


ENGINEERING TOMORROW
Bedienungsanleitung
VLT® Midi Drive FC 280
www.danfoss.de/vlt

Inhaltsverzeichnis Bedienungsanleitung
Inhaltsverzeichnis
1 Einführung
1.1 Zielsetzung des Handbuchs
1.2 Zusätzliche Materialien
1.3 Dokument- und Softwareversion
1.4 Produktübersicht
1.5 Zulassungen und Zertifizierungen
1.6 Entsorgung
2 Sicherheit
2.1 Sicherheitssymbole
2.2 Qualifiziertes Personal
2.3 Sicherheitsmaßnahmen
3 Mechanische Installation
3.1 Auspacken
3.2 Installationsumgebung
3.3 Montage
4
4
4
4
4
6
6
7
7
7
7
9
9
10
10
4 Elektrische Installation
4.1 Sicherheitshinweise
4.2 EMV-gerechte Installation
4.3 Erdung
4.4 Anschlussdiagramm
4.5 Zugriff
4.6 Motoranschluss
4.7 Netzanschluss
4.8 Steuerkabel
4.8.1 Steuerklemmentypen 19
4.8.2 Verdrahtung der Steuerklemmen 20
4.8.3 Aktivierung des Motorbetriebs (Klemme 27) 20
4.8.4 Mechanische Bremssteuerung 21
4.8.5 USB-Datenschnittstelle 22
4.9 Checkliste vor der Installation
5 Inbetriebnahme
5.1 Sicherheitshinweise
13
13
13
13
15
17
17
18
19
23
25
25
5.2 Anlegen der Netzversorgung
5.3 Betrieb des Local Control Panels (LCP)
5.3.1 Numerisches LCP Bedienteil (LCP 101) 26
5.3.2 Die Funktion der Rechtspfeil-Taste am LCP 101 27
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 1
25
25
Inhaltsverzeichnis
VLT® Midi Drive FC 280
5.3.3 Quick-Menü am LCP 101 28
5.3.4 Hauptmenü am LCP 101 30
5.3.5 Grafisches LCP-Bedienteil (GLCP) 32
5.3.6 Parametereinstellungen 33
5.3.7 Ändern von Parametereinstellungen mit LCP 102 33
5.3.8 Daten auf das/vom LCP hochladen/herunterladen 34
5.3.9 Wiederherstellen der Werkseinstellungen mit dem LCP 34
5.4 Grundlegende Programmierung
5.4.1 Einstellung von Asynchronmotoren 35
5.4.2 PM-Motoreinstell. in VVC
5.4.3 Autom. Motoranpassung (AMA) 36
+
5.5 Überprüfung der Motordrehung
5.6 Überprüfung der Drehrichtung des Drehgebers
5.7 Prüfung der Ort-Steuerung
5.8 Systemstart
5.9 Speichermodul
5.9.1 Synchronisieren von Frequenzumrichterdaten mit einem neuen Speichermodul
(Erstellen eines Antriebs-Backups) 38
5.9.2 Kopieren von Daten auf einen anderen Frequenzumrichter 39
5.9.3 Kopieren von Daten auf mehrere Frequenzumrichter 39
5.9.4 Übertragen von Firmware-Daten 39
5.9.5 Sichern von Parameteränderungen auf dem Speichermodul 40
5.9.6 Löschen von Daten 40
5.9.7 Übertragungsleistung und Übertragungsanzeigen 40
5.9.8 Aktivieren des PROFIBUS-Umsetzers 41
35
35
37
37
37
37
38
6 Safe Torque Off (STO)
6.1 Sicherheitsmaßnahmen für STO
6.2 Installation der Funktion „Safe Torque Off“
6.3 Inbetriebnahme der Funktion „Safe Torque Off“
6.3.1 Aktivierung der Funktion „Safe Torque Off“ 44
6.3.2 Deaktivierung der Funktion „Safe Torque Off“ 44
6.3.3 Inbetriebnahmeprüfung der Funktion „Safe Torque Off“ 45
6.3.4 Prüfen auf STO-Anwendungen im manuellen Wiederanlaufmodus 45
6.3.5 Prüfen auf STO-Anwendungen im automatischen Wiederanlaufmodus 45
6.4 Wartung und Service der STO-Funktion
6.5 STO Technische Daten
7 Anwendungsbeispiele
7.1 Einführung
7.2 Anwendungsbeispiele
2 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503
42
43
43
44
46
47
48
48
48
Inhaltsverzeichnis Bedienungsanleitung
7.2.1 AMA 48
7.2.2 Drehzahl 48
7.2.3 Start/Stopp 49
7.2.4 Externe Alarmquittierung 50
7.2.5 Motorthermistor 50
7.2.6 SLC 50
8 Wartung, Diagnose und Fehlersuche
8.1 Wartung und Service
8.2 Warnungs- und Alarmtypen
8.3 Anzeige von Warn- und Alarmmeldungen
8.4 Warnungen und Alarmmeldungen
8.4.1 Liste der Warn- und Alarmcodes 54
8.5 Fehlersuche und -behebung
9 Technische Daten
9.1 Elektrische Daten
9.2 Netzversorgung
9.3 Motorausgang und Motordaten
9.4 Umgebungsbedingungen
9.5 Kabelspezifikationen
9.6 Steuereingang/-ausgang und Steuerdaten
9.7 Anzugsdrehmomente für Anschlüsse
9.8 Sicherungen und Trennschalter
9.9 Baugrößen, Nennleistungen und Abmessungen
52
52
52
53
54
59
61
61
63
64
64
65
65
68
68
71
10 Anhang
10.1 Symbole, Abkürzungen und Konventionen
10.2 Aufbau der Parametermenüs
Index
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 3
74
74
74
86
Einführung
VLT® Midi Drive FC 280
11
1 Einführung
1.1 Zielsetzung des Handbuchs
Diese Bedienungsanleitung enthält Informationen zur
sicheren Installation und Inbetriebnahme des VLT® Midi
DriveFC 280 Frequenzumrichters.
Die Bedienungsanleitung richtet sich ausschließlich an
qualifiziertes Personal.
Lesen Sie die Bedienungsanleitung vollständig durch, um
sicher und professionell mit dem Frequenzumrichter zu
arbeiten. Beachten Sie insbesondere die Sicherheitshinweise und allgemeinen Warnungen. Bewahren Sie diese
Bedienungsanleitung immer zusammen mit dem Frequenzumrichter auf.
VLT® ist eine eingetragene Marke.
1.2 Zusätzliche Materialien
Es stehen zusätzliche Handbücher zur Verfügung, die Ihnen
helfen, erweiterte Funktionen, die Programmierung und die
Wartung von Frequenzumrichtern zu verstehen:
Das VLT® Midi Drive FC 280 Projektierungs-
•
handbuch, für Informationen zu Konstruktion und
typischen Anwendungen des Frequenzumrichters.
Das VLT® Midi Drive FC 280 Programmierhandbuch
•
enthält Informationen über die Programmierung
und vollständige Parameterbeschreibungen.
Zusätzliche Veröffentlichungen und Handbücher sind bei
Danfoss erhältlich. Siehe drives.danfoss.com/knowledge-
center/technical-documentation/ für Auflistungen.
Dokument- und Softwareversion
1.3
Dieses Handbuch wird regelmäßig geprüft und aktualisiert.
Alle Verbesserungsvorschläge sind willkommen. Tabelle 1.1
zeigt die Dokumentversion und die entsprechende Softwareversion an.
Produktübersicht
1.4
1.4.1 Bestimmungsgemäße Verwendung
Der Frequenzumrichter ist ein elektronischer Motorregler
zur:
Regelung der Motordrehzahl als Reaktion auf die
•
Systemrückführung oder auf Remote-Befehle von
externen Reglern. Ein Antriebssystem besteht aus
Frequenzumrichter, Motor und vom Motor
angetriebenen Geräten.
Überwachung von System- und Motorzustand.
•
Sie können den Frequenzumrichter auch zum Motorüberlastschutz verwenden.
Je nach Konfiguration lässt sich der Frequenzumrichter als
Stand-alone-Anwendung oder als Teil einer größeren
Anlage oder Installation einsetzen.
Der Frequenzumrichter ist für die Verwendung in Wohn-,
Geschäfts- und Gewerbebereichen unter Berücksichtigung
örtlich geltender Gesetze und Standards zugelassen.
HINWEIS
In Wohnumgebungen kann dieses Produkt Funkstörungen verursachen. In diesem Fall müssen Sie
zusätzliche Maßnahmen zur Minderung dieser Störungen
ergreifen.
Vorhersehbarer Missbrauch
Verwenden Sie den Frequenzumrichter nicht in
Anwendungen, die nicht mit den angegebenen Betriebsbedingungen und -umgebungen konform sind. Achten Sie
darauf, dass Ihre Anwendung die unter Kapitel 9 Technische
Daten angegebenen Bedingungen erfüllt.
Ausgabe Anmerkungen Softwareversion
MG07A5
Tabelle 1.1 Dokument- und Softwareversion
4 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503
Software-Update und
Speichermodul-Unterstützung
1.5
M
7
63
4
5
21
8
10
130BE200.12
M
7
63
4
5
21
8
9
T2/T4
S2
Einführung Bedienungsanleitung
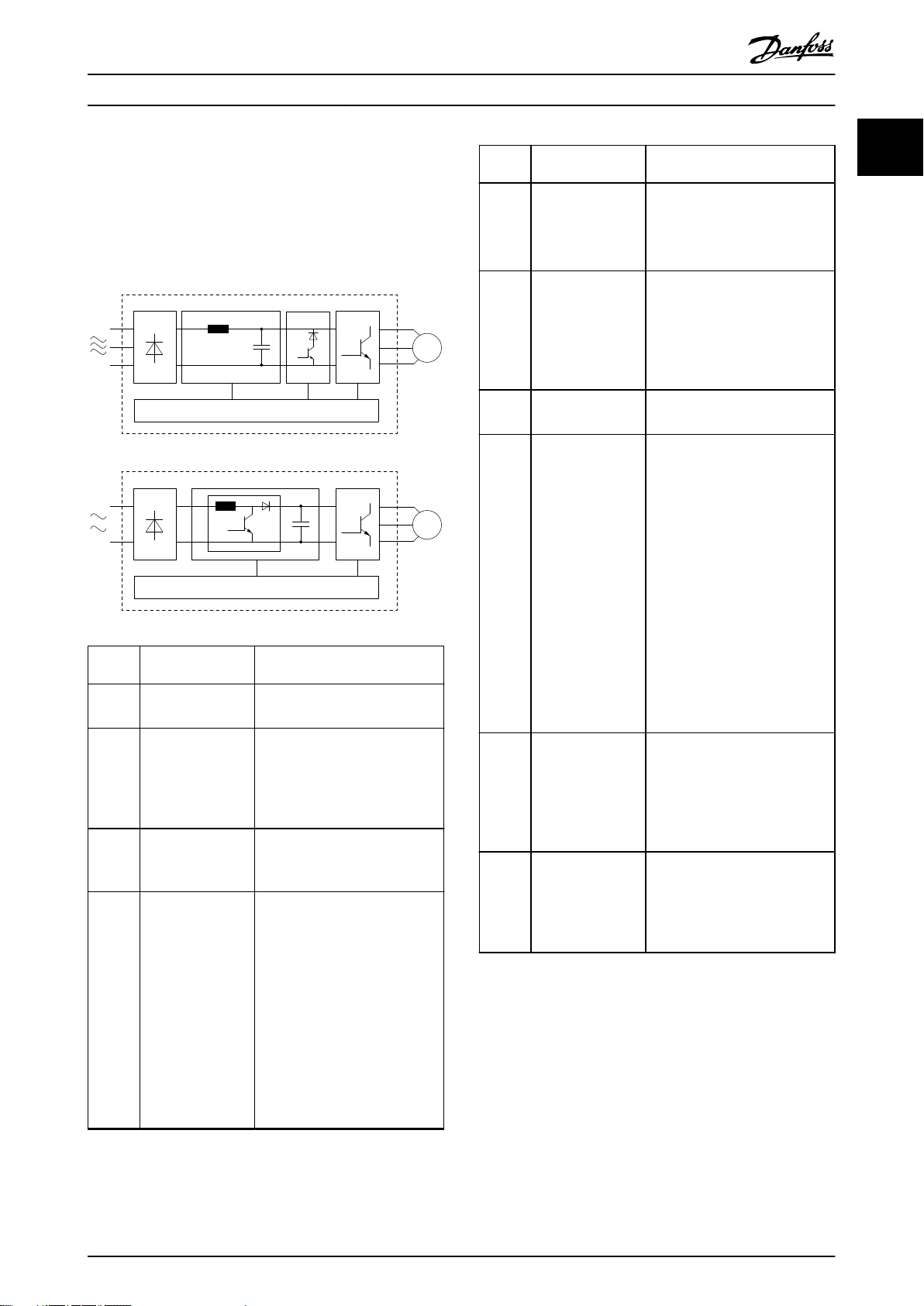
1.4.2 Blockschaltbild des
Frequenzumrichters
Abbildung 1.1 ist ein Blockschaltbild der internen
Baugruppen des Frequenzumrichters.
Numme
r
1 Netzanschluss
2 Gleichrichter
3
4
Bauteil Funktionen
Netzversorgung für den
•
Frequenzumrichter.
Die Gleichrichterbrücke
•
wandelt den eingehenden
Wechselstrom in einen
Gleichstrom zur Versorgung
des Wechselrichters um.
Der Gleichspannungszwi-
Gleichspannungszwischenkreis
Zwischenkreisdrossel
•
schenkreis führt den
Gleichstrom.
Die Zwischenkreisdrossel
•
filtert den Zwischenkreisgleichstrom.
Sie bietet Schutz vor Netztran-
•
sienten.
Sie reduziert den Effektivstrom
•
(EFF).
Sie hebt den Leistungsfaktor
•
der Netzrückspeisung an.
Sie reduziert Oberschwin-
•
gungen am Netzeingang.
Numme
r
5
6 Wechselrichter
7 Motorklemmen
8 Steuerteil
9 PFC
10 Bremschopper
Abbildung 1.1 Beispiel für Blockschaltbild eines Frequenzumrichters
Bauteil Funktionen
Die Kondensatoren speichern
•
Gleichspannungskondensatoren
die Gleichspannung.
Sie überbrücken kurzzeitige
•
Verlustleistungen.
Der Wechselrichter erzeugt
•
aus der Gleichspannung eine
pulsweitenmodulierte ACWellenform für eine variable
Motorregelung an den
Motorklemmen.
Geglättete 3-phasige
•
Motorspannung zum Motor.
Das Steuerteil überwacht die
•
Netzversorgung, die interne
Verarbeitung, den
Motorausgang und den
Motorstrom und sorgt somit
für einen effizienten Betrieb
und eine effiziente Regelung.
Es überwacht die Benutzer-
•
schnittstelle sowie die
externen Steuersignale und
führt die resultierenden
Befehle aus.
Es stellt die Zustandsmel-
•
dungen und
Kontrollfunktionen bereit.
Die Korrektur des Leistungs-
•
faktors verändert die
Wellenform des vom Frequenzumrichter aufgenommenen
Stroms, um den Leistungsfaktor zu verbessern.
Der Bremschopper wird im
•
DC-Zwischenkreis zur
Regelung der Gleichspannung
bei Energierückspeisung des
Verbrauchers eingesetzt.
1.4.3 Baugrößen und Nennleistungen
Eine Übersicht zu den Baugrößen und Nennleistungen der
Frequenzumrichter finden Sie in Kapitel 9.9 Baugrößen,
Nennleistungen und Abmessungen.
1 1
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 5
089
Einführung
VLT® Midi Drive FC 280
11
1.4.4 Safe Torque Off (STO)
Der VLT® Midi Drive FC 280 Frequenzumrichter unterstützt
die Funktion Safe Torque Off (STO). Siehe Kapitel 6 Safe
Torque Off (STO) für Details zu Installation, Inbetriebnahme,
Wartung und technischen Daten der STO-Funktion.
1.5 Zulassungen und Zertifizierungen
Entsorgung
1.6
Sie dürfen elektrische Geräte und Geräte
mit elektrischen Komponenten nicht
zusammen mit normalem Hausmüll
entsorgen.
Sammeln Sie diese separat gemäß den
lokalen Bestimmungen und den aktuell
gültigen Gesetzen und führen Sie sie dem
Recycling zu.
Hinsichtlich der Übereinstimmung mit dem Europäischen
Übereinkommen über die internationale Beförderung
gefährlicher Güter auf Binnenwasserstraßen (ADN) siehe
das Kapitel ADN-konforme Installation im Projektierungs-
handbuch VLT® Midi Drive FC 280.
Der Frequenzumrichter erfüllt die Anforderungen der
UL508C bezüglich der thermischen Sicherung. Weitere
Informationen finden Sie im Kapitel Thermischer
Motorschutz im Projektierungshandbuch VLT® Midi Drive FC
280.
Angewendete Normen und Konformität für STO
Zur Verwendung der Funktion „Safe Torque Off“ an den
Klemmen 37 und 38 müssen Sie alle Sicherheitsbestimmungen in einschlägigen Gesetzen, Vorschriften und
Richtlinien erfüllen. Die integrierte STO-Funktion erfüllt
folgende Normen:
IEC/EN 61508:2010, SIL2
•
IEC/EN 61800-5-2:2007, SIL2
•
IEC/EN 62061:2015, SILCL von SIL2
•
EN ISO 13849-1:2015, Kategorie 3 PL d
•
6 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

