

Page 1

ENGINEERING TOMORROW
Guida alla Programmazione
VLT® Midi Drive FC 280
www.danfoss.it/vlt-drives
Page 2

Page 3
Sommario Guida alla Programmazione
Sommario
1 Introduzione
1.1 Come leggere questa Guida alla Programmazione
1.2 Denizioni
1.3 Cablaggio elettrico - cavi di comando
2 Sicurezza
2.1 Simboli di sicurezza
2.2 Personale qualicato
2.3 Precauzioni di sicurezza
3 Programmazione
3.1 Funzionamento del pannello di controllo locale
3.1.1 Pannello di Controllo Locale (LCP) Numerico 14
3.1.2 Funzione del tasto destro sull'NLCP 15
3.1.3 Menu rapido sull'NLCP 16
3.1.4 Menu principale sull'NLCP 18
3.1.5 Layout GLCP 19
3.1.6 Impostazioni dei parametri 21
3
3
4
8
12
12
12
12
14
14
3.1.7 Modica delle impostazioni parametri 21
3.1.8 Caricamento/scaricamento di dati sul/dal GLCP 21
3.1.9 Ripristino delle impostazioni di fabbrica con l'LCP 22
3.2 Programmazione di base
3.2.1 Setup del motore asincrono 22
3.2.2 Setup motore PM in VVC
3.2.3 Adattamento automatico motore (AMA) 24
4 Descrizioni dei parametri
4.1 Parametri: 0-** Operation / Display
4.2 Parametri: 1-** Load and Motor
4.3 Parametri: 2-** Brakes
4.4 Parametri: 3-** Reference/Ramps
4.5 Parametri: 4-** Limits/Warnings
4.6 Parametri: 5-** Digital In/Out
4.7 Parametri: 6-** Analog In/Out
4.8 Parametri: 7-** Controllers
4.9 Parametri: 8-** Comm. and Options
22
+
22
25
25
33
44
47
53
57
69
73
78
4.10 Parametri: 9-** PROFIdrive
4.11 Parametri: 10-** CAN Fieldbus
4.12 Parametri: 12-** Ethernet
4.13 Parametri: 13-** Smart logic
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 1
83
83
83
83
Page 4
Sommario
VLT® Midi Drive FC 280
4.14 Parametri: 14-** Special Functions
4.15 Parametri: 15-** Drive Information
4.16 Parametri: 16-** Data Readouts
4.17 Parametri: 18-** Data Readouts 2
4.18 Parametri: 21-** Ext. Closed Loop
4.19 Parametri: 22-** Appl. Functions
4.20 Parametri: 30-** Special Features
4.21 Parametri: 32-** Motion Control Basic Settings
4.22 Parametri: 33-** Motion Control Adv. Settings
4.23 Parametri: 34-** Motion Control Data Readouts
4.24 Parametri: 37-** Application Settings
5 Elenchi dei parametri
5.1 Introduzione
5.2 Elenchi dei parametri
6 Risoluzione dei problemi
6.1 Avvisi e allarmi
89
95
97
101
101
103
104
105
106
107
109
111
111
114
132
132
Indice
6.1.1 Allarmi 132
6.1.2 Avvisi 132
6.1.3 Messaggi di avviso/allarme 132
6.1.4 Elenco dei codici di avviso e allarme 133
142
2 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 5
Introduzione Guida alla Programmazione
1 Introduzione
1.1 Come leggere questa Guida alla
Programmazione
1.1.1 Scopo del manuale
Questa guida alla programmazione fornisce informazioni
sul controllo del convertitore di frequenza, l'accesso ai
parametri, la programmazione e la risoluzione dei
problemi.
La guida alla programmazione è concepita per l'uso da
parte di personale qualicato che ha già dimestichezza con
il convertitore di frequenza VLT® Midi Drive FC 280.
Leggere le istruzioni prima della programmazione e
osservare le procedure illustrate in questo manuale.
VLT® è un marchio registrato.
1.1.2 Risorse aggiuntive
Le risorse aggiuntive includono:
La Guida operativa VLT® Midi Drive FC 280
•
fornisce le informazioni necessarie per la
preparazione e il funzionamento del convertitore
di frequenza.
La Guida alla Progettazione VLT® Midi Drive FC
•
280 fornisce dettagliate informazioni tecniche sul
convertitore di frequenza nonché sulla progettazione e sulle applicazioni del cliente.
Contattare il fornitore locale Danfoss oppure visitare
drives.danfoss.com/knowledge-center/technical-documentation/ per scaricare le documentazioni.
1.1.3 Versione del documento e del
software
Il presente manuale è revisionato e aggiornato
regolarmente. Sono bene accetti tutti i suggerimenti di
eventuali migliorie. Tabella 1.1 mostra la versione del
documento e la versione software corrispondente.
Edizione Osservazioni Versione
software
MG07C3 Aggiornamento dovuto al rilascio di
una nuova versione del software.
Tabella 1.1 Versione del documento e del software
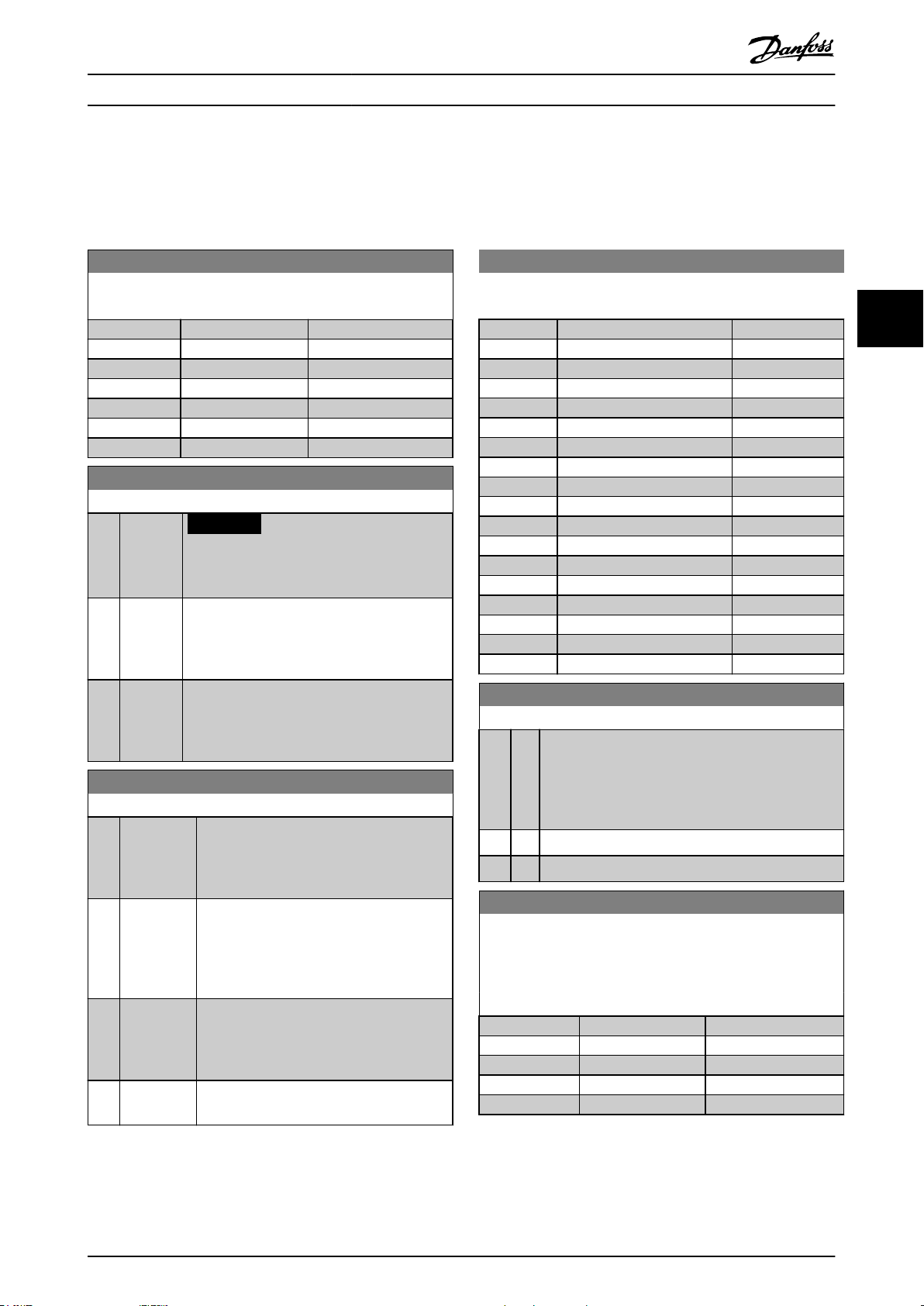
°C
°F
CA Corrente alternata
AEO Ottimizzazione automatica dell'energia
Gradi Celsius
Fahrenheit
1.2
ACP
AWG American Wire Gauge
AMA Adattamento automatico motore
CC Corrente continua
EEPROM
EMC Compatibilità elettromagnetica
EMI Interferenza elettromagnetica
ESD Scarica elettrostatica
ETR Relè termico elettronico
f
M,N
FC Convertitore di frequenza
IGBT Transistor bipolare a gate isolato
IP Classe di protezione IP
I
LIM
I
INV
I
M,N
I
VLT,MAX
I
VLT,N
L
d
L
q
LCP Pannello di controllo locale
LED
MCP Processore di controllo del motore
N.A. Non applicabile
NEMA
P
M,N
PCB Scheda di circuito stampato
PE Messa a terra di protezione
PELV Tensione di protezione bassissima
PWM
R
s
Regen Morsetti rigenerativi
Giri/min. Giri al minuto
RFI Interferenza in radiofrequenza
SCR Raddrizzatore controllato al silicio
SMPS Alimentazione a commutazione
T
LIM
U
M,N
X
h
Tabella 1.2 Abbreviazioni
Processore di controllo dell'applicazione
Memoria a sola lettura programmabile, cancellabile elettricamente
Frequenza nominale motore
Limite di corrente
Corrente nominale di uscita dell'inverter
Corrente nominale del motore
Corrente di uscita massima
Corrente di uscita nominale fornita dal
convertitore di frequenza
Induttanza asse d del motore
Induttanza asse q del motore
Light-emitting diode (diodo a
emissione luminosa)
National Electrical Manufacturers
Association (Associazione nazionale
dei costruttori elettrici)
Potenza nominale motore
Modulazione di larghezza degli
impulsi
Resistenza di statore
Limite di coppia
Tensione nominale motore
Reattanza principale del motore
1 1
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 3
Page 6
Introduzione
VLT® Midi Drive FC 280
11
Le funzioni sono divise in 2 gruppi.
Le funzioni nel gruppo 1 hanno una priorità maggiore
rispetto a quelle nel gruppo 2.
Gruppo 1 Arresto di precisione, arresto a ruota libera, arresto
di precisione e arresto a ruota libera, arresto
rapido, frenatura CC, arresto e [OFF].
Gruppo 2 Avvio, avviamento a impulsi, inversione, avvio
inverso, jog e uscita congelata.
Tabella 1.3 Gruppi funzionali
1.2.3 Motore
Motore in funzione
Coppia generata sull'albero di trasmissione e velocità da 0
Per la conformità all'Accordo europeo relativo al trasporto
internazionale di merci pericolose per vie navigabili interne
(ADN), fare riferimento al capitolo Impianto conforme ad
®
ADN nella Guida alla Progettazione VLT
Midi Drive FC 280.
Il convertitore di frequenza soddisfa i requisiti UL 508C di
protezione termica. Per maggiori informazioni, fare
riferimento al capitolo Protezione termica del motore nella
Guida alla Progettazione VLT® Midi Drive FC 280.
Norme applicate e conformità per STO
L'uso di STO sui morsetti 37 e 38 richiede che siano
soddisfatte tutte le norme di sicurezza, incluse le leggi, i
regolamenti e le direttive vigenti. La funzione STO
integrata è conforme alle seguenti norme:
IEC/EN 61508: 2010 SIL2
•
IEC/EN 61800-5-2: 2007 SIL2
•
IEC/EN 62061: 2012 SILCL di SIL2
•
IEC/EN 61326-3-1: 2008
•
EN ISO 13849-1: 2008 - Categoria 3 PL d
•
Denizioni
1.2
1.2.1 Frequenzumrichter
Motorfreilauf
Die Motorwelle dreht im Motorfreilauf. Kein Drehmoment
am Motor.
I
VLT,MAX
Maximaler Ausgangsstrom.
I
VLT,N
Vom Frequenzumrichter gelieferter Ausgangsnennstrom.
U
VLT,MAX
Maximale Ausgangsspannung.
1.2.2 Ingresso
giri/min. alla velocità massima sul motore.
f
JOG
Frequenza del motore quando viene attivata la funzione
jog (mediante i morsetti digitali).
f
M
Frequenza del motore.
f
MAX
Frequenza massima del motore.
f
MIN
Frequenza minima del motore.
f
M,N
Frequenza nominale del motore (dati di targa).
I
M
Corrente del motore (eettiva).
I
M,N
Corrente nominale del motore (dati di targa).
n
M,N
Velocità nominale del motore (dati di targa).
n
s
Velocità del motore sincrono.
2 × Parametro 1−23 × 60s
ns=
n
slip
Parametro 1−39
Scorrimento del motore.
P
M,N
Potenza nominale del motore (dati di targa in kW o cv).
T
M,N
Coppia nominale (motore).
U
M
Tensione istantanea del motore.
U
M,N
Tensione nominale del motore (dati di targa).
Comandi di controllo
Avviare e arrestare il motore collegato mediante l'LCP e gli
ingressi digitali.
4 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 7
175ZA078.10
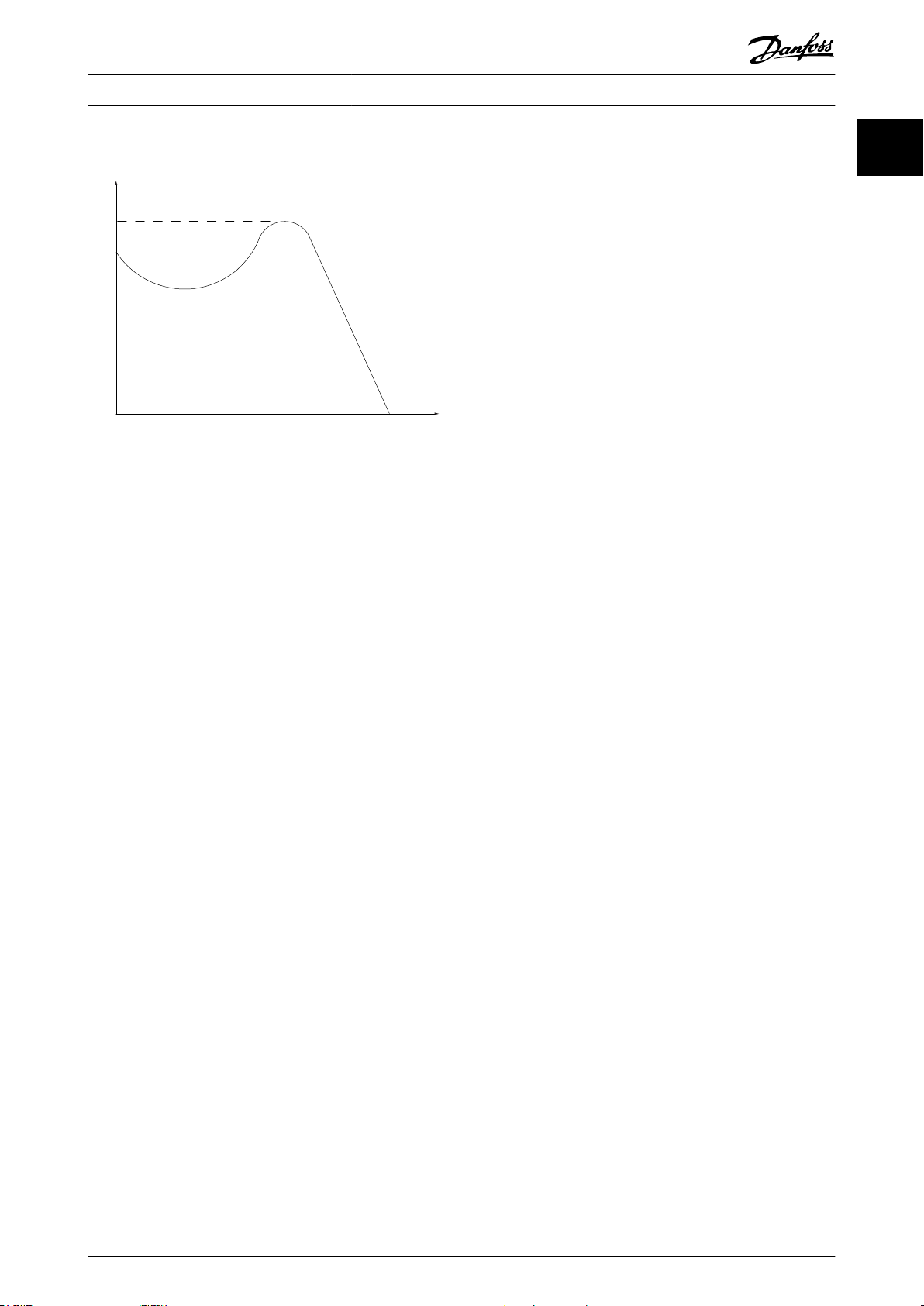
Coppia massima
Giri/min.
Coppia
Introduzione Guida alla Programmazione
Coppia di interruzione
Disegno 1.1 Coppia di interruzione
η
VLT
L'ecienza del convertitore di frequenza è denita come il
rapporto tra la potenza di uscita e quella di ingresso.
Comando di disabilitazione dell'avviamento
Comando di disabilitazione dell'avviamento appartenente
ai comandi di controllo nel gruppo 1. Per maggiori dettagli
vedere Tabella 1.3.
Comando di arresto
Comando di arresto appartenente ai comandi di controllo
nel gruppo 1. Per maggiori dettagli vedere Tabella 1.3.
1.2.4 Riferimenti
Riferimento analogico
Un segnale trasmesso agli ingressi analogici 53 o 54 può
essere in tensione o in corrente.
Riferimento binario
Un segnale trasmesso alla porta di comunicazione seriale.
Riferimento preimpostato
Un riferimento preimpostato denito che può essere
impostato tra -100% e +100% dell'intervallo di riferimento.
Selezione di 8 riferimenti preimpostati mediante i morsetti
digitali.
Riferimento impulsi
Un segnale a impulsi di frequenza trasmesso agli ingressi
digitali (morsetto 29 o 33).
Ref
MAX
Determina la relazione tra l'ingresso di riferimento al 100%
del valore di fondo scala (tipicamente 10 V, 20 mA) e il
riferimento risultante. Il valore di riferimento massimo è
impostato in parametro 3-03 Riferimento max..
Ref
MIN
Determina la relazione tra l'ingresso di riferimento allo 0%
del valore (tipicamente 0 V, 0 mA, 4 mA) e il riferimento
risultante. Il valore di riferimento minimo è impostato in
parametro 3-02 Riferimento minimo.
1.2.5 Varie
Ingressi analogici
Gli ingressi analogici vengono utilizzati per controllare varie
funzioni del convertitore di frequenza.
Esistono 2 tipi di ingressi analogici.
Ingresso in corrente, 0–20 mA e 4–20 mA.
•
Ingresso in tensione, da 0 a +10 V CC.
•
Uscite analogiche
Le uscite analogiche sono in grado di fornire un segnale di
0–20 mA oppure 4–20 mA.
Adattamento automatico motore, AMA
L'algoritmo AMA determina i parametri elettrici del motore
collegato quando questo non è in funzione.
Resistenza di frenatura
La resistenza di frenatura è un modulo in grado di
assorbire la potenza freno generata nella fase di frenatura
rigenerativa. Questa potenza di frenatura rigenerativa
aumenta la tensione del circuito intermedio e un chopper
di frenatura assicura che la potenza venga trasmessa alla
resistenza di frenatura.
Caratteristiche CT
Caratteristiche della coppia costante, usate per tutte le
applicazioni quali nastri trasportatori, pompe di trasferimento e gru.
Ingressi digitali
Gli ingressi digitali consentono di controllare varie funzioni
del convertitore di frequenza.
Uscite digitali
Il convertitore di frequenza presenta due stadi di uscita a
stato solido che sono in grado di fornire un segnale a 24 V
CC (massimo 40 mA).
DSP
Processore di segnali digitali.
ETR
Il relè termico elettronico è un calcolo del carico termico
basato sul carico corrente e sul tempo. È volto a stimare la
temperatura del motore.
Bus standard FC
Include il bus RS485 con protocollo FC o protocollo MC.
Vedere parametro 8-30 Protocol.
Inizializzazione
Se viene eseguita un'inizializzazione
(parametro 14-22 Operation Mode), il convertitore di
frequenza ritorna all'impostazione di fabbrica.
Duty cycle intermittente
Un ciclo di utilizzo intermittente fa riferimento a una
sequenza di duty cycle. Ogni ciclo è costituito da un
periodo a carico e da un periodo a vuoto. Il funzionamento
può avvenire con servizio periodico o aperiodico.
1 1
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 5
Page 8
Introduzione
VLT® Midi Drive FC 280
11
LCP
Il pannello di controllo locale rappresenta un'interfaccia
completa per il controllo e la programmazione del convertitore di frequenza. Il quadro di comando è estraibile e può
essere installato no a 3 m dal convertitore di frequenza,
ossia su un pannello frontale con il kit di montaggio
opzionale.
NLCP
Interfaccia del pannello di controllo locale numerico per il
controllo e la programmazione del convertitore di
frequenza. Il display è numerico e il pannello viene
utilizzato per mostrare i valori di processo. L'NLCP possiede
funzioni di memorizzazione e copia.
lsb
Bit meno signicativo.
msb
Bit più signicativo.
MCM
Abbreviazione di Mille Circular Mil, un'unità di misura
americana della sezione trasversale dei cavi. 1 MCM ≡
0,5067 mm2.
Parametri online/oine
Le modiche ai parametri online vengono attivate
immediatamente dopo la variazione del valore dei dati.
Premere [OK] per attivare le modiche ai parametri oine.
PID di processo
Il controllo PID mantiene velocità, pressione e temperatura
regolando la frequenza di uscita in base alle variazioni del
carico.
PCD
Dati del controllo di processo.
Spegnere e riaccendere
Disinserire l'alimentazione di rete no a quando il display
(LCP) non si spegne, quindi reinserire l'alimentazione.
Fattore di potenza
Il fattore di potenza indica la relazione fra I1 e I
Fattoredi potenza =
3xUxI1cosϕ1
3xUxI
RMS
RMS
.
cosϕ1 = 1, pertanto:
Fattoredi potenza =
I1xcosϕ1
I
RMS
=
I
I
1
RMS
Il fattore di potenza indica in che misura il convertitore di
Ingresso a impulsi/encoder incrementale
Trasmettitore di impulsi esterno usato per retroazionare
informazioni sulla velocità del motore. L'encoder viene
usato nelle applicazioni che richiedono una grande
precisione nel controllo di velocità.
RCD
Dispositivo a corrente residua.
Setup
Salvare le impostazioni dei parametri in 4 setup. Scegliere
tra i 4 setup di parametri e modicarne 1 solo quando
questo è inattivo.
SFAVM
Acronimo che descrive la modulazione vettoriale asincrona
orientata secondo il usso dello statore del modello di
commutazione.
Compensazione dello scorrimento
Il convertitore di frequenza compensa lo scorrimento del
motore integrando la frequenza in base al carico rilevato
del motore, mantenendo costante la velocità del motore.
Smart logic control (SLC)
Lo smart logic control SLC è una sequenza di azioni
denite dall'utente che vengono eseguite quando gli
eventi deniti dall'utente vengono valutati TRUE dal
controllore logico (gruppo di parametri 13-** Smart Logic
Control).
STW
Parola di stato.
THD
La distorsione armonica totale indica il contributo totale
della distorsione armonica.
Termistore
Una resistenza dipendente dalla temperatura, installata nei
punti in cui viene controllata la temperatura (convertitore
di frequenza o motore).
Scatto
Uno stato che si presenta in situazioni di guasto, ad
esempio se il convertitore di frequenza è soggetto a una
sovratensione o quando interviene per proteggere il
motore, un processo o un meccanismo. Il riavvio viene
impedito nché la causa del guasto non è scomparsa e lo
stato di scatto viene annullato attivando il ripristino
oppure, talvolta, tramite la programmazione di ripristino
automatico. Non usare lo scatto per la sicurezza personale.
frequenza impone un carico sull'alimentazione di rete.
Quanto minore è il fattore di potenza, tanto maggiore è la
corrente di ingresso I
2
I
RMS
= I
+ I
1
2
5
per lo stesso rendimento in kW.
RMS
+ I
2
+ .. + I
7
2
n
Un fattore di potenza elevato indica inoltre che le dierenti
correnti armoniche sono basse.
Le bobine CC integrate producono un elevato fattore di
potenza, riducendo al minimo il carico applicato sull'alimentazione di rete.
6 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 9

