

Danfoss FC 280 Programming guide [de]

ENGINEERING TOMORROW
Programmierhandbuch
VLT® Midi Drive FC 280
www.danfoss.de/vlt
Inhaltsverzeichnis Programmierhandbuch
Inhaltsverzeichnis
1 Einführung
1.1 Lesen dieses Programmierhandbuchs
1.2 Definitionen
1.3 Elektrische Verdrahtung – Steuerleitungen
2 Sicherheit
2.1 Sicherheitssymbole
2.2 Qualifiziertes Personal
2.3 Sicherheitsmaßnahmen
3 Programmieren
3.1 Betrieb des Local Control Panels (LCP)
3.1.1 Numerisches LCP Bedienteil (LCP 101) 14
3.1.2 Die Funktion der Rechtspfeil-Taste am LCP 101 15
3.1.3 Quick-Menü am LCP 101 16
3.1.4 Hauptmenü am LCP 101 18
3.1.5 Grafisches LCP-Bedienteil (GLCP) 20
3.1.6 Parametereinstellungen 21
3
3
4
8
12
12
12
12
14
14
3.1.7 Ändern von Parametereinstellungen mit LCP 102 21
3.1.8 Daten auf das/vom LCP hochladen/herunterladen 22
3.1.9 Wiederherstellen der Werkseinstellungen mit dem LCP 22
3.2 Grundlegende Programmierung
3.2.2 PM-Motoreinstell. in VVC
3.2.3 Autom. Motoranpassung (AMA) 24
4 Parameterbeschreibungen
4.1 Parameter: 0-** Betrieb und Display
4.2 Parameter: 1-** Motor/Last
4.3 Parameter: 2-** Bremsfunktionen
4.4 Parameter: 3-** Sollwert/Rampen
4.5 Parameter: 4-** Grenzen/Warnungen
4.6 Parameter: 5-** Digit. Ein-/Ausgänge
4.7 Parameter: 6-** Analoge Ein-/Ausg.
4.8 Parameter: 7-** PID Regler
4.9 Parameter: 8-** Opt./Schnittstellen
4.10 Parameter: 9-** PROFIdrive
22
+
23
25
25
38
52
55
62
66
78
82
88
93
4.11 Parameter: 10-** CAN/DeviceNet
4.12 Parameter: 12-** Ethernet
4.13 Parameter: 13-** Smart Logic
4.14 Parameter: 14-** Sonderfunktionen
MG07C403 Danfoss A/S © 02/2019 Alle Rechte vorbehalten. 1
93
93
94
101
Inhaltsverzeichnis
VLT® Midi Drive FC 280
4.15 Parameter: 15-** Info/Wartung
4.16 Parameter: 16-** Datenanzeigen
4.17 Parameter: 18-** Datenanzeigen 2
4.18 Parameter: 21-** Erw. Mit Rückführung
4.19 Parameter: 22-** Anwendungsfunktionen
4.20 Parameter: 30-** Besonderheiten
4.21 Parameter: 31-** Special Option (Spezialoption)
4.22 Parameter: 32-** Motion Control Basic Settings (Grundeinstellungen Motion Control)
4.23 Parameter: 33-** Motion Control Adv. Einstellungen
4.24 Parameter: 34-** Motion Control Data Readouts (Datenanzeige Motion Control)
4.25 Parameter: 37-** Application Settings (Anwendungseinstellungen)
5 Parameterlisten
5.1 Einführung
5.2 Parameterlisten
6 Fehlersuche und -behebung
110
112
116
117
119
122
122
123
123
125
127
129
129
132
152
6.1 Warnungen und Alarmmeldungen
6.1.3 Warn-/Alarmmeldungen 152
6.1.4 Liste der Warn- und Alarmcodes 153
Index
152
163
2 Danfoss A/S © 02/2019 Alle Rechte vorbehalten. MG07C403
Einführung Programmierhandbuch
1 Einführung
1.1 Lesen dieses Programmierhandbuchs
1.1.1 Zielsetzung des Handbuchs
Dieses Programmierhandbuch enthält Informationen über
die Regelung des Frequenzumrichters, den Zugriff auf
Parameter, Programmierung sowie Fehlersuche und behebung.
Das Programmierhandbuch ist für die Verwendung durch
qualifiziertes Personal bestimmt, das mit dem VLT® Midi
Drive FC 280Frequenzumrichter vertraut ist.
Lesen Sie die Anweisungen, bevor Sie mit der Programmierung beginnen, und befolgen Sie die Anweisungen in
diesem Handbuch.
VLT® ist eine eingetragene Marke.
1.1.2 Zusätzliche Materialien
Folgende zusätzliche Materialien sind verfügbar:
Die VLT® Midi Drive FC 280-Bedienungsanleitung
•
enthält die erforderlichen Informationen für die
Inbetriebnahme und den Betrieb des Frequenzumrichters.
Das VLT® Midi Drive FC 280-Projektierungs-
•
handbuch enthält detaillierte technische
Informationen zum Frequenzumrichter sowie zur
kundenspezifischen Anpassung und zu
Anwendungen.
Wenden Sie sich an Ihren örtlichen Danfoss-Zulieferer oder
besuchen Sie drives.danfoss.com/knowledge-center/technical-
documentation/ zum Herunterladen der technischen
Dokumentation.
1.1.3 Dokument- und Softwareversion
Dieses Handbuch wird regelmäßig geprüft und aktualisiert.
Alle Verbesserungsvorschläge sind willkommen. Tabelle 1.1
zeigt die Dokumentversion und die entsprechende Softwareversion an.
Ausgabe Anmerkungen Software-
version
MG07C4 Update aufgrund einer neuen
Softwareversion.
Tabelle 1.1 Dokument- und Softwareversion
1.6
°C
°F
AC Wechselstrom
AEO Automatische Energieoptimierung
ACP
AWG
AMA Automatische Motoranpassung
DC Gleichstrom
EEPROM
EMV
EMI EMV-Störungen
ESD Elektrostatische Entladung
ETR Elektronisches Thermorelais
f
M,N
FC Frequenzumrichter
IGBT Insulated-Gate Bipolar Transistor
IP Schutzart
I
LIM
I
INV
I
M,N
I
VLT,MAX
I
VLT,N
L
d
L
q
LCP
LED Light Emitting Diode (Leuchtdiode)
MCP
N.v. Nicht verwendbar
NEMA
P
M,N
PCB Leiterplatte
PE Schutzerde
PELV
PWM
R
s
rückspeisefähig Rückspeiseklemmen
U/min Umdrehungen pro Minute
EMV Funkstörungen
SCR
Grad Celsius
Fahrenheit
Application Control Processor
(Anwendungssteuerungsprozessor)
American Wire Gauge = Amerikanisches Drahtmaß
Electrically Erasable Programmable
Read-Only Memory
Electromagnetic Compatibility
(Elektromagnetische Verträglichkeit)
Motornennfrequenz
Stromgrenze
Wechselrichter-Nennausgangsstrom
Motornennstrom
Maximaler Ausgangsstrom
Vom Frequenzumrichter gelieferter
Ausgangsnennstrom
Motor D-Achsen-Induktivität
Motor Q-Achsen-Induktivität
Local Control Panel (LCP-Bedieneinheit)
Motor Control Processor (Motorsteuerungsprozessor)
National Electrical Manufacturers
Association (Nationale Vereinigung
von Elektroherstellern)
Motornennleistung
PELV (Schutzkleinspannung Protective Extra Low Voltage)
Pulsbreitenmodulation (Pulse Width
Modulation)
Statorwiderstand
Gesteuerter Silizium-Gleichrichter
(Silicon Controlled Rectifier)
1 1
MG07C403 Danfoss A/S © 02/2019 Alle Rechte vorbehalten. 3
089
Einführung
VLT® Midi Drive FC 280
11
SMPS Schaltnetzteil SMPS
T
LIM
U
M,N
X
h
Tabelle 1.2 Abkürzungen
Drehmomentgrenze
Motornennspannung
Hauptreaktanz des Motors
U
VLT,MAX
Maximale Ausgangsspannung.
1.2.2 Eingang
Steuerbefehle
Sie können den angeschlossenen Motor über das LCP und
die Digitaleingänge starten und stoppen.
Die Funktionen sind in zwei Gruppen unterteilt.
Funktionen in Gruppe 1 haben eine höhere Priorität als
Funktionen in Gruppe 2.
Gruppe 1 Präziser Stopp, Freilaufstopp, präziser Stopp und
Freilaufstopp, Schnellstopp, DC-Bremse, Stopp und
[OFF].
Gruppe 2 Start, Puls-Start, Start Reversierung, Start Rücklauf,
Festdrehzahl JOG, Ausgangsfrequenz speichern
und [Hand On].
Tabelle 1.3 Funktionsgruppen
1.2.3 Motor
Hinsichtlich der Übereinstimmung mit dem Europäischen
Übereinkommen über die internationale Beförderung
gefährlicher Güter auf Binnenwasserstraßen (ADN) siehe
das Kapitel ADN-konforme Installation im Projektierungs-
handbuch VLT® Midi Drive FC 280.
Der Frequenzumrichter erfüllt die Anforderungen der
UL508C bezüglich der thermischen Sicherung. Weitere
Informationen finden Sie im Kapitel Thermischer
Motorschutz im Projektierungshandbuch VLT
®
Midi Drive FC
280.
Angewendete Normen und Konformität für STO
Zur Verwendung der Funktion „Safe Torque Off“ an den
Klemmen 37 und 38 müssen Sie alle Sicherheitsbestimmungen in einschlägigen Gesetzen, Vorschriften und
Richtlinien erfüllen. Die integrierte STO-Funktion erfüllt
folgende Normen:
IEC/EN 61508:2010, SIL2
•
IEC/EN 61800-5-2:2007, SIL2
•
IEC/EN 62061:2015, SILCL von SIL2
•
EN ISO 13849-1:2015, Kategorie 3 PL d
•
Definitionen
1.2
1.2.1 Frequenzumrichter
Motorfreilauf
Die Motorwelle dreht im Motorfreilauf. Kein Drehmoment
am Motor.
I
VLT,MAX
Maximaler Ausgangsstrom.
I
VLT,N
Vom Frequenzumrichter gelieferter Ausgangsnennstrom.
Motor läuft
An der Antriebswelle erzeugtes Drehmoment und Drehzahl
von 0 U/min bis zur maximalen Drehzahl des Motors.
f
JOG
Motorfrequenz bei aktivierter Funktion Festdrehzahl JOG
(über Digitalklemmen oder Bus).
f
M
Motorfrequenz.
f
MAX
Maximale Motorfrequenz.
f
MIN
Minimale Motorfrequenz.
f
M,N
Motornennfrequenz (Typenschilddaten).
I
M
Motorstrom (Istwert).
I
M,N
Motornennstrom (Typenschilddaten).
n
M,N
Motornenndrehzahl (Typenschilddaten).
n
s
Synchrone Motordrehzahl.
2 × Parameter 1−23 × 60s
ns=
n
slip
Parameter 1−39
Motorschlupf.
P
M,N
Motornennleistung (Typenschilddaten in kW oder HP).
T
M,N
Nenndrehmoment (Motor).
4 Danfoss A/S © 02/2019 Alle Rechte vorbehalten. MG07C403
175ZA078.10
Kippgrenze
Drehzahi
Moment
Einführung Programmierhandbuch
U
M
Momentanspannung des Motors.
U
M,N
Motornennspannung (Typenschilddaten).
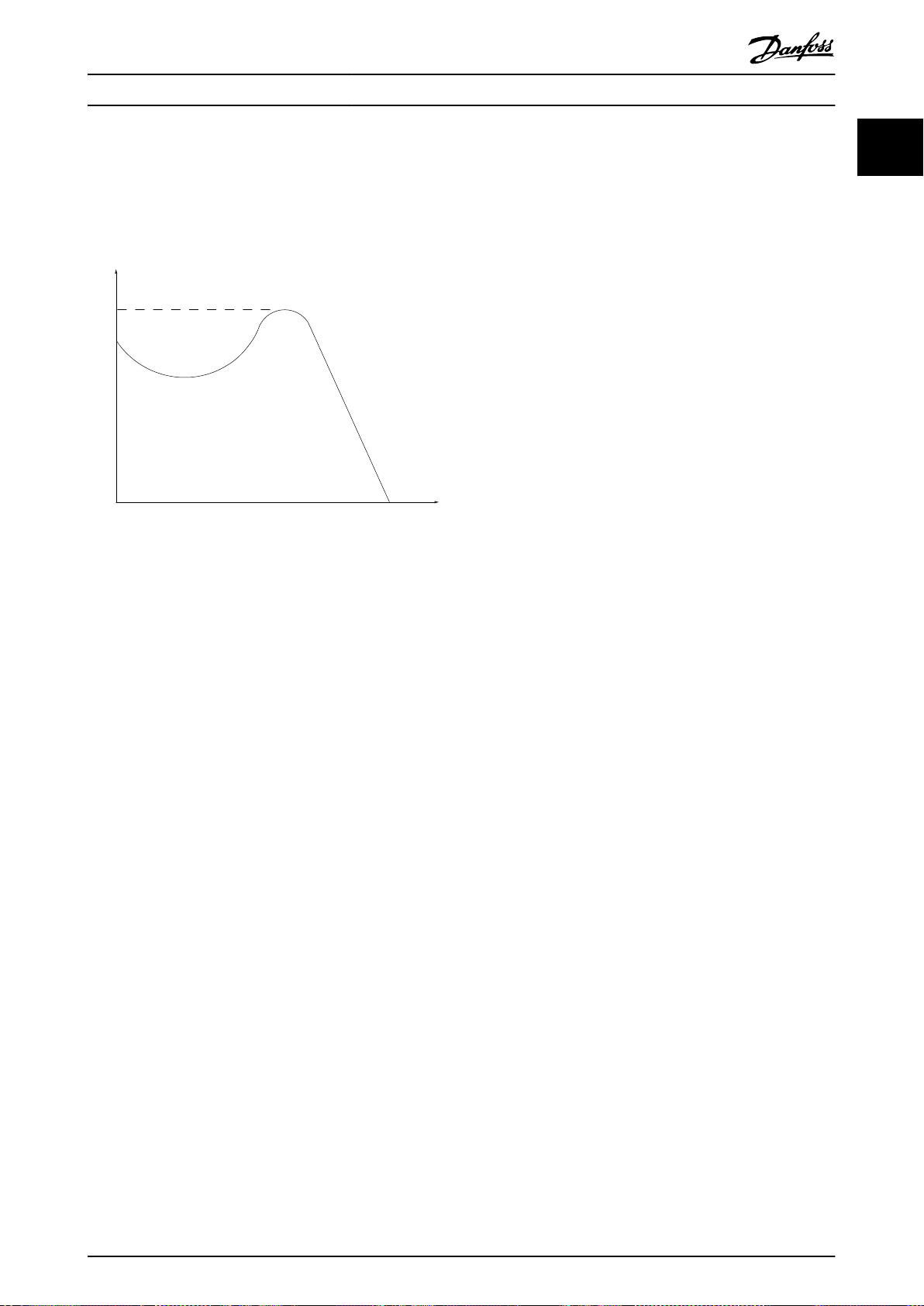
Losbrechmoment
Abbildung 1.1 Losbrechmoment
η
VLT
Der Wirkungsgrad des Frequenzumrichters ist definiert als
das Verhältnis zwischen Leistungsabgabe und Leistungsaufnahme.
Einschaltsperrbefehl
Ein Startdeaktivierungsbefehl, der zu den Steuerbefehlen in
Gruppe 1 gehört. Nähere Angaben finden Sie unter
Tabelle 1.3.
Stoppbefehl
Ein Stoppbefehl, der zu den Steuerbefehlen in Gruppe 1
gehört. Nähere Angaben finden Sie unter Tabelle 1.3.
1.2.4 Sollwerteinstellung
Analogsollwert
Ein Sollwertsignal an den Analogeingängen 53 oder 54
(Spannung oder Strom).
Binärsollwert
Ein über die serielle Kommunikationsschnittstelle
übertragenes Signal.
Festsollwert
Ein definierter Festsollwert, einstellbar zwischen -100 %
und +100 % des Sollwertbereichs. Sie können bis zu 8
Festsollwerte über die Digitaleingänge auswählen. Sie
können bis zu 4 Festsollwerte über den Bus auswählen.
