


ENGINEERING TOMORROW
Guía de programación
VLT® Midi Drive FC 280
vlt-drives.danfoss.com

Índice Guía de programación
Índice
1 Introducción
1.1 Cómo leer esta Guía de programación
1.2 Deniciones
1.3 Instalación eléctrica: cables de control
2 Seguridad
2.1 Símbolos de seguridad
2.2 Personal cualicado
2.3 Medidas de seguridad
3 Programación
3.1 Funcionamiento del panel de control local
3.1.1 Panel de control local numérico (LCP) 14
3.1.2 Función de la tecla derecha en el NLCP 15
3.1.3 Menú rápido del NLCP 16
3.1.4 Menú principal del NLCP 18
3.1.5 Disposición del GLCP 19
3.1.6 Ajustes de parámetros 21
3
3
4
8
12
12
12
12
14
14
3.1.7 Cambio de los ajustes de parámetros con el GLCP 21
3.1.8 Carga/descarga de datos al/del GLCP 21
3.1.9 Restablecimiento de los ajustes predeterminados con el LCP 22
3.2 Programación básica
3.2.1 Ajuste del motor asíncrono 22
3.2.2 Ajuste de Motor PM en VVC
3.2.3 Adaptación automática del motor (AMA) 24
4 Descripciones de parámetros
4.1 Parámetros: 0-** Operation / Display
4.2 Parámetros: 1-** Load and Motor
4.3 Parámetros: 2-** Brakes
4.4 Parámetros: 3-** Reference/Ramps
4.5 Parámetros: 4-** Limits/Warnings
4.6 Parámetros: 5-** Digital In/Out
4.7 Parámetros: 6-** Analog In/Out
4.8 Parámetros: 7-** Controllers
4.9 Parámetros: 8-** Comm. and Options
22
+
23
25
25
33
44
47
53
57
68
72
77
4.10 Parámetros: 9-** PROFIdrive
4.11 Parámetros: 10-** CAN Fieldbus
4.12 Parámetros: 12-** Ethernet
4.13 Parámetros: 13-** Smart Logic
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 1
82
82
82
82
Índice
VLT® Midi Drive FC 280
4.14 Parámetros: 14-** Special Functions
4.15 Parámetros: 15-** Drive Information
4.16 Parámetros: 16-** Data Readouts
4.17 Parámetros: 18-** Data Readouts 2
4.18 Parámetros: 21-** Ext. Closed Loop
4.19 Parámetros: 22-** Appl. Functions
4.20 Parámetros: 30-** Special Features
4.21 Parámetros: 32-** Motion Control Basic Settings
4.22 Parámetros: 33-** Motion Control Adv. Settings
4.23 Parámetros: 34-** Motion Control Data Readouts
4.24 Parámetros: 37-** Application Settings
5 Listas de parámetros
5.1 Introducción
5.2 Listas de parámetros
6 Resolución de problemas
6.1 Advertencias y alarmas
88
95
97
101
101
103
104
105
106
107
109
111
111
114
132
132
Índice
6.1.1 Alarmas 132
6.1.2 Advertencias 132
6.1.3 Advertencia / mensaje de alarma 132
6.1.4 Lista de códigos de alarma y advertencia 133
143
2 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305
Introducción Guía de programación
1 Introducción
1.1 Cómo leer esta Guía de programación
1.1.1 Objetivo del manual
Esta guía de programación facilita información sobre el
control del convertidor de frecuencia y el acceso a los
parámetros, la programación y la resolución de problemas.
La guía de programación está diseñada para su utilización
por parte de personal
con el convertidor de frecuencia VLT® Midi Drive FC 280.
Lea las instrucciones antes de proceder a la programación
y siga los procedimientos indicados en este manual.
VLT® es una marca registrada.
1.1.2 Recursos adicionales
Recursos adicionales disponibles:
La Guía de funcionamiento del VLT® Midi Drive FC
•
280 proporciona toda la información necesaria
para poner en marcha el convertidor de
frecuencia.
La Guía de diseño del VLT® Midi Drive FC 280
•
proporciona información técnica detallada acerca
del convertidor de frecuencia y el diseño y las
aplicaciones del cliente.
Póngase en contacto con su distribuidor local de Danfoss o
consulte drives.danfoss.com/knowledge-center/technical-
-documentation/ para descargar la documentación.
1.1.3 Versión del documento y del software
Este manual se revisa y se actualiza de forma periódica. Le
agradecemos cualquier sugerencia de mejoras. La Tabla 1.1
muestra las versiones de documento y software.
Edición Comentarios Versión de
MG07C3 Actualización a la nueva versión del
software
Tabla 1.1 Versión del documento y del software
°C
°F
CA Corriente alterna
AEO Optimización automática de la energía
ACP Procesador de control de la aplicación
AWG Calibre de cables estadounidense
AMA Adaptación automática del motor
CC Corriente continua
cualicado que esté familiarizado
software
1.2
Grados Celsius
Fahrenheit
EEPROM
CEM Compatibilidad electromagnética
EMI Interferencias electromagnéticas
ESD Descarga electrostática
ETR Relé termoelectrónico
f
M, N
FC Convertidor de frecuencia
IGBT Transistor bipolar de puerta aislada
IP Protección Ingress
I
LÍM.
I
INV
I
M, N
I
VLT, MÁX.
I
VLT, N
L
d
L
q
LCP Panel de control local
LED Diodo emisor de luz
MCP Procesador de control del motor
N.A. No aplicable
NEMA
P
M, N
PCB Placa de circuito impreso
PE Conexión a tierra de protección
PELV Tensión de protección muy baja
PWM
R
s
Regen Terminales regenerativos
r/min Revoluciones por minuto
RFI Interferencias de radiofrecuencia
SCR Recticador controlado por silicio
SMPS
T
LÍM.
U
M, N
X
h
Tabla 1.2 Abreviaturas
Memoria de solo lectura eléctrica,
programable y borrable
Frecuencia nominal del motor
Límite de intensidad
Intensidad nominal de salida del
convertidor
Corriente nominal del motor
Intensidad de salida máxima
Corriente nominal de salida
suministrada por el convertidor de
frecuencia
Inductancia del eje d del motor
Inductancia del eje q del motor
Asociación Nacional de Fabricantes de
Equipos Eléctricos
Potencia nominal del motor
Modulación de la anchura de
impulsos
Resistencia del estátor
Fuente de alimentación del modo de
conmutación
Límite de par
Tensión nominal del motor
Reactancia principal del motor
1 1
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 3
Introducción
VLT® Midi Drive FC 280
11
1.2.2 Entrada
Comandos de control
Inicie y detenga el funcionamiento del motor conectado
mediante el LCP y las entradas digitales.
Las funciones se dividen en dos grupos.
Las funciones del grupo 1 tienen mayor prioridad que las
funciones del grupo 2.
Grupo 1 Parada precisa, paro por inercia, parada precisa y
por inercia, parada rápida, frenado de CC, parada
y [OFF].
Grupo 2 Arranque, arranque de pulsos, cambio de sentido,
arranque e inversión, velocidad ja y mantener
salida.
Tabla 1.3 Grupos de funciones
Para comprobar la conformidad con el Acuerdo europeo
relativo al transporte internacional de mercancías
peligrosas por vías de navegación interior (ADN), consulte
el capítulo «Instalación conforme con ADN» de la Guía de
®
diseño del VLT
Midi Drive FC 280.
El convertidor de frecuencia cumple los requisitos de la
norma UL 508C de retención de memoria térmica. Si desea
obtener más información, consulte el capítulo «Protección
térmica del motor» en la Guía de diseño del VLT® Midi Drive
FC 280.
Normas aplicadas y conformidad para STO
El uso de la STO en los terminales 37 y 38 conlleva el
cumplimiento de todas las disposiciones de seguridad,
incluidas las normas, los reglamentos y las directrices
pertinentes. La función STO integrada cumple las
siguientes normas:
CEI/EN 61508: 2010 SIL2
•
CEI/EN 61800-5-2: 2007 SIL2
•
CEI/EN 62061: 2012 SILCL de SIL2
•
CEI/EN 61326-3-1: 2008
•
EN ISO 13849-1: 2008 categoría 3 PL d
•
Deniciones
1.2
1.2.1 Convertidor de frecuencia
Inercia
El eje del motor se encuentra en modo libre. Sin par en el
motor.
I
VLT, MÁX.
Intensidad de salida máxima.
I
VLT,N
Corriente nominal de salida suministrada por el convertidor
de frecuencia.
U
VLT, MÁX.
Tensión de salida máxima.
1.2.3 Motor
Motor en funcionamiento
Par generado en la salida del eje motor y velocidad desde
0 r/min hasta la velocidad máxima del motor.
f
VELOCIDAD FIJA
La frecuencia del motor cuando se activa la función de
velocidad ja (mediante terminales digitales).
f
M
Frecuencia del motor.
f
MÁX.
Frecuencia máxima del motor.
f
MÍN.
Frecuencia mínima del motor.
f
M, N
Frecuencia nominal del motor (datos de la placa de
características).
I
M
Intensidad del motor (real).
I
M, N
Corriente nominal del motor (datos de la placa de características).
n
M, N
Velocidad nominal del motor (datos de la placa de características).
n
s
Velocidad del motor síncrono.
2 × Parámetro 1−23 × 60s
ns=
n
deslizamiento
Deslizamiento del motor.
P
M, N
Potencia nominal del motor (datos de la placa de características en kW o CV).
T
M, N
Parámetro 1−39
Par nominal (motor).
4 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305
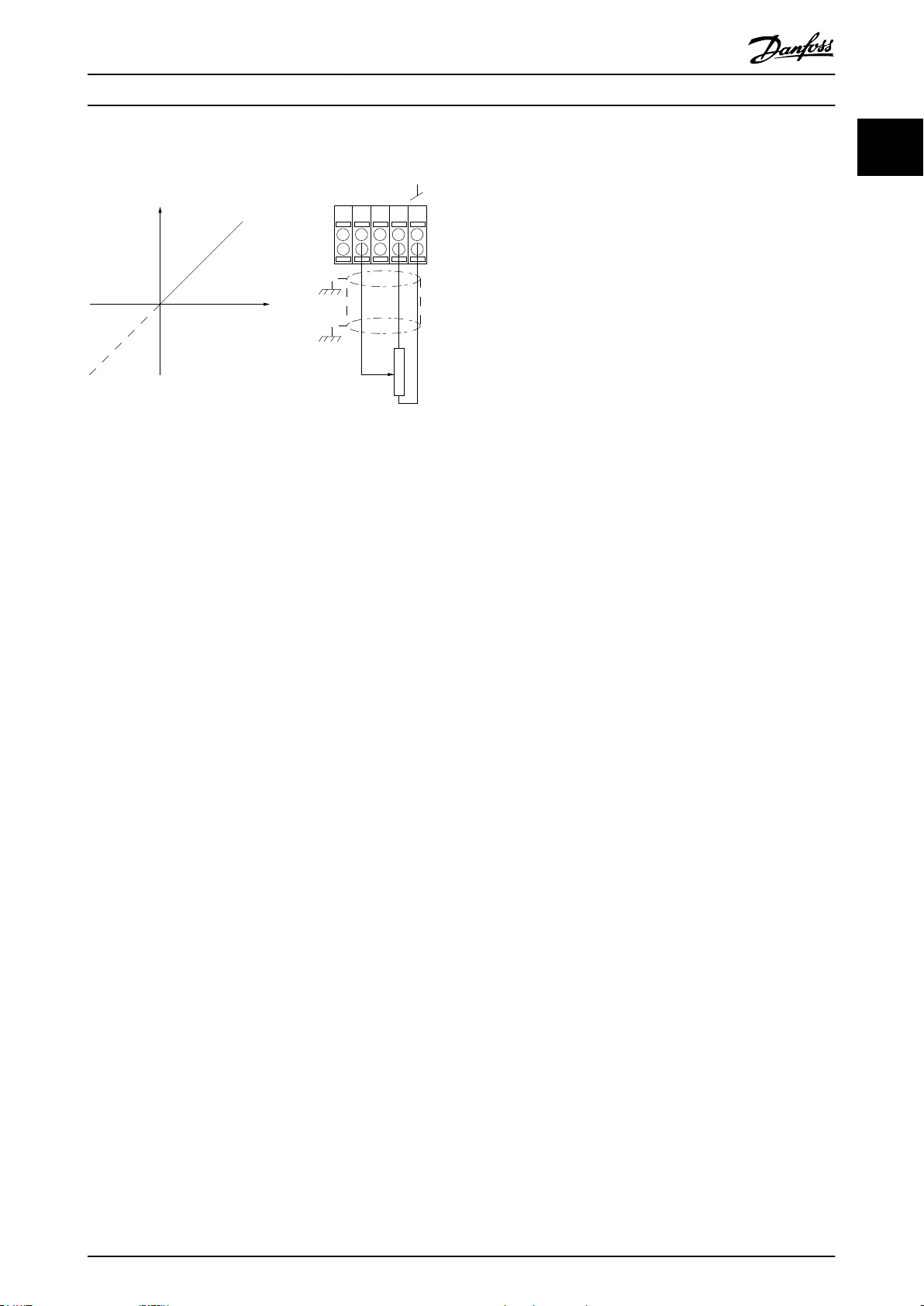
175ZA078.10
Par max.
0 / min.
Par
Introducción Guía de programación
U
M
Tensión instantánea del motor.
U
M, N
Tensión nominal del motor (datos de la placa de características).
Par de arranque
Ilustración 1.1 Par de arranque
η
VLT
El rendimiento del convertidor de frecuencia se dene
como la relación entre la potencia de salida y la potencia
de entrada.
Orden de desactivación de arranque
Una orden de desactivación de arranque que pertenece a
las órdenes de control del grupo 1. Consulte la Tabla 1.3
para ver más detalles.
Orden de parada
Una orden de parada que pertenece a las órdenes de
control del grupo 1. Consulte la Tabla 1.3 para ver más
detalles.
1.2.4 Referencias
Referencia analógica
Una señal transmitida a las entradas analógicas 53 o 54
puede ser tensión o corriente.
Referencia binaria
Una señal transmitida al puerto de comunicación serie.
Referencia interna
Una referencia interna denida que puede ajustarse a un
valor comprendido entre el –100 % y el +100 % del
intervalo de referencias. Pueden seleccionarse ocho
referencias internas mediante los terminales digitales.
Referencia de pulsos
Señal de frecuencia de pulsos transmitida a las entradas
digitales (terminal 29 o 33).
Ref
MÁX.
Determina la relación entre la entrada de referencia a un
100 % de escala completa (normalmente, 10 V y 20 mA) y
la referencia resultante. El valor de referencia máximo se
ajusta en el parámetro 3-03 Referencia máxima.
Ref
MÍN.
Determina la relación entre la entrada de referencia a un
valor del 0 % (normalmente, 0 V, 0 mA y 4 mA) y la
referencia resultante. El valor de referencia mínimo se
ajusta en el parámetro 3-02 Referencia mínima.
1.2.5 Varios
Entradas analógicas
Las entradas analógicas se utilizan para controlar varias
funciones del convertidor de frecuencia.
Hay dos tipos de entradas analógicas:
Entrada de corriente, 0-20 mA y 4-20 mA.
•
Entrada de tensión, de 0 a 10 V CC.
•
Salidas analógicas
Las salidas analógicas pueden proporcionar una señal de
0-20 mA o 4-20 mA.
Adaptación automática del motor (AMA)
El algoritmo AMA determina los parámetros eléctricos para
el motor conectado cuando se encuentra parado.
Resistencia de frenado
La resistencia de frenado es un módulo capaz de absorber
la potencia de frenado generada durante el frenado
regenerativo. Esta potencia de frenado regenerativo
aumenta la tensión del circuito intermedio y un interruptor
de freno garantiza que la potencia se transmita a la
resistencia de frenado.
Características de par constante (CT)
Características de par constante utilizadas para todas las
aplicaciones, como cintas transportadoras, bombas de
desplazamiento y grúas.
Entradas digitales
Las entradas digitales pueden utilizarse para controlar
distintas funciones del convertidor de frecuencia.
Salidas digitales
El convertidor de frecuencia dispone de dos salidas de
estado sólido que pueden proporcionar una señal de 24 V
CC (máximo 40 mA).
DSP
Procesador digital de señal.
ETR
El relé termoelectrónico es un cálculo de carga térmica
basado en la carga presente y el tiempo transcurrido. Su
nalidad es calcular la temperatura del motor.
Bus estándar FC
Incluye el bus RS485 bus con el protocolo FC o el
protocolo MC. Consulte el parámetro 8-30 Protocol.
1 1
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 5
Introducción
VLT® Midi Drive FC 280
11
Inicialización
Si se lleva a cabo una inicialización
(parámetro 14-22 Operation Mode), el convertidor de
frecuencia vuelve a los ajustes predeterminados.
Ciclo de trabajo intermitente
Una clasicación de trabajo intermitente es una secuencia
de ciclos de trabajo. Cada ciclo está formado por un
periodo en carga y un periodo sin carga. El funcionamiento
puede ser de trabajo periódico o de trabajo no periódico.
LCP
El panel de control local constituye una completa interfaz
para el control y la programación del convertidor de
frecuencia. El panel de control es desmontable y puede
instalarse hasta a tres metros (9,8 ft) de distancia del
convertidor de frecuencia, es decir, en un panel frontal con
la opción del kit de instalación.
NLCP
Interfaz de panel de control local numérico para el control
y la programación del convertidor de frecuencia. La
pantalla es numérica y el panel se utiliza para mostrar los
valores de proceso. El NLCP tiene funciones de almacenamiento y copia.
lsb
Bit menos signicativo.
msb
Bit más signicativo.
MCM
Sigla en inglés de Mille Circular Mil, una unidad norteamericana de sección transversal de cables. 1 MCM = 0,5067
mm2.
Parámetros en línea / en estado de desconexión
Los cambios realizados en los parámetros en línea se
activan inmediatamente después de cambiar el valor de
dato. Pulse [OK] para activar cambios en los parámetros
fuera de línea.
PID de proceso
El control de PID mantiene la velocidad, la presión y la
temperatura mediante el ajuste de la frecuencia de salida
El factor de potencia indica hasta qué punto el convertidor
de frecuencia impone una carga a la alimentación de red.
Cuanto menor es el factor de potencia, mayor es I
RMS
para
el mismo rendimiento en kW.
I
RMS
= I
+ I
1
5
+ I
2
+ .. + I
7
2
n
2
2
Además, un factor de potencia elevado indica que las
distintas corrientes armónicas son bajas.
Las bobinas de CC integradas producen un alto factor de
potencia, lo cual minimiza la carga impuesta a la alimentación de red.
Entrada de pulsos / codicador incremental
Un transmisor externo de pulsos digitales utilizado para
proporcionar información sobre la velocidad del motor. El
encoder se utiliza para aplicaciones donde se necesita una
gran precisión en el control de velocidad.
RCD
Dispositivo de corriente diferencial.
Ajuste
Guarde ajustes de parámetros en cuatro conguraciones
distintas. Alterne entre las cuatro conguraciones de
ajustes de parámetros y edite un ajuste mientras está
inactivo.
SFAVM
Acrónimo que describe el patrón de conmutación
denominado «modulación asíncrona de vectores orientada
al ujo del estátor».
Compensación de deslizamiento
El convertidor de frecuencia compensa el deslizamiento del
motor añadiendo un suplemento a la frecuencia que sigue
a la carga medida del motor, manteniendo la velocidad del
mismo casi constante.
Smart logic control (SLC)
El SLC es una secuencia de acciones denidas por el
usuario que se ejecuta cuando el controlador Smart Logic
evalúa como verdaderos los eventos asociados denidos
por el usuario (grupo de parámetros 13-** Smart Logic).
STW
Código de estado.
para adaptarla a la carga variable.
THD
PCD
Datos de control de proceso.
Ciclo de potencia
Desactive la red hasta que la pantalla (LCP) se quede
oscura. A continuación, conecte de nuevo la alimentación.
Factor de potencia
El factor de potencia es la relación entre I1 e I
Factor depotencia =
3xUxI1cosϕ1
3xUxI
RMS
RMS
.
cosϕ1 = 1; por lo tanto:
Factor depotencia =
I1xcosϕ1
I
RMS
=
I
I
RMS
1
Distorsión total de armónicos; indica la contribución total
de la distorsión armónica.
Termistor
Resistencia que depende de la temperatura y que se
coloca en el punto donde se controla la temperatura
(convertidor de frecuencia o motor).
Desconexión
Estado al que se pasa en situaciones de fallo; por ejemplo,
si el convertidor de frecuencia está sujeto a sobretensión o
cuando está protegiendo el motor, el proceso o el
mecanismo del motor. Se impide el rearranque hasta que
desaparece la causa del fallo y se anula el estado de
desconexión mediante la activación del reinicio o, en
ocasiones, mediante la programación de un reinicio
6 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

Introducción Guía de programación
automático. La desconexión no debe utilizarse para la
seguridad personal.
Bloqueo por alarma
Estado al que se pasa en situaciones de fallo cuando el
convertidor de frecuencia está protegiéndose a sí mismo y
requiere una intervención física; por ejemplo, si el
convertidor de frecuencia se cortocircuita en la salida. Un
bloqueo por alarma solo puede cancelarse cortando la
alimentación, eliminando la causa del fallo y volviendo a
conectar el convertidor de frecuencia. Se impide el
rearranque hasta que se cancela el estado de desconexión
mediante la activación del reinicio o, en algunos casos,
mediante la programación del reinicio automático. El
bloqueo por alarma no debe utilizarse para la seguridad
personal.
Características VT
Características de par variable utilizadas en bombas y
ventiladores.
+
VVC
Comparado con el control estándar de la proporción de
tensión/frecuencia, el control vectorial de la tensión (VVC+)
mejora la dinámica y la estabilidad, tanto cuando se
cambia la velocidad de referencia como en relación con el
par de carga.
60° AVM
Hace referencia al patrón de conmutación denominado
«modulación asíncrona de vectores de 60°».
1 1
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 7
130BE202.17
Power
input
Switch mode
power supply
Motor
Analog output
interface
(PNP) = Source
(NPN) = Sink
ON = Terminated
OFF = Open
Brake
resistor
91 (L1/N)
92 (L2/L)
93 (L3)
PE
50 (+10 V OUT)
53 (A IN)
2)
54 (A IN)
55 (COM digital/analog I/O)
0/4−20 mA
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
10 V DC
15 mA 100 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(A OUT) 42
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0 V
5 V
S801
0/4−20 mA
RS485
RS485
03
+10 V DC
0−10 V DC
24 V DC
02
01
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
27 (D IN/OUT)
24 V
0 V
0 V (PNP)
24 V (NPN)
29 (D IN)
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
38 (STO2)
4)
37 (STO1)
4)
95
P 5-00
21
ON
(+DC/R+) 89
(R-) 81
0−10 V DC
(-DC) 88
RFI
0 V
250 V AC, 3 A
Relay 1
1)
3)
Introducción
VLT® Midi Drive FC 280
11
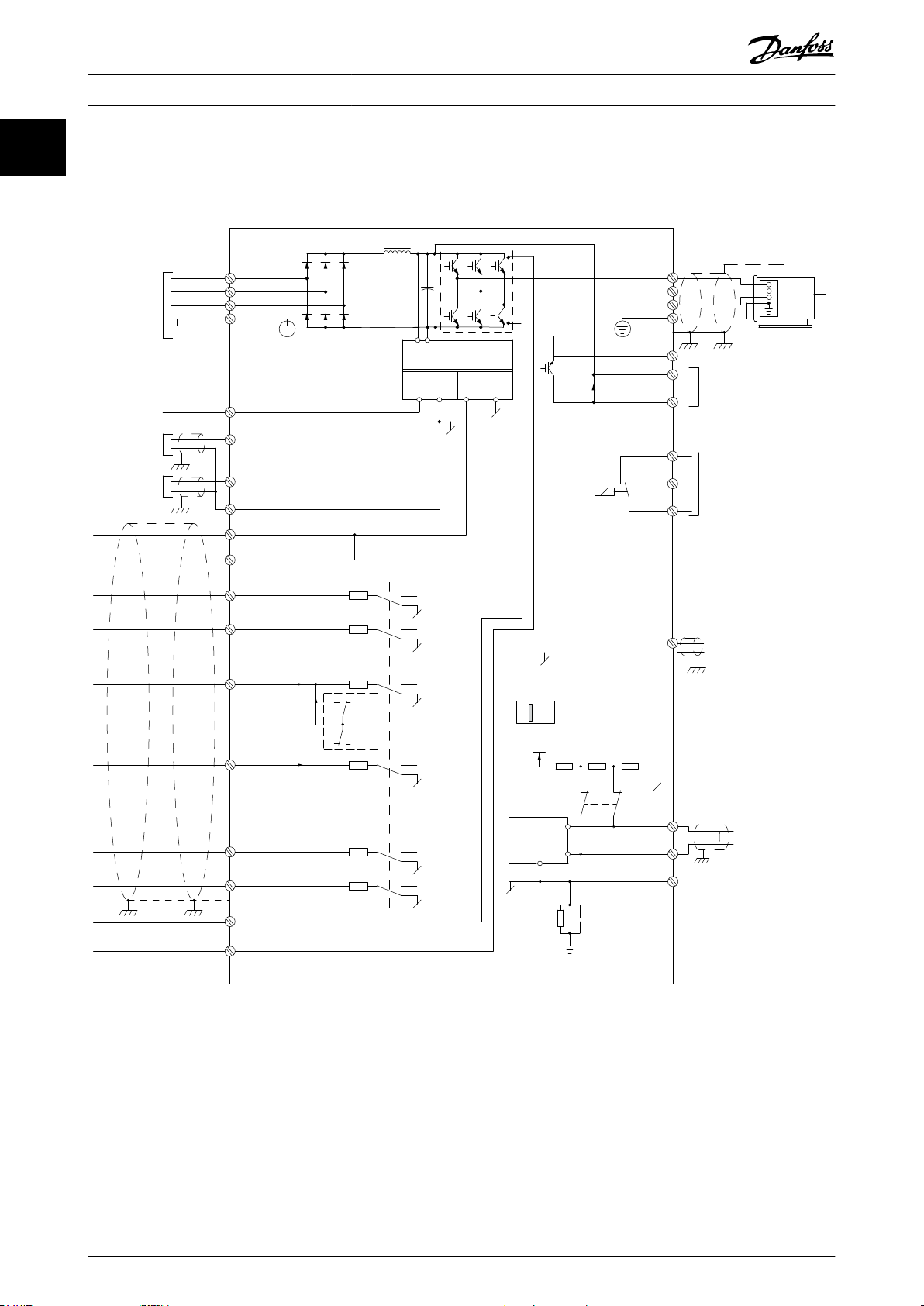
1.3 Instalación eléctrica: cables de control
1.3.1 Descripción general
Ilustración 1.2 Dibujo esquemático del cableado básico
A = analógico, D = digital
1) El chopper de frenado integrado solo está disponible en las unidades trifásicas.
2) El terminal 53 también puede utilizarse como entrada digital.
3) El conmutador S801 (terminal de bus) se puede utilizar para activar la terminación del puerto RS485 (terminales 68 y 69).
4) Consulte el capítulo 6 del manual de funcionamiento, «Safe Torque O (STO)», para ver el cableado correcto de la función STO.
8 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305
130BE730.10
12 13 18 19 27 29 32 33 55
+24 VDC
0 VDC
PNP (Source)
Digital input wiring
NPN (Sink)
Digital input wiring
12 13 18 19 27 29 32 33 55
+24 VDC
0 VDC
130BE731.10
130BA681.10
Introducción Guía de programación
En raras ocasiones, las señales analógicas y los cables de
control largos producen lazos de tierra de 50/60 Hz
debidos al ruido procedente de los cables de alimentación
de red. Si esto ocurre, rompa la pantalla o inserte un
condensador de 100 nF entre la pantalla y el chasis.
Conecte las entradas y salidas analógicas y digitales por
separado de las entradas comunes (terminal 55) del
convertidor de frecuencia para evitar que las corrientes de
conexión toma a tierra de ambos grupos afecten a otros
grupos. Por ejemplo, conectar la entrada digital puede
perturbar la señal de entrada analógica.
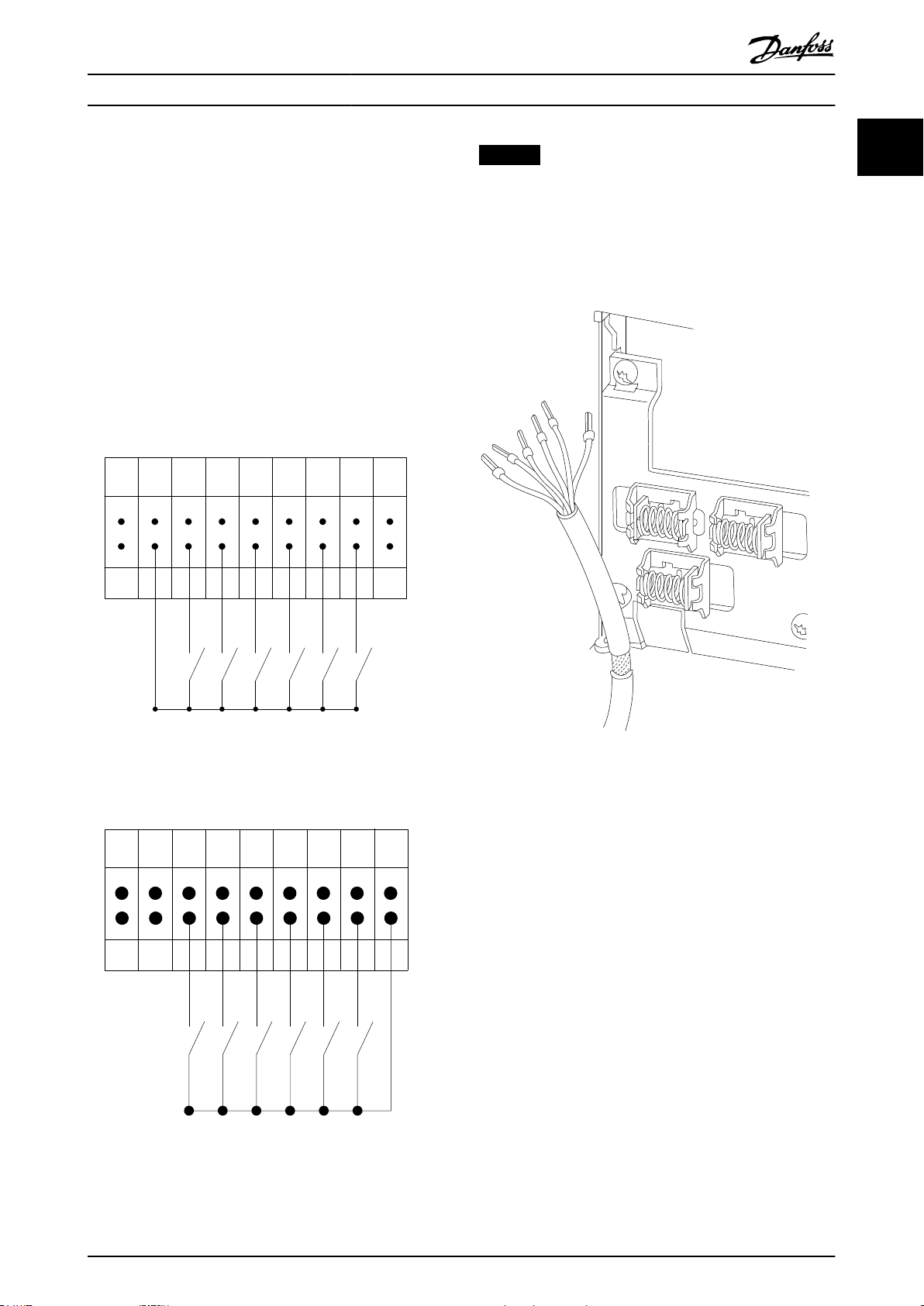
Polaridad de entrada de los terminales de control
AVISO!
Los cables de control deben estar apantallados o
blindados.
Consulte el apartado «Uso de cables de control apantallados» en la Guía de diseño para comprobar la correcta
terminación de los cables de control.
1 1
Ilustración 1.3 PNP (fuente)
Ilustración 1.4 NPN (disipador)
Ilustración 1.5 Conexión toma a tierra de cables de control
apantallados o blindados
1.3.2 Arranque/parada
Terminal 18 = Parámetro 5-10 Terminal 18 Entrada digital [8]
Arranque.
Terminal 27 = Parámetro 5-12 Terminal 27 Entrada digital [0]
Sin función (predeterminado: inercia)
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 9

130BE732.10
12 13 18 322719 29 33
P 5-12 [2]
P 5-10 [8]
Start/Stop
+24V
Speed
Start/Stop
[18]
1312 18 19
130BF101.10
322927 33
P 5 - 12 [6]
P 5 - 10[9]
+24V
Speed
Start Stop inverse
Start (18)
Stop (27)
FC
+24 V
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
130BF095.10
Introducción
VLT® Midi Drive FC 280
11
1.3.4 Aceleración/deceleración
Terminales 29/32 = Aceleración/deceleración
Terminal 18 = Parámetro 5-10 Terminal 18 Entrada
digital [8] Arranque (predeterminado).
Terminal 27 = Parámetro 5-12 Terminal 27 Entrada
digital [19] Mantener referencia.
Terminal 29 = Parámetro 5-13 Terminal 29 Entrada
digital [21] Aceleración.
Terminal 32 = Parámetro 5-14 Terminal 32 entrada
digital [22] Deceleración.
Ilustración 1.6 Arranque/parada
1.3.3 Arranque/parada por pulsos
Terminal 18 = Parámetro 5-10 Terminal 18 Entrada digital [9]
Arranque por pulsos.
Terminal 27= Parámetro 5-12 Terminal 27 Entrada digital [6]
Parada.
Ilustración 1.8 Aceleración/deceleración
1.3.5 Referencia de potenciómetro
Referencia de tensión a través de un potenciómetro
Fuente de referencia 1 = [1] Entrada analógica 53
(predeterminada).
Terminal 53, tensión baja = 0 V.
Terminal 53, tensión alta = 10 V.
Terminal 53, valor bajo ref. / realimentación =
0 Hz.
Terminal 53, valor alto ref. / realimentación =
50 Hz.
Parámetro 6-19 Terminal 53 mode = [1] Tensión.
Ilustración 1.7 Arranque/parada por pulsos
10 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305
130BD381.12
555342 54 50
Speed
P 6-15
1 kΩ
+10V/15mA
Ref. voltage
P 6-11 10V
Introducción Guía de programación
Ilustración 1.9 Referencia de potenciómetro
1 1
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 11
Seguridad
VLT® Midi Drive FC 280
2 Seguridad
22
2.1 Símbolos de seguridad
En este documento se utilizan los siguientes símbolos:
ADVERTENCIA
Indica situaciones potencialmente peligrosas que pueden
producir lesiones graves o incluso la muerte.
PRECAUCIÓN
Indica una situación potencialmente peligrosa que puede
producir lesiones leves o moderadas. También puede
utilizarse para alertar contra prácticas no seguras.
AVISO!
Indica información importante, entre la que se incluyen
situaciones que pueden producir daños en el equipo u
otros bienes.
2.2 Personal cualicado
Se precisan un transporte, un almacenamiento, una
instalación, un funcionamiento y un mantenimiento
correctos y ables para que el convertidor de frecuencia
funcione de un modo seguro y sin ningún tipo de
problemas. Este equipo únicamente puede ser manejado o
instalado por personal cualicado.
ADVERTENCIA
ARRANQUE ACCIDENTAL
Cuando el convertidor de frecuencia se conecta a una
red de CA, a un suministro de CC o a una carga
compartida, el motor puede arrancar en cualquier
momento. Un arranque accidental durante la programación, el mantenimiento o los trabajos de reparación
puede causar la muerte, lesiones graves o daños
materiales. El motor puede arrancar mediante un
interruptor externo, un comando de bus de campo, una
señal de referencia de entrada desde el LCP, por funcionamiento remoto mediante el Software de conguración
MCT 10 o tras la eliminación de una condición de fallo.
Para evitar un arranque accidental del motor:
Desconecte el convertidor de frecuencia de la
•
red.
Pulse [O/Reset] en el LCP antes de programar
•
cualquier parámetro.
Debe cablear y montar completamente el
•
convertidor de frecuencia, el motor y cualquier
equipo accionado antes de conectar el
convertidor de frecuencia a la red de CA, al
suministro de CC o a una carga compartida.
El personal cualicado es aquel personal formado que está
autorizado para realizar la instalación, la puesta en marcha
y el mantenimiento de equipos, sistemas y circuitos
conforme a la legislación y la regulación vigentes.
Asimismo, el personal debe estar familiarizado con las
instrucciones y medidas de seguridad descritas en esta
guía.
Medidas de seguridad
2.3
ADVERTENCIA
TENSIÓN ALTA
Los convertidores de frecuencia contienen tensión alta
cuando están conectados a una entrada de red de CA, a
una fuente de alimentación de CC o a una carga
compartida. Si la instalación, el arranque y el mantenimiento no son efectuados por personal cualicado,
pueden causarse lesiones graves o incluso la muerte.
La instalación, el arranque y el mantenimiento
•
deben ser realizados exclusivamente por
personal cualicado.
12 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

