου, απενεργοποιήστε την επιλογή.
έως παράμετρος 5-13 Ψηφιακή είσοδος
ακροδέκτη 29).
Bit 11, Ρελέ 01
Bit 11 = 0: Το ρελέ δεν είναι ενεργοποιημένο.
Bit 11 = 1: Το ρελέ 01 ενεργοποιείται όταν έχει επιλεγεί το
[36] Λέξη ελέγχου bit 11 στην παράμετρος 5-40 Λειτουργία
ρελέ.
Bit 12, Ρελέ 02
Bit 12 = 0: Το ρελέ 02 δεν είναι ενεργοποιημένο.
Bit 12 = 1: Το ρελέ 02 ενεργοποιείται όταν έχει επιλεγεί το
[37] Λέξη ελέγχου bit 12 στην παράμετρος 5-40 Λειτουργία
ρελέ.
Bit 13, Επιλογή ρύθμισης
Χρησιμοποιήστε το bit 13 για να επιλέξετε από τις 2
ρυθμίσεις του μενού σύμφωνα με τον Πίνακας 5.36.
Ρυθμίσεις Bit 13
1 0
2 1
Πίνακας 5.36 Ρυθμίσεις μενού
Η λειτουργία είναι δυνατή μόνο αν έχει επιλεγεί το [9]
Πολλαπλή ρύθμιση στην παράμετρος 0-10 Ενεργός ρύθμιση.
Για να καθορίσετε πως το bit 13 συνεργάζεται με την
αντίστοιχη λειτουργία στις ψηφιακές εισόδους, χρησιμοποιήστε την παράμετρος 8-55 Επιλογή ρύθμισης.
Bit 15 Αναστροφή
Bit 15 = 0: Χωρίς ανατροφή.
Bit 15 = 1: Αναστροφή. Στην προεπιλεγμένη ρύθμιση, η
αναστροφή έχει ρυθμιστεί στο ψηφιακό στην
παράμετρος 8-54 Επιλογή αναστροφής. Το bit 15 ξεκινά την
αναστροφή μόνο αν έχει επιλεγεί η σειριακή επικοινωνία,
[2] Λογική διάταξη OR ή [3] Λογική διάταξη AND.
5.11.2 Λέξη κατάστασης σύμφωνα με το
προφίλ FC (STW)
Ρυθμίστε την παράμετρος 8-30 Protocol σε [0] FC.
Εικόνα 5.14 Λέξη περιγραφής κατάστασης
72 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

Εγκατάσταση και ρύθμιση RS4... Οδηγός σχεδίασης εφαρμογών
Bit Bit=0 Bit=1
00 Έλεγχος ανέτοιμος Έλεγχος έτοιμος
01 Ρυθμιστής στροφών
ανέτοιμος
02 Ελεύθερη κίνηση Ενεργοποίηση
03 Χωρίς σφάλμα Σφάλμα
04 Χωρίς σφάλμα Σφάλμα (χωρίς ενεργο-
05 Δεσμευμένο –
06 Χωρίς σφάλμα Κλείδ. ενεργ. ασφάλειας
07 Χωρίς προειδοποίηση Προειδοποίηση
08
09 Τοπική λειτουργία Έλεγχος διαύλου
10 Εκτός ορίου συχνότητας Όριο συχνότητας εντάξει
11 Χωρίς λειτουργία Σε λειτουργία
12 Ρυθμιστής στροφών ΟΚ Σταματημένος, αυτόματη
13 Τάση εντάξει Υπέρβαση τάσης
14 Ροπή εντάξει Υπέρβαση ροπής
15 Χρονοδιακ. εντάξει Υπέρβαση χρονοδιακ.
Ταχύτητα≠τιμή αναφοράς
Πίνακας 5.37 Λέξη περιγραφής κατάστασης σύμφωνα με το
προφίλ FC
Ρυθμιστής στροφών
έτοιμος
ποίηση ασφάλειας)
Ταχύτητα=τιμή αναφοράς
εκκίνηση
Επεξήγηση των bit κατάστασης
Bit 00, Έλεγχος ανέτοιμος/έτοιμος
Bit 00=0: Ο ρυθμιστής στροφών εμφανίζει σφάλμα.
Bit 00=1: Οι έλεγχοι του ρυθμιστή στροφών είναι έτοιμοι
αλλά το εξάρτημα τροφοδοσίας δεν λαμβάνει απαραίτητα
ρεύμα (αν υπάρχει εξωτερική τροφοδοσία 24 V προς τους
ελέγχους).
Bit 01, Ο ρυθμιστής στροφών είναι έτοιμος
Bit 01=0: Ο ρυθμιστής στροφών δεν είναι έτοιμος.
Bit 01=1: Ο ρυθμιστής στροφών είναι τώρα έτοιμος για
λειτουργία.
Bit 02, Σταμάτημα με ελεύθερη κίνηση
Bit 02=0: Ο ρυθμιστής στροφών απελευθερώνει τον
κινητήρα.
Bit 02=1: Ο ρυθμιστής στροφών εκκινεί τον κινητήρα με
μια εντολή εκκίνησης.
Bit 03, Χωρίς σφάλμα/ενεργοποίηση ασφάλειας
Bit 03=0: Ο ρυθμιστής στροφών δεν βρίσκεται σε
κατάσταση σφάλματος.
Bit 03=1: Ο ρυθμιστής στροφών εμφανίζει σφάλμα. Για να
ξεκινήσει και πάλι η λειτουργία, πατήστε [Reset].
Bit 04, Χωρίς σφάλμα/ενεργοποίηση ασφάλειας
Bit 04=0: Ο ρυθμιστής στροφών δεν βρίσκεται σε
κατάσταση σφάλματος.
Bit 04=1: Ο ρυθμιστής στροφών εμφανίζει σφάλμα αλλά
δεν τίθεται εκτός.
Bit 05, Δεν χρησιμοποιείται
Το bit 05 δεν χρησιμοποιείται στη λέξη κατάστασης.
Bit 06, Χωρίς σφάλμα/κλείδωμα ασφάλειας
Bit 06=0: Ο ρυθμιστής στροφών δεν βρίσκεται σε
κατάσταση σφάλματος.
Bit 06=1: Ο ρυθμιστής στροφών έχει παρουσιάσει σφάλμα
και έχει κλειδώσει.
Bit 07, Χωρίς προειδοποίηση/προειδοποίηση
Bit 07=0: Δεν υπάρχουν προειδοποιήσεις.
Bit 07=1: Έχει σημειωθεί προειδοποίηση.
Bit 08, Τιμή αναφοράς ταχύτητας/ταχύτητα=τιμή
αναφοράς
Bit 08=0: Ο κινητήρας λειτουργεί αλλά η τρέχουσα
ταχύτητα είναι διαφορετική από την προκαθορισμένη τιμή
αναφοράς ταχύτητας. Μπορεί να συμβεί όταν η ταχύτητα
βρίσκεται σε φάση γραμμικής αύξησης/μείωσης κατά την
εκκίνηση/σταμάτημα.
Bit 08=1: Η ταχύτητα του κινητήρα ισούται με την
προκαθορισμένη τιμή αναφοράς ταχύτητας.
Bit 09, Τοπική λειτουργία/έλεγχος διαύλου
Bit 09=0: Το [O/Reset] είναι ενεργοποιημένο στη μονάδα
ελέγχου ή έχει επιλεγεί το [2] Τοπική στην
παράμετρος 3-13 Τοποθεσία επιθυμητών τιμών. Δεν είναι
δυνατός ο έλεγχος του ρυθμιστή στροφών μέσω σειριακής
επικοινωνίας.
Bit 09=1: Είναι δυνατός ο έλεγχος του ρυθμιστή στροφών
μέσω επικοινωνίας διαύλου επικοινωνίας/σειριακής επικοινωνίας.
Bit 10, Εκτός ορίου συχνότητας
Bit 10=0: Η συχνότητα εξόδου έχει φτάσει την τιμή στην
παράμετρος 4-12 Motor Speed Low Limit [Hz] ή στην
παράμετρος 4-14 Motor Speed High Limit [Hz].
Bit 10=1: Η συχνότητα εξόδου βρίσκεται εντός των καθορισμένων ορίων.
Bit 11, χωρίς λειτουργία/λειτουργία
Bit 11=0: Ο κινητήρας δεν λειτουργεί.
Bit 11=1: Ο ρυθμιστής στροφών έχει σήμα εκκίνησης χωρίς
ελεύθερη κίνηση.
Bit 12, Ρυθμιστής στροφών εντάξει/σταματημένος,
αυτόματη εκκίνηση
Bit 12=0: Δεν υπάρχει΄προσωρινή υπέρβαση της
θερμοκρασίας στον ρυθμιστή στροφών.
Bit 12=1: Ο ρυθμιστής στροφών σταματά εξαιτίας της
υπέρβασης της θερμοκρασίας αλλά η μονάδα δεν τίθεται
σε σφάλμα και επαναλαμβάνει τη λειτουργία της αφού
αποκατασταθεί η υπέρβαση θερμοκρασίας.
Bit 13, Τάση εντάξει/υπέρβαση ορίου
Bit 13=0: Δεν υπάρχουν προειδοποιήσεις τάσης.
Bit 13=1: Η τάση ΣΡ στη ζεύξη συνεχούς ρεύματος του
ρυθμιστή στροφών είναι πολύ χαμηλή ή πολύ υψηλή.
Bit 14, Ροπή εντάξει/υπέρβαση ορίου
Bit 14=0: Το ρεύμα κινητήρα είναι μικρότερο από το
τρέχον όριο που έχει επιλεγεί στην παράμετρος 4-18 Current
Limit.
Bit 14=1: Έχει γίνει υπέρβαση του ορίου ρεύματος στην
παράμετρος 4-18 Current Limit.
5 5
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 73

Actual output
frequency
STW
Follower-slave
Speed referenceCTW
Master-slave
16bit
130BA276.11
Reverse Forward
Par.3-00 set to
(1) -max- +max
Max reference Max reference
Par.3-00 set to
(0) min-max
Max reference
Forward
Min reference
100%
(4000hex)
-100%
(C000hex)
0%
(0hex)
Par.3-03 0 Par.3-03
Par.3-03
(4000hex)(0hex)
0% 100%
Par.3-02
130BA277.10
Εγκατάσταση και ρύθμιση RS4...
VLT® Midi Drive FC 280
Bit 15, χρονοδιακόπτης εντάξει/υπέρβαση ορίου
Bit 15=1: 1 από τους χρονοδιακόπτες υπερβαίνει το 100%.
Bit 15=0: Δεν έχει γίνει 100% υπέρβαση των χρονοδιακοπτών για τη θερμική προστασία κινητήρα και τη θερμική
προστασία
5.11.3 Τιμή αναφοράς ταχύτητας διαύλου
Η τιμή αναφοράς ταχύτητας μεταδίδεται στο ρυθμιστή στροφών σε σχετική τιμή σε %. Η τιμή μεταδίδεται με τη μορφή
λέξης 16 bit. Η ακέραια τιμή 16384 (4000 hex) αντιστοιχεί στο 100%. Οι αρνητικοί αριθμοί ακολουθούν τη μορφή του
συμπληρώματος ως προς 2. Η πραγματική συχνότητα εξόδου (MAV) κλιμακώνεται με τον ίδιο τρόπο όπως η αναφορά
διαύλου.
55
Εικόνα 5.15 Πραγματική συχνότητα εξόδου (MAV)
Η τιμή MAV και η τιμή αναφοράς κλιμακώνονται ως εξής:
Εικόνα 5.16 Τιμή αναφοράς και MAV
74 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