Sicherheit Bedienungsanleitung
2 Sicherheit
2.1 Sicherheitssymbole
Sicherheitsmaßnahmen
2.3
2 2
Folgende Symbole kommen in diesem Dokument zum
Einsatz:
WARNUNG
Weist auf eine potenziell gefährliche Situation hin, die
zum Tod oder zu schweren Verletzungen führen kann!
VORSICHT
Weist auf eine potenziell gefährliche Situation hin, die zu
leichten oder mittelschweren Verletzungen führen kann.
Die Kennzeichnung kann ebenfalls als Warnung vor
unsicheren Verfahren dienen.
HINWEIS
Weist auf eine wichtige Information hin, z. B. eine
Situation, die zu Geräte- oder sonstigen Sachschäden
führen kann.
2.2 Qualifiziertes Personal
Der einwandfreie und sichere Betrieb des Frequenzumrichters setzt fachgerechten und zuverlässigen Transport
voraus. Lagerung, Installation, Bedienung und Instandhaltung müssen diese Anforderungen ebenfalls erfüllen.
Nur qualifiziertes Personal darf dieses Gerät installieren
oder bedienen.
Qualifiziertes Fachpersonal sind per Definition geschulte
Mitarbeiter, die gemäß den einschlägigen Gesetzen und
Vorschriften zur Installation, Inbetriebnahme und Instandhaltung von Betriebsmitteln, Systemen und Schaltungen
berechtigt sind. Ferner muss das Personal mit den in dieser
Anleitung enthaltenen Anweisungen und Sicherheitsmaßnahmen vertraut sein.
WARNUNG
HOCHSPANNUNG
Bei Anschluss an Versorgungsnetz, DC-Versorgung oder
Zwischenkreiskopplung führen Frequenzumrichter
Hochspannung. Erfolgen Installation, Inbetriebnahme
und Wartung nicht durch qualifiziertes Personal, kann
dies zu schweren Verletzungen oder sogar zum Tod
führen!
Installation, Inbetriebnahme und Wartung
•
dürfen ausschließlich von qualifiziertem
Personal durchgeführt werden.
Verwenden Sie vor der Durchführung von
•
Wartungs- oder Reparaturarbeiten ein
geeignetes Spannungsmessgerät, um sicherzustellen, dass der Frequenzumrichter keine
Spannung mehr führt.
WARNUNG
UNERWARTETER ANLAUF
Bei Anschluss des Frequenzumrichters an Versorgungsnetz, DC-Versorgung oder Zwischenkreiskopplung
kann der angeschlossene Motor jederzeit unerwartet
anlaufen. Ein unerwarteter Anlauf im Rahmen von
Programmierungs-, Service- oder Reparaturarbeiten kann
zum Tod, zu schweren Verletzungen oder zu
Sachschäden führen! Der Motor kann über einen
externen Schalter, einen Feldbus-Befehl, ein Sollwerteingangssignal, über ein LCP oder LOP, eine Fernbedienung
per MCT 10 Konfigurationssoftware oder nach einem
quittierten Fehlerzustand anlaufen.
So verhindern Sie ein unerwartetes Starten des Motors:
Trennen Sie den Frequenzumrichter vom Netz.
•
Drücken Sie [Off/Reset] am LCP, bevor Sie
•
Parameter programmieren.
Verkabeln und montieren Sie Frequenzum-
•
richter, Motor und alle angetriebenen Geräte
vollständig, bevor Sie den Frequenzumrichter an
Versorgungsnetz, DC-Versorgung oder
Zwischenkreiskopplung anschließen.
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 7
Sicherheit
VLT® Midi Drive FC 280
WARNUNG
ENTLADEZEIT
22
Der Frequenzumrichter enthält Zwischenkreiskondensatoren, die auch bei abgeschaltetem Frequenzumrichter
geladen sein können. Auch wenn die Warn-LED nicht
leuchten, kann Hochspannung anliegen. Das Nichteinhalten der angegebenen Wartezeit nach dem Trennen
der Stromversorgung vor Wartungs- oder Reparaturarbeiten kann zum Tod oder zu schweren Verletzungen
führen!
Stoppen Sie den Motor.
•
Trennen Sie die Netzversorgung und alle
•
externen DC-Zwischenkreisversorgungen,
einschließlich externer Batterie-, USV- und DCZwischenkreisverbindungen mit anderen
Frequenzumrichtern.
Trennen oder verriegeln Sie den PM-Motor.
•
Warten Sie, damit die Kondensatoren
•
vollständig entladen können. Die entsprechende
minimale Wartezeit finden Sie in Tabelle 2.1.
Verwenden Sie vor der Durchführung von
•
Wartungs- oder Reparaturarbeiten ein
geeignetes Spannungsmessgerät, um sicherzustellen, dass die Kondensatoren vollständig
entladen sind.
WARNUNG
GEFAHR DURCH ANLAGENKOMPONENTEN!
Ein Kontakt mit drehenden Wellen und elektrischen
Betriebsmitteln kann zum Tod oder zu schweren Verletzungen führen!
Stellen Sie sicher, dass Installations-,
•
Inbetriebnahme- und Wartungsarbeiten
ausschließlich von geschultem und qualifiziertem Personal durchgeführt werden.
Alle Elektroarbeiten müssen den VDE-
•
Vorschriften und anderen lokal geltenden
Elektroinstallationsvorschriften entsprechen.
Befolgen Sie die Verfahren in diesem Handbuch.
•
VORSICHT
GEFAHR BEI EINEM INTERNEN FEHLER
Ein interner Fehler im Frequenzumrichter kann zu
schweren Verletzungen führen, wenn der Frequenzumrichter nicht ordnungsgemäß geschlossen wird.
Stellen Sie vor dem Anlegen von Netzspannung
•
sicher, dass alle Sicherheitsabdeckungen
angebracht und ordnungsgemäß befestigt sind.
Spannung
[V]
200–240 0,37–3,7 4
380–480
Tabelle 2.1 Entladezeit
Leistungsbereich
[kW]
0,37–7,5 4
11–22 (15–30) 15
Mindestwartezeit
(Minuten)
WARNUNG
GEFAHR DURCH ABLEITSTRÖME
Die Ableitströme überschreiten 3,5 mA. Eine nicht
vorschriftsgemäße Erdung des Frequenzumrichters kann
zum Tod oder zu schweren Verletzungen führen!
Lassen Sie die ordnungsgemäße Erdung der
•
Geräte durch einen zertifizierten Elektroinstallateur überprüfen.
8 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503
130BE616.14
VLT
MADE IN
DENMARK
T/C: FC-280PK37T4E20H1BXCXXXSXXXXAX
0.37kW 0.5HP
IN: 3x380-480V 50/60Hz, 1.2/1.0A
OUT: 3x0-Vin 0-500Hz, 1.2/1.1A
IP20
P/N: 134U2184 S/N: 000000G000
Midi Drive
www.danfoss.com
CAUTION / ATTENTION:
WARNING / AVERTISSEMENT:
See manual for special condition/mains fuse
Voir manual de conditions speciales/fusibles
Enclosure: See manual
5AF3 E358502 IND.CONT.EQ.
Stored charge, wait 4 min.
Charge r
é
siduelle, attendez 4 min.
21
1
2
4
3
5
11
20
19
18
16
15
14
13
10
8
9
6
17
R
US LISTED
www.tuv.com
ID 0600000000
Danfoss A/S, 6430 Nordborg, Denmark
12
7
Mechanische Installation Bedienungsanleitung
3 Mechanische Installation
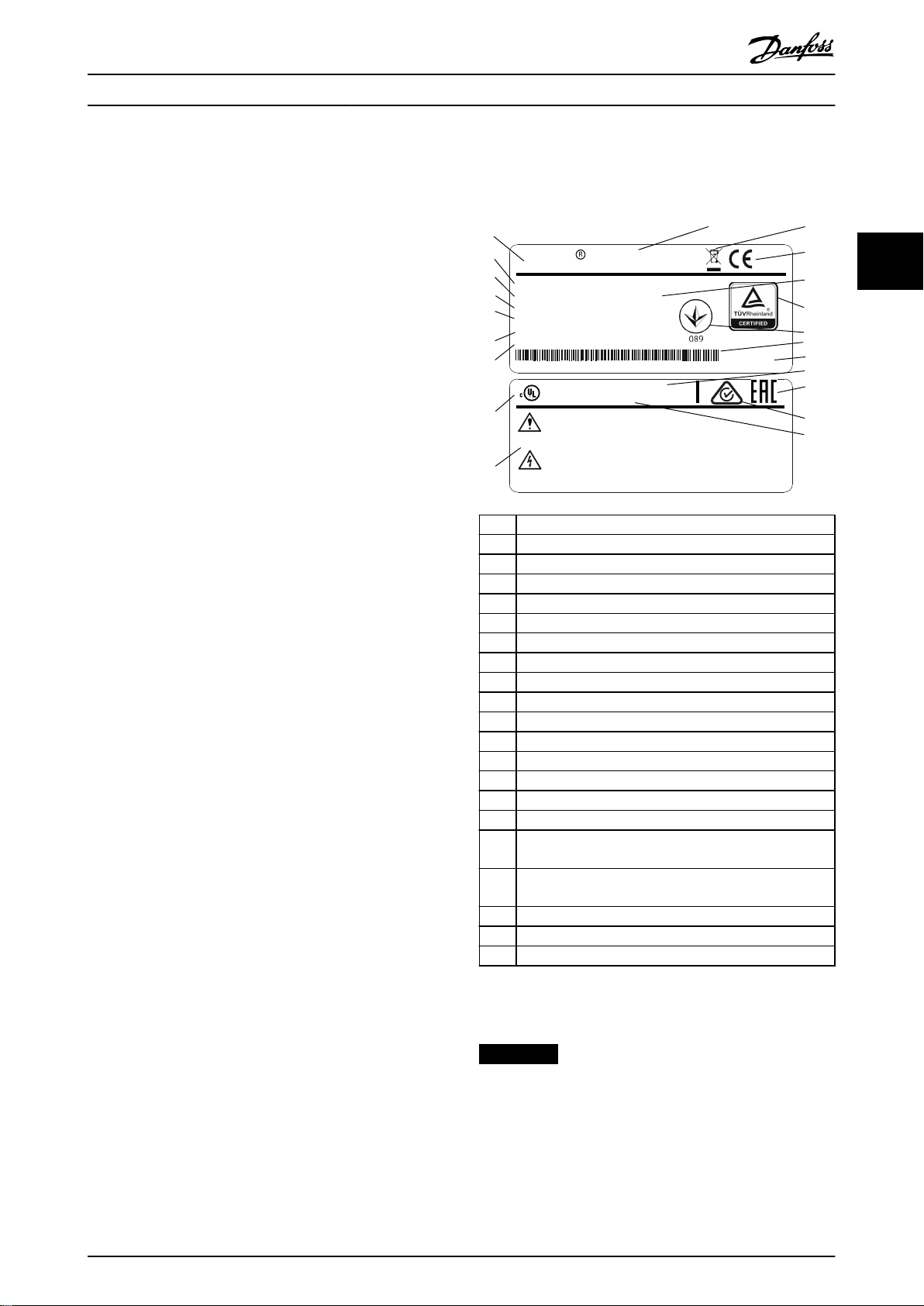
3.1 Auspacken
3.1.1 Gelieferte Teile
Die mitgelieferten Teile können je nach Produktkonfiguration unterschiedlich sein.
Stellen Sie sicher, dass die gelieferten Teile und
•
die Angaben auf dem Typenschild mit der
Auftragsbestätigung übereinstimmen.
Prüfen Sie Verpackung und Frequenzumrichter
•
optisch auf Schäden durch unsachgemäße
Handhabung beim Versand. Machen Sie
Beanstandungen direkt beim Spediteur geltend.
Bewahren Sie beschädigte Teile zur Klärung auf.
1 Produktlogo
2 Produktname
3 Entsorgung
4 CE-Zeichen
5 Seriennummer
6 TÜV-Logo
7 UkrSEPRO-Logo
8 Barcode
9 Herkunftsland
10 Hinweis auf Gehäusetyp
11 EAC-Logo
12 RCM-Logo
13 UL-Sollwert
14 Warnungsspezifikationen
15 UL-Logo
16 Schutzart
Ausgangsspannung, Frequenz und Strom (bei niedrigen/
17
hohen Spannungen)
Eingangsspannung, Frequenz und Strom (bei niedrigen/
18
hohen Spannungen)
19 Nennleistung
20 Bestellnummer
21 Typencode
3 3
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 9
Abbildung 3.1 Produkttypenschild (Beispiel)
HINWEIS
Nehmen Sie nicht das Typenschild vom Frequenzumrichter ab (Verlust des Garantieanspruchs).
Weitere Informationen zum Typencode finden Sie im
Kapitel Typencode im Projektierungshandbuch VLT® Midi
Drive FC 280.
130BE615.12
Mechanische Installation
VLT® Midi Drive FC 280
3.1.2 Lagerung
Vergewissern Sie sich, dass die Lageranforderungen erfüllt
sind. Weitere Informationen hierzu finden Sie unter
Kapitel 9.4 Umgebungsbedingungen.
33
3.2 Installationsumgebung
HINWEIS
Stellen Sie in Umgebungen mit flüssigen oder festen
Aerosolen oder korrosiven Gasen sicher, dass die
Schutzart der Geräte der Installationsumgebung
entspricht. Eine Nichterfüllung der Anforderungen von
bestimmten Umgebungsbedingungen kann zu einer
Reduzierung der Lebensdauer des Frequenzumrichters
führen. Stellen Sie sicher, dass alle Anforderungen
hinsichtlich Luftfeuchtigkeit, Temperatur und Höhenlage
erfüllt werden.
Vibrationen und Erschütterungen
Der Frequenzumrichter entspricht den Anforderungen für
Geräte zur Wandmontage sowie bei Montage an Maschinengestellen oder in Schaltschränken.
Detaillierte Spezifikationen zu Umgebungsbedingungen
finden Sie unter Kapitel 9.4 Umgebungsbedingungen.
Montage
Wenden Sie sich für die Anpassung der Bohrungen des
VLT® Midi Drive FC 280 zur Bestellung der separaten
Rückwand an Ihren örtlichen Danfoss-Händler.
Zur Montage des Frequenzumrichters:
1. Achten Sie darauf, dass der Montageort stabil
genug ist, um das Gewicht des Geräts zu tragen.
Sie können mehrere Frequenzumrichter Seite-anSeite ohne Zwischenraum aufstellen.
2. Stellen Sie die Einheit so nah wie möglich am
Motor auf. Halten Sie die Motorkabel so kurz wie
möglich.
3. Sorgen Sie durch Montage des Geräts auf einer
ebenen, stabilen Oberfläche oder an der
optionalen Rückwand für eine ausreichende
Luftzirkulation zur Kühlung.
4. Verwenden Sie die vorgesehenen Bohrungen am
Frequenzumrichter zur Wandmontage, sofern
vorhanden.
HINWEIS
Hinweise zu den Abmessungen der Bohrungen finden Sie
unter Kapitel 9.9 Baugrößen, Nennleistungen und
Abmessungen.
Montage
3.3
HINWEIS
Eine unsachgemäße Montage kann zu Überhitzung und
einer reduzierten Leistung führen.
Kühlung
Stellen Sie sicher, dass über und unter dem
•
Frequenzumrichter zur Luftzirkulation ein Abstand
von mindestens 100 mm (3,9 Zoll) vorhanden ist.
Heben
Prüfen Sie das Gewicht des Frequenzumrichters,
•
um ein sicheres Heben zu gewährleisten, siehe
Kapitel 9.9 Baugrößen, Nennleistungen und
Abmessungen.
Vergewissern Sie sich, dass die Hebevorrichtung
•
für die Aufgabe geeignet ist.
Planen Sie ggf. zum Transportieren des Geräts ein
•
Hebezeug, einen Kran oder einen Gabelstapler
mit der entsprechenden Tragfähigkeit ein.
Verwenden Sie zum Heben die Transportösen am
•
Frequenzumrichter (sofern vorhanden).
3.3.1 Seite-an-Seite-Installation
Seite-an-Seite-Installation
Alle VLT® Midi Drive FC 280 Einheiten können Sie vertikal
oder horizontal Seite an Seite einbauen. Eine zusätzliche
Belüftung von der Seite ist an den Einheiten nicht
erforderlich.
Abbildung 3.2 Seite-an-Seite-Installation
10 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503
130BF642.10
G
130BF643.10
G
Mechanische Installation Bedienungsanleitung
HINWEIS
GEFAHR VON ÜBERHITZUNG
Wird ein IP21-Umbausatz verwendet, kann eine Seite-anSeite-Montage zu einer Überhitzung und Beschädigung
der Einheit führen.
Zwischen den oberen Abdeckungskanten des
•
IP21-Umbausatzes ist ein Abstand von
mindestens 30 mm (1,2 Zoll) erforderlich.
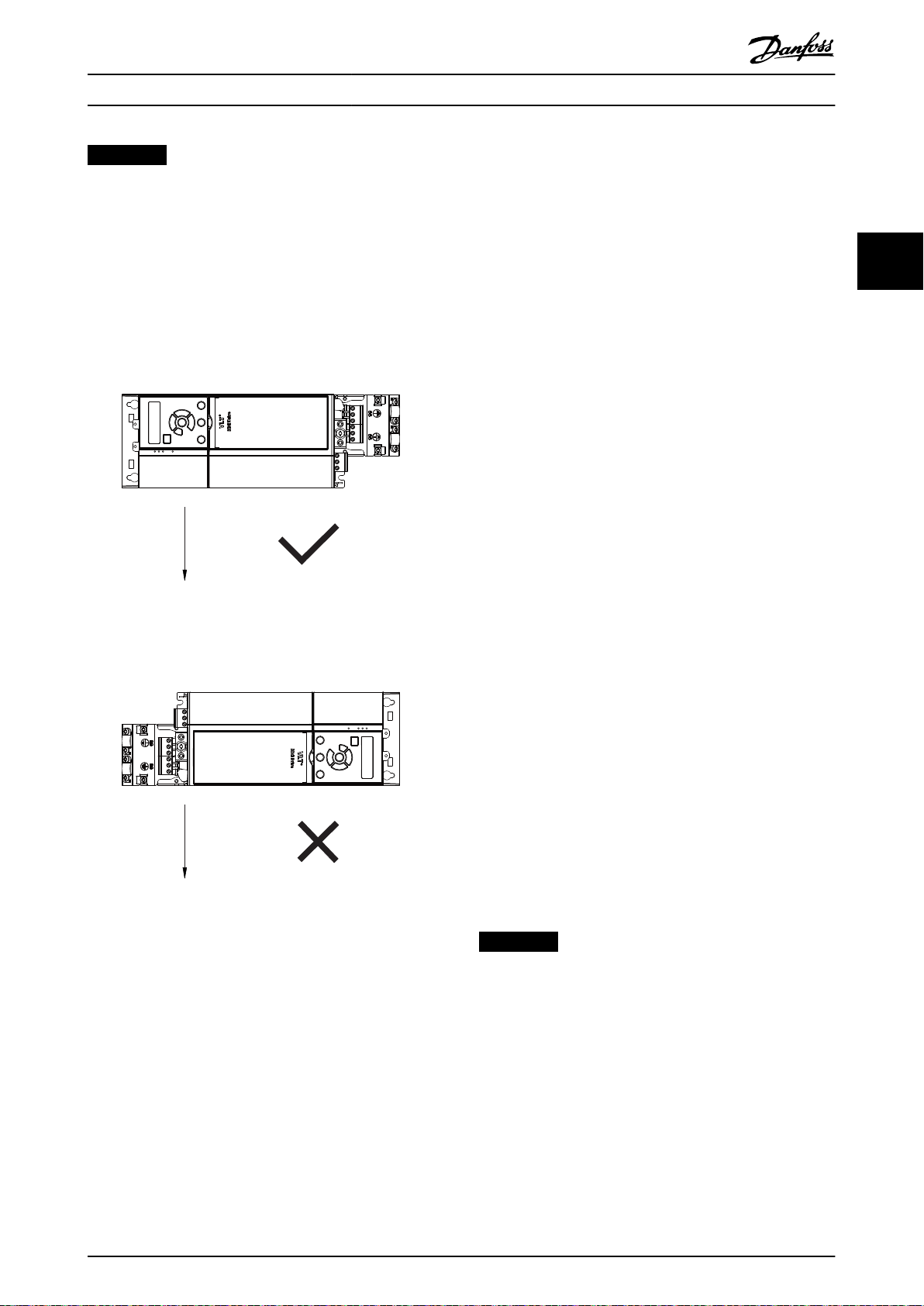
3.3.2 Horizontale Montage
Abbildung 3.3 Richtige horizontale Montage
(linke Seite nach unten)
Abbildung 3.4 Falsche horizontale Montage
(rechte Seite nach unten)
3.3.3 Bus-Abschirmset
Das Bus-Abschirmset gewährleistet die mechanische
Befestigung und die elektrische Abschirmung von Kabeln
für die folgenden Steuerkassettenvarianten:
Steuerkassette mit PROFIBUS
•
Steuerkassette mit PROFINET
•
Steuerkassette mit CANopen
•
Steuerkassette mit Ethernet
•
Steuerkassette mit POWERLINK
•
Jedes Bus-Abschirmset enthält 1 waagerechtes
Abschirmblech und 1 senkrechtes Abschirmblech. Die
Montage des senkrechten Abschirmblechs ist optional. Das
senkrechte Abschirmblech bietet bessere mechanische
Unterstützung für PROFINET-, Ethernet- und POWERLINKSteckverbinder und -Kabel.
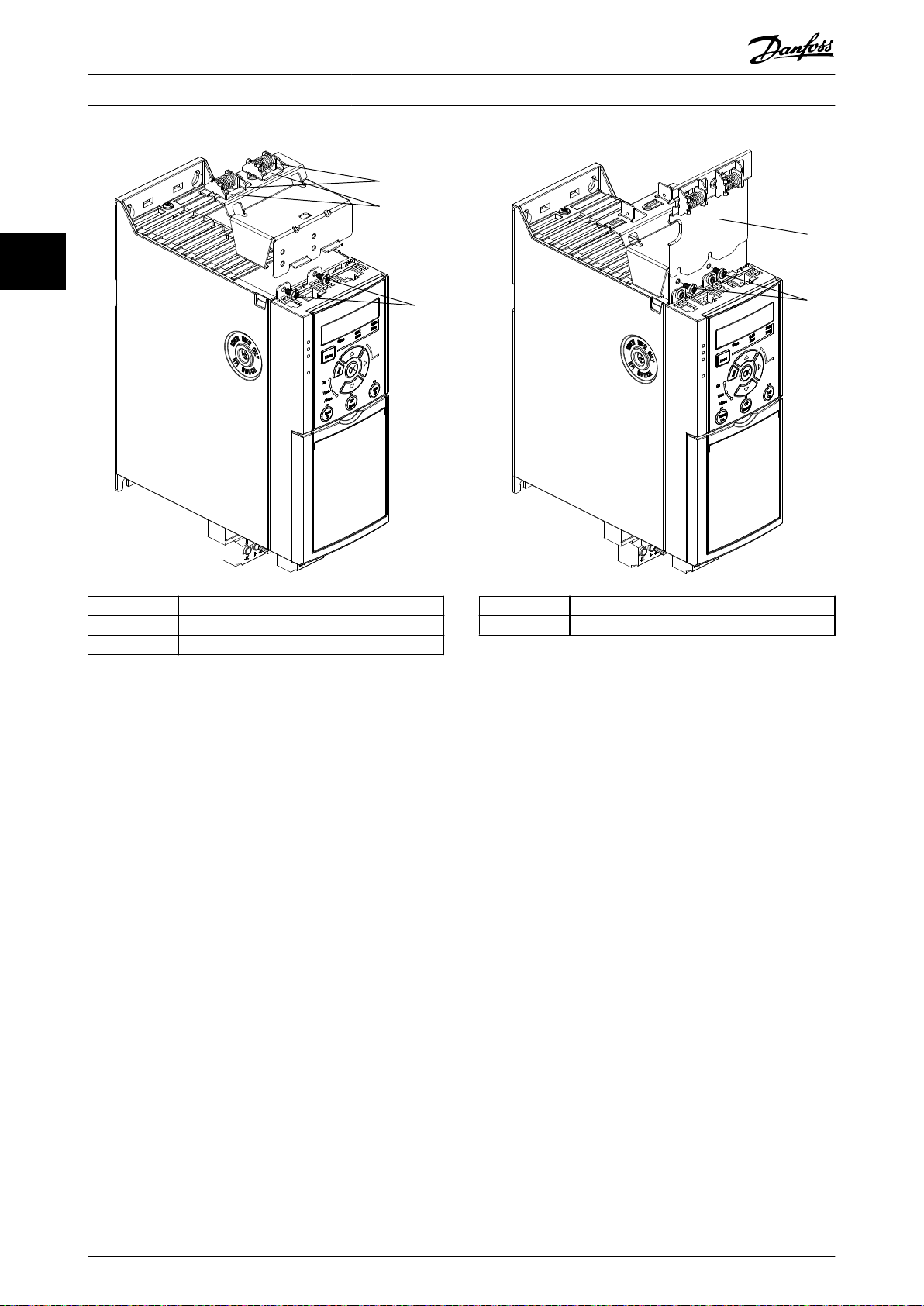
3.3.4 Montage
Zur Montage des Bus-Abschirmsets:
1. Platzieren Sie das waagerechte Abschirmblech an
der am Frequenzumrichter montierten Steuerkassette, und befestigen Sie das Blech mithilfe
von 2 Schrauben, wie in Abbildung 3.5 gezeigt.
Das Anzugsdrehmoment beträgt 0,7–1,0 Nm
(6,2–8,9 in-lb).
2. Gegebenenfalls: Montieren Sie das senkrechte
Abschirmblech wie folgt:
2a Entfernen Sie die 2 mechanischen
Federn und die 2 Metallschellen vom
waagerechten Blech.
2b Montieren Sie die mechanischen Federn
und Metallschellen am senkrechten
Blech.
2c Befestigen Sie das Blech mit 2
Schrauben, wie in Abbildung 3.6 gezeigt.
Das Anzugsdrehmoment beträgt 0,7–1,0
Nm (6,2–8,9 in-lb).
HINWEIS
Wird die obere IP21-Abdeckung verwendet, montieren
Sie das senkrechte Abschirmblech nicht, da dessen Höhe
eine ordnungsgemäße Installation der oberen IP21Abdeckung beeinträchtigt.
3 3
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 11
1
2
3
130BE480.10
130BE481.10
1
2
Mechanische Installation
VLT® Midi Drive FC 280
33
1 Mechanische Federn
2 Metallschellen
3 Schrauben
Abbildung 3.5 Befestigung des waagerechten Abschirmblechs
mit Schrauben
1 Senkrechtes Abschirmblech
2 Schrauben
Abbildung 3.6 Befestigung des senkrechten Abschirmblechs
mit Schrauben
Abbildung 3.5 sowie Abbildung 3.6 zeigen EthernetSteckverbinder (RJ45). Der tatsächliche Steckverbindertyp
hängt von der gewählten Feldbusvariante des Frequenzumrichters ab.
3. Achten Sie auf die korrekte Verdrahtung der
Feldbuskabel (PROFIBUS/CANopen) oder stecken
Sie die Kabelstecker (RJ45 für PROFINET/
POWERLINK/Ethernet/IP) in die Buchsen der
Steuerkassette.
4. 4a Positionieren Sie die PROFIBUS/
CANopen-Kabel zwischen den FederzugMetallschellen, um die Kabel
mechanisch zu fixieren und einen
elektrischen Kontakt zwischen Kabel und
Masse herzustellen.
4b Positionieren Sie die PROFINET-/
POWERLINK-/Ethernet-/IP-Kabel zwischen
den Federzug-Metallschellen, um die
Kabel mechanisch zu fixieren.
12 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503
Elektrische Installation Bedienungsanleitung
4 Elektrische Installation
4.1 Sicherheitshinweise
Siehe Kapitel 2 Sicherheit für allgemeine Sicherheitshinweise.
WARNUNG
INDUZIERTE SPANNUNG!
Induzierte Spannung von Motorkabeln von
verschiedenen Frequenzumrichtern, die nebeneinander
verlegt sind, können Gerätekondensatoren auch dann
aufladen, wenn die Geräte abgeschaltet und verriegelt
sind. Die Nichtbeachtung der Empfehlung zum separaten
Verlegen von Motorkabeln oder zur Verwendung von
abgeschirmten Kabeln kann zum Tod oder zu schweren
Verletzungen führen!
Verlegen Sie Motorkabel getrennt.
•
Verwenden Sie abgeschirmte Kabel.
•
Verriegeln Sie alle Frequenzumrichter gleich-
•
zeitig.
WARNUNG
STROMSCHLAGGEFAHR
Der Frequenzumrichter kann einen Gleichstrom im
Schutzleiter verursachen, der zum Tod oder zu schweren
Verletzungen führen kann!
Wenn ein Fehlerstromschutzschalter als Schutz
•
vor Stromschlag eingesetzt wird, ist netzseitig
nur ein Fehlerstromschutzschalter vom Typ B
zulässig.
Eine Nichtbeachtung dieser Empfehlung kann dazu
führen, dass der Fehlerstromschutzschalter nicht den
gewünschten Schutz bietet.
Überspannungsschutz
Für Anwendungen mit mehreren Motoren
•
benötigen Sie zusätzliche Schutzvorrichtungen
wie einen Kurzschlussschutz oder einen
thermischen Motorschutz zwischen Frequenzumrichter und Motor.
Der Kurzschluss- und Überspannungsschutz wird
•
durch Sicherungen am Eingang gewährleistet.
Wenn die Sicherungen nicht Bestandteil der
Lieferung ab Werk sind, muss sie der Installateur
als Teil der Installation bereitstellen. Die
maximalen Nennwerte der Sicherungen finden Sie
unter Kapitel 9.8 Sicherungen und Trennschalter.
Leitungstyp und Nennwerte
Die Querschnitte und Hitzebeständigkeit aller
•
verwendeten Kabel sollten den örtlichen und
nationalen Vorschriften entsprechen.
Empfehlung für die Verdrahtung des Stroman-
•
schlusses: Kupferdraht, bemessen für mindestens
75 °C (167 °F).
Siehe Kapitel 9.5 Kabelspezifikationen zu empfohlenen
Kabelquerschnitten und -typen.
4.2 EMV-gerechte Installation
Befolgen Sie zur Durchführung einer EMV-gerechten Installation die Anweisungen in Kapitel 4.3 Erdung,
Kapitel 4.4 Anschlussdiagramm, Kapitel 4.6 Motoranschluss,
und Kapitel 4.8 Steuerkabel.
4.3 Erdung
WARNUNG
GEFAHR DURCH ABLEITSTRÖME
Die Ableitströme überschreiten 3,5 mA. Eine nicht
vorschriftsgemäße Erdung des Frequenzumrichters kann
zu schweren Verletzungen oder sogar zum Tod führen!
Lassen Sie die ordnungsgemäße Erdung der
•
Geräte durch einen zertifizierten Elektroinstallateur überprüfen.
Für elektrische Sicherheit
Erden Sie den Frequenzumrichter gemäß den
•
geltenden Normen und Richtlinien.
Verwenden Sie für Netzversorgung, Motorkabel
•
und Steuerleitungen einen speziellen Schutzleiter.
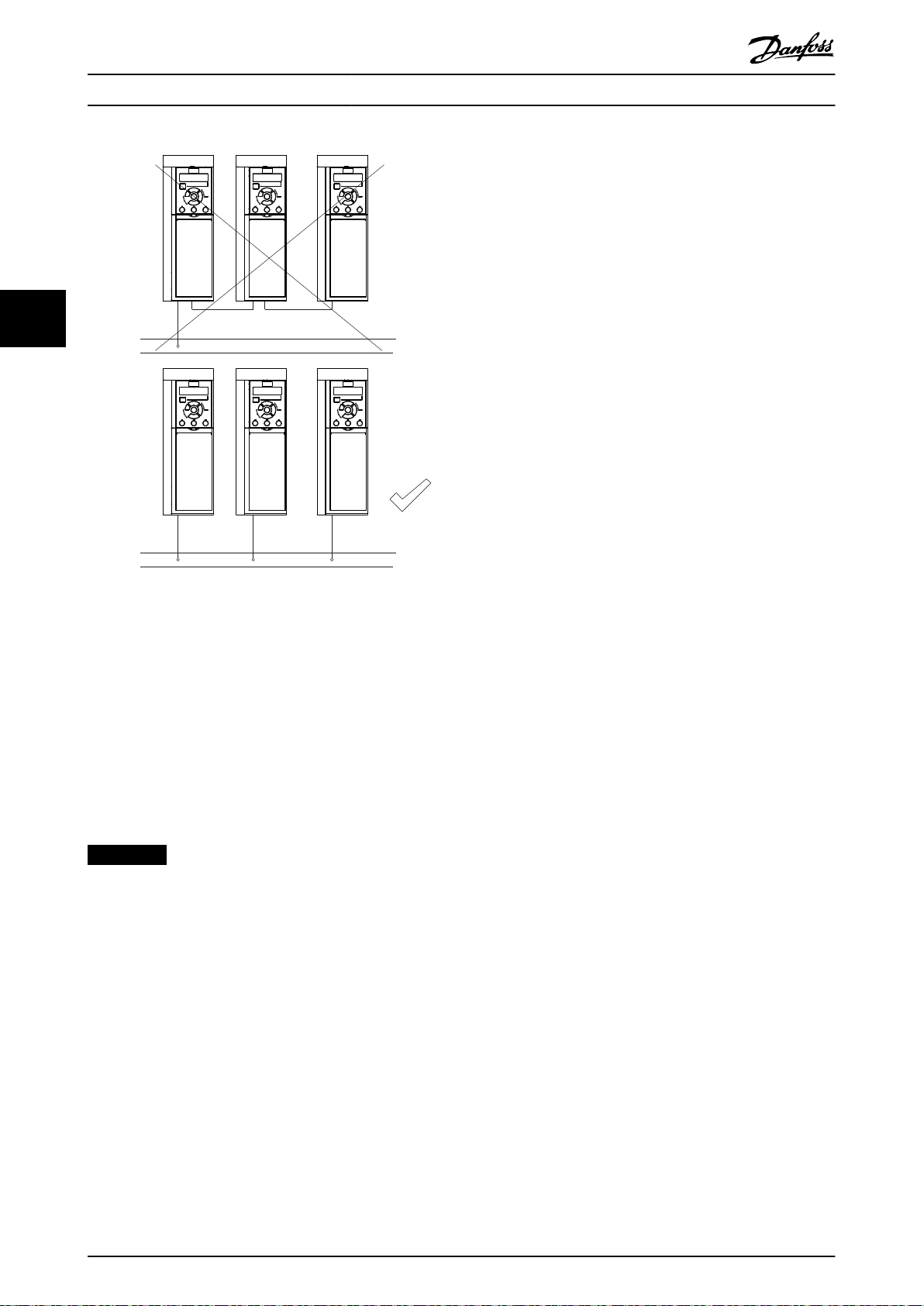
Erden Sie Frequenzumrichter nicht in Reihe
•
hintereinander (siehe Abbildung 4.1).
Halten Sie die Erdungskabel so kurz wie möglich.
•
Befolgen Sie die Anforderungen des Motorhers-
•
tellers an die Motorkabel.
Minimaler Kabelquerschnitt für die Erdleitungen:
•
10 mm2 (7 AWG).
Schließen Sie einzelne Erdungskabel, die beide
•
den Bemaßungsvorgaben entsprechen, separat
ab.
4 4
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 13
130BC500.10
FC 1
FC 1
FC 2
FC 2
FC 3
FC 3
PE
PE
Elektrische Installation
VLT® Midi Drive FC 280
44
Abbildung 4.1 Erdungsprinzip
Für eine EMV-gerechte Installation
Stellen Sie einen elektrischen Kontakt zwischen
•
Kabelschirm und Frequenzumrichtergehäuse her,
indem Sie Kabelverschraubungen aus Metall oder
die mit den Geräten mitgelieferten Schellen
verwenden (siehe Kapitel 4.6 Motoranschluss).
Reduzieren Sie Schalttransienten, indem Sie Kabel
•
mit einer hohen Litzenzahl verwenden.
Verwenden Sie keine verdrillten Abschirmung-
•
senden (Pigtails).
HINWEIS
POTENZIALAUSGLEICH
Es besteht die Gefahr von Schalttransienten, wenn das
Massepotenzial zwischen Frequenzumrichter und System
unterschiedlich ist. Installieren Sie Ausgleichskabel
zwischen den Systemkomponenten. Empfohlener
Leitungsquerschnitt: 16 mm2 (6 AWG).
14 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503
Power
input
Switch mode
power supply
Motor
Analog output
interface
(PNP) = Source
(NPN) = Sink
ON = Terminated
OFF = Open
Brake
resistor
91 (L1/N)
92 (L2/L)
93 (L3)
PE
50 (+10 V OUT)
53 (A IN)
2)
54 (A IN)
55 (COM digital/analog I/O)
0/4−20 mA
12 (+24 V OUT)
13 (+24 V OUT)
18 (D IN)
10 V DC
15 mA 100 mA
+ - + -
(U) 96
(V) 97
(W) 98
(PE) 99
(A OUT) 42
(P RS485) 68
(N RS485) 69
(COM RS485) 61
0 V
5 V
S801
0/4−20 mA
RS485
RS485
03
+10 V DC
0−10 V DC
24 V DC
02
01
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
19 (D IN)
24 V (NPN)
0 V (PNP)
17 V
0 V
0 V (PNP)
24 V (NPN)
29 (D IN)
24 V (NPN)
0 V (PNP)
0 V (PNP)
24 V (NPN)
33 (D IN)
32 (D IN)
38 (STO2)
4)
37 (STO1)
4)
95
P 5-00
21
ON
(+DC/R+) 89
(R-) 81
0−10 V DC
(-DC) 88
RFI
0 V
250 V AC, 3 A
Relay 1
1)
3)
5)
5)
130BE202.19
27 (D IN/OUT)
6)
Elektrische Installation Bedienungsanleitung
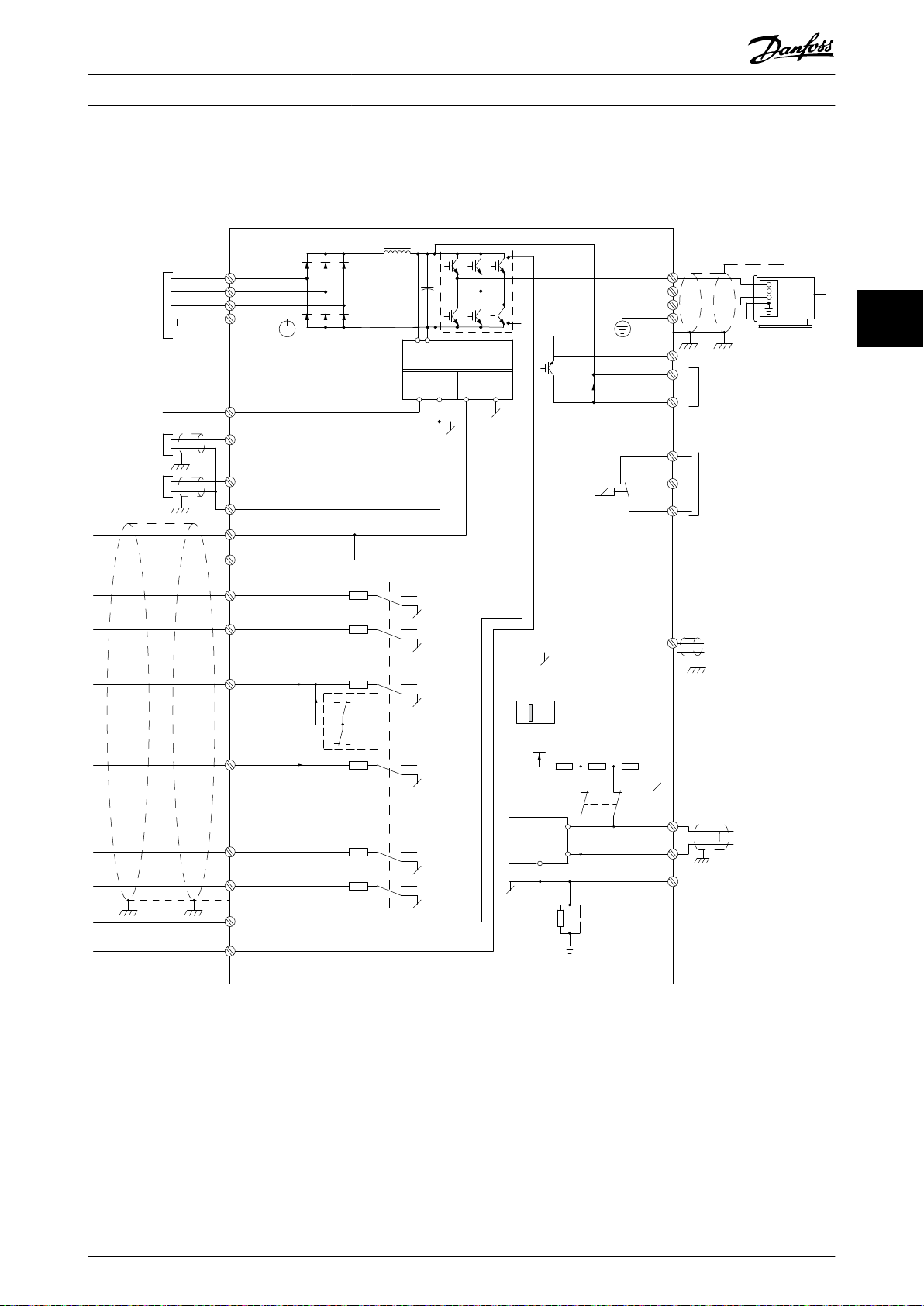
4.4 Anschlussdiagramm
Dieser Abschnitt enthält eine Beschreibung zum Anschluss des Frequenzumrichters.
4 4
Abbildung 4.2 Anschlussdiagramm des Grundgeräts
A = Analog, D = Digital
1) Der integrierte Bremschopper ist nur für dreiphasige Einheiten erhältlich.
2) Sie können Klemme 53 auch als Digitaleingang verwenden.
3) Sie können den Schalter S801 (DC-Bus-Zwischenkreisklemmen) verwenden, um für die serielle RS485-Schnittstelle (Klemmen 68
und 69) die integrierten Busabschlusswiderstände zu aktivieren.
4) Kapitel 6 Safe Torque Off (STO) zeigt die richtige STO-Verdrahtung.
5) Der S2-Frequenzumrichter (Single-Phase 200–240 V) unterstützt nicht Zwischenkreiskopplungsanwendungen.
6) Die maximale Spannung beträgt 17 V für Klemme 27 als Analogausgang.
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 15
e30bf228.11
L1
L2
L3
PE
PE
u
v
w
2
1
3
5
16
17
18
14
12
8
7
10
9
4
11
13
4
6
15
90
4
Elektrische Installation
VLT® Midi Drive FC 280
44
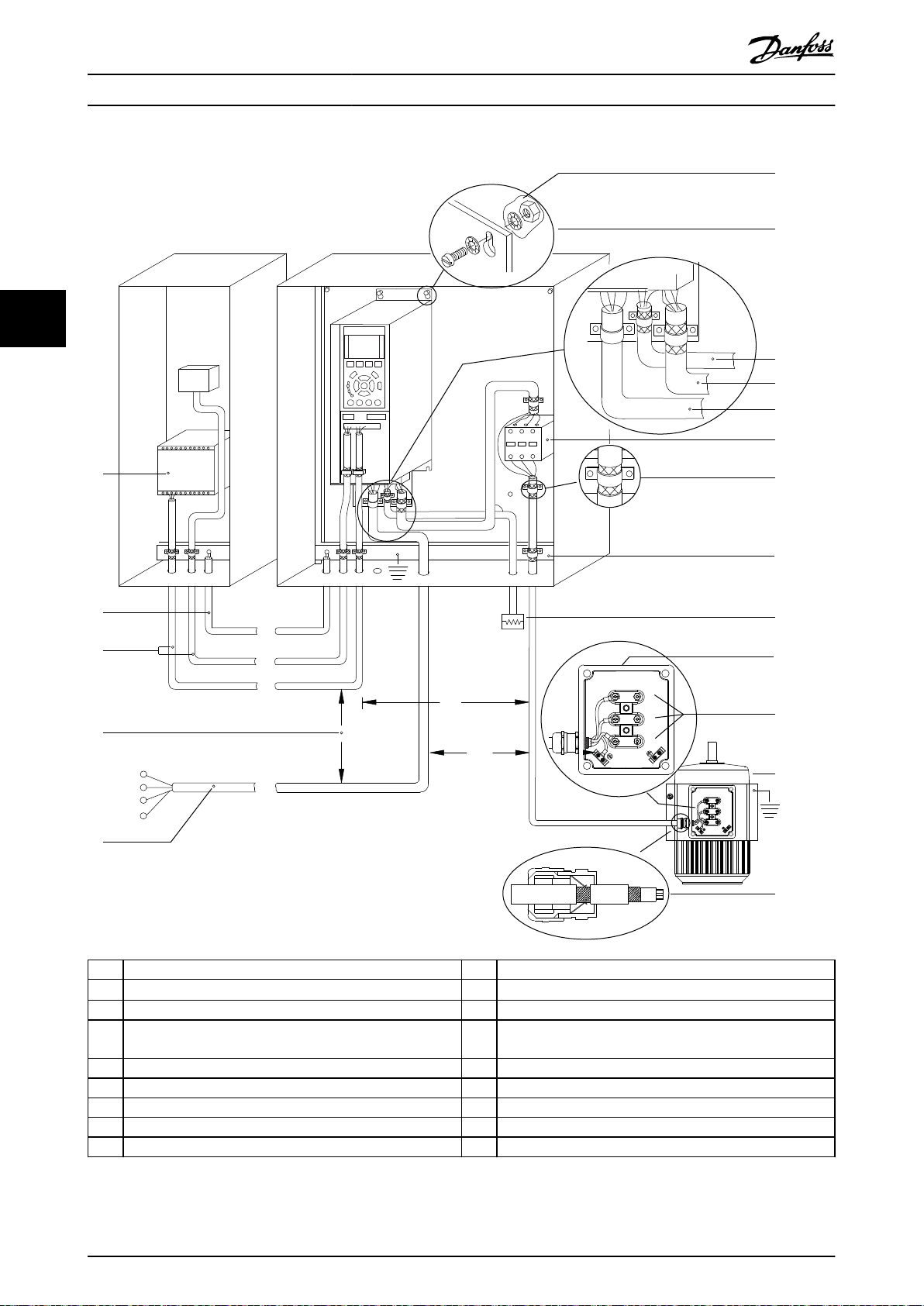
1 SPS 10 Netzkabel (ungeschirmt)
2
Minimum 16 mm2 (6 AWG) Potenzialausgleich
3 Steuerleitungen 12 Kabelisolierung, abisoliert
4 Mindestens 200 mm (7,87 Zoll) zwischen Steuerleitungen,
Motorkabeln und Netzkabeln.
5 Netzversorgung 14 Bremswiderstand
6 Freiliegende (nicht lackierte) Oberfläche 15 Metallkasten
7 Sternscheiben 16 Anschluss zum Motor
8 Anschlusskabel für Bremse (abgeschirmt) 17 Motor
9 Motorkabel (abgeschirmt) 18 EMV-Kabelverschraubung
Abbildung 4.3 Typische elektrische Verbindung
11 Ausgangsschütz usw.
13 Bezugserde-Sammelschiene. Beachten Sie nationale und
örtliche Vorschriften für die Schaltschrankerdung.
16 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503
130BC504.11
130BD531.10
U
V
W
96
97
98
Elektrische Installation Bedienungsanleitung
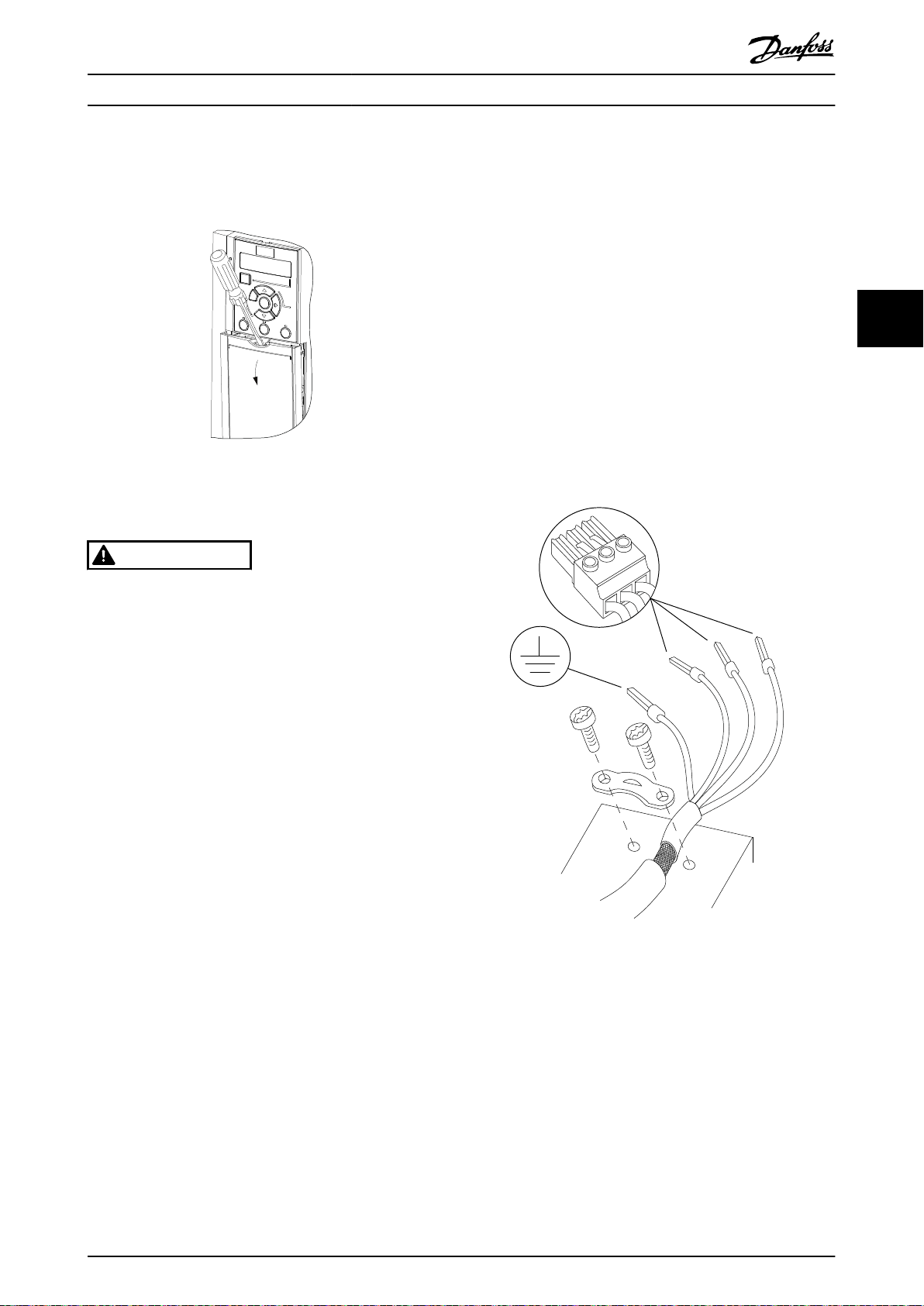
4.5 Zugriff
Entfernen Sie die Abdeckplatte mit Hilfe eines
•
Schraubendrehers. Siehe Abbildung 4.4.
Abbildung 4.4 Steuerkabeldurchführung
4.6 Motoranschluss
WARNUNG
INDUZIERTE SPANNUNG
Induzierte Spannung durch nebeneinander verlegte
Motorkabel kann Gerätekondensatoren auch dann
aufladen, wenn die Geräte abgeschaltet und verriegelt
sind. Die Nichtbeachtung der Empfehlung zum separaten
Verlegen von Motorkabeln oder zur Verwendung von
abgeschirmten Kabeln kann zum Tod oder zu schweren
Verletzungen führen!
Vorgehensweise
1. Isolieren Sie einen Abschnitt der äußeren
Kabelisolierung ab.
2. Positionieren Sie das abisolierte Kabel unter der
Kabelschelle, um eine mechanische Befestigung
und elektrischen Kontakt zwischen Kabelschirm
und Erde herzustellen.
3. Schließen Sie das Erdungskabel gemäß den
Erdungsanweisungen in Kapitel 4.3 Erdung an die
nächstgelegene Erdungsklemme an. Siehe
Abbildung 4.5.
4. Schließen Sie die 3 Phasen des Motorkabels an
die Klemmen 96 (U), 97 (V) und 98 (W) an (siehe
Abbildung 4.5).
5. Ziehen Sie die Klemmen gemäß den Anzugsdrehmomenten in Kapitel 9.7 Anzugsdrehmomente für
Anschlüsse an.
4 4
Verlegen Sie Motorkabel getrennt.
•
Verwenden Sie abgeschirmte Kabel.
•
Befolgen Sie bezüglich der Kabelquerschnitte
•
örtliche und nationale Vorschriften. Maximale
Kabelquerschnitte siehe Kapitel 9.1 Elektrische
Daten.
Befolgen Sie die Anforderungen des Motorhers-
•
tellers an die Motorkabel.
Kabeleinführungen für Motorkabel oder
•
Bodenplatten mit Durchführungen sind am
Unterteil von Frequenzumrichtern mit Schutzart
IP21 (NEMA Typ 1) vorgesehen.
Schließen Sie kein Anlass- oder Polwechselgerät
•
(z. B. Dahlander-Motor oder Asynchron-Schleifringläufermotor) zwischen Frequenzumrichter und
Motor an.
Abbildung 4.5 Motoranschluss
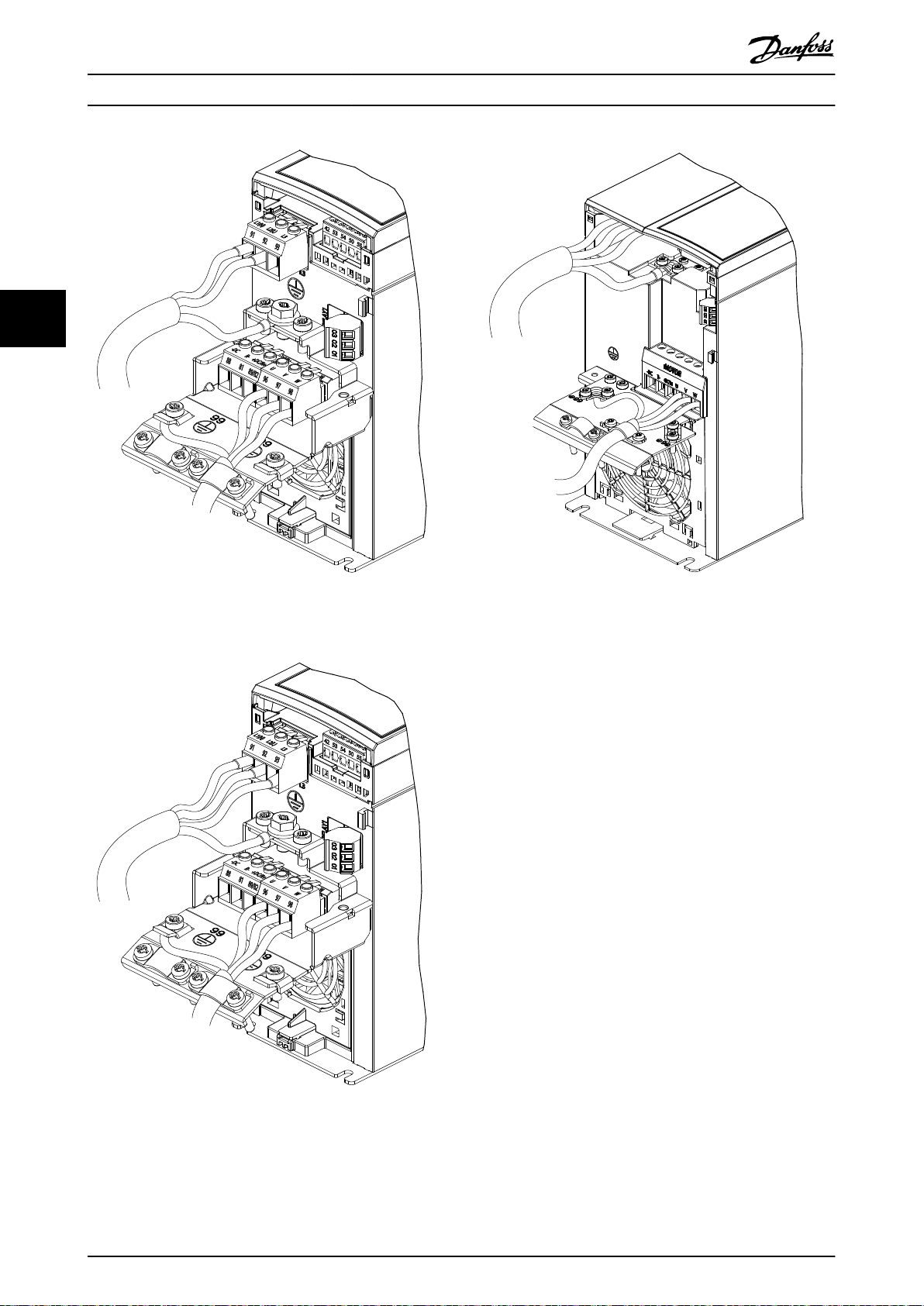
Die Netz-, Motor- und Erdanschlüsse für ein- und
dreiphasige Frequenzumrichter sind jeweils in
Abbildung 4.6, Abbildung 4.7 und Abbildung 4.8 aufgeführt.
Die jeweiligen Konfigurationen ändern sich je nach
Gerätetypen und optionaler Ausrüstung.
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 17
130BE232.11
130BE231.11
130BE804.10
Elektrische Installation
VLT® Midi Drive FC 280
44
Abbildung 4.6 Netz-, Motor- und Erdanschluss für
1-phasige Einheiten
Abbildung 4.7 Netz-, Motor- und Erdanschluss für 3-phasige
Einheiten (K1, K2, K3)
Abbildung 4.8 Netz-, Motor- und Erdanschluss für 3-phasige
Einheiten (K4, K5)
Netzanschluss
4.7
Wählen Sie die Querschnitte der Kabel anhand
•
des Eingangsstroms des Frequenzumrichters.
Maximaler Kabelquerschnitt siehe
Kapitel 9.1 Elektrische Daten.
Befolgen Sie bezüglich der Kabelquerschnitte
•
örtliche und nationale Vorschriften.
Vorgehensweise
1. Schließen Sie die AC-Eingangsleistungskabel an
die Klemmen N und L für 1-phasige Einheiten
(siehe Abbildung 4.6) oder an die Klemmen L1, L2
und L3 für 3-phasige Einheiten (siehe
Abbildung 4.7) an.
2. Schließen Sie je nach Konfiguration der Geräte
die Eingangsleistung an die Netzeingangsklemmen oder den Netztrennschalter an.
3. Erden Sie das Kabel gemäß den Erdungsanweisungen in Kapitel 4.3 Erdung.
4. Versorgt ein IT-Netz, eine potenzialfreie Dreieckschaltung oder ein TT/TN-S-Netz mit geerdetem
Zweig (geerdete Dreieckschaltung) den Frequenzumrichter, müssen Sie darauf achten, dass die
Schraube des EMV-Filters entfernt wird. Durch das
Entfernen der Schraube des EMV-Filters
verhindern Sie Schäden am Zwischenkreis und
verringern die Erdungskapazität gemäß IEC
18 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503
130BE212.10
1 2
3
130BE214.10
37 38 12 13 18 19 27 29 32 33 61
42 53 54 50 55
68 69
1
3
2
Elektrische Installation Bedienungsanleitung
61800-3 (siehe Abbildung 9.2, die Schraube des
EMV-Filters befindet sich an der Seite des
Frequenzumrichters).
4.8 Steuerkabel
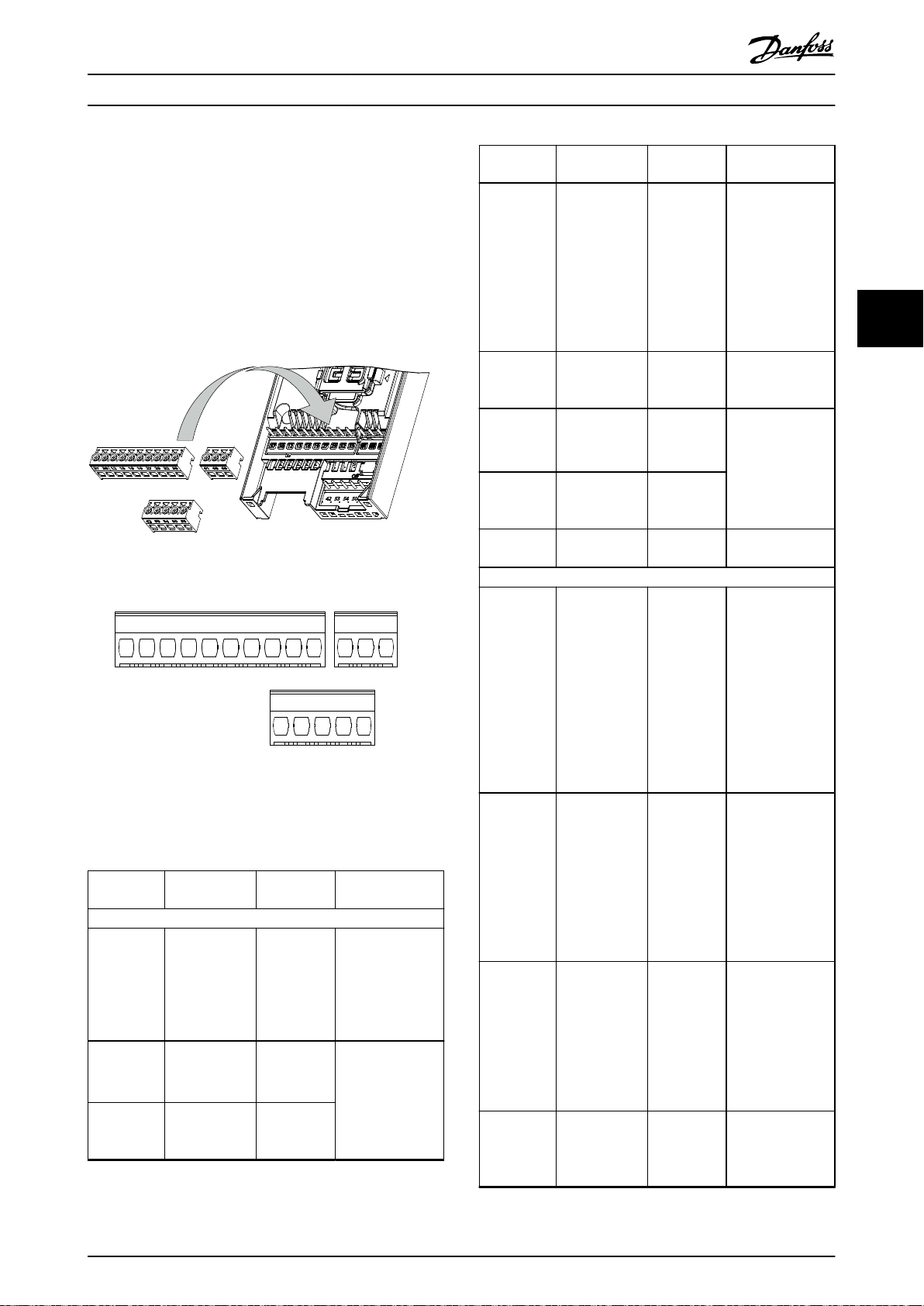
4.8.1 Steuerklemmentypen
Abbildung 4.9 zeigt die steckbaren Anschlüsse des Frequenzumrichters. Tabelle 4.1 und Tabelle 4.2 fasst
Klemmenfunktionen und Werkseinstellungen zusammen.
Abbildung 4.9 Anordnung der Steuerklemmen
Abbildung 4.10 Klemmennummern
Nähere Angaben zu Klemmenspezifikationen finden Sie in
Kapitel 9.6 Steuereingang/-ausgang und Steuerdaten.
Klemmen Parameter
Digital-E/A, Puls-E/A, Drehgeber
12, 13 – +24 V DC
Parameter 5-10
18
19
Klemme 18
Digitaleingang
Parameter 5-11
Klemme 19
Digitaleingang
Werksein-
stellung
[8] Start
[10]
Reversierung
Beschreibung
24-V-DC-Versorgungsspannung.
Maximaler
Ausgangsstrom
von 100 mA für
alle 24-V-Lasten.
Digitaleingänge.
Klemmen Parameter
Parameter 5-01
Klemme 27
Funktion
Parameter 5-12
27
29
32
33
37, 38 – STO
42
50 – +10 V DC
53
54
Klemme 27
Digitaleingang
Parameter 5-30
Klemme 27
Digitalausgang
Parameter 5-13
Klemme 29
Digitaleingang
Parameter 5-14
Klemme 32
Digitaleingang
Parameter 5-15
Klemme 33
Digitaleingang
Analogeingänge/-ausgänge
Parameter 6-91
Klemme 42
Analogausgang
Parameter-
gruppe 6-1*
Analogeingang
53
Parameter-
gruppe 6-2*
Analogeingang
54
Werksein-
stellung
Digitaleingang [2]
Motorfreilauf
(inv.)
Digitalausgang [0]
Ohne
Funktion
[14]
Festdrehzahl
JOG
[0] Ohne
Funktion
[0] Ohne
Funktion
[0] Ohne
Funktion
–
–
Beschreibung
Lässt sich als
Digitaleingang,
Digitalausgang
oder Pulsausgang
wählen. Die
Werkseinstellung
ist Digitaleingang.
Digitaleingang.
Digitaleingang,
24-V-Drehgeber.
Sie können
Klemme 33 als
Pulseingang
verwenden.
Funktionale Sicherheitseingänge.
Programmierbarer
Analogausgang.
Das Analogsignal
liefert 0 .. 20 mA
oder 4 .. 20 mA
bei maximal
500 Ω. Sie können
die Klemmen auch
als Digitalausgänge
konfigurieren.
10-V-DC-Versorgungsspannung
am Analogausgang. Maximal
15 mA, in der
Regel für Potenziometer oder
Thermistor
verwendet.
Analogeingang.
Nur die Einstellung
Spannung wird
unterstützt. Sie
können diesen
auch als Digitaleingang
verwenden.
Analogeingang.
Programmierbar
für Spannung oder
Strom.
4 4
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 19
Elektrische Installation
VLT® Midi Drive FC 280
Klemmen Parameter
55 – –
Tabelle 4.1 Klemmenbeschreibung – Digitaleingänge/-ausgänge,
Analogeingänge/-ausgänge
44
Klemmen Parameter
Serielle Kommunikation
61 – –
Parameter-
68 (+)
69 (-)
01, 02, 03
Tabelle 4.2 Klemmenbeschreibungen – Serielle Schnittstelle
gruppe 8-3* FC-
Schnittstellenein
stellungen
Parameter-
gruppe 8-3* FC-
Schnittstellenein
stellungen
Parameter 5-40
Relaisfunktion
Werksein-
stellung
Werkseinstellung
Relais
[1] Steuer.
bereit
Beschreibung
Bezugspotenzial
für Digital- und
Analogeingänge.
Beschreibung
Integrierter RCFilter für
Kabelabschirmung.
Dient NUR zum
Anschluss der
Abschirmung bei
EMV-Problemen.
RS485-Schnitt-
–
–
stelle. Ein Schalter
auf der
Steuerkarte dient
zum Zuschalten
des Abschlusswiderstands.
WechselkontaktRelaisausgang.
Diese Relais
befinden sich je
nach Konfiguration
und Größe des
Frequenzumrichters an
verschiedenen
Positionen.
Verwendbar für
Wechsel- oder
Gleichspannung
sowie ohmsche
oder induktive
Lasten.
4.8.2 Verdrahtung der Steuerklemmen
Steuerklemmenanschlüsse am Frequenzumrichter sind
steckbar und ermöglichen so eine einfache Installation
(siehe Abbildung 4.9).
Details zur STO-Verdrahtung siehe Kapitel 6 Safe Torque Off
(STO).
HINWEIS
Halten Sie Steuerleitungen möglichst kurz und verlegen
Sie diese separat von den Leistungskabeln, um
Störungen möglichst gering zu halten.
1. Lösen Sie die Schrauben für die Klemmen.
2. Führen Sie die abisolierten Steuerleitungen in die
Steckplätze ein.
3. Ziehen Sie die Schrauben für die Klemmen fest.
4. Stellen Sie sicher, dass der Kontakt fest hergestellt
ist. Lose Steuerkabel können zu Fehlern oder
einem Betrieb führen, der nicht die optimale
Leistung erbringt.
Steuerleitungsquerschnitte finden Sie unter
Kapitel 9.5 Kabelspezifikationen und typische Beispiele für
den Anschluss der Steuerleitungen unter
Kapitel 7 Anwendungsbeispiele.
4.8.3 Aktivierung des Motorbetriebs
(Klemme 27)
Um den Frequenzumrichter in Werkseinstellung zu
betreiben, benötigen Sie ggf. Drahtbrücken zwischen
Klemme 12 (oder 13) und Klemme 27.
Digitaleingangsklemme 27 ist für den Empfang
•
eines externen 24-V-DC-Verriegelungsbefehls
ausgelegt.
Kommt keine Verriegelungsvorrichtung zum
•
Einsatz, schließen Sie eine Brücke zwischen
Steuerklemme 12 (empfohlen) oder 13 und
Klemme 27 an. Die Brücke liefert ein 24-V-DCSignal an Klemme 27.
Nur für LCP 102: Wenn die Statuszeile unten im
•
LCP AUTO FERN FREILAUF anzeigt, ist der Frequenzumrichter betriebsbereit, es fehlt aber ein
Eingangssignal an Klemme 27.
HINWEIS
START NICHT MÖGLICH
Der Frequenzumrichter kann nicht ohne Signal an
Klemme 27 laufen, es sei denn, Sie programmieren
Klemme 27 neu.
20 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503
Start Current
2)
Only support in some products.
1)
DC injection current during “Active Brake Delay” after MAV reduced to “0” . Only support in some products.
Off
On
Off
Relay
/
DO Status
Active Brake Delay
Active Brake Delay
MAV
Start Speed
Active Brake Speed
0
t
Start Delay
Off
On
Off
Start Command
Released
Activated
Reaction time of
mech
.
brake
Reaction time of
mech
.
brake
Mech
.
Brake Status
Release Brake Current
Output Current
DC Injection Current
1)
0
t
130BF687.10
Activated
Note:
2)
Elektrische Installation Bedienungsanleitung
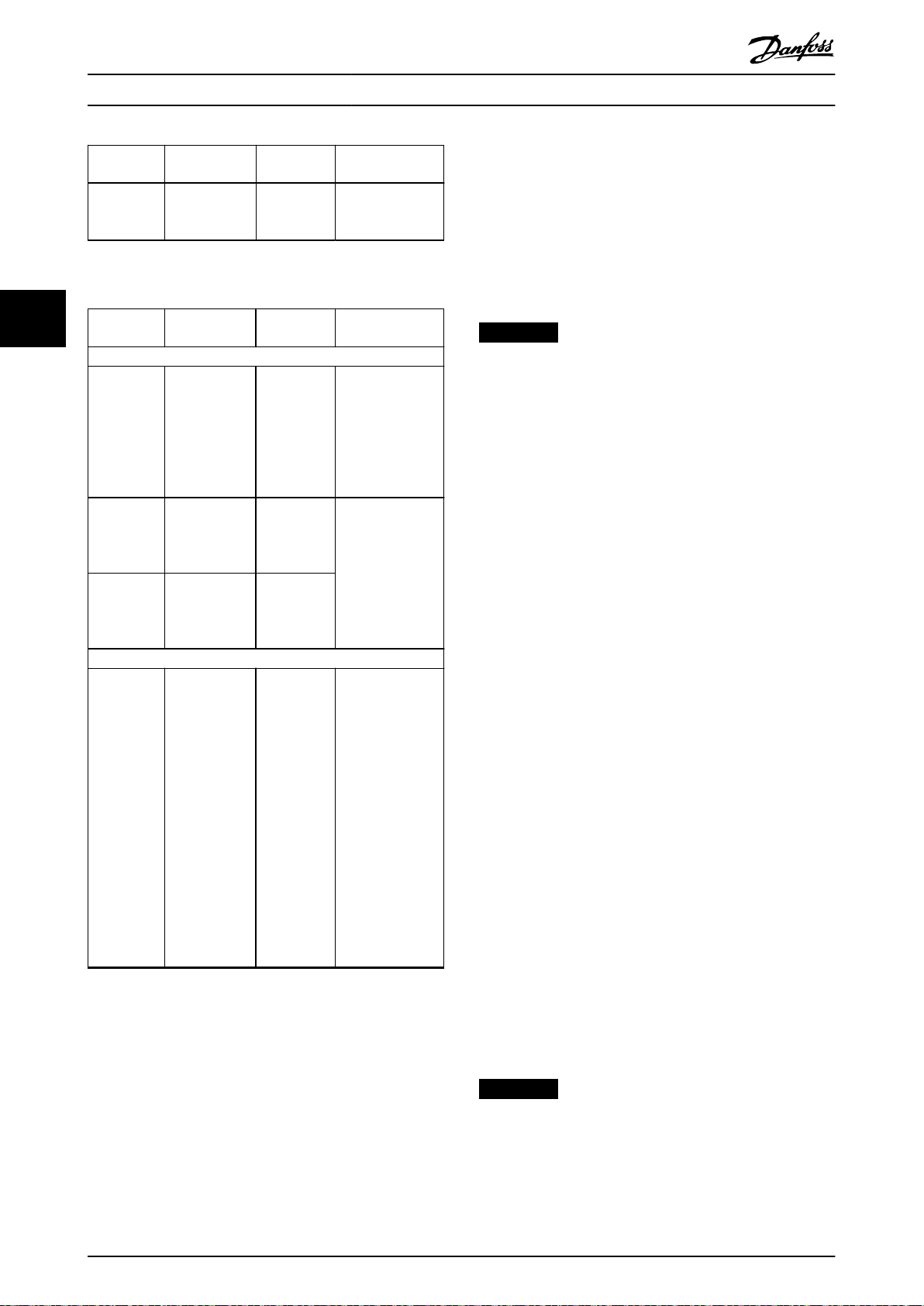
4.8.4 Mechanische Bremssteuerung
In Hub-/Senkanwendungen muss eine elektromechanische Bremse gesteuert werden können.
Steuern Sie die Bremse mit einem Relaisausgang oder Digitalausgang (Klemme 27).
•
Halten Sie den Ausgang geschlossen (spannungsfrei), solange der Frequenzumrichter den Motor nicht im Stillstand
•
halten kann, beispielsweise aufgrund zu hoher Last.
Wählen Sie für Anwendungen mit einer elektromechanischen Bremse [32] Mechanische Bremse in der Parameter-
•
gruppe 5-4* Relais aus.
Die Bremse wird gelöst, wenn der Motorstrom den eingestellten Wert in Parameter 2-20 Bremse öffnen bei
•
Motorstrom überschreitet.
Die Bremse wird aktiviert, wenn die Ausgangsfrequenz geringer als die in Parameter 2-22 Bremse schließen bei
•
Motorfrequenz eingestellte Frequenz ist und der Frequenzumrichter einen Stoppbefehl ausgibt.
Befindet sich der Frequenzumrichter in einer der folgenden Situationen, schließt die mechanische Bremse sofort.
Im Alarmmodus.
•
Bei Überspannung.
•
STO ist aktiviert.
•
Freilaufbefehl wird erteilt.
•
4 4
Abbildung 4.11 Mechanische Bremse
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 21
130BE201.11
L1(N) L2(L) L3
U V W
02 01
A1
A2
Frequency converter
Output
relay
Command circuit
220 V AC
Mechanical
brake
ShaftMotor
Freewheeling
diode
Brake power circuit
380 V AC
Output
contactor
input
61
68
69
+
130BB489.10
RS485
Elektrische Installation
VLT® Midi Drive FC 280
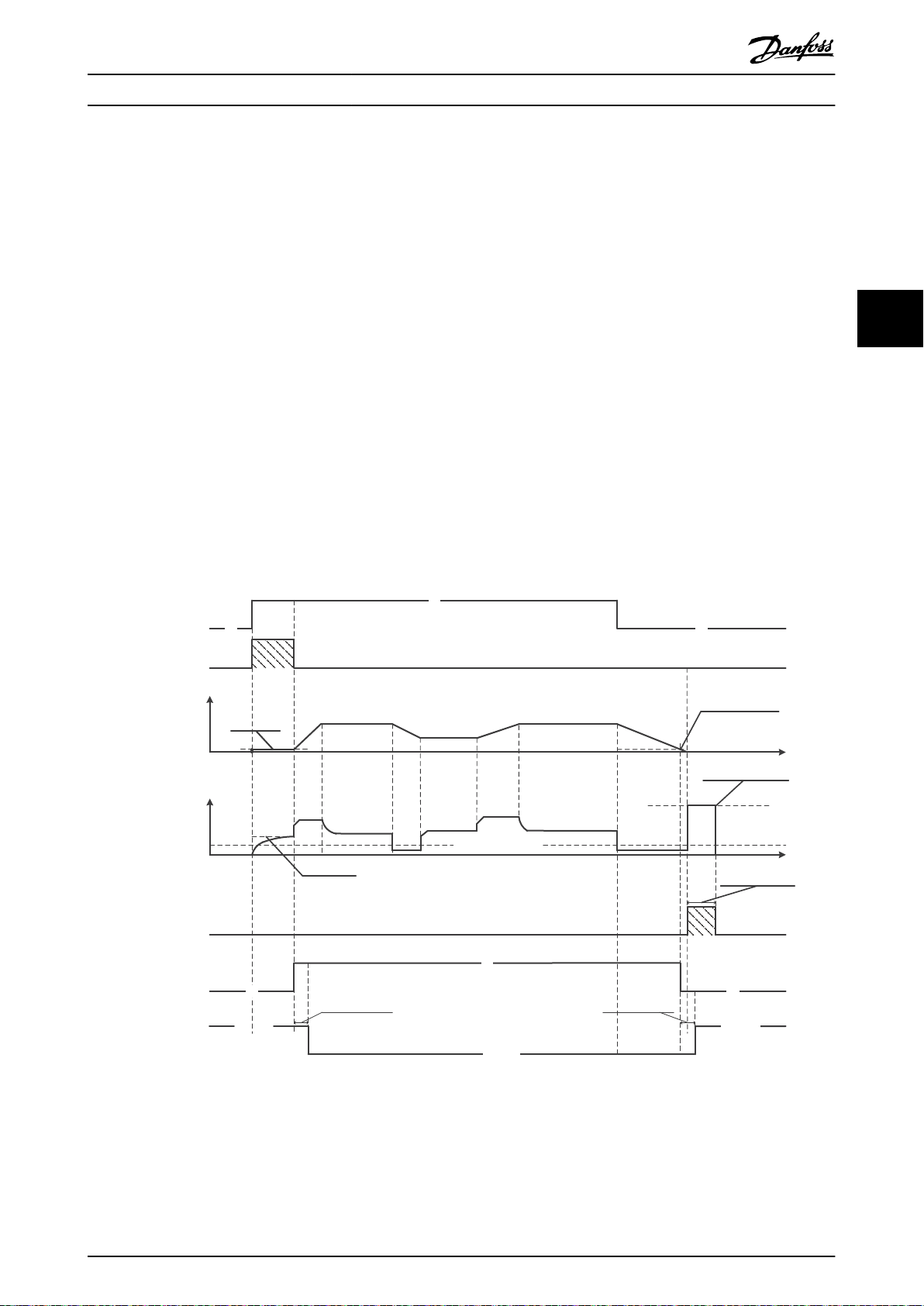
Der Frequenzumrichter ist keine Sicherheitsvorrichtung. Es
liegt in der Verantwortung des Anlagenplaners, Sicherheitsvorrichtungen gemäß den einschlägigen nationalen Kran-/
Hebevorschriften zu integrieren.
HINWEIS
Sie können die Adresse eines USB-Busses nicht einstellen
und keinen Busnamen konfigurieren. Wenn Sie mehrere
Frequenzumrichter per USB anschließen, werden in der
Netzwerkbusliste von MCT 10 Konfigurationssoftware
automatisch weitere Busnamen erstellt.
Das Anschließen mehrerer Frequenzumrichter mit einem
USB-Kabel führt bei Computern mit Windows XP häufig
zu Ausnahmefehlern und Abstürzen. Daher empfiehlt es
44
sich, immer nur einen Frequenzumrichter per USB mit
dem PC zu verbinden.
4.8.6 RS485 Serielle Schnittstelle
Schließen Sie das serielle RS485-Schnittstellenkabel an die
Klemmen (+)68 und (-)69 an.
Wir empfehlen die Verwendung eines
•
abgeschirmten seriellen Schnittstellenkabels.
Zur vorschriftsgemäßen Erdung siehe
•
Kapitel 4.3 Erdung.
Abbildung 4.12 Anschluss der mechanischen Bremse an den
Frequenzumrichter
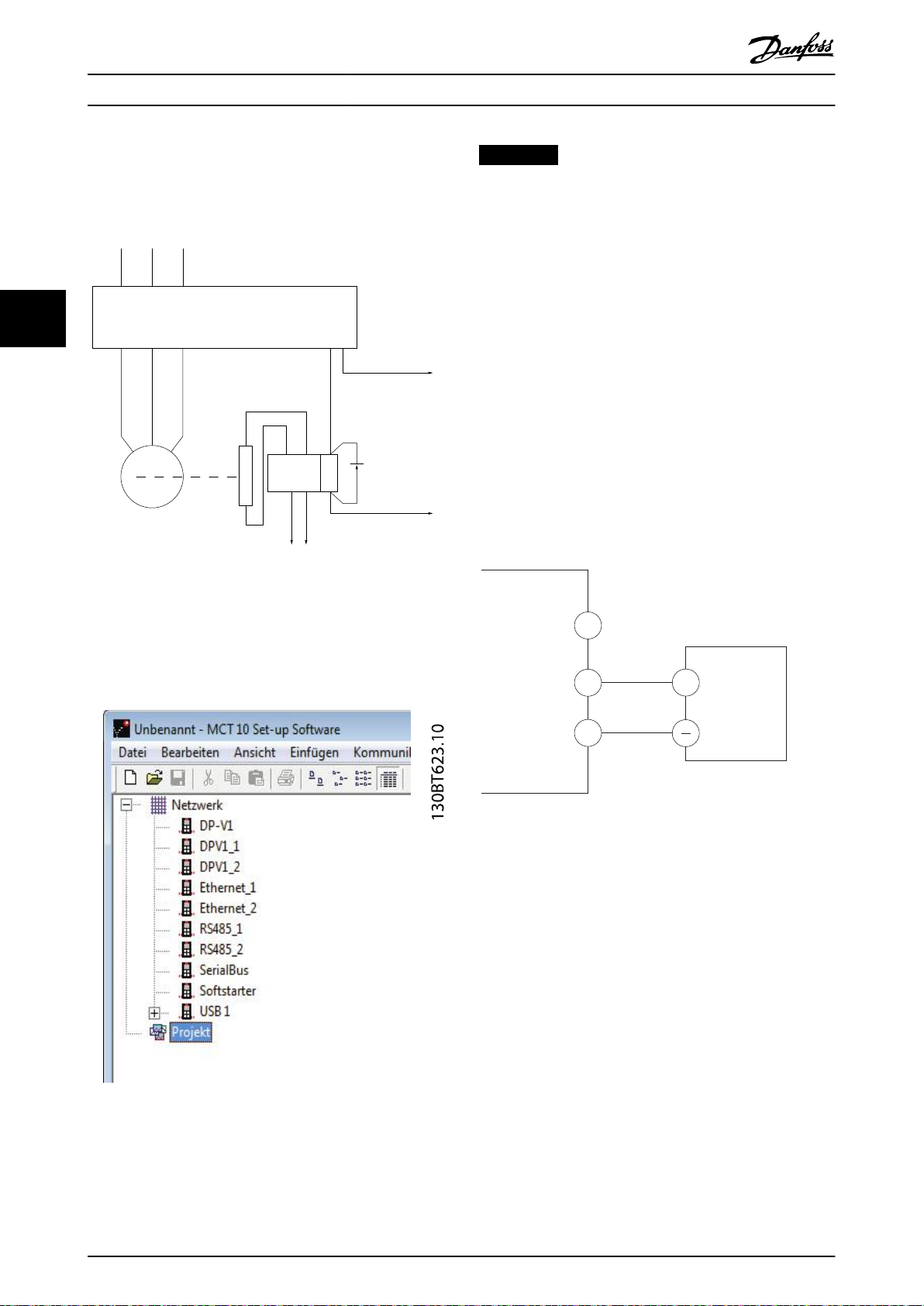
4.8.5 USB-Datenschnittstelle
Abbildung 4.13 Netzwerkbusliste
Wenn Sie das USB-Kabel trennen, entfernen Sie damit den
über den USB-Anschluss verbundenen Frequenzumrichter
aus der Netzwerkbusliste.
Abbildung 4.14 Schaltbild für serielle Kommunikation
Programmieren Sie zur grundlegenden Konfiguration der
seriellen Kommunikation die folgenden Parameter:
1. Den Protokolltyp in Parameter 8-30 FC-Protokoll.
2. Die Adresse des Frequenzumrichters in
Parameter 8-31 Adresse.
3. Die Baudrate in Parameter 8-32 Baudrate.
Zwei Kommunikationsprotokolle sind in den Frequenzumrichter integriert. Befolgen Sie die Anforderungen des
Motorherstellers an die Motorkabel.
Danfoss FU.
•
Modbus RTU
•
Funktionen können Sie extern über die Protokollsoftware
und die RS485-Verbindung oder in Parametergruppe 8-**
Opt./Schnittstellen programmieren.
22 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503
Elektrische Installation Bedienungsanleitung
Durch Auswahl eines bestimmten Kommunikationsprotokolls ändern Sie verschiedene Standardparametereinstellungen
passend zu den Spezifikationen dieses Protokolls, und einige zusätzliche protokollspezifische Parameter stehen zur
Verfügung.
4.9 Checkliste vor der Installation
Prüfen Sie die gesamte Anlage vor dem Anlegen von Netzspannung an das Gerät wie in Tabelle 4.3 beschrieben. Markieren
Sie die geprüften Punkte anschließend mit einem Haken.
Prüfpunkt Beschreibung
Zusatzeinrichtungen•Erfassen Sie Zusatzeinrichtungen, Schalter, Trennschalter oder Netzsicherungen bzw. Hauptschalter, die
netz- oder motorseitig am Frequenzumrichter angeschlossen sein können. Stellen Sie sicher, dass diese
Einrichtungen für einen Betrieb bei voller Drehzahl bereit sind.
Überprüfen Sie Funktion und Installation von Sensoren, die Istwertsignale zum Frequenzumrichter senden.
•
Entfernen Sie die Kondensatoren zur Leistungsfaktorkorrektur am Motor/an den Motoren.
•
Stellen Sie alle Kondensatoren zur Leistungsfaktorkorrektur an der Netzseite ein und stellen Sie sicher, dass
•
diese verdrosselt sind.
Kabelführung
Steuerleitungen
Abstand zur
Kühlluftzirkulation
Umgebungsbedingungen
Sicherungen und
Trennschalter
Erdung
Netz- und
Motorkabel
Schaltschrankinnenraum
Schalter
Vibrationen
Stellen Sie sicher, dass Sie Motorkabel und Steuerleitungen getrennt oder in 3 separaten Metall-Installati-
•
onsrohren verlegen oder geschirmte Kabel zur Vermeidung von Hochfrequenzstörungen verwenden.
Prüfen Sie, ob Kabel gebrochen oder beschädigt sind und ob lose Verbindungen vorliegen.
•
Stellen Sie zur Gewährleistung der Störfestigkeit sicher, dass Steuerleitungen getrennt von Netz- und
•
Motorkabeln verlaufen.
Prüfen Sie den Stellbereich der Signale.
•
Wir empfehlen die Verwendung von abgeschirmten Kabeln oder Kabeln mit verdrillten Aderpaaren. Stellen Sie
sicher, dass die Abschirmung richtig abgeschlossen ist.
Stellen Sie sicher, dass für eine ausreichende Luftzirkulation entsprechende Freiräume über und unter dem
•
Frequenzumrichter vorhanden sind, siehe Kapitel 3.3 Montage.
Überprüfen Sie, dass die Anforderungen für die Umgebungsbedingungen erfüllt sind.
•
Stellen Sie sicher, dass die richtigen Sicherungen oder Trennschalter eingebaut sind.
•
Prüfen Sie, dass alle Sicherungen fest eingesetzt und in einem betriebsfähigen Zustand sowie alle
•
Trennschalter geöffnet sind.
Prüfen Sie, dass die Anlage eine Erdverbindung besitzt und die Kontakte fest angezogen sind und keine
•
Oxidation aufweisen.
Führen Sie keine Erdung an Kabelkanälen oder eine Montage der Rückwand an einer Metallfläche durch.
•
Prüfen Sie, ob alle Kontakte fest angeschlossen sind.
•
Stellen Sie sicher, dass Motor- und Netzkabel in getrennten Installationsrohren verlegt sind oder getrennte
•
abgeschirmte Kabel verwendet werden.
Stellen Sie sicher, dass das Innere des Frequenzumrichters frei von Schmutz, Metallspänen, Feuchtigkeit
•
und Korrosion ist.
Prüfen Sie, dass das Gerät auf einer unlackierten Metalloberfläche montiert ist.
•
Stellen Sie sicher, dass alle Schalter und Trennschalter in der richtigen Schaltposition sind.
•
Stellen Sie sicher, dass der Frequenzumrichter je nach Anforderung stabil montiert ist oder bei Bedarf
•
Dämpferbefestigungen verwendet werden.
Prüfen Sie, ob übermäßige Vibrationen vorhanden sind.
•
☑
4 4
Tabelle 4.3 Checkliste bei der Installation
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 23
Elektrische Installation
VLT® Midi Drive FC 280
VORSICHT
POTENZIELLE GEFAHR IM FALLE EINES INTERNEN FEHLERS
Es besteht Verletzungsgefahr, wenn Sie den Frequenzumrichter nicht ordnungsgemäß schließen.
Vor dem Einschalten des Stroms müssen Sie sicherstellen, dass alle Sicherheitsabdeckungen eingesetzt und
•
sicher befestigt sind.
44
24 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503
Inbetriebnahme Bedienungsanleitung
5 Inbetriebnahme
5.1 Sicherheitshinweise
Allgemeine Sicherheitshinweise finden Sie in
Kapitel 2 Sicherheit.
WARNUNG
HOCHSPANNUNG
Frequenzumrichter führen bei Anschluss an das Versorgungsnetz Hochspannung. Werden Installation,
Inbetriebnahme und Wartung nicht von qualifiziertem
Personal durchgeführt, kann dies zum Tod oder zu
schweren Verletzungen führen!
Installation, Inbetriebnahme und Wartung
•
dürfen nur von qualifiziertem Personal
durchgeführt werden.
Bevor Sie Spannung anlegen:
1. Schließen Sie die Abdeckung ordnungsgemäß.
2. Überprüfen Sie, dass alle Kabelverschraubungen
festgezogen sind.
3. Stellen Sie sicher, dass die Eingangsspannung des
Geräts ausgeschaltet und gesperrt ist. Verlassen
Sie sich bei der Abschaltung des Eingangsstroms
nicht auf die Trennschalter des Frequenzumrichters.
4. Stellen Sie sicher, dass an den Eingangsklemmen
L1 (91), L2 (92) und L3 (93) zwischen zwei Phasen
und zwischen Phase und Masse keine Spannung
anliegt.
5. Stellen Sie sicher, dass an den Ausgangsklemmen
96 (U), 97 (V) und 98 (W) zwischen zwei Phasen
und zwischen Phase und Masse keine Spannung
anliegt.
6. Prüfen Sie den korrekten Motoranschluss durch
Messen der Widerstandswerte an U–V (96–97), V–
W (97–98) und W–U (98–96).
7. Prüfen Sie die ordnungsgemäße Erdung von
Frequenzumrichter und Motor.
8. Prüfen Sie den Frequenzumrichter auf lose
Anschlüsse an den Klemmen.
9. Prüfen Sie, ob die Versorgungsspannung mit der
Spannung von Frequenzumrichter und Motor
übereinstimmt.
Anlegen der Netzversorgung
5.2
Legen Sie unter Verwendung der folgenden Schritte
Spannung an den Frequenzumrichter an:
1. Stellen Sie sicher, dass die Abweichung in der
Eingangsspannungssymmetrie höchstens ±3 %
beträgt. Ist dies nicht der Fall, so korrigieren Sie
die Asymmetrie der Eingangsspannung, bevor Sie
fortfahren. Wiederholen Sie dieses Verfahren nach
der Spannungskorrektur.
2. Stellen Sie sicher, dass die Verkabelung optionaler
Geräte dem Zweck der Anlage entspricht.
3. Stellen Sie sicher, dass alle Bedienvorrichtungen
auf AUS stehen. Die Gehäusetüren müssen
geschlossen und die Abdeckungen sicher
befestigt sein.
4. Legen Sie die Netzversorgung an den Frequenzumrichter an. Starten Sie den Frequenzumrichter
noch nicht. Stellen Sie bei Frequenzumrichtern
mit Trennschaltern diese auf EIN, um die Netzversorgung am Frequenzumrichter anzulegen.
5.3 Betrieb des Local Control Panels (LCP)
Der Frequenzumrichter unterstützt das numerische LCP
(LCP 101), das grafische LCP (LCP 102) und Blindabdeckungen. Dieser Abschnitt enthält eine Beschreibung des
Betriebs mit LCP 101 und LCP 102.
HINWEIS
Sie können den Frequenzumrichter auch mit dem PC
über eine RS485-Kommunikationsschnittstelle oder einen
USB-Anschluss programmieren. Dazu müssen Sie die MCT
10 Konfigurationssoftware installieren. Diese Software
können Sie über die Bestellnummer 130B1000 bestellen
oder von der Danfoss-Website herunterladen:
drives.danfoss.com/downloads/pc-tools/#/.
5 5
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 25