Pulssollwert
Ein an die Digitaleingänge übertragenes Pulsfrequenzsignal
(Klemme 29 oder 33).
Ref
MAX
Bestimmt das Verhältnis zwischen dem Sollwerteingang bei
100 % des Gesamtskalenwerts (in der Regel 10 V, 20 mA)
und dem resultierenden Sollwert. Der maximale Sollwert
wird in Parameter 3-03 Maximum Reference eingestellt.
Ref
MIN
Bestimmt das Verhältnis zwischen dem Sollwerteingang bei
0 % (normalerweise 0 V, 0 mA, 4 mA) und dem
resultierenden Sollwert. Der minimale Sollwert wird in
Parameter 3-02 Minimum Reference eingestellt.
1.2.5 Verschiedenes
Analogeingänge
Die Analogeingänge können verschiedene Funktionen des
Frequenzumrichters steuern.
Es gibt zwei Arten von Analogeingängen:
Stromeingang, 0-20 mA und 4-20 mA.
•
Spannungseingang, 0 bis +10 V DC.
•
Analogausgang
Die Analogausgänge können ein Signal von 0-20 mA oder
4-20 mA ausgeben.
Automatische Motoranpassung, AMA
Die AMA ist ein Testalgorithmus, der die elektrischen
Parameter des angeschlossenen Motors im Stillstand misst.
Bremswiderstand
Der Bremswiderstand wird zur Aufnahme der bei generatorischer Bremsung erzeugten Energie benötigt. Während
generatorischer Bremsung erhöht sich die Zwischenkreisspannung. Ein Bremschopper stellt sicher, dass die
generatorische Energie an den Bremswiderstand
übertragen wird.
Konstantmoment (CT)-Kennlinie
Konstantmomentkennlinie; wird für Anwendungen wie
Förderbänder, Verdrängungspumpen und Krane eingesetzt.
Digitaleingänge
Die Digitaleingänge können verschiedene Funktionen des
Frequenzumrichters steuern.
Digitalausgänge
Der Frequenzumrichter verfügt über zwei programmierbare
Ausgänge, die ein 24-V-DC-Signal (max. 40 mA) liefern
können.
ETR
Das elektronische Thermorelais ist eine Berechnung der
thermischen Belastung auf Grundlage der aktuellen
Belastung und Zeit. Damit lässt sich die Motortemperatur
schätzen.
Frequenzumrichter-Standardbus
Schließt RS485-Bus mit FC-Protokoll oder MC-Protokoll ein.
Siehe Parameter 8-30 Protocol.
1 1
MG07C403 Danfoss A/S © 02/2019 Alle Rechte vorbehalten. 5

Einführung
VLT® Midi Drive FC 280
11
Initialisierung
Eine Initialisierung (Parameter 14-22 Operation Mode oder 2Finger-Reset) stellt die Werkseinstellung des
Leistungs− faktor =
ϕ
1 = 1, deshalb:
cos
3xUxI1cosϕ1
3xUxI
EFF
Frequenzumrichters wieder her.
Arbeitszyklus für Aussetzbetrieb
Der Aussetzbetrieb bezieht sich auf eine Abfolge von
Arbeitszyklen. Jeder Zyklus besteht aus einem Belastungsund einem Entlastungszeitraum. Der Betrieb kann
periodisch oder nichtperiodisch sein.
LCP
Das LCP Bedienteil dient zum Steuern und Programmieren
des Frequenzumrichters. Die Bedieneinheit ist abnehmbar,
und Sie können diese mithilfe des optionalen Einbausatzes
bis zu 3 m entfernt vom Frequenzumrichter anbringen (z.
B. an einer Schaltschranktür).
LCP 102
Die grafische LCP-Bedieneinheit (LCP 102) dient zum
Steuern und Programmieren des Frequenzumrichters. Das
Display ist grafisch und die Bedieneinheit dient der
Anzeige von Prozesswerten. Das LCP 102 verfügt über
Funktionen zum Speichern und Kopieren.
LCP 101
Die numerische LCP-Bedieneinheit (LCP 101) dient zum
Steuern und Programmieren des Frequenzumrichters. Das
Display ist numerisch und die Bedieneinheit dient der
Anzeige von Prozesswerten. Das LCP 101 verfügt über
Funktionen zum Speichern und Kopieren.
lsb
„Least Significant Bit“; steht bei binärer Codierung für das
Bit mit der niedrigsten Wertigkeit.
msb
„Most Significant Bit“; steht bei binärer Codierung für das
Bit mit der höchsten Wertigkeit.
MCM
Steht für Mille Circular Mil; eine amerikanische Maßeinheit
für den Leitungsquerschnitt. 1 MCM = 0,5067 mm2.
Online-/Offline-Parameter
Änderungen der Online-Parameter werden sofort nach
Änderung des Datenwertes aktiviert. Drücken Sie [OK], um
Änderungen an Offline-Parametern zu aktivieren.
PID-Prozess
Der PID-Regler sorgt durch eine Anpassung der Ausgangsfrequenz an die wechselnde Last für eine
Aufrechterhaltung von Drehzahl, Druck und Temperatur.
PCD
Process Control Data (Prozessregelungsdaten).
Aus-/Einschaltzyklus
Schalten Sie die Netzversorgung aus, bis das Display (LCP)
dunkel ist. Schalten Sie die Spannungsversorgung
anschließend wieder ein.
Leistungsfaktor
Der Leistungsfaktor ist das Verhältnis zwischen I1 und I
.
eff
Leistungs− faktor =
I1xcosϕ1
I
EFF
Der Leistungsfaktor gibt an, wie stark ein Frequenzumrichter die Netzversorgung belastet.
Je niedriger der Leistungsfaktor, desto höher der I
gleicher kW-Leistung.
2
2
I
EFF
= I
+ I
1
5
+ I
2
+ .. + I
7
Darüber hinaus weist ein hoher Leistungsfaktor darauf hin,
dass der Oberschwingungsstrom sehr niedrig ist.
Die eingebauten DC-Spulen erzeugen einen hohen
Leistungsfaktor und reduzieren dadurch die Netzbelastung.
Pulseingang/Inkrementalgeber
Ein externer digitaler Impulsgeber für Istwertinformationen
über die Motordrehzahl. Der Drehgeber kommt in
Anwendungen zum Einsatz, bei denen eine große
Genauigkeit bei der Drehzahlregelung erforderlich ist.
Fehlerstromschutzschalter
Fehlerstromschutzschalter.
Parametersatz
Sie können die Parametereinstellungen in vier Parametersätzen speichern. Sie können zwischen den vier
Parametersätzen wechseln oder einen Satz bearbeiten,
während ein anderer Satz gerade aktiv ist.
SFAVM
Akronym für den Schaltmodus „Statorfluss-orientierte
asynchrone Vektormodulation“.
Schlupfausgleich
Der Frequenzumrichter gleicht den belastungsabhängigen
Motorschlupf aus, indem er unter Berücksichtigung des
Motorersatzschaltbildes und der gemessenen Motorlast die
Ausgangsfrequenz anpasst (nahezu konstante
Motordrehzahl).
Smart Logic Control (SLC)
Der SLC ist eine Abfolge benutzerdefinierter Aktionen, die
ausgeführt werden, wenn die zugehörigen benutzerdefinierten Ereignisse vom Smart Logic Controller
(Parametergruppe 13-** Smart Logic Control) als „wahr“
bewertet werden.
STW (ZSW)
Zustandswort
THD
Total Harmonic Distortion ist die gesamte Spannungsverzerrung, die sich aus der Addition der einzelnen
Oberschwingungen ergibt.
Thermistor
Ein temperaturabhängiger Widerstand, mit dem die
Temperatur des Frequenzumrichters oder des Motors
überwacht wird.
I
1
=
I
EFF
bei
eff
2
n
6 Danfoss A/S © 02/2019 Alle Rechte vorbehalten. MG07C403

Einführung Programmierhandbuch
Abschaltung
Ein Zustand, der in Fehlersituationen eintritt, z. B. bei einer
Überspannung des Frequenzumrichters oder wenn der
Frequenzumrichter den Motor, den Prozess oder den
Mechanismus schützt. Der Neustart wird verzögert, bis die
Fehlerursache behoben wurde und der Alarmzustand über
die [Reset]-Taste am LCP quittiert wird. In einigen Fällen
erfolgt das Quittieren automatisch (durch vorherige
Programmierung). Sie dürfen die Abschaltung nicht zu
Zwecken der Personensicherheit verwenden.
Abschaltblockierung
Ein Zustand, der in Fehlersituationen eintritt, wenn sich der
Frequenzumrichter selbst schützt und ein Eingriff
erforderlich ist, z. B. bei einem Kurzschluss am Ausgang
des Frequenzumrichters. Sie können eine Abschaltblockierung nur durch Unterbrechen der Netzversorgung,
Beheben der Fehlerursache und erneuten Anschluss des
Frequenzumrichters aufheben. Der Neustart wird verzögert,
bis Sie den Fehlerzustand über die [Reset]-Taste am LCP
oder in manchen Fällen durch Programmierung eines
automatischen Resets quittieren. Sie dürfen die Abschaltblockierung nicht zu Zwecken der Personensicherheit
verwenden.
VT-Kennlinie
Variable Drehmomentkennlinie; typisch bei Anwendungen
mit quadratischem Lastmomentverlauf über den Drehzahlbereich, z. B. Kreiselpumpen und Lüfter.
+
VVC
Im Vergleich zur herkömmlichen U/f-Steuerung bietet
Voltage Vector Control (VVC+) eine verbesserte Dynamik
und Stabilität der Motordrehzahl in Bezug auf Änderungen
des Drehzahlsollwerts sowie in Bezug auf das LastDrehmoment.
60° AVM
Siehe den Schaltmodus 60° asynchrone Vektormodulation.
1 1
MG07C403 Danfoss A/S © 02/2019 Alle Rechte vorbehalten. 7
Power
input
Switch mode
power supply
Motor
Analog output
interface
(PNP) = Source
(NPN) = Sink
ON = Terminated
OFF = Open
Brake
resistor
91 (L1/N)
92 (L2/L)
93 (L3)
PE
50 (+10 V OUT)
53 (A IN)
2)
54 (A IN)
55 (COM digital/analog I/O)
0/4−20 mA
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
10 V DC
15 mA 100 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(A OUT) 42
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0 V
5 V
S801
0/4−20 mA
RS485
RS485
03
+10 V DC
0−10 V DC
24 V DC
02
01
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
17 V
0 V
0 V (PNP)
24 V (NPN)
29 (D IN)
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
38 (STO2)
4)
37 (STO1)
4)
95
P 5-00
21
ON
(+DC/R+) 89
(R-) 81
0−10 V DC
(-DC) 88
RFI
0 V
250 V AC, 3 A
Relay 1
1)
3)
5)
5)
130BE202.19
27 (D IN/OUT)
6)
Einführung
VLT® Midi Drive FC 280
11
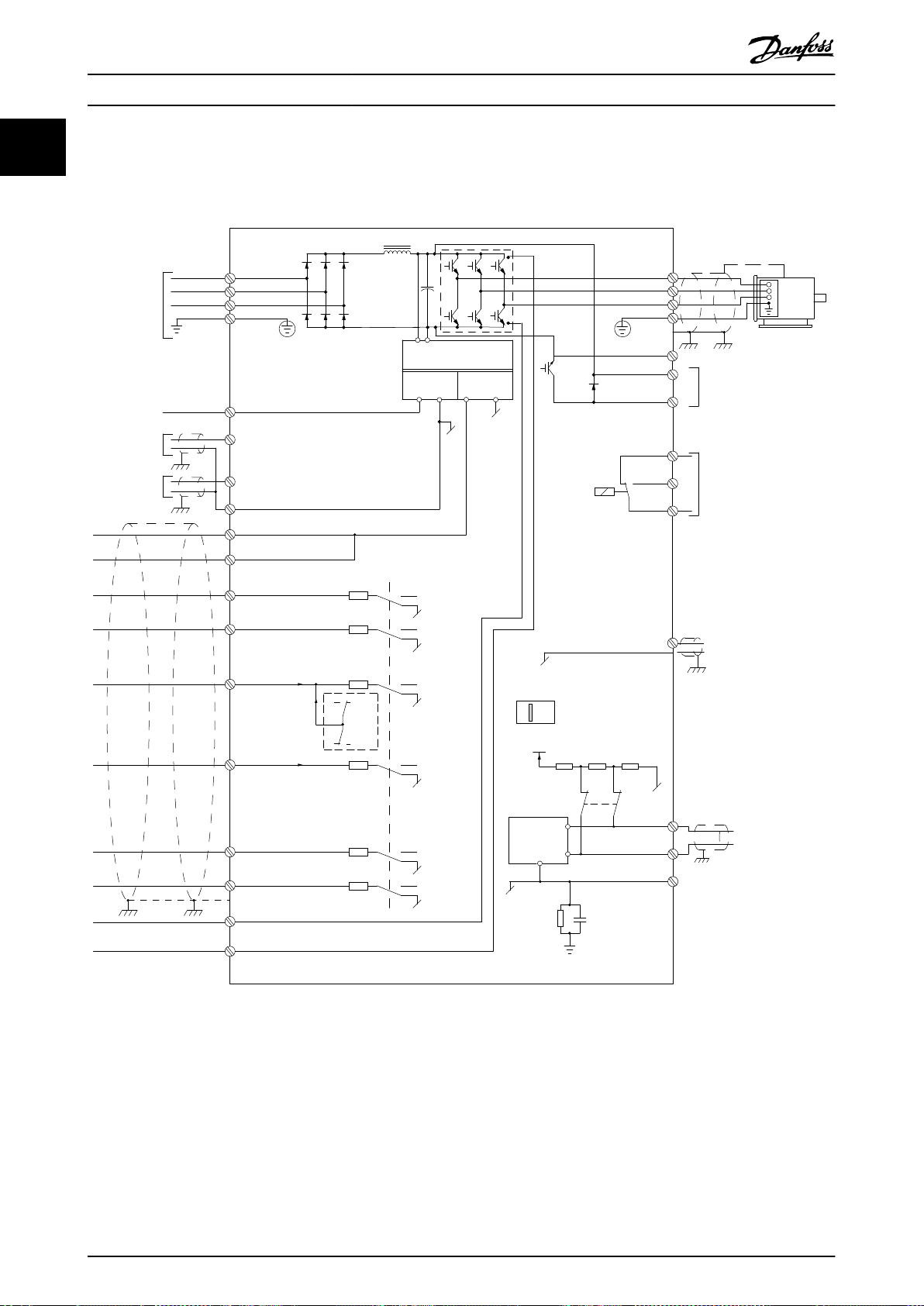
1.3 Elektrische Verdrahtung – Steuerleitungen
1.3.1 Übersicht
Abbildung 1.2 Anschlussdiagramm des Grundgeräts
A = Analog, D = Digital
1) Der integrierte Bremschopper ist nur für dreiphasige Einheiten erhältlich.
2) Sie können Klemme 53 auch als Digitaleingang verwenden.
3) Sie können den Schalter S801 (DC-Bus-Zwischenkreisklemmen) verwenden, um für die serielle RS485-Schnittstelle (Klemmen 68
und 69) die integrierten Busabschlusswiderstände zu aktivieren.
4) Eine Anleitung zur korrekten STO-Verdrahtung finden Sie in der Bedienungsanleitung in Kapitel 6 „Safe Torque Off (STO)“.
5) Der S2-Frequenzumrichter unterstützt nicht die Anwendung von Zwischenkreiskopplungen.
8 Danfoss A/S © 02/2019 Alle Rechte vorbehalten. MG07C403
130BE730.10
12 13 18 19 27 29 32 33 55
+24 VDC
0 VDC
PNP (Source)
Digital input wiring
NPN (Sink)
Digital input wiring
12 13 18 19 27 29 32 33 55
+24 VDC
0 VDC
130BE731.10
130BA681.10
Einführung Programmierhandbuch
Lange Steuerleitungen und Analogsignale können in
seltenen Fällen aufgrund von Störungen in den Netzkabeln
zu Brummschleifen mit 50 Hz führen. In diesem Fall
müssen Sie die Abschirmung durchbrechen oder einen
100-nF-Kondensator zwischen Abschirmung und Gehäuse
einbauen.