130BF710.10
FC-280PK37T4E20H1BXCXXXSXXXXAX
1 7 11 13 16 18 24 293 20
Κωδικός είδους και επιλογή Οδηγός σχεδίασης εφαρμογών
6 Κωδικός είδους και επιλογή
6.1 Κωδικός τύπου
Ο κωδικός τύπου είναι μια συμβολοσειρά χαρακτήρων που
περιγράφουν τη διαμόρφωση του ρυθμιστή στροφών,
ανατρέξτε στο Εικόνα 6.1.
Εικόνα 6.1 Κωδικός τύπου
Οι αριθμοί που εμφανίζονται στο Πίνακας 6.1 αναφέρονται
στη θέση των γραμμάτων/αριθμών στη θέση της συμβολοσειράς κωδικού τύπου, ο οποίος διαβάζεται από τα
αριστερά προς τα δεξιά.
Ομάδες προϊόντων 1–2
Σειρά ρυθμιστή στροφών 4–6
Ονομαστική τιμή ισχύος 7–10
Φάσεις 11
Τάση του δικτύου ρεύματος 12
Περίβλημα 13–15
Φίλτρο RFI 16–17
Πέδηση 18
Οθόνη (LCP) 19
Επίστρωση PCB 20
Επιλογή δικτύου ρεύματος 21
Προσαρμογή A 22
Προσαρμογή Β 23
Έκδοση λογισμικού 24–27
Γλώσσα λογισμικού 28
Προαιρετικός εξοπλισμός A 29–30
Πίνακας 6.1 Θέσεις χαρακτήρων κωδικού τύπου
Αριθμοί παραγγελίας: Επιλογές,
6.2
εξαρτήματα και ανταλλακτικά
Πρόσθετες επιλογές και εξαρτήματα Αριθμός παραγγελίας
®1)
132B0359
134B0792
132B0254
130B1107
132B0262
132B0363
132B0364
132B0365
132B0366
132B0368
132B0102
130B1117
VLT® Memory Module MCM 102
VLT® Memory Module Programmer
MCM 101
VLT® Control Panel LCP 21
(αριθμητικός)
VLT® Control Panel LCP 102 (γραφικός)
Προσαρμογέας γραφικού LCP 132B0281
Τυφλό κάλυμμα VLT® Control Panel LCP
Κιτ μετατροπής IP21/Τύπου 1, K1 132B0335
Κιτ μετατροπής IP21/Τύπου 1, K2 132B0336
Κιτ μετατροπής IP21/Τύπου 1, K3 132B0337
Κιτ μετατροπής IP21/Τύπου 1, K4 132B0338
Κιτ μετατροπής IP21/Τύπου 1, K5 132B0339
Πλάκα προσαρμογέα 2800 μεγέθους A,
VLT
Πλάκα προσαρμογέα 2800 μεγέθους Β,
VLT
Πλάκα προσαρμογέα 2800 μεγέθους C,
VLT
Πλάκα προσαρμογέα 2800 μεγέθους D,
VLT
Τροφοδοτικό 24 V ΣΡ MCB 106 VLT
Κιτ απομακρυσμένης στερέωσης για
LCP, με καλώδιο 3 m (10 ft)
Κιτ απομακρυσμένης στερέωσης για
LCP, χωρίς LCP
1) Διαθέσιμο από τα μέσα του 2017.
1)
®
®
®
®
Πίνακας 6.2 Αριθμοί παραγγελίας για πρόσθετες επιλογές και
εξαρτήματα
6
6
Από την διαδικτυακή εφαρμογή Διαμορφωτή ρυθμιστή
στροφών, ο πελάτης μπορεί να διαμορφώσει το σωστό
ρυθμιστή στροφών για μια εφαρμογή και να δημιουργήσει
τη συμβολοσειρά κωδικού τύπου. Ο Διαμορφωτής
ρυθμιστή στροφών δημιουργεί αυτόματα έναν 8-ψήφιο
αριθμό πώλησης που παραδίδεται στην τοπική υπηρεσία
πωλήσεων.
Μια άλλη επιλογή είναι η δημιουργία μιας λίστας έργων με
πολλά προϊόντα και η αποστολή τους σε έναν
αντιπρόσωπο πωλήσεων της Danfoss.
Ο Διαμορφωτής ρυθμιστή στροφών βρίσκεται στον
παγκόσμιο ιστότοπο: vltcong.danfoss.com.
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 75

6
Κωδικός είδους και επιλογή
Ανταλλακτικά Αριθμός παραγγελίας
Σετ εξαρτημάτων τάπες FC 280 132B0350
Ανεμιστήρας 50x20 IP21 PWM 132B0351
Ανεμιστήρας 60x20 IP21 PWM 132B0352
Ανεμιστήρας 70x20 IP21 PWM 132B0353
Ανεμιστήρας 92x38 IP21 PWM 132B0371
Ανεμιστήρας 120x38 IP21 PWM 132B0372
Περίβλημα καλύμματος ακροδεκτών
μεγέθους Κ1
Περίβλημα καλύμματος ακροδεκτών
μεγέθους Κ2
Περίβλημα καλύμματος ακροδεκτών
μεγέθους Κ3
Περίβλημα καλύμματος ακροδεκτών
μεγέθους Κ4
Περίβλημα καλύμματος ακροδεκτών
μεγέθους Κ5
Κιτ αποσύζευξης καλωδίου διαύλου, FC
280
Κιτ αποσύζευξης, εισ./εξ. ισχύος, Κ1 132B0373
Κιτ αποσύζευξης, εισ./εξ. ισχύος, Κ2/Κ3 132B0374
Κιτ αποσύζευξης, εισ./εξ. ισχύος, Κ4/Κ5 132B0375
Κασέτα ελέγχου - κανονική, VLT
Κασέτα ελέγχου - CANopen, VLT
Κασέτα ελέγχου - PROFIBUS, VLT
Κασέτα ελέγχου - PROFINET, VLT
Κασέτα ελέγχου - EtherNet/IP, VLT
Κασέτα ελέγχου - POWERLINK VLT
®
®
®
®
®
®
VLT® Midi Drive FC 280
132B0354
132B0355
132B0356
132B0357
132B0358
132B0369
132B0345
132B0346
132B0347
132B0348
132B0349
132B0378
Αριθμοί παραγγελίας: Αντιστάτες
6.3
πέδησης
H Danfoss παρέχει μεγάλη γκάμα από αντιστάτες που είναι
ειδικά σχεδιασμένοι για τους δικούς μας μετατροπείς
συχνότητας. Βλ. κεφάλαιο 2.9.4 Έλεγχος της λειτουργίας
πέδησης για τη διαστασιολόγηση των αντιστατών πέδης. Η
ενότητα αυτή καταγράφει τους αριθμούς παραγγελίας για
τους αντιστάτες πέδησης. Η αντίσταση του αντιστάτη
πέδησης που παρέχεται από τον αριθμό παραγγελίας
μπορεί να είναι μεγαλύτερη από την R
περίπτωση, η πραγματική ροπή πέδησης μπορεί να είναι
μικρότερη από την υψηλότερη ροπή πέδησης την οποία
μπορεί να παρέχει ο ρυθμιστής στροφών.
. Σε αυτή την
rec
Πίνακας 6.3 Αριθμοί παραγγελίας ανταλλακτικών
76 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

Κωδικός είδους και επιλογή Οδηγός σχεδίασης εφαρμογών
6.3.1 Αριθμοί παραγγελίας: Αντιστάτες πέδησης 10%
Ονομαστικ
ή τιμή
ισχύος
3-φασικό
380–480 V
(T4)
PK37 0,37 (0,5) 890 1041,98 989
PK55 0,55 (0,75) 593 693,79 659
PK75 0,75 (1,0) 434 508,78 483
P1K1 1,1 (1,5) 288 338,05 321
P1K5 1,5 (2,0) 208 244,41 232
P2K2 2,2 (3,0) 139 163,95 155
P3K0 3 (4,0) 100 118,86 112
P4K0 4 (5,0) 74 87,93 83
P5K5 5,5 (7,5) 54 63,33 60
P7K5 7,5 (10) 38 46,05 43
P11K 11 (15) 27 32,99 31
P15K 15 (20) 19 24,02 22
P18K 18,5 (25) 16 19,36 18
P22K 22 (30) 16 18,00 17
P
m (HO)
[kW (hp)]
R
min
[Ω] [Ω] [Ω]
R
br. nom
R
rec
P
br avg
[kW (hp)] 175Uxxxx [s]
0,030
(0,040)
0,045
(0,060)
0,061
(0,080)
0,092
(0,120)
0,128
(0,172)
0,190
(0,255)
0,262
(0,351)
0,354
(0,475)
0,492
(0,666)
0,677
(0,894)
0,945
(1,267)
1,297
(1,739)
1.610
(2.158)
1.923
(2.578)
Αριθμός
παραγγελίας
3000 120 1,5 (16) 0,3 139
3001 120 1,5 (16) 0,4 131
3002 120 1,5 (16) 0,4 129
3004 120 1,5 (16) 0,5 132
3007 120 1,5 (16) 0,8 145
3008 120 1,5 (16) 0,9 131
3300 120 1,5 (16) 1.3 131
3335 120 1,5 (16) 1,9 128
3336 120 1,5 (16) 2,5 127
3337 120 1,5 (16) 3,3 132
3338 120 1,5 (16) 5,2 130
3339 120 1,5 (16) 6,7 129
3340 120 1,5 (16) 8,3 132
3357 120 1,5 (16) 10,1 128
Περίοδος Διατομή
καλωδίου
1)
2
[mm
(AWG)]
Θερμικό
ρελέ
[A] [%]
Μέγιστη
ροπή
πέδησης με
αντιστάτη
6
6
Πίνακας 6.4 FC 280 - Δίκτυο ρεύματος: 3-φασικό 380–480 V (T4), 10% Κύκλος εργασίας
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 77

Κωδικός είδους και επιλογή
VLT® Midi Drive FC 280
6
Ονομαστικ
ή τιμή
ισχύος
3-φασικό
200–240 V
P
m (HO)
[kW (hp)]
R
min
R
br. nom
R
[Ω] [Ω] [Ω]
rec
P
br avg
Αριθμός
παραγγελίας
[kW (hp)] 175Uxxxx [s]
Περίοδος Διατομή
καλωδίου
1)
[mm
(AWG)]
Θερμικό
2
(T2)
PK37 0,37 (0,5) 225 263,22 250
PK55 0,55 (0,75) 151 176,90 168
PK75 0,75 (1,0) 110 129,92 123
P1K1 1,1 (1,5) 73 86,77 82
P1K5 1,5 (2,0) 53 62,70 59
P2K2 2,2 (3,0) 35 42,06 39
P3K7 3,7 (5,0) 20 24,47 23
0,030
(0,040)
0,045
(0,060)
0,062
(0,083)
0,092
(0,120)
0,128
(0,172)
0,190
(0,255)
0,327
(0,439)
3006 120 1,5 (16) 0,6 140
3011 120 1,5 (16) 0,7 142
3016 120 1,5 (16) 0,8 143
3021 120 1,5 (16) 0,9 139
3026 120 1,5 (16) 1,6 143
3031 120 1,5 (16) 1,9 140
3326 120 1,5 (16) 3,5 145
Πίνακας 6.5 FC 280 - Δίκτυο ρεύματος: 3-φασικό 200–240 V (T2), 10% Κύκλος εργασίας
1) Πρέπει να τηρούνται οι εθνικοί και τοπικοί κανονισμοί σχετικά με τις διατομές των καλωδίων και τη θερμοκρασία χώρου.
Μέγιστη
ρελέ
ροπή
πέδησης με
αντιστάτη
[A] [%]
78 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