130BC506.10
Setup 1
A
B
C
D
5
12
13 14 15
10
11
10
9
6
7
8
4
1
2
3
Menu
Status
Quick
Menu
Main
Menu
Hand
On
O
Reset
Auto
On
Back
OK
On
Warn
Alarm
130BD135.10
Setup 12
INDEX
AHP
VkW
srpm
Hz%
n2n1
n3
p5 p4
p3 p2 p1
Inbetriebnahme
VLT® Midi Drive FC 280
5.3.1 Numerisches LCP Bedienteil (LCP 101)
A. Numerisches Display
Das LCD-Display ist hintergrundbeleuchtet und verfügt
Die numerische Bedieneinheit (LCP 101) ist in die
folgenden 4 Funktionsbereiche unterteilt.
A. Numerisches Display
B. Menütaste.
C. Navigationstasten und Anzeigeleuchten (LED)
D. Bedientasten mit Kontroll-Anzeigen (LED).
55
über eine numerische Zeile. Das LCP 101 zeigt alle Daten
an.
Die Satznummer zeigt den aktiven Parametersatz und den
editierbaren Parametersatz an. Stimmen der aktive Satz
und Programm-Satz überein, wird nur diese Satznummer
1
gezeigt (Werkseinstellung). Bei unterschiedlichem aktiven
Satz und editierbarem Parametersatz zeigt das Display
beide Satznummern (z. B. Satz 12) an. Die blinkende Zahl
kennzeichnet den editierbaren Parametersatz.
2 Parameternummer.
3 Parameterwert.
Die Motorlaufrichtung wird im unteren Bereich des
4
Displays angezeigt. Ein kleiner Pfeil zeigt die Laufrichtung
an.
Das Dreieck zeigt an, ob sich das LCP in der Statusanzeige,
5
im Quick-Menü oder im Hauptmenü befindet.
Tabelle 5.1 Legende zu Abbildung 5.1, Abschnitt A
Abbildung 5.2 Anzeigeinformationen
B. Menütaste
Drücken Sie die Taste [Menu], um zwischen Status, QuickMenü oder Hauptmenü zu wählen.
Abbildung 5.1 Ansicht des LCP 101
C. Anzeigeleuchten (LED) und Navigationstasten
Anzeige LED Funktion
Die On-LED leuchtet auf, wenn der
Frequenzumrichter an die
6 On Grün
7 Warn Gelb
8 Alarm Rot
Tabelle 5.2 Legende für Abbildung 5.1, Anzeigeleuchten (LEDs)
Netzspannung angeschlossen ist oder
über eine DC-Bus-Zwischenkreisklemme oder eine externe 24-VVersorgung versorgt wird.
Die gelbe WARN-LED leuchtet auf,
wenn eine Warnung auftritt. Im Display
erscheint zusätzlich ein Text, der das
Problem angibt.
Durch eine Fehlerbedingung blinkt die
rote Alarm-LED und ein Alarmtext wird
angezeigt.
26 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

130BC440.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Inbetriebnahme Bedienungsanleitung
Taste Funktion
Zum Zurücknavigieren zum vorherigen
9 [Back]
10
11 [OK]
12
Tabelle 5.3 Legende für Abbildung 5.1, Navigationstasten
[▲] [▼]
[►]
Schritt oder zur vorherigen Ebene in der
Navigationsstruktur.
Zum Umschalten zwischen Parametergruppen, Parametern und innerhalb von
Parametern oder zur Erhöhung/Verringerung der Parameterwerte. Mit den
Pfeiltasten können Sie auch den
Ortsollwert festlegen.
Durch Drücken rufen Sie Parametergruppen auf oder aktivieren eine
Auswahl.
Zum Bewegen von links nach rechts
innerhalb des Parameterwerts zur
Änderung der einzelnen Ziffern.
D. Bedientasten mit Kontroll-Anzeigen (LED)
Taste Funktion
Diese Taste startet den Frequenzumrichter in
der Hand-Steuerung.
Ein externes Stoppsignal über Steuersignale
13 Hand On
14 Off/Reset
15 Auto On
Tabelle 5.4 Legende zu Abbildung 5.1, Abschnitt D
•
oder serielle Kommunikation hebt den
Handbetrieb auf.
Diese Taste dient dazu, den Motor zu stoppen,
jedoch ohne Unterbrechung der Stromversorgung zum Frequenzumrichter, oder dazu,
den Frequenzumrichter nach Behebung eines
Fehlers manuell zurückzusetzen. Im
Alarmmodus wird der Alarm zurückgesetzt,
wenn die Alarmbedingung beseitigt wird.
Diese Taste schaltet das System in den
Fernbetrieb.
Sie reagiert auf einen externen Startbefehl
•
über Steuerklemmen oder serielle
Kommunikation.
WARNUNG
ELEKTRISCHE GEFAHR
Auch nach dem Drücken der [Off/Reset]-Taste liegt
weiterhin Spannung an den Klemmen des Frequenzumrichters an. Durch Drücken der Taste [Off/Reset] wird der
Frequenzumrichter nicht von der Netzversorgung
getrennt. Ein Berühren spannungsführender Teile kann
zu schweren Verletzungen oder zum Tod führen!
Berühren Sie keine spannungsführenden Teile!
•
5.3.2 Die Funktion der Rechtspfeil-Taste am
LCP 101
Drücken Sie [►], um die 4 Ziffern in der Anzeige einzeln zu
ändern. Wenn Sie [►] einmal drücken, bewegt sich der
Cursor zur ersten Ziffer, und diese Ziffer beginnt zu
blinken, wie in Abbildung 5.3 gezeigt. Drücken Sie [▲] [▼]
zum Ändern der Werte. Durch Drücken von [►] ändert sich
der Wert der Ziffern nicht und das Dezimalkomma wird
nicht verschoben.
5 5
Abbildung 5.3 Funktion der Rechtspfeil-Taste
Sie können [►] auch zum Bewegen zwischen Parametergruppen verwenden. Drücken Sie im Hauptmenü [►], um
zum ersten Parameter in der nächsten Parametergruppe zu
wechseln (z. B. von Parameter 0-03 Ländereinstellungen [0]
International zu Parameter 1-00 Regelverfahren [0] Regelung
ohne Rückführung).
HINWEIS
Bei der Inbetriebnahme zeigt die LCP die Meldung
INITIALISIERUNG an. Wenn diese Meldung nicht mehr
angezeigt wird, ist der Frequenzumrichter betriebsbereit.
Das Hinzufügen oder Entfernen von Optionen kann die
Inbetriebnahme verzögern.
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 27

Inbetriebnahme
VLT® Midi Drive FC 280
5.3.3 Quick-Menü am LCP 101
Über das Quick-Menü können Sie auf die am häufigsten
verwendeten Parameter zugreifen.
1. Drücken Sie zum Aufrufen des Quick-Menüs die
[Menu]-Taste, bis der Anzeiger im Display auf dem
Quick-Menü steht.
2.
Wählen Sie mithilfe der Tasten [▲] [▼] entweder
QM1 oder QM2, und drücken Sie dann [OK].
3.
Navigieren Sie mit den Tasten [▲] [▼] durch die
55
Parameter im Quick-Menü.
4. Drücken Sie zur Auswahl eines Parameters [OK].
5.
Drücken Sie [▲] [▼], um den Wert einer Parametereinstellung zu ändern.
6. Drücken Sie [OK], um die Änderung zu
akzeptieren.
7. Drücken Sie zum Verlassen zweimal [Back] (oder
dreimal, wenn in QM2 und QM3) zum Aufrufen
des Status, oder drücken Sie einmal [Menu] zum
Aufrufen des Hauptmenüs.
28 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

130BC445.13
1-22 XXXX V
Motor
nominal
speed
QM 1
0-01 [0]
1-10 [0]
1-24 XXXX A
Language
Motor Type
1-20 XXXX kW
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Stator
Motor frequency
1-25 XXXX
1-30 XXXX
1-39 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
3-02 XXXX
3-03 XXXX
3-41 XXXX S
3-42 XXXX S
5-12
[2]
1-29 [1]
AMA
Back EMF at
1000 RPM
d-axis
QM 2
BMS
AMS
ES
5-70 XXXX
5-71 [0]
1-30 XXXX
1-39 XXXX
1-90 [0]
2-10 [0]
4-16 XXXX %
4-17 XXXX %
4-18 XXXX %
1-00 [0]
1-01 [1]
1-10 [0]
1-24 XXXX A 1-20 XXXX kW
1-22 XXXX V
Motor
nominal
speed
Motor power
Motor voltage
1-26 XXXX 1-23 XXXX
Motor frequency
1-25 XXXX
1-30 XXXX
1-40 XXXX
1-37 XXXX
1-25 XXXX
1-24 XXXX
A
Back EMF at
1000 RPM
d-axis
1-39 XXXX
4-14 XXXX
4-19 XXXX
Stator
QM 3
QM 4 QM 5
L10C
SFS
TBD
Motor
nominal
speed
Motor
nominal
speed
Motor current
Motor cont.
rated torque
Resistance (Rs)
Motor poles
inductance (Ld)
Asynchronous motor
Motor current
Minimum reference
Maximum reference
Ramp 1 ramp-up time
Ramp 1 ramp-down time
Terminal 27 digital input
Basic motor set-up
mode
Motor control
principle
Motor type
PM motor
PM motor
Motor
current
Motor cont.
rated torque
Stator
Resistance (Rs)
Motor poles
inductance (Ld)
Motor speed high limit [Hz]
Maximum output frequency
Asynchronous motor
Motor current
RPM
RPM
RPM
Hz
RPM
Hz
Hz
Hz
Hz
Hz
Adv. motor set-up
Resistance (Rs)
Motor poles
Motor thermal
protection
Brake function
Torque limit motor mode
Torque limit generator mode
Current limit
Encoder set-up
Terminal 32/33
pulses per revolution
Terminal 32/33
encoder direction
Changes made
Last 10 changes Since factory setting
Alarm log
Inbetriebnahme Bedienungsanleitung
5 5
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 29
Abbildung 5.4 Aufbau des Quick-Menüs

130BC446.10
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
7
10
11
12
OK
OK
Back
8
Back
Setup 1
2 x
+
OK
9
OK
Inbetriebnahme
VLT® Midi Drive FC 280
5.3.4 Hauptmenü am LCP 101
Das Hauptmenü bietet Zugriff auf alle Parameter.
1. Wählen Sie das Hauptmenü, indem Sie die Taste
[Menu] wiederholt drücken, bis der Pfeil im
Display über Main Menu steht.
2.
[▲] [▼]: Navigieren Sie durch die Parametergruppen.
3. Drücken Sie [OK], um eine Parametergruppe
auszuwählen.
55
4.
[▲] [▼]: Zum Navigieren durch die Parameter der
jeweiligen Gruppe.
5. Drücken Sie zur Auswahl des Parameters [OK].
6.
[►] und [▲]/ [▼]: Zum Einstellen/Ändern des
Parameterwerts.
7. Übernehmen Sie den Wert mit [OK].
8. Drücken Sie zum Verlassen zweimal [Back] (oder
dreimal für Arrayparameter) bis zum Aufruf des
Hauptmenüs, oder drücken Sie einmal [Menu]
zum Aufrufen des Status.
Siehe Abbildung 5.5, Abbildung 5.6 und Abbildung 5.7 für
die Prinzipien zur jeweiligen Änderung des Werts der
kontinuierlichen, nummerierten und Arrayparameter. Die
Aktionen in den Abbildungen sind in Tabelle 5.5, Tabelle 5.6
und Tabelle 5.7 beschrieben.
Abbildung 5.5 Hauptmenü-Interaktionen - Kontinuierliche
Parameter
1 [OK]: Der erste Parameter in der Gruppe wird angezeigt.
2
Drücken Sie mehrfach [▼], um zum gewünschten Parameter
nach unten zu navigieren.
3 Drücken Sie [OK], um mit der Bearbeitung zu beginnen.
4
[►]: Erste Stelle blinkt (kann geändert werden).
5
[►]: Zweite Stelle blinkt (kann geändert werden).
6
[►]: Dritte Stelle blinkt (kann geändert werden).
7
[▼]: Bei einer Reduzierung des Parameterwerts ändert sich
das Dezimalkomma automatisch.
8
[▲]: Erhöht den Parameterwert.
9 [Back]: Zum Verwerfen der Änderungen, zurück zu 2.
[OK]: Zum Bestätigen der Änderungen, zurück zu 2.
10
[▲][▼]: Zur Auswahl eines Parameters innerhalb der Gruppe.
11 [Back]: Zum Entfernen des Werts und zur Anzeige der
Parametergruppe.
12
[▲][▼]: Zur Auswahl der Gruppe.
Tabelle 5.5 Ändern von Werten in kontinuierlichen Parametern
30 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

130BC447.11
Setup 1
Setup 1
Setup 1
1
2
3
4
5
6
OK
OK
Back
7
OK
Back
130BC448.10
1
2
4
5
6
7
8
9
10
OK
Back
Back
Back
5 x
Setup 1
Setup 1
Setup 1
Setup 1
%
INDEX
%
INDEX
%
INDEX
Setup 1
INDEX
%
OK
OK
OK
Inbetriebnahme Bedienungsanleitung
Für nummerierte Parameter ist die Interaktion ähnlich, das
Arrayparameter funktionieren wie folgt:
LCP 101 zeigt den Parameterwert jedoch aufgrund seiner
Beschränkung auf 4 große Ziffern in Klammern an, und die
Nummerierung kann größer als 99 sein. Ist der Nummerierungswert größer als 99, kann das LCP nur den ersten Teil
der Klammer anzeigen.
5 5
Abbildung 5.6 Hauptmenü-Interaktionen - Nummerierte
Parameter
Abbildung 5.7 Hauptmenü-Interaktionen - Arrayparameter
1 [OK]: Der erste Parameter in der Gruppe wird angezeigt.
2 Drücken Sie [OK], um mit der Bearbeitung zu beginnen.
3
[▲][▼]: Zum Ändern des Parameterwerts (blinkend).
4 Drücken Sie zum Verwerfen der Änderungen [Back] oder
zum Bestätigen der Änderungen [OK] (zurück zu Bildschirmansicht 2).
5
[▲][▼]: Zur Auswahl eines Parameters innerhalb der Gruppe.
6 [Back]: Zum Entfernen des Werts und zur Anzeige der
Parametergruppe.
7
[▲][▼]: Zur Auswahl einer Gruppe.
Tabelle 5.6 Ändern von Werten in nummerierten Parametern
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 31
1 [OK]: Zur Anzeige der Parameternummern und des Werts im
ersten Index.
2 [OK]: Der Index kann ausgewählt werden.
3
[▲][▼]: Zur Auswahl des Index.
4 [OK]: Wert kann geändert werden.
5
[▲][▼]: Zum Ändern des Parameterwerts (blinkend).
6 [Back]: Zum Verwerfen der Änderungen.
[OK]: Zum Bestätigen der Änderungen.
7 [Back]: Zum Abbrechen der Bearbeitung des Indexes und
zur Auswahl eines neuen Parameters.
8
[▲][▼]: Zur Auswahl eines Parameters innerhalb der Gruppe.
9 [Back]: Zum Entfernen des Indexwerts und zur Anzeige der
Parametergruppe.
10
[▲][▼]: Zur Auswahl der Gruppe.
Tabelle 5.7 Ändern von Werten in Arrayparametern

130BD598.10
Auto
On
Reset
Hand
On
O
Status
Quick
Menu
Main
Menu
Alarm
Log
Back
Cancel
Info
OK
Status
1(1)
36.4 kW
Auto Remote Ramping
0.000
On
Alarm
Warn.
A
7.83 A
799 RPM
B
C
D
53.2 %
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18 19 20 21
Inbetriebnahme
VLT® Midi Drive FC 280
5.3.5 Grafisches LCP-Bedienteil (GLCP)
B. Menütasten am Display
Die Menütasten dienen dem Menüzugriff für die Parame-
Das LCP 102 ist in vier Funktionsbereiche unterteilt (siehe
Abbildung 5.8).
tereinstellung, dem Umschalten zwischen
Statusanzeigemodi im Normalbetrieb und der Anzeige von
Fehlerspeicherdaten.
A. Displaybereich
B. Menütasten am Display
C. Navigationstasten und Anzeigeleuchten (LED)
D. Bedientasten und Quittieren (Reset)
55
Taste Funktion
6 Status Zeigt Betriebszustände an.
Diese Taste bietet schnellen Zugang zu
Quick
7
Menu
Parametern zur Programmierung für die erste
Inbetriebnahme und zu vielen detaillierten
Anwendungshinweisen.
8 Main Menu
Dient zum Zugriff auf alle Programmierparameter.
Zeigt eine Liste aktueller Warnungen, die
9 Alarm Log
letzten 10 Alarme und das Wartungsprotokoll.
Tabelle 5.9 Legende für Abbildung 5.8, Menütasten am Display
C. Navigationstasten und Anzeigeleuchten
(LEDs)
Verwenden Sie die Navigationstasten, um Funktionen zu
programmieren und den Displaycursor zu bewegen. Im
lokalen Betrieb dienen die Navigationstasten auch zur
Drehzahlsteuerung. In diesem Bereich befinden sich auch
drei Statusanzeigeleuchten des Frequenzumrichters.
Taste Funktion
10 Back
Kehrt zum vorhergehenden Schritt oder Liste
in der Menüstruktur zurück.
Macht die letzte Änderung oder den letzten
11 Cancel
Befehl rückgängig, so lange der
Anzeigemodus bzw. die Displayanzeige nicht
geändert worden ist.
12 Info
Abbildung 5.8 Grafisches LCP-Bedienteil (GLCP)
Navigati-
A. Displaybereich
Das Display ist aktiviert, wenn Netzspannung, eine DC-BusZwischenkreisklemme oder eine externe 24 V DCVersorgung den Frequenzumrichter mit Spannung versorgt.
Die auf der Bedieneinheit angezeigten Informationen
können an die Benutzeranwendung angepasst werden.
Wählen Sie die Optionen im Quick-Menü Q3-13 Displayein-
stellungen.
32 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503
Display Parameternummer Werkseinstellung
1 0-20 [1602] Sollwert [%]
2 0-21 [1614] Motorstrom
3 0-22 [1610] Leistung [kW]
4 0-23 [1613] Frequenz
5 0-24 [1502] Zähler-kWh
Tabelle 5.8 Legende zu Abbildung 5.8, Anzeigebereich
13
onstasten
14 OK
Tabelle 5.10 Legende für Abbildung 5.8, Navigationstasten
Zeigt Informationen zur angezeigten
Funktion an.
Navigieren Sie mit Hilfe der vier Navigationstasten zwischen den verschiedenen Optionen
in den Menüs.
Durch Drücken rufen Sie Parametergruppen
auf oder aktivieren eine Auswahl.

Inbetriebnahme Bedienungsanleitung
Anzeige LED Funktion
Die On-LED leuchtet auf, wenn der
Frequenzumrichter an die
15 On Grün
16 Warn Gelb
17 Alarm Rot
Tabelle 5.11 Legende für Abbildung 5.8, Anzeigeleuchten (LEDs)
D. Bedientasten und Quittieren (Reset)
Die Bedientasten befinden sich unten an der LCP.
Taste Funktion
Startet den Frequenzumrichter im HandBetrieb.
18 Hand On
Diese Taste stoppt den Motor, trennt aber
19 Aus
20 Auto On
21 Reset
Tabelle 5.12 Legende für Abbildung 5.8, Bedientasten und
Quittieren (Reset)
nicht die Stromversorgung des Frequenzumrichters.
Diese Taste schaltet das System in den
Fernbetrieb.
•
Diese Taste dient dazu, den Frequenzumrichter nach Behebung eines Fehlers manuell
zurückzusetzen.
Netzspannung angeschlossen ist
oder über eine DC-Bus-Zwischenkreisklemme oder eine externe 24V-Versorgung versorgt wird.
Die gelbe WARN-LED leuchtet auf,
wenn eine Warnung auftritt. Im
Display erscheint zusätzlich ein
Text, der das Problem angibt.
Die rote Alarm-LED blinkt bei
einem Fehlerzustand. Im Display
erscheint zusätzlich ein Text, der
den Alarm näher spezifiziert.
Ein externes Stoppsignal über
•
Steuersignale oder serielle
Kommunikation hebt den
Handbetrieb auf.
Sie reagiert auf einen externen
Startbefehl über Steuerklemmen oder
serielle Kommunikation.
HINWEIS
Drücken Sie zur Einstellung des Display-Kontrasts
[Status] und [▲]/[▼].
5.3.6 Parametereinstellungen
Um die richtige Programmierung für Anwendungen zu
erhalten, müssen Sie häufig Funktionen in mehreren
verwandten Parametern einstellen. Weitere Informationen
zu den Parametern finden Sie in Kapitel 10.2 Aufbau der
Parametermenüs.
Programmierdaten speichert der Frequenzumrichter im
internen Speicher.
Laden Sie die Daten zur Sicherung in den LCP-
•
Speicher.
Schließen Sie das LCP zum Laden von Daten auf
•
einen anderen Frequenzumrichter an dieses Gerät
an und laden Sie die gespeicherten Einstellungen
herunter.
Bei der Wiederherstellung von Werkseinstellungen
•
werden die im Speicher des LCP gespeicherten
Daten nicht geändert.
5.3.7 Ändern von Parametereinstellungen
mit LCP 102
Aufrufen und ändern von Parametereinstellungen durch
Drücken von Quick Menu oder Main Menu. Über die Taste
Quick Menu erhalten Sie nur Zugriff auf eine begrenzte
Anzahl von Parametern.
1. Drücken Sie die Taste [Quick Menu] oder [Main
Menu] am LCP.
2.
Drücken Sie die Tasten [▲] [▼], um durch die
Parametergruppen zu navigieren, drücken Sie auf
die [OK]-Taste, um eine Parametergruppe
auszuwählen.
3.
Drücken Sie die Tasten [▲] [▼], um durch die
Parameter zu navigieren, drücken Sie auf die
Tasten [OK], um ein Parameter auszuwählen.
4.
Drücken Sie [▲] [▼], um den Wert einer Parametereinstellung zu ändern.
5.
Drücken Sie auf die Tasten [◄] [►], um die Stelle
bei der Eingabe eines dezimalen Parameters zu
wechseln.
6. Drücken Sie [OK], um die Änderung zu
akzeptieren.
7. Drücken Sie zweimal [Back], um zum Menü Status
zu wechseln, oder drücken Sie [Main Menu], um
das Hauptmenü zu öffnen.
5 5
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 33

Inbetriebnahme
VLT® Midi Drive FC 280
Änderungen anzeigen
Quick Menu Q5 - Liste geänd. Param. listet alle Parameter
auf, die von der Werkseinstellung abweichen.
Die Liste zeigt nur Parameter, die im aktuellen
•
Programm-Satz geändert wurden.
Parameter, die auf die Werkseinstellung zurück-
•
gesetzt wurden, werden nicht aufgelistet.
Die Meldung Empty zeigt an, dass keine
•
Parameter geändert wurden.
5.3.8 Daten auf das/vom LCP hochladen/
55
herunterladen
1. Drücken Sie die [Off]-Taste, um den Motor zu
stoppen, bevor Sie Daten laden oder speichern.
2. Drücken Sie auf [Main Menu] Parameter 0-50 LCP-
Kopie und anschließend auf [OK].
3. Wählen Sie [1] Speichern in LCP zum Hochladen
der Daten auf das LCP oder [2] Lade von LCP, Alle
zum Herunterladen der Daten vom LCP.
4. Drücken Sie [OK]. Sie können den Upload- oder
Download-Vorgang an einem Statusbalken
verfolgen.
5. Drücken Sie auf [Hand on] oder [Auto on], um
zum Normalbetrieb zurückzukehren.
5.3.9 Wiederherstellen der
Werkseinstellungen mit dem LCP
HINWEIS
Bei der Wiederherstellung der Werkseinstellungen
besteht die Gefahr eines Datenverlustes von Programmierung, Motordaten, Lokalisierung und Überwachung.
Speichern Sie die Daten für eine Datensicherung vor der
Initialisierung im LCP.
Die Initialisierung des Frequenzumrichters stellt die
Standard-Parametereinstellungen wieder her. Eine Initialisierung ist über Parameter 14-22 Betriebsart (empfohlen)
oder manuell möglich. Die Initialisierung setzt die Einstellungen für Parameter 1-06 Drehrichtung rechts und
Parameter 0-03 Ländereinstellungen nicht zurück.
Empfohlene Initialisierung, über
Parameter 14-22 Betriebsart
1. Wählen Parameter 14-22 Betriebsart und drücken
Sie auf [OK].
2. Wählen Sie [2] Initialisierung aus, und drücken Sie
auf [OK].
3. Schalten Sie den Frequenzumrichter
spannungslos und warten Sie, bis das Display
erlischt.
4. Legen Sie die Netzversorgung an den Frequenzumrichter an.
Die Werkseinstellungen der Parameter werden während der
Inbetriebnahme wiederhergestellt. Dies kann etwas länger
dauern als normal.
5. Alarm 80, Frequenzumrichter auf Werkseinstellung
initialisiert wird angezeigt.
6. Mit [Reset] kehren Sie zum normalen Betrieb
zurück.
Manuelles Initialisierungsverfahren
1. Schalten Sie den Frequenzumrichter
spannungslos und warten Sie, bis das Display
erlischt.
2. Halten Sie [Status], [Main Menu] und [OK] am LCP
102 bzw. [Menu] und [OK] am LCP 101 gleichzeitig gedrückt und legen Sie Strom an das Gerät
an (ca. 5 Sek. oder bis zu einem hörbaren Klicken
und dem Starten des Lüfters).
Die Initialisierung stellt die Werkseinstellungen der
Parameter während der Inbetriebnahme wieder her. Dies
kann etwas länger dauern als normal.
Die manuelle Initialisierung setzt die folgenden Frequenzumrichterinformationen nicht zurück:
Parameter 15-00 Betriebsstunden.
•
Parameter 15-03 Anzahl Netz-Ein.
•
Parameter 15-04 Anzahl Übertemperaturen.
•
Parameter 15-05 Anzahl Überspannungen.
•
Die Initialisierung über Parameter 14-22 Betriebsart
•
ändert keine Einstellungen des Frequenzumrichters wie Betriebsstunden, über die serielle
Schnittstelle gewählte Optionen, Fehlerspeicher,
Alarm Log und weitere Überwachungsfunktionen.
Eine manuelle Initialisierung löscht alle Daten zu
•
Motor, Programmierung, Lokalisierung und
Überwachung und stellt die Werkseinstellungen
wieder her.
34 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

Inbetriebnahme Bedienungsanleitung
5.4 Grundlegende Programmierung
5.4.1 Einstellung von Asynchronmotoren
Geben Sie die folgenden Motordaten in der aufgeführten
Reihenfolge ein. Diese Angaben finden Sie auf dem MotorTypenschild.
1. Parameter 1-20 Motorleistung.
2. Parameter 1-22 Motornennspannung.
3. Parameter 1-23 Motornennfrequenz.
4. Parameter 1-24 Motornennstrom.
5. Parameter 1-25 Motornenndrehzahl.
Für optimale Leistung im VVC+-Modus sind zusätzliche
Motordaten zur Konfiguration der folgenden Parameter
erforderlich.
6. Parameter 1-30 Statorwiderstand (Rs).
7. Parameter 1-31 Rotorwiderstand (Rr).
8. Parameter 1-33 Statorstreureaktanz (X1).
9. Parameter 1-35 Hauptreaktanz (Xh).
Die Daten finden Sie im Motordatenblatt (diese Daten sind
in der Regel nicht auf dem Motor-Typenschild zu finden).
Führen Sie über Parameter 1-29 Autom. Motoranpassung
(AMA) [1] Komplette Anpassung oder durch manuelle
Eingabe der folgenden Parameter eine komplette AMA
durch:
Anwendungsspezifische Anpassung bei der
Durchführung von VVC
VVC+ ist der robusteste Steuermodus. In den meisten
Situationen bietet dieser ohne weitere Anpassungen
optimale Leistung. Führen Sie für eine Leistungsoptimierung eine komplette AMA durch.
5.4.2
PM-Motoreinstell. in VVC
Erste Programmierschritte
1. Stellen Sie Parameter 1-10 Motorart auf die
folgenden Optionen ein, um den PMMotorbetrieb zu aktivieren:
1a [1] PM, Vollpol
1b [3] PM (Vergr. Magnete), Sat
2. Wählen Sie [0] Regelung ohne Rückführung in
Parameter 1-00 Regelverfahren.
+
+
HINWEIS
Die Geberrückführung wird bei PM-Motoren nicht
unterstützt.
Programmierung von Motordaten
Nach Auswahl einer PM-Motoroption in
Parameter 1-10 Motorart finden Sie die Parameter für PMMotoren in den Parametergruppen 1-2* Motordaten und
1-3* Erw. Motordaten I und 1–4* Erw. Motordaten II aktiv.
Die Informationen finden Sie auf dem Motor-Typenschild
und im Datenblatt des Motors.
Programmieren Sie die folgenden Parameter in der
angegebenen Reihenfolge:
1. Parameter 1-24 Motornennstrom.
2. Parameter 1-26 Dauer-Nenndrehmoment.
3. Parameter 1-25 Motornenndrehzahl.
4. Parameter 1-39 Motorpolzahl.
5. Parameter 1-30 Statorwiderstand (Rs).
Geben Sie den Widerstand der Statorwicklung
(Rs) zwischen Leiter und Sternpunkt an. Wenn nur
Leiter-Leiter-Daten bereitstehen, teilen Sie den
Wert durch 2, um den Wert zwischen Leiter und
Sternpunkt zu erhalten.
Sie können den Wert auch mit einem Ohmmeter
messen, das den Kabelwiderstand berücksichtigt.
Teilen Sie den gemessenen Wert durch 2 und
geben Sie das Ergebnis ein.
6. Parameter 1-37 Indukt. D-Achse (Ld).
Geben Sie die direkte Achseninduktivität des PMMotors zwischen Leiter und Sternpunkt an.
Wenn nur Leiter-Leiter-Daten bereitstehen, teilen
Sie den Wert durch 2, um den Wert zwischen
Leiter und Sternpunkt zu erhalten.
Sie können den Wert auch mit einem Induktivitätsmessgerät messen, das die Induktivität des
Kabels berücksichtigt. Teilen Sie den gemessenen
Wert durch 2 und geben Sie das Ergebnis ein.
7. Parameter 1-40 Gegen-EMK bei 1000 UPM.
Geben Sie die Gegen-EMK des PM-Motors
zwischen zwei Außenleitern bei 1000 UPM
mechanischer Drehzahl (Effektivwert) ein. Die
Gegen-EMK ist die Spannung, die von einem PMMotor erzeugt wird, wenn kein Frequenzumrichter
angeschlossen ist und die Welle extern gedreht
wird. Die Gegen-EMK wird normalerweise bei
Motornenndrehzahl oder bei 1000 U/min
gemessen zwischen zwei Außenleitern
angegeben. Wenn der Wert nicht für eine
Motordrehzahl von 1000 UPM verfügbar ist,
berechnen Sie den korrekten Wert wie folgt:
Wenn die Gegen-EMK z. B. 320 V bei 1800 UPM
beträgt, können Sie diese wie folgt bei 1000 UPM
berechnen:
Gegen-EMK= (Spannung/UPM)x1000 =
(320/1800)x1000 = 178.
Programmieren Sie diesen Wert für
Parameter 1-40 Gegen-EMK bei 1000 UPM.
5 5
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 35