Schließen Sie die Digital- und Analogein- und -ausgänge
aufgeteilt nach Signalart an die Bezugspotentiale des
Frequenzumrichters (Klemme 55) an, um eine gegenseitige
Beeinträchtigung durch Fehlerströme zu vermeiden. Zum
Beispiel kann durch Schalten am Digitaleingang das
analoge Eingangssignal gestört werden.
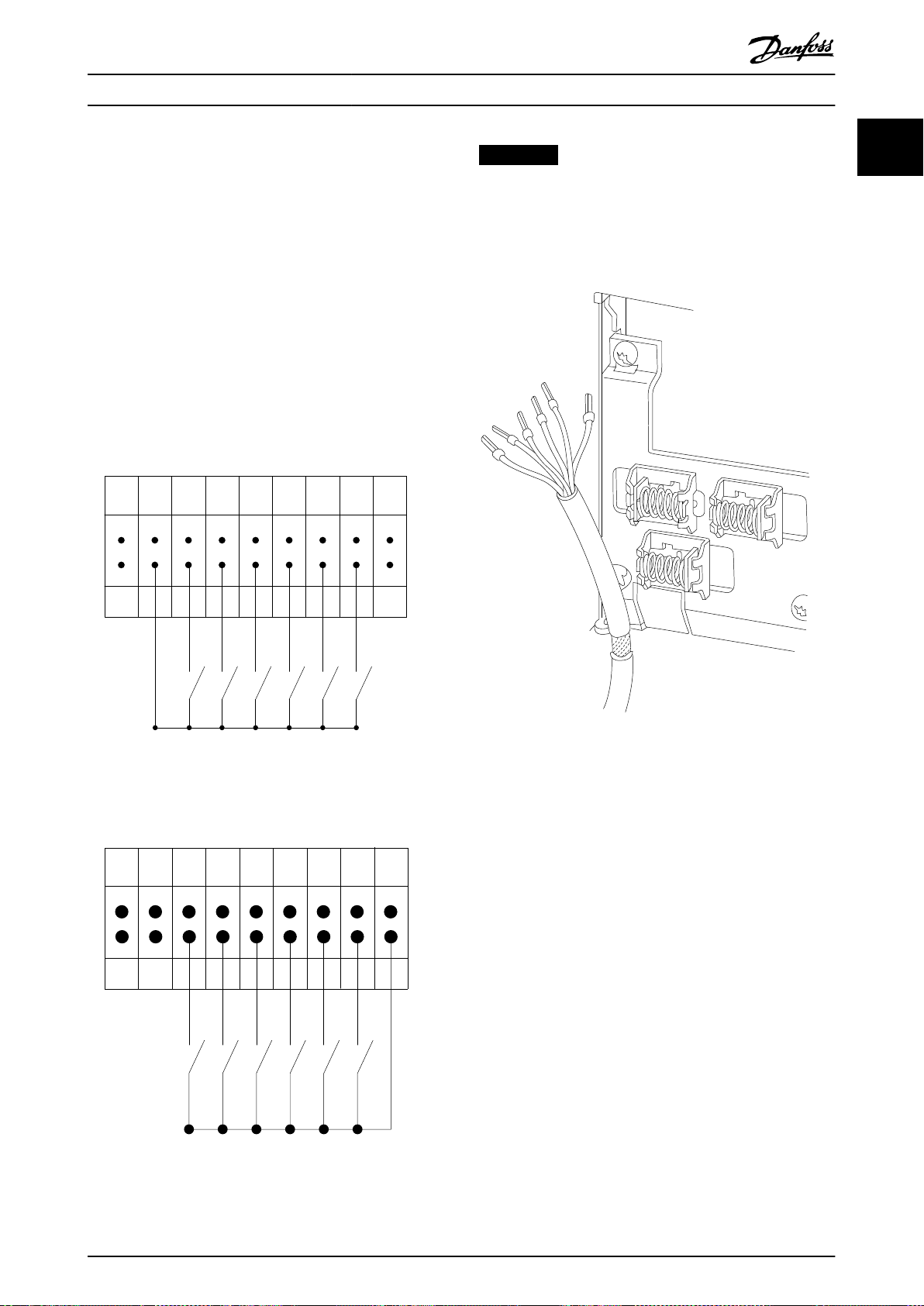
Eingangspolarität der Steuerklemmen
HINWEIS
Steuerleitungen müssen abgeschirmt sein.
Siehe den Abschnitt Verwendung abgeschirmter Steuerleitungen im Projektierungshandbuch zum korrekten Abschluss
der Steuerleitungen.
1 1
Abbildung 1.3 (PNP) = Quelle
Abbildung 1.4 (NPN) = Verbraucher
Abbildung 1.5 Erdung abgeschirmter Steuerleitungen
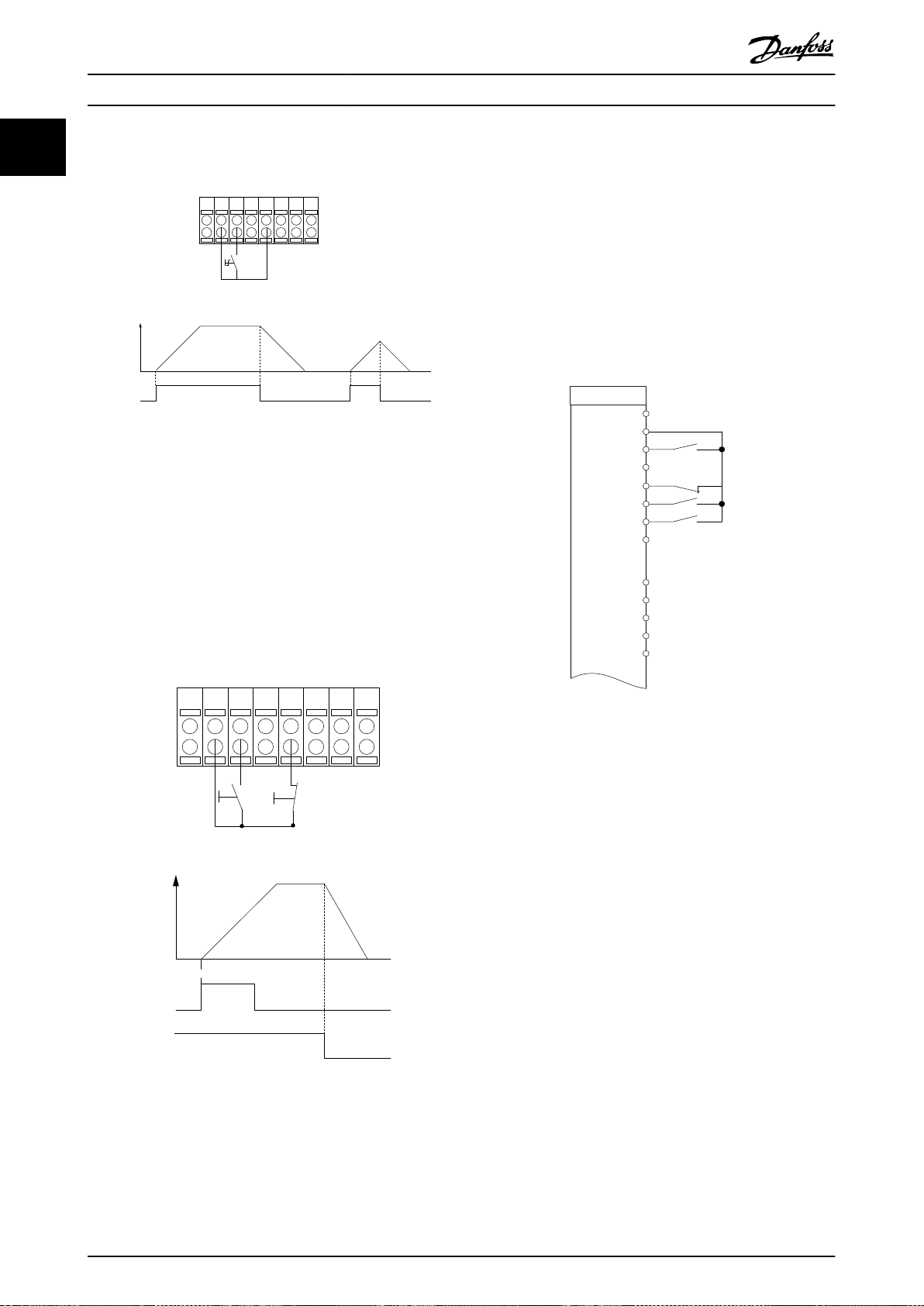
1.3.2 Start/Stopp
Klemme 18 = Parameter 5-10 Terminal 18 Digital Input [8]
Start.
Klemme 27 = Parameter 5-12 Terminal 27 Digital Input [0]
Ohne Funktion (Standardeinstellung Motorfreilauf invers).
MG07C403 Danfoss A/S © 02/2019 Alle Rechte vorbehalten. 9
130BE732.11
12 13 18 322719 29 33
P 5-12 [2]
P 5-10 [8]
Start/Stop
+24V
Speed
Start
[18]
1312 18 19 322927 33
P 5 - 12 [6]
P 5 - 10 [9]
+24 V
Speed
Latched start Stop inverse
Latched start (18)
Stop inverse (27)
130BF101.11
FC
+24 V
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
130BF095.10
Einführung
VLT® Midi Drive FC 280
11
1.3.4 Drehzahlkorrektur auf/ab
Klemmen 29/32 = Drehzahlkorrektur auf/ab
Klemme 18 = Parameter 5-10 Terminal 18 Digital
Input [9] Start (Werkseinstellung).
Klemme 27 = Parameter 5-12 Terminal 27 Digital
Input [19] Sollw. speich.
Klemme 29 = Parameter 5-13 Terminal 29 Digital
Input [21] Drehzahl auf.
Klemme 32 = Parameter 5-14 Terminal 32 Digital
Input [22] Drehzahl ab.
Abbildung 1.6 Start/Stopp
1.3.3 Puls-Start/Stopp invers
Klemme 18 = Parameter 5-10 Terminal 18 Digital Input [9]
Puls-Start.
Klemme 27= Parameter 5-12 Terminal 27 Digital Input [6]
Stopp (inv.)
Abbildung 1.8 Drehzahlkorrektur auf/ab
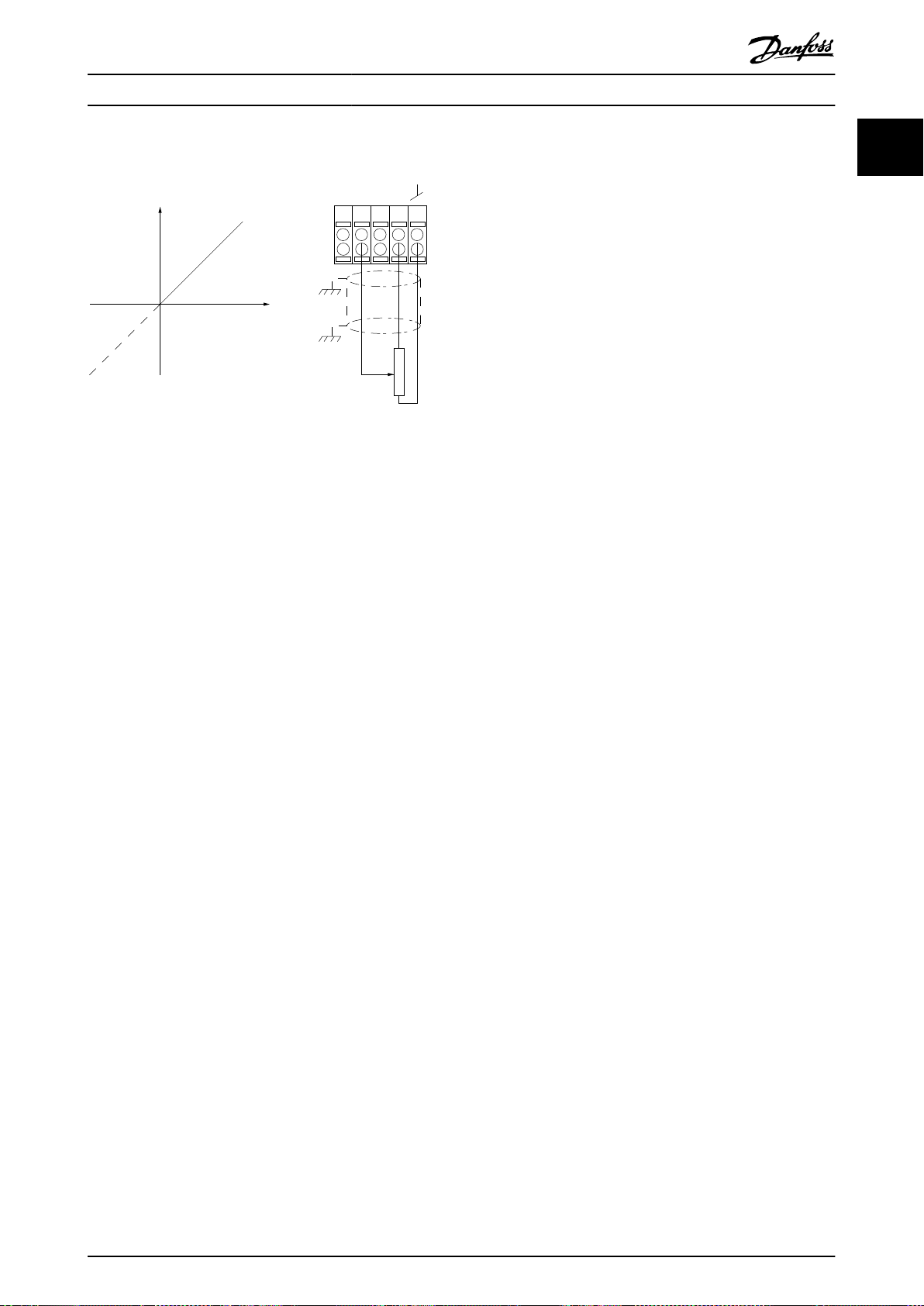
1.3.5 Potenziometer Sollwert
Spannungssollwert über ein Potenziometer
Sollwertquelle 1 = [1] Analogeingang 53
(Werkseinstellung).
Klemme 53, Skal. Min. Spannung = 0 V.
Klemme 53, Skal. Max. Spannung = 10 V.
Abbildung 1.7 Puls-Start/Stopp invers
Klemme 53, Min. Soll-/Istwert = 0 Hz.
Klemme 53, Max. Soll-/Istwert = 50 Hz.
Parameter 6-19 Terminal 53 mode = [1] Spannung.
10 Danfoss A/S © 02/2019 Alle Rechte vorbehalten. MG07C403
130BD381.12
555342 54 50
Speed
P 6-15
1 kΩ
+10V/15mA
Ref. voltage
P 6-11 10V
Einführung Programmierhandbuch
Abbildung 1.9 Potenziometer Sollwert
1 1
MG07C403 Danfoss A/S © 02/2019 Alle Rechte vorbehalten. 11
Sicherheit
VLT® Midi Drive FC 280
2 Sicherheit
22
2.1 Sicherheitssymbole
Sicherheitsmaßnahmen
2.3
Folgende Symbole kommen in diesem Dokument zum
Einsatz:
WARNUNG
Weist auf eine potenziell gefährliche Situation hin, die
zum Tod oder zu schweren Verletzungen führen kann!
VORSICHT
Weist auf eine potenziell gefährliche Situation hin, die zu
leichten oder mittelschweren Verletzungen führen kann.
Die Kennzeichnung kann ebenfalls als Warnung vor
unsicheren Verfahren dienen.
HINWEIS
Weist auf eine wichtige Information hin, z. B. eine
Situation, die zu Geräte- oder sonstigen Sachschäden
führen kann.
2.2 Qualifiziertes Personal
Der einwandfreie und sichere Betrieb des Frequenzumrichters setzt fachgerechten und zuverlässigen Transport
voraus. Lagerung, Installation, Bedienung und Instandhaltung müssen diese Anforderungen ebenfalls erfüllen.
Nur qualifiziertes Personal darf dieses Gerät installieren
oder bedienen.
Qualifiziertes Fachpersonal sind per Definition geschulte
Mitarbeiter, die gemäß den einschlägigen Gesetzen und
Vorschriften zur Installation, Inbetriebnahme und Instandhaltung von Betriebsmitteln, Systemen und Schaltungen
berechtigt sind. Ferner muss das Personal mit den in dieser
Anleitung enthaltenen Anweisungen und Sicherheitsmaßnahmen vertraut sein.