Introduzione Guida alla Programmazione
Scatto bloccato
Uno stato che si verica in situazioni di guasto quando il
convertitore di frequenza entra in autoprotezione e che
richiede un intervento manuale, ad es. se nel convertitore
di frequenza si verica un cortocircuito sull'uscita. Uno
scatto bloccato può essere annullato scollegando la rete,
eliminando la causa del guasto e ricollegando il convertitore di frequenza all'alimentazione. Il riavvio viene
impedito no a che lo stato di scatto non viene eliminato
attivando il ripristino o, in alcuni casi, tramite programmazione di ripristino automatico. Non usare lo scatto
bloccato per la sicurezza personale.
Caratteristiche VT
Caratteristiche coppia variabile utilizzate per pompe e
ventole.
+
VVC
Rispetto al controllo tradizionale del rapporto tensione/
frequenza, il controllo vettoriale della tensione (VVC+)
una maggiore dinamicità e stabilità in caso di variazioni del
riferimento di velocità e in funzione della coppia di carico.
60° AVM
Si riferisce al modello di commutazione modulazione
vettoriale asincrona a 60°.
ore
1 1
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 7
Page 10
130BE202.17
Power
input
Switch mode
power supply
Motor
Analog output
interface
(PNP) = Source
(NPN) = Sink
ON = Terminated
OFF = Open
Brake
resistor
91 (L1/N)
92 (L2/L)
93 (L3)
PE
50 (+10 V OUT)
53 (A IN)
2)
54 (A IN)
55 (COM digital/analog I/O)
0/4−20 mA
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
10 V DC
15 mA 100 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(A OUT) 42
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0 V
5 V
S801
0/4−20 mA
RS485
RS485
03
+10 V DC
0−10 V DC
24 V DC
02
01
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
27 (D IN/OUT)
24 V
0 V
0 V (PNP)
24 V (NPN)
29 (D IN)
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
38 (STO2)
4)
37 (STO1)
4)
95
P 5-00
21
ON
(+DC/R+) 89
(R-) 81
0−10 V DC
(-DC) 88
RFI
0 V
250 V AC, 3 A
Relay 1
1)
3)
Introduzione
VLT® Midi Drive FC 280
11
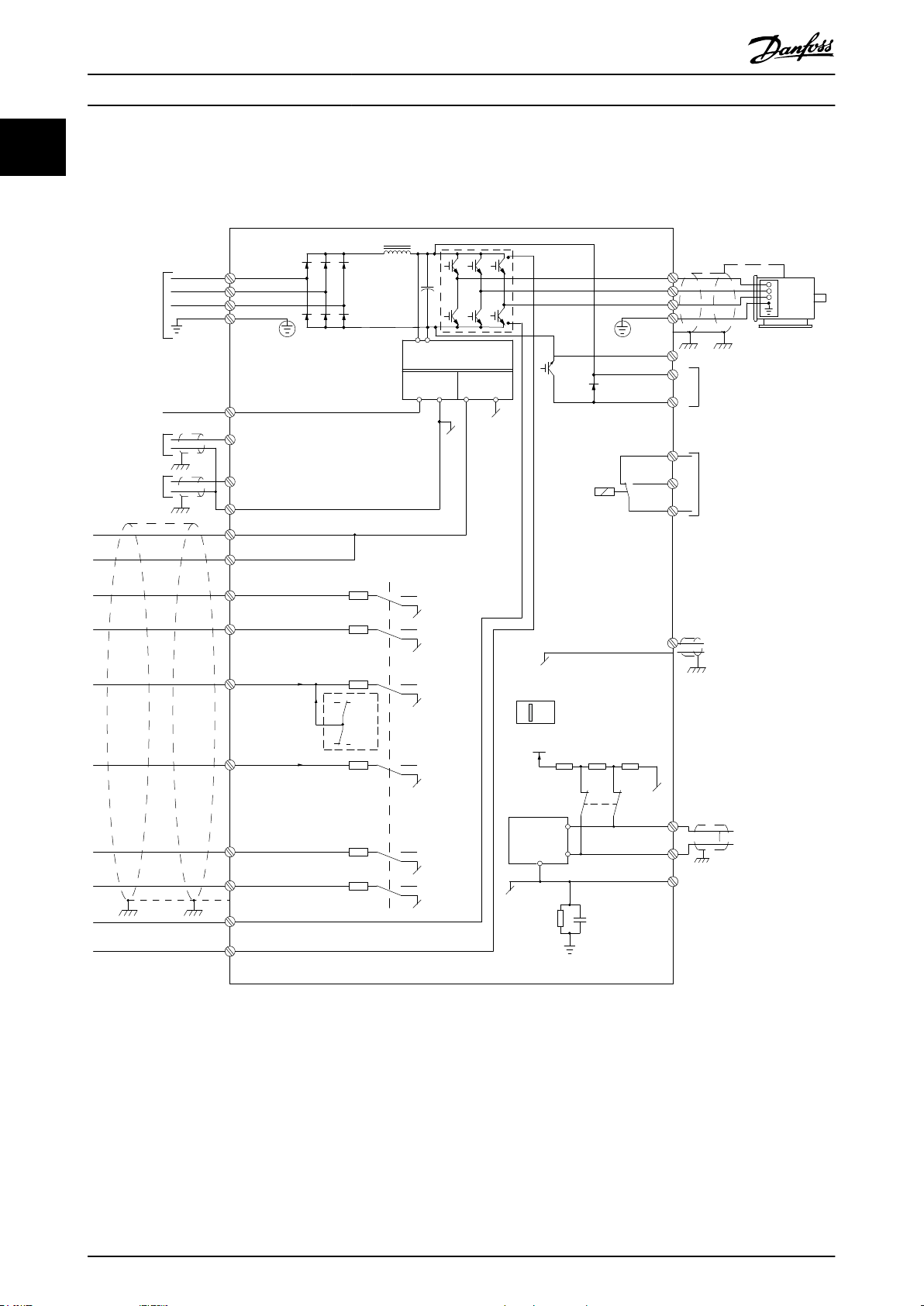
1.3 Cablaggio elettrico - cavi di comando
1.3.1 Panoramica
Disegno 1.2 Schema di cablaggio base
A = analogico, D = digitale
1) Il chopper di frenatura integrato è disponibile solo su unità trifase.
2) Il morsetto 53 può essere usato anche come ingresso digitale.
3) L'interruttore S801 (morsetto del bus) può essere utilizzato per abilitare la terminazione sulla porta RS485 (morsetti 68 e 69).
4) Fare riferimento al capitolo 6 Safe Torque O (STO) nella guida operativa per il cablaggio corretto del STO.
8 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 11
130BE730.10
12 13 18 19 27 29 32 33 55
+24 VDC
0 VDC
PNP (Source)
Digital input wiring
NPN (Sink)
Digital input wiring
12 13 18 19 27 29 32 33 55
+24 VDC
0 VDC
130BE731.10
130BA681.10
Introduzione Guida alla Programmazione
In casi rari, lunghi cavi di comando e segnali analogici
producono loop di terra di 50/60 Hz causati dai disturbi
trasmessi dai cavi dell'alimentazione di rete. In tali
circostanze, interrompere la schermatura o inserire un
condensatore da 100 nF fra la schermatura e lo chassis.
Collegare separatamente gli ingressi e le uscite digitali e
analogici agli ingressi comuni (morsetto 55) del convertitore di frequenza per evitare che le correnti di terra
provenienti dai due gruppi incidano su altri gruppi. Per
esempio, commutazioni sull'ingresso digitale potrebbero
disturbare il segnale d'ingresso analogico.
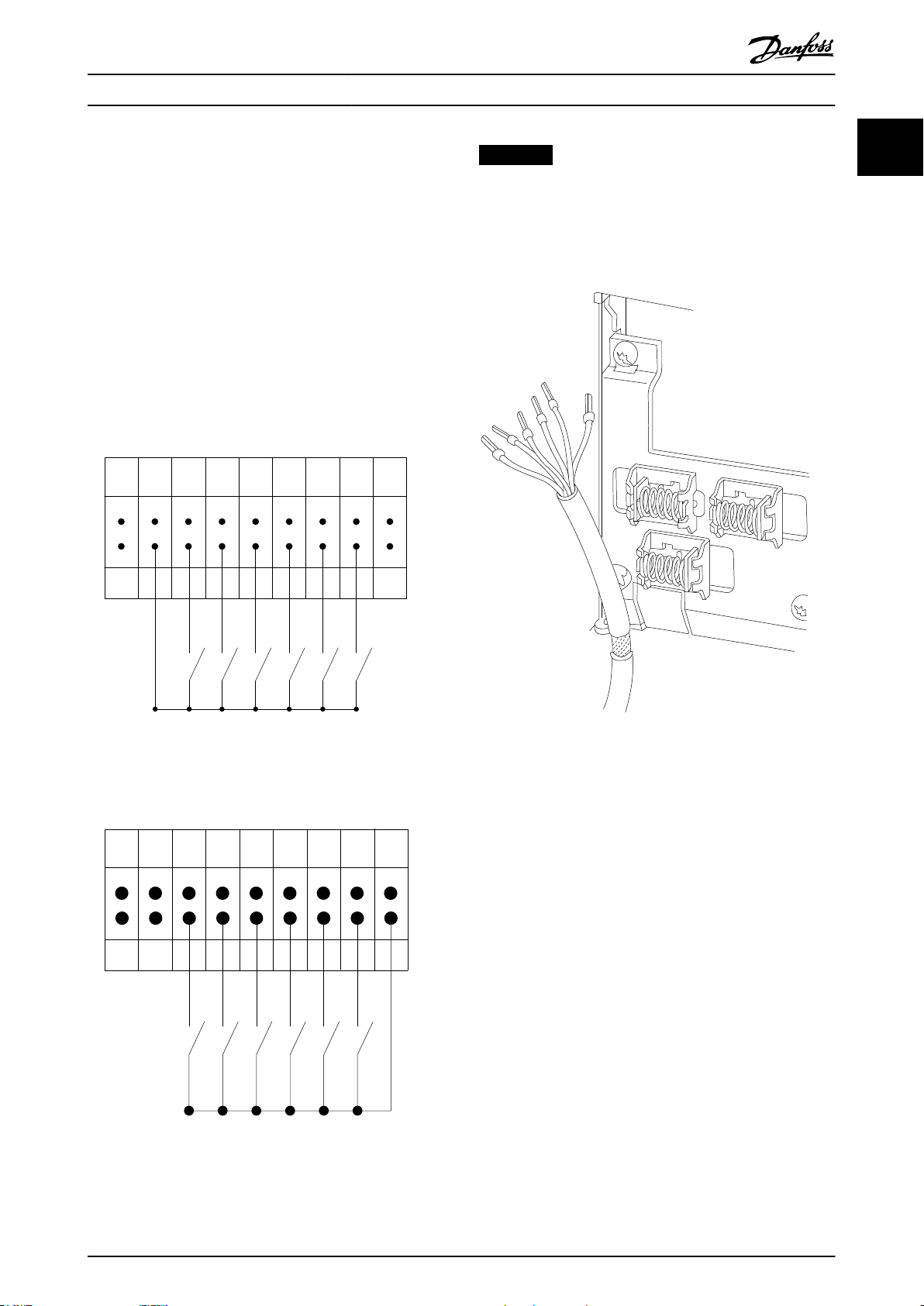
Polarità di ingresso dei morsetti di controllo
AVVISO!
I cavi di comando devono essere schermati.
Vedere la sezione Utilizzo di cavi di comando schermati nella
Guida alla Progettazione per la corretta terminazione dei
cavi di comando.
1 1
Disegno 1.3 PNP (source)
Disegno 1.4 NPN (sink)
Disegno 1.5 Messa a terra dei cavi di comando schermati
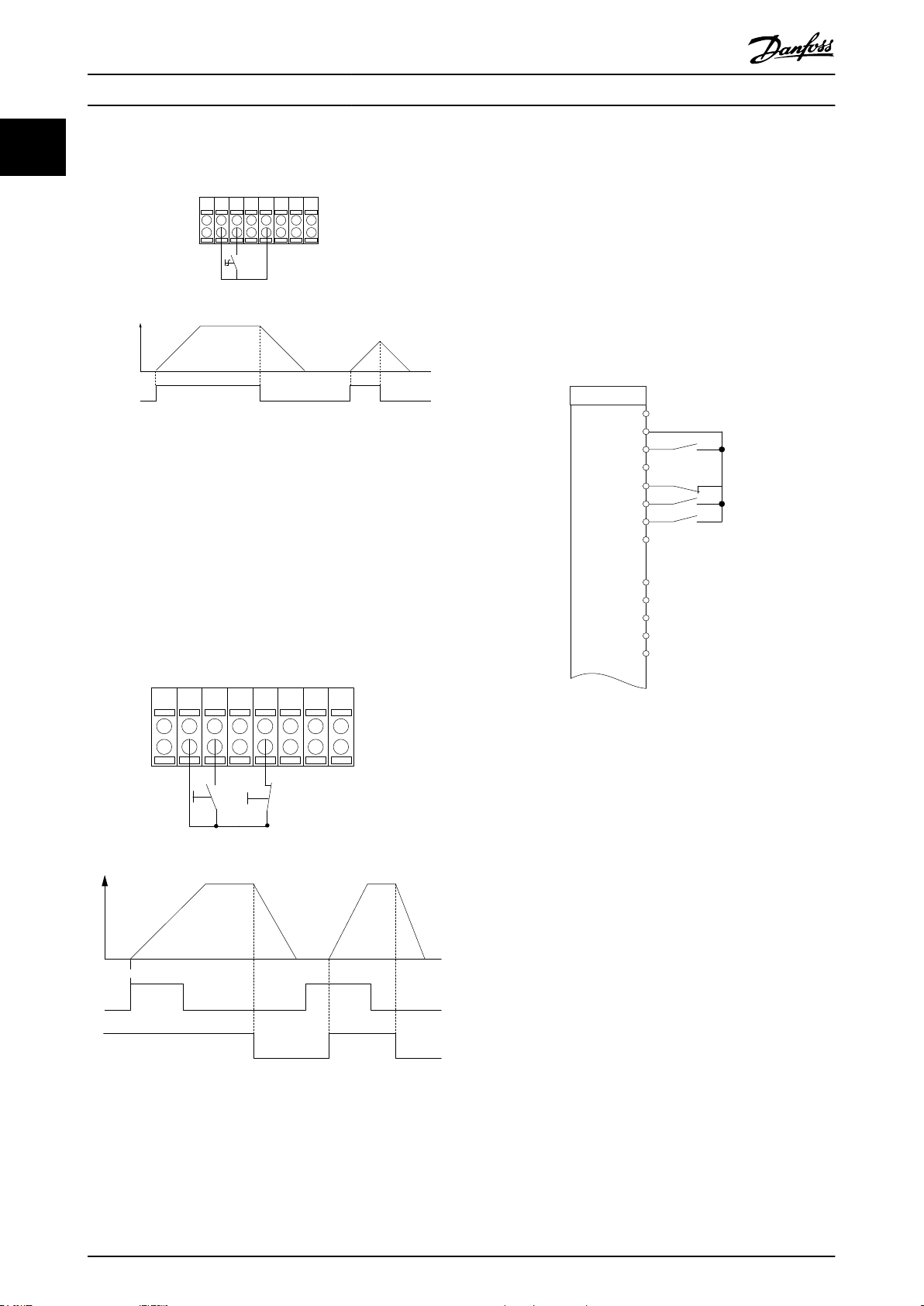
1.3.2 Avviamento/arresto
Morsetto 18 = Parametro 5-10 Ingr. digitale morsetto 18 [8]
Avviamento.
Morsetto 27= Parametro 5-12 Ingr. digitale morsetto 27 [0]
Nessuna funzione (predenito ruota libera negato)
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 9
Page 12
130BE732.10
12 13 18 322719 29 33
P 5-12 [2]
P 5-10 [8]
Start/Stop
+24V
Speed
Start/Stop
[18]
1312 18 19
130BF101.10
322927 33
P 5 - 12 [6]
P 5 - 10[9]
+24V
Speed
Start Stop inverse
Start (18)
Stop (27)
FC
+24 V
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
130BF095.10
Introduzione
VLT® Midi Drive FC 280
11
1.3.4 Accelerazione/decelerazione
Morsetti 29/32 = Accelerazione/Decelerazione
Morsetto 18 = Parametro 5-10 Ingr. digitale
morsetto 18 [9] Avviamento (predenito).
Morsetto 27 = Parametro 5-12 Ingr. digitale
morsetto 27 [19] Blocco riferimento.
Morsetto 29 = Parametro 5-13 Ingr. digitale
morsetto 29 [21] Accelerazione.
Morsetto 32 = Parametro 5-14 Ingr. digitale
morsetto 32 [22] Decelerazione.
Disegno 1.6 Avviamento/arresto
1.3.3 Avviamento/arresto a impulsi
Morsetto 18 = Parametro 5-10 Ingr. digitale morsetto 18 [9]
Avv. a impulsi
Morsetto 27= Parametro 5-12 Ingr. digitale morsetto 27 [6]
Stop (negato).
Disegno 1.8 Accelerazione/decelerazione
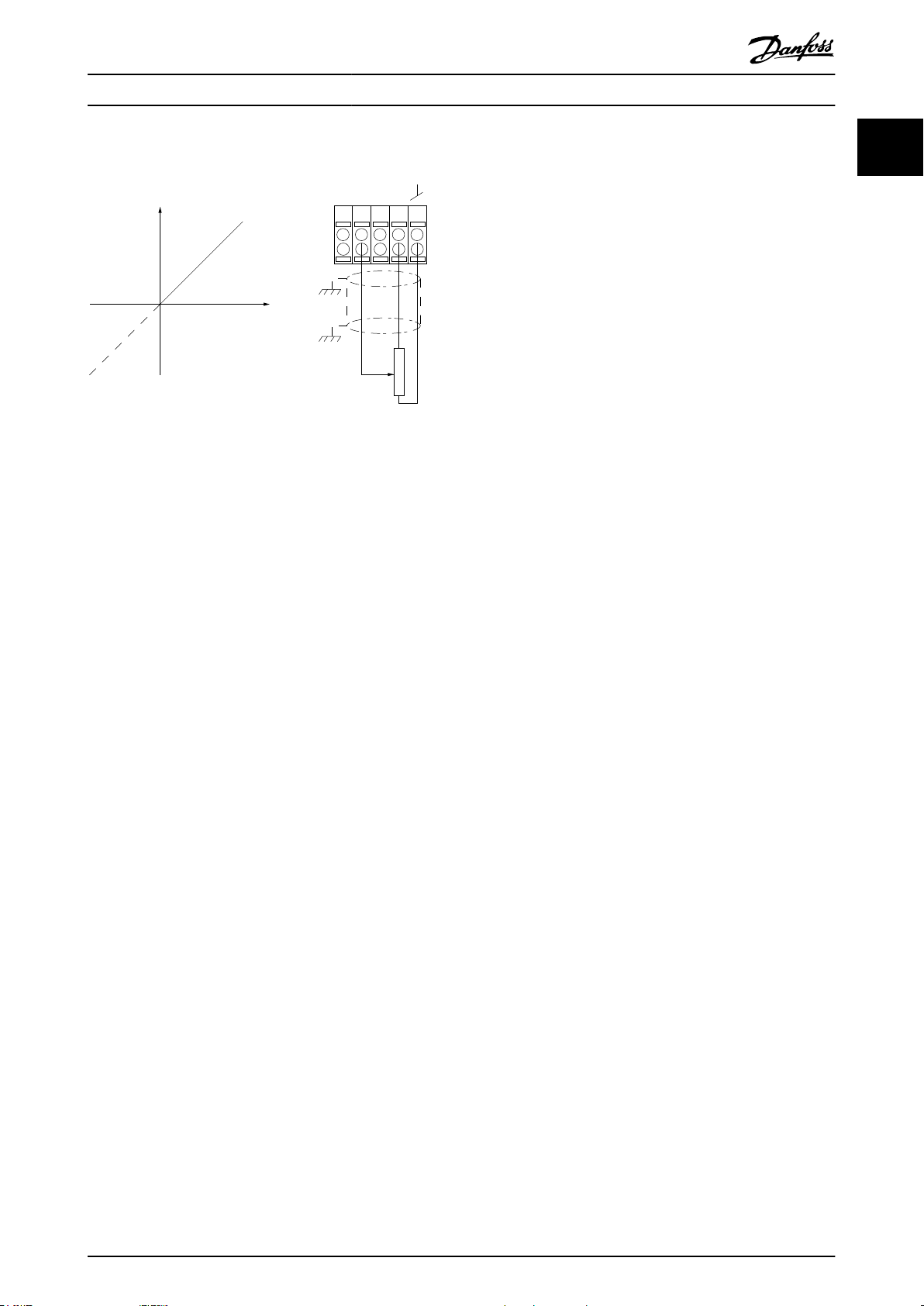
1.3.5 Riferimento del potenziometro
Riferimento tensione mediante potenziometro
Risorsa di riferimento 1 = [1] Ingr. analog. 53
(default).
Morsetto 53, bassa tensione = 0 V.
Morsetto 53, alta tensione = 10 V.
Rif.basso/val.retroaz. morsetto 53 = 0 Hz.
Rif. alto/val.retroaz. morsetto 53 = 50 Hz.
Parametro 6-19 Terminal 53 mode = [1] Tensione.
Disegno 1.7 Avviamento/arresto a impulsi
10 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 13
130BD381.12
555342 54 50
Speed
P 6-15
1 kΩ
+10V/15mA
Ref. voltage
P 6-11 10V
Introduzione Guida alla Programmazione
Disegno 1.9 Riferimento del potenziometro
1 1
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 11
Page 14
Sicurezza
VLT® Midi Drive FC 280
2 Sicurezza
22
2.1 Simboli di sicurezza
Nel presente documento vengono utilizzati i seguenti
simboli:
AVVISO
Indica una situazione potenzialmente rischiosa che
potrebbe causare morte o lesioni gravi.
ATTENZIONE
Indica una situazione potenzialmente rischiosa che
potrebbe causare lesioni leggere o moderate. Può anche
essere usato per mettere in guardia da pratiche non
sicure.
AVVISO!
Indica informazioni importanti, incluse situazioni che
possono causare danni alle apparecchiature o alla
proprietà.
2.2 Personale qualicato
Il trasporto, l'immagazzinamento, l'installazione, l'uso e la
manutenzione eettuati in modo corretto e adabile sono
essenziali per un funzionamento senza problemi e in
sicurezza del convertitore di frequenza. Solo il personale
qualicato è autorizzato a installare o a far funzionare
questa apparecchiatura.
AVVISO
AVVIO INVOLONTARIO
Quando il convertitore di frequenza è collegato alla rete
CA, all'alimentazione CC o alla condivisione del carico, il
motore può avviarsi in qualsiasi momento. L'avvio
involontario durante le operazioni di programmazione,
manutenzione o riparazione può causare morte, lesioni
gravi o danni alle cose. Il motore può essere avviato
tramite un interruttore esterno, un comando eldbus, un
segnale di riferimento in ingresso dall'LCP, da remoto
utilizzando Software di congurazione MCT 10, oppure a
seguito del ripristino di una condizione di guasto.
Per prevenire un avviamento involontario del motore,
procedere come segue:
Scollegare il convertitore di frequenza dalla
•
rete.
Premere [O/Reset] sull'LCP prima di
•
programmare i parametri.
Cablare e montare completamente il conver-
•
titore di frequenza, il motore e qualsiasi
apparecchiatura azionata prima di collegare il
convertitore di frequenza alla rete CA, all'alimentazione CC o alla condivisione del carico.
Per personale
tamente formati, autorizzati a installare, mettere in
funzione ed eettuare la manutenzione su apparecchiature,
sistemi e circuiti in conformità alle leggi e ai regolamenti
pertinenti. Inoltre, il personale deve avere dimestichezza
con tutte le istruzioni e le misure di sicurezza descritte in
questa guida.
Precauzioni di sicurezza
2.3
qualicato si intendono i dipendenti adegua-
AVVISO
**ALTA TENSIONE
I convertitori di frequenza sono soggetti ad alta tensione
quando collegati all'alimentazione di ingresso della rete
CA, all'alimentazione CC o alla condivisione del carico. Se
l'installazione, l'avviamento e la manutenzione non
vengono eseguiti da personale qualicato potrebbero
presentarsi rischi di lesioni gravi o mortali.
L'installazione, l'avviamento e la manutenzione
•
devono essere eettuati esclusivamente da
personale qualicato.
12 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 15
Sicurezza Guida alla Programmazione
AVVISO
TEMPO DI SCARICA
Il convertitore di frequenza contiene condensatori del
collegamento CC che possono rimanere carichi anche
quando il convertitore di frequenza non è alimentato.
Può ancora essere presente alta tensione anche dopo lo
spegnimento dei LED. Il mancato rispetto del tempo di
attesa indicato dopo il disinserimento dell'alimentazione
e prima di eettuare lavori di manutenzione o
riparazione può causare lesioni gravi o mortali.
Arrestare il motore.
•
Scollegare la rete CA e gli alimentatori del
•
collegamento CC remoti, comprese le batterie di
riserva, i gruppi di continuità e i collegamenti
CC ad altri convertitori di frequenza.
Scollegare o bloccare il motore PM.
•
Attendere che i condensatori si scarichino
•
completamente. La durata minima del tempo di
attesa è specicata in Tabella 2.1.
Prima di eettuare qualsiasi intervento di
•
manutenzione o riparazione, usare un
appropriato dispositivo di misurazione della
tensione per assicurarsi che i condensatori siano
completamente scarichi.
AVVISO
PERICOLO APPARECCHIATURE
Il contatto con gli alberi rotanti e le apparecchiature
elettriche può causare morte o lesioni gravi.
Assicurarsi che soltanto personale adegua-
•
tamente formato e qualicato eettui
l'installazione, l'avviamento e la manutenzione.
Assicurarsi che i lavori elettrici siano eseguiti in
•
conformità alle norme elettriche nazionali e
locali.
Seguire le procedure illustrate in questa guida.
•
ATTENZIONE
RISCHIO DI GUASTO INTERNO
Un guasto interno nel convertitore di frequenza può
provocare lesioni gravi quando questo non è chiuso
correttamente.
Prima di applicare la corrente elettrica,
•
assicurarsi che tutte le coperture di sicurezza
siano al loro posto e ssate in modo sicuro.
2 2
Tensione [V]
200–240 0,37–3,7 (0,5–5) 4
380–480
Tabella 2.1 Tempo di scarica
Gamma di potenza
[kW (cv)]
0,37–7,5 (0,5–10) 4
11–22 (15–30) 15
Tempo di attesa minimo
(minuti)
AVVISO
RISCHIO DI CORRENTE DI DISPERSIONE
Le correnti di dispersione superano i 3,5 mA. Un
collegamento a terra non corretto del convertitore di
frequenza può causare morte o lesioni gravi.
Assicurare che la messa a terra dell'apparec-
•
chiatura sia correttamente eseguita da un
installatore elettrico certicato.
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 13
Page 16
130BC506.10
Setup 1
A
B
C
D
5
12
13 14 15
10
11
10
9
6
7
8
4
1
2
3
Menu
Status
Quick
Menu
Main
Menu
Hand
On
O
Reset
Auto
On
Back
OK
On
Warn
Alarm
130BD135.10
Setup 12
INDEX
AHP
VkW
srpm
Hz%
n2n1
n3
p5 p4
p3 p2 p1
Programmazione
VLT® Midi Drive FC 280
3 Programmazione
3.1 Funzionamento del pannello di
controllo locale
33
Il convertitore di frequenza supporta il pannello di
controllo locale numerico (NLCP), il pannello di controllo
locale graco (GLCP) e la copertura cieca. Questa sezione
descrive le operazioni con l'NLCP e il GLCP.
AVVISO!
Il convertitore di frequenza può essere anche
programmato da Software di congurazione MCT 10 sul
PC attraverso la porta di comunicazione RS485 o la porta
USB. Questo software può essere ordinato usando il
numero d'ordine 130B1000 oppure scaricato dal
Danfosssito web: www.danfoss.com/BusinessAreas/Drives-
Solutions/softwaredownload.
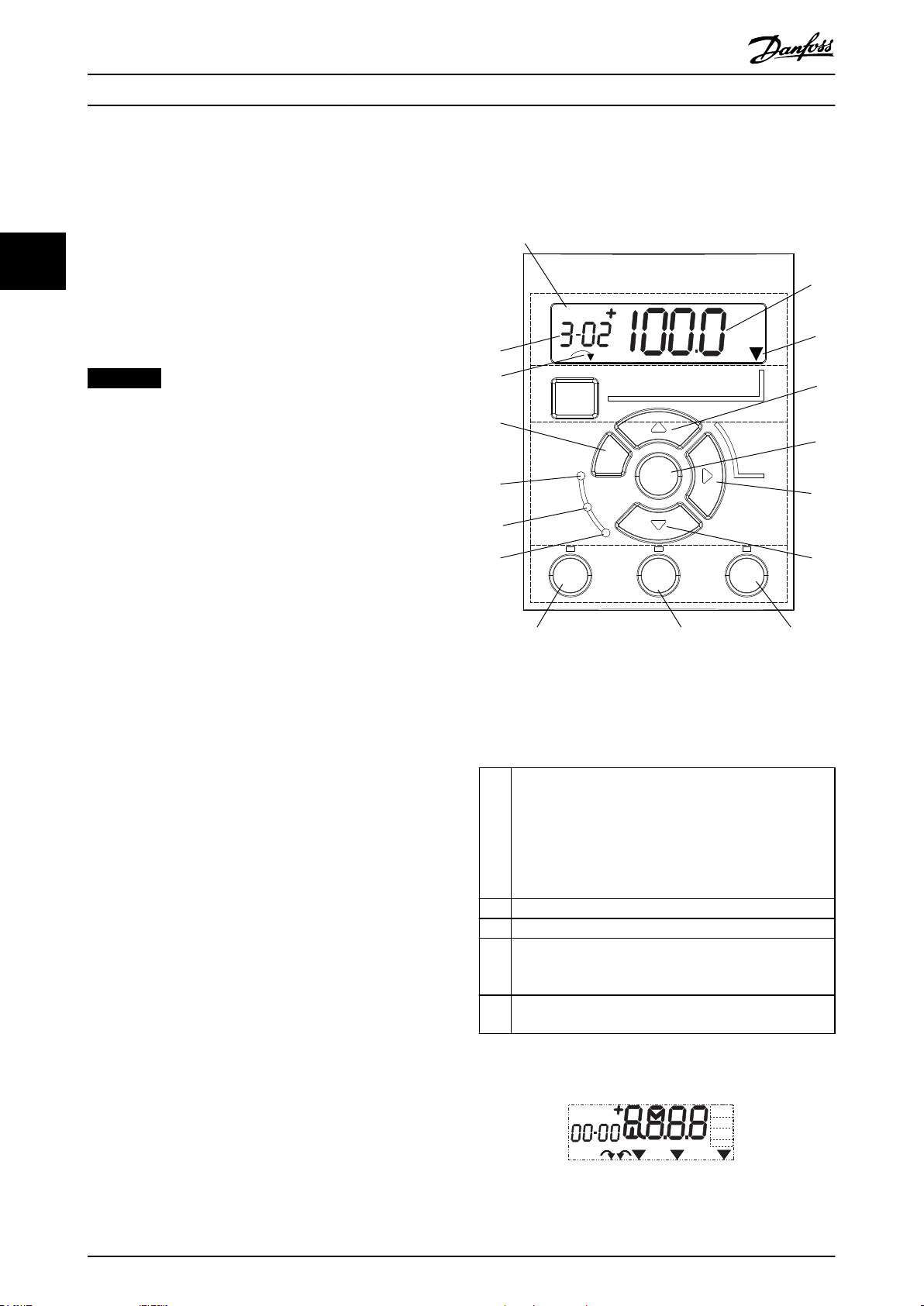
3.1.1 Pannello di Controllo Locale (LCP)
Numerico
Il pannello di controllo locale numerico (NLCP) è suddiviso
in quattro gruppi funzionali.
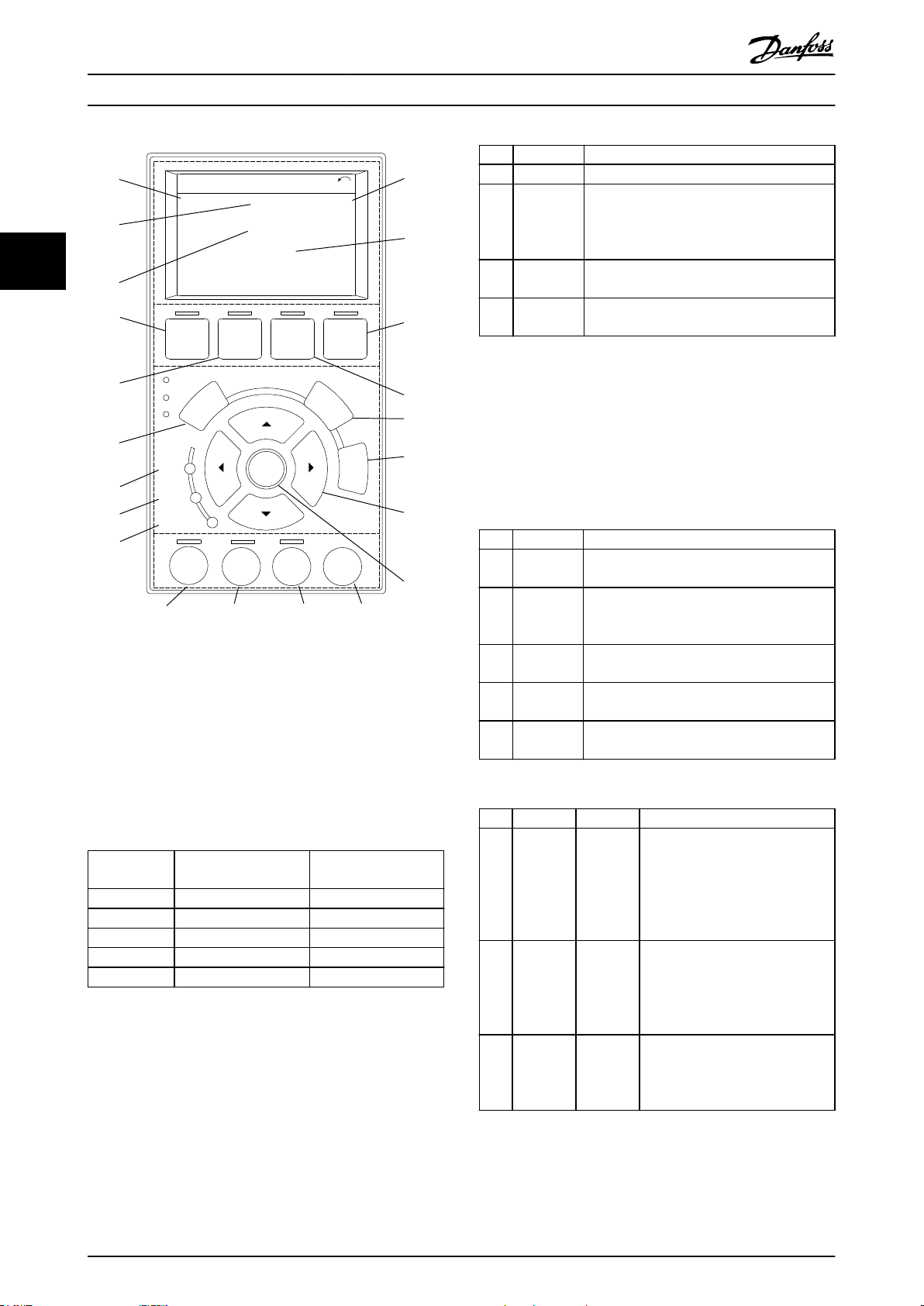
A. Display numerico.
B. Tasto menu.
C. Tasti di navigazione e spie (LED).
D. Tasti funzione e spie luminose (LED).
Disegno 3.1 Vista dell'NLCP
A. Display numerico
Il display LCD è retroilluminato con 1 riga numerica. Tutti i
dati sono visualizzati sull'NLCP.
Il numero del setup mostra il setup attivo e quello di
modica. Se lo stesso setup funge da setup attivo e da
setup di modica, viene visualizzato solo quel numero di
1
setup (impostazione di fabbrica). Se il setup attivo e il
setup di modica sono diversi, sul display vengono
visualizzati entrambi i numeri (ad esempio, setup 12). Il
numero che lampeggia indica il setup di modica.
2 Numero del parametro.
3 Valore del parametro.
La direzione del motore è mostrata in basso nella parte
4
inferiore sinistra del display. Una piccola freccia indica la
direzione.
Il triangolo indica se l'LCP è nel menu di stato, nel menu
5
rapido o nel menu principale.
Tabella 3.1 Legenda per Disegno 3.1, Sezione A
Disegno 3.2 Informazioni display
14 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 17
130BC440.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Programmazione Guida alla Programmazione
B. Tasto menu
Premere [Menu] per selezionare tra menu di stato, menu
rapido o menu principale.
C. Spie luminose (LED) e tasti di navigazione
Indicator
6 On Verde
7 Warn Giallo
8 Allarme Rosso
Tabella 3.2 Legenda per Disegno 3.1, spie (LED)
9 [Back]
10
11 [OK]
12
Luce Funzione
e
La spia luminosa ON si accende
quando il convertitore di frequenza
viene alimentato dalla tensione di rete,
da un morsetto del bus CC o da un'alimentazione esterna a 24 V.
Quando sono soddisfatte le condizioni
per l'avviso, si accende il LED giallo
WARN e sul display appare il testo che
illustra il problema.
Una condizione di guasto provoca il
lampeggiamento del LED di allarme
rosso e la visualizzazione di un testo
relativo all'allarme.
Tasto Funzione
Per spostarsi alla fase o al livello
precedente nella struttura di navigazione.
Per commutare tra gruppi di parametri,
parametri e all'interno dei parametri o
[▲] [▼]
[►]
aumentare/diminuire i valori dei
parametri. Per impostare il riferimento
locale possono essere anche usate le
frecce.
Premere per accedere a gruppi di
parametri o per abilitare una selezione.
Può essere usato anche per spostarsi da
sinistra a destra all'interno del valore di
un parametro per modicare ogni cifra
singolarmente.
Tasto Funzione
Pone il sistema in modalità di funzionamento
remoto.
Risponde a un comando di avvio esterno
15 Auto On
Tabella 3.4 Legenda per Disegno 3.1, Sezione D
•
dai morsetti di controllo o dalla comunicazione seriale.
AVVISO
RISCHIO ELETTRICO
Anche dopo aver premuto il tasto [O/Reset], i morsetti
del convertitore di frequenza restano ancora sotto
tensione. Premendo il tasto [O/Reset], non si scollega il
convertitore di frequenza dall'alimentazione di rete. Il
contatto con parti sotto tensione può causare morte o
lesioni gravi.
Non toccare le parti sotto tensione.
•
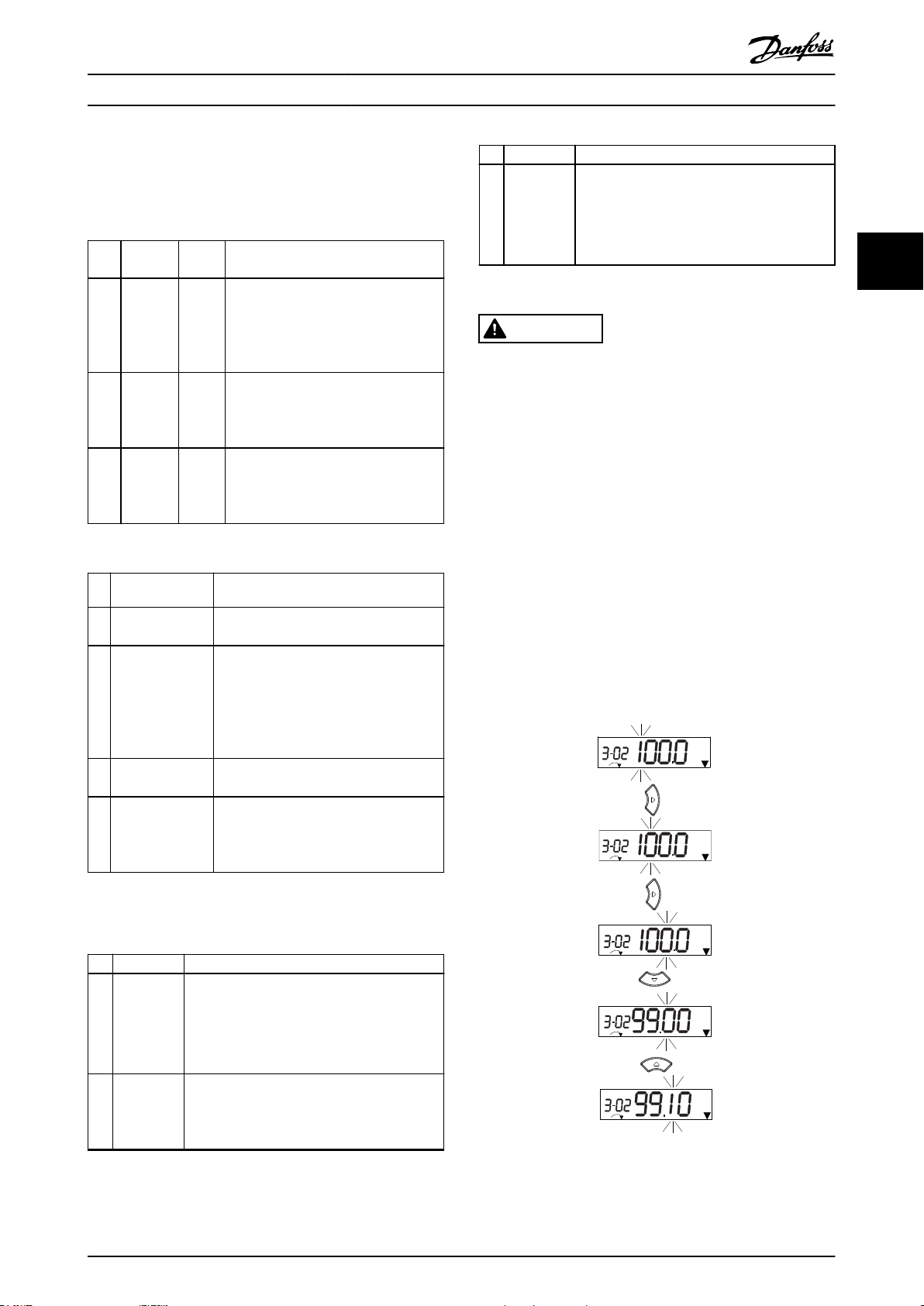
3.1.2 Funzione del tasto destro sull'NLCP
Premere [►] per modicare qualsiasi delle 4 cifre sul display
singolarmente. Premendo una volta [►], il cursore si sposta
sulla prima cifra, che inizia a lampeggiare, come mostrato
in Disegno 3.3. Premere [▲] o [▼] per modicare il valore.
Premendo [►] non è possibile modicare il valore delle
cifre oppure spostare la virgola.
3 3
Tabella 3.3 Legenda per Disegno 3.1, tasti di navigazione
D. Tasti funzione e spie luminose (LED)
Tasto Funzione
Avvia il convertitore di frequenza nella
modalità di comando locale.
Un segnale di arresto esterno dall'ingresso
13 Hand on
14 O/Reset
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 15
•
di comando o dalla comunicazione seriale
esclude il comando Hand on locale.
Arresta il motore ma non disinserisce l'alimentazione al convertitore di frequenza oppure
ripristina manualmente il convertitore di
frequenza dopo aver eliminato un guasto.
Disegno 3.3 Funzione tasto destro
Page 18
Programmazione
[►] può anche essere usato per spostarsi tra gruppi di
parametri. Nel menu principale, premere [►] per spostarsi
al primo parametro nel gruppo di parametri successivo (ad
esempio, spostarsi da parametro 0-03 Regional Settings [0]
Internazionale a parametro 1-00 Conguration Mode [0]
Anello aperto).
33
AVVISO!
Durante l'avviamento, l'NLCP visualizza il messaggio LCP
ON. Quando questo messaggio non viene più
visualizzato, il convertitore di frequenza è pronto per
funzionare. L'aggiunta o la rimozione di opzioni può
prolungare la durata dell'avviamento.
VLT® Midi Drive FC 280
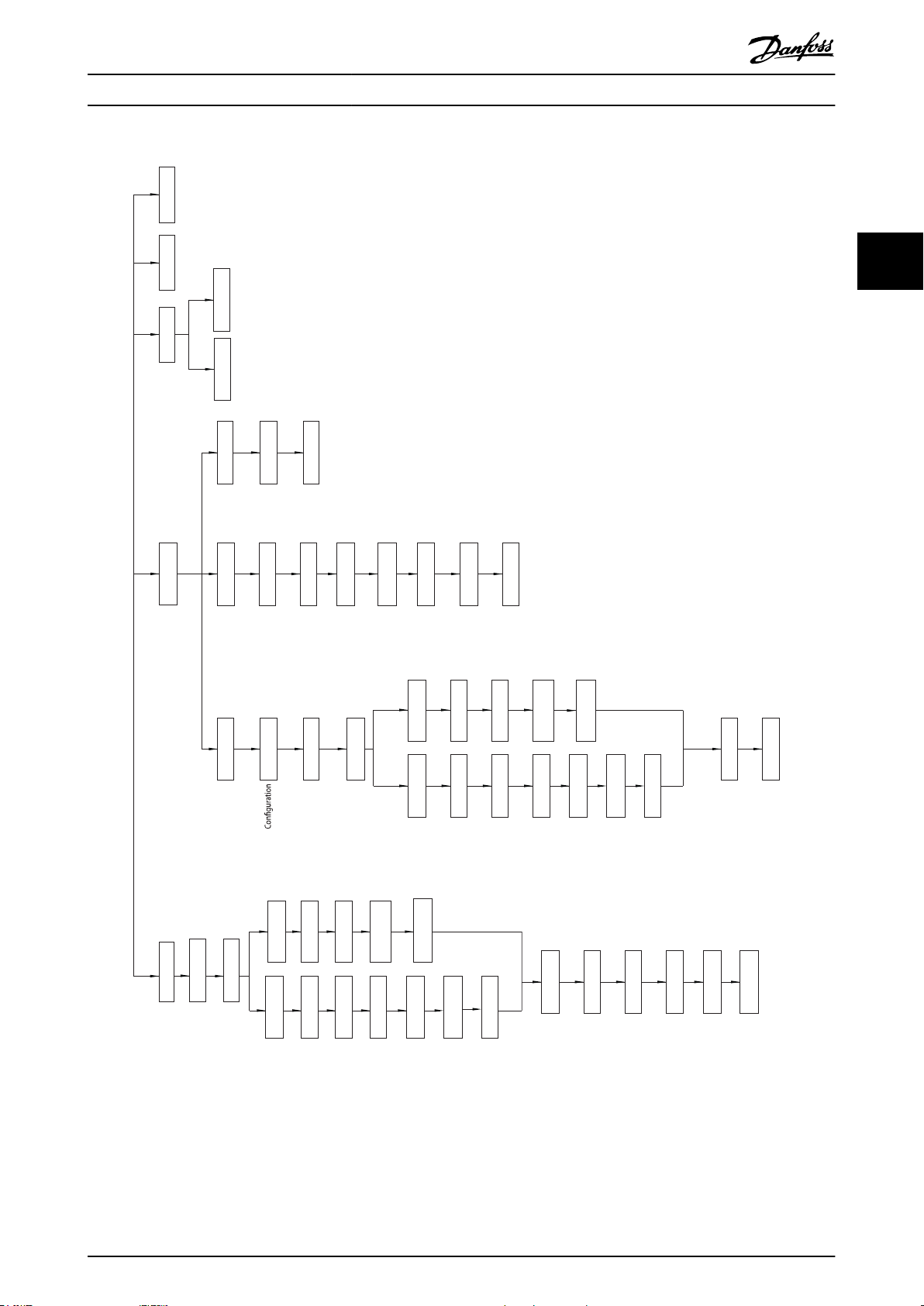
3.1.3 Menu rapido sull'NLCP
Il Menu rapido consente di accedere rapidamente ai
parametri più utilizzati.
1. Per accedere al Menu rapido, premere il tasto
[Menu] no a quando l'indicatore nel display non
si trova posizionato su Menu rapido.
2.
Premere [▲] o [▼] per selezionare QM1 o QM2,
quindi premere [OK].
3.
Premere [▲] o [▼] per scorrere tra i parametri nel
Menu rapido.
4. Premere [OK] per selezionare un parametro.
5.
Premere [▲] o [▼] per modicare il valore di
impostazione di un parametro.
6. Premere [OK] per accettare la modica.
7. Per uscire, premere due volte [Back] (o 3 volte se
in QM2 e QM3) per spostarsi alla voce Stato o
premere [Menu] una volta per spostarsi al Menu
principale.
16 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 19
130BC445.12
1-22 XXXX V
Motor
nominal
speed
QM 1
0-01 [0]
1-10 [0]
1-24 XXXX A
Language
Motor Type
1-20 XXXX kW
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Stator
Motor frequency
1-25 XXXX
1-30 XXXX
1-39 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
3-02 XXXX
3-03 XXXX
3-41 XXXX S
3-42 XXXX S
5-12
[2]
1-29 [1]
AMA
Back EMF at
1000 RPM
d-axis
QM 2
BMS
AMS
ES
5-70 XXXX
5-71 [0]
1-30 XXXX
1-39 XXXX
1-90 [0]
2-10 [0]
4-16 XXXX %
4-17 XXXX %
4-18 XXXX %
1-00 [0]
1-01 [1]
1-10 [0]
1-24 XXXX A 1-20 XXXX kW
1-22 XXXX V
Motor
nominal
speed
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Motor frequency
1-25 XXXX
1-30 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
Back EMF at
1000 RPM
d-axis
1-39 XXXX
4-19 XXXX
4-14 XXXX
Stator
QM 3
QM 4 QM 5
L10C
SFS
TBD
Motor
nominal
speed
Motor
nominal
speed
Motor current
Motor cont.
rated torque
Resistance (Rs)
Motor poles
inductance (Ld)
Asynchronous motor
Motor current
Minimum reference
Maximum reference
Ramp 1 ramp-up time
Ramp 1 ramp-down time
Terminal 27 digital input
Basic motor set-up
mode
Motor control
principle
Motor type
PM motor
PM motor
Motor
current
Motor cont.
rated torque
Stator
Resistance (Rs)
Motor poles
inductance (Ld)
Motor speed high limit [Hz]
Maximum output frequency
Asynchronous motor
Motor current
RPM
RPM
RPM
Hz
RPM
Hz
Hz
Hz
Hz
Hz
Adv. motor set-up
Resistance (Rs)
Motor poles
Motor thermal
protection
Brake function
Torque limit motor mode
Torque limit generator mode
Current limit
Encoder set-up
Terminal 32/33
pulses per revolution
Terminal 32/33
encoder direction
Changes made
Last 10 changes Since factory setting
Alarm log
Programmazione Guida alla Programmazione
3 3
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 17
Disegno 3.4 Struttura menu rapido
Page 20
130BC446.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
7
10
11
12
OK
OK
Back
8
Back
Setup 1
2 x
+
OK
9
OK
Programmazione
VLT® Midi Drive FC 280
3.1.4 Menu principale sull'NLCP
Il Menu principale consente di accedere a tutti i parametri.
1. Per accedere al Menu principale, premere il tasto
33
Vedere Disegno 3.5, Disegno 3.6 e Disegno 3.7 per i principi
di
continui, numerati e array. Le azioni delle illustrazioni sono
descritte in Tabella 3.5, Tabella 3.6 e Tabella 3.7.
[Menu] no a quando l'indicatore nel display non
si trova posizionato su Menu principale.
2.
[▲] [▼]: per spostarsi tra i gruppi di parametri.
3. Premere [OK] per selezionare un gruppo di
parametri.
4.
[▲] [▼]: per spostarsi tra i parametri di un gruppo
specico.
5. Premere [OK] per selezionare il parametro.
6.
[►] e [▲] [▼]: per
impostare/modicare il valore
del parametro.
7. Premere [OK] per accettare il valore.
8. Per uscire, premere due volte [Back] (o 3 volte per
i parametri array) per spostarsi al Menu Principale
o premere [Menu] una volta per spostarsi alla
voce Stato.
modica del valore, rispettivamente, dei parametri
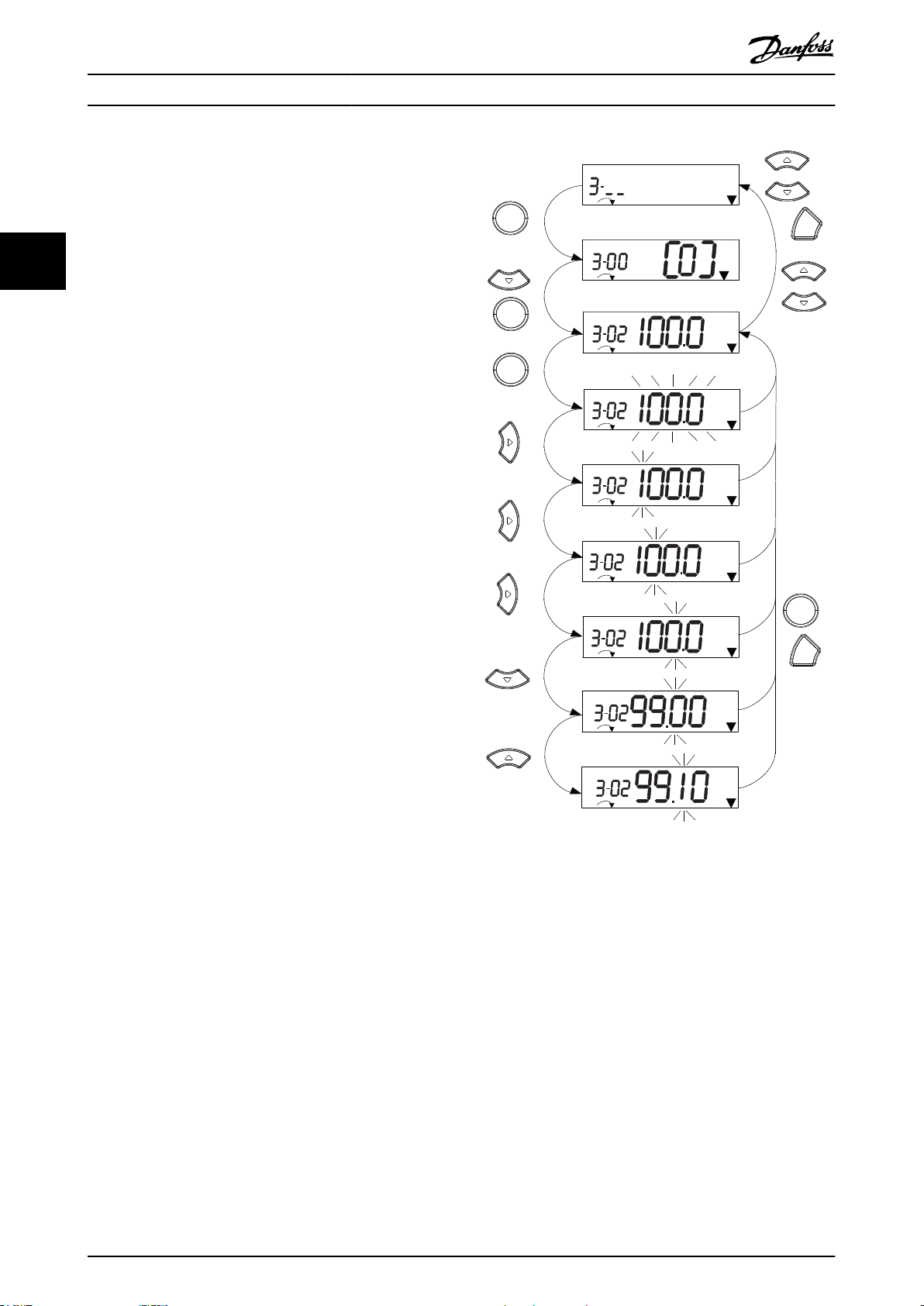
Disegno 3.5 Interazioni Menu principale - Parametri continui
18 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 21
130BC447.11
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
OK
OK
Back
7
OK
Back
130BC448.10
1
2
4
5
6
7
8
9
10
OK
Back
Back
Back
5 x
Setup 1
Setup 1
Setup 1
Setup 1
%
INDEX
%
INDEX
%
INDEX
Setup 1
INDEX
%
OK
OK
OK
Programmazione Guida alla Programmazione
1 [OK]: consente di visualizzare il primo parametro del
gruppo.
2
Premere ripetutamente [▼] per spostarsi sul parametro.
3 Premere [OK] per avviare la modica.
4
[►]: la prima cifra lampeggia (può essere modicata).
5
[►]: la seconda cifra lampeggia (può essere modicata).
6
[►]: la terza cifra lampeggia (può essere modicata).
7
[▼]: riduce il valore del parametro, la virgola decimale si
sposta automaticamente.
8
[▲]: aumenta il valore del parametro.
9 [Back]: annulla le modiche, torna a 2.
[OK]: accetta le modiche, torna a 2.
10
[▲][▼]: seleziona un parametro all'interno del gruppo.
11 [Back]: rimuove il valore e mostra il gruppo di parametri.
12
[▲][▼]: seleziona un gruppo.
Tabella 3.5 Modica dei valori nei parametri continui
Per i parametri numerati, l'interazione è simile, ma il valore
del parametro è mostrato in parentesi a causa del limite di
visualizzazione delle cifre (4 cifre grandi) sull'NLCP, mentre
il parametro numerato può essere maggiore di 99. Quando
il valore numerato è maggiore di 99, l'LCP è in grado di
mostrare solo la prima parte della parentesi.
I parametri array funzionano nel modo seguente:
3 3
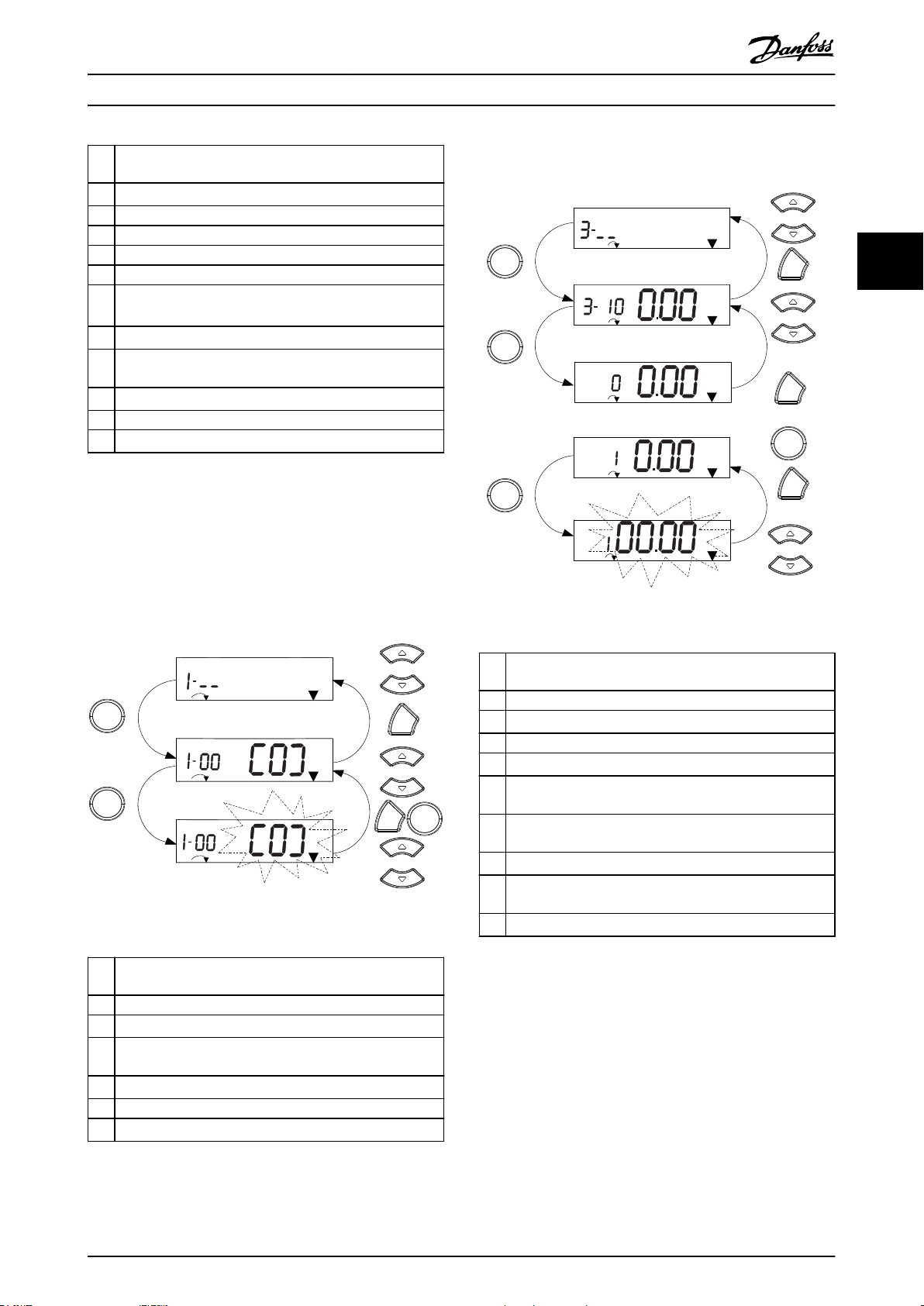
Disegno 3.7 Interazioni Menu principale - Parametri array
1 [OK]: mostra i numeri dei parametri e il valore nel primo
indice.
2 [OK]: è possibile selezionare l'indice.
3
[▲][▼]: seleziona l'indice.
4 [OK]: il valore può essere modicato.
5
[▲][▼]: modica il valore del parametro (lampeggiante).
6 [Back]: annulla le modiche.
[OK]: accetta le modiche.
7 [Back]: annulla l'indice delle modiche, seleziona un nuovo
parametro.
8
[▲][▼]: seleziona un parametro all'interno del gruppo.
9 [Back]: rimuove il valore dell'indice del parametro e mostra
Disegno 3.6 Interazioni Menu principale - Parametri numerati
1 [OK]: consente di visualizzare il primo parametro del
gruppo.
2 Premere [OK] per avviare la modica.
3
[▲][▼]: modica il valore del parametro (lampeggiante).
4 Premere [Back] per annullare le modiche o [OK] per
accettarle (e tornare alla schermata 2).
5
[▲][▼]: seleziona un parametro all'interno del gruppo.
6 [Back]: rimuove il valore e mostra il gruppo di parametri.
7
[▲][▼]: seleziona un gruppo.
Tabella 3.6 Modica dei valori nei parametri numerati
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 19
il gruppo di parametri.
10
[▲][▼]: seleziona un gruppo.
Tabella 3.7 Modica dei valori nei parametri array
3.1.5 Layout GLCP
Il GLCP è suddiviso in 4 gruppi funzionali (vedere
Disegno 3.8).
A. Area di visualizzazione
B. Tasti del menu Display
C. Tasti di navigazione e spie luminose (LED)
D. Tasti di funzionamento e ripristino
Page 22
130BD598.10
Auto
on
Reset
Hand
on
Off
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
36.4 kW
Auto Remote Ramping
0.000
On
Alarm
Warn.
A
7.83 A
799 RPM
B
C
D
53.2 %
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18 19 20 21
Programmazione
VLT® Midi Drive FC 280
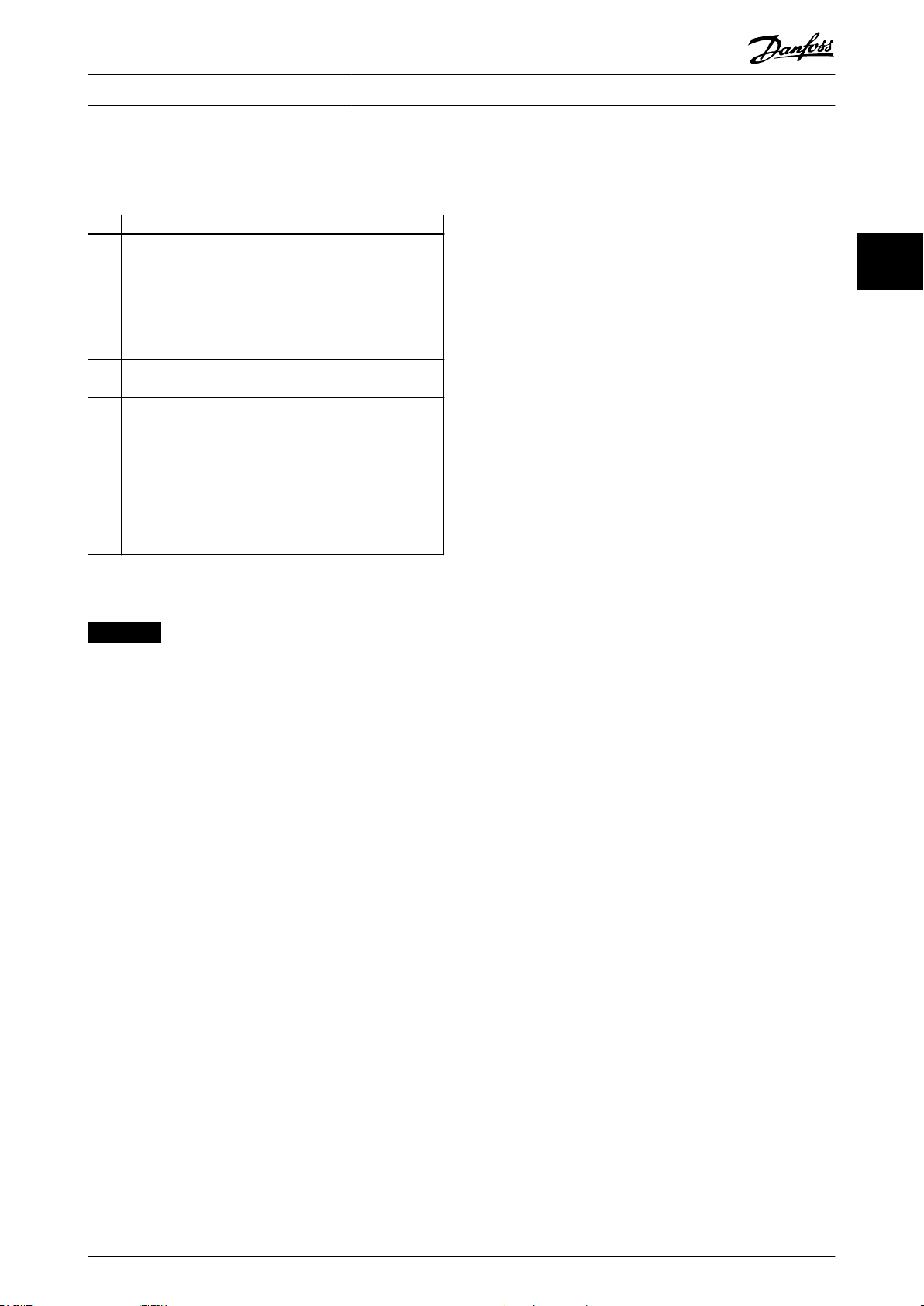
Tasto Funzione
6 Stato Mostra le informazioni sul funzionamento.
Consente l'accesso ai parametri di program-
Menu
7
rapido
mazione per le istruzioni sul setup iniziale e
a molte istruzioni dettagliate relative all'applicazione.
33
Menu
8
principale
9 Log allarme
Permette di accedere a tutti i parametri di
programmazione.
Mostra un elenco degli avvisi correnti, gli
ultimi 10 allarmi e il log di manutenzione.
Tabella 3.9 Legenda per Disegno 3.8, tasti del menu Display
C. Tasti di navigazione e spie luminose (LED)
I tasti di navigazione sono utilizzati per le funzioni di
programmazione e per spostare il cursore del display. I
tasti di navigazione inoltre permettono il controllo di
velocità nel funzionamento locale. In quest'area sono
presenti anche 3 indicatori di stato del convertitore di
frequenza.
Tasto Funzione
10 Back
Consente di tornare al passaggio o all'elenco
precedente nella struttura del menu.
Annulla l'ultima modica o l'ultimo comando,
Disegno 3.8 Pannello di controllo locale graco (GLCP)
A. Area di visualizzazione
L'area di visualizzazione è attivata quando il convertitore di
frequenza è alimentato dalla tensione di rete, da un
morsetto del bus CC o da un'alimentazione esterna a 24 V
11 Cancel
12 Info
Tasti di
13
navigazione
14 OK
sempre che la modalità di visualizzazione
non sia stata cambiata.
Premere per una denizione della funzione
visualizzata.
Per spostarsi tra le voci nel menu, usare i 4
tasti di navigazione.
Premere per accedere a gruppi di parametri
o per abilitare una selezione.
CC.
Le informazioni visualizzate sull'LCP sono personalizzabili
per le applicazioni dell'utente. Selezionare le opzioni nel
Menu rapido Q3-13 Impost. display.
Impostazione di
Display Numero di parametro
1 0-20 [1602] Riferimento [%]
2 0-21 [1614] Corrente motore
3 0-22 [1610] Potenza [kW]
fabbrica
4 0-23 [1613] Frequenza
5 0-24 [1502] Contatore kWh
Tabella 3.8 Legenda per Disegno 3.8, area display
B. Tasti del menu Display
I tasti menu sono utilizzati per l'accesso ai menu, per la
programmazione dei parametri, per commutare tra le varie
modalità di visualizzazione dello stato durante il funzionamento normale e per la visualizzazione dei dati del log
guasti.
20 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Tabella 3.10 Legenda per Disegno 3.8, tasti di navigazione
Indicatore Luce Funzione
La spia luminosa ON si accende
quando il convertitore di
15 On Verde
frequenza viene alimentato dalla
tensione di rete, da un morsetto
del bus CC o da un'alimentazione
esterna a 24 V.
Quando sono soddisfatte le
condizioni per l'avviso, si accende
16 Warn Giallo
il LED giallo WARN e sul display
appare il testo che illustra il
problema.
Una condizione di guasto provoca
17 Allarme Rosso
il lampeggiamento del LED di
allarme rosso e la visualizzazione
di un testo relativo all'allarme.
Tabella 3.11 Legenda per Disegno 3.8, spie (LED)
Page 23
Programmazione Guida alla Programmazione
D. Tasti di funzionamento e ripristino
I tasti di funzionamento si trovano nella parte bassa
dell'LCP.
Tasto Funzione
Avvia il convertitore di frequenza in modalità
hand on.
Un segnale di arresto esterno
18 Hand on
19 O
20 Auto On
21 Reset
Tabella 3.12 Legenda per Disegno 3.8, tasti di funzionamento e
ripristino
•
dall'ingresso di comando o dalla
comunicazione seriale esclude il
comando Hand on locale.
Arresta il motore ma non rimuove l'alimentazione al convertitore di frequenza.
Pone il sistema in modalità di funzionamento
remoto.
Risponde a un comando di avvio esterno
•
dai morsetti di controllo o dalla comunicazione seriale.
Ripristina manualmente il convertitore di
frequenza dopo la cancellazione di un
guasto.
AVVISO!
Per regolare il contrasto del display, premere il tasto
[Status] e i tasti [▲]/[▼].
3.1.6 Impostazioni dei parametri
Una corretta programmazione delle applicazioni spesso
richiede l'impostazione di funzioni in diversi parametri
correlati. I dettagli per i parametri sono forniti in
capitolo 4 Descrizioni dei parametri.
I dati di programmazione sono memorizzati internamente
al convertitore di frequenza.
Per il backup, caricare i dati nella memoria
•
dell'LCP.
Per scaricare i dati su un altro convertitore di
•
frequenza, collegare l'LCP a quell'unità e scaricare
le impostazioni memorizzate.
Il ripristino delle impostazioni di fabbrica non
•
modica i dati salvati nella memoria dell'LCP.
3.1.7 Modica delle impostazioni parametri
Accedere alle impostazioni dei parametri e modicarle dal
Menu rapido o dal Menu principale. Il Menu rapido consente
di accedere solo a un numero limitato di parametri.
1. Premere [Quick Menu] o [Main Menu] sull'LCP.
2.
Premere [▲] o [▼] per sfogliare i gruppi di
parametri, premere [OK] per selezionare un
gruppo di parametri.
3.
Premere [▲] o [▼] per sfogliare i parametri,
premere [OK] per selezionare un parametro.
4.
Premere [▲] o [▼] per modicare il valore di
impostazione di un parametro.
5.
Premere [◄] o [►] per cambiare cifra quando un
parametro decimale si trova nello stato di
modica.
6. Premere [OK] per accettare la modica.
7. Premere due volte [Back] per accedere allo Stato,
o premere [Main Menu] una volta per accedere al
Menu principale.
Visualizza modiche
Menu rapido Q5 - modiche eettuate elenca tutti i
parametri modicati rispetto alle impostazioni di fabbrica.
Questo elenco mostra solo i parametri che sono
•
stati cambiati nell'attuale setup di modica.
I parametri che sono stati ripristinati ai valori
•
predeniti non sono elencati.
Il messaggio Vuoto indica che non è stato
•
modicato alcun parametro.
3.1.8 Caricamento/scaricamento di dati
sul/dal GLCP
1. Premere [O] per arrestare il motore prima di
caricare o scaricare dati.
2. Premere [Main Menu] parametro 0-50 LCP Copy e
premere [OK].
3. Selezionare [1] Tutti a LCP per caricare dati
sull'LCP o selezionare [2] Tutti da LCP per scaricare
dati dall'LCP.
4. Premere [OK]. Una barra di avanzamento mostra
l'avanzamento del processo di caricamento o di
scaricamento.
5. Premere [Hand On] o [Auto On] per ritornare al
funzionamento normale.
3 3
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 21
Page 24
Programmazione
VLT® Midi Drive FC 280
3.1.9 Ripristino delle impostazioni di
fabbrica con l'LCP
Le impostazioni di fabbrica dei parametri vengono
ripristinate durante l'avviamento. Questo può richiedere un
tempo leggermente più lungo del normale.
AVVISO!
Ripristinando le impostazioni di fabbrica è possibile che
33
vengano persi i dati di programmazione, quelli relativi al
motore, quelli di localizzazione e quelli sul monitoraggio.
Per eseguire un backup, caricare i dati sull'LCP prima
dell'inizializzazione.
Il ripristino delle impostazioni di fabbrica dei parametri
avviene mediante l'inizializzazione del convertitore di
frequenza. L'inizializzazione può essere eettuata attraverso
parametro 14-22 Operation Mode (consigliato) o
manualmente. L'inizializzazione non ripristina le
impostazioni per parametro 1-06 Clockwise Direction.
L'inizializzazione mediante
•
parametro 14-22 Operation Mode non ripristina le
impostazioni del convertitore di frequenza quali
ore di funzionamento, selezioni della comunicazione seriale, log guasti, log allarme e altre
funzioni di monitoraggio.
L'inizializzazione manuale cancella tutti i dati di
•
motore, programmazione, localizzazione e
monitoraggio e ripristina le impostazioni di
fabbrica.
Procedura di inizializzazione consigliata tramite
parametro 14-22 Operation Mode
1. Selezionare parametro 14-22 Operation Mode e
premere [OK].
2. Selezionare [2] Inizializzazione e premere [OK].
3. Togliere l'alimentazione all'unità e attendere che il
display si spenga.
4. Alimentare l'unità.
Durante l'avvio vengono ripristinate le impostazioni
predenite dei parametri. Questo può richiedere un tempo
leggermente più lungo del normale.
L'inizializzazione manuale non ripristina le seguenti
informazioni sul convertitore di frequenza.
Parametro 15-00 Operating hours
•
Parametro 15-03 Power Up's
•
Parametro 15-04 Over Temp's
•
Parametro 15-05 Over Volt's
•
3.2 Programmazione di base
3.2.1 Setup del motore asincrono
Inserire i seguenti dati motore nell'ordine elencato. Le
informazioni sono riportate sulla targa del motore.
1. Parametro 1-20 Motor Power.
2. Parametro 1-22 Motor Voltage.
3. Parametro 1-23 Motor Frequency.
4. Parametro 1-24 Motor Current.
5. Parametro 1-25 Motor Nominal Speed.
Per ottenere prestazioni ottimali in modalità VVC+sono
necessari ulteriori dati motore per impostare i seguenti
parametri.
6. Parametro 1-30 Stator Resistance (Rs).
7. Parametro 1-31 Rotor Resistance (Rr).
8. Parametro 1-33 Stator Leakage Reactance (X1).
9. Parametro 1-35 Main Reactance (Xh).
I dati sono riportati nella scheda tecnica del motore (di
norma non sono disponibili sulla targa del motore).
Eettuare un AMA completo usando
parametro 1-29 Automatic Motor Adaption (AMA) [1]
Abilit.AMA compl. o impostare i seguenti parametri
manualmente:
5. Viene visualizzato l'Allarme 80, Convertitore inizia-
lizzato al valore predenito.
6. Premere [Reset] per ritornare al funzionamento
normale.
Procedura di inizializzazione manuale
1. Togliere l'alimentazione all'unità e attendere che il
display si spenga.
2. Tenere premuti contemporaneamente [Stato],
[Menu principale] e [OK] sul GLCP o premere
contemporaneamente [Menu] e [OK] sull'NLCP
mentre si alimenta l'unità (circa 5 s o nché non
si avverte un clic e la ventola inizia a funzionare).
22 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Regolazione specica dell'applicazione nel funzionamento VVC
VVC+ è la modalità di controllo più robusta. Nella maggior
parte delle situazioni, fornisce prestazioni ottimali senza
necessità di altre regolazioni. Eseguire un AMA completo
per ottenere prestazioni migliori.
3.2.2
Fasi di programmazione iniziale
1. Impostare parametro 1-10 Motor Construction sulle
+
Setup motore PM in VVC
seguenti opzioni per attivare il funzionamento
motore PM:
+
Page 25
Programmazione Guida alla Programmazione
1a [1] PM, non salient SPM
1b [2] PM, salient IPM, non Sat
1c [3] PM, salient IPM, Sat
2. Selezionare [0] Anello aperto in
parametro 1-00 Conguration Mode.
AVVISO!
La retroazione encoder non è supportata per motori PM.
Programmazione dei dati del motore
Dopo aver selezionato una delle opzioni motore PM in
parametro 1-10 Motor Construction, sono attivi i parametri
relativi al motore PM nei gruppi di parametri 1-2* Dati
motore, 1-3* Dati motore avanz. e 1-4* Contr. mot. avanz. II.
Le informazioni possono essere trovate sulla targa del
motore e nella scheda tecnica del motore.
Programmare i seguenti parametri nell'ordine elencato:
1. Parametro 1-24 Motor Current.
2. Parametro 1-26 Motor Cont. Rated Torque.
3. Parametro 1-25 Motor Nominal Speed.
4. Parametro 1-39 Motor Poles.
5. Parametro 1-30 Stator Resistance (Rs).
Immettere la resistenza dell'avvolgimento dello
statore da linea a lo comune (Rs). Se sono
disponibili solo dati linea-linea, dividere il valore
linea-linea per 2 per ottenere il valore da linea a
lo comune (centro stella).
È anche possibile misurare il valore con un
ohmmetro, che terrà conto della resistenza del
cavo. Dividere il valore misurato per 2 e
immettere il risultato.
6. Parametro 1-37 d-axis Inductance (Ld).
Immettere l'induttanza assiale diretta del motore
PM da linea a lo comune.
Se sono disponibili solo dati da linea a linea,
dividere il valore linea-linea per 2 per ottenere il
valore da linea a lo comune (centro stella).
È anche possibile misurare il valore con un
misuratore di induttanza, che terrà conto dell'induttanza del cavo. Dividere il valore misurato per
2 e immettere il risultato.
7. Parametro 1-40 Back EMF at 1000 RPM.
Immettere la forza c.e.m. da linea a linea del
motore PM con una velocità meccanica di 1000
giri/minuto (valore RMS). La forza c.e.m. è la
tensione generata da un motore PM quando non
è collegato alcun convertitore di frequenza e
l'albero è girato verso l'esterno. Normalmente la
forza c.e.m. è specicata per la velocità nominale
del motore oppure per 1000 giri/min. tra due fasi.
Se il valore non è disponibile per una velocità del
motore di 1000 giri/min., calcolare il valore
corretto come segue: Ad esempio, se la forza
c.e.m. a 1800 giri/min. è pari a 320 V, la forza
c.e.m. a 1000 giri/min. sarà:
Forza c.e.m. = (tensione/giri/min.)x1000 =
(320/1800)x1000 = 178.
Programmare questo valore per
parametro 1-40 Back EMF at 1000 RPM..
Test del funzionamento del motore
1. Avviare il motore a bassa velocità (da 100 a 200
giri/min.). Se il motore non gira, controllare installazione, programmazione generale e dati motore.
Parcheggio
Questa funzione è l'opzione raccomandata per applicazioni
in cui il motore ruota a velocità lenta (ad esempio per
eetto di autorotazione in applicazioni con ventola).
Parametro 2-06 Parking Current e parametro 2-07 Parking
Time possono essere regolati. Aumentare le impostazioni di
fabbrica di questi parametri per applicazioni con inerzia
elevata.
Avviare il motore a velocità nominale. Se l'applicazione non
funziona correttamente, controllare le impostazioni PM VVC
+
. Tabella 3.13 mostra le raccomandazioni per le diverse
applicazioni.
Applicazione Impostazioni
Applicazioni a bassa
inerzia
I
Load/IMotor
Applicazioni a inerzia
media
50>I
Applicazioni a inerzia
elevata
I
Load/IMotor
Carico elevato a bassa
velocità
<30% (velocità nominale)
<5
Load/IMotor
Tabella 3.13 Raccomandazioni per diverse applicazioni
>5
>50
Aumentare il valore per
•
parametro 1-17 Voltage lter time
const. da 5 a 10.
Ridurre il valore per
•
parametro 1-14 Damping Gain.
Ridurre il valore (<100%) per
•
parametro 1-66 Min. Current at
Low Speed.
Mantenere i valori calcolati.
Aumentare i valori per
parametro 1-14 Damping Gain,
parametro 1-15 Low Speed Filter Time
Const. e parametro 1-16 High Speed
Filter Time Const.
Aumentare il valore per
parametro 1-17 Voltage lter time
const.
Aumentare il valore per
parametro 1-66 Min. Current at Low
Speed (>100% per un tempo
prolungato può surriscaldare il
motore).
Se il motore inizia a oscillare a una certa velocità,
aumentare parametro 1-14 Damping Gain. Aumentare il
valore in piccoli passi.
3 3
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 23
Page 26
Programmazione
La coppia di avviamento può essere regolata in
parametro 1-66 Min. Current at Low Speed. Se impostato su
100%, la coppia nominale viene usata come coppia di
avviamento.
VLT® Midi Drive FC 280
33
(AMA)
Per ottimizzare la compatibilità tra il convertitore di
frequenza e il motore nella modalità VVC+, eseguire l'AMA.
Il convertitore di frequenza costruisce un modello
•
matematico del motore per la regolazione della
corrente motore in uscita, aumentando in questo
modo le prestazioni del motore.
Alcuni motori potrebbero non essere in grado di
•
eseguire la versione completa del test. In questo
caso selezionare [2] Abilitare AMA ridotto
inparametro 1-29 Automatic Motor Adaption (AMA).
In presenza di avvisi o allarmi, vedere
•
capitolo 6.1 Avvisi e allarmi.
Per ottenere i migliori risultati, eseguire questa
•
procedura a motore freddo.
Eseguire l'AMA mediante l'LCP
1. Impostando i parametri
morsetti 13 e 27 prima di eseguire l'AMA.
2. Accedere al Menu principale.
3. Andare al gruppo di parametri 1-** Carico e
motore.
4. Premere [OK].
5. Impostare i parametri usando i dati di targa per il
gruppo di parametri 1-2* Dati motore.
6. Impostare la lunghezza del cavo motore in
parametro 1-42 Motor Cable Length.
7. Andare a parametro 1-29 Automatic Motor
Adaption (AMA).
8. Premere [OK].
9. Selezionare [1] Abilit.AMA compl.
10. Premere [OK].
11. Il test viene eseguito automaticamente
segnalando il completamento.
Il completamento dell'AMA richiede da 3 a 10 minuti, a
seconda della taglia di potenza.
predeniti, collegare i
3.2.3 Adattamento automatico motore
AVVISO!
La funzione AMA non provoca il funzionamento del
motore e non lo danneggia.
24 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 27
Descrizioni dei parametri Guida alla Programmazione
4 Descrizioni dei parametri
4.1 Parametri: 0-** Operation / Display
0-01 Language
Selezionare la lingua da utilizzare sul display.
Option: Funzione:
[0] * English
[1] Deutsch
[2] Francais
[3] Dansk
[4] Spanish
[5] Italiano
[28] Bras.port
0-03 Impostazioni locali
Option: Funzione:
AVVISO!
Questo parametro non può essere
regolato mentre il motore è in funzione.
[0] * Interna-
zionale
[1] Stati Uniti Attivare parametro 1-20 Potenza motore [kW] per
0-04 Stato di funz. all'accens. (manuale)
Option: Funzione:
[0] Prosegui Riavviare il convertitore di frequenza
[1] * Arr. forz.,
rif=vecc.
[2] Arresto forz.,
rif=0
Attivare parametro 1-20 Potenza motore [kW] per
impostare la potenza motore in kW e impostare
il valore predenito di parametro 1-23 Frequen.
motore su 50 Hz.
impostare la potenza motore in kW e impostare
il valore predenito di parametro 1-23 Frequen.
motore su 60 Hz.
Selezionare il modo di funzionamento
quando si ricollega il convertitore di
frequenza alla tensione di rete dopo lo
spegnimento nella modalità hand-on.
mantenendo le impostazioni di avvio/arresto
(applicate tramite [Hand On/O]) selezionate
prima dello spegnimento del convertitore di
frequenza.
Riavviare il convertitore di frequenza con un
riferimento locale salvato dopo il ritorno della
tensione di rete e dopo aver premuto [Hand
On].
Ripristina il riferimento locale a 0 al riavvio
del convertitore di frequenza.
0-06 Tipo di rete
Selezionare la tensione di alimentazione, la frequenza e il tipo.
Option: Funzione:
[0] 200-240V/50Hz/rete IT
[1] 200-240V/50Hz/Delta
[2] 200-240V/50Hz
[10] 380-440V/50Hz/rete IT
[11] 380-440V/50Hz/Delta
[12] 380-440V/50Hz
[20] 440-480V/50Hz/rete IT
[21] 440-480V/50Hz/Delta
[22] 440-480V/50Hz
[100] 200-240V/60Hz/rete IT
[101] 200-240V/60Hz/Delta
[102] 200-240V/60Hz
[110] 380-440V/60Hz/rete IT
[111] 380-440V/60Hz/Delta
[112] 380-440V/60Hz
[120] 440-480V/60Hz/rete IT
[121] 440-480V/60Hz/Delta
[122] 440-480V/60Hz
0-07 Auto DC Braking
Option: Funzione:
Funzione di protezione contro le sovratensioni durante
il funzionamento a ruota libera nell'ambiente di rete IT.
Questo parametro è solo attivo quando in questo
parametro è selezionato [1] On e le opzioni della rete
IT sono selezionate in parametro 0-06 GridType.
[0] O Questa funzione non è attiva.
[1] * On Questa funzione è attiva.
0-10 Active Set-up
Seleziona il setup per controllare le funzioni del convertitore di
frequenza. Programmare i parametri nei setup 1–4. Usare il setup
di fabbrica per tornare allo stato iniziale. Usare il multi setup per
il controllo remoto.
Option: Funzione:
[1] * Set-up 1
[2] Set-up 2
[3] Set-up 3
[4] Set-up 4
[9] Multi Set-up
4 4
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 25
Page 28
Descrizioni dei parametri
VLT® Midi Drive FC 280
0-11 Programming Set-up
Selezionare il setup da programmare durante il funzionamento;
sia il setup attivo sia il setup inattivo. Il numero di setup
modicati lampeggia nell'LCP.
Option: Funzione:
[1] Set-up 1
[2] Set-up 2
[3] Set-up 3
44
[4] Set-up 4
[9] * Active Set-up
0-12 Link Setups
Option: Funzione:
Il collegamento assicura la sincronizzazione dei
valori di parametri Non modicabili durante il
funzionamento consentendo il passaggio da un
setup all'altro durante il funzionamento.
Se i setup non sono collegati non è possibile
modicarli mentre il motore è in funzione.
Quindi la modica del setup non è attiva no a
quando il motore è in arresto a ruota libera.
[0] Not
linked
[20]*Linked Copiare i parametri Non modicabili durante il
Lasciare i parametri invariati in entrambi i setup
e non permettere modiche a motore in
funzione.
funzionamento da un setup all'altro, pertanto
sono identici in entrambi i setup.
0-14 Readout: Edit Set-ups / Channel
Range: Funzione:
0* [-2147483647 -
2147483647 ]
Visualizzare l'impostazione di
parametro 0-11 Programming Set-up.
Modicare il setup per ciascun canale di
comunicazione. A signica setup attivo; F
signica di fabbrica; i numeri indicano il
codice di setup. I canali di comunicazione
da destra a sinistra sono LCP, il bus FC, USB,
e HPFB1-5.
0-16 Application Selection
Option: Funzione:
Selezionare le funzioni dell'applicazione integrate. Quando
viene selezionata un'applicazione, una serie di parametri
correlati viene impostata
automaticamente.
[0] * None
[1] Simple Process Close Loop
[2] Local/Remote
[3] Speed Open Loop
[4] Simple Speed Close Loop
[5] Multi Speed
[6] OGD LA10
0-16 Application Selection
Option: Funzione:
[7] OGD V210
0-20 Display Line 1.1 Small
Selezionare la variabile da visualizzare nella riga 1, posizione a
sinistra.
Option: Funzione:
[0] None
[37] Display Text 1
[38] Display Text 2
[39] Display Text 3
[748] PCD Feed Forward
[953] Probus Warning Word
[1005] Readout Transmit Error Counter
[1006] Readout Receive Error Counter
[1230] Warning Parameter
[1501] Running Hours
[1502] kWh Counter
[1600] Control Word
[1601] Reference [Unit]
[1602] * Reference [%]
[1603] Status Word
[1605] Main Actual Value [%]
[1609] Custom Readout
[1610] Power [kW ]
[1611] Power [hp]
[1612] Motor Voltage
[1613] Frequency
[1614] Motor current
[1615] Frequency [%]
[1616] Torque [Nm]
[1617] Speed [RPM]
[1618] Motor Thermal
[1620] Motor Angle
[1622] Torque [%]
[1630] DC Link Voltage
[1633] Brake Energy /2 min
[1634] Heatsink Temp.
[1635] Inverter Thermal
[1636] Inv. Nom. Current
[1637] Inv. Max. Current
[1638] SL Controller State
[1639] Control Card Temp.
[1650] External Reference
[1652] Feedback[Unit]
[1653] Digi Pot Reference
[1657] Feedback [RPM]
[1660] Digital Input
[1661] Terminal 53 Setting
[1662] Analog input 53
[1663] Terminal 54 Setting
[1664] Analog input 54
[1665] Analog output 42 [mA]
26 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 29
Descrizioni dei parametri Guida alla Programmazione
0-20 Display Line 1.1 Small
Selezionare la variabile da visualizzare nella riga 1, posizione a
sinistra.
Option: Funzione:
[1666] Digital Output
[1667] Pulse input 29[Hz]
[1668] Pulse Input 33 [Hz]
[1669] Pulse Output 27 [Hz]
[1671] Relay output
[1672] Counter A
[1673] Counter B
[1674] Prec. Stop Counter
[1680] Fieldbus CTW 1
[1682] Fieldbus REF 1
[1684] Comm. Option STW
[1685] FC Port CTW 1
[1686] FC Port REF 1
[1690] Alarm Word
[1691] Alarm Word 2
[1692] Warning Word
[1693] Warning Word 2
[1694] Ext. Status Word
[1695] Ext. Status Word 2
[1697] Alarm Word 3
[1890] Process PID Error
[1891] Process PID Output
[1892] Process PID Clamped Output
[1893] Process PID Gain Scaled Output
[2117] Ext. 1 Reference [Unit]
[2118] Ext. 1 Feedback [Unit]
[2119] Ext. 1 Output [%]
[3401] PCD 1 Write For Application
[3402] PCD 2 Write For Application
[3403] PCD 3 Write For Application
[3404] PCD 4 Write For Application
[3405] PCD 5 Write For Application
[3406] PCD 6 Write For Application
[3407] PCD 7 Write For Application
[3408] PCD 8 Write For Application
[3409] PCD 9 Write For Application
[3410] PCD 10 Write For Application
[3421] PCD 1 Read For Application
[3422] PCD 2 Read For Application
[3423] PCD 3 Read For Application
[3424] PCD 4 Read For Application
[3425] PCD 5 Read For Application
[3426] PCD 6 Read For Application
[3427] PCD 7 Read For Application
[3428] PCD 8 Read For Application
[3429] PCD 9 Read For Application
[3430] PCD 10 Read For Application
[3450] Actual Position
[3456] Track Error
0-21 Display Line 1.2 Small
Selezionare la variabile da visualizzare nella riga 1, posizione
centrale.
Option: Funzione:
[0] None
[37] Display Text 1
[38] Display Text 2
[39] Display Text 3
[748] PCD Feed Forward
[953] Probus Warning Word
[1005] Readout Transmit Error Counter
[1006] Readout Receive Error Counter
[1230] Warning Parameter
[1501] Running Hours
[1502] kWh Counter
[1600] Control Word
[1601] Reference [Unit]
[1602] Reference [%]
[1603] Status Word
[1605] Main Actual Value [%]
[1609] Custom Readout
[1610] Power [kW]
[1611] Power [hp]
[1612] Motor Voltage
[1613] Frequency
[1614] * Motor current
[1615] Frequency [%]
[1616] Torque [Nm]
[1617] Speed [RPM]
[1618] Motor Thermal
[1620] Motor Angle
[1622] Torque [%]
[1630] DC Link Voltage
[1633] Brake Energy /2 min
[1634] Heatsink Temp.
[1635] Inverter Thermal
[1636] Inv. Nom. Current
[1637] Inv. Max. Current
[1638] SL Controller State
[1639] Control Card Temp.
[1650] External Reference
[1652] Feedback[Unit]
[1653] Digi Pot Reference
[1657] Feedback [RPM]
[1660] Digital Input
[1661] Terminal 53 Setting
[1662] Analog input 53
[1663] Terminal 54 Setting
[1664] Analog input 54
[1665] Analog output 42 [mA]
[1666] Digital Output
[1667] Pulse input 29[Hz]
[1668] Pulse Input 33 [Hz]
[1669] Pulse Output 27 [Hz]
4 4
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 27
Page 30
Descrizioni dei parametri
VLT® Midi Drive FC 280
0-21 Display Line 1.2 Small
Selezionare la variabile da visualizzare nella riga 1, posizione
centrale.
Option: Funzione:
[1671] Relay output
[1672] Counter A
[1673] Counter B
[1674] Prec. Stop Counter
44
[1680] Fieldbus CTW 1
[1682] Fieldbus REF 1
[1684] Comm. Option STW
[1685] FC Port CTW 1
[1686] FC Port REF 1
[1690] Alarm Word
[1691] Alarm Word 2
[1692] Warning Word
[1693] Warning Word 2
[1694] Ext. Status Word
[1695] Ext. Status Word 2
[1697] Alarm Word 3
[1890] Process PID Error
[1891] Process PID Output
[1892] Process PID Clamped Output
[1893] Process PID Gain Scaled Output
[2117] Ext. 1 Reference [Unit]
[2118] Ext. 1 Feedback [Unit]
[2119] Ext. 1 Output [%]
[3401] PCD 1 Write For Application
[3402] PCD 2 Write For Application
[3403] PCD 3 Write For Application
[3404] PCD 4 Write For Application
[3405] PCD 5 Write For Application
[3406] PCD 6 Write For Application
[3407] PCD 7 Write For Application
[3408] PCD 8 Write For Application
[3409] PCD 9 Write For Application
[3410] PCD 10 Write For Application
[3421] PCD 1 Read For Application
[3422] PCD 2 Read For Application
[3423] PCD 3 Read For Application
[3424] PCD 4 Read For Application
[3425] PCD 5 Read For Application
[3426] PCD 6 Read For Application
[3427] PCD 7 Read For Application
[3428] PCD 8 Read For Application
[3429] PCD 9 Read For Application
[3430] PCD 10 Read For Application
[3450] Actual Position
[3456] Track Error
0-22 Display Line 1.3 Small
Selezionare una variabile da visualizzare nella riga 1, posizione
destra.
Option: Funzione:
[0] None
[37] Display Text 1
[38] Display Text 2
[39] Display Text 3
[748] PCD Feed Forward
[953] Probus Warning Word
[1005] Readout Transmit Error Counter
[1006] Readout Receive Error Counter
[1230] Warning Parameter
[1501] Running Hours
[1502] kWh Counter
[1600] Control Word
[1601] Reference [Unit]
[1602] Reference [%]
[1603] Status Word
[1605] Main Actual Value [%]
[1609] Custom Readout
[1610] * Power [kW]
[1611] Power [hp]
[1612] Motor Voltage
[1613] Frequency
[1614] Motor current
[1615] Frequency [%]
[1616] Torque [Nm]
[1617] Speed [RPM]
[1618] Motor Thermal
[1620] Motor Angle
[1622] Torque [%]
[1630] DC Link Voltage
[1633] Brake Energy /2 min
[1634] Heatsink Temp.
[1635] Inverter Thermal
[1636] Inv. Nom. Current
[1637] Inv. Max. Current
[1638] SL Controller State
[1639] Control Card Temp.
[1650] External Reference
[1652] Feedback[Unit]
[1653] Digi Pot Reference
[1657] Feedback [RPM]
[1660] Digital Input
[1661] Terminal 53 Setting
[1662] Analog input 53
[1663] Terminal 54 Setting
[1664] Analog input 54
[1665] Analog output 42 [mA]
[1666] Digital Output
[1667] Pulse input 29[Hz]
[1668] Pulse Input 33 [Hz]
[1669] Pulse Output 27 [Hz]
28 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 31