Seguridad Guía de programación
ADVERTENCIA
TIEMPO DE DESCARGA
El convertidor de frecuencia contiene condensadores de
enlace de CC que pueden seguir cargados incluso si el
convertidor de frecuencia está apagado. Puede haber
tensión alta presente aunque las luces del indicador LED
de advertencia estén apagadas. Si, después de
desconectar la alimentación, no espera el tiempo especicado antes de realizar cualquier trabajo de reparación o
tarea de mantenimiento, pueden producirse lesiones
graves o incluso la muerte.
Pare el motor.
•
Desconecte la red de CA y las fuentes de
•
alimentación de enlace de CC remotas, incluidas
las baterías de emergencia, los SAI y las
conexiones de enlace de CC a otros convertidores de frecuencia.
Desconecte o bloquee el motor PM.
•
Espere a que los condensadores se descarguen
•
por completo. El tiempo mínimo de espera se
especica en la Tabla 2.1.
Antes de realizar cualquier trabajo de
•
reparación o mantenimiento, utilice un
dispositivo de medición de tensión adecuado
para asegurarse de que los condensadores se
han descargado por completo.
ADVERTENCIA
PELIGRO DEL EQUIPO
El contacto con ejes de rotación y equipos eléctricos
puede provocar lesiones graves o la muerte.
Asegúrese de que la instalación, el arranque y
•
el mantenimiento sean realizados únicamente
por personal formado y cualicado.
Asegúrese de que los trabajos eléctricos
•
respeten las normativas eléctricas locales y
nacionales.
Siga los procedimientos indicados en esta guía.
•
PRECAUCIÓN
PELIGRO DE FALLO INTERNO
Si el convertidor de frecuencia no está correctamente
cerrado, un fallo interno en este puede causar lesiones
graves.
Asegúrese de que todas las cubiertas de
•
seguridad estén colocadas y jadas de forma
segura antes de suministrar electricidad.
2 2
Tensión [V]
200–240 0,37-3,7 (0,5-5) 4
380–480
Tabla 2.1 Tiempo de descarga
Gama de potencias
[kW (CV)]
0,37-7,5 (0,5-10) 4
11–22 (15–30) 15
Tiempo de espera
mínimo
(minutos)
ADVERTENCIA
PELIGRO DE CORRIENTE DE FUGA
Las corrientes de fuga superan los 3,5 mA. No efectuar la
correcta conexión toma a tierra del convertidor de
frecuencia puede ser causa de lesiones graves e incluso
de muerte.
La correcta conexión a tierra del equipo debe
•
estar garantizada por un instalador eléctrico
certicado.
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 13
130BC506.10
Setup 1
A
B
C
D
5
12
13 14 15
10
11
10
9
6
7
8
4
1
2
3
Menu
Status
Quick
Menu
Main
Menu
Hand
On
O
Reset
Auto
On
Back
OK
On
Warn
Alarm
130BD135.10
Setup 12
INDEX
AHP
VkW
srpm
Hz%
n2n1
n3
p5 p4
p3 p2 p1
Programación
VLT® Midi Drive FC 280
3 Programación
3.1 Funcionamiento del panel de control
local
33
El convertidor de frecuencia admite panel de control local
numérico (NLCP), panel de control local gráco (GLCP) y
tapa ciega. En este apartado se describe el funcionamiento
con NLCP y GLCP.
AVISO!
El convertidor de frecuencia también puede programarse
desde un PC con el Software de conguración MCT 10, a
través del puerto de comunicación RS485 o mediante un
puerto USB. Este software puede solicitarse usando el
número de pedido 130B1000 o descargarse desde el sitio
web de Danfoss: www.danfoss.com/BusinessAreas/Drives-
Solutions/softwaredownload.
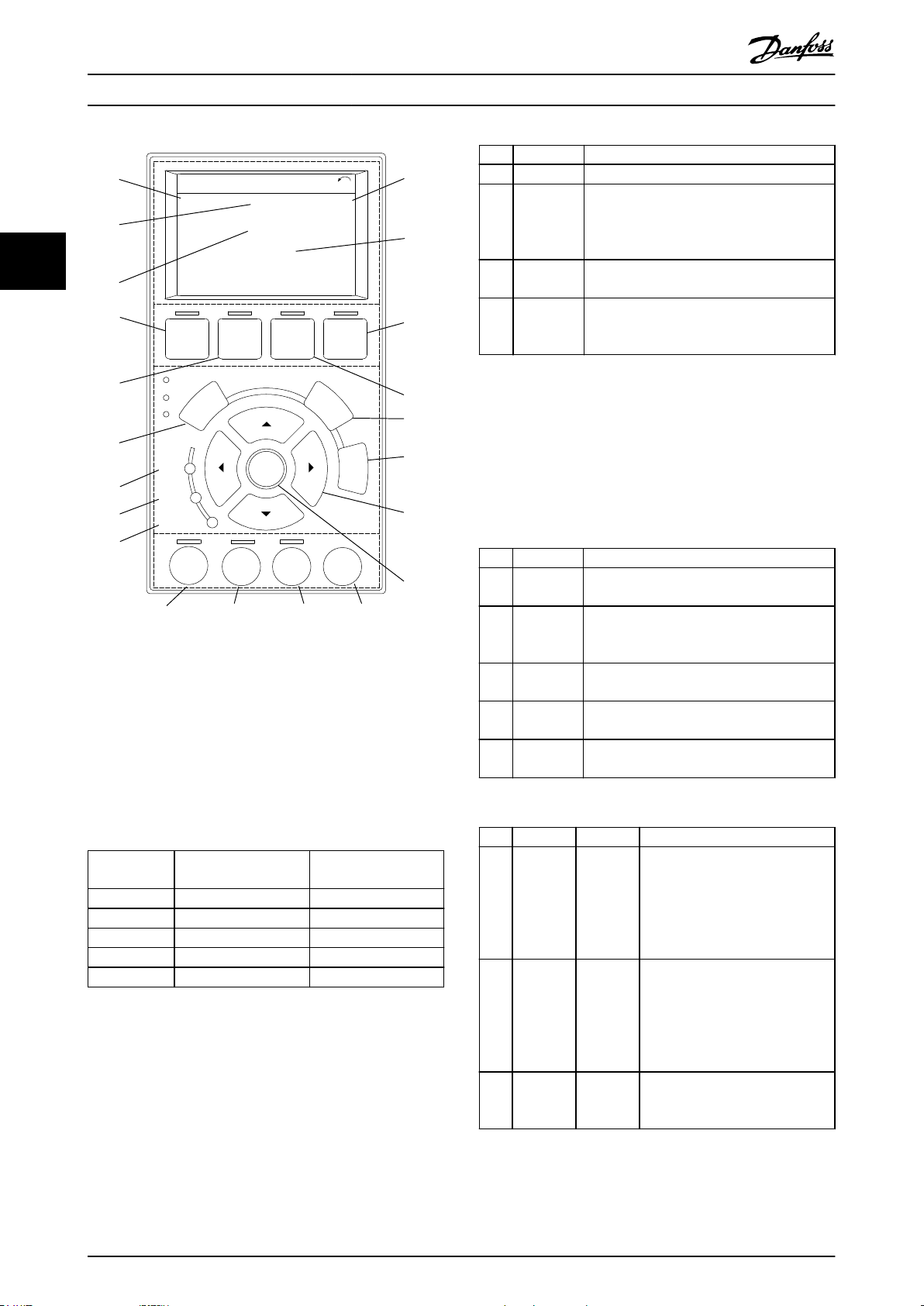
3.1.1 Panel de control local numérico (LCP)
El panel de control local numérico (NLCP) se divide en
cuatro grupos funcionales.
A. Pantalla numérica.
B. Tecla de menú.
C. Teclas de navegación y luces indicadoras (LED).
D. Teclas de funcionamiento y luces indicadoras
(LED).
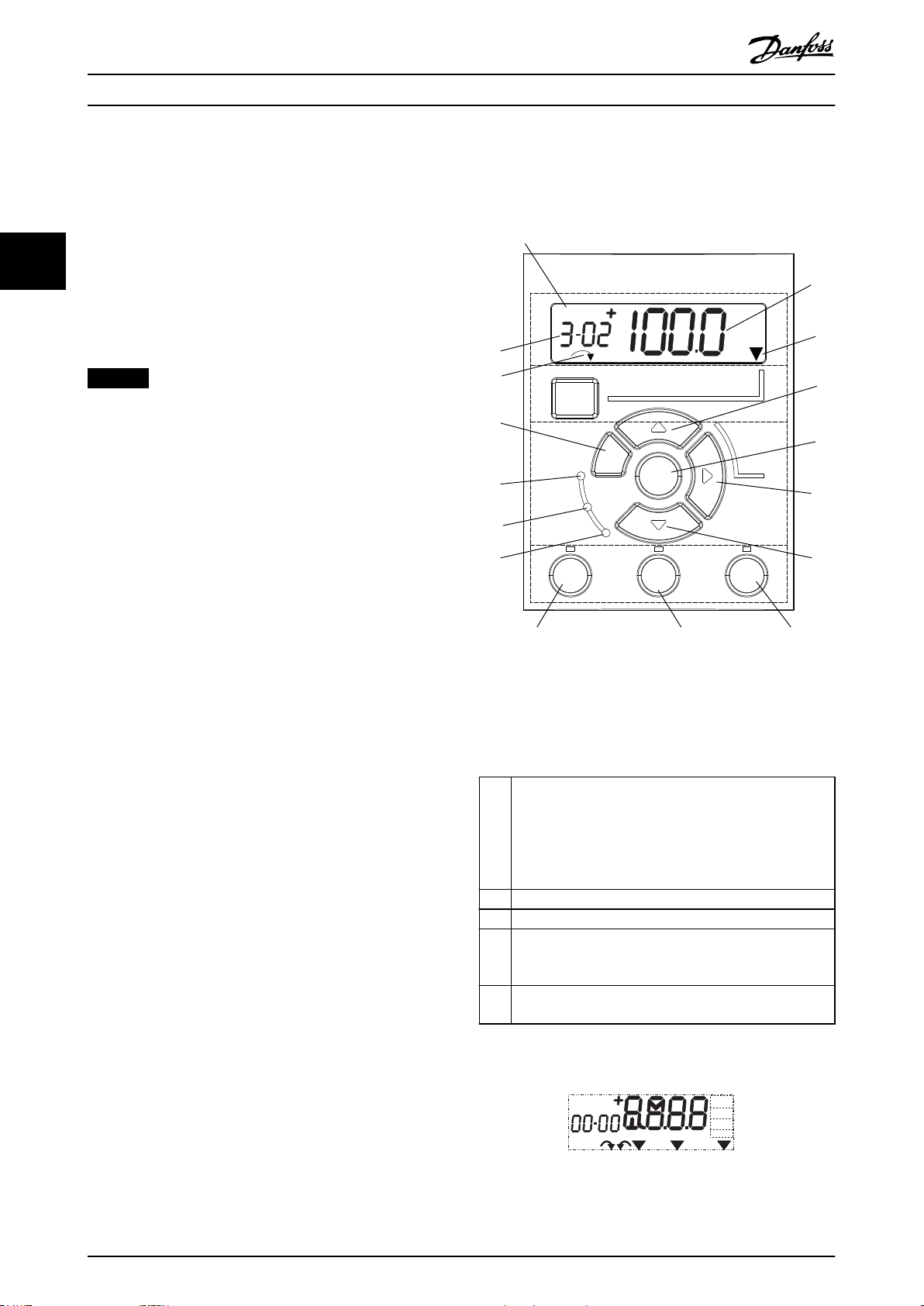
Ilustración 3.1 Vista del NLCP
A. Pantalla numérica
La pantalla LCD está retroiluminada y cuenta con una línea
numérica. Todos los datos se muestran en el NLCP.
El número de ajuste muestra el ajuste activo y el ajuste
editado. Si el mismo ajuste actúa como ajuste activo y
editado, solo se mostrará ese número de ajuste (ajustes de
1
fábrica). Cuando el ajuste activo y el editado dieren,
ambos números se muestran en la pantalla (por ejemplo,
ajuste 12). El número intermitente indica el ajuste editado.
2 Número de parámetro.
3 Valor del parámetro.
La dirección del motor se muestra en la parte inferior
4
izquierda de la pantalla. Una pequeña echa indica el
sentido.
El triángulo indica si el LCP está en Status, Quick Menu, o
5
Main Menu.
Tabla 3.1 Leyenda de la Ilustración 3.1, sección A
Ilustración 3.2 Información de la pantalla
14 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305
130BC440.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Programación Guía de programación
B. Tecla de menú
Para alternar entre Status, Quick Menu, o Main Menu, pulse
[Menu].
C. Luces indicadoras (LED) y teclas de navegación
Indicació
6 On Verde
7 Warn
8 Alarm Rojo
Tabla 3.2 Leyenda de la Ilustración 3.1, luces indicadoras (LED)
9 [Back]
10
11 [OK]
12
[▲] [▼]
Luz Función
n
La luz de encendido se activa cuando
el convertidor de frecuencia recibe
potencia de la tensión de red, a través
de un terminal de bus de CC o de un
suministro externo de 24 V.
Cuando se cumplen las condiciones de
advertencia, se enciende el LED de
Amarill
advertencia amarillo y aparece un texto
o
en la pantalla que identica el
problema.
Un fallo hace que el LED de alarma
rojo parpadee y que aparezca un texto
de alarma.
Tecla Función
Para ir al paso o nivel anterior en la
estructura de navegación.
Para navegar entre grupos de
parámetros, parámetros y dentro de
estos, así como para aumentar/reducir los
valores de los parámetros. Las echas
también puede usarse para ajustar la
referencia local.
Pulse para acceder a grupos de
parámetros o para activar una selección.
Pulse para desplazarse de izquierda a
[►]
derecha dentro del valor de parámetro a
n de cambiar cada valor de modo
individual.
Tecla Función
Pone el sistema en modo de funcionamiento
remoto.
Responde a una orden de arranque externo
15 Auto On
Tabla 3.4 Leyenda de la Ilustración 3.1, sección D
•
emitida por los terminales de control o por
comunicación serie.
ADVERTENCIA
PELIGRO ELÉCTRICO
Incluso después de pulsar la tecla [O/Reset], habrá
tensión en los terminales del convertidor de frecuencia.
Al pulsar la tecla [O/Reset], no se desconecta el
convertidor de frecuencia de la alimentación. Tocar las
partes con corriente puede causar lesiones graves e
incluso la muerte.
No toque ninguna pieza con corriente.
•
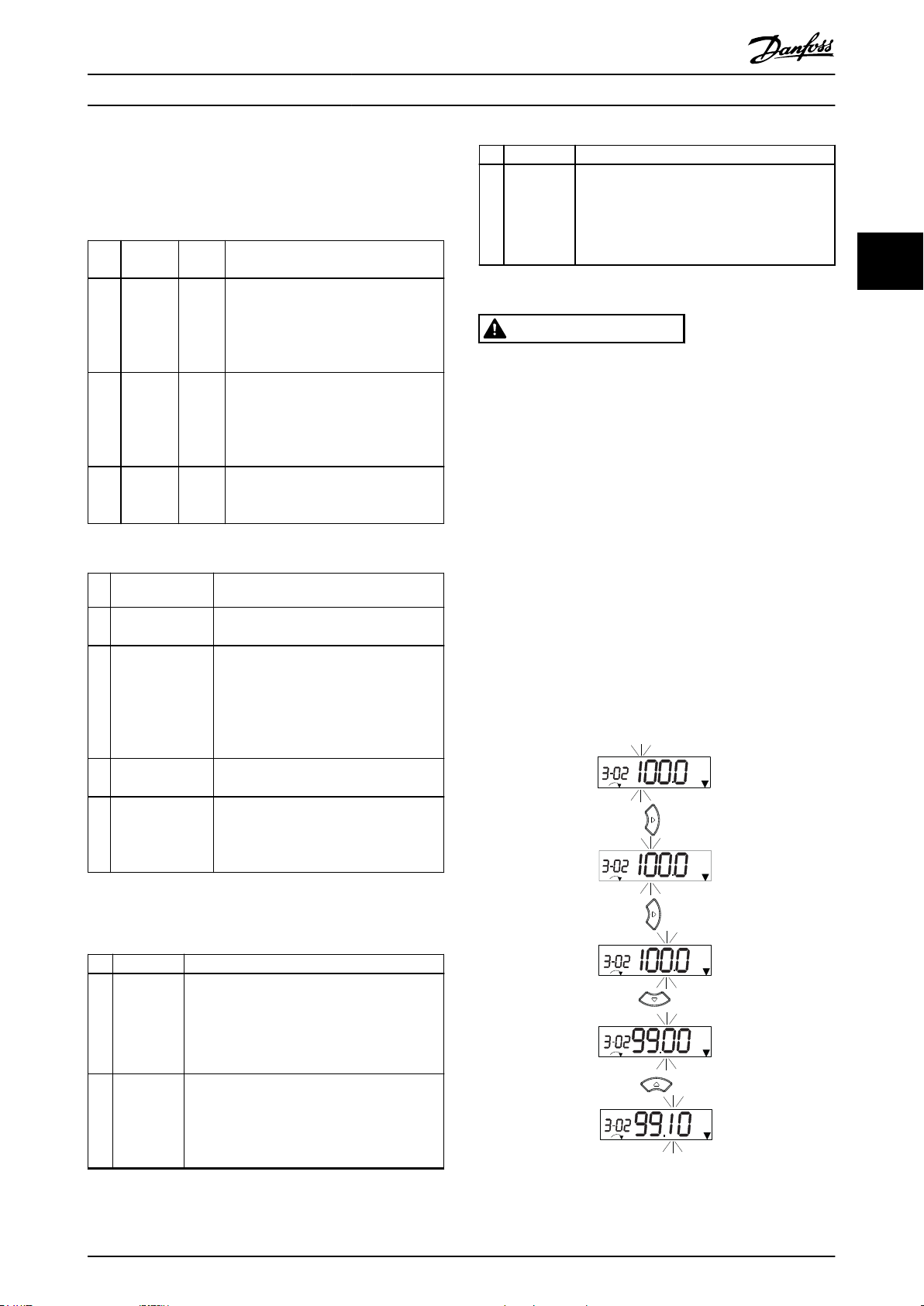
3.1.2 Función de la tecla derecha en el
NLCP
Pulse [►] para editar cualquiera de los cuatro dígitos de la
pantalla de forma individual. Al pulsar [►] una vez, el
cursor se mueve al primer dígito y el dígito empieza a
parpadear como se muestra en la Ilustración 3.3. Pulse [▲] y
[▼] para cambiar el valor. Al pulsar [►], no se altera el valor
de los dígitos ni se mueve la coma decimal.
3 3
Tabla 3.3 Leyenda de la Ilustración 3.1, teclas de navegación
D. Teclas de funcionamiento y luces indicadoras (LED)
Tecla Función
Arranca el convertidor de frecuencia en control
local.
Una señal de parada externa emitida por la
13 Hand On
14 O/Reset
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 15
•
entrada de control o por comunicación
serie invalida la tecla [Hand on] local.
Detiene el motor pero no desconecta la
alimentación del convertidor de frecuencia, o
reinicia el convertidor de frecuencia
manualmente una vez que se ha eliminado un
fallo.
Ilustración 3.3 Función de la tecla derecha
Programación
[►] también puede usarse para navegar entre grupos de
parámetros. En el Menú principal, pulse [►] para moverse al
primer parámetro del siguiente grupo de parámetros (por
ejemplo, para moverse de parámetro 0-03 Regional Settings
[0] International a parámetro 1-00 Conguration Mode [0]
Veloc. lazo abierto).
33
AVISO!
Durante el arranque, el NLCP muestra el mensaje LCP ON
(LCP activado). Cuando deje de mostrarse dicho mensaje,
el convertidor de frecuencia estará listo para funcionar.
La adición o supresión de opciones puede alargar la
duración del arranque.
VLT® Midi Drive FC 280
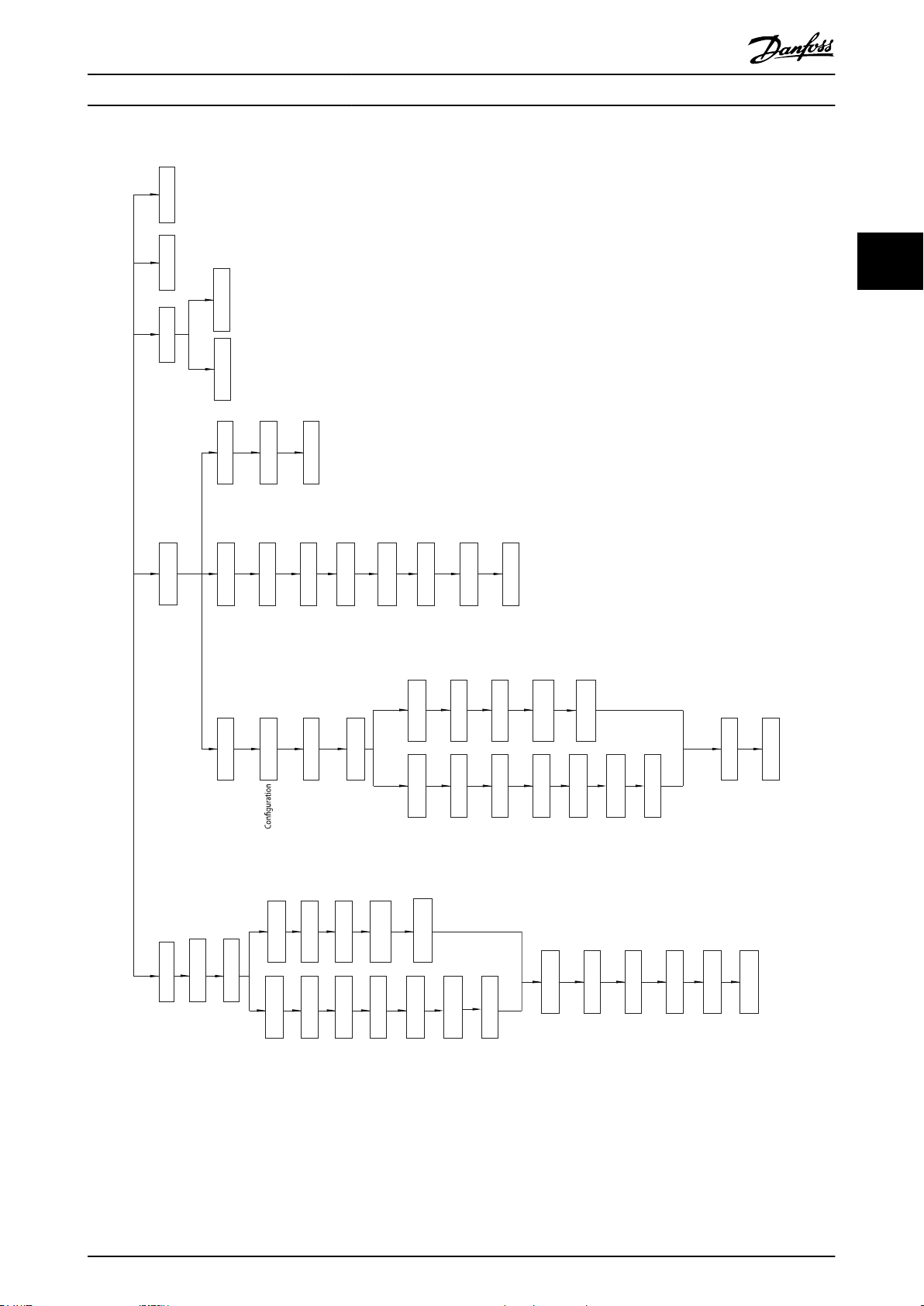
3.1.3 Menú rápido del NLCP
El Menú rápido proporciona un fácil acceso a los
parámetros más utilizados.
1. Para entrar en el Menú rápido, pulse la tecla
[Menu] hasta que el indicador de la pantalla se
coloque encima de Menú rápido.
2.
Use [▲] [▼] para seleccionar QM1 o QM2 y luego
pulse [OK].
3.
Pulse [▲] [▼] para desplazarse por los parámetros
del Menú rápido.
4. Pulse [OK] para seleccionar un parámetro.
5.
Pulse [▲] [▼] para cambiar el valor de ajuste de
un parámetro.
6. Pulse [OK] para aceptar el cambio.
7. Para salir, pulse [Back] dos veces (o tres veces en
QM2 y QM3) para entrar en Status, o bien pulse
[Menu] una vez para entrar en Menú principal.
16 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305
130BC445.12
1-22 XXXX V
Motor
nominal
speed
QM 1
0-01 [0]
1-10 [0]
1-24 XXXX A
Language
Motor Type
1-20 XXXX kW
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Stator
Motor frequency
1-25 XXXX
1-30 XXXX
1-39 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
3-02 XXXX
3-03 XXXX
3-41 XXXX S
3-42 XXXX S
5-12
[2]
1-29 [1]
AMA
Back EMF at
1000 RPM
d-axis
QM 2
BMS
AMS
ES
5-70 XXXX
5-71 [0]
1-30 XXXX
1-39 XXXX
1-90 [0]
2-10 [0]
4-16 XXXX %
4-17 XXXX %
4-18 XXXX %
1-00 [0]
1-01 [1]
1-10 [0]
1-24 XXXX A 1-20 XXXX kW
1-22 XXXX V
Motor
nominal
speed
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Motor frequency
1-25 XXXX
1-30 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
Back EMF at
1000 RPM
d-axis
1-39 XXXX
4-19 XXXX
4-14 XXXX
Stator
QM 3
QM 4 QM 5
L10C
SFS
TBD
Motor
nominal
speed
Motor
nominal
speed
Motor current
Motor cont.
rated torque
Resistance (Rs)
Motor poles
inductance (Ld)
Asynchronous motor
Motor current
Minimum reference
Maximum reference
Ramp 1 ramp-up time
Ramp 1 ramp-down time
Terminal 27 digital input
Basic motor set-up
mode
Motor control
principle
Motor type
PM motor
PM motor
Motor
current
Motor cont.
rated torque
Stator
Resistance (Rs)
Motor poles
inductance (Ld)
Motor speed high limit [Hz]
Maximum output frequency
Asynchronous motor
Motor current
RPM
RPM
RPM
Hz
RPM
Hz
Hz
Hz
Hz
Hz
Adv. motor set-up
Resistance (Rs)
Motor poles
Motor thermal
protection
Brake function
Torque limit motor mode
Torque limit generator mode
Current limit
Encoder set-up
Terminal 32/33
pulses per revolution
Terminal 32/33
encoder direction
Changes made
Last 10 changes Since factory setting
Alarm log
Programación Guía de programación
3 3
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 17
Ilustración 3.4 Estructura de menú rápido
130BC446.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
7
10
11
12
OK
OK
Back
8
Back
Setup 1
2 x
+
OK
9
OK
Programación
VLT® Midi Drive FC 280
3.1.4 Menú principal del NLCP
El Menú principal proporciona acceso a todos los
parámetros.
33
1. Para entrar en el Menú principal, pulse [Menu]
hasta que el indicador de la pantalla se coloque
sobre Menú principal.
2.
[▲] [▼]: desplazarse por los grupos de parámetros.
3. Pulse [OK] para seleccionar un grupo de
parámetros.
4.
[▲] [▼]: desplazarse por los parámetros de ese
grupo en concreto.
5. Pulse [OK] para seleccionar el parámetro.
6.
[►] y [▲] [▼]: ajustar/cambiar el valor del
parámetro.
7. Pulse [OK] para aceptar el valor.
8. Para salir, pulse [Back] dos veces (o tres veces
para parámetros de matrices) para entrar en
Menú principal, o bien pulse [Menu] una vez para
entrar en Status.
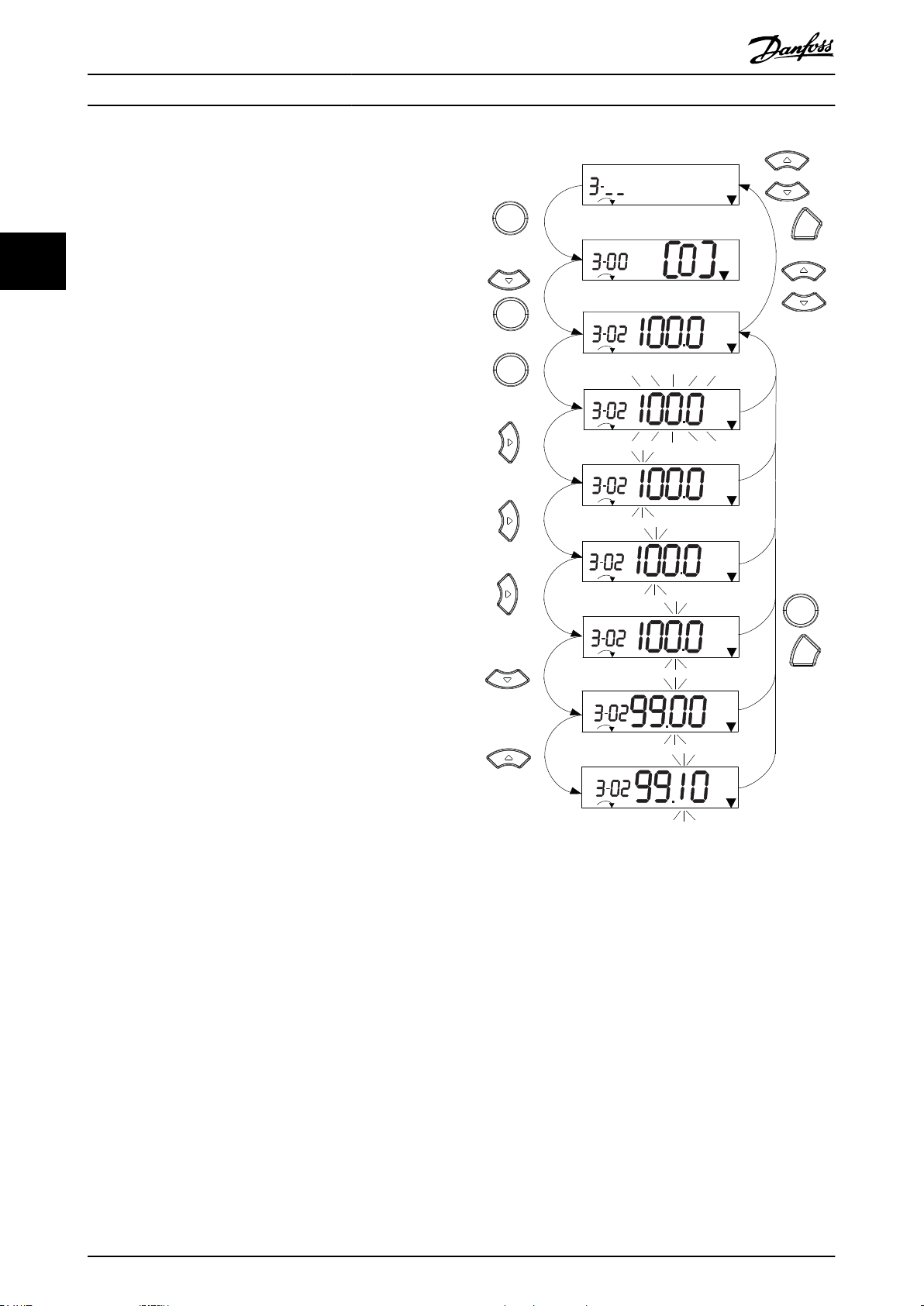
Consulte la Ilustración 3.5, la Ilustración 3.6 y la
Ilustración 3.7 para conocer los principios de cambio de
valor de los parámetros continuos, enumerados y de
matrices, respectivamente. Las acciones de las ilustraciones
se describen en la Tabla 3.5, la Tabla 3.6 y la Tabla 3.7.
Ilustración 3.5 Interacciones del menú principal: parámetros
continuos
18 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305
130BC447.11
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
OK
OK
Back
7
OK
Back
130BC448.10
1
2
4
5
6
7
8
9
10
OK
Back
Back
Back
5 x
Setup 1
Setup 1
Setup 1
Setup 1
%
INDEX
%
INDEX
%
INDEX
Setup 1
INDEX
%
OK
OK
OK
Programación Guía de programación
1 [OK]: se muestra el primer parámetro del grupo.
2
Pulse [▼] repetidamente para bajar hasta el parámetro.
3 Pulse [OK] para iniciar la edición.
4
[►]: parpadea el primer dígito (puede editarse).
5
[►]: parpadea el segundo dígito (puede editarse).
6
[►]: parpadea el tercer dígito (puede editarse).
7
[▼]: se disminuye el valor del parámetro; la coma decimal
cambia automáticamente.
8
[▲]: se aumenta el valor del parámetro.
9 [Back]: cancelar los cambios, volver al 2.
[OK]: aceptar los cambios, volver al 2
10
[▲][▼]: selección de un parámetro dentro del grupo.
11 [Back]: elimina el valor y muestra el grupo de parámetros.
12
[▲][▼]: selección del grupo.
Tabla 3.5 Cambio de valores de los parámetros continuos
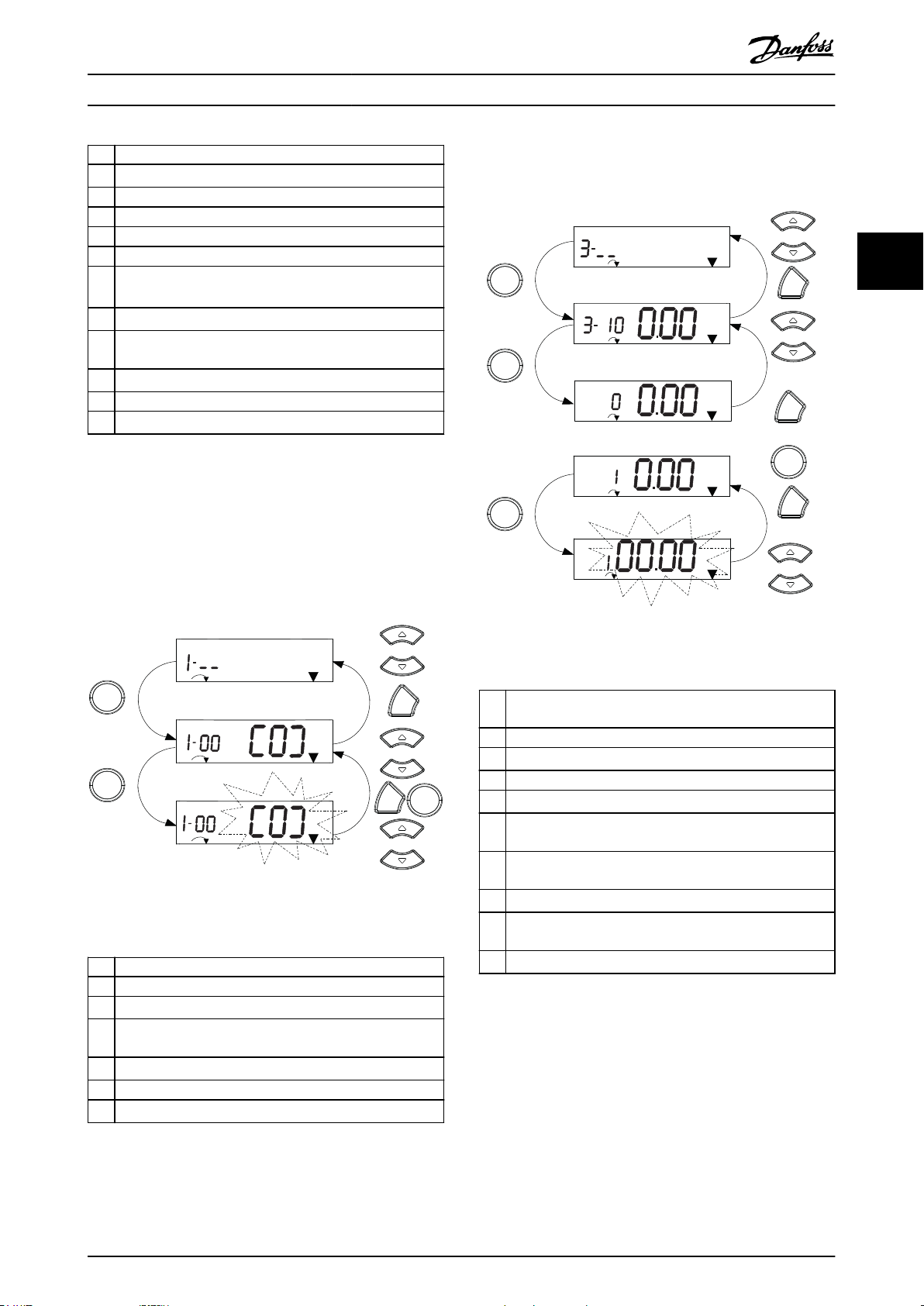
Con los parámetros enumerados, la interacción es similar,
pero el valor del parámetro se muestra entre corchetes por
causa de la limitación de dígitos (cuatro dígitos grandes)
del NLCP, y la enumeración puede ser mayor de 99.
Cuando el valor de enumeración es superior a 99, el LCP
solo muestra el primero de los corchetes.
Los parámetros de matrices funcionan de la siguiente
manera:
3 3
Ilustración 3.7 Interacciones del menú principal: parámetros de
matrices
1 [OK]: se muestran los números de parámetros y el valor del
primer índice.
2 [OK]: puede seleccionarse el índice.
3
[▲][▼]: selección del índice.
4 [OK]: puede editarse el valor.
5
[▲][▼]: cambiar el valor del parámetro (que parpadea).
6 [Back]: cancelar los cambios.
[OK]: aceptar los cambios.
7 [Back]: cancelar la edición del índice; seleccionar un nuevo
Ilustración 3.6 Interacciones del menú principal: parámetros
enumerados
parámetro
8
[▲][▼]: selección de un parámetro dentro del grupo.
9 [Back]: eliminar el valor del índice del parámetro y mostrar
el grupo de parámetros.
10
[▲][▼]: selección del grupo.
Tabla 3.7 Cambio de valores de los parámetros de matrices
3.1.5 Disposición del GLCP
El GLCP se divide en cuatro grupos funcionales (consulte la
Ilustración 3.8).
A. Área de la pantalla
B. Teclas de menú de la pantalla
C. Teclas de navegación y luces indicadoras (LED)
D. Teclas de funcionamiento y reinicio
1 [OK]: se muestra el primer parámetro del grupo.
2 Pulse [OK] para iniciar la edición.
3
[▲][▼]: cambiar el valor del parámetro (que parpadea).
4 Pulse [Back] para cancelar los cambios u [OK] para
aceptarlos (y volver a la pantalla 2).
5
[▲][▼]: selección de un parámetro dentro del grupo.
6 [Back]: elimina el valor y muestra el grupo de parámetros.
7
[▲][▼]: selección de un grupo.
Tabla 3.6 Cambio de valores de los parámetros enumerados
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 19
130BD598.10
Auto
on
Reset
Hand
on
Off
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
36.4 kW
Auto Remote Ramping
0.000
On
Alarm
Warn.
A
7.83 A
799 RPM
B
C
D
53.2 %
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18 19 20 21
Programación
VLT® Midi Drive FC 280
Tecla Función
6 Status Muestra la información de funcionamiento.
Permite acceder a parámetros de progra-
Quick
7
Menu
mación para obtener instrucciones de ajuste
inicial, así como muchas otras instrucciones
detalladas sobre la aplicación.
33
8 Main Menu
Permite el acceso a todos los parámetros de
programación.
Muestra una lista de advertencias actuales,
9 Alarm Log
las últimas diez alarmas y el registro de
mantenimiento.
Tabla 3.9 Leyenda de la Ilustración 3.8, teclas de menú de la
pantalla
C. Teclas de navegación y luces indicadoras (LED)
Las teclas de navegación se utilizan para programar
funciones y desplazar el cursor de la pantalla. Las teclas de
navegación también permiten el control de velocidad en
funcionamiento local. También hay tres luces indicadoras
del estado del convertidor de frecuencia en esta área.
Tecla Función
10 Back
Vuelve al paso o lista anterior en la
estructura del menú.
Cancela el último cambio o la última orden,
Ilustración 3.8 Panel de control local gráco (GLCP)
11 Cancel
siempre y cuando el modo display no haya
cambiado.
A. Área de la pantalla
El área de la pantalla se activa cuando el convertidor de
frecuencia recibe potencia de la tensión de red, a través de
un terminal de bus de CC o de un suministro externo de
24 V CC.
La información visualizada en el LCP puede personalizarse
para las aplicaciones del usuario. Seleccione las opciones
en el Menú rápido Q3-13 Ajustes de display.
Ajustes predeter-
Pantalla Número de parámetro
1 0-20 [1602] Referencia %
2 0-21 [1614] Intensidad motor
3 0-22 [1610] Potencia [kW]
minados
12 Info
Teclas de
13
navegación
14 OK
Tabla 3.10 Leyenda de la Ilustración 3.8, teclas de navegación
Indicación Luz Función
15 On Verde
4 0-23 [1613] Frecuencia
5 0-24 [1502] Contador kWh
Tabla 3.8 Leyenda de la Ilustración 3.8, área de la pantalla
16 Warn Amarillo
B. Teclas de menú de la pantalla
Las teclas del menú se utilizan para acceder al menú de
ajuste de parámetros, alternar los modos display durante el
funcionamiento normal y visualizar los datos del registro
de fallos.
20 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305
17 Alarm Rojo
Tabla 3.11 Leyenda de la Ilustración 3.8, luces indicadoras (LED)
Pulsar para obtener una denición de la
función que se está visualizando.
Para desplazarse entre los elementos del
menú, utilice las cuatro teclas de navegación.
Pulse para acceder a grupos de parámetros o
para activar una selección.
La luz de encendido se activa
cuando el convertidor de
frecuencia recibe potencia de la
tensión de red, a través de un
terminal de bus de CC o de un
suministro externo de 24 V.
Cuando se cumplen las
condiciones de advertencia, se
enciende el LED de advertencia
amarillo y aparece un texto en la
pantalla que identica el
problema.
Un fallo hace que el LED de
alarma rojo parpadee y que
aparezca un texto de alarma.
Programación Guía de programación
D. Teclas de funcionamiento y reinicio
Las teclas de funcionamiento están en la parte inferior del
LCP.
Tecla Función
Arranca el convertidor de frecuencia en
modo manual.
Una señal de parada externa
18 Hand On
19 O
20 Auto On
21 Reinicio
Tabla 3.12 Leyenda de Ilustración 3.8, teclas de funcionamiento
y reinicio
•
emitida por la entrada de control o
por comunicación serie invalida la
tecla [Hand on] local.
Detiene el motor pero no desconecta la
potencia del convertidor de frecuencia.
Pone el sistema en modo de funcionamiento
remoto.
Responde a una orden de arranque
•
externo emitida por los terminales de
control o por comunicación serie.
Reinicia el convertidor de frecuencia
manualmente una vez se ha eliminado un
alarma.
AVISO!
Para ajustar el contraste de la pantalla, pulse las teclas
[Status] y [▲]/[▼].
3.1.6 Ajustes de parámetros
El establecimiento de la programación adecuada para
aplicaciones requiere a menudo el ajuste de las funciones
en diferentes parámetros relacionados. Encontrará más
detalles sobre los parámetros en el capétulo 4 Descripciones
de parámetros.
Los datos de programación se almacenan internamente en
el convertidor de frecuencia.
Para hacer una copia de seguridad, cargue los
•
datos en la memoria del LCP.
Para descargar los datos a otro convertidor de
•
frecuencia, conecte el LCP a esa unidad y
descargue los ajustes guardados.
El restablecimiento de los ajustes predeter-
•
minados de fábrica no cambia los datos
almacenados en la memoria del LCP.
3.1.7 Cambio de los ajustes de parámetros
con el GLCP
Acceso a los ajustes de parámetros y modicación de los
mismos desde el Menú rápido o desde el Menú principal. El
Menú rápido solo permite acceder a un número limitado de
parámetros.
1. Pulse [Quick Menu] o [Main Menu] en el LCP.
2.
Pulse [▲] [▼] para desplazarse por los grupos de
parámetros; pulse [OK] para seleccionar un grupo
de parámetros.
3.
Pulse [▲] [▼] para desplazarse por los parámetros;
pulse [OK] para seleccionar un parámetro.
4.
Pulse [▲] [▼] para cambiar el valor de ajuste de
un parámetro.
5.
Pulse [◄] [►] para saltarse un dígito cuando se
está editando un parámetro decimal.
6. Pulse [OK] para aceptar el cambio.
7. Pulse [Back] dos veces para entrar en Estado, o
bien pulse [Main Menu] una vez para entrar en el
Menú principal.
Visualización de los cambios
En el Menú rápido Q5, Changes Made, se muestra una lista
de todos los parámetros modicados desde los ajustes
predeterminados.
La lista muestra únicamente los parámetros que
•
se han cambiado en el ajuste de edición actual.
No se indican los parámetros que se han
•
restablecido a los valores predeterminados.
El mensaje Vacío indica que no se ha cambiado
•
ningún parámetro.
3.1.8 Carga/descarga de datos al/del GLCP
1. Pulse [O] para detener el motor antes de cargar
o descargar datos.
2. Pulse [Main Menu] parámetro 0-50 LCP Copy y
después pulse [OK].
3. Seleccione [1] Trans. LCP tod. par. para cargar los
datos al LCP o seleccione [2] Tr d LCP tod. par.
para descargar datos del LCP.
4. Pulse [OK]. Una barra de progreso muestra el
proceso de carga o de descarga.
5. Pulse [Hand On] o [Auto On] para volver al
funcionamiento normal.
3 3
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 21
Programación
VLT® Midi Drive FC 280
3.1.9 Restablecimiento de los ajustes
predeterminados con el LCP
Los ajustes de parámetros predeterminados de fábrica se
restablecen durante el arranque. Esto puede llevar algo
más de tiempo de lo normal.
AVISO!
Existe el riesgo de perder los registros de monitorización,
33
ubicación, datos del motor y programación al restablecer
los ajustes predeterminados. Para obtener una copia de
seguridad, cargue los datos al LCP antes de la inicialización.
El restablecimiento de los ajustes predeterminados de los
parámetros se lleva a cabo a través de la inicialización del
convertidor de frecuencia. La inicialización puede
efectuarse a través del parámetro 14-22 Operation Mode
(recomendado) o manualmente. La inicialización no reinicia
los ajustes del parámetro 1-06 Clockwise Direction.
La inicialización mediante el
•
parámetro 14-22 Operation Mode no restablece los
ajustes del convertidor de frecuencia, como las
horas de funcionamiento, las selecciones de
comunicación serie, el registro de fallos, el
registro de alarmas y otras funciones de monitorización.
La inicialización manual elimina todos los datos
•
del motor, programación, ubicación y monitorización y restaura los ajustes predeterminados de
fábrica.
Procedimiento de inicialización recomendado, a través
del parámetro 14-22 Operation Mode
1. Seleccione el parámetro 14-22 Operation Mode y
pulse [OK].
2. Seleccione [2] Inicialización y pulse [OK].
3. Desconecte la alimentación de la unidad y espere
a que se apague la pantalla.
4. Encienda la alimentación de la unidad.
Los ajustes predeterminados de los parámetros se
restauran durante el arranque. Esto puede llevar algo más
de tiempo de lo normal.
La inicialización manual no reinicia la siguiente información
del convertidor de frecuencia:
Parámetro 15-00 Operating hours
•
Parámetro 15-03 Power Up's
•
Parámetro 15-04 Over Temp's
•
Parámetro 15-05 Over Volt's
•
3.2 Programación básica
3.2.1 Ajuste del motor asíncrono
Introduzca los siguientes datos del motor en el orden
indicado. Encontrará la información en la placa de características del motor.
1. Parámetro 1-20 Motor Power.
2. Parámetro 1-22 Motor Voltage.
3. Parámetro 1-23 Motor Frequency.
4. Parámetro 1-24 Motor Current.
5. Parámetro 1-25 Motor Nominal Speed.
Para conseguir un rendimiento óptimo en modo VVC+, se
necesitarán datos adicionales del motor a n de ajustar los
siguientes parámetros.
6. Parámetro 1-30 Stator Resistance (Rs).
7. Parámetro 1-31 Rotor Resistance (Rr).
8. Parámetro 1-33 Stator Leakage Reactance (X1).
9. Parámetro 1-35 Main Reactance (Xh).
Dichos datos se encuentran en la hoja de datos del motor
(normalmente este tipo de datos no consta en la placa de
características del motor). Ejecute un AMA completo
mediante el parámetro 1-29 Automatic Motor Adaption
(AMA) [1] Act. AMA completo o introduzca manualmente los
parámetros.
5. Se visualiza Alarma 80. Drive initialised to default
value.
6. Pulse [Reset] para volver al modo de funcionamiento.
Procedimiento de inicialización manual
1. Desconecte la alimentación de la unidad y espere
a que se apague la pantalla.
2. Mantenga pulsados [Status], [Main Menu] y [OK]
simultáneamente en el GLCP o pulse [Menu] y
[OK] al mismo tiempo en el NLCP mientras
suministra potencia a la unidad (durante aproximadamente 5 s o hasta que se oiga un clic y el
ventilador arranque).
22 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305
Ajuste especíco de la aplicación al funcionar en modo
+
VVC
VVC+ es el modo de control más
de las situaciones, proporciona un rendimiento óptimo sin
ajustes adicionales. Ejecute un AMA completo para obtener
unos mejores resultados.
able. En la mayor parte
Programación Guía de programación
3.2.2
Ajuste de Motor PM en VVC
+
Pasos para la programación inicial
1. Para activar el funcionamiento del motor PM,
ajuste el parámetro 1-10 Motor Construction con
las siguientes opciones:
1a [1] PM, non salient SPM
1b [2] PM, salient IPM, non Sat
1c [3] PM, salient IPM, Sat
2. Seleccione [0] Veloc. lazo abierto en el
parámetro 1-00 Conguration Mode.
AVISO!
La realimentación de encoder no es compatible con
motores PM.
Programación de los datos del motor
Después de seleccionar una de las opciones de motor PM
en el parámetro 1-10 Motor Construction, se activarán los
parámetros relacionados con el motor PM en los grupos de
parámetros 1-2* Motor Data, 1-3* Datos motor av. I y 1-4*
Datos motor av. II.
Encontrará la información en la placa de características del
motor y en la hoja de datos del motor.
Programe los siguientes parámetros en el orden indicado:
1. Parámetro 1-24 Motor Current.
2. Parámetro 1-26 Motor Cont. Rated Torque.
3. Parámetro 1-25 Motor Nominal Speed.
4. Parámetro 1-39 Motor Poles.
5. Parámetro 1-30 Stator Resistance (Rs).
Introduzca resistencia de bobinado del estátor
(Rs) de línea a común. Si solo dispone de datos
línea a línea, divida el valor línea a línea entre dos
para lograr el valor de línea a común (punto de
inicio).
Asimismo, existe la posibilidad de medir el valor
con un ohmímetro, que también tiene en cuenta
la resistencia del cable. Divida el valor medido
entre dos e introduzca el resultado.
6. Parámetro 1-37 d-axis Inductance (Ld).
Introduzca la inductancia directa al eje del motor
PM de línea a común.
Si solo dispone de datos línea a línea, divida el
valor línea a línea entre dos para lograr el valor
de línea a común (punto de inicio).
Asimismo, es posible medir el valor con un
medidor de inductancia, que también tiene en
cuenta la inductancia del cable. Divida el valor
medido entre dos e introduzca el resultado.
7. Parámetro 1-40 Back EMF at 1000 RPM.
Introduzca la fuerza contraelectromotriz línea a
línea del motor PM a una velocidad mecánica de
1000 r/min (valor RMS). La fuerza contraelectromotriz es la tensión que genera un motor PM
cuando no se le conecta un convertidor de
frecuencia y el eje se gira desde el exterior. La
fuerza contraelectromotriz normalmente se
especica para la velocidad nominal del motor o
con la medición de 1000 r/min entre dos líneas.
Si no dispone del valor para una velocidad del
motor de 1000 r/min, calcule el valor correcto del
siguiente modo: Por ejemplo, si la fuerza contraelectromotriz a 1800 r/min es de 320 V, la fuerza
contraelectromotriz a 1000 r/min será:
fuerza contraelectromotriz = (tensión/RPM) ×
1000 = (320/1800) × 1000 = 178.
Programe este valor para el parámetro 1-40 Back
EMF at 1000 RPM.
Funcionamiento del motor de prueba
1. Arranque el motor a velocidad baja (de 100 a 200
r/min). Si el motor no gira, compruebe la
instalación, la programación general y los datos
del motor.
Estacionamiento
Se recomienda elegir esta función en aquellas aplicaciones
en las que el motor gire a velocidad baja (por ejemplo,
autorrotación en aplicaciones de ventiladores). Pueden
ajustarse el Parámetro 2-06 Parking Current y el
parámetro 2-07 Parking Time. Aumente los ajustes de
fábrica de los parámetros para las aplicaciones con una
inercia alta.
Arranque el motor a velocidad nominal. Si la aplicación no
funciona bien, compruebe los ajustes PM de VVC+. La
Tabla 3.13 muestra recomendaciones en diferentes aplicaciones.
Aplicación Ajustes
Aplicaciones de inercia
baja
I
carga/Imotor
Aplicaciones de inercia
media
50>I
Aplicaciones con alta
inercia
I
Carga/IMotor
<5
carga/Imotor
>50
>5
Aumente el valor del
•
parámetro 1-17 Voltage lter time
const. en un factor de 5 a 10.
Reduzca el valor del
•
parámetro 1-14 Damping Gain.
Reduzca el valor (<100 %) del
•
parámetro 1-66 Min. Current at
Low Speed.
Conserve los valores calculados.
Aumente los valores del
parámetro 1-14 Damping Gain, del
parámetro 1-15 Low Speed Filter Time
Const. y del parámetro 1-16 High
Speed Filter Time Const.
3 3
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 23
Programación
VLT® Midi Drive FC 280
Aplicación Ajustes
Carga elevada a velocidad
baja
<30 % (velocidad nominal)
33
Tabla 3.13 Recomendaciones en diferentes aplicaciones
Si el motor arranca con una oscilación a una velocidad
concreta, aumente el parámetro 1-14 Damping Gain.
Aumente el valor en intervalos pequeños.
El par de arranque puede ajustarse en el
parámetro 1-66 Min. Current at Low Speed. 100 %
proporciona un par nominal como par de arranque.
Aumente el valor del
parámetro 1-17 Voltage lter time
const.
Aumente el valor del
parámetro 1-66 Min. Current at Low
Speed (>100 % durante un tiempo
prolongado puede sobrecalentar el
motor).
9. Seleccione [1] Act. AMA completo.
10. Pulse [OK].
11. La prueba empieza automáticamente e indica
cuándo ha nalizado.
En función de la potencia, la AMA tarda de 3 a 10 minutos
en completarse.
AVISO!
La función de AMA no hace funcionar el motor ni lo
daña.
3.2.3 Adaptación automática del motor
(AMA)
Para optimizar la compatibilidad entre el convertidor de
frecuencia y el motor en modo VVC+, ejecute la AMA.
El convertidor de frecuencia construye un modelo
•
matemático del motor para regular la intensidad
de salida de este, de forma que mejora su
rendimiento.
Algunos motores pueden no ser capaces de
•
ejecutar la versión completa de la prueba. En ese
caso, seleccione [2] Act. AMA reducido en el
parámetro 1-29 Automatic Motor Adaption (AMA).
Si se producen advertencias o alarmas, consulte
•
el capétulo 6.1 Advertencias y alarmas.
Para obtener los mejores resultados posibles,
•
ejecute este procedimiento con el motor en frío.
Ejecutar un AMA con el LCP
1. Con los ajustes de parámetros predeterminados,
conecte los terminales 13 y 27 antes de ejecutar
el AMA.
2. Entre en el Menú principal.
3. Vaya al grupo de parámetros 1-** Load and Motor.
4. Pulse [OK].
5. Ajuste los parámetros del motor usando los datos
de la placa de características para el grupo de
parámetros 1-2* Motor Data.
6. Ajuste la longitud del cable de motor en el
parámetro 1-42 Motor Cable Length.
7. Vaya al parámetro 1-29 Automatic Motor Adaption
(AMA).
8. Pulse [OK].
24 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305
Descripciones de parámetros Guía de programación
4 Descripciones de parámetros
4.1 Parámetros: 0-** Operation / Display
0-01 Language
Seleccione el idioma que se usará en la pantalla.
Option: Función:
[0] * English
[1] Deutsch
[2] Francais
[3] Dansk
[4] Spanish
[5] Italiano
[28] Bras.port
0-03 Ajustes regionales
Option: Función:
AVISO!
Este parámetro no se puede ajustar con el
motor en marcha.
[0] * Interna-
cional
[1] EE UU Activar el parámetro 1-20 Potencia motor [kW]
0-04 Estado operación en arranque (Manual)
Option: Función:
[0] Auto-
-arranque
[1] * Par. forz., ref.
guard
[2] Par. forz., ref.
= 0
Activar el parámetro 1-20 Potencia motor [kW]
para el ajuste de la potencia del motor en kW y
ajusta el valor predeterminado del
parámetro 1-23 Frecuencia motor en 50 Hz.
para el ajuste de la potencia del motor en CV y
ajusta el valor predeterminado del
parámetro 1-23 Frecuencia motor en 60 Hz.
Seleccionar el modo de funcionamiento
cuando se vuelve a conectar el convertidor
de frecuencia a la tensión de red después de
apagarlo en el modo de funcionamiento
manual.
Volver a arrancar el convertidor de
frecuencia manteniendo los mismos ajustes
de arranque/parada (aplicados por [Hand
On/O]) que se habían seleccionado antes
de que se apagase el convertidor.
Reiniciar el convertidor de frecuencia con
una referencia local guardada, después de
restablecerse la tensión de red y tras pulsar
[Hand On].
Inicializar la referencia local a 0 al reiniciar el
convertidor de frecuencia.
0-06 Tipo red
Seleccione la tensión de alimentación, la frecuencia y el tipo.
Option: Función:
[0] 200-240 V / 50 Hz / red IT
[1] 200-240 V / 50 Hz / triáng.
[2] 200-240 V / 50 Hz
[10] 380-440 V / 50 Hz / red IT
[11] 380-440 V / 50 Hz / triángulo
[12] 380-440 V / 50 Hz
[20] 440-480 V / 50 Hz / red IT
[21] 440-480 V / 50 Hz / triángulo
[22] 440-480 V / 50 Hz
[100] 200-240 V / 60 Hz / red IT
[101] 200-240 V / 60 Hz / triángulo
[102] 200-240 V / 60 Hz
[110] 380-440 V / 60 Hz / red IT
[111] 380-440 V / 60 Hz / triángulo
[112] 380-440 V / 60 Hz
[120] 440-480 V / 60 Hz / red IT
[121] 440-480 V / 60 Hz / triángulo
[122] 440-480 V / 60 Hz
0-07 Auto DC Braking
Option: Función:
Función protectora contra sobretensión en inercia en
un entorno de red IT. Este parámetro solo estará activo
cuando aquí se seleccione [1] Activado y se
seleccionen las opciones de red IT en el
parámetro 0-06 GridType.
[0] O Esta función no está activa.
[1] * On La función está activa.
0-10 Active Set-up
Seleccione el ajuste para controlar las funciones del convertidor
de frecuencia. Programe los parámetros en los ajustes 1 a 4.
Utilice el ajuste de fábrica para volver al estado inicial. Use el
ajuste múltiple para el control remoto.
Option: Función:
[1] * Set-up 1
[2] Set-up 2
[3] Set-up 3
[4] Set-up 4
[9] Multi Set-up
4 4
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 25
Descripciones de parámetros
VLT® Midi Drive FC 280
0-11 Programming Set-up
Seleccione el ajuste que debe programarse durante el funcionamiento; ajuste activo o ajuste inactivo. El número de ajuste que
se está editando parpadea en el LCP.
Option: Función:
[1] Set-up 1
[2] Set-up 2
[3] Set-up 3
44
[4] Set-up 4
[9] * Active Set-up
0-12 Link Setups
Option: Función:
La relación entre parámetros garantiza la sincronización de los valores de los parámetros «no
modicables durante el funcionamiento»,
permitiendo cambiar de un ajuste a otro durante
el funcionamiento.
Si los ajustes no están relacionados, no será
posible cambiar de uno a otro con el motor en
marcha. Por tanto, el cambio de ajuste no se
producirá hasta que el motor quede en inercia.
[0] Not
linked
[20]*Linked Copiar parámetros «no modicables durante el
No se realizan cambios de parámetros en
ninguno de los ajustes y no puede cambiarse
con el motor en marcha.
funcionamiento» de un ajuste a otro, de modo
que sean idénticos en ambos ajustes.
0-14 Readout: Edit Set-ups / Channel
Range: Función:
0* [-2147483647 -
2147483647 ]
Ver el ajuste del
parámetro 0-11 Programming Set-up. Editar
el ajuste para cada uno de los canales de
comunicación. «A» signica ajuste activo;
«F» signica «de fábrica»; los números
indican el código de ajuste. Los canales de
comunicación son, de derecha a izquierda:
LCP, FC-bus, USB y HPFB1-5.
0-16 Application Selection
Option: Función:
Seleccionar funciones de
aplicación integradas. Al
seleccionar una aplicación, un
conjunto de parámetros
relacionados se ajustan automáticamente.
[0] * None
[1] Simple Process Close
Loop
[2] Local/Remote
[3] Speed Open Loop
[4] Simple Speed Close Loop
0-16 Application Selection
Option: Función:
[5] Multi Speed
[6] OGD LA10
[7] OGD V210
0-20 Display Line 1.1 Small
Seleccione una variable para mostrarla en la línea 1, posición
izquierda.
Option: Función:
[0] None
[37] Display Text 1
[38] Display Text 2
[39] Display Text 3
[748] PCD Feed Forward
[953] Probus Warning Word
[1005] Readout Transmit Error Counter
[1006] Readout Receive Error Counter
[1230] Warning Parameter
[1501] Running Hours
[1502] kWh Counter
[1600] Control Word
[1601] Reference [Unit]
[1602] * Reference [%]
[1603] Status Word
[1605] Main Actual Value [%]
[1609] Custom Readout
[1610] Power [kW]
[1611] Power [hp]
[1612] Motor Voltage
[1613] Frequency
[1614] Motor current
[1615] Frequency [%]
[1616] Torque [Nm]
[1617] Speed [RPM]
[1618] Motor Thermal
[1620] Motor Angle
[1622] Torque [%]
[1630] DC Link Voltage
[1633] Brake Energy /2 min
[1634] Heatsink Temp.
[1635] Inverter Thermal
[1636] Inv. Nom. Current
[1637] Inv. Max. Current
[1638] SL Controller State
[1639] Control Card Temp.
[1650] External Reference
[1652] Feedback[Unit]
[1653] Digi Pot Reference
[1657] Feedback [RPM]
[1660] Digital Input
[1661] Terminal 53 Setting
[1662] Analog input 53
[1663] Terminal 54 Setting
26 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305
Descripciones de parámetros Guía de programación
0-20 Display Line 1.1 Small
Seleccione una variable para mostrarla en la línea 1, posición
izquierda.
Option: Función:
[1664] Analog input 54
[1665] Analog output 42 [mA]
[1666] Digital Output
[1667] Pulse input 29[Hz]
[1668] Pulse Input 33 [Hz]
[1669] Pulse Output 27 [Hz]
[1671] Relay output
[1672] Counter A
[1673] Counter B
[1674] Prec. Stop Counter
[1680] Fieldbus CTW 1
[1682] Fieldbus REF 1
[1684] Comm. Option STW
[1685] FC Port CTW 1
[1686] FC Port REF 1
[1690] Alarm Word
[1691] Alarm Word 2
[1692] Warning Word
[1693] Warning Word 2
[1694] Ext. Status Word
[1695] Ext. Status Word 2
[1697] Alarm Word 3
[1890] Process PID Error
[1891] Process PID Output
[1892] Process PID Clamped Output
[1893] Process PID Gain Scaled Output
[2117] Ext. 1 Reference [Unit]
[2118] Ext. 1 Feedback [Unit]
[2119] Ext. 1 Output [%]
[3401] PCD 1 Write For Application
[3402] PCD 2 Write For Application
[3403] PCD 3 Write For Application
[3404] PCD 4 Write For Application
[3405] PCD 5 Write For Application
[3406] PCD 6 Write For Application
[3407] PCD 7 Write For Application
[3408] PCD 8 Write For Application
[3409] PCD 9 Write For Application
[3410] PCD 10 Write For Application
[3421] PCD 1 Read For Application
[3422] PCD 2 Read For Application
[3423] PCD 3 Read For Application
[3424] PCD 4 Read For Application
[3425] PCD 5 Read For Application
[3426] PCD 6 Read For Application
[3427] PCD 7 Read For Application
[3428] PCD 8 Read For Application
[3429] PCD 9 Read For Application
[3430] PCD 10 Read For Application
[3450] Actual Position
0-20 Display Line 1.1 Small
Seleccione una variable para mostrarla en la línea 1, posición
izquierda.
Option: Función:
[3456] Track Error
0-21 Display Line 1.2 Small
Seleccionar una variable que se mostrará en la línea 1, en
posición central.
Option: Función:
[0] None
[37] Display Text 1
[38] Display Text 2
[39] Display Text 3
[748] PCD Feed Forward
[953] Probus Warning Word
[1005] Readout Transmit Error Counter
[1006] Readout Receive Error Counter
[1230] Warning Parameter
[1501] Running Hours
[1502] kWh Counter
[1600] Control Word
[1601] Reference [Unit]
[1602] Reference [%]
[1603] Status Word
[1605] Main Actual Value [%]
[1609] Custom Readout
[1610] Power [kW]
[1611] Power [hp]
[1612] Motor Voltage
[1613] Frequency
[1614] * Motor current
[1615] Frequency [%]
[1616] Torque [Nm]
[1617] Speed [RPM]
[1618] Motor Thermal
[1620] Motor Angle
[1622] Torque [%]
[1630] DC Link Voltage
[1633] Brake Energy /2 min
[1634] Heatsink Temp.
[1635] Inverter Thermal
[1636] Inv. Nom. Current
[1637] Inv. Max. Current
[1638] SL Controller State
[1639] Control Card Temp.
[1650] External Reference
[1652] Feedback[Unit]
[1653] Digi Pot Reference
[1657] Feedback [RPM]
[1660] Digital Input
[1661] Terminal 53 Setting
[1662] Analog input 53
[1663] Terminal 54 Setting
4 4
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 27
Descripciones de parámetros
VLT® Midi Drive FC 280
0-21 Display Line 1.2 Small
Seleccionar una variable que se mostrará en la línea 1, en
posición central.
Option: Función:
[1664] Analog input 54
[1665] Analog output 42 [mA]
[1666] Digital Output
[1667] Pulse input 29[Hz]
44
[1668] Pulse Input 33 [Hz]
[1669] Pulse Output 27 [Hz]
[1671] Relay output
[1672] Counter A
[1673] Counter B
[1674] Prec. Stop Counter
[1680] Fieldbus CTW 1
[1682] Fieldbus REF 1
[1684] Comm. Option STW
[1685] FC Port CTW 1
[1686] FC Port REF 1
[1690] Alarm Word
[1691] Alarm Word 2
[1692] Warning Word
[1693] Warning Word 2
[1694] Ext. Status Word
[1695] Ext. Status Word 2
[1697] Alarm Word 3
[1890] Process PID Error
[1891] Process PID Output
[1892] Process PID Clamped Output
[1893] Process PID Gain Scaled Output
[2117] Ext. 1 Reference [Unit]
[2118] Ext. 1 Feedback [Unit]
[2119] Ext. 1 Output [%]
[3401] PCD 1 Write For Application
[3402] PCD 2 Write For Application
[3403] PCD 3 Write For Application
[3404] PCD 4 Write For Application
[3405] PCD 5 Write For Application
[3406] PCD 6 Write For Application
[3407] PCD 7 Write For Application
[3408] PCD 8 Write For Application
[3409] PCD 9 Write For Application
[3410] PCD 10 Write For Application
[3421] PCD 1 Read For Application
[3422] PCD 2 Read For Application
[3423] PCD 3 Read For Application
[3424] PCD 4 Read For Application
[3425] PCD 5 Read For Application
[3426] PCD 6 Read For Application
[3427] PCD 7 Read For Application
[3428] PCD 8 Read For Application
[3429] PCD 9 Read For Application
[3430] PCD 10 Read For Application
[3450] Actual Position
0-21 Display Line 1.2 Small
Seleccionar una variable que se mostrará en la línea 1, en
posición central.
Option: Función:
[3456] Track Error
0-22 Display Line 1.3 Small
Seleccione una variable para mostrarla en la línea 1, posición
derecha.
Option: Función:
[0] None
[37] Display Text 1
[38] Display Text 2
[39] Display Text 3
[748] PCD Feed Forward
[953] Probus Warning Word
[1005] Readout Transmit Error Counter
[1006] Readout Receive Error Counter
[1230] Warning Parameter
[1501] Running Hours
[1502] kWh Counter
[1600] Control Word
[1601] Reference [Unit]
[1602] Reference [%]
[1603] Status Word
[1605] Main Actual Value [%]
[1609] Custom Readout
[1610] * Power [kW]
[1611] Power [hp]
[1612] Motor Voltage
[1613] Frequency
[1614] Motor current
[1615] Frequency [%]
[1616] Torque [Nm]
[1617] Speed [RPM]
[1618] Motor Thermal
[1620] Motor Angle
[1622] Torque [%]
[1630] DC Link Voltage
[1633] Brake Energy /2 min
[1634] Heatsink Temp.
[1635] Inverter Thermal
[1636] Inv. Nom. Current
[1637] Inv. Max. Current
[1638] SL Controller State
[1639] Control Card Temp.
[1650] External Reference
[1652] Feedback[Unit]
[1653] Digi Pot Reference
[1657] Feedback [RPM]
[1660] Digital Input
[1661] Terminal 53 Setting
[1662] Analog input 53
[1663] Terminal 54 Setting
28 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