Κωδικός είδους και επιλογή Οδηγός σχεδίασης εφαρμογών
6.3.2 Αριθμοί παραγγελίας: Αντιστάτες πέδησης 40%
Ονομαστικ
ή τιμή
ισχύος
3-φασικό
380–480 V
(T4)
PK37 0,37 (0,5) 890 1041,98 989
PK55 0,55 (0,75) 593 693,79 659
PK75 0,75 (1,0) 434 508,78 483
P1K1 1,1 (1,5) 288 338,05 321
P1K5 1,5 (2,0) 208 244,41 232
P2K2 2,2 (3,0) 139 163,95 155
P3K0 3 (4,0) 100 118,86 112
P4K0 4 (5,0) 74 87,93 83
P5K5 5,5 (7,5) 54 63,33 60
P7K5 7,5 (10) 38 46,05 43
P11K 11 (15) 27 32,99 31
P15K 15 (20) 19 24,02 22
P18K 18,5 (25) 16 19,36 18
P22K 22 (30) 16 18,00 17
P
m (HO)
[kW (hp)]
R
[Ω] [Ω] [Ω]
min
R
br. nom
R
rec
P
br avg
[kW (hp)] 175Uxxxx [s]
0,127
(0,170)
0,191
(0,256)
0,260
(0,349)
0,391
(0,524)
0,541
(0,725)
0,807
(1,082)
1.113
(1.491)
1.504
(2.016)
2.088
(2.799)
2.872
(3.850)
4.226
(5.665)
5.804
(7.780)
7.201
(9.653)
8.604
(11.534)
Αριθμός
παραγγελία
ς
3101 120 1,5 (16) 0,4 139
3308 120 1,5 (16) 0,5 131
3309 120 1,5 (16) 0,7 129
3310 120 1,5 (16) 1 132
3311 120 1,5 (16) 1,4 145
3312 120 1,5 (16) 2,1 131
3313 120 1,5 (16) 2,7 131
3314 120 1,5 (16) 3,7 128
3315 120 1,5 (16) 5 127
3316 120 1,5 (16) 7,1 132
3236 120 2,5 (14) 11,5 130
3237 120 2,5 (14) 14,7 129
3238 120 4 (12) 19 132
3203 120 4 (12) 23 128
Περίοδος Διατομή
καλωδίου
1)
[mm2]
Θερμικό
ρελέ
[A] [%]
Μέγιστη
ροπή
πέδησης με
αντιστάτη
6
6
Πίνακας 6.6 FC 280 - Δίκτυο ρεύματος: 3-φασικό 380–480 V (T4), 40% Κύκλος εργασίας
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 79

Κωδικός είδους και επιλογή
VLT® Midi Drive FC 280
6
Ονομαστικ
ή τιμή
ισχύος
3-φασικό
200–240 V
(T2)
PK37 0,37 (0,5) 225 263,22 250
PK55 0,55 (0,75) 151 176,90 168
PK75 0,75 (1,0) 110 129,92 123
P1K1 1,1 (1,5) 73 86,77 82
P1K5 1,5 (2,0) 53 62,70 59
P2K2 2,2 (3,0) 35 42,06 39
P3K7 3,7 (5,0) 20 24,47 23
Πίνακας 6.7 FC 280 - Δίκτυο ρεύματος: 3-φασικό 200–240 V (T2), 40% Κύκλος εργασίας
1) Πρέπει να τηρούνται οι εθνικοί και τοπικοί κανονισμοί σχετικά με τις διατομές των καλωδίων και τη θερμοκρασία χώρου.
P
m (HO)
[kW (hp)]
R
min
[Ω] [Ω] [Ω]
R
br. nom
R
rec
P
br avg
[kW (hp)] 175Uxxxx [s]
0,129
(0,173)
0,192
(0,257)
0,261
(0,350)
0,391
(0,524)
0,541
(0,725)
0,807
(1,082)
1.386
(1.859)
Αριθμός
παραγγελίας
Περίοδος Διατομή
καλωδίου
1)
[mm
(AWG)]
3096 120 1,5 (16) 0,8 140
3008 120 1,5 (16) 0,9 142
3300 120 1,5 (16) 1.3 143
3301 120 1,5 (16) 2 139
3302 120 1,5 (16) 2,7 143
3303 120 1,5 (16) 4,2 140
3305 120 1,5 (16) 6,8 145
Θερμικό
2
Μέγιστη
ρελέ
[A] [%]
ροπή
πέδησης με
αντιστάτη
Αριθμοί παραγγελίας: Φίλτρα ημιτονοειδούς κύματος
6.4
Ονομαστικές τιμές ισχύος και ρεύματος ρυθμιστή στροφών
[kW
(hp)]
200–240 V 200–240 V 200–240 V 50 Hz 60 Hz 100 Hz – IP00 IP20
– –
– –
0,37
(0,5)
– – 1,1 (1,5) 3 1,1 (1,5) 2,8
0,55
(0,75)
0,75 (1) 4,2 2,2 (3) 5,3 2,2 (3) 4,8
1,1 (1,5) 6 3 (4) 7,2 3 (4) 6,3
1,5 (2) 6,8 – – – –
– – 4 (5,5) 9 4 (5,5) 8,2 10 9,5 7,5 6 130B2409 130B2444
2,2 (3) 9,6 5,5 (7,5) 12 5,5 (7,5) 11
3,7 (5) 15,2 7,5 (10) 15,5 7,5 (10) 14
– – 11 (15) 23 11 (15) 21 24 23 18 5 130B2412 130B2447
– – 15 (20) 31 15 (20) 27
– –
– – 22 (30) 42,5 22 (30) 40 48 45,5 36 5 130B2281 130B2307
[A]
2,2 0,75 (1) 2,2 0,75 (1) 2,1
3,2 1,5 (2) 3,7 1,5 (2) 3,4
[kW
(hp)]
0,37
(0,5)
0,55
(0,75)
18,5
(25)
[A]
1,2
1,7
37
[kW
(hp)]
0,37
(0,5)
0,55
(0,75)
18,5
(25)
[A] [A] [A] [A] [kHz] – –
1,1
1,6
34
Ονομαστική τιμή ρεύματος
φίλτρου
2,5 2,5 2 6 130B2404 130B2439
4,5 4 3,5 6 130B2406 130B2441
8 7,5 5,5 6 130B2408 130B2443
17 16 13 6 130B2411 130B2446
38 36 28,5 5 130B2413 130B2448
Συχνότητα
μεταγωγής
)
1
Αριθμός παραγγελίας
Πίνακας 6.8 Φίλτρα ημιτονοειδούς κύματος για ρυθμιστές στροφών με 380-480 V
1) Η συχνότητα μεταγωγής πρέπει να υποβιβαστεί στα 3 kHz εξαιτίας της ταχύτητας εξόδου (λιγότερο από το 60% της κανονικής ταχύτητας), της
υπερφόρτωσης ή της υπερβολικής θερμοκρασίας. Ο πελάτης ενδέχεται να παρατηρήσει αλλαγή του θορύβου του φίλτρου.
80 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

Κωδικός είδους και επιλογή Οδηγός σχεδίασης εφαρμογών
Οι προτεινόμενες ρυθμίσεις παραμέτρων για το φίλτρο ημιτονοειδούς κύματος είναι οι εξής:
Ρύθμιση του [1] Φίλτρου ημιτονοειδούς κύματος στο παράμετρος 14-55 Output Filter.
•
Ρυθμίστε την κατάλληλη τιμή για το μεμονωμένο φίλτρο στο παράμετρος 14-01 Switching Frequency. Όταν το [1]
•
Φίλτρο ημιτονοειδούς κύματος ρυθμίζεται στο παράμετρος 14-55 Output Filter, οι επιλογές κάτω από 5 kHz στο
παράμετρος 14-01 Switching Frequency καταργούνται αυτόματα.
6.5 Αριθμοί παραγγελίας: Φίλτρα dU/dt
Ονομαστικές τιμές ισχύος και ρεύματος ρυθμιστή
στροφών
380-440 V 441-480 V
[kW (hp)] [A] [kW (hp)] [A] [A] [A] – – –
11 (15) 23 11 (15) 21
15 (20) 31 15 (20) 27
18,5 (25) 37 18,5 (25) 34
22 (30) 42,5 22 (30) 40
Πίνακας 6.9 Φίλτρα dU/dt για ρυθμιστές στροφών με 380-480 V
Ονομαστική τιμή ρεύματος
φίλτρου
380@ 60 Hz
200–400/440
@ 50 Hz
44 40 130B2835 130B2836 130B2837
460/480 @
60 Hz
500/525 @
50 Hz
IP00 IP20 IP54
Αριθμός παραγγελίας
6.6 Αριθμοί παραγγελίας: Εξωτερικά φίλτρα ΗΜΣ
Για τα K1S2 και K2S2, με εξωτερικά φίλτρα ΗΜΣ που αναφέρονται στο Πίνακας 6.10, μπορεί να επιτευχθεί το μέγιστο μήκος
θωρακισμένου καλωδίου των 100 m (328 ft) σύμφωνα με το πρότυπο EN/IEC 61800-3 C2 (EN 55011 A1) ή των 40 m (131.2
ft) σύμφωνα με το EN/IEC 61800-3 C1 (EN 55011 B).
Για τα K1T4, K2T4 και K3T4, με εσωτερικό φίλτρο Α1, με τα εξωτερικά φίλτρα ΗΜΣ που αναφέρονται στο Πίνακας 6.10,
μπορεί να επιτευχθεί το μέγιστο μήκος θωρακισμένου καλωδίου των 100 m (328 ft) σύμφωνα με το πρότυπο EN/IEC 61800-3
C2 (EN 55011 A1) ή των 25 m (82 ft) σύμφωνα με το EN/IEC 61800-3 C1 (EN 55011 B).
6
6
Αριθμός παραγγελίας φίλτρου ΗΜΣ
Μέγεθος περιβλήματος ρυθμιστή στροφών K1S2 K2S2 K1T4 K2T4 K3T4
Διαστάσεις A [mm (in)] 250 (9,8) 312,5 (12,3) 250 (9,8) 312,5 (12,3)
Διαστάσεις a1 [mm (in)] 234 (9,2) 303 (11,9) 234 (9,2) 303 (11,9)
Διαστάσεις a2 [mm (in)] 19,5 (0,77) 21,3 (0,84) 19,5 (0,77) 21,3 (0,84)
Διαστάσεις am [mm (in)] 198 (7,8) 260 (10,2) 198 (7,8) 260 (10,2)
Διαστάσεις B [mm (in)] 75 (2,95) 90 (3,54) 75 (2,95) 90 (3,54) 115 (4,53)
Διαστάσεις b1 [mm (in)] 55 (2,17) 70 (2,76) 55 (2,17) 70 (2,76) 90 (3,54)
Διαστάσεις bm [mm (in)] 60 (2,36) 70 (2,76) 60 (2,36) 70 (2,76) 90 (3,54)
Διαστάσεις C [mm (in)] 50 (1,97)
Διαστάσεις c1 [mm (in)] 22,7 (0,89)
Διαστάσεις D1 [mm (in)] Ø5,3 (Ø0,21)
Διαστάσεις Dm [mm (in)] M4 M5 M4 M5
Διαστάσεις e1 [mm (in)] 6,5 (0,26) 5 (0,20) 6,5 (0,26) 5 (0,20)
Διαστάσεις f1 [mm (in)] 10 (0,39) 12,5 (0,49)
Διαστάσεις fm [mm (in)] 7,5 (0,30)
Βίδες στερέωσης φίλτρου ΗΜΣ M5
Βίδες στερέωσης ρυθμιστή στροφών M4 M5 M4 M5
Βάρος [kg (lb)] 1,10 (2,43)
Πίνακας 6.10 Λεπτομέρειες φίλτρου ΗΜΣ για τα K1–K3
134B5466 134B5467 134B5463 134B5464 134B5465
10 (0,39) 7,5 (0,30) 10 (0,39)
1,50 (3,31) 1,20 (2,65) 1,90 (4,19) 2,10 (4,63)
12,5 (0,49)
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 81

130BF872.10
a1
a1
A
am
a2
e1
e1
c1
f1
fm
6-D1
4-Dm
6-D1
b1
bm
B
C
6
Κωδικός είδους και επιλογή
VLT® Midi Drive FC 280
Εικόνα 6.2 Διαστάσεις φίλτρου ΗΜΣ για τα K1–K3
Για τα K4T4 και K5T4 με εσωτερικό φίλτρο Α1, με τα εξωτερικά φίλτρα ΗΜΣ που αναφέρονται στο Πίνακας 6.11, μπορεί να
επιτευχθεί το μέγιστο μήκος θωρακισμένου καλωδίου των 100 m (328 ft) σύμφωνα με το πρότυπο EN/IEC 61800-3 C2 (EN
55011 A1) ή των 25 m (82 ft) σύμφωνα με το EN/IEC 61800-3 C1 (EN 55011 B).
Ισχύς [kW (hp)]
Μέγεθος 380–480 V
11–15
(15–20)
18,5–22
(25–30)
Τύπος A B C D E F G H I J K L1
FN3258-30-47 270 50 85 240 255 30 5,4 1 10,6 M5 25 40
FN3258-42-47 310 50 85 280 295 30 5,4 1 10,6 M5 25 40
Πίνακας 6.11 Λεπτομέρειες φίλτρου ΗΜΣ για τα K4–K5
Ροπή
[Nm (in-lb)]
1,9–2,2
(16,8–19,5)
1,9–2,2
(16,8–19,5)
Βάρος [kg (lb)]
1,2
(2,6)
1,4
(3,1)
Αριθμός
παραγγελίας
132B0246
132B0247
82 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