Inbetriebnahme
VLT® Midi Drive FC 280
Testmotorbetrieb
5.4.3 Autom. Motoranpassung (AMA)
1. Starten Sie den Motor mit niedriger Drehzahl (100
bis 200 UPM). Wenn sich der Motor nicht dreht,
überprüfen Sie die Installation, die allgemeine
Programmierung und die Motordaten.
Führen Sie zur Optimierung der Kompatibilität zwischen
Frequenzumrichter und Motor im VVC+-Modus eine AMA
aus.
Parken
Diese Funktion wird für Anwendungen empfohlen, in
denen sich der Motor mit niedriger Drehzahl dreht, z. B.
bei Auftreten eines Windmühlen-Effekts (Motor wird durch
Last gedreht) in Lüfteranwendungen. Sie können
Parameter 2-06 Parking Strom und Parameter 2-07 Parking
Zeit anpassen. Erhöhen Sie bei Anwendungen mit hohem
55
Trägheitsmoment die Werkseinstellung dieser Parameter.
Starten Sie den Motor mit Nenndrehzahl. Falls die
Anwendung nicht einwandfrei funktioniert, prüfen Sie die
VVC+ PM-Einstellungen. Tabelle 5.13 enthält Empfehlungen
für verschiedene Anwendungen.
Anwendung Einstellungen
Anwendungen mit
niedrigem Trägheitsmoment
I
Anwendungen mit
mittlerem Trägheitsmoment
50>I
Anwendungen mit hohem
Trägheitsmoment
I
Hohe Last bei niedriger
Drehzahl
<30 % (Nenndrehzahl)
<5
Last/IMotor
>5
Last/IMotor
>50
Last/IMotor
Tabelle 5.13 Empfehlungen für verschiedene Anwendungen
Erhöhen Sie den Wert für
•
Parameter 1-17 Spannungskonstante um den Faktor 5 bis 10.
Reduzieren Sie den Wert für
•
Parameter 1-14 Dämpfungsfaktor.
Reduzieren Sie den Wert
•
(<100 %) für Parameter 1-66 Min.
Strom bei niedr. Drz.
Behalten Sie berechnete Werte bei.
Erhöhen Sie die Werte für
Parameter 1-14 Dämpfungsfaktor,
Parameter 1-15 Filter niedrige
Drehzahl und Parameter 1-16 Filter
hohe Drehzahl
Erhöhen Sie den Wert für
Parameter 1-17 Spannungskonstante
Erhöhen Sie den Wert für
Parameter 1-66 Min. Strom bei niedr.
Drz. (>100 % über längere Zeit kann
den Motor überhitzen).
Ausführen einer AMA mit Hilfe des LCP
Je nach Leistungsgröße nimmt die Durchführung der AMA
Der Frequenzumrichter erstellt zur Regelung des
•
erzeugten Motorstroms ein mathematisches
Motormodell, mit dem die Motorleistung
verbessert werden kann.
Einige Motoren sind möglicherweise nicht dazu in
•
der Lage, den Test vollständig durchzuführen.
Wählen Sie in diesem Fall [2] Reduz. Anpassung in
Parameter 1-29 Autom. Motoranpassung (AMA).
Informationen zu Warn- oder Alarmmeldungen
•
finden Sie unter Kapitel 8.4 Warnungen und
Alarmmeldungen.
Führen Sie dieses Verfahren bei kaltem Motor
•
durch, um das beste Ergebnis zu erzielen.
1. Schließen Sie bei Verwendung der werkseitigen
Parametereinstellung vor dem Durchführen der
AMA die Klemmen 13 und 27 an.
2. Öffnen Sie das Hauptmenü.
3. Navigieren Sie zu Parametergruppe 1-** Motor/
Last.
4. Drücken Sie [OK].
5. Stellen Sie die Motorparameter in der Parameter-
gruppe 1-2* Motordaten mit Hilfe der
Typenschilddaten ein.
6. Legen Sie die Motorkabellänge in
Parameter 1-42 Motorkabellänge fest.
7. Gehen Sie zu Parameter 1-29 Autom. Motoran-
passung (AMA).
8. Drücken Sie [OK].
9. Wählen Sie [1] Komplette Anpassung.
10. Drücken Sie [OK].
11. Der Test wird automatisch durchgeführt und zeigt
an, wann er beendet ist.
3 bis 10 Minuten in Anspruch.
Wenn der Motor bei einer bestimmten Drehzahl zu
schwingen beginnt, erhöhen Sie
Parameter 1-14 Dämpfungsfaktor. Erhöhen Sie den Wert in
kleinen Schritten.
HINWEIS
Die AMA-Funktion verursacht kein Starten und keine
Beschädigung des Motors.
Sie können das Startmoment in Parameter 1-66 Min. Strom
bei niedr. Drz. einstellen. 100 % ist Nenndrehmoment als
Startmoment.
36 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

Inbetriebnahme Bedienungsanleitung
5.5 Überprüfung der Motordrehung
Prüfen Sie vor dem Betrieb des Frequenzumrichters die
Motordrehung.
1. Drücken Sie [Hand On].
2. Lassen Sie den positiven Drehzahl-Sollwert durch
Drücken von [▲] anzeigen.
3. Überprüfen Sie, ob die angezeigte Drehzahl
positiv ist.
4. Überprüfen Sie, ob die Verdrahtung zwischen
dem Frequenzumrichter und dem Motor korrekt
ist.
5. Überprüfen Sie, dass die Drehrichtung des Motors
mit der Einstellung in Parameter 1-06 Drehrichtung
rechts übereinstimmt.
5a Wenn Parameter 1-06 Drehrichtung rechts
auf [0] Normal eingestellt ist (Werkseinstellung: Rechtslauf):
a. Vergewissern Sie sich, dass sich
der Motor im Rechtslauf dreht.
b. Vergewissern Sie sich, dass der
Richtungspfeil des LCP
Rechtslauf anzeigt.
5b Wenn Parameter 1-06 Drehrichtung rechts
auf [1] Invers eingestellt ist (Linkslauf):
a. Vergewissern Sie sich, dass sich
der Motor im Linkslauf dreht.
b. Vergewissern Sie sich, dass der
Richtungspfeil des LCP
Linkslauf anzeigt.
HINWEIS
NEGATIVER ISTWERT
Wenn der Istwert negativ ist, ist der Drehgeber falsch
angeschlossen. Verwenden Sie Parameter 5-71 Kl. 32/33
Drehgeber Richtung zum Umkehren der Richtung oder
vertauschen Sie die Kabel des Drehgebers.
5.7 Prüfung der Ort-Steuerung
1. Drücken Sie die [Hand On]-Taste, um einen
Handstart-Befehl am Frequenzumrichter durchzuführen.
2. Beschleunigen Sie den Frequenzumrichter durch
Drücken von [▲] auf volle Drehzahl. Eine
Bewegung des Cursors links vom Dezimalpunkt
führt zu schnelleren Änderungen des Eingangs.
3. Achten Sie darauf, ob Beschleunigungsprobleme
auftreten.
4. Drücken Sie [Off]. Achten Sie darauf, ob Verzögerungsprobleme auftreten.
Bei Beschleunigungs- oder Verzögerungsproblemen siehe
Kapitel 8.5 Fehlersuche und -behebung. Informationen zum
Zurücksetzen des Frequenzumrichters nach einer
Abschaltung finden Sie unter Kapitel 8.2 Warnungs- und
Alarmtypen.
Systemstart
5.8
Vor der Durchführung der in diesem Abschnitt
beschriebenen Inbetriebnahme müssen Verdrahtung der
Anwendung und Anwendungsprogrammierung
abgeschlossen sein. Das folgende Verfahren wird nach
erfolgter Anwendungskonfiguration empfohlen.
5 5
Überprüfung der Drehrichtung des
5.6
Drehgebers
Überprüfen Sie die Drehrichtung des Drehgebers nur, wenn
Geberrückführung verwendet wird.
1. Wählen Sie [0] Regelung ohne Rückführung in
Parameter 1-00 Regelverfahren.
2. Wählen Sie [1] 24V/HTL-Drehgeber in
Parameter 7-00 Drehgeberrückführung.
3. Drücken Sie [Hand On].
4.
Drücken Sie [▲] zur Anzeige des positiven
Drehzahl-Sollwerts (Parameter 1-06 Drehrichtung
rechts auf [0] Normal).
5. Überprüfen Sie in Parameter 16-57 Feedback
[RPM], ob die Rückführung positiv ist.
1. Drücken Sie auf [Auto on].
2. Legen Sie einen externen Startbefehl an.
3. Stellen Sie den Drehzahlsollwert über den
Drehzahlbereich ein.
4. Entfernen Sie den externen Startbefehl.
5. Überprüfen Sie die Geräusch- und Vibrationspegel
des Motors, um zu gewährleisten, dass das
System wie vorgesehen arbeitet.
Wenn Warnungen oder Alarme auftreten, finden Sie
Informationen zum Zurücksetzen des Frequenzumrichters
nach einer Abschaltung unter Kapitel 8.2 Warnungs- und
Alarmtypen.
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 37
Inbetriebnahme
VLT® Midi Drive FC 280
5.9 Speichermodul
Das VLT® Memory Module MCM ist ein kleines Speichermedium, das beispielsweise folgende Daten enthält:
Firmware für den Frequenzumrichter (ohne die
•
Firmware für den Datenaustausch über die
Steuerkarte)
PUD-Datei
•
SIVP-Datei
•
Parameterdatei
•
55
Das VLT® Memory Module MCM ist Zubehör. Der Frequenzumrichter wird werkseitig ohne installiertes
Speichermodul geliefert. Über folgende Bestellnummern
können Sie ein neues Speichermodul bestellen.
Beschreibung Bestellnummer
VLT® Memory Module MCM 102
VLT® Memory Module MCM 103
Tabelle 5.14 Bestellnummer
Jedes Speichermodul hat eine eindeutige Seriennummer,
die nicht verändert werden kann.
132B0359
132B0466
HINWEIS
Das VLT® Memory Module MCM kann am Frequenzumrichter mit Firmware 1.5 oder höher verwendet werden.
Wählen Sie die korrekten Optionen für
Parameter 31-40 Memory Module Function, bevor Sie den
Frequenzumrichter mit dem Speichermodul konfigurieren.
Parameter 31-40 Memory
Module Function
[3] Allow Both Download and
Upload
Tabelle 5.15 Beschreibung von
Parameter 31-40 Memory Module Function
HINWEIS
VERMEIDEN SIE UNBEABSICHTIGTES ÜBERSCHREIBEN
Die Werkseinstellung von Parameter 31-40 Memory
Module Function ist [1] Only Allow Download. Bei jedem
Update, z. B. der Firmware durch MCT 10 mittels OSSDatei, der Parameter über LCP oder Bus, dem
Zurücksetzen von Parametern über
Parameter 14-22 Betriebsart oder dem Dreifinger-Zurücksetzen des Frequenzumrichters, gehen die aktualisierten
Daten beim nächsten Aus- und Wiedereinschalten
verloren, da der Frequenzumrichter wieder Daten vom
Speichermodul lädt.
Nachdem die Daten vom Speichermodul in den
•
Frequenzumrichter übertragen wurden, wählen
Sie [0] Disabled oder [2] Only Allow Upload in
Parameter 31-40 Memory Module Function, bevor
Sie das Gerät erneut Aus- und wieder
Einschalten.
Beschreibung
Wenn diese Option ausgewählt
ist, lädt der Frequenzumrichter
zuerst Daten vom
Speichermodul herunter.
Anschließend werden Daten
vom Frequenzumrichter in das
Speichermodul hochgeladen.
5.9.1 Synchronisieren von
Parameter 31-40 Memory
Module Function
Beschreibung
Frequenzumrichterdaten mit einem
neuen Speichermodul (Erstellen eines
Antriebs-Backups)
[0] Disabled Das Herunter- und Hochladen von
Daten ist deaktiviert.
*[1] Only Allow Download Nur das Herunterladen von Daten
vom Speichermodul in den
Frequenzumrichter ist erlaubt. Dies
ist die Werkseinstellung von
Parameter 31-40 Memory Module
Function.
[2] Only Allow Upload Nur das Hochladen von Daten vom
Frequenzumrichter in das
Speichermodul ist erlaubt.
1. Schließen Sie ein neues leeres Speichermodul an
den Frequenzumrichter an.
2. Wählen Sie in Parameter 31-40 Memory Module
Function die Option [2] Only Allow Upload oder [3]
Allow Both Download and Upload.
3. Schalten Sie den Frequenzumrichter ein.
4. Warten Sie, bis die Synchronisierung
abgeschlossen ist, und prüfen Sie anschließend
anhand von Kapitel 5.9.7 Übertragungsleistung und
Übertragungsanzeigen die Übertragungsanzeigen
am Frequenzumrichter.
38 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

Inbetriebnahme Bedienungsanleitung
HINWEIS
Um das unbeabsichtigte Überschreiben der Daten im
Speichermodul zu vermeiden, sollten Sie die Einstellungen für Parameter 31-40 Memory Module Function vor
dem nächsten Aus- und Wiedereinschalten entsprechend
ändern.
5.9.2 Kopieren von Daten auf einen
anderen Frequenzumrichter
1. Vergewissern Sie sich, dass die erforderlichen
Daten in das Speichermodul hochgeladen wurden
(siehe Kapitel 5.9.1 Synchronisieren von Frequen-
zumrichterdaten mit einem neuen Speichermodul
(Erstellen eines Antriebs-Backups)).
2. Trennen Sie das Speichermodul vom Frequenzumrichter und schließen Sie es an einen neuen
Frequenzumrichter an.
3. Stellen Sie sicher, dass am neuen Frequenzumrichter unter Parameter 31-40 Memory Module
Function die Optionen [1] Only Allow Download
oder [3] Allow Both Download and Upload
ausgewählt sind.
4. Schalten Sie den neuen Frequenzumrichter ein.
5. Warten Sie, bis das Herunterladen abgeschlossen
ist und die Daten übertragen wurden. Prüfen Sie
anschließend anhand von Kapitel 5.9.7 Übertra-
gungsleistung und Übertragungsanzeigen die
Übertragungsanzeigen am Frequenzumrichter.
HINWEIS
Um das unbeabsichtigte Überschreiben der Daten im
Speichermodul zu vermeiden, sollten Sie die Einstellungen für Parameter 31-40 Memory Module Function vor
dem nächsten Aus- und Wiedereinschalten entsprechend
ändern.
2. Um das unbeabsichtigte Hochladen von Daten
auf das Master-Speichermodul zu vermeiden,
stellen Sie sicher, dass auf den anderen Frequenzumrichtern in Parameter 31-40 Memory Module
Function die Option [1] Only Allow Download
ausgewählt ist.
3. Trennen Sie das Speichermodul vom Frequenzumrichter und schließen Sie es an einen neuen
Frequenzumrichter an.
4. Schalten Sie den neuen Frequenzumrichter ein.
5. Warten Sie, bis das Herunterladen abgeschlossen
ist und die Daten übertragen wurden. Prüfen Sie
anschließend anhand von Kapitel 5.9.7 Übertra-
gungsleistung und Übertragungsanzeigen die
Übertragungsanzeigen am Frequenzumrichter.
6. Wiederholen Sie die Schritte 3 bis 5 mit dem
nächsten Frequenzumrichter.
HINWEIS
Mit dem VLT® Memory Module Programmer können Sie
die Daten auch von einem PC auf das Speichermodul
herunterladen.
HINWEIS
Wenn an einen der Frequenzumrichter ein leeres
Speichermodul zur Datensicherung angeschlossen ist,
ändern Sie die Einstellungen in Parameter 31-40 Memory
Module Function zu [2] Only Allow Upload oder [3] Allow
Both Download and Upload, bevor Sie das Gerät aus- und
wieder einschalten.
5.9.4 Übertragen von Firmware-Daten
Wenn zwei Frequenzumrichter die gleiche Spannung und
Leistung haben, können die Firmware-Daten von einem
Frequenzumrichter auf den anderen übertragen werden.
5 5
5.9.3 Kopieren von Daten auf mehrere
Frequenzumrichter
Wenn mehrere Frequenzumrichter die gleiche Spannung/
Leistung haben, können die Informationen von einem
Frequenzumrichter über ein Speichermodul auf die
anderen übertragen werden.
1. Führen Sie die in Kapitel 5.9.1 Synchronisieren von
Frequenzumrichterdaten mit einem neuen
Speichermodul (Erstellen eines Antriebs-Backups)
beschriebenen Schritte aus, um die Daten von
einem Frequenzumrichter in ein Speichermodul
hochzuladen.
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 39
1. Befolgen Sie die in Kapitel 5.9.1 Synchronisieren
von Frequenzumrichterdaten mit einem neuen
Speichermodul (Erstellen eines Antriebs-Backups)
beschriebenen Schritte, um die Firmware-Daten
von einem Frequenzumrichter in ein
Speichermodul hochzuladen.
2. Befolgen Sie die in Kapitel 5.9.2 Kopieren von
Daten auf einen anderen Frequenzumrichter
beschriebenen Schritte, um die Firmware-Daten
auf einen anderen Frequenzumrichter mit gleicher
Spannung und Leistung zu übertragen.

Inbetriebnahme
VLT® Midi Drive FC 280
HINWEIS
Mit dem VLT® Memory Module Programmer können Sie
5.9.7 Übertragungsleistung und
Übertragungsanzeigen
die Firmware-Daten auch von einem PC in das
Speichermodul laden.
Die Datenübertragung zwischen Frequenzumrichter und
Speichermodul kann unterschiedlich lange dauern (siehe
5.9.5 Sichern von Parameteränderungen
Tabelle 5.16).
auf dem Speichermodul
Dateityp Zeit
Das Hochladen von Daten vom
1. Schließen Sie ein neues oder leeres
Speichermodul an den Frequenzumrichter an.
2. Wählen Sie in Parameter 31-40 Memory Module
55
Function die Option [2] Only Allow Upload oder [3]
Firmware-Datei
Allow Both Download and Upload.
3. Schalten Sie den Frequenzumrichter ein.
4. Warten Sie, bis die Synchronisierung
abgeschlossen ist, und prüfen Sie anschließend
anhand von Kapitel 5.9.7 Übertragungsleistung und
Übertragungsanzeigen die Übertragungsanzeigen
am Frequenzumrichter.
5. Jede Änderung der Parametereinstellungen wird
automatisch mit dem Speichermodul synchron-
SIVP-Datei ca. 10 s
Parameterdatei
Tabelle 5.16 Übertragungsleistung
1) Wenn ein Parameter im Frequenzumrichter geändert wurde und
der aktualisierte Parameter hochgeladen werden soll, warten Sie
mindestens fünf Sekunden, bevor Sie das Gerät ausschalten.
isiert.
Dateityp
5.9.6 Löschen von Daten
Das Speichermodul kann durch Einstellen von
Parameter 31-43 Erase_MM ohne erneutes Aus- und Wiedereinschalten geleert werden.
1. Stellen Sie sicher, dass das Speichermodul im
Frequenzumrichter installiert ist.
2. Wählen Sie [1] Erase MM in
Parameter 31-43 Erase_MM.
3. Alle Dateien auf dem Speichermodul werden
gelöscht.
4. Die Einstellung von Parameter 31-43 Erase_MM
kehrt zurück zu [0] No function.
FirmwareDatei
SIVP-Datei
Parameterdatei
Tabelle 5.17 Übertragungsanzeige
1) Die On-LED befindet sich am LCP. Zu Lage und Funktionen der OnLED siehe Kapitel 5.3.1 Numerisches LCP Bedienteil (LCP 101) und
Kapitel 5.3.5 Grafisches LCP-Bedienteil (GLCP).
Während der
Übertragung wird
„Synchronisierung
mit dem
Speichermodul“
angezeigt.
Keine Textanzeige.
•
Frequenzumrichter auf das
Speichermodul dauert etwa zwei
Minuten.
Das Herunterladen von Daten vom
•
Speichermodul auf den Frequenzumrichter dauert etwa sechs Minuten.
1)
Anzeige
LCP 102 LCP 101
Keine Textanzeige.
ca. 5 s
On-LED
Während der
Übertragung
blinkt die LED
langsam.
Die LED blinkt
nicht.
1)
40 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

Inbetriebnahme Bedienungsanleitung
5.9.8 Aktivieren des PROFIBUS-Umsetzers
Das VLT® Memory Modul MCM 103 dient als Kombination
aus Speichermodul und Aktivierungsmodul zur Aktivierung
der PROFIBUS-Umsetzerfunktion in der Firmware. Das VLT
Memory Module MCM 103 enthält eine PBconver.MMEDatei, die mit der individuellen Seriennummer des
Speichermoduls kombiniert wird. PBconver.MME ist der
Schlüssel für die Funktion des PROFIBUS-Umsetzers.
Um den PROFIBUS-Umsetzer zu aktivieren, wählen Sie in
Parameter 14-70 Compatibility Selections die Version aus.
Parameter 14-70 Compatibility
Selections
*[0] No Function Die Auswahl der Kompatibili-
[12] VLT2800 3M Wählen Sie den Kompatibili-
[13] VLT2800 3M incl. MAV Wählen Sie den Kompatibili-
[14] VLT2800 12M Wählen Sie den Kompatibili-
[15] VLT2800 12M incl. MAV Wählen Sie den Kompatibili-
Beschreibung
tätsfunktion ist deaktiviert.
tätsmodus VLT2800 3M für den
Frequenzumrichter.
tätsmodus VLT2800 3M incl.
MAV für den Frequenzumrichter.
tätsmodus VLT2800 12M für
den Frequenzumrichter.
tätsmodus VLT2800 12M incl.
MAV für den Frequenzumrichter.
Für begrenzte Zeit lässt sich der PROFIBUS-Umsetzer auch
ohne das VLT® Memory Module MCM 103 aktivieren.
Schließen Sie jedoch vor Ablauf dieser Zeit ein VLT
®
Memory Module MCM 103 an, um die PROFIBUS-Umsetzer-
®
funktion beizubehalten.
Aktivieren des PROFIBUS-Umsetzers über Parametereinstellungen
1. Wählen Sie [1] Enabled in Parameter 31-47 Time
Limit Function.
2. Wählen Sie in Parameter 14-70 Compatibility
Selections die Option [12] VLT 2800 3M oder [14]
5 5
VLT 2800 12M.
3. Schalten Sie den Frequenzumrichter aus und
wieder ein, um ihn als VLT® 2800 PROFIBUS 3M
bzw. 12M zu starten.
4. Parameter 31-48 Time Limit Remaining Time
beginnt nach dem Aus- und Wiedereinschalten
mit dem Countdown und zeigt die noch
verbleibende Zeit an.
Nach 720 Stunden Betriebszeit gibt der Frequenzumrichter
eine Warnung aus. Der PROFIBUS-Umsetzer funktioniert
weiterhin. Wenn der Timer in Parameter 31-48 Time Limit
Remaining Time den Wert 0 erreicht, meldet der Frequenzumrichter beim nächsten Anfahrbefehl eine
Abschaltblockierung.
Tabelle 5.18 Beschreibung von
Parameter 14-70 Compatibility Selections
Aktivieren des PROFIBUS-Umsetzers über das VLT
®
Memory Module MCM 103
1. Schließen Sie das Speichermodul an den Frequenzumrichter an.
2. Wählen Sie in Parameter 14-70 Compatibility
Selections die Option [12] VLT 2800 3M oder [14]
VLT 2800 12M.
3. Schalten Sie den Frequenzumrichter aus und
wieder ein, um ihn als VLT® 2800 PROFIBUS 3M
bzw. 12M zu starten.
HINWEIS
Damit das VLT® Memory Module MCM 103 als PROFIBUSUmsetzer funktioniert, darf Parameter 31-40 Memory
Module Function nicht auf [0] Disabled gesetzt sein.
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 41

24 V
17 V
IGBT
+UDC
X3
IGBT
PELV
X3
X3
24 V
voltage
source
high-side
gate driving
circuit
diagnostic
circuit
low-side
gate driving
circuit
12
38
37
55
130BE463.12
Time
5 ms max.
Debounce time
Time
STO valid
STO invalid
Voltage
T37/38
Test pulse STO demanded
STO request
state
130BE587.12
Safe Torque Off (STO)
6 Safe Torque Off (STO)
VLT® Midi Drive FC 280
6
Die Funktion „Safe Torque Off“ (STO) ist ein Bestandteil des
sicherheitsbezogenen Steuerungssystems. Sie verhindert,
dass der Frequenzumrichter das Drehfeld, das der Motor
zum Drehen benötigt, erzeugt.
Die STO-Funktion ist für folgende Anforderungen ausgelegt
und als dafür geeignet zugelassen:
IEC/EN 61508: 2010 SIL2
•
IEC/EN 61800-5-2: 2007 SIL2
•
IEC/EN 62061: 2012 SILCL von SIL2
•
EN ISO 13849-1: 2008 Kategorie 3 PL d
•
Wählen Sie die Komponenten aus und legen Sie sie im
sicherheitsbezogenen Steuerungssystem richtig an, um die
erforderliche Betriebssicherheitsstufe zu erreichen. Vor der
Nutzung der Funktion „Safe Torque Off“ müssen Sie eine
umfassende Risikoanalyse der Anlage durchführen. Dies
dient dazu, zu ermitteln, ob die Funktion „Safe Torque Off“
und die Sicherheitsstufen des Frequenzumrichters für die
Anlage und Anwendung angemessen und ausreichend
sind.
Die STO-Funktion des Frequenzumrichters wird über die
Steuerklemmen 37 und 38 gesteuert. Bei Aktivierung der
STO-Funktion wird die Spannungsversorgung an der Hochund Niederspannungsseite der Schaltungen der IGBTAnsteuerkarte getrennt. Abbildung 6.1 zeigt die STOArchitektur. Tabelle 6.1 zeigt die STO-Status anhand der
Erregung der Klemmen 37 und 38 an.
Klemme 37 Klemme 38 Drehmo
ment
Erregt
1)
Erregt
Ja
2)
Warnung oder
Alarm
Keine
Warnungen oder
Alarmmeldungen.
Unerregt
3)
Unerregt Nein Warnung/Alarm
68: Safe Torque
Off.
Unerregt Erregt Nein Alarm 188: Fehler
der STO-Funktion.
Erregt Unerregt Nein Alarm 188: Fehler
der STO-Funktion.
Tabelle 6.1 STO-Status
1) Der Spannungsbereich beträgt 24 V ±5 V, Klemme 55 ist die
Bezugsklemme.
2) Drehmoment ist nur bei Betrieb des Frequenzumrichters
vorhanden.
±
3) Offener Schaltkreis oder der Spannungsbereich von 0 V
1,5 V,
Klemme 55 ist die Bezugsklemme.
Testimpulsfilterung
Für Sicherheitsvorrichtungen, die Testimpulse in den STOSteuerleitungen erzeugen: Wenn die Impulssignale nicht
länger als 5 ms einen niedrigen Spannungspegel haben
(≤1,8 V), wie in Abbildung 6.2 gezeigt, werden sie ignoriert.
Abbildung 6.2 Testimpulsfilterung
Abbildung 6.1 STO-Architektur
Asynchrone Eingangstoleranz
Die Eingangssignale an den 2 Klemmen sind nicht immer
synchron. Wenn die Diskrepanz zwischen den 2 Signalen
länger als 12 ms ist, tritt der Alarm STO-Fehler (Alarm 188
Fehler STO-Funktion) auf.
42 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

130BE213.10
Safe Torque Off (STO) Bedienungsanleitung
Gültige Signale
Zur Aktivierung der STO-Funktion müssen die beiden
Signale für mindestens 80 ms einen niedrigen Pegel haben.
Zur Deaktivierung der STO-Funktion müssen die beiden
Signale für mindestens 20 ms einen hohen Pegel haben.
Siehe Kapitel 9.6 Steuereingang/-ausgang und Steuerdaten
für die Spannungspegel und den Eingangsstrom der STOKlemmen.
6.1 Sicherheitsmaßnahmen für STO
Qualifiziertes Personal
Nur qualifiziertes Personal darf dieses Gerät installieren
oder bedienen.
Qualifiziertes Fachpersonal sind per Definition geschulte
Mitarbeiter, die gemäß den einschlägigen Gesetzen und
Vorschriften zur Installation, Inbetriebnahme und Instandhaltung von Betriebsmitteln, Systemen und Schaltungen
berechtigt sind. Außerdem muss das Personal mit allen
Anweisungen und Sicherheitsmaßnahmen gemäß dieser
Anleitung vertraut sein.
HINWEIS
Nach der Installation der STO-Funktion müssen Sie eine
Inbetriebnahmeprüfung gemäß Kapitel 6.3.3 Inbetrieb-
nahmeprüfung der Funktion „Safe Torque Off“
durchführen. Nach der ersten Installation und nach jeder
Änderung der Sicherheitsinstallation müssen Sie eine
erfolgreiche Inbetriebnahmeprüfung vornehmen.
6.2 Installation der Funktion „Safe Torque
Off“
Befolgen Sie zum Motoranschluss, der Netzversorgung und
der Steuerkabel die Anweisungen zur sicheren Installation
in Kapitel 4 Elektrische Installation.
Aktivieren Sie die Funktion „Safe Torque Off“ wie folgt:
1. Entfernen Sie die Drahtbrücke zwischen den
Steuerklemmen 12 (24 V), 37 und 38. Ein
Durchschneiden oder Brechen der Drahtbrücke
reicht zur Vermeidung von Kurzschlüssen nicht
aus. Siehe Drahtbrücke in Abbildung 6.3.
6
6
WARNUNG
STROMSCHLAGGEFAHR
Die Funktion „Safe Torque Off“ (STO) trennt NICHT die
Netzspannung zum Frequenzumrichter oder zu Zusatzstromkreisen und gewährleistet daher keine elektrische
Sicherheit. Ein nicht erfolgtes Trennen der Netzspannung
von der Einheit und die Nichteinhaltung der
angegebenen Wartezeit kann zum Tod oder zu schweren
Verletzungen führen!
Führen Sie Arbeiten an elektrischen Teilen des
•
Frequenzumrichters oder des Motors nur nach
Abschaltung der Netzspannungsversorgung
durch. Halten Sie zudem zunächst die unter
Kapitel 2.3.1 Entladezeit angegebene Wartezeit
ein.
HINWEIS
Bei Gestaltung der Maschinenanwendung müssen Sie
Zeit und Entfernung für einen Freilauf bis zum Stopp
(STO) berücksichtigen. Weitere Informationen im Hinblick
auf Stoppkategorien finden Sie in EN 60204-1.
Abbildung 6.3 Drahtbrücke zwischen Klemme 12 (24 V), 37
und 38
2. Schließen Sie eine Zweikanal-Sicherheitsvorrichtung (zum Beispiel eine Sicherheits-SPS, einen
Lichtvorhang, ein Sicherheitsrelais oder eine NotAus-Taste) an die Klemmen 37 und 38 an, um
eine Sicherheitsvorrichtung einzurichten. Die
Vorrichtung muss gemäß der Gefahrenbewertung
die gewünschte Sicherheitsstufe erfüllen.
Abbildung 6.4 zeigt das Anschlussdiagramm von
STO-Anwendungen, bei denen sich Frequenzumrichter und Sicherheitsvorrichtung im selben
Schaltschrank befinden. Abbildung 6.5 zeigt das
Anschlussdiagramm von STO-Anwendungen, bei
denen eine externe Versorgung verwendet wird.
HINWEIS
Am STO-Signal muss eine PELV anliegen.
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 43

130BE424.11
37
38
12
55
1
130BE425.12
24 V source
37
38
+
-
12
55
1
6
Safe Torque Off (STO)
1 Sicherheitsvorrichtung
Abbildung 6.4 STO-Verkabelung in 1 Schaltschrank, der
Frequenzumrichter liefert die Versorgungsspannung
VLT® Midi Drive FC 280
Inbetriebnahme der Funktion „Safe
6.3
Torque Off“
6.3.1 Aktivierung der Funktion „Safe Torque
Off“
Die STO-Funktion aktiveren Sie durch das Wegschalten der
Spannung an den Klemmen 37 und 38 des Frequenzumrichters.
Ist STO aktiviert, gibt der Frequenzumrichter Alarm 68, Safe
Torque Off oder Warnung 68, Safe Torque Off, aus, schaltet
ab und lässt den Motor im Freilauf zum Stillstand kommen.
Verwenden Sie die STO-Funktion zum Stoppen des
Frequenzumrichters bei Notfällen. Setzen Sie im Normalbetrieb, bei dem Sie kein „Safe Torque Off“ benötigen,
stattdessen die normale Stoppfunktion des Frequenzumrichters ein.
HINWEIS
Ist die STO-Funktion aktiviert, während der Frequenzumrichter Warnung 8 (DC-Unterspannung) oder Alarm 8 (DC-
Unterspannung) ausgibt, überspringt der
Frequenzumrichter den Alarm 68, Safe Torque Off, der
STO-Betrieb wird jedoch nicht beeinträchtigt.
1 Sicherheitsvorrichtung
Abbildung 6.5 STO-Verdrahtung, Externe Versorgung
3. Führen Sie die Verdrahtung gemäß den
Anweisungen in Kapitel 4 Elektrische Installation
durch, und:
3a Beseitigen Sie Kurzschlussgefahren.
3b Stellen Sie sicher, dass die STO-Kabel
abgeschirmt sind, wenn sie länger als 20
m (65,6 ft) sind oder außerhalb des
Gehäuses verlaufen.
3c Schließen Sie die Sicherheitsvorrichtung
direkt an die Klemmen 37 und 38 an.
6.3.2 Deaktivierung der Funktion „Safe
Torque Off“
Befolgen Sie die Anweisungen in Tabelle 6.2, um die STO-
Funktion zu deaktivieren und den Normalbetrieb mithilfe
des Wiederanlaufmodus der STO-Funktion fortzusetzen.
WARNUNG
VERLETZUNGS- BZW. LEBENSGEFAHR
Durch das erneute Anlegen der 24 V DC-Versorgung an
Klemme 37 oder 38 beenden Sie den SIL2 STO-Zustand,
wodurch der Motor potenziell gestartet wird. Ein
unerwartetes Anlaufen des Motors kann zum Tod und zu
schweren Verletzungen führen!
Stellen Sie sicher, dass alle Sicherheitsmaß-
•
nahmen ergriffen werden, bevor Sie die 24 V
DC-Versorgung an die Klemmen 37 und 38
anschließen.
44 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

Safe Torque Off (STO) Bedienungsanleitung
Wiederanlaufmodus
Manueller
Wiederanlauf
Automatischer
Wiederanlauf
Tabelle 6.2 STO-Deaktivierung
Schritte zur Deaktivierung der STOFunktion und der
Umstellung auf den
Normalbetrieb
1. Legen Sie die 24 V
DC-Versorgung wieder
an den Klemmen 37
und 38 an.
2. Initiieren Sie ein
Quittiersignal (über
Feldbus, Klemme oder
durch Drücken der
Taste [Reset]/[Off
Reset] am LCP).
Legen Sie die 24 V DCVersorgung wieder an
den Klemmen 37 und 38
an.
Konfiguration des
Wiederanlaufmodus
Werkseinstellung.
Parameter 5-19 Klemme
37/38 Safe Torque Off=[1]
Safe Torque Off-Alarm
Parameter 5-19 Klemme
37/38 Safe Torque Off=
[3] Warnung Safe Torque
Off.
6.3.3 Inbetriebnahmeprüfung der Funktion
„Safe Torque Off“
Führen Sie nach der Installation und vor erstmaligem
Betrieb eine Inbetriebnahmeprüfung der Anlage oder
Anwendung, die die STO-Funktion einsetzt, durch.
Nach jeder Änderung der Anlage oder Anwendung, zu der
die Funktion „Safe Torque Off“ gehört, müssen Sie diese
Prüfung wiederholen.
HINWEIS
Nach der ersten Installation und nach jeder Änderung
der Installation müssen Sie eine erfolgreiche Inbetriebnahmeprüfung der STO-Funktion vornehmen.
So führen Sie eine Inbetriebnahmeprüfung durch:
Befolgen Sie die Anweisungen in
•
Kapitel 6.3.4 Prüfen auf STO-Anwendungen im
manuellen Wiederanlaufmodus, wenn die STO-
Funktion auf den manuellen Wiederanlaufmodus
eingestellt ist.
Befolgen Sie die Anweisungen in
•
Kapitel 6.3.5 Prüfen auf STO-Anwendungen im
automatischen Wiederanlaufmodus, wenn die STO-
Funktion auf den automatischen
Wiederanlaufmodus eingestellt ist.
6.3.4 Prüfen auf STO-Anwendungen im
manuellen Wiederanlaufmodus
Führen Sie für Anwendungen, bei denen
Parameter 5-19 Klemme 37/38 Safe Torque Off auf die
Werkseinstellung [1] Safe Torque Off-Alarm eingestellt ist,
die Inbetriebnahmeprüfung wie folgt durch:
1. Stellen Sie Parameter 5-40 Relaisfunktion auf [190]
Safe Function active (Sicherheitsfunktion aktiv) ein.
2. Trennen Sie die 24 V DC-Spannungsversorgung
an den Klemmen 37 und 38 über die Sicherheitsvorrichtung, während der Frequenzumrichter den
Motor antreibt (d. h. Netzversorgung bleibt
bestehen).
3. Überprüfen Sie Folgendes:
3a Der Motor geht in den Freilauf. Es
dauert ggf. lange, bis der Motor stoppt.
3b Ist das LCP montiert, wird Alarm 68, Safe
Torque Off auf dem LCP angezeigt. Ist
das LCP nicht montiert, wird Alarm 68,
Safe Torque Off in
Parameter 15-30 Fehlerspeicher:
Fehlercode protokolliert.
4. Legen Sie die 24 V DC-Spannung wieder an den
Klemmen 37 und 38 an.
5. Stellen Sie sicher, dass der Motor im Freilauf und
das bedarfsgerechte Relais (falls angeschlossen)
aktiviert bleibt.
6. Senden Sie ein Quittiersignal (über Feldbus,
Klemme oder durch Drücken der Taste [Reset]/
[Off Reset] am LCP).
7. Stellen Sie sicher, dass der Motor betriebsbereit
ist und innerhalb des ursprünglichen Drehzahlbereichs läuft.
Sie haben die Inbetriebnahmeprüfung erfolgreich
abgeschlossen, wenn Sie alle oben beschriebenen Schritte
erfolgreich durchführen konnten.
6.3.5 Prüfen auf STO-Anwendungen im
automatischen Wiederanlaufmodus
Führen Sie für Anwendungen, bei denen
Parameter 5-19 Klemme 37/38 Safe Torque Off auf [3]
Warnung Safe Torque Off eingestellt ist, die Inbetriebnah-
meprüfung wie folgt durch:
1. Trennen Sie die 24 V DC-Spannungsversorgung
an den Klemmen 37 und 38 über die Sicherheitsvorrichtung, während der Frequenzumrichter den
Motor antreibt (d. h. Netzversorgung bleibt
bestehen).
6
6
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 45

Safe Torque Off (STO)
VLT® Midi Drive FC 280
6
2. Überprüfen Sie Folgendes:
2a Der Motor geht in den Freilauf. Es
dauert ggf. lange, bis der Motor stoppt.
2b Ist das LCP montiert, wird Warnung 68,
Safe Torque Off W68, auf dem LCP
angezeigt. Ist das LCP nicht montiert,
wird Warnung 68, Safe Torque Off W68 in
Bit 30 von Parameter 16-92 Warnwort
protokolliert.
3. Legen Sie die 24 V DC-Spannung wieder an den
Klemmen 37 und 38 an.
4. Stellen Sie sicher, dass der Motor betriebsbereit
ist und innerhalb des ursprünglichen Drehzahlbereichs läuft.
Sie haben die Inbetriebnahmeprüfung erfolgreich
abgeschlossen, wenn Sie alle oben beschriebenen Schritte
erfolgreich durchführen konnten.
HINWEIS
Siehe Warnung zum Wiederanlaufverhalten in
Kapitel 6.1 Sicherheitsmaßnahmen für STO.
6.4 Wartung und Service der STO-Funktion
Der Benutzer ist verantwortlich für Sicherheits-
•
maßnahmen.
Sie können die Frequenzumrichterparameter mit
•
einem Passwort schützen.
Die Funktionsprüfung besteht aus 2 Teilen:
Grundlegende Funktionsprüfung.
•
Diagnosefunktionsprüfung.
•
Wenn Sie alle Schritte erfolgreich abschließen, ist die
Funktionsprüfung erfolgreich.
Grundlegende Funktionsprüfung
Wenn die STO-Funktion 1 Jahr lang nicht verwendet
wurde, führen Sie eine grundlegende Funktionsprüfung
durch, um einen Fehler oder eine Fehlfunktion der STOFunktion durchzuführen.
1. Stellen Sie sicher, dass Parameter 5-19 Klemme
37/38 Safe Torque Off auf *[1] Safe Torque OffAlarm eingestellt ist.
2. Trennen Sie die 24 V DC-Spannungsversorgung
an den Klemmen 37 und 38.
3. Prüfen Sie, ob das LCP den Alarm 68, Safe Torque
Off anzeigt.
4. Vergewissern Sie sich, dass der Frequenzumrichter
die Anlage abschaltet.
5. Vergewissern Sie sich, dass der Motor in den
Freilauf schaltet und zum Stillstand kommt.
6. Leiten Sie ein Startsignal ein (über Feldbus,
Klemme oder LCP), und stellen Sie sicher, dass
der Motor nicht startet.
7. Legen Sie die 24 V DC-Spannungsversorgung
erneut an die Klemmen 37 und 38 an.
8. Vergewissern Sie sich, dass der Motor nicht
automatisch gestartet wird und nur durch ein
Quittiersignal (über Feldbus, Klemme oder durch
Drücken der Taste [Reset]/[Off Reset] am LCP)
wieder anläuft.
Diagnosefunktionsprüfung
1. Überprüfen Sie, dass Warnung 68, Safe Torque Off
und Alarm 68, Safe Torque Off nicht auftreten,
wenn keine 24-V-Spannungsversorgung an den
Klemmen 37 und 38 angeschlossen ist.
2. Trennen Sie die 24-V-Spannungsversorgung von
Klemme 37 und überprüfen Sie, ob das LCP Alarm
188, Fehler der STO-Funktion anzeigt, wenn das
LCP montiert ist. Ist das LCP nicht montiert,
überprüfen Sie, dass Alarm 188, Fehler in der STO-
Funktion in Parameter 15-30 Fehlerspeicher:
Fehlercode protokolliert wird.
3. Legen Sie die 24-V-Versorgungsspannung an
Klemme 37 an, und überprüfen Sie, dass das
Zurücksetzen des Alarms erfolgreich ist.
4. Trennen Sie die 24-V-Versorgungsspannung von
Klemme 38 und überprüfen Sie, ob das LCP Alarm
188, Fehler in der STO-Funktion (STO-Funktionsstörung) anzeigt, wenn das LCP montiert ist. Ist
das LCP nicht montiert, überprüfen Sie, dass
Alarm 188, Fehler in der STO-Funktion in
Parameter 15-30 Fehlerspeicher: Fehlercode
protokolliert wird.
5. Legen Sie die 24-V-Versorgungsspannung an
Klemme 38 an, und überprüfen Sie, dass das
Zurücksetzen des Alarms erfolgreich ist.
46 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

Safe Torque Off (STO) Bedienungsanleitung
6.5 STO Technische Daten
Die Analyse zu Fehlermöglichkeiten, Effekten und Diagnose (Failure Modes, Effects, and Diagnostic Analysis, FMEDA) wird auf
Basis der folgenden Voraussetzungen durchgeführt:
VLT® Midi Drive FC 280 nimmt 10 % der Gesamt-Ausfalltoleranz für eine SIL2-Sicherheitsschleife ein.
•
Die Ausfallraten basieren auf der Siemens SN29500-Datenbank.
•
Die Ausfallraten sind konstant; Verschleißmechanismen sind nicht inbegriffen.
•
Für jeden Kanal wird vorausgesetzt, dass die sicherheitsrelevanten Komponenten vom Typ A sind und eine
•
Hardware-Ausfalltoleranz von 0 aufweisen.
Die Belastungsniveaus sind für einen Industriebereich durchschnittlich, und die Arbeitstemperatur der
•
Komponenten beträgt bis zu 85 °C (185 °F).
Ein Sicherheitsfehler (zum Beispiel der Ausgang im sicheren Zustand) wird innerhalb von 8 Stunden repariert.
•
Kein Drehmomentausgang ist der sichere Zustand.
•
Sicherheitsnormen
Sicherheitsfunktion Safe Torque Off IEC 61800-5-2
Safety Performance
Maschinensicherheit ISO 13849-1, IEC 62061
Funktionale Sicherheit IEC 61508
ISO 13849-1
Kategorie Kat. 3
DC (Diagnosedeckungsgrad) 60 % (niedrig)
Durchschnittliche Zeit bis zu einem gefährlichen Ausfall (MTTFd) 2400 Jahre (hoch)
Performance Level (Leistungsniveau) PL d
IEC 61508/IEC 61800-5-2/IEC 62061
Safety Integrity Level SIL2
Wahrscheinlichkeit eines gefährlichen Ausfalls pro Stunde (PFH)
(Betriebsart mit hoher Anforderungsrate)
Wahrscheinlichkeit eines gefährlichen Ausfalls bei Anforderung
(PFD
für PTI = 20 Jahre) (Betriebsart mit niedriger Anforde-
avg
rungsrate)
SFF (Safe Failure Fraction)
HFT (Hardwarefehlertoleranz)
7,54E-9 (1/h)
6.05E-4
Für 2-kanalige Teile: >84%
Für einkanalige Teile: >99%
Für 2-kanalige Teile: HFT = 1
Für einkanalige Teile: HFT = 0
6
6
Intervall der Wiederholungsprüfungen
CCF (Common Cause Failure, Ausfall aufgrund gemeinsamer
Ursache)
DTI (Diagnostic Test Intervall, Intervall der Diagnoseprüfung) 160 ms
Systematische Eignung SC 2
Reaktionszeit
Tabelle 6.3 Technische Daten der STO-Funktion
1) Reaktionszeit ist die Zeitspanne ab einer Eingangssignalbedingung, welche die STO-Funktion auslöst, bis kein Drehmoment mehr am Motor
vorhanden ist.
2) Hinweise zum Prüfverfahren finden Sie unter Kapitel 6.4 Wartung und Service der STO-Funktion.
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 47
1)
Antwortzeiten zwischen Ein- und Ausgang Baugrößen K1–K3: Maximal 50 ms
2)
20 Jahre
β = 5 %; βD = 5 %
Baugrößen K4 und K5: Maximal 30 ms