Descrizioni dei parametri Guida alla Programmazione
0-22 Display Line 1.3 Small
Selezionare una variabile da visualizzare nella riga 1, posizione
destra.
Option: Funzione:
[1671] Relay output
[1672] Counter A
[1673] Counter B
[1674] Prec. Stop Counter
[1680] Fieldbus CTW 1
[1682] Fieldbus REF 1
[1684] Comm. Option STW
[1685] FC Port CTW 1
[1686] FC Port REF 1
[1690] Alarm Word
[1691] Alarm Word 2
[1692] Warning Word
[1693] Warning Word 2
[1694] Ext. Status Word
[1695] Ext. Status Word 2
[1697] Alarm Word 3
[1890] Process PID Error
[1891] Process PID Output
[1892] Process PID Clamped Output
[1893] Process PID Gain Scaled Output
[2117] Ext. 1 Reference [Unit]
[2118] Ext. 1 Feedback [Unit]
[2119] Ext. 1 Output [%]
[3401] PCD 1 Write For Application
[3402] PCD 2 Write For Application
[3403] PCD 3 Write For Application
[3404] PCD 4 Write For Application
[3405] PCD 5 Write For Application
[3406] PCD 6 Write For Application
[3407] PCD 7 Write For Application
[3408] PCD 8 Write For Application
[3409] PCD 9 Write For Application
[3410] PCD 10 Write For Application
[3421] PCD 1 Read For Application
[3422] PCD 2 Read For Application
[3423] PCD 3 Read For Application
[3424] PCD 4 Read For Application
[3425] PCD 5 Read For Application
[3426] PCD 6 Read For Application
[3427] PCD 7 Read For Application
[3428] PCD 8 Read For Application
[3429] PCD 9 Read For Application
[3430] PCD 10 Read For Application
[3450] Actual Position
[3456] Track Error
0-23 Display Line 2 Large
Selezionare una variabile da visualizzare nella riga 2.
Option: Funzione:
[0] None
[37] Display Text 1
[38] Display Text 2
[39] Display Text 3
[748] PCD Feed Forward
[953] Probus Warning Word
[1005] Readout Transmit Error Counter
[1006] Readout Receive Error Counter
[1230] Warning Parameter
[1501] Running Hours
[1502] kWh Counter
[1600] Control Word
[1601] Reference [Unit]
[1602] Reference [%]
[1603] Status Word
[1605] Main Actual Value [%]
[1609] Custom Readout
[1610] Power [kW]
[1611] Power [hp]
[1612] Motor Voltage
[1613] * Frequency
[1614] Motor current
[1615] Frequency [%]
[1616] Torque [Nm]
[1617] Speed [RPM]
[1618] Motor Thermal
[1620] Motor Angle
[1622] Torque [%]
[1630] DC Link Voltage
[1633] Brake Energy /2 min
[1634] Heatsink Temp.
[1635] Inverter Thermal
[1636] Inv. Nom. Current
[1637] Inv. Max. Current
[1638] SL Controller State
[1639] Control Card Temp.
[1650] External Reference
[1652] Feedback[Unit]
[1653] Digi Pot Reference
[1657] Feedback [RPM]
[1660] Digital Input
[1661] Terminal 53 Setting
[1662] Analog input 53
[1663] Terminal 54 Setting
[1664] Analog input 54
[1665] Analog output 42 [mA]
[1666] Digital Output
[1667] Pulse input 29[Hz]
[1668] Pulse Input 33 [Hz]
[1669] Pulse Output 27 [Hz]
[1671] Relay output
4 4
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 29
Page 32

Descrizioni dei parametri
VLT® Midi Drive FC 280
0-23 Display Line 2 Large
Selezionare una variabile da visualizzare nella riga 2.
Option: Funzione:
[1672] Counter A
[1673] Counter B
[1674] Prec. Stop Counter
[1680] Fieldbus CTW 1
[1682] Fieldbus REF 1
44
[1684] Comm. Option STW
[1685] FC Port CTW 1
[1686] FC Port REF 1
[1690] Alarm Word
[1691] Alarm Word 2
[1692] Warning Word
[1693] Warning Word 2
[1694] Ext. Status Word
[1695] Ext. Status Word 2
[1697] Alarm Word 3
[1890] Process PID Error
[1891] Process PID Output
[1892] Process PID Clamped Output
[1893] Process PID Gain Scaled Output
[2117] Ext. 1 Reference [Unit]
[2118] Ext. 1 Feedback [Unit]
[2119] Ext. 1 Output [%]
[3401] PCD 1 Write For Application
[3402] PCD 2 Write For Application
[3403] PCD 3 Write For Application
[3404] PCD 4 Write For Application
[3405] PCD 5 Write For Application
[3406] PCD 6 Write For Application
[3407] PCD 7 Write For Application
[3408] PCD 8 Write For Application
[3409] PCD 9 Write For Application
[3410] PCD 10 Write For Application
[3421] PCD 1 Read For Application
[3422] PCD 2 Read For Application
[3423] PCD 3 Read For Application
[3424] PCD 4 Read For Application
[3425] PCD 5 Read For Application
[3426] PCD 6 Read For Application
[3427] PCD 7 Read For Application
[3428] PCD 8 Read For Application
[3429] PCD 9 Read For Application
[3430] PCD 10 Read For Application
[3450] Actual Position
[3456] Track Error
0-24 Display Line 3 Large
Selezionare una variabile da visualizzare nella riga 3.
Option: Funzione:
[0] None
[37] Display Text 1
[38] Display Text 2
[39] Display Text 3
[748] PCD Feed Forward
[953] Probus Warning Word
[1005] Readout Transmit Error Counter
[1006] Readout Receive Error Counter
[1230] Warning Parameter
[1501] Running Hours
[1502] * kWh Counter
[1600] Control Word
[1601] Reference [Unit]
[1602] Reference [%]
[1603] Status Word
[1605] Main Actual Value [%]
[1609] Custom Readout
[1610] Power [kW]
[1611] Power [hp]
[1612] Motor Voltage
[1613] Frequency
[1614] Motor current
[1615] Frequency [%]
[1616] Torque [Nm]
[1617] Speed [RPM]
[1618] Motor Thermal
[1620] Motor Angle
[1622] Torque [%]
[1630] DC Link Voltage
[1633] Brake Energy /2 min
[1634] Heatsink Temp.
[1635] Inverter Thermal
[1636] Inv. Nom. Current
[1637] Inv. Max. Current
[1638] SL Controller State
[1639] Control Card Temp.
[1650] External Reference
[1652] Feedback[Unit]
[1653] Digi Pot Reference
[1657] Feedback [RPM]
[1660] Digital Input
[1661] Terminal 53 Setting
[1662] Analog input 53
[1663] Terminal 54 Setting
[1664] Analog input 54
[1665] Analog output 42 [mA]
[1666] Digital Output
[1667] Pulse input 29[Hz]
[1668] Pulse Input 33 [Hz]
[1669] Pulse Output 27 [Hz]
[1671] Relay output
30 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 33

Descrizioni dei parametri Guida alla Programmazione
0-24 Display Line 3 Large
Selezionare una variabile da visualizzare nella riga 3.
Option: Funzione:
[1672] Counter A
[1673] Counter B
[1674] Prec. Stop Counter
[1680] Fieldbus CTW 1
[1682] Fieldbus REF 1
[1684] Comm. Option STW
[1685] FC Port CTW 1
[1686] FC Port REF 1
[1690] Alarm Word
[1691] Alarm Word 2
[1692] Warning Word
[1693] Warning Word 2
[1694] Ext. Status Word
[1695] Ext. Status Word 2
[1697] Alarm Word 3
[1890] Process PID Error
[1891] Process PID Output
[1892] Process PID Clamped Output
[1893] Process PID Gain Scaled Output
[2117] Ext. 1 Reference [Unit]
[2118] Ext. 1 Feedback [Unit]
[2119] Ext. 1 Output [%]
[3401] PCD 1 Write For Application
[3402] PCD 2 Write For Application
[3403] PCD 3 Write For Application
[3404] PCD 4 Write For Application
[3405] PCD 5 Write For Application
[3406] PCD 6 Write For Application
[3407] PCD 7 Write For Application
[3408] PCD 8 Write For Application
[3409] PCD 9 Write For Application
[3410] PCD 10 Write For Application
[3421] PCD 1 Read For Application
[3422] PCD 2 Read For Application
[3423] PCD 3 Read For Application
[3424] PCD 4 Read For Application
[3425] PCD 5 Read For Application
[3426] PCD 6 Read For Application
[3427] PCD 7 Read For Application
[3428] PCD 8 Read For Application
[3429] PCD 9 Read For Application
[3430] PCD 10 Read For Application
[3450] Actual Position
[3456] Track Error
0-30 Custom Readout Unit
Programmare un valore da mostrare nell'LCP. Il valore ha una
relazione lineare, quadratica o cubica rispetto alla velocità.
Questa relazione dipende dall'unità selezionata.
Option: Funzione:
[0] None
[1] * %
[5] PPM
[10] 1/min
[11] RPM
[12] Pulse/s
[20] l/s
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[127] ft³/h
[140] ft/s
[141] ft/min
[160] °F
[170] psi
[171] lb/in2
[172] in WG
[173] ft WG
[180] HP
4 4
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 31
Page 34

Descrizioni dei parametri
VLT® Midi Drive FC 280
0-31 Custom Readout Min Value
Range: Funzione:
0 CustomReadoutUnit*
44
[ 0 -
999999.99
CustomReadoutUnit]
Questo parametro imposta il
valore minimo della visualizzazione personalizzata (avviene a
velocità zero). È possibile
impostare un valore diverso da 0
solo quando si seleziona un'unità
lineare in parametro 0-30 Custom
Readout Unit. Per unità
quadratiche e cubiche il valore
minimo è 0.
0-32 Custom Readout Max Value
Range: Funzione:
100 CustomReadoutUnit*
[ 0.0 -
999999.99
CustomReadoutUnit]
Questo parametro imposta il
valore massimo da mostrare
quando la velocità del motore
ha raggiunto il valore
impostato per
parametro 4-14 Motor Speed
High Limit [Hz].
0-37 Display Text 1
0-44 [O/Reset] Key on LCP
Option: Funzione:
[0] Disabled
[1] * Enabled
[7] Enable Reset Only
0-50 LCP Copy
Option: Funzione:
[0] * No copy Nessuna funzione.
[1] All to LCP Copiare tutti i parametri in tutti i setup dalla
memoria del convertitore di frequenza alla
memoria dell'LCP. Per scopi di manutenzione,
copiare tutti i parametri sull'LCP dopo la messa
in funzione.
[2] All from
LCP
[3] Size indep.
from LCP
Copiare tutti i parametri in tutti i setup dalla
memoria dell'LCP alla memoria del convertitore
di frequenza.
Copiare solo i parametri che non dipendono
dalle dimensioni del motore. Questa selezione
può essere utilizzata per programmare vari
convertitori di frequenza con la stessa funzione
senza violare i dati motore che sono già
impostati.
Range: Funzione:
[0 - 0 ] Testo libero, ad es. per codice dispositivo dell'appli-
cazione bus di campo.
0-51 Set-up Copy
Usare questo parametro per copiare dei parametri fra i setup.
Option: Funzione:
0-38 Display Text 2
Range: Funzione:
[0 - 0 ] Testo libero, ad esempio usato per il codice di
posizione dell'applicazione bus di campo.
0-39 Display Text 3
[0] * No copy
[1] Copy from setup 1
[2] Copy from setup 2
[3] Copy from setup 3
[4] Copy from setup 4
[9] Copy from Factory setup
Range: Funzione:
[0 - 0 ] Testo libero, ad esempio usato per il codice di aiuto
dell'applicazione bus di campo.
0-40 [Hand on] Key on LCP
Option: Funzione:
[0] Disabled Evitare un avviamento involontario del conver-
titore di frequenza in modalità Hand on.
[1] * Enabled [Hand On] è abilitato.
0-42 [Auto on] Key on LCP
Option: Funzione:
[0] Disabled Evitare un avviamento involontario del conver-
titore di frequenza dall'LCP.
[1] * Enabled [Auto On] è attivato.
32 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 35