H
B
K
C
A
D
J
G
E
F
l
1
L
1
130BC247.10
Κωδικός είδους και επιλογή Οδηγός σχεδίασης εφαρμογών
6
6
Εικόνα 6.3 Διαστάσεις φίλτρου ΗΜΣ για τα K4–K5
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 83

Προδιαγραφές
7 Προδιαγραφές
7.1 Ηλεκτρικά δεδομένα
VLT® Midi Drive FC 280
Ρυθμιστής στροφών
τυπική έξοδος άξονα [kW (hp)]
Κλάση προστασίας περιβλήματος IP20 (IP21/
Τύπου 1 ως επιλογή)
Ένταση ρεύματος εξόδου
Έξοδος άξονα [kW ] 0,37 0,55 0,75 1,1 1,5 2,2 3
Συνεχόμενο (3x380–440 V) [A] 1,2 1,7 2,2 3 3,7 5,3 7,2
Συνεχόμενο (3x441–480 V) [A] 1,1 1,6 2,1 2,8 3,4 4,8 6,3
Διαλείπον (60 δευτ. υπερφόρτωση) [A] 1,9 2,7 3,5 4,8 5,9 8,5 11,5
Συνεχόμενο kVA (400 V ΕΡ) [kVA] 0,9 1,2 1,5 2,1 2,6 3,7 5,0
Συνεχόμενο kVA (480 V ΕΡ) [kVA] 0,9 1.3 1,7 2,5 2,8 4,0 5,2
77
Μέγιστο ρεύμα εισόδου
Συνεχόμενο (3x380–440 V) [A] 1,2 1,6 2,1 2,6 3,5 4,7 6,3
Συνεχόμενο (3x441–480 V) [A] 1,0 1,2 1,8 2,0 2,9 3,9 4,3
Διαλείπον (60 δευτ. υπερφόρτωση) [A] 1,9 2,6 3,4 4,2 5,6 7,5 10,1
Περισσότερες προδιαγραφές
Μέγιστη διατομή καλωδίου (δικτύου ρεύματος,
κινητήρα, πέδησης και διαμοιρασμού φορτίων
[mm2 (AWG)]
Εκτιμώμενη απώλεια ισχύος στο μέγιστο
ονομαστικό φορτίο [W]
Βάρος, κατηγορία προστασίας περιβλήματος
IP20 [kg (lb)]
Βάρος, κατηγορία προστασίας περιβλήματος
IP21 [kg (lb)]
Βαθμός απόδοσης [%]
1)
2)
PK37
0,37
(0,5)
K1 K1 K1 K1 K1 K1 K2
20,9 25,2 30 40 52,9 74 94,8
2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5) 3,6 (7,9)
4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1)
96,0 96,6 96,8 97,2 97,0 97,5 98,0
PK55
0,55
(0,75)
PK75
0,75
(1,0)
P1K1
1,1
(1,5)
4 (12)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
P3K0
3,0
(4,0)
Πίνακας 7.1 Τροφοδοσία από το δίκτυο ρεύματος 3x380-480 V ΕΡ
84 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

Προδιαγραφές Οδηγός σχεδίασης εφαρμογών
Ρυθμιστής στροφών
τυπική έξοδος άξονα [kW (hp)]
Κλάση προστασίας περιβλήματος IP20 (IP21/
Τύπου 1 ως επιλογή)
Ένταση ρεύματος εξόδου
Έξοδος άξονα 4 5,5 7,5 11 15 18,5 22
Συνεχόμενο (3x380–440 V) [A] 9 12 15,5 23 31 37 42,5
Συνεχόμενο (3x441–480 V) [A] 8,2 11 14 21 27 34 40
Διαλείπον (60 δευτ. υπερφόρτωση) [A] 14,4 19,2 24,8 34,5 46,5 55,5 63,8
Συνεχόμενο kVA (400 V ΕΡ) [kVA] 6,2 8,3 10,7 15,9 21,5 25,6 29,5
Συνεχόμενο kVA (480 V ΕΡ) [kVA] 6,8 9,1 11,6 17,5 22,4 28,3 33,3
Μέγιστο ρεύμα εισόδου
Συνεχόμενο (3x380–440 V) [A] 8,3 11,2 15,1 22,1 29,9 35,2 41,5
Συνεχόμενο (3x441–480 V) [A] 6,8 9,4 12,6 18,4 24,7 29,3 34,6
Διαλείπον (60 δευτ. υπερφόρτωση) [A] 13,3 17,9 24,2 33,2 44,9 52,8 62,3
Περισσότερες προδιαγραφές
Μέγιστη διατομή καλωδίου (δικτύου ρεύματος,
κινητήρα, πέδησης και διαμοιρασμού φορτίων
[mm2 (AWG)]
Εκτιμώμενη απώλεια ισχύος στο μέγιστο
ονομαστικό φορτίο [W]
Βάρος περιβλήματος κατηγορίας προστασίας
IP20 [kg (lb)]
Βάρος, κατηγορία προστασίας περιβλήματος
IP21 [kg (lb)]
Βαθμός απόδοσης [%]
1)
2)
P4K0
4
(5,4)
K2 K2 K3 K4 K4 K5 K5
115,5 157,5 192,8 289,5 393,4 402,8 467,5
3,6 (7,9) 3,6 (7,9) 4,1 (9,0) 9,4 (20,7) 9,5 (20,9) 12,3 (27,1) 12,5 (27,6)
5,5 (12,1) 5,5 (12,1) 6,5 (14,3) 10,5 (23,1) 10,5 (23,1) 14,0 (30,9) 14,0 (30,9)
98,0 97,8 97,7 98,0 98,1 98,0 98,0
P5K5
5,5
(7,5)
4 (12) 16 (6)
P7K5
7,5
(10)
P11K
11
(15)
P15K
15
(20)
P18K
18,5
(25)
P22K
22
(30)
7 7
Πίνακας 7.2 Τροφοδοσία από το δίκτυο ρεύματος 3x380-480 V ΕΡ
Ρυθμιστής στροφών
τυπική έξοδος άξονα [kW (hp)]
Κλάση προστασίας περιβλήματος IP20 (IP21/
Τύπου 1 ως επιλογή)
Ένταση ρεύματος εξόδου
Συνεχόμενο (3x200–240 V) [A] 2,2 3,2 4,2 6 6,8 9,6 15,2
Διαλείπον (60 δευτ. υπερφόρτωση) [A] 3,5 5,1 6,7 9,6 10,9 15,4 24,3
Συνεχόμενο kVA (230 V ΕΡ) [kVA] 0,9 1.3 1,7 2,4 2,7 3,8 6,1
Μέγιστο ρεύμα εισόδου
Συνεχόμενο (3x200–240 V) [A] 1,8 2,7 3,4 4,7 6,3 8,8 14,3
Διαλείπον (60 δευτ. υπερφόρτωση) [A] 2,9 4,3 5,4 7,5 10,1 14,1 22,9
Περισσότερες προδιαγραφές
Μέγιστη διατομή καλωδίου (δικτύου ρεύματος,
κινητήρα, πέδησης και διαμοιρασμού φορτίων
[mm2 (AWG)]
Εκτιμώμενη απώλεια ισχύος στο μέγιστο
ονομαστικό φορτίο [W]
Βάρος περιβλήματος κατηγορίας προστασίας
IP20 [kg (lb)]
Βάρος, κατηγορία προστασίας περιβλήματος
IP21 [kg (lb)]
Βαθμός απόδοσης [%]
1)
2)
PK37
0,37
(0,5)
K1 K1 K1 K1 K1 K2 K3
29,4 38,5 51,1 60,7 76,1 96,1 147,5
2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5) 3,6 (7,9)
4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1) 6,5 (14,3)
96,4 96,6 96,3 96,6 96,5 96,7 96,7
PK55
0,55
(0,75)
PK75
0,75
(1,0)
P1K1
1,1
(1,5)
4 (12)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
P3K7
3,7
(5,0)
Πίνακας 7.3 Τροφοδοσία από το δίκτυο ρεύματος 3x200–240 V ΕΡ
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 85

Προδιαγραφές
VLT® Midi Drive FC 280
Ρυθμιστής στροφών
τυπική έξοδος άξονα [kW (hp)]
Κλάση προστασίας περιβλήματος IP20 (IP21/Τύπου 1
ως επιλογή)
Ένταση ρεύματος εξόδου
Συνεχόμενο (3x200–240 V) [A] 2,2 3,2 4,2 6 6,8 9,6
Διαλείπον (60 δευτ. υπερφόρτωση) [A] 3,5 5,1 6,7 9,6 10,9 15,4
Συνεχόμενο kVA (230 V ΕΡ) [kVA] 0,9 1.3 1,7 2,4 2,7 3,8
Μέγιστο ρεύμα εισόδου
Συνεχόμενο (1x200–240 V) [A] 2,9 4,4 5,5 7,7 10,4 14,4
Διαλείπον (60 δευτ. υπερφόρτωση) [A] 4,6 7,0 8,8 12,3 16,6 23,0
Περισσότερες προδιαγραφές
Μέγιστη διατομή καλωδίου (για δίκτυο ρεύματος και
κινητήρα) [mm2] ([AWG])
Εκτιμώμενη απώλεια ισχύος στο μέγιστο ονομαστικό
φορτίο [W ]
77
Βάρος περιβλήματος κατηγορίας προστασίας IP20 [kg
(lb)]
Βάρος, κατηγορία προστασίας περιβλήματος IP21 [kg
(lb)]
Βαθμός απόδοσης [%]
Πίνακας 7.4 Τροφοδοσία από το δίκτυο ρεύματος 1x200-240 V ΕΡ
1) Η τυπική απώλεια ισχύος είναι στις ονομαστικές συνθήκες φορτίου και αναμένεται να κυμαίνεται εντός ±15% (η ανοχή σχετίζεται με τη διαφορά
στην τάση και στην κατάσταση του καλωδίου).
Οι τιμές βασίζονται στο βαθμό απόδοσης ενός τυπικού κινητήρα (IE2/IE3 οριακή γραμμή). Οι κινητήρες χαμηλότερου βαθμού απόδοσης
προσθέτουν στην απώλεια ισχύος στον ρυθμιστή σ τροφών και κινητήρες με μεγάλο βαθμό απόδοσης μειώνουν την απώλεια ισχύος.
Εφαρμόζεται στη διαστασιολόγηση ψύξης του ρυθμιστή στροφών. Εάν η συχνότητα μεταγωγής είναι υψηλότερη από την προεπιλεγμένη ρύθμιση,
οι απώλειες ισχύος αυξάνονται κάποιες φορές. Συμπεριλαμβάνεται η κατανάλωση ισχύος του LCP και της τυπικής κάρτας ελέγχου Τα πρόσθετα και
το φορτίο του πελάτη προσθέτουν μερικές φορές έως και 30 W σ τις απώλειες (αν και συνήθως προστίθενται μόνο 4 W για μια πλήρως
εξοπλισμένη κάρτα ελέγχου ΄ή τον τοπικός δίαυλος επικοινωνίας).
Για δεδομένα απώλειας ισχύος σύμφωνα με το EN 50598-2, ανατρέξτε στη διεύθυνση www.danfoss.com/vltenergyeciency.
2) Μετρούμενη χρησιμοποιώντας θωρακισμένα καλώδια κινητήρα 50 m (164 ft) σε ονομαστικό φορτίο και ονομαστική συχνότητα. Για την
κατηγορία ενεργειακής απόδοσης ανατρέξτε στο κεφάλαιο 7.4 Συνθήκες χώρου. Για τις απώλειες μερικού φορτίου, ανατρέξτε στη διεύθυνση
www.danfoss.com/vltenergyeciency.
1)
2)
PK37
0,37
(0,5)
K1 K1 K1 K1 K1 K2
37,7 46,2 56,2 76,8 97,5 121,6
2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5)
4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1)
94,4 95,1 95,1 95,3 95,0 95,4
PK55
0,55
(0,74)
PK75
0,75
(1,0)
4 (12)
P1K1
1,1
(1,5)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
Τροφοδοσία ρεύματος
7.2
Τροφοδοσία από το δίκτυο ρεύματος (L1/N, L2/L, L3)
Ακροδέκτες τροφοδοσίας (L1/N, L2/L, L3)
Τάση τροφοδοσίας 380–480 V: -15% (-25%)1) έως +10%
Τάση τροφοδοσίας 200–240 V: -15% (-25%)1) έως +10%
1) Ο ρυθμιστής στροφών μπορεί να λειτουργήσει με -25% τάση εισόδου με μειωμένη απόδοση. Η μέγιστη ισχύς εξόδου του
ρυθμιστή στροφών είναι 75% εάν η τάση εισόδου είναι -25% και 85% εάν η τάση εισόδου είναι -15%.
Η πλήρης ροπή δεν αναμένεται σε τάση δικτύου ρεύματος χαμηλότερη από 10% κάτω από τη χαμηλότερη ονομαστική τάση
τροφοδοσίας του ρυθμιστή στροφών.
Συχνότητα τροφοδοσίας ρεύματος 50/60 Hz ±5%
Μέγιστη προσωρινή ασυμμετρία μεταξύ φάσεων δικτύου ρεύματος 3,0 % της ονομαστικής τάσης τροφοδοσίας
Συντελεστής πραγματικής ισχύος (λ) ≥0,9 ονομαστική τιμή σε ονομαστικό φορτίο
Συντελεστής ισχύος μετατόπισης (cos ϕ) Κοντά στη μονάδα (>0,98)
Ενεργοποίηση τροφοδοσίας εισόδου (L1/N, L2/L, L3) (εκκινήσεις) ≤7,5 kW (10 hp) Μέγιστο 2 φορές/λεπτό
Ενεργοποίηση τροφοδοσίας εισόδου (L1/N, L2/L, L3) (εκκινήσεις) 11–22 kW (15–30 hp) Μέγιστο 1 φορά/λεπτό
86 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