130BF096.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
12
13
18
19
27
29
32
33
50
53
54
55
42
A OUT
D IN
+24 V
130BE204.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
0 ~10 V
+
-
FC
+24 V
130BF097.10
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
4 - 20mA
+
-
FC
+24 V
Anwendungsbeispiele
7 Anwendungsbeispiele
VLT® Midi Drive FC 280
7.1 Einführung
Die Beispiele in diesem Abschnitt sollen als Schnellreferenz
für häufige Anwendungen dienen.
7.2.2 Drehzahl
Parameter
Funktion Einstellung
Parameter 6-10
Parametereinstellungen sind die regionalen
•
Werkseinstellungen, sofern nicht anders
angegeben (in Parameter 0-03 Ländereinstellungen
ausgewählt).
Neben den Zeichnungen sind die Parameter für
•
die Klemmen und ihre Einstellungen aufgeführt.
Wenn Schaltereinstellungen für die analogen
•
Klemmen 53 und 54 erforderlich sind, werden
diese ebenfalls dargestellt.
77
HINWEIS
Wird die Funktion „Safe Torque Off“ (STO) nicht
verwendet, benötigen Sie Drahtbrücken zwischen den
Klemmen 12, 37 und 38, um den Frequenzumrichter in
Werkseinstellung zu betreiben.
Klemme 53 Skal.
0,07 V
Min.Spannung
Parameter 6-11
Klemme 53 Skal.
10 V*
Max.Spannung
Parameter 6-14
Klemme 53 Skal.
0
Min.-Soll/Istwert
Parameter 6-15
Klemme 53 Skal.
50
Max.-Soll/Istwert
Parameter 6-19
Klemme 53
Modus
[1] Einstellung
Spannung
* = Werkseinstellung
Hinweise/Anmerkungen:
7.2 Anwendungsbeispiele
7.2.1 AMA
Tabelle 7.2 Analoger Drehzahlsollwert (Spannung)
Parameter
Funktion Einstellung
Parameter 1-29 Aut
om. Motoranpassung
Parameter 5-12 Kle
mme 27 Digitaleingang
[1]
Komplette
Anpassung
*[2]
Motorfreila
uf (inv.)
* = Werkseinstellung
Hinweise/Anmerkungen: Sie
müssen Parametergruppe 1-2*
Motordaten entsprechend den
Motorspezifikationen einstellen.
HINWEIS
Tabelle 7.1 AMA mit angeschlossener Kl. 27
Sind die Klemmen 13 und
27 nicht angeschlossen,
stellen Sie
Parameter 5-12 Terminal 27
Digital Input auf [0] Ohne
Funktion ein.
Tabelle 7.3 Analoger Drehzahlsollwert (Strom)
Parameter
Funktion Einstellung
Parameter 6-22
Klemme 54 Skal.
4 mA*
Min.Strom
Parameter 6-23
Klemme 54 Skal.
20 mA*
Max.Strom
Parameter 6-24
Klemme 54 Skal.
0
Min.-Soll/Istwert
Parameter 6-25
Klemme 54 Skal.
50
Max.-Soll/Istwert
Parameter 6-29
Klemme 54
[0] Strom
Funktion
* = Werkseinstellung
Hinweise/Anmerkungen:
48 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

130BE208.11
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
≈ 5kΩ
FC
+24 V
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
130BF100.10
+24 V
130BB840.12
Speed
Reference
Start (18)
Freeze ref (27)
Speed up (29)
Speed down (32)
130BF098.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
19
18
27
29
32
33
50
53
54
55
42
+24 V 13
Anwendungsbeispiele Bedienungsanleitung
Parameter
Funktion Einstellung
Parameter 6-10 Kl
emme 53 Skal.
Min.Spannung
Parameter 6-11 Kl
emme 53 Skal.
Max.Spannung
Parameter 6-14 Kl
emme 53 Skal.
Min.-Soll/Istwert
Parameter 6-15 Kl
emme 53 Skal.
Max.-Soll/Istwert
Parameter 6-19 T
erminal 53 mode
* = Werkseinstellung
Hinweise/Anmerkungen:
Tabelle 7.4 Drehzahlsollwert (Verwendung eines manuellen
Potenziometers)
Parameter
Funktion Einstellung
Parameter 5-10 Kl
emme 18 Digitaleingang
Parameter 5-12 Kl
emme 27 Digitaleingang
Parameter 5-13 Kl
emme 29 Digitaleingang
Parameter 5-14 Kl
emme 32 Digitaleingang
* = Werkseinstellung
Hinweise/Anmerkungen:
0,07 V
10 V*
0
50
[1] Spannung
*[8] Start
[19] Sollw.
speich.
[21] Drehzahl
auf
[22] Drehzahl
ab
Abbildung 7.1 Drehzahl auf/Drehzahl ab
7.2.3 Start/Stopp
Parameter
Parameter 5-10 Kle
mme 18 Digital-
Parameter 5-11 Kle
mme 19 Digitaleingang
Parameter 5-12 Kle
mme 27 Digitaleingang
Parameter 5-14 Kle
mme 32 Digitaleingang
Parameter 5-15 Kle
mme 33 Digitaleingang
Parameter 3-10 Fes
tsollwert
Festsollwert 0
Festsollwert 1
Festsollwert 2
Festsollwert 3
* = Werkseinstellung
Hinweise/Anmerkungen:
Funktion Einstellung
[8] Start
eingang
*[10]
Reversierun
g
[0] Ohne
Funktion
[16]
Festsollwert
Bit 0
[17]
Festsollwert
Bit 1
25%
50%
75%
100%
7 7
Tabelle 7.6 Start/Stopp mit Reversierung und 4 Festdrehzahlen
Tabelle 7.5 Drehzahl auf/Drehzahl ab
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 49

130BF099.10
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
+24 V
130BE210.11
+24 V
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
12
13
18
19
27
29
32
33
50
53
54
55
42
FC
D IN
+24 V
FC
+24 V
D IN
D IN
D IN
D IN
D IN
D IN
+10 V
A IN
A IN
COM
A OUT
R1
12
13
18
19
27
29
32
33
50
53
54
55
42
01
02
03
130BE211.11
+24 V
Anwendungsbeispiele
VLT® Midi Drive FC 280
7.2.4 Externe Alarmquittierung
Parameter
Funktion Einstellung
Parameter 5-11
Klemme 19
Digitaleingang
* = Werkseinstellung
Hinweise/Anmerkungen:
[1] Alarm
quittieren
7.2.6 SLC
Parameter
Funktion Einstellung
Parameter 4-30
Drehgeberüberwachung
[1] Warnung
Funktion
Parameter 4-31
Drehgeber max.
50
Fehlabweichung
Parameter 4-32
Drehgeber
5 s
Timeout-Zeit
Parameter 7-00
Drehgeberrückführung
[1] 24V/HTLDrehgeber
Parameter 5-70
Kl. 32/33
Drehgeber Aufl.
1024*
[Pulse/U]
77
Parameter 13-00
Smart Logic
[1] Ein
Controller
Parameter 13-01
SL-Controller
[19] Warnung
Start
Tabelle 7.7 Externe Alarmquittierung
7.2.5 Motorthermistor
HINWEIS
Um die PELV-Anforderungen zu erfüllen, müssen Sie
Thermistoren verstärken oder zweifach isolieren.
Parameter
Funktion Einstellung
Parameter 1-90
Thermischer
Motorschutz
Parameter 1-93
Thermistoran-
[2] ThermistorAbschalt.
[1] Analogeingang 53
Parameter 13-02
SL-Controller
Stopp
Parameter 13-10
VergleicherOperand
Parameter 13-11
VergleicherFunktion
Parameter 13-12
Vergleicher-Wert
Parameter 13-51
SL-Controller
Ereignis
Parameter 13-52
SL-Controller
Aktion
Parameter 5-40
Relaisfunktion
* = Werkseinstellung
[44] [Reset]-
Taste
[21]
Warnnummer
*[1] ≈
61
[22]
Vergleicher 0
[32] Digital-
ausgang A-
AUS
[80] SL-Digital-
ausgang A
schluss
Parameter 6-19
Tabelle 7.8 Motorthermistor
50 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503
Terminal 53
mode
* = Werkseinstellung
Hinweise/Anmerkungen:
Wenn nur eine Warnung
erforderlich ist, müssen Sie
Parameter 1-90 Thermischer
Motorschutz auf [1] Thermistor
Warnung programmieren.
[1] Einstellung
Spannung

Anwendungsbeispiele Bedienungsanleitung
Parameter
Hinweise/Anmerkungen:
Wenn der Grenzwert der
Drehgeberüberwachung
überschritten wird, gibt der
Frequenzumrichter Warnung 61,
Istwertüberwachung aus. Der
SLC überwacht Warnung 61,
Istwertüberwachung. Wird
Warnung 61, Istwertüberwachung wahr, wird Relais 1
ausgelöst.
Externe Geräte können
anzeigen, dass eine Wartung
erforderlich ist. Wenn der
Istwertfehler innerhalb von 5 s
wieder unter diese Grenze fällt,
läuft der Frequenzumrichter
weiter, und die Warnung wird
ausgeblendet. Relais 1 bleibt
ausgelöst, bis Sie [Off/Reset]
drücken.
Tabelle 7.9 Verwendung von SLC zur Einstellung eines Relais
7 7
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 51

Wartung, Diagnose und Fehle...
VLT® Midi Drive FC 280
8 Wartung, Diagnose und Fehlersuche
8.1 Wartung und Service
Unter normalen Betriebsbedingungen und Lastprofilen ist
der Frequenzumrichter über die gesamte Lebensdauer
wartungsfrei. Zur Vermeidung von Betriebsstörungen,
Gefahren und Beschädigungen müssen Sie den Frequenzumrichter je nach Betriebsbedingungen in regelmäßigen
Abständen auf festen Sitz der Klemmenverbindungen,
Staubeintritt usw. prüfen. Ersetzen Sie verschlissene oder
beschädigte Teile durch Originalersatzteile oder
Standardteile. Wenden Sie sich für Service und Support an
Ihren örtlichen Danfoss-Händler.
WARNUNG
UNERWARTETER ANLAUF
Bei Anschluss des Frequenzumrichters an Versorgungsnetz, DC-Versorgung oder Zwischenkreiskopplung
88
kann der angeschlossene Motor jederzeit unerwartet
anlaufen. Ein unerwarteter Anlauf im Rahmen von
Programmierungs-, Service- oder Reparaturarbeiten kann
zum Tod, zu schweren Verletzungen oder zu
Sachschäden führen! Der Motor kann über einen
externen Schalter, einen Feldbus-Befehl, ein Sollwerteingangssignal, über ein LCP oder LOP, eine Fernbedienung
per MCT 10 Konfigurationssoftware oder nach einem
quittierten Fehlerzustand anlaufen.
So verhindern Sie ein unerwartetes Starten des Motors:
Trennen Sie den Frequenzumrichter vom Netz.
•
Drücken Sie [Off/Reset] am LCP, bevor Sie
•
Parameter programmieren.
Verkabeln und montieren Sie Frequenzum-
•
richter, Motor und alle angetriebenen Geräte
vollständig, bevor Sie den Frequenzumrichter an
Versorgungsnetz, DC-Versorgung oder
Zwischenkreiskopplung anschließen.
8.2 Warnungs- und Alarmtypen
Warnungs-/
Alarmtyp
Warnung Eine Warnung weist auf einen abnormalen
Alarm Ein Alarm weist auf eine Störung hin, die
Abschaltung
Bei einer Abschaltung setzt der Frequenzumrichter seinen
Betrieb aus, um Schäden an sich selbst oder an anderen
Geräten zu verhindern. Falls eine Abschaltung auftritt, läuft
der Motor bis zum Stillstand aus. Die Steuerung des
Frequenzumrichters ist weiter funktionsfähig und
überwacht den Zustand des Frequenzumrichters. Nach
Behebung des Fehlerzustands können Sie die
Alarmmeldung des Frequenzumrichters quittieren.
Abschaltblockierung
Bei einer Abschaltblockierung setzt der Frequenzumrichter
seinen Betrieb aus, um Schäden an sich selbst oder an
anderen Geräten zu verhindern. Falls eine Abschaltblockierung auftritt, läuft der Motor bis zum Stillstand aus. Die
Steuerung des Frequenzumrichters ist weiter funktionsfähig
und überwacht den Zustand des Frequenzumrichters. Der
Frequenzumrichter löst nur dann eine Abschaltblockierung
aus, wenn schwerwiegende Störungen auftreten, die den
Frequenzumrichter oder sonstige Geräte beschädigen
können. Nachdem die Störungen behoben wurden,
müssen Sie die Netzversorgung aus- und wieder
einschalten, bevor Sie den Frequenzumrichter zurücksetzen
können.
Beschreibung
Betriebszustand hin, der zu einem Alarm führt.
Eine Warnung wird quittiert, wenn Sie die
abnorme Bedingung beseitigen.
sofortige Aufmerksamkeit erfordert. Die Störung
führt immer zu einer Abschaltung oder einer
Abschaltblockierung. Quittieren Sie den Frequenzumrichter nach einem Alarm.
Setzen Sie den Frequenzumrichter zurück; hierbei
haben Sie 4 Möglichkeiten:
Durch Drücken der Taste [Reset]/[Off/Reset].
•
Über einen Digitaleingang mit der Funktion
•
„Reset“.
Über die serielle Schnittstelle.
•
Durch automatisches Quittieren.
•
52 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

Setup 1
Status
Quick
Menu
Main
Menu
130BD111.10
Setup 1
Status Quick
Menu
Main
Menu
130BD112.10
130BD062.10
D
Hand
On
Reset
Auto
On
OK
On
Warn
Alarm
Wartung, Diagnose und Fehle... Bedienungsanleitung
8.3 Anzeige von Warn- und
Alarmmeldungen
Abbildung 8.1 Anzeige von Warnungen
Ein Alarm oder ein Alarm mit Abschaltblockierung blinkt
zusammen mit der Nummer des Alarms auf dem Display.
Abbildung 8.2 Alarm/Abschaltblockierung
Neben dem Text und dem Alarmcode im LCP des Frequenzumrichters leuchten die drei LED zur Statusanzeige. Die
Anzeige-LED Warnung leuchtet während einer Warnung
gelb. Die Anzeige-LED Alarm leuchtet während eines
Alarms gelb.
Abbildung 8.3 Kontrollanzeigen zur Statusanzeige
8 8
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 53

Wartung, Diagnose und Fehle...
VLT® Midi Drive FC 280
8.4 Warnungen und Alarmmeldungen
8.4.1 Liste der Warn- und Alarmcodes
Eine (X)-Kennzeichnung in Tabelle 8.1 zeigt an, dass die Warnung bzw. der Alarm aufgetreten ist.
Nr. Beschreibung
2 Signalfehler X X –
3 Kein Motor X – –
4
Netzasymmetrie
7
DC-Überspannung
8
DC-Unterspannung
88
9 Wechselrichterüberlastung X X –
10 Motortemperatur ETR X X –
Übertemperatur des Motor-
11
Thermistors
12 Drehmomentgrenze X X –
13 Überstrom X X X
14 Erdschluss – X X Entladung zwischen Ausgangsphasen und Erde.
16 Kurzschluss – X X Kurzschluss im Motor oder an den Motorklemmen.
17 Steuerwort-Timeout X X – Es besteht keine Kommunikation zum Frequenzumrichter.
25 Bremswiderstand Kurzschluss – X X
26 Bremsüberlast X X –
Brems-IGBT/Bremschopper
27
kurzgeschlossen
28 Bremswiderstandstest – X –
30 U-Phasenfehler – X X Die Motorphase U fehlt. Phase prüfen.
31 V-Phasenfehler – X X Die Motorphase V fehlt. Phase prüfen.
32 W-Phasenfehler – X X Die Motorphase W fehlt. Phase prüfen.
34 Feldbus-Fehl. X X – PROFIBUS-Kommunikationsfehler sind aufgetreten.
35 Fehler im Optionsmodul – X – Feldbus erkennt interne Fehler.
1)
1)
1)
Warnung Alarm Abschaltblo-
ckierung
X X X
X X –
X X –
X X –
– X X
Das Signal an Klemme 53 oder 54 liegt unter 50 % des in
Parameter 6-10 Klemme 53 Skal. Min.Spannung,
Parameter 6-20 Klemme 54 Skal. Min.Spannung und
Parameter 6-22 Klemme 54 Skal. Min.Strom eingestellten
Werts.
Am Ausgang des Frequenzumrichters ist kein Motor
angeschlossen.
Versorgungsseitiger Phasenausfall oder zu asymmetrische
Netzspannung. Überprüfen Sie die Versorgungsspannung.
Die Zwischenkreisspannung überschreitet den Grenzwert.
Die Zwischenkreisspannung fällt unter den unteren
Spannungsgrenzwert.
Der Frequenzumrichter wurde zu lange Zeit mit mehr als
100 % Ausgangsstrom belastet.
Der Motor ist zu heiß, weil er zu lange mit mehr als
100 % belastet wurde.
Der Thermistor oder Thermistoranschluss ist getrennt,
oder der Motor ist zu heiß.
Das Drehmoment überschreitet den in
Parameter 4-16 Momentengrenze motorisch oder
Parameter 4-17 Momentengrenze generatorisch
eingestellten Wert.
Die Spitzenstromgrenze des Wechselrichters ist
überschritten. Wenn dieser Alarm bei der NetzEinschaltung auftritt, überprüfen Sie, ob die
Leistungskabel versehentlich an den Motorklemmen
angeschlossen sind.
Es besteht ein Kurzschluss am Bremswiderstand, weshalb
die Bremsfunktion unterbrochen ist.
Die während der letzten 120 s auf den Bremswiderstand
übertragene Leistung überschreitet den Grenzwert.
Mögliche Korrekturmaßnahmen: Verringern Sie die
Bremse durch eine niedrigere Drehzahl oder eine längere
Rampenzeit.
Es besteht ein Kurzschluss am Bremstransistor, weshalb
die Bremsfunktion unterbrochen ist.
Der Bremswiderstand ist nicht angeschlossen/funktioniert
nicht.
Ursache
54 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

Wartung, Diagnose und Fehle... Bedienungsanleitung
Nr. Beschreibung
36 Netzausfall X X –
38 Interner Fehler – X X Kontaktieren Sie den örtlichen Danfoss-Zulieferer.
40 Überlast T27 X – –
46 Spannungsfehl. IGBT-AnstKarte – X X –
47 24-V-Versorgung niedrig X X X
49 Drehzahlgrenze – X –
50 AMA-Kalibrierungsfehler – X – Ein Kalibrierungsfehler ist aufgetreten.
51 AMA U
AMA Motornennstrom
52
überprüfen
53 AMA Motor zu groß – X – Der Motor ist für die Durchführung der AMA zu groß.
54 AMA Motor zu klein – X – Der Motor ist für die Durchführung der AMA zu klein.
55 AMA-Datenbereich – X –
56 AMA Abbruch – X – Die AMA wurde unterbrochen.
57 AMA Timeout – X – –
58 AMA interner Fehler – X – Wenden Sie sich an Danfoss.
59 Stromgrenze X X – Der Frequenzumrichter ist überlastet.
60 Externe Verriegelung – X – Die externe Verriegelung wurde aktiviert.
61 Drehgeber-Fehler X X – –
63 Mechanische Bremse zu niedrig – X –
65 Steuerkartentemp X X X
67 Optionen neu – X –
68
Safe Torque Off
69 Leistungskartentemp X X X
80 Initialisiert – X –
nom
und I
überprüfen – X –
nom
2)
Warnung Alarm Abschaltblo-
ckierung
– X –
X X –
Diese Warnung bzw. dieser Alarm ist nur aktiv, wenn die
Versorgungsspannung zum Frequenzumrichter geringer
als der in Parameter 14-11 Netzausfall-Spannung
eingestellte Wert ist und Parameter 14-10 Netzausfall-
Funktion NICHT auf [0] Ohne Funktion programmiert ist.
Prüfen Sie die Last an Klemme 27 oder beseitigen Sie
den Kurzschluss.
Die externe 24-V-DC-Steuerversorgung ist möglicherweise
überlastet.
Die Motordrehzahl liegt unterhalb der in
Parameter 1-87 Min. Abschaltfrequenz [Hz] festgelegten
Grenze.
Die Einstellung von Motorspannung, Motorstrom und
Motorleistung ist falsch.
Der Motorstrom ist zu niedrig. Überprüfen Sie die Einstellungen.
Die Parameterwerte des Motors liegen außerhalb des
zulässigen Bereichs. Die AMA lässt sich nicht ausführen.
Der Motorstrom hat „Bremse öffnen bei Motorstrom“
innerhalb des Zeitfensters für die Verzögerungszeit nicht
überschritten.
Die Abschalttemperatur der Steuerkarte hat die
Obergrenze überschritten.
Eine neue Option wird erkannt oder eine installierte
Option wird entfernt.
STO ist aktiviert. Befindet sich Safe Torque Off (STO) im
manuellen Quittiermodus (Standard), so legen Sie zum
Fortsetzen des Normalbetriebs 24 V DC an die Klemmen
37 und 38 an, und senden Sie dann ein Quittiersignal
(über Feldbus, Digital-I/O oder Taste [Reset]/[Off Reset]).
Befindet sich STO im automatischen Wiederanlaufmodus,
wird durch Anlegen von 24 V DC an die Klemmen 37
und 38 automatisch der Normalbetrieb des Frequenzumrichters aufgenommen.
Die Abschalttemperatur der Leistungskarte hat die
Obergrenze überschritten.
Setzt alle Parametereinstellungen auf die Werkseinstellungen zurück.
Ursache
8 8
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 55
Wartung, Diagnose und Fehle...
VLT® Midi Drive FC 280
Nr. Beschreibung
87 Auto DC-Bremsung X – –
88 Optionserkennung – X X Die Option wird erfolgreich entfernt.
95 Riemenbruch X X – –
99 Rotor blockiert – X –
120 Positionsregelungsfehler – X – –
126 Motor dreht – X – Der PM-Motor dreht bei Durchführung der AMA.
127 Gegen-EMK zu hoch X – – Die Gegen-EMK des PM-Motors ist vor dem Start zu hoch.
188
STO Interner Fehler
2)
88
nw
Nicht im Betrieb – – –
run
Fehler
Es wurde ein falsches Passwort
Par.
eingegeben
Warnung Alarm Abschaltblo-
ckierung
– X –
– – –
Tritt im IT-Netz auf, wenn der Frequenzumrichter einen
Freilauf durchführt und die Gleichspannung für 400-VEinheiten höher als 830 V und für 200-V-Einheiten höher
als 425 V ist. Der Motor verbraucht im Zwischenkreis
Energie. Sie können diese Funktion in Parameter 0-07 Auto
DC-Bremse IT aktivieren/deaktivieren.
Rotor ist blockiert.
Die 24 V DC-Versorgung ist nur an eine der beiden STOKlemmen (37 und 38) angeschlossen, oder es wurde ein
Fehler in den STO-Kanälen erkannt. Vergewissern Sie sich,
dass beide Klemmen an die 24-V-DC-Versorgung
angeschlossen sind und die Diskrepanz zwischen den
Signalen an den beiden Klemmen weniger als 12 ms
beträgt. Wenn der Fehler weiterhin auftritt, wenden Sie
sich an einen Danfoss-Händler in Ihrer Nähe.
Sie können den Parameter nur bei angehaltenem Motor
ändern.
Tritt auf, wenn beim Versuch, einen passwortgeschützten
Parameter zu ändern, ein falsches Passwort verwendet
wird.
Ursache
Tabelle 8.1 Codeliste der Warnungen und Alarme
1) Netzspannungsverzerrungen können diese Fehler verursachen. Der Einbau eines Danfoss-Netzfilters kann dieses Problem beheben.
2) Dieser Alarm kann nicht automatisch über Parameter 14-20 Quittierfunktion quittier t werden.
56 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

Wartung, Diagnose und Fehle... Bedienungsanleitung
Sie können die Alarmwörter, Warnwörter und erweiterten Zustandswörter zur Diagnose auslesen.
Bit Hex Dez
000000
10
11
12
13
14
15
16
0
1
2
3
4
5
6
7
8
9
01
000000
02
000000
04
000000
08
000000
10
000000
20
000000
40
000000
80
000001
00
000002
00
000004
00
000008
00
000010
00
000020
00
000040
00
000080
00
000100
00
1
2
4 Erdschluss Reserviert Reserviert Reserviert Reserviert
8 Steuerkartentemp Reserviert Reserviert
16
32 Überstrom Reserviert Reserviert Überstrom Reserviert
64
128
256
512
1024
2048 DC-Überspannung Drehzahlgrenze Reserviert
4096 Kurzschluss
8192 Reserviert Reserviert Reserviert Reserviert Reserviert Bremsung
16384 Netzunsymm. Reserviert Reserviert Netzunsymm. Reserviert Reserviert
32768 AMA nicht OK Reserviert Reserviert Kein Motor
65536 Signalfehler Reserviert Reserviert Signalfehler Reserviert AC-Bremse
Alarmwort
(Parameter 16-90
Alarmwort)
Bremswiders-
tandstest
Umrichter
Übertemperatur
Steuerwort-
Timeout
Drehmoment-
grenze
Motor Therm.
Über
Motor-ETR
Übertemp.
Wechselrichterü-
berlast
DC-
Unterspannung
Alarmwort 2
(Parameter 16-91 Al
armwort 2)
Reserviert
Spannungsfehl.
IGBT-AnstKarte
Reserviert Reserviert
Reserviert Reserviert
Reserviert Reserviert
Riemenb–
ruch
Reserviert Reserviert
Startfehler Reserviert
Externe Verrie-
gelung
Alarmwort 3
(Parameter 16-
97 Alarmwort
3)
Fehler der
STO-Funktion
MM-Alarm
Reserviert
Reserviert Reserviert Reserviert
Warnwort
(Parameter 16
-92 Warnwort)
Reserviert Reserviert Rampen Aus
Umrichter
Übertem-
peratur
Steuerkar-
tentemp
Steuerwort-
Timeout
Drehmoment-
grenze
Motor Therm.
Über
Motor-ETR
Übertemp.
Wechselrichte-
rüberlast
DC-
Unterspan–
nung
DC-Überspan–
nung
Warnwort 2
(Parameter 16
-93 Warnwort
Reserviert
Reserviert
Reserviert
Reserviert
Reserviert
Riemenbruch
Reserviert
Reserviert
Reserviert
Auto DC-
Bremsung
Erweitertes
Zustandsw
ort
(Parameter
2)
16-94 Erw.
Zustandswo
rt)
AMA-
Anpassung
Start
Rechts-/
Linkslauf
Frequenz-
korrektur
Ab
Frequenz-
korrektur
Auf
Istwert
hoch
Istwert
niedr.
Ausgangsst
rom hoch
Ausgangsst
rom niedrig
Ausgangsfr
eq. hoch
Ausgangsfr
eq. niedrig
Bremswi-
derstandste
st i.O.
Max.
Bremsung
OVC aktiv
Erweiter–
tes
Zustands
wort 2
(Parameter
16-95 Erw.
Zustandsw
ort 2)
Hand/Auto
Profibus
AUS1 aktiv
Profibus
AUS2 aktiv
8 8
Profibus
AUS3 aktiv
Reserviert
Reserviert
Steuer.
bereit
Frequen-
zumrichter
bereit
Schnellsto
pp
DC-Bremse
Stopp
Reserviert
Auffor-
derung
Ausgangs-
frequenz
speichern
Drehz.
speich.
JOG-
Aufford.
Festdrehza
hl JOG
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 57
Wartung, Diagnose und Fehle...
VLT® Midi Drive FC 280
Erweitertes
Alarmwort
Bit Hex Dez
000200
17
000400
18
000800
19
001000
20
002000
21
004000
88
22
008000
23
010000
24
020000
25
040000
26
0800000013421772
27
1000000026843545
28
20000000536870912Frequenzum-
29
4000000010737418
30
8000000021474836
31
131072 Interner Fehler Reserviert Reserviert Reserviert Reserviert Reserviert
00
262144 Bremsüberlast Reserviert Reserviert
00
524288 U-Phasenfehler Reserviert Reserviert Reserviert Reserviert
00
1048576 V-Phasenfehler Optionserkennung Reserviert Reserviert Überlast T27
00
2097152 W-Phasenfehler
00
4194304 Feldbus-Fehl. Rotor blockiert Reserviert Feldbus-Fehl.
00
8388608
00
16777216 Netzausfall Reserviert Reserviert Netzausfall Reserviert Reserviert Bypass
00
33554432 Reserviert Stromgrenze Reserviert Stromgrenze Reserviert Reserviert Reserviert
00
67108864 Bremswiderstand Reserviert Reserviert Reserviert Reserviert Reserviert
00
8
6
24
48
(Parameter 16-90
Alarmwort)
24-V-Versorgung
niedrig
Brems-IGBT Reserviert Reserviert Reserviert Reserviert Reserviert Reserviert
Optionen neu Reserviert Reserviert
richter initialisiert
Safe Torque Off Reserviert Reserviert
Mech. Bremse Reserviert Reserviert Reserviert Reserviert
Alarmwort 2
(Parameter 16-91 Al
armwort 2)
Fehler im
Optionsmodul
Positionsrege-
lungsfe–
hler
Drehgeber-Fehler Reserviert Reserviert
Alarmwort 3
(Parameter 16-
97 Alarmwort
3)
Reserviert Reserviert Reserviert Reserviert
Reserviert
Warnwort
(Parameter 16
-92 Warnwort)
Bremswi-
derstand
Leistungs-
grenze
24-V-
Versorgung
niedrig
Drehgeber-
Fehler
Safe Torque
Off
Warnwort 2
(Parameter 16
-93 Warnwort
2)
Reserviert Reserviert Start
Speichermodu
l
Reserviert Reserviert In Betrieb
Reserviert Reserviert
Gegen-EMK zu
hoch
Reserviert Reserviert Reserviert
Zustandsw
ort
(Parameter
16-94 Erw.
Zustandswo
rt)
Max.-
Sollwert
Min.-
Sollwert
Reserviert
Reserviert
Datenbank
ausgelastet
Erweiter–
tes
Zustands
wort 2
(Parameter
16-95 Erw.
Zustandsw
ort 2)
Startauf-
forderung
Reserviert
Startverzö-
gerung
Energiesparmodus
Energiespa
r-Boost
Externe
Verrie-
gelung
FlyStart
aktiv
Warnung
Kühlkör-
perreinigu
ng
Reserviert
Tabelle 8.2 Beschreibung des Alarmworts, Warnworts und erweiterten Zustandsworts
58 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

Wartung, Diagnose und Fehle... Bedienungsanleitung
8.5 Fehlersuche und -behebung
Symptom Mögliche Ursache Test Lösung
Drücken Sie auf [Auto On] oder
[Hand On] (je nach Betriebsart), um
den Motor in Betrieb zu nehmen.
Legen Sie ein gültiges Startsignal an,
um den Motor zu starten.
Legen Sie 24 V an Klemme 27 an
oder programmieren Sie diese
Klemme auf [0] Ohne Funktion.
Programmieren Sie die richtigen
Einstellungen. Setzen Sie den
Festsollwert in Parametergruppe 3-1*
Sollwerteinstellung auf aktiv. Prüfen
Sie, ob Frequenzumrichter und Motor
richtig verkabelt sind. Überprüfen Sie
die Skalierung der Klemmen.
Überprüfen Sie das Sollwertsignal:
Programmieren Sie die richtigen
Einstellungen.
Deaktivieren Sie das Reversierungssignal.
Programmieren Sie die richtigen
Grenzen.
Programmieren Sie die richtigen
Einstellungen.
Überprüfen Sie die Einstellungen in
Parametergruppe 6-** Analoge Ein-/
Ausg.
Überprüfen Sie die Motoreinstellungen in den Parametergruppen 1-2*
Motordaten, 1-3* Erw. Motordaten I
und 1-5* Lastunabh. Einstellung.
Überprüfen Sie die Parametergruppen
2-0* DC Halt/DC Bremse und 3-0*
Sollwertgrenzen.
LCP-Stopp
Fehlendes Startsignal (Standby)
Motorfreilaufsignal aktiv (Freilauf)
Motor läuft nicht
Falsche Sollwertsignalquelle
Motordrehgrenze
Die Motordrehrichtung ist falsch
Motor erreicht
maximale Drehzahl
nicht
Motordrehzahl ist
instabil
Motor läuft unruhig Mögliche Übermagnetisierung
Motor bremst nicht
Aktives Reversierungssignal
Falscher Motorphasenanschluss
Frequenzgrenzen sind falsch
eingestellt
Sollwerteingangssignal nicht richtig
skaliert
Möglicherweise falsche Parametereinstellungen
Möglicherweise falsche Einstellungen
in den Bremsparametern.
Möglicherweise sind die Rampe-abZeiten zu kurz.
Überprüfen Sie, ob die [Off]-Taste
betätigt wurde.
Stellen Sie sicher, dass
Parameter 5-10 Klemme 18 Digitaleingang die richtige Einstellung für
Klemme 18 besitzt (verwenden Sie die
Werkseinstellung).
Stellen Sie sicher, dass
Parameter 5-12 Terminal 27 Digital
Input die richtige Einstellung für
Klemme 27 besitzt (verwenden Sie die
Werkseinstellung).
Überprüfen Sie Folgendes:
Ist das Sollwertsignal ein lokaler,
•
Fern- oder Bussollwert?
Ist der Festsollwert aktiv?
•
Ist der Anschluss der Klemmen
•
korrekt?
Ist die Skalierung der Klemmen
•
korrekt?
Ist das Sollwertsignal verfügbar?
•
Überprüfen Sie, ob
Parameter 4-10 Motor Drehrichtung
korrekt programmiert ist.
Überprüfen Sie, ob ein Reversierungsbefehl für die Klemme in
Parametergruppe 5-1* Digitaleingänge
programmiert ist.
Ändern Sie Parameter 1-06 Clockwise
Direction.
Prüfen Sie die Ausgangsgrenzen in
Parameter 4-14 Max Frequenz [Hz] und
Parameter 4-19 Max. Ausgangsfrequenz.
Überprüfen Sie die Skalierung des
Sollwerteingangssignals in Parameter-
gruppe 6-** Analoge Ein-/Ausg. und in
Parametergruppe 3-1* Sollwerteinstellung.
Überprüfen Sie die Einstellungen aller
Motorparameter, darunter auch alle
Schlupfausgleichseinstellungen. Prüfen
Sie bei Regelung mit Rückführung die
PID-Einstellungen.
Prüfen Sie alle Motorparameter auf
falsche Motoreinstellungen.
Prüfen Sie die Bremsparameter. Prüfen
Sie die Einstellungen für die Rampenzeiten.
8 8
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 59

Wartung, Diagnose und Fehle...
Symptom Mögliche Ursache Test Lösung
Phasenkurzschluss
Offene Netzsicherungen oder
Trennschalter
ausgelöst
Abweichung der
Netzstromasym-
88
metrie ist größer als
3 %
Motorstromasymmetrie größer 3 %
Störgeräusche oder
Vibrationen (z. B. ein
Lüfterflügel löst bei
bestimmten
Frequenzen Störgeräusche oder
Vibrationen aus)
Motorüberlastung Die Anwendung überlastet den Motor.
Lose Anschlüsse
Problem mit der Netzversorgung
(siehe Beschreibung unter Alarm 4,
Netzasymmetrie)
Problem mit dem Frequenzumrichter
Problem mit Motor oder Motorverdrahtung
Problem mit dem Frequenzumrichter
Resonanzen, z. B. im Motor-/Lüftersystem
VLT® Midi Drive FC 280
Kurzschluss zwischen Phasen an Motor
oder Bedienteil. Prüfen Sie die Motorund Bedienteilphasen auf
Kurzschlüsse.
Führen Sie die Inbetriebnahmeprüfung
nach losen Anschlüssen und
Kontakten durch.
Wechseln Sie die Netzeingangskabel
am Frequenzumrichter um 1 Position:
A zu B, B zu C, C zu A.
Wechseln Sie die Netzeingangskabel
am Frequenzumrichter um 1 Position:
A zu B, B zu C, C zu A.
Wechseln Sie die Kabel zum Motor um
1 Position: U zu V, V zu W, W zu U.
Wechseln Sie die Kabel zum Motor um
1 Position: U zu V, V zu W, W zu U.
Ausblendung kritischer Frequenzen
durch Verwendung der Parameter in
Parametergruppe 4-6*
Drehz.ausblendung.
Schalten Sie die Übermodulation unter
Parameter 14-03 Overmodulation ab.
Erhöhen Sie die Resonanzdämpfung
unter Parameter 1-64 Resonance
Dampening.
Beseitigen Sie erkannte Kurzschlüsse.
Führen Sie die Inbetriebnahmeprüfung durch und stellen Sie sicher,
dass der Motorstrom im Rahmen der
Spezifikationen liegt. Wenn der
Motorstrom den Voll-Laststrom auf
dem Typenschild überschreitet, läuft
der Motor ggf. nur mit reduzierter
Last. Überprüfen Sie die Spezifikationen der Anwendung.
Ziehen Sie lose Anschlüsse und
Kontakte fest.
Wenn die Asymmetrie dem Kabel
folgt, liegt ein Netzstromproblem vor.
Prüfen Sie die Netzversorgung.
Wenn der asymmetrische
Leitungszweig in der gleichen
Eingangsklemme bleibt, liegt ein
Problem mit dem Gerät vor. Wenden
Sie sich an Ihren Händler.
Wenn die Asymmetrie dem Kabel
folgt, liegt das Problem beim Motor
oder in den Motorkabeln. Überprüfen
Sie den Motor und die Motorkabel.
Wenn die Asymmetrie an der
gleichen Ausgangsklemme bestehen
bleibt, liegt ein Problem mit dem
Frequenzumrichter vor. Wenden Sie
sich an Ihren Händler.
Überprüfen Sie, ob die Störgeräusche
und/oder Vibrationen ausreichend
reduziert worden sind.
Tabelle 8.3 Fehlerbehebung
60 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

Technische Daten Bedienungsanleitung
9 Technische Daten
9.1 Elektrische Daten
Frequenzumrichter
Typische Wellenleistung [kW (HP)]
Schutzart der Baugröße IP20 (optional IP21/Typ
1)
Ausgangsstrom
Wellenleistung [kW] 0,37 0,55 0,75 1,1 1,5 2,2 3
Dauerbetrieb (3 x 380–440 V) [A] 1,2 1,7 2,2 3 3,7 5,3 7,2
Dauerbetrieb (3 x 441–480 V) [A] 1,1 1,6 2,1 2,8 3,4 4,8 6,3
Überlast (60 s) [A] 1,9 2,7 3,5 4,8 5,9 8,5 11,5
Dauerbetrieb kVA (400 V AC) [kVA] 0,9 1,2 1,5 2,1 2,6 3,7 5,0
Dauerbetrieb kVA (480 V AC) [kVA] 0,9 1,3 1,7 2,5 2,8 4,0 5,2
Max. Eingangsstrom
Dauerbetrieb (3 x 380–440 V) [A] 1,2 1,6 2,1 2,6 3,5 4,7 6,3
Dauerbetrieb (3 x 441–480 V) [A] 1,0 1,2 1,8 2,0 2,9 3,9 4,3
Überlast (60 s) [A] 1,9 2,6 3,4 4,2 5,6 7,5 10,1
Weitere Spezifikationen
Maximaler Leitungsquerschnitt (Netz, Motor,
Bremse und Zwischenkreiskopplung) [mm
(AWG)]
Typische Verlustleistung bei maximaler
Nennlast [W]
Gewicht, Schutzart IP20 [kg (lb)] 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5) 3,6 (7,9)
Gewicht, Schutzart IP21 [kg (lb)] 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1)
Wirkungsgrad [%]
1)
2)
2
PK37
0,37
(0,5)
K1 K1 K1 K1 K1 K1 K2
20,9 25,2 30 40 52,9 74 94,8
96,0 96,6 96,8 97,2 97,0 97,5 98,0
PK55
0,55
(0,75)
PK75
0,75
(1,0)
P1K1
1,1
(1,5)
4 (12)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
P3K0
3,0
(4,0)
9 9
Tabelle 9.1 Netzversorgung 3 x 380–480 V AC
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 61

Technische Daten
VLT® Midi Drive FC 280
Frequenzumrichter
Typische Wellenleistung [kW (HP)]
Schutzart der Baugröße IP20 (optional IP21/Typ
1)
P4K0
4
(5,5)
K2 K2 K3 K4 K4 K5 K5
P5K5
5,5
(7,5)
P7K5
7,5
(10)
P11K
11
(15)
P15K
15
(20)
P18K
18,5
(25)
P22K
22
(30)
Ausgangsstrom
Wellenleistung 4 5,5 7,5 11 15 18,5 22
Dauerbetrieb (3 x 380–440 V) [A] 9 12 15,5 23 31 37 42,5
Dauerbetrieb (3 x 441–480 V) [A] 8,2 11 14 21 27 34 40
Überlast (60 s) [A] 14,4 19,2 24,8 34,5 46,5 55,5 63,8
Dauerbetrieb kVA (400 V AC) [kVA] 6,2 8,3 10,7 15,9 21,5 25,6 29,5
Dauerbetrieb kVA (480 V AC) [kVA] 6,8 9,1 11,6 17,5 22,4 28,3 33,3
Max. Eingangsstrom
Dauerbetrieb (3 x 380–440 V) [A] 8,3 11,2 15,1 22,1 29,9 35,2 41,5
Dauerbetrieb (3 x 441–480 V) [A] 6,8 9,4 12,6 18,4 24,7 29,3 34,6
Überlast (60 s) [A] 13,3 17,9 24,2 33,2 44,9 52,8 62,3
Weitere Spezifikationen
Maximaler Leitungsquerschnitt (Netz, Motor,
Bremse und Zwischenkreiskopplung) [mm
2
4 (12) 16 (6)
(AWG)]
Typische Verlustleistung bei maximaler Nennlast
1)
[W]
115,5 157,5 192,8 289,5 393,4 402,8 467,5
Gewicht, Schutzart IP20 [kg (lb)] 3,6 (7,9) 3,6 (7,9) 4,1 (9,0) 9,4 (20,7) 9,5 (20,9) 12,3 (27,1) 12,5 (27,6)
99
Gewicht, Schutzart IP21 [kg (lb)] 5,5 (12,1) 5,5 (12,1) 6,5 (14,3) 10,5 (23,1) 10,5 (23,1) 14,0 (30,9) 14,0 (30,9)
Wirkungsgrad [%]
2)
98,0 97,8 97,7 98,0 98,1 98,0 98,0
Tabelle 9.2 Netzversorgung 3 x 380–480 V AC
Frequenzumrichter
Typische Wellenleistung [kW (HP)]
Schutzart der Baugröße IP20 (optional IP21/Typ
1)
PK37
0,37
(0,5)
K1 K1 K1 K1 K1 K2 K3
PK55
0,55
(0,75)
PK75
0,75
(1,0)
P1K1
1,1
(1,5)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
P3K7
3,7
(5,0)
Ausgangsstrom
Dauerbetrieb (3 x 200-240 V) [A] 2,2 3,2 4,2 6 6,8 9,6 15,2
Überlast (60 s) [A] 3,5 5,1 6,7 9,6 10,9 15,4 24,3
Dauerbetrieb kVA (230 V AC) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8 6,1
Max. Eingangsstrom
Dauerbetrieb (3 x 200-240 V) [A] 1,8 2,7 3,4 4,7 6,3 8,8 14,3
Überlast (60 s) [A] 2,9 4,3 5,4 7,5 10,1 14,1 22,9
Weitere Spezifikationen
Maximaler Leitungsquerschnitt (Netz, Motor,
Bremse und Zwischenkreiskopplung) [mm
2
4 (12)
(AWG)]
Typische Verlustleistung bei maximaler Nennlast
1)
[W]
29,4 38,5 51,1 60,7 76,1 96,1 147,5
Gewicht, Schutzart IP20 [kg (lb)] 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5) 3,6 (7,9)
Gewicht, Schutzart IP21 [kg (lb)] 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1) 6,5 (14,3)
Wirkungsgrad [%]
2)
96,4 96,6 96,3 96,6 96,5 96,7 96,7
Tabelle 9.3 Netzversorgung 3 x 200-240 V AC
62 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