Descrizioni dei parametri Guida alla Programmazione
4.2 Parametri: 1-** Load and Motor
1-00 Conguration Mode
Option: Funzione:
Selezionare il principio di regolazione dell'applicazione da utilizzare quando è attivo un
riferimento remoto (vale a dire tramite un
ingresso analogico o un bus di campo).
[0]*Open Loop Abilitare il controllo di velocità (senza segnale
di retroazione dal motore) con compensazione
automatica dello scorrimento per una velocità
pressoché costante al variare del carico. Le
compensazioni sono attive ma possono essere
disabilitate nel gruppo di parametri 1-0* Carico
e motore.
[1] Speed
closed loop
[2] Torque
closed loop
[3] Process
Closed
Loop
[4] Torque
open loop
[7] Extended
PID Speed
OL
Abilitare il controllo di velocità ad anello
chiuso con retroazione. Per una maggiore
precisione della velocità, fornire un segnale di
retroazione e impostare il regolatore di velocità
PID. I parametri del controllo di velocità
vengono impostati nel gruppo di parametri 7-0*
Ctrl. vel. PID.
Consentire la regolazione della coppia ad
anello chiuso con retroazione di velocità. Solo
possibile quando viene selezionata l'opzione
[1] VVC+ in parametro 1-01 Motor Control
Principle.
Consentire l'uso del controllo di processo nel
convertitore di frequenza. I parametri relativi al
controllo di processo vengono impostati nei
gruppi di parametri 7-2* Retroaz. reg. proc. e
7-3* Reg. PID di proc..
1-01 Principio controllo motore
Option: Funzione:
[0] U/f
AVVISO!
Il controllo U/f non include le compensazioni
di scorrimento e del carico.
Usato per motori collegati in parallelo e/o
applicazioni con motori speciali. Impostare le
impostazioni U/f in parametro 1-55 Caratteristica U/f -
u e parametro 1-56 Caratteristica U/f - F.
[1] * VVC+
AVVISO!
Quando parametro 1-10 Struttura motore è
impostato su opzioni abilitate PM, è
disponibile solo l'opzione VVC+.
1-01 Principio controllo motore
Option: Funzione:
Modalità di funzionamento normale, incluse le
compensazioni di scorrimento e del carico.
1-03 Torque Characteristics
Option: Funzione:
Selezionare la caratteristica di coppia
richiesta. VT e AEO sono entrambe
operazioni che fanno risparmiare
energia.
[0] * Constant torque
[1] Variable Torque
[2] Auto Energy Optim.
CT
1-06 Clockwise Direction
Option: Funzione:
AVVISO!
Questo parametro non può essere regolato
mentre il motore è in funzione.
Questo parametro denisce il termine senso orario
corrispondente alla freccia di direzione dell'LCP.
Utilizzato per cambiare in modo semplice il senso
di rotazione dell'albero senza scambiare i
elettrici del motore.
[0] * Normal L'albero motore gira in senso orario quando il
convertitore di frequenza è collegato U⇒U; V⇒V; e
W⇒W al motore.
[1] Inverse L'albero motore gira in senso antiorario quando il
convertitore di frequenza è collegato U⇒U; V⇒V; e
W⇒W al motore.
1-08 Largh. di banda controllo motore
Option: Funzione:
[0] Alta Adatto per una risposta estremamente
dinamica.
[1] Media Adatto per condizioni operative stazionarie
uniformi.
[2] * Bassa Adatto per condizioni operative stazionarie
uniformi con una risposta dinamica minima.
[3] Adaptive 1 Ottimizzato per funzionamento in stato
stazionario, con smorzamento attivo supplementare.
[4] Adaptive 2 Attenzione rivolta a motori PM a bassa
induttanza. Questa opzione è un'alternativa a
[3] Adaptive 1.
li
4 4
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 33
Page 36

Descrizioni dei parametri
VLT® Midi Drive FC 280
1-10 Struttura motore
Option: Funzione:
[0]*Asynchron Per motori asincroni.
[1] PM, non-
salient SPM,
non Sat
44
[2] PM, salient
IPM, non Sat.
[3] PM, salient
IPM, Sat.
Per motori a magnete permanente (PM)
con magneti montati sulla supercie (non
salienti). Fare riferimento da
parametro 1-14 Damping Gain no a
parametro 1-17 Voltage lter time const. per
dettagli sull'ottimizzazione del funzionamento del motore.
Per motori a magneti permanenti (PM) con
magneti interni (salienti), senza controllo di
saturazione dell'induttanza.
Per motori a magnete permanente (PM)
con magneti interni (salienti), con controllo
di saturazione dell'induttanza.
1-14 Damping Gain
Range: Funzione:
120%* [ 0 -
250 %]
Il guadagno di smorzamento stabilizza la
macchina PM. Il valore del guadagno dello
smorzamento controlla le prestazioni dinamiche
della macchina PM. Un elevato guadagno di
smorzamento fornisce un'elevata prestazione
dinamica e un basso guadagno di smorzamento
fornisce una ridotta prestazione dinamica. La
prestazione dinamica è collegata ai dati della
macchina e al tipo di carico. Se il guadagno di
smorzamento è troppo alto o troppo basso, il
controllo diventa instabile.
1-17 Voltage lter time const.
Range: Funzione:
Size
related*
[ 0.001 - 1s]Ridurre l'inusso dell'ondulazione ad
alta frequenza e la risonanza del
sistema nel calcolo della tensione di
alimentazione. Senza questo ltro, le
ondulazioni nelle correnti possono
distorcere la tensione calcolata e
compromettere la stabilità del sistema.
1-20 Motor Power
Option: Funzione:
[2] 0.12 kW - 0.16 hp
[3] 0.18 kW - 0.25 hp
[4] 0.25 kW - 0.33 hp
[5] 0.37 kW - 0.5 hp
[6] 0.55 kW - 0.75 hp
[7] 0.75 kW - 1 hp
[8] 1.1 kW - 1.5 hp
[9] 1.5 kW - 2 hp
[10] 2.2 kW - 3 hp
[11] 3 kW - 4 hp
[12] 3.7 kW - 5 hp
[13] 4 kW - 5.4 hp
[14] 5.5 kW - 7.5 hp
[15] 7.5 kW - 10 hp
[16] 11 kW - 15 hp
[17] 15 kW - 20 hp
[18] 18.5 kW - 25 hp
[19] 22 kW - 30 hp
[20] 30 kW - 40 hp
1-15 Low Speed Filter Time Const.
Range: Funzione:
Size
related*
[ 0.01 20 s]
Questa costante di tempo viene usata
al di sotto del 10% della velocità
nominale. Ottenere un controllo rapido
attraverso una costante di tempo di
smorzamento breve. Tuttavia, se questo
valore è troppo piccolo, il controllo
diventa instabile.
1-22 Tensione motore
Range: Funzione:
Size
related*
[50 - 1000V]Immettere la tensione motore
nominale in base ai dati di targa del
motore. Il valore di default
corrisponde all'uscita nominale
dell'unità.
1-23 Motor Frequency
1-16 High Speed Filter Time Const.
Range: Funzione:
Size
related*
[ 0.01 20 s]
Questa costante di tempo viene usata
al di sopra del 10% della velocità
nominale. Ottenere un controllo rapido
attraverso una costante di tempo di
smorzamento breve. Tuttavia, se questo
valore è troppo piccolo, il controllo
diventa instabile.
Range: Funzione:
AVVISO!
Questo parametro non può essere
regolato mentre il motore è in funzione.
Size
related*
[ 20
Selezionare la frequenza del motore dai dati di
- 500
targa del motore. Per un funzionamento a 87
Hz]
Hz con motori a 230/440 V, impostare il valore
in base ai dati di targa per 230 V/50 Hz.
Adattare parametro 4-14 Motor Speed High Limit
[Hz] e parametro 3-03 Maximum Reference
all'applicazione da 87 Hz.
34 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 37

Descrizioni dei parametri Guida alla Programmazione
1-24 Corrente motore
Range: Funzione:
Size
related*
[ 0.01 -
10000.00 A]
Immettere il valore di corrente
nominale del motore dai dati di targa
del motore. Questi dati vengono
utilizzati per calcolare la coppia del
motore, la protezione termica del
motore e così via.
1-25 Vel. nominale motore
Range: Funzione:
Size
related*
[50 - 60000
RPM]
Immettere il valore di velocità
nominale del motore dai dati di
targa del motore. Questi dati
vengono utilizzati per calcolare le
compensazioni del motore.
1-26 Motor Cont. Rated Torque
Range: Funzione:
Size
related*
[ 0.1 10000
Nm]
Impostare il valore dai dati di targa del
motore. Il valore di default corrisponde
all'uscita nominale dell'unità. Questo
parametro è disponibile quando
parametro 1-10 Struttura motore è impostato
su [1] PM, non salient SPM, non Sat, [2] PM,
salient IPM, non Sat, oppure [3] PM, salient
IPM, Sat, vale a dire il parametro è valido
solo per motori PM, SPM non salienti e IPM
salienti.
1-29 Adattamento automatico motore (AMA)
Option: Funzione:
AVVISO!
Questo parametro non può essere
regolato mentre il motore è in funzione.
AVVISO!
Il morsetto 27 Ingresso digitale
(parametro 5-12 Ingr. digitale morsetto 27)
è impostato per default su ruota libera
negato. Questa impostazione signica che
l'AMA non può essere eseguita se il
morsetto 27 è disinserito.
La funzione AMA migliora le prestazioni
dinamiche del motore mediante l'ottimizzazione
automatica, a motore fermo, dei parametri
motore avanzati (da parametro 1-30 Resist.
statore (RS) a parametro 1-35 Reattanza principale
(Xh)).
[0]*O Nessuna funzione.
1-29 Adattamento automatico motore (AMA)
Option: Funzione:
[1] Abilit.AMA
compl.
[2] Abilitare
AMA
ridotto
A seconda dell'opzione selezionata in
parametro 1-10 Motor Construction, l'AMA viene
eseguito con parametri diversi.
Se viene selezionato [0] Asynchron,
•
l'AMA viene eseguito su:
- Parametro 1-30 Stator
Resistance (Rs).
- Parametro 1-31 Rotor
Resistance (Rr).
- Parametro 1-33 Stator Leakage
Reactance (X1).
- Parametro 1-35 Main
Reactance (Xh).
Se viene selezionato [1] PM, non-salient
•
SPM, non Sat , l'AMA viene eseguito su:
- Parametro 1-30 Stator
Resistance (Rs).
- Parametro 1-37 d-axis
Inductance (Ld).
Se viene selezionato [2] PM, salient IPM,
•
non Sat, l'AMA viene eseguito su:
- Parametro 1-30 Stator
Resistance (Rs).
- Parametro 1-37 d-axis
Inductance (Ld).
- Parametro 1-38 q-axis
Inductance (Lq).
Se viene selezionato [3] PM, salient IPM,
•
Sat, l'AMA viene eseguito su:
- Parametro 1-30 Stator
Resistance (Rs).
- Parametro 1-37 d-axis
Inductance (Ld).
- Parametro 1-38 q-axis
Inductance (Lq).
- Parametro 1-44 d-axis
Inductance Sat. (LdSat).
- Parametro 1-45 q-axis
Inductance Sat. (LqSat).
Eettuare un AMA ridotto in cui viene
determinata solo la resistenza di statore R
(parametro 1-30 Stator Resistance (Rs)) nel
sistema. Selezionare questa opzione se si utilizza
un ltro LC tra il convertitore di frequenza e il
motore.
4 4
s
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 35
Page 38

Descrizioni dei parametri
VLT® Midi Drive FC 280
Quando parametro 1-10 Struttura motore è impostato su
opzioni che consentono la modalità motore permanente,
l'unica opzione disponibile è [1] Abilit.AMA compl..
Attivare la funzione AMA premendo [Hand on] dopo aver
selezionato [1] Abilit.AMA compl. o [2] Abilitare AMA ridotto.
Dopo una sequenza normale, il display visualizza il
messaggio: Premere [OK] per terminare l'AMA. Dopo aver
premuto [OK], il convertitore di frequenza è pronto per
44
funzionare.
AVVISO!
Per un adattamento ottimale del convertitore di
•
frequenza, eseguire l'AMA su un motore freddo.
L'AMA non può essere eettuato quando il
•
motore è in funzione.
AVVISO!
Evitare una coppia rigenerativa esterna durante l'AMA.
1-31 Rotor Resistance (Rr)
Range: Funzione:
Size
related*
[ 0 -
9999.000
Ohm]
Immettere il valore di resistenza dello
statore. Il valore può essere ottenuto
da una scheda tecnica del motore
oppure eettuando un AMA su un
motore freddo. L'impostazione di
fabbrica viene calcolata dal convertitore di frequenza in base ai dati di
targa del motore.
1-33 Stator Leakage Reactance (X1)
Range: Funzione:
Size
related*
[ 0.0 -
9999.000
Ohm]
Impostare il valore della reattanza di
dispersione statore. Il valore può
essere ottenuto da una scheda
tecnica del motore oppure
eettuando un AMA su un motore
freddo. L'impostazione di fabbrica
viene calcolata dal convertitore di
frequenza in base ai dati di targa del
motore.
AVVISO!
Se una delle impostazioni nel gruppo parametri 1-2* Dati
motore viene modicata, i parametri avanzati del motore,
da parametro 1-30 Resist. statore (RS) a
parametro 1-39 Poli motore, tornano alle impostazioni di
fabbrica.
Se viene usato un ltro LC, impostare il convertitore di
frequenza per funzionare nella modalità di controllo U/f
(consigliato), o eseguire un AMA ridotto in modalità VVC+.
Se non viene utilizzato un
ltro LC, eseguire un AMA
completo.
1-30 Stator Resistance (Rs)
Range: Funzione:
Size
related*
[ 0.0 -
9999.000
Ohm]
AVVISO!
Questo parametro non può
essere regolato mentre il
motore è in funzione.
Impostare il valore della resistenza di
statore. Fare riferimento al valore
nella scheda tecnica del motore o
eettuare un AMA a motore freddo.
1-35 Main Reactance (Xh)
Range: Funzione:
Size
related*
[ 0.0 -
9999.00
Ohm]
Impostare la reattanza principale del
motore utilizzando uno dei metodi
seguenti:
Eseguire l'AMA su un motore
•
freddo. Il convertitore di
frequenza misura il valore dal
motore.
Immettere il valore X
•
manualmente. I valori sono
indicati dal fornitore del motore.
Usare l'impostazione di fabbrica
•
Xh. Il convertitore di frequenza
stabilisce l'impostazione sulla
base dei dati di targa del motore.
1-37 d-axis Inductance (Ld)
Range: Funzione:
Size related* [ 0 - 1000
mH]
Impostare il valore dell'induttanza
asse d. Vedere la scheda tecnica
del motore a magneti permanenti.
h
36 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 39

Descrizioni dei parametri Guida alla Programmazione
1-38 q-axis Inductance (Lq)
Range: Funzione:
Size related* [ 0.000 -
1000 mH]
AVVISO!
Questo parametro non può
essere regolato mentre il
motore è in funzione.
Impostare il valore dell’induttanza
asse q. Il valore è riportato sulla
scheda tecnica del motore.
1-39 Poli motore
Range: Funzione:
Size
related*
[2 100 ]
AVVISO!
Questo parametro non può essere
regolato mentre il motore è in
funzione.
Immettere il numero di poli del motore.
Il valore dei poli motore deve sempre
essere un numero pari perché si riferisce al
numero totale di poli, non alla coppia di
poli.
1-42 Motor Cable Length
Range: Funzione:
50 m* [0 - 100 m] Impostare la lunghezza del cavo motore in
metri.
1-43 Motor Cable Length Feet
Range: Funzione:
164 ft* [0 - 328 ft] Impostare la lunghezza del cavo motore.
L'unità di lunghezza è il piede.
1-44 d-axis Inductance Sat. (LdSat)
Range: Funzione:
Size
related
[ 0 1000
mH]
Questo parametro è attivo solo quando
parametro 1-10 Motor Construction è
impostato su [3] PM, salient IPM, Sat.
Questo parametro corrisponde alla
saturazione dell'induttanza dell'asse d. Il
valore di default è il valore impostato in
parametro 1-37 d-axis Inductance (Ld). Nella
maggior parte dei casi, il valore di default
non deve essere modicato. Se il fornitore del
motore fornisce una curva di saturazione,
immettere il valore di induzione dall'asse d
che equivale al 100% del valore nominale.
4 4
1-40 Forza c.e.m. a 1000 giri/minuto
Range: Funzione:
Size
related*
[0 9000 V]
Impostare la forza c.e.m. nominale per il
motore a 1000 giri/minuto.
La forza c.e.m. è la tensione generata da un
motore PM quando non è collegato alcun
convertitore di frequenza e l'albero è girato
verso l'esterno. Normalmente la forza c.e.m.
è specicata per la velocità nominale del
motore oppure per 1000 giri/min. tra due
fasi. Se il valore non è disponibile per una
velocità del motore di 1000 giri/min.,
calcolare il valore corretto come segue: Se la
forza c.e.m. è, per esempio 320 V a 1800
giri/minuto, può essere calcolata a 1000 giri/
minuto:
Esempio
Forza c.e.m. 320 V a 1800 giri/minuto. Forza
c.e.m. = (tensione/giri/min.)*1000 =
(320/1800)*1000 = 178.
Questo parametro è attivo solo quando
parametro 1-10 Motor Construction è
impostato sulle opzioni che abilitano motori
PM (a magneti permanenti).
AVVISO!
Quando si usano i motori PM, si
raccomanda di usare le resistenze
freno.
1-45 q-axis Inductance Sat. (LqSat)
Range: Funzione:
Size
related*
[ 0 1000
mH]
Questo parametro è attivo solo quando
parametro 1-10 Motor Construction è
impostato su [3] PM, salient IPM, Sat.
Questo parametro corrisponde alla
saturazione dell'induttanza dell'asse q. Il
valore di default è il valore impostato in
parametro 1-38 q-axis Inductance (Lq). Nella
maggior parte dei casi, il valore di default
non deve essere modicato. Se il fornitore
del motore fornisce una curva di saturazione,
immettere il valore di induzione dall'asse q
che equivale al 100% del valore nominale.
1-46 Position Detection Gain
Range: Funzione:
100 %* [ 20 -
200 %]
Regolare l'ampiezza dell'impulso di prova
durante il rilevamento della posizione
all'avvio. Regolare questo parametro per
migliorare la misurazione della posizione.
1-48 Current at Min Inductance for d-axis
Range: Funzione:
100 % [ 20 - 200 %] Usare questo parametro per impostare il
punto di saturazione dell'induttanza.
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 37
Page 40

Magn. current
130BB780.10
Hz
Par.1-50
90%
Par.1-52
Descrizioni dei parametri
VLT® Midi Drive FC 280
1-49 Current at Min Inductance for q-axis
Range: Funzione:
100 % [ 20 -
200 %]
44
Questo parametro specica il valore di
saturazione della curva dell'induttanza q. Dal 20
al 100% di questo parametro, l'induttanza viene
approssimata linearmente a causa di
parametro 1-38 q-axis Inductance (Lq) e
parametro 1-45 q-axis Inductance Sat. (LqSat).
Questi parametri sono legati alle compensazioni
del carico di targa del motore, al tipo di carico
dell'applicazione e alla funzione del freno
elettronico per l'arresto rapido / la ritenuta del
motore.
1-56 U/f Characteristic - F
Range: Funzione:
Size
related*
[ 0 -
500.0
Hz]
Immettere i punti di frequenza per formare
una caratteristica U/f che corrisponda al
motore. La tensione in ogni punto è denita
in parametro 1-55 U/f Characteristic - U.
Per realizzare una caratteristica U/f basata su
6 tensioni e frequenze denibili fare
riferimento a Disegno 4.2.
1-50 Magnetizz. motore a vel. nulla.
Range: Funzione:
100%* [0 -
300 %
]
Usare questo parametro insieme a
parametro 1-52 Min velocità magnetizz. normale
[Hz] per ottenere un carico termico dierente sul
motore nel funzionamento a bassa velocità.
Impostare un valore percentuale della corrente
magnetizzante nominale. Un valore troppo basso
può ridurre la coppia sull'albero motore.
Disegno 4.2 Esempio della caratteristica
U/f
1-60 Low Speed Load Compensation
Range: Funzione:
100 %* [0 -
300 %]
Disegno 4.1 Magnetizzazione del motore
Immettere il valore di compensazione della
tensione a bassa velocità in percentuale.
Questo parametro viene usato per ottimizzare
la prestazione di carico a bassa velocità.
Questo parametro è attivo solo se
parametro 1-10 Struttura motore = [0]
Asynchron.
1-52 Min Speed Normal Magnetising [Hz]
Range: Funzione:
1 Hz* [ 0.1 -
10.0 Hz]
Impostare la frequenza richiesta per la
corrente di magnetizzazione normale. Usare
questo parametro insieme a
parametro 1-50 Magnetizz. motore a vel. nulla.,
quindi vedere Disegno 4.1.
1-55 U/f Characteristic - U
Range: Funzione:
Size
related*
[0 - 1000V]Immettere la tensione in ogni punto di
frequenza per formare manualmente
una caratteristica U/f che corrisponda al
motore. I punti di frequenza sono
deniti in parametro 1-56 U/f Characte-
ristic - F
1-61 High Speed Load Compensation
Range: Funzione:
100 %* [0 -
300 %]
Immettere il valore di compensazione della
tensione di carico ad alta velocità in
percentuale. Questo parametro è usato per
ottimizzare la prestazione di carico ad alta
velocità. Questo parametro è attivo solo se
parametro 1-10 Struttura motore = [0]
Asynchron.
1-62 Slip Compensation
Range: Funzione:
Size
related*
[ -400 -
399.0 %]
Immettere il valore percentuale per la
compensazione dello scorrimento per
compensare la tolleranza nel valore di
n
. La compensazione dello
M,N
scorrimento viene calcolata automaticamente, vale a dire in base alla velocità
nominale del motore n
M,N
.
38 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 41

Descrizioni dei parametri Guida alla Programmazione
1-63 Costante di tempo compens. scorrim.
Range: Funzione:
0.1 s* [0.05 - 5 s] Immettere la velocità di reazione della
compensazione dello scorrimento. Un valore
alto comporta una reazione lenta mentre un
valore basso comporta una reazione veloce.
In caso di problemi di risonanza a bassa
frequenza, prolungare l'impostazione del
tempo.
1-64 Resonance Dampening
Range: Funzione:
100%* [0 -
500 %]
Immettere il valore di smorzamento della
risonanza. Impostare parametro 1-64 Resonance
Dampening e parametro 1-65 Resonance
Dampening Time Constant per eliminare
problemi di risonanza ad alta frequenza. Per
ridurre l'oscillazione di risonanza, aumentare il
valore di parametro 1-64 Resonance Dampening.
1-65 Resonance Dampening Time Constant
Range: Funzione:
0.005 s* [ 0.001 -
0.05 s]
Impostare parametro 1-64 Resonance
Dampening e parametro 1-65 Resonance
Dampening Time Constant per eliminare
problemi di risonanza ad alta frequenza.
Scegliere la costante di tempo che fornisce
lo smorzamento ideale.
1-66 Min. Current at Low Speed
Range: Funzione:
50 %* [ 0 -
120 %]
Immettere la corrente motore minima a bassa
velocità. L'aumento di questa corrente
migliora la coppia del motore a bassa
velocità.
Parametro 1-66 Min. Current at Low Speed
viene abilitato solo per un motore PM.
1-70 PM Start Mode
Selezionare la modalità di avviamento del motore PM. Per inizializzare il nucleo del controllo VVC+ per un motore PM
precedentemente a ruota libera. Attivo per motori PM in VVC
solo se il motore viene arrestato (o funziona a una velocità molto
bassa).
+
Option: Funzione:
[0] * Rotor Detection Stimare l'angolo elettrico del rotore e
usare questo angolo come punto di
avviamento. Questa opzione è la selezione
standard per applicazioni industriali. Se il
riaggancio al volo rileva che il motore
funziona a bassa velocità o si è fermato, il
convertitore di frequenza rileva la
posizione del rotore (l'angolo) e avvia il
motore da quella posizione.
1-70 PM Start Mode
Selezionare la modalità di avviamento del motore PM. Per inizializzare il nucleo del controllo VVC+ per un motore PM
precedentemente a ruota libera. Attivo per motori PM in VVC
solo se il motore viene arrestato (o funziona a una velocità molto
bassa).
+
Option: Funzione:
[1] Parking La funzione di parcheggio applica corrente
CC attraverso l'avvolgimento dello statore
e ruota il rotore alla posizione dello zero
elettrico. Questa opzione viene utilizzata
tipicamente per applicazioni con pompe e
ventole. Se la funzione riaggancio al volo
rileva che il motore funziona a bassa
velocità o si è fermato, il convertitore di
frequenza trasmette una corrente CC per
far parcheggiare il motore a un angolo e
quindi avviare il motore da quella
posizione.
1-71 Ritardo avv.
Range: Funzione:
0 s* [0 - 10s]Questo parametro consente un ritardo del tempo
di avviamento. Il convertitore di frequenza inizia
con la funzione di avviamento selezionata in
parametro 1-72 Funz. di avv.. Impostare il ritardo
all'avviamento no all'inizio dell'accelerazione.
1-72 Start Function
Option: Funzione:
Selezionare la funzione di avviamento durante
il ritardo all'avviamento. Questo parametro è
collegato a parametro 1-71 Ritardo avv..
[0] DC Hold/
delay time
[1] DC-Brake/
delay time
[2]*Coast/delay
time
[3] Start speed
cw
Alimentare il motore con una corrente di
mantenimento CC (parametro 2-00 DC Hold/
Motor Preheat Current) durante il tempo di
ritardo avviamento.
Alimentare il motore con una corrente di
mantenimento CC (parametro 2-01 DC Brake
Current) durante il tempo di ritardo
avviamento.
Motore a ruota libera durante il tempo di
ritardo avviamento (inverter disinserito).
Possibile solo con VVC+. Indipendentemente
dal valore applicato dal segnale di riferimento,
la velocità di uscita applica l'impostazione della
velocità di avviamento in parametro 1-75 Start
Speed [Hz], mentre la corrente di uscita
corrisponde all'impostazione della corrente di
avviamento in parametro 1-76 Start Current.
Questa funzione viene generalmente utilizzata
nelle applicazioni di sollevamento senza
contrappesi e, in particolare, nelle applicazioni
che prevedono un motore conico, in cui
4 4
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 39
Page 42

Descrizioni dei parametri
VLT® Midi Drive FC 280
1-72 Start Function
Option: Funzione:
l'avviamento è in senso orario, seguito dalla
rotazione nel direzione dei riferimenti.
[4] Horizontal
operation
44
[5] VVC+
clockwise
Possibile solo con VVC+.
Per ottenere la funzione descritta in
parametro 1-75 Start Speed [Hz] e
parametro 1-76 Start Current durante il tempo
di ritardo avviamento. Il motore ruota nel
senso del riferimento. Se il segnale di
riferimento è uguale a 0, parametro 1-75 Start
Speed [Hz] viene ignorato e la velocità di uscita
va a 0. La corrente di uscita corrisponde all'impostazione della corrente di avviamento in
parametro 1-76 Start Current.
La corrente di avviamento viene calcolata
automaticamente. Questa funzione usa solo la
velocità di avviamento nel tempo di ritardo
avviamento.
1-73 Flying Start
Option: Funzione:
AVVISO!
Questo parametro non può essere
modicato mentre il motore è in
funzione.
AVVISO!
Per ottenere le prestazioni migliori di
riaggancio al volo, i dati avanzati del
motore da parametro 1-30 Stator
1-73 Flying Start
Option: Funzione:
[4] Enab.
Always
Ref. Dir.
Consentire il riaggancio al volo a ogni comando
di avviamento. La ricerca viene eseguita solo
nella direzione di riferimento.
1-75 Start Speed [Hz]
Range: Funzione:
Size
related*
[ 0 -
500.0
Hz]
Questo parametro può essere utilizzato in
applicazioni di sollevamento (motore a rotore
conico). Impostare la velocità di avviamento
del motore. Dopo il segnale di avviamento,
la velocità di uscita salta al valore impostato.
Impostare la funzione di avviamento in
parametro 1-72 Start Function su [3] Vel. di
avv. s. orario, [4] Funz. orizzontale o [5] VVC
in senso orario e impostare un tempo di
ritardo avviamento in parametro 1-71 Ritardo
avv..
1-76 Start Current
Range: Funzione:
Size
related*
[ 0 10000
A]
Alcuni motori, per esempio motori a rotore
conico, richiedono una sovracorrente/
velocità di avviamento per disinnestare il
rotore. Per ottenere questa sovralimentazione, impostare la corrente desiderata in
questo parametro. Impostare
parametro 1-72 Start Function su [3] Vel. di
avv. s. orario o [4] Funz. orizzontale, e
impostare un tempo di ritardo avviamento
in parametro 1-71 Ritardo avv..
+
Resistance (Rs) a parametro 1-35 Main
Reactance (Xh) devono essere corretti.
1-78 Compressor Start Max Speed [Hz]
Range: Funzione:
Agganciare un motore che gira liberamente a
causa di una caduta di tensione dell'alimentazione di rete.
[0]*Disabled Nessuna funzione.
[1] Enabled Abilitare il convertitore di frequenza per
agganciare e controllare un motore in rotazione.
Quando parametro 1-73 Flying Start è abilitato,
parametro 1-71 Ritardo avv. e
parametro 1-72 Start Function non hanno alcuna
funzione.
[2] Enabled
Always
[3] Enabled
Ref. Dir.
Consentire il riaggancio al volo a ogni comando
di avviamento.
Abilitare il convertitore di frequenza per
agganciare e controllare un motore in rotazione.
La ricerca viene eseguita solo nella direzione di
riferimento.
0 Hz* [ 0 -
500
Hz]
Questo parametro consente una coppia di
avviamento elevata. Il tempo che trascorre da
quando viene dato il segnale di avviamento no
al superamento della velocità in questo
parametro diventa una zona di avviamento. Nella
zona di avviamento, il limite di corrente e il limite
di coppia del motore vengono impostati sul
valore massimo possibile per la combinazione
convertitore di frequenza/motore. Il tempo senza
la protezione dal limite di corrente e dal limite di
coppia non deve eccedere il valore impostato in
parametro 1-79 Compressor Start Max Time to Trip.
Altrimenti il convertitore di frequenza scatta con
allarme 18, Avviamento fallito.
40 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 43

Descrizioni dei parametri Guida alla Programmazione
1-79 Compressor Start Max Time to Trip
Range: Funzione:
5 s* [0 -
10 s]
Il tempo che trascorre da quando viene dato il
segnale di avviamento no al superamento della
velocità impostata in parametro 1-78 Compressor
Start Max Speed [Hz] non deve superare il tempo
impostato in questo parametro. Altrimenti il convertitore di frequenza scatta con allarme 18,
Avviamento fallito. Qualsiasi tempo impostato in
parametro 1-71 Ritardo avv. per l'uso di una
funzione di avviamento deve essere eseguito entro
il limite di tempo.
1-80 Function at Stop
Option: Funzione:
Seleziona la funzione del convertitore di
frequenza dopo un comando di arresto o
dopo che la velocità è stata decelerata in
rampa secondo quanto impostato in
parametro 1-82 V. min. funz. all'arr. [Hz].
Le scelte disponibili dipendono dall'impostazione in parametro 1-10 Motor Construction.
[0] Asynchron.
•
- [0] Evol. libera.
- [1] Corr. CC.
- [3] Premagnetizz..
[1] PM, non-salient SPM, non Sat.
•
[2] PM, salient IPM, non Sat.
•
[3] PM, salient IPM, Sat.
•
- [0] Evol. libera.
- [1] Corr. CC.
[0]*Coast Lasciare il motore in evoluzione libera.
[1] DC hold /
Motor
Preheat
[3] Pre-
magnetizing
Alimentare il motore con una corrente di
mantenimento CC (vedere parametro 2-00 DC
Hold/Motor Preheat Current).
Formare un campo magnetico mentre il
motore viene arrestato. Questo permette al
motore di generare rapidamente una coppia
in risposta ai comandi (sono nei motori
asincroni). Questa funzione di premagnetizzazione non aiuta in occasione del primo
comando di avviamento in assoluto. Per premagnetizzare il sistema per il primo
avviamento in assoluto esistono due soluzioni:
1. Avviare il convertitore di frequenza
con riferimento a 0 giri/min e
attendere un tempo uguale a 2–4
volte le costanti di tempo del rotore
(vedere l'equazione in basso) prima
1-80 Function at Stop
Option: Funzione:
di aumentare la velocità di
riferimento.
2. 2a Impostare
parametro 1-71 Ritardo avv.
sul tempo di pre-magnetizzazione (2–4 costanti di
tempo del rotore).
2b Impostare
parametro 1-72 Start
Function su [0] Corr. CC.
2c Impostare la grandezza
della corrente di
mantenimento CC
(parametro 2-00 DC Hold/
Motor Preheat Current deve
essere uguale a I
U
/(1,73 x Xh).
nom
Esempio di costanti di tempo rotore=
(Xh+X2)/(6,3*Freq_nom*Rr)
1 kW=0,2 s
10 kW=0,5 s
100 kW=1,7 s
pre-mag
1-82 V. min. funz. all'arr. [Hz]
Range: Funzione:
0 Hz* [0 - 20 Hz] Impostare la frequenza di uscita alla quale
attivare parametro 1-80 Funzione all'arresto.
1-83 Precise Stop Function
Option: Funzione:
[0]*Precise ramp
stop
[1] Counter stop
with reset
Agisce in modo ottimale solo quando la
velocità di funzionamento (per esempio la
velocità di funzionamento di un nastro
trasportatore) è costante. Si tratta di un
controllo ad anello aperto. Si ottiene una
elevata precisione ripetitiva nel punto di
arresto.
Contare il numero di impulsi, di solito da un
encoder, generando un segnale di arresto
dopo che un numero preprogrammato di
impulsi, denito in parametro 1-84 Precise
Stop Counter Value, è stato ricevuto nel
morsetto 29 o nel morsetto 33. Si tratta di
una retroazione diretta con un controllo ad
anello chiuso monodirezionale. La funzione
del contatore è attivata (inizio conteggio) in
relazione al segnale di avviamento (quando
questo passa da arresto ad avviamento).
Dopo ogni arresto preciso, viene ripristinato
il numero di impulsi contati durante la
decelerazione no a 0 giri/minuto.
4 4
=
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 41
Page 44

Descrizioni dei parametri
VLT® Midi Drive FC 280
1-83 Precise Stop Function
Option: Funzione:
[2] Counter stop
without reset
44
[3] Speed
compensated
stop
[4] Speed
compensated
counter stop
with reset
[5] Speed
compensated
counter stop
without reset
Come in [1] Cont. stop con reset, ma il
numero di impulsi contato durante la
decelerazione no a 0 giri/min viene
detratto dal valore del contatore immesso in
parametro 1-84 Precise Stop Counter Value. È
possibile utilizzare questa funzione di
ripristino per compensare eventuali distanze
aggiuntive eettuate durante il tempo di
decelerazione oppure per diminuire gli
eetti del progressivo logoramento delle
parti meccaniche.
Arresto precisamente allo stesso punto,
indipendentemente dalla velocità presente.
Il segnale di arresto viene ritardato
internamente quando la velocità presente è
inferiore alla velocità massima (impostata in
parametro 4-19 Max Output Frequency). Il
ritardo viene calcolato in base alla velocità
di riferimento del convertitore di frequenza
e non in base alla velocità corrente.
Assicurarsi che il convertitore di frequenza
abbia eettuato una rampa di salita prima
di attivare l'arresto con compensazione
velocità.
Come [3] Stop con vel. comp., ma dopo ogni
arresto preciso viene ripristinato il numero
di impulsi contati durante la rampa di
decelerazione no a 0 giri/min.
Come [3] Stop con vel. comp., ma il numero
di impulsi contato durante la rampa di
decelerazione no a 0 giri/min viene
detratto dal valore del contatore immesso in
parametro 1-84 Precise Stop Counter Value. È
possibile utilizzare questa funzione di
ripristino per compensare eventuali distanze
aggiuntive eettuate durante il tempo di
decelerazione oppure per diminuire gli
eetti del progressivo logoramento delle
parti meccaniche.
1-84 Precise Stop Counter Value
Range: Funzione:
100000* [0 -
999999999 ]
Immettere il valore del contatore da
utilizzare nella funzione arresto di
precisione integrata in
parametro 1-83 Precise Stop Function. La
frequenza massima consentita nel
morsetto 29 o 33 è 32 kHz.
1-85 Precise Stop Speed Compensation Delay
Range: Funzione:
10 ms* [0 - 100
ms]
Immettere il ritardo per sensori, PLC e così via
da utilizzare in parametro 1-83 Precise Stop
Function. Nella modalità di arresto con
compensazione di velocità, il ritardo a
frequenze diverse ha una maggiore inuenza
sulla modalità di arresto.
1-88 AC Brake Gain
Range: Funzione:
1.4* [1.0 -
Questo parametro viene usato per impostare la
2.0 ]
capacità della potenza di frenatura CA (impostare il
tempo di rampa di decelerazione quando l'inerzia è
costante). Se la tensione del collegamento CC non è
superiore al valore di scatto della tensione del
collegamento CC, la coppia del generatore può
essere regolata con questo parametro. Quanto più
elevato è il guadagno del freno CA, tanto più forte
è la capacità frenante del freno. Se è uguale a 1,0,
ciò signica che non è presente alcuna capacità
frenante del freno CA.
AVVISO!
Se è presente una coppia generatore
continua, una coppia generatore più alta
provoca una corrente motore più elevata e il
motore diventa molto caldo. In questa
condizione, parametro 2-16 AC Brake, Max
current può essere usato per proteggere il
motore dal surriscaldamento.
1-90 Motor Thermal Protection
Option: Funzione:
[0] * No protection Motore continuamente in sovraccarico
quando non è richiesto alcun avviso o
scatto del convertitore di frequenza.
[1] Thermistor
warning
[2] Thermistor
trip
[3] ETR warning1Calcola il carico e attiva un avviso nel
Attiva un avviso quando il termistore
collegato nel motore reagisce in caso di una
sovratemperatura del motore.
Arresta (fa scattare) il convertitore di
frequenza quando il termistore collegato nel
motore reagisce in caso di sovratemperatura
del motore.
Il valore di disinserimento del termistore
deve essere >3 kΩ.
Integrare un termistore (sensore PTC) nel
motore come protezione degli avvolgimenti.
display quando il motore è in sovraccarico.
Programmare un segnale di avviso tramite
una delle uscite digitali.
42 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 45

Descrizioni dei parametri Guida alla Programmazione
1-90 Motor Thermal Protection
Option: Funzione:
[4] ETR trip 1 Calcola il carico e arresta (fa scattare) il
convertitore di frequenza quando il motore
è in sovraccarico. Programmare un segnale
di avviso tramite una delle uscite digitali. Il
segnale appare in caso di un avviso e se il
convertitore di frequenza scatta (avviso
termico).
[22] ETR Trip -
Extended
Detection
1-93 Thermistor Source
Option: Funzione:
AVVISO!
Questo parametro non può essere
modicato mentre il motore è in
funzione.
4 4
[0] * None
[1] Analog
Input 53
[2] Analog
Input 54
[3] Digital input
18
[4] Digital input
19
[5] Digital input
32
[6] Digital input
33
AVVISO!
Impostare l'ingresso digitale su [0] PNP
- attivo a 24 V in parametro 5-00 Digital
I/O Mode.
Selezionare l'ingresso al quale dovrebbe
essere collegato il termistore (sensore PTC).
Un'opzione ingresso analogico [1] Ingr.
analog. 53 o [2] Ingr. analog. 54 non può
essere selezionata se l'ingresso analogico è
già utilizzato come risorsa di riferimento
(selezionato in parametro 3-15 Reference 1
Source, parametro 3-16 Reference 2 Source o
parametro 3-17 Reference 3 Source.
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 43
Page 46

Descrizioni dei parametri
4.3 Parametri: 2-** Brakes
VLT® Midi Drive FC 280
2-00 DC Hold/Motor Preheat Current
Range: Funzione:
50 %* [0 -
160 %]
44
Impostare la corrente di mantenimento quale
percentuale della corrente motore nominale I
parametro 1-24 Motor Current. Questo parametro
serve a mantenere il funzionamento del motore
(coppia di mantenimento) o per il preriscaldamento del motore. Questo parametro è attivo
se viene selezionato [0] Corr. CC/t. ritardo in
parametro 1-72 Start Function, o se viene
selezionato [1] Corrente CC/prerisc. mot. in
parametro 1-80 Function at Stop.
M,N
AVVISO!
2-04 DC Brake Cut In Speed
Range: Funzione:
0 Hz* [ 0 - 500
Hz]
Questo parametro viene utilizzato per
impostare la velocità di inserimento del freno
CC alla quale deve essere attiva la corrente di
frenatura CC (parametro 2-01 Corrente di
frenatura CC) con un comando di arresto.
2-06 Parking Current
Range: Funzione:
100 %* [0 - 150 %] Impostare la corrente come percentuale
della corrente nominale del motore,
parametro 1-24 Motor Current.
Il valore massimo dipende dalla corrente
nominale del motore. Evitare di applicare il
100 % della corrente per troppo tempo.
Potrebbe danneggiare il motore.
2-07 Tempo di parcheggio
Range: Funzione:
3 s* [0.1 - 60 s] Imposta la durata della corrente di parcheggio
impostata in parametro 2-06 Corrente di
parcheggio dopo l'attivazione.
2-01 Corrente di frenatura CC
Range: Funzione:
50%* [0 -
150 %]
AVVISO!
SURRISCALDAMENTO DEL MOTORE
2-10 Brake Function
Option: Funzione:
[0]*O Nessuna resistenza freno installata.
Il valore massimo dipende dalla corrente
nominale del motore.
Per evitare danni al motore causati dal
surriscaldamento, non farlo funzionare al
100% per troppo tempo.
Impostare la corrente come % della corrente
nominale del motore, parametro 1-24 Corrente
motore. Quando la velocità è inferiore al limite
impostato in parametro 2-04 Velocità inserimento
frenatura CC [Hz] o quando è attiva la funzione
Frenatura CC a recupero (nel gruppo di parametri
5-1* Ingressi digitali impostato su [5] Freno CC neg.;
o tramite la porta seriale), in caso di comando di
arresto viene applicata una corrente di frenatura
CC. Vedere parametro 2-02 Tempo di frenata CC per
la durata.
[1] Resistor
brake
[2] AC brake Migliorare la frenatura senza usare una resistenza
Una resistenza freno è incorporata nel sistema
per dissipare l'energia di frenatura in eccesso
come calore. Il collegamento di una resistenza
freno consente una maggiore tensione del
collegamento CC durante la frenatura (funzionamento rigenerativo). La funzione resistenza
freno è solo attiva in convertitori di frequenza
con un freno dinamico integrale.
di frenatura. Questo parametro controlla una
sovramagnetizzazione del motore quando gira
con un carico generatore. Questa funzione può
migliorare la funzione OVC. L'aumento di perdite
elettriche nel motore consente alla funzione OVC
di accrescere la coppia di frenata senza superare
il limite di tensione.
2-02 Tempo di frenata CC
Range: Funzione:
10 s* [0 - 60 s] Immettere la durata della corrente di frenatura
CC impostata in parametro 2-01 Corrente di
frenatura CC dopo l'attivazione.
44 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
AVVISO!
Il freno CA non è ecace quanto la
frenatura dinamica con resistenza.
Il freno CA è per la modalità VVC+ ad
anello aperto e chiuso.
Page 47

Descrizioni dei parametri Guida alla Programmazione
2-11 Brake Resistor (ohm)
Range: Funzione:
Size
related*
[ 0 65535
Ohm]
Impostare il valore della resistenza di
frenatura in Ω. Questo valore viene usato
per monitorare la potenza trasmessa alla
resistenza di frenatura.
Parametro 2-11 Brake Resistor (ohm) è solo
attivo in convertitori di frequenza dotati di
un freno dinamico integrale. Utilizzare
questo parametro per i valori senza
decimali.
2-12 Brake Power Limit (kW)
Range: Funzione:
Size
related*
[0.001
- 2000
kW]
Parametro 2-12 Limite di potenza freno (kW) è
la potenza media prevista dissipata nella
resistenza di frenatura per un periodo di 120
s. Viene usato come limite di monitoraggio
per parametro 16-33 Energia freno/2 min e
specica il momento di dare un avviso/
allarme.
Per calcolare parametro 2-12 Limite di
potenza freno (kW), è possibile usare la
seguente formula.
P
br, avg
P
br,avg
nella resistenza di frenatura. Rbr è la
resistenza del reostato di frenatura. tbr è il
tempo di frenatura attivo entro il periodo di
120 s Tbr.
Ubr è la tensione CC dove è attiva la
resistenza di frenatura. Per unità T4, la
tensione CC è 770 V, che può essere ridotta
tramite parametro 2-14 Riduzione tensione
freno.
2
U
V × tbrs
br
W =
RbrΩ × Tbrs
è la potenza media prevista dissipata
AVVISO!
Se Rbr è sconosciuta o se Tbr è diversa
da 120 s, l'approccio pratico sta nel far
funzionare l'applicazione di frenatura,
visualizzare parametro 16-33 Energia
freno/2 min e quindi immettere questo
valore + 20% in parametro 2-12 Limite
di potenza freno (kW).
2-14 Riduzione tensione freno
Range: Funzione:
0 V* [ 0 - 70 V] L'impostazione di questo parametro può
modicare la resistenza di frenatura
(parametro 2-11 Brake Resistor (ohm)).
2-16 AC Brake, Max current
Range: Funzione:
100 %* [0 -
160 %]
Immettere la corrente massima consentita
per l'uso del freno CA al ne di evitare il
surriscaldamento degli avvolgimenti motore.
AVVISO!
Parametro 2-16 AC Brake, Max current
non è disponibile per tutti i motori PM,
per esempio, tutte le opzioni PM in
parametro 1-10 Motor Construction.
2-17 Over-voltage Control
Option: Funzione:
Il controllo sovratensione (OVC) riduce il
rischio di scatto del convertitore di frequenza a
causa di una sovratensione sul collegamento
CC dovuta alla potenza generativa erogata dal
carico.
[0] * Disabled Nessun OVC richiesto.
[1] Enabled
(not at
stop)
[2] Enabled Attivare OVC.
Attivare l'OVC tranne quando si usa un segnale
di stop per arrestare il convertitore di
frequenza.
AVVISO
RISCHIO DI LESIONI PERSONALI E DANNI
ALLE APPARECCHIATURE
L'abilitazione di OVC in applicazioni di
sollevamento può provocare lesioni
personali e danni alle apparecchiature.
Non abilitare OVC in tali applicazioni.
2-19 Over-voltage Gain
Range: Funzione:
100 %* [0 - 200 %] Selezionare il guadagno di sovratensione.
2-20 Release Brake Current
Range: Funzione:
0 A* [0 -
100 A]
Impostare la corrente motore per il rilascio del
freno meccanico in presenza di una condizione di
avviamento. Il limite superiore è specicato in
parametro 16-37 Corrente max inv..
AVVISO!
Quando viene selezionata l'uscita di
controllo del freno meccanico ma non è
collegato alcun freno meccanico, la
funzione non funziona con l'impostazione
di fabbrica a causa di una corrente motore
troppo bassa.
4 4
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 45
Page 48