Descripciones de parámetros Guía de programación
0-22 Display Line 1.3 Small
Seleccione una variable para mostrarla en la línea 1, posición
derecha.
Option: Función:
[1664] Analog input 54
[1665] Analog output 42 [mA]
[1666] Digital Output
[1667] Pulse input 29[Hz]
[1668] Pulse Input 33 [Hz]
[1669] Pulse Output 27 [Hz]
[1671] Relay output
[1672] Counter A
[1673] Counter B
[1674] Prec. Stop Counter
[1680] Fieldbus CTW 1
[1682] Fieldbus REF 1
[1684] Comm. Option STW
[1685] FC Port CTW 1
[1686] FC Port REF 1
[1690] Alarm Word
[1691] Alarm Word 2
[1692] Warning Word
[1693] Warning Word 2
[1694] Ext. Status Word
[1695] Ext. Status Word 2
[1697] Alarm Word 3
[1890] Process PID Error
[1891] Process PID Output
[1892] Process PID Clamped Output
[1893] Process PID Gain Scaled Output
[2117] Ext. 1 Reference [Unit]
[2118] Ext. 1 Feedback [Unit]
[2119] Ext. 1 Output [%]
[3401] PCD 1 Write For Application
[3402] PCD 2 Write For Application
[3403] PCD 3 Write For Application
[3404] PCD 4 Write For Application
[3405] PCD 5 Write For Application
[3406] PCD 6 Write For Application
[3407] PCD 7 Write For Application
[3408] PCD 8 Write For Application
[3409] PCD 9 Write For Application
[3410] PCD 10 Write For Application
[3421] PCD 1 Read For Application
[3422] PCD 2 Read For Application
[3423] PCD 3 Read For Application
[3424] PCD 4 Read For Application
[3425] PCD 5 Read For Application
[3426] PCD 6 Read For Application
[3427] PCD 7 Read For Application
[3428] PCD 8 Read For Application
[3429] PCD 9 Read For Application
[3430] PCD 10 Read For Application
[3450] Actual Position
0-22 Display Line 1.3 Small
Seleccione una variable para mostrarla en la línea 1, posición
derecha.
Option: Función:
[3456] Track Error
0-23 Display Line 2 Large
Seleccione una variable para mostrarla en la línea 2.
Option: Función:
[0] None
[37] Display Text 1
[38] Display Text 2
[39] Display Text 3
[748] PCD Feed Forward
[953] Probus Warning Word
[1005] Readout Transmit Error Counter
[1006] Readout Receive Error Counter
[1230] Warning Parameter
[1501] Running Hours
[1502] kWh Counter
[1600] Control Word
[1601] Reference [Unit]
[1602] Reference [%]
[1603] Status Word
[1605] Main Actual Value [%]
[1609] Custom Readout
[1610] Power [kW]
[1611] Power [hp]
[1612] Motor Voltage
[1613] * Frequency
[1614] Motor current
[1615] Frequency [%]
[1616] Torque [Nm]
[1617] Speed [RPM]
[1618] Motor Thermal
[1620] Motor Angle
[1622] Torque [%]
[1630] DC Link Voltage
[1633] Brake Energy /2 min
[1634] Heatsink Temp.
[1635] Inverter Thermal
[1636] Inv. Nom. Current
[1637] Inv. Max. Current
[1638] SL Controller State
[1639] Control Card Temp.
[1650] External Reference
[1652] Feedback[Unit]
[1653] Digi Pot Reference
[1657] Feedback [RPM]
[1660] Digital Input
[1661] Terminal 53 Setting
[1662] Analog input 53
[1663] Terminal 54 Setting
[1664] Analog input 54
4 4
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 29

Descripciones de parámetros
VLT® Midi Drive FC 280
0-23 Display Line 2 Large
Seleccione una variable para mostrarla en la línea 2.
Option: Función:
[1665] Analog output 42 [mA]
[1666] Digital Output
[1667] Pulse input 29[Hz]
[1668] Pulse Input 33 [Hz]
[1669] Pulse Output 27 [Hz]
44
[1671] Relay output
[1672] Counter A
[1673] Counter B
[1674] Prec. Stop Counter
[1680] Fieldbus CTW 1
[1682] Fieldbus REF 1
[1684] Comm. Option STW
[1685] FC Port CTW 1
[1686] FC Port REF 1
[1690] Alarm Word
[1691] Alarm Word 2
[1692] Warning Word
[1693] Warning Word 2
[1694] Ext. Status Word
[1695] Ext. Status Word 2
[1697] Alarm Word 3
[1890] Process PID Error
[1891] Process PID Output
[1892] Process PID Clamped Output
[1893] Process PID Gain Scaled Output
[2117] Ext. 1 Reference [Unit]
[2118] Ext. 1 Feedback [Unit]
[2119] Ext. 1 Output [%]
[3401] PCD 1 Write For Application
[3402] PCD 2 Write For Application
[3403] PCD 3 Write For Application
[3404] PCD 4 Write For Application
[3405] PCD 5 Write For Application
[3406] PCD 6 Write For Application
[3407] PCD 7 Write For Application
[3408] PCD 8 Write For Application
[3409] PCD 9 Write For Application
[3410] PCD 10 Write For Application
[3421] PCD 1 Read For Application
[3422] PCD 2 Read For Application
[3423] PCD 3 Read For Application
[3424] PCD 4 Read For Application
[3425] PCD 5 Read For Application
[3426] PCD 6 Read For Application
[3427] PCD 7 Read For Application
[3428] PCD 8 Read For Application
[3429] PCD 9 Read For Application
[3430] PCD 10 Read For Application
[3450] Actual Position
[3456] Track Error
0-24 Display Line 3 Large
Seleccionar una variable que se mostrará en la línea 3.
Option: Función:
[0] None
[37] Display Text 1
[38] Display Text 2
[39] Display Text 3
[748] PCD Feed Forward
[953] Probus Warning Word
[1005] Readout Transmit Error Counter
[1006] Readout Receive Error Counter
[1230] Warning Parameter
[1501] Running Hours
[1502] * kWh Counter
[1600] Control Word
[1601] Reference [Unit]
[1602] Reference [%]
[1603] Status Word
[1605] Main Actual Value [%]
[1609] Custom Readout
[1610] Power [kW]
[1611] Power [hp]
[1612] Motor Voltage
[1613] Frequency
[1614] Motor current
[1615] Frequency [%]
[1616] Torque [Nm]
[1617] Speed [RPM]
[1618] Motor Thermal
[1620] Motor Angle
[1622] Torque [%]
[1630] DC Link Voltage
[1633] Brake Energy /2 min
[1634] Heatsink Temp.
[1635] Inverter Thermal
[1636] Inv. Nom. Current
[1637] Inv. Max. Current
[1638] SL Controller State
[1639] Control Card Temp.
[1650] External Reference
[1652] Feedback[Unit]
[1653] Digi Pot Reference
[1657] Feedback [RPM]
[1660] Digital Input
[1661] Terminal 53 Setting
[1662] Analog input 53
[1663] Terminal 54 Setting
[1664] Analog input 54
[1665] Analog output 42 [mA]
[1666] Digital Output
[1667] Pulse input 29[Hz]
[1668] Pulse Input 33 [Hz]
[1669] Pulse Output 27 [Hz]
[1671] Relay output
30 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

Descripciones de parámetros Guía de programación
0-24 Display Line 3 Large
Seleccionar una variable que se mostrará en la línea 3.
Option: Función:
[1672] Counter A
[1673] Counter B
[1674] Prec. Stop Counter
[1680] Fieldbus CTW 1
[1682] Fieldbus REF 1
[1684] Comm. Option STW
[1685] FC Port CTW 1
[1686] FC Port REF 1
[1690] Alarm Word
[1691] Alarm Word 2
[1692] Warning Word
[1693] Warning Word 2
[1694] Ext. Status Word
[1695] Ext. Status Word 2
[1697] Alarm Word 3
[1890] Process PID Error
[1891] Process PID Output
[1892] Process PID Clamped Output
[1893] Process PID Gain Scaled Output
[2117] Ext. 1 Reference [Unit]
[2118] Ext. 1 Feedback [Unit]
[2119] Ext. 1 Output [%]
[3401] PCD 1 Write For Application
[3402] PCD 2 Write For Application
[3403] PCD 3 Write For Application
[3404] PCD 4 Write For Application
[3405] PCD 5 Write For Application
[3406] PCD 6 Write For Application
[3407] PCD 7 Write For Application
[3408] PCD 8 Write For Application
[3409] PCD 9 Write For Application
[3410] PCD 10 Write For Application
[3421] PCD 1 Read For Application
[3422] PCD 2 Read For Application
[3423] PCD 3 Read For Application
[3424] PCD 4 Read For Application
[3425] PCD 5 Read For Application
[3426] PCD 6 Read For Application
[3427] PCD 7 Read For Application
[3428] PCD 8 Read For Application
[3429] PCD 9 Read For Application
[3430] PCD 10 Read For Application
[3450] Actual Position
[3456] Track Error
0-30 Custom Readout Unit
Ajuste un valor para que se muestre en el LCP. El valor tiene una
relación lineal, cuadrática o cúbica con la velocidad. Esta relación
depende de la unidad seleccionada.
Option: Función:
[0] None
[1] * %
[5] PPM
[10] 1/min
[11] RPM
[12] Pulse/s
[20] l/s
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[127] ft³/h
[140] ft/s
[141] ft/min
[160] °F
[170] psi
[171] lb/in2
[172] in WG
[173] ft WG
[180] HP
4 4
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 31

Descripciones de parámetros
VLT® Midi Drive FC 280
0-31 Custom Readout Min Value
Range: Función:
0 CustomReadoutUnit*
44
[ 0 -
999999.99
CustomReadoutUnit]
Este parámetro establece el valor
mínimo de la lectura personalizada (se produce a velocidad
cero). Solo es posible ajustar un
valor diferente de 0 cuando se
selecciona una unidad lineal en
el parámetro 0-30 Custom
Readout Unit. Para unidades
cuadráticas o cúbicas, el valor
mínimo es 0.
0-32 Custom Readout Max Value
Range: Función:
100 CustomReadoutUnit*
[ 0.0 -
999999.99
CustomReadoutUnit]
Este parámetro establece el
valor máximo que se mostrará
cuando la velocidad del motor
haya alcanzado el valor
ajustado para el
parámetro 4-14 Motor Speed
High Limit [Hz].
0-37 Display Text 1
Range: Función:
[0 - 0 ] Texto libre, por ejemplo, para la etiqueta de
dispositivo de la aplicación de eldbus.
0-38 Display Text 2
Range: Función:
[0 - 0 ] Texto libre, por ejemplo, para la etiqueta de
ubicación de la aplicación de eldbus.
0-39 Display Text 3
Range: Función:
[0 - 0 ] Texto libre, por ejemplo, para la etiqueta de ayuda
de la aplicación de eldbus.
0-44 [O/Reset] Key on LCP
Option: Función:
[0] Disabled
[1] * Enabled
[7] Enable Reset Only
0-50 LCP Copy
Option: Función:
[0] * No copy Sin función.
[1] All to LCP Copiar todos los parámetros de todos los
ajustes desde la memoria del convertidor de
frecuencia al LCP. Para facilitar el mantenimiento, es recomendable copiar todos los
parámetros en el LCP después de la puesta en
servicio.
[2] All from
LCP
[3] Size
indep.
from LCP
Copiar todos los parámetros de todos los
ajustes desde la memoria del LCP hasta la
memoria del convertidor de frecuencia.
Copiar solo los parámetros que sean independientes del tamaño del motor. Esta selección
puede utilizarse para programar varios convertidores de frecuencia con la misma función sin
perturbar los datos del motor que ya se han
ajustado.
0-51 Set-up Copy
Utilice este parámetro para copiar parámetros entre congura-
ciones.
Option: Función:
[0] * No copy
[1] Copy from setup 1
[2] Copy from setup 2
[3] Copy from setup 3
[4] Copy from setup 4
[9] Copy from Factory setup
0-40 [Hand on] Key on LCP
Option: Función:
[0] Disabled Evite el arranque accidental del convertidor de
frecuencia en modo manual.
[1] * Enabled [Hand On] está activado.
0-42 [Auto on] Key on LCP
Option: Función:
[0] Disabled Evite el arranque accidental del convertidor de
frecuencia desde el LCP.
[1] * Enabled [Auto On] está activado.
32 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

Descripciones de parámetros Guía de programación
4.2 Parámetros: 1-** Load and Motor
1-00 Conguration Mode
Option: Función:
Seleccionar el principio de control de la
aplicación que se utilizará cuando esté activa
una referencia remota (es decir, una entrada
analógica o de eldbus).
[0]*Open Loop Permitir el control de velocidad (sin señal de
realimentación del motor) con compensación
de deslizamiento automática, para velocidad
casi constante y carga variable. Las compensaciones están activadas pero se pueden
desactivar en el grupo de parámetros 1-0* Load
and Motor.
[1] Speed
closed loop
[2] Torque
closed loop
[3] Process
Closed
Loop
[4] Torque
open loop
[7] Extended
PID Speed
OL
Activar el control de lazo cerrado de velocidad
con realimentación. Para conseguir mayor
precisión de velocidad, proporcione una señal
de realimentación y ajuste el control de PID de
velocidad. Los parámetros del control de
velocidad se ajustan en el grupo de parámetros
7-0* Speed PID Ctrl.
Permite el control de par de lazo cerrado con
realimentación de velocidad. Solo puede
utilizarse cuando se selecciona la opción [1]
VVC+ en el parámetro 1-01 Motor Control
Principle.
Permitir el uso del control de proceso en el
convertidor de frecuencia. Los parámetros del
control de procesos se ajustan en los grupos de
parámetros 7-2* Ctrl. realim. proc. y 7-3* Ctrl.
PID proceso.
1-01 Principio control motor
Option: Función:
[0] U/f
AVISO!
Al llevar a cabo el control U/f no se incluyen
las compensaciones de carga y deslizamiento.
Se utiliza con motores conectados en paralelo y/o
congu-
[1] * VVC+
aplicaciones de motor especiales. Ajuste la
ración U/f en el parámetro 1-55 Característica U/f - U
y el parámetro 1-56 Característica U/f - F.
AVISO!
Cuando se ajuste el
parámetro 1-10 Construcción del motor a
opciones de PM activado, solo estará
disponible la opción VVC+.
1-01 Principio control motor
Option: Función:
Modo de funcionamiento normal, con las compensaciones de deslizamiento y carga.
1-03 Torque Characteristics
Option: Función:
Seleccione las características de par
necesarias. Tanto VT como AEO son
operaciones de ahorro de energía.
[0] * Constant torque
[1] Variable Torque
[2] Auto Energy Optim.
CT
1-06 Clockwise Direction
Option: Función:
AVISO!
Este parámetro no se puede ajustar con el
motor en marcha.
Este parámetro dene el término en sentido horario
correspondiente a la
utiliza para cambiar de forma sencilla el sentido de
la rotación del eje sin intercambiar los cables del
motor.
[0] * Normal El eje del motor gira en sentido horario cuando el
convertidor de frecuencia está conectado U⇒U;
V⇒V; y W⇒W al motor.
[1] Inverse El eje del motor gira en sentido antihorario cuando
el convertidor de frecuencia está conectado U⇒U;
V⇒V; y W⇒W al motor.
1-08 Motor Control Bandwidth
Option: Función:
[0] High Adecuado para una respuesta muy dinámica.
[1] Medium Adecuado para un correcto funcionamiento en
estado estable.
[2] * Low Adecuado para un correcto funcionamiento en
estado estable con una respuesta dinámica
mínima.
[3] Adaptive 1 Optimizado para un correcto funcionamiento
en estado estable con amortiguación activa
adicional.
[4] Adaptive 2 Orientada a motores PM de baja inductancia.
Esta opción es una alternativa a [3] Adaptive 1.
1-10 Construcción del motor
Option: Función:
[0]*Asynchron Para motores asíncronos.
echa de sentido del LCP. Se
4 4
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 33

Descripciones de parámetros
VLT® Midi Drive FC 280
1-10 Construcción del motor
Option: Función:
[1] PM, non-
-salient SPM
44
[2] PM, salient
IPM, non Sat.
[3] PM, salient
IPM, Sat.
Para los motores de magnetización
permanente (PM) con los polos montados
en supercie (no salientes). Consulte los
parámetros del parámetro 1-14 Damping
Gain al parámetro 1-17 Voltage lter time
const. para conocer los detalles sobre la
optimización del funcionamiento del motor.
Para los motores de magnetización
permanente (PM) con polos interiores
(salientes), sin control de saturación de la
inductancia.
Para los motores de magnetización
permanente (PM) con polos interiores
(salientes), con control de saturación de la
inductancia.
1-14 Damping Gain
Range: Función:
120%* [ 0 -
La ganancia de amortiguación estabiliza la
250 %]
máquina PM. El valor de la ganancia de amortiguación controla el rendimiento dinámico de la
máquina PM. Una ganancia de amortiguación alta
genera un rendimiento dinámico alto y un valor
bajo genera una dinámica de rendimiento
dinámico bajo. El rendimiento dinámico depende
de los datos de la máquina y del tipo de carga. Si
la ganancia de amortiguación es demasiado alta o
demasiado baja, el control será inestable.
1-15 Low Speed Filter Time Const.
1-17 Voltage lter time const.
Range: Función:
Size
related*
[ 0.001 - 1s]Reducir la inuencia del rizado de alta
frecuencia y la resonancia del sistema
en el cálculo de la tensión de alimentación. Sin este ltro, las ondulaciones
en la corriente podrían distorsionar la
tensión calculada y afectar la
estabilidad del sistema.
1-20 Motor Power
Option: Función:
[2] 0.12 kW - 0.16 hp
[3] 0.18 kW - 0.25 hp
[4] 0.25 kW - 0.33 hp
[5] 0.37 kW - 0.5 hp
[6] 0.55 kW - 0.75 hp
[7] 0.75 kW - 1 hp
[8] 1.1 kW - 1.5 hp
[9] 1.5 kW - 2 hp
[10] 2.2 kW - 3 hp
[11] 3 kW - 4 hp
[12] 3.7 kW - 5 hp
[13] 4 kW - 5.4 hp
[14] 5.5 kW - 7.5 hp
[15] 7.5 kW - 10 hp
[16] 11 kW - 15 hp
[17] 15 kW - 20 hp
[18] 18.5 kW - 25 hp
[19] 22 kW - 30 hp
[20] 30 kW - 40 hp
Range: Función:
Size
related*
[ 0.01 - 20s]Esta constante de tiempo se aplica por
debajo del 10 % de la velocidad
nominal. Obtendrá un control rápido
mediante una constante de tiempo de
amortiguación breve. Sin embargo, si
este valor es demasiado escaso, el
control se volverá inestable.
1-22 Tensión motor
Range: Función:
Size
related*
[50 1000 V]
Introduzca la tensión del motor nominal
conforme a los datos de la placa de
características del mismo. El valor
predeterminado se corresponde con la
salida nominal de la unidad.
1-16 High Speed Filter Time Const.
Range: Función:
Size
related*
34 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305
[ 0.01 - 20s]Esta constante de tiempo se aplica por
encima del 10 % de la velocidad
nominal. Obtendrá un control rápido
mediante una constante de tiempo de
amortiguación breve. Sin embargo, si
este valor es demasiado escaso, el
control se volverá inestable.
1-23 Motor Frequency
Range: Función:
AVISO!
Este parámetro no se puede ajustar con
el motor en marcha.
Size
related*
[ 20
Seleccione el valor de frecuencia del motor
- 500
según los datos de la placa de características
Hz]
del mismo. Para el funcionamiento a 87 Hz con
motores de 230/440 V, ajuste el valor conforme
a los datos de la placa de características para
230 V / 50 Hz. Adapte el parámetro 4-14 Motor
Speed High Limit [Hz] y el