WARNUNG
HOCHSPANNUNG
Bei Anschluss an Versorgungsnetzeingang, DCVersorgung oder Zwischenkreiskopplung führen
Frequenzumrichter Hochspannung. Erfolgen Installation,
Inbetriebnahme und Wartung nicht durch qualifiziertes
Personal, kann dies zum Tod oder zu schweren Verletzungen führen!
Installation, Inbetriebnahme und Wartung
•
dürfen ausschließlich von qualifiziertem
Personal durchgeführt werden.
Verwenden Sie vor der Durchführung von
•
Wartungs- oder Reparaturarbeiten ein
geeignetes Spannungsmessgerät, um sicherzustellen, dass der Frequenzumrichter keine
Spannung mehr führt.
WARNUNG
UNERWARTETER ANLAUF
Bei Anschluss des Frequenzumrichters an Versorgungsnetz, DC-Versorgung oder Zwischenkreiskopplung
kann der angeschlossene Motor jederzeit unerwartet
anlaufen. Ein unerwarteter Anlauf im Rahmen von
Programmierungs-, Service- oder Reparaturarbeiten kann
zum Tod, zu schweren Verletzungen oder zu
Sachschäden führen! Der Motor kann über einen
externen Schalter, einen Feldbus-Befehl, ein Sollwerteingangssignal, über ein LCP oder LOP, eine Fernbedienung
per MCT 10 Konfigurationssoftware oder nach einem
quittierten Fehlerzustand anlaufen.
So verhindern Sie ein unerwartetes Starten des Motors:
Trennen Sie den Frequenzumrichter vom Netz.
•
Drücken Sie [Off/Reset] am LCP, bevor Sie
•
Parameter programmieren.
Verkabeln und montieren Sie Frequenzum-
•
richter, Motor und alle angetriebenen Geräte
vollständig, bevor Sie den Frequenzumrichter an
Versorgungsnetz, DC-Versorgung oder
Zwischenkreiskopplung anschließen.
12 Danfoss A/S © 02/2019 Alle Rechte vorbehalten. MG07C403
Sicherheit Programmierhandbuch
WARNUNG
ENTLADEZEIT
Der Frequenzumrichter enthält Zwischenkreiskondensatoren, die auch bei abgeschaltetem Frequenzumrichter
geladen sein können. Auch wenn die Warn-LED nicht
leuchten, kann Hochspannung anliegen. Das Nichteinhalten der angegebenen Wartezeit nach dem Trennen
der Stromversorgung vor Wartungs- oder Reparaturarbeiten kann zum Tod oder zu schweren Verletzungen
führen!
Stoppen Sie den Motor.
•
Trennen Sie die Netzversorgung und alle
•
externen DC-Zwischenkreisversorgungen,
einschließlich externer Batterie-, USV- und DCZwischenkreisverbindungen mit anderen
Frequenzumrichtern.
Trennen oder verriegeln Sie den PM-Motor.
•
Warten Sie, damit die Kondensatoren
•
vollständig entladen können. Die entsprechende
minimale Wartezeit finden Sie in Tabelle 2.1.
Verwenden Sie vor der Durchführung von
•
Wartungs- oder Reparaturarbeiten ein
geeignetes Spannungsmessgerät, um sicherzustellen, dass die Kondensatoren vollständig
entladen sind.
WARNUNG
GEFAHR DURCH ANLAGENKOMPONENTEN!
Ein Kontakt mit drehenden Wellen und elektrischen
Betriebsmitteln kann zum Tod oder zu schweren Verletzungen führen!
Stellen Sie sicher, dass Installations-,
•
Inbetriebnahme- und Wartungsarbeiten
ausschließlich von geschultem und qualifiziertem Personal durchgeführt werden.
Alle Elektroarbeiten müssen den VDE-
•
Vorschriften und anderen lokal geltenden
Elektroinstallationsvorschriften entsprechen.
Befolgen Sie die Verfahren in diesem Handbuch.
•
VORSICHT
GEFAHR BEI EINEM INTERNEN FEHLER
Ein interner Fehler im Frequenzumrichter kann zu
schweren Verletzungen führen, wenn der Frequenzumrichter nicht ordnungsgemäß geschlossen wird.
Stellen Sie vor dem Anlegen von Netzspannung
•
sicher, dass alle Sicherheitsabdeckungen
angebracht und ordnungsgemäß befestigt sind.
2 2
Spannung
[V]
200–240 0,37–3,7 4
380–480
Tabelle 2.1 Entladezeit
Leistungsbereich
[kW]
0,37–7,5 4
11–22 (15–30) 15
Mindestwartezeit
(Minuten)
WARNUNG
GEFAHR DURCH ABLEITSTRÖME
Die Ableitströme überschreiten 3,5 mA. Eine nicht
vorschriftsgemäße Erdung des Frequenzumrichters kann
zum Tod oder zu schweren Verletzungen führen!
Lassen Sie die ordnungsgemäße Erdung der
•
Geräte durch einen zertifizierten Elektroinstallateur überprüfen.
MG07C403 Danfoss A/S © 02/2019 Alle Rechte vorbehalten. 13
130BC506.10
Setup 1
A
B
C
D
5
12
13 14 15
10
11
10
9
6
7
8
4
1
2
3
Menu
Status
Quick
Menu
Main
Menu
Hand
On
O
Reset
Auto
On
Back
OK
On
Warn
Alarm
130BD135.10
Setup 12
INDEX
AHP
VkW
srpm
Hz%
n2n1
n3
p5 p4
p3 p2 p1
Programmieren
3 Programmieren
VLT® Midi Drive FC 280
3.1 Betrieb des Local Control Panels (LCP)
A. Numerisches Display
Das LCD-Display ist hintergrundbeleuchtet und verfügt
33
Der Frequenzumrichter unterstützt das numerische LCP
(LCP 101), das grafische LCP (LCP 102) und Blindabde-
über eine numerische Zeile. Das LCP 101 zeigt alle Daten
an.
ckungen. Dieser Abschnitt enthält eine Beschreibung des
Betriebs mit LCP 101 und LCP 102.
HINWEIS
Sie können den Frequenzumrichter auch mit dem PC
über eine RS485-Kommunikationsschnittstelle oder einen
USB-Anschluss programmieren. Dazu müssen Sie die MCT
10 Konfigurationssoftware installieren. Diese Software
können Sie über die Bestellnummer 130B1000 bestellen
oder von der Danfoss-Website herunterladen:
drives.danfoss.com/downloads/pc-tools/#/.
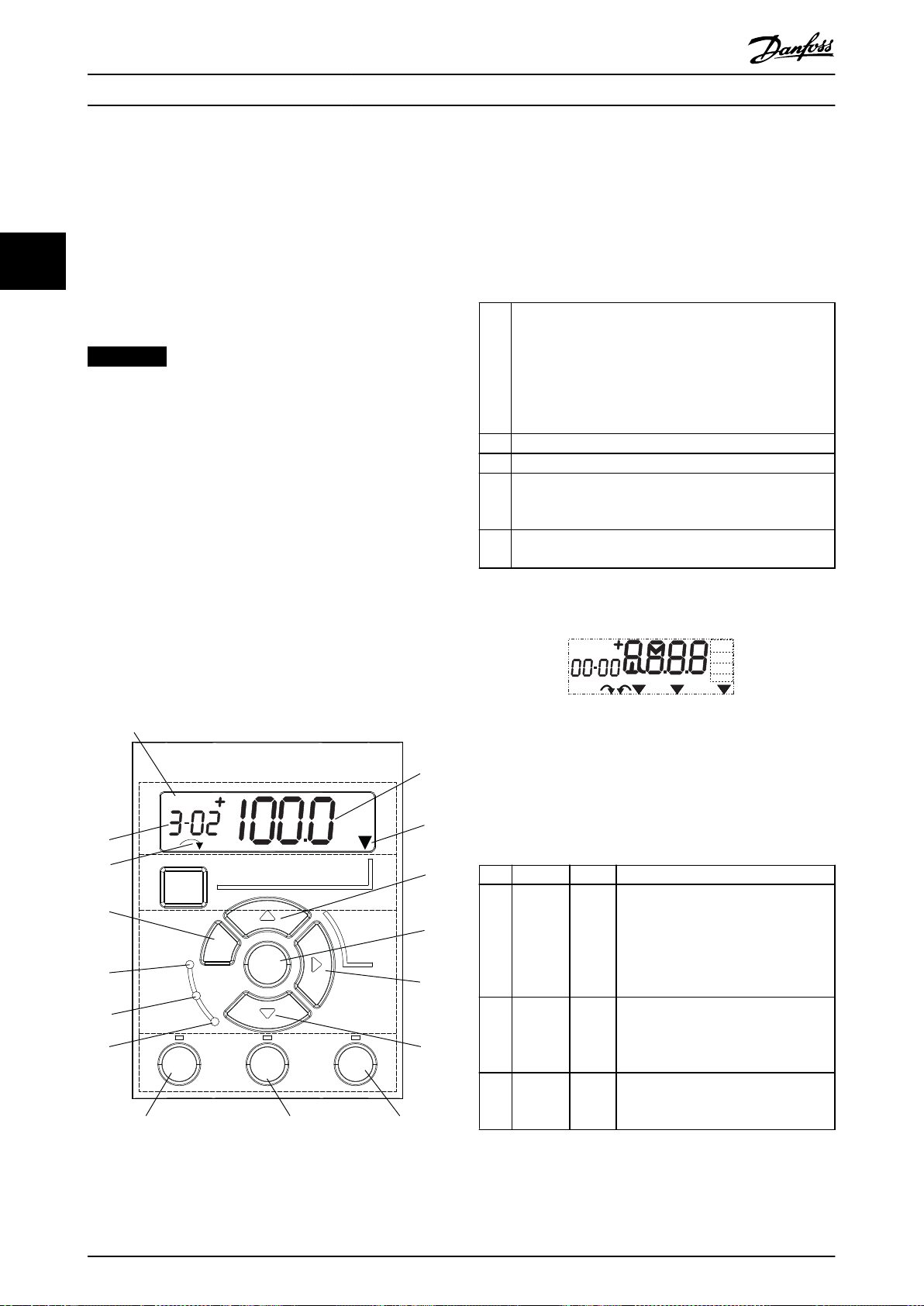
3.1.1 Numerisches LCP Bedienteil (LCP 101)
Die Satznummer zeigt den aktiven Parametersatz und den
editierbaren Parametersatz an. Stimmen der aktive Satz
und Programm-Satz überein, wird nur diese Satznummer
1
gezeigt (Werkseinstellung). Bei unterschiedlichem aktiven
Satz und editierbarem Parametersatz zeigt das Display
beide Satznummern (z. B. Satz 12) an. Die blinkende Zahl
kennzeichnet den editierbaren Parametersatz.
2 Parameternummer.
3 Parameterwert.
Die Motorlaufrichtung wird im unteren Bereich des
4
Displays angezeigt. Ein kleiner Pfeil zeigt die Laufrichtung
an.
Das Dreieck zeigt an, ob sich das LCP in der Statusanzeige,
5
im Quick-Menü oder im Hauptmenü befindet.
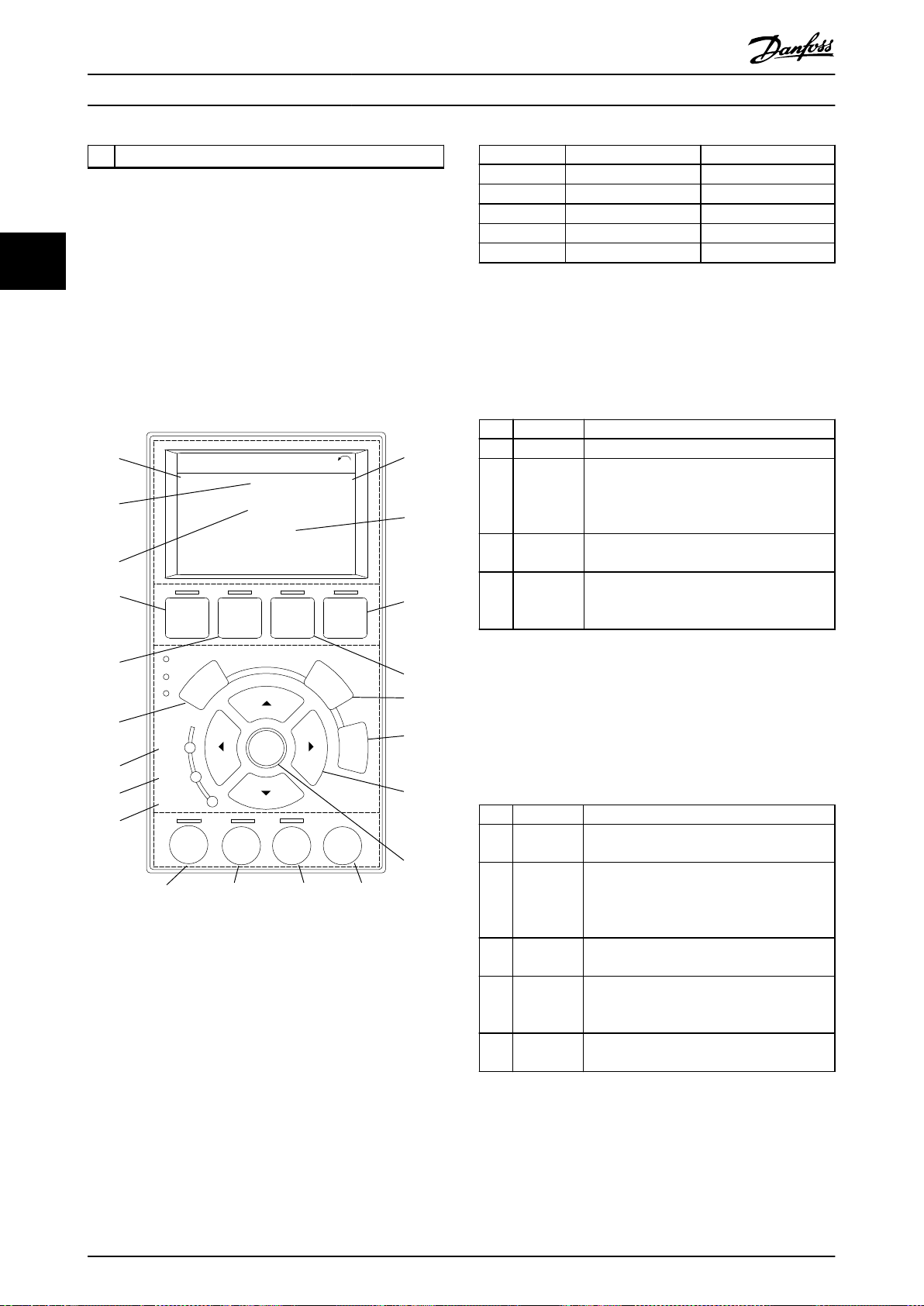
Die numerische Bedieneinheit (LCP 101) ist in die
folgenden 4 Funktionsbereiche unterteilt.
Tabelle 3.1 Legende zu Abbildung 3.1, Abschnitt A
A. Numerisches Display
B. Menütaste.
C. Navigationstasten und Anzeigeleuchten (LED)
D. Bedientasten mit Kontroll-Anzeigen (LED).
Abbildung 3.2 Anzeigeinformationen
B. Menütaste
Drücken Sie die Taste [Menu], um zwischen Status, QuickMenü oder Hauptmenü zu wählen.
C. Anzeigeleuchten (LED) und Navigationstasten
Anzeige LED Funktion
Abbildung 3.1 Ansicht des LCP 101
6 On Grün
7 Warn Gelb
8 Alarm Rot
Tabelle 3.2 Legende für Abbildung 3.1, Anzeigeleuchten (LEDs)
Die On-LED leuchtet auf, wenn der
Frequenzumrichter an die
Netzspannung angeschlossen ist oder
über eine DC-Bus-Zwischenkreisklemme oder eine externe 24-VVersorgung versorgt wird.
Die gelbe WARN-LED leuchtet auf,
wenn eine Warnung auftritt. Im Display
erscheint zusätzlich ein Text, der das
Problem angibt.
Durch eine Fehlerbedingung blinkt die
rote Alarm-LED und ein Alarmtext wird
angezeigt.