Descrizioni dei parametri
2-22 Activate Brake Speed [Hz]
Range: Funzione:
0 Hz* [0 - 400 Hz] Impostare la frequenza motore per l'atti-
vazione del freno meccanico in presenza di
una condizione di arresto.
2-23 Activate Brake Delay
Range: Funzione:
44
0 s* [0 - 5s]Immettere il tempo di ritardo freno a ruota libera
dopo il tempo rampa di decelerazione. L'albero
viene tenuto a velocità zero con piena coppia di
mantenimento. Accertarsi che il freno meccanico
abbia bloccato il carico prima che il motore inizi
la modalità ruota libera.
VLT® Midi Drive FC 280
46 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 49

Descrizioni dei parametri Guida alla Programmazione
4.4 Parametri: 3-** Reference/Ramps
3-00 Reference Range
Option: Funzione:
[0] * Min - Max Selezionare il campo del segnale di riferimento
e il segnale di retroazione. I valori del segnale
possono essere solo positivi o positivi e
negativi.
[1] -Max -
+Max
Sia per i valori positivi che negativi (entrambe
le direzioni) relative a parametro 4-10 Motor
Speed Direction.
3-01 Reference/Feedback Unit
Option: Funzione:
Selezionare l'unità per riferimenti e retroazioni del
PID controllo di processo.
[0] None
[1] %
[2] RPM
[3] Hz
[4] Nm
[5] PPM
[10] 1/min
[12] Pulse/s
[20] l/s
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
[25] m³/h
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[80] kW
[120] GPM
[121] gal/s
[122] gal/min
[123] gal/h
[124] CFM
[125] ft³/s
[126] ft³/min
[127] ft³/h
[130] lb/s
3-01 Reference/Feedback Unit
Option: Funzione:
[131] lb/min
[132] lb/h
[140] ft/s
[141] ft/min
[145] ft
[150] lb ft
[160] °F
[170] psi
[171] lb/in2
[172] in WG
[173] ft WG
[180] HP
3-02 Minimum Reference
Range: Funzione:
0
Reference
Feedback
Unit*
[ 0 4999
Reference
Feedback
Unit]
Immettere il riferimento minimo. Il
riferimento minimo è il valore minimo
ottenuto dalla somma di tutti i
riferimenti.
Il riferimento minimo è solo attivo se
parametro 3-00 Reference Range è
impostato su [0] Min - Max.
L'unità di riferimento minimo corrisponde
a:
L'opzione in
•
parametro 1-00 Conguration
Mode
L'unità selezionata in
•
parametro 3-01 Reference/
Feedback Unit.
3-03 Maximum Reference
Range: Funzione:
Size
related*
[-4999.0 - 4999
ReferenceFeedbackUnit]
Immettere il riferimento massimo. Il
riferimento massimo è il valore
massimo ottenuto dalla somma di
tutti i riferimenti.
L'unità di riferimento massimo
corrisponde a:
•
•
4 4
L'opzione selezionata in
parametro 1-00 Conguration Mode.
L'unità selezionata in
parametro 3-00 Reference
Range.
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 47
Page 50

X
100
%
0-100
Z
Y
X+X*Y/100
P 3-14
130BA278.10
Descrizioni dei parametri
VLT® Midi Drive FC 280
3-04 Reference Function
Option: Funzione:
[0] * Sum Sommare entrambe le fonti di riferimento
[1] External/
Preset
esterne e preimpostate.
Utilizza le risorse di riferimento esterne o
quelle preimpostate. Passaggio da esterno a
preimpostato mediante un comando o un
ingresso digitale.
Disegno 4.3 Rif. relativo preimpostato
44
3-10 Riferim preimp.
Range: Funzione:
0 %* [-100 -
100 %]
3-11 Jog Speed [Hz]
Range: Funzione:
5 Hz* [ 0 - 500.0
Hz]
3-12 Catch up/slow Down Value
Range: Funzione:
0 %* [0 -
100 %]
3-14 Preset Relative Reference
Range: Funzione:
0 %* [-100 -
100 %]
Immettere no a 8 riferimenti preimpostati
diversi (0–7) in questo parametro usando una
programmazione ad array. Per la selezione dei
riferimenti dedicati, selezionare Rif. preimp. bit
0/1/2 [16], [17], o [18] per gli ingressi digitali
corrispondenti nel gruppo di parametri 5-1*
Ingressi digitali.
La velocità jog è la velocità di uscita ssata
a cui il convertitore funziona quando la
funzione jog è attivata. Vedere anche
parametro 3-80 Jog Ramp Time.
Inserire un valore in percentuale che viene
aggiunto o sottratto dal riferimento eettivo per
Catch up o Slow down. Se [28] Catch up viene
selezionato tramite uno degli ingressi digitali (da
parametro 5-10 Ingr. digitale morsetto 18 a
parametro 5-15 Ingresso digitale morsetto 33), il
valore percentuale viene aggiunto al riferimento
totale. Se [29] Slow down viene selezionato tramite
uno degli ingressi digitali (da parametro 5-10 Ingr.
digitale morsetto 18 a parametro 5-15 Ingresso
digitale morsetto 33), il valore percentuale viene
detratto dal riferimento totale.
Il riferimento corrente, X, viene aumentato o
diminuito con la percentuale Y impostata in
parametro 3-14 Rif. relativo preimpostato. Questo
produce il riferimento attuale Z. Il riferimento
attuale (X) è la somma degli ingressi selezionati
in parametro 3-15 Risorsa di rif. 1,
parametro 3-16 Risorsa di riferimento 2,
parametro 3-17 Risorsa di riferimento 3 e
parametro 8-02 Origine del controllo.
Disegno 4.4 Riferimento corrente
3-15 Reference 1 Source
Option: Funzione:
Selezionare l'ingresso di riferimento da
usare per il primo segnale di riferimento.
Parametro 3-15 Reference 1 Source,
parametro 3-16 Reference 2 Source e
parametro 3-17 Reference 3 Source
deniscono no a 3 diversi segnali di
riferimento. La somma di questi segnali
di riferimento denisce il riferimento
attuale.
[0] No function
[1] * Analog Input 53
[2] Analog Input 54
[7] Frequency input
29
[8] Frequency input
33
[11] Local bus
reference
[20] Digital pot.meter
[32] Bus PCD
3-16 Reference 2 Source
Option: Funzione:
Selezionare l'ingresso di riferimento da
usare per il primo segnale di riferimento.
Parametro 3-15 Reference 1 Source,
parametro 3-16 Reference 2 Source e
parametro 3-17 Reference 3 Source
deniscono no a 3 diversi segnali di
riferimento. La somma di questi segnali
di riferimento denisce il riferimento
attuale.
[0] No function
48 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 51

Descrizioni dei parametri Guida alla Programmazione
3-16 Reference 2 Source
Option: Funzione:
[1] Analog Input 53
[2] * Analog Input 54
[7] Frequency input
29
[8] Frequency input
33
[11] Local bus
reference
[20] Digital pot.meter
[32] Bus PCD
3-17 Reference 3 Source
Option: Funzione:
Selezionare l'ingresso di riferimento da
usare per il primo segnale di
riferimento. Parametro 3-15 Reference 1
Source, parametro 3-16 Reference 2
Source e parametro 3-17 Reference 3
Source deniscono no a 3 diversi
segnali di riferimento. La somma di
questi segnali di riferimento denisce il
riferimento attuale.
[0] No function
[1] Analog Input 53
[2] Analog Input 54
[7] Frequency input
29
[8] Frequency input
33
[11] * Local bus
reference
[20] Digital pot.meter
[32] Bus PCD
3-18 Relative Scaling Reference Resource
Option: Funzione:
Disegno 4.5 Riferimento corrente
risultante
[0] * No function
[1] Analog Input
53
[2] Analog Input
54
[7] Frequency
input 29
[8] Frequency
input 33
[11] Local bus
reference
3-40 Ramp 1 Type
Option: Funzione:
Selezionare il tipo di rampa desiderato in base
ai requisiti per accelerazione/decelerazione. Una
rampa lineare dà un'accelerazione costante
durante la rampa. Una rampa sinusoidale 2 dà
un'accelerazione non lineare.
[0] * Linear
[1] Sine
Ramp
[2] Sine 2
Ramp
Rampa S basata sui valori impostati in
parametro 3-41 Ramp 1 Ramp Up Time e
parametro 3-42 Ramp 1 Ramp Down Time.
4 4
3-18 Relative Scaling Reference Resource
Option: Funzione:
AVVISO!
Questo parametro non può essere
regolato mentre il motore è in
funzione.
Selezionare un valore variabile da sommare
al valore sso (denito in
parametro 3-14 Preset Relative Reference). La
somma dei valori ssi e variabili (denominata
Y in Disegno 4.5) viene moltiplicata per il
riferimento eettivo (denominato X in
Disegno 4.5). Questo prodotto viene quindi
aggiunto al riferimento eettivo (X+X*Y/100)
per fornire il riferimento eettivo risultante.
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 49
3-41 Ramp 1 Ramp Up Time
Range: Funzione:
Size
related*
[0.01 3600 s]
Immettere il tempo rampa di accelerazione,
vale a dire il tempo di accelerazione
necessario per passare da 0 giri/min alla
velocità del motore sincrono nS. Selezionare
un tempo rampa di accelerazione tale che la
corrente in uscita non superi il limite di
corrente impostato in parametro 4-18 Current
Limit durante la rampa. Il valore 0,00
corrisponde a 0,01 s nel modo velocità.
Vedere il tempo rampa di decelerazione in
parametro 3-42 Ramp 1 Ramp Down Time.
Par . 3 − 41 =
t
s xns Giri/ min.
acc
rif Giri/min.
Page 52

Descrizioni dei parametri
VLT® Midi Drive FC 280
3-42 Ramp 1 Ramp Down Time
Range: Funzione:
Size
related*
44
[0.01 3600 s]
Impostare il tempo rampa di decelerazione, vale a dire il tempo di
decelerazione dalla velocità del motore
sincrono ns a 0 giri/min. Selezionare un
tempo rampa di decelerazione tale in
modo da far sì che non si verichino
sovratensioni nell'inverter a causa del
funzionamento rigenerativo del motore
oppure tale che la corrente generata non
raggiunga il limite di corrente impostato in
parametro 4-18 Current Limit. Il valore 0,00
corrisponde a 0,01 s nel modo velocità.
Vedere tempo rampa di accelerazione in
parametro 3-41 Ramp 1 Ramp Up Time.
t
s xns Giri/ min.
Par . 3 − 42 =
dec
rif Giri/min.
3-50 Ramp 2 Type
Option: Funzione:
Selezionare il tipo di rampa desiderato in base
ai requisiti per accelerazione/decelerazione. Una
rampa lineare dà un'accelerazione costante
durante la rampa. Una rampa sinusoidale 2 dà
un'accelerazione non lineare.
[0] * Linear
[1] Sine
Ramp
[2] Sine 2
Ramp
Rampa S basata sui valori impostati in
parametro 3-51 Ramp 2 Ramp Up Time e
parametro 3-52 Ramp 2 Ramp Down Time.
3-52 Ramp 2 Ramp Down Time
Range: Funzione:
Size
related*
[0.01 3600 s]
Impostare il tempo rampa di decelerazione, vale a dire il tempo di
decelerazione dalla velocità nominale del
motore ns a 0 giri/min. Selezionare un
tempo rampa di decelerazione tale che
non si verichino sovratensioni nel convertitore di frequenza a causa del
funzionamento rigenerativo del motore
oppure tale che la corrente generata non
raggiunga il limite di corrente impostato
in parametro 4-18 Limite di corrente. Il
valore 0,00 corrisponde a 0,01 s nel modo
velocità. Vedere tempo rampa di accelerazione in parametro 3-51 Rampa 2 tempo
di accel..
Par . 3 − 52 =
3-60 Ramp 3 Type
Option: Funzione:
Selezionare il tipo di rampa desiderato in base
ai requisiti per accelerazione/decelerazione. Una
rampa lineare dà un'accelerazione costante
durante la rampa. Una rampa-S dà un'accelerazione non lineare.
[0] * Linear
[1] Sine
Ramp
[2] Sine 2
Ramp
Rampa S basata sui valori impostati in
parametro 3-61 Rampa 3 tempo di accel. e
t
s xns Giri/ min.
dec
rif Giri/min.
parametro 3-62 Rampa 3 tempo di decel..
3-51 Ramp 2 Ramp Up Time
Range: Funzione:
Size
related*
[0.01 3600 s]
Immettere il tempo rampa di accelerazione,
vale a dire il tempo di accelerazione
necessario per passare da 0 giri/min alla
velocità nominale del motore ns. Selezionare
un tempo rampa di accelerazione tale che la
corrente in uscita non superi il limite di
corrente impostato in parametro 4-18 Current
Limit durante la rampa. Il valore 0,00
corrisponde a 0,01 s nel modo velocità.
Vedere il tempo rampa di decelerazione in
parametro 3-52 Ramp 2 Ramp Down Time.
Par . 3 − 51 =
t
s xns Giri/ min.
acc
rif Giri/min.
3-61 Ramp 3 Ramp up Time
Range: Funzione:
Size
related*
[0.01 3600 s]
Immettere il tempo rampa di accelerazione,
vale a dire il tempo di accelerazione
necessario per passare da 0 giri/min alla
velocità nominale del motore ns. Selezionare
un tempo rampa di accelerazione tale che la
corrente in uscita non superi il limite di
corrente impostato in parametro 4-18 Limite
di corrente durante la rampa. Il valore 0,00
corrisponde a 0,01 s nel modo velocità.
Vedere il tempo rampa di decelerazione in
parametro 3-62 Rampa 3 tempo di decel..
50 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 53

130BD375.10
Time
P 3-80
Hz
P 4-14 Hz
high limit
P 1-25
Motor speed
Jog speed
P 3-19
P 3-80
Ramp up
(acc)
Ramp down
(dec)
t jog t jog
P 4-12 Hz
low limit
Descrizioni dei parametri Guida alla Programmazione
3-62 Ramp 3 Ramp down Time
Range: Funzione:
Size
related*
[0.01
- 3600
s]
Immettere il tempo rampa di decelerazione,
vale a dire il tempo di decelerazione dalla
velocità nominale del motore ns a 0 giri/min.
Selezionare un tempo rampa di decelerazione tale che non si verichino
sovratensioni nell'inverter a causa del funzionamento rigenerativo del motore oppure tale
che la corrente generata non raggiunga il
limite di corrente impostato in
parametro 4-18 Limite di corrente. Il valore
0,00 corrisponde a 0,01 s nel modo velocità.
Vedere tempo rampa di accelerazione in
parametro 3-61 Rampa 3 tempo di accel..
Par . 3 − 62 =
3-70 Ramp 4 Type
Option: Funzione:
Selezionare il tipo di rampa desiderato in base
ai requisiti per accelerazione/decelerazione. Una
rampa lineare dà un'accelerazione costante
durante la rampa. Una rampa-S dà un'accelerazione non lineare.
[0] * Linear
[1] Sine
Ramp
[2] Sine 2
Ramp
Rampa S basata sui valori impostati in
parametro 3-71 Rampa 4 tempo di accel. e
parametro 3-72 Rampa 4 tempo di decel..
3-71 Ramp 4 Ramp up Time
Range: Funzione:
Size
related*
[0.01 3600 s]
Immettere il tempo rampa di accelerazione,
vale a dire il tempo di accelerazione
necessario per passare da 0 giri/min alla
velocità nominale del motore ns. Selezionare
un tempo rampa di accelerazione tale che la
corrente in uscita non superi il limite di
corrente impostato in parametro 4-18 Limite
di corrente durante la rampa. Il valore 0,00
corrisponde a 0,01 s nel modo velocità.
Vedere il tempo rampa di decelerazione in
parametro 3-72 Rampa 4 tempo di decel..
Par . 3 − 71 =
t
s xns Giri/ min.
dec
rif Giri/min.
t
s xns Giri/ min.
acc
rif Giri/min.
3-72 Ramp 4 Ramp Down Time
Range: Funzione:
Size
related*
[0.01
- 3600
s]
Immettere il tempo rampa di decelerazione,
vale a dire il tempo di decelerazione dalla
velocità nominale del motore ns a 0 giri/min.
Selezionare un tempo rampa di decelerazione tale che non si verichino
sovratensioni nell'inverter a causa del funzionamento rigenerativo del motore oppure tale
che la corrente generata non raggiunga il
limite di corrente impostato in
parametro 4-18 Limite di corrente. Il valore
0,00 corrisponde a 0,01 s nel modo velocità.
Vedere tempo rampa di accelerazione in
parametro 3-71 Rampa 4 tempo di accel..
t
Par . 3 − 72 =
dec
3-80 Jog Ramp Time
Range: Funzione:
Size
related*
Disegno 4.6 Tempo Rampa Jog
[0.01
Immettere il tempo di rampa jog, vale a dire il
- 3600
tempo di accelerazione/decelerazione
s]
necessario per passare da 0 giri/min alla
frequenza nominale del motore ns. Assicurarsi
che la corrente di uscita risultante richiesta per
il tempo di rampa jog in questione non superi
il limite di corrente impostato in
parametro 4-18 Current Limit. Il tempo di
rampa jog viene avviato attivando un segnale
jog tramite l'LCP, un ingresso digitale
selezionato o la porta di comunicazione
seriale. Quando lo stato jog è disattivato, sono
validi i normali tempi di rampa.
4 4
s xns Giri/ min.
rif Giri/min.
t
s xns Giri/min.
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 51
Par . 3 − 80 =
ΔJogvelocità par . 3 − 19 Giri/min.
Jog
Page 54

130BD376.10
Time
Hz
P 4-14 Hz
high limit
Reference
P 1-25
Motor speed
low limit
P 4-12 Hz
P 3-81
Qramp
Qstop
Descrizioni dei parametri
VLT® Midi Drive FC 280
3-81 Quick Stop Ramp Time
Range: Funzione:
Size
related*
44
[0.01 3600 s]
Immettere il tempo di decelerazione arresto
rapido, vale a dire il tempo di decelerazione
per passare dalla velocità del motore
sincrono a 0 giri/min. Assicurarsi che nell'inverter non si crei alcuna sovratensione
dovuta a un funzionamento rigenerativo del
motore, necessario per ottenere il tempo
rampa di decelerazione dato. Assicurarsi
anche che la corrente generata necessaria
per ottenere il tempo rampa di decelerazione in questione non superi il limite di
corrente (impostato in parametro 4-18 Limite
di corrente). Attivare l'arresto rapido per
mezzo di un segnale su un ingresso digitale
selezionato oppure mediante la porta di
comunicazione seriale.
3-93 Maximum Limit
Range: Funzione:
100 %* [-200 -
200 %]
Impostare il valore massimo consentito per
il riferimento risultante. Questo è
consigliato se il potenziometro digitale
viene usato per la regolazione di precisione
del riferimento risultante.
3-94 Minimum Limit
Range: Funzione:
-100 % [-200 200 %]
Impostare il valore minimo consentito per il
riferimento risultante. Questo è consigliato
se il potenziometro digitale viene usato per
la regolazione di precisione del riferimento
risultante.
3-95 Ramp Delay
Range: Funzione:
1000
ms*
[0 3600000 ms]
Impostare il ritardo richiesto dall'attivazione della funzione potenziometro
digitale nché il convertitore di frequenza
inizia ad aumentare il riferimento. Con un
ritardo di 0 ms, il riferimento inizia ad
aumentare non appena viene attivato il
segnale aumento/diminuzione.
Disegno 4.7 Tempo rampa arr. rapido
3-90 Step Size
Range: Funzione:
0.10 %* [0.01 200 %]
Immettere la dimensione di incremento
richiesta per l'aumento/la riduzione come
valore percentuale della velocità del motore
sincrono, ns. Se viene attivato Aumenta/
Diminuisci, il riferimento risultante viene
aumentato/diminuito della quantità
impostata in questo parametro.
3-92 Power Restore
Option: Funzione:
[0] * O Ripristinare il riferimento del potenziometro digitale a
[1] On Ripristinare il più recente riferimento del
0% dopo l'accensione.
potenziometro digitale all'accensione.
3-96 Maximum Limit Switch Reference
Range: Funzione:
25 %* [0 -
200 %]
Immettere il riferimento massimo del necorsa.
Se la gru raggiunge un necorsa (OFF), e se la
velocità supera il valore in questo parametro,
allora la velocità viene ridotta automaticamente al valore in questo parametro. Se il
necorsa è disinserito, la velocità non può
superare il valore in questo parametro.
52 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 55

Descrizioni dei parametri Guida alla Programmazione
4.5 Parametri: 4-** Limits/Warnings
4-10 Motor Speed Direction
Option: Funzione:
[0] * Clockwise
AVVISO!
L'impostazione in parametro 4-10 Direz.
velocità motore inuisce su
parametro 1-73 Riaggancio al volo.
È consentito solo il funzionamento in senso
orario.
[2] Both
directions
È consentito il funzionamento sia in senso
orario sia in senso antiorario.
4-12 Limite Basso Velocità Motore [Hz]
Range: Funzione:
0 Hz* [ 0 -
500,0 Hz]
Immettere il limite minimo per la velocità del
motore. Il limite basso velocità motore può
essere impostato per corrispondere alla
frequenza di uscita minima dell'albero motore.
Il limite basso velocità motore non deve
superare l'impostazione in
parametro 4-14 Motor Speed High Limit [Hz].
4-14 Motor Speed High Limit [Hz]
Range: Funzione:
65
Hz*
[ 0.1 500
Hz]
AVVISO!
La frequenza di uscita massima non può
superare il 10% della frequenza di
commutazione dell'inverter
(parametro 14-01 Frequenza di
commutazione).
4-18 Current Limit
Range: Funzione:
Size
related*
[ 0 1000 %]
Questa è una reale funzione di limite di
corrente che persiste nell'intervallo fuori
limite. Tuttavia, a causa dell'indebolimento
di campo, la coppia motore al limite di
corrente si riduce di conseguenza quando
l'aumento di tensione si interrompe al di
sopra della velocità sincronizzata del
motore.
4-19 Max Output Frequency
Range: Funzione:
Size
related*
[ 0 -
AVVISO!
500
Questo parametro non può essere
Hz]
regolato mentre il motore è in funzione.
AVVISO!
La frequenza di uscita massima non può
superare il 10% della frequenza di
commutazione dell'inverter
(parametro 14-01 Frequenza di
commutazione).
Fornire un limite estremo per la frequenza di
uscita per una maggiore sicurezza nelle
applicazioni in cui sussiste il rischio di fuorigiri.
Questo limite è estremo in tutte le congu-
razioni (indipendentemente dall'impostazione
in parametro 1-00 Conguration Mode).
4 4
Immettere il limite massimo per la velocità del
motore. È possibile impostare il limite alto
velocità motore in modo tale da farlo
corrispondere al massimo consigliato dal
produttore per l'albero motore. Il limite alto
velocità motore deve essere superiore al valore
impostato in parametro 4-12 Limite Basso Velocità
Motore [Hz].
4-16 Torque Limit Motor Mode
Range: Funzione:
Size related* [ 0 - 1000 %] Questa funzione limita la coppia
sull'albero per proteggere l'installazione meccanica.
4-17 Torque Limit Generator Mode
Range: Funzione:
100 %* [ 0 - 1000 %] Questa funzione limita la coppia
sull'albero per proteggere l'installazione
meccanica.
4-20 Torque Limit Factor Source
Selezionare un ingresso analogico per la messa in scala delle
impostazioni in parametro 4-16 Torque Limit Motor Mode e
parametro 4-17 Torque Limit Generator Mode da 0% a 100% (o
viceversa). I livelli di segnale corrispondenti allo 0% e al 100%
sono deniti nella scala dell'ingresso analogico, per esempio nel
gruppo di parametri 6-1* Ingr. analog. 1. Questo parametro è solo
attivo quando parametro 1-00 Conguration Mode è impostato su
[0] Anello aper to o [1] Anello chiuso vel..
Option: Funzione:
[0] * No function
[2] Analog in 53
[4] Analog in 53 inv
[6] Analog in 54
[8] Analog in 54 inv
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 53
Page 56

Descrizioni dei parametri
VLT® Midi Drive FC 280
4-21 Speed Limit Factor Source
Selezionare un ingresso analogico per la messa in scala delle
impostazioni in parametro 4-19 Max Output Frequency da 0% a
100% (o viceversa). I livelli di segnale corrispondenti allo 0% e al
100% sono deniti nella scala dell'ingresso analogico, per
esempio nel gruppo di parametri 6-1* Ingr. analog. 1. Questo
parametro è solo attivo quando parametro 1-00 Conguration
Mode è in Modo coppia.
44
Option: Funzione:
[0] * No function
[2] Analog in 53
[4] Analog in 53 inv
[6] Analog in 54
[8] Analog in 54 inv
4-22 Break Away Boost
Option: Funzione:
[0] * O
[1] On Il convertitore di frequenza fornisce una corrente
superiore ai livelli di corrente normali per aumentare la
coppia di spunto.
Disegno 4.8 Errore di velocità retroazione motore
4-32 Motor Feedback Loss Timeout
4-30 Motor Feedback Loss Function
Option: Funzione:
Questa funzione viene usata per monitorare
la consistenza nel segnale di retroazione,
vale a dire se il segnale di retroazione è
disponibile. Seleziona la reazione che il
convertitore di frequenza dovrebbe avere in
caso di rilevamento di un errore di
retroazione. L'azione selezionata viene
eettuata quando il segnale di retroazione
dierisce dalla velocità di uscita impostata in
parametro 4-31 Motor Feedback Speed Error
per un periodo superiore al valore impostato
in parametro 4-32 Motor Feedback Loss
Timeout.
[0] * Disabled
[1] Warning
[2] Trip
[3] Jog
[4] Freeze
Output
[5] Max Speed
[6] Switch to
Open Loop
4-31 Motor Feedback Speed Error
Range: Funzione:
20 Hz* [0 - 50 Hz] Selezionare l'errore di velocità massimo
consentito (velocità di uscita rispetto alla
retroazione).
Range: Funzione:
0.05 s* [0 - 60s]Impostare il valore di timeout che consente di
superare l'errore di velocità impostato in
parametro 4-31 Motor Feedback Speed Error
prima di abilitare la funzione selezionata in
parametro 4-30 Motor Feedback Loss Function.
4-40 Warning Freq. Low
Range: Funzione:
Size
related*
[ 0 -
Utilizzare questo parametro per impostare un
500
limite inferiore per il campo di frequenza.
Hz]
Quando la velocità del motore scende al di
sotto di questo limite, il display indica Velocità
bassa. Il bit di avviso 10 viene impostato in
parametro 16-94 Ext. Status Word. Il relè di
uscita può essere congurato per indicare
questo avviso. La spia di avvertimento dell'LCP
non si accende quando è raggiunto il limite
impostato.
4-41 Warning Freq. High
Range: Funzione:
Size
related*
[ 0 -
Utilizzare questo parametro per impostare un
500
limite superiore per il campo di frequenza.
Hz]
Quando la velocità del motore supera questo
limite, il display indica Vel. alta. Il bit di avviso
9 viene impostato in parametro 16-94 Ext.
Status Word. Il relè di uscita può essere
congurato per indicare questo avviso. La spia
di avvertimento dell'LCP non si accende
quando è raggiunto il limite impostato.
54 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 57

Descrizioni dei parametri Guida alla Programmazione
4-42 Adjustable Temperature Warning
Range: Funzione:
0* [ 0 - 255 ] Utilizzare questo parametro per impostare il
limite di temperatura del motore.
4-50 Avviso corrente bassa
Range: Funzione:
0 A* [ 0 -
194.0 A]
Immettere il valore I
motore scende al di sotto di questo limite,
viene impostato un bit nella parola di stato.
Questo valore può anche essere programmato
per produrre un segnale sull'uscita digitale o
sull'uscita a relè.
. Quando la corrente
LOW
4-51 Avviso corrente alta
Range: Funzione:
Size
related*
[ 0.0 -
194.0 A]
Immettere il valore I
corrente motore supera questo limite,
viene impostato un bit nella parola di
stato. Questo valore può anche essere
programmato per produrre un segnale
sull'uscita digitale o sull'uscita a relè.
. Quando la
HIGH
4-54 Warning Reference Low
Range: Funzione:
-4999* [-4999 4999 ]
Immettere il limite basso del riferimento.
Quando il riferimento eettivo scende al di
sotto di questo limite, il display indica Ref
Il bit 20 viene impostato in
parametro 16-94 Ext. Status Word. Il relè di
uscita o l'uscita digitale possono essere
congurati per indicare questo avviso.
Raggiunto il limite impostato in questo
parametro, la spia di avviso dell'LCP non si
accende.
4-55 Warning Reference High
Range: Funzione:
4999* [-4999 -
4999 ]
Utilizzare questo parametro per impostare un
limite alto per l'intervallo di riferimento.
Quando il riferimento attuale supera questo
limite, il display mostra Ref
impostato in parametro 16-94 Ext. Status Word.
Il relè di uscita o l'uscita digitale possono
essere congurati per indicare questo avviso.
Raggiunto il limite impostato in questo
parametro, la spia di avviso dell'LCP non si
accende.
. Il bit 19 viene
HIGH
LOW
4-56 Warning Feedback Low
Range: Funzione:
-4999
ProcessCtrlUnit*
[-4999 - 4999
ProcessCtrlUnit]
Utilizzare questo parametro
per impostare un limite basso
per il campo di retroazione.
Se la retroazione scende al di
sotto di questo limite, il
display indica Retroaz.ba. Il
bit 6 viene impostato in
parametro 16-94 Ext. Status
Word. Il relè di uscita o
l'uscita digitale possono
essere congurati per
indicare questo avviso.
Raggiunto il limite impostato
in questo parametro, la spia
di avviso dell'LCP non si
accende.
4 4
4-57 Warning Feedback High
Range: Funzione:
4999
ProcessCtrlUnit*
.
[-4999 - 4999
ProcessCtrlUnit]
Utilizzare questo parametro
per impostare un limite alto
per il campo di retroazione.
Quando la retroazione supera
questo limite, il display
mostra Retroaz. alta. Il bit 5
viene impostato in
parametro 16-94 Ext. Status
Word. Il relè di uscita o
l'uscita digitale possono
essere congurati per
indicare questo avviso.
Raggiunto il limite impostato
in questo parametro, la spia
di avviso dell'LCP non si
accende.
4-58 Funzione fase motore mancante
Option: Funzione:
[0] Disattivato Non viene visualizzato alcun allarme in caso di
mancanza di una fase del motore.
[1] * Abilitato Viene visualizzato un allarme in caso di
mancanza di una fase del motore.
4-61 Bypass Speed From [Hz]
Range: Funzione:
0 Hz* [ 0 - 500 Hz] Alcuni sistemi richiedono di evitare
determinate velocità di uscita per problemi
di risonanza nel sistema. Immettere i limiti
inferiori delle velocità da evitare.
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 55
Page 58

Descrizioni dei parametri
4-63 Bypass Speed To [Hz]
Range: Funzione:
0 Hz* [ 0 - 500 Hz] Alcuni sistemi richiedono di evitare
determinate velocità di uscita per problemi
di risonanza nel sistema. Immettere i limiti
superiori delle velocità da evitare.
4-64 Semi-Auto Bypass Set-up
44
Option: Funzione:
[0] * O
[1] Enable
VLT® Midi Drive FC 280
56 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 59

Descrizioni dei parametri Guida alla Programmazione
4.6 Parametri: 5-** Digital In/Out
5-00 Modo I/O digitale
Option: Funzione:
Impostare la modalità NPN o PNP per gli
ingressi digitali 18, 19, 27, 29, 32 e 33. Modo
I/O digitale.
[0] * PNP - attivo
a 24V
[1] NPN - attivo
a 0V
Azione sul fronte di salita dell'impulso (0). I
sistemi PNP sono collegati con uno stadio di
pull-down a (GND).
Azione sugli impulsi con fronte negativo (1). I
sistemi NPN vengono collegati in pull-up a
+24 V all'interno del convertitore di
frequenza.
5-01 Terminal 27 Mode
Option: Funzione:
AVVISO!
Questo parametro non può essere regolato
mentre il motore è in funzione.
[0] * Input Denire il morsetto 27 come un ingresso digitale.
[1] Output Denire il morsetto 27 come un'uscita digitale.
4.6.1 5-1* Ingressi digitali
Gli ingressi digitali vengono utilizzati per selezionare varie
funzioni nel convertitore di frequenza.
Ingressi digitali da 5-10 a 5-15
[0] Nessuna
funzione
[1] Reset Ripristina il convertitore di frequenza dopo
[2] Evol. libera
neg.
[3] Ruota lib. e
ripr. inv.
[4] Arr. rapido
(negato)
[5] Freno CC
neg.
Nessuna reazione ai segnali trasmessi al
morsetto.
uno scatto/un allarme. Non tutti gli allarmi
possono essere ripristinati.
(Ingresso digitale di default 27): Arresto a
ruota libera, ingresso negato (NC). Il convertitore di frequenza lascia il motore in
evoluzione libera. 0 logico⇒arresto a ruota
libera.
Ripristino e arresto a ruota libera, ingresso
negato (NC). Lascia il motore in evoluzione
libera e ripristina il convertitore di frequenza.
0 logico⇒arresto a ruota libera e ripristino.
Ingresso negato (NC). Genera un arresto in
base al tempo di rampa arresto rapido
impostato in parametro 3-81 Tempo rampa
arr. rapido. Quando il motore si arresta,
l'albero è in evoluzione libera. 0
logico⇒Arresto rapido.
Ingresso negato per frenatura CC (NC).
Arresta il motore alimentandolo con una
corrente CC per un determinato lasso di
tempo. Vedere parametro 2-01 Corrente di
frenatura CC no a parametro 2-04 Velocità
inserimento frenatura CC [Hz]. La funzione è
attiva soltanto quando il valore in
parametro 2-02 Tempo di frenata CC è diverso
da 0. 0 logico⇒frenatura in CC.
[6] Stop (negato)
AVVISO!
Quando il convertitore di frequenza è
al limite della coppia e ha ricevuto un
comando di arresto, potrebbe non
fermarsi da solo. Per assicurare che il
convertitore di frequenza si arresti,
congurare un'uscita digitale come
[27] Coppia lim. e arresto e collegare
questa uscita digitale a un ingresso
digitale che è congurato come ruota
libera.
Funzione stop negato. Genera una funzione
di arresto quando il morsetto selezionato
passa da 1 logico a 0 logico. L'arresto viene
eseguito in base al tempo di rampa
selezionato (parametro 3-42 Rampa 1 tempo
di decel., parametro 3-52 Rampa 2 tempo di
decel., parametro 3-62 Ramp 3 Ramp down
Time, parametro 3-72 Ramp 4 Ramp Down
Time).
[8] Avviamento Ingresso digitale di default 18. Selezionare
avvio per un comando di avvio/arresto. 1
logico = avvio, 0 logico = arresto.
[9] Avv. a
impulsi
[10] Inversione Ingresso digitale di default 19. Cambia il
[11] Avv.
inversione
[12] Abilitaz.
+avviam.
[13] Abilitaz.
+inversione
[14] Marcia jog Ingresso digitale di default 29. Utilizzare per
[15] Rif. preimp.
abil.
Il motore viene avviato se viene applicato un
impulso per almeno 2 ms. Il motore si ferma
se viene attivato [6] Stop (negato) o viene
dato un comando di ripristino (mediante DI).
senso di rotazione dell'albero motore.
Selezionare 1 logico per l'inversione. Il
segnale di inversione cambia solo il senso di
rotazione, ma non attiva la funzione di
avviamento. Selezionare entrambe le
direzioni in parametro 4-10 Direz. velocità
motore. La funzione non è attiva nel
processo ad anello chiuso.
Utilizzato per l’avviamento/arresto e per
l'inversione sullo stesso cavo. Non sono
ammessi segnali di avviamento contemporanei.
Disabilitare il movimento in senso antiorario
e consentire il senso orario.
Disabilitare il movimento in senso antiorario
e consentire il senso antiorario.
attivare la velocità jog. Vedere
parametro 3-11 Velocità di jog [Hz].
Commutazione tra il riferimento esterno e il
riferimento preimpostato. Si presume che in
parametro 3-04 Funzione di riferimento sia
stato selezionato [1] Esterno/Preimpost. 0
4 4
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 57
Page 60

Speed [rpm] Speed [rpm]
Time[sec] Time[sec]a b
130BB462.10
Read Timer:
20 timer tides
Read Timer:
20 timer tides
Time Start
Time counter
Sample time
Timer
Pulse
130BB464.10
Descrizioni dei parametri
VLT® Midi Drive FC 280
logico = riferimento esterno attivo; 1 logico
= è attivo uno degli 8 riferimenti
preimpostati.
[16] Rif. preimp.
bit 0
[17] Rif. preimp.
bit 1
[18] Rif. preimp.
44
bit 2
I bit di riferimento preimpostati 0, 1 e 2
consentono di scegliere uno degli otto
riferimenti preimpostati in base a Tabella 4.1.
Come [16] Rif. preimp. bit 0.
Come [16] Rif. preimp. bit 0.
Velocità invariata 0 0
Ridotta del valore % 1 0
Aumentata del valore % 0 1
Ridotta del valore % 1 1
Tabella 4.2 Shut Down/Catch Up
viene attivato per oltre 400 ms, il riferimento
risultante segue l'impostazione nel parametro
della rampa di salita/discesa 3-x1/3-x2.
Shut down Catch-up
Bit rif. preimp. 2 1 0
Rif. preimp. 0 0 0 0
Rif. preimp. 1 0 0 1
Rif. preimp. 2 0 1 0
Rif. preimp. 3 0 1 1
Rif. preimp. 4 1 0 0
Rif. preimp. 5 1 0 1
Rif. preimp. 6 1 1 0
Rif. preimp. 7 1 1 1
Tabella 4.1 Bit rif. preimp.
[19] Blocco
riferimento
Bloccare il riferimento attuale che ora è il
punto che abilita/condiziona l’utilizzo di [21]
Accelerazione e [22] Decelerazione. Se vengono
utilizzati [21] Accelerazione o [22] Decelerazione,
la variazione di velocità segue sempre la rampa
2 (parametro 3-51 Rampa 2 tempo di accel. e
parametro 3-52 Rampa 2 tempo di decel.) nell'intervallo 0–parametro 3-03 Riferimento max..
[20] Uscita
congelata
AVVISO!
Se è attivo [20] Blocco uscita, non è
possibile arrestare il convertitore di
frequenza impostando il segnale in [8]
Avviamento su basso. Arrestare il convertitore di frequenza tramite un morsetto
programmato per [2] Evol. libera neg. o
[22] Decele-
razione
[23] Selez.
setup bit
0
[24] Selez.
setup bit
1
[26] Stop prec.
(negato)
[27] Start e
Stop prec.
[28] Catch-up Aumentare il valore di riferimento per la
[29] Slow
down
[32] Impulso
basato sul
tempo
Uguale a [21] Accelerazione.
Selezionare [23] Selez. setup bit 0 o [1] Selez.
setup bit 1 per selezionare 1 dei 2 setup.
Impostare parametro 0-10 Setup attivo su [9]
Multi setup.
Ingresso digitale di default 32. Uguale a [23]
Selez. setup bit 0.
La funzione di arresto preciso negato è
disponibile per i morsetti 18 o 19.
percentuale (relativa) impostata in
parametro 3-12 Valore di catch-up/slow down.
Ridurre il valore di riferimento della percentuale
(relativa) impostata in parametro 3-12 Valore di
catch-up/slow down.
Misurare la durata tra i fronti d'impulso. Questo
parametro ha una risoluzione più alta a basse
frequenze, ma non è precisa a frequenze più
alte. Questo principio ha una frequenza di
disinserimento che lo rende inadatto per
encoder con risoluzioni basse a basse velocità
(per esempio 30 PPR).
[3] Ruota lib. e ripr. inv.
Bloccare la frequenza corrente del motore (Hz)
che ora è il punto che abilita/condiziona
l’utilizzo di [21] Accelerazione e [22] Decele-
[21] Accele-
razione
razione. Se vengono utilizzati [21] Accelerazione
o [22] Decelerazione, la variazione di velocità
segue sempre la rampa 2
(parametro 3-51 Rampa 2 tempo di accel. e
parametro 3-52 Rampa 2 tempo di decel.) nell'intervallo 0–parametro 1-23 Frequen. motore.
Selezionare [21] Accelerazione e [22] Decele-
razione se si desidera il controllo digitale
dell'accelerazione e decelerazione
(potenziometro motore). Attivare questa
funzione selezionando [19] Blocco riferimento o
[20] Blocco uscita. Se accelerazione/decelerazione viene attivato per meno di 400 ms, il
riferimento risultante viene aumentato/ridotto
dello 0,1%. Se accelerazione/decelerazione
a: Risoluzione bassa
dell'encoder
Disegno 4.9 Durata tra i fronti d'impulso
[34] Rampa bit0Abilitare una scelta tra una delle 4 rampe
disponibili, in base a Tabella 4.3.
[35] Rampa bit1Uguale a Rampa bit 0.
b: Risoluzione
dell'encoder standard
58 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 61

Descrizioni dei parametri Guida alla Programmazione
Bit rampa preimpostato 1 0
Rampa 1 0 0
Rampa 2 0 1
Rampa 3 1 0
Rampa 4 1 1
Tabella 4.3 Bit rampa preimpostati
[40] Avv. prec. su
imp.
[41] Stop pr. su
imp. neg.
[51] Interblocco
esterno
[58] DigiPot
paranco
[60] Contatore A (Solo morsetto 29 o 33) Ingresso per il
[61] Contatore A (Solo morsetto 29 o 33) Ingresso per il
[62] Ripristino
cont. A
[63] Contatore B (Solo morsetto 29 o 33) Ingresso per il
[64] Contatore B (Solo morsetto 29 o 33) Ingresso per il
[65] Ripristino
cont. B
[72] Errore PID
inver.
[73] Ripr. PID parteIRipristinare la parte I del controllore PID di
Un avvio preciso su impulso richiede
solamente un impulso di 3 ms sui morsetti
18 o 19 quando si usa
parametro 1-83 Precise Stop Function [1]
Cont. stop con reset o [2] Cont. stop s. reset.
Quando si raggiunge il valore di
riferimento, il convertitore di frequenza
abilita internamente il segnale di Arresto
preciso. Questo signica che il convertitore
di frequenza attiva la funzione Arresto
preciso quando viene raggiunto il valore
del contatore di parametro 1-84 Precise
Stop Counter Value.
Inviare un segnale di arresto da impulso se
è stata attivata la funzione arresto di
precisione in parametro 1-83 Precise Stop
Function. La funzione Stop prec. (negato)
da impulso è disponibile per i morsetti 18
o 19.
Questa funzione consente di assegnare un
guasto esterno al convertitore di
frequenza. Tale guasto viene gestito come
un allarme generato internamente.
conteggio incrementale nel contatore SLC.
conteggio in decremento nel contatore
SLC.
Ingresso per il ripristino del contatore A.
conteggio incrementale nel contatore SLC.
conteggio in decremento nel contatore
SLC.
Ingresso per il ripristino del contatore B.
Invertire l'errore risultante dal regolatore
PID di processo. Disponibile solo se
parametro 1-00 Modo congurazione è
impostata su [6] Riavvolgit. super, [7] PID
veloc. OL esteso.
processo. Equivalente a
parametro 7-40 Ripristino PID proc. parte I.
Disponibile solo se parametro 1-00 Modo
congurazione è impostata su [6] Riavvolgit.
super o [7] PID veloc. OL esteso.
[74] Abilitaz. PID Questa opzione consente il controllore PID
di processo esteso. Equivalente a
parametro 7-50 PID di processo PID esteso.
Disponibile solo se parametro 1-00 Modo
congurazione è impostata su [7] PID veloc.
OL esteso.
[150] Vai a Home Il convertitore di frequenza si sposta sulla
posizione home.
[151] Switch rif.
Home
[155] Limite HW
positivo
[156] Limite HW
negativo
[157] Pos. arresto
rapido inv
[160] Vai a pos.
destinazione
[162] Pos. Idx Bit0 Indice di posizione bit 0. Questa opzione è
[163] Pos. Idx Bit1 Indice di posizione bit 1. Questa opzione è
[164] Pos. Idx Bit2 Indice di posizione bit 2. Questa opzione è
[171] Finecorsa
senso orario
inverso
[172] Finecorsa
senso
antiorario
inverso
Indicare lo stato dell'interruttore con
riferimento home. On signica che è stata
raggiunta la posizione home, o signica
che la posizione home non è stata
raggiunta.
È stato superato il limite di posizione
hardware positivo. Questa opzione è attiva
sul fronte di discesa.
È stato superato il limite di posizione
hardware negativo. Questa opzione è
attiva sul fronte di discesa.
Arrestare il convertitore di frequenza
durante il posizionamento con il tempo di
rampa impostato in
parametro 32-81 Motion Ctrl Quick Stop
Ramp. Questa opzione è ecace solo
quando parametro 37-00 Application Mode
è impostato su [2] Controllo posizione.
Il convertitore di frequenza si sposta sulla
posizione di destinazione. Questa opzione
è ecace solo quando
parametro 37-00 Application Mode è
impostato su [2] Controllo posizione.
ecace solo quando
parametro 37-00 Application Mode è
impostato su [2] Controllo posizione.
ecace solo quando
parametro 37-00 Application Mode è
impostato su [2] Controllo posizione.
ecace solo quando
parametro 37-00 Application Mode è
impostato su [2] Controllo posizione.
5-10 Ingr. digitale morsetto 18
Option: Funzione:
[8] * Avviamento Le funzioni sono descritte nel gruppo di
parametri 5-1* Ingressi digitali.
4 4
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 59
Page 62