Technische Daten Bedienungsanleitung
Frequenzumrichter
Typische Wellenleistung [kW (HP)]
Schutzart der Baugröße IP20 (optional IP21/Typ 1) K1 K1 K1 K1 K1 K2
Ausgangsstrom
Dauerbetrieb (3 x 200-240 V) [A] 2,2 3,2 4,2 6 6,8 9,6
Überlast (60 s) [A] 3,5 5,1 6,7 9,6 10,9 15,4
Dauerbetrieb kVA (230 V AC) [kVA] 0,9 1,3 1,7 2,4 2,7 3,8
Max. Eingangsstrom
Dauerbetrieb (1 x 200-240 V) [A] 2,9 4,4 5,5 7,7 10,4 14,4
Überlast (60 s) [A] 4,6 7,0 8,8 12,3 16,6 23,0
Weitere Spezifikationen
Maximaler Leitungsquerschnitt (Netz und Motor)
[mm2 (AWG)]
Typische Verlustleistung bei maximaler Nennlast
1)
[W]
Gewicht, Schutzart IP20 [kg (lb)] 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,3 (5,1) 2,5 (5,5)
Gewicht, Schutzart IP21 [kg (lb)] 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 4,0 (8,8) 5,5 (12,1)
Wirkungsgrad [%]
Tabelle 9.4 Netzversorgung 1x200-240 V AC
1) Die typische Verlustleistung gilt für Nennlastbedingungen und sollte innerhalb von ±15 % liegen (Toleranz bezieht sich auf variierende
Spannungs- und Kabelbedingungen).
Werte basieren auf einem typischen Motorwirkungsgrad (Übergang IE2/IE3). Motoren mit niedrigerem Wirkungsgrad tragen ebenfalls zur Verlustleistung im Frequenzumrichter bei, und Motoren mit hohem Wirkungsgrad reduzieren die Verlustleistung.
Gilt für die Dimensionierung der Kühlung des Frequenzumrichters. Wenn die Taktfrequenz im Vergleich zur Werkseinstellung erhöht wird, kann die
Verlustleistung bedeutend steigen. Die Leistungsaufnahme des LCP und typischer Steuerkarten sind eingeschlossen. Weitere Optionen und
Anschlusslasten können die Verluste um bis zu 30 W erhöhen (typisch sind allerdings nur 4 W zusätzlich, bei einer vollständig belasteten
Steuerkarte bzw. einem vollständig belasteten Feldbus).
Verlustleistungsdaten gemäß EN 50598-2 finden Sie unter www.danfoss.com/vltenergyefficiency.
2) Gemessen mit 50 m (164 ft) abgeschirmten Motorkabeln bei Nennlast und Nennfrequenz. Die Energieeffizienzklasse finden Sie unter
Kapitel 9.4 Umgebungsbedingungen. Informationen zu Teillastverlusten finden Sie unter www.danfoss.com/vltenergyefficiency.
2)
PK37
0,37
(0,5)
37,7 46,2 56,2 76,8 97,5 121,6
94,4 95,1 95,1 95,3 95,0 95,4
PK55
0,55
(0,75)
PK75
0,75
(1,0)
4 (12)
P1K1
1,1
(1,5)
P1K5
1,5
(2,0)
P2K2
2,2
(3,0)
9 9
Netzversorgung
9.2
Netzversorgung (L1/N, L2/L, L3)
Versorgungsklemmen (L1/N, L2/L, L3)
Versorgungsspannung 380–480 V: -15 % (-25 %)1) bis +10 %
Versorgungsspannung 200–240 V: -15 % (-25 %)1) bis +10 %
1) Der Frequenzumrichter kann bei einer Eingangsspannung von -25 % mit reduzierter Leistung laufen. Die maximale Ausgangsleistung des Frequenzumrichters beträgt 75 % bei einer Eingangsspannung von -25 % bzw. 85 % bei einer Eingangsspannung
von -15 %.
Bei einer Netzspannung von weniger als 10 % unterhalb der niedrigsten Versorgungsnennspannung des Frequenzumrichters wird
kein volles Drehmoment erreicht.
Netzfrequenz 50/60 Hz ±5 %
Maximale kurzzeitige Asymmetrie zwischen Netzphasen 3,0 % der Versorgungsnennspannung
Wirkleistungsfaktor (λ) ≥0,9 bei Nennlast
Verschiebungs-Leistungsfaktor (cos ϕ) Nahe 1 (>0,98)
Schalten am Netzeingang (L1/N, L2/L, L3) (Anzahl der Netz-Einschaltungen) ≤7,5 kW (10 HP) max. 2 x/Min.
Schalten am Netzeingang (L1/N, L2/L, L3) (Anzahl der Netz-Einschaltungen) 11-22 kW (15–30 HP) max. 1 x/Min.
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 63

Technische Daten
VLT® Midi Drive FC 280
9.3 Motorausgang und Motordaten
Motorausgang (U, V, W)
Ausgangsspannung 0–100 % der Versorgungsspannung
Ausgangsfrequenz 0–500 Hz
Ausgangsfrequenz bei VVC+-Betrieb 0–200 Hz
Schalten am Ausgang Unbegrenzt
Rampenzeit 0,01–3600 s
Drehmomentkennlinie
Startmoment (konstantes Drehmoment) Maximal 160 %/60 s
Überlastmoment (konstantes Drehmoment) Maximal 160 %/60 s
Anlaufstrom maximal 200 %/1 s
Drehmomentanstiegzeit in VVC+-Modus (unabhängig von fsw) Maximal 50 ms
1) Prozentwert bezieht sich auf das Nenndrehmoment. Bei Frequenzumrichtern mit einem Leistungsbereich von 11–22 kW (15–30
hp) beträgt dieser 150 %.
1)
1)
9.4 Umgebungsbedingungen
Umgebungsbedingungen
Schutzart, Frequenzumrichter IP20 (optional IP21/NEMA Typ 1)
Schutzart, Umbausatz IP21/Typ 1
Vibrationstest, alle Baugrößen 1,14 g
99
Luftfeuchtigkeit 5–95 % (IEC 721-3-3; Klasse 3K3 (nicht kondensierend) bei Betrieb)
Umgebungstemperatur (bei Schaltmodus DPWM)
- mit Leistungsreduzierung Maximal 55 °C (131 °F)
- bei vollem konstanten Ausgangsstrom Maximal 45 °C (113 °F)
Min. Umgebungstemperatur bei Volllast 0 °C (32 °F)
Min. Umgebungstemperatur bei reduzierter Leistung -10 °C (14 °F)
Temperatur bei Lagerung/Transport -25 bis +65/70 °C (-13 bis +149/158 °F)
Max. Höhe über dem Meeresspiegel ohne Leistungsreduzierung 1000 m (3280 ft)
Max. Höhe über dem Meeresspiegel mit Leistungsreduzierung 3000 m (9243 ft)
EN 61800-3, EN 61000-3-2, EN 61000-3-3, EN 61000-3-11,
EMV-Normen, Störaussendung
EMV-Normen, Störfestigkeit
Energieeffizienzklasse
1) Siehe Abschnitt „Besondere Betriebsbedingungen“ im Projektierungshandbuch zur:
Leistungsreduzierung aufgrund von hoher Umgebungstemperatur
•
Leistungsreduzierung aufgrund von niedrigem Luftdruck
•
2) Um das Überhitzen der Steuerkarte an PROFIBUS-, PROFINET, EtherNet/IP- und POWERLINK-Ausführungen des VLT
FC 280 zu verhindern, müssen Sie eine komplette Auslastung der digitalen und analogen Ein- und Ausgänge bei Umgebungstemperaturen über 45 °C (113 °F) vermeiden.
3) Die Umgebungstemperatur für K1S2 mit Leistungsreduzierung beträgt maximal 50 °C (122 °F).
4) Die Umgebungstemperatur für K1S2 bei vollem konstantem Ausgangsstrom beträgt maximal 40 °C (104 °F).
5) Bestimmt gemäß EN 50598-2 bei:
Nennlast
•
90 % der Nennfrequenz
•
Taktfrequenz-Werkseinstellung.
•
Schaltmodus-Werkseinstellung
•
Offener Typ: Umgebungslufttemperatur 45 °C (113 °F).
•
5)
EN 61000-3-12, EN 61000-6-3/4, EN 55011, IEC 61800-3
EN 61800-3, EN 61000-6-1/2, EN 61000-4-2, EN 61000-4-3
EN 61000-4-4, EN 61000-4-5, EN 61000-4-6, EN 61326-3-1
®
Midi Drive
1)2)3)
IE2
4)
64 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

Technische Daten Bedienungsanleitung
Typ 1 (NEMA-Satz): Umgebungstemperatur 45 °C (113 °F).
•
9.5 Kabelspezifikationen
Kabellängen und Querschnitte
Maximale Motorkabellänge, mit Abschirmung 50 m (164 ft)
Maximale Motorkabellänge, ohne Abschirmung 75 m (246 ft)
Maximaler Querschnitt für Steuerklemmen, flexibler/starrer Draht 2,5 mm2/14 AWG
Mindestquerschnitt für Steuerklemmen 0,55 mm2/30 AWG
Maximale STO-Eingangskabellänge, ungeschirmt 20 m (66 ft)
1) Leistungskabelquerschnitte, siehe Tabelle 9.1, Tabelle 9.2, Tabelle 9.3 und Tabelle 9.4.
Bei Konformität mit EN 55011 1A und EN 55011 1B müssen Sie das Motorkabel in bestimmten Fällen kürzen. Nähere Einzelheiten
finden Sie in Kapitel 2.6.2 EMV-Emission im Projektierungshandbuch VLT
1)
®
Midi Drive FC 280.
9.6 Steuereingang/-ausgang und Steuerdaten
Digitaleingänge
Klemme Nr.
Logik PNP oder NPN
Spannungsniveau 0–24 V DC
Spannungsniveau, logisch 0 PNP <5 V DC
Spannungsniveau, logisch 1 PNP >10 V DC
Spannungsniveau, logisch 0 NPN >19 V DC
Spannungsniveau, logisch 1 NPN <14 V DC
Maximale Spannung am Eingang 28 V DC
Pulsfrequenzbereich 4–32 kHz
(Arbeitszyklus) minimale Pulsbreite 4,5 ms
Eingangswiderstand, R
1) Sie können die Klemme 27 auch als Ausgang programmieren.
i
18, 19, 271), 29, 32, 33
Ca. 4 kΩ
9 9
STO-Eingänge
Klemme Nr. 37, 38
Spannungsniveau 0–30 V DC
Spannungsniveau, niedrig <1,8 V DC
Spannungsniveau, hoch > 20 V DC
Maximale Spannung am Eingang 30 V DC
Minimaler Eingangsstrom (pro Testpunkt) 6 mA
1) Weitere Informationen zu STO-Eingängen finden Sie unter Kapitel 6 Safe Torque Off (STO).
Analogeingänge
Anzahl der Analogeingänge 2
Klemme Nr. 531), 54
Betriebsarten Spannung oder Strom
Betriebsartwahl Software
Spannungsniveau 0–10 V
Eingangswiderstand, R
Höchstspannung -15 V bis +20 V
Strombereich 0/4 bis 20 mA (skalierbar)
Eingangswiderstand, R
Maximaler Strom 30 mA
Auflösung der Analogeingänge 11 Bit
Genauigkeit der Analogeingänge Maximale Abweichung 0,5 % der Gesamtskala
Bandbreite 100 Hz
Die Analogeingänge sind galvanisch von der Versorgungsspannung (PELV = Protective extra low voltage/Schutzkleinspannung)
und anderen Hochspannungsklemmen getrennt.
1)
i
i
Ca. 10 kΩ
ca. 200 Ω
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 65

Mains
Functional
isolation
PELV isolation
Motor
DC bus
High
voltage
Control
37
RS485
38
33
130BE837.10
Technische Daten
VLT® Midi Drive FC 280
1) Klemme 53 unterstützt nur die Einstellung Spannung, und Sie können diese auch als Digitaleingang verwenden.
Abbildung 9.1 Galvanische Trennung
HINWEIS
GROSSE HÖHENLAGE
Bei Höhenlagen über 2000 m (6562 ft) über NN ziehen Sie bitte die Danfoss-Hotline bezüglich PELV zurate.
Pulseingänge
Programmierbare Pulseingänge 2
Klemmennummer Puls 29, 33
Maximale Frequenz an Klemme 29, 33 32 kHz (Gegentakt)
Maximale Frequenz an Klemme 29, 33 5 kHz (offener Kollektor)
99
Minimale Frequenz an Klemme 29, 33 4 Hz
Spannungsniveau Siehe Abschnitt zu Digitaleingängen
Maximale Spannung am Eingang 28 V DC
Eingangswiderstand, R
i
Ca. 4 kΩ
Pulseingangsgenauigkeit Maximale Abweichung: 0,1 % der Gesamtskala
Digitalausgänge
Programmierbare Digital-/Pulsausgänge 2
Klemme Nr. 27
Spannungsniveau am Digital-/Pulsausgang 0–24 V
Maximaler Ausgangsstrom (Körper oder Quelle) 40 mA
Maximale Last am Pulsausgang 1 kΩ
Maximale kapazitive Last am Pulsausgang 10 nF
Min. Ausgangsfrequenz am Pulsausgang 4 Hz
Max. Ausgangsfrequenz am Pulsausgang 32 kHz
Genauigkeit am Pulsausgang Maximale Abweichung: 0,1 % der Gesamtskala
Auflösung am Pulsausgang 10 Bit
Klemmennummer (siehe Daten in Analogausgänge) 42
Spannungsniveau am Digitalausgang 0–17 V
1) Sie können die Klemme 27 auch als Eingang programmieren.
2) Sie können Klemme 42 auch als Analogausgang programmieren.
Der Digitalausgang ist von der Versorgungsspannung (PELV) und anderen Hochspannungsklemmen galvanisch getrennt.
Analogausgang
Anzahl programmierbarer Analogausgänge 1
Klemme Nr. 42
Strombereich am Analogausgang 0/4–20 mA
Maximale Widerstandslast zum Bezugspotenzial am Analogausgang 500 Ω
Maximale Spannung am Analogausgang 17 V
Genauigkeit am Analogausgang Maximale Abweichung: 0,8 % der Gesamtskala
Auflösung am Analogausgang 10 Bit
1) Sie können Klemme 42 auch als Digitalausgang programmieren.
66 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503
1)
2)
1)

Technische Daten Bedienungsanleitung
Der Analogausgang ist galvanisch von der Versorgungsspannung (PELV – Schutzkleinspannung, Protective extra low voltage) und
anderen Hochspannungsklemmen getrennt.
Steuerkarte, 24-V-DC-Ausgang
Klemme Nr. 12, 13
Maximale Last 100 mA
Die 24-V-DC-Versorgung ist von der Versorgungsspannung (PELV) galvanisch getrennt. Jedoch hat die Versorgungsspannung das
gleiche Potenzial wie die analogen und digitalen Ein- und Ausgänge.
Steuerkarte, +10-V-DC-Ausgang
Klemme Nr. 50
Ausgangsspannung 10,5 V ±0,5 V
Maximale Last 15 mA
Die 10-V-DC-Versorgung ist von der Versorgungsspannung (PELV) und anderen Hochspannungsklemmen galvanisch getrennt.
Steuerkarte, RS485 serielle Schnittstelle
Klemme Nr. 68 (P,TX+, RX+), 69 (N,TX-, RX-)
Klemme Nr. 61 Masse für Klemmen 68 und 69
Die serielle RS485-Schnittstelle ist von der Versorgungsspannung (PELV, Schutzkleinspannung – Protective extra low voltage)
galvanisch getrennt.
Steuerkarte, serielle USB-Schnittstelle
USB-Standard 1,1 (Full Speed)
USB-Buchse USB-Stecker Typ B
Der Anschluss an einen PC erfolgt über ein standardmäßiges USB-Kabel.
Die USB-Verbindung ist galvanisch von der Versorgungsspannung (PELV, Schutzkleinspannung) und anderen Hochspannungsklemmen getrennt.
Der USB-Erdanschluss ist nicht galvanisch vom Schutzleiter getrennt. Benutzen Sie nur einen isolierten Laptop als PC-Verbindung
zum USB-Anschluss am Frequenzumrichter.
9 9
Relaisausgang
Programmierbare Relaisausgänge 1
Relais 01 01–03 (NC/(Öffner), 01–02 (NO/Schließer)
Maximaler Belastungsstrom der Klemme (AC-1)1) auf 01-02 (NO/Schließer) (ohmsche Last) 250 V AC, 3 A
Maximaler Belastungsstrom der Klemme (AC-15)1) auf 01-02 (NO/Schließer) (induktive Last bei bei cosφ 0,4) 250 V AC, 0,2 A
Maximaler Belastungsstrom der Klemme (DC-1)1) auf 01-02 (NO/Schließer) (ohmsche Last) 30 V DC, 2 A
Maximaler Belastungsstrom der Klemme (DC-13)1) auf 01-02 (NO/Schließer) (induktive Last) 24 V DC, 0,1 A
Maximaler Belastungsstrom der Klemme (AC-1)1) auf 01-03 (NC/Öffner) (ohmsche Last) 250 V AC, 3 A
Maximaler Belastungsstrom der Klemme (AC-15)1) auf 01-03 (NC/Öffner) (induktive Last bei cosφ 0,4) 250 V AC, 0,2 A
Maximaler Belastungsstrom der Klemme (DC-1)1) auf 01-03 (NC/Öffner) (ohmsche Last) 30 V DC, 2 A
Minimaler Belastungsstrom der Klemme an 01-03 (NC/Öffner), 01-02 (NO/Schließer) 24 V DC 10 mA, 24 V AC 20 mA
1) IEC 60947 Teil 4 und 5.
Die Relaiskontakte sind durch verstärkte Isolierung vom Rest der Schaltung galvanisch getrennt.
Steuerkartenleistung
Abtastintervall 1 ms
Steuerungseigenschaften
Auflösung der Ausgangsfrequenz bei 0-500 Hz ±0,003 Hz
System-Reaktionszeit (Klemmen 18, 19, 27, 29, 32 und 33) ≤2 ms
Drehzahlregelbereich (ohne Rückführung) 1:100 der Synchrondrehzahl
Drehzahlgenauigkeit (ohne Rückführung) ±0,5 % der Nenndrehzahl
Drehzahlgenauigkeit (mit Rückführung) ±0,1 % der Nenndrehzahl
Alle Angaben zu Steuerungseigenschaften basieren auf einem vierpoligen Asynchronmotor.
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 67

Technische Daten
VLT® Midi Drive FC 280
9.7 Anzugsdrehmomente für Anschlüsse
Stellen Sie sicher, dass Sie beim Festziehen aller elektrischen Verbindungen die korrekten Anzugsdrehmomente verwenden.
Ein zu geringes oder zu hohes Anzugsdrehmoment führt zu Problemen an den elektrischen Anschlüssen. Verwenden Sie
einen Drehmomentschlüssel, um das richtige Drehmoment zu erzielen. Empfohlener Steckplatzschraubendrehertyp: SZS 0,6
x 3,5 mm.
Drehmoment [Nm (in-lb)]
Baugröße
K1
K2
K3 7,5 (10) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
K4
K5
Tabelle 9.5 Anzugsdrehmomente
Leistung
[kW (HP)]
0,37–2,2
(0,5–3,0)
3,0–5,5
(4,0–7,5)
11–15
(15–20)
18,5–22
(25–30)
Netz Motor
0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 0,8 (7,1) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,2 (10,6) 1,6 (14,2) 0,4 (3,5) 0,5 (4,4)
Gleichstrom-
anschluss
Bremse Masse
Steuerung/
Regelung
Relais
9.8 Sicherungen und Trennschalter
99
Verwenden Sie versorgungsseitig Sicherungen und/oder Trennschalter als Schutz vor Personen- und Sachschäden für den
Fall einer Bauteilstörung im Inneren des Frequenzumrichters (erster Fehler).
Schutz des Abzweigkreises
Sie müssen alle Abzweigkreise in Installationen (einschließlich Schaltanlagen und Maschinen) in Übereinstimmung mit
nationalen/internationalen Vorschriften mit einem Kurzschluss- und Überstromschutz versehen.
HINWEIS
Integrierter elektronischer Kurzschlussschutz bietet keinen Schutz des Abzweigkreises. Sorgt für Schutz des Abzweigkreises gemäß den nationalen und lokalen Richtlinien und Vorschriften.
Tabelle 9.6 enthält eine Auflistung der empfohlenen getesteten Sicherungen.
VORSICHT
GEFAHR VON PERSONENSCHÄDEN UND SACHSCHÄDEN
Im Falle einer Fehlfunktion kann das Nichtbeachten dieser Empfehlungen zu Gefahren für den Bediener und Schäden
am Frequenzumrichter und anderen Geräten führen.
Wählen Sie Sicherungen anhand der Empfehlungen aus. Auf diese Weise können Sie mögliche Schäden am
•
Frequenzumrichter auf Schäden innerhalb des Geräts beschränken.
HINWEIS
SACHSCHÄDEN
Die Verwendung von Sicherungen bzw. Trennschaltern ist zur Übereinstimmung mit IEC 60364 für CE zwingend
erforderlich. Das Nichtbeachten der Schutzempfehlungen kann zu Schäden am Frequenzumrichter führen.
Danfoss empfiehlt die Verwendung von Sicherungen und Trennschaltern in Tabelle 9.6 und Tabelle 9.7, um Konformität mit
UL 508C oder IEC 61800-5-1 sicherzustellen. Verwenden Sie für Nicht-UL-Anwendungen Trennschalter für den Schutz einer
Schaltung, die eine maximale Stromstärke von 50.000 A
Kurzschlussnennstrom für Frequenzumrichter (SCCR) ist beim Schutz durch T-Klasse-Sicherungen für die Verwendung in
einer Schaltung mit mehr als 100.000 A
68 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503
, 240 V/480 V geeignet.
eff
(symmetrisch) bei einer Spannung von 240 V/400 V zulassen. Der
eff

Technische Daten Bedienungsanleitung
Baugröße Leistung [kW (HP)] Nicht-UL-Sicherung
Dreiphasig 380-480 V
Dreiphasig 200-240 V
Einphasig 200-240 V
Nicht-UL-Trennschalter
(Eaton)
0,37 (0,5)
0,55–0,75
K1
K2
K3 7,5 (10) PKZM0-25
K4
K5
K1
K2 2,2 (3,0)
K3 3,7 (5,0) PKZM0-25
K1
K2 2,2 (3,0) gG-25 PKZM0-20
(0,75–1,0)
1,1–1,5
(1,5–2,0)
2,2 (3,0)
3,0–5,5
(4,0–7,5)
11–15
(15–20)
18,5–22
(25–30)
0,37 (0,5) gG-10
0,55 (0,75)
0,75 (1,0)
1,1 (1,5)
1,5 (2,0)
0,37 (0,5) gG-10
0,55 (0,75)
0,75 (1,0)
1,1 (1,5)
1,5 (2,0)
gG-10
PKZM0-16
gG-20
gG-25
gG-50 –
gG-80 –
gG-20
gG-25
gG-20
PKZM0-20
PKZM0-16
PKZM0-20
PKZM0-16
9 9
Tabelle 9.6 Nicht-UL-Sicherung und -Trennschalter
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 69

Technische Daten
VLT® Midi Drive FC 280
Baugröße
3-phasig
380–480 V
3-phasig
200–240 V
99
Einphasig
200-240 V
K2–K3
K2–K3
Leistung
[kW (HP)]
0,37–0,75
(0,5–1,0)
K1
K4
K5
K1
K1
K2 2,2 (3,0)
1,1–1,5
(1,5–2,0)
2,2 (3,0) KTS-R-15 JKS-15 JJS-15 FNQ-R-15 KTK-R-15 LP-CC-15 KLSR-15 ATM-R15 A6K-15R
3,0–7,5
(4,0–10)
11–15
(15–20)
18,5–22
(25–30)
0,37 (0,5) KTN-R-6 JKS-6 JJN-6 FNQ-R-6 KTK-R-6 LP-CC-6 KLNR-6 ATM-R6 A2K-6R
0,55 (0,75)
0,75 (1,0)
1,1–1,5
(1,5–2,0)
2,2–3,7
(3,0–5,0)
0,37 (0,5) KTN-R-6 JKS-6 JJN-6 FNQ-R-6 KTK-R-6 LP-CC-6 KLNR-6 ATM-R6 A2K-6R
0,55 (0,75)
0,75 (1,0)
1,1–1,5
(1,5–2,0)
Klasse
KTS-R-6 JKS-6 JJS-6 FNQ-R-6 KTK-R-6 LP-CC-6 KLSR-6 ATM-R6 A6K-6R
KTS-R-10 JKS-10 JJS-10 FNQ-R-10 KTK-R-10 LP-CC-10 KLSR-10 ATM-R10 A6K-10R
KTS-R-25 JKS-25 JJS-25 FNQ-R-25 KTK-R-25 LP-CC-25 KLSR-25 ATM-R25 A6K-25R
KTS-R-50 JKS-50 JJS-50 – – – KLSR-50 – A6K-50R
KTN-
KTN-
KTN-
KTN-
KTN-
KTN-
KTN-
KTN-
Klasse J Klasse T
RK1
– JKS-80 JJS-80 – – – – – –
R-10
R-15
R-20
R-25
R-10
R-15
R-20
R-25
JKS-10 JJN-10 FNQ-R-10 KTK-R-10 LP-CC-10 KLNR-10 ATM-R10 A2K-10R
JKS-15 JJN-15 FNQ-R-15 KTK-R-15 LP-CC-15 KLNR-15 ATM-R15 A2K-15R
JKS-20 JJN-20 FNQ-R-20 KTK-R-20 LP-CC-20 KLNR-20 ATM-R20 A2K-20R
JKS-25 JJN-25 – – – KLNR-25 ATM-R25 A2K-25R
JKS-10 JJN-10 FNQ-R-10 KTK-R-10 LP-CC-10 KLNR-10 ATM-R10 A2K-10R
JKS-15 JJN-15 FNQ-R-15 KTK-R-15 LP-CC-15 KLNR-15 ATM-R15 A2K-15R
JKS-20 JJN-20 FNQ-R-20 KTK-R-20 LP-CC-20 KLNR-20 ATM-R20 A2K-20R
JKS-25 JJN-25 – – – KLNR-25 ATM-R25 A2K-25R
Bussmann E4273
Klasse
CC
Klasse CC
KlasseCCKlasse
Littelfuse
E81895
RK1
MERSEN
E163267/
E2137
Klasse CC Klasse RK1
MERSEN
E163267/
E2138
Tabelle 9.7 UL-Sicherung
70 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

Technische Daten Bedienungsanleitung
9.9 Baugrößen, Nennleistungen und Abmessungen
Baugröße K1 K2 K3 K4 K5
Leistungsgröß
e [kW]
Abmessungen
[mm (in)]
Gewicht
[kg (lb)]
Bohrungen
[mm (in)]
1-phasig
200–240 V
3-phasig
200–240 V
3-phasig
380–480 V
Höhe A1 210 (8,3) 272,5 (10,7)
Höhe A2 278 (10,9) 340 (13,4)
Breite B 75 (3,0) 90 (3,5) 115 (4,5) 133 (5,2) 150 (5,9)
Tiefe C 168 (6,6) 168 (6,6) 168 (6,6) 245 (9,6) 245 (9,6)
Höhe A 338,5 (13,3) 395 (15,6)
Breite B 100 (3,9) 115 (4,5) 130 (5,1) 153 (6,0) 170 (6,7)
Tiefe C 183 (7,2) 183 (7,2) 183 (7,2) 260 (10,2) 260 (10,2)
Höhe A 294 (11,6) 356 (14)
Breite B 75 (3,0) 90 (3,5) 115 (4,5) 133 (5,2) 150 (5,9)
Tiefe C 168 (6,6) 168 (6,6) 168 (6,6) 245 (9,6) 245 (9,6)
IP20 2,5 (5,5) 3,6 (7,9)
IP21 4,0 (8,8) 5,5 (12,1)
a 198 (7,8) 260 (10,2)
b 60 (2,4) 70 (2,8) 90 (3,5) 105 (4,1) 120 (4,7)
c 5 (0,2) 6,4 (0,25)
d 9 (0,35) 11 (0,43) 11 (0,43) 12,4 (0,49) 12,6 (0,5)
e 4,5 (0,18) 5,5 (0,22)
f 7,3 (0,29) 8,1 (0,32)
0,37
(0,5)
0,37
(0,5)
0,37
(0,5)
0,55
(0,75)
0,55
(0,75)
0,55
(0,75)
FC 280 mit unterer Kabeleinführungsabdeckung (ohne obere Abdeckung)
0,75
(1,0)
0,75
(1,0)
0,75
(1,0)
1,1
(1,5)
1,1
(1,5)
1,1
(1,5)
FC 280 mit IP21/UL/Typ 1-Satz
1,5
(2,0)
1,5
(2,0)
1,5
(2,0)
FC 280 IP20
2,2
(3,0)
3
(4,0
)
2,2
(3,0)
2,2
(3,0)
4
(5,5)
5,5
(7,5)
– – –
3,7
(5,0)
7,5
(10)11(15)15(20)
272,5
(10,7)
341,5
(13,4)
395
(15,6)
(14,1)
(10,1)
(14,3)
(10,2)
(0,26)
(0,22)
(0,36)
425 (16,7) 520 (20,5)
357
391 (15,4) 486 (19,1)
4,6
8,2 (18,1) 11,5 (25,4)
6,5
10,5 (23,1) 14,0 (30,9)
260
6,5
5,5
9,2
8 (0,32) 7,8 (0,31)
6,8 (0,27) 7 (0,28)
11 (0,43) 11,2 (0,44)
– –
317,5
(12,5)
379,5
(14,9)
297,5
(11,7)
18,5
(25)22(30)
410 (16,1)
474 (18,7)
9 9
390 (15,4)
Tabelle 9.8 Baugrößen, Nennleistungen und Abmessungen
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 71

130BE844.11
B
C
A1
A2
130BE846.10
B
A
C
Technische Daten
VLT® Midi Drive FC 280
99
Abbildung 9.2 Standard mit Abschirmblech
Abbildung 9.3 Standard mit unterer Kabeleinführungsabdeckung (ohne obere Abdeckung)
72 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

B
C
A
130BE845.10
C
a
b
130BA648.12
f
e
B
A
a
d
e
b
c
Technische Daten Bedienungsanleitung
9 9
Abbildung 9.4 Standard mit IP21/UL/Typ 1-Satz
Abbildung 9.5 Bohrungen oben und unten
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 73

Anhang
VLT® Midi Drive FC 280
10 Anhang
10.1 Symbole, Abkürzungen und Konventionen
°C
°F
AC Wechselstrom
AEO Automatische Energieoptimierung
AWG American Wire Gauge = Amerikanisches Drahtmaß
AMA Automatische Motoranpassung
DC Gleichstrom
EMV Electromagnetic Compatibility (Elektromagnetische Verträglichkeit)
ETR Elektronisches Thermorelais
f
M,N
FC Frequenzumrichter
I
INV
I
LIM
I
M,N
I
VLT,MAX
I
VLT,N
IP Schutzart
LCP Local Control Panel (LCP-Bedieneinheit)
MCT Motion Control Tool
MM Speichermodul
1010
MMP Speichermodul-Programmieranwendung
n
s
P
M,N
PELV PELV (Schutzkleinspannung - Protective Extra Low Voltage)
PCB Leiterplatte
PM-Motor Permanentmagnetmotor
PUD Power Unit Data
PWM Pulsbreitenmodulation (Pulse Width Modulation)
UPM Umdrehungen pro Minute
SIVP Spezifische Initialisierungswerte und Schutz
STO Safe Torque Off
T
LIM
U
M,N
Grad Celsius
Grad Fahrenheit
Motornennfrequenz
Wechselrichter-Nennausgangsstrom
Stromgrenze
Motornennstrom
Maximaler Ausgangsstrom
Vom Frequenzumrichter gelieferter Ausgangsnennstrom
Synchrone Motordrehzahl
Motornennleistung
Drehmomentgrenze
Motornennspannung
Tabelle 10.1 Symbole und Abkürzungen
Konventionen
Für Abbildungen sind alle Abmessungen in
•
[mm(in)] angegeben.
Ein Sternchen (*) kennzeichnet die Werksein-
•
10.2 Aufbau der Parametermenüs
- Parametername.
stellung eines Parameters.
Nummerierte Listen zeigen Vorgehensweisen.
•
Aufzählungslisten enthalten andere Informa-
•
tionen.
Kursivschrift bedeutet:
•
- Querverweise.
- Link.
74 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

Anhang Bedienungsanleitung
tersatz
0 - 999 *0
[9] Kopieren aus werkseitigem Parame-
[3] Kopieren aus Parametersatz 3
[4] Kopieren aus Parametersatz 4
[0] Disabled
0-42 [Auto On]-LCP Taste
*[1] Aktiviert
0-44 [Off/Reset]-LCP-Taste
[0] Disabled
*[1] Aktiviert
[7] Nur Reset aktivieren
0-5* Kopie/Speichern
0-50 LCP-Kopie
*[0] Keine Kopie
[3] Lade von LCP, nur Fkt.
[2] Lade von LCP, Alle
[1] Speichern in LCP
[2] Kopieren aus Parametersatz 2
0-51 Parametersatz-Kopie
*[0] Keine Kopie
[1] Kopieren aus Parametersatz 1
0-6* Passwort
0-60 Hauptmenü Passwort
1-** Motor/Last
1-0* Grundeinstellungen
1-00 Regelverfahren
*[0] Regelung ohne Rückführung
[1] Mit Drehgeber
[2] Drehmom. m. Rück.
[3] PID-Regler
0 - 250 % *120 %
0,01 – 20 s *Größenabhängig
[0] Hoch
[1] Mittel
[2] Niedrig
[3] Adaptiv 1
*[0] Normal
[1] Invers
[7] Erw.PID-Drehz.m.Rück.
1-01 Motorsteuerprinzip
[0] U/f
*[1] VVC+
1-03 Drehmomentkennlinie
*[0] Konstantes Drehmoment
[1] Variables Drehmoment
[4] Drehmom. o. Rück.
[2] Autom. Energieoptim. CT
1-06 Rechtslauf
1-08 Bandbreite der Motorsteuerung
[4] Adaptiv 2
1-1* Motorauswahl
1-10 Motorart
*[0] Asynchron
[1] PM, Vollpol
[3] PM (Vergr. Magnete), Sat
1-14 Dämpfungsfaktor
1-15 Filter niedrige Drehzahl
1-16 Filter hohe Drehzahl
0-3* LCP-Benutzerdef
0-30 Freie Anzeigeeinheit
[0] Keine
[1667] Pulseingang 29 [Hz]
[1665] Analogausgang 42 [mA]
[1666] Digitalausgang
-2147483647 - 2147483647 *0
*[1] %
[5] PPM
[1669] Pulsausgang 27 [Hz]
[1668] Pulseingang 33 [Hz]
[12] Puls/s
[20] l/s
[10] 1/min
[1671] Relaisausgänge
[21] l/min
[11] UPM
[1672] Counter A
[1673] Counter B
[1674] Präziser Stopp-Zähler
[1680] Bus Steuerwort 1
0 – 999999,99 Freie Anzeigeeinheit
*0 Freie Anzeigeeinheit
[122] Gal/min
[123] Gal/h
[124] cfm
[127] ft³/h
[140] Fuß/s
[141] Fuß/min
[160] °F
[170] psi
[171] lb/in2
[172] inch wg
[173] ft wg
[180] HP
0-31 Freie Anzeige Min.-Wert
[25] m³/h
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
[72] Pa
[73] kPa
[74] m WG
[80] kW
[120] GPM
[22] l/h
[23] m³/s
[24] m³/min
[121] Gal/s
0-32 Freie Anzeige Max.-Wert
0 - 0 *
0,0 – 999999,99 Freie Anzeigeeinheit
*100 Freie Anzeigeeinheit
0-37 Displaytext 1
0 - 0 *
0 - 0 *
0-38 Displaytext 2
0-39 Displaytext 3
0-4* LCP-Tastenfeld
[0] Disabled
0-40 [Hand On]-LCP Taste
*[1] Aktiviert
10 10
Gleiche Optionen wie 0-20
Gleiche Optionen wie 0-20
Gleiche Optionen wie 0-20
Gleiche Optionen wie 0-20
0-23 Displayzeile 2 Groß
0-21 Displayzeile 1,2 Klein
[3456] Spurfehler
0-22 Displayzeile 1,3 Klein
[3427] PCD 7 Lesen für Anwendung
[3430] PCD 10 Lesen für Anwendung
[3401] PCD 1 Schreiben für Anwendung
[3402] PCD 2 Schreiben für Anwendung
[3403] PCD 3 Schreiben für Anwendung
[3404] PCD 4 Schreiben für Anwendung
[3405] PCD 5 Schreiben für Anwendung
[3406] PCD 6 Schreiben für Anwendung
[1890] PID-Prozess Abweichung
[1893] PID-Prozess verstärkungsskal. Ausgang
[1697] Alarmwort 3
[1698] Warnwort 3
[1690] Alarm Word
[1691] Alarmwort 2
[1686] Sollwert 1 FC-Schnittstelle
[1684] Feldbus-Komm. Status
[1685] FC Steuerwort 1
[1682] Bus Sollwert 1
[1695] Ext. Zustandswort 2
[1692] Warning Word
[1693] Warnwort 2
[1694] Ext. Status Word
[2119] Erw. Ausgang 1 [%]
[2118] Erw. Istwert 1 [Einheit]
[2117] Erw. Sollwert 1 [Einheit]
[1891] PID-Prozessausgang
[1892] PID-Prozess begrenz. Ausgang
[3407] PCD 7 Schreiben für Anwendung
[3408] PCD 8 Schreiben für Anwendung
[3409] PCD 9 Schreiben für Anwendung
[3421] PCD 1 Lesen für Anwendung
[3410] PCD 10 Schreiben für Anwendung
[3426] PCD 6 Lesen für Anwendung
[3425] PCD 5 Lesen für Anwendung
[3423] PCD 3 Lesen für Anwendung
[3424] PCD 4 Lesen für Anwendung
[3422] PCD 2 Lesen für Anwendung
[3450] Istposition
[3428] PCD 8 Lesen für Anwendung
[3429] PCD 9 Lesen für Anwendung
0-24 Displayzeile 3 Groß
0-14 Anzeige: Par.sätze/Kanal bearbeiten
0-** Betrieb/Display
0-0* Grundeinstellungen
0-16 Anwendungsauswahl
*[0] Keine
0-01 Sprache
*[0] Englisch (English)
[1] Einfacher Prozess mit Rückführung
[2] Hand/Fern
[3] Drehzahlsteuerung
[4] Einfache Drehzahl mit Rückführung
[1] Deutsch
[2] Francais
[3] Dansk
[4] Espanol
[5] Multi Speed
[6] OGD LA10
[7] OGD V210
0-02 Motordrehzahleinheit (Umschaltung
[5] Italiano
[28] Bras. Port.
[8] Hubwerk
Hz/UPM)
0-2* LCP-Display
0-20 Displayzeile 1,1 Klein
[0] UPM
*[1] Hz
[38] Displaytext 2
[0] Keine
[37] Displaytext 1
0-03 Ländereinstellungen
[1] Nord-Amerika
[0] International
[39] Displaytext 3
0-04 Netz-Ein Modus
[748] PCD Feed Forward
[953] Profibus-Warnwort
[0] Wiederanlauf
*[1] LCP Stop, Letzt.SW
[1005] Zähler Übertragungsfehler
[2] LCP Stop, Sollw.=0
[1006] Zähler Empfangsfehler
0-06 Netztyp
[1230] Warnparameter
[0] 200-240V/50Hz/IT-Netz
[1501] Running Hours
[1502] Zähler-kWh
[2] 200-240V/50Hz
[1] 200-240V/50Hz/Delta
[1600] Control Word
[10] 380-440V/50Hz/IT-Netz
[1601] Reference [Unit]
*[1602]Sollwert [%]
[12] 380-440V/50Hz
[11] 380-440V/50Hz/Delta
[1603] Status Word
[1605] Main Actual Value [%]
[20] 440-480V/50Hz/IT-Netz
[21] 440-480V/50Hz/Delta
[1609] Benutzerdefinierte Anzeige
[22] 440-480V/50Hz
[1610] Leistung [kW]
[100] 200-240V/60Hz/IT-Netz
[1611] Power [hp]
[101] 200-240V/60Hz/Delta
[1612] Motor Voltage
[1613] Frequenz
[102] 200-240V/60Hz
[110] 380-440V/60Hz/IT-Netz
[1614] Motorstrom
[111] 380-440V/60Hz/Delta
[1615] Frequency [%]
[112] 380-440V/60Hz
[1616] Drehmoment [Nm]
[120] 440-480V/60Hz/IT-Netz
[1617] Drehzahl [UPM]
[121] 440-480V/60Hz/Delta
[1618] Motor Thermal
[122] 440-480V/60Hz
[1620] Rotor-Winkel
[1622] Drehmoment [%]
0-07 Auto DC-Bremsung
[0] Aus
[1633] Bremsleist./2 min
[1634] Heatsink Temp.
[1635] Inverter Thermal
[1630] DC-Zwischenkreisspannung
*[1] On
0-1* Parametersätze
0-10 Aktiver Satz
*[1] Satz 1
[1636] Nenn- WR Strom
[2] Satz 2
[1637] Nenn- WR-Strom
[3] Satz 3
[1650] External Reference
[1652] Istwert [Einheit]
[1639] Steuerkartentemp.
[9] Externe Anwahl
0-11 Programm-Satz
[1653] DigiPot Sollwert
[1] Satz 1
[2] Satz 2
[1638] SL Controller State
[4] Satz 4
[1657] Feedback [RPM]
[1660] Digitaleingang
[3] Satz 3
[4] Satz 4
*[9] Aktiver Satz
[1662] Analogeingang 53
0-12 Satz verknüpfen mit
*[20] Verknüpft
[0] Nicht verknüpft
[1663] AE 54 Modus
[1664] Analogeing. 54
[1661] AE 53 Modus
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 75

Anhang
[72] Pa
[73] kPa
[74] m WG
[80] kW
VLT® Midi Drive FC 280
Gleiche Optionen wie 3-15
-4999,0 – 4999 Soll-/Istwert-Einheit
*0 Soll-/Istwert-Einheit
3-03 Maximaler Sollwert
*Größenabhängig
3-04 Sollwertfunktion
*[0] Addierend
[1] Externe Anwahl
3-1* Sollwerteinstellung
3-10 Festsollwert
0 - 100 % *0 %
3-12 Wert für Frequenzkorrektur auf/ab
-100 - 100 % *0 %
[20] Digitalpoti
[32] Bus-PCD
[8] Pulseingang 33
[11] Bus Sollwert
[7] Pulseingang 29
*[1] Analogeingang 53
[2] Analogeingang 54
[0] Ohne Funktion
3-15 Variabler Sollwert 1
3-14 Relativer Festsollwert
0 – 500,0 Hz *5 Hz
-100 - 100 % *0 %
3-11 Festdrehzahl Jog [Hz]
-4999,0 – 4999 Soll-/Istwert-Einheit
[173] ft wg
[180] HP
[120] GPM
[121] Gal/s
[122] Gal/min
[123] Gal/h
[124] cfm
[125] ft³/s
[126] ft³/min
[127] ft³/h
[130] lb/s
[131] lb/min
[132] lb/h
[140] Fuß/s
[141] Fuß/min
[145] ft
[150] lb ft
[160] °F
[170] psi
[171] lb/in2
3-02 Minimaler Sollwert
[172] inch wg
Gleiche Optionen wie 3-15
3-17 Variabler Sollwert 3
3-18 Relative Skalierungsreferenzquelle
*[0] Ohne Funktion
3-16 Variabler Sollwert 2
[1] Analogeingang 53
0 – 6200 Ohm *Größenabhängig
[2] AC-Bremse
2-11 Bremswiderstand (Ohm)
2-12 Bremswiderstand Leistung (kW )
[1] Bremswiderstand
0 – 500 V *0 V
0,001 – 2000 kW *Größenabhängig
2-14 Bremsspannungsreduzierung
2-16 AC-Bremse, max. Strom
0 - 160 % *100 %
2-17 Überspannungssteuerung
*[0] Disabled
0 - 200 % *100 %
[1] Aktiv (ohne Stopp)
[2] Aktiviert
2-19 Überspannungsverstärkung
2-2* Mechanische Bremse
2-20 Bremse öffnen bei Motorstrom
0 – 100 A *0 A
0 – 400 Hz *0 Hz
2-22 Bremse schließen bei Motorfrequenz
0 – 5 s *0 s
2-23 Mech.Bremse Verzögerungszeit
2-39 Mech. Bremse m. Richt. Änderung
2-3* Erw. Mech Bremse
*[0] OFF
[1] ON
[2] ON mit Startverzögerung
3-** Sollwert/Rampen
3-0* Sollwertgrenzen
3-00 Sollwertbereich
*[0] Min. bis Max.
[1] -Max. bis + Max.
[0] Keine
3-01 Soll-/Istwerteinheit
[3] Hz
[4] Nm
[5] PPM
[10] 1/min
[12] Puls/s
[20] l/s
[21] l/min
[22] l/h
[23] m³/s
[24] m³/min
[25] m³/h
[1] %
[2] UPM
[30] kg/s
[31] kg/min
[32] kg/h
[33] t/min
[34] t/h
[40] m/s
[41] m/min
[45] m
[60] °C
[70] mbar
[71] bar
1010
0 – 500 Hz *0 Hz
0 – 328 ft *164 ft
0 – 10 s *5 s
1-79 Kompressorstart Max. Anlaufzeit
0 – 65535 mH *Größenabhängig
1-8* Stoppfunktion
1-80 Stoppfunktion
*[0] Motorfreilauf
[1] DC-Halten/Motor-Vorheizung
20 - 200 % *100 %
0 – 65535 mH *Größenabhängig
0 – 20 Hz *0 Hz
1-83 Funktion Präziser Stopp
1-82 Ein.-Frequenz für Stoppfunktion [Hz]
[3] Vormagnetisierung
20 - 200 % *100 %
20 - 200 % *100 %
*[0] Präz. Rampenstopp
[1] Zähler Stopp mit Reset
[2] Zähler Stopp ohne Reset
0 - 300 % *100 %
[3] Drehzahlkompensierter Stopp
Reset
Reset
[4] Drehzahlkompens. Zählerstopp m.
0,1 – 10,0 Hz *1 Hz
0 - 999999999 *100000
[5] Drehzahlkompens. Zähler Stopp o.
1-84 Präziser Stopp-Wert
0 – 500,0 Hz *Größenabhängig
0 – 1000 V *Größenabhängig
1,0 - 2,0 *1,4
0 – 100 ms *10 ms
1-88 Verstärkung AC-Bremse
1-85 Verzögerung Drehzahlkompensation
1-9* Motortemperatur
1-90 Thermischer Motorschutz
*[0] Kein Motorschutz
0 - 300 % *100 %
0 - 300 % *100 %
-400 – 400,0 % *Größenabhängig
[2] Thermistor-Abschalt.
[1] Thermistor Warnung
0,05 – 5 s *0,1 s
2-06 Parkstrom
0,1 – 60 s *3 s
0 - 150 % *100 %
2-07 Parkzeit
2-1* Generator. Bremsen
0 – 500,0 Hz *Größenabhängig
*[0] Aus
2-10 Bremsfunktion
0 – 1000 A *Größenabhängig
0 – 500 Hz *0 Hz
2-01 DC-Bremsstrom
0 – 60 s *10 s
0 - 150 % *50 %
2-04 DC-Bremse Ein
2-02 DC-Bremszeit
Erkennung
[6] Digitaleingang 33
[5] Digitaleingang 32
[3] Digitaleingang 18
1-93 Thermistorquelle
[4] ETR-Alarm 1
[22] ETR-Abschaltung - Erweiterte
[3] ETR-Warnung 1
0 - 500 % *100 %
*[0] Keine
0 - 120 % *50 %
0,001 – 0,05 s *0,005 s
[4] Digitaleingang 19
[2] Analogeingang 54
[1] Analogeingang 53
0 – 10 s *0 s
0 - 160 % *50 %
2-00 DC-Halte-/Vorwärmstrom
2-** Bremsfunktionen
2-0* DC Halt/DC Bremse
1-46 Positionserkennung Verstärkung
1-45 Querinduktivitätssät. (LqSat)
1-44 Längsinduktivitätssät. (LdSat)
0,001 – 1 s *Größenabhängig
0,01 – 20 s *Größenabhängig
1-17 Spannungskonstante
1-2* Motordaten
1-20 Motorleistung
[2] 0,12 kW – 0,16 HP
[3] 0,18 kW – 0,25 HP
[7] 0,75 kW - 1,00 PS
[5] 0,37 kW - 0,50 PS
[6] 0,55 kW – 0,75 HP
[4] 0,25 kW - 0,33 PS
1-5* Lastunabh. Einstellung
1-50 Motormagnetisierung bei 0 U/min
[8] 1,10 kW - 1,50 PS
[9] 1,50 kW - 2,00 PS
1-52 Min. Frequenz norm. Magnetis. [Hz]
[10] 2,20 kW - 3,00 PS
[11] 3,00 kW - 4,00 PS
1-56 U/f-Kennlinie - F
1-55 U/f-Kennlinie - U
[13] 4,00 kW - 5,40 PS
[12] 3,70 kW - 5,00 PS
1-6* Lastabh. Einstellung
1-60 Lastausgleich tief
[18] 18,5 kW - 25 PS
[17] 15,00 kW - 20 PS
[16] 11,00 kW - 15,00 PS
[15] 7,50 kW - 10,0 PS
[14] 5,50 kW - 7,50 PS
1-61 Lastausgleich hoch
[19] 22 kW - 30 PS
[20] 30 kW - 40 PS
1-62 Schlupfausgleich
50 – 1000 V *Größenabhängig
1-22 Motor Voltage
1-63 Schlupfausgleich Zeitkonstante
20 – 500 Hz *Größenabhängig
1-23 Motorfrequenz
1-64 Resonanzdämpfung
0,01 – 1000,00 A *Größenabhängig
1-24 Motorstrom
1-65 Resonanzdämpfung Zeitkonstante
50 – 60000 U/min *Größenabhängig
1-25 Motornenndrehzahl
1-66 Min. Strom bei niedr. Drz.
1-7* Startfunktion
1-70 Anlaufmodus
*[0] Rotorlageerkennung
[1] Parken
1-71 Startverzögerung
0,1 – 10000,0 Nm *Größenabhängig
1-29 Autom. Motoranpassung (AMA)
*[0] Aus
1-26 Dauer- Nenndrehmoment
[1] Komplette AMA
[2] Reduz. Anpassung
1-3* Erw. Motordaten I
1-30 Statorwiderstand (Rs)
0,0 – 9999,000 Ohm *Größenabhängig
1-72 Startfunktion
[0] DC Halten/Verzögerung
[1] DC-Bremse/Verzögerung
0 – 9999,000 Ohm *Größenabhängig
1-33 Statorstreureaktanz (X1)
1-31 Rotorwiderstand (Rr)
*[2] Freilauf/Verz.zeit
[3] Startdrz. Re.
[4] Start Sollrichtung
[5] VVC+ Rechtslauf
1-73 Motorfangschaltung
0 – 65535 mH *Größenabhängig
0,0 – 9999,00 Ohm *Größenabhängig
0,0 – 9999,000 Ohm *Größenabhängig
1-37 D-Achsen-Induktivität (Ld)
1-35 Hauptreaktanz (Xh)
*[0] Disabled
[1] Aktiviert
[2] Immer aktiviert
0,000 – 65535 mH *Größenabhängig
1-39 Motorpolzahl
1-38 Q-Achsen-Induktivität (Lq)
[3] Enabled Ref. Dir.
2 – 100 *Größenabhängig
1-76 Startstrom
1 – 9000 V *Größenabhängig
1-42 Motorkabellänge
1-78 Verdichterstart Max. Frequenz [Hz]
0 – 100 m *50 m
1-43 Motorkabellänge Fuß
1-75 Startdrehzahl [Hz]
[4] Enab. Always Ref. Dir.
1-4* Erw. Motordaten II
1-40 Gegen-EMK bei 1000 UPM
1-49 Strom bei min. Querinduktivität
1-48 Strom bei min. Längeninduktivität
76 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