Descripciones de parámetros Guía de programación
1-23 Motor Frequency
Range: Función:
parámetro 3-03 Maximum Reference a la
aplicación de 87 Hz.
1-24 Intensidad motor
Range: Función:
Size
related*
[ 0.01 -
10000.00 A]
Introduzca el valor de la corriente
nominal del motor según los datos de
la placa de características del mismo.
Los datos se utilizan para calcular el
par motor, la protección térmica del
motor, etc.
1-25 Veloc. nominal motor
Range: Función:
Size
related*
[50 60000 RPM]
Introduzca el valor de la velocidad
nominal del motor según los datos de
la placa de características del mismo.
Estos datos se utilizan para calcular las
compensaciones automáticas del
motor.
1-26 Motor Cont. Rated Torque
Range: Función:
Size
related*
[ 0.1 10000
Nm]
Introduzca el valor según los datos de la
placa de características del motor. El valor
predeterminado se corresponde con la salida
nominal. Este parámetro estará disponible si
el parámetro 1-10 Construcción del motor se
ajusta en [1] PM, non salient SPM, non Sat, [2]
PM, salient IPM, non Sat o [3] PM, salient IPM,
Sat; es decir, el parámetro solo es válido para
motores PM, SPM no salientes e IPM
salientes.
1-29 Adaptación automática del motor (AMA)
Option: Función:
AVISO!
Este parámetro no se puede ajustar con el
motor en marcha.
AVISO!
El ajuste predeterminado del terminal 27
Entrada digital (parámetro 5-12 Terminal
27 Entrada digital) es inercia inversa. Este
ajuste implica que el AMA no puede
efectuarse si se desconecta el terminal 27.
La función de AMA optimiza el rendimiento
dinámico del motor optimizando automáticamente sus parámetros avanzados (del
parámetro 1-30 Resistencia estator (Rs) al
1-29 Adaptación automática del motor (AMA)
Option: Función:
parámetro 1-35 Reactancia princ. (Xh)) con el
motor parado.
[0]*No Sin función.
[1] Act. AMA
completo
[2] Act. AMA
reducido
En función de la opción seleccionada en el
parámetro 1-10 Motor Construction, el AMA se
ejecuta sobre diferentes parámetros.
Si se selecciona, [0] Asynchron, el AMA
•
se ejecuta sobre:
- Parámetro 1-30 Stator
Resistance (Rs).
- Parámetro 1-31 Rotor Resistance
(Rr).
- Parámetro 1-33 Stator Leakage
Reactance (X1).
- Parámetro 1-35 Main Reactance
(Xh).
Si se selecciona [1] PM, non-salient SPM,
•
el AMA se ejecuta sobre:
- Parámetro 1-30 Stator
Resistance (Rs).
- Parámetro 1-37 d- axis
Inductance (Ld).
Si se selecciona [2] PM, salient IPM, non
•
Sat, el AMA se ejecuta sobre:
- Parámetro 1-30 Stator
Resistance (Rs).
- Parámetro 1-37 d- axis
Inductance (Ld).
- Parámetro 1-38 q- axis
Inductance (Lq).
Si se selecciona [3] PM, salient IPM, Sat,
•
el AMA se ejecuta sobre:
- Parámetro 1-30 Stator
Resistance (Rs).
- Parámetro 1-37 d- axis
Inductance (Ld).
- Parámetro 1-38 q- axis
Inductance (Lq).
- Parámetro 1-44 d- axis
Inductance Sat. (LdSat).
- Parámetro 1-45 q- axis
Inductance Sat. (LqSat).
Realizar un AMA reducido de la resistencia del
estátor Rs (parámetro 1-30 Stator Resistance (Rs))
únicamente en el sistema. Si se utiliza un ltro
LC entre el convertidor de frecuencia y el motor,
seleccione esta opción.
4 4
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 35

Descripciones de parámetros
VLT® Midi Drive FC 280
Cuando el parámetro 1-10 Construcción del motor se ajusta
a opciones que activan el modo de motor permanente, la
única opción disponible será [1] Act. AMA completo.
Active la función AMA pulsando la tecla [Hand on] después
de seleccionar [1] Act. AMA completo o [2] Act. AMA
reducido. Después de una secuencia normal, aparece en
pantalla lo siguiente: pulse [OK] para nalizar el AMA.
Después de pulsar [OK], el convertidor de frecuencia está
44
listo para su uso.
AVISO!
Para obtener la mejor adaptación posible del
•
convertidor de frecuencia, ejecute el AMA con el
motor frío.
El AMA no puede realizarse mientras el motor
•
esté en funcionamiento.
AVISO!
Evite la generación externa de par durante el AMA.
AVISO!
Si se cambia alguno de los ajustes del grupo de
parámetros 1-2* Motor Data, los parámetros avanzados
del motor, del parámetro 1-30 Resistencia estator (Rs) al
1-33 Stator Leakage Reactance (X1)
Range: Función:
Size
related*
[ 0.0 -
9999.000
Ohm]
Dena el valor de reactancia de fuga
del estátor. Obtenga el valor de la
hoja de datos del motor o ejecute un
AMA en un motor frío. El ajuste
predeterminado lo calcula el
convertidor de frecuencia a partir de
los datos de la placa de características
del motor.
1-35 Main Reactance (Xh)
Range: Función:
Size
related*
[ 0.0 -
9999.00
Ohm]
Ajuste la reactancia principal del motor
utilizando uno de los siguientes métodos:
Ejecute un AMA en un motor frío.
•
El convertidor de frecuencia mide
el valor del motor.
Introduzca manualmente el valor
•
de Xh. Consulte este valor al
proveedor del motor.
Utilice el ajuste predeterminado
•
de Xh. El convertidor de
frecuencia selecciona el ajuste
basándose en los datos de la
placa de características del motor.
parámetro 1-39 Polos motor, volverán a los ajustes
predeterminados.
1-37 d-axis Inductance (Ld)
Range: Función:
Si se utiliza un ltro LC, ajuste el convertidor de frecuencia
para que funcione en modo de control U/f (recomendado)
o ejecute un AMA reducido en modo VVC+. Si no se utiliza
ltro LC, ejecute un AMA completo.
Size related* [ 0 - 1000
mH]
Introduzca el valor de la inductancia
del eje d. Obtenga el valor de la hoja
de datos del motor de magnetización
permanente.
1-30 Stator Resistance (Rs)
Range: Función:
Size
related*
[ 0.0 -
9999.000
Ohm]
AVISO!
Este parámetro no se puede
ajustar con el motor en marcha.
Fije el valor de resistencia del
estátor. Introduzca el valor de la hoja
de datos del motor o ejecute un
AMA en un motor frío.
1-38 q-axis Inductance (Lq)
Range: Función:
Size
related*
[ 0.000 1000 mH]
AVISO!
Este parámetro no se puede
ajustar con el motor en marcha.
Ajuste el valor de la inductancia del
eje q. Encontrará el valor en la hoja
de datos del motor.
1-31 Rotor Resistance (Rr)
Range: Función:
Size
related*
36 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305
[ 0 -
9999.000
Ohm]
Ajustar el valor de la resistencia del
rotor. Obtenga el valor en la hoja de
datos del motor o ejecute una AMA en
un motor frío. El ajuste predeterminado
lo calcula el convertidor de frecuencia
a partir de los datos de la placa de
características del motor.

Descripciones de parámetros Guía de programación
1-39 Polos motor
Range: Función:
Size
related*
[2 100 ]
AVISO!
Este parámetro no se puede ajustar
con el motor en marcha.
Introduzca el n.º de polos del motor.
El número de polos del motor debe ser
siempre un número par, ya que la cifra se
reere al número total de polos, no a pares
de polos.
1-40 fcem a 1000 RPM
Range: Función:
Size
related*
[0 9000
V]
Ajuste la fuerza contraelectromotriz nominal
del motor a 1000 r/min.
La fuerza contraelectromotriz es la tensión
que genera un motor PM cuando no se le
conecta un convertidor de frecuencia y el eje
se gira desde el exterior. La fuerza contraelectromotriz normalmente se especica para la
velocidad nominal del motor o con la
medición de 1000 r/min entre dos líneas. Si
no dispone del valor para una velocidad del
motor de 1000 r/min, calcule el valor
correcto del siguiente modo: Si la fuerza
contraelectromotriz es, por ejemplo, de 320 V
a 1800 r/min, puede calcularse para 1000 r/
min:
Ejemplo
Fuerza contraelectromotriz 320 V a 1800 r/
min. fuerza contraelectromotriz = (tensión/r/
min) × 1000 = (320/1800) × 1000 = 178.
Este parámetro solo está activo cuando el
parámetro 1-10 Motor Construction se ajusta
en opciones que activan motores PM
(magnetización permanente).
AVISO!
Cuando se utilizan motores PM, se
recomienda utilizar resistencias de
frenado.
1-44 d-axis Inductance Sat. (LdSat)
Range: Función:
Size
related
[ 0 1000
mH]
Este parámetro estará activado solo si el
parámetro 1-10 Motor Construction se ajusta en
[3] PM, salient IPM, Sat.
Este parámetro corresponde a la saturación de
la inductancia del eje d. El valor predeterminado es el establecido en el
parámetro 1-37 d-axis Inductance (Ld). En la
mayoría de los casos, no debe cambiarse el
valor predeterminado. Si el proveedor del
motor proporciona la curva de saturación,
introduzca el valor de inductancia del eje d,
que corresponde al 100 % de la corriente
nominal.
1-45 q-axis Inductance Sat. (LqSat)
Range: Función:
Size
related*
[ 0 1000
mH]
Este parámetro estará activado solo si el
parámetro 1-10 Motor Construction se ajusta
en [3] PM, salient IPM, Sat.
Este parámetro corresponde a la saturación
de la inductancia del eje q. El valor predeterminado es el establecido en el
parámetro 1-38 q-axis Inductance (Lq). En la
mayoría de los casos, no debe cambiarse el
valor predeterminado. Si el proveedor del
motor proporciona la curva de saturación,
introduzca el valor de inductancia del eje q,
que corresponde al 100 % de la corriente
nominal.
1-46 Position Detection Gain
Range: Función:
100 %* [ 20 -
200 %]
Ajustar la amplitud del pulso de prueba
durante la detección de la posición y el
arranque. Ajuste este parámetro para
mejorar la medición de la posición.
1-48 Current at Min Inductance for d-axis
Range: Función:
100 % [ 20 - 200 %] Utilice este parámetro para ajustar el
punto de saturación de la inductancia.
4 4
1-42 Motor Cable Length
Range: Función:
50 m* [0 - 100 m] Ajuste la longitud del cable de motor en
metros.
1-43 Motor Cable Length Feet
Range: Función:
164 ft* [0 - 328 ft] Ajuste la longitud del cable de motor. La
unidad de longitud es el pie.
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 37
1-49 Current at Min Inductance for q-axis
Range: Función:
100 % [ 20 -
200 %]
Este parámetro especica la curva de saturación
de los valores de inductancia de q. Entre el
20 % y el 100 % de este parámetro, las
inductancias se aproximan linealmente debido al
parámetro 1-38 q-axis Inductance (Lq) y el
parámetro 1-45 q-axis Inductance Sat. (LqSat).
Estos parámetros están relacionados con las
compensaciones de carga de la placa de
características del motor, el tipo de carga de la

Magn. current
130BB780.10
Hz
Par.1-50
90%
Par.1-52
Descripciones de parámetros
VLT® Midi Drive FC 280
1-49 Current at Min Inductance for q-axis
Range: Función:
aplicación y la función de freno electrónico para
parada rápida de motor y sujeción de la carga.
1-56 U/f Characteristic - F
Range: Función:
1-50 Magnet. motor a veloc. cero
Range: Función:
100%* [0 -
44
Utilice este parámetro junto con el
300 %
parámetro 1-52 Magnetización normal veloc. mín.
]
[Hz] para obtener una carga térmica distinta en el
motor cuando funciona a velocidad lenta.
Introduzca un valor como porcentaje de la
corriente de magnetización nominal. Si el ajuste es
muy pequeño, puede reducirse el par en el eje del
motor.
Ilustración 4.1 Magnetización del motor
Ilustración 4.2 Ejemplo de característica u/f
1-60 Low Speed Load Compensation
Range: Función:
100 %* [0 -
300 %]
Introduzca, en porcentaje, el valor de compensación de carga de velocidad baja. Este
parámetro se usa para optimizar el rendimiento
de carga de velocidad baja. Este parámetro solo
está activo cuando el
parámetro 1-10 Construcción del motor = [0]
Asynchron.
1-61 High Speed Load Compensation
1-52 Min Speed Normal Magnetising [Hz]
Range: Función:
1 Hz* [ 0.1 -
10.0 Hz]
Ajuste la frecuencia deseada para una
corriente de magnetización normal. Utilice
este parámetro junto con el
parámetro 1-50 Magnet. motor a veloc. cero y
consulte también la Ilustración 4.1.
Range: Función:
100 %* [0 -
300 %]
Introduzca el valor de compensación de tensión
de carga de alta velocidad en porcentaje. Este
parámetro sirve para optimizar el rendimiento
de carga de alta velocidad. Este parámetro solo
está activo cuando el
parámetro 1-10 Construcción del motor = [0]
Asynchron.
1-55 U/f Characteristic - U
Range: Función:
Size
related*
[0 - 1000V]Introduzca la tensión para cada punto
de frecuencia para crear manualmente
una característica U/f que se ajuste al
motor. Los puntos de frecuencia se
denen en el parámetro 1-56 U/f Charac-
teristic - F.
1-56 U/f Characteristic - F
Range: Función:
Size
related*
38 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305
[ 0 -
500.0
Hz]
Introduzca los puntos de frecuencia para crear
una característica U/f que se ajuste al motor.
La tensión en cada punto se dene en el
parámetro 1-55 U/f Characteristic - U.
Cree una característica U/f basándose en seis
tensiones y frecuencias denibles. Consulte la
Ilustración 4.2.
1-62 Slip Compensation
Range: Función:
Size related* [ -400 - 399.0 %]
1-63 Tiempo compens. deslizam. constante
Range: Función:
0.1 s* [0.05 - 5 s] Introduzca la velocidad de reacción de
compensación de deslizamiento. Un valor
alto produce una reacción lenta y uno bajo
produce una reacción rápida. Si se producen
problemas de resonancia a baja frecuencia,
ajuste un tiempo más largo.
1-64 Resonance Dampening
Range: Función:
100%* [0 -
500 %]
Introduzca el valor de amortiguación de
resonancia. Ajuste el parámetro 1-64 Resonance
Dampening y el parámetro 1-65 Resonance
Dampening Time Constant para ayudar a eliminar
problemas de resonancia de alta frecuencia. Para
reducir la oscilación de resonancia, incremente el
valor del parámetro 1-64 Resonance Dampening.

Descripciones de parámetros Guía de programación
1-65 Resonance Dampening Time Constant
Range: Función:
0.005 s* [ 0.001 -
0.05 s]
Ajuste el parámetro 1-64 Resonance
Dampening y el parámetro 1-65 Resonance
Dampening Time Constant para ayudar a
eliminar problemas de resonancia de alta
frecuencia. Introduzca la constante de
tiempo que proporcione la mejor amortiguación.
1-66 Min. Current at Low Speed
Range: Función:
50 %* [ 0 -
120 %]
Introduzca la intensidad mínima del motor a
baja velocidad. Incrementar este valor hace
que mejore el par a baja velocidad.
El Parámetro 1-66 Min. Current at Low Speed
está activado solo para motores PM.
1-70 PM Start Mode
Seleccione el modo de arranque del motor PM. Esto se realiza
para iniciar el núcleo de control VVC+ de un motor PM que
previamente funcionaba libremente. Activado para motores PM
en modo VVC+ solo si el motor se detiene (o funciona a una
velocidad muy lenta).
Option: Función:
[0] * Rotor Detection Estimar el ángulo eléctrico del rotor y
utilizarlo como punto de arranque. Esta
opción es la selección estándar en aplicaciones industriales. Si la función de motor
en giro detecta que el motor está
funcionando a baja velocidad o se ha
detenido, el convertidor de frecuencia
detecta la posición del rotor (el ángulo) y
arranca el motor desde esa posición.
[1] Parking La función de estacionamiento aplica
corriente CC al bobinado del estátor y gira
el rotor a la posición eléctrica cero. Esta
opción suele usarse en aplicaciones de
bombeo y ventilación. Si la función de
motor en giro detecta que el motor está
funcionando a baja velocidad o se ha
detenido, el convertidor de frecuencia
envía una corriente CC para hacer que el
motor se detenga en un ángulo
determinado y arranque el motor desde
esa posición.
1-72 Start Function
Option: Función:
Seleccione la función de arranque durante el
retardo de arranque Este parámetro está ligado
al parámetro 1-71 Retardo arr..
[0] DC Hold/
delay time
[1] DC-Brake/
delay time
[2]*Coast/delay
time
[3] Start speed
cw
[4] Horizontal
operation
[5] VVC+
clockwise
Alimentación del motor con una corriente de
CC mantenida (parámetro 2-00 DC Hold/Motor
Preheat Current) durante el tiempo de retardo
de arranque.
Alimentación del motor con una corriente de
CC mantenida (parámetro 2-01 DC Brake Current)
durante el tiempo de retardo de arranque.
Motor en inercia durante el tiempo de retardo
de arranque (inversor desconectado).
Posible solamente con VVC+. Independientemente del valor aplicado por la señal de
referencia, la velocidad de salida corresponde al
ajuste de la velocidad de arranque en el
parámetro 1-75 Start Speed [Hz] y la intensidad
de salida corresponde al ajuste de la intensidad
de arranque en el parámetro 1-76 Start Current.
Esta función suele utilizarse en aplicaciones de
elevación sin contrapeso y especialmente en
aplicaciones con un motor de rotor cónico, en
el que el giro debe comenzar en sentido
horario y continuar en el sentido de la
referencia.
Posible solamente con VVC+.
Para obtener la función descrita en el
parámetro 1-75 Start Speed [Hz] y el
parámetro 1-76 Start Current durante el tiempo
de retardo de arranque. El motor gira en el
sentido de la referencia. Si la señal de
referencia es igual a cero, se ignora el
parámetro 1-75 Start Speed [Hz] y la velocidad
de salida también es cero. La intensidad de
salida se corresponde al ajuste de la intensidad
de arranque en el parámetro 1-76 Start Current.
La corriente de arranque se calcula automáticamente. Esta función solo utiliza la velocidad
de arranque para el tiempo de retardo de
arranque.
4 4
1-71 Retardo arr.
Range: Función:
0 s* [0 -
10 s]
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 39
Este parámetro activa un retardo del tiempo de
arranque. El convertidor de frecuencia comienza
con la función de arranque seleccionada en el
parámetro 1-72 Función de arranque. Ajusta el
tiempo de retardo de arranque antes de que
comience la aceleración.

Descripciones de parámetros
VLT® Midi Drive FC 280
1-73 Flying Start
Option: Función:
AVISO!
No se puede cambiar este parámetro con
el motor en marcha.
AVISO!
44
Para obtener el máximo rendimiento de
la función de motor en giro, los datos
avanzados del motor, del
1-76 Start Current
Range: Función:
Size
related*
[ 0 10000
A]
Algunos motores (por ejemplo, de rotor
cónico) necesitan corriente o velocidad de
arranque adicional para desembragar el
rotor. Para obtener este refuerzo, ajuste la
corriente necesaria en el parámetro. Ajuste
parámetro 1-72 Start Function a [3] Int./Vel.
arranque CW o [4] Func. horizontal y ajuste
un tiempo de retardo de arranque en
parámetro 1-71 Retardo arr..
parámetro 1-30 Stator Resistance (Rs) al
parámetro 1-35 Main Reactance (Xh),
deben ser correctos.
Esta función permite atrapar un motor que gira
sin control debido a un corte de alimentación.
[0]*Disabled Sin función.
[1] Enabled Permitir que el convertidor de frecuencia pueda
atrapar y controlar un motor en giro. Si el
parámetro 1-73 Flying Start está activado, el
parámetro 1-71 Retardo arr. y el
parámetro 1-72 Start Function no tienen ninguna
función.
[2] Enabled
Always
[3] Enabled
Ref. Dir.
[4] Enab.
Always
Ref. Dir.
Activar la función de Motor en giro en cada
orden de arranque.
Permitir que el convertidor de frecuencia pueda
atrapar y controlar un motor en giro. Se efectúa
la búsqueda solo en el sentido de la referencia.
Activar la función de Motor en giro en cada
orden de arranque. Se efectúa la búsqueda solo
en el sentido de la referencia.
1-75 Start Speed [Hz]
Range: Función:
Size
related*
[ 0 -
500.0
Hz]
Este parámetro se puede usar para aplicaciones de elevación (rotor cónico). Ajuste la
velocidad de arranque del motor. Tras la
señal de arranque, la velocidad de salida
salta al valor ajustado. Ajuste la función de
arranque del parámetro 1-72 Start Function
en [3] Int./Vel. arranque CW, [4] Func.
horizontal o [5] VVC+/Flux s. horario, y ajuste
un tiempo de retardo de arranque en el
parámetro 1-71 Retardo arr..
1-78 Compressor Start Max Speed [Hz]
Range: Función:
0 Hz* [ 0 -
500
Hz]
Este parámetro activa un par de arranque alto. El
tiempo transcurrido desde la señal de arranque
hasta que la velocidad supera la velocidad jada
en el parámetro se convierte en una zona de
arranque. En la zona de arranque, el límite de
intensidad y el límite de par del motor están
jados en el valor máximo posible para la
combinación de convertidor de frecuencia y
motor. El tiempo sin protección desde el límite
de intensidad y el límite de par no debe superar
el valor jado en el parámetro 1-79 Compressor
Start Max Time to Trip. De lo contrario, el
convertidor de frecuencia se desconecta con la
alarma 18, Start Failed.
1-79 Compressor Start Max Time to Trip
Range: Función:
5 s* [0 -
El tiempo transcurrido desde la señal de arranque
10 s]
hasta que la velocidad supera la velocidad jada en
el parámetro 1-78 Compressor Start Max Speed [Hz]
no debe superar el tiempo jado en el parámetro.
De lo contrario, el convertidor de frecuencia se
desconecta con la alarma 18, Start Failed. Todos los
tiempos jados en el parámetro 1-71 Retardo arr.
para utilizar una función de arranque deben
ejecutarse dentro del límite de tiempo.
1-80 Function at Stop
Option: Función:
Seleccione la función que realiza el
convertidor de frecuencia después de una
orden de parada o después de que la
velocidad se reduzca a los ajustes del
parámetro 1-82 Vel. mín. para func. parada [Hz].
Las selecciones posibles dependen del ajuste
del parámetro 1-10 Motor Construction.
[0] Asynchron.
•
- [0] Inercia.
- [1] CC mantenida.
40 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

Descripciones de parámetros Guía de programación
1-80 Function at Stop
Option: Función:
- [3] Premagnetización.
[1] PM, non-salient SPM, non Sat.
•
[2] PM, salient IPM, non Sat.
•
[3] PM, salient IPM, Sat.
•
- [0] Inercia.
- [1] CC mantenida.
[0]*Coast Dejar el motor en modo libre.
[1] DC hold /
Motor
Preheat
[3] Pre-
-magnetizing
El motor recibe una corriente de CC
mantenida (consulte el parámetro 2-00 DC
Hold/Motor Preheat Current).
Crear un campo magnético cuando el motor
está parado, lo que permite al motor crear par
rápidamente en las órdenes (solo en motores
asíncronos). Esta función de premagnetización
no contribuye a la primera orden de arranque.
Para premagnetizar la máquina para la
primera orden de arranque, existen dos
soluciones distintas:
1. Arranque el convertidor de
frecuencia con una referencia de
0 r/min y espere de dos a cuatro
constantes de tiempo de rotor
(consulte la ecuación indicada más
abajo) antes de aumentar la
velocidad de referencia.
2. 2a Ajuste el
parámetro 1-71 Retardo arr.
con el tiempo de premagnetización (de 2 a 4
constantes de tiempo).
2b Ajuste el
parámetro 1-72 Start
Function en [0] CC
mantenida.
2c Ajuste la magnitud de
corriente de CC mantenida
(parámetro 2-00 DC Hold/
Motor Preheat Current) para
que sea igual a I
U
/(1,73 × Xh).
nom
Ejemplos de constantes de tiempo de rotor =
(Xh+X2)/(6,3*Freq_nom*Rr)
1 kW = 0,2 s
10 kW=0,5 s
100 kW=1,7 s
premagnet.
1-82 Vel. mín. para func. parada [Hz]
Range: Función:
0 Hz* [0 - 20 Hz] Ajuste la frecuencia de salida a la que se
activa el parámetro 1-80 Función de parada.
1-83 Precise Stop Function
Option: Función:
[0]*Precise ramp
stop
[1] Counter stop
with reset
[2] Counter stop
without reset
[3] Speed
compensated
stop
=
[4] Speed
compensated
counter stop
with reset
Solo resulta óptima cuando la velocidad de
funcionamiento (por ejemplo, la de una
cinta transportadora) es constante. Se trata
de un control de lazo abierto. Para obtener
una alta precisión repetitiva en el punto de
parada.
Contar el número de pulsos, normalmente
desde un encoder, y generar una señal de
parada cuando un número de pulsos
preprogramado, denido en el
parámetro 1-84 Precise Stop Counter Value, se
ha recibido en el terminal 29 o en el
terminal 33. Se trata de una realimentación
directa con un control de lazo cerrado
unidireccional. La función de contador se
activa (empieza a temporizar) en el límite de
la señal de arranque (cuando cambia de
parada a arranque). Después de cada parada
precisa, se reinicia el número de pulsos
contados en la desaceleración a 0 r/min.
Igual que [1] Par. cont. c/reinicio pero el
número de pulsos contados durante la
desaceleración hasta 0 r/min se descuenta
del valor de contador introducido en el
parámetro 1-84 Precise Stop Counter Value.
Esta función de reset puede utilizarse para
compensar la distancia adicional recorrida
durante la rampa de desaceleración y para
reducir el impacto del desgaste gradual de
las piezas mecánicas.
Realizar la parada exactamente en el mismo
punto, independientemente de la velocidad
actual. La señal de parada se retrasará
internamente cuando la velocidad actual sea
inferior a la máxima (ajustada en el
parámetro 4-19 Max Output Frequency). El
retardo se calcula a partir de la velocidad de
referencia del convertidor de frecuencia y no
a partir de la velocidad real. Debe
asegurarse de que el convertidor de
frecuencia se ha acelerado en rampa antes
de activar la parada compensada por
velocidad.
Igual que [3] Parada vel. comp. pero después
de cada parada precisa, se reinicia el
número de pulsos contados durante la
desaceleración hasta 0 r/min.
4 4
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 41

Descripciones de parámetros
VLT® Midi Drive FC 280
1-83 Precise Stop Function
Option: Función:
[5] Speed
compensated
counter stop
without reset
44
Igual que [3] Parada vel. comp. pero el
número de pulsos contados durante la
desaceleración hasta 0 r/min se descuenta
del valor de contador introducido en el
parámetro 1-84 Precise Stop Counter Value.
Esta función de reset puede utilizarse para
compensar la distancia adicional recorrida
durante la rampa de desaceleración y para
reducir el impacto del desgaste gradual de
las piezas mecánicas.
1-84 Precise Stop Counter Value
Range: Función:
100000* [0 -
999999999 ]
Introduzca el valor de contador
utilizado en la función de parada
precisa integrada en el
parámetro 1-83 Precise Stop Function. La
frecuencia máxima admisible en el
terminal 29 o el 33 es 32 kHz.
1-85 Precise Stop Speed Compensation Delay
Range: Función:
10 ms* [0 -
100 ms]
Introducir el tiempo de retardo para sensores,
PLC, etc., para su uso en el
parámetro 1-83 Precise Stop Function. En modo
de parada compensada por velocidad, el
tiempo de retardo a distintas frecuencias tiene
inuencia importante en la función de parada.
1-88 AC Brake Gain
Range: Función:
1.4* [1.0 -
2.0 ]
Este parámetro se utiliza para ajustar la capacidad
de potencia de freno de CA (ajuste el tiempo de
deceleración cuando la inercia sea constante).
Siempre que la tensión del enlace de CC no sea
superior al valor de alarma de tensión del enlace
de CC, el par del generador podrá ajustarse con
este parámetro. Cuanto más alta sea la ganancia
del freno de CA, mayor será la capacidad del freno.
Si la ganancia del freno es igual a 1,0, esto signica
que no hay capacidad de freno de CA.
AVISO!
En caso de par de generador continuo, un
1-90 Motor Thermal Protection
Option: Función:
[0] * No protection El motor está sometido a sobrecarga
continua, cuando no se requiere ninguna
advertencia o desconexión del convertidor
de frecuencia.
[1] Thermistor
warning
[2] Thermistor
trip
[3] ETR warning1Calcula la carga y activa una advertencia en
[4] ETR trip 1 Calcula la carga y detiene (desconecta) el
[22] ETR Trip -
Extended
Detection
Activa una advertencia cuando el termistor
conectado en el motor reacciona por
sobretemperatura del motor.
Detiene (desconecta) el convertidor de
frecuencia cuando el termistor conectado
en el motor reacciona por sobretemperatura
de este.
El valor de desconexión del termistor debe
ser >3 kΩ.
Integre un termistor (sensor PTC) en el
motor para la protección del bobinado.
la pantalla cuando hay sobrecarga en el
motor. Programe una señal de advertencia
mediante una de las salidas digitales.
convertidor de frecuencia cuando hay
sobrecarga en el motor. Programe una señal
de advertencia mediante una de las salidas
digitales. La señal aparece en caso de que
haya una advertencia y si el convertidor de
frecuencia se desconecta (advertencia
térmica).
1-93 Thermistor Source
Option: Función:
AVISO!
No se puede cambiar este parámetro
con el motor en marcha.
AVISO!
Ajuste la entrada digital a [0] PNP –
Activo a 24 V en el
parámetro 5-00 Digital I/O Mode.
mayor par del generador causará una mayor
intensidad del motor y este se calentará. En
esas condiciones, el parámetro 2-16 AC
Brake, Max current puede utilizarse para
proteger el motor del sobrecalentamiento.
Seleccione la entrada a la que se debe
conectar el termistor (sensor PTC). No se
puede seleccionar una opción de entrada
analógica [1] Entrada analógica 53 o [2]
Entrada analógica 54 si la entrada analógica
ya se utiliza como fuente de referencia
(seleccionado en el parámetro 3-15 Reference
1 Source, el parámetro 3-16 Reference 2 Source
o el parámetro 3-17 Reference 3 Source).
42 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

Descripciones de parámetros Guía de programación
1-93 Thermistor Source
Option: Función:
[0] * None
[1] Analog
Input 53
[2] Analog
Input 54
[3] Digital input
18
[4] Digital input
19
[5] Digital input
32
[6] Digital input
33
4 4
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 43

Descripciones de parámetros
4.3 Parámetros: 2-** Brakes
VLT® Midi Drive FC 280
2-00 DC Hold/Motor Preheat Current
Range: Función:
50 %* [0 -
160 %]
44
Ajuste la intensidad mantenida como porcentaje
de la corriente nominal del motor I
(parámetro 1-24 Motor Current). Este parámetro
mantiene el funcionamiento del motor (par
mantenido) o precalienta el motor. Este parámetro
está activo si se ha seleccionado [0] CC mantenida
en el parámetro 1-72 Start Function o [1] CC
mantenida/precalent. motor en el
parámetro 1-80 Function at Stop.
M, N
AVISO!
El valor máximo depende de la corriente
2-04 DC Brake Cut In Speed
Range: Función:
0 Hz* [ 0 - 500
Hz]
Este parámetro establece la velocidad de
conexión del freno de CC a la que se activará
la intensidad de frenado CC
(parámetro 2-01 Intens. freno CC), en relación
con una orden de parada.
2-06 Parking Current
Range: Función:
100 %* [0 - 150 %] Ajuste la intensidad como un porcentaje
de la corriente nominal del motor,
parámetro 1-24 Motor Current.
nominal del motor. Evite la corriente al
100 % durante demasiado tiempo. Puede
dañar el motor.
2-01 Intens. freno CC
2-07 Tiempo estacionamiento
Range: Función:
3 s* [0.1 - 60 s] Una vez activada, ajustar la duración de la
corriente de estacionamiento en el
parámetro 2-06 Intensidad estacionamiento.
Range: Función:
50%* [0 -
150 %
]
AVISO!
SOBRECALENTAMIENTO DEL MOTOR
El valor máximo depende de la corriente
2-10 Brake Function
Option: Función:
[0]*O Sin resistencia de frenado instalada.
nominal del motor.
Para evitar daños por sobrecalentamiento
en el motor, no lo haga funcionar al 100 %
durante demasiado tiempo.
Ajuste la intensidad como porcentaje de la
corriente nominal del motor,
parámetro 1-24 Intensidad motor. Si la velocidad es
inferior al límite establecido en el
parámetro 2-04 Velocidad de conexión del freno CC
[Hz] o si está activada la función de parada por
freno de CC (en el grupo de parámetros 5-1*
Entradas digitales, mediante [5] Freno CC, o a través
del puerto serie), se aplicará intensidad de frenado
CC ante una orden de parada. Ver el
parámetro 2-02 Tiempo de frenado CC para
averiguar la duración.
[1] Resistor
brake
[2] AC brake Mejorar el frenado sin utilizar resistencia de
Se incorpora al sistema una resistencia de
frenado para disipar el exceso de energía de
frenado como calor. La conexión de una
resistencia de frenado permite una mayor
tensión de CC durante el frenado (funcionamiento de generación). La función de resistencia
de frenado solo está activa en convertidores de
frecuencia con freno dinámico integrado.
frenado. Este parámetro controla una sobremagnetización del motor al funcionar con una carga
del generador. Esta función puede mejorar la
función OVC. El aumento de las pérdidas
eléctricas en el motor permite que la función
OVC aumente el par de frenado sin superar el
límite de sobretensión.
2-02 Tiempo de frenado CC
Range: Función:
10 s* [0 - 60 s] Una vez activada, ajuste la duración de la
intensidad de frenado CC en el
parámetro 2-01 Intens. freno CC.
44 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305
AVISO!
El freno de CA no es tan ecaz como el
freno dinámico con resistencia.
El freno de CA es para el modo VVC+,
tanto en lazo cerrado como abierto.

Descripciones de parámetros Guía de programación
2-11 Brake Resistor (ohm)
Range: Función:
Size
related*
[ 0 65535
Ohm]
Ajuste el valor de la resistencia de frenado
en Ω. Este valor se emplea para
monitorizar la energía entregada a la
resistencia de frenado. El
Parámetro 2-11 Brake Resistor (ohm) solo
está activo en convertidores de frecuencia
que tengan un freno dinámico integrado.
Utilice este parámetro para valores sin
decimales.
2-12 Brake Power Limit (kW)
Range: Función:
Size
related*
[0.001
- 2000
kW]
El Parámetro 2-12 Límite potencia de freno
(kW) describe la potencia media esperada
disipada en la resistencia de frenado en un
intervalo de 120 s. Se utiliza para controlar
el límite del parámetro 16-33 Energía freno /
2 min y, de este modo, especica cuándo se
emite una advertencia/alarma.
Para el cálculo del parámetro 2-12 Límite
potencia de freno (kW), puede utilizarse la
siguiente fórmula.
W =
P
br, media
P
es la potencia media disipada en la
br, med
resistencia de frenado. Rbr es la resistencia
de la resistencia de frenado. tbr es el tiempo
de frenado activo en el intervalo de 120 s,
Tbr.
Ubr es la tensión de CC donde el valor de la
resistencia de frenado está activo. En
unidades T4, la tensión de CC es de 770 V,
que pueden reducirse mediante el
parámetro 2-14 Reduc. tensión freno.
2
U
V × tbrs
br
RbrΩ × Tbrs
2-16 AC Brake, Max current
Range: Función:
100 %* [0 -
160 %]
Introduzca la corriente máxima admisible al
usar el freno de CA para evitar el recalentamiento de las bobinas del motor.
AVISO!
El Parámetro 2-16 AC Brake, Max current
no está disponible para todos los
motores PM; por ejemplo, todas las
opciones PM del parámetro 1-10 Motor
Construction.
2-17 Over-voltage Control
Option: Función:
El control de sobretensión (OVC) reduce el riesgo
de que el convertidor de frecuencia se
desconecte debido a una sobretensión en el
enlace de CC causada por la energía generativa
procedente de la carga.
[0]*Disabled No se requiere control de sobretensión (OVC).
[1] Enabled
(not at
stop)
[2] Enabled Activar el control de sobretensión (OVC).
Activar el control de sobretensión (OVC), excepto
cuando se está usando una señal de parada para
detener al convertidor de frecuencia.
ADVERTENCIA
RIESGO DE LESIONES Y DE DAÑOS EN EL
EQUIPO
La activación del OVC en aplicaciones de
elevación puede producir lesiones y daños
en el equipo. No debe activarse el OVC en
dichas aplicaciones.
4 4
AVISO!
Si Rbr es desconocido o si Tbr es
diferente de 120 s, el enfoque
práctico es hacer funcionar la
aplicación de freno, efectuar la lectura
de datos del parámetro 16-33 Energía
freno / 2 min y después introducir este
valor más un 20 % en el
parámetro 2-12 Límite potencia de
freno (kW).
2-14 Reduc. tensión freno
Range: Función:
0 V* [ 0-70 V] El ajuste de este parámetro puede modicar la
resistencia de frenado (parámetro 2-11 Brake
Resistor (ohm)).
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 45
2-19 Over-voltage Gain
Range: Función:
100 %* [0 - 200 %] Seleccione la ganancia de sobretensión.
2-20 Release Brake Current
Range: Función:
0 A* [0 -
100 A]
Ajustar el valor que debe tener la intensidad del
motor para que, en una situación de arranque, se
libere el freno mecánico. El límite superior se
especica en el parámetro 16-37 Máx. Int. Inv..
AVISO!
Cuando se selecciona la salida de control
de freno mecánico pero el freno mecánico
no está conectado, la función no funciona
según el ajuste predeterminado debido a
una intensidad del motor demasiado baja.