Descrizioni dei parametri
VLT® Midi Drive FC 280
5-11 Ingresso digitale morsetto 19
4.6.2 5-3* Uscite digitali
Option: Funzione:
[10] * Inversione Le funzioni sono descritte nel gruppo di
parametri 5-1* Ingressi digitali.
Le 2 uscite digitali allo stato solido sono comuni per il
morsetti 27. Impostare la funzione I/O per il morsetto 27 in
parametro 5-01 Modo Morsetto 27.
5-12 Ingresso digitale morsetto 27
Option: Funzione:
[2] * Evol. libera neg. Le funzioni sono descritte nel gruppo di
44
parametri 5-1* Ingressi digitali.
5-13 Ingresso digitale morsetto 29
Option: Funzione:
[14] * Marcia jog Le funzioni sono descritte nel gruppo di
parametri 5-1* Ingressi digitali.
[32] Ingr. impulsi
5-14 Ingresso digitale morsetto 32
Option: Funzione:
[0] * Nessuna funzione Le funzioni sono descritte nel gruppo di
parametri 5-1* Ingressi digitali.
[82] Encoder input B
5-15 Ingresso digitale morsetto 33
Option: Funzione:
[0] * Nessuna funzione Le funzioni sono descritte nel gruppo di
parametri 5-1* Ingressi digitali.
[32] Ingr. impulsi
[81] Encoder input A
5-19 Terminal 37/38 Safe Torque O
Usare questo parametro per congurare la funzionalità STO.
L'avviso fa procedere il convertitore di frequenza a ruota libera e
consente il riavvio automatico. L'allarme fa procedere il convertitore di frequenza a ruota libera e richiede un riavvio manuale.
Option: Funzione:
[1] * Safe Torque O
Alarm
[3] Safe Torque O
Warning
Far girare il convertitore di frequenza a
ruota libera quando è attivato Safe Torque
O. Ripristino manuale da LCP, ingresso
digitale o bus di campo. Questo allarme
non può più essere resettato tramite la
modalità di ripristino automatica di
parametro 14-20 Reset Mode nel software
1.2 e in versioni successive.
Far girare il convertitore di frequenza a
ruota libera quando è attivato Safe Torque
O (morsetto 37 e morsetto 38 o).
Quando viene ristabilito il circuito Safe
Torque O, il convertitore di frequenza
continua a funzionare senza ripristino
manuale.
Il morsetto 42 può essere congurato come uscita digitale.
AVVISO!
Questi parametri non possono essere regolati mentre il
motore è in funzione.
5-30 Uscite digitali
[0] * Nessuna funzione Valore predenito per tutte le uscite
digitali.
[1] Comando pronto La scheda di controllo è pronta.
[2] Conv. freq. pronto Il convertitore di frequenza è pronto
per il funzionamento e alimenta il
quadro di comando.
[3] Conv. freq. pr. / rem. Il convertitore di frequenza è pronto
per il funzionamento ed è in
modalità Auto On.
[4] Pronto/n.avviso Pronto per il funzionamento. Non è
stato dato alcun comando di
avviamento o di arresto
(avviamento/disabilitazione). Sono
attivi avvisi.
[5] In funzione Il motore è in funzione e la coppia
all'albero è presente.
[6] In marcia/no avviso La velocità di uscita è superiore alla
velocità impostata in
parametro 1-81 Vel.min. per
funz.all'arresto[giri/min]. Il motore è
in funzione e non ci sono avvisi.
[7] Mar.in range/n. avv. Il motore funziona negli intervalli di
corrente e velocità programmati
impostati da parametro 4-50 Avviso
corrente bassa a
parametro 4-51 Warning Current High.
Non sono presenti avvisi.
[8] Mar./rif. rag./n. avv. Il motore gira alla velocità di
riferimento. Nessun avviso.
[9] Allarme L'uscita è attivata da un allarme. Non
sono presenti avvisi.
[10] Allarme o avviso L'uscita è attivata da un allarme o da
un avviso.
[11] Al lim. coppia È stato superato il limite di coppia
impostato in parametro 4-16 Lim. di
coppia in modo motore o
parametro 4-17 Lim. di coppia in
modo generatore.
[12] Fuori dall'interv. di
corrente
La corrente del motore è al di fuori
dell'intervallo impostato in
parametro 4-18 Limite di corrente.
60 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 63

Descrizioni dei parametri Guida alla Programmazione
[13] Sotto corrente, bassa La corrente del motore è inferiore a
quella impostata in
parametro 4-50 Avviso corrente bassa.
[14] Sopra corrente, alta La corrente del motore è superiore a
quella impostata in
parametro 4-51 Avviso corrente alta.
[15] Fuori campo di
frequenza
[16] Sotto velocità, bassa La velocità di uscita è inferiore al
[17] Sopra velocità, alta La velocità di uscita è superiore al
[18] Fuori campo retroaz. La retroazione è oltre i limiti
[19] Sotto retroaz. bassa La retroazione è inferiore al limite
[20] Sopra retroaz. alta La retroazione è superiore al limite
[21] Avviso termico È attivo l'avviso termico se è stato
[22] Pronto, n. avv. term. Il convertitore di frequenza è pronto
[23] Rem.,pronto, n. ter. Il convertitore di frequenza è pronto
[24] Pronto, tens. OK Il convertitore di frequenza è pronto
[25] Inversione Il motore funziona (o è pronto per
[26] Bus OK Comunicazione attiva (nessuna
[27] Coppia lim.&arresto Viene utilizzato quando si esegue un
La frequenza di uscita è al di fuori
del campo di frequenza.
valore impostato in
parametro 4-40 Warning Freq. Low.
valore impostato in
parametro 4-41 Warning Freq. High.
impostati in parametro 4-56 Avviso
retroazione bassa e
parametro 4-57 Avviso retroazione
alta.
impostato in parametro 4-56 Avviso
retroazione bassa.
impostato in parametro 4-57 Avviso
retroazione alta.
superato il limite di temperatura nel
motore, nel convertitore di
frequenza, nella resistenza di
frenatura o nel termistore.
per il funzionamento e non è
presente alcun avviso di sovratemperatura.
per il funzionamento ed è in
modalità Auto On. Non è presente
nessun avviso di sovratemperatura.
per il funzionamento e la tensione
di rete rientra nell'intervallo di
tensione specicato (vedere la
sezione Speciche generali nella
Guida alla Progettazione).
funzionare) in senso orario in
presenza di logica=0 e in senso
antiorario in presenza di logica=1.
L'uscita cambia non appena viene
applicato il segnale di inversione.
temporizzazione) mediante la porta
di comunicazione seriale.
arresto a ruota libera e in condizioni
di limite di coppia. Il convertitore di
frequenza ha ricevuto un segnale di
arresto ed è al limite di coppia, il
segnale è 0 logico.
[28] Freno, ness. avv. Il freno è attivo e non ci sono avvisi.
[29] Fr.pronto, no gu. Il freno è pronto per funzionare e
non ci sono guasti.
[30] Guasto freno (IGBT) L'uscita è un 1 logico quando l'IGBT
freno è cortocircuitato. Utilizzare
questa funzione per proteggere il
convertitore di frequenza in caso di
guasti nei moduli dei freni. Utilizzare
l'uscita o il relè per scollegare la
tensione di rete dal convertitore di
frequenza.
[31] Relè 123 Il relè è attivato quando [0] Parola di
controllo è selezionata nel gruppo di
parametri 8-** Comun. e opzioni.
[32] Controllo del freno
meccanico
[36] Bit 11 par. di contr.
[37] Bit 12 par. di contr.
[40] Fuori campo rif. Questa opzione è attiva quando la
[41] Sotto rif., basso Questa opzione è attiva quando la
[42] Sopra rif., alto Questa opzione è attiva quando la
[43] Limite PID esteso
[45] Com. bus Controllare l'uscita tramite eldbus.
[46] Controllo bus,
timeout: On
[47] Controllo bus,
timeout: O
[55] Uscita a impulsi
[56] Avviso pulizia
dissipatore, alto
[60] Comparatore 0 Vedere il gruppo di parametri 13-1*
Abilitare il controllo di un freno
meccanico esterno. Vedere il gruppo
di parametri 2-2* Freno meccanico
per maggiori dettagli.
velocità attuale è al di fuori delle
impostazioni in
parametro 4-52 Avviso velocità bassa
e parametro 4-55 Avviso riferimento
alto.
velocità attuale è inferiore all'impostazione del riferimento di velocità.
velocità attuale è superiore all'impostazione del riferimento di velocità.
Lo stato dell'uscita è impostato in
parametro 5-90 Controllo bus digitale
e a relè. Lo stato dell'uscita è
mantenuto nell'eventualità di
timeout del eldbus.
Controllare l'uscita tramite eldbus.
Lo stato dell'uscita è impostato in
parametro 5-90 Controllo bus digitale
e a relè. In caso di timeout del bus,
lo stato dell'uscita è impostato su
alto (On).
Comparatori. Se il comparatore 0
viene valutato come TRUE, l'uscita
diventa alta. Altrimenti è bassa.
4 4
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 61
Page 64

Descrizioni dei parametri
VLT® Midi Drive FC 280
[61] Comparatore 1 Vedere il gruppo di parametri 13-1*
Comparatori. Se il comparatore 1
viene valutato come TRUE, l'uscita
diventa alta. Altrimenti è bassa.
[62] Comparatore 2 Vedere il gruppo di parametri 13-1*
Comparatori. Se il comparatore 2
viene valutato come TRUE, l'uscita
diventa alta. Altrimenti è bassa.
[63] Comparatore 3 Vedere il gruppo di parametri 13-1*
44
[64] Comparatore 4 Vedere il gruppo di parametri 13-1*
[65] Comparatore 5 Vedere il gruppo di parametri 13-1*
[70] Regola logica 0 Vedi il gruppo di parametri
[71] Regola logica 1 Vedi il gruppo di parametri
[72] Regola logica 2 Vedi il gruppo di parametri
[73] Regola logica 3 Vedi il gruppo di parametri
[74] Reg. log. 4 Vedi il gruppo di parametri
[75] Reg. log. 5 Vedi il gruppo di parametri
[80] Uscita digitale SL A Vedere parametro 13-52 Azione regol.
Comparatori. Se il comparatore 3
viene valutato come TRUE, l'uscita
diventa alta. Altrimenti è bassa.
Comparatori. Se il comparatore 4
viene valutato come TRUE, l'uscita
diventa alta. Altrimenti è bassa.
Comparatori. Se il comparatore 5
viene valutato come TRUE, l'uscita
diventa alta. Altrimenti è bassa.
13-4*Regole logiche. Se la regola
logica 0 viene valutata come true,
l'uscita diventa alta. Altrimenti è
bassa.
13-4*Regole logiche. Se la regola
logica 1 viene valutata come true,
l'uscita diventa alta. Altrimenti è
bassa.
13-4*Regole logiche. Se la regola
logica 2 viene valutata come true,
l'uscita diventa alta. Altrimenti è
bassa.
13-4*Regole logiche. Se la regola
logica 3 viene valutata come true,
l'uscita diventa alta. Altrimenti è
bassa.
13-4*Regole logiche. Se la regola
logica 4 viene valutata come true,
l'uscita diventa alta. Altrimenti è
bassa.
13-4*Regole logiche. Se la regola
logica 5 viene valutata come true,
l'uscita diventa alta. Altrimenti è
bassa.
SL. L'uscita diventa alta
ogniqualvolta viene eseguita l'Azione
Smart Logic [38] Imp. usc. dig. A
alta . L'uscita diventa bassa
ogniqualvolta viene eseguita l'Azione
[81] Uscita digitale SL B Vedere parametro 13-52 Azione regol.
[82] Uscita digitale SL C Vedere parametro 13-52 Azione regol.
[83] Uscita digitale SL D Vedere parametro 13-52 Azione regol.
[91] Uscita A emulazione
encoder
[160] Nessun allarme L'uscita è alta se non è presente
[161] Inversione attiva L'uscita è alta ogniqualvolta il
[165] Rif. locale attivo
[166] Rif. remoto attivo
[167] Comando di
avviamento attivo
[168] Conv.freq.mod.man. L'uscita è alta ogniqualvolta il
[169] Conv.freq.mod.auto L'uscita è alta ogniqualvolta il
[170] Homing Completed L'operazione di homing è
[171] Target Position
Reached
Smart Logic [32] Imp. usc. dig. A
bassa .
SL. L'ingresso diventa alto
ogniqualvolta viene eseguita l'azione
smart logic [39] Imp. usc. dig. B alta.
L'ingresso diventa basso
ogniqualvolta viene eseguita l'azione
Smart Logic [33] Imp. usc. dig. B
bassa.
SL. L'ingresso diventa alto
ogniqualvolta viene eseguita l'azione
smart logic [40] Imp. usc. dig. C alta .
L'ingresso diventa basso
ogniqualvolta viene eseguita l'azione
Smart Logic [34] Imp. usc. dig. C
bassa.
SL. L'ingresso diventa alto
ogniqualvolta viene eseguita l'azione
Smart logic [41] Imp. usc. dig. D alta.
L'ingresso diventa basso
ogniqualvolta viene eseguita l'azione
Smart Logic [35] Imp. usc. dig. D
bassa.
alcun allarme.
convertitore di frequenza ruota in
senso antiorario (il prodotto logico
dei bit di stato in funzione E
inversione).
L'uscita è alta ogniqualvolta è
presente un comando di avviamento
attivo e non è attivo alcun comando
di arresto.
convertitore di frequenza è in
modalità Hand on.
convertitore di frequenza è in
modalità Auto on.
completata. Questa opzione è
ecace solo quando
parametro 37-00 Application Mode è
impostato su [2] Controllo posizione.
È stata raggiunta la posizione di
destinazione. Questa opzione è
ecace solo quando
parametro 37-00 Application Mode è
impostato su [2] Controllo posizione.
62 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 65

Descrizioni dei parametri Guida alla Programmazione
[172] Position Control
Fault
[173] Posizione freno
meccanico
[190] Funzione STO attiva
[193] Modo pausa Il convertitore di frequenza/sistema
[194] Cinghia rotta È stata rilevata una condizione di
[239] Guasto funzione STO
Si è vericato un errore nel processo
di posizionamento. Fare riferimento
a parametro 37-18 Pos. Ctrl Fault
Reason per dettagli sul guasto.
Questa opzione è ecace solo
quando parametro 37-00 Application
Mode è impostato su [2] Controllo
posizione.
Selezionare il controllo meccanico
per il posizionamento. Questa
opzione è ecace solo quando
parametro 37-00 Application Mode è
impostato su [2] Controllo posizione.
è entrato nel modo pausa. Vedere il
gruppo di parametri 22-4* Modo
Pausa.
cinghia rotta. Vedere il gruppo di
parametri 22-4* Modo Pausa.
5-34 On Delay, Digital Output
Range: Funzione:
0.01 s* [0 - 600 s]
5-35 O Delay, Digital Output
Range: Funzione:
0.01 s* [0 - 600 s]
4.6.3 5-4* Relè
Parametri per congurare la temporizzazione e le funzioni
di uscita per il relè.
Il parametro mostra 1 relè.
5-40 Funzione relè
Option: Funzione:
[0] Nessuna funzione Impostazione di fabbrica per tutte le
uscite digitali.
[1] * Comando pronto La scheda di controllo è pronta.
[2] Conv. freq. pronto Il convertitore di frequenza è pronto
per funzionare. Le alimentazioni di
rete e del controllo sono OK.
[3] Conv. freq. pr. / rem. Il convertitore di frequenza è pronto
per il funzionamento ed è in
modalità Auto On.
[4] Pronto/n.avviso Pronto per il funzionamento. Non è
stato trasmesso alcun comando di
avviamento o di arresto. Sono attivi
avvisi.
[5] In funzione Il motore è in funzione e la coppia
all'albero è presente.
5-40 Funzione relè
Option: Funzione:
[6] In marcia/no avviso La velocità di uscita è superiore alla
velocità impostata in
parametro 1-82 Min Speed for
Function at Stop [Hz]. Il motore è in
funzione e non sono presenti avvisi.
[7] Mar. in range/n. avv. Il motore funziona negli intervalli di
corrente programmati impostati in
parametro 4-50 Warning Current Low.
[8] Mar./rif. rag./n. avv. Il motore gira alla velocità di
riferimento. Nessun avviso.
[9] Allarme L'uscita è attivata da un allarme.
Nessun avviso.
[10] Allarme o avviso Un allarme o avviso attiva l'uscita.
[11] Al lim. coppia È stato superato il limite di coppia
impostato in parametro 4-16 Torque
Limit Motor Mode o
parametro 4-17 Torque Limit
Generator Mode.
[12] Fuori dall'interv. di
corrente
[13] Sotto corrente, bassa La corrente del motore è inferiore a
[14] Sopra corrente, alta La corrente del motore è superiore a
[15] Fuori campo di
frequenza
[16] Sotto velocità, bassa La frequenza di uscita è inferiore al
[17] Sopra velocità, alta La frequenza è superiore al valore
[18] Fuori campo retroaz. La retroazione è oltre i limiti
[19] Sotto retroaz. bassa La retroazione è inferiore al limite
[20] Sopra retroaz. alta La retroazione è superiore al limite
[21] Avviso termico L'avviso termico si attiva se la
La corrente del motore è al di fuori
dell'intervallo impostato in
parametro 4-18 Current Limit.
quella impostata in
parametro 4-50 Warning Current Low.
quella impostata in
parametro 4-51 Warning Current High.
La velocità/frequenza di uscita
supera il limite impostato in
parametro 4-40 Warning Freq. Low e
parametro 4-41 Warning Freq. High.
valore impostato in
parametro 4-40 Warning Freq. Low.
impostato in parametro 4-41 Warning
Freq. High.
impostati in parametro 4-56 Warning
Feedback Low e
parametro 4-57 Warning Feedback
High.
impostato in parametro 4-56 Warning
Feedback Low.
impostato in parametro 4-57 Warning
Feedback High.
temperatura supera il limite
all'interno del motore, nel conver-
titore di frequenza, nella resistenza
di frenatura o nel resistore collegato.
4 4
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 63
Page 66

Descrizioni dei parametri
VLT® Midi Drive FC 280
5-40 Funzione relè
Option: Funzione:
[22] Pronto, n. avv. term. Il convertitore di frequenza è pronto
per il funzionamento e non è
presente alcun avviso di sovratemperatura.
[23] Rem., pronto, n. ter. Il convertitore di frequenza è pronto
per il funzionamento ed è in
44
[24] Pronto, tens. OK Il convertitore di frequenza è pronto
[25] Inversione Il motore funziona (o è pronto per
[26] Bus OK Comunicazione attiva (nessuna
[27] Coppia lim.&arresto Viene utilizzato per eseguire un
[28] Freno, ness. avv. Il freno è attivo e non ci sono avvisi.
[29] Fr.pronto, no gu. Il freno è pronto per il funzio-
[30] Guasto freno (IGBT) L'uscita è un 1 logico quando l'IGBT
[31] Relè 123 L'uscita/il relè digitale viene attivato
[32] Com. freno mecc. Selezione del controllo del freno
[36] Bit 11 par. di contr. Attivare il relè 1 con la parola di
modalità Auto On. Non è presente
nessun avviso di sovratemperatura.
per il funzionamento e la tensione di
rete rientra nell'intervallo di tensione
specicato.
funzionare) in senso orario in
presenza di logica=0 e in senso
antiorario in presenza di logica=1.
L'uscita cambia non appena viene
applicato il segnale di inversione.
temporizzazione) mediante la porta
di comunicazione seriale.
arresto a ruota libera per il convertitore di frequenza nella condizione
limite di coppia. Se il convertitore di
frequenza ha ricevuto un segnale di
arresto ed è al limite di coppia, il
segnale è 0 logico.
namento e non sono presenti guasti.
freno è cortocircuitato. Utilizzare
questa funzione per proteggere il
convertitore di frequenza in caso di
guasto nel modulo freni. Usare
l'uscita/il relè digitale per disinserire
la tensione di rete dal convertitore
di frequenza.
quando [0] Parola di controllo è
selezionata nel gruppo di parametri
8-** Comun. e opzioni.
meccanico. Quando i parametri
selezionati nel gruppo di parametri
2-2* Mechanical Brake sono attivi,
potenziare l'uscita anché sostenga
la corrente per la bobina nel freno.
Questo problema viene risolto
collegando un relè esterno all'uscita
digitale selezionata.
controllo dal bus di campo. Nessun
5-40 Funzione relè
Option: Funzione:
altro impatto funzionale sul conver-
titore di frequenza. Applicazione
tipica: controllo del dispositivo
ausiliario dal bus di campo. La
funzione è valida quando viene
selezionato [0] Prolo FC in
parametro 8-10 Control Word Prole.
[37] Bit 12 par. di contr. Attivare il relè 2 con la parola di
controllo dal bus di campo. Nessun
altro impatto funzionale sul conver-
titore di frequenza. Applicazione
tipica: controllo del dispositivo
ausiliario dal bus di campo. La
funzione è valida quando viene
selezionato [0] Prolo FC in
parametro 8-10 Control Word Prole.
[40] Fuori campo rif. Attivo quando la velocità attuale
non rientra nelle impostazioni in
parametro 4-55 Warning Reference
High no a parametro 4-56 Warning
Feedback Low.
[41] Sotto rif., basso Attivo quando la velocità attuale è
inferiore all'impostazione del
riferimento di velocità.
[42] Sopra rif., alto Attivo quando la velocità attuale è
superiore all'impostazione del
riferimento di velocità.
[45] Com. bus Controllare l'uscita digitale/il relè
tramite bus. Lo stato dell'uscita è
impostato in parametro 5-90 Digital
& Relay Bus Control. Lo stato
dell'uscita è mantenuto nell'even-
tualità di timeout del bus.
[46] Controllo bus,
timeout: On
[47] Controllo bus,
timeout: O
[56] Avviso pulizia
dissipatore, alto
[60] Comparatore 0 Vedi il gruppo di parametri 13-1*
[61] Comparatore 1 Vedi il gruppo di parametri 13-1*
Controllare l'uscita tramite bus. Lo
stato dell'uscita è impostato in
parametro 5-90 Digital & Relay Bus
Control. In caso di timeout del bus,
lo stato dell'uscita è impostato su
alto (on).
Controllare l'uscita tramite bus. Lo
stato dell'uscita è impostato in
parametro 5-90 Digital & Relay Bus
Control. In caso di timeout del bus,
lo stato dell'uscita è impostato basso
(o).
Smart Logic Control. Se il
Comparatore 0 in SLC è TRUE,
l'uscita diventa alta. Altrimenti
diventa bassa.
Smart Logic Control. Se il
comparatore 1 in SLC è TRUE,
64 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 67

Descrizioni dei parametri Guida alla Programmazione
5-40 Funzione relè
Option: Funzione:
l'uscita diventa alta. Altrimenti
diventa bassa.
[62] Comparatore 2 Vedi il gruppo di parametri 13-1*
Smart Logic Control. Se il
comparatore 2 in SLC è TRUE,
l'uscita diventa alta. Altrimenti
diventa bassa.
[63] Comparatore 3 Vedi il gruppo di parametri 13-1*
Smart Logic Control. Se il
comparatore 3 in SLC è TRUE,
l'uscita diventa alta. Altrimenti
diventa bassa.
[64] Comparatore 4 Vedi il gruppo di parametri 13-1*
Smart Logic Control. Se il
Comparatore 4 in SLC è TRUE,
l'uscita diventa alta. Altrimenti
diventa bassa.
[65] Comparatore 5 Vedi il gruppo di parametri 13-1*
Smart Logic Control. Se il
Comparatore 5 in SLC è TRUE,
l'uscita diventa alta. Altrimenti
diventa bassa.
[70] Reg. log. 0 Vedi il gruppo di parametri
13-4*Regole logiche. Se la regola
logica 0 in SLC è TRUE, l'uscita
diventa alta. Altrimenti diventa
bassa.
[71] Reg. log. 1 Vedi il gruppo di parametri
13-4*Regole logiche. Se la regola
logica 1 in SLC è TRUE, l'uscita
diventa alta. Altrimenti diventa
bassa.
[72] Reg. log. 2 Vedi il gruppo di parametri
13-4*Regole logiche. Se la regola
logica 2 in SLC è TRUE, l'uscita
diventa alta. Altrimenti diventa
bassa.
[73] Reg. log. 3 Vedi il gruppo di parametri
13-4*Regole logiche. Se la regola
logica 3 in SLC è TRUE, l'uscita
diventa alta. Altrimenti diventa
bassa.
[74] Reg. log. 4 Vedi il gruppo di parametri
13-4*Regole logiche. Se la regola
logica 4 in SLC è TRUE, l'uscita
diventa alta. Altrimenti diventa
bassa.
[75] Reg. log. 5 Vedi il gruppo di parametri
13-4*Regole logiche. Se la regola
logica 5 in SLC è TRUE, l'uscita
diventa alta. Altrimenti diventa
bassa.
[80] Uscita digitale SL A Vedere parametro 13-52 SL Controller
Action. L'uscita A è bassa su [32]
5-40 Funzione relè
Option: Funzione:
Azione Smart Logic. L'uscita A è alta
su [38] Azione Smart Logic.
[81] Uscita digitale SL B Vedere parametro 13-52 SL Controller
Action. L'uscita B è bassa su [32]
Azione Smart Logic. L'uscita B è alta
su [38] Azione Smart Logic.
[82] Uscita digitale SL C Vedere parametro 13-52 SL Controller
Action. L'uscita C è bassa su [32]
Azione Smart Logic. L'uscita C è alta
su [38] Azione Smart Logic.
[83] Uscita digitale SL D Vedere parametro 13-52 SL Controller
Action. L'uscita D è bassa su [32]
Azione Smart Logic. L'uscita D è alta
su [38] Azione Smart Logic.
[160] Nessun allarme L'uscita è alta se non è presente
alcun allarme.
[161] Inversione attiva L'uscita è alta ogniqualvolta il
convertitore di frequenza ruota in
senso antiorario (il prodotto logico
dei bit di stato in funzione E
inversione).
[165] Rif. locale attivo
[166] Rif. remoto attivo
[167] Comando di
avviamento attivo
[168] Conv.freq.mod.man. L'uscita è alta ogniqualvolta il
[169] Conv.freq.mod.auto L'uscita è alta ogniqualvolta il
[170] Homing Completed L'operazione di homing è
[171] Target Position
Reached
[172] Position Control
Fault
[173] Posizione freno
meccanico
L'uscita è alta ogniqualvolta è
presente un comando di avviamento
attivo e non è attivo alcun comando
di arresto.
convertitore di frequenza è in
modalità Hand on.
convertitore di frequenza è in
modalità Auto on.
completata. Questa opzione è
ecace solo quando
parametro 37-00 Application Mode è
impostato su [2] Controllo posizione.
È stata raggiunta la posizione di
destinazione. Questa opzione è
ecace solo quando
parametro 37-00 Application Mode è
impostato su [2] Controllo posizione.
Si è vericato un errore nel processo
di posizionamento. Fare riferimento
a parametro 37-18 Pos. Ctrl Fault
Reason per dettagli sul guasto.
Questa opzione è ecace solo
quando parametro 37-00 Application
Mode è impostato su [2] Controllo
posizione.
Selezionare il controllo meccanico
per il posizionamento. Questa
opzione è ecace solo quando
4 4
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 65
Page 68

130BD377.10
Ref.
Low freq.
P 5-50/
P 5-55
Input
(Hz)
High
ref.
value
P 5-53/
p 5-58
High freq.
P 5-51/
P 5-56
Low
ref.
value
P 5-52/
p 5-57
Descrizioni dei parametri
VLT® Midi Drive FC 280
5-40 Funzione relè
Option: Funzione:
parametro 37-00 Application Mode è
impostato su [2] Controllo posizione.
[190] Funzione STO attiva
[193] Modo pausa Il convertitore di frequenza/sistema
è entrato nel modo pausa. Vedere il
gruppo di parametri 22-4* Modo
44
[194] Funzione cinghia
rotta
[239] Guasto funzione STO
Pausa.
È stata rilevata una condizione di
cinghia rotta. Vedere il gruppo di
parametri 22-4* Modo Pausa.
Disegno 4.11 Ritardo disatt., relè
5-41 Ritardo attiv., relè
Range: Funzione:
0.01 s* [0.01 -
600 s]
Impostare il ritardo per il tempo di
attivazione dei relè. Il relè si inserisce solo se
la condizione in parametro 5-40 Funzione relè
è interrotta durante il tempo specicato.
Se la condizione dell'evento selezionato cambia prima che
il timer di ritardo di attivazione o disattivazione scada,
l'uscita a relè non viene eettuata.
4.6.4 5-5* Ingr. impulsi
I parametri degli ingressi a impulsi vengono usati per
denire una nestra adatta per l'area del riferimento a
impulsi congurando la scala e le impostazioni del ltro
per gli ingressi digitali. I morsetti di ingresso 29 o 33
fungono da ingressi di riferimento di frequenza. Impostare
il morsetto 29 (parametro 5-13 Ingr. digitale morsetto 29) o il
morsetto 33 (parametro 5-15 Ingr. digitale morsetto 33) su
[32] Ingr. impulsi. Se il morsetto 29 viene utilizzato come
ingresso, impostare parametro 5-01 Modo Morsetto 27 su [0]
Ingresso.
Disegno 4.10 Ritardo attiv., relè
5-42 Ritardo disatt., relè
Range: Funzione:
0.01 s* [0.01 - 600 s] Immettere il ritardo del tempo di disatti-
vazione dei relè.
Disegno 4.12 Ingresso a impulsi
5-50 Term. 29 Low Frequency
Range: Funzione:
4 Hz* [4 - 31999
Hz]
66 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Immettere il limite di bassa frequenza
corrispondente alla velocità bassa dell'albero
motore (vale a dire al valore di riferimento
basso) in parametro 5-52 Term. 29 Low Ref./
Feedb. Value. Fare riferimento a Disegno 4.12.
Page 69

Descrizioni dei parametri Guida alla Programmazione
5-51 Term. 29 High Frequency
Range: Funzione:
32000
Hz*
[5 - 32000
Hz]
Immettere il limite di alta frequenza
corrispondente alla velocità alta
dell'albero motore (che è il valore di
riferimento alto) in parametro 5-53 Term.
29 High Ref./Feedb. Value.
5-52 Term. 29 Low Ref./Feedb. Value
Range: Funzione:
0* [-4999 -
4999 ]
Immettere il limite del valore di riferimento basso
per la velocità dell'albero motore [Hz]. Questo
valore è anche il valore di retroazione minimo,
vedere anche parametro 5-57 Term. 33 Low Ref./
Feedb. Value. Impostare il morsetto 29 su ingresso
digitale (parametro 5-02 Terminal 29 Mode= [0]
Ingresso e parametro 5-13 Ingresso digitale
morsetto 29= valore applicabile).
5-53 Term. 29 High Ref./Feedb. Value
Range: Funzione:
Size
related*
[-4999 4999 ]
Immettere il valore di riferimento alto
[Hz] per la velocità dell'albero motore e il
valore di retroazione alto. Vedere anche
parametro 5-58 Term. 33 High Ref./Feedb.
Value. Selezionare il morsetto 29 come
ingresso digitale (parametro 5-02 Modo
morsetto 29=[0] Ingresso e
parametro 5-13 Ingr. digitale morsetto 29 =
valore applicabile).
5-55 Term. 33 Low Frequency
Range: Funzione:
4 Hz* [4 - 31999
Hz]
Immettere il limite di bassa frequenza
corrispondente alla velocità bassa dell'albero
motore (che è il valore di riferimento basso)
in parametro 5-57 Term. 33 Low Ref./Feedb.
Value.
5-56 Term. 33 High Frequency
Range: Funzione:
32000
Hz*
[5 - 32000
Hz]
Immettere l'alta frequenza
corrispondente alla velocità alta
dell'albero motore (vale a dire al valore
di riferimento alto) in
parametro 5-58 Term. 33 High Ref./Feedb.
Value.
5-57 Term. 33 Low Ref./Feedb. Value
Range: Funzione:
0* [-4999 -
4999 ]
Immettere il limite del valore di riferimento
basso [Hz] per la velocità dell'albero motore.
Questo valore è anche il valore di retroazione
basso, vedere anche parametro 5-52 Term. 29
Low Ref./Feedb. Value.
5-58 Term. 33 High Ref./Feedb. Value
Range: Funzione:
Size related* [-4999 -
4999 ]
Immettere il valore di riferimento
alto [Hz] per la velocità dell'albero
motore. Vedere anche
parametro 5-53 Term. 29 High Ref./
Feedb. Value.
5-60 Terminal 27 Pulse Output Variable
Option: Funzione:
[0] * No operation
[45] Bus ctrl.
[48] Bus ctrl., timeout
[100] Output frequency
[101] Reference
[102] Process Feedback
[103] Motor Current
[104] Torque rel to limit
[105] Torq relate to rated
[106] Power
[107] Speed
[109] Max Out Freq
[113] Ext. Closed Loop 1
5-62 Pulse Output Max Freq 27
Range: Funzione:
5000 Hz* [4 - 32000
Hz]
Impostare la frequenza massima per il
morsetto 27 corrispondente alla variabile
di uscita selezionata in
parametro 5-60 Terminal 27 Pulse Output
Variable.
5-70 Term 32/33 Pulses Per Revolution
Range: Funzione:
1024* [1 - 4096 ] Impostare gli impulsi per giro dell'encoder
sull'albero motore. Leggere il valore corretto
dall'encoder.
5-71 Term 32/33 Encoder Direction
Option: Funzione:
AVVISO!
Questo parametro non può essere
regolato mentre il motore è in
funzione.
Cambiare il senso di rotazione rilevato
dell’encoder senza modicare i collegamenti
all’encoder.
[0] * Clockwise
[1] Counter
clockwise
Impostare il canale A in ritardo di 90° (gradi
elettrici) rispetto al canale B dopo la
rotazione in senso orario dell'albero
dell'encoder.
Impostare il canale A in anticipo di 90° (gradi
elettrici) rispetto al canale B dopo la
4 4
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 67
Page 70

Descrizioni dei parametri
VLT® Midi Drive FC 280
5-71 Term 32/33 Encoder Direction
Option: Funzione:
rotazione in senso orario dell'albero
dell'encoder.
5-90 Controllo bus digitale e a relè
Range: Funzione:
0* [0 - 0xFFFFFFFF ] Questo parametro mantiene lo stato delle
44
Bit 0–3 Riservato
Bit 4 Morsetto di uscita relè 1
Bit 6–23 Riservato
Bit 24 Terminale 42 uscita digitale
Bit 26–31 Riservato
uscite digitali e dei relè controllati tramite
bus.
Un 1 logico signica che l'uscita è alta o
attiva.
Uno 0 logico signica che l'uscita è bassa
o inattiva.
Tabella 4.4 Funzioni di bit
5-93 Pulse Out 27 Bus Control
Range: Funzione:
0 %* [0 -
100 %]
Imposta la frequenza di uscita trasferita al
morsetto di uscita 27 quando il morsetto è
congurato come [45] Com. bus in
parametro 5-60 Terminal 27 Pulse Output
Variable.
5-94 Pulse Out 27 Timeout Preset
Range: Funzione:
0 %* [0 -
100 %]
Imposta la frequenza di uscita trasferita al
morsetto di uscita 27 quando il morsetto è
congurato come [48] Com. bus, timeout in
parametro 5-60 Terminal 27 Pulse Output Variable
ed è stata rilevata una temporizzazione.
68 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 71

Ref./Feedback
Analog input
High Ref./
Feedb. Value'
Low Ref./
Feedb. Value'
'Low Voltage'or
'Low Current'
'High Voltage'or
'High Current'
130BD378.10
1 V 5 V 10 V
300
600
900
1200
1500
[V]
150
Par 6-xx
Par 6-xx
Par 6-xx
Par 6-xx
Descrizioni dei parametri Guida alla Programmazione
4.7 Parametri: 6-** Analog In/Out
6-00 Tempo timeout tensione zero
Range: Funzione:
10 s* [1 - 99 s] Immettere il tempo di temporizzazione.
6-01 Funz. temporizz. tensione zero
Option: Funzione:
Selezionare la funzione di temporizzazione. La
funzione impostata in parametro 6-01 Funz.
temporizz. tensione zero viene attivata se il
segnale di ingresso sul morsetto 53 o 54 è
inferiore al 50% del valore in
parametro 6-10 Tens. bassa morsetto 53,
parametro 6-20 Tens. bassa morsetto 54 o
parametro 6-22 Corr. bassa morsetto 54 per un
periodo di tempo denito in
parametro 6-00 Tempo timeout tensione zero.
[0] * O
[1] Blocco
uscita
[2] Arresto
[3] Mar.Jog
[4] Vel. max.
[5] Stop e
scatto
6-11 Tensione alta morsetto 53
Range: Funzione:
10 V* [0 - 10 V] Immettere la tensione (V) che corrisponde al
valore di riferimento alto (impostato in
parametro 6-15 Rif. alto/valore retroaz. morsetto
53).
6-14 Rif.basso/val.retroaz.morsetto 53
Range: Funzione:
0* [-4999 -
4999 ]
Immettere il valore di riferimento o di
retroazione che corrisponde alla tensione o
corrente impostata in parametro 6-10 Tens.
bassa morsetto 53.
6-15 Rif. alto/valore retroaz. morsetto 53
Range: Funzione:
Size
related*
[-4999 4999 ]
Immettere il valore di riferimento o di
retroazione che corrisponde alla
tensione o corrente impostata in
parametro 6-11 Tensione alta morsetto
53.
6-16 Tempo cost. ltro morsetto 53
Range: Funzione:
0.01 s* [0.01 - 10s]Immettere la costante di tempo. Questa è
una costante di tempo del ltro passa-basso
di primo ordine per sopprimere il disturbo
elettrico nel morsetto 53. Un valore elevato
della costante di tempo migliora lo
smorzamento ma aumenta anche il ritardo
di tempo.
4 4
6-18 Terminal 53 Digital Input
Option: Funzione:
[0] * No operation
[1] Reset
[2] Coast inverse
[3] Coast and reset inverse
[4] Quick stop inverse
[5] DC-brake inverse
[6] Stop inverse
Disegno 4.13 Funzione di temporizzazione
6-10 Tens. bassa morsetto 53
Range: Funzione:
0.07 V* [0 - 10V]Impostare la tensione (V) che corrisponde a
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 69
parametro 6-14 Rif.basso/val.retroaz.morsetto
53. Per attivare parametro 6-01 Funz.
temporizz. tensione zero, impostare il valore su
>1 V.
[8] Start
[10] Reversing
[11] Start reversing
[12] Enable start forward
[13] Enable start reverse
[14] Jog
[15] Preset reference on
[16] Preset ref bit 0
[17] Preset ref bit 1
[18] Preset ref bit 2
[19] Freeze reference
[20] Freeze output
Page 72

Descrizioni dei parametri
VLT® Midi Drive FC 280
6-18 Terminal 53 Digital Input
Option: Funzione:
[21] Speed up
[22] Speed down
[23] Set-up select bit 0
[24] Set-up select bit 1
[28] Catch up
[29] Slow down
44
[34] Ramp bit 0
[35] Ramp bit 1
[51] External Interlock
[55] DigiPot increase
[56] DigiPot decrease
[57] DigiPot clear
[58] DigiPot Hoist
[72] PID error inverse
[73] PID reset I part
[74] PID enable
[150] Go To Home
[151] Home Ref. Switch
[155] HW Limit Positive Inv
[156] HW Limit Negative Inv
[157] Pos. Quick Stop Inv
[160] Go To Target Pos.
[162] Pos. Idx Bit0
[163] Pos. Idx Bit1
[164] Pos. Idx Bit2
[171] Limit switch cw inverse
[172] Limit switch ccw inverse
6-19 Modo morsetto 53
Selezionare la modalità di ingresso morsetto 53.
Option: Funzione:
[1] * Modalità tensione
[6] Ingresso digitale
6-20 Tens. bassa morsetto 54
Range: Funzione:
0.07 V* [0 - 10V]Impostare la tensione (V) che corrisponde al
valore di riferimento basso (impostato in
parametro 6-24 Rif.basso/val.retroaz.morsetto
54). Per attivare parametro 6-01 Funz. temporizz.
tensione zero, impostare il valore su >1 V.
6-22 Corr. bassa morsetto 54
Range: Funzione:
4 mA* [0 - 20
mA]
Immettere il valore di corrente bassa. Questo
segnale di riferimento corrisponde al valore di
riferimento/retroazione basso impostato in
parametro 6-24 Rif.basso/val.retroaz.morsetto 54.
Per attivare la funzione temporizzazione zero
vivo in parametro 6-01 Funz. temporizz. tensione
zero, impostare il valore come >2 mA.
6-23 Corrente alta morsetto 54
Range: Funzione:
20 mA* [0 - 20
mA]
Immettere il valore di corrente alta che
corrisponde al valore di riferimento o di
retroazione alti impostati in
parametro 6-25 Rif. alto/valore retroaz.
morsetto 54.
6-24 Rif.basso/val.retroaz.morsetto 54
Range: Funzione:
0* [-4999 -
4999 ]
Immettere il valore di riferimento o retroazione
che corrisponde alla tensione o corrente
impostata in parametro 6-21 Tensione alta
morsetto 54/parametro 6-22 Corr. bassa morsetto
54.
6-25 Rif. alto/valore retroaz. morsetto 54
Range: Funzione:
Size
related*
[-4999 4999 ]
Immettere il valore di riferimento o
retroazione che corrisponde alla
tensione o corrente impostata in
parametro 6-21 Tensione alta morsetto
54/parametro 6-23 Corrente alta
morsetto 54.
6-26 Tempo Cost. ltro morsetto 54
Range: Funzione:
0.01 s* [0.01 - 10s]Immettere la costante di tempo del ltro
passa-basso di primo ordine per sopprimere
il disturbo elettrico nel morsetto 54. Un
valore elevato della costante di tempo
migliora lo smorzamento ma aumenta
anche il ritardo di tempo.
6-21 Tensione alta morsetto 54
Range: Funzione:
10 V* [0 - 10 V] Immettere la tensione (V) che corrisponde al
valore di riferimento alto (impostato in
parametro 6-25 Rif. alto/valore retroaz. morsetto
54).
70 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
6-29 Modo morsetto 54
Option: Funzione:
Selezionare se il morsetto 54 è usato per ingresso
in corrente o in tensione.
[0] Corrente
[1] * Tensione
Page 73