Anhang Bedienungsanleitung
[64] Zähler B (-1)
[63] Zähler B (+1)
[65] Reset Zähler B
[64] Zähler B (-1)
[171] Begrenzungsschalter Rechtslauf invers
[164] Pos. Idx Bit2
[172] Begrenzungsschalter Linkslauf invers
[171] Begrenzungsschalter Rechtslauf invers
Gleiche Optionen wie 5-12
5-13 Klemme 29 Digitaleingang
[30] Zählereingang
Gleiche Optionen wie 5-10
5-11 Klemme 19 Digitaleingang
[172] Begrenzungsschalter Linkslauf invers
inv)
[163] Pos. Idx Bit1
[150] Gehe zu Home
[151] Home Ref. Schalter
[150] Gehe zu Home
[74] PID aktiviert
[156] HW Grenze Negativ Inv
[155] HW Grenze Positiv Inv
[156] HW Grenze Negativ Inv
[157] Pos. Quick Stop Inv (Pos. Schnellstopp
[151] Home Ref. Schalter
[74] PID aktiviert
[73] PID Reset I-Anteil
[72] PID-Fehler inv.
[72] PID-Fehler inv.
[73] PID Reset I-Anteil
[65] Reset Zähler B
[157] Pos. Quick Stop Inv (Pos. Schnellstopp
[155] HW Grenze Positiv Inv
[164] Pos. Idx Bit2
[160] Gehe zu Zielpos.
[162] Pos. Idx Bit0
inv)
[160] Gehe zu Zielpos.
[162] Pos. Idx Bit0
[163] Pos. Idx Bit1
Gleiche Optionen wie 5-12
5-14 Klemme 32 Digitaleingang
[32] Pulseingang
[83] Drehgebereingang Z
5-12 Klemme 27 Digitaleingang
[0] Ohne Funktion
[1] Reset
[2] Motorfreilauf (inv.)
Gleiche Optionen wie 5-12
[82] Drehgebereingang B
5-15 Klemme 33 Digitaleingang
[4] Schnellst. inv.
[5] DC Bremse (invers)
[3] Mot.freil./Res. inv.
[30] Zählereingang
[32] Pulseingang
[81] Drehgebereingang A
[6] Stopp (invers)
[8] Start
[9] Puls-Start
*[1] Safe Torque Off-Alarm
[3] Warnung Safe Torque Off
5-19 Klemme 37/38 Safe Torque Off
[10] Reversierung
[11] Start + Reversierung
[12] Start nur Rechts
5-3* Digitalausgänge
5-30 Klemme 27 Digitalausgang
*[0] Ohne Funktion
[1] Steuer. bereit
[16] Festsollwert Bit 0
[15] Festsollwert ein
[13] Start nur Links
[14] Festdrehzahl JOG
[11] Moment.grenze
[12] Außerh.Stromber.
[13] Unter Min.-Strom
[3] Bereit/Fern-Betrieb
[18] Festsollwert Bit 2
[4] Freigabe/k. Warnung
[19] Sollwert speichern
[6] Motor ein/k. Warnung
[20] Drehz. speich.
[21] Drehzahl auf
[28] Frequenzkorrektur Auf
[24] Satzanwahl Bit 1
[22] Drehzahl ab
[23] Satzanwahl Bit 0
[2] Bereit
[17] Festsollwert Bit 1
[9] Alarm
[10] Alarm oder Warnung
[8] Ist=Sollw./k. Warn.
[7] Grenzen OK/k. Warn.
[5] In Betrieb
[14] Über Max.-Strom
[34] Rampe Bit 0
[35] Rampe Bit 1
[45] Latched star t reverse
[29] Frequenzkorrektur Ab
[15] Außerhalb Frequenzbereich
[16] Unter Min.-Drehzahl
[17] Über Max.-Frequenz
[55] DigiPot Auf
[56] DigiPot Ab
[51] Externe Verriegelung
[18] Außerh.Istwertber.
[57] DigiPot löschen
[58] DigiPot Heben
[60] Zähler A (+1)
[61] Zähler A (-1)
[63] Zähler B (+1)
[62] Reset Zähler A
[23] Fern, Ber., k. therm.
[21] Warnung Übertemp
[22] Bereit, keine Übertemperaturwarnung
[19] Unter Min.-Istwert
[20] Über Max.-Istwert
10 10
0 – 500 Hz *0 Hz
0 – 500 Hz *0 Hz
4-58 Motorphasen Überwachung
[0] Aus
0 – 1000 % *Größenabhängig
4-16 Momentengrenze motorisch
[2] Analogeingang 54
[7] Pulseingang 29
*[1] On
4-17 Momentengrenze generatorisch
[8] Pulseingang 33
4-63 Ausbl. Frequenz bis [Hz]
4-6* Drehz.ausblendung
0 - 1000 % *100 %
[11] Bus Sollwert
4-61 Ausbl. Frequenz von [Hz]
4-18 Stromgrenze
3-3* Gen Ramp Settings
0 – 1000 % *Größenabhängig
4-19 Max. Ausgangsfrequenz
*[0] Aus
3-31 Ramp Down w/ dir. Change
5-** Digit. Ein-/Ausgänge
0 – 500 Hz *Größenabhängig
4-2* Variable Grenzen
[2] Rampenzeit Ab 2
[1] Rampenzeit Ab 1
*[0] PNP
5-0* Grundeinstellungen
5-00 Arbeitsweise der Digitaleingänge
[2] Analogeing. 53
*[0] Ohne Funktion
4-20 Variable Drehmomentgrenze
[9] Rampenzeit Schnellstopp
[4] Rampenzeit Ab 4
[3] Rampenzeit Ab 3
[1] NPN
[4] Analogeing. 53 inv.
3-4* Rampe 1
*[0] Eingang
5-01 Klemme 27 Funktion
[8] Analogeing. 54 inv.
[6] Analogeing. 54
3-40 Rampentyp 1
*[0] Linear
[1] Ausgänge
5-1* Digitaleingänge
5-10 Klemme 18 Digitaleingang
*[0] Ohne Funktion
[2] Analogeing. 53
4-21 Variable Drehzahlgrenze
3-41 Rampenzeit Auf 1
[1] Sinusrampe
[2] Sinusrampe 2
[1] Reset
[0] Ohne Funktion
[6] Analogeing. 54
[4] Analogeing. 53 inv.
0,01 – 3600 s *Größenabhängig
3-42 Rampenzeit Ab 1
[55] DigiPot Auf
[56] DigiPot Ab
[57] DigiPot löschen
[58] DigiPot Heben
[60] Zähler A (+1)
[61] Zähler A (-1)
[40] Präziser Puls-Start
[41] Präziser Puls-Stopp invers
[45] Latched star t reverse
0 – 500,00 A *Größenabhängig
4-10 Motordrehrichtung
4-54 Warnung Sollwert niedr.
*[0] Nur Rechts
[51] Externe Verriegelung
-4999 - 4999 *-4999
4-55 Warnung Sollwert hoch
[2] Beide Richtungen
4-11 Min. Motordrehzahl [UPM]
-4999 - 4999 *4999
4-56 Warnung Istwert niedr.
0 – 1500 U/min *Größenabhängig
4-12 Min. Motorfrequenz [Hz]
-4999 – 4999 Prozessregeleinheit
0 – 400,0 Hz *0 Hz
[19] Sollwert speichern
[18] Festsollwert Bit 2
[20] Drehz. speich.
[6] Stopp (invers)
*[8] Start
[9] Puls-Start
[10] Reversierung
[11] Start + Reversierung
[0] Disabled
[1] Warnung
*[2] Abschaltung
Gleicher Inhalt wie 3-4*
3-8* Weitere Rampen
3-80 Rampenzeit JOG
[12] Start nur Rechts
[3] Festdrehzahl JOG
0,01 – 3600 s *Größenabhängig
[4] Schnellst. inv.
[5] DC Bremse (invers)
[3] Mot.freil./Res. inv.
[2] Motorfreilauf (inv.)
4-22 Losbrechverstärkung
*[0] Aus
[1] On
[8] Analogeing. 54 inv.
0,01 – 3600 s *Größenabhängig
4-3* Motor-Istw-Überwachung
4-30 Drehgeberüberwachung Funktion
Gleicher Inhalt wie 3-4*
Gleicher Inhalt wie 3-4*
3-5* Rampe 2
3-6* Rampe 3
3-7* Rampe 4
[13] Start nur Links
[4] Ausgangsfrequenz speichern
3-81 Rampenzeit Schnellstopp
[5] Max. Drehzahl
[6] Regelung o. Geber
0,01 – 3600 s *Größenabhängig
3-9* Digitalpoti
[16] Festsollwert Bit 0
0 – 50 Hz *20 Hz
4-31 Drehgeber max. Fehlabweichung
0,01 - 200 % *0,10 %
3-90 Digitalpoti Einzelschritt
[17] Festsollwert Bit 1
[14] Festdrehzahl JOG
[15] Festsollwert ein
[21] Drehzahl auf
0 – 60 s *0,05 s
4-32 Drehgeber Timeout-Zeit
4-4* Warnungen Grenzen 2
4-40 Warnung Frequenz Niedrig
3-92 Digitalpoti speichern bei Netz-Aus
[1] On
3-93 Digitalpoti Max. Grenze
*[0] Aus
[26] Präz. Stopp invers
[23] Satzanwahl Bit 0
[24] Satzanwahl Bit 1
[22] Drehzahl ab
0 - 200 *0
0 – 500 Hz *Größenabhängig
0 – 500 Hz *Größenabhängig
4-42 Einstellbare Temperaturwarnung
4-41 Warnung Frequenz Hoch
-200 - 200 % *-100 %
-200 - 200 % *100 %
3-95 Rampenverzögerung
3-94 Digitalpoti Min. Grenze
0 – 3600000 ms *1000 ms
4-5* Warnungen Grenzen
3-96 Maximaler Endschaltersollwert
0 – 500 A *0 A
4-50 Warnung Strom niedrig
0 - 200 % *25 %
4-** Grenzen/Warnungen
4-51 Warnung Strom hoch
4-1* Motor Grenzen
[34] Rampe Bit 0
[35] Rampe Bit 1
[28] Frequenzkorrektur Auf
[29] Frequenzkorrektur Ab
[27] Präziser Start, Stopp
[62] Reset Zähler A
-4999 – 4999 Prozessregeleinheit
*4999 Prozessregeleinheit
*-4999 Prozessregeleinheit
4-57 Warnung Istwert hoch
0,1 – 500 Hz *65 Hz
0 – 60000 U/min *Größenabhängig
4-14 Max. Frequenz [Hz]
4-13 Max. Motordrehzahl [UPM]
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 77

Anhang
VLT® Midi Drive FC 280
[58] DigiPot Heben
[72] PID-Fehler inv.
0 – 0xFFFFFFFF *0
5-93 Pulsausgang 27 Bussteuerung
[73] PID Reset I-Anteil
0 - 100 % *0 %
[74] PID aktiviert
[150] Gehe zu Home
0 - 100 % *0 %
5-94 Pulsausgang 27 Timeout Voreinstellung
inv)
6-19 Klemme 53 Modus
*[1] Einstellung Spannung
[156] HW Grenze Negativ Inv
[157] Pos. Quick Stop Inv (Pos. Schnellstopp
[160] Gehe zu Zielpos.
1 – 99 s *10 s
*[0] Aus
6-01 Signalausfall Zeit Funktion
[162] Pos. Idx Bit0
[1] Drehz. speich.
[151] Home Ref. Schalter
[155] HW Grenze Positiv Inv
6-** Analoge Ein-/Ausg.
6-0* Analoger E/A-Modus
6-00 Signalausfall Zeit
[163] Pos. Idx Bit1
[2] Stopp
[164] Pos. Idx Bit2
[3] Festdrehzahl JOG
[172] Begrenzungsschalter Linkslauf invers
[171] Begrenzungsschalter Rechtslauf invers
[4] Max. Drehzahl
[5] Stopp und Alarm
6-1* Analogeingang 53
6-10 Klemme 53 Skal. Min. Spannung
0 – 10 V *0,07 V
[6] Digitaleingang
6-2* Analogeingang 54
6-20 Klemme 54 Skal. Min.Spannung
0 – 10 V *10 V
0 – 10 V *0,07 V
6-14 Klemme 53 Skal. Min.-Soll/ Istwert
6-11 Klemme 53 Skal. Max. Spannung
0 – 20 mA *4 mA
0 – 10 V *10 V
6-22 Klemme 54 Skal. Min.Strom
6-21 Klemme 54 Skal. Max.Spannung
-4999 – 4999 *Größenabhängig
-4999 - 4999 *0
6-16 Klemme 53 Filterzeitkonstante
6-15 Klemme 53 Skal. Max.-Soll/ Istwert
0 – 20 mA *20 mA
6-24 Klemme 54 Skal. Min.-Soll/ Istwert
6-23 Klemme 54 Skal. Max.Strom
0,01 – 10 s *0,01 s
6-18 Klemme 53 Digitaleingang
*[0] Ohne Funktion
-4999 - 4999 *0
[1] Reset
0,01 – 10 s *0,01 s
-4999 – 4999 *Größenabhängig
6-29 Klemme 54 Modus
[0] Strom
[5] DC Bremse (invers)
[6] Stopp (invers)
*[1] Einstellung Spannung
[8] Start
[10] Reversierung
6-9* Analog-/Digitalausgang 42
6-90 Klemme 42 Funktion
*[0] 0-20 mA
[11] Start + Reversierung
[12] Start nur Rechts
[13] Start nur Links
[2] Digitalausgang
6-91 Klemme 42 Analogausgang
[1] 4-20 mA
[15] Festsollwert ein
[16] Festsollwert Bit 0
[14] Festdrehzahl JOG
*[0] Ohne Funktion
[100] Ausgangsfrequenz
[18] Festsollwert Bit 2
[17] Festsollwert Bit 1
[101] Sollwert
[19] Sollwert speichern
[102] Prozess Istwert
[103] Motorstrom
[20] Drehz. speich.
[21] Drehzahl auf
[104] Mom.relativ zu Max.
[22] Drehzahl ab
[106] Leistungs-
[105] Mom.relativ zu Nenn.
[24] Satzanwahl Bit 1
[23] Satzanwahl Bit 0
[107] Drehzahl
[28] Frequenzkorrektur Auf
[139] Bussteuerung
[143] Erw. CL 1
[254] DC-Zwischenkreisspannung
[55] DigiPot Auf
[35] Rampe Bit 1
[51] Externe Verriegelung
6-92 Klemme 42 Digitalausgang
[56] DigiPot Ab
[111] Drehzahlrückführung
[113] PID begrenz. Ausgang
[29] Frequenzkorrektur Ab
[34] Rampe Bit 0
*[0] Ohne Funktion
[57] DigiPot löschen
6-26 Klemme 54 Filterzeitkonstante
6-25 Klemme 54 Skal. Max.-Soll/ Istwert
[4] Schnellst. inv.
[3] Mot.freil./Res. inv.
[2] Motorfreilauf (inv.)
1010
0 – 600 s *0,01 s
0 – 600 s *0,01 s
1 – 32000 Hz *32000 Hz
0 – 31999 Hz *4 Hz
-4999 – 4999 *Größenabhängig
-4999 - 4999 *0
1 – 32000 Hz *32000 Hz
0 – 31999 Hz *4 Hz
-4999 – 4999 *Größenabhängig
-4999 - 4999 *0
4 – 32000 Hz *5000 Hz
1 - 4096 *1024
[167] Startbefehl aktiv
[168] Hand-Betrieb
[165] Hand-Sollwert aktiv
[166] Fernsollwert aktiv
*[1] Steuer. bereit
[2] Bereit
[3] Bereit/Fern-Betrieb
[4] Freigabe/k. Warnung
[24] Bereit, keine Über-/Unterspannung
[25] Rückwärts
[26] Bus OK
[27] Mom.grenze u. Stopp
[169] Auto-Betrieb
[170] Referenzfahrt abgeschlossen
[171] Zielpos. erreicht
[172] Positionsregelungsfehler
[8] Ist=Sollw./k. Warn.
[7] Grenzen OK/k. Warn.
[5] In Betrieb
[6] Motor ein/k. Warnung
[31] Relais 123
[30] Stör.Bremse (IGBT)
[29] Bremse OK, k. Alarm
[28] Bremse, k. Warnung
[173] Position Mech. Bremse
[190] STO-Funktion aktiv
[193] Energiesparmodus
[194] Riemenbruchfunktion
[11] Moment.grenze
[12] Außerh.Stromber.
[9] Alarm
[10] Alarm oder Warnung
[40] Außerh. Sollw.-Ber.
[37] Steuerwort Bit 12
[32] Mechanische Bremse
[36] Steuerwort Bit 11
[239] Fehler der STO-Funktion
5-41 Ein Verzögerung, Relais
[13] Unter Min.-Strom
[14] Über Max.-Strom
[42] Über Max.-Sollwert
[41] Unter Min.-Sollwert
5-42 Aus Verzögerung, Relais
[15] Außerhalb Frequenzbereich
[16] Unter Min.-Drehzahl
[43] Erweiterte PID-Grenze
[45] Bussteuerung
5-5* Pulseingang
5-50 Klemme 29 Min. Frequenz
[19] Unter Min.-Istwert
[18] Außerh.Istwertber.
[17] Über Max.-Frequenz
[47] Bussteuerung, Timeout: Aus
[55] Pulsausgang
[46] Bussteuerung, Timeout: On
[20] Über Max.-Istwert
[56] Warnung Kühlkörperreinigung, hoch
5-51 Klemme 29 Max. Frequenz
[21] Warnung Übertemp
[22] Bereit, keine Übertemperaturwarnung
[60] Vergleicher 0
[61] Vergleicher 1
5-53 Klemme 29 Max. Soll-/Ist- Istwert
5-52 Klemme 29 Min. Soll-/Ist- Istwert
[23] Fern, Ber., k. therm.
[24] Bereit, keine Über-/Unterspannung
[25] Rückwärts
[64] Vergleicher 4
[62] Vergleicher 2
[63] Vergleicher 3
[26] Bus OK
[65] Vergleicher 5
5-55 Klemme 33 Min. Frequenz
[27] Mom.grenze u. Stopp
[28] Bremse, k. Warnung
[71] Logikregel 1
[70] Logikregel 0
5-56 Klemme 33 Max. Frequenz
[30] Stör.Bremse (IGBT)
[29] Bremse OK, k. Alarm
[72] Logikregel 2
[73] Logikregel 3
5-57 Klemme 33 Min. Soll-/ Istwert
[31] Relais 123
[74] Logikregel 4
[32] Mechanische Bremse
[75] Logikregel 5
5-58 Klemme 33 Max. Soll-/ Istwert
[37] Steuerwort Bit 12
[36] Steuerwort Bit 11
[81] SL-Digitalausgang B
[80] SL-Digitalausgang A
5-6* Pulsausgänge
5-60 Klemme 27 Pulsausgang
*[0] Ohne Funktion
[45] Bussteuerung
[45] Bussteuerung
[40] Außerh. Sollw.-Ber.
[41] Unter Min.-Sollwert
[42] Über Max.-Sollwert
[160] Kein Alarm
[83] SL-Digitalausgang D
[91] Drehgeber emulieren Ausgang A
[82] SL-Digitalausgang C
[48] Bus-Strg., Timeout
[100] Ausgangsfrequenz
[46] Bussteuerung, Timeout: On
[47] Bussteuerung, Timeout: Aus
[165] Hand-Sollwert aktiv
[161] Reversierung aktiv
[101] Sollwert
[56] Warnung Kühlkörperreinigung, hoch
[166] Fernsollwert aktiv
[102] Prozess Istwert
[60] Vergleicher 0
[167] Startbefehl aktiv
[103] Motorstrom
[61] Vergleicher 1
[168] Hand-Betrieb
[106] Leistungs-
[107] Drehzahl
[105] Mom.relativ zu Nenn.
[104] Mom.relativ zu Max.
[64] Vergleicher 4
[65] Vergleicher 5
[63] Vergleicher 3
[62] Vergleicher 2
[169] Auto-Betrieb
[170] Referenzfahrt abgeschlossen
[171] Zielpos. erreicht
[172] Positionsregelungsfehler
[109] Max. Ausgangsfreq.
[113] PID begrenz. Ausgang
5-62 Pulsausgang Max. Frequenz 27
[71] Logikregel 1
[72] Logikregel 2
[73] Logikregel 3
[70] Logikregel 0
[173] Position Mech. Bremse
[190] STO-Funktion aktiv
[193] Energiesparmodus
[194] Riemenbruchfunktion
5-7* 24V Drehgebereingang
5-70 Kl. 32/33 Drehgeber Aufl. [Pulse/U]
[74] Logikregel 4
[75] Logikregel 5
[80] SL-Digitalausgang A
0 – 600 s *0,01 s
[239] Fehler der STO-Funktion
5-34 Ein Verzögerung, Digitalausgang
5-71 Kl. 32/33 Drehgeberrichtung
*[0] Nur Rechts
[1] Linkslauf
5-9* Bussteuerung
[160] Kein Alarm
[83] SL-Digitalausgang D
[81] SL-Digitalausgang B
[82] SL-Digitalausgang C
0 – 600 s *0,01 s
5-35 Aus Verzögerung, Digitalausgang
5-4* Relais
5-40 Relaisfunktion
5-90 Dig./Relais Ausg. Bussteuerung
[161] Reversierung aktiv
[0] Ohne Funktion
78 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

Anhang Bedienungsanleitung
[21] Warnung Übertemp
0 - 100 *1
[30] Stör.Bremse (IGBT)
[40] Außerh. Sollw.-Ber.
auf
7-52 PID-Proz Vorwärtsschubfaktor Rampe
[60] Vergleicher 0
0,01 – 100 s *0,01 s
[61] Vergleicher 1
7-53 PID-Prozess Vorsteuerungsfaktor Rampe
0 – 2147483647 *Größenabhängig
8-19 Produktcode
[4] PID-Fehler inv.
[5] PID Reset I-Anteil
[2] CT W gültig, aktiv niedrig
[2] Nur Steuerwort
8-02 Steuerquelle
[0] Keine
[6] PID aktiviert
[1] FC-Schnittstelle
[2] FC USB
8-3* FC-Schnittstelleneinstellungen
[3] Option A
8-03 Steuerwort Timeout-Zeit
8-30 Protokoll
0,5 – 6000 s *1 s
[0] Keine
[74] Logikregel 4
[75] Logikregel 5
*[0] Linear
[1] Radiziert
7-62 Istwertumwandl. 2
[81] SL-Digitalausgang B
*[0] Linear
[1] Radiziert
8-** Opt./Schnittstellen
[73] Logikregel 3
[70] Logikregel 0
[71] Logikregel 1
[72] Logikregel 2
[65] Vergleicher 5
[63] Vergleicher 3
[64] Vergleicher 4
[62] Vergleicher 2
0,001 – 1 s *0,001 s
0,001 – 1 s *0,001 s
ab
0,01 – 100 s *0,01 s
7-57 PID-Prozess Istw. Filterzeit
7-56 PID-Prozess Sollw. Filterzeit
7-6* Istwertumwandlung
7-60 Istwertumwandl. 1
[83] SL-Digitalausgang D
[82] SL-Digitalausgang C
[80] SL-Digitalausgang A
*[1] Standardprofil
[93] Alarm68 oder Alarm188
8-14 Konfigurierbares Steuerwort STW
8-0* Grundeinstellungen
8-01 Führungshoheit
*[0] Klemme und Steuerw.
[1] Nur Klemme
*[0] FC
[2] Modbus RTU
8-04 Steuerwort Timeout-Funktion
*[0] Aus
0,0 - 247 *1
8-31 Adresse
[1] Drehz. speich.
[2] Stopp
8-32 Baudrate
[3] Festdrehzahl JOG
[0] 2400 Baud
[1] 4800 Baud
[4] Max. Drehzahl
[5] Stopp und Alarm
[2] 9600 Baud
[3] 19200 Baud
8-07 Diagnose Trigger
*[0] Deaktivieren
[4] 38400 Baud
[1] Alarme
[5] 57600 Baud
[6] 76800 Baud
[2] Alarme/Warnungen
8-1* Steuer- Einstellungen
[7] 115200 Baud
8-10 Steuerwortprofil
8-33 Parität/Stoppbits
[0] Gerade Parität, 1 Stoppbit
*[0] FC-Profil
[1] PROFIdrive-Profil
[1] Unger. Parität, 1 Stoppbit
[5] ODVA
[2] Ohne Parität, 1 Stoppbit
[3] Ohne Parität, 2 Stoppbits
[7] CANopen DSP 402
8-13 Konfiguration Zustandswort STW
0,0010 – 0,5 s *0,01 s
8-36 Maximale Antwortzeitverzögerung
8-35 Min. Antwortzeitverzögerung
*[1] Standardprofil
[2] Nur Alarm 68
[0] Ohne Funktion
0,1 – 10,0 s *Größenabhängig
[3] Abschalt. o. Al. 68
8-4* FC/MC-Protokoll
8-42 PCD-Schreibkonfiguration
[11] Kl.19 D.-Eing. Zustand
[10] Kl.18 D.-Eing. Zustand
[0] Keine
[1] [302] Minimaler Sollwert
[12] Kl.27 D.-Eing. Zustand
[13] Kl.29 D.-Eing. Zustand
[3] [341] Rampenzeit Auf 1
[2] [303] Maximaler Sollwert
[15] Kl.33 D.-Eing. Zustand
[14] Kl.32 D.-Eing. Zustand
10 10
0 - 65535 *0
0 – 6000 U/min *0 U/min
0 - 10 *0,01
0 – 20 s *0 s
0,10 – 9999 s *9999 s
1 - 50 *5
0 - 200 % *5 %
0 - 200 % *0 %
-100 - 100 % *100 %
-100 - 100 % *-100 %
0 - 100 % *100 %
0 - 100 % *100 %
Normal/Inv. Steuer-
Steuer-
[2] Analogeingang 54
[165] Hand-Sollwert aktiv
[1] Steuer. bereit
[3] Pulseingang 29
[166] Fernsollwert aktiv
[2] Bereit
[4] Pulseingang 33
[167] Startbefehl aktiv
[3] Bereit/Fern-Betrieb
7-3* Process PID II.
[168] Hand-Betrieb
[4] Freigabe/k. Warnung
7-31 PID-Prozess Anti-Windup
7-30 Auswahl Normal-/Invers-Regelung
*[0] Normal
[1] Invers
[169] Auto-Betrieb
[170] Referenzfahrt abgeschlossen
[171] Zielpos. erreicht
[172] Positionsregelungsfehler
[8] Ist=Sollw./k. Warn.
[7] Grenzen OK/k. Warn.
[5] In Betrieb
[6] Motor ein/k. Warnung
7-33 PID-Prozess P-Verstärkung
*[1] On
7-32 PID-Prozess Reglerstart bei
[0] Aus
[173] Position Mech. Bremse
[193] Energiesparmodus
[194] Riemenbruchfunktion
[198] Frequenzumrichter-Bypass
6-93 Klemme 42 Ausgang min. Skalierung
[11] Moment.grenze
[12] Außerh.Stromber.
[10] Alarm oder Warnung
[13] Unter Min.-Strom
[9] Alarm
0 - 200 % *0 %
[14] Über Max.-Strom
7-35 PID-Prozess D-Zeit
7-34 PID-Prozess I-Zeit
0 - 200 % *100 %
6-96 Klemme 42, Wert bei Bussteuerung
6-94 Klemme 42 Ausgang max. Skalierung
[15] Außerhalb Frequenzbereich
[16] Unter Min.-Drehzahl
[17] Über Max.-Frequenz
0 - 16384 *0
[18] Außerh.Istwertber.
7-36 PID-Prozess D-Verstärkung/ Grenze
7-** Regler
[19] Unter Min.-Istwert
7-0* PID Drehzahlregler
[20] Über Max.-Istwert
7-38 PID-Prozess Vorsteuerung
7-39 Bandbreite Ist=Sollwert
7-00 Drehgeberrückführung
[1] 24V-Drehgeber
[6] Analogeingang 53
[7] Analogeingang 54
[23] Fern, Ber., k. therm.
[24] Bereit, keine Über-/Unterspannung
[21] Warnung Übertemp
[22] Bereit, keine Übertemperaturwarnung
*[0] Normal
7-49 PID-Ausgang Normal/Invers-Regelung
*[0] Ohne Funktion
[1] Analogeingang 53
7-20 PID-Prozess Istwert 1
[74] Logikregel 4
[75] Logikregel 5
[73] Logikregel 3
[1] Invers
[2] Analogeingang 54
[80] SL-Digitalausgang A
7-5* Erw. Process PID II
[3] Pulseingang 29
[81] SL-Digitalausgang B
[0] Disabled
7-50 PID-Prozess erw. PID
7-22 PID-Prozess Istwert 2
[4] Pulseingang 33
[83] SL-Digitalausgang D
[82] SL-Digitalausgang C
*[1] Aktiviert
7-51 Verstärkg PID-Prozess Vorstrgsfaktor
[1] Analogeingang 53
*[0] Ohne Funktion
[160] Kein Alarm
[161] Reversierung aktiv
[32] Bus-PCD
7-46 PID-Prozess Vorsteuerungsfaktor
mentregl.
0 - 500 % *100 %
7-12 PID-Proportionalverst. Drehmo-
[64] Vergleicher 4
[63] Vergleicher 3
[62] Vergleicher 2
*[0] Normal
7-13 PID-Integrationszeit Drehmomentre-
[65] Vergleicher 5
gelung
0,002 – 2 s *0,020 s
[71] Logikregel 1
[70] Logikregel 0
7-2* PID-Prozess Istw.
[72] Logikregel 2
[1] Ja
7-02 Drehzahlregler P-Verstärkung
[28] Bremse, k. Warnung
7-41 PID-Prozessausgang neg. Begrenzung
0 - 1 *0,015
7-03 Drehzahlregler I-Zeit
[30] Stör.Bremse (IGBT)
[29] Bremse OK, k. Alarm
7-42 PID-Prozessausgang pos. Begrenzung
2 – 20000 ms *8 ms
7-04 Drehzahlregler D-Zeit
[31] Relais 123
[32] Mechanische Bremse
0 – 200 ms *30 ms
[36] Steuerwort Bit 11
1 – 6000 ms *10 ms
[42] Über Max.-Sollwert
0,0001 - 32 *1
7-07 Drehzahlregler Rückführung Getriebe-
[45] Bussteuerung
[46] Bussteuerung, Timeout: On
[47] Bussteuerung, Timeout: Aus
7-08 Drehzahlregler Vorsteuerung
7-1* Drehmom. PID-Regler
[61] Vergleicher 1
[60] Vergleicher 0
[56] Warnung Kühlkörperreinigung, hoch
1 - 20 *5
7-05 Drehzahlregler D-Verstärk./ Grenze
7-06 Drehzahlregler Tiefpassfilterzeit
[40] Außerh. Sollw.-Ber.
[41] Unter Min.-Sollwert
[37] Steuerwort Bit 12
0 - 500 % *0 %
übersetzung
*[0] Nein
7-4* Erw. Process PID I
7-40 PID-Prozess Reset I-Teil
[9] Pulseingang 33
*[20] Keine
[8] Pulseingang 29
[26] Bus OK
[27] Mom.grenze u. Stopp
[25] Rückwärts
[7] Pulseingang 29
[8] Pulseingang 33
[11] Bus Sollwert
[2] Analogeingang 54
*[0] Ohne Funktion
[1] Analogeingang 53
7-45 PID-Prozess Vorsteuerungsfaktor
7-44 PID-Prozess P-Skal.Max.Sollw.
7-43 PID-Prozess P-Skal.Min.Sollw.
[1] Invers
7-48 PCD Feed Forward
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 79

Anhang
VLT® Midi Drive FC 280
0 - 65535 *0
9-67 Steuerwort 1
[3425] PCD 5 Lesen für Anwendung
[3426] PCD 6 Lesen für Anwendung
0 - 65535 *0
9-68 Zustandswort 1
[3427] PCD 7 Lesen für Anwendung
[3428] PCD 8 Lesen für Anwendung
9-70 Programm Satz
[1] Satz 1
[3429] PCD 9 Lesen für Anwendung
[3430] PCD 10 Lesen für Anwendung
[2] Satz 2
[3] Satz 3
[4] Satz 4
[3450] Istposition
[3456] Spurfehler
9-18 Teilnehmeradresse
*[0] Aus
*[9] Aktiver Satz
9-71 Profibus Datenwerte speichern
1 - 126 *126
0 - 65535 *1037
9-19 Systemnummer Antriebseinheit
[1] Alles speichern
9-22 Auswahl Telegrammtyp
*[100] Keine
[1] Standardtelegramm 1
[1613] Frequenz
[1614] Motorstrom
[101] PPO 1
[1615] Frequency [%]
0 - 65535 *0
0 - 0 *0
0 - 0 *0
0 - 1000 *0
9-52 Zähler: Fehler Gesamt
[1668] Pulseingang 33 [Hz]
[1667] Pulseingang 29 [Hz]
0 - 65535 *0
9-53 Profibus-Warnwort
9-63 Aktive Baudrate
[0] 9,6 kBit/s
[1671] Relaisausgänge
[1672] Counter A
[1673] Counter B
[1669] Pulsausgang 27 [Hz]
[1] 19,2 kBit/s
[2] 93,75 kBit/s
[1674] Präziser Stopp-Zähler
[1684] Feldbus-Komm. Status
[3] 187,5 kBit/s
[4] 500 kBit/s
[1690] Alarm Word
[1685] FC Steuerwort 1
[6] 1,5 MBit/s
[7] 3 MBit/s
[1691] Alarmwort 2
[1692] Warning Word
[8] 6 MBit/s
[9] 12 MBit/s
[1693] Warnwort 2
[1694] Ext. Status Word
[10] 31,25 kBit/s
[11] 45,45 kBit/s
[1697] Alarmwort 3
[1695] Ext. Zustandswort 2
*[255] Baudrate unbekannt
[1698] Warnwort 3
Gleiche Optionen wie 9-15 & 9-16
9-44 Fehlermeldungs-Zähler
9-45 Fehlercode
9-27 Parameter bearbeiten
[0] Disabled
*[1] Aktiviert
9-28 Prozessregelung
[0] Deaktivieren
[1652] Istwert [Einheit]
[1653] DigiPot Sollwert
*[1] Bussteuerung aktiv.
[1661] AE 53 Modus
[1657] Feedback [RPM]
[1660] Digitaleingang
[104] PPO 4
[105] PPO 5
[106] PPO 6
[107] PPO 7
[108] PPO 8
[200] Anw.Telegramm 1
[102] PPO 2
[103] PPO 3
[1618] Motor Thermal
[1622] Drehmoment [%]
[1617] Drehzahl [UPM]
[1620] Rotor-Winkel
[1616] Drehmoment [Nm]
9-23 Signal-Parameter
[1634] Heatsink Temp.
[1635] Inverter Thermal
[1630] DC-Zwischenkreisspannung
[1633] Bremsleist./2 min
[1639] Steuerkartentemp.
[1650] External Reference
[1638] SL Controller State
9-47 Fehlernummer
[1665] Analogausgang 42 [mA]
[1666] Digitalausgang
[1664] Analogeing. 54
[1662] Analogeingang 53
[1663] AE 54 Modus
0 - 0 *0
9-64 Bus-ID
[3422] PCD 2 Lesen für Anwendung
[3421] PCD 1 Lesen für Anwendung
0 - 0 *0
9-65 Profilnummer
[3423] PCD 3 Lesen für Anwendung
[3424] PCD 4 Lesen für Anwendung
1010
0 – 1500 U/min *200 U/min
0 – 1500 U/min *100 U/min
0 - 65535 *0
0 - 65535 *0
[1] Bus
[4] [342] Rampenzeit Ab 1
8-91 Bus Festdrehzahl JOG 2
[2] Logisch UND
[5] [351] Rampenzeit Auf 2
9-** PROFIdrive
*[3] Logisch ODER
8-52 Anwahl DC-Bremse
[7] [380] Rampenzeit JOG
[6] [352] Rampenzeit Ab 2
9-00 Sollwert
9-07 Istwert
[1] Bus
[2] Logisch UND
[0] Digitaleingang
[10] [414] Max. Frequenz [Hz]
[8] [381] Schnellstopp-Zeit
[9] [412] Min. Motorfrequenz [Hz]
9-15 PCD-Schreibkonfiguration
[0] Keine
*[3] Logisch ODER
8-53 Anwahl Start
[0] Digitaleingang
Bussteuerung
[12] [676] Klemme 45, Wert bei
[11] [590] Dig./Relais Ausg. Bussteuerung
[302] Minimaler Sollwert
[303] Maximaler Sollwert
[1] Bus
[2] Logisch UND
Bussteuerung
[13] [696] Klemme 42, Wert bei
[341] Rampenzeit Auf 1
[312] Wert für Frequenzkorrektur auf/ab
*[3] Logisch ODER
8-54 Anwahl Reversierung
[15] FC Steuerwort
[16] FC Sollwert
[380] Rampenzeit JOG
[352] Rampenzeit Ab 2
[351] Rampenzeit Auf 2
[342] Rampenzeit Ab 1
[0] Digitaleingang
[1] Bus
[2] Logisch UND
*[3] Logisch ODER
[2] [1501] Running Hours
8-43 PCD-Lesekonfiguration
[0] Keine
[1] [1500] Operation Hours
[412] Min. Motorfrequenz [Hz]
[414] Max. Frequenz [Hz]
[381] Rampenzeit Schnellstopp
8-55 Parametersatzanwahl
[0] Digitaleingang
[1] Bus
[5] [1601] Reference [Unit]
[4] [1600] Control Word
[3] [1502] Zähler-kWh
[416] Momentengrenze motorisch
[2] Logisch UND
[6] [1602] Reference %
[417] Momentengrenze generatorisch
[553] Klemme 29 Max. Soll-/Ist- Istwert
*[3] Logisch ODER
8-56 Festsollwertanwahl
[8] [1605] Main Actual Value [%]
[7] [1603] Status Word
[615] Klemme 53 Skal. Max.-Soll/ Istwert
[593] Pulsausgang 27 Bussteuerung
[590] Dig./Relais Ausg. Bussteuerung
[558] Klemme 33 Max. Soll-/ Istwert
[0] Digitaleingang
[1] Bus
[2] Logisch UND
*[3] Logisch ODER
[9] [1609] Benutzerdefinierte Anzeige
[10] [1610] Leistung [kW ]
[11] [1611] Power [hp]
[12] [1612] Motor Voltage
[748] PCD Feed Forward
[696] Klemme 42, Wert bei Bussteuerung
[625] Klemme 54 Skal. Max.-Soll/ Istwert
[0] Digitaleingang
[1] Bus
8-57 Profidrive AUS2 Select
[13] [1613] Frequenz
[14] [1614] Motorstrom
[15] [1615] Frequency [%]
[890] Bus Festdrehzahl JOG 1
[2] Logisch UND
[16] [1616] Drehmoment [Nm]
[891] Bus Festdrehzahl JOG 2
*[3] Logisch ODER
[17] [1618] Motor Thermal
[1682] Bus Sollwert 1
[3401] PCD 1 Schreiben für Anwendung
[3402] PCD 2 Schreiben für Anwendung
[1680] Bus Steuerwort 1
[0] Digitaleingang
[1] Bus
[2] Logisch UND
8-58 Profidrive AUS3 Anwahl
[21] [1638] SL Controller State
[20] [1635] Inverter Thermal
[19] [1634] Heatsink Temp.
[18] [1630] DC-Zwischenkreisspannung
[3403] PCD 3 Schreiben für Anwendung
[3404] PCD 4 Schreiben für Anwendung
*[3] Logisch ODER
8-7* Protokoll-SW-Version
[22] [1650] External Reference
[23] [1652] Feedback [Unit]
[3405] PCD 5 Schreiben für Anwendung
[3406] PCD 6 Schreiben für Anwendung
[3407] PCD 7 Schreiben für Anwendung
[3408] PCD 8 Schreiben für Anwendung
0 – 655 *Größenabhängig
8-79 Protokoll-Firmwareversion
8-8* Diagnose FC-Schnittstelle
8-80 Zähler Busmeldungen
[25] [1661] Terminal 53 Switch Setting
[26] [1662] Analogeingang 53
[27] [1663] Terminal 54 Switch Setting
[24] [1660] Digital Input 18,19,27,33
[3409] PCD 9 Schreiben für Anwendung
[3410] PCD 10 Schreiben für Anwendung
9-16 PCD-Lesekonfiguration
0 - 4294967295 *0
0 - 4294967295 *0
8-81 Bus-Fehlernummer
[28] [1664] Analogeing. 54
[29] [1665] Analogausgang 42 [mA]
[30] [1671] Relaisausgänge
[0] Keine
[1500] Betriebsstunden
[1501] Running Hours
0 - 4294967295 *0
8-83 Follower-Fehlernummer
8-82 Zähler Follower-Meldungen
[32] [1673] Counter B
[33] [1690] Alarm Word
[31] [1672] Counter A
[1502] Zähler-kWh
[1600] Control Word
0 - 4294967295 *0
8-84 Gesendete Follower-Meldungen
[35] [1694] Ext. Status Word
[34] [1692] Warning Word
[1601] Reference [Unit]
[1602] Sollwert [%]
0 - 4294967295 *0
8-85 Follower-Timeout-Fehler
8-5* Betr. Bus/Klemme
8-50 Anwahl Motorfreilauf
[1603] Status Word
[1605] Main Actual Value [%]
[1609] Benutzerdefinierte Anzeige
[1610] Leistung [kW]
0 - 4294967295 *0
*[0] Kein Reset
[1] Reset
8-88 FC-Anschlussdiagnose
[1] Bus
[2] Logisch UND
*[3] Logisch ODER
[0] Digitaleingang
[1611] Power [hp]
[1612] Motor Voltage
8-9* Bus-Istwert
8-90 Bus Festdrehzahl JOG 1
8-51 Anwahl Schnellstopp
[0] Digitaleingang
80 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