Descripciones de parámetros
2-22 Activate Brake Speed [Hz]
Range: Función:
0 Hz* [0 - 400 Hz] Ajuste la frecuencia del motor para activar
el freno mecánico cuando surja una
condición de parada.
2-23 Activate Brake Delay
Range: Función:
44
0 s* [0 - 5 s] Introduzca tiempo de retardo de freno de inercia
tras tiempo de deceleración. El eje se mantiene
parado con par mantenido total. Asegúrese de
que el freno mecánico ha bloqueado la carga
antes de que motor entre en modo de inercia.
VLT® Midi Drive FC 280
46 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

Descripciones de parámetros Guía de programación
4.4 Parámetros: 3-** Reference/Ramps
3-00 Reference Range
Option: Función:
[0] * Min - Max Seleccionar el intervalo de señal de referencia y
señal de realimentación. Los valores de señal
pueden ser solo positivos o positivos y
negativos.
[1] -Max -
+Max
Tanto para valores positivos como negativos
(ambas direcciones), en relación con el
parámetro 4-10 Motor Speed Direction.
3-01 Reference/Feedback Unit
Option: Función:
Seleccione la unidad para las referencias y
realimentaciones del control de PID de procesos.
[0] None
[1] %
[2] RPM
[3] Hz
[4] Nm
[5] PPM
[10] 1/min
[12] Pulse/s
[20] l/s
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[125] ft³/s
[126] ft³/min
[127] ft³/h
[130] lb/s
3-01 Reference/Feedback Unit
Option: Función:
[131] lb/min
[132] lb/h
[140] ft/s
[141] ft/min
[145] ft
[150] lb ft
[160] °F
[170] psi
[171] lb/in2
[172] in WG
[173] ft WG
[180] HP
3-02 Minimum Reference
Range: Función:
0
Reference
Feedback
Unit*
[ 0 4999
Reference
Feedback
Unit]
Introduzca la referencia mínima. La
referencia mínima es el valor mínimo que
puede obtenerse sumando todas las
referencias.
La referencia mínima solo se activa si el
parámetro 3-00 Reference Range se ajusta
en [0] Mín - Máx.
La unidad de referencia mínima coincide
con:
•
•
3-03 Maximum Reference
Range: Función:
Size
related*
[-4999.0 4999
Reference
Feedback
Unit]
Introduzca la referencia máxima. La
referencia máxima es el valor más alto
que puede obtenerse sumando todas las
referencias.
La unidad de referencia máxima coincide:
•
•
4 4
La opción del
parámetro 1-00 Conguration
Mode.
La unidad seleccionada en el
parámetro 3-01 Reference/
Feedback Unit.
La opción seleccionada en el
parámetro 1-00 Conguration
Mode.
La unidad seleccionada en el
parámetro 3-00 Reference Range.
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 47

X
100
%
0-100
Z
Y
X+X*Y/100
P 3-14
130BA278.10
Descripciones de parámetros
VLT® Midi Drive FC 280
3-04 Reference Function
Option: Función:
[0] * Sum Sumar las fuentes de referencia interna y
externa.
[1] External/
Preset
Utilice la fuente de referencia interna o
externa. Cambiar entre externa e interna a
través de una orden o una entrada digital.
Ilustración 4.3 Referencia interna relativa
44
3-10 Referencia interna
Range: Función:
0 %* [-100 -
100 %]
Es posible programar hasta ocho referencias
internas distintas (0-7) en este parámetro,
utilizando una programación indexada. Para
seleccionar las referencias especicas,
seleccione Ref. interna bit 0/1/2 [16], [17] o [18]
para las entradas digitales correspondientes en
el grupo de parámetros 5-1* Entradas digitales.
Ilustración 4.4 Referencia real
3-11 Jog Speed [Hz]
Range: Función:
5 Hz* [ 0 - 500.0
Hz]
La velocidad ja es una velocidad de salida
ja a la que funciona el convertidor de
frecuencia cuando se activa la función de
velocidad ja. Consulte también el
parámetro 3-80 Jog Ramp Time.
3-12 Catch up/slow Down Value
Range: Función:
0 %* [0 -
100 %]
Introduzca un valor de porcentaje que se sumará
o restará, respectivamente, de la referencia real
para el enganche arriba o abajo. Si se ha
seleccionado [28] Enganche arriba en una de las
entradas digitales (del parámetro 5-10 Terminal 18
Entrada digital al parámetro 5-15 Terminal 33
Entrada digital), el valor porcentual se sumará a la
referencia total. Si se ha seleccionado [29]
Enganche abajo en una de las entradas digitales
(del parámetro 5-10 Terminal 18 Entrada digital al
parámetro 5-15 Terminal 33 Entrada digital), el valor
porcentual se restará de la referencia total.
3-14 Preset Relative Reference
Range: Función:
0 %* [-100 -
100 %]
La referencia actual, X, se incrementa o se reduce
en el porcentaje Y, ajustado en el
parámetro 3-14 Referencia interna relativa. Esto da
como resultado la referencia Z real. La referencia
real (X) es la suma de las entradas seleccionadas
en el parámetro 3-15 Fuente 1 de referencia, el
parámetro 3-16 Fuente 2 de referencia, el
parámetro 3-17 Fuente 3 de referencia y el
parámetro 8-02 Fuente de control.
3-15 Reference 1 Source
Option: Función:
Seleccione la entrada de referencia que
se utilizará para la primera señal de
referencia. El Parámetro 3-15 Reference 1
Source, el parámetro 3-16 Reference 2
Source y el parámetro 3-17 Reference 3
Source denen hasta tres señales de
referencia distintas. La suma de estas
señales de referencia dene la referencia
actual.
[0] No function
[1] * Analog Input 53
[2] Analog Input 54
[7] Frequency input
29
[8] Frequency input
33
[11] Local bus
reference
[20] Digital pot.meter
[32] Bus PCD
3-16 Reference 2 Source
Option: Función:
Seleccione la entrada de referencia que
se utilizará para la primera señal de
referencia. El Parámetro 3-15 Reference 1
Source, el parámetro 3-16 Reference 2
Source y el parámetro 3-17 Reference 3
Source denen hasta tres señales de
referencia distintas. La suma de estas
señales de referencia dene la referencia
actual.
[0] No function
48 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

Descripciones de parámetros Guía de programación
3-16 Reference 2 Source
Option: Función:
[1] Analog Input 53
[2] * Analog Input 54
[7] Frequency input
29
[8] Frequency input
33
[11] Local bus
reference
[20] Digital pot.meter
[32] Bus PCD
3-17 Reference 3 Source
Option: Función:
Seleccione la entrada de referencia que
se utilizará para la primera señal de
referencia. El Parámetro 3-15 Reference 1
Source, el parámetro 3-16 Reference 2
Source y el parámetro 3-17 Reference 3
Source denen hasta tres señales de
referencia distintas. La suma de estas
señales de referencia dene la
referencia actual.
[0] No function
[1] Analog Input 53
[2] Analog Input 54
[7] Frequency input
29
[8] Frequency input
33
[11] * Local bus
reference
[20] Digital pot.meter
[32] Bus PCD
3-18 Relative Scaling Reference Resource
Option: Función:
Ilustración 4.5 Referencia real
resultante
[0] * No function
[1] Analog Input
53
[2] Analog Input
54
[7] Frequency
input 29
[8] Frequency
input 33
[11] Local bus
reference
3-40 Ramp 1 Type
Option: Función:
Seleccione el tipo de rampa, en función de las
necesidades de aceleración/desaceleración. Una
rampa lineal proporciona una aceleración
constante durante la rampa. Una rampa senoidal
2 aporta aceleración no lineal.
[0] * Linear
[1] Sine
Ramp
[2] Sine 2
Ramp
Rampa S basada en los valores ajustados en el
parámetro 3-41 Ramp 1 Ramp Up Time y el
parámetro 3-42 Ramp 1 Ramp Down Time.
4 4
3-18 Relative Scaling Reference Resource
Option: Función:
AVISO!
Este parámetro no se puede ajustar
con el motor en marcha.
Seleccione un valor variable para añadir al
jo (denido en el
valor
parámetro 3-14 Preset Relative Reference).
La suma de los valores jo y variable
(denominada Y en la Ilustración 4.5) se
multiplica por la referencia real
(denominada X en la Ilustración 4.5). Este
producto se añade a la referencia real (X+
X*Y/100) para obtener la referencia real
resultante.
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 49
3-41 Ramp 1 Ramp Up Time
Range: Función:
Size
related*
[0.01 3600 s]
Introduzca el tiempo de aceleración de
rampa, es decir, el tiempo de aceleración
desde 0 r/min hasta la velocidad del motor
síncrona nS. Seleccione un tiempo de
aceleración tal que la intensidad de salida
no supere el límite de intensidad del
parámetro 4-18 Current Limit durante la
rampa. El valor 0,00 corresponde a 0,01 s en
modo de velocidad. Consulte el tiempo de
deceleración en el parámetro 3-42 Ramp 1
Ramp Down Time.
Par . 3 − 41 =
t
s xns r /min
acel.
ref . r/ min

Descripciones de parámetros
VLT® Midi Drive FC 280
3-42 Ramp 1 Ramp Down Time
Range: Función:
Size
related*
44
[0.01
- 3600
s]
Introduzca el tiempo de deceleración, es
decir, el tiempo de desaceleración desde la
velocidad del motor síncrono, ns hasta 0 r/
min. Seleccione un tiempo de deceleración
tal que no se produzca una sobretensión en
el inversor debido al funcionamiento regenerativo del motor, y tal que la corriente
generada no supere el límite establecido en
el parámetro 4-18 Current Limit. El valor 0,00
corresponde a 0,01 s en modo de velocidad.
Consulte el tiempo de aceleración en el
parámetro 3-41 Ramp 1 Ramp Up Time.
t
s xns r /min
Par . 3 − 42 =
desac.
ref . r/ min
3-50 Ramp 2 Type
Option: Función:
Seleccione el tipo de rampa, en función de las
necesidades de aceleración/desaceleración. Una
rampa lineal proporciona una aceleración
constante durante la rampa. Una rampa senoidal
2 aporta aceleración no lineal.
[0] * Linear
[1] Sine
Ramp
[2] Sine 2
Ramp
Rampa S basada en los valores ajustados en el
parámetro 3-51 Ramp 2 Ramp Up Time y el
parámetro 3-52 Ramp 2 Ramp Down Time.
3-51 Ramp 2 Ramp Up Time
Range: Función:
Size
related*
[0.01 3600 s]
Introduzca el tiempo de aceleración, es
decir, el tiempo de aceleración desde 0
r/min hasta la velocidad nominal del motor
ns. Seleccione un tiempo de aceleración tal
que la intensidad de salida no supere el
límite de intensidad del
parámetro 4-18 Current Limit durante la
rampa. El valor 0,00 corresponde a 0,01 s en
modo de velocidad. Consulte el tiempo de
deceleración en el parámetro 3-52 Ramp 2
Ramp Down Time.
t
s xns r /min
Par . 3 − 51 =
acel.
ref . r/ min
3-52 Ramp 2 Ramp Down Time
Range: Función:
Size
related*
[0.01 3600 s]
Introduzca el tiempo de deceleración, es
decir, el tiempo de desaceleración desde
la velocidad nominal del motor ns hasta 0
r/min. Seleccione un tiempo de deceleración tal que no se produzca una
sobretensión en el convertidor de
frecuencia debido al funcionamiento
regenerativo del motor, y tal que la
corriente generada no supere el límite de
intensidad establecido en el
parámetro 4-18 Límite intensidad. El valor
0,00 corresponde a 0,01 s en modo de
velocidad. Consulte el tiempo de
aceleración en el parámetro 3-51 Rampa 2
tiempo acel. rampa.
Par . 3 − 52 =
3-60 Ramp 3 Type
Option: Función:
Seleccione el tipo de rampa, en función de las
necesidades de aceleración/desaceleración. Una
rampa lineal proporciona una aceleración
constante durante la rampa. Una rampa S aporta
aceleración no lineal.
[0] * Linear
[1] Sine
Ramp
[2] Sine 2
Ramp
Rampa S basada en los valores ajustados en el
parámetro 3-61 Rampa 3 tiempo acel. rampa y el
parámetro 3-62 Rampa 3 tiempo desacel. rampa.
3-61 Ramp 3 Ramp up Time
Range: Función:
Size
related*
[0.01 3600 s]
Introduzca el tiempo de aceleración, es
decir, el tiempo de aceleración desde 0
r/min hasta la velocidad nominal del motor
ns. Seleccione un tiempo de aceleración tal
que la intensidad de salida no supere el
límite de intensidad del
parámetro 4-18 Límite intensidad durante la
rampa. El valor 0,00 corresponde a 0,01 s en
modo de velocidad. Consulte el tiempo de
deceleración en el parámetro 3-62 Rampa 3
t
s xns r /min
desac.
ref . r/ min
tiempo desacel. rampa.
50 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

130BD375.10
Time
P 3-80
Hz
P 4-14 Hz
high limit
P 1-25
Motor speed
Jog speed
P 3-19
P 3-80
Ramp up
(acc)
Ramp down
(dec)
t jog t jog
P 4-12 Hz
low limit
Descripciones de parámetros Guía de programación
3-62 Ramp 3 Ramp down Time
Range: Función:
Size
related*
[0.01
- 3600
s]
Introduzca el tiempo de deceleración, es
decir, el tiempo de desaceleración desde la
velocidad nominal del motor ns hasta 0 r/
min. Seleccione un tiempo de deceleración
tal que no se produzca una sobretensión en
el inversor debido al funcionamiento regenerativo del motor, y tal que la corriente
generada no supere el límite de intensidad
establecido en el parámetro 4-18 Límite
intensidad. El valor 0,00 corresponde a 0,01 s
en modo de velocidad. Consulte el tiempo
de aceleración en el parámetro 3-61 Rampa 3
tiempo acel. rampa.
t
Par . 3 − 62 =
desac.
3-70 Ramp 4 Type
Option: Función:
Seleccione el tipo de rampa, en función de las
necesidades de aceleración/desaceleración. Una
rampa lineal proporciona una aceleración
constante durante la rampa. Una rampa S aporta
aceleración no lineal.
[0] * Linear
[1] Sine
Ramp
[2] Sine 2
Ramp
Rampa S basada en los valores ajustados en el
parámetro 3-71 Rampa 4 tiempo acel. rampa y el
parámetro 3-72 Rampa 4 tiempo desacel. rampa.
3-71 Ramp 4 Ramp up Time
Range: Función:
Size
related*
[0.01 3600 s]
Introduzca el tiempo de aceleración, es
decir, el tiempo de aceleración desde 0
r/min hasta la velocidad nominal del motor
ns. Seleccione un tiempo de aceleración tal
que la intensidad de salida no supere el
límite de intensidad del
parámetro 4-18 Límite intensidad durante la
rampa. El valor 0,00 corresponde a 0,01 s en
modo de velocidad. Consulte el tiempo de
deceleración en el parámetro 3-72 Rampa 4
tiempo desacel. rampa.
Par . 3 − 71 =
t
s xns r /min
ref . r/ min
s xns r /min
acel.
ref . r/ min
3-72 Ramp 4 Ramp Down Time
Range: Función:
Size
related*
[0.01
- 3600
s]
Introduzca el tiempo de deceleración, es
decir, el tiempo de desaceleración desde la
velocidad nominal del motor ns hasta 0 r/
min. Seleccione un tiempo de deceleración
tal que no se produzca una sobretensión en
el inversor debido al funcionamiento regenerativo del motor, y tal que la corriente
generada no supere el límite de intensidad
establecido en el parámetro 4-18 Límite
intensidad. El valor 0,00 corresponde a 0,01 s
en modo de velocidad. Consulte el tiempo
de aceleración en el parámetro 3-71 Rampa 4
tiempo acel. rampa.
t
Par . 3 − 72 =
desac.
3-80 Jog Ramp Time
Range: Función:
Size
related*
[0.01
Introduzca el tiempo de rampa de velocidad
- 3600
ja, es decir, el tiempo de aceleración/desace-
s]
leración entre 0 r/min y la frecuencia nominal
del motor ns. Asegúrese de que la intensidad
de salida resultante requerida para el tiempo
de rampa de velocidad ja determinado no
supere el límite de intensidad del
parámetro 4-18 Current Limit. El tiempo de
rampa de velocidad ja se inicia tras la
activación de una señal de velocidad ja
mediante el LCP, una salida digital seleccionada
o el puerto de comunicación serie. Cuando el
estado de velocidad ja está desactivado, los
tiempos de rampa normales son válidos.
4 4
s xns r /min
ref . r/ min
Ilustración 4.6 Tiempo rampa veloc. ja
Par . 3 − 80 =
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 51
Δvelocidad fija par. . 3 − 19 r /min
t
s xns r / min
vel. fija

130BD376.10
Time
Hz
P 4-14 Hz
high limit
Reference
P 1-25
Motor speed
low limit
P 4-12 Hz
P 3-81
Qramp
Qstop
Descripciones de parámetros
VLT® Midi Drive FC 280
3-81 Quick Stop Ramp Time
Range: Función:
Size
related*
44
[0.01 3600 s]
Introduzca el tiempo de rampa de desaceleración de parada rápida, es decir, el tiempo
de desaceleración desde la velocidad
síncrona del motor hasta 0 r/min. Asegúrese
de que no se produce ninguna sobretensión
en el inversor como consecuencia del
funcionamiento regenerativo del motor
requerido para conseguir el tiempo de
deceleración dado. Asegúrese también de
que la corriente generada requerida para
conseguir el tiempo de deceleración dado
no supera el límite de intensidad (ajustado
en el parámetro 4-18 Límite intensidad).
Active la parada rápida mediante una señal
de una entrada digital seleccionada o
mediante el puerto de comunicación serie.
3-93 Maximum Limit
Range: Función:
100 %* [-200 -
200 %]
Ajuste el valor máximo admisible para la
referencia resultante. Esto es aconsejable si
se utiliza el potenciómetro digital para
ajustar con precisión la referencia
resultante.
3-94 Minimum Limit
Range: Función:
-100 % [-200 200 %]
Ajuste el valor mínimo admisible para la
referencia resultante. Esto es aconsejable si
se utiliza el potenciómetro digital para
ajustar con precisión la referencia
resultante.
3-95 Ramp Delay
Range: Función:
1000
ms*
[0 3600000
ms]
Introduzca el retardo necesario desde la
activación de la función del potenciómetro
digital hasta que el convertidor de
frecuencia comience a efectuar la rampa
del valor de referencia. La referencia inicia
la rampa cuando se activa aumentar/
disminuir, con un retardo de 0 ms.
Ilustración 4.7 Tiempo rampa parada rápida
3-90 Step Size
Range: Función:
0.10 %* [0.01 200 %]
Introduzca el tamaño de incremento
requerido para aumentar/disminuir, como
porcentaje de la velocidad síncrona del
motor, ns. Si está activado Aumentar/
Disminuir, la referencia resultante aumenta o
disminuye en la cantidad denida en este
parámetro.
3-92 Power Restore
Option: Función:
[0] * O Reiniciar la referencia de potenciómetro digital al 0 %
[1] On Restaurar la última referencia de potenciómetro digital
después del encendido.
después del encendido.
3-96 Maximum Limit Switch Reference
Range: Función:
25 %* [0 -
200 %]
Introduzca la referencia de conmutador del
límite máximo. Si la grúa alcanza un
conmutador de límite (OFF) y si la velocidad
excede el valor de este parámetro, entonces la
velocidad se reducirá automáticamente al valor
indicado en el parámetro. Si el conmutador de
límite está desconectado, la velocidad no podrá
superar el valor indicado en este parámetro.
52 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

Descripciones de parámetros Guía de programación
4.5 Parámetros: 4-** Limits/Warnings
4-10 Motor Speed Direction
Option: Función:
[0] * Clockwise
AVISO!
El ajuste en el parámetro 4-10 Dirección
veloc. motor tiene su efecto en el
parámetro 1-73 Motor en giro.
Solo se permite el funcionamiento en sentido
horario.
[2] Both
directions
Se permite el funcionamiento tanto en
sentido horario como en sentido antihorario.
4-12 Límite bajo veloc. motor [Hz]
Range: Función:
0 Hz* [ 0-500,0
Hz]
Introduzca el límite mínimo para la velocidad
del motor. El límite bajo de la velocidad del
motor puede ajustarse para que se
corresponda con la frecuencia de salida
mínima del eje del motor. El límite bajo de la
velocidad del motor no debe superar el
ajuste del parámetro 4-14 Motor Speed High
Limit [Hz].
4-14 Motor Speed High Limit [Hz]
Range: Función:
65
[ 0.1
Hz*
AVISO!
- 500
La frecuencia de salida máxima no puede
Hz]
superar el 10 % de la frecuencia de
conmutación del inversor
(parámetro 14-01 Frecuencia conmutación).
4-18 Current Limit
Range: Función:
Size
related*
[ 0 1000 %]
Esta es una auténtica función de límite de
intensidad que continúa en el rango
sobresíncrono. Sin embargo, debido al
debilitamiento del campo inductor, el par
motor al límite de intensidad cae en
consecuencia cuando el incremento de la
tensión se detiene por encima de la
velocidad sincronizada del motor.
4-19 Max Output Frequency
Range: Función:
Size
related*
[ 0 -
AVISO!
500
Este parámetro no se puede ajustar con
Hz]
el motor en marcha.
AVISO!
La frecuencia de salida máxima no
puede superar el 10 % de la frecuencia
de conmutación del inversor
(parámetro 14-01 Frecuencia
conmutación).
Proporcionar un límite nal a la frecuencia de
salida para aumentar la seguridad en aplicaciones en las que existe un riesgo de exceso de
velocidad. Este límite es el mismo en todas las
conguraciones (independientemente del ajuste
del parámetro 1-00 Conguration Mode).
4 4
Introduzca el límite máximo para la velocidad del
motor. El límite alto de la velocidad del motor
puede ajustarse para que se corresponda con el
máximo recomendado por el fabricante del eje
del motor. El límite alto de la velocidad del motor
debe superar el ajuste del parámetro 4-12 Límite
bajo veloc. motor [Hz].
4-16 Torque Limit Motor Mode
Range: Función:
Size related* [ 0 - 1000 %] Esta función limita el par en el eje
para proteger la instalación
mecánica.
4-17 Torque Limit Generator Mode
Range: Función:
100 %* [ 0 - 1000 %] Esta función limita el par en el eje para
proteger la instalación mecánica.
4-20 Torque Limit Factor Source
Seleccione una entrada analógica para el escalado de los ajustes
del parámetro 4-16 Torque Limit Motor Mode y el
parámetro 4-17 Torque Limit Generator Mode desde 0 % hasta
100 % (o a la inversa). Los niveles de señal correspondientes al
0 % y al 100 % se denen en el escalado de la entrada
analógica; por ejemplo, en el grupo de parámetros 6-1* Entrada
analógica 1. Este parámetro solo está activo cuando el
parámetro 1-00 Conguration Mode está ajustado como [0] Veloc.
lazo abierto o [1] Veloc. Lazo Cerrado.
Option: Función:
[0] * No function
[2] Analog in 53
[4] Analog in 53 inv
[6] Analog in 54
[8] Analog in 54 inv
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 53

Descripciones de parámetros
VLT® Midi Drive FC 280
4-21 Speed Limit Factor Source
Seleccione una entrada analógica para el escalado de los ajustes
del parámetro 4-19 Max Output Frequency desde 0 % hasta 100 %
(o a la inversa). Los niveles de señal correspondientes al 0 % y al
100 % se denen en el escalado de la entrada analógica; por
ejemplo, en el grupo de parámetros 6-1* Entrada analógica 1. Este
parámetro solo está activo cuando el parámetro 1-00 Congu-
ration Mode se halla en modo de par.
44
Option: Función:
[0] * No function
[2] Analog in 53
[4] Analog in 53 inv
[6] Analog in 54
[8] Analog in 54 inv
4-22 Break Away Boost
Option: Función:
[0] * O
[1] On El convertidor de frecuencia suministra una corriente
más alta que los niveles de intensidad normales para
mejorar la capacidad de par de arranque.
4-30 Motor Feedback Loss Function
Option: Función:
Esta función se utiliza para controlar la
consistencia de la señal de realimentación,
siempre que esté disponible. Seleccione qué
acción deberá efectuar el convertidor de
frecuencia en caso de que se detecte un
fallo de realimentación. La acción
seleccionada se realiza cuando la señal de
realimentación diere de la velocidad de
salida en el valor ajustado en el
parámetro 4-31 Motor Feedback Speed Error
durante más tiempo que el valor ajustado en
el parámetro 4-32 Motor Feedback Loss
Timeout.
[0] * Disabled
[1] Warning
[2] Trip
[3] Jog
[4] Freeze
Output
[5] Max Speed
[6] Switch to
Open Loop
4-31 Motor Feedback Speed Error
Range: Función:
20 Hz* [0 - 50 Hz] Seleccione el error máximo admisible en la
velocidad (velocidad de salida frente a
realimentación).
Ilustración 4.8 Error de velocidad en realim. del motor
4-32 Motor Feedback Loss Timeout
Range: Función:
0.05 s* [0 - 60s]Ajuste el valor de tiempo límite en que se
permite sobrepasar el error de velocidad
ajustado en el parámetro 4-31 Motor Feedback
Speed Error antes de activar la función
seleccionada en el parámetro 4-30 Motor
Feedback Loss Function.
4-40 Warning Freq. Low
Range: Función:
Size
related*
[ 0 -
Utilice este parámetro para establecer un
500
límite inferior para el rango de frecuencia.
Hz]
Cuando la velocidad del motor sea inferior a
este límite, en la pantalla se indicará Velocidad
baja. La advertencia del bit 10 se ajusta en el
parámetro 16-94 Ext. Status Word. El relé de
salida puede congurarse para indicar esta
advertencia. La luz de advertencia LCP no se
ilumina cuando se alcanza el límite ajustado.
4-41 Warning Freq. High
Range: Función:
Size
related*
[ 0 -
Utilice este parámetro para establecer un
500
límite superior para el rango de frecuencia.
Hz]
Cuando la velocidad del motor supera este
límite, la pantalla indica Alta velocidad. La
advertencia del bit 9 se ajusta en el
parámetro 16-94 Ext. Status Word. El relé de
salida puede congurarse para indicar esta
advertencia. La luz de advertencia LCP no se
ilumina cuando se alcanza el límite ajustado.
54 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

Descripciones de parámetros Guía de programación
4-42 Adjustable Temperature Warning
Range: Función:
0* [ 0 - 255 ] Utilice este parámetro para establecer el límite
de temperatura del motor.
4-50 Advert. Intens. baja
Range: Función:
0 A* [ 0 -
194.0 A]
Introduzca el valor de I
intensidad del motor cae por debajo de este
límite, se congura un bit en el código de
estado. Este valor también puede programarse
para producir una señal en la salida digital o
en la salida de relé.
. Cuando la
BAJO
4-51 Advert. Intens. alta
Range: Función:
Size
related*
[ 0.0 -
194.0 A]
Introduzca el valor de I
intensidad del motor supera este límite,
se ajusta un bit en el código de estado.
Este valor también puede programarse
para producir una señal en la salida
digital o en la salida de relé.
ALTO
. Si la
4-54 Warning Reference Low
Range: Función:
-4999* [-4999 4999 ]
Introduzca el límite de referencia inferior.
Cuando la referencia real desciende por debajo
de este límite, la pantalla indica Ref
20 se ajusta en el parámetro 16-94 Ext. Status
Word. El relé de salida o la salida digital
pueden congurarse para indicar esta
advertencia. La luz de advertencia del LCP no
estará activada cuando se haya alcanzado el
límite establecido para este parámetro.
BAJA
. El bit
4-55 Warning Reference High
Range: Función:
4999* [-4999 -
4999 ]
Utilice este parámetro para establecer un límite
superior para el intervalo de referencias.
Cuando la referencia real supera este límite, la
pantalla indica Ref
parámetro 16-94 Ext. Status Word. El relé de
salida o la salida digital pueden congurarse
para indicar esta advertencia. La luz de
advertencia del LCP no estará activada cuando
se haya alcanzado el límite establecido para
este parámetro.
. El bit 19 se ajusta en el
ALTA
4-56 Warning Feedback Low
Range: Función:
-4999
ProcessCtrlUnit*
[-4999 - 4999
ProcessCtrlUnit]
Utilice este parámetro para
establecer un límite inferior
para el rango de realimentación. Cuando la
realimentación cae por
debajo de este límite, la
pantalla indica Realim. baja. El
bit 6 se ajusta en el
parámetro 16-94 Ext. Status
Word. El relé de salida o la
salida digital pueden
congurarse para indicar esta
advertencia. La luz de
advertencia del LCP no estará
activada cuando se haya
alcanzado el límite
establecido para este
parámetro.
4-57 Warning Feedback High
Range: Función:
4999
ProcessCtrlUnit*
[-4999 - 4999
ProcessCtrlUnit]
Utilice este parámetro para
establecer un límite superior
para el rango de realimentación. Cuando la
realimentación supera este
límite, la pantalla indica
Realim. alta. El bit 5 se ajusta
en el parámetro 16-94 Ext.
Status Word. El relé de salida
o la salida digital pueden
congurarse para indicar esta
advertencia. La luz de
advertencia del LCP no estará
activada cuando se haya
alcanzado el límite
establecido para este
parámetro.
4-58 Función Fallo Fase Motor
Option: Función:
[0] Desactivado En caso de que falte una fase del motor, no
se muestra ninguna alarma.
[1] * Activado Se muestra una alarma si falta una fase del
motor.
4 4
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 55

Descripciones de parámetros
4-61 Bypass Speed From [Hz]
Range: Función:
0 Hz* [ 0 - 500
Hz]
En algunos sistemas es necesario evitar
algunas velocidades de salida por problemas
de resonancia en el sistema. Introduzca los
límites inferiores de las velocidades que se
deben evitar.
VLT® Midi Drive FC 280
44
4-63 Bypass Speed To [Hz]
Range: Función:
0 Hz* [ 0 - 500
Hz]
En algunos sistemas es necesario evitar
algunas velocidades de salida por problemas
de resonancia en el sistema. Introduzca los
límites superiores de las velocidades que se
deben evitar.
4-64 Semi-Auto Bypass Set-up
Option: Función:
[0] * O
[1] Enable
56 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

Descripciones de parámetros Guía de programación
4.6 Parámetros: 5-** Digital In/Out
5-00 Modo E/S digital
Option: Función:
Ajuste el modo NPN o PNP para las entradas
digitales 18, 19, 27, 29, 32 y 33. Modo de
entrada digital.
[0] * PNP - Activo
a 24 V
[1] NPN - Activo
a 0 V
Acción en pulsos direccionales positivos (0).
Los sistemas PNP tienen una resistencia a
GND (conexión toma a tierra).
Acción en pulsos direccionales negativos (1).
Los sistemas NPN tienen un arranque de
hasta +24 V internamente en el convertidor
de frecuencia.
5-01 Terminal 27 Mode
Option: Función:
AVISO!
Este parámetro no se puede ajustar con el
motor en marcha.
[0] * Input Denir el terminal 27 como una entrada digital.
[1] Output Denir el terminal 27 como una salida digital.
4.6.1 5-1* Entradas digitales
Las entradas digitales se usan para seleccionar varias
funciones del convertidor de frecuencia.
De 5-10 a 5-15 Entradas digitales
[0] Sin función No hay reacción a las señales que llegan al
terminal.
[1] Reinicio Reinicia el convertidor de frecuencia después
de una desconexión/alarma. No todas las
alarmas pueden reiniciarse.
[2] Inercia (Entrada digital 27 predeterminada): parada por
inercia, entrada invertida (NC). El convertidor
de frecuencia deja el motor en el modo libre.
«0» lógico⇒paro por inercia.
[3] Inercia y
reinicio
[4] Parada
rápida
[5] Freno CC Entrada invertida para frenado de CC (NC).
Entrada invertida de parada por inercia y
reinicio (NC). Deja el motor en modo libre y
reinicia el convertidor de frecuencia. «0»
lógico⇒paro por inercia y reinicio.
Entrada invertida (NC). Genera una parada de
acuerdo con el tiempo de rampa de parada
rápida ajustado en el parámetro 3-81 Tiempo
rampa parada rápida. Cuando el motor se para,
el eje está en modo libre. 0 lógico⇒Parada
rápida.
Detiene el motor alimentándolo con corriente
continua durante un periodo de tiempo
determinado. Consulte del
parámetro 2-01 Intens. freno CC al
parámetro 2-04 Velocidad de conexión del freno
CC [Hz]. Esta función solo está activada cuando
el valor del parámetro 2-02 Tiempo de frenado
CC es distinto de 0. «0» lógico⇒frenado de CC.
[6] Parada
AVISO!
Cuando el convertidor de frecuencia está
en el límite de par y ha recibido una
orden de parada, es posible que no se
detenga por sí mismo. Para garantizar
que el convertidor de frecuencia se pare,
congure una salida digital como [27]
Torque limit and stop y conecte esta
salida digital a una entrada digital
congurada como inercia.
Función de parada invertida. Genera una
función de parada cuando el terminal
seleccionado pasa del nivel lógico «1» al «0». La
parada se lleva a cabo de acuerdo con el
tiempo de rampa seleccionado
(parámetro 3-42 Rampa 1 tiempo desacel. rampa,
parámetro 3-52 Rampa 2 tiempo desacel. rampa,
parámetro 3-62 Ramp 3 Ramp down Time,
parámetro 3-72 Ramp 4 Ramp Down Time).
[8] Arranque Entrada digital 18 predeterminada. Seleccione
el arranque para una orden de arranque/
parada. 1 lógico = arranque, 0 lógico = parada.
[9] Arranque
por pulsos
[10] Cambio de
sentido
[11] Arranque e
inversión
[12] Act.
arranque
adelante
[13] Act.
arranque
inverso
[14] Velocidad
ja
[15] Ref.
interna, sí
El motor arranca si se aplica un pulso durante
2 ms como mínimo. El motor se detiene
cuando se activa [6] Parada o cuando se emite
una orden de reinicio (a través de DI).
Entrada digital 19 predeterminada. Cambie el
sentido de rotación del eje del motor.
Seleccione «1» lógico para cambiar de sentido.
La señal de cambio de sentido solo cambia el
sentido de giro. No activa la función de
arranque. Seleccione ambos sentidos en el
parámetro 4-10 Dirección veloc. motor. La
función no está activa en lazo cerrado de
proceso.
Se utiliza para el arranque/parada y para el
cambio de sentido en el mismo cable. No
permite ninguna señal de arranque al mismo
tiempo.
Liberar el movimiento en sentido antihorario y
permitir el movimiento en sentido horario.
Liberar el movimiento en sentido horario y
permitir el movimiento en sentido antihorario.
Entrada digital 29 predeterminada. Utilícela
para activar la velocidad ja. Consulte el
parámetro 3-11 Velocidad ja [Hz].
Cambiar entre referencia externa y referencia
interna. Se supone que se ha seleccionado [1]
Externa sí/no en el parámetro 3-04 Función de
referencia. «0» lógico = referencia externa
4 4
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 57

Speed [rpm] Speed [rpm]
Time[sec] Time[sec]a b
130BB462.10
Read Timer:
20 timer tides
Read Timer:
20 timer tides
Time Start
Time counter
Sample time
Timer
Pulse
130BB464.10
Descripciones de parámetros
VLT® Midi Drive FC 280
activa; «1» lógico = una de las ocho referencias
internas está activa.
[16] Ref. interna
bit 0
Los bits de referencia 0,1 y 2 permiten realizar
una selección entre una de las ocho referencias
internas conforme a la Tabla 4.1.
[17] Ref. interna
Igual que [16] Ref. interna bit 0.
bit 1
[18] Ref. interna
bit 2
44
Bit de ref. interna 2 1 0
Ref. interna 0 0 0 0
Igual que [16] Ref. interna bit 0.
Sin cambio de velocidad 0 0
Reducción porcentual 1 0
Aumento porcentual 0 1
Reducción porcentual 1 1
disminuirá en un 0,1 %. Si se activa la
aceleración/deceleración durante más de 400
ms, la referencia resultante seguirá el ajuste
del parámetro de aceleración/deceleración 3-
-x1/3-x2.
Apagado Enganche
arriba
Ref. interna 1 0 0 1
Ref. interna 2 0 1 0
Ref. interna 3 0 1 1
Ref. interna 4 1 0 0
Ref. interna 5 1 0 1
Ref. interna 6 1 1 0
Ref. interna 7 1 1 1
Tabla 4.1 Ref. interna bit
[19] Mantener
referencia
Mantener la referencia real, que es ahora el
punto de activación o condición que se
utilizará para [21] Aceleración y [22] Decele-
ración. Si se utiliza [21] Aceleración o [22]
Deceleración, el cambio de velocidad siempre
se lleva a cabo después de la rampa 2
(parámetro 3-51 Rampa 2 tiempo acel. rampa y
parámetro 3-52 Rampa 2 tiempo desacel. rampa)
en el intervalo 0-parámetro 3-03 Referencia
máxima.
[20] Mantener
salida
AVISO!
Cuando está activada la opción [20]
Mantener salida, el convertidor de
frecuencia no puede pararse ajustando
la señal [8] Arranque como baja.
Detenga el convertidor de frecuencia
mediante un terminal programado para
[2] Inercia o [3] Inercia y reinicio.
Mantener la frecuencia real del motor (Hz), que
es ahora el punto de activación o condición
Tabla 4.2 Apagado / enganche arriba
[22] Deceleración Igual que [21] Aceleración.
[23] Selec.ajuste
LSB
Seleccione [23] Selec.ajuste LSB o [24] Set-up
select bit 1 para seleccionar uno de los dos
ajustes. Ajuste el parámetro 0-10 Ajuste activo
a [9] Ajuste múltiple.
[24] Set-up select
bit 1
[26] Parada
precisa
Entrada digital 32 predeterminada. Igual que
[23] Selec.ajuste LSB.
La función de parada precisa está disponible
para los terminales 18 o 19.
[27] Arranq./
parada prec.
[28] Enganche
arriba
Aumentar el valor de referencia en porcentaje
(relativo) establecido en el
parámetro 3-12 Valor de enganche/arriba-
-abajo.
[29] Enganche
abajo
Disminuir el valor de referencia en porcentaje
(relativo) establecido en el
parámetro 3-12 Valor de enganche/arriba-
-abajo.
[32] Entrada de
pulsos
Medir la duración entre ancos por pulso.
Este parámetro tiene una mayor resolución en
frecuencias bajas, pero no es tan preciso en
frecuencias altas. Este principio tiene una
frecuencia de desconexión que lo hace
inadecuado para encoders con resoluciones
bajas (por ejemplo, 30 PPR) a velocidades
bajas.
que se utilizará para [21] Aceleración y [22]
Deceleración. Si se utiliza [21] Aceleración o [22]
Deceleración, el cambio de velocidad siempre
se lleva a cabo después de la rampa 2
(parámetro 3-51 Rampa 2 tiempo acel. rampa y
parámetro 3-52 Rampa 2 tiempo desacel. rampa)
a: resolución del
encoder baja
b: resolución del
encoder estándar
en el intervalo 0-parámetro 1-23 Frecuencia
motor.
[21] Aceleración Seleccione [21] Aceleración y [22] Deceleración
si desea un control digital de la aceleración/
deceleración (potenciómetro del motor). Active
esta función seleccionando [19] Mantener
referencia o [20] Mantener salida. Si se activa la
Ilustración 4.9 Duración entre ancos por
pulso
aceleración/deceleración durante menos de
400 ms, la referencia resultante aumentará/
58 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

Descripciones de parámetros Guía de programación
[34] Bit rampa 0 Permitir seleccionar una de las cuatro rampas
disponibles, de acuerdo con la Tabla 4.3.
[35] Bit rampa 1 Igual que bit rampa 0.
Ajuste de bit de rampa 1 0
Rampa 1 0 0
Rampa 2 0 1
Rampa 3 1 0
Rampa 4 1 1
Tabla 4.3 Bits de rampa preseleccionados
[40] Inic.
preciso
pulsos
[41] Det.
precisa
pulsos
[51] Parada
externa
[58] Elevador
DigiPot
[60] Counter A (Solo en los terminales 29 o 33.) Entrada para
[61] Counter A (Solo en los terminales 29 o 33.) Entrada para
[62] Reset del
contador A
[63] Counter B (Solo en los terminales 29 o 33.) Entrada para
[64] Counter B (Solo en los terminales 29 o 33.) Entrada para
[65] Reset del
contador B
[72] Error de
PID inverso
[73] Reinicio
PID parte I
Un arranque preciso de pulsos solo requiere
un pulso de 3 ms en los terminales 18 o 19
cuando se utiliza el parámetro 1-83 Precise
Stop Function [1] Par. cont. c/reinicio o [2] Par.
cont. s/reinicio. cuando se alcanza la referencia,
el convertidor de frecuencia activa
internamente la señal de parada precisa. Esto
signica que el convertidor de frecuencia
realizará la parada precisa cuando se alcance
el valor del contador del
parámetro 1-84 Precise Stop Counter Value.
Enviar una señal de parada por pulsos cuando
se active la función de parada precisa del
parámetro 1-83 Precise Stop Function. La
función parada inversa precisa de pulsos está
disponible para los terminales 18 o 19.
Esta función permite dar un fallo externo al
convertidor de frecuencia. Este fallo se trata
como una alarma generada internamente.
el incremento en el recuento en el contador
SLC.
la disminución en el recuento en el contador
SLC.
Entrada para reiniciar el contador A.
el incremento en el recuento en el contador
SLC.
la disminución en el recuento en el contador
SLC.
Entrada para reiniciar el contador B.
Invertir el error resultante del controlador del
PID de proceso. Disponible solo si el
parámetro 1-00 Modo Conguración está
ajustado en [6] Bobinadora superf. o [7] Vel.
lazo a. PID ampl.
Reiniciar la parte I del controlador del PID de
proceso. Equivalente al parámetro 7-40 Reinicio
parte I de PID proc.. Disponible solo si el
parámetro 1-00 Modo Conguración está
ajustado en [6] Bobinadora superf. o [7] Vel.
lazo a. PID ampl.
[74] Activar PID Esta opción habilita el controlador del PID de
proceso. Equivalente al parámetro 7-50 PID de
proceso PID ampliado. Disponible solo si el
parámetro 1-00 Modo Conguración está
ajustado en [7] Vel. lazo a. PID ampl.
[150] Go To
Home
[151] Home Ref.
Switch
[155] HW Limit
Positive
[156] HW Limit
Negative
[157] Pos. Quick
Stop Inv
[160] Go To
Target Pos.
[162] Pos. Idx
Bit0
[163] Pos. Idx
Bit1
[164] Pos. Idx
Bit2
[171] Limit
switch cw
inverse
[172] Limit
switch ccw
inverse
El convertidor de frecuencia se mueve a la
posición inicial.
Indicar el estado del interruptor de referencia
al inicio. On signica que se ha alcanzado la
posición inicial y o signica que no se ha
alcanzado la posición inicial.
Se ha superado el límite positivo de posición
de hardware. Esta opción se encuentra activa
en el anco de bajada.
Se ha superado el límite negativo de posición
de hardware. Esta opción se encuentra activa
en el anco de bajada.
Detener el convertidor de frecuencia durante
el posicionamiento con un tiempo de rampa
ajustado en el parámetro 32-81 Motion Ctrl
Quick Stop Ramp. Esta opción solo será
efectiva cuando el parámetro 37-00 Application
Mode esté ajustado como [2] Position Control
El convertidor de frecuencia se mueve a la
posición de destino. Esta opción solo será
efectiva cuando el parámetro 37-00 Application
Mode esté ajustado como [2] Position Control
Posición del bit de índice 0. Esta opción solo
será efectiva cuando el
parámetro 37-00 Application Mode esté
ajustado como [2] Position Control
Posición del bit de índice 1. Esta opción solo
será efectiva cuando el
parámetro 37-00 Application Mode esté
ajustado como [2] Position Control
Posición del bit de índice 2. Esta opción solo
será efectiva cuando el
parámetro 37-00 Application Mode esté
ajustado como [2] Position Control
5-10 Terminal 18 Entrada digital
Option: Función:
[8] * Arranque Las funciones se describen en el grupo de
parámetros 5-1* Entradas digitales.
4 4
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 59

Descripciones de parámetros
VLT® Midi Drive FC 280
5-11 Terminal 19 entrada digital
4.6.2 5-3* Salidas digitales
Option: Función:
[10] * Cambio de sentido Las funciones se describen en el
grupo de parámetros 5-1* Entradas
digitales.
5-12 Terminal 27 Entrada digital
Option: Función:
44
[2] * Inercia Las funciones se describen en el grupo de
parámetros 5-1* Entradas digitales.
5-13 Terminal 29 Entrada digital
Option: Función:
[14] * Velocidad ja Las funciones se describen en el grupo
de parámetros 5-1* Entradas digitales.
[32] Entrada de pulsos
5-14 Terminal 32 Entrada digital
Option: Función:
[0] * Sin función Las funciones se describen en el grupo de
parámetros 5-1* Entradas digitales.
[82] Encoder input B
5-15 Terminal 33 Entrada digital
Option: Función:
[0] * Sin función Las funciones se describen en el grupo
de parámetros 5-1* Entradas digitales.
[32] Entrada de pulsos
[81] Encoder input A
5-19 Terminal 37/38 Safe Torque O
Utilice este parámetro para congurar la función de STO. Una
advertencia pone el convertidor de frecuencia en modo de
inercia y activa el rearranque automático. Una alarma pone el
convertidor de frecuencia en modo de inercia y requiere un
rearranque manual.
Option: Función:
[1] * Safe Torque O
Alarm
[3] Safe Torque O
Warning
Hacer que el convertidor de frecuencia
entre en modo de inercia cuando se
activa la función de Safe Torque O.
Reinicio manual desde el LCP, entrada
digital o eldbus. Esta alarma ya no podrá
resetearse mediante el reinicio automático
del parámetro 14-20 Reset Mode en la
versión 1.2 del software ni en futuras
versiones.
Hacer que el convertidor de frecuencia
entre en modo de inercia cuando se
activa la función de Safe Torque O
(terminal 37 y terminal 38 inactivos).
Cuando se restablezca el circuito de Safe
Torque O, el convertidor de frecuencia
continúa sin reinicio manual.
Las 2 salidas digitales de estado sólido son comunes para
el terminal 27. Ajuste la función de I/O para el terminal 27
en el parámetro 5-01 Terminal 27 modo E/S.
El terminal 42 también puede congurarse como salida
digital.
AVISO!
Estos parámetros no se pueden ajustar con el motor en
marcha.
5-30 Salidas digitales
[0] * Sin función Valor predeterminado para todas las
salidas digitales.
[1] Control prep. La tarjeta de control está preparada.
[2] Unidad lista El convertidor de frecuencia está
preparado para el funcionamiento y la
placa de control tiene alimentación.
[3] Unid. lista/
remoto
[4] Activar / sin
advert.
[5] Funciona-
miento
[6] Func./sin
advert.
[7] Func. en
ran./sin adv.
[8] Func. en
ref./sin adv.
[9] Alarma Una alarma activa la salida. no hay
[10] Alarma o
advertencia
[11] En límite par Se ha superado el límite de par ajustado
[12] Fuera ran.
intensidad
[13] Corriente
posterior, baja
El convertidor de frecuencia está
preparado para el funcionamiento y en
modo automático.
Preparado para funcionar. No se ha dado
la orden de arranque o de parada
(arrancar/desactivar). No hay advertencias
activas.
El motor funciona y hay par de eje.
La velocidad de salida es mayor que la
velocidad ajustada en el
parámetro 1-81 Vel. mín. para func. parada
[RPM]. El motor está en marcha y no hay
advertencias.
El motor está funcionando dentro de los
intervalos de corriente y velocidad
programados del parámetro 4-50 Advert.
Intens. baja al parámetro 4-51 Warning
Current High. no hay advertencias.
El motor funciona a la velocidad de
referencia. No hay advertencias.
advertencias.
Una alarma o una advertencia activa la
salida.
en el parámetro 4-16 Modo motor límite de
par o en el parámetro 4-17 Modo generador
límite de par.
La intensidad del motor está fuera del
intervalo denido en el
parámetro 4-18 Límite intensidad.
La intensidad del motor es inferior a la
ajustada en el parámetro 4-50 Advert.
Intens. baja.
60 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