Προδιαγραφές Οδηγός σχεδίασης εφαρμογών
7.3 Απόδοση κινητήρα και Δεδομένα κινητήρα
Απόδοση κινητήρα (U, V, W)
Τάση εξόδου 0 - 100% τάσης τροφοδοσίας
Συχνότητα εξόδου 0–500 Hz
Συχνότητα εξόδου σε λειτουργία VVC
Μεταγωγή στην έξοδο Απεριόριστη
Χρόνος γραμμικής μεταβολής 0,01–3600 s
Χαρακτηριστικά ροπής
Ροπή εκκίνησης (σταθερή ροπή) Μέγιστη 160% για 60 δευτ.
Ροπή υπερφόρτωσης (σταθερή ροπή) Μέγιστη 160% για 60 δευτ.
Ρεύμα εκκίνησης Μέγιστο 200% για 1 δευτ.
Χρόνος ανόδου ροπής σε VVC+ (ανεξάρτητα από fsw) Μέγιστο 50 ms
1) Το ποσοστό σχετίζεται με την ονομαστική ροπή. Είναι 150% για μετατροπείς συχνότητας 11–22 kW (15–30 hp).
+
0–200 Hz
7.4 Συνθήκες χώρου
Συνθήκες χώρου
Κατηγορία IP IP20 (IP21/NEMA τύπος 1 ως επιλογή)
Δοκιμή κραδασμών, με όλους τους τύπους περιβλήματος 1,14 g
Σχετική υγρασία 5–95% (IEC 721-3-3, κλάση 3K3 (μη συμπυκνούμενη υγρασία) κατά τη διάρκεια της λειτουργίας
Θερμοκρασία χώρου (σε λειτουργία μεταγωγής DPWM)
- με υποβιβασμό Μέγιστη 55 °C (131 °F)
- με πλήρες, σταθερό ρεύμα εξόδου Μέγιστη 45 °C (113 °F)
Ελάχιστη θερμοκρασία χώρου κατά τη διάρκεια της λειτουργίας πλήρους κλίμακας 0 °C (32 °F)
Ελάχιστη θερμοκρασία χώρου σε μειωμένη απόδοση -10 °C (14 °F)
Θερμοκρασία κατά τη διάρκεια της αποθήκευσης/μεταφοράς -25 to +65/70 °C (-13 to +149/158 °F)
Μέγιστο υψόμετρο πάνω από τη στάθμη της θάλασσας χωρίς υποβιβασμό 1.000 m (3.280 ft)
Μέγιστο υψόμετρο πάνω από τη στάθμη της θάλασσας με υποβιβασμό 3.000 m (9.243 ft)
EN 61800-3, EN 61000-3-2, EN 61000-3-3, EN 61000-3-11,
Πρότυπα ΗΜΣ, Εκπομπή
Πρότυπα ΗΜΣ, Ατρωσία
Κλάση ενεργειακής απόδοσης
1) Ανατρέξτε στο κεφάλαιο 7.12 Ειδικές συνθήκες για:
Υποβιβασμό για υψηλή θερμοκρασία χώρου.
•
Υποβιβασμό για υψηλό υψόμετρο.
•
2) Για την έκδοση PROFIBUS, PROFINET EtherNet/IP και POWERLINK του VLT
υπερθέρμανση της κάρτας ελέγχου, αποφύγετε το πλήρες φορτίο ψηφιακών/αναλογικών Εισ/Εξ σε θερμοκρασία χώρου
υψηλότερη των 45 °C (113 °F).
3) Η μέγιστη θερμοκρασία χώρου για το K1S2 με υποβιβασμό είναι 50
4) Η μέγιστη θερμοκρασία χώρου για το K1S2 με πλήρες, σταθερό ρεύμα εξόδου είναι 40 °C (104 °F).
5) Ορίζεται σύμφωνα με το EN 50598-2 σε:
Ονομαστικό φορτίο.
•
Ονομαστική συχνότητα 90%.
•
Εργοστασιακή ρύθμιση συχνότητας εναλλαγής.
•
Εργοστασιακή ρύθμιση μοτίβου μεταγωγής.
•
Ανοικτού τύπου: Θερμοκρασία χώρου 45 °C (113 °F).
•
Τύπου 1 (κιτ ΝΕΜΑ): Θερμοκρασία χώρου 45 °C (113 °F).
•
5)
EN 61000-3-12, EN 61000-6-3/4, EN 55011, IEC 61800-3
EN 61800-3, EN 61000-6-1/2, EN 61000-4-2, EN 61000-4-3
EN 61000-4-4, EN 61000-4-5, EN 61000-4-6, EN 61326-3-1
®
Midi Drive FC 280, για να αποτρέψετε την
°
C (122 °F).
1)2)3)
IE2
1)
1)
7 7
4)
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 87

Προδιαγραφές
7.5 Προδιαγραφές καλωδίου
VLT® Midi Drive FC 280
Μήκη καλωδίων
Μέγιστο μήκος καλωδίου κινητήρα, θωρακισμένο 50 m (164 ft)
Μέγιστο μήκος καλωδίου κινητήρα, μη θωρακισμένο 75 m (246 ft)
Μέγιστη διατομή για τους ακροδέκτες σημάτων ελέγχου, εύκαμπτο/άκαμπτο σύρμα 2,5 mm2/14 AWG
Ελάχιστη διατομή σε ακροδέκτες σημάτων ελέγχου 0,55 mm2/30 AWG
Μέγιστο μήκος καλωδίου εισόδου STO, μη θωρακισμένο 20 m (66 ft)
1) Για τις διατομές των καλωδίων ρεύματος, ανατρέξτε στα Πίνακας 7.1, Πίνακας 7.2, Πίνακας 7.3, και Πίνακας 7.4.
Κατά τη συμμόρφωση με τα EN 55011 1A και EN 55011 1B το καλώδιο κινητήρα πρέπει να μειώνεται σε συγκεκριμένες
περιπτώσεις. Ανατρέξτε στο κεφάλαιο 2.6.2 Εκπομπή EMC για περισσότερες λεπτομέρειες.
1)
7.6 Είσοδος/έξοδος ελέγχου και Δεδομένα ελέγχου
Ψηφιακές είσοδοι
Αριθμός ακροδέκτη
Λογική διάταξη PNP ή NPN
77
Επίπεδο τάσης 0–24 V DC
Επίπεδο τάσης, λογική διάταξη 0 PNP <5 V ΣΡ
Επίπεδο τάσης, λογική διάταξη 1 PNP >10 V ΣΡ
Επίπεδο τάσης, λογική διάταξη 0 NPN >19 V ΣΡ
Επίπεδο τάσης, λογική διάταξη 1 NPN <14 V ΣΡ
Μέγιστη τάση στην είσοδο 28 V DC
Εύρος παλμικής συχνότητας 4–32 kHz
(Κύκλος εργασίας) ελάχιστο πλάτος παλμού 4,5 ms
Αντίσταση εισόδου, R
1) Ο ακροδέκτης 27 μπορεί επίσης να προγραμματιστεί ως έξοδος.
i
18, 19, 271), 29, 32, 33
Περίπου 4 kΩ
Είσοδοι STO
Αριθμός ακροδέκτη 37, 38
Επίπεδο τάσης 0–30 V ΣΡ
Επίπεδο τάσης, χαμηλό <1,8 V ΣΡ
Επίπεδο τάσης, υψηλό >20 V ΣΡ
Μέγιστη τάση στην είσοδο 30 V ΣΡ
Ελάχιστο ρεύμα εισόδου (κάθε ακροδέκτης) 6 mA
Αναλογικές είσοδοι
Αριθμός αναλογικών εισόδων 2
Αριθμός ακροδέκτη 531), 54
Τρόποι λειτουργίας Τάση ή ένταση
Επιλογή τρόπου λειτουργίας Λογισμικό
Επίπεδο τάσης 0–10 V
Αντίσταση εισόδου, R
Μέγιστη τάση -15 V to +20 V
Επίπεδο έντασης ρεύματος 0/4 έως 20 mA (κλιμακούμενο)
Αντίσταση εισόδου, R
Μέγιστη ένταση ρεύματος 30 mA
Ανάλυση για αναλογικές εισόδους 11 bit
Ακρίβεια αναλογικών εισόδων Μέγιστο σφάλμα 0,5% πλήρους κλίμακας
Εύρος συχνοτήτων 100 Hz
Οι αναλογικές είσοδοι διαθέτουν γαλβανική απομόνωση από την τάση τροφοδοσίας (PELV) και άλλους ακροδέκτες υψηλής τάσης.
1) Ο ακροδέκτης 53 υποστηρίζει μόνο τη λειτουργία τάσης και μπορεί επίσης να χρησιμοποιηθεί ως ψηφιακή είσοδος.
i
i
Περίπου 10 kΩ
Περίπου 200 Ω
88 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