Descrizioni dei parametri Guida alla Programmazione
6-90 Terminal 42 Mode
Option: Funzione:
Impostare il morsetto 42 come uscita
analogica o digitale. Quando è impostata
l'uscita digitale, il morsetto 42 emette 0 mA
come OFF o 20 mA come ON. La resistenza
esterna (≥1 kΩ) deve essere collegata tra i
morsetti 42 e 55.
[0] * 0-20 mA
[1] 4-20 mA
[2] Uscita
digitale
6-91 Terminal 42 Analog Output
Option: Funzione:
[0] * No operation
[100] Output frequency
[101] Reference
[102] Process Feedback
[103] Motor Current
[104] Torque rel to limit
[105] Torq relate to rated
[106] Power
[107] Speed
[111] Speed Feedback
[113] Ext. Closed Loop 1
[139] Bus Control
[143] Ext. CL 1
[254] DC Link Voltage
6-92 Terminal 42 Digital Output
Option: Funzione:
[0] * No operation
[1] Control Ready
[2] Drive ready
[3] Drive rdy/rem ctrl
[4] Stand-by / no warning
[5] Running
[6] Running / no warning
[7] Run in range/no warn
[8] Run on ref/no warn
[9] Alarm
[10] Alarm or warning
[11] At torque limit
[12] Out of current range
[13] Below current, low
[14] Above current, high
[15] Out of frequency range
[16] Below frequency, low
[17] Above frequency, high
[18] Out of feedb. range
[19] Below feedback, low
[20] Above feedback, high
[21] Thermal warning
6-92 Terminal 42 Digital Output
Option: Funzione:
[22] Ready, no thermal
warning
[23] Remote,ready,no TW
[24] Ready, no over-/ under
voltage
[25] Reverse
[26] Bus OK
[27] Torque limit & stop
[28] Brake, no brake warning
[29] Brake ready, no fault
[30] Brake fault (IGBT)
[31] Relay 123
[32] Mech brake ctrl
[36] Control word bit 11
[37] Control word bit 12
[40] Out of ref range
[41] Below reference, low
[42] Above ref, high
[45] Bus ctrl.
[46] Bus control, timeout: On
[47] Bus control, timeout: O
[56] Heat sink cleaning
warning, high
[60] Comparator 0
[61] Comparator 1
[62] Comparator 2
[63] Comparator 3
[64] Comparator 4
[65] Comparator 5
[70] Logic rule 0
[71] Logic rule 1
[72] Logic rule 2
[73] Logic rule 3
[74] Logic rule 4
[75] Logic rule 5
[80] SL digital output A
[81] SL digital output B
[82] SL digital output C
[83] SL digital output D
[160] No alarm
[161] Running reverse
[165] Local ref active
[166] Remote ref active
[167] Start command activ
[168] Drive in hand mode
[169] Drive in auto mode
[170] Homing Completed L'operazione di homing è
completata. Questa opzione è
ecace solo quando
parametro 37-00 Application
Mode è impostato su [2]
Controllo posizione.
4 4
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 71
Page 74

(mA)
0%
20
0/4
100%
Current
Analog
output
Min Scale
par. 6-93
Variable
for
output
example:
Power
Analog
Output
Max Scale
par. 6-94
130BB772.10
Descrizioni dei parametri
VLT® Midi Drive FC 280
6-92 Terminal 42 Digital Output
Option: Funzione:
[171] Target Position Reached È stata raggiunta la posizione di
destinazione. Questa opzione è
ecace solo quando
parametro 37-00 Application
Mode è impostato su [2]
6-94 Terminal 42 Output Max Scale
Range: Funzione:
100%* [0 -
200 %]
Scala per l'uscita max (20 mA) della messa in
scala sul morsetto 42. Impostare il valore alla
percentuale dell'intero campo della variabile
selezionata in parametro 6-91 Terminal 42 Analog
Output.
Controllo posizione.
44
[172] Position Control Fault Si è vericato un errore nel
processo di posizionamento. Fare
riferimento a
parametro 37-18 Pos. Ctrl Fault
Reason per dettagli sul guasto.
Questa opzione è ecace solo
quando
parametro 37-00 Application
Mode è impostato su [2]
Controllo posizione.
[173] Position Mech Brake Selezionare il controllo
Disegno 4.14 Scala di uscita rispetto alla
corrente
meccanico per il posizionamento. Questa opzione è
ecace solo quando
parametro 37-00 Application
Mode è impostato su [2]
Controllo posizione.
[193] Sleep Mode Il convertitore di frequenza/
6-96 Morsetto 42, uscita controllata via bus
Range: Funzione:
0* [0 - 16384 ] Mantenere l'uscita analogica in corrispondenza
del morsetto 42 se controllato dal bus.
sistema è entrato nel modo
pausa. Vedere il gruppo di
parametri 22-4* Modo Pausa.
[194] Broken Belt Function È stata rilevata una condizione di
6-98 Drive Type
Range: Funzione:
0* [0 - 0 ]
cinghia rotta. Vedere il gruppo di
parametri 22-4* Modo Pausa.
[198] Drive Bypass
6-93 Terminal 42 Output Min Scale
Range: Funzione:
0 %* [0 -
200 %]
72 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Scala per l'uscita minima (0 mA o 4 mA) del
segnale analogico sul morsetto 42. Impostare il
valore alla percentuale dell'intero campo della
variabile selezionata in parametro 6-91 Terminal
42 Analog Output.
Page 75

Descrizioni dei parametri Guida alla Programmazione
4.8 Parametri: 7-** Controllers
7-00 Speed PID Feedback Source
Option: Funzione:
AVVISO!
Questo parametro non può
essere modicato mentre il
motore è in funzione.
Selezionare la fonte retroazione per il
controllo del CL della velocità.
[1] 24V encoder
[6] Analog Input 53
[7] Analog Input 54
[8] Frequency input 29
[9] Frequency input 33
[20] * None
7-02 Speed PID Proportional Gain
Range: Funzione:
0.015* [0 -
7-03 Speed PID Integral Time
Range: Funzione:
8
[2 -
ms*
20000
ms]
Immettere il guadagno proporzionale del
1 ]
regolatore di velocità. Il guadagno proporzionale
amplica l'errore (vale a dire lo scostamento fra il
segnale di retroazione e il setpoint). Questo
parametro viene usato insieme alla regolazione
parametro 1-00 Modo congurazione [1] Anello
chiuso vel. Una regolazione rapida si ottiene con
un'amplicazione elevata. Tuttavia, se l'amplicazione è troppo elevata, il processo può
diventare instabile.
Immettere il tempo di integrazione del
regolatore di velocità che determina il tempo
necessario al controllo PID interno per
correggere gli errori. Quanto maggiore è il
segnale di errore, tanto più rapidamente
aumenta il guadagno. Il tempo di integrazione
determina un ritardo del segnale e pertanto ha
un eetto di smorzamento e può essere
utilizzato per eliminare l'errore di velocità nello
stato stazionario. Una regolazione rapida si
ottiene con un tempo di integrazione breve, se
questo è troppo breve il processo diventa
instabile. Un tempo di integrazione troppo lungo
disattiva l'azione di integrazione, provocando
scostamenti rilevanti dal riferimento richiesto, in
quanto il regolatore di processo richiede troppo
tempo per la regolazione degli errori. Questo
parametro viene usato con il controllo [1] Anello
chius vel. impostato in parametro 1-00 Modo
congurazione.
7-04 Speed PID Dierentiation Time
Range: Funzione:
30
ms*
[0 200
ms]
Immettere il tempo di derivazione del controllo
di processo. Il derivatore non reagisce a un
errore costante. Fornisce un guadagno proporzionale al tasso di variazione della retroazione di
velocità. Quanto più rapide sono le variazioni
dell’errore, tanto maggiore è il guadagno
dovuto al derivatore. Il guadagno è proporzionale alla velocità alla quale si vericano le
variazioni. L'impostazione di questo parametro
su zero disattiva il derivatore. Questo parametro
viene usato insieme alla regolazione
parametro 1-00 Conguration Mode [1] Anello
chiuso vel.
7-05 Speed PID Di. Gain Limit
Range: Funzione:
5* [1 -
20 ]
Impostare un limite per il guadagno fornito dal
derivatore. Siccome il guadagno derivativo aumenta
alle frequenze superiori, limitare il guadagno può
essere utile. Per esempio, impostare un
collegamento derivativo puro alle basse frequenze e
uno costante a frequenze superiori. Questo
parametro viene usato insieme alla regolazione
parametro 1-00 Conguration Mode [1] Anello chiuso
vel.
7-06 Speed PID Lowpass Filter Time
Range: Funzione:
10
ms*
[1 -
6000
ms]
AVVISO!
Un ltraggio eccessivo può deteriorare le
prestazioni dinamiche.
Questo parametro viene usato insieme a
parametro 1-00 Modo congurazione [1]
Anello chiuso vel.
Impostare una costante di tempo per il ltro
passa-basso del controllo di velocità. Il ltro passabasso migliora le prestazioni allo stato stazionario
e smorza le oscillazioni sul segnale di retroazione.
Questo parametro e utile in presenza di forti
disturbi nel sistema, vedere Disegno 4.15. Per
esempio, se viene programmata una costante di
tempo (τ) di 100 ms, la frequenza di disinserimento per il ltro passa-basso è 1/0,1=10 RAD/s.,
il che corrisponde a (10/2 x π) = 1,6 Hz. Il
controllore PID regola solo un segnale di
retroazione che varia con una frequenza inferiore
a 1,6 Hz. Se il segnale di retroazione varia con una
frequenza superiore a 1,6 Hz, il controllore PID
non reagisce.
4 4
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 73
Page 76

Par 7-07=1.00 Par 7-07=n1/n2
130BA871.10
Motor
n1 n2
Descrizioni dei parametri
VLT® Midi Drive FC 280
7-06 Speed PID Lowpass Filter Time
Range: Funzione:
Impostazioni pratiche di parametro 7-06 Speed PID
Lowpass Filter Time ricavate dal numero di impulsi
per giro dell'encoder:
Encoder PPR Parametro 7-06 Vel.
tempo ltro passa-
basso PID
44
512 10 ms
1024 5 ms
2048 2 ms
4096 1 ms
7-08 Speed PID Feed Forward Factor
Range: Funzione:
0 %* [0 - 500 %] Il segnale di riferimento bypassa il controllo
di velocità del valore specicato. Questa
funzione migliora le prestazioni dinamiche
dell'anello di regolazione della velocità.
7-12 Torque PID Proportional Gain
Range: Funzione:
100 %* [0 - 500 %] Immettere il guadagno proporzionale del
regolatore di coppia. La selezione di un
valore alto velocizza la risposta del
controllore. Un valore troppo elevato rende
il controllore instabile.
7-13 Torque PID Integration Time
Range: Funzione:
0.020 s* [0.002 - 2s]Immettere il tempo di integrazione per il
regolatore di coppia. Quanto più basso è
il tempo di integrazione, tanto più
rapidamente reagisce il controllore.
Tuttavia, l'impostazione di un valore
troppo basso renderà il controllore
instabile.
7-20 Process CL Feedback 1 Resource
Option: Funzione:
Il segnale di retroazione eettivo è
costituito dalla somma di no a 2 diversi
segnali di ingresso. Selezionare quale
ingresso dell'inverter utilizzare come
fonte del primo tra questi segnali. Il
secondo segnale di ingresso è denito in
Disegno 4.15 Segnale di retroazione
7-07 Speed PID Feedback Gear Ratio
Range: Funzione:
1* [0.0001 -
32 ]
[0] * No function
[1] Analog Input 53
[2] Analog Input 54
[3] Frequency input
29
[4] Frequency input
33
parametro 7-22 Process CL Feedback 2
Resource.
7-22 Process CL Feedback 2 Resource
Option: Funzione:
Disegno 4.16 Retroaz. vel. PID Rapp.
trasmiss.
Il convertitore di frequenza moltiplica la
retroazione di velocità per questo rapporto.
[0] * No function
[1] Analog Input 53
74 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Il segnale di retroazione eettivo è
costituito dalla somma di no a 2 diversi
segnali di ingresso. Selezionare quale
ingresso venga considerato come fonte
del secondo tra questi segnali. Il primo
segnale di ingresso è denito in
parametro 7-20 Process CL Feedback 1
Resource.
Page 77

Descrizioni dei parametri Guida alla Programmazione
7-22 Process CL Feedback 2 Resource
Option: Funzione:
[2] Analog Input 54
[3] Frequency input
29
[4] Frequency input
33
7-30 PID proc., contr. n./inv.
Option: Funzione:
I controlli normali e inversi sono implementati
introducendo una dierenza tra il segnale di
riferimento e il segnale di retroazione.
[0] * Normale Impostare il controllo di processo in modo tale da
aumentare la frequenza di uscita.
[1] Inverso Impostare il controllo di processo in modo tale da
ridurre la frequenza di uscita.
7-31 Anti saturazione regolatore PID
Option: Funzione:
[0] O Continuare la regolazione di un errore anche se non è
più possibile aumentare o diminuire la frequenza di
uscita.
[1] * On Interrompere la regolazione dell'errore quando non è
più possibile variare la frequenza di uscita.
7-32 PID di processo, veloc. avviam.
Range: Funzione:
0 RPM* [0 -
6000
RPM]
Immettere la velocità del motore da
utilizzare come segnale di avvio per avviare il
controllo PID. Quando viene inserita l'alimentazione, il convertitore di frequenza inizia ad
accelerare e quindi funziona con un controllo
di velocità ad anello aperto. Al raggiungimento della velocità di avviamento PID di
processo, il convertitore di frequenza passa al
PID controllo di processo.
7-33 Process PID Proportional Gain
Range: Funzione:
0.01* [0 - 10 ] Inserire il guadagno proporzionale PID. Il
guadagno proporzionale moltiplica l'errore tra il
setpoint e il segnale di retroazione.
7-34 Process PID Integral Time
Range: Funzione:
9999 s* [0.10 -
9999 s]
Inserire il tempo di integrazione PID. L'integratore fornisce un guadagno crescente in
caso di errore costante fra il valore di
regolazione e il segnale di retroazione. Il
tempo di integrazione è il tempo necessario
per l’integratore per raggiungere un
guadagno uguale al guadagno proporzionale.
7-35 Process PID Dierentiation Time
Range: Funzione:
0 s* [0 - 20s]Immettere il tempo di derivazione PID di
processo. Il derivatore non reagisce a una
variazione costante, ma fornisce un guadagno
solo quando l'errore cambia. Quanto più breve è
il tempo di derivazione PID di processo, tanto
più elevato è il guadagno del derivatore.
7-36 PID di processo, limite guad. deriv.
Range: Funzione:
5* [1 - 50 ] Immettere un limite per il guadagno dierenziale.
Se non esiste alcun limite, il guadagno
dierenziale aumenta in presenza di variazioni
rapide. Per ottenere un guadagno dierenziale
puro in presenza di variazioni lente e un
guadagno dierenziale costante in presenza di
variazioni rapide, limitare il guadagno
dierenziale.
7-38 Process PID Feed Forward Factor
Range: Funzione:
0 %* [0 -
200 %]
Inserire il fattore di feed forward (FF) del PID. Il
fattore FF invia una parte grande o piccola del
segnale di riferimento al controllo PID in modo
che il controllo PID inuenzi solo una parte del
segnale di comando. Qualsiasi modica di questo
parametro inuisce sulla velocità del motore.
Quando il fattore FF è attivato, garantisce una
minore sovraelongazione e un’elevata dinamica
durante la modica del setpoint.
Parametro 7-38 Process PID Feed Forward Factor è
attivo quando parametro 1-00 Conguration Mode
è impostato su [3] Processo.
7-39 Ampiezza di banda riferimento a
Range: Funzione:
5 %* [0 -
200 %]
Immettere l'ampiezza di banda di riferimento.
Quando l’errore del controllo PID (la
dierenza fra il riferimento e la retroazione) è
inferiore al valore di questo parametro, il bit
di stato di riferimento a è 1.
7-40 Ripristino PID proc. parte I
Option: Funzione:
[0] * No
[1] Sì Selezionare [1] Sì per ripristinare la parte I del
regolatore PID di processo. La selezione ritorna
automaticamente a [0] No. Reimpostando la parte l
consente di avviare da un punto ben denito dopo la
modica di qualcosa nel processo, per esempio
cambiare un rullo di stoa.
4 4
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 75
Page 78

Descrizioni dei parametri
VLT® Midi Drive FC 280
7-41 Process PID Output Neg. Clamp
Range: Funzione:
-100 %* [ -100 - 100 %] Inserire un limite negativo per l'uscita
del regolatore PID di processo.
7-42 Process PID Output Pos. Clamp
Range: Funzione:
100 %* [ -100 - 100 %] Inserire un limite positivo per l'uscita
44
del regolatore PID di processo.
7-46 PID proc. com. Feed Fwd n./inv.
Option: Funzione:
[1] Inverso Selezionare [1] Inverso per gestire la risorsa di
feed forward come valore negativo.
7-48 PCD Feed Forward
Range: Funzione:
0* [0 - 65535 ] Parametro di visualizzazione dove è possibile
leggere il bus parametro 7-45 Process PID Feed
Fwd Resource [32].
7-43 Scala guadagno PID di proc. a rif. min.
Range: Funzione:
100 %* [0 -
100 %]
Inserire una percentuale di scala per applicare
l'uscita del PID di processo nel funzionamento
a riferimento minimo. La percentuale di scala
viene regolata linearmente tra la scala al
riferimento minimo (parametro 7-43 Scala
guadagno PID di proc. a rif. min.) e la scala al
riferimento massimo (parametro 7-44 Scala
guadagno PID di proc. a rif. max).
7-44 Scala guadagno PID di proc. a rif. max
Range: Funzione:
100 %* [0 -
100 %]
Inserire una percentuale di scala per applicare
l'uscita del PID di processo nel funzionamento
a riferimento massimo. La percentuale di scala
viene regolata linearmente tra la scala al
riferimento minimo (parametro 7-43 Scala
guadagno PID di proc. a rif. min.) e la scala al
riferimento massimo (parametro 7-44 Scala
guadagno PID di proc. a rif. max).
7-45 Process PID Feed Fwd Resource
Option: Funzione:
Selezionare quale ingresso del convertitore di frequenza viene utilizzato per
il fattore feed forward. Il fattore FF
viene aggiunto direttamente all'uscita
del controllore PID. Questo parametro
può aumentare le prestazioni
dinamiche.
[0] * No function
[1] Analog Input 53
[2] Analog Input 54
[7] Frequency input 29
[8] Frequency input 33
[11] Local bus reference
[32] Bus PCD
7-46 PID proc. com. Feed Fwd n./inv.
Option: Funzione:
[0] * Normale Selezionare [0] Normale per impostare il fattore di
feed forward al ne di gestire la risorsa FF come
valore positivo.
7-49 Com. uscita PID di processo n./inv.
Option: Funzione:
[0] * Normale Selezionare [0] Normale per utilizzare l'uscita
risultante dal regolatore PID di processo tale e
quale.
[1] Inverso Selezionare [1] Inverso per invertire l'uscita
risultante dal regolatore PID di processo.
L'operazione viene eseguita dopo l'applicazione
del fattore di feed forward.
7-50 PID di processo PID esteso
Option: Funzione:
[0] Disabilitato Disattivare le parti estese del regolatore PID di
processo.
[1] * Abilitato Abilitare le parti estese del controllo PID.
7-51 Process PID Feed Fwd Gain
Range: Funzione:
1* [0 -
100 ]
Il feed forward viene usato per ottenere il
guadagno sulla base di un segnale disponibile ben
noto. Il controllore PID in tal caso si occupa solo
della parte più piccola del controllo, necessaria a
causa di caratteri sconosciuti. Il fattore di feed
forward standard in parametro 7-38 Process PID Feed
Forward Factor è sempre messo in relazione con il
riferimento, mentre parametro 7-51 Process PID Feed
Fwd Gain ore più opzioni. Nelle applicazioni di
avvolgimento, il fattore di feed forward è
tipicamente la velocità di linea del sistema.
7-52 Process PID Feed Fwd Ramp up
Range: Funzione:
0.01 s* [0.01 - 100 s] Controllare la dinamica del segnale di
feed forward durante l'accelerazione.
7-53 Process PID Feed Fwd Ramp down
Range: Funzione:
0.01 s* [0.01 - 100 s] Controllare la dinamica del segnale di
feed forward durante la decelerazione.
76 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 79

Descrizioni dei parametri Guida alla Programmazione
7-56 Rif. PID di Proc., tempo lt.
Range: Funzione:
0.001 s* [0.001 - 1s]Impostare una costante di tempo per il
ltro passa-basso di prim'ordine di
riferimento. Il ltro passa-basso migliora
le prestazioni allo stato stazionario e
smorza le oscillazioni sul segnale di
riferimento/retroazione. Comunque un
ltraggio eccessivo può peggiorare le
prestazioni dinamiche.
7-57 PID di Processo, Tempo lt. retr.
Range: Funzione:
0.001 s* [0.001 - 1s]Impostare una costante di tempo per il
ltro passa-basso di prim'ordine di
retroazione. Il ltro passa-basso migliora
le prestazioni allo stato stazionario e
smorza le oscillazioni sul segnale di
riferimento/retroazione. Comunque un
ltraggio eccessivo può peggiorare le
prestazioni dinamiche.
4 4
7-60 Feedback 1 Conversion
Selezionare una conversione per il segnale di retroazione 1.
Selezionare [0] Lineare per lasciare invariato il segnale di
retroazione.
Option: Funzione:
[0] * Linear
[1] Square root
7-62 Feedback 2 Conversion
Selezionare una conversione per il segnale di retroazione 2.
Selezionare [0] Lineare per lasciare invariato il segnale di
retroazione.
Option: Funzione:
[0] * Linear
[1] Square root
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 77
Page 80

Descrizioni dei parametri
VLT® Midi Drive FC 280
4.9 Parametri: 8-** Comm. and Options
8-01 Control Site
Option: Funzione:
L'impostazione in questo parametro
esclude le impostazioni in
parametro 8-50 Selezione ruota libera no a
parametro 8-58 Prodrive OFF3 Select.
44
[0] * Digital and
ctrl.word
[1] Digital only Controllo utilizzando solo gli ingressi
[2] Controlword
only
Controllo utilizzando sia l'ingresso digitale
sia la parola di controllo.
digitali.
Controllo utilizzando solamente la parola
di controllo.
8-02 Control Source
Option: Funzione:
Seleziona fonte della parola di controllo.
AVVISO!
Questo parametro non può essere regolato
mentre il motore è in funzione.
[0] None
[1] FC Port
[2] FC USB
[3] Option A
8-03 Control Timeout Time
Range: Funzione:
1 s* [0.1 -
6000 s]
8-04 Control Timeout Function
Option: Funzione:
[0] * O Selezionare la funzione di temporizzazione.
[1] Freeze output
[2] Stop
[3] Jogging
[4] Max. speed
[5] Stop and trip
8-07 Diagnosis Trigger
Option: Funzione:
[0] * Disable Non inviare i dati diagnostici estesi (EDD).
Immettere il tempo massimo previsto che deve
trascorrere fra la ricezione di 2 telegrammi
consecutivi. Se questo tempo viene superato, ciò
indica che la comunicazione seriale si è arrestata.
In tal caso viene eseguita la funzione selezionata
in parametro 8-04 Control Timeout Function.
La funzione di timeout viene attivata se la
parola di controllo non viene aggiornata
entro il tempo specicato in
parametro 8-03 Control Timeout Time.
8-07 Diagnosis Trigger
Option: Funzione:
[1] Trigger on
alarms
[2] Trigger
alarm/warn.
Inviare EDD in caso di allarmi.
Inviare EDD in caso di allarmi o avvisi in
parametro 16-90 Alarm Word,
parametro 9-53 Probus Warning Word o
parametro 16-92 Warning Word.
8-10 Control Word Prole
Selezionare l'interpretazione della parola di controllo e di stato
corrispondente al bus di campo installato.
Option: Funzione:
[0] * FC prole
[1] PROFIdrive prole
[5] ODVA
[7] CANopen DSP 402
8-14 Congurable Control Word CTW
La parola di controllo ha 16 bit (0–15). I bit 10 e 12–15 sono
congurabili.
Option: Funzione:
[0] None
[1] * Prole default
[2] CTW Valid, active low
[4] PID error inverse
[5] PID reset I part
[6] PID enable
8-19 Product Code
Range: Funzione:
Size
related*
[0 2147483647 ]
Selezionare 0 per visualizzare
l'attuale codice di prodotto del
bus di campo in base all'opzione
eldbus montata. Selezionare [1]
per visualizzare l'attuale ID del
venditore.
8-30 Protocol
Option: Funzione:
Selezionare il protocollo per la porta RS485
integrata.
[0] * FC Comunicazione secondo il protocollo FC.
[2] Modbus RTU Comunicazione secondo il protocollo Modbus
RTU.
8-31 Indirizzo
Range: Funzione:
1* [ 0 - 247 ] Immettere l'indirizzo per la porta RS485.
Intervallo valido: 1–126 per il bus FC, oppure 1–
247 per Modbus.
78 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 81

Descrizioni dei parametri Guida alla Programmazione
8-32 Baud rate
Option: Funzione:
Selezionare il baud rate per la porta RS485.
[0] 2400 Baud
[1] 4800 Baud
[2] * 9600 Baud
[3] 19200 Baud
[4] 38400 Baud
[5] 57600 Baud
[6] 76800 Baud
[7] 115200 Baud
8-33 Parity / Stop Bits
Parità e bit di stop per il protocollo utilizzando la porta FC. Per
alcuni dei protocolli non sono disponibili tutte le opzioni.
Option: Funzione:
[0] Even Parity, 1 Stop Bit
[1] Odd Parity, 1 Stop Bit
[2] No Parity, 1 Stop Bit
[3] No Parity, 2 Stop Bits
8-35 Minimum Response Delay
Range: Funzione:
0.01 s* [ 0.0010 - 0.5s]Specica un tempo di ritardo minimo tra
la ricezione di una richiesta e la
trasmissione di una risposta. Questo
viene utilizzato per superare i tempi di
attesa del modem.
8-36 Maximum Response Delay
Range: Funzione:
Size
related*
[ 0.1 -
10.0 s]
Specicare il ritardo massimo
consentito tra la ricezione di una
richiesta e la trasmissione di una
risposta. Se questo tempo viene
superato, non viene data alcuna
risposta.
8-37 Maximum Inter-char delay
Range: Funzione:
0.025 s* [0.025 -
0.025 s]
Specicare il tempo di ritardo massimo
tra 2 caratteri in un messaggio. Il
superamento di questo tempo di ritardo
fa sì che il messaggio viene scartato.
8-42 PCD Write Conguration
Selezionare i parametri da assegnare ai telegrammi PCD. Il
numero di PCD disponibili dipende dal tipo di telegramma. I
valori nel PCD vengono in seguito scritti nei parametri selezionati
come valori di dati.
Option: Funzione:
[0] None
[1] [302] Minimum Reference
[2] [303] Maximum Reference
[3] [341] Ramp 1 Ramp up time
8-42 PCD Write Conguration
Selezionare i parametri da assegnare ai telegrammi PCD. Il
numero di PCD disponibili dipende dal tipo di telegramma. I
valori nel PCD vengono in seguito scritti nei parametri selezionati
come valori di dati.
Option: Funzione:
[4] [342] Ramp 1 Ramp down time
[5] [351] Ramp 2 Ramp up time
[6] [352] Ramp 2 Ramp down time
[7] [380] Jog Ramp Time
[8] [381] Quick Stop Time
[9] [412] Motor Speed Low Limit
[Hz]
[10] [414] Motor Speed High Limit
[Hz]
[11] [590] Digital & Relay Bus
Control
[12] [676] Terminal45 Output Bus
Control
[13] [696] Terminal 42 Output Bus
Control
[14] [894] Bus Feedback 1
[15] FC Port CTW
[16] FC Port REF
8-43 Cong. lettura PCD
Selezionare i parametri da assegnare ai PCD dei telegrammi. Il
numero di PCD disponibili dipende dal tipo di telegramma. I PCD
mantengono i valori dati eettivi dei parametri selezionati.
Option: Funzione:
[0] * Nessuno
[1] [1500] Ore funzionamento
[2] [1501] Ore esercizio
[3] [1502] Contatore kWh
[4] [1600] Parola di controllo
[5] [1601] Riferimento [unità]
[6] [1602] Riferimento %
[7] [1603] Parola di stato
[8] [1605] Valore eettivo principale
[%]
[9] [1609] Visualizzazione persona-
lizzata
[10] [1610] Potenza [kW]
[11] [1611] Potenza [cv]
[12] [1612] Tensione motore
[13] [1613] Frequenza
[14] [1614] Corrente motore
[15] [1615] Frequenza [%]
[16] [1616] Coppia [Nm]
[17] [1618] Term. motore
[18] [1630] Tensione collegamento CC
[19] [1634] Temp. dissip.
[20] [1635] Termico inverter
[21] [1638] Stato controllo SL
[22] [1650] Riferimento esterno
4 4
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 79
Page 82

Descrizioni dei parametri
VLT® Midi Drive FC 280
8-43 Cong. lettura PCD
Selezionare i parametri da assegnare ai PCD dei telegrammi. Il
numero di PCD disponibili dipende dal tipo di telegramma. I PCD
mantengono i valori dati eettivi dei parametri selezionati.
Option: Funzione:
[23] [1652] Retroazione [unità]
[24] [1660] Ingresso digitale 18, 19, 27,
29, 32, 33
44
[25] [1661] Mors. 53 impost. commut.
[26] [1662] Ingresso analogico 53(V)
[27] [1663] Mors. 54 impost. commut.
[28] [1664] Ingr. analog. 54
[29] [1665] Uscita analogica 42 [mA]
[30] [1671] Uscita relè [bin]
[31] [1672] Contatore A
[32] [1673] Contatore B
[33] [1690] Parola di allarme
[34] [1692] Parola di avviso
[35] [1694] Parola di stato est.
8-50 Selezione ruota libera
Option: Funzione:
Selezionare un controllo della funzione di
rotazione libera tramite i morsetti (ingressi
digitale) e/o tramite il bus.
[0] Ingr.
digitale
[1] Bus Attivare un comando di ruota libera mediante
[2] Logica E Attivare il comando di ruota libera tramite il
[3] * Logica O Attivare il comando di ruota libera tramite il
Attivare il comando di ruota libera mediante un
ingresso digitale.
la porta di comunicazione seriale o l'opzione
bus di campo.
bus di campo/la porta di comunicazione seriale
e tramite 1 ingresso digitale supplementare.
bus di campo/la porta di comunicazione seriale
o tramite 1 degli ingressi digitali.
8-51 Selez. arresto rapido
Selezionare il trigger per la funzione di arresto rapido.
Option: Funzione:
[0] Ingr. digitale
[1] Bus
[2] Logica E
[3] * Logica O
8-52 DC Brake Select
Option: Funzione:
Scegliere se controllare la frenatura CC tramite i
morsetti (ingresso digitale) e/o mediante il bus di
campo.
AVVISO!
Quando parametro 1-10 Struttura motore è
impostato su [1] PM non-salient SPM, è
disponibile solo la selezione [0] Ingr.
digitale.
[0] Digital
input
[1] Bus Attivare un comando di frenatura CC mediante la
[2] Logic
AND
[3]*LogicORAttivare un comando di frenatura CC tramite il
8-53 Selez. avvio
Option: Funzione:
[0] Ingr.
digitale
[1] Bus Una porta di comunicazione seriale o il bus di
[2] Logica E Il bus di campo/la porta di comunicazione
[3] * Logica O Il bus di campo/la porta di comunicazione
8-54 Reversing Select
Option: Funzione:
[0] Digital
input
[1] Bus Una porta di comunicazione seriale o il bus di
[2] Logic
AND
Attivare il comando di frenatura CC mediante un
ingresso digitale.
porta di comunicazione seriale o l'opzione bus di
campo.
Attivare un comando di frenatura CC tramite il
bus di campo/la porta di comunicazione seriale e
anche tramite uno degli ingressi digitali.
bus di campo / la porta di comunicazione seriale
oppure tramite uno degli ingressi digitali.
Selezionare il trigger per la funzione di
avviamento.
Un ingresso digitale attiva la funzione di
avviamento.
campo attivano la funzione di avviamento.
seriale e un ingresso digitale attivano la
funzione di avviamento.
seriale o un ingresso digitale attivano la
funzione di avviamento.
Selezionare il trigger per la funzione di
inversione.
Un ingresso digitale attiva la funzione di
inversione.
campo attivano la funzione di inversione.
Il bus di campo/la porta di comunicazione
seriale e un ingresso digitale attivano la
funzione di inversione.
80 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 83

Descrizioni dei parametri Guida alla Programmazione
8-54 Reversing Select
Option: Funzione:
[3] * Logic OR Il bus di campo/la porta di comunicazione
seriale o un ingresso digitale attivano la
funzione di inversione.
8-55 Selez. setup
Option: Funzione:
Selezionare il trigger per la selezione del setup.
[0] Ingr.
digitale
[1] Bus Una porta di comunicazione seriale o il bus di
[2] Logica E Il bus di campo/la porta di comunicazione
[3] * Logica O Il bus di campo/la porta di comunicazione
Un ingresso digitale attiva la selezione del
setup.
campo attivano la selezione del setup.
seriale e un ingresso digitale attivano la
selezione del setup.
seriale o un ingresso digitale attivano la
selezione del setup.
8-56 Selezione rif. preimpostato
Option: Funzione:
Selezionare il trigger per la selezione del
riferimento preimpostato.
[0] Ingr.
digitale
[1] Bus Una porta di comunicazione seriale o il bus di
[2] Logica E Il bus di campo/la porta di comunicazione
[3] * Logica O Il bus di campo/la porta di comunicazione
Un ingresso digitale attiva la selezione del
riferimento preimpostato.
campo attivano la selezione del riferimento
preimpostato.
seriale e un ingresso digitale attivano la
selezione del riferimento preimpostato.
seriale o un ingresso digitale attivano la
selezione del riferimento preimpostato.
8-57 Selezione Prodrive OFF2
Selezionare il controllo della selezione OFF2 del convertitore di
frequenza mediante i morsetti (ingresso digitale) e/o mediante il
bus di campo. Questo par. è solo attivo se parametro 8-01 Sito di
comando è impostato su [0] Digitale e parola di controllo e
parametro 8-10 Prolo parola di com. è impostato su [1] Prolo
Prodrive.
Option: Funzione:
[0] Ingr. digitale
[1] Bus
[2] Logica E
[3] * Logica O
8-58 Selezione Prodrive OFF3
Selezionare il controllo della selezione OFF3 del convertitore di
frequenza mediante i morsetti (ingresso digitale) e/o mediante il
bus di campo. Questo parametro è solo attivo se
parametro 8-01 Sito di comando è impostato su [0] Par. dig. e di
com. e parametro 8-10 Prolo parola di com. è impostato su [1]
Prolo PROFIdrive.
Option: Funzione:
[0] Ingr. digitale
[1] Bus
[2] Logica E
[3] * Logica O
8-79 Protocol Firmware version
Range: Funzione:
Size related* [0 - 65535 ] Revisione del rmware: FC è
nell'indice 0; Modbus è nell'indice 1;
gli indici 2–4 sono invertiti.
8-80 Bus Message Count
Range: Funzione:
0* [0 - 4294967295 ] Questo parametro mostra il numero di
telegrammi validi rilevati sul bus.
8-81 Bus Error Count
Range: Funzione:
0* [0 - 4294967295 ] Questo parametro mostra il numero di
telegrammi con guasti (per esempio
guasti CRC) rilevati sul bus.
8-82 Slave Messages Rcvd
Range: Funzione:
0* [0 - 4294967295 ] Questo parametro mostra il numero di
telegrammi validi inviati allo slave inviati
dal convertitore di frequenza.
8-83 Slave Error Count
Range: Funzione:
0* [0 - 4294967295 ] Mostra il numero di telegrammi di errore
che il convertitore di frequenza non ha
potuto eseguire.
8-84 Slave Messages Sent
Range: Funzione:
0* [0 - 4294967295 ] Mostra il numero di messaggi inviati
dallo slave.
8-85 Slave Timeout Errors
Range: Funzione:
0* [0 - 4294967295 ] Mostra il numero di errori di temporiz-
zazione dello slave.
4 4
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 81
Page 84

Descrizioni dei parametri
VLT® Midi Drive FC 280
8-88 Reset FC port Diagnostics
Ripristinare tutti i contatori diagnostici della porta FC.
Option: Funzione:
[0] * Do not reset
[1] Reset counter
8-90 Bus Jog 1 Speed
Range: Funzione:
44
100 RPM* [ 0 - 1500
RPM]
Immettere la velocità jog. È una
velocità ssa (jog) attivata tramite
porta seriale o opz. bus di campo.
8-91 Bus Jog 2 Speed
Range: Funzione:
200 RPM* [ 0 - 1500
RPM]
Immettere la velocità jog. Questo
valore è una velocità ssa (jog)
tramite la porta seriale o l'opzione
eldbus.
82 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 85

Descrizioni dei parametri Guida alla Programmazione
4.10 Parametri: 9-** PROFIdrive
Per le descrizioni dei parametri PROFIBUS, vedere la Guida
alla Programmazione PROFIBUS DP VLT® Midi Drive FC 280.
Per le descrizioni dei parametri PROFINET, vedere la Guida
alla Programmazione PROFINET VLT® Midi Drive FC 280.
4.11 Parametri: 10-** CAN Fieldbus
Per le descrizioni dei parametri bus di campo CAN, vedere
la Guida alla Programmazione CANopen VLT® Midi Drive FC
280.
4.12 Parametri: 12-** Ethernet
Per le descrizione dei parametri Ethernet, vedere la Guida
alla Programmazione EtherNet/IP VLT® Midi Drive FC 280 e
la Guida alla Programmazione PROFINET VLT® Midi Drive FC
280.
4.13 Parametri: 13-** Smart logic
13-00 SL Controller Mode
Option: Funzione:
[0] * O Disabilita il controllore smart logic.
[1] On Abilita il controllore smart logic.
13-01 Start Event
Selezionare la condizione (TRUE o FALSE) che attiva il controllore
smart logic.
Option: Funzione:
[0] False
[1] True
[2] Running
[3] In range
[4] On reference
[7] Out of current range
[8] Below I low
[9] Above I high
[16] Thermal warning
[17] Mains out of range
[18] Reversing
[19] Warning
[20] Alarm (trip)
[21] Alarm (trip lock)
[22] Comparator 0
[23] Comparator 1
[24] Comparator 2
[25] Comparator 3
[26] Logic rule 0
[27] Logic rule 1
[28] Logic rule 2
[29] Logic rule 3
[33] Digital input DI18
[34] Digital input DI19
13-01 Start Event
Selezionare la condizione (TRUE o FALSE) che attiva il controllore
smart logic.
Option: Funzione:
[35] Digital input DI27
[36] Digital input DI29
[39] * Start command
[40] Drive stopped
[42] Auto Reset Trip
[50] Comparator 4
[51] Comparator 5
[60] Logic rule 4
[61] Logic rule 5
[83] Broken Belt
13-02 Stop Event
Selezionare la condizione (true o false) che disattiva il controllore
smart logic.
Option: Funzione:
[0] False
[1] True
[2] Running
[3] In range
[4] On reference
[7] Out of current range
[8] Below I low
[9] Above I high
[16] Thermal warning
[17] Mains out of range
[18] Reversing
[19] Warning
[20] Alarm (trip)
[21] Alarm (trip lock)
[22] Comparator 0
[23] Comparator 1
[24] Comparator 2
[25] Comparator 3
[26] Logic rule 0
[27] Logic rule 1
[28] Logic rule 2
[29] Logic rule 3
[30] SL Time-out 0
[31] SL Time-out 1
[32] SL Time-out 2
[33] Digital input DI18
[34] Digital input DI19
[35] Digital input DI27
[36] Digital input DI29
[39] Start command
[40] * Drive stopped
[42] Auto Reset Trip
[50] Comparator 4
[51] Comparator 5
[60] Logic rule 4
4 4
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 83
Page 86

Descrizioni dei parametri
VLT® Midi Drive FC 280
13-02 Stop Event
Selezionare la condizione (true o false) che disattiva il controllore
smart logic.
Option: Funzione:
[61] Logic rule 5
[70] SL Time-out 3
[71] SL Time-out 4
[72] SL Time-out 5
44
[73] SL Time-out 6
[74] SL Time-out 7
[83] Broken Belt
13-11 Comparator Operator
Option: Funzione:
[1]*Approx.Equal
(~)
[2] Greater Than
(>)
Il risultato della valutazione è TRUE quando
la variabile selezionata in
parametro 13-10 Comparator Operand è
pressoché uguale al valore sso in
parametro 13-12 Comparator Value.
Logica inversa di [0] Less Than (<).
13-12 Comparator Value
Range: Funzione:
13-03 Ripristinare SLC
Option: Funzione:
[0] * Non ripristinare
SLC
[1] Ripristinare SLC Ripristinare tutti i parametri nel gruppo di
Mantenere le impostazioni programmate
in tutti i gruppi di parametri 13-** Smart
logic.
parametri 13-** Smart logic alle
impostazioni di fabbrica.
13-10 Comparator Operand
Selezionare la variabile da monitorare con il comparatore. È un
parametro array contenente i comparatori da 0 a 5.
Option: Funzione:
[0] * Disabled
[1] Reference %
[2] Feedback %
[3] Motor speed
[4] Motor Current
[6] Motor power
[7] Motor voltage
[12] Analog input AI53
[13] Analog input AI54
[18] Pulse input FI29
[19] Pulse input FI33
[20] Alarm number
[30] Counter A
[31] Counter B
13-11 Comparator Operator
Option: Funzione:
Selezionare l'operatore da utilizzare nel
confronto. È un parametro array contenente
i comparatori da 0 a 5.
[0] Less Than (<) Il risultato della valutazione è TRUE, quando
la variabile selezionata in
parametro 13-10 Comparator Operand è
inferiore al valore sso in
parametro 13-12 Comparator Value. Il
risultato è false, se la variabile selezionata in
parametro 13-10 Comparator Operand è
superiore al valore sso in
parametro 13-12 Comparator Value.
0* [-9999 -
9999 ]
Selezionare il livello di attivazione per la
variabile che viene monitorata da questo
comparatore. Questo è un parametro array
contenente i comparatori da 0 a 5.
13-20 SL Controller Timer
Range: Funzione:
0 s* [0 - 3600s]Immettere il valore per denire la durata
dell'uscita false dal timer programmato. Un
timer è solo FALSE se viene avviato da
un'azione (per es. [29] Avvio timer 1) e no allo
scadere del valore impostato per il timer.
13-40 Logic Rule Boolean 1
Option: Funzione:
Selezionare il primo ingresso
booleano (true o false) per la regola
logica selezionata. Vedere
parametro 13-01 Start Event ([0]–[61])
e parametro 13-02 Stop Event ([70]–
[74]) per una descrizione più
approfondita.
[0] * False
[1] True
[2] Running
[3] In range
[4] On reference
[7] Out of current range
[8] Below I low
[9] Above I high
[16] Thermal warning
[17] Mains out of range
[18] Reversing
[19] Warning
[20] Alarm (trip)
[21] Alarm (trip lock)
[22] Comparator 0
[23] Comparator 1
[24] Comparator 2
[25] Comparator 3
[26] Logic rule 0
[27] Logic rule 1
84 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 87

Descrizioni dei parametri Guida alla Programmazione
13-40 Logic Rule Boolean 1
Option: Funzione:
[28] Logic rule 2
[29] Logic rule 3
[30] SL Time-out 0
[31] SL Time-out 1
[32] SL Time-out 2
[33] Digital input DI18
[34] Digital input DI19
[35] Digital input DI27
[36] Digital input DI29
[39] Start command
[40] Drive stopped
[42] Auto Reset Trip
[50] Comparator 4
[51] Comparator 5
[60] Logic rule 4
[61] Logic rule 5
[70] SL Time-out 3
[71] SL Time-out 4
[72] SL Time-out 5
[73] SL Time-out 6
[74] SL Time-out 7
[83] Broken Belt
13-41 Logic Rule Operator 1
Option: Funzione:
Selezionare il primo operatore logico da
utilizzare negli ingressi booleani da
parametro 13-40 Logic Rule Boolean 1 e
parametro 13-42 Logic Rule Boolean 2.
[0] * Disabled Ignorare parametro 13-42 Logic Rule Boolean
2, parametro 13-43 Logic Rule Operator 2 e
parametro 13-44 Logic Rule Boolean 3.
[1] AND Valutare l'espressione [13-40] AND [13-42].
[2] OR Valutare l'espressione [13-40] OR [13-42].
[3] AND NOT Valutare l'espressione [13-40] AND NOT
[13-42].
[4] OR NOT Valutare l'espressione [13-40] OR NOT
[13-42].
[5] NOT AND Valutare l'espressione NOT [13-40] AND
[13-42].
[6] NOT OR Valutare l'espressione NOT [13-40] OR
[13-42].
[7] NOT AND
NOT
[8] NOT OR NOT Valutare l'espressione NOT [13-40] OR NOT
Valutare l'espressione NOT [13-40] AND NOT
[13-42].
[13-42].
13-42 Logic Rule Boolean 2
Option: Funzione:
Selezionare il secondo ingresso
booleano (true o false) per la regola
logica selezionata. Vedere
parametro 13-01 Start Event ([0]–[61])
e parametro 13-02 Stop Event ([70]–
[74]) per una descrizione più
approfondita.
[0] * False
[1] True
[2] Running
[3] In range
[4] On reference
[7] Out of current range
[8] Below I low
[9] Above I high
[16] Thermal warning
[17] Mains out of range
[18] Reversing
[19] Warning
[20] Alarm (trip)
[21] Alarm (trip lock)
[22] Comparator 0
[23] Comparator 1
[24] Comparator 2
[25] Comparator 3
[26] Logic rule 0
[27] Logic rule 1
[28] Logic rule 2
[29] Logic rule 3
[30] SL Time-out 0
[31] SL Time-out 1
[32] SL Time-out 2
[33] Digital input DI18
[34] Digital input DI19
[35] Digital input DI27
[36] Digital input DI29
[39] Start command
[40] Drive stopped
[42] Auto Reset Trip
[50] Comparator 4
[51] Comparator 5
[60] Logic rule 4
[61] Logic rule 5
[70] SL Time-out 3
[71] SL Time-out 4
[72] SL Time-out 5
[73] SL Time-out 6
[74] SL Time-out 7
[83] Broken Belt
4 4
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 85
Page 88