Anhang Bedienungsanleitung
0 - 4294967295 *0
0 - 0 *0
0 - 65535 *0
0 - 65535 *0
0 – 2000000000 ms *30000 ms
1 - 239 *1
0 – 2000000,000 ms *5000,000 ms
0 - 2000000000 *15
0 - 2147483647 *0
0 - 4294967295 *0
Port)
0 - 65535 *4000
0 - 3600 *120
-1 - 20 % *-1 %
0 - 65535 *0
[1663] AE 54 Modus
[416] Momentengrenze motorisch
12-37 COS Sperrtimer
[1664] Analogeing. 54
[417] Momentengrenze generatorisch
[1665] Analogausgang 42 [mA]
[553] Klemme 29 Max. Soll-/Ist- Istwert
12-38 COS-Filter
12-6* Ethernet PowerLink
12-60 Node-ID
[1669] Pulsausgang 27 [Hz]
[1668] Pulseingang 33 [Hz]
[1666] Digitalausgang
[1667] Pulseingang 29 [Hz]
[593] Pulsausgang 27 Bussteuerung
[615] Klemme 53 Skal. Max.-Soll/ Istwert
[590] Dig./Relais Ausg. Bussteuerung
[558] Klemme 33 Max. Soll-/ Istwert
12-63 Basis-Ethernet-Timeout
12-62 SDO-Timeout
[1671] Relaisausgänge
[1672] Counter A
[1673] Counter B
[1674] Präziser Stopp-Zähler
[1684] Feldbus-Komm. Status
[748] PCD Feed Forward
[890] Bus Festdrehzahl JOG 1
[891] Bus Festdrehzahl JOG 2
[696] Klemme 42, Wert bei Bussteuerung
[625] Klemme 54 Skal. Max.-Soll/ Istwert
12-96 Anschluss-Konfig.
0 – 65535 *Größenabhängig
[0] Normal
[1] Port 1 auf 2 spiegeln
0 – 65535 *Größenabhängig
12-34 CIP Produktcode
[2] Port 2 auf 1 spiegeln
12-35 EDS-Parameter
[1692] Warning Word
12-68 Kumulative Zähler
[1693] Warnwort 2
[1694] Ext. Status Word
12-69 Ethernet PowerLink-Status
[1695] Ext. Zustandswort 2
[0] Disabled
*[1] Aktiviert
12-92 IGMP-Snooping-Funktion
[0] Disabled
*[1] Aktiviert
*[0] Disabled
[1] Aktiviert
12-83 SNMP-Agent
[0] Disabled
*[1] Aktiviert
12-84 Adressenkonflikterkennung
[0] Disabled
*[1] Aktiviert
12-23 Prozessdaten Schreiben Konfiguration
Größe
8 - 32 *16
12-89 Transparent Socket Channel Port (TSC-
Größe
12-24 Prozessdaten Lesen Konfiguration
12-8* Andere Ethernet-Dienste
12-80 FTP-Server
*[0] Disabled
[1] Aktiviert
12-81 HTTP-Server
*[0] Disabled
[1] Aktiviert
12-82 SMTP-Service
[3450] Istposition
[3422] PCD 2 Lesen für Anwendung
[3423] PCD 3 Lesen für Anwendung
[3424] PCD 4 Lesen für Anwendung
[3425] PCD 5 Lesen für Anwendung
[3426] PCD 6 Lesen für Anwendung
[3427] PCD 7 Lesen für Anwendung
[1697] Alarmwort 3
[1698] Warnwort 3
[3421] PCD 1 Lesen für Anwendung
[3428] PCD 8 Lesen für Anwendung
[3429] PCD 9 Lesen für Anwendung
[3430] PCD 10 Lesen für Anwendung
[3456] Spurfehler
8 - 32 *16
12-9* Erweiterte Ethernet-Dienste
12-28 Datenwerte speichern
*[0] Disabled
12-90 Kabeldiagnose
[2] Alles speichern
*[0] Aus
[1] Aktiviert
12-91 Auto Cross Over
[1] On
12-29 Immer speichern
*[0] Aus
12-3* EtherNet/IP
12-93 Fehler Kabellänge
0 - 2147483647 *0
*[0] Aus
12-30 Warnparameter
12-31 DeviceNet Sollwert
12-94 Broadcast Storm Schutz
[1] On
12-32 DeviceNet Steuerung
12-95 Timeout bei Inaktivität
[1] On
*[0] Aus
12-33 CIP Revision
12-67 Schwellwertzähler
12-66 Schwellwert
[1690] Alarm Word
[1691] Alarmwort 2
[1685] FC Steuerwort 1
10 10
[1662] Analogeingang 53
[1634] Heatsink Temp.
[1635] Inverter Thermal
[1639] Steuerkartentemp.
[1650] External Reference
[1630] DC-Zwischenkreisspannung
[1620] Rotor-Winkel
[1622] Drehmoment [%]
[1633] Bremsleist./2 min
[1502] Zähler-kWh
[1600] Control Word
[1601] Reference [Unit]
[1602] Sollwert [%]
[1603] Status Word
[1605] Main Actual Value [%]
[1609] Benutzerdefinierte Anzeige
[1610] Leistung [kW]
[1611] Power [hp]
[1612] Motor Voltage
[1682] Bus Sollwert 1
[3401] PCD 1 Schreiben für Anwendung
[3402] PCD 2 Schreiben für Anwendung
[3403] PCD 3 Schreiben für Anwendung
[3404] PCD 4 Schreiben für Anwendung
[3405] PCD 5 Schreiben für Anwendung
[3406] PCD 6 Schreiben für Anwendung
[3407] PCD 7 Schreiben für Anwendung
[3408] PCD 8 Schreiben für Anwendung
[3409] PCD 9 Schreiben für Anwendung
[3410] PCD 10 Schreiben für Anwendung
12-22 Prozessdaten Lesen Konfiguration
[0] Keine
[1500] Betriebsstunden
[1680] Bus Steuerwort 1
[1501] Running Hours
[1613] Frequenz
[1614] Motorstrom
[1615] Frequency [%]
[1617] Drehzahl [UPM]
[1616] Drehmoment [Nm]
[1618] Motor Thermal
[1652] Istwert [Einheit]
[1638] SL Controller State
[1653] DigiPot Sollwert
[1657] Feedback [RPM]
[1661] AE 53 Modus
[1660] Digitaleingang
1 - 48 *0
1 - 48 *0
[0] MANUELL
[1] DHCP
9-72 ProfibusDriveReset
*[0] Normal Betrieb
[2] BOOTP
*[10] DCP
[20] Von Knoten-ID
[3] Reset Schnittstelle
[1] Reset Netz-Ein
[2] Vorbereitung Reset Netz-Ein
0 - 4294967295 *0
12-01 IP-Adresse
12-02 IP-Subnetzmaske
0 - 65535 *0
9-75 DO-Identifizierung
9-80 Definierte Parameter (1)
0 - 4294967295 *0
0 - 4294967295 *0
0 - 2147483647 *0
0 - 4294967295 *0
0 - 4294967295 *0
12-05 Lease läuft ab
12-04 DHCP-Server
12-03 Standard-Gateway
0 - 9999 *0
0 - 9999 *0
0 - 9999 *0
9-81 Definierte Parameter (2)
9-82 Definierte Parameter (3)
9-83 Definierte Parameter (4)
12-07 Domain Name
12-06 Namensserver
0 - 9999 *0
0 - 9999 *0
0 - 9999 *0
9-84 Definierte Parameter (5)
9-85 Definierte Parameter (6)
12-08 Host-Name
0 - 9999 *0
9-90 Geänderte Parameter (1)
12-09 Phys. Adresse
9-91 Geänderte Parameter (2)
0 - 17 *0
12-1* Ethernetverbindungsparameter
12-10 Verb.status
0 - 9999 *0
0 - 9999 *0
9-92 Geänderte Parameter (3)
*[0] Keine Verbindung
[1] Links
12-11 Verb.dauer
0 - 9999 *0
9-93 Geänderte Parameter (4)
9-94 Geänderte Parameter (5)
0 – 0 *Größenabhängig
12-12 Auto. Verbindung
[0] Aus
0 - 9999 *0
0 - 65535 *0
9-99 Profibus-Versionszähler
*[1] On
12-13 Verb.geschw.
10-** CAN-Feldbus
10-0* Grundeinstellungen
*[0] Keine
[1] 10 Mbit/s
[16] 10 kBit/s
10-01 Baudratenauswahl
12-14 Verb.duplex
[2] 100 Mbit/s
[17] 20 kBit/s
[18] 50 kBit/s
[0] Halbduplex
*[20] 125 kbit/s
*[1] Vollduplex
[21] 250 kBit/s
0 - 2147483647 *0
12-18 Überwachung MAC
[22] 500 kBit/s
[23] 800 kBit/s
0 - 2147483647 *0
12-19 Überwachung IP-Adr.
10-02 Node-ID
[24] 1000 kBit/s
12-2* Prozessdaten
1 - 127 *127
0 – 255 *Größenabhängig
12-20 Steuerinstanz
0 - 255 *0
10-05 Zähler Übertragungsfehler
12-21 Prozessdaten Schreiben Konfiguration
[0] Keine
0 - 255 *0
10-06 Zähler Empfangsfehler
[302] Minimaler Sollwert
10-3* Parameterzugriff
[303] Maximaler Sollwert
10-31 Datenwerte speichern
[341] Rampenzeit Auf 1
[312] Wert für Frequenzkorrektur auf/ab
*[0] Aus
[2] Alles speichern
[414] Max. Frequenz [Hz]
[412] Min. Motorfrequenz [Hz]
[380] Rampenzeit JOG
[381] Rampenzeit Schnellstopp
[352] Rampenzeit Ab 2
[351] Rampenzeit Auf 2
[342] Rampenzeit Ab 1
10-33 Immer speichern
*[0] Aus
[1] On
[3] Bearbeiteten Programmsatz speichern
12-** Ethernet
12-0* IP-Einstellungen
12-00 IP-Adresszuweisung
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 81

Anhang
[14] Anwahl Festsollw. 4
[15] Anwahl Festsollw. 5
[16] Anwahl Festsollw. 6
Gleiche Optionen wie 13-41
[17] Anwahl Festsollw. 7
[18] Anwahl Rampe 1
Gleiche Optionen wie 13-42
[19] Anwahl Rampe 2
[22] Betrieb
[23] Start+Reversierung
[24] Stopp
[25] Schnellstopp
[26] DC-Bremse
[28] Drehz. speich.
[27] Motorfreilauf
VLT® Midi Drive FC 280
0 – 100 % *Größenabhängig
0 – 100 % *Größenabhängig
0 – 100 *Größenabhängig
[73] Start Timer 6
[74] Start Timer 7
[71] Start Timer 4
[72] Start Timer 5
[61] Reset Zähler B
[70] Start Timer 3
[60] Reset Zähler A
[40] Digitalausgang C-EIN
[41] Digitalausgang D-EIN
[39] Digitalausgang B-EIN
[35] Digitalausgang D-AUS
[38] Digitalausgang A-EIN
[34] Digitalausgang C-AUS
[32] Digitalausgang A-AUS
[29] Start Timer 0
[33] Digitalausgang B-AUS
[30] Start Timer 1
[31] Start Timer 2
14-** Sonderfunktionen
14-0* IGBT-Ansteuerung
14-01 Taktfrequenz
[0] Ran3
[1] Ran5
[2] 2,0 kHz
[3] 3,0 kHz
[4] 4,0 kHz
[5] 5,0 kHz
[6] 6,0 kHz
[7] 8,0 kHz
[8] 10,0 kHz
[9] 12,0 kHz
[10] 16,0 kHz
14-03 Übermodulation
[0] Aus
*[1] On
14-07 Totzeit-Kompensationsniveau
14-08 Dämpfungsverstärkungsfaktor
14-09 Totzeit Vorspannungs-Strompegel
14-1* Netzausfall
[1] Rampenstopp
14-10 Netzausfall
*[0] Ohne Funktion
[2] Rampenstopp/Alarm
13-44 Logikregel Boolsch 3
13-43 Logikregel Verknüpfung 2
13-5* SL-Programm
13-51 SL-Controller-Ereignis
*[0] Falsch
[1] WAHR
[2] In Betrieb
[3] Im Bereich
[7] Außerh.Stromber.
[8] Unter Min.-Strom
[4] Ist=Sollwert
[9] Über Max.-Strom
[16] Warnung Übertemp
[18] Reversierung
[17] Netzsp. außerh. Bereich
[19] Warnung
[20] Alarm (Abschaltung)
[21] Alarm (Abschaltblockierung)
[22] Vergleicher 0
[26] Logikregel 0
[27] Logikregel 1
[25] Vergleicher 3
[23] Vergleicher 1
[24] Vergleicher 2
[31] SL Timeout 1
[32] SL Timeout 2
[29] Logikregel 3
[30] SL Timeout 0
[28] Logikregel 2
[36] Digitaleingang 29
[39] Startbefehl
[40] Frequenzumrichter gestoppt
[35] Digitaleingang 27
[33] Digitaleingang 18
[34] Digitaleingang 19
[42] Auto-Reset-Absch.
[60] Logikregel 4
[61] Logikregel 5
[70] SL Timeout 3
[51] Vergleicher 5
[50] Vergleicher 4
[74] SL Timeout 7
[72] SL Timeout 5
[73] SL Timeout 6
[83] Riemenbruch
[71] SL Timeout 4
*[0] Disabled
13-52 SL-Controller-Aktion
[1] Normal Betrieb
[2] Anwahl Datensatz 1
[3] Anwahl Datensatz 2
[4] Anwahl Datensatz 3
[5] Anwahl Datensatz 4
[10] Anwahl Festsollw. 0
[11] Anwahl Festsollw. 1
[12] Anwahl Festsollw. 2
[13] Anwahl Festsollw. 3
1010
13-2* Timer
[16] Warnung Übertemp
0 – 3600 s *0 s
13-20 SL-Timer
[17] Netzsp. außerh. Bereich
[18] Reversierung
*[0] Falsch
13-4* Logikregeln
13-40 Logikregel Boolsch 1
[19] Warnung
[20] Alarm (Abschaltung)
[21] Alarm (Abschaltblockierung)
[1] WAHR
[22] Vergleicher 0
[2] In Betrieb
[23] Vergleicher 1
[3] Im Bereich
[24] Vergleicher 2
[1] UND
[2] ODER
[19] Pulseingang 33
[20] Alarmnummer
[4] ODER NICHT
[3] UND NICHT
[30] Counter A
[31] Counter B
[5] NICHT UND
[6] NICHT ODER
13-11 Vergleicher-Funktion
[0] Kleiner als (<)
[73] SL Timeout 6
[6] Motorleistung
[7] Motorspannung
[12] Analogeingang 53
13-41 Logikregel Verknüpfung 1
[18] Pulseingang 29
[13] Analogeingang 54
[71] SL Timeout 4
[39] Startbefehl
13-03 Reset SLC
[40] Frequenzumrichter gestoppt
*[0] Kein SLC-Reset
[1] Reset SLC
[50] Vergleicher 4
13-1* Vergleicher
13-10 Vergleicher-Operand
*[0] Disabled
[21] Alarm (Abschaltblockierung)
[22] Vergleicher 0
[34] Digitaleingang 19
[35] Digitaleingang 27
[24] Vergleicher 2
[23] Vergleicher 1
[51] Vergleicher 5
[42] Auto-Reset-Absch.
[39] Startbefehl
*[40] Frequenzumrichter gestoppt
[50] Vergleicher 4
[36] Digitaleingang 29
[18] Reversierung
[4] Ist=Sollwert
[7] Außerh.Stromber.
[8] Unter Min.-Strom
[9] Über Max.-Strom
[16] Warnung Übertemp
[29] Logikregel 3
[26] Logikregel 0
[27] Logikregel 1
[28] Logikregel 2
[25] Vergleicher 3
[17] Netzsp. außerh. Bereich
[30] SL Timeout 0
[19] Warnung
[32] SL Timeout 2
[31] SL Timeout 1
[20] Alarm (Abschaltung)
[33] Digitaleingang 18
[28] Logikregel 2
[25] Vergleicher 3
[26] Logikregel 0
[27] Logikregel 1
[32] SL Timeout 2
[29] Logikregel 3
[30] SL Timeout 0
[73] SL Timeout 6
[74] SL Timeout 7
[72] SL Timeout 5
[83] Riemenbruch
[71] SL Timeout 4
[60] Logikregel 4
[61] Logikregel 5
[70] SL Timeout 3
[36] Digitaleingang 29
[35] Digitaleingang 27
[33] Digitaleingang 18
[34] Digitaleingang 19
[31] SL Timeout 1
[60] Logikregel 4
[51] Vergleicher 5
[42] Auto-Reset-Absch.
[72] SL Timeout 5
[61] Logikregel 5
[70] SL Timeout 3
[1] Reference %
[2] Istwert %
[3] Motordrehzahl
[4] Motorstrom
*[0] Disabled
[74] SL Timeout 7
[83] Riemenbruch
[7] NICHT UND NICHT
[8] NICHT ODER NICHT
[2] Größer als (>)
*[1] Annähernd gleich (~)
Gleiche Optionen wie 13-40
13-42 Logikregel Boolsch 2
-9999 - 9999 *0
13-12 Vergleicher-Wert
0 - 4294967295 *4000
12-99 Medienzähler
12-98 Schnittstellenzähler
0 - 4294967295 *0
13-** Smart Logic
13-0* SLC-Einstellungen
13-00 SL-Controller Modus
[61] Logikregel 5
[83] Riemenbruch
13-02 Stopp-Ereignis
[0] Falsch
[1] WAHR
[2] In Betrieb
[3] Im Bereich
[4] Ist=Sollwert
[7] Außerh.Stromber.
[8] Unter Min.-Strom
[21] Alarm (Abschaltblockierung)
[22] Vergleicher 0
[24] Vergleicher 2
[23] Vergleicher 1
[18] Reversierung
[2] In Betrieb
[3] Im Bereich
[4] Ist=Sollwert
[7] Außerh.Stromber.
[8] Unter Min.-Strom
[9] Über Max.-Strom
[0] Falsch
[1] On
13-01 Start-Ereignis
[1] WAHR
*[0] Aus
[16] Warnung Übertemp
[17] Netzsp. außerh. Bereich
[20] Alarm (Abschaltung)
[19] Warnung
[25] Vergleicher 3
[26] Logikregel 0
[33] Digitaleingang 18
[27] Logikregel 1
[51] Vergleicher 5
[60] Logikregel 4
[42] Auto-Reset-Absch.
[50] Vergleicher 4
*[39] Startbefehl
[40] Frequenzumrichter gestoppt
[35] Digitaleingang 27
[36] Digitaleingang 29
[34] Digitaleingang 19
[28] Logikregel 2
[29] Logikregel 3
[9] Über Max.-Strom
[10] Port 1 deaktiviert
[11] Port 2 deaktiviert
[254] Int.Port auf 1 spiegeln
0 – 63 *Größenabhängig
12-97 QoS-Priorität
[255] Int.Port auf 2 spiegeln
82 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

Anhang Bedienungsanleitung
0 - 20 *0
0 – 65535 °C *0 °C
16-39 Steuerkartentemp.
16-38 SL Controller State
0 - 2000 *0
16-5* Soll- & Istwerte
0 - 56 *0
0 – 0xFFFFFFFF *0
16-50 External Reference
-200 - 200 % *0 %
0 - 9999 *0
-4999 – 4999 Prozessregeleinheit
*0 Prozessregeleinheit
16-52 Istwert [Einheit]
-200 - 200 *0
-30000 – 30000 U/min *0 U/min
0 - 4095 *0
16-57 Feedback [RPM]
16-53 DigiPot Sollwert
0 - 65535 *0
-4999 – 4999 Soll-/Istwert-Einheit
*0 Soll-/Istwert-Einheit
16-6* Ein- & Ausgänge
16-60 Digitaleingang
-200 - 200 % *0 %
16-61 AE 53 Modus
0 - 65535 *0
[1] Einstellung Spannung
[6] Digitaleingang
16-62 Analogeingang 53
-200 - 200 % *0 %
0 - 20 *1
[0] Strom
16-63 AE 54 Modus
Anzeigeeinheit
0 – 9999 Freie Anzeigeeinheit *0 Freie
[1] Einstellung Spannung
16-35 Inverter Thermal
0 – 655,35 A *0 A
0 – 655,35 A *0 A
0 - 255 % *0 %
16-37 Nenn- WR-Strom
16-36 Nenn- WR Strom
0 - 20 *0
0 - 30 *0
16-64 Analogeing. 54
0 – 1000 kW *0 kW
0 - 20 *1
0 – 20 mA *0 mA
16-65 Analogausgang 42 [mA]
0 – 1000 PS *0 PS
0 - 130000 *0
0 - 63 *0
16-66 Digitalausgang
16-67 Pulseingang 29 [Hz]
0 – 6553,5 Hz *0 Hz
0 – 65535 V *0 V
0 - 40000 *0
0 - 130000 *0
16-69 Pulsausgang 27 [Hz]
16-68 Pulseingang 33 [Hz]
0 - 6553,5 % *0 %
0 – 655,35 A *0 A
-32768 - 32767 *0
0 - 31 *0
16-71 Relaisausgänge
16-72 Counter A
-30000 – 30000 U/min *0 U/min
-30000 – 30000 Nm *0 Nm
0 - 2147483647 *0
-32768 - 32767 *0
16-73 Counter B
16-74 Präziser Stopp-Zähler
16-8* Feldbus und FC-Schnittstelle
0 - 65535 *0
0 - 100 % *0 %
-200 - 200 % *0 %
-32768 - 32767 *0
0 - 65535 *0
16-80 Bus Steuerwort 1
0 - 65535 *0
16-84 Feldbus-Komm. Status
0 – 10000 kW *0 kW
16-85 FC Steuerwort 1
-128 – 127 °C *0 °C
16-82 Bus Sollwert 1
0 – 65535 V *0 V
15-70 Option in Steckplatz A
15-71 Steckplatz A – Option SW-Version
15-9* Parameterinfo
0 - 0x7fffffff. h *0 h
0 - 0x7fffffff. h *0 h
15-02 Zähler-kWh
15-01 Running Hours
15-00 Betriebsstunden
40 - 75 % *66 %
40 - 90 % *66 %
14-41 Minimale AEO-Magnetisierung
14-4* Energieoptimierung
14-40 Quadr.Mom. Anpassung
15-98 Typendaten
15-92 Definierte Parameter
15-97 Anwendungstyp
0 - 2147483647 *0
0 – 2147483647 kWh *0 kWh
15-03 Netz-Einschaltungen
0 - 200 % *100 %
14-44 Stromoptimierung D-Achse für IPM
14-5* Umgebung
15-99 Parameter-Metadaten
0 - 65535 *0
0 - 65535 *0
15-04 Anzahl Übertemperaturen
15-05 Anzahl Überspannungen
14-51 Zwischenkreis-Spannungskompensation
[0] Aus
*[1] On
14-52 Lüftersteuerung
16-** Datenanzeigen
15-06 Reset kWh-Zähler
*[0] Kein Reset
[5] Modus Konstant-ein
[6] Modus Konstant-aus
16-01 Reference [Unit]
16-0* Anzeigen-Allgemein
16-00 Control Word
[1] Reset
15-07 Reset Motorlaufstundenzähler
*[0] Kein Reset
[1] Reset
*[0] Kein Filter
[7] Mod Ein-w.-Wechselr.-ein-sonst-aus
*[8] Drehzahlveränderbarer Modus
14-55 Ausgangsfilter
15-3* Alarm Log
[1] Sinusfilter
15-30 Alarm Log: Fehlercode
14-6* Auto-Reduzier.
16-02 Sollwert [%]
0 - 255 *0
14-61 Funktion bei Wechselrichterüberlast
16-03 Status Word
16-05 Main Actual Value [%]
-32767 - 32767 *0
15-31 Ursache Interner Fehler
15-4* Typendaten
15-40 FC-Typ
*[2] 2,0 kHz
*[0] Abschaltung
[1] Reduzieren
14-63 Min. Taktfrequenz
16-09 Benutzerdefinierte Anzeige
16-1* Anzeigen-Motor
16-10 Leistung [kW]
16-12 Motor Voltage
16-11 Power [hp]
16-18 Motor Thermal
16-17 Drehzahl [UPM]
16-16 Drehmoment [Nm]
16-15 Frequency [%]
16-14 Motorstrom
16-13 Frequenz
16-20 Rotor-Winkel
16-22 Drehmoment [%]
16-3* Anzeigen Frequenzumrichter
16-30 DC-Zwischenkreisspannung
16-33 Bremsleist./2 min
16-34 Heatsink Temp.
10 10
0 - 255 *0
15-57 Dateiversion
*[0] Optionskonfig. schützen
[1] Optionsänderung aktivieren
0 - 16 *0
15-59 Dateiname
15-6* Install. Optionen
14-9* Fehlereinstellungen
14-90 Fehlerebenen
*[3] Abschaltblockierung
0 – 20 *Größenabhängig
0 – 30 *Größenabhängig
15-61 Option SW-Version
15-60 Option installiert
[4] Abschaltung zeitverzögertes w-Reset
[5] Fangschaltung
15-** Info/Wartung
15-0* Betriebsdaten
0 - 0 *0
0 - 0 *0
15-49 Steuerkarte SW-Version
*[0] No Function
14-70 Compatibility Selections
0 - 0 *0
15-50 Leistungsteil SW-Version
[12] VLT2800 3M
[13] VLT2800 3M incl. MAV
0 - 40 *0
0 - 0 *0
15-46 Typ Bestellnummer
15-48 LCP-Version
Kompensat
20 – 1000 Hz *Größenabhängig
14-65 Drehzahl-Reduzierung, Totzeit-
0 - 0 *0
14-7* Kompatibilität
0 - 0 *0
0 - 20 *0
0 - 20 *0
0 - 0 *0
0 - 41 *0
15-41 Leistungsteil
15-42 Spannung
15-43 Software-Version
15-44 Typencode (original)
15-45 Typencode (aktuell)
[5] 5,0 kHz
[6] 6,0 kHz
[7] 8,0 kHz
[8] 10,0 kHz
[9] 12,0 kHz
[10] 16,0 kHz
14-64 Totzeit-Kompensation, Nullstrom-Pegel
*[0] Disabled
[3] 3,0 kHz
[4] 4,0 kHz
[1] Aktiviert
0 - 0 *0
0 - 0 *0
15-51 Typ Seriennummer
15-52 OEM-Informationen
[14] VLT2800 12M
[15] VLT2800 12M incl. MAV
14-8* Optionen
14-88 Optionsdatenspeicher
15-53 Leistungskarte Seriennummer
0 - 65535 *0
14-89 Optionserkennung
0 – 0xFFFFFFFF *0
[1] Quitt. Service
[3] Software-Reset
14-29 Servicecode
0 - 500 % *100 %
stärkung
14-3* Stromgrenze
14-30 Stromgrenzenregler, Proportionalver-
1 – 100 ms *5 ms
0,002 – 2 s *0,020 s
14-32 Stromgrenzenregler, Filterzeit
14-31 Stromgrenzenregler, Integrationszeit
[3] Motorfreilauf
[4] Kinetischer Speicher
[5] Kinet. Speich./Alarm
[6] Alarm
14-11 Netzspannung bei Netzausfall
[7] Kin. back-up, trip w recovery
100 – 800 V *Größenabhängig
14-12 Reaktion auf Netzphasenfehler
*[0] Abschaltung
[1] Warnung
[2] Disabled
14-15 Kin. Speicher Abschaltung Wiederhers-
tellungsstufe
*Größenabhängig
0 –60000,000 Soll-/Istwert-Einheit
*[0] Manueller Reset
[1] 1x Autom. Quittieren
14-2* Quittierfunktionen
14-20 Quittierfunktion
grenze
0 – 60 s *60 s
[2] Initialisierung
14-24 Stromgrenze Verzögerungszeit
*[0] Normal Betrieb
0 – 60 s *60 s
14-27 WR-Fehler Aktion
[0] Abschaltung
*[1] Warnung
14-28 Produktionseinstellungen
14-25 Abschaltverzögerung bei Drehmoment-
*[0] Normal Betrieb
0 – 600 s *10 s
14-21 Automatische Wiederanlaufzeit
[3] 3x Autom. Quittieren
[4] 4x Autom. Quittieren
[5] 5x Autom. Quittieren
[6] 6x Autom. Quittieren
[7] 7x Autom. Quittieren
[8] 8x Autom. Quittieren
[9] 9x Autom. Quittieren
[10] 10x Autom.Quitt.
[11] 15x Autom.Quitt.
[12] 20x Autom.Quitt.
[2] 2x Autom. Quittieren
[13] Unbegr. Autom. Quitt.
14-22 Betriebsart
[14] Quittieren bei Netz-Einschaltung
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 83

Anhang
VLT® Midi Drive FC 280
[1] Blockierung in Rückwärtsrichtung
0 - 65535 *0
[2] Blockierung in Vorwärtsrichtung
37-17 Pos. Ctrl Fault Behaviour (Pos.
0 - 65535 *0
34-27 PCD 7 Lesen für Anwendung
Regelfehlerverhalten)
*[0] Rampe ab und Bremse
0 - 65535 *0
34-28 PCD 8 Lesen für Anwendung
0 - 65535 *0
34-29 PCD 9 Lesen für Anwendung
1 – 1000 ms *10 ms
33-03 Referenzfahrt-Geschwindigkeit
0 - 65535 *0
34-30 PCD 10 Lesen für Anwendung
-1500 – 1500 U/min *100 U/min
33-04 Referenzfahrt-Verhalten
34-5* Prozessdaten
34-50 Istposition
*[1] Reversieren, kein Index
[3] Vorwärts, kein Index
-1073741824 - 1073741824 *0
33-4* Grenzwertverarb.
-2147483647 - 2147483647 *0
34-56 Spurfehler
-1073741824 - 1073741824 *-500000
33-41 Negative Software-Wegbegrenzung
37-** Anwendungseinstellungen
33-42 Positive Software-Wegbegrenzung
37-0* Anwendungsmodus
37-00 Anwendungsmodus
*[0] Antriebsmodus
[2] Positionsregelung
37-1* Positionsregelung
-1073741824 - 1073741824 *500000
aktiv
*[0] Inaktiv
[1] Aktiv
33-43 Negative Software-Wegbegrenzung
37-01 Pos. Istwertanschluss
*[0] 24-V-Drehgeber
37-02 Pos. Target (Pos. Ziel)
*[0] Inaktiv
[1] Aktiv
33-44 Positive Software-Wegbegrenzung aktiv
*[0] DI
[1] Feldbus
0 - 65535 *0
34-24 PCD 4 Lesen für Anwendung
ckierung)
37-15 Pos. Direction Block (Pos. Richtungsblo-
0 - 65535 *0
34-25 PCD 5 Lesen für Anwendung
*[0] Keine Blockierung
34-26 PCD 6 Lesen für Anwendung
37-13 Pos. PID-Ausgangsschelle
[0] Deaktivieren
*[1] Aktivieren
0 - 65535 *0
0 - 65535 *0
34-22 PCD 2 Lesen für Anwendung
1 - 10000 *1000
37-14 Pos. Steuer- Source (Pos. Strg.-Quelle)
0 - 65535 *0
34-23 PCD 3 Lesen für Anwendung
0 - 1073741824 *0
gerung)
0 – 1000 ms *200 ms
0 – 1000 ms *200 ms
gerung)
Verzögerung)
*[1] Aktivieren
0 - 65535 *0
37-08 Pos. Hold Delay (Pos. Halte-
0 - 65535 *0
34-06 PCD 6 Schreiben für Anwendung
0 – 10000 ms *0 ms
37-09 Pos. Coast Delay (Pos. Freilaufverzö-
0 - 65535 *0
34-07 PCD 7 Schreiben für Anwendung
0 - 65535 *0
34-08 PCD 8 Schreiben für Anwendung
37-10 Pos. Brake Delay (Pos. Bremsverzö-
0 - 65535 *0
34-09 PCD 9 Schreiben für Anwendung
34-10 PCD 10 Schreiben für Anwendung
37-12 Pos. PID-Anti-Windup
37-11 Pos. Bremslebensdauer
0 - 65535 *0
34-2* PCD-Par. lesen
34-21 PCD 1 Lesen für Anwendung
Bremsregelung)
50 – 100000 ms *5000 ms
50 – 100000 ms *5000 ms
*[0] Absolut
[1] Relativ
34-** Datenanzeige Motion Control
34-0* PCD-Par. schreiben
1 – 30000 U/min *100 U/min
37-05 Pos. Ramp Up Time (Pos. Rampe Auf)
37-04 Pos. Velocity (Pos. Geschwindigkeit)
0 - 65535 *0
0 - 65535 *0
34-02 PCD 2 Schreiben für Anwendung
34-01 PCD 1 Schreiben für Anwendung
37-06 Pos. Rampenzeit ab
0 - 65535 *0
34-03 PCD 3 Schreiben für Anwendung
[0] Deaktivieren
37-07 Pos. Auto Brake Ctrl (Pos. Automatische
0 - 65535 *0
34-04 PCD 4 Schreiben für Anwendung
34-05 PCD 5 Schreiben für Anwendung
-1073741824 - 1073741824 *0
37-03 Pos. Typ
1 - 10000 *512
33-47 Zielpositionsfenster
1010
0 – 60 s *Größenabhängig
0 – 600 s *10 s
5 - 100 % *10 %
0 – 200,0 % *Größenabhängig
0,05 – 1 s *0,10 s
0 - 2 *0
0 – 720 h *720 h
1 - 65535 *1
1 - 65535 *1
1 - 2147483648 *2000000
1 – 30000 U/min *1500 U/min
50 – 3600000 ms *1000 ms
Control
-1073741824 - 1073741824 *0
22-62 Riemenbruchverzögerung
[4] Pulseingang 33
[3] Pulseingang 29
0 - 65535 *1084
16-86 Sollwert 1 FC-Schnittstelle
30-** Sonderfunktionen
30-2* Erw. Startanpassung
-999999,999 –
999999,999 ErwPID1Einheit
21-15 Erw. Sollwert 1
-32768 - 32767 *0
16-9* Diagnoseanzeigen
16-90 Alarm Word
30-21 Strom für hohes Anlaufmoment [%]
30-20 Zeit für hohes Startmoment [s]
-999999,999 –
999999,999 ErwPID1Einheit
*0 ErwPID1Einheit
21-17 Erw. Sollwert 1 [Einheit]
0 – 0xFFFFFFFFUL *0
0 – 0xFFFFFFFFUL *0
16-92 Warning Word
16-91 Alarmwort 2
[1] On
30-23 Erkennungszeit blockierter Rotor [s]
30-22 Blockierter Rotorschutz
*[0] Aus
-999999,999 –
999999,999 ErwPID1Einheit
*0 ErwPID1Einheit
21-18 Erw. Istwert 1 [Einheit]
0 – 0xFFFFFFFFUL *0
0 – 0xFFFFFFFFUL *0
16-94 Ext. Status Word
16-93 Warnwort 2
31-** Special Option
31-4* Speichermodul
31-40 Speichermodul-Funktion
0 - 100 % *0 %
*0 ErwPID1Einheit
21-19 Erw. Ausgang 1 [%]
21-2* Erw. Prozess-PID 1
0 – 0xFFFFFFFFUL *0
0 – 0xFFFFFFFFUL *0
16-97 Alarmwort 3
16-95 Ext. Zustandswort 2
[2] Only Allow Upload
[0] Disabled
*[1] Only Allow Download
[1] Invers
21-20 Erw. 1 Normal-/Invers-Regelung
*[0] Normal
0 - 4294967295 *0
0 – 0xFFFFFFFFUL *0
16-98 Warnwort 3
31-41 MM Information
[3] Allow Both Download and Upload
0 - 10 *0,01
21-21 Erw. 1 Proportionalverstärkung
18-** Datenanzeigen 2
18-5* Speichermodulanzeige
31-42 Configure Memory Module Access
0,01 – 10000 s *10000 s
21-22 Erw. 1 I-Zeit
0 – 0xFFFFFFFFUL *0
18-51 Ursache der Warnung Speichermodul
[2] Set MM to read write
[1] Set MM to read only
*[0] Normal Betrieb
0 – 10 s *0 s
21-23 Erw. 1 D-Zeit
21-24 Erw. 1 Grenze
0 - 0 *0
18-52 Speichermodul-ID
18-9* PID-Anzeigen
[1] Erase MM
31-43 Erase_MM
*[0] Ohne Funktion
1 - 50 *5
22-** Anw.- Funktionen
22-0* Verschiedenes
-200 - 200 % *0 %
18-91 PID-Prozessausgang
18-90 PID-Prozess Abweichung
*[0] Disabled
[1] Aktiviert
31-47 Time Limit Function
ungsmodus
22-02 Energiesparmodus CL-Steuer-
*[0] Normal
-200 - 200 % *0 %
-200 - 200 % *0 %
18-92 PID-Prozess begrenz. Ausgang
31-48 Time Limit Remaining Time
32-** Grundeinstellungen Motion Control
32-1* Benutzereinheit
0 – 600 s *10 s
[1] Vereinfacht
22-4* Energiesparmodus
22-40 Min. Laufzeit
-200 - 200 % *0 %
18-93 PID-Prozess verstärkungsskal. Ausgang
21-** Ext. Mit Rückführung
21-0* Erw. PID-Auto-Anpassung
32-11 Benutzereinheit Nenner
0 – 600 s *10 s
22-41 Min. Energiespar-Stoppzeit
21-09 Erw. PID aktivieren
*[0] Disabled
32-12 Benutzereinheit Zähler
0 - 400,0 *10
22-43 Energiespar-Startfreq. [Hz]
[1] Ext CL1 PID aktiviert
21-1* Erw. PID Soll-/Istw. 1
32-6* PID
22-44 Soll-/Istw.-Diff. Energie-Start
21-11 Erw. 1 Minimaler Sollwert
32-67 Max. tolerierter Positionsfehler
0 - 100 % *10 %
-999999,999 –
32-81 Rampenzeit Schnellstopp Motion
32-8* Geschwindigkeit und Beschleunigung
32-80 Maximal zulässige Geschwindigkeit
0 – 600 s *60 s
-100 - 100 % *0 %
22-47 Energiesparfrequenz [Hz]
22-46 Max. Boost-Zeit
22-45 Sollwert-Boost
-999999,999 –
999999,999 ErwPID1Einheit
*0 ErwPID1Einheit
999999,999 ErwPID1Einheit
21-12 Erw. 1 Maximaler Sollwert
33-** Motion Control Erw. Einstellungen
33-0* Ref.punktbeweg.
0 – 3600 s *0 s
0 - 400,0 *0
22-49 Wiederanlaufverzögerung
22-48 Energiesparverzögerung
*100 ErwPID1Einheit
*[0] Ohne Funktion
[1] Analogeingang 53
21-13 Erw. 1 Sollwertquelle
33-01 Referenzversatz
[1] Erzwungene manuelle Referenzfahrt
[2] Erzwungene autom. Referenzfahrt
33-00 Referenzfahrt-Modus
*[0] Nicht erzwingen
0 – 3600 s *0 s
22-6* Riemenbrucherkennung
22-60 Riemenbruchfunktion
*[0] Aus
[1] Warnung
[7] Pulseingang 29
[8] Pulseingang 33
21-14 Erw. 1 Istwertanschluss
[2] Analogeingang 54
*[0] Ohne Funktion
33-02 Referenz-Rampenzeit
[2] Abschaltung
22-61 Riemenbruchmoment
[1] Analogeingang 53
[2] Analogeingang 54
84 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

Anhang Bedienungsanleitung
10 10
[1] Bremse direkt
37-18 Pos. Ctrl Fault Reason (Pos. Regelfeh-
lergrund)
*[0] Kein Fehler
[1] Referenzfahrt erforderlich
[12] Rev. Betrieb
[7] Bremslebensdauer
[8] Schnellstopp
[2] Pos. HW Grenze
[3] Neg. HW-Grenze
[4] Pos. SW-Grenze
[9] PID-Fehler zu groß
[5] Neg. SW-Grenze
[13] Fwd. Betrieb
[20] Referenzposition nicht gefunden
0 - 255 *0
37-19 Pos. New Index (Pos. Neuer Index)
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 85

Index
VLT® Midi Drive FC 280
Index
A
Abkürzung.............................................................................................. 74
Ableitstrom......................................................................................... 8, 13
Abnahme und Zertifizierung.............................................................. 6
Abstand zur Kühlluftzirkulation...................................................... 23
Abstandsanforderung:........................................................................ 10
AC-Wellenform......................................................................................... 5
Alarm Log................................................................................................ 32
AMA mit angeschlossener Kl. 27..................................................... 48
Ausgänge
Analogausgang................................................................................ 66
Digitalausgang.................................................................................. 66
Ausgangsleitungen.............................................................................. 23
Ausgangsstrom..................................................................................... 66
Auto on.............................................................................................. 33, 37
B
Bedarfsgerechtes Relais..................................................................... 45
Bedientaste...................................................................................... 26, 32
Bestimmungsgemäße Verwendung................................................ 4
Burst-Transient....................................................................................... 14
D
Digitaleingang....................................................................................... 20
Drahtbrücke............................................................................................ 20
Drehmoment
Drehmomentkennlinie.................................................................. 64
Drehrichtung des Drehgebers......................................................... 37
Drehzahlsollwert............................................................................ 37, 48
Durchführen........................................................................................... 23
E
Eingang
Eingangsspannung......................................................................... 25
Eingangsstrom.................................................................................. 13
Klemmen...................................................................................... 18, 25
Leistungs-......................................................................... 5, 18, 23, 25
Netzkabel............................................................................................ 23
Strom.................................................................................................... 18
Eingänge
Analogeingang................................................................................. 65
Digitaleingang.................................................................................. 65
Pulseingang....................................................................................... 66
EMV............................................................................................................ 64
EMV-Filter................................................................................................ 19
EMV-gerechte Installation................................................................. 13
Energieeffizienz....................................................................... 61, 62, 63
Energieeffizienzklasse......................................................................... 64
Entladezeit................................................................................................. 8
Entsorgungshinweise............................................................................ 6
Erdung................................................................................. 17, 18, 23, 25
Erschütterungen................................................................................... 10
Externer Regler........................................................................................ 4
Externes Steuersignal............................................................................ 5
F
Fehler
Fehlerspeicher................................................................................... 32
Fernsteuerung.......................................................................................... 4
G
Geerdete Dreieckschaltung.............................................................. 19
Geschirmte Kabel................................................................................. 23
Gleichstrom............................................................................................... 5
H
Hand on.................................................................................................... 33
Hauptmenü...................................................................................... 30, 32
Heben....................................................................................................... 10
Hochspannung................................................................................. 7, 25
Horizontale Montage.......................................................................... 11
I
IEC 61800-3...................................................................................... 19, 64
Inbetriebnahme.................................................................................... 34
Initialisierung
Manuelles Verfahren....................................................................... 34
Vorgehensweise............................................................................... 34
Installation.............................................................................................. 23
Installationsumgebung...................................................................... 10
Instandhaltung...................................................................................... 52
Isoliertes Netz........................................................................................ 19
Istwert....................................................................................................... 23
K
Kabelführung......................................................................................... 23
Kabellänge.............................................................................................. 65
Kabelquerschnitt........................................................................... 13, 17
Klemmen
Ausgangsklemme............................................................................ 25
Steuerklemme............................................................................ 33, 57
Klemmen-Anzugsdrehmoment...................................................... 68
Konvention............................................................................................. 74
Kühlung.................................................................................................... 10
86 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

Index Bedienungsanleitung
L
Lagerung................................................................................................. 10
Leistungsfaktor................................................................................. 5, 23
Leistungsreduzierung......................................................................... 64
M
Masse
Erdanschluss...................................................................................... 23
Schutzleiter........................................................................................ 13
Mechanische Bremssteuerung........................................................ 21
Menüstruktur......................................................................................... 32
Menütaste........................................................................................ 26, 32
Montage............................................................................................ 10, 23
Motor
Daten.................................................................................................... 36
Drehung.............................................................................................. 37
Motorausgang................................................................................... 64
Motordaten........................................................................................ 35
Motorkabel.................................................................................. 13, 17
Motorleistung............................................................................. 13, 32
Motorstrom........................................................................................ 32
Schutzart............................................................................................... 4
Status...................................................................................................... 4
Strom................................................................................................ 5, 36
Thermischer Motorschutz............................................................... 6
N
Navigationstaste............................................................................ 26, 32
Netz
Netzversorgung (L1/N, L2/L, L3)................................................. 63
Spannung........................................................................................... 32
Versorgungsdaten........................................................................... 61
Netzeingang...................................................................................... 5, 18
Normen und Konformität für STO..................................................... 6
Numerisches Display........................................................................... 26
O
Optionsmodule..................................................................................... 25
Ort-Steuerung........................................................................................ 33
P
Parametersatz........................................................................................ 37
PELV.................................................................................................... 50, 67
PID-Regler............................................................................................... 67
Potenzialausgleich............................................................................... 14
Potenzialfreie Dreieckschaltung..................................................... 19
Programmieren....................................................................... 20, 32, 33
Q
Qualifiziertes Personal........................................................................... 7
Querschnitt............................................................................................. 65
Quick-Menü..................................................................................... 28, 32
R
Recycling.................................................................................................... 6
Relaisausgänge..................................................................................... 67
Reset..................................................................................... 32, 33, 34, 52
Rückwand................................................................................................ 10
S
Schutz des Abzweigkreises............................................................... 68
Schutz vor Störungen......................................................................... 23
Seite-an-Seite-Installation................................................................. 10
Serielle Kommunikation
Serielle Kommunikation........................................... 22, 33, 52, 67
Serielle USB-Schnittstelle.............................................................. 67
Service...................................................................................................... 52
Sicherheit................................................................................................... 8
Sicherung.................................................................................. 13, 23, 68
SIL2............................................................................................................... 6
SILCL von SIL2........................................................................................... 6
Sollwert.................................................................................................... 32
Spannungsniveau................................................................................ 65
Spezifikation........................................................................................... 23
Startbefehl.............................................................................................. 37
Steuerkarte
+10-V-DC-Ausgang......................................................................... 67
Leistung............................................................................................... 67
RS485 Serielle Schnittstelle.......................................................... 67
Serielle USB-Schnittstelle.............................................................. 67
Steuerung/Regelung
Kennlinie............................................................................................. 67
Steuerklemme............................................................................ 33, 57
Verdrahtung......................................................................... 13, 20, 23
STO
Aktivierung......................................................................................... 44
Automatischer Wiederanlauf................................................ 44, 45
Deaktivierung.................................................................................... 44
Inbetriebnahmeprüfung............................................................... 45
Instandhaltung................................................................................. 46
Manueller Wiederanlauf......................................................... 44, 45
Technische Daten............................................................................. 47
Stromanschluss..................................................................................... 13
Symbol...................................................................................................... 74
Systemrückführung................................................................................ 4
T
Thermischer Schutz................................................................................ 6
Thermistor............................................................................................... 50
Transientenschutz................................................................................... 5
Trennschalter.................................................................................. 23, 25
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 87

Index
Typenschild............................................................................................... 9
VLT® Midi Drive FC 280
Ü
Überspannungsschutz....................................................................... 13
U
Umgebungsbedingung..................................................................... 64
Unerwarteter Anlauf....................................................................... 7, 52
V
Versorgungsnetz.............................................................................. 5, 18
Versorgungsspannung................................................................ 25, 67
Vibrationen............................................................................................. 10
W
Warnungs- und Alarmliste................................................................ 56
Werkseinstellung.................................................................................. 34
Z
Zusatzeinrichtungen........................................................................... 23
Zusätzliche Ressource........................................................................... 4
Zwischenkreiskopplung....................................................................... 7
88 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. MG07A503

Index Bedienungsanleitung
MG07A503 Danfoss A/S © 08/2018 Alle Rechte vorbehalten. 89

Die in Katalogen, Prospekten und anderen schriftlichen Unterlagen, wie z.B. Zeichnungen und Vorschlägen enthaltenen Angaben und technischen Daten sind vom Käufer vor Übernahme und
Anwendung zu prüfen. Der Käufer kann aus diesen Unterlagen und zusätzlichen Diensten keinerlei Ansprüche gegenüber Danfoss oder Danfoss-Mitarbeitern ableiten, es sei denn, dass diese
vorsätzlich oder grob fahrlässig gehandelt haben. Danfoss behält sich das Recht vor, ohne vorherige Bekanntmachung im Rahmen der angemessenen und zumutbaren Änderungen an seinen
Produkten – auch an bereits in Auftrag genommenen – vorzunehmen. Alle in dieser Publikation enthaltenen Warenzeichen sind Eigentum der jeweiligen Firmen. Danfoss und das Danfoss-Logo sind
Warenzeichen der Danfoss A/S. Alle Rechte vorbehalten.
Danfoss A/S
Ulsnaes 1
DK-6300 Graasten
vlt-drives.danfoss.com
132R0153 MG07A503 08/2018
*MG07A503*
 Loading...
Loading...