Mains
Functional
isolation
PELV isolation
Motor
DC bus
High
voltage
Control
37
RS485
38
33
130BE837.10
Προδιαγραφές Οδηγός σχεδίασης εφαρμογών
Εικόνα 7.1 Γαλβανική απομόνωση
ΕΙΔΟΠΟΙΗΣΗ
ΜΕΓΑΛΟ ΥΨΟΜΕΤΡΟ
Για εγκατάσταση σε υψόμετρο μεγαλύτερα των 2.000 m (6.562 ft), επικοινωνήστε με το τμήμα υποστήριξης της Danfoss
σχετικά με την PELV.
Είσοδοι παλμού
Προγραμματιζόμενες είσοδοι παλμού 2
Παλμός αριθμού ακροδέκτη 29, 33
Μέγιστη συχνότητα στους ακροδέκτες 29, 33 32 kHz (με κύκλωμα Push-pull)
Μέγιστη συχνότητα στους ακροδέκτες 29, 33 5 kHz (ανοιχτός συλλέκτης)
Ελάχιστη συχνότητα στους ακροδέκτες 29, 33 4 Hz
Επίπεδο τάσης Ανατρέξτε στην ενότητα για την ψηφιακή είσοδο
Μέγιστη τάση στην είσοδο 28 V ΣΡ
Αντίσταση εισόδου, R
i
Περίπου 4 kΩ
Ακρίβεια εισόδου παλμών Μέγιστο σφάλμα: 0,1% πλήρους κλίμακας
Ψηφιακές έξοδοι
Προγραμματιζόμενες ψηφιακές έξοδοι / έξοδοι παλμών 1
Αριθμός ακροδέκτη 27
Επίπεδο τάσης στην ψηφιακή έξοδο/έξοδο συχνότητας 0–24 V
Μέγιστο ρεύμα εξόδου (ψύκτρα ή πηγή) 40 mA
Μέγιστο φορτίο στην έξοδο συχνότητας 1 kΩ
Μέγιστο χωρητικό φορτίο στην έξοδο συχνότητας 10 nF
Ελάχιστη συχνότητα εξόδου στην έξοδο συχνότητας 4 Hz
Μέγιστη συχνότητα εξόδου στην έξοδο συχνότητας 32 kHz
Ακρίβεια εξόδου συχνότητας Μέγιστο σφάλμα: 0,1% πλήρους κλίμακας
Ανάλυση συχνότητας εξόδου 10 bit
1) Ο ακροδέκτης 27 μπορεί επίσης να προγραμματιστεί ως είσοδος.
Η ψηφιακή έξοδος διαθέτει γαλβανική απομόνωση από την τάση τροφοδοσίας (PELV) και άλλους ακροδέκτες υψηλής τάσης.
7 7
1)
Αναλογικές έξοδοι
Αριθμός προγραμματιζόμενων αναλογικών εξόδων 1
Αριθμός ακροδέκτη 42
Εύρος έντασης ρεύματος σε αναλογική έξοδο 0/4–20 mA
Μέγιστο φορτίο αντιστάτη σε κοινό στην αναλογική έξοδο 500 Ω
Ακρίβεια στην αναλογική έξοδο Μέγιστο σφάλμα: 0,8% πλήρους κλίμακας
Ανάλυση στην αναλογική έξοδο 10 bit
Η αναλογική έξοδος διαθέτει γαλβανική απομόνωση από την τάση τροφοδοσίας (PELV) και άλλους ακροδέκτες υψηλής τάσης.
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 89

Προδιαγραφές
Κάρτα ελέγχου, έξοδος 24 V DC
Αριθμός ακροδέκτη 12, 13
Μέγιστο φορτίο 100 mA
Η τροφοδοσία 24 V ΣΡ διαθέτει γαλβανική απομόνωση από την τάση τροφοδοσίας (PELV). Ωστόσο, η τροφοδοσία έχει το ίδιο
δυναμικό με τις αναλογικές και ψηφιακές εισόδους και εξόδους.
Κάρτα ελέγχου, έξοδος +10 V ΣΡ
Αριθμός ακροδέκτη 50
Τάση εξόδου 10.5 V ±0.5 V
Μέγιστο φορτίο 15 mA
Η τροφοδοσία 10 V DC διαθέτει γαλβανική απομόνωση από την τάση τροφοδοσίας (PELV) και άλλους ακροδέκτες υψηλής τάσης.
Κάρτα ελέγχου, σειριακή επικοινωνία RS485
Αριθμός ακροδέκτη 68 (P,TX+, RX+), 69 (N,TX-, RX-)
Αριθμός ακροδέκτη 61 Κοινό για τους ακροδέκτες 68 και 69
Το κύκλωμα σειριακής επικοινωνίας RS485 διαθέτει γαλβανική απομόνωση από την τάση τροφοδοσίας (PELV).
Κάρτα ελέγχου, σειριακή επικοινωνία USB
77
Τυπικό USB 1,1 (Πλήρης ταχύτητα)
Βύσμα USB Βύσμα USB τύπου B
Η σύνδεση στον Η/Υ γίνεται μέσω ενός τυπικού καλωδίου USB κύριου υπολογιστή/συσκευής.
Η σύνδεση USB διαθέτει γαλβανική απομόνωση από την τάση τροφοδοσίας (PELV) και άλλους ακροδέκτες υψηλής τάσης.
Η σύνδεση γείωσης USB δεν διαθέτει γαλβανική απομόνωση από την προστατευτική γείωση. Χρησιμοποιείτε μόνο απομονωμένο
φορητό Η/Υ ως σύνδεση στη θύρα USB στο μετατροπέα συχνότητας.
VLT® Midi Drive FC 280
Έξοδοι ρελέ
Προγραμματιζόμενες έξοδοι ρελέ 1
Ρελέ 01 01–03 (NC), 01–02 (NO)
Μέγιστο φορτίο ακροδέκτη (ΕΡ-1)1) στο 01–02 κανονικά ανοικτό (NΟ) (αντιστατικό φορτίο) 250 V ΕΡ, 3 A
Μέγιστο φορτίο ακροδέκτη (ΕΡ-15)1) στο 01–02 κανονικά ανοικτό (NO) (Επαγωγικό φορτίο @ cosφ 0,4) 250 V ΕΡ, 0,2 A
Μέγιστο φορτίο ακροδέκτη (ΕΡ-1)1) στο 01–02 κανονικά ανοικτό (NΟ) (αντιστατικό φορτίο) 30 V ΣΡ, 2 A
Μέγιστο φορτίο ακροδέκτη (ΣΡ-13)1) στο 01-02 κανονικά ανοικτό (ΝΟ) (επαγωγικό φορτίο) 24 V ΣΡ, 0,1 A
Μέγιστο φορτίο ακροδέκτη (ΕΡ-1)1) στο 01–03 κανονικά κλειστό (NC) (αντιστατικό φορτίο) 250 V ΕΡ, 3 A
Μέγιστο φορτίο ακροδέκτη (ΕΡ-15)1) στο 01–03 κανονικά κλειστό (NC) (Επαγωγικό φορτίο @ cosφ 0,4) 250 V ΕΡ, 0,2 A
Μέγιστο φορτίο ακροδέκτη (ΣΡ-1)1) στο 01–03 κανονικά κλειστό (NC) (αντιστατικό φορτίο) 30 V ΣΡ, 2 A
Ελάχιστο φορτίο ακροδέκτη στο 01-03 κανονικά κλειστό (NC), 01-02 κανονικά ανοικτό (NO) 24 V ΣΡ 10 mA, 24 V ΕΡ 20 mA
1) IEC 60947 μέρη 4 και 5
Η επαφές του ρελέ διαθέτουν ενισχυμένη γαλβανική απομόνωση από το υπόλοιπο κύκλωμα.
Απόδοση κάρτας ελέγχου
Διάστημα σάρωσης 1 ms
Χαρακτηριστικά ελέγχου
Ανάλυση συχνότητας εξόδου στα 0 - 500 Hz ±0,003 Hz
Χρόνος απόκρισης συστήματος (ακροδέκτες 18, 19, 27, 29, 32 και 33) ≤2 ms
Ζώνη ελέγχου ταχύτητας (ανοικτός βρόχος) 1:100 σύγχρονης ταχύτητας
Ακρίβεια ταχύτητας (ανοικτός βρόχος) ±0,5% της ονομαστικής ταχύτητας
Ακρίβεια ταχύτητας (κλειστός βρόχος) ±0,1% της ονομαστικής ταχύτητας
Όλα τα χαρακτηριστικά ελέγχου βασίζονται σε έναν τετραπολικό ασύγχρονο κινητήρα.
90 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

Προδιαγραφές Οδηγός σχεδίασης εφαρμογών
7.7 Ροπές σύσφιξης σύνδεσης
Διασφαλίστε ότι χρησιμοποιείτε τις σωστές ροπές κατά τη σύσφιξη όλων των ηλεκτρικών συνδέσεων. Πολύ χαμηλή ή πολύ
υψηλή ροπή μερικές φορές μπορεί να οδηγήσει σε προβλήματα ηλεκτρικής σύνδεσης. Για τη διασφάλιση της εφαρμογής
ορθής ροπής, χρησιμοποιήστε ροπόκλειδο. Ο συνιστώμενος τύπος υποδοχής κατσαβιδιού είναι SZS 0,6x3,5 mm.
Ροπή [Nm (in-lb)]
Τύπος
περιβλήμα
τος
K1
K2
K3 7,5 (10) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
K4
K5
Πίνακας 7.5 Ροπές σύσφιξης
Ισχύς
[kW (hp)]
0,37–2,2
(0,5–3,0)
3,0–5,5
(4,0–7,5)
11–15
(15–20)
18,5–22
(25–30)
Δίκτυο
ρεύματος
0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
Κινητήρας
Σύνδεση
συνεχούς
ρεύματος
Πέδηση Γείωση Έλεγχος Ρελέ
7 7
7.8 Ασφάλειες και ασφαλειοδιακόπτες
Χρησιμοποιήστε ασφάλειες ή/και ασφαλειοδιακόπτες στην
πλευρά τροφοδοσίας για να προστατέψετε το προσωπικό
σέρβις και τον εξοπλισμό από τραυματισμούς και βλάβες
σε περίπτωση βλάβης εξαρτήματος μέσα στο μετατροπέα
συχνότητας (πρώτη βλάβη).
Προστασία κυκλώματος διακλάδωσης
Προστατέψτε όλα τα κυκλώματα διακλάδωσης μιας εγκατάστασης (συμπεριλαμβανομένων των διακοπτών και
μηχανών) από βραχυκύκλωμα και υπερένταση σύμφωνα με
τις εθνικές/διεθνείς διατάξεις.
ΕΙΔΟΠΟΙΗΣΗ
Η ενσωματωμένη προστασία βραχυκυκλώματος στερεάς
κατάστασης δεν παρέχει προστασία κυκλώματος
διακλάδωσης. Διασφαλίστε προστασία κυκλώματος
διακλάδωσης σύμφωνα με τους εθνικούς και τοπικούς
κανόνες και κανονισμούς.
Η ενότητα Πίνακας 7.6 αναγράφει τις συνιστώμενες
ασφάλειες και ασφαλειοδιακόπτες που έχουν ελεγχθεί.
ΠΡΟΣΟΧΗ
ΚΙΝΔΥΝΟΣ ΠΡΟΣΩΠΙΚΟΥ ΤΡΑΥΜΑΤΙΣΜΟΥ ΚΑΙ
ΒΛΑΒΗΣ ΤΟΥ ΕΞΟΠΛΙΣΜΟΥ
Η δυσλειτουργία ή εάν δεν ακολουθήσετε τις συστάσεις,
μπορεί να έχει σαν αποτέλεσμα να εκτεθεί σε κίνδυνο το
προσωπικό και να προκύψει βλάβη στο μετατροπέα
συχνότητας ή σε άλλες συσκευές.
Επιλέξτε τις ασφάλειες σύμφωνα με τις
•
συστάσεις. Η πιθανή ζημιά μπορεί να
περιοριστεί στο εσωτερικό του μετατροπέα
συχνότητας.
ΕΙΔΟΠΟΙΗΣΗ
ΒΛΑΒΗ ΕΞΟΠΛΙΣΜΟΥ
Η χρήση ασφαλειών ή/και ασφαλειοδιακοπτών είναι
υποχρεωτική για τη διασφάλιση της συμμόρφωσης με το
IEC 60364 για το CE. Η μη τήρηση των συστάσεων
προστασίας μπορεί να οδηγήσει σε ζημία του ρυθμιστή
στροφών.
Η Danfoss συνιστά τη χρήση ασφαλειών και ασφαλειοδιακοπτών στο Πίνακας 7.6 για τη διασφάλιση της
συμμόρφωσης με το UL 508C ή το IEC 61800-5-1. Για τις μη
UL εφαρμογές, οι ασφαλειοδιακόπτες πρέπει να είναι
σχεδιασμένοι για προστασία κυκλώματος ικανού να παρέχει
κατά το μέγιστο 50000 A
το μέγιστο. Η ονομαστική τιμή βραχυκυκλώματος του
ρυθμιστή στροφών (SCCR) είναι κατάλληλη για χρήση σε
κύκλωμα ικανό να παρέχει μέχρι 100000 A
κατά το μέγιστο, όταν προστατεύεται από ασφάλειες
κλάσης T.
(συμμετρικό), 240 V/400 V κατά
rms
, 240 V/480 V
rms
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 91