Descripciones de parámetros Guía de programación
[14] Corriente
anterior, alta
[15] Fuera del
rango de
velocidad
[16] Velocidad
posterior, baja
[17] Velocidad
anterior, alta
[18] Fuera rango
realim.
[19] < que realim.
alta
[20] > que realim.
baja
[21] Advertencia
térmica
[22] Listo, sin adv.
térm.
[23] Rem list sin
adv tér
[24] Listo, tensiónOKEl convertidor de frecuencia está
[25] Cambio
sentido
[26] Bus OK Comunicación activa (sin tiempo límite) a
[27] Límite par y
parada
[28] Freno, sin
advert.
La intensidad del motor es superior a la
ajustada en el parámetro 4-51 Advert.
Intens. alta.
La frecuencia de salida está fuera del
rango de frecuencia.
La velocidad de salida es inferior al valor
ajustado en el parámetro 4-40 Warning
Freq. Low.
La velocidad de salida es superior al valor
ajustado en el parámetro 4-41 Warning
Freq. High.
La realimentación se encuentra fuera del
intervalo ajustado en el
parámetro 4-56 Advertencia realimentación
baja y el parámetro 4-57 Advertencia
realimentación alta.
La realimentación está por debajo del
límite ajustado en el
parámetro 4-56 Advertencia realimentación
baja.
La realimentación está por encima del
límite ajustado en el
parámetro 4-57 Advertencia realimentación
alta.
La advertencia térmica se activa cuando la
temperatura sobrepasa el límite en el
motor, en el convertidor de frecuencia, en
la resistencia de frenado o en el termistor.
El convertidor de frecuencia está
preparado para funcionar y no hay
advertencia de exceso de temperatura.
El convertidor de frecuencia está
preparado para el funcionamiento y en
modo automático. No hay advertencia de
exceso de temperatura.
preparado para el funcionamiento y la
tensión de red está dentro del rango de
tensión especicado (consulte el apartado
«Especicaciones generales» en la Guía de
diseño).
El motor está en marcha (o listo para
funcionar) en sentido horario cuando el
valor lógico = 0 y en sentido antihorario
cuando el valor lógico = 1. La salida
cambia cuando se aplica la señal de
cambio de sentido.
través del puerto de comunicación serie.
Utilícelo al realizar un paro por inercia y en
condiciones de límite de par. Si el
convertidor de frecuencia ha recibido una
señal de parada y está en el límite de par,
la señal es «0» lógico.
El freno está activado y no hay
advertencias.
[29] Fren. prep. sin
fallos
[30] Fallo freno
(IGBT)
[31] Relé 123 El relé está activado cuando está
[32] Ctrl. freno
mec.
[36] Bit código
control 11
[37] Bit código
control 12
[40] Fuera rango
de ref.
[41] Bajo ref., alta Esta opción estará activa cuando la
[42] Sobre ref., alta Esta opción estará activa cuando la
[43] Límite PID
ampliado
[45] Contr. bus Controlar la salida mediante eldbus. El
[46] Contr. bus, 1
si t. lím.
[47] Contr. bus, 0
si t. lím.
[55] Salida de
pulsos
[56] Heat sink
cleaning
warning, high
[60] Comparador 0 Consulte el grupo de parámetros 13-1*
[61] Comparador 1 Consulte el grupo de parámetros 13-1*
El freno está listo para su funcionamiento
y no presenta ningún fallo.
La salida es «1» lógico cuando el IGBT del
freno se ha cortocircuitado. Utilice esta
función para proteger el convertidor de
frecuencia en caso de que haya un fallo en
los módulos de freno. Utilice la salida o
relé para desconectar la tensión de red del
convertidor de frecuencia.
seleccionado [0] Control Word en el grupo
de parámetros 8-** Comm. and Options.
Permitir controlar un freno mecánico
externo. Para obtener más detalles,
consulte el grupo de parámetros 2-2*
Mechanical Brake.
Esta opción estará activa cuando la
velocidad real esté fuera de los ajustes de
los parámetros comprendidos entre el
parámetro 4-52 Advert. Veloc. baja y el
parámetro 4-55 Advertencia referencia alta.
velocidad real sea inferior al ajuste de
velocidad de referencia.
velocidad real sea superior al ajuste de
velocidad de referencia.
estado de la salida se ajusta en el
parámetro 5-90 Control de bus digital y de
relé. El estado de la salida se retiene en
caso de tiempo límite de eldbus.
Controlar la salida mediante eldbus. El
estado de la salida se ajusta en el
parámetro 5-90 Control de bus digital y de
relé. En caso de tiempo límite de bus, el
estado de la salida se ajusta alto (Sí).
Comparadores. Si el comparador 0 se
evalúa como verdadero, la salida será alta.
De lo contrario, será baja.
Comparadores. Si el comparador 1 se
4 4
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 61

Descripciones de parámetros
VLT® Midi Drive FC 280
evalúa como verdadero, la salida será alta.
De lo contrario, será baja.
[62] Comparador 2 Consulte el grupo de parámetros 13-1*
Comparadores. Si el comparador 2 se
evalúa como verdadero, la salida será alta.
De lo contrario, será baja.
[63] Comparador 3 Consulte el grupo de parámetros 13-1*
Comparadores. Si el comparador 3 se
evalúa como verdadero, la salida será alta.
44
[64] Comparador 4 Consulte el grupo de parámetros 13-1*
[65] Comparador 5 Consulte el grupo de parámetros 13-1*
[70] Regla lógica 0 Consulte el grupo de parámetros 13-4*
[71] Regla lógica 1 Consulte el grupo de parámetros 13-4*
[72] Regla lógica 2 Consulte el grupo de parámetros 13-4*
[73] Regla lógica 3 Consulte el grupo de parámetros 13-4*
[74] Regla lógica 4 Consulte el grupo de parámetros 13-4*
[75] Regla lógica 5 Consulte el grupo de parámetros 13-4*
[80] Salida digital
SL A
[81] Salida digital
SL B
[82] Salida digital
SL C
De lo contrario, será baja.
Comparadores. Si el comparador 4 se
evalúa como verdadero, la salida será alta.
De lo contrario, será baja.
Comparadores. Si el comparador 5 se
evalúa como verdadero, la salida será alta.
De lo contrario, será baja.
Reglas lógicas. Si la regla lógica 0 se evalúa
como verdadera, la salida será alta. De lo
contrario, será baja.
Reglas lógicas. Si la regla lógica 1 se evalúa
como verdadera, la salida será alta. De lo
contrario, será baja.
Reglas lógicas. Si la regla lógica 2 se evalúa
como verdadera, la salida será alta. De lo
contrario, será baja.
Reglas lógicas. Si la regla lógica 3 se evalúa
como verdadera, la salida será alta. De lo
contrario, será baja.
Reglas lógicas. Si la regla lógica 4 se evalúa
como verdadera, la salida será alta. De lo
contrario, será baja.
Reglas lógicas. Si la regla lógica 5 se evalúa
como verdadera, la salida será alta. De lo
contrario, será baja.
Consulte el parámetro 13-52 Acción
Controlador SL. La salida será alta cuando
se ejecute Smart Logic Action [38] Aj. sal.
dig. A alta . La salida será baja cuando se
ejecute Smart Logic Action [32] Aj. sal. dig.
A baja.
Consulte el parámetro 13-52 Acción
Controlador SL. La entrada será alta cuando
se ejecute la acción de lógica inteligente
[39] Aj. sal. dig. B alta. La entrada será baja
cuando se ejecute la acción de lógica
inteligente [33] Aj. sal. dig. B baja.
Consulte el parámetro 13-52 Acción
Controlador SL. La entrada será alta cuando
se ejecute la acción de lógica inteligente
[83] Salida digital
SL D
[91] Encoder
emulate
output A
[160] Sin alarma El valor de la salida es alto si no hay
[161] Func. inverso La salida es alta cuando el convertidor de
[165] Ref. local
activa
[166] Ref. remota
activa
[167] Coman.
arranque
activo
[168] Drive modo
manual
[169] Dispos. en
modo auto.
[170] Homing
Completed
[171] Target
Position
Reached
[172] Position
Control Fault
[173] Position Mech
Brake
[190] STO function
active
[193] Modo reposo El convertidor de frecuencia / sistema ha
[40] Aj. sal. dig. C alta. La entrada será baja
cuando se ejecute la acción de lógica
inteligente [34] Aj. sal. dig. C baja.
Consulte el parámetro 13-52 Acción
Controlador SL. La entrada será alta cuando
se ejecute la acción de lógica inteligente
[41] Aj. sal. dig. D alta. La entrada será baja
cuando se ejecute la acción de lógica
inteligente [35] Aj. sal. dig. D baja.
presente ninguna alarma.
frecuencia está funcionando en sentido
antihorario (producto lógico de los bits de
estado «en funcionamiento» E «inverso»).
La salida es alta cuando hay una orden de
arranque activo y no está activada ninguna
orden de parada.
La salida es alta cuando el convertidor de
frecuencia está en modo manual.
La salida es alta cuando el convertidor de
frecuencia está en modo automático.
Se ha completado la operación de retorno
al inicio. Esta opción solo será efectiva
cuando el parámetro 37-00 Application
Mode esté ajustado como [2] Position
Control
Se ha alcanzado la posición de destino.
Esta opción solo será efectiva cuando el
parámetro 37-00 Application Mode esté
ajustado como [2] Position Control
Se ha producido un error en el proceso de
posicionamiento. Consulte el
parámetro 37-18 Pos. Ctrl Fault Reason para
obtener detalles sobre el fallo. Esta opción
solo será efectiva cuando el
parámetro 37-00 Application Mode esté
ajustado como [2] Position Control
Seleccionar el control mecánico para el
posicionamiento. Esta opción solo será
efectiva cuando el
parámetro 37-00 Application Mode esté
ajustado como [2] Position Control
pasado al modo reposo. Consulte el grupo
de parámetros 22-4* Modo reposo.
62 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

Descripciones de parámetros Guía de programación
[194] Correa rota Se ha detectado una rotura en la correa.
Consulte el grupo de parámetros 22-4*
Modo reposo.
[239] STO function
fault
5-34 On Delay, Digital Output
Range: Función:
0.01 s* [0 - 600 s]
5-35 O Delay, Digital Output
Range: Función:
0.01 s* [0 - 600 s]
4.6.3 5-4* Relés
Parámetros para congurar la temporización y las
funciones de salida de los relés.
El parámetro muestra un relé.
5-40 Relé de función
Option: Función:
[0] Sin función Ajustes predeterminados para todas las
salidas digitales.
[1] * Ctrl prep. La tarjeta de control está preparada.
[2] Unidad lista El convertidor de frecuencia está preparado
para el funcionamiento. La alimentación y
los suministros de control están OK.
[3] Unid. lista/
remoto
[4] Activar / sin
advert.
[5] Funciona-
miento
[6] Func./sin
advert.
[7] Func. en
ran./sin adv.
[8] Func. en
ref./sin adv.
[9] Alarma Una alarma activa la salida. No hay
[10] Alarma o
advertencia
[11] En límite par Se ha superado el límite de par ajustado
El convertidor de frecuencia está preparado
para el funcionamiento y en modo
automático.
Preparado para funcionar. No se han dado
órdenes de arranque ni de parada. No hay
advertencias activas.
El motor funciona con un par de eje.
La velocidad de salida es mayor que la
velocidad ajustada en el
parámetro 1-82 Min Speed for Function at
Stop [Hz]. El motor está en marcha y no
hay ninguna advertencia presente.
El motor funciona dentro de los rangos de
intensidad programados en el
parámetro 4-50 Warning Current Low.
El motor funciona a la velocidad de
referencia. No hay advertencias.
advertencias.
Una alarma o una advertencia activan la
salida.
en el parámetro 4-16 Torque Limit Motor
Mode o en el parámetro 4-17 Torque Limit
Generator Mode.
5-40 Relé de función
Option: Función:
[12] Fuera ran.
intensidad
[13] Corriente
posterior, baja
[14] Corriente
anterior, alta
[15] Fuera del
rango de
velocidad
[16] Velocidad
posterior, baja
[17] Velocidad
anterior, alta
[18] Fuera rango
realim.
[19] < que realim.
alta
[20] > que realim.
baja
[21] Advertencia
térmica
[22] Listo, sin adv.
térm.
[23] Rem list sin
adv tér
[24] Listo, tensiónOKEl convertidor de frecuencia está preparado
[25] Cambio
sentido
[26] Bus OK Comunicación activa (sin tiempo límite) a
[27] Límite par y
parada
La intensidad del motor está fuera del
intervalo denido en el
parámetro 4-18 Current Limit.
La intensidad del motor es inferior a la
ajustada en el parámetro 4-50 Warning
Current Low.
La intensidad del motor es superior a la
ajustada en el parámetro 4-51 Warning
Current High.
La velocidad/frecuencia de salida supera el
límite ajustado en el
parámetro 4-40 Warning Freq. Low y el
parámetro 4-41 Warning Freq. High.
La frecuencia de salida es inferior al valor
ajustado en el parámetro 4-40 Warning Freq.
Low.
La frecuencia es superior al valor ajustado
en el parámetro 4-41 Warning Freq. High.
La realimentación se encuentra fuera del
intervalo ajustado en el
parámetro 4-56 Warning Feedback Low y el
parámetro 4-57 Warning Feedback High.
La realimentación está por debajo del
límite ajustado en el
parámetro 4-56 Warning Feedback Low.
La realimentación está por encima del
límite ajustado en el
parámetro 4-57 Warning Feedback High.
La advertencia térmica se activa cuando la
temperatura sobrepasa el límite en el
motor, en el convertidor de frecuencia, en
la resistencia de frenado o en la resistencia
conectada.
El convertidor de frecuencia está preparado
para funcionar y no hay advertencia de
exceso de temperatura.
El convertidor de frecuencia está preparado
para el funcionamiento y en modo
automático. No hay advertencia de exceso
de temperatura.
para su uso y la tensión de red se
encuentra dentro del rango de tensión
especicado.
El motor está en marcha (o listo para
funcionar) en sentido horario cuando el
valor lógico = 0 y en sentido antihorario
cuando el valor lógico = 1. La salida
cambia cuando se aplica la señal de
cambio de sentido.
través del puerto de comunicación serie.
Utilícelo para efectuar un paro por inercia
del convertidor de frecuencia en situación
4 4
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 63

Descripciones de parámetros
VLT® Midi Drive FC 280
5-40 Relé de función
Option: Función:
de límite de par. Si el convertidor de
frecuencia ha recibido una señal de parada
y está en el límite de par, la señal será «0»
lógico.
[28] Freno, sin
advert.
44
[29] Fren. prep. sin
fallos
[30] Fallo freno
(IGBT)
[31] Relé 123 La salida o el relé digital están activados
[32] Ctrl. freno
mec.
[36] Bit código
control 11
[37] Bit código
control 12
[40] Fuera rango
de ref.
[41] Bajo ref., alta Activado cuando la velocidad real sea
[42] Sobre ref., alta Activado cuando la velocidad real sea
[45] Contr. bus Controlar la salida digital o relé mediante
El freno está activado y no hay
advertencias.
El freno está listo para su funcionamiento y
no presenta ningún fallo.
La salida es «1» lógico cuando el IGBT del
freno se ha cortocircuitado. Utilice esta
función para proteger el convertidor de
frecuencia en caso de que haya un fallo en
el módulo de freno. Utilice la salida/relé
digital para desconectar la tensión de red
del convertidor de frecuencia.
cuando está seleccionado [0] Control word
en el grupo de parámetros 8-** Comm. and
Options.
Control de freno mecánico ampliado.
Cuando se activen los parámetros
seleccionados en el grupo de parámetros
2-2* Mechanical Brake, refuerce la salida
para conducir la corriente para la bobina
del freno. Este problema se resuelve
conectando un relé externo a la salida
digital seleccionada.
Active el relé 1 mediante un código de
control a partir del eldbus. No hay otro
impacto funcional en el convertidor de
frecuencia. Aplicación típica: control de un
dispositivo auxiliar a partir de un eldbus.
La función es válida cuando se selecciona
[0] Protocolo FC en el
parámetro 8-10 Control Word Prole.
Active el relé 2 mediante un código de
control a partir del eldbus. No hay otro
impacto funcional en el convertidor de
frecuencia. Aplicación típica: control de un
dispositivo auxiliar a partir de un eldbus.
La función es válida cuando se selecciona
[0] Protocolo FC en el
parámetro 8-10 Control Word Prole.
Activado cuando la velocidad real esté
fuera de los ajustes del
parámetro 4-55 Warning Reference High y el
parámetro 4-56 Warning Feedback Low.
inferior al ajuste de velocidad de referencia.
superior al ajuste de velocidad de
referencia.
bus. El estado de la salida se ajusta en el
5-40 Relé de función
Option: Función:
parámetro 5-90 Digital & Relay Bus Control.
El estado de la salida se retiene en caso de
tiempo límite de bus.
[46] Contr. bus, 1
si t. lím.
[47] Contr. bus, 0
si t. lím.
[56] Heat sink
cleaning
warning, high
[60] Comparador 0 Consulte el grupo de parámetros 13-1*
[61] Comparador 1 Consulte el grupo de parámetros 13-1*
[62] Comparador 2 Consulte el grupo de parámetros 13-1*
[63] Comparador 3 Consulte el grupo de parámetros 13-1*
[64] Comparador 4 Consulte el grupo de parámetros 13-1*
[65] Comparador 5 Consulte el grupo de parámetros 13-1*
[70] Regla lógica 0 Consulte el grupo de parámetros 13-4*
[71] Regla lógica 1 Consulte el grupo de parámetros 13-4*
[72] Regla lógica 2 Consulte el grupo de parámetros 13-4*
[73] Regla lógica 3 Consulte el grupo de parámetros 13-4*
Controlar la salida mediante bus. El estado
de la salida se ajusta en el
parámetro 5-90 Digital & Relay Bus Control.
En caso de tiempo límite de bus, el estado
de la salida se ajusta alto (Sí).
Controlar la salida mediante bus. El estado
de la salida se ajusta en el
parámetro 5-90 Digital & Relay Bus Control.
En caso de tiempo límite de bus, el estado
de la salida se ajusta bajo (No).
Comparadores. Si el comparador 0 del SLC
se evalúa como verdadero, la salida será
alta. De lo contrario, será baja.
Comparadores. Si el comparador 1 del SLC
se evalúa como verdadero, la salida será
alta. De lo contrario, será baja.
Comparadores. Si el comparador 2 del SLC
se evalúa como verdadero, la salida será
alta. De lo contrario, será baja.
Comparadores. Si el comparador 3 del SLC
se evalúa como verdadero, la salida será
alta. De lo contrario, será baja.
Comparadores. Si el comparador 4 del SLC
se evalúa como verdadero, la salida será
alta. De lo contrario, será baja.
Comparadores. Si el comparador 5 del SLC
se evalúa como verdadero, la salida será
alta. De lo contrario, será baja.
Reglas lógicas. Si la regla lógica 0 del SLC
se evalúa como verdadera, la salida será
alta. De lo contrario, será baja.
Reglas lógicas. Si la regla lógica 1 del SLC
se evalúa como verdadera, la salida será
alta. De lo contrario, será baja.
Reglas lógicas. Si la regla lógica 2 del SLC
se evalúa como verdadera, la salida será
alta. De lo contrario, será baja.
Reglas lógicas. Si la regla lógica 3 del SLC
64 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

Descripciones de parámetros Guía de programación
5-40 Relé de función
Option: Función:
se evalúa como verdadera, la salida será
alta. De lo contrario, será baja.
[74] Regla lógica 4 Consulte el grupo de parámetros 13-4*
Reglas lógicas. Si la regla lógica 4 del SLC
se evalúa como verdadera, la salida será
alta. De lo contrario, será baja.
[75] Regla lógica 5 Consulte el grupo de parámetros 13-4*
Reglas lógicas. Si la regla lógica 5 del SLC
se evalúa como verdadera, la salida será
alta. De lo contrario, será baja.
[80] Salida digital
SL A
[81] Salida digital
SL B
[82] Salida digital
SL C
[83] Salida digital
SL D
[160] Sin alarma El valor de la salida es alto si no hay
[161] Func. inverso La salida es alta cuando el convertidor de
[165] Ref. local
activa
[166] Ref. remota
activa
[167] Coman.
arranque
activo
[168] Drive modo
manual
[169] Dispos. en
modo auto.
[170] Homing
Completed
Consulte el parámetro 13-52 SL Controller
Action. La salida A es baja cuando se
ejecuta la acción de lógica inteligente [32].
La salida A es alta cuando se ejecuta la
acción de lógica inteligente [38].
Consulte el parámetro 13-52 SL Controller
Action. La salida B es baja cuando se
ejecuta la acción de lógica inteligente [32].
La salida B es alta cuando se ejecuta la
acción de lógica inteligente [38].
Consulte el parámetro 13-52 SL Controller
Action. La salida C es baja cuando se
ejecuta la acción de lógica inteligente [32].
La salida C es alta cuando se ejecuta la
acción de lógica inteligente [38].
Consulte el parámetro 13-52 SL Controller
Action. La salida D es baja cuando se
ejecuta la acción de lógica inteligente [32].
La salida D es alta cuando se ejecuta la
acción de lógica inteligente [38].
presente ninguna alarma.
frecuencia está funcionando en sentido
antihorario (producto lógico de los bits de
estado «en funcionamiento» E «inverso»).
La salida es alta cuando hay una orden de
arranque activo y no está activada ninguna
orden de parada.
La salida es alta cuando el convertidor de
frecuencia está en modo manual.
La salida es alta cuando el convertidor de
frecuencia está en modo automático.
Se ha completado la operación de retorno
al inicio. Esta opción solo será efectiva
cuando el parámetro 37-00 Application
Mode esté ajustado como [2] Position
Control
5-40 Relé de función
Option: Función:
[171] Target
Position
Reached
[172] Position
Control Fault
[173] Position Mech
Brake
[190] STO function
active
[193] Modo reposo El convertidor de frecuencia / sistema ha
[194] Correa rota Se ha detectado una rotura en la correa.
[239] STO Function
Fault
Se ha alcanzado la posición de destino.
Esta opción solo será efectiva cuando el
parámetro 37-00 Application Mode esté
ajustado como [2] Position Control
Se ha producido un error en el proceso de
posicionamiento. Consulte el
parámetro 37-18 Pos. Ctrl Fault Reason para
obtener detalles sobre el fallo. Esta opción
solo será efectiva cuando el
parámetro 37-00 Application Mode esté
ajustado como [2] Position Control
Seleccionar el control mecánico para el
posicionamiento. Esta opción solo será
efectiva cuando el
parámetro 37-00 Application Mode esté
ajustado como [2] Position Control
pasado al modo reposo. Consulte el grupo
de parámetros 22-4* Modo reposo.
Consulte el grupo de parámetros 22-4*
Modo reposo.
5-41 Retardo conex, relé
Range: Función:
0.01 s* [0.01 600 s]
Ilustración 4.10 Retardo conex, relé
Introduzca el retardo del tiempo de
conexión del relé. El relé solo se activa si la
condición en el parámetro 5-40 Relé de
función está ininterrumpida durante el
tiempo especicado.
4 4
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 65

Evento
seleccionado
Salida de relé
Retardo a la
Conexión E-26
Retardo a la
Desconexión E-27
130BA172.10
130BD377.10
Ref.
Low freq.
P 5-50/
P 5-55
Input
(Hz)
High
ref.
value
P 5-53/
p 5-58
High freq.
P 5-51/
P 5-56
Low
ref.
value
P 5-52/
p 5-57
Descripciones de parámetros
VLT® Midi Drive FC 280
5-42 Retardo desconex, relé
Range: Función:
0.01 s* [0.01 - 600 s] Introduzca el retardo del tiempo de
desconexión del relé.
44
5-50 Term. 29 Low Frequency
Range: Función:
4 Hz* [4 - 31999
Hz]
Ajuste el límite de frecuencia baja correspondiente a la velocidad baja del eje del motor
(es decir, al valor de referencia bajo) en el
parámetro 5-52 Term. 29 Low Ref./Feedb. Value.
Consulte la Ilustración 4.12.
5-51 Term. 29 High Frequency
Range: Función:
Ilustración 4.11 Retardo desconex, relé
Si la condición de evento seleccionada cambia antes de
que expire el temporizador de retardo de conexión o
desconexión, la salida de relé no se verá afectada.
4.6.4 5-5* Entrada de pulsos
Los parámetros de entrada de pulsos se usan para denir
una ventana adecuada para el área de referencia del pulso
congurando los ajustes de escalado y ltro para las
entradas de pulsos. Los terminales de entrada 29 o 33
funcionan como entradas de referencia de frecuencia.
Ajuste el terminal 29 (parámetro 5-13 Terminal 29 Entrada
digital) o el terminal 33 (parámetro 5-15 Terminal 33 entrada
digital) en [32] Entrada de pulsos. Si se utiliza el terminal 29
como entrada, debe ajustarse el parámetro 5-01 Terminal 27
modo E/S en [0] Entrada.
32000
Hz*
5-52 Term. 29 Low Ref./Feedb. Value
Range: Función:
0* [-4999 -
5-53 Term. 29 High Ref./Feedb. Value
Range: Función:
Size
related*
4999 ]
[5 32000 Hz]
[-4999 4999 ]
Introduzca el límite alto de frecuencia
correspondiente a la velocidad alta del
eje del motor (que es el valor de
referencia alto) en el
parámetro 5-53 Term. 29 High Ref./Feedb.
Value.
Ajuste el límite del valor de referencia bajo para
la velocidad del eje del motor [Hz]. Este es
también el valor de realimentación más bajo;
consulte también el parámetro 5-57 Term. 33 Low
Ref./Feedb. Value. Ajuste el terminal 29 a entrada
digital (parámetro 5-02 Terminal 29 Mode=[0]
Entrada y parámetro 5-13 Terminal 29 Entrada
digital=valor aplicable).
Introduzca el valor de referencia alto [Hz]
para la velocidad del eje del motor y el
valor alto de realimentación. Consulte
también el parámetro 5-58 Term. 33 High
Ref./Feedb. Value. Seleccione el terminal 29
como entrada digital
(parámetro 5-02 Terminal 29 modo E/S=[0]
Entrada (predeterminado) y
parámetro 5-13 Terminal 29 Entrada
digital=valor aplicable).
5-55 Term. 33 Low Frequency
Range: Función:
4 Hz* [4 - 31999
Hz]
Ilustración 4.12 Entrada de pulsos
66 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305
Ajuste la frecuencia baja correspondiente a
la velocidad baja del eje del motor (es decir,
al valor de referencia bajo) en el
parámetro 5-57 Term. 33 Low Ref./Feedb.
Value.

Descripciones de parámetros Guía de programación
5-56 Term. 33 High Frequency
Range: Función:
32000
Hz*
[5 - 32000
Hz]
Introduzca la frecuencia alta correspondiente a la velocidad alta del eje del
motor (es decir, al valor de referencia
alto) en el parámetro 5-58 Term. 33 High
Ref./Feedb. Value.
5-57 Term. 33 Low Ref./Feedb. Value
Range: Función:
0* [-4999 -
4999 ]
Ajuste el valor de referencia bajo [Hz] para la
velocidad del eje del motor. Este es también el
valor bajo de realimentación; consulte también
el parámetro 5-52 Term. 29 Low Ref./Feedb.
Value.
5-58 Term. 33 High Ref./Feedb. Value
Range: Función:
Size
related*
[-4999 4999 ]
Introduzca el valor de referencia alto
[Hz] para la velocidad del eje del
motor. Consulte también el
parámetro 5-53 Term. 29 High Ref./
Feedb. Value.
5-60 Terminal 27 Pulse Output Variable
Option: Función:
[0] * No operation
[45] Bus ctrl.
[48] Bus ctrl., timeout
[100] Output frequency
[101] Reference
[102] Process Feedback
[103] Motor Current
[104] Torque rel to limit
[105] Torq relate to rated
[106] Power
[107] Speed
[109] Max Out Freq
[113] Ext. Closed Loop 1
5-62 Pulse Output Max Freq 27
Range: Función:
5000 Hz* [4 - 32000
Hz]
Ajuste la frecuencia máxima para el
terminal 27 correspondiente a la variable
de salida seleccionada en el
parámetro 5-60 Terminal 27 Pulse Output
Variable.
5-70 Term 32/33 Pulses Per Revolution
Range: Función:
1024* [1 - 4096 ] Ajuste los pulsos del encoder por revolución
del eje del motor. Lea el valor correcto del
encoder.
5-71 Term 32/33 Encoder Direction
Option: Función:
AVISO!
Este parámetro no se puede ajustar
con el motor en marcha.
Cambiar la dirección de rotación detectada
del encoder sin necesidad de cambiar el
cableado.
[0] * Clockwise
[1] Counter
clockwise
5-90 Control de bus digital y de relé
Range: Función:
0* [0 - 0xFFFFFFFF ] Este parámetro guarda el estado de los
Bit 0-3 Reservado
Bit 4 Relé 1 terminal de salida
Bit 6-23 Reservado
Bit 24 Terminal 42 salida digital
Bit 26-31 Reservado
Tabla 4.4 Funciones de bit
5-93 Pulse Out 27 Bus Control
Range: Función:
0 %* [0 -
100 %]
5-94 Pulse Out 27 Timeout Preset
Range: Función:
0 %* [0 -
100 %]
Ajustar el canal A con 90° (grados eléctricos)
de retraso con respecto al canal B cuando el
eje del encoder gira en sentido horario.
Ajustar el canal A con 90° (grados eléctricos)
de avance con respecto al canal B cuando el
eje del encoder gira en sentido horario.
relés y salidas digitales controlados por
bus.
Un 1 lógico indica que la salida es alta o
está activa.
Un 0 lógico indica que la salida es baja o
está inactiva.
Ajuste la frecuencia de salida que se transere
al terminal de salida 27 cuando el terminal se
congure como [45] Contr. bus en el
parámetro 5-60 Terminal 27 Pulse Output
Variable.
Ajuste la frecuencia de salida transferida al
terminal de salida 27 cuando el terminal se
congure como [48] Contr. bus, t. lím. en el
parámetro 5-60 Terminal 27 Pulse Output Variable
y se detecte un tiempo límite.
4 4
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 67

Ref./Feedback
Analog input
High Ref./
Feedb. Value'
Low Ref./
Feedb. Value'
'Low Voltage'or
'Low Current'
'High Voltage'or
'High Current'
130BD378.10
1 V 5 V 10 V
300
600
900
1200
1500
[V]
150
Par 6-xx
Par 6-xx
Par 6-xx
Par 6-xx
Descripciones de parámetros
VLT® Midi Drive FC 280
4.7 Parámetros: 6-** Analog In/Out
6-00 Tiempo Límite Cero Activo
Range: Función:
10 s* [1 - 99 s] Introduzca el valor de tiempo límite.
6-01 Función Cero Activo
6-11 Terminal 53 escala alta V
Range: Función:
10 V* [0 - 10 V] Introduzca la tensión (V) que corresponda al
valor de referencia alto (denido en el
parámetro 6-15 Term. 53 valor alto ref./realim).
Option: Función:
44
[0] * No
[1] Mantener
salida
[2] Parada
[3] Velocidad ja
[4] Velocidad max.
[5] Parada y
desconexión
Seleccionar la función de tiempo límite. La
función ajustada en el
parámetro 6-01 Función Cero Activo se
activa si la señal de entrada del terminal
53 o 54 es inferior al 50 % del valor del
parámetro 6-10 Terminal 53 escala baja V,
el parámetro 6-20 Terminal 54 escala baja V
o el parámetro 6-22 Terminal 54 escala baja
mA durante el periodo de tiempo denido
en el parámetro 6-00 Tiempo Límite Cero
Activo.
6-14 Term. 53 valor bajo ref./realim
Range: Función:
0* [-4999 -
4999 ]
Introduzca el valor de referencia o realimentación que corresponda a la tensión o
corriente ajustadas en el
parámetro 6-10 Terminal 53 escala baja V.
6-15 Term. 53 valor alto ref./realim
Range: Función:
Size
related*
[-4999 4999 ]
Introduzca el valor de referencia o
realimentación que corresponda a la
tensión o corriente ajustadas en el
parámetro 6-11 Terminal 53 escala alta
V.
6-16 Terminal 53 tiempo ltro constante
Range: Función:
0.01 s* [0.01 - 10s]Introducir la constante de tiempo. Se trata
de una constante del tiempo de ltro de
paso bajo digital de primer nivel para
supresión de ruido eléctrico en el terminal
53. Un valor alto de la constante de tiempo
mejora la amortiguación, aunque aumenta el
retardo de tiempo por el ltro.
6-18 Terminal 53 Digital Input
Option: Función:
[0] * No operation
[1] Reset
[2] Coast inverse
[3] Coast and reset inverse
[4] Quick stop inverse
[5] DC-brake inverse
[6] Stop inverse
[8] Start
Ilustración 4.13 Función de tiempo límite
6-10 Terminal 53 escala baja V
Range: Función:
0.07 V* [0 - 10V]Introduzca la tensión (V) que corresponda al
68 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305
parámetro 6-14 Term. 53 valor bajo ref./realim.
Para activar el parámetro 6-01 Función Cero
Activo, ajuste el parámetro a >1 V.
[10] Reversing
[11] Start reversing
[12] Enable start forward
[13] Enable start reverse
[14] Jog
[15] Preset reference on
[16] Preset ref bit 0
[17] Preset ref bit 1
[18] Preset ref bit 2
[19] Freeze reference
[20] Freeze output

Descripciones de parámetros Guía de programación
6-18 Terminal 53 Digital Input
Option: Función:
[21] Speed up
[22] Speed down
[23] Set-up select bit 0
[24] Set-up select bit 1
[28] Catch up
[29] Slow down
[34] Ramp bit 0
[35] Ramp bit 1
[51] External Interlock
[55] DigiPot increase
[56] DigiPot decrease
[57] DigiPot clear
[58] DigiPot Hoist
[72] PID error inverse
[73] PID reset I part
[74] PID enable
[150] Go To Home
[151] Home Ref. Switch
[155] HW Limit Positive Inv
[156] HW Limit Negative Inv
[157] Pos. Quick Stop Inv
[160] Go To Target Pos.
[162] Pos. Idx Bit0
[163] Pos. Idx Bit1
[164] Pos. Idx Bit2
[171] Limit switch cw inverse
[172] Limit switch ccw inverse
6-19 Terminal 53 mode
Seleccione el modo de entrada del terminal 53.
Option: Función:
[1] * Tensión
[6] Entrada digital
6-20 Terminal 54 escala baja V
Range: Función:
0.07 V* [0 - 10V]Introduzca la tensión (V) que corresponda al
valor bajo de referencia (denido en el
parámetro 6-24 Term. 54 valor bajo ref./realim).
Para activar el parámetro 6-01 Función Cero
Activo, ajuste el parámetro a >1 V.
6-21 Terminal 54 escala alta V
Range: Función:
10 V* [0 - 10 V] Introduzca la tensión (V) que corresponda al
valor de referencia alto (denido en el
parámetro 6-25 Term. 54 valor alto ref./realim).
6-22 Terminal 54 escala baja mA
Range: Función:
4 mA* [0 - 20
mA]
Introduzca el valor de intensidad baja. Esta
señal de referencia corresponde al valor bajo
de referencia/realimentación ajustado en el
parámetro 6-24 Term. 54 valor bajo ref./realim.
Para activar la función tiempo límite de cero
activo del parámetro 6-01 Función Cero Activo,
ajuste el valor a >2 mA.
6-23 Terminal 54 escala alta mA
Range: Función:
20 mA* [0 - 20
mA]
Introduzca el valor de corriente alta que
corresponda al valor alto de referencia/
realimentación denido en el
parámetro 6-25 Term. 54 valor alto ref./
realim.
6-24 Term. 54 valor bajo ref./realim
Range: Función:
0* [-4999 -
4999 ]
Introduzca el valor de referencia o realimentación que se corresponde con la tensión o
corriente ajustadas en el
parámetro 6-21 Terminal 54 escala alta V / el
parámetro 6-22 Terminal 54 escala baja mA.
6-25 Term. 54 valor alto ref./realim
Range: Función:
Size
related*
[-4999 4999 ]
Introduzca el valor de referencia o
realimentación que se corresponde con
la tensión o corriente ajustadas en el
parámetro 6-21 Terminal 54 escala alta
V / el parámetro 6-23 Terminal 54 escala
alta mA.
6-26 Terminal 54 tiempo ltro constante
Range: Función:
0.01 s* [0.01 - 10s]Introduzca la constante de tiempo, que es
una constante del tiempo de ltro de paso
bajo digital de primer nivel para supresión
de ruido eléctrico en el terminal 54. Un valor
alto de la constante de tiempo mejora la
amortiguación, aunque aumenta el retardo
de tiempo por el ltro.
6-29 Modo terminal 54
Option: Función:
Seleccione si el terminal 54 se utiliza para
entrada de corriente o de tensión.
[0] Intensidad
[1] * Tensión
4 4
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 69

Descripciones de parámetros
VLT® Midi Drive FC 280
6-90 Terminal 42 Mode
Option: Función:
Ajuste el terminal 42 como salida analógica o
salida digital. Cuando se ajusta la salida
digital, la salida del terminal 42 es 0 mA
(desactivado) o 20 mA (activado). La
resistencia externa (≥1 kΩ) debe conectarse
entre los terminales 42 y 55.
44
[0] * 0-20 mA
[1] 4-20 mA
[2] Salida
digital
6-91 Terminal 42 Analog Output
Option: Función:
[0] * No operation
[100] Output frequency
[101] Reference
[102] Process Feedback
[103] Motor Current
[104] Torque rel to limit
[105] Torq relate to rated
[106] Power
[107] Speed
[111] Speed Feedback
[113] Ext. Closed Loop 1
[139] Bus Control
[143] Ext. CL 1
[254] DC Link Voltage
6-92 Terminal 42 Digital Output
Option: Función:
[0] * No operation
[1] Control Ready
[2] Drive ready
[3] Drive rdy/rem ctrl
[4] Stand-by / no warning
[5] Running
[6] Running / no warning
[7] Run in range/no warn
[8] Run on ref/no warn
[9] Alarm
[10] Alarm or warning
[11] At torque limit
[12] Out of current range
[13] Below current, low
[14] Above current, high
[15] Out of frequency range
[16] Below frequency, low
[17] Above frequency, high
[18] Out of feedb. range
[19] Below feedback, low
[20] Above feedback, high
[21] Thermal warning
6-92 Terminal 42 Digital Output
Option: Función:
[22] Ready, no thermal
warning
[23] Remote,ready,no TW
[24] Ready, no over-/ under
voltage
[25] Reverse
[26] Bus OK
[27] Torque limit & stop
[28] Brake, no brake warning
[29] Brake ready, no fault
[30] Brake fault (IGBT)
[31] Relay 123
[32] Mech brake ctrl
[36] Control word bit 11
[37] Control word bit 12
[40] Out of ref range
[41] Below reference, low
[42] Above ref, high
[45] Bus ctrl.
[46] Bus control, timeout: On
[47] Bus control, timeout: O
[56] Heat sink cleaning
warning, high
[60] Comparator 0
[61] Comparator 1
[62] Comparator 2
[63] Comparator 3
[64] Comparator 4
[65] Comparator 5
[70] Logic rule 0
[71] Logic rule 1
[72] Logic rule 2
[73] Logic rule 3
[74] Logic rule 4
[75] Logic rule 5
[80] SL digital output A
[81] SL digital output B
[82] SL digital output C
[83] SL digital output D
[160] No alarm
[161] Running reverse
[165] Local ref active
[166] Remote ref active
[167] Start command activ
[168] Drive in hand mode
[169] Drive in auto mode
[170] Homing Completed Se ha completado la operación
de retorno al inicio. Esta opción
solo será efectiva cuando el
parámetro 37-00 Application Mode
esté ajustado como [2] Position
Control
70 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

(mA)
0%
20
0/4
100%
Current
Analog
output
Min Scale
par. 6-93
Variable
for
output
example:
Power
Analog
Output
Max Scale
par. 6-94
130BB772.10
Descripciones de parámetros Guía de programación
6-92 Terminal 42 Digital Output
Option: Función:
[171] Target Position Reached Se ha alcanzado la posición de
destino. Esta opción solo será
efectiva cuando el
parámetro 37-00 Application Mode
esté ajustado como [2] Position
Control
[172] Position Control Fault Se ha producido un error en el
proceso de posicionamiento.
Consulte el parámetro 37-18 Pos.
Ctrl Fault Reason para obtener
detalles sobre el fallo. Esta
opción solo será efectiva cuando
el parámetro 37-00 Application
Mode esté ajustado como [2]
Position Control
[173] Position Mech Brake Seleccionar el control mecánico
para el posicionamiento. Esta
opción solo será efectiva cuando
el parámetro 37-00 Application
Mode esté ajustado como [2]
Position Control
[193] Sleep Mode El convertidor de frecuencia /
sistema ha pasado al modo
reposo. Consulte el grupo de
parámetros 22-4* Modo reposo.
[194] Broken Belt Function Se ha detectado una rotura en la
correa. Consulte el grupo de
parámetros 22-4* Modo reposo.
[198] Drive Bypass
6-94 Terminal 42 Output Max Scale
Range: Función:
100%* [0 -
200 %]
Escale la salida máxima (20 mA) del escalado del
terminal 42. Ajuste el valor en porcentaje del
intervalo completo de la variable seleccionada en
el parámetro 6-91 Terminal 42 Analog Output.
Ilustración 4.14 Escala de salida frente a
intensidad
6-96 Control bus salida terminal 42
Range: Función:
0* [0 - 16384 ] Mantener la salida analógica del terminal 42 si
está controlada mediante bus.
6-98 Drive Type
Range: Función:
0* [0 - 0 ]
4 4
6-93 Terminal 42 Output Min Scale
Range: Función:
0 %* [0 -
200 %]
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 71
Escalado para la salida mínima (0 o 4 mA) de la
señal analógica en el terminal 42. Ajuste el valor
en porcentaje del intervalo completo de la
variable seleccionada en el
parámetro 6-91 Terminal 42 Analog Output.