14 Danfoss A/S © 02/2019 Alle Rechte vorbehalten. MG07C403
130BC440.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Programmieren Programmierhandbuch
Taste Funktion
Zum Zurücknavigieren zum vorherigen
9 [Back]
10
11 [OK]
12
Tabelle 3.3 Legende für Abbildung 3.1, Navigationstasten
[▲] [▼]
[►]
Schritt oder zur vorherigen Ebene in der
Navigationsstruktur.
Zum Umschalten zwischen Parametergruppen, Parametern und innerhalb von
Parametern oder zur Erhöhung/Verringerung der Parameterwerte. Mit den
Pfeiltasten können Sie auch den
Ortsollwert festlegen.
Durch Drücken rufen Sie Parametergruppen auf oder aktivieren eine
Auswahl.
Zum Bewegen von links nach rechts
innerhalb des Parameterwerts zur
Änderung der einzelnen Ziffern.
D. Bedientasten mit Kontroll-Anzeigen (LED)
Taste Funktion
Diese Taste startet den Frequenzumrichter in
der Hand-Steuerung.
Ein externes Stoppsignal über Steuersignale
13 Hand On
14 Off/Reset
15 Auto On
Tabelle 3.4 Legende zu Abbildung 3.1, Abschnitt D
•
oder serielle Kommunikation hebt den
Handbetrieb auf.
Diese Taste dient dazu, den Motor zu stoppen,
jedoch ohne Unterbrechung der Stromversorgung zum Frequenzumrichter, oder dazu,
den Frequenzumrichter nach Behebung eines
Fehlers manuell zurückzusetzen. Im
Alarmmodus wird der Alarm zurückgesetzt,
wenn die Alarmbedingung beseitigt wird.
Diese Taste schaltet das System in den
Fernbetrieb.
Sie reagiert auf einen externen Startbefehl
•
über Steuerklemmen oder serielle
Kommunikation.
WARNUNG
ELEKTRISCHE GEFAHR
Auch nach dem Drücken der [Off/Reset]-Taste liegt
weiterhin Spannung an den Klemmen des Frequenzumrichters an. Durch Drücken der Taste [Off/Reset] wird der
Frequenzumrichter nicht von der Netzversorgung
getrennt. Ein Berühren spannungsführender Teile kann
zu schweren Verletzungen oder zum Tod führen!
Berühren Sie keine spannungsführenden Teile!
•
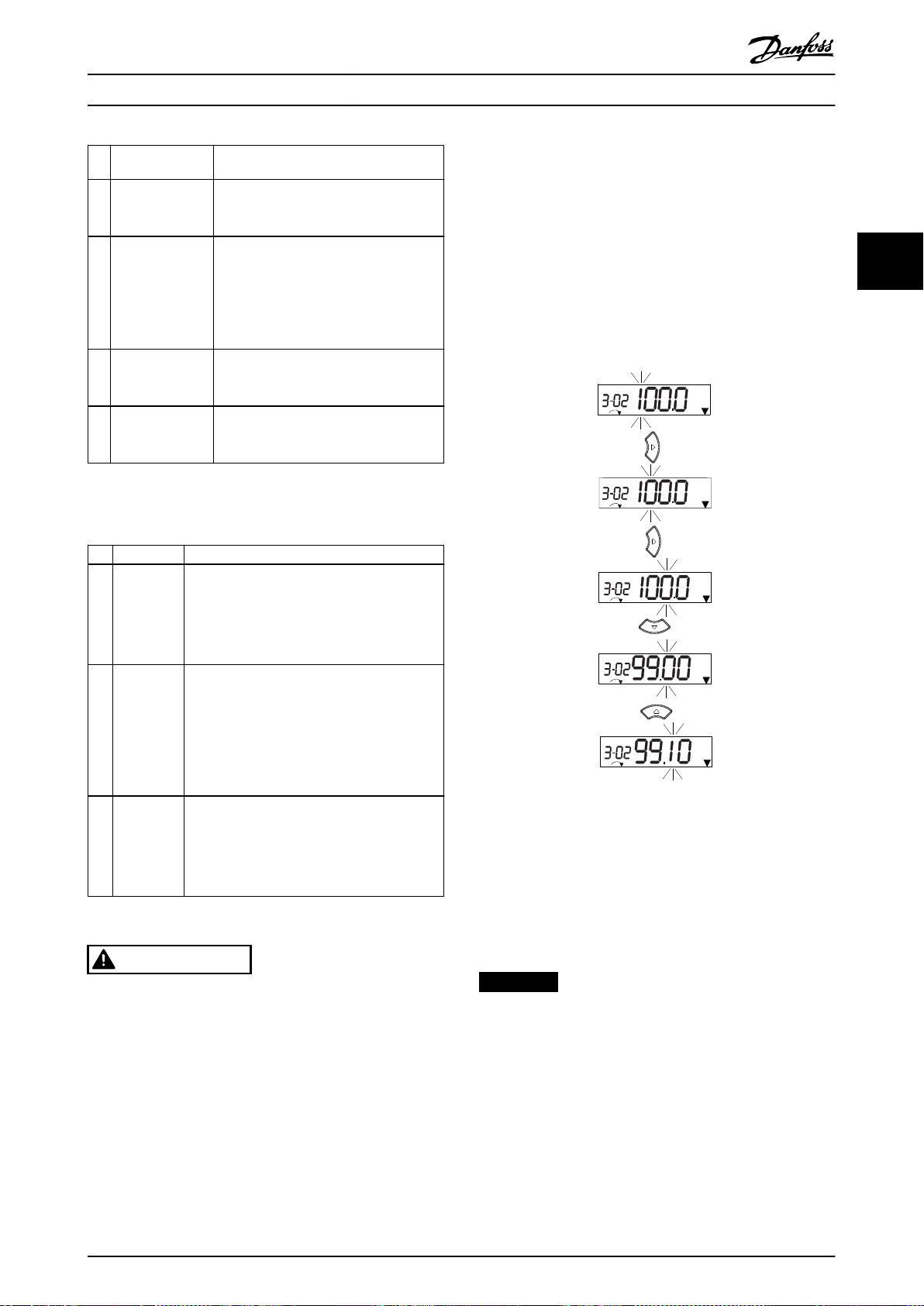
3.1.2 Die Funktion der Rechtspfeil-Taste am
LCP 101
Drücken Sie [►], um die 4 Ziffern in der Anzeige einzeln zu
ändern. Wenn Sie [►] einmal drücken, bewegt sich der
Cursor zur ersten Ziffer, und diese Ziffer beginnt zu
blinken, wie in Abbildung 3.3 gezeigt. Drücken Sie [▲] [▼]
zum Ändern der Werte. Durch Drücken von [►] ändert sich
der Wert der Ziffern nicht und das Dezimalkomma wird
nicht verschoben.
Abbildung 3.3 Funktion der Rechtspfeil-Taste
Sie können [►] auch zum Bewegen zwischen Parametergruppen verwenden. Drücken Sie im Hauptmenü [►], um
zum ersten Parameter in der nächsten Parametergruppe zu
wechseln (z. B. von Parameter 0-03 Ländereinstellungen [0]
International zu Parameter 1-00 Regelverfahren [0] Regelung
ohne Rückführung).
HINWEIS
Bei der Inbetriebnahme zeigt das LCP 101 die Meldung
LCP EIN an. Wenn diese Meldung nicht mehr angezeigt
wird, ist der Frequenzumrichter betriebsbereit. Das
Hinzufügen oder Entfernen von Optionen kann die
Inbetriebnahme verzögern.
3 3
MG07C403 Danfoss A/S © 02/2019 Alle Rechte vorbehalten. 15
Programmieren
VLT® Midi Drive FC 280
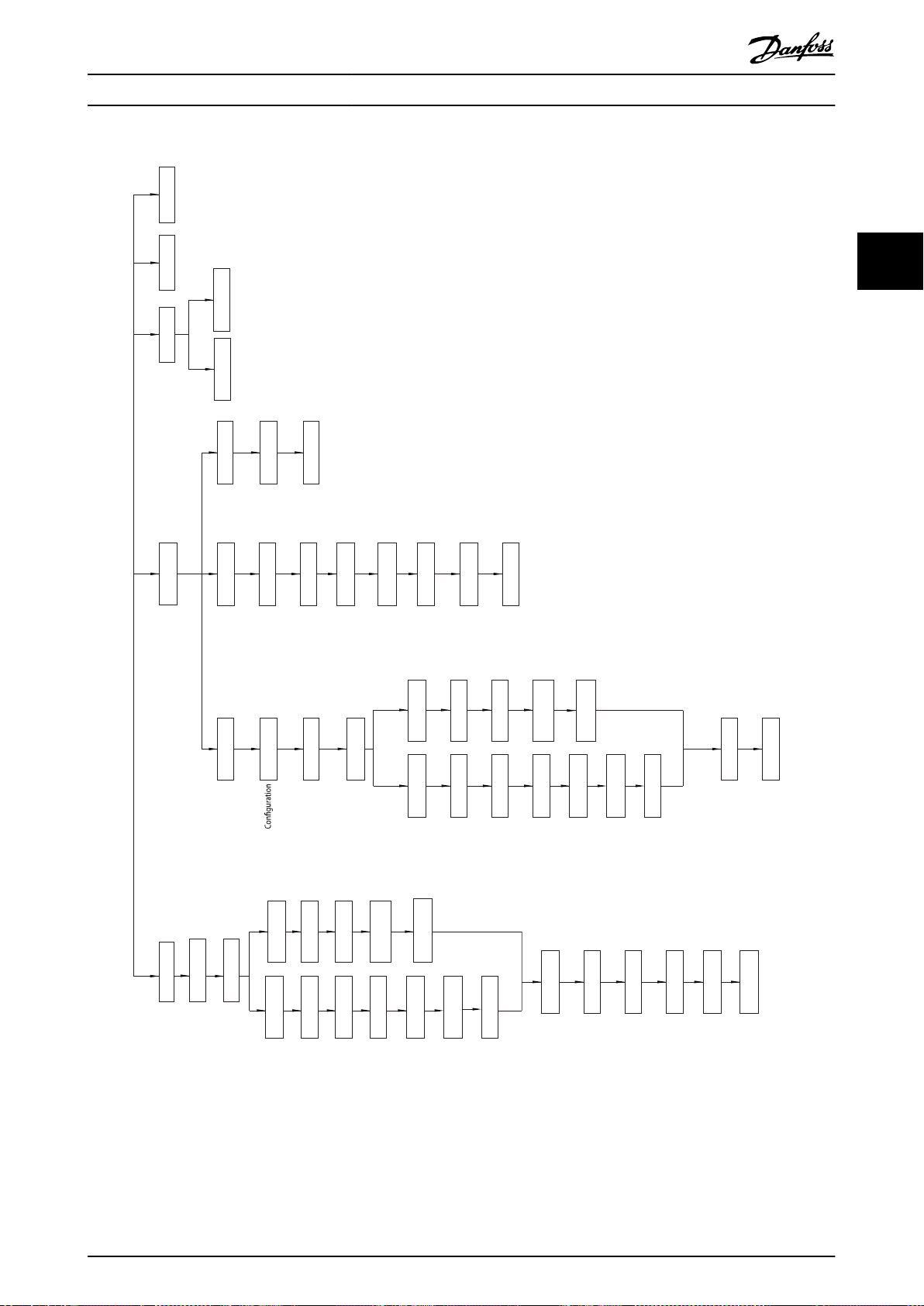
3.1.3 Quick-Menü am LCP 101
Über das Quick-Menü können Sie auf die am häufigsten
verwendeten Parameter zugreifen.
33
1. Drücken Sie zum Aufrufen des Quick-Menüs die
[Menu]-Taste, bis der Anzeiger im Display auf dem
Quick-Menü steht.
2.
Wählen Sie mithilfe der Tasten [▲] [▼] entweder
QM1 oder QM2, und drücken Sie dann [OK].
3.
Navigieren Sie mit den Tasten [▲] [▼] durch die
Parameter im Quick-Menü.
4. Drücken Sie zur Auswahl eines Parameters [OK].
5.
Drücken Sie [▲] [▼], um den Wert einer Parametereinstellung zu ändern.
6. Drücken Sie [OK], um die Änderung zu
akzeptieren.
7. Drücken Sie zum Verlassen zweimal [Back] (oder
dreimal, wenn in QM2 und QM3) zum Aufrufen
des Status, oder drücken Sie einmal [Menu] zum
Aufrufen des Hauptmenüs.
16 Danfoss A/S © 02/2019 Alle Rechte vorbehalten. MG07C403
130BC445.13
1-22 XXXX V
Motor
nominal
speed
QM 1
0-01 [0]
1-10 [0]
1-24 XXXX A
Language
Motor Type
1-20 XXXX kW
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Stator
Motor frequency
1-25 XXXX
1-30 XXXX
1-39 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
3-02 XXXX
3-03 XXXX
3-41 XXXX S
3-42 XXXX S
5-12
[2]
1-29 [1]
AMA
Back EMF at
1000 RPM
d-axis
QM 2
BMS
AMS
ES
5-70 XXXX
5-71 [0]
1-30 XXXX
1-39 XXXX
1-90 [0]
2-10 [0]
4-16 XXXX %
4-17 XXXX %
4-18 XXXX %
1-00 [0]
1-01 [1]
1-10 [0]
1-24 XXXX A 1-20 XXXX kW
1-22 XXXX V
Motor
nominal
speed
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Motor frequency
1-25 XXXX
1-30 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
Back EMF at
1000 RPM
d-axis
1-39 XXXX
4-14 XXXX
4-19 XXXX
Stator
QM 3
QM 4 QM 5
L10C
SFS
TBD
Motor
nominal
speed
Motor
nominal
speed
Motor current
Motor cont.
rated torque
Resistance (Rs)
Motor poles
inductance (Ld)
Asynchronous motor
Motor current
Minimum reference
Maximum reference
Ramp 1 ramp-up time
Ramp 1 ramp-down time
Terminal 27 digital input
Basic motor set-up
mode
Motor control
principle
Motor type
PM motor
PM motor
Motor
current
Motor cont.