1.0
0.99
0.98
0.97
0.96
0.95
0.93
0.92
0% 50% 100% 200%
0.94
Relative Eciency
130BB252.11
1.01
150%
% Speed
100% load 75% load 50% load 25% load
Προδιαγραφές
VLT® Midi Drive FC 280
Ασφαλειοδια-
Μέγεθος περιβλήματος Ισχύς [kW (hp)] Ασφάλεια μη UL
0,37 (0,5)
0,55–0,75
K1
τριφασικό 380–480 V
77
τριφασικό 200–240 V
Μονοφασικό 200–240 V
K2
K3 7,5 (10) PKZM0-25
K4
K5
K1
K2 2,2 (3,0)
K3 3,7 (5,0) PKZM0-25
K1
K2 2,2 (3,0) gG-25 PKZM0-20 JJN-25
(0,74–1,0)
1,1–1,5
(1,48–2,0)
2,2 (3,0) JJS-15
3,0–5,5
(4,0–7,5)
11–15
(15–20)
18,5–22
(25–30)
0,37 (0,5) gG-10
0,55 (0,74)
0,75 (1,0) JJN-15
1,1 (1,48)
1,5 (2,0)
0,37 (0,5) gG-10
0,55 (0,74)
0,75 (1,0) JJN-15
1,1 (1,48)
1,5 (2,0)
gG-10
gG-20
gG-25
gG-50 – JJS-50
gG-80 – JJS-80
gG-20
gG-25
gG-20
κόπτης μη UL
(Eaton)
PKZM0-16
PKZM0-20
PKZM0-16
PKZM0-20
PKZM0-16
Ασφάλεια UL
(Bussmann, κλάσης T)
JJS-6
JJS-10
JJS-25
JJN-6
JJN-10
JJN-20
JJN-25
JJN-6
JJN-10
JJN-20
Πίνακας 7.6 Ασφάλεια και ασφαλειοδιακόπτης
Βαθμός απόδοσης
7.9
Βαθμός απόδοσης του μετατροπέα συχνότητας (η
Το φορτίο στο μετατροπέα συχνότητας έχει μικρή
επίπτωση στο βαθμό απόδοσής του. Γενικά, ο βαθμός
απόδοσης είναι ο ίδιος στην ονομαστική συχνότητα του
κινητήρα f
. Ο κανόνας αυτός ισχύει ακόμα και ο
M,N
κινητήρας παρέχει 100% της ονομαστικής ροπής στον
άξονα ή μόνο 75%, αν, για παράδειγμα, υπάρχει μερικό
φορτίο.
Αυτό σημαίνει, επίσης, ότι ο βαθμός απόδοσης του
μετατροπέα συχνότητας δεν αλλάζει ακόμη και αν
επιλεγούν άλλα χαρακτηριστικά U/f.
Ωστόσο, τα χαρακτηριστικά U/f επηρεάζουν το βαθμό
απόδοσης του κινητήρα.
Ο βαθμός απόδοσης μειώνεται ελαφρώς όταν η συχνότητα
εναλλαγής ρυθμίζεται σε τιμή πάνω από την προεπιλεγμένη. Αν η τάση δικτύου ρεύματος είναι 480 V ή αν το
καλώδιο κινητήρα είναι μεγαλύτερο από 30 m (98.4 ft), ο
βαθμός απόδοσης μειώνεται επίσης ελαφρώς.
Υπολογισμός βαθμού απόδοσης μετατροπέα συχνότητας
Υπολογίστε το βαθμό απόδοσης του μετατροπέα
συχνότητας σε διαφορετικά φορτία με βάση το Εικόνα 7.2.
Πολλαπλασιάστε τον συντελεστή στο Εικόνα 7.2 με τον
92 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327
VLT
συγκεκριμένο συντελεστή απόδοσης που αναφέρεται στους
πίνακες προδιαγραφών στο κεφάλαιο 7.1 Ηλεκτρικά
)
δεδομένα:
Εικόνα 7.2 Καμπύλες τυπικής απόδοσης
Βαθμός απόδοσης του κινητήρα (η
MOTOR
)
Ο βαθμός απόδοσης ενός κινητήρα συνδεδεμένου με το
μετατροπέα συχνότητας εξαρτάται από το επίπεδο
μαγνήτισης. Γενικά, ο βαθμός απόδοσης είναι εξίσου
ικανοποιητικός με τη λειτουργία του δικτύου ρεύματος. Ο
βαθμός απόδοσης του κινητήρα εξαρτάται από τον τύπο
κινητήρα.

Προδιαγραφές Οδηγός σχεδίασης εφαρμογών
Στην περιοχή 75-100% της ονομαστικής ροπής, ο βαθμός
απόδοσης του κινητήρα είναι σχεδόν σταθερός τόσο όταν
ελέγχεται από τον μετατροπέα συχνότητας όσο και όταν
λειτουργεί απευθείας στο δίκτυο ρεύματος.
Στους μικρούς κινητήρες, τα χαρακτηριστικά U/f
επηρεάζουν οριακά το βαθμό απόδοσης. Ωστόσο, σε
κινητήρες από 11 kW (14,8 hp) και άνω, υπάρχουν
σημαντικά πλεονεκτήματα.
Γενικά, η συχνότητα εναλλαγής δεν επηρεάζει το βαθμό
απόδοσης στους μικρούς κινητήρες. Στους κινητήρες από
11 kW (14,8 hp) και πάνω υπάρχει βελτίωση του βαθμού
απόδοσης κατά 1-2% επειδή η μορφή ημιτόνου του
ρεύματος του κινητήρα είναι σχεδόν τέλεια σε υψηλή
συχνότητα εναλλαγής.
Βαθμός απόδοσης του συστήματος (η
SYSTEM
)
Για τον υπολογισμό του βαθμού απόδοσης του
συστήματος, πολλαπλασιάζεται ο βαθμός απόδοσης του
μετατροπέα συχνότητας (η
κινητήρα (η
η
= η
SYSTEM
MOTOR
VLT
x η
):
MOTOR
) με τον βαθμό απόδοσης του
VLT
7.10 Ακουστικός θόρυβος
Ο ακουστικός θόρυβος από το μετατροπέα συχνότητας
προέρχεται από 3 πηγές:
Πηνία ενδιάμεσου κυκλώματος ΣΡ.
•
Ενσωματωμένος ανεμιστήρας.
•
Στραγγαλιστικό πηνίο φίλτρου RFI.
•
Οι τυπικές τιμές μετριούνται σε απόσταση 1 m (3,3 ft) από
τη μονάδα:
Συνθήκες dU/dt
7.11
Κατά τη μεταγωγή ενός τρανζίστορ στη γέφυρα του
αναστροφέα, αυξάνεται η τάση στον κινητήρα κατά ένα
λόγο dU/dt που εξαρτάται από τους ακόλουθους
παράγοντες:
Το είδος του καλωδίου κινητήρα.
•
Τη διατομή του καλωδίου κινητήρα.
•
Το μήκος του καλωδίου κινητήρα.
•
Αν το καλώδιο κινητήρα είναι θωρακισμένο ή όχι.
•
Αυτεπαγωγή.
•
Η φυσική επαγωγή προκαλεί υπερύψωση U
στην τάση
PEAK
κινητήρα πριν αυτή σταθεροποιηθεί σε ένα επίπεδο που
εξαρτάται από την τάση στη ζεύξη ΣΡ. Ο χρόνος ανόδου
και η τάση κορυφής U
επηρεάζουν τη διάρκεια ζωής
PEAK
του κινητήρα. Αν η τάση κορυφής είναι υπερβολικά υψηλή,
επηρεάζονται οι κινητήρες χωρίς μόνωση πηνίου φάσης.
Όσο μακρύτερο είναι το καλώδιο κινητήρα, τόσο
μεγαλύτερος είναι ο χρόνος ανόδου και η τάση κορυφής.
Η μεταγωγή των IGBT προκαλεί την τάση κορυφής στους
ακροδέκτες του κινητήρα. Ο VLT® Midi Drive FC 280
συμμορφώνεται με το IEC 60034-25 όσον αφορά σε
κινητήρες σχεδιασμένους να ελέγχονται από μετατροπείς
συχνότητας. Ο FC 280 συμμορφώνεται επίσης με το IEC
60034-17 όσον αφορά σε κινητήρες Norm που ελέγχονται
από μετατροπείς συχνότητας.
Τα ακόλουθα δεδομένα dU/dt μετρούνται στην πλευρά
ακροδεκτών του κινητήρα:
7 7
Μέγεθος
περιβλήματος
[kW (hp)]
K1
0,37–2,2
(0,5–3,0)
K2
3,0–5,5 (4,0–7,5)
K3
7,5 (10)
K4
11–15 (15–20)
K5
18,5–22 (25–30)
Πίνακας 7.7 Τυπικές μετρούμενες τιμές
80% της
ταχύτητας
ανεμιστήρα
[dBA]
41,4 42,7 33
50,3 54,3 32,9
51 54,2 33
59 61,1 32,9
64,6 65,6 32,9
ανεμιστήρα
Πλήρης
ταχύτητα
[dBA]
Θόρυβος
υπόβαθρου
Τάση
Μήκος
καλωδίου
[m (ft)]
5 (16,4) 400 0,0904 0,718 6,41
50 (164) 400 0,292 1,05 2,84
5 (16,4) 480 0,108 0,835 6,20
50 (164) 480 0,32 1,25 3,09
Πίνακας 7.8 Δεδομένα dU/dt για τον FC 280, 2,2 kW (3,0 hp),
3x380–480 V
Μήκος
καλωδίου
[m (ft)]
5 (16,4) 400 0,096 0,632 5,31
50 (164) 400 0,306 0,99 2,58
5 (16,4) 480 0,118 0,694 4,67
50 (164) 480 0,308 1,18 3,05
Πίνακας 7.9 Δεδομένα dU/dt Data για τον FC 280, 5,5 kW
(7,5 hp), 3x380–480 V
δικτύου
ρεύματο
ς [V]
Τάση
δικτύου
ρεύματο
ς [V]
Χρόνος
ανόδου
[μsec]
Χρόνος
ανόδου
[μsec]
U
PEAK
[kV]
U
[kV]
PEAK
dU/dt
[kV/μsec]
dU/dt
[kV/μsec]
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 93