Descripciones de parámetros
4.8 Parámetros: 7-** Controllers
VLT® Midi Drive FC 280
7-00 Speed PID Feedback Source
Option: Función:
AVISO!
No se puede cambiar este
parámetro con el motor en
marcha.
44
Seleccione la fuente de realimentación para el control CL de
velocidad.
[1] 24V encoder
[6] Analog Input 53
[7] Analog Input 54
[8] Frequency input 29
[9] Frequency input 33
[20] * None
7-02 Speed PID Proportional Gain
Range: Función:
0.015* [0 -
7-03 Speed PID Integral Time
Range: Función:
8
ms*
Introduzca la ganancia proporcional del
1 ]
controlador de velocidad. La ganancia proporcional amplica el error (es decir, la desviación
entre la señal de realimentación y el valor de
consigna). Se utiliza con el control de
parámetro 1-00 Modo Conguración [1] Veloc. Lazo
Cerrado. Se obtiene un control rápido con una
amplicación alta. Sin embargo, si la amplicación
es demasiado alta, puede que el proceso se vuelva
inestable.
[2 20000
ms]
Introducir el tiempo integral del controlador de
velocidad, que determina el tiempo que tarda el
control de PID en corregir errores. Cuanto mayor
es el error, más rápido se incrementa la
ganancia. El tiempo integral produce un retardo
de la señal y, por lo tanto, un efecto de amortiguación, y puede utilizarse para eliminar errores
de velocidad de estado estable. Obtenga control
rápido mediante un tiempo integral corto,
aunque si es demasiado corto, el proceso es
inestable. Un tiempo integral demasiado largo
desactiva la acción integral, dando lugar a
desviaciones importantes de la referencia
requerida, debido a que el controlador de
proceso tarda demasiado en compensar los
errores. Este parámetro se utiliza con el control
[1] Veloc. Lazo Cerrado ajustado en el
parámetro 1-00 Modo Conguración.
7-04 Speed PID Dierentiation Time
Range: Función:
30
ms*
[0 200
ms]
Introducir tiempo diferencial del controlador de
velocidad. El diferenciador no reacciona a un
error constante. Produce una ganancia proporcional a la velocidad de cambio de la
realimentación de velocidad. Cuanto más rápido
cambia el error, mayor es la ganancia del
diferenciador. La ganancia es proporcional a la
velocidad a la que cambian los errores. El ajuste
a 0 de este parámetro desactiva el diferenciador. Se utiliza con el control de
parámetro 1-00 Conguration Mode [1] Veloc.
Lazo Cerrado.
7-05 Speed PID Di. Gain Limit
Range: Función:
5* [1 -
20 ]
Ajuste un límite para la ganancia que proporciona
el diferenciador. Como la ganancia diferencial
aumenta a frecuencias más altas, limitarla puede ser
útil. Por ejemplo, ajuste un enlace D puro a bajas
frecuencias y un enlace D constante a frecuencias
más altas. Se utiliza con el control de
parámetro 1-00 Conguration Mode [1] Veloc. Lazo
Cerrado.
7-06 Speed PID Lowpass Filter Time
Range: Función:
10
[1 ms*
AVISO!
6000
Una ltración grave puede perjudicar el
ms]
rendimiento dinámico.
Este parámetro se utiliza con el
parámetro 1-00 Modo Conguración [1]
Veloc. Lazo Cerrado.
Ajuste una constante de tiempo para el ltro de
paso bajo del control de velocidad. El ltro de
paso bajo mejora el rendimiento en estado estable
y amortigua las oscilaciones de la señal de
realimentación. Este parámetro es útil si hay una
gran cantidad de ruido en el sistema; consulte la
Ilustración 4.15. Por ejemplo, si se programa una
constante de tiempo (τ) de 100 ms, la frecuencia
de corte del ltro de paso bajo será 1/0.1 = 10
RAD/s, que corresponde a (10/2 × π) = 1,6 Hz. El
controlador PID solo regulará una señal de
realimentación que varíe con una frecuencia
menor de 1,6 Hz. Si la señal de realimentación
varía en una frecuencia superior a 1,6 Hz, el
controlador PID no reaccionará.
Ajustes prácticos del parámetro 7-06 Speed PID
Lowpass Filter Time tomados del número de pulsos
por revolución del encoder:
72 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

Par 7-07=1.00 Par 7-07=n1/n2
130BA871.10
Motor
n1 n2
Descripciones de parámetros Guía de programación
7-06 Speed PID Lowpass Filter Time
Range: Función:
PPR del encoder Parámetro 7-06 Tiempo
512 10 ms
1024 5 ms
2048 2 ms
4096 1 ms
ltro paso bajo PID
veloc.
7-08 Speed PID Feed Forward Factor
Range: Función:
0 %* [0 - 500 %] Se deriva la señal de referencia del
controlador de velocidad en la cantidad
especicada. Esta función aumenta el
rendimiento dinámico del lazo de control de
velocidad.
7-12 Torque PID Proportional Gain
Range: Función:
100 %* [0 -
500 %]
Introducir la ganancia proporcional para el
controlador de par. La selección de un valor
alto hace que el controlador reaccione más
rápidamente. Un ajuste demasiado alto
puede hacer que el controlador sea
inestable.
7-13 Torque PID Integration Time
Range: Función:
0.020 s* [0.002 - 2s]Introducir el tiempo de integración para
el controlador del par. Cuanto menor sea
el tiempo de integración, más rápida será
la reacción del controlador. Sin embargo,
un ajuste demasiado bajo provoca inestabilidad en el controlador.
4 4
Ilustración 4.15 Señal de realimentación
7-07 Speed PID Feedback Gear Ratio
Range: Función:
1* [0.0001 -
32 ]
Ilustración 4.16 Relación engranaje realim.
PID velocidad
El convertidor de frecuencia multiplica la
realimentación de velocidad por esta relación
7-20 Process CL Feedback 1 Resource
Option: Función:
La señal de realimentación efectiva se
compone de la suma de hasta dos
señales de entrada diferentes. Seleccione
qué entrada debe considerarse como
fuente de la 1.ª de estas señales. La
segunda señal de entrada se dene en el
parámetro 7-22 Process CL Feedback 2
Resource.
[0] * No function
[1] Analog Input 53
[2] Analog Input 54
[3] Frequency input
29
[4] Frequency input
33
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 73

Descripciones de parámetros
VLT® Midi Drive FC 280
7-22 Process CL Feedback 2 Resource
Option: Función:
La señal de realimentación efectiva se
compone de la suma de hasta dos
señales de entrada diferentes. Seleccione
qué entrada debe considerarse como
fuente de la 2.ª de estas señales. La
primera señal de entrada se dene en el
44
[0] * No function
[1] Analog Input 53
[2] Analog Input 54
[3] Frequency input
29
[4] Frequency input
33
parámetro 7-20 Process CL Feedback 1
Resource.
7-33 Process PID Proportional Gain
Range: Función:
0.01* [0 - 10 ] Introducir la ganancia proporcional de PID. La
ganancia proporcional multiplica el error entre
el valor de consigna y la señal de realimentación.
7-34 Process PID Integral Time
Range: Función:
9999 s* [0.10 -
9999 s]
Introducir el tiempo integral de PID. El
integrador proporciona un incremento de la
ganancia a un error constante entre el valor
de consigna y la señal de realimentación. El
tiempo integral es el periodo de tiempo que
necesita la integral para alcanzar una
ganancia igual a la ganancia proporcional.
7-35 Process PID Dierentiation Time
7-30 Ctrl. normal/inverso de PID de proceso.
Option: Función:
El control normal e inverso se aplican introduciendo una diferencia entre la señal de referencia y
la señal de realimentación.
[0] * Normal Ajustar el control de proceso para aumentar la
frecuencia de salida.
[1] Inversa Ajustar el control de proceso para reducir la
frecuencia de salida.
7-31 Saturación de PID de proceso
Option: Función:
[0] No Continuar regulando un error aunque no se pueda
aumentar o disminuir la frecuencia de salida.
[1] * Sí Terminar la regulación de un error cuando ya no se
puede seguir ajustando la frecuencia de salida.
Range: Función:
0 s* [0 - 20 s] Introducir el tiempo diferencial de PID El
diferenciador no reacciona a un error constante,
sino que proporciona una ganancia solo cuando
el error cambia. Cuanto más corto sea el tiempo
diferencial de PID, más fuerte será la ganancia
del diferenciador.
7-36 Límite ganancia diferencial PID proceso.
Range: Función:
5* [1 - 50 ] Introduzca un límite para la ganancia del diferen-
ciador. Si no hay límite, la ganancia del
diferenciador aumentará cuando haya cambios
rápidos. Para conseguir una ganancia del diferenciador pura con cambios lentos y una ganancia
del diferenciador constante con cambios rápidos,
limite la ganancia del diferenciador.
7-32 Valor arran. para ctrldor. PID proceso.
Range: Función:
0 RPM* [0 -
6000
RPM]
74 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305
Introduzca la velocidad del motor que se
debe alcanzar como señal de arranque para
iniciar el control de PID. Cuando se conecta
la potencia, el convertidor de frecuencia
reacciona comenzando una rampa y,
después, funciona con control de velocidad
en lazo abierto. Cuando se haya alcanzado la
velocidad de arranque de PID del proceso, el
convertidor de frecuencia cambiará a control
de PID de procesos.
7-38 Process PID Feed Forward Factor
Range: Función:
0 %* [0 -
200 %]
Introducir el factor de proalimentación PID (FF). El
factor FF envía una fracción constante de la señal
de referencia sin pasar a través del control de PID
(esto es, directamente a la salida del PID), de
forma que este solo afecta a la fracción restante
de la señal de control. Por lo tanto, cualquier
cambio de este parámetro afecta a la velocidad
del motor. Cuando el factor FF se activa,
proporciona menos sobremodulación y una
elevada respuesta dinámica al cambiar el valor de
consigna. El Parámetro 7-38 Process PID Feed
Forward Factor estará activo cuando el
parámetro 1-00 Conguration Mode esté ajustado
como [3] Proceso.

Descripciones de parámetros Guía de programación
7-39 Ancho banda En Referencia
Range: Función:
5 %* [0 -
200 %]
Introduzca el ancho de banda en referencia.
Cuando el error de control de PID (diferencia
entre la referencia y la realimentación) es
menor que el valor de este parámetro, el bit
de estado en referencia es 1.
7-40 Reinicio parte I de PID proc.
Option: Función:
[0] * No
[1] Sí Seleccione [1] Sí para reiniciar la parte I del
controlador del PID de proceso. La selección se ajusta
automáticamente a [0] No. El reinicio de la parte I
permite el arranque desde un punto bien denido
después de efectuar alguna modicación en el
proceso, como el cambio de un rodillo textil.
7-41 Process PID Output Neg. Clamp
Range: Función:
-100 %* [ -100 - 100 %] Introduzca un límite negativo para la
salida del controlador del PID de
proceso.
7-45 Process PID Feed Fwd Resource
Option: Función:
Seleccione qué entrada del convertidor
de frecuencia se usará como factor de
acercamiento. El factor FF se añade
directamente a la salida del
controlador PID. Este parámetro puede
aumentar el rendimiento dinámico.
[0] * No function
[1] Analog Input 53
[2] Analog Input 54
[7] Frequency input 29
[8] Frequency input 33
[11] Local bus reference
[32] Bus PCD
7-46 Feed Forward PID Proceso normal/inv.
Option: Función:
[0] * Normal Seleccionar [0] Normal para ajustar el factor de
acercamiento de manera que se trate el recurso de
proalimentación como valor positivo.
[1] Inversa Seleccione [1] Inversa para tratar el recurso de
proalimentación como un valor negativo.
4 4
7-42 Process PID Output Pos. Clamp
Range: Función:
100 %* [ -100 - 100 %] Introduzca un límite positivo para la
salida del controlador del PID de
proceso.
7-43 Esc. ganancia PID proc. con ref. mín.
Range: Función:
100 %* [0 -
100 %]
Introduzca un porcentaje de escalado para la
salida del PID de proceso cuando funcione
con la referencia mínima. Este porcentaje de
escalado se ajusta linealmente entre la escala
de la referencia mínima (parámetro 7-43 Esc.
ganancia PID proc. con ref. mín.) y la de la
referencia máxima (parámetro 7-44 Esc.
ganancia PID proc. con ref. máx.).
7-44 Esc. ganancia PID proc. con ref. máx.
Range: Función:
100 %* [0 -
100 %]
Introduzca un porcentaje de escalado para la
salida del PID de proceso cuando funcione
con la referencia máxima. Este porcentaje de
escalado se ajusta linealmente entre la escala
de la referencia mínima (parámetro 7-43 Esc.
ganancia PID proc. con ref. mín.) y la de la
referencia máxima (parámetro 7-44 Esc.
ganancia PID proc. con ref. máx.).
7-48 PCD Feed Forward
Range: Función:
0* [0 - 65535 ] Parámetro de lectura de datos en que puede
leerse el parámetro 7-45 Process PID Feed Fwd
Resource [32] del bus.
7-49 Ctrl. salida PID de proc. normal/inv.
Option: Función:
[0] * Normal Seleccione [0] Normal para usar la salida resultante
del controlador del PID de proceso tal cual.
[1] Inversa Seleccione [1] Inversa para invertir la salida
resultante del controlador del PID de proceso. Esta
operación se ejecuta tras aplicar el factor de
acercamiento.
7-50 PID de proceso PID ampliado
Option: Función:
[0] Desactivado Desactivar las partes ampliadas del
controlador del PID de proceso.
[1] * Activado Activar las partes ampliadas del controlador
PID.
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 75

Descripciones de parámetros
VLT® Midi Drive FC 280
7-51 Process PID Feed Fwd Gain
Range: Función:
1* [0 -
100 ]
44
La proalimentación se utiliza para alcanzar la
ganancia con base en una señal conocida que esté
disponible. El controlador PID se encargará
únicamente de la parte más pequeña del control,
necesaria debido a los caracteres desconocidos. El
factor de acercamiento estándar del
parámetro 7-38 Process PID Feed Forward Factor está
siempre relacionado con la referencia, mientras que
el parámetro 7-51 Process PID Feed Fwd Gain
presenta más opciones. En las aplicaciones de
bobinadoras, el factor de acercamiento suele ser la
velocidad de la línea del sistema.
7-62 Feedback 2 Conversion
Seleccione una conversión para la señal de realimentación 2.
Seleccione [0] Lineal para no modicar la señal de realimentación.
Option: Función:
[0] * Linear
[1] Square root
7-52 Process PID Feed Fwd Ramp up
Range: Función:
0.01 s* [0.01 - 100 s] Controlar la dinámica de la señal de
proalimentación durante la rampa de
aceleración.
7-53 Process PID Feed Fwd Ramp down
Range: Función:
0.01 s* [0.01 - 100 s] Controlar la dinámica de la señal de
proalimentación durante la rampa de
deceleración.
7-56 Tiempo ltro ref. PID de proc.
Range: Función:
0.001 s* [0.001 - 1s]Establezca una constante de tiempo para
el ltro de paso bajo de primer orden de
referencia. Este ltro mejora el
rendimiento en estado estable y
amortigua las oscilaciones de la señal de
referencia/realimentación. Una ltración
grave puede perjudicar el rendimiento
dinámico.
7-57 Tiempo ltro realim. PID de proceso
Range: Función:
0.001 s* [0.001 - 1s]Ajuste una constante de tiempo para el
ltro de paso bajo de primer orden de
realimentación. Este ltro mejora el
rendimiento en estado estable y
amortigua las oscilaciones de la señal de
referencia/realimentación. Una ltración
grave puede perjudicar el rendimiento
dinámico.
7-60 Feedback 1 Conversion
Seleccione una conversión para la señal de realimentación 1.
Seleccione [0] Lineal para no modicar la señal de realimentación.
Option: Función:
[0] * Linear
[1] Square root
76 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

Descripciones de parámetros Guía de programación
4.9 Parámetros: 8-** Comm. and Options
8-01 Control Site
Option: Función:
El ajuste de este parámetro anula los
ajustes del parámetro 8-50 Selección inercia
al parámetro 8-58 Prodrive OFF3 Select.
[0] * Digital and
ctrl.word
[1] Digital only Control solo mediante el uso de entradas
[2] Controlword
only
Control mediante el uso de la entrada
digital y el código de control.
digitales.
Control solo mediante el uso de código de
control.
8-02 Control Source
Option: Función:
Seleccione la fuente de código de control.
AVISO!
Este parámetro no se puede ajustar con el
motor en marcha.
[0] None
[1] FC Port
[2] FC USB
[3] Option A
8-03 Control Timeout Time
Range: Función:
1 s* [0.1 -
6000 s]
8-04 Control Timeout Function
Option: Función:
[0] * O Seleccionar la función de tiempo límite. La
[1] Freeze output
[2] Stop
[3] Jogging
[4] Max. speed
[5] Stop and trip
8-07 Diagnosis Trigger
Option: Función:
[0] * Disable No enviar datos de diagnóstico ampliado
Introduzca el tiempo máximo entre la recepción
de dos telegramas consecutivos. Si se supera
este tiempo, esto indica que la comunicación
serie se ha detenido. Se ejecutará entonces la
función seleccionada en el
parámetro 8-04 Control Timeout Function.
función de tiempo límite se activa cuando el
código de control no se actualiza dentro del
periodo de tiempo especicado en el
parámetro 8-03 Control Timeout Time.
(EDD).
8-07 Diagnosis Trigger
Option: Función:
[1] Trigger on
alarms
[2] Trigger
alarm/warn.
Enviar EDD tras alarmas.
Enviar EDD tras alarmas o advertencias en el
parámetro 16-90 Alarm Word, el
parámetro 9-53 Probus Warning Word o el
parámetro 16-92 Warning Word.
8-10 Control Word Prole
Seleccione la interpretación del código de control y del código
de estado correspondientes al eldbus instalado.
Option: Función:
[0] * FC prole
[1] PROFIdrive prole
[5] ODVA
[7] CANopen DSP 402
8-14 Congurable Control Word CTW
El código de control tiene 16 bits (0-15). Se pueden congurar
los bits 10 y 12-15.
Option: Función:
[0] None
[1] * Prole default
[2] CTW Valid, active low
[4] PID error inverse
[5] PID reset I part
[6] PID enable
8-19 Product Code
Range: Función:
Size
related*
[0 2147483647 ]
Seleccione 0 para leer los datos del
código de producto del eldbus
real conforme a la opción de bus
de campo instalada. Seleccione 1
para leer la identidad real del
proveedor.
8-30 Protocol
Option: Función:
Seleccione el protocolo para el puerto RS485
integrado.
[0] * FC Comunicación conforme al protocolo FC.
[2] Modbus RTU Comunicación conforme al protocolo Modbus
RTU.
8-31 Dirección
Range: Función:
1* [ 0 - 247 ] Introduzca la dirección del puerto RS485.
Intervalo válido: 1-126 para bus FC o 1-247 para
Modbus.
4 4
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 77

Descripciones de parámetros
VLT® Midi Drive FC 280
8-32 Velocidad en baudios
Option: Función:
Seleccione la velocidad en baudios del
puerto RS485.
[0] 2.400 baudios
[1] 4.800 baudios
[2] * 9.600 baudios
[3] 19.200 baudios
44
[4] 38.400 baudios
[5] 57.600 baudios
[6] 76.800 baudios
[7] 115.200 baudios
8-33 Parity / Stop Bits
Paridad y bits de parada para el protocolo que utilice el puerto
FC. Para algunos protocolos, no todas las opciones están
disponibles.
Option: Función:
[0] Even Parity, 1 Stop Bit
[1] Odd Parity, 1 Stop Bit
[2] No Parity, 1 Stop Bit
[3] No Parity, 2 Stop Bits
8-35 Minimum Response Delay
Range: Función:
0.01 s* [ 0.0010 - 0.5s]Especicar el tiempo de retardo mínimo
entre la recepción de una petición y la
transmisión de una respuesta. Se utiliza
para reducir el retardo de procesamiento
del módem.
8-36 Maximum Response Delay
Range: Función:
Size
related*
[ 0.1 -
10.0 s]
Especicar el tiempo de retardo
máximo permitido entre la recepción
de una petición y la transmisión de una
respuesta. Si se supera este tiempo, no
se devuelve ninguna respuesta.
8-37 Maximum Inter-char delay
Range: Función:
0.025 s* [0.025 - 0.025s]Especicar el tiempo de retardo
máximo entre dos caracteres en un
mensaje. Superar este tiempo de
retardo hace que se rechace el
mensaje.
8-42 PCD Write Conguration
Seleccione los parámetros que desee asignar a los telegramas de
PCD. El número de los PCD disponibles depende del tipo de
telegrama. Los valores de los PCD se escriben entonces en los
parámetros seleccionados como valores de datos.
Option: Función:
[0] None
[1] [302] Minimum Reference
8-42 PCD Write Conguration
Seleccione los parámetros que desee asignar a los telegramas de
PCD. El número de los PCD disponibles depende del tipo de
telegrama. Los valores de los PCD se escriben entonces en los
parámetros seleccionados como valores de datos.
Option: Función:
[2] [303] Maximum Reference
[3] [341] Ramp 1 Ramp up time
[4] [342] Ramp 1 Ramp down time
[5] [351] Ramp 2 Ramp up time
[6] [352] Ramp 2 Ramp down time
[7] [380] Jog Ramp Time
[8] [381] Quick Stop Time
[9] [412] Motor Speed Low Limit
[Hz]
[10] [414] Motor Speed High Limit
[Hz]
[11] [590] Digital & Relay Bus
Control
[12] [676] Terminal45 Output Bus
Control
[13] [696] Terminal 42 Output Bus
Control
[14] [894] Bus Feedback 1
[15] FC Port CTW
[16] FC Port REF
8-43 Cong. lectura PCD
Seleccione los parámetros que desee asignar a los PCD de los
telegramas. El número de PCD disponibles depende del tipo de
telegrama. Los PCD contienen los valores de dato reales de los
parámetros seleccionados.
Option: Función:
[0] * None
[1] [1500] Operation Hours
[2] [1501] Running Hours
[3] [1502] kWh Counter
[4] [1600] Control Word
[5] [1601] Reference [Unit]
[6] [1602] Reference %
[7] [1603] Status Word
[8] [1605] Main Actual Value [%]
[9] [1609] Custom Readout
[10] [1610] Power [kW]
[11] [1611] Power [hp]
[12] [1612] Motor Voltage
[13] [1613] Frequency
[14] [1614] Motor Current
[15] [1615] Frequency [%]
[16] [1616] Torque [Nm]
[17] [1618] Motor Thermal
[18] [1630] DC Link Voltage
[19] [1634] Heatsink Temp.
[20] [1635] Inverter Thermal
78 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

Descripciones de parámetros Guía de programación
8-43 Cong. lectura PCD
Seleccione los parámetros que desee asignar a los PCD de los
telegramas. El número de PCD disponibles depende del tipo de
telegrama. Los PCD contienen los valores de dato reales de los
parámetros seleccionados.
Option: Función:
[21] [1638] SL Controller State
[22] [1650] External Reference
[23] [1652] Feedback [Unit]
[24] [1660] Digital Input 18, 19, 27, 29,
32, 33
[25] [1661] Terminal 53 Switch Setting
[26] [1662] Analog Input 53(V)
[27] [1663] Terminal 54 Switch Setting
[28] [1664] Analog Input 54
[29] [1665] Analog Output 42 [mA]
[30] [1671] Relay Output [bin]
[31] [1672] Counter A
[32] [1673] Counter B
[33] [1690] Alarm Word
[34] [1692] Warning Word
[35] [1694] Ext. Status Word
8-50 Selección inercia
Option: Función:
Seleccione el control de la función de inercia a
través de los terminales (entrada digital) y/o a
través del bus.
[0] Entrada
digital
[1] Bus Activar la orden de funcionamiento por inercia a
[2] Lógico Y Activar la orden de funcionamiento por inercia a
[3] * Lógico O Activar la orden de funcionamiento por inercia a
Activar la orden de funcionamiento por inercia a
través de una entrada digital.
través del puerto de comunicación serie o de la
opción de bus de campo.
través del eldbus o del puerto de comunicación serie, así como de una entrada digital
adicional.
través del eldbus o del puerto de comunicación serie, o a través de una de las entradas
digitales.
8-51 Selección parada rápida
Seleccione la activación de la función de parada rápida.
Option: Función:
[0] Entrada digital
[1] Bus
[2] Lógico Y
[3] * Lógico O
8-52 DC Brake Select
Option: Función:
Seleccione el control de la función de freno de CC
a través de los terminales (entradas digitales) y/o
del eldbus.
AVISO!
Cuando el parámetro 1-10 Construcción del
motor se congure como [1] PM no saliente
SPM, solo estará disponible la opción [0]
Entrada digital.
[0] Digital
input
[1] Bus Activar la orden de freno de CC a través del puerto
[2] Logic
AND
[3]*LogicORActivar la orden de freno de CC a través del
8-53 Selec. arranque
Option: Función:
[0] Entrada
digital
[1] Bus Un puerto de comunicación serie o el eldbus
[2] Lógico Y El eldbus o el puerto de comunicación serie
[3] * Lógico O El eldbus o el puerto de comunicación serie
8-54 Reversing Select
Option: Función:
[0] Digital
input
[1] Bus Un puerto de comunicación serie o el eldbus
[2] Logic
AND
Activar la orden de freno de CC a través de una
entrada digital.
de comunicación serie o de la opción de bus de
campo.
Activar la orden de freno de CC a través del
eldbus o del puerto de comunicación serie y
también a través de una de las entradas digitales.
eldbus o del puerto de comunicación serie o a
través de una de las entradas digitales.
Seleccione la activación de la función de
arranque.
Una entrada digital activa la función de
arranque.
activan la función de arranque.
y una entrada digital activan la función de
arranque.
o una entrada digital activan la función de
arranque.
Seleccione la activación de la función de
cambio de sentido.
Una entrada digital activa la función de cambio
de sentido.
activan la función de cambio de sentido.
El eldbus o el puerto de comunicación serie y
una entrada digital activan la función de cambio
de sentido.
4 4
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 79

Descripciones de parámetros
VLT® Midi Drive FC 280
8-54 Reversing Select
Option: Función:
[3] * Logic OR El eldbus o el puerto de comunicación serie o
una entrada digital activan la función de cambio
de sentido.
8-55 Selec. ajuste
Option: Función:
44
[0] Entrada
digital
[1] Bus Un puerto de comunicación serie o el eldbus
[2] Lógico Y El eldbus o el puerto de comunicación serie
[3] * Lógico O El eldbus o el puerto de comunicación serie
Seleccione la activación de la selección de
ajustes.
Una entrada digital activa la selección de
ajustes.
activan la selección de ajustes.
y una entrada digital activan la selección de
ajustes.
o una entrada digital activan la selección de
ajustes.
8-56 Selec. referencia interna
Option: Función:
Seleccione la activación de la selección de
referencia interna.
[0] Entrada
digital
[1] Bus Un puerto de comunicación serie o el eldbus
[2] Lógico Y El eldbus o el puerto de comunicación serie
[3] * Lógico O El eldbus o el puerto de comunicación serie
Una entrada digital activa la selección de la
referencia interna.
activan la selección de referencia interna.
y una entrada digital activan la selección de
referencia interna.
o una entrada digital activan la selección de
referencia interna.
8-58 Prodrive OFF3 Selección
Seleccione el control de selección de APAGADO 3 del convertidor
de frecuencia a través de los terminales (entrada digital) y/o
mediante el eldbus. Este parámetro solo estará activo si el
parámetro 8-01 Puesto de control se ajusta como [0] Digital y cód.
ctrl y si el parámetro 8-10 Trama Cód. Control se ajusta como [1]
Perl PROFIdrive.
Option: Función:
[0] Entrada digital
[1] Bus
[2] Lógico Y
[3] * Lógico O
8-79 Protocol Firmware version
Range: Función:
Size related* [0 - 65535 ] Revisión del rmware: FC está en el
índice 0; Modbus está en el índice 1;
los índices 2-4 están reservados.
8-80 Bus Message Count
Range: Función:
0* [0 - 4294967295 ] Este parámetro muestra el número de
telegramas válidos detectados en el bus.
8-81 Bus Error Count
Range: Función:
0* [0 - 4294967295 ] Este parámetro muestra el número de
telegramas con fallos (por ejemplo, fallos
de CRC) detectados en el bus.
8-82 Slave Messages Rcvd
Range: Función:
0* [0 - 4294967295 ] Este parámetro muestra el número de
telegramas válidos enviados al esclavo
por el convertidor de frecuencia.
8-83 Slave Error Count
Range: Función:
8-57 Prodrive OFF2 Selección
Seleccione el control de selección de APAGADO 2 del convertidor
de frecuencia a través de los terminales (entrada digital) y/o
mediante el eldbus. Este parámetro solo está activo si
parámetro 8-01 Puesto de control se ajusta como [0] Digital y cód.
ctrl y si parámetro 8-10 Trama Cód. Control se ajusta como [1]
Perl PROFIdrive.
Option: Función:
[0] Entrada digital
[1] Bus
[2] Lógico Y
[3] * Lógico O
0* [0 - 4294967295 ] Este parámetro muestra el número de
telegramas de error no ejecutados por el
convertidor de frecuencia.
8-84 Slave Messages Sent
Range: Función:
0* [0 - 4294967295 ] Este parámetro muestra el n.º de
mensajes enviados desde el esclavo.
8-85 Slave Timeout Errors
Range: Función:
0* [0 - 4294967295 ] Este parámetro muestra los errores de
tiempo límite del esclavo.
80 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

Descripciones de parámetros Guía de programación
8-88 Reset FC port Diagnostics
Reinicie contadores diagn. puerto FC.
Option: Función:
[0] * Do not reset
[1] Reset counter
8-90 Bus Jog 1 Speed
Range: Función:
100 RPM* [ 0 - 1500
RPM]
Introduzca la velocidad ja. Es una
velocidad ja (jog) que se activa por el
puerto serie o la opción de bus de
campo.
8-91 Bus Jog 2 Speed
Range: Función:
200 RPM* [ 0 - 1500
RPM]
Introduzca la velocidad ja. Este valor
es una velocidad ja que se activa por
el puerto serie o la opción de bus de
campo.
4 4
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 81

Descripciones de parámetros
VLT® Midi Drive FC 280
4.10 Parámetros: 9-** PROFIdrive
Para ver las descripciones de los parámetros de Probus,
consulte la Guía de programación de Probus DP para el
VLT® Midi Drive FC 280.
Para ver las descripciones de los parámetros de PROFINET,
consulte la Guía de programación de PROFINET para el VLT
®
Midi Drive FC 280.
44
4.11 Parámetros: 10-** CAN Fieldbus
Para ver las descripciones de los parámetros del eldbus
CAN, consulte la Guía de programación de CANOpen para el
VLT® Midi Drive FC 280.
4.12 Parámetros: 12-** Ethernet
Para ver las descripciones de los parámetros de Ethernet,
consulte la Guía de programación de Ethernet/IP para el
VLT® Midi Drive FC 280 y la Guía de programación de
PROFINET para el VLT® Midi Drive FC 280.
4.13 Parámetros: 13-** Smart Logic
13-00 SL Controller Mode
Option: Función:
[0] * O Desactivar el controlador Smart Logic.
[1] On Activar el controlador Smart Logic.
13-01 Start Event
Seleccione la condición (verdadero o falso) que activa el
controlador Smart Logic.
Option: Función:
[0] False
[1] True
[2] Running
[3] In range
[4] On reference
[7] Out of current range
[8] Below I low
[9] Above I high
[16] Thermal warning
[17] Mains out of range
[18] Reversing
[19] Warning
[20] Alarm (trip)
[21] Alarm (trip lock)
[22] Comparator 0
[23] Comparator 1
[24] Comparator 2
[25] Comparator 3
[26] Logic rule 0
[27] Logic rule 1
[28] Logic rule 2
[29] Logic rule 3
13-01 Start Event
Seleccione la condición (verdadero o falso) que activa el
controlador Smart Logic.
Option: Función:
[33] Digital input DI18
[34] Digital input DI19
[35] Digital input DI27
[36] Digital input DI29
[39] * Start command
[40] Drive stopped
[42] Auto Reset Trip
[50] Comparator 4
[51] Comparator 5
[60] Logic rule 4
[61] Logic rule 5
[83] Broken Belt
13-02 Stop Event
Seleccione la condición (verdadero o falso) que desactiva el
controlador Smart Logic.
Option: Función:
[0] False
[1] True
[2] Running
[3] In range
[4] On reference
[7] Out of current range
[8] Below I low
[9] Above I high
[16] Thermal warning
[17] Mains out of range
[18] Reversing
[19] Warning
[20] Alarm (trip)
[21] Alarm (trip lock)
[22] Comparator 0
[23] Comparator 1
[24] Comparator 2
[25] Comparator 3
[26] Logic rule 0
[27] Logic rule 1
[28] Logic rule 2
[29] Logic rule 3
[30] SL Time-out 0
[31] SL Time-out 1
[32] SL Time-out 2
[33] Digital input DI18
[34] Digital input DI19
[35] Digital input DI27
[36] Digital input DI29
[39] Start command
[40] * Drive stopped
[42] Auto Reset Trip
[50] Comparator 4
82 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

Descripciones de parámetros Guía de programación
13-02 Stop Event
Seleccione la condición (verdadero o falso) que desactiva el
controlador Smart Logic.
Option: Función:
[51] Comparator 5
[60] Logic rule 4
[61] Logic rule 5
[70] SL Time-out 3
[71] SL Time-out 4
[72] SL Time-out 5
[73] SL Time-out 6
[74] SL Time-out 7
[83] Broken Belt
13-03 Reiniciar SLC
Option: Función:
[0] * No reiniciar
SLC
[1] Reiniciar SLC Reiniciar todos los parámetros del grupo de
Mantener los ajustes programados en el
grupo de parámetros 13-** Smart Logic.
parámetros 13-**Smart Logic a los ajustes
predeterminados.
13-10 Comparator Operand
Seleccione la variable que debe controlar el comparador. Este es
un parámetro de matrices que contiene comparadores de 0 a 5.
Option: Función:
[0] * Disabled
[1] Reference %
[2] Feedback %
[3] Motor speed
[4] Motor Current
[6] Motor power
[7] Motor voltage
[12] Analog input AI53
[13] Analog input AI54
[18] Pulse input FI29
[19] Pulse input FI33
[20] Alarm number
[30] Counter A
[31] Counter B
13-11 Comparator Operator
Option: Función:
Seleccione el operador que se utilizará en la
comparación. Este es un parámetro de
matrices que contiene los operadores
comparadores de 0 a 5.
[0] Less Than (<) El resultado de la evaluación será verdadero
cuando la variable seleccionada en el
parámetro 13-10 Comparator Operand sea
inferior al valor jado en el
parámetro 13-12 Comparator Value. El
resultado será falso si la variable
seleccionada en el
13-11 Comparator Operator
Option: Función:
parámetro 13-10 Comparator Operand es
superior al valor jado en el
parámetro 13-12 Comparator Value.
[1]*Approx.Equal
(~)
[2] Greater Than
(>)
El resultado de la evaluación será verdadero
cuando la velocidad variable seleccionada en
el parámetro 13-10 Comparator Operand sea
aproximadamente igual al valor jado en el
parámetro 13-12 Comparator Value.
Lógica inversa de la opción [0] Less Than (<).
13-12 Comparator Value
Range: Función:
0* [-9999 -
9999 ]
Introduzca el nivel de disparo para la variable
controlada por este comparador. Este es un
parámetro de matrices que contiene los
valores de comparador de 0 a 5.
13-20 SL Controller Timer
Range: Función:
0 s* [0 - 3600s]Introduzca el valor para denir la duración de la
salida falso del temporizador programado. Un
temporizador solo es falso si lo activa una
acción (por ejemplo, [30] Tempor. inicio 1) y
hasta que transcurra el tiempo introducido en
el temporizador.
13-40 Logic Rule Boolean 1
Option: Función:
Seleccione la primera entrada
booleana (verdadero o falso) para la
regla lógica seleccionada. Consulte el
parámetro 13-01 Start Event ([0]-[61]) y
el parámetro 13-02 Stop Event ([70]-
-[74]) para obtener una descripción
más detallada.
[0] * False
[1] True
[2] Running
[3] In range
[4] On reference
[7] Out of current range
[8] Below I low
[9] Above I high
[16] Thermal warning
[17] Mains out of range
[18] Reversing
[19] Warning
[20] Alarm (trip)
[21] Alarm (trip lock)
[22] Comparator 0
[23] Comparator 1
4 4
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 83

Descripciones de parámetros
VLT® Midi Drive FC 280
13-40 Logic Rule Boolean 1
Option: Función:
[24] Comparator 2
[25] Comparator 3
[26] Logic rule 0
[27] Logic rule 1
[28] Logic rule 2
[29] Logic rule 3
44
[30] SL Time-out 0
[31] SL Time-out 1
[32] SL Time-out 2
[33] Digital input DI18
[34] Digital input DI19
[35] Digital input DI27
[36] Digital input DI29
[39] Start command
[40] Drive stopped
[42] Auto Reset Trip
[50] Comparator 4
[51] Comparator 5
[60] Logic rule 4
[61] Logic rule 5
[70] SL Time-out 3
[71] SL Time-out 4
[72] SL Time-out 5
[73] SL Time-out 6
[74] SL Time-out 7
[83] Broken Belt
13-41 Logic Rule Operator 1
Option: Función:
Seleccione el primer operador lógico que se
usará en las entradas booleanas del
parámetro 13-40 Logic Rule Boolean 1 y el
parámetro 13-42 Logic Rule Boolean 2.
[0] * Disabled Omitir el parámetro 13-42 Logic Rule Boolean
2, el parámetro 13-43 Logic Rule Operator 2 y
el parámetro 13-44 Logic Rule Boolean 3.
[1] AND Evaluar la expresión [13-40] Y [13-42].
[2] OR Evaluar la expresión [13-40] O [13-42].
[3] AND NOT Evaluar la expresión [13-40] Y NO [13-42].
[4] OR NOT Evaluar la expresión [13-40] O NO [13-42].
[5] NOT AND Evaluar la expresión NO [13-40] Y [13-42].
[6] NOT OR Evaluar la expresión NO [13-40] O [13-42].
[7] NOT AND
NOT
[8] NOT OR
NOT
Evaluar la expresión NO [13-40] Y NO [13-42].
Evaluar la expresión NO [13-40] O NO [13-42].
13-42 Logic Rule Boolean 2
Option: Función:
Seleccione la segunda entrada
booleana (verdadero o falso) para la
regla lógica seleccionada. Consulte el
parámetro 13-01 Start Event ([0]-[61]) y
el parámetro 13-02 Stop Event ([70]-
-[74]) para obtener una descripción
más detallada.
[0] * False
[1] True
[2] Running
[3] In range
[4] On reference
[7] Out of current range
[8] Below I low
[9] Above I high
[16] Thermal warning
[17] Mains out of range
[18] Reversing
[19] Warning
[20] Alarm (trip)
[21] Alarm (trip lock)
[22] Comparator 0
[23] Comparator 1
[24] Comparator 2
[25] Comparator 3
[26] Logic rule 0
[27] Logic rule 1
[28] Logic rule 2
[29] Logic rule 3
[30] SL Time-out 0
[31] SL Time-out 1
[32] SL Time-out 2
[33] Digital input DI18
[34] Digital input DI19
[35] Digital input DI27
[36] Digital input DI29
[39] Start command
[40] Drive stopped
[42] Auto Reset Trip
[50] Comparator 4
[51] Comparator 5
[60] Logic rule 4
[61] Logic rule 5
[70] SL Time-out 3
[71] SL Time-out 4
[72] SL Time-out 5
[73] SL Time-out 6
[74] SL Time-out 7
[83] Broken Belt
84 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