rated torque
Stator
Resistance (Rs)
Motor poles
inductance (Ld)
Motor speed high limit [Hz]
Maximum output frequency
Asynchronous motor
Motor current
RPM
RPM
RPM
Hz
RPM
Hz
Hz
Hz
Hz
Hz
Adv. motor set-up
Resistance (Rs)
Motor poles
Motor thermal
protection
Brake function
Torque limit motor mode
Torque limit generator mode
Current limit
Encoder set-up
Terminal 32/33
pulses per revolution
Terminal 32/33
encoder direction
Changes made
Last 10 changes Since factory setting
Alarm log
Programmieren Programmierhandbuch
3 3
MG07C403 Danfoss A/S © 02/2019 Alle Rechte vorbehalten. 17
Abbildung 3.4 Aufbau des Quick-Menüs
130BC446.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
7
10
11
12
OK
OK
Back
8
Back
Setup 1
2 x
+
OK
9
OK
Programmieren
VLT® Midi Drive FC 280
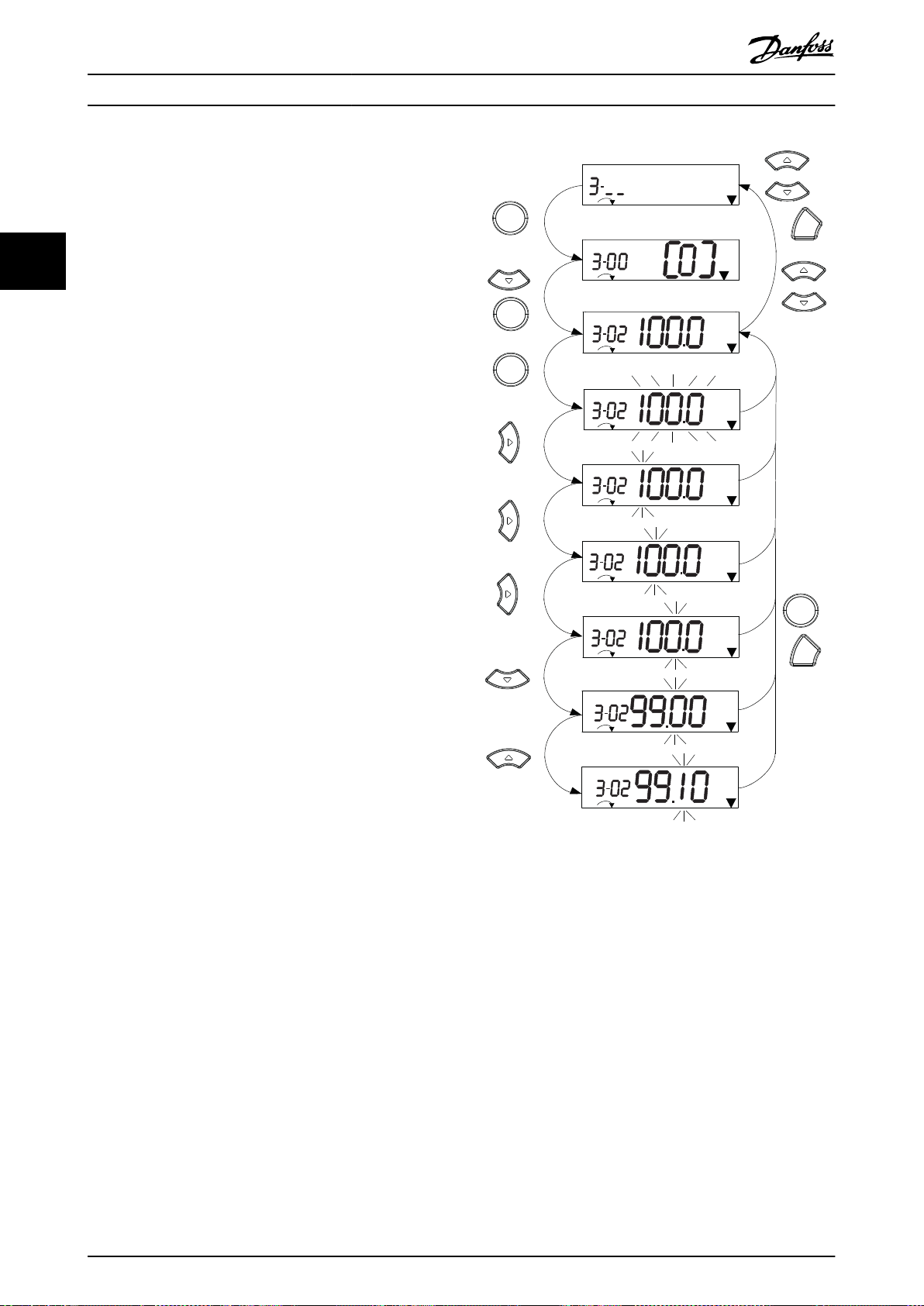
3.1.4 Hauptmenü am LCP 101
Das Hauptmenü bietet Zugriff auf alle Parameter.
1. Wählen Sie das Hauptmenü, indem Sie die Taste
33
Siehe Abbildung 3.5, Abbildung 3.6 und Abbildung 3.7 für
die Prinzipien zur jeweiligen Änderung des Werts der
kontinuierlichen, nummerierten und Arrayparameter. Die
Aktionen in den Abbildungen sind in Tabelle 3.5, Tabelle 3.6
und Tabelle 3.7 beschrieben.
[Menu] wiederholt drücken, bis der Pfeil im
Display über Main Menu steht.
2.
[▲] [▼]: Navigieren Sie durch die Parametergruppen.
3. Drücken Sie [OK], um eine Parametergruppe
auszuwählen.
4.
[▲] [▼]: Zum Navigieren durch die Parameter der
jeweiligen Gruppe.
5. Drücken Sie zur Auswahl des Parameters [OK].
6.
[►] und [▲]/ [▼]: Zum Einstellen/Ändern des
Parameterwerts.
7. Übernehmen Sie den Wert mit [OK].
8. Drücken Sie zum Verlassen zweimal [Back] (oder
dreimal für Arrayparameter) bis zum Aufruf des
Hauptmenüs, oder drücken Sie einmal [Menu]
zum Aufrufen des Status.
Abbildung 3.5 Hauptmenü-Interaktionen - Kontinuierliche
Parameter
18 Danfoss A/S © 02/2019 Alle Rechte vorbehalten. MG07C403
130BC447.11
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
OK
OK
Back
7
OK
Back
130BC448.10
1
2
4
5
6
7
8
9
10
OK
Back
Back
Back
5 x
Setup 1
Setup 1
Setup 1
Setup 1
%
INDEX
%
INDEX
%
INDEX
Setup 1
INDEX
%
OK
OK
OK
Programmieren Programmierhandbuch
1 [OK]: Der erste Parameter in der Gruppe wird angezeigt.
2
Drücken Sie mehrfach [▼], um zum gewünschten Parameter
nach unten zu navigieren.
3 Drücken Sie [OK], um mit der Bearbeitung zu beginnen.
4
[►]: Erste Stelle blinkt (kann geändert werden).
5
[►]: Zweite Stelle blinkt (kann geändert werden).
6
[►]: Dritte Stelle blinkt (kann geändert werden).
7
[▼]: Bei einer Reduzierung des Parameterwerts ändert sich
das Dezimalkomma automatisch.
8
[▲]: Erhöht den Parameterwert.
9 [Back]: Zum Verwerfen der Änderungen, zurück zu 2.
[OK]: Zum Bestätigen der Änderungen, zurück zu 2.
10
[▲][▼]: Zur Auswahl eines Parameters innerhalb der Gruppe.
11 [Back]: Zum Entfernen des Werts und zur Anzeige der
Parametergruppe.
12
[▲][▼]: Zur Auswahl der Gruppe.
Tabelle 3.5 Ändern von Werten in kontinuierlichen Parametern
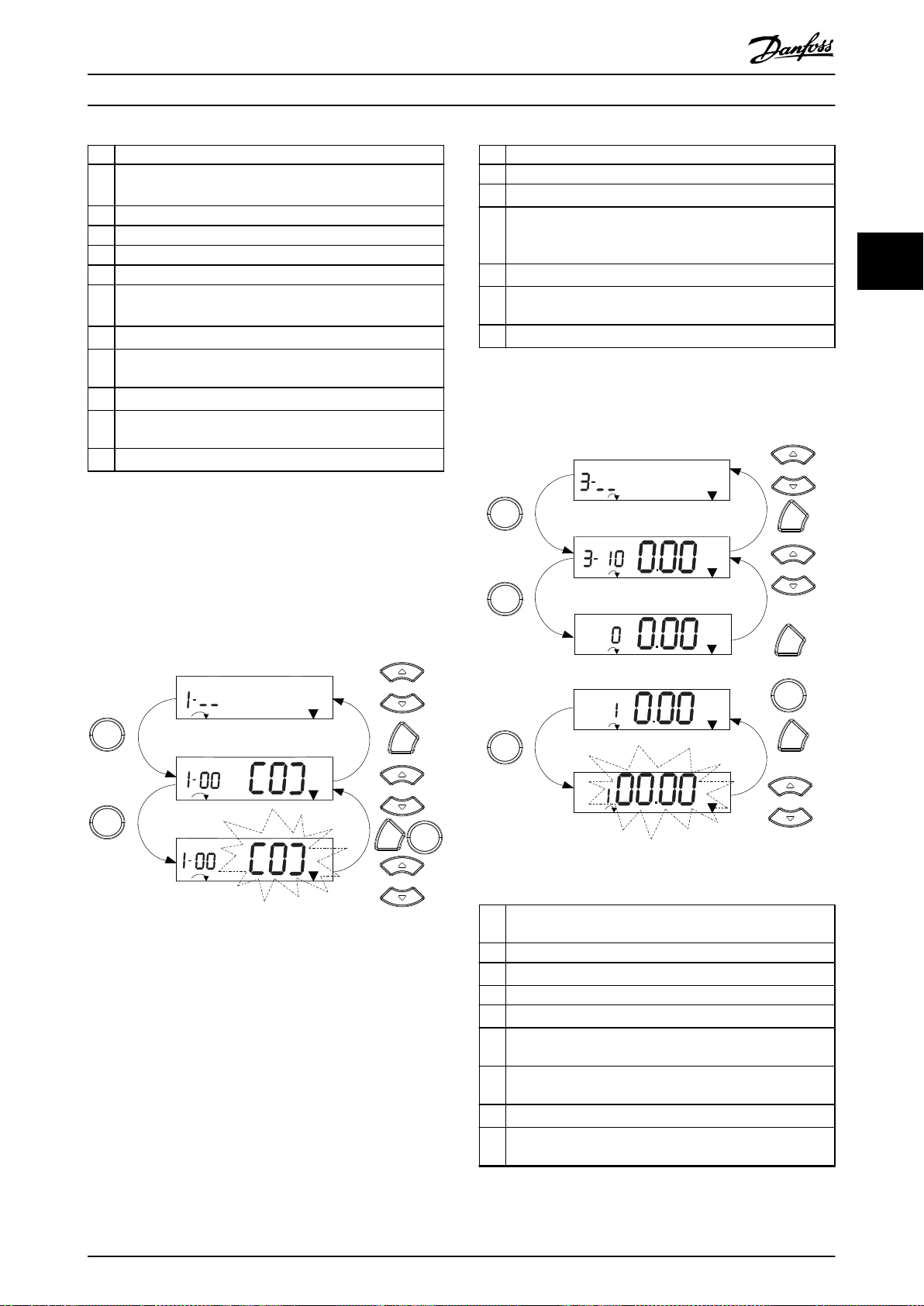
Für nummerierte Parameter ist die Interaktion ähnlich, das
LCP 101 zeigt den Parameterwert jedoch aufgrund seiner
Beschränkung auf 4 große Ziffern in Klammern an, und die
Nummerierung kann größer als 99 sein. Ist der Nummerierungswert größer als 99, kann das LCP nur den ersten Teil
der Klammer anzeigen.
1 [OK]: Der erste Parameter in der Gruppe wird angezeigt.
2 Drücken Sie [OK], um mit der Bearbeitung zu beginnen.
3
[▲][▼]: Zum Ändern des Parameterwerts (blinkend).
4 Drücken Sie zum Verwerfen der Änderungen [Back] oder
zum Bestätigen der Änderungen [OK] (zurück zu Bildschirmansicht 2).
5
[▲][▼]: Zur Auswahl eines Parameters innerhalb der Gruppe.
6 [Back]: Zum Entfernen des Werts und zur Anzeige der
Parametergruppe.
7
[▲][▼]: Zur Auswahl einer Gruppe.
Tabelle 3.6 Ändern von Werten in nummerierten Parametern
Arrayparameter funktionieren wie folgt:
3 3
Abbildung 3.7 Hauptmenü-Interaktionen - Arrayparameter
Abbildung 3.6 Hauptmenü-Interaktionen - Nummerierte
Parameter
MG07C403 Danfoss A/S © 02/2019 Alle Rechte vorbehalten. 19
1 [OK]: Zur Anzeige der Parameternummern und des Werts im
ersten Index.
2 [OK]: Der Index kann ausgewählt werden.
3
[▲][▼]: Zur Auswahl des Index.
4 [OK]: Wert kann geändert werden.
5
[▲][▼]: Zum Ändern des Parameterwerts (blinkend).
6 [Back]: Zum Verwerfen der Änderungen.
[OK]: Zum Bestätigen der Änderungen.
7 [Back]: Zum Abbrechen der Bearbeitung des Indexes und
zur Auswahl eines neuen Parameters.
8
[▲][▼]: Zur Auswahl eines Parameters innerhalb der Gruppe.
9 [Back]: Zum Entfernen des Indexwerts und zur Anzeige der
Parametergruppe.
130BD598.10
Auto
On
Reset
Hand
On
O
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
36.4 kW
Auto Remote Ramping
0.000
On
Alarm
Warn.
A
7.83 A
799 RPM
B
C
D
53.2 %
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18 19 20 21
Programmieren
VLT® Midi Drive FC 280
10
[▲][▼]: Zur Auswahl der Gruppe.
Display Parameternummer Werkseinstellung
1 0-20 [1602] Sollwert [%]
Tabelle 3.7 Ändern von Werten in Arrayparametern
2 0-21 [1614] Motorstrom
3 0-22 [1610] Leistung [kW]
3.1.5 Grafisches LCP-Bedienteil (GLCP)
4 0-23 [1613] Frequenz
5 0-24 [1502] Zähler-kWh
33
Das LCP 102 ist in vier Funktionsbereiche unterteilt (siehe
Abbildung 3.8).
A. Displaybereich
B. Menütasten am Display
C. Navigationstasten und Anzeigeleuchten (LED)
D. Bedientasten und Quittieren (Reset)
Tabelle 3.8 Legende zu Abbildung 3.8, Anzeigebereich
B. Menütasten am Display
Die Menütasten dienen dem Menüzugriff für die Parametereinstellung, dem Umschalten zwischen
Statusanzeigemodi im Normalbetrieb und der Anzeige von
Fehlerspeicherdaten.
Taste Funktion
6 Status Zeigt Betriebszustände an.
Diese Taste bietet schnellen Zugang zu
Quick
7
Menu
Parametern zur Programmierung für die erste
Inbetriebnahme und zu vielen detaillierten
Anwendungshinweisen.
8 Main Menu
Dient zum Zugriff auf alle Programmierparameter.
Zeigt eine Liste aktueller Warnungen, die
9 Alarm Log
letzten 10 Alarme und das Wartungsprotokoll.
Tabelle 3.9 Legende für Abbildung 3.8, Menütasten am Display
C. Navigationstasten und Anzeigeleuchten (LEDs)
Verwenden Sie die Navigationstasten, um Funktionen zu
programmieren und den Displaycursor zu bewegen. Im
lokalen Betrieb dienen die Navigationstasten auch zur
Drehzahlsteuerung. In diesem Bereich befinden sich auch
drei Statusanzeigeleuchten des Frequenzumrichters.
Taste Funktion
10 Back
Abbildung 3.8 Grafisches LCP-Bedienteil (GLCP)
11 Cancel
A. Displaybereich
Das Display ist aktiviert, wenn Netzspannung, eine DC-BusZwischenkreisklemme oder eine externe 24 V DCVersorgung den Frequenzumrichter mit Spannung versorgt.
Die auf der Bedieneinheit angezeigten Informationen
können an die Benutzeranwendung angepasst werden.
Wählen Sie die Optionen im Quick-Menü Q3-13 Displayein-
stellungen.
20 Danfoss A/S © 02/2019 Alle Rechte vorbehalten. MG07C403
12 Info
Navigati-
13
onstasten
14 OK
Tabelle 3.10 Legende für Abbildung 3.8, Navigationstasten
Kehrt zum vorhergehenden Schritt oder Liste
in der Menüstruktur zurück.
Macht die letzte Änderung oder den letzten
Befehl rückgängig, so lange der
Anzeigemodus bzw. die Displayanzeige nicht
geändert worden ist.
Zeigt Informationen zur angezeigten
Funktion an.
Navigieren Sie mit Hilfe der vier Navigationstasten zwischen den verschiedenen Optionen
in den Menüs.
Durch Drücken rufen Sie Parametergruppen
auf oder aktivieren eine Auswahl.
Programmieren Programmierhandbuch
Anzeige LED Funktion
Die On-LED leuchtet auf, wenn der
Frequenzumrichter an die
15 On Grün
16 Warn Gelb
17 Alarm Rot
Tabelle 3.11 Legende für Abbildung 3.8, Anzeigeleuchten
(LEDs)
D. Bedientasten und Quittieren (Reset)
Die Bedientasten befinden sich unten an der LCP.
Taste Funktion
Startet den Frequenzumrichter im HandBetrieb.
18 Hand On
Diese Taste stoppt den Motor, trennt aber
19 Aus
20 Auto On
21 Reset
Tabelle 3.12 Legende für Abbildung 3.8, Bedientasten und
Quittieren (Reset)
nicht die Stromversorgung des Frequenzumrichters.
Diese Taste schaltet das System in den
Fernbetrieb.
•
Diese Taste dient dazu, den Frequenzumrichter nach Behebung eines Fehlers manuell
zurückzusetzen.
Netzspannung angeschlossen ist
oder über eine DC-Bus-Zwischenkreisklemme oder eine externe 24V-Versorgung versorgt wird.
Die gelbe WARN-LED leuchtet auf,
wenn eine Warnung auftritt. Im
Display erscheint zusätzlich ein
Text, der das Problem angibt.