Προδιαγραφές
VLT® Midi Drive FC 280
Τάση
Μήκος
καλωδίου
[m (ft)]
5 (16,4) 400 0,128 0,732 4,54
50 (164) 400 0,354 1,01 2,27
5 (16,4) 480 0,134 0,835 5,03
50 (164) 480 0,36 1,21 2,69
Πίνακας 7.10 Δεδομένα dU/dt για τον FC 280, 7,5 kW (10 hp),
3x380–480 V
Μήκος
καλωδίου
[m (ft)]
5 (16,4) 400 0,26 0,84 2,57
50 (164) 400 0,738 1,07 1,15
77
5 (16,4) 480 0,334 0,99 2,36
50 (164) 480 0,692 1,25 1,44
Πίνακας 7.11 Δεδομένα dU/dt για τον FC 280, 15 kW (20 hp),
3x380–480 V
Μήκος
καλωδίου
[m (ft)]
5 (16,4) 400 0,258 0,652 2,01
50 (164) 400 0,38 1,03 2,15
5 (16,4) 480 0,258 0,752 2,34
50 (164) 480 0,4 1,23 2,42
Πίνακας 7.12 Δεδομένα dU/dt για τον FC 280, 22 kW (30 hp),
3x380–480 V
δικτύου
ρεύματο
ς [V]
Τάση
δικτύου
ρεύματο
ς [V]
Τάση
δικτύου
ρεύματο
ς [V]
Χρόνος
ανόδου
[μsec]
Χρόνος
ανόδου
[μsec]
Χρόνος
ανόδου
[μsec]
U
PEAK
[kV]
U
PEAK
[kV]
U
PEAK
[kV]
dU/dt
[kV/μsec]
dU/dt
[kV/μsec]
dU/dt
[kV/μsec]
Μήκος
καλωδίου
[m (ft)]
5 (16,4) 240 0,092 0,526 4,56
50 (164) 240 0,28 0,6 1,72
Πίνακας 7.15 Δεδομένα dU/dt Data για τον FC 280, 3,7 kW
(5,0 hp), 3x200–240 V
Μήκος
καλωδίου
[m (ft)]
5 (16,4) 240 0,088 0,414 3,79
50 (164) 240 0,196 0,593 2,41
Πίνακας 7.16 Δεδομένα dU/dt για τον FC 280, 1,5 kW (2,0 hp),
1x200–240 V
Μήκος
καλωδίου
[m (ft)]
5 (16,4) 240 0,112 0,368 2,64
50 (164) 240 0,116 0,362 2,51
Πίνακας 7.17 Δεδομένα dU/dt για τον FC 280, 2,2 kW (3,0 hp),
1x200–240 V
7.12
Κάτω από ορισμένες ειδικές συνθήκες, όπου η λειτουργία
του ρυθμιστή στροφών αντιμετωπίζει δυσκολίες, σκεφτείτε
την επιλογή του υποβιβασμού. Υπό κάποιες συνθήκες, ο
Τάση
δικτύου
ρεύματο
ς [V]
Τάση
δικτύου
ρεύματο
ς [V]
Τάση
δικτύου
ρεύματο
ς [V]
Χρόνος
ανόδου
[μsec]
Χρόνος
ανόδου
[μsec]
Χρόνος
ανόδου
[μsec]
Ειδικές συνθήκες
U
PEAK
[kV]
U
PEAK
[kV]
U
PEAK
[kV]
dU/dt
[kV/μsec]
dU/dt
[kV/μsec]
dU/dt
[kV/μsec]
υποβιβασμός πρέπει να γίνεται με μη αυτόματο τρόπο.
Τάση
Μήκος
καλωδίου
[m (ft)]
5 (16,4) 240 0,0712 0,484 5,44
50 (164) 240 0,224 0,594 2,11
Πίνακας 7.13 Δεδομένα dU/dt για τον FC 280, 1,5 kW (2,0 hp),
3x200–240 V
Μήκος
καλωδίου
[m (ft)]
5 (16,4) 240 0,072 0,468 5,25
50 (164) 240 0,208 0,592 2,28
Πίνακας 7.14 Δεδομένα dU/dt για τον FC 280, 2,2 kW (3,0 hp),
3x200–240 V
δικτύου
ρεύματο
ς [V]
Τάση
δικτύου
ρεύματο
ς [V]
Χρόνος
ανόδου
[μsec]
Χρόνος
ανόδου
[μsec]
U
PEAK
[kV]
U
PEAK
[kV]
dU/dt
[kV/μsec]
dU/dt
[kV/μsec]
Υπό άλλες συνθήκες, ο ρυθμιστής στροφών εκτελεί
αυτόματα υποβιβασμό σε κάποιο βαθμό όταν είναι
απαραίτητο. Ο υποβιβασμός γίνεται για να εξασφαλιστεί η
απόδοση σε κρίσιμες φάσεις όπου η εναλλακτική λύση θα
ήταν ένα σφάλμα.
7.12.1 Μη αυτόματος υποβιβασμός
Ο υποβιβασμός με μη αυτόματο τρόπο πρέπει να
εξετάζεται σε περιπτώσεις με:
Ατμοσφαιρική πίεση - για εγκατάσταση σε
•
υψόμετρο πάνω από 1.000 m (3281 ft).
Ταχύτητα κινητήρα - σε συνεχή λειτουργία σε
•
χαμηλές στροφές σε εφαρμογές με συνεχή ροπή.
Θερμοκρασία χώρου – πάνω από 45 °C (113 °F),
•
για λεπτομέρειες, ανατρέξτε από το Εικόνα 7.3 έως
το Εικόνα 7.12.
94 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327

0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
Switching Frequency [kHz]
Output Current
45C
50C
55C
130BE889.10
(1)
(2)
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BE890.10
(1) Output Current
(2) Switching Frequency [kHz]
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BE891.10
(2) Switching Frequency [kHz]
(1) Output Current
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BE892.10
(2) Switching Frequency [kHz]
(1) Output Current
Προδιαγραφές Οδηγός σχεδίασης εφαρμογών
(1) Ένταση ρεύματος εξόδου
(2) Συχνότητα μεταγωγής [kHz]
Εικόνα 7.3 Καμπύλη υποβιβασμού Κ1Τ4
(1) Ένταση ρεύματος εξόδου
(2) Συχνότητα μεταγωγής [kHz]
Εικόνα 7.4 Καμπύλη υποβιβασμού Κ2Τ4
(1) Ένταση ρεύματος εξόδου
(2) Συχνότητα μεταγωγής [kHz]
Εικόνα 7.5 Καμπύλη υποβιβασμού Κ3Τ4
(1) Ένταση ρεύματος εξόδου
(2) Συχνότητα μεταγωγής [kHz]
Εικόνα 7.6 Καμπύλη υποβιβασμού Κ4Τ4
7 7
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 95

0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BE893.10
(1) Output Current
(2) Switching Frequency [kHz]
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BF104.10
(1) Output Current
(2) Switching Frequency [kHz]
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BF105.10
(1) Output Current
(2) Switching Frequency [kHz]
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BF106.10
(1) Output Current
(2) Switching Frequency [kHz]
0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BF107.10
(1) Output Current
(2) Switching Frequency [kHz]
Προδιαγραφές
VLT® Midi Drive FC 280
(1) Ένταση ρεύματος εξόδου
(2) Συχνότητα μεταγωγής [kHz]
(1) Ένταση ρεύματος εξόδου
(2) Συχνότητα μεταγωγής [kHz]
Εικόνα 7.7 Καμπύλη υποβιβασμού Κ5Τ4
Εικόνα 7.10 Καμπύλη υποβιβασμού Κ3Τ2
77
(1) Ένταση ρεύματος εξόδου
(2) Συχνότητα μεταγωγής [kHz]
Εικόνα 7.8 Καμπύλη υποβιβασμού Κ1Τ2
(1) Ένταση ρεύματος εξόδου
(2) Συχνότητα μεταγωγής [kHz]
(1) Ένταση ρεύματος εξόδου
(2) Συχνότητα μεταγωγής [kHz]
Εικόνα 7.9 Καμπύλη υποβιβασμού Κ2Τ2
96 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327
Εικόνα 7.11 Καμπύλη υποβιβασμού Κ1S2

0%
0 2 4 6 8 10 12 14 16
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
45C
50C
55C
130BF107.10
(1) Output Current
(2) Switching Frequency [kHz]
Προδιαγραφές Οδηγός σχεδίασης εφαρμογών
ΕΙΔΟΠΟΙΗΣΗ
Η ονομαστική συχνότητα εναλλαγής είναι 6 kHz για τους
K1–K3, 5 kHz για τους K4–K5.
7.12.2 Αυτόματος υποβιβασμός
Ο μετατροπέας συχνότητας ελέγχει συνεχώς για κρίσιμα
επίπεδα:
•
•
•
(1) Ένταση ρεύματος εξόδου
(2) Συχνότητα μεταγωγής [kHz]
Εικόνα 7.12 Καμπύλη υποβιβασμού Κ2S2
•
Σε απόκριση προς την κρίσιμη στάθμη, ο μετατροπέας
συχνότητας ρυθμίζει τη συχνότητα εναλλαγής.
Κρίσιμα υψηλή θερμοκρασία της ψύκτρας.
Υψηλό φορτίο κινητήρα.
Χαμηλή ταχύτητα κινητήρα.
Ενεργοποίηση σημάτων προστασίας (υπέρταση/
υπόταση, υπερένταση, σφάλμα γείωσης και
βραχυκύκλωμα).
7 7
MG07B327 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. 97

Προδιαγραφές
VLT® Midi Drive FC 280
7.13 Μεγέθη περιβλημάτων, ονομαστικές ισχύες και διαστάσεις
Μέγεθος
ισχύος [kW]
77
Διαστάσεις
αποστολής
[χλστ. (ίντσες)]
Βάρος
[kg (lb)]
Οπές
στερέωσης
[χλστ. (ίντσες)]
Μέγεθος
περιβλήματος
Μονοφασικό
200–240 V
Τριφασική
200–240 V
Τριφασική
380–480 V
Ύψος Α1 210 (8,3) 272,5 (10,7)
Ύψος Α2 278 (10,9) 340 (13,4)
Πλάτος Β 75 (3,0) 90 (3,5) 115 (4,5) 133 (5,2) 150 (5,9)
Βάθος C 168 (6,6) 168 (6,6) 168 (6,6) 245 (9,6) 245 (9,6)
Ύψος Α 338,5 (13,3) 395 (15,6)
Πλάτος Β 100 (3,9) 115 (4,5) 130 (5,1) 153 (6,0) 170 (6,7)
Βάθος C 183 (7,2) 183 (7,2) 183 (7,2) 260 (10,2) 260 (10,2)
Ύψος Α 294 (11,6) 356 (14)
Πλάτος Β 75 (3,0) 90 (3,5) 115 (4,5) 133 (5,2) 150 (5,9)
Βάθος C 168 (6,6) 168 (6,6) 168 (6,6) 245 (9,6) 245 (9,6)
IP20 2,5 (5,5) 3,6 (7,9)
IP21 4,0 (8,8) 5,5 (12,1)
a 198 (7,8) 260 (10,2)
b 60 (2,4) 70 (2,8) 90 (3,5) 105 (4,1) 120 (4,7)
c 5 (0,2) 6,4 (0,25)
d 9 (0,35) 11 (0,43) 11 (0,43) 12,4 (0,49) 12,6 (0,5)
e 4,5 (0,18) 5,5 (0,22)
f 7,3 (0,29) 8,1 (0,32)
0,37
(0,5)
0,37
(0,5)
0,37
(0,5)
0,55
(0,75)
0,55
(0,75)
0,55
(0,75)
FC 280 με κάλυμμα εισόδου καλωδίου βάσης (χωρίς επάνω κάλυμμα)
K1 K2 K3 K4 K5
0,75
(1,0)
0,75
(1,0)
0,75
(1,0)
1,1
(1,5)
1,1
(1,5)
1,1
(1,5)
FC 280 με κιτ IP21/UL/τύπου 1
1,5
(2,0)
1,5
(2,0)
1,5
(2,0)
FC 280 IP20
2,2
(3,0)
3
(4,0
2,2
(3,0)
2,2
(3,0)
4
5,5
(5,5)
)
(7,5)
– – –
3,7
(5,0)
7,5
(10)11(15)15(20)
272,5
(10,7)
341,5
(13,4)
395
(15,6)
357
(14,1)
4,6
(10,1)
6,5
(14,3)
260
(10,2)
6,5
(0,26)
5,5
(0,22)
9,2
(0,36)
– –
317,5
(12,5)
379,5
(14,9)
425 (16,7) 520 (20,5)
391 (15,4) 486 (19,1)
8,2 (18,1) 11,5 (25,4)
10,5 (23,1) 14,0 (30,9)
297,5
(11,7)
8 (0,32) 7,8 (0,31)
6,8 (0,27) 7 (0,28)
11 (0,43) 11,2 (0,44)
18,5
(25)22(30)
410 (16,1)
474 (18,7)
390 (15,4)
Πίνακας 7.18 Μεγέθη περιβλημάτων, ονομαστικές ισχύες και διαστάσεις
98 Danfoss A/S © 05/2017 Με την επιφύλαξη κάθε δικαιώματος. MG07B327
 Loading...
Loading...