Descrizioni dei parametri
VLT® Midi Drive FC 280
13-43 Logic Rule Operator 2
Option: Funzione:
Selezionare il secondo operatore logico da
utilizzare negli ingressi booleani calcolati in
parametro 13-40 Logic Rule Boolean 1,
parametro 13-41 Logic Rule Operator 1 e
parametro 13-42 Logic Rule Boolean 2, e
l'ingresso booleano proveniente da
44
[0] * Disabled Ignorare parametro 13-44 Logic Rule Boolean
[1] AND
[2] OR
[3] AND NOT
[4] OR NOT
[5] NOT AND
[6] NOT OR
[7] NOT AND
NOT
[8] NOT OR NOT
parametro 13-42 Logic Rule Boolean 2.
Parametro 13-42 Logic Rule Boolean 2 indica
l'ingresso booleano di parametro 13-44 Logic
Rule Boolean 3. Parametro 13-40 Logic Rule
Boolean 1 e parametro 13-42 Logic Rule
Boolean 2 indica l'ingresso booleano
calcolato in parametro 13-40 Logic Rule
Boolean 1, parametro 13-41 Logic Rule
Operator 1 e parametro 13-42 Logic Rule
Boolean 2.
3.
13-44 Logic Rule Boolean 3
Option: Funzione:
Selezionare il terzo ingresso booleano
(true o false) per la regola logica
selezionata. Vedere
parametro 13-40 Logic Rule Boolean 1,
parametro 13-41 Logic Rule Operator 1
e parametro 13-42 Logic Rule Boolean
2 e l'ingresso booleano. Vedere
parametro 13-01 Start Event ([0]–[61])
e parametro 13-02 Stop Event ([70]–
[74]) per una descrizione più
approfondita.
[0] * False
[1] True
[2] Running
[3] In range
[4] On reference
[7] Out of current range
[8] Below I low
[9] Above I high
[16] Thermal warning
[17] Mains out of range
[18] Reversing
[19] Warning
13-44 Logic Rule Boolean 3
Option: Funzione:
[20] Alarm (trip)
[21] Alarm (trip lock)
[22] Comparator 0
[23] Comparator 1
[24] Comparator 2
[25] Comparator 3
[26] Logic rule 0
[27] Logic rule 1
[28] Logic rule 2
[29] Logic rule 3
[30] SL Time-out 0
[31] SL Time-out 1
[32] SL Time-out 2
[33] Digital input DI18
[34] Digital input DI19
[35] Digital input DI27
[36] Digital input DI29
[39] Start command
[40] Drive stopped
[42] Auto Reset Trip
[50] Comparator 4
[51] Comparator 5
[60] Logic rule 4
[61] Logic rule 5
[70] SL Time-out 3
[71] SL Time-out 4
[72] SL Time-out 5
[73] SL Time-out 6
[74] SL Time-out 7
[83] Broken Belt
13-51 SL Controller Event
Option: Funzione:
Selezionare il terzo ingresso booleano
(true o false) per la regola logica
selezionata. Vedere
parametro 13-40 Logic Rule Boolean 1,
parametro 13-41 Logic Rule Operator 1,
parametro 13-42 Logic Rule Boolean 2
e l'ingresso booleano. Vedere
parametro 13-01 Start Event ([0]–[61])
e parametro 13-02 Stop Event ([70]–
[74]) per una descrizione più
approfondita.
[0] * False
[1] True
[2] Running
[3] In range
[4] On reference
[7] Out of current range
[8] Below I low
[9] Above I high
86 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 89

Descrizioni dei parametri Guida alla Programmazione
13-51 SL Controller Event
Option: Funzione:
[16] Thermal warning
[17] Mains out of range
[18] Reversing
[19] Warning
[20] Alarm (trip)
[21] Alarm (trip lock)
[22] Comparator 0
[23] Comparator 1
[24] Comparator 2
[25] Comparator 3
[26] Logic rule 0
[27] Logic rule 1
[28] Logic rule 2
[29] Logic rule 3
[30] SL Time-out 0
[31] SL Time-out 1
[32] SL Time-out 2
[33] Digital input DI18
[34] Digital input DI19
[35] Digital input DI27
[36] Digital input DI29
[39] Start command
[40] Drive stopped
[42] Auto Reset Trip
[50] Comparator 4
[51] Comparator 5
[60] Logic rule 4
[61] Logic rule 5
[70] SL Time-out 3
[71] SL Time-out 4
[72] SL Time-out 5
[73] SL Time-out 6
[74] SL Time-out 7
[83] Broken Belt
13-52 SL Controller Action
Option: Funzione:
[0] * Disabled Selezionare l'azione corrispondente all'evento
SLC. Le azioni vengono eseguite se l'evento
corrispondente (denito in
parametro 13-51 SL Controller Event) è
valutato come vero.
[1] No action
[2] Select set-up1Modicare il setup attivo
(parametro 0-10 Active Set-up) a 1. Se il setup
viene modicato, si unisce agli altri comandi
di setup provenienti dagli ingressi digitali o
tramite un eldbus.
[3] Select set-up2Modicare il setup attivo
(parametro 0-10 Active Set-up) a 2: Se il setup
viene modicato, si unisce agli altri comandi
13-52 SL Controller Action
Option: Funzione:
di setup provenienti dagli ingressi digitali o
tramite un eldbus.
[4] Select set-up3Modicare il setup attivo
(parametro 0-10 Active Set-up) a 3. Se il setup
viene modicato, si unisce agli altri comandi
di setup provenienti dagli ingressi digitali o
tramite un eldbus.
[5] Select set-up4Modicare il setup attivo
(parametro 0-10 Active Set-up) a 4. Se il setup
viene modicato, si unisce agli altri comandi
di setup provenienti dagli ingressi digitali o
tramite un eldbus.
[10] Select preset
ref 0
[11] Select preset
ref 1
[12] Select preset
ref 2
[13] Select preset
ref 3
[14] Select preset
ref 4
[15] Select preset
ref 5
[16] Select preset
ref 6
[17] Select preset
ref 7
Selezionare il riferimento preimpostato 0. Se
il riferimento preimpostato attivo viene
modicato, si unisce agli altri comandi di
riferimento preimpostato provenienti dagli
ingressi digitali o tramite un eldbus.
Selezionare il riferimento preimpostato 1. Se
il riferimento preimpostato attivo viene
modicato, si unisce agli altri comandi di
riferimento preimpostato provenienti dagli
ingressi digitali o tramite un eldbus.
Selezionare il riferimento preimpostato 2. Se
il riferimento preimpostato attivo viene
modicato, si unisce agli altri comandi di
riferimento preimpostato provenienti dagli
ingressi digitali o tramite un eldbus.
Selezionare il riferimento preimpostato 3. Se
il riferimento preimpostato attivo viene
modicato, si unisce agli altri comandi di
riferimento preimpostato provenienti dagli
ingressi digitali o tramite un eldbus.
Selezionare il riferimento preimpostato 4. Se
il riferimento preimpostato attivo viene
modicato, si unisce agli altri comandi di
riferimento preimpostato provenienti dagli
ingressi digitali o tramite un eldbus.
Selezionare il riferimento preimpostato 5. Se
il riferimento preimpostato attivo viene
modicato, si unisce agli altri comandi di
riferimento preimpostato provenienti dagli
ingressi digitali o tramite un eldbus.
Selezionare il riferimento preimpostato 6. Se
il riferimento preimpostato attivo viene
modicato, si unisce agli altri comandi di
riferimento preimpostato provenienti dagli
ingressi digitali o tramite un eldbus.
Selezionare il riferimento preimpostato 7. Se
il riferimento preimpostato attivo viene
modicato, si unisce agli altri comandi di
4 4
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 87
Page 90

Descrizioni dei parametri
VLT® Midi Drive FC 280
13-52 SL Controller Action
Option: Funzione:
riferimento preimpostato provenienti dagli
ingressi digitali o tramite un eldbus.
[18] Select ramp1Selezionare la rampa 1.
[19] Select ramp2Selezionare la rampa 2.
44
[22] Run Inviare un comando di avvio al convertitore
di frequenza.
[23] Run reverse Inviare un comando di avvio inverso per il
convertitore di frequenza.
[24] Stop Inviare un comando di arresto al convertitore
di frequenza.
[25] Qstop Inviare un comando di arresto rapido al
convertitore di frequenza.
[26] DC Brake Inviare un comando del freno CC al conver-
titore di frequenza.
[27] Coast Il convertitore di frequenza va immedia-
tamente in evoluzione libera. Tutti i comandi
di arresto, incluso il comando di ruota libera,
arrestano l'SLC.
[28] Freeze
output
[29] Start timer 0 Per una descrizione più dettagliata, vedere
[30] Start timer 1 Per una descrizione più dettagliata, vedere
[31] Start timer 2 Per una descrizione più dettagliata, vedere
[32] Set digital
out A low
[33] Set digital
out B low
[34] Set digital
out C low
[35] Set digital
out D low
[38] Set digital
out A high
[39] Set digital
out B high
[40] Set digital
out C high
[41] Set digital
out D high
[60] Reset
Counter A
[61] Reset
Counter B
[70] Start Timer 3 Per una descrizione più dettagliata, vedere
Bloccare l'uscita del convertitore di
frequenza.
parametro 13-20 SL Controller Timer.
parametro 13-20 SL Controller Timer.
parametro 13-20 SL Controller Timer.
Qualsiasi uscita con uscita SL A è bassa.
Qualsiasi uscita con uscita SL B è bassa.
Qualsiasi uscita con uscita SL C è bassa.
Qualsiasi uscita con uscita SL D è bassa.
Qualsiasi uscita con uscita SL A è alta.
Qualsiasi uscita con uscita SL B è alta.
Qualsiasi uscita con uscita SL C è alta.
Qualsiasi uscita con uscita SL D è alta.
Azzerare il contatore A.
Azzerarare il contattore B.
parametro 13-20 SL Controller Timer.
13-52 SL Controller Action
Option: Funzione:
[71] Start Timer 4 Per una descrizione più dettagliata, vedere
parametro 13-20 SL Controller Timer.
[72] Start Timer 5 Per una descrizione più dettagliata, vedere
parametro 13-20 SL Controller Timer.
[73] Start Timer 6 Per una descrizione più dettagliata, vedere
parametro 13-20 SL Controller Timer.
[74] Start Timer 7 Per una descrizione più dettagliata, vedere
parametro 13-20 SL Controller Timer.
88 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 91

Descrizioni dei parametri Guida alla Programmazione
4.14 Parametri: 14-** Special Functions
14-01 Frequenza di commutazione
Option: Funzione:
Selezionare la frequenza di commutazione dell'inverter. La modica della frequenza di
commutazione contribuisce a ridurre la rumorosità
del motore.
[2] 2,0 kHz
[3] 3,0 kHz
[4] 4,0 kHz
[5] 5,0 kHz
[6] 6,0 kHz
[7] 8,0 kHz
[8] 10,0 kHz
[9] 12,0 kHz
[10] 16,0 kHz
14-03 Overmodulation
Option: Funzione:
[0] O Per evitare l'ondulazione della coppia sull'albero
motore, selezionare [0] O per evitare la sovramodulazione della tensione di uscita. Questa funzione può
essere utile per applicazioni come macchine retti-
catrici.
[1] * On Selezionare [1] On per attivare la funzione di sovramo-
dulazione della tensione di uscita. Selezionare questa
impostazione quando è necessario che la tensione di
uscita sia superiore al 95% della tensione di ingresso
(di solito in caso di funzionamento fuori sincronia) La
tensione di uscita viene aumentata in funzione del
livello di sovramodulazione.
AVVISO!
La sovramodulazione genera una maggiore
ondulazione della coppia e un aumento delle
armoniche.
14-07 Dead Time Compensation Level
Range: Funzione:
Size
related*
14-08 Damping Gain Factor
Range: Funzione:
Size related* [0 - 100 %] Fattore di attenuazione per la
[0 100 ]
Livello di compensazione dei tempi morti
applicata in percentuale. Un alto livello
(>90%) ottimizza la risposta del motore
dinamico; un livello del 50–90% è buono
per ridurre al minimo l'ondulazione della
coppia motore e per la dinamica del
motore. Un livello 0 disattiva la compensazione dei tempi morti.
compensazione della tensione
collegamento CC.
14-09 Dead Time Bias Current Level
Range: Funzione:
Size related* [0 - 100 %] Imposta un segnale bias (in [%]) da
aggiungere al segnale di corrente per
la compensazione dei tempi morti in
alcuni motori.
14-10 Mains Failure
Option: Funzione:
AVVISO!
Parametro 14-10 Mains Failure non può
essere modicato mentre il motore è in
funzione.
Parametro 14-10 Mains Failure viene usato
tipicamente dove sono presenti interruzioni di rete
(cadute di tensione) molto brevi. In presenza di un
carico del 100% e una breve interruzione di
tensione, la tensione CC sui condensatori principali
cala rapidamente. Per convertitori di frequenza più
grandi, bastano solo pochi millisecondi prima che
il livello CC cali a circa 373 V CC e l'IGBT venga
disinserito e perda il controllo del motore. Quando
l'alimentazione viene ripristinata e l'IGBT si riavvia,
la frequenza di uscita e il vettore di tensione non
corrispondono alla velocità/frequenza del motore
e normalmente il risultato è una sovratensione o
sovracorrente che nella maggior parte dei casi
provoca uno scatto bloccato.
Parametro 14-10 Mains Failure può essere
programmato per evitare questa situazione.
Selezionare la funzione di funzionamento del
convertitore di frequenza quando viene raggiunta
la soglia in parametro 14-11 Tensione di alimen-
tazione a guasto di rete.
[0]*No
function
[1] Ctrl.
rampdown
Il convertitore di frequenza non compensa
un'interruzione della rete. La tensione sul
collegamento CC si riduce rapidamente e il
controllo del motore va perso entro millisecondi e
secondi. Il risultato è uno scatto bloccato.
Il convertitore di frequenza mantiene il controllo
del motore ed eettua una rampa di decelerazione controllata dal livello
parametro 14-11 Mains Voltage at Mains Fault. Se
parametro 2-10 Brake Function è [0] O o [2] Freno
CA, la rampa segue la rampa di sovratensione. Se
parametro 2-10 Brake Function è [1] Freno
resistenza, la rampa segue l'impostazione in
parametro 3-81 Quick Stop Ramp Time. Questa
opzione è particolarmente utile nelle applicazioni
con pompe nelle quali l'inerzia è bassa e la
frizione è elevata. Una volta ripristinata l'alimen-
4 4
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 89
Page 92

130BC918.10
U
14-11*1.35
Ref
n [RPM]
t [S]
A B CDE A
DC
U
DC
[V]
t [S]
Descrizioni dei parametri
VLT® Midi Drive FC 280
14-10 Mains Failure
Option: Funzione:
tazione, la frequenza di uscita accelera il motore
alla velocità di riferimento (se l'interruzione di rete
persiste, la rampa di decelerazione controllata
potrebbe far scendere la frequenza di uscita no a
0 giri/min, e quando l'alimentazione è ripristinata,
l'applicazione viene accelerata da 0 giri/min. alla
44
[2] Ctrl.
rampdown,
trip
[3] Coasting Le centrifughe possono funzionare per un'ora
[4] Kinetic
back-up
velocità di riferimento precedente attraverso la
normale rampa di salita). Se l'energia nel
collegamento CC scompare prima che il motore
venga decelerato a zero, il motore viene arrestato
gradualmente.
La selezione è simile alla selezione [1] Rampa
decel. contr., eccetto che in [2] Rampa dec. c., sc. è
necessario un ripristino per l'avviamento dopo
un'accensione.
senza alimentazione elettrica. In tali situazioni è
possibile selezionare una funzione di ruota libera
in occasione dell'interruzione di rete, insieme a un
riaggancio al volo che si verica al ripristino dell'alimentazione.
Il backup dell'energia cinetica assicura che il
convertitore di frequenza continuerà a funzionare
nché nel sistema è presente energia grazie
all'inerzia proveniente dal motore e dal carico. Ciò
viene eettuato convertendo l'energia meccanica
al collegamento CC, mantenendo così il controllo
del convertitore di frequenza e del motore. Questo
può estendere il funzionamento controllato, a
seconda dell'inerzia nel sistema. Per le ventole si
tratta tipicamente di alcuni secondi, per le pompe
no a 2 secondi e per compressori solo di una
frazione di secondo. Molte applicazioni industriali
possono estendere il funzionamento controllato
per molti secondi, il che è spesso un tempo
suciente per consentire il ritorno della rete.
14-10 Mains Failure
Option: Funzione:
Il livello CC durante [4] Back up cinetico è
parametro 14-11 Mains Voltage at Mains Fault x
1,35.
Se la rete non ritorna, UDC viene mantenuta il più
a lungo possibile decelerando la velocità a 0 giri/
minuto. Inne il convertitore di frequenza decelera
a ruota libera.
Se la rete ritorna mentre è in corso il backup
dell'energia cinetica, UDC aumenta oltre
parametro 14-11 Mains Voltage at Mains Fault x
1,35. Ciò viene rilevato in uno dei seguenti modi:
•
•
•
[5] Kinetic
back-up,
trip
La dierenza tra il backup dell'energia cinetica con
e senza scatto è che l'ultima decelera sempre a 0
giri/min e scatta, indipendentemente dal ritorno
della rete.
La funzione è eettuata in modo che non rileva se
la rete torna, questa è la ragione per il livello
relativamente elevato sul collegamento CC
durante la rampa di discesa.
Se UDC >parametro 14-11 Mains Voltage
at Mains Fault x 1,35 x 1,05
Se la velocità è superiore al riferimento.
Questo è rilevante se la rete ritorna a un
livello inferiore di quello precedente, per
esempio parametro 14-11 Mains Voltage
at Mains Fault x 1,35 x 1,02. Questo non
soddisfa il criterio in alto e il convertitore
di frequenza tenta di ridurre UDC a
parametro 14-11 Mains Voltage at Mains
Fault x 1,35 aumentando la velocità. Ciò
non accadrà perché la rete non può
essere ridotta.
In caso di funzionamento motorizzato. Lo
stesso meccanismo come nel punto
precedente, ma dove l'inerzia impedisce
che la velocità aumenti oltre la velocità
di riferimento. Questo dà luogo alla
funzione motrice del motore nché la
velocità è superiore alla velocità di
riferimento e si verica la situazione in
alto. Invece di attendere che ciò avvenga,
viene introdotto il presente il criterio.
A Funzion.norm.
B Guasto di rete
C Back up cinetico
D Ritorno rete
E Funzionamento normale: rampa
Disegno 4.17 Backup dell'energia cinetica
90 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 93

14-11*1.35
Ref
790 V
0
A B C D
130BC920.10
U
n [RPM]
t [S]
DC
U
DC
[V]
t [S]
Descrizioni dei parametri Guida alla Programmazione
14-10 Mains Failure
Option: Funzione:
A Funzion.norm.
B Guasto di rete
C Back up cinetico
D Scatto
Disegno 4.18 Funz. rigen., scatto
[6] Alarm
[7] Kin.
back-up,
trip w
recovery
14-11 Mains Voltage at Mains Fault
Range: Funzione:
342 V* [100 -
800 V]
Questo parametro denisce la tensione di
soglia alla quale deve essere attivata la
funzione selezionata in parametro 14-10 Mains
Failure. Il livello di rilevamento è impostato su
un fattore sqrt2 del valore in questo
parametro.
14-12 Funz. durante sbilanciamento di rete
Option: Funzione:
Il funzionamento in condizioni di grave
squilibrio di rete riduce la durata del motore. È
considerato grave se il convertitore di
frequenza viene fatto funzionare continuamente
a valori vicini al carico nominale (per esempio
una pompa o una ventola che funzionano quasi
a velocità massima).
[0] * Scatto Far scattare il convertitore di frequenza.
[1] Avviso Emettere un avviso.
[2] Disattivato Non viene eseguita alcuna azione.
14-15 Kin. Backup Trip Recovery Level
Range: Funzione:
Size related* [0 - 500.000 Reference-
FeedbackUnit]
Questo parametro
specica il livello di
recupero scatto del
backup dell'energia
cinetica.
14-20 Reset Mode
Option: Funzione:
AVVISO
AVVIO INVOLONTARIO
Quando il convertitore di frequenza
è collegato alla rete CA, all'alimentazione CC o alla condivisione del
carico, il motore può avviarsi in
qualsiasi momento. L'avvio
involontario durante le operazioni
di programmazione, manutenzione
o riparazione può causare morte,
lesioni gravi o danni alle cose. Il
motore può essere avviato tramite
un interruttore esterno, un
comando eldbus, un segnale di
riferimento in ingresso dall'LCP
oppure dopo aver eliminato una
condizione di guasto.
Per prevenire un avviamento
involontario del motore, procedere
come segue:
•
•
•
AVVISO!
Se il numero specicato di ripristini
automatici viene raggiunto entro
10 minuti, il convertitore di
frequenza entra in modalità [0]
Ripristino manuale. Dopo aver
eseguito il ripristino manuale,
l'impostazione di
parametro 14-20 Reset Mode torna
alla selezione di partenza. Se il
numero di ripristini automatici non
viene raggiunto entro 10 minuti,
oppure quando viene eettuato un
ripristino manuale, il contatore
interno di ripristini automatici viene
azzerato.
4 4
Scollegare il convertitore
di frequenza dalla rete.
Premere [O/Reset]
sull'LCP prima di
programmare i parametri.
Cablare completamente e
montare il convertitore di
frequenza, il motore e
qualsiasi apparecchiatura
azionata prima di
collegare il convertitore di
frequenza alla rete CA,
all'alimentazione CC o alla
condivisione del carico.
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 91
Selezionare la funzione di ripristino dopo
Page 94

Descrizioni dei parametri
VLT® Midi Drive FC 280
14-20 Reset Mode
Option: Funzione:
lo scatto. Dopo il ripristino, è possibile
riavviare il convertitore di frequenza. La
modalità di ripristino automatico non
inuisce sull'allarme 68, Safe Torque O e
l'allarme 188, STO internal fault nel
software v1.2 e ulteriori versioni.
44
[0] * Manual reset Selezionare [0] Ripristino manuale per
eettuare il ripristino mediante [Reset] o
mediante gli ingressi digitali.
[1] Automatic reset
x 1
[2] Automatic reset
x 2
[3] Automatic reset
x 3
[4] Automatic reset
x 4
[5] Automatic reset
x 5
[6] Automatic reset
x 6
[7] Automatic reset
x 7
[8] Automatic reset
x 8
[9] Automatic reset
x 9
[10] Automatic reset
x 10
[11] Automatic reset
x 15
[12] Automatic reset
x 20
[13] Innite auto
reset
[14] Reset at power-
up
Selezionare [1]-[12] Riprist. autom. x 1…x
20 per eseguire da 1 a 20 ripristini
automatici dopo lo scatto.
Selezionare [13] Ripr. autom. inn. per
ripristinare in modo continuo dopo lo
scatto.
14-21 Automatic Restart Time
Range: Funzione:
10 s* [0 - 600s]Impostare l'intervallo di tempo tra lo scatto e
l'avvio della funzione di ripristino automatico.
Questo parametro è attivo quando
parametro 14-20 Reset Mode è impostato su [1]–
[13] Riprist. autom.
14-22 Operation Mode
Option: Funzione:
Specicare il funzionamento normale, eseguire i
test o inizializzare tutti i parametri, fatta
eccezione per parametro 15-03 Accensioni,
parametro 15-04 Sovratemp. e
parametro 15-05 Sovratensioni. Questa funzione
è solo attiva quando il convertitore di frequenza
viene spento e riacceso.
[0]*Normal
operation
[2] Initiali-
sation
Funzionamento normale con motore
selezionato.
Resettare tutti i valori dei parametri alle
impostazioni di fabbrica, fatta eccezione per
parametro 15-03 Accensioni,
parametro 15-04 Sovratemp. e
parametro 15-05 Sovratensioni. Il convertitore di
frequenza eettua un reset durante la
successiva accensione.
14-24 Trip Delay at Current Limit
Range: Funzione:
60 s* [0 -
Immettere il ritardo scatto per limite di corrente in
60 s]
secondi. Se la corrente di uscita raggiunge il limite
di corrente (parametro 4-18 Current Limit), viene
visualizzato un avviso. Se l'avviso limite di corrente
è continuamente presente per la durata indicata in
questo parametro, il convertitore di frequenza
scatta. Per funzionare continuamente nel limite di
corrente senza scattare, impostare il parametro a
60 s = O. Il monitoraggio termico del convertitore
di frequenza rimane attivo.
14-25 Trip Delay at Torque Limit
Range: Funzione:
60 s* [0 -
Immettere il ritardo scatto per limite di coppia in
60 s]
secondi. Se la coppia in uscita ha raggiunto il
limite di coppia (parametro 4-16 Torque Limit Motor
Mode e parametro 4-17 Torque Limit Generator
Mode), viene visualizzato un avviso. Se questo
avviso è continuamente presente per la durata
indicata in questo parametro, il convertitore di
frequenza scatta. Disabilitare il ritardo scatto
impostando il parametro su 60 s = O. Il monitoraggio termico del convertitore di frequenza
rimane attivo.
14-27 Action At Inverter Fault
Option: Funzione:
Selezionare come il convertitore di frequenza
reagisca quando si verica una sovratensione o
un guasto di terra.
[0] Trip Disattivare i ltri di protezione e scatta al primo
guasto.
[1] * Warning Far funzionare i ltri di protezione normalmente.
92 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 95

Descrizioni dei parametri Guida alla Programmazione
14-28 Production Settings
Option: Funzione:
[0] * No action
[1] Service reset
[3] Software Reset
14-29 Service Code
Range: Funzione:
0* [0 - 0x7FFFFFFF ] Solo per uso interno.
14-30 Reg. lim. corr., guadagno proporz.
Range: Funzione:
100 %* [0 - 500 %] Immettere il guadagno proporzionale del
regolatore del limite di corrente. La
selezione di un valore alto velocizza la
risposta del controllore. Un valore troppo
elevato rende il controllore instabile.
14-31 Current Lim Ctrl, Integration Time
Range: Funzione:
0.020 s* [0.002 - 2 s] Controllare il tempo di integrazione del
controllo del limite di corrente. Se si
imposta un valore più basso, il controllo
reagirà più rapidamente. Un'impostazione
troppo bassa renderà il regolatore
instabile.
14-32 Current Lim Ctrl, Filter Time
Range: Funzione:
5 ms* [1 - 100 ms] Imp. la cost. di tempo per il ltro p.-b. della
reg. limite di corrente.
14-40 VT Level
Range: Funzione:
66%* [40 -
AVVISO!
90 %]
Questo parametro non può essere regolato
mentre il motore è in funzione.
AVVISO!
Questo parametro non è attivo quando
parametro 1-10 Struttura motore è
impostato su opzioni che abilitano il modo
motore PM.
Immettere il livello di magnetizzazione del motore
a bassa velocità. La selezione di un valore basso
riduce le perdite di energia nel motore ma anche
la capacità di carico.
14-41 AEO Minimum Magnetisation
Range: Funzione:
66 %* [40 -
75 %]
Immettere la magnetizzazione minima
consentita per AEO. La selezione di un valore
basso riduce le perdite di energia nel motore
ma anche la resistenza alle variazioni
improvvise del carico.
14-44 d-axis current optimization for IPM
Range: Funzione:
100%* [0 -
200 %]
Questo parametro è disponibile solo quando
parametro 1-10 Motor Construction è impostato su
[2] PM, salient IPM, non-Sat.
Normalmente, il controllo PM VVC+ ottimizza
automaticamente l'asse d, smagnetizzando la
corrente a seconda delle impostazioni dell'asse d
e q. Quando parametro 1-10 Motor Construction è
impostato su [2] PM, salient IPM, non-Sat,
utilizzare questo parametro per compensare
l'eetto saturazione a carico elevato. Solitamente,
l'incremento di questo valore migliora l'ecienza.
Tuttavia, 0% signica nessuna ottimizzazione e
corrente sull'asse d pari a zero (non consigliato).
14-51 DC-Link Voltage Compensation
Option: Funzione:
[0] O Disattivare la compensazione del collegamento CC.
[1] * On Attivare la compensazione del collegamento CC.
14-52 Comando ventola
Option: Funzione:
[5] Modalità sempre on
[6] Modalità sempre o
[7] Modalità on se inverter on, altrimenti o
[8] * Modalità a velocità variabile
14-55 Output Filter
Option: Funzione:
AVVISO!
Questo parametro non può essere
modicato mentre il motore è in
funzione.
Selezionare il tipo di ltro di uscita
collegato.
[0] * No Filter
[1] Sine-Wave
Filter
4 4
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 93
Page 96

Descrizioni dei parametri
VLT® Midi Drive FC 280
14-61 Function at Inverter Overload
Quando il convertitore di frequenza emette un avviso per sovraccarico del convertitore di frequenza, selezionare se continuare e
far scattare il convertitore di frequenza o se ridurre la corrente di
uscita.
Option: Funzione:
[0] * Trip
[1] Derate
44
14-63 Min Switch Frequency
Option: Funzione:
Impostare la frequenza di commutazione minima
consentita dal ltro di uscita.
[2] * 2.0 kHz
[3] 3.0 kHz
[4] 4.0 kHz
[5] 5.0 kHz
[6] 6.0 kHz
[7] 8.0 kHz
[8] 10.0 kHz
[9] 12.0 kHz
[10] 16.0 kHz
14-64 Dead Time Compensation Zero Current Level
Option: Funzione:
[0] * Disabled
[1] Enabled Se si usa un cavo motore lungo, selezionare
questa opzione per ridurre al minimo l'ondulazione della coppia sul motore.
14-90 Fault Level
Utilizzare questo parametro per personalizzare i livelli di guasto.
Usare l'ottavo elemento per controllare il livello di guasto
dell'allarme 13, Sovracorrente.
Option: Funzione:
[3] * Trip Lock L'allarme è impostato su scatto bloccato.
[4] Trip w. delayed
reset
[5] Flystart All'avviamento, il convertitore di frequenza
Indice Allarme Scatto
0 Riservato – – –
1 Riservato – – –
2 Riservato – – –
3 Riservato – – –
4 Riservato – – –
5 Riservato – – –
6 Riservato – – –
7 Sovracorrente D x x
L'allarme è congurato su allarme scatto
che può essere ripristinato dopo un tempo
di ritardo. Per esempio, se l'allarme 13,
Sovracorrente è congurato su questa
opzione, può essere ripristinato 3 minuti
dopo l'allarme.
tenta di agganciare un motore in rotazione.
Se viene selezionata questa opzione,
parametro 1-73 Flying Start viene forzato su
[1] Abilitato.
bloccato
Scatto con
reset
ritardato
Flystart
14-65 Speed Derate Dead Time Compensation
Range: Funzione:
Size
related*
[ 20 1000 Hz]
Il livello di compensazione di tempi
morti viene ridotto linearmente rispetto
alla frequenza di uscita dal livello
massimo impostato in
parametro 14-07 Dead Time Compensation
Level al livello minimo impostato in
questo parametro.
14-89 Option Detection
Selezionare il comportamento quando viene rilevato un cambio
di opzione. Questa impostazione di parametro ritorna a [0] Protez.
cong. opzione dopo un cambio di opzione.
Option: Funzione:
[0] * Protect Option
Cong.
[1] Enable Option
Change
Congelare le impostazioni
correnti e prevenire modiche
indesiderate quando mancano o
vengono rilevati cambi di
opzioni.
Le impostazioni possono essere
modicate quando si cambia la
congurazione del sistema.
Tabella 4.5 Tabella per la selezione dell'azione quando
Appare l'allarme selezionato (Parametro 14-90 Fault Level)
D = Impostazioni di fabbrica
x = selezione possibile
94 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 97

Descrizioni dei parametri Guida alla Programmazione
4.15 Parametri: 15-** Drive Information
15-00 Operating hours
Range: Funzione:
0 h* [0 - 0x7f. h] Visualizza il numero di ore di esercizio
del convertitore di frequenza. Il valore è
salvato quando il convertitore di
frequenza viene spento.
15-01 Running Hours
Range: Funzione:
0 h* [0 -
0x7f. h]
Visualizza il numero di ore di esercizio del
convertitore di frequenza. Azzerare il
contatore in parametro 15-07 Reset Running
Hours Counter. Il valore è salvato quando il
convertitore di frequenza viene spento.
15-02 Contatore kWh
Range: Funzione:
0 kWh* [0 -
2147483647
kWh]
Registrare il consumo energetico del
motore come un valore medio
nell'arco di un’ora. Azzerare il
contatore in parametro 15-06 Riprist.
contat. kWh.
15-03 Accensioni
Range: Funzione:
0* [0 - 2147483647 ] Indica il numero di volte che il conver-
titore di frequenza è stato acceso.
15-04 Sovratemp.
Range: Funzione:
0* [0 - 65535 ] Visualizza il numero di guasti da sovratempe-
ratura del convertitore di frequenza.
15-05 Sovratensioni
Range: Funzione:
0* [0 - 65535 ] Visualizza il numero di sovratensioni del
convertitore di frequenza.
15-06 Riprist. contat. kWh
Option: Funzione:
[0] * Nessun reset Non è necessario alcun ripristino del
contatore kWh.
[1] Contat.
riprist.
Premere [OK] per azzerare il contatore kWh
(vedere parametro 15-02 Contatore kWh).
15-07 Reset Running Hours Counter
Option: Funzione:
[0] * Do not reset
[1] Reset counter Premere [OK] per azzerare il contatore ore di
esercizio (vedere parametro 15-01 Running
Hours).
15-30 Alarm Log: Error Code
Range: Funzione:
0* [0 - 255 ] Visualizza il codice errore e ricercare il suo
signicato in capitolo 6 Risoluzione dei problemi.
15-31 InternalFaultReason
Range: Funzione:
0* [-32767 -
32767 ]
Visualizza una descrizione aggiuntiva
dell'errore. Questo parametro viene usato
prevalentemente in combinazione con
l'allarme 38 Guasto interno.
15-40 FC Type
Range: Funzione:
0* [0 - 0 ] Visualizza il tipo di convertitore di frequenza. La
visualizzazione è identica al campo di potenza
della denizione del codice del tipo, caratteri 1–6.
15-41 Power Section
Range: Funzione:
0* [0 - 20 ] Visualizza il tipo di FC. La visualizzazione è
identica al campo di potenza della denizione del
codice del tipo, caratteri 7–10.
15-42 Voltage
Range: Funzione:
0* [0 - 20 ] Visualizza il tipo di FC. La visualizzazione è
identica al tipo di campo di potenza della
denizione del codice del tipo, caratteri 11–12.
15-43 Versione software
Range: Funzione:
0* [0 - 5 ] Visualizza la versione software combinata (o
versione del pacchetto) comprendente sia il
software di potenza che il software di controllo.
15-44 Stringa cod. tipo ordin.
Range: Funzione:
0* [0 - 40 ] Visualizza il codice identicativo usato per
riordinare il convertitore nella sua congurazione
originale.
15-45 Actual Typecode String
Range: Funzione:
0* [0 - 40 ] Visualizza il codice identicativo eettivo.
15-46 Drive Ordering No
Range: Funzione:
0* [0 - 0 ] Visualizza il numero d'ordine a 8 cifre utilizzato per
riordinare il convertitore di frequenza nella sua
congurazione originale.
4 4
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 95
Page 98

Descrizioni dei parametri
VLT® Midi Drive FC 280
15-48 N. ld LCP
Range: Funzione:
0* [0 - 20 ] Visualizza il numero ID dell'LCP.
15-71 Slot A Option SW Version
Range: Funzione:
0* [0 - 20 ] Visualizza la versione software per l'opzione
installata nello slot A.
15-49 Scheda di contr. SW id
Range: Funzione:
0* [0 - 20 ] Visualizza il numero di versione software della
scheda di controllo.
44
15-50 Scheda di pot. SW id
15-92 Dened Parameters
Range: Funzione:
0* [0 - 2000 ] Questo parametro contiene un elenco di tutti i
parametri deniti nel convertitore di frequenza.
L’elenco termina con 0.
Range: Funzione:
0* [0 - 20 ] Visualizza il numero di versione software della
scheda di potenza.
15-51 Numero seriale conv. di freq.
15-97 Application Type
Range: Funzione:
0* [0 - 0xFFFFFFFF ] Questo parametro contiene dati utilizzati
da Software di congurazione MCT 10.
Range: Funzione:
0* [0 - 10 ] Visualizza il numero seriale del convertitore di
frequenza.
15-52 OEM Information
15-98 Drive Identication
Range: Funzione:
0* [0 - 56 ] Questo parametro contiene dati utilizzati da
Software di congurazione MCT 10.
Range: Funzione:
0* [0 - 0 ] Visualizzare le informazioni OEM.
15-99 Parameter Metadata
Range: Funzione:
15-53 N. di serie scheda di potenza
Range: Funzione:
0* [0 - 19 ] Visualizza il numero di serie della scheda di
potenza.
0* [0 - 9999 ] Questo parametro contiene dati utilizzati da
Software di congurazione MCT 10.
15-57 File Version
Range: Funzione:
0* [0 - 255 ] Visualizzare la versione del le.
15-59 Filename
Range: Funzione:
0* [0 - 16 ] Visualizzare il nome attuale dei le delle OEM.
15-60 Option Mounted
Range: Funzione:
Size related* [0 - 30 ] Mostra il tipo di opzione installata.
15-61 Option SW Version
Range: Funzione:
Size related* [0 - 20 ] Visualizza la versione software
dell'opzione installata.
15-70 Option in Slot A
Range: Funzione:
0* [0 - 30 ] Visualizza il codice identicativo per l'opzione
installata nello slot A e la traduzione del codice
identicativo.
96 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
Page 99

Descrizioni dei parametri Guida alla Programmazione
4.16 Parametri: 16-** Data Readouts
16-00 Parola di controllo
Range: Funzione:
0* [0 - 65535 ] Visualizza la parola di controllo inviata dal
convertitore di frequenza tramite la porta di
comunicazione seriale in codice hex.
16-01 Reference [Unit]
Range: Funzione:
0 ReferenceFeedbackUnit*
[-4999 - 4999
ReferenceFeedbackUnit]
Visualizza il valore di
riferimento attuale
applicato su base a impulsi
o analogica nell'unità che
risulta dalla congurazione
selezionata in
parametro 1-00 Conguration Mode.
16-02 Riferimento [%]
Range: Funzione:
0 %* [-200 -
200 %]
Visualizza il riferimento totale. Il riferimento
totale è la somma dei riferimenti digitali,
analogici, preimpostati, bus e congelati più
catch-up e slow-down.
16-03 Parola di stato
Range: Funzione:
0* [0 - 65535 ] Visualizza la parola di stato inviata dal conver-
titore di frequenza tramite la porta di
comunicazione seriale in codice hex.
16-05 Main Actual Value [%]
Range: Funzione:
0 %* [-200 - 200 %] Visualizza la parola di 2 byte inviata con la
parola di stato al bus master che riporta il
valore reale principale.
16-09 Custom Readout
Range: Funzione:
0 CustomReadoutUnit*
[0 - 9999
CustomReadoutUnit]
Visualizza la visualizzazione
personalizzata da
parametro 0-30 Custom
Readout Unit a
parametro 0-32 Custom
Readout Max Value.
16-10 Power [kW]
Range: Funzione:
0
kW*
[0 1000
kW]
Visualizzare la potenza motore in kW. Il valore
visualizzato calcolato si basa sulla tensione del
collegamento CC e sulla corrente del
collegamento CC. Il valore è ltrato, e pertanto
possono passare circa 128 ms dalla variazione di
un valore in ingresso alla modica dei valori
visualizzati. La risoluzione del valore di visualizzazione sul bus di campo è in passi da 1 W.
16-11 Power [hp]
Range: Funzione:
0 hp* [0 -
1000 hp]
Visualizza la potenza motore in cv. Il valore
visualizzato viene calcolato in base alla
tensione e alla corrente attuali del
collegamento CC. Il valore è ltrato, e pertanto
possono passare circa 128 ms dalla variazione
di un valore in ingresso alla modica dei valori
visualizzati.
16-12 Motor Voltage
Range: Funzione:
0 V* [0 - 65535 V] Visualizza la tensione motore, un valore
calcolato viene usato per controllare il
motore.
16-13 Frequency
Range: Funzione:
0 Hz* [0 - 6553.5 Hz] Visualizza la frequenza del motore senza
smorzamento della risonanza.
16-14 Motor current
Range: Funzione:
0 A* [0 - 655.35A]Visualizza la corrente motore misurata come
valore medio, I
possono passare circa 30 ms dalla variazione
di un valore in ingresso alla modica dei
valori visualizzati.
. Il valore è ltrato, e
RMS
16-15 Frequency [%]
Range: Funzione:
0 %* [0 -
6553.5 %]
Visualizza una parola di due byte che
rappresenta la frequenza motore eettiva
(senza smorzamento della risonanza) in
percentuale (scala 0000-4000 Hex) di
parametro 4-19 Freq. di uscita max..
4 4
MG07C306 Danfoss A/S © 07/2016 Tutti i diritti riservati. 97
Page 100

Descrizioni dei parametri
VLT® Midi Drive FC 280
16-16 Torque [Nm]
Range: Funzione:
0 Nm [-30000 -
30000 Nm]
44
16-17 Speed [RPM]
Visualizza il valore di coppia con segno,
applicata all’albero motore. Alcuni motori
forniscono più del 160% di coppia.
Pertanto, il valore minimo e il valore
massimo dipendono dalla corrente massima
del motore nonché dal motore usato.
Range: Funzione:
0 RPM [-30000 -
30000 RPM]
Visualizza la velocità eettiva dell'albero
motore in giri/min. Nel controllo di
processo ad anello aperto o ad anello
chiuso, il regime del motore viene stimato.
Nelle modalità di regolazione velocità ad
anello chiuso, il regime del motore viene
misurato.
16-18 Motor Thermal
Range: Funzione:
0 %* [0 -
100 %]
Visualizza il valore calcolato del carico termico
sul motore. Il limite di disinserimento è 100%. La
base per il calcolo è la funzione ETR selezionata
in parametro 1-90 Motor Thermal Protection.
16-20 Motor Angle
Range: Funzione:
0* [0 - 65535 ] Visualizza lo sfasamento angolare attuale
dell’encoder rispetto all'indice di zero.
L'intervallo di valori 0–65535 corrisponde a 0–
2xpi (radianti).
16-22 Coppia [%]
Range: Funzione:
0 %* [ -200– 200 % ] Visualizza la coppia come percentuale
della coppia nominale, con segno,
applicata all’albero motore.
16-30 DC Link Voltage
Range: Funzione:
0 V* [0 - 65535 V] Visualizza un valore misurato. Il valore è
ltrato con una costante di tempo di 30 ms.
16-34 Heatsink Temp.
Range: Funzione:
0 °C* [-128 - 127 °C] Visualizza la temperatura del dissipatore
del convertitore di frequenza.
16-35 Inverter Thermal
Range: Funzione:
0 %* [0 - 255 %] Visualizza il carico in percentuale sull'inverter.
16-36 Inv. Nom. Current
Range: Funzione:
0 A* [0 - 655.35A]Visualizza la corrente nominale dell'inverter,
che dovrebbe corrispondere ai dati di targa
del motore collegato. I dati vengono
utilizzati per calcolare la coppia e la
protezione del motore.
16-37 Inv. Max. Current
Range: Funzione:
0 A* [0 - 655.35A]Visualizza la corrente massima dell'inverter
che dovrebbe corrispondere ai dati di targa
del motore collegato. I dati vengono
utilizzati per calcolare la coppia e la
protezione del motore.
16-38 SL Controller State
Range: Funzione:
0* [0 - 20 ] Visualizza lo stato dell'evento eseguito dal
controllo SL.
16-39 Control Card Temp.
Range: Funzione:
0 °C* [0 - 65535 °C] Visualizza la temperatura della scheda di
controllo indicata in °C.
16-50 External Reference
Range: Funzione:
0 %* [-200 -
200 %]
Visualizza il riferimento totale, la somma
dei riferimenti digitali, analogici,
preimpostati, bus e riferimenti congelati,
più catch-up e slow-down.
16-52 Feedback[Unit]
16-33 Energia freno/2 min
Range: Funzione:
0 kW* [0 - 10000
kW]
Visualizza la potenza freno trasmessa a
una resistenza freno esterna. La potenza
media viene calcolata su una base media
nel corso degli ultimi 120 s.
Range: Funzione:
0
ProcessCtrlUnit*
[-4999 - 4999
ProcessCtrlUnit]
Indica l'unità della retroazione
risultante dalla selezione
dell'unità e scala selezionata
in parametro 3-00 Reference
Range,
parametro 3-01 Reference/
Feedback Unit,
parametro 3-02 Minimum
Reference e
98 Danfoss A/S © 07/2016 Tutti i diritti riservati. MG07C306
 Loading...
Loading...