Descripciones de parámetros Guía de programación
13-43 Logic Rule Operator 2
Option: Función:
Seleccione el segundo operador lógico que
se utilizará en la entrada booleana calculada
en el parámetro 13-40 Logic Rule Boolean 1,
en el parámetro 13-41 Logic Rule Operator 1
y en el parámetro 13-42 Logic Rule Boolean 2
y la entrada booleana del
parámetro 13-42 Logic Rule Boolean 2. El
Parámetro 13-42 Logic Rule Boolean 2 indica
la entrada booleana del
parámetro 13-44 Logic Rule Boolean 3. El
Parámetro 13-40 Logic Rule Boolean 1 y el
parámetro 13-42 Logic Rule Boolean 2 indican
la entrada booleana calculada en el
parámetro 13-40 Logic Rule Boolean 1, en el
parámetro 13-41 Logic Rule Operator 1 y en
el parámetro 13-42 Logic Rule Boolean 2.
[0] * Disabled Omitir el parámetro 13-44 Logic Rule Boolean
3.
[1] AND
[2] OR
[3] AND NOT
[4] OR NOT
[5] NOT AND
[6] NOT OR
[7] NOT AND
NOT
[8] NOT OR NOT
13-44 Logic Rule Boolean 3
Option: Función:
Seleccione la tercera entrada
booleana (verdadero o falso) para la
regla lógica seleccionada. Consulte el
parámetro 13-40 Logic Rule Boolean 1,
el parámetro 13-41 Logic Rule Operator
1 y el parámetro 13-42 Logic Rule
Boolean 2, así como la entrada
booleana. Consulte el
parámetro 13-01 Start Event ([0]-[61]) y
el parámetro 13-02 Stop Event ([70]-
-[74]) para obtener una descripción
más detallada.
[0] * False
[1] True
[2] Running
[3] In range
[4] On reference
[7] Out of current range
[8] Below I low
[9] Above I high
[16] Thermal warning
[17] Mains out of range
[18] Reversing
13-44 Logic Rule Boolean 3
Option: Función:
[19] Warning
[20] Alarm (trip)
[21] Alarm (trip lock)
[22] Comparator 0
[23] Comparator 1
[24] Comparator 2
[25] Comparator 3
[26] Logic rule 0
[27] Logic rule 1
[28] Logic rule 2
[29] Logic rule 3
[30] SL Time-out 0
[31] SL Time-out 1
[32] SL Time-out 2
[33] Digital input DI18
[34] Digital input DI19
[35] Digital input DI27
[36] Digital input DI29
[39] Start command
[40] Drive stopped
[42] Auto Reset Trip
[50] Comparator 4
[51] Comparator 5
[60] Logic rule 4
[61] Logic rule 5
[70] SL Time-out 3
[71] SL Time-out 4
[72] SL Time-out 5
[73] SL Time-out 6
[74] SL Time-out 7
[83] Broken Belt
13-51 SL Controller Event
Option: Función:
Seleccione la tercera entrada
booleana (verdadero o falso) para la
regla lógica seleccionada. Consulte el
parámetro 13-40 Logic Rule Boolean 1,
el parámetro 13-41 Logic Rule Operator
1, el parámetro 13-42 Logic Rule
Boolean 2 y la entrada booleana.
Consulte el parámetro 13-01 Start
Event ([0]-[61]) y el
parámetro 13-02 Stop Event ([70]-[74])
para obtener una descripción más
detallada.
[0] * False
[1] True
[2] Running
[3] In range
[4] On reference
[7] Out of current range
4 4
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 85

Descripciones de parámetros
VLT® Midi Drive FC 280
13-51 SL Controller Event
Option: Función:
[8] Below I low
[9] Above I high
[16] Thermal warning
[17] Mains out of range
[18] Reversing
[19] Warning
44
[20] Alarm (trip)
[21] Alarm (trip lock)
[22] Comparator 0
[23] Comparator 1
[24] Comparator 2
[25] Comparator 3
[26] Logic rule 0
[27] Logic rule 1
[28] Logic rule 2
[29] Logic rule 3
[30] SL Time-out 0
[31] SL Time-out 1
[32] SL Time-out 2
[33] Digital input DI18
[34] Digital input DI19
[35] Digital input DI27
[36] Digital input DI29
[39] Start command
[40] Drive stopped
[42] Auto Reset Trip
[50] Comparator 4
[51] Comparator 5
[60] Logic rule 4
[61] Logic rule 5
[70] SL Time-out 3
[71] SL Time-out 4
[72] SL Time-out 5
[73] SL Time-out 6
[74] SL Time-out 7
[83] Broken Belt
13-52 SL Controller Action
Option: Función:
[0] * Disabled Seleccione la acción correspondiente al
evento SLC. Las acciones se ejecutan cuando
el evento correspondiente (denido en el
parámetro 13-51 SL Controller Event) se evalúa
como verdadero.
[1] No action
[2] Select set-
-up 1
[3] Select set-
-up 2
Cambio del ajuste activo
(parámetro 0-10 Active Set-up) a 1. Si se
cambia el ajuste, se une a otras órdenes de
ajuste que lleguen de las entradas digitales o
mediante un eldbus.
Cambio del ajuste activo
(parámetro 0-10 Active Set-up) a 2. Si se
13-52 SL Controller Action
Option: Función:
cambia el ajuste, se une a otras órdenes de
ajuste que lleguen de las entradas digitales o
mediante un eldbus.
[4] Select set-
-up 3
[5] Select set-
-up 4
[10] Select preset
ref 0
[11] Select preset
ref 1
[12] Select preset
ref 2
[13] Select preset
ref 3
[14] Select preset
ref 4
[15] Select preset
ref 5
[16] Select preset
ref 6
[17] Select preset
ref 7
Cambio del ajuste activo
(parámetro 0-10 Active Set-up) a 3. Si se
cambia el ajuste, se une a otras órdenes de
ajuste que lleguen de las entradas digitales o
mediante un eldbus.
Cambio del ajuste activo
(parámetro 0-10 Active Set-up) a 4. Si se
cambia el ajuste, se une a otras órdenes de
ajuste que lleguen de las entradas digitales o
mediante un eldbus.
Selección de la referencia interna 0. Si se
cambia la referencia interna activa, esta se
une con otras órdenes de referencia interna
que llegan de las entradas digitales o a
través de un eldbus.
Selección de la referencia interna 1. Si se
cambia la referencia interna activa, esta se
une con otras órdenes de referencia interna
que llegan de las entradas digitales o a
través de un eldbus.
Selección de la referencia interna 2. Si se
cambia la referencia interna activa, esta se
une con otras órdenes de referencia interna
que llegan de las entradas digitales o a
través de un eldbus.
Selección de la referencia interna 3. Si se
cambia la referencia interna activa, esta se
une con otras órdenes de referencia interna
que llegan de las entradas digitales o a
través de un eldbus.
Selección de la referencia interna 4. Si se
cambia la referencia interna activa, esta se
une con otras órdenes de referencia interna
que llegan de las entradas digitales o a
través de un eldbus.
Selección de la referencia interna 5. Si se
cambia la referencia interna activa, esta se
une con otras órdenes de referencia interna
que llegan de las entradas digitales o a
través de un eldbus.
Selección de la referencia interna 6. Si se
cambia la referencia interna activa, esta se
une con otras órdenes de referencia interna
que llegan de las entradas digitales o a
través de un eldbus.
Selección de la referencia interna 7. Si se
cambia la referencia interna activa, esta se
une con otras órdenes de referencia interna
86 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

Descripciones de parámetros Guía de programación
13-52 SL Controller Action
Option: Función:
que llegan de las entradas digitales o a
través de un eldbus.
[18] Select ramp1Seleccionar rampa 1.
[19] Select ramp2Seleccionar rampa 2.
[22] Run Enviar una orden de arranque al convertidor
de frecuencia.
[23] Run reverse Enviar una orden de arranque con cambio de
sentido al convertidor de frecuencia.
[24] Stop Enviar una orden de parada al convertidor de
frecuencia.
[25] Qstop Enviar una orden de parada rápida al
convertidor de frecuencia.
[26] DC Brake Enviar una orden de freno de CC al
convertidor de frecuencia.
[27] Coast El convertidor de frecuencia entra en parada
por inercia inmediatamente. Todas las
órdenes de parada, incluyendo la de inercia,
detienen el SLC.
[28] Freeze
output
[29] Start timer 0 Para más detalles, consulte el
[30] Start timer 1 Para más detalles, consulte el
[31] Start timer 2 Para más detalles, consulte el
[32] Set digital
out A low
[33] Set digital
out B low
[34] Set digital
out C low
[35] Set digital
out D low
[38] Set digital
out A high
[39] Set digital
out B high
[40] Set digital
out C high
[41] Set digital
out D high
[60] Reset
Counter A
Mantener la salida del convertidor de
frecuencia.
parámetro 13-20 SL Controller Timer.
parámetro 13-20 SL Controller Timer.
parámetro 13-20 SL Controller Timer.
Cualquier salida con salida SL A se pone a
nivel bajo.
Cualquier salida con salida SL B se pone a
nivel bajo.
Cualquier salida con salida SL C se pone a
nivel bajo.
Cualquier salida con salida SL D se pone a
nivel bajo.
Cualquier salida con salida SL A se pone a
nivel alto.
Cualquier salida con salida SL B se pone a
nivel alto.
Cualquier salida con salida SL C se pone a
nivel alto.
Cualquier salida con salida SL D se pone a
nivel alto.
Reinicio del contador A a 0.
13-52 SL Controller Action
Option: Función:
[61] Reset
Counter B
[70] Start Timer3Para más detalles, consulte el
[71] Start Timer4Para más detalles, consulte el
[72] Start Timer5Para más detalles, consulte el
[73] Start Timer6Para más detalles, consulte el
[74] Start Timer7Para más detalles, consulte el
Reinicio del contador B a 0.
parámetro 13-20 SL Controller Timer.
parámetro 13-20 SL Controller Timer.
parámetro 13-20 SL Controller Timer.
parámetro 13-20 SL Controller Timer.
parámetro 13-20 SL Controller Timer.
4 4
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 87

Descripciones de parámetros
VLT® Midi Drive FC 280
4.14 Parámetros: 14-** Special Functions
14-01 Frecuencia conmutación
Option: Función:
Seleccione la frecuencia de conmutación del
inversor. El cambio de la frecuencia de
conmutación ayuda a reducir el ruido acústico del
motor.
44
[2] 2,0 kHz
[3] 3,0 kHz
[4] 4,0 kHz
[5] 5,0 kHz
[6] 6,0 kHz
[7] 8,0 kHz
[8] 10,0 kHz
[9] 12,0 kHz
[10] 16,0 kHz
14-03 Overmodulation
Option: Función:
[0] O Para evitar el rizado del par en el eje del motor,
seleccione [0] Desactivado a n de evitar la sobremodulación de la tensión de salida. Esta característica
puede ser útil para aplicaciones tales como máquinas
recticadoras.
[1] * On Seleccione [1] Activado para activar la función de
sobremodulación para la tensión de salida. Seleccione
este ajuste cuando se requiere que la tensión de salida
sea superior al 95 % de la tensión de entrada (habitual
durante el funcionamiento sobresíncrono). La tensión
de salida aumenta en función del grado de sobremodulación.
AVISO!
La sobremodulación produce un mayor rizado
del par a medida que aumentan los armónicos.
14-07 Dead Time Compensation Level
Range: Función:
Size
related*
14-08 Damping Gain Factor
Range: Función:
Size related* [0 - 100 %] Factor de amortiguación para
[0 100 ]
Nivel de compensación de tiempo muerto
aplicada en porcentaje. Un nivel elevado
(>90 %) optimiza la respuesta dinámica del
motor, mientras que un nivel situado entre
el 50 y el 90 % resulta bueno tanto para la
minimización del rizado del par del motor
como para la dinámica del motor. Un nivel
cero desactiva la compensación de tiempo
muerto.
compensación de tensión de enlace
de CC.
14-09 Dead Time Bias Current Level
Range: Función:
Size related* [0 - 100 %] Ajuste una señal de sesgo (en [%])
que se añadirá a la señal de
detección de la corriente para
compensación por tiempo muerto de
algunos motores.
14-10 Mains Failure
Option: Función:
AVISO!
El Parámetro 14-10 Mains Failure no se
puede cambiar mientras el motor está en
marcha.
El Parámetro 14-10 Mains Failure suele utilizarse
cuando se producen interrupciones de alimentación muy breves (caídas de tensión). Con un
100 % de la carga y una breve interrupción de la
tensión, la tensión de CC de los condensadores
principales cae rápidamente. En el caso de
convertidores de frecuencia grandes, en cuestión
de milisegundos el nivel de CC puede bajar hasta
373 V CC y los IGBT pueden desconectarse y
perder el control del motor. Cuando la alimentación se restablece y los IGBT vuelven a iniciarse,
la frecuencia de salida y el vector de tensión no
se corresponden con la velocidad/frecuencia del
motor. Como resultado, se produce habitualmente
una sobretensión o sobreintensidad, lo que suele
provocar un bloqueo por alarma. El
Parámetro 14-10 Mains Failure puede programarse
para evitar esta situación.
Seleccionar la función a la que debe seguir el
convertidor de frecuencia cuando se alcance el
umbral denido en el parámetro 14-11 Avería de
tensión de red.
[0]*No
function
[1] Ctrl.
ramp-
-down
El convertidor de frecuencia no compensa una
interrupción de la alimentación. La tensión del
enlace de CC cae rápidamente y el motor se
pierde en cuestión de milisegundos o segundos.
El resultado es el bloqueo por alarma.
El convertidor de frecuencia sigue controlando el
motor y realiza una rampa de deceleración
controlada desde el nivel del
parámetro 14-11 Mains Voltage at Mains Fault. Si el
parámetro 2-10 Brake Function está ajustado como
[0] Desactivado o [2] Frenado de CA, la rampa
sigue la rampa de sobretensión. Si el
parámetro 2-10 Brake Function está ajustado como
[1] Freno con resistencia, la rampa se realiza de
acuerdo con lo establecido en el
88 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

130BC918.10
U
14-11*1.35
Ref
n [RPM]
t [S]
A B CDE A
DC
U
DC
[V]
t [S]
Descripciones de parámetros Guía de programación
14-10 Mains Failure
Option: Función:
parámetro 3-81 Quick Stop Ramp Time. Esta
selección resulta especialmente útil en las aplicaciones de bomba, en las que la inercia es baja y
la fricción, alta. Cuando la alimentación se
restablece, la frecuencia de salida acelera el motor
hasta la velocidad de referencia (si la interrupción
de red es prolongada, la rampa de deceleración
controlada podría hacer que la frecuencia de
salida descendiera hasta 0 r/min. Cuando la
alimentación se restablece, la aplicación acelera
desde 0 r/min hasta la anterior velocidad de
referencia mediante una aceleración normal). Si la
energía del enlace de CC desaparece antes de
que la velocidad del motor se reduzca a cero, el
motor quedará en inercia.
[2] Ctrl.
ramp-
-down,
trip
[3] Coasting Las centrifugadoras pueden funcionar durante
[4] Kinetic
back-up
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 89
Esta selección es similar a la selección [1] Deceler.
controlada, excepto en que en [2] Decel. contr.,
desc. es necesario un reinicio para arrancar tras
aplicar la alimentación.
una hora sin fuente de alimentación. En estos
casos, es posible seleccionar una función de
inercia al interrumpirse la alimentación, junto con
una función de motor en giro, que se produce al
restablecerse la alimentación.
La energía regenerativa garantiza que el
convertidor de frecuencia sigue en funcionamiento mientras haya energía en el sistema
generada por la inercia del motor y de la carga.
Esto se realiza convirtiendo la energía mecánica al
enlace de CC y, de este modo, se mantiene el
control del convertidor de frecuencia y del motor.
Esto puede ampliar el funcionamiento controlado,
en función de la inercia del sistema. En
ventiladores, normalmente abarca varios
segundos; en bombas, hasta 2 segundos, y en
compresores, solo una fracción de segundo.
Muchas aplicaciones de la industria pueden
ampliar el funcionamiento controlado durante
varios segundos, lo que a menudo es tiempo
suciente para que la alimentación vuelva.
14-10 Mains Failure
Option: Función:
A Funcion. normal
B Fallo aliment.
C Energía regenerativa
D Retorno de red
E Funcionamiento normal: En rampa
Ilustración 4.17 Energía regenerativa
El nivel de CC durante [4] Energía regenerativa es
el parámetro 14-11 Mains Voltage at Mains Fault ×
1,35.
Si la alimentación no vuelve, la UCC se mantendrá
todo el tiempo que sea posible reduciendo la
velocidad hasta 0 r/min. Finalmente, el
convertidor de frecuencia se quedará en inercia.
Si la alimentación vuelve mientras está en modo
de energía regenerativa, la UCC aumenta por
encima del parámetro 14-11 Mains Voltage at
Mains Fault × 1,35. Esto se detecta de una de las
siguientes maneras:
•
•
•
Si UCC >parámetro 14-11 Mains Voltage at
Mains Fault × 1,35 × 1,05
Si la velocidad es superior a la
referencia. Esto es relevante si la alimentación vuelve en un nivel inferior al
anterior; por ejemplo,
parámetro 14-11 Mains Voltage at Mains
Fault × 1,35 × 1,02. No se cumple el
criterio anterior y el convertidor de
frecuencia intenta reducir la UCC al
parámetro 14-11 Mains Voltage at Mains
Fault × 1,35 mediante un incremento de
la velocidad. Esto no da resultado, ya
que la alimentación no se puede reducir.
Si funciona a motor. El mismo
mecanismo del punto anterior, pero la
inercia evita que la velocidad aumente
por encima de la velocidad de
referencia. Esto hace que el motor
funcione a motor hasta que la velocidad
esté por encima de la velocidad de
referencia y se produzca la situación
anterior. En lugar de esperar a que
sucedo esto, se introduce el presente
criterio.
4 4

14-11*1.35
Ref
790 V
0
A B C D
130BC920.10
U
n [RPM]
t [S]
DC
U
DC
[V]
t [S]
Descripciones de parámetros
VLT® Midi Drive FC 280
14-10 Mains Failure
Option: Función:
[5] Kinetic
back-up,
trip
La diferencia entre la energía regenerativa con y
sin desconexión es que la última siempre
desacelera a 0 r/min y se desconecta, independientemente de si la alimentación vuelve o no.
14-15 Kin. Backup Trip Recovery Level
Range: Función:
Size related* [0 - 500.000 Referen-
ceFeedbackUnit]
Este parámetro especica
el nivel de recuperación
de desconexión de
energía regenerativa.
La función se ha hecho de tal manera que ni
siquiera detecta si vuelve la alimentación. Esto es
44
lo que hace que haya un nivel relativamente alto
en el enlace de CC durante la desaceleración.
A Funcion. normal
B Fallo aliment.
C Energía regenerativa
D Desconexión
Ilustración 4.18 Desconexión de energía
regenerativa
[6] Alarm
[7] Kin.
back-up,
trip w
recovery
14-11 Mains Voltage at Mains Fault
Range: Función:
342 V* [100 -
800 V]
Este parámetro dene la tensión umbral a la
que se activa la función seleccionada en el
parámetro 14-10 Mains Failure. El nivel de
detección es un factor de raíz cuadrada del
valor de este parámetro.
14-12 Función desequil. alimentación
Option: Función:
El funcionamiento en situación de grave
desequilibrio de red reduce la vida útil del
motor. Las condiciones se consideran graves
si el motor se está utilizando continuamente
cerca del valor nominal de carga (por
ejemplo, controlando una bomba o un
ventilador cerca de la máxima velocidad).
[0] * Desconexión Desconexión del convertidor de frecuencia.
[1] Advertencia Emitir una advertencia.
[2] Desactivado No se ejecuta ninguna acción.
90 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

Descripciones de parámetros Guía de programación
14-20 Reset Mode
Option: Función:
ADVERTENCIA
ARRANQUE ACCIDENTAL
Cuando el convertidor de frecuencia se
conecta a una red de CA, a un
suministro de CC o a una carga
compartida, el motor puede arrancar
en cualquier momento. Un arranque
accidental durante la programación, el
mantenimiento o los trabajos de
reparación puede causar la muerte,
lesiones graves o daños materiales. El
motor puede arrancar mediante un
conmutador externo, una orden de
eldbus, una señal de referencia de
entrada desde el LCP o por la
eliminación de una condición de fallo.
Para evitar un arranque accidental del
motor:
•
•
•
AVISO!
Si en un intervalo de 10 minutos se
alcanza el número especicado de
reinicios automáticos, el convertidor
de frecuencia entrará en modo [0]
Reset manual. Después de que se lleve
a cabo el reinicio manual, el ajuste del
parámetro 14-20 Reset Mode vuelve a
la selección original. Si en un intervalo
de 10 minutos no se alcanza el
número de reinicios automáticos, o si
se realiza un reinicio manual, el
contador interno de reinicios
automáticos se pone a 0.
Seleccione la función de reset después de
una desconexión. Tras el reinicio, el
convertidor de frecuencia puede volver a
arrancarse. El modo de reinicio automático
no afecta a la alarma 68, Safe Torque O ni a
Desconecte el convertidor de
frecuencia de la alimentación.
Pulse [O/Reset] en el LCP
antes de programar cualquier
parámetro.
Debe cablear y montar
completamente el convertidor
de frecuencia, el motor y
cualquier equipo accionado
antes de conectar el
convertidor de frecuencia a la
red de CA, al suministro de
CC o a una carga compartida.
14-20 Reset Mode
Option: Función:
la alarma 188, STO internal fault en la versión
1.2 del software y en las versiones
posteriores.
[0] * Manual reset Seleccione [0] Reset manual para realizar un
reinicio mediante [Reset] o las entradas
digitales.
[1] Automatic
reset x 1
[2] Automatic
reset x 2
[3] Automatic
reset x 3
[4] Automatic
reset x 4
[5] Automatic
reset x 5
[6] Automatic
reset x 6
[7] Automatic
reset x 7
[8] Automatic
reset x 8
[9] Automatic
reset x 9
[10] Automatic
reset x 10
[11] Automatic
reset x 15
[12] Automatic
reset x 20
[13] Innite auto
reset
[14] Reset at
power-up
Seleccione [1]-[12] Reset autom. x 1-x 20 para
realizar entre uno y veinte reinicios
automáticos tras una desconexión.
Seleccione [13] Reset auto. innito para un
reinicio continuo tras una desconexión.
14-21 Automatic Restart Time
Range: Función:
10 s* [0 - 600s]Introduzca el intervalo de tiempo desde la
desconexión hasta el arranque de la función de
reset automático. Este parámetro está activo
cuando el parámetro 14-20 Reset Mode se ajusta
como [1]-[13] Reset autom.
14-22 Operation Mode
Option: Función:
Utilice este parámetro para especicar el funcionamiento normal, para realizar pruebas o para
inicializar todos los parámetros, salvo el
parámetro 15-03 Arranques, el
parámetro 15-04 Sobretemperat. y el
parámetro 15-05 Sobretensión. Esta función solo
4 4
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 91

Descripciones de parámetros
VLT® Midi Drive FC 280
14-22 Operation Mode
Option: Función:
está activa cuando se desconecta la alimentación y se vuelve a conectar en el convertidor
de frecuencia.
[0]*Normal
operation
44
[2] Initiali-
sation
Funcionamiento normal con el motor
seleccionado.
Reinicie todos los valores de los parámetros a
los ajustes predeterminados, excepto el
parámetro 15-03 Arranques, el
parámetro 15-04 Sobretemperat. y el
parámetro 15-05 Sobretensión. El convertidor de
frecuencia se reiniciará durante el siguiente
arranque.
14-24 Trip Delay at Current Limit
Range: Función:
60 s* [0 -
Introduzca el retardo de desconexión con límite de
60 s]
intensidad en segundos. Cuando la intensidad de
salida alcanza el límite de intensidad
(parámetro 4-18 Current Limit), se dispara una
advertencia. Cuando la advertencia de límite de
intensidad está presente de modo continuo
durante el tiempo que se especica en este
parámetro, el convertidor de frecuencia se
desconecta. Para que funcione sin interrupción en
el límite de intensidad sin que se desconecte,
ajuste el parámetro a 60 s = No. El control térmico
del convertidor de frecuencia sigue estando activo.
14-28 Production Settings
Option: Función:
[0] * No action
[1] Service reset
[3] Software Reset
14-29 Service Code
Range: Función:
0* [0 - 0x7FFFFFFF ] Solo para uso interno.
14-30 Ctrol. lim. intens., Gananacia proporc.
Range: Función:
100 %* [0 -
500 %]
Introducir la ganancia proporcional para el
controlador de límite de intensidad. La
selección de un valor alto hace que el
controlador reaccione más rápidamente. Un
ajuste demasiado alto puede hacer que el
controlador sea inestable.
14-31 Current Lim Ctrl, Integration Time
Range: Función:
0.020 s* [0.002 - 2 s] Controlar el tiempo de integración para
el control del límite de corriente.
Ajustarlo a un valor inferior hace que
reaccione con mayor rapidez. Un ajuste
demasiado bajo puede provocar inestabilidad en el control.
14-32 Current Lim Ctrl, Filter Time
Range: Función:
14-25 Trip Delay at Torque Limit
Range: Función:
60 s* [0 -
Introduzca el retardo de desconexión con límite de
60 s]
par en segundos. Cuando el par de salida alcanza
el límite de par (parámetro 4-16 Torque Limit Motor
Mode y parámetro 4-17 Torque Limit Generator
Mode), se dispara una advertencia. Cuando la
advertencia de límite de par está presente de
modo continuo durante el tiempo que se especica
en este parámetro, el convertidor de frecuencia se
desconecta. Para desactivar el retardo de
desconexión, ajuste el parámetro a 60 s = No. El
control térmico del convertidor de frecuencia sigue
estando activo.
5 ms* [1 - 100 ms] Ajustar una constante de tiempo para el
ltro de paso bajo del controlador de
límite de intensidad.
14-40 VT Level
Range: Función:
66%* [40 -
AVISO!
90 %]
Este parámetro no se puede ajustar con el
motor en marcha.
AVISO!
Este parámetro no está disponible cuando el
parámetro 1-10 Construcción del motor se
ajusta en opciones que activan el modo de
14-27 Action At Inverter Fault
motor PM.
Option: Función:
Seleccione cómo debe reaccionar el convertidor
de frecuencia en caso de sobretensión o fallo de
conexión a tierra.
[0] Trip Desactivar los ltros de protección y desconectar
al primer fallo.
[1] * Warning Ejecutar normalmente los ltros de protección.
Introduzca el nivel de magnetización del motor a
baja velocidad. La selección de un valor bajo reduce
la pérdida de energía en el motor, pero también
reduce la capacidad de carga.
92 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

Descripciones de parámetros Guía de programación
14-41 AEO Minimum Magnetisation
Range: Función:
66 %* [40 -
75 %]
Introduzca el valor mínimo de magnetización
admisible para la AEO. La selección de un
valor bajo reduce la pérdida de energía en el
motor, pero también puede reducir la
resistencia a cambios de carga repentinos.
14-44 d-axis current optimization for IPM
Range: Función:
100%* [0 -
Este parámetro estará disponible solo si el
200 %
parámetro 1-10 Motor Construction se ajusta en [2]
]
PM, salient IPM, non Sat.
Normalmente, el control PM VVC+ optimiza
automáticamente la corriente de desmagnetización del eje d a partir de los ajustes del eje d y
el eje q. Cuando el parámetro 1-10 Motor
Construction se ajuste como [2] PM, salient IPM,
non Sat, utilice este parámetro para compensar el
efecto de saturación en carga elevada.
Normalmente, la reducción de este valor mejora el
rendimiento. Sin embargo, un 0 % implica que no
hay optimización y la corriente del eje d será cero
(no se recomienda).
14-51 DC-Link Voltage Compensation
Option: Función:
[0] O Desactivar la compensación del enlace de CC.
[1] * On Activar la compensación del enlace de CC.
14-61 Function at Inverter Overload
Cuando el convertidor de frecuencia emita una advertencia de
sobrecarga del convertidor de frecuencia, seleccione entre
continuar y desconectar el convertidor de frecuencia o reducir la
intensidad de salida.
Option: Función:
[0] * Trip
[1] Derate
14-63 Min Switch Frequency
Option: Función:
Ajuste la frecuencia de cambio mínima permitida
por el ltro de salida.
[2] * 2.0 kHz
[3] 3.0 kHz
[4] 4.0 kHz
[5] 5.0 kHz
[6] 6.0 kHz
[7] 8.0 kHz
[8] 10.0 kHz
[9] 12.0 kHz
[10] 16.0 kHz
14-64 Dead Time Compensation Zero Current Level
Option: Función:
[0] * Disabled
[1] Enabled Si se utiliza un cable de motor largo, seleccione
esta opción para minimizar el rizado del par del
motor.
4 4
14-52 Control del ventilador
Option: Función:
[5] Constant-on mode
[6] Constant-o mode
[7] On-when-Inverter-is-on-else-o Mode
[8] * Variable-speed mode
14-55 Output Filter
Option: Función:
AVISO!
No se puede cambiar este
parámetro con el motor en marcha.
Seleccione el tipo de ltro de salida
conectado.
[0] * No Filter
[1] Sine-Wave Filter
14-65 Speed Derate Dead Time Compensation
Range: Función:
Size
related*
[ 20 1000 Hz]
El nivel de compensación de tiempo
muerto se reduce linealmente frente a la
frecuencia de salida desde el nivel
máximo congurado en el
parámetro 14-07 Dead Time Compensation
Level hasta el nivel mínimo ajustado en
este parámetro.
14-89 Option Detection
Seleccionar el comportamiento cuando se detecta un cambio de
opción. Este parámetro vuelve a [0] Protect Option Cong. tras un
cambio de opción.
Option: Función:
[0] * Protect Option
Cong.
[1] Enable Option
Change
Mantener los ajustes actuales y
evitar cambios no deseados cuando
se detecta que faltan opciones o
están defectuosas.
Los ajustes se pueden cambiar
cuando se modica la conguración
del sistema.
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 93

Descripciones de parámetros
VLT® Midi Drive FC 280
14-90 Fault Level
Use este parámetro para personalizar los niveles de fallo. Utilice
el octavo elemento para controlar el nivel de fallo de la alarma
13, Over Current.
Option: Función:
[3] * Trip Lock La alarma se ajusta como bloqueo por
alarma.
[4] Trip w.
44
delayed reset
[5] Flystart En el arranque, el convertidor de frecuencia
La alarma está congurada como alarma
de desconexión, que puede reiniciarse tras
un tiempo de retardo. Por ejemplo, si la
alarma 13, Over Current se congura para
esta opción, puede reiniciarse tres minutos
después de emitirse la alarma.
intenta atrapar un motor en giro. Si se
selecciona esta opción, el
parámetro 1-73 Flying Start se fuerza a la
posición [1] Activado.
Índice Alarma Bloqueo por
alarma
0 Reservado – – –
1 Reservado – – –
2 Reservado – – –
3 Reservado – – –
4 Reservado – – –
5 Reservado – – –
6 Reservado – – –
7 Sobreco-
rriente
Tabla 4.5 Tabla de selección de acciones cuando
aparece la alarma seleccionada (Parámetro 14-90 Fault Level)
D = ajuste predeterminado
x = selección posible
D x x
Desconex.
reinic.
retard.
Flystart
94 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

Descripciones de parámetros Guía de programación
4.15 Parámetros: 15-** Drive Information
15-00 Operating hours
Range: Función:
0 h* [0 - 0x7f. h] Ver cuántas horas ha funcionado el
convertidor de frecuencia. Este valor se
guarda cuando se desconecta el
convertidor de frecuencia.
15-01 Running Hours
Range: Función:
0 h* [0 -
0x7f. h]
Ver cuántas horas ha funcionado el
convertidor de frecuencia. Reiniciar el
contador en el parámetro 15-07 Reset
Running Hours Counter. Este valor se guarda
cuando se desconecta el convertidor de
frecuencia.
15-02 Contador KWh
Range: Función:
0 kWh* [0 -
2147483647
kWh]
Registrar el consumo de energía del
motor como valor promedio durante
una hora. Reiniciar el contador en el
parámetro 15-06 Reiniciar contador
KWh.
15-03 Arranques
Range: Función:
0* [0 - 2147483647 ] Ver el número de veces que se ha
encendido el convertidor de frecuencia.
15-04 Sobretemperat.
Range: Función:
0* [0 - 65535 ] Ver el número de fallos de temperatura del
convertidor de frecuencia.
15-05 Sobretensión
Range: Función:
0* [0 - 65535 ] Ver el número de situaciones de sobretensión
del convertidor de frecuencia.
15-30 Alarm Log: Error Code
Range: Función:
0* [0 - 255 ] Anote el código de error y busque su signicado
en el capétulo 6 Resolución de problemas.
15-31 InternalFaultReason
Range: Función:
0* [-32767 -
32767 ]
Ver una descripción adicional del error. Este
parámetro se utiliza principalmente en
combinación con la alarma 38, Internal
Fault.
15-40 FC Type
Range: Función:
0* [0 - 0 ] Visualice el tipo de convertidor de frecuencia. La
lectura de datos es idéntica al campo de potencia
de la de denición del código descriptivo;
caracteres 1-6.
15-41 Power Section
Range: Función:
0* [0 - 20 ] Visualice el tipo de convertidor de frecuencia. La
lectura de datos es idéntica al campo de potencia
de la de denición del código descriptivo;
caracteres 7-10.
15-42 Voltage
Range: Función:
0* [0 - 20 ] Visualice el tipo de convertidor de frecuencia. La
lectura de datos es idéntica al tipo de campo de
potencia de la denición del código descriptivo;
caracteres 11-12.
15-43 Versión de software
Range: Función:
0* [0 - 5 ] Vea la versión de SW combinada (o versión de
paquete) que consta de SW de potencia y SW de
control.
4 4
15-06 Reiniciar contador KWh
Option: Función:
[0] * No reiniciar No se necesita reiniciar el contador de kWh.
[1] Reiniciar
contador
Pulse [OK] para poner a 0 el contador de
kWh (consulte el parámetro 15-02 Contador
KWh).
15-07 Reset Running Hours Counter
Option: Función:
[0] * Do not reset
[1] Reset counter Pulse [OK] para poner a 0 el contador de
horas de funcionamiento (consulte el
parámetro 15-01 Running Hours).
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 95
15-44 Tipo cód. cadena solicitado
Range: Función:
0* [0 - 40 ] Vea el código descriptivo utilizado para pedir de
nuevo el convertidor de frecuencia con su
conguración original.
15-45 Actual Typecode String
Range: Función:
0* [0 - 40 ] Vea el código descriptivo real.

Descripciones de parámetros
VLT® Midi Drive FC 280
15-46 Drive Ordering No
Range: Función:
0* [0 - 0 ] Muestra el número de pedido de ocho dígitos
utilizado para volver a pedir el convertidor de
frecuencia en su conguración original.
15-48 No id LCP
Range: Función:
44
0* [0 - 20 ] Ver el número ID del LCP.
15-70 Option in Slot A
Range: Función:
0* [0 - 30 ] Ver el código descriptivo de la opción instalada
en la ranura A y una traducción de dicho código
descriptivo.
15-71 Slot A Option SW Version
Range: Función:
0* [0 - 20 ] Ver la versión de software de la opción instalada
en la ranura A.
15-49 Tarjeta control id SW
Range: Función:
0* [0 - 20 ] Visualice el número de versión de software de la
tarjeta de control.
15-50 Tarjeta potencia id SW
15-92 Dened Parameters
Range: Función:
0* [0 - 2000 ] Visualice una lista de todos los parámetros
denidos en el convertidor de frecuencia. La
lista termina con 0.
Range: Función:
0* [0 - 20 ] Visualice el número de versión de software de la
tarjeta de potencia.
15-51 Nº serie convert. frecuencia
15-97 Application Type
Range: Función:
0* [0 - 0xFFFFFFFF ] Este parámetro contiene datos utilizados
por Software de conguración MCT 10.
Range: Función:
0* [0 - 10 ] Visualice el número de serie del convertidor de
frecuencia.
15-52 OEM Information
15-98 Drive Identication
Range: Función:
0* [0 - 56 ] Este parámetro contiene datos utilizados por
Software de conguración MCT 10.
Range: Función:
0* [0 - 0 ] Ver la información OEM.
15-99 Parameter Metadata
Range: Función:
15-53 Número serie tarjeta potencia
Range: Función:
0* [0 - 19 ] Ver el número de serie de la tarjeta de potencia.
0* [0 - 9999 ] Este parámetro contiene datos utilizados por
Software de conguración MCT 10.
15-57 File Version
Range: Función:
0* [0 - 255 ] Ver la versión del archivo.
15-59 Filename
Range: Función:
0* [0 - 16 ] Ver el nombre de archivo real de los archivos OEM.
15-60 Option Mounted
Range: Función:
Size related* [0 - 30 ] Ver el tipo de opción instalada.
15-61 Option SW Version
Range: Función:
Size related* [0 - 20 ] Ver la versión de software de la opción
instalada.
96 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305

Descripciones de parámetros Guía de programación
4.16 Parámetros: 16-** Data Readouts
16-00 Código de control
Range: Función:
0* [0 - 65535 ] Vea el código de control enviado desde el
convertidor de frecuencia a través del puerto
de comunicación serie en código hexadecimal.
16-01 Reference [Unit]
Range: Función:
0 Reference
Feedback
Unit*
[-4999 4999
Reference
Feedback
Unit]
Visualice el valor actual de
referencia aplicado, en forma de
impulsos o analógica, en la unidad
resultante de la conguración
seleccionada en el
parámetro 1-00 Conguration Mode.
16-02 Referencia %
Range: Función:
0 %* [-200 -
200 %]
Visualice la referencia total. La referencia
total es la suma de las referencias digital,
analógica, interna, de bus y mantenida, más
el enganche arriba y abajo.
16-03 Código estado
Range: Función:
0* [0 - 65535 ] Vea el código de estado enviado desde el
convertidor de frecuencia a través del puerto
de comunicación serie en código hexadecimal.
16-05 Main Actual Value [%]
Range: Función:
0 %* [-200 - 200 %] Consulte el código de dos bytes enviado
con el código de estado al bus maestro
que indica el valor actual principal.
16-10 Power [kW]
Range: Función:
valor de lectura de datos en el eldbus se indica
en pasos de 1 W.
16-11 Power [hp]
Range: Función:
0 hp* [0 -
1000 hp]
Ver la potencia del motor en CV. El valor que se
muestra está calculado a partir de la tensión y
corriente reales del enlace de CC. El valor se
ltra, por lo que pueden transcurrir 128 ms
aproximadamente desde que cambia un valor
de entrada hasta que la pantalla reeja el
cambio de la lectura de datos.
16-12 Motor Voltage
Range: Función:
0 V* [0 - 65535 V] Vea la tensión del motor; un valor calculado
se utiliza para controlar el mismo.
16-13 Frequency
Range: Función:
0 Hz* [0 - 6553.5 Hz] Ver la frecuencia del motor, sin amorti-
guación de resonancia.
16-14 Motor current
Range: Función:
0 A* [0 -
655.35 A]
Consulte la intensidad del motor calculada
como un valor medio, I
por lo que pueden transcurrir 30 ms aproximadamente desde que cambia un valor de
entrada hasta que la pantalla reeja el cambio
de la lectura de datos.
. El valor se ltra,
RMS
4 4
16-09 Custom Readout
Range: Función:
0 Custom
Readout
Unit*
[0 - 9999
Custom
Readout
Unit]
Visualice el valor de lectura personalizada de los parámetros
comprendidos entre el
parámetro 0-30 Custom Readout Unit
y el parámetro 0-32 Custom Readout
Max Value.
16-15 Frequency [%]
Range: Función:
0 %* [0 -
6553.5 %]
Visualice un código de dos bytes que informa
de la frecuencia real del motor (sin amortiguación de resonancia), como porcentaje
(escala 0000-4000 hexadecimal) del
parámetro 4-19 Frecuencia salida máx..
16-16 Torque [Nm]
16-10 Power [kW]
Range: Función:
0
[0 -
kW*
1000
kW]
MG07C305 Danfoss A/S © 07/2016 Reservados todos los derechos. 97
Mostrar la potencia del motor en kW. El valor
calculado que se muestra está basado en la
tensión y corriente reales del enlace de CC. El
valor se ltra, por lo que pueden transcurrir 128
ms aproximadamente desde que cambia un
valor de entrada hasta que la pantalla reeja el
cambio de la lectura de datos. La resolución del
Range: Función:
0 Nm [-30000 -
30000 Nm]
Muestra el valor de par con signo por aplicar
al eje del motor. Algunos motores proporcionan más del 160 % del par. Como
resultado, el valor mínimo y el valor máximo
dependen de la intensidad máxima del
motor, así como del motor que se utilice.

Descripciones de parámetros
VLT® Midi Drive FC 280
16-17 Speed [RPM]
Range: Función:
0 RPM [-30000 -
30000 RPM]
44
16-18 Motor Thermal
Ver las r/min reales del motor. En control
de proceso en lazo abierto o lazo cerrado,
se hace una estimación de las r/min del
motor. En los modos de velocidad con lazo
cerrado, se miden las r/min del motor.
Range: Función:
0 %* [0 -
100 %]
Vea la carga térmica calculada en el motor. El
límite de desconexión se sitúa en el 100 %. La
base para el cálculo es la función ETR
seleccionada en el parámetro 1-90 Motor Thermal
Protection.
16-20 Motor Angle
Range: Función:
0* [0 - 65535 ] Vea el desplazamiento actual del ángulo del
encoder con relación a la posición índice. El
rango de valores de 0 a 65 535 corresponde a
0-2 × pi (radianes).
16-36 Inv. Nom. Current
Range: Función:
0 A* [0 - 655.35A]Ver la corriente nominal del inversor, que
debe coincidir con los datos de la placa de
características del motor conectado. Los
datos se utilizan para calcular el par y la
protección contra sobrecarga del motor.
16-37 Inv. Max. Current
Range: Función:
0 A* [0 - 655.35A]Ver la corriente máxima del inversor, que
debe coincidir con los datos de la placa de
características del motor conectado. Los
datos se utilizan para calcular el par y la
protección contra sobrecarga del motor.
16-38 SL Controller State
Range: Función:
0* [0 - 20 ] Muestra el estado del evento que está ejecutando
el controlador SL.
16-39 Control Card Temp.
Range: Función:
16-22 Par [%]
Range: Función:
0 %* [ -200– 200 % ] Ver el par aplicado al eje del motor
como porcentaje del par nominal y con
signo.
16-30 DC Link Voltage
Range: Función:
0 V* [0 - 65535 V] Visualice un valor medido. El valor se ltra
con una constante de tiempo de 30 ms.
16-33 Energía freno / 2 min
Range: Función:
0 kW* [0 - 10000
kW]
Ver la potencia de frenado transmitida a
una resistencia de frenado externa. La
potencia media se calcula según el
promedio de los últimos 120 s.
16-34 Heatsink Temp.
Range: Función:
0 °C* [-128 - 127 °C] Visualice la temperatura del disipador del
convertidor de frecuencia.
16-35 Inverter Thermal
0 °C* [0 - 65535 °C] Ver la temperatura de la tarjeta de control
(en °C.
16-50 External Reference
Range: Función:
0 %* [-200 -
200 %]
Vea la referencia total, suma de las
referencias digital, analógica, interna, de
bus y mantenida, más el enganche arriba y
abajo.
16-52 Feedback[Unit]
Range: Función:
0
ProcessCtrlUnit*
[-4999 - 4999
ProcessCtrlUnit]
Ver la unidad de realimentación resultante de la
selección de unidad y
escalado del
parámetro 3-00 Reference
Range, el
parámetro 3-01 Reference/
Feedback Unit, el
parámetro 3-02 Minimum
Reference y el
parámetro 3-03 Maximum
Reference.
Range: Función:
0 %* [0 - 255 %] Ver el porcentaje de carga en el inversor.
98 Danfoss A/S © 07/2016 Reservados todos los derechos. MG07C305
 Loading...
Loading...