Die rote Alarm-LED blinkt bei
einem Fehlerzustand. Im Display
erscheint zusätzlich ein Text, der
den Alarm näher spezifiziert.
Ein externes Stoppsignal über
•
Steuersignale oder serielle
Kommunikation hebt den
Handbetrieb auf.
Sie reagiert auf einen externen
Startbefehl über Steuerklemmen oder
serielle Kommunikation.
HINWEIS
Drücken Sie zur Einstellung des Display-Kontrasts
[Status] und [▲]/[▼].
3.1.6 Parametereinstellungen
Um die richtige Programmierung für Anwendungen zu
erhalten, müssen Sie häufig Funktionen in mehreren
verwandten Parametern einstellen. Weitere Informationen
zu den Parametern finden Sie in Kapitel 4 Parameterbe-
schreibungen.
Programmierdaten speichert der Frequenzumrichter im
internen Speicher.
Laden Sie die Daten zur Sicherung in den LCP-
•
Speicher.
Schließen Sie das LCP zum Laden von Daten auf
•
einen anderen Frequenzumrichter an dieses Gerät
an und laden Sie die gespeicherten Einstellungen
herunter.
Bei der Wiederherstellung von Werkseinstellungen
•
werden die im Speicher des LCP gespeicherten
Daten nicht geändert.
3.1.7 Ändern von Parametereinstellungen
mit LCP 102
Aufrufen und ändern von Parametereinstellungen durch
Drücken von Quick Menu oder Main Menu. Über die Taste
Quick Menu erhalten Sie nur Zugriff auf eine begrenzte
Anzahl von Parametern.
1. Drücken Sie die Taste [Quick Menu] oder [Main
Menu] am LCP.
2.
Drücken Sie die Tasten [▲] [▼], um durch die
Parametergruppen zu navigieren, drücken Sie auf
die [OK]-Taste, um eine Parametergruppe
auszuwählen.
3.
Drücken Sie die Tasten [▲] [▼], um durch die
Parameter zu navigieren, drücken Sie auf die
Tasten [OK], um ein Parameter auszuwählen.
4.
Drücken Sie [▲] [▼], um den Wert einer Parametereinstellung zu ändern.
5.
Drücken Sie auf die Tasten [◄] [►], um die Stelle
bei der Eingabe eines dezimalen Parameters zu
wechseln.
6. Drücken Sie [OK], um die Änderung zu
akzeptieren.
7. Drücken Sie zweimal [Back], um zum Menü Status
zu wechseln, oder drücken Sie [Main Menu], um
das Hauptmenü zu öffnen.
Änderungen anzeigen
Quick Menu Q5 - Liste geänd. Param. listet alle Parameter
auf, die von der Werkseinstellung abweichen.
Die Liste zeigt nur Parameter, die im aktuellen
•
Programm-Satz geändert wurden.
Parameter, die auf die Werkseinstellung zurück-
•
gesetzt wurden, werden nicht aufgelistet.
Die Meldung Empty zeigt an, dass keine
•
Parameter geändert wurden.
3 3
MG07C403 Danfoss A/S © 02/2019 Alle Rechte vorbehalten. 21
Programmieren
VLT® Midi Drive FC 280
3.1.8 Daten auf das/vom LCP hochladen/
herunterladen
1. Drücken Sie die [Off ]-Taste, um den Motor zu
stoppen, bevor Sie Daten laden oder speichern.
33
2. Drücken Sie auf [Main Menu] Parameter 0-50 LCPKopie und anschließend auf [OK].
3. Wählen Sie [1] Speichern in LCP zum Hochladen
der Daten auf das LCP oder [2] Lade von LCP, Alle
zum Herunterladen der Daten vom LCP.
4. Drücken Sie [OK]. Sie können den Upload- oder
Download-Vorgang an einem Statusbalken
verfolgen.
5. Drücken Sie auf [Hand on] oder [Auto on], um
zum Normalbetrieb zurückzukehren.
3.1.9 Wiederherstellen der
Werkseinstellungen mit dem LCP
HINWEIS
Bei der Wiederherstellung der Werkseinstellungen
besteht die Gefahr eines Datenverlustes von Programmierung, Motordaten, Lokalisierung und Überwachung.
Speichern Sie die Daten für eine Datensicherung vor der
Initialisierung im LCP.
Die Initialisierung des Frequenzumrichters stellt die
Standard-Parametereinstellungen wieder her. Eine Initialisierung ist über Parameter 14-22 Betriebsart (empfohlen)
oder manuell möglich. Die Initialisierung setzt die Einstellungen für Parameter 1-06 Drehrichtung rechts und
Parameter 0-03 Ländereinstellungen nicht zurück.
Die Initialisierung über Parameter 14-22 Betriebsart
•
ändert keine Einstellungen des Frequenzumrichters wie Betriebsstunden, über die serielle
Schnittstelle gewählte Optionen, Fehlerspeicher,
Alarm Log und weitere Überwachungsfunktionen.
Eine manuelle Initialisierung löscht alle Daten zu
•
Motor, Programmierung, Lokalisierung und
Überwachung und stellt die Werkseinstellungen
wieder her.
Empfohlene Initialisierung, über
Parameter 14-22 Betriebsart
1. Wählen Parameter 14-22 Betriebsart und drücken
Sie auf [OK].
2. Wählen Sie [2] Initialisierung aus, und drücken Sie
auf [OK].
3. Schalten Sie den Frequenzumrichter
spannungslos und warten Sie, bis das Display
erlischt.
4. Legen Sie die Netzversorgung an den Frequenzumrichter an.
Die Werkseinstellungen der Parameter werden während der
Inbetriebnahme wiederhergestellt. Dies kann etwas länger
dauern als normal.
5. Alarm 80, Frequenzumrichter auf Werkseinstellung
initialisiert wird angezeigt.
6. Mit [Reset] kehren Sie zum normalen Betrieb
zurück.
Manuelles Initialisierungsverfahren
1. Schalten Sie den Frequenzumrichter
spannungslos und warten Sie, bis das Display
erlischt.
2. Halten Sie [Status], [Main Menu] und [OK] am LCP
102 bzw. [Menu] und [OK] am LCP 101 gleichzeitig gedrückt und legen Sie Strom an das Gerät
an (ca. 5 Sek. oder bis zu einem hörbaren Klicken
und dem Starten des Lüfters).
Die Initialisierung stellt die Werkseinstellungen der
Parameter während der Inbetriebnahme wieder her. Dies
kann etwas länger dauern als normal.
Die manuelle Initialisierung setzt die folgenden Frequenzumrichterinformationen nicht zurück:
Parameter 15-00 Betriebsstunden.
•
Parameter 15-03 Anzahl Netz-Ein.
•
Parameter 15-04 Anzahl Übertemperaturen.
•
Parameter 15-05 Anzahl Überspannungen.
•
Grundlegende Programmierung
3.2
3.2.1 Einstellung von Asynchronmotoren
Geben Sie die folgenden Motordaten in der aufgeführten
Reihenfolge ein. Diese Angaben finden Sie auf dem MotorTypenschild.
1. Parameter 1-20 Motorleistung.
2. Parameter 1-22 Motornennspannung.
3. Parameter 1-23 Motornennfrequenz.
4. Parameter 1-24 Motornennstrom.
5. Parameter 1-25 Motornenndrehzahl.
Für optimale Leistung im VVC+-Modus sind zusätzliche
Motordaten zur Konfiguration der folgenden Parameter
erforderlich.
6. Parameter 1-30 Statorwiderstand (Rs).
7. Parameter 1-31 Rotorwiderstand (Rr).
8. Parameter 1-33 Statorstreureaktanz (X1).
9. Parameter 1-35 Hauptreaktanz (Xh).
Die Daten finden Sie im Motordatenblatt (diese Daten sind
in der Regel nicht auf dem Motor-Typenschild zu finden).
22 Danfoss A/S © 02/2019 Alle Rechte vorbehalten. MG07C403
Programmieren Programmierhandbuch
Führen Sie über Parameter 1-29 Autom. Motoranpassung
(AMA) [1] Komplette Anpassung oder durch manuelle
Eingabe der folgenden Parameter eine komplette AMA
durch:
Anwendungsspezifische Anpassung bei der
Durchführung von VVC
VVC+ ist der robusteste Steuermodus. In den meisten
Situationen bietet dieser ohne weitere Anpassungen
optimale Leistung. Führen Sie für eine Leistungsoptimierung eine komplette AMA durch.
3.2.2
PM-Motoreinstell. in VVC
Erste Programmierschritte
1. Stellen Sie Parameter 1-10 Motorart auf die
folgenden Optionen ein, um den PMMotorbetrieb zu aktivieren:
1a [1] PM, Vollpol
1b [3] PM (Vergr. Magnete), Sat
2. Wählen Sie [0] Regelung ohne Rückführung in
Parameter 1-00 Regelverfahren.
+
+
HINWEIS
Die Geberrückführung wird bei PM-Motoren nicht
unterstützt.
Programmierung von Motordaten
Nach Auswahl einer PM-Motoroption in
Parameter 1-10 Motorart finden Sie die Parameter für PMMotoren in den Parametergruppen 1-2* Motordaten und
1-3* Erw. Motordaten I und 1–4* Erw. Motordaten II aktiv.
Die Informationen finden Sie auf dem Motor-Typenschild
und im Datenblatt des Motors.
Programmieren Sie die folgenden Parameter in der
angegebenen Reihenfolge:
1. Parameter 1-24 Motornennstrom.
2. Parameter 1-26 Dauer-Nenndrehmoment.
3. Parameter 1-25 Motornenndrehzahl.
4. Parameter 1-39 Motorpolzahl.
5. Parameter 1-30 Statorwiderstand (Rs).
Geben Sie den Widerstand der Statorwicklung
(Rs) zwischen Leiter und Sternpunkt an. Wenn nur
Leiter-Leiter-Daten bereitstehen, teilen Sie den
Wert durch 2, um den Wert zwischen Leiter und
Sternpunkt zu erhalten.
Sie können den Wert auch mit einem Ohmmeter
messen, das den Kabelwiderstand berücksichtigt.
Teilen Sie den gemessenen Wert durch 2 und
geben Sie das Ergebnis ein.
6. Parameter 1-37 Indukt. D-Achse (Ld).
Geben Sie die direkte Achseninduktivität des PMMotors zwischen Leiter und Sternpunkt an.
Wenn nur Leiter-Leiter-Daten bereitstehen, teilen
Sie den Wert durch 2, um den Wert zwischen
Leiter und Sternpunkt zu erhalten.
Sie können den Wert auch mit einem Induktivitätsmessgerät messen, das die Induktivität des
Kabels berücksichtigt. Teilen Sie den gemessenen
Wert durch 2 und geben Sie das Ergebnis ein.
7. Parameter 1-40 Gegen-EMK bei 1000 UPM.
Geben Sie die Gegen-EMK des PM-Motors
zwischen zwei Außenleitern bei 1000 UPM
mechanischer Drehzahl (Effektivwert) ein. Die
Gegen-EMK ist die Spannung, die von einem PMMotor erzeugt wird, wenn kein Frequenzumrichter
angeschlossen ist und die Welle extern gedreht
wird. Die Gegen-EMK wird normalerweise bei
Motornenndrehzahl oder bei 1000 U/min
gemessen zwischen zwei Außenleitern
angegeben. Wenn der Wert nicht für eine
Motordrehzahl von 1000 UPM verfügbar ist,
berechnen Sie den korrekten Wert wie folgt:
Wenn die Gegen-EMK z. B. 320 V bei 1800 UPM
beträgt, können Sie diese wie folgt bei 1000 UPM
berechnen:
Gegen-EMK= (Spannung/UPM)x1000 =
(320/1800)x1000 = 178.
Programmieren Sie diesen Wert für
Parameter 1-40 Gegen-EMK bei 1000 UPM.
Testmotorbetrieb
1. Starten Sie den Motor mit niedriger Drehzahl (100
bis 200 UPM). Wenn sich der Motor nicht dreht,
überprüfen Sie die Installation, die allgemeine
Programmierung und die Motordaten.
Parken
Diese Funktion wird für Anwendungen empfohlen, in
denen sich der Motor mit niedriger Drehzahl dreht, z. B.
bei Auftreten eines Windmühlen-Effekts (Motor wird durch
Last gedreht) in Lüfteranwendungen. Sie können
Parameter 2-06 Parking Strom und Parameter 2-07 Parking
Zeit anpassen. Erhöhen Sie bei Anwendungen mit hohem
Trägheitsmoment die Werkseinstellung dieser Parameter.
Starten Sie den Motor mit Nenndrehzahl. Falls die
Anwendung nicht einwandfrei funktioniert, prüfen Sie die
VVC+ PM-Einstellungen. Tabelle 3.13 enthält Empfehlungen
für verschiedene Anwendungen.
3 3
MG07C403 Danfoss A/S © 02/2019 Alle Rechte vorbehalten. 23
Programmieren
VLT® Midi Drive FC 280
Anwendung Einstellungen
Anwendungen mit
niedrigem Trägheitsmoment
I
Last/IMotor
<5
33
Anwendungen mit
mittlerem Trägheitsmoment
50>I
Anwendungen mit hohem
Trägheitsmoment
I
Last/IMotor
Hohe Last bei niedriger
Drehzahl
<30 % (Nenndrehzahl)
Last/IMotor
>50
>5
Erhöhen Sie den Wert für
•
Parameter 1-17 Spannungskonstante um den Faktor 5 bis 10.
Reduzieren Sie den Wert für
•
Parameter 1-14 Dämpfungsfaktor.
Reduzieren Sie den Wert
•
(<100 %) für Parameter 1-66 Min.
Strom bei niedr. Drz..
Behalten Sie berechnete Werte bei.
Erhöhen Sie die Werte für
Parameter 1-14 Dämpfungsfaktor,
Parameter 1-15 Filter niedrige
Drehzahl und Parameter 1-16 Filter
hohe Drehzahl
Erhöhen Sie den Wert für
Parameter 1-17 Spannungskonstante
Erhöhen Sie den Wert für
Parameter 1-66 Min. Strom bei niedr.
Drz. (>100 % über längere Zeit kann
den Motor überhitzen).
Ausführen einer AMA mit Hilfe des LCP
1. Schließen Sie bei Verwendung der werkseitigen
Parametereinstellung vor dem Durchführen der
AMA die Klemmen 13 und 27 an.
2. Öffnen Sie das Hauptmenü.
3. Navigieren Sie zu Parametergruppe 1-** Motor/
Last.
4. Drücken Sie [OK].
5. Stellen Sie die Motorparameter in der Parameter-
gruppe 1-2* Motordaten mit Hilfe der
Typenschilddaten ein.
6. Legen Sie die Motorkabellänge in
Parameter 1-42 Motorkabellänge fest.
7. Gehen Sie zu Parameter 1-29 Autom. Motoran-
passung (AMA).
8. Drücken Sie [OK].
9. Wählen Sie [1] Komplette Anpassung.
10. Drücken Sie [OK].
11. Der Test wird automatisch durchgeführt und zeigt
an, wann er beendet ist.
Je nach Leistungsgröße nimmt die Durchführung der AMA
3 bis 10 Minuten in Anspruch.
Tabelle 3.13 Empfehlungen für verschiedene Anwendungen
Wenn der Motor bei einer bestimmten Drehzahl zu
schwingen beginnt, erhöhen Sie
Parameter 1-14 Dämpfungsfaktor. Erhöhen Sie den Wert in
kleinen Schritten.
Sie können das Startmoment in Parameter 1-66 Min. Strom
bei niedr. Drz. einstellen. 100 % ist Nenndrehmoment als
Startmoment.
3.2.3 Autom. Motoranpassung (AMA)
Führen Sie zur Optimierung der Kompatibilität zwischen
Frequenzumrichter und Motor im VVC+-Modus eine AMA
aus.
Der Frequenzumrichter erstellt zur Regelung des
•
erzeugten Motorstroms ein mathematisches
Motormodell, mit dem die Motorleistung
verbessert werden kann.
Einige Motoren sind möglicherweise nicht dazu in
•
der Lage, den Test vollständig durchzuführen.
Wählen Sie in diesem Fall [2] Reduz. Anpassung in
Parameter 1-29 Autom. Motoranpassung (AMA).
Informationen zu Warn- oder Alarmmeldungen
•
finden Sie unter Kapitel 6.1 Warnungen und
Alarmmeldungen.
Führen Sie dieses Verfahren bei kaltem Motor
•
durch, um das beste Ergebnis zu erzielen.
HINWEIS
Die AMA-Funktion verursacht kein Starten und keine
Beschädigung des Motors.
24 Danfoss A/S © 02/2019 Alle Rechte vorbehalten. MG07C403
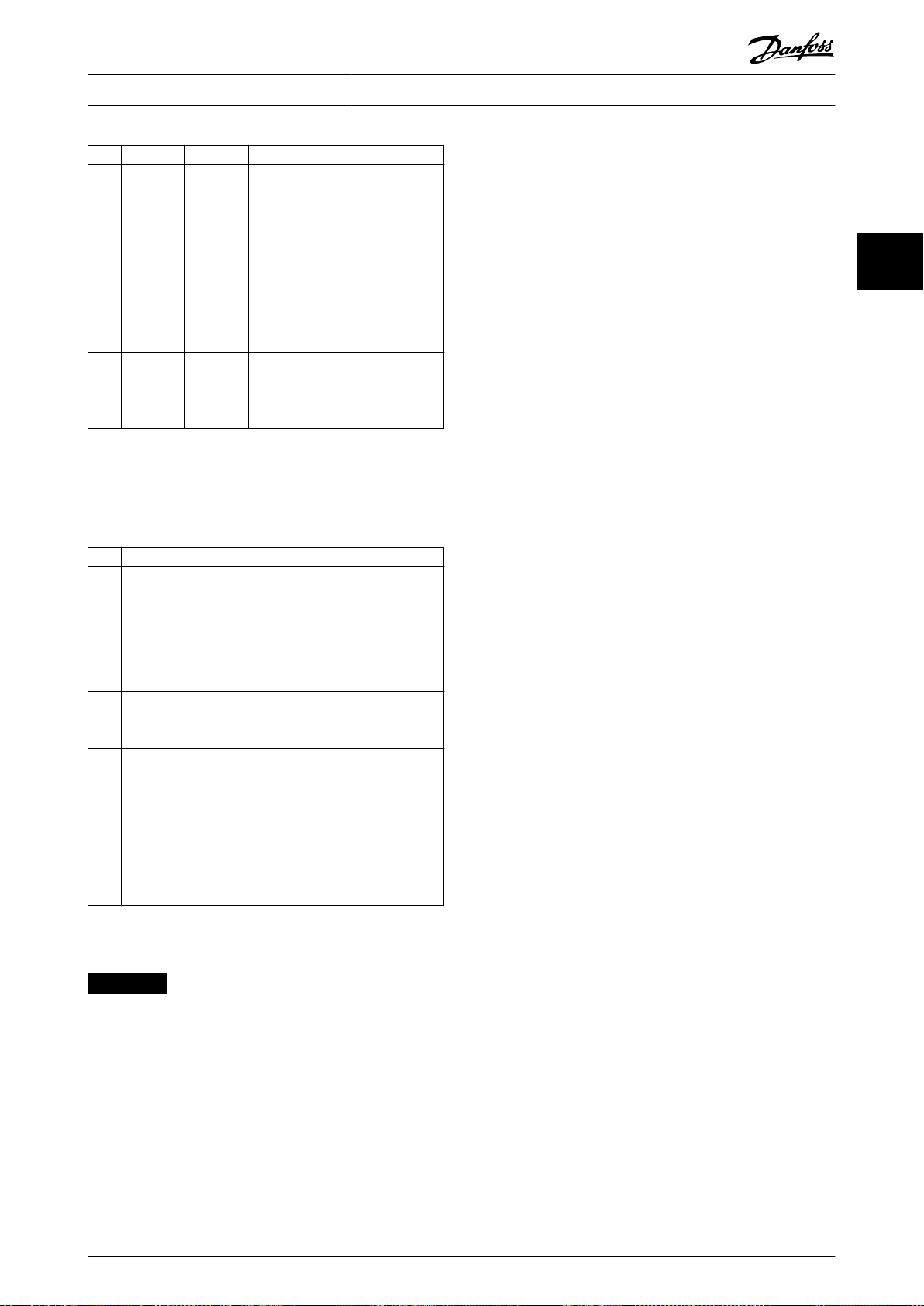
0-03 Ländereinstellungen
Option: Funktion:
HINWEIS
Diesen Parameter können Sie
bei laufendem Motor nicht
einstellen.
[0] International Aktiviert Parameter 1-20 Motor
Power [kW], um die Motorleistung
in kW einzustellen und legt die
Werkseinstellung von
Parameter 1-23 Motor Frequency auf
50 Hz fest.
[1] Nord-Amerika Aktiviert Parameter 1-20 Motor
Power [kW], um die Motorleistung
in HP einzustellen und legt die
Werkseinstellung von
Parameter 1-23 Motor Frequency auf
60 Hz fest.
0-04 Operating State at Power-up (Hand)
Option: Funktion:
Wählt den Betriebsmodus des
Frequenzumrichters nach Wiederzuschalten der Netzspannung des
Frequenzumrichters nach einem
Netz-Aus im Hand-Betrieb aus.
[0] Resume Startet den Frequenzumrichter
unter Beibehaltung derselben Start/
Stopp-Einstellungen (eingestellt
über [Hand On/Off]) wie vor dem
Netz-Aus des Frequenzumrichters
neu.
[1] * Forced stop,
ref=old
Startet den Frequenzumrichter nach
Wiederanlegen der Netzspannung
und Drücken von [Hand On] mit
0-04 Operating State at Power-up (Hand)
Option: Funktion:
einem gespeicherten Ortsollwert
neu.
[2] Forced stop,
ref=0
Setzt den Ortsollwert bei Wiederanlauf bei einem Neustart des
Frequenzumrichters auf 0.
0-07 Auto DC Braking
Option: Funktion:
Schutzfunktion gegen
Überspannung bei Freilauf in ITNetzumgebung. Dieser Parameter
ist nur aktiv, wenn Sie [1] Ein in
diesem Parameter und IT-Netzoptionen in Parameter 0-06 GridType
ausgewählt haben.
[0] Off Diese Funktion ist nicht aktiv.
[1] * On Diese Funktion ist aktiv.
Parameterbeschreibungen Programmierhandbuch
4 Parameterbeschreibungen
4.1 Parameter: 0-** Betrieb und Display
0-01 Sprache
Wählen Sie die im Display verwendete Sprache aus.
Option: Funktion:
[0] * Englisch (English)
[1] Deutsch
[2] Francais
[3] Dansk
[4] Espanol
[5] Italiano
[28] Portugiesisch
4 4
0-06 Netztyp
Wählen Sie Netzspannung, Frequenz und Typ aus.
Option: Funktion:
[0] 200-240V/50Hz/IT-Netz
[1] 200-240V/50Hz/Delta
[2] 200-240V/50Hz
[10] 380-440V/50Hz/IT-Netz
[11] 380-440V/50Hz/Delta
[12] 380-440V/50Hz
[20] 440-480V/50Hz/IT-Netz
[21] 440-480V/50Hz/Delta
[22] 440-480V/50Hz
[100] 200-240V/60Hz/IT-Netz
[101] 200-240V/60Hz/Delta
[102] 200-240V/60Hz
[110] 380-440V/60Hz/IT-Netz
[111] 380-440V/60Hz/Delta
[112] 380-440V/60Hz
[120] 440-480V/60Hz/IT-Netz
[121] 440-480V/60Hz/Delta
[122] 440-480V/60Hz
MG07C403 Danfoss A/S © 02/2019 Alle Rechte vorbehalten. 25
0-10 Aktiver Satz
Wählen Sie die Konfiguration zur Steuerung der Funktionen des
Frequenzumrichters. Programmieren Sie Parameter in den
Parametergruppen 1–4. Verwenden Sie die Werkseinstellung zum
Wiederherstellen des Initialzustands. Verwenden Sie die externe
Anwahl für den Fern-Betrieb.
Option: Funktion:
[1] * Satz 1
[2] Satz 2
[3] Satz 3
[4] Satz 4
[9] Externe
Anwahl
0-11 Programm-Satz
Wählen Sie den während des Betriebs zu programmierenden
Parametersatz aus. Dies ist entweder der aktive oder der inaktive
Parametersatz. Das LCP zeigt die bearbeitete Satznummer
blinkend an.
Option: Funktion:
[1] Satz 1
[2] Satz 2
[3] Satz 3
[4] Satz 4
[9] * Aktiver Satz
0-12 Link Setups
Option: Funktion:
Diese Verknüpfung sorgt für die
Synchronisierung der während des
Betriebs nicht änderbaren Parameterwerte, wenn während des
Betriebs der Parametersatz
gewechselt wird.
Um bei laufendem Motor zwischen
den Parametersätzen umschalten zu
können, müssen Sie diese zuvor
verknüpfen. Daher findet die
Umschaltung erst statt, wenn der
Motor im Freilauf ist.
[0] Not linked Lassen Sie die Parameter in beiden
Parametersätzen unverändert. Diese
Parameter können Sie bei
laufendem Motor nicht ändern.
[20] * Linked Kopieren Sie Parameter, die mit
Ändern während des Betriebs nicht
möglich markiert sind, aus einem
Parametersatz in den nächsten,
sodass diese in beiden Parametersätzen identisch sind.
0-14 Anzeige: Par.sätze/Kanal
Range: Funktion:
0* [-2147483647
2147483647 ]
Zeigt die Einstellung von
Parameter 0-11 Programm-Satz an.
Bearbeiten Sie die Parametersätze
für jeden Kommunikationskanal. „A“
steht für den aktiven Parametersatz;
„F“ steht für werkseitig; Ziffern
stehen für die Nummer des
jeweiligen Parametersatzes. Die
Kommunikationskanäle von rechts
nach links sind LCP, FC-Bus, USB
und HPFB1-5.
0-16 Anwendungsauswahl
Option: Funktion:
Zur Auswahl von integrierten
Anwendungsfunktionen. Wenn Sie
eine Anwendung auswählen, wird
automatisch ein entsprechender
Parametersatz ausgewählt.
[0] * Kein
[1] Einfacher
Prozess mit
Rückführung
[2] Hand/Fern
[3] Ohne
Rückführung
[4] Einfache
Drehzahl mit
Rückführung
[5] Multi Speed
[6] OGD LA10
[7] OGD V210
[8] Hoist
0-20 Displayzeile 1.1
Wählen Sie eine Variable zur Anzeige in der 1. Zeile, linke Stelle.
Option: Funktion:
[0] Keine
[37] Displaytext 1
[38] Displaytext 2
[39] Displaytext 3
[748] PCD Feed
Forward
[953] Profibus-
Warnwort
[1005] Zähler
Übertragungs-
fehler
[1006] Zähler
Empfangs-
fehler
[1230] Warnpa-
rameter
Parameterbeschreibungen
VLT® Midi Drive FC 280
44
26 Danfoss A/S © 02/2019 Alle Rechte vorbehalten. MG07C403
0-20 Displayzeile 1.1
Wählen Sie eine Variable zur Anzeige in der 1. Zeile, linke Stelle.
Option: Funktion:
[1501] Motorlauf-
stunden
[1502] Zähler-kWh
[1600] Steuerwort
[1601] Sollwert
[Einheit]
[1602] * Sollwert [%]
[1603] Zustandswort
[1605] Hauptistwert
[%]
[1609] Benutzerdefi-
nierte Anzeige
[1610] Leistung [kW]
[1611] Leistung [PS]
[1612] Motorspannun
g
[1613] Frequenz
[1614] Motorstrom
[1615] Frequenz [%]
[1616] Drehmoment
[Nm]
[1617] Drehzahl
[UPM]
[1618] Therm.
Motorschutz
[1620] Rotor-Winkel
[1622] Drehmoment
[%]
[1630] DC-Spannung
[1633] Bremsleist/2
min
[1634] Kühlkör-
pertemp.
[1635] FC Überlast
[1636] Nenn-WR-
Strom
[1637] Max.-WR-
Strom
[1638] SL
Contr.Zustand
[1639] Steuerkar-
tentemp.
[1650] Externer
Sollwert
[1652] Istwert
[Einheit]
[1653] Digitalpoti
Sollwert
[1657] Feedback
[RPM]
[1660] Digita-
leingänge
0-20 Displayzeile 1.1
Wählen Sie eine Variable zur Anzeige in der 1. Zeile, linke Stelle.
Option: Funktion:
[1661] Klemme 53
Modus
[1662] Analog-
eingang 53
[1663] Klemme 54
Modus
[1664] Analogeing.
54
[1665] Analog-
ausgang 42
[mA]
[1666] Digitalausgang
[1667] Pulseingang
29 [Hz]
[1668] Pulseingang
33 [Hz]
[1669] Pulsausgang
27 [Hz]
[1671] Relaisausgang
[1672] Zähler A
[1673] Zähler B
[1674] Präziser Stopp-
Zähler
[1680] Bus
Steuerwort 1
[1682] Bus Sollwert 1
[1684] Feldbus-
Komm. Status
[1685] FC Steuerwort
1
[1686] FC Sollwert 1
[1690] Alarmwort
[1691] Alarmwort 2
[1692] Warnwort
[1693] Warnwort 2
[1694] Erw.
Zustandswort
[1695] Erw.
Zustandswort
2
[1697] Alarmwort 3
[1698] Warning Word
3
[1890] PID-Prozess
Abweichung
[1891] PID-Prozess-
ausgang
[1892] PID-Prozess
begrenz.
Ausgang
[1893] PID-Prozess
verstär-
Parameterbeschreibungen Programmierhandbuch
MG07C403 Danfoss A/S © 02/2019 Alle Rechte vorbehalten. 27
4 4
0-20 Displayzeile 1.1
Wählen Sie eine Variable zur Anzeige in der 1. Zeile, linke Stelle.
Option: Funktion:
kungsskal.
Ausgang
[2117] Erw. Sollwert 1
[Einheit]
[2118] Ext. Istwert 1
[Einheit]
[2119] Erw. Ausgang
1 [%]
[3401] PCD 1
Schreiben für
Anwendung
[3402] PCD 2
Schreiben für
Anwendung
[3403] PCD 3
Schreiben für
Anwendung
[3404] PCD 4
Schreiben für
Anwendung
[3405] PCD 5
Schreiben für
Anwendung
[3406] PCD 6
Schreiben für
Anwendung
[3407] PCD 7
Schreiben für
Anwendung
[3408] PCD 8
Schreiben für
Anwendung
[3409] PCD 9
Schreiben für
Anwendung
[3410] PCD 10
Schreiben für
Anwendung
[3421] PCD 1 Lesen
für
Anwendung
[3422] PCD 2 Lesen
für
Anwendung
[3423] PCD 3 Lesen
für
Anwendung
[3424] PCD 4 Lesen
für
Anwendung
[3425] PCD 5 Lesen
für
Anwendung
0-20 Displayzeile 1.1
Wählen Sie eine Variable zur Anzeige in der 1. Zeile, linke Stelle.
Option: Funktion:
[3426] PCD 6 Lesen
für
Anwendung
[3427] PCD 7 Lesen
für
Anwendung
[3428] PCD 8 Lesen
für
Anwendung
[3429] PCD 9 Lesen
für
Anwendung
[3430] PCD 10 Lesen
für
Anwendung
[3450] Istposition
[3456] Schlepp-
abstand
0-21 Displayzeile 1.2
Wählen Sie eine Variable zur Anzeige in der 1. Zeile, mittlere
Stelle.
Option: Funktion:
[0] Keine
[37] Displaytext 1
[38] Displaytext 2
[39] Displaytext 3
[748] PCD Feed
Forward
[953] Profibus-
Warnwort
[1005] Zähler
Übertragungs-
fehler
[1006] Zähler
Empfangs-
fehler
[1230] Warnpa-
rameter
[1501] Motorlauf-
stunden
[1502] Zähler-kWh
[1600] Steuerwort
[1601] Sollwert
[Einheit]
[1602] Sollwert [%]
[1603] Zustandswort
[1605] Hauptistwert
[%]
[1609] Benutzerdefi-
nierte Anzeige
[1610] Leistung [kW]
Parameterbeschreibungen
44
28 Danfoss A/S © 02/2019 Alle Rechte vorbehalten. MG07C403
VLT® Midi Drive FC 280
 Loading...
